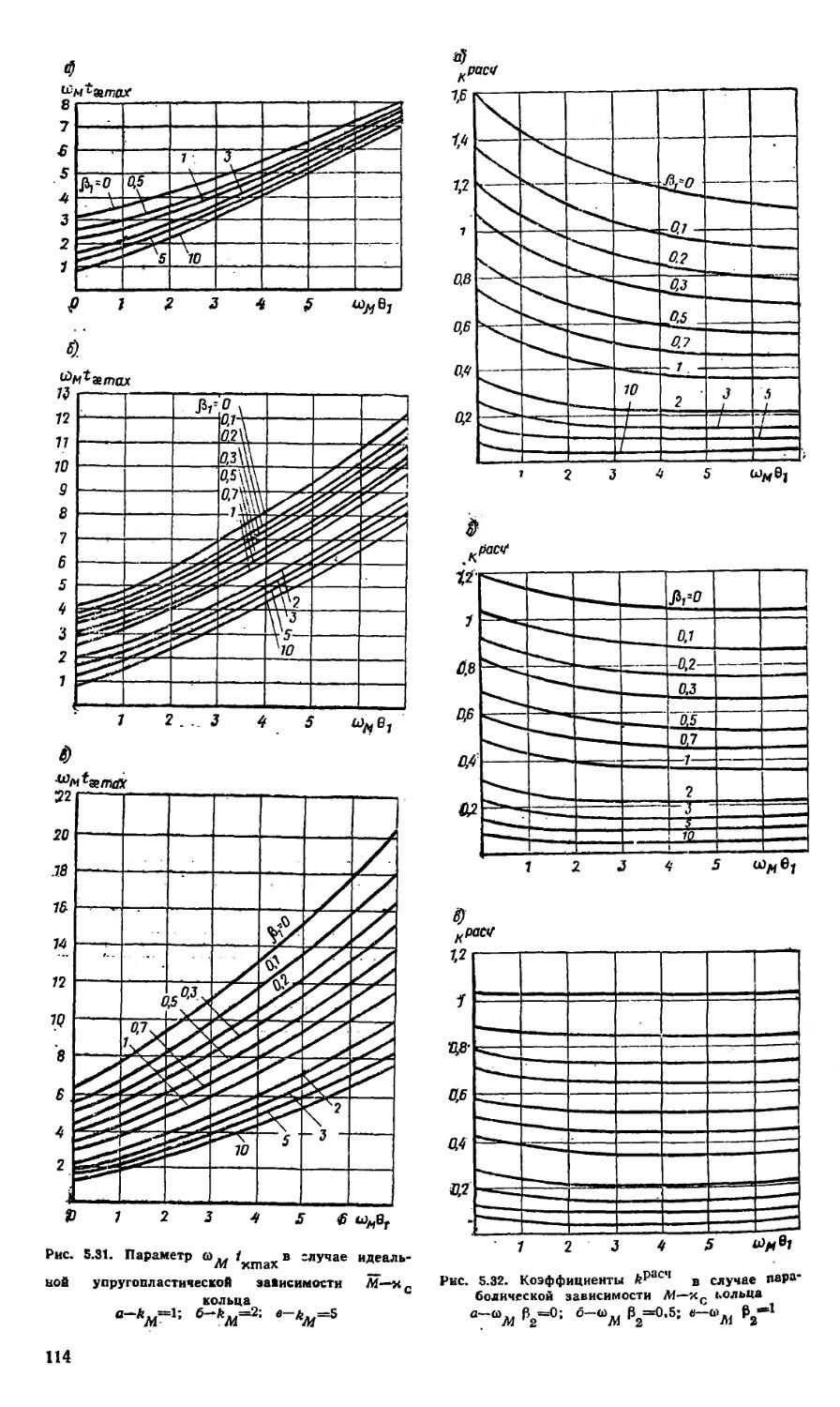
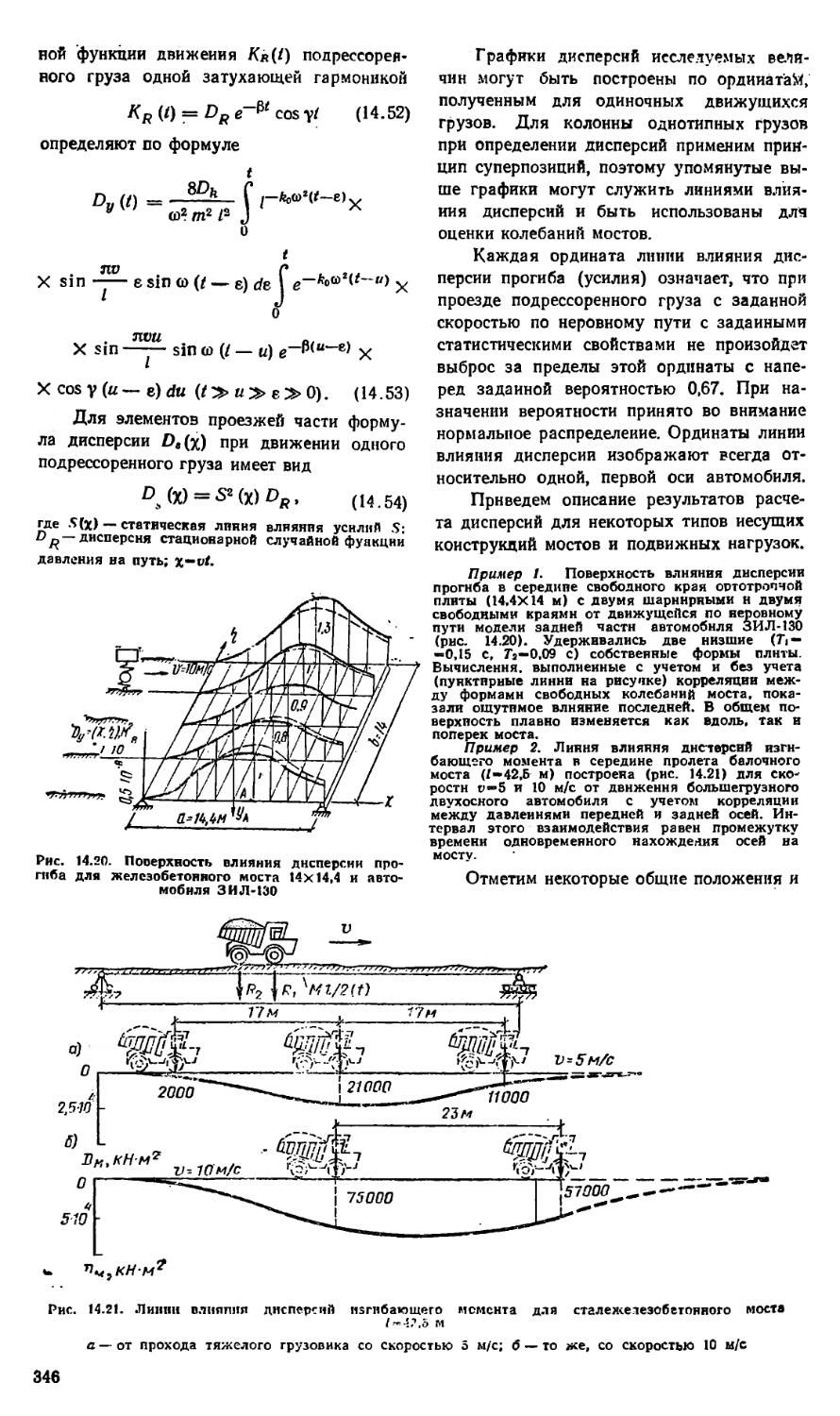
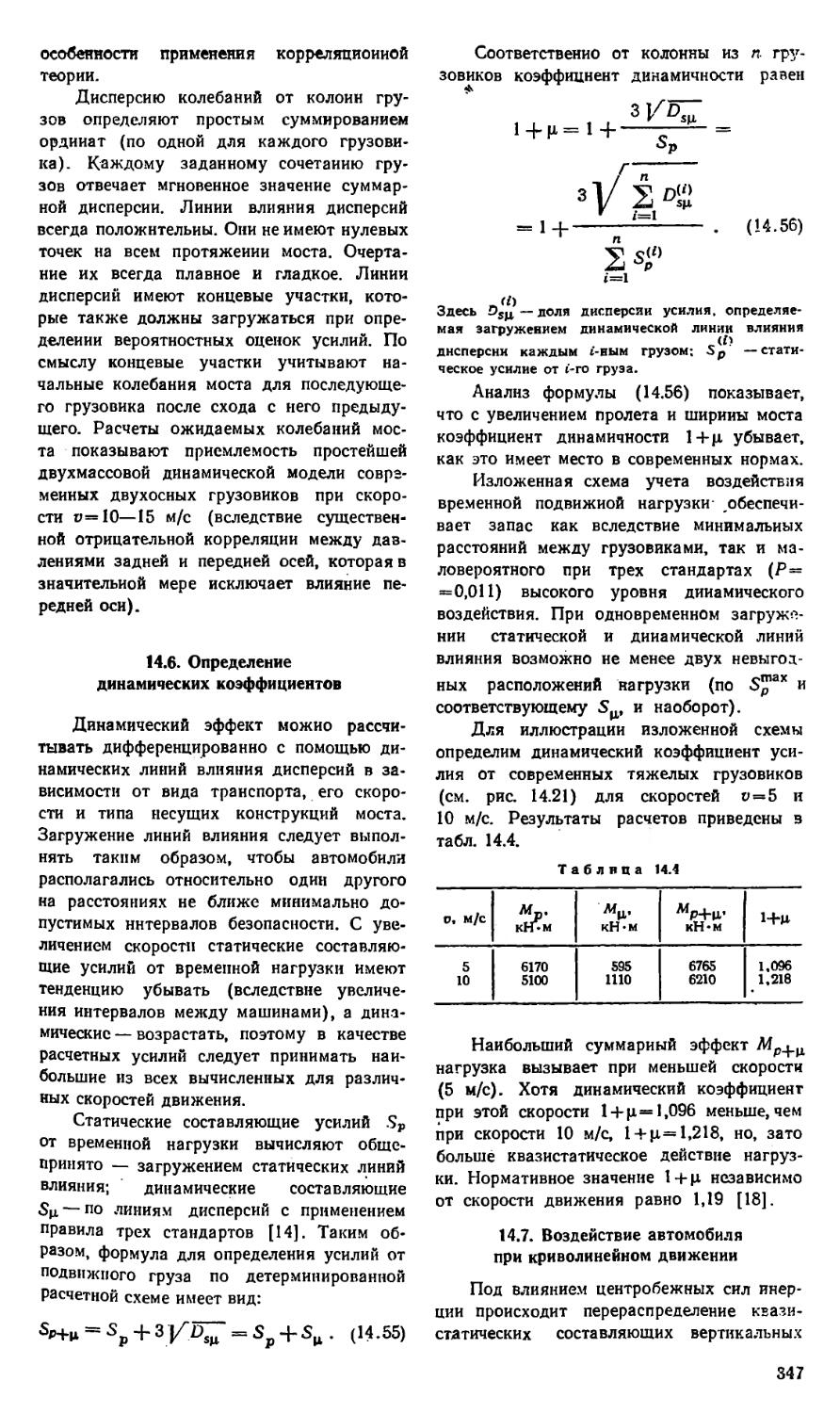
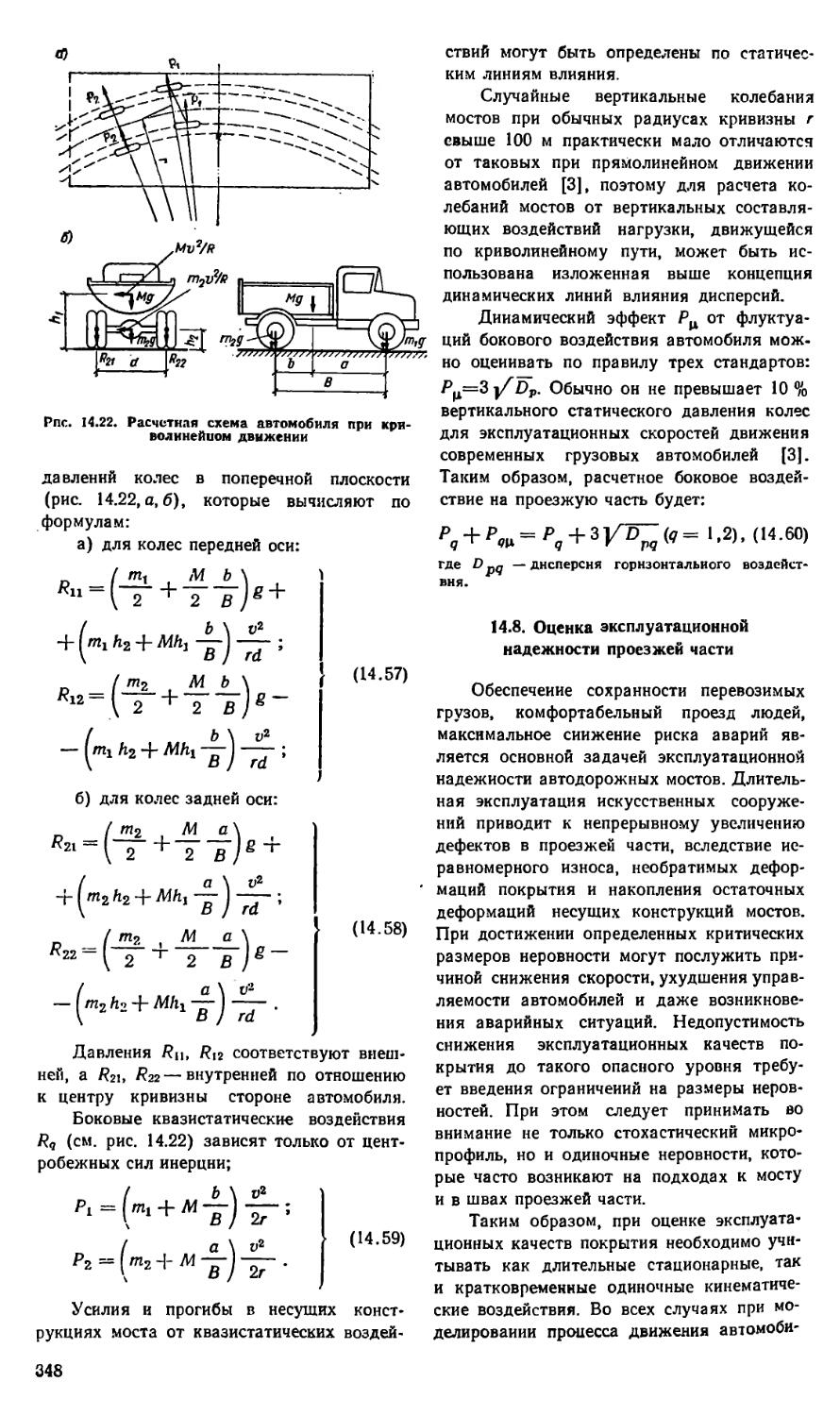
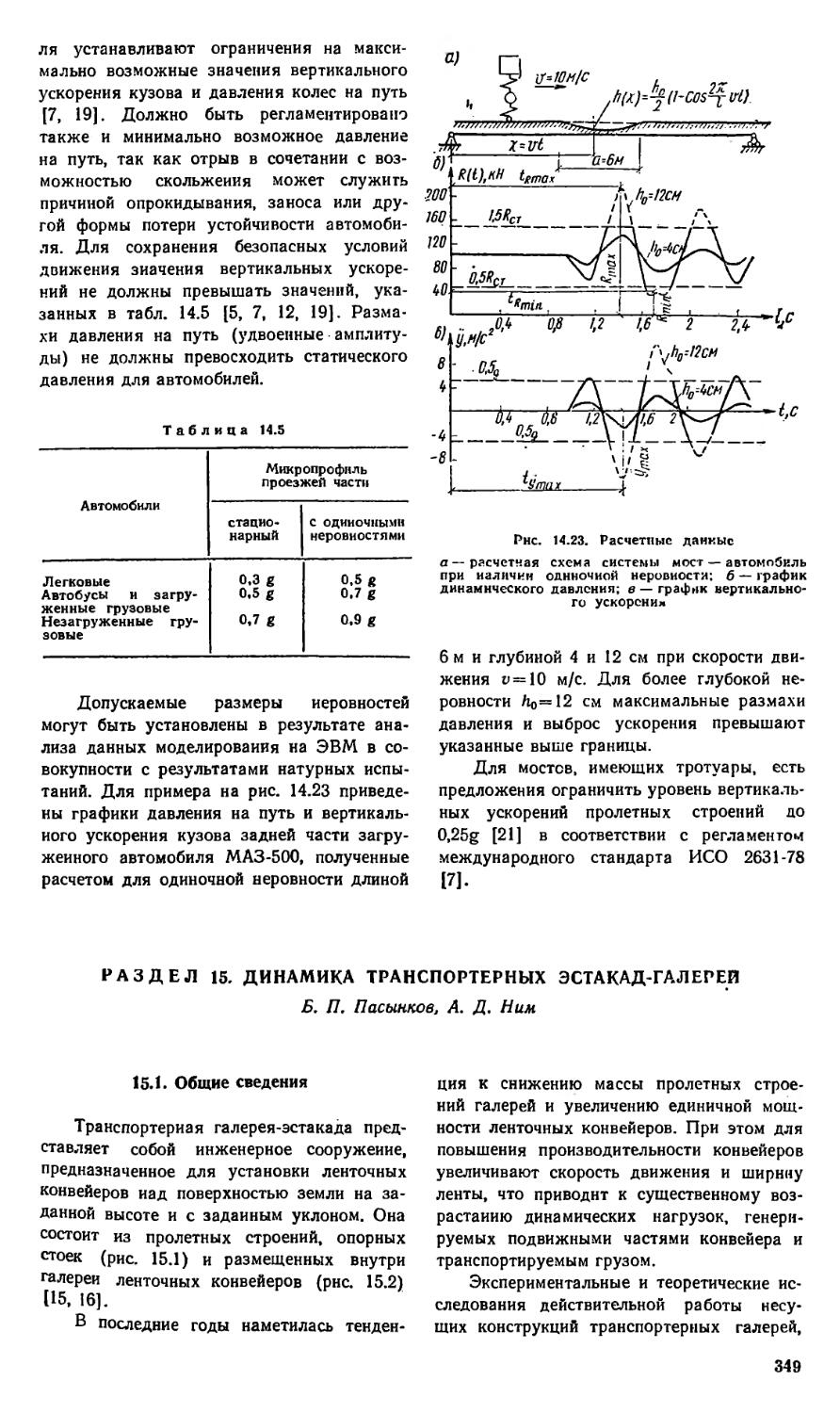
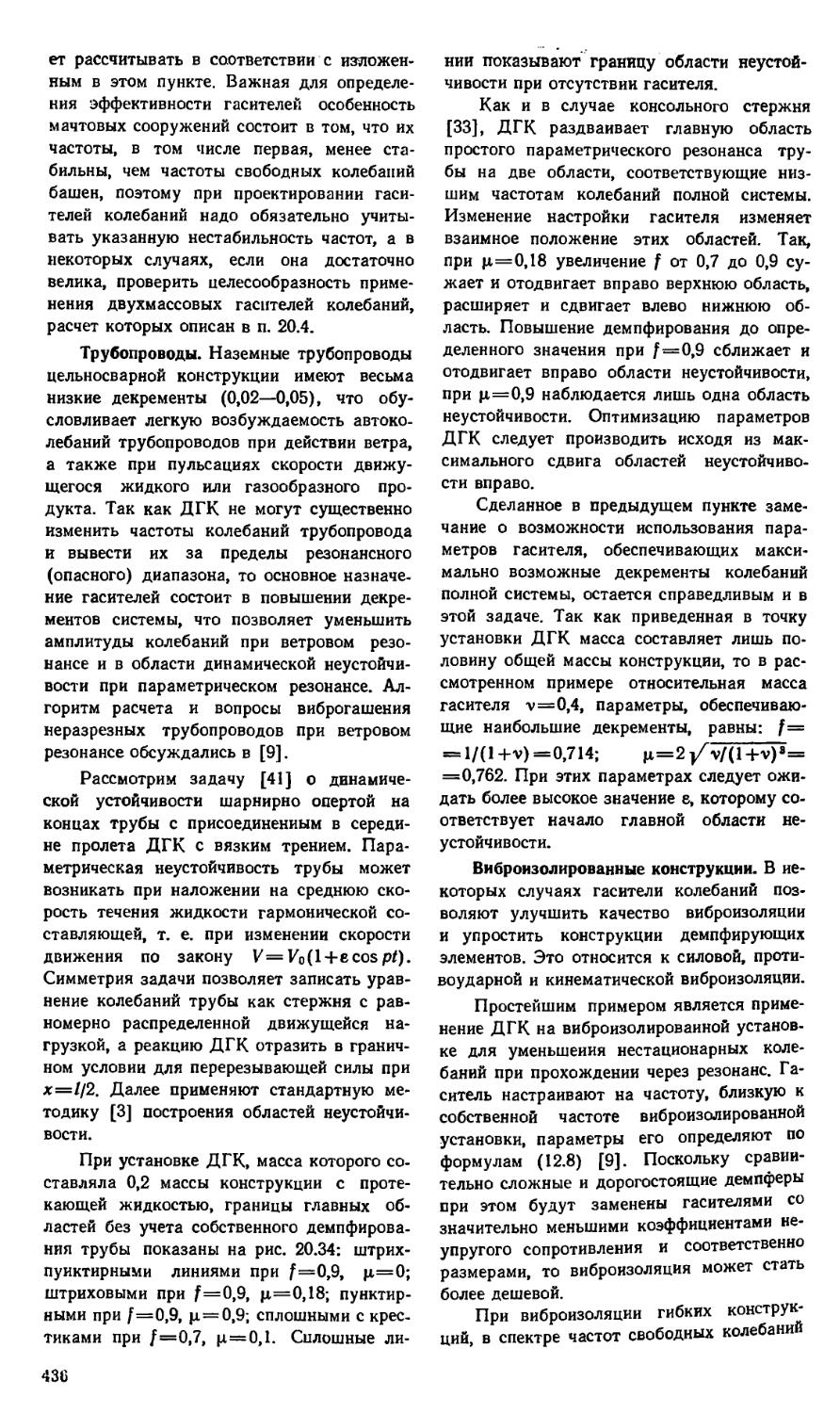
/
















































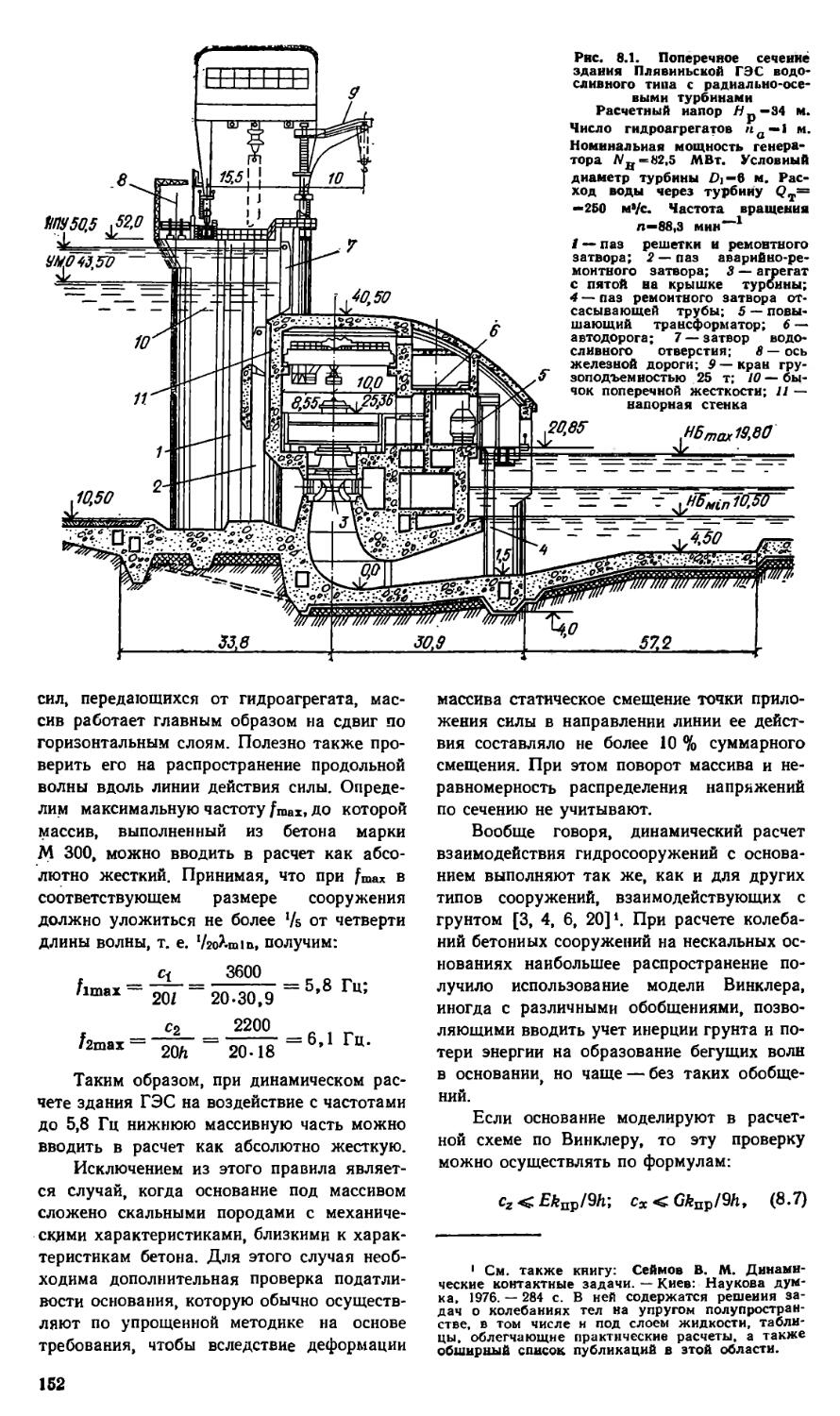

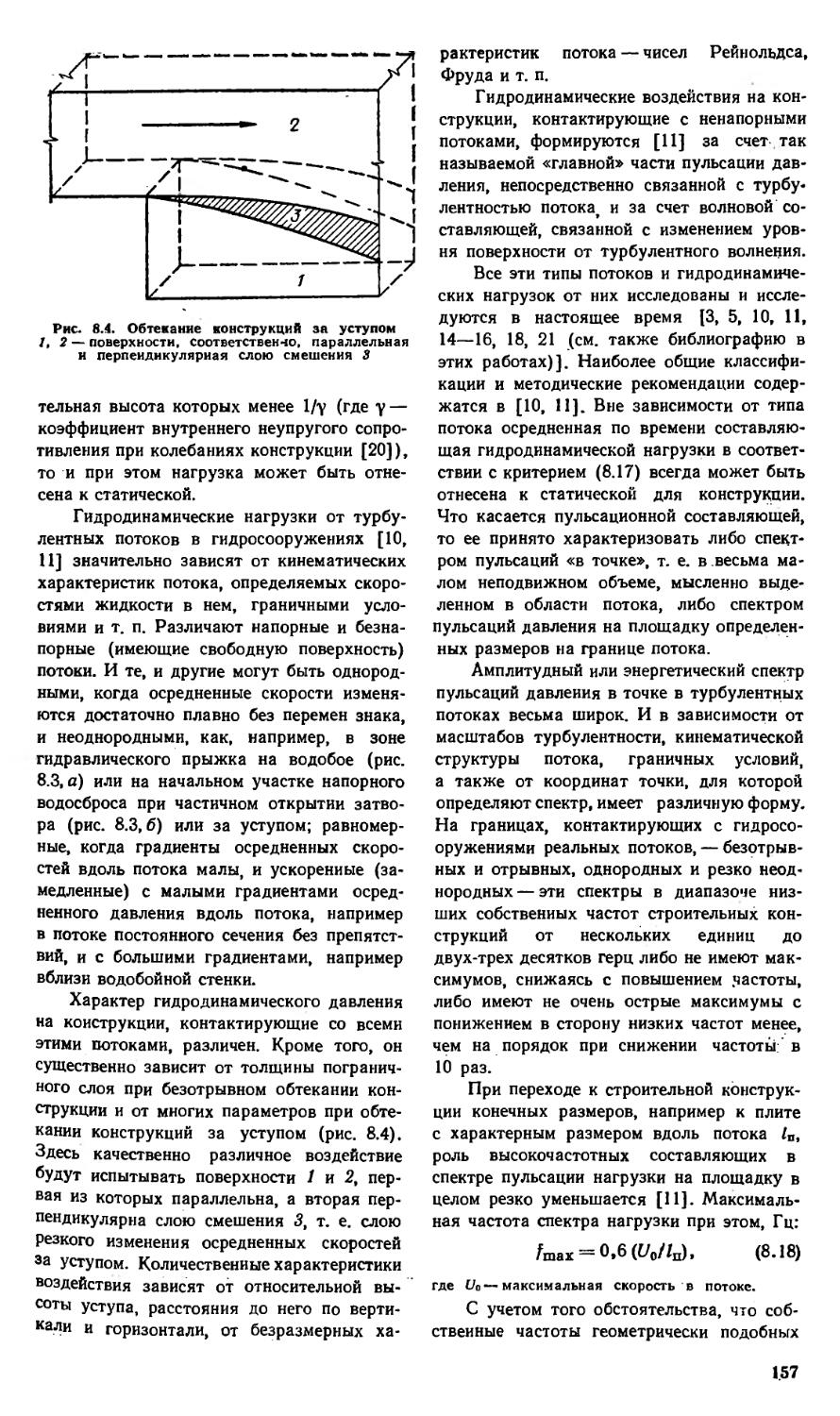












































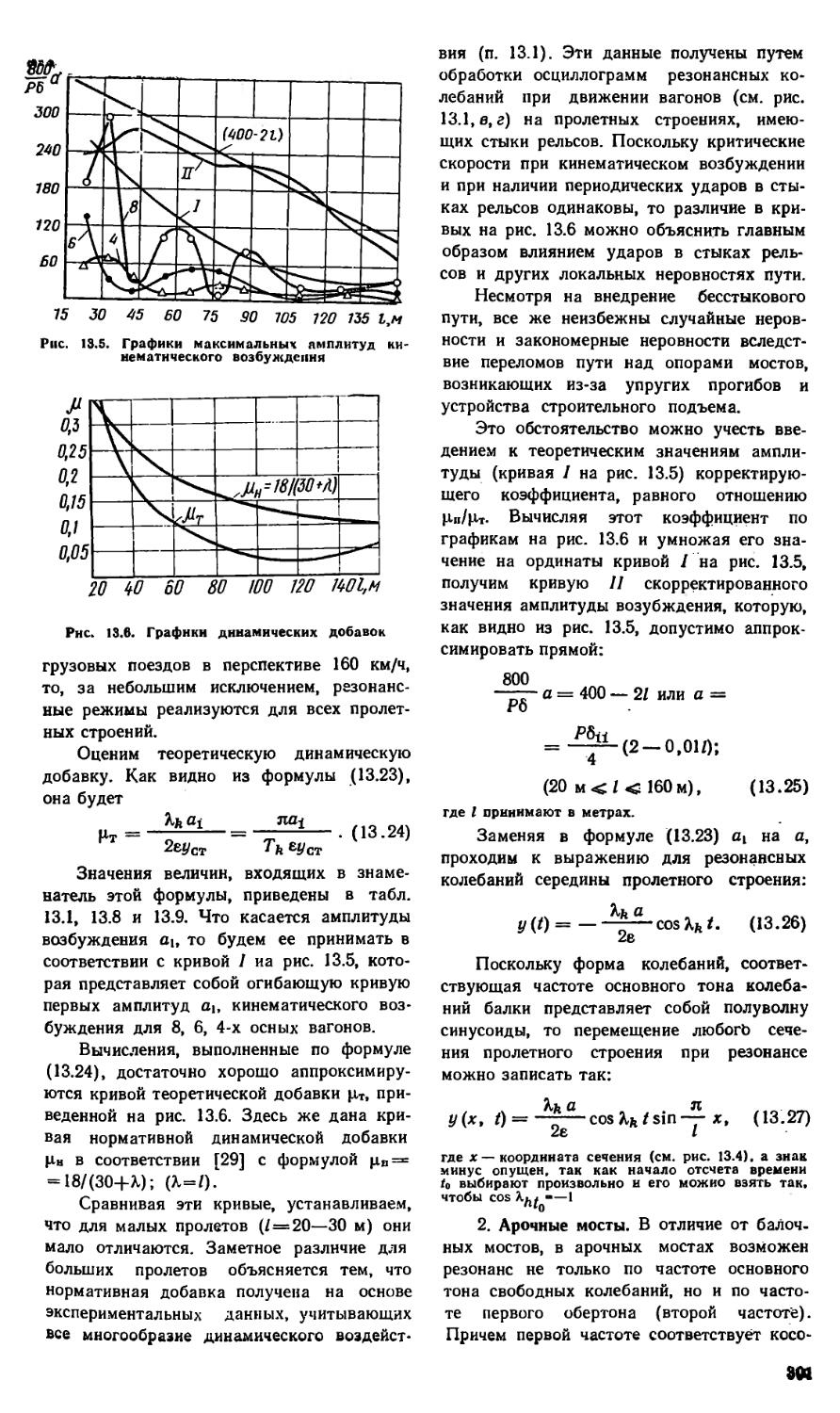
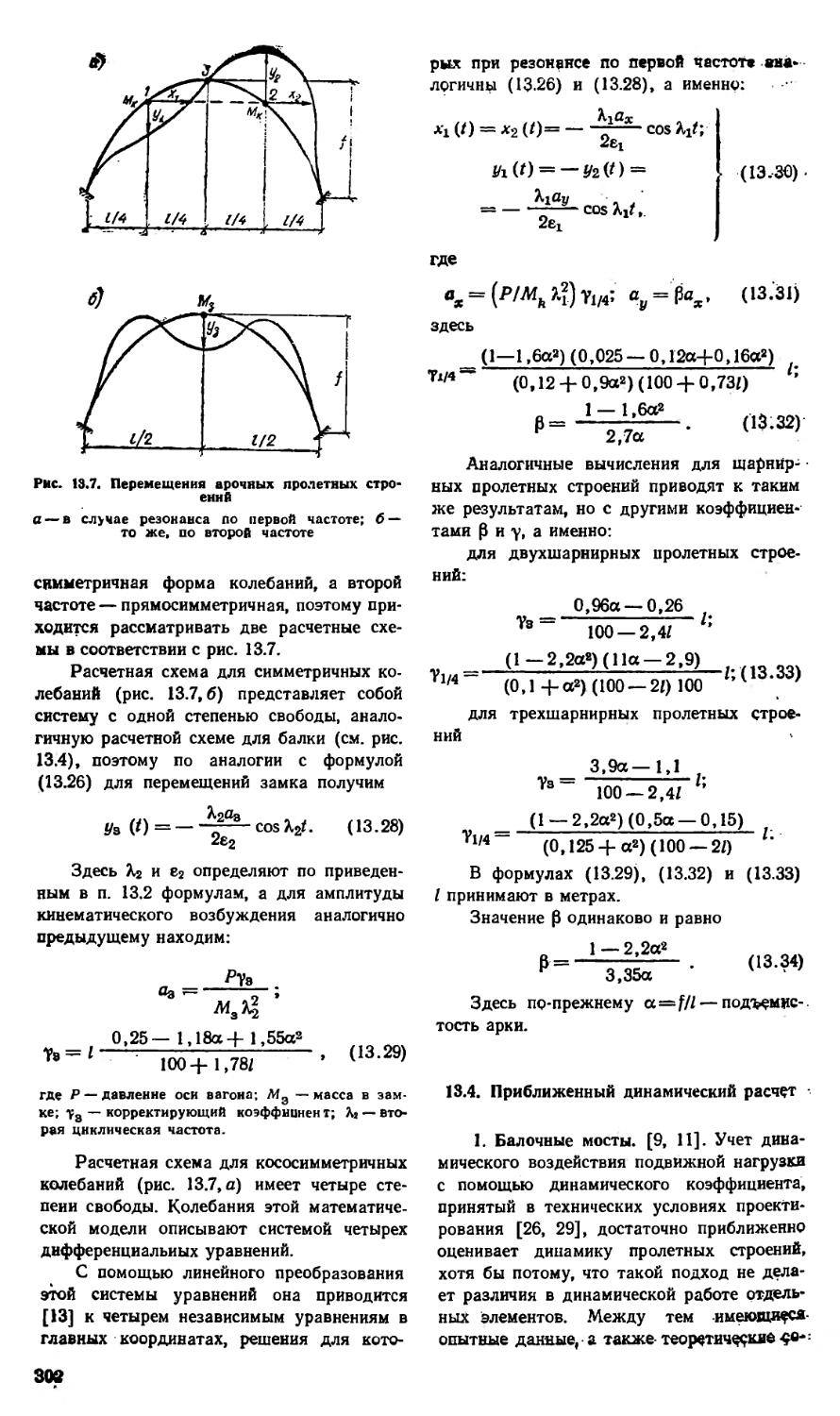
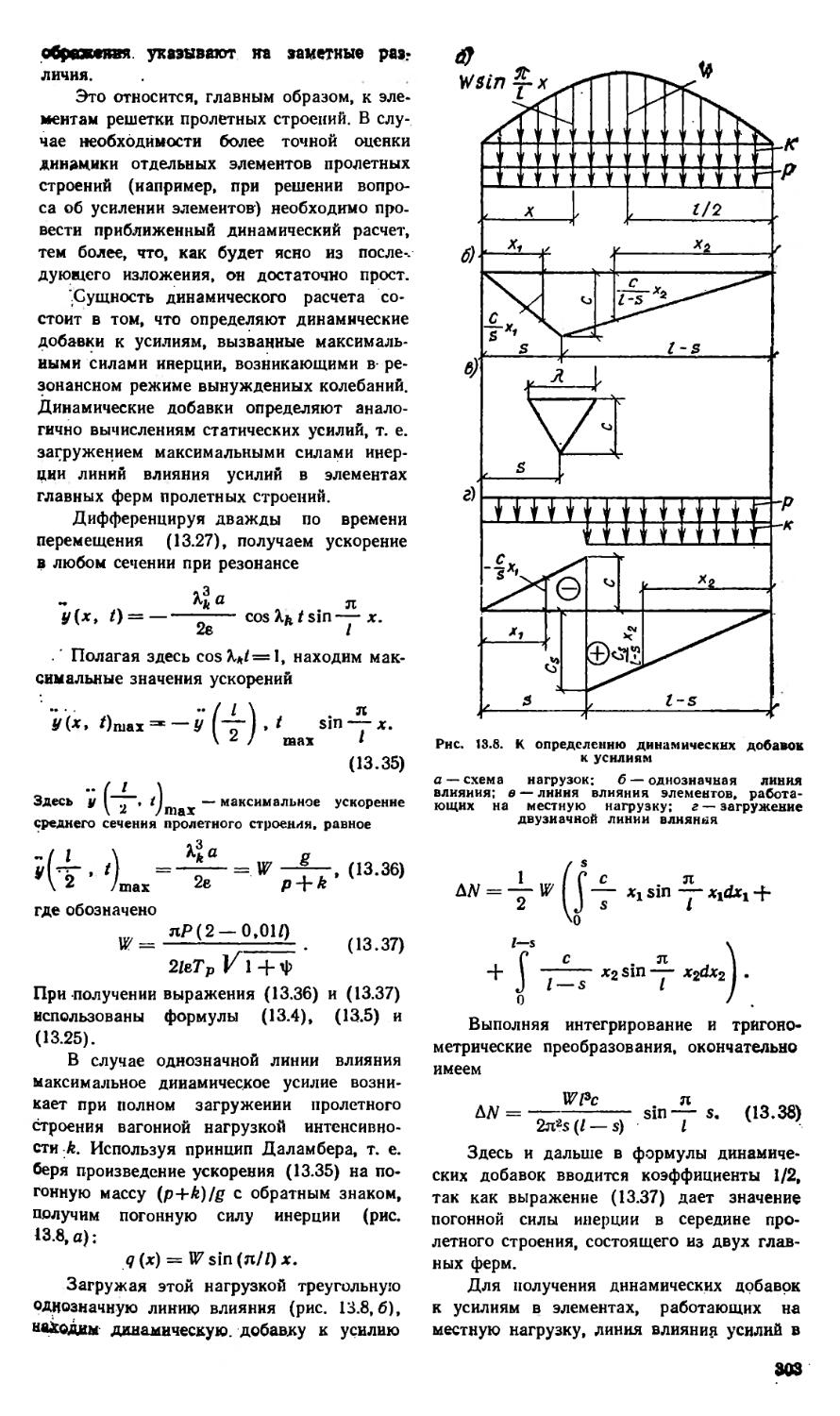

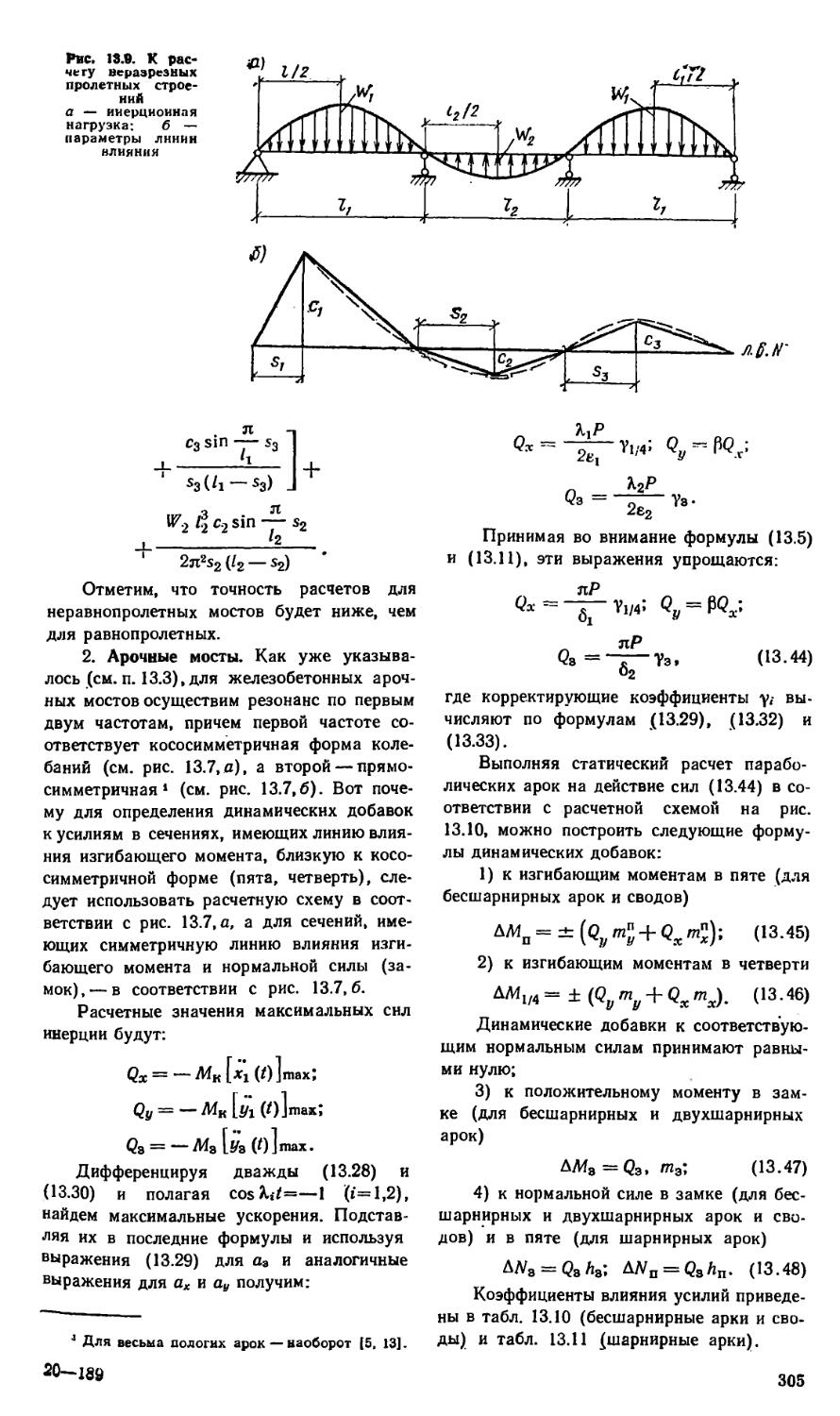







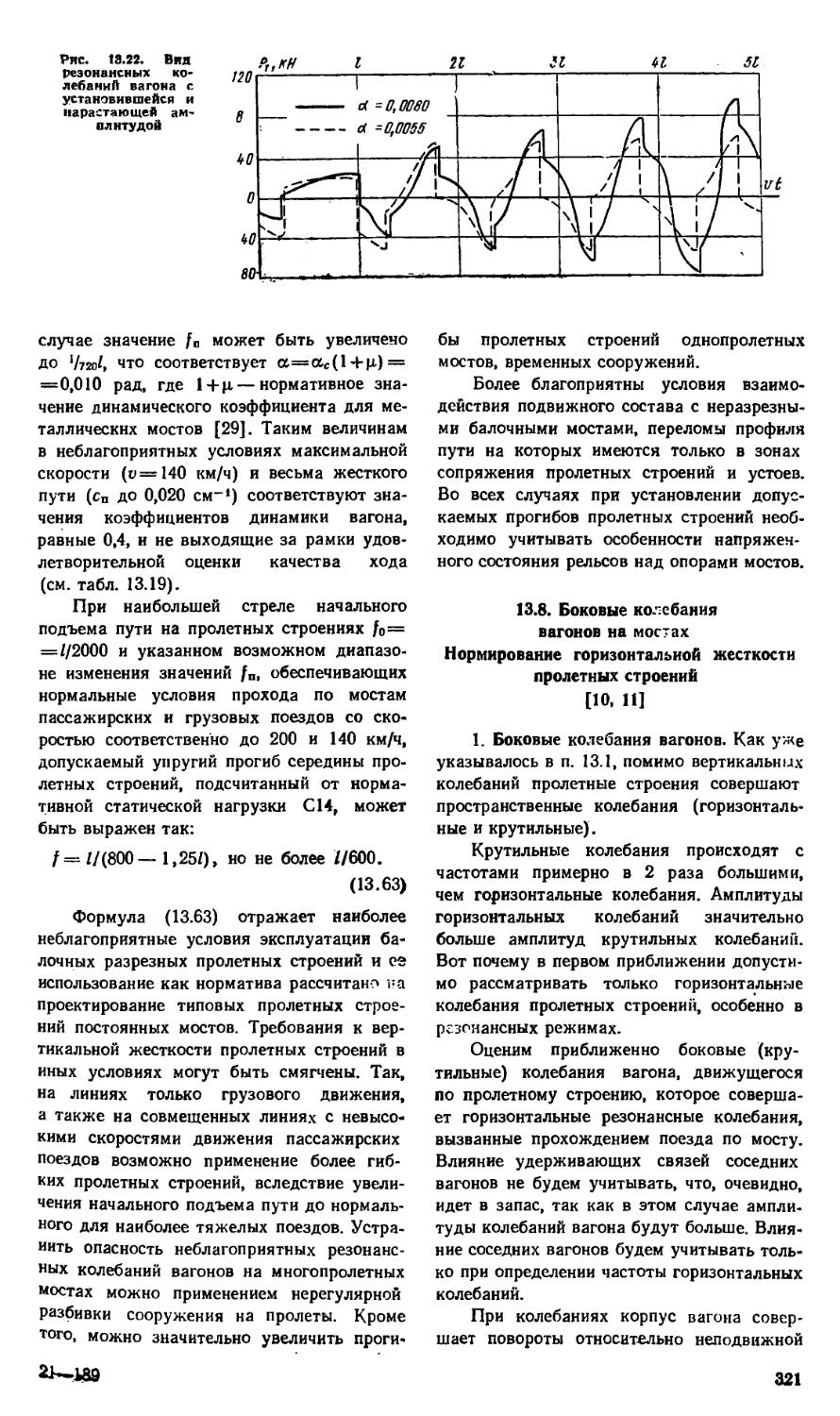
















































Текст
СПРАВОЧНИК ПРОЕКТИРОВЩИКА
ДИНАМИЧЕСКИЙ РАСЧЕТ СПЕЦИАЛЬНЫХ ИНЖЕНЕРНЫХ СООРУЖЕНИЙ
И КОНСТРУКЦИЙ
Под редакцией профессоров Б. Г. Коренева, А. Ф. Смирнова
МОСКВА СТРОИИЗДАТ 1986
ББК 38.112
Д 46
УДК 624.042.8(036.6)
Рецензенты: доктора техн, наук, профессора А. В. Александров, В. М. Сеймов, Н. А. Николаенко, В. А. Ильичев и Ленинградский Промстройниипроект (канд. техн, наук В. М. Пе-тельский)
Авторы: Ю. К. Амбриашвили, А. И. Ананьин, А. Г. Барчен-ков, А. С. Бернштейн, Н. Г. Бондарь, А. С. Гехман, Г. И. Глушков, М. А. Гусев, В. И. Жарницкий, Н. Г. Зари-товский, А. А. Зевни, В. А. Ивович, А. П. Кириллов, Г. Л. Кедрова, Н. В. Колкунрв, Б. Г. Коренев, И. Д. Красулнн, К). Г. Козьмин, П. П. Кульмач, А. И. Курносов, И. С. Литвин, О. В. Лужин, Н. А. Николаенко, А. Д. Ним, Г. Г. Орлов, Б. В. Остроумов, Б. П. Пасынков, А. С. Поверскнй, Н. Н. Попов, Б. С. Расторгуев, Л. М. Резников, М. М. Ройт-штейн, В. С. Сафронов, А. Г. Соколов, Н. А. Стрельчук, Н. Г. Фнгаров, Й. Ш. Халфин, И. С. Шейнин.
Научный редактор канд. техн, наук А. С. Яковлев
Динамический расчет специальных инженерных Д 46 сооружений и конструкций/Ю. К. Амбриашвили, А. И. Ананьин, А. Г. Барченков и др.; Под ред. Б. Г. Коренева, А. Ф. Смирнова. — М.: Стройиздат, 1986. — 461 с.: ил.— (Справочникпроектировщика).
Рассмотрены вопросы динамики железнодорожных н автодорожных мостов, речных гидротехнических сооружений, сооружений горнорудной промышленности, атомных электростанций, фундаментов под турбоагрегаты. Изложены данные о применении гасителей колебаний и виброизоляцнн фундаментов под турбоагрегаты. Продолжает серию справочников «Динамический расчет зданий и сооружений» и «Динамический расчёт зданий и сооружений на специальные воздействия».
Для инженерно-технических и научных работников проектных в научно-исследовательских организаций.
3202000000—600
Д 047(01)—86
45—85
ББК 38.112 5С1
(g) Стройиздат, 1986
ПРЕДИСЛОВИЕ
Предлагаемый справочник по динамическому расчету специальных инженерных сооружений, представляя собой самостоятельное издание, является в то же время продолжением двух справочников по динамике сооружений под редакцией Б. Г. Коренева и И. М. Рафиковича, выпушенных ранее Стройиздатом.
Первый из них — Справочник по динамике сооружений, вышедший в 1972 г. и переизданный в 1983 г., был посвящен общим вопросам практической, инженерной динамики сооружений; он был ориентирован на освещение проблем расчета и методов борьбы с вибрациями обычных, главным об* разом промышленных зданий; при этом основное внимание уделялось учету влияния динамических нагрузок от машин.
Второй справочник — Динамический расчет сооружений ид специальные воздействия, выпущенный в свет в 1981 г., также в своей основной части был предназначен для. проектировщиков обычных зданий. Главная цель, поставленная при его разработке, состояла в рассмотрении вопросов расчета на различные динамические воздействия, названные обобщенно специальными. К их числу в первую очередь были отнесены сейсмические воздействия, нагрузки, вызванные взрывом, аэродинамические воздействия, носящие автоколебательный характер и являющиеся причиной возникновения ветрового резонанса и галопирования, нагрузки, вызванные влиянием на здания сверхзвуковых самолетов, нагрузки, передаваемые через грунт, и др.
В указанных двух справочниках рассматривались некоторые вопросы расчета башен, а также задачи расчета фундаментов под машины и др., но все же проблемы динамического расчета специальных сооружений там, по существу, затронуты не были, что оговорено в предисловиях к этим изданиям.
Проблемы динамического расчета специальных инженерных сооружений, которые излагаются в предлагаемом Справочнике, являются чрезвычайно важными и в то же время достаточно разнообразными и сложными. Рассматриваются задачи динамического расчета сооружений различных ти-п<^в железнодорожных и автодорожных мостов, трубопроводов. Применение последних для транспортировки нефти и газа определяет повышенный интерес к расчету подобных сооружений. Некоторые задачи
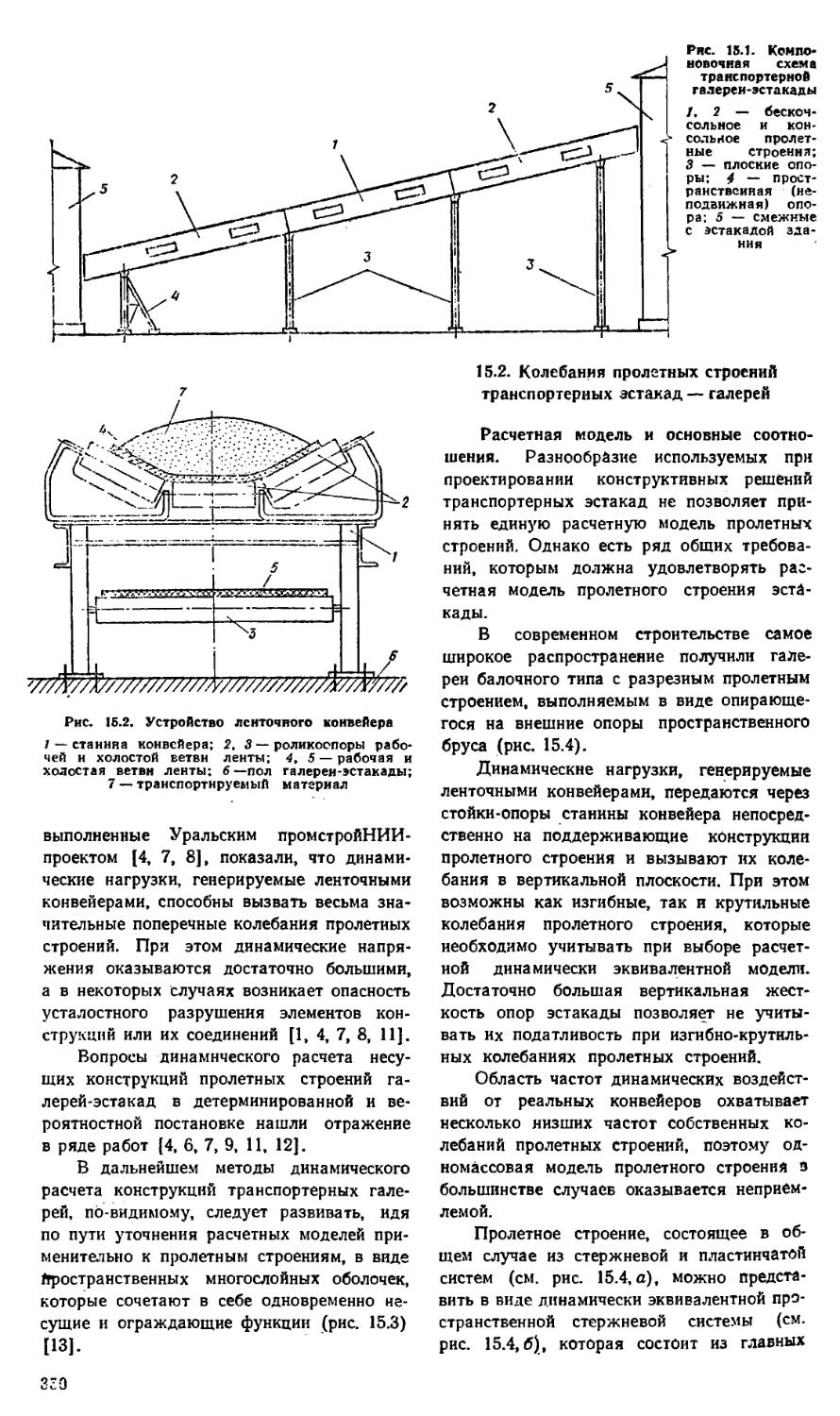
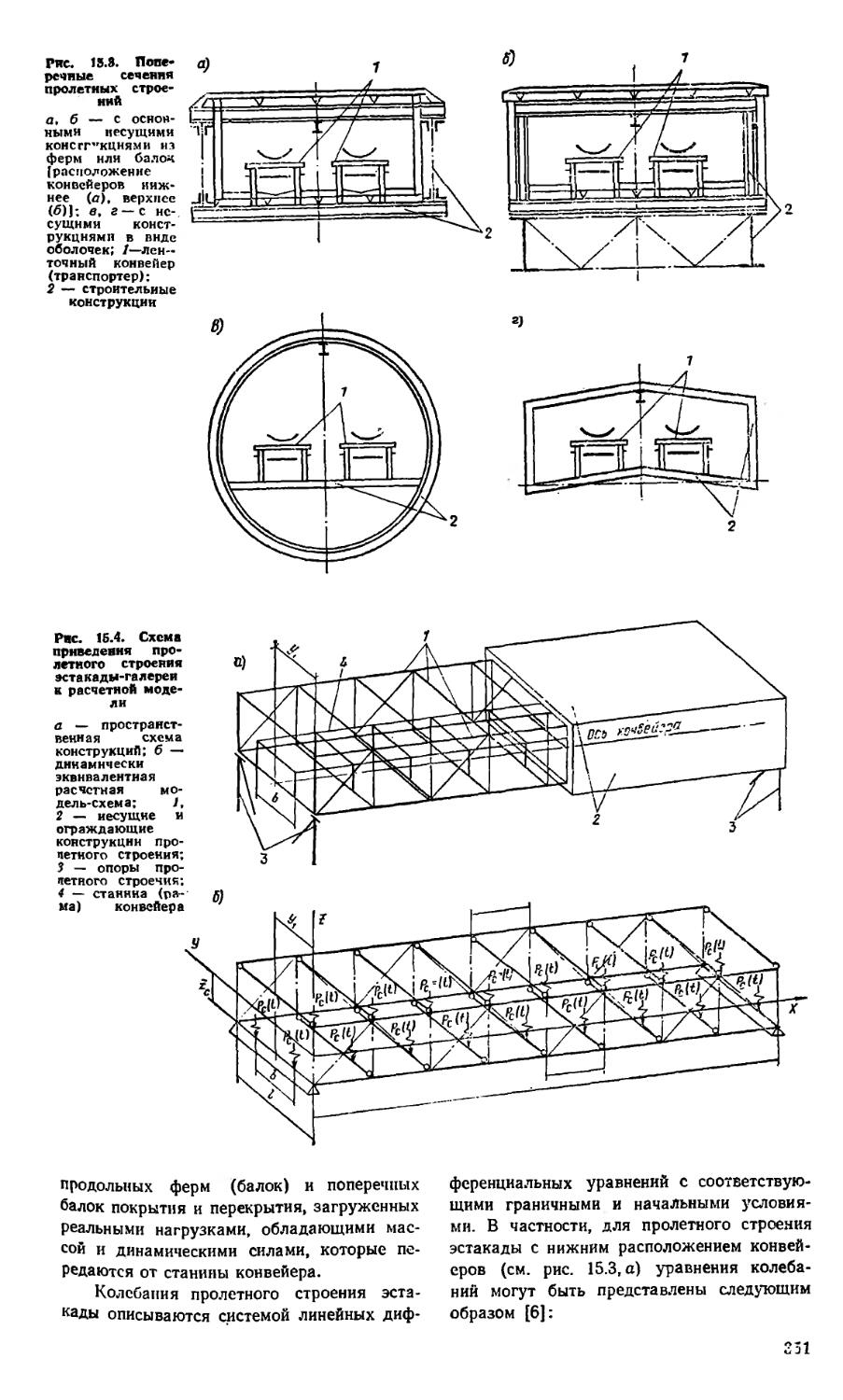
внутризаводского транспорта сделали актуальным динамический расчет галерей, оборудованных транспортерами, поэтому в Справочник включены разделы, посвященные динамическому расчету трубопроводов и транспортерных галерей.
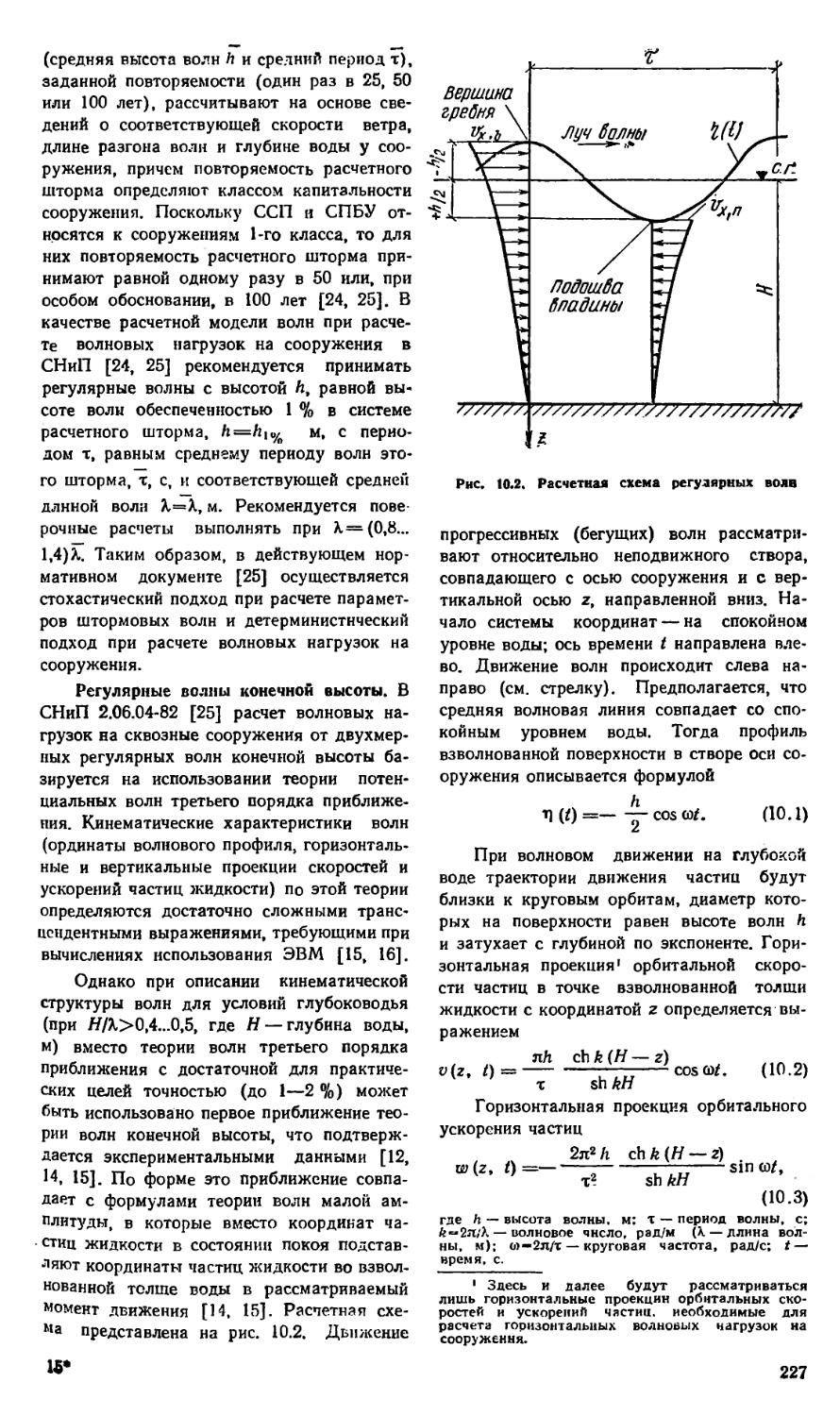
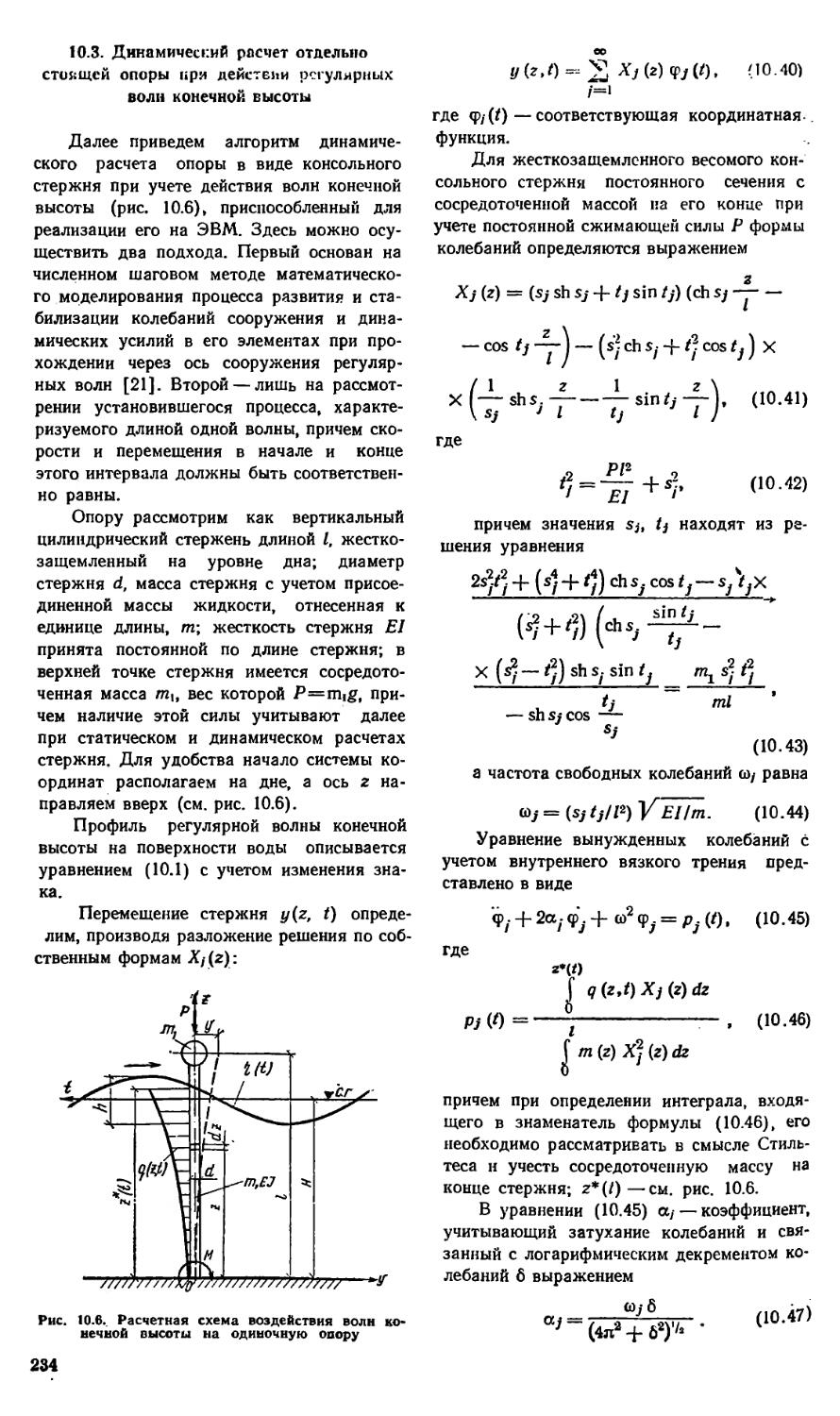
Динамическому расчету гидротехнических сооружений, имеющему важное значение, отведено три раздела, в которых рассматриваются соответственно морские и речные портовые сооружения, речные энергетические гидросооружения и специальные сооружения — эстакады, расположенные в пределах шельфа и предназначенные для добычи нефти. Достаточное внимание уделено вопросу динамического воздействия волн, использованы результаты, полученные в гидродинамике и гидроупругости.
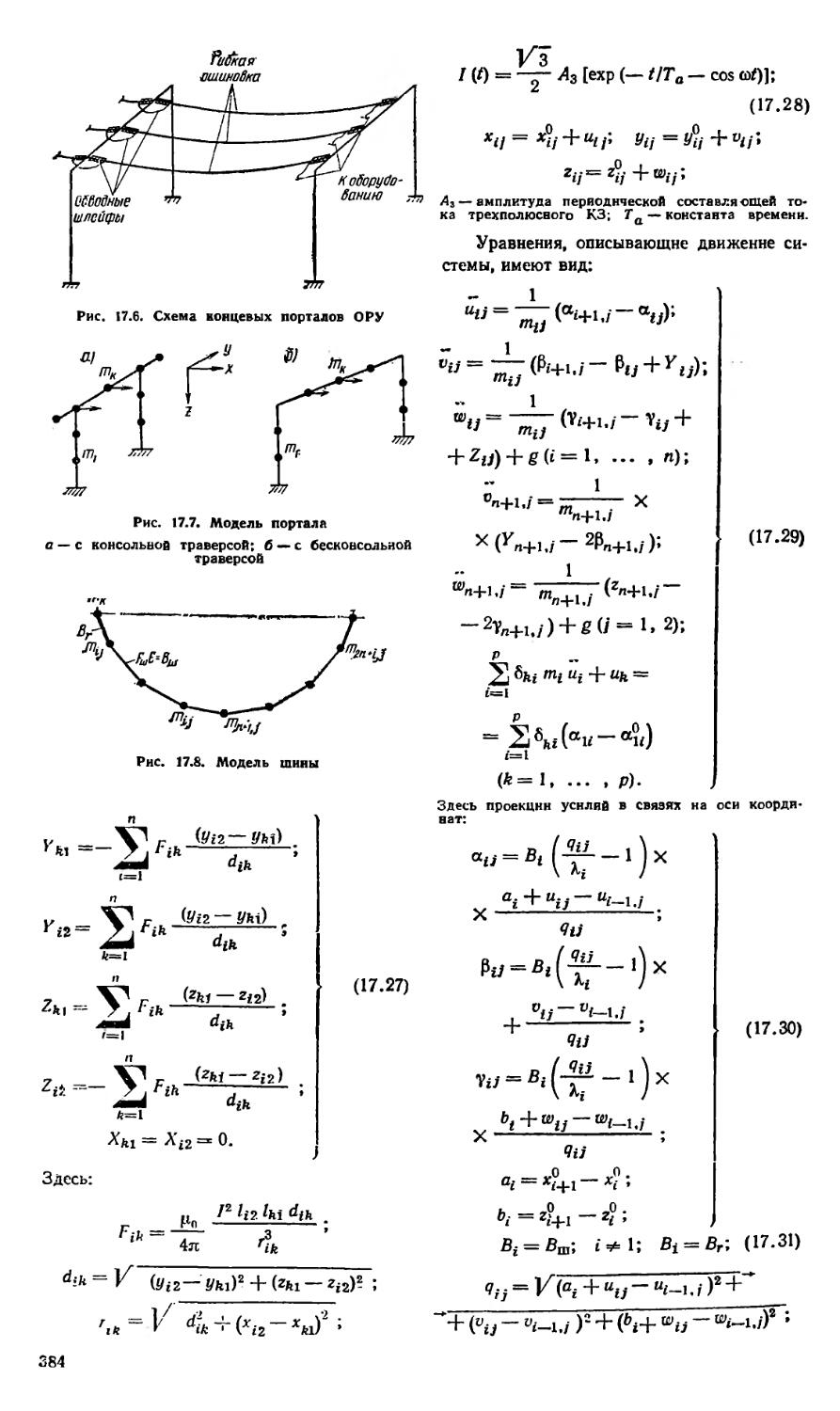
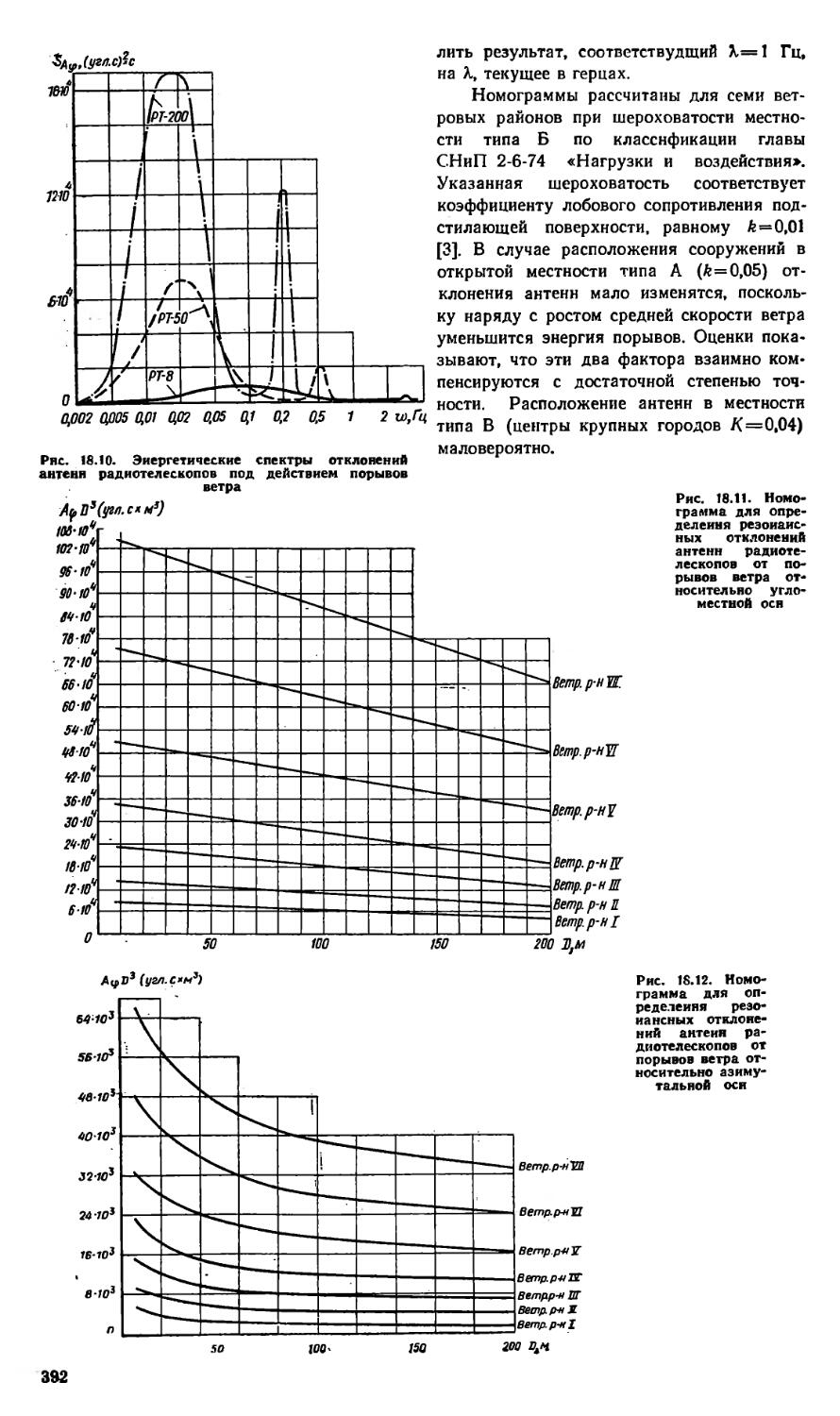
Б Справочнике освещены вопросы о специальных сооружениях, предназначенных для связи и передачи электроэнергии по проводам,-—это мачтовые сооружения и опоры линий электропередач; рассмотрены также радиотелескопы, которые одновременно являются устройствами для спутниковой связи.
Во многих случаях различные области энергетики и промышленного производства связаны с возведением зданий и специальных сооружений, которые требуют достаточно сложного расчета, выходящего за рамки тех, которые проводятся при проектировании обычных зданий. К их числу относятся здания атомных электростанций, сооружения химической промышленности, несущие резервуары, специальные сооружения горнорудной промышленности, здания для размещения взрывоопасных производств и заглубленные сооружения, подвергающиеся действию взрыва. Все эти вопросы изложены в соответствующих разделах Справочника.
При проектировании специальных сооружений уделяется, естественно, значительное внимание борьбе с вибрациями. Учитывая, что одним из эффективных средств, служащих для этой цели, является применение гасителей колебаний, соответствующий-раздел посвящен этому вопросу.
Следует отметить, что практически невозможно в рамках одного, даже довольно большого по своему объему Справочника, осветить вопросы динамического расчета всех специальных сооружений; однако нам представляется, что в Справочнике об<?уж-
3
дается достаточно широкий круг проблем динамического расчета специальных сооружений, который в будущем можно будет расширить.
Степень изученности динамики различных специальных сооружений далеко не одинакова. Так, если вопросы расчета железнодорожных мостов изучались еще в прошлом веке, то появившиеся совсем недавно радиотелескопы, по существу, лишь только начинают изучаться с позиций динамики; поэтому уровень детальности и полноты изложения материалов не всегда одинаков. Тем не менее, он отражает существующее в настоящее время положение в области динамических расчетов. Издание
Справочника, полагаем,, несомненно, будет способствовать углублению и дальнейшему развитию динамики специальных сооружений.
В состав авторского коллектива вошли специалисты, которые непосредственно работают в области динамического расчета соответствующих специальных сооружений и в основном являются авторами нормативных и инструктивных материалов, а также научных исследований и монографий по затронутым в Справочнике вопросам.
Б. Г. Коренев
|4. Ф. Смирнов |
РАЗДЕЛ 1. ДИНАМИКА СООРУЖЕНИЙ ГОРНОРУДНОЙ ПРОМЫШЛЕННОСТИ
В. А. Ивович, А. С. Поверский
1.1. Общие сведения
Предприятия горнорудной промышленности оснашёны машинами с большими динамическими нагрузками. При работе технологического оборудования (главным образом грохотов и дробилок) возможно возникновение повышенных колебаний несущих конструкций и рабочих мест, которые отрицательно сказываются на здоровье обслуживающего персонала и в некоторых случаях могут привести даже к разрушению отдельных частей зданий, что создает трудности при эксплуатации зданий или сооружений и вызывает необходимость последующей переделки конструкций. На горнорудных предприятиях повышенный уровень колебаний строительных конструкций наблюдается в производственных зданиях горно-обогатительных комбинатов и шахтных копрах при экстренных режимах работы подъемных установок. Иногда возникают повышенные колебания фундаментов при работе мельничных установок (стержневых, шаровых н рудно-галечных). Вопросы динамики фундаментов мельничных установок подробно изложены в работе [26], поэтому здесь они не затрагиваются.
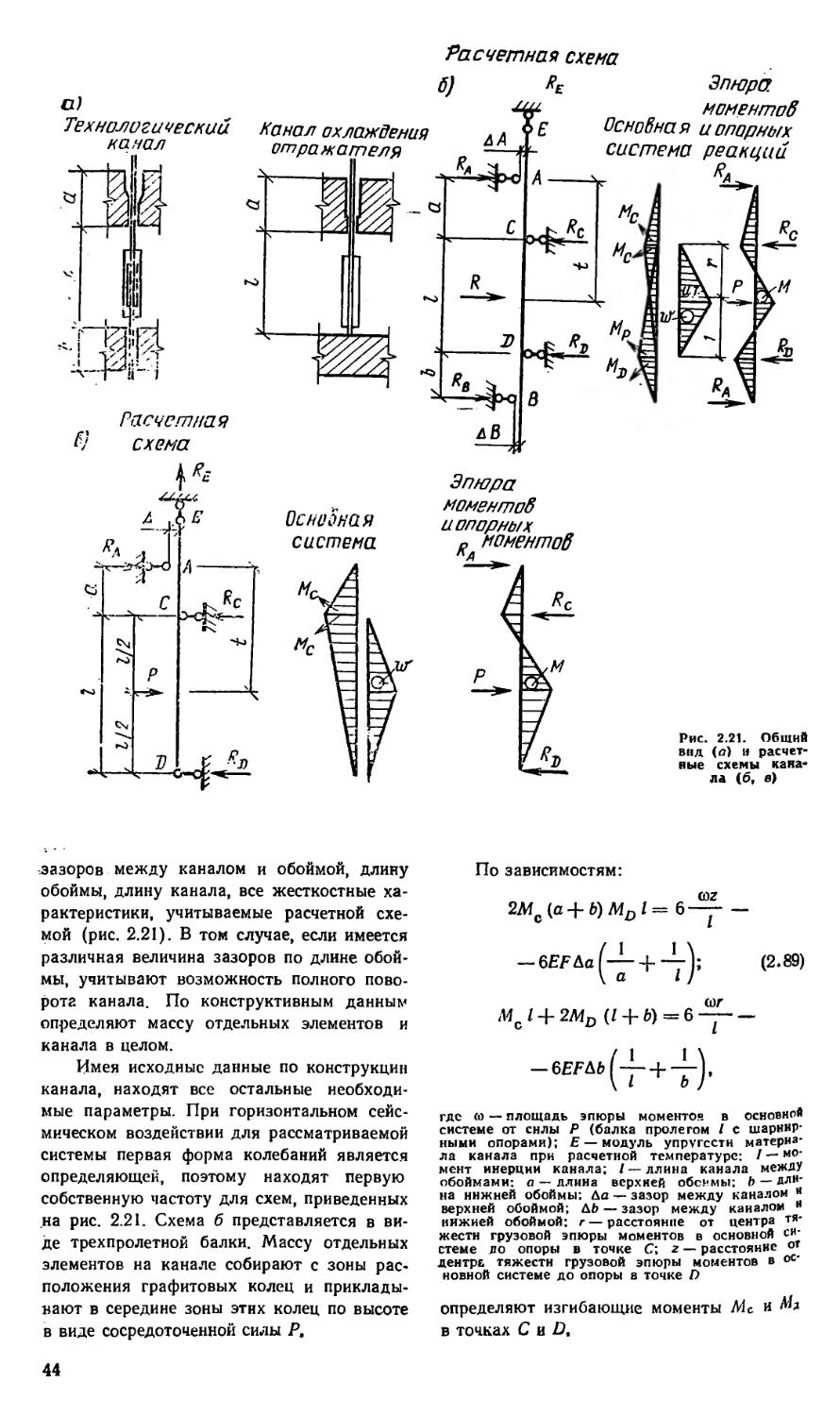
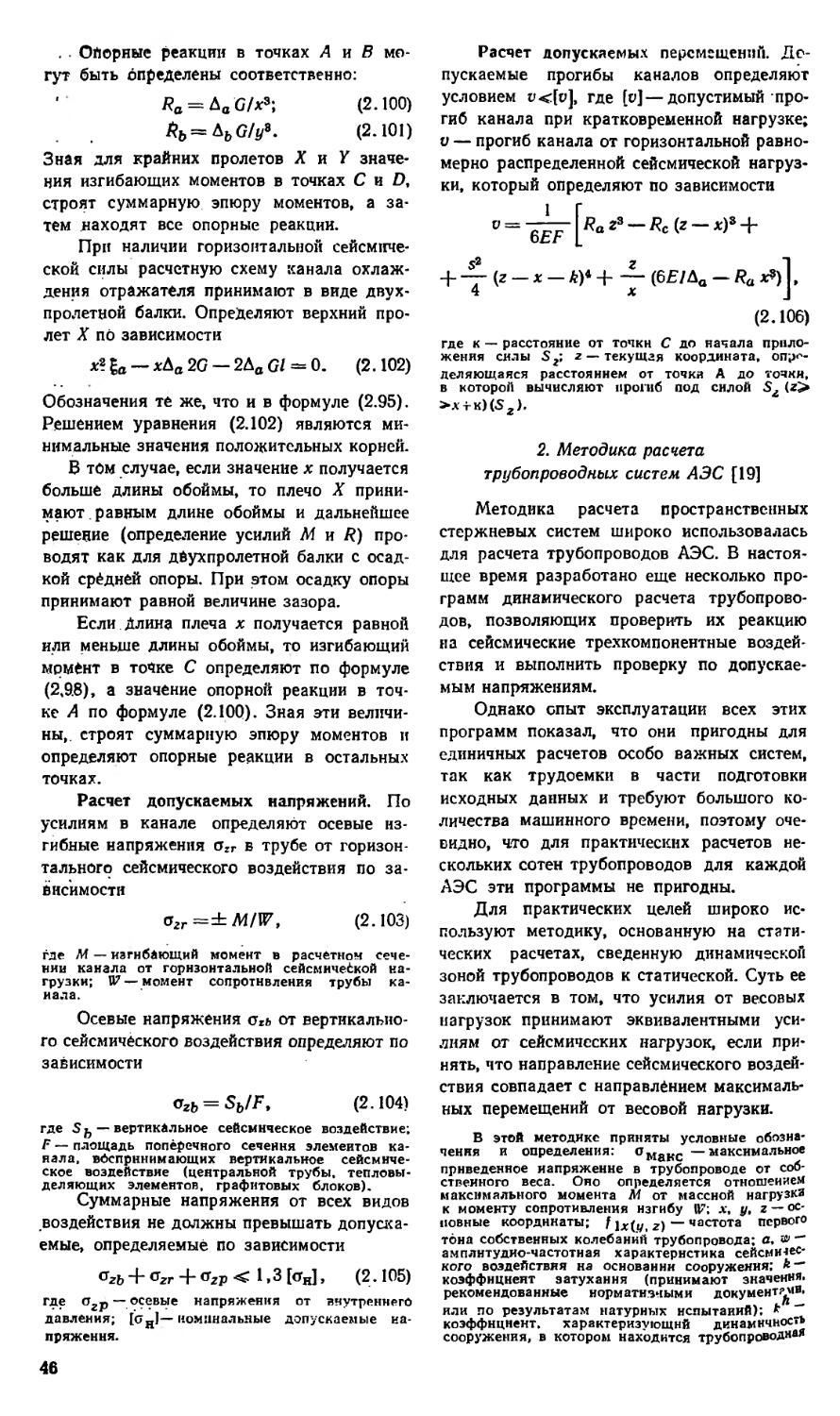
Повышенные колебания производственных зданий обогатительных и дробильносортировочных фабрик, а также надшахтных зданий и сооружений в большинстве случаев являются следствием недостаточно точного учета динамических воздействий на конструкции при проектировании, неудачных конструктивных решений, малой эффективности или отсутствия виброизоляции для машин, устанавливаемых на перекрытиях.
Мероприятия по ограничению ожидаемых колебаний строительных конструкций заданными пределами при проектировании связаны с проведением динамических расчетов. Задачей динамического расчета является оценка ожидаемых колебаний еще до возведения здания или сооружения и удовлетворение требованиям, исключающим вредное влияние этих колебаний на людей, строительные конструкции, а также машины и приборы, чувствительные к колебаниям.
Из всего разнообразия вопросов динамики сооружений горнорудной промышленности в настоящем разделе выбраны вопро
сы наиболее важные с точки зрения инженерных приложений.
Имеются инструкции и руководства, способствующие упрощению динамических расчетов и принятию мер по защите от вибраций. Однако они затрагивают не все проблемы, возникающие при проектировании зданий и сооружений горнорудной промышленности.
В этом разделе приводятся подробные сведения о динамических нагрузках от конусных и щековых дробилок, а также от грохотов и многоканатных подъемных установок шахтных копров, указаны основные направления защиты от вибраций и даны рекомендации по расчету подвесной низкочастотной виброизоляции, осуществляемой по схеме маятникового подвеса и применяемой для эффективного уменьшения динамических нагрузок, передающихся на поддерживающие конструкции. Заметим, что при отсутствии достоверных данных по динамическим нагрузкам от машин динамический расчет строительных конструкций становится несостоятельным. По вопросам динамического расчета типовых промышленных зданий имеется достаточное количество работ [1—28], систематических же данных по нагрузкам, создаваемым многоканатными подъемными установками, в отечественной литературе пока еще нет. По проектированию виброизоляции под машины имеется специальное Руководство [25], однако практических указаний по виброизоляции дробилок, обладающих низкими частотами возмущений и большими горизонтальными нагрузками, оно не содержит.
1.2. Динамические нагрузки от машин на горно-обогатительных комбинатах
Машины с динамическими нагрузками на обогатительных предприятиях, в соответствии с Инструкцией [12], можно разделить на две группы: машины с конструктивно неуравновешенными движущимися частями; машины с номинально уравновешенными, а фактически неуравновешенными движущимися частями. К первой группе относятся щековые и конусные дробилки, инерционные, эксцентриковые и качающиеся грохоты. Ко второй группе — молотковые дробилки, самобалансные и резонансные
5
грохоты, вентиляторы, центробежные насосы. Важной особенностью машин, относящихся ко второй группе, является большое влияние обрабатываемого материала на динамическую нагрузку.
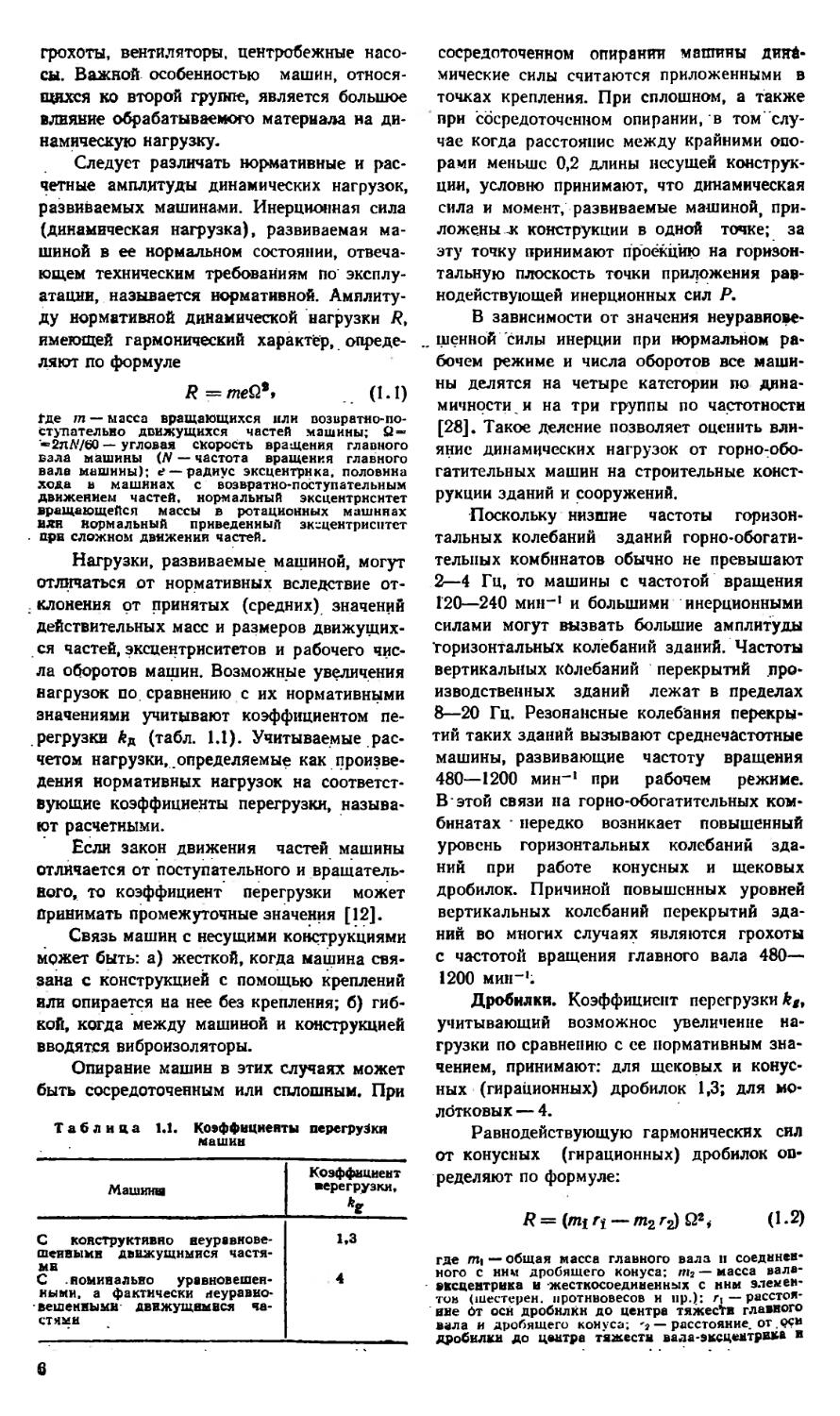
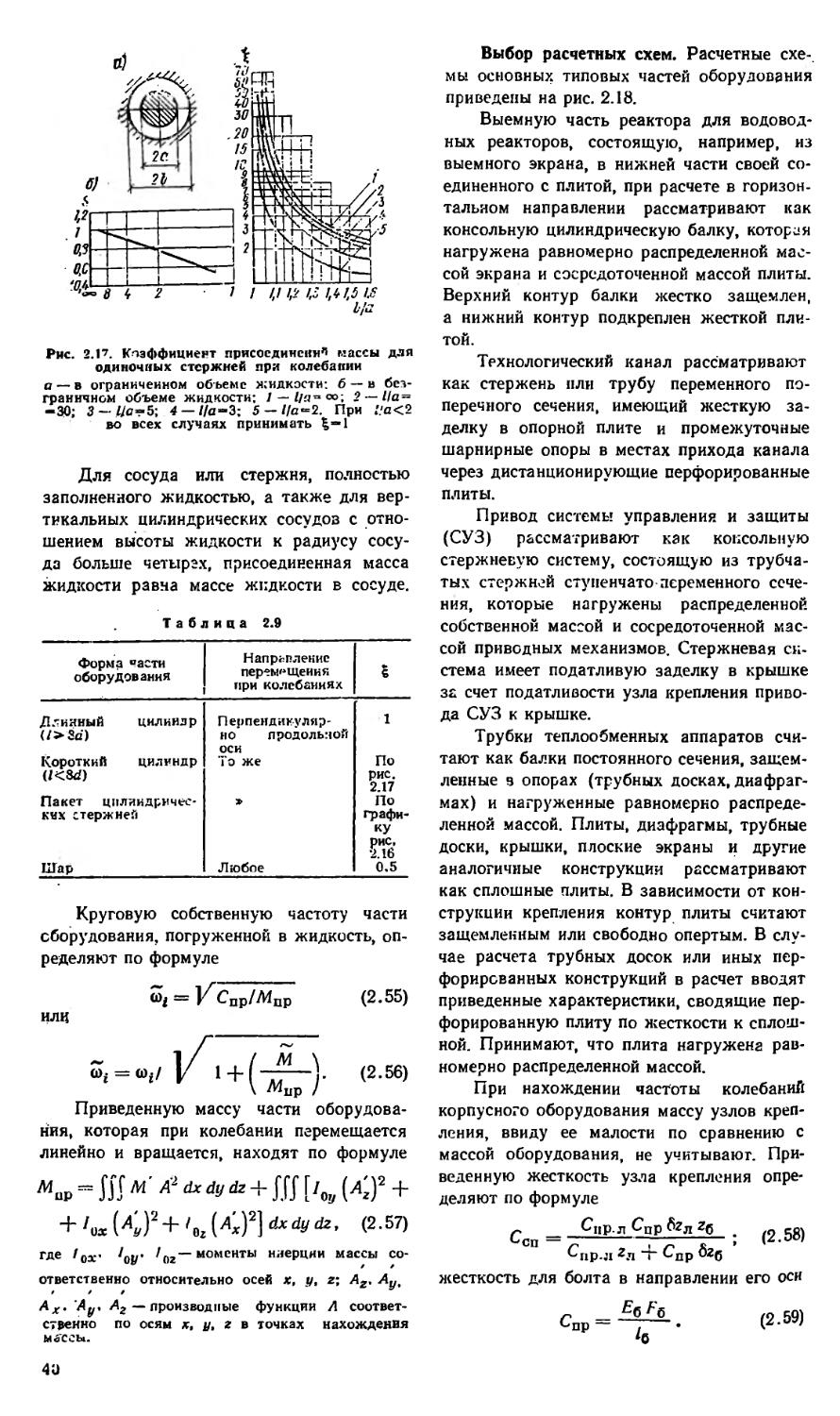
Следует различать нормативные и расчетные амплитуды динамических нагрузок, развиваемых машинами. Инерционная сила (динамическая нагрузка), развиваемая машиной в ее нормальном состоянии, отвечающем техническим требованиям по эксплуатации, называется нормативной. Амплитуду нормативной динамической нагрузки R, имеющей гармонический характер, определяют по формуле
R=meQ9> (1.1)
Где т — масса вращающихся или возвратно-поступательно движущихся частей машины; Q — «=2пЛ'/бО — угловая скорость вращения главного вала машины (N — частота вращения главного вала машины); е — радиус эксцентрика, половина хода в машинах с возвратно-поступательным движением частей, нормальный эксцентриситет вращающейся массы в ротационных машинах или нормальный приведенный эксцентриситет при сложном движении частей.
Нагрузки, развиваемые машиной, могут отягчаться от нормативных вследствие от-. клонения от принятых (средних) значений действительных масс и размеров движущихся частей, эксцентриситетов и рабочего числа оборотов машин. Возможные увеличения нагрузок по. сравнению с их нормативными значениями учитывают коэффициентом перегрузки Ад (табл. 1.1). Учитываемые расчетом нагрузки, определяемые как произведения нормативных нагрузок на соответствующие коэффициенты перегрузки, называют расчетными.
Если закон движения частей машины отличается от поступательного и вращательного, то коэффициент перегрузки может Принимать промежуточные значения [12].
Связь машин с несущими конструкциями может быть: а) жесткой, когда машина связана с конструкцией с помощью креплений или опирается на нее без крепления; б) гибкой, когда между машиной и конструкцией вводятся виброизоляторы.
Опирание машин в этих случаях может быть сосредоточенным или сплошным. При
Таблица 1.1. Коэффициенты перегрузки машин
Машина Коэффициент ерегрузки, ке
С конструктивно неуравновешенными движущимися частями 1.3
С .номинально уравновешенными, а фактически неуравновешенными движущимися частями 4
сосредоточенном опирании машины динамические силы считаются приложенными в точках крепления. При сплошном, а также при сосредоточенном опирании, в том’ случае когда расстояние между крайними опорами меньше 0,2 длины несущей конструкции, условно принимают, что динамическая сила и момент, развиваемые машиной, приложены к конструкции в одной точке; за эту точку принимают проекцию на горизонтальную плоскость точки приложения равнодействующей инерционных сил Р.
В зависимости от значения неуравновешенной силы инерции при нормальном рабочем режиме и числа оборотов все машины делятся на четыре категории по динамичности и на три группы по частотности [28]. Такое деление позволяет оценить влияние динамических нагрузок от горно-обогатительных машин на строительные конструкции зданий и сооружений.
Поскольку низшие частоты горизонтальных колебаний зданий горно-обогатительных комбинатов обычно не превышают 2—4 Гц, то машины с частотой вращения Г20—240 мин-1 и большими инерционными силами могут вызвать большие амплитуды Горизонтальных колебаний зданий. Частоты вертикальных колебаний перекрытий производственных зданий лежат в пределах 8—20 Гц. Резонансные колебания перекрытий таких зданий вызывают среднечастотные машины, развивающие частоту вращения 480—1200 мин-1 при рабочем режиме. В этой связи на горно-обогатительных комбинатах ' нередко возникает повышенный уровень горизонтальных колебаний зданий при работе конусных и щековых дробилок. Причиной повышенных уровней вертикальных колебаний перекрытий зданий во многих случаях являются грохоты с частотой вращения главного вала 480— 1200 мин-1.
Дробилки. Коэффициент перегрузки kg, учитывающий возможное увеличение нагрузки по сравнению с се нормативным значением, принимают: для щековых и конусных (гирационных) дробилок 1,3; для молотковых — 4.
Равнодействующую гармонических сил от конусных (гирационных) дробилок определяют по формуле:
R= (miri — m2r^Q2i (1-2) где mi — общая масса главного вала п соединенного с ним дробящего конуса; т2 — масса вала-эксцентрика и -жесткосоединенных с ннм элементов (шестерен, противовесов н пр.): rt — расстояние От осн дробнлкн до центра тяжесТи главного вала и дробящего конуса; — расстояние, от .оси дробилки до центра тяжести вала-эксцентрика
6
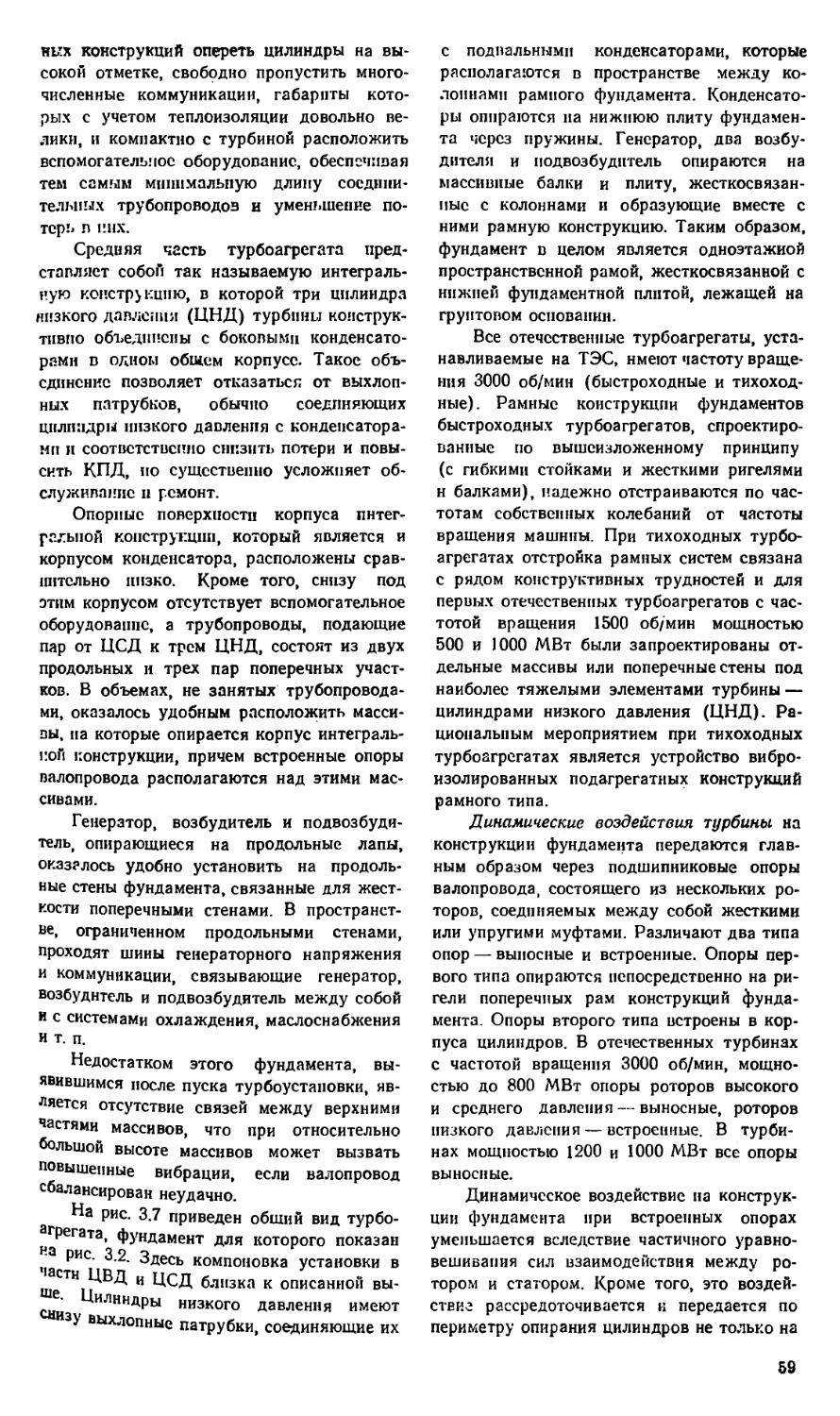
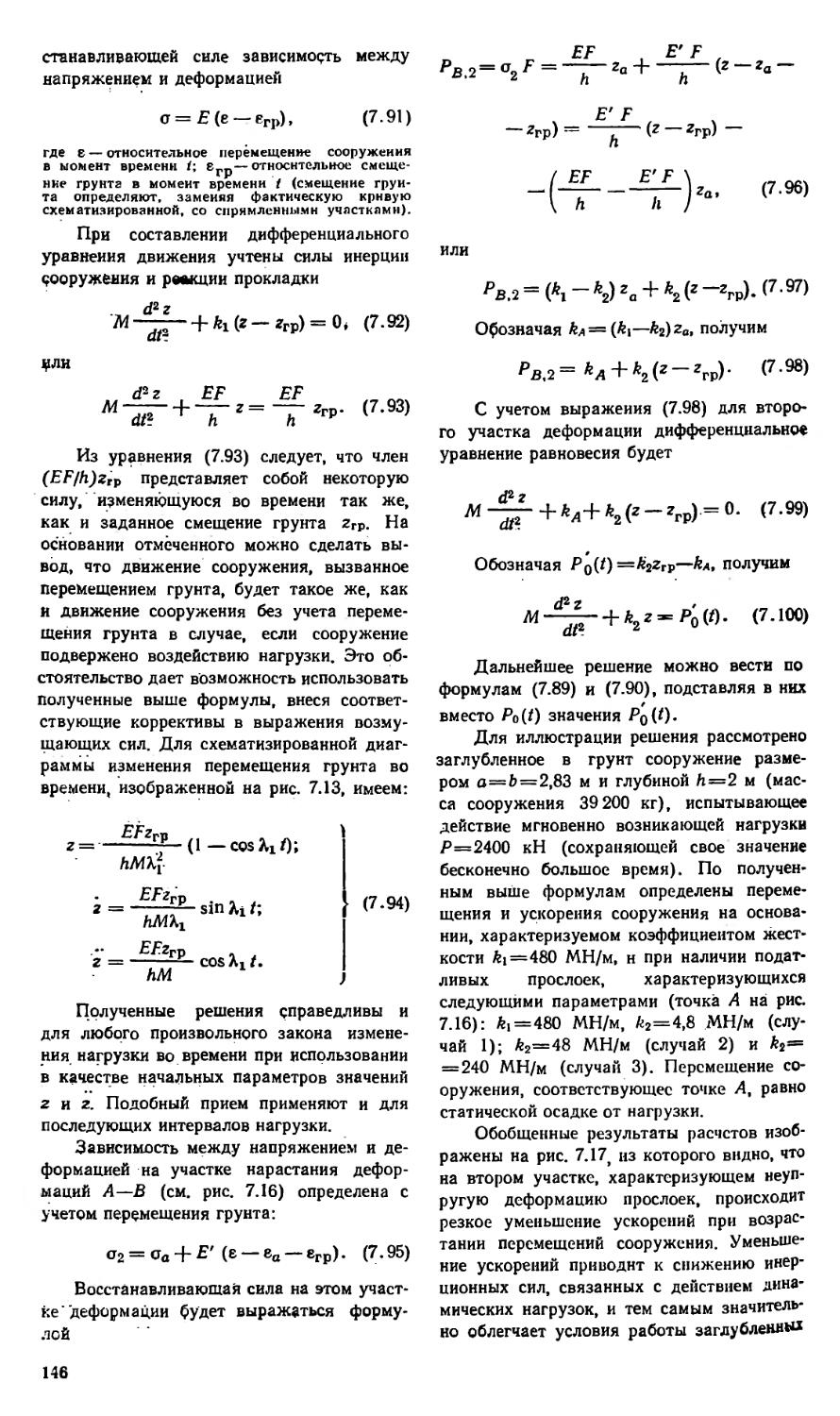
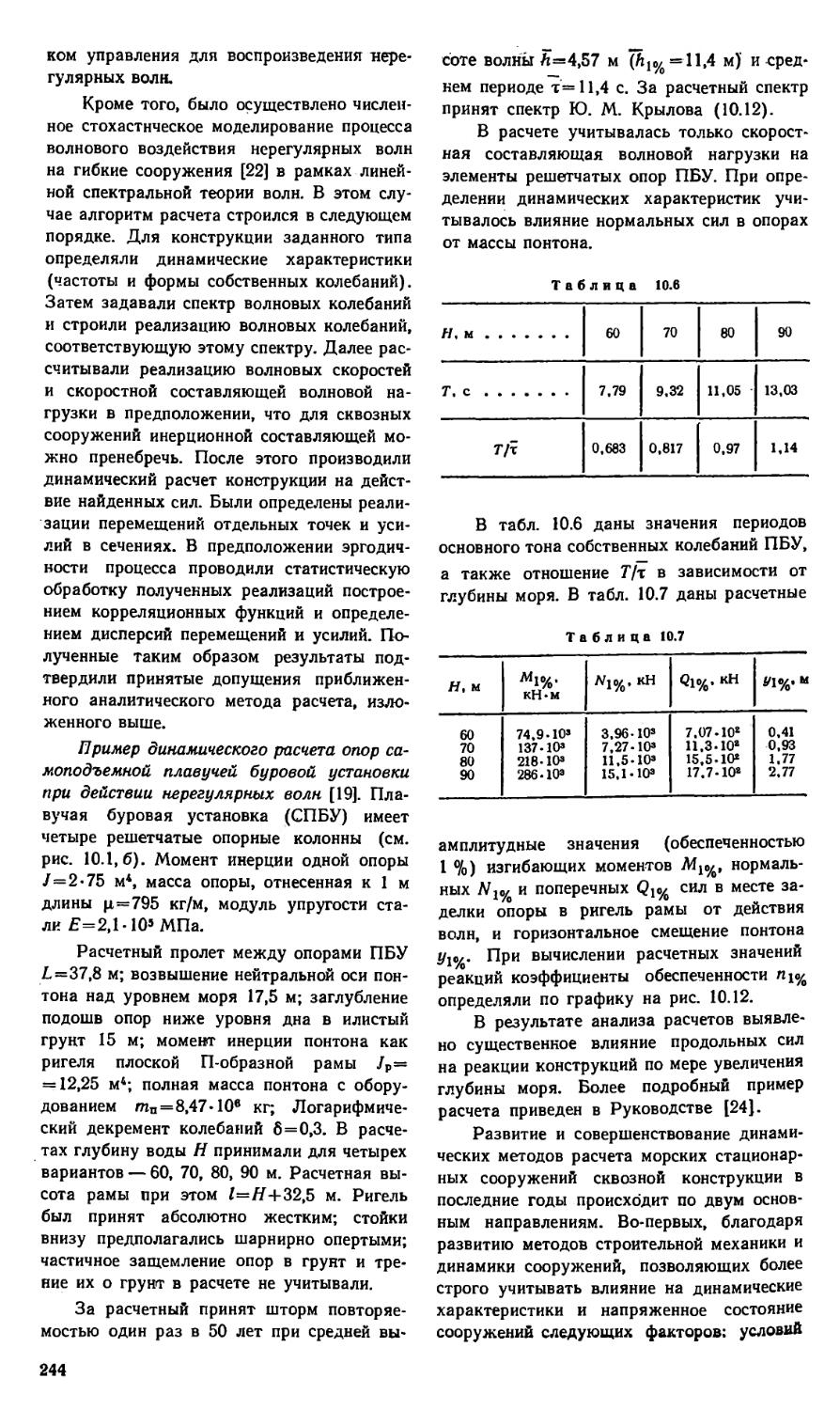
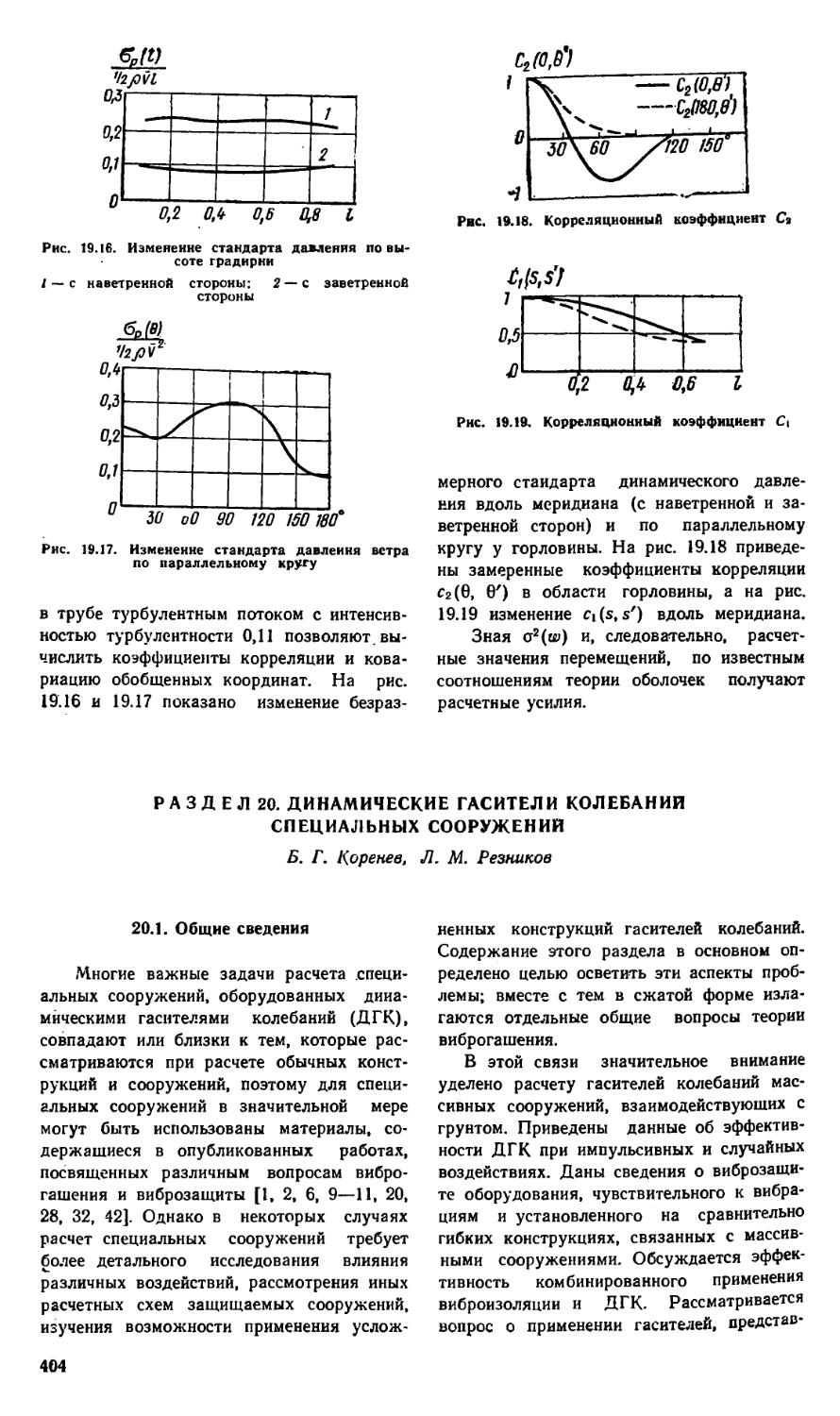
Phi;. 1.1. Схема дробилок и точки приложения неуравновешенных сил
а—в дробилках с крутым конусом; б — то же, с пологим конусом; А — неподвижная точка*. Б — центр тяжести тела /; В — центр тяжести тела 2; J — дробящий конус; 2 — вал-эксцентрик; 3 — главный вал
других соединенных с ним элементов (шестерен, противовесов и т. д.); Q—2лЛ//60— круговая частота возмущающей силы (fl — частота вращения главного вала мин а).
Равнодействующая R вращается в горизонтальной плоскости со скоростью Q и приложена:
а) в дробилках с крутым конусом — посередине длины главного вала (рис. М,а);
б) в дробилках с пологим конусом — в неподвижной точке главного вала, образованной пересечением осей дробилки и главного вала (рис. 1,1, б). В табл. 1.2 приведены нормативные значения инерционных сил от конусных дробилок по данным ЦНИИСК и работы [27].
За расчетную амплитуду возмущающей силы от молотковой дробилки рекомендуется принимать увеличенную в Ад раз ампли* туду, возникающую при отрыве одного молотка, а именно [12]:
Яр = Лд/Л1ГЯа, (1.3)
где — коэффициент перегрузки, принимаемый — масса одного молотка; г — расстояние от оси главного вала до центра тяжести молотка. Амплитуду нормативной динамической силы от молотковых дробилок рекомендуется определять по формуле (1.1), в которой эксцентриситет I принимают 1 мм Инерционная сила (с амплитудой R или /?р) постоянная по величине и действует в вертикальной плоскости, вращаясь с постоянной угловой скоростью Q. Точка приложения силы находится в пределах расположения опорных подшипников ротора. Значение нормативной динамической си-
Таблица 1.2. Динамические вагруэп от коаусных дробилок
Марка дробилки Масса дробилки без электрооборудования, кг Категория динамичности Частота вращения главного вала .дробилки, мин-1 Нормативная •. инерционная сила, кН
ККД 500/75 38 6Q0 IV 160 18
ККД 900/130 ГРШ 143000 IV 140 49
ККД 1200/150 240 000 IV 120 75
ККД 1500/180 380 000 IV 80 75
ККД 1500/300 610 000 IV 82 125
КРД 700/75 ГРЩ 130 200 IV 135. 75
КРД 900/100 ГРЩ 269000 IV 110 82
КСД 1750Б 47 000 IV 245 7
КОД 2200Гр 97 000 IV 242 150
КСД 22OQT 97000 IV 242 ’ 87
КСД 1200А 22 400 IV 260 5,7
КСД 3Q00T 200 000 IV 185 120
КСД ЗОООГр 200 000 IV 185 120
КМД 2200Гр 90 $00 IV 242 150
КМД 3000Т 200 000 IV 185 120
КМД 1750 47 000 IV 245 14,7
КМД 1750ГРЩ 4Q 000 IV 245 16,5
КДС 22Q0, А. Б 80 50Q IV 224 24
лы R от молотковой дробилки определяют по (1.3) при £д=1.
Величина возмущающей силы от щековой дробилки может быть разложена в плоскости действия механизма дробилки на вертикальную Rx и горизонтальную R* составляющие силы, приложенные к оси главного вала. Значения Rx и Rx определяют в зависимости от кинематических схем дробилок [28]. В табл. 1.3 и 1.4 приведены некоторые дднные по щековым дробилкам [27].
Грохоты. Большие динамические нагрузки образуются также при работе грохотов. Возникает неуравновешенная центробежная сила, вектор которой вращается с частотой, равной частоте вращения главного вала машины в 1 с. Эта сила может быть разложена на вертикальную Rx н горизонтальную Rx составляющие, приложенные в центре инерции движущихся частей. Амплитуды нормативных инерционных сил Rx и Rx определяют по формуле
Rz = mezQ2; Rx^mexQ2f . (1Л) где т — масса движущихся частей; ег, - — при-
веденные эксцентриситеты вращающихся частей относительно оси вращения.
Значения ех, ех для грохотов с конструктивно неуравновешенными движущимися частями определяют по их кинематическим схемам. Для грохотов с номинально уравновешенными движущимися частями значения ех и ея принимают равными Vs амплитуды колебаний коробов в соответствующих направлениях [12]. При вычислении динамических нагрузок необходимо учитывать влияние обрабатываемого материа»
7
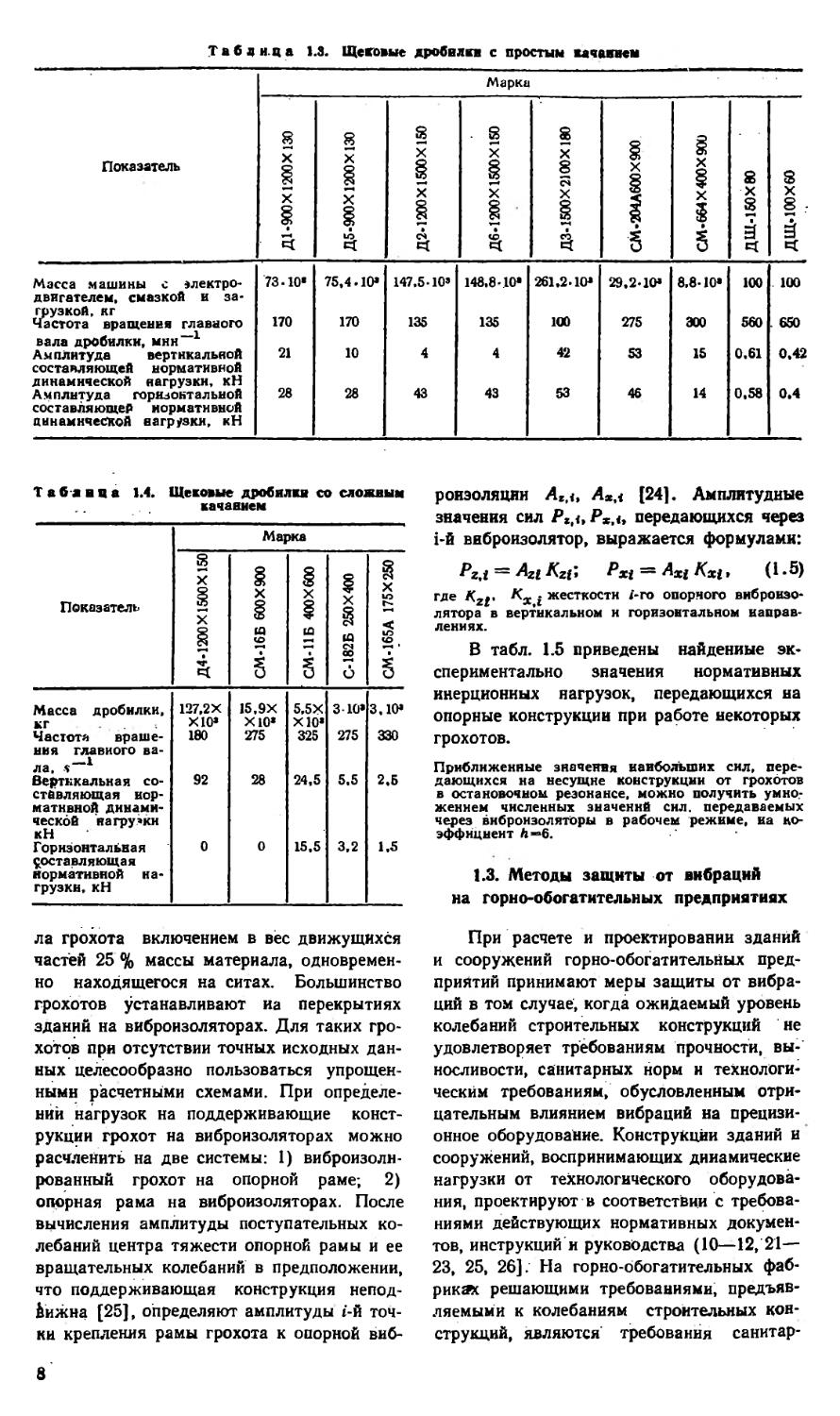
Таблица 1.3. Щековые дробилки с простым ичапием
Марка
Показатель Д1-900Х1200X130 Д5-900Х1200Х130 Д2-1200Х1500X150 Д6-1200Х1500X150 ДЗ-1500Х2100Х180 СМ-204А600X900 СМ-664 X 400X 900 ДЩ-150Х80 ДЩ.100Х60
Масса машины с электродвигателем, смазкой и за- 73.10» 75,4.10» 147,5-10» 148,8-10» 261,2-10* 29,2-10* 8,8-10» 100 100
грузкой, кг Частота вращения главного 170 170 135 135 100 275 300 560 650
вала дробилки, мнн— 1 Амплитуда вертикальной составляющей нормативной 21 10 4 4 42 S3 15 0.61 0,42
динамической нагрузки, кН Амплитуда горизонтальной составляющей нормативной динамической нагрузки, кН 28 28 43 43 53 46 14 0,58 0.4
Т а б а ц а 1.4. Щековые дробили со сложным качанием
Марка
Показатель
Масса дробилки, кг
Частота вращения главного ва-_______1 ла, $ Вертикальная составляющая нормативной динамической нагру»ки кН Горизонтальная (оставляющая нормативной нагрузки, кН
127.2Х ХЮ» 180
92
15.9Х ХЮ» 275 5.5Х ХЮ» 325 3-10» 275 3.10» 330
28 24,5 5,5 2.Б
3,2
0
ла грохота включением в вес движущихся частей 25 % массы материала, одновременно находящегося на ситах. Большинство грохотов устанавливают на перекрытиях здании на виброизоляторах. Для таких грохотов при отсутствии точных исходных данных целесообразно пользоваться упрощенными расчетными схемами. При определений нагрузок на поддерживающие конструкции грохот на виброизоляторах можно расчленить на две системы: 1) виброизолн-рованнын грохот на опорной раме; 2) опорная рама на виброизоляторах. После вычисления амплитуды поступательных колебаний центра тяжести опорной рамы и ее вращательных колебаний в предположении, что поддерживающая конструкция неподвижна [25], определяют амплитуды i-й точки крепления рамы грохота к опорной виб-
роиэоляции Аг,1, A»,t [24]. Амплитудные значения сил Pt,i, Px.t, передающихся через i-й виброизолятор, выражается формулами:
Pz,l = Kzi» Pxi~ Axf Kxl» (1*5)
где i жесткости г-го опорного виброизо-
лятора в вертикальном и горизонтальном направлениях.
В табл. 1.5 приведены найденные экспериментально значения нормативных инерционных нагрузок, передающихся на опорные конструкции при работе некоторых грохотов.
Приближенные значения наибольших сил, передающихся на несущие конструкции от грохотов в остановочном резонансе, можно получить умножением численных значений сил. передаваемых через внброизоляторы в рабочем режиме, на коэффициент h—6.
1.3. Методы защиты от вибраций на горно-обогатительных предприятиях
При расчете и проектировании зданий и сооружений горно-обогатительных предприятий принимают меры защиты от вибраций в том случае, когда ожидаемый уровень колебаний строительных конструкций не удовлетворяет требованиям прочности, выносливости, санитарных норм и технологическим требованиям, обусловленным отрицательным влиянием вибраций на прецизионное оборудование. Конструкции зданий и сооружений, воспринимающих динамические нагрузки от технологического оборудования, проектируют в соответствии с требованиями действующих нормативных документов, инструкций и руководства (10—12, 21— 23, 25, 26]. На горно-обогатительных фабриках решающими требованиями, предъявляемыми к колебаниям строительных конструкций, являются требования санитар-
S
Таблица 1.5. Нормативные значения амплитуд динамических нагрузок, передающихся на опорные конструкций при работе грохотов (экспериментальные данные)
Жесткость Жесткость Максимальная
пружин млн пружин или Амплитуда силы. сила, передаю-
рессор в рессор в го- передающаяся щаяся через Направление
Грохот вертикальном ризонтальиом через виброизо- виброизол яторы силы
направлении. направлении. ляторы в рабочем в остановочном
кН/см кН/см рел^нме • кН резонансе, кН
ВГО-1 8.4 35 2,76 16,56 Вертикальное
8,38 49,98 Горизонтальное
В ГО-2 8.4 35 3,3 19,80 >
10,1 60,6
ВГД-1 8.4 35 2.94 17.64 »
9.02 54,12
ВГД-2 10.9 45,5 4.53 27,18 >
14,35 26.18
ГУП-1 11.72 — 3,5 21,0 Вертикальное
ГУП-2 20,8 — 6.24 37,4 »
ГРО 115,2 32.4 7.5 22 >
4.5 6,5 Горизонтальное
ГРО-1 108 30,4 10,4 25,5 >
7 2.2
ГРО-21 — — 21 — >
** —— 4,1 —
ГРО-22 — — 20.75 — >
5.45 —
ГРС 35,44 >
15.46 —
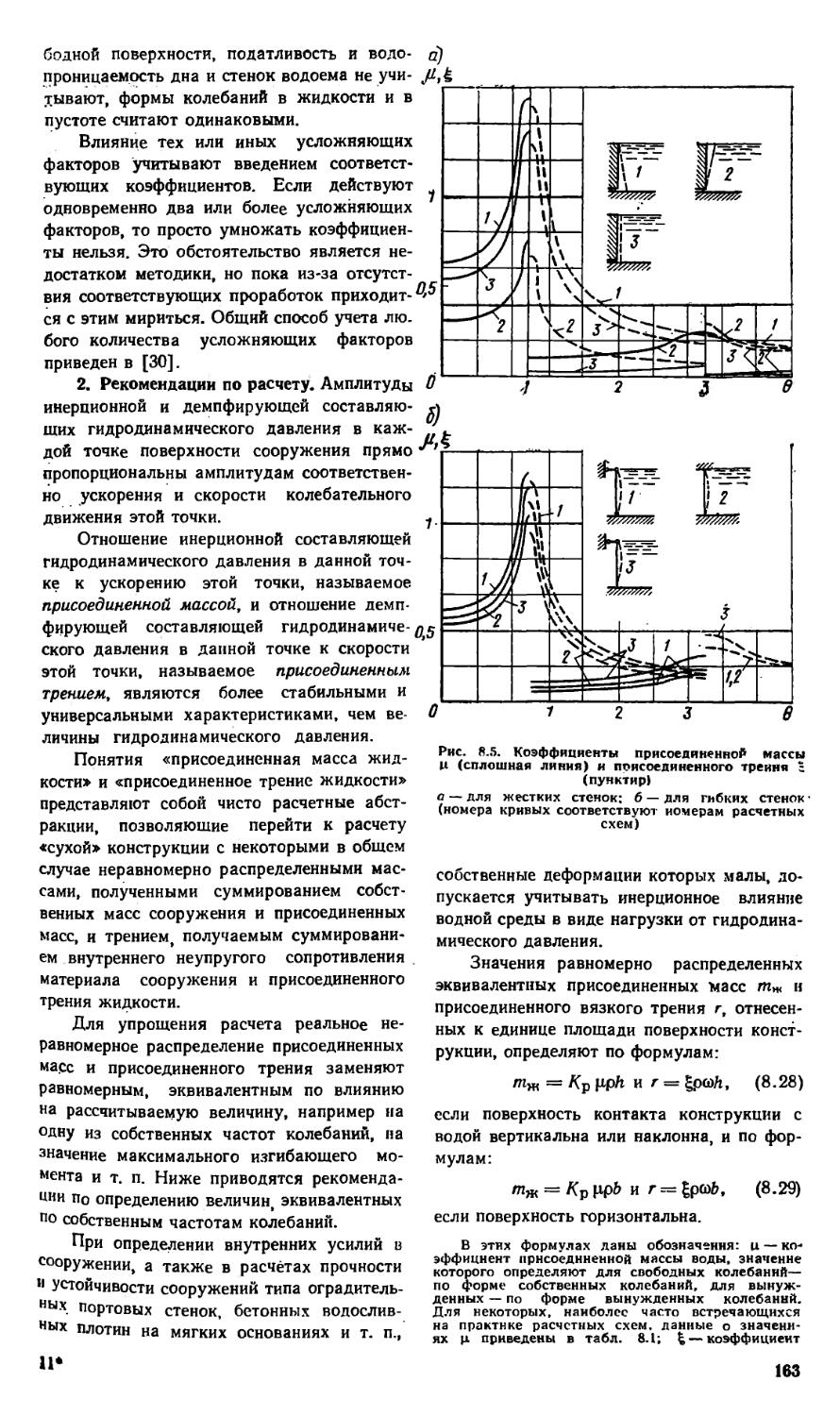
ГРС-1 43,2 12,3 5,3 15,9 >
ГРК-15 1120 32 22.4 67,2 >
25.5
ГРК-22 — . — 29.15 — Вертикальное
7,05 •— Горизонтальное'
ГРК-82 — 20 — »
3,75 —
ГР-54 — 37,5 — >
9 —
ГПО-4К — — 16,7 — >
ГГТ-32 — —— 10.48 — >.
0.6 —
Г ГТ-72-1 — — 23.2 — >
ГУК-К — — 6,6 >
1.6
ГУК-ОД — — 6,6 — >
1,16 —
СМ-13 — 2,9 12 »
ъ 4,2 17
БКГОМ2А — — 17.9 — Вертикальное
БКГОМ11А — — 5,78 ——
168Б2Р — —• 18.7 45 »
ГИ2СА — 10,3 — »
ГИ2СБ — — 1,23 — >
Примечание. Максимальные силы, передающиеся иа строительные конструкции при прохождении через резонанс системы грохота, а также грохота на упругих опорах, возникают в режимах остановки машины. Максимальные силы в режимах остановки грохотов в 5—6 раз больше, чем максимальные значения этих сил в установившемся рабочем режиме.
ных норм [21]. В работе [21] ранее действовавшие нормы дополнены и уточнены.
Допустимые колебания строительных конструкций, непосредственно действующие на машины и приборы, определяют предельно допустимыми значениями амплитуд ускорений и скоростей колебаний [10, 20, 25].
Динамический расчет перекрытий и каркасов зданий горно-обогатительных комбинатов производят в соответствии с требованиями Инструкции. [10]. Динамический расчет конструкций фундаментов на нагрузки от машин и оборудования выполняют в соответствии с работами [24—26]. ожно указать следующие меры по уменьшению уровня колебаний строительных конструкций: а) выработка такого конструк-нвного решения здания, при котором несущие конструкции его не испытывали бы
значительных вибрационных воздействий от машин; б) изменение соотношения между частотой собственных колебаний конструкции и частотой возмущения таким образом, чтобы эти частоты возможно больше различались между собой; в) повышение эффективности виброизоляцин; г) изменение расположения машин на перекрытии таким образом, чтобы динамическое воздействие их на конструкцию было минимальным; д) уравновешивание, балансировка и изменение частоты вращения машины; е) применение виброгасителсй; ж) повышение сил неупругого сопротивления, применение ударного демпфирования и т. я.
Способы уменьшения колебаний строительных конструкций, возбуждаемых работой грохотов. Колебания можно уменьшить подвеской грохотов;
9
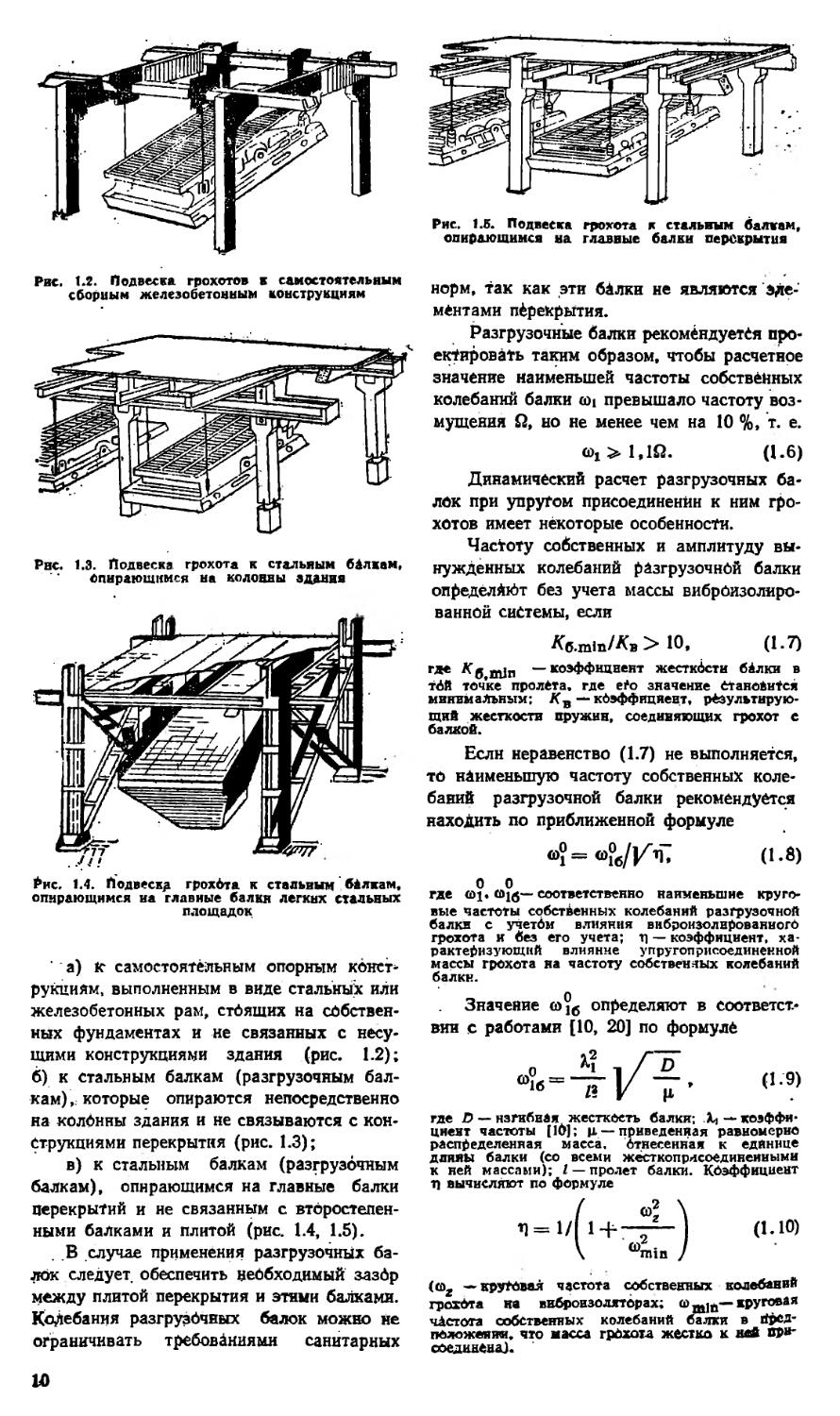
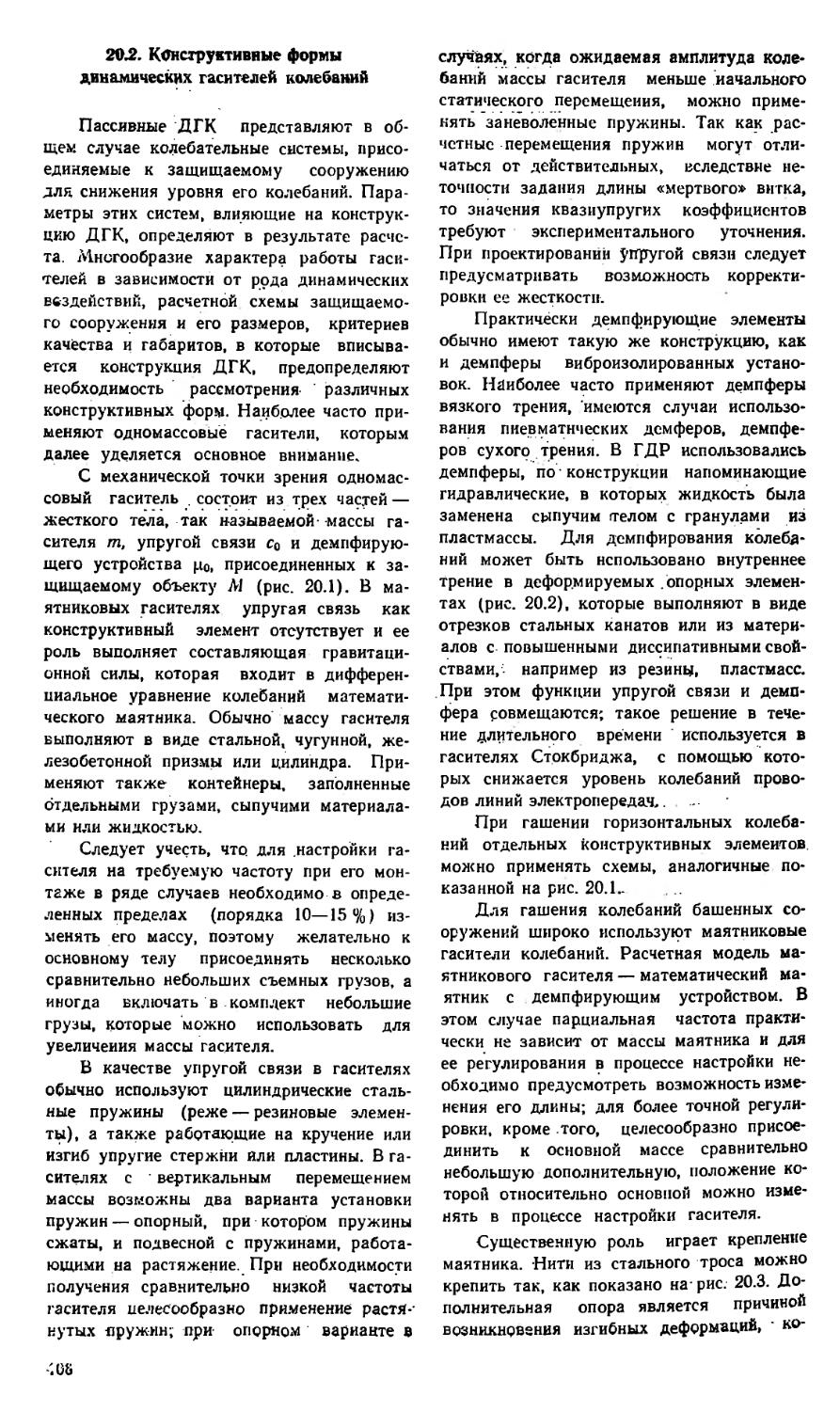
Рис. 1.2. Подвеска грохотов к самостоятельным сборным железобетонным конструкциям
Рис. 1.3. Подвеска грохота к стальным балкам, опирающимся на колонии здания
Нис. 1.4. Подвескд грохбта к стальным балкам, опирающимся на главные балки легких стальных площадок
’ а) к- самостоятельным опорным конструкциям, выполненным в виде стальник или железобетонных рам, стбящих на собственных фундаментах и не связанных с несущими конструкциями здания (рис. 1.2); б) к стальным балкам (разгрузочным балкам) которые опираются непосредственно на колОнны здания и не связываются с конструкциями перекрытия (рис. 1.3);
в) к стальным балкам (разгрузочным балкам), опирающимся на главные балки перекрытий и не связанным с второстепенными балками и плитой (рис. 1.4, 1.5).
. В случае применения разгрузочных балок следует обеспечить необходимый заздр между плитой перекрытия и этими балками. Колебания разгрузочных балок можно не ограничивать требованиями санитарных
Рис. 1.5. Подвеска грохота к стальным балкам, опирающимся на главные балки перекрытия
норм, так как эти балки не являются элементами пёрекрытия.
Разгрузочные балки рекомендуется проектировать таким образом, чтобы расчетное значение наименьшей частоты собственных колебаний балки превышало частоту возмущения й, но не менее чем на 10 %, т. е.
(Ох >1,10. (1.6)
Динамический расчет разгрузочных балок при упругом присоединении к ним грохотов имеет некоторые особенности.
Частоту собственных и амплитуду вынужденных колебаний разгрузочной балки определяет без учета массы виброизолиро-ванной системы, если
Кб-шш/Хв > Ю, (1.7) где К д дуп — коэффициент жесткбсти бАлки в тОй точке пролета, где еГо значение Становится минимальным; Кв — коэффициент, результирующий жесткости пружин, соединяющих грохот с балкой.
Если неравенство (1.7) не выполняется, то наименьшую частоту собственных колебаний разгрузочной балки рекомендуется находить по приближенной формуле
®1=®?б/КтЬ d-в) о о
где <£>1. со (б ~ соответственно наименьшие круговые частоты собственных колебаний разгрузочной балки с учетбм влияния виброизолнрованиогО грохота и без его учета; Г) — коэффициент, характеризующий влияние упругоприсоединенной массы грохота на частоту собственных колебаний балки.
Значение определяют в соответствии с работами [10, 20] по формуле
(19)
где D — нзгибнАя жесткость балки; Xi — коэффициент частоты [Ю]; Ц — приведенная равномерно распределенная масса. Отнесенная к единице длины балки (со всеми жёсткопрлсоединениыми к ней массами); I — пролет балки. Коэффициент И вычисляют по формуле
(1.Ю)
(со2 — круговая частота собственных колебаний грохбта на виброизоляторах; со дщ— круговая чАстота собственных колебаний балки в йрсл* положение, что масса грохота жестка к шй при* соединена).
10
Частоту <jot вычисляют по формуле
сог = ]/<Лв/тг, (1.-11)
где Kj — коэффициент суммарной жесткости пружин, соединяющих грохот с балкой; тг — масса грохоТа.
Частоту tom in определяют по формуле
(1 • 12)
где цг— приведенная масса на балке от грохота в предположении, что грохот жестко связав с балкой.
В случае когда расстояние между крайними пружинными подвесками грохота, умноженное на число грохотов, меньше 7s пролета балки, приведенную погонную массу рг определяют нз условия, что масса каждого грохота сосредоточена в средней точке между упругими подвесками.
Если это расстояние больше 7s пролета балки, то при определении цг принимается, что масса грохота сосредоточена в точках присоединения подвесок к разгрузочной балке. Сосредоточенную массу, приходящуюся на каждую упругую подвеску, находят по правилу рычага.
Подсчет приведенной погонной массы, определение амплитуд колебаний и проверка несущей способности разгрузочной балки производятся по указаниям работы [10].
Перекрытия, несущие конструкций которых . одновременно являются поддерживающими для грохотов, желательно выполнять монолитными или сборно-монолитными (из сборных железобетонных балок с монолитной плитой поверху). Для уменьшения амплитуд колебаний перекрытия не рекомендуется сосредоточивать машины с динамическими нагрузками в одном пролете или В смежных пролетах.
Следует стремиться к повышению жесткости и частот собственных колебаний перекрытия, поддерживающего грохот, с таким расчетом, чтобы разность между ’ наименьшей расчетной частотой собственных колебаний перекрытия, вычисленной с учетом погрешности ее определения, и частотой возмущения составила не менее 10 % частоты собственных колебаний конструкции:
6)1 — Q > 0,10фр (1.13)
где 8о)й>] — расчетное значение наимень-
шей частоты собственных колебаний перекрытия;
**Р°ЯТНО€ значение наименьшей частоты возмушеиы*олебаинй перекрытия; Q — частота емов no'*fioj е°~значение погрешности, прнинма-
В противном случае при пуске или остановке грохота в печение некоторого вре-
мени будет иметь место резонансное увеличение колебаний поддерживающей конструкции. -
Отсюда следуют несколько рекомендаций гео уменьшению уровня вибраций перекрытий под грохоты: а) уменьшение пролета конструкции; б) увеличение размеров поперечного сечения; в) использование многопролетных конструкций; г) соединение главных балок с колоннами жесткими рамными узлами; д) добавление новых связей; е) переход от шарнирного опирания к защемлениям. Жесткость следует увеличивать таким образом, чтобы не было существенного увеличения массы конструкции.
В некоторых случаях, когда грохоты устанавливают на опорную конструкцию непосредственно (без виброизоляпии), жесткость конструкции можно увеличить устройством под машину жесткого и легкоТо постамента, имеющего значительную протяженность по сравнению с Пролетом конструкции и прочно связанного с ней. Жесткость стальных балок можно увеличить приваркой, дополнительных . элементов. Жесткость железобетонных балок можно увеличить устройством больших вуТов по концам балки или обетонирбванием.
Указанные мероприятия наиболее эффективно могут быть применены для низкочастотных машин (менее 4б0 об/мин).
Если частота возмущения Q близка к наибольшей расчетной частоте первой резонансной зоны Ш| [10, 20], то амплитуду колебаний конструкции мбжно существенно снизить, несколько уменьшив ее жесткость. Наибольшее значение расчетной частоты первой резонансной зоны определяют по формуле
%'=(1+ео)<°1» О-14)
me coj —вероятнее значение наибольшей частоты первой зоны сгущения частот; для однопролетных
. • 0
конструкций U»l=4Jj.
Жесткость конструкции можно снизить: а) увеличением пролета; б) уменьшением размеров поперечного сечения; в) устранением лишних опор; г) переходом от защемления к шарнирным опорам. Снижая жесткость конструкции таким образом, чтобы перейти к" режиму ее зарезонансных колебаний, следует стремиться к тому, чтобы частота возмущения Q не попала во вторую резонансную зону.
Колебания конструкции, поддерживающей грохоты, можно уменьшить изменением расположения машин на этой конструкции. При приближении машин к опорам конст
11
рукции частоты ее собственных колебаний и коэффициент жесткости повышаются. При изменении расположения машин на перекрытии здания следует учитывать, что жесткость здания в продольном направлении обычно выше ее значения в поперечном направлении.
В ряде случаев для повышения жесткости здания хорошие результаты дает применение крестовых связей, устанавливаемых в плоскостях, совпадающих с направлением горизонтальных колебаний здания.. При ярко выраженном резонансном характере колебаний опорной конструкции под грохот., для которого допустимо изменение рабочего числа оборотов в некоторых пределах, уменьшения колебаний конструкций можно достичь понижением или повышением числа оборотов машины.
Колебания конструкции, вызываемые грохотами с номинально уравновешенными движущимися частями, можно уменьшить статической и динамической балансировкой машины в том случае, если таковая не производилась или если машина разбалансировалась.
Способы уменьшения колебаний конструкций, вызываемых работой дробилок. Для уменьшения амплитуд колебаний фундамента под дробилку надо стремиться к тому, чтобы частота собственных колебаний фундамента вместе с закрепленной на нем дробилкой возможно больше отличалась от частоты возмущения. Желательно, чтобы частота собственных колебаний фундамента с укрепленной на нем дробилкой была выше или ниже частоты возмущения не менее чём на 30 %. В том случае, когда рабочая частота дробилки ниже наименьшей частоты собственных колебаний фундамента с закрепленной на нем дробилкой, для уменьшения колебаний фундамента следует увеличивать коэффициент жесткости основания фундамента с тем расчетом, чтобы частота собственных колебаний фундамента повысилась.
Увеличение коэффициента жесткости основания фундамента достигается уширением его подошвы или устройством жестко присоединенной к фундаменту плиты, усилением основания с помощью свай, а также химическим укреплением грунта, цементацией, битумизацией и т. п.
Частоты собственных вращательных и горизонтальных колебаний фундамента под дробилку можно повысить также жестким соединением по периметру фундамента, с перекрытием или полом здания.
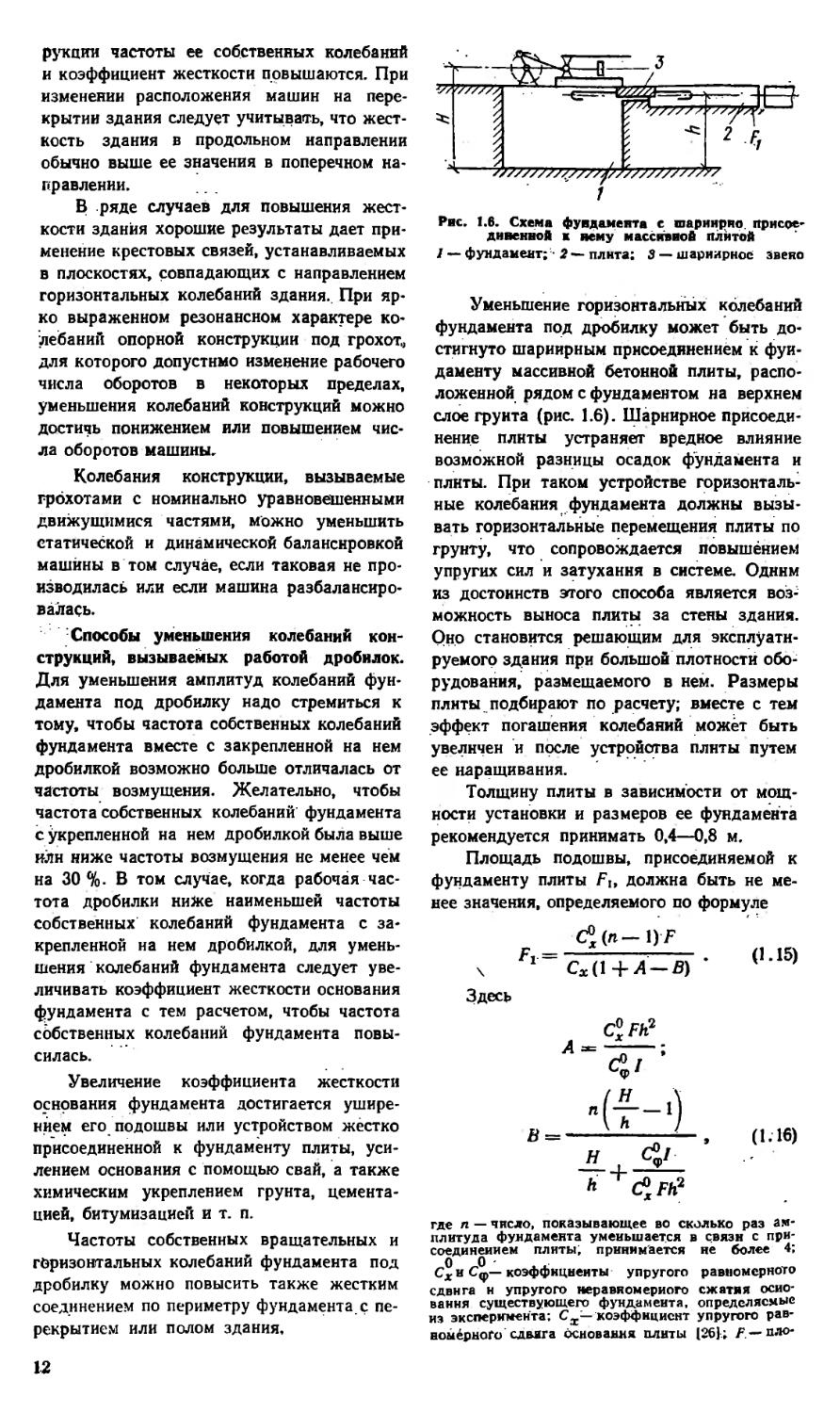
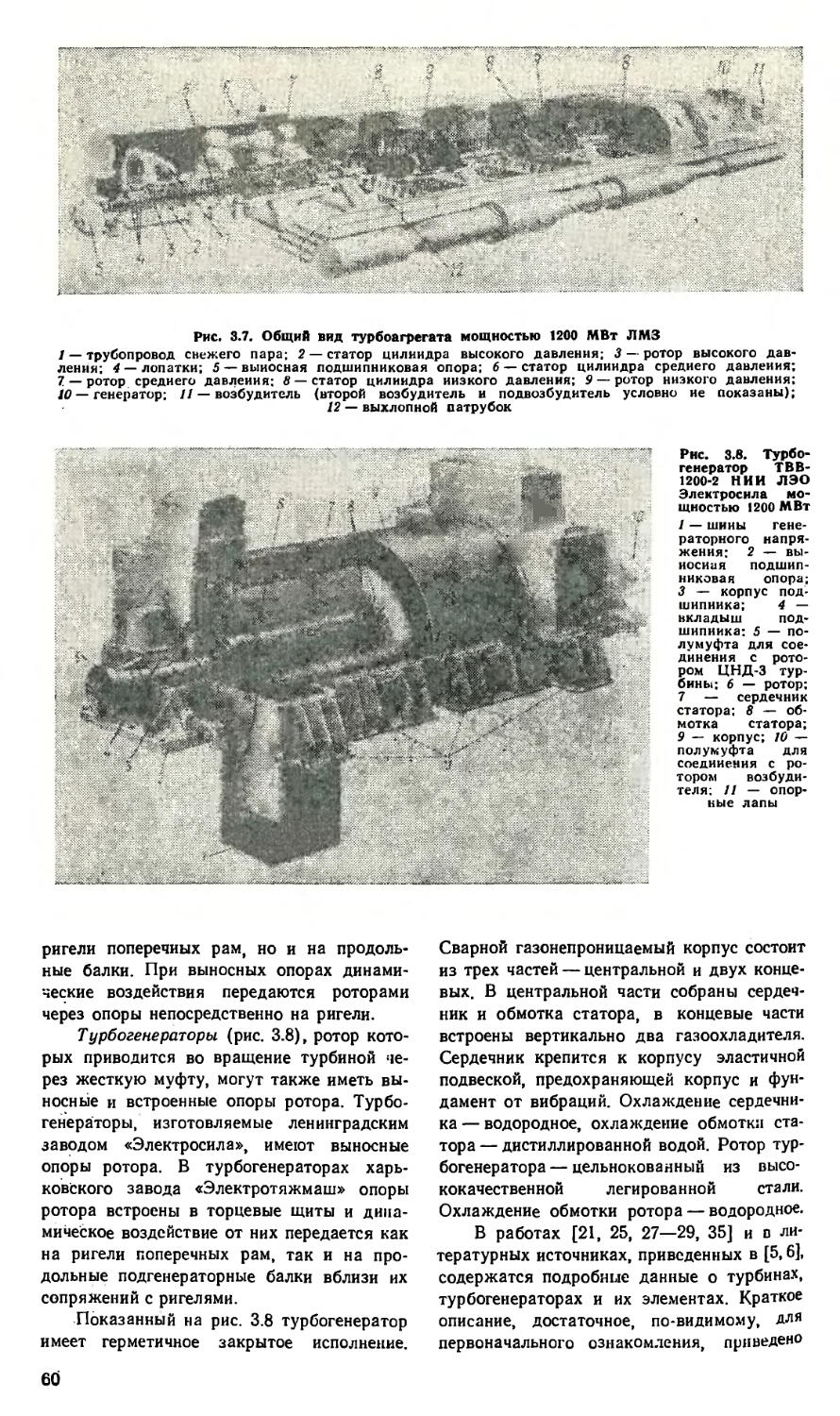
Рис. 1.6. Схема фувдамеита с шарнирно присоединенной ж нему массивной плитой / — фундамент; 2 — плита; 3 — шарнирное звено
Уменьшение горизонтальных колебаний фундамента под дробилку может быть достигнуто шарнирным присоединением к фундаменту массивной бетонной плиты, расположенной рядом с фундаментом на верхнем слое грунта (рис. 1.6). Шарнирное присоединение плиты устраняет вредное влияние возможной разницы осадок фундамента и плиты. При таком устройстве горизонтальные колебания фундамента должны вызывать горизонтальные перемещения плиты по грунту, что сопровождается повышением упругих сил и затухания в системе. Одним из достоинств этого способа является возможность выноса плиты за стены здания. Оно становится решающим для эксплуатируемого здания при большой плотности оборудования, размещаемого в нем. Размеры плиты подбирают по расчету; вместе с тем эффект погашения колебаний может быть увеличен и после устройства плиты путем ее наращивания.
Толщину плиты в зависимости от мощности установки и размеров ее фундамента рекомендуется принимать 0,4—0,8 м.
Площадь подошвы, присоединяемой к фундаменту плиты F,, должна быть не менее значения, определяемого по формуле
С°Л(п-1)Т \ F1~ Сх(1+Л-В) ’
Здесь
C°xFh2 л = ------
(1-15)
(1.16)
где п — число, показывающее во сколько раз амплитуда фундамента уменьшается в связи с присоединением плиты, принимается не более 4;
и Сф— коэффициенты упругого равномерного сдвига и упругого неравномерного сжатия основания существующего фундамента, определяемые из эксперимента; Сх—коэффициент упругого равномерного сдвига основания плиты (26}; F — п.ю-
12
гцадъ подошвы фунд«мента; 7 — момент инерции плошади подошвы фундамента относительно оси, проходящей через центр тяжести его площади н перпендикулярной плоскости колебаний; значения Я н h определяют согласно рнс. 1.6.
Когда рабочая частота дробилки выше наибольшей частоты собственных колебаний дробильной установки, уменьшение амплитуд колебаний установки можно получить увеличением массы и момента инерции фундамента так, чтобы частоты собственных колебаний понизились.
Уменьшение степени передачи вибраций на здания от работы дробилки может быть достигнуто устройством по всему периметру фундамента. дробилки достаточного зазора, отделяющего фундамент дробилки от смежных конструкций (например, перекрытий или фундаментов здания).
Колебания фундаментов под щековые дробилки, при работе которых возникают большие значения неуравновешенных сил инерции, можно уменьшить применением системы противовесов, уравновешивающих эти силы. Уравновешивание механизмов дробилки сводится к такому подбору величин и расположения дополнительных масс, присоединяемых к собственным массам механизмов дробилки, чтобы модуль главного вектора сил инерции уменьшился или стал равным нулю.
При проектировании фундаментов под дробилки необходимо стремиться к тому, чтобы общий центр тяжести фундамента совместно с машиной и центр тяжести площади подошвы фундамента находились на одной вертикали. Следует стремиться также к уменьшению расстояния между центрами тяжести всей установки и линией действия возмущающей силы. Сокращение этого расстояния уменьшает амплитуды вращательных колебаний фундамента.
Колебания зданий, возбуждаемых работой конусных дробилок, можно уменьшить также применением динамических гасителей колебаний, устанавливаемых на перекрытиях.
Для уменьшения вредного влияния вибраций, передающихся через грунт на строительные конструкции при работе дробилок, обладающих низкими частотами возмущений, можно применить виброизоляцию (25} Внброизоляция может быть осуществлена в подвесном (рис. 1.7) и опорном вариантах (24} В последнем случае требуется использование специальных вибройзоляторов, обладающих большой жесткостью в вертикальном направлении и малой жесткостью в горизонтальном направлении [25} Промышленный выпуск [таких вибройзоляторов пока
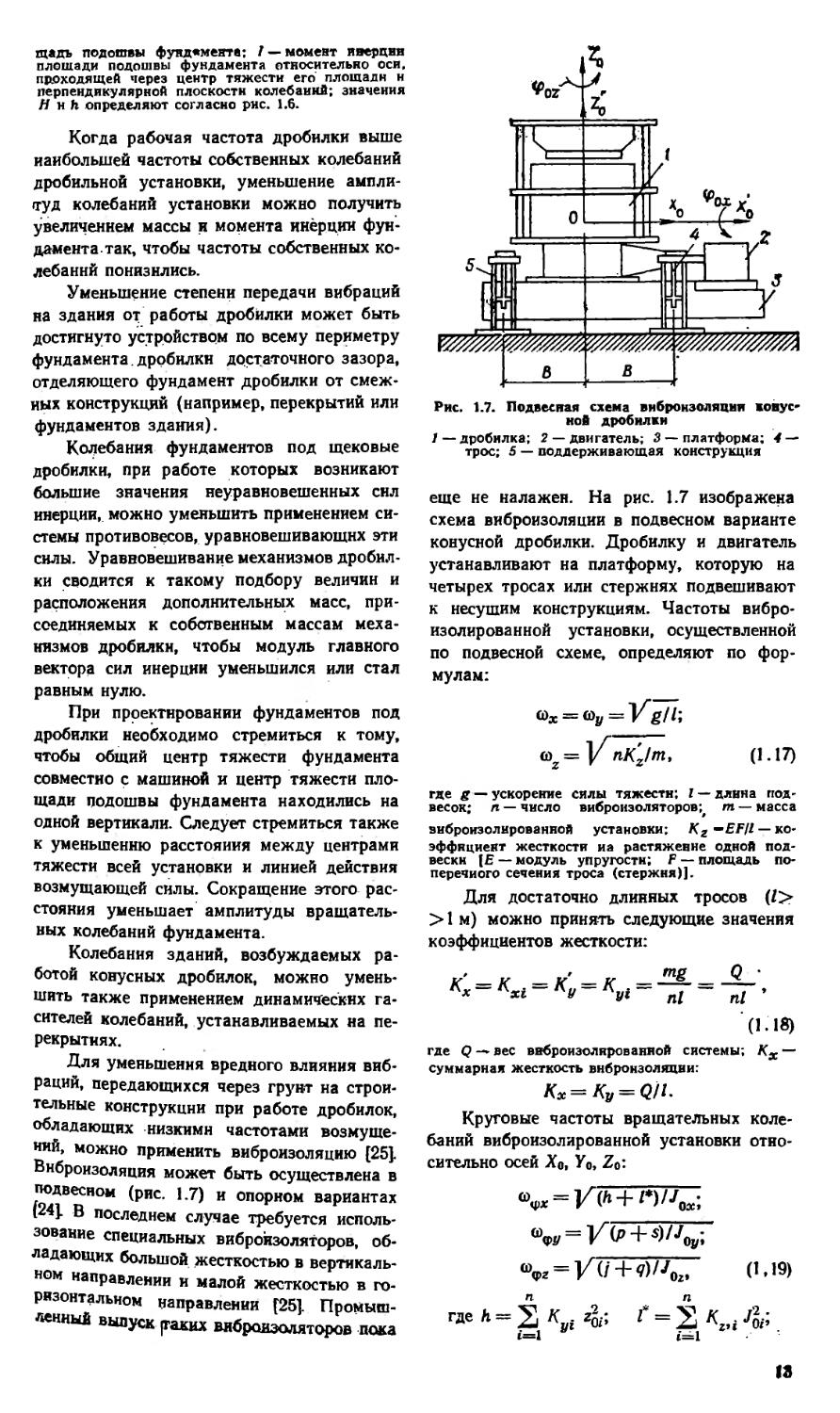
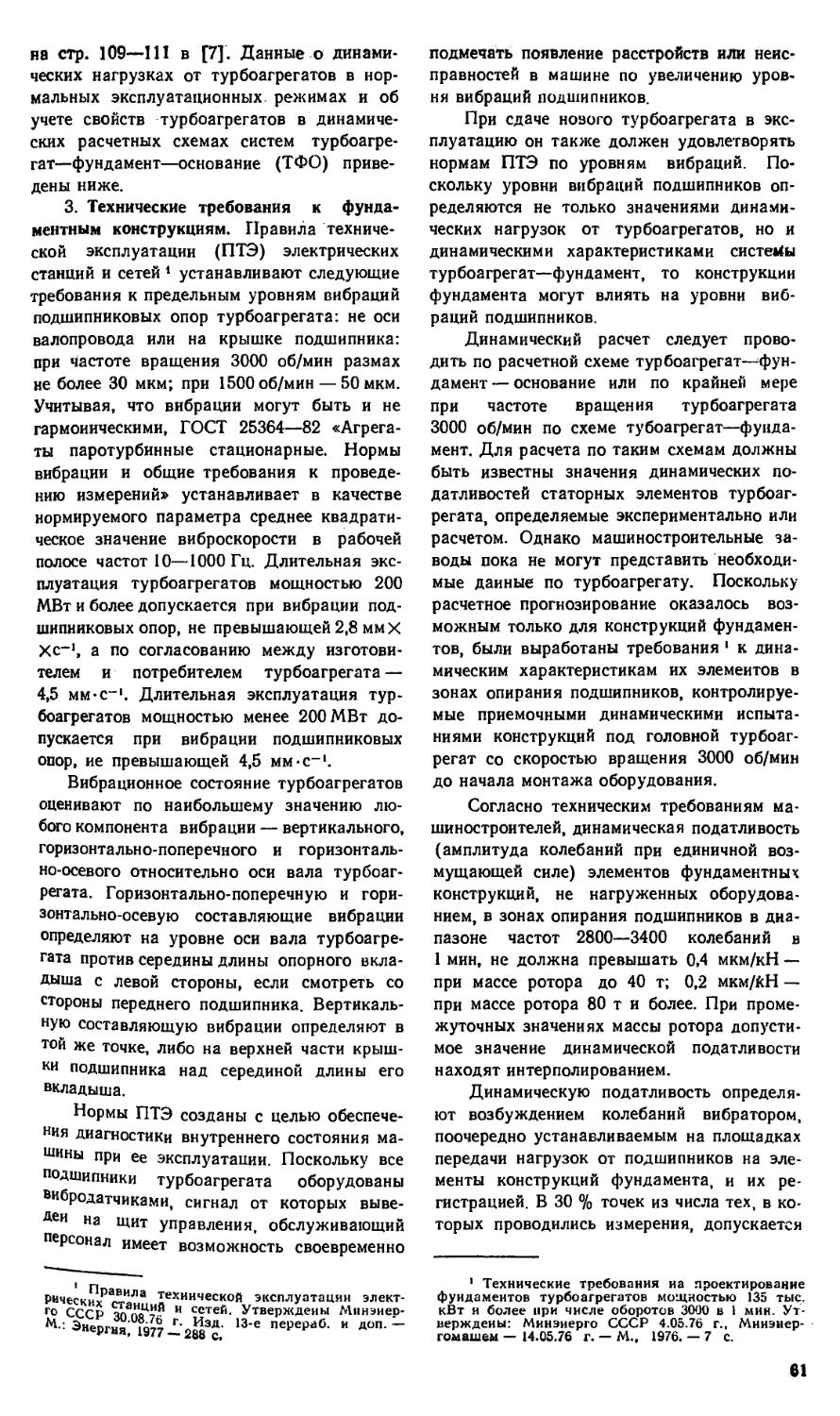
Рис. 1.7. Подвесная схема вибронзоляцмн конус-ной дробилки
1 — дробилка; 2 — двигатель; 3 — платформа; 4 — трос; 5 — поддерживающая конструкция
еще не налажен. На рис. 1.7 изображена схема виброизоляции в подвесном варианте конусной дробилки. Дробилку и двигатель устанавливают на платформу, которую на четырех тросах или стержнях подвешивают к несущим конструкциям. Частоты вибро-изолированной установки, осуществленной по подвесной схеме, определяют по формулам:
a>x = a)y = Vg/l;
(0=1/ nKJm, z v
(1.17)
где g — ускорение силы тяжести; I — длина подвесок; п — число виброизоляторов; т — масса виброизолнрованной установки; Kz—EFIl-vx>-эффициент жесткости иа растяжение одной подвески [Е — модуль упругости; F — площадь поперечного сечения троса (стержня)].
Для достаточно длинных тросов (Z> > 1 м) можно принять следующие значения коэффициентов жесткости:
* xt у yi п1 п1
(1.18) где Q — вес виброизолнрованной системы; Кх — суммарная жесткость внбронзоляцни:
Kx=Ky = Qjl.
Круговые частоты вращательных колебаний виброизолированной установки относительно осей Хо, Уо, Zo:
« + »)//,„ 0.19)
где h = 2 zo.> 1 — i t=l 1=1
13
Р ж 2 ^zti Х01’’ S = ^xi 6=1 i=l
•/ = S ^ytt • 9=2 %xt i=l y i=\
Kxi, Ky it Кг t — жёсткости f’-ro yrtpyroTo алвмеи+а соответственно в направлении осей X», Y9, Zt>; xoi. yoi, xgt — кдордииаты центра жесткости, t-roz ynpyroro элемента в системе кборди-нат. Уц,. Zq; п — общее число упругих элементов;. Jnx, JOy. J02—главные центральные моменты инерции.
Из (1.19) видно, что наименьшее значение из трех вращательных частот собственных колебаний будет иметь частота юфг, не зависящая..от. жёсткости Kz.i, являющейся больше жесткостей Kx.i, Kv,i. Для предварительных подсчетов параметров вибрбизо-ляпии по (1.19) можно принять h=s=0. В этом случае при |«/oi|=C; |xOi|=B; Kyi^mglnlx Кц=Кг получим приближенные формулы:
(1.20)
гдё R—. v Вг+Сг — радиус окружности, проведенной че^ез точки крепления виброизблирован-ной установки к подвеёкам в горизонтальной плоскости; 2С—расстояние между подвесками в направлении оси Уо; 2В — расстояние между подвесками в направлении оси х0
Наибольший практический интёрес при расчете виброизоляции имеют амплитуды a0Je, и (рог. Значения амплитуд колебаний определяют по формулам:
Рх
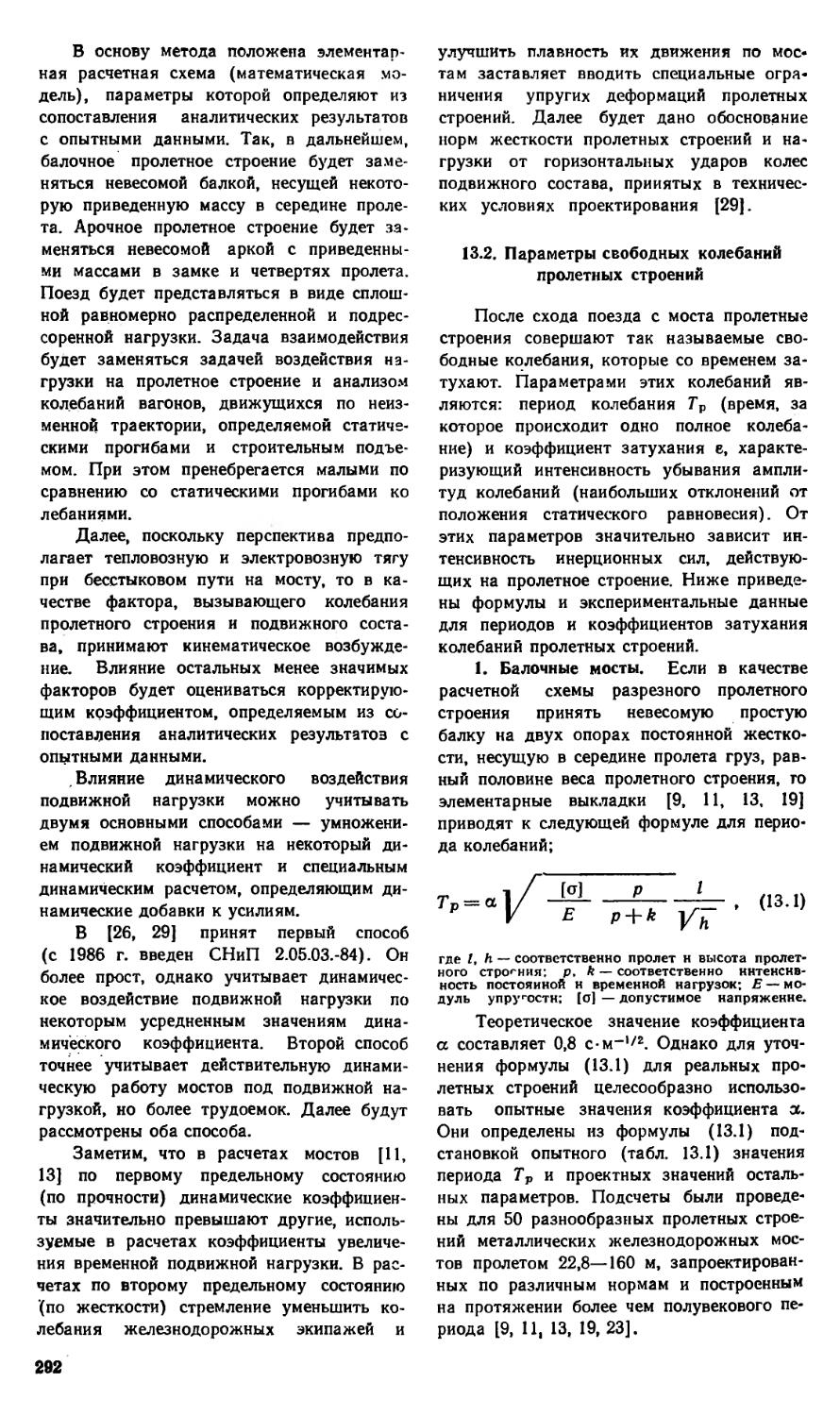
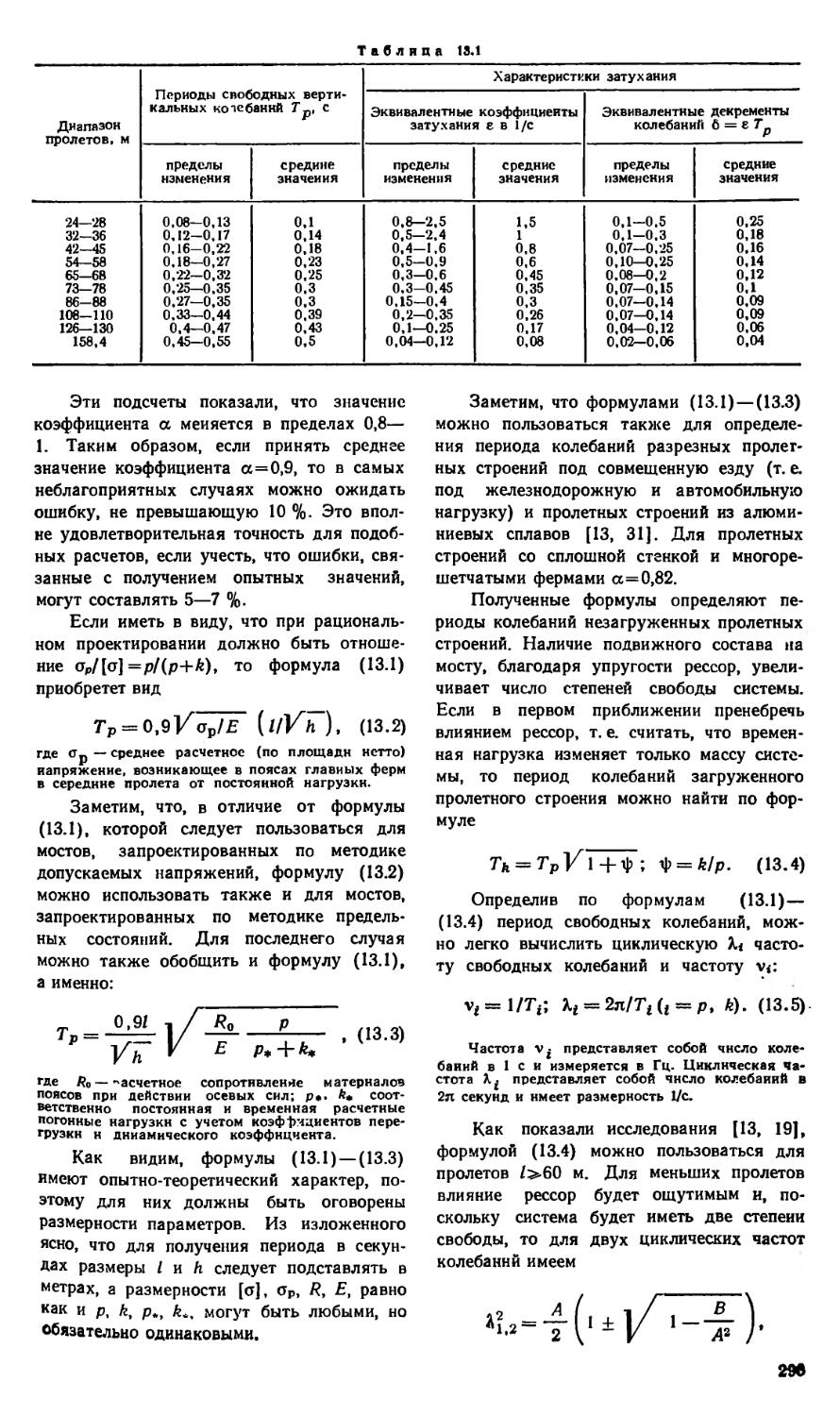
Сох Соу 2\ ’
/п(Й“ — (l)J)
^а-О’
(1.21)
где йоа. &()у— амплитуды колебаний центрА тяжести установки в направлении координатных Осей ХвУл; <Р02 — амплитуда вращательных колебаний установки относительно беи Zo; ~
амплитуды возмущающих сил по осям Хв, У»; А£ог — Амйяитуда возмущающего момента относительно оси Zo.
•Как показывают соотношения (1.17) и (1.20), при использовании тросдв в качёСТве Виброизоляторов будут иметь место неравенства: £Йх = фу<<Вг И ®<px=G)<py>W<pr. Наибольший практический интерес при расчете виброизоляции имеют амплитуды aOaf, св» н фа*- При проектировании виброизоля
ции круговую частоту возмущений Й принимают мёньше круговых частот собственных колебаний виброизолированной уста-нбвКи иг, ©фх, софг/. В этом случае амплитуды йог, <рох, фо» будут близки к соответсТ-вующим перемещениям, вызванным действием статически приложенных нагрузок Рг; Alox и Моу. Это следует из (1.21) при Й-М).
Наибольшие амплитуды горизонтальных колебаний в плоскости Х0У0 некоторой i-й тдчки установки подсчитывают по формулам:
— I вох I +1 Фог Уы В
*
ayi — I I + I Фог xoi В
(1.22)
где Хрр . Уд; — коэффициенты i-й точки в системе Хд, Yg, Яд
Амплитуды колебаний виброизолированной установки не должны прёвышать допускаемого значения, определяемого по амплитуде допускаемого ускорения =20б0 мм/с2. Для уменьшения амплитуд колебаний можно применять тяжелый постамент.
Наибольшие динамические Силы.и -момент, которые передаются на поддерживающие конструкции, можно вычислить по формулам:
Pkx — &xi КхЬ ' Phy = axi Kyi‘t мь ЧЛ.
(1.23)
В опорном варианте виброизоляции в качестве виброизоляторов используют стержни с гидрошарнирами [25], расположенными на его концах, или с резиновыми шарнирами. Такие виброиэоляторы обладают большой жесткостью в вертикальном направлении и малой — в горизонтальных направлениях. Приведенные здесь расчётные формулы, за исключением первой формулы’ (1.17), остаются справедливыми как для подвесной, так и для опорной схем вибро-изОлйции. Частоты ©2, сох, «у определяются по рекомендациям работы [25].
1.4. Основные вопросы динамики башенных копров
Повышение уровня добычи угля и других полезных ископаемых требует ввода в эксплуатацию новых н технического перевооружения действующих горнодобывающих предприятий. Наряду с опережающим ростом прогрессивного открытого способа разработки месторождения будет соверщен-
14
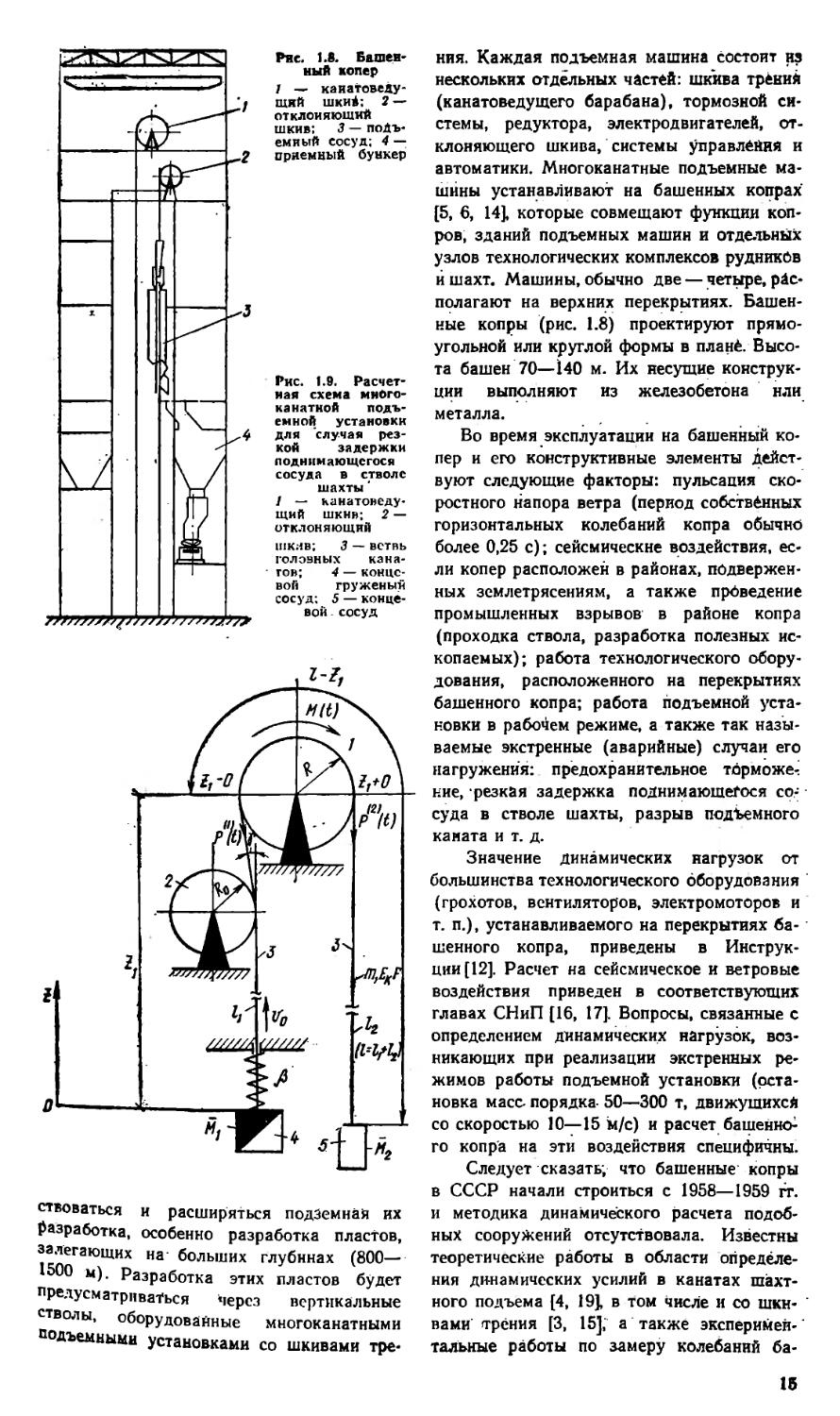
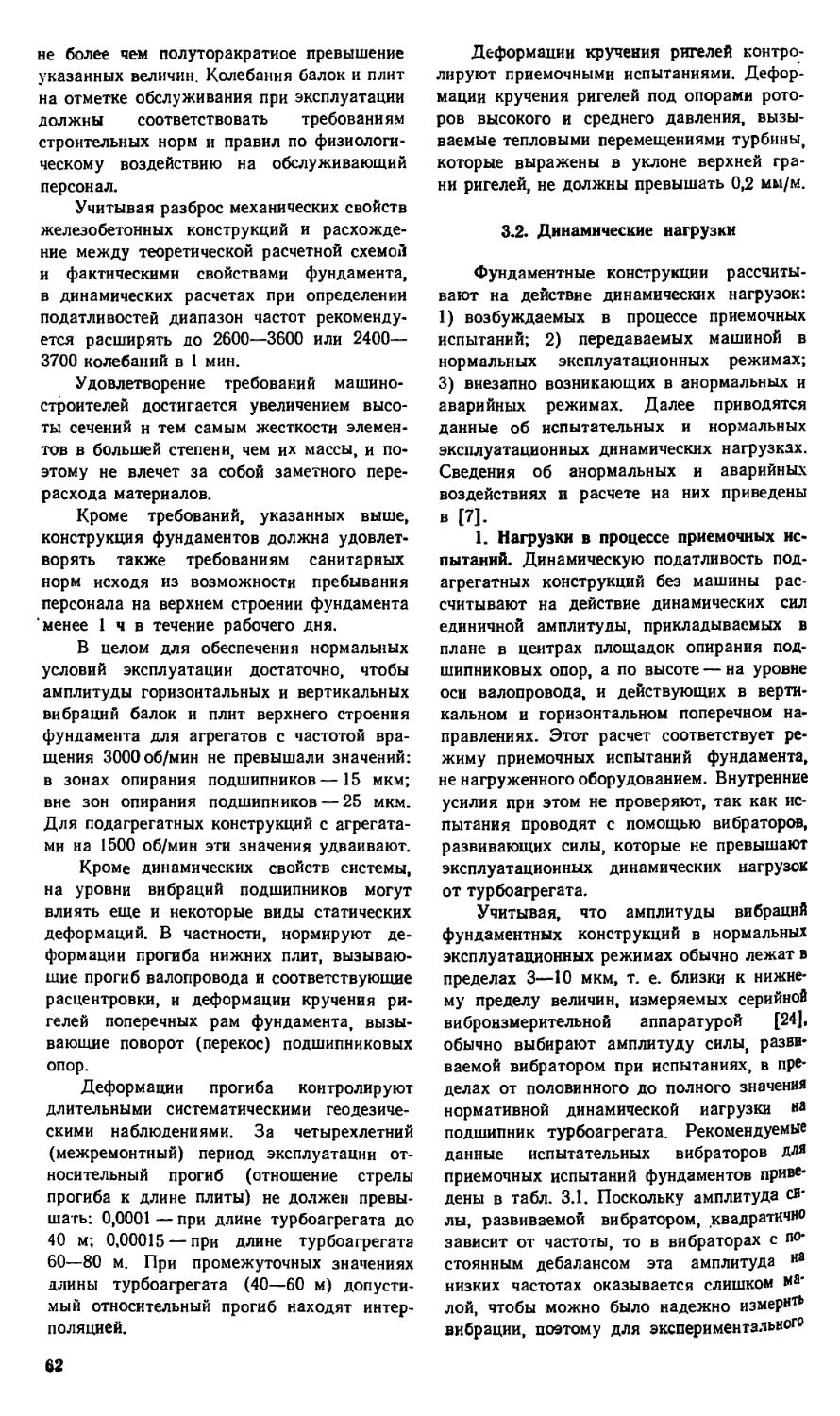
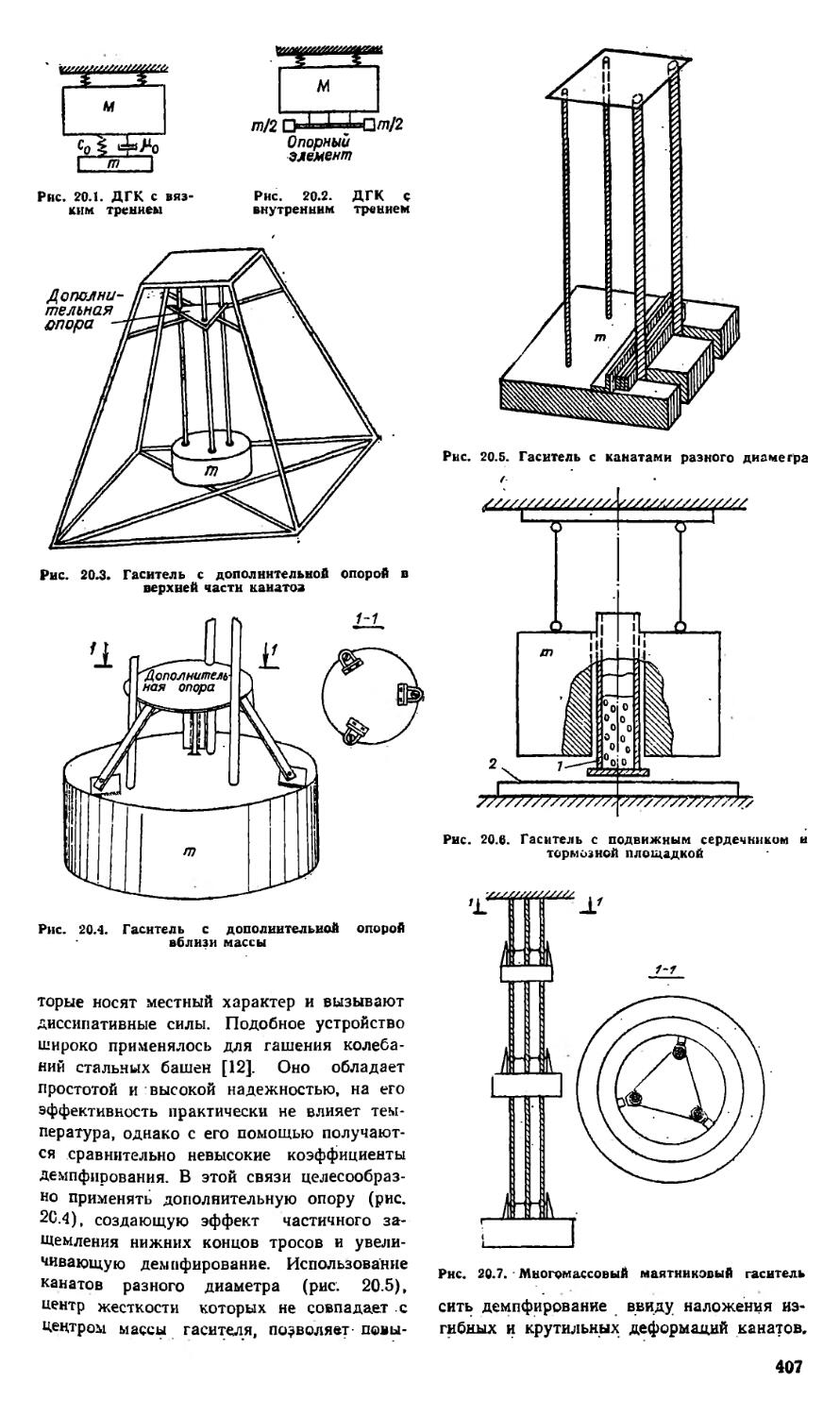
Ряс. 1.8. Башев-ный копер
1 — каиатоведу-щяй шкий; 2 — отклоняющий шкив; 3 — подъемный сосуд; 4 — приемный бункер
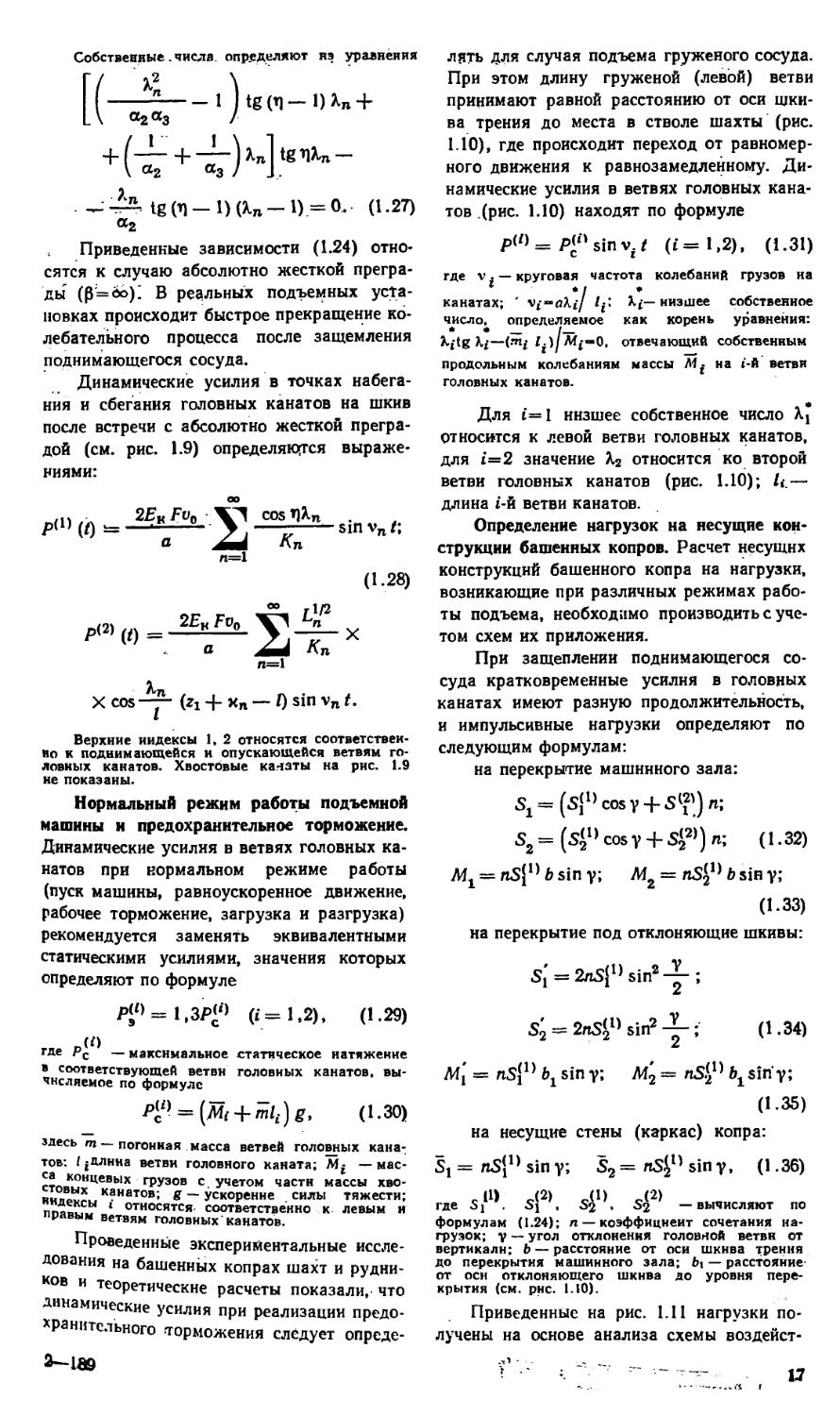
Рис. 1.9. Расчетная схема миОго-канатной подъемной установки для случая резкой задержки поднимающегося сосуда в стволе шахты'
1 — канатоведущий шкнв; 2 — отклоняющий шкив; 3 — ветвь головных канатов; 4 — концевой груженый сосуд; 5 — концевой .сосуд
ствоваться и расширяться подземная их разработка, особенно разработка пластов, залегающих на больших глубинах (800— 500 м). Разработка этих пластов будет предусматриваться через вертикальные стволы, оборудованные многоканатными одъемными установками со шкивами тре
ния. Каждая подъемная машина состоит из нескольких отдельных частей: шкива трёниЯ (канатоведущего барабана), тормозной системы, редуктора, электродвигателей, отклоняющего шкива, системы управления и автоматики. Многоканатные подъемные машины устанавливают на башенных копрах [5, 6, 14], которые совмещают функции копров, зданий подъемных машин и отдельных узлов технологических комплексов рудников и шахт. Машины, обычно две — четыре, располагают на верхних перекрытиях. Башенные копры (рис. 1.8) проектируют прямоугольной или круглой формы в планё. Высота башен 70—140 м. Их несущие конструкции выполняют из железобетона нли металла.
Во время эксплуатации на башенный копер и его конструктивные элементы действуют следующие факторы: пульсация скоростного напора ветра (период собственных горизонтальных колебаний копра обычно более 0,25 с); сейсмические воздействия, если копер расположен в районах, подверженных землетрясениям, а также проведение промышленных взрывов в районе копра (проходка ствола, разработка полезных ископаемых); работа технологического оборудования, расположенного на перекрытиях башенного копра; работа подъемной установки в рабочем режиме, а также так называемые экстренные (аварийные) случаи его нагружения: предохранительное торможе-' ние, резкая задержка поднимающегося сосуда в стволе шахты, разрыв подъемного каната и т. д.
Значение динамических нагрузок от большинства технологического оборудования (грохотов, вентиляторов, электромоторов и т. п.), устанавливаемого на перекрытиях башенного копра, приведены в Инструкции [12]. Расчет на сейсмическое и ветровые воздействия приведен в соответствующих главах СНиП [16, 17]. Вопросы, связанные с определением динамических нагрузок, возникающих при реализации экстренных режимов работы подъемной установки (остановка масс- порядка 50—300 т, движущихся со скоростью 10—15 м/с) и расчет башенного копра на эти воздействия специфичны.
Следует сказать; что башенные копры в СССР начали строиться с 1958—1959 гг. и методика динамического расчета подобных сооружений отсутствовала. Известны теоретические работы в области определения динамических усилий в канатах шахтного подъема [4, 19], в том числе и со шкивами трения [3, 15], а также экспериментальные работы по замеру колебаний ба-
16
(Денных копров [8, 9]. Тем не менее необходимо дальнейшее исследование динамики башенных копров для уточнения методики их расчета (аварийные нагрузки, возможность совпадения во времени сейсмического воздействия и экстренных режимов работы подъемной установки и т. п.), а также учитывая то, что в дальнейшем намечается проектировать копры нового типа.
Динамические нагрузки от многоканатных подъемных машин. При определении динамических нагрузок от многоканатных подъемных машин исходные данные должны отвечать требованиям [10, 11] и дополнительно содержать следующие сведения: а) типы подъемных машин, редукторов, электродвигателей и отклоняющих шкивов, их количество и массы, расположенные в плане и по высоте башенного копра; способы крепления к несущим конструкциям;
6) приведенная к окружности канатоведущего шкива масса вращающихся частей подъемной установки (канатоведущий шкив, редуктор, роторы электродвигателей, отклоняющие шкивы);
в) геометрические размеры канатоведущих шкивов и углы обхвата их канатами;
г) тип подъемных сосудов, их масса с прицепными устройствами, масса противовесов, значения полезных грузов, масса и количество вагонеток при клетьевых подъемах, типы тормозных устройств;
д) количество головных и хвостовых канатов, модули упругости головных канатов и коэффициенты поглощения энергии при колебаниях грузов на канатах;
е) схемы подъемов с учетом перспективной разработки горизонтов, тахограммы подъемов.
Внезапная задержка поднимающегося сосуда в стволе шахты (защемление). При встрече с преградой может произойти задержка поднимающегося в стволе шахты сосуда. Динамические усилия в каждой ветви головных канатов при внезапной задержке поднимающегося сосуда можно, представить в виде двух кратковременных нагрузок по-лусинусоидальной формы. Первый импульс S|n соответствует кратковременной нагрузке длительностью ti=-n/vi, а другой —отвечает усилию в ветви длительностью т2г= =n/v2.
Здесь Vi, v2 — соответственно первая и вторая круговые частоты собственных колебаний установки (рис. 1.9). Индексы i=l,2 относятся соответственно к защемляемой (поднимающейся) и опускающейся ветвям головных канатов.
Значения импульсбв определяют по
формулам:
4а tnv0
где tic — максимальная скорость подъема; т — погонная масса ветви головных кадетов.
Максимальные значения для случая встречи поднимающегося сосуда с абсолютно жесткой преградой для поднимающейся и опускающейся ветвей определяют соответственно по формулам:
п
COS T]Xy
Kn
L"2
Ln . . _
COS — (2j + Xn — /)
Kn
(n = 1,2
(1.25)
Здесь
Kn = Ln Ln (1-4)
Г 2L
X sin
n
— Xn — sin
2?vn / I I
sin 2r|Zn , 2Xn П
2
71 ---
«3
2^n . , Ln \ ----sin2—— xn ;
a2 I }
sin2 T]A.n
sin2 (гг + xn — I)
I a2
xn =— arctg— ;
An An
= zjl', a2 = ml/Mz, a3 = тЦМ^
vn = aLnl L,
(1.26)
Mt — масса концевого груза с учетом хвостового каната; г» — расстояние от оси шкива_ трения до места защемления сосуда с массой Mt (см. рис. 1.9); Mr — приведенная к окружности шкива трения масса всех вращающихся частей подъемной установки; I — суммарная длина ветвей головных канатов; а — скорость подъема; Оо—скорость упругой волны деформация в канатах:
(£к — модуль упругости каната; F — площадь поперечного сечения всех канатов головной ветви; заметим здесь, что в состав массы концевого груза( М, нходнт часть массы хвостового каната, равная массе его ветви, расположенной между- точкой наибольшего провеса и точкой примыкания каната к соответствующему концевому, грузу).
16
Собственные. числа. определяют из уравнения
X,2 \
—— -1 tg(T]-l)Xn +
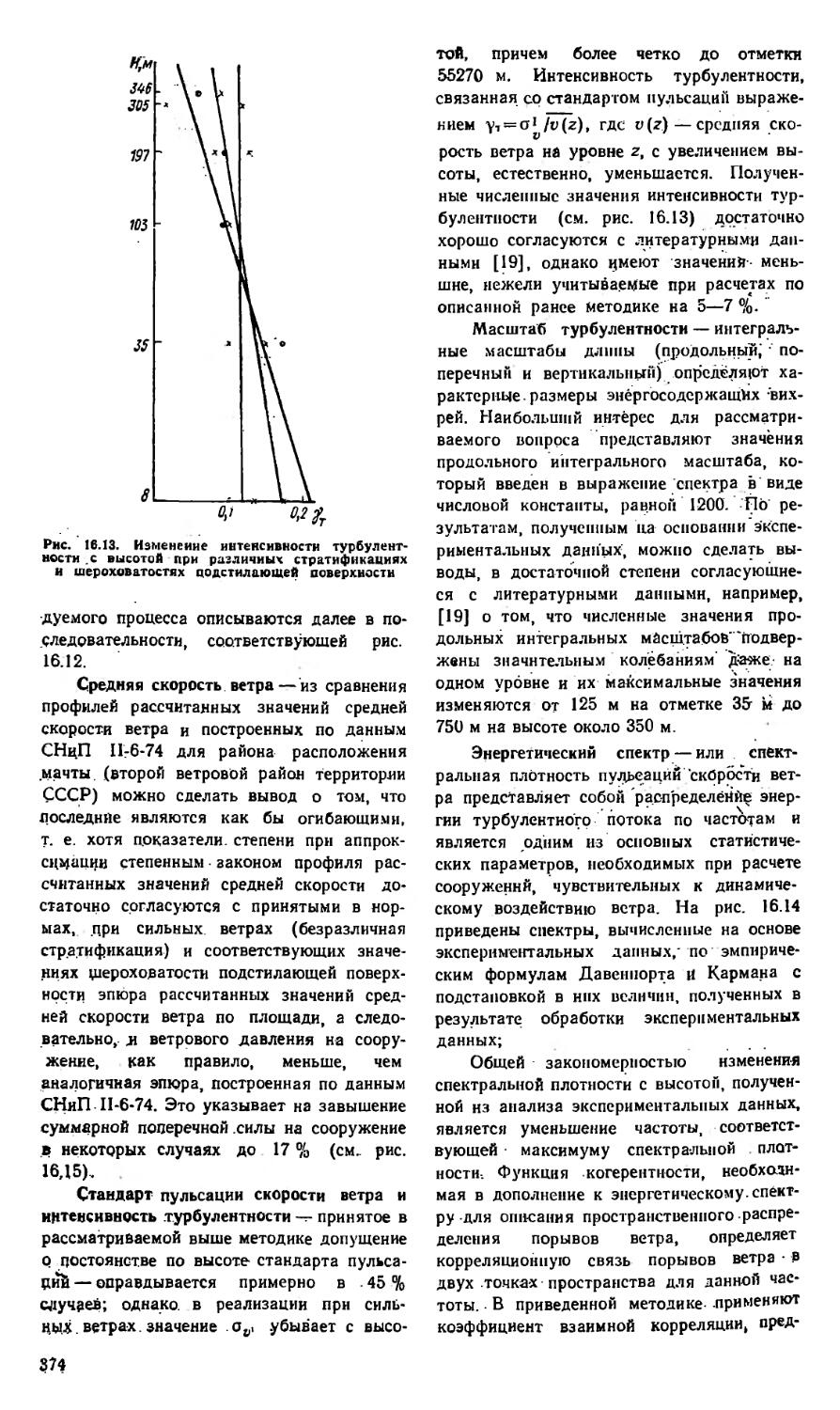
О2аЗ /
Х.Ц tg ЛХ/Д —
\ «2 “3 /
tg (Л - 1) (Хп - 1) = 0- (1.27) а2
Приведенные зависимости (1.24) относятся к случаю абсолютно жесткой преграды (0 = <*>). В реальных подъемных установках происходит быстрое прекращение колебательного процесса после защемления поднимающегося сосуда.
Динамические усилия в точках набегания и сбегания головных канатов на шкив после встречи с абсолютно жесткой преградой (см. рис. 1.9) определяются выражениями:
Р(1) (/) -
2Дк Fvo
cos т)Хп
—------sinM;
An
(1.28)
Jl
X cos —(гг + xn — l) sin vn t.
Верхние индексы 1, 2 относятся соответственно к поднимающейся и опускающейся ветвям головных канатов. Хвостовые ка.чаты на рис. 1.9 не показаны.
Нормальный режим работы подъемной машины и предохранительное торможение. Динамические усилия в ветвях головных канатов при нормальном режиме работы (пуск машины, равноускоренное движение, рабочее торможение, загрузка и разгрузка) рекомендуется заменять эквивалентными статическими усилиями, значения которых определяют по формуле
(i=l,2), (1.29)
где Рс — максимальное статическое натяжение в соответствующей ветвн головных канатов, вычисляемое по формуле
= + (1.30)
здесь т — погонная масса ветвей головных канатов: I{Длина ветви головного каната; — мас-стопмНЦевых гРузов с. учетом части массы хво-вн к?нат°в; g — ускорение силы тяжести; n пл пи. .7 ‘ вносятся соответственно к левым и правым ветвям головных канатов.
Проведенные экспериментальные исследования на башенных копрах шахт и рудников и теоретические расчеты показали, что динамические усилия при реализации предохранительного торможения следует опреде
лять для случая подъема груженого сосуда. При этом длину груженой (левой) ветви принимают равной расстоянию от оси шкива трения до места в стволе шахты (рис. 1.10), где происходит переход от равномерного движения к равнозамедленному. Динамические усилия в ветвях головных канатов (рис. 1.10) находят по формуле
р(Л = р(П sin v. t (f = 1,2), (1.31) где v — круговая частота колебаний грузов на канатах; ' — /р —низшее собственное
число, определяемое как корень уравнения: Kttg —(mi I.}IAft—0, отвечающий собственным продольным колебаниям массы М. на i-й ветви головных канатов.
Для i=l низшее собственное число Xj относится к левой ветви головных канатов, для 1=2 значение Х2 относится ко второй ветви головных канатов (рис. 1.10); It.— длина i-й ветви канатов.
Определение нагрузок на несущие конструкции башенных копров. Расчет несущих конструкций башенного копра на нагрузки, возникающие при различных режимах работы подъема, необходимо производить с учетом схем их приложения.
При защеплении поднимающегося сосуда кратковременные усилия в головных канатах имеют разную продолжительность, и импульсивные нагрузки определяют по следующим формулам:
на перекрытие машинного зала:
Sj = (Sp cos у + п;
S2 = (S2U cos V + n; (1.32)
= rtSf116sin y; = nS^ ft sin у;
(1.33)
на перекрытие под отклоняющие шкивы:
$1 = 2л5р sin2 ;
S2 = 2nS^n sin2 ; (1.34)
= nSp) Ь± sin у; М2 — nS^ b± sin у;
(1.35) на несущие стены (каркас) копра:
Sj = rtSj1' sin у; S2 = sin у, (1.36)
„ 10 Д2) „(1) 12)
где S ] . Si , S2 . S2 — вычисляют по формулам (1.24); п — коэффициент сочетания нагрузок; у — угол отклонения головной ветвн от вертикали; Ь — расстояние от оси шкива трения до перекрытия машинного зала; Ь\ — расстояние от оси отклоняющего шкива до уровня перекрытия (см. рис. 1.10).
Приведенные на рис. 1.11 нагрузки получены на основе анализа схемы воздейст-
№
Cf2
Рис. 1.10. Расчетная схема многоканатной подъемной установки для случая предохранительного торможения
вия нагрузок на конструкции башенного копра (рис. 1.12).
При предохранительном торможении нагрузки определяют по формулам:
на перекрытие машинного зала:
(Р(1) cosy —
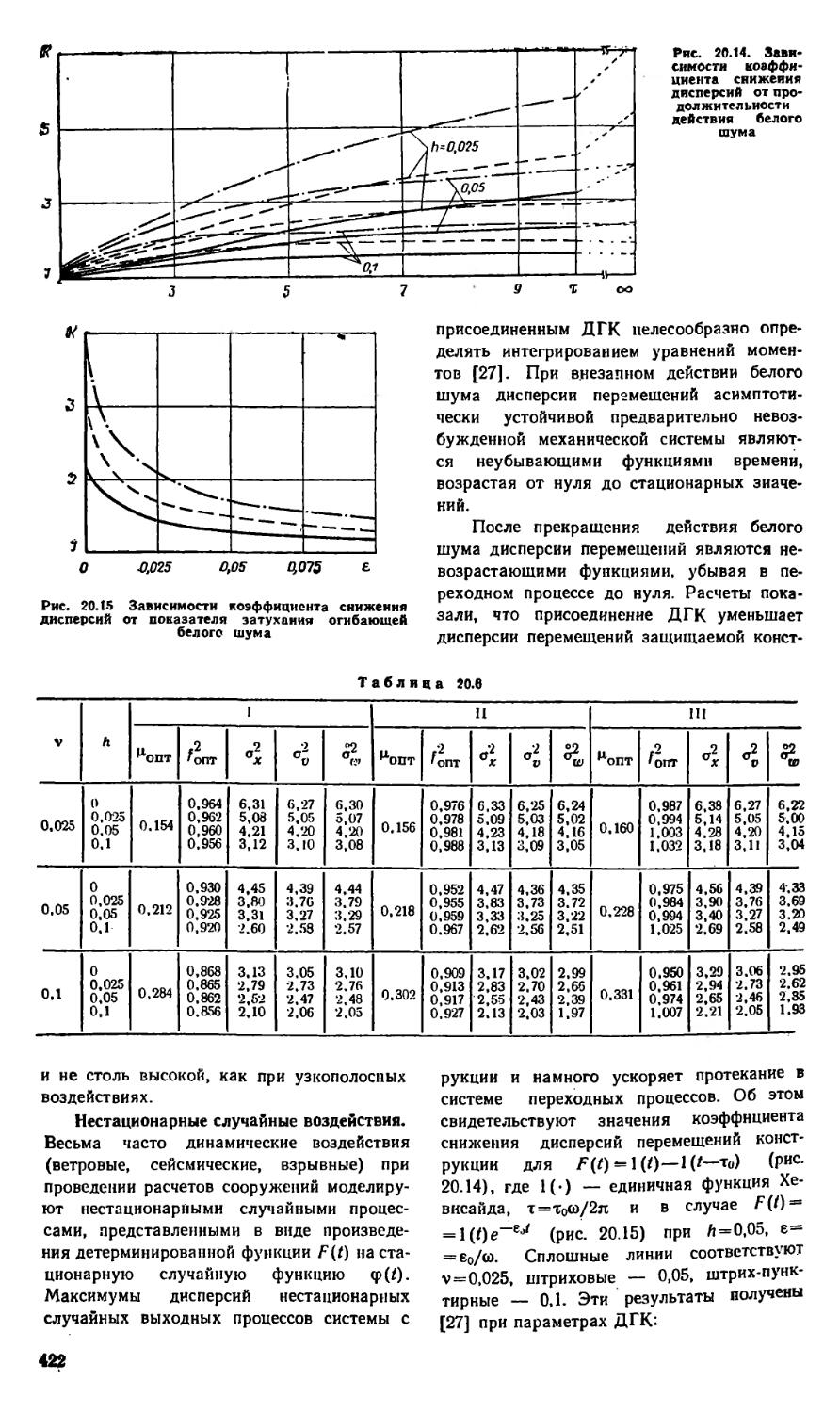
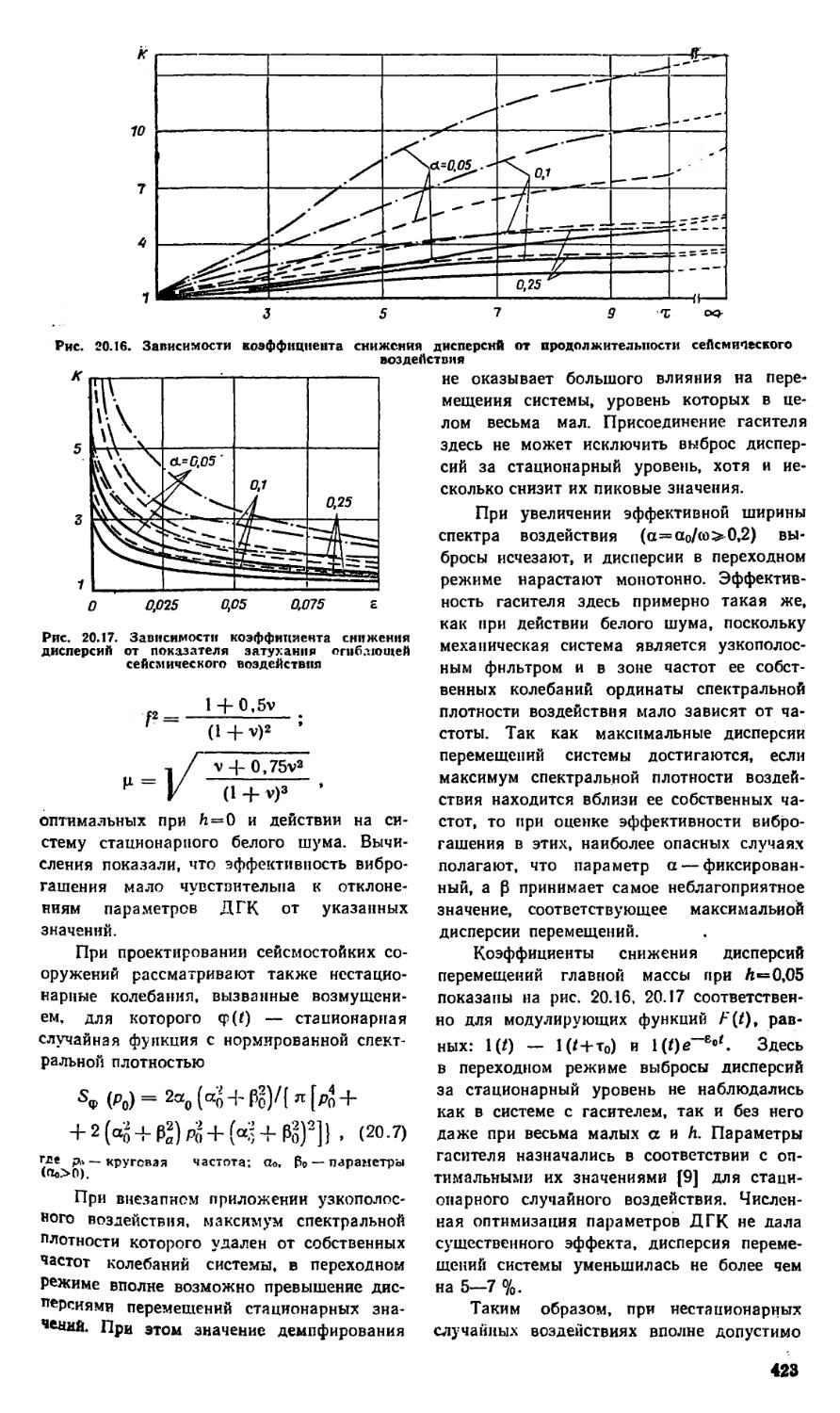
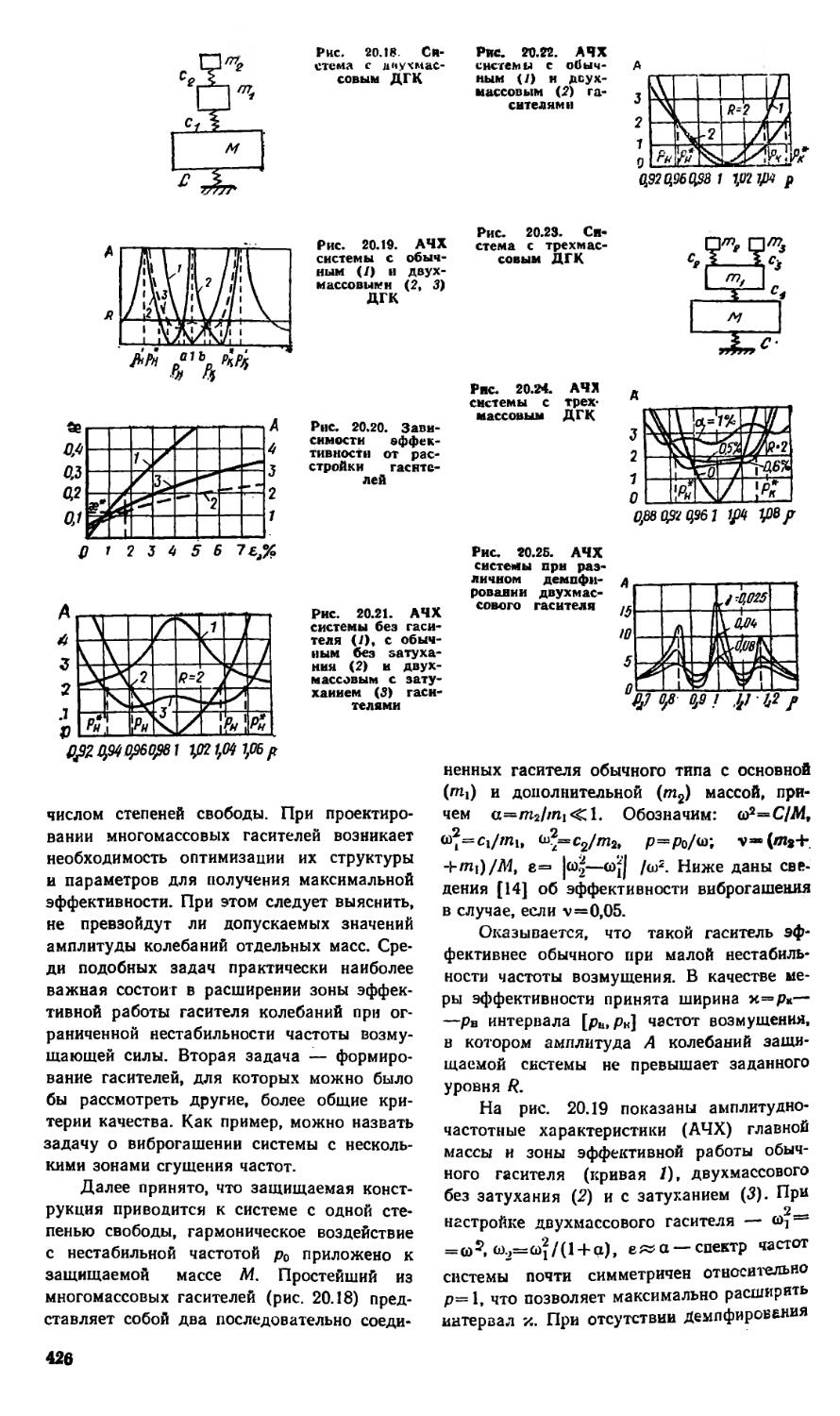
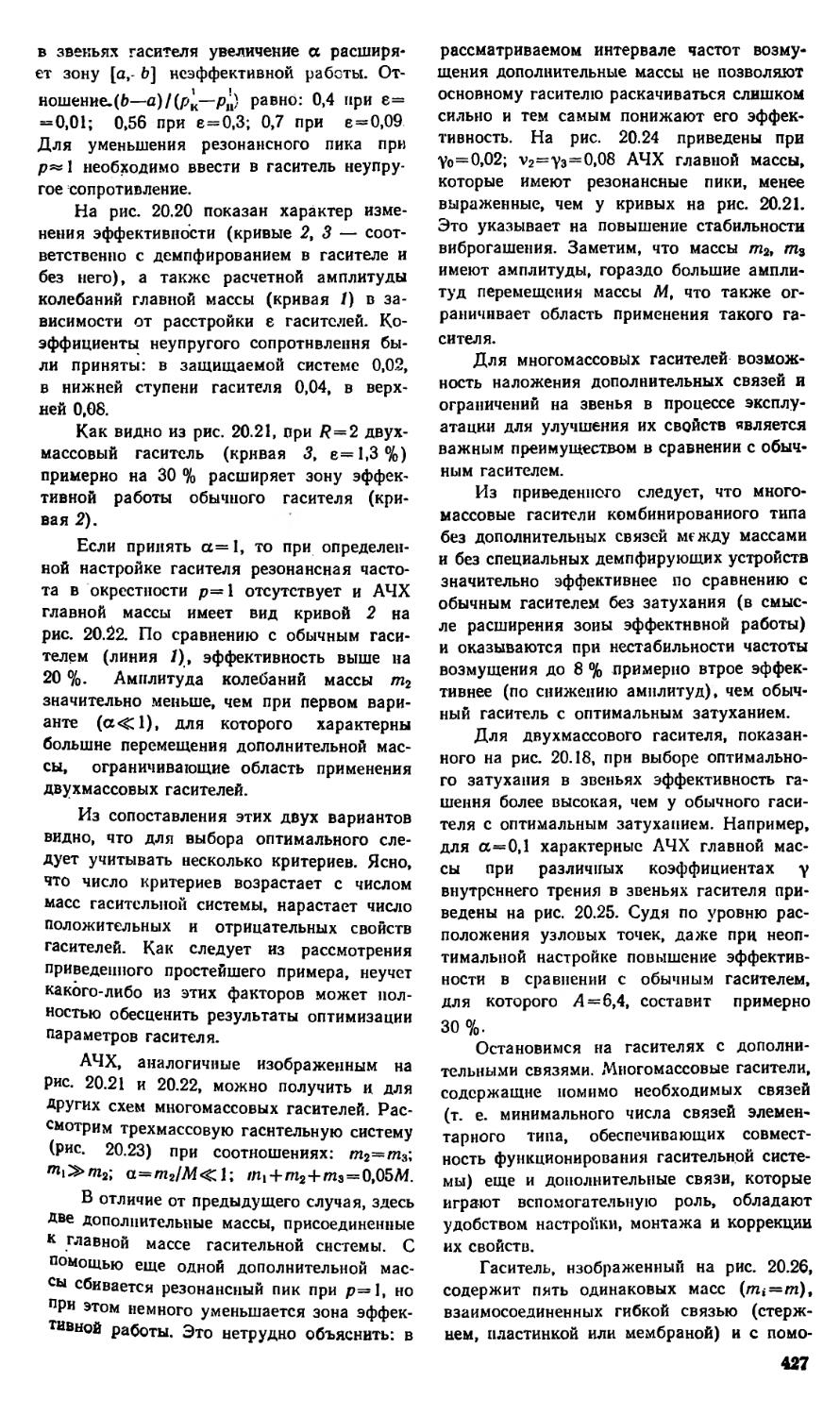
N Ю = 1---------------- sin v> * О -37)
Р (0 (I Р(1) I cos у +1 Я?) |)sin Vj t; (1.38)
М (/) = (Ях> b sin у) sin Vi t' (1.39) перекрытие, на котором расположены отклоняющие шкивы:
/V' (0 =(2P(i)sin2-^-jsinvf*; (1.40) \ JU /
М' (t) = (Я1) bt sin у) sin Vi t; (1.41) на несущие стены (каркас) копра
Рг (t) = (P(Dsin у) sin V1t, (1.42)
(D (2)
где P н P определяют по формуле (1.28); R — радиус шкива трения (канатэведущего шкива); Лт — радиус тормозного барабана; с—расстояние между опорами стоек тормозов (см. рис. 1.12). Значения R, RT. с, b, Ь, берутся из паспорта на подъемную машину и технологическое задание.
Схема приложения нагрузок к элементам копра показана на рис. 1.11.
Вышеприведенные нагрузки при защемлении и торможении следует определять при расположении поднимающегося груженого сосуда для ветви канатов, расположен-
Рис. 1.11. Схемы действия нагрузоч на конструк-' ции копра при торможении н защемлении а — перекрытие машинного зала; б — перекрытие под отклоняющие шкивы; е — башня копра (несущие стены); Н\— расстояние or фундамента до перекрытия машинного зала; Hi — расстояние от фундамента до перекрытия под отклоняющие шкивы
Рис. 1.12, Схема действия нагрузок на кодструх-цни башенного копра
ной у отклоняющего шкнва. Частоту нагрузок N(t), P(t), M(t), N'(i) и Af<(Z) принимают равной частоте колебаний груженого сосуда на канатах.
Наибольшее значение горизонтальной динамической нагрузки при предохранительном торможении Рг(0 может достигать 50—60 % динамического усилия в соответ
18
ствующей ветви головных канатов. Так как частоты собственных горизонтальных колебаний копров (основной тон) лежат в диапазоне 0,5—1,5 Гц, а частоты колебаний сосудов на канатах 0,5—5 Гц, то для большинства подъемов при осуществлении предохранительного торможения на определенной глубине наступит явление резонанса, поэтому частоту нагрузки Vi принимают равней частоте собственных горизонтальных колебаний копра по основному тону (vi=pt). Йри этом следует учитывать затухание колебаний в материале копра [2]. Динамический расчет здания копра можелг быть выполнен в соответствии с рекомендациями работы [10]. Коэффициент перегрузки для динамических нагрузок, возникающих при предохранительном торможении и внезапной задержке сосуда в стволе шахты, принимают равным 1.
При проверке несущей способности башенного копра и его элементов на совместное действие нагрузок статических и динамических, нагрузки, возникающие при предохранительном торможении, учитываются в основном сочетании нагрузок с коэффициентом сочетания 1, а при внезапной задержке сосуда в стволе — в особом сочетании нагрузок с коэффициентом сочетания 0,8 [16].
При оборудовании башенного копра несколькими подъемными машинами расчет строительных конструкций следует производить для невыгоднейшей комбинации нагрузок. Предохранительное торможение надлежит рассматривать одновременно для всех, нескольких или одной подъемной машины, а внезапную задержку сосуда в стволе, ввиду ее случайного характера, следует рассматривать только для одной из машин при нормальной работе остальных.
Особенности динамического расчета башенных копров. Башенные копры имеют следующие конструктивные особенности:
а) наибольшие размеры в плане по сравнению с высотой Н:
а/Н= 1/4,..., 1/6; (1.43)
’ б) наличие монолитно связанных между собой наружных несущих стен, перегородок и внутренней шахты для железобетонных копров и связевых ферм между вертикальными элементами для металлических копров;
в) наличие по всей высоте копра через м перекрытий, которые можно считать кедеформируемыми;
г) в большинстве случаев общий фундамент под все сооружение.
2*
Отмеченные особенности позволяют на основании аналогии с другими высотными сооружениями (дымовые трубы, мачты, башни и т. п.) не учитывать при колебаниях пространственную работу копра и рассматривать его как ступенчатую или однородную консоль с упругой или жесткой опорой [13, 18].
Как показывает опыт проектирования, для каркасных металлических копров с легким стеновым заполнением и копров, расположенных на отдельных опорах, в большинстве случаев собственный вес перекрытий с оборудованием превышает в 2 раза н более собственный вес вертикальных элементов в пределах этажа, поэтому расчетную схему для таких копров допускается принимать в виде упругой невесомой консоли с сосредоточенными массами в уровне перекрытий, распределяя массы вертикальных элементов поровну между верхним и нижним перекрытиями. В копрах с несущими железобетонными стенами и каркасных с тяжелым стеновым заполнением обычно массы вертикальных элементов превышают массы перекрытий (за исключением перекрытий под подъемные машины и участков копра, где расположены приемные бункера), поэтому для таких копров следует сосредоточенные массы заменять равномерно распределенной массой в пределах участка с постоянной жесткостью и расчетную схему-принимать в виде консоли с распределенными параметрами.
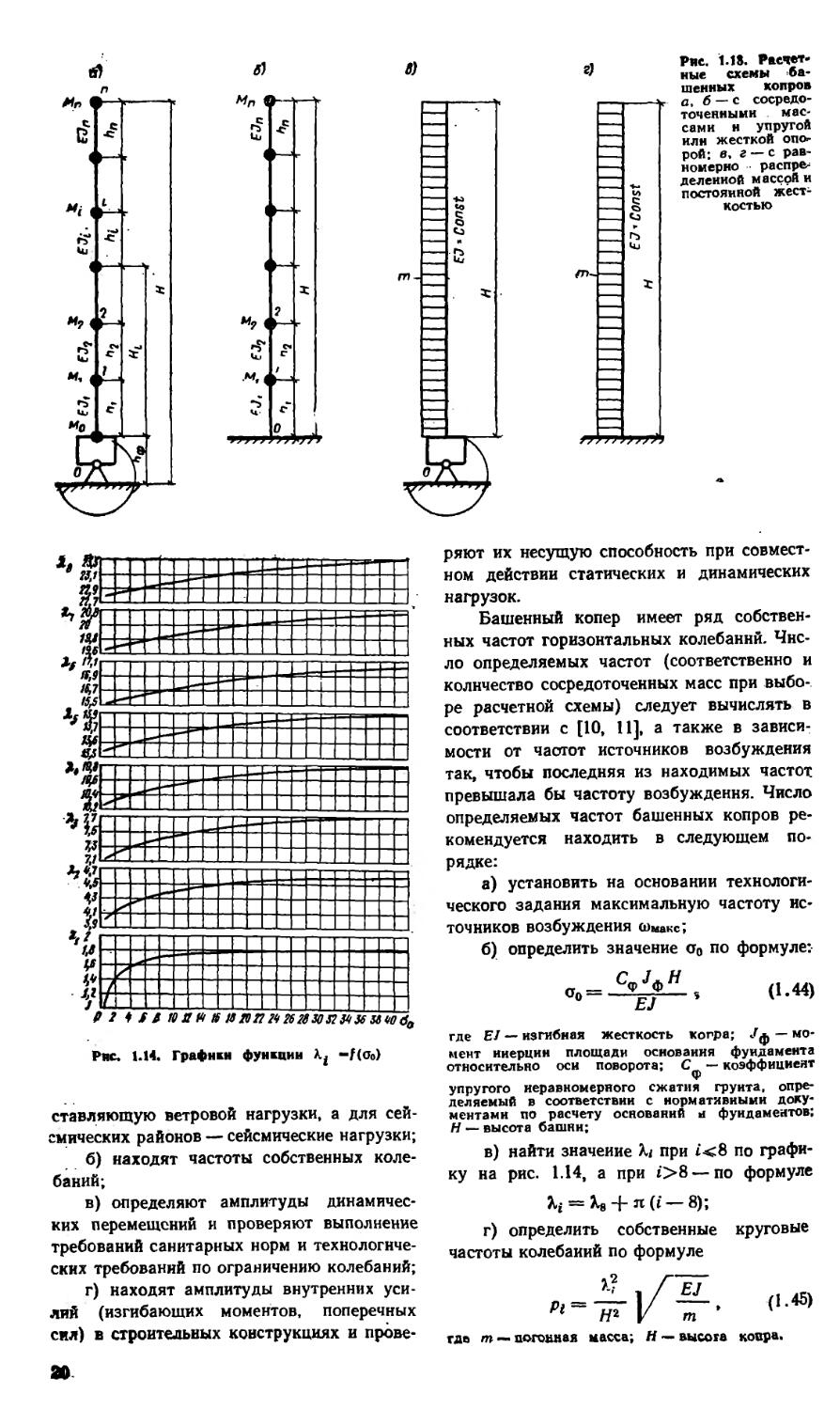
Таким образом, расчетную схему копра следует принимать в виде упругой консоли с сосредоточенными в уровнях перекрытий или других характерных местах массами или с равномерно распределенной массой по высоте. При этом полагается, что копер будет совершать только изгибные колебания. Расчетные схемы каркасных копров принимают в соответствии с указаниями Инструкции [10]. Заметим также, что для копров всех видов следует учитывать неравномерное сжатие грунта под подошвой фундамента при повороте его в вертикальной плоскости. Для скальных и малодеформируемых грунтов можно не учитывать податливость, основания и расчетную схему представлять в виде жестко заделанной на уровне верх-: него обреза фундамента консоли. Расчетные схемы копров с несущими стенами изображены на рис. 1.13.
Динамический расчет рекомендуется производить в такой последовательности:
а) вычисляют динамические нагрузки от подъемных машин и другого технологического оборудования, динамическую со-
19
Й)
г)
Рие. 1.1». Расчетные схемы башенных копров а, б — с сосредоточенными массами и упругой или жесткой опорой: в, г — с равномерно распределенной массой и постоянной жесткостью
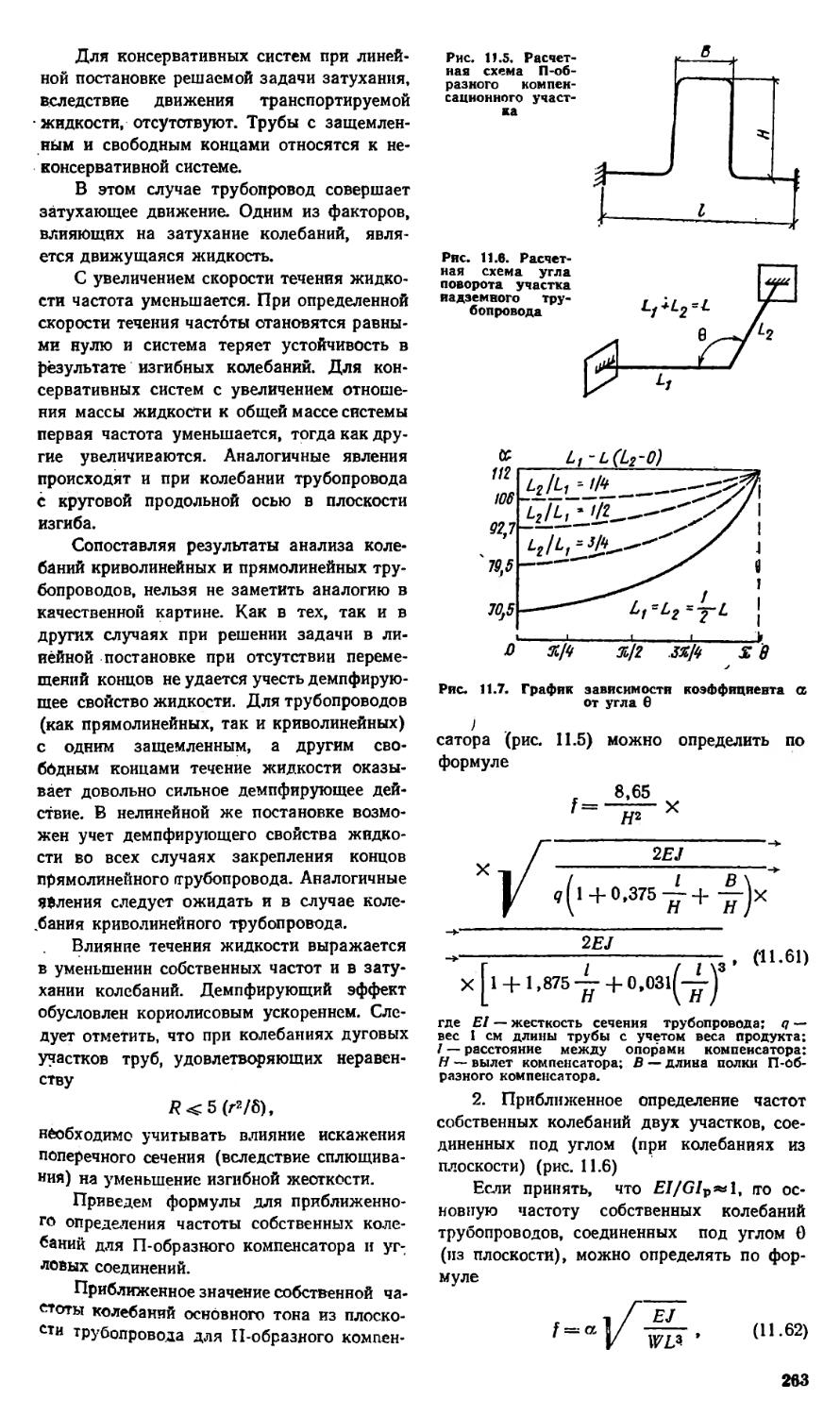
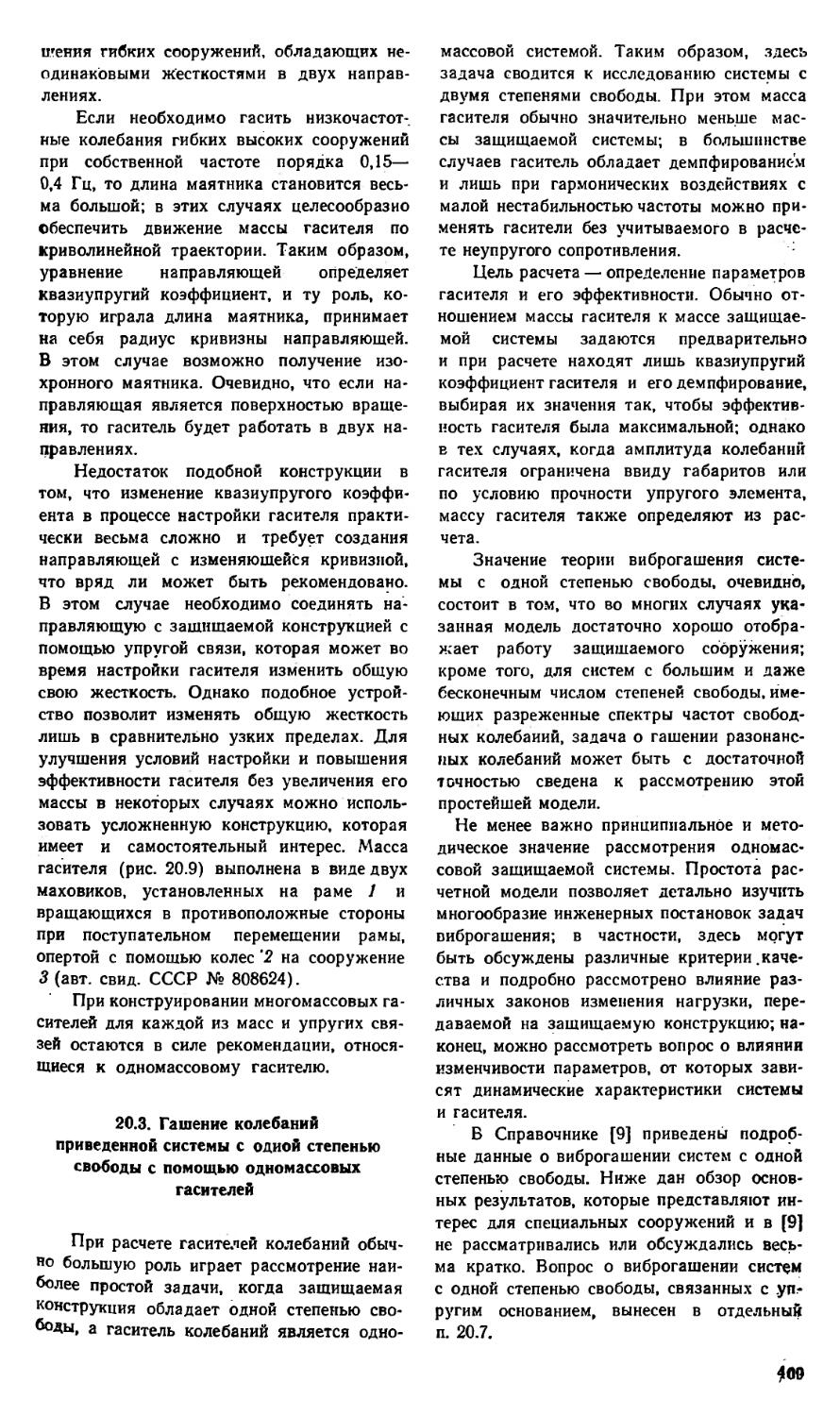
Р 2 * S / 10 О U № UЯП 24262830523436 3840<So
Ряс. 1.14. Графики функции A.* -f(o0)
ряют их несущую способность при совместном действии статических и динамических нагрузок.
Башенный копер имеет ряд собственных частот горизонтальных колебаний. Число определяемых частот (соответственно и количество сосредоточенных масс при выборе расчетной схемы) следует вычислять в соответствии с [10, 11], а также в зависимости от частот источников возбуждения так, чтобы последняя из находимых частот превышала бы частоту возбуждения. Число определяемых частот башенных копров рекомендуется находить в следующем порядке:
а) установить на основании технологического задания максимальную частоту источников возбуждения (Омаке;
б) определить значение о0 по формуле:
Cm
°0 EJ ’
(1.44)
ставляющую ветровой нагрузки, а для сейсмических районов — сейсмические нагрузки;
б) находят частоты собственных колебаний;
в) определяют амплитуды динамических перемещений и проверяют выполнение требований санитарных норм и технологических требований по ограничению колебаний;
г) находят амплитуды внутренних усилий (изгибающих моментов, поперечных сил) в строительных конструкциях и прове-
где EJ — нагибная жесткость копра; /ф —момент инерции площади основания фундамента относительно оси поворота; — коэффициент упругого неравномерного сжатия грунта, определяемый в соответствии с нормативными документами по расчету оснований и фундаментов; Н — высота башни;
в) найти значение X/ при /<8 по графику на рис. 1.14, а при i>8 — по формуле
4~ я (i — 8);
г) определить собственные круговые
частоты колебаний по формуле
где т — погонная масса; Н — высота
(1.45)
копра.
Необходимое для определения частот собственных колебаний число i находят из условия Pi>-1,3(0макс.
Формула (1.45) и графики на рис. 1.14 справедливы для расчетной схемы копра в виде упруго заделанной консоли постоянной жесткости по высоте с равномерно распределенной массой [1,20].
Для расчетных схем копра с дискретными и распределенными массами, имеющими различную жесткость по высоте, а также для схем с числом степеней свободы
более трех и постоянной жесткостью целесообразно использовать метод начальных параметров в матричной форме [7]. Амплитуда перемещений и внутренних усилий в элементах перекрытий башенного копра при действии периодических нагрузок (предохранительное торможение, неуравновешенность шкивов, работа электродвигателей и другого оборудования) определяют согласно указаниям [10], а на действие импульсивных нагрузок — в соответствии с [11].
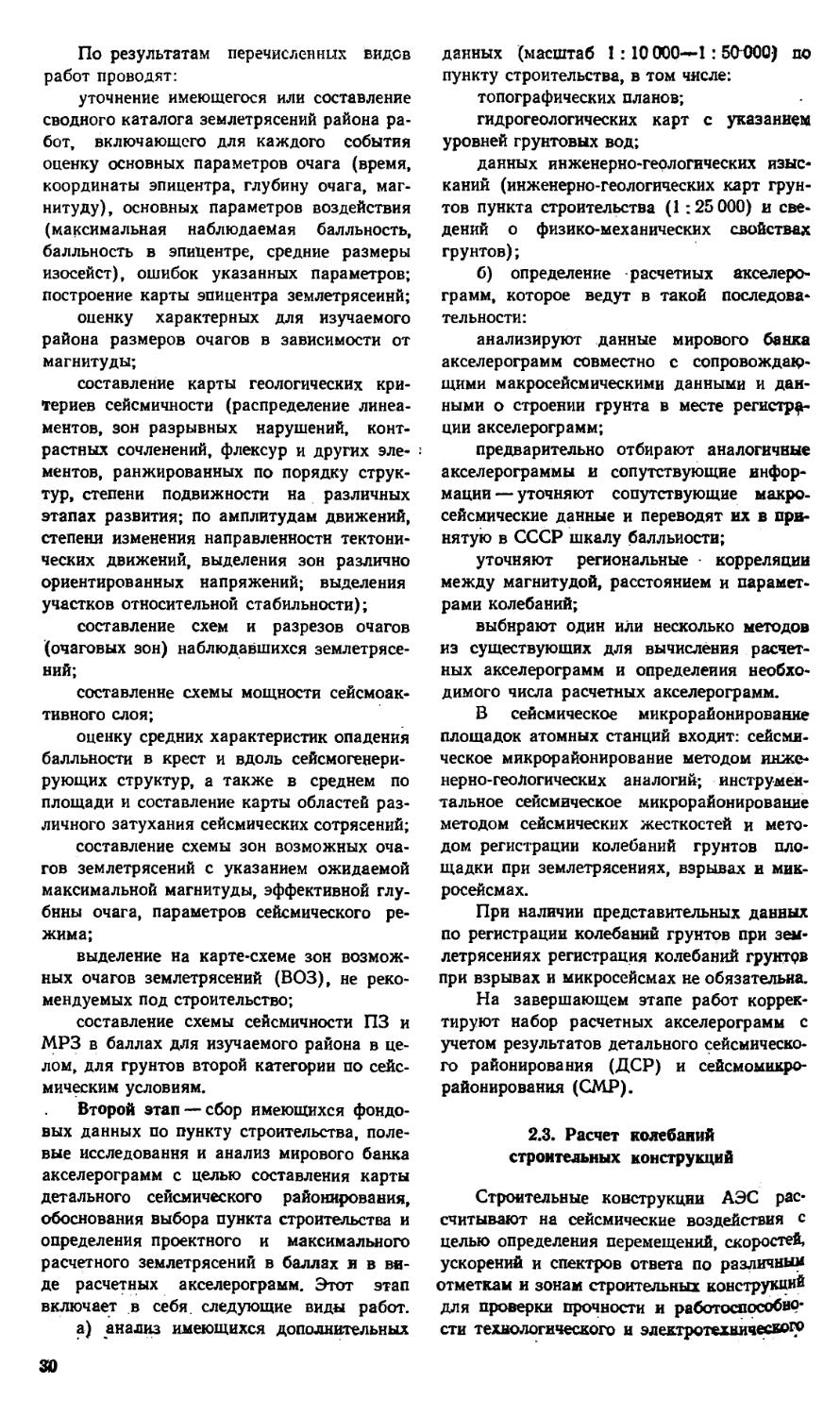
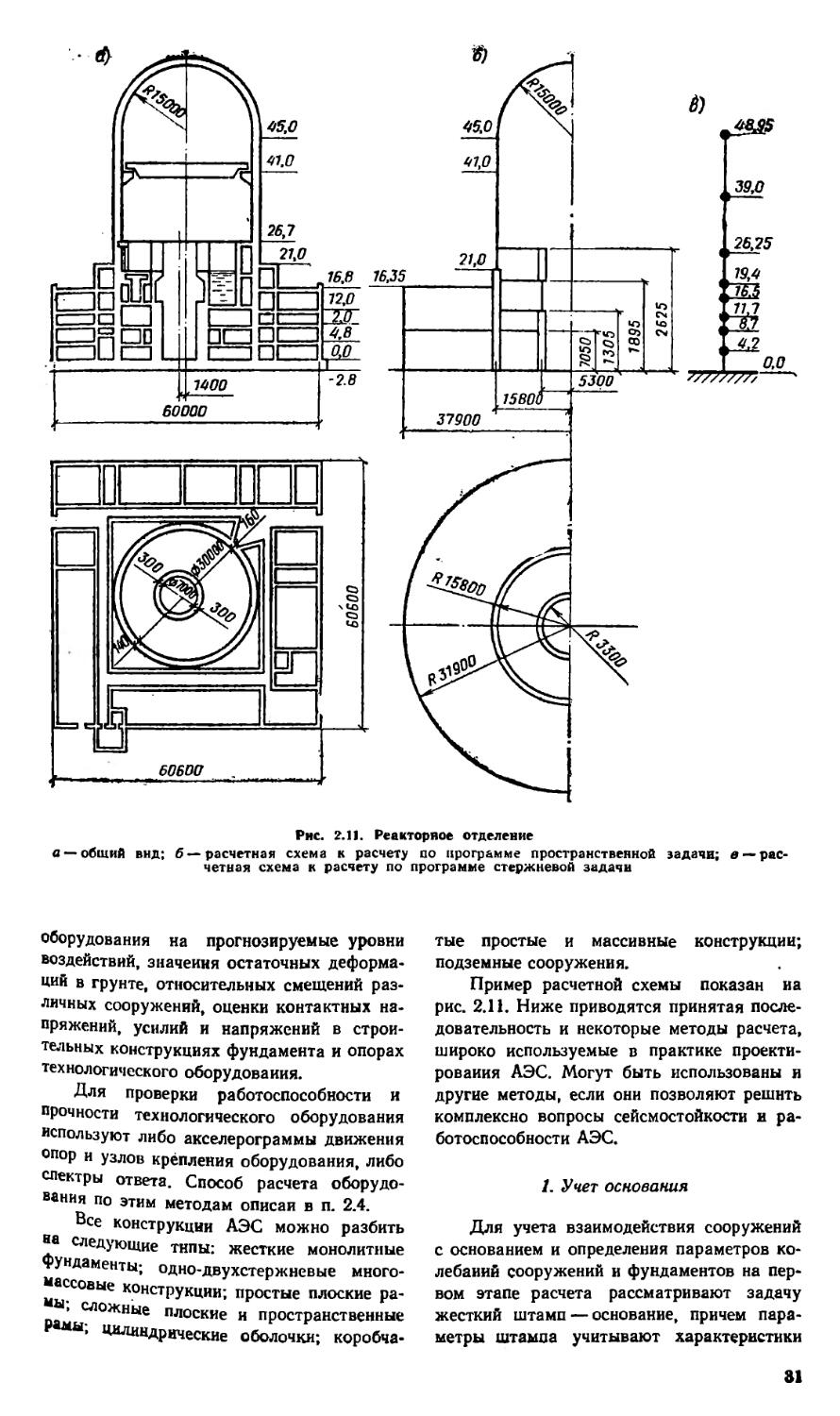
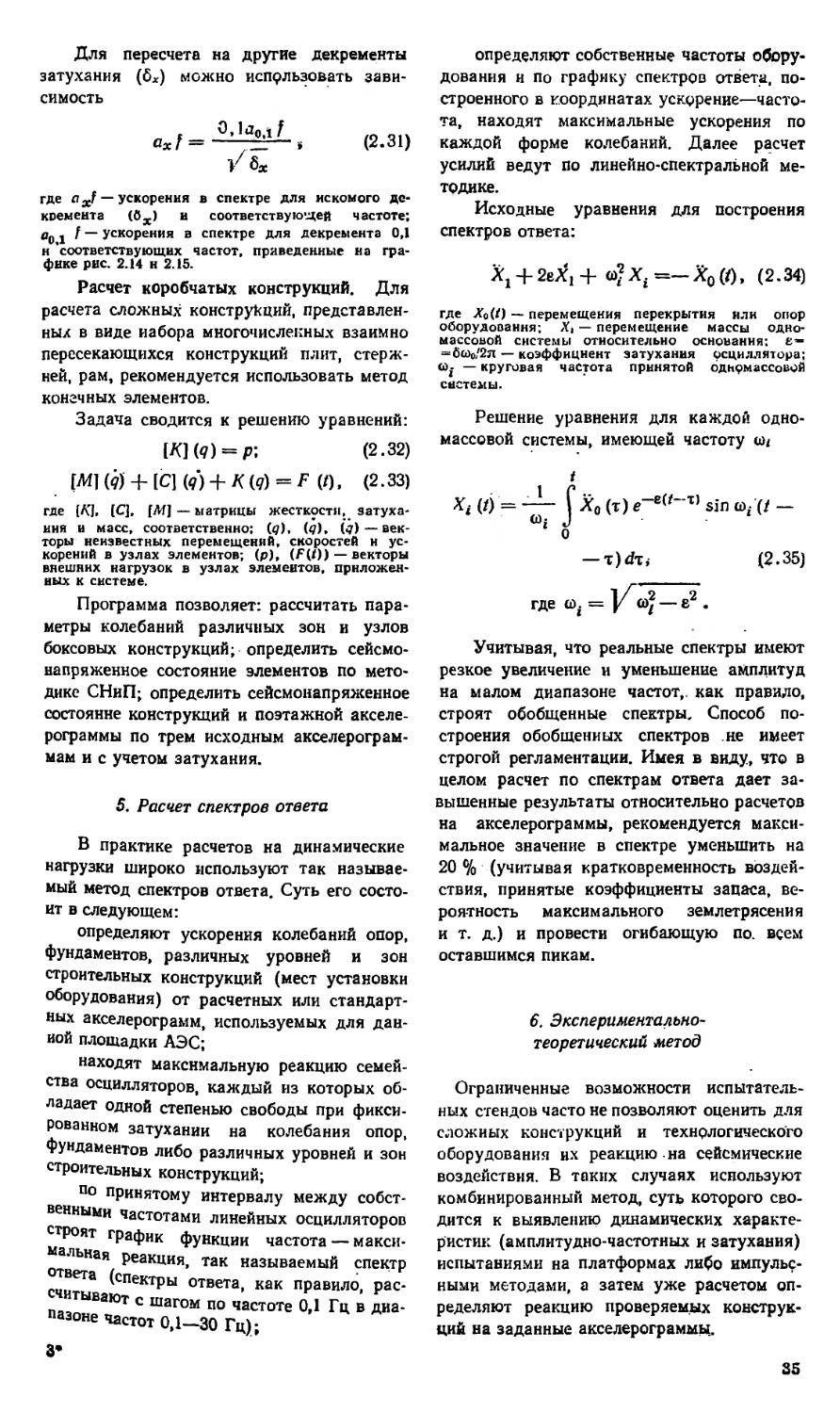
РАЗД ЕЛ 2. ДИНАМИЧЕСКИЕ НАГРУЗКИ В АТОМНЫХ ЭЛЕКТРОСТАНЦИЯХ
Ю. К. Амбриашвили, А. П. Кириллов
Обеспечение безопасности атомных станций (АЭС) значительно отличается от подобных задач, возникающих применительно к гражданским, промышленным, гидротехническим сооружениям.
Отличительная особенность проблемы состоит не только в обеспечении прочности строительных конструкций, что является определяющим для сооружений других типов, но н в гарантии надежного функционирования всех систем АЭС, управляющих ядер-ным процессом, а также ответственных за расхолаживание реактора. Такими элементами являются насосное и электрическое оборудование, приводы стержней управления и защиты (СУЗ), электронная система контроля и управления, различные электрические системы. Особой надежностью должна обладать система расхолаживания реактора, обеспечивающая последовательным включением различных циркуляционных контуров снижение температур и активности ядерного процесса до безопасного уровня. Каждый нз этих контуров включает в себя, кроме трубопроводов, определенного типа насосов и электрического оборудования, различного вида заглушки, вентили и обслуживается сложным комплексом электронных цепей, приборов и устройств — отказ любого из этих элементов может привести к нарушению работоспособности всей системы расхолаживания. Указанные выше и подобные ей системы расхолаживания и управления реактором располагаются в строительных объемах АЭС на различных Уровнях по высоте и в различных помещениях в плане. Строительные конструкции.
обладая собственными динамическими свойствами, трансформируют передающиеся на них колебания так, что каждый строительный элемент, включая и перекрытия, будет колебаться различно, и эти колебания будут являться нагрузкой для установленных на них элементов технологического, .электрического оборудования, систем контроля н управления.
Проектирование, строительство и эксплуатацию АЭС в нашей стране ведут по нормам и правилам ядерной и радиационной безопасности, которые обеспечивают высокую надежность всех систем, участвующих в технологическом процессе и гарантирующих защиту окружающей среды [1—5]. Учет этих норм н правил обязателен и при различных динамических воздействиях.
2.1. Виды динамических нагрузок
Динамические воздействия, учитываемые при проектировании АЭС, по своему происхождению могут быть естественными, вызванными различными явлениями природы, и искусственными, связанными с деятельностью человека; по месту возникновения— внутренними, связанными с работой размещенного в строительных объемах оборудования, и внешними, связанными с процессами, происходящими вне строительных объемов, где размещено технологическое оборудование; по длительности воздействия— постоянными, возникающими в режимах эксплуатации, и кратковременными, связанными с чрезвычайными воздействиями н авариями.
21
По многим этим нагрузкам на сегодня можно дать только общее представление о характере воздействия и тех параметрах, которые могут быть учтены ири расчетах. В целом же, учитывая многообразие типов реакторов, строительных конструкций и районов строительства, в каждом случае необходимо проводить комплекс расчетных и экспериментальных исследований для прогноза й выявления источника и характера динамических нагрузок.
1. Внутренние нагрузки
Гидродинамические нагрузки возникают в результате циркуляции теплоносителя (переносящей тепло среды) в системе реактор—турбина—система охлаждения. Эти нагрузки могут быть постоянными н временными.
Постоянно действующие технологические нагрузки имеют, как правило, нестационарный характер. В настоящее время пока отсутствуют расчетные методы определения очагов возникновения и характера изменения этих нагрузок. Экспериментально установлено, что диапазон их частот очень широк, что вызывает опасность резонансных явлений в системах трубопроводов. Учитывая это, эффективный способ обеспечения безопасной работы трубопроводов — ограничение размаха их колебаний раскреплением специальными амортизаторами, не препятствующими медленным деформациям от температуры, на строительные конструкции.
Временные нагрузки связаны с газогид-родинамическимн процессами при срабатывании различного рода клапанов, взрывах гремучей смеси, вызывающих гидравлический удар, и другими быстропротекающими воздействиями. Наиболее обоснованно оценить характер и уровень таких нагрузок можно экспериментально.
Аварийные динамические нагрузки. Многие динамические нагрузки, учитываемые при проектировании АЭС, связаны с разрывом напорных трубопроводов. В результате такой аварии истечение находящегося под высоким давлением теплоносителя может привести:
к возникновению реактивной силы, которая будет передаваться на опорные конструкции;
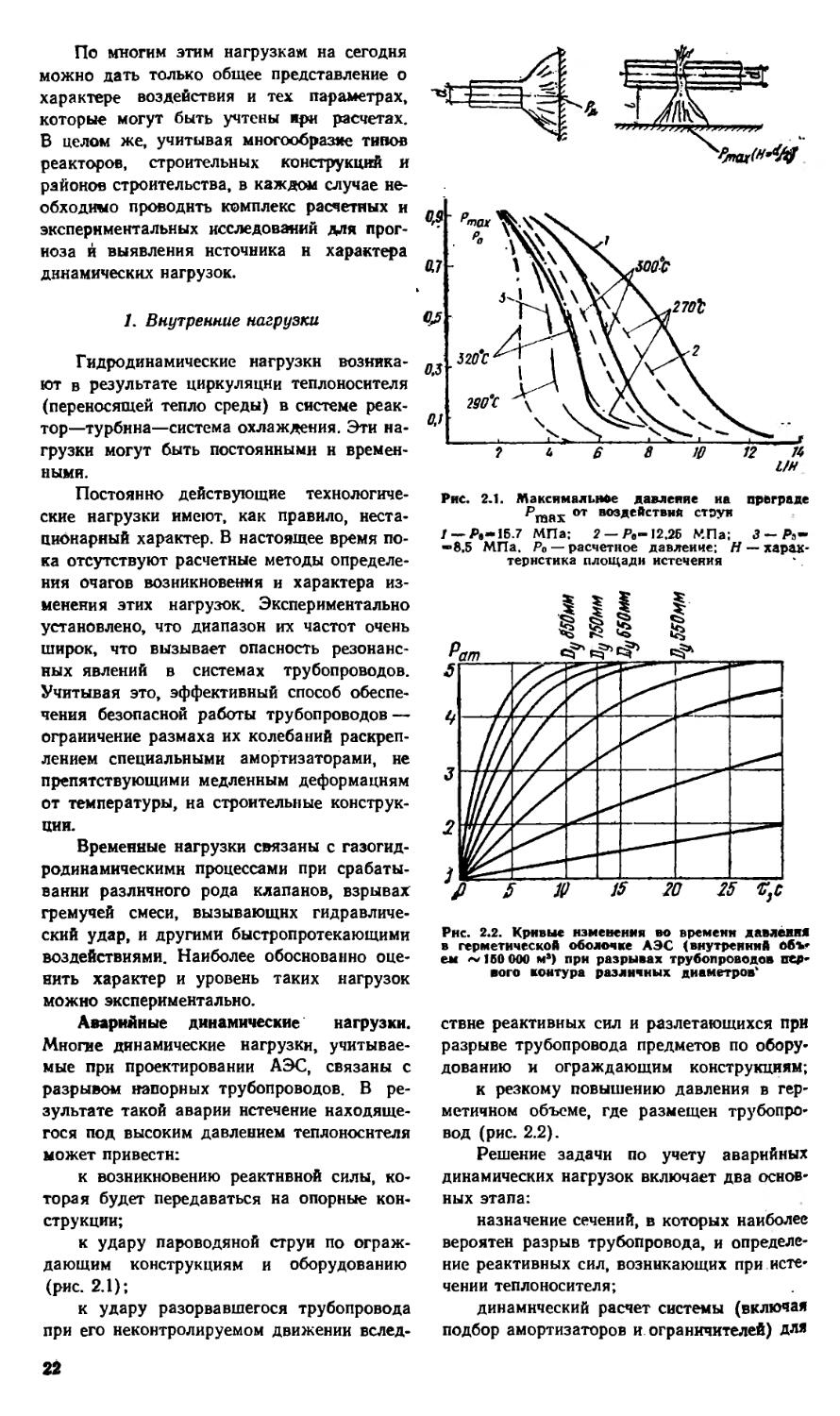
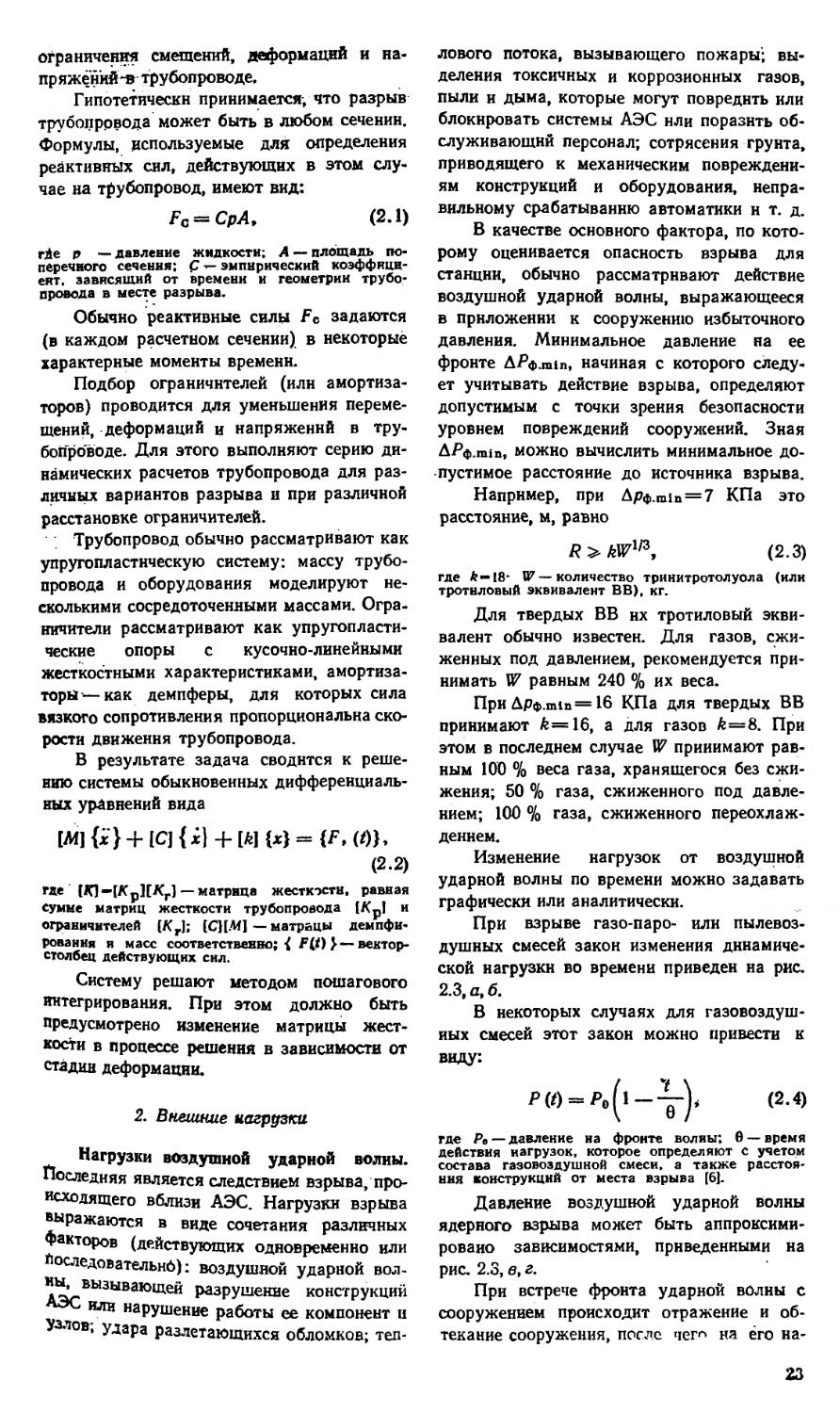
к удару пароводяной струи по ограждающим конструкциям и оборудованию (рис. 2.1);
к удару разорвавшегося трубопровода при его неконтролируемом движении вслед-
Рис. 2.1. Максимальное давление на преграде Ргаах 07 воздействия струн
/ — Ре-15.7 МПа: 2 — Рв-12.26 МПа; 3 — Р,-
—8.5 МПа, Рв — расчетное давление; Н — характеристика площади истечения
Рис. 2.2. Кривые изменения во времени давления в герметической оболочке АЭС (внутренний Объ* ем ~ 160 000 м1) при разрывах трубопроводов первого контура различных диаметров'
ствне реактивных сил и разлетающихся при разрыве трубопровода предметов по оборудованию и ограждающим конструкциям;
к резкому повышению давления в герметичном объеме, где размещен трубопровод (рис. 2.2).
Решение задачи по учету аварийных динамических нагрузок включает два основных этапа:
назначение сечений, в которых наиболее вероятен разрыв трубопровода, и определение реактивных сил, возникающих при истечении теплоносителя;
динамический расчет системы (включая подбор амортизаторов и ограничителей) для
22
ограничения смещений, деформаций и на-пряженнй-и трубопроводе.
Гипотетически принимается, что разрыв трубопровода может быть в любом сеченин. Формулы, используемые для определения реактивных сил, действующих в этом случае на трубопровод, имеют вид:
Fc = CpA. (2.1)
гДе р — давление жидкости; А — площадь поперечного сечення; (7 — эмпирический коэффициент, зависящий от времени и геометрии трубопровода в месте разрыва.
Обычно реактивные силы Fc задаются (в каждом расчетном сечении) в некоторые характерные моменты времени.
Подбор ограничителей (илн амортизаторов) проводится для уменьшения перемещений, деформаций и напряжений в трубопроводе. Для этого выполняют серию динамических расчетов трубопровода для различных вариантов разрыва и при различной расстановке ограничителей.
Трубопровод обычно рассматривают как упругопластнческую систему: массу трубопровода и оборудования моделируют несколькими сосредоточенными массами. Ограничители рассматривают как упругопластические опоры с кусочно-линейными жесткостными характеристиками, амортизаторы— как демпферы, для которых сила вязкого сопротивления пропорциональна скорости движения трубопровода.
В результате задача сводится к решению системы обыкновенных дифференциальных уравнений вида
wi {х} + ICJ {Л + ВД W = (F, (0),
(2.2) где [Д]—[Кр][Кг] —матрица жесткости, равная сумме матриц жесткости трубопровода (Кр] и ограничителей [Кг]; (С][М] — матрацы демпфирования и масс соответственно; { Fit) J—вектор-столбец действующих сил.
Систему решают методом пошагового интегрирования. При этом должно быть предусмотрено изменение матрицы жесткости в процессе решения в зависимости от стадии деформации.
2. Внешние нагрузки
Нагрузки воздушной ударной волны. Последняя является следствием взрыва, происходящего вблизи АЭС. Нагрузки взрыва выражаются в виде сочетания различных факторов (действующих одновременно или Последовательно): воздушной ударной волки, вызывающей разрушение конструкций
или нарушение работы ее компонент н Узлов, удара разлетающихся обломков; теп-
лового потока, вызывающего пожары; выделения токсичных и коррозионных газов, пыли и дыма, которые могут повредить или блокировать системы АЭС нли поразить обслуживающий персонал; сотрясения грунта, приводящего к механическим повреждениям конструкций и оборудования, неправильному срабатыванию автоматики н т. д.
В качестве основного фактора, по которому оценивается опасность взрыва для станции, обычно рассматривают действие воздушной ударной волны, выражающееся в приложении к сооружению избыточного давления. Минимальное давление на ее фронте ДРф.пип, начиная с которого следует учитывать действие взрыва, определяют допустимым с точки зрения безопасности уровнем повреждений сооружений. Зная Д^ф.пип, можно вычислить минимальное допустимое расстояние до источника взрыва.
Например, при Дрф.т1п = 7 КПа это расстояние, м, равно
R>kWlf3, (2.3)
где k —18- W — количество тринитротолуола (или тротиловый эквивалент ВВ), кг.
Для твердых ВВ их тротиловый эквивалент обычно известен. Для газов, сжиженных под давлением, рекомендуется принимать W равным 240 % их веса.
При Дрф.пип= 16 КПа для твердых ВВ принимают £=16, а для газов £=8. При этом в последнем случае W принимают равным 100 % веса газа, хранящегося без сжижения; 50 % газа, сжиженного под давлением; 100 % газа, сжиженного переохлаждением.
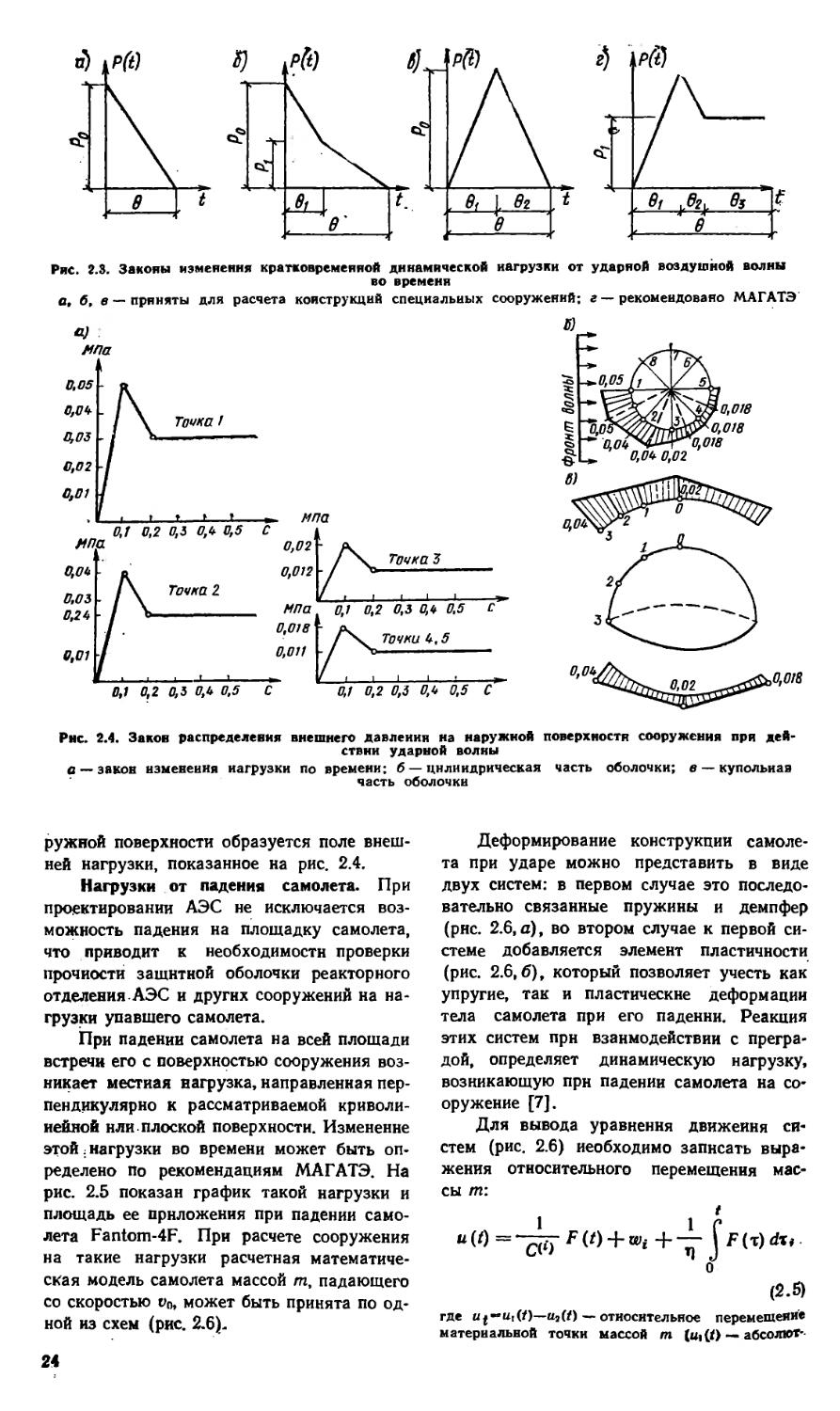
Изменение нагрузок от воздушной ударной волны по времени можно задавать графически или аналитически.
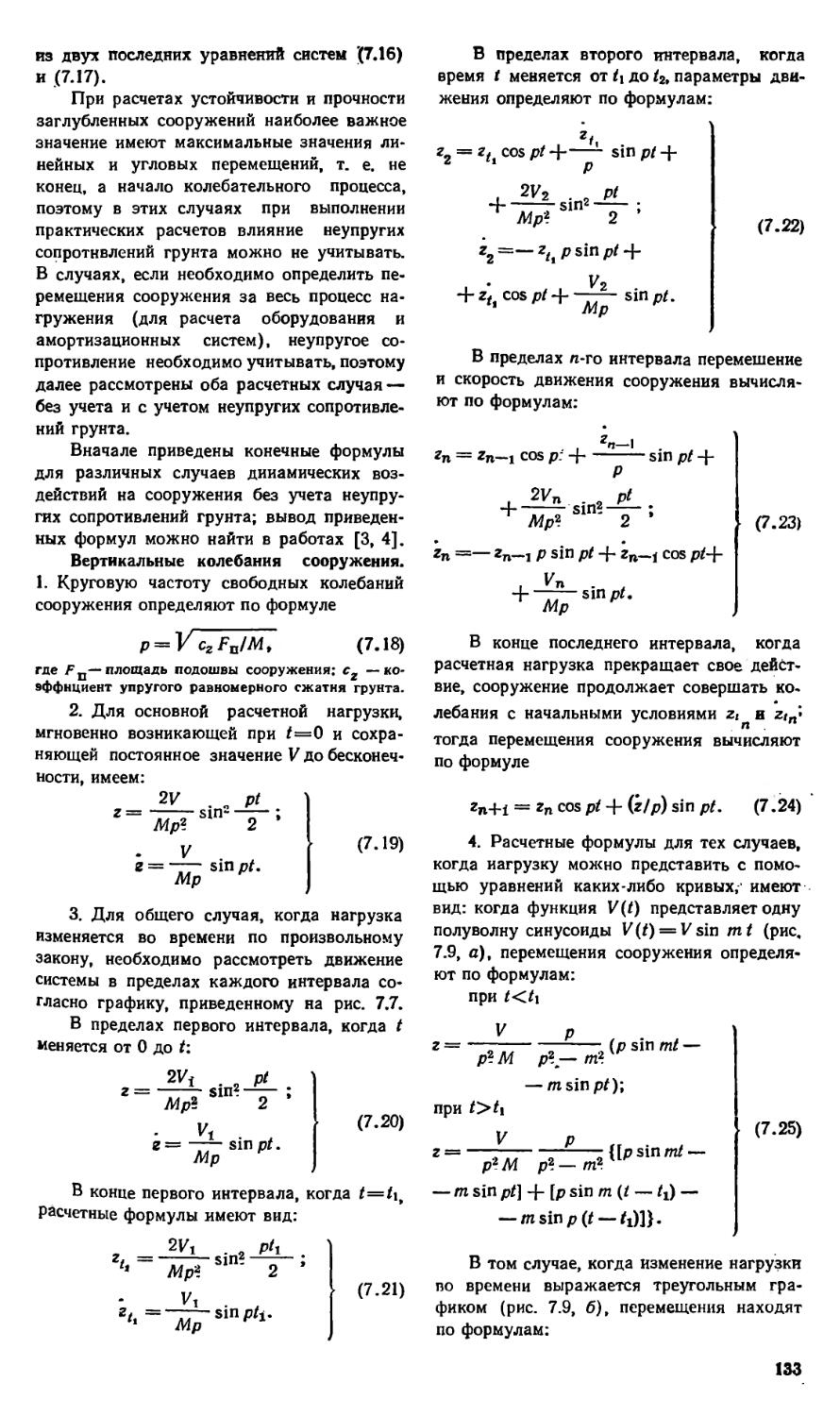
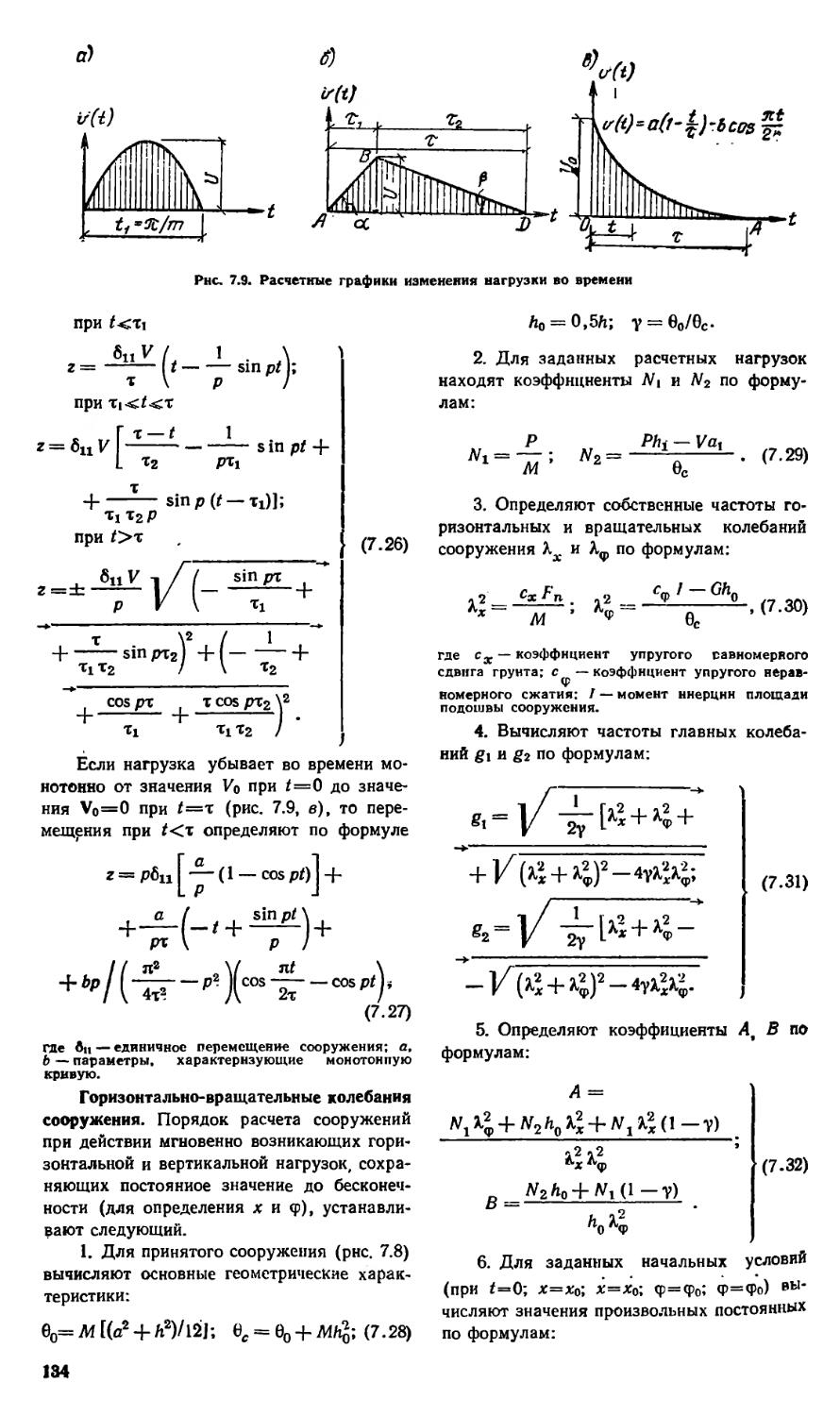
При взрыве газо-паро- или пылевоздушных смесей закон изменения динамической нагрузки во времени приведен на рис. 2.3, а, б.
В некоторых случаях для газовоздуш-иых смесей этот закон можно привести к виду:
₽ю=-р,(1-4-У <2 *-4>
\ v /
где Рв — давление на фронте волны; 6 — время действия нагрузок, которое определяют с учетом состава газовоздушной смеси, а также расстояния конструкций от места взрыва [6].
Давление воздушной ударной волны ядерного взрыва может быть аппроксимировано зависимостями, приведенными на рис. 2.3, в, г.
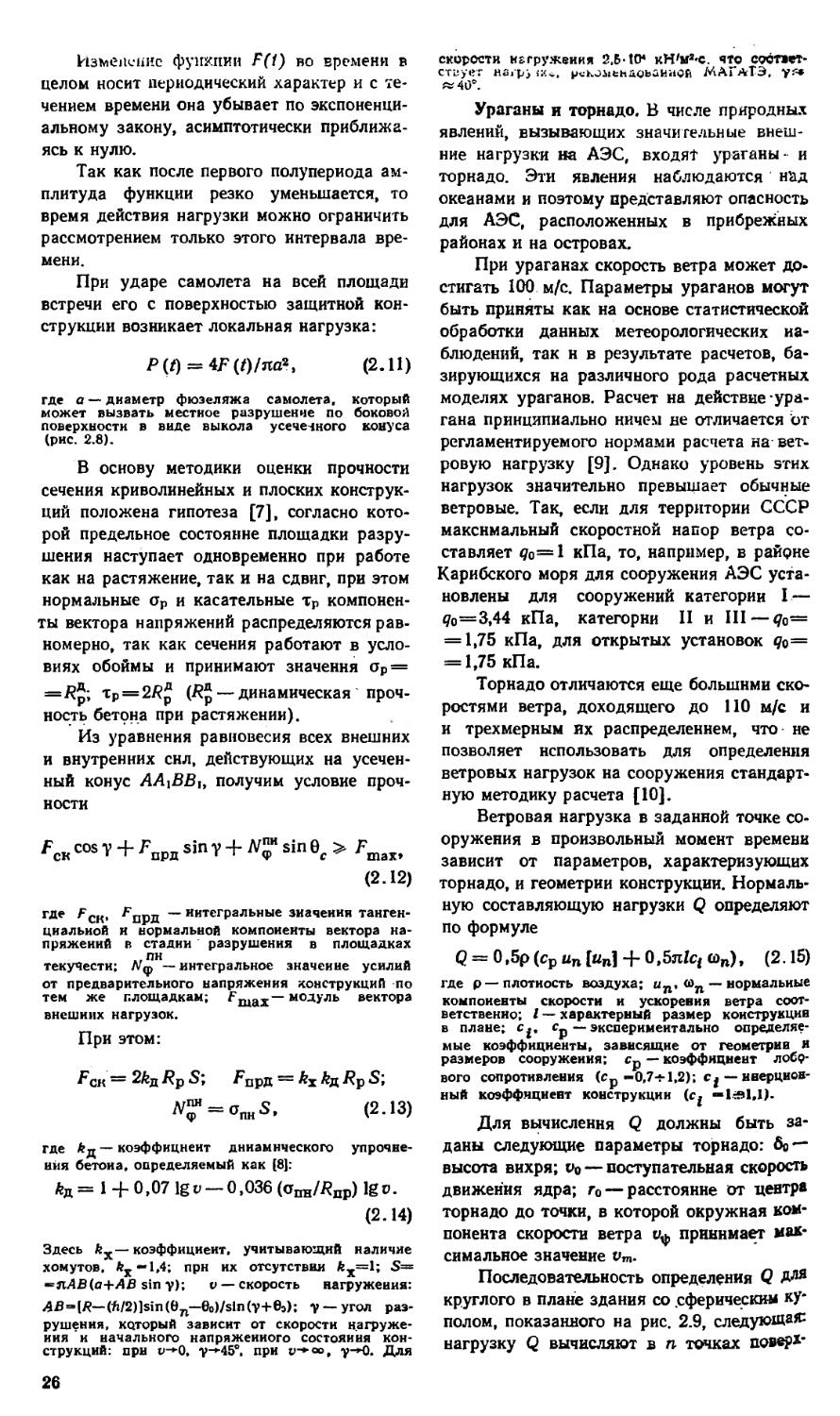
При встрече фронта ударной волны с сооружением происходит отражение и обтекание сооружения, после чсг^ на его на-
23
Рис. 2.3. Законы изменения кратковременной динамической нагрузки от во времени
а, 6, в — приняты для расчета конструкций специальных сооружений;
а)
Рис. 2.4. Заков распределения внешнего давлении на наружной поверхности сооружения при действии ударной волны
а — закон изменения нагрузки по времени; б — цилиндрическая часть оболочки; в — купольная часть оболочки
ударной воздушной волны
г — рекомендовано МАГАТЭ
ружной поверхности образуется поле внешней нагрузки, показанное на рис. 2.4.
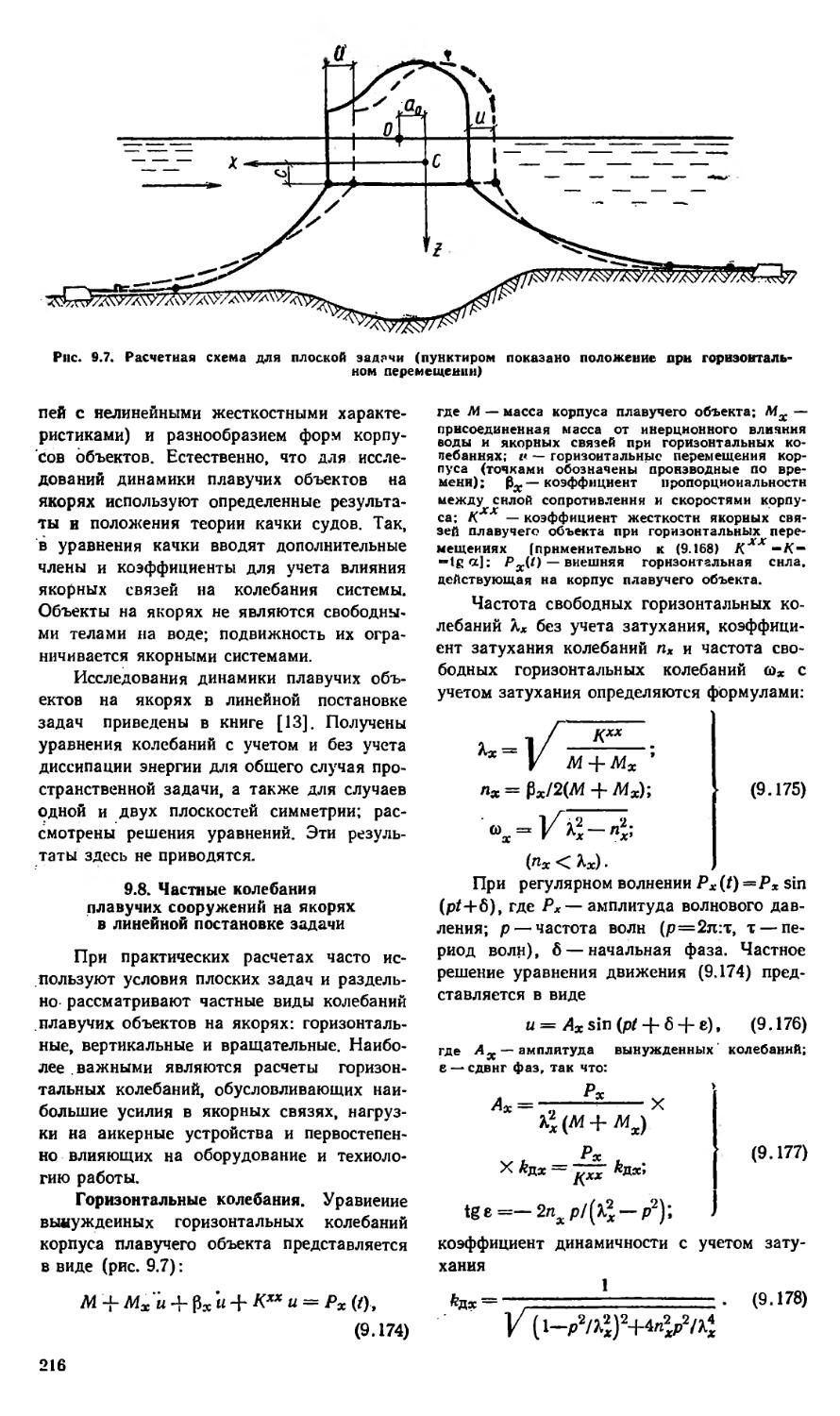
Нагрузки от падения самолета. При проектировании АЭС не исключается возможность падения на площадку самолета, что приводит к необходимости проверки прочности защитной оболочки реакторного отделения АЭС и других сооружений на нагрузки упавшего самолета.
При падении самолета на всей площади встречи его с поверхностью сооружения возникает местная нагрузка, направленная перпендикулярно к рассматриваемой криволинейной нли плоской поверхности. Изменение этойнагрузки во времени может быть определено по рекомендациям МАГАТЭ. На рис. 2.5 показан график такой нагрузки и площадь ее приложения при падении самолета Fantom-4F. При расчете сооружения на такие нагрузки расчетная математическая модель самолета массой т, падающего со скоростью с>о, может быть принята по одной из схем (рис. 2.6).
24
Деформирование конструкции самолета при ударе можно представить в виде двух систем; в первом случае это последовательно связанные пружины и демпфер (рнс. 2.6,а), во втором случае к первой системе добавляется элемент пластичности (рис. 2.6,6), который позволяет учесть как упругие, так и пластические деформации тела самолета при его падении. Реакция этих систем прн взаимодействии с преградой, определяет динамическую нагрузку, возникающую прн падении самолета на сооружение [7].
Для вывода уравнения движения систем (рис. 2.6) необходимо записать выражения относительного перемещения массы т:
t
1 1 С
U = “ссо" F +Wi + "ij" J F dXi о
(2.5) где U|“Ur(O—и2(Л — относительное перемещение материальной точки массой т (щ (О — абсолют--
Рис. 2.5. Нагрузка при аварии самолета «Fan-tom-4F» (масса 2 т; скорость 215 м/с)
а — от удара всего самолета; б — от удара двигателя; в — площадь контакта при соударении
Рис. 2.в. Механические модели тела самолета а — упруговязкая; б — упруговязкопластичная
Рис. 2.7. Диаграмма сила — перемещения
а — соответствует механической модели, изображенной на рис. 5. о; б — соответствует механической модели, изображенной на рис. 5, б
иое перемещение материальной точки массой т; “НО — перемещение сооружения в точке удара); г (г) — сила, возникающая при взаимодействии самолета с сооружением (преградой); т) — коэффициент демпфирования; —жесткость поперечного сечения тела самолета при различных стадиях деформирования.
Значения wt определяют из диаграммы F-u (рис. 2.7):
Wi = _ (F(*-1)/C(O), (2.6)
Где U(I) соудяпр ’ ~ значения перемещения и сила
формн₽реоНвИаЯниВя тела1 самолета.°“а ДИаграММЫ Де'
Рассматривая условия Даламбера совместно с уравнением (2.5), с учетом начальных условий Ui(0)=0 и U](O)=vo, получим кусочно-линейное интегральное уравнение ервого рода относительно сил взаимодей-. «вия f (О в виде;
Рис. 2.8. Схема разрушения
С(0
t
+ — J F (т) (/ — т) dx = и2 (0 — wt + М-0
(2.7)
Уравнение (2.7) в общем случае содержит две неизвестные функции — F(t)\ u2(t). Для решения задачи необходимо записать еше уравнение движения сооружения при действии нагрузки F(t):
u2 = L(F), (2.8)
где L — некоторый дифференциальный оператор. Из решения (2.8) определяют и2 (/) как функцию от F(t):
u2(t) = f[F(t)]. (2.9)
После подстановки (2.9) в (2.7) получается кусочно-линейное интегральное уравнение первого рода относительно снл взаимодействия, в результате решения которого определяют F(t).
Так как жесткость современных' защитных конструкций сооружений АЭС на полтора-два порядка выше жесткости тела самолета, то при определении функции F(t) в (2.7) можно принимать и2(/) =0. Применяя метод интегрального преобразования Лапласа для схемы, приведенной на рис. 2.6, а при Ui(t) =0, из решения уравнения’ (2.5) получим:
— sin (со/ — D2) , (2. ГО)
G) I
X
где ш == С/т\ D = (1/2) У тС/т].
25
Изменение функции F(t) во времени в целом носит периодический характер и с течением времени она убывает по экспоненциальному закону, асимптотически приближаясь к нулю.
Так как после первого полупериода амплитуда функции резко уменьшается, то время действия нагрузки можно ограничить рассмотрением только этого интервала времени.
При ударе самолета на всей площади встречи его с поверхностью защитной конструкции возникает локальная нагрузка:
Р(П = 4Г(0/ла2, (2.11)
где а — диаметр фюзеляжа самолета, который может вызвать местное разрушение по боковой поверхности в виде выкола усеченного конуса (рис. 2.8).
В основу методики оценки прочности сечения криволинейных и плоских конструкций положена гипотеза [7], согласно которой предельное состояние площадки разрушения наступает одновременно при работе как на растяжение, так и на сдвиг, при этом нормальные ор и касательные тР компоненты вектора напряжений распределяются равномерно, так как сечения работают в условиях обоймы и принимают значения ор = =7?pi тр = 2/?р (Яр — динамическая прочность бетона при растяжении).
Из уравнения равновесия всех внешних и внутренних сил, действующих на усеченный конус AAiBBi, получим условие прочности
fск cos Т + горд sin ? + w™ sin ес > Fm„,
(2-12)
где FCK, ^Прд — интегральные значении тангенциальной и нормальной компоненты вектора напряжений в стадии разрушения в площадках ..пн
текучести; Аф —интегральное значение усилий от предварительного напряжения конструкций по тем же площадкам; ^щах- МОДУЛЬ вектора внешних нагрузок.
При ЭТОМ:
Яск — Яр S; F прд — Ад Яр S;
С = апн5, (2.13)
где &д — коэффициент динамического упрочнения бетона, определяемый как [8]:
£д= 1-|-0,07 lgv — 0,036 (Спн/Япр) Igo-
(2.14)
Здесь А>х—коэффициент, учитывающий наличие хомутов, —1,4; прн их отсутствии fex=l; S= —лЛВ(а+ЛВ sin у); v — скорость нагружения: ЛВ=(Я— (ft/2)]sin(en—0o)/sin(v+63); -у —угол разрушения, который зависит от скорости нагружения и начального напряженного состояния конструкций: при ti-s-O, при v-*-oo, у-Ю. Для
скорости нагружения 2,БЛО* kH'm’-c. что соответствует натру МАГАТЭ, уг»
» 40°.
Ураганы и торнадо. В числе природных явлений, вызывающих значительные внешние нагрузки на АЭС, входят ураганы- и торнадо. Эти явления наблюдаются н'ад океанами и поэтому представляют опасность для АЭС, расположенных в прибрежных районах и на островах.
При ураганах скорость ветра может достигать 100 м/с. Параметры ураганов могут быть приняты как на основе статистической обработки данных метеорологических наблюдений, так н в результате расчетов, базирующихся на различного рода расчетных моделях ураганов. Расчет на действие урагана принципиально ничем не отличается от регламентируемого нормами расчета на ветровую нагрузку [9]. Однако уровень этих нагрузок значительно превышает обычные ветровые. Так, если для территории СССР максимальный скоростной напор ветра составляет q0= 1 кПа, то, например, в районе Карибского моря для сооружения АЭС установлены для сооружений категории I — <7о=3,44 кПа, категории II и III — q0= = 1,75 кПа, для открытых установок qo= = 1,75 кПа.
Торнадо отличаются еще большими скоростями ветра, доходящего до 110 м/с и и трехмерным их распределением, что не позволяет использовать для определения ветровых нагрузок на сооружения стандартную методику расчета [Ю].
Ветровая нагрузка в заданной точке сооружения в произвольный момент времени зависит от параметров, характеризующих торнадо, и геометрии конструкции. Нормальную составляющую нагрузки Q определяют по формуле
Q = 0,5р (ср ип [нп] 4- 0,5nlct соп), (2.15) где р—плотность воздуха; ип, <оп — нормальные компоненты скорости и ускорения ветра соответственно; I — характерный размер конструкции в плане; с^. —экспериментально определяе-
мые коэффициенты, зависящие от геометрии и размеров сооружения; Ср — коэффициент лобового сопротивления (Ср—0,7+1,2); — инерцион-
ный коэффициент конструкции (с^ —
Для вычисления Q должны быть заданы следующие параметры торнадо: 6о — высота вихря; Vo— поступательная скорость движения ядра; г0 — расстояние от центра торнадо до точки, в которой окружная компонента скорости ветра Оф принимает максимальное значение vm.
Последовательность определения Q ДлЯ круглого в плане здания со .сферическим куполом, показанного на рис. 2.9, следующая нагрузку Q вычисляют в п точках поверх*
26
кости Д*. равно отстоящих одна от другой . на угол у=2я/п. Координаты точек:
хь = Rz cos — 1) у;
Ук = sin (Л— 1) у, (2.16) где радиус Rz определяется геометрией конструкции.
Для сооружения, показанного на рас. 2-9,
Я2 =
Я
при ггр<г<Л, прн 0 < г < zrp.
(2.17)
Пусть центр торнадо перемещается в
плоскости хОу по прямой 0'0" (рнс. 2.10) и
В произвольный момент времени t имеет ко
ординаты:
XI = х0 — «о (t — *о); У1 — Уо> (2 • 18) где х«, ffo — начальное положение центра (при *-*).
Если ввести подвижную полярную систему координат О«гф, начало которой совпадает с положением центра торнадо, то расстояние г* от центра торнадо до точки Л» составляет
rk = V (xt - х0)2 + (У1 ~ У о)2- (2.19)
Радиальную, тангенциальную н вертикальную составляющие скорости ветра в цилиндрической системе координат r<pz с началом в точке Ot определяют в зависимости от значения параметра
tj = —---------£.----------- (2.20)
«о[1-ехр(-0,5р*)]
Выражениями: при т] > 1 = 0;
Р* (2.21)
— ехр(— l,256pj)];
«г= 8 (Р*) = 93р£ vm exp (- 5Pfe);
при Т] < 1
vr = f (Ph) = 0,672 exp (— лт]) X
Xsin [(&-}- 1) лт]];
% = f (РЛ) = (1 — exp (— irq) X (2.22)
X cos2dnT)];
= g (ph) = (1 — exp (— лт]) X
X cos 2b jtq],
гда P*“ 1,2 exp (-0,8pJ).
(2.23)
Рис. 2.9. Схема реакторного отделения, рассчитываемого на воздействие торнадо
Рис. 2.10. Расчетная схема к определению ветрового давления при торнадо
Нормальную к поверхности конструкции компоненту скорости ип, необходимую для расчета нагрузки по (2.15), определяют:
и = (v cos а4-1' sin а) cos0 — v sin0,
(2.24) где а — угол между нормалью к поверхности в точке Afr и радиусом-вектором (рис. 2.10): cos а = [xft (xt — Xh) 4- Ук(У1 — Jfc)] (1 /Ягс,ь),
(2.25) угол 0=0 — для цилиндрической поверхности здания, 0—arcs! n(z—znlRi) — для сферического купола.
Нормальная компонента ускорения сол: соя = [ Vr cos а + sin а 4- d cos а —
— Vr sin а) | cos 6 — Vz sin 0. (2.26) Полученные по этой методике эпюры распределения ветрового давления по по-
27
вёрхности конструкции в фиксированный момент времени имеют довольно сложный характер, а закон изменения давления в фиксированной точке представляет собой нерегулярные колебания продолжительностью около 10 с с преобладающим периодом колебаний 1—2 с. Таким образом, для большинства сооружений (за исключением низкочастотных) ветровую нагрузку от торнадо можно в первом приближении рассматривать как статическую.
При расчетах АЭС на действие торнадо помимо ветровых нагрузок учитывают возможность удара о конструкцию летящих со скоростью ветра предметов довольно значительной массы (например, автомобиля массой до 2 т).
2.2. Сейсмические нагрузки иа АЭС
1. Основные положения
“ Проверка сейсмостойкости АЭС обязательна для атомных энергетических устано-йок, строящихся в районах сейсмичностью 4 балла н выше со средней повторяемостью 1 раз. в 100, 1000 или 10 000 лет без учета особенностей площадки (по СНнП II-7-81) [11]. Сейсмичность районов интенсивностью менее 6 баллов оценивается по фондовым материалам с учетом описательной части сейсмической шкалы MSK-64. На площадках сейсмичностью 9 баллов и выше строительство атомных энергетических установок не допускается.
При расчете АЭС учитывают землетрясения [12] следующих двух видов: проектное землетрясение (ПЗ) — характеризуется сейсмичностью площадки в баллах н набором аналоговых или синтезированных акселерограмм по трем компонентам для землетрясений со средней повторяемостью до 100 лет. Предполагается, что такое землетрясение обязательно произойдет за срок службы АЭС. Максимальное расчетное землетрясение (MP3) — характеризуется сейсмичностью площадки в баллах и набором аналоговых или синтезированных акселерограмм по трем компонентам для землетрясения со средней повторяемостью 1 раз в период до 10 000 лет. На ранних стадиях проектирования допускается определять MP3 в баллах путем добавления одного балла к величине сейсмичности ПЗ.
Площадка строительства атомной энергетической установки, как правило, должна удаляться от потенциальных очаговых зон на расстояния, не менее указанных в табл. 2:1.
Сейсмостойкой является такая атомная энергетическая установка, на которой обеспечивается радиационная безопасность в соответствии с Общими положениями обеспечения безопасности АЭС прн проектировании, строительстве и эксплуатации [1] при сейсмических воздействиях вплоть до MP3 включительно.
Строительные конструкции, технологическое н электротехническое оборудование, трубопроводы, приборы и т. д. в зависимости от степени их ответственности в обеспечении сейсмостойкости АЭС, требований к
Таблица 2.1
Магнитуде Максимальные расстояния в крест структур, км Магнитуде М аксимальные расстояния в крест структур, км
>8.1 75 6.1—7 25
7.1—8 50 5,1—6 12
их сохранности и работоспособности после прохождения землетрясения разделяются на три категории сейсмостойкости.
К первой категории сейсмостойкости относятся здания, сооружения, конструкции, оборудование и их элементы, обеспечивающие безопасность установки согласно требованиям Общих положений обеспечения безопасности АЭС при проектировании, строительстве н эксплуатации [1] при сейсмических воздействиях вплоть до MP3 включительно.
Ко второй категории сейсмостойкости относятся здания, сооружения, конструкции, оборудование и нх элементы, которые должны обеспечить возможность работы установки после прохождения землетрясения интенсивностью до проектного (ПЗ) включительно и нарушение работы которых в отдельности или в совокупности с другими не может привести к превышению предельно допустимых годовых доз внешнего и внутреннего облучения персонала установки и населения, определенных согласно действующим нормам радиационной безопасности.
К третьей категории сейсмостойкости относятся все остальные здания, сооружения, конструкции, оборудование и их элементы, нарушение работы которых не может привести к превышению предельно допустимых годовых доз внешнего и внутреннего облучения персонала установки и населения, определенных согласно действующим нормам радиационной безопасности.
Элементы одной функциональной системы могут быть отнесены к разным катего
28
риям сейсмостойкости с проведением специальных мероприятий по их разделению (отсечная, регулирующая арматура н т. п.). Прн этом принимаемая для разделения арматура относится к более высокой категории.
Оборудование, компоненты и конструкции выполняют и рассчитывают таким образом, чтобы выход из строя элементов низшей категории не приводил к отказу в работе или разрушению элементов высшей категории. В противном случае их катего-рийность повышается.
Здания, сооружения, конструкции и оборудование первой и второй категории сейсмостойкости должны сохранять работоспособность после прохождения землетрясения интенсивностью до ПЗ включительно; прн землетрясении с интенсивностью до MP3 включительно все системы первой категории должны выполнять свои функции по обеспечению безопасности.
Прн расчетах на сейсмостойкость следует учитывать сейсмические воздействия в вертикальном и двух взаимно перпендикулярных горизонтальных направлениях.
2. Сейсмология и определение расчетных параметров землетрясения
Сейсмологические исследования должны выполняться для каждой конкретной атомной электрической установки по специально составленной программе, включающей: анализ фондовых материалов, геологическое, геофизическое, детальное сейсмо-районирование и сейсмомикрорайонирование [13].
При проведении сейсмологических исследований следует учитывать и анализировать возможность возникновения и особен
ности воздействия землетрясений энергети-
ческих групп А, Б, В, Г, Д.
На основе сейсмологических исследований должны выдаваться акселерограммы аналоговые или синтезированные для ПЗ и MP3 с нормированием длительности, максимума амплитуды и энергетического спектра этих воздействий.
Работы по оценке сейсмической опасности площадок строительства АЭС разделяются иа исследования по уточнению сейсмотектонических условий района перспективного строительства и сейсмическому микро-РЭДонировэиню конкурентных площадок.
Следования по Детальному сейсмиче-ому районированию выполняют в два этапа.
Первый этап — сбор имеющихся фондовых данных по району строительства .и рекогносцировка на местности с целью составления схемы расположения зон возможного возникновения очагов землетрясений и сравнительная оценка сейсмической опасности пунктов строительства по интенсивности проектного и максимального расчетного землетрясений. Он включает в себя следующие работы:
а) анализ имеющихся фондовых материалов по геологическому строению, новейшей тектонике, геофизическим полям, сейсмичности, рельефу района строительства (масштаб 1 :200 000 — 1:1 000 000), в том числе составление:
физико-географических карт района;
геологических карт и других данных по геологическому строению, истории геологического развития за различные этапы, по современному структурному плану;
карт неоген-четвертнчных отложений;
данных по геоморфологии и новейшей тектонике;
данных о современных тектонических движениях;
данных о поверхностных нарушениях сейсмического происхождения (первичные и вторичные сейсмоднслокацин);
данных о глубинном строении (профиле глубинного строения земли (ГСЗ) и о характере геофизических полей;
данных по глубокому бурению;
данных аэрофотосъемки (1:20 000— 1:50 000), а также космических снимков различных масштабов и в различных спектрах;
каталогов землетрясений (национальных и международных), сводок макросейсмиче-скнх данных, схем нзосейст;
каталогов цунами;
б) рекогносцировку на местности с целью привязки имеющихся к началу работ данных по геологии, геоморфологии, геофизике, сейсмологии и сведений о грунтах к конкретным условиям в районе предполагаемого пункта строительства;
в) проведение историко-архивных и археологических поисков для обнаружения дополнительных сведений об исторических землетрясениях в районе строительства, а также сведений о возможных цунами;
г) проведение полевых геолого-геоморфологических работ для уточнения имеющихся материалов и схем, в первую очередь по новейшей, четвертичной и современной тектонике, сейсмодислокациям и быстрым геологическим асейсмичным процессам.
29
По результатам перечисленных видов работ проводят:
уточнение имеющегося или составление сводного каталога землетрясений района работ, включающего для каждого события оценку основных параметров очага (время, координаты эпицентра, глубину очага, магнитуду), основных параметров воздействия (максимальная наблюдаемая балльность, балльность в эпицентре, средние размеры изосейст), ошибок указанных параметров; построение карты эпицентра землетрясений;
опенку характерных для изучаемого района размеров очагов в зависимости от магнитуды;
составление карты геологических критериев сейсмичности (распределение линеа-ментов, зон разрывных нарушений, контрастных сочленений, флексур и других эле- : ментов, ранжированных по порядку структур, степени подвижности на различных этапах развития; по амплитудам движений, степени изменения направленности тектонических движений, выделения зон различно ориентированных напряжений; выделения участков относительной стабильности);
составление схем и разрезов очагов (очаговых зон) наблюдавшихся землетрясений;
составление схемы мощности сейсмоактивного слоя;
оценку средних характеристик опадения балльности в крест и вдоль сейсмогенерирующих структур, а также в среднем по площади и составление карты областей различного затухания сейсмических сотрясений;
составление схемы зон возможных очагов землетрясений с указанием ожидаемой максимальной магнитуды, эффективной глубины очага, параметров сейсмического режима;
выделение на карте-схеме зон возможных очагов землетрясений (ВОЗ), не рекомендуемых под строительство;
составление схемы сейсмичности ПЗ и MP3 в баллах для изучаемого района в целом, для грунтов второй категории по сейсмическим условиям.
Второй этап — сбор имеющихся фондовых данных по пункту строительства, полевые исследования и анализ мирового банка акселерограмм с целью составления карты детального сейсмического районирования, обоснования выбора пункта строительства и определения проектного и максимального расчетного землетрясений в баллах и в виде расчетных акселерограмм. Этот этап включает в себя, следующие виды работ.
а) анализ имеющихся дополнительных
данных (масштаб 1: 10 000—1: 50000) по пункту строительства, в том числе:
топографических планов;
гидрогеологических карт с указанием уровней грунтовых вод;
данных инженерно-геологических изысканий (инженерно-геологических карт грунтов пункта строительства (1:25 000) и сведений о физико-механических свойствах грунтов);
б) определение расчетных акселерограмм, которое ведут в такой последовательности:
анализируют данные мирового банка акселерограмм совместно с сопровождающими макросейсмическими данными и данными о строении грунта в месте регистрации акселерограмм;
предварительно отбирают аналогичные акселерограммы и сопутствующие информации — уточняют сопутствующие макро-сейсмические данные и переводят их в принятую в СССР шкалу балльности;
уточняют региональные корреляции между магнитудой, расстоянием и параметрами колебаний;
выбирают один или несколько методов из существующих для вычисления расчетных акселерограмм и определения необходимого числа расчетных акселерограмм.
В сейсмическое микрорайонированне площадок атомных станций входит: сейсмическое микрорайонирование методом инженерно-геологических аналогий; инструментальное сейсмическое микрорайонированне методом сейсмических жесткостей и методом регистрации колебаний грунтов площадки при землетрясениях, взрывах и мик-росейсмах.
При наличии представительных данных по регистрации колебаний грунтов при землетрясениях регистрация колебаний грунтов при взрывах и микросейсмах не обязательна.
На завершающем этапе работ корректируют набор расчетных акселерограмм с учетом результатов детального сейсмического районирования (ДСР) и сейсмомикрорайонирования (СМР).
2.3. Расчет колебаний строительных конструкций
Строительные конструкции АЭС рассчитывают на сейсмические воздействия с целью определения перемещений, скоростей, ускорений и спектров ответа по различным отметкам и зонам строительных конструкций для проверки прочности и работоспособности технологического и электротехнического
3D
Рис. 2.11. Реакторное отделение о —общий вид; б—расчетная схема к расчету по программе пространственной задачи; а —расчетная схема к расчету по программе стержневой задачи
оборудования на прогнозируемые уровни воздействий, значения остаточных деформаций в грунте, относительных смещений различных сооружений, оценки контактных напряжений, усилий и напряжений в строительных конструкциях фундамента и опорах технологического оборудования.
Для проверки работоспособности и прочности технологического оборудования используют либо акселерограммы движения опор и узлов крепления оборудования, либо спектры ответа. Способ расчета оборудования по этим методам описан в п. 2.4.
Все конструкции АЭС можно разбить на следующие типы: жесткие монолитные Фундаменты; одно-двухстержневые много-м:СС°ВЫе КОнстРУКЦИи; простые плоские ра-р ’ СЛ0Жные плоские и пространственные Цилиндрические оболочки; коробча
тые простые и массивные конструкции; подземные сооружения.
Пример расчетной схемы показан иа рис. 2.11. Ниже приводятся принятая последовательность и некоторые методы расчета, широко используемые в практике проектирования АЭС. Могут быть использованы и другие методы, если они позволяют решить комплексно вопросы сейсмостойкости и работоспособности АЭС.
1. Учет основания
Для учета взаимодействия сооружений с основанием и определения параметров колебаний сооружений и фундаментов на первом этапе расчета рассматривают задачу жесткий штамп — основание, причем параметры штампа учитывают характеристики
81
надфуидаментного строения и технологического оборудования, а основание — характеристики площадки строительства АЭС.
В результате совместного расчета штампа и упругого полупространства от заданного сейсмического воздействия в основании штампа определяют откорректированные акселерограммы, которые используют в дальнейшем для расчета сооружений по более точным расчетным схемам.
Решение этой задачи может быть реализовано методом конечных элементов, конечно-разностным и аналитическим методами. В частности, по конечно-разностной схеме решение системы штамп—основание от действия сейсмической нагрузки, заданной произвольно направленной акселерограммой, сводится к решению двух частных задач — определения смещения системы как единого целого от воздействия заданной сейсмической нагрузки; определения упругого смещения штампа от заданной в его основании сейсмической нагрузки и вызванного этим смещением упругого смещения основания.
2. Расчет стержневых систем
Для предварительных расчетов усилий и оценки параметров движения строительных конструкций на различных высотах рекомендуется использовать в качестве расчетной схемы стержень с распределенными массами (см. рис. 2.11). По такой схеме могут быть рассчитаны оболочки, плоские рамы, трубы, высокие гибкие опорные конструкции, градирни и т. д. [14].
Частоты, формы колебаний, перемещения, скорости, ускорения и усилия при действии горизонтальной акселерограммы определяют по формулам СНиП. При этом исходные уравнения записывают в виде:
бц вц 4- бц an yn-J-... + ?>inmn Уп +
+ бщ ап + У1 = (— бп
61 n тп) Уо‘> (2.27)
бщ mi У1 + бщ f/i + • • • + бпп тп Уп +
“Ь бпп ап Уп + Уп — (— бП1 Шу —... —
6nnmn)f/o* (2.28)
Решение этой системы отыскивают в виде суммы п п
Ук W = 2 yiK (t) = 2 xik фг (О • (2-29) f=l *=1
В уравнениях обозначено: yiK(t) — относительные смещения сосредоточенных масс; j/o(O—смещение почвы, заданное акселерограммой; m. — i-я сосредоточенная масса; х-к — величина, 1 не зависящая от времени I, определяющаяся местоположением точки н номером компоненты
суммы; Ф । 7) — функция времени, ке зависящая от местоположения точки, но зависящая от номера компоненты суммы.
3. Расчет пространственных рамных систем
В основе динамического расчета лежит решение дифференциального уравнения движения с учетом поглощения энергии, которое записывается в виде
AMU + АСУ + U = AMW, (2.30) где А, М, С — соответственно матрицы податливости масс и затухания; U, U, U — векторы перемещений, скоростей и ускорений; W — акселерограмма землетрясения.
Акселерограмма землетрясения задается в форме трех проекций на оси координат, Ux,y,z=f(t) и (px,ytZ=f(t) в виде функций ускорений и углов поворота. Существующие программы позволяют отобразить многообразие сложных конфигураций пространственных рамных систем. Стержни в схеме невесомы, а масса стержней и оборудования сосредоточивается на соответствующих уровнях.
Программы позволяют определить частоты и формы колебаний, усилия в характерных сечениях и записать параметры колебаний конструкций на различных участках рамы.
4. Расчет реакторных отделений
Для повышения безопасности АЭС и обеспечения локализации возможной аварии в радиоактивном контуре, реактор, все наиболее ответственное оборудование, обеспечивающее работоспособность, расхолаживание и последующий ремонт, обустраивают защитными монолитными герметичными железобетонными конструкциями. Для этих целей в практике АЭС широко используют два типа конструкций различных модификаций — цилиндрические оболочки; коробчатые и боксовые массивные конструкции.
Оболочки и боксы имеют сложную систему конструктивных связей, вспомогательных помещений и конструкций для технологических нужд внутри и снаружи зданий.
Основное технологическое оборудование, подлежащее проверке на сейсмостойкость, расположено либо в оболочках и боксах, либо в сооружениях, примыкающих к ним, поэтому независимо от места расположения оборудования при создании расчетных схем оболочек или боксов должны быть учтены максимально близкие конст-
32
Рис. 2.14. Обобщенные спектры ответа горизонтальных колебаний точки: 1 — 50 м; 2, 5—40 м; 3. 6 — 35 М; 4 — 30 м; 5 — 40 м; 6 — 35 м
руктивные особенности натурных объектов.
Защитные оболочки. Для расчета защитных оболочек используют метод конечных разностей или метод конечных элемен-
тов, позволяющие учесть в расчетной схеме технологическое оборудование, окружающие и внутренние конструкции, представляемые в виде систем дисков, цилиндров и колонн. Программы позволяют рассчитать динамическую реакцию конструкции на все 1ды ударов, землетрясения, статические и пературные нагрузки. В результате рас
чета могут быть получены перемещения, скорости и ускорения в заданных точках, усилия, моменты и напряжения. Пример создания расчетных схем для оболочки, рассчитываемой конечно-разностным методом, показан на рис. 2.12 [15, 16].
Срединная поверхность оболочек и плит, входящих в конструкцию, должна быть симметрична относительно вертикальной оси, проходящей через центр рассматриваемой конструкции (рис. 2.13). Толщина элементов конструкции может быть произ-
3—189
33
Рис. 2.15. Обобщенные спектры ответа вертикальных колебаний точки: 7 — 50 м; 2, 5 — 40 м; 3, 5 — 35 м; 4 — 30 м
вольной. В расчете могут быть учтены местные конструктивные утолщения и ослабления отдельных элементов конструкций. Материал конструкции считается идеально упругим, подчиняющимся закону Гука. Опорный контур оболочек, входящих в конструкцию, принимают жесткозаделанным в основание.
Расчетными воздействиями могут служить: произвольное сочетание статических нагрузок; динамические нагрузки, заданные графиками изменения интенсивности нагрузки во времени; сейсмические воздействия, заданные с помощью одной или нескольких акселерограмм различной интенсивности, различного направления, сдвинутых по фазе; произвольное по области и линейное по толщине каждого элемента конструкции изменение температуры.
В основу разработанной методики положены общие зависимости моментной теории оболочек и теории тонких плит, работающих в условиях изгиба и плоского напряженного состояния без введения каких-либо упрощающих допущений. Задачу решают в перемещениях.
В качестве расчетной системы координат для оболочек выбрана система криволинейных ортогональных координат (см. рис. 2.13). Координата а для каждой из оболочек совпадает с направлением образующей ее срединной поверхности, координата ф представляет собой угол и откладывается от условий нулевой меридианальной плоскости, проходящей через образующую и ось вращения, в направлении, обратном часовой стрелке. Координата у нормальна к срединной поверхности оболочки.
Для плит в качестве расчетной выбрана цилиндрическая система координат, одна из осей которой совпадает с вертикальной осью,
проходящей через центр купола оболочки. Координата г направлена вдоль радиуса. Направление и плоскость отсчета для координаты ф— те же, что и у оболочек.
Направление расчетных осей колонн совпадает с направлением оси вращения конструкции. Привязка колонн к расчетной координатной системе осуществляется в узлах пересечения нх с плитами.
Для серии типовых защитных оболочек были выполнены расчеты па аналоговые акселерограммы, выбранные для европейской зоны СССР. Целью расчета являлось построение поэтажных акселерограмм и спектров ответа для проверки используемого оборудования, разработки мер по его сейсмозащите или создание конструктивно новых сейсмостойких систем, поставляемых серийно на АЭС.
На рис. 2.14 и 2.15 приведены горизонтальные и вертикальные огибающие спектров ответа по результатам расчета на все акселерограммы для различных уровней и зон оболочки. Декремент затухания принят 0,1. Все расчеты выполнены на девятибалльное землетрясение при нормировании пиковых значений — горизонтальных 0,4 g и вертикальных 0,2 g. Для построения спектров ответа при более слабых землетрясениях все значения исходного девятибалльного спектра уменьшаются вдвое при уменьшении интенсивности землетрясения на 1 балл (табл. 2.2).
Таблица 2.2
Ускорение в спектре на соответствующей отметке, см/с2 fllX 2 alX 4 alX 8 oIX 16
aVIII aVII aVI aV
34
Для пересчета на другие декременты затухания (бх) можно использовать зависимость
axf =
А» 1дод f
(2.31)
где axf — ускорения в спектре для искомого дс-коемента (бх) и соответствующей частоте; а0 j f — ускорения в спектре для декремента 0,1 и 'соответствующих частот, приведенные на графике рис. 2.14 и 2.15.
Расчет коробчатых конструкций. Для расчета сложных конструкций, представленных в виде набора многочисленных взаимно пересекающихся конструкций плит, стержней, рам, рекомендуется использовать метод конечных элементов.
Задача сводится к решению уравнений: [*](<7) = р; (2.32)
[МИЙ+ £](?) +Л(g) = F (/), (2.33) где [Я], [С]. [МJ — матрицы жесткости, затухания и масс, соответственно; (q), (q), lq) — векторы неизвестных перемещений, скоростей и ускорений в узлах элементов; (р), (£(/)) —векторы внешних нагрузок в узлах элементов, приложенных к системе.
Программа позволяет: рассчитать параметры колебаний различных зон и узлов боксовых конструкций; определить сейсмо-напряженное состояние элементов по методике СНиП; определить сейсмонапряженное состояние конструкций и поэтажной акселерограммы по трем исходным акселерограммам и с учетом затухания.
5. Расчет спектров ответа
В практике расчетов на динамические нагрузки широко используют так называемый метод спектров ответа. Суть его состоит в следующем:
определяют ускорения колебаний опор, фундаментов, различных уровней и зон строительных конструкций (мест установки оборудования) от расчетных или стандартных акселерограмм, используемых для данной площадки АЭС;
находят максимальную реакцию семейства осцилляторов, каждый из которых обладает одной степенью свободы при фиксированном затухании на колебания опор, Фундаментов либо различных уровней и зон строительных конструкций;
но принятому интервалу между собственными частотами линейных осцилляторов строят график функции частота — м аксиальная реакция, так называемый спектр (СПектРы ответа, как правило, рас-итывают с шагом по частоте 0,1 Гц в диапазоне частот 0,1-30 Гц) ;
3*
определяют собственные частоты оборудования и по графику спектров ответа, построенного в координатах ускорение—частота, находят максимальные ускорения по каждой форме колебаний. Далее расчет усилий ведут по линейно-спектральной методике.
Исходные уравнения для построения спектров ответа:
Л1 + 2еХ1+ <о?Х£=-Хо(О» (2.34) где — перемещения перекрытия или опор оборудования; Xt — перемещение массы одномассовой системы относительно основания;
= бы0/2л — коэффициент затухания осциллятора; <0- — круговая частота принятой одномассовой системы.
Решение уравнения для каждой одномассовой системы, имеющей частоту о*
t
Xi (t) = —— С Хо (т) е~е^-^ Sjn - (f — oJ
— t)Jt, (2.35)
где = j/”— e2 .
Учитывая, что реальные спектры имеют резкое увеличение и уменьшение амплитуд на малом диапазоне частот,, как правило, строят обобщенные спектры. Способ построения обобщенных спектров не имеет строгой регламентации. Имея в виду, что в целом расчет по спектрам ответа дает завышенные результаты относительно расчетов на акселерограммы, рекомендуется максимальное значение в спектре уменьшить на 20 % (учитывая кратковременность воздействия, принятые коэффициенты запаса, вероятность максимального землетрясения и т. д.) и провести огибающую по. всем оставшимся пикам.
6. Экспериментально-теоретический метод
Ограниченные возможности испытательных стендов часто не позволяют оценить для сложных конструкций и технологического оборудования их реакцию на сейсмические воздействия. В таких случаях используют комбинированный метод, суть которого сводится к выявлению динамических характеристик (амплитудно-частотных и затухания) испытаниями на платформах либо импульсными методами, а затем уже расчетом определяют реакцию проверяемых конструкций на заданные акселерограммы.
S5
В общем виде уравнения имеют вид:
= й„ (Ю, С); (2.36)
lunUMl
ф-(ю,с) = фп(ш,с) —q>m(<o,c); (2.37) для функции t) выполняется преобразование Лапласа:
£
oJn(xCT,io,c)= | dt.
(2.38) и соответственно получаем аргумент и модуль |о*|Фё.
Далее находим функцию
хн, со,с) | = тп (со,с) | от (Z\<o,c)|; (2.39) arg о*.(хн, со, с) = ф5 (Z1, ю,с)+ фп(ю,с)5 (2.40) образуем комплексную функцию
oj* (хн, со, с) = | о? (д?*, и, с) | е аГ£ °i X
Х(хн,со,с) (2.41)
и, выполнив обратные преобразования, получаем искомые функции.
В уравнениях (2.36)—(2.41) принято: 1ии(о>. с)1— преобразование Лапласа функции отклика модели ы^О; С)1 — преобразование Лапласа
т( т \ функции воздействия um(t) на модель; х ,tj исходная акселерограмма.
Описанный метод может быть широко использован при заводской проверке сейсмостойкости оборудования, в лабораторных условиях при наличии платформ с гармоническими или импульсными возбудителями колебаний. Реализованные программы расчета. на ЭВМ позволяют значительно сократить потребность испытаний на случайные воздействия (типа сейсмических) и с достаточной надежностью в заводских условиях и непосредственно на АЭС выполнить проверку их сейсмостойкости.
2.4. Определение сейсмических сил
1. Строительные конструкции
Строительные конструкции следует проектировать в соответствии со СНиП 11-7-81 «Строительство в сейсмических районах», а также требованиями и уточнениями, изложенными ниже.
Расчетное значение сейсмической нагрузки, соответствующее формам собствен
ных колебаний сооружений, следует определять по формуле
Sih = k3 kek2 k^> Qh П/h, (2.42)
где k3—коэффициент, учитывающий особые условия эксплуатации АЭС. принимают: для конструкций первой категории k3 —1,25 второй категории ftg—0,5 (для конструкций второй катего
рии, не предназначающихся для хранения ра-
диоактивных продуктов и сред, допускается принимать k3— 0,3); ftp — коэффициент, учитывающий соотношение балльности MP3 и ПЗ, при
нимают по формуле (2.43); А — коэффициент, значение которого следует принимать по табл. 2.3; k .. Q , ₽., Г), —определяют в соответст-v k г th
вии со СНиП II-7-81 «Строительство в сейсмических районах»; — коэффициент, учитывающий конструктивные решения зданий, следует принимать для зданий и сооружений общего назначения по СНиП П-7-81 «Строительство в сейсми-
ческих районах».
Коэффициент Ас следует принимать для конструкций I категории по формуле
Лб = 2(/мрз /п3 > 1, (2.43)
где /дорз и ^пЗ~ балльность площадки строительства MP3 и ПЗ соответственно. Для конструкций II категории ftp—!.
Значение коэффициента А принимают в зависимости от балльности площадки строительства по табл. 2.3.
При расчете строительных конструкций с учетом сейсмического воздействия одновременно по трем компонентам значения вертикальных усилий принимают равными половине от горизонтальных, рассчитанных по формуле (2.42). Сейсмические воздействия на строительные конструкции 11 категории сейсмостойкости для площадок сейсмичностью до пяти баллов включительно (с учетом особенностей площадки) допускается не учитывать. Сочетания нагрузок при расчете конструкций принимают в соответствии со СНиП «Нагрузки и воздействия». При расчете конструкций первой категории необходимо учитывать сочетание нагрузок НУЭ+МРЗ, ННУЭ+МРЗ и НУЭ + +ПА+ПЗ; конструкции второй категории рассчитывают на сочетание нагрузок: для подкатегории Па — НУЭ + ПА-рПЗ; для подкатегории Пб — НУЭ + ПЗ и ННУЭ+ + ПЗ, где НУЭ — нормальные условия эксплуатации; ПА — проектная авария; ННУЭ — нарушение нормальных условий эксплуатации.
При расчете на прочность и устойчивость элементов конструкций помимо коэф-
Таблица 2.3
Сейсмичность площадки строительства (ПЗ). балл 5 6 7 8
А 0.0'25 0,050 0,10 и.я ~~
36
Таблица 2.4
Конструкции Коэффициент
При расчетах на прочность
Стальные и деревянные Железобетонные со стержневой н проволочной арматурой (кроме проверки прочности наклонных сечений): 1.4
а) из тяжелого бетона с арматурой классов A-I. А-П, A-III. Вр-1 1.2
б) то же, с арматурой других классов 1.1
в) нз бетона на пористых заполнителях 1.1
г) из ячеистого бетона с арматурой всех классов Железобетонные, проверяемые по прочности наклонных сечений: 1
а) колонны многоэтажных зданий 0,9
б) прочие элементы Каменные, армокаменные в бетонные: 1
а) прн расчете на внецентренное сжатие 1.2
б) то же, на сдвиг и растяжение 1
Сварные соединения 1
Болтовые (в том числе соединяемые на высокопрочных болтах) и заклепочные соединения При расчетах на устойчивость Стальные элементы гибкостью: 1.1
сь. 100 1
до 20 1.2
20-100 1.2-1 (по интерполяции)
Примечание. При расчете стальных и железобетонных несущих конструкций, подлежащих эксплуатации в неотапливаемых помещениях или на открытом воздухе при расчетной температуре ниже минус 40 °C, следует принимать тяр~ “I. В случаях проверки прочности наклонных сечений колонн т„_—0,9.
фициентов условий работы, принимаемых в соответствии с другими главами СНиП, вводят дополнительно коэффициент условий работы ткр, учитывающий кратковременность сейсмического воздействия.
Значения коэффициентов тКр следует принимать согласно табл. 2.4.
Проектирование строительных конструкций выполняют по СНиП на соответствующие виды конструкций. При этом расчетные сопротивления материалов при расчетах на MP3 следует принимать с учетом рекомендаций СНиП II-7-81 «Строительство в сейсмических районах».
Проектирование и расчет оснований и Фундаментов выполняют по СНиП 11-15-74 снования зданий и сооружений».
При расчете сооружений, систем, эле-В СЛУЧае ОТСУТСТВИЯ дополнитель-* даиных логарифмические декременты бетп ЭНИй СледУет принимать: для железо-ческиНЫХ К0НСТ₽Укций — 0.25, для металли-х конструкций — 0,06.
2. Технологическое оборудование и трубопроводы
Большой и разнообразный перечень технологического оборудования, применяемого на АЭС, не позволяет составить рекомендации по его отдельным видам и поэтому ниже изложены общие положения, требования ' и методы расчета элементов, их составных частей и опорных конструкций.
Требования к расчету. Исходными данными для расчета являются воздействия от ПЗ и MP3 в виде акселерограмм и спектров реакций для точек крепления оборудования и трубопроводов; нагрузки при -нормальных условиях эксплуатации (НУЭ) и в необходимых случаях при нарушении нормальных условий эксплуатации (ННУЭ) и аварийных ситуациях.
Сейсмические нагрузки на оборудование и трубопроводы определяют с учетом одновременного сейсмического воздействия в двух горизонтальных и вертикальном направлениях. Сейсмическое воздействие мо: жет быть задано: тремя акселерограммами; спектрами ответа, соответствующими акселерограммам для различных осей координат; при отсутствии этих данных — обобщенными спектрами ответа.
Оценку прочности оборудования и тру-, бопроводов при сейсмических воздействиях выполняют по допускаемым напряжениям. Допускаемые перемещения определяют в необходимых случаях в зависимости от эксплуатационных условий.
При расчете учитывают нагрузки, возникающие при нормальных условиях эксплуатации, и сейсмические нагрузки. Необходимость учета сочетаний сейсмических нагрузок с нагрузками ННУЭ или аварийной ситуации устанавливает проектная (конструкторская) организация. Оборудование- п трубопроводы категории I следует рассчитывать на сочетания нагрузок НУЭ+МРЗ и НУЭ+ПЗ. В случае, если принятые для расчета акселерограммы ПЗ и MP3 различаются только по амплитудам, допускается не рассматривать сочетание НУЭ+ПЗ. Сочетания нагрузок и допускаемые напряжения при расчетах оборудования на сейсмические воздействия приведены в табл. 2.5—2.8.
Оборудование и трубопроводы второй категории следует рассчитывать на сочетание нагрузок НУЭ+ПЗ.
Декремент колебаний при отсутствии обоснованных данных принимают 0,12 (2 % критического затухания). Средние напряжения смятия для элементов крепежных де-
37
Таблица 2.5
Категория сейсмостойкости Сочетание нагрузок Оцениваемая группа категорий напряжений Допускаемое напряжение
I НУЭ+МРЗ + <а'Ст (О) 2 + (0)$ 1.4[он] 1.8[он1
НУЭ+ПЗ (О)2 + (О)2 1.2[он1 1.61М
II НУЭ+ПЗ (О)2 + (о)2 1.5[он1
Примечание. Для трубопроводов АЭУ. прошедших оценку прочности на этапах статических расчетов и полное конструирование, допускается проверка прочности на сейсмические нагрузки по с мембранным напряжениям f(o)m + (o)/nl не п₽°' изводить. . '
талей (шпонки, штифты и т. п.) не должны превышать значений, приведенных в табл. 2.7.
Таблица 2.6
Категория сейсмостойкости Сочетание нагрузок Оцениваемая группа категорий напряжений Допускаемое напряжение
I НУЭ+МРЗ (0)4 + 10)4 МЮН]' 2.2Ю„|'
НУЭ+ПЗ (о)4 + (О)£ 1.2|Он]' 4ОН1'
II НУЭ+ПЗ (О) 4 + (О)$ 1.б[он]' 2.3[ОН]'
Таблица 2.7
Категория сейсмостойкости Сочетание нагрузок Оцениваемые категории напряжений Допускаемые напряжения
I НУЭ+МРЗ НУЭ+ПЗ <°>см 1.8ст „ 0,2
II НУЭ+ПЗ <°)см 20 0,2
Средние касательные напряжения в шпонках, штифтах, шпильках и болтах не должны превышать значений, приведенных в табл. 2.8;
Таблица 2.8
Категория сейсмостойкости Сочетание нагрузок Оцениваемые категории напряжений Допускаемые напряжения
в шпонках и шпиль-нах н болтах и шпильках
I НУЭ+МРЗ НУЭ+ПЗ О’25^ °’35°0,2
II НУЭ+ПЗ (т)с 0Л°0,2
При расчете оборудования и трубопроводов на циклическую прочность определяют суммарную повреждаемость от эксплуатационных и сейсмических нагрузок за весь предполагаемый срок службы оборудования и трубопроводов. Число циклов от сейсмических нагрузок находят в соответствии с приложением. Оценку циклической прочности от сейсмических нагрузок допускается не производить, если повреждаемость от прочих нагрузок не превышает 0,8. Расчету иа устойчивость подлежит оборудование, работающее под давлением и имеющее вертикальную компоновку. Допускаемые напряжения принимают: при <гКр«То,2 = =0,7оКр; при =сго.2-
Общие рекомендации по расчету. Для проведения расчета элементов оборудования на прочность при сейсмических воздействиях составляют механическую модель оборудования, состоящую из масс, соединенных между собой и с точками крепления связями. Элементы оборудования, имеющие малую массу (узел крепления, амортизацию и т. п.), вносят в модель только как связь, обладающую определенной жесткостью [17].
В случае, если оборудование состоит из отдельных агрегатов, жесткозакреплеиных и имеющих неопорные связи, эти связи отбрасывают и в дальнейших расчетах не учитывают.
Расчетная механическая модель оборудования или трубопроводов должна отражать основные динамические свойства рассматриваемой конструкции, удовлетворять возможностям программ расчета на ЭВМ и выбранным методам расчета.
Для части оборудования, которая может быть схематизирована в виде сосредоточенной массы со связью, массу и коэффициент жесткости определяют на основании рабочих чертежей. Для вычисления коэффициента жесткости используют методы
88
сопротивления материалов. Круговую соб ственную частоту находят по формуле
(2.44) где — коэффициент жесткости; М.— сосредоточенная масса.
Для определения массы, коэффициента жесткости и круговой собственной частоты деталей и сборочных единиц с распределенными параметрами используют метод приведения, который состоит в следующем:
задаются определенной кривой прогиба, которая может иметь место при колебаниях (в первом приближении это кривая статического прогиба от весовых нагрузок);
выбирают точку приведения (точка может быть выбрана произвольно, но при колебаниях конструкции должно выполняться условие — перемещение точки приведения отлично от нуля);
вычисляют для принятой точки приведения приведенную массу; круговую собственную частоту определяют по формуле
<0f =Успр/Мпр. (2.45)
В общем случае для части оборудования с распределенными параметрами:
Л4пр fJJ М' A- dx dy dz\ (2.46)
Спр = 2ПД"р’ <2'47>
ст
где ПДПр — потенциальная энергия части оборудования при перемещении точки приведения, равном единице.
Значения Л4пр и Спр могут быть вычислены также по формулам:
2G (АГ)2
Л4Пр =---------~
£(ДСпТ₽)2 SG. А-т Спр =
(2-48)
(2.49)
ст \2
Приведенные коэффициенты жесткости могут быть определены методами сопротивления материалов. Причем для коротких Деталей (/г//>0,3) следует учитывать влияние сдвига, умножая приведенный коэффициент жесткости на коэффициент сдвига Ссдз, определяемый в зависимости от формы детали.
Если для части оборудования с постоянным поперечным сечением (постоянная погонная масса Л41) в качестве кривой прогиба выбрана кривая статического прогиба от сосредоточенной силы Р, приложенной в точке приведения, то
1
Л1ПР=Л1' l^A2p(v)dv, (2.50)
Су) — прогиб от силы Р; о — координата.
В этом случае приведенный коэффициент жесткости равен силе (или моменту), вызывающей в направлении действия перемещение точки приведения, равное ёДинице.
Приведенную массу части оборудования, находящегося в жидкой среде, определяют с учетом присоединенной массы жидкости, по формуле
Яф = Мпр + ;й. (2.51)
Присоединенную массу жидкости вы-числяют по формуле
М = £Л10. (2.52)
Для частей оборудования, находящихся в безграничной жидкости, tj следует принимать в соответствии с табл. 2.9.
Коэффициент | для цилиндрических элементов, находящихся в ограниченных объемах воды, можно определять по графику на рис. 2.17.
Погонную массу стержня All, с учетом присоединенной массы, вычисляют по формуле
•Л41 = Mi -J- Л4}к
(2-53)
где — присоединенная погонная масса жидкости, определяемая по формуле
Л1ж = £Л101, (2.54)
где Мл — масса жидкости, вытесненная стержнем единичной Длины. :
0,5 0,5 0,5 0,7 0,8 0,9 1 d/t
Рис. 2.16. Коэффициент присоединенной массы для пакетов стержней
а — расположение стержней ио треугольной сетке; б — то же, по квадратной сетке; в — коэффициент t
39
Рис. 2.17. Коэффициент присоединений массы для одиночных стержней при колебании
а — в ограниченном объеме жидкости: б — в безграничном объеме жидкости; / — //»=<»; 2 — 11а = -30; 3- До-5; 4 —//а-3; 5 -//с=2. При Ца<2 во всех случаях принимать £—1
Для сосуда или стержня, полностью заполненного жидкостью, а также для вертикальных цилиндрических сосудов с отношением высоты жидкости к радиусу сосуда больше четырех, присоединенная масса жидкости равна массе жидкости в сосуде.
Таблица 2.9
Форма °асти оборудования Направление перемещения при колебаниях 6
Длинный цилиндр </>Зо) Короткий цилиндр (/<8d) Пакет цилиндрических стержней Шар Перпендикулярно продольной оси То же Любое 1 По рис. 2.17 По графику рис, 2.16 0.5
Круговую собственную частоту части оборудования, погруженной в жидкость, определяют по формуле
(0| — Р^Сцр/Мцр (2.55)
или
Приведенную массу части оборудования, которая при колебании перемещается линейно и вращается, находят по формуле мт - Ш M-A!dXdydz+до [ ias (л;)2 + + (2-57>
где 10Х' ^оу /02—моменты инерции массы соответственно относительно осей х, у, z; Az, Ay. Ах. Ay, Аг—производные функции Л соответственно по осям х, у, г в точках нахождения массы.
Выбор расчетных схем. Расчетные схемы основных типовых частей оборудования приведены на рис. 2.18.
Выемную часть реактора для водоводных реакторов, состоящую, например, из выемного экрана, в нижней части своей соединенного с плитой, при расчете в горизонтальном направлении рассматривают как консольную цилиндрическую балку, которая нагружена равномерно распределенной массой экрана и сосредоточенной массой плиты. Верхний контур балки жестко защемлен, а нижний контур подкреплен жесткой плитой.
Технологический канал рассматривают как стержень пли трубу переменного поперечного сечения, имеющий жесткую заделку в опорной плите и промежуточные шарнирные опоры в местах прихода канала через дистанционирующие перфорированные плиты.
Привод системы управления и защиты (СУЗ) рассматривают как консольную стержневую систему, состоящую из трубчатых стержней ступенчато переменного сечения, которые нагружены распределенной собственной массой и сосредоточенной массой приводных механизмов. Стержневая система имеет податливую заделку в крышке за счет податливости узла крепления привода СУЗ к крышке.
Трубки теплообменных аппаратов считают как балки постоянного сечения, защемленные э опорах (трубных досках, диафрагмах) и нагруженные равномерно распределенной массой. Плиты, диафрагмы, трубные доски, крышки, плоские экраны и другие аналогичные конструкции рассматривают как сплошные плиты. В зависимости от конструкции крепления контур плиты считают защемленным или свободно опертым. В случае расчета трубных досок или иных перфорированных конструкций в расчет вводят приведенные характеристики, сводящие перфорированную плиту по жесткости к сплошной. Принимают, что плита нагружена равномерно распределенной массой.
При нахождении частоты колебаний корпусного оборудования массу узлов крепления, ввиду ее малости по сравнению с массой оборудования, не учитывают. Приведенную жесткость узла крепления определяют по формуле
С = Счр-л Спрfeji2б (2 gg) Спр.Л 2 Л 1“ Сцр ^2б жесткость для болта в направлении его оси
сте = . (2-59)
*б
4U
Рис. 2.18. Расчетные схемы типовых узлов
а — выемная часть; б — привод СУЗ; в-- технологический канал; г — трубка теплообменника;' д—перфорированная плита
Рис. 2.19. Схемы узлов крепления
а — с лапами типа балок; б — с опорными фланцами; в — с секторными лапами; г—подкрепления лап п опорных фланцев ребрами жесткости; д — с помощью башмаков; 1 — эскиз конструкции узла крепления; 2 — расчетная схема
Приведенные коэффициенты жесткости лап (опорных фланцев, нажимных фланцев) вычисляют:
Для лапы типа балки (рис. 2.19,а):
для опорного фланца (рис. 2.19,6):
Eh3
Спр.л- а2(Х Ссдв!
Г ЗЕ1
спр.л — /3
Ссдв;
(2.60)
1
£сдв ~ |
1 -н 0,6--
а
I h \2 а
— in — я / Л
(2.62)
(2.63)
СДВ —
1 + 0,75 (Л//)
(2.61)
где a, h — размеры опорного фланца в соответствии с рнс. 2.19, б.
41
Таблица 2.10
e/ft 1.05 1.1 1,15 1,2 1.25 1.5 2 3 4 5
а 0.0001 0.0004 0,0014 0,003 0,005 0,025 0,083 0.209 0.293 0,35
Численные значения коэффициентов а приведены в табл. 2.10.
для сёкторных лап (рис. 2.19, в):
Eh3 т2л
Спр.л = ~Т~ 0 Ссдв • (2 • 64) а£ а 2па
где т — длина дуги одной лапы, измеренная по окружности радиуса а.
Значение Ссдв определяют так же, как и для опорного фланца: '
для лап и опорных фланцев, подкрепленных ребрами жесткости (рис. 2.19,а):
вания с креплением к фундаменту по схемам, представленным на рис. 2.20, определяют следующим образом:
при расчете колебаний в направлении оси корпуса в соответствии со схемой, представленной на рис. 2.20, б:
CCJ) = EF/l-, (2.72)
Мпр = О.ЗЗЛ^ Z; (2.73)
для корпусов с креплением в средней
части
С*р.л — р Ссдвг;
(2.65)
Z — Zx I2’,
(2.74)
(2.66)
при расчете колебаний в поперечном направлении:
(2.67)
где г — число секций; h<, ft-— расстояние соответственно от верхней и нижней кромок поперечного сечения; S(x)--статический момент инерции площадки поперечного сечения; Ь(л) — ширина секции;
для . крепления с помощью башмаков (рис. 2.19, д)
Спр. л =
_________Спр.л Спр.Л Z~ С^пр.б
Спр.б^пр.л2 ^пр.л^пр.б 2 ^пр.л^пр.л г
(2.68)
где С — приведенный коэффициент жестко-, пр.л
стн башмаков, вычисляемый по формулам для лап типа балок; С — приведенный коэффн-пр.л
циент жесткдстн опорного фланца, вычисляемый по формулам для опорных фланцев; г — число башмаков;
” Сом (V6e)2' <2-69)
ав, Ьб.— размеры башмаков в соответствии с рис. 2.19, <9;
для нажимного фланца (рис. 2.20,а):
aD
Спр= 17,1 (g^-a Ссдв; (2.70)
_________1________
Ссдв= l-j-0,75 [Л/(а—6)]2 J (2'71)
где a, b, h — размеры нажимного фланца в соответствии с рнС. 2.20. а.
Приведенные коэффициенты жесткости и маСсу цилиндрического корпуса оборудо-
Спр— р . Ссдв; (2.75)
СсД,“ 1 + 0,94[(^ + </2)//2] ’<2’7е)
/Ипр = 0,26Л41/. (2.77)
для двухопорного корпуса (рис. 20.20, г) при колебаниях в направлении, перпендикулярном оси:
Сир — р Ссдв; (2.78)
1
Ссдв= г( 9 , «21 ’ (2-79)
1 4-3,75[(dI; -J-d;)/Z ]
Afnp = 0,5A41Z. (2.80)
Приведенный коэффициент жесткости и массу для консольно закрепленного экрана определяют как для корпусов, показанных на рис. 2.20, б. Для экранов с ограничителями перемещений (рис. 2.20, в) при расчете колебаний в поперечном направлении:
Спр — р Ссдв; (2.81) 0,14-0,5р + 4р* сдв 0,1-J-2,5р 4~ 15»2р? ’ 1 ’ где
₽ = (dj4-rfn)//2; (2.83)
Мпр = 0,43ЛД/. (2.80
42
Рис. 2.20. Схемы узлос крепления
а —с нажимными фланцами; б —корпуса к фундаменту; в — экран с ограничителем перемещений; г — двухопориый корпус к фундаменту; д — схема к расчету крышек и перфорированных плит: / — эскиз конструкции; 2—расчетная схема; 3 — эскиз корпуса с креплением в нижней части; 4 — то же, в средней части
Расчетные значения Спр и Л4пр при колебаниях в направлении оси экрана определяют как для корпусов при колебании их в продольном направлении (см. рис. 2.20, в).
При расчете приведенных коэффициентов жесткости и массы крышки или перфорированной плиты при й/а>0,3 (рис. 2.20, д) крышку или плиту считают сосредоточенными массами. При /г/с<0,3 в случае поперечных колебаний значения Спр и Мпр находят из зависимостей:
для крышек, заглушек и других элементов типа сплошных круглых пластин:
Спр = 32,4 (Dla?); (2.85)
Л4пр = 0,ЗЛ4; (2.86)
для перфорированных плит:
Спр — 32,4О(ри/а2,
(2.87)
где Фи коэффициент ослабления при изгибе;
Л1пр = 0,ЗЛ4. (2.88)
При расчетах, как правило, определяют частоты, формы колебаний и сейсмические силы. Напряжения в сечениях и проверку опускаемых напряжений ведут по дейст-
*°Щим нормативным документам.
2.5. Методы расчета отдельных видов технологического оборудования
1. Методика, расчета трубных элементов канального типа [18]
Исходными данными для расчета на сейсмические воздействия являются: спектры ответа или акселерограммы на отметке установки канала; допускаемые напряжения; допускаемые прогибы каналов при кратковременной нагрузке.
Принимают следующий порядок проведения расчета: составление расчетной схемы; определение собственной частоты колебаний каналов; нахождение горизонтальной сейсмической силы; определение вертикальной сейсмической силы; вычисление усилий, изгибающих моментов, опорных реакций и перемещений от горизонтального сейсмического воздействия. Расчет канала ведут с учетом присоединенной массы рядом стоящих каналов.
При составлении расчетной схемы и конструкции канала определяют величину
43
Расчетная схема
Расчетная £) схема
Эпюра
Основная
система
моментов и опорных
Рис. 2.21. Общий вид (о) и расчетные схемы канала (б, в)
зазоров между каналом и обоймой, длину обоймы, длину канала, все жесткостные характеристики, учитываемые расчетной схемой (рис. 2.21). В том случае, если имеется различная величина зазоров по длине обоймы, учитывают возможность полного поворота канала. По конструктивным данным определяют массу отдельных элементов и канала в целом.
Имея исходные данные по конструкции канала, находят все остальные необходимые параметры. При горизонтальном сейсмическом воздействии для рассматриваемой системы первая форма колебаний является определяющей, поэтому находят первую собственную частоту для схем, приведенных на рис. 2.21. Схема б представляется в виде трехпролетной балки. Массу отдельных элементов на канале собирают с зоны расположения графитовых колец и прикладывают в середине зоны этих колец по высоте в виде сосредоточенной силы Р.
(02
По зависимостям:
2Мс(а + Ь)Мо1=6^- -
— 6EFAa (---4- —
\ а I
(2.89)
юг
Mcl + 2MD (/4-6)=6 —-
— 6EFM
2 b
где и — площадь эпюры моментов в основной системе от силы Р (балка пролетом / с шарнирными опорами); Е — модуль упругссти материала канала при расчетной температуре: /— м0' мент инерции канала; /— длина канала между обоймами: а — длина верхней обсимы: b — ДлИ' на ннжней обоймы: Да — зазор между каналом й верхней обоймой; ДЬ — зазор между каналом н нижней обоймой: г—расстояние от центра тяжести грузовой эпюры моментов в основной системе до опоры в точке С; z — расстояние от дентрс тяжести грузовой эпюры моментов в ос-
новной системе до опоры в точке Г)
определяют изгибающие моменты Л4С и Afa в точках С и D,
44
После решения системы уравнений .и определения изгибающих моментов & точках С и D строят суммарную эпюру моментов. Затем находят опорные реакции. Статический прогиб истр в точке приложения силы Р определяется:
истР - 6EF
RaP-Rc(t-a)s +
+ "7(6Е/Аа-7?а°3)
(2.90)
где I — раехтояние от точки А до точки приложения, силы Р.
Имея статический прогиб под силой Р, находят первую собственную частоту канала f по зависимости
f— п V^/^ctp» (2.91)
где е — ускорение свободного падения.
Схема b может быть представлена в виде двухпролетной балки (см. рис. 2.21, в).
Вес элементов канала охлаждения отражателя собирают с величины ,7/з5 пролета I и прикладывают в середине пролета в виде сосредоточенной силы Р. При наличии в створе каналов отражателя их вес собирают также с величины 17/35 пролета и прибавляют к весу канала охлаждения отражателя. Зная суммарный вес Р, приложенный в середине пролета, по зависимости
/ 1 1 \
2Л1С (а + /) = 3<о — 6EI ha I — + —), \ а I /
(2.92) определяют изгибающий момент в точке С [обозначения те же, что и в формуле (2.89)]. Решив уравнение (2.92) для точки С, вычисляют опорные реакции Ra, Rc, RD. По зависимости (2.90) находят статический прогиб под силой Р, а затем по формуле (2.91) собственную частоту канала.
По спектру ответа на отметке расположения каналов при логарифмическом декременте колебаний 0,45 с учетом собственной частоты канала определяют действующее сейсмическое ускорение ач, а затем горизонтальную сейсмическую силу ST по зависимости
Sr = mar, - (2.93)
пут ~ равномерно распределенная масса, кото-нё г,.., тех,,°логического канала находят в зона пт ‘'Положения графитовых колец, а для ка-с Ап хлаждения отражателя в зоне |7/з5 пролета массы ®ременным учетом при необходимости v каналов отражателя: аг — горизонтальное стота1гНИ<^ 110 ,наченням спектров ответа на частоте Л_„оответствУющнх первой собственной ча-чите каналов.
Вертикальное сейсмическое воздействие, ^гправленное вдоль продольной оси таких •«ементов канала, как центральная труба,
тепловыделяющие элементы, графитовые блоки, определяют по зависимости
SB = maD, (2.94)
где т— масса соответствующих элементов канала; ав— вертикальное ускорение, получаемое по спектрам ответа на соответствую цих отметках здания.,
При определении усилий (изгибающих моментов опорных реакций) от горизонтального сейсмического воздействия в технологическом канале рассчитывают схему в виде трехпролетной балки. Вначале рассчитывают верхний X и нижний Y пролеты по зависимостям:
[4п^с - (2^с - )2 /2[ + хЗ [8т/ (2^ -
- Id ) - 8Д<Ч] + *2 (2|с -sD)-
— 8тп — 16^ = 0; (2.95)
/х2 Д6 GI
х2 £с - 2AaG (а + Z) ’ (2‘ 6)
где s и с — грузовые члены в основной систе-с и
ме соответственно в точках С н D, которые находят по формулам:
£c = 6(<dL/Z) и (2.97)
[со — площадь эпюры моментов в основной системе от сейсмической силы Sr (балки пролетом I с шарнирными опорами); 4 — расстояние от центра тяжести грузовой эпюры в основной системе до опоры в точке D; г — расстояние от центра тяжести грузовой эпюры в основной системе до опбры, в ‘ точке С); Е — модуль упругости материала канала при расчетной температуре; / — момент инерции канала; G — жест.-состная характеристика канала, равная произведению значений G=6EF; Ла — зазор между каналом и верхней обоймой; Д^—зазор между каналом н нижней обоймой; I — длина канала между обоймами; п — произведение величин: п=Д^6/; т — произведение величин: tn=&a GI.
Отрезки X и У являются крайними пролетами трехпролетной балки, поэтому действительными надо принимать минимальные положительные корни уравнений (2.95) и (2.96).
При решении этих уравнений возможны два варианта. В первом значения X и У получаются больше длины обоймы. В этом случае крайние пролеты принимают равными длинам обойм и дальше для определения усилий (Л4, R) канал рассчитывают как трехпролетной балки на оседающих опорах. При этом значение осадки принимают равным величине зазоров.
Во втором варианте значения X и У равны или меньше длин обойм. В этом случае изгибающий момент в точке С определяют по зависимости
Л4с = ДаО/х2. (2.98)
Изгибающий момент в точке D вычисляют по зависимости
MD = ^bG/y2. (2.99)
45
. Оперные реакции в точках А и В могут быть определены соответственно:
Ra = &aG/x3\ (2.100)
ЛЬ=АЬС/Л (2.101)
Зная для крайних пролетов X и У значения изгибающих моментов в точках С и D, строят суммарную эпюру моментов, а затем находят все опорные реакции.
При наличии горизонтальной сейсмической силы расчетную схему канала охлаждения отражателя принимают в виде двухпролетной балки. Определяют верхний пролет X по зависимости
X? — xba 2G — 2ДО GI = 0. (2.102)
Обозначения те же, что и в формуле (2.95). Решением уравнения (2.102) являются минимальные значения положительных корней.
В том случае, если значение х получается больше длины обоймы, то плечо X принимают . равным длине обоймы и дальнейшее решение (определение усилий М и R) проводят как для дйухпролетной балки с осадкой срёдней опоры. При этом осадку опоры принимают равной величине зазора.
Если Длина плеча х получается равной или меньше длины обоймы, то изгибающий мрмёнт в точке С определяют по формуле (2,9.8), а значение опорной реакции в точке А по формуле (2.100). Зная эти величины,. строят суммарную эпюру моментов и определяют опорные реакции в остальных точках.
Расчет допускаемых напряжений. По усилиям в канале определяют осевые из-гибные напряжения ozr в трубе от горизонтального сейсмического воздействия по зависимости
сг2г —± Л4/1Г, (2.103)
где М — изгибающий момент в расчетном сечении канала от горизонтальной сейсмической нагрузки; U7 — момент сопротивления трубы канала.
Осевые напряжения огь от вертикального сейсмического воздействия определяют по зависимости
czb = Sb/F, (2.104)
где S — вертикальное сейсмическое воздействие; F — площадь поперечного сечения элементов канала. воспринимающих вертикальное сейсмическое воздействие (центральной трубы, тепловыделяющих элементов, графитовых блоков).
Суммарные напряжения от всех видов воздействия не должны превышать допускаемые, определяемые по зависимости
&zb “1“ ®zr Ч- &zp < 1 >3 [<тн], (2.105)
где агр — осевые напряжения от внутреннего давления; [он1— номинальные допускаемые напряжения.
Расчет допускаемых перемещении. Допускаемые прогибы каналов определяют условием и<[е], где [о]—допустимый прогиб канала при кратковременной нагрузке; v — прогиб канала от горизонтальной равномерно распределенной сейсмической нагрузки, который определяют по зависимости
1
6£Г
Ra г3 — Rc(z — х)3 +
$2 jF
+ —(г-х-А)*+ — (6Е1Ла -Ra х?) 4 х
(2.106)
где к — расстояние от точки С до начала приложения силы S2; z — текущая координата, определяющаяся расстоянием от точки А до точки, в которой вычисляют прогиб под силой (z> >А-гк)(32).
2. Методика расчета трубопроводных систем АЭС [19]
Методика расчета пространственных стержневых систем широко использовалась для расчета трубопроводов АЭС. В настоящее время разработано еще несколько программ динамического расчета трубопроводов, позволяющих проверить их реакцию на сейсмические трехкомпонентные воздействия и выполнить проверку по допускаемым напряжениям.
Однако опыт эксплуатации всех этих программ показал, что они пригодны для единичных расчетов особо важных систем, так как трудоемки в части подготовки исходных данных и требуют большого количества машинного времени, поэтому очевидно, что для практических расчетов нескольких сотен трубопроводов для каждой АЭС эти программы не пригодны.
Для практических целей широко используют методику, основанную на статических расчетах, сведенную динамической зоной трубопроводов к статической. Суть ее заключается в том, что усилия от весовых нагрузок принимают эквивалентными усилиям от сейсмических нагрузок, если принять, что направление сейсмического воздействия совпадает с направлением максимальных перемещений от весовой нагрузки.
В этой методике приняты условные обозначения и определения: ° макс —максимальное приведенное напряжение в трубопроводе от собственного веса. Оно определяется отношением максимального момента М от массной нагрузки к моменту сопротивления изгибу 1Г; х, у, z — основные координаты; f 1х(у, г)—частота первого тона собственных колебаний трубопровода; а, ® " амплитудно-частотная характеристика сейсми4вс-кого воздействия на основании сооружения; Л — коэффициент затухания (принимают значения, рекомендованные нормативными документой, или по результатам натурных испытаний); * " коэффициент. характеризующий динамичность сооружения, в котором находится трубопровод^*
46
система. Он равен отношению максимального ускорения соответствующей поэтажной акселерг-граммы. полученной для конкретной строительной конструкции на максимальной отметке закрепления неподвижной опоры трубопровода, к значению расчетного ускорения по акселерограмме на основании. Это коэффициент изменения ускорения по высоте сооружения. Его значение допускается принимать по табл. 2.11; а® х(у, z) — безразмерный коэффициент, соот-max
ветствующий значению ускорения в долях от ускорения свободного падения по спектру ответа для конкретного направления сейсмического воздействия на отметке подошвы сооружения;
z) — то же,для соответствующей отметки закрепления неподвижной опоры трубопровода:
z) —безразмерный коэффициент, соответствующий значению ускорения в долях от ускорения свободного падения для соответствующей частоты первого тона колебаний по спектру отве-
та для конкретного направления сейсмического воздействия для соответствующей отметки закрепления неподвижной опоры трубопровода; (OS)S2 —напряжения только от сейсмической
нагрузки.
Общие положения. Анализу прочности при сейсмических воздействиях подвергаются трубопроводы, прошедшие этапы конструирования и оценку прочности при воздействии на них статических и циклических нагрузок. Действующие напряжения (0)2 и (о«)«2 в трубопроводе допускается определять от совместного действия нссейсмнче-ских нагрузок первого этапа (внутреннего давления, собственного веса) и сейсмических
нагрузок.
Статический метод анализа сейсмической прочности состоит в статическом расчете (о.,) s2 в элементах трубопроводов. Анализ проводят с использованием программ и результатов статических расчетов трубопроводов па прочность. При этом к сбычным статическим расчетам добавляется расчет при проецировании массных нагрузок па координатные оси. Для программ, предусматривающих задание нагрузки от массы только в одном (вертикальном) направлении, необходимо изменять направления осей координат так, чтобы нагрузка от массы могла быть задана и в горизонтальном направлении. Определение (ов)б2 производят
при температуре 20 °C, нулейых значениях «собственных» смещений концеЬых заземленных сечений и внутреннем давлении, равном нулю. Расчет выполняют для модуля упругости материала, соответствующего рабочей температуре стенки трубопровода.'
При составлении расчетных схем для соответствующего направления дсей координат учитывают опоры, ограничивающие перемещения трубопроводов по этой оси. Если трубопроводная система содержит несколько ответвлений, то каждое ответвление оценивают по прочности. При этом принимают для расчета (о«)«2 максимальное значение оМях, которое получается для п-го ответвления, соответствующее для n-го ответвления максимальное значение (0)2. значения перемещения, полученные на n-м ответвлении. Расчетную схему трубопроводной системы для динамического анализа на базе статических расчетов составляют таким образом, чтобы в значительной степени обеспечить учет взаимного влияния ответвлений трубопроводов в рамках применяемой программы и в пределах допускаемой точности.
Оценку прочности производят индивидуально для каждого направления сейсмического воздействия. Последние задают спектрами ответа. Условие прочности принимают в соответствии с действующими нормативными документами. Критерии прочности при сейсмических воздействиях оценивают по уравнению:
> 1. (2.Г07)
(^5)52
Для проведения расчетов необходимы следующие исходные данные: геометрические и эксплуатационные параметры трубопроводной системы;
жесткостные характеристики опбр; результаты статических расчетов;
Таблица 2.11
Максимальная отметка закрепления трубопровода
Тип сооружения до 10 м при компонентах до 20 м при компонентах до 30 м при компонентах до 40 м при компонентах
горизонтальных вертикальных горизонтальных вертикальных горизонтальных вертикальных горизонтальных вертикальных
Й*"иый корпус. 1.2 1 1.5 1.2 1.8 1.6 2 2
Оболочка Пространствен-кон^СТержнеБая конструкция 1.2 1.4 1 1.4 1.6 1.8 1.2 1.8 2 2.3 1.6 2.2 2,5 3 2 3
При м е ч а н н е. РУжеиня слабых гр Таблица унтов коэф составле фициент А на .тля > следует у ксстких гр величить в унтов. Пр 1,5 раза. н наличи! < в основа НИИ соо-
47
спектры ответа на отметке основания сооружения или на отметках опирания трубопроводов.
Расчет прочности трубопроводов на сейсмические воздействия проводится в такой последовательности:
определяют (о8)«2 для направлений сейсмических воздействий, совпадающих с направлением действия массных нагрузок, проецируемых на координатные оси трубопроводной системы;
оценивают напряжения в элементах трубопровода по формуле (2.107);
проверяют условия прочности для опорных конструкций с учетом дополнительных нагрузок от сейсмических воздействий;
делают заключение о прочности.
Напряжения (о«)«2 от сейсмических нагрузок определяют последовательно по формулам:
для случая отсутствия спектра ответа на отметке закрепления неподвижных опор
(CTs)s‘2.x = 1 >Загпах,ж сттах,ж (2.108)
и т. д. для других направлений сейсмического воздействия (у, г)-,
при использовании спектра ответа на отметке закрепления неподвижных опор
(а )s2 х = 1 »3отах х °тах х' (2.109) gj IIIdAfA lllaAfJv ' *
Если условие прочности (2.107) выполняется, то дальнейшие расчеты можно не проводить.
В случае если условие прочности (2.107) не выполняется, производят расчет с учетом частоты первого тона колебаний.
Частоту f\.x(y, z) для конкретного направления сейсмического воздействия определяют по максимальным перемещениям, полученным в результате статических расчетов трубопроводов на нагрузки от массы, проецируемые на координатные оси:
от массы, проецируемой на одно из направлений осей координат по формулам:
«/ =
= К(О+(^Г+(б/.г)2
-К(«ЬГ+(«?.,)+И.,)’;
(2.111)
Если условия прочности не выполняются, то устанавливают дополнительные опоры или амортизаторы по тем координатным осям, для которых условия прочности не выполняются. В этом случае расчеты повторяют по схеме с установленными дополнительными опорами.
Определение усилий от трубопровода на оборудование и неподвижные опоры по результатам статических расчетов, т. е. значения (ов)«2,х, (ae)s2.i/ и (о8)82.г- Определяют коэффициенты эквивалентности сейсмических нагрузок статическим по формулам:
(Calsa, х (a)max,z
(gs)s2,y , (g)max,2
(gs)s2,?
(g)max,2
(2.112)
Тогда для неподвижных опор дополнительная сейсмическая нагрузка соответствует усилиям от статических нагрузок в рабочем состоянии, умноженная на коэффициенты:
±М\-Мхк^ ±<%=Qxkx,
±Л4;=Мг«г; ±NS—Nklt
(2.113)
(2.110)
где М, Q, N — момент, поперечная и продольная силы.
Принимается, что усилия от сейсмических нагрузок совпадают по знаку с усилиями от статических нагрузок.
Дополнительную нагрузку от сейсмического воздействия на промежуточные скользящие опоры или на простые подвески определяют по формуле
где g — ускорение свободного падения, м/с2; Qj — вес /-го отрезка трубопровода, собранного с пролета между соответствующими точками схемы, применяемой для статических расчетов; вж fjf Л2
у. t>j . t>j— перемещение центра тяжести /-го отрезка при воздействии на трубопровод нагрузки
dz7V’ = 7V k (2.1U)
2 Z 2» v
где Nz — значения нагрузок на эти опоры в Ра' бочем состоянии по результатам статических расчетов.
48
Таблица 2.12
Сборочная единица изделия Эксплуатационное требование Критерий работоспособности
Болтовые соединения Герметичность соединений или недопустимость взаимного сдинга стыкуемых частей Недопустимость превышения напряжений в болтах от усилий предварительной затяжки по сравнению с допускаемыми
Резннональцевая муфта Отсутствие взанмосмещения полумуфт Расчетную проверку не прон«водят ввиду монтажа насоса и двигателя на общей раме
Вал насоса Недопустимость биения вала из-за остаточных прогибов Проверка отсутствия остаточных прогибов вала вследствие сейсмического нагружения
Торцевое уплотнение Недопустимость бнени> вала из-за смятия колец подшипника Недопустимость превышения допускаемых нагрузок на подшипник
Для определения дополнительных нагрузок на пружинные опоры вводят коэффициент
^ = A>z±(/2/2)y4 + ^. (2.115)
Дополнительные сейсмические нагрузки равны усилиям на опоры от статических нагрузок в рабочем состоянии, умноженным на коэффициент Ajq :
±AZ? = ^^. (2.116)
Назначение мероприятий сейсмозащиты трубопроводов: определяют места установки опор или амортизаторов и их предварительное количество; из условий прочности при сейсмических воздействиях для координатных осей выбирают коэффициенты Ах, Ау и Az, которые вычисляют по формулам:
Тогда необходимое число дополнительных опор, или амортизаторов, равно п= =LjlX(y,Z). Это минимальное количество, при котором будет удовлетворяться условие прочности. Места установки опор определяют конструктивно и так, чтобы межопорные участки были меньше пли равны lX(V.Z)-
Повторно проводят статический расчет для той координатной оси, относительно которой устанавливают дополнительные опоры или амортизаторы. Жесткость опор и амортизаторов задают и вводят в расчет обычным способом, при этом проверяют условие прочности при сейсмических воздействиях по формуле (2.112). Окончательное число амортизаторов определяют после проведения поверочных расчетов.
3. Методика расчета насосов
1,9 [ст] — (сг)2 . (°s)s2,x
1 .9 [<У] — (°) 2 (CTs)s2,y 1,9[о] — (g)2 (as)s2,z
(2.117)
Принимаем всю длину трубопровода за 7 и считаем, что при Ах=1 длина трубопровода, равная L, удовлетворяет условию прочности. При Лх<1 условие прочности не выполняется, соответственно длина L может содержать два или больше участков, а число дополнительных опор или амортизаторов На Длине L больше или равно 1. Длина участка, Удовлетворяющая условию прочности,
^,(y,z) = ^x(i/,z) £ • (2.118)
Основные расчетные схемы, уравнения, обозначения и условия работоспособности даны в табл. 2.12—2.16. В приведенных там формулах инерционные силы могут быть получены умножением масс рассматриваемых агрегатов на ускорения отметки установки изделий, если основные частоты системы выше 40 Гц, либо по спектрам ответа, рассчитанным по акселерограмме на лапах изделий для элементов, собственные частоты которых входят в области частот анализируемой акселерограммы. В этом случае массу агрегата умножают на ускорение спектра по первым собственным частотам.
Критерии прочности принимают в соответствии с действующими нормативными документами на проектируемые изделия. Критерии работоспособности для насосного оборудования приведены в табл. 2.12.
4—189
49
Таблица 2.13. Расчет болтозых соединений
Схемы
Формулы
Условные обозначения
Схемы
PH
°расч = 113 „
2 ai t=i
р о= из —-
F6
oZraax
— расстояние от /-го болта до оси поворота, проходящей через точку А («”1, 2...) см;
P — расчетные силы, кг;
1,3 — коэффициент, учитывающий скручивание болта от момента трения в резьбе
Н — плечо приложения силы, см; Irnav — максимальные значения I. (/-1, 2, 3, ... л);
л — число болтов;
f—0,1 — коэффициент трения стали по стали:
Fq — рабочее сеченне болта (по его внутреннему диаметру), см2; °расч— расчетное напряжение. МПа;
Ц. Т. — центр тяжести рассчитываемого элемента;
Н — расстояние от ц. ж. до проекции силы Р на плоскость разъема болтового соединения. См;
а. — расстояние от ц. ж. до цент-
Га t-го болтового отверстия, см; “0,2 — коэффициент трения
Таблица 2.14. Расчет лап насоса
Формулы
Условные обозначения
pz li о = —Z—L. (/ = 1,2)
т= Р2/пР
л — число лап;
Wx — момент сопротивления рассчитываемого сечения (1—1) нли (2— 2) относительно оси. параллельной оси х F — площадь рассчитываемого сечения, см2
Wy — момент сопротивления рассчитываемого элемента сечения (1—1) или (2—2) относительно осн, параллельной оси у, см8
Таблица 2.15. Расчет рамы электропасосного агрегата
Схемы
Направление воздействия
Формулы
условные обозначения
Коэффициенты перегрузок вдоль осей у. х, г обозначены ух. <7^. fl2. бас- бв “ масса насо’ са и двигателя соответственно
Pzl бас^г’ Р22 = без-
Рг1. Р22“ расчетные силы
х
Рх2 ~ СЛв^х
Pxi = бас^х
Q=P
V1 X1 2b
п = р
б-б2 м
Н,, Нг — расстояние от ц. ж. насоса и двигателя до плоскости лап;
Рх1' Рх2 ~ Расчетные силы
51
Таблица 2.16. Проверка работоспособности вала
Схемы
Проверка работоспособности подшипников
Расчетная схема
Формулы Условные обозначения Условия работоспособности
JO ъ ? •>* 1 -п -° 1 II q И 1 I II II ч 1 § -о а Л1 . > • ст Т J- кэ '« •5 и । 2. ' _|_ + о “ Iм °°1“ Е -? £ „О =>. Л «J « Ю а — ’ _ — .. И С) « 6^ — масса рабочего колеса посаженного на консоль вала. кг; Gj — собственный вес консольной части вала, кг; G2 — суммарная масса деталей, насаженных на вал между двумя его опорами, кг; Gq — собственный вес части вала между двумя опорами, кг Отсутствие остаточных де формаций
р _ />1(о+<’) + PgC . В 1 D _ P2b — P,g . R‘ t • ',x = («1 + 02) (Gi + Gj) — масса вала и неподвижно посаженных на нем элементов: [Q] i — допустимое радиальное усилие для t-го подшипника; [Л] i — допустимое осевое усилие для t-го подшипника < Г QJ£
2.6. Принципы оценки сейсмостойкости электротехнического оборудования
1. Общая характеристика методов испытания
Методики испытаний электротехнического оборудования (ЭТО) и контрольно-измерительных приборов и аппаратуры (КЗПиА) объединяют методы проверки электрических параметров, включая способ подключения электрических схем, контроль отдельных элементов комплектующих изделий или цепей, подготовку и согласование аппаратуры для регистрации контролируемых параметров и т. д. и вибрационных испытаний на воздействия, моделирующие отклики на ПЗ и MP3 в местах установки испытуемого оборудования. Как и все подобного рода, испытания проводят специализированные группы, в результате чего составляют комплексную программу по обеспечению сейсмостойкости изделий.
Методы проверки сейсмостойкости включают в себя;
оценку реакции конструкции как механической системы, на которой установлены в различных зонах аппаратура, приборы и прочие комплектующие изделия в виде масс, на динамические воздействия;
проверку работоспособности и технических характеристик аппаратуры приборов и других комплектующих на уровне воздействий для мест их установки в изделиях, полученных в результате испытаний.
По существу, различные комбинации этих двух испытаний используют при окончательной оценке сейсмостойкости. К числу таких комбинаций можно отнести:
построение паспортных кривых на все приборы, аппаратуру и комплектующие в виде графика «отказа» в координатах ускорение — частота, где указанная кривая является границей работоспособности (область под кривой) и неработоспособности (область над кривой), рис. 2.22;
проверку работоспособности и технических параметров отдельного изделия (шкафа, панели и гг. д.) с комплектующей его аппаратурой и приборами или нескольких изделий, объединенных между собой секцией. В этом случае могут быть построены
52
5 "10 15 20 25 30 1,Гц
Рис. 2.22. Акселерограммы и спектры ответов а, б — на оснонании изделия; в — амплитудно-частотные характеристики (АЧХ) изделия в местах крепления комплектующих; г, д — акселерограмма и спектр ответа в местах крепления комплектующих; е — кривая работоспособности комплектующих
также паспортные кривые отдельных либо объединенных секций, где в тех же координатах ускорение — частота строят кривую, разделяющую аналогично область нормальной работоспособности и неработоспособности, но уже только испытуемых шкафа или секций;
испытания отдельных элементов или секций на воздействия для конкретной АЭС и отметки их установки. В этом случае проверяют работоспособность и разрабатывают меры по защите применительно к конкретным условиям.
В этом разделе приведены только методы проверки сейсмостойкости и сейсмоза-Шиты ЭТО и КИП с точки зрения их конструкционных динамических характеристик в предположении, что работоспособность комплектующих изделий и цепей проверены в рамках специальных исследований разработчиками электрических и функциональных схем.
Реакция конструкций ЭТО и КИП на сейсмические воздействия может быть оце
нена расчетным, экспериментальным, экспериментально-расчетным методами.
Сущность расчетного метода состоит в расчетах усилий, частот и форм колебаний, перемещений, ускорений и спектров ответа для конструкций ЭТО и КИП, расчетная схема которых может быть представлена как пространственная стержневая система, учитывающая схему распределения жесткостей и масс, граничных условий перехода от одной жесткости к другой. Причем при наличии емких программ расчета на ЭВМ пространственных стержневых систем на динамические воздействия такие задачи могут быть реализованы для изделий, объединенных в секции.
Приведенные таким образом расчеты дают достаточно надежные результаты при условии правильного учета всех механических характеристик конструкций.
Экспериментальный метод состоит в динамических испытаниях отдельных шкафов и секций для выявления частот, форм, амплитудно-частотных характеристик и реакции на заданный спектр воздействий, характеризуемый амплитудно-частотной характеристикой (где за амплитуду принимают перемещение или ускорение), сейсмограмму или акселерограмму в местах установки комплектующих элементов.
Экспериментально-расчетный метод состоит в экспериментальном получении амплитудно-частотных характеристик шкафов или секций и по акселерограммам от ПЗ или MP3 на лапах или других местах крепления ЭТО или КИП рассчитывают спектр реакции для зон установки комплектующих элементов. Схема расчета по этой методике показана на рис. 2.23.
2. Экспериментальные методы
Наиболее широко в экспериментах по изучению динамических характеристик конструкций ЭТО, нх сейсмостойкости и эффективности разрабатываемых методов сейсмо-защиты были использованы хорошо известные, прошедшие практическую апробацию, методы:
вибрационные испытания на платформах, где воздействие задают на лапы изделия в виде гармонических колебаний;
испытание вибраторами, где в жестко-закрепленном на фундаменте изделии возбуждают колебания с помощью механических и электродинамических вибраторов, устанавливаемых последовательно в различных зонах испытуемого изделия;
53
мгновенное снятие нагрузки, где используют способ задания начальных перемещений (оттяжку, сдвиг, вращение и т. д.), а затем при мгновенном снятии нагрузки возбуждают колебания изделия под действием упругих сил системы;
ударные методы, где колебания изделия вызываются приложением мгновенной ударной нагрузки.
Многочисленные опыты показали, что наиболее эффективными для практических целей могут быть испытания на платформах в лабораторных условиях и метод мгновенного снятия нагрузки для натурных условий, причем в последнем случае оценку сейсмостойкости ведут по экспериментальнорасчетной методике.
3. Испытания на платформах
Технические характеристики платформ, используемые для проверки сейсмостойкости ЭТО и КИП, как правило, согласовываются с габаритом, массой, динамическими характеристиками изделий и со спектром амплитудно-частотных характеристик горизонтальных и вертикальных воздействий в местах установки на лапах изделий.
Состав и последовательность испытаний: а) ведут тарировку платформы при заданных габаритах, массах и моментах инерции испытуемых изделий для оценки возможных изменений технических параметров платформ:
степени искажения гармоник в диапазоне частот предстоящих испытаний изделий с принятой дискретизацией по частоте;
изменения уровня ускорений относительно паспортных данных платформы;
б) ведут подготовку изделий к контролю электрических параметров и характеристик работоспособности цепей при вибрационных испытаниях:
имитацию электрических нагрузок на контролируемые узлы, аппаратуру, приборы и другие комплектующие изделия;
подготовку измерительной аппаратуры для регистрации контролируемых параметров;
в) подготавливают измерительную аппаратуру для регистрации параметров механических колебаний (перемещений, скоростей и ускорений) металлоконструкций ЭТО и КИП, а в случае необходимости — комплектующих изделий, установленных на металлоконструкции;
согласовывают регистрирующую, усиливающую аппаратуру с датчиками измерений в соответствии с заводскими инструкциями;
защищают измерительный комплекс от
возможных внешних электрических помех;
устанавливают по паспортным тариро-вочным данным степень усилия для каждого канала осциллографов с учетом ожидаемого размаха амплитуд колебаний в зонах установки каждого датчика;
г) устанавливают испытуемый шкаф или секцию шкафов в соответствии с принятой программой испытаний, где количество одновременно испытуемых шкафов определено либо их проектным решением, либо с учетом габаритов платформы;
отдельный шкаф или секцию устанавливают на специальную раму, которая жестко прикреплена к столу виброплатформы, и приваривают по основанию швом в соответствии с проектом;
устанавливают контрольно-измерительную аппаратуру регистраций колебаний виброплатформы, металлоконструкций шкафа и электрических параметров изделия;
проводят предварительные пробные испытания для проверки работоспособности и согласования всех задающих регистрирующих систем;
д) вибрационные испытания проводят в 10 этапов.
Первый. В диапазоне 0,1—30 Гц при плавном изменении частоты (либо пошаговом в 1 Гц) при небольших уровнях ускорений определяют резонансные частоты для исследуемых зон шкафа.
Второй. По результатам испытаний первого этапа корректируют чувствительность аппаратуры, гальванометров, уточняют размещение датчиков на экранах светолучевых осциллографов и т. д.
Третий. В несколько проходов в диапазоне частот 0,1—30 Гц (с увеличением амплитуды ускорений на каждом проходе) выявляют возможные нелинейности, что может характеризовать смещение резонансов и изменение Кд изменением декремента колебаний звоном в шкафе или комплектующих.
Четвертый. Устраняют все обнаруженные дефекты, связанные с некачественным монтажом, сваркой, креплением панелей к каркасу шкафов и комплектующих. Перенастраивают аппаратуру.
Пятый. Проводят испытания на конкретные спектры ускорений, рассчитанные от ПЗ и MP3 для уровня крепления изделий. В этом случае при плавном или пошаговом изменении частоты платформы задают такие перемещения, которые соответствуют ускорению в спектре на данной частоте. На каждом шаге испытаний регистрируют все контролируемые параметры.
54
Шестой. Визуально расшифровывают результаты контроля электрических параметров, комплектующих элементов и цепей. Фиксируют все отказы или отклонения. В последующем при расшифровке динамических испытаний конструкций шкафа или сборки устанавливают частоты и ускорения на платформе и в зоне отказавшего изделия, при которых отмечен отказ.
Седьмой. Проводят испытания шкафа или секции при максимальных ускорениях платформы в диапазоне частот 0,1—30 Гц. По техническим характеристикам платформ ВР-ЮО график рабочих ускорений в диапазоне частот 0,1—30 Гц близок к спектру максимальных ускорений в акселерограммах восьмибалльных землетрясений в главном корпусе реакторного отделения на отметке примерно +30 м от подошвы фундамента здания.
Восьмой. Расшифровка результатов динамических испытаний конструкций и комплектующих, параметров движения платформы на всех этапах испытаний и электрических испытаний комплектующих и цепей.
Девятый. Разрабатывают предложения и мероприятия по сейсмозащите шкафов пли секций, включающие:
снижение динамического эффекта благодаря выводу отдельных исследованных зон или в целом металлоконструкций из резонансов;
дообработку металлоконструкций;
раскрепление и более надежное закрепление комплектующих и элементов металлоконструкций;
замену отдельных комплектующих.
Десятый. После реализации всех предложений производят повторные испытания по первому—восьмому этапам.
РАЗДЕЛ 3. ФУНДАМЕНТЫ МОЩНЫХ ТУРБОАГРЕГАТОВ ТЕПЛОВЫХ И АТОМНЫХ ЭЛЕКТРОСТАНЦИЙ
И. С. Литвин, И. С. Шейнин
Термин «мощные турбоагрегаты» относится к турбоагрегатам мощностью 135 МВт и более, на проектирование фундаментов которых распространяются технические требования машиностроителей. Указания по проектированию фундаментов турбоагрегатов меньшей мощности приведены в [20, 23]. Термин «фундамент турбоагрегата» обозначает и собственно фундаментную плиту, лежащую на грунтовом основании, и те сложные пространственные конструкции, которые вмещают современный сложный турбоагрегат, и на которые опирается основная часть этого агрегата. Это необходимо иметь в виду при поисках литературы по конструкциям фундаментов. Рекомендации по учету динамических явлений при проектировании конструкции фундаментов содержатся в [1—3, 7—11, 13, 15—20, 22—23, 26, 30—35].
3.1. Особенности работы системы турбоагрегат — фундамент — основание
1. Назначение конструкций фундаментов и их принципиальные конструктивные схемы. Современные мощные турбоагрегаты Устанавливают, как правило, на высоте 10— м от пола первого эт'ажа машинного отменил главного корпуса тепловой (ТЭС)
или атомной (АЭС) электростанций. Это вызвано необходимостью (по технико-экономическим соображениям) расположить конденсаторы и некоторые внешние устройства турбины непосредственно под ней. Большинство конструкций фундаментов представляет собой пространственную раму, опирающуюся на нижнюю фундаментную железобетонную плиту (рис. 3.1—3.3). Тяжелые турбоагрегаты с частотой вращения 1500 об/мин иногда устанавливают на отдельные массивы, которые опираются на фундаментную плиту, имеющую коробчатое сечение (рис. 3.4), либо на поперечные стены, связанные продольными ригелями и опирающиеся на плоскую фундаментную плиту (рис. 3.5).
Назначение конструкций фундаментов состоит в объединении частей турбоагрегата в единую машину, в восприятии статических и динамических нагрузок от турбоагрегата и передаче этих нагрузок на фундаментную плиту и через нее — на грунтовое основание. Конструкции фундаментов должны удовлетворять требованиям машиностроителей и положениям санитарных норм по допустимым вибрациям и деформациям, а также условиям прочности, устойчивости, жесткости и экономичности. Пространственная рама ееетоэт из плоских по-
55
Рис. 3.1. Фундамент турбоагрегата мощностью 800 МВт на 3000 об/мии для ТЭС (разработчик — ЛО АТЭП). Генераторная часть слева
мощностыо 1200
3000 об/мин для
(разработчик — ЛО
Рис. 3.2. Фундамент турбоагрегата *
МВт на
ТЭС ....
АТЭП). Генераторная часть слева
перечных одно- или двухпролетных и, как правило, одноярусных рам, связанных продольными балками, жесткосоединенными со стойками или ригелями поперечных рам. Пролеты в осях стоек, равно как и высота рам, определяются компоновкой турбоустановки, не подчиняются модульной строительной системе, но принимаются кратными 50 мм.
Дальнейшее изложение относится к желозобетонным конструкциям, поскольку в отечественной практике стальные конструкции фундаментов при мощности турбоагрегатов 135 МВт и более пока не применяются.
В пространственной рамной системе применяют относительно гибкие стойки с жесткими ригелями поперечных рам и про-
56
1- f
3-
12295,$
18480
9999
6142,5^ 10006
20010
13.000
2(h0
3570
7850 7850
5850'5850
3,600 S3— 1200^
R
.0,000
2,700
^50^5№>5
>408,k'>2b,.
5^5035.
1392,54337,5
35403540
Г1
Id
П
?F
J4220
15(000
&5250J1200 600^6'1/0
s
1200 1200 Ьз '200 22 '200
1200 120018202560
^2001200^3250
it J
50860
73 280
H
Г1
Рис. 3.3. Фундамент турбоагрегата мощностью 1000 МВт на 3000 об/мин для АЭС (разработчик — ЛО АТЭП). Генераторная часть справа
I — продольная ось турбоагрегата; 2 — ось ЦНД; 3 — ось ЦВД; 4 — ось генератора; 5 — сборные элементы; 6 — монолитные пояса
Ы n
22420
Рнс. 3.4. Фундамент турбоагрегата мощностью 1000 МВт на 1500 об/мин с боковыми конденсаторами на скальном осно анин (разработчик — ХО АТЭП). Генераторная часть справа
Дольными балками, что способствует смешению опасных резонансных пиков ампли-тотНО ЧаСТОТН°^ хаРактеРистики в зону час-более низких, чем рабочая частота ращения турбоагрегата. В результате >• еньшаются амплитуды колебаний риге-Вйпп а также улучшаются условия
оизодяции фундаментной плиты и ос
нования от динамических воздействий. При таком решении удаление частот собственных колебаний элементов фундамента от частоты вращения машины достигается с наименьшей материалоемкостью.
2. Особенности турбоагрегатов, влияющие на фундаментные конструкции, далее показаны на примерах. На рис. 3.6 приве-
Б7
Рве. 3.5. Фунда* мент турбоагрегата мощностью 1000 МВт на 1500 об/мин с подвальными поперечными конденсаторами (разработчик ХО АТЭП). Генераторная
часть справа
Рис. 3-0. Обшиб вид турбоустановки мощностью 500 МВт [35] с фундаментом, верхнее строение которого имеет рамную, стеновую и массивную части
/—трубопровод свежего пара; 2 — статор цилиндра высокого давления; 3—ротор высокого давления: 4 — лопатки; 5 — выносная подшипниковая опора; 6 —жесткая муфта, соединяющая роторы; 7 — ротор среднего давления; 8 — статор цилиндра среднего давления; 9 — встроенная подшипниковая опора; Ю—ротор низкого давления; //—статор цилиндра низкого давления; 12 — корпус конденсатора; 13 — охлаждающие поверхности конденсатора; 14 — генератор; 15 — возбудитель; 16 — подвозбудитель: 17 — стеновая часть верхнего строения фундамента; 18— массивные части верхнего строения фундамента; /9 — колонны рамной части верхнего строения фундамента; 20 — продольные балки; 21 — ригели поперечных рам
ден общий вид турбоустановки [35], состоящей из турбоагрегата со вспомогательным оборудованием и железобетонного фундамента. Эта зарубежная турбоустановка интересна тем, что в ней применен фундамент, при создании верхнего строения кото
рого использованы все три типа конструкций фундаментов под машины — рамный, массивный и стеновой. Рамная часть под цилиндрами высокого (ЦВД) и среднего (ЦСД) давления турбины позволяет при сравнительно малом объеме железобетон-
58
них конструкций опереть цилиндры на высокой отметке, свободно пропустить многочисленные коммуникации, габариты которых с учетом теплоизоляции довольно велики, и компактно с турбиной расположить вспомогательное оборудование, обеспечивая тем самым минимальную длину соединительных трубопроводов и уменьшение потерь п них.
Средняя часть турбоагрегата представляет собой так называемую интегральную конструкцию, в которой три цилиндра низкого давления (ЦНД) турбины конструктивно объединены с боковыми конденсаторами в одном общем корпусе. Такое объединение позволяет отказаться от выхлопных патрубков, обычно соединяющих цилиндры низкого давления с конденсаторами и соответственно снизить потери и повысить КПД, ио существенно усложняет обслуживание п ремонт.
Опорные поверхности корпуса интегральной конструкции, который является и корпусом конденсатора, расположены сравнительно низко. Кроме того, снизу под этим корпусом отсутствует вспомогательное оборудование, а трубопроводы, подающие пар от ЦСД к трем ЦНД, состоят из двух продольных и трех пар поперечных участков. В объемах, не занятых трубопроводами, оказалось удобным расположить массивы, па которые опирается корпус интегральной конструкции, причем встроенные опоры валопровода располагаются над этими массивами.
Генератор, возбудитель и подвозбудитель, опирающиеся на продольные лапы, оказалось удобно установить на продольные стены фундамента, связанные для жесткости поперечными стенами. В пространстве, ограниченном продольными стенами, проходят шины генераторного напряжения и коммуникации, связывающие генератор, возбудитель и подвозбудитель между собой и с системами охлаждения, маслоснабжения и т. п.
Недостатком этого фундамента, выявившимся после пуска турбоустаповки, является отсутствие связей между верхними частями массивов, что при относительно большой высоте массивов может вызвать повышенные вибрации, если валопровод сбалансирован неудачно.
На рис. 3.7 приведен общий вид турбоагрегата, фундамент для которого показан рис. 3.2. Здесь компоновка установки в *СТН.ЦВД и ЦСД близка к описанной вы-
Цилиндры низкого давления имеют
3У выхлопные патрубки, соединяющие их
с подвальными конденсаторами, которые располагаются в пространстве между колоннами рамного фундамента. Конденсаторы опираются на нижнюю плиту фундамента через пружины. Генератор, два возбудителя и подвозбудитель опираются на массивные балки и плиту, жесткосвязан-пыс с колоннами и образующие вместе с ними рамную конструкцию. Таким образом, фундамент в целом является одноэтажной пространственной рамой, жесткосвязанной с нижней фундаментной плитой, лежащей на грунтовом основании.
Все отечественные турбоагрегаты, устанавливаемые на ТЭС, имеют частоту вращения 3000 об/мин (быстроходные и тихоходные). Рамные конструкции фундаментов быстроходных турбоагрегатов, спроектированные по вышеизложенному принципу (с гибкими стойками и жесткими ригелями н балками), надежно отстраиваются по частотам собственных колебаний от частоты вращения машины. При тихоходных турбоагрегатах отстройка рамных систем связана с рядом конструктивных трудностей и для первых отечественных турбоагрегатов с частотой вращения 1500 об/мин мощностью 500 и 1000 МВт были запроектированы отдельные массивы или поперечные стены под наиболее тяжелыми элементами турбины — цилиндрами низкого давления (ЦНД). Рациональным мероприятием при тихоходных турбоагрегатах является устройство вибро-изолированных подагрегатных конструкций рамного типа.
Динамические воздействия турбины на конструкции фундамента передаются главным образом через подшипниковые опоры валопровода, состоящего из нескольких роторов, соединяемых между собой жесткими или упругими муфтами. Различают два типа опор — выносные и встроенные. Опоры первого типа опираются непосредственно на ригели поперечных рам конструкций фундамента. Опоры второго типа встроены в корпуса цилиндров. В отечественных турбинах с частотой вращения 3000 об/мин, мощностью до 800 МВт опоры роторов высокого и среднего давления — выносные, роторов низкого давления — встроенные. В турбинах мощностью 1200 и 1000 МВт все опоры выносные.
Динамическое воздействие на конструкции фундамента при встроенных опорах уменьшается вследствие частичного уравновешивания сил взаимодействия между ротором и статором. Кроме того, это воздействие рассредоточивается н передается по периметру опирания цилиндров не только на
59
Рис. 3.7. Общий вид турбоагрегата мощностью 1200 МВт ЛМЗ
/— трубопровод свежего пара; 2 — статор цилиидра высокого давления; 3 — ротор высокого давления; 4 — лопатки; 5 — выносная подшипниковая опора; 6 — статор цилиидра среднего давления; 7 — ротор среднего давления; 8 — статор цилиидра низкого давления; 9 — ротор низкого давления; 10 — генератор; 11— возбудитель (второй возбудитель и подвозбудитель условно не показаны);
12 — выхлопной патрубок
Рис. 3.8. Турбогенератор ТВВ-1200-2 НИИ ЛЭО Электросила мощностью 1200 МВт 1 — шины генераторного напряжения: 2 — выносная подшипниковая опора; 3 — корпус подшипника; 4 — вкладыш подшипника; 5 — полумуфта для соединения с ротором ЦНД-3 турбины; 6 — ротор; 7 — сердечник статора: 8 — обмотка статора; 9 — корпус; 10 — полумуфта для соединения с ротором возбудителя; 11 — опорные лапы
ригели поперечных рам, но и на продольные балки. При выносных опорах динамические воздействия передаются роторами через опоры непосредственно на ригели.
Турбогенераторы (рис. 3.8), ротор которых приводится во вращение турбиной через жесткую муфту, могут также иметь выносные и встроенные опоры ротора. Турбогенераторы, изготовляемые ленинградским заводом «Электросила», имеют выносные опоры ротора. В турбогенераторах харьковского завода «Электротяжмаш» опоры ротора встроены в торцевые щиты и динамическое воздействие от них передается как на ригели поперечных рам, так и на продольные подгенераторные балки вблизи их сопряжений с ригелями.
Показанный на рис. 3.8 турбогенератор имеет герметичное закрытое исполнение.
60
Сварной газонепроницаемый корпус состоит из трех частей — центральной и двух концевых. В центральной части собраны сердечник и обмотка статора, в концевые части встроены вертикально два газоохладителя. Сердечник крепится к корпусу эластичной подвеской, предохраняющей корпус и фундамент от вибраций. Охлаждение сердечника — водородное, охлаждение обмотки статора — дистиллированной водой. Ротор турбогенератора — цельнокованный из высококачественной легированной стали. Охлаждение обмотки ротора — водородное.
В работах [21, 25, 27—29, 35] и в литературных источниках, приведенных в [5,6], содержатся подробные данные о турбинах, турбогенераторах и их элементах. Краткое описание, достаточное, по-видимому, для первоначального ознакомления, приведено
на стр. 109—111 в [7]. Данные о динамических нагрузках от турбоагрегатов в нормальных эксплуатационных, режимах и об учете свойств турбоагрегатов в динамических расчетных схемах систем турбоагрегат—фундамент—основание (ТФО) приведены ниже.
3. Технические требования к фундаментным конструкциям. Правила технической эксплуатации (ПТЭ) электрических станций и сетей 1 устанавливают следующие требования к предельным уровням вибраций подшипниковых опор турбоагрегата: не оси валопровода или на крышке подшипника: при частоте вращения 3000 об/мин размах не более 30 мкм; при 1500 об/мин — 50мкм. Учитывая, что вибрации могут быть и не гармоническими, ГОСТ 25364—82 «Агрегаты паротурбинные стационарные. Нормы вибрации и общие требования к проведению измерений» устанавливает в качестве нормируемого параметра среднее квадратическое значение виброскорости в рабочей полосе частот 10—1000 Гц. Длительная эксплуатация турбоагрегатов мощностью 200 МВт и более допускается при вибрации подшипниковых опор, не превышающей 2,8 ммХ Хс-1, а по согласованию между изготовителем и потребителем турбоагрегата — 4,5 мм-с_|. Длительная эксплуатация турбоагрегатов мощностью менее 200 МВт допускается при вибрации подшипниковых опор, ие превышающей 4,5 мм-с_|.
Вибрационное состояние турбоагрегатов оценивают по наибольшему значению любого компонента вибрации — вертикального, горизонтально-поперечного и горизонтально-осевого относительно оси вала турбоагрегата. Горизонтально-поперечную и горизонтально-осевую составляющие вибрации определяют на уровне оси вала турбоагрегата против середины длины опорного вкладыша с левой стороны, если смотреть со стороны переднего подшипника. Вертикальную составляющую вибрации определяют в той же точке, либо на верхней части крышки подшипника над серединой длины его вкладыша.
Нормы ПТЭ созданы с целью обеспечения диагностики внутреннего состояния машины при ее эксплуатации. Поскольку все подшипники турбоагрегата оборудованы вибродатчиками, сигнал от которых выведен на щит управления, обслуживающий персонал имеет возможность своевременно
подмечать появление расстройств или неисправностей в машине по увеличению уровня вибраций подшипников.
При сдаче нового турбоагрегата в эксплуатацию он также должен удовлетворять нормам ПТЭ по уровням вибраций. Поскольку уровни вибраций подшипников определяются не только значениями динамических нагрузок от турбоагрегатов, но и динамическими характеристиками системы турбоагрегат—фундамент, то конструкции фундамента могут влиять на уровни вибраций подшипников.
Динамический расчет следует проводить по расчетной схеме турбоагрегат—фундамент— основание или по крайней мере при частоте вращения турбоагрегата 3000 об/мин по схеме тубоагрегат—фундамент. Для расчета по таким схемам должны быть известны значения динамических податливостей статорных элементов турбоагрегата, определяемые экспериментально или расчетом. Однако машиностроительные заводы пока не могут представить необходимые данные по турбоагрегату. Поскольку расчетное прогнозирование оказалось возможным только для конструкций фундаментов, были выработаны требования 1 к динамическим характеристикам их элементов в зонах опирания подшипников, контролируемые приемочными динамическими испытаниями конструкций под головной турбоагрегат со скоростью вращения 3000 об/мин до начала монтажа оборудования.
Согласно техническим требованиям машиностроителей, динамическая податливость (амплитуда колебаний при единичной возмущающей силе) элементов фундаментных конструкций, не нагруженных оборудованием, в зонах опирания подшипников в диапазоне частот 2800—3400 колебаний в 1 мин, не должна превышать 0,4 мкм/кН — при массе ротора до 40 т; 0,2 мкм/йН — при массе ротора 80 т и более. При промежуточных значениях массы ротора допустимое значение динамической податливости находят интерполированием.
Динамическую податливость определяют возбуждением колебаний вибратором, поочередно устанавливаемым на площадках передачи нагрузок от подшипников на элементы конструкций фундамента, и их регистрацией. В 30 % точек из числа тех, в которых проводились измерения, допускается
Рически1Р^-,1'Ла техиической эксплуатации элект-го СССР и сетей- Утверждены Минэиео-
М : ,3'е пе^аб- и доп ~
1 Технические требования иа проектирование фундаментов турбоагрегатов мощностью 135 тыс. кВт и более при числе оборотов 3000 в 1 мин. Утверждены: Минэнерго СССР 4.05.76 г., Мииэнер-гомашем — 14.05.76 г. — М., 1976. — 7 с.
61
не более чем полуторакратиое превышение указанных величин. Колебания балок и плит на отметке обслуживания при эксплуатации должны соответствовать требованиям строительных норм и правил по физиологическому воздействию на обслуживающий персонал.
Учитывая разброс механических свойств железобетонных конструкций и расхождение между теоретической расчетной схемой и фактическими свойствами фундамента, в динамических расчетах при определении податливостей диапазон частот рекомендуется расширять до 2600—3600 или 2400— 3700 колебаний в 1 мин.
Удовлетворение требований машиностроителей достигается увеличением высоты сечений и тем самым жесткости элементов в большей степени, чем их массы, и поэтому не влечет за собой заметного перерасхода материалов.
Кроме требований, указанных выше, конструкция фундаментов должна удовлетворять также требованиям санитарных норм исходя из возможности пребывания персонала на верхнем строении фундамента менее 1 ч в течение рабочего дня.
В целом для обеспечения нормальных условий эксплуатации достаточно, чтобы амплитуды горизонтальных и вертикальных вибраций балок и плит верхнего строения фундамента для агрегатов с частотой вращения 3000 об/мин не превышали значений: в зонах опирания подшипников—15 мкм; вне зон опирания подшипников — 25 мкм. Для подагрегатных конструкций с агрегатами на 1500 об/мин эти значения удваивают.
Кроме динамических свойств системы, на уровни вибраций подшипников могут влиять еще и некоторые виды статических деформаций. В частности, нормируют деформации прогиба нижних плит, вызывающие прогиб валопровода и соответствующие расцентровки, и деформации кручения ригелей поперечных рам фундамента, вызывающие поворот (перекос) подшипниковых опор.
Деформации прогиба контролируют длительными систематическими геодезическими наблюдениями. За четырехлетний (межремонтный) период эксплуатации относительный прогиб (отношение стрелы прогиба к длине плиты) не должен превышать: 0,0001 — при длине турбоагрегата до 40 м; 0,00015 — при длине турбоагрегата 60—80 м. При промежуточных значениях длины турбоагрегата (40—60 м) допустимый относительный прогиб находят интерполяцией.
Деформации кручения ригелей контролируют приемочными испытаниями. Деформации кручения ригелей под опорами роторов высокого и среднего давления, вызываемые тепловыми перемещениями турбины, которые выражены в уклоне верхней грани ригелей, не должны превышать 0,2 мы/м.
3.2. Динамические нагрузки
Фундаментные конструкции рассчитывают на действие динамических нагрузок: 1) возбуждаемых в процессе приемочных испытаний; 2) передаваемых машиной в нормальных эксплуатационных режимах; 3) внезапно возникающих в анормальных и аварийных режимах. Далее приводятся данные об испытательных и нормальных эксплуатационных динамических нагрузках. Сведения об анормальных и аварийных воздействиях и расчете на них приведены в [7].
1. Нагрузки в процессе приемочных испытаний. Динамическую податливость подагрегатных конструкций без машины рассчитывают на действие динамических сил единичной амплитуды, прикладываемых в плане в центрах площадок опирания подшипниковых опор, а по высоте — на уровне оси валопровода, и действующих в вертикальном и горизонтальном поперечном направлениях. Этот расчет соответствует режиму приемочных испытаний фундамента, не нагруженного оборудованием. Внутренние усилия при этом не проверяют, так как испытания проводят с помощью вибраторов, развивающих силы, которые не превышают эксплуатационных динамических нагрузок от турбоагрегата.
Учитывая, что амплитуды вибраций фундаментных конструкций в нормальных эксплуатационных режимах обычно лежат в пределах 3—10 мкм, т. е. близки к нижнему пределу величин, измеряемых серийной вибронзмерительной аппаратурой [24], обычно выбирают амплитуду силы, развиваемой вибратором при испытаниях, в пределах от половинного до полного значения нормативной динамической нагрузки на подшипник турбоагрегата. Рекомендуемые данные испытательных вибраторов для приемочных испытаний фундаментов приведены в табл. 3.1. Поскольку амплитуда силы, развиваемой вибратором, квадратично зависит от частоты, то в вибраторах с по* стоянным дебалансом эта амплитуда на низких частотах оказывается слишком малой, чтобы можно было надежно измерить вибрации, поэтому для экспериментального
62
Таблица Э.1
Частота вращения об/мин Мощность турбоагрегата, МВт Амплитуда динамической силы, развиваемой вибра тором на оборотной частоте. кН
3000 1500 ( 25 и меиее { 50—150 ( 200 и более 500—1000 10—20 50 100 250
определения начального участка частотных характеристик рекомендуется предусмотреть возможность увеличения кинетического момента дебаланса в 2—4 раза. При этом необходимо, чтобы привод вибратора поддерживал устойчивые обороты на этих частотах.
2. Нормальные эксплуатационные нагрузки. В нормальных эксплуатационных режимах источниками возникновения динамических явлений в системе турбоагрегат— фундамент являются:
1) газодинамические воздействия турбулентных пульсирующих потоков пара в проточных частях паровых турбин;
2) механическая неуравновешенность роторов и валопровода машины;
3) гидродинамические воздействия турбулентных потоков охлаждающей воды в конденсаторах турбины;
4) неуравновешенность электромагнитных полей в генераторе;
5) вращение магнитного поля в генераторе.
Поток пара наряду с основным действием — созданием вращательного движения ротора турбины — возбуждает также вибрации рабочих лопаток ротора и направляющих лопаток диафрагмы статора турбины. Однако в целом по каждой ступени, а тем более по каждому цилиндру турбины эти воздействия в значительной мере осредня-ются. В связи с этим считают, что передаваемые на подшипник от ротора и на фундамент от статора динамические воздействия, связанные с турбулентностью потока пара, настолько малы, что отдельно их можно не учитывать. В скрытом виде учет осгаточной неуравновешенности этих сил выполняют увеличением принимаемой для ра^че1а механической неуравновешенности роторов против действительной, как это бу-*ет указано далее. Для турбин некоторых типов с сопловым парораспределением из-естны случаи, когда из-за неодинаковости виГ ПЭРа Че₽ез СОпла возникали сильные кон₽аЦИИ °П°Р ПОдшипиика и фундаментной
РУкции вблизи регулирующей ступени
турбины. Но этот случай не может считаться расчетным для фундаментов, а соответствующие вибрации устраняют при регулировании или ремонте турбины.
Кроме того, возможно возникновение автоколебательного движения ротора турбины в потоке пара, происходящего с частотой существенно ниже оборотной. Это явление называют низкочастотной вибрацией. Фундаментные конструкции на такой режим не рассчитывают, а сами низкочастотные вибрации устраняют при регулировании и ремонте турбины.
Механическая неуравновешенность отдельных роторов первоначально является следствием остаточной их несбалансированности на стенде завода-изготовителя. Все заводы — изготовители турбин оборудованы разгонно-балансировочными стендами, дающими возможность балансировать каждый ротор по двухопорной схеме, с доведением остаточных сил механической неуравновешенности, действующих на каждую опору ротора при рабочей частоте вращения, до 1—2 % соответствующей статической реакции опоры. Однако при соединении всех роторов турбоагрегатов в единый валопровод форма изогнутой оси на рабочей частоте вращения совпадает с формой изогнутой оси многоопорной балки, в связи с чем остаточный дебаланс каждого ротора изменяется по сравнению с получившимся при балансировке по схеме двухопорной балки. Кроме того, проявляются неточности соединения полумуфт роторов при их спаривании.
При эксплуатации возможно возникновение дополнительного изгиба ротора из-за неравномерного прогрева по окружности (тепловой дебаланс) и других причин, а также появление добавочной неуравновешенности из-за неодинаковой эрозии лопаток. С учетом этих обстоятельств, а также имея в виду различные добавочные неуравновешенности, в расчетах принимают, что нормативная динамическая нагрузка, передаваемая валопроводом на опору подшипника, имеет амплитуду 0,15 от статической реакции опоры. Частоту ее принимают равной частоте вращения валопровода агрегата. Как показывают измерения вибрации фундаментных конструкций, иногда проявляются колебания на частотах высших гармоник, но амплитуды их не превышают нескольких процентов от амплитуд вибрации на частоте вращения валопровода, поэтому расчет на высшие гармоники не производят.
При расчетах полагается, что динамические силы, действующие на каждую опо-
63
f я L_J*'
| 22
I 23
'no
| A w
I 25
'BO
I 26
'ur>
Рис. 3.9. Геометрические схемы верхнего
а — Т-180/210-130+ТГВ-200-2М, 200 МВт; б — Т-250/300-240-2+ТВВ-320-2УЗ. 300 МВт; в - К-500-240-4 + МВт; е — К-500-65/3000-2+ТВВ-500-2АУЗ, 500 МВт; ж — К-750-65/3000+ТВВ-800-2, 750 МВт; з—К-1000-1 — ЦВД; 2 — ЦСД; 3 — ЦНД; 4 — турбогенератор; 5 — возбудитель; 6 — подвозбудитель; 7 — ось нератора; 9 — ось ЦНД; 10 — ось конденсатора; 11 — ось ЦВД; 12 — ось ЦСД; 13 — упругая муфта; упорно-опорный выносной; /в — подшипник приставной; 19 — подшипник упорный; 20 — впуск свежего нзводствеиный отбор пара; 24 — то же, отопительный; 25 — отопительный отбор пара высокого давле
ру, находятся в одной фазе. В действительности, фаза является случайной величиной. С учетом того, что передаточные функции для амплитуд вибраций в отдельной точке фундаментной конструкции от сил, приложенных на разных опорах, имеют разную фазу, можно утверждать, что синфазность сил не всегда идет в запас. Однако такой выбор фаз приводит к уровням вибрации, соответствующим математическому ожиданию амплитуд, осредненных по всем точкам фундамента.
Гидродинамические воздействия турбулентных потоков охлаждающей воды в кон
денсаторах турбин и вибрации конденсатора и турбоагрегата в целом от этих воздействий изучены до настоящего времени весьма слабо. Известно лишь, что пульсации гидродинамического давления имеют широкий спектр от долей герца до 25— 30 Гц, а вибрации носят локальный характер, т. е. колебания каждого из элементов конденсатора происходят главным образом с частотами, близкими к низшим собственным частотам этого элемента. Турбоагрегату эти колебания передаются через горловину конденсатора. При этом, если конденсатор имеет так называемую жесткую под*
64
строения фундаментов и схемы турбоагрегатов
+ТВВ-500-2ЕУЗ. 500 МВт: г — К-800-240-5+ТВВ-800-2, 800 МВт; д — К-1200-240-3+ТВВ-1200-2, 1200 -60'3000+ТВВ-1000-2, 1000 МВт; и — условные обозначения;
подшипника, его индекс и масса роторов, приходящаяся на подшипниковую опору; 8 — ось турбоге-14 — жесткая муфта: /5 — подшипник опорный встроенный; 16 — то же. выносной; /7 — подшипник пара; 21 — передача пара через промежуточный перегрев; 22 — выпуск пара в конденсатор; 23 -г- прения; 26 — то же, низкого давления
веску к выхлопному патрубку цилиндра низкого давления, то частоты его собственных колебаний в заполненном охлаждающем водой и конденсатом состоянии в горизонтальном направлении имеют значения 4—8 Гц, а в вертикальном — в 1,5—2 раза выше. Поэтому высокие частоты гидродинамического воздействия виброизолируются, а тУрбоагрегат передаются лишь воздействия с частотами до 10—12 Гц, в связи с чем верхнем строении фундаментной конст-ии приборами можно обнаружить ко-ания с частотами, близкими к низшим астотам ее горизонтальных колебаний. Ам
плитуды перемещений и ускорений при этих колебаниях несущественны и фундаментные конструкции на них не рассчитывают.
Неуравновешенность электромагнитн ых полей в генераторе приводит к появлению сил одностороннего тяжения ротора, действующих аналогично добавочному механическому дебалансу. Для учета этого обстоятельства нормативную динамическую нагрузку от ротора генератора принимают равной 15% значения статической реакции подшипников, т. е. как и для турбины, несмотря на то, что остаточный дебаланс статора не превышает 2—3 %, а его изменение
5—189
65
a - ПТ-60-130/13+ТВФ-63-2; К-200- 130-3+ТГВ-200-2МУЗ;
Рис. 3.10. Схемы турбоагрегатов
б — Т-100/120-130-3+ТВФ-120-2; в — ПТ-135/165-130/15+ТВВ-160-2УЗ; г — д — К-220-44-3+ТВВ-220; е - К-300-240(ЛМЗ)+ТВВ-320-2 (условные обозначения см. на рис. 3.9)
при соединении с валопроводом невелико благодаря большой жесткости.
Вращение магнитного поля в генераторе, поскольку это поле неоднородно по окружности, а сконцентрировано у полюсов ротора, приводит к прохождению замкнутой кольцевой волны деформации в сердечнике статора. Эта волна имеет число периодов, равное числу полюсов ротора, т. е. два для генераторов при 3000 об/мин и четыре при 150Q об/мин. При вращении ротора каждая точка сердечника статора совершает колебательное движение в радиальном направлении с частотой, равной произведению частоты вращения на число полюсов, т. е. 100 Гц (двойная частота переменного трка в электрической сети) вне зависимости от оборотов машины. Эти колебания через опоры сердечника передаются корпусу гене
ратора и от него — конструкциям фундамента.
Заводы — изготовители генераторов не задают ни динамических нагрузок, передаваемых на фундаментные конструкции от статора, ни ограничений на вибрации этих конструкций. По их данным [17, 21] амплитуды вибраций элементов сердечника обычно лежат в пределах 200—250 мкм. За счет соотношения динамических жесткостей опорных элементов генераторов н фундаментных конструкций на последних амплитуды вибраций при частоте 100 Гц иногда достигали 25—30 мкм. Несмотря на то, что в зоне таких вибраций вблизи генератора нет постоянных рабочих мест обслуживающего персонала, тем не менее даже кратковременное нахождение людей в этой зоне вызывает неприятные ощущения. Кроме того,
66
Таблица 8.2
Турбоагрегат мощностью. МВт Типы Динамические нагрузки, кН. роторов
электростанции турбины генератора высокого давления среднего давления низкого давления генератора
60 ТЭЦ ЛМЗ ПТ-60-130/13 ПТ-60-90/13 «Электросила» ТВФ-60-2 9—12 — 15 18
100 УТМЗ Т-100/120-130-3 «Электросила* ТВФ-120^2 3—4 10—13 15 23
135 > УТМЗ ПТ-135/165-130/15 «Электросила* ТВВ-160-2УЗ 7—9 — 20—30 23
200 ГРЭС ЛМЗ К-200-130-3 «Электротяжмаш» ТГВ-200-2.МУЗ 6 14-17 ’ 27 38
220 АЭС ХТЗ К-220-44-3 «Электросила» ТВВ-220 9—12 — 30—35 32
250 ТЭЦ УТМЗ Т-250/300-240-2 «Электросила» ТВ В-320-2УЗ 6—13 11—22 25 45
300 ГРЭС ЛМЗ К-300-240-1 «Электросила» ТВВ-320-2 8—24 33 29 45
500 > ЛМЗ К-500-240-4 «Электросила» ТВВ-500-2ЕУЗ 9 20 26—28 . 50
500 АЭС К-500-65/3000-2 «Электросила» ТВВ-500-2АУЗ 27 — 27-33 50
750 К^750-65/3000 «Электросила» ТВВ-800-2 24 — 30-39 62
800 ГРЭС ЛМЗ К-800-240-5 «Электросила» ТВВ-800-2 9 23 20—21 60—66
1QQ0 ’ АЭС ЛМЗ К-100Q-60/3000 «Электросила» ТВВ-1000-2 26 . .— 60 . . 68
1200 ГРЭС ЛМЗ К-1200-240-3 «Электросила» ТВВ-1200-2 15,5 30 62 83-90
Примечание: ЛМЗ — Ленинградский металлический завод; ХТЗ — Харьковский турбинный завод; УТМЗ — Уральский турбомоторный завод.
такие вибрации повышают общий уровень ем «Электросила», имеют такую подвеску, шума в машинном зале, поэтому электрома- поэтому проблема подавления стогерцовых шиностроительные заводы применяют виб- вибраций осталась только при проектирова- роизолирующую подвеску сердечника ста- нии фундаментов для турбоагрегатов мощ- к корпусу генератора. ностью 100 МВт и менее. В настоящее время большинство гене- Таким образом, в соответствии ‘ с нор- раторов, выпускаемых для тепловых и атом- мами, расчет возможных уровней вибраций НЫх электростанций, имеет виброизолирую- подшипников в системе турбоагрегат—ф'ун- Шую подвеску сердечника статора к корпу- дамент—основание следует выполнять на су генератора, что приводит к уменьшению синфазно действующие динамические силы, рации корпуса и подгенераторных кон- нормативная амплитуда которых составля- У дни до 3—5 мкм. Это допустимо по ет 15 % величины статической реакции каж- Саб арНЫм Н0Рмам даже для постоянных дого подшипника, нагруженного массой ро- боле® 1оГТ- ^Се генеРатоРы мощностью тора. При этом точка приложения совпа- ® U0 МВт, выпускаемые объединена- дает с центром подшипника, а линия дей- " 67
Таблица 8.3
Тип электростанции Тип турбоагрегата: мощность. МВт Масса турбоагрегата. т Масса конденсатора Масса роторов, т
турбины трубопрово- дов генератора, воздуховоз-будителя турбины генератора и гозбуди-теля
Конденсационная (ГРЭС) К-300-240-3+ТВВ-320-2; 300 933 280 336. 80 53
То же К-500-240-4+ТВВ-500-2ЕУЗ; 500 1770 400 752 112 72
> К-800-240-5+ТВВ-800-2: 800 2205 405 928 124 91
К-1200-240-3+ТВВ-1200-2; 1200 3000 765 1600 309 127
Атомная (АЭС) К-750-65/3000-2+ТВВ-800-2; 750 1990 545 1440 214 89
То же К-1000-60/3000+ТВВ-1000-2; 1000 3660 600 2960 357 103
ствия вращается с частотой, равной частоте вращения вала агрегата.
Для некоторых наиболее распространенных типов мощных энергетических турбоагрегатов с частотой вращения 3000 об/мин в табл. 3.2 приведены данные о динамических нагрузках роторов, позволяющие анализировать сочетания нагрузок, учитывать массы турбоагрегата в расчетных схемах и т. п. На рис. 3.9 приведены геометрические схемы верхнего строения фундаментов и схемы турбоагрегатов с привязкой линий действия сил. В табл. 3.3 даны сведения о массах всех основных элементов агрегата, типах турбоагрегатов, их мощности, типах электростанций, а на рис. 3.10 приведены схемы для некоторых не вошедших в табл. 3.2 и рис. 3.9, но довольно распространенных турбоагрегатов. Если в столбце табл. 3.3 указана одна цифра, то она относится к любому из двух подшипников соответствующего цилиндра, генератора. Если указаны две цифры, то вторая по порядку цифра относится к подшипнику, ближнему к генератору.
Расчет внутренних усилий в элементах фундамента для проверки раскрытия трещин выполняют на те же силы, что и расчет уровней вибраций, но с расчетной амплитудой, получаемой умножением нормативной амплитуды на коэффициент перегрузки л = 2.
Расчет внутренних усилий в элементах фундамента для проверки их прочности выполняют на те же силы, но при коэффициенте перегрузки и = 10, а также с учетом случая неодновременного с упомянутыми действия динамических сил, возникающих в анормальных и аварийных режимах [7].
68
3.3. Расчетные схемы
Вид расчетной схемы фундаментной конструкции и системы турбоагрегат—фундамент—основание определяется ее геометрией, видом грунтов основания, частотой вращения турбоагрегата, целью расчета, необходимой точностью результатов расчета, способом расчета, возможностями применяемой вычислительной техники, степенью достоверности и точностью исходных данных и, наконец, степенью изученности истинного характера физико-механических закономерностей динамических явлений, происходящих в системе. Основные рекомендации по выбору расчетных схем строительных конструкций приведены в [24, стр. 70—74]. Ниже приводятся лишь рекомендации, связанные со спецификой рассчитываемой системы.
1. Фундаменты энергетических турбоагрегатов на 3000 об/мин имеют вид и геометрию сложной пространственной одноэтажной нерегулярной рамы, колонны которой жестко связаны с фундаментной плитой, лежащей на упругом основании (см. рис. 3.1—3.3). Натурные исследования колебаний таких конструкций с установленными на них турбоагрегатами показали, что их низшие собственные частоты лежат в пределах: для вертикальных колебаний — 12—25 Гц, для горизонтальных колебаний— 4—7 Гц.
В эксплуатационных режимах колонны выполняют виброизоляцию фундаментной плиты, благодаря чему амплитуды ее колебаний обычно в 6—8 раз ниже, чем на верхнем строении и в вертикальном направлении не превышают 3—6 мкм, а в гори-
Рис. 8.11. Расчетные схемы подагрегатиых конструкций для турбоагрегатов на 3000 об/мии
а — для определения динамических податливостей, уровня вибраций и внутренних усилий по условию недопущения трещин для турбоагрегата мощностью 1200 МВт Костромской ГРЭС по рис. 3.2; б — то же, применительно к стальной подагрегатиой конструкции под турбоагрегат мощностью 100 МВт Северной ТЭЦ Ленэнерго; в — для определения внутренних усилий прн внезапном появлении дебалаиса (продольная плоская рама); г — то же (поперечная плоская) рама и при коротком замыкании иа шинах генераторного напряжения; д — фрагмент для поверочных сопоставительных расчетов разных программ. На схемах а), б) и д) сосредоточенные массы турбоагрегата условно показаны только иа половине фундамента. Остальные расположены симметрично. На схемах в), г) массы турбоагрегата размазываются по стержням
зонтальном— лежат на пределе чувствительности виброизмерительных приборов, поэтому для определения динамических податливостей, уровней вибрации и внутренних усилий в эксплуатационных режимах обычно колебаниями фундаментной плиты на грунтовом основании пренебрегают. Это позволяет при использовании предельных возможностей современных ЭВМ принять расчетную схему фундамента в виде пространственной стержневой рамы с колоннами, жесткозащемленными снизу (рис. 3.11, а, б).
Стержни с отношением длины пролета (в осях) к высоте сечения более пяти обычно считают тонкими. При величине указанного отношения меньше пяти необходим учет сдвига. В некоторых случаях вводят также учет инерции поворота сечений. В некоторых пролетах фундамента ригели и балки связаны между собой горизонтальной плитой. Как видно из рис. 3.1—3.3, все эти усложнения возникают, как правило, в зонах генератора и возбудителя. На эти зоны в эксплуатационных режимах передаются весьма малые динамические нагрузки, так как сердечник статора генератора виброизо-лирован от корпуса, а возбудитель имеет подшипники, встроенные в жесткий корпус, поэтому нередко неточный учет динамических характеристик этих элементов не может вызвать существенного ухудшения точности расчета в целом. Это дает возможность вводить эти элементы в расчетную схему фундамента условно, используя идеализацию в виде тонких стержней. При этом
соответствующие участки плит, примыкающие к балкам и ригелям, учитывают при подсчете массы и момента инерции соответствующего стержня.
Необходимо иметь в виду, что, как показали сопоставления результатов расчета и экспериментальных исследований плоских и пространственных рам, для расчета фундаментов рамного типа на частотах, близких к рабочим частотам турбоагрегата, различные упрощения расчетных схем и приведения их к виду плоских поперечных или продольных рам, либо фрагментов типа плоской поперечной рамы с прилегающими продольными балками, жесткозащемленными на другом конце, не позволяют получить необходимую точность результатов. Приемлемая точность получается только при использовании расчетной схемы в виде пространственной рамы.
При определении внутренних усилий в элементах фундаментов от аварийных нагрузок, связанных с нарушением работы турбоагрегата и обычно имеющих импульсный характер, важное значение имеют низшие формы собственных колебаний, поэтому неучет истинного характера связи верхнего строения с фундаментной плитой на грунтовом основании может привести к существенным погрешностям. Это может проявиться особенно сильно при мягких грунтах, имеющих высокие значения коэффициентов упругой податливости. В этом случае рекомендуются расчетные схемы в виде плоских рам, связанных с плитой, лежащей на грунтовом основании.
69
Рис. 3.12. Маломасштабная модель подагрегатной конструкции для турбоагрегата мощностью 1000 МВт на 1600 об/мнн с боковыми конденсаторамн
Для расчетов на внезапное появление дебалйнсов, например при вылете лопаток турбоагрегата, применяют схемы плоских продольных или поперечных рам, соответственно, при учёте вертикальных или горизонтальных сил (рис. 3.11, в, г).
Для определения внутренних усилий от момента короткого замыкания на шинах генераторного напряжения или в обмотках статора применяют расчетные схемы в виде плоских поперечных рам (рис. 3.11,г).
В качестве модели упругого основания в большинстве случаев применяют модель Вйнклера, реже модель упругой полуплоскости или упругого слоистого основания. Сопоставительный анализ оценки влияния выбора модели упругого основания на точность результатов расчета внутренних усилий’ по рекомендованным выше расчетным схемам пока не проведен.
2. Фундаменты турбоагрегатов на 1500 об/мин. Системы турбоагрегат на 1500 об/мин—фундамент—основание даже в стационарных эксплуатационных режимах совершают колебания, в которых смешения фундаментной плиты на упругом основании имеют настолько существенное значение, что пренебрежение ими совершенно недопустимо, поэтому нижняя (фундаментная) плита на упругом основании входит в расчетные схемы всех фундаментов для турбоагрегатов на 1500 об/мин. Поскольку же вид и геометрия фундаментных конструкций для турбоагрегатов с подвальными конденсаторами (см. рис. 3.5) и с боковыми кон
денсаторами (см. рис. 3.4) различны, то отличаются и их расчетные схемы.
Фундаменты стенового типа (см. рис. 3.5) рассчитывают на основе расчлененной расчетной схемы, при которой каждую поперечную стену или раму рассматривают самостоятельно с присоединением к ней соответствующего участка фундаментной плиты на упругом основании. Продольные балки учитывают только как массы. Их изгиб-ную жесткость не учитывают, так как она много меньше вертикальных и горизонтальных жесткостей стен в местах присоединения продольных балок.
Фундаменты массивного типа (см. рис. 3.4) рассчитывают также на основе расчлененной расчетной схемы. Каждый массив рассчитывают вместе с соответствующим участком фундаментной плиты на упругом основании, имеющей коробчатое сечение. Однако, поскольку жесткость на кручение короба, образуемого такой фундаментной плитой, намного выше, чем плоской фундаментной плиты, то погрешность от применения расчлененной схемы при определении динамических податливостей и уровней вибрации в эксплуатационных режимах может быть весьма существенной, поэтому взамен расчета выполняют исследования на маломасштабных моделях по методике, изложенной в [7]. Вид такой модели во время испытаний показан на рис. 3.12.
Приведенные ранее рекомендации по выбору расчетных схем фундаментов в кратком виде сведены в табл. 3.4.
70
Таблица 3.4
Частота вращения, об/мин Вид и геометрия фундаментных конструкций Цель расчета Расчетная схема фундамента Учет колебаний фундаментной плиты на грунтовом основании
скальном мягком
3000 Пространственная одноэтажная нерегулярная рама Определение динамических податливостей подагрегатной конструкции Пространственная стержневая рама с колоннами, жесткозащемленными снизу Не требуется
Определение уровня вибраций и внутренних усилий То же То же
Определение внутренних усилий при внезапном появлении дебалансов (например, вылет лопаток) Плоские продольные и поперечные рамы Желателен Необходим
Определение внутренних усилий от момента короткого замыкания иа шинах генераторного напряжения Плоские поперечные рамы
1500 Стеновая Определение динамических податливостей Пластины, нагруженные силами, параллельными срединной плоскости, объединенные фундаментной плитой и продольными балками Необходим
Определение уровней вибраций в эксплуатационных режимах
Массивная Определение динамических податливостей Массивы сложной конфигурации, объединяемые имеющей коробчатое сечение фундаментной плитой, лежащей на упругом основании х> »
Определение уровней вибрации в эксплуатационных режимах
3. Турбоагрегаты. Как уже упоминалось, при определении уровней вибраций и внутренних усилий от эксплуатационных и анормальных нагрузок необходимо выполнять расчет системы турбоагрегат—фундамент—основание.
Общие сведения о турбинах, турбогенераторах, об их прочности и колебаниях приведены в [4,5,21,25—29, 35]. Некоторые данные о турбоагрегатах и их динамических расчетных схемах изложены в [7, с. 109— НО]. Ниже приведены рекомендации, базирующиеся на результатах экспериментальных исследований и изучения конструкции турбоагрегатов. Цилиндры высокого давления (ЦВД.) турбин имеют жесткий двойной литой корпус (см. рис. 3.6, 3.7), лапы которого опираются па площадки подшипниковых опор и через них — на фундамент. Данных о частотных характеристиках корпуса Ч Д нет. Расчетом принимается, что для всех выпускаемых турбин низшие часто-Гы собственных, колебаний корпусов ЦВД
лежат значительно выше рабочей частоты вращения вала, Лбэтому корпус ЦВД можно вводить в расчетную схему в виде абсолютно твердого тела, характеризуемого данными о величине его массы, координатах центра масс и значениях моментов инерции относительно трех центральных осей, т. е. не менее чем семью числами.
Цилиндры среднего давления (ЦСД) по своим динамическим характеристикам занимают промежуточное положение между ЦВД и цилиндрами низкого давления. Так, ЦСД турбин мощностью 300 МВт, содержащие часть низкого давления, имеют динамические характеристики, не позволяющие учитывать ее аналогично ЦВД. Однако многие турбины имеют корпус ЦСД, расчетная схема которого может быть принята как и для ЦВД в виде абсолютно твердого тела. Это турбины мощностью 500, 800 н 1200 МВт для ТЭС, т. о. на сверхкритнче^ ские параметры пара и 500, 750 и 1000 МВт для АЭС,
71
Цилиндры низкого давления (ЦНД) имеют корпус в виде тонкостенной оребренной складчатой оболочки сложной конфигурации (см. рис. 3.7), не поддающейся до настоящего времени динамическому расчету. Эксперименты, проведенные на моделях корпусов ЦНД турбин мощностью 300 МВт Харьковского турбинного завода и на одном натурном ЦНД показали наличие по меньшей мере трех резонансов на частотах ниже оборотной. Это свидетельствует об ошибочности учета корпуса ЦНД в расчетной схеме в виде набора отдельных ничем не связанных масс, поэтому динамические характеристики корпуса ЦНД задают в виде блочной матрицы функций динамических жесткостей, порядок которой принимают равным п — числу площадок опирания корпуса ЦНД на подагрегатную конструкцию для корпуса ЦНД с выносными опорами, либо п+2 — для ЦНД со встроенными опорами, так как он взаимодействует не только с фундаментом, но и с валопроводом.
Каждый блок этой матрицы в общем случае должен был содержать 12 компонентов (по шесть амплитудных и фазовых), но исходя из инженерных оценок это число может быть уменьшено до шести, если исключить поворотные компоненты, а возможно, что и до четырех, если исключить и осевой компонент. Число п зависит от конструкции ЦНД, но для большинства из них оно может быть принято равным 24, причем благодаря наличию двух осей симметрии отличающихся блоков в матрице функций динамических жесткостей будет только (24/2)2=144. Это делает задачу расчета реальной при использовании предельных возможностей современных ЭВМ.
Конденсаторы, имеющие так называемую жесткую связь с выхлопным патрубком ЦНД, представляют собой коробчатую ребристую оболочку с множеством связей между стенами в виде трубок. Трубки и часть полостей этой оболочки наполнены пли частично залиты водой. Это довольно сложная механическая система, имеющая несколько собственных частот, существенно более низких, чем 50 Гц, которые являются рабочей частотой вращения высокооборотных турбоагрегатов АЭС и всех турбоагрегатов ТЭС.
Как упомянуто было ранее, соединение конденсаторов с выхлопными патрубками ЦНД обеспечивает виброизоляцию на всех частотах выше, по крайней мере 20—25 Гц, поэтому для расчетов вибраций и внутренних усилий в эксплуатационных режимах в системах с турбоагрегатами на 3000 об/мин
конденсаторы в расчетную схему не должны включаться.
Для расчета амплитудно- и фазочастотных характеристик и переходных процессов в системах с турбоагрегатами на 3000 об/мин и для всех динамических расчетов систем с турбоагрегатами на 1500 об/мин конденсаторы с так называемым жестким соединением весьма приближенно можно учитывать в виде массы, соединенной с выхлопным патрубком ЦНД упругими связями, характеристики которых подбирают так, чтобы собственные частоты, соответственно вертикальных и горизонтальных колебаний этой массы были равны низшим натурным собственным частотам, которые для турбин каждого типа необходимо определять экспериментально. Конденсаторы с гибким соединительным патрубком в динамической расчетной схеме не учитывают.
Что касается пружин, через которые часть веса конденсатора передается на фундаментную плиту, то их жесткость обычно столь мала, что обеспечивает виброизоляцию конденсатора от фундаментной плиты на всех частотах выше 10 Гц.
Генераторы мощностью более 100 МВт имеют виброизолирующую подвеску сердечника статора, поэтому для расчета уровня вибраций в эксплуатационных режимах массу сердечника необходимо исключать (Фридман, Школьник [17]).
При расчете амплитудно- и фазочастотных характеристик расчетная схема генератора представляется в виде совокупности сложной пространственной оболочки-корпуса, к которой крепится на упругих элементах абсолютно жесткое массивное тело — сердечник. При наличии встроенных подшипников щитовые части, в которых эти подшипники закреплены, вводят в расчет как оребренные пластины, жесткосвязанные с корпусом генератора и опорными лапами.
При расчете переходных процессов, связанных с анормальными режимами, применяют плоские расчетные схемы в виде совокупности двух колец, связанных пружинами. Внутреннее — жесткое, характеризуемое массой и моментом инерции вокруг оси ротора, имитирует сердечник, а внешнее — деформируемое, характеризуемое распределенными массой и жесткостью, имитирует корпус, к которому как жесткие консоли прикреплены лапы. Жесткость и массу этого кольца можно принимать равномерно распределенными, определяемыми методом «размазывания» ребер. Жесткости и места крепления пружин, связывающих кольца, принимают такими же, как у упругих вста
72
вок между сердечником и корпусом генера
тора.
Опоры выносных подшипников вводят в расчетную схему в виде колебательной системы, содержащей одну или две массы (в зависимости от числа собственных частот, лежащих не выше чем 1,4 рабочей частоты вращения турбоагрегата). Значение верхней массы принимают 0,7 от фактической массы верхней части опоры (с подшипником), лежащей выше горизонтальной плоскости, которая проходит через нижнюю точку установочного кольца подшипника. Значение нижней массы, если оно требуется, принимают равным половине от остальной массы опоры.
Массы связаны между собой и с фундаментом пружинами, продольные и поперечные жесткости которых подбирают так, чтобы собственные частоты идеализированной и натурной систем были равны, а коэффициент внутреннего неупругого сопротивления принимают 0,05. Верхнюю массу соединяют с ротором пружиной, имитирующей упругие свойства масляного слоя. Жесткость н характеристики затухания этой пружины определяются маркой масла, толщиной, площадью слоя и давлением в
нем, т. е. задаются машиностроителями. Таким образом, общая расчетная схема системы турбоагрегат—фундамент—основание представляется в виде взаимосоединенных
элементов: валопровод—масляные пленки— опоры подшипников (выносных)—фундамент, связанный со статорами машины,—основание. При встроенных подшипниках по
следовательность изменяется: валопровод—
масляные пленки—опоры подшипников— статоры—фундамент—основание.
При этом необходимо иметь в виду, что
статор каждого цилиндра турбины самостоятельно опирается на фундамент и крепится к нему с помощью дистанционных болтов. Последние допускают сравнительно небольшие сдвиги опорных поверхностей статора по закладным металлическим час
тям, расположенным на поперечных и продольных балках верхнего строения фундаментной конструкции, но препятствуют срыву машины с фундамента. Такие сдвиги воз-
при тепловых деформациях в процессе прогрева во время пус-охлаждения после остановки (по-но меньшие деформации происхо-
никают
тУрбины
Ка либо Аобные, Аят и при изменении режимов работы тур-смот В конструкции статора преду-заф РеИЫ Одна илн несколько точек, икенрованных от сдвига по фундаменту, точки называют фикс-пунктами.
При обычных колебаниях в системе турбоагрегат—фундамент упругие силы и трение между опорными поверхностями статора и закладными частями, как правило, обеспечивают совместность их перемещений, в связи с чем при динамических расчетах на нормальные эксплуатационные нагрузки обычно считают смежные точки статора и фундамента жесткосвязанными. Корпус статора генератора жестко крепят к фундаменту.
3.4. Методы динамического расчета
1. Механические характеристики. Динамический расчет фундамента выполняют в предположении упругой работы железобетона. Значения модуля упругости бетона Ев для динамического расчета принимают по данным главы СНиП «Нормы проектирования. Бетонные и железобетонные конструкции». Модуль сдвига бетона G принимают 0,4£б, а плотность ре=2,5 т/м3. Жесткость сечений железобетонных элементов, как и для динамических расчетов других строительных конструкций, определяют по полному сечению бетона без учета трещин в растянутой зоне и арматуры.
При задании расчетных размеров поперечного сечения элементов фундамента необходимо иметь в виду следующее. Из-за ограничения массы сборных элементов по условиям транспортировки фундаменты для установок большой мощности приходится собирать из сборных элементов неполной высоты с доведением их размеров до необходимой величины укладкой на месте монолитного бетона (набетонкой). Кроме того, после проведения приемочных испытаний, во время монтажа турбоагрегата его закладные части также заливают слоем бетона сравнительно небольшой толщины (обычно . менее 10 % высоты поперечного сечения всего элемента). Как показали исследования [17—19], набетонка и заливка в полной мере участвуют в работе элемента и должны учитываться при задании размеров его поперечного сечения.
Таким образом, при расчете динамических податливостей фундамента в процессе его приемочных испытаний учитывают поперечное сечение элементов с набетонкой, а при расчетах амплитуд эксплуатационных вибраций и внутренних усилий необходимо учитывать поперечное сечение элементов с набетонкой и заливкой. Однако поскольку неопределенность, вносимая в расчетную схему машиной, весьма велика, а влияние заливки на динамические характеристики
73
системы турбоагрегат—фундамент невелико, то вследствие сравнительно малой толщины этой заливки пока до уточнения динамических характеристик статорных элементов турбин заливку в расчете не учитывают.
Учитывая, что динамические приемочные испытания фундамента проводят до его нагружения эксплуатационными нагрузками, т. е. прн сохранении максимальной сплошности бетона, а также то, что испытательные нагрузки вызывают внутренние усилия в элементах менее 0,2 от предельных, рекомендуется при расчете динамических податливостей фундамента принимать логарифмический декремент колебаний 6 = 0,16, а коэффициент внутреннего неупругого сопротивления у=6/л=0,05. При расчете виброперемещений и внутренних усилий в элементах фундамента принимают 6=0,31; у=0,1.
2. Применяемые методы и приемы. Выполняют следующие виды динамических расчетов фундаментов на эксплуатационные воздействия:
а) расчет горизонтальных и вертикальных динамических податливостей фундаментной конструкции, пенагруженной оборудованием, во всех точках передачи на фундамент динамических нагрузок от подшипников турбоагрегата;
б) расчет горизонтальных н вертикальных виброперемещений в элементах системы турбоагрегат—фундамент—основание (либо в случаях, указанных в п. 3.3, пп. 1 без учета податливости основания) в условиях нормальной эксплуатации от одновременного и синфазного действия всех динамических сил, передаваемых турбоагрегатом и определяемых в соответствии с рекомендациями п. 3.2, пп. 2, значениями нормативных амплитуд, равными 0,15 статической реакции в каждом подшипнике;
в) расчет внутренних усилий в элементах фундамента как части системы турбоагрегат—фундамент—основание в условиях нормальной эксплуатации от системы сил, упомянутой в п. «б», но расчетные амплитуды которых вычисляют умножением нормативных амплитуд на коэффициент перегрузки, значения которого рекомендованы в п. 3.2, пп. 2. Общие рекомендации по расчетам строительных конструкций изложены в [24, с. 82—92].
Поскольку конструкции фундаментов наиболее ответственны, то необходимы высокая точность прогнозирования динамических явлений, особенно в части уровня виброперемещений, достижение повышенной точности, благодаря меньшей неопределен
ности исходных данных об упругих и инерционных- характеристиках, для динамического . расчета этих конструкций, поэтому следует применять методы, дающие достаточно точные результаты.
Прямые методы составления систем канонических уравнений приводят к столь высоким порядкам систем, что не позволяют получить результат с применением современных ЭВМ, поэтому обычно применяют различные методы, приемы и упрощения, позволяющие свести задачу к последовательному решению систем уравнений сравнительно невысокого порядка.
Наиболее известный и применяемый прием состоит в использовании симметрии фундамента турбоагрегата относительно вертикальной плоскости, проходящей через ось ротора. При этом независимо рассматривают симметричные и антисимметричные колебания под действием симметричной и антисимметричной составляющих нагрузки, соответственно. Этот прием позволяет снизить в 1,5—2 раза порядок каждой из двух систем уравнений, на которые разбивают основную систему.
Однако по программам, составленным с применением этого приема, не удается выполнить расчеты фундаментных конструкций с несимметричными геометрическими или механическими характеристиками элементов, либо с несимметричными присоединяемыми массами оборудования.
Необходимость в расчете несимметричных фундаментных конструкций возникает сравнительно редко, в связи с чем для массовых расчетов прием, использующий симметрию, безусловно, может быть рекомендован.
Некоторое распространение получил также прием, использующий интуитивную, базирующуюся на опыте, оценку сравнительной существенности различных компонентов смещения узлов или внутренних усилий с исключением из рассмотрения менее существенных компонентов. Так, например, при расчете на вертикальные иагрузй иногда пренебрегают горизонтальными смещениями узлов вдоль оси агрегата и поворотами узлов вокруг вертикальной оси. Иногда пренебрегают продольными деформациями стержней или при расчете на вертикальные воздействия пренебрегают горизонтальными поперечными смещениями УЗ' лов и при расчете на горизонтальные нагрузки не учитывают вертикальных смещений узлов и т. п. Такой прием позволяет сразу в 2—3 раза уменьшить порядок системы уравнений и дает возможность соств®*
74
пять программы с минимальным временем rtefa. Но сопбставление результатов расчета с применением и без применения такого приема показало недостаточную его точность, особенно при расчете Горизонтальных колебаний в диапазоне частот, близких к рабочим, поэтому использовать этот прием следует с осторожностью.
Весьма распространены приемы, основывающиеся на анализе типовых расчетных схем фундаментных конструкций с выявлением каких-то топологических закономерностей, позволяющих упростить систему уравнений. Например, все расчетные схемы, приведенные на рнс. 3.11, имеют то общее, что, если используя свойство симметрии пространственных рам, рассматривать только часть, лежащую по одну сторону от продольной вертикальной плоскости, которая проходит через ось агрегата, то горизонтальные элементы образуют непрерывную цепь, соединенную в узлах только с так называемыми тупиковыми элементами, т. е. элементами, соединяющимися с цепью только в одной точке, не выходящими на нее в какой-либо другой точке. Это позволяет, используя методы расчета цепных систем, создать весьма компактные и быстро действующие программы. Но по таким программам нельзя рассчитывать фундаментные конструкции, в которых имеются более двух продольных балок.
Большое распространение получили приемы, использующие последовательное наращивание механической системы [12], с исключением на каждом шаге наращивания нз системы уравнений так называемых внутренних узлов, т. е. узлов, в которых на этом шаге отсутствует соединение с другими элементами. Узлы, в которых производится соединение на данном шаге, называют внешними. Информация о связи перемещений или внутренних усилий во внутренних узлах с перемещениями внешних узлов сохраняется в памяти машины только для тех узлов (их называют сохраняемыми узлами), которые могут понадобиться в дальнейшем, т- е. либо для тех узлов, информация о колебаниях или внутренних усилиях в которых должна быть выдана в результате расчета (постоянно сохраняемые узлы), либо Для тех узлов разветвленных механических систем с замыкаемыми контурами, в которых в ходе дальнейшего расчета должен замыкаться контур или наращиваться эл-з-Уалы)ЭТ0Г° КОНТУ₽а (временно сохраняемые
Поскольку узел, являющийся внешним Данном шаге наращивания, будет внут
ренним на следующем шаге, то необходим пересчет зависимостей, которые связывают перемещения и внутренние усилия в сохраняемых узлах с перемещениями внешних узлов. Этот пересчет можно выполнять либо на каждом шаге наращивания, либо «обратным ходом» после окончания наращивания и замыкания всей механической системы, либо для части узлов по первому, а для части узлов по второму варианту. Поскольку второй вариант пересчета экономичнее, то обычно первый применяют только для временно сохраняемых узлов с тем, чтобы в дальнейшем после замыкания контура эту информацию не сохранять. При использовании второго варианта пересчета необходимо только иметь в виду, что все постоянно сохраняемые узлы должны быть во-единены с последним внешним узлом хотя бы одной непрерывной цепью сохраняемых узлов. Для этого приходится иногда оставлять до конца счета и временно сохраняемые узлы.
При расчете цепной системы, т. е. системы, не содержащей замкнутых контуров, операцию последовательного наращивания с применением однотипной рекуррентной процедуры называют прямой прогонкой. Операцию «обратного хода», т. е. последующего вычисления перемещений и внутренних усилий в сохраняемых узлах, называют обратной прогонкой.
При расчете фундаментных конструкций с применением одного из приемов последовательного наращивания обычно используют небольшой набор стандартных элементов, для которых выписывают готовые выражения динамических жесткостей или динамических податливостей. В качестве таких стандартных элементов обычно принимают:
а) свободный стержень с приложенными по концам перемещениями или нагрузками;
б) стержень с одним защемленным, а другим свободным концом, к которому приложены перемещения или нагрузки; такой элемент является расчетной схемой колонны;
в) точечную массу;
г) абсолютно жесткое тело, в двух или четырех точках которого приложены перемещения или нагрузки;
д) невесомый упругий элемент.
На основе использования различных приемов последовательного наращивания создано большое количество алгоритмов и программ динамического расчета фунд.з-
76
Таблица 3.5
Наименование ОМАР БАРС ФИПР ВИБРАМ МОД-1 ВИБРАМ-1
Организация-разработчик ИПМаш АН УССР ИПМаш АН УССР Л ПИ нм. Калинина ВНИИГ им. Веденеева ВНИИГ им. Веденеева ВНИИГ им. Веденеева, Л ПИ им; Калинина
Тип ЭВМ М-222; ЕС 1060 БЭСМ-6 БЭСМ-6 ЕС 1030 ЕС 1060 ЕС 1030 ЕС 1060 ЕС 1060
Язык программирования АЛГОЛ АВТОКОД БМ-220/PL ФОРТРАН-Церн ФОРТРАН ФОРТРАН-IV ФОРТРАН-IV ФОРТРАН-IV
Рассчитываемые значения динамические податливости Р Р Р Р Р Р
вибрационные перемещения от заданной системы сил (эксплуатационный режим) Р Р Р Р Н Р
внутренние динамические усилия Р Р Р Р Н Р
Особенности рее - Максимальное узлов 75/260 75 80 50 50 50
стержней 90/300 165 250 80 200 80
1 степеней свободы 4 6 6 6 6 6
лизации алгоритмов ЧИСЛО 1 1 1 1
продольных риге- лей. примыкающих к поперечному по одну сторону от него 2 2 2 2 60 2
учет* несимметрии системы Н Р Н Н Р Н
вибронзоляцнн Н Р Р Р н Р
сдвиговой деформации стержня Н Н Р Н н Р
Расчет многоярусных рам1 Н Н Н Н р Н
Время счета9, с а 3 10 •20 60/6 Г2О/Г2 8
б 8/1,5 30 60 •240/20 900/90 30
в 10/2 30 60 •250/-22 1800/180 32
Возможное расхождение результатов %* 30 0 30 0 0 0
Данные об опубликовании См. сноску 4 См. сноску 5 См. скоску 6 Цейтлин Б. В. [8, с.70-79] Глаговский В. Б., Рабкин М. А. |Ю. с. 57-60] См. сноску 7
’ В таблице приняты обозначения: Н — не реализован, Р—реализован в данной программе. 9 Время счета указано для условий вычисления всех определяемых по данной программе элементов блочной матрицы податливостей (порядок каждого блока матрицы равен числу степеней свободы по таблице) на одной частоте возмущения применительно к ЭВМ организации-разработчика: а —для фрагмента фундамента, показанного иа рис. 3.11, д, при трех узлах возмущения (точках приложения силы) и семи узлах наблюдения (точках, в которых определяется податливость), б —для шести узлов возмущения и наблюдения пространственной рамы фундамента под турбоагрегат К-1200 Костромской ГРЭС (см. рис. 3.11, о), в — для расчета того же фундамента при 8 узлах возмущения и 24 узлах наблюдения. Для программы ВИБРАМ и МОД-1 над чертой указано время для машины ЕС 1030, под чертой — для ЕС 1060 9 В графе, названной условным термином «Возможное расхождение результатов» указано отклонение максимального значения амплитуды динамических
податливостей в диапазоне 2400—3400 об/мин, для расчетной схемы, показанной иа рнс. 3.11, а от совпавших значений, полученных по программе «Барс», «Внбрам» н «Мод-1» в условиях данных, приведенных в этой таблице. 4 Филиппов А. П., Шульженко Н. Г., Билетчеико В. П. Колебания рамных фундаментов мощных турбоагрегатов. — Строит, мех. и расчет соор., 1978, № I, с. 34—38. ’ Воробьев Ю. С., Шульженко Н. Г. Исследование колебаний систем элементов турбоагрегатов. — Киев: Нау-кова думка, 1978. — 136 с. 9 Фридман В. М., Привалова О. В. Метод расчета рамного фундамента паротурбоагрегата. Динамика энергосооруженнй/ВНИИГ им. Веденеева, 1975, вып. 4. с. 3—11. ’ Расчет колебаний рамных фундаментов под турбоагрегаты с учетом деформации сдвига и ннерцнн вращения поперечного сечения стержпей/Авторы: В. М. Фридман, А. М. Жуковский, О. В Привалова, Б. В. Цейтлин/—Изв. ВНИИГ им. Веденеева. — Сб. науч, трудов, 1983, т. 166. — с. 20—2).
ментных конструкций, описанных в литературе [8—11, 17—19].
В некоторых из этих алгоритмов и программ использовано большое количество добавочных приемов сокращения объема и времени счета, получивших развитие в последние годы в связи с прогрессом в области совершенствования метода конечных элементов и суперэлементов [14].
Первым приемом, позволяющим свести задачу динамического расчета фундаментной конструкции к последовательному решению систем уравнений сравнительно невысокого порядка, является идея разложения исходной механической системы на части, каждая из которых может быть рассчитана с применением системы уравнений невысокого порядка. Условие целесообразности такого разложения — возможность так разделить исходную механическую систему, чтобы между частями остался минимум связей. Иначе процедура последующего объединения частей механической системы может оказаться неудобной или слишком громоздкой.
Возможно иерархическое построение подсистем, при котором на каждой ступени разложения (иногда применяют термин «уровень разложения») сохраняется оптимальное для данной ЭВМ (для которой составляется программа) количество связей между подсистемами. При выборе в качестве подсистем наинизшей ступени простейших стандартных элементов, например, тех, которые перечислены выше, метод разложения смыкается с методом последовательного наращивания. Однако для фундаментных конструкций целесообразнее в качестве подсистем низшей ступени выбирать фрагменты, которые состоят из плоских поперечных рам с примыкающими к ним однопролетными продольными балками.
Приемы разложения на подсистемы, применение которых целесообразно в различных случаях, изложены в [12].
Ряд приемов использует чисто математические соображения о сокращении времени счета на ЭВМ систем уравнений с различными свойствами. Например, при использовании метода постепенного разложения можно, изменяя последовательность обхода узлов, получить разный характер заполнения матрицы коэффициентов систем уравнений. В большинстве случаев удается привести матрицу к форме ленточной, а целесообразно подбирая последовательность обхода узлов, можно добиться минимальной ширины ленты. Это в сочетании с использованием алгоритмов решения систем
уравнений, целесообразных для ленточных матриц коэффициентов, может дать большой выигрыш во времени счета.
В некоторых случаях удается учесть блочный характер матрицы коэффициентов, слабую заполненность матрицы жесткостей системы [8]—[И], [17]—[19] (при использовании суперэлементной схемы вычислений ее оптимизацию по числу арифметических операций можно выполнять на основании критерия минимума локального заполнения (Цейтлин [9]).
Применение приемов такого рода позволяет получить неменьший эффект, чем использование изложенных выше приемов, основанных на методах механики и инженерном опыте. Наибольший эффект удается получить на основе использования не одного, а нескольких из изложенных выше методов и приемов в их разумном сочетании.
В табл. 3.5 приведены данные о некоторых программах, позволяющие определить область их применения, точность, время счета, язык программирования и тип ЭВМ, для реализации которых они предназначены, а также сведения об их опубликовании.
Более подробно методы динамического расчета фундаментных конструкций, а также не приведенные в Справочнике приёмы их упрощения и повышения эффективности программ описаны в литературе [8—12, 14, 15, 17—20, 22—24, 30—34].
3. Взаимозаменяемость и стыковка расчетных программ. Программы расчета, описанные в п. 3.4, пп. 2 не взаимозаменяемы и не стыкуемы, так как имеют различную форму представления исходных данных и результатов расчета. Это затрудняет их применение для динамического расчета фундаментных конструкций и особенно для расчета системы турбоагрегат — фундамент — основание с учетом реальных динамических характеристик статорных элементов турбоагрегата и нижней фундаментной плиты на упругом основании.
Чтобы преодолеть это затруднение, разработаны технические условия на единую форму представления исходных данных н результатов расчетов на ЭВМ отдельных элементов системы турбоагрегат—фундамент—основание. В соответствии с этими техническими условиями исходные данные для расчета любого отдельного элемента системы представляются в строго определенной табличной (матричной) форме, одинаковой для всех элементов. И в этой же форме представляются результаты расчета этого элемента, являясь тем самым исход-
78
нъгми данными для следующего этапа расчета, который объединяет два и более элемента предыдущего уровня. Основные положения этих технических условий опубликованы (Глаговский, Рабкин, Шейнин [10]).
Для реализации расчета объединенной системы по данным об отдельных ее элементах разработана довольно универсальная программа стыковки (Глаговский, Рабкин [Ю]). В ее основу положена методика вычисления матрицы динамических податливостей для системы, если известны и представлены в определенной форме матрицы динамических податливостей ее частей и данные о связях, соединяющих эти части (места соединения и механические характеристики связей). Программа разработана на языке ФОРТРАН для ЕС ЭВМ.
4. О расчете фундаментов тихоходных
турбоагрегатов. Динамический расчет показанных на рнс. 3.4 и 3.5 фундаментов стенового и массивного типа для турбоагрегатов па 1500 об/мнн рекомендуется выполнять методом конечных элементов (МКЭ), поскольку он позволяет получить приемлемую для таких конструкций точность. Однако программ по МКЭ, специализированных для расчета таких конструкций, пока не создано.
Ряд рекомендаций по исследованию, учету при проектировании и прогнозированию динамических явлений в фундаментных конструкциях и элементах системы турбоагрегат—фундамент—основание приведен также в литературе [1—11; 13, 15— 35], а также в источниках, упомянутых в библиографических ссылках, приведенных в этих изданиях.
Р А 3 Д Е Л 4. ВИБРОИЗОЛИРОВАННЫЕ ФУНДАМЕНТЫ ТУРБОАГРЕГАТОВ
Г. Л. Кедрова, Б. Г. Коренев
В этом разделе основное внимание уделяется динамическому расчету вибронзо-лированного фундамента. Приводятся общие сведения о конструктивных формах виброизолированного фундамента, области его применения и некоторых его преимуществах. Излагаются данные о конструктивных формах виброизоляторов и демпферов и о расчете виброизолятора.
Материалы о расчете виброизолированного фундамента включают: 1) краткие сведения о расчете фундамента как гибкой многомассовой системы, который по своему содержанию является аналогом расчета не-виброизолированного фундамента; 2) расчет верхней плиты фундамента как гибкой балки на упругом основании и, соответственно, скручиваемого стержня на упругом основании.
4.1. Конструкция виброизолированного фундамента, область применения, преимущества и недостатки
Конструктивная форма виброизолированного фундамента отличается от формы обычных железобетонных рамных фундаментов (см. разд. 3 Справочника) тем, что верхняя плита, представляющая плоскую горизонтальную раму, отрезана от поддер
живающих ее колонн и опирается на них через вибронзоляторы, параллельно с которыми в ряде случаев устанавливаются демпферы.
Виброизолированные фундаменты применяются как прн турбоагрегатах, имеющих 3000 об/мин, так и в случае, когда частота вращения машины составляет 1500 об/мин. Поскольку применение виброизо-ляцин резко уменьшает передачу динамических нагрузок на грунт, практически сводя расчет нижней части фундамента к статическому, то, очевидно, что виброизолированные фундаменты должны применяться в тех случаях, когда необходимо снизить динамическое воздействие фундамента на грунт и примыкающие к нему конструкции [1].
При виброизолированном варианте фундамента нижнюю плиту нередко заменяют отдельными фундаментами под колонны или она имеет значительно меньшую толщину, чем при типовом рамном фундаменте, что облегчает производство работ при высоком уровне грунтовых вод, создает большую экономию средств. Благодаря устройству виброизолированного фундамента можно сравнительно легко производить его рихтовку— операцию по восстановлению расчетных проектных отметок в случае сравнительно больших и неравномерных осадок
79
колонн, что ’ позволяет рекомендовать устройство подобных фундаментов при сжимаемых и неоднородных по протяжению грунтах. Следует отметить, что большой вклад, даваемый осадкой пружин в перемещение верхней плиты, предопределяет снижение влияния неравномерных осадок грунта на ее прочность.
Расчетная схема виброизолированного фундамента позволяет провести достаточно четкие расчеты на сейсмические воздействия. Известную роль играет то обстоятельство, что обычно имеется значительный запас в коэффициенте эффективности виброизоляции из-за того, что частота собственных колебаний' виброизолированной части фундамента весьма низка (порядка 5 Гц), поэтому в. необходимых случаях легко повысить запас прочности в пружинах виброизоляции, увеличив их поперечное сечение.
Опыт проектирования виброизолирован-ных фундаментов показал, что в некоторых случаях сечения колонн значительно уменьшаются, общее количество колонн сокращается, а пространство, необходимое для размещения трубопроводов и других элементов технологического оборудования под агрегатом, увеличивается на 10—20 %.
Уменьшение динамических перемещений колонн и нижней плиты позволяет в отдельных случаях связать находящуюся ниже виброизоляторов часть фундамента с конструкциями здания электростанции. Примеры таких решений описывались в литературе, но вряд ли они могут иметь сколь-нибудь широкое распространение.
По литературным данным, являющимся весьма ориентировочными, для виброизоли-рованных фундаментов снижение объема железобетона в колоннах и нижней плите близко к 25 % при благоприятных грунтовых условиях и к 50 % в случаях, когда для фундаментов традиционного типа применяют свайные основания, дренаж и спуск воды. Имеются и другие преимущества эксплуатационного и монтажного характера.
В то же время известным недостатком варианта виброизолированного фундамента является необходимость повышения требований; к качеству строительно-монтажных работ, связанных с применением виброизоляторов. Расход арматуры верхней плиты виброизолированного фундамента увеличивается примерно на 20 %.
Должны соблюдаться некоторые другие требования, предъявляемые к виброизоли-рованному фундаменту. Так, следует предусмотреть достаточно развитые капители ко-. лонн для расположения на них виброизоля
торов; вокруг колонн или между ними — площадки обслуживания виброизоляторов и окна , для установки подъемно-транспортного оборудования (тельферов, монорельсов, лебедок) для доставки виброизоляторов. Вертикальная жесткость трубопроводов и других коммуникаций, идущих между турбоагрегатом и другими элементами энергоблока, должна быть не более 10 % жесткости соответствующих виброизоляторов.
4.2. Расположение виброизоляторов, их конструктивные формы, расчет пружинных виброизоляторов
В зависимости от способа расположения виброизоляторов на несущих конструкциях фундамента виброизолированный фундамент имеет разные конструктивные решения.
Пружинные виброизоляторы организованы в ряды (рис. 4.1). Особенностью фундамента являются дополнительные балки вдоль его длинных сторон, лежащие ниже расположенной на виброизоляторах верхней фундаментной плиты. Балки устанавливают в местах, где предполагается расположить виброизоляторы. Ширина между пружинными виброизоляторами в поперечном направлении значительна, поэтому применение этого способа ограничено высотой поперечных ребер жесткости, которые мешают прокладке трубопроводов [2].
Групповой способ расположения виброизоляторов (рис. 4.2) требует устройства капителей — увеличения сечений верхних частей колонн для обеспечения достаточной площади опоры виброизоляторов. Способ позволяет размещать пружины в местах концентрации нагрузок, проще осуществлять контроль за точностью установки пружинных виброизоляторов по высоте, улучшает условия монтажа трубопроводов. Групповое расположение виброизоляторов позволяет без нарушения общей работы узла заменить вышедшую из строя пружину [3].
Виброизоляцию верхней фундаментной плиты вместе с турбоустановкой осуществляют, как правило, в опорном варианте, прн котором виброизоляторы располагают непосредственно под конструктивными элементами верхней плиты, на которой укрепляют турбоагрегат. Второй вариант — подвесной, когда изолируемый турбоагрегат с верхней фундаментной плитой подвешивают на пружинных элементах, закрепленных выше подошвы фундаментной плиты, применяют довольно редко из-за сложности монтажа и
80
Рис. 4.1. Расположение виброизоляторов рядами на балках
Рис. 4.2. Расположение виброизоляторов на капителях колонн
необходимости иметь дополнительные регулирующие приспособления.
Пружина является основным несущим и упругим элементом виброизолятора. В некоторых случаях виброизолятор включает в себя регулировочное устройство и демпфирующий элемент. К виброизолятору фундамента турбоагрегата предъявляются следующие требования:
1) пружины должны обладать значительными несущей способностью и податливостью в вертикальном и горизонтальном направлениях для восприятия статических и динамических нагрузок от верхней плиты с турбоагрегатом и обеспечения низких по сравнению с частотой возмущающей силы турбоустановки основных частот собственных колебаний турбоагрегата с верхней фундаментной плитой;
2) расположение пружин в виброизоляторе должно быть таким, чтобы обеспечивался свободный доступ к любой из них с площадок обслуживания виброизоляторов и чтобы легко можно было заменить вышедшую из строя пружину;
3) регулировочные устройства должны сохранять неподвижное состояние верхней Фундаментной плиты во время монтажа машины, выравнивать высотное положение плиты при неравномерной осадке колонн Фундамента и в случае отличного от проектного распределения статической нагрузки на пружины;
4) виброизоляторы должны быть обеспечены замыкающими устройствами, используемыми при транспортировке виброизоляторов, монтаже турбоагрегата и при после-6—189
дующих капитальных ремонтах турбоагрегата.
В виброизоляторах находят применение цилиндрические винтовые пружины сжатия и тарельчатые элементы, причем предпочтение отдается первым по следующим причинам [4]:
1) динамические характеристики цилиндрических пружин, в частности значения вертикальной и горизонтальной жесткостей, легко могут быть определены расчетом, в отличие от определения горизонтальной жесткости тарельчатых элементов, характеристика которых нелинейна;
2) цилиндрические винтовые пружины обладают значительной податливостью в горизонтальной плоскости и независимостью упругих свойств в вертикальной плоскости от влияния коэффициента трения при скольжении;
3) тарельчатые пружины обладают малой податливостью в горизонтальном направлении, что требует размещения дополнительных пружин по периметру верхней фундаментной плиты, закрепляемых на вспомогательных конструкциях;
4) на податливость тарельчатых пружин в вертикальной плоскости влияет коэффициент трения при скольжении, поэтому для поддержания постоянной упругости элементов в вертикальном направлении необходима смазка.
Пружинные виброизоляторы в зависимости от регулировочного устройства разделяются на виброизоляторы с механизмом для ручного регулирования и виброизоляторы, где натяжение и регулирование пружинных элементов осуществляется гидравлической системой. На рис. 4.3 показан виброизолятор с тарельчатыми пружинами, с регулированием механическими средствами [5].
Максимальная нагрузка, до которой регулировочный гаечный ключ 1 может быть повернут вручную, без чрезмерного усилия, составляет 180 кН. Полная нагрузка, воспринимаемая виброизолятором — упругим элементом 2, достигает 280 кН. Запас надежности обеспечивает длительный срок службы пружин и некоторый резерв несущей способности для случая повреждения пружины во время эксплуатации турбоагрегата. Расстояние между нижней поверхностью плиты основания 3 и верхней частью опорной конструкции 4 равно 20 см. Гаечный ключ 1 завинчивает болт 5, снабженный на верхнем конце шестигранной головкой 6. Нижний конец болта 5 имеет шаровую поверхность 7, помещающуюся в выем-
81
Рис. 4.3. Пружинный виброизолятор, управляемый вручную
44-х тонный гидравлический домкрат
Нс‘622мм (8 свободном состоянии) Н=580мм (под нагрузкой)
Рис. 4.4. Пружинный виброизолятор с несущей способиостью 725 кН
ке 8 плиты 9, которая является частью упругого элемента 2. Тарельчатые пружины 10 надевают на трубу 11, которая заходит в отверстие 12 плиты 9. Детали упругого элемента могут взаимоперемещаться только в вертикальном направлении. Поворот регулировочного болта 5 вызывает постепенное увеличение напряжения пружинного элемента. Характеристика пружин известна заранее, так же как и ход болта. Нужное нагружение пружинного элемента определяют заранее,
На рис. 4.4 показан гидравлически управляемый виброизолятор, обладающий несущей способностью в 725 кН. Виброизолятор включает три концентрические цилиндрические пружины сжатия, каждая из которых составлена из трех входящих одна в другую винтовых пружин, которые имеют чередующиеся правый и левый углы навивки пружин. Упругий прогиб виброизолятора под действием нагрузки 725 кН составляет ~32 мм. Три наружные пружины выполнены из высокосортной стали с диаметром прутка 55 мм и предельной прочностью на растяжение в пределах 1240—1488 МН/м2. Основные собственные частоты турбоустановки в вертикальном и горизонтальном направлениях составляют 3 и 3,34 Гц.
Пружинные виброизоляторы для транспортировки слегка преднапрягают. На месте гидравлическими домкратами их сжимают до значения предварительного сжатия, превосходящего расчетное значение сжатия виброизолятора на 3,2—6,4 мм. Дополнительное преднапряжение компенсируется несколькими слоями металлических пластин толщиной от 3,2 до 6,4 мм, укладываемых сверху пружинных виброизоляторов. После строительства верхней фундаментной плиты и установки машины пружинные вибро-изоляторы дополнительно еще гидравлически сжимают для изъятия металлических пластин, а затем ослабляют болты каждого пружинного виброизолятора до приобретения им расчетного значения сжатия [3].
Другой вид гидравлически управляемого виброизолятора схематически показан на рис. 4.5. Регулирование нагружением пружин осуществляется гидравлическим домкратом. Неподвижное состояние опорной плиты во время монтажа турбоагрегата прн замкнутых пружинных элементах сохраняют с помощью опорных болтов. Несущая способность виброизоляторов варьируется в пределах 500—2000 кН. Жесткость всех пружинных вибронзоляторов планируют такой, чтобы основная собственная частота установки составляла не более 5 Гц [5].
Пружинные виброизоляторы с цилиндрическими винтовыми пружинами сжатия и замыкающими устройствами, выпускаемые фирмой GERB (ФРГ), показаны на рис. 4.6 (несущая способность виброизолятора 500 кН) и рис. 4.7 (несущая способность виброизолятора 1300кН). В обоих случаях прогиб при статической нагрузке ~30 мм, что соответствует собственной частоте системы с одной степенью свободы в 3 Гц [2].
Значительная податливость пружин необходима постольку, поскольку: 1) при ма-
82
Рис. 4.5. Гидравлически управляемый виброизолятор с нагрузкой 500—2000 кН
1 — гидравлический домкрат; 2 — опорная плита; 3 — опорный болт
Рис. 4.8. Пружинный виброизолятор с встроенным демпфером вязкого трения
Рис. 4.6. Пружинный виброизолятор с максимальной нагрузкой 500 кН
Рис. 4.10. Пружинный виброизолятор с демпфированием
Рис. 4.9. Пружинный виброизолятор с демпфирующим элементом
Рис. 4.7. Пружинный виброизолятор с максимальной нагрузкой 1300 кН
лых статических прогибах пружин весьма значительными оказываются прогибы верхней фундаментной плиты; 2) при малых статических прогибах пружин относительные перемещения колонн будут приводить к ьозникновению более резких изменений на-гРУзок, передаваемых на опоры и влияющих на упругие прогибы верхней плиты.
Пружинная виброизоляция гарантирует незначительное перераспределение нагрузок в системе. При собственной частоте вертикальных колебаний верхней плиты с турбоагрегатом в 3 Гц и относительной осадке опоры 5 мм, изменение нагрузки в данной точке составляет менее 15 %,
Виброизоляторы другого типа (рис. 4.8), выпускаемые фирмой GERB, содержат помимо цилиндрических винтовых пружин сжатия также демпферы вязкого трения. Виброизолятор имеет большую податливость как в вертикальном, так и в любом горизонтальном направлении. Собственные частоты системы на таких виброизоляторах при номинальной нагрузке составляют: в горизонтальном направлении ~0,5 Гц, в вертикальном 1,4 Гц. Несущая способность таких виброизоляторов может достигать 3,5 МН [6].
Пружинные виброизоляторы, представленные на рис. 4.9 и 4.10, содержат элементы, повышающие демпфирование в виброизоляторах. Применение этих элементов основано на характере деформирования винтовых пружин, при котором перемещение свободного конца пружины в направлении продольной оси сопровождается его поворотом вокруг оси [7]. Виброизолятор (рис. 4.9) включает две концентрически расположенные цилиндрические пружины
6*
83
1 и 2 разных углов подъема. Между металлическими дисками 3 и 5 расположена прокладка 4, выполненная из материала, обладающего значительным демпфированием. Вследствие поворота в противоположные стороны наружной и внутренней пружин и присоединенных к ним металлических частей в эластичной прокладке, приклеенной к металлическим пластинам, возникает внутреннее трение. Коэффициент демпфирования виброизолятора с эластичной прокладкой в 2,5 раза выше коэффициента демпфирования пружинного виброизолятора [8].
Пружинный виброизолятор с демпфированием (рис. 4.10) состоит из двух, последовательно расположенных одиночных цилиндрических пружин сжатия одинакового угла подъема 1 и 4, между которыми находится демпфирующий элемент. Основная часть демпфирующего элемента — кольцо 2 из- эластичного материала, обладающего большим внутренним трением, — расположена между двумя стальными дисками 5 и 8. Между выступами 6 и 7 дисков размещен одинарный упорный шариковый подшипник 3. При работе виброизолятора на сжатие с кручением пружины поворачивают в противоположные стороны прикрепленные к ним диски; эластичный элемент, расположенный между дисками и приклеенный к ним, работает на сдвиг, в результате чего в нем возникает внутреннее трение, отсутствующее в обычном пружинном виброизоляторе. В условиях прохождения через резонанс амплитуды колебаний объекта снижаются в 3—4 раза [9]. В эксплуатационном режиме турбоустановки пружинные виброизоляторы с демпфированием имеют два достоинства, которые отсутствуют у демпфиров вязкого трения: демпфирующие элементы, основанные на использовании внутреннего трения, дают невысокие диссипативные силы в виброизоляционном режиме, вследствие чего потери на диссипацию энергии отсутствуют; и практически они не снижают качества виброизоляции в эксплуатационном режиме, которое вследствие повышенных диссипативных сил ухудшается в системах с вязкими демпферами.
Наиболее часто в виброизоляторах применяют концентрические пружины сжатия [10]. Каждая из таких пружин содержит две-три пружины, поставленные соосно одна в другую, совместно воспринимающие нагрузку Р. Пружины, размещаемые одна в другой, подбирают последовательно то правого, то левого углов подъема.
Согласованную работу концентрических пружин определяют условиями:
а) одинаковой высотой пружин в предельно сжатом состоянии:
i'i dx = t*2 d2 = 4'3 d2i
где ij и dj (j=l, 2, 3)—число и диаметр рабочих витков обычной пружины;
б) одинаковыми напряжениями, возникающими вследствие кручения составляющих пружин
Т1 = т2 = т3 < [т], где [т] — допускаемое напряжение на кручение материала пружины;
в) одинаковыми индексами составляющих пружин
с = Dxfdx = D2/ d2 = D$! d2, где Dj — средние диаметры составляющих пружин.
Полная нагрузка Р, приходящаяся на одну концентрическую пружину, равна сумме нагрузок, воспринимаемых составляющими пружинами:
з р = 2 р>. i=i
где Pj определяют по формулам, применяемым для расчета обычных цилиндрических винтовых пружин круглого сечения:
ай[т]
P1 = -^oT(i='-2-где k — коэффициент, учитывающий повышение напряжений в точках сечения прутка, лежащих на поверхности цилиндра диаметром D—d.
Отсюда
р, t/Р, 4
Pi fiD; if/ ’
Для концентрической пружины, состоящей из двух составляющих пружин, при радиальном зазоре между пружинами бг= =0,5 (di—ds) справедливы соотношения:
Di = D2 + 2dx; PJP2 = / / 2 \*
/ \ I* /
откуда
// 2 \э ,
Рх = Р 1-— +1. / \ с /
Путь расчета концентрической пружины; а) определяют значения Р/ каждой из составляющих пружин в зависимости от полной нагрузки Р; по этим значениям подбирают параметры пружин по «Каталогу пружинных виброизоляторов и пружин для виброизоляторов» [11]или б) для одной из составляющих пружин определяют d и i при данном значении с, руководствуясь ГОСТ 13765—68; параметры другой пружины-" по отношению
di/d2 » Oj/D2 = 4’2/ = с l (с “* 2) •
84
. ... Эффективный способ увеличения несущей способности, пружин — это технологическое их заневоливание, заключающееся в выдерживании цилиндрических пружин сжатия в течение 12—48 ч в сжатом состоянии или в многократном обжатии (10— 15 раз) без выдержки под нагрузкой [12, 13[.
Ввиду того, что при заневоливании пружин напряжения превосходят предел пропорциональности, при их разгрузке размеры пружин меняются — шаг витков оказывается меньше, чем при навивке пружин. В результате в материале пружин возникают остаточные напряжения, которые в опасных зонах сечения витков (наружные поверхности сечения прутка) противоположны по направлению напряжениям от рабочей нагрузки. В связи с этим заневоленные пружины в эксплуатационных условиях оказываются менее напряженными, чем такие же -пружины, не подвергавшиеся пластическому деформированию, что ведет за собой повышение несущей способности пружин в пределах упругости.
Руководствуясь диаграммой сдвига (у, т) материала пружины, выбирают наибольший сдвиг ун, который практически целесообразно допустить в рассматриваемом случае при заневоливании. Тем самым устанавливают степень развития пластической зоны в сечениях витков.
Применяемый способ расчета заневолен-ных пружин сжатия включает прежде всего определение Рз — максимального осевого усилия пружины при данной степени зане-воливания, получаемого из значения момента, крутящего пруток.
Имеем:
Г nd3
T?5dV = -2D Ф)
где т — касательное напряжение в точках поперечного сечения прутка; Ф— интеграл, вычисляемый графическим способом и представляющий собой момент инерции относительно вертикальной оси т площади диаграммы сдвига: х=/(т)» ограниченной ординатой при *уи-и
Этот способ расчета заневоленных пружин, когда должна быть известна диаграмма сдвига материала, с помощью ряда предпосылок и условий заменяют более простым способом расчета обычных пружин, приводимым ниже [7, 14].
При расчете за неволенной цилиндрической пружины сжатия необходимо иметь следующие исходные данные и технические характеристики: а) средний диаметр пружины D; б) диаметр прутка пружины d;
в) число рабочих витков i; г) модуль упругости при кручении материала пружины G; д) предел текучести при сдвиге тт; е) касательное напряжение в пружине ти, соответствующее уя; ж) относительный сдвиг в момент максимального сжатия пружины уи=Тт/СР; з) относительный сдвиг, соответ, ствующий началу текучести ут; и) коэффициент заневоливания Р=ут/ув, обычно принимаемый 0=0,5.
Первыми тремя параметрами пружины задаются, остальные данные представляют собой результат экспериментального исследования на кручение материала, идущего на изготовление заневоленной пружины.
Заневоленную цилиндрическую пружину рассчитывают в такой последовательности. Определяют относительный сдвиг, соответствующий упругим деформациям пружины (после заневоливания зависимость т— у линейная):
? = th/G. (4.1)
Максимальное осевое усилие пружины при данной степени заневоливания (несущую способность пружины) вычисляют ilO формуле
P3 = nd3Tn/8D. (4.2)
Максимальную рабочую нагрузку, воспринимаемую пружиной, принимают Рц— =0,8 Р3 или
Р2 = ти/Ю D«nd3xT/8D. (4.3)
Деформация заневоленной пружины при максимальной рабочей нагрузке Р?
8P2D?
Г2=—^~- (4-4)
Оа*
Осадка, снимаемая при разневоливании пружины, или увеличение высоты пружины при ее разгрузке
&Р з шР2
(4.5)
Осадка пружины при заневоливании, необходимая для получения в сечениях витков сдвига ув:
F0 = (mDz/d)yH.
(4-6)
Высота пружины при максимальной деформации:
Я3 = (t'i — 0,5) d# (4.7)
где ii — полное число витков.
Высота пружины до заневоливания (свободная высота пружины — заготовки):
H0 = Ha + F0. (4.8)
85
Рис. 4.11. К расчету заневолеиной винтовой цилиндрической пружины сжатия
Высота пружины после заневоливания (высота ненагруженной готовой заневолен-ной пружины):
HaaB = H3 + F3. .(4-9)
Высота пружины при максимальной рабочей нагрузке:
H2 = HaaB-F2. (4.10)
Остаточная осадка пружины:
Лист — (JW'^?M)(Th — Т) — — Нзак—
= Fo- ?з-
(4.11)
На рис. 4.11 показаны заготовка пружины, пружина в процессе заневоливания, пружина после заневоливания в свободном состоянии и под нагрузкой Р2.
Жесткость пружины в вертикальном
направлении:
Р3 = Gd* “ F3 ~ F2 ~8D*i '
(4.12)
Жесткость в горизонтальном направлении пружины со свободными и защемленными концами при условии //Зан/^<6:
Увеличение несущей способности зане-воленных пружин по сравнению с обычными составит
nd3 тн nd3 тя
♦ = -------------
где Тз — максимальное допускаемое напряжение при кручении обычной пружины; k — коэффициент. зависящий от формы сечения, кривнзиы витка и других факторов.
При условии Тн = 1,29 тт, т3=тт (идет в запас прочности обычной пружины) для пружин с малым индексом: c=Dld=3—4 и коэффициентом k =1,4—1,55, соответствующим данному индексу, имеем ф=1,8—2 [15, 16],
Пружины в виброизоляторах, так же как и сами виброизоляторы, в целях экономии места при размещении их на несущих конструкциях фундамента должны обладать максимальным отношением несущей способности пружины (виброизолятора) к площади, занимаемой пружиной (виброизолятором). Для обычных, незаневоленных 0 пружин это отношение составляет опр = = 3,66 МН/м2, для виброизоляторов, включающих обычные пружины,— оВи =0,9— —1,2 МН/м2. При использовании заневолен-ных пружин сжатия имеем: Оцр=5,8—6,6 МН/м2; овн=1,6—2,1 МН/м2 [24].
4.3. Расчет виброизолированных фундаментов турбоагрегатов
Зарубежная практика расчета виброизолированного фундамента турбоагрегата предусматривает динамический расчет верхней фундаментной плиты, содержащий в себе следующие элементы [5, 6, 17]:
1) систему турбоагрегат — верхняя фундаментная плита на внброизоляторах рассматривают в виде мпогомассовой модели (рис. 4.12), получающейся в результате дискретизации системы по методу конечных элементов или методу сосредоточенных параметров. В точках пересечения продольных и поперечных балок сосредоточены массы системы, изображенные на рис. 4.12 кружками. Двойными кружками обозначены основные точки, соответствующие местам установки на плиту опор машины и корпуса генератора.
В общем случае упругие элементы — виброизоляторы должны обладать линейными и угловыми жесткостями по трем направлениям и демпфирующими характеристиками;
2) вычисление матриц жесткости, масс и демпфирования в соответствии с принятым способом дискретизации;
86
Рис. 4.12. Расчетная схема верхней плиты фундамента
Рнс. 4.13. Анализ собственных колебаний верхней плиты фундамента
3) составление системы линейных дифференциальных уравнений движения при известном воздействии внешних сосредоточенных и распределенных гармонических нагрузок, передаваемых от турбоагрегата:
в случае демпфирования, прямо пропорционального скорости движения
РИ] {и ) + [С] {и} + (KI {U} = {F (/)};
в случае демпфирования в виде внутреннего трения с использованием комплексных модулей упругости
[Л1] {и* ) -р [№*]{£/*} = {F* (/)},
где fzVf) — диагональная матрица масс; [С] — матрица демпфирования; [К] — матрица жесткости; {I/}, {l/}, (t/J
— искомые векторы ускорений. скоростей и перемещений отдельных масс си-^емы; t£(/)} —вектор внешнего воздействия, знак «*» обозначает комплексные величины;
4___-у2
т=(«+адк]; а=—_х_.
кнй-^’ б ~ логарифмический декремент колеба-
В случае сейсмического воздействия {F (/)}=_[A1] ($(/)), 7^ —вектор заданных акселерограмм;
S(n ° ({О}-определяющий вектор;
единая акселерограмма);
4) математическое решение системы дифференциальных уравнений с помощью: методов прямого численного интегрирования (методы Рунге — Кутта, Нюмарка и др.); методов, использующих разложение по формам собственных колебаний соответствующей однородной системы без демпфирования.
Последние методы аналогичны обычному методу, применяемому для исследования частот собственных колебаний многомассовых систем, где используют матрицу прогибов балок, частотный детерминант, составляют уравнение частот, определяют собственные числа и векторы.
Спектр частот собственных колебаний системы представлен на рис. 4.13. Там же показаны симметричная и антисимметричная формы колебаний высшего порядка.
Многомассовая система обладает большим количеством собственных частот и практически неизбежно, что некоторые значения этих частот будут лежать рядом с рабочей частотой вращения самой машины. Диапазон проверяемых частот колебаний устанавливают от —20 до +20 % рабочей частоты вращения (например, на рис. 4.13 от 2880 до 4320 об/мин при рабочей скорости 3600 мин-1). Проверкой устанавливают, какие из основных точек системы (точек, которые соответствуют местам установки на плиту опор машины и корпуса генератора) реагируют на частоты указанного диапазона. В случае, если собственные частоты балки в этих точках совпадают с частотами вынужденных колебаний в рассматриваемом диапазоне, то размеры этой балки должны быть изменены и следует провести повторный поверочный расчет.
Из спектра собственных частот (см. рис. 4.13) можно видеть, что преобладающее число частот системы расположено ниже частоты возмущающей силы -турбоагрегата.
Существующие в отечественной практике фундаментостроения турбоагрегатов методы динамического расчета виброизолированного фундамента [18—23] основаны на рассмотрении всего фундамента (верхней фундаментной плиты и стоек) как пространственной стержневой системы с распределенными параметрами, в которой балки связаны со стойками через упругие элементы— виброизоляторы. Часть стержней подвержена воздействию внешних поперечных сосредоточенных и распределенных гармонических нагрузок, передаваемых от валопровода турбоагрегата. Виброизоляторы моделируются упругими безынерционными эле-
87
ментами, обладающими тремя линейными и тремя поворотными комплексными коэффициентами жесткостей. Основание моделируется жесткими массами плиты на упругих в вертикальном направлении элементах.
Приводимая ниже методика расчета [20, 21] зарекомендовала себя на практике при проектировании многих виброизолиро-ванных фундаментов под турбоагрегаты. Согласно этой методике, систему условно разделяют плоскостью, перпендикулярной продольной оси турбоагрегата, на две подсистемы, которые в свою очередь разделяются на участки, состоящие из одной поперечной рамы с примыкающими к ней продольными балками, расположенными с одной стороны. Последовательно решают задачу о вынужденных колебаниях для каждого участка. Связь между участками устанавливают в виде рекуррентных зависимостей. Параметры деформированного состояния определяют при сопряжении обеих подсистем с использованием рекуррентных соотношений. Задача сводится к решению последовательности систем алгебраических уравнений, соответствующих каждому вы-деленнему участку, с накоплением информации о системе по рекуррентным зависимостям.
Расчетная схема наиболее общего, Z-ro участка подсистемы приведена на рис. 4.14. Его стержневые элементы испытывают поперечные колебания в двух направлениях, а также продольные и крутильные дефор
мации. Начало и конец стержней выбирают в узловых точках. Для каждого из стержней вводят свою систему координат — xin, yin, Zin-
Колебания балок и стоек описываются в рамках технической теории стержней дифференциальными уравнениями:
д* щп Pin in hn д2 Ujn
di£ pin I in <№
= pint eXP 04 0’
d* vin . Pjn pin ^in д2 vin _
d^n E in I in dt2
= P^in) exp (to*/);
яг о Z2 Л2 (4.15)
d2Wjn _ Pin ‘in d2 Win _
< tin dt2
= р«п.(^л)ехР(1Ч0;
d2 Gjn Pin lin Ipin
0£,п Gtnldin
020
X“^T= pM4(^n)exP(to*0-
Здесь i — номер участка; n — номер стержня в участке, _ безразмерная координата вдоль оси стержня: Ьin=zin/1in'. uin. v.*, w.*-соответственно перемещения по направлениям xi п’ ^in при изгибных н по направлению z^n при продольных колебаниях; в^п —угловые перемещения при крутильных колебаниях; Pin P^in^ ~ Функции, учитывающие внешнюю нагрузку; р^п —плотность материала элемента;
lin' Fin' Spin ~ длииа» площадь поперечного сечения, полярный момент инерции элемента; Ein in'' Gin ^din~ жесткость элемента при изгибе и кручении; Cfn, Kin — линейные и угловые жесткости виброизолятора, С^п — жесткость основания под стойками; т.п— массы, сосредоточенные в местах пересечения стержней (см. рис. 4.14) .
Геометрические условия сопряжения в узлах верхней фундаментной плиты записывают в виде равенств перемещений и углов на краях жесткосоединенных балок:
<=<= ’8*=’’JU'’-*-»’«
m^k). (4.16)
Те же условия в узлах основания записывают в виде равенств нулю перемещений и углов поворота стоек
9рс = 0; ф₽с = 0(р — х, г). (4.17)
Здесь q . , ф . — линейные и угловые пере-
ыещения краев балок в системе координат xyz, <7рс‘ 4>рс— т0 же’ для стоек: !*• т~ номера сопрягаемых балок; (s) — (0), (s) —(1)—индекс,
обозначающий начало и конец балки.
Динамические условия сопряжения за-сывают как равенства нулю сумм проек
83
ций сил и моментов на оси координат в системе xyz'.
в узлах верхней фундаментной плиты:
v0(s2 -4- Q -4- Q 4- Q =0;
’ ^рви ’ чри ~ хрв k
Qpwi 4- Qpc = 0'»
2М^р«+мр»+л,1»=о; k
MPm + Mpc = 0 (p = x, y, z);
(4.18)
в узлах основания
Qpc 4" Qph 4- Qpb — 0 (p — У) (4-19)
момен-
и
— внутренние силы и моменты в и моменты в силы н мэ-
МРви - снлы . Мрс — силы — инерционные в узлах; (?рв, нагрузки, пере-
(s) ,,(s)
Здесь MP^k
ты в балках; QpBH виброизоляторах; Qpc стойках: <?piI, Afp(J
менты от сосредоточенных масс AfpB — внешние сосредоточенные даваемые от турбоагрегата.
Условия (4.16)—(4.19) и уравнения (4.15) записаны в разных системах координат (на рис. 4.14 оси системы координат для геометрических и динамических условий изображены пунктирными линиями). Совместное их использование не требует приведе
ния координат х, у, z к координатам каждого стержневого элемента ввиду инвариантности условий (4.16)—(4.19) относительно данного преобразования.
Силы и моменты в стержнях рассматриваемого участка выражаются через перемещения и углы поворота их краев. Так, например, выражение для изгибающего момента в стержне исходя из (4.15) запишется следующим образом:
М"оп © = С" h © + © +
+ С" Ь © + фЦ" /4 ® + Л'© h ©>
(4.20)
где надстрочный индекс «и» обозначает нзгибные Деформации; N*n (£)—функция, учитывающая вид внешней нагрузки; fy (£) — сочетание тригонометрических и гиперболических функций.
Аналогичны зависимости для поперечных и продольных сил и крутящих моментов в стержнях.
Условия (4.16) — (4.19), помимо неизвестных силовых параметров типа (4.20) рассматриваемого i-ro участка, содержат параметры продольных балок (i—1)-го участка. Силы и моменты на концах продольных балок предыдущего участка представляют через функции, характеризующие Упругоинерционные свойства предшествующего участка ф|)“1\ и через параметры де
формации Фр? узлов рассматриваемого участка:
^Г1,(1) = 2(й,ИфГ1) +
+^,иф;г1)+й)пф!г1)+
4-ф1!,ифЙ-1)4-фЯ,иф!Г1)4-
+ф1;,кф/(г,,+ф!г,)
(4.21)
(ft, t= ь 2, ... , /).
Здесь h. t — номер продольной балки; I — число продольных балок участка;
(1) = (1); «Й,-1’ (I) = М“„ (1);
(О = % (О;
<" 0) = <& (О; =
= м^т-, /$-‘>(1) = <&.(!); надстрочные индексы «и», «п», «к» обозначают соответственно нзгибные, продольные н крутильные деформации.
Выражения для сил и моментов подставляют в уравнения динамического равновесия узлов, составленные из условий (4.18) — (4.19). Затем используют условия сопряжения элементов и после ряда преобразований получают систему уравнений:
для узлов с выходящей продольной балкой
22КЛ01+»/«<)=
р I
= 2S* +~ьн>< фй)+Nt- <4 -22> р
для узлов без продольной балки
22 («W 9%’ + W?)= »') <4-23) р I
где /=1, 2, ...» 6; р=х, у, z; /=1, 2. Т (Т —
суммарное число* верхних узлов рассматриваемого участка); Nj, Nj — коэффициенты, характеризующие внешнюю нагрузку; a jpi. ^jpl — ко'
эффициеиты, характеризующие упругоинерцион-иые свойства системы.
В системе уравнений, состоящей из совокупности зависимостей (4.22) и (4.23), для верхних узлов конструкции число неизвестных больше числа уравнений на число параметров деформаций концов продольных балок <7рр, Это используют для нахождения рекуррентных зависимостей между указанными параметрами для рассматриваемого участка решением общей системы уравнений для всех узлов. Уравнения связи между параметрами деформаций соседних узлов имеют вид:
22 +»;фй)+с;/;
Р i
(0) = у у (" А1) . ь” №(1) Ч . /' Фр/i JLi^j\apt^pt °pt^pt) cpt' р t
(4.24)
где ft, /—1. 2. t (/ — числе продольных балок
участка): коэффициенты apf,...,cpt зависят от (Л-1)
функций Ф// , введенных ранее.
Рекуррентные зависимости для функций определяют подстановкой соотношений для параметров деформаций концои продольных балок, которые соответствуют (.4.24), в выражения сил и моментов в крайних сечениях, примыкающих к следующему участку.
Каждую из двух выделенных частей системы рассматривают независимо при последовательном прохождении выделенных участков от краев к месту сопряжения. Используют условия сопряжения обеих частей и находят параметры деформации для узлов сопрягаемых участков. Для узлов других участков их находят по рекуррентным зависимостям (4.24) с использованием отдельных уравнений системы (4.22), (4.23). Амплитуды колебаний сечений отдельных стержней, значения внутренних усилий и моментов определяют по найденным геометрическим параметрам на краях элементов.
Изложенную методику применяют для оценки уровня вибрации и внутренних усилий в элементах верхней плиты фундамента турбоагрегата в каждом конкретном случае. По рассматриваемой методике разработана программа на языке ФОРТРАН для ЭВМ БЭСМ-6, которая рассчитана для фундаментов, имеющих до 10 участков.
По этой программе выполнены расчеты ряда виброизолированных фундаментов, в том числе фундамента под турбоагрегат марки Р-50-130-1, мощностью 50 МВт — первого в СССР виброизолированного фундамента, построенного в г. Кириши под Ленинградом.
На рис. 4.15 показаны амплитудно-частотные характеристики (АЧХ) точек одного йз пролета фундамента турбоагрегата мощностью 50 МВт. Кривые соответствуют: 1 — АЧХ верхнего конца стойки; 2 — АЧХ конца балки; 3—АЧХ середины балки. Сплошными линиями обозначены АЧХ виброизолированного фундамента, пунктирными — невиброизолированного.
. Из полученных результатов следует, что в рассматриваемом диапазоне частот амплитуды верхних концов стоек на порядок меньше амплитуд точек балок. Уровень динамических усилий, передаваемых на стойки виброизолированного фундамента, существенно меньше, чем невиброизолированного. Уровень вибрации верхней фундаментной плиты виброизолированного фундамен-
Рис. 4.15. АЧХ точек пролета фундамента под турбоагрегат Р-50-130-1 при вертикальном нагружении
та несколько меньше уровня вибрации невиброизолированного.
Для детальной и глубокой проработки различных вариантов виброзащитных устройств желательно иметь расчетные схемы, допускающие проведение сравнительно простых и менее трудоемких выкладок. Это связано с тем, что применение новых конструкций виброзащитных средств, особенно одновременное использование гасителей колебаний и демпферов, существенно повышает трудоемкость расчета, а оптимизация параметров требует проведения многократных динамических расчетов. Виброзащитные мероприятия в целом должны иметь универсальный характер, обеспечивая нормальную эксплуатацию фундамента как в рабочем, так и в переходных режимах.
. С инженерной точки зрения весьма удобной представляется расчетная схема фундамента в виде балки, лежащей на упругом основании. Балка условно заменяет систему перекрестных балок верхней плиты фундамента, виброизоляторы являются сплошным упругим основанием. Ограниченный динамический расчет только верхней части фундамента объясняется ничтожно малыми амплитудами колебаний частей фундамента, расположенных ниже виброизоляторов (стойки, нижняя плита).
Динамический расчет балки сводится к исследованию изгибных и крутильных колебаний. Сначала необходимо определить частоты и формы свободных изгибных колебаний балки. Коэффициент постели балки находят как полную жесткость вибро
90
изоляторов, отнесенную к ее длине. Для предварительных приближенных расчетов рассматривают балку постоянного сечения с равномерно распределенной по ее длине массой прн постоянном по длине коэффициенте постели.
Частоты и формы свободных колебаний определяют из рассмотрения дифференциального уравнения t-й формы свободных колебаний Xi(x), которое имеет вид
Е1 ^<'-уП^Хг + С1Хг==0> <4-25>
dx* ill
где EI — жесткость балки; т — погонная масса; Ct — квазиупругий коэффициент; Ci — (2si+s2)c z/lt (cg —жесткость виброизолятора; Si — число виб-роиэоляторов в пределах одного пролета крайней продольной балки; si — число виброизоляторов в пределах пролета средней продольной балки; Zi—длина пролета продольной балки); со. — частота свободных колебаний.
Обозначим
При свободных концах стержня для t-й формы колебаний получается выражение
Xi (х) = (сЪй1гх + COS ku х) X
X (sin ku I — sh ku I) -f- (sh ku * +
-f- sin ku x)(ch ku I — cos ku I) •
Здесь I — полная длина балки равная длине всей верхней части фундамента; для краткости обозначим
Частота собственных колебаний выражается формулой
(t = 1, 2, 3 ...),
(4.26)
где =4,7300; т2—7,8532; прн Г>2 — (2»+1)Л/2.
При t=l, 3, 5... форма колебаний симметричная; при 1=2, 4, 6... форма колебаний обратно симметричная. В таблице приведены значения ординат первых двух форм свободных колебаний.
При уточненных расчетах следует: принимать жесткость, балки, изменяющуюся по длине по ступенчатому закону; рассматривать действительный закон распределения масс по длине балки с учетом изменения массы турбоагрегата; принимать во внимание изменение коэффициента постели по Длине балки.
Для определения первых двух частот и Форм колебаний рекомендуется использо-вать- метод последовательных приближений.
Вынужденные колебания рассматрива
ют, полагая, что на балку действует нагрузка *7o+<7(x)sin <оЛ; функцию q(x) можно представить в виде ряда по формам собственных колебаний:
»(*)- 2 А
Z=1
где
4f^(x)X, (x)dx
А, =—------------------. (4.27)
Учитывая ортогональность форм свободных колебаний, получим выражение для упругой линии
у (х,/) = уг (х) sin со* t а0 sin со* t, (4.28)
где У! (х) =2 Bt Xi (х); z=i
Число do соответствует элементарному решению задачи о вертикальных колебаниях жесткого тела с массой, равной ml при значении квазиупругого коэффициента, равном С1/.
При изучении вынужденных колебаний верхней плиты фундамента важно выяснить степень ее искривления, характеризуемого функцией yt(x). Как это обычно получается при динамических расчетах строительных конструкций, наибольший интерес представляет вклад, даваемый формами, близкими к резонансным. Наиболее неблагоприятным случаем будет совпадение одной
Х/1 Xi(x) Х2(х) х]1 Х4(х) Х2(х)
0,000 4-1,64§2 —1,0000 0,275 —0,3110 0,6374
0,025 1.454? —0.8040 0.300 —0,4475 0.6620
0,050 1,2631 —0,6079 0,325 —0,5714 0.6569
0,075 1,0722 —0,4147 0.350 -0,6815 0,6245
0,100 1,8838 —0,2274 0.375 —0,7767 0,5652
0.125 0,6969 —0.0487 0,400 —0,8559 0,4830
0.150 0,5133 0,1175 0.425 —0.9184 . 0,3805
0,175 0,3342 0,2672 0,450 —0,9636 0,2627
0,200 0,1608 0,3972 0.475 —0,9909 0,1340
0,225 0,250 —0,0055 -0,1632 0,5037 0,5847 0,500 —1,0000 0.0000
из частот со,- с частотой вынужденных колебаний (О*.
Для значений частот свободных колебаний, отличающихся от частоты вынужденных колебаний менее чем на 20 %, при определении коэффициента В,- — необходимо учитывать внутреннее трение по формуле
91
где v — коэффициент внутреннего сопротивления виброизолированной конструкции.
Для уменьшения амплитуд колебаний балки в околорезонансной области в некоторых случаях вводят дополнительные сопротивления благодаря применению демпферов вязкого трения. В эксплуатационном режиме турбоагрегата влияние демпферов на коэффициент внутреннего сопротивления всей виброизолированной конструкции при определении динамических перемещений сравнительно невелико. Большой вклад в общий коэффициент демпфирования изгибаемой конструкции дает изгиб балки, обладающей большой жесткостью и значительным коэффициентом внутреннего сопротивления железобетона, а также деформирование пружинных виброизоляторов. Учет жесткости турбоагрегата дополнительно уменьшает вклад демпферов в коэффициент внутреннего сопротивления всей конструкции, поэтому основное значение демпферов состоит только в снижении уровня колебаний при переходе через резонанс и сокращении длительности колебаний, вызываемых коротким замыканием.
Вопрос о крутильных колебаниях верхней плиты виброизолированного фундамента имеет, меньшее практическое значение. Расчет производят в той же последовательности, что и при рассмотрении изгибных колебаний. При этом плиту, имеющую две продольные балки, рассматривают как стержень, лежащий на упругом основании. Крутильную жесткость стержня приближенно можно принять равной удвоенному произведению площади поперечного сечения крайней продольной балки на квадрат расстояния от оси этой балки до оси всей плиты, которое умножают на модуль сдвига железобетона. Квазиупругий коэффициент стержня находят как приходящуюся на единицу длины пролета балки сумму моментов второго порядка квазиупругих коэффициентов виброизоляторов относительно оси плиты.
Для определения частот и форм свободных крутильных колебаний, предполагая, что стержень имеет постоянное сечение, нужно рассмотреть дифференциальное уравнение
d2<p,-(x) 2
-4ф(И = 0( (4.30)
где Gio — крутильная жесткость; — момент инерцин поперечного сечения относительно оси • вращения; ф4- (х) — угол поворота сечения; с-2— коэффициент, который для задачи о стержне иа виброизоляторах равен: C2=sl cz — Рас-
стояние между продольными балками, остальные обозначения такие же, как на с. 91).
При свободных концах стержня имеем: оо v 1ПЛХ
<Р (*) = У At c°s —— ’
1=1
(« = 1, 2, 3, ...).
Далее получается, как и в случае изгибных. колебаний, решение в виде ряда по формам свободных колебаний стержня. При этом формулы для Bi сохраняются так же, как и замечание о необходимости учета демпфирования при частотах свободных колебаний, отличающихся менее чем на 20 % от частоты вынужденных колебаний.
Для уменьшения амплитуд колебаний в эксплуатационном режиме, имеющих частоты соответственно 50 или 25 Гц, целесообразно применять линейные динамические гасители колебаний. Эффективность гасителей в этом случае является следствием того, что частота вынужденных колебаний обладает высоким уровнем стабильности, поэтому в виброизолированных фундаментах можно применять ДГК без затухания; учет возможной небольшой нестабильности может быть проведен в соответствии с данными разд. 20 этого Справочника, при этом не исключена целесообразность использования многомассовых гасителей.
Поскольку амплитуды колебаний защищаемой конструкции весьма малы, то в данном случае можно принять массу гасителей —0,4—0,5 % приведенной массы плиты. Значение массы может быть уточнено при расчете исходя из допускаемых значений амплитуд гасителя и уровня нестабильности. При определении мест расположения гасителей следует исходить из того, какой вид имеет форма доминирующих колебаний. Например, если основной вклад принадлежит первой форме изгибных колебаний, то, как это следует из таблицы, гасители следует располагать вблизи от концов плиты и в ее середине; в четвертях пролета расположены зоны, примыкающие к узлам, и ставить здесь гасители нецелесообразно.
Расчет на прохождение через резонанс при пуске и остановке машины состоит обычно в определении максимальных амплитуд колебаний, возникающих при. значениях угловой скорости, близких к частоте собственных колебаний виброизолированной установки. Эти амплитуды, как правило, значительно выше, чем амплитуды при эксплуатационном режиме. Они увеличиваются
92
при уменьшении коэффициентов, характеризующих затухание в виброизоляторах, и при уменьшении значения углового ускорения ротора в случае совпадения частоты собственных колебаний и угловой скорости. Детальное рассмотрение вопроса об определении резонансных амплитуд можно найти в монографиях [25, 26], практический способ их вычисления изложен в [10].
В указанных монографиях специально не рассматривается вопрос о прохождении через резонанс применительно к расчету фундаментов под турбоагрегаты, однако приведенные в них результаты непосредственно могут быть использованы для этой цели. Графическое определение требуемого коэффициента демпфирования системы, приведенное на рис. 2.4 в работе [10], может быть применено при данном расчете.
При расчете фундаментов под турбоагрегаты следует иметь в виду, что так как угловая скорость при прохождении через резонанс обычно в 10—15 раз меньше эксплуатационной, то ускорения при прохождении через резонанс все же значительно ниже, чем в эксплуатационном режиме; кроме того, они имеют низкую частоту, которая значительно ниже частот изгибных колебаний элементов конструкции фундамента. В литературе, посвященной фундаментам под турбоагрегаты, обычно рассматривается применение демпферов вязкого трения (фирма «Герб»). Перечислим некоторые другие способы подавления пускового резонанса: 1) применение динамических гасителей; 2) использование ударных гасителей колебаний [27]; 3) устройство упругой вставки между демпфером и колеблющейся массой [28]; 4) применение демпферов сухого трения [29]. Использование этих способов может сочетаться с применением обычных демпферов.
При неравномерной статической осадке фундамента искривляется и поверхность его верхней плиты. Для того чтобы придать ей первоначальную форму, необходимо изменить высоту виброизоляторов, т. е. произвести рихтовку верхней плиты фундамента.
Рассмотрим сначала вопрос о возвращении оси фундамента горизонтального положения. Обозначим через Wi(x) ординаты Деформированной оси, отсчитываемые от горизонтальной проектной оси. Определим перемещения и(х), которые должны получить виброизоляторы. Если найденные по приведенным ниже формулам перемещения и(х) использовать при назначении высоты пружин, то после загружения конструкции массой турбоагрегата балка не будет иметь
статических искривлений и ее ось будет горизонтальной.
Рассмотрим верхнюю фундаментную плиту как балку с жесткостью EI, лежащую на упругом винклеровом основании с коэффициентом жесткости Ci, отнесенным к единице длины балки.
Дифференциальное уравнение изогнутой оси принимает вид
Е/щ]v + сх wt — ct и (4-31)
и, следовательно,
и = + (EI/cJ (4.32)
Для вычислений удобно представить второе слагаемое формулы (4.31) в виде ряда по собственным формам колебаний стержня со свободными концами.
Положим, что
®1W =5 Ai Xi (*>» 1=1
где Xi удовлетворяет уравнению
Eix]v — щи? Xi = 0
(4.33)
(4.34)
и граничным условиям балки со свободными краями.
Значения Л, определяют аналогично (4.27) в результате разложения в ряд функции о>|(х); функции Xi(x) даны на стр. 91. Будем иметь
и{х) = У BiXi(x). (4.35) 1=1
Воспользовавшись (4.31), получим
= Л*/(ти?4-С1)
и, следовательно:
сю
U (х) = (х) -Г 7 , —Н--------- xi (*) •
щи; + Cj
i=i
(4.36)
Для определения симметричной составляющей следует полагать 1=1, 3, 5; для обратно симметричной 1=2, 4, 6. Практически достаточно ограничиться сравнительно небольшим числом членов ряда, порядка 3—4.
В рассматриваемой задаче о виброизо-лированном фундаменте следует принять коэффициент с>= (2si+s2)cz/Zi, где с2 — жесткость виброизолятора; /1 — пролет продольной балки; S| — число виброизоляторов в пределах пролета крайней балки; s2 — число виброизоляторов в пределах пролета средней балки.
93
Если .продольные балки при неравномерной осадке фундамента перемещаются соответственно на Wi,i(x) и Wi,2(x), то для средней осадки имеем Wi (х) =[t0i,i (л) + 4-W1.2 (х)]/2. В дальнейшем используем формулы, полученные выше.
Для корректировки углов поворота отдельных точек плиты относительно ее продольной оси следует воспользоваться решением задачи о кручении стержня на упругом основании. Обозначим
Ф! (х) = (Ш1Д (х) — Wi ,2 (х))/Ьц где Ь, — расстояние между продольными балками.
Найдем угол 0( (х), на который должно быть повернуто при рихтовке сечение верхней плиты.
Имеем
G/q Ф1 ~Ь с2 Ф1 —с2®1’ (4.37)
где C9=S] с? ti/2Zj: Gl0 — крутильная жесткость плиты, которая может быть определена обычным образом из статического расчета.
Из (4.37) следует
0х (х) = ф (х) + (х). (4.38)
Второе слагаемое выражения" (4.37) можно представить в виде, аналогичном (4.36), разложив функцию ф1(х) в ряд Фурье.
РАЗД ЕЛ 5. РАСЧЕТ КОНСТРУКЦИЙ ЗАГЛУБЛЕННЫХ СООРУЖЕНИИ НА ДЕЙСТВИЕ ВЗРЫВНЫХ ВОЛН
В. И. Жарницкий, Н. Н. Попов, Б. С. Расторгуев
В Справочниках [3,8] рассмотрен комплекс вопросов, связанных с расчетом сооружений и их элементов на действие взрывных нагрузок большой интенсивности: даны параметры воздушных ударных волн и волн, возникающих в грунте; изложены принципы взаимодействия волн с конструкциями, сформулированы предельные состояния и приведены способы их нормирования; рассмотрены методы расчета наиболее распространенных в практике строительства железобетонных конструкций на взрывные нагрузки в упругой и пластической стадиях, основанные на использовании обобщенных диаграмм сопротивления конструкций, армированных преимущественно мягкими сталями (диаграмма Прандтля).
. В этом разделе приводятся данные о взрывных нагрузках на сооружения, расположенные в грунте, а также излагается метод расчета железобетонных конструкций на взрывные нагрузки, основанный на использовании действительных диаграмм ст—в арматуры и бетона. Приводятся графики для расчета изгибаемых и внецентренносжа-тых элементов прямоугольного сечения, колец, расположенных в грунте. Содержатся решения, демонстрирующие использование численных методов в расчетах конструкции на взрывные нагрузки.
5.1. Действие взрывных волн
При воздушном и наземном взрывах в воздухе распространяется воздушная ударная волна. Параметры на фронте этой волны (давление, плотность, температура и др.) возрастают скачком. Воздушная ударная волна вызывает разрушение н повреждение наземных сооружений на больших площадях. Эта волна взаимодействует с сооружениями или их элементами, расположенными выше или на уровне поверхности земли, оказывая на них давление, затекает в каналы входов и воздухозаборов, а также в помещения через неплотности. Параметры воздушной ударной волны определяются в соответствии с [3, 8].
При взрывах в грунте возникают сложные волновые процессы. Грунт приходит в движение, вовлекая в него заглубленное сооружение и давя на ограждающие конструкции.
Действие волн в грунте. Параметры волн в грунте зависят от различных факторов: расположения центра взрыва относительно поверхности земли (наземный, подземный), сейсмогеологических условий района строительства, физико-механических характеристик грунта, расстояния до центра заряда и его мощности.
91
Рис. 8.2. Схема распространения падающей волны в мягком грунте (в координатах z,.t) а —схема нагружения стержня; б — случай неводонасыщенного грунта; в — случай водонасыщенного грунта
Методы определения параметров волны основываются на следующих предпосылках:
I) реальные гидрогеологические условия района строительства принимают одинаковыми по всему району;
2) в грунтовой среде выделяется однородный стержень из упругопластического материала, расположенный нормально к фронту волны, при отсутствии в нем поперечных деформаций [2, 5];
3) фактический закон деформирования грунта заменяют идеализированной диаграммой о—е, не зависящей от скорости деформирования (рис. 5.1).
Условия равновесия элементарного участка столба приводят к дифференциальному уравнению в частных производных гиперболического типа:
d2w(z, t) д2 w (z, t)
дГ2 = 0,2 dz?
(5.1)
где да — продольное смещение поперечного сечения стержня; г — координата сечения: f—время; а(о) — скорость распростраиення деформаций, принимаемая по (5.3).
Уравнение (5.1) решают методом характеристик [1.5], в результате которого находят уравнения характеристик в плоскостях z, t и с, v (v = dw/dt— скорость частиц).
Каждой характеристике положительного направления
г — a(o)t = const (5.2) в плоскости z, t соответствует определенное значение напряжения or=const (а также деформации е=const), которое распространяется с определенной скоростью:
а (о) = (ог)/р , (5.3)
где H(<7)=.do/de — касательный модуль на кривой О—е; р — плотность грунта.
В случае полубесконечного стержня из материала с билинейной диаграммой <у—е (рис. 5.1, а), к концу которого приложена нагрузка, достигающая мгновенно максимального значения amax(0), (ae<amax(0)^ <Опл), а затем линейно убывающая, в нем имеются две зоны деформации (рис. 5.2,а): в зоне упругопластических деформаций (0<z<zs) происходит затухание максимальных напряжений Отах (z)>aa (что связано с необратимыми затратами энергии на пластическое деформирование):
gmax (2) __ ।__ 1 2 Г ।___/ Gi \2
^тах (0) 2 О16 L \ °о / .
(5.4)
где On — скорость распространения упругих деформаций; о, — скорость распространения упругопластических деформаций;
в зоне упругих деформаций (z^zs) максимальные напряжения не изменяются: O’max (z) = Отах (zs) = Const = (Ts-
В координатах z, t определяют изменение давления во времени на заданной глубине о (z=const, /) и распределение давления (по глубине) в заданный момент времени a (z, /—const).
В плоскости z, t (рис. 5.2, б) можно выделить три характерные области: 1) характеризуемую отсутствием напряжений и деформаций; 2) нагружения, характеризуемые нарастанием напряжений от нуля до максимального значения (теоретически здесь o(z,/)=as); 3) разгрузки, характеризуемые спадом напряжений.
Граница между областями 1 и 2 характеризует положение фронта волны и является прямой z=aot. Граница между областями 2 и 3 соответствует распространению максимальных напряжений и совпадает с волной разгрузки. В зоне упругопластических деформаций (z<zs) волне разгрузки в плоскости z, t соответствует кривая.
В инженерных расчетах можно использовать приближенный метод, основанный на следующих допущениях:
рассматривают в плоскости z, t характеристики только положительного направ
ления (5.2)’; вдоль этих характеристик о— =const в области нагружения и разгру-жения;
в плоскости z, t волне разгрузки соответствует характеристика, вдоль которой распространяется напряжение огаах;
в зоне упругопластических деформаций учитывают затухание максимальных напряжений Omax(z) по (5.4);
время разгружения принимают не зависящим от глубины, т. е. 0(z) =0(0) = const.
На рис. 5.2 представлены случаи распространения волны в стержне, построенные в плоскости z, t для различных диаграмм а—е.
Изложенным методом определяют параметры падающей волны сжатия в грунте, возникающей в результате действия на поверхность воздушной ударной волны (рис. 5.3).
В водонасыщенном грунте (рис. 5.!,б), а также в неводонасыщенном (рис. 5.1, а), но при Omax(z) ><Упл распространяется ударная волна (рис. 5.2, в), давление на фронте которой скачком достигнет максимального значения. При достижении волной сжатия подстилающего скального основания
возникает отраженная волна сжатия, и на
пряжение возрастает на величину
Потр = & (2р)(^отр — D cos? Р, (5.5) где o(Zp) — напряжение в падающей волне сжатия на глубине границы раздела сред z^; Р-угол между направлением движения падающей волны н нормалью к границе раздела (₽— (л/2)— ai; ai-arcsin (ai/Пф)].
Коэффициент отражения [4]:
_ аиРп
«ОТО ~ г
ап Рп + ai Pi
(5.6)
где с j Pj—акустическая жесткость мягкого грунта; ад Рд — то же, скального грунта.
Напряжения в отраженной волне сжатия распространяются снизу вверх (со скоростью а0 в зоне 2 и в зоне /). При взаимодействии отраженной волны сжатия со свободной поверхностью возникает волна разрежения (аирц=0 и аразр=—Оотр), на-
Рис. 5'.3. Схема распространения падающей волны сжатия в мягком неводонасыщеииом грунте (в координатах z, R; Рф>ао)
96
I --------Отраженная Ьол на.
--------Ьолна разрежения
Рис, 5.4. Схема распространения волны в грунте при отражении от границы раздела сред и свободной поверхности (в координатах г, Я)
Рис. 5.5. Схема распространения волны при отражении от границы раздела сред и свободной поверхности (в координатах z, t)
Рис. 5.6. Схемы взаимодействия волны в грунте с преградой а —0=0; б —0-Л/2; в — О<0<Л/2
пряжения в которой распространяются вниз со скоростью разгрузки.
В результате сложения отраженной от скалы волны сжатия и волны разрежения, отраженной от свободной поверхности, возникают дополнительные напряжения, которые будут складываться с напряжениями падающей волны во времени. Этот процесс представлен в координатах z, R на рис. 5.4 и в координатах z, t на рис. 5.5, где GoTp.maxf^J = OoTP.tnaxfZp^ = const, Т. е. 33-тухание максимального давления отражения на глубине не рассматривается.
Взаимодействие волны в грунте с преградой. В случае взаимодействия волны в грунте с нормально расположенной преградой (рис. 5.6, а) давление на преграду, равное сумме давлений от падающей и отраженной от нее волны, составляет:
в случае неподвижной преграды
9пр = ^отр °пад = 2оПад • (5 • 7)
в случае податливой преграды
_/ арЩтр V _
чпр — I котр I опад —
\ апад /
°РипР \ /ц о\
— 1стпад« (5-о)
\ апад /
В формулах (5.7) и (5.8):. о паД — максимальная амплитуда напряжений в волче, падающей на преграду (без учета взаимодействия с преградой): и пр — скорость смещения преграды в момент действия на нее напряжений опад <“пр можно определить согласно разд. 7 этого Справочника).
В случае взаимодействия волны с преградой, расположенной параллельно направлению движения фронта (см. рис. 5.6), преграда препятствует поперечным деформациям грунта и давление на нее определяется:
9пр — стпад» (5 • 9)
где k q — коэффициент бокового давления [3].
В случае падения волны на преграду под углом Р (рис. 5.6, в) давление находят по формулам [6]:
для неподвижной преграды
<?пр = апад (2 cos2 р + k6 sin2 р); (5.10) для податливой преграды
<7пр = апад (2--------— пр- ) х
.\ стпад /
X cos2 Р 4- Аб sin2 р .
(5.11)
5.2. Динамические нагрузки на элементы конструкций
Интенсивность давления на элемент сооружения, вызванного действием взрывной
96
волны в воздухе или в грунте, является функцией времени t и координаты рассматриваемой точки х, т. е. q=f(x, t). В большинстве случаев для прямолинейных (плоских) элементов в пределах их размеров динамическую нагрузку принимают равномерно распределенной, равной q(t). Однако иногда необходимо учитывать набегание нагрузки на конструкцию или неравномерный характер распределения давления. Зависимости q(t), имеющие сложный характер, обычно упрощают и сводят к одному из законов, представленных на рис. 5.7.
Далее рассмотрим динамические нагрузки на ограждающие конструкции заглубленного прямоугольного сооружения (рис. 5.8).
Нагрузки на покрытие, а) В случае отдельно стоящего сооружения при толщине обсыпки ftoced м на покрытие действует давление проходящей воздушной ударной волны, изменяющееся во времени согласно рис. 5.7, а, максимальное давление ^тах= =Дрф.
б) В случае встроенного сооружения при толщине обсыпки ftoced м на покрытие действует динамическая нагрузка, изменяющаяся во времени по рис. 5.7, б. Максимальная нагрузка (?max=Ap<j>- Время нарастания давления до максимального значения 01 связано с прохождением воздушной ударной волны через наземное сооружение, сопровождающимся разрушением его конструкций. Некоторые рекомендации по назначению 01 содержатся в [6] .
в) При толщине обсыпки ft0oc > 1 м следует рассматривать действие на покрытие падающей волны сжатия в грунте с учетом его упругопластических свойств. В результате давление от падающей волны будет
<7пад(0 = а (ЛЛобс)(соз2 р + k6 sin2 Р). (5.12) Кроме того, возникает дополнительное давление отражения
<7отр (/) = о (t, fto6c) cos2 р. (5.13)
Образовавшаяся отраженная волна, достигнув свободной поверхности, отразится от нее в виде волны разрежения. Указанные воздействия суммируют во времени. На рис. 5.9 представлена схема определения нагрузки в координатах z, t.
Нагрузка на наружные стены, а) На полностью заглубленные в неводонасыщеи-ный грунт стены основное действие оказывает падающая волна сжатия в грунте. График изменения давления во времени представлен на рис. 5.7,6. Время нарастания давления 0i=Ti и максимальное .давление <?тах по формуле (5.10)- вычисляют в
a)
Рис. 5.7. Законы изменения динамической нагрузки во времени
а — нагрузка, мгновенно достигая максимального значения, уменьшается по линейному закону: б — нагрузка возрастает н уменьшается по линейным законам; в — нагрузка, мгновенно достигая максимального значения, уменьшается по билинейному закону
Рис. 5.8. Схема нагрузок на заглубленное сооружение
а—граница-раздела сред расположена ниже подошвы фундамента; б— уровень грунтовых вод выше подошвы фундамента
точке, соответствующей середине высоты этажа, и принимают постоянными по высоте конструкции. Наибольшее давление дей
ствует на фронтальную стену. Если в пределах высоты сооружения или вблизи его подошвы расположена граница раздела сред, акустическая жесткость аор которых отличается более чем в 1,5 раза, то рекомендуется на участках стен, расположенных выше указанной границы раздела, рассматривать действие отраженной от этой границы волны сжатия с учетом волны разряжения, отраженной от свободной поверхности. Дополнительную нагрузку при этом определяют по формуле (5.10) и накладывают на нагрузку от волны сжатия с учетом построения волновой картины в координатах z, t. Влияние отражения от слоя водонасыщенного грунта учитывают, согласно [7], увеличением максимальной нагрузки на стены выше уровня грунтовых вод в 1,2 раза.
б) На участки стен, расположенных в водонасыщенном грунте, действует ударная
Рнс. 5.9. Схема определения нагрузки на покрыта® при толщине обсыпки
f — распространение волны (в координатах z, t); ° — суммирование давлений от падающей волны сжатия 1, женной сжатия 2, Разрежения, Раженной свободно^
верхности, 3
отра-волны волны > от-от по-
волна (см. рис. 5.7, а); максимальное давление <7тах = Дрф-
в) На стены, отделяющие помещения убежищ от помещений подвалов, которые не защищены от действия воздушной ударной волны, действует динамическая нагрузка, представленная на графике рис. 5.7,6. Максимальное давление дтах=Арф, а время нарастания давления до этого значения должно назначаться с учетом затекания воздушной ударной волны в подвальные помещения, сопровождающегося разрушением (повреждением) конструкций подвала.
Нагрузка на фундаменты. На подошву фундамента действует давление (отпор) грунта, возникающее при перемещении сооружения, вызванного действием на покрытие воздушной ударной волны. Нагрузка на подошву фундамента изменяется во времени по закону, представленному на рис, 5.7, б.
Максимальное давление:
<7тах — (Fпон/Fфун) Арф» (5-14) где ^цок^фун отношение площади покрытия сооружения к площади подэшвы его фундаментов. Для сооружений, имеющих сплошную фундаментную плиту, ^цок^фун “*•
Время нарастания давления до максимального значения
ч = -^1п(1+^£®_), <5.15, 01 р \ тс ]
где' — масса сооружения, приходящаяся на единицу площади фундамента; at — скорость уп-ругопластнческих деформаций в грунте на уровне подошвы.
Если вблизи подошвы расположена граница раздела сред, акустическая жесткость ар которых отличается более чем в 1,5 раза, то рекомендуется учитывать дополнительную нагрузку от волны, отраженной от этой границы, с учетом волны разрежения, отраженной от свободной поверхности. Указанную дополнительную нагрузку в этом случае определяют по формулам (5.5) и (5.10) и накладывают на нагрузку отпора с учетом построения волновой картины в координатах z, t. В работе [8] действие отраженной волны рекомендуется учитывать в случае, если расстояние от низа сплошной фундаментной плиты до скалы меньше величины заглубления сооружения, определяя нагрузку умножением Дрф на коэффициент 1,2.
5.3. Общие положения по расчету конструкции
Расчет конструкций основан на следующих основных положениях: рассматривают одноразовое воздействие динамической на
грузки; несущую способность рассчитывают по первой группе предельных состояний — по отсутствию разрушения или по отсутствию пластических деформаций в арматуре [3]; учитывают влияние скорости деформирования на диаграммы о—е материалов; при этом с увеличением скорости расчетные сопротивления увеличиваются.
Диаграммы о—е арматуры и бетона. Характер фактических и расчетных диаграмм о—е арматуры различных классов и бетона представлен на рис. 5.10 и 5.11. Методы определения расчетных динамических сопротивлений арматуры и бетона приведены в [3]. Приближенно можно принять, что характер диаграмм о—е и значения предельных деформаций не зависят от скорости деформирования. В качестве расчетных могут применяться не только диаграммы о—е, изображенные на рис. 5.10 и 5.11, но и другие зависимости, достаточно хорошо аппроксимирующие фактические кривые.
Методы расчета. Методы решения рассматриваемых динамических задач могут быть описаны схемой, представленной на рис. 5.12.
В блоке А содержатся дифференциальные уравнения колебаний конструкций, которые в общем виде являются нелинейными и включают усилия и перемещения. Так, нзгибные колебания балки как системы с бесконечным числом степеней свободы описываются уравнением
д27И(х, t) d2w(x, f)
—м—+т---------------ж— = Р{Х- 0
(S.t6)
(здесь и далее p=bq, где b — ширина).
В блоке А определяют перемещения w(x, t) конструкции. Эти перемещения связаны с деформациями условиями неразрывности, входящими в блок Б. Так, уравнению (5.16) соответствует условие
д2 w (х, t)
*(*,/) = - Л * (5Л7>
дхг.
где х(х, О — кривизна.
В блоке Б определяют деформации. Система уравнений становится замкнутой, если добавить зависимость между усилиями и деформациями, входящими в блок В и выражающими сопротивление конструкции. В случае упругопластического изгиба эта зависимость в общем виде будет
А4 = /(х). (5.18)
Применяют различные методы определения зависимостей блока В. Эти зависимости могут быть заданы (например, полу-
109
«гены экспериментально) или вычислены теоретически на основе действительных диаграмм и—е арматуры и бетона.
С помощью различных методов дифференциальные уравнения в частных производных (блок А) приводят к системе неоднородных обыкновенных дифференциальных уравнений второго порядка. Эти уравнения описывают колебания конструкции как системы с конечным числом степеней свободы. В инженерных расчетах наиболее широко используют систему с одной степенью свободы.
Рис. 5.10. Фактические и расчетные диаграммы о—е арматуры
а —классов А-I, А-П, А-П1 (фактические); 6, в —классов А-I, А-П, A-III (расчетные); г — классов A-IV, A-V, A-VI (фактические); д, е — классов A-IV, A-V, A-V1 (расчетные)
диаграммы а—в бетона
Практические методы расчета дают возможность определить параметры конструкции, обеспечивающие достижение расчетного предельного состояния (характеризуемого рассматриваемыми ниже критериями) в момент остановки конструкции.
Критерии предельного состояния по несущей способности. В качестве критериев, характеризующих достижение расчетного предельного состояния, могут быть использованы различные величины. В общем виде любой критерий k может быть представлен в виде
^шах < ^пред» (5.19)
т. е. его максимальное значение не должно превышать предельного.
К критериям предельного состояния предъявляется ряд требований: соответствие применяемым методам расчета; возможность их использования при различных напряженных состояниях (например, в случае изгиба и внецентренного сжатия); возможность определения значений критериев экспериментально; необходимость обеспечения достоверности результатов расчетов и обеспечения резервов несущей способности (де-формативности) конструкций и др. В качестве указанных критериев можно использовать деформации арматуры и бетона.
Для предельного состояния по отсутствию пластических деформаций в арматуре в качестве критерия в (5.19) принимают деформацию в растянутой арматуре: £Шах= ^Еа.тах", ^пред= ,ГДе 6^^ =0,8(/?а/£а)— для арматуры с условным пределом текучести; ба0)=/?а£а для арматуры с физическим пределом текучести [3].
Для предельного состояния по отсутствию разрушения критерий (5.19) записывается в виде
Рис, 8,12, Блок-схема решения задачи
101
®6,max < еб,пред> Ea,max < ®а,пред> где еб lnax. еа тах — наибольшие деформации в бетоне сжатой’ зоны и в растянутой арматуре; еб.пред* * еа,преД -предельные значения соответствующих деформаций.
Значения предельных деформаций бетона можно принимать ев.Пред=2,5-10~3; если в расчете изгибаемых конструкций учитывается нисходящая ветвь диаграммы, то вв.првд=3,5-IO-3. Предельная деформация арматуры равна общему относительному удлинению арматуры при разрыве, умноженному на коэффициент 0,6. В качестве критерия в (5.19) можно использовать деформации сечения (кривизна, продольная деформация), а также перемещения конструкции.
Прн применении методов расчета, основанных на использовании идеальной упругопластической диаграммы деформаций, в качестве критерия в (5.19) принимают углы раскрытия в шарнирах пластичности [3, 8] и др.
5.4. Расчет внецентренно сжатых балочных конструкций на основе диаграммы о—е арматуры и бетона
Общие уравнения. Блок-схема, представленная на рис. 5.12, включает следующие уравнения, образующие систему.
Дифференциальные уравнения поперечных колебаний конструкции, загруженной согласно рис. 5.13, как системы с бесконечным числом степеней свободы (блок Д):
d2M(x,f) _ д
Эх? дх
tdw(x.t)
N(x,t)-+
Jx
d2w (х? f) + т-----= p(x,t); (5.20)
Ot“
dN (x,t) d2v(x,i)
—s-=°- <5-2”
Здесь w — поперечные перемещения; v — продольные перемещения; m — погонная масса балки.
Дифференциальные уравнения деформаций (блок Б):
поперечных
. v d2tt>(x,0
ХсМ=~,- ; (5.22)
дх2
продольных
®с СМ) =
до(х,0 дх
(5.23)
Зависимости, выражающие сопротивление конструкции (блок В):
М (х) = ft [хс (х); ес(х)]; (5.24) N (х) = /г1хс(*); ес(х)]. (5.25)
Рис. 5.13. Схема нагрузок на стержень
В выражениях (5.20—5.25) М. N—момент и продольная сила в сечении; хс и ес — кривизна и продольная деформация сечения.
Должны быть заданы четыре начальных условия (в момент времени 1=0) и шесть условий на концах стержней (х=(\ х=I, I — пролет). л:
Решение системы (5.20)—(5.25) можно выполнить методом прямых решения дифференциальных уравнений в частных производных [1].
На отрезке (0, I) берутся точки x,=is (1=0, 1, 2,..., п—1, п) и проводятся прямые х=х,-. Предполагается существование достаточно гладких решений: w(x, t), v(x, t), M (x, t) к N (x, t) и принимается в (5.20) — (5.25) х=х,, производные по х заменяются приближенными разностными формулами.
Центральные разностные формулы второго порядка аппроксимации позволяют получить в точках (i=l, 2,..., п—1) вместо системы (5.20), (5.21) систему обыкновенных нелинейных дифференциальных уравнений второго порядка:
3?
__ A^t+i (0—^-1 (0 (t) — a/f-1 (0 2s 2s +
+ A'i (0--------------------------- +
S“
-j-mwi (t) = pt (0; (5.26)
Wi+i(0 — Ni-i(0 , --------—--------4- mvt (0 = 0. (5.27)
Вместо системы (5.22) и (5.23) получается система алгебраических уравнений:
(0 — ^1 (0 + Wi-i (0 .
*c.i (0 =-------------.
(5.28)
= . (5.29)
В точках i=0, п целесообразно применять односторонние разностные формулы второго порядка точности. В этом случае вся система также' будет иметь второй порядок точности (уравнения в точках i=0, п
102
Рве. 5.14. Схема поперечного сечения балки
здесь не записаны). С помощью приведенного решения задача сводится к системе с несколькими степенями свободы.
Зависимости (5.24) и (5.25) принимают вид:
= fi (^c,i» (5.30)
A'i = fz («ел"» eC)i). (5.31)
Метод определения зависимостей (5.30), (5.31) через диаграммы о—е арматуры и бетона. Диаграммы о—8 материалов могут быть представлены в аналитической форме, учитывающей различные факторы: влияние скорости деформирования, работу растянутого бетона, знакопеременное деформирование в процессе нагружения и др.
На элементарных приращениях деформаций сечения бхс, 6ес и усилий 6М и 6W в сечении зависимости между напряжениями и деформациями на диаграмме а—8 могут быть приняты линейными:
So (у) = £(е)б8(1/), (5.32)
где £(е) —касательный модуль.
На конечных элементарных приращениях криволинейная диаграмма о—е переходит в полигональную с изменяющимся на каждом шаге счета модулем; сечение (рис. 5.14) при этом можно рассматривать как Упругое с переменным по высоте у(0, А) модулем. В этом случае имеет место принцип суперпозиции и полное приращение деформаций волокна бе (у) и напряжения to (у) разделяется на независимые композиты, отвечающие приращениям 6хс и 6ес:
во (у) = 6стх (у) + 6сте (у); (5.33)
«в(у)=б8х(1/)4-бее(л), (5.34)
При этом:
tox(y) = £(8)6ex(y); (5.35)
Ч (у) « £ (е) бее (у). (5.36)
Принцип суперпозиции дает возможность выразить приращение каждого усилия через приращение только ему отвечающей деформации:
6M = F1(6xc); (5.37)
6?V = F2(6ec), (5.38)
т. е. приращение кривизны сечения вызывает приращение только изгибающего момента, а приращение его продольной деформации — только приращение продольного усилия. Для сечения, симметричного относительно плоскости изгиба, уравнения равновесия в приращениях относительно верхнего волокна (у=0) имеют вид:
h
6Л4 = 6Л4Х = f b (у) £б (8) 6ех (у) у dy + б
+ Fa Еа (еа) бех (М ho + Fa Еа (еа) Х
X 6ех(а ) а ’, (5.39)
h
6N = 6/Ve = f b (у) Еб (е) 6ее (у) dy + б
+ fa £а (еа) Ч (Ло) + Fa £а (еа)
(5.40) При этом 6Л4е =0; 6/Vx =0.
Согласно гипотезе плоских сечений, записанной относительно точки приложения элементарного продольного усилия yew;
6ех (у) = 6хс (у — y6/v); (5.41)
6ес(у)=6ес. (5.42)
Значение ye/v определяют из условия 6Ме=0: h
£ Ь (у) Еб (в) ydy +
= ~h -
f &(у)£б (8)dy + б
F_ E (ea) hn + F. E (ea) a a a \ а/ О a a v а/ -*-------------------, , . ---- • (5.43)
+ f/.w+f.£.W
Полные усилия, деформации и напряжения определяют как сумму соответствующих элементарных приращений: k
^k} = S 6хс = хсК-1) + (5• 44>
k
4k) = 2 Ч = есЛ-1> + 4*4 (5-45)
k
(У)= У to (у) = (Г*- 0 (у) + (у);
(5.46) k
(у) = 2 6s (у) = e(fe—(у) -}- 6e(fe) (У)»
(5.47)
103
k
M{k} = 2 = M(k~V + 6A4(fe); (5.48)
k
AMfe> = 2 6/V = N(k~l} + 6/V(fe), (5.49)
где k — текущий шаг счета.
Замена интегралов в формулах (5.39), (5.40) и (5.43) по численной формуле (например, Симпсона) позволяет перейти к рассмотрению работы сечения в конечном числе волокон.
Важное значение имеет то обстоятельство, что каждое усилие выражается через только ему отвечающую деформацию, но с учетом влияния другой деформации:
М, = F] [хе.( («„.,)]; (5.50)
<5-60
Представленные решения позволяют определить зависимости (5.50) и (5.51) в рассматриваемом сечении согласно блок-схеме, представленной на рис. 5.20 на каждом шаге К вычислений.
При решении системы уравнений за каждый шаг вычислений текущее время изменяется на величину б/.
5.5. Динамический расчет внецентренно сжатых конструкций
как системы с двумя степенями свободы
Уравнения колебаний. Для инженерных расчетов в случае равномерно распределенной поперечной нагрузки p(x,t)=p(t) и равенстве сжимающих сил, приложенных к концам балки, /V (0, t)=—N(l, t)t приемлемо рассмотрение балки как системы с двумя степенями свободы — одной в поперечном, другой в продольном направлении.
Расчетами установлено, что в случае, если продольная сила изменяется во времени, согласно рис. 5.7,6, нарастая до максимального значения за время 01W, и если <DW0jw>-6. (что выполняется практически для всех реальных конструкций ввиду высокой частоты <i)N собственных продольных колебаний основного тона), то уравнение продольных колебаний можно исключить из решения, приняв, что изменение сжимающего усилия в сечеиии носит квазистатический характер, т. е. расчетная сжимающая сила в сечениях равна максимальному значению динамической силы Л/=Л^ах.
Приводимые ниже уравнения колебаний получены методом прямых s=//2 (i= =0, 1, 2) путем применения соответствующих разностных формул. Эти формулы приводят к схеме, представляющей уточненный
вариант модели из двух жестких дисков, соединенных упругопластическим шарниром [3, 9]. Для защемленной балки расчетная схема приводит к равенству кривизн пролетного и опорного сечений. Для случая одинакового армирования этих сечеиий опорный и пролетный моменты равны (что возможно при их перераспределении). Это позволяет рассматривать в блоке В работу одного сечения.
Уравнения поперечных колебаний (блок Л) без учета геометрической нелинейности имеют вид:
для шарнирно опертой балки
w(t) —
12/Иг (0 /л/2
1,5
— р(0;
т
(5.52)
для защемленной балки
.. 24ЛМО 1,5
шД/) —-----— =---------Р (0 • (5 53)
ml2. т
Уравнения блока Б:
кривизна сечения шарнирно опертой балки
8wi (t) Xci(0=-^-; (5-54)
1“
кривизна сечеиия защемленной балки
хсИ—(5-55) 4“
продольная деформация сечения в обоих случаях
Вместо (5.52) и (5.54), а также (5.53) и (5.55) могут быть записаны уравнения колебаний:
шарнирно опертой балки
96 12
= — (5.57)
ml* mi.
защемленной балки
384 24
- хс1(0-—= —гР V). (5-58) т 4* ml2
При М1=ВмХ1 значение собственной частоты изгибаемых колебаний защемленной балки
19,596 . / Вм й |/ —
(5.59)
где В..— нзгнбная жесткость. м
В формуле (5.59) коэффициент 19,596 меньше коэффициента в известной формуле частоты собственных колебаний основного тойа защемленной балки, равного 22,373; различие в значительной мере объясняется влиянием перераспределения моментов.
104
Рис. 5.15. Коэффициенты динамичности о случае идеальной упругопластической зависимости Л-1—и; а — 6/6,<10; б — 10^6/6,00; в — 30^6/6,<50; г — 6/6, >50
В результате решения дифференциальных уравнений колебаний (5.53) — (5.58) построены вспомогательные безразмерные графики, представленные на рис. 5.15—5.18. Графики получены при нагрузке p(t), изменяющейся во времени, согласно рис. 5.7, б, для случаев идеальной упругопластической и параболической зависимостей —xCi (см. ниже).
По графикам определяют коэффициент динамичности изгиба kdM (см. рис. 5.15 и 5-17) и параметр /хтах(0м (/хтах — время достижения максимальной кривизны) (см. Рис. 5.16 и 5.18).
Коэффициентам, характеризующий достижение расчетного предельного состояния и используемый для выбора кривой на гра
фиках рис. 5.15 и 5.16, определяют по формуле (5.71). Расчетный график рис.-5.15 и кривую на рис. 5.17 выбирают в зависимости от отношения времени снижения нагруз-. ки 0 ко времени ее нарастания 01 (см. рис. 5.7, б).
Коэффициент динамичности используют для вычисления расчетного изгибающего момента в сечении балки:
шарнирно опертой
а а
м = -^—4; (5.60)
о
защемленной
6 д
(5.61)
105
Рнс. 5.16. Параметры <а^хтах в случае иде*
В формулах (5.60) и (5.61) р*ьХ. ~bqшах.
Расчетный изгибающий момент в сечении не должен превышать несущую способность конструкции, вычисляемую с учетом сжимающей силы. При правильном определении параметров сечения (Л, Fa, Fa) в момент остановки конструкции, соответствующий времени достижения максимальной кривизны /хтах»будет достигнуто расчетное предельное состояние по несущей способности. В случае идеальной упругопластической зависимости М—хс время достижения начала текучести /хт определяют по формуле ..
J ^xmax
=---------arccos
хт л
2 \
1-— . (5.62) kM /
Сопротивление внецентренно сжатых сечений железобетонных конструкций [9]. В уравнениях (5.57) или (5.58) необходимо установить зависимость
альной упругопластической зависимости Л1— х_
С
Рис. 5.17. Коэффициент динамичности в случае параболической зависимости М—хс
в расчетном сечении (i=l для шарнирной и i=0, 1, 2 для защемленной балки; при этом Л41=—Л40=—Мг).
Ниже приводятся результаты расчетов, выполненных на ЭВМ для прямоугольных внецентренно сжатых сечений по формулам (5.39)—(5.49) согласно блок-схеме рис. 5.20 при диаграммах и—е арматуры и бетона, представленных на рис. 5.19. Результаты расчетов представлены в виде безразмерных графиков, где обозначено:
М
М- 2bh2R^
Рис. 5.18. Параметры *ХГП£?- в случае параболической зависимости М—к с
(5.65) Jc = v-;
(5.67)
“ = И
(5.63)
(5.64)
(5.66)
(5.68)
(5.69)
д д
В формулах (5.63)—(5.69): /?а; Япр —сопротивление арматуры и бетона; Eq —начальный ы©-дуль упругости бетона; ВЛ1. — начальная жест-UA1
кость сечения при изгибе: a/bht — коэффи-
циент армирования; Л, Ло — высота сечения полная и рабочая.
Расчетами установлено существенное влияние «истории» процесса нагружения на работу конструкции.
Представленные графики могут быть использованы для приближенных расчетов
106
Закрытие arcigE-рпрещинц
Рис. 5.19. Расчетные диаграммы 0—8 бетона (а) я арматуры (б)
Рис. 5.20. Блок-схема расчета сечения
при следующих способах нагружения: сечение сначала сжимается, затем изгибается; сечение сжимается и изгибается одновременно (хс/ес= const). Диаграммы сопротивления конструкции сжатию N—ес являются криволинейными.
На рис. 5.21 представлены диаграммы сопротивления изгибу М—хс сечений, сжатых продольным усилием. Сплошными линиями показаны зависимости, соответствующие различным значениям N (кривые 1—7). Пунктирные кривые (I, II, III) соответствуют постоянным значениям деформаций бетона (бб=1; 1,2; 1,4) в крайнем, наиболее Деформированном сжатом волокне. Штрих-пунктирные кривые (а—и) соответствуют постоянным значениям деформаций растянутой арматуры (еа=0, 1, ...» 6). Таким образом, рис. 5.21 содержит зависимости М—хс для внецеитренно сжатых сечений железобетонных конструкций, необходимые для их Динамического расчета, а также позволяет оценивать деформации арматуры и бетона, сравниваемые с их предельными значениями.
. Продольная сжимающая сила существенно влияет на начертание кривой М—хс,
на несущую способность сечения при изгибе, на начальную жесткость сечения, на его кривизну, при которой в крайнем, наиболее деформированном волокне бетона достигаются предельные деформации, на деформацию арматуры. Кривая 1 на рис. 5.21 соответствует случаю чистого изгиба (N=0); эта кривая близка к зависимости Прандтля. С увеличением N (до значения N<0,197 в рассматриваемом случае) зависимость М—х0 остается близкой к идеальной упругрпласти-ческой. При этом начальная жесткость сечения при изгибе (при Л1-*0)
увеличивается; момент, соответствующий началу текучести в арматуре, повышается, заданные деформации бетона достигаются при меньших значениях хс, т. е. деформа-тивность конструкции уменьшаемся. При дальнейшем увеличении N (ЛГ>0,197 в рассматриваемом случае) зависимость М—хс становится криволинейной (кривые 4—7) и деформации текучести в арматуре не достигается, она может быть и сжата. На кривой М—хс имеется нисходящий участок. Максимальный момент (характеризующий несущую способность конструкции) и де-
W7
Рис. 5.21. Зависимость Л1— xf (в случае сначала сжатого силой Л/, затем изгибаемого сечеиня)
/уо N
1 0 0
2 0,056 0,05
3 0,109 0,1
4 0,197 0,195
5 0,5
6 0,546 0,7
7 0,61 0,9
Обозначения
J------1 _
10 11 эе_
Рис. 5.22. Кривые Л1—N, соответствующие достижению деформаций волокна бетона: Eg—1, 1.4 и деформаций арматуры: еа— 0, 1, 2, 3...
формативное™ конструкции с увеличением N уменьшаются.
Для динамических расчетов кривые М—Хс аппроксимированы двумя типами зависимостей: 1) идеальной упругопластической (ПрЭНДТЛЯ), при ЭТОМ еа>1 И Mtfmax> >N; 2) квадратной параболой, при этом еа<1и Л/м тахсЛ^. Характер кривой М—хс устанавливают расчетом.
На рис. 5.22 представлены кривые предельных усилий Л4п₽ед—№₽ед, соответствующие достижению деформаций бетона евпред=1; 1,4 (сплошные линии). Там же нанесены линии (пунктирные), соответствующие деформациям арматуры ва=0, 1, 2, и точками на кривых ес=1,4 показаны еав = 3,4,5,6; приведены области, соответствующие обоим типам зависимостей М—Ко
108
Рнс. 5.25. Критерий &Л1=хепред/ хт ° слУчае нДе* альной упругопластнческой зависимости М—х_ ________________________ и при ц-0,062
Каждой точке на пунктирной кривой Рис. 5.21 соответствует точка на сплошной кривой рис. 5.22. Например, в точке пересечения кривых 2 (при N=0,056) и III
Рис. 5.26. Коэффициент Ха, учитывающий влияние |Х
(еб=1,4) имеем 2И=0,079 и еа=4,8; точка с соответствующими значениями имеется на предельной кривой рис. 5.22 при еб=1,4. Графики рис. 5.21 и 5.22 соответствуют значениям ц=0,062 и ц7н=1 (&' относится к арматуре, расположенной со стороны более сжатой грани).
Для выполнения практических расчетов в диапазоне значений р=0,031. ..0,093 и |x7ix=0... 1 предназначены графики рис. 5.23—5.27. Начальную изгибную жесткость сечения Дом определяют по рис. 5.23 и фор-
109
2 -> = 0.062
- yu'=0,6/i
Рис. 6.97. Расчет* ные предельные кривые Л1 п₽ед jy-пред
2- уточняющий расчет
Рис. 5.28. К примеру расчета
муле (5.68). В случае идеальной упругопластической зависимости М—хс расчетную жесткость принимают
(5.70)
где Л1 — коэффициент, учитывающий криволинейный характер начального участка диаграммы Л1—хс (рис. 5.24).
В этом же случае критерий kw= =хс,пред/хт (используемый при определении коэффициента динамичности kdM и параметра cWxmax по рис. 5.15 и 5.16:
^Л4 = ^2^И» (5.71)
где хс,пред и ХТ ~ кривизна в моменты достижения предельной деформации бетона и начала
• _____________________
текучести арматуры; Лд/— критерий крд при ц,— —0,062, определяемый по графику рис. 5.25; Л2 — коэффициент, принимаемый по рис. 5.26 и учитывающий влияние коэффициента армирования.
В плоскости М, N несущей способности конструкции отвечает определенная точка. Если эта точка лежит внутри области, ограниченной предельной кривой и осями М и N' (рис. 5.22), то предельные деформации бетона не достигаются и высота сечения может быть уменьшена (точка /). Если точка лежит вне указанной области, то несущая способность недостаточна и необходимо увеличить высоту сечения (точка 2). Точка, лежащая на предельной кривой, соответствует достижению бетоном предельных деформаций при минимальном значении высоты сечения (точка 3).
На рис. 5.27 дана серия предельных кривых Л1п₽ед—№₽« которые могут быть использованы для расчетов; кривые построены при различных значениях р'/Й и £
ПО
Пример. Произвести расчет защемленной балки при след\'ющих исходных данных. Пролет ♦
1—3 м; ширина- 5—1 м; бетон марки М400 Яцр = -20 МПа, Ер — 3,3-10« МПа; арматура класса А-П1 /?а-360 МПа; £'а=2-1(Р МПа (расчетные сопротивления арматуры и бетона определяют согласно § 1.5 [3]). Рассматривается одновременное действие динамической поперечной нагрузки (втах “0.3 МПа) и динамической сжимающей продольной силы Wmax —1000 кН), изменяющихся во времени согласно рис. 5.7, б (0^
-0,02 с, е =е.,-о,зс). 1р
Р N
Предварительный расчет. В результате предварительного расчета устанавливают первоначальное значение высоты поперечного сечения балки. Задаемся ц,—0,062. По конструктивным соображениям принимаем ц7ц—0,5.
коэффициентом динамичности находим расчетный изгибающий нии, вызванный поперечной
fc<?max 1 kM
Задаваясь изгиба ktf = 1 2, момент в сече-нагрузкой М=
-=202,5 кН-м;
при
этом расчетная
5-5 W-1000 кН. упрочнения бетона находим расчетные /?пр =24 МПа и
п.
16 продольная сила. согласно Задаваясь коэффициентами б а
fey-1,2 и арматуры Ау = 1.2, динамические сопротивления
Ла-430 МПа.
Выбираем расчетную кривую Л4п₽ед — Л/пРед на_рис. 5.27, соответствующую принятым значениям ц и |17ц.; наносим эту кривую на рис. 5.28. Задаваясь несколькими значениями h н используя расчетные значения Л4=202,5 ьН-м и W= — 1000 кН, вычисляем безразмерные усилия по формулам (5.63) и (5.64):_
ft—0,2 м, М-0,1055, М-0,1042;
ft—0,25 м, М-0,0675, /V-0.0833;
Л—0,3 м, М—0,0469, Л/-0.0694.
По полученным значениям строим кривую в плоскости М, N на рис. 5.28. В точке пересечения кривых находим Мп^ед-0,086 и Л/прсД=0,095.
значениях усилий ио формуле _______I высоту балки, соот-
При ЭТИХ L__________
(5.63) или (5.64) находим ветствующую довтижению бетоном предельных деформаций, Лт|П-0,22 м.
Уточняющий расчет. Устанавливаем характер кривой М—хс. Так как прн ft = 0,22 м Л/пред = —О.ОЭбС/УдРптах (см- ₽ис- 5.22 и 5.28),
то диаграмма сопротивления конструкции изгибу М—хс является идеальной упру-^г.ред
гопластической. Находим отношение
0,095
= 0 59 =0>*51- При этом значении находим по кривой 2 графика, приведенного на Рис. 5.23, начальную безразмерную жесткость сечения Sqm =0,082. По рнс. 5.24 находим по пря-М°% £_коэффициент Л i—0,88. По формулам (5.68) и (5.70) вычисляем жесткость сечения В ..= _____ М
=Л1в0Л4йЛ3£б=31 400 кН-м2. По рис. 5.25 нахо-
дим Ад) = 1,8, а по рис. 5.26 — ^2 — 1: по формуле (6.71) вычисляем k. ,= 1,8.
Л!
в Оиределяем погонную массу т =0,538 кН/м2.
чнсл"ем круговую частоту изгибных колебаний по Формуле (5.59)
о ,9»6
М й
ВМ
т
= 493,8—— 2лс
Находим
«аходим параметр а>м 6 =493,8-0,02- 9,88. ны Отн°шение ер/61р-15. О пределяем уточнеи-поив®п^пеи,!.я Ус”лий. Расчетным является график, данный на рис. 5.15, в, по которому при
fe;yf —1,8 и 6|р— 9.88 находим fe^f —1.02. Уточненное значение момента в сечения М —172 кН-м. Значение продольной силы сохраняется /V— — 1000 кН. Определяем уточненные расчетные динамические сопротивления бетона и арматуры. По графику на рнс. 5.16 при fe^—1,8 и <lj^®lp= -9,88 находим (экстраполируя) со,, t — 15;
Jn .max время достижения максимальной деформации
Схтах “• 5/493,8-0,03 с; время достижения текучести по формуле (5.62) Z -0,016 с.
Согласно § 1.5 [3], коэффициент упрочнения
бетона fey—1,2; вычисляем Rq —1,2-20—24 МПа. Определяем среднюю скорость деформаций арма-. туры по формуле, приведенной в § 1.5 [3].
kl&} R ку «з
1,2-360
Е = ъ- , - =---------—— = 0,135 1/С.
2-106-0,016
По графику на рис. 1.13, помещенному там же, находим fey3)—1,24; вычисляем Яа —1,24-360— —446 МПа.
Переходим к определению толщины. Вновь задаваясь несколькими значениями h и используя уточненные значения усилий и расчетных сопротивлений, вычисляем М по формуле (5.63) и N по (5.64): _ ________
ft-0,2 м, М=0,0896, W-0.104;
ft—0,25 м,_М—0,0573,_Л(—0,083;
h=0,3 м, М-0,0398, /V—0,0695._ _
По полученным значениям М и N строим кривую на рис. 5.28 (кривая 2). В точке пересечения этой кривой с предельной кривой находим М=0,089. По формуле (5.63) определяем минимальную толщину, при которой в сжатом волокне бетона достигается предельная деформация
ftmln=/0,00358/0,089 = 0,2 м-
По формуле (5.69) вычисляем коэффициент армирования
н = 2? (*/*,) (^р/Я?) =
= 2-0,062 (0,2/0,18) (24/446) = 0,0074.
Требуемая площадь растянутой арматуры составляет F„—0,0074-100-18—13,3 см2; требуемая
площадь сжатой арматуры—Fa = 13,3-0,5—6,65 см2.
Рекомендации по приближенному расчету сооружения. Приближенный расчет со*
111
fl
Рис. 5.30. Коэффициенты Д?Расч в случае идеальной
fl —= 1, © Р; = 0; б— = 1. ш р2 = 0,6: в — k = 1, ш ра=1:е—fe =2. to ₽а=0: м м м м мм мм
оружения, представляющего в поперечном сечении раму (рис. 5.8), может быть выполнен в соответствии со следующими рекомендациями.
1. Согласно п. 5.2, определяют динамические нагрузки на ограждающие конструкции: покрытие, наружные стены и фундаменты.
2. Производят независимый расчет каждого из перечисленных элементов, входящих в раму. Элементы плит покрытия и фундамента рекомендуется рассматривать как изгибаемые; их расчет может быть выполнен в соответствии с п. 5.5 (при Л/=0) или со
гласно [3, 9]. Элементы наружных стен рекомендуется рассчитывать как внецентренно сжатые в соответствии с п. 5.5; максимальная сжимающая сила на стены может быть принята равной полусумме максимальных значений опорных реакций, передающихся с покрытия и фундамента.
В результате расчета элементов для каждого из них определяют: расчетную поперечную нагрузку (p=PmaxfeAi)’’ расчетные динамические сопротивления арматуры и бетона (/?д, #„р); поперечное сечение и армирование (ft, b, Fa, Fa), а также расчет-
112
ж)'
красч
упругопластической зависимости М—хс кольца
a~kM = 2- “^=°’5: e-kM = 2' шлА = 1’ 0K~kM==5: W‘“0’ 3-kM = 5- “лА>0-5
ную жесткость сечения (Вм) и другие характеристики.
3. Элементы внутренних стен (колонны) рассчитывают как центральносжатые, если на эти элементы не действуют изгибающие моменты; если моменты возникают (например, в сооружениях, имеющих не равные пролеты), то эти элементы рассчитывают как внецентренно сжатые.
4. Производят статический расчет рамы как упругой системы на действие поперечных нагрузок, указанных в п. 2. В результате расчета рамы определяют эпюры усилии. Допускается перераспределять усилия в 8—189
раме, уменьшая опорные моменты до 50 %.
5. По полученным усилиям уточняют размеры поперечных сечений элементов и их армирование; рассчитывают по наклонным сечениям.
5.6. Динамический расчет кольца в грунте
Рассматривается плоская задача о расчете замкнутого кругового кольца в грунте; загруженного динамической нагрузкой. Боковой отпор грунта принимают по выражению
dw(x,t)
9гр (x,t) = &гр w (x,t) + Qi Р-—----,
(5.72)
113
Р I г 3 4 A
Я
4>
w/4^ae/ndJf
Рис. 5.32. Коэффициенты fePac4 в случае пара* болической зависимости М—хг ьольца а~ШМ Р2=°: 6_“Л1 ₽2=0’5: ""“Al ₽2в1
Рис. 5.31. Параметр а. 1 в случае идеаль-/и хгпах
ной упругопластической зависимости М—v. с
кольца
в“*Л1=1; 6-^=2; 6-^=5
114
где *rp — коэффициент постели грунта; OiP — акустическая жесткость грунта.
Уравнения колебаний кольца как системы с бесконечным числом степеней свободы (блок А): изгибных
д2М (x,t) _д_
дхг + дх
и.2—L
' г дх N (x,t)
dw(x,t)
~ дх
д2 tai (х,/) dt2
dw (x,t)
+ pb--------J—’ + Arp ba> (x,t) = p (Xrflj
(5.73)
продольных
dN (x ,f) 1 dM(Xif)
dx
дх
. d2v(x,t) .
-4- m------------= (J.
dt2
(5.74)
Уравнения деформаций (блок Б};. поперечных
d2w(x,t) 1 dv(xff)
Хс(,,,) = “^--------;1Г:(5-75)
продольных
d2u(x,t) 1
ес(х>0 =----ау(^/). (5.76)
дх 2
Здесь х — криволинейная текущая координата сечений стержня; ш — радиальное смещение; о — продольное (касательное) смещение; г — радиус коЛьца.
Для связи между усилиями и деформациями (блок В) могут быть использованы решения п. 5.5.
Метод прямых решения дифференциальных уравнений в частных производных приводит к системе с несколькими степенями свободы.
Ниже приведены графики и формулы, служащие для приближенного расчета кольца как системы с двумя степенями свободы (в поперечном и продольном направлениях).
Динамическая радиальная нагрузка, распределенная по кольцу согласно рис. 5-29, изменяется во времени по рис. 5.7,6 при 6-мю. Хак и выше, действие продольных сжимающих усилий рассматривают ква-зистатическим (при <ow6iW>6).
Усилия в сечениях определяют по формулам:
= 0,137 (р1<шах - р2 тах) г2 ЛР««;
(5.77)
^тах —
0,Q343£rp₽rJ X
1 + 0,0343 —
. Р1,тах— Р2«тах\
X Б I» (о. /о) °М /
где р —* коэффициент, принимаемый в случае идеальной упругопластнческой зависимости М— —Хс; Р-*л/ 1*Л1 — по Формуле (5.71)] . р—2 в случае параболической зависимости .И—хс-
Частота изгибных колебаний кольца в воздухе
ам == (2,68/г2) УВм!т. (5.79)
Графики служат для определения Л₽асч — расчетного коэффициента (рис. 5.30—5.32) и параметра <ofxtnax (рис. 5.31 и 5.35). Указанные величины определяют по параметру шмбь Графики построены для идеальной упругопластической (при £м*= =хепред /хт = 1.2,5) и параболической М—Хс зависимостей.
Расчетный график выбирают в зависимости от параметра сомрг, а расчетную кривую на нем — в зависимости от значения рь где
₽х = 4X^/3707110^; (5.80)
®Л4 ₽2 = 4с1 Р^птшм. (5-81)
Приведенные формулы могут быть использованы совместно с помещенными выше формулами и графиками, выражаюшн-
Рис. 5.33. Параметр а м *хпих в случае параболической залисммостм М—нс кольца
8*
115
ми сопротивление внецентренно сжатых сечений прямолинейных элементов, для расчета колец, удовлетворяющих условию rjh^-3. Исходные данные, необходимые для динамического расчета кольца: г — радиус кольца; динамические нагрузки pi,max; Рг.шах; 0, и 0; марка бетона и класс арматурной стали; характеристики грунта — коэффициент постели Кгр и акустическая жесткость
Оф. Расчет ведут в такой же последовательности, что и для прямолинейной балки (см. пример). При этом вместо коэффициента kм определяют и подставляют в формулы (5.60) и (5.61) коэффициент 6₽асч, определяемый по графику рис. 5.30 или 5.32. При расчете может потребоваться произвести уточняющий расчет несколько раз.
Р А 3 Д Е Л 6. ЗАЩИТА ПРОМЫШЛЕННЫХ ЗДАНИЙ ВЗРЫВООПАСНЫХ ПРОИЗВОДСТВ ЛЕГКОСБРАСЫВАЕМЫМИ КОНСТРУКЦИЯМИ
Г. Г. Орлов, Н. А. Стрельчук
6.1. Определение нагрузок, возникающих при взрывном горении газовоздушных смесей и мгновенном вскрытии легкосбрасываемых конструкций
Одной из основных задач в общей проблеме защиты зданий взрывоопасных производств является умение определять возникающие нагрузки на строительные конструкции при взрыве горючих смесей внутри помещений. Существующая теория горения, взрыва и детонации горючих смесей отвечает на вопросы, связанные с явлениями взрывного горения при течении таких процессов в трубах [3, 5, 9]. Вместе с тем взрывы га-зо- и пылевоздушных смесей в больших объемах, соизмеримых с объемами промышленных зданий, изучены недостаточно. В связи с этим при решении практических задач зашиты зданий взрывоопасных производств от взрывов внутри помещений и при построении модели по определению величины и характера взрывных нагрузок, действующих на строительные конструкции, принимаются заведомо такие исходные данные, которые позволяют получить надежные результаты по обеспечению взрывозащиты в целом [1, Ю].
Основная идея защиты промышленных зданий при взрыве газо- и пылевоздушных смесей состоит в обеспечении прочности и устойчивости несущих конструкций и разрушении или вскрытии специальных легкосбрасываемых конструкций в наружном ограждении зданий при минимальных нагрузках в течение минимального времени.
. Легкосбрасываемые конструкции (ЛСК) по характеру работы в процессе взрывного
горения газовоздушной смеси (ГВС) разделяются на две группы.
К первой группе относятся ЛСК, имеющие сранительно небольшую массу и разрушающиеся практически мгновенно. При расчете таких ЛСК представляется возможным пренебречь силами инерции, возникающими при движении ЛСК, а также считать, что вскрытие перекрываемых ими проемов происходит мгновенно. В связи с этим при определении значений давлений, возникающих при взрывном горении ГВС, можно считать, что с момента вскрытия ЛСК истечение газа из объема будет происходить через полностью открытое сечение проема. При достаточно большой площади образующихся проемов можно обеспечить снижение давления с момента вскрытия ЛСК.
Ко второй группе относятся ЛСК, при вскрытии которых нельзя пренебречь силами инерции. Для этих ЛСК характерным является относительно медленное (немгновенное) вскрытие проемов в ограждающих конструкциях. В результате этого в начальный момент после вскрытия проемов, независимо от их площади, нагрузка при взрывном горении ГВС будет возрастать [1,3,6].
В настоящее время в качестве ЛСК широко применяют остекление. Глухое остекление по характеру разрушения может быть отнесено к первой группе ЛСК, а поворотные остекленные переплеты — ко второй. К ЛСК второй группы относятся стеновые элементы, плиты покрытий.
При применении ЛСК первой группы повышение давления до заданного значения может быть ограничено выбором необходимой площади ЛСК. Требуемую площадь
116
ЛСК следует устанавливать исходя из более неблагоприятных условий с точки зрения обеспечения взрывобезопасности зданий взрывоопасных производств, при которых может произойти взрывное горение ГВС внутри помещений. Такой подход к решению поставленной задачи вытекает из необходимости получения надежных результатов по обеспечению взрывобезопасности, поэтому при определении требуемой площади ЛСК применительно к нормальному или ускоряющемуся режимам горения ГВС в тех случаях, когда не задано количество взрывоопасной смеси в объеме помещения, следует принимать, что весь объем помещения заполнен взрывоопасной ГВС [1, 4].
До момента вскрытия ЛСК повышение давления внутри помещения определяют как в замкнутом объеме. С момента вскрытия ЛСК наряду с горением ГВС внутри объема при определении давления необходимо учитывать истечение газа из объема через образовавшиеся проемы в ограждающих конструкциях. Истечение газа из помещений через отверстия можно рассматривать как адиабатический процесс [5, 7].
При ограничении возникающей нагрузки при взрывном горении ГВС на ограждающие конструкции задача, по существу, сводится к определению площади ЛСК и их параметров.
При разработке метода по определению нагрузок на ограждающие конструкции в качестве исходных приняты следующие предпосылки: все точки поверхности фронта пламени в любой момент времени находятся на одинаковом расстоянии от источника зажигания, т. е. не учитывают влияния потока газа, вытекающего из отверстия на форму пламени и взаимодействия пламени со стенами помещения, а также влияние формы помещения на распространение пламени; давление одинаково во всех точках помещения, поскольку скорость распространения фронта пламени при взрывном горении газовоздушной смеси внутри помещения меньше скорости звука [3, 8, 11].
Введем следующие обозначения: т — масса; р — плотность; и н — нормальная скорость горения; /’—значение абсолютного давления; Sy—площадь фронта пламени; V„— объем помещения; п _ П
ап Р/Диус ФРоита пламени; v — показатель oinoa ТЬ1: *— в₽емя: индекс и относится к гони . смеси« индекс в—к продуктам сгора-ия, а — показатель интенсификации горения.
Характер изменения давления на ограждающие конструкции помещения, а также координаты положения фронта пламени в зависимости от времени при мгновенном вскрытии ЛСК или в случае, когда отвер
стие заранее открыто, устанавливают следующими уравнениями:
dP л [7 Ри \ „ 1
— Р I 1) сс UhS/ X
& L\ Pb / Ри
d/ Jj К Vb \ Уь + — Yu; 1» (6.1)
dR .Ре.. 1 vb 1 dP (R
dt а ин „ Pb Sf Уь p dt
Для того чтобы решать приведенные уравнения, необходимо установить значение параметров: dm^/dt— потока массы через отверстие, коэффициента расширения р«/рь; площади фронта пламени — S/(P) и объема продуктов горения— Vt>(R).
Поток массы газовоздушной смеси через
отверстие можно представить уравнением для адиабатического истечения газа из замкнутого объема в среду с атмосферным давлением [11]:
а) при истечении в сверхзвуковой об
ласти, когда
Р (у + 1\ V/V—l
где Рс — критическое давление, dmv Г уР (у -f- lV+v/1— Yj0,5
= и^отвр» J J :
(6.3)
б) при истечении в дозвуковой области
dmv f 2уРр ( Ро V,vf.
— Цоотв[ . I n I 1
ш I? — 1 \ Р /
Эти. выражения можно переписать в ином, более удобном для использования виде:
а) при Р/Ро>Рс
dmv „ 17 2 \v+Uv-i
-- P"SOTB Ри CU ] I , , I
or I \Т + * /
(6.5)
б) При Р/Ро<Рс d/n„
~ = M-SOTB ри си at
' 2 ( Ро у/У у — 1 \ Р )
где си — скорость распространения звука в горючей смеси, м/с.
Ро — давление в окружающей среде (атмосферное); у.— коэффициент истечения.
Для решения уравнений (6.1) — (6.6) необходимо установить отношение плотности свежей горючей смеси к плотности продуктов сгорания в зависимости от давления (коэффициент расширения).
117
Рис. 6.1. Характер изменения давления на стенки сосуда сферической формы по уравнениям (6.1) (6.2), (6.6) объемом 14 м3 и мгновенном вскрытии отверстия площадью 0,5 м2 при:
1 — ДР-1; 2 — ДР-3; 3 — ДР-5; 4 — ДР-10 кПа; и „-0,3 м/с, ри/р„ =6; п-2; у-1,4 11 «1 15
i
Рис. 6.2. Характер изменения давления иа стенки сосуда сферической формы объемом 14 м3 и мгновенном вскрытии отверстия при ДР—5 кПа (6.1), (6.2). (6.6) площадью и2:
/ — 0,1; 2 — 0,3; 3 — 0.5; «н -0,3 м/с; Ри/Рв=6: а—2
Рис. 6.3. Характер изменения давления на ограждающие конструкции помещения объемом 100 м* до момента зажигания ГВС при открытом отверстии площадью, м2/ма
/ — 0,03: 2 — 0,05; 3 — 0,07 м2/м3 по уравнениям (6.1), (6.2), (6.6); «н—0,45 м/с; Ри/Рв“7,5; а-2
Учитывая, что прочность основных строительных конструкций не превышает порядка 20 кПа (2000 кг/м2), можно считать, что коэффициент расширения при взрывах горючих смесей в помещениях -изменяется в пределах 5 % и при оценочных расчетах считать его постоянным и равным коэффициенту расширения при атмосферном давлении.
Для решения практических задач при использовании уравнений (6,1)—(6,6) не-
обходимо задать конкретный вид функций Sf(R) и т. е. функций площади
фронта пламени и объема сгоревшего газа в зависимости от координаты фронта пламени. Указываемые функции для сферического сосуда прн центральном зажигании имеют вид: Sf(R) = 4л/?2; Vb(R) = (4/3) при распространении плоского фронта пламени в трубе диаметра D, Sf(R)=nD3l4’, У6(/?) = (л£>2/4)/?.
Для помещения по форме, близкой к ку*
118
Рис. 6.4. Характер изменения давления на ограждающие конструкции помещения объемом 100 м3 при мгновенном вскрытии отверстия при нагрузке ДР—2 кПа площадью, ы2/м3
] — 0 03- 2 — 0,05; 3 — 0,07 по уравнениям
(6.1).’ (6.2), (6.6); Пн“0,45 м/с; Р И/Рв“7.5; 0.-2
Рис. 6.Б. Характер изменения давления взрыва на ограждающие конструкции помещения объемом 1000 м3 по уравнениям (6.1), (6.2), (6.6) при открытом отверстии до момента зажигания ГВС площадью, м2/м3
1- 0.Q3; 2 — 0,05; 3—0,07; Я„-0,45 м/с; р„/Рв= -7,5; а-2
вен объему, общему для куба с ребром а и шара радиуса R с центром, находящимся в геометрическом центре куба.
Для примера на основании уравнений (6.1), (6.2), (6.6) построены графические зависимости изменения характера и величины нагрузок, действующих на ограждающие конструкции в случае, когда "отверстие открыто до момента зажигания взрывоопасной смеси или оно мгновенно вскрывается при достижении определенного ’ значения взрывной нагрузки (см. рис. 6.1—6.6).
При определении возникающих нагрузок при взрывном горении газовоздушной смеси внутри помещения можно учитывать и одновременное истечение как взрывоопасной смеси, так и продуктов сгорания. Особенно это необходимо делать при расчете нагрузок на ограждающие конструкции в помещениях, имеющих форму, отличную от кубической, а также при наличии нескольких отверстий.
С учетом истечения продуктов сгорания уравнения (6.1) и (6.2) принимают вид:
Рис. 6.6. Характер изменения давления взрыва иа ограждающие конструкции помещения объемом 5- 10s м3 по уравнениям (6.1), (6.2), (6.6) при открытом отверстии до момента зажигания ГВС, площадью, м2/м3
7—0,03; 2 — 0,0£; 3-0,07; ин-0,45 м/с; Ри/Рв= -7,5; а-2
аи. dR _ \ рв Тв Иы / 1
dt Л . + Sf
Vb ( 1 dmvu
УиУв + УвУи \ Ри dt
где Jdt — поток массы продуктов сгорания; dmuvldt — поток массы исходной смеси..
Выражение для потока массы в дозвуковом режиме истечения:
бу, например куб с ребром а и источником зажигания, находящимся в центре куба, Sf(R) можно задать следующим образом. Др соприкосновения со стенкой фронт пламени принимают сферическим, т. е. для Ж ^0/2, где а— ребро куба:
5/ (/?) = 4лЯ?; Vb (R) = ~ лЯ3. О
Для куба Sf(R) принимают равной площади сферы радиуса R, которая находится внутри куба с ребром а, а Уь.(^) ра-
1 dm Л Л Г 2 ~ ~ Н$отв Си ) “ Г
Р« dt (Т — 1
Рп V—Vv 1)0,5
(6.9)
Для того чтобы установить величину (1/р) (dmldt) для продуктов сгорания и ГВС, необходимо задать значения ц, SOTB; Cv; а показатели адиабаты уи и ув принимают по справочным данным. Коэффициент истечения при взрывах в помещениях =Ю,8...0,85, поэтому он может быть принят
119
Рис. 6.7. Схимы места расположения фронта пламени по отношению отверстий в наружном ограждении помещений вытянутой формы
одинаковым как для ГВС, так и для продуктов сгорания.
Скорость звука для продуктов сгорания
Площадь, через которую истекает несгоревший газ.
•JOTBU ~ °0ТВ — °ОТВЬ"
В связи с этим можно принять следующую схему расчета. После зажигания ГВС до момента вскрытия ЛСК горение происходит в замкнутом объеме: £отв.и=5отв <>=0. После, вскрытия отверстия истекает свежая смесь: 3Отв.ь=0; 3Огв.и=3Отв. При достижении фронтом пламени отверстия начинается истечение продуктов сгорания: 3Отв« и Зотв ь находят из геометрических размеров помещения.
Для примера рассмотрим случай распространения пламени по помещению, имеющему вытянутую форму прямоугольного сечения при распространении плоского фронта пламени. Места расположения отверстия указаны на рис. 6.7, из которого видно, что площадь отверстия ЗОТв изменяется в зависимости от места расположения фронта пламени: a) 3otb=0j Sotb u=3i4“3г; б) Sot>=
=SOtb ь меняется линейно в зависимости от координаты фронта пламени; в) 3Отв.ь=3|, Зотв и = Зг.
По аналогии с расчетом, учитывающим истечение горючей смеси и затем продуктов сгорания, можно учесть одновременное истечение продуктов сгорания и несгоревшей смеси, и установить величину и характер возникающих нагрузок с учетом параметров горючей смеси.
6.2. Определение величины и характера нагрузок при использовании инерционных
ЛСК
Для того чтобы установить величину и характер изменения давления, возникающего при взрывах в помещениях закрытых инерционными ЛСК, необходимо решать уравнения (6.1), (6.2), (6.6) совместно с уравнениями движения ЛСК.
Для ЛСК, которые представляют собой свободно опертые плиты, располагаемые в горизонтальном наружном ограждении помещения, уравнение движения плиты имеет вид
£^2 у _ _
т —— = (Р (0 — Ро) ab — mg, (6.10) at
где х — перемещение плиты; ab — площадь плиты (отверстия); g — ускорение свободного падения; P(t)—усредненное давление на плиту:
р = 7s~ JJ р ,y,f> dx dy’
S
Для смещаемых ЛСК, расположенных в вертикальном ограждении помещения, уравнения движения плиты
^2 _
m—— = (P(t)-P0)ab. (6.11)
dP
Для поворотных ЛСК с горизонтальным верхним шарниром уравнение движения
d2 <р / ч а 2Ь
1 =— mg — sin <р + (Р (t) — Ро) —.
dt~ х х
(6.12)
Для поворотных ЛСК с горизонтальным нижним шарниром уравнение движения запишется в виде
d2 ф I г~ \ а2 b
1 ~Т~ = tng — s\n4 + (P (t) — Ро) —т— • Си х
(6.13)
Для поворотных ЛСК с боковым вертикальным шарниром уравнение движения имеет вид
= (6.14)
dt2. 2
120
Рис. 6.8. Характер изменения давления на ограждающие конструкции помещения объемом 100 м’ прн вскрытии легкосбрасываемого элемента в покрытии площадью, м2/м’
/—0,07; 2—0,05; 5 — 0,03 и массой 120, 50 и
20 кг/м2 по уравнениям (6.15); (У н—0,45 м/с; Ри/Ра-7,5; а=2
лр,кпа
Рис. 6.9. Характер изменения давления на ограждающие конструкции помещения объемом 1000 м’ при вскрытии легкосбрасываемых элементов в покрытии площадью. м1/м3
7 ~ 0,07; 2 — 0,05; 3 — 0,03 и массой 120, 50 и
20 кг/м2 по уравнениям (6.15); UH=0,45 м/с;
Ри/Рв “7’5; а“2
где У — момент инерции массы пляты относительно оси вращения; а — высота поворотного элемента; в — ширина элемента; m — масса элемента; ф — уГОЛ раскрытия поворотных ЛСК.
Значение среднего давления на плиту равно
/>(/) = р--------------.
ah + 2 (а + b) х (t)
В уравнениях (6.1), (6.2) и (6.6) единственным параметром, который зависит от положения ЛСК, является 30тв. При выпол-
Рис. 6.10. Характер изменения давления па ограждающие конструкции помещения объемом 5-10s м3 при вскрытии легкосбрасываемых элементов в покрытии площадью, м2/м3 /_0,07: 2 — 0,05: 3 — 0,03 и массой 120. 50 и 20 кг/м2 по уравнениям (6.15); (Ун =0,45 м/с; ри/рв“7-5; а“2
Рнс. 6.11. Характер изменения давления на ограждающие конструкции помещения Рп—100 м3 прн вскрытии легкосбрасываемых элементов в вертикальном ограждении площадью, м-'/м3
— 0.07; 2 — 0.05: 3 — 0.03 и массой 120. 50 и
20 кг/м2 по уравнениям (6.16); Ua -0,45 м/с; ₽и/рв"7*5; а“2
Рис. 6.12- Характер изменения давления на ограждающие конструкции помещения к'п= 1000 м3 при вскрытии легкосбрасываемых элементов. в вертикальном ограждении площадью, м2/м3
1 — 0,07; 2— 0,05; 3 — 0,03 и массой 120. 50 и
20 кг/м2 по уравнениям (6.16); (Уд—0,45 м/с; ₽и/рв”7,5: а”2
121
нении числовых расчетов могут быть сделаны следующие допущения. Коэффициент истечения принимают постоянным. Площадь отверстия можно задать следующим образом.
Для смещаемых ЛСК в покрытии и стеновом ограждении: SOtB=^(a+b)x, если 2(&+b)<ab- SotB=<ib, если 2(a+b)x>ab, где а, b — длина и ширина ЛСК; х — отклонение ЛСК от первоначального положения.
Для поворотных ЛСК: SOTb=Z2 sin ф+ 4-2W sin (<р/2), если Is sin q>+2b sin tp/2<bl; Зтв=1Ь, если Z2sin ф+2М sin(<p/2) >6/, где I — длина ЛСК; b — ширина; <р — угол раскрытия.
Для определения давления, возникающего при взрывном горении ГВС в помещениях, в Ограждении которых расположены инерционные ЛСК, важно знать закон движения ЛСК только на начальном участке, например для смещаемых ЛСК только при X(t) <ab/2(a+b).
Системы уравнений для Определения возникающих нагрузок на ограждающие конструкции при использовании различных видов ЛСК можно записать в Следующем виде:
для смещаемых ЛСК, располагаемых в покрытии (рис. 6.8—6.10)
dP „ V Г --= Р—— а, dZ VnL
_ 1 dm. llfVh
Pu dt ]/ \ yb yu )’
dR Pu Vb 1 dP
---=a, uR--------------------;
dZ pb Sf yb P dt
77" = G3 Л>) S0TB//rt — g\ at
dxfdt =
при Z=0: P=Po', x=0; x=0; R=0;
для смещаемых ЛСК, расположенных в вертикальном ограждении здания (рис. 6.11—6.13)
dP
Y
Кп
_ 1 dm. 1/ / +
Pu dt \1 \ уь уи Г
dR ри Vb 1 dP
-— 3 a, uR----—------------;
dt рь S/Уь P dt
^-=(P — P0)SorR/m; dx!db=&
(6.16)
для поворотных ЛСК с горизонтальным верхним шарниром в вертикальном ограждении (рис. 6,14—6.16)
Рис. в. 13. Характер изменения давления на ограждающие конструкции помещения Vn—5-103 м3 при вскрытии легкосбрасываемых элементов в вертикальном ограждении площадью, м2/м?
/—0.07; 2 — 0,05: 3 — 0.03 и массой !20. 50 и
20 кг/м3 по уравнениям (6.16): ид =0,45 м/с; Рн/Рв=7,5; а=2
Pu dt \/ \ уь "И Yu /
dR ри vb 1 dP
----=а, ик-----------------;
dt рь S/y p dt
(6.17)
. a2 b
+ (p-p0)— ; d<p/dz = g;
для поворотных ЛСК с горизонтальным нижним шарниром
(6.15)
для поворотных ЛСК с боковым вертикальным шарниром (рис. 6.17).
\ Рь
_ 1 dffl^j / /_Vb_ + _Vu_\ . Pu dt ]/ \ Yb + Yu /
dR pu Vb 1 dP
---=tz, uK-----—---------------;
dt pb SfY P dt
-^-=(P-P0)-^--, d<p/dt = t at xt
при Z=0: P=Po', ₽=0; <p=6; ф=0.
В выражениях (6.15) — (6.19) dmvldt Определяется иЗ (6.6). Здесь везде рассматривается дозвуковой режим при истечении горючей смеси.
122
Рис. в. 14. Характер изменения да зления взрыва на ограждающие конструкции помещения объемом 100 м3 при вскрытии поворотных элементов с. горизонтальным верхним шарниром площадью, м2
7 — 3: 2—5: 3 — 7 и массой 20, 50 и 120 кг/м2 по уравнениям (6.17); ин =0,45 м/с; Ри/Рв=7,5;
а=2; /?р=0,5 кПа
^ис. в. 15. Характер изменения давления взрыва на ограждающие конструкции помещения объемом 1000 м3 при вскрытии поворотных элементов с горизонтальным шарниром площадью, м2/м3 7 — 0,03- 2 — 0,05; 3 — 0,07 и массой 20, 50 и 120 кг/м2 ПО уравнениям (6.17); ин=0.45 м/с; Ри/Рв-7,5;
а-2; Яр =0,5 кПа
Системы уравнений (6.15) — (6..19) решают на ЭВМ численными методами.
6. 3. Определение нагрузок, разрушающих стекло
Для определения расчетной нагрузки, разрушающей листовое оконное стекло Р£т рекомендуется зависимость [1]:
рст = рст^ (6,20)
Гил р СТ
лигпчУ —нагрузка, при которой разрушается "сии В>Ое оконное стекло (при одинарном остек-7ппи с Соотношением сторон листа стекла I : 1 лпвиаНма5’т по табл- 6.1); у—коэффициент ус-нии работы (принимают по табл. 6.2).
&Р,кАа
4? £5 J ‘ 12,5 15 t,e.
Рис. 6.16. Характер изменения давления взрыва на ограждающие конструкции помещения объемом 5-103 м3 при вскрытии поворотных элементов с горизонтальным шарниром площадью, м2/м*
7 — 0.03; 2 — 0,05: 3 — 0,07 и массой 20, 50 и 120 кг/м2 по уравнениям (6.17); и„ =0,45 м/с; ри/Ро = 7,5;
а-2; Яр =0,5 кПа
Рис. 6.17. Характер изменения давления взрыва на ограждающие конструкции, помещения объемом 100 м3 при вскрытии поворотных элементов с вертикальным шарниром площадью, м2
I — 3; 2 — 5: 3—7 и массой 20, 50 и 120 кг/м2 по уравнениям (6.19); и„-0,45 м/с; Ри/Р - “7,5;
а-2; Яр»0,5 кПа
Величину нагрузки, разрушающей стекло, при промежуточных значениях площади одного листа следует определять интерпо-
Таблица 6.1
Толщина стекла, мм Нагрузка, разрушающая стекло. кПа, при площади одного листа стекла Р^т
0.6 0.8 1,0 1.2 1.5 2
3 4 3 2.1 . 1,5 1,2. 1
4 —— — 3.2 2.6 2 1,5
5 — — 4 3.2 •2,5
ляцией приведенных в табл. 5.2 значений. В том случае, когда в качестве легкоразру-шаемой конструкции применяют двойное
Таблица 6.2
Соотношение сторон листа стекла Коэффициент условий работы Соотношение сторон листа стекла Коэффициент условий работы
1:1 1 1:1.75 1,16
1:1.33 1,04 1:2 1.25
1:1.5 1.08 1:3 1,38
123
остекление, расчетную разрушающую нагрузку для стекла РрТ принимают 1,15Р£Т.
6. 4. Расчет требуемой площади ЛСК
Требуемую площадь ЛСК устанавливают из условия, чтобы давление в помещении не превысило заданного значения Pg. Скорость выгорания ГВС максимальна, когда Sf принимает максимальное значение. Для сферического объема S/ max=4n/?2, где R — радиус сферической оболочки. Для объема любой другой формы Sf max можно оценить как S/max=5V2/3, где V — объем помещения. Тогда скорость увеличения объема газа из-за его сгорания составит auSf тат (Ри/рь—1) и не будет превышать объемной скорости истечения при заданном Рд, которую можно найти из уравнения (6.6).
Для звукового потока, принимая внешнее давление равным атмосферному, можно записать
HnfeS/max (Pu/Pb 0 Н^отв Си< X
1
V—1/V1)O,5
(6.21)
Следует отметить, что так как в дан-
ном случае нс учитывается перемешивание
горючего газа с воздухом, то выражение S^B>aunk(pJpb — l)S/max X (6.22) дает несколько завышенное значение сиР площади требуемого отверстия. (2 f Рп у/v Г. ( 0.5 В качестве примеров для помещений Х (у 1 \ Рд / L \ Рд J J1 ’ объемом 100, 103, 104 и 5-104 м3, в которых (6.22) может образоваться пропановоздушная где k — коэффициент, принимаемый в зависимо- СМССЬ, ПО уравнениям (6.22), (6.24) УСТЗНОВ-кпнет^кииУиСКаеМОГО давления на ограждающие лены трсбуеМые площади отверстий в зави-кипк. д ру ПЦП п« * • •
Рд, кПа 0.5 1 1.5 2 2.5 3 4 5 6 7
k 0,94 0,89 0.87 0,85 0.84 0,82 0.8 0.78 0,76 0,75
Показатель интенсивности горения а устанавливается в зависимости от степени заполнения объема помещения различными объектами технологического оборудования, строительными конструкциями.
При свободном объеме помещения от оборудования и строительных конструкций а=2. При заполнении объема помещения до 20 % и более а следует принимать равным 3 при расстоянии между объемами Z>10d (где d — средний линейный размер поперечного сечения объекта); при Z<4d, а=4, Промежуточные значения а определяются интерполяцией.
Предложенный метод по определению требуемой площади легкосбрасываемых кон
струкций позволяет установить необходим мую площадь отверстия для случаев, когда отверстие открыто до момента зажигания ГВС, ЛСК разрушаются мгновенно.
На практике встречаются случаи, когда горючая смесь может заполнить не весь объем помещения, а только часть его. Допустим, что в объеме Уп ГВС занимает объем Vo- Если не учитывать обеднения смеси вследствие перемешивания с воздухом, то для случая, когда Vo(pu/p*) = Уп, площадь отверстия можно определить по формуле (6.22). Для Vo(pu/p6)<Vn в эту формулу нужно подставить
5/т«х^51^(А,/(>ь)]2/31. (6.23)
Тогда
.(6.24)
тр -
где -$отв ~ площадь отверстия, обеспечивающего снижение давления до безопасного для полностью заполненного ГВС объема помещения; Vo — объем взрывоопасной смеси в помещении, м3, Vo^G/C (G — количество поступивших веществ, определяемое в соответствии со СН 463-74; С — стехиометрическую концентрацию взрывоопасной смеси, г/м3, принимают по справочным материалам или по табл. 6.3.
сим ости от давления Рл при мгновенном вскрытии конструкций (рис. 6.18—6.22).
Для определения требуемой площади отверстия в наружном ограждении помещения нужно задать следующие величины: 1) если отверстие было открыто до момента зажигания горючей смеси внутри помещения, то PR задают из соображений прочности ограждающих конструкций, которые не должны разрушаться. Если отверстие было закрыто ЛСК, которые мгновенно разрушаются при Рд, то следует принять Рр=Рл\
2) в отношении плотности ГВС к плотности продуктов сгораний pM/pt степень расширения продуктов горения можно счи-
124
Рис. 6.18. Площадь мгновенно вскрываемых лег-косбрасываемых конструкций в наружном ограждении помещения объемом Уц=100 м3, приходящаяся иа единицу объема по уравнениям (6.22) и (6.24)
Объем взрывоопасной ГВС составляет: 1 — 5 % объема помещения; 2—10 %; 3—12%; 4 — помещение полностью заполнено взрывоопасной ГВС;
U =0,45 м/с; 0-2; ри/рв=7,5
Рис. 6.19. Площадь мгновенно вскрываемых лег-косбрасываемых конструкций в наружном ограждении помещения объемом Кц=500 м3, приходящаяся на единицу объема по уравнениям (6.22) и (6.24)
Объем взрывоопасной ГВС составляет: 1 — 5 % объема помещения; 2—10%; 3 — 12 %; 4 — помещение полностью заполнено взрывоопасной ГВС;
U =0,45 м/с; <х=2; р И/Рв “7,5
в.20. Площадь мгновенно вскрываемых лег-косбрасываемых конструкций в наружном ограждении помещения объемом Уп = 1000 м3, приходящаяся на единицу объема по уравнениям (6.22) и (6.24)
?«ъем пзРыв<эопасной ГВС составляет: 1 — 5 % ооъема помещения; 2—10%; 3—12%; 4 — помещение полностью заполнено взрывоопасной ГВС;
ия =0,45 м/с; а=2, ри/Рв=7,5
тать константой и пользоваться значением Рь/ра при атмосферном давлении;
Таблица 6.3
се о Д.
Вещество ехнометрнческая нцентрация взр> опасной смеси г/м3 аксимальное рас-ipeune продукте рения p./pfe , эрмальная скоро рння взрывоопа! й смеси и , м/с
Ux об £з£
Акролкин 140.8 8,1 0,66
Акрилонитрил 1250 8,2 0,46
Аммиак 165.8 6,2 0,1
Амилен 93,1 8 0,42
Ацетальдегид 151,6 8 0,41
Ацетилен 98,2 8 1.57
Ацетон 104 7,7 0.43
Бензол 104,9 8 0,47
1-Бутан 95,1 8,2 0,46
П-Бутаи 90,1 8 0.37
Бутилен 94,2 8 0.43
Винилацетилен 93,7 8,7 0,81
Водород 40,4 7,8 2.67
Гексадекан 85,7 7,5 0.4
Н-Гексан 91,4 7,5 0.38
1-Гексан 87,1 7,6 0.45
1-Гекснн 93,2 8,1 0.52
Гептан 91.7 8 0.42
1-Гептнн 97,2 7,5 0.41
Дивинил 99,1 8,2 0.54
Днизопропил 91,4 8 0,35
Диметиловый эфир 134,1 7,7 0.49
Днэтиловый эфир 124,5 8 0.49
Изоамилен 84,7 8 0.44
Изобутан 90,1 8 0.34
Изобутилен 94,2 8 0.37
Изооктан 92,1 8 0.34
Изопентан 79,2 7,8 0.4
Изопрен 88,3 8,1 0.5
Изопропиламин 100,7 7.4 0,29
Изопропилбензол 51,6 7.6 0.38
Изопропилмеркаптан 114,3 7,8 0,33
Изопропиловый спирт 140 8 0,41
Изопропилхлорид 147,2 7,6 0,27
Ксилол 92,1 7.4 0.34
Метан 91,5 7,5 0.33
Метиловый спирт , 115 8 0,57
Метилциклогексан 85,3 7.8 0.4
Метилэтилкетон 117,8 7,7 0.43
Неогексан 83 7.7 0,4
Неопентан 82,2 7,7 0,35
Окись пропилена 128 8.1 0,67
Окись углерода 1163 8.2 0.85
Окись этилена 117,5 8 0,89
Пропан 89,2 8 0,45
Пропадиен 91,6 7,6 0,38
Пропилен 94,2 8,5 0,68
Пропианальдегид 128,8 8 0,5
Сероуглерод 222,4 7,8 0,59
Толуол 93,5 8 0.38
Фуран 134.8 8,2 0,62
Хлористый Н-Пропил 147,8 7.6 0,28
Циклобутан 84,5 8 0,61
Циклогексан 141,2 7,5 0.43
Циклогексан 88,1 7,8 0,43
Цнклопентан 84,8 7.8 0,45
Цнклопентадиен 92,1 ’7,7 0.42
Циклопропан 83,4 8.1 0,54
Этан 77,3 7.7 0,45
Этилацетат 152,5 7.3 0,37
Этилбензол 94.3 7.4 0.35
Этилен 94.4 8 0,74
Этиловый спирт 155 8 0,55.
Примечание. Характеристики веществ, не
приведенных в табл. 6.3, следует принимать по
официальным справочникам или данным мини-
стерств и ведомств.
3) из тех же соображений си= с0, где Со — скорость звука во взрывоопасной смеси при нормальных условиях;
4) скорость горения можно принять u=auH, где ик — нормальная скорость распространения пламени [4]. При решении практических задач следует принимать
125
Рис. 6.21. Площадь мгновенно вскрываемых лсг-косбрасываемых конструкций в наружном ограждении помещения объемом Уп—10 000 м1, приходящаяся - на единицу объема по уравнениям (6.22) и (6.24)
Объем взрывоопасной ГВС составляет: / — 5 % объема помещения; 2 — 10 %; 3 — 12 %; 4 — помещение полностью заполнено взрывоопасной ГВС: (7Н—0,45 м/с; а-2; Ри/Рв“7,5
Рис. 6.22. Площадь мгновенно вскрываемых лег-косбрасываемых конструкций в наружном ограждении помещения объемом Vn—10С 000 м\ приходящаяся на единицу объема по уравнениям (6.22) н (6.24)
Объем взрывоопасной ГВС составляет: 1 — 5 % объема помещения; 2—10%; 3—12%; 4 — помещение полностью заполнено взрывоопасной ГВС;
U -0,45 м/с; а-2; ри/Рв-7,5
для стехиометрического состава горючей смеси в объеме помещения;
5) площадь фронта пламени 5/max зависит от многих параметров: размеров ’ и формы помещения, места расположения и формы отверстий в наружном ограждении здания, равномерности распределения взрывоопасной смеси по объему. Для оценочных расчетов по определению 5/ тат можно считать, что S/max=5Vn/3 [9],
Изложенный метод по защите зданий взрывоопасных производств легкосбрасывае-мыми конструкциями позволяет определить взрывные нагрузки на ограждающие конструкции и, сравнивая их с допускаемыми (безопасными), находить требуемую для этого площадь легкосбрасываемых конструкций в зависимости от параметров взрывоопасной смеси.
РАЗД ЕЛ 7. РАСЧЕТ СООРУЖЕНИИ, ЗАГЛУБЛЕННЫХ Б ГРУНТ
Г. И. Глушков
При проектировании заглубленных в грунт сооружений промышленного строительства, убежищ гражданской обороны возникает ряд сложных проблем, связанных с необходимостью их расчета на действие динамических нагрузок. Такие нагрузки возникают при взрывных работах (на карьерах н в шахтах масса взрываемых зарядов достигала 400 т, а в дальнейшем может еще возрасти, а также при действии крупных взрывов и сейсмических воздействиях).
Под заглубленными будем подразумевать сооружения, возводимые в открытых котлованах со вскрытием дневной поверхности. Их можно разбить на два типа: сооружения неглубокого заложения, ширина которых значительно превышает глубину (рис. 7.1,а), и сооружения глубокого заложения, у которых глубина заложения в несколько раз больше его. ширины (рис. 7.1,6).
Расчет сооружений Глубокого заложения характеризуется следующими особенностями: для восприятия вертикальных усилий
Рис. 7.1. Схема сооружения, заглублённого в грунт
а — неглубокого заложения; б — глубокого заложения; / — сооружение; 2 — отметка подошвы сооружения; 3 — отметка перекрытия сооружения;
4 — отметка поверхности грунта
126
кроме реактивного давления по подошве мбгут быть введены в расчет и силы трений, развивающиеся по их боковым граням, вследствие плотного прилегания грунта; расчет на горизонтальные нагрузки и моменты производят с учетом заделки в грунт, что йозволяет передать на сооружение значительные нагрузки.
При кратковременном действии нагрузки для сохранности сооружений, заглубленных в грунт, и оборудования, установленного в них, а также для защиты людей, находящихся внутри сооружения, необходимо обеспечить прочность конструкций и ограничить уровень их колебаний пределами, исключающими вредное воздействие на людей и технологическое оборудование. Поэтому цель динамического расчета сооружений, заглубленных в грунт, состоит в определении перемещения, скорости и ускорения колебания сооружений и их ограничение до уровня, допустимого для людей и технического оборудования. Прочностные расчеты элементов конструкций производятся обычными методами строительной механики и здесь не рассматриваются,
7.1. Виды динамических нагрузок и их воздействие на сооружения
При наземном взрыве поверхность земли подвергается воздействию весьма значительного давления, и от эпицентра взрыва распространяются сферические ударные волны и сейсмовзрывные волны в грунте. Воздушная ударная волна, распространяясь по. поверхности земли, возбуждает в грунте волны сжатия и разрежения. Поскольку скорость распространения волны в грунте отстает от скорости распространения фронта воздушной волны, в грунте возникают продольные и поперечные волны. При наличии подстилающих твердых пород на границах раздела слоев возникают отраженные и преломленные волны (рис. 7.2). В результате воздействия сейсмовзрывных волн грунт подвергается интенсивным вертикальным и горизонтальным колебаниям, происходящим в относительно небольшой промежуток времени (рис. 7.3.).
Взрывные волны, распространяющиеся во все стороны от места взрыва, в зависимости от среды, в которой они распространяются, и их интенсивности разделяются на воздушные ударные волны и волны сжатия в грунте; ударные волны — с резким нарастанием давления (рис. 7.4, б); волны сжатия—с постепенным нарастанием давления (Рис. 7,4, а\.
Избыточное давление на фронте и скорость распространения воздушной ударной волны на любом расстоянии от центра взрыва определяется по формулам, приведенным в [17].
Давление в волне сжатия зависит от мощности взрыва, избыточного Давления и глубины, отсчитанной от поверхности земли.
Напряжения сжатия, действующие в направлении радиуса, исходящего из места взрыва, называют радиальными напряжениями сжатия R [9]. Для мягких нескальных грунтов значения максимальных радиальных напряжений определяют До формуле
FK q ^3 > <7-1’
где с максимальные радиальные напряжения; F — коэффициент, учитывающий влияние глубины заложения заряда; К — коэффициент, учитывающий свойства грунта; /? — расстояние 6т места взрыва, м; q — общая масса заряда, кг.
Радиус заряда, приведенного к сферической форме, м:
Ниже приведена зависимость F от (117 — глубина заложения заряда, м.) для взрывчатых веществ средней мощности:
... О 3 6 9 12 и больше
F....... 0,2 0,5 0,7 0,8 1
Значения коэффициента, учитывающего свойства грунта, могут быть следующими: для лесса 30—120; ила 90—600; суглинка 90—200; глины, не насыщенной и насыщенной водой, соответственно 700—1400 и 3500—10000.
В скальных грунтах радиальные напряжения определяются по формуле, предложенной А. И. Ханукаевым [9]:
= F (2300 — — 1200 X \ №
xV+350VZ
(7.3)
Время действия волны с, почти не зависит от расстояния. В твердых породах можно принять приближенно
t = V~q /2000. (7.4)
Максимальная скорость смещения грунта Or, м/с:
’«—(75)
127
t Рис. 7.2. Схема сил, действующих на заглубленное в грунт сооружение (9]
/ — сооружение; 2 — воздушная ударная волна;
3 — поверхностная волна; 4—прямая волна сжатия; 5 — отраженная волна; 6 — поперечная волна сдвига; 7 — продольная волна сжатия
Рис. 7.3. Кривые, характеризующие колебания грунта при взрыве 50 000 кг тринитротолуола иа расстоянии 63 м от центра взрыва [6]
1 — смещение; 2 — ускорение
Рнс. 7.4. Взрывные волны в воздухе и грунтах
I а — волна сжатия; б—ударная волна; 1, 2 — соответственно фазы сжатия и разрежения
Смещение породы при прохождении взрывной волны приближенно можно определить по формуле
5Л = —(7.6)
Используя формулы (7.5) и (7.6), получим
( 1 q 1 qW
С _ Г I---2______2-
R \ 130 R3 250 /?2 т
Большие напряжения взрывных волн в грунтах при крупных взрывах не позволяют использовать для расчета положения классической сейсмологии.
При получении формул для определения перемещений и перегрузок в грунте при крупных взрывах используют экспериментальные данные, а также результаты теоретических исследований. Исследования за рубежом в этой области выполнены Ньюмарком, Кардером, Клоудом и др. [6]. Максимальные компоненты перемещений по-
128
роды на некотором расстоянии от кратера в интервале избыточных давлений в воздухе 0,7—4,2 мПа для скальных грунтов (однородный гранит) Ньюмарк рекомендует определять по следующим формулам [6]:
dB = 0,81 (о0,83 Я~15; (7.8)
av = 0,061с)0’83 Я“3’5 с2ь s (7.9)
где d—вертикальное перемещение, см; со — мощность взрыва, Мт; R — расстояние, м; а р — вертикальное ускорение, м/с2; С[± — сейсмическая скорость, м/с.
В скальных грунтах напряжения рекомендуется вычислять по формуле
гДсОде—напряжения, МПа; R—расстояние от места взрыва, м.
Перемещение грунта, вызванное ударной волной в воздухе, действующей на поверхность, Ньюмарк рекомендует определять по формулам:
р0,4 ^0,33
dB = 0,355-------------; (7.11)
Ps0
ав = 1,12 —---------S°nfi ; , (7.12)
/ 2Р0’6 \
I 1 । ___s0 I
2 \ + 294с)0’33 /
где Pso — избыточное давление в воздухе, МПа; z—глубина расположения точки, м; dv, — то же, что в формулах (7.8), (7.9).
Напряжения для мягких нескальных грунтов на любой глубине от динамических нагрузок, действующих одновременно на значительную часть поверхности, могут быть получены из рассмотрения продольных колебаний столба грунта. Решение подобной задачи рассматривалось в трудах С. С. Давыдова [5].
7.2. Условия работы заглубленных сооружений при динамических воздействиях и принципы их расчета
Воздушная ударная волна, проходящая по поверхности земли, вызывает волну сжатия в грунте, распространяющуюся под углом к поверхности со скоростью ат (рис.7.5). Как только волна сжатия достигает сооружения, она вызывает горизонтальную и вертикальную составляющие нагрузки на сооружения [17]. Определение давления на покрытия и вертикальные стены сооружения изложено в разд. 5 этого Справочника и в [17].
Рассмотрим условия работы сооружения глубокого заложения в форме параллелепи
педа, характерные для многих заглубленных в грунт сооружений. Работу сооружения неглубокого заложения можно рассматривать как частный случай работы сооружения глубокого заложения при условии, что реактивный отпор грунта по боковым граням или учитывают или отсутствует (сооружения мелкого заложения).
Если на сооружение действуют горизонтальные и вертикальные нагрузки Р(/) и У(0 (см. рис. 7.5), то сооружение стремится повернуться вокруг некоторой точки, лежащей на глубине z0 от поверхности грунта, и сдвинуться по плоскости основания (рис. 7.6).
В первой стадии при небольших значениях внешних сил сопротивление грунта по вертикальным граням и основанию является упругим, эпюры грунта по вертикальным граням имеют криволинейное очертание, а по основанию эпюры реактивного давления имеют вид трапеции (рис. 7.6, а). При возрастании внешних сил преобладают неупругие сопротивления грунта, а эпюры реактивного давления грунта по передней грани в верхней части сооружения могут достичь предельного давления, ограниченного линией предельного сопротивления; одновременно возрастает вертикальное давление в основании сооружения (рис. 7.6, б). В следующей стадии происходит ограничение реактивного давления по передней грани в верхней части сооружения линией предельного сопротивления грунта (рис. 7.6, в).
Дальнейшее возрастание внешних сил вызывает рост пластических деформаций; реактивное давление грунта по задней грани в нижней части сооружения достигает линии предельного сопротивления; реактивное давление в основании сооружения имеет вид треугольника (рис. 7.6, г). Затем происходит дальнейший рост пластических деформаций; реактивные давления грунта по передней и задней граням сооружения ограничиваются линиями предельного сопротивления; в основании сооружения также развиваются пластические деформации, а треугольная эпюра реактивных давлений захватывает лишь некоторую часть основания (рис. 7.6, д). Наконец, при максимальном значении внешних сил пластические деформации грунта развиваются по вертикальным граням и основанию сооружения: эпюры напряженного состояния грунта характеризуются заключительной предельной стадией, в которой криволинейная эпюра напряжений грунта по передней и задней граням сооружения выходит за пределы линии предельного сопротивления, а напря
9—189
129
жение по подошве сооружения достигает также предельного сопротивления грунта (рис. 7.6, е). Во всех рассмотренных стадиях напряженного состояния по вертикальным граням и подошве сооружения развиваются силы трения.
Характер перемещения сооружений в грунте и стадии напряженного состояния зависят от значения внешних сил. размеров сооружения, сил трения и реактивных давлений, развивающихся по вертикальным граням и основанию. Решающее значение имеют реактивные давления по вертикальным граням и основанию сооружения. Их расчетные величины определяют характером стадии напряженного состояния грунта, в зависимости от которого расчеты заглубленных сооружений можно вести: 1) с учетом
Рнс. 7.5. Взаимодействие волны сжатия в грунте с сооружением
I— воздушная ударная волна; 2 — волна сжатия в грунте
реакции упругого основания; 2) по предельным нагрузкам, соответствующим состоянию предельного равновесия.
Методы динамического расчета с учетом сопротивления грунта позволяют определить параметры колебаний и усилия в конструкциях сооружений при действии сейсмовзрыв-ных волн в грунте. Расчет сооружений с учетом сопротивления грунта основан нй следующих предпосылках:
1) при кратковременном нагружении, характерном для взрывных воздействий, параметры колебаний определяют с учетом реакции упругого основания и влияния внутреннего трения (неупругих сопротивлений);
2) жесткость сооружения предполагается бесконечно большой по сравнению с окружающим грунтом, что характерно для монолитных и сборно-монолитных железобетонных сооружений;
3) внутреннее трение при кратковременном однократном действии нагрузки незначительно снижает максимальные параметры движения сооружения, поэтому расчет можно вести и без учета внутреннего трения;
4) за расчетную нагрузку принимают динамическую нагрузку, закон изменения которой во времени в общем случае произвольный.
Заданный график изменения внешних сил во времени изменяется мгновенно скачкообразно (рис. 7.7, а). В пределах каждого интервала движение системы будет определяться с помощью формул, соответствующих постоянным внешним силам. При переходе от одного интервала к другому составляют уравнения с учетом того, что в каждой точке количество движения старой и новой систем должно балансироваться. Согласно приведенному методу, основной расчетной нагрузкой является нагрузка,
Рис. 7.6. Основные стадии изменения реактивного давления грунта на сооружение нри возрастании внешних сил
13в
Рис. 7.7. Дейст-- вительный (сплошная линия) и схематизированный
(пунктир) графики изменения внешних сил во времени (а) и основной закон изменения внешних нагрузок вс времени (б)
а) б)
v(t) ищ
zr i
где R , R , R — равнодействующие реакции Z X ф
грунта, равные давлению волны в грунте, вызванной перемещением сооружения; а — скорость распространения волны в грунте (табл. 7.1); х, г, ф; dz/dt-, dx/dtx dftfdt— соответственно вертикальные, горизонтальные, угловые смещения и скорости движения центра тяжести сооружения в данный момент времени; с2 — коэффициент уп-
мгндвенно возникающая при /=0 и сохра-няющая постоянное значение до бесконечности (рис. 7.7, б). При расчете параметры движения в конце каждого интервала являются начальными для последующего интервала, что соответствует условному переносу начала координат в точку мгновенно-Скачкообразного изменения нагрузки в соответствующем интервале [1].
Расчет сооружений по предельным нагрузкам предусматривает полное выворачивание их из грунта. Расчетные нагрузки и размеры сооружений определяют таким образом, чтобы была обеспечена полная гарантия недопущения образования плоскостей скольжения и выпора грунта.
7.3. Динамический расчет сооружений с учетом сопротивления грунта
/. Сооружения неглубокого заложения
Перемещения сооружения в грунте определим с учетом реакции упругого основания и неупругих сопротивлений грунта. Влияние сопротивления грунта при расчете заглубленных сооружений на действие взрывных нагрузок можно учесть, рассматривая либо процесс генерирования в грунте
волн сжатия или разрежения вследствие перемещения сооружения, находящегося в контакте с грунтом, либо процесс колебания сооружения совместно с присоединенной массой грунта [7].
Волна, вызванная перемещением сооружения в грунте, оказывает на сооружение давление, направленное в противоположную Перемещению сторону, и прямо пропорциональное перемещению и скорости колебания сооружения:
D _ , ДР dz V
dt J’ ар dx
Сг
Я
Яф
сх
ар Ф-т- — сф
(7.13)
dt ) dtp ~dT
ругого равномерного сжатия грунта на уровне подошвы сооружения; с — коэффициент упругого
неравномерного сжатия грунта: сх — коэффици-
ент упругого равномерного сдвига грунта на уровне подошвы сооружения; ^г = сг^п' *гх=сх’?п; ^Ф =Сф J — коэффициенты жесткости (Fn — пло
щадь подошвы сооружения: / — момент инерции площади подошвы сооружения; сх — коэффициент
упругого равномерного сдвига грунта на уровне подошвы сооружения); р — плотность грунта.
Значения скорости распространения продольных волн в грунте приведены в табл. 7.1.
Таблица 7.1
Грунт а, м/с
Влажная глнна 1500
Песок мелкозернистый 300
Песок среднезерннстый 550
Гравий средней крупности 760
Лес естественной влажности 600
Значения коэффициента упругого сжатия грунта даны в табл. 7.2.
Между коэффициентами сг\ сх; сф установлены соотношения сф=2сг и сх—0,7 с2.
Равнодействующие реакций основания при условии, что силы неупругого сопротив-
Таблица 7.2
Отношение 10/F Значение сг для песков. Н/см»
10 0.2 Е
50 0.145 Е
100 0.132 Е
150 0.126 Е
200 0.122Е
Примечание.. F — площадь подошвы, м2; Е — модуль деформации грунта, определяемый в соответствии с требованиями главы СНиП по проектированию оснований зданий и сооружений; значение с2 для супесей и суглинков следует увеличить в 1,2 раза, а для глнны — в 1,5 раза.
9*
131
Рнс. 7.8. Расчетная схема перемещения сооружения под действием внешних сил
ления пропорциональны скорости колебания, определяют по формулам:
где k ; k ; k ; z; x; ф; dz/dt-, dx/dt-, dq>Hdt — to z x Ф
же, что и в формулах (7.13); Ф ; Ф ; Ф — мо-Z X Ф
дули затухания.
Значения модулей затухания, установленные опытным путем, сравнительно мало отличаются одно от другого и поэтому можно принять:
Ф2 = Фх = Фф = Ф. (7.15)
Для расчетов значения модуля затухания можно принимать по табл. 7.3.
Нижний предел значений модуля затухания можно применять для сооружений неглубокого заложения, верхний — для сооружений глубокого заложения.
Сопоставление формул (7.13) и (7.14) показывает, что выражения для определения сопротивления грунта с помощью модуля затухания и скорости распространения волн имеют один и тот же вид, поэтому порядок решения разнообразных задач, свя-
Таблица 7.3
Грунты Ф, с
Глинистые водонасыщенные и влажные Глинистые иеводонасыщенные Песчаные водонасыщенные Слабые супесчано-суглинистые » ленточные глины » насыпные 0,003—0,0045 0,0045—0,006 0,01—0,15
занных с расчетом сооружений, заглубленных в грунт, не меняется.
Применяя тот или иной способ учета сопротивления грунта, необходимо в формулах (7.14) и (7.13) заменить Ф2 на aplcz, Ф* на ар[сх, на ар/сф, или наоборот.
Учитывая изложенное, уравнения динамического равновесия системы имеют вид (рис. 7.8).
Для случая, когда сопротивление грунта определяют с учетом генерирования волн сжатия, имеем:
d2 г dz
М
+ctFuz=V(t)-, d2x / dx d<p \
+ Cx Fn (x — (pho) = P(t);
d2<p 4
е°"^Г + <С’Р/ + С^п,1§_
(7.16)
dtp
GAC) ф — cx Гц Ao x + ар/— — di
I dx dq>
°pPn ^o I , Ao " \ di dt
= P(t)hi-V(t)a1.
Для случая, когда неупругие сопротивления грунта определяются с помощью модулей затухания, имеем:
+ czFnz=V(t);
d2 х „ ( dx
М Сх ®х I — dt£. \ dt
dq> \
—ho — + cxFn(x — (ph0)=P(f);
at /
d2 ф ( <>
в» +K/ + C«fn'1O-
— G^o) — Cx ho x + dtp
+ c ф Фф / (К — cx Фх Fnh0X
(7-17)
= P(t)h1 — V(t) ait
где M — масса сооружения; z; x; ф; dzldt-, dxfdt; яф/dt — то же, что и в формулах (7.13), (7.14); d2zldt2, cPxIdt2, d2q>!dt2 — линейное и угловое ускорения; 6о — момент инерции сооружения относительно осн 0—у; ho“O,5h; V(0, Р(О — вертикальные н горизонтальные силы.
При решении дифференциальных уравнений вертикальные колебания сооружения рассматривают самостоятельно; горизонтально-вращательные колебания получают
132
из двух последних уравнений систем (7.16) и (7.17).
При расчетах устойчивости и прочности заглубленных сооружений наиболее важное значение имеют максимальные значения ли* нейных и угловых перемещений, т. е. не конец, а начало колебательного процесса, поэтому в этих случаях при выполнении практических расчетов влияние неупругих сопротивлений грунта можно не учитывать. В случаях, если необходимо определить перемещения сооружения за весь процесс нагружения (для расчета оборудования и амортизационных систем), неупругое сопротивление необходимо учитывать, поэтому далее рассмотрены оба расчетных случая — без учета и с учетом неупругих сопротивлений грунта.
Вначале приведены конечные формулы для различных случаев динамических воздействий на сооружения без учета неупругих сопротивлений грунта; вывод приведенных формул можно найти в работах [3, 4].
Вертикальные колебания сооружения.
1. Круговую частоту свободных колебаний сооружения определяют по формуле
p = V~czFT1IMt
(7.18)
где F п— площадь подошвы сооружения: с2 — коэффициент упругого равномерного сжатия грунта.
2. Для основной расчетной нагрузки, мгновенно возникающей при f=0 и сохраняющей постоянное значение V до бесконеч
ности, имеем:
2V . „ pt г =-----sin—— ;
Afp? 2
V г = —— sin pt.
Mp
(7.19)
3. Для общего случая, когда нагрузка изменяется во времени по произвольному закону, необходимо рассмотреть движение системы в пределах каждого интервала согласно графику, приведенному на рис. 7.7.
В пределах первого интервала, когда t меняется от 0 до t:
2Vi . „ pt Z = ' .. o' sin? —— Mpi 2
Vt г =-----sin pt.
Mp
(7.20)
В конце первого интервала, когда t=tit Расчетные формулы имеют вид:
, 2V1 п2
Z. ----------Sin?-----
** Мр2 2
Ут
2. =--------- Sin pti.
Z* Mp F1
(7.21)
В пределах второго интервала, когда время t меняется от ti до t2, параметры движения определяют по формулам:
?2 = zti cos pt +—L sin pt -f-p
, 2V2 . o pt
4-----7- sin2--- ;
Л4р? 2 (7.22)
z2 =— zti p sin pt 4-
4- Zt cos pt 4- —— sin pt.
* Mp
В пределах n-го интервала перемещение и скорость движения сооружения вычисляют по формулам:
, «п-1 .
2n = zn-i cos р: 4------sin pt 4-
Р
2Vn
Mp2
pt sin?——
2
(7.23)
zn =— zn—j p sin pt 4- zR—i cos pt-\-
Vn . t
—— sin pt Mp
В конце последнего интервала, когда расчетная нагрузка прекращает свое действие, сооружение продолжает совершать колебания с начальными условиями zt^ и z»n‘> тогда перемещения сооружения вычисляют по формуле
2n+i = 2n cos pt 4- (z/p) sin pt. (7.24)
4. Расчетные формулы для тех случаев, когда нагрузку можно представить с помощью уравнений каких-либо кривых/ имеют вид: когда функция V(/) представляет одну полуволну синусоиды V(t) = V sin tn t (рис. 7.9, а), перемещения сооружения определяют по формулам:
при t<ti
V р г = —--------------------(р sin mt —
р2М р\— tri2.
— msin pt у, при t>ti
V р г = —--------------------- {Гр sin mt —
р2 М р2 — т2.
— tn sin pt] 4- [р sin m(t — tj) — — m sin p(t — fi)]}.
(7.25)
В том случае, когда изменение нагрузки по времени выражается треугольным графиком (рис. 7.9, б), перемещения находят по формулам:
133
й0 = о,5л; т = е0/ос.
При
6П V / 1 \
г =------- t — — sin pt ;
* \ Р )
при
. , Г Т --- t 1
z = Оц VI -------—-------s in pt +
L т2 ₽Ti
+ —— sinp (t — ti)]; Til T2 p
при t>x
2. Для заданных расчетных нагрузок находят коэффициенты Ni и Nt по формулам:
Phi — Vat
(7.29)
(7.26)
3. Определяют собственные частоты горизонтальных и вращательных колебаний сооружения X. и по формулам:
2 _ сх^п . х~ М ’
T \2 / 1
+-------sin pr21 +1 —--------+
T1T2 / \ T2
I COS px д X COS px2 \2
Ti Ti T2 /
= -%/е <7-30)
Если нагрузка убывает во времени монотонно от значения Vo при t=0 до значения Vo=O при t=x (рис. 7.9, в), то перемещения при t<x определяют по формуле
где сх — коэффициент упругого равномерного сдвига грунта; с — коэффициент упругого нерав-Ф
номерного сжатия: I — момент ннерцнн площади подошвы сооружения.
4. Вычисляют частоты главных колебаний gi и gz по формулам:
z = р6ц
л2 в V nt \
—-----р2. COS—— — COS pt k
4т” J\ 2т /
(7.27)
где вц — единичное перемещение сооружения; а, b — параметры. характеризующие монотонную кривую.
Горизонтально-вращательные колебания сооружения. Порядок расчета сооружений при действии мгновенно возникающих горизонтальной и вертикальной нагрузок, сохраняющих постоянное значение до бесконечности (для определения х и ф), устанавливают следующий.
1. Для принятого сооружения (рнс. 7.8) вычисляют основные геометрические характеристики:
е0= М [(а2 + ft2)/12]; 6С = 0О + Mhfr, (7.28)
+ 1/(х1 + ^)2-4Тг.Х;
5. Определяют коэффициенты At В по формулам:
/V1A,2+^ft04+/V1X2(l-y)
4^
^А0 + /Уг(1-у) ^Ф
(7.32)
6. Для заданных начальных условий (при f=0; х=х0; х=х0; <р=<р0; <Р=фо) вЫ" числяют значения произвольных постоянных по формулам:
134
Фо ^0 * *0 (\г £2)
с2 =
>->0 (Фо—а)—<^0—— gj) 2 _2
S1 £1
• 2 • f 9 2ч <7-33)
Фр ^х hp хо (\х £1)
Сз е2(в?-й) с4 =
МФ.-Д)-^) (>£—«?)
&—&
Если при £=0; х=0; х=0; ф=0; ф=0 и С1=с3=0, то:
-4(4-81)-6*1*0
Сл~ 2 2 ’
8l 82 (7.34)
= 2 2 ;
£2“£1
7. Для любого промежутка времени оп-рёделяют расчетные значения горизонтальных перемещений сооружения х и углов поворота ф по формулам:
х = q sin gi 14- с2 cos gi t +
4~ C3 sin g21 + q cos g214- A;
a2 «2
*-x ~ Si
Ф = Q---------- sin S1 14-
^xK
x 0 _ 9 9
£1 + c2 9 COS gi t 4"
^x-el
+ сз 9 si13 S2 t +
Kt ho
,2 2
^x— S2
+ сл---------cos g214- B;
*1*0
X = C1S1 cos £11 — c2 £1 sin gi 14-4- c3 g2 dos g21 — c4 g2 sin g21;
л2 /Т2
К ~ S1
Ф = ci gi--;-----cos g! t —
Khp
K~Si
— c2 gi---------sin gi t 4-
h0
l2 Л2
1 к £‘2
+ c3 S2 —:-----c°s £21 —
Kh0
(7.35)
~~ ct S2 —9----“ sin g21;
>•1*0
при t=0-, x=Xo=O и фо=Фо=0:
X = c2 cos £114- c4 cos £214- A;
a2 „2 К Si
Ф = C2----------COS £1 t 4-
Xx/io
Xx — £2
4- C4-------- COS £2 14- B\
X =— C2 £jSin git —Ci g2 sin g2 t-,
I2 «2
*x £1
Ф =— c2 £1-----;----sin g! t —
^h0
xj — £2
— Q £2------------Sin g21.
(7.36)
Для общего случая, когда внешние си
лы изменяются во времени по произвольному закону, расчет ведут на основе главного решения, полученного выше. Порядок определения горизонтальных перемещений х и углов поворота сооружения ф устанавливают следующий.
1. Разбивают заданные графики изменения горизонтальной и вертикальной нагрузок во времени на ряд интервалов, в пределах которых действительные кривые заменяют схематизированными прямыми, сохраняя постоянное отношение вертикальной нагрузки к горизонтальной (рис. 7.10).
2. В пределах первого интервала,,когда t меняется от 0 до Л, горизонтальные перемещения и углы поворота вычисляют по формулам (7.36) (начальные условия при /=0, х=х=0 и ф=ф=0), коэффициенты Ci и С2 определяют по формулам (7.34).
3. В конце первого интервала, когда Z=/lt перемещения и углы поворота вычисляют по следующим формулам:
xZi=c2cos£1^4-c4cos£2/i4- А; '
I2 ZT2
—£1
’>/.=с2_7Г—cos«i'i +
^Xfto
72 «2
. ^х — £2 , „
+ с4 9 COS £2 Zi 4" В\
=— C2£1 sin£i *1—с4 £2 sin £2 ^1;
I2
^х~ Si ---- smx
а 2 2
Хх — g2
XSitj-c^—---------smg2^
АХ«о
(7.37)
4. С момента Л во втором интервале рассматривают новую систему, для которой
135
г/ • • Ф/, и Ф^ являются начальными па-
раметрами, если начало координат перенести в точку t=t\. При ti<t<t2 перемещения и углы поворота сооружения вычисляют по формулам (7.35).
Коэффициенты, входящие в эти формулы:
Ф/, кх hQ X,' £2)
C2 = ~л) •’ 2
g~2~gl
Vt, ^x x(t (^x )
3 g2(gi— gi)
(7.38)
g)—(**. — л)(а£—g?) •
£1 — g-2
Коэффициенты A, B, hx, gi и g? опреде
ляются так же, как и в предыдущем случае.
5. В момент, когда t=tz, линейные и угловые перемещения новой системы равны: Ч =с2 sin£l /2 + C2COS^l/2 +
+ c3 Sin S2 '2 + C4COSV2+ A;
1'2 „2
^x g\
4V, = ci ; sin gt ^2 +
4*.
4-е?
+ c2 7, cos £1 ^2 +
4*.
4-el
+ сз —;----s*n £2 ^2 +
4*.
— £2
+ c« —;-----cos g2 *2 +B;
(7.39)
4 = c^cos gl t2- c2g{ Sin gx Z2+
+ C3 «2 008 V2 - C4 £2 sin V2;
. *-x — £1
fl, = C1 Si —005 Si <2 -
*xho
>2 — «г2
£1
-Ml sin«i'2 +
4-«?
+ «3 £2 о cos £2 ^2 —
4*o
4- e?
+ C4 g2 — ----sin g212.
4*.
Рис. 7.10. Действительный и схематизированный графики изменения внешних снл во времени а — при горизонтальной силе; б — прн вертикальной силе
6. Если число интервалов и, то в пределах n-го интервала горизонтальные перемещения и углы поворота сооружения вычисляют по формулам (7.35).
7. В конце n-го интервала внешние силы прекращают свое действие и сооружение совершает колебания с начальными условия-мих,п. Лл, Ф1п, <Pt„.
Вертикальные и горизонтально-вращательные колебания сооружения с учетом влияния неупругих сопротивлений грунта определяют в следующем порядке.
Рассмотрим решение системы (7.17) для внезапно приложенных сил, остающихся с течением времени постоянными; это решение позволяет рассматривать и более сложные случаи нагружения, когда внешние силы изменяются по произвольному закону способом, изложенным ранее.
Введем обозначения:
= сг % = сх п = сгФг Fn/M;
по = Сг Fn/M; пх = Фг у2 ; п2=у2 ’
Л3 = ^х п4 = ^х ^0’
= + ')>%.
ie=(cvI-Oho + cxF^)l0o-, = сх Фх E/iq/Oo;
ns = Сх Fh0/&0\ Ni = V
N2 = P(t)/M‘, N3 = (P (t) ht--— VW ai)/60;
2e = cz Ф2 FnIM', Fn = ab;
M = Glg\ h0 = 0,5ft;
I = ab3/\2; e0 = M[a? + ft?)/12].
Тогда получим: cP г , dz
1“ И *7“ Иц Z — N jJ
dp dz d2 x dx
-----+ tii-----H n2 x —
dt2 dt
dtp
— n3— — n4tp = Jv2; at
d24> , d<P ,
~лГ+"с 1Г + dx
— ni —— —nBx = N3.
(7.40)
(7.41)
136
Параметры вертикальных колебаний (перемещения, скорости, ускорения) определяют из решения первого уравнения системы (7.41). Если в начальный момент перемещение и скорость равны нулю, имеем:
В итоге получим систему четырем линейных уравнений первого порядка:
dyjdt = у*
=— п2У1 — у2 + «4 Уз +
t о
X sin Pi (t — ti) dti, t
— ez +~— f /Vi e~eli~Z|)X
Al J 1 о
X cos pi (t — /г)
Pi = V e<
+ л3 У1 + ^2, dy^/dt = yt;
dy^
.. = пе У1 + пч У2 — пвУз —
(7.42)
— пьУ* + ^з-
(7.45)
Для основной расчетной схемы, когда сооружение внезапно нагружено постоянной силой V, возникающей в момент времени /=0 и сохраняющей постоянное значение до бесконечности, имеем:
г =-----— 1 — е еч cos pi t +
tAp\ L \
ё у
+ — sin рА / Pi
(7.43)
v «2+р? _Bt . .
---1-------e sin Pi Mpl Pi
Параметры горизонтально-вращательного движения сооружения, внезапно нагруженного постоянными силами V и Р, получим из рассмотрения последних двух уравнений системы (7.41). Для удобства решения эту систему уравнений второго порядка целесообразно преобразовать в систему четырех линейных уравнений первого порядка, предварительно обозначив:
х = уг\ dx/dt = У2‘. Ф = Уз, dq!dt = yi. (7.44)
Эту систему уравнений целесообразно решать с помощью ЭВМ. Для иллюстрации влияния неупругих сопротивлений грунта на расчетные параметры движения сооружения с помощью ЭВМ вычислены горизонтальные перемещения и углы поворота заглубленного в грунт сооружения с размерами а=Ь= =2,83 м; Л=2 м; h0=l м. Масса сооружения соответственно 39 200 кг.
При расчетах приняты следующие характеристики механических свойств грунта: Сх=3-107 Н/м3; Сф=12-107 Н/м3; Ф,=Ф„= =0,003 с (случай 1); Ф*=ФУ=0,006 (случай 2). Сооружение испытывает мгновенно приложенную горизонтальную силу Р= =20 кН с плечом /ц=3 м. В результате расчета получены графики горизонтальных перемещений сооружения (рис. 7.11, а) и графики углов поворота сооружения с учетом и без учета влияния иеупругих сопротивлений грунта (рис. 7.11, б). Как видно из рассмотрения приведенных графиков, влияние затухания на расчетные параметры незначительно; оно существенно лишь в конце колебательного процесса. Это позволяет производить практические расчеты нередко без учета влияния неупругих сопротивлений грунта.
Определение максимальных параметров движения сооружений. Перемещения, скорости и углы поворота сооружения рпреде-
₽ис. 7.П. Графики горизонтальных перемещений ним
сооружения (а) и углов поворота сооруже-(б)
без учета неупругого сопротивления грунта; 2 — с учетом неупругого сопротивления грунта прн Ф =Ф„ “0,003 с; 3 — то же, при Ф =Ф —0,006 с
X Ф X ф
187
Рис. 7.12. Расчетные схемы вертикального (а), горизонтального (б) и углового (в) перемещений сооружений под действием внешних сил
ляют составлением графиков или таблиц для различных значений времени t. На основании этих подсчетов устанавливают максимальные значения горизонтальных смещений сооружений. Максимальные вертикальные смещения находят суммированием перемещений от вертикальной силы и поворота сооружения, вызванного горизонтальной силой. Перемещения сооружения при повороте на угол <р определяют применительно к расчетной схеме, изображенной на рис. 7.8. Тогда
а
гф = “ tgф « 0,5аф. (7.46)
Максимальные значения вертикальных перемещений выявляют для момента времени составлением таблиц или графиков. Если максимальные значения вертикальных перемещений и углов поворота по времени примерно совпадают, то общее смещение находят по формуле:
2 — 2тах 4“ 2Фтах или 2 — 2тах 4“ 0»5a<pmax
(7.47) Наибольшее давление на грунт вычисляют по формуле
a = zcz. (7-48)
Условия устойчивости сооружения определяют следующим образом.
1. Наибольшее давление в основании сооружения не должно превышать расчетного давления R-.
с < mR, (7.49)
где т — коэффициент условий работы.
2. Параметры колебаний (перемещения, скорости, ускорения) не должны превышать предельно допустимых.
Если указанные требования не соблюдаются, то необходимо увеличить размеры и рассчитать заново.
Расчетные усилия в различных элементах конструкций определяют с учетом внешних сил, динамики их воздействия и давления на грунтовое основание.
2. Сооружения глубокого заложения
Рассматривается система с тремя степенями свободы, предусматривающая вертикальное, горизонтальное и вращательное перемещения (рис. 7.12). Расчетные формулы приведены без учета и с учетом неупругих сопротивлений грунта.
Дифференциальные уравнения движения системы без учета неупругих сопротивлений имеют вид:
Мг 4- сг zab = V (О'.
.. . cvhb c„h2b
Мх + —----х — —-----
2 12
(7.50)
'v h2b
*—~x = P(t)h1 + V(f) ai-
При решении уравнений (7.50) введены обозначения:
F. = bh; Fn = ab'r б n r
XL = c ab/MF IM;
2 Z Z П
A = %wm = cvf6im-,
4 = % 7/0,; l = ba3H2-,
N2=P(l)/M; Л/3 = (Р(0Л1 +
+ V(Oai)/0o;
60/eB = V» ho = 0,5/t;
вв = е0+м4
(7.51)
где 6o — момент инерции сооружения относительно оси, проходящей через центр его тяжести н перпендикулярно плоскости колебаний; с с — у ® коэффициенты упругого равномерного и неравномерного сжатия на уровне основания сооружения по горизонтали (с /с —/).
а у
Ниже приведены конечные формулы для расчета сооружений глубокого заложения; вывод этих формул можно найти в работах [3, 4].
Вертикальные колебания сооружения. Расчет производят по формулам (7.18) — (7.27), полученным для сооружений неглубокого заложения. Полученные решения могут быть уточнены вследствие дополнительного учета касательных составляющих напряжений по боковым граням и основанию сооружения. Расчетные формулы для уточненного решения приведены в работе [4].
Горизонтально-вращательные колебания сооружения. Порядок расчета при воздействии на сооружение мгновенно возникающих горизонтальной и вертикальной нагрузок, сохраняющих постоянное значение до бесконечности, для определения х и ф устанавливают следующий.
1. Вычисляют основные геометрические характеристики сооружения и параметры нагрузок: 60, 6в, у, 2Vi, N2, N3 по формулам (7.51).
2. Определяют собственные частоты горизонтальных и вращательных колебаний сооружений X* и Хг по формулам (7.51).
3. Вычисляют частоты главных колебаний по формулам:
(7.52)
$2 = °*5Х? Х^ + 0,06Xj^-^j/•
4. Находят коэффициенты А и В по Формулам:
, %N2 ,
А = —7-+0,16ftjX
^з^У + 0»б4А/2(1 —у)
Х^у + 0,12Х*М1-У) /’
ХфЛу-|-0,12X^h(l —у) / *
(7.53)
5. Для заданных начальных условий (при t=0, х=х0; х=х0; <р=ф0; Ф=Фо) вычисляют значения произвольных постоянных:
_ 0,08Х>фо/-х0(0,5^-г1)
S1(S2—«1)
O.OtOjft (ф„— В) /— :2=----------5---i--------
si—et
-к-л) (°X-si) "* 2 2 *
81 8-> — gi
OtO8X^(p/-xo(O,5X^-gf) g2(g?-sl) :
0,08X;j ft (%-В)/-
S.=----------~1-----------'
81
(7.54)
6. Для любого момента времени вычисляют горизонтальные и угловые перемещения сооружения:
0.5X2- g?
ф = С1-------------sin gi t +
0,08X2/1/
0,5X2 —gj
+ c2-------;-----cos gi t +
0,08X£ft/
, 0,5X2 -g2
+ сз------------sin g2 t +
о,О8х;л/
0,5x2—g|
4- Ci------------cos g21 + B-,
0,08X*n/
x = Ci gi cos gi t — c2gi sin gi t + + c3 g2 cos g21 — g2 sin g21\ o.sxj - g?
Ф = Cl gi------------ COS gi t —
0,08X^/i/
(7.55)
139
0,5^-g?
— c2 gi ~ sin gj t + 0,081; hj
0,511- fi?
+ C3 g2 --------COS g2 t —
0M2xhj 0,515 —g*
— c4 g2---------Sin g21.
Q,№k2hj
(7.55)
7. Горизонтальные перемещения сооружения по глубине находят по формуле
x(/)z=±«q>(0 + x(0- (7.56)
Давление по глубине сооружения вычисляют по формуле
ax = cy Z~-1+ z<P (t)J + x (0] • (7.57) Л
как было рассмотрено выше, решение можно распространить когда нагрузки изменяются во
поворота вычисляют по
Максимальные линейные и угловые перемещения сооружения определяют составлением графиков и таблиц для различных моментов времени; максимальные вертикальные смещения — суммированием перемещений от вертикальной силы и поворота сооружения, вызванного горизонтальной силой.
Также, полученное на случай,
времени по произвольному закону. Для этого кривые горизонтальной и вертикальной нагрузок аппроксимируют горизонтальными схематизированными прямыми по отдельным интервалам. В первом интервале перемещения и углы
формулам (7.55) при начальных условиях: *о=хо=фо=Ч>о=0. В конце первого интервала перемещение и углы поворота сооружения определяют по тем же формулам при условии, что t=ti. С момента 6 во втором интервале рассматривают новую систему, для которой xrlt <ptl являют-
ся начальными параметрами, если начало координат перенести в точку ti. Перемещения и углы поворота сооружения находят по формулам (7.55). Такой же порядок расчета сохраняется и для вычислений в следующих интервалах.
Прн учете в грунте неупругого сопротивления необходимо дополнительно иметь в виду реакции грунта по основанию и боковым граням, пропорциональные скорости колебания сооружения. Ниже приведены
дифференциальные уравнения движения сооружения с учетом неупругих сопротивлений грунта:
d2z
М-------
dt2.
dz dt
d2 х су hb
М---- 1 —-—
Л2
cnh2b
a" v
' 2 12
t ФуСу/ib dx
' 2 dt ~
“ 12
00 dt2 caa3b
12
dt
17cah3b ~384
cy h2 b ~~ IF”
/17саФаЛ3Ь ’\ 384 +
СфФф a3 b
12
Фу Cy h2 b dx
d(p dt
12 dt
= P(t)h1-V(t) ai.
Обозначим:
cz Фг ab •------ =m',
M
cz ab
—77“ = m°' M
0,5Фу Cy hb mi =-----------••
m2 =
m3 =
M 0,5cу hb /Й
Фа са h2 b 12Л4
m - C*h2b
4 12Л4
_____ 17саФаЬ3Ь тъ 3840o
_ \7cah3b
m* 3840^
Фу Cy h2 b fTl’j —
% Фф a3 b 1260
% °3 b 1260 ’
Cy h2 b ; ma =----------;
120o >20o
0o — M |2 » — abf
M^G/g; h0 = 0,5;
/ = afes/12; N^V/M;
n2 = pim-,
бо
(7.58)
(7.59)
L4i
Тогда получим:
d2z dz ,
—г- + пг— +moz = Ni, at- at
d2 x dx
~de+ml di +
dq>
+ m2x — m3 —— —тл(р = N2, at
d2<f> , d<p
de +mi dt +
dx
+ m6 <p — m? —— —max = N3. at
(7.60)
Уравнения (7.60) не отличаются от уравнений (7.41), за исключением того, что вместо п/ в (7.41) в уравнениях (7.60) следует ввести mi, указанные в выражениях (7.59), поэтому методику расчета о влиянии неупругого сопротивления грунта и выводы для сооружения неглубокого заложения можно применить и для расчета сооружений глубокого заложения.
Устойчивость сооружения определяется условием, чтобы максимальные давления на грунт не превышали расчетных. Напряжения по боковым граням сооружения не должны превышать предельных давлений, определенных по способу Кулона. Это условие удовлетворяется, если угол касательной к эпюре напряжений будет меньше угла т наклона прямой mz:
где <₽» — угол внутреннего трения грунта; z — ордината точки по глубине сооружения.
Изгибающие моменты Мг и поперечные силы Qz в сечениях на разных глубинах оп
ределяют с учетом внешних сил и расчетных напряжений для различных моментов времени:
te'Ф
Мг = М + Рг~ —— X Ьп
/ z4 \
X z°z Т :
6с' ф /2о?2 Zs\
6г = р_——-y-J’ п
(7.62)
где г» — ордината, характеризующая расположение центра вращения и определяемая по формуле (7.55) при х=0.
3. Расчет сооружений с учетом перемещения грунта, вызванного динамической нагрузкой
Для расчета сооружений на взрывные нагрузки в грунте, связанные с действием
волн сжатия и перемещения грунта могут быть использованы полученные экспериментально сейсмограммы, а также записи скорости колебаний грунта (перемещения в этом случае определяют интегрированием графиков скорости). Установленные опытом зависимости перемещений грунта во времени (см. рис. 7.2, 7.3) являются исходными при расчете устойчивости и прочности сооружений, заглубленных в грунт. Для облегчения практических расчетов целесообразно установленные кривые перемещений грунта во времени заменять схематизированными прямыми и расчеты производить поэтапно для каждого интервала с учетом начальных условий (рис. 7.13). Перемещение грунта вызывает соответствующее перемещение сооружения. Общее перемещение сооружения в грунте определяется тремя степенями свободы, соответствующими вертикальным, горизонтальным и вращательным колебаниям.
Давление, передающееся со стороны грунта на основание и вертикальные грани сооружения, определяют с учетом заданного перемещения грунта (см. рис. 7.13):
для вертикальных граней
О'* = Су (хтр — х); (7.63)
для горизонтальных граней
сгг = с£(ггр — z), (7.64)
где х, z — горизонтальные и вертикальные перемещения сооружения в момент С, с у н сг — коэффициент упругого равномерного сжатия грунта по вертикали и горизонтали; *гр и ггр — горизонтальное и вертикальное смещение грунта в момент времени t (устанавливают по данным испытаний).
При составлении дифференциальных уравнений движения учитывают силы инерции сооружения и реакции грунта. Дифференциальное уравнение для вертикального движения сооружения имеет вид:
Мг + сг (z — zrp) ab = 0,1 или .. > (7.ОО)
Мг -|- сг гаЬ = сг abzab. J
Из последнего уравнения следует, что член CzGbzrp представляет собой некоторую
Рис. 7.13. Фактическая картина перемещения грунта (сплошная кривая) и схематизированные прямые (пунктир)
141
силу, изменяющуюся во времени так же, как и заданное смещение грунта ггр.
На основании отмеченного можно сделать вывод, что движение сооружения, вызываемое смещением грунта, будет таким же, как и движение сооружения без учета перемещения грунта при условии, что оно подвержено воздействию силы Cgabztv. Это обстоятельство дает возможность использовать все полученные выше выкладки. Внося соответствующие коррективы в выражения для определения возмущающих сил, получим:
Л1г 4- сг zab = сг аЬгГу, cvhb
Мх 4— ------* —
2
с„ h2 b си hb
(7.66)
/ 17саЯ36
\ 384
cvh2b _ cv h2b
Полученные уравнения имеют такой же вид, как и уравнения (7.50), за исключением выражений в правой части уравнений (7.50) и (7.66).
Обозначая
n3 =— о.за’ .
\ у / h
(7.67)
дальнейшее решение производят по ранее приведенным формулам (7.52)—(7.57), предварительно разбив заданные кривые на ряд интервалов, в пределах которых нагрузка имеет постоянное значение. В формулах (7.52)—(7.57) необходимо использовать значения Wi, Ns, N3 из выражения (7.67). Таким образом, можно рассчитывать сооружения, заглубленные в грунт, при перемещениях грунта, изменяющихся по любому закону. Время на расчет существенно сокращается при использовании ЭВМ.
7.4. Динамический расчет заглубленных в грунт сооружений с учетом предельного сопротивления грунта
Расчет сооружений по предельным нагрузкам, соответствующим состоянию предельного равновесия, основан на следующих предпосылках.
1. При кратковременных нагрузках большой интенсивности возможно, что сооружение неглубокого заложения, остава
ясь прочным, теряет устойчивость вследствие образования поверхностей скольжения и выпора грунта. Максимальные динамические нагрузки, вызывающие состояние предельного сопротивления грунта, называют несущей способностью. Сооружение устойчиво в том случае, если сейсмовзрывные нагрузки в грунтах меньше несущей способности. Несущую способность заглубленных сооружений определяют методом расчета сооружений в стадии предельного сопротивления грунта. В результате расчета находят предельное значение внешних сил . в состоянии предельного равновесия, при котором деформации грунта очень велики, и все сопротивление его исчерпано. Вводя расчетные коэффициенты, применительно к методике расчета по предельному состоянию, находят значения динамических сил и параметры сооружения, при которых образование поверхностей скольжения и выпора грунта не происходит.
2. Главным фактором, препятствующим выворачиванию сооружения из грунта, является пассивное давление, вычисленное обычно по методу Кулона.
3. При действии сейсмовзрывных волн в грунтах сооружение и призма отпора в стадии предельного сопротивления грунта при-ходят в движение, деформации и усилия становятся функциями не только координат точки, но и времени, поэтому особенность динамической задачи состоит в необходимости учета сил инерции, которые зависят от массы и перемещения системы сооружение—грунт.
4. При динамическом расчете сооружений, заглубленных в грунт, активное и пассивное давление грунта необходимо определять с учетом перемещения сооружения в фазе сдвигов и выпирания грунта.
Определение активного динамического давления грунта на подпорную стенку при действии любой кратковременной нагрузки на поверхности выполнено И. К. Снитко [15]. Для вывода расчетных формул Н. К. Снитко применяет теорию Кулона и рассматривает предельное состояние клина сползания. Этот прием может быть использован и для определения активного давления, и на заглубленные сооружения. Уравнение равновесия стенки имеет следующий вид;
Ea + Im-E6-F=0, (7.68)
где Е& — динамическое активное давление сыпучего тела; Jm — сила инерции массы стеики: F — горизонтальная реакция, действующая по подошве стенки; Eq — реактивное давленье груи-та по передней грани.
142
В случае действия внезапно приложенной постоянной нагрузки Еа определяют по формуле [15]:
Датах— goA&tg2l45°— X \ ~ J
А 4- 2mg sin2
(7.69) где go — интенсивность распределенной нагрузки; h и b — размеры стенки; фо — угол внутреннего трения; т — масса стенки; g — ускорение силы тяжести; А=уГр h3b cos ф; уГр — плотность грунта.
В случае действия распределенного по
поверхности грунта вертикального мгновенного импульса s0, Еа определяют по формуле
s0Mib tg(9 —ф0) tamax- tg9 X
Г А
X I...............
[Д 4- 2mg sin 6 cos (Э — ф0) е = 45°4-(ф/2),
(7.70)
где К — круговая частота собственных колебаний
системы.
В случае горизонтального внезапного смещения стенки (землетрясение)
ДД0Х2
2e sin е (в — ’<7'71)
где До — начальное отклонение стенки.
При приближенном определении пассивного динамического давления грунта на заглубленные в грунт сооружения учитывают следующие силы (рис. 7.14):
P0(t)—динамическую нагрузку, действующую на сооружение. Изменение этой нагрузки во времени принято равным мгновенно возрастающей силе, сохраняющей это значение до бесконечности; это решение можно распространить на любой закон изменения нагрузки во времени;
Е*— динамическое пассивное давление грунта по передней грани сооружения;
Р0И)
cooovZJu* Схема сил, действующих на систему нг-кение — грунт в стадии предельного сопротивления грунта
Рис. 7.IS. Схема сил, действующих на призму отпора грунта при динамическом воздействии нагрузки
!т — силу инерции массы сооружения, которая является функцией ускорения перемещения сооружения:
1т=—т^, (7.72)
Т — равнодействующую касательных составляющих напряжений по подошве сооружения:
T — c*abx, (7.73)
где а, Ь — размеры сооружения в плане: х — перемещение сооружения по грунту; сх — обобщенный коэффициент равномерного сдвига [16]. Динамические уравнения равновесия при смещении сооружения параллельно первоначальному имеют вид
f>0<') + /m-r-£5 = 0> <7-74>
откуда
£2=₽о « + <7-75)
Уравнение динамического равновесия при выпирании призмы отпора составлено с учетом (рис. 7.15): динамической реакции со стороны сооружения, равной и противоположной по направлению силе давления грунта; силы динамической реакции от плоскости сползания в состоянии предельного равновесия, отклоняющейся от направления нормали к плоскости сползания на угол внутреннего трения; силы инерции призмы отпора /п, направленной параллельно линии выпирания АС и равной:
1 /п=— тп—-х, (7.76)
cos р
где Шц—масса призмы отпора: х—ускорение горизонтального смещения сооружения.
Условие равновесия призмы отпора составлено в виде суммы проекций всех сил, приложенных к призме отпора АВС на ось п—п.
14S
Еп C0S (Р + Ч’о) — Gn Sin (Р + %) + 4-/п cos р cos (р -ь Фо) = о, (7.77)
где
Gn = 4-Trp^6tga, (7.78) Л»
откуда
£5 = °о *е (₽ + ф») + * <7 79>
Приравнивая выражения (7.75) и (7.79), получим дифференциальное уравнение для отыскания горизонтального смещения х, а пассивное динамическое давление грунта на сооружение определяют по формуле
Ро (0 + /т~Т = Gn tg (₽ + ф0)+(Сп/£)*"
(7.80)
откуда
= v Vrp tg2 (45° + b Х
(7.81)
При действии внезапно приложенной постоянной нагрузки Р:
ctg(45° + -^J(P.
Mupg Фо 2
Ед = Е п ст
fCT=4"TrPhs te-(45°+
(7.82)
В некоторых случаях к сооружению приложены момент, а также горизонтальная сила с эксцентриситетом относительно центра тяжести сооружения. Тогда следует учитывать смещение сооружения х, параллельное первоначальному положению, а так
же угол поворота ф.
Формула для определения пассивного давления в этом случае:
£!ф = Г' + 4- «8 (“5° +-£-)* +
L б \ /
+ ictg(45”+-^-k g X 2 J
(7.83)
где hy — расстояние между центрами масс сооружения н призмы отпора.
Анализ показывает, что динамическое пассивное давление существенно зависит от ускорения движения сооружения и призмы отпора, которое определяется конструкцией сооружения, характером закона нарастания внешней нагрузки и ее значением. Ми
нимальное значение динамического пассивного давления часто меньше пассивного давления для случая статического загруже-ния сооружения, поэтому в расчет необходимо вводить минимальное значение пассивного давления. Несущую способность Ри определяют по формуле [4]:
Рн = (26? - 1)[(1 + /Л) Е + 2TJ - (V + С)/,
(7.84)
где 0=zo/^ — отношение ординаты центра вращения сооружения zo к его глубине h; Г — сила трения; V — вертикальная сила; О — масса сооружения; f и fi — коэффициент трения грунта по основанию и граням сооружения.
Условие устойчивости, исключающее образование поверхностей скольжения и выпора грунта:
Рв<Рн»^ (7.85)
где Рв — горизонтальная составляющая нагрузки с учетом активного давления; т — коэффициент условия работы.
Расчет заглубленных в грунт сооружений с учетом предельного сопротивления грунта позволяет обеспечить устойчивость сооружения и исключить образование поверхностей скольжения и выпора грунта.
7.5. Динамический расчет заглубленных в грунт сооружений с податливыми прослойками
В качестве инженерных мероприятий по снижению перегрузок, возникающих при динамических воздействиях, могут быть использованы ' податливые прослойки между сооружением и грунтом (см. рис. 7.1). Ниже приведено приближенное теоретическое рассмотрение работы сооружений в упругопластической стадии работы прокладок между сооружением и грунтом при воздействии ударных нагрузок.
Рассмотрим простейшую систему с одной степенью свободы без затухания, так как влияние последнего на расчетные максимальные параметры невелико. Принятая расчетная схема предусматривает отсутствие эксцентриситета приложения нагрузки (при наличии эксцентриситета необходимо дополнительно учесть и поворот сооружения, что можно сделать заменой линейных перемещений сооружения угловыми). Восстанавливающая сила нелинейно связана с перемещением прокладки. Динамические перемещения, скорости и ускорения определяют за пределом упругости в интервале времени, соответствующем области нарастания параметров; криволинейную диаграмму прослойки под нагрузкой заменяют ломаной (рис. 7.16).
144
Рис. 7.16. Криволинейная (/) и схематизированная ломг.ная (2) диаграммы деформации податливой прослойки под нагрузкой
а2 = °а + Е' (е — еа), (7.88)
где F' — модуль упругости прокладки, соответствующий участку Л—В.
Дифференциальное уравнение равновесия с учетом (7.88):
d2 z
M~—— + k2z^P0(t)t (7.89) dr
где />о(О =/>(/)-(*.-*2)za; k^EFIh-. k^E’Flh-коэффициенты жесткости прокладки соответственно для участков О—А и А—В; F, h — площадь и толщина прокладки.
В случае когда на сооружение действует мгновенно возникающая и сохраняющая свое значение до бесконечности нагрузка Р, решение уравнения (7.89) имеет вид:
При решении принято, что жесткость прокладки значительно меньше жесткости грунта, вследствие чего перемещением грунта можно пренебречь. Движение сооружения на первом участке О—А нарастания деформаций и втором А—В рассмотрено отдельно. Для первого участка при наличии линейной характеристики восстанавливающей силы дифференциальное уравнение движения сооружения имеет вид
. , , sinX2/
Z COS Л2 л
P — (ki — k2)za
]-----------------(1 — cos Х2Т);
Z =— 2а Хо sin Х2 t + za cos Х214
Р — (Z?1 — /?2) za Л4Х2
sin Х21\
(7.90)
d2z
М-—- + ^z = P(Z), dr
z —— Xj (za cos X21 +
(7.86)
sin X21
j P~(^1—^2)Zg
где М — масса сооружения; fet — коэффициент жесткости прокладки; z — перемещение прокладки; P(t) — расчетная ударная нагрузка.
В случае когда в начальный момент перемещение и скорость равны нулю, а на сооружение действует ударная нагрузка, мгновенно возникающая и сохраняющая свое значение до бесконечности, решение уравнения (7.86) имеет вид:
X cos X2 /;
X2= Vk2/M .
где
Р
z =-----— (1 — cos Xi /);
Р
z = —sin Xi/;
/Ил»!
p
2 = ----COS Xi t",
M
Xi = /kJM .
(7-87)
Применяя ступенчатую аппроксимацию, данное решение можно развить и для нагрузки с произвольным законом изменения во времени.
Для второго участка А—В нарастания Деформаций на рис. 7.16 применимо решение Н. К. Снитко [15]. Зависимость между напряжением и деформацией на этом участке
При расчетах по формулам (7.90) необходимо знать za и z0. Для определения za и za следует проделать расчеты по формулам (7.87) и найти то время, после которого характерен второй участок деформаций, т. е. время, соответствующее точке А на рис. 7.16. Далее расчеты ведут по формулам (7.90) при новом начале координат, соответствующем времени для точки А.
Рассмотренную методику можно развить также для расчета вынужденных перемещений сооружения, вызванных перемещением грунта, которые связаны с ударными эффектами, а в некоторых случаях для сейсмических воздействий.
В качестве основной исходной предпосылки рассмотрены колебания грунта в виде записи смещения во времени (см. рис. 13). Перемещения грунта вызывают соответствующие перемещения сооружения. При определении реакции прослоек движение сооружения рассмотрено отдельно для двух характерных участков деформации О—А и А—В.
Для первого участка при линейной вос-
10—189
145
станавливающей силе зависимость между напряжением и деформацией
сг = Е (е — ггр), (7.91)
где е — относительное перемещение сооружения в момент времени t; еГр— относительное смещение грунта в момент времени t (смещение грунта определяют, заменяя фактическую кривую схематизированной, со спрямленными участками).
При составлении дифференциального уравнения движения учтены силы инерции сооружения и реакции прокладки
d2z
М —— + Лх(г-ггр) = 0, (7.92) atz
ЦЛН
d-z EF EF
М —— -4---------z =------zrD.
h h гр
(7.93)
Из уравнения (7.93) следует, что член (EFlh)ztp представляет собой некоторую силу, изменяющуюся во времени так же, как и заданное смещение грунта 2гр. На основании отмеченного можно сделать вывод, что движение сооружения, вызванное перемещением грунта, будет такое же, как и движение сооружения без учета перемещения грунта в случае, если сооружение подвержено воздействию нагрузки. Это обстоятельство дает возможность использовать полученные выше формулы, внеся соответствующие коррективы в выражения возмущающих сил. Для схематизированной диаграммы изменения перемещения грунта во времени, изображенной на рис. 7.13, имеем:
z = —~--гр (1 — cos Xi /); hAfXf
EFzr-p hM^
sin Xi /;
(7-94)
EFzrv hM
cos Ax t.
Полученные решения справедливы и для любого произвольного закона изменения нагрузки во времени при использовании в качестве начальных параметров значений г и 2. Подобный прием применяют и для последующих интервалов нагрузки.
Зависимость между напряжением и деформацией на участке нарастания деформаций А—В (см. рис. 7.16) определена с учетом перемещения грунта:
02 = са + Е' (е — еа — егр). (7.95)
Восстанавливающая сила на этом участке'деформации будет выражаться формулой
EF , Е’F , PB,‘2—a2F ~ h Za~^ h 2 Za
Е’ F --zrp) — (z — zrp)
( EF E'F\ „ — —;------------- )za> t7-96)
\ h h /
или
PB,2 = («, - 42) 2fl + (г —zrp). (7.97)
Обозначая kA=(k\—k2)za, получим
₽В.2=*Л + Мг~ггр)- P-98’
С учетом выражения (7.98) для второго участка деформации дифференциальное уравнение равновесия будет
Я2 z
M-^-+kA+k2(2-2n).= 0. (7.99)
Обозначая Ро(О=^8ггр—кл, получим d2z
М—- + k2z=PQ(f). (7.100) atz л
Дальнейшее решение можно вести по формулам (7.89) и (7.90), подставляя в них вместо Ро(О значения ₽о(О.
Для иллюстрации решения рассмотрено заглубленное в грунт сооружение размером а=Ь=2,83 м и глубиной Я=2 м (масса сооружения 39 200 кг), испытывающее действие мгновенно возникающей нагрузки Р=2400 кН (сохраняющей свое значение бесконечно большое время). По полученным выше формулам определены перемещения и ускорения сооружения на основании, характеризуемом коэффициентом жесткости Л1=480 МН/м, н при наличии податливых прослоек, характеризующихся следующими параметрами (точка А на рис. 7.16): Л1=480 МН/м, Л2=4,8 МН/м (случай 1); Л2=48 МН/м (случай 2) и k2— =240 МН/м (случай 3). Перемещение сооружения, соответствующее точке А, равно статической осадке от нагрузки.
Обобщенные результаты расчетов изображены на рис. 7.17, из которого видно, что на втором участке, характеризующем неупругую деформацию прослоек, происходит резкое уменьшение ускорений при возрастании перемещений сооружения. Уменьшение ускорений приводит к снижению инерционных сил, связанных с действием динамических нагрузок, и тем самым значительно облегчает условия работы заглубленных
146
Рис, 7.17. Кривые перемещений (а) и ускорений (б) движения сооружения на податливых и неподатливых основаниях
в грунт сооружений под нагрузкой. Применение податливых прослоек позволяет ограничить уровень колебаний конструкций при действии ударных нагрузок пределами, исключающими вредное влияние на людей и технологическое оборудование.
Таким образом, применение податливых прослоек следует рассматривать как одно из эффективных мероприятий по снижению перегрузок специальных инженерных сооружений и конструкций при динамических воздействиях.
РАЗД ЕЛ 8. РЕЧНЫЕ ГИДРОТЕХНИЧЕСКИЕ СООРУЖЕНИЯ
А. П. KupuAAQeJ И. С. Шейнин
Речные гидротехнические сооружения — плотины, здания ГЭС, подпорные стены, причальные сооружения, судоходные шлюзы и т. п. — подвергаются динамическим воздействиям во время строительства и эксплуатации в нормальных и аварийных режимах, а кроме того, могут подвергаться сейсмическим и взрывным, в том числе промышленно-сейсмическим воздействиям.
Далее приводятся рекомендации только по учету эксплуатационных динамических воздействий. Динамический расчет сооружений на специальные воздействия см. [4].
8.1. Общие положения
Характер динамических явлений в гидросооружениях различных типов. Динамические явления в гидросооружениях возникают вследствие силовых воздействий, которые передаются через опорные части работающих гидроагрегатов и другого оборудования, от пульсаций давления воды в вроточных частях, на поверхностях сооружения, контактирующих с турбулентными потоками, а также вследствие кинематического возбуждения, передаваемого через
грунты основания при колебаниях соседних сооружений или их элементов, например плит крепления нижнего бьефа или днища водобойного колодца при сбросе воды.
Для гидросооружений каждого вида характерны те или иные динамические явления, связанные со специфическими для этого сооружения нагрузками; в то же время для некоторых сооружений учета динамических явлений практически не требуется.
Плотины из местных материалов и глухие бетонные и железобетонные платины совсем не требуют учета динамических явлений, если только в них не встроены или не расположены в непосредственной близости от них какие-либо устройства или сооружения, являющиеся источниками динамических воздействий. В частности,- таким, источником может быть транспорт, .если по плотине проходит шоссейная или железная дорога. В этом случае применяют нормы проектирования соответствующих транспортных сооружений (мостов — для бетонных плотин, насыпей — для -плотин из местных материалов). Этот вид нагрузки.характерен для многих видов речных гидросооружений и здесь не рассматривается.
147
. Водосливные плотины испытывают силовые, динамические воздействия от пульсаций гидродинамического давления со стороны пропускаемых через них потоков и кинематическое возбуждение от колебаний основания, возникающих при гашении энергии в нижнем бьефе. Секции водосливной плотины, примыкающие к зданию ГЭС, испытывают от него кинематическое возбуждение через грунт или силовое воздействие через сопрягающий устой.
Здания приплотинных ГЭС испытывают главным образом силовые динамические воздействия, передающиеся через опорные части работающих гидроагрегатов. Ограждающие конструкции проточных частей здания ГЭС и напорные трубопроводы, идущие от плотины к зданию ГЭС, испытывают силовое гидродинамическое воздействие от пульсаций гидродинамического давления со стороны потока. Эти пульсации давления могут возникать из-за турбулентности потока и из-за периодического изменения гидравлического сопротивления турбинного тракта при вращении рабочего колеса турбины. Колебания зданий приплотинных ГЭС от-пульсации давления в нижнем бьефе, как правило, несущественны, так как обычно гашение энергии потока за гидроагрегатом не делают с целью повышения его КПД.
. Кинематическое возбуждение от колебаний грунта, возникающих при гашении энергии в нижнем бьефе водосливных плотин,- может оказаться существенным, если водобойные сооружения расположены в непосредственной близости от здания ГЭС.
Здания русловых ГЭС испытывают суммарные динамические воздействия, характерные для приплотинной ГЭС и для того типа плотины, которую это здание заменяет, являясь частью общего напорного фронта гидроузла. Особенно сложные воздействия испытывают здания совмещенных и водосливных ГЭС, так как они объединяют функции здания ГЭС и водосливной плотины... Правда, в зданиях совмещенных ГЭС, имеющих водосбросные отверстия, динамические явления, связанные со сбросом воды, носят главным образом местный характер, так как возникают лишь в элементах конструкций, ограждающих водосбросные галереи, а каких-либо воздействий со стороны нижнего бьефа не наблюдается, по-ви-димому, в связи с отсутствием гасителей энергии. В зданиях же ГЭС, встроенных в водослив, динамические явления, связанные с гашением энергии в нижнем бьефе, могут оказаться значительными и требуют обязательного учета.
Судоходные шлюзы и причальные сооружения могут испытывать динамические, воздействия, связанные либо с вибрацией затворов, либо с работой расположенных на них механизмов, либо с колебаниями рядом расположенных сооружений. Специфическими для них являются аварийные нагрузки, связанные с навалом судна при подходе к сооружению со сверхнормативной скоростью или обрывом швартовых; но нормами проектирования [13] расчет на них не предусмотрен.
Прочие гидросооружения — водоприемники, лесосплавные лотки, плотоходы, рыбопропускные и водозаборные сооружения не испытывают сколько-нибудь существенных для сооружения в целом динамических воздействий, связанных с их эксплуатацией. Возможны довольно интенсивные местные динамические воздействия во входных устройствах водозаборных башен и на рифленых днищах водоприемников-быстротоков ирригационных каналов. Учет ударов бревен или плотов обычно требует проверки соответствующих конструкций на местную прочность.
2. Оценка допустимости динамических явлений. Влияние динамических явлений на общую устойчивость сооружения в общем случае зависит от двух обстоятельств.
Первое — изменение физико-механических характеристик грунтов основания. Для связных грунтов, из-за происходящих в них физико-химических процессов (гелеобразование, тиксотропные превращения и т. п.) при длительном воздействии вибраций, в совокупности с изменением других природных факторов, таких, как уровень, давление грунтовых вод, температура грунтов и т. п., возможно уменьшение коэффициентов трения и сцепления. Для малосвязных грунтов даже при кратковременном воздействии сильных вибраций возможна перестройка структуры скелета (разжижение). Наконец, если основание гидросооружения сложено скальными породами, то при интенсивных динамических воздействиях возможно разрушение слоя контакта бетона со скалой, а при длительном воздействии вибраций — усталостное нарушение сцепления между ними.
Однако все эти изменения характеристик могут возникнуть при достаточно интенсивных воздействиях — сейсмических, взрывных и т. п. При нормальной эксплуатации гидросооружений их проявление ие отмечено, поэтому при проверке общей устойчивости гидросооружений с учетом только эксплуатационных динамических воз
148
действий изменение механических характеристик грунтов основания и зоны контакта бетона со скалой не учитывают.
Второе обстоятельство связано с тем, что при динамических воздействиях к статическим силам, действующим на сооружение, добавляются динамические. Необходим учет не только динамических нагрузок, но и динамических реакций грунта и водной среды. Поскольку динамические нагрузки являются знакопеременными, действуют с разными частотами, а при одинаковых частотах— с разными фазами, причем фазы динамических реакций могут быть различными по отношению к фазам действующих сил, то точное суммирование всех сил и вычисление главного вектора и главного момента и законов их изменения во времени представляет собой сложную и трудоемкую задачу. Решают ее в две стадии.
На первой стадии все динамические силы вводят в расчет в одном варианте:
1) при проверке общей устойчивости на сдвиг компоненты расчетных амплитуд динамических сил, параллельные равнодействующей статических сдвигающих сил, арифметически добавляют к статическим, а компоненты расчетных амплитуд динамических сил, параллельные равнодействующей нормальных к поверхности сдвига сил, арифметически вычитают из статических;
2) при проверке общей устойчивости на опрокидывание вокруг определенной точки моменты расчетных амплитуд всех динамических сил арифметически суммируют с моментом статических опрокидывающих сил.
При таком способе суммирования получается оценка коэффициента запаса устойчивости «снизу», т. е. этот коэффициент реально не может быть ниже вычисленного, а фактическая устойчивость всегда будет выше расчетной. Поскольку динамические расчеты обычно носят поверочный характер, то по их результатам не вносят облегчений в конструкции, запроектированные на основе конструктивно-компоновочных соображений или статических расчетов, поэтому, если коэффициенты запаса общей устойчивости на сдвиг и опрокидывание, вычисленные изложенным способом, будут не менее нормативных, то второй стадии расчета не требуется.
Если же расчетная устойчивость, вычисленная таким способом, оказывается менее нормативной, то необходимо выполнение второй стадии расчетов с учетом реально возможных соотношений фаз динамических сил.
Наконец, если и уточненный расчет покажет недостаточную устойчивость запроектированного сооружения с учетом динамических сил, то необходимо внести изменения в проект.
Устойчивость откосов земляных гидросооружений проверяют таким же образом.
Устойчивость креплений русла, в частности плит крепления нижнего бьефа гидром-узлов, может быть нарушена при возникновении гидродинамического давления на плиту при прохождении над ней вихря, имеющего размеры, близкие к ее размерам, либо при кратковременном локальном уменьшении уровня воды над плитой, происшедшем столь быстро, что давление под ней не успевает на это среагировать.
Возникновение кратковременного дефицита гидродинамического давления, осред-ненного по площади плиты, или момента этого давления относительно одной из граней плиты, может привести к ее отрыву от грунта основания, а многократное повторение такого отрыва — к выбросу плиты.
Если для ускорения проникновения давления под плиту ее укладывают на крупный щебень и устраивают в ней дренажные колодцы, то появляется еще одна возможность возникновения дефицита осреднен-ного давления над плитой. Так, если масштаб турбулентности меньше размера плиты, то при возрастании давления над дренажным колодцем и соответственно в подплитной полости над частью плиты возможно уменьшение давления. При этом силы и моменты, осредненные по площади плиты, намного меньше, чем возможные при отсутствии дренажных отверстий, но все же должны учитываться.
Влияние динамических явлений на прочность гидротехнических сооружений оценивают так же, как и для всех сооружений других типов. При этом желательно иметь в виду, что прочностные ’характеристики материалов определяют по стандартным методикам, регламентируемым соответствующими ГОСТами, где наряду с другими требованиями указывают и скорости возрастания нагрузки, прикладываемой к образцу. Для бетона эта скорость составляет 0,2—0,3 МПа/c, т. е. 2—3 кгс/(см2-с), для стали 2—3 МПа/с, т. е. 20—30 кгс/ /(см2-с). Полученную прочность принято относить к статическим условиям нагружения. Если нагрузка на образец будет прикладываться с большей скоростью, то получаемая прочность будет выше и будет характеризовать динамические условия нагружения.
149
Влияние динамических явлений на выносливость гидротехнических сооружений в большинстве случаев значительно больше, чем для промышленных сооружений. Это объясняется тем, что, во-первых, выносливость бетонных и железобетонных конструкций в водной среде ниже, чем в воздухе; во-вторых, вследствие длительности расчетных сроков эксплуатации многих гидросооружений число циклов динамических напряжений, вызванных стационарными нагрузками, много больше, чем для промышленных сооружений, что особенно важно, если усталостное разрушение происходит по бетону, для которого, как известно, предел выносливости монотонно снижается с увеличением числа циклов. В-третьих, поскольку пр условиям производства работ арматуру во многих гидросооружениях монтирует блоками, все ее стыки располагаются в одном сечении, так что именно выносливость сварных стыков определяет выносливость конструктивного элемента или сооружения в целом. Аналогично обстоит дело и в тех случаях, когда рабочую арматуру конструктивного элемента гидросооружения закладывают в предварительно изготовляемые опалубочные плиты, как это было, например, на Плявиньской ГЭС.
Общие определения и данные для расчета выносливости строительных конструкций приведены в [20], а применительно к гидросооружениям — в [3]. Следует отметить, что по действующему СНиП 11-56-77 «Бетонные и железобетонные конструкции гидротехнических сооружений», расчетное сопротивление ненапрягаемой растянутой стержневой арматуры ₽а при расчете железобетонных конструкций на выносливость следует определять по формуле
<8J> где — коэффициент условий работы, вычисляемый по формуле:
____________1,&0*д*с fe0 fefl kC 1,8
где ko — коэффициент, учитывающий класс арматуры:
класс арматуры: А-I A-II A-III
значение коэффициента: 0,44 0,32 0,28
Лд— коэффициент, учитывающий диаметр арматуры:
диаметр арматуры, мм: 20 30 40 60
значение коэффициента: 1 0,9 0,85 0,8,
причем для промежуточных значений диаметра арматуры коэффициент Лд определяют по интерполяции; — коэффициент, учитывающий тип сварного стыка, принимаемый:
для контактного стыкового соединения по ГОСТ 14098—68 и ГОСТ 19293—73 типа КС-М (с механической зачисткой) равным 1, а типа КС-О (без механической зачистки) равным 0,8;
для стыкового соединения, выполченого способом ванной одноэлек:родной еззрки иа стальной прокладке при ее длине 5' диаметров н более наименьшего из стыкуемых стержней, равным 0,8, а при длине 1,5—3 диаметра наименьшего из стыкуемых стержней, равным 0,6.
для стыкового соединения с парными симметричными накладками по ГОСТ 19293—73, равным 0,5;
для арматуры, нс имеющей сварных стыковых соединений, значение kc принимают равным 1; p*=amin/amax — коэффициент асимметрии цикла, где orojn и °mal соответственно наименьшее и наибольшее напряжения цикла.
Накопленные экспериментальные данные позволяют сделать следующие основные выводы по выносливости бетона:
1) относительное значение выносливости бетона при различных видах напряженного состояния (сжатие, растяжение, изгиб и т. д.) может быть принято одинаковым;
2) для сжатой зоны бетона пределом выносливости является граница микротре-щинообразования R^. Поскольку эта граница зависит только от уровня действующего напряжения и вида напряженного состоя; ния (простое, плоское, объемное), то для любых р* предел выносливости будет одинаковым. Значение р*. сказывается только на долговечности, т. е. на числе циклов, при котором наступит перегиб линий выносливости;
3) перегиб линий выносливости, т. е. достижение предела выносливости, начинается при числе циклов >107. Для р*=0 можно принять перегиб в точке 7V=1O7. Для больших N эта точка отодвигается вправо по оси и тем больше, чем больше р*;
4) началом линий выносливости на оси напряжений является точка, соответствующая динамической прочности бетона при скорости нагружения, равной скорости изменения переменной нагрузки.
Для практических расчетов значение усталостной прочности можно определить как
<8-з>
где /?£ — прочность бетона при статическом нагружении (призменная, кубиковая, на растяжение и т. д.);
Ко = 0,5/( — 0,616р*). (8-4)
’и
Влияние динамических явлений на обслуживающий персонал и технологическое оборудование оценивают по правилам, общим для всех строительных конструкций [20].
3. Особенности конструктивно-компоновочных решений и расчетных схем. Большинство речных гидротехнических сооружений, воспринимающих напор воды (плотины, здания русловых ГЭС), а также подпорные стенки, являются гравитационными, а еле-
150
довательно, имеют массивную конструкцию. Но и для некоторых ненапорных сооружений, таких, например, как здания припло-тинных ГЭС, необходимость расположения в иих проточных трактов сложной конфигурации с плавными поверхностями (напорные и отсасывающие трубы, спиральные камеры и т. п.) требует выполнения их в монолитном железобетоне в виде массивов. Это не позволяет вводить идеализацию конструктивных элементов в виде тонких стержней, пластин и оболочек, а требует применения моделей абсолютно твердого или деформируемого твердого тела.
Даже в тех случаях, когда один или два размера конструкции намного превышают остальные, т. е. применима идеализация в виде стержней, пластин и оболочек, высоты сечений этих элементов обычно измеряют единицами или десятками метров. В связи с этим характер работы бетона и арматуры в них резко отличается от характера работы бетона и арматуры в обычных промышленных и гражданских зданиях и сооружениях — увеличивается влияние растянутого бетона в изгибаемых элементах, меняется характер трещинообразования и т. п.
Для конструктивных элементов, контактирующих с водной средой, необходим учет их динамического взаимодействия в процессе колебаний. Более подробно эти вопросы будут освещены далее применительно к конкретным сооружениям. Здесь же приведем только некоторые общие рекомендации по выбору динамических расчетных схем.
Прежде всего необходимо иметь в виду, что динамический расчет сооружений является обычно поверочным, поэтому данные о геометрии и материалах конструктивных элементов оказываются заданными. Кроме того, до начала расчета конструкций и выбора их расчетной схемы необходимо иметь данные о частотах динамических нагрузок (п. 8.2).
Основные трудности вызывают вопросы об условиях, при которых массивный элемент сооружения можно вводить в расчетную схему в виде абсолютно твердого тела, и когда необходим учет его деформаций. Для решения поставленной задачи необходимо знать скорости распространения продольных Ci и поперечных Сг упругих волн в зависимости от проектной марки бетона по прочности на сжатие ₽ и его механических характеристик — модуля упругости Е, модуля сдвига G, коэффициента Пуассона V и плотности р;
В неравенстве слева стоит выражение для ci при распространении волны вдрль стержня, а справа — при распространении плоской волны в трехмерном упругом пространстве.
Для приближенных расчетов можно принять следующие значения с> и сг, км/р, в зависимости от R:
R
100 160 200 300 400 500
2.8 3,1 3,3 3.6 3.8 4
1.7 1.9 2,1 2,2 2.4 2,5
Зная частоты возмущающих сил f, Гц, и учитывая, что большинство конструкций гидросооружений работают в линейной области так, что вынужденные колебания происходят с частотами возмущающих сил, можно вычислить длины самых коротких продольной Xi и поперечной Х2 волн в массивных элементах сооружения:
Mmin = ci/fmax» ^2min = с2//тах* (®*6)
Если расстояние от возмущающей силы до наиболее' удаленной части массива при силовом его возбуждении, либо наибольший из размеров массива в направлении распространения волны при кинематическом возбуждений, составляет менее ‘А—Vs от четверти Xsmin (если возможны волны сдвига) ИЛИ mln (если основными являются продольные волны), то динамический расчет деформаций такого элемента не требуется. В динамическую расчетную схему сооружения такой массив может быть включен как абсолютно твердое тело.
Для примера рассмотрим нижнюю массивную часть здания Плявиньской ГЭС (рис. 8.1). Расстояние по вертикали от отметки подошвы —4,0 до отметки центра рабочего колеса +14,0 составит Л = 18 м, наибольшее горизонтальное расстояние- от оси агрегата до крайней точки массива 1= '=30,9 м. Под действием горизонтальных
151
.8
УМ04350
11
20,85
ОБ max 19,80
10,50
ИПУ50.5
। J
OP
33,8
57,2
30,9
40,50
10
0,55,
що 25?6
Рис. 8.1. Поперечное сечение здания Плявииьской ГЭС водосливного типа с радиально-осевыми турбинами
Расчетный напор Лр— 34 м. Число гидроагрегатов на—1 м. Номинальная мощность генератора NH= 82,5 МВт. Условный диаметр турбины Di— в м. Расход воды через турбину QT= —250 м»/с. Частота вращения л—88,3 мин"-1
/ — паз решетки и ремонтного затвора; 2 — паз аварийно-ремонтного затвора; 3 — агрегат с пятой на крышке турбины;
4 — паз ремонтного затвора отсасывающей трубы; 5 — повышающий трансформатор; 6 — автодорога; 7 — затвор водосливного отверстия; 8 — ось железной дороги; У—кран грузоподъемностью 25 т; 10 — бычок поперечной жесткости; 11 — напорная стенка
- । НимСп 10^50
450
сил, передающихся от гидроагрегата, массив работает главным образом на сдвиг по горизонтальным слоям. Полезно также проверить его на распространение продольной волны вдоль линии действия силы. Определим максимальную частоту fmax, до которой массив, выполненный из бетона марки М 300, можно вводить в расчет как абсолютно жесткий. Принимая, что при /шах в соответствующем размере сооружения должно уложиться не более Vs от четверти длины волны, т. е. Vzo^min, получим:
с^ 3600
/1тах = 2QI ~ 20-30,9 — 5’ Гц’
с2 2200
/2тах= 20л = 20>18 -6,1 Гц.
Таким образом, при динамическом расчете здания ГЭС на воздействие с частотами до 5,8 Гц нижнюю массивную часть можно вводить в расчет как абсолютно жесткую.
Исключением из этого правила является случай, когда основание под массивом сложено скальными породами с механическими характеристиками, близкими к характеристикам бетона. Для этого случая необходима дополнительная проверка податливости основания, которую обычно осуществляют по упрощенной методике на основе требования, чтобы вследствие деформации
массива статическое смещение точки приложения силы в направлении линии ее действия составляло не более 10 % суммарного смещения. При этом поворот массива и неравномерность распределения напряжений по сечению не учитывают.
Вообще говоря, динамический расчет взаимодействия гидросооружений с основанием выполняют так же, как и для других типов сооружений, взаимодействующих с грунтом [3, 4, 6, 20] *. При расчете колебаний бетонных сооружений на нескальных основаниях наибольшее распространение получило использование модели Винклера, иногда с различными обобщениями, позволяющими вводить учет инерции грунта и потери энергии на образование бегущих волн в основание но чаще — без таких обобщений.
Если основание моделируют в расчетной схеме по Винклеру, то эту проверку можно осуществлять по формулам:
с^ < ЕЛцр/9/i; Сх бЛцр/Эй, (8-7)
1 См. также книгу: Сеймов В. М. Динамические контактные задачи. — Киев: Наукова думка. 1976. — 284 с. В ней содержатся решения задач о колебаниях тел на упругом полупространстве, в том числе н под слоем жидкости, таблицы, облегчающие практические расчеты, а также обширный список публикаций в этой области.
152
где с г н сх — коэффициенты упругого равномерного, соответственно, сжатия и сдвига, а коэффициент приведения площади массива
#пр —
(8-8)
вычисляют разбиением его на п горизонтальных слоев, в пределах каждого из которых его сечение в плане можно считать постоянным и равным a F (F — площадь подошвы массива), а толщину соответствующего слоя равной б-h.
Если проверку выполняют на действие горизонтальной силы или горизонтальной н вертикальной сил, то лимитирующей является вторая из формул (8.7). Это объясняется тем, что для большинства грунтов, как известно из опыта, сх~С,7сг, тогда как G = =E/[2(l+v)]<0,43Е (здесь v —коэффициент Пуассона, равный для бетона 0,17— 0,19). И только при проверке на чисто вертикальную динамическую силу используют первую из формул (8.7).
Пример. Для массива нижней части Пля-виньской ГЭС, показанного на рис. 8.1. определить предельные ся и сх при заданных: Е— —3.4-1O10 h/м2; G — 1.45-1010 Н/м2; h=18 м. причем для подсчета fenp его разбили на шесть горизонтальных слоев со следующими данными:
1 2 3 4 5 6
0.18 0,06 0,15 0.18 0,18 0,15
а1
0.6 0.9 0.8 0,7 0,6 1
По формуле (8.8) / 0,18 0,06 0,15
ь „ — I —----_1_ — ----д_ —-—
пр \ 0,6 ' 0,9 + 0,0 '
, 0,18 0,18 0,15 W
* ’ ‘ —) =0,79;
0,7 ' 0,6 по формулам (8.7)
3,4- 10w-0,79
9-18
1,45»lQM-0,79
9-18
= 1,66-Ю8 Н/м3;
= 0,7М08 Н/м3
Поскольку от агрегата передаются и вертикальные и горизонтальные силы, то в данном случае лимитирующим является сх. Принимая ez=cxf0‘7^(°'71/0.7) 10" Н/м»®10» Н/м’, можно окончательно заключить, что, если здание расположено на плотных грунтах с cz 10* Н/м*. то его нижнюю массивную часть можно рассматривать как абсолютно твердое тело при динамическом Расчете на действие сил с частотами до 5,8 Гц (см. предыдущий пример).
Рассмотрим теперь вопрос о том, при каких частотах стержень, пластина или оболочка могут считаться тонкими. Для приме
ра возьмем шарнирно опертый с двух сторон стержень прямоугольного сечения. В статике считают такой стержень тонким, если его пролет не менее чем в 5 раз превышает высоту поперечного сечения ha. При динамическом расчете вводят добавочное требование, чтобы длина полуволны формы вынужденных колебаний превышала йп в 5 или более раз. Поскольку [20] значение а, равное частному от деления л на длину полуволны формы колебаний, связано с характеристиками стержня и круговой частотой вынужденных колебаний со формулой
то, с учетом того, что /n=Fn/1^/12, тп = =pFn, a aha должно быть не более л/5, получают формулу для максимальной частоты, при которой стержень может считаться тонким:
/щах — Cj/55/in,
(8.9)
где 7П — соответственно высота, площадь
и момент инерции поперечного сечеиня; тп— погонная масса, а остальные обозначения те же, что и прежде.
Пример. Для балки из бетона марки М 300 (ci—3600 м/с, hn — l,5 м
/тах = 3600/55-1,5 = 43,6 Гц.
Формула (8.9) получена без учета распределения гармонической нагрузки по длине балки и позволяет получить лишь ориентировочные результаты. Для конструкций более жестких, чем свободно опертые стержни, например для балок, жесткозашемлен-ных с двух концов, эта частота должна быть снижена, а для консольных стержней и плит может быть повышена.
8.2. Динамические нагрузки
1. Динамические нагрузки, передаваемые на сооружение через опорные части гидроагрегатов. Наиболее интенсивные динамические явления в зданиях гидроэлектростанций возникают от динамических нагрузок, связанных с работой гидроагрегатов. Эти нагрузки условно делят на нагрузки, передаваемые через опорные части гидроагрегатов на поддерживающие их конструкции, и на гидродинамические нагрузки, действующие на поверхности проточных трактов гидротурбинных блоков — напорной и отсасывающей труб, спиральной камеры и камеры рабочего колеса. О гидродинамических нагрузках см. ниже.
153
й JQ 100150 200 25Q 300 350 400 Мц}МВт
Ряс. 8.2. Зависимость нормативной амплитуды оборотной составляющей горизонтальной динами-_н
ческой нагрузки г0& от номинальной мощности гидроагрегата
В настоящее время наиболее распространены вертикальные гидроагрегаты, представление об устройстве которых дано в [1, 4, 6, 22]. Количество гидроэлектростанций, на которых установлены горизонтальные капсульные гидроагрегаты, пока исчисляется единицами. Сведения о характере и величинах динамических нагрузок от них практически отсутствуют.
Данные о динамических нагрузках должны содержать сведения об их происхождении, частотах, амплитудах, линиях действия и точках приложения.
Стационарные динамические нагрузки, передающиеся через опорные части вертикального гидроагрегата, в нормальных эксплуатационных режимах возникают [1, 3, 6, 17]:.
1) из-за механической неуравновешенности ротора, неуравновешенности магнитных полей, а также асимметрии проточного тракта турбин. С этим связано появление гармонической горизонтальной составляющей нагрузки, частота которой, называемая оборотной, равна числу оборотов агрегата в 1 с и обозначается /об. Амплитуда этой составляющей для каждого агрегата различна и зависит от. качества изготовления и балансировки агрегата, но с некоторым довольно. существенным запасом может быть определена по графику, приведенному на рис. 8.2. Точка приложения этой составляющей может быть принята в центре тяжести ротора агрегата. Расчетное значение амплитуды оборотной составляющей динамической нагрузки равно произведению Р"б на коэффициент перегрузки АОб=1.2. Более точно для. агрегата каждого типа эта нагрузка может быть рассчитана по его чертежам, как это показано в [3, 17];
- 2) из-за пульсаций скорости потока и, собтветственно, давления на рабочее колесо турбины при периодическом изменении
(8.10)
МВт; Dx — диаметр ок-
гидравлнческого сопротивления турбинного тракта, которое происходит с частотами: .
лопастной, /лс=/обПЛс, где пЛс •— число лопастей рабочего колеса турбины;
лопаточной, /дк—/обплк, где пди— число лопаток направляющего аппарата;
статорной, /ст=/обПст, где пОт— число колонок статора турбины;
комбинационной, /к=/об(пЛсПЛк/5), где s — наибольший общий делитель чисел пло и Плк. С этой частотой будет повторяться одинаковая комбинация взаимного расцоло-. жения лопаток направляющего аппарата и лопастей рабочего колеса. Кроме того, мо-. жет существовать и крайне незначительная, чисто случайная составляющая динамической нагрузки. Нормативная амплитуда лопастной составляющей, действующей горизонтально, определяют (в кН) по формуле
рн _ лс 3/об D ’
где Мн — номинальная мощность, условный диаметр турбины, м. т. е. ружности. образованной при вращении центра давления лопасти; g — ускорение свободного падения. м/с2.
Точка приложения этой составляющей лежит посередине высоты рабочего колеса. Нормативную амплитуду лопастной составляющей, которая действует вдоль оси агрегата, определяют по формуле
^с = 5^с- (8-11)
Коэффициент перегрузки этих составляющих knc= 1,1.
Составляющие динамической нагрузки, имеющие лопаточную, статорную и комбинационную частоты, сравнительно малы по амплитуде, и практически потребность в их учете возникает лишь в редких случаях. Это может произойти, например, при расчете вертикальных колебаний подгенераторной конструкции подвесного агрегата, если на эту конструкцию передается нагрузка от. подпятника, но при измерении вибрации в зоне гидроагрегата они отмечаются весьма часто;
3) из-за неперпендикулярности зеркала подпятника оси агрегата, вследствие чего возникают вертикальные динамические нагрузки с сегментной частотой /сг=/обНсг, где «сг — число сегментов, а также с некоторыми частотами, лежащими между оборотной и сегментной, которые возникают вследствие неодинаковой жесткости сегментов. Амплитуды этих составляющих, зафик
сированные в натурных условиях, не превосходили значений Р^, но на большинстве агрегатов они обычно незначительны, и рас
154
чет на них не производится. Если колебания конструкций с такими частотами при эксплуатации сооружения начинают становиться заметными, то это свидетельствует о близости выхода подпятника из строя;
4) из-за вибраций активного железа генератора и других явлений, связанных с частотой перемен знака электрического напряжения в сети. Частоты этих составляющих называют сетевыми и обозначают fci и fc2=2fci (для генераторов, вырабатывающих ток с промышленной частотой 50 Гц, fcl = 50 Гц, a fc2=100 Гц). Составляющие с сетевыми частотами направлены главным образом горизонтально, их амплитуды не превосходят 0,1 Р"б, а при расчете вертикальных и крутильных колебаний их можно не учитывать.
Кроме перечисленных составляющих нагрузки многие агрегаты развивают еще одну составляющую, которая имеет двойную оборотную частоту: /д.о=2/о«. Одной из причин появления такой составляющей может быть неточность изготовления и сборки рабочих колес радиально-осевых турбин, изготовленных из двух половин. Действующая вдоЛь оси агрегата составляющая с такой частотой обычно гораздо важнее горизонтальной. Ее амплитуду можно с достаточным запасом оценить по формулам:
Fj.o = 0,016pg«Df; Лдо= 1. 1, (8.12) где р — плотность воды; g — ускорение свободного падения; Н — напор.
При одновременной работе нескольких гидроагрегатов в одном блоке здания ГЭС суммарную амплитуду стационарной динамической нагрузки от каждой составляющей определяют по рекомендации [20, с. 64].
Нестационарные динамические нагрузки возникают при пуске и остановке агрегатов, когда указанные выше частоты и соответствующие им амплитуды, кроме сетевой, меняются от нуля до стационарных значений и, кроме того, спектр нагрузки обогащается не очень значительными по амплитуде высокочастотными (до 500 Гц) составляющими.
Кроме того, нестационарные нагрузки возникают при включении генератора в электрическую сеть и при изменении величины электрической нагрузки на генератор.
До настоящего времени расчеты на все эти виды нагрузок не проводились, но вызванные ими колебания были зафиксированы в ходе натурных исследований гидросооружений. Нагрузки, возникающие в аварийных режимах, описаны в [4, 17].
2. Гидродинамические нагрузки на конструкции зданий ГЭС, связанные с работой гидроагрегатов. Гидродинамические нагрузки на конструкции могут возникать из-за пульсаций давления, вызываемых периодическим изменением гидравлического .сопротивления турбинного тракта при вращении рабочего колеса турбины. Наиболее существенны нагрузки, действующие на каждый гидротурбинный блок в целом. Их равнодействующая направлена перпендикулярно к входному отверстию блока, проходит через центр тяжести площади этого отверстия и меняется по гармоническому закону с лопастной частотой [лс- Амплитуда Р" этой силы может быть с некоторым запасом определена по формуле
^n=Vp^HH’ (8*13)
гДе F — площадь входного отверстия; *н—(t>rhax— —°min>/,cmax— коэффициент неравномерности эпюры скоростей по окружности спиральной камеры;
г> „ и — наибольшая и наименьшая иэ max пи п
скоростей по окружности спиральной камеры. При отсутствии данных о значении коэффициента неравномерности допускается принимать его */ю.
Если в секции здания ГЭС расположено два и более агрегата, то суммарную нагрузку на секцию определяют по следующим правилам:
1) при проверке общей устойчивости и : прочности расчетная суммарная амплитуда
<8и>
где п_ — число агрегатов в секции; а
2) при проверке выносливости и воздействия на персонал и технологическое оборудование нормативная суммарная амплитуда
(8.15)
Если ограждающие конструкции напорной трубы и спиральной камеры выполняют из сборных облегченных плит (например, здания ГЭС ячеистой конструкции), то их проверяют на воздействие тех же пульсаций давления с амплитудой на каждый квадратный метр поверхности *;
Рп=4"р^пЯ* (8.16) 4И.
Камеру рабочего колеса обычно выполняют в монолитном бетоне и она имеет столь массивную конструкцию, что местные
1 Еще один, по-видимому, весьма редкий, но более сложный случай появления сильных. пульсаций давления с лопастной частотой списан в книге Дж. Ден-Гартог. Механические колебания. — М.: Физматгиз, 1960. — с. 19—21.
155
динамические воздействия для нее несущественны.
Конструкции отсасывающей трубы подвергаются воздействию вихревого шнура, образующегося по оси рабочего колеса турбины, который распространяется вместе с потоком в среднем вдоль оси отсасывающей трубы, но колеблется относительно среднего положения по случайному закону. При подходе шнура к ограждающей поверхности отсасывающей трубы на нее действует удар. Локальная сила в месте удара довольно велика (отмечены максимальные значения в точке до 1/з напора), меняется во времени примерно по колоколообразному закону с продолжительностью импульса на уровне половины его высоты порядка 0,03—0,1 с. Повторяемость ударов по разным поверхностям — через 3—5 с.
При натурных измерениях вибраций зданий ГЭС облегченной конструкции иногда отмечаются «вздрагивания» с такой периодичностью, особенно в зоне здания вблизи отсасывающей трубы. Рекомендации по расчету на такие воздействия пока не разрабатывались, по-видимому, в связи с тем, что традиционные конструкции изогнутых отсасывающих труб в массивных блоках из монолитного железобетона не нуждаются в проверке на эти воздействия. Необходимость в этом возникнет лишь в случае разработки новых облегченных конструкций.
3. Гидродинамические нагрузки иа поверхности конструкций, контактирующих с
турбулентными потоками. Гидродинамические нагрузки со стороны потока на жесткую конструкцию можно представить [10, 11] слагающимися из осредненной (в вероятностном смысле) и пульсационной составляющих.
Одним из основных критериев отнесения нагрузки к статической или динамической является, соответственно, отсутствие или наличие в ее спектре частот более высоких, чем /Гд, равной 1/5 от низшей из собственных частот конструкции /oi. Любые нагрузки, имеющие частоты
f < /гД = Е fol» 17)
о
вызывают перемещения, деформации и внутренние усилия в конструкции, отличающиеся от статических менее, чем на 5 %, а следовательно, должны классифицироваться в строительной механике сооружений как статические.
Для ряда нагрузок этот предел может быть повышен. Например, нагрузки с широким спектром, частоты максимумов которого удовлетворяют неравенству (8.17), а «хвостовая» часть с энергией менее 5 % суммарной энергии спектра имеет вид кривой, монотонно снижающейся с частотой и приближающейся к нулю при частоте /оь тоже могут рассматриваться как статические. Более того, если эта «хвостовая» часть спектра заходит в область частот выше 1<н и содержит локальные максимумы, относи-
а)
S)
Рис. 8.3. Схемы турбулентных потоков и эпюры осредиеиных скоростей
а — на водобое; 6 — на начальном участке напорного водосброса при частичном открытии затвора
156
Рис. 8.4. Обтекание конструкций за уступом
1,2 — поверхности, соответственчо, параллельная и перпендикулярная слою смешения 3
тельная высота которых менее 1/у (где у — коэффициент внутреннего неупругого сопротивления при колебаниях конструкции [20]), то и при этом нагрузка может быть отнесена к статической.
Гидродинамические нагрузки от турбулентных потоков в гидросооружениях [10, 11] значительно зависят от кинематических характеристик потока, определяемых скоростями жидкости в нем, граничными условиями и т. п. Различают напорные и безнапорные (имеющие свободную поверхность) потоки. И те, и другие могут быть однородными, когда осредненные скорости изменяются достаточно плавно без перемен знака, и неоднородными, как, например, в зоне гидравлического прыжка на водобое (рис. 8.3, а) или на начальном участке напорного водосброса при частичном открытии затвора (рис. 8.3, б) или за уступом; равномерные, когда градиенты осредненных скоростей вдоль потока малы, и ускоренные (замедленные) с малыми градиентами осред-ненного давления вдоль потока, например в потоке постоянного сечения без препятствий, и с большими градиентами, например вблизи водобойной стенки.
Характер гидродинамического давления на конструкции, контактирующие со всеми этими потоками, различен. Кроме того, он существенно зависит от толщины пограничного слоя при безотрывном обтекании конструкции и от многих параметров при обтекании конструкций за уступом (рис. 8.4). Здесь качественно различное воздействие будут испытывать поверхности 1 и 2, первая из которых параллельна, а вторая перпендикулярна слою смешения 3, т. е. слою резкого изменения осредненных скоростей за уступом. Количественные характеристики воздействия зависят от относительной высоты уступа, расстояния до него по вертикали и горизонтали, от безразмерных ха
рактеристик потока — чисел Рейнольдса, Фруда и т. п.
Гидродинамические воздействия на конструкции, контактирующие с ненапорными потоками, формируются [11] за счет так называемой «главной» части пульсации давления, непосредственно связанной с турбулентностью потока, и за счет волновой составляющей, связанной с изменением уровня поверхности от турбулентного волнения.
Все эти типы потоков и гидродинамических нагрузок от них исследованы и исследуются в настоящее время [3, 5, 10, 11, 14—16, 18, 21 (см. также библиографию в этих работах)]. Наиболее общие классификации и методические рекомендации содержатся в [10, 11]. Вне зависимости от типа потока осредненная по времени составляющая гидродинамической нагрузки в соответствии с критерием (8.17) всегда может быть отнесена к статической для конструкции. Что касается пульсационной составляющей, то ее принято характеризовать либо спектром пульсаций «в точке», т. е. в .весьма малом неподвижном объеме, мысленно выделенном в области потока, либо спектром пульсаций давления на площадку определенных размеров на границе потока.
Амплитудный или энергетический спектр пульсаций давления в точке в турбулентных потоках весьма широк. И в зависимости от масштабов турбулентности, кинематической структуры потока, граничных условий, а также от координат точки, для которой определяют спектр, имеет различную форму. На границах, контактирующих с гидросооружениями реальных потоков, — безотрывных и отрывных, однородных и резко неоднородных — эти спектры в диапазоне низших собственных частот строительных конструкций от нескольких единиц до двух-трех десятков герц либо не имеют максимумов, снижаясь с повышением .частоты, либо имеют не очень острые максимумы с понижением в сторону низких частот менее, чем на порядок при снижении частоты в 10 раз.
При переходе к строительной конструкции конечных размеров, например к плите с характерным размером вдоль потока /п, роль высокочастотных составляющих в спектре пульсации нагрузки на площадку в целом резко уменьшается [11]. Максимальная частота спектра нагрузки при этом, Гц:
/max = (t/0/Zn), (8.18)
где Uo—максимальная скорость в потоке.
С учетом того обстоятельства, что собственные частоты геометрически подобных
157
конструкций из одинакового материала, тоже обратно пропорциональны линейному размеру, в [25] выполнен анализ соотношения этих частот и определяемых по (8.18), и показано, что для типовых конструкций гидросооружений при реально возможных в настоящее время скоростях турбулентных потоков гидродинамические нагрузки со стороны этих потоков можно принимать как статические.
В частности, для контактирующих с турбулентными потоками плит ограждения водопропускных галерей нагрузки от потока можно рассматривать как динамические, если максимальные осредненные по времени. скорости Уь будут удовлетворять неравенству
а? / «. \
Uo>— I—(8.19) 0 130 /п / 1 ' '
Где Л , ?п— толщина и пролет плиты; с» — скорость распространения продольных волн в материале плиты (для бетона марка М 300—Ci« «3600 м/с); Ю| — коэффициент, зависящий от соотношения сТОрон плиты и условий её опирания; его. наименьшее значение (для балочной защемленной'плиты): «1—4,73.
Даже для тонких плит с /п7Лп=Ю скорбеть Uо должна была бы иметь неприемлемою по условиям кавитации и никогда в реальных гидросооружениях не допускаемое значение Uo>60 м/с. Реальные скорости в гидросооружениях обычно ограничиваются 18—20 м/с и никогда не превосходят 60 м/с.
Аналогичный анализ выполнен и для конструкций других типов. Это не значит, что такие нагрузки не представляют интереса. Просто расчет на них конструкций, контактирующих с (турбулентными потоками, следует проводить методами статики сооружений (более подробно об этом расчете бу: дет изложено далее). Кроме того, деформации конструкций или, например, грунтового основания под плитами крепления нижнего бьефа могут передаваться другим конструкциям (например, верхнему строению здания ГЭС), хотя и не контактирующим с потеком, ио настолько низкочастотным, что для них кинематическое возбуждение с частотами ниже определяемой по (8.18) является динамическим. Все эти обстоятельства необходимо учитывать при проведении расчета конкретных гидросооружений.
Для уникальных гидросооружений, входящих в состав энергетических, ирригационных или воднотранспортных гидроузлов, обычно проводят модельные исследования, в ходе, которых получают также и данные о гидродинамических нагрузках на элементы гидросооружений. Оценку этих данных мо-
жно проводить аналогично рекомендованному выше для типовых гидросооружений.
8.3. Учет влияния водной среды при динамических расчетах гидросооружений
1. Расчетные предпосылки. Одним из Основных этапов динамического расчета зданий гидроэлектростанций, плотин, причальных сооружений, волноломов и других гидротехнических сооружений является анализ колебаний конструкций гидросооружений в водной среде. Существеиой особенностью задачи о колебаниях конструкций гидросооружений в жидкости является необходимость совместного решения уравнений упругих колебаний конструкций и уравнений гидродинамики для водной среды, взаимодействующей с конструкцией. Такая задача, называемая задачей гидроупругости, состоит из двух взаимосвязанных частей. Первая часть задачи относится к конструкции, совершающей колебания под действием внешних сил, среди которых учитывается и гидродинамическое давление жидкости, в свою очередь зависящее от колебаний конструкции. Вторая часть задачи относится к водной среде, движение которой определяется внешними силами, начальными и граничными условиями, среди которых учиты-’ вается и условие на границе с колеблющейся конструкцией, в свою очередь зависящее от движения жидкости.
Однако практическая реализация этого подхода связана с весьма трудоемкими вычислениями, поэтому получили распространение приближенные приемы, основанные, по существу, на раздельном рассмотрении систем уравнений движения упругого тела и жидкости, когда для конструкции решается отдельно задача динамической теории упругости, а для жидкости — задача гидродинамики.
Все предпосылки, используемые при расчете, удобнее рассматривать, разделив . их на три группы. К первой относятся предпосылки, обычно принимаемые при изучении колебаний конструкций без учета водной среды. Это предпосылки об учете перерезывающих сил, инерции вращения, внутреннего трения, а также об условиях опирания. Границы применимости этих предпосылок и погрешности, ими вносимые, хорошо изучены и здесь не рассматриваются.
Ко второй группе относятся предпосылки, обычно используемые в гидродинамике при изучении колебаний жидкости, когда задано движение на границе области, занима
158
емой жидкостью. Они касаются учета вязкости, сжимаемости и однородности, волнения на свободной поверхности, перемещений границ и т. п. Границы применимости этих предпосылок и погрешности, ими вносимые, изучены в гидродинамике довольно хорошо. Но для характерных условий, встречающихся в задачах о колебаниях конструкций гидросооружений в жидкости, приходится уточнять вопрос о применимости различных предпосылок.
К третьей группе предпосылок относятся гипотезы, априорно оценивающие степень взаимного влияния жидкости и конструкции в задачах гидроупругости.
Среди предпосылок, принимаемых при решении задач гидродинамики о малых колебаниях жидкости, вызванных колебаниями конструкций, наиболее распространены и встречаются либо в различных комбинациях, либо все вместе следующие: пренебрегают вязкостью жидкости; сжимаемостью жидкости; неоднородностью жидкости; при определении гидродинамического давления на колеблющуюся конструкцию можно не учитывать изменения координат поверхности конструкции, связанного с колебаниями (колебания конструкции считают малыми); волнение на свободной поверхности, вызванное колебаниями конструкции в жидкости, можно не учитывать; для водоемов, расположенных в климатических зонах, где образуется лед, можно не учитывать замерзание водоема; податливость дна и стенок водоема можно не учитывать; водопроницаемостью дна и стенок водоема можно пренебречь; границы области жидкости, далекие от поверхностей, излучающие колебания в жидкости, можно не учитывать, так что область жидкости в направлении этих границ считают бесконечной.
Учет вязкости жидкости был предложен [26] для проведения расчетов только вблизи точек резонанса. При этом необходимы также введение затухания в модель материала основания и учет водопроницаемости поверхности дна. Последние два фактора весьма значительно снижают высоту резонансного пика, соответствующего собственной частоте колебаний жидкости как акустического объема, намного перекрывая снижение резонансного пика от учета влияния вязкости, поэтому необходимость в учете вязкости отпадает, н предпосылка об идеальности жидкости может быть принята для расчета колебаний гидротехнических сооружений на всех режимах.
Сжимаемость жидкости, как известно, играет большую роль, когда глубина воды
у сооружения настолько велика, что возможен акустический резонанс. Собственней частота полу бесконечной полосы жидкости прямоугольного поперечного сеченйя глубиной Н определяется формулой
пл а р па
“п = — ~ ИЛИ fn = — , (8.20)
Z П ЧП
где ®n, fn— частоты колебаний, соответственно рад/с н Гц; а — скорость распространения уцр'у« гнх волн в жидкости (~ 1420 м/с).
Исследования показали, что при частоте колебаний, составляющей менее 0,44 от первой резонансной частоты, для всех расчетных схем увеличение гидродинамического давления не превышает 10 % по сравнению с давлением, вычисленным для случая неаэрированной несжимаемой жидкости.
Следовательно, для частот колебаний
/<0,44/1
0,44а
4Н ~
150 Н
(8.21)
где И — глубина водоема, м, можно считать жидкость несжимаемой. Учет сжимаемости связан с вопросом о частоте акустического резонанса области жидкости, а эта частота зависит от геометрии послед-, ней. При использовании формулы (8.21) в проектной практике обычно возникают вопросы, ответы на которые приводятся ниже.
Найдется ли такая форма водоема, для которой резонансная частота могла бы быть ниже, чем для прямоугольного водоема? Анализ показал, что если принять резонанс? ную частоту прямоугольного водоема за J, то для полукруглого сечения резонансная частота будет соответственно 1,17, для узкого треугольника 1,53, для трапецеидального меняется в пределах 1—1,53 в зависимости от соотношения размеров оснований трапеции.
Можно показать, что любоё реальное отклонение от прямоугольной формы поперечного сечения водбема мбжет повести лишь к увеличению собственной частоты. Следовательно, назначение границы частоты f<l5GfH с этой точки зрения вполне обоснованно.
Второй вопрос — это влияние аэрации жидкости на снижение резонаненбй частоты объема жидкости. Как известно, аэрация способствует резкому снижению скорости звука в жидкости, так что с этой точки зрения аэрированный поток может рассматриваться как сжимаемый уже при достаточно низких частотах колебаний, но с другой стороны, резонансные амплитуды гидродинамического давления значительно ниже, чем для неаэрированного. Возможно, что
159
огибающая всех максимумов на частотах, определяемых по (8.21) будет не более чем на 10 % превышать значения для неаэри-рованной жидкости. Этот вопрос требует дальнейшей проработки, пока же затруднительно дать какие-либо конкретные рекомендации об учете сжимаемости жидкости для аэрированного потока.
Третий вопрос — о влиянии податливости. и водопроницаемости дна и стенок водоема на собственные частоты слоя жидкости — будет рассмотрен далее при анализе предпосылок, связанных с характером граничных условий.
Вопрос о неоднородности жидкости рассматривался рядом авторов [3, 24, 32]. Показано, что во многих случаях неучет переменной по глубине плотности приводит к значительной погрешности в определении скоростей и давлений в жидкости. Были проанализированы условия, при которых возможно считать жидкость однородной. Оказалось, что если отношение
р(Н«)/р(0)< 1,15, (8.22)
где р(Я) и р(0)—плотности жидкости соответственно на дне н на свободной поверхности, то изменение равнодействующей гидродинамического давления по сравнению с той же величиной, вычисленной для однородной жидкости, составляет менее 10 %.
Кроме рассмотренных предпосылок, касающихся модели жидкости, следует остановиться на предпосылках о граничных условиях. Это, во-первых, предпосылка о малости колебаний, которая может быть принята практически всегда, так как градиенты скоростей и давлений в жидкости настолько малы, что изменения самих скоростей и давлений в жидкости достигают заметных значений на расстояниях, составляющих заметные доли либо от длины упругой волны в жидкости, либо от характерного размера области, которым является глубина слоя жидкости. Этот размер для гидротехнических сооружений редко бывает менее нескольких метров. Такого же порядка может достигать длина самой короткой упругой волны (при частоте 100 Гц Х=14,2 м). Амплитуды же колебаний конструкций обычно лежат в пределах 1 мм и даже в случае сильных сейсмических колебаний не превосходят нескольких сантиметров, поэтому ошибка при определении давления на конструкцию не превзойдет долей процента.
Во-вторых, это предпосылка об учете поверхностных волн, вызванных колебаниями сооружений. Задачу о малых колеба
ниях конструкций гидросооружений в жидкости решают обычно в предположении, что волнение на свободной поверхности можно нс учитывать. Но оказывается, что при расчете колебаний гидросооружений в весьма широком диапазоне частот и при самых различных глубинах воды у сооружения, предпосылка о возможности не учитывать волнение на свободной поверхности не всегда справедлива. Установлено, что влияние поверхностных волн практически ие сказывается на характере колебаний в жидкости стенок постоянной толщины, если выполняется условие
f > бУн или Fr = &Hlg > 100, (8.23) где f, <о — частоты колебаний, Гц и рад/с соответственно; g — ускорение силы тяжести, м/сг.
Кроме границ применимости предпосылок, установлен характер некоторых физических закономерностей, связанных с поверхностным волнением. Так, при колебаниях стенки на границе с жидкостью, имеющей свободную поверхность, часть энергии колебательного движения расходуется на образование поверхностных бегущих волн, вследствие чего появляется составляющая гидродинамического давления, сдвинутая по фазе относительно перемещения на л/2, т. е. которая действует в одной фазе с силами внутреннего неупругого сопротивления стенки и выполняет для конструкции роль «присоединенного трения».
Относительная величина этой части энергии зависит от формы и частоты колебаний стенки и от глубины прилегающего к ней слоя жидкости. Она тем меньше, чем больше частота (О и глубина Н, влияние которых оценивают по числу Фруда.
В случаях, когда присоединенное трение значительно, соответственно уменьшается роль тех составляющих гидродинамического давления, которые меняются в одной фазе с силами инерции самой конструкции и, следовательно, действие которых эквивалентно для конструкции действию «присоединенных масс».
Учет льда на поверхности водоема необходим при расчете колебаний конструкций гидросооружений, расположенных в замерзающих водоемах. Анализ влияния льда для различных условий показал, что с его образованием и увеличением толщины начинает существенно уменьшаться инерционное и увеличивается демпфирующее влияние жидкости. Например, при глубине водоема 10 м и нарастании толщины льда до 1— 1,5 м собственные частоты конструкции увеличиваются от значений, соответствую-
160
щпх частотам в водоеме со свободной поверхностью, до величин, соответствующих частотам в пустоте. Физически это объясняется тем, что при появлении льда затрудняется образование стоячих волн с линиями тока, выходящими на свободную поверхность, и образуется как бы своеобразный волновод, по которому от колеблющейся конструкции уходят бегущие волны, уносящие энергию.
Показано, что при определении собственных частот колебаний гидросооружений с вертикальной напорной гранью, находящихся на границе с водоемом, покрытым льдом, ошибка от неучета льда не превзойдет 10 %, если выполняется хотя бы одно из следующих условий:
а) толщина ледяного покрова не превышает 0,03 глубины водоема;
б) колебательное число Фруда задачи (8.23) имеет значение не менее 200.
Следующие две предпосылки связаны с учетом податливости н водопроницаемости дна и стенок водоема.
В задачах о колебаниях конструкций гидросооружений в жидкости обычно принимают, что дно и стенки водоема являются абсолютно жесткими водонепроницаемыми поверхностями. Между тем для многих гидротехнических сооружений дно нельзя считать абсолютно жестким, особенно при заилении водохранилища. Илы представляют собой очень податливое основание и это обстоятельство вносит серьезные изменения.
Показано [23], что учет податливости и водопроницаемости приводит к изменению двух расчетных величин:
1) уменьшению частот акустических резонансов области жидкости от величины, соответствующей резонасу при неподатливом дне до величины, когда имеет место резонанс слоя жидкости на упругом основании;
2) снижению амплитуды резонансного пика гидродинамического давления вследствие потерь энергии на образование бегущих волн в основании и на динамическую фильтрацию жидкости в порах и трещинах водопроницаемых поверхностей. Исследования влияния упругой податливости основания с учетом затухания в нем, определяемого коэффициентом внутреннего неупругого сопротивления [23], показало, что введение затухания в модель материала основания существенно снижает высоту резонансного пика по сравнению со случаями идеально жесткого и идеально упругого дна.
Влияние локальной упругой податливости основания на резонансную частоту водо
11— 189
ёма полностью определяется критерием, для которого предложено название «коэффициент жесткости основания» [27]:
S = Cz/p©5 Я,
(8.24)
где Сг — коэффициент упругого равномерного сжатия грунта; р— плотность воды.
При значениях влиянием податливости на снижение частоты акустического резонанса можно пренебречь, считая при определении этой частоты дно и стенки водоема абсолютно жесткими.
При вычислении высоты резонансного пика нужно всегда учитывать податливость и водопроницаемость дна. При достаточно больших значениях коэффициента жесткости S>10 коэффициент резонансного увеличения гидродинамического давления на первом акустическом резонансе при поступательных колебаниях вертикальных стенок на границе с полубесконечным слоем сжимаемой жидкости может быть определен -по приближенной формуле
У Г / /?со \1
S/ ? + -z- . (8-25)
L \ ^2 /J
где R — коэффициент пропорциональности между давлением и скоростью на границе жидкости с водопроницаемым дном.
В связи со снижением резонансной частоты при учете податливости и водопроницаемости дна возникает вопрос, не изменится ли установленная выше (8.21) граница применимости предпосылки о несжимаемости жидкости.
Оказывается, что одновременно со снижением частоты уменьшается и резонансное увеличение амплитуд гидродинамического давления [23] таким образом, что при достаточно большом у огибающая всех максимумом на частотах ниже 0,44 от резонансной при неподатливом дне оказывается не более чем на 10 % превышающей значение для несжимаемой жидкости. Вместе с тем снижению резонансной частоты более чем в 2 раза соответствует столь большая по-, датливость дна, что грунты, реализующие такую податливость, имеют достаточно высокое значение у. Следовательно, формула (8.22) сохраняет свою силу и при учете податливости дна.
Что касается предпосылок о влиянии границ, удаленных от колеблющихся поверхностей, т. е. о влиянии длины и ширины водохранилища, здесь можно сказать следующее. Длину водоема I можно принимать бесконечной, если она удовлетворяет неравенству:
161
а) для любых моделей жидкости и частот колебаний
I > ЗН-, (8.26)
б) для несжимаемой жидкости или ежи-маемой жидкости при 6 <0,7
(8.27) где 0 = ^Н/па.
Ширину водоема можно не учитывать, т. е. расчет можно вести по плоской расчетной схеме, если ширина колеблющейся конструкции в 3 раза и более превышает глубину водоема, а при меньшей ширине, если борта водоема вертикальны.
Для водохранилищ с переменной глубиной расчет можно выполнять так же, как и для водохранилища с горизонтальным дном, если в пределах площадки, которая имеет длину, удовлетворяющую неравенству (8.26) или (8.27), углы наклона дна водоема не превышают 5°.
Для речных гидросооружений довольно широко распространен случай, когда в жесткой стене колеблющегося сооружения имеется гибкая вставка, например затвор. Такая вставка может влиять на величину и распределение гидродинамического давления. Однако этим влиянием можпо пренебречь [6, 26], если гибкая вставка расположена в пределах верхней трети глубины слоя жидкости у сооружения, какую бы форму колебаний не имело сооружение. Если же сооружение совершает колебания вокруг центра, расположенного в пределах 0,5—0,8 глубины слоя жидкости, а гибкая вставка имеет высоту не более четверти глубины этого слоя, то можно не учитывать гибкость вставки при любом ее положении. Если гибкая вставка не удовлетворяет приведенным выше условиям, то ее необходимо учитывать в расчете, как указано ниже. Этим исчерпывается перечень расчетных предпосылок гидродинамики.
Что касается предпосылок гидроупру-гости, то здесь основной является предпосылка о влиянии жидкости на форму колебания. Обычно считают, что формы колебаний конструкции гидросооружения в жидкости и пустоте практически одинаковы. Эта гипотеза позволяет сразу разделить задачу гидроупругости на последовательность сравнительно простых задач. При этом сначала определяют форму колебаний конструкции в пустоте. Затем вычисляют присоединенную массу и давление жидкости на конструкцию, форма колебаний которой задана в результате решения первой задачи.
Практически почти все результаты, полученные до настоящего времени, базиру
162
ются на предпосылке о верности этой гипотезе. К сожалению, в подтверждение этбй гипотезы можно привести лишь несколько фактов, показывающих совпадение собствен, ных частот, вычисленных с ее применением и замеренных в натуре.
Методы анализа колебаний конструкций гидросооружений в водной среде с учетом влияния жидкости на формы колебаний представлены в литературе довольно широко [3]. Однако, по-видимому, из-за трудоемкости реализации этих методов не удавалось провести сколько-нибудь подробный количественный анализ, позволяющий судить о влиянии жидкости на формы колебаний и о применимости часто используемой гипотезы о совпадении форм колебаний в жидкости и в пустоте. В последнее время появился ряд работ [3, 29, 30], содержащих основные расчетные формулы и графики форм колебаний и эпюры гидродинамического давления, анализ которых позволил сделать некоторые выводы.
Оказывается, что при собственных колебаниях и при силовом возбуждении колебаний конструкции предпосылка о совпадении форм колебаний в жидкости н пустоте может быть принята почти всегда, за исключением очень гибких конструкций.
В случае кинематического возбуждения для частот колебаний ниже первой собственной частоты конструкции влиянием жидкости на форму колебания также можно пренебречь. Выше же первой собственной частоты картина получается довольно пестрая, и дать какие-либо универсальные рекомендации не удается. Дело в том, что при этих частотах формы колебаний существенно отличаются от форм, вычисленных без учета влияния жидкости. Причем это отличне может идти и в запас прочности, и наоборот. С повышением частоты знак ошибки может неоднократно изменяться. То обстоятельство, что знак ошибки не постоянен, не дает возможности утверждать, что гипотеза о совпадении форм колебаний в жидкости и в пустоте всегда дает результат, идущий в запас прочности, и, следовательно, вынуждает пользоваться этой гипотезой с большой осторожностью и, если это возможно, получать результаты без использования этой гипотезы.
В настоящее время в качестве основного расчетного варианта принят случай, когда используют следующую систему допущений: жидкость принимают идеальной, однородной и несжимаемой, границы области жидкости, далекие от колеблющейся конструкции, не учитывают; волновые явления и лед на сво-
бодной поверхности, податливость и водо- а)
проницаемость дна и стенок водоема не учитывают, формы колебаний в жидкости и в пустоте считают одинаковыми.
Влияние тех или иных усложняющих факторов учитывают введением соответствующих коэффициентов. Если действуют одновременно два или более усложняющих факторов, то просто умножать коэффициенты нельзя. Это обстоятельство является недостатком методики, но пока из-за отсутствия соответствующих проработок приходится с этим мириться. Общий способ учета любого количества усложняющих факторов приведен в [30].
2. Рекомендации по расчету. Амплитуды инерционной и демпфирующей составляющих гидродинамического давления в каждой точке поверхности сооружения прямо пропорциональны амплитудам соответственно ускорения и скорости колебательного движения этой точки.
Отношение инерционной составляющей гидродинамического давления в данной точке к ускорению этой точки, называемое присоединенной массой, и отношение демпфирующей составляющей гидродинамического давления в данной точке к скорости этой точки, называемое присоединенным трением, являются более стабильными и универсальными характеристиками, чем ве
личины гидродинамического давления.
Понятия «присоединенная масса жидкости» и «присоединенное трение жидкости» представляют собой чисто расчетные абстракции, позволяющие перейти к расчету «сухой» конструкции с некоторыми в общем
случае неравномерно распределенными массами, полученными суммированием собственных масс сооружения и присоединенных масс, и трением, получаемым суммированием внутреннего неупругого сопротивления материала сооружения и присоединенного трения жидкости.
Для упрощения расчета реальное неравномерное распределение присоединенных ма.сс и присоединенного трения заменяют равномерным, эквивалентным по влиянию на рассчитываемую величину, например на одну из собственных частот колебаний, на значение максимального изгибающего момента и т. п. Ниже приводятся рекомендации по определению величин, эквивалентных по собственным частотам колебаний.
При определении внутренних усилий в сооружении, а также в расчётах прочности и устойчивости сооружений типа оградительных портовых стенок, бетонных водосливных плотин на мягких основаниях и т. п.,
Рис. 8.5. Коэффициенты присоединенной массы ц (сплошная линия) и присоединенного треиня = (пунктир)
а — для жестких стенок; 6 — для гибких стенок (номера кривых соответствуют номерам расчетных схем)
собственные деформации которых малы, допускается учитывать инерционное влияние водной среды в виде нагрузки от гидродинамического давления.
Значения равномерно распределенных эквивалентных присоединенных масс mw и присоединенного вязкого трения г, отнесенных к единице площади поверхности конструкции, определяют по формулам:
= Кр и г = £pG)h, (8.28)
если поверхность контакта конструкции с водой вертикальна или наклонна, и по формулам:
= Кр Р-рЬ и г — |р(о6, (8.29)
если поверхность горизонтальна.
В этих формулах даны обозначения: и — коэффициент присоединенной массы воды, значение которого определяют для свободных колебаний— по форме собственных колебаний, для вынужденных — по форме вынужденных колебаний. Для некоторых, наиболее часто встречающихся на практике расчетных схем, данные о значениях р. приведены в табл. 8.1; £— коэффициент
163
Таблица 8.1. Данные для определения коэффициентов ц и |
Расчетная схема Коэффициенты присоединенной массы и присоединенного трения Гидродинамическое давление Примечания
Для несжимаемой жидкости ц= 0.543—0,65 — + 0 Ро=<7о“гНр — ( ПЯ— пг \ -—/Л л / Ро=^х=<7Ь“г—нгР (0,543г)-0,325 НУ, PZ=O; „ (0,325г)— 0,210/7) Т=Г7 1 (0,5431)—0,325/7) где R, К — см. в табл 8.2 Колебания-вращения жесткой напорной грани вокруг центра колебаний, расположенного на глубине Т) от свободной поверхности
г* 1 ъ — X
На +0,21 — п2 1_" +Hi П Зп» случаи т)-0, T]“W и Т)-* оо см. схемы 2, 3, 4
Z/ZZZ/ZZZ tz *7
1' * — X Для несжимаемой жидкости ц,—0,63. Для сжимаемой жидкости ц и £ см. кривые 1 на рнс. 8.5, а „ . 16Л2р Ро=—<7о“ К ; Л8 РО=РХ=—0,324tt>s<70ft8p; Л=0; т=0.647 Л. где К — см. в табл. 8.2 Колебания-вращения жесткой напорной грани вокруг центра, расположенного на высоте свободной поверхности
3 tzzzzzzzzzzz |z
Hfc-T ~ 1/ c — X Для несжимаемой жидкости ц—0,31; для сжимаемой жидкости ц и £ — см. кривые 2 на рис. 8.5, а Рв=?о®8 Я—/Л Л2 \ л / Ро=Рх=0,22 0осо2Л8р; Pz=0; Т=0,525 Л, где R, К—см. в табл. 8. 2 Колебания-вращения жесткой напорной грани вокруг центра, расположенного иа уровне дна
Для несжимаемой жидкости ц.—0,543; для сжимаемой жидкости ц, и £ — см. кривые 3 на рис. 8.5, а Р0=гх to8 HpR; Ро=Рж=О,543гх й)2/72р; т=0,599 Н, где 7?—см. в табл. 8.2 Горизонтальные поступательные колебания жесткой напорной грани
1. * X
ZZZZZZ'ZZ/Z z
Для несжимаемой жидкости щ—0,516; Цг—0,229; для сжимаемой ЖИДКОСТИ Ц.1 и £| — см. кривые 1 на рнс. 8.5, б Pn=0,203 Р <о2 Нрс , п п /2 П л=1; 2; Р1=0,183Я1<о2Н2р. т=0,585 Н; Р2=-0,083 Р2 <о2 /72р, где Rn= >п 'У ; Хп <21> »an z j—амплитуда л-й формы колебаний в (•) Zt; 7Г П х (Zj)=siu ——• г; с -см. в табл. 8. 3 —
. x
5 ZZZZ/ZZZZ7Z/ZZ |z
Для несжимаемой жидкости Ц1 —0,476; Иг—0,190; для сжимаемой ЖИДКОСТИ U1 и si — см. кривые 2 на рнс. 8.5, 6 Рп=2,546/?по>2НрСп, л=1;2; Р1=14,02 R^H^p, Т,=0.580 Н; Р2=-74.3 Р2со2 /угр, где /?п—см. пояснения к схеме 5; —
X X
'2
164
Продолжение табл. Я.1
р асчетная схема Коэффициенты присоединенного трения Гидродинамическое Давление Примечание
хп <2>=<sh ertz—sinenz)x X(ch a —cosX_>—(ch К — fC —COS Xn)(sh En2—sill En2p ln=en H- >,,=4.73; >,=7.853; Сд-^м. в табл. 8. 3
Си —-3 I: 77/77/7/ 1* Li-= X 77/// Для несжимаемой жидкости Ц| —0,444; Цг—0,230; для сжимаемой ЖИДКОСТИ Ц1 и fci см. кривые 3 на рис. 8.5, б Pn=2,546«n£o2WpCn; л=1; 2; Р1=4,174«1©2 W2p; т=0,560 Н; Р2=—37.67 Р2 <1)2 Н»р. где Рп—см. пояснения к схеме 5; хп (2)=sh>,nzx XsinXnshen2;Xn=enH; >*=3,9266; >,=7.0685; Сп—см. в табл. 8. 3
£ h —~ К >7W, Для несжимаемой жидкости Ц!—0,238; Цг“ 0,326 Pn=2,546Pn<i)JftpCn. л=1; 2; Р t=0,628 рг 0)2 Лгр. Т=0,495Л; р =-9,81 Р9 <1)2 ЛгР1 где Rn—см. пояснения к схеме 5; Сп—см. в табл. 8.3 —
5 2г № "ЗГ Для несжимаемой ЖИДКОСТИ щ — см. графики на рис. 8.9; ц»—щ— на рис. 8.10 — Колебания гибкого участка при неподвижной жесткой части сооружения. В формулу (8.28) вместо Н подставляют высоту гибкого участка стенки сН. Значение со равно с прн а—0 и постоянно для каждой конструкции. Кривые co“const показывают зависи- мость ц* от колебаний уровня воды
I1. "
т //77///У5 2
•я Для несжимаемой ЖИДКОСТИ Ц1 — см. графики на рнс. 8.11: На—Цб — на рис. 8.12 —
I * !_5L 111 H .Io C. X
57 z
7 t3 5: 77/ t- —*•-X Для несжимаемой жидкости ц. — см. графики на рнс. 8.13 — Колебания жесткого сооружения с гибкой вставкой вокруг центра, расположенного на глубине цот свободной поверхности
b
S ch | ’ан 1 о X Для несжимаемой жидкости ц — см. графики иа рис. 8.14 —
.Z V////7/77} Г ? /
165
присоеднненидго вязкого трения. Для некоторых расчетных схем данные для его определения также приведены в табл. 8.1. Кроме того, справочные данные о значениях ц н £ изложены в литературе [3, 6. 8—10, 18. 21. 23. 24, 26—30, 32|: /Ср — безразмерный коэффициент, учитывающий влияние тех или иных расчетных предпосылок: р — плотность жидкости в невозмущэнном состоянии: h — линейный размер вертикального элемента; Ъ — линейный размер горизонтального элемента; со — круговая частота колебаний.
Для случаев когда инерционное влияние можно учитывать в виде нагрузки от гидродинамического давления, в табл, 8.1— 8.3 приведены формулы для определения ординат, равнодействующей и плеча равнодействующей гидродинамического давления, а также необходимые для их расчета циф
ровые данные.
В этих таблицах использованы в основном те же обозначения, что и в тексте рекомендаций. Некоторые новые обозначения следующие: р — ординаты эпюр гидродинамического давлении; Р — амплитудные значения рарнодействующей гидродинамического давления; т — глубина погружения равнодействующей гидродинамического давления; qo — угловая амплитуда вращательных колебаний; гх — амплитуда поступательных горизонтальных колебаний жесткой конструкции; И — вертикальная координата центра вращательных колебаний (подставляют в формулы со своим знаком): п — номер формы и частоты собственных колебаний конструкции.
С учетом сжимаемости жидкости в условиях плоской задачи коэффициенты присоединенных масс и присоединенного трения без учета податливости основания определяют для гибких и жестких стенок по графику, приведенному на рис. 8.5, для частот, не попадающих в промежутки, где отношение
Н (6)/р (0) < Крез, (8.30) где р-(в) н Ц(0) — коэффициенты присоединенных масс соответственно для сжимаемой н несжимаемой жидкости; Крез ~ коэффициент резонансного увеличения гидродинамического давления, который в зависимости от вида грунта, слагающего дно водоема на первом акустическом резонансе можно принимать следующим: для илистых водонасыщеиных грунтов —1,5; для песчано-глинистых грунтов—2; для трещиноватой фильтрующей скалы—2,5.
Для частот, попадающих в промежутки, где несправедливо неравенство (8.30),
И(6) = КрезН(0). (8.31)
Безразмерный коэффициент, учитывающий неоднородность жидкости (К'р) определяют по графику, приведенному на рис. 8.6, в зависимости от коэффициента изменения плотности аН:
1 о(Н)
аН= — ]п —. (8.32)
2 р(0)
Безразмерный коэффициент, учитывающий влияние поверхностных волн Кп-в, определяют по графику на рис. 8.7. Безразмерный коэффициент, учитывающий ограниченность длины водоема Ki, находят по графикам иа. рис. 8.8.
Рис. 8.6. График поправочного коэффициента для различных форм колебаний (номера кривых соответствуют номерам расчетных схем над графиком)
Рис. 8.1. График поправочного коэффициента К__ (сплошные линии) и коэффициентов присоединенного трения £пв (пунктир). Номера кривых соответствуют номерам расчетных схем
Если вода находится с двух сторон сооружения, то значения присоединенных масс и присоединенного трения воды находят независимо для каждой из сторон сооружения по формуле (8.28) или (8.29) и затем суммируют.
Для упрощения расчетов можно положить, что:
а) присоединенная масса воды при колебаниях свай примерно равна массе воды, вытесненной сваей;
Таблица 8.2. Безразмерные коэффициенты R и К
Z/H R К Z/H R к
0,00 0,000 0.000 0.55 0,637 0,596
0,05 0,135 0.058 0.60 0,660 0,640
0,10 0,226 0,116 0.65 0.679 0,682
0,15 0,300 0.174 0,70 0,697 0.720
0,20 0,363 0.231 0,75 0.711 0.755
0,25 0.418 0.287 0,80 0,718 0,788
0,30 0,466 0.343 0,85 0,731 0.812
0.35 0,509 0.397 0,90 0,738 0,832
0,40 0.550 0,448 0,95 0,741 0.847
0,45 0.580 0.500 1.0 0.742 0,852
0.50 0.610 0.549 — — —
166
Рис. 6.8. Зависимость от ИН ири разных частотах 0 для расчетных схем, показанных на чер* тежах
Рис. 8.9. График коэффициента присоединенной массы Ц| при шарнирном опирании гибкой стенки для схемы 9 в табл. 8.1
•б) присоединенная масса воды для цилиндрических оболочек типа водозаборных башен, опускных колодцев, свай-оболочек, цилиндрических шпунтовых перемычек и т. п. при отношении их диаметра к глубине не более 2, примерно равна массе жидкости, вытесненной оболочкой, деленной на число волн изгиба по периметру оболочки.
При расчете колебаний конструкции для случая совместного действия внутреннего неупругого сопротивления и внешнего вязкого трения значение максимальной амплитуды можно с некоторым весьма небольшим запасом принимать на основе расчета, выполняемого для чисто вязкого трения с коэффициентом сопротивления, равным сумме коэффициентов вязкого ут и внутреннего неупругого сопротивления, причем у, определяют по формуле
Тг = г!(т + /пж) ©о» (8.33)
где т — масса единицы площади стенки; <о« — первая собственная частота конструкции.
После вычисления значения присоединенной массы собственную круговую частоту колебаний конструкции в жидкости со, рад/с или частоту f, Гц, можно найти по формулам:
если колебания поступательные
(8.34)
если сооружение совершает вращательные колебания
Таблица 8.3. Коэффициенты Сп для схем 5—8 в табл. 8.1
2/« 5 6 7 8
с, сг G с. с, с. с. с,
0 0,000 0,000 0,000 0,000 0,000 0,000 0,000 0,000
0,1 0,310 0,193 0.669 8,254 1,719 16,610 0,218 0,042
0.2 0,598 0.289 1,269 11,853 3,562 36.650 0,289 —1,470
0,3 0,843 0,258 1.741 6,602 5.295 37,759 0,314 —3,235
0,4 1,029 0.073 2,048 —5,024 6,667 18.237 0.311 —4,715
0.5 1,149 —0,205 2,227 —19,411 7,469 —20,034 0,292 —5,660
0,6 1.197 —0,489 2,230 —31,313 7,616 —64,300 0,266 —6.022
0,7 1,185 —0,694 2,206 —36.950 7,242 —90,415 0,238 —5,769
0.8 1,127 —0,771 1,818 —35,962 6,571 --97,834 0.216 —5,243
0,9 1,050 —0,731 1,659 —31.654 5,947 —90,441 0.201 —4,713
1.0 1,000 —0,668 1,595 —29.213 5,685 —81.878 0,195 —4,488
167
Рнс. 8.10. График коэффициентов присоединенной массы Цг—щ прн шарнирном опираиин гибкой стеики для схемы 9 в табл. 8.1
(8.35)
Здесь ©о. Го — частота собственных колебаний в пустоте; т — масса единицы площади конструкции; 0^, 0 — момент инерции соответственно присоединенной массы и массы сооружения относительно центра колебаний.
При возможности значительных изменений уровня воды у сооружения необходимо определять полосу собственных частот для разных значений глубины воды и выбирать наиневыгоднейшее ее значение.
.168
8.4. Здания ГЭС
1. Краткие сведения о зданиях ГЭС. Здания ГЭС предназначены для установки и обеспечения нормальной работы гидроаг-
Рис. 8.11. График коэффициентов присоединенной массы Ц1 для жесткозаделанной на опорах гибкой стенки (схема 10 табл. 8.1)
регатов, перерабатывающих энергию падаю* щей воды в электрическую энергию, а также различного вспомогательного гидро- и электромеханического оборудования. Здание ГЭС может также выполнять роль плотины и водосбросного сооружения.
Различают три основных типа зданий ГЭС: 1) русловой ГЭС, 2) приплети н н о й ГЭС и 3) деривационной ГЭС.
Здание русловой ГЭС входит в состав напорного фронта и на соответствующем участке заменяет плотину. Такие здания ГЭС размещают в русле или пойме равнинной реки, строят их на мягких (рис. 8.15) и на скальных породах при напорах до 35— 40 м. Подвод воды к приточному тракту турбин русловых зданий ГЭС осуществляют непосредственно из верхнего бьефа через водоприемник, который находится в самом здании.
Здания русловых ГЭС, выполняющие
₽ис. 8.12. График коэффициентов присоединенной массы ц2— р.5 для жесткозаделанной на опорах гибкой стенки (схема 10 табл. 8.1)
169
J*
46
4*
42
c = 1; £3 и £3
/ - -z' : i i ’/ \ —-\ JU 1 1, Js 7 Ч1 u jijL li i’i! : •• 'rl fi|\ i $ 7 ш
0.4 0,8 1,2 1,6 2 2,4 2,8 3,2 3,6 4 4,4 f/f01
о J* ДБ
Q4
42
c=0,5; a=0,5
—— *^4 .
: $ i \ • • ~ ' “ * * — - —
— f -42^ — — ’•т- - —
0,4 0,8 1,2 1,6 2 2,4 2,8 3,2 3,6 4 4,4 f/fOf
О J1 О',Б
4«
0,2
c=0,5i a=0,2 5
—
— • Л z J — ’-‘V L Z)
.. -*
— IT--- z * a •
О 0,4 0,8 1,2 1,6 2 2,4 2,8 3,2 3,6 4 4,4 -F/-F01
Cl II $3 It о II . C3
* > \ с хи — г —
— — — -х \ \ X \ \ If-.• / /
: 1 i! Ji — — //1 .<7 м 1 /М_ \ir ь i ! —
О 0,4 0,8 1,2 1,Б 2 2,4 2,8 3,2 3,6 4 4,4 f/-f01
О 0,4 0,8 1,2 1,Б 2 2,4 2,8 3,2 3,6 4 4,4 f/-f01
--------------------у 4 7
------------------_-2 ------------— 5 ------------------В
--------------------3 6 д
------------------10
также роль водосбросного сооружения, делятся на здания совмещенного и водосливного типа. В первом из них для сброса паводковых вод устраивают водосбросные галереи, размещаемые в нижней массивной части здания ГЭС. Во втором — паводковые расходы пропускают над агрегатами через поверхностные водосливы, размещаемые над верхним перекрытием машинного зала (см. рис. 8.1).
С увеличением напоров в плотинной схеме использования реки здание ГЭС приходится располагать в нижнем бьефе под защитой плотины. Здания ГЭС такого типа называют приплотинными (рис. 8.16). Стро
ят приплотинные здания ГЭС, как правило, на скальном основании при напорах до 200—250 м. Исключением являются случаи, когда здание ГЭС находится за плотиной из местных материалов.
При деривационной схеме использования падения реки в весьма широком диапазоне напоров, примерно от 20 до 1800 м, строят здания деривационных ГЭС. Эти здания, как и приплотинные, воспринимают напор лишь по сечению трубопроводов, подводящих воду к турбинам. Здания деривационных ГЭС строят как на скальных, так и на мягких породах. Водоприемные у •’.тройства этих ГЭС находятся на значительном уДа'
170
Рис. 8.13. Значения коэффициентов присоединенных масс при шарнирном опирании для схемы 11 в табл. 8.1 в зависимости от отношения частоты вынужденных колебаний f к первой собственной частоте f0l
2 —ц-О.ЗЯ; 3 — Ц-0.4Я; 4 — ц-О.бЯ; 5 — П-0,6//; б — Т)-0,7Я; 7 —8 — Т)-2Я; 9 — т\-7Н; 10 — П-ЮЯ
лении от здания станции и практически никак на его компоновку не влияют. При малых напорах в деривационном канале может быть построено здание ГЭС руслового типа, которое в данном случае воспринимает напор.
Большинство зданий ГЭС, как уже говорилось, имеют нижнюю часть, выполненную в виде монолитного железобетонного массива, в котором располагаются водопропускные тракты, гидроагрегат и вспомогательные помещения (см. рис. 8.1, 8.15, 8.16). В зданиях русловых ГЭС к этому массиву примыкают напорная стенка и бычки поперечной жесткости (см. рис. 8.1, 8.15). На приплотинных и деривационных ГЭС, а
также на русловых ГЭС обычного и совмещенного типа верхнее строение здания ГЭС выше нижнего массива и практически не отличается по конструкции от обычных промышленных зданий с рамным каркасом. Исключение составляют напорная стенка и бычки. На зданиях ГЭС водосливного типа (см. рис. 8.1) верхнее строение, включающее машинный зал и вспомогательные помещения, выполняют в виде монолитной или сборно-монолитной оболочки криволинейного очертания, подобранного для обеспечения нормальной работы водослива, и опирающейся на ряд поперечных и продольных стен.
171
Рис. 8.14. Значения коэффициентов присоединенных масс при жестко заделанной на опорах гибкой к цервой собственной частоте fa
2; Динамические расчетные схемы. Динамическую расчетную схему нижней части зданий ГЭС на мягких грунтах принимают в виде жесткого массива на упругом основании; С массивом взаимодействуют остальные конструкции здания. При расчете поперечных (вдоль потока) колебаний бычки поперечной жесткости зданий русловых ГЭС считают входящими в состав жесткого массива. При расчете продольных (поперек потока) колебаний эти бычки рассматривают как деформируемые плиты [3], а напорные и другие массивные продольные (поперек потока) стены, заделанные в нижний массив, считают входящими в его состав.
Здания ГЭС большой длины делят температурно-осадочными швами на секции. Здания русловых ГЭС отделяют такими же швами от сопрягающих устоев сооружений, которые образуют с ними общий напорный
фронт. В отличие от ненапорных сооружений, в швах русловых ГЭС устраивают заполнение, которое обеспечивает гидроизоляцию н воспринимает напор воды. Характеристики этого заполнения аналогичны характеристикам виброизоляции [20] — на низких частотах (по исследованиям на нескольких ГЭС — до 15—18 Гц [3]) оно обеспечивает совместность перемещений секций, а на высоких частотах по швам выполняют виброизоляцию. Поскольку швы обычно имеют битумное заполнение, в котором проходят трубы для прогрева, то их упруго-демпфирующие характеристики довольно значительно меняются с температурой окружающего воздуха и режимами работы ГЭС.
Если нижняя массивная часть здания ГЭС имеет верхнюю отметку на уровне пола машинного зала, то гидроагрегат целиком находится в цилиндрической турбинной
172
стенке для схемы 12 в табл. 8.1 в зависимости от отношения частоты вынужденных колебаний f (обозначения см. на рнс. 8.13)
шахте. Если же массивная часть доходит до пола турбинного этажа, то выше для помещения гидрогенератора устраивают цилиндрическую оболочку, верхнюю часть которой обычно связывают с перекрытием между турбинным этажом и машинным залом. Эта оболочка, называемая генераторным стаканом, через распорные домкраты воспринимает горизонтальные нагрузки от статорных элементов генератора, а при генераторах подвесной конструкции — и вертикальные нагрузки от подпятника, расположенного на верхней крестовине. Горизонтальные нагрузки через верхнюю крестови-НУ передаются на перекрытие.
Расчетная схема здания ГЭС кроме нижнего массива на упругом основании должна включать генераторный стакан, верхнее строение и все остальные связанные с ним конструкции, Однако эта расчетная схема
допускает определенные упрощения. Верхние конструкции можно считать абсолютно жесткими и входящими в состав нижнего массива, если низшая из собственных частот будет не менее чем в 3 раза выше наивысшей из частот динамической нагрузки, на которую ведут расчет. Обычно это правило позволяет упростить учет подгенераторных конструкций, а в некоторых случаях — и верхнего строения зданий водосливных ГЭС, особенно при расчете на низкочастотные, воздействия (обычно с оборотной и двойней оборотной частотами).
При расчете на более высокочастотные воздействия такое верхнее строение работает как упругомассовая система, связанная с нижним абсолютно жестким массивом. Так же всегда работает и верхнее строение, зданий обычных и совмещенных русловых, а также приплотинных и деривационных
173
Рис. 8.16. Здание ГЭС руслового типа на мягком основании
ФПУ — форсированный подпорный уровень; НПУ — нормальный подпорный уровень; УМО — уровень мертвого объема водохранилища; 1 — бычок поперечной жесткости здания ГЭС; 2 — байпас для заполнения водой турбинной камеры; 3 — сороудержнвающая решетка; 4 — аварийно-ремонтный затвор; 5 — паз грейфера для очистки решеток; 6— забральная балка; 7 — автодорожный мост; 8 — лебедка затвора; 9 — полукозловой кран для обслуживания щитового отделения; 10 — мостовой кран для обслуживания машинного зала и монтажной площадки; 11 — напорная стенка; 12 — маслонапорная установка (МНУ); 13 — агрегат с пятой на крышке турбины; 14 — колонка управления; 15—главные повышающие трансформаторы; 16 — козловой кран для обслуживания шандориого заграждения; 17 — помещение электрических распределительных устройств; 18 — лаз в спиральную камеру; 19 — кабельный коридор; 20 — помещение насосной; -21 — шандорное заграждение отсасывающих труб; 22«—лаз в отсасывающую трубу; 23 — промежуточный бачок отсасывающей трубы; 24 — сливная труба для откачки воды нз отсасывающей трубы; 25 — сливная,труба для опорожнения спиральной камеры; 26 — сухая галерея; 27 — галерея, ведущая к насосной
ГЭС. При этом возможно другое упрощение. Если частота возмущающей силы в 3 раза и более превышает низшую частоту собственных колебаний верхнего строения, то при динамическом расчете жесткого фундамента стоящее на нем верхнее строение можно не учитывать, так как оно виброизолиру-ется от фундамента благодаря гибкости колонн.
Если подгенераторную конструкцию или верхнее строение здания ГЭС надо рассчитывать как упругие системы, взаимодействующие с жесткой нижней частью сооружения, но их масса составляет менее '/и массы нижией части, то их влиянием на формы и частоты колебаний нижней части можно пренебречь на всех частотах, которые отличаются, более чем на 10 % от собственной
частоты подгенераторной конструкции или верхнего строения. Если отношение масс больше 7so, но меньше V20, то эта полоса расширяется до 20 %.
Кинематические воздействия на подгенераторную конструкцию или верхнее строение со стороны нижней массивной части здания ГЭС могут быть определены только после расчета колебаний са'мбй нижней части. Среди всех гармонических составляющих колебаний фундамента, которые имеют заметную амплитуду, самой высокочастотной обычно является составляющая с лопаточной частотой.
Собственные частоты совместных колебаний генератора с подгенераторной коист-рукцией обычно определяют на основе следующих предпосылок:
1М
Рис. 8.16. Станционная плотина н здание приплотинного типа Саяно-Шушенской ГЭС
/ — водоприемник; 2 — временный водоприемник; 3 — турбинный трубопровод; 4 — гидроизоляция; 5 — дренажные скважины; 6 — скважины глубокой цементации; 7 — упругая прокладка. 3 — воздуховоды; 9 — сороудержнвающая решетка; 10 — железобетонный кожух турбинного трубопровода
1) масса статора генератора и других элементов, колеблющихся совместно с ним, намного больше массы подгенераторной конструкции, в связи с чем при составлении расчетной схемы можно считать подгенераторную конструкцию невесомым упругим элементом, прибавляя к массе генератора массу верхней четверти подгенераторной конструкции;
2) жесткость статора с верхней кресто
виной и другими совместно колеблющимися частями генератора настолько велика, что он может считаться абсолютно жестким телом.
Для конкретных типов подгенераториых конструкций и их сопряжений с конструкциями здания ГЭС вводят дополнительные предпосылки. Так, например, при передаче горизонтальных нагрузок от генератора на монолитное или сборное замоноличенное
176
Рве. 8.17. Поперечное сечение здания русловой водосливной ГЭС (пунктирной линией показана условная подошва здания)
железобетонное междуэтажное перекрытие вводят предпосылку о том, что благодаря высокой жесткости этого перекрытия в своей плоскости собственные частоты горизонтальных колебаний системы генератор — подгенераторная конструкция настолько велики, что эти колебания при нормальной эксплуатации не могут возникнуть и на них конструкцию можно не рассчитывать.
3. Рекомендации по расчету. Расчет зданий ГЭС по полной расчетной схеме обычно выполняют в несколько этапов. Сначала рассчитывают все элементы здания, получающие кинематическое возбуждение при колебаниях нижнего массива с единичными амплитудами и определяют силы динамического взаимодействия между ними н массивом. Затем рассчитывают колебания
176
нижнего массива на заданные нагрузки, вводя указанные выше силы взаимодействия как функции поступательного и углового смещения соответствующих точек массива.
Эту процедуру можно рассматривать как использование метода деформаций для расчета статически неопределимых систем с выбором в качестве неизвестных компонентов поступательного и углового смещений массива. Применяют также методы конечных элементов с использованием в качестве таких элементов тех стержней, рам, ферм, плит и оболочек, на которые удается разбить верхнее строение. Наиболее удобную стыковку этих элементов осуществляют методами динамических жесткостей или динамических податливостей.
Формулы для динамических жесткостей каждого из элементов берут, как правило, готовыми из справочников, например [20]. Формулы для расчета колебаний массива без эксцентриситета в плане центра масс относительно центра площади подошвы имеются там же, а при наличии эксцентриситета — в [6]. Известно, что если эксцентриситет составляет менее половины высоты массива или */ю части ширины подошвы массива в плоскости колебаний, то им можно пренебречь.
Возможная ошибка в определении собственных частот при применении перечисленных методов расчета может достигать 30 %, поэтому в расчетах амплитуды вынужденных колебаний используют [20] значения собственных частот, сдвинутые на 30 % в сторону соответствующей частоты вынужденных колебаний.
Поскольку традиционно расчет на гидродинамические нагрузки рассматривается проектировщиками гидросооружений как динамический, и по сравнению с расчетом на обычные статические нагрузки, не меняющиеся во времени, отличается от него, приведем основные особенности такого расчета.
Для расчета устойчивости сооружений и прочности его конструкций необходимо знать максимальное за расчетный срок эксплуатации значение гидродинамической нагрузки, осредненной по поверхности сооружения или конструкции. Это значение может быть задано на основе экспериментов на моделях или в натурных условиях на аналогичных сооружениях, либо (для типовых схем сооружений) взято из нормативных документов или литературных источников [3, 13—18, 21].
В том случае, когда данные об этих нагрузках приведены в виде рекомендаций
по определению осредненных (в вероятностном смысле) и пульсационных составляющих [3, 5, 10, 11, 21], расчетное значение нагрузки может быть взято в виде суммы максимального значения осредпен-ной составляющей и некоторого числа ka стандартов пульсационной составляющей. Число kB выбирают в зависимости от ответственности и класса капитальности сооружения и, следовательно, расчетного срока его эксплуатации. Его значение до настоящего времени не нормировано, но обычно его задают в пределах от £п = 4 для сооружений 3-го класса капитальности, разрушение .которых не приведет к гибели людей или потере больших материальных ценностей, до Лп=5,5 для ответственных сооружений 1-го класса капитальности.
При расчете гидродинамическую нагрузку суммируют с гидростатической и другими статическими нагрузками в наиболее неблагоприятных сочетаниях и проверяют, чтобы значения коэффициентов запаса по устойчивости сооружения и прочности его конструкций не оказались менее нормативных.
Для расчета выносливости конструктивных элементов сооружения необходимо знать обеспеченность за расчетный срок эксплуатации числа циклов изменения нагрузки, имеющих разную интенсивность. Эти данные также получают из опыта либо из литературы [3, 5, 10, 11, 13—18, 21] в виде кривых обеспеченности, либо, наконец, принимают в виде определенного распределения (обычно — нормального распределения Гаусса) пульсаций давления с интенсивностью, равной определенному числу стандартов kB. При этом внутренние усилия и напряжения Oi в элементах конструкций вычисляют на основе статических расчетов отдельно от суммы статических сил со средним значением осредненной гидродинамической нагрузки. Напряжения Ог: от пульсационных составляющих интенсивностью Pi определяют тоже на основе статических расчетов, после чего выносливость проверяют по обычным правилам [7] с использованием гипотезы линейного накопления повреждений.
Допустимость колебаний по воздействию на персонал и технологическое оборудование проверяют по кинематическим параметрам вибраций в тех точках сооружения, где расположены рабочие места обслуживающего персонала, причем форму амплитудного спектра этих вибраций принимают полностью подобной форме спектра нагрузки, а значения амплитуд определяют прос
12—189
177
то как статические смещения от пульсационной нагрузки.
4. Пример динамического расчета здания русловой ГЭС.
Динамический расчет здания русловой ГЭС является чрезвычайно трудоемкой операцией, поэтому здесь для примера рассмотрено лишь несколько этапов этого расчета, связанных с определением частот и форм собственных колебаний, амплитуд вынужденных колебаний нижней массивной части здания ГЭС и с проверкой выносливости напорной стенки при колебаниях, вызванных работой агрегатов.
Начальные этапы расчета связаны с определением массы здания, положения центра тяжести и момента инерции масс относительно центра тяжести, а также с нахождением частот и форм собственных колебаний верхнего строения. В результате этих расчетов выяснилось, что для здания, поперечное сечение которого и максимальные уровни бьефов показаны на рис. 8.17, имеют место следующие величины:
вес, масса и момент инерции масс относительно центра тяжести для нижней массивной части здания: QH=2,94-10® кН; Мн = 3,00-108 кг; 0н=7,75-1О10 кг/м2;
вес и масса верхнего строения: QB= = 1,08-105 кН; Л1в=11-10в кг;
вес, масса и момент инерции масс относительно центра тяжести для всего здания ГЭС: Q=3,05-106 кН; М=3,11-108 кг, 0 = = 9-32-10'° кг-м2;
площадь и момент инерции подошвы сооружения (размер 64,3x101 м): Г= =6500 м2; 7=2,2-10® м4. Высота и эксцентриситет центра тяжести нижней массивной плиты фундамента: ЛВ=П м; ен=6,3 м;
высота и эксцентриситет центра тяжести всего здания ГЭС: Л=15,6 м, е=5,4 м;
частоты горизонтальных собственных колебаний верхнего строения: /ов.г=12,8; 28,6; 56,2 Гц;
Частоты вертикальных собственных колебаний верхнего строения: /ов.в=И,2; 30,1; 58,3 Гц;
изгибы русла в плане начинаются в 300 м от створа сооружения в сторону верхнего бьефа и в 250 м в сторону нижнего бьефа.
Высоту центра тяжести вычисляли как расстояние от центра тяжести до .условной горизонтальной поверхности, положение которой определено как среднее по всем отметкам подошвы сооружения.
По результатам инженерно-геологиче
ских изысканий определено значение Сг= =39-10® Н/м3.
Технологами заданы максимально допустимые ускорения в точках А (точная автоматика щита управления) и Б (трансформаторные помещения) — 63 мм/ся.
Расчетные нагрузки от гидроагрегатов. В агрегатной секции установлено пять гидроагрегатов мощностью 82,5 МВт, с радиальноосевыми турбинами, рабочие колеса которых имеют 15 лопастей, направляющий аппарат— 24 лопатки, а статор—12 колонн. Номинальная частота вращения' пн = =88,25 об/мин, угонная пу=165 об/мин. Напор — максимальный Ятах=40 м, минимальный Ят1п=29 м. Масса ротора агрегата 475 т, высота центра тяжести ротора над центром тяжести здания ГЭС ftt = = 7,4 м. Условный диаметр турбины £)| = 6м, высота середины рабочего колеса над центром тяжести нижней массивной части Л2 = =5,1 м. Площадь входного отверстия в спиральную камеру Fea = 112 м2, высота центра площади входного отверстия над центром тяжести нижней массивной части совпадает с Л2=5,1 м. В соответствии с указаниями п. 8.2, пп. 1, определяем частоты и амплитуды гармонических составляющих стационарной динамической нагрузки:
1) оборотной:
88 25
,ос“~&Г = 1,47 Гц: р"6 = 471
Роб е = 471 Vs = 10S0 кН;
2) двойной оборотной;
/д.о = 2/об = 2.94 Гц;
F“ о = 0,016pgtf£>? = 0,016- Ю.Х
X 40-62 = 230 кН;
F" о.с = 230 У5 =515 кН;
3) лопастной;
/лс-=ЛбПлс= 1.47-15 = 22 Гц;
рн e = 82,5-9,8 1 = • ки.
лс З/обГГ 3-1,-47-6
Рк = 30,61/5 =70 кН;
^ЛС = 5Рлс = 153 кН;
Г“с с = 153 ]/5 = 340 кН;
178
4) пульсационной, действующей с лопастной частотой:
Ра — 2 сп —
= 4-9,81-112-40-0,1 =2200 кН; 2
Рп.с. = 2200 4920 кН.
Высота центра площади входа в спиральную камеру совпадает с высотой середины рабочего колеса, а частота пульсационной составляющей совпадает с лопастной, поэтому в дальнейшем расчет будем вести на суммарную силу, действующую с лопастной частотой:
Р„с _ = 4920 + 70 = 4990 кН.
Расчет собственных колебаний «сухого» сооружения
Жесткость основания:
К2 = CZF = 3,9- 1О‘.6,5- 10s =
= 2,54-10е кН/м;
= 0,7С2 F = 0,7-2,54- 10е =
= 1,78-10е кН/м;
K^ = 2CzI = 2-3,9.104-2,2-10е =
= 1.72-1011 кН-м.
Парциальные частоты:
М
/2=—— ,г (2л)?
1 2,54.10й
= (2л)2 3,11-10е
/2 = ]Л20,77 = 4,56 Гц;
о____1 kx __ 1 1,78-lQ11 _
‘х~ (2л)? М ~ (2л)2 3,11-106 “ = 14,54 Гц2; fx = V 14,54 = 3,81 Гц;
л = 1 kq — Qh =
(2л)2 0 + Л4Л2
1 1,72- 10м — 3,05-108-15,6
(2л)? 9,32-10“ + 3,11-108-15,62 = = 25,90 Гц2; /ф= ]/25ДЮ = 5,09 Гц.
Собственные частоты: поскольку efh= =5,4/15,6 = 0,345<0,5, то считаем, что эксцентриситет учитывать не нужно.
Далее определяют значение
е
V =---------- «
е + мл2
9,32-10“ ---------------------------= О 552 9,32-10“ + 3,1 Г- 10е-15,6?
18»
и вычисляют собственные частоты:
/2___________-
’01,02 - 2v
- /(fl + f‘J2-Wl 4 I = х Ле V f UUA
X [ 14,54 + 25,90 ± K( 14,54 +25,90)24x
---------------- 1090 Гн2
X0.552-14,54-25,90 = ;
62,40 Гн2
f01 = Kio?9 = 3,3 Гц; fo2 = Кб2Л = = 7,9 Гц.
Координаты центров колебаний:
h______________15,6
1- (/о21Дл) “1-(‘0’9/14,54)’ = 62,4 м;
15,6
=--------!------=-4,74 м.
1 —(62,4/14,54)
Так как частоты /щ и fz более чем в 3 раза ниже низшей из частот собственных колебаний верхнего строения, то их определение с учетом массы верхнего строения является законным. Этого нельзя сказать
о частоте /02. Она ниже низшей частоты собственных колебаний верхнего строения менее чем в 3 раза и поэтому должна бы была определяться на основе рассмотрения совместных колебаний нижней массивной части сооружения и гибкой верхней. Однако то обстоятельство, что масса верхнего строения Мв составляет от массы Л4Н нижней части здания
Мв
Мя
11-Ю6
3-10®
= 0,0365 < ,
20
позволяет не учитывать гибкость верхнего строения при определении fOa и т]2, так как при этом /оа отличается более чем на 20 % от низшей из частот собственных горизонтальных колебаний верхнего строения.
Все вычисленные величины пригодны для расчета вынужденных колебаний с оборотной и двойной оборотной частотами. Но для расчета вынужденных колебаний с лопастной частотой необходимо предварительно определить собственные частоты и координаты центра колебаний без учета верхнего строения, т. е. провести расчет, аналогичный приведенному выше, но с подстановкой вместо М, Q, 0, h, е значений с подстрочным индексом «н», т. е. относящихся к нижней массивной части здания ГЭС. При этом эксцентриситет ев также не нужно учиты
179
вать, так. как он хотя и превышает половину высоты Ан, но составляет менее '/ю ши-рины подошвы сооружения. После проведения соответствующих расчетов получим: /?н=4,64 Гц; foiH=3,6 Гц; fo2H = 8,1 Гц; Т]1н=77,6 м; г]2н=—3,27 м.
Расчет вынужденных вертикальных колебаний
Амплитуда колебаний с двойной оборотной частотой:
где “0.7-4.56—3,19 Гц — расчетное
значение собственной частоты, которое получают сдвигом па 30 % вычисленной частоты в сторону частоты возмущающей силы н вводят [20] для того, чтобы учесть возможную погрешность определения собственной частоты.
Амплитуда колебаний лопастной частоты:
Расчет вынужденных колебаний вокруг центра первой формы собственных колебаний
Определение приведенного момента инерции:
ew =0+Л'П1?=9,32.1О1о +
4- 3,11 • 108-62,4? = 1,3-10* 1 * * * У? кг-м2;
«01,= , + "нЧ?,= 7.Я.1О1о +
4- 3- 10е-77,6? = 1,88-Ю12 кг-ма.
Определение приведенной жесткости:
Ло1 = Л'х С*! “ Л)2 + *ф = 1'78.10* (62,4 -— 15,6)2Ч- 1,72-10“ = 5,62-10“ кН-м; ^о1н = ТСх 011н — ^н)- 4~ 7(ф = = 1,78.10е (77,6— 11)? Ч- 1,72.10й» = 9,63-10U кН-м.
Проверка:
г________^01______
01 ~ (2л)?е01 ~
= 10,93 Погрешность: 10,93—10,9 10,9 9,63-1014
5,62-10ц (2л)3 1,3-10х? Гц?.
100 « 0,3%;
f2 -/01н“-
= 12,95 Гц?
В
(2л)? 1,88-1013
Погрешность
12,96—12,95
Погрешность 0,3 % вполне допустима, дальнейшем будем вводить откорректи-
рованные в сторону меньших значений Koi=5,61-10“ кН-м; Koib =9,60- 10н кН-м, так как они идут в запас.
Определение угловой амплитуды колебаний оборотной частоты:
АО61 = г ~
к* / (1—-£-)+* г \ '01р1 /
1050 (7,4 4-62,4)
// 1 472 X2
5,61.1OU|/ +0.2?
= 2,08-10—7 рад, где
/oipi = 0.7/о1 = 0,7.3,3 = 2,31 Гц.
Определение угловой амплитуды колебаний лопастной частоты:
______________Р л с. с (^:? ~Ь Лгн)-
1лс1 —________------------------____
^01н 1/ ( 1 — ~7Г~ ) +?? г \ '01нр2'
__________4990 (5,1 4- 77,6)________
, / / 222 \2
9,6.10111/ 1--— 4-0,2?
У \ 4,оо3 /
= 2,04-10—8 рад,
где
/о1н.р2 = 1 »3/о1н = 1,3*3,6 = 4,68 Гц.
Расчет вынужденных колебаний вокруг центра второй формы собственных колебаний
Определение приведенного момента инерции:
6Q2 = 6 4- ЛП] = 9,32• Ю10 4-4-3,1Ы08.4,74? = 1,002-10» кг-м2;
^ = ен + ЧЛ2н=7>75-1010-+ 3- io«.3,272 = 8f07- Ю10 кг-м2.
Определение амплитуды колебаний центра подошвы здания при оборотной частоте:
Определение приведенной жесткости:
Ко2 = Кх (Л2 - № + ЯФ= 1,78- 108(— 4,74— — 15,6)2 + 1,72- Юи = 2,47-Ю11 кН-м;
^о2н — «х (Лги ~~ ^н)2 ~Ь Кф = = 1,78-108 ( —3,27 — 11)2 +
+ 1,72-10и = 2,09-1011 кН-м.
Проверка:
Лоб — А)б1 (Л1 — h) 4~ Лб2 (Л г — Ю — = 2,08-10—7 (62,4 — 15,6) — — 1,18-10-8 (4,74 + 15,6) = 9,45- 10-”. м.
Определение координаты центра колебаний массива при оборотной частоте:
^соб h
Кр2
2,47-1014
= —--------------=62,40Гц2.
02 (2л)20о2 (2 л)2 1,002-1011
Погрешность неуловима;
Лсоб Лоб 12,9-15,6 г, „ ------------= о/,6 12,9 — 9,4
м.
f2 -'02н —
2,09- 1014
(2л)2 8,07- 1010
= 65,60 Гц2:
Определение амплитуды центра тяжести нижней части лопастной частоте:
колебаний здания при
/о2н = Кб5,6 = 8,1 Гц.
Погрешность неуловима.
Определение угловой амплитуды колебаний оборотной частоты:
'SUS+’M
Л0б.2 = г ; ~ ~
Ко21/ (1--7Г-) +?2
г \ 'о2р! •
__________1050 (7,4 — 4,74)________
, Л 1,472 \2
2-47'10“у (*--Йзг) +°’2;
= 1,18.10—8 рад;
Ляс — ЛЛС1 Л1н 4~ ЛЛс2 Лгн — = 2,04-10~8-77,6 — — 1,3-10—8-3,27 = 1,54-10—п м.
Нахождение амплитуды колебаний центра тяжести подошвы здания при лопастной частоте:.
Лоле — ЛЛс1 (Лги — ЛН)=ЛЛС2 (Лгн — ^н) = = 2,04-10—в (77,6— 11) —
— 1,3-10—8 (3,27+ 11)=1,16.10-в м.
Определение координаты центра колебаний лопастной частоты:
fo2Pi = 0,7fO2=0,7-7,9 = 5,53 Гц.
Определение угловой амплитуды колебаний лопастной частоты:
। лс.с (^2 4* Лгн)
1лс.2 — .-----------------
(1—7Г2-) + Vs г \ 'о2нр2 1
_________4990 (5,1—3,27)_________
2,09-10“ ]/~(1 — —J-0.22
V \ 10.532/ *
= 1,3-10—8 рад,
_____Ллс ^н_____
Ллс — & —
А: л с — Aurc
1,54-11 =-----’------= 44,6.
1,54—1,16
Определение присоединенных масс жидкости
Проверяют необходимость учета сжимаемости жидкости. По формуле (8.21) сжимаемость не надо учитывать для частот
150______150
Н ~ 41
= 3,66 Гц.
где
^о2н.рг = 1 »3fo2n = 1,3-8,1 = 10,53 Гц.
? Следовательно, для оборотной частоты /об= 1,47 Гц сжимаемость учитывать не нужно. Для лопастной частоты /лс=22 Гц учет сжимаемости необходим. Для нее безразмерная частота 0В со стороны верхнего бьефа
Расчет действительных амплитуд и форм вынужденных колебаний
Определение амплитуды колебаний центра тяжести здания при оборотной частоте:
Лсоб == /^об1 Л i л- -4Ofj2 Л2 — — • 08 • 10~7 х X 62,4— 1,18-10-в-4,74 = 12,9-10-“ м.
а со
4Hf 4-41-22
0в =------ =----------= 2,54
а 1420
стороны нижнего бьефа
4-18,3-22
" =1,13.
1420
Проверяют необходимость учета поверхностных волн. По формуле (8.23) эти
181
волны не надо учитывать для частот: со стороны верхнего бьефа />5/j/z Я=5/ у 41 =-0,78 Гц; со стороны нижнего бьефа— />5/-^ 18,3=1,17 Гц; так как /ов= = 1,47 Гц, а /лс=22 Гц, то поверхностные волны учитывать не нужно.
Проверяют ограниченность длины водоема: по формуле (8.26)
/в > 3//в = 3-41 = 123 м; /Н>ЗЯН = 3-18,3 = 55 м.
Так как изгибы русла начинаются дальше этих расстояний, то длину водоема можно считать бесконечной.
Проверяют необходимость учета гибкой вставки. Высота затвора 9 м, что составляет 9/41 =0,22 <1/3. Следовательно, присоединенные массы можно определять, считая сооружение по всей высоте абсолютно жестким.
Присоединенную массу для колебаний с оборотной частотой со стороны верхнего бьефа определяют по табл. 8.1:,
Роб-в
nz.
0,543—0,65-------— 4-0,21 ——
’’о6-8 Поб.в
0,543 — 0,65-----+ 0,21------
______________95 952
41 412
“ 95 + 3-95?
= 0,478;
по формуле (8.29)
'Лж.об-в— Р^вРоб.в— 103-41-0,478— = 1,96-104 кг-м-2;
со стороны нижнего бьефа:
Р-об-н —
18,3 18,32
0,543 — 0,65 ---— + 0,21 ——
64,3 64,32 _ “ 18,3_18,32 ~
“ 64,3 + 3-64,З2
= 0,499;
'Пж.об.н = Ю3- 18,3-0,499 = = 9,1-103 кг-м-2.
Определяют присоединенные массы и трение для колебаний с лопастной частотой. Поскольку на рис. 8.5 нет кривых для формы колебаний, имеющейся при лопастной частоте, то необходима интерполяция между кривыми, соответствующими расчетным схемам 3 и 4 по табл. 8.1. Пропорцию для интерполяции примем .для случая несжимаемой жидкости, для которого имеется
формула, позволяющая определить присоединенные массы при любой форме колебаний:
со стороны верхнего бьефа
41 412
0,543 — 0,65—4-0,21 ——
__________ 86,6 86,62
И’®*ф = 41 4i~2 =
86,6 + 3-86,62
0,468;
со стороны нижнего бьефа
Рв.ф—
18 3 0,543 — 0,65-— 4-
______________55,9
18,3
1— 55,9 +
,21
-- -- = 0,496.
18,За
3-55,92
Соответственно разность ординат между кривыми 2 и 3 на рис. 8.5, а делят в пропорции:
0,468 — 0,31
0,543 — 0,31
0,496 — 0,31
= 0,678;
п п = 0,798, 0,543 — 0,31
а сами ординаты, соответствующие расчетному случаю, будут:
М-лс.в = 0,12; £лс.в = 0»16»
Рлс.н = £лс.н=1»15»
^ж.лс.в— Ю3-41-0,12 — = 4,92-10® кг-м-2;
щж.лс.в= 103-18,3-0,09= 1,65-103 кг-м-2; глс.в = 2л/лс Р#в £лс.в = 2л-22-103- 41X X 0,16 = 9,07-105 кг-м—?-с—1; /•лсн = 2л-22-10®-18,3- 1,15 = = 2,91-10® кг-м—?«с—
Пересчет амплитуд и собственных частот с учетом присоединенных масс жидкости
Определение моментов инерции присоединенных масс жидкости для колебаний с оборотной частотой относительно центров собственных колебаний:
еж.об1 .= 3 {^ж.об.в [ПВ1 (Пв1 *.) ] "Ь "Ь тж.об.н [’IhJ (Пн! Нц) ])} = 101
= —— [1,96 (99,83 — 58,8») 4-3
4-0,91 (69,13 — 50,8®)] 104 =
= 5,82-10« кг-м2;
182
бж.об.2 “ “Г" П -96 <32’663 + 8-36’) +
4-0,91 (1,963 4- 16,343)] - 10* = = 2,47-1010 кг-м?.
Лсоб.ж _ 1,Б4-1О—о
Лоб 57,6
= 3,06-10-7.
Пересчет собственных частот для расчета вынужденных колебаний оборотной частоты:
Эти амплитуды считают окончательными. Пересчет формы колебаний, т. е. поло--жения центра вынужденных колебаний, не требуется, так как принята предпосылка о-близости форм колебаний в жидкости и в пустоте. И действительно
Лоб.ж.—
5,82-10ц
1,3-1012
= 2,74 Гц;
Ас об-ж h
Асоб.ж Аюб.ж
17,65-15,6
17,65— 13,05
= 59,8 м.
7,9 /ж.об2 = ---------------=7,08 Гц.
, / 2,47-1010
И 1+ 1,002-1011
Пересчет угловых амплитуд колебаний оборотном частоты:
т. е. положение центра колебаний изйеня--ется всего на 2—4 %.
Определение моментов инерции присоединенных масс жидкости для колебаний лопастной частоты относительно центров-собственных колебаний:
где
?об.с 01 "Ь ^1)
_________1050(7,4 4-62,4)________
1 /7 1,472 \2
5*6Ь у/ +
= 2,84-10—7 рад,
/ж.об1р — 0,7/ж.об1 — 0,7-2,74 = 1,92 Гц;
Л ^об.с 01 “Ь ^2)
Лж.об2 — , =
г \ 'ж.об2р 7
______________1050(7,4 — 4,74)_____________
„ -1 /"/ 1.472 \2
2,74-1011 1/1 — —----------- 4- о,22
V \ 4,96? J
= 1,21-10~8 рад, </ж.об2р = 0,7/ж.об2 = 0,7-7,08 = 4,96 Гц).
6 —
°ж.лс1 — 2
|тж.лсв
(’IbIh "в) ] “Ь ТТ’ж.ле.н [’IhIh ь 101
- (Пни - Ян)3]} = — (4920 (119.68 _
— 78,62) 4- 1650 (88,93 — 70,63)] = = 2,24- 10й кг-м2;
Ож.лсг = “V" (4920 (38.733 4- 2,273) 4-
О
4- 1650 (8,ОЗ3 4- 10,233)] = 9,8-109 кг-м2.
Пересчет собственных частот для расчета вынужденных колебаний лопастной частоты:
Пересчет действительных амплитуд вы-нужденных колебаний оборотной частоты:
Лс об.ж — Лж.об! ’ll + ^ж.об2 *12 = = 2,84-10-7-62,4 — 1,21-10~8-4,74 = = 17,65-10—• м;
Ас об.ж — Лж.обг (’ll — Л)4" + лж.об2(’12~Л) = 2,84-10-’ (62,4 — — 15,6)— 1,21- 10—8 (4,74 4~ 15,6) = = 13,05-10—8 м;
3,6
2,24-1011
1,88-101?
= 3,3 Гц;
/ж.лс2ж— 7,65 Гц.
/ 9,8-10е
V 1+8,07-1010
Вычисление приведенного внутреннего неупругого сопротивления;
183
№»-(ч,1н-
6л/Ж.ЛС1 (6о1Н 4"
П1Н
+ 6>К.ЛС1)
101 [9,07 (119,6s + 78,63) + ’ + бл-3,3 (1,88-104 +
+ 29,1 (88,9s — 70.63)1 Ю5
= 1 »85;
Тп2 =
+ 2.24.Ю11)
101 [9,07 (38,733- + 2,273) + 6л. 7,65 (8,07- Ю10 +
4-29,1 (8,ОЗ3 + 10,233)1106
—---------------------------= 0,645.
4-9,8.10»)
Пересчет угловых амплитуд колебаний лопастной частоты:
^лс.с (йг + ПпО_______ лс.жх —______________________________----
r ' ’ ж.лс1р '
__________4990 (5,1 + 77,6)_________
, f / 222 \2.
9,6.10п|/ J-H.852
= 1,7-10—8 рад,
где
/ж.лсгр — 1 »3/ж.лс1 — 1,3*3,3 — 4,29 Гц; ^лс-с (^2 4- Лгн)
4990 (5,1 + 3,27)
2,09- 10й
= 1,11*10—8 рад,
где
/ж.лсгр = ЬЗ/ж.лсг = 1,3-7,65 = 9,95 Гц.
Пересчет действительных амплитуд вынужденных колебаний лопастной частоты:
А:лс.ж — Апс.ж! Л1н 4~ ^лс.жгЛгн — = 1,7-10—8-77,6 — 1,11-10—8-3,27 = = 1,28-10-° м;
А?ЛС.Ж = ^ЛС.Ж1 (Л1Н--йн) 4-
4- ЛЛС.Ж2 (Л2Н - йн) = 1.7-10—8 (77,6-11)-— 1,11-10—8 (3,27+ 11) = 0,97-10-» м;
. _ ^слс.ж_______1,28- 1Q—6
ЛС'Ж ~ Ллс “ 44,6
= 2,87-10—8 рад.
Эти амплитуды считают окончательными.
Проверки неблагоприятных режимов колебаний при разных уровнях воды в бьефах в данном случае не требуется, так как даже при самых высоких уровнях, когда присоединенные массы имеют наибольшее значение, собственные частоты остаются выше оборотной частоты, а при отсутствии жидкости собственные частоты «сухого» сооружения остаются ниже лопастной частоты.
Вычисление амплитуд колебаний характерных точек
Характерными называются точки, данные об амплитудах колебаний которых необходимы либо для проверки допустимости вибрации,, либо для проведения дальнейших расчетов. Представляет интерес определить амплитуды колебаний в четырех точках, обозначенных на рис. 8.17 буквами А, Б, В, Г, причем в точках А и Б, где располагаются обслуживающий персонал и технологическое оборудование, необходимы суммарные амплитуды колебаний, учитывающие и вертикальную, и горизонтальную составляющие, а в точках В и Г, где с сооружением сопрягается гибкая вертикальная напорная стенка, колебания которой в дальнейшем необходимо рассчитывать, необходимы амплитуды лишь горизонтальных колебаний.
Амплитуды колебаний в точке А: горизонтальных:
Алоб.г ~ ^об.ж ^Лоб = 3,06-10—7 х
X 69,9 =21,4-10-» м;
АЛлс г = 2,87-10—8-61,5 = 1,77-10-» м;
вертикальных:
^Лоб-с = ^об.ж еЛоб ~ 3,06-10 7 .13 = = 4-10-» м;
Лллс.в = 2,87-10-в-13 = °’37- 10“в м«
где ^Ло<5* e^og —высота точки Л над центром колебаний оборотной частоты и расстояние но горизонтали между этими точками соответственно.
Амплитуды колебаний в точке Б: горизонтальных:
^Боб.г = 3»06‘Ю~7*65 = 19,9-10-» м;
АБлсг = 2,87-10—8-56,6 = 1,62 10—» м;
вертикальных
Л£0б.в = 3,06- 10-7- 22 = 6,74-10-» м;
А£лс.а= 2,87-10—8*22 = 0,63-10-" м.
184
Амплитуда горизонтальных колебаний в точке В:
АВоб — ^Об.ж ЙВоб ~ 3»06' 10—’-65 =
= 19,9-10-в м;
ЛВлс = 2,87-10-8-56,6 = 1,62-10-» м.
Амплитуда горизонтальных колебаний в точке Г:
ЛГоб= 3,06-10—’-83 = 25,4-10—6 м;
АГлс= 2,87-10—8-74,6 = 2,14-10—8 м.
Проверка допустимости колебаний
Воздействие на персонал зависит от максимальной скорости, которая в точке А не более, чем:
в горизонтальном направлении
( ?об ААоб.г лс^Апс.г) =
= 2л (1,47-21,4 +22-1,77) 10-3 =
= 0,44 мм/с <2 мм/с;
в вертикальном направлении
РОб Лоб.В 4" f Д.О ^Д-02 4"
= 2л (1,47-4 +
+ 2,94-8,1 + 22(0,37+0,12)] 10-3=
= 0,25 мм/с <2 мм/с.
Следовательно, по воздействию на персонал эти вибрации допустимы.
Воздействие на технологическое оборудование зависит от максимального ускорения, которое в точке А не более чем:
в горизонтальном направлении
4л (/об ^Лоб.г 4" /дс ^Ллс.г)
= 4л2 (1,472-21,4 + 222-1,77) 10-3 =
= 35,7 мм/с2 < 63 мм/с?;
в вертикальном направлении
4л2 [/об ^Лоб.в 4- /д.о Ад.02 4- ?ЛС (ЛЛлс.В 4-4- А“О2)]х=4л2(1,472-4+2,942-8,1 +
4-222.0,49) 10—3 = 12,3 мм/с?<63 мм/с2.
а в точке Б соответственно 34 и 17,3 мм/с2. Следовательно, по воздействию на технологическое оборудование эти вибрации допустимы.
Расчет напорной стенки
По данным статического расчета изгибающие моменты от гидростатической нагрузки (все нагрузки, усилия, масса, площадь
и т. п. приведены к 1 ции поперек потока):
на верхней опоре посередине пролета на нижней опоре модуль упругости бетона ............
плотность бетона
м длины здания стаи
г „=5080 кН-м в. ст
L „ =2820 кН • м
пр. ст
L „_=6050 кН - м н« ст
F=2,94- 101Л Па
рб=2.4-103 кг-м-3
Предварительные расчеты
Построение расчетной схемы проводят в предположении, что напорная стенка, как и для статического расчета, может считаться жестко заделанной на опорах, имеет постоянное сечение, а на высоте 12,6/18 = 0,7 пролета от нижней опоры к ней прикреплена сосредоточенная масса (подкрановая балка).
Момент инерции поперечного сечения
стенки
/= 1-23/12 = 0,667 м*.
Зависимость между прогибом посередине пролета и изгибающими моментами в сечениях определим как для балки под равномерно распределенной нагрузкой, для которой:
прогиб посередине пролета др а 3MEI ’
опорный момент
Lon = ?/2/12;
момент посередине пролета
Lnp = <?/2/24 и, следовательно,
32Е1а 32-2,94-Ю10-0,667а
Ь°п = J2 = 182
= 1,96-10»а Н-ы; IGEla
£пр =----— = 0,98-10» а. Н-м.
. Предварительная проверка необходимости динамического расчета может быть выполнена на основе предположения о том, что колебания стенки окажутся резонансными, т. е. будут иметь амплитуду в 10 раз большую, чем средняя суммарная амплитуда колебаний опор. В ряде случаев даже при таком явно и намного идущем в запас предположении динамические изгибающие моменты оказываются менее 5 % изгибающих моментов, вызванных статической нагрузкой. При этом ясно, что динамический расчет, который дает уточненные и еще меньшие значения моментов, не нужен.
Максимальное значение амплитуды на каждой опоре равно сумме амплитуд коле
185
баний оборотной и лопастной частот, а среднее по опорам значение максимальной амплитуды
,. ^Воб Айле “Ь ^Гоб~Ь ^Глс
‘’max = 4 2 ’ =
19,9-4- 1,6+25,4 + 2,1
= 24,5’10—• м; резонансная амплитуда колебаний
<2рез = Ю^тах = 245* 10—® м, соответствующие моменты
^оп.реэ= 1,96’Ю»’245’10-® =
= 480 кН-м > 254 кН-м = 0,05LB.CT;
Lnp .ре3 = 0,98.10®. 245-10-® =
= 240 кН-м> 141 кН’М = 0,05Lnp.CT.
Таким образом, в данном случае динамический расчет необходим.
Динамический расчет
Равномерно распределенная масса стенки
тст = Рб6 = 2,4«2.103 = 4800 кг-м—?.
Номер высшей собственной частоты, которая может проявиться при колебаниях стенки, определяют по формуле
imax < //(46) = 18/(4-2) = 2,25, следовательно, tmax=2.
Определение эквивалентной равномерно распределенной массы, соответствующей подкрановой балке, проводят, как указано в [20], с учетом коэффициентов 1, 2 для первой собственной частоты и 2,27 — для второй, полученных для массы, расположенной в 0,3 пролета от опоры, т. е.
1,2
тЭКВ1 = 2,4-103-1,6-2———= 512 кг-м-2;
1 18
"гэкв9 = 960 кг-м-2.
Собственные частоты колебаний стенки определяют по формуле [20], где все величины приведены к 1 м ширины стенки по напорному фронту:
_______1 «1 ! /~Ё7 _ ^°1- 2л /2 V гщ ~
1 4,732 -I f 2,94-1010-0,667
= ~2л 18,0? |/ 24 912 =
= 9,72 Гц;
/о2 = 26,6 Гц;
т1 = шст + п?экв1 + ^Чк.об.в в 4800 + + 512+ 19 600 = 24 912 кг-м~2;
/п2 = 4 800 + 960 + 19600 = 25360 кг-м-?, причем значение си=4,73, а а2=7,85.
Учитывая возможную неточность определения собственных частот, в дальнейшем в расчет будут введены значения:
& « °.7 /01= 0,7-9,72 = 6,8 Гц;
= 1,3/и = 1,3-9,72= 12,6 Гц;
^ = 22 Гц = /Лс, так как 0,7/о2 < /лс < /02, т. е. /оз может совпасть с лопастной частотой.
Оборотная частота возмущающей силы составляет 1,47/6,8=0,216>0,2 от первой собственной частоты и, следовательно, расчет для этой частоты следует продолжить, введя в качестве расчетной эпюры средних перемещений оборотной частоты
Игоб+ ЛВоб)/2= К25.4 + 19,9)/2]10—® =
= 22,7-10-® м.
Относительно второй собственной частоты оборотная частота составит 1,47 (0,7 X Х26.6) =0,079<0,2 и, следовательно, перемещение опор с оборотной частотой не будет вызывать динамических прогибов по второй собственной форме.
Лопастная частота возмущающей силы выше первой собственной частоты и может совпасть со второй собственной частотой, поэтому амплитуды колебаний опор (точки В, Г) надо разделить на составляющие: симметричную
А.лс = 0Глс ^Влс)/2 =
= [(2,14 + 1,62)/2]—3 = 1,88-10-* м и антисимметричную
^2 л с = (Аг лс ^Влс)/2 ~
= [(2,14—1,62)/2] 10-® = 0,26-10-® м.
Амплитуды колебаний середины пролета относительно опор определяют, учитывая незначительность массы подкрановой балки, как для балки с равномерно распределенной массой. При этом с некоторым запасом можно пользоваться формулой из [20], принимая:
для оборотной частоты
22,7.10-* (1.47/6.8)2 ^отн.об — ------------------------=*
У [1 —(1,47/6,8)?]?+0,1?
= 1,1-10-® м;
для лопастной частоты
1,88-10-® (22/12,6)2
^ОТН-ЛС —-------------- — “
У [1 — (22/12,6)2]2 +0,1?
= 2,8-10-® м.
Поскольку амплитуда антисимметричных колебаний опор мала, то нет необходимости
186
проводить точный расчет амплитуд колебаний, соответствующих второй форме. С некоторым запасом можно-принять, что прогибы в четвертях пролета не превзойдут 10Д2лс=2,6- 10—6 м, а динамические изгибающие моменты для этих прогибов определяют на основе предположения об изгибе стенки по статической форме, но при вдвое меньшем пролете, так что
^оп.динг = 7,85 • 10е а кН • м;
^пр.дин2 = 3,92 • 106 о кН • м.
Динамические изгибающие моменты: в середине пролета
. ^пр-дин! = 9,81-10» в =.9,81 • 10» (1,1 + + •2,8) 10—6 = 3,82 кН-м;
в четверти пролета
£пр.дин2 = 3,92- 10«а = 3,92-10«-2,6- 10-в = = 10,2 кН-м;
на опоре
^ОП.ДИН = ^ОП.ДПН! 4“ ^ОП.ДИН2 =
= 1,96-106(1,1+2,8) 10-6 +
+ 7,85- 10в-2,6-10-6 = 28,1 кН-м.
Таким образом, динамические изгибающие моменты не превосходят 0,6 % моментов, вызванных статической нагрузкой, и никакой проверки выносливости напорной стенки не требуется.
Другие примеры динамических расчетов гидросооружений см. в [6].
8.5. Водосливные плотины, водно-транспортные и другие сооружения ।
1. Водосливные плотины. Через водосливные плотины осуществляется пропуск паводковых вод. В необходимых случаях, например при остановке по какой-либо причине всех гидроагрегатов, через эти плотины пропускают и санитарные расходы, поддерживающие необходимый минимальный уровень воды в реке ниже плотины [2]. Для пропуска воды плотину оборудуют либо поверхностными водосливами, либо водосбросными отверстиями, перекрываемыми в первом случае поверхностными, а во втором — глубинными затворами.
Для гашения энергии сбрасываемой воды разработано множество конструктивнокомпоновочных схем сооружений [2]. К ним относятся водобойные колодцы, водобойные стенки, различные гасители типа шашек, пирсов, растекателей и т. п., выступающих над плитами крепления нижнего бьефа. Используют и свободный сброс струи в глубокий бассейн, ;и отброс струи с так называе
мого носка-трамплина, и расщепление струн на зубчатых порогах, и многие другие способы. Во всех этих способах в конечном счете часть энергии сбрасываемой воды через грунт передается плотине^ вызывая ее колебания.
Методов чисто расчетного прогнозирования уровней вибрации водосливных плотин и динамических напряжений в них пока не разработано. Применительно к уникальным сооружениям используют модельно-расчетный метод, который состоит в следующем. На гидравлических моделях определяют гидродинамические нагрузки на отдельные конструктивные элементы, их воспринимающие, например плиты днища и стенок водобойного колодца. Данные об этих нагрузках представляют в виде энергетических спектров Si(co), где i — номер элемента. На упругой маломасштабной модели [4], включающей плотину, сооружения нижнего бьефа, грунтовый массив, примерно в 3 раза превышающий по каждому из измерений размер плотины, и погруженной в слой материала, который обеспечивает поглощение упругих волн границами, определяют передаточные функции или амплитудно-частотные характеристики по перемещениям Па^*((о) и напряжениям По/» (со) в разных точках / (нумерация по /' охватывает и перебор всех компонентов) напорной и водосливной граней плотины от гармонических нагрузок с единичной амплитудой. Последние поочередно прикладывают к каждому из конструктивных элементов, упомянутых выше.
Энергетический спектр перемещений Suj(<о) или напряжений S0/(co) вычисляют как суперпозицию произведений спектров нагрузок на квадрат соответствующей передаточной функции:
Suf (to) = 5 nUji (<>); (8.36)
Sa/ (°) = S Sr (°) no/i (“>• <8-37>
Переход от энергетических спектров (8.36) и (8.37) к вероятностной оценке ожидаемого уровня амплитуд колебаний или напряжений можно выполнять одним из методов, применяемых в расчете сооружений на стационарные случайные воздействия [4, 20]. В частности, верхняя оценка может быть получена в виде определенного, числа (4—5,5) стандартов смещения
t/,=
SUf (to) d<o
1/2
(8.38)
187
или напряжения
f Sa/ (со) dto о
(8.39)
Величины, получающиеся даже при такой завышенной оценке, до настоящего времени приводили к заключению о пренебре-жимой малости получающихся значений. Так, например, для плотины Саяно-Шушенской ГЭС (см. рис. 8.16)—одной из самых высоких в настоящее время и имеющей одни из самых высоких удельных расходов (расходы иа 1 м водосливного фронта), амплитуды максимальных напряжений в самой напряженной точке плотины оказались менее 0,5 МПа.
Тем не менее, учитывая отсутствие пока достаточных данных для общих выводов и большое различие в рельефе и грунтовых условиях в районах створов, в конструкциях плотин и гасителей энергии, можно рекомендовать аналогичную проверку для всех проектируемых ответственных водосливных плотин.
2. Водно-транспортные и другие сооружения. В настоящее время принято разделять водно-транспортные сооружения на две большие группы: сооружения судоход
ных каналов, шлюзы, судоподъемники и т. п. [19]; портовые сооружения — причальные стенки и пирсы, массивные, шпунтовые, свайные и т. п. оградительные сооружения акваторий порта, берегоукрепительные сооружения [31].
Сооружения первой группы, как правило, на динамические нагрузки не рассчитывают. Исключение составляют поверочные расчеты колебаний конструкций, возбуждаемые через грунт от расположенных рядом колеблющихся сооружений, если на этих конструкциях расположены чувствительные к вибрациям устройства управления шлюзом, либо рабочие места персонала.
Расчет сооружений второй группы проводят так же, как и для соответствующих морских гидросооружений (см. разд. 9 в этом Справочнике).
Другие виды речных гидротехнических сооружений — водозаборные сооружения, плотоходы, бревноспуски, рыбопропускные сооружения испытывают в основном гидродинамические нагрузки от турбулентных потоков, которые, как показано в 8.3, п. 3, являются для конструкций этих сооружений статическими. Расчет иа эти нагрузки п. 8.4, п. 3.
раздело, динамика портовых морских и речных
ГИДРОТЕХНИЧЕСКИХ СООРУЖЕНИЙ
П. П. Кульман, И. Г. Заритовский
Портовые гидротехнические сооружения имеют разнообразные конструктивные формы. В соответствии с конструкцией и особенностями ее работы по обеспечению прочности и устойчивости сооружения (конструктивно-расчетный признак) выделяются следующие основные типы сооружений: свайные, гравитационные, плавучие, смешанной и специальной конструкций.
Сооружения свайного типа имеют разные конструкции и включают в себя опорные несущие элементы из свай, колонн. Устойчивость таких сооружений обеспечивается главным образом заделкой свай и колонн в грунтовом основании. Сооружения гравитационного типа возводят монолитными (бетон, железобетон), из массивов-гигантов, из кладки массивов или сборных железобетонных элементов, из оболочек большого диаметра с заполнением. Устойчивость гравитационных сооружений на
сдвиг, опрокидывание и пр. обеспечивается их собственным весом. Плавучие сооружения в конструктивном отношении представляют собой находящиеся на плаву тела той или иной формы, удерживаемые в заданных местах акваторий якорными системами. Сооружения смешанного типа являются комбинированными и включают в себя конструктивные элементы, характерные для сооружений разных типов. Гидросооружения специального типа, как, например, на сложных фундаментах типа кессонов и опускных колодцах, нередко имеют мостовую конструкцию и в целом мало распространены. В этом разделе приведены методы динамических расчетов свайных, гравитационных и плавучих сооружений. Вопросам динамических расчетов портовых гидросооружений посвящены монографии [11, 12, 13].
Пороговые гидротехнические сооружения
188
подвергаются разнообразным динамическим нагрузкам от действия: морских волн, ветра, льда, судов, эксплуатационных грузов и технологического оборудования (кранов, установок, вагонов), ударных волн в воздухе и в воде. На гидросооружения могут действовать сейсмические инерционные нагрузки от собственного веса сооружений, сейсмическое давление воды и грунта. Данные о нагрузках и воздействиях приводятся в нормах, руководствах, справочниках и т. п. [4, 5, 24, 25, 27, 28, 29, 30, 31, 32].
9.1. Основные расчетные положения для свайных сооружений, коэффициенты жесткостей свайных опор
Основными конструктивными элементами свайного сооружения сквозного типа являются верхнее строение, включающее ростверк с надстройкой, и сваи, соединяющие верхнее строение с грунтовым основанием. Обычно понятия верхнего строения и ростверка отождествляются. На верхнее строение (ростверк) могут действовать как статические, так и динамические нагрузки. При действии статических сил верхнее строение претерпевает статические смещения. При динамических же нагрузках верхнее строение совершает колебательные движения. Сваи воспринимают иа себя воздействия верхнего строения и передают их на грунтовое основание.
При сейсмических явлениях источник возмущения — движение грунтового основания. Движения основания через сваи передаются верхнему строению, которое также приходит в движение и, вследствие этого, претерпевает воздействие сейсмических инерционных нагрузок. Мера и характер передачи движений основания верхнему строению, силовое воздействие на последнее и усилия в сваях зависят, с одной стороны, от параметров, характеризующих движения грунтового основания, а с другой — от динамических характеристик свайного сооружения в целом.
Чаще всего практически при определении колебаний ростверка (верхнего строения) и усилий в сваях, собственными деформациями ростверка пренебрегают. Ростверк рассматривают как абсолютно твердое тело. Даже при достаточно гибком ростверке последний для отдельных видов движений, например для наиболее важного случая горизонтальных колебаний, обычно представляется абсолютно жестким. Сваи являются своего рода упругими связями, соединяющими ростверк с основанием, ко
торое может быть как подвижным (при сейсмических явлениях), так и неподвижным (в обычных условиях в том числе при динамических воздействиях на ростверк).
Таким образом, в общем случае динамический расчет сооружения с жестким свайным ростверком формулируется как задача о колебаниях твердого тела (ростверка,, верхнего строения), связанного с неподвижным или подвижным основание# с помощью упругих связей (свай) (рис. 9.1).
Под точками опор или просто опорами ростверка (твердого тела) понимают места соединения голов свай с ростверком. Такие опоры являются упругими, податливыми вследствие деформаций материала свай и грунта основания. В теоретических построениях, приводимых ниже, ограничений на форму ростверка, положение опор (голов свай) и соединения свай с ростверком не накладывается.
Общий случай плоской задачи. Здесь применительно к плоскости XZ (рис. 9.1, а) каждая t-я свайная опора ростверка характеризуется следующими коэффициентами жесткостей опор [12]:
Kxxit Kzzit Kxzi> Myyi, Gyxi, Gyzj- (9.1)
Коэффициенты Kxxi(Kzzi) интерпрети-
руют как величину силы, приложенной к
Рис. 9.1. Расчетная схема свайного сооружения с жестким ростверком
а—в вертикальной плоскости XZ; б —в плане
189
Рис. 9.2. Схемы к определению усилий в сваях в зависимости от сопротивления свай с ростверком и основанием (плоская задача)
i-й опоре (голове сваи) в направлении оси X(Z) и вызывающей единичное перемещение опоры в управлении той же оси X(Z); размерность коэффициентов сила/длина.
Коэффициенты Kxzi Интерпретируются как значение силы, приложенной к i-й опоре (голове сваи) в направлении оси X и вызывающей единичное перемещение опоры в направлении оси Z; размерность коэффициентов — сила! длина.
Коэффициенты Mvyi интерпретируются как значение момента, приложенного к i-й опоре (голове сваи) в плоскости, перпендикулярной оси У, и вызывающего единичный- поворот опоры в той же плоскости (вокруг оси У); размерность коэффициентов сила/длина.
Коэффициенты Gvx,-, GVZi интерпретируют как значение момента, приложенного к i-й опоре (голове сбаи) в плоскости, перпендикулярной оси У, и вызывающего единичное перемещение опоры в направлении осн X- или Z; размерность коэффициентов сила.
При расчетах свайных гидросооружений различают четыре типа сопряжения свай с ростверком и основанием (рис. 9.2). Тип сопряжения зависит от конструкции ростверка, видов свай, свойств грунтов и т. п. (см. литературу по портовым гидросооружениям). Сооружения типа свайных набережных, пирсов рассчитывают часто по плоской схеме. Значения коэффициентов жесткостей опор определяются формулами:
при сопряжениях по типу шарнир-шарнир (рис. 9.2,а);
Kxxi = Ai sin2o^;
= A cos-ai» (9.2)
Kxzi = sin аг cos af;
^yyi — Gyxi — Gyzi = 0;
r.0
при сопряжениях no типу шарнир-заделка (рис. 9.2,6):
Kxxt = Ai sin2 ai + 35i cos2 af;
Кгп = Ai cos- + 3Bi sin2 af;
Kxzi = At sin az cos a4;
A^yyt = Gyxi ~ Gyzi = 0;
(9.3)
при сопряжениях no типу заделка-шарнир (рис. 9.2, в):
Myyt — ^Lt; Gyxt = cosa^;
Gyzi = ?;Di sinaf, (9.4)
a Kxxt, Kitt, Kxzt вычисляют no (9.3);
при сопряжениях по типу заделка-заделка (рис. 9.2,г):
Kxxt ~ At sin2 сс 4- 12Br: cos2 a$;
К,,} — At cos2 4- 12Bi sin2 af;
Kxzi = Ai sin a, cos a£;
м -a (9-5)
Myyi —
Gyxi == G&i coscc^;
Gyzi^GDi sin af.
Входящие в формулы (9.2)—(9.5) коэффициенты Ai характеризуют продольную жесткость сваи по направлению оси сваи; коэффициенты Bt, Di, Li характеризуют работу сваи на изгиб; а< — углы наклона свай к вертикалям (угол положителен при отклонении сваи влево от вертикали, проведенной через ее голову, и отрицателен при отклонении сваи вправо). Значения Ai (размерность сила]длина), Bt (сила/длина), Di (сила), Lt (сила/длину) определяются формулами:
A, =\HttIEtro + a/CJ; =
(9.6)
z? ll
где — расчетная длина сваи; — модуль упругости материала сваи; F. — площадь поперечного сечения сваи; /- —момент инерции плошали поперечного сечения сваи; —коэффициент, характеризующий жесткость грунта основания вместе с погруженной в грунт частью сваи (размерность сила!длина).
Для железобетонных свай при мягких грунтах основания
Ci = (350.. .500)
где — несущая способность сваи. т.
При скальных основаниях упруго работает только материал на свободной длине сваи, так что
Ai^EtFiHi.
По данным решения уравнений колебаний находят: щ, — горизонтальные и вертикальные проекции перемещения свайных опор ростверка; tpv— углы поворота ростверка. Усилия и моменты в i-й свае обозначаются: Nt — продольное усилие; Qi — поперечная сила; miB — изгибающий момент в верхнем сечении сваи; min— изгибающий момент в нижнем сечении сваи. Для определения усилий и моментов в сваях используют формулы:
при сопряжениях по типу шарнир-шарнир (рис. 9.2,а):
Nt = (щ sin a.; 4- wt cos af);
Qi = ггцв = tniH = 0; (9.7)
при сопряжениях no типу шарнир-заделка (рис. 9.2,6):
N; = А; (и{ sin аг 4- W; cos a.-); mirt = 3D} (ut cos a,i — G>i sin aj;
1
Qi = —miH; miB = 0;
(9.8)
при сопряжениях no типу заделка-шарнир (рис. 9.2, в):
Aif = Af (ut sin аг -f- cos аг);
nifB =— 3Dt (Ui cos аг — wt sin af);
Л 1
Qi-------. miJi> = 0;
(9.9)
при сопряжениях no типу заделка-заделка (рис. 9.2, г):
Nt = Ai (ut sin a*- 4- щ cosa£); miH = 6D£ (Uf cos аг — ajj sin аг) -f-
+ 2/гФ»; (9< IQ
miB ~ min Ф;/> _ 1 Qi =~ (miH — miB).
Общий случай пространственной задачи (см. рис. 9.1). Здесь каждая i-я свайная опора ростверка характеризуется следующими матрицами коэффициентов жесткостей опор [12]:
ACxacj Kyxt Kzxi Kxyi Kyyi Kzyi Kxzt Kyzi Kzzi>
Mxxi Myxt
Mxyt Myyi MZyi Mxzt Myzi MZzi
Gxxt Qyxi Gzxi Qxyi Gyyi Gzyi J Gxzt Gyzi Gzzi
(9.11)
(9-.13)
Коэффициенты вида Knmi интерпретируют как значение силы, приложенной к i-fi опоре (голове сваи) в направлении оси п, и вызывающей единичное перемещение опоры в направлении оси т. Направления п, т совмещаются с осями X, У, Z. Размерность коэффициентов Knmi сила/длину.
Коэффициенты вида МПтм интерпретируют как значение момента, приложенного к i-й опоре (голове сваи) в плоскости, перпендикулярной оси п, и вызывающего единичный поворот опоры в плоскости, перпендикулярной оси т. Размерность Мппи си-лаХдлину.
Коэффициенты вида Gnmi интерпретируют как значение момента, приложенного к i-й опоре (голове сваи) в плоскости, перпендикулярной оси п, и вызывающего еди=-ничное перемещение опоры по направлению оси пг. Размерность Gnmi сила.
Имеет место свойство взаимности, согласно которому: Knmi = Kmni-, Mnmi=* — Mmnii Gnmi — Gmnf.
Значения коэффициентов жесткостей опор зависят от типов сопряжений концов свай с ростверком и основанием и определяются формулами:
при сопряжениях по типу шарнир-шарнир (рис. 9.3, а):
Kxxi = Ai sin2 af cos2 6г;
= Ai sin2 at sin cos Kyyt = Ai sin2 af sin2 Kxzi = А^ sin &i cos at cos
Kzzi = Ai cos2 af;
^yzi = А^ sin cos af sin Mnmi = Gnmi ~
(9.14)
при сопряжениях no типу шарнир-заделка (рис. 9.3, б) :
191
Рис. 9.3. Схемы к определению усилий в сваях в зависимости от сопряжения свай с ростверком и основанием (пространственная задача)
Mxxi = 3Li (sin2 f>i 4- cos2 af x
G /
X cos2 6,) 4--*—~ sin2 ai c°s2
h
Myyi = 3Li (cos2 6£ 4- c°s2 otj X
X sin2 6£) 4- sin2 a£ sin2 ё£; h
MZzi = 3Li sin2 af4- cos2 af;
Mxyi = 3L£ (sin 6£ cos 6f 4-
, Gf I pi . .
4~ —‘— sin2 a£ sin cos
4
Mxzi = sin a£ cos a£
1 Gi I pi
4--------sin a,- cos a.-
Myzi = 3Lt sin at cos af
1 Gi I pi . .
1 ------sin af cos a£ sin o£;
cos 6,-;
(9.16)
Л'хзс£ = At sin2 а£ cos2 -J- 3Bt x X (cos2a£ cos2 + sin2 d£);
Kvui = Ai sin2 ai sin2 6i + X X (cos2 af sin2 4- cos2 fy);
Кгц = At cos2 a£ + ЗВг sin2 a£; Kxyi == Ai sin2 a£ sin cos +
4- 3Bi (cos2 a£ sin 6£ cos 6$ 4"
4- sin cos bt);
Kxzi = Ai sin af cos a£ cos 4~ 4- 3Bi sin a£ cos a£ cos
/C{/2i = Ai sin af- cos af sin 4-4- 3B£ sin a£ cos a£ sin 6£-;
(9.15)
^nmi — Gnmi — 0;
при сопряжениях no типу заделка-шарнир (рис. 9.3, в):
Gxxi = 6Df cosa£ sin cos 6£ 4-4- 3Dt sin2 a-i cos2 6£;
Gyyi = SDi cos af sin cos 6f 4-4- 3Dt sin2 &i sin? 6£;
Gzzt = sin a£ cos a£;
Gxyi = 3Df (cos a£ cos2 4"
X sin 6,- cos 6t-);
Gxzi = 3Df (sin a£ sin 6£ 4-4- sin a£ cos at cos 6f);
Gyzi = 3Di (sin at cos 6£ 4-4- sin a£ cos a£ sin 6£),
)
а коэффициенты Kxxi, KVVi, Kzzi, Kxvi, Kxzi,
Kyzi вычисляют no (9.15);
при сопряжениях по типу заделка-заделка (рнс. 9.3, г);
192
Kxxi = Ai sin2 al cos2 6i +
4- 12Bf (cos2 tz£ cos2 6j + sin2 6f); Kyyi = Ai sin2 ai sin? 6i +
4- 12Bf (cos2 af sin2 4- cos? 6,); K22f = Аг cos? a{ 4- 12Bf sin2 af;
Kxyi= Ai sin2 az sin cos 6£ 4-4- 12Bf (cos2 az sinfy cos 6f 4-
4- sin cos 6f);
KX2i = Ai sin a£ cos af cos 6f 4" 4- 12Bf sin af cos af cos 6^;
Kyzi = Ai sin af cos af sin 4-
4- 12Bf sin a£- cos af sin Mxxi = 4Lt (sin? 6£ 4-
4- cos2 a-i cos2 6f) 4- ~ ~'1 X
4
Xsin2 a£ cos2 64;
Myyt = 4Li (cos2 at + cos5 ai X
X sin 5,) 4- 6* I™ sin2 аг sin2 df;
h
Mzzi = 4£-i sin2 ai + ~t/Pt cos2 a£;
Mxyi = 4Lf (sin 6Z cos 4-cos2 at x
X sin cos 6г) 4* 6* ^Pt s in2 Gi X
X sin 6* cos6£;
MX2i = 4^f sin ai cos ai cos +
(9.17)
^»zf = 4Lf sin a,i cos аг sin 6£ 4-। Gf/pf . .
4--------sin az cos a£ sin of;
Gxxi = 12Df cos af sin cos 6£ -f-4- 6Df sin2 a£ cos?
Gyyi = l2Dt cos af sin 6f cos 6£ 4-4- 6DZ sin2 a, sin? 6f;
G22i = 6DZ sin af cosa£;
Gxyi = 6D£ (cos af cos2 4-4-cos аг sin? 04 4-sin? 6* sin X X cos fy);
GX2f = 6Dt sin a£ (sin 4-4- cos аг cos 6t);
Gyzt = 6Df sin az (cos 6£ 4-4- cos at sin 6f).
Входящие в формулы (9.14)—(9.17) коэффициенты Др В., С-, L. имеют прежний физический смысл и значения их находят по выражениям (9.6); а. — угол м«-жду осью сваи и вертикалью, проведенной через ее голову (в пространственных задачах этот угол всегда положителен); б. — угол между проекцией оси сваи на горизонтальную плоскость XY и осью X (угол положителен при отсчетах от оси X по часовой стрелке и отрицателен при отсчетах от оси X
(9.18)
против часовой стрелки): G{—модуль сдвига материала свай; /у-—полярный момент инерции поперечного сечения сваи; остальные обозначения прежние.
Формулы (9.14) получены Л. С. Кокиным, а формулы (9.15) — (9.17)—Ю. А. Суптелем.
По данным решений уравнений колебаний находят: a<, vj, Wt — проекции перемещения свайных опор ростверка, соответственно на оси координат X, Y, Z; фх, фу, ф2 — углы поворотов ростверка вокруг осей координат. Усилия и моменты в i-й свае обозначаются (см. рис. 9.3): Nt — продольное усилие; Q.-, —поперечные силы со-
ответственно в направлениях осей X, У; т. т.~ , т. т - — изгибающие момен-1вх toy tax (ну
ты в верхнем и нижнем сечениях сваи, соответственно, в плоскостях, перпендикулярных к осям X, У; т/и- т.^~ — крутящие моменты в верхнем и нижнем сечениях сван в плоскости, перпендикулярной к оси Z. Для определения усилий и моментов в сваях используют формулы Ю. Я. Суптеля:
при сопряжениях, по типу шарнир-шарнир (рис. 9.3, а):
TVj = At (Ui sin a£ cos 4-
4- vt cos at sin 4- Wi cos a£);
<?й = <2,5 = = miw =
при сопряжениях no типу шарнир-заделка (рис. 9.3, б):
Ni = Aj sin af cos + 4- cos at sin df 4- cos af);
=3Di (~U1sin 5(+V1cos 6.);
miKl = 3D,(«jcosaicos6j + 4- v. cos a. sin 6. — sin a.)-
1 1
при сопряжениях no типу заделка-шарнир (рис. 9.3, в):
iV, = Ai (Ui sin a£ cos fy 4-
4- Vi cos af sin бг 4- Wi cos af);
mi3x=-2Dt (~“i 6г + 4-0. cos 6.);
miBy=~Wi (ui cos a-cos 4-4- v. cos af sin 6. —10. sin a.)j
di7=~
1 — —m. - m. - — m. - = 1 гв*» ih* гнУ
= m. ~ -- tn. ~ — 0; ihz ibZ '
(9.19)
13— Ш9
193
при сопряжениях по типу заделка (рнс. 9.3,г):
А'( = Ai (ut sin at cos 4-
4- ut cos <xf sin 6f + uij cos at);
mia-^QDi(-ui sin6i +
-{- o£ cos 6f) + 2Li (Фх cos a. cos 6{+
4-Ф cos a. sin 6. — го sin a.); 1 t l VZ i
m^=6Df(“fcosaicos6i +
4- vt cos a. sin 6 — wt sin a£) 4-+ 2Li (— Фх sin 6i + Ф» cos 6г);
miHZ = ^7^ (фх Sin C0S fii +
+ Фу sin a. sin 6f 4- ф_ cos a.); (g<2l)
m!»I-----~ 2Ll (4>x cos а1 X
X cos 6. + Ф cos a. sin 6. —
-ф251Па.);
т1ы =- mi»y - 2Li(- Ф* sin 6i+ + Ф,созб£), mi32 =~
1
^ix — /. miHy т1ъу)'>
®1У = ~i7 (miHX
9.2. Уравнения свободных колебаний свайных сооружений с жестким ростверком
Начало осей координат расположено в центре тяжести точек С верхнего строения (ростверка), которое представляется твердым телом (см. рис. 9.1). Оси координат в пространстве неподвижны. Положение тела определяется шестью координатами: тремя проекциями перемещения центра тяжести тела на оси координат и тремя углами поворота тела вокруг этих осей.
Обозначения: М — масса тела (верхнего строения, ростверка): 0Х, 0^, 02 —моменты инерции массы тела относительно осей координат; вод. 0Х2. вуг ~ Центробежные моменты инерции массы тела; х, у, г — координаты точек тела; а£. Ь., с* — координаты t-й опоры тела соответственно в проекциях на оси X, Y, Z; ис, 1»с. с»с — проекции перемещения центра тяжести тела (точки С) соответственно на оси X, Y, Z; фз;. <Ру- Ч>2 — углы поворота тела вокруг осей координат; и, v, w — проекции перемещения произвольной точки тела соответственно на оси X, Y, Z.
Проекции перемещения и, v, w произвольной точки тела с координатами х, у, г связаны с проекциями перемещения uc, цс, гвс центра тяжести (точки С) формулами кинематики:
и = ис + геру — уф2;
V = Vc + Х(рг — гфх;
(9.22)
W = Wc + t/фх — А'ф{/ •
Проекции перемещения Uj, vt, Wi f-й
опоры ростверка связаны с проекциями перемещения центра тяжести зависимостями:
“i = “с + Ч <Ру — фг;
ff = »с+ ЧУх— ci Фх1 wt = wc + bi фж — af фр.
(9.23)
Уравнения без учета рассеивания энергии колебаний. Общий случай пространственной задачи. Уравнения свободных колебаний свайного сооружения с жестким ростверком без учета диссипации энергии колебаний в общем случае пространственной задачи имеют вид [12]:
Мис Кц ис 4- vc 4- wc 4* + ^14 Фх + ^1б Фу + -Км Фг = 0;
Мос 4“ ^21 ис + ^22 °C 4“ %23 wc 4“ 4" ^24 Фх 4" %2б фу 4" %2в Фг = 0;
Мшс 4- Кз1 ис 4- /С32 vc 4- К33 wc 4-
; + ^34 Фх 4~ Кзъ Фу 4“ Кзв Фг = 0»
©х Фх — ©ху Фу ©хг Фг 4"
4- Ки «С + ^42 °с 4~^4з wc 4*
4“ ^44 фх 4" ^45 Фу 4" ^4в фг = 0;
©У Фу — ©ху Фх ©уг Фг 4“
4- ^51 ис 4~ к52 °с 4- ^53 wc 4-
+ ^54 фх 4- ^55 фу 4" Кы фг = 0?
Фг — ^хг Фх — буг Фу 4~ Кв! ис 4" 4~ Кв2 °с 4~ Кез Wc 4"
4* '^в4 Фх 4“ Квь *Ру 4“ ^вв фг = 0 •
(9.24)
Здесь точками над символами обозначены производные по времени. В соответствии с числом степеней свободы система шести дифференциальных уравнений содержит неизвестные ис, vc, wc, фх, фу, фг — проекции перемещения центра тяжести и повороты верхнего строения.
Входящие в уравнения (9.24) жесткост-ные характеристики Кц, Кц, .... Къь, К& определяются формулами:
Л„ = ^; К12=К21 = Л^;
Ki3 = K31 = J<“:
к„=ки=(*?*-^+И:
Ка=К>!'; К2з = Кзг = К>'г;
кг> - = (к“‘ ~ К'“ +
^ = ^2 = К“-^г+^):
(9.25)
1Н
Kv-Km-(^-K?+^Y ' Кй3 = К";
к43 = (к?- к? + в*1); ,^=^=(к"-к»г-с9!); хж = хвз = (к"г-к^+°ггУ-К«=(М“ + №' + Л-Й-2КЙ +
+ 2GJ2 - 26^);
k«=*m=[(*s+«s--№" + «й) + (о“+^2)-
-(g'w4-^) + m«'J;
^=KM“[(«S'+«S)-~(/<3+*S') + (G“+G»i')-
-(Gj'+G^J + M"]-, xe-(M»+«S+«S-2«3+
+ 2G“‘-X%‘);
К„-Ка-[№1+К%)-
-(*S+C') + (^+gD-
-(<;?+or)+*’];
k№ " («“+C + K% - 2KS+ + 2С«-2б^).
(9.25)
Здесь жесткостные характеристики выражены через находящиеся в правых частях коэффициенты жесткостей верхнего строения (ростверка). Последние выражаются через коэффициенты жесткостей опор (9.11) — (9.13) и координаты опор aj, b<t ct по выражениям:
Kxx Kxy=YKXyt,
КУУ = ^Kyui'
Kxz = ^KX2i-, K2Z=TKzzi;
Mxx КУг = - ^Mxxi-, МУУ = 1МууС, (9.26)
Mzz =r-
M™ = sA'Jx^; = SMxzi-t
№>z = 2Myzi-,
Kxbx = Kxcx=--^Kxxlci; '
кьь = ^xxi ьЬ K“ “ s«„. ?;
к«у = KXX=^K 2.K . a>\ V'Ji 1 ZK - a-; upt ' >« > Й. II II MM " ’ >5 * •< << «4. n n ND ”. «• • M • (9.27)
А'ХУ = 2Л' . a. c • ac yyi i *»
K” = s\rf‘<;
к?-™,**,-,
K’L^^a,-bi, кт=^аьь
К“ьг = ^ьй КГ-Я^е,- K‘‘^ZKxzic,-,
к%=гкху1 ai bi,
K^K^. a. 1 bi’,
K’HSK", ai bi,
КЩ = *Kxyi at cit
K’S = £Kai ai cb
KS = ^Kylt ai ci',
Kb?=^Kxyt bi clt
kv = zk . xzl b. 1 c.- 19
K^ = ZKy . 06 yzi bl ci',
Kxy = T.K CC xy '.c 2-
(9.28)
I®-™** %
Gxx = ^Gxxi; Gxy = ZGxyi\ Gxz = = SGxzi» Gyx= %GyXt', (jyy='ZGyyi’t Gyz=^GyZi', Gzx=SGzxi; Gzy=^zyi;
Сгг=^ггь Gxx = XGxx/ci;
Gxbx = SGxx,b<; Gxy = ZGxyic(; Gxy = ^xyia^ Gbz =’2.Gxzlbi\ Gxz = ZGxziai-, Gyx = ZGvxicf, GF^G^bil Gyy=^GyyicC, ^ = ZGyylai} G^z = ZGyzibi\ &a=*Gyzia<, G«=2GW/Ct-; Gzbx-YG^bi, Gzy = ^}zyice, Gzy = ZGzyiae, Gzbz = 2Gzzibi;
Glz = 2Gz^ai.
(9.27)
(9.29)
JO*
195
Случаи наличия плоскостей симметрии. Свайные сооружения имеют часто одну, а нередко и две вертикальные плоскости симметрии (набережные, опоры пирсов, мостов). В таких случаях уравнения движения разделяют на отдельные независимые группы, чем облегчается решение задач.
Случай одной плоскости симметрии. Пусть вертикальная плоскость XZ является плоскостью симметрии. Для протяженных в плане сооружений плоскость XZ совмещается с поперечными сечениями, которые являются расчетными плоскостями. Уравнения свободных колебаний свайного сооружения с жестким ростверком без учета диссипации энергии колебаний при наличии одной плоскости симметрии имеют вид [12]:
Мас 4- Кхх ис + Kxz wE +(***-- «а + G^) <ру = 0;
Mwc + Кхг ис + Kzz wc + + ('<Г-^г + 0,'г)<1>„ = 0; e„9f + («T-Kr+<!<")Ue + Я^-^+<*>,+оЛ-о; M'vc + Kmvc + & ф +д <р 0; вя Фх —-©хг Фг + Л1 С»с + фх 4"
+ Д3 ф2 = 0;
©г Фг ©хг Фх 4“ ^2 4~
4- Дз Фх 4- ф2 = 0.
Здесь обозначено:
-2K«4-2G-^-2G^;
QX~MXX+K%+K“--2K$-2Gxcy',
-2K^4-2G^;
\ = Kyz-K^+Gxy-, Kyay-Kxy+G2!l;
+ (Gxy-Gzcy) + Mxz.
(9.30)
(9.31)
(9.32)
Уравнения колебаний разделились на две независимые группы. Первая группа уравнений (9.30) определяет колебания ростверка в плоскости симметрии XZ, а вто
рая группа (9.31) определяет колебания, перпендикулярные плоскости симметрии.
Для колебаний ростверка в плоскости симметрии ХУ, определяемых системой уравнений (9.30), частотное уравнение имеет вид
Xе — <7Х44-гХ — s = 0, (9.33)
где обозначено:
<7 = ^+^4-Ч.</;
г ’ К + М) ^ру + ~
(9.34)
s=(X2X2-Xjz)X2v-X26{-
-X2Z6<4-2X2Z6<.
Здесь введены частные частоты:
Х2=Кгг/М; tf=KxxlM;
(9.35) х2г = к«Ли:
= (1/M0J (К“-К“ + 0®г)2;
- (• /«в,) (Ф -x(K“-K"+G»*);
3= i/Me„(K“-K“+ g»*)2.
Корни частотного уравнения (9.33) — есть квадраты трех главных частот Xt2 (i= = 1, 2, 3). По (9.35) вычисляют парциальные частоты вертикальных Хг, горизонтальных Хж и вращательных Х^у колебаний.
Плоские свободные колебания ростверка (верхнего строения), определяемые системой уравнений (9.30), представляют вращательные колебания, выраженные в главных формах вокруг трех центров главных колебаний, точек Oi(*i; zi), О2(х2; z2), О3(х3; z3), являющихся следами трех осей главных колебаний на плоскости XZ. Координаты центров колебаний
zi = Qf; (£=1,2,3), (9.37)
где
_
‘ мм(»н) ’ (9.38)
Здесь введены обозначения:
р2=в„/1И; Н1 = ^с„-\rZ axz h-ЦХ ’
= X"2 Сдд X" агг -j- hyE,
(9.39)
196
схх=Кксх1Кхх-.схг^КГ1Кхг-.
hyX=^M-, hyz^ Gflz/M.
(9.40)
где Ру — радиус инерции массы: cxx, cxz< aiZ, axz— приведенные плечи.
Проекции перемещения Ui, Wi во времени t на оси координат X, Z произвольной точки ростверка, координаты которой х и z, определяются формулами:
ui = A (?i + г) sin it
Wi = At (Qi — x)sinkitt (9.41) где A — амплитуды; i—1, 2, 3.
Свободные колебания ростверка, представляемые системой уравнений (9.30), в главных формах определяются уравнениями
Ф« +Х?Ф£ = 0 (1=1, 2, 3), (9.42)
где ф. — углы поворота вокруг f-ro центра главных колебаний* X. — главные частоты, вычисляемые из (9.33).
Расчеты вынужденных колебаний в главных формах сводятся к операциям с уравнениями:
ф\ + X? = (I/OJA^ (/) (1=1, 2, 3), (9.43)
где в.—момент ииерцин массы ростверка относительно t-й оси (центра) главных колебаний; N. (О— момент внешних снл относительно той же оси.
Для колебаний ростверка, перпендикулярных плоскости симметрии XZ, и определяемых системой уравнений (9.31), частотное уравнение имеет вид
рХ6 — <Д4 + rV — s = 0, (9.44)
где обозначено:
(Ч + ^фх + + v +
"Г v (2°хг —
Г=^у W* + 4J + Чх Хф2 “
X (2^“ст«)’
5=^^“W«)+W“
-645^-6^9-2.
Здесь введены частные частоты:
х; - к">/М; Х^. = йд./ел; a'i2 = Дз/е„;
(9.46)
,4_ ; 4_ Л2 .
4 Aiexez °' тие2 ’
радиусы инерции массы и их отношение
р“ = 0х/Л1; р2=в/7И;
(9.48)
P2XZ=GXZ/M; V = pJ2/p2p2.
Корни частотного уравнения (9.44) есть квадраты трех главных частот kj (i=4, 5, 6). По (9.46) вычисляют парциальные частоты горизонтальных в направлении оси У и вращательных Л.фА., Хф2 вокруг осей X и Z колебаний.
Свободные колебания ростверка, определяемые системой уравнений (9.31), в главных формах интерпретируются как колебания-вращения вокруг трех осей главных колебаний, лежащих в плоскости XZ и определяемых уравнениями
Ri+xSt — г = у = 0 (i = 4, 5, 6). (9.49)
Здесь:
_ w3 +%)- н4 Р;( %, -
S‘ ~ Н,р’(^г - X? ) - Н, 1^(о‘хг+ X/) ’ (9.50)
где
Я3=Д1/Л1; Н< = Ьг1М. (9.51)
Проекции перемещения сч во времени t на ось У произвольной точки ростверка с координатами х, г следуют из выражения
Vi = Bi (Ri + xSi — z)sinXf/, (9.52) где — амплитуды; i—4, 5, 6.
Свободные и вынужденные колебания ростверка в главных формах определяются уравнениями вида (9.42), (9.43), но при t = =4, 5, 6. В целом, имеется шесть осей главных колебаний. Когда сооружение имеет одну плоскость симметрии, три из этих осей перпендикулярные плоскости симметрии, а три другие расположены в ней.
Случай двух плоскостей симметрии. Пусть сооружение имеет вертикальные плоскости симметрии XZ и YZ. Уравнения свободных колебаний свайного сооружения с жестким ростверком без учета диссипации энергии колебаний при наличии двух плоскостей симметрии имеют вид [12]:
Ait0c + Кгг юс = 0; (9.53)
197
Mu. + Kxx и. + (КХХ~ №х}, X V ЛЛ L % V 1
х Фу = 0;
вЛ+(к“—к»г+С*")“с +
4- й» Фи = 0;
Л1ос + K“vvc 4- А, фх = 0;
®х Фх 4* Ai vc 4“ «х фх = 0;
(9.54)
(9.55)
©г Фг 4“ Фг = 0. (9.56)
Уравнения разделились на четыре независимые группы. Вертикальные колебания (9.53) и врашательные вокруг оси Z (9.56) не зависят от других видов колебаний. Группа из двух уравнений (9.54) определяет горизонтально-вращательные колебания ростверка в плоскости симметрии XZ, а группа (9.55), также состоящая из двух уравнений, определяет колебания ростверка в другой плоскости симметрии YZ.
Вертикальные колебания (9.53) стали главными и частоту их кг находят по первой из формул (9.35). Центр (ось) главных колебаний сместился в бесконечность по оси X.
Для горизонтально-вращательных колебаний ростверка в плоскости симметрии XZ, определяемых уравнениями (9.54), частотное уравнение имеет вид
+ + vl=°. (9-5?)
где
ri -(1/ме,)[к“0,-(к"- К"+ ст J2], а частные частоты Кх, Кф„—по (9.35). Корни уравнения (9.57) есть квадраты двух главных частот Xq{ (t=l, 2). Имеется два пентра главных колебаний: О|(х(; zt), Ог(^2; 22), расположенных по оси Z, так что координаты их:
«(-0; = (1=1. 2).
(9.58) Центры главных колебаний являются следами пересечения осей главных колебаний с плоскостью XZ. Свободные и вынужденные колебания ростверка в главных формах определяются аналогичными (9.42), (9.43) уравнениями.
Колебания ростверка во второй плоскости симметрии YZ, определяемые системой уравнений (9.55), имеют уравнение частот в виде
&J- + vi-0. (9.59)
где
Ц^х
а частные частоты Х;/, Хфх—по (9.46). Корни уравнения (9.59) есть квадраты двух главных частот X2, (1=4, 5). Имеются две горизонтальные оси главных колебаний, положение которых определяется формулой
zt - 4) (i -4, 5). (9.60)
Свободные и вынужденные колебания ростверка в главных формах определяются аналогичными (9.42), (9.43) уравнениями. Вращательные колебания вокруг оси Z (9.56) стали главными с частотой Хф2 по (9.46). Осью главных колебаний стала ось Z.
Таким образом, при наличии двух вертикальных плоскостей симметрии имеется шесть главных частот — Хг, Л01, ^02, ^04. Л05. Хфг и шесть осей главных колебаний. При этом ось главных колебаний для вертикальных колебаний (9.54) находится на бесконечности, а для вращательных колебаний (9.56) совмещена с осью Z.
Уравнения с учетом рассеивания энергии колебаний. Общий случай пространственной задачи. Уравнения свободных колебаний свайного сооружения с жестким ростверком и учетом диссипации энергии колебаний в общем случае пространственной задачи имеют вид [12]: ..
Мис + Рх ис + Ки «с + К12 Ос 4“
+ К1зи»с4-К14фх4-К15ф1/-+-К1Бфг=0>
Mvc 4~ Ру о с 4* “с 4" К22 °с 4“
4- К23 wc 4* К24 фх 4~ %2б Ф» 4*
4“ ^29 Фг = 0»
Mwc 4- pz wc 4" Kat «с 4“ К32 °с 4-
4* К33 wc 4* К34 Фх 4- Кзб Фд 4-
4* Язв Фг = 0;
0х Фх — ®ху Фр ®хг Фг “Р ( 6 )
4* Их Фх 4~ К41 ис 4-^42 с»с4-Ki3Wc4-
4- К44 Ф.г- 4“ К4Б фу 4~ ^4« Фг = 0’
бу фд — 0ху Фх — 0уг Фг + Hl/ Ф»+
4- Кы ие 4" Кб2 vc 4* К53 wc 4-
4” ^64 Фх 4- К55 фу 4- КБо ф2 = 0;
0г фг — бхг Фх — 6{/г Ф» 4" Иг фг +
4" Kei “с 4- Кв2 ос 4~ Квз wc 4-
4- Кв4 фх 4- фу 4- Лее Фг = 0-
Здесь сходящие в уравнения жесткостные характеристики Ли, Ли...Л«5. Л« определяются
по формулам (9.25)—(9.29); Рх. Р^, Рг — коэффициенты пропорциональности между силами сопротивления и скоростями ростверка прн колебаниях нд.,ль осей координат; их, иу, Цг — коэффициенты пропорциональности между моментами сопротивления и скоростями поворотов ростверка при вращательных колебаниях вокруг осей координат: точками над символами обозначены производные по времени.
198
Колебания сооружения определяются системой шести дифференциальных уравнений. Неизвестные: ие, ve, wc — проекции перемещения центра тяжести ростверка (верхнего строения) на оси X, У, Z; фх, фу, фг — углы поворота ростверка вокруг осей координат (см. рис. 9.1).
Случаи наличия плоскостей симметрии. Здесь, так же как и при отсутствии затухания колебаний, уравнения движения разделяются на независимые группы.
Случай одной плоскости симметрии. Пусть расчетной является вертикальная плоскость симметрии XZ. Уравнения свободных колебаний свайного сооружения с жестким ростверком и учетом диссипации энергии колебаний при наличии одной плоскости симметрии имеют вид [12]:
Aftic 4* Рх «с 4* Кхх «с 4~ К*2 wc 4* + (*'“-K"+G’"K=0;
Alwc+ + Kx2«c + Kz8wc + + (к;2-^2+0"2)ф? = °; е ф +.U ф +(/<5*—к?+ у ч/ 1 • и у ' с а
+ &х} ис +(К« - к22+ 6*2)щ 4-фр = 0;
Мис 4- Рр ос 4- К™ vc 4~ Aj фа 4" + ^2 Фг = 0;
6х фх — ®хгФг4" Р-х Фх 4“ А] °с 4" ^х Фх 4- Аа фг = 0;
6г Фг ~ вжг Фх 4- Иг Фг+ А2 »с 4" 4- А3 фх 4- й2 ф2 = 0.
(9.62)
(9.63)
Здесь все обозначения прежние. Уравнения разделились на две независимые группы, первая из которых (9.62) описывает колебания ростверка в плоскости симметрии XZ, а вторая (9.63) определяет колебания, перпендикулярные плоскости симметрии.
Для колебаний ростверка в плоскости симметрии XZ, определяемых системой уравнений (9.62), частотное уравнение имеет вид
4 = 2^(пг+^ЯЛу) +
-г 2A-Z (пх 4- пф//) 4- 2Хф£/ (rix~t~nz) 4" + 8ПхПгП<Ру'>
= Л(*х + М + 4ПЛ) +
+ Ч 4" 4пфХ/ [X; \ пх) —
-(^г + б1 + «з);
Х \>У~ ( ^xzrtq>v+ пх + ^3 пг) ] ’’
~^бз4-2Х2г6^,
(9.65)
где
(9.66) а остальные обозначения прежние.
Частотное уравнение (9.64) дает значения трех пар сопряженных комплексных корней:
^1. г =— ri ± ^3,4 =
=— r2 ± t’o s2»
Аб ,8 = г3 10 53»
(9.67)
где значения г* 2 я определяют затухания колебаний, а частоты колебаний: 1 — V —1-
Как известно, колебания систем с затуханием не могут быть представлены в общем случае в главных формах колебаний. В рассматриваемом случае каждая пара сопряженных комплексных корней (9.67) определяет реальную простейшую форму колебаний, которая в строгом смысле уже не является главной (далее терминология главных колебаний используется).
Плоские свободные колебания ростверка, определяемые системой уравнений (9.62), в главных (простейших) формах интерпретируются как колебания — вращения вокруг трех центров колебаний, точек Di(xi; Zi); О2(х2; z2); О3(х3; z3), являющихся следами трех осей колебаний на плоскости XZ. Координаты центров колебаний:
xt = Qi; Zi=-Pi (i= 1. 2, 3), (9.68)
^•4- p*54-^4-^34-^24-^4-s= 0.
(9.64)
Здесь обозначено:
Р — 2 (пх 4- п2 4- Лфр);
9 = (*?+*! + *£у) 4- 4 (пх п_ 4-
(9.65)
где
Ру (^<ру sf “J" ri 2rt(py Л<) Х Q _ - .
"l*xz-
х (*х ~sf + г? — 2nx rf) -
- Н2 (? “ - s2 4- г2 - 2пх Г£.)
159
- _ +r? -2п.2г,)-Я2
Txz si +ri 2njtri)x
X (£-si+ri-2nzri)
(9.69) Здесь все обозначения прежние (9.35); (9.39); (9.66); (9.67).
Проекции перемещения и,, Wi во времени t на оси координат X, Z произвольной точки ростверка, координаты которой х и г находят из выражений:
«i = At (Pi + z) е rt* sin Si t;
__r Л (У • *
= Ai (Qi — x) e ‘‘ sin st t, где Ai — амплитуды; i— 1, 2, 3.
Свободные колебания ростверка, представляемые системой уравнений (9.62), в главных (простейших) формах определяются уравнениями:
it + 2ri Ф, + (s? + r? ) Ф/ =
= 0(i = l, 2,3), (9.71)
где <р. —углы поворота вокруг i-ro центра колебаний; s.— по (9.67). Вынужденные колебания рассчитывают по уравнениям
<pf + 2п ф, + ($“ + гг) фг. = Л/1 (/)
(< = 1, 2, 3), ‘ (9.72)
где в?, Ni (О — то же. что н в (9.43).
Колебания ростверка, перпендикулярные плоскости симметрии XZ и определяемые системой уравнений (9.63), имеют частотное уравнение в виде
рЛ® + pk5 + qk* + qk3 + rk3 -j- rk + s = 0.
(9.73)
Здесь обозначено:
p = 1 — v;
p =2|пу(1-^ + пфх + иф2];
\>X "b \>z) "Ь (Пу Пфх+ + nu «Ф2+ЛФЛ %z + v (2axz-^y);
* = 2Zp (%x + %.) + 2Xjx (nw +
+ %z) + 2M>z (ny + %x) + + 4^%zt44o;z:
r = 4 (4* + Xaz) -г 4z — -(«4 + 60< + ^)+vq;’2(2xJ -<)+
+ 4 К %X nvz + Чх Пу Пф2 + \>z ny %J> ;=2[s('4Xz-v<) + + %X К ?4z - 6s) + nW2 x >Ф‘Х-бб)];
(?4x ^фг — vaxz) -b 64 QXZ ~ - - 62
(9.74)
где
% = ₽I//2M; V=JV2ex;
пФ2 = К/202; (9-75)
Хфх’ 4»’ °xz~110 <9-46); v —110 (9-48>;
O4,5,e — no (9.47).
Частотное уравнение (9.73) имеет корни в виде трех пар сопряженных комплексных чисел:
&1,2---r4 ± io s4i ^з,4 ——,Q 7K4
, _ , . ?(9.76)
«б,е —— re zt t0 se, )
где значения e определяют затухания колебаний: s4e - — частоты; to— j/—1.
Свободные колебания ростверка, определяемые системой уравнений (9.63), в главных (простейших) формах интерпретируются как колебания — вращения вокруг трех осей колебаний, расположенных в плоскости симметрии XZ и определяемых уравнениями:
Ri + xSi — z = y = 0 (i = 4, 5, 6). (9.77)
Здесь
- НзР«г(°« + гу—'f —
h3h4-pLK-^ + ~
—Р« ( +'I — 2п^ rl)
+-Ч +4-'?) ’ (9 78
_ н4рИЧх-4+^-
S‘ + *
ч)- Р«г(ст« + $ —
-2V Р« (°« +®1 ’
где все обозначения прежние. Выражение
= Bi (Ri + xSf — г)е sin t (i=4, 5, 6); (9.79)
определяет проекции перемещения и» во времени t на ось У произвольной точки ростверка с координатами х, z (Bi — амплитуды) .
Свободные и вынужденные колебания ростверка в главных (простейших) формах описываются уравнениями вида (9.71), (9.72), но при i=4, 5, 6.
Случай двух плоскостей симметрии. Пусть, как и ранее, две вертикальные плоскости симметрии сооружения совмещены с координатными плоскостями XZ и YZ. У равнения свободных колебаний свайного сооружения с жестким ростверком и учетом диссипации энергии колебаний при наличии двух плоскостей симметрии имеют вид:
200
Л4а>+ ₽z4-a'cH-^22^c = 0; (9.80)
^c+Px“c+KXX“c+ ^cX-
- кха2 4- GH фр = 0;
' y (9.81)
ел+р|Л+(к“_
-к« + с^)«е + йЛ1, = о:
Mvc -J- Py vc + Kyy vc 4- Aj <Px = 0*> | (Q g2) 6x Фх 4* .ux фх 4" vc 4" &x фх =0;J
Qz Фг 4" Hz Фг 4" ^2 Фг — ®
Как и прежде, уравнения колебаний разделились на четыре независимые группы. Вертикальные колебания (9.80) стали главными с частотой колебаний с учетом затухания
со2 =
(9.84)
где Лг — по (9.35); nz — по (9.66).
Центр (ось) колебаний находится на бесконечности по оси X.
Г оризонтал ьно-вращательиые колебания (9.81) ростверка в плоскости симметрии XZ имеют частотное уравнение
*0 + 2^о(Лх + Пф{/) "Ь ^о(^х +
4" 4пх ПЧ>у) 4" 2^0 пфу 4
4" \>у пх) 4" У у —
(9.85)
дающее значения двух пар сопряженных комплексных корней:
^oi,o2 —— roi — io soi> ^оз,о4 —
=— r02 ± i0 s02 (io = V — 1 )» (9.86) где значения о2 представляют затухания колебаний, а значения sojo2 —частоты.
Имеется два центра колебаний — Oi (хг, zi). О2(х2; z2), лежащих на оси Z с координатами:
— ^01 + r0i — 2лх rot
(i=l, 2). (9.87)
Центры колебаний — есть следы пересечения осей колебаний с плоскостью XZ. Свободные и вынужденные колебания ростверка представляются аналогичными (9.71), (9.72) уравнениями.
Горизонтально-вращательные колебания (9.82) ростверка во второй плоскости симметрии YZ имеют уравнение частот
Aj + 2ло (пу 4- пфХ) 4- 4-
4~ ^фх 4“ ^пу Лфх) 4~ 2/?q 4
4~ ^фх пу) 4~ Ух 0.
(9.88)
Это уравнение дает значения также двух пар сопряженных комплексных корней:
^01,02 = г04 io 5(МЙ ^03,04 -г05 S05
(io=K=u), (9.89)
где гм 06 —затухания; $м,05 — частоты колебаний.
Имеются две горизонтальные оси колебаний с координатами
— Ня
Zi = -------------2-----------(1‘ = 4- 5)-
^у s0i 4- roi %пу rQi
(9.90)
Свободные и вынужденные колебания ростверка также представляются аналогичными (9.71), (9.72) уравнениями.
Вращательные колебания (9.83) стали главными с частотой колебаний с учетом затухания;
~ . (9.91)
где по (9.46); Пф2~ по (9.75).
Ось Z стала осью главных колебаний.
9.3. Уравнения вынужденных колебаний свайных сооружений с жестким ростверком при сейсмических воздействиях
Расчетная схема сооружения прежняя (см. рис. 9.1). Начало осей координат помещено в центре тяжести ростверка (верхнего строения), который представляется не-деформируемым твердым телом. При сейсмических явлениях движение .грунтового основания через сваи передается ростверку, который приходит в колебательное движение. Возникают сейсмические инерционные нагрузки, которые являются возмущающими для сооружения. Предполагается, что длина сейсмической волны в основании существенно превосходит размеры сооружения в плане в плоскостях расчета. На практике это предположение обычно удовлетворяется. В случаях же протяженных в плане сооружений расчетные плоскости находятся в поперечных вертикальных сечениях, а кроме того, сооружения разделены по длине на отдельные секции. Динамический расчет сводится к решению задачи о колебаниях ростверка как твердого тела, связанного с подвижным основанием с помощью упругих связей (свай).
201
Проекции перемещения и, v, w некоторой произвольной точки ростверка с координатами х, у, z определяются формулами:
u = (xG + ис) + г (фоу + ф&) —
— У (Фог + Фг);
V = (Уо + ос) + X (фог + ф2) — -г(Фох + Фх); (9'92)
W = («о + Wc) + У (фох + Фх) —
— х (Фоу + Фу) •
где Ко, уо, «о — проекции перемещения основания на оси X, Y, Z; <роя. ч>Оу ,<р0; — углы поворота основания вокруг соответствующих осей координат; ис, ос, и»с —проекции перемещения центра тяжести ростверка (точки С) относительно основания иа оси X, Y, 2: <рх» <р&. Ф2—углы поворота ростверка относительно поворотов основания вокруг соответствующих осей координат.
Общий случай пространственной задачи. Сейсмические уравнения колебаний свайного сооружения с жестким ростверком с учетом диссипации энергии колебаний в общем случае пространственной задачи имеют вид [12]:
М.йс + йс -f- Ku «с + /(12 vc 4" 4" Л13 tt»c+ /(14 Фх + /(1Б Фу 4" + /(1в Фг =— Л1х0;
Mvc + ру vc -+- К21 Ис .4" /(22 vc 4" 4“ /(23 wc 4" /(24 Фх 4" /(25 Фу 4-+ /(гв Фг =— Му01
Mwc 4- рг wc 4-./(31 «С 4- /(яг Vc 4-4~ /(33 Wc 4- /(34 Фх 4~ /(зб Фу 4-4- Кзв Фг =• A120j, ©гс Фх — ©ху фу — ©хгФг 4" Нх Фх4" 4" /(«1 ис 4" /(42 ис 4" /(43 wc 4* 4" /(44 Фх 4" /(45 фу 4" /(46 Фг = =— ©х фох 4- ©ху Фоу 4“ ©хг Фог?
©у Фу — &жу фх &yz Фг 4~ Ну Фу4* 4" /(м ис 4-/(б2 vc 4- /(53 wc 4-4" /(б4 Фх 4" /(55 Фу 4- /(бв Фг = =— ©у фор 4" ©ху Фох 4~ ©уг Фог?
©г Фг-©хг фх — ©уг фу 4" Нг фг 4" 4- /(ei ис 4" /(вг vc 4- /(вз wc 4-4" /(в4 Фх 4" /(вб Фу 4" /(ев Фг =
=— ©г Фог 4" ©хг Фох 4" ©уг Фоу •
(9.93)
Входящие в уравнения коэффициенты Xn, К12, ...» Kes, Кее определяются прежними формулами (9.25) — (9.29).
В общем случае колебания ростверка определяются системой шести дифференциальных уравнений с неизвестными ис, vc, wc, фх, ф«, фг, представляющими собой не
абсолютные, а относительные проекции перемещения центра тяжести и относительные углы поворотов ростверка по отношению основания. В правых частях уравнения содержат сейсмические инерционные возмущающие силы, вызванные движениями основания. Законы движения основания хо(О, Уо(Л, zo(O, фох (0» фоу (0, Фог(0 задаются. Уравнения (9.93) позволяют производить расчеты при произвольных законах движения оснований, однако с этим связана боль
шая или меньшая сложность их решения. Требуется применение счетно-вычислительной техники.
Если в системе уравнений (9.93) исключить члены с первой производной, то следуют сейсмические уравнения колебаний свайного сооружения с жестким ростверком без учета диссипации энергии колебаний в общем случае пространственной задачи.
Случаи наличия плоскостей симметрии. Случай одной плоскости симметрии. Пусть сооружение имеет одну вертикальную плоскость симметрии XZ, затухание колебаний исключается. Сейсмические уравнения колебаний свайного сооружения с жестким ростверком без учета диссипации энергии колебаний при наличии одной плоскости симметрии имеют вид [12]:
Мис + к** ис + Кхг WC + (K" — -K"+G«")^=-Mx0;
Mi>c + К" и, + К“ wc + (К“-
+ (K.r-^+<^)wc+au<f =
“ 'Ро,.
Л1пс 4~ ос 4- Ai Фх 4- Дг Фг = =— Муй-, ©х фх — ©хг Фг 4“ Д1 vc 4“ ^х фх 4~ 4“ Д3 Фг =— ©х Фох 4" ©хг Фог;
©г Фг — ©хг Фх 4- Д2 VC 4" Д3 Фх 4"
(9.94 )
(9.95)
-|- й2 фг — ©г Фог 4“ ©хг Фох-Здесь обозначения прежние (9.32).
Неизвестные ис, vc, wc, фх, фу, фг определяют -относительные перемещения центра тяжести и повороты ростверка по отношению к основанию. Уравнения разделились на две группы, из которых первая (9.94) определяет колебания ростверка в плоскости симметрии XZ, а вторая (9.95) — колебания, перпендикулярные плоскости енммет-
202
рии. Входящие в правые части уравнений сейсмические инерционные нагрузки зависят от характера движений основания. Данные о характере и параметрах движения оснований при землетрясениях приведены в литературе [4, 9, 12, 19, 21, 22 и др.]. В работе [22] рекомендовано принимать движение основания по простому гармоническому закону, исключая затухание. При этом амплитуды и периоды колебаний основания устанавливают в зависимости от расчетной сейсмичности и могут определяться по расчетным ускорениям, соответствующим значениям коэффициентов сейсмичности [25,28].
Представляют практический интерес вынужденные колебания ростверка в плоскости симметрии XZ, определяемые системой уравнений (9.94), при движении основания по закону:
х0 = bx sin pt; z0 = bz sin pt;
Чоу — Гу sin pt, (9.96)
где bx. t>z — линейные; Ту — угловая амплитуды; р — частота колебаний основания: р=2л : T.Q(TQ— период колебаний основания).
Тогда относительные проекции перемещения ис, wc центра тяжести и относительные повороты <ру ростверка определяются формулами:
Uc = Dj sin pt; wc — D2 sin pt;
(f>y = D3 sin pt, (9.97)
где относительные амплитуды колебаний:
Di = djd; D2 = d2! d; D2 = d2l d.
(9.98)
Здесь обозначено:
‘* = P?vw('v«',!-X«/₽4) + + 2h1h2^/p‘2-h2lyi-^vx-dl = bx(ti\vw-'li)+btX
* (A1 A2 Pp vw ) "b
+ '-»рИЛ2Лг/''2-А1\):
d2 “ bx (*, A2 - Pi V + + ',z(₽?vxv®»-'1'0 +
+rUPl{hlK»/P2-l‘2'’x)-
d, = bx (л_. Х;г/₽2 - л, vj +
(9.99)
где
vz=(^)-l;
\y = (h<py!p )
ft, = H}/p’ = (1 /Л4р2) X x(k«-k«+g^);
h2 = HJp2-.= (l/Mp2) X
(9.100)
^xz, "kx, ^z, ^(py —n° (9.35); pv, Hi, H3 — no (9.39).
Проекции перемещения и, w некоторой
точки ростверка с координатами х, z на оси X, Z определяются формулами:
и — 1(Ьх + ^i) + z (ry + + £>3)] sin pt;
® = К*г + D?) — х (rv + 4" ДО] sin pt.
(9.101)
Точки плоскости XZ, координаты которых
62+ D2 - bx + Df --------; г =—------------»
гу-\-^3 гу~Ь^з
(9.102)
являются сейсмическими центрами колебаний. Эти центры есть следы на плоскости XZ сейсмических осей колебаний. Колеба
ния жесткого ростверка можно рассматривать как колебания — вращения вокруг сейсмического центра колебаний.
Сейсмическая инерционная сила S, приложенная к центру тяжести ростверка, равна
5 = МрЧгу+П3)Ух2 + ~2* (9.103)
и направлена по нормали к прямой, соединяющей сейсмический центр колебаний с центром тяжести ростверка.
Следует рассмотреть также вынужденные колебания ростверка, перпендикулярные плоскости симметрии XZ, определяемые системой уравнений _ (9.95) при движении основания по закону:
Уй *= by sin pt; Фох — sin pt;
Фог = гг sin pt, (9.104)
где by — линейная; rX'rz ~ угловые амплитуды; р — частота.
Тогда относительная проекция перемещения vc центра тяжести и относительные, повороты фх, фг ростверка определяются формулами:
°с = Fi sin pt; фх = F2 sin pt;
Фг = /з sin pt, (9.105)
203
где относительные амплитуды колебаний
Л = d,ld\ F2 = d2ld‘, F3 = d3/d. (9. Г06)
Здесь обозначено:
rf=\(pxPzv<pxv<r2-
~ P«vxz)-ft3Pzv<p2-
*— Рд, v^x -J~ 2/ig/i^ рхг vxz>
= Ьу (p* P2 V(pX V(₽2 -Ptzvx2) + U/A (\ PXZVXZ-- Л3 p2 v) + (/l3 P*2 Vx2 -
-л4Рл V)’
. ^2 ~ by (^4 Рхг Vxz - h3 p2 v<p2) + W~X (p2 Vy Vwz ---Л4) 4~ — Pxz V V )'»
1 Z\ 3 4 rXZ у X2J*
d3 = by (ft3 p« VX2 - Л4 Pxv<px) +
+ ^х (h3\-Pxz\ VXJ + + wl (p; vy v - <
где
(9.107)
колебаний при наличии двух плоскостей симметрии включают четыре независимые группы уравнений:
(9.111)
Mwc + Kzz wc =— Л4г0;
Мйс + Кххис+(К'* —
4- G**) и 4- О Ф =— ® фп • 1 ) с 1 у^у у т0р»
Mvc 4- КуУ vc 4- Ai фх =— Myth вхФх4-Д1 »с 4- ^х Фх=—вхФох: .
(9.112)
(9.113)
0, ф! 4- й2 ф2 =— 02 ф02. (9.114)
Вертикальные колебания (9.111) отделились и для них относительная амплитуда D2 и сейсмическая сила Sz:
D2 = bz/vz; Sz = Mp2(bz +D2). (9.115) Здесь и далее предполагается, что остаются в силе выражения (9.96), (9.97), (9.104), (9.105).
Горизонтально-вращательные колебания (9.112) ростверка в плоскости симметрии XZ имеют относительные амплитуды:
^=(в2л2-е„гт)/м;
\ = ^/P2-1'’ V(PX =
= Aw/p2-1: vvz= (9.108)
= Л22/р2-1;
vX2 = a;.2/p2+ 1;
h3 = H3/p2 = \/Mp2-,
\=HJp2= ^2/Mp2;
^<pX • ^q>2 • °xz no (9.46); px, pz, pXz — no (9.48); H3, H4 — no (9.51).
Проекции перемещения v точек ростверка с координатами х, z на ось Y:
v — 1(6» + ^1) + х (гг + ^з) — г(Лх +
+ Т'г)] s>n pF (9.109)
Сейсмической осью колебаний является прямая, уравнение которой
(by + FJ + x(rz + F3) - г (rx 4- F2) = 0.
(9.110)
Случай двух плоскостей симметрии. Пусть координатные плоскости XZ и YZ являются плоскостями симметрии сооружения. Сейсмические уравнения колебаний свайного сооружения с жестким ростверком без учета диссипации энергии
(9.116)
из = ~o’
P^xV-^i
Сейсмический центр колебаний находится на оси Z, а расстояние до него от центра ростверка определяется по второй из формул (9.102). Сейсмическая сила
Sx = Mp2(ftx + Oi)- (9.Н7)
Г оризонтал ьно-вращательные колебания (9.113) ростверка во второй плоскости симметрии YZ имеют относительные ампли
туды:
₽1_ Уфх-^х^з .
VyV<px— (Лз/ру
Гх Рх Vu — Ьу h3
Г1 'Х. У У «з
^2 = 7> Г,- •
Pxv&v<px~^
(9.118)
Вращательные колебания вокруг оси Z (9.114) отделились, так что относительная амплитуда F^rjv^.
9-4. Основные расчетные положения для гравитационных сооружений, жесткостные характеристики оснований
Основным конструктивным элементом гравитационных портовых сооружений ти-
204 '
Рис. 9.4. Расчетная схема гравитационного сооружения а — пространственный случай; б — плоский случай
па мола, волнолома является выполненный в основном из бетона массив (массивная стена), опирающийся через посредство каменной постели на грунтовое основание. Так как устойчивость гравитационных сооружений при действии внешних сил обеспечивается главным образом их массой, то размеры сооружений в поперечных вертикальных сечениях значительны. Тело гравитационного сооружения считается абсолютно жестким, его деформации ничтожны по сравнению с перемещениями, обусловливаемыми податливостью основания. Грунтовое основание под гравитационным сооружением является упругим, а при сейсмических процессах и подвижным.
В обычных несейсмических условиях тело гравитационного сооружения воспринимает на себя статические и динамические воздействия и передает их на основание (рис. 9.4). Здесь динамический расчет сводится к задаче о колебаниях твердого тела на упругом неподвижном основании. При сейсмических явлениях движения основания передаются сооружению и возникают действующие на тело сейсмические инерционные нагрузки. Значения сейсмических нагрузок зависят от характера движений основания и динамических характеристик гравитационного сооружения в целом. Таким образом, в общем случае динамический расчет гравитационных сооружений формулируется как задача о колебаниях твердого тела на упругом неподвижном или подвижном основании.
Упругие свойства естественного основания характеризуются следующими параметрами: Сх, Су — коэффициенты упругого равномерного сдвига основания соответственно в направлении осей X, У; Сг — коэффициент упругого равномерного сжатия основания; СфХ, С^у—коэффициенты упругого неравномерного сжатия основания при поворотах сооружения соответственно вокруг осей X, У; Сф2 — коэффициент упругого неравномерного сдвига основания при поворотах сооружения вокруг оси Z.
Эти коэффициенты широко применяют при расчетах колебаний фундаментов под машины, где для определения их значений построена специальная теория [26, 31]. Они зависят от упругих свойств оснований, размеров и форм площадей подошв массивов, напряженного состояния грунта основания и его физико-механических свойств и являются некоторыми обобщенными характеристиками. Для гравитационных гидротехнических сооружений имеются особенности в назначении величин параметров, характеризующих упругие свойства оснований (большие размеры сооружений, наличие каменных постелей и др). Соответствующие рекомендации приведены в нормативах [24, 25], а также в работах [8, 12, 16 и др.].
Коэффициенты жесткостей основания под сооружением, при перемещениях последнего вдоль координатных осей будут: CXF, CVF, CtF — силы, которые надо приложить к сооружению в направлениях соответствующих осей, чтобы оно перемести
205
лось поступательно на единицу длины вдоль тех же осей; F — площадь подошвы.
Коэффициенты жесткостей основания под сооружением при поворотах последнего вокруг координатных осей будут:
Rx ~ ^Ч>Х ^Ох» Ry = ^Оу*
Rz = СФ2
где Rx. Ry—моменты, которые необходимо приложить к сооружению, чтобы оно совершило единичный поворот вокруг осей, проходящих через центр тяжести площади подошвы (точку О) и параллельных осям координат X. У; Rz — момент, который необходимо приложить к сооружению, чтобы он совершило единичный поворот вокруг оси Z; 1QX, 1$у — моменты инерции площади подошвы относительно осей, проходящих через центр тяжести площади подошвы (точку О), и параллельных осям координат X, У; lz— полярный момент инерции площади подошвы.
При динамических расчетах гравитационных сооружений используют присоединенные массы воды и грунта, гидродинамические давления воды, коэффициенты затухания колебаний. Необходимые рекомендации имеются в нормах [25, 28] и другой литературе [4, 11, 12, 26, 31, 32 и др.].
9.5. Уравнения свободных колебаний гравитационных сооружений
Начало осей координат расположено в центре тяжести точки С тела (массива, стены) гравитационного сооружения (см. рис. 9.4). Оси координат в пространстве неподвижны. Положение массива определяется тремя проекциями перемещения центра тяжести на оси координат и тремя углами поворота массива вокруг этих осей. Точка О есть центр тяжести площади подошвы.
Обозначения: М — масса тела (массива, стены); ву. ©2—моменты инерции массы тела относительно осей координат, ©Ху- ®х2-&yz—центробежные моменты инерции массы тела; х, у. г — координаты точек тела; в, б. h — координаты центра тяжести площади подошвы соответственно в проекциях на осн X, У, Z (е, 6 — эксцентриситеты, h — возвышение центра тяжести массива над плоскостью подошвы); ис-«с. о»с— проекции перемещения центра тяжести тела (точки С) соответственно на оси X, У, Z; Фх' Фу' Фг — Углы поворота тела вокруг осей координат; и, v, w — проекции перемещения произвольной точки тела соответственно на осн X. У, Z.
Проекции перемещения u, v, w произвольной точки тела с координатами х, у, z связаны с проекциями перемещения ие, vc, wc центра тяжести формулами (9.22).
Уравнения без учета рассеивания энергии колебаний. Общий случай пространственной задачи. Уравнения свободных колебаний гравитационного сооружения без учета диссипации энергии колебаний в общем случае пространственной задачи имеют вид [12]:
Мис 4- Сх Fuc + Сх Fhq>y — — Сх Рбфг = 0;
Mvc + Су Fvc — Су Fhq>x 4-4- Су Fe^ = 0;
Mwc 4“ СF'We 4~ Сг F^(px — — С2 Fs.(f>y = 0;
Фх ®жу Ф{/ ®хг Фг
Су Fhvc 4“ C2 F6wc 4~ С^х 4-
+ CyFh* + CzF&)4>x-
— Сг F&^y — Су Fuhtyt = 0;
©у фу — 0Яу Фх — е^ф2 4-4~ Сх Fhuc — Cz Fnwc —
— С2 Гебфх 4" (Ry 4“ Сх F№ 4-
4- Сг Fk2) фу — Сх Ff)h<f>z = 0;
ег — ©хг Фх — врг Фр — — Сх Fduc 4- Су Fevc —
— Су Fehtpx — Сх F6hq>y 4-4-(^4-СхГ6?4-СуГе?)фг = = 0.
(9.119)
Система шести дифференциальных уравнений (соответственно числу степеней свободы) включает неизвестные — три проекции перемещения центра тяжести ие, vc, wc и три угла поворота <рх, фу, фг массива.
Случаи наличия плоскостей симметрии. Гравитационные гидротехнические сооружения часто являются протяженными в плане и имеют одну вертикальную плоскость симметрии (волноломы, молы, плотины), а нередко и две (отдельные массивные опоры причальных сооружений, опоры мостов, маяки). При наличии плоскостей симметрии решения уравнений облегчаются, так как последние разделяются на независимые группы.
Случай одной плоскости симметрии. Пусть с плоскостью симметрии сооружения совмещена координатная плоскость XZ (в протяженных сооружениях с плоскостью XZ совмещаются вертикальные поперечные сечения). Уравнения свободных колебаний гравитационного сооружения без учета диссипации энергии колебаний при наличии одной плоскости симметрии разделяются на две независимые группы:
Мис 4- Сх Fuc 4- Сх Fhtpy = 0;
4- С2 Fwc — Сг Гефу = 0;
©у фу 4~ Сх Fhuc — Сг Fewc 4~ 4- (Ry 4- Сх F№ 4- СгГе?)фу=0;
(9.120)
(9.121)
206
-г С у Fvc — Су Fh(px + "г Су = 0;
фх ^хгфг — Су Fhvc -f-
-HKx + CyFA*) Фх —
— Су Feh(i>2 = 0;
02 ф2 -- ©XZ Фх 4" Су Fеис —
— Су Feh<px 4- (Rz 4-
4- CyFe2 *) ф2 = 0.
(9.121)
(9.125)
Уравнения колебаний произвольных то-
Группа уравнений (9.1ЯС) определяет свободные колебания сооружения в плоскости симметрии XZ, а другая группа (9.121) —колебания, перпендикулярные этой плоскости симметрии.
Для свободных колебаний сооружения в плоскости симметрии, определяемых системой уравнений (9.120), частотное уравнение имеет вид
чек гравитационного сооружения, уравнения свободных и вынужденных колебаний сооружения в главных формах определяются выражениями (9.41)—(9.43).
Для свободных колебаний сооружения, выражаемых системой уравнений (9.121),
частотное уравнение имеет вид
Xе — 4- г}* — s = 0, (9.122)
где
и 1 -- И м 1 >= о л= £ + 11 «: "О м (с 1 1 4- > > 1 в 1С Лэ * 48 1 > > N * 4. 4- ч: .с >» -. "О " ' N КЭ «г ьэ . 1 1 (9.123)
-^^е2/р2.
Здесь частные частоты:
р№ — (/А,4 4~ г№ — s = 0, где
р = 1 — v;
9 = W+Ч* + Чх) ~
-v(2oj2 + xj);
г — (Ц,х + + ^фх Чг +
x(2Xj+<^);
s=^(4*^-w«) +
+ ^°й~ — ^б^фх*
Здесь частные частоты:
(9.126)
(9.127)
rf-CF/M; l2=CF/M; х X 2 Z
Ч,-(1'в,)(/г»+с«'%2+
(9.124)
^Фх = -^-(Кх + С9ГНг);
^=-^-(«х+с„л2);
(9.128)
„2 _ CVF .
'у М ’
2 а квадрат радиуса инерции массы р;, = =&V/M. Корни частотного уравнения
(9.122)—есть квадраты трех главных частот A,2 (i=l, 2, 3). Кроме того, имеются частные частоты горизонтальных Ах, вертикальных Аг и вращательных Афу колебаний.
Свободные колебания сооружения, определяемые системой уравнений (9.120), в главных формах представляются как колебания-вращения вокруг трех центров главных колебаний — Oi(xi; Zi); О2(х2; z2); Оз(х3; z3). Эти центры являются следами пересечения трех осей главных колебаний с плоскостью симметрии XZ. Координаты центров;
Су Feh &xz
а радиусы инерции и их отношение р*, рг, рхг, v находят по (9.48). Частотное уравнение (9.126) дает квадраты трех главных частот А.2 (i=4, 5, 6). Имеются частные частоты горизонтальных по направлению оси Y и вращательных А.фЛ, Аф2 вокруг осей X и Z колебаний.
Свободные колебания сооружения, определяемые системой уравнений (9.121), в главных формах представляются как ко
207
лебания-вращения вокруг лежащих в плоскости XZ трех осей главных колебаний, определяемых уравнениями
’ R, + xSj — г = у = 0 (i = 4, 5, 6), (9.129) где
Проекции перемещения произвольных точек сооружения на ось У находят по (9.52), а уравнения свободных и вынужденных колебаний в главных формах имеют вид (9.42), (9.43), но при г=4, 5, 6.
В целом колебания гравитационного сооружения на упругом основании интерпретируют как вращательные вокруг шести осей главных колебаний. При наличии одной плоскости симметрии три из этих осей перпендикулярны ей, а три другие расположены в ней.
Случай двух плоскостей симметрии. Пусть гравитационное сооружение имеет две вертикальные взаимно перпендикулярные плоскости симметрии, совмещенные с координатными плоскостями XZ и YZ. Уравнения свободных колебаний гравитационного сооружения без учета диссипации энергии колебаний при наличии двух плоскостей симметрии разделяют на следующие четыре независимые группы:
М wc + Cz Fwc = 0; (9.131)
Мис 4” Cx F uc -f- Cx Fh(py — 0,
Ф{/ 4" Cx Fhuc -J- (Ry -j-
+ Cx Fh2) <p& — 0;
Mvc -{- Cy Fvc — Cv Fh<px = 0.
Фх — Cy Fhvc -f- (Rx + + Cy Fh2) фх = 0;
(9.133)
в2Фг + ^2Фг = 0. (9-134)
Вертикальные колебания (9.131) и вращательные колебания вокруг оси Z (9.134) отделились от других видов колебаний. Группы по два уравнения (9.132), (9.133) определяют колебания сооружения
в плоскостях симметрии.
Вертикальные колебания (9.131) стали главными с частотой А2 по второй из формул (9.124). Для этих колебаний центр главных колебаний переместился в бесконечность по оси X.
Горизонтально-вращательные колебания (9.132) сооружения в плоскости симметрии XZ имеют частотное уравнение
^-X3(^ + 4s) + ^=°, (9.135) где частные частоты колебаний — по (9.124);
(9.136)
Частотное уравнение (9.135) дает корни ^0i (1= 1. 2) —квадраты двух главных частот. Имеется два центра главных колебаний— Oi(xi; Zi), Ог(х2; z2), находящихся на оси Z с координатами:
•Ч = 0; г, = -------* , (1 = 1,2).
1 - (а&/л£)
(9.137)
Центры главных колебаний есть следы на плоскости XZ от пересечения с осями главных колебаний. Свободные и вынужденные колебания сооружения в главных формах определяются аналогичными (9.42), (9.43) уравнениями. Выражения (9.131), (9.132), (9.135)—(9.137) и их модификации применяют для расчетов колебаний фундаментов под машины.
Колебания сооружения (9.133) во второй плоскости симметрии YZ имеют частотное уравнение
- *0 Чх = °’ <9-138)
где частные частоты ^,%фХ — по (9.128) и ЛфХ =Rx/ex. Корни этого уравнения (i= =4, 5) есть квадраты двух главных частот. Положение двух горизонтальных осей главных колебаний определяется формулой
(9. 132)
_____h
г‘_1-(4/^)
(i = 4,5). (9.139)
Свободные и вынужденные колебания сооружения в главных формах определяются аналогичными (9.42), (9.43) уравнениями. Вращательные колебания вокруг оси Z (9.134) стали главными с частотой Хф2 по (9.128). Ось Z стала осью главных колебаний.
В целом при наличии двух вертикальных плоскостей симметрии имеется шесть главных частот —Хг, А.0!, Ло2, Хоь %ф2 й шесть осей главных колебаний.
208
Уравнения с учетом рассеивания энергии колебаний. Общий случай пространственной задачи. Уравнения свободных колебаний гравитационного сооружения с учетом диссипации энергии колебаний в общем случае пространственной задачи имеют вид [12]:
Мис + Ра Uc 4~ Сх Fuc +
4- Сх Fh(f>y — Сх Fbtyz = 0;
Mvc 4~ Ру ис 4" Су Fvc
— Су Fhtyx 4" Су рЕ<рг = 0;
Mwc 4- PzCOc 4" Сг Fwc -f-
4- Cz Fttyx — C2 Feq>y = 0;
©x Фх — ©xy фу — ©хг фг 4-
4" Ня Фх — Су Fhvc 4- Сг Fbvi)c-\-
4- («х 4- Су Fh2 + Сг Ff)2) фх - (9
— Cz Fe6<pv — Су Fehq>z = 0*.
©У Фу ©ху Фх — ©угф г 4“
4~ Ру фу 4- Сх Fhuc — С2 Fewc —
— Сг Fe&px 4- (Ry 4- Сх Fh2 +
4- Cz Fe2) <py — Cx Fdh<pz = 0;
©г ф2 ©хгфх ©уг Фу 4-
4- Pz Фг — Cx F6uc 4- Cy Fevc —
— Cy Fehq>x — Cx Fbfapy 4-
4- (Rz 4- Cx F& + Cy FE*)<p2=0.
Здесь все обозначения прежние и, кроме того: Эх' Ру ₽2 — коэффициенты пропорциональности между силами сопротивления н скоростями сооружения при колебаниях вдоль осей координат; цх, ц.у. — коэффициенты пропорциональности между моментами сопротивления и скоростями поворотов сооружения при вращательных колебаниях вокруг осей координат. Неизвестные прежние—u,.. v w . ф , <р m tz *-Z Cz JC fj i
Случай плоскостей симметрии. При одной или двух вертикальных плоскостях симметрии в сооружении, уравнения колебаний разделяют на независимые группы.
Случай одной плоскости симметрии. Пусть с плоскостью симметрии совмещена координатная плоскость XZ. Уравнения свободных колебаний гравитационного сооружения с учетом диссипации энергии колебаний при наличии одной плоскости симметрии состоят из двух независимых групп:
Мис 4- Рх ис 4- Сх Fuc 4-4" Сх Fh<Py = 0;
Л11&с4-р2^с4-СгГц?с—CzFe<py=0;
вуфу 4~ Ну Фу 4- Сх Fhuc — — Сг Fewc — (Ry 4~ Сх Fh2 4*
4- Cz Fe2) Фу = 0;
(9.141)
Mvc 4- ₽у i»c 4~ Су Fvc —
— Су Ffufx 4- Су FE(pz = 0;
©х Фх — ©xz Фг 4“ Их Фх —
- Су Fhvc 4- (Rx 4- CyFh2) Фх —
— Су FEhq>z = 0;
©г фг — ©хг Фх 4“ Иг Фг 4“
4- Су Fevc — FEfapx 4- (Rz 4-
4-СуГв?)ф2= 0. 1
(9.142)
Здесь первая группа уравнений определяет колебания сооружения в плоскости симметрии, а вторая группа описывает колебания, перпендикулярные плоскости симметрии.
Частотное уравнение для колебаний сооружения в плоскости симметрии XZ, как следует из уравнений движения (9.141), представляется в виде
А® 4- Р 4- 4- qk3 4-4- ~rk
4-s = 0.
(9.143)
Здесь обозначено:
г = (л' 4- 4~ 4пЛ пг) 4~
-}- Х2 4" пг 4* 4-Х22Пх)-Л2^/р^-в2ЭД; г = 2 [хх X2 Пф4,4- (х2 П2 4-4-?гПл)^фу-Л2^Лг/Ру-
(9.144)
а также р, q, у — по (9.65); X . X . К —по х г ФУ
(9.35); п , п , п — по (9.66); остальные обо-х г ФУ
значения прежние.
Частотное уравнение (9.143) дает величины трех пар сопряженных комплексных корней вида (9.67), где значения Г112,з определяют затухание колебаний, a Si,2,3 —частоты колебаний.
Свободные колебания гравитационного сооружения, определяемые системой уравнений (9.141), в главных (простейших) формах представляются как колебания-вращения вокруг трех центров колебаний — О1(*ь Zi); О2(х2; г2); Оз(х3; z3), координаты которых:
14—189
209
Xi = Qi = e
h
1-(^-^ + 2пхГ!)лГ
(< = 1,2,3).
Центры колебаний являются следами на плоскости XZ трех осей колебаний. Проекции перемещения произвольных точек гравитационного сооружения, уравнения свободных и вынужденных колебаний в главных (простейших) формах определяются выражениями (9.70)—(9.72).
Частотное уравнение для колебаний гравитационного сооружения, определяемых уравнениями движения (9.142), имеет вид (9.73), но остаются также в силе выражения (9.74) — (9.76); частные частоты "Ку, Хфд., ^<рг Охг> находят по (9.128).
Свободные колебания гравитационного сооружения по уравнениям (9.142) интерпретируют в главных (простейших) формах как колебания-вращения вокруг трех осей колебаний, расположенных в плоскости XZ и определяемых выражением
Ri 4 xSt — z = у = 0 (1=4, 5, 6),
(9.146)
где
(9.147)
Здесь все обозначения прежние; значения частот s4, ь,б и затУханнй 5 в колебаний следуют из комплексных корней' (9.76) частотного уравнения (9.73).
Проекции перемещения точек сооружения следуют из (9.79); свободные и вынуж
денные колебания сооружения в главных (простейших) формах определяются уравнениями вида (9.71), (9.72) при 1=4, 5, 6.
Случай двух плоскостей симметрии. Пусть координатные плоскости XZ и NZ являются плоскостями симметрии гравитационного сооружения. Уравнения свободных колебаний гравитационного сооружения с учетом диссипации энергии колебаний при наличии двух плоскостей симметрии разделяются на четыре независимые группы:
Mwc -f- рг wc 4- С2 Fwc •— 0; (9.148)
Aluc + Рх ис + Сх Fuc 4~
Ч-СхГЛф^О; (9 |49)
вуфу 4~ Ир Фу + Сх Fhuc 4~ 4-(Яу4-СжЯЛ2)Фу = 0;
4- Ру vc + Су Fvc —
-Ср£Л(рх = 0; (9 150)
©х<Рх + Их <Рх — Су Fhvc 4-
4~ (Ry 4~ Су F№) фх =
©2ф24- Hz <Pz + Яг Фг = °- (9.151)
Вертикальные колебания (9.148) сооружения отделились, стали главными с частотой колебаний сог с учетом затухания по (9.84), где —по (9.124), пг—по (9.66). Центр колебаний находится в бесконечности по оси X.
Горизонтально-вращательные колебания (9.149) гравитационного сооружения в плоскости симметрии XZ имеют частотное уравнение
+ 2^о (пх + лфу) + (^х + ^фу +
4" ^Пх Лфу) 2^0 ЛфУ 4~ ^фХ пу лх)
4- *^ = 0, (9.152)
где частные частоты — по (9.124); ,
X— по (9.136); пх, п^—по (9.66). Уравнение (9.152) дает две пары сопряженных комплексных корней вида (9.86), так что значения sOi, 02 есть частоты колебаний, а ток 02 — затухания. Имеется два центра колебаний— О] (xi; Zi), О2(х2; г2), расположенных на оси Z с координатами:
1 — (s0t — r6i 4- 2пл roi)^x (i=l,2). (9.i53)
Свободные и вынужденные колебания сооружения вокруг центров колебаний представляют аналогичными (9.71), (9.72) уравнениями.
Горизонтально-вращательные колебания (9.150) гравитационного сооружения уже в
210
плоскости симметрии FZ имеют частотное уравнение
+ 2feo (пу + лфХ) + (А ~ + Лфх 4-
4“ ^Пу nq>x ) 4~ (X" пфх + Хфх л^4-
+ ^9-х = 0, (9.154)
где частные частоты 1 ,Х —по (9.128);
и фХ
^х=^х/вх’ пу> ПФХ-ПО (9-75)- Уравнение (9.154) дает комплексные корни вида (9.89), так что значения Sot.os — частоты колебаний, a rOil os — затухания колебаний. Имеются две горизонтальные оси колебаний с координатами:
_________________h____________
1 ~ (s0i — r0i + 2пу r0i
(i = 4,5). (9.155)
Свободные и вынужденные колебания сооружения вокруг осей колебаний определяются аналогичными (9.71), (9.72) уравнениями.
Вращательные колебания (9.151) вокруг оси Z отделились, стали главными с частотой колебаний софг с учетом затухания по (9.91), где —по (9.128), а лф2—по (9. 75). Ось Z стала осью главных колебаний.
9.6. Уравнения вынужденных колебаний гравитационных сооружений при сейсмических воздействиях
Расчетная схема гравитационного сооружения прежняя (см. рис. 9.4). Начало осей координат помещено в центре тяжести точки С массива (блока, стены), который представляется абсолютно жестким телом. При сейсмических движениях грунтового основания массив приходит в движение, возникают сейсмические инерционные нагрузки. Длина сейсмических волн в основании предполагается значительно превосходящей размеры сооружения в плане в плоскостях расчетов. Для протяженных в плане сооружений расчетные плоскости принимают в поперечных вертикальных сечениях, а также имеется в виду деление сооружения осадочными швами на отдельные секции. Динамический расчет гравитационного сооружения сводится к задаче о колебаниях массива как твердого тела, опирающегося на упругое подвижное основание.
Упругие свойства естественного основания характеризуются прежними коэффициентами жесткостей. Используются также прежние обозначения и имеется в виду, что: *о, Уо, г0 — проекции перемещения основания на оси X, У, Z; фОя, фоу, фо2 — углы поворота основания вокруг осей координат;
14*
ис, vc, wc — проекции перемещения центра тяжести сооружения (массива) относительно основания на оси X, Y, Z; <рх, фу, фг— углы поворота сооружения (массива) относительно поворотов основания вокруг соответствующих осей координат.
Для проекций перемещений и, v, w — произвольных точек массива остаются в силе формулы (9.92).
Общий случай пространственной задачи. Сейсмические уравнения колебаний гравитационного сооружения с учетом диссипации энергии колебаний в общем случае пространственной задачи имеют вид [12]:
Мис + рх ис 4- Сх Fuc -}-
+ Сх Fhqy — Сх /'бфг =— Мх0; Mvc + Ру vc + Су Fvc —
— Су Fhq>x 4- Су Fetpz =— Муй\ Mwc 4- pz 4~ Cz Fw? 4-
4~ Сг /*7)фх — C2 Лефу ==“—
®хфх - &ху 4>у — ©хгФог + 4- Их Фх — Су Fhvc 4- С2 F6wc+ 4- (#х 4- Су Fh2 4- С2 F62) фх -
Сz Fвбфу Су Fehtyz —
= ©х Фох 4“ ®ху Фоу 4- ©хг Фог>
©у Фу ©ху Фх ®уг Фг 4“
4" Ну Фу 4~ сх Fhuc — Сг Fewc —
-CzFe&f>x+(Rv + CxFh* + 4-C2Fe2) Фу-Сх/-бЛф2 =
——©уФоу 4- ©ху Фох 4" ®уг Фог!
©г Фг — ©хг Фх — ©уг фу 4~
4~ Иг — Фг — Сх F6uc 4-
4- Су Fevc — Су Fehtpx — -CxF6/Hpy4-(fl24-CxF624-
4“ Су Fe2) фг = 02 фиг 4“
4- ©хг Фог 4- ©уг Фоу
(9.156)
В общем случае пространственной задачи колебания гравитационного сооружения определяются системой из шести связанных между собой дифференциальных уравнений. Неизвестные ис, vc, wc, фх, ц>у, фг определя
ют перемещения центра тяжести по отно
шению поворотов основания и углы поворотов массива по отношению поворотов основания. В правых частях уравнений находятся сейсмические инерционные возмущающие силы. Законы движения основания- во времени хо(О. £/о(О» z0(/), фох(О»Фоу(О.фо2(О задаются и с этим связана большая или меньшая сложность решения уравнений.
211
Если в (9.156) исключить диссипативные члены (члены с первой производной), то следуют сейсмические уравнения колебаний гравитационного сооружения без учета диссипации энергии колебаний в общем случае пространственной задачи.
Случаи наличия плоскостей симметрии. Случай одной плоскости симметрии. Если сооружение имеет одну вертикальную плоскость симметрии XZt то затухание колебаний не рассматривается. Сейсмические уравнения колебаний гравитационного сооружения без учета диссипации энергии колебаний при наличии одной плоскости симметрии включают две группы уравнений:
Muq 4~ Сх Fuc 4~ С Fhtyy — =— Мх0;
+ Cz Fwc — С2 Fey у = — m'z0;
0S Ф1/ ~I" Cx Fhuc —“ C2 F4“ + (Ry + Cx Fh? + C2 Fe?) <f)y = = ву фад;
+ Cy Foc Cy Fhyx 4* 4- Cy Feyz =— My0‘ ®хФх ®хг Фг CyFhvc 4~ 4-(«х4-суЕЛ?)фх--
— Cy F ehyz =— ®x Фох 4~
4“ ®хгФог'»
® г Фг “ ®хг Фх 4“ Су F£VC — — Су Fehyx 4- (R2 4-
4- Су Fe2) <рг =— 0гфв2 4-4" ®хг Фох-
(9.157)
(9.158)
Первая группа уравнений (9.157) определяет колебания сооружения в плоскости симметрии XZ, а вторая группа (9.158) — колебания, перпендикулярные плоскости симметрии. Неизвестные ис, ve, wc\ фж, фи, фг определяют перемещения центра тяжести и повороты массива по отношению основания. Остаются в силе сделанные в п. 9.3 замечания в отношении законов движения основания при землетрясениях.
Важный практический интерес представляют вынужденные колебания гравитационного сооружения в плоскости симметрии XZ, определяемые первой группой уравнений (9.157). Пусть, как и в случаях свайного сооружения, основание колеблется по закону (9.96). Тогда, оставляя в силе формулы (9.97), (9.98), выражения для d, di, d2, dit
необходимые для вычисления амплитуд />1,2,3 относительных колебаний, имеют вид:
d = v v vmr. р2 —- h2v X х z Ф!/ ГУ z
di= 'w p'i - (Л^4)]-
-6геЛ(Л>’)/₽4-
<2 9 4 (9.159)
d2=-bxehX2x^/p4 + hzX
X (vxv9yPy-h2^i/P4) +
+ ryevxPy^P2>
dj|:--bxhVzX2/p2 +
+ 6zevx^/p24-^P>xvz.
Здесь bx, bz — линейные; Гу — угловая амплитуды колебаний основания; р — частота вынужденных колебаний основания; v , V , v — по х z ФУ
кич). 1 * л — по (9.124); 0 /Л4
(9.100); Кх< ^г, Хф^ У У
Колебания гравитационного сооружения можно также рассматривать как вращательные колебания вокруг так называемого сейсмического центра колебаний. Формулы для определения проекций перемещения u,w точек сооружения, координат х, z сейсмического центра и сейсмических сил S имеют тот же вид, что и для свайного сооружения (9.101)—(9.103).
Следует также рассмотреть вынужденные колебания гравитационного сооружения, определяемые второй группой уравнений (9.158). Пусть, как и в случае свайного сооружения, основание колеблется по закону (9.104) и остаются в силе формулы (9.105), (9.106). Тогда необходимые для вычисления относительных амплитуд Л, 2. з выражения будут:
d = vy(pxPz W” -Р1г^2)-^/р4(р>ЧфЛ4-
4-Pz^v)J)24-2Px2eAvX2);
dl — by (Рх Pz УФХ Vq>z
plzvxz)4-^x(p«eVxZ
4“ Pz ^V<J)2) tyP
(9.160)
- ^(p^xz + P2 d2=fry(P^eVxz+P^^) X XAj/p24-lT2(p2 vy v^z— e2 X4/p4)—
-W2(eh^/p4 + p2xzvyvxzy, d3 =“ by (Pxz hvxz 4- Px EV<px) X
212
x^/P2-w2(ehFl/P4 +
+ p'«vJ +
x (p? W^2^4)-
(9.160)
Здесь by линейная; rx. r2 — угловые амплитуды колебаний основания: р — частота вынужденных колебаний основания; рх. р2, piXje— по (9.48);
v . v ,v . W . W — по (9. iOS); Л , К» у фх фг х z У Фх
2/2
хфг- стх2—по (9.J28); vX2=l—оХ2/р .
Формулы для определения проекций перемещения о точек сооружения и положения сейсмической оси колебаний имеют тот
же вид, что и для свайного сооружения (9.109), (9.110).
Случай двух плоскостей симметрии. Предполагается, что плоскостя
ми симметрии сооружения являются координатные плоскости XZ, YZ.
Сейсмические уравнения колебаний гравитационного сооружения без учета диссипации энергии колебаний при наличии двух плоскостей симметрии включают четыре независимые группы уравнений:
Mwc + Сг Fwc ——Mz0‘, (9.161)
Мис Ч- Сх Fuc Сх FhFy — =— Мх0;
hUc Ч- (*у
Ч~ Сх Fh2) (ру = ву
Mvc Ч- Су Fvc — Су Fhtpx = =— Му0;
©хф.г — Су Fhvc Ч~ (Rx +
(9.162)
(9.163)
Ч~ Су Fh2) фх — Фох?
вгфгЧ-Я2фг=—©г Фог- (9.164) В приводимых ниже решениях этих уравне
ний предполагается, что остаются в силе
выражения (9.96), (9.97) и (9.104), (9.105) для законов движения оснований и представлений частных решений.
Вертикальные колебания (9.161) сооружения не зависят от колебаний других видов и для них относительную амплитуду D2 и сейсмическую силу Sz вычисляют по (9.115).
Горизонтально-вращательные колебания (9.162) сооружения в плоскости симметрии XZ имеют относительные амплитуды, определяемые по формулам:
Ьх\у~ ryh^xlP' Г VxV4>y-^^Xfp2yP4' ryP2yvx-bxh7ilp1
(9.165)
где все обозначения прежние. Сейсмический центр колебаний расположен на оси Z с координатой z по второй из формул (9.102). Сейсмическую силу Sx определяют по (9.117).
Горизонтально-вращательные колебания (9.163) в плоскости симметрии YZ имеют относительные амплитуды:
F by\X+rXh^P2 .
\\x-b2typxp4 р гхР>у + Ьу^2у'р2 (9.166)
12 — . •
где также обозначения прежние.
Вращательные колебания вокруг оси Z (9.164) не зависят от колебаний других видов и для них относительная амплитуда
^3 r/V$z [v„=(^)->;
(9.167)
9.7. Основные расчетные положения для плавучих сооружений на якорях, жесткостные характеристики якорных связей
Якорные системы удерживают в заданных местах акваторий разнообразные плавучие объекты: портовые причальные и волнозащитные сооружения; морские плавучие платформы и другие средства для добычи полезных ископаемых на шельфах и из вод Мирового океана; плавучие доки; средства навигационной обстановки; плавучие базы, морские и океанские станции различного назначения; водные переправы; плавучие средства для производства морских работ и т. п. Получают распространение плавучие промышленные предприятия различного назначения, плавучие обычные и атомные электростанции.
Плавучие средства на якорях практически непрерывно подвергаются переменным во времени воздействиям волн, ветров, течений, судов. Якорные системы воспринимают на себя внешние воздействия, удерживают дорогостоящие плавучие сооружения и должны быть надежными. Якорные системы рассчитывают с учетом динамических воздействий. Вопросам проектирования и расчетов якорных систем посвящена монография [13], расчетные рекомендации содержатся в нормах [24, 27]. Применяют разнообразные якорные системы, некоторые схемы которых приведены на рис. 9.5.
Якорные системы удержания обычно включают: гибкие якорные связи (якорные
213
Рис. 9.5. Характерные схемы якорных систем а — обыкновенная (прямая) с длинными якорными связями; б — перекрестная (подкнльная) с длинными якорными связями; в — обыкновенная с короткими якорными связями и подвесными грузами; г — перекрестная с короткими якорными связями и подвесными грузами; <? — с длинными якорными связями и общим подвесным грузом; е— с длинными якорными связями и якорными штангами
цепи, канаты стальные тросовые); анкерные опоры (якоря или устройства разных конструкций); грузы (железобетонные массивы, чугунные блоки), подвешиваемые к якорным связям; рейдовые бочки (плавучие стальные емкости). Якорные связи соединяют корпуса плавучих объектов с анкерными опорами. В качестве якорных связей обычно применяют тяжелые якорные цепи, для которых характерно полное отсутствие сопротивления изгибу. Якорные цепи являются гибкими, тяжелыми связями и под действием собственного веса провисают по цепным линиям. В расчетах якорные связи принимают нерастяжимыми или растяжимыми. Упругость якорных связей увеличивает перемещения удерживаемых объектов, но практически не сказывается на значениях усилий в связях и нагрузках на якоря.
v. В качестве анкерных опор применяют судовые якоря, стальные якоря специальных конструкций, разнообразные гравитационные якоря или строительные устройства разных конструкций. Подвеска грузов к
якорным связям обеспечивает: увеличение эксплуатационных глубин у кордонов плавучих объектов; уменьшение вертикальных нагрузок на анкерные опоры; улучшение работы якорной системы при переменных во времени волновых и ветровых воздействиях. Рейдовые бочки входят в якорные системы рейдовых стоянок, а также включаются в системы удержания морских буровых установок, разных плавучих станций н др.
Корпуса плавучих объектов имеют разнообразную форму и при расчетах рассматриваются как твердое тело, перемещения которого обусловливаются податливостью якорной системы вследствие изменения провесов связей. Под действием внешних горизонтальных нагрузок корпус претерпевает перемещения по горизонтали. Якорные связи входят в контакт с корпусом через клюзы, обеспечивающие прохождение и направление якорных канатов через элементы конструкции корпуса.
Под жесткостной характеристикой R(u) якорной системы понимается связь между значениями внешних горизонтальных сил R, действующих на плавучий объект, и горизонтальными перемещениями и объекта на якорях (рис. 9.6). В общем случае характеристика R(u) нелинейна. Могут быть симметричные и несимметричные графики R(u) (понимается симметрия относительно начала осей координат).
При симметричной якорной системе функция R(u) также симметрична. При несимметричной якорной системе ветвь R(u) характеристики соответствует перемещениям плавучего объекта в одну сторону, например вправо (здесь, применительно к рис. 9.5, сила R направлена слева направо), а ветвь R(u) соответствует перемещениям объекта в другую сторону, влево (сила R направлена справа налево). Жесткостную характеристику R (и) строят по данным статических расчетов якорной системы или по опытным данным, и представляют как графически, так и аналитически. Аналитическое представление функции R(u) используют при динамических расчетах.
При малых перемещениях и симметричной якорной системе плавучего объекта на якорях характеристику R(u) можно представлять прямой (рис. 9.6, а), тангенс угла наклона которой дает постоянный коэффициент жесткости К, т. е.
R(u) = Ku, K=tga (uSgO). (9.168)
При значительных перемещениях обычно характеристика R{u) нелинейна. Здесь
214
Рис. 9.6. Графики жесткостных. характеристик а — линейная: б — нелинейная симметричная, криволинейная; в — нелинейная несимметричная, криволинейная; г — нелинейная несимметричная из двух прямых
функция R(u) есть кривая с различными углами наклона а (и), т. е. разными коэффициентами жесткостей при различных перемещениях и. При симметричной якорной системе, а следовательно, и симметричном графике Я (и), аналитическое выражение для нелинейной криволинейной жесткостной характеристики (рис. 9.6, б) принимают в виде нечетного полинома
R(u)=K1u + K2us (u^O), (9.169)
или в виде кубической параболы
Я(п)=Ко2И3 (и«0). (9.170)
Здесь Ki, Кз, К'л — численные коэффициенты.
При несимметричной якорной системе и значительных перемещениях жесткостная характеристика представляется двумя аналитическими выражениями — нечетными полиномами (рис. 9.6, в):
R(u) = K1u+ К2и3 0); 1
J <9.171)
R (и) = Ki и ~К2 и3 (u<0); J или кубическими параболами:
Я(и) = К02и3 (и^О);
R (и) = Ко2 и3 (“ < 0) • (9.172)
При несимметричной якорной системе плавучего объекта нелинейная характеристика R(u) представляется также двумя прямолинейными отрезками (рис. 9.6, г), так что:
R(u) = Ku, K=tga (u > 0);)
} (9.173)
R(u) = Ku, K=tga (u<0)J
Тело даже самой простейшей формы, плавающее на взволнованной свободной поверхности воды, представляет вместе с водой сложную гидромеханическую систему. Решения гидромеханических задач о совместных колебаниях тела и воды в строгих постановках методами классической гидродинамики наталкиваются на серьезные математические трудности. Достаточно глубоко разработана теория линейной качки судов, где для основных видов качки — бортовой, килевой, вертикальной — зависимости между восстанавливающими моментами (силами) и поворотами (перемещениями) приняты линейными.
Изучение качки судов методами нелинейной механики более сложно. Сейчас до
статочно хорошо разработаны нелинейные теории отдельных видов качки, и в- первую очередь, бортовой, при которой судно более подвержено опасности опрокидывания. Практические расчеты в теории качки судов производят при принятом ряде упрощающих положений. В уравнения вводят установленные экспериментально или теоретически коэффициенты для значений внешних сил по учету размеров и форм корпусов судов, а также инерционного и демпфирующего влияния воды и т. п.
Задачи о колебаниях плавучих объектов на якорях отличаются в сторону усложнения от задач теории качки судов; что обусловливается в первую очередь • наличием якорных связей {особенно якорных це-
215
Рис. 9.7. Расчетная схема для плоской задачи (пунктиром показано положение прн горизонтальном перемещении)
пей с нелинейными жесткостными характеристиками) и разнообразием форм корпусов объектов. Естественно, что для исследований динамики плавучих объектов на якорях используют определенные результаты и положения теории качки судов. Так, в уравнения качки вводят дополнительные члены и коэффициенты для учета влияния якорных связей на колебания системы. Объекты на якорях не являются свободными телами на воде; подвижность их ограничивается якорными системами.
Исследования динамики плавучих объектов на якорях в линейной постановке задач приведены в книге [13]. Получены уравнения колебаний с учетом и без учета диссипации энергии для общего случая пространственной задачи, а также для случаев одной и двух плоскостей симметрии; рассмотрены решения уравнений. Эти результаты здесь не приводятся.
9.8. Частные колебания плавучих сооружений на якорях в линейной постановке задачи
При практических расчетах часто используют условия плоских задач и раздельно- рассматривают частные виды колебаний плавучих объектов на якорях: горизонтальные, вертикальные и вращательные. Наиболее важными являются расчеты горизонтальных колебаний, обусловливающих наибольшие усилия в якорных связях, нагрузки на анкерные устройства и первостепенно влияющих на оборудование и технологию работы.
Горизонтальные колебания. Уравнение вынужденных горизонтальных колебаний корпуса плавучего объекта представляется в виде (рис. 9.7):
М Ч- Мх "и + рх и + КХХ и = Рх (/)-,
(9.174)
где М — масса корпуса плавучего объекта; Мх — присоединенная масса от инерционного влияния воды и якорных связей при горизонтальных колебаниях; t< — горизонтальные перемещения корпуса (точками обозначены производные по времени) ; — коэффициент пропорциональности
между силой сопротивления и скоростями корпуса; КХХ — коэффициент жесткости якорных связей плавучего объекта при горизонтальных перемещениях (применительно к (9.168) Кхх—К— —tga]; Px(t) — внешняя горизонтальная сила, действующая на корпус плавучего объекта.
Частота свободных горизонтальных колебаний л* без учета затухания, коэффициент затухания колебаний пх и частота свободных горизонтальных колебаний <ох с учетом затухания определяются формулами:
лх=₽х/2(М4-Мх);
(9.175)
(пх hx) •
При регулярном волнении Рх (/) =РХ sin (р/+б), где Рх— амплитуда волнового давления; р — частота волн (р=2л:т, т — период волн), б—начальная фаза. Частное решение уравнения движения (9.174) пред
ставляется в виде
и= sin (р/+ б + е), (9.176)
где — амплитуда вынужденных' колебаний; е — сдвиг фаз, так что:
(9.177)
tg е =— 2пх р/ “ Р2)",
коэффициент динамичности с учетом затухания
' '------------ • (9-178)
216
При резонансе, когда совпадают частоты вынужденных и свободных колебаний р= = ‘кх, значение Лд*=Хх:2п*.
Горизонтальные составляющие усилий (распоры) в передней Н2 и тыловой Н2 якорных связях в рабочих состояниях определяются формулами:
Н2 = КХХАХ + Нг\ Н2 = Н2, (9.179)
где Hi — распор в первоначальном состоянии [13].
Вертикальные колебания. Уравнение вынужденных вертикальных колебаний корпуса плавучего объекта представляется в виде
(М + Мг) w + р2 w’+ (К22 +yS)w= Р2 (0 ,
(9.180)
Здесь 0^ — момент инерции массы корпуса относительно оси У. проходящей через центр тяжести корпуса перпендикулярно плоскости колебаний; 0 — присоединенный момент инерции относи-
ФР
тельно той же оси Y от инерционного влияния воды и якорных связей при вращательных колебаниях; фу — повороты корпуса вокруг оси У;
— коэффициент пропорциональности между моментом сопротивления и скоростями поворо-хх хх 2
тов корпуса; Ксс = К с , где с — расстояние по вертикали между центром тяжести корпуса (точка С) и клюзовыми точками (см. рис. 9.7); по — расстояние по горизонтали между центром тяжести корпуса (точка С) и центром тяжести площади ватерлинии (точка О); /Оу—момент инерции площади ватерлинии относительно горизонтальной оси, проходящей через точку О перпендикулярно плоскости колебаний; Му (О — момент относительно оси У внешних сил, действующих на корпус плавучего объекта.
Имеют место зависимости:
где М— масса корпуса плавучего объекта; М* — присоединенная масса от инерционного влияния воды и якорных связей при вертикальных колебаниях; w — вертикальные перемещения корпуса; Pz — коэффициент пропорциональности между силой сопротивления и скоростями корпуса . при вертикальных колебаниях; К22 — коэффициент жесткости якорных связей плавучего объекта при вертикальных перемещениях; у — сила тяжести единицы объема воды (объёмный вес); S — площадь ватерлинии; Рг (t) — внешняя вертикальная сила, действующая на корпус плавучего объекта.
Частоты свободных вертикальных колебаний без учета затухания кг и с учетом затухания сиг, а также коэффициент затухания колебаний пг будут:
где 7. — частота свободных вращательных колебаний без учета затухания: ш —то же, с уче-Ф
том затухания; — коэффициент затухания колебаний.
(9.185)
При регулярном волнении следует:
/K22 + yS
М + Мг ' пг = ₽2/2(М + Мг);
Му (/) = Му sin (pt + б);
<ру = Ар sin (pt + 0 + е);
(9.181)
Му
(9.186)
При регулярном волнении по аналогии с предыдущим случаем следует:
^2(0 = ^sin(^ + 6);
w = Аг sin (pt + б -|- е); (м + м„) (9.182)
(№ + vS)
где коэффициент динамичности kat с учетом затухания вычисляют по формуле (9.178), в которой индекс х заменяется на z. При совпадении частот вынужденных р и свободных Хг колебаний, т. е. при резонансе, ^дг=Хг:2пг.
Вращательные колебания. Уравнение вынужденных колебаний корпуса:
(®1/4-®Ф^) фу + Ир Фу + &у Фр = М9 (О»
(9.183) где
о» = К"+ TSoo + Мое- (9-184)
Пу Дф’
где коэффициент динамичности Адф с учетом затухания также вычисляют по (9.178),
где индекс х заменяют на <р. При резонансе
^д<р Хф -2Пф
О поверке на резонанс. Практически важна поверка динамической работы плавучих объектов на якорях на резонанс при действии морских волн. Частоты свободных колебаний X.(i=x, г, <р) сравнивают с преобладающими частотами р расчетного морского волнения. В зависимости от соотно
шений частот р:Х< вычисляют значения коэффициентов динамичности £a<(i=x, 2, <р). На известных графиках [13] для коэффициентов динамичности kai в зависимости от возможных соотношений частот p:h устанавливают области работы объекта на якорях при различных видах колебаний. Эти области должны быть удалены от резонансной зоны. В зоне резонанса сильно увеличиваются амплитуды колебаний, а также усилия в якорных связях и нагрузки на анкерные опоры.
217
Удаление области работы плавучего объекта от зоны резонанса достигается изменениями частот собственных колебаний через посредство изменений: масс объекта; первоначального натяжения якорных связей, их калибра; масс подвешиваемых грузов; площадей ватерлинии; положений клюзовых устройств; глубин. Вне резонансной зоны, а точнее вне зоны 0,70<р:Х<< 1,35, влияние затухания на колебания несущественно. Здесь расчеты можно производить без учета затухания колебаний.
Входящие в уравнения значения присоединенных масс от инерционного влияния воды и якорных связей приводятся в литературе по качке судов, книге [13] и руководстве [24].
9.9. Горизонтальные колебания плавучих сооружений на якорях в нелинейной постановке задачи
Исследование колебаний в нелинейной постановке с учетом нелинейности жестко-стных характеристик якорных систем имеет значение в первую очередь для горизонтальных колебаний, обусловливающих наибольшие усилия в якорных связях.
Свободные колебания. Уравнение свободных горизонтальных колебаний (на тихой воде) корпуса плавучего объекта представляется в виде
(Л4 4-Л4Х) и+ рхй+ /?(«) = О, (9.187) где жесткостную характеристику R(u) принимают по (9.169) — (9.173), а все остальные обозначения прежние. Это уравнение нелинейное и для его решения используют различные приближенные методы нелинейной механики. При исключении затухания Рх=0.
Случай симметричной криволинейной жесткостной характеристики (рис. 9.6, б). При представлении R (и) в виде нечетного полинома (9.169) частота собственных горизонтальных колебаний Кх определяется формулой
Х2 = а2 + ^, (9.188)
где
п2 = Кг/(М + Л4Х); v = К2/(М + Л4Х);
(9.189)
Ах — амплитуда горизонтальных колебаний; £ численный коэффициент.
При решении способом гармонической линеаризации £=3/4, а способом прямой линеаризации £=5/т.
При представлении характеристики R(u) кубической параболой (9.170);
(9.190) а £ имеет прежние значения.
Случай несимметричной криволинейной жесткостной характеристики (рис. 9.6, в). При представлении характеристики нечетными полиномами (9.171) частоту свободных колебаний А* находят из выражения
(9.191)
где
о? = Л,/(М +
4=К,1(М+М^
У1 = Кг1(М + Мх);
v2-kJ(m+ mJ.
(9.192)
При представлении характеристики кубическими параболами (9.172)
(9.193)
где
vOi = К02/(М + Мх); v02 = К02/(М + Мх).
(9.194)
Случай несимметричной жесткостной характеристики из двух прямых (рис. 9.6, г). Здесь в соответствии с (9.173)
л?-4-(“?+«?). где
(9.195)
а21 = к/(м+ мх);
а2=К/(Л4+Л4х).
(9.196)
Вынужденные колебания. Уравнение вынужденных горизонтальных колебаний корпуса плавучего объекта имеет вид
(М + Л4Х) и + ₽хи + Я(ц) = Рх(П,
(9.197) где все обозначения прежние. Далее предполагается при регулярном волнении Рх (/) = = Рxsin (pt+6). Из решения этого уравнения определяют амплитуды Ах вынужденных колебаний, необходимые для вычисления частот колебаний, усилий в якорных связях и нагрузок на анкерные опоры. При исключении затухания рх=0.
Случай симметричной криволинейной жесткостной характеристики (рис. 9.6, б). При представлении характеристики R(u) в виде нечетного полинома (9.169) и частоте колебаний по (9.188) амплитуду Ах вынужденных колебаний находят из выражения
218
ZvA3x+^-p^Ax=Bx, (9.198)
где
Уравнение (9.198) имеет один действительный корень Ах и легко решается подбором или графически. В последнем случае корень Ах есть абсцисса точки пересечения кривых [13]:
У1 = Mt + (°2 - Р2) АХ,У2 = ВХ.
Горизонтальные составляющие усилий (распоры) в передней Н2 и тыловой Н2 якорных связях в рабочих состояниях определяются формулами:
Я2 = Ах + К2 А*+ = Я2’
(9.200) где — распор в первоначальном состоянии.
При длинных якорных связях значения
Н2, Н2 являются также нагрузками на анкерные опоры, а при коротких — горизонтальными составляющими нагрузок на опоры.
При представлении характеристики R(u) кубической параболой (9.170) и частоте колебаний по (9.190) амплитуда Ах определяется из уравнения
^ол3х-р2лх=вл (9.201)
а распоры в якорных связях и нагрузки на анкерные опоры
»2-*И^ + И>;(Й2 = Нг)- (9.202)
Случай несимметричной криволинейной жесткостной характеристики (рис. 9.6, в). При представлении характеристики нечетными полиномами (9.171) и частоте колебаний по (9.191) амплитуда Ах вынужденных колебаний определяется- из уравнения
А = В X X»
(9.203)
действительный корень Ах которого легко
найти подбором или графически.
При несимметричных жесткостных ха
рактеристиках среднее положение колебаний смещается на значение А от начального
положения покоя (см. рис. 9.6). Амплитуды Ах отсчитывают от смещенного среднего положения колебаний. От начального по
ложения покоя отсчитывают амплитуды Аь А2, которые связаны с А, и А формулами:
А, + А2 = 2АХ; А, — А2 = 2А; (9.204)
используют также выражение
2ai At + \ А? = 2а] А2 + v2 А2.
(9.205)
Распоры в якорных связях:
Я2 = К1А1 + К2Л? + Я1;
я2 = к, А2 + К2 А2 + (9.206)
При представлении характеристики кубическими параболами (9.172) и частоте колебаний по (9.193) амплитуду Ах определяют из уравнения
3 тК+ъИ-оЧ’».- <9!!07> имеющего один действительный корень Ах. При этом:
Aj = 2Ах/(о + 1);
А2=А1<т; ст=|/ (9.208)
а смещение А — по (9.204). Распоры в якорных связях:
Н, = кю + «11 Н2 = КЮ^ + Н,.
2 (9.209)
Случай несимметричной жесткостной характеристики из двух прямых (рис. 9.6, г). Здесь характеристика—по (9.173), частота колебаний — по (9.195), а амплитуда
Ах = 2Вя/[(а? + а?) - 2р2]. (9.210)
Амплитуды Аь А2 находят по (9.208), где a=at:a2. Распоры в якорных связях в рабочих состояниях:
Я2 = KAi 4- Hi, Н2 = КА2 + Hi.
(9.211)
О графическом представлении. При практических расчетах представляют интерес: значения частот X, при амплитудах Ах, обусловленных действием расчетных внешних сил; амплитуды А,, при которых следуют значения частот близкие к частоте р возмущающей силы. Аналитические результаты позволяют определять амплитуды Ах вынужденных колебаний, усилия в якорных связях и т. п. в зависимости от амплитуд Рх волнового давления и его частот р, от сопротивления пх в системе и других факторов. Однако параметры волн (высоты, длины, периоды) изменяются, в соответствии с этим меняются величины Рх, р.
Часто параметры расчетных волн могут задаваться только в некотором возможном диапазоне, что позволяет устанавливать только возможные границы значений Рх, о. Динамическая работа объекта на якорях зависит от соотношений частот свободных и вынужденных колебаний. Нелинейность якорных систем в целом существенно усложняет явление, поэтому важны графические представления, дающие наглядную связь значений амплитуд Ах в зависимости
219
от изменений значений Рх, р, пх в некоторых диапазонах. Такие графические представления для плавучих объектов на якорях имеются в монографии [13]. Там же помещены рекомендации по учету инерционного влияния воды и якорных связей.
ческого расчета; ц —масса единицы длины связи с учетом присоединенной массы воды: Е— модуль упругости; F — площадь поперечного сечения; t — время.
Частоты свободных колебаний в плоскости провисания якорной связи с опорами на разных уровнях следуют из выражений:
7*0 42 л2 ,
9.10. Колебания якорных связей при движениях плавучего сооружения
При колебаниях плавучих объектов на якорях под действием внешних нагрузок в движение вовлекаются и якорные связи. При колебаниях в связях дополнительно к статическим возникают значительные динамические усилия. Практические расчеты якорных систем производят с учетом динамики работы якорных связей. Далее будут рассмотрены короткие связи, передающие на анкерные опоры горизонтальные и вертикальные нагрузки (рис. 9.8). Связи яв-
Xch2^-J_ 2а
Х? = ,
1 pl?
8EFa2 Р л2 1]
------------ch2----X
Я? + а2 Р л2)2 2а
«лЧ-Хд EFPn2
4p.il3 Х
/ 1) х» -4- л
X I ash — ch—-------
\ а а
0 = 1,3,5..
2_Г^2л2
Z Pl?
2EFP л2 £2
(9.213)
EFPtP -------X
1 р, (Ц? + а? Р л2)2 1 4рЯ3
/ Я х. 4-Хд \
X a sh — ch —-------~ — Я ,
\ а а /
(i = 2,4,6...),
где х д, х& —абсциссы опор якорной связи; £ — вертикальная проекция провеса связи; а — параметр цепной линии.
Частоты X/ свободных колебаний якорной связи с опорами на одном уровне определяются формулами:
*4 =
Р рЯ2
9,8696Т0 +
Рис. 9.8. Расчетная схема для колебаний короткой якорной связи при движениях плавучего объекта
ляются гибкими, тяжелыми, растяжимыми и провисающими по цепным линиям. Используется допущение о малости стрел провеса связей.
Свободные колебания. В линейной постановке задачи уравнение свободных колебаний якорной связи в плоскости провисания представляется в виде п д2 v EF d2 z С dz dv
л •> “г ~й Т~2~ 1 -------j— dx "i"
дх- Л dx2 J dx дх
0
n
EF d2v (* ( dz \2 dv
1“ ~;----ГТ" I ------ dx — II ------= o.
2t) dx-. J \ dx J dt2.
о
(9.212) где x, z — координаты точек связи в осях xoz в положении статического равновесия; v — вертикальные перемещения точек связи при колебаниях; т) — горизонтальная проекция провеса якорной связи; Го — усилие в связи по данным статн-
Таблица 9.1. Значения
8EFK2
(1 + i2K3)?
1,3,5...);
Х,- =
(9.214)
i2
(S^WeT^EFKJ рЯ?
(t = 2,4,6...).
Численные коэффициенты Kt, Кг, Ki даны в табл. 9.1 в зависимости от отношений т]:а.
В нелинейной постановке задачи основная частота свободных колебаний якорной связи зависит уже от амплитуды начального отклонения. Допускается вычислять значения частот колебаний коротких связей по соответствующим формулам, полученным для пологих нитей, форма провеса которых характеризуется уравнением параболы [7, 31].
коэффициентов К\, Кч, К3
п а 0.05 0,10 0,20 0,30 0,40 0,50 0,60 0,70
; к, 0,00 0,00493 0,01604 0,03701 0,06662 0,10412 0.15093 0,20656
220
Продолжение табл. 9.1
n a 0.05 0,10 0,20 0,30 0,40 0,50 0,60 0,70
K, 3950,2892. 989.52807 249,21366 112,15461 64.18968 41.99658 29,95567 22,71281
K, 3947.8416 986,96040 246,74010 109.66226 61,68503 39,47842 27,41557 20,14205
n a 0.80 0.90 1,00 1,10 1,20 1,30 1,40 1,50
K, 0,27172 0,34681 0,43229 0.52847 0,63638 0,75616 0,88879 1.03516
K, 17,85796 14,82401 12,54902 10,88312 9,63252 8,67517 7,93358 7,35285
K. 15,42126 12.18470 9,86960 8.15670 6,85389 5,84000 5,03551 4,38649
Горизонтальные смещения точек связи при колебаниях записываются в виде
Вынужденные колебания. В линейной постановке задачи уравнения вынужденных колебаний якорной связи при плавучего сооружения (рис. 9.8) „ . FF
Л 2 дх2. п
С dz dv J dx дх
движениях имеют вид:
Л
о
d2z dx2
EF d2v 2Л dx2 .) ’ о d2t> ~ И "dt2 d2 и EF^1 dv _ i
П
‘ * dz V dx /
= 0;
(9.215)
d2z
d2v
dx ' dx dx2
d2u — u-----— o,
r dt2.
где « — горизонтальные перемещения иой связи, а остальные обозначения прежние.
Горизонтальные колебания. При горизонтальных колебаниях сооружения по закону u(xa, t)=Axsinpt вертикальные перемещения точек якорной связи определяются выражением
точек якор-
»(Ж, 0 =
sin pt —
1=1,2,3...
Р . . \ .
---;— sin Л,- 11 sm---(х — хп)
/ Л ' в'
Здесь Ах — амплитуда Р— частота колебаний; ют по формуле:
|*Л
(XR ch------
а
колебаний а параметр
2ain
(9.216)
сооружения: вычисли-
(Л? + а2Йп?) Х \
— ch-----cos in J. (9.217)
sin е(х— хв)
sin ет)
X (x—xB)
sin pt
sh — sin
in
Л
(9.218)
где
a2 i2 л2 (in -J- еЛ) со,- =----------------------—
Л3 + a2 л (in +en)2
a2 i2 л2 (in — ей)
Л3 + а2. Л (in — ел)?
e =
№
(9.219)
связи, имеют место в точке крепления к плавучему сооружению и определяются по формуле
Наибольшие усилия в якорной
е , tgen ~т
ХА
~ Р
а
1=1,2,3
in
----COS
Л
2е
р sin kj t ki sin pt
sin pt
(9.220)
те Т ^4 — статическая составляющая точке Д.
усилия в
221
Вертикальные колебания. При колебаниях сооружения по закону v(xa, t)=AzSinpt выражение для вертикальных перемещений точек якорной связи имеет вид
Az (х — хр)
v (х, /) =------------ sin pt 4-
т;
VI Az стг / P \ + r, —;—T sin ~ 7"sin ‘ x x; — P ' *t !
t =1,2,3,...
X sin -~-(x — xb) • (9.221)
Здесь
ст, = — k; — cos in. (9.2 22) 1 T) in
^script
Рис. 9.0. Расчетная схема для колебаний длинной якорной связи с подвесным грузом
Горизонтальные смещения точек связи
i=1,2,3...
СО; in , X
X ——sin—— (x— xB)sh— sin pt. (9.223)
Рис. 9.10. Расчетная схема для колебаний короткой якорной связи с подвесным грузом
Наибольшее натяжение якорной связи будет в точке А. Следует
оо
/=1/2,3...
cos in X
р sin X; t Xf sin pt
XA
X sh-----sin pt.
a
(9.224)
Значения т), To, а, ха, xb. Тд, входящие в формулы п. 9.10, определяют в результате статического расчета для среднего положения якорной связи, относительно которого происходят колебания.
обозначены производные по времени); Кхх. Кг2. Кхг — коэффициенты жесткостей якорной связи в точке подвеса груза.
Квадраты двух главных частот свободных колебаний груза X2 (i=l, 2) определяют из частотного уравнения
^4-(x24-X2)2X24-X2X2-XJz=0.
(9-226)
Входящие сюда частные частоты находят по формулам:
(9.227)
9-П. Колебания якорных связей с подвесными грузами
Вынужденные колебания. Уравнения вынужденных колебаний груза записывают в виде [18]:
Для раскрепления плавучих объектов на якорях широко применяют якорные связи с подвесными грузами. Вопросы динамики связи с одиночным грузом исследованы в работе [18], практический способ расчета введен в нормы [24].
Свободные колебания. Уравнения свободных колебаний подвесного груза в плоскости провисания якорной связи имеют вид (рис. 9.9; 9.10) [18]:
Л4Гр и 4- Кхх и 4* KXz <0 = 0;
/Игр ш 4- K2Z w 4- Kxz и = 0,
где Л4гр —масса подвесного груза с учетом присоединенной массы воды; и, w — горизонтальные и вертикальные перемещения груза (точками
Л1гр И 4" Кхх 4" Kxz W — Рх(0 *
/Игр W 4- Kzz W 4- Kxz и = Pz (t).
(9.228)
(9.225)
Здесь Px(t), Pz (О — горизонтальная и вертикальная силы, передающиеся на подвесной груз через якорную связь при колебаниях плавучего сооружения:
Px(f)=Px sin pt', Pz (t) = Pz sin pt\
Px = Ax (C0 cos2 a + 7 д/^о)+
4- Az Co cos a sin a;
Pz == Az(co siir a + ta/so) 4-
4- Ax Co cos a sin a;
Co = EF/S0,
(9.229)
222
где Р х, Рг —амплитудные значения сил, действующих' иа груз: Лх. Аг — амплитуды вынужденных колебаний плавучего сооружения; р — частота . колебаний: Тд— статическая составляющая натяжения якорной связи в точке A; So — длина верхнего участка связи (от клюз-- до груза); а — угол наклона к горизонту касательной к связи в точке А; Со — коэффициент жесткости якорной связи в точке подвеса груза, обусловливаемый работой верхнего участка связи.
При установившихся колебаниях решение системы (9.228) записывают:
a=axsinp/; w = az sin pt, (9.230) где амплитуды вынужденных колебаний груза:
РХ-РЖ;-Р2)
Ох '
РА-РАЯ-?2} а, =------------------------- .
К-
(9.231)
Длинные якорные связи (см. рис. 9.9). Длинные связи передают на анкерные опоры нагрузки вдоль поверхности дна (некоторый участок длины связи перед якорем лежит на дне). Коэффициенты жесткостей связи в точке подвеса груза находят по формулам [24]:
v QHgU —So)
ХХ~ G-So)’lc-2^c '
Т*
+ Со cos? a ;
•^о
К’г~ +
, - . 1 (9.232)
+ Со cos а sin а;
pg ^=((-50)Чс-2а£с х
X [т)с (а + ) а (Z S0)J +
ТА
+ Со sin? а + —— ,
•^0 J
где I — длина свободного провеса связи (от клюза до точки касания с дном); Z.Q—горизон-
тальная и вертикальная проекции провеса ннж-иего участка связи (от груза до точки касания с дном): g — ускорение силы тяжести.
Наибольшее натяжение якорной связи будет иметь место в клюзовой точке (в точке Л):
„ W(k + k)
xz — " г - ' т-
(у + s)(r,c+ хв) -
-2о(?С + ?я) + Со cos a sin а;
*«=;----------------х
(S* + S)(qc + XB)-
-2a(tc-HB)
Х[(Сс + £в)(’1с+хв)“'" G(T)c+ + хв) — + s )] +
(9.234)
где S*—длина нижнего участка связи (от груза до анкерной опоры), а для значений хв, Св сле* дуют выражения:
1
x6=aAr th—- —
~ хв
S = ash----;
а
— a I ch
Наибольшее усилие в якорной связи будет в точке А и находится по формуле (9.233).
Для коротких якорных связей, удовлетворяющих условию Afrp:p,<400, уравнение вынужденых колебаний связи при вертикальных гармонических смещениях плавучего сооружения может быть записано в виде
d2v о т (Pv
т" +1,1+6 <*_ )'
(9.236)
где v — вертикальные смещения точек связи при колебаниях; 6(х—Т)с> — дельта-функция Дирака.
Частоты свободных колебаний таких связей определяют из соотношения = е/7'о4Ч гДе £/ находят из уравнения
Mrpsin Б/(П—Пс) pisin е£ Л
sin Лс = 1 •
(9.237)
Решение уравнения (9.236) имеет вид
ТА = Т’а + (\ + -у2- С, sin а. \ ''ZZ / 'Vi
(9.233)
Короткие якорные связи (рис. 9.10). Короткие связи передают на анкерные опоры горизонтальные и вертикальные составляющие нагрузки. Коэффициенты жесткостей связи в точке подвеса груза имеют вид [24]:
v(x, t) =
где
sin ex
Az : “f* e
sin en
E — pVp/r0 ; sine pl — nc)
Mrp
az ft jsin pt, (9.238)
(9.239)
— sine(x — '4c)^(x — ^c)-
223
Амплитуда вертикальных колебаний подвесного груза
sin ет)с а —----------------------------------------
А4гр
sin еЛ — е----sin е (л — Лс)sin *Лс
(9.240)
(9.239)
Решение уравнения (9.244) определяется выражением:
оо
и= 2 Xf(x)SfW = /=1.2.3,...
H (* —M =
(9.241)
4=1.2.3....
(В; in
------sin —
2е, Л
6Z sin ef (x — xB) +
(х — xfl)sh-y iSj (О-
Функция Н(х—Лс) в выражении определяется соотношениями
0 при х < Лс ; 1 при х > Лс •
Наибольшее натяжение связи будет точке крепления к плавучему сооружению определяется формулой „ ^F
Т д — Т д 4” п А Л 2 cos а , Мгр 4~eaz-------------
И
\ tgen
\2
в и
(9.242)
где
sin е (Л — Лс)
Х=-------------------cosе(Ч- V).
(9.243)
По экспериментальным данным, динамические усилия в связи с подвесным грузом могут в 1,5 раза и более превосходить значения статических усилий для той же схемы раскрепления.
9.12. Колебания якорных связей при действии горизонтальной нагрузки
Общий случай. Уравнение вынужденных горизонтальных колебаний якорной связи имеет вид (рис. 9.11):
д2 и d2 z dv
(T. + EF) —- + EF~— — + дх2. dx2 дх
dz д2 v д2 и
/)=0-
связи, а остальные обозначения преж-
(9.244)
где q(x, t) — горизонтальная нагрузка на единицу длины ние.
Рис. 9.11. Расчетная схема для колебаний короткой якорной связи при действии горизонтальной нагрузки
(9.245)
Здесь функция (x) характеризует форму связи при колебаниях: (О — функция времени; параметры 6-, (I)., е. вычисляют по формулам:
6i = —
ХА 1Л(шг4-2е£) sh — cos in а
' М
— е. sin е-Л— cos е-Л ц г 1 1
i2 а2 п2 (in -|- ef Л) <О;=---------------------------
Л3 + а2 Л (in + Et Л)2
i2 а2 п2 (in — Ej Л)
Л3 + а2 Л (in — Л)2
ei — ^>i
(9.246)
где М — масса корпуса плавучего объекта.
Функция Si(t) зависит от вида нагрузки и находится из выражений:
(0 = I Нг(и) sin Xf(i— o)da;
1 о
XA
н‘(/) = тгг Jч'
хв
Здесь обозначено:
ХА
M
ф‘= J
XB
в? / sin 2ef т]
= ~2~ V ” 2e;
X ch------
a
i2 a3 n2 ---------------sh
ix а
6f СО;
X
2е,-
\ ХА
сп-----cos ef л cos т —
а
(0f Л2 ХА
I? л2 а
1 м
X sin е; л cos in -f- of —sin? ег Л;
J р.
, ХВ
— ch-----
а
i? л2
(9.247)
(9.248)
224
Рнс. 9.12. Графики функции f(t) изменения внешней нагрузки во времени для случаев
а —внезапно приложенной нагрузки, остающейся далее постоянной; б—внезапно приложенной и действующей в течение конечного промежутка времени; в — изменяющейся по закону треугольника; г — затухающей по экспоненциальному закону; д — изменяющейся по периодическому закону
________QT]2_________
& ~ Т)2 -|- a2, (in — тр ~
_________Qi)2________ т]2 + a2 (in + ef П)2 ’
Частные случаи. Внешние нагрузки, действующие на плавучее сооружение, передаются на каждую отдельную якорную связь в виде сосредоточенной силы Рх(/) = —Pxf(t), приложенной в точке А и изменяющейся во времени по закону f (t). Графики функции f(t) для некоторых случаев приведены на рис. 9.12. Тогда
Если нагрузка внезапно приложена к сооружению в момент (=0 и далее затухает по закону f(t) = l-e~nt в течение промежутка времени т (рис. 9.12, г), то:
X?
*1 ^=~2---2
rf + n2
e~nt~
n
1 ' Xt 1 J
X?
Bi(0 = —2—-e-nTx
(9.254)
Н»?
S, (/) = -%- Bi (I). (I > г).
(9.249)
Здесь т — время действия внешней нагрузки (рис. 9.12) и, кроме того:
Gt = ®i/®i; Gf = Рх 6i sin ef T). (9.250) При f(t), по схеме рис. 9.12, a,
Л- (t) = 1 (1— cosX,0- (9.251) Наибольшие перемещения и усилия в связи имеют место при cosX.O—1, Xit=in (i— = 1, 3, 5, ...).
При f (0, по схеме рис. 9.12, б, функцию Л<(0 вычисляют по (9.251), а
X cos Xi (t—т)-sin Xi X
L *i
(n \
cosX4 t——sin Xitj. “t /
При периодической нагрузке (рис. 9.12,5), так что f(0 = sin pt, следует
X?
Ai =
К~Р
Bi (t) = 2 sin Xt sin X£ (t — t/2). (9.252)
sin pt — ~ sin Xi t j.
*1 /
(9.255)
Наибольшие усилия в якорной связи имеют место в точке крепления к плавучему сооружению и определяются по формулам: при (<т
Максимальные перемещения и усилия в связи будут во время действия нагрузки, если т^.0,57’,-, где Ti — период колебаний. Если т<0,5 Ti, то максимальные перемещения и усилия будут после прекращения действия силы в момент (=0,5x4-0,25 7,-.
При f(t) по схеме рис. 9.12, в:
EF
1.2,3,...
in . ха
x 1ei cose( Л + sh~x X/ L П a
1) а
(9.256)
Ai (0 = (1 — cosXj/) —
” (Xi t *— sin Xi (),
Aj T
&i (0 =— cos Xi t 4-;---sin X;t~
^i T
1
— :— sin Xi (t — x).
(9.253)
X cos in
при От
EF
В, Ю -V
(=1,2,3,...
15--lfi9
225
in
П
X
XA
X sh-----cos in
a
(9.257)
При других законах изменения нагрузки во времени расчетные формулы для определения перемещений и усилий в связи следует получать из общих выражений (9.245)— (9,248),
РАЗДЕЛ 10. РАСЧЕТ МОРСКИХ ГЛУБОКОВОДНЫХ НЕФТЕГАЗОПРОМЫСЛОВЫХ СООРУЖЕНИЙ ПРИ ВОЗДЕЙСТВИИ ВОЛН
О. В. Лужин, И. Ш. Халфин
Металлические морские сооружения сквозной конструкции (из трубчатых элементов) широко используются при освоении акваторий континентального шел:ьфа с глубинами более 50—60 м. Наибольшее распространение получили два основных типа подобных сооружений (рис. 10.1)—стацио-
Рис. 10.1. Примеры глубоководных сквозных сооружений
а— СПБУ с круглоцилиндрическими опорами;
б — СПБУ с решетчатыми опорами; в — ССП моноблочного типа
нарные свайные платформы (ССП) и самоподъемные передвижные буровые установки (СПБУ). Для глубоководных слабосейсмических акваторий шельфа, лишенных ледового покрова, ветер и штормовые волны являются главными факторами внешней среды, воздействие которых определяет прочность и устойчивость морских сооружений. Рассматриваемые глубоководные сооружения, особенно СПБУ, отличаются достаточно высокой податливостью опор и значительной массой (8000—15 000 т) надводной платформы, так что период собственных колебаний сооружений может оказаться достаточно близким к среднему периоду штормовых волн. Это вызывает необходимость
динамического расчета морских сооружений на воздействие волн.
10.1. Морские волны, их параметры и кинематическая структура
В районе расположения сооружения в зависимости от синоптических условий и стадии развития шторма могут быть различные типы волн: случайные (нерегулярные) ветровые волны, имеющие в основном трехмерную структуру; групповые волны, являющиеся частью системы нерегулярных волн, и, наконец, волны зыби, которые характеризуются двухмерной структурой взволнованной поверхности моря. В реальных условиях строгих границ между волнами этих типов не существует.
При расчетах воздействий волн на сооружения и при теоретическом описании волнового движения схематизируют расчетные модели волн; при этом рассматривают обычно два основных типа волн: регулярные (типа волн зыби) и нерегулярные (ветровые). Регулярные волны рассматривают как двухмерные либо в линейном приближении (теория волн малой амплитуды), либо в нелинейном приближении (теории волн конечной амплитуды) [12, 14, 15, 26]. Нерегулярные волны описываются как двухмерные или как трехмерные с помощью только линейной спектральной теории волн [6,9,10]. Изучение систем групповых волн началось лишь в последние годы и теория этих волн развита слабо [10].
При статических и динамических расчетах морских сооружений на действие волн используют два основных подхода: детерминистический— при действии регулярных волн и вероятностный (стохастический) — при действии нерегулярных волн.
В существующих нормативных документах [23, 24, 25] штормовое волнение Рас' сматрнвают как случайный процесс и средние параметры волн расчетного шторма
226
(средняя высота волн й и средний период т), заданной повторяемости (один раз в 25, 50 или 100 лет), рассчитывают на основе сведений о соответствующей скорости ветра, длине разгона волн и глубине воды у сооружения, причем повторяемость расчетного шторма определяют классом капитальности сооружения. Поскольку ССП и СПБУ относятся к сооружениям 1-го класса, то для них повторяемость расчетного шторма принимают равной одному разу в 50 или, при особом обосновании, в 100 лет [24, 25]. В качестве расчетной модели волн при расчете волновых нагрузок на сооружения в СНиП [24, 25] рекомендуется принимать регулярные волны с высотой Л, равной высоте волы обеспеченностью 1 % в системе расчетного шторма, м, с перио-
дом т, равным среднему периоду волн этого шторма, т, с, и соответствующей средней длиной волн Х=Х, м. Рекомендуется пове рочные расчеты выполнять при Х=(0,8... 1,4)Х. Таким образом, в действующем нормативном документе [25] осуществляется стохастический подход при расчете параметров штормовых волн и детерминистический подход при расчете волновых нагрузок на сооружения.
Регулярные волны конечной высоты. В СНиП 2.06.04-82 [25] расчет волновых нагрузок на сквозные сооружения от двухмерных регулярных волн конечной высоты базируется на использовании теории потенциальных волн третьего порядка приближения. Кинематические характеристики волн (ординаты волнового профиля, горизонтальные и вертикальные проекции скоростей и ускорений частиц жидкости) по этой теории определяются достаточно сложными трансцендентными выражениями, требующими при вычислениях использования ЭВМ [15, 16].
Однако при описании кинематической структуры волн для условий глубоководья (при Я/Х>0,4...0,5, где Н — глубина воды, м) вместо теории волн третьего порядка приближения с достаточной для практических целей точностью (до 1—2 %) может быть использовано первое приближение теории волн конечной высоты, что подтверждается экспериментальными данными [12, 14, 15]. По форме это приближение совпадает с формулами теории волн малой амплитуды, в которые вместо координат частиц жидкости в состоянии покоя подставляют координаты частиц жидкости во взволнованной толще воды в рассматриваемый момент движения [14, 15]. Расчетная схема представлена на рис. 10.2. Движение
15*
Рис. 10.2. Расчетная схема регулярных волн
прогрессивных (бегущих) волн рассматривают относительно неподвижного створа, совпадающего с осью сооружения и с вертикальной осью z, направленной вниз. Начало системы координат — на спокойном уровне воды; ось времени t направлена влево. Движение волн происходит слева направо (см. стрелку). Предполагается, что средняя волновая линия совпадает со спокойным уровнем воды. Тогда профиль взволнованной поверхности в створе оси сооружения описывается формулой
т] (/) =— -у- cos со/. (Ю.1)
При волновом движении на глубокой воде траектории движения частиц будут близки к круговым орбитам, диаметр которых на поверхности равен высоте волн h и затухает с глубиной по экспоненте. Горизонтальная проекция' орбитальной скорости частиц в точке взволнованной толщи жидкости с координатой г определяется выражением
л/i ch k (Н — г) „
v (z, t) =--------——-----1 cos G)t. (10.2)
х sh kn
Горизонтальная проекция орбитального ускорения частиц
2л2 h chk(H — z)
w(z, 0=—---------------—-------since/,
X- sh An
(Ю.З)
где h — высота волны, м: т — период волны, с; — волновое число, рад/м (л. — длина волны, м); о>—2л/т — круговая частота, рад/с; t — время, с.
1 Здесь и далее будут рассматриваться лишь горизонтальные проекции орбитальных скоростей и ускорений частиц, необходимые для расчета горизонтальных волновых нагрузок на сооружения.
227
Длина и период волны связаны соотношением
т = 1 / -----cth kH , (Ю.4)
V g
где g—9,81 м/с® — ускорение силы тяжести.
Вид эпюр v(z) под вершиной гребня и под подошвой впадины волны показан на рис. 10.2, при этом скорость в точке на вер
шине волны
jih chk(H + h/2)
X sh kH
а в точке на подошве волны
ch£ nh
oQ =-----------
sh kH
Нерегулярные (случайные) волны. Ограничимся рассмотрением двумерных (плоских) глубоководных нерегулярных волн. Волновые колебания т](/) в фиксированной точке моря характеризуются как стационарный эргодический случайный процесс с нулевым средним значением и гауссовым (нормальным) распределением ординат. Эти свойства морского ветрового волнения подтверждены многочисленными натурными исследованиями [6, 9, 10].
Статистические и спектральные характеристики параметров нерегулярных волн на поверхности моря [6, 9]. Случайную последовательность видимых волновых колебаний т] (О в некоторой точке поверхности моря определяют следующими вероятностными характеристиками:
а) средней высотой волн Л, м, и средним периодом волн т, с, зависящими от средней скорости ветра, продолжительности его действия, длины разгона волн и глубины моря [25];
б) интегральными функциями обеспеченности (превышения) высот и периодов волн. При этом функция обеспеченности высот глубоководных волн подчиняется закону Рэлея (вследствие нормального закона распределения ординат волновых колебаний) и для безразмерных высот волн имеет вид
Функция обеспеченности безразмерных периодов глубоководных волн определяется формулой
в) стандартом (средиеквадратическим отклонением) волновых колебаний о^, м, который связан со средней высотой волн зависимостью
= Ji//2л .
(Ю.7)
Формула (10.7) получена теоретически из свойства нормальности распределения ординат волновых колебаний и подтверждена натурными исследованиями;
г) дифференциальным законом распределения (плотностью вероятности) волновых колебаний т)(<), который подчиняется нормальному закону (закону Гаусса) в форме
1 / "П2 \
/ (П) = —ZZZ----exp I —------ ]; (10.8)
/2л <тп 2оп )
д) интегральной функцией обеспеченности ординат волновых колебаний, определяющей вероятность того события, что случайное центрированное значение т) выйдет за пределы интервала симметричного относительно нулевого среднего значения, где п — число стандартов:
F(T))=P(n|>nan).
(10.9)
При нормальном распределении т), согласно (10.8), функцию обеспеченности, отвечающую (10.9), определяют по формуле
F(r])= 1-ф(л//2), (10.10)
f п \
где ф- I .— ] — интеграл вероятности (функ-\у 2 /
ция Лапласа)1;
е) функцией спектральной плотности (частотным энергетическим спектром), характеризующей распределение общей энергии волновых колебаний между элементарными синусоидальными колебаниями (спектральными составляющими) с различными частотами, на которые может быть разложена реализация видимых волновых колебаний в точке.
На основе данных натурных исследований штормового волнения некоторыми авторами предложены различные аналитические выражения функции спектральной плотности волновых колебаний на поверхности моря.
Из числа наиболее часто применяемых укажем следующие спектры, представленные в одинаковой нормировке:
/ т \ Г / т V
Р I 1 = ехр — 0,674 [ 1 ;
\ т / L \ т /
(10.6)
X
1 В форме Ф(х)-(2 //Я") J е~~** dt. 0
228
/л
=*^—г
Рис. (0.3. Коэффициенты затухания на глубоководье
а — стандарта горизонтальной составляющей орбитальной скорости; б — то же, орбитального ускорения; / — по спектру (10.13); 2 — по спектру (10.11); 3 — по спектру (10.12)
спектр дробно-рациональный [1]
(w) = 0,13о2 т (со/со)-4 [1 — 1,832 X
X (со/со)-2 -}- (со/w)-41“\ (10.11)
спектр Ю. М. Крылова [9, 10]
(ю) = 0,5ст2 t(o/w) 7 х
X exp I— 0,785 (w/й)-4]; (10.12)
спектр Б. X. Глуховского [6]
Sn (cd) = 0,69ст2 тСсв/ю)-6 X X ехр Г— ~~ (со/w)-2 , I At
(10.13)
где и—2л,'т — средняя частота волн, рад/с.
Дисперсия волновых колебаний, характеризующая их полную энергию, связана со спектром соотношением
со
Dn = o2 = f Sn(<B)d<0. (10.14) b
Статистические и спектральные характеристики кинематических параметров глубоководных нерегулярных волн на глубине z. Согласно линейной спектральной теории волн, волновые колебания т] (z, 0, горизонтальные составляющие скорости и (г, 0 и ускорения w(z, 0 частиц жидкости на некоторой глубине z от поверхности (система координат та же, что на рис. 10.2) также будут стационарными эргодическими случайными функциями с нулевым средним значением, спектральные плотности которых выражаются через спектр волновых колебаний на поверхности Sn(co) по формулам: с г ( 2<о2 г \
$„(©, z) = sr)(®)expl------- ; (10.15)
S (ш. г) = со? Sn (со, z); (10.16)
о ч
Sw(w, z) = ®«Sn(®. г). (10.17)
Стандарты t](z, 0, v(z, 0 и w(z, t) определяются из соотношения (10.14), при этом для различных спектров волновых колебаний на поверхности затухание стандартов скорости и ускорения по глубине может быть описано в одинаковой форме зависимостями [6, 8]:
%(') = %йКс(0; (10.18)
(') = (г). (10-19>
где (У —определяют нз (10.7); — безраз-
П _ _
мерный параметр глубины; со—2л/т — средняя частота воли: Ко (г) и Kw (г) — параметры затухания стандартов, определенные численным интегрированием и представленные на рис. 10.3.
На уровне спокойного горизонта при г=0 для всех спектров Кв(0) = 1, а значения Ки>(0) следующие: по формуле (10.11) — 1,085; (10.12)—1,215; (10.13)—1,732.
Как следует из спектральной теории волн, случайные функции i](z, 0, u(z, 0 и w(z, 0 на различной глубине г от поверхности также подчиняются нормальному закону распределения в форме, аналогичной (10.8), при этом интегральные функции обеспеченности ординат этих функций и их амплитудных значений подчиняются зависимостям типа (10.5), (10.9) и (10.10). Как показано в [1, 6, 9], функции v(z, 0 и w (z, 0 являются статистически независимыми. Необходимо отметить, что вследствие линейности спектральной теории волн вычисляемые на ее основе кинематические параметры нерегулярных волн рассматривают лишь от уровня спокойного горизонта и ниже (при z>>0, см. рис. 10.2),
229
10.2. Нагрузки от воля яа сооружения
Ниже излагается методика расчета нагрузок от регулярных и нерегулярных волн на жесткие и податливые преграды различной геометрии.
Нагрузки от регулярных вол№ конечной высоты. Нагрузки на отдельно стоящую жесткую вертикальную опору. При обтекании волнами отдельно стоящей жесткой вертикальной опоры относительно небольшого поперечного размера, когда дифракцией (отражением) волн можно пренебречь, удельную (на единицу высоты опоры) горизонтальную волновую нагрузку в сечении на расстоянии z от спокойного уровня определяют по аналогии с обтеканием этого сечения опоры плоскопараллельным неуста-новившимся (колебательным) потоком вязкой жидкости [12, 13] по формуле
q(z, 0 = <7ск(*. *)+9hh(z, /).(10.20)
Первый член уравнения (10.20) представляет собой скоростную составляющую, а второй член — инерционную составляющую волновой нагрузки. Расчет этих.составляющих выполняют по формулам:
<7ск (г, 0 = ~ РВСХ v (г, 01» (г, 01;
(10.21)
7ин (*, 0 = (>FC„ w (г, 0. (10.22) где p=v/g — плотность воды (v — удельный вес воды. Н/м*; g — ускорение силы тяжести, м/с2); В — ширина опоры в направлении, перпендикулярном скорости; F — площадь поперечного сечения опоры; v(z, /), w(z, t)—горизонтальные скорость и ускорение частиц жидкости, определяемые по формулам (10.2) и (10.3) без учета влияния опоры; Сх и Сн — соответственно постоянные коэффициенты лобового и инерционного сопротивления опоры в волне.
На основе экспериментальных исследований [7, 29] значения коэффициента Сх для гладких цилиндров круглого сечения принимают С*=0,7 (в натурных условиях) и Сх=1,2 — в лабораторных условиях; для шероховатых (покрытых морскими обрастаниями) цилиндров круглого сечения С*= = 1,33; для тел квадратных сеченнй С*= = 1,6; для тел ромбовидных сечений (развернутый квадрат) Сх=1,4; для уголковых элементов, тавровых сечений и швеллеров Сх= 1,4. Значения коэффициента Св для круглых цилиндров на основе теоретических и экспериментальных исследований принимают Сж=2. В СНиП 2.06.04-82 [25] для круглых цилиндров принято Сл=1; Си=2 и рекомендовано уточнять эти значения по данным экспериментальных исследований.
Для вертикальной круглоцилиндрической опоры диаметром d формулы (10.21) и (10.22) имеют вид:
9ck(z. t) = pdCxv(z, /)|o(z, oi;
(10.21a)
7ira(z, 0 = -7- pnd2 Cn w (z, 0- (10.22a) 4
При подстановке в (10.21a). и (10.22a) скоростей и ускорений по (10.2) и (10.3) получим для удельной волновой нагрузки на круглоцилиндрическую опору в соответствии с (10.20) выражение
ch2Jfe(H —z) dh*cx—л- x snt kn
Л3
1 л2
<7 (z, 0 = — Р — 2 т.
X cos cat I cos cat |--— p —d2 hCu X
chk(H — z) . л пгл X-----ГТ77-----sin cat. (10.23)
sh kn
Анализ этого выражения позволяет отметить следующие особенности волновой нагрузки: скоростная составляющая нагрузки является негармонической функцией, нелинейной относительно высоты волны;
соотношение между скоростной qcv и инерционной 7ин составляющими волновой нагрузки зависит от соотношения между диаметром d опоры и высотой волны h: для малых d и больших h преобладает скоростная составляющая нагрузки, с увеличением d возрастает значение инерционной составляющей;
между дсп и </ин имеется сдвиг по фазе на л/2;
максимальная удельная нагрузка возникает в различные фазы волны в зависимости от соотношения значений qc» и дНи',
максимальное значение qcK=qcK.tnu возникает при cos со/=1, /=0, когда вершина гребня волны проходит через ось преграды, при этом <7ин=0, так как sinco/=0;
максимальное значение ^вн=<7вн.ша1 возникает при sin ю/=1, /=т/4, когда профиль волны проходит через точку пересечения оси опоры со спокойным уровнем.
Равнодействующую горизонтальной нагрузки от регулярных волн конечной высоты на круглоцилиндрическую вертикальную опору определяют интегрированием удельных нагрузок на смоченной высоте опоры от дна до свободной взволнованной поверхности по формуле
ПСП
<?(П= f Q(z, t)dz, н
где ц(О определяют по (10.1).
(10.24)
230
Рис. 10.4. Графики изменения равнодействующей волновой нагрузки на одиночную цилиндрическую опору за период волны конечной высоты
а — для скоростной составляющей нагрузки; б — для инерцт.оиной составляющей нагрузки: I — по СНиП 2.06.04-82 [25]; 2 — численный счет по формуле (10.24)
На рис. 10.4 показано в безразмерной форме изменение за период волны скоростной Qck и инерционной QHh составляющих равнодействующей нагрузки от волн конечной высоты на жесткую круглоцилиндрическую опору по СНиП 2.06.04-82 [25] и в результате численных расчетов по (10.24) с учетом (10.23). Из рис. 10.4 следует, что полная волновая нагрузка является существенно негармоничной при изменении профиля волны конечной высоты по гармоническому закону (10.1), причем нагрузка Qck=QcK-max под вершиной гребня волны ((/т=0; !](()=—й/2) значительно больше, чем под подошвой впадины при Z/т—±’/2 и П(П = +Л/2.
Нагрузки на жесткое сооружение решетчатой конструкции. Суммарную максимальную нагрузку от волн на сквозное сооружение (см. рис. 10.1), имеющее некоторую протяженность по направлению распространения волны, необходимо получать численным методом для ряда фаз волны, суммированием нагрузок на отдельные элементы сооружения с учетом положения каждого элемента относительно профиля расчетной волны [24, 25].
Для сооружений типа СПБУ, имеющих широко расставленные решетчатые опоры (см. рис. 10.1) в виде плоскопараллельных Ферм малой ширины (В/Х<0,1), целесооб
разно перейти к рассмотрению сосредоточенных волновых нагрузок, приложенных в характерных точках-узлах решетчатых конструкций. Шаг разбиения опор по высоте Да следует принимать равным расстоянию между узлами или кратным этому расстоянию. При этом скорости и ускорения частиц, действующих на элементы решетчатой опоры малой ширины, вычисляют в предположении, что эти элементы совпадают с осью опоры.
Тогда сосредоточенную волновую нагрузку на участке Да*, приложенную в узле k на глубине afe, определяют по формуле, аналогичной (10.20):
(2ft» 0 — 9еск (zfe» 9 ^Еин (Zft* 0 [см. формулу (10.20а)]
где
^ск (V 0 = °(%’ $lv(zk> 01 ’ <10-25>
^ии (2fe’ 0 = w (zk> 0; (10-26> f
azk =4” PS Cxi lidJcosah (10‘27) /=i
f A
1 VI
dj, — соответственно диаметр н длина /-го стержня, относящегося к узлу fe; ау — угол наклона /-го стержня, примыкающего к узлу k, к плоскости, перпеидикуляряой лучу волны; f — число стержней, сходящихся в узле ft; Cxj к Cuj — соответственно коэффициенты лобового и инерционного сопротивлений для /-го стержня, определяемые по вышеизложенному.
Формулы (10.27) и (10.28) получены из условия учета всех элементов, примыкающих к рассматриваемому узлу k. Если длина участка Дз* принята кратной расстоянию между узлами, то грузовые коэффициенты и 62йв формулах (10.27), (10.28) должны быть определены с учетом всех узлов, расположенных на рассматриваемом интервале.
Нагрузки на отдельно стоящую податливую вертикальную опору. При обтекании волнами податливой вертикальной опоры возникают колебания последней, поэтому при расчете волновых нагрузок на опору необходимо учитывать не абсолютные значения скоростей и ускорений частиц жидкости по (10.21) и (10.22), а относительные скорости и ускорения между частицами жидкости и соответствующими точками опоры. Тогда удельная горизонтальная волновая нагрузка на податливую опору на глубине z определится выражением [31]
231
1
q (?, t) = — pBCx [v (z, t) — у (z,f)] X
Xlv(2,0-y (z,t)l+.pFw (г, 0 + P (Cu - 1) X
XF[e»(z, t) — y(z, /)], (10.29)
где v(z, f), w(z, /) находят no (10.2) и (10.3); y(z. /) и y(z, t) — горизонтальные скорость и ускорение сечеиия опоры при прогибе у иа глубине z.
Значения коэффициентов Сх и Си принимают такими же, как для жесткой опоры (см. выше). Первый член уравнения (10.29) определяет’ скоростную составляющую волновой нагрузки, второй — инерционную составляющую, обусловленную ненарушенным полем волновых давлений вокруг опоры (по принципу Фруда—Крылова), третий — инерционную составляющую, вызванную изменением присоединенной массы тела. При y(z, f)=y(z, 0=0 (опора неподвижна) формула (10.29) переходит в формулы (10.20) — (10.22). Расчет волновой нагрузки по (10.29) требует для вычисления y(z, t) и y(z, t) выполнения динамических расчетов колебаний опоры на основе численных методов.
Нагрузки от нерегулярных волн. Нагрузки от нерегулярных волн на сквозные сооружения ниже вычисляются на основе линейной спектральной теории в предположении, что волны являются двумерными (плоскими).
Удельные и сосредоточенные волновые нагрузки на жесткие сооружения сквозной конструкции [1, 3, 19]. При определении удельных (на единицу длины) волновых нагрузок на обтекаемые жесткие опоры с элементами малых поперечных размеров вводят следующие основные допущения.
1. Волновые нагрузки находят согласно линейной спектральной теории волн в сечениях опор, расположенных на уровне спокойного горизонта и ниже при z>0.
2. Полная горизонтальная удельная случайная волновая нагрузка на обтекаемую опору на глубине z, определяемая как сумма скоростной и инерционной составляющих, является случайной стационарной эргодической функцией с нулевым средним значением и для цилиндрических элементов диаметром d выражается формулой
1
<7 (г. 0 = V pdCx v (г, /)|о (г, /)| + At
1
4-— pnd? Си w (г, t), (10.30)
где o(z, /), w(z, t) — случайные функции горизонтальных скоростей и ускорений частиц, а коэффициенты Сх и Си определяются так же, как при регулярных волнах.
3. Сосредоточенные случайные волновые нагрузки определяют для некоторых характерных точек опор, за которые принимаются центры участков разбиения сплошных опор по высоте Дг* или узлы решетчатых конструкций. В соответствии с допущением п. 1 первая от свободной поверхности характерная точка f располагается на глубине УгДг/ от спокойного уровня (рис. 10.9). Тогда для сосредоточенной на участке Дгл случайной нагрузки q^(zk, t), приложенной в некоторой точке (узле) k на глубине zk, справедлива формула, следующая из (10.30):
^2 (zjt. t) = ask v (zkf 01D ( zh’ 01 +
+ 62Aay(zfe, 9, (10.31)
где для сплошных круглоцилиндрических опор:
= 0 /2) Pdk Сх Azft;
62ft=(l/4)pndJCuAzb (10.32) а для решетчатых опор ограниченной ширины из цилиндрических стержней и b%k определяют по формулам (10.27) и (10.28). Спектр сосредоточенной волновой нагрузки. Расчет спектров сосредоточенной случайной волновой нагрузки базируется на использовании представлений линейной спектральной теории, поэтому нелинейная скоростная составляющая нагрузки должна быть линеаризована. На основе известного метода статистической линеаризации нелинейную случайную функцию о|о| в области ее математического ожидания можно с наилучшим приближением заменить линейной функцией у4 Зо„ц, где ov — стандарт случайной функции скорости о (Л [1, 19]. Тогда линеаризованная функция полной сосредоточенной случайной волновой нагрузки на глубине вместо (10.31) примет вид
о = )/3(zfc)»(z,,0 + + ‘м(|0-33)
Поскольку пока отсутствуют экспериментальные данные о взаимной корреляции случайных удельных волновых нагрузок по глубине, то, переходя к задаче определения спектральных плотностей волновых нагрузок в различных точках по высоте смоченной части опоры, можно предложить два способа расчета функции спектральной плотности волновых нагрузок [19]. По первому способу, приводящему к нижней оценке нагрузок, предполагается, что корреляционная связь между удельными волновыми нагрузками по глубине отсутствует. Тогда авто-
232
спектральная плотность сосредоточенной линеаризованной волновой нагрузки в различных точках Zu по глубине выражается формулой
= [/3аа ft.)?5., (“•**) +
+с0-34)
С учетом выражений (10.16) и (10.17) для спектров скоростей и ускорений получим окончательно
Sq2 (to,zft) = [3a2ft о2 (zfc) -|- со2] X
X to2 Sn (to) e-<2“4/«), (10.35)
где Sq (a>) — одномерный спектр волновых колебаний на поверхности [см. формулы (10.11)— (10.13)].
Второй способ основывается на ряде допущений о характере корреляционных связей между случайными волновыми нагрузками на разной глубине и приводит к следующему выражению взаимной спектральной плотности сосредоточенных волновых нагрузок, действующих в точках k и s смоченной высоты опоры:
гв) = [3azft a2s av (zj (zj-f-+ by.k &vs to2] ©2 Sn (to) e-K2fc+zs)/g]^x
Xe“1(|2h“ zs|/fil to2. (10.36)
Дисперсия сосредоточенной волновой нагрузки на жесткую опору. В предположении статистической независимости скоростей v (z, t) и ускорений w(z, t) дисперсия полной сосредоточенной случайной волновой нагрузки, определяемой формулой (10.33), может быть представлена выражением ^(гй) = <скК) + <ин(^. <10-37)
где стандарты скоростной и инерционной составляющих волновой нагрузки находят соответственно по формулам:
а92ск (zfe) =1^3 aZk о2 (zft); (10.38)
°<J2HH(Zh)= bZk°w(Zk), (I0-39> причем значения Ov(zfc) и и®(г*) определяют по формулам (10.18) и (10.19).
Функции распределения удельных и сосредоточенных случайных волновых нагрузок на жесткую опору. В общем случае, вследствие нелинейности скоростной составляющей случайной волновой нагрузки, согласно (10.30), функция распределения Удельной волновой нагрузки на одиночную жесткую опору не подчиняется нормальному закону распределения. Лишь в частном случае при резком преобладании инерцион-
Рис. 10.5. График функции обеспеченности ординат удельных волновых нагрузок на жесткую цилиндрическую опору. Коэффициенты: и— -9(г)/0д(2); v-aqcK U>/%m <«>, где и определяют по формулам (10.38) и (10.30) 4 ин
ной составляющей нагрузки функция ее распределения будет отвечать нормальному закону. В работе [18] обобщением законов распределения для отдельных составляющих волновой нагрузки получена функция обеспеченности для ординат полной удельной нагрузки, имеющая вид семейства кривых, которые зависят от соотношения стандартов скоростной и инерционной составляющих нагрузки (см. рис. 10.5).
Учитывая, что это соотношение изменяется по глубине, приходим к выводу, что функции обеспеченности удельной волновой нагрузки будут изменяться с глубиной. Комплексные экспериментальные исследования нерегулярных волн и их воздействия на жесткие отдельные опоры различных диаметров показали, что экспериментальные значения основных статистических характеристик горизонтальных скоростей и ускорений частиц жидкости [28], а также удельных и равнодействующих волновых нагрузок при различных соотношениях между скоростной и инерционной составляющими нагрузки [8] удовлетворительно совпали с соответствующими величинами, вычисленными на основе линейной спектральной теории. При этом затухание с глубиной стандартов скоростей и ускорений и стандартов удельных нагрузок хорошо описывается теоретически при использовании спектров в форме (10.12) и (10.13). Использование дробно-рационального спектра [см. формулу (10.11)] приводит к завышению значений стандартов ускорений частиц [28] и, как следствие, стандартов инерционной составляющей удельной волновой нагрузки в разных точках по глубине [8].
233
10.3. Динамический расчет отдельно стоящей опоры при действии регулярных волн конечной высоты
Далее приведем алгоритм динамического расчета опоры в виде консольного стержня при учете действия волн конечной высоты (рис. 10.6), приспособленный для реализации его на ЭВМ. Здесь можно осуществить два подхода. Первый основан на численном шаговом методе математического моделирования процесса развития и стабилизации колебаний сооружения и динамических усилий в его элементах при прохождении через ось сооружения регулярных волн [21]. Второй — лишь на рассмотрении установившегося процесса, характеризуемого длиной одной волны, причем скорости и перемещения в начале и конце этого интервала должны быть соответственно равны.
Опору рассмотрим как вертикальный цилиндрический стержень длиной I, жестко-защемленный на уровне дна; диаметр стержня d, масса стержня с учетом присоединенной массы жидкости, отнесенная к единице длины, т; жесткость стержня EI принята постоянной по длине стержня; в верхней точке стержня имеется сосредоточенная масса ть вес которой P=mIg, причем наличие этой силы учитывают далее при статическом и динамическом расчетах стержня. Для удобства начало системы координат располагаем на дне, а ось г направляем вверх (см. рис. 10.6).
Профиль регулярной волны конечной высоты на поверхности воды описывается уравнением (10.1) с учетом изменения знака.
Перемещение стержня y(z, t) определим, производя разложение решения по собственным формам Х, (2) :
Рис. 10.6., Расчетная схема воздействия волн конечной высоты на одиночную опору
ею
1/(М)-2 ХДг)фД/), (10.40) /—1
где ф/(0—соответствующая координатная-функция.
Для жесткозащемлснного весомого консольного стержня постоянного сечения с сосредоточенной массой на его конце при учете постоянной сжимающей силы Р формы колебаний определяются выражением
а
Xj (z) = (sj sh Sj + tj sin tj) (ch sj —
— cos tj —j — (sj ch Sj -f- cos tj) X /1 z 1 Z \
XI—shs.-----— —sin/у —— ), (10.41)
\ Sj i I tj I }
где
P/2
/2=— +sj, (10.42)
7 EI '
причем значения Sj, tj находят из решения уравнения
2sj.f j + (s7 ch sj cos 4 — sj x
X (sj — tj) sh Sj sin tj rr^s2 t2
tj ml
— sh sj cos —
(10.43) а частота свободных колебаний (О/ равна
toj = (Sj tj/ /2) У EI/т. (10.44)
Уравнение вынужденных колебаний с учетом внутреннего вязкого трения представлено в виде
<Р/ + 2а.ф; + = р. (j)t (10,45)
где
Z*(O
f q(z,t)Xj(z)dz
Pj (0 =---------------------— , (Ю.46)
f m (z) Xj (z) dz
причем при определении интеграла, входящего в знаменатель формулы (10.46), его необходимо рассматривать в смысле Стиль-теса и учесть сосредоточенную массу на конце стержня; z*(/)—см. рис. 10.6.
В уравнении (10.45) а> — коэффициент, учитывающий затухание колебаний и связанный с логарифмическим декрементом колебаний 6 выражением
(оу 6
= (4п2 + 4г)'л ’
(10.47)
234
Суммарную удельную волновую нагрузку q(z, t) определяют как алгебраическую сумму скоростной и инерционной составляющих по формуле (10.23), которая с учетом изменения системы координат согласно рис. 10.6, примет вид
, pdCx л2 h2 ch2 kz
Q (z. 0 = .—z-.t ' — I cos orf1 cos co/ —
2т2 sh2 kn
pd2 Cu л3 h ch kz
~~ 2x2shkH
sin co/
(10.48)
при 0<z<H4-(ft/2)cos (at, где z— возвышение над дном моря.
Для решения уравнения (10.45) можно использовать любой численный метод, в частности метод припасовывания [30]. Разобьем временную ось на малые отрезки времени Д/=Д=/П—tn-t. Фрикцию pj(t) представим как кусочно-постоянную функцию на каждом малом интервале
РДп] = (/п_1 + Q/2. (Ю.49)
Рассмотрев отрезок времени 0с/сД и положив в начале интервала значения координатной функции и ее производной равными значениям в конце предыдущего интервала, будем иметь:
Ф/ (0) =
ф,<°) = ф,[п-1): (10.50)
тогда в конце рассматриваемого интервала получим:
<₽/Щ] = в—атЛ ((фяп-и- ’Ляп]) cosco* Д +
ф/[п-П , Д;
е *
со. (0.
X sin со* Д
(10.51)
(со* cos (Оу Д — ay sin (Оу Д) —
“ (фя«-И “ Ч/и) (а/cos “/ Д +
4- (OySincOyA) , (10.52)
где
со* = ]/ co'j — а*; (10.53)
^•[n] = (10.54)
С помощью соотношений (10.51) и
(10.52) при начальных условиях /=0; Ф3(0)=
Ю1=0 представляется возможным про
следить переходный режим и режим установившихся колебаний.
Суммарные перемещения находят в соответствии с выражениями (10.40), а затем определяют изгибающие моменты Л1 и поперечные силы Q:
д2 У ~ дМ _ ду дг1- дх дг
(10.55)
Приведенный алгоритм численного исследования динамических реакций опоры для примера был реализован на ЭВМ при учете первой, основной формы колебаний (/=1) для определения коэффициентов динамичности при различных соотношениях между максимальными равнодействующими скоростной Qcn и инерционной (?ии составляющими волновых нагрузок на опору и при различных отношениях периода собственных колебаний опор Т к периоду т.
Для расчета были приняты следующие исходные данные: глубина воды /7 = 100 м, параметры волн Л = 10 м, т=10 с, Л=156м, расстояние от заделки до центра массы mlt расположенной на верхнем конце, 7=112 м, вес опоры Л>п=Ю4 кН, вес сосредоточенной массы P=/zi|g=2-104 кН, логарифмический декремент колебаний опоры с учетом влияния жидкости иа затухание принят 6=0,314 [2, 3].
Влияние различных соотношений (?ин/ /Qck исследовали заданием различных значений диаметра опоры d=0,25, 1 и Юм, чему соответствовали значения Qmh/Qck— = 0,2; 0,8; 8. Кроме того, рассматривали крайние случаи Qhu/Qck=0 (при d=0,25 м и Си=0) и Qnv/QcK=00 (при d=10 м и С=0).
Жесткость опоры EI подбирали в диапазоне (0,1—1,5) Т/х, причем значения EI при каждом заданном соотношении Т/х принимали постоянными для различных диаметров опор.
Расчет динамических реакций Ra опоры (прогиба у центра массы и изгибающего момента М в заделке опоры у дна) производили с шагом Д/= (V20—• 1/ьо)т для 20—30 волн до стабилизации процесса колебаний. Кроме того, производили статический расчет конструкции при различных фазах волны.
Коэффициенты динамичности определе ны как
=/?дтах/^стшах» (10.56)
где £дтах— максимальное значение динамической реакции по реализации при стабилизации процесса; ^стгаах — максимальное значение реакции при статическом расчете.
236
Рис. 10.7. Графики коэффициентов динамичности / — при 5им^см 2—при QHM/QcM = 0,8; 3 — при Сим/^см =8: 4 —ПРИ Оцм/^см ”0: 5-при QKM/QcM=«>. где <2ИМ и QcM. соответственно. максимальные значения инерционной и скоростной составляющих равнодействующей волновой нагрузки на опору; 6 — по СНиП 2.06.04-82 125)
Рис. 10.8. Сравнение расчетных и экспериментальных значений изгибающих моментов в заделке вертикальной цилиндрической опоры
Результаты представлены на рис. 10.7 в виде семейства графиков Лд=/(7’/т; QMH/ /Qck). Анализ этих графиков позволяет отметить следующее:
в результате применения метода математического моделирования выявлено существенное различие в эффекте динамического воздействия волн конечной высоты на одиночную цилиндрическую опору в зависимости от соотношения инерционной и скоростной составляющих волновой нагрузки;
при учете только первой формы собственных колебаний опор в случае равенства частоты собственных колебаний опоры удвоенной частоте волны, т. е. при Т/т=0,5, возникает второй резонансный максимум коэффициента йд, что обусловливается негармоничностью и нелинейностью волновой нагрузки при учете конечной высоты волн;
в высокочастотной зоне (0,1-сТ/т 0,3) полученные значения коэффициента йд существенно отличаются от значений коэффициентов динамичности, рекомендуемых в СНиП 2.06.04-82 [25, 17, табл. 15], последние не зависят от соотношения Qhh/Qck. Достоверность метода численного моделирования динамических реакций одиночной цилиндрической опоры при действии регулярных волн конечной высоты была оценена сопоставлением с результатами экспериментальных исследований в волновом лотке. Рассматривались изгибающие моменты в заделках гибких одиночных цилиндрических стоек с различными сосредоточенными массами на верхних концах стоек при действии регулярных волн конечной высоты. Параметры модели: глубина воды Н= 100 см; диаметр стальных стоек d = 5 мм; жесткость стоек £/=6,44-107 мН-см; декремент колебаний в воде 6=0,0416; высота волн ft=20...20,5 см; период волн т=1,07 и 1,24 с; отношение Т/т в опытах изменялось в пределах 0,4<Т/т< 1,34. Сравнение опытных и расчетных значений изгибающих моментов в заделке стержней представлено на рис. 10.8 и указывает на их удовлетворительное (с точностью до 20 %) совпадение.
10.4. Динамический расчет сквозных сооружений на действие нерегулярных волн
При разработке инженерного метода динамического расчета сквозных сооружений на случайные волновые воздействия [15, 24] были приняты следующие основные допущения, базирующиеся на данных экспериментальных исследований и положениях динамики сооружений.
1. Реальные морские глубоководные сооружения, являющиеся динамическими
236
Рнс. 10.9. Схема действия сосредоточенных волновых нагрузок на опору сооружения
Рис. 10.10. Характерные типы морских сооружений сквозной конструкции
а — консольный стержень; б — консольный стержень с сосредоточенной массой наверху; е — П-образная рама с заделкой у дна; г — П-образная рама с шарнирным опиранием у дна
системами с бесконечно большим числом степеней свободы, рассматриваются как системы с конечным числом степеней свободы. Это достигается сосредоточением масс системы в отдельных характерных точках (узлах) опор (рис. 10.9).
2. При решении динамической задачи, как правило, можно ограничиться учетом только первой (основной) формы колебаний. Это допущение, намного упрощающее расчет, подтверждается данными натурных исследований колебаний сквозных сооружений различных типов [2]. Установлено, что при действии штормовых волн подобные сооружения колеблются с частотой, равной частоте первой формы собственных колебаний.
3. В первом приближении можно отказаться от учета конечной высоты волн и от
учета гидродинамических эффектов, связанных с взаимодействием с водной средой, принимая при этом в расчете значения декрементов колебаний, характеризующих затухание колебаний сооружений в воде.
4. Как показали результаты натурных исследований [2, 3, 33], рассматриваемые типы сооружений обладают небольшим затуханием. В табл. 10.1 представлены данные о логарифмических декрементах колебаний б некоторых морских сооружений, приведенные в работах [2, 3, 31, 33].
Таблица 10.1
Тип конструкции Глубина воды, м б
Стационарная морская платформа Стационарная ледостойкая платформа Стационарная морская платформа Самоподъемная ПБУ на цилиндрических опорах Стационарное блочное основание 120—300 114 15 11—24 0,314 0,18-0.25 0,215—0,245 0,33-0,5 0,17-0,27
В связи с отмеченным, эти гибкие сооружения можно рассматривать как динамические системы, характеризуемые узкой полосой пропускания (узкополосные фильтры). Это означает, что при случайных волновых воздействиях на входе системы спектр волновой нагрузки можно рассматривать как спектр «белого шума» с ординатой, равной ординате спектра волновой нагрузки на частоте собственных колебаний системы, а процессы на выходе системы (деформации, усилия) можно рассматривать как узкополосные случайные процессы с несущей частотой, равной частоте собственных колебаний сооружения.
Расчет динамических характеристик сооружений. Для проведения динамического расчета упругих систем необходимо знать их динамические свойства и, в частности, частоты и формы свободных колебаний. Задачи этого плана могут быть решены с помощью методов строительной механики. Однако для инженерных целей расчетные схемы большинства сквозных глубоководных сооружений могут быть сведены к нескольким характерным типам (рис. 10.10). При этом расчетная схема сооружения должна отражать основные свойства конструкции и условия ее закрепления на дне моря (шарнир, заделка и т. п.). При определении совокупности частот и собственных форм можно рассматривать пространственные .четырехопорные сооружения (типа СПБУ)
237
Т я б л и ц я 10.2
Тип конструкции Расчетная схема Частоты первой формы колебаний Формы и условия
X, = х- (3 — 2х) Г,
М,. =— 6Е/ (1 — 2х) — ;
I
Iя
_х2(3-х)/ , Л1 — ————— -f-2
+ «!?+«£ /х;
ЗЕ/
Mt =------ (1-х);
I
Qi = ~~ Р
х = г//; а, = 3 £/6* ;
as = 3 ; 6t — горизонтальная податливость, м/кН; 6, —вращатель-
ная податливость, 1/кН.
238
Таблица 10.3
Расчетная схема
Частоты первой формы колебаний
Формы и усилия
<р, (о) (1-Х —
X,--------—
V- П1( V) . sin ох
— cos ох J----------
v
,, El I ф, (и) Mi =----------—-----------cos vx —
I L Hi (v) sin ох у J
Q, = ——Г <Р| v sii. ох + cos ох
I- L Hi (v)
2 I
Xi = [ар — (ох — sin ох) у] —!— 4-о
+ [(ох — sin ox) sin о — Pv] z .•
Mt = (v sin ox — a cos ox) EIv X
X + (V cos ox — sin о sin ox) X I
X E/o1 ;
I3
Qi = (a sin о x + v cos о x) X EI&X
X —-----(v sin ox 4- sin о cos ox) X
I3
X f/o1 — l3
как плоские рамные конструкции, при этом жесткость Е/р и массу Шр ригеля рамы принимают равными половине жесткости Е1п и половине массы тп всей надводной платформы с оборудованием и вышкой.
Жесткость ригеля плоской рамы Е1Р можно принимать бесконечной при выполнении условия L//2Z/p<0,l, где I — момент инерции опоры рамы; /р — момент инерции Ригеля рамы; L — пролет рамы; / — высота рамы от плоскости опирания в дно до оси ригеля.
При абсолютно жестком ригеле каждая опора рамы может рассматриваться как
одиночный стержень с сосредоточенной наверху массой пц=(1/2)*пр и соответствующими условиями опирания (табл. 10.2, 10.3).
Значения величин, входящих в формулы табл. 10.3, следующие:
г 1 / Р
Р = ms', х = — ; ц=/|/ -------:
* / V Е1
&
’’<”>- =
и2
I :
tg(c/2)J
239
р = 1 — cos ох;
zi = Ф1 (о/2);
2IL / Л
7-ГФ2 (о) • ip * J
П1(У)=Ф1(1')~ — ; ’ll (и/2) = Ф1 (и/2) —
I — (o/tgo)
- (у-/12); ф2 (v) = 8 ltg (0/2)_r/2J °’ а = v— sin о;
у = 1 — cos v;
z2 = I 3 +
При вычислении частоты первой формы колебаний coi, рад/с допускается рассматривать опору как невесомый стержень с сосредоточенной наверху массой т, определяемой по формуле
/п=пг14-пгпр» (10.57) где шпр ~ приведенная к оси ригеля сумма массы опоры от низа платформы до дна н массы воды в полости опор.
При отсутствии воды в полостях опор значения /ппр для некоторых характерных схем сооружений вычисляют по табл. 10.4, в которой р, — равномерно распределенная по длине масса конструкции опор. Масса воды в полости опор р.1, распределенная лишь по части длины опор /ь приводится к массе р,пр, равномерно распределенной по всей длине опор, по формулам табл. 10.5.
Присоединенную массу воды при расчете о»] не учитывают при соблюдении условия
^/(Н + Нпр) I > 10-
Частоты 0)1, собственные формы и соответствующие им усилия определяют по известным формулам динамики сооружений. Для некоторых характерных типов сооружений при учете влияния продольной силы в опорах, возникающей от массы платформы с оборудованием и конечной жесткости ригеля, рамы расчет частот, форм и соответствующих усилий производят по табл. 10.3. Для тех же типов сооружений без учета продольных сил в опорах и при бесконечно большой жесткости ригеля рамы расчеты выполняют по формулам табл. 10.2. Если частоты (1)ь вычисленные по табл. 10.2 и 10.3, различаются не более чем на 5 %, то все расчетные характеристики можно принимать по табл. 10.2. Если частоты различаются в пределах 5—20 %, то расчетные значения частоты Wi следует принимать по табл. 10.3 с учетом продольной силы в опорах, а формы и усилия допускается вычислять упрощенно по табл. 10.2 без учета продольной силы. Если частоты различаются более чем на 20 %, то все расчеты следует выполнять с учетом продольной силы по табл. 10.3.
Динамический расчет перемещений и
Рис. 10.11. Расчетная схема системы с конечным числом степеней свободы
а — схема сосредоточения масс в характерных точках; б — реакция в точке k‘ от' единичного смещения опоры в точке I
усилий в конструкциях сквозных сооружений при действии нерегулярных волн. С учетом принятых допущений равномерно распределенные по длине массы конструкций сплошных опор сосредоточиваются в характерных точках, а в опорах шарнирно-стержневой конструкции — в узлах. На высоте смоченной части опор массы сосредоточиваются в тех же характерных точках, где прикладываются сосредоточенные случайные волновые нагрузки (см. рис. 10.9).
Для динамического расчета плоских систем воспользуемся уравнениями вынужденных колебаний системы с числом степеней свободы, равным п (рис. 10.11), с учетом затухания по Е. С. Сорокину, представленными в матричной записи:
ту 4- (и + iv) Ку= qz(t), (10.58) где т — диагональная матрица масс
т = ’ ;
т2
тп
240
Таблица 10.4
Тип конструкции Расчетная схема стержня Схемы приведения масс Расчетные формулы
Таблица 10.5
Тип конструкции Расчетная схема стержня Схема приведения масс Расчетная формула
7777? п z777 fe, /» “ПР - U.236 : », _ — ГА (_£s_V_ 4 L5 u ) 1 1 I 1 II \ I ) 7 V I ) J
16—189
241
К— симметричная матрица жесткостей
Кп Х12 - • • Kin
Кц Х22- • К2п
• • •
Kni Кп2~ • •Кпп
где Kfei “ реакция в k-й горизонтальной опоре (см. рис. 10.11) от смещения опоры Z на единицу;
—► —>
у —вектор перемещения масс; <?V(O—вектор внешних сосредоточенных нагрузок; i — мнимая единица; и, v — параметры затухания, связанные с логарифмическим декрементом колебаний 6 соотношениями:
и = (4 — ??)/(4 4- у?); v = 4у/(4 + у2);
Т = 6/л. (10.59)
Частоты собственных колебаний находятся как корни алгебраического уравнения, получаемого из определителя
тК~х— — Е
(10.60)
= 0
где Е — единичная матрица порядка л.
Собственные векторы определяют при рассмотрении системы уравнений
.(т К~'------— £
\ 4
из которой удаляют одно из уравнений, а соответствующий элемент вектора X/ полагают равным произвольной величине, причем
Х/ = 0, (10.61)
Но так как известна спектральная плотность сил (см. разд. 10.2), то спектральные плотности правых частей уравнений (10.63) при отсутствии корреляции между силами определяют как Ay(w)/Bj, где
п
Aj (ш) = V X2kl Sg^,2h), k=f
(10.65)
причем Sc/2((o, Zk) —спектральная плотность сосредоточенной волновой нагрузки в точке k, определяемая формулой (10.34).
Спектральную плотность функции £/ находят как
_________Aj (<о)________ В2 (со4 —2исо2 С0у4~____*
(10.66)
Спектральную плотность перемещения любой массы /и* определяют без’учета взаимной корреляции между собственными формами:
л v2
Ук Bj со4 — 2uco2 соу + со4
(10.67)
Аналогичные формулы определяют спектральную плотность любого усилия Вл (изгибающий момент, поперечную и нормальную силы в сечении k):
Xnj точки k, соответствующее
где X kj— перемещение /-й форме колебаний.
Решение уравнения (10.58) теперь может быть представлено в виде
уно = 2 хк&а). (Ю.62) /•=1
причем Л = 1, 2, .... п.
Функции являются решениями
уравнений:
п
3 k=f
(10.63) где /—1, 2.л,
причем
(|0М>
a f—номер первой массы, наиболее близко находящейся в воде от поверхности (см. рис, 10.9),
о ( ч _ V? Aj И
w4-2ucd2<o2 + < ’
/=1 I 1 1
(10.68)
где Rkj — соответствующее 7-й собственной форме усилие, которое находят, например, по табл. 10.2, 10.3.
Дисперсии перемещений и усилий (в дальнейшем любой из этих факторов обозначим символом Rh) определяют через спектральные плотности выражением
п _2 п
°** “ х
7-1 ' t=t
С Sqx(o>. Zfc)dC0
J co4 — 2uciT co2 4- co4
0
(10.69)
Поскольку спектральная плотность нагрузки описывается достаточно плавными кривыми, а знаменатель подынтегрального выражения существенно мал при со, близком к Cl)j, то можно положить, что
242
Sq£ ((0, Zh) Э Sq2 (CO;, zft). (10.70)
Последнее соотношение является следствием принятого допущения «узкополосно-сти> рассматриваемых динамических систем. Бынося (coj, Zfc) за знак интеграла в выражении (10.69) и учитывая, что
оо
_______dco________
со* 2 * 4 — 2uur coy -f- со4
л2 л2
2oJ У2\\~и) 26со?
можно определить дисперсии как
(10.71)
Я2 Яь,-
сг2 = — V —— Л л© А. (10.72)
Rh 26 ]{ j)
/=i / J
. При учете взаимной корреляции внешних сил в разных точках — I и S по глубине, проводя аналогичные рассуждения, получим для дисперсий выражение
2 Па С>(Ш|)
% 26
/= 1 1 i
(10.73)
где
Cj (W>) “ S 2j Xu XSI SqziQss (®> >Zl ZS ) l=f s * * В *=f
(10.74)
После определения дисперсий расчетные значения перемещений и усилий определяют по формуле
«Иаоч="/%^- (Ю.75)
где
у — коэффициент
обеспеченности.
Предполагая, что на выходе системы перемещения и усилия распределены по нормальному закону, что справедливо при существенном преобладании инерционной составляющей волновой нагрузки, получим следующую связь между коэффициентом обеспеченности п1 % и процентом обеспеченности i % амплитудных значений динамических реакций:
л?о/о = 2 In (100/t %). (10.76)
Приведем соответствующие значения ni%- 3,7; 3,03; 2,8; 2,65; 2,44 и /%: 0,1; 1; 2; 3; 5.
В том случае, когда преобладает скоростная составляющая волновой нагрузки,
W.Q. имеет, место при t/max/A<0.1 (t/шах —
наибольший поперечный размер сечения эле-
ментов опор), коэффициент обеспеченности для амплитудных значений динамических реакций следует принимать в соответствии с данными, приведенными на графике рис. 10.12 в зависимости от отношения Шшах/оь где сотах — частота, соответствующая максимуму спектра волновых колебаний.
При расчете рамных систем следует учитывать взаимосвязь между волновыми воздействиями на первый, второй и последующие (по лучу распространения волны) ряды опор сооружения. При числе опор в плоскости, равном г, и при равных расстояниях между опорами £<0,25Х (А — средняя длина волны)
Г г _ -11/2
1 уч оа(/—1)£
/?вз — . cos ,
т Лак g
L i=i J
(10.77)
где <о — средняя частота волн.
Расчетные значения перемещений и усилий в этом случае определяются как
Rkpac4 = *wn«%%- <10-78>
Рассмотренный приближенный метод расчета глубоководных морских сооружений был экспериментально проверен [18, 19, 20]. Он показал хорошее совпадение результатов при расчете отдельно стоящих опор с диаметром сечения t/<0,5/i; % и сквозных сооружений типа самоподъемных передвижных буровых установок (СПБУ) при Н/).:*->0,3 и при 7'/т>0,5, где Т — период основного тона колебаний.
Физическое моделирование проводили в специальном волновом .лотке, оборудованном волнопродуктором с электронным бло
243
ком управления для воспроизведения нерегулярных волн.
Кроме того, было осуществлено численное стохастическое моделирование процесса волнового воздействия нерегулярных волн на гибкие сооружения [22] в рамках линейной спектральной теории волн. В этом случае алгоритм расчета строился в следующем порядке. Для конструкции заданного типа определяли динамические характеристики (частоты и формы собственных колебаний). Затем задавали спектр волновых колебаний и строили реализацию волновых колебаний, соответствующую этому спектру. Далее рассчитывали реализацию волновых скоростей и скоростной составляющей волновой нагрузки в предположении, что для сквозных сооружений инерционной составляющей можно пренебречь. После этого производили динамический расчет конструкции на действие найденных сил. Были определены реализации перемещений отдельных точек и усилий в сечениях. В предположении эргодичности процесса проводили статистическую обработку полученных реализаций построением корреляционных функций и определением дисперсий перемещений и усилий. Полученные таким образом результаты подтвердили принятые допущения приближенного аналитического метода расчета, изложенного выше.
Пример динамического расчета опор самоподъемной плавучей буровой установки при действии нерегулярных волн [19]. Плавучая буровая установка (СПБУ) имеет четыре решетчатые опорные колонны (см. рис. 10.1,6). Момент инерции одной опоры /=2-75 м4, масса опоры, отнесенная к 1 м длины р,=795 кг/м, модуль упругости стали £=2,1-10’ МПа.
Расчетный пролет между опорами ПБУ L=37,8 м; возвышение нейтральной оси понтона над уровнем моря 17,5 м; заглубление подошв опор ниже уровня дна в илистый грунт 15 м; момент инерции понтона как ригеля плоской П-образной рамы JP= = 12,25 м4; полная масса понтона с оборудованием гип=8,47-10е кг; Логарифмический декремент колебаний 6=0,3. В расчетах глубину воды И принимали для четырех вариантов — 60, 70, 80, 90 м. Расчетная высота рамы при этом 1=Я+32,5 м. Ригель был принят абсолютно жестким; стойки внизу предполагались шарнирно опертыми; частичное защемление опор в грунт и трение их о грунт в расчете не учитывали.
За расчетный принят шторм повторяемостью один раз в 50 лет при средней вы
соте волны Л=4,57 м (й1уо = 11,4 м) и среднем периоде т=11,4 с. За расчетный спектр принят спектр Ю. М. Крылова (10.12).
В расчете учитывалась только скоростная составляющая волновой нагрузки на элементы решетчатых опор ПБУ. При определении динамических характеристик учитывалось влияние нормальных сил в опорах от массы понтона.
Таблица 10.6
Н, м 60 70 80 90
7, с 7,79 9,32 11,05 13,03
Т/х 0,683 0,817 0,97 1,14
В табл. 10.6 даны значения периодов основного тона собственных колебаний ПБУ, а также отношение 7/т в зависимости от глубины моря. В табл. 10.7 даны расчетные
Таблица 10.7
И, м М1%-кН-м ^1%. кН Qlo/o, кН 4Ц%. м
60 74,9-10» 3,96-10» 7,07-10» 0,41
70 137-10» 7,27-10» 11,3-10» 0,93
80 218-10» 11,5-10» 15,5-10» 1.77
90 286-10» 15,1-10» 17.7-10» 2,77
амплитудные значения (обеспеченностью 1 %) изгибающих моментов нормальных Njyo и поперечных сил в месте заделки опоры в ригель рамы от действия волн, и горизонтальное смещение понтона
При вычислении расчетных значений реакций коэффициенты обеспеченности определяли по графику на рис. 10.12.
В результате анализа расчетов выявлено существенное влияние продольных сил на реакции конструкций по мере увеличения глубины моря. Более подробный пример расчета приведен в Руководстве [24].
Развитие и совершенствование динамических методов расчета морских стационарных сооружений сквозной конструкции в последние годы происходит по двум основным направлениям. Во-первых, благодаря развитию методов строительной механики и динамики сооружений, позволяющих более строго учитывать влияние на динамические характеристики и напряженное состояние сооружений следующих факторов: условий
244
опирания морских соооружений на дно (например, произвольная линейно-упругая заделка опор в дно [20], линейное опирание [27]; наличие продольных сил в опорах от больших сосредоточенных масс надводных платформ (особенно, для СПБУ); наличие вращательных степеней свободы при переходе от плоских расчетных схем к пространственным; зависимость затухания от деформации в системе сооружение — водная среда при значительных амплитудах колебаний сооружений [31, 32].
В целом переход от линейно-деформи-руемых моделей сооружения к нелинейно-деформируемым моделям требует развития численных методов динамических расчетов.
Во-вторых, развитие динамических расчетов происходит вследствие уточнения силовых воздействий на элементы сооружений от ветра и волн. При детерминистическом подходе это уточнение производят учетом нелинейных эффектов при действии регулярных и групповых волн конечной высоты [21]. При стохастическом подходе в ряде работ [3, 4] учитывают взаимную пространственно-временную корреляцию удельных волновых нагрузок (по глубине и по лучу волны) для двухмерного нерегулярного волнения и плоской расчетной схемы сооружения; развиваются методы расчета пространственных схем глубоководных сооружений с учетом трехмерности нерегулярного волнения [31]. Известны работы [31, 32], где волновые нагруз
ки рассчитывают с учетом колебаний сооружения и относительных, а не абсолютных скоростей и ускорений частиц жидкости [см. формулу (10.29)]. Однако экспериментальные исследования, подтверждающие эти расчеты, отсутствуют.
При рассмотрении совместного действия волн и ветра на морские сооружения, волновые и ветровые нагрузки, вычисленные по расчетным экстремальным параметрам волн и ветра, считают статистически независимыми и обычно суммируют с введением нормативных коэффициентов сочетания нагрузок [4, 17]. В последней работе В. В. Болотина [5] на основе теоретических посылок развивается общий стохастический подход к расчету надежности морских сооружений на сочетание нагрузок (волновых, ветровых п сейсмических) с учетом их динамического воздействия. Однако реализация этого подхода требует проведения обширных натурных исследований для установления объективных временных и пространственных корреляционных связей между ветром н волнами.
Предлагаемый справочный материал касается расчета глубоководных морских сооружений на действие ветровых волн. Вопросы проектирования рассматриваемых конструкций отражены в «Инструкции по проектированию морских стационарных платформ» ВСН 51.1-81 (М.: Мингазпром, 1981).
РАЗД ЕЛ 11. ДИНАМИКА ТРУБОПРОВОДОВ
Н. Г. Фигаров, А. С. Гехман, И. Д. Красулин
11.1. Особенности движения жидкости в трубопроводах
Практическое проектирование магистральных трубопроводов, как правило, связано с решением ряда статических задач, учитывающих температурные воздействия, статическое давление транспортируемого продукта, нагрузки от массы трубопровода и т. п. На такой подход в основном ориентирует проектировщиков и специалистов по трубопроводному строительству действующие строительные нормы на проектирование трубопроводов. Лишь при проектировании некоторых надземных систем значительное место отводится в настоящее время к рассмотрению задач о динамических воздейст
виях на трубопроводы. Однако такой подход при решении проблемы повышения надежности трубопроводных систем не может рассматриваться как исчерпывающий.
Безусловно, упомянутые выше основные статические нагрузки и воздействия являются решающими при выборе основных конструктивных решений, необходимых толщин стенок труб и т. д. Тем не менее нередко на работу трубопровода значительно влияют различного рода динамические нагрузки и воздействия. Опыт эксплуатации протяженных трубопроводов (в первую очередь надземных) и исследования последних лет показали, сколь существенна может быть роль динамических воздействий при эксплуатации трубопроводных конструкций.
246
В практике проектирования, как правило, стремятся выбирать конструктивные решения таким образом, чтобы избежать возможности возникновения колебаний трубопроводной системы в целом или отдельных ее элементов. Но это не всегда возможно, поэтому важную роль приобретают расчеты трубопроводов на действие динамических нагрузок. Да и выбор систем, нс реагирующих на динамические воздействия, или в которых такие воздействия не возникают, также требует специальных исследований и расчетов конструкций на динамические воздействия и нагрузки.
Как известно, магистральные трубопроводы представляют собой протяженные системы, прокладываемые подземно, назем-но (в насыпи или открытые) и надземно. Трубопроводные системы имеют многочисленные повороты в различных плоскостях, примыкают к различным запорным узлам, резервуарам и т. д. Диаметры труб, толщины их стенок могут изменяться по длине трубопроводной системы. Динамические усилия, возникающие в трубопроводах, связаны в основном с характером протекания потока жидкости (нефти, нефтепродуктов и т. д.) по трубопроводу, с изменениями скорости и направления течения, транспортом многофазовых потоков, с сейсмическими и ветровыми воздействиями.
Вопросы учета ветровых воздействий достаточно подробно освещены в [28] и поэтому рассматриваться здесь не будут. В этом разделе собраны материалы о динамических воздействиях на трубопровод протекающий по нему жидкости или газа, а также данные о расчете магистральных трубопроводов на сейсмические воздействия. Кроме того, приводятся некоторые сведения о конструкциях магистральных трубопроводов.
К особенностям трубопроводных систем относится, как уже отмечалось, сложное пространственное очертание трубопроводной системы. В различных элементах трубопроводной системы происходит изменение направления потока, изменение площади его поперечного сечения и других характеристик, вследствие чего возникают дополнительные динамические усилия. Эти усилия имеют такой же периодический характер, как и создающий их пульсирующий поток, и вызывают вибрацию конструкций, в том нисле технологических аппаратов, арматуры, отдельных участков трубопроводной системы и т. д.
Для уменьшения или предотвращения вибрации необходимо определить связь вы
зывающих ее усилий с пульсацией потока перекачиваемого продукта, ее величиной и направлением. Изучению нестационарного движения сжимаемой жидкости в упругом трубопроводе посвящено большое число работ, берущих начало от исследований Н. Е. Жуковского [6]. Среди публикаций, отражающих современное состояние вопроса, следует отметить монографии [10, 17,22].
Известно, что режим движения жидкости характеризуется числом Рейнольдса
Re = vD/v, где v — скорость течения жидкости; D — внутренний диаметр трубопровода; ? — кинематическая вязкость жидкости.
Переход из одного режима движения в другой осуществляется при критическом значении числа Рейнольдса Reitp. На основании многочисленных экспериментальных данных по определению критического числа Рейнольдса установлено, что при перекачке подогретых нефти и нефтепродуктов критическое значение числа Рейнольдса равно ReKp= 1000...2000. Для высокопарафинистых нефтей Кекр ближе к нижнему пределу (для жебытайской нефти, содержащей около 25 % парафина, ReKp « 1100), а для высоко-вязких нефтепродуктов, содержащих малое количество парафина, Reitp ближе к верхнему пределу (для мазута марки 20—ReHp« «2000).
Температура нефтепродукта по длине трубопровода изменяется в значительных пределах, а объем перекачиваемого продукта остается постоянным.
Так как вязкость жидкости зависит от температуры, то в общем случае в трубопроводе могут наблюдаться два режим? движения жидкости — в начале трубопровода при высоких температурах нефть или нефтепродукт движутся при турбулентном режиме, а в конце перегона — при ламинарном.
При перекачке высоковязких нефтей и нефтепродуктов, как правило, сталкиваются с необходимостью ее подогрева. В таких нефтепроводах могугг возникать помимо гидродинамической нестационарности еще и неустановившиеся тепловые процессы.
При эксплуатации магистральных трубопроводов под действием различных факторов установившийся поток транспортируемого продукта может перейти в неуогано-вившийся. В магистральных нефтепроводах с промежуточными насосными станциями неустановившееся движение может возникать при отключении и включении насосных агрегатов на насосных станциях или при внезапном полном отключении одной из
246
промежуточных станций, например из-за временного прекращения энергоснабжения. В нефтепроводах неуотановившееся движение может возникнуть при изменении положения рабочих органов запорных задвижек и обратных клапанов, а также при промежуточных отборах продукта.
Внезапное изменение плотности и давления способствует зарождению и распространению волн в жидкости и газах. Локально возникшая вследствие изменения давления и расхода волна распространяется по трубопроводу в обе стороны со скоростью звука в транспортируемой жидкости. Скорость звука в среде нефти и нефтепродуктов достигает 1000—1100 м/с, а в газе приблизительно равна 320 м/с, поэтому волны давления по газопроводу распространяются с меньшей скоростью, чем по нефтепроводу. При встрече волны давления с каким-либо препятствием в трубе (поворот, запорный орган задвижки и т. д.) возникают отраженные волны давления.
Пульсации потока газа, создаваемые компрессорными машинами, вызывают вибрацию трубопроводов и технологических аппаратов [10, 22]. При работе компрессорных установок возникают явления, влияющие на поведение системы компрессор — трубопровод. К ним относятся колебания давления и скорости потока газа. Одна из причин возникновения больших амплитуд давления — наличие условий для возникновения резонансных колебаний потока газа, что наступает при совпадении собственных частот столба газа на различных участках трубопровода с частотами вынужденных колебаний, создаваемых компрессором.
Распространение волн давления связано с соответствующим перемещением в трубо--проводе транспортируемого продукта и, следовательно, расходом энергии таких волн на преодоление гидравлических сопротивлений, поэтому с течением времени волны давления затухают и наступает установившийся режим транспортирования нефти или других продуктов. Волны повышенного давления, которые возникают в магистральных газопроводах, имеют меньшие, чем в нефтепроводах, амплитуды и скорости распространения. В то же время затухание возмущения в газопроводах протекает медленнее. В некоторых случаях стабилизация процесса может вообще не наступить.
Наибольшую опасность представляют волны повышенного давления, возникающие при внезапном отключении магистрального Трубопровода. В этом случае волна повышенного давления имеет наибольшую вели
чину и, распространяясь по трубопроводу, суммируется с давлением транспортируемого продукта. Волны давления такого типа имеют значительную скорость нарастания давления или крутизну волны (0,4— 0,8 МПа/с) и большую амплитуду, особенно в нефтепродуктопроводах вследствие незначительной сжимаемости нефти [10]. Кроме волн повышенного давления возникают еще волны пониженного давления. Волны пониженного давления, распространяясь к последующей насосной станции, могут вызвать кавитацию в насосах, что особенно опасно при перекачке нефтепродуктов, характеризующихся высокой упругостью паров из-за образования газовых пузырьков в зоне пониженных давлений.
Колебания давления, возникшие при каком-либо локальном возмущении, распространяясь по трубопроводу, могут значительно влиять на режим работы других промежуточных станций и на систему регулирования, вызывая новые локальные возмущения и тем самым замедляя затухание колебаний. В этом случае магистральный трубопровод может длительное время работать в неустановившемся режиме.
При исследовании нестационарных режимов работы трубопорводов нефть и нефтепродукты рассматривают в виде капельной жидкости, для которой справедливо соотношение (закон Гука):
р=ро[1+(Р-Ро)/^1. (11-1)
где ро — плотность перекачиваемого продукта прн давлении Ро: — модуль объемного сжатия
жидкости.
Нестационарное движение нефти и газа в трубопорводах может быть описано системой уравнений:
дР д (рп) дх dt
+ 2а (ро);
dv 1 дР
дх ~~ С? dt ’
(Н.2)
из которых определяют давление и скорость движения транспортируемого продукта.
Здесь С — скорость распространения звука в данной среде; v — средняя скорость движения жидкости в данном сечении трубы; 2a-“32v/d-(v — кинематический коэффициент вязкости; d — внутренний диаметр трубы).
Так как v практически не зависит от давления, то 2а=const сказывается вполне точным для ламинарного потока.
Первое слагаемое в правой части первого уравнения системы (11.2) учитывает влияние сил инерции жидкости, а второе — влияние сил трения. Для магистральных трубопроводов, если потеря давления на трение превосходит инерционные силы,
247
d(pv)/dt может быть опущено. Если потеря давления на трение не велика (например, для коротких трубопроводов), или в случае рассмотрения начального процесса неуста-новившегося (переходного) режима, можно пренебречь вторым слагаемым первого уравнения системы (11.2), так как оно будет мало по сравнению с первым чиленом этого же уравнения.
При рассмотрении движения газа в трубопроводе можно предположить:
для случая ламинарного движения газа
На криволинейном участке с радиусом Ri движение жидкости приводит к возникновению погонной центробежной силы
‘Zne-pM'i/'M- (117)
На длине участка, соответствующего центральному углу ф, эта сила будет
ф
Г
Рс = pFo Р\ sin (1 1 -8)
J Ri о
при ф=л/2
Pc = f>Fovl’ (1L8a)
для турбулентного
дР _ д (pv) X RT f
дх dt + 86 Р '
(Н.4)
Этими уравнениями следует заменить для соответствующих случаев первое уравнение в системе (11.2).
В уравнениях (11.3) н (11.4) приняты обозначения: К — коэффициент сопротивления в формуле Дарси — Вейсбаха для потери напора на трение в трубопроводе; при квадрватичиом законе трения предлагается Л—const; R — газовая постоянная; Т — абсолютная температура, принимаемая F—const.
Получающиеся после замены первого уравнения системы уравнений могут быть сведены к уравнению для движения капельной жидкости при р=const:
d2.v 1 d2 v 2а dv
dx2 ~ С2 dt2 + С2 dt ' <Н‘5>
Аналогичное выражение можно записать и относительно давления.
Решения уравнения (11.5) носят волновой характер с убывающей амплитудой, так как содержат множитель е~поэтому возникающие колебания в жидкостях быстро затухают и влияние инерционного слагаемого заметно лишь в начале процесса, т. е. при малых значениях времени. Для учета упругости стенок круглых труб Н. Е. Жуковским была предложена формула для определения эффективной скорости распространения звука:
Со = .. ' ~~ — , (11.6)
V 1 + (2рС? г/£б)
где С, г—соответственно толщина стенки и радиус трубы; Е — модуль упругости материала трубы.
При движении жидкости по криволинейной трубе возникающие инерционные силы не имеют осевой симметрии и, нагружая трубу, вызывают изгибные и крутильные колебания. Колебания трубы в свою очередь вызывают колебания движущейся жидкости.
где Fo — площадь поперечного сечения трубы; Fo—лг2; — усредненная по сечению трубы ско-
рость движения жидкости.
Если усилие, возникающее в трубопроводе при гидравлическом ударе
Р = рГ0о6С0. (11.9) где Со — определяют по формуле (11.6), то из сопоставления выражений (11.8а) и (11.9) нетрудно установить, что Рс/Р—и^/Са.
Если принять жидкость идеальной, а упругость трубы учитывать по формуле Н. Е. Жуковского через эффективную скорость распространения волны в трубе [6], то в линейной постановке волновое уравнение для криволинейного трубопровода можно записать в виде
d2P 1 d2P Un
dx? “ C2 dt2 ~P 0 R ’
(11.10)
где P — радиус кривизны трубы.
В общем случае решение задачи о движении неустановившейся жидкости в криволинейном трубопроводе представляет собой довольно сложную задачу. Для малых колебаний пространственно криволинейного трубопровода, который несет неустановив-шийся поток вязкой сжимаемой жидкости, общие решения приведены в работах [5,24].
11.2. Конструктивные решения магистральных трубопроводов
Магистральные трубопроводы — это протяженные газо-, нефте- и продуктопрово-ды, а также водоводы, связывающие месторождения природного газа, нефти или источники водоснабжения с местами их переработки или потребления. В отличие от городских трубопроводных сетей различного назначения, магистральные трубопроводы имеют значительно меньшее число поворотов, разветвлений и сложных узлов сопряжения (как отдельных трубопроводов, име
248
ющих разное направление, так и в местах ввода трубопроводов в различные здания, резервуары, колодцы, подключения к оборудованию и т. д.). Протяженность магистральных трубопроводов от сравнительно небольшой может достигать нескольких тысяч километров (газопроводы, транспортирующие газ с севера Тюменской области или из районов Средней Азии на Урал или в районы европейской части страны, имеют протяженность до 4 тыс. км). Диаметры современных газопроводов достигают 1420 мм, нефтепроводов — 1220 мм, а диаметры магистральных водоводов — 1500—2500 мм.
Давление газа в современных газопроводах достигает 7,5 МПа, давление нефти в нефтепроводах 6,4 МПа. Давление в водоводах в большинстве случаев гораздо ниже и не превышает 1,5—2 МПа. Исключение могут составить подводящие водоводы на высоконапорных деривационных гидроэлектростанциях.
Современные газо- и нефтепроводы сооружают из стальных труб, взаимно соединенных сваркой. Существуют небольшие опытные участки газопроводов малого диаметра из пластмассовых труб. Более низкое давление в водоводах позволяет в некоторых случаях отказаться при их сооружении от применения стальных труб и использовать железобетонные, асбестоцементные, чугунные и другие трубы, соединяемые между собой различными нежесткими стыками (например, раструбными, муфтовыми и др.). Действующая в настоящее время глава СНиП «Магистральные трубопроводы. Нормы проектирования» распространяется на линейную часть новых и реконструируемых трубопроводов и ответвлений от них с условным диаметром до 1400 мм и избыточным давлением не свыше 10 МПа.
По виду прокладки трубопорводы разделяются на подземные, наземные (открытые и в насыпи) и надземные (рис. 11.1). Подземные трубопроводы укладывают в траншеи (в некоторых случаях, особенно для нестальных трубопроводов с нежесткими стыками, на специально подготовленное основание, выровненное с подсыпкой из мягкого грунта), которые после окончания монтажа трубопровода засыпают грунтом. В соответствии с действующей главой СНиП «Магистральные трубопроводы. Нормы проектирования» толщина грунтовой засыпки составляет в зависимости от грунтовых и гидрологических условий 0,8—1 м (и в зависимости от этих условий учитывается или не учитывается в расчетах).
Наземные трубопроводы можно укла
дывать на поверхность грунта без ее предварительной подготовки или на невысокие грунтовые насыпи, призмы, отдельные деревянные шпалы или теплоизоляционные плиты, ковры, маты. Кроме того, наземные трубопроводы нередко дополнительно обваловывают грунтом (трубопроводы в насыпи).
Надземные трубопроводы представляют собой конструкции, укладываемые на опоры различной высоты. Опорные части в местах опирания трубопровода на опору (ригель) могут быть скользящими или роликовыми (катковыми) в зависимости от нагрузки на опору (диаметра трубопровода), особенностей эксплуатации и т. п. В конструкциях спор можно использовать различные сваи, фундаментные железобетонные плиты, укладываемые без заглубления в грунт, шпальные клетки и т. д.
В зависимости от вида прокладки (подземной, наземной, надземной), степени защемления трубопровода в грунте (обеспечения несмещаемости сечений трубопровода), конфигурации трубопровода в плайе и в вертикальной плоскости характер работы трубопровода под действием давления и температуры может сильно меняться. Следует отметить, что в большинстве случаев подземные трубопроводы и трубопроводы в насыпи в случае их достаточного защемления в грунте прокладывают прямолинейно (кривизна оси трубопроводов не превышает на прямолинейных участках 2500—5000DH (DH — наружный диаметр трубопровода), а углы поворота — сравнительно невелики (3—9°). Лишь в отдельных случаях, например при резких поворотах трассы, при необходимости обхода какого-либо неблагоприятного участка, при подходах к переходам через препятствия, на головных и концевых участках, в районе крановых узлов и т. п., углы поворота достигают 90°.-
Различают трубопроводные системы, где температурные воздействия и изменение давления транспортируемого продукта не приводят к существенным перемещениям трубопровода и проявляются в виде усилий (защемленные в грунте трубопроводы, системы без компенсации возможных продольных перемещений), и системы, в которых значительные продольные усилия без изменения температуры и давления в трубопроводе не возникают благодаря устройству специальных компенсаторов или компенсационных участков.
В качестве компенсационных участков могут служить специальной конфигурации и размеров криволинейные участки трубопровода — треугольные, (трапециевидные
249
О) б) в) Ур.Г.В
Рис. 11.1. Способы прокладки трубопроводов (поперечные разрезы)
а— е — подземная; ж — наземная, открытая; э. з'— наземная в насыпи; и—м — надземная; и', к— свободноподвижные опбры надземной системы прокладки турбопроводов, обеспечивающей перемещение трубопровода в любом направлении в горизонтальной плоскости; и, к' — продольно подвижные опоры, обеспечивающие перемещение трубопровода вдоль его оси; л — опора, на которой трубопровод, закреплен от продольных перемещений (неподвижная); м — гибкая (подвесная) опб-ра: 1 — трубопровод; 2 — теплоизоляционный экран (может применяться при прокладке трубопровода на вечномерзлых грунтах); 3 — балластирующий груз; 4 — обетонированный трубопровод; 5 — балластирующий груз, жестко закрепленный на трубопроводе; 6 — анкеры; 7 — механизм регулирования высотного положения ригеля; 8 — ограничитель: 9— роликовая опора; 10— хомут с упругим закреплением; И — ригель; 12 — плита фундаментной части опоры; 13 — свая; 14 — трубчатый ригель; 15 — ограничитель перемещения трубопровода, изготовляемый из трубы; 16 — ограничитель; 17 — деревянные элементы опоры; 18 — стальной канат
б) /
w -Xi I 4 ( 'l*"N J i-j4X |ff[
2)
X4 f f ( 4-Г-Г4 К Г f I Г РИЧ44
Рис. 11.2. Схемы прокладки трубопроводов, печигаюшие самокомпенсацию деформаций (планы)
а, б — «змейка»; в, г — прямолинейная со «ла; боизогнутымн компенсационными участкам®. / — трубопровод: 2 — неподвижные опоры; л свббодноподвижиые опоры; 4 — продольноподви
ные опоры
260
и др., углы поворотов трассы. Продольные усилия в трубопроводах с компенсационными участками невелики и связаны в основном с реакцией (распором) компепсацион-. кого участка и величиной сил трения при Перемещении трубопровода иа опорах при надземной прокладке или по грунту прн открытой прокладке трубопровода. На рнс. 11.2 приведены возможные конфигурации трубопроводов (продольных осей) в системах с компенсацией перемещений.
11.3. Особенности конструктивных решений трубопроводов, прокладываемых в сейсмических районах
Учет сейсмических воздействий в некоторых случаях может привести к необходимости изменения принятых ранее (при учете только статических нагрузок) конструктивных решений. Не рекомендуется достигать повышения сейсмостойкости трубопроводов увеличением толщины стенок «груб, что приводит к значительному повышению материалоемкости и стоимости сооружения, поэтому повышение надежности трубопроводов, пересекающих сейсмически опасные районы, целесообразнее достигать, применяя те или иные конструктивные мероприятия, например компенсационные участки, обходя трассой наиболее неблагоприятные участки. Одним из основных антисейсмических мероприятий при проектировании трубопроводов является целесообразный выбор трассы с учетом данных сейсмического районирования, включая сейсмическое микрорайоннро-вание. При определении трассы трубопроводов желательно не пересекать линий тектонических разломов, избегать участков, сложенных динамически неустойчивыми грунтами, и т. д.
Значительный эффект снижения сейсмических нагрузок может быть достигнут в результате чередования прямолинейных и криволинейных (компенсационных) участков при применении зигзагообразной прокладки трубопроводов и т. д.
При пересечении трубопроводом участков трассы с грунтами, характеризующимися резко отличными друг от друга сейсмическими свойствами, или при пересечении линий тектонических разломов следует предусмотреть применение конструкций, обеспечивающих возможность свободного перемещения трубопровода. Так, например, в некоторых случаях может быть рекомендована укладка трубопровода в неглубокую траншею с пологими откосами. Трубопровод на таких участках следует засыпать крупнозер
нистым песком или торфом и т. п., т. е. такими грунтами, которые не Оказывали бы значительного.сопротивления выходу трубопровода из траншеи и его перемещению. Длина слабозащемленных участков подземного трубопровода, которые примыкают к линии разлома, должна составлять не менее 100—150Дн с каждой стороны от разлома.
В местах пересечения трубопроводом линий тектонического разлома может быть рекомендовано применение надземной прокладки. Общая длина надземного участка в месте пересечения разлома должна составлять приблизительно 200—300£>н-
При прокладке трубопроводов на участках, сложенных грунтами, дающими значительные просадки при сейсмических воздействиях, рекомендуется предварительное уплотнение грунтового основания, особенно в местах присоединения трубопровода к каким-либо сооружениям нли установкам и аппаратам. Причем грунтовое основание следует уплотнять и вдоль трассы трубопровода, и под сооружением или фундаментом установок, к которым подсоединяют трубопровод.
Следует избегать применения на магистральных трубопроводах сложных соединительных узлов, жестких соединений между собой трубопроводов различных направлений или жестких соединений трубопроводов со стенами зданий и сооружений, а также с оборудованием.
В местах подсоединения трубопроводов к трубопроводам других направлений, к сооружениям и т. п. необходимо предусмотреть устройство криволинейных вставок, компенсаторов и т. д. В некоторых случаях допускается ввод трубопроводов в резервуары через сальниковые устройства, обеспечивающие некоторую подвижность трубопровода вдоль и поперек его продольной оси. Ввод трубопроводов в различные здания (компрессорные, насосные и т. п.) должен осуществляться через открытые проемы, размеры которых превышают диаметр трубопровода.
При применении надземных систем прокладки трубопроводов в сейсмических районах необходимо предусмотреть возможность такой работы конструкции, которая обеспечивала бы снижение дополнительных напряжений от сейсмических воздействий, но в то же время препятствовала бы сбросу трубопровода с опор и падению самих опор трубопровода.
Конструкции опор надземных трубопроводов следует выбирать таким образом,
251
чтобы была обеспечена возможность эксплуатации трубопровода в нормальных условиях (перемещение трубопровода при изменении температуры и давления транспортируемого продукта) и в то же время воспринимались бы усилия, возникающие во время землетрясения. В конструкциях таких опор следует предусмотреть включение дополнительных связей или резкое увеличение сил сопротивления перемещению в тех случаях, когда усилия, действующие на трубопровод (сейсмические), превысят нормальные эксплуатационные. Целям гашения колебаний в трубопроводе могут служить различные специальные устройства для предотвращения возникновения колебаний.
Весьма сейсмостойкими являются наземные открытые (без обвалования грунтом) трубопроводы н наемные трубопроводы в насыпи. Однако насыпь над трубопроводом должна быть выполнена с таким расчетом, чтобы она не препятствовала смещениям трубопровода, особенно на участках, примыкающих к разломам, при взаимных смещениях бортов разломов.
При прокладке трубопроводов в горных и пересеченных районах, при устройстве полок, выемок и т. д. необходимо выбирать крутизну откосов, обеспечивающую их устойчивость при сейсмических воздействиях; Ориентировочно может быть рекомендовано снижение крутизны откосов на 10—20 % по сравнению с принимаемыми в несейсмических районах.
11.4. Колебания надземных трубопроводов
В общем виде определение частоты собственных колебаний пространственно криволинейного многопролетного надземного трубопровода с разными длинами пролетов представляет собой сложную задачу, решение которой целесообразнее проводить численными методами. Однако составление программы и ее реализация на ЭВМ также весьма трудоемки. В то же время для практических целей часто бывает достаточно знать частоты собственных колебаний основного тона. Сложный пространственнокриволинейный трубопровод можно условно разбить на ряд характерных прямолинейных и криволинейных участков, лежащих в одной плоскости. Рассмотрение каждого нз этих участков даст возможность цодойти к оценке колебаний всей системы в целом.
Практика показала, что колебания прямолинейных участков трубопроводов близки к колебаниям одно- или многопролетных
стержневых систем. На криволинейных участках наблюдаются изгибно-крутильные колебания при рассмотрении колебаний из плоскости и колебания, аналогичные колебаниям арочных систем, при рассмотрении колебаний в плоскости кривизны.
Далее будут приведены примеры наиболее изученных случаев колебаний трубопроводов с протекающей по ним несжимаемой жидкостью.
В линейной постановке уравнение колебания прямолинейного трубопровода
а4 и & и
EI' а 4 + (m + то) “ГТ- + dx4 dt2
+ 2/п0 Уо
д2и dxdt
д2и
дх2
(11.11)
где /По=лг]Ро; Vo —скорость движения жидкости; W — продольная сжимающая сила; Ро — внутреннее давление; т — масса единицы длины трубопровода; р0 — плотность транспортируемой жидкости; п — радиус внутренней стеики трубопровода.
Представим решение в виде ряда
оо
и(х, 0=2 Mfnto- (11.12) п=1
где Фп(х) — удовлетворяет заданным граничным условиям задачи.
Подставляя (11.12) в уравнение (11.11) и производя процедуру Бубнова—Галерки-на, придем к системе уравнений:
2А др. +Вм dt +C-”W]=0’ n=l
(11.13)
где
G2 .|
Bnj = £ > Gn} =
«if
L L
f + fl3 f C ♦/ dx
0_______________0________ .
= L ’
G1 f dx
0
tn —[- tn^ 2/лр Vo
<4= — ; 02= El ;
(11.14)
Выражение для Cnj представляет собой квадрат собственной частоты основного то
252
на колебаний трубопровода, который можно записать в виде
a L
а4
4-—-------------. (11.15)
Г 2
ai I %dx
Таким образом, задача определения частоты собственных колебаний трубопровода сводится к нахождению аппроксимирующих функций фп(х), которые удовлетворяют граничным условиям задачи. Простота вычисления в значительной степени зависит от подбора этих функций.
В дальнейшем функции фЛ(х) будем определять нз решения уравнения свободных колебаний балок:
Ф1У-ЬПФ = О (11.16) с соответствующими граничными условиями. Таким образом, в каждом частном случае краевой задачи будем иметь бесконечный ряд фундаментальных функций фп(х) (п=1,2,...), каждую из которых определяют с точностью до произвольного множителя (амплитуды свободных колебаний балки) и заранее удовлетворяет граничным условиям.
Фундаментальные функции обладают свойством ортогональности, тем не менее это свойство не всегда сохраняется в отношении производных от этих функций. Как видно из формул (11.14) и (11.15), в них содержатся производные первого, второго и четвертого порядков. В отношении производных четвертого порядка и кратных им фундаментальные функции — ортогональны, в отношении производных второго порядка свойство ортогональности нарушается. Однако известно, что для ряда задач с наиболее часто встречающимися граничными условиями, фундаментальные функции в отношении производных второго порядка обладают свойством квазиортогональностн, т. е. сумма побочных членов соответствующей матрицы или, иначе говоря, сумма интегралов произведений с разными индексами пренебрежимо мала.
Для балки с шарнирным опиранием по краям сумма членов, содержащих интегралы с разными индексами, составит не более 5—6 % общей суммы. В конечном же результате погрешность от неучета этих слагаемых будет и того меньше, поэтому прн решении практических задач фундаментальные функции и их вторые производные можно считать как ортогональные.
Интегралы от фундаментальных функ
ций и их производных, равно как и от их квадратов, можно выразить через значение самой функции и ее производных на концевых участках. Приведем значения этих интегралов:
О при п ¥= /
L
| Фп ‘Фу dx = о
д
1‘ Ф„Ф/^ = б
[Зф" +
♦22«я'+*;+.
+ %)]о прял = Л
L L
f ф™фу</х = ^( о о
Фп фу dx; (11.15а)
IX (Фп Ф/ - X Ф/+ Фп ф/ )-
[ ф" ^dx = б
при П = j
+ фп [2ФпФп —
-Фп ] — € )]о при П = Ь
— Фп % + ФЛ/ —
— ФпФ/]о пРи n==i
[чХ-2С]о
4*7»
( при п = /.
Подставляя вместо интегралов, входящих в формулу (11.15), их значения, можно найти частоту колебаний трубопровода с протекающей жидкостью.
Рассмотрим несколько простых Примеров. Трубопровод с шарнирно закрепленными концами (рис. 11.3, а). Граничные условия:
ф (0) = 0; ф" (0) = 0;
Ф(/) = 0; ф"(0 = 0.
Для собственных форм колебаний трубопровода, не заполненного жидкостью, известно, что
Фп (*) = sin (ллх/Z).
Тогда, приняв [см. (11.12)]
СО I
u(x, t) — У] Wn sin (nnxll) e , n=l
253
Рис. 11.3. Расчетная схема одн.тдролстных надземных переходов
в — трубопровод с шарнирно закрепленными концами; б — трубопровод с жестким защемлением по концам; в — трубопровод жестко защемлен на одном конце и шарнирно опирается на другом; г — трубопровод жестко защемлен на одном конце и упруго закреплен относительно поперечных перемещений иа другом; д — трубопровод жестко защемлен на одном конце и упруго защемлен относительно угловых перемещений и жестко — относительно поперечных на другом; е — трубопровод со свободным одним концом и другим, упругозащнщеиным относительно угловых перемещений; ж — трубопровод с одним шарнирно закрепленным концом и с упругопро-седающей опорой на другом
придем к системе характеристических уравнений
(О’ - о2) о 3 = 0
п=1
(/4-п — нечетно, п= 1, 2, 3 ...), (11.17)
где
Частотное уравнение запишется в виде:
_ ©г tVo Л12 ©: 0 lVo Д14 © ^o^2i®2^“"®2pVo^28® ........... ' ’ -о о =0. о Wo Л32 ® fi3 — °>......
Здесь основными являются диагональные элементы й2—©2. Приравнивая их нулю, для собственных частот получим выражение (11.18). Элементы, содержащие коэффициенты Anj, соответствуют кориолисовым силам, и их учет лишь уточняет значение частот со = Йп. Приравняв нулю определитель второго порядка в левом верхнем углу, получим
(й? — со2)(й| — ю2)— Vq Д?2 ю2 = 0.
Здесь учтено, что ASi=—Ац. Ввиду малости
значения
^Л?2
й( + й2 + vl Л22 pl-a?)2 ”
по сравнению с единицей низший кбрень квадратного уравнения можно привести к виду
2 ^0^12 <в2~ й2- У2Д22------——-----------.
й; -йг
(11.21)
Уравнение (11.20) показывает, что учет кориолисовых сил понижает значение собственной частоты. Следующее приближение можно получить, рассматривая определитель третьего порядка, и т. д.
Приравнивая нулю уравнения (11.18) или (11.21), можно получить критическое значение скорости движения жидкости или продольной (сжимающей) силы.
2. Трубопровод с жестким защемлением по концам (рис. 11.3,6). Граничные условия:
ф (0) = 0; ф' (0) = 0;
ф (/) = 0; ф'(0 = 0-
Собственные формы колебаний с точ-нбстью до постоянного множителя описываются формулой
Фп(х) = и —*
\ * л
_ Ц(«п)
У(«п)
(11.22)
где ап — корни уравнения:
и? — TV = 0 или ch al cos al —
—1 = 0. а = Оп/1. (11.23)
Тогда, приняв
и (х, 0 = 2 Фп (х) , (11.24)
П=1
придем к системе
(11.20)
(Я2 - ®2) Г„ + 2 + £>„,) Г, - 0,
,=1 (11.45)
234
где
й2 = 6П
(11.26)
Выражение для форм колебаний трубопровода будет иметь следующий вид:
I to2/n0V0f K^idx 0
= t (т+т0) \ ф; dx о
/ ап \
Фп (*) = и I -j- х) —
5 (an) / ап \
—---- И—~ х ,
Т (0&п) \ I /
(11.31)
(11.27)
где an — определяют из уравнений частот;
S2 _ ут w —— а3 4----
Ти— SV
или w =— (а/)3Х
т-^-Шо
Z
f tf^dx
--------- (П.28)
о
Уравнение частот запишется в виде:
— со' + Ли + Dn Л 2i + £>21; Ai + ^зь
Аг + £\г-
Q2 со“-Г- A 4-D
2 w 22 ~ 22’”» =0 Аг + ^зг- • •
(11.29)
ch а/ cos al 4- 1 ----------------—-------; (11.32) ch a sin а — sh a cos al
и(х)И(х)Г(х)5(х) — функции Крылова.
где w-wP/EI — относительная жесткость опоры.
В выражениях (11.25) — (11.29) фп, an — значения, определяемые из (11.31) и (11.32).
5. Трубопровод на одном конце при х=0 — жестко защемлен, а на другом при х=1 — упруго защемлен относительно угловых перемещений и жестко — относительно поперечных (рис. 11.3, д).
Граничные условия:
Ф (0) = 0; ф' (0) = 0;
hl
Ф" (/)=- — Ф' (/); ф(/) = о.
Выражение для форм колебаний имеет вид (11.22), в котором ап определяют из уравнения
Здесь, как и в предыдущем случае, основными являются диагональные элементы
3. Трубопровод жестко защемлен на конце при х=0 н шарнирно опирается на другом при х=1 (рис. 11.3, в).
Граничные условия:
ф (0) = 0; ф' (0) = 0; Ф(/) = 0; Г (/) = 0.
' Форма колебаний описывается выражением, аналогичным (11.22), в котором ап — корень уравнения:
tga/=tha/. (11.30)
Все формулы предыдущей задачи остаются верными и в данном случае, если в ннх поменять значение * а», найденное по уравнению (11.23), па Оп, определенное по (11.30).
4. Трубопровод жестко защемлен иа одном конце при х=0 и упруго закреплен относительно поперечных перемещений на другом конце при х=1 (рис. 11.3, г). Граничные условия:
ф (0) = 0; ф' (0) = 0;
,Ф" (/) =*= 0; Е^"' (/) = щф (/), где & — жесткость опоры на сжатие или растяжение.
ch al sin al — sh al cos al
h =--------—--------------j-----al, (11.33)
ch al cos al — 1
где It — относительная жесткость правой опоры относительно угловых перемещений; h—h(llEI).
Формулы (11.25) — (11.29) остаются верны и для данной задачи при условии определения ап из уравнения (11.33).
6. Трубопровод со свободным одним концом и другим, упругозащемленным относительно поперечных перемещений и же-сткозащемленным относительно угловых перемещений (рис. 11.3, е). Граничные условия:
ф' (0) = 0; ф"' (0) =— w ф (0);
ф"(/)=0; ф'"(0=0.
Выражение для форм колебаний трубопровода запишется в виде
где ап — корень уравнения;
а3
S? (а) — Т (а) V (а) — -=— [S (а) Т (а) — w
— u (а) V (a)J = 0. (11.35)
Подставляя полученные значения (*)• t*W и фп(х) в формулы (11.27) и (11.28), придем к уравнению частот в форме (11.25).
7. Трубопровод с одним шарнирно закрепленным концом при х=0 и с упруго-проседающей опорой на другом конце при х=1 (рис. 11.3, ж). Граничные условия;
где х — число промежуточных опор; — координата i-й опоры; а(; аг', аз — имеют те же значения, что и в (11.14).
Воспользовавшись методом Бубнова—. Галеркина и представив решение в виде ряда (11.12), придем к системе уравнений (11.13), где
L
а2 f
0
Фп (0) = 0; %(0)==0;
Фп(0 = 0; (0 = «»%(0.
Выражение для форм колебаний трубопровода будет
Фп (*) = т
\ V (ап) / ап : —--------V |------
J Т (ап) I
х
(11.36)
где ап — корень уравнения.
= (а/)3
th а/— tgal
2
(11.37)
Уравнение частот, как и в предыдущем случае, записывается в виде (11.25).
Рассмотрим колебания прямолинейного многопролетного трубопровода с упруго-просекающими промежуточными опорами (рис. 11.4). Дифференциальное уравнение колебаний многопролетного трубопровода на упругих опорах можно записать в виде:
д* и д2 и д2 и д2 и "ГТ" + а1 д/о + fl2 д + Оз д , + dx4 dt2 дх dt дх2
V. yW;
-^-u6(x-gf) = 0, (11.38)
1=1
,f Ф™ *”ij dx+a8f Ф1п Ф^ dx
Cnj = L
Oi f Фгп Ф«; dx b
x L
2j wi f Ф/п Фг/ 6 (* — &)
+ ---------z--------------- (11 -39)
ElOi f Фгп Фг; dx
[i=l,2,3...(x+ 1)].
Индекс i при аппроксимирующей функции показывает необходимость применения того уравнения форм колебаний, которое соответствует данному отрезку трубопровода, начиная от левой опоры. Квадрат собственной частоты основного тона колебания многопролетного трубопровода на упругих опорах может быть найден по формуле
L сз.Г ^Ф// dx
П + f 2
Oi f ylndx o
2 Wi ф<п(&) i=l_______________
L
(11.40)
Если длины пролетов многопролетного трубопровода равны, то &=fl (где I — длина каждого пролета; i=l, 2, 3...). Выражение для аппроксимирующей функции можно записать в виде
Ф„(0)
Фп (X) = Фп (0) S (ах) + — Т (ах) +
Рис. 11.4. Многопролетный трубопровод с упру-гопроседающими промежуточными опорами
а — трубопровод с шарнирным опиранием на концах и с упругопроседающей промежуточной опорой; б — трубопровод, одни конец которого закреплен шарнирно, а другой жестко н с упругопроседающей промежуточной опорой; в — трубопровод с жесткозащемлеиными концами и с упругопроседающей промежуточной опорой; г — трубопровод по концам упругозащемлен относительно угловых перемещений н жестко — относительно поперечных перемещений и с промежуточной упругопроседающей опорой
т ^(0) , + —И(ах)
К[а(х-^)Ь (П.41)
Фп(0) а3
V (ах) —
256
где (0): (0); ^"(O); ^"(O): X. — определи-
n n П П I
ют из уравнений, удовлетворяющих граничным условиям при x—L, и дополнительным условиям на промежуточных опорах
^n(U)=XifWi, (11.42)
где —сила реакции промежуточной опоры. Если (х—£t)<0, то соответствующий член суммы последнего слагаемого в уравнении (11.41) обращается в нуль:
а4
ф™(*)= у-фп(*); a = an'L
Рассмотрим несколько примеров колебаний двухпролетного трубопровода с упру-гопроседающей промежуточной опорой.
1. Трубопровод с шарнирным опиранием на концах и с упругопроседающей промежуточной опорой (рис. 11.4, а). Граничные условия:
Фп (0) = 0; (0) = 0;
ФпЮ = 0; <(/) = 0.
Условие на промежуточной опоре
M?w(/i)= X1', l=li+Z2. Аппроксимирующую W
функцию можно принять в виде:
Фп (х) = "у Afe V fcn . 'j ~~
L 1
( к\ { h\
&k = 7" I 1 Ah VI oCjj j;
где w — wP/EI — относительная жесткость упругой опоры; ап — корень частотного уравнения:
Т(а/) — V (al) - Pr V(al2) El
V(aZ) — Т (al) - 4-T (a/2) El =0.
Т (а/Д - V(a/i) a3 w
(11.44)
Подставляя полученные выражения в формулу (11.40), получим собственную частоту колебания основного тона трубопровода.
2. Трубопровод одним концом при х=0 закреплен шарнирно, а другим концом при Х~1 жестко защемлен, На расстоянии h от
левой опору установлена упругопроседающая опора (рис. 11.4,6). Граничные условия:
Фп(0) = 0; <(0) = 0;
Фп(0 = 0; <(0 = °-
На промежуточной опоре фя'(/1)—XJw. Выражение для фп(х), удовлетворяющее заданным граничным условиям, будет
Фп (х) = ~~ (т (ап -7-)— Ak v(an -у )— ап I \ I J \ * /
где
< ' ‘ ' I.
v(«n)- 41/ктИ(Хп'г)
о£ \ I / \ I /
а>п — корень уравнения:
T(aZ) S(al) — V (al) — и (al) V(al2) = 0.
El __ и (al2) El
T (aZJ - V (ah) a8 w
(11.46)
Подставляя полученные выражения в (11.40), получим частоту колебаний основного тона.
3. Трубопровод с жесткозащемленными концами и с упругопроседающей промежуточной опорой (рис, 11,4, в). Граничные условия:
ф„(0) = 0; ф'(0) = 0;
Фпи> = о; Фп(°)=°;
Дополнительное условие: t])n(Zi)=XJw.
Выражение для функции фп(х) для данного примера имеет вид
Z2 Фп (х) = — а;
/ X \ ( X \
«4 «П — I — Ak VI ап ~}—
^J^.Bkv[-Y-(x-li) at I 1
(11.47)
где
, . xs) ( li ^2 \
U (an) ’— =- u I an . ) Vj an , I a \ ' / \ 1 /.
_______ n______________
v (<*n) -v(<Xn-f-) ’ a’ \ U \ t )
( li\ ( It \
Bk—Bl«n . I—AhVi<Xn . 1» \ I / \ * z
а_ — корень уравнения:
и (al) — V (la) V (al2) EI
Т (al) — и (al) — и (al2) El = 0.
и (alt) - V (all) a3 w.
(11.48)
Подставляя полученные выражения в (11.40), получим частоту колебаний основного тона.
4. Трубопровод с промежуточной упругой опорой по концам упруго защемлен относительно угловых перемещений и жестко — относительно поперечных перемещений (рис. 11.4, а). Граничные условия:
Ч)п(0) = 0; <(0) = Л1^(0);
%(П = 0; <(0 = М>>
Условие на промежуточной опоре: tpn(Zi) =Х|/о>; hi, h2— жесткости упругих заделок.
Функцию 'фп (х) для данной задачи можно принять в виде
ф'(0) I С / х \
Т <хп — -AnVX «п I \ I )
I х \ htl Г ( х \ x anTrT" uanT~
- вп V (ап -у-)]-™ ГDn—~— hr Cnl X
V I /J c£ an J
an 1
-f-tx-ll) p
(11.49)
X V
где
Cn « tz(an —J— Bn ~J:
/ liA I h\
Bn = T ^an J J An V
an — корень уравнения:
| T (al) — и (a/)l
L <x j
I aiz (al) — (/ц -f- h2) S (al) 4- T (al) L a
1 Г hi 1
— T (a^i)--------L и (air)
a L a' J
V(al) a?
1 Г h2 1
-------T (al) — —— и (aZ) a £ a J
V (ak) a3
_V№) a3 EI
—Z~k№)-~Y-«(aZ2)l =0.
л 1 L I
1
Ш
(11.50)
Частоту основного тона найдем, подставляя полученные выражения в (11.40).
Если во всех разобранных примерах принять Л=/2, то полученные выражения значительно упростятся. Аналогичные решения можно получить и для случая жестких промежуточных опор. Для этого необходимо принять значение w бесконечно большим, т. е. о»-»-оо. Это равносильно тому, что дополнительное условие на соответствующей опоре ipn(/i)=0. Для более сложных случаев закрепления концевых участков трубопровода аппроксимирующие функции можно находить по методу, приведенному в [1].
Криволинейные участки магистральных трубопроводов чаще всего имеют круговое очертание, и поэтому при движении жидкости они совершают изгибно-крутильные колебания. Для таких трубопроводов малые колебания в плоскости кривизны и из нее не зависят друг от друга.
Рассмотрим собственные колебания для каждого из этих случаев в отдельности.
1. Колебания трубопровода с круговым очертанием продольной оси из плоскости ее кривизны. Дифференциальные уравнения, описывающие малые колебания трубопровода из плоскости ее кривизны, можно записать в виде системы;
2S8
где
€
эе?
82Ф ae?
(11.51)
c>4 de?
= 0;
и
R
w0
v =
л:0
ip-
I RV;
EI
i1/2 _L
~№' k=~ET'
R — радиус кривизны трубопровода: В — угловая координата; и — перемещение оси трубопровода; V— скорость течения жидкости; t—время; Ф — угол кручения; то — масса жидкости.
Безразмерная величина £, характеризующая перемещение осевой линии, может быть выражена через значение угла закручивания с помощью формулы
6= *ф ]• (и.52)
Систему уравнений (11.51) приводят к одному уравнению вида 8«Ф 8*Ф
EI
119 д*Ф l2R1,2v---------4-
- d03 dr
k J de? “ 1 d2®
- -- =S 0;
k dr? (11.53) решение которого можно принять в виде
6
1 de? dr? \
_2р1лЛ_^£
H k d0dr
iK.fi IQX • n e
(11.54)
где Хп— шесть корней уравнения;
Xе — (2 -J- v2) X4 — 2₽1/2 v QXS +(1— — — \ k
— й2)х2 — 2₽1/2-^-Х — — = 0; (11.55) / k k
Q — безразмерная частота, связанная с круговой tm —I- т ~|1/2 —•—“ X
ХЯ’со (© — круговая частота); СЛ—постоянные, определяемые с помощью граничных условий.
Безразмерное значение перемещения осевой линии можно найти из выражения
П=1
/X—0 /от Хе п
(11.56)
Подставляя (11.54) и (11.56) в граничные условия каждой конкретной задачи, получим систему шести уравнений для определения постоянных Сп.
1Лп]{Сп} = {0}; (г, п=1, 2, 3, ...
... , 6). (11.57)
Угол 0 меняется в пределах 0^0 «р. Рассмотрим собственные в неплоскостные колебания криволинейного трубопровода для наиболее характерных и часто встречающихся в практике случаев..
а) Концы трубопровода имеют шарнирное опирание:
(>-°L_n. JL . J?®. п.
е=фР °’ ае + ее = ’
Частоты собственных колебаний определя-
ют из уравнения:
4ц 412 ^1з» ••• » Ав 4г1 4гг > - ♦ • • , 4гв 4ei Ав2 » ♦ • • * » А»
где
= 0, (11,58)
л — 12___1 • л — ( —— ь \ :
ЛЗп”Лп А’ Л4п .2 Т* 8 » ,
\ кп /
б) Концы трубопровода жестко защемлены:
° ° 1--— = 0; ф=0; £ = 0
0 = <р J d0
Систему уравнений для определения Сп записывают аналогично (11.57), где
п
4fln. — в
апф
Уравнение частот собственных колебаний записывают аналогично (11.58).
259
в) Один конец трубопровода защемлен, а другой имеет шарнирное опирание:
которое описывает малые колебания кругового трубопровода в плоскости его кривизны, несущего установившийся поток несжигаемой жидкости, можно записать в виде:
д4Ф , „4 д2Ф + 0
Коэффициенты при неизвестных Сп в системе уравнений (11.57) будут:
1 / 1
Лиг — ~г Azn — I 9 + k I Xn;
Азп = 1;
An=/4- + H A’;
/ 12 1 \
= I п /М.
Л5П — 11 Iе * \ Ml J
Уравнение частот записывают аналогично (11.58).
г) Один конец трубопровода защемлен, а другой свободен:
где
1 +q 7 д*ф а2<р \ г
р \ дт2 0 дт2 /
яе0
Ф = w/RQq’, £ = 6/60; т = t -----------
g
q = mT/m0; 6 = Vo V Rdogi
, El
»=0: ф=°-0=ф: *. + J*L=0. дб дб
дЦ _ ац дФ
—----Ф = 0; ---------=0.
ао? ае? ае
6=0; | = 0
Rf)o — длина осевой линии трубы между опорами; w — перемещение центра тяжести сечения трубы по касательной к осевой линии; R — радиус кривизны осевой линии; Р — давление жидкости; Fo — площадь просвета трубы; то и тт — погонная масса жидкости и трубы; Ц> — относительная скорость движения жидкости; 6 — угловая координата.
Принимаем решение (11.59) в виде (11.54), где Хп — корни уравнения:
Для этого случая коэффициенты Л<п в уравнении (11.57) будут:
й =У K00gco
безразмерная частота.
й2)х +
(11.60)
= (К* -1) А”; и6л=х„(^„-1) А" .
Уравнение частот собственных колебаний записывают аналогично (11.58).
При отсутствии перемещения концов трубы систему трубопровод — протекающая жидкость, которая совершает свободные колебания, можно считать консервативной. Трубы с защемленными, защемленным и шарнирным, а также шарнирными концами относятся к консервативным системам.
2. Колебания трубопровода с круговым очертанием продольной оси в плоскости его кривизны. Дифференциальное уравнение,
Система уравнений для определения постоянных Сп будет аналогична (11.57), где коэффициенты Л$п имеют следующие значения:
а) трубопровод по концам имеет шарнирное опирание:
Ал 1» ^2п Хп» ^Зп
Алп =
б) трубопровод по концам имеет жесткое защемление:
£= 0 )
*=1 ]ф®=0;
— = 0;
-^- = 0;
260
А,п^е\ А„ = ЛпА;
А = X2 £^п •
Авп кпе •
в) один конец трубопровода имеет шарнирное опирание, а другой — жесткое защемление:
= 0; <Р=О;_^Р_ = О. да<Р __0.
£ = 1; ф = 0; dg ’ д£3
JSL=O; -^- = 0. %
А. = 1; A = Х; Л„ = Ъ?п ; 171 271 Л оп и
Ащ — еп ; А^п = Xn в п;
А — X2 е^п лвп — лл е
Уравнение частот записывается аналогично (11.58).
Приближенное значение частот собственных колебаний можно получить, решая (11.59) методом Галеркина. Для этого принимают
оо
ф = S (ОФ*(£)»
fe=0
где Ф — удовлетворяют заданным граничным условиям задачи.
После выполнения процедуры Галеркина получим
d2 Аь _ <1аъ
Bjk ~Г + 2Ejh + Ajk ah = dx- dx
= 0(j = 0, 1, 2 ...),
где
i
n. C .t
—(l+f)J
1
- e?d
д2фн
0
1
-Mj О
ft,
d&
Ni — + & + n~>
N2 = 2|10~ +
+62+«2;a2 f о
Удерживая только два члена разложения j, А=0; 1, уравнение частот можно записать в виде
(soo 5н — 5io) — (Аю 5ц + ®оо+
+ 4^о “ 2Л10 *ю) + (Аю А1 — Л20) = 0. Откуда
^оо + Al % + 4£f0—2Л10 510 ,й? =---------------------т;---------х
2 (Bqq Вп — В10)
X 1±
± 1 /” j 4(ВооВц—£1о)(ЛооЛп Л|о)
I (Аю®114"А1Аю)"1"4£1о 2Л10Л’10_ ’
Знак минус перед корнем соответствует первому тону колебаний, знак плюс — второму.
Критическую скорость движения жидкости (скорость дивергенции) определяют равенством ш=0. Тогда, ЛОоЛц—Л10 =0. В первом приближении при удержании только первого члена разложения соотношение для определения частоты колебаний будет
со? = (Лоо/Boo)(gl £0о) •
Соответственно, критическую скорость определяют из условия ЛОо=0. Если записать
/У2=Х+62, то
Aik = Ajk + & Afr
Поэтому критическая скорость в первом приближении может быть записана в виде
о Aik
^0крит= ч R^og'
Aik
Приведем два примера использования вышеприведенных формул.
1. Рассмотрим колебания трубопровода с криволинейной (круговой) продольной осью и с шарнирным опиранием концевых участков. Аппроксимирующую функцию, которая удовлетворяет вышеприведенным соответствующим граничным условиям, можно принять в виде
= «й [1 — cos 2л (k + 1) g], где fe—0, 1, 2, ...
261
В первом приближении ф0 = а0[1 — —cos 2л£], после раскрытия элементарных интегралов значения Лоо и Всо будут:
л.о = Т (-₽4 - ₽2 ^);
floo=---Г(1 + «) (₽2 + 3«?)-
Тогда значение безразмерной частоты будет
Q2 = л°° = i-Ф6 - ^2Р4 + е2р2 = в» (1 + 9)(р2+зе§) » P2(P2-eg)(P2-^—г2)
'+« (Р2 + зе§)
где
С2=(62 + п2)/и; р = 2л.
Подставляя в выражение для определения частоты колебания значения ц, N2, и переходя к размерным величинам, получим
Фь — «ь [3 sin 2л (ft + 1) £ -
— sin6n(ft + l)£]ft = O, 1, 2, ...
Как и в предыдущем примере, ограничимся только первым приближением. После раскрытия интегралов и упрощений выражение для безразмерной частоты собственных колебаний будет:
№_______|. рг[41р4-45^(2^ + ?)+
0+g) 81(₽2 + 5^)
-ь 81 (eg+«Д) eg]
si (р2+seg)
Переходя к размерным величинам, получим
(/п0 + тт) R*
g [41 g — 45g (2 + у2) + 81 (1 + у8)]
EI g(g-i)2
(m0 + m1)Ri (pf + 3)
где
где
и(й-‘)
Критическую скорость транспортирования жидкости найдем из уравнения:
р1 = 2л/е0.
Приравнивая ш=0, найдем критическую скорость движения транспортируемой жидкости
EI
R2 т0 т0
ВВ.
1/2 =
к0крит
4л2 ео Из полученного выражения для частоты колебания трубопровода с транспортируемой жидкостью можно получить собственную частоту колебания трубопровода с криволинейным (круговым) очертанием продольной оси при отсутствии внутреннего давления и движения жидкости. Приняв Р=0 Vo=O, получим
и
о 0)2 = -------------
р? (р? -
Эта формула совпадает с формулой частот колебания двухшарнирных круговых арок. Результаты проверок показали, что полученные формулы вполне приемлемы для практического применения и нет надобности для нахождения второго приближения.
2. Рассмотрим колебания трубопровода с криволинейным (круговым) очертанием продольной оси, концевые участки которого жестко защемлены. Аппроксимирующая функция, которая удовлетворяет граничным условиям:
41₽? - 45g (2 + у2) + 81 (I + у2) = 0;
41g-90g+ 81 EI
45g —81 P*mo
PF.
m0
Проверка результатов для частного случая жесткозакрепленной по краям арки показала, что погрешность результата, получаемого пр приближенной формуле по сравнению с точным значением, составляет не более 1—2 %, что вполне приемлемо для практических целей, поэтому необходимость в последующем приближении отпадает.
Для трубопровода с шарнирно закрепленными концами аппроксимирующую функцию можно также принять в виде
Фо = ао(2£<>-6^ + 5^-^);
Фл == из +*) - (io + 3k) es- + + (ll+3*H4-(4+*)g8hft,
а для случая, когда один конец .трубопровода имеет шарнирное закрепление, а ДРУ" гой — жесткое защемление:
Фо = <х0 (3g* - 8£ь + 6g* - g2);
Фл = ah ф -- 3^ + 3g* - g3) 6?-
262
Для консервативных систем при линейной постановке решаемой задачи затухания, вследствие движения транспортируемой • жидкости, отсутствуют. Трубы с защемленным и свободным концами относятся к неконсервативной системе.
В этом случае трубопровод совершает затухающее движение. Одним из факторов, влияющих на затухание колебаний, является движущаяся жидкость.
С увеличением скорости течения жидкости частота уменьшается. При определенной скорости течения частбты становятся равными нулю и система теряет устойчивость в результате изгибных колебаний. Для консервативных систем с увеличением отношения массы жидкости к общей массе системы первая частота уменьшается, тогда как другие увеличиваются. Аналогичные явления происходят и при колебании трубопровода с круговой продольной осью в плоскости изгиба.
Сопоставляя результаты анализа колебаний криволинейных и прямолинейных трубопроводов, нельзя не заметить аналогию в качественной картине. Как в тех, так и в других случаях при решении задачи в линейной постановке при отсутствии перемещений концов не удается учесть демпфирующее свойство жидкости. Для трубопроводов (как прямолинейных, так и криволинейных) с одним защемленным, а другим свободным концами течение жидкости оказывает довольно сильное демпфирующее действие. В нелинейной же постановке возможен учет демпфирующего свойства жидкости во всех случаях закрепления концов прямолинейного (трубопровода. Аналогичные Явления следует ожидать и в случае колебания криволинейного трубопровода.
Влияние течения жидкости выражается в уменьшении собственных частот и в затухании колебаний. Демпфирующий эффект обусловлен кориолисовым ускорением. Следует отметить, что при колебаниях дуговых участков труб, удовлетворяющих неравенству
/? С 5 (г2/б), необходимо учитывать влияние искажения поперечного сечения (вследствие сплющивания) на уменьшение изгнбной жесткости.
Приведем формулы для приближенного определения частоты собственных колебаний для П-образного компенсатора и уг-левых соединений.
Приближенное значение собственной чайоты колебаний основного тона из плоскости трубопровода для П-образного компен-
Рис. 11.6. Расчетная схема угла поворота участка надземного трубопровода
Рис. 11.5. Расчетная схема П-об-разкого компенсационного участка
Рис. 11.7. График зависимости коэффициента а от угла 6
сатора (рис. 11.5) можно определить по формуле
где EI — жесткость сечения трубопровода; q — вес I см длины трубы с учетом веса продукта: 7 — расстояние между опорами компенсатора: Н — вылет компенсатора; В — длина полки П-образного компенсатора.
2. Приближенное определение частот собственных колебаний двух участков, соединенных под углом (при колебаниях из плоскости) (рис. 11.6)
Если принять, что EI/GI-pf^X, гго основную частоту собственных колебаний трубопроводов, соединенных под углом 0 (из плоскости), можно определять по формуле
'““Гггг- (11'62>
263
где ТГ — момент сопротивления сечения; а—числовой коэффициент, зависящий от отношения Lt/La и от угла 6 и опредлеяемый по графику (рис. 11.7).
Кривые зависимости а от 0, приведенные на рис. 11.7, для всех других отношений L\IL2 значения 0 должны располагаться между кривой Lt—L(L3—0) и кривой 1
£1=£2= — Хотя такой подход не совсем точен, тем не менее простое интерполирование между двумя крайними случаями при любом отношении Li/L2 в первом приближении является вполне удовлетворительным. Таким образом, эти два крайних случая в сочетании с простой интерполяцией позволяют определять значения а при любом отношении длин криволинейных участков трубопроводов и любом угле 0.
Для схемы прокладки трубопроводов с наклонными компенсирующими участками (см. рис. 11.2) собственные частоты в пределах первой зоны сгущения мало зависят от угла <р (в точках перехода от одного участка к другому опора препятствует возникновению крутильных колебаний) между компенсирующими и прямолинейными участками (при наиболее распространенных на практике значениях <р=18...24). Влияние угла <р сказывается только для высших форм колебаний. Это в равной степени относится и к трубопроводам с треугольными компенсационными участками.
На практике часто трубопровод на опорах вблизи компенсаторов не имеет закрепления, воспринимающего кручение. При этом даже в нижней части спектра собственных частот могут появляться частоты, для которых велико влияние крутильных деформаций. Как показали результаты расчетов на ЭВМ [28], эти частоты изменяют характер спектра собственных частот (располагаются между зонами сгущения частот ниже первой собственной частоты изгибных колебаний и т. п.), что необходимо учитывать при расчете конкретных надземных трубопроводов на динамические воздействия.
Трубопроводные переходы большого пролета из труб малого диаметра приближенно можно рассчитывать как гибкую нить.
Предлагая, что трубопровод представляет собой гибкую нить с натяжением N, движение идеальной жидкости ламинарное и происходит с постоянной скоростью о; колебания малы, при этом не нарушается характер течения жидкости и N остается постоянным, уравнение колебания трубопровода можно записать в виде
2М
Эа и 2т0 v д2 и
dt2 m-j- т0 дх di
т0 V2. — N I д2 и т -|- /п9 J дх2
(11.63)
Круговую частоту малых колебаний гибкого трубопровода вычисляют по формуле
пл т0 v2 — N
= i г- --- »
V (т -J- т0) N — тт0 v2
(11.64)
где I — длина трубопровода; т— погонная масса трубопровода; ш0 — погонная масса движущейся жидкости; v — средняя по сечению скорость течения жидкости.
Если
(11.65)
то движение трубопровода становится апериодическим нарастающим (неустойчивый режим).
11.5. Колебания трубопровода вследствие пульсации давления и изменения скорости протекающей жидкости
Уравнение малых колебаний многопролетного трубопровода на упругопроседаю-щих опорах может быть записано в виде (11.38). Применением процедуры Галерки-на уравнение (11.38) приводится к уравнению (11.13), коэффициенты которого определяют по формулам (11.39).
Для рассмотрения колебаний вблизи частот основного тона достаточно в разложении (11.13) удержать один член ряда
d2 f df
-rr + B^-+Ci/(Z) = 0. (11.66)
at2 at
Квадрат частоты основного тона может быть найден по формуле
L
4 [ ф" ф«/х
ра1 + L +
2 ws ф2 (Ф s=l
L
(т + /п0) J
о
(11.67)
Как видно из (11.67), повышение жесткости опор приводит к увеличению высоты собственных колебаний. С возрастанием жесткости опоры произведение ЮвфДО.
стремится к предельному значению, равному силе реакции жесткой опоры. Значение функции ф(х) на опоре, равное прогибу трубопровода в этой точке, равно нулю, поэтому для трубопровода на жестких опорах последнее слагаемое в формуле (11.67) обращается в нуль. Для описания малых колебаний многопролетного трубопровода на жестких опорах в дифференциальном уравнении (11.38) последнее слагаемое следует записать в виде
V.
2 Ps(x,Z)6(x-sZ).
s=l
Функция ф(х) для многопролеггного трубопровода должна удовлетворять как краевым условиям, так и условиям на промежуточных опорах.
Рассмотрим случай, когда длина продольной волны в столбе пульсирующей жидкости значительно больше длины трубопровода, т. е. 2лс/соЗ>£ (с — скорость звука в жидкости; со — круговая частота пульсаций). Он наиболее характерен для нефтепродуктов. Для моногармонических пульсаций закон изменения давления и скорости можно записать:
Р = Ро + ДР cos coZ;
ДР . .
v=v0 —-----sin at,
Фо
где Ро, Vo — средние значения давления и скорости; ДР — амплитуда пульсаций давления.
С учетом выражений (11.68) коэффициент ал в уравнении (11.38) запишется в виде
Яд — Дд Яд cos (at ,
где а з- (/П{,ДР)/(Е7) (величины, содержащие отношение vic, малы по сравнению с единицей и поэтому исключены).
Тогда в формуле (11.66) выражение для С\ примет вид:
Ci = С + С cos coZ;
t L
ai Г ф" ibdx
3<; (n.69)
C L
яг | ф2 dx 6 гДе C=Q2 определяют по формуле (11.67). Уравнение колебаний (11.66) будет d2Z(Z) df (t}
+ B dt +[Q? + C' C°S WZ] f (0=0‘ (11.70) Решение уравнения (11.70) можно принять в виде:
при В > 0 / (Z) = у (Z) е
при В < 0 f(t)=y (Z) е(В/2)г, где t/(O — решение уравнения d2 у (Z) г_9 ,
—+ COSCOZl С/(Z) =0, (11,71)
где Q2= Q2— (В2/4).
В зависимости от соотношения параметров Q, со, С'/Q.2 решение уравнения (11.71) может быть ограниченным — устойчивым или неограниченно возрастающим — неустойчивым. При неустойчивых решениях амплитуды поперечных колебаний возрастают неограниченно, что соответствует потере динамической устойчивости (параметрическому резонансу). Наиболее широкая область, при которой наступает динамическая потеря устойчивости, расположена в первой зоне неустойчивых решений уравнения изменения амплитуд колебания во времени и соответствует частоте возмущения, примерно в 2 раза превышающей собственную 1 баний.
Известно, группируются возмущающего
частоту поперечных коле-
(11.68)
co/Q = 2; 1;
что неустойчивые решения около отношений частоты воздействия со к частоте Q:
2 1 2 2
3 ; 2 ’ 5 ...... k
(k =1,2,3...).
Из этого соотношения видно, что потеря динамической устойчивости возможна при частотах возмущающих сил, расположенных по убывающим тонам собственных колебаний.
Известно, что для границы первой области неустойчивости (когда частота возбуждения примерно в 2 раза больше частоты собственных колебаний) справедливо неравенство
[ 1 1 X со
««(ч-Т’+Ъ’’2)'
где 9=-(C7Q2).
Из этих соотношений можно найти значение критической пульсации давления:
4Q2 _ £2 £
± ДРкрит = 2 --------------(пг+^о) Г ф2сЬс.
m0 f Ф" Ф<** J
(11.72)
При В=0
265
L f ф1У ipdx
Г EJ (i
Д^крит = 8 . 4“
L mo p
I ip" ф4х
придем к системе однородных уравнений относитльно v,; Wj. При этом мнимую единицу следует понимать как оператор, сдвигающий фазу тригонометрических функций времени на л/2; v,, Wj — постоянные величины;
2 ws\jp2(sl)
^=i ( p 9\ 1
—j—+(тг+^)±4
m0 ip" ipdx
Й^о — С' и>2 =
(11.73)
В случае большого часла пролетов трубопровода условия закрепления его концов на значении ДРкрит не сказываются.
Для трубопроводов на упругих опорах существует предельное значение параметра жесткости упругих опор ©пред. При критической нагрузке каждый пролет выпучивается по полуволне синусоиды, а упругие опоры ведут себя как абсолютно жесткие. Дальнейшее увеличение жесткости упругих опор гс>шпрОд не повышает устойчивости системы
Предельное значение параметра жесткости упругих опор можно найти по известной формуле — / л \
©пред = 2л211 -f- cos — I, (11.74)
\ п + т/
где »j —число пролетов (л-1, 2, 3,...); Т— ’/2, если жесткой является только одна крайняя опора н т—0. если обе крайние опоры жесткие.
Рассмотрим случай, когда происходит рассеяние энергии на упругих опорах. В этом случае
WS = Wos (1 + fll),
где u>0S — упругая составляющая характеристики жесткости опоры; т] — коэффициент потерь энергии колебаний в материале опоры; ?] —6|/л, 61—декремент колебаний; 1.
Тогда формула (11.66) примет вид
+ Ф3 + с' cos + iC") f (0 = 0,
(11.75)
где Й2 — определяют, как и ранее; С' —вычисляют по формуле (11.69):
©os 'ПФ8 (sl)
L
(т 4- т0) |‘ ф2 (х) dx о
— С" и/, 4~ С щ = 0;
1 2 3
- 2 0)2 1 , \
Q — —— -{- С IВУ1 —
4 2/
— С" vi — --- С' w3 = 0.
(11.76)
Для приближенной оценки первой, наиболее опасной области неустойчивости достаточно взять второе и третье уравнения в (11.76). Отбрасывая побочные члены, содержащие Оз и ©э, и решая систему, получим из условия нетривиальности экстремальные точки для частот:
<01 = 2Й или ©i/Q = 2; = 0.
Как видно, полученное значение для ©1 в точности совпадает с первым членом ранее приведенного ряда. Решая систему относительно С' и С", получим, что критической частоте пульсации соответствует критический коэффициент возбуждения, при котором С'—2С". Подставляя значения С' и С", получим критическое значение пульсаций давления:
X 2 “'о® ф? («о др £____________
“^крит — „ г
т0 р
ф" фйх
(11.77)
Выражение (11.77) соответствует наименьшей величине пульсирующего давления, при котором возможны явления динамической неустойчивости.
Случаю ©2=0 соответствует значение [C']2 = 4[Q2—С"?],
откуда
ДРкрит —
1 4- Vй? — (С")? X /п0 /
Приняв решение уравнения (11.75) в виде
L f ф2 dx ti ------
[ ф"ф<& 0
(11.78)
266
Все интегралы, входящие в вышеприведенные формулы, могут быть раскрыты и записаны через граничные значения соответствующей задачи. Приведенные выше (11.15) значения этих интегралов с достаточной для практики точностью справедливы как для однопролетных, так и для многопролетных трубопроводов.
11.6. Динамика подземных трубопроводов
Наличие протекающей в прямолинейном трубопроводе идеальной жидкости не сказывается на частоте и формах продольных колебаний этих трубопроводов, поэтому методы определения частот и форм колебаний прямолинейных участков трубопроводов, приведенные ниже, не учитывают наличия в трубопроводе идеальной жидкости.
Одним из видов динамических воздействий на трубопроводы являются воздействия, возникающие во время землетрясений промышленных взрывов и т. д.
Исследования, а также практика эксплуатации трубопроводов показывают, что подземные трубопроводы, проложенные в сейсмических районах, при землетрясениях подвергаются воздействию значительных динамических нагрузок (при землетрясениях силой более 8 баллов по сейсмической шкале MSK-64). Динамический расчет подземных трубопроводов при сейсмических нагружениях может быть осуществлен, если известен закон движения при землетрясениях грунтового массива, окружающего трубопровод, и вид функции, характеризующей взаимодействие трубопровода и грунта.
На основании материалов обследования реальных трубопроводов, перенесших землетрясения, а также данных экспериментальных исследований можно все повреждения и разрушения трубопроводов сгруппировать следующим образом:
разрушения трубопроводов, вызванные смещениями грунтовой толщи вдоль активного разлома;
разрушения или повреждения трубопроводов вне зон влияния тектонического разлома в результате совместных деформаций трубопровода и грунтового массива, в котором этот трубопровод находится;
разрушения или повреждения трубопроводов в местах их подсоединения к другим трубопроводам или сооружениям, а также на границах участков, сложенных грунтами с различными деформационными (сейсмическими) свойствами.
Разрушения или повреждения трубопроводов, проложенных б однородных грунтах, при сейсмических воздействиях, направленных по нормали к продольной оси трубопровода, наиболее возможны в случаях соответствующего нагружения тонкостенных трубопроводов большого диаметра. Данные расчетов подтверждают появление значительных дополнительных сейсмических напряжений, возникающих при землетрясениях, сила которых не менее 9 баллов по шкале MSK-64.
Проведение расчетов трубопроводов, пересекающих линии тектонических разломов, при ограниченных сведениях и величине взаимного смещения берегов разлома, практически, нецелесообразно. В случае необходимости пересечения трассой линии разлома необходимо всякий раз выбирать наиболее приемлемое конструктивное решение, которое обеспечивает свободное смещение трубопровода в зоне, примыкающей к разлому.
Существуют два принципиально различных подхода к расчету подземных трубопроводов вне зон разлома. Первый из них связан с рассмотрением колебаний трубопровода, взаимодействующего с грунтом, па основе динамической теории сейсмостойкости подземных сооружений [25, 38, 13, 15].
При втором подходе повреждения или разрушения трубопровода связывают с деформациями (сжатием — растяжением) грунтовой среды вдоль продольной оси трубопровода. Сейсмическое воздействие рассматривают как квазистатическое [35, 39, 41]. При этом особый интерес представляет наиболее часто встречающийся случай разрушения или повреждения трубопроводов в результате воздействия сейсмической волны, направление которой совпадает с продольной осью трубопровода. При этом сейсмические воздействия, характеристики грунтового массива и самого трубопровода можно рассматривать как воздействия и характеристики, имеющие вероятностный характер. В настоящее время разработаны основы вероятностных методов расчёта на сейсмические воздействия, которые подробно изложены в работах [40].
Остановимся более подробно на этих подходах к определению напряженного состояния подземных трубопроводов.
1. Динамическая теория сейсмостойкости основывается на том, что движение грунтового массива, окружающего трубопровод, при землетрясениях можно пред
267
ставить в виде бегущей волны переменной интенсивности:
и0(х, t) = fit — — \ ср
которую, в частности, можно выразить через затухающую по времени гармоническую функцию:
/6 — -^-) = Ле а(/ xIcp) sin о -----—Y
\ Ср / \ Ср /
где х — координаты точек, расположенных на продольной оси трубопровода; — скорость продольных сейсмических воли в грунте; А — амплитуда колебаний частиц грунта при сейсмических воздействиях; а—коэффициент затухания колебаний в грунтовом массиве; t — время сейсмического воздействия; со — частота колебаний частиц грунта.
При данной постановке задачи рассматривают только процесс, связанный с колебаниями трубопровода в грунте без учета объема колеблющегося грунтового массива.
Таким образом, исследование условий работы подземных трубопроводов при землетрясениях приводит к решению линейного или нелинейного дифференциального уравнения в частных производных при соответствующих начальных и граничных условиях и с учетом закона движения грунта при землетрясении.
Дифференциальное уравнение продольных колебаний подземного ггрубопровода можно записать в виде:
9 д2и
— ат ~ТТ ± ь-11 “ “ (“)]и = дх‘
где
ат = EFlm‘, Ь2 —----------;
т
kx— коэффициент линейной пропорциональности между касательными напряжениями тх, распределенными по периметру трубопровода, и деформацией его сечения:
ix = kxu(x,t); (11.80) DH — наружный диаметр трубопровода; со(и) — функция, характеризующая нелинейную составляющую деформации труба — грунт (со (и) — определяют экспериментально).
Точное значение со (и) определить сложно. Однако если известна зависимость между тя и и при цикле нагружение — разгрузка, то решение уравнения (11.79) можно найтн, разбив диаграмму на участки и произведя интегрирование отдельно для каждого участка. При этом следует соблюдать условие сопряжения участков при переходе от одного к другому. Значительно проще найти коэффициент линейной пропорциональности kXi поэтому на практике
для простоты для малых деформаций пользуются приближенным линеаризированным уравнением, заведомо допуская при этом определенные погрешности. Последние могут быть снижены правильным нахождением значения kx.
Если в уравнении (11.79) пренебречь нелинейным членом (о(«)=0, т. е. в системе труба—грунт рассматривать только упругий участок диаграммы нагрузка—разгрузка тя — и и ограничиться только рассмотрением малых деформаций, то получим известное линейное дифференциальное уравнение
d2 и 9 д2 и t д2 и0
-----— аг--------± о и ——-------------.
dt2. 1 dx? dt2
(11.81)
в правой части которого стоит ускорение колебаний частиц грунта при землетрясении. Если ускорение грунта заданная функция u0=f(t), то представив и(х, t) в виде ряда
СО
и (х ,t) = ил (t) Хп (х) (11.82)
Л=1
при нулевых начальных условиях, решение (11.81) может быть записано так:
u(x,t)
оо
Л=1
Jf (т) sin an(t —
— x)dx, (11.83)
где con= г ai — частота л-й формы
собственных колебаний трубопровода; Хп—коэффициент, зависящий от условий закрепления трубопровода на концах рассматриваемого участка;
J Xn © dl
(*) = Хп (ж) —-----------
о
Хп(х)-л-я форма колебания трубопровода; Тп= =2л/а> п — период л-й формы свободных колебаний трубопровода.
Напряжение от сейсмического воздействия в любом сечении трубопровода могут быть определены по формуле со t
a (x,t) = Е (х) J / (т) sin (on (t — п=\ О
—т) dx, (11.84)
где Е — модуль упругости материала трубы.
В уравнении (11.81) знак перед Ь2 будет положительным ( + ), если колебательное движение элемента сечения трубы происходит в направлении положения равно
268
весия, знак будет отрицательным '(—)‘, если продольные колебательные движения элемента трубопровода происходят в направлении от положения равновесия. Для определения максимальных значений сейсмических напряжений и перемещений в трубопроводе достаточно ограничиться рассмотрением четверти периода колебательного движения и принять знак минус перед коэффициентом Ь2. В формулах (11.83) и (11.84) значение сейсмического ускорения частиц грунта входят под интеграл. Задавшись приближенным значением ускорения колебаний частиц грунта при землетрясениях, можно оценить значения перемещения и напряженного состояния трубопровода. Если перемещение грунта при землетрясении представить в виде суммы затухающих синусоид:
N
и0 (О = X sin cos /, (11.85)
S=1
то для значения un(t), входящего в форму
лу (11.82), получим
N
un (0 =
s=l
Асо2е-<°72) “s'(Г/
----5--------- 1
D2ns+B2s
COS C0s t
+ (an cos tant — bn sin ont}. (11.86)
Здесь — амплитуды затухающих колебаний;
— круговые частоты сейсмического воздействия; — коэффициенты затухания сейсмических воли;
Если затухание сейсмической силы велико, то в формуле (11.86) можно пренебречь значением а2 по сравнению с единицей. В этом случае формула (11.86) значительно упростится и примет вид
N
sinco^/k (11.89)
X [ — (1>2) sin (о t 4- a (i)2 cos со /1 —
I V п SJ 8 ' S п S A
о Г 9 / 3 \
- a (on cos <on t - — -jl + —- asJx
X
Большая протяженность подземных магистральных трубопроводов приводит к тому, что на различных участках трассы трубопровод подвергается сейсмическим воздействиям различной интенсивности. Это связано с неодинаковой удаленностью различных участков трассы от эпицентра землетрясения, с геологическим строением участков трассы, с затуханием сейсмической волны. При расчетах обычно рассматривают участок трубопровода, расположенный между технологическими или конструктивными узлами.
Длина сейсмической волны обычно значительно превышает длину рассматриваемого участка и поэтому затуханием велны на этом отрезке можно пренебречь. При расчетах достаточно определить перемещение сечения трубопровода и напряжения, возникающие в нем от одной сейсмической волны.
Приняв в формуле (11.89) а(=0 и ограничиваясь только одним членом суммы, получим
Лй)2 / (I)
“п (0 = —;------7 Sin со/ —------sin con t
(1)2 — (l)2 \
(11.90)
Если частота собственных колебаний трубопроводной системы намного больше частоты колебаний сейсмической волны, т. е. (Оп^о, то задача становится квази-статической и формула (11.90) может быть представлена в виде
или
ип (0 = (Л(|)2/(о2) sin (О/, (11.91)
Un W =~ (Й’о/й)п)-
В случае когда (о-*-соп
А
ип (0 = “7“ (sin со/ — со/ cos со/).
(11.92)
(и:эз)
369
Из формулы (11.93) видно, что первый максимум [мп(О] получится при т. е. через четверть периода колебания грунтового массива, окружающего трубопровод. Обычно un(t) называют коэффициентом динамичности системы.
При прокладке трубопроводов в сейсмических районах, как уже отмечалось, не рекомендуется жестко защемлять концы участков трубопровода, не предусмотрев устройства вблизи этих жестких узлов специальных компенсационных участков, углов поворота оси трубопровода и т. п. Однако не исключены случаи, когда прямолинейный участок трубопровода будет жестко защемлен по концам. При определении напряжений в сечении трубопровода на таком участке граничные условия могут быть записаны в виде:
и(*,О|х=о=О; п(х, Г) |х=/ = 0. (11.94) В этом случае форма колебаний будет определяться в соответствии с формулой
Xn(x) = sinXnx, (11.95) где
х2 = (пл//)2;
о2 = (пл//)2 а2 + fe2.
(11.96)
Если концы прямолинейного участка трубопровода имеют возможность упруго смещаться (устраиваются компенсаторы), граничные условия запишутся так:
ди ki ди k2
— = «; = — и,
дх х=о EI дх х=е Е1
(11.97)
где ft) и kt — коэффициенты, учитывающие степень жесткости закрепления трубопровода иа концах участка.
Форму колебаний можно определить по формуле
Хп (х) — С»
1
:—— sin Xn X 4- cos Хп X ,
где Кп —корень уравнения;
tgH =
Н (*1 + Я2)
Н* — Х1 х2
(11.98)
(11.99)
Xi = ki/EF', х2 = k2IEF‘, |.i = X/.
В случае, когда один конец прямолинейного участка трубопровода защемлен, а другой имеет возможность упругого смещения, граничные условия будут:
— =Х1«; u(x,0L=/ = 0.
дх |л=о 1
(11.100)
Форма колебаний в данном случае
также будет определяться по формуле (11.98); X при этом будет корнем уравнения
xltgp + p = 0. (11.101)
Подставляя значения для коэффициента Un(t) и соответствующие дайной задаче значения форм колебаний Хл(Х) в формулы (11.82) — (11.84), можно найти перемещение и напряжения в любом сечении трубопровода.
2. Наибольшее практическое распространение получил приближенный метод расчета трубопроводов, основанный на рассмотрении сейсмического воздействия на подземный трубопровод как квазистатиче-ского. При выводе расчетной формулы для определения продольного сейсмического напряжения в подземном прямолинейном трубопроводе исходим из сопоставления деформации трубопровода и окружающего его грунта, т. е. из предположения, что
егр = етр или
егр = т* етр, (11.102) где егр —относительные упругие деформации грунтовой среды; 8тр — относительные упругие деформации трубопровода; т* — коэффициент пропорциональности.
Если учесть, что относительная упругая деформация грунтовой среды
е-р=±Ъ’°.тосГ1’ <11103>
то напряжение в подземных (или наземных в насыпи) трубопроводах могут быть определены по формуле
(11.104)
где т — коэффициент защемления трубопровода в грунте (гл—1/m*) определяют по табл. 11.1; ko — коэффициент ответственности сооружения, вычисляемый в соответствии с действующими нормативными документами (табл. 11.2); —
коэффициент повторяемости землетрясений, определяемый по табл. 11.3; ас — сейсмическое ускорение, см/с2 (табл. 11.4); Го — преобладающий период сейсмических колебаний грунтового массива, определяемый при изысканиях (при сейсмической оценке трассы), с. При отсутствии необходимых данных допускается принимать Го” “1 с; Ср — скорость распространения продольной сейсмической волны вдоль продольной оси трубопровода. Скорость распространения сейсмической волны определяют при изысканиях (при сейсмической оценке трассы газопровода). Ориентировочные значения С_ приведены а табл. ИЛ-
г
В действительности трубопровод пересекает участки с различными грунтовыми условиями, трасса трубопровода имеет повороты (в плане и в вертикальной плоскости) , поэтому для определения напряжений в трубопроводе сложного в плане очертания целесообразны численные методы, позволяющие учесть как изменение грунтовых условий, так и конфигурацию
2ДО
Таблица 11.1. Ориентировочные значения скоростей распространения упругих продольных воли Ср и коэффициентов защемления трубопроводов в грунте т
Грунты СР’ км/с т
Насыпные, рыхлые (пески, супеси, суглинки и др.) ие- 0,12 0,5
водоиасыщенпые Песчаные маловлажные (су- 0,15 0,5
хне) Песчаные средней влажно- 0,25 0,45
сти Песчаные водонасыщенные (со значительным содержанием в порах грунта защем- 0.35 0,45
ленного воздуха) Супеси и суглинки 0,3 0,6
Глинистые влажные, пла- 0,5 0,35
стичные Глинистые плотные, полу- 2 0.7
твердые и твердые Лесс н лессовидные грунты 0,4 0,5
Торфяной 0,1 0,2
Низкотемпературные мерзлые (песчаные, глинистые О О * — 1
насыпные) Высокотемпературные мерзлые (песчаные, глинистые, 1.5 1
насыпные) Гравийные, щебенистые и 1.1 См. п.2при>
галечниковые породы мечаииц
Известняки, сланцы, песча- 1.5 То же
ники нарушенные Скальные породы иенару- 2.2
шейные
Примечания: 1. В таблице приведены наименьшие значения Ср. Значения Ср должны уточняться при изысканиях. 2. Значения коэффициентов защемления трубопровода следует принимать по грунту засыпки.
Таблица 11.2. Значения коэффициента Ко. учитывающего ответственность трубопровода
Характеристика трубопроводов
1. Газопроводы при рабочем давлении от 2,5 до 10 МПа (25—100 кгс/см2) включительно: нефтепроводы н нефтепродуктов роводы при условном диаметре 1000—1200 мм. Газопроводы вне зависимости от рабочего давления, а также нефтепроводы и нефтепродуктов роводы любого диаметра, обеспечивающие функционирование особо ответственных объектов. Переходы магистральных трубопроводов через водные преграды с шириной по зеркалу в межень 25 м и более
1.5*
2. Газопроводы при рабочем давлении 1.2—2,5 МПа (12—25 кгс/см2): нефтепроводы и иефтепродуктопроподы при условном диаметре 800—500 мм
3. Газопроводы при рабочем давлении ниже 1,2 МПа и нефтепроводы при условном диаметре менее 500 мм
При сейсмичности площадки 9 баллов и выше коэффициент Ко для трубопроводов, указанных в П- 1. умножают дополнительно на коэффициент -1,0.
Таблица 11.3. Значения коэффициента повторяемости землетрясений К п
Повторяемость землетрясений .... 1 раз в 100 лет 1 раз в ЮООлет 1 раз в 10 000 лет
Коэффициент повторяемости 1,15 1 0,9
Таблица 11.4. Сейсмические ускорения колебаний частиц грунта
Сила землетрясения, баллы 7 8 9 10
Сейсмическое см/с2 . . . ускорение. 100 200 400 800
трубопровода вдоль его продольной оси. Такой подход использовался в некоторых работах при решении задач о расчете протяженных подземных трубопроводов на сейсмические воздействия [35]. При этом сейсмические воздействия вводились как квазистатические наравне с другими статическими нагрузками и воздействиями. Расчетные модели принимались в зависимости от конкретных грунтовых условий, возможности проскальзывания трубопровода и степени его защемления в грунте. Сам же трубопровод рассматривался как балка на упругом основании.
При решении предыдущих задач динамики подземных трубопроводов предполагалось, что жидкость, движущаяся по трубопроводам, идеальна. Однако вязкость жидкости существенно влияет на характер ее движения в трубах и способствует изменению скорости и давления жидкости при колебаниях последних. Учет влияния вязкости и напора транспортируемых по трубопроводам нефтепродуктов требует к себе особого внимания при прохождении трассы магистральных трубопроводов ' через сейсмоопасные районы.
Система уравнений (11.2) описывает неустановившееся движение вязкой несжимаемой жидкости в круглой неподвижной цилиндрической трубе.
Перемещения трубопровода в продольном направлении при землетрясениях представим в виде совокупности перемещения трубопровода как жесткого тела и перемещения относительно центра масс, происходящих вследствие растяжения или сжатия трубопровода. С учетом движения трубопровода уравнение (11.5) можно переписать в следующем виде:
W dW д* № _+2а—=с?—
(11.105)
271
где w—u±Ho±w (знак (+) следует принимать п тех случаях, когда скорости перемещения трубопровода и жидкости противоположны, а знак (—) — когда направления скорости совпадают); v — скорость течения жидкости; ио — скорость движения трубопровода как жесткого тела; и — скорость перемещения сечения вследствие растяжения или сжатия трубопровода.
Второе слагаемое в левой части уравнения (11.105) характеризует величину силы трения, действующую на стенки трубопровода при протекании жидкости. При исследовании неустановившегося движения вязкой жидкости в подвижных трубопроводах слагаемым, характеризующим его деформируемость, ввиду малости можно пренебречь. В общем случае для определения продольного перемещения сечения трубопровода u(x, t) при землетрясении в предположении ламинарности вязкой несжимаемой жидкости следует решить систему уравнений:
д2. W dw
дй dt
2 d2.ii dt2 1 дх2 d2u0 dt2
d2W
дх? ’
20 (и ± й0),
(11.106)
где
0 = а(р//п); 2a = 32v/d?.
Если принять скорость перемещения трубопровода как жесткого тела, равную скорости движения частиц грунта при землетрясении, и пренебречь влиянием деформируемости трубопровода на движение жидкости, то можно каждое уравнение системы (11.106) решать отдельно. Сначала первое уравнение системы (11.106) при заданной «о и и=0, а затем второе уравнение с уже известной правой частью. Предположим, что скорость движения жидкости есть известная уже функция времени v[t).
v = иср + Д» sin со/.
С учетом вышесказанного дифференциальное уравнение колебания прямолинейного подземного трубопровода запишется;
ди dt
д2 и 7 dt2
d2u
—+ Йи + 2Р-
— 20о т 20ЙО. от
(11.107)
Представляя решение в виде ряда
оо
и (х,t) — 2 un(i)y.n(x), (11.108) n=l
придем к уравнению
+2₽ -^-+ ш* и„ = f (/).
dt2 dt п п п
(11.109)
где
fn (t) =— Лео? sin at — 20оср q= 20До sin at ± ± 2co0 A cos at. (11.110) При нулевых начальных условиях решение уравнения (11.109) будет
“п (О = 2₽ [0 - е-” (0 cos et +
+ 0 sin 0/)] -f- В {sin (at — (p) e~(sin q?X л_, , 0sincp— cocos® „ .
X cos 6t -f--------------sin 0/]} +
0
+ {cos (erf — <P) + e~£— cos cp cos 0/ — 0 cos ср-f-co sin cp 1]
_h-----ILZE-----sin0/ , (11.111)
0 JJ
где
В = Лео? qz 20До/ ]/*(co2 — co2J2 -f- 402 co2 ; tg«p = 20co/(ip2 — co2);
B___________2Лсо6___________
]/(^-«7+4₽W
0 = “S-p2; »2 = a?^ + t2.
Это решение — совокупность трех решений: внезапно приложенной к системе действующей на нее длительное время нагрузки; чисто вынужденных колебаний с амплитудами В и Blt частотой действующей нагрузки со и сдвигом фазы <р; сопутствующих затухающих колебаний с частотой 0, зависящей от амплитуд В и Bit частоты возмущения со, сопротивления 0 и сдвига фаз <р. Если в уравнении пренебречь силами трения, связанными со скоростью деформирования трубопровода, ввиду малости этих сил, то выражение (11.111) примет вид:
ип (0 = 20 -Vcp— (1 — cos con t) -{- В (sin со/ — con
co
—-------sin con f) -J- BL (cos co/ — cos con /),
COn
(11.112)
где
Лео2 20Ди „ 2Лсо0 Bi « В i — •
(co2-co2) (“«-“)
Подставляя полученные выражения для un(/) в формулу (11.108), где фп(*)"" форма колебаний трубопровода, находим его перемещение при сейсмических воздей
272
ствиях с учетом транспортируемой вязкой жидкости:
оо
и (X, t) = X\n (X) (2₽(1 — cos ШпО+ I <*п
П=1
+ Bl (cos tot — COS ton t) +
(CD \]
sinorf —-sincjn/ Ik (11.113)
/J
Напряжения в трубопроводе будут определяться по формуле
ОО
а(х, t) = Е 2 % <*) ип Ю =
П=1
= Е 2 % (X) |2Р-^ (1 - cos ton t) + n=l L Qn
+ Bt (cos tot — cos ton t) +
(GJ \"|
sin©/—-----sinojn/ . (11.114)
тп / J
Удерживая первый член ряда и приравнивая его к расчетным сопротивлениям металла труб, определяемым согласно СНиП 2.05.06^86 «Магистральные трубопроводы> (Т?2). можно дать оценку допустимого приращения давления в трубопроводе, вызванного сейсмическими воздействиями:
Д^доп = (^2-Л1£)/^, (11.115)
где
М = ф' (х) Г2р (1 — cos ton t) +
L ип
4- Bi (cos tot — cos c)n t) +
Лш2 f to \1
-f- "7---7 sin Grf —---sin соп /11;
gj2— GJ2 \ /J
ф' (x) 2p / .
N =--------------1 sin tot —
pM®»-®2) '
GJ \
— ----sinGJn/ .
“n /
Подставляя в полученные выражения значения ф'(х) для различных случаев закрепления, получим допустимое приращение давления в трубопроводах для каждого конкретного случая.
П.7. Динамика подводных трубопроводов
Требования, предъявляемые к конструктивной надежности подводных трубопроводов, намного выше требований, предъявляемых к подземным и надземным трубопроводам. Это связано с большой агрессивностью среды, со значительными механическими воздействиями, а также сложностью ремонтных работ, поэтому трубы, предназначенные для подводных газонефте-проводов, должны обладать повышенной
прочностью по сравнению с надземными. Трубопроводы, уложенные по дну моря, находятся под воздействием течений, подвижек морского дна, волнового давления и др.
Подводные трубопроводы подвержены действию различных волновых нагрузок. При определении волновых нагрузок на трубопроводы в первом приближении их можно принять за абсолютно твердое цилиндрическое тело. Тогда задача может быть сведена к решению уравнения Лапласа при граничных условиях:
1) линеаризованное условие малости перемещения частиц жидкости свободной поверхности от первоначального горизонтального положения записывают в виде
02 ф 0ф
-------4-£------ б/2 г е дг
= 0; (11.116)
2) условие на поверхности трубопро
вода
0Ф
дп
= 0; s
(11.117)
Г — контур трубопровода; п — нормаль к конту-РУ-
Если трубопровод находится у свободной поверхности глубокого водоема (моря), то влиянием дна можно пренебречь. Тогда должно выполняться условие обращения в нуль на бесконечности потенциала скоростей колеблющейся жидкости. Если трубопровод находится в неглубоком водоеме, то условие на дне водоема:
0Ф
---- =0. (11.118) дг г=—н
Зная потенциал скоростей колеблющейся жидкости Ф, можно по формуле Коши— Лагранжа определить ее давление на поверхность подводного трубопровода
0Ф рУ2
Р = -Тг-Р-^-- —
где т-р# — плотность жидкости; движения частиц жидкости.
+ F(0, (11.119)
V — скорость
В линейной постановке гидродинамическое давление можно определить по формуле
0Ф
Р=-р——. (11.120)
ot
При определении потенциала скоростей колеблющейся жидкости Ф, содержащей внутри источник возмущения, можно представить его в виде суммы потенциала Ф1 невозмущенной волны и потенциала Ф2 возмущения, вносимого препятствием в невозмущенное волновое движение. При этом должно соблюдаться условие, что сумма потенциалов полученных частных решений
И—189
273
удовлетворяет уравнению Лапласа и граничным условиям первоначальной задачи.
Значения сил, приходящихся на единицу длины и действующих на цилиндры разных’диаметров, погруженных на одну и ту же глубину, будут одинаковы при данном волнении. Объясняется это тем, что по мере увеличения диаметра цилиндра среднее значение волновых давлении по его поверхности увеличивается (по абсолютной величине) как раз в такой пропорции, в какой уменьшается отношение поверхности цилиндра к его объему.
Наиболее часто встречающиеся • в реальных условиях прогрессивные гравитационные волны при набегании на препятствия отражаются от них. Если препятствие мало, то происходит частичное отражение от него. В той или иной степени ослабления волна распространяется дальше за препятствие, как правило, это также прогрессивная волна. Отразившаяся от преграды врлна взаимодействует с основной набегающей волной, и в результате перед преградой образуется сложное волновое движение в виде интерферированной волны. Таким образом, при аналитическом исследовании силового воздействия волн на горизонтальные обтекаемые преграды в общем случае необходимо исходить из учета явлений как отражения, так и обтекания. Теория плоских прогрессивных волн малой амплитуды довольно подробно разобрана в курсах теоретической гидромеханики.
Рассматривая действие прогрессивной поверхности волны на полностью погруженный в глубокую жидкость цилиндр, потенциал скоростей можно Предствить в виде суммы двух Потенциалов
Ф = + Ф2,
где Ф| — потенциал скорости прогрессивной волны; Фа — потенциал скорости отраженных волн.
В линейной постановке выражения для гидродинамического давления можно представить В виде суммы
. (11.121)
В-полярных координатах'
<Di »*= аек^г sln sin (kr cos 0 -j- of). о
(11.122)
Выражение для давления будет
Pi =— sin е‘г‘Я) чоз (Лг соз 6 +-W) • - - (11.123)
- Потенциал скоростей отраженных .волн, удовлетворяющий условию на поверхности цилиндра
дФо ЭФ,
-~=-~Г- (11.124)
on on
предложен [44] в виде - 02
а - sin 6— Н fkR2 \
Ф2 = '— а ег sin I-----------cos 0 + Gt —
g L \ r }
— e kH sin о/ . (11.125)
Эта приближенная формула справедлива для цилиндра, находящегося в глубокой жидкости. Такое приближение упрощает выкладки и для цилиндра, расположенного на большом расстоянии от границы свободной поверхности, дает хорошие результаты. Вместе с тем, анализируя полученное решение, можно получить представление о механизме воздействия жидкости на цилиндр. Гидродинамическое давление, оказываемое отраженной волной на цилиндр, можно определить по формуле
Pz =— Pga.
( kR2 п , л
X COS ----- cos 0 4- Gt
—кН
— e“ftHcoscrt
Сравнивая выражения для потенциала скоростей и давления падаюшей и отраженных волн, видим, что существуют зависимости:
ф2 (г = R) = фх (/ = /?) — Ф1(г = 0);
Р2 (г = R) = Pt(r = R) — Pi (г = 0).
В этих формулах:
a-=h/2 — амплитуда колебаний поверхности поли; /г—2л/Х; Л — высота волны; o2—2itg/X; 6 — полярный угол с центром на оси цилиндра; g — ускорение свободного падения; р — плотность водной среды: R — радиус цилиндра; Н — глубина погружения цилиндра.
Волновое воздействие на различные преграды изложено в СНиП 2.06.04?82 «Нагрузки и воздействия на гидротехнические сооружения (волновые, ледовые и от судов>).
Волнения, возникающие на свободной поверхности моря, захватывают слой водной массы, толщина которой меньше длины поверхности волны. Это говорит о том, что при глубине прокладки, соизмеримой с длиной волны, колеблющийся слой водной массы охватывает и уложенный на дне тру* бопровод. На практике известны случаи повреждения трубопроводов, уложенных на глубине 70—90 м при штормовой погоде.
274
Трубопроводы, уложенные на морском дне,. могут иметь различные схемы опирания. В зависимости от рельефа дна и конструкции трубопровод можно рассчитывать как многопролетную балку, как балку на сплошном основании или по схеме провисающей нити.
Для большинства трубопроводов, применяемых на практике, отношение толщины стенки б к радиусу срединной поверхности 7? удовлетворяет неравенству 6//?<l/2Q, что дает основание относить трубопровод к тонкостенным круглым цилиндрическим оболочкам и строить расчет на основе теории тонких оболочек.
Существенной особенностью динамического расчета подводных трубопроводов является необходимость совместного решения уравнений деформации круглой цилиндрической оболочки и уравнений гидродинамики для водной среды,. взаимодействующей с ней.
При рассмотрении высокочастотных колебаний трубопровода в жидкости необходимо учитывать сжимаемость последней, т. е. рассматривать задачу в акустическом приближении. При низкочастотных колебаниях трубопровода жидкость можно считать несжимаемой.
Ввиду того, что в общем виде решение гидроупругих задач сложно, то для упрощения используют различные предпосылки, которые можно разбить на следующие группы:
1) допущения, связанные с особенностями конструкций трубопровода (балочные системы на жестких или упругих опорах, иа упругом основании, системы работающей по схеме провисающей нити и т. д.). В зависимости от конструкции и условий работы подводного трубопровода выбирают метод его расчета, рассматривая трубопровод либо как балку, либо как оболочку;
2) допущения, связанные с учетом гидродинамического воздействия, в том числе вязкости, волнения свободной поверхности, перемещения границ и т. д.
Границы применимости этих предпосылок и погрешности, ими вносимые, изучены Довольно хорошо. Но для конкретных условий, встречающихся в практике задач вопрос о применимости различных предпосылок следует уточнять.
Наиболее распространенной гипотезой, часто встречающейся в приближенных расчетах, является предположение о том, что фсрйы колебаний конструкций в жидкости «г в пустоте одинаковы. Преимущество этого предположения перед другими в том, что 18*
оно позволяет разделить задачу гидроупругости на последовательность сравнигельно простых задач.
Сначала определяют форму колебаний конструкции в пустоте. Затем вычисляют, присоединенную массу и давление жидкости на конструкцию, форма- колебаний которой получена в результате решения первой задачи. Наконец, с учетом присоединенных масс и гидродинамического давления нахо-. дят частоты собственных колебаний и. напряжения в конструкции.
При использовании этой гипотезы в .задачах конструкций в жидкости не учитывают существующую в реальных условиях зависимость гидродинамической нагрузки на конструкцию от деформации, вызванной этой нагрузкой.
При решении гидроупругих задач влияние граничных условий на конечный результат сказывается неодинаково. Наиболее значимо удовлетворение условий на излучающей поверхности, поскольку плотность^ излучаемой энергии в объеме жидкости, который примыкает к поверхности оболочки, наибольшая.
В других частях пространства, заполненного жидкостью, плотность энергии значительно меньше, поэтому влияние ошибки при выполнении краевых условий скажется в меньшей степени.
Условие совместного движения оболочки н прилегающих к ней частиц жидкости записывают в виде
3W а®
±—- = -^. (11.-127)
dt дп
Если положительное направление W совпадает с внешней нормалью, то принимают (+),в противном случае (—); ф — потенциал скоростей колеблющееся жидкости; п — направление вйеш-' ней нормали; W — перемещение поверхности оболочки.
Если трубопровод погружен в безграничное пространство, запрлненное жидкостью, в качестве граничного условия на бесконечности принимают равенство нулю функции потенциала ее возмущенного движения, чтр представляет собой аналог условия излучения
<р->0, V х2 -f- у2 г2. .
К вышеприведенным формулам добавляют еще соответствующие граничные условия, характеризующие вид закрепления концов трубопровода. Кроме того, для нестационарных задач следует учитывать еще начальные условия (при t—О; <р=<ро ит. д.).
Основная трудность - при решении гид-роупругнх задач состоит в определении
27Б
гидродинамичесчких сил взаимодействия оболочки с жидкостью. Зная гидродинамические силы, можно найти напряженное и деформированное состояние трубопровода.
Динамические характеристики упругих конструкций, колеблющихся в жидкой среде, значительно отличаются от их характеристик, полученных в вакууме. Действие Жидкой среды прежде всего вызывает уменьшение собственной частоты, которое может быть порядка 50 %. При низких частотах это вызвано дополнительной инерцией при высоких частотах — тормозящим действием. Отсутствие влияния инерции прн высоких частотах можно объяснить тем, что в этом случае поверхность оболочки вибрирует с такой скоростью, что возмущение не может распространяться далеко, прежде чем действие волны повторится; другими словами, низкочастотные колебания имеют тенденцию ускорять большие объемы жидкости, в то время как высокочастотные колебания сжимают малые количества жидкости.
В идеальной сжимаемой среде потенциал скоростей удовлетворяет волновому уравнению
1 д2 Ф
V?4>-—--------да =°-
Со где со — акустическая скорость звука в жидкости. Для случая несжимаемой жидкости со“°°-
При колебании оболочки в безграничной акустической среде значение присоединенной массы можно определить по формуле
рг kn-л (М*) kn при Q<cO(o.
Для случая несжимаемой жидкости с0=оо и, следовательно, параметр 0=1. Тогда значение присоединенной массы бесконечно длинной цилиндрической оболочки в безграничной несжимаемой жидкости может быть определено по формуле
Рг
(11.129)
*n-i (<>') сог-----------
kn (®г)
Сжимаемостью жидкости можно пренебречь при выполнении условия
(Q/c0co)2«l. (11.130)
Низшую частоту собственных колебаний системы оболочка — несжимаемая жидкость с фиксированными волновыми числами со и п можно определить по формуле
о^21
В вышеприведенных формулах: со™ л/Л — волновое число; (З—р/ 1—( Q^l гос/) —параметр; 1 — длина полуволны колебаний в направлении продольной оси; л — число волн в кольцевом на* правлении; то — масса оболочки на единицу площади координатной поверхности; Qn] — первый корень частотного уравнения в вакууме.
Для круговой цилиндрической оболочки конечной длины с соотношениями DH/L=l/10 и условиях на концах прн z= = 0 и z=L (<р)в=0 (условие, аналогичное условию на свободной поверхности при отсутствии на ней давления), наличие твердой стенки не приведет к заметному изменению параметра частотного уравнения до тех пор, пока 6/DB>2 (где b — радиус жесткой круговой стенки). При 6/DH=l,5 погрешность составит приблизительно 5 %; L — длина оболочки.
Это подтверждает соображения относительно первостепенной важности удовлетворения условий на поверхности оболочки и о незначительном влиянии ошибки на выполнение других краевых условий.
Отсюда можно заключить, что искажениями, вносимыми краевыми условиями на колебания цилиндрической оболочки вне зоны 6/DH<2 можно пренебречь. Аналогично можно отметить, что замена краевых условий на плоскостях z=0; z=L другими, оказывает незначительное влияние на изменение параметра частотного уравнения.
Однако введение препятствия (жесткой стенки) в зону, непосредственно примыкающую к поверхности оболочки, значительно влияет на частоту собственных колебаний. С приближением к свободной поверхности частоты колебаний оболочки возрастают. Твердая же поверхность действует противоположно.
Бесконечно длинная цилиндрическая оболочка, содержащая жидкость, слабее чувствует свободную поверхность и сильнее— жесткую стенку, чем оболочка, незаполненная продуктом.
Следует отметить, что границы раздела влияют на собственные колебания длинных цилиндрических оболочек сильнее, чем на колебания коротких. Неучет влияния окружающей жидкости при. определении частоты собственных колебаний оболочки (трубопровода) может привести к серьезным ошибкам.
Большинство существующих ныне расчетов надземных, наземных и подземных трубопроводов небольших диаметров произведены по балочной теории. При этом
276
полученные теоретические результаты неплохо соответствуют экспериментальным данным, что доказывает правомерность этого подхода. В большинстве имеющихся работ по расчету подводных трубопроводов также применяется балочная теория. Экспериментальных работ по проверке напряженного состояния подводных трубопроводов очень мало и достаточного обоснования правомерности применения балочной теории при расчете подводных трубопроводов средних и больших диаметров в настоящее время пока нет, поэтому расчет по балочной теории может быть оправдан только как первое приближение.
Дифференциальное уравнение для подводного трубопровода:
d2 w дф
LW+m—- =-P«-Z“+9. (И.132) ОТ“ от
где L — дифференциальный оператор поперечных колебаний трубопровода; q — возмущающая нагрузка; ф — потенциал скоростей колеблющейся жидкости.
Частоту свободных колебаний стержня (трубопровода) в жидкости можно определить по формуле
— кинетическая энергия жидкости; Гст—кинетическая энергия стержня; V — потенциальная энергия стержня; — частота свободных колебаний стержня в пустоте; mv~обобщенная масса стержня, соответствующая v-й частоте; — присоединенная масса жидкости, соответствующая v-й частоте колебаний трубопровода.
Пренебрегая потенциальной энергией жидкости, присоединенную массу ее можно найти по формуле
1 дТж
Mv = ---------т22- . (11.134)
?v d<lv
ГДе 9 v ~ координата (точка над q означает производную но времени).
Как и ранее, кинетическая энергия Жидкости
Лк Нф-^-do, (11.135)
* J и иП (О)
гДе интегрирование ведут по поверхности
стержня. Как и в предыдущих задачах, трудность состоит в определении потенциала скоростей колеблющейся жидкости.
Частоту колебаний стержня в пустоте находят по формуле
1 дУ
о 4v дЧх
p3v=—. (И.136)
где V — потенциальная энергия только стержня.
При решении задач о колебаниях упругих элементов в жидкости граничные условия на поверхности упругого элемента задают исходя из уравнения свободных колебаний упругого элемента в пустоте. При этом считают, что формы колебаний упругого элемента в жидкости мало отличаются от соответствующих форм колебаний упругого элемента в пустоте.
Во многих практических случаях при анализе колебаний стержня определяют частоты собственных колебаний или максимальных напряжений в каком-либо сечении или максимальные амплитуды перемещения и т. д. В каждом из этих случаев задача может быть упрощена заменой реального распределения присоединенной массы на равномерное, дающее тот же результат при определении требуемого параметра.
При анализе колебаний в несжимаемой жидкости приближенно принимают равенство между кинетической энергией жидкости, колеблющейся совместно с трубопроводом (стержнем), и кинетической энергией равномерно распределенной присоединенной массы, совершающей колебания с той же частотой. Выражения для потенциала скоростей колеблющейся жидкости примем в виде
Ф(г, г, 0,0= 2 9п(0Х
га=1.2,3...
X 2 ФЛп(г,г,0), (11.137)
*=1,2.3,...
а для деформации колеблющегося стержня в виде
®(г, t)= 2 9n(0Xn(z). (11.138) л=1,2
Тогда кинетическая энергия окружающего стержень слоя жидкости для л-й главной формы колебаний равна
г„= -p JJ 4.n-^-dS =
(S) 2л ft
=~'Г₽а/j’’"'ir‘fede = о о
277
п
(11.139)
О о
при г=а, где г — радиус стержня.
£ то же время выражение для кинетической энергии'массы жидкости, участвующей в движении, считая, что последняя равномерно распределена по длине стержня /г с интенсивностью цп (для n-й формы), имеет вид
л
rn = -J-«X (11.140)
о
где Хп (z) — балочные функции.
Приравнивая правые части обоих выражений для Тп, можно получить
Ип
2л Л
ра
(z) dz
^n-drae
(11.141)
Эта формула определяет осредненную погонную присоединенную массу жидкости Цп. которую можно считать равномерно распределенной по длине стержня h для каждой л-й формы. В случае сжимаемой
жидкости этот критерий использован быть не может из-за отсутствия взаимно однозначного соответствия между кинетической энергией жидкости и ее давлением на поверхности стержня. В качестве более общего критерия может быть использован принцип равенства работ сил давления жидкости и сил инерции от равномерно распределенной присоединенной массы на любом возможном перемещении поверхности трубопровода (стержня).
В сжимаемой жидкости с повышением частоты колебаний трубопровода сначала происходит повышение значения присоединенной массы, потом ее уменьшение и, наконец, изменение знака, когда действие давления жидкости уже лучше интерпретировать не как присоединенную массу, а как присоединенную жидкость. При расчетах трубопроводов обычно ограничиваются только учетом действия жидкости как присоединенной массы.
Как видно из вышеизложенного, динамический расчет трубопроводов в жидкой среде сводится к определению присоединенной массы жидкости. Значение присоединенной массы находят по потенциалу скоростей колеблющейся жидкости, т. е. задача сводится к решению уравнения Лапласа или волнового уравнения при определенных граничных условиях.
Р А 3 Д Е Л 12. РАСЧЕТ СООРУЖЕНИИ, НЕСУЩИХ ЧАСТИЧНО ЗАПОЛНЕННЫЕ РЕЗЕРВУАРЫ. НА ВЕТРОВУЮ
И СЕЙСМИЧЕСКУЮ НАГРУЗКИ
Н. А. Нцкдлаенко
. 12. L Основные положения расчета, и допущения
Расчетные динамические модели сооружений
Сооружения на ветровую и сейсмические. нагрузки рассчитывают по действующим строительным нормам и правилам [15, 16]. Ветровые и сейсмические нагрузки на -сооружение определяются физическими основами ветрового потока, движением основания при землетрясении и расчетной- . динамической моделью сооружения. Послд определения нагрузок сооружение рассчитывают статически.
Предполагается, что прн действии ветровой нагрузки в сооружениях не появляются пластические деформации и повреждения. Иначе обстоит дело с поведением сооружений при сейсмических воздействиях. При землетрясениях, даже слабых, в сооружениях возникают повреждения или отдельные разрушения. Концепция двойного подхода к расчету сооружений на действие сейсмических сил, принятая у нас в стране и за рубежом, предполагает, что на частые, но слабые землетрясения сооружение рассчитывают в упругой стадии.
- Методами этого расчета определяются сейсмические силы, которые генерируются самим сооружением. На сильные, но весьма редкие- -землетрясения, -сооружения рас-
278
.. Рнс, 12.1. Одно- а) -б)--
мерные динамические расчетные .модели
а маятниковая; б — плоская рама; в — пространственная ортогональная рама
Рис. 12.4. Механические аналоги Динамической системы с жидким наполнением'
РИС. 12.2. Двухмерные динамические расчетные модели
i т: вектор перемещений центра масс плиты в ее плоскости; 2 — условное обозначение угла поворота в плоскости плиты
Рис. 12.3. Трехмерная динамическая расчетная модель
1 — вектор перемещений центра масс плиты в пространстве; 2 — вектор угла поворота плиты в пространстве
о —для одномерной расчетной модели; б —для двухмерной расчетной модели
ственной работой, разрушением второстепенных элементов, совместной работой сооружения и основания, образованием сильных фрикционных связей и т. д. Расчеты в этом случае, как правило, ведутся численно на ЭВМ и для этих расчетов первостепенную, роль играют сформулированные расчетные модели сооружений, так как разрешающая способность каждой модели ограничена. Сооружение представляет собой большую стохастическую систему с переменной во времени структурой, поэтому расчетная, модель его непрерывно изменяется при переходе сооружения из одного состояния в другое.
Таким образом, методология расчета сооружений на ветровую и сейсмическую нагрузки различна. Так как сильные землетрясения весьма редки, то сооружение считается сейсмостойким, если в результате землетрясения не было человеческих жертв* и удалось сохранить материальные" и ду-
считываются на реальные или синтезированные сейсмограммы прошедших землетрясений. Считается, что здесь основную роль играют резервы несущей способности сооружения, обусловленные работой конструкций за прадедами упругости, прострая-.
ховные ценности, даже если- сооружение после землетрясения придется капитально ремонтировать или полностью разобрать.
В этом разделе будет изложен расчет сооружений на ветровую и сейсмическую нагрузки в. упругой стадии по действующим СНиП П-7-81 [15] и СНиП 11-57-82 [16].
279
Динамический расчет во многом определяется принятой расчетной моделью сооружения н воздействия. Расчетная модель сооружения может быть одномерной, двумерной и трехмерной. Для дискретных динамических моделей сооружений примем следующую классификацию [1]. Одномерной считается система материальных точек (или система материальных тел), соединенных деформируемыми связями, которые движутся по паралельным прямым. Если модель состоит из материальных тел, соединенных связями, то все они движутся поступательно, а их центры масс—по параллельным прямым. Примерами являются упругая маятниковая модель, принятая в СНиП II-7-81 и СНиП П-57-82 (рис. 12.1); плоская и пространственная (многопролетная и многоэтажная, ортогональная) рамы (рис. 12.1,6, в), в узлах которых (но это не обязательно) сосредоточены массы, движущиеся по параллельным прямым. Двумерной— система материальных точек, движущихся по криволинейным траекториям в параллельных плоскостях (система материальных тел, движущихся плоскопараллельно в параллельных плоскостях (рис. 12.2). Например, ортогональная плоская или пространственная рама с точечными массами в узлах решетки, каждая точка которой движется в параллельных, горизонтальных (вертикальных) плоскостях. Трехмерная — система материальных точек, движущихся по пространственным траекториям (система твердых тел, движущихся произвольно, рис. 12.3).
Очевидно, что количество степеней свободы во всех случаях может быть различным. Можно указать только минимальное число степеней свободы: для одномерной 1, для двумерной 2, для трехмерной 3. Далее будут рассмотрены только одномерные н двумерные модели для сооружений, несущих частично заполненные резервуары.
Так как рассматриваться будут специальные сооружения, то необходимо сформулировать расчетную динамическую модель резервуаров н заполняющую его жидкость, а также показать, к каким механическим аналогам приводится эта система.
Так как жесткость резервуаров различной формы велика и изменение поперечного контура мало, то для практических расчетов можно принять, что резервуар любой формы не деформируем. Жидкость будем рассматривать как идеальную, учтя рассеяние энергии в ней при колебаниях по феноменологической теории Рэлея, согласно которой диссипативные силы пропорцио
нальны относительной скорости движения частицы жидкости [2, 3, 4]. Параметры, характеризующие декремент колебаний волн жидкости для резервуаров различной формы, можно определить экспериментально в зависимости от числа Рейнольдса для различных видов жидкостей. Такой подход существенно упрощает решение всех задач н позволяет обойти решение принципиально трудной задачи о движении вязкой жидкости в резервуарах.
Экспериментальные исследования [5] в этой области и расчеты показывают, что практическое значение для всех расчетных параметров играет только развивающаяся на поверхности жидкости волна первой формы, которая дает 97—98 % всего комплекса волн для всех параметров расчета отдельных резервуаров и конструкций, несущих резервуары.
Отметим, что чем вязче жидкость, тем меньше вероятность возникновения на ее поверхности волн высших форм (2, 3... и т. д.). В экспериментах [5] на динамических системах с водой на поверхности жидкости наблюдались волны 2-й и 3-й форм, но заметить их на записях колебания системы не удалось, что подчеркивает ничтожно малое влияние этих поверхностных волн жидкости на колебание динамической системы, поэтому ограничимся только учетом волны первой формы как при расчете отдельных резервуаров, так и сооружений, несущих резервуары.
На рис. 12.4, а, б приведены механические аналоги рассматриваемых динамических систем: на рис. 12.4, а для одномерной динамической модели, которая подробно была проанализирована в работах [2, 3, 5] как при ветровых, так и сейсмических воздействиях; на рис. 12.4,6 — для двумерной динамической модели, которая может применяться при пространственном расчете сооружений.
Следует отметить, что сооружение при любых динамических воздействиях работает как пространственная система вследствие очень многих факторов (несимметричность планировки, несимметричность распределения жесткостей несущих элементов, миого-компонентность вектора возмущения, неоднородность структуры конструкций, случайный разброс свойств материалов и т. д.)-В работах [6, 7, 9—11] сформулированы и решены задачи пространственного расчета сооружений, для которых расчетная динамическая модель .составлена из системы твердых тел, соединенных различными Де' формируемыми связями. Сейсмическое воз
280
действие моделируется векторами поступательного движения и вращения основания. Динамическая модель, показанная на рис. 12.4, б, является частным случаем, рассмотренным в работе [7] общих динамических моделей, и хорошо описывает упруго-гравитационные колебания сооружения с жидкими массами.
В разделе будут рассмотрены малые пространственные колебания сооружения с резервуарами (рис. 12.4,6) при трехкомпонентном сейсмическом возмущении — два поступательных движения по оси xOi и х02 и вращения вокруг оси х0з, обусловленного волнами Лява, возникающими на поверхности Земли во время землетрясения.
12.2. Решение гидродинамических зада» для кругового, цилиндрического, сферического и прямоугольного
резервуаров (плоская задача)
Для практических расчетов отдельно стоящих резервуаров или резервуаров на сооружениях понадобится неполное решение гидродинамической задачи, а значение гидродинамического давления на стенкн p(f), результирующая гидродинамического давления XT(f) н функция, определяющая профиль волны, £(/), которые с учетом волны только первой формы находят по формулам [2]:
р (П =- А [вп (П + Су (у) К (/)]; (12.1)
Хг (/) =— В la v (0 4- By fy (/) ]; (12.2)
uo = =-А[Ь(0+Мп] (12.3)
Fj (t) + 2 f (0 4-X?/1 (/)=- V (/); (12.4)
для цилиндрического резервуара без
внутренних колонн:
X = 2pasinG; a =0,5;
ch
q (у) =0,418 —
ch (1,84Л0)
В = 2лра2/г; By = 0,227 X
X th (1,84/i0)//i0;
Д, = (2a/g) sin 0;
(12.5)
3? = g/al,84 th(l,84/i0);
01 = 0,843/41,84 — J;
\ a / hQ = Zz/a;
для прямоугольного резервуара (плоская задача):
A » pa; a = 0,5;
. Г л (У + M ch----------
ci (У) = 0,406
а | ch (лй0) Л1 = а/g; В = 2pabh; By = (0,13/Л0) th (лй0);
ay = 0,406 cos (лх/a);
^*9 ЗГ/?
Xj = —— th (лй0); h0 = h/a.
(12.6)
здесь b — длина резервуара (см. рис. 12.5), остальные значения указаны на рис. 12.5. Значения коэффициентов и частот волны первой формы для сферического резервуара приведены в табл. 12.1.
Значение Ba=mw (тж — масса жидкости). Графики коэффициентов су и с2 приведены на рис. 12.6, а, б. Значение уе, определяющее линию действия силы ХР, находят по формулам:
для цилиндрического резервуара
Рис. 12.5. Схемы и основные обозначения резервуаров
а — цилиндрического; 6 — прямоугольного; и — сферического
Рис. 12.6. Графики коэффициента ct (а) И С] (б>
0,475 Г
th(l ,84Л0) —
Ус = h
0,5о (/) 4-________^0
0,475 »(')+—~ Ли
0,543 / 1 \1-
/1С I ch (1,84/г,0 Т1
X /h(l,84/i0)/j (0
(12.7)
281
T i i л и a » 12.1
йо с~2_1 BBt С‘= ра’ йо Г=~2 — ' "м g BBt • С|” ₽?*• •
0 1 0 1.2 1.788 1,273
0,2 1,072 0,109 1.4 2,124 1,145
.0,4 1.152 0,372 1.6 2,688 0,834
0.6 1,262 0.698 1.8 3,976 0,382
0,8 1.342 1 1.9 6,242 0.170
1 1,541 1.195 2 — 0
T А б л я a a 12.2
Кинематическая вязкость в стоксах V. см*/с
Температура. Масла
°C
авиамасло трансфор- автотрактОр-
вода МЭС автол 18 автол 10 матерное турбинное ное АС-5
—50 . 1-510’ 6.510s 1,410е
- 4Q — 13 600 1.910’ 36 200 99,847 •— —
—30 1930 20000 3400 18,237 230,38
—20 — 388 2550 540 4,812 43.57 —
—ГО 111 490 ' 122 1,92 12,51
0,018 35.5 116 39 0.91 4,6 8,673
10 0.013 —— — 0,49 1,99 —
20 0.01 5.81 12.8 6 0.28 1,019 1,709
30 0,008 — — — 0,179 0,567 —
40 0,0066 —— — — 0,123 0,344
50 0.0055 0.85 1,21 0.758 0.096 0,219 0,3219
60 —— — — — — —
70. — — — —
80 — —• —
90 — — ——
100 — 0,142 0,153 0,114 0,0668
Продолжение табл. 12.2
Температура, Кинематическая вязкость в стоксах v. см’/с
Масла Реактивное топливо
автотрак-торнде АК-6 автотрдк. торнбе АС-9,5 автотракторное АК-15 автомобильное АК-10 Т-1 Т-5 ТС-1 Т-2
• —60 — 6,510е 1,410е 1500 10 006 800 500
—40 • — 1,810s 36 200 900 5000 500 430
—30 — 20 000 3400 — г —
—20 — 2650 540 460 1800 280 220
—10 —— —- 490 122 — —
19,34 33,69 116 39,1 250 600 180 150
10 — — —— мм —•
20 2.847 4,775 12,8 6 160 400 130 но
30 — ч-— ——
40 — — —— 120 250 100 90
50 • 0,4361 0,6791 1,21 0,758 — —
60 — — — 90 180 80 75
70 » — ——— ——
80 — —— —— — 75 — 69 —
90 —
100 0.0778 0,1063 0,153 0.114 64 56
для пр ям о у го л ьн or 6 резервуара
Уе =
/ th (лй0) а 0,5М(0 + 1-------~~
\
»(/) +
0,102 0,102 V
Яо ch (ЛЯ0)Д
+ ^-А(о лЛо
/1(0
(12.*)
Параметр vI в (12.4) характеризует затухание в жидкости по феноменологической
теории и, как отмечалось выше, определяется экспериментально в Зависимости от числа Рейнольдса (₽i=Xia2/vi). Для волны первой формы
Vi = Х/2л,
где Vj — кинематический коэффициент вязкости жидкбети. который берут по табл, 12.2 в зависимости ot температуры: 61 — логарифмический декремейт колебаний, для вычисления которого рекомендуется следующая эмпирическая формула [4. 2, 8] Для цилиндрического резервуара:
- 0,451л Г 1,3
1=15 L sh(l,84A0) *
-J-------------p 1 '| + 4,091. (12.0)
ch(l,84ft0) J \
Для Л><к61 с высокой точностью можно Опредёлить по формуле
б1= 1,84л/ VtfT. (12.10)
Для прямоугольного резервуара [2]
(плбскАя задача)
^0,5v(n/fl)2. (12.11)
В случае сферического резервуара рекомендуются формулы [4, 2]:
для верхней полусферы Яо>1 (й>0,1)
1,84л
6
(12.12)
. для нижней полусферы йо<1
~ 1,84л 1+0,46(2 —/t0)
1 * 1,46(2 —М
Для удобства расчетов приводятся формулы для вычисления: ннжией полусферы:
11 = [/ 1,842 —(1,46 —/ц)« _ о,5б] X
(12.13)
также
(12.14)
верхней полусферы
М - [V 1,842-(1,97-Ло)? __ 0,34] X
xVgh. (12.15)
12.3. Расчет наземных резервуаров иа сейсмические нагрузки
Основные предположения о расчетной модели резервуара и заполняющей жидкости приведены в п. 12.1. Считаем, что при землетрясении резервуар движется горизонтально, поступательно. Сейсмическое движение основания является стационарным случайным процессом времени, движение жидкости рассматриваем в переходном режиме с нулевыми начальными условиями, предполагая, что длительность землетрясения составляет примерно 30 с*.
Полная сейсмическая нагрузка, действующая на резервуар, складывается из нагрузки от массы конструкций и массы заполняющей жидкости.
Практика эксплуатации парков резервуаров показывает, что вероятность их полного заполнения очень мала, за исключением особых случаев, или вызывается осо-
* Так как сейсмическое движение основания является ярко выраженным йестационарным. оыстро затухающим случайным процессом, то это „^положение дает верхнюю границу всех рас-'•ТКЫХ параметров.
беннбстЯми конструкции, При кОТбрОй плавающая крыша, плотно прилегающая к стенкам резервуаров, перемешается вместе с уровнем жидкости, поэтому во избежание гидродинамического удара развивающейся В резервуаре волны о покрытие необходимо рассчитывать зазор Аа между. уровнем жидкости и покрытием.
Для сферического рёзерАуара этого расчета делать не надо, тай как в сферическом резервуаре гидродинамического удара волны о покрытие не будёт — ВОлиа «набегает» на стенку резервуара. Предполагаем также, что интенсивность движения резервуара такова, что резонансные колебания жидкости не разрушаются и процесс движения жидкости устойчив.
Для нормированной корреляционной функции и спектральной плотндсти сейсмического движения основания приняты формулы [2]:
К •• (т) = cos рт;
н хо
со2 + zn4
G (со) = 2d 1 11 • их/ ’ со< + 2а«)2 + /Н<
(m2 =.d2 + рг; a = а2 — р’). (12.16) Величины а и Р изменяются в пределах: а=6...8,5 с-1; Р=14...2О с”1.
Для дальнейших расчетов Приняты значения: а=7 с-1; Р=18 с-1. Усредненный график G .. (со) приведен на рис. 12.7.
их0
Наземные цилиндрические прямоугольные и сферические резервуары рассчитывают в следующем порядке *.
Цилиндрический, круговой, вертикальный резервуар (рис 12.8). Расчетные значения зазора Ав определяют по фбрмуДе (12.3) (при r=a\ sin 0= 1)
А3 = 0,836aftс & V 1—е-60*’ , 7 (12.17) где ke=0,25Д — коэффициент сейсмичности (Д определяют по СНиП П-7-81 [15]).
Значение ft в этой формуле; может быть принято равным полной высоте резервуара (рис. 12.8), так как th(l,84ftp/(i)*»
»th(l,84A/fl). Коэффициент V!
(12.18)
где
= 1,464 {/th 1,84ft-X
shl,84ft0 \chl,84ft0 1 J 1 J’
(12.19)
* Подробно методика рассмотрена в работах [2.3].
283
Рис. 12.7. Усредненный график нормированной спектральной плотн'','тн сейсмического ускорения (а=7 с~’); fl = 18 с-1)
Рис. 12.9. График коэффициента
Рис. 12.10. График коэффициента
график в зависимости от /г0 приведен иа рис. 12.9. Коэффициент Ц для различных Vi в зависимости от 7’i(7’i=2n/A.1) приведен на рис. 12.10.
В частных случаях, если 2<Xi<6/c-1 GhXo(cd) —0,04с,
= 0,0836
1 _ д—
(12.20)
Если 1 <xj <2 с-1 G .. (ю) —0,01 с, нх0
(12.21)
Если параметр у^О.Об^”1), то с 5 %-ной погрешностью зазор можно вычислить по формуле
As = 0,836aJfecgt . (12.22)
Гидродинамическое давление жидкости на стенку резервуара вычисляют по формуле (12.1):
Р (у) — Ртах (У) sin 0, (12.23)
где
Ртах (У) — °об а^с |р
1 —е 60v*;(12.24)
— плотность жидкости, заполняющей резервуар: 6р — коэффициент, который берут по табл. 12.3 в зависимости от значения XiVi и Et(y):
El (У) = 0,418
ch (1,84ftoff/ft ch(l,84h0)
(12.25)
Распределенную нагрузку по оси резервуара вычисляют по формуле
Рос (У) = з, 14v06 a2 kc VI - e 60v* .
(12.26)
Результирующую гидродинамического давления жидкости иа стенки резервуара вычисляют по формуле (12.2):
*г = Лк Мр И 1 ~ , (12.27)
где Pw—вес всей жидкости; £р определяют по табл. 12.3 в зависимости от X<vi и £>, которая равна
Л = 0,418—0,237 — (1,84fto) . (12.28)
h0
Следующим этапом вычисления расчетных нагрузок является определение контурного давления на днище резервуара, которое вызывает значительные усилия и изгибающие моменты.
Нагрузка по контуру д$ равна
У (0) — 9тах sin 6» (12.29)
где
284
Таблица 12.3
Значения коэффициентов динамичности gp в зависимости от Е, (г/>
%1=0,075 1/с "vi=0,05 1/с
0.4 | 0.3 0,2 0.1 0,05 0 0,4 | 0,3 0.2 0,1 0.05 0
10 6 4 3 2.5 2 1 1.23 0,92 0,85 0,83 0,82 0.81 2.01 1.11 0,84 0,74 0.7 0,66 2,91 1,48 0.97 0,76 0,67 0,59 3,88 1,92 1.21 0.90 0,75 0,61 4,36 2,15 1,35 0,99 0,82 0,65 4,83 2,39 1,49 1.1 0.9 0,72 0,415 0,985 0,876 0,843 0,830 0,820 2,43 1.305 0,94 0,803 0,74 0,695 3,57 1,79 1,165 0,893 0,773 0,66 0,6 4,75 2,34 1,475 1,09 0,905 0,729 0,69 5,33 2,63 1,65 1.21 1 0,8 0.75 5.92 2,93 1.84 1,33 1,08 0.88 0.75
Значения коэффициентов динамичности в зависимости от Е, (у)
v,=0,04 1/с Ч,=0,025 1/с
0.4 0,3 0.2 0.1 0,05 0 0,4 0.3 0,2 0.1 0.05 0
10 6 4 3 2.5 2 1 0,65 1.03 0,88 0,85 0,82 0,79 2,67 1.43 1 0,79 0,73 0.71 3,98 2 1.27 0,99 0.84 0,74 5,29 2,62 1,65 1.21 0,99 0.84 5,75 2,95 1,84 1.32 1.11 0.89 6,35 3,27 2,06 1.5 1.21 0.98 1,81 1,14 0,91 0,86 0,85 0,84 3,39 1,78 1,22 0,96 0,87 0,78 5,05 2,52 1,59 1.2 1,05 0,84 6,31 3,31 2,03 1,67 1.27 1,01 7.51 3,73 2.33 1.72 1.41 1.12 8.37 4,15 2,58 1,89 1,56 1,27
Значения коэффициентов динамичности £р в зависимости от Е, [у)
Vt=0,005 1/с vj =0,004 1/с
0,4 0,3 0.2 0.1 0.05 0 0,4 0.3 0,2 0.1 0,05 0
10 6 4 3 . 2.5 2 1 3,83 2,01 1,405 1,175 1,06 0.973 0.95 7,52 3,34 2,38 1,795 1,48 1,26 1.1 11.3 5,66 3.49 2,57 2,14 1.71 1,25 15 7,4 4,63 3.4 2,81 2,26 1.4 16,9 8,34 5,21 3,83 3.14 2,51 1.6 18,75 9.27 5,78 4,27 3,49 2,77 1.8 4,26 2,22 1,51 1.24 1.12 1,01 1.1 7,35 4,18 2,65 1,98 1,67 1,36 1.2 12,6 6,21 3,9 2,87 2,38 1.9 1.4 16,8 8,28 5,18 3. 8 3,14 2,49 1.7 18,9 9,32 5,81 4,26 3,52 2.8 1.8 21,3 10.32 6,47 4.74 3,91 3,1 2.1
уе — можно определить по формуле (12.7) или приближенно (см. рис. 12.11).
Гидродинамическое давление жидкости на днище Рдп(г, 0) определяют по формуле
рдн.(г, 0) = ооб akc sin 0 —11 X
11 ( 1 >0’1
I/ t —60v,
xtpr 1—6 ; (12.31)
£p— берут по табл. 12.3 в зависимости от
Ei = 0,418 [1 — ---------j; (12.32)
ch(l,84ft0)J ’
Л(-)—функция Бесселя.
После определения нагрузок, действующих на резервуар, необходимо рассчитать его стенки на прочность или проверить по заданным сечениям действующие напряжения. Так как колебание жидкости в резер,-вуаре происходит со значительно более низкими частотами, чем частоты собственных
колебаний резервуара и днища, то можно приближенно рассчитывать конструкцию на действие статической нагрузки, равной по величине максимальному значению гидродинамического воздействия. Можно предложить следующий порядок расчета. Сначала резервуар рассчитывают на гидростатическое давление жидкости, по которому определяют необходимую толщину стенки. Затем проводят расчет на гидродинамическое давление и проверяют напряжение в стенке от суммарного усилия. Если резервуар заполнен полностью, то его рассчитывают как массивное сооружение, считая жидкость твердым телом *.
Прямоугольный резервуар (плоская задача). Расчетное значение гидродинамического давления жидкости определяют по формуле (12.24), принимая в ней а половину ширины или длины резервуара (в зависимости от того, в каком направлении ве-
* Указания по расчету цилиндрического резервуара с плавающими понтоном или с колой-., нами приведены в [8].
285
Рир. 12.11. дпюры распределения гидродинамического давления жидкости
а — nd высоте; б —в плане;’ в—контурного давления на днище, передаваемого стен-ками резервуара; г — объемная, эпюра давления жидкости на динще н профиль, сёченнй ...
по оси г, g — сечение эпюры, показанной иа позиции г по оси г
Рнс. 12.12. Конструкция крепле-' ния сферического-резервуара на кольцевом «ста- -кане>
дут расчет). Коэффициент динамичности определяют по табл. 12.2 в зависимости от
„ Г ch (лй0 у/й) 1 £1 (у) = 0,405 1 -----~~~ (Ло=Л/а).
L сп (л«0) J
(12.33)
Результирующую динамических сил Хг(0 вычисляют по формуле (12.27); а .£р — по табл. 12.3 в зависимости от Е\.
£1 = 0,405 — 0,12714fto) . (12.34)
"о
Координата ус может быть вычислена приближенно после того, как построена эпюра гидродинамического давления.
...Сферический резервуар. Расчет сферического резервуара существенно зависит От конструкции его крепления к фундаменту. Применяют два вида крепления: на кольцевом железобетонном стакане (рис. 12.12) и на стойках.
В первом случае движение совпадает с движением основания, во втором соответствует случаю сооружения, несущего резервуар. Рассмотрим вначале первый Вариант крепления.
Результирующую гидродинамического давления вычисляют по формуле (12.2):
= (12.35)
Частота волны первой формы
Xi *= eg (£/^) (с?—берут по табл. 12.1 в зависимости от й«). Величина равна:
для нижней полусферы
~ 0,92 V .
vj —-------—;-----(12.36)
Йо о для верхней полусферы
~ 0,92 1+0,46(2 —й0)
V1== а 1,46(2 —й0) ’
: . (12.-37
Масса жидкости, заполняющей резервуар
2лс3 ;— й0 р = 2,09ра3 й0 (Рж = тж £).
О
Коэффициент берут по табл. 12.1 в
Зависимости of vb Xi и Ей
£1== 0,5(1
2,09йо.
(графики коэффициентов ct и сг приведены на рис. 12.6).
Сила ХГ воспринимается «стаканом» и деталями, которые крепят к нему резервуар. Все эти конструкции должны быть рассчитаны на нагрузки от собственного веса и сейсмические силы от массы резервуара и массы жидкости.
Приведенные расчеты резервуаров основаны на однокомпонентном горизонтальном движении основания. Развитие и уточнение методик расчетов должно идти, по-видимому, по пути учета многокомпонентное™ сейсмического воздействия. На всех расчетных величинах должно значительно сказаться Вращение основания вокруг горизонтальной оси, которое возникает вследствие поверхностных волн Рэлея [11, 9, 10]-
285
12.4. £аече¥ сооружений,
несущих резервуары,
на ветровую нагрузку
Рассмотрим одномассовую систему (см. риС. 1£. 13) как наиболее простую расчетную динамическую модель, с помощью которой можно установить влияние подвижности жидкого наполнения на величину расчетного значения ветровой нагрузки [2]. Основные положения расчета сооружений на ветровые нагрузки изложены в СНиП П-6-74 и в [12], которые полностью сохраняются и при расчете сооружений, несущих частично заполненные резервуары. Все необходимые сведения по расчету сооружений на ветер можно также найти в Справочнике [13].
Уравнение движения одномассовой системы е учетом (12.2) и (12.4), если принять гипотезу затухания Е. С. Сорокина, имеет Вид [2, 3] (учитывают волиу первой формы) *.
+ («+<») \ + T7fi(^)’
(12.3$)
где
+ 2vj =— хх;
= ВВк1М£ М = т1 + тж; = Кг/М;
(12.39) ц= (4 — v2)/(4 + y2); v - 4у/(4 + у2);
у = 6/л;
Fi (О — пульсация скоростного напора ветра; kt — квазиупругий коэффициент; mJK — масса жидкости: б — логарифмический декремент колебаний конструкции, а остальные величины определяют по формулам (12.5), (12.6) или табл. 12.1 в зависимости от. формы резервуара.
Коэффициент динамичности сооружения (или конструкции), несущей частично заполненный резервуар, находят как отношение дисперсии динамического к статическому прогибу [2, 3]:
(12.40)
2
где <Xj>—дисперсия динамического отклонения; В«(0) — стандарт пульсации скоростного напора.
Дисперсию <х{> определяют из уравнений (12.22) и (12.23) по известным формулам теории случайных процессов. Если Для пульсации скоростного напора ветра принять нормированные корреляционную и спектральную плотности по формулам
Рис. 12.13- ОдиомАссовая расчетная динамическая модель сооружения, несущего резервуар
Рнс. 12.14. Графики коэффициента динамичности для определения ветровой нагрузки
А — для железобетонных н каменных сооружений (у—0,1; А,|—1,5...4|/с); Б — для стальных сооружений (v-0,05, Т- 1.5...4'/с); / — /nJ-О; 2 —
—/П|=0,2; 3 — /П|-0,4; 4 — /П|-0.6
(12-16) (а=0,42 с-i ₽=6,3$7 ё"1 — усред-неиные данные), то получим
<j>6
<^£2^______а С (О)2 Ч- т*) do
1 л J (со4 -Р 2x0)- '
+"i4)
(Г2;41)
Коэффициент динамичности <^> вычислялся на ЭВМ для значений .l<Xi< <4 ст*,- представляющих практический интерес при у=0,1, соответствующего : железобетонным конструкциям- и у=0,05 —металлическим конструкциям. В табл.. 12:4 приведены значения коэффициента динамичности для у=0,1. Для у=0,05 значения не приводятся, так как качественный xapaxtep изменения ,|i в зависимости от Х1 не меняется. На рис. 12.14 приведены графики. в зависимости от Х1 и у. Для сравнения на этом рисунке приводятся графики |1/для случая /П|.=0, что соответствует твердой массе. Эти графики совпадают‘с''графиками М. Ф. Барштейна [13].
Т а б л и П а 12.4
Значения для железобетонных конструкций (у—0.1) при
j X 15 7,=о 71=1,5 о сч II II 1g и СФ II 1** 7,=4 7,=0 7=1.5 mi=0.‘. 7=2,5 СФ II 7,=4 Принято для графика
15 10,5 6,28 4 3.14 2,09 1.25 1,15 1,22 1,33 1,48 1,59 1,82 2,20 1.14 1.21 1,31 1.45 1.55 1,79 2,17 1.14 1.21 1,31 1,45 1,55 1,79 2,17 1.14 1,21 1,31 1.43 1.56 1,79 2,17 1.14 1,21 1,31 1.43 1,56 1,80 2,29 1.14 1.21 1.34 1,44 1,56 1,80 2,20 1.14 1.27 1,44 1,49 1.74 2,10 1.14 1.27 1.44 1,49 1.74 2,10 1,18 1,29 1,44 1,53 1,74 2,10 1.18 1.29 1,45 1,53 1,75 2,12 1,20 1,31 1.45 1,53 1,75 2,12 1,18 1,30 1,44 1,53 1,75 2,12
Значения для железобетонных конструкций (у0,1) при
т1=0,3 /п1=0,4 Принято ДЛЯ графика
71=0 71=1.5 7=2.5 СФ - 7,=4 71=0 7,=1,5 71=2,5 СО II 1** 7=4
15 10,5 6,28 4 3,14 2,09 1,25 1.18 1.27 1.41 1,50 1,73 2,09 1,18 1.27 1.41 1.50 1,73 2.09 1,18 1,29 1,43 1,52 1,73 2,10 1,18 1,29 1,43 1,52 1,73 2.10 1,18 1,29 1.43 1,52 1,73 2,10 1,10 1,15 1.23 1,34 1.42 1.63 1,98 1,10 1,15 1,23 1.34 1.42 1,63 1,99 1.11 1.16 1,25 1,36 1,45 1,67 1,99 1,10 1,16 1,25 1,36 1,45 1,67 1,98 1,10 1.16 1,26 1,40 1.50 1,69 1,99 1,10 1,15 1.26 1,39 1,48 1,67 1,99
Значения Ь для железобетонных конструкций (V-0,1) при
5) Принято для графика
71=0 7=1.5 7j=2,5 7=з 7,=4
15 1,09 1,09 1,09 1,09 1.09 1,09
10,5 1.17 1.17 1.14 1,13 1,13 1,13
6,28 1,22 1,22 1.24 1,24 1,22 1,22
4 1,35 1,35 1,37 1,37 1.42 1,40
3,14 1,54 1,54 1,54 1,54 1,58 1,58
2,09 1,70 1,70 1,72 1,72 1,73 1.73
1,25 1,85 1,85 1,85 1,86 1.88 1,86
Из элементарных подсчетов следует, что учет подвижности жидкости вносит поправку примерно 4-5-7 %, не имеющую практического значения. Отсюда следует вывод, что при расчете сооружений на ветровую нагрузку жидкие массы, заполняющие резервуары, можно рассматривать как твердые тела. Физически это объясняется тем, что частота волны первой формы колебаний жидкости для реальных случаев резервуаров очень сильно отличается от частоты колебания сооружения. Волны более высших форм из-за большой диссипации колебаний гаснут и не могут отразиться на колебании сооружения. Если учесть вычисления, выполненные для одномассовой системы, которые показывают, что изменение частоты А.1 в пределах 1—4 с-1 сказывается на значениях коэффициента £i незначительно, то можно сделать вывод [2, 3], что л — массовую систему с жидким наполнением — рассчитывают так же, как и систему с твердыми массами, но при оп
ределении частот и форм свободных колебаний вводят приведенное значение веса в каждой точке:
QSnp=Qs(l-^s). (12.42)
Все расчетные формулы сохраняют свое значение [12J, a £i берут по рис. 6 работы [12].
Расчеты ряда п — массовых систем с жидким наполнением — показали, что окончательные значения расчетной ветровой нагрузки, вычисленной с учетом приведенных масс, при расчете форм и частот собственных колебаний мало отличаются от значений ветровой нагрузки, полученных в предположении, что жидкость является твердым телом, поэтому практические расчеты систем с жидким наполнением на ветровую нагрузку можно производить на всех этапах, не учитывая подвижности заполнения, т. е. рассматривать жидкость как твердое тело.
288
12.5. Расчет сооружений, несущих резервуары, на сейсмическую нагрузку
В Справочнике [14] в разделе, посвященном расчету зданий и сооружений на сейсмические воздействия, приводятся основные положения расчета различных сооружений, в том числе и сооружений, несущих частично заполненные резервуары. Расчет строится для простейшей одномерной динамической системы, несущей один цилиндрический резервуар в предположении, что сейсмическое воздействие моделируется одномерным поступательным движением основания, которое представляет стационарный случайный процесс времени. Расчет приведен в форме, принятой в СНиП. Далее будет приведена методика определения сейсмических сил для двух видов динамических моделей — одномерной (см.! рис. 12.15) и двухмерной. Последняя модель будет рассмотрена для трехкомпонентного сейсмического воздействия — произвольного поступательного движения в горизонтальной плоскости и вращения вокруг вертикальной оси. Механический аналог сооружения с резервуарами, перекрытия которых движутся плоскопараллельно в горизонтальной плоскости, приведен на рис. 12.4,6. Эту модель сооружения можно использовать в частном, но широко распространенном случае пространственного расчета сооружения на сейсмические силы.
Одномерная модель сооружения (рис. 12.15). В соответствии со спектральной теорией и нормативным методом расчета [2, 3, 15] расчетное значение сейсмической силы при установившихся колебаниях в s-й точке при /-й форме колебаний сооружения определяют по формуле
SsJ = Qs А'П js ₽j (Xj) . (12.43)
где Qs — приведенный вес сосредоточенной массы в точке 5; A, kt. kt — коэффициенты, определяемые по СНиП П-7-81; т) ys — коэффициент Формы колебаний; Ру (X у) — коэффициент динамичности (см. СНиП П-7-81); Ху — собственная частота колебаний системы.
Значения Q«, ₽j(Aj), Aj определяют по формулам:
<?, = <4’1»+ 2 «S (12.44)
fe-H t
(s) где Ук.эл —вес конструктивных элементов; QWs —вес жидкости в ft-ном резервуаре на k
®-м этаже; ftjs находят по графикам рис. 12.16 в зависимости от формы резервуара; T)ys. Ру. (^у). Ху —определяют так же, как и для си-сиМп с ТВСРДЬ,МИ массами в соответствии со ьниП П-7-81, при этом массу жидкости в каждом
Рис. 12.15. Многомассовая расчетная динамическая модель сооружения, несущего резервуары
Рис. 12.16 График коэффициента динамичности РЛ'е для определения сейсмического момента «IBS относительно вертикальной оси
резервуаре нужно умножить на коэффициент jfels в зависимости от формы резервуара.
Например, на третьем этаже сооружения находятся четыре резервуара (два одинаковых цилиндрических с йо=1 и два одинаковых сферических с /t0=l,2), тогда В расчет вводят массу жидкости, равную
2«’*!з‘)=2<гж.цвл-о.55+2<гжсфе1).о,5. ft=l
Для практических расчетов вполне достаточно учитывать только первую форму колебания сооружения. Приведенный метбд расчета по приведенным массам жидкости по сравнению с «точным» дает погрешность порядка 8 %. Такая точность при определении сейсмических сил вполне удовлетворительна.
Двумерная модель сооружения (см. рис. 12.4,6), несущего частично заполненный резервуар. В работах [6, 7, 11] подробно рассматривались задачи динамики
19—189
289
трехмерных динамических моделей сооружений для расчета их на сейсмические силы как пространственных систем. Там же были рассмотрены механика системы тел, соединенных деформируемыми связями, и векторное определение сейсмического воздействия. Из результатов работы [7] как частный случай можно получить уравнения движения двухмерной модели, показанной на рис. 12.4,6, если считать, что перекрытия на котором находятся резервуары, совершают плоскопараллельные движения в горизонтальной плоскости, а движение основания задано тремя компонентами (два поступательных и вращение вокруг вертикальной оси). Рассматриваем малые колебания динамической системы сооружение— резервуар, учитываем только волну первой формы на поверхности жидкости, считая ее идеальной. Ограничиваемся случаем одного резервуара на перекрытии. Механический аналог этой системы легко представить себе из рис. 12.4,6.
Уравнения движения этой системы имеют вид (7]:
(12.45)
Х1 + + ml fl = — xlCh
х2 + ^2 + ^2 “Ь т2 fz — — х20< а3 + + R3 = — азо»
(12.46)
В этих уравнениях Dt, Di, D-, — функции, характеризующие диссипацию энергии в сооружении; /ft, R2, Rt — функции, характеризующие деформативиость связей, наложенных на плиту перекрытия, которая рассматривается как твердое тело; Хю их» — ускорения поступательного
движения основания в направлении ееей х( я Xi (см. рнс. 12.4,6); Ota—угловое ускорение врбщё-ния основания вокруг осн х8. спектральная плотность которого зависит от длины волн Jlftea н разменов сооружения в плайе (подробные справки по этим вопросам можно найти в работах [7, 9, 10, 11]); fi, h — функции волнообразования на поверхности жидкости; Х,(, Хг — частотные характеристики волны первой формы.
Для идеальной жидкости вращение вокруг продольной оси цилиндра приводит к тривиальному случаю, т. е. жидкость не участвует во вращении тела. Для кругового цилиндра или сферы rni=m2, Xi=Xj и определяется по формулам (12.39) и табл. 12.1.
Для кратковременного внешнего возмущения и случая, когда период волны жидкости первой формы в резервуаре значительно больше соответствующего Периода колебания сооружения, расчет на сейсмические силы можно вести по приведенной массе жидкости, т. е. сооружение рассматривают как систему с твердыми массами. Величина каждой массы складывается из масс конструктивных элементов и приведенной массы жидкости (см. с. . .); момент инерции вокруг продольной оси х3 вычисляют без учета массы жидкости.
Сейсмические силы вычисляют по каждому направлению по формуле (12.43) с соответствующим значением т)^*, а сейсмический момент вокруг вертикальной оси х3 — по формуле
где / —момент ннерцнн массы s-ro перекрытия относительно осн ха, проходящей через центр масс плиты и резервуара (предполагается, что резервуар установлен центрально); 0 опре-
/ах,
дел я ют по графику рис. 12.16 для сооружений с размерами в плане более 25 м.
РАЗ ДЕЛ 13. ДИНАМИЧЕСКИ!! РАСЧЕТ ПРОЛЕТНЫХ СТРОЕНИИ ЖЕЛЕЗНОДОРОЖНЫХ МОСТОВ
Н. Г. Бондарь, Ю. Г. Козьмин
13.1. Общие положения
В процессе эксплуатации мосты испытывают, помимо статических, также динамические нагрузки, которыми являются силы инерции, возникающие вследствие колебаний, которые происходят в элементах конструкций моста. Колебания мостовых Сооружений вызываются различными нагрузками и воздействиями: движущейся нагрузкой, порывами ветра, ударами плыву
щих льдин и навалом судов на опоры, мостов, сейсмическими воздействиями, взрывной волной и др.
Силы инерции увеличивают напряжения в элементах мостовых конструкций я могут создать затруднения для нормальной эксплуатации мостов. При определенных условиях они могут привести даже к аварии сооружения.
Для железнодорожных мостов регулярным фактором возбуждения колебаний
является подвижная нагрузка. Все осталь-ные перечисленные выше воздействия носят случайный характер и поэтому должны или не допускаться, или учитываться в особых условиях.
Существует много факторов динамического Воздействия подвижной нагрузки * на • мосты. К главным относятся следующие . . (2, 3, 8, 9—11, 13, 17, 19, 22, 30]:
1) скорость движения нагрузки (эффект скорости). Этот фактор определяет силы инерции, возникающие от движения поезда по криволинейной траектории, зависящей от упругих прогибов пролетного строения и строительного подъема;
2) неуравновешенность локомотивов, 'Которая определяет силы инерции, возникающие от периодического движения элементов локомотивов (противовесы кривошипно-шатунные механизмы, поршни и т. п.);
3) удары колес о неровности пути на ' мостах. Последние можно разделить на закономерные и случайные. К закономерным неровностям относятся стыки рельсов и переломы профиля пути на опорах мостов, к случайным — всякого рода неровности и выбоины на рельсах и бандажах колес подвижного состава, возникающие в результате неравномерного износа;
4) колебания надрессорного строения подвижного состава, которые приводят к периодическому изменению давления на ось. Эти колебания вызываются ударами колес о неровности пути на мостах, а так-..же движением по извилистой траектории, возникающей из-за того, что поскольку продольные балки опираются на поперечные, то статические перемещения их под нагрузкой будут различными. Последнее обстоятельство получило название балочного эффекта;
5) влияние подвижного состава, которое определяет горизонтальные силы воздействия подвижной нагрузки, возникающие от извилистого в плане движения вагонов и локомотивов из-за коничности бандажей [33];
6) пульсация статических прогибов пролётных строений при движении поездов, составленных из однотипных вагонов. Она определяется тем обстоятельством, что, поскольку вагонная нагрузка сосредоточена в местах расположения осей, то всегда можно найти два ее положения, дающие наибольший и наименьший стати
• -Задача о воздействии подвижной нагрузки на сооружения является одной из старейших задач строительной техники (1, 11, 13. 17, 19J.
19*
ческий прогиб пролетного строения. Условимся называть этот фактор кинематическим возбуждением.
Оценивая влияние приведенных факторов динамического воздействия, следует отметить [11, 13, 17, 19], что: во-первых, влияние эффекта скорости незначительно и им можно пренебречь; во-вторых, влияние неуравновешенности локомотивов существенно при паровой тяге и несущественно при электровозной и тепловозной тяге; в-третьих, влияние подвижного состава в основном вызывает пространственные колебания пролетных строений и при рассмотрении плоских колебаний их можно не принимать во внимание; в-четвертых колебания надрессорного строения проявляются при достаточно больших скоростях движения (около 60—70 км/ч); в-пятых, с введением бесстыкового пути на мостах роль ударов колес подвижного состава заметно уменьшается.
В современных условиях введение на железнодрожном транспорте новых тяжелых типов подвижного состава и высокоскоростного движения исследование динамики мостов приобретает особую актуальность.
Изучение динамических процессов, вызываемых подвижной нагрузкой, может проводиться в двух аспектах: исследование поведения сооружения под действием заданной нагрузки и изучение поведения комплексной системы пролетное строение— подвижной состав, т. е. исследование взаимодействия пролетного строения с подвижным составом.
Пока скорости движения были невелики и рессоры не работали как упругие элементы, допустим был первый аспект. В современных условиях высокоскоростного движения становится актуальным .второй аспект исследования. Актуальность этой проблемы обосновывается тем, что при высоких скоростях движения колебания подвижного состава на мосту могут проходить значительно неблагоприятнее, чем на подходах, что при определенных условиях может угрожать безопасности движения поездов на мосту.
Аналитическое изучение вопроса взаимодействия пролетных строений с подвижным составом представляет громадные трудности и в большинстве случаев не дает достаточно надежных результатов для практики. Вот почему пока наиболее приемлемым оказывается экспериментально-теоретический метод исследования [11, 13].
В основу метода положена элементарная расчетная схема (математическая модель), параметры которой определяют из сопоставления аналитических результатов с опытными данными. Так, в дальнейшем, балочное пролетное строение будет заменяться невесомой балкой, несущей некоторую приведенную массу в середине пролета. Арочное пролетное строение будет заменяться невесомой аркой с приведенными массами в замке и четвертях пролета. Поезд будет представляться в виде сплошной равномерно распределенной и подрессоренной нагрузки. Задача взаимодействия будет заменяться задачей воздействия нагрузки на пролетное строение и анализом колебаний вагонов, движущихся по неизменной траектории, определяемой статическими прогибами и строительным подъемом. При этом пренебрегается малыми по сравнению со статическими прогибами ко лебаниями.
Далее, поскольку перспектива предполагает тепловозную и электровозную тягу при бесстыковом пути на мосту, то в качестве фактора, вызывающего колебания пролетного строения и подвижного состава, принимают кинематическое возбуждение. Влияние остальных менее значимых факторов будет оцениваться корректирующим коэффициентом, определяемым из сопоставления аналитических результатов с опытными данными.
.Влияние динамического воздействия подвижной нагрузки можно учитывать двумя основными способами — умножением подвижной нагрузки на некоторый динамический коэффициент и специальным динамическим расчетом, определяющим динамические добавки к усилиям.
В [26, 29] принят первый способ (с 1986 г. введен СНиП 2.05.03.-84). Он более прост, однако учитывает динамическое воздействие подвижной нагрузки по некоторым усредненным значениям динамического коэффициента. Второй способ точнее учитывает действительную динамическую работу мостов под подвижной нагрузкой, но более трудоемок. Далее будут рассмотрены оба способа.
Заметим, что в расчетах мостов [И, 13] по первому предельному состоянию (по прочности) динамические коэффициенты значительно превышают другие, используемые в расчетах коэффициенты увеличения временной подвижной нагрузки. В расчетах по второму предельному состоянию (по жесткости) стремление уменьшить колебания железнодорожных экипажей и
улучшить плавность их движения по мостам заставляет вводить специальные ограничения упругих деформаций пролетных строений. Далее будет дано обоснование норм жесткости пролетных строений и нагрузки от горизонтальных ударов колес подвижного состава, принятых в технических условиях проектирования [29].
13.2. Параметры свободных колебаний пролетных строений
После схода поезда с моста пролетные строения совершают так называемые свободные колебания, которые со временем затухают. Параметрами этих колебаний являются: период колебания Гр (время, за которое происходит одно полное колебание) и коэффициент затухания е, характеризующий интенсивность убывания амплитуд колебаний (наибольших отклонений от положения статического равновесия). От этих параметров значительно зависит интенсивность инерционных сил, действующих на пролетное строение. Ниже приведены формулы и экспериментальные данные для периодов и коэффициентов затухания колебаний пролетных строений.
1. Балочные мосты. Если в качестве расчетной схемы разрезного пролетного строения принять невесомую простую балку на двух опорах постоянной жесткости, несущую в середине пролета груз, равный половине веса пролетного строения, го элементарные выкладки [9, И, 13, 19] приводят к следующей формуле для периода колебаний;
, _ „ I f м р_____________________________________
р V Е p + k
(13.1)
где I, h — соответственно пролет н высота пролетного строения; р, k — соответственно интенсивность постоянной и временной нагрузок; Е — модуль упруостн; [о] — допустимое напряжение.
Теоретическое значение коэффициента а составляет 0,8 с-м_,/2. Однако для уточнения формулы (13.1) для реальных пролетных строений целесообразно использовать опытные значения коэффициента а. Они определены из формулы (13.1) подстановкой опытного (табл. 13.1) значения периода Тр и проектных значений остальных параметров. Подсчеты были проведены для 50 разнообразных пролетных строений металлических железнодорожных мостов пролетом 22,8—160 м, запроектированных по различным нормам и построенным на протяжении более чем полувекового периода [9, 11, 13, 19, 23].
292
Таблица 13.1
Диапазон пролетов, м Периоды свободных вертикальных котебаннй Тр, с Характеристики затухания
Эквивалентные коэффициенты затухания г в 1/с Эквивалентные декременты колебаний 6 = е Тр
пределы изменения средние значения пределы изменения средние значения пределы изменения средние значения
24—28 0,08—0,13 0,1 0,8—2,5 1,5 0,1—0,5 0,25
32-36 0,12-0,17 0,14 0,5—2.4 1 0,1-0,3 0,18
42-45 0,16—0,22 0,18 0,4—1,6 0,8 0,07—0,25 0,16
54-58 0,18-0,27 0,23 0,5—0.9 0,6 0,10—0,25 0,14
65—68 0,22—0,32 0,25 0,3—0,6 0,45 0.08—0,2 0,12
73—78 0,25—0.35 0,3 0.3-0,45 0,35 0,07—0,15 0,1
86-88 0.27—0,35 0,3 0,15-0,4 0,3 0,07—0.14 0,09
108-110 0,33-0,44 0,39 0,2—0,35 0,26 0,07—0,14 0,09
126—130 0,4—0,47 0,43 0,1—0,25 0,17 0,04—0,12 0,06
158,4 0,45—0,55 0,5 0,04—0,12 0,08 0,02-0,06 0,04
Эти подсчеты показали, что значение коэффициента а меняется в пределах 0,8— 1. Таким образом, если принять среднее значение коэффициента а=0,9, то в самых неблагоприятных случаях можно ожидать ошибку, не превышающую 10 %. Это вполне удовлетворительная точность для подобных расчетов, если учесть, что ошибки, связанные с получением опытных значений, могут составлять 5—7 %.
Если иметь в виду, что при рациональном проектировании должно быть отношение ор/[о] =р/(р+£), то формула (13.1) приобретет вид
Тр = 0,9]/ор/Е (//Кл~). (13.2) где Стр — среднее расчетное (по площади нетто) напряжение, возникающее в поясах главных ферм в середине пролета от постоянной нагрузки.
Заметим, что, в отличие от формулы (13.1), которой следует пользоваться для мостов, запроектированных по методике допускаемых напряжений, формулу (13.2) можно использовать также и для мостов, запроектированных по методике предельных состояний. Для последнего случая можно также обобщить и формулу (13.1), а именно:
где /?0 — расчетное сопротивление материалов поясов при действии осевых сил; р«. Л, соответственно постоянная и временная расчетные погонные нагрузки с учетом коэффициентов перегрузки и динамического коэффициента.
Как видим, формулы (13.1) — (13.3) имеют опытно-теоретический характер, поэтому для них должны быть оговорены размерности параметров. Из изложенного ясно, что для получения периода в секундах размеры / и h следует подставлять в метрах, а размерности [о], оР, R, Е, равно как и р, k, p„t к.*, могут быть любыми, но обязательно одинаковыми.
Заметим, что формулами (13.1)—(13.3) можно пользоваться также для определения периода колебаний разрезных пролетных строений под совмещенную езду (т. е. под железнодорожную и автомобильную нагрузку) и пролетных строений из алюминиевых сплавов [13, 31]. Для пролетных строений со сплошной стенкой и многорешетчатыми фермами а=0,82.
Полученные формулы определяют периоды колебаний незагруженных пролетных строений. Наличие подвижного состава на мосту, благодаря упругости рессор, увеличивает число степеней свободы системы. Если в первом приближении пренебречь влиянием рессор, т. е. считать, что временная нагрузка изменяет только массу системы, то период колебаний загруженного пролетного строения можно найти по формуле
Th = TpVl +ф ;
q = k/p. (13.4)
Определив по формулам (13.1)— (13.4) период свободных колебаний, можно легко вычислить циклическую частоту свободных колебаний и частоту v,:
Ki = 2n/Ti(i = pt k). (13.5)
Частота представляет собой число колебаний в 1 с и измеряется в Гц. Циклическая частота представляет собой число колебаний в 2л секунд и имеет размерность 1/с.
Как показали исследования [13, 19], формулой (13.4) можно пользоваться для пролетов />60 м. Для меньших пролетов влияние рессор будет ощутимым и, поскольку система будет иметь две степени свободы, то для двух циклических частот колебаний имеем
г
2_______А
1,2 2
где
А = Л? —+ 24 300 р Р + 6
/ 1 ! \ .
\ р -р6 Л —6/ ’
Здесь принимают в 1/с; р и k в кН См.
В случае отсутствия некоторых данных, входящих в приведенные выше формулы, для ориентировочного определения периодов свободных колебаний разрезных пролетных строений можно воспользоваться эмпирическими (построенными по данным опытов) формулами [13] для железнодорожных мостов Тр=38 10-4/ (для К <90 м); ?₽= (47/—0,1/2) 10-4 (для />90м), для совмещенных мостов 7^= (8+0,39/) X ХЮ-2. В этих формулах пролет принима
ют в метрах, а период — в секундах.
Частоты колебаний неразрезиых балок в спектре образуют последовательные зоны сгущения. Количество частот в каждой зоне равно количеству пролетов неразрезной балки. В каждой зоне частоты располагаются довольно плотно, поэтому практический интерес представляет не все, а только частоты, ограничивающие зону сгущения.
Для неразрезных пролетных строений с пролетами до 150 м практический интерес представляют колебания первой зоны сгущения. Для двух- и трехпролетных неразрезных ферм, которые получили наибольшее применение на железнодорожных мостах, периоды колебаний, ограничивающие первую зону сгущения (?£ и Т"}, с достаточной для инженерных целей точностью можно оценить по эмпирическим формулам [11]: Тр=54/П• 10-4—0,13; Т"=40/п-10"4— —0,11, где /п — приведенная длина пролетов, м, которую принимают: для неразрезных равнопролетных ферм — равной длине одного пролета и для неравнопролетных ферм — среднеквадратичному значению из суммы пролетов
-где N — число пролетов (пролет в к. а период в с).
Для более точного определения частот va=*l/T* и vu=\/Tu нсразрезных многопролетных ферм с разной длиной пролетов можно использовать известную [25] методику, в соответствии с которой:
ПО ;
где п[ и гц — частоты колебаний парциальных (условно разрезанных над промежуточными опорами) систем, которые определяют по формуле (13.1): для nH. лв можно вычислить приближенно из выражений л п—1,6л11 для конценых Пролетов н п — 2,3пи для средних пролетов (при Л>3).
Опытные данные [13] ио определению периодов свободных колебаний балочных железобетонных пролетных строений железнодорожных мостов имеют заметный разброс значений. Он объясняется главным образом несовершенством опорных частей, которое существенно влияет иа степень подвижности опорных частей. Частично он объясняется различием в конструкции и области тре-щинообразовання в растянутой зоне.
Вот почему для железобетонных пролетных строений малых пролетов моэкнб указать [13] только зону для периодов свободных колебаний. Так, для /<5 м 0,01/>7,р>0,02 с; для 5</<33,5 м имеем
0,0072/ > Тр > 0,0072 — 0,05, (13.7) где / в м; Тр в с.
Для железобетонных балочных пролетных строений пролетами более 18 м можно воспользоваться формулой, . аналогичной выражению (13.2)
Тр^О.бвК (ор/£)(//1ЛГ),
где Ор — расчетное напряжение в сжатой аоже от постоянной нагрузки; х — расстояние от нейтральной оси до крайней сжатой фибры; Е — модуль упругости.
Периоды свободных колебаний предна-пряженных пролетных строений, как пра^ вило, немного больше, чем для конструкций из монолитного железобетона.
При существующих скоростях движения поездов для разрезных пролетных строений практически всегда может быть осуществлен резонанс по первой частоте (периоду основного тона). В связи с ростом скоростей в перспективе становится возможным осуществление резонансов по второй частоте (периоду обертона), поэтому необходимо уметь их определять.
Для решения этого вопроса пока имеется только теоретический путь, так как опытных данных по вторым частотам практически нет. Периоды обертонов можно приближенно определить по формуле
т2 = Гр/Чр, (13.8) где Тр — период основного тона, а /Iр—коэффициент уменьшения периода: Пр “4 для пролетных строений (металлических и железобетонных) со сплошной стенкой: Цр—2.2 для сквозных железнодорожных и Цр-2,5 для совмещенных мостов [13. 31]
Таблица 13.2
По опытным данным, для пролетного строения /=109,6 м совмещенного моста Цр=2,42.
Помимо вертикальных колебаний, пролетные строения железнодорожных мостов совершают пространственные колебания. • Они представляют собой совместные колебания двух форм со своими периодами. 'Первой формой являются горизонтальные колебания, при которых, в основном, происходит изгиб пролетного строения из плоскости; второй — колебания «боковой качки», при котором, в основном, происходит закручивание пролетного строения.
Пространственные колебания с большими амплитудами опасны не столько с точки зрения прочности, сколько с точки зрения 'безопасности движения поездов по мостам (см. п. 13.8).
Для ориентировочного определения периодов свободных колебаний разрезных металлических пролетных строений желез-дорожных мостов можно воспользоваться (13] следующими эмпирическими формулами: для периодов горизонтальных колебаний — 77=0,008/; колебаний «боковой качки»— Тир=0,004/. Здесь по-прежнему пролет / в м, а период в с.
Более точные значения периода горизонтальных колебаний дают выражение, полученное [13, 27] аналогично формуле (13.1):
,(13.9)
где Ъ — ширина пролетного строения: <хг — коэффициент, который определяется по опытным ценным (табл. 13.2) для периодов горизонтальных колебаний, аналогично коэффициенту а в формуле (13.1).
Его значения достаточно хорошо аппроксимируются эмпирическими зависимостями: для пролетных строений с ездой понизу — аг= 1.93...0.01/; поверху — (аг= =200/(150+/); открытых мостов — аг= =2,35.
Для уточнения периода колебаний «боковой качки» можно воспользоваться [13] формулой
кр
или более точным выражением, полученным [13, 27] аналогично формуле (13.1):
Экспериментальные значения периодов свободных горизонтальных колебаний Тг, с
Пролетные строения с ездой понизу Пролетные строении с ездой поверху
Диапазон пролетов, м интервал изменения среднее значение диапазон пролетов, м среднее значение
33,6 0.3 0.3 22,4 0.2
43.7—45 0,37—0,42 0.38 33.1 0,28
54,8—55,5 0.4—0.5 0,45 33.6 0.29
65.8—66.5 0,5—0,71 0.56 43,9—45 0.35
76.8—80.5 0,59—0,75 0.66 54.9 0,45
87.0—87.5 0.65—0.99 0,74 55.9 0,48
108.3—110 0.89—0.97 0,94 89,4 0.85
Эту формулу, как и выражение (13.9), можно использовать для существующих мостов. Ими можно также воспользоваться и для новых мостов, запроектированных nd методике предельных состояний, если радикалы в этих формулах заменить на
где обозначения такие же, как в формуле (13.3).
Для определения частот горизонтальных колебаний неразрезных ферм, ограничивающих зону сгущений (v“ и v£), можно воспользоваться выражением (13.6), а циклические частоты колебаний парциальных систем п,н и ^определить по формуле
п4= 1/2л V СИЛ, где М — приведенная масса (М—рШцУ, С — расчетная характеристика горизонтальной жесткости с учетом податливости ветровых фепм, поперечных связей и порталов, которую определяют по формуле
с =(!//-!) +(₽/г2).
Здесь и и гг — податливость соответственно нижних и верхних ветровых ферм; 0 — экспериментальный коэффициент, зависящий от соотношения податливостей портала п> и ветровой фермы и, значение которых помещено в та б а. 13.3, где индексы «Н» и «в» относятся соответственно к нижней и верхней границам зоны сгущений.
При колебаниях пролетных строений мостов вследствие возникновения различных неупругих сопротивлений наблюдается рассеяние энергии. По этой причине свободные колебания пролетных строений, являются затухающими — амплитуда колебаний уменьшается, а через некоторое время колебания вовсе не ощущаются.
Таблица 13.3
Отношение Г0 =а Ри ДЛЯ пролетов Р” Для пролетов
1 концевых ,1 промежуточных концевых промежуточных
а>3 0,3 0,8 0 0
3>а>2 0,5 0,8 0 0
2>а>1 0,6 0,9 0,3 0,3
а<1 0.9 1 0.5 0,5
Пролетные строения с ездой поверху 1 1 0,75 0.75
Неупругие сопротивления, возникающие при колебаниях пролетных строений мостов, принято делить на внутренние и внешние. К внутренним прежде всего относят неупругие сопротивления (внутреннее вязкое трение) в самом материале пролетного строения при его деформациях. Внешние неупругие сопротивления возникают вследствие сухого трения в опорных частях конструкции, трения частей верхнего строения пути при его смещениях во время колебаний, лобового сопротивления воздуха и т. д.
В конструкциях пролетных строений, где элементы имеют болтовые податливые прикрепления, могут возникать неупругие сопротивления, вследствие сухого трения во взаимных соединениях элементов.
Характер убывания амплитуд при указанных сопротивлениях различный. Так, при сухом трении амплитуды убывают по линейному закону арифметической прогрессии; при вязком трении — по закону геометрической прогрессии. В последнем случае математическое описание сопротивления наиболее простое (сопротивление пропорционально скорости). Вот почему совместное воздействие различных сопротивлений приводит к эквивалентному вязкому трению.
Исследования показывают, что доминирующую роль в сопротивлениях играет сухое трение. Поскольку его величина существенно зависит от случайных обстоятельств (состояния опорных частей и мостового полотна, величины затяжки болтов и т.п.), то экспериментальные данные по параметрам затухания имеют большой разброс (см. табл. 13.1).
Параметры затухания могут быть найдены только путем обработки опытных данных натурных экспериментов. Эквивалентное значение логарифмического декремента колебаний б находят, обрабатывая осциллограмму (виброграмму) свободных
затухающих колебаний, полученную после удаления с моста подвижной нагрузки или после удара. Для этого выбирают участок с четкой записью однотонных колебаний и точно замеряют на нем две амплитуды — Ао и Ап, отделенные одна от другой п, волнами.
Искомую величину определяют по формуле
Ап
Определив по этой же осциллограмме период свободных колебаний Тр, легко найти коэффициент затухания е=&/Тр. Невзирая на значительное рассеяние опытных данных, для приближенной оценки коэффициента затухания все же можно рекомендовать [13] эмпирическую формулу
е = 1/10 Тр(1 4-ЮТр). (13.10) Есть основание предполагать, что наличие поезда на пролетном строении увеличивает силы сопротивления колебаниям, так как появляются дополнительные источники поглощения энергии, среди которых следует указать на рессоры подвижного состава. Опыты подтверждают это предположение. Однако этот вопрос еще мало изучен, и дать количественную оценку не представляется возможным. Остается путь учета этого обстоятельства при помощи корректирующего коэффициента, определяемого из сопоставления аналитических результатов с опытными данными.
Формулой (13.10) можно пользоваться для ориентировочного определения эквивалентного коэффициента затухания балочных (разрезных и неразрезных) металлических пролетных строений железнодорожных мостов.
Декремент колебаний для неразрезных пролетных строений изменяется в пределах б=0,04...0,08. Характеристики затухания пролетных строений совмещенных мостов (табл. 13.4) значительно ниже [31], чем для железнодорожных мостов (кроме /= = 109,6 м). Это видно из сопоставления декрементов колебаний в табл. 13.1 и 13.4.
В балочных железобетонных пролетных строениях разброс в характеристиках затухания еще больший, чем в металлических. Это объясняется несовершенством опорных частей и возникновением трещин в растянутой зоне, что видно из табл. 13.5, в которой приведены опытные данные для железобетонных предварительно напряженных пролетных строений железнодорожных мостов.
296
Таблица 13.4
Пролет, м . . - . 66 82,2 85 87,6 109.6
Период, с . 0,35 0.46 U, 39 0,34 0,51
Эквивалентный коэффициент затухания, 1/с . - - . 0,105 0,117 0.162 0,135 0,216
Эквивалентный декремент колебаний 0,037 0,054 0.063 0.046 0.11
Таблица 13.5
| Пролет, м । Опытные значения
характеристика жесткости, кН/см период колебаний ГРС эквивалентный декремент колебаний
18 1760 0.109 0,22
18,2 1670 0,114 0.2
20,5 1080 0,117 0,25
22,9 1540 0,146 0,21
1530 0,147 0,11—0,29
1580 0.154 0,29—0,33
1540 0,141 0.24—0,43
1170 0,155 0,32—0,39
23 2070 0,139 0,56
2160 0,137 0,47
2420 0,145 0,42
1510 0,15 0,38
33.5 1240 0,232 0,18—0,3
Для ориентировочного определения декремента колебания железобетонных пролетных строений можно воспользоваться [13] формулой
б = е7’р = (280/£) 10э« 0,3. (13.11)
, (13.12)
где I — пролет; q — интенсивность погонной нагрузки от собственного веса арок и надарочного строения в замке; g — ускорение силы тяжести; EJ3 — жесткость свода (или двух арок) в замке для бесшарнирных арок или в четверти для шарнирных арок; Юр — коэффициент частоты, равный:
1) для шарнирных арок постоянного сечения
<ор = 42 —60а (а = ///), (13.13)
где f — стрела подъема оси арки; а—подъемис-тость аокн;
2) для бесшарнирных арок (сводов) переменного сечения в соответствии с законом
/3 — [1 — (1 — п) ех] /х COS фх>
коэффициент частоты определяют по формуле
(Ор = 105
г3 + г4а2 + г5
(13.14)
где п — коэффициент развития сечения, равный
/п COS фп
1п. /х— моменты инерции соответственно в пяте и в сечении с абсциссой х, отсчитываемой ст замка; <рп. Фх — углы наклона касательной к оси аркн соответственно в пяте и в сечении с абсциссой х: гх—2х/1 — относительная координата сечения; г. — коэффициенты, определяемые по формуле
ri = nJ?i + 7’f (/= 1, 2, 3, 4, 5), (13.15)
где значения R., берут из табл. 13.6.
Для определения периода обертона свободных колебаний арочных пролетных строений можно воспользоваться формулой (13.8), где коэффициент уменьшения периода равен:
для трехшарнирных арок т]р=1,6+а;
для двухшарнирных арок
т]р = 2,3 + а; (13.16) для бесшарнирных арок (сводов)
Пр = 1,9+1,4а. (13.17)
Вычисления по формулам (13.12) — (13.17) и выражению (13.5) частот в Гц для ряда пролетных строений железнодорожных мостов приведены в табл. 13.7. Из нее видно, что опытные данные [6, 7, 13] достаточно близки к расчетным, значит приведенные формулы для практических вычислений приемлемы.
Декременты колебаний для железобе-
2. Арочные мосты. Как показали исследования [4—7, 13], очертание оси арки мало влияет на периоды колебаний пролетных строений, поэтому в дальнейшем рассматриваются пролетные строения с параболическими арками.
Для железобетонных арочных пролетных строений со сквозным надарочным строением период основного тона свободных колебаний может быть определен по формуле
Таблица 13.6
1
1 2 3 4 5
3.7 34.2 16,3 364 1955
Ti
1,7 15,7 0,15 —3U --88
297
Таблица 1S.7
Система арок /. м а V=i/rp-Гц v^=l/7’“ о ' р Ги
расчет опыт расчёт опыт
Бесшар-нирные 29 0,5 4,3 4.2 11.1 10
52 0.25 3.2 3.4 7.2 8.5
55 0,245 2,3 2.7 5.2 5.8
106 0,325 1.3 1.5 3,1 3,6
140 0,207 1.8 2 3.9 4.3
150 0,267 1.3 — 2.9 2.7
228 0.149 1.1 — 2.3 1.7
Шарнирные 28 0.31 4.1 4.5 7,8 7.7
52 0,26 1.7 2.5 4,4 —
120 0.145 1.6 1.8 1.9 1.95
тонных арочных пролетных строений со сквозным надарочным пролетным строением вычисляют по эмпирической [13] формуле
= (0,00lXf 4-0,05p)(t = 1,2), (13.18) где р принимают равным: для бесшариириых мостов р— 1, для шарнирных р—3.
Формулой (13.18) можно пользоваться для определения декремента первых двух форм колебаний. Для нахождения частоты горизонтальных колебаний арочных бес-щарнирных пролетных строений можно воспользоваться [13] формулой
2д2
Хг =----------
Ь2(14-а)
0,565/8 4- 0,435/п
0,172тп 4- 0,578/Лз
где L — длина дуги арки (свода); шп, тэ — сумма погонных масс арки и половины надарочного строения в пяте и замке.
13.3. Вынужденные колебания пролетных строений
1. Балочные мосты [9, 11]. При движении по пролетному строению поезда, состоящего из одинаковых вагонов, происходит пульсация статических прогибов (рис. 13Ц,а, б). Характер кривых прогибов зависит от пролета и типа подвижного состава. В качестве примера на рис. 13.2 приведены кривые прогибов для середины балочного
Рис. 13.1. К возбуждению колебаний пролетных строений вагонной нагрузкой
а—расчетная схема; б — график основного тона кинематического возбуждения; в — опытная виброграмма колебаний пролетного строения /" =87,83 м под действием наливного поезда; г — то же, для пролета 66 м
Рис. 13.2. Графики кинетического возбуждения под действием перспективной вагонной нагрузки для /—23 м
металлического пролетного строения /=23 м при движении четырехосных, шестиосных и восьмиосных вагонов перспективной нагрузки (рис. 13.3) с давлением на ось Р== =300 кН и погонной нагрузкой Л= = 140 кН/м. Длина графика по горизонтали соответствует длине вагона В. Аналогичные графики построены для десяти пролетов в диапазоне /=23...15О м. Для вычислений использованы ЭЦВМ «Минск-132», причем линия влияния перемещений в середине была аппроксимирована полуволной синусоиды.
При движении однотипных вагонов по пролетному строению прогибы будут периодически повторяться через период
= 2л/(о = B/v, т. е. <о = 2я(у/В),
(13.19)
где v — скорость движения; <о — частота ’пульсации
Следовательно, графики прогибов, мо.ж-
298
Таблица 13.8
Пролет, м Во.сьмиосные Шестиосные Четырехосные !/ст
. а1 Ог а, °1 аг а,
23 188 57 30 139 21 5 60 20 1,2 6,8
33 302 42 19 34 40 4 69 16,8 1.1 9,78
44 29 42 5 15 24 4 29 15,3 1 13,02
-55 102 11 5 41 6 5 12.3 12 1.2 16,28
66 101 14 0,7 49 9 0,7 17,1 5,6 1.3 19,54
77 79 26 1.8 50 16 5 27.5 10,3 0.9 22.8
88 79 20 33 30 17 3 18.8 1.8 0,45 26,06
ПО 21 15 3.5 10 8,7 1.8 15.6 1.6 0.1 32,57
! 127 21 12 3.2 19 8,4 2 12.7 1.8 0,54 37.61
150 Примем 1 32 а н и е. 1 2-’ 1 3 Данные табл. | 16 | 1.6 | 2,4 13.8 следует умножить на 1 3-‘ РС/800. 1 2-4 I 0.16 44,42
но разложить в тригонометрический ряд Фурье оо
(0 = Уст + S ai sin (iQ>t + ’
Z=I
где уст — статический прогиб под нагрузкой, являющийся постоянным членом ряда; t—blv — время осуществления прогиба для абсциссы b (см. рис. 13.2).-
Полученные графики были подвергнуты гармоническому анализу, результаты которого представлены в табл. 13.8. Из нее видно, что амплитуда а<, как правило, быстро уменьшается с ростом порядка i. Это дает право для приближенных вычислений ограничиться только первым членом ряда ai sin <о/(ф|=0), который и является кинематическим возбуждением для расчетной схемы пролетного строения (рис. 13.4), где tnk=pl!2g — приведенная масса.
Составим уравнение движения приведенной массы. Динамические перемещения ее будут состоять из кинематического возбуждения, а также перемещений от сил инерции и сопротивлений.
Сила инерции, как известно, равна произведению массы на ускорение, представляющее собой вторую производную от перемещения по времени, т. е.
d*y mh~~d^~ ~ ткУ'
, Здесь.и далее число точек на у укатывает на порядок обыкновенной производной по времени t.
Используя принцип Даламбера и прикладывая к балке силу инерции с обратным знаком (т. е. в направлении, противоположном ускорению), получим выражение для перемещения середины балки от силы инерции tnk6uy, где бц — коэффициент влияния перемещений в середине балки.
Заменяя силы сопротивлений эквивалентным вязким трением, т. е. считая их пропорциональными скорости, находим выражение для перемещения середины балки от сил сопротивлений Ьп8иУ- Здесь Ьп — коэффициент пропорциональности, а знак минус указывает на то, что сила сопротивления направлена в сторону, противоположную направлению движения.
Суммируя перемещения от кинематического возбуждения, а также от сил инерции и сопротивлений, имеем
y = ai sin at — (mh y”+bn у) бц-
Заметим, что поскольку у представляет собой динамическое перемещение, отсчитанное от положения статического равновесия, то в равенство не входит статический прогиб Уст.
Перенеся все известные в левую часть равенства и разделив все члены на т*6ц, получим дифференциальное уравнение задачи:
у-}- 2еу +А$у= X* sin (13.20) Здесь обозначено:
1 1.7 1 Л71 5 м 1,7 7,7 1.7 1
Г- - В • 17,2 м
Рис. 13.4. Динамическая расчетная схема пролетного строения
2е = bnlnth', = 1/1^mh 6n .
Как вытекает из формул, приведенных в п. 13.2, е — представляет собой эквивалентный коэффициент затухания, а X* — циклическую частоту свободных колебаний загруженного пролетного строения.
Решение уравнения (13.20), как известно [9, 11], имеет вид
__g£
у (0 = е (Ci cos т)/ 4- Сг sin т)0 -f-
+ A sin (tut -f- <р0),
(13.21)
где
*П = V tf — e2; <р0 = arctg
2есо
а1
А =---- . (13.22)
У +
Произвольные постоянные интегрирования С| и С2 в решении (13.21) определяются из начальных условий.
Выражение (13.21) справедливо с момента полной загрузки пролетного строения вагонами. Будем полагать, что длина поезда значительно больше длины пролетного строения. Такое предположение вполне допустимо даже для больших пролетов, так как в перспективе поезда, по-видимому, бу-дут сдвоенными или даже строенными. В этом случае время t пребывания поезда на пролетном строении будет таким, что
первый член решения '(13.21)' окажется весьма малым по сравнению со вторым членом, т. е. свободные колебания затухнут и установятся колебания
У (0 = A sin (со/ —<р0).
Максимальное значение амплитуды А установившихся колебаний будет при резонансе, т. е. когда частоты свободных колебаний X* и возбуждения <о оказываются равными. Полагая в двух последних формулах (13.21), (13.22) Х*=(0, получим
У «) = -COS t. (13.23) 2е
Опытные виброграммы резонансных колебаний приведены на рис. 13.1, в, г.
Определим критические скорости движения поездов, при которых возникают резонансные колебания. Полагая в формуле (13.19) Та=Th. находим
Икр = •
Подсчитанные по этой формуле критические скорости для перспективной нагрузки (см. рис. 13.3) для существующих пролетных строений приведены в табл. 13.9. Значения Tk вычислены по формуле (13.4) с использованием табл. 13.1. Заметим, что пролетные строения, рассчитанные на перспективную нагрузку С14, будут немного тяжелее существующих, что приведет к снижению критических скоростей. Если принимать максимальную скорость движения
Таблица 13.9
Пролет 1, м Постоянная нагрузка р, кН/м Период колебаний с Критическая скорость, км/ч
Va
23 22 0.27 115 170 230
33 27,5 0.34 91 135 182
44 31,5 0,42 74 110 148
55 36.5 0.5 62 92 124
66 41 0.52 60 89 120
77 45,5 0,58 53 76 106
88 49,5 0,61 51 72 102
НО 58,5 0,71 44 66 88
126 65 0,76 41 61 82
158 86 0.8 39 58
Примечание. Индекс скорости и указывает иа число осей вагона.
Рис. 13.5. Графики максимальных амплитуд кинематического возбуждения
Рнс. 13.6. Графики динамических добавок грузовых поездов в перспективе 160 км/ч, то, за небольшим исключением, резонансные режимы реализуются для всех пролетных строений.
Оценим теоретическую динамическую добавку. Как видно из формулы (13.23), она будет
Ц, _ = ПП1 (13 24)
2е*/ст k ^Уст
Значения величин, входящих в знаменатель этой формулы, приведены в табл. 13.1, 13.8 и 13.9. Что касается амплитуды возбуждения ait то будем ее принимать в соответствии с кривой I иа рис. 13.5, которая представляет собой огибающую кривую первых амплитуд at, кинематического возбуждения для 8, 6, 4-х осных вагонов.
Вычисления, выполненные по формуле (13.24), достаточно хорошо аппроксимируются кривой теоретической добавки р,т, приведенной на рис. 13.6. Здесь же дана кривая нормативной динамической добавки ри в соответствии [29] с формулой ц.в = = 18/(30+Л); (Л=/)?
Сравнивая эти кривые, устанавливаем, что для малых пролетов (/=20—30 м) они мало отличаются. Заметное различие для больших пролетов объясняется тем, что нормативная добавка получена на основе экспериментальных данных, учитывающих все многообразие динамического воздейст
вия (п. 13.1). Эти данные получены путем обработки осциллограмм резонансных колебаний при движении вагонов (см. рис. 13.1,в, г) на пролетных строениях, имеющих стыки рельсов. Поскольку критические скорости при кинематическом возбуждении и при наличии периодических ударов в стыках рельсов одинаковы, то различие в кривых на рис. 13.6 можно объяснить главным образом влиянием ударов в стыках рельсов и других локальных неровностях пути.
Несмотря на внедрение бесстыкового пути, все же неизбежны случайные неровности и закономерные неровности вследствие переломов пути над опорами мостов, возникающих из-за упругих прогибов и устройства строительного подъема.
Это обстоятельство можно учесть введением к теоретическим значениям амплитуды (кривая / на рис. 13.5) корректирующего коэффициента, равного отношению р,п/р,т. Вычисляя этот коэффициент по графикам на рис. 13.6 и умножая его значение на ординаты кривой I на рис. 13.5, получим кривую II скорректированного значения амплитуды возубждения, которую, как видно из рис. 13.5, допустимо аппроксимировать прямой:
800
——• а = 400 — 21 или а — Ро
P6tl
= “Г1- (2 — 0,01/);
4
(20 м</< 160 м), (13.25)
где I принимают в метрах.
Заменяя в формуле (13.23) ai на а, проходим к выражению для резонансных колебаний середины пролетного строения:
Х,ь и y(t)=--^—cos7.kt. (13.26)
Поскольку форма колебаний, соответствующая частоте основного тона колебаний балки представляет собой полуволну синусоиды, то перемещение любого сечения пролетного строения при резонансе можно записать так:
у(х, t) = —•cos/sin— х, (13.27) где х— координата сечения (см. рис. 13.4). а знак минус опущен, так как начало отсчета времени to выбирают произвольно и его можно взять так, чтобы cos —*
2. Арочные мосты. В отличие от балочных мостов, в арочных мостах возможен резонанс не только по частоте основного тона свободных колебаний, но и по частоте первого обертона (второй частоте). Причем первой частоте соответствует косо-
8М
рых при резонансе по первой частоте аналогичны (13.26) и (13.28), а именно:
Civ
*1 (О = *2 (0= — -7-----cos М;
2ei
Ут. (О = — У2(!) =
2е>
(13.30)
Рис. 13.7. Перемещения арочных пролетных строений
а — в случае резонанса по первой частоте; б — то же. по второй частоте
симметричная форма колебаний, а второй частоте — прямосимметричная, поэтому приходится рассматривать две расчетные схемы в соответствии с рис. 13.7.
Расчетная схема для симметричных колебаний (рис. 13.7,6) представляет собой систему с одной степенью свободы, аналогичную расчетной схеме для балки (см. рис. 13.4), поэтому по аналогии с формулой (13.26) для перемещений замка получим
Уз (0 = — cos М. (13.28) 2е2
Здесь и е2 определяют по приведенным в п. 13.2 формулам, а для амплитуды кинематического возбуждения аналогично предыдущему находим:
Оз “
Л13Х1 ’
0,25— 1,18а+ 1,55а3 ’-"160+1,78/-------------’ <13-29>
где Р — давление оси вагона; Мэ — масса в замке; та — корректирующий коэффицнен т; Л» — вторая циклическая частота.
Расчетная схема для кососимметричных колебаний (рис. 13.7, а) имеет четыре степени свободы. Колебания этой математической модели описывают системой четырех дифференциальных уравнений.
С помощью линейного преобразования этой системы уравнений она приводится [13] к четырем независимым уравнениям в главных координатах, решения для кото-
где
ах = (р/мь ’•?) W (,3-3|>
здесь
(1—1,6аа) (0,025 — 0,12а+0,16а8) ;
Т1/4~ (0,12 + 0,9а2) (100 + 0,731)
Аналогичные вычисления для шарнир- -них пролетных строений приводят к таким же результатам, но с другими коэффициентами р и у, а именно:
для двухшарнирных пролетных строений:
0,96а —0,26
гз 100 — 2,4/
(1—2,2а2) (11а —2,9) _
71/4 “ (0,1 + а2) (100 —21) 100
для трехшарнирных пролетных строений
3,9а— 1,1
100 — 2,4/
(1 — 2,2а2) (0,5а —0,15)
71,4 “ (0,125 +а2) (100 — 2/)
В формулах (13.29), (13.32) и (13.33) / принимают в метрах.
Значение р одинаково и равно
1 — 2,2а2
3,35а
(13.34)
Здесь по-прежнему ct—fU — подьемнс-тость арки.
13.4. Приближенный динамический расчет -
1. Балочные мосты. [9, 11]. Учет динамического воздействия подвижной нагрузки с помощью динамического коэффициента, принятый в технических условиях проектирования [26, 29], достаточно приближенно оценивает динамику пролетных строений, хотя бы потому, что такой подход не делает различия в динамической работе отдельных элементов. Между тем имеющиеся опытные данные, а также теоретические
300
обромяяя. указывают на заметные раз? личия.
Это относится, главным образом, к элементам решетки пролетных строений. В случае необходимости более точной оценки динамики отдельных элементов пролетных строений (например, при решении вопроса об усилении элементов-) необходимо провести приближенный динамический расчет, тем более, что, как будет ясно из после-, дующего изложения, он достаточно прост.
’.Сущность динамического расчета состоит в том, что определяют динамические добавки к усилиям, вызванные максимальными силами инерции, возникающими в- резонансном режиме вынужденных колебаний. Динамические добавки определяют аналогично вычислениям статических усилий, т. е. загруженном максимальными силами инерции линий влияния усилий в элементах главных ферм пролетных строений.
Дифференцируя дважды по времени перемещения (13.27), получаем ускорение в любом сечении при резонансе
У(х, 0 =
а
2е
cos Xfc t sin — x.
.' Полагая здесь cos Х*/=1, находим максимальные значения ускорений
. •• / I \ п
У(х, ^)шах3 — У V I. t sm — х.
\ ‘ / max *
(13.35)
" ( 1 )
Здесь у , ^утаХ — максимальное ускорение среднего сечения пролетного строения, равное
I \ ^"ka В
. Ч = ——
2 / max 2е Р +
где обозначено
лР(2 —0,01/)
Ис
2/еТр V1 4- ф
(13.36)
(13.37)
При получении выражения (13.36) и (13.37) использованы формулы (13.4), (13.5) и (13.25).
В случае однозначной линии влияния
максимальное динамическое усилие возни
кает при полном загружеиии пролетного строения вагонной нагрузкой интенсивности k. Используя принцип Даламбера, т. е. беря произведение ускорения (13.35) на погонную массу (p+k)lg с обратным знаком, получим погонную силу инерции (рис. 13.8, а):
q (х) = W sin (nil) х.
Загружая этой нагрузкой треугольную однозначную линию влияния (рис. 13.8,6), находим динамическую, добавку к усилию
Рнс. 13.8. К определению динамических добавок к усилиям
а — схема нагрузок; б — однозначная линия влияния; в — лнння влияния элементов, работающих на местную нагрузку; г—загружение двузначной линии влияния
Выполняя интегрирование и тригонометрические преобразования, окончательно имеем
WPc п
&N =————---------- sin—s. (13.38)
2л2$ (/ — s) I
Здесь и дальше в формулы динамических добавок вводится коэффициенты 1/2, так как выражение (13.37) дает значение погонной силы инерции в середине пролетного строения, состоящего из двух главных ферм.
Для получения динамических добавок к усилиям в элементах, работающих на местную нагрузку, линия влияния усилий в
803
которых распространяется на длине Х</ (рис. 13,8, в), синусоиду в пределах X допустимо заменить касательной к ней и использовать способ Верещагина, т. е.
AW =W7.c sin-у-з. (13.39)
При определении динамических добавок к усилиям в элементах с двузначной линией влияния загружение вагонной нагрузкой следует производить на максимум и минимум усилия. Такое загружение соответствует сходу нагрузки с пролетного строения, введенного в резонанс.
Поскольку ведут приближенный расчет, то допустимо ввести два предположения: во-первых, считать, что ускорения по длине пролета мало отличаются от закона (13.27); во-вторых, можно не учитывать узловой передачи нагрузки, т. е. считать, что линия влияния усилия имеет вид, изображенный на рис. 13.8,г, где s — расстояние от левой опоры до середины панели.
В соответствии с рис. 13.8, г и формулами (13.35) и (13.36) для динамической добавки к усилию получим выражение
(S р С с — — I — sin X g J s 1 о
Z—s .
P cs n \
X I -------- x2 sin — x2dx2 .
JI — s I I
o /
Выполняя интегрирование и тригонометрические преобразования, а также принимая во внимание равенство
с/з = cs/(l — s), окончательно имеем
Wl2c / л
= ± ——-— я cos — з 4-2л2з \ I г
4-—7Tsin~7's)- (13.40)
Р +« I /
Здесь знак «±> соответствует знаку участка линии влияния, загружаемого временной нагрузкой; s н с — длина и ордината линии влияния незагруженного участка.
Выражение (13.37) удобно представить так:
2яРу PXh
elTp V1 +ф е/
У, (13.41)
ческий расчет и других разрезных пролетных строений железнодорожных и совмещенных мостов с той лишь разницей, что корректирующий коэффициент в формуле (13.41) равен:
для металлических совмещенных мостов
у = l,4.10-3Z —0,045(60 м</< ИО м);
для преднапряженных железобетонных мостов
у = 0,011/ —0,015 (15 м < /< 35 м). (13.43)
Заметим, что в приведенных выше формулах корректирующего коэффициента у значение пролета / принимают в метрах.
Как показывают экспериментальные данные, для неразрезных пролетных строений железнодорожных мостов при существующих скоростях движения возможен только резонанс по основному тону колебаний, форма которых при одинаковых пролетах такая же, как для разрезных пролетных строений. Это позволяет определять W для каждого пролета как для разрезного, используя формулу (13.41), где корректирующий коэффициент
y = kR (0,4 — 0,002/) (50 м< / < 160 м). Здесь коэффициент feH принимают: для двухпролетных неразрезных строений &н“0,8; для трехпролетных неразрезных строений feH“0,7 (крайний пролет) и Ан “0.6 (средний пролет).
Период ТР=ТИ определяют по формуле (13.6). Усилия определяют загружением синусоидальной инерционной нагрузкой соответствующих линий влияния с предварительной их линеаризацией. Это замечание показано на рис. 13.9, где определяют по формуле (13.41):
----2лРУг.. .
eljT» К1 + ф
W2 =------------------
е/2Гн 1^1 + ф у1 = 0,7 (0,4 — 0,002/1); у2 = 0,6 (0,4 — 0,002/2).
Криволинейные участки линий влияния заменяют треугольниками с вершинами в точках с максимальными ординатами.
Усилия определяют по формулам (13.38)—(13.40) с алгебраическим суммированием по пролетам. Например, в соответствии с рис. 13.9, имеем
где у = 0,5 — 0,00251 (20 м < I < 150 м).
(13.42)
Аналогично можно произвести динами-
ДА/ =
2л2
г 31
с, sin — 5
______к_
_ S1 (11 — sl)
рнс. 13.9. К расчету аеразрезных пролетных строений а — инерционная нагрузка: б —
параметры лннин влияния
Л
С3 sin — s3
1Г2 4 с-2 sin -у- s2 , ____________‘2
2л252 (^2 — s2)
Отметим, что точность расчетов для неравнопролетных мостов будет ниже, чем для равнопролетных.
2. Арочные мосты. Как уже указывалось (см. п. 13.3), для железобетонных арочных мостов осуществим резонанс по первым двум частотам, причем первой частоте соответствует кососимметричная форма колебаний (см. рис. 13.7,а), а второй — прямосимметричная1 (см. рис. 13.7,6). Вот почему для определения динамических добавок к усилиям в сечениях, имеющих линию влияния изгибающего момента, близкую к кососимметричной форме (пята, четверть), следует использовать расчетную схему в соответствии с рис. 13.7, а, а для сечений, имеющих симметричную линию влияния изгибающего момента и нормальной силы (замок),— в соответствии с рис. 13.7,6.
Расчетные значения максимальных сил инерции будут:
Qx = — Мк [xj (/)]max;
Qy = — Мк [t/i (O]max;
Qs = — Ala [уа (/)]max.
Дифференцируя дважды (13.28) и (13.30) и полагая cosXj/=—1 (i=l,2), найдем максимальные ускорения. Подставляя их в последние формулы и используя выражения (13.29) для аэ и аналогичные выражения для ах и ау получим:
К2Р
2е2
Тз •
Принимая во внимание формулы (13.5) и (13.11), эти выражения упрощаются:
Qx — Yi/4; Qy — PQX;
пР
<2з=“Г-Тэ, (13.44)
о2
где корректирующие коэффициенты у, вычисляют по формулам (13.29), (13.32) и (13.33).
Выполняя статический расчет параболических арок на действие сил (13.44) в соответствии с расчетной схемой на рис. 13.10, можно построить следующие формулы динамических добавок:
1) к изгибающим моментам в пяте (для бесшарнирных арок и сводов)
(13Л5>
2) к изгибающим моментам в четверти ДМ1/4 = ± (Qv ту + Qx тх), (13.46) Динамические добавки к соответствующим нормальным силам принимают равными нулю;
3) к положительному моменту в замке (для бесшарнирных и двухшарнирных арок)
1 Для весьма пологих арок — наоборот [5, 13].
20—189
ДЛ4а — Q3, m3; (13.47)
4) к нормальной силе в замке (для бесшарнирных и двухшарнирных арок и сводов) и в пяте (для шарнирных арок)
ААа = Qa fta; AA^n = Q3^n. (13.48)
Коэффициенты влияния усилий приведены в табл. 13.10 (бесшарнирные арки и своды) и табл. 13.11 (шарнирные арки).
305
Рис. 13.10. Расчетная схема арочных пролетных строений
а — в случае резонанса по первой частоте; б — то же, по второй частоте
Коэффициент влияния ha во втором равенстве (13.48) можно определить по формуле
1 / \
йп = -7= 2« + — , (13.49) V 1 + 16а2 ' а '
где а—/// — подъемистость арки.
Таблица 13.1С
п Коэффициенты влияния
т> ту/1 т3// тх ' mx/f f hs~
0.15 0,13 0,06 0,041 0.423 0,164 0,267
0,2 0.125 0.063 0,042 0,407 0.171 0.263
0,25 0,121 0,065 0,043 0,392 0,179 0,259
0.3 0,117 0.067 0,044 0.382 0,184 0,256
0.4 0,111 0.07 0,045 0.362 0,194 0,251
0,6 0,103 0.074 0.047 0.34 0.205 0,245
0.8 0,097 0.076 0.048 0,324 0.212 0,24
1 0.094 0.077 0.049 0.312 0,219 0,236
Таблица 13.11
Конструкция арок Коэффициенты влияния
V' та/7 О "'х// hg (fll)
Двухшаринрная 0,105 0,065 0,375 0.195
Трехшарнирная 0,125 — 0,375 0,25
13.5. Динамические коэффициенты
В соответствии с техническими условиями проектирования мостов [26, 29], динамическое воздействие подвижной нагрузки па мосты учитывают умножением усилий, напряжений и перемещений иа некоторый коэффициент, именуемый динамическим коэффициентом.
Значения динамических коэффициентов устанавливают на основании анализа экспериментальных данных. Они представляют собой отношение максимальной динамической величины (усилие, напряжение, перемещение) к соответствующей статической. Значения динамических коэффициентов сравнительно мало отличаются от единицы, что подчеркивается их обозначением (1 + ц), где р,— малая величина, именуемая динамической добавкой. Они существенно зависят от типа подвижного состава, а также конструкции и материала пролетных строений мостов.
Нормативные значения динамических коэффициентов в различных странах различны. Это объясняется большим различием в конструкциях и массе подвижного состава и пролетных строений мостов. Имеет значение также уровень изученности вопроса, а также экономические соображения (коэффициент запаса). Так как все эти обстоятельства с течением времени изменяются, то это отражается на нормах динамических коэффициентов.
1. Балочные мосты. В нормах 1931, 1947 и 1956 гг. для разрезных пролетных строений железнодорожных металлических мостов использовалась формула: 1 + р.= = 1+27/(30 + Х) в [26, 29] и нормах 84 г.
18
1 + н = 1 +^ГТТ>1’15- (13-50) oU -j— Л
Обращает на себя внимание заметное снижение нормативного значения динамического коэффициента с 1962 г. Это произошло потому, что раньше нормы базировались на нагрузке с весьма неуравновешенными локомотивами-паровозами, а в дальнейшем нормы строились для практически уравновешенных локомотивов-электровозов и тепловозов.
Значение X в формуле (13.50) принимают равным длине расчетного пролета для основных элементов главных ферм или длине линии влияния для элементов, работающих на местную нагрузку.
Для мостов под совмещенную езду (железнодорожную и автомобильную) результаты статистического анализа опытных
306
данных показывают [32], что динамический коэффициент для железнодорожных нагрузок ниже, чем по формуле (13.50). Для его определения можно рекомендовать выражение
1-Ьц=14--------- >1,1. (13.51)
Поскольку железнодорожная нагрузка для мостов под совмещенную езду является доминирующей, а динамический коэффициент определяют из опытов при резонансе (колебания с максимальными амплитудами), то предлагаемую формулу (13.51) естественно распространить также и на автомобильные нагрузки. Этим исключается существовавшая ранее нелогичность, когда при совместном загружении железнодорожной и автомобильной нагрузки одного и того же пролетного строения их вводили в расчет с различными динамическими коэффициентами, взятыми как для железнодорожных и автомобильных мостов. Введение единого динамического коэффициента оправдывается еще и тем, что в соответствии с действующими сейчас нормами динамический коэффициент для автомобильной нагрузки определяют по формуле
1 р, _ 1
15
37,5 4-Х
которая дает значения, близкие к вычисленным по выражнеию (13.51).
Экспериментальные исследования [16] показывают, что для вычисления динамического коэффициента неразрезных металлических пролетных строений железнодорожных мостов можно воспользоваться формулой (13.51). При этом под X по-прежнему понимают длину загружения линии влияния. Причем для основных элементов главных ферм ее принимают не меньшей длины пролета, к которому относится рассматриваемый элемент фермы.
Для железобетонных балочных пролетных строений и рамных конструкций (в том числе сквозных надарочных строений, а также железобетонных сквозных опор) Динамический коэффициент находят по формуле
1 + ^=1 + Т^ТТ>1’15- <13-52)
Динамический коэффициент для деревянных мостов принимают равным: для сечения элементов (1 + р,) = 1,1; для сопряжений (1 + и) = 1>2.
2. Арочные мосты. Расчеты арочных пролетных строений, выполненные [13] для
паровой тяги, дают значения динамических коэффициентов, которые хорошо укладываются в эмпирические зависимости:
для бесшарнирных мостов
15
1+>1=1+ТИй‘х
х(1+0,4— ]; (13 53).
для шарнирных мостов
Эти формулы дают также хорошее совпадение С Данными опытов. В табл. 13.12 приведены данные по максимальным опытным значениям динамических коэффициентов по напряжениям [колонка (1 +ц8)] и вычисленным по вышеприведенным формулам [колонка (14-|1т)].
Таблица 13.12
1. м f а~ 1 Конструкция арок (сводов) <1+м)8 (1+М)т
27,86 0,31 Шарнирная 1.4 1,36
27,94 0,31 1,38 1,36
29 0.5 Бесшарннрная 1.2 1.21
52 0,25 1.25 1,26
52 0,26 Шарнирная 1,29 1,33
53 0,26 Бесшарннрная 1.17 1,25
106 0.325 1,13 1.16
120 0,145 Шарнирная 1.34 1.34
140 0,2 Бесшарнириый свод 1,22’ 1»19
228 0,149 1,25*. 1.17
* Динамические коэффициенты по перемещениям.
Заметим, что формула (13.53) была принята в качестве нормы в Технических нормах проектирования мостов 1956 г. (ТУПМ-56). Использование формулы (13.53) в ТУПМ-56 вполне логично, так как она получена для паровой тяги, которая лежала также в основе норм проектирования. Перенесение же этой формулы в новые нормы [29] СН 200-62 нельзя признать логичным, поскольку в основе норм
20*
307
Рис. 13.11. Динамические коэффициенты арочных пролетных строений
лежит электровозная и тепловозная тяга.
Вот почему в Строительных нормах и правилах СНиП Д.7-62 [26] принята следующая норма для динамических коэффициентов:
где I — пролет; f — стрела подъема оси арки (свода); Ло — коэффициент, значение которого приведено в табл. 13.13.
Ограничение снизу в формуле (13.54) определяется влиянием пространственных колебаний [13].
В табл. 13.14 приведено сопоставление динамических коэффициентов, вычисленных по формулам (13.53) и (13.54), с опытными данными. На рис. 13.11 даны графики, построенные по формуле (13.54).
Таблица 13.13
%-. Пролет 1, м a- z Динамический коэффициент
по формуле (13.53) по формуле (13.54) опыт
52 0.25 1,26 1.17 1.19
55 0.245 1,25 1.17 1.П
105 0,325 1,16 1.11 1.11*
140 0,2 1,19 1.19 1,24
150 0.267 1.15 1,15 1,17*
* Динамические коэффициенты по напряжениям.
Таблица 13.14
И0 /<110 м НО м</<140 м
Бесшарнириые арки и своды 10 1 у-8.3 15
Шарнирные арки 13 +5 ~11,2 20
Немонотонность графиков динамических коэффициентов на рис. 13.11 объясняется тем, что, как показали исследования [13], при существующих скоростях движения поездов резонанс по первой частоте возбуждается для пролетов меньше 110 м, а по второй частоте — для пролетов больше 140 м. Кроме того, для больших пролетов тип локомотивов не играет существенной роли и резонансные колебания возбуждаются в результате кинематического возбуждения и ударов колес в стыках рельсов. Напротив, для малых пролетов тип локомотивов оказывает решающее влияние. Бот почему для них значение коэффициента Ло уменьшается с Ло=15, полученного для паровозной тяги, до Ло=Ю, полученного для тепловозной и электровозной тяги.
Динамическое воздействие на массивные арочные пролетные строения (бетонные и каменные) со сплошным надсводным строением, а также на массивные опоры и трубы невелико, поэтому динамический коэффициент принимают для временных горизонтальных нагрузок (см. п. 13.8) и давления грунта от временной вертикальной нагрузки 1+|х=1. (В СНиП 2.05.03.-84) Л0=12).
13.6. Примеры расчета
Балочные мосты.
Пример 1. Металлическое пролетное строение (рис. 13.12). Основные расчетные данные: пролет /=44 м; высота главных ферм h=8,5 м; расчетная нагрузка С14; погонная временная нагрузка Л=140 кН/м; давление на ось Р=300 кН; модуль упругости £=2-105 МПа, расчетное сопротивление /? = 280 МПа.
Основные данные эскизного расчета: погонная постоянная нагрузка р=35 кН/м; расчетная постоянная нагрузка р*=3,5Х XL1=38,5 кН/м; нормативный динамический коэффициент в соответствии с формулой (13.50): l+g= 1 + 18/(30 + 44) = 1.24; коэффициент перегрузки ли = 1,15; эквивалентная временная нагрузка £э=14б кН/м; расчетная временная нагрузка; А*=146Х X 1,24-1,15=208 кН/м.
308
Рнс. 13.12. К примеру динамического расчета
По формуле (13.1) вычисляем период свободных колебаний незагруженного пролетного строения:
Тр = 0,9
280
2- 105
35
38,5 + 208
44
X —; =0,19 с.
Кв,5
Подставляя это значение в выражение (13.10), определяем эквивалентный коэффициент затухания; е= [10-0,192(1 +1,9)]~1 = =0,95 1/с. Эти значения близки средним по табл. 13.1. Вычисляем отношение: ф= = &/р= 140/35 = 4. Подставляя полученные данные в формулы (13.41) и (13.42), находим погонную силу инерции в середине пролета:
2-3,13-300 (0,5-0,0025-44) 0,95-44-0,19 К1+4 = 41 кН/м.
Вычисление динамических добавок по формулам (13.38) — (13.40) к усилиям сведены в табл. 13.15. Здесь же даны максимальные статические усилия от вагонной нагрузки Л'ст= (\/2)kF, где F— площадь линий влияния.
Там же приведены динамические коэф
фициенты по усилиям
1 + И= 1 + (A/V/A/CT).
Как видно из рассмотрения табл. 13.15, динамические коэффициенты для элементов поясов мало отличаются от нормативного значения 1,24. Иное положение для элементов решетки, причем для раскосов отмечается превышение, для подвесок динамические коэффициенты оказываются намного ниже нормативного значения (13.50), равного
1 + и= 1 +(18/30+ 11)= 1,44.
Пример 2. Унифицированное пролетное строение из предварительно напряженного железобетона. Основные расчетные данные: пролет /=23,3 м; постоянная нагрузка р — =93 кН/м; нормативный динамический коэффициент в соответствии с формулой (13.52): 1+ц= 1 + 10/(20+23,3) = 1,23; погонная нагрузка от вагонов А = 140 кН/м; давление на ось Р=300 кН.
Период свободных колебаний определим по среднему значению формулы (13.6), т е. Тр=0,0072/—0,25=0,0072-23,3—0,025= =0,14 с. Коэффициент затухания найдём по приближенному выражению (13.11), т. е. 6=0,3/7^=0,3/0,14=2,14 1/с. Эти величины близки к среднему значению по табл. 13.5. Вычисляем отношение
ф = klp= 140/93= 1,5.
Подставляя полученные данные в формулы (13.41) и (13.43), определяем погонную силу инерции в середине пролета 2-3,14-300(0,011-23,3 — 0,015) 2,1-23,3-0,14 J^l + 1,5 = 41,6 кН/м,
Вычисление динамических добавок по формулам (13.38) и (13.40) к изгибающим моментам и поперечным силам в сечениях через //8 сведены в табл. 13.16. Там же приведены максимальные статические усилия от вагонной нагрузки и динамические коэффициенты по усилиям. Как видно из табл. 13.16, динамические коэффициенты мало отличаются от нормативного значения 1,23, определяемого по формуле (13.52).
Арочные мосты.
Пример 3. Железобетонное арочное пролетное строение с двумя бесшарнирными арками. Основные расчетные данные: пролет /=52 м; расчетная нагрузка С14; стрела подъема оси арки /=13 м (а=///=0,25); момент инерции сечения в замке (две арки) /3=0,23 м4; коэффициент развития сечений л=0,25; модуль упругости бетона £=3,4Х
309
Таблица 13.15
Элементы (см. рис. 13.12) Параметры линий влияния Динамическая добавка AW, кН Максимальные статические усилия N„„, cm> кН Динамический коэффициент 1+Ц
С S. м Л sin ~ s F, м
Пояса 3—5 —1,3 22 1 28,6 —473 —2000 1.24
СО ь-д -0,97 11 0,71 —21,3 —332 —1500 1,22
0-1 7—8 —1,05 5,5 0,38 —23,1 —332 —1630 1.2
4—б 1.21 16,5 0,92 26,6 433 1860 1.23
0—2 6—8 0,56 5.5 0,38 12,3 177 860 1.21
Раскосы 1—2 —0,22 8.25 0,56 16,8 330 1175 1.28
2—3 0,37 13,75 0,83 —11,8 —261 —825 1.32
4—5 —0,53 19,25 0,98 8.1 154 565 1.27
Подвесил 1—1* 7—7* 1 5,5 0,38 5,5 44 385 1.11
3—3* 1 16.5 0.92 5.5 104 385 1,27
Таблица 13.16
Усилия Сечения Параметры линий влияния Динамическая добавка Максимальное статическое усилие Динамический коэффициент
С ч. Ы л Sin“ s F
Изгибающие моменты, кН-м 1 2 5.8 11,6 1 67,7 1150 4750 1,24
— ft — 1 8 8 5.5 8,8 0,92 64 1060 4500 1.23
—: — 1 4 4 4.4 5.8 0.7 51,2 810 3580 1,23
Л -Д 8 8 2.5 2.9 0.38 29,2 430 2040 1.21
Поперечные силы, кН 1 2 0.5 11,6 1 2,9 30 203 1.15
3 5 — ft — Z 8 8 0.37 8.8 0,92 .4,6 85 322 1.26
ь | W 0.25 5.8 0.7 6,5 132 455 1.29
1 1 , —: •— 1 8 8 0,12 2.9 0.38 9 148 630 1.24
210
Х10‘ МПа; вес 1 м Пролетного строения в замке ^=125 кН/м; интенсивность временной нагрузки Л=140 кН/м (Р=300 кН). Определяем параметры свободных колебаний. По формуле (13.15) и данным табл. 13.6 вычисляем коэффициенты г г.
ri =3,7.0,25+1,7 = 2,6;
г2 = 34,3-0,25+ 15,7 = 24,2;
г3= 16,3.0,25 + 0,15 = 4,2;
г4 = 36,4-0,25 — 30 = 61; г6= 1955-0,25 — 88 = 400.
Пользуясь выражением (13.14) нахо-дим коэффициент частоты
©р = 105х
2,6 + 24,2-0,252 -------------------------- 69.
4,2 + 61-0,252 + 400-0,254
Далее по формуле (13.12) определяем значение периода основного тона колебаний:
2-3.14-522 Т_ — ------------V
34-10в-0,23-9,81
Пользуясь выражением (13.5), вычисляем циклическую частоту основного тона колебаний:
2-3,14
Xi — 0,316
20,1/с.
По формуле (13.17) определяем коэффициент т)р:
Чр = 1,9+1,4-0,25 = 2,25.
Находим вторую циклическую частоту
Х2 = Xi т]р = 2,25-20 = 45,1/с.
По выражению (13.18) вычисляем декременты колебаний:
= 0,001-20 + 0,05 = 0,07;
б2 = 0,001-45 + 0,05 = 0,095.
По формулам (13.29) и (13.32) находим коэффициенты:
со 0,25—1,18-0,25+1,55- 0,25а
Уз=52-------2------------------=0,014;
₽ =
100+ 1,78-52
1 — 1,6-0,252 ----- —* 1----=1,33;
2,7-0,25
_ 52(1 — 1,6-0,252) X V1/4~ (0,12 + 0,9-0.252)X
X (0,025 —0,12-0,25+ 0,16-0,252)
X (100 + 0,73-52) *
= 0,0096.
По выражениям (13.44) вычисляем расчетные силы инерции
3-14-300 _
Qx =---—— 0,0096 = 129 кН;
0,07
Qy= 1,33-129 = 171 кН;
3,14-300
ft>=-^5-°'014=l39KH-
Результаты вычислений динамических добавок к изгибающим моментам и нормальной силе в замке по формулам (13.45)—(13.48) с использованием табл. 13.10 сведены в табл. 13.17. Здесь же приведены максимальные статические усилия от временной нагрузки и соответствующие динамические коэффициенты, которые заметно отличаются от нормативного значения по формуле (13.54):
10
52 \ — = 1,17.
13 /
Поскольку Д//П=Д//1/4=0, а в нормативном расчете Д//п=0,17//„т и ДЯ1/4 = =0,17/7|/4, то динамические коэффициенты по максимальным напряжениям приближаются к нормативному значению.
Пример 4. Железобетонное арочное пролетное строение с двумя двухшарнирными арками под один железнодорожный путь. Основные расчетные данные: пролег /=52 м; стрела подъема оси арки / = = 13,5 м («=///=0,26); расчетная нагрузка С14; интенсивность временной нагрузки Л=140 кН/м (Р=300 кН); момент инерции сечения в четверти пролета (двух арок) /=0,56 м4; модуль упругости бетона Е= = 3-104 МПа; погонный вес пролетного строения <7=138 кН/м.
Таблица 13.17
Усилие Динамическая добавка Максимальное статическое усилие Динамический коэффициент
Момент в пяте, кН-м 1740 8000 1,22
Момент в четверти, кН-м 878 2880 1,3
Момент в замке, кН-м 310 1660 1.18
Нормальная сила в замке, кН 145 1920 1.08
Определяем параметры свободных колебаний. По формуле (13.13) вычисляем коэффициент частоты
©р = 42 — 60-0,26 = 26,4.
Пользуясь выражением (13,12), определяем
311
значение периода основного тона колебаний:
т 2-3J4.522
Tv =-------------X
v 26,4
138
3.107-0,56-9,81 °’58 С*
Пользуясь выражением (13.5), вычисляем циклическую частоту основного тока колебаний:
2-3,14 ’=^г10'81/с-
По формуле (13.16) находим коэффициент т)р:
т)р = 2,3+ 0,26 = 2,56.
Находим вторую частоту:
л2 = т]р X] = 2,56-10,8 = 27,6 1/с
По выражению (13.18) вычисляем декременты колебаний:
61 = 0,001-10,8 + 0,15 = 0,161;
62= 0,001-27,6+ 0,15 = 0,178.
По формулам (13.33) и (13.34) находим коэффициенты:
1 —2.2-0.262
К =--------------= 0,98;
Р 3,35-0,26
(0,96-0,26—0,26) 52
Тз = -------------------= 0,021;
100-2,4-52 T|/4 =
_ 52(1 -2,2-0,262) (11-0,26 — 2,9)
100(0,1 +0,262) (ЮО — 2-52) =
= 0,026.
По выражениям (13.44) вычисляем расчет-
ные силы инерции:
3,14-300
Qx = ———------0,026= 153 кН;
0,161
Qy = 0,98-153 = 150 кН;
3,14-300
Qs = "а 17й ' ОДО = 1П кН.
и, 1 /о
Таблица 13.18
Усилие Динамическая добавка Максимальное статическое усилие Динамический коэффи- циент
Момент в замке, кН-м 370 3020 1.12
Нормальная сила в замке, кН 82 1930 1,04
Момент в четверти, ,кН-м 1590 6160 1,26
Вычисление динамических добавок по формулам (13.45) — (13.48) с использованием табл. 13.11 сведены в табл. 13.18. Здесь
же приведены максимальные статические усилия от временной нагрузки и соответствующие динамические коэффициенты.
13.7. Колебания вагонов на мостах в вертикальной плоскости.
Нормирование вертикальной жесткости пролетных строений
1. Неровности профиля пути на мостах, вызванные упругими прогибами пролетных строений. Экипажи поезда движутся в пределах моста по криволинейным траекториям, очертание которых определяется в основном прогибами пролетных строений, а также величиной и формой начального подъема пути на мостах. При этом главную роль в формировании неровностей траекторий движения экипажей играют статические деформации пролетных строений.
На рис. 13.13 показаны характерные формы траекторий движения экипажей поезда по мосту с разрезными балочными пролетными строениями одинаковой длины и жесткости. Здесь используют следующие обозначения: f — наибольший прогиб середины пролетного строения от временной нагрузки; f0 — стрела начального подъема пути; 0 — угол поворота конца пролетного строения; ссо — начальный угол перелома профиля пути (при отсутствии нагрузки); а — угол перелома профиля пути под нагрузкой.
При отсутствии начального подъема пути (fo=O, рис. 13.13, а) траектория движения средних экипажей поезда представляет собой цепь симметричных впадин со стрелой f, образующих переломы под углом а=0 у устоев и а=20 у промежуточных опор. Траекториям движения экипажей, расположенных в головной и хвостовой частях поезда, свойственны меньшие величины стрел неровностей и углов переломов.
При рациональном для мостов (нормальном) начальном подъеме пути (/о=/72, рис. 13.13,6) неровности траекторий движения экипажей поезда в 2 раза меньше.
Стрела начального подъема пути, устраиваемого в основном для смягчения траекторий движения тяжелых экипажей грузовых поездов, как правило, превышает наибольшие прогибы пролетных строений от сравнительно легких пассажирских поездов. В этом распространенном на практике случае неровности имеют вид, показанный на рис. 13.13, в. Наибольшие неровности здесь свойственны траекториям движения последних экипажей.
Особенностью неровностей профиля
312
fld/rpdffjief/ur МШжёния
Al Al AIAIA1A Al ALAlAl Al A
n r\ IT
a)fo = 0. <*0=Q
6)f0=f/2, a0 = s22
Рис. 13.13. Вид траекторий движения экипажей поезда по мосту
1 — начальный профиль; 2 — траектория первого экипажа; 3— то же, средних экипажей; 4 — то же, последнего экипажа
пути на мостах является наличие местных переломов профиля в зоне концов пролетных строений. Неблагоприятная роль их может проявляться двояко: как очага динамических эффектов и как зоны, где рельсы вследствие угловых деформаций их основания испытывают дополнительные силовые воздействия.
Значения 0 и f связаны зависимостью где А —коэффициент, зависящий от формы упругой оси изогнутой балки и находящийся в пределах от 3,2 (балка равного сопротивления) до 4 (балка постоянного сечения). Для разрезных мостовых ферм Д=3,6.
Переломы профиля смягчаются вследствие изгиба рельса и деформации его упругого основания. Ординаты симметричной половины местной неровности в зоне промежуточных опор определяются выражением
11 W = У (*) + Уп М = у <х) + ----------- х
4сп
X (cos сп х — sin сп X), (13.55)
~ УРавиеиие кривой прогиба пролетного Р еиия; у (х) _ уравнение изгиба рельсов;
V-------
са ' и/4Е/ — коэффициент относительной жест-ОсмТН пути 1“ ~ модуль упругости подрельсового .снЕ1 — изгибная жесткость рельса}; е"*Д718.
Динамические составляющие упругих Деформаций пролетных строений мостов не меняют форму неровностей профиля в зоне опор, но вносят изменения в их количественные характеристики. В общем случае а==ас(1±Ц), где ас — угол перелома под
рельсового основания, вызванный наибольшими статическими прогибами пролетных строений, а ц — динамическая добавка. Экстремальные значения р. в случае неровности над промежуточной опорой моста могут реализоваться лишь только в момент совпадения фаз колебаний пролетных строений, опирающихся на рассматриваемую опору. Наиболее вероятному среднему значению переменного во времени а отвечает его значение, соответствующее статическим прогибам пролетных строений (ц=0). Динамическую составляющую асц целесообразно учитывать в прочностных расчетах рельсов, а также при оценке воздействия на экипаж одиночной неровности на многопролетном мосту.
2. Методологические основы определения. наибольших допустимых упругих прогибов пролетных строений. Нормирование жесткости пролетных строений мостов сводится к задаче установления предельных наибольших значений упругих их деформаций, при которых обеспечиваются требования нормальной эксплуатации мостов с позиций их взаимодействия с подвижным составом.
Исследования показывают [21], что при оценке динамических процессов в системе мост—поезд, вызванных неровностями траекторий движения поезда по искусственному сооружению, определяющим является уровень колебаний экипажей поезда. Для современных конструкций пути и подвижного состава ВНИИЖТ [14, 15] разработана система оценки качества хода вагонов по таким показателям, как коэффициенты динамики вагонов ускорения его кузова и плавность хода (для пассажирских вагонов). В табл. 13.19 указаны их значения для вертикальных колебаний. Последний показатель оценивает действие вибраций на организм человека в условиях весьма протяженного участка пути и начета б л и и а 13.19
Оценка хода Коэффициент вертикальной динамики ч вертикальные ускорения В ДО 1ЯХ g=9,81 м/с1 для поездов Показатель плавности хода
пассажирских грузовых
Отличный Хороший Удовлетворительный Максимально допустимый Непригодный для регулярной эксплуатации <0,1 0.1—0.15 0,16—0,2 0,21—G, Зэ 0,36 и более <0,2 0.2—0,35 0.36—0,45 0,46—0.65 0.66 и более До 1 - 2 г 3,25 х 4 » 5
313
Рис. 13.14. Расчетная схема системы вагой — пролетное строение моста при учете - упругости рельсового пути
ство хода вагонов по искусственным сооружениям, что имеет значение лишь для редких, случаев весьма длинных эстакад. По аналогии с требованиями к характеристикам хода вагонов по прямым участкам пути.типовой конструкции [14] показатели динамики пассажирских экипажей на мостках не должны выходить за рамки хорошего, а грузовых — удовлетворительного хода.
Вертикальная жесткость пролетных строений и начальный подъем пути на мосту должны быть такими, чтобы одновременно обеспечивались нормальные условия движения как тяжелых грузовых, так и сравнительно легких пассажирских поездов, движущихся с различными скоростями. Экипажи тяжелых грузовых поездов движутся в. пределах моста по неровностям типа впадин. При известной форме изогнутой оси пролетных строений количественные характеристики неровностей пути на мосту в этом случае определяются величиной стрелы провисания профиля в середины длины пролетного строения /п.
Экипажи пассажирских поездов, вследствие их малой массы, вызывают незначительные деформации пролетных строений и проходят по неровностям, характеристики которых в основном определяются величиной стрелы начального подъема пути на пролетных строениях [о-
Наибольший допускаемый прогиб середины балочного пролетного строения f от действия нормативной подвижной вертикальной нагрузки определяют как сумму наибольших допускаемых значений fa и f0:
/=/о + /п- (13.56)
При назначении допускаемых значений f необходимо также соблюдение условий прочности рельсов в зонах опор мостов, где вследствие поворотов концов про
летных строений в рельсах возникают дополнительные изгибающие моменты, равные
«сп ЕI -с Л1а=——
(sin сп х 4- cos сп х).
Поскольку показатели динамики подвижного состава являются одним из главных критериев допустимости тех или иных неровностей траекторий движения поезда по мостам, то расчетные модели экипажей в расчетах по определению максимальных значений /о и /п должны быть в наибольшей мере приближены к их действительным схемам.
3. Расчетные схемы и математические модели взаимодействия мостов и подвижного состава в вертикальности плоскости. Расчетная схема вагона с одноступенчатым центральным рессорным подвешиванием, взаимодействующего с пролетным строением моста через упруговязкий путь, показана на рис. 13.14. Демпферы вагона в общем случае представлены двумя типами: с вязким сопротивлением (гидравлические гасители с параметром 0Р) и сухим трением (клиновые гасители с коэффициентом трения фр). Приведенная схема отвечает современным грузовым вагонам, оборудованным главным образом клиновыми гасителями (ф₽¥=0; ₽р = 0). К этой же схеме могут быть приведены и пассажирские вагоны, имеющие, как правило, гидравлические гасители (фр=0; РР¥=0), если известными приемами [12] заменить параметры двухступенчатого подвешивания на эквивалентные параметры одноступенчатого.
Колебания кузова определяются вертикальными перемещениями его центра тяжести zK (подпрыгивание) и углом поворота фк (галопирование). Для тележек соответственно: 2-тт И фтт-
Характеристики пролетного строения могут быть заданы функцией влияния про-
314
Рнс. 13.15. Ординаты неровностей траектории движения г-го колеса /п-й ' тележки экипажа
гибов К(х, s) [2], погонной массой m(s) и сопротивлением колебаниям P(s).
Причиной возникновения динамических процессов в рассматриваемой системе мост— подвижный состав являются неровности траекторий движения экипажей, ординаты которых в месте расположения колесной пары с индексом тг формируются в результате прогибов пролетных строений утг и неровностей рельсового пути т)тг (рис. 13.15). Здесь т — номер тележки; г — номер колесной пары в тележке.
Параметры жесткости ka и вязкого сопротивления рп рельсового пути можно считать одинаковыми в пределах длины моста.
Деформации рессор Дрт и пути Дптг определяют следующим образом:
Арт= 2к + ( О ^вт Фк 2тт»
= г™ + п <“ ’тт “ »тг ~ V
где ZBl+ZB2 —база вагона; 2а — база тележки.
Усилия в рессорном подвешивании Rm и давление колесных пар на путь Smr равны:
Rm = kp Дрт 4” Fвт 4" Fст»
Smr ~ Аптг "4* Рп Аптг-
Здесь ^стп — соответственно усилия в гидравлических и клиновых демпферах т-й тележки;
^вт ~ Рр Дрт; Fem = 'Фр kp (Дс 4" Дрт) X X sign Дрт,
— жесткость рессор; Дс — их статический прогиб.).
Уравнения взаимодействия пролетного строения моста и движущихся по нему п экипажей поезда имеют вид:
2/к 4* 2 Rim ~ О» m
hk <Pffe + V. (- 1Г-1 ltmn Rim = 0;
Г
!iT Ч>1Гт + а. 2 (- 1)г“1 Stnu, = 0;
I
у ---I Q ($) К (x.s) ds + SSS
0 i т г
4“ ^imr] К {.X, Sjmr)
(i = 1,2,..., п\ . m — 1,2; г=1,2),
(13.57)
Первые две уравнения описывают колеба-ния кузова i-re экипажа; третье и четвертое — его тележек. Здесь Мк и ?к — масса и момент инерцив кузова; Мт т —то же» тележек.
Последнее уравнение представляет--собой выражение для динамического прогиба пролетного строения. В нем принято обозначение: Q (s) (s) у+Р (s) y+q$ (s).
Исходному состоянию упругой оси пролетного строения соответствует ее очертание при отсутствии поезда на мосту. Влияние статического воздействия поезда и начального подъема пути учитывают введением в последнее уравнение статических давлений на путь колесных пар Gimr и условной распределенной нагрузки $ф, действие которой создает заданную начальную кривизну рельсового пути.
Расчетная схема, показанная на рис. 13.14, и отвечающая ей математическая модель (13.57), позволяют рассматривать весьма широкий круг задач динамики системы мост—поезд, в том числе реакцию системы на проход экипажем неровностей, параметры которых в значительной мере зависят от упруговязких свойств рельсового пути и инерционных характеристик ходовых частей экипажа.
При изучении общих динамических деформаций пролетных строений мостов и колебаний подрессоренных частей вагонов на искусственных сооружениях можно не учитывать высокочастотные процессы, происходящие в подсистеме ходовые части вагона — рельсовый путь и пренебрегать силами инерции тележек [20]. В этом случае (рис. 13.16) колебания вагона характеризуются только двумя параметрами г» я <р*. Деформации рессор Д^, и усилия в них Я,„равны: Ат = гк + (- 1)'П“1 Фк (£'пгг+
Г
4* Птг)»
Rm ~ ^р Ат 4“ ^вт 4” ^стг
= РрАт’ ^ст ~ ^ст % (Ас +
4- А,и) sign Д;п.
Уравнения колебаний:
MiK ztv 4" Rm = .'•I
'л+2<-1Г1 '<т..«т = 0;
(13.58)
315
Pwc. 13.16. Расчетная схема системы- вагон — прэлетпос строение мостя без учета упругости пути
I
F=-f C(s)X(x,s)<fc + 2S[Gi„ + О I т
4- Я.*_] К (х, s. )• 1 im] v ’ imz» (i= 1,2,...» n; m=l,2), где G-m — статическое давление m-fi тележки на путь.
Коэффициент вертикальной динамики вагона рв определяют как отношение динамического давления кузова на тележку Rm, R*m] к соответствующему статическому воздействию.
4. Колебания пассажирских вагонов на мостах. Требования к начальному подъему пути на пролетных строениях. При изучении колебаний пассажирского экипажа на мостах следует принимать во внимание малую динамическую связанность системы кузов пассажирского вагона — пролетное строение. Это позволяет определять основные динамические перемещения подрессоренных частей подвижного состава из рассмотрения задачи о движении экипажей по траектории, отвечающей статическим деформациям пролетных строений с учетом формы и величины начального подъема пути. Может быть принята схема экипажа, показанная на рис. 13.16. Колебания вагона выражаются первыми двумя уравнениями системы (13.58). Ординатам траектории движения колес т)^1Г соответствуют значения утг, определяемые из последних уравнений систем (13.57) и (13.58), если в их правой части все величины, кроме q$ и Gimr, принять равными нулю.
В инженерных расчетах, учитывая малые значения прогибов пролетных строений от действия пассажирских поездов, неров-ftbcTH траекторий движения экипажей по мосту можно рассматривать как известные и аппроксимировать функциями, отражающими форму и величину начального подъема пути на пролетных строениях (квадрат
ная парабола, круговая кривая и др.). Если учесть оборудование пассажирских вагонов преимущественно гидравлическими гасителями (вязкое сопротивление), симметричность загрузки кузова (1ьт=1ь), использовать переход [12] к эквивалентному одноступенчатому подвешиванию, а за обобщенные координаты принять полусумму и полуразность динамических прогибов рессор первой и второй тележек:
дг=1/2(д;+д;); Д,-1/2(д;-Д5), то уравнения (13.58) применительно к колебаниям одного вагона (индекс i опущен)
примут вид:
2ez = 1 /2 SS Ятг*
т г
(13.59) + 2еф \ + ^ф Дф =
=-i/2 (-1)”-1
т г где 8.8 . X , X — соответственно коэффици-z Ф z Ф енты затухания и частоты собственных колебаний экипажа типа подпрыгивания и галопирования:
ег=₽р/Ч; *ф=₽р'в2/'к;
о о 2*n ZB
• • *
Величины х\тг представляют собой вторые производные уравнения профиля пути в месте расположения колеса с индексом тг. По центрам первой и второй тележек вагона они выражаются одинаковыми функциями, значения которых соответствуют моментам времени, сдвинутым на величину tb=2lbfv, где 21ь — длина базы экипажа; v — скорость движения.
Резонанс колебаний вагонов возникает при скоростях движения поезда, равных
Наиболее неблагоприятным для развития колебаний вагона является широко рас
316
пространенный в практике случай движения поезда по мосту с несколькими балочными разрезными пролетными строениями одинаковой длины. При очертании профиля пути на каждом пролетном строении длиной I по квадратной параболе со стрелой подъема /о динамические прогибы рессор экипажа, движущегося со скоростью v на W-ном пролете многопролентого моста, определяются выражением
+ ^-Аг±^-А^, (13.61)
Kt К1 где N
А2.9 = Т [е~Ег,Ф Sin Хг,Ф X
/
ха— о) ± <1~‘г-хъ) sin л2ф х
ха-0-ть)];
К=
4 при / = 1
8 при /> 1
Первое слагаемое выражения (13.61) отражает действие центробежных сил инерции, второе и третье — влияние ударов на переломах профиля пути в зоне опор моста. Прогибу рессор передней тележки Д j с0' ответствует знак плюс перед третьим ела-♦
гаемым, а задней тележки Д2 — знак минус. Значению Аг в выражении (13.61) соответствуют индексы z и знак плюс перед вторым членом, а значению Лф соответственно — индексы ф и знак минус.
На рис. 13.17, 13.18 приведены данные об установившихся колебаниях на многопролетных мостах современных пассажирских вагонов на тележках КВЗ-ЦНИИ (Мк=44,3 т; /к=2270 тм2; fcp=152 МНм"1; Рр = 72,7 кН-cm-1; /в=8,5 м; а=1,2 м; Де=0,192 м). Неровности профиля обусловлены начальным подъемом пути на каждом пролете со стрелой f0= 1/2000/ (осо=0,004 рад). Колебания экипажей пассажирских поездов на мостах имеют следующие особенности:
1) вследствие близости циклических частот и А,ф резонансы по подпрыгиванию и галопированию практически сливаются, образуя резонансные зоны. С увеличением скорости расширяется диапазон длин пролетных строений, при движении по ко-
рне. 13.17. Зависимость наибольших значений коэффициентов динамики вагонов и в от скорости движения поезда по миогопролетным мостам с пролетными строениями длиной Z-27—66 м
Рис. 13.18. Огибающие наибольших Значений иь при заданных значениях максимальной скорости движения
1-f0 = 1/Ю00; Vmax = 120 км/ч ?-f0=l/1500; Vmax = 120 км/ч J- /g = 2000j Vmax = 200 км/ч
Рис. 13.19. Зависимость оценки качества хода вагонов от значений f3 и
торым возможны резонансные колебания вагонов, имеющие максимум при скорости vs, равной примерно среднему арифметическому значений vg2 и о5ф;
2) наибольшие коэффициенты динамики вагонов линейно связаны с величиной углов перелома профиля пути на мосту а и примерно линейно зависят от скорости движения поездов;
317
3)’ установившийся режим колебаний вагонов при основном (s=l) резонансе наступает на четвертом-пятом пролете моста, при втором резонансе — на втором-третьем. Коэффициенты динамики вагона в переходном режиме колебаний на IV-м— пролетном строении jiw можно определить в долях значений ц, соответствующих установившемуся режиму на многопролетных мостах, с помощью коэффициента
значения которого приведены в табл. 13.20. Коэффициенты Zn можно использовать для
Таблица 13.20
Номер резонанса Коэффициент £д; при N. равном
1 2 3 4 5
Первый, s— 1 0.33 0,77 0,93 0,98 1
Второй, s—2 0,45 0,94 1 1 1
Трэгий, s—3 0,49 1 1 1 1
оценки колебаний экипажей пассажирских поездов на мостах с ограниченным числом пролетных строений, в том числе на однопролетных, где динамическая реакция экипажей в 2—3 раза меньше по сравнению со случаем, когда на мосту установлено два или более таких пролетных строений.
Начальный подъем пути на мостах следует назначать близким к нормальному для наиболее тяжелых, обращающихся на данной линии грузовых поездов, но не превышать значения, обеспечивающего допускаемые показатели качества хода по мостам экипажей пассажирских поездов с установленными для них скоростями движения.
Наибольший угол перелома профиля пути отмечается для последнего экипажа пассажирского поезда (см. рис. 13.13, в) и равен а=а0—cq, где а0=A — на-
чальный угол перелома профиля над промежуточной опорой, a a^=3,6(f/Z)—угол поворота конца пролетного строения при его прогибе f от воздействия пассажирского поезда. При подъеме пути по круговой кривой или квадратной параболе А=4, по форме кривой упругих прогибов от равномерно распределенной нагрузки 4=3,6. С помощью графиков, вид которых показан на рис. 13.18, учитывая линейную зависимость jlib от а, могут быть определены наибольшие значения рв в зависимости от начального подъема пути на пролетных строениях и установленной максимальной скорости движения пассажирских поездов. На рис. 13.19 показана оценка качества хода вагонов на тележках КВЗ-ЦНИИ по многопролетным мостам- с разрезными балочными пролетными строениями. Значение
f0 существенно зависит от скорости движения поездов и должно уменьшаться с ее увеличёнием. При Umax=120 км/ч стрелу подъема целесообразно принимать не превышающей ‘/1500. Э При Пгавх =200 км/ч — V2000 Длины пролета. На мостах с пролётными строениями индивидуальной проектировки в зависимости от их длины, схема разбивки моста и конкретных условий эксплуатации требования к подъему пути могут быть иными.
5. Колебания грузовых вагонов на- мостах. Требования к вертикальной жесткости пролетных строений. Колебания подрессоренных частей грузовых вагонов на мостах в общем случае могут бытьКрпределены системой уравнений (13.57). При решении инженерных задач можно пренебречь силами инерции масс пролетных строений. Влияние их динамических прогибов на параметры неровностей профиля пути может быть определено с помощью соответствующих динамических коэффициентов (см. подп. 2). Колебания грузовых вагонов в этом случае выражаются первыми четырьмя уравнениями системы (13.57). При этом ординаты прогибов пролетных строений утг определяют из рассмотрения статических деформаций моста, а в значениях Rm следует учитывать только силы сопротивления фрикционных гасителей колебаний Fcm, которыми, как правило, оборудуют грузовые вагоны.
Основным очагом возбуждения колебаний вагонов являются переломы профиля пути в зоне сопряжения концов пролетных строений над промежуточными опорами моста. Если форму прогибов разрезных балочных строений длиной I при их полном загружен:™ поездом представить квадратной параболой, то траектории движения каждого из колес экипажа в соответствии с (13.55) выразятся следующим образом:
+ —~---------(cos сп £г — si п сп |г) .
2сп J
Здесь при
0 х аг Вг = (®г •
X О-r ~ (** ®г)»
где а г — расстояние от r-го колеса до вершины перелома ч. начальный момент времени: аг^И2-
Для мостов с небольшим числом пролетных строений (два-три) и многопролетных сооружений, движение по которым не сопровождается резонансными. колебаниями
318
Рис. 13.20. Зависимость наибольших значений динамических прогибов рессор вагонов с клиновыми демпферами от скорости движения поезда
Рис. 13.21. Зависимость наибольших значений от величины угла одиночного перелома профиля пути
подвижного состава, наибольшие колебания вагона возникают при проходе указанных переломов профиля, рассматриваемых как одиночные неровности. В рамках рассматриваемой задачи могут быть определены ДРП1, цв в зависимости от угла перелома профиля а, характеристик жесткости рельсового пути сп, параметров экипажа (Ми, Л<» kp, Дс, фр и др.) и скорости движения поезда.
На рис. 13.20 приведена зависимость шах Дрта от скорости движения поезда при а=0,008 рад (стрела прогиба середины пролетного строения //1000), а на рис. 13.21—зависимость max цв от значения а при о =120 км/ч для случая движения че
рез одиночные переломы профиля наиболее распространенного на сети железных дорог четырехосного груженого полувагона на тележках ЦНИИ-ХЗ-0 (2ИК=76,5 т; /к= = 1080 тм2; Л4Т=4,2 т; /т = 3,2 тм2; £р = = 8 МНм-‘; Дс=0,0475 м; /вт=4,325 м; а=0,9 м) при фр=0,1.
Упруговязкие свойства рельсового пути в рассматриваемом примере характеризуются параметрами сп=0,008 см-1 и 0п~ = 1 МНсм-1. Значения сп и ka связаны зависимостью 1гп=8Е1с^.
При оценке динамики грузовых вагонов на мостах следует иметь в виду, что рессорное подвешивание экипажей, имеющих фрикционные гасители колебаний, начинает работать как упругий элемент лишь при сравнительно высоких скоростях движения (см. рис. 13.20). При небольших значениях v рессорное подвешивание вследствие непреодоленных сопротивлений фрикционных гасителей, уподобляется жесткой связи. Важным для инженерных расчетов является и то обстоятельство, что зависимость коэффициентов динамики вагонов от величины одиночных неровностей в зоне опор мостов можно рассматривать как линейную (см. рис. 13.21).
На многопролетных мостах и эстакадах с одинаковыми балками небольшой длины неровности профиля, обусловленные упругими прогибами пролетных строений, могут вызывать резонансные колебания грузовых вагонов, при скорости движения поезда, равной (13.60). Для грузовых вагонов иа тележках типа ЦНИИ-ХЗ-0 (Mz= =2,3-2яс-‘, =2,65-2лс-1) при о<
<140 км/ч основной резонанс возможен на мостах с пролетными строениями длиной до 16,7 м (по подпрыгиванию) и 14,7 м (по ’алопированию).
Особенностью резонансных колебаний грузовых вагонов, оборудованных фрикционными гасителями колебаний, является опасность непрерывного возрастания амплитуды колебаний. Это происходит в случае, если подводимая к системе энергия внешнего возмущения превышает энергию, поглощаемую гасителями. Возникновение таких опасных режимов колебаний зависит от скорости движения поезда, параметров неровностей пути, характеристик вагонов, в том числе от параметров гасителей колебаний.
При заданных характеристиках подвижного состава основным фактором, определяющим режим резонансных колебаний грузовых вагонов на мостах (с устойчивой или
31Э
нарастающей амплитудой), является значение упругих прогибов пролетных строений. Существуют такие предельные значения стрелы провисания профиля пути в середине длины пролетного строения fa и соответствующим им углы переломов профиля в зоне опор мостов а, превышение которых приводит к постоянному увеличению амплитуд колебаний экипажей при резонансе.
Для нахождения предельных значений [п и а при достаточно строгом решении могут быть использованы системы уравнений (13.57) и (13.58). Пренебрежение упругостью рельсовой нити делает перелом профиля пути над опорами моста более резким, вследствие чего использование более простых уравнений (13.58) идет в запас надежности расчетов.
Большому упрощению систем нелинейных дифференциальных уравнений (13.57) и (13.58) отвечает приближенное определение значений fn и а, основанное на игнорировании сил инерции пролетных строений. Для мостов с балками малых длин (/< <20 м) такой прием оправдан незначительной динамической связанностью колебаний экипажа и пролетных строений. При таком допущении, аналогичном принятому ранее при составлении уравнений (13.59), колебание грузовых вагонов на неровностях профиля, вызванное статическими прогибами пролетных строений т]*, выражается двумя нелинейными уравнениями:
т
Функции, расположенные в правой части уравнений (13.62), отражают действие на экипаж центробежных сил инерции (на всей длине моста) и ударных импульсов, возникающих в моменты прохода каждым колесом переломов профиля в зоне опор моста.
Решением уравнений (13.62) для определенных типов грузовых вагонов, движущихся но многопролетному мосту с резонансной скоростью (13.60), могут быть
установлены количественные характеристики колебаний подвижного состава в зависимости от характера и величины неровностей профиля пути на мосту, определяемых главным образом вертикальной жесткостью пролетных строений.
Для мостов с небольшим числом пролетных строений допускаемые значения /п определяются из условия, чтобы величина Ць не превышала допускаемых значений. При длинных мостах и эстакадах допускаемые значения /п необходимо устанавливать из условия исключения резонансных колебаний вагонов с нарастающей амплитудой.
На рис. 13.22 показаны динамические давления. кузова на переднюю ось четырехосного полувагона на тележках ЦНИИ-ХЗ-0 (фр=0,07) при его движении со скоростью о1ф=120 км/ч по мосту с пятью пролетными строениями длиной /=12,6 м, имеющими в одном случае fa= 1/900/ (а= =0,008 рад), в другом /и = 1/1310/ (а= =0,0055 рад). При а=0,008 рад возникает опасный для многопролетных сооружений режим колебаний с нарастающей амплитудой.
При нормировании вертикальной жесткости типовых металлических пролетных строений следует исходить из возможности сочетания наиболее неблагоприятных условий их динамического взаимодействия с подвижным составом. Такими условиями являются: установка на мосту большого количества однотипных пролетных строений одинаковой длины, создающих возможность резонансных колебаний экипажей поезда; реализация высокоскоростного движения пассажирских поездов, обусловливающего малую величину начального подъема пути иа мостах, и др.
Как показали исследования НИИ мостов [21], наибольшие значения параметров неровностей траектории движения грузовых вагонов (тележки типа ЦНИИ-ХЗ-0;
С140 км/ч; фр5^0,06) по многопролетным мостам могут быть приняты следующими. Для устранения опасности возникновения на мостах колебаний вагонов с непрерывно нарастающей амплитудой значения /п, для пролетных строений малых длин /< с20 м не должны превышать значения, равного ‘/i2oo/. что соответствует а=Лс=я =0,006 рад.
Для пролетных строений длиной более 20—30 м критерием назначения предельных значений /п является обеспечение определенного уровня колебаний экипажа, вызванного проходом через одиночную неровность профиля в зоне опор моста. В этом
320
Рис. 19.22. Вид резонансных колебаний вагона с установившейся и нарастающей амплитудой
случае значение fa может быть увеличено до что соответствует а=ас(1+р.) = =0,010 рад, где 1+р, — нормативное значение динамического коэффициента для металлических мостов [29]. Таким величинам в неблагоприятных условиях максимальной скорости (о =140 км/ч) и весьма жесткого пути (сп до 0,020 см-1) соответствуют значения коэффициентов динамики вагона, равные 0,4, и не выходящие за рамки удовлетворительной оценки качества хода (см. табл. 13.19).
При наибольшей стреле начального подъема пути на пролетных строениях /о= =//2000 и указанном возможном диапазоне изменения значений /п, обеспечивающих нормальные условия прохода по мостам пассажирских и грузовых поездов со скоростью соответственно до 200 и 140 км/ч, допускаемый упругий прогиб середины пролетных строений, подсчитанный от нормативной статической нагрузки С14, может быть выражен так:
/=//(800— 1,25/), но не более //600.
(13.63)
Формула (13.63) отражает наиболее неблагоприятные условия эксплуатации балочных разрезных пролетных строений и es использование как норматива рассчитано иа проектирование типовых пролетных строений постоянных мостов. Требования к вертикальной жесткости пролетных строений в иных условиях могут быть смягчены. Так, на линиях только грузового движения, а также на совмещенных линиях с невысокими скоростями движения пассажирских поездов возможно применение более гибких пролетных строений, вследствие увеличения начального подъема пути до нормального для наиболее тяжелых поездов. Устранить опасность неблагоприятных резонансных колебаний вагонов на многопролетных мостах можно применением нерегулярной разбивки сооружения на пролеты. Кроме того, можно значительно увеличить проги
бы пролетных строений однопролетных мостов, временных сооружений.
Более благоприятны условия взаимодействия подвижного состава с неразрезными балочными мостами, переломы профиля пути на которых имеются только в зонах сопряжения пролетных строений и устоев. Во всех случаях при установлении допускаемых прогибов пролетных строений необходимо учитывать особенности напряженного состояния рельсов над опорами мостов.
13.8. Боковые колебания вагонов на мостах
Нормирование горизонтальной жесткости пролетных строений
[10, 11]
1. Боковые колебания вагонов. Как уже указывалось в п. 13.1, помимо вертикальных колебаний пролетные строения совершают пространственные колебания (горизонтальные и крутильные).
Крутильные колебания происходят с частотами примерно в 2 раза большими, чем горизонтальные колебания. Амплитуды горизонтальных колебаний значительно больше амплитуд крутильных колебаний. Вот почему в первом приближении допустимо рассматривать только горизонтальные колебания пролетных строений, особенно в резонансных режимах.
Оценим приближенно боковые (крутильные) колебания вагона, движущегося по пролетному строению, которое совершает горизонтальные резонансные колебания, вызванные прохождением поезда по мосту. Влияние удерживающих связей соседних вагонов не будем учитывать, что, очевидно, идет в запас, так как в этом случае амплитуды колебаний вагона будут больше. Влияние соседних вагонов будем учитывать только при определении частоты горизонтальных колебаний.
При колебаниях корпус вагона совершает повороты относительно неподвижной
321
Ряс. 13.23. Расчетная схема боковых колебаний вагона
ножая эту величину на жесткость рессор с одной стороны вагона (УгЖ), получим реакции рессор */4сфЖ.
В том же направлении, что и реакции рессор, будут действовать силы сопротивления. Приводя эти силы к эквивалентному вязкому трению, пропорциональному первой степени угловой скорости ф, получим выражение для сил сопротивлений &фф ,где kfp — коэффициент сопротивления.
Приравнивая нулю моменты всех сил относительно неподвижной точки Оь приходим к дифференциальному уравнению:
/ф + с'ф + с?Жф = mhoyv
(13.64)
Как видно из рис. 13.23, линейное смещение yi центра тяжести О определяется зависимостью
У1=У~ hoy.
(13.65)
Рис. 13.24. Схема горизонтальных перемещений пролетного строения при резонансе
точки 0\, именуемой центром подвешивания (рис. 13.23). На кузов действуют инерционный момент /ф н сила инерции тпуи где ф и jii — угол поворота и линейное смещение массы т кузова, приложенной в центре тяжести кузова О, I — момент инерции масс кузова (сумма произведений масс на квадраты расстояний до центра тяжести О').
В соответствии с принципом Даламбе-ра, инерционный момент /<р и сила инерции ту\, прикладываются в направлении, противоположном движению (см. рис. 13.23).
На корпус вагона действуют также реакции со стороны рессор, равные по величине и противоположные по направлению. Их значение определяют из следующих соображений. В силу малости угла тангенс угла можно заменить углом и для деформаций рессор получим значение ’/гСф. Ум-
Поскольку пролетное строение находится в резонансе по первой частоте колебаний, то форму колебаний можно аппроксимировать синусоидой (рис. 13.24), т. е.
л ли
у = уаsin — х = у0 sin—— t =
4 v
= у0 Sin pf
(13.66)
где I — расчетный пролет: x — перемещение вагона вдоль пролета; v — скорость движения поезда; t — время, отсчитываемое от момента входа центра тяжести вагона на пролет; </о — перемещение середины пролетного строения, равное
2л
Уо= frsinlrKi = frsin——t, (13.67)
•* ГК
(fr, ZrK. 7ГК — амплитуда, частота и период свободных горизонтальных колебаний загруженного пролетного строения).
Период колебаний определяют по формуле, аналогичной выражению (13.4), т. е.
7,гк = Тг/Г+ф (ф-Л/р), (13.68)
где k — погонная нагрузка (на единицу длины) от вагонов; р — погонная нагрузка от собственного веса пролетного строения; Тг — период свободных горизонтальных колебаний незагруженного пролетного строения, определяемый по формуле (13.9).
Приведенное выше (см. п. 13.2) значение корректирующего коэффициента аг для мостов с ездой понизу справедливо для диапазона пролетов /=ЗО...11О м, для больших пролетов (/=110...160 м) его следует вычислять по формуле
аг= 1,03 — 0,0018/. (13.69)
Подставляя выражения (13.65) — (13.67) в формулу (13.64), после преобразований
322
приходим к дифференциальному уравнению боковых колебаний вагона:
Ф + 2ефФ +«фФ= 2у[(1 + X2) sin Хгк/X
X sin р/ — 21 cos 1ГК t cos В/], (13.70)
где п . е — циклическая частота свободных ко-Ф Ф лебаний боковой качки вагона и соответствующий коэффициент затухания:
о______С2 Ж _____fep С
П*~4(1+,г^ ; еф~2(/ + /пй2) *
Кроме того, в уравнении (13.70) обо
значено:
0 ^ГК
— . ?=---------------
^гн 1 -j- т Hq
4Agn2 с? Ж
(13.71)
где п?~-Ж1т — циклическая частот? колебаний подпрыгивания вагона.
Используя известные тригонометрические преобразования, представим уравнение (13.70) так:
Ф + 2ефф4- nJф = у [(1 — I)2cos—
— (1 4~ I)2 cos ф2/], (13.72)
где обозначено:
Ф1 — ЭДк — 0 — ЭДк (1 — ЭД» ф2 = ЭДк + 3 = Эди (1 + ЭД. (13.73)
Поскольку уравнение (13.72) линейно, то частное решение его можно получить, суммируя частные решения от составляющих правей части.
Решение уравнения (13.72) имеет вид <р (0 = е~е^ (Сг cos 1]ф 14- С2 sin Цф t) 4-4- Аг sin фг 14- Д2 cos ф! 14- Аэ sin ф214-
4- А4cos ф21• (13.74)
Здесь обозначено:
у(1 —1)2еффг
{ 'I । 1 л 2 . 9 ’
(«ф — +4еф ф{
(л1--ф?Г+4ефф2 7(1 4- X)2 ефФ2
(%— ^2)2 + 4е'фФ2 ,У(1+ЭД2(Яф-Ф2) ("ф-^+Ц^г
Произвольные постоянные интегрирования Ci и Сг найдем подстановкой начальных условий ф(0)=0 и ф(0)=0 в решение (13.74) и его первую производную по времени. Имеем:
Ct =— (А2 4* Л4);
С2 =- (ф, At 4- Ф2 Л3). (13.76)
«Ф
Особый интерес представляют резонансные режимы, т. е. когда
Ф1 = ЭДк — 0 — ЭДн (1 ЭД = Пф или
Ф2 = ЭДк + 0 — ЭДк (1 4* ЭД = ЛФ. (13.77)
Из выражений (13.75) видно, что наибольшие амплитуды будут при втором резонансе (пф=ф2). В этом случае, как видно из выражения (13.75):
/>4 = 0;
„ у (14-ЭД2
4g п •
В случае первого резонанса
(13.78)
(Лф=Ф1)
аналогично находим:
Л 7(1—1)2
Д2 = 0; (13.79)
*еФпФ
Вычисления показывают, что при резонансе по одной из частот амплитуды колебаний с другими частотами весьма малы и ими можно пренебречь. Кроме того, критическая скорость при втором резонансе может оказаться отрицательной (см. далее п. 3), т. е. второй резонанс неосуществим.
Используя формулы (13.76), (13.78) и (13.79), получим возможность представить приближенно решение (13.74) в случае резонанса так:
7 (1 ± I)2 , м
Ф Ю ®Ч=' 4е„пф (1 - ') sin Пф «.
(13.80)
Здесь верхние знаки соответствуют второму резонансу, нижние — первому. При этом, поскольку значения амплитуды (13.78) и (13.79) имеют противоположные знаки, то значения амплитуды угла по формуле (13.80) будут немного завышенными, что идет в запас.
2. Нормирование нагрузки от горизонтальных ударов колес подвижного состава. При движении по мосту поезд оказывает на пролетное строение динамическое горизонтальное воздействие. Характер этого воздействия весьма сложен и вызывается вилянием подвижного состава и совместными пространственными колебаниями пролетного строения и подвижного состава.
21-*
323
При резонансных режимах этих колебаний могут возникать гребнем бандажей сам.
Техническими мостов установлены значения
горизонтальные удары колес вагонов по рель-
условиями проектирования мостов установлены значения эквивалентных статических горизонтальных поперечных нагрузок от ударов колес подвижного состава, которые принимают равномерно распределенными по длине пролета с интенсивностью S.
Оценим значение этой нагрузки, используя опытно-теоретический путь и заменяя пролетное строение балкой постоянного сечения на двух опорах. В этом случае наибольший горизонтальный прогиб пролетного строения может быть найден по известной формуле
Г’нс. 13.25. Экспериментальные значения максимальных амплитуд горизонтальных колебаний
5S/4 г~ 384£7Г Частоту основного тона свободных колебаний балки определяют из известного выражения:
(13.81)
с использованием данных табл. 13.9 для р и табл. 13.2 для Тга достаточно хорошо аппроксимируются выражением
Гг (/) = 875-10—г I — 25- IO-8 /? _ 19. Ю~4. (13.84)
Здесь I — пролет, м; Fr в мг/кН.
Учитывая зависимости (13.83) и (13.84), в соответствии с формулой (13.82), получим
EIr
е-
Р
Находя отсюда жесткость Е1Г и подставляя ее в формулу (13.81), получим
55л4 g g Tj
7777— = SFr. (13.82) 1536р
384рХ?
Здесь использовано выражение (13.5) для i=r. Видим, что если использовать экспериментальные данные для максимальных горизонтальных прогибов f3, периодов колебаний Тгэ и соответствующие значения погонных нагрузок р от собственного веса, то по формуле (13.82) можно получить значения интенсивности S горизонтальной нагрузки.
Экспериментальные значения максимальных амплитуд горизонтальных колебаний fa, полученные резличными исследователями, показаны на рис. 13.25 точками. Там же сплошной линией представлен график средних значений fa, который допустимо аппроксимировать пунктирной прямой:
f9 (/) = (0.3 + 0,004Z) IO-?, (13.83) где I и f3 принимают в метрах.
Экспериментальные данные для периодов Тгэ горизонтальных колебаний приведены в табл. 13.2.
Вычисления значения
5(0 = 4 Fг
____________0,3 4-0.004/__________кН = 875-10—5 I — 25- IO-6 Z? _ 19-10-? м ’
Вычисления по этой формуле достаточно хорошо аппроксимируются более простым выражением:
_____________10__________кН = 0,12/—375.10-8/2— 1,9 м
(13.85)
Следует отметить, что для большинства мостов, для которых использованы экспериментальные значения амплитуд fa и периодов Тгэ, значение нагрузки не превосходило нагрузки Н7 по схеме НК, 1931 г. С ростом временной вертикальной нагрузки следует ожидать увеличения горизонтального воздействия подвижного состава на пролетные строения. Предполагая, что возрастание горизонтального действия подвижного состава будет происходить пропорционально возрастанию временной нагрузки и учитывая формулу (13.85), получим
_____________10_____________ 0>12Z —375- Ю-в/2—1,9 kt
(13.86) где S(l, k) — горизонтальная нагрузка, кН/м, от воз действия перспективного подвижного состава: — расчетная вертикальная эквивалентная нагрузка, кН/м; k7—эквивалентная нагрузка, кН/м. от поезда по схеме Н7.
Последнюю можно выразить в таком виде:
, _ Wg Тп ’ 1536 р
70______
0,59 +23-10—4 I
(Z= 33..-160).
324
Гис. 13.28. К нормированию горизонтальной нагрузки от ударов колес подвижного состава
Подставляя эту зависимость в формулу (13.86), имеем
ks 0,59 + 23-10-4
7 о,12/— 375-10-» /? — 1,9
Эту зависимость можно аппроксимировать так:
' ’ ' 0,96/ — 33-10—4 /? — 10
(/ = 33...160 м). (13.87)
График этой зависимости для нормативной нагрузки С14 представлен на рис. 13.26. Здесь же приведено нормативное значение по действующим нормам, определенное по формуле
S = 0,6K, (13.88)
где К — класс нормативной временной нагрузки. $в кН/м.
Как видно из рис. 13.26, формула (13.87) для пролетов больше /=40 м дает меньшее значение горизонтальной нагрузки, чем норма (13.88). При этом интенсивность горизонтальной нагрузки уменьшается с увеличением пролета. Последнее, видимо, объясняется тем, что при больших пролетах на пролетном строении размещается большее число вагонов и воздействие их частично погашается. Кроме того, с увеличением пролета возрастает отношение масс пролетного строения подвижного состава.
Из рис. 13.26 видно, что норму (13.88) можно сохранить для пролетов /<40 м, а для />110 м использовать выражение
S = 0,3K. (13.89)
Дчя диапазона пролетов 40</<110 м горизонтальная нагрузка может быть определена по линейной интерполяции.
3. Нормирование горизонтальной жесткости. Динамические перемещения рессор не должны превышать некоторой части статического прогиба g/n2. В случае боковых колебаний вагонов в силу малости угла ф (см. рис. 13.23) перемещения рессор равны ‘/асф. Следовательно,
- с| ф | < а-^- («<?!). (13.90)
2 п2
Наибольшие углы поворота ф будут при резонансе. Они определяются выражением (13.80), полагая в котором sinn(p/=l, получим:
ml lYld±^)2
Ф чпах— а» „
(1 —е 'W’hp).
(13.91)
При этом предполагается в запас, что резонанс наступит в момент схода вагона с пролетного строения, т. е. при t=llvvv, где оКр— критическая скорость, определяемая из условий (13.77) по формуле
2л
Тр/Г+Ф
(13.92)
Здесь использованы выражения (13.68), (13.22).
Для дальнейших расчетов будем использовать осредненные данные параметров вагонов, приведенные в табл. 13.21. По формуле (13.92) вычислены первая vt (знак минус) и вторая Ог (знак плюс) критических скоростей. При вычислениях использованы данные табл. 13.9 для р, а также табл. 13.2 и 13.21. Для подсчета периодов Тг пролетных строений пролетов 126 и 158 м использовалась известная эмпирическая формула [13] Гг=0,008/, где / в м; Тт в с.
Вычисления сведены в табл. 13.22. Прочерки в таблице указывают на неосуществимость резонанса, так как соответствующая критическая скорость оказывается отрицательной.
Таблица 13.21
Вагоны Параметры вагонрв
1/с ЕФ’ 1/с k, кН/м С, м fto. м
Г рузовые шестиосные 6,6 0,3 80 2 2
Грузовые четырехосные 11.7 0,3 60 2 2
Пассажирские 4 0,9 25 2 2
Если принять максимальную скорость грузовых поездов Ощах=130 км/ч, то возможен резонанс для шестиосных вагонов при диапазоне пролетов 1=44...88 м, для четырехосных при диапазоне /=23...44 м.
325
Таблица 13.22
Пролет, м
вагонов о км/ч 23 33 44 55 G6 77 88 по 126 158
у- 1 vi Грузовых шестиосных { ш 210 150 115 77 0 0 69 132 ‘275 465 550
_ f V1 Грузовых четырехосных | v* 130 0 0 88 1G5 330 445 570 825 980 ИЗО
Пассажирских t>( 465 410 310 470 360 320 300 195 190 48
Из формулы (13.82) следует
Если принят максимальную скорость движения пассажирских вагонов 0шаз= =200 км/ч, то осуществим только первый резонанс для диапазона /=110...158 м.
Вычислим допустимые горизонтальные перемещения пролетных строений. Для этого подставим значение (13.91) в формулу (13.90) и примем там знак равенства. Используя обозначения (13.68) и (13.71), получим
ag^cT^X
ла/10пф X
. М • <13-93)
— 11 _ е~^’кр) р /J
Здесь знак минус берут в случае реализации первой критической скорости, плюс — второй.
Вычисления по формуле (13.93) с использованием табл. 13.9 и 13.21, 13.22 показаны на рис. 13.27 точками. При этом случай нулевой критической скорости не принимают во внимание как противоречащий физическому смыслу.
При вычислениях значения а приняты в соответствии с табл. 13.19 для грузовых вагонов а=0,3 и для пассажирских вагонов а=0,15. На рис. 13.27 кружками показаны отношения frit.
Суть нормирования горизонтальной жесткости пролетных строений состоит в том, что вычисленные максимальные горизонтальные прогибы не должны превышать допускаемых, вычисленных по формуле (13.93) и показанных на рис. 13.27 точками.
Поскольку вычисление горизонтальных прогибов весьма громоздко, то более удобным, хотя и косвенным путем нормирования горизонтальной жесткости, является нормирование периода свободных горизонтальных колебаний пролетных строений.
1 Л 1536 fr V 5л2 g S
Полагая здесь горизонтальный прогиб допустимым [fr], получим допустимый период колебаний.
Используя здесь формулу (13.87), находим
ТР < [Тг] = [0,0313 (0,96/ —
f/г] ~ кэ
— 33-10-Ч?— 10) р
(13.94)
где I в м; р, Лэ в кН/м; (7г]в см.
Сначала примем для допускаемого прогиба выражение [Д] =0,02/, которое показано на рис. 13.27 сплошной прямой линией. Вычисления по формуле (13.94) для нагрузки С14 в этом случае показаны на рис. 13.28 точками. Здесь же сплошной ломаной линией приведено нормативное значение из действующих технических условий [29] :
С 0,01/с 1,5 с. (13.95)
Как видно из рис. 13.28, для пролетных строений/<60 м норма (13.95) немного превышает значения (13.94). Это замечание отпадает, если для допускаемого прогиба принять выражение [Д] =0,03/, которое показано на рис. 13.27 пунктирной линией. Вычисления по формуле (13.94) для нагрузки в этом случае показаны на рис. 13.28 кружками. Как видно, норму (13.95) можно рекомендовать для пролетов /<60 м. Для больших пролетов нормативное предельное значение периода горизонтальных колебаний можно немного повысить,
а именно
Тг< 0,015 (/ — 20) с 1,8 с
(13.96)
Это выражение показано на рис. 13.28 пунктирной ломаной линией.
В эмпирических формулах пролет / принимают в метрах, а период Тг —в се* кундах. Расчетные значения периода Тг го'
326
Рис. 13.27. К нормированию горизонтальной жесткости пролетных строений
Рис. 13.28. Нормы для периода горизонтальных колебаний пролетных строений
ризонтальиых колебаний вычисляют по формулам (13.69).
В заключение сделаем одно замечание. На рис. 13.27 для пролета /=44 м нижние значения ft и fr/l соответствуют четырех
осному вагону, а верхние — шестиосному. Поскольку последние ближе к перспективной нагрузке, то они и приняты во внимав ние при выборе допускаемых прогибов [fr] =0,03/.
РАЗД ЕЛ 14. ДИНАМИКА АВТОДОРОЖНЫХ МОСТОВ
А. М. Ананьин, А. Г. Барченков, В. С. Сафронов
Увеличение интенсивности движения, веса подвижной нагрузки и одновременное снижение массы мостов является современной тенденцией мостостроения. В связи с этим возрастает необходимость использования уточненных расчетных схем мост—автомобиль.
Динамический расчет [24, 2], излагаемый в этом разделе, продусматривает учет сил инерции нагрузки и моста, нелинейностей в характеристиках жесткости и демпфирования рессор и шин автомобиля, вероятностный характер взаимодействия колес и поверхности проезжей части [6. 15], а также учет внутреннего неупругого сопротивления материала пролетных строений. В разделе содержатся сведения, необходимые для решения задач динамики автодорожных мостов в дополнение к действующим строительным нормам [18]. Здесь не рассматривается теория расчета сооружений на подвижные нагрузки, так как она была изложена в Справочнике [17],
14.1. Общие сведения
Движущиеся автомобили (рис. 14.1) вызывают нестационарные колебания пролетных строений. На диаграмме прогибов
или напряжений в заднной точке моста (рис. 14.2) можно выделить две составляющие: квазистатическую, медленно изменяющуюся в течение всего времени прохода автомобиля, и осциллирующую динамическую. Характерными элементами диаграммы являются: Ост — квазистатическое напряжение в момент нахождения нагрузки в произвольном сечении; о — флуктуация напряжения для этого же момента времени; о™ах—максимальное значение динамического напряжения; а — амплитуда при наибольшем динамическом напряжении. В целом колебания пролетного строения представляют собой переходный процесс, т. е. сочетание вынужденных и сопровождающих свободных колебаний. Степень проявления последних зависит в основном от неупругого сопротивления материала конструкций. Вынужденные колебания происходят преимущественно с частотами, близкими к частотам собственных колебаний автомобиля (без учета обратной связи), которые возникают и поддерживаются при движении его по неровному пути.
Диаграммы, полученные при проезде автомобилей одинакового типа, всегда отличаются одна от другой, так как условия
327
Рис. 14.1. Общий вид эксплуатируемого моста
Рис. 14.2. Диаграмма нормальных напряжений прн проезде автомобиля
Рис. 14.3. Расчетная схема мост — автомобиль, деформация рессор и — —С(О, деформация шин
«-UO—МО—1/(Х. Л. О
проезда никогда точно не повторяются, поэтому задача динамического расчета мостов имеет вероятностную природу даже при проезде одного автомобиля. Действие ко
лонн подвижной нагрузки имеет двойственный стохастический характер из-за случайного расположения автомобилей в потоке и наличия неровностей проезжей части. Основной причиной, порождающей динамические явления в пролетных строениях и опорах, служит неровный путь. Для протяженных и широких мостов при одновременном действии нескольких автомобилей значительно возрастает квазистатическая составляющая, динамическая же составляющая увеличивается в меньшей степени вследствие интерференции колебаний.
Подрессоренная нагрузка и мост представляют собой единую динамическую совокупность, движение которой (рис. И.З) описывается двумя системами связанных
328
дифференциальных уравнений:
L1fc(O. £ W. У (ХДЬ 0. Л(П] = 0; (14.1)
L2 [у (x,z,t), U0, f/ (X. n, 0. h (0] = 0;
(14.2) где £(/), £ (О — перемещения инертных элементов автомобиля (кузова и осей); у(%, г)> О — вертикальное перемещение моста в точках опирания нагрузки с координатами х и if, h(O — неровный путь, задаваемый детерминистической или случайной функцией; у(х, г, <) — перемещение заданной точки моста.
Система обыкновенных дифференциальных уравнений (14.1) соответствует подрессоренной нагрузке, а система уравнений с частными производными (14.2)—мосту с распределенной по длине массой.
14.2. Расчет по действующим строительным нормам
Динамический эффект от подвижной нагрузки, согласно техническим условиям на проектирование мостов [18], учитывают введением динамического коэффициента 1 + g в качестве множителя к временной нормативной нагрузке только при расчете по первому предельному состоянию (на прочность) .
Для железобетонных мостов и решетчатых опор значение динамической добавки р, задают в виде линейных убывающих зависимостей от длины I пролета (или общей длины загружаемых участков линий влияния):
p- = Ci —с2/. (14.3)
Для металлических мостов и опор динамическую добавку принимают по гиперболическим зависимостям (рис. 14.4):
Н=с3/(с4+/), (14.4)
где сь сг, сг, с« — постоянные
Для массивных опор динамический коэффициент не вводят.
Отметим, что динамические коэффициенты для металлических несущих конструкций намного выше, чем для железобетонных. Это объясняется высокой жесткостью и большим внутренним сопротивлением железобетона как материала, а также большой массой железобетонных мостов. Для их раскачивания необходима весьма значительная энергия. Техническое состояние покрытия строительными нормами не регламентируется, поэтому и назначенные ими Динамические коэффициенты являются достаточно высокими.
Расчет по второму (по перемещениям) и третьему (на трещиностойкость) предельным состояниям выполняют без динамического коэффициента, вследствие кратковре-
Рнс. 14.4. Динамические коэффициенты для автодорожных мостов по СНиП 2.05.03-84.
1 — висячие мосты; 2 — балочные железобетонные мосты; 3 — балочные металлические мосты; 4 — арочные железобетонные мосты
менного действия временных нагрузок.
На выносливость обычно рассчитывают элементы металлических автодорожных мфе-тов.-для которых по сравнению с железобетонными мостами статическое напряжение от собственного веса значительно меньше и разница между напряжениями оШах и Omin из-за динамической составляющей напряжения может оказаться значительной.
Нагрузки от торможения, разгона и ударов автомобилей, навала судов, подвижки льда, действия ветров, монтажных нагрузок и др., имеющих явно выраженный динамический характер, строительные нормы определяют как дополнительные статические воздействия. Большинство из этих нагрузок маловероятны или малы по величине. Подвижная нагрузка является основной временной нагрузкой. Специальный динамический расчет мостов необходим при апробации новых типов нагрузок, не предусмотренных нормами, и нестандартных несущих конструкций, а также при оценке эксплуатационных качеств элементов проезжей части моста.
14.3. Динамическое воздействие автомобилей на проезжую часть
При образовании расчетных схем автомобилей [15, 21] кузов представляют абсолютно жестким инертным телом, а масса колес — сосредоточивается к осям. Рессоры и шины считают нелинейно-упругими диссипативными связями. На рис. 14.5, а, б, в, г изображены наиболее распространенные схемы автомобилей и их упрощенные варианты в виде систем с двумя и одной степенями свободы (рис. 14.5, д, е, ж).
Неровности проезжей части задаются в виде кинематического возмущения для движущейся модели автомобиля. В зависимости от состояния покрытия, швов проезжей части и сопряжений пролетного строения с подходами закон кинематического
329
Рис. 14.5. Расчетные схемы автомобилей
а — двухосного; б — трехосного с балансирной подвеской; в — трехосного с седельным полуприцепом; г — четырехосного; д — в виде двухмассовой модели; е, ж — в виде одномассовой низкочастотной и высокочастотной модели
возмущения может быть непрерывным или иметь резкие выбросы [8]. Размеры и количество неровностей на проезжей части моста непрерывно изменяются в процессе эксплуатации [5, 21]. Впадины и выступы в совокупности составляют микропрофиль пути /i(a)=/i(7), имеющий, вообще говоря, случайный характер. По результатам измерений определяют статистические оценки микропрофиля и аппроксимирующие их моментные характеристики. Основной из них является корреляционная функция [15]: которая характеризует случайные выбросы в зависимости от расстояния х или времени t от начала отсчета [14].
Если вместо абсолютного перемещения у расчетной модели автомобиля исследуют его относительное перемещение — y(t)—h(t), то в этом случае используют кривизну неровностей Л"(х) и соответствующую корреляционную функцию К ft (х) [2].
Одиночные неровности симметричной и несимметричной форм на подходах к мосту и на стыках соседних пролетных строений, учитывая сглаживающую способность шин, можно описать одной или двумя косинусоидами:
h0 (. 2лх \
h (%) =± -Г” 1 — cos ——' ;
2 \ а /
h (X) =± —cos ~г)
2 \ а /
-I- Л°2 Л nnc 4jtX НА
±------I I — cos------I, (14.5)
2 \ d )
где ho, hn, hm. d — стрелки (глубины или высоты) и длина неровностей.
Уравнения движения инертных элементов расчетной модели автомобиля (14.1) составляют в предположении малости вертикальных перемещений ^и^см. рис. 14.5).
390
В связях, соответствующих рессорам, силы демпфирования представлены силами вязкого— по гипотезе Фойгта (kpv) и сухого — по гипотезе Кулона (ГР sign о) трения: в шинах неупругое сопротивление .принято по гипотезе Фойгта.
Численным интегрированием уравнений (14.1) находят давление на путь R(u, и) и усилия в рессорах F(v, v) в зависимости от деформаций шин и рессор и и v, определяемых выражениями:
« = С(0~МО—»(Х. Ч. 0;
» = М0-С(0- (14.6)
При нахождении усилий R(u, и) и F(v, v) в связях модели автомобиля без учета податливости моста (обратной связи) в выражении (14.6) следует положить равным нулю у (х, л» 0-
Усилия в рессорах нелинейно зависят от деформаций, поэтому характеристики жесткости моделирующих их связей задают непрерывными нелинейными или кусочнолинейными функциями (рис. 14.6, а) со значениями ср и ср на первом и втором участках соответственно. На третьем участке отражены удары кузова об оси; в этом случае говорят о «пробивании» рессор.
Характеристики связей, соответствующих шинам, представлены аналогично рис. 14.6, б. Кроме двух участков со значениями характеристик сш и сш в области положительных перемещений и имеется участок в зоне отрицательных перемещений (при потере контакта шины с дорогой). При статическом загружении автомобиля, находящегося в состоянии покоя, усилия в связях Rc и Fc и перемещения и, v не выходят за пределы первых двух основных участков.
Рис. 14.6. Характеристики жесткости а — рессор; б — шин
При движении по укрытию удовлетворительного качества выбросы давлений за их пределы сравнительно редки. Для упрощения описания взаимодействия подвижной нагрузки с дорогой могут быть использованы линеаризованные характеристики связей.
При линейных или линеаризованных характеристиках жесткости связей усилия в иих вычисляют по формулам:
R (u, U ) — Сд] и и —
(П-НП-НХ, /)]; аг /
(14.7)
о) =Cpo + ^po4-Tpsign't> =
= ^ср + dt + ^р sign j X
X (14-8)
где коэффициенты Сщ. Аш и <?р, Ар соответствуют силам упругого и иеупругого (по Фойгту) сопротивления в шипах и рессорах: 7 р — сила постоянного трения в рессорах.
Для современных автомобилей значения коэффициентов приведены в работах [2, 21]. Для грузовых автомобилей весом 80—240 кН их находят в следующих пределах:
ср= 500... 1500 кН/м Ар= 10...20 кН-с/м;
сш= 1000...4000 кН/м 6Ш= 4...10 кН-с/м; Л.= 2...10 кН.
Расчетная схема наиболее распространенного автомобиля с одним кузовом (рис. 14.5) может существенно быть упрощена
[11, 23], если соблюдается условие =ab [7, 21]. Тогда задняя и передняя части автомобиля могут быть представлены независимо колеблющимися телами с приведенными массами М(а/а+Ь) и М(b/a+b). На заднюю часть загруженного автомобиля приходится 75—85 % всего веса, поэтому динамическое воздействие главным образом определяется соответствующей подсистемой с двумя степенями свободы (рис. 15.5, д). При этом возможно выделение низкочастотной и высокочастотной составляющих колебаний. Приближенно их можно определить отдельно из анализа систем с одной степенью свободы.
При нахождении низкочастотного слагаемого вес задней части кузова и половина веса колес определяют приведенную массу расчетной модели, эквивалентная жесткость упругой связи соответствует последовательно соединенным между собой рессорам и шинам. При выделении высокочастотной части пренебрегают инертностью кузова, перемещение которого происходит значительно медленнее перемещения колес. В пределе перемещение кузова приравнивают нулю, что означает переход к расчетной схеме, изображенной на рис. 14.5, ж. Эту модель используют при определении динамического давления для расчета проезжей части.
Дифференциальные уравнения колебаний для наиболее распространенных моделей грузовых автомобилей приведены в табл. 14.1 в соответствии с обозначениями рис. 14.5.
В результате решения дифференциальных уравнений колебаний автомобиля (табл. 14.1) при заданных реализациях неровного пути h(t) вычисляют соответствующие функции динамического давления R(u, и). По ним находят оценки корреляционных функций для передних Kr r и задних ко-лес KRaRa'
Для стационарной случайной функции давления, обладающей свойством эргодичности, вероятностные характеристики могут быть определены не как средние по множеству реализаций, а как средние по времени Т при одной реализации.
Тогда получим оценку корреляционной функции давления в виде
Т—t
KRiRi = T — t f ~ А] х
о
X (т) — Riidt. (14.9)
331
Таблица 14.1
Уравнения движения Примечания
Плоская модель двухосного автомобиля с четырьмя степенями свободы (рис. 14.5. а): Мг\ + 2F, + 2F, = Mg; вг2 — 2F1 а + 2Fg Ь = 0; Ft = F (v.. Ь.); mg tq + 2*q ~ 2Fq = mq g (0 = 1.2) Индексы 1 н 2 отвечают передней и задней осям. Деформация рессор vq = lq (П - С, (П: деформация шин «q = Cq (*) - * (0 - Л (*) - У (Xq. Q
Колебания двухосного автомобиля в поперечной плоскости (три степени свободы): »«» ' Иш * Г2П ♦, + -у- [«in - «1л1 + [«а. - ®2л1 - ' [р1п * Рг» Р2л|-° (0 = 1,2) «х — момент инерции кузова в поперечной плоскости; Qxq — момент инерции осей в поперечной плоскости; clt с2. di, d2 — расстояние между рессорами и шинами передней и задней осей; ф(0, M>q(f) — углы поворота кузова н осей. Индексы «л» и «и* отвечают левой и правой колеям
Плоская модель автомобиля с балансирной подвеской (рис. 14.5,6) — пять степеней свободы: М, z', 4- 2F, + 4F-j = Mg; 6z4—2F, a + 4F.5= 0; тЧ 4 — 2Fq + 2Rq ~ mq & («7 = 1. 2. 3) Деформация рессор: vi = (П - Ci (0; Vt = (П - [£, (t) + Ь (/)]: деформация шин “q = Cq (П-ftq (П - ff (Х^ t)
Плоская модель трехосного автомобиля с седельным полуприцепом (рис. 14.5. в) с шестью степенями свободы: (Afj + М2) z, + Afj lb, z2 + a» z,l -f- + 22 Fg=(A41+A42)g; 0=1 (®1 + «2 *?) ’2+ "2 \ I \ + «2 У - - 2F> a, + 2 [F« + Fs] 6, = 0; (e2 + M2 a!) z3 + M2 az [ \ 4- b± z2] + + 2F3 (aj + bt) = Mj a2 g; mq iq — 2Fq 4- 2Rq = mq g (0=1, 2, 3) Деформ атия рессор: Vq = Cq (П-Cq (П; деформация шин uq = Cq ftq (t) У (Xq.
Плоская модель четырехосного тягача (рис. 14.5. г) с шестью степенями свободы: 4 4+2S F4 = Mg- Fg = F(vq' ^z): 0=1 2 4 e^-2SF9a« + 23 F2fc9 = °-’ 0=2 0=3 mptq + 2Rq~ 2Fq=mQZ «7 = 1. 2, 3. 4) Деформация рессор fq = £q «)-Cq (П; деформация шин uq = C0 (П - hq (t) - у (Xv. 0
Двухмассовая модель (рнс. 14.5, д) с линеаризованными характеристиками жесткости рессор и шнн: + 2kр и + 2Тр sign и + 2ср v = Mg; + 2ftm « + 2сш u = mg Деформация рессор v= C «) -C(O; деформация шин « = С (0 — Л(0 — »(х. /).
332
Продолжение табл. 14.1
Уравнения движения Примечания
Одномассовая низкочастотная модель (рис. 14.5. е) с приведенными характеристиками жесткости и демпфирования: (м+— U+2 --?*Р -+27 sign it + I 2 ) *ш + *р ₽ 4.. 2 —Сш Cp и = (M + — g сш + cp \ 2 / Деформация приведенной связи и — £ (1) — й (/) —р(%. О
Одном ассовая высокочастотная модель (рис. 14.5, ас): + 2 (Лш + *р) “ + 2 (СШ + ср) “ + + 27р sign t = mg Деформация шин и = t (П -Л (/) - у (X. О
Корреляцию между осями автомобиля определяют оценкой корреляционной функции связи по формулам:
Т—t )
1 h
— ^1 t) — CO —7
T—tt—t
Kr.r, = t / \ f (RaM-O-
* — н —f J и
(14.10)
— (t + /i) — tijdt,
где Т^Цо — полная длина реализации в масштабе времени; t — время между моментами корреляции; ti^a+b/v — запаздывание заднего колеса по отношению к переднему.
Оценка (14.9) аппроксимируется автокорреляционной функцией, а (14.10) — взаимной корреляционной функцией динамического давления на путь. Обычно используют аналитические выражения [14]:
(0 = KR(0) ]В£ exp (— Vi 0 cos t +
+ В2exp (—y20cosfl2^]. (14.11)
Приближенно при нормированных корреляционных функциях Kr, ввиду подобия центрированных случайных функций $ = (1=1,2), для определения взаимной корреляционной функции можно пользоваться формулой (14.11) с учетом запаздывания ti.
Значения коэффициентов аппроксимаций для некоторых грузовых автомобилей приведены в табл. 14.2, а графики нормированных корреляционных функций двухосных автомобилей — на рис. 14.7, где сплошная линия отвечает автокорреляционной, пунктирная — взаимной корреляционной Функциям. Отметим, что с увеличением ско
рости движения влияние высокочастотной составляющей в Kr(1) возрастает.
Таблица 14.2
Тип автомобиля о, м/с Параметры автокорреляционной функции задней оси
гНЯ ‘(0) Qi, с 1 1 d г-’ *'a V j. с-1 в,
ЗИЛ-130 6 15 17 2,8 1
10 100 12 — 1,3 — 1 —
15 160 11 — 1 — 1 —
25 440 11 70 0,8 — 3,8 0,22
МАЗ-500 6 40 16 2,3 — 1 —
10 150 11 — — 1 —,
15 223 11 70 1.9 4,5 0.9 0,11
25 470 10 60 1.3 1.9 0.6 0.36
БелдЗ-540 6 120 16 — 2,2 — 1 —
10 270 10 — 2,2 —— 1 —
15 430 10 70 2 4.7 0.7 0.25
При длительной эксплуатации на про-езхсей части могут возникать последовательные почти регулярные неровности, расстояние мех<ду которыми определяется наиболее вероятной скоростью движения тяжелых грузовых автомобилей и периодами их собственных колебаний [5, 8]. Периоды свободных вертикальных колебаний полностью загруженных автомобилей имеют две зоны — низшую с периодами 0,45—0,75 с и высшую с периодами 0,1—0,2 с. Для незагруженных автомобилей несколько изменяет положение низшая зона — диапазон ее периодов находится в пределах 0,35—0,6 с [21.2].
При движении автомобиля по пути с часто расположенными неровностями может возникать блокировка (выключение)
333
Рис. 14.7. График
КОРрпЛйЦНОННиЙ функции динамического давления для двухосного грузового автомобиля
рессор, вследствие непреодоления сил кулоновского трения. При этом колебания происходят на одних шинах. Периоды свободных вертикальных колебаний грузовиков, вычисленные с учетом блокировки рессор, находятся в сравнительно узких пределах, а именно 0,3—0,35 с. Колебания с такими периодами нередко возникают в мостах при проходе по ним грузовиков с листовыми рессорами.
Частоты свободных вращательных колебаний автомобилей в поперечной плоскости, рассчитанные как для системы с тремя степенями свободы (с учетом кренов кузова и колесных пар), характеризуются двумя зонами сгущения с периодами 0,1—0,13 с, и 0,7—1,0 с.
14.4. Расчет системы мост — автомобиль
Колебания моста при движении нагрузки представляют собой сложный переходный процесс. Его описание и анализ существенно зависят от того, какими линейными или нелинейными характеристиками определяются деформации несущих конструкций. Для расчета линейно-упругих систем необходимо предварительное определение собственных частот wv, собственных форм и интегралов от квадрата собственных форм колебаний (или нормирующих множителей) [1. 6].
Рассмотрим лииейно-деформируемые системы. Решение обыкновенных дифференциальных уравнений (14.1) и с частными производными (14.2), описывающих движение системы мост—автомобиль, можно свести с помощью преобразования Бубнова—Галер-кина к решению обыкновенных дифференциальных уравнений. В качестве базиса при этом используют собственные формы колебаний главной подсистемы мост. Блоки связи между подсистемами автомобиль и мост
соответствуют динамическому давлению на путь R(u, и). Если эта величина известна, например определена из решения (14.1) без учета обратной связи, то становится возможным и анализ отдельной системы уравнений (14.2).
Оператор функционально упрощается, так как связан теперь только с подсистемой мост, к которой приложено динамическое давление R(u, и). Перемещение моста представляется в виде разложения по собственным формам:
п
у(х, у, г, t) = У, у(х, у, z)fv (/).
v=i
(14.12) Используя процедуру метода Бубнова—Га-леркина
У’ г> *• R^Yv У> г> х у
Xdxdydz = Q (14.13)
и условия ортогональности
(*’ Уг z^Yv(x’ у> z)dxdydz = o
(fc-v), (14.14)
получим вместо исходных уравнений (14.2) нераспадающуюся (из-за правой части) систему обыкновенных дифференциальных уравнений относительно функций fv(t) разложения перемещений:
fv (О “Г ®v /v W “г A? W ~
г1)Я(«. й), (14.15)
где Ay — интеграл от квадрата v-й собственной формы;
Av = • У • г) dxdydz\ (14.16)
v
У¥(Х. П) — ординаты собственных форм моста иод точками опирания нагрузки с координатами % л И; Я(и, и)—вектор возмущения (динамическое давление нагрузки на путь); и — радиальная А формация шии: M,t)—у(х, 7). t).
334
п
Функция у(х, т), O=syv(x. П)Л-(-) V
описывает изменение профиля пути вследствие деформации моста. В учете этого изменения при определении динамического давления состоит суть, обратной связи [14]. Такой учет может быть произведен решением совместной системы уравнений (14.1) и (14.2) или методом последовательных приближений. Для мостов пролетом до 30—40 м и современной подвижной нагрузки влияние обратной связи невелико. Пренебрежение этим фактором ведет (в запас) к некоторому преувеличению динамического давления.
Для учета неупругого внутреннего сопротивления материала конструкций моста используют модернизированную гипотезу Фойгта (с поправкой Бока). Коэффициент внутреннего сопротивления выражается через коэффициент поглощения Чт или декремент затухания б и эффективную (наиболее вероятную) частоту со колебаний моста, вызванных подвижной нагрузкой
д»0 = ф/2ло = б/лш. (14.17)
В простых случаях результаты решения уравнения (14.2) с учетом выражений (14.12)—(14.16) могут быть получены в аналитическом виде. Пусть, например, по шарнирно опертой балке с распределенной по длине массой т движется по неровному пути h(t) со скоростью v подрессоренный груз массой М\ коэффициент жесткости связи с. Перемещения балки без учета диссипации энергии при удержании одной основной формы колебаний описываются выражением
У(х, t) =
2 m/©!
h (е) sin <о (т — е) de — h (т)
лот
X sin —— sin <ог (f — т) dx
ЛХ S1B—— ,
(14.18)
где
= V с/М ; ©J = л2 /-?/ ЕНт.
(14.19)
В общем случае дифференциальные Уравнения движения (14.15) для моста я Уравнения, приведенные в табл. 14.1, для нагрузки решают совместно с помощью ЭВМ, Одновременно с их решением фор
мируют выходные функции перемещений и внутренних усилий S в несущих конструкциях исследуемого моста
S=SSvfv(O, (14.20) где — соответствующий коэффициент разложения.
Исходные дифференциальные уравнения движения (14.2) для несущих конструкций мостов различных типов, а также выражения для прогибов и коэффициентов разложения внутренних сил приведены в табл. 14.3. Необходимая комбинация уравнений движения мостов и подвижной нагрузки может быть получена объединением соответствующих данных табл. 14.1— 14.3. Связь между уравнениями осуществляется через функции R(u, и).
Расчет проезжей части. Определение локальных перемещений (усилий) в элементах конструкции проезжей части может быть значительно упрощено. Вследствие большой разницы частот возмущения и собственных колебаний конструкции в уравнениях (14.15) могут быть отброшены инерционные f^f) и диссипативные fv (t) члены. Тогда, подставляя разложения (14.12) в систему (14.15), получим выражения для функции отклика
!/Х2(Х» ’)) = ₽(«, «)2шу2АГ1х V
*yv(x, у, z)Yv(x, т». (14.21)
Здесь функцию отклика Ухг (х, л) определяют только податливостью элементов конструкции проезжей части, так как эту часть системы принимают безынерционной. Для нее усилия и перемещения вычисляют без рассмотрения переходного процесса. В формулы усилий (14.20) надо подставить выражение
fv (0 = “v Yv (Х> Ч) R («» и ):
(14.22)
Погрешность в результате пренебрежения инертностью системы будет тем меньше, чем ниже ее собственные частоты cov по сравнению с эффективными частотами возмущения R(и, и).
Необходимое число п удерживаемых собственных форм несущих конструкций моста для любых нагрузок можно определить по наперед заданной погрешности усилий [6S] или перемещений [6J, вычисленных от некоторой характерной статической нагрузки. Сравнение результатов расчета S<, Ухг, полученных точным методом, и на основе разложений (14.20) и (14.22)
335
Табл RO a 14.8
Уравнения движения, выражения для прогибов и коэффициентов разложения внутренних сил Примечания
Балочныд рамный мост: состоящий из п стержней (рис. 14.8) (х, t) + El p + Ло pjv (x, /) = •= R (и, и ) 6 (x — x). (i = 1, 2, 3 n); 6(x—x) — дельта-функция, фиксирующая точки опирания нагрузки; П *v =2 mi f (*) axi 6=1 0 Yv/ (x) — собственная форма колебаний моста;
vt (•*• t) = fv (0: V Mv — изгибающий момент; Qy — поперечная сила:
Afv—Е/У"(*): <?v=-E/yv (xy и1 (х. 0 — прогиб
Шарнирная ферма с приведенными узловыми массами* (рис. 14.9), имеющая п степеней свободы: п mi*i+ 2Cji С + ft° tf")z* (0 = 6=1 = R (“. и ) (б. ;_г +— б Д V ЕЕ. . Г h—i= Ч с°з(/Л|Р)+ ^х1со$(/л,х)— lk—t L — Z(P) cos /л, pj —cos (/л, б.у — символы Кронекера; ^v= гуг 6=1 c^j — коэффициенты метода перемещений; —составляющие перемещений по v-й собственной форме для i-ro узла; у. (1)—вертикальное перемещение i-го узла; { — продольное усилие в стержне между узлами Л—i
Балка Лангера с подвесками (рис. 14.12): ту+Е1& (1 + 2ср 6 (х ~ *р) =
= R6 (х — х);
ср = со2 »(хр-'); р=1
х[ё?г-(Е/вг1
f — строительный подъем балки жесткости;
I
Av = m J (x) 0
Yv — собственная форма колебаний балки Лангера;
Ср — усилия в подвесках;
yix, t) — прогиб балки жесткости;
— изгибающий момент по v-й форме колебаний;
Q2V— поперечная сила';
Nv — продольная сила в поддерживающей арке
V = ху v (X) fv (П; ----EI6 У И (х);
Q =— EK Y" (х);
pV б v' / п \ п
("г - 2 °’’) 2 >'v('f)
\ Р=1 J ₽=1
* Движение арочных мостов может быть описано по аналогичной схеме.
886
Продолжение табл. 14.3
Уравнения движения, выражения для прогибов и коэффициентов разложения внутренних снл Примечания
Вантовый мост (рис. 14.13): Е1б [1 + *об'^“] ylV + m6f/ + +2 sIn ai 6 (x ~ Хг) = Я6 (x — x.): i £,° (1+fron + + + S S. cos a. 6 (p — JQ) = 0; y(x. t} = ^Yv lx} fv(t); W (x. П = S Wv (x) fv (t); MOv=-E'»V>’; Mnv— E'„O 5. {t} = fv (f) (yv (x.) sin a. + x., у. —координаты крепления вант к балке жесткости и пилонам; <х^ — угол наклона <-й ванты к горизонтали; /v, IFy — компоненты v-й собственной формы колебаний вантового моста для балкн жесткости и пилона; у. W — перемещения балки жесткости и пилона; 7Wgv; Mnv — изгибающие моменты в балке жесткости и пилоне; S. — усилия в вантах; Av = m6 J' iv dx + mn | l^’v № аУ 0 i)
V - ^v(f/f)cos af]
Конструктивно-ортотропная плита (рис. 14.10) -- / с?\Г d* w d* w mW + 11 + ku — 1 Dt + '2D,— + \ dt J [ dx* dx- dz2 2 <7=1 - Пл) + «Qn 6 (x - X<7n) 6 (z " ПЛ)]: И) = ш (X, z. t) Rq =R (ug. uq); w (x, z, t) = v wv (x, z) fv (t); ds wv d2 wv Mxv — Di <jx- *D- дгг • Г d2 w-v <Э2и»м1 M =— D9 Ь Iх V • zv 2 I dz2 dx2 J d* wv d3 wv 1 dx3 dxdz2 d3 wv o3 wv »zv- D, 1* Wy(x, г) — собственная форма колебаний плнты; a b =m j j W2 (x, z) dxdz; 0 0 U7(x, z, /) — прогиб; Mxv. Mzv — изгибающие моменты по v-й форме колебаний; Qxv^zv —поперечные силы по v-й форме колебаний; А4хгУ — крутящий момент по v-й форме колебаний
Тонкостенный стержень незамкнутого профиля (рис. 14.11) с шарнирными опорами и симметричным сечением: my + Elz р + K1V = =2(^n+^n)fi(x-^ wzj + ma Ф + Е/ fl + *0 —) zIV = ft u \ ot ) ОФ-bmaz + fl + k»—Ы, .«»,V ~ G/k = \ dt }\ “ R 1 в2(««л 'л+*«п Zn)6(x-M: у (X. t) = 2 rv (x) fv (t); г (X, Z) = s (x) fx(Z): Ф(х, f) = 2®i« №zv=-£/zyJ^: V=-£Z/1(X): Qzv=-^z<<x): <2,х=-£,Л(Х): —e'm *; <«> / AV =т j’ Yv <х> dx; 0 1 А = f [mZ’2 (х) -I- Вф2 (х) Н-A J ]_ Л Л 0 + 2таФ^ (х) (х) ] dx; у, г — вертикальные и горизонтальные перемещения стержня; <р — угол поворота; yv. 2^. Фд^ — собственные формы вертикальных и изгибно-крутильных колебаний; /в, /п — эксцентриситеты давления по левой и правой колее; Мг> Му— изгибающие моменты; Вы — бимомент; Qz. Qy — поперечные силы; Мх— крутящий момент
22—189
337
Рис. 14.8. Расчетная схема рамиого моста
Рис. 14.1С. Расчетная схема ортотропной плиты
Рис. 14.11. Расчетная схема пролетного строения в виде тонкостенного стержня незамкнутого профиля
Рис. 14.12. Расчетная схема балки Лангера
Рис. 14.13. Расчетная схема вантового моста
в обобщенный ряд Фурье по собственны формам колебаний моста — S , Y^:
S, - s!"> < [SJ; (14.23)
позволяет выявить необходимое число n удерживаемых собственных форм колебаний несущих конструкций моста. При расчете прогибов в балочных мостах обычно оказывается достаточным ограничиться одной низшей формой. Для более сложных конструкций (неразрезных, рамных, плитных и т. д.) надо удерживать уже три — пять низших форм. При определении изгибающих моментов следует учитывать собственных форм в 2 раза, а для поперечных и продольных сил — в 4 раза больше, чем для прогибов.
Уравнения (14.15) можно расчленить на две группы. Одна из них соответствует низшим собственным формам колебаний моста v»l, 2... k, частоты которых to v имеют один порядок с собственными частотами подрессоренной нагрузки. Эта группа форм является определяющей при вычислении прогиба (усилий). Число k находят при заданной погрешности е по мажорантной оценке
(14.24)
Вторая группа уравнений (14.15) соответствует высшим собственным формам» частоты которых далеки от частоты воз
338
мущения (v*4+l, Л+2...). Вклад этой группы в суммарный прогиб (усилие) мал. поэтому соответствующие коэффициенты разложения fv можно определять приближенно, отбрасывая в (14.15) производные функции fv (/):
fv (0 = Лу 1 <ov 2 R (и, ii) Yv (х, П)
(v = k + 1,
и).
(14.25)
Полученная таким образом система алгебраических уравнений не связана с дифференциальными уравнениями первой группы. Это упрощает решение задачи и приво-
Рис. 14.14. Колебания балочного сталежелезобетонного моста
а — расчетные схемы I и //; б — экспериментальная диаграмма прогиба; в — расчетные диаграммы прогибов
дит к существенной экономии машинного времени.
Расчет опор моста. Воздействие вертикальной подвижной нагрузки на опоры мостов определяется опорными реакциями пролетных строений. Для вычисления реакции можно использовать выражения поперечных сил по концам пролетов балочных мостов.
Более опасным динамическим воздействием является поперечное торможение, навал судов или движение льда. В строительных нормах эти виды нагрузок задаются статически. При динамическом расчете опор балочных мостов в поперечном направлении можно приближенно использовать в качестве расчетной схемы консольную стойку (при гибких высоких опорах) или жесткий блок на упругом основании. Для уточненной расчетной схемы следует учитывать поддерживающее влияние пролетного строения.
Низшая частота колебаний опор может быть определена через приведенную массу т (момент инерции 6) и жесткость с(сф) по известным выражениям
(о = ргс//п; со = }/сф/6. (14.26)
Навал судов и движение льда представляются заданием начальной скорости, которую определяют на основе предварительного анализа соударения [8].
Результаты испытаний. При испытании существующих мостов на. действие подвижной нагрузки с помощью приборов получают диаграммы, которые представляют собой запись прогибов или продольных деформаций в процессе движения нагрузки (рис. 14.2). Они отражают результат наложения колебаний пролетного строения, возбуждаемых движущейся по неровному
Рис. 14.15. График сопряженной импульсной функции для трехпролетного неразрез-ного моста от прохода автопоезда со скоростью 9 м/с
22*
339
пути нагрузкой, на кривую квазистатичес-ких перемещений.
Периоды свободных вертикальных колебаний наиболее распространенных балочных мостов пролетами 10—120 м обычно находятся в пределах 0,1—0,6 с. Наибольшие значения периодов изгибно-крутильных колебаний этих мостов могут достигать значения 0,6—0,7 с. Декременты колебаний стальных, сталежелезобетонных, предна-пряженных мостов и мостов из обычного железобетона находятся в диапазоне б= = 0,05...0,3. Динамическое воздействие отдельных автомобилей на путь носит хаотический характер с наиболее вероятными периодами 0,4—0,8 и 0,1—0,12 с, отвечающими свободным колебаниям автомобилей. Исключение представляют некоторые специальные виды подвижной нагрузки — самоходные скреперы, трейлеры, тяжелые тракторы на пневматических шинах. Они могут вызывать более стабильные периодические возмущения с периодами 0,3— 0,6 с. Это объясняется отсутствием подвески и амортизаторов у таких машин.
Иногда возможно возникновение колебаний мостов с весьма большими амплитудами (период 0,4—0,6 с) при редких случайных сочетаниях подряд расположенных волн неровностей и скорости движения автомобиля — так называемых квази-резонансных режимов.
Испытания мостов при проезде автомобилей весом 80—240 кН свидетельствуют о том, что их основные динамические характеристики находятся в ограниченных пределах. Амплитуды колебаний мостов не превышают: 0,3 мм для балочных мостов пролетом до 22 м из обычного железобетона: 1 мм для предварительно напряженных железобетонных мостов пролетом 22—40 м; 2—3 мм для стальных балочных и решетчатых мостов пролетом 30—120 м; 3—5 мм для неразрезных балочных и рамно-консольных мостов пролетом 60—70 м. Сравнение расчетных и экспериментальных диаграмм колебаний мостов приносит удовлетворительное совпадение частот и амплитуд, если удается правильно отразить условия движения и основные параметры подвижной нагрузки [2, 24]. Для примера сопоставлены диаграммы колебаний сталежелезобетонного моста пролетом 42,5 м (рис. 14.14).
Схема нагрузки (ЗИЛ-164) отражает динамическое воздействие только задней оси, на которую приходится 75 % веса. Действие передней оси учитывают статическим давлением. Колебания моста и на
грузки исследовались с помощью ЭВМ по уравнениям табл. 14.1 и 14.3 для двух вариантов — с учетом неподрессоренной массы т оси и без учета ее. Влияние неподрессоренной массы оси автомобиля оказалось несущественным. Совпадение с экспериментом удовлетворительное. При испытании мостов колоннами машин, когда групповых заездов делается много, можно наблюдать большой разброс амплитуд. Колебания могут быть как немного больше, так и меньше, чем при одиночных заездах [2].
Квазирезонансныс режимы колебаний мостов. Выявление резонансных колебаний связано с выбором такого чередования неровностей, которые приносят наибольший динамический эффект. Переменность дина-, мических характеристик системы мост — автомобиль при движении автомобиля обусловливает ее нестационарность. В этом случае алгоритм расчета строят с применением интегрального соотношения между входным (возмущением) и выходным (например, прогибом) процессами [14] в линейной колебательной системе с переменными параметрами:
t = и) h (и) du, (14.27)
где y(t) — прогиб или напряжение в произвольной точке моста; h(u) — кинематическое возмущение; и) — импульсная функция — реакция колебательной системы мост — автомобиль на импульсное кинематическое возмущение при заданной скорости движения нагрузки.
Совокупность значений W(t, и) для заданного положения t=th нагрузки иа мосту и различных моментов и воздействия кинематического импульса представляет собой сопряженную импульсную функцию W(th, и), которая является динамической функцией влияния кинематического возмущения для определенной скорости движения транспортных средств.
Применение сопряженной импульсной функции W(th, и) проиллюстрируем [4] на примере типовой неразрезной сталежелезобетонной конструкции пролетного строения по схеме 63,36+84,3+63,36 м. Автопоезд составлен по широко распространенной схеме: тягач К-701 и трейлер с грузом. Масса полностью загруженного автопоезда 40 т. На рис. 14.15 показана вычисленная для прогиба в середине пролета импульсная функция W{tk, и) при фиксировании момента th, когда задняя ось трейлера находится над эти.м сечением моста. Она получена для кинематического возмущения задней тележки трейлера, на кото
340
Рис. 14.16. Диаграмма колебаний нормальных напряжений в нижнем поясе среднего пролета неразрезиого моста при самом невыгодном расположении одиночной неровности
Рнс. 14.17. Расчетная схема висячего моста
а — обозначения; б — схема дискретизации из-гиб.чой жесткости балки
рую приходится более половины веса автопоезда. Скорость движения автопоезда и=9 м/с.
График функции W(th, и) можно использовать как для расчета амплитуд прогибов моста при заданном очертании и расположении неровностей, так и для выявления опасного чередования неровностей. В последнем случае достаточно расположить выступы профиля над положительными, а выемки профиля — над отрицательными ординатами графика Нфл, и). Задаваясь высотами (глубинами) неровностей, можно рассчитать максимально возможные амплитуды колебаний заданного сечения моста. При этом следует применять приемы, разработанные в теории линий влияния для определения усилий от статической нагрузки. Максимально возможные расчетные амплитуды колебаний рассматриваемого моста при глубине неровностей покрытия в 1 см могут в несколько
раз превышать статический прогиб от подвижной нагрузки.
Однако опасное расположение неровностей по всей длине моста является весьма маловероятным событием. В условиях эксплуатации вполне возможны (особенно в зимнее время) одиночные неровности с резонансной длиной волны. В этом случае неровность надо расположить над самыми большими ординатами функции W(tk, и). Так, для рассматриваемого примера (см. рис. 14.15) наибольший динамический эффект будут оказывать неровности, расположенные в среднем пролете моста. Для такого расположения одиночной неровности в форме косинусоиды высотой 10 см рассчитана [4] диаграмма нормальных напряжений (рис. 14.16), из которой видно, что максимальные динамические напряжения превышают соответствующие квазнстатические значения более чем в 2,5 раза.
Причиной возникновения квазирезо-
341
иансного режима колебаний может также послужить гибкая проезжая часть с регулярно повторяющейся податливостью [24]. При этом резонансная скорость црез, определяемая расстоянием d между поперечными балками и основной собственной частотой колебаний пролетного строения со, будет
1»рез = ad/л. (14.28)
Расчет висячих мостов [16]. Повышенная деформативность системы характеризуется настолько большими вертикальными перемещениями балки жесткости и несущего кабеля, что становится необходимым учет изменения параметров расчетной схемы при определении усилий в конструкциях моста; задача превращается в геометрически нелинейную. Наиболее серьезно нелинейность проявляется в мостах с вертикальными подвесками при отсутствии напрягаемых наклонных тросов (вант).
Для расчета колебаний висячего моста используют дискретные модели. На риг. 14.17,а показана расчетная схема однопролетного кабельного моста с вертикальными подвесками в виде плоской двухпоясноч стержневой системы. Несущий кабель между пилонами составлен из п+2 прямолинейных упругих звеньев. То же число звеньев имеет нижний пояс, соответствующий балке жесткости моста. Звенья этого пояса считают абсолютно жесткими. Каждый узел верхнего и нижнего поясов соединяется недеформируемой вертикальной подвеской. Сопротивление изгибу балки жесткости учитывают дискретными упругими связями (рис. 14.17,6) жесткостью
с( = 2£/1/(1в., + 1с(+1), (14.29)
где Е1 . изгнбная жесткость балки на участке между серединами f-й и f+1-ft панелей длиной соответственно и I.
Изгибающий момент Л1, в сечении балки жесткости вблизи места присоединения i-й подвески вычисляют с учетом внутреннего сопротивления:
(14.30)
Mi = Лф, (0 ,
здесь (О — угол взаимного поворота звеньев нижвего пояса в i-м узле;
Массу кабеля, подвесок, балки жесткости и элементов проезжей части приводят к узлам нижнего пояса.
Уравнения колебаний висячего моста с учетом геометрической нелинейности имеют вид;
(a,+i - al+2) W. (g- ^.(0)—
+ (a,+i — az) R-+i(g — ч.+1 (Г)) —
— 2 ® ф27 + k2R(u, й) = О,
i=l, 2 ... , п), (14.31)
где t). (Г) — масса н вертикальное ускорение i-го узла: а,. Ф .. (v—1,2) — переменные коэффициенты, которые зависят от изменяющейся формы несущего кабеля и положения автомобиля на мосту; R(u, и) — динамическое давление, оказываемое автомобилем на проезжую часть.
Уравнения (14.31), описывающие движение моста, должны также удовлетворять уравнениям связей — условиям совместности деформаций несущего кабеля и балки жесткости:
(X, - х,_!)’ + (Se — =
= 2..............................л + 2>-
\ EF /
(14.32)
где 1.0— длина i-ro звена верхнего пояса до деформации; EF — жесткость при растяжении несущего кабеля; 6’t- — продольное усилие в «-ном звене.
Из условия равновесия i-й подвески (см. рис. 14.17,6) усилие можно выразить так:
s _ cos af-H
1 sin (af — a.-j)
[/n(g —T)f (/))—
- - c. qp. (f. + fi+l) +
+ ‘«+1Ф«+1 (14.33)
В уравнениях связей (14.32) координаты крайних узлов:
Х1 = б„: х„+2 = £-«; У1=у„+2=0
(14.34)
учитывают горизонтальные перемещения б„ верха пилонов, которые зависят от вре
мени
бп (/)=--- ” „
Fh cos? a0
cos oj (t) Si (t).
(14.35)
Уравнения (14.31) и (14.32) являются нелинейными относительно (2п+2) координат узлов верхнего пояса. Продольные усилия в кабеле, изгибающие моменты и поперечные силы в балке жесткости однозначно определяются через эти координаты.
Для решения систем разрешающих уравнений используют численные методы.
342
Дифференциальные уравнения (14.31) преобразуют к системе алгебраических уравнений заменой производных конечно-разностными представлениями:
(4-н,t - 4+2,t) - 4,/4-1 +
+ 24,/ - т1/^—1] -
Ж
- д/ 2 cj ГД*Р/./ + ko (Ф/.Ж - Ф/,0 х i=i-i
х + ДЙ ku R (Up u,_j) } +
+ ai.t) [Д^2 S — 4-4-1 ,m-i +
+ 24-н,/ “ 4-f-i,/—1 ] ~
/4-2
- Д/ 2 5 + k0 (<jpM+i - X
ХФ2Л + д^Аа +₽(ut, u,_,) = 0
(i = 1, 2, ... , n). (14.36)
Уравнения связей (14.32) в конечно-разностном представлении имеют вид
— xi—1./4-1)2 + (0/.ЛН — #1—1, г-н)2 =
(S \а
1 + 77 ) (* = Ь 2.....п -|- 2).
сг /
(14.37)
В системах (14.36) и (14.37) индексами t, t—1, /+1 обозначены моменты времени t, t—Д/, /+Д/, для которых вычисляют все функции.
Расчет совместных колебаний моста и движущихся транспортных средств сводится к последовательному решению систем нелинейных алгебраических уравнений (14.36) и (14.37) на каждом шаге интегрирования дифференциальных уравнений автомобиля (см. табл. 14.1).
Висячие мосты с предварительно напрягаемым кабелем и наклонными тросами (вантами) обладают меньшей деформатив-ностыо и влияние нелинейности для них невелико. Для таких висячих систем повышенной жесткости можно использовать методы расчета линейио-деформируемых систем.
Кроме подвижной нагрузки причиной возбуждения колебаний висячих мостов может служить действие ветра. При этом возникают автоколебания — незатухающие колебания под действием сил, интенсивность которых зависит от состояния движения самой колеблящейся системы. Источник энергии — воздушный поток. К та
ким вибрациям относятся многообразные колебания аэроупругих систем (баффтинг, ветровой резонанс, галопирование, срывной и изгибно-крутильный флаттер).
В висячих мостах перемещения сопровождаются заметным увеличением (или уменьшением) растягивающих усилий в кабеле, что изменяет параметры жесткости системы. Это изменение периодически (вместе со срывом вихрей) повторяется и приводит, таким образом, к параметрическим резонансным колебаниям. В результате становится возможной потеря динамической устойчивости висячих мостов, когда частота срыва вихрей приближается к собственной частоте сооружения.
Критическую скорость ветра, вызывающего резонансные колебания, определяют по нормам проектирования [18]. Методом Бубнова — Г алеркина задача сводится к исследованию устойчивости линейной системы обыкновенных дифференциальных уравнений с периодическими коэффициентами. Более подробное изложение этого вопроса можно найти в работах [12, 13]. Аэродинамическая неустойчивость мостов типа галопирования возникает в случае неправильного выбора формы поперечного сечения балки жесткости. При исследовании этих колебаний и изгибно-крутильного флаттера существенное значение имеют аэродинамические испытания. В настоящее время пока еще нельзя считать исчерпывающими известные приемы расчета колебаний под действием ветра.
Расчет мостов-лент, предназначаемых преимущественно для пропуска легкой подвижной нагрузки [9, 20]. Пролетные строения этих мостов состоят из несущих кабелей и балки жесткости, объединенных между собой (рис. 14.18). Вследствие существенной пологости кабеля и значительных продольных усилий мосты-ленты весьма податливы, поэтому для них еще большее, чем для висячих мостов, значение имеет геометрическая нелинейность. Численную реализацию динамического расчета на подвижную нагрузку осуществляют по дискретной расчетной схеме (рис. 14.19, а) как для жесткой нити. Пролетное строение представляется шарнирной цепью из упру-госоединеиных жестких звеньев. Распределенную массу моста приводят к узлам. К узлам приводят и временную нагрузку. Уравнения движения получаются по. дискретной схеме, они содержат тригонометрические функции первоначальных углов наклона а и их изменения
343
Рис. 14.19. Членение пролетного строения на элементы
а — продольное; б — поперечное
Гпс. 14.18. Общий вид моста-ленты
F2 = <?M - 2Q. bt + <?(+1+
SV = - 2Ht k. + Я/+1Л/+1 +
+ (Hi—I + 1 ) Zi—1 ““ (Hi + Hoi) zi 4-
+ (Hi+X + ^oi+i) А4-1 + mi $l
- Y + [я. (u, и) &ц—
- (u, и ) б,^ ] =
(i=l,2, ... , n); (14.38)
ZX = 0:Hi_l-2H. + Hi+l-]-
+ (x. — /л. V. — Xf_j 4- 4-
4-т£бл-т/_1бм_1=г2 (i=l,2.........n), (14.39)
где IT. V — вертикальные н горизонтальные перемещения узлов; 6 ... 6. . , — символы Кронеке-ji /.«—1
ра.
При исходных распорах Но и поперечной силе Qo имеем:
- F, =- С,_, 4-1 + 2Qf dt - C/+i 4+i -
— (С/—1 + Со./—1 ) ?/—1 4—1 +
+ 2(C1 + Cw)T,d,-
(C/-j-i + Со/4-1) V/4-1 4—1J (14.40)
+ (<2/-i + Co/_i) ^/_i 1*/—i—
- 2 (С/ + co() 6, bt + (Q;+1 + <?a+1) X
X 6/+i bl+t. (14.41)
Здесь:
kt = tgat; bt = sin a; dz = cos az;
6f«zi; (14.42)
= tg (af 4- p£) — tgaz; y£ «— zt bt;
H., Q£— распор и поперечная сила в i-ном звене; Ур вертикальные и горизонтальные состав-
ляющие узлов нагрузок; Я£ (и, и); T£ —то же, от подвижной нагрузки.
Вместе с уравнениями движения используют физические зависимости:
EltV =
=±МХ\ Q = M' (14.43) и геометрические соотношения:
^lidi = l-, 'Zlibi^h-, i I
P0 1«- 2 sin (a. — at-+1)/(Z. 4- //+i)-(14 44) При учете пространственного характе
344
ра напряженно-деформированного состояния моста распределение поперечных сил в сечениях принимают по кусочно-линейному закону (см. рис. 14.19,6). Тогда уравнения движения будут содержать члены с двойными индексами.
Для /-ной жесткой нити, заменяющей полосу проезжей части с кабелем, значение Qij:
f 2 „ 1 „ \
0# — ( 3 + з + з tfi+1 )Сп’
(14.45)
п
где Qj,t—поперечная сила в плите проезжей части; ап— ширина расчетной полосы.
Перераспределение нагрузки поперек моста вследствие изгиба плит учитывают при определении узловых нагрузок, порождаемых внутренними усилиями в плитах:
+ ТГ"' + Т^'+')’ (14 ,1в) где </!,., - 2М}5>+ М#,.,);
(14.47)
— изгибающий момент в продольных сечениях моста.
После перехода к перемещениям они систему дифференциальных уравнений движения (14.38) — (14.44) решают по такой же схеме, что и для висячих мостов.
14.5. Оценка случайных колебаний
Наибольшая общая оценка ожидаемых колебаний мостов может быть дана [2] на основе метода статистических испытаний путем многократного решения на ЭВМ уравнений перемещения моста (14.15) при случайных сочетаниях автомобилей различных типов и реализациях неровного пути Л (/)• Результаты решения после статистической обработки могут быть представлены в виде плотностей распределения искомых усилий (перемещений), а по ним даны оценки числа выбросов за наперед заданные уровни [6].
Однако практическое исполнение такой схемы расчета технически затруднено из-за необходимости большого объема исходной информации. Расчет значительно упрощается, если не учитывать изменение профиля пути, вследствие деформации конструкции моста. Тогда вначале находят динамическое давление на мост и определяют по выражениям (14.9), (14.10) оценки кор
реляционных функций Кя(0- Затем соответствующие им аппроксимации — корреляционные функции используют для определения статистических оценок колебаний
мостов.
Статистические характеристики выходных случайных процессов [математических ожиданий S(t) и дисперсий Ds (/) ] находят с помощью теории случайных функций [И]:
_ _ i
S(t) = ^Ripv(x, г) [ du; (14.48)
v b
2 2 n n
<7=1 Г=1 V=1 k=l
X Z)
f fl?
0
t
(i- e) de J (l-ё
— u) KftqRr (u — +
t t
bf (t — u)du$
Ь u
XKRqRr(e-u)de], (14.49)
где R — математическое ожидание давления на путь (статическое давление) подрессоренного груза; Ч‘у(х, z) — коэффициенты разложений, зависящие от вида выходной величины и принимаемые по данным табл. 14.3; fv ((—и) — импульсные функции, определяемые из уравнений (14.15) как реакции иевозбуждениой системы иа единичный безразмерный импульс Л — 16((—и).
Темп затухания дисперсии Ds(0 после схода нагрузки с моста может быть определен без учета корреляции между собственными формами несущих конструкций:
П —Ь tip- i
= е о v , (14.50)
V=1
где Dfy(l) — значение дисперсии б момент схода нагрузки с моста.
В простейшем случае для шарнирной балки при одном подвижном грузе без учета внутреннего сопротивления материала математическое ожидание прогиба совпадает с известным решением А. Н. Крылова о движении силы с равномерной скоростью о [10, 7]
VTJO VJIV
------1 —--------sin cov t
I I v
V31X
I
(14.51)
Дисперсию колебаний прогиба шарнирной балки с удержанием основной ее собственной формы и заданием коррелянион-
345
ной функции движения Кя(/) подрессоренного груза одной затухающей гармоникой
(0 = Dr е~& cos yt (14.52) определяют по формуле
Dy (f)
t
CD2 m2 /2 J 0
nv
X sin —— e sin co (/ — e)
e—k0(i)4t—u)
X
nvu
X sin------
I
sin co (I — u) e—P(“—e) x
X cos у (zz—e) du (/> «> e> 0). (14.53) Для элементов проезжей части формула дисперсии D«(x) при движении одного подрессоренного груза имеет вид
о (X) = S“(X)I>R, (14.54)
где $(х) — статическая линия влияния усилий S: дисперсия стационарной случайной функции давления на путь; %—vt.
Рис. 14.20. Поверхность влияния дисперсии прогиба для железобетонного моста 14x14,4 и автомобиля ЗИЛ-130
Графики дисперсий исследуемых величин могут быть построены по ординатам, полученным для одиночных движущихся грузов. Для колонны однотипных грузов при определении дисперсий применим принцип суперпозиций, поэтому упомянутые выше графики могут служить линиями влияния дисперсий и быть использованы для оценки колебаний мостов.
Каждая ордината линии влияния дисперсии прогиба (усилия) означает, что при проезде подрессоренного груза с заданной скоростью по неровному пути с заданными статистическими свойствами не произойдет выброс за пределы этой ординаты с наперед заданной вероятностью 0,67. При назначении вероятности принято во внимание нормальное распределение. Ординаты линии влияния дисперсии изображают всегда относительно одной, первой оси автомобиля.
Приведем описание результатов расчета дисперсий для некоторых типов несущих конструкций мостов и подвижных нагрузок.
Пример 1. Поверхность влияния дисперсии прогиба в середине свободного края ортотропной плиты (14,4X14 м) с двумя шарнирными и двумя свободными краями от движущейся по неровному пути модели задней части автомобиля ЗИЛ-130 (рис. 14.20). Удерживались две низшие (П — —0,15 с, Та—0,09 с) собственные формы плиты. Вычисления, выполненные с учетом и без учета (пунктирные линии на рисунке) корреляции между формами свободных колебаний моста, показали ощутимое влияние последней. В общем поверхность плавно изменяется как вдоль, так и поперек моста.
Пример 2. Линия влияния днстерсий изгибающего момента в середине пролета балочного моста (/—42,5 м) построена (рис. 14.21) для скорости р—5 и 10 м/с от движения большегрузного двухосного автомобиля с учетом корреляции между давлениями передней и задней осей. Интервал этого взаимодействия равен промежутку времени одновременного нахождения осей на мосту.
Отметим некоторые общие положения и
Рис. 14.21. Линин влияния дисперсий изгибающего момента для сталежелезобетонного моста Г-ЧЛЗ м
а — от прохода тяжелого грузовика со скоростью 3 м/с; б — то же, со скоростью 10 м/с
346
особенности применения корреляционной теории.
Дисперсию колебаний от колонн грузов определяют простым суммированием ординат (по одной для каждого грузовика). Каждому заданному сочетанию грузов отвечает мгновенное значение суммарной дисперсии. Линии влияния дисперсий всегда положительны. Они не имеют нулевых точек на всем протяжении моста. Очертание их всегда плавное и гладкое. Линии дисперсий имеют концевые участки, которые также должны загружаться при определении вероятностных оценок усилий. По смыслу концевые участки учитывают начальные колебания моста для последующего грузовика после схода с него предыдущего. Расчеты ожидаемых колебаний моста показывают приемлемость простейшей двухмассовой динамической модели современных двухосных грузовиков при скорости v= 10—15 м/с (вследствие существенной отрицательной корреляции между давлениями задней и передней осей, которая в значительной мере исключает влияние передней оси).
14.6. Определение динамических коэффициентов
Динамический эффект можно рассчитывать дифференцированно с помощью динамических линий влияния дисперсий в зависимости от вида транспорта, его скорости и типа несущих конструкций моста. Загружение линий влияния следует выполнять таким образом, чтобы автомобили располагались относительно один другого на расстояниях не ближе минимально допустимых интервалов безопасности. С увеличением скорости статические составляющие усилий от временной нагрузки имеют тенденцию убывать (вследствие увеличения интервалов между машинами), а динамические — возрастать, поэтому в качестве расчетных усилий следует принимать наибольшие из всех вычисленных для различных скоростей движения.
Статические составляющие усилий Sp от временной нагрузки вычисляют общепринято — загружением статических линий влияния; динамические составляющие — по линиям дисперсий с применением правила трех стандартов [14]. Таким образом, формула для определения усилий от подвижного груза по детерминированной расчетной схеме имеет вид:
s₽+B = Sp + 3J/'D^’ = Sp + SB. (14.65)
Соответственно от колонны из п грузовиков коэффициент динамичности равен
Здесь доля дисперсии усилия, определяемая загружением динамической линии влияния (Г'
дисперсии каждым i-ным грузом; 5 р — статическое усилие от i-ro груза.
Анализ формулы (14.56) показывает, что с увеличением пролета и ширины моста коэффициент динамичности 1+р, убывает, как это имеет место в современных нормах.
Изложенная схема учета воздействия временной подвижной нагрузки- обеспечивает запас как вследствие минимальных расстояний между грузовиками, так и маловероятного при трех стандартах (Р= =0,011) высокого уровня динамического воздействия. При одновременном загруже-нии статической и динамической линий влияния возможно не менее двух невыгодных расположений нагрузки (по Spax и соответствующему и наоборот).
Для иллюстрации изложенной схемы определим динамический коэффициент усилия от современных тяжелых грузовиков (см. рис. 14.21) для скоростей о=5 и 10 м/с. Результаты расчетов приведены в табл. 14.4.
Т а б л в п а 14.4
о, м/с . £ ’Мц. кН-м МР+|Г кН-м 1+ц
5 6170 595 6765 1,096
10 5100 1110 6210 1,218
Наибольший суммарный эффект Л1р_|_ц нагрузка вызывает при меньшей скорости (5 м/с). Хотя динамический коэффициент при этой скорости l + |i= 1,096 меньше, чем при скорости 10 м/с, 1 + ц= 1,218, но, зато больше квазистатическое действие нагрузки. Нормативное значение 1+ц независимо от скорости движения равно 1,19 [18].
14.7. Воздействие автомобиля при криволинейном движении
Под влиянием центробежных сил инерции происходит перераспределение квази-статических составляющих вертикальных
347
Рпс. 14.22. Расчетная схема автомобиля при криволинейном движении
давлений колес в поперечной плоскости (рис. 14.22,а,б), которые вычисляют по формулам:
а) для колес передней оси:
„ / т-. М Ь \
Л,, = ( 2 +Т'в)в +
/ b \ v2
+1 mi ^2 + 1 ~ ;
\ в / rd
(mz М Ь \
2 + 2 В
( b \ V2
— Ш1 Л2 + Mhi — ;
\ В J rd
б) для колес задней оси:
( т2 М а\ Rzi = { 2 +~2~в)ё +
/ а \ V2
+ I «2 ^2 + М/ц "7" I ~~7~ »
\ В ] га
(т2 t М а \
~2~ ^~2~~В)ё~
(а \ v2 т2 h2 + Mhj, — —— . о / rd
(14.57)
(14.58)
Давления Rn, Ru соответствуют внешней, a Rn, R22—внутренней по отношению к центру кривизны стороне автомобиля.
Боковые квазистатические воздействия Rq (см. рис. 14.22) зависят только от центробежных сил инерции;
„ I ai-
Р2 == т2 + Л1 )
6_\ V2 .
В ) 2г ’
V2 2г *
(14.59)
Усилия и прогибы в несущих конструкциях моста от квазистатических воздей
ствий могут быть определены по статическим линиям влияния.
Случайные вертикальные колебания мостов при обычных радиусах кривизны г свыше 100 м практически мало отличаются от таковых при прямолинейном движении автомобилей [3], поэтому для расчета колебаний мостов от вертикальных составляющих воздействий нагрузки, движущейся по криволинейному пути, может быть использована изложенная выше концепция динамических линий влияния дисперсий.
Динамический эффект от флуктуаций бокового воздействия автомобиля можно оценивать по правилу трех стандартов: Рц=3 jZDp. Обычно он не превышает 10 % вертикального статического давления колес для эксплуатационных скоростей движения современных грузовых автомобилей [3]. Таким образом, расчетное боковое воздействие на проезжую часть будет:
+ Р№ = ₽, + 3<’ = 1.2), (14.60) где D рд — дисперсия горизонтального воздействия.
14.8. Оценка эксплуатационной надежности проезжей части
Обеспечение сохранности перевозимых грузов, комфортабельный проезд людей, максимальное снижение риска аварий является основной задачей эксплуатационной надежности автодорожных мостов. Длительная эксплуатация искусственных сооружений приводит к непрерывному увеличению дефектов в проезжей части, вследствие неравномерного износа, необратимых деформаций покрытия и накопления остаточных деформаций несущих конструкций мостов. При достижении определенных критических размеров неровности могут послужить причиной снижения скорости, ухудшения управляемости автомобилей и даже возникновения аварийных ситуаций. Недопустимость снижения эксплуатационных качеств покрытия до такого опасного уровня требует введения ограничений на размеры неровностей. При этом следует принимать во внимание не только стохастический микропрофиль, но и одиночные неровности, которые часто возникают на подходах к мосту и в швах проезжей части.
Таким образом, при оценке эксплуатационных качеств покрытия необходимо учитывать как длительные стационарные, так и кратковременные одиночные кинематические воздействия. Во всех случаях при моделировании процесса движения автомоби
348
ля устанавливают ограничения на максимально возможные значения вертикального ускорения кузова и давления колес на путь [7, 19]. Должно быть регламентировано также и минимально возможное давление на путь, так как отрыв в сочетании с возможностью скольжения может служить причиной опрокидывания, заноса или другой формы потери устойчивости автомобиля. Для сохранения безопасных условий движения значения вертикальных ускорений не должны превышать значений, указанных в табл. 14.5 [5, 7, 12, 19]. Разма-хи давления на путь (удвоенные амплитуды) не должны превосходить статического давления для автомобилей.
Таблица 14.5
Автомобили Микропрофнль проезжей части
стационарный С одиночными неровностями
Легковые Автобусы и загруженные грузовые Незагруженные грузовые 0,3 g 0,5 g 0,7 g 0,5 g 0,7 g 0.9 g
Допускаемые размеры неровностей могут быть установлены в результате анализа данных моделирования на ЭВМ в совокупности с результатами натурных испытаний. Для примера на рис. 14.23 приведены графики давления на путь и вертикального ускорения кузова задней части загруженного автомобиля МАЗ-500, полученные расчетом для одиночной неровности длиной
а)
Ь? V^IOM/C ,
)( Ъ hw^l-cos^vll
X=Ut
5Р J а--6м
Рнс. 14.23. Расчетные данные
а—расчетная схема системы мост — автомобиль при наличии одиночной неровности; б — график динамического давления; в — график вертикального ускорения
6 м и глубиной 4 и 12 см при скорости движения о = 10 м/с. Для более глубокой неровности /г0=12 см максимальные размахи давления и выброс ускорения превышают указанные выше границы.
Для мостов, имеющих тротуары, есть предложения ограничить уровень вертикальных ускорений пролетных строений до 0,25g [21] в соответствии с регламентом международного стандарта ИСО 2631-78 [7].
РАЗДЕЛ 15. ДИНАМИКА ТРАНСПОРТЕРНЫХ ЭСТАКАД-ГАЛЕРЕЙ
Б. П. Пасынков, А. Д. Ним
15.1. Общие сведения
Транспортерная галерея-эстакада представляет собой инженерное сооружение, предназначенное для установки ленточных конвейеров иад поверхностью земли на заданной высоте и с заданным уклоном. Она состоит из пролетных строений, опорных стоек (рис. 15.1) и размещенных внутри галереи ленточных конвейеров (рнс. 15.2) [15, 16].
В последние годы наметилась тенден
ция к снижению массы пролетных строений галерей и увеличению единичной мощности ленточных конвейеров. При этом для повышения производительности конвейеров увеличивают скорость движения и ширину ленты, что приводит к существенному возрастанию динамических нагрузок, генерируемых подвижными частями конвейера и транспортируемым грузом.
Экспериментальные и теоретические исследования действительной работы несущих конструкций транспортерных галерей,
349
Рис. 15.1. Компоновочная схема транспортерной галереи-эстакады
1.2 — бескоч-сольное и консольное пролетные строения;
3 — плоские опоры; 4 — пространственная (неподвижная) опора; 5 — смежные с эстакадой зда-
ния
Рис. 1Б.2. Устройство ленточного конвейера
/ — станина конвейера; 2, 3—роликоопоры рабочей н холостой ветвн ленты; 4, 5 — рабочая и холостая ветвн ленты: б— пол галереи-эстакады;
7 — транспортируемый материал
выполненные Уральским промстройНИИ-проектом [4, 7, 8], показали, что динамические нагрузки, генерируемые ленточными конвейерами, способны вызвать весьма значительные поперечные колебания пролетных строений. При этом динамические напряжения оказываются достаточно большими, а в некоторых случаях возникает опасность усталостного разрушения элементов конструкций или их соединений [1, 4, 7, 8, 11].
Вопросы динамического расчета несущих конструкций пролетных строений галерей-эстакад в детерминированной и вероятностной постановке нашли отражение в ряде работ [4, 6, 7, 9, 11, 12].
В дальнейшем методы динамического расчета конструкций транспортерных галерей, по-видимому, следует развивать, идя по пути уточнения расчетных моделей применительно к пролетным строениям, в виде Пространственных многослойных оболочек, которые сочетают в себе одновременно несущие и ограждающие функции (рис. 15.3) [13]-
15.2. Колебания пролетных строений транспортерных эстакад — галерей
Расчетная модель и основные соотношения. Разнообразие используемых при проектировании конструктивных решений транспортерных эстакад не позволяет принять единую расчетную модель пролетных строений. Однако есть ряд общих требований, которым должна удовлетворять расчетная модель пролетного строения эстакады.
В современном строительстве самое широкое распространение получили галереи балочного типа с разрезным пролетным строением, выполняемым в виде опирающегося на внешние опоры пространственного бруса (рис. 15.4).
Динамические нагрузки, генерируемые ленточными конвейерами, передаются через стойки-опоры станины конвейера непосредственно на поддерживающие конструкции пролетного строения и вызывают их колебания в вертикальной плоскости. При этом возможны как изгибные, так и крутильные колебания пролетного строения, которые необходимо учитывать при выборе расчетной динамически эквивалентной модели. Достаточно большая вертикальная жесткость опор эстакады позволяет не учитывать их податливость при изгибно-крутиль-ных колебаниях пролетных строений.
Область частот динамических воздействий от реальных конвейеров охватывает несколько низших частот собственных колебаний пролетных строений, поэтому одномассовая модель пролетного строения э большинстве случаев оказывается неприемлемой.
Пролетное строение, состоящее в общем случае из стержневой и пластинчатой систем (см. рис. 15.4, а), можно представить в виде динамически эквивалентной пространственной стержневой системы (см. рис. 15.4,6), которая состоит из главных
330
Рис. 15.3. Поперечные сечения пролетных строений
а, б — с основными несущими КОНСГГ”КЦНЯМИ из ферм или балоч [расположение конвейеров нижнее (о), верхнее (б)); в, г — с несущими конструкциями в виде оболочек; /—ленточный конвейер (транспортер):
2 — строительные конструкции
Рис. 15.4. Схема приведения пролетного строения эстакады-галереи к расчетной модели
а — пространственная схема конструкций; б — динамически эквивалентная расчетная мо-
дель-схема; 1, 2 — несущие и ограждающие конструкции про-иетного строения;
3 — опоры про-
продольных ферм (балок) и поперечных балок покрытия и перекрытия, загруженных реальными нагрузками, обладающими массой и динамическими силами, которые передаются от станины конвейера.
Колебания пролетного строения эстакады описываются системой линейных диф
ференциальных уравнений с соответствующими граничными и начальными условиями. В частности, для пролетного строения эстакады с нижним расположением конвейеров (см. рис. 15.3, а) уравнения колебаний могут быть представлены следующим образом [6]:
251
d2 dx?
(и + to sign co)
^1,2 (x) X
/ d2ur?fe
X I Bih (y) - • -
\ dy2
^1.2
N,
(^2i (У) X
г
d'2w2j dy2
У=У1,2 J &z\,2 + mi,2 (*) ~ = 0;
C/i-
(15.1)
1.2
d2 /
(a + iv sign co) — Blh (у) X dy* \
^w*k
+ mlh (y) - =0
dt2
&w'k dy~
(k= 1, 2, .... ад
d2
(u 4- iv-sign co)------
dr/2
B2j (y) x
™2i dy2 i d~ [£)’f
+ tn^j (У) X
(j- 1, 2, ... , N2).
Граничные условия для бесконсольных пролетных строений имеют вид:
<•>(0, t) = Z*l 2(L, t) =
dZZt.2 dx2
_ <^„2 x=o dx?
w\k (^1.2 » 0“0’
dt/2 ^="1,2
w>j(yi,2 » 0 = *)»
d2 w2j dy2.
= 0(^ = 0» У =1)-
(15.2)
Z* 2(x, /): »’*fc(ir. О; в2/(р): ВУ*/<У. fl-
нзгибные жесткости н комплексные функции смещения главных ферм, поперечных балок покрытия и перекрытия; /г^ 2(*)> mih^’ ,fl2jWi~ » интенсивности присоединенных масс; fj (у, Г)— интенсивности нагрузок на /-ную балку перекрытия; V — коэффициент неупругого сопротивления; L — пролет главных ферм; I — ширина галереи в осях ферм.
Так как далее будут рассматриваться установившиеся колебания, то начальные условия не задаются.
Учитывая, что основную опасность для конструкций представляют резонансные и близкие к ним колебания пролетного строения, для решения уравнений установившихся колебаний целесообразно использовать разложение решения по собственным формам. А поскольку пролетные строения эстакад, как правило, имеют редкий спектр в области реальных частот динамических нагрузок от конвейеров, то при определении параметров колебаний пролетного строения достаточно учета одного члена разложения, соответствующего собственной форме резонансной частоты.
Динамические характеристики пролетных строений. Важнейшими динамическими характеристиками пролетного строения являются собственные частоты, формы и соответствующие им коэффициенты неупругого сопротивления.
Для определения собственных частот и форм рассматривают однородную систему дифференциальных уравнений, которая соответствует системе, описывающей вынужденные колебания. Коэффициент иеупруго-го сопротивления у при этом полагают равным нулю.
Так как уравнения колебаний в общем случае достаточно сложны, то для решения задачи о собственных частотах и формах используют приближенные методы. Одним из наиболее приемлемых приближенных методов для решения задач динамики пролетных строений является модифицированный алгоритм Бубнова — Галеркииа [5].
Характеристическое уравнение для собственных частот, полученное по модифицированному алгоритму Бубнова — Галерки-на, имеет вид:
В соотношениях (15.1), (15.2) принято: ii"(l + +v=)—!/2; u.-v(l-i-V?)~1>'2; ij/—b
det |k)p, — X2 [оур, «rJJ = °»
(р, q — 1, 2, ...» n). (15'3)
здесь
352
х —77^ dy :
dy* I
_ _ 1 /L
kp, OJgl2 = 2 | [ tns (x) Z8p (x)X
S=1 \b
X zsq (x) dx +
"s i \
+2 f«isj (У) wsip (fO wsiq (y) dy , /=1 o /
(15.4)
где wr, tip—действительные координатные вектор—функции: Zsp (х), wsjy (У) — компоненты вектор-функцнн wp
Погрешности в определении собственных частот пролетного строения, обусловленные неточностью исходных данных и расчетной модели, учитывают введением резонансных зон, границы которых вычисляют по формулам:
=0,85Хг; Л,* = 1,151г, (15.5) где Лг — вычисленное значение r-ной собствен-ной частоты, рад/с; Лг. Лг— нижняя и верхняя границы г-ой резонансной зоны, п
Вектор-функция Wr= 2 a'qwqt где
<7=1
{Qrg} — r-ный собственный вектор обобщенной задачи на собственные значения (15.3), аппроксимирует r-ную собственную форму.
Для практических расчетов экстакад с нижним расположением конвейеров могут быть использованы следующие соотношения.
Среднее значение r-ной собственной частоты колебаний пролетного строения определяют по формуле
ХР = V[irC t (15.6)
где
81а.£/1т*
С =------1----
RL2m
1 — 1,64
R — модуль упругости и расчетное сопротивление материала поясов главных ферм, МПа; т* — Расчетная погонная масса пролетного строения со всеми нагрузками, имеющими массу (в том числе толпа, просыпь и детали), кг/см; т — Учитываемая в динамическом расчете погонная
пая высота и длина пролета главных ферм, м? масса пролетного строения, кг/см; Л, L — расчет-
Ijt — длина консоли главных ферм, м.
Частоты динамических нагрузок от реальных ленточных конвейеров, таковы, что резонансные колебания пролетного строения возможны лишь на собственных частотах, соответствующих низшей симметричной и первой кососимметричной собственным формам. Коэффициенты р., (<= = 1,2), определяющие эти собственные частоты, вычисляют по формулам:
для низшей собственной частоты
_______1 ~4~ 0,81 (SjSi Ч~ S2I2)_ 1+0,81 (е^ (2+£0 + е2£2 (2 +&));
(15.7)
для первой собственной частоты кососимметричных колебаний
Р-2 — P-lhc —
0,03213
1 + 2в0
0,1503
1 + 2bq
(15.8)
ms ls 1 C
где es=——(s—1,2): 1-----(s—1,2): e =
m 97'iEs,s
— 1—8!—8j. /П|, mt — интенсивности масса покрытия и перекрытия, кг/см; /ь 6 — шаг поперечных балок покрытия и перекрытия, м; £i/i, £2/3—нз-гнбные жесткости поперечных балок покрытия и перекрытия. Н-см2; Z — шнрнна галереи в осях ферм, см.
Собственные формы колебаний определяют следующим образом (рис. 15.5):
а) прогиб главных ферм описывается балочными функциями со значением в середине пролета, равным единице;
б) динамические прогибы поперечных балок аппроксимируются параболическими функциями третьего порядка с максимальными значениями при единичном смещении опор, определяемыми по формулам:
для низшей собственной формы
Ч81 =
1,273^ 1
(15.9)
для первой кососимметричной собст
венной формы
„_________0,0316p.2gs / , m /141т
Пв2 1-0,00531^ •)•(•)
где T)ip п2/ 1.2) — амплитуды динамических
прогибов балок н перекрытия.
Коэффициент неупругого сопротивления несущих конструкций пролетных строений можно принимать:
для отапливаемых галерей с металлическими несущими конструкциями у=0,03,
23-189
353
Рис. 15.5. Собственные формы колебаний несущих элементов пролетного строения, соответствующие
а — низшей собственной частоте симметричных колебаний; б — первой собственной частоте кососимметричных колебаний
с железобетонными несущими конструкциями— у=0,07;
для неотапливаемых галерей с металлическими несущими конструкциями у= =0,02, с железобетонными несущими конструкциями — у=0,05.
Поперечные динамические нагрузки, создаваемые ленточными конвейерами. Основными факторами, определяющими поперечные динамические нагрузки от ленточного конвейера, являются [4, 8]: а) дисбаланс вращающихся масс холостых и рабочих роликов; б) радиальное биение роликов; в) удары по рабочим роликам, возникающие при транспортировании крупнокусковых грузов. При этом весовая не-уравновешнность (дисбаланс) роликов приводит к возникновению инерционных нагрузок от подвижных частей роликоопор, а радиальное биение является причиной поперечных колебаний рабочей и холостой ветвей ленты конвейера, создающих динамические нагрузки от транспортируемого материала и ленты. В некоторых случаях возможны поперечные резонансные колебания холостой ветви ленты конвейера.
Динамические нагрузки на пролетное строение от одного конвейера могут быть представлены в виде * [6]:
/(х, у, z, = —f/i+-y) +
" Л'.Р
У Pph(f)S(x — Xfe) + k=l
Nx
+ 2 ^(0б(х-х;)]; (15.11)
/=1
Pph (0 = ~^(тл “г /пм) Zp +
xk
+ J /Им (х, t) (1 — xh-i
X — Xh~! \ X — Xh—i ----------------------------dx
lp f lP
CP(k—\) dp(k~i) x
X sin t -f- <Pp(fc_i) ) +
(15.12)
♦ Выражение для нагрузки от /-ной холО^ той роликоопоры Pxj (t) соответствует случаю среднего налипания транспортируемого материала на ленту н холостые ролики.
354
— (тл + тм) /р +
О
xk
С (х— Xk—i)'£ . ,
+ I тм (х, t)---------------------dx -J-
ft—i
Afe+i
+ j rnM(x, — xh
X — Xft \2 1 ' 2
1 ) dpk
‘P / J
X sin (<opfc / + q>pft) 4- f-~ («л +
*ft+i
4~ ^m) ip 4" J* (r> /) ^1 — xk
x ep<»+i> dplfe+l> “«#+1) x
+^“>"(“1»'+’’>*)+
+ cos₽2 Mce ^‘‘pfAs x S=1
Xsin(G)pfts/+<ppJ;
Pxj W = ^тл1х (4(7-1) x
X dx(j-l) “«(Z—1) sin (0х(/—1) * + + %c(/-l)) + 4exj dxj <o;/Sin(®x/X
X/ + Фх/-) + WH) dx(/+D X X £%+I)sin((°x(/+l) * + Фх(/+1) )) + rxj dxj X +<4/«п(<^/+фхд
(15.12)
где тл ~ масса единицы длины лечты конвейера; тм~ среднее значение интенсивности массы транспортируемого груза; кг/м; тм(х, О — интенсивность пульсирующей составляющей массы гРУза, кг/м; /р, /т—шаг рабочих в шаг холостых роликоопор, м; Mps> rpk’ ^pk • ^pk ~~ масса, относительный весовой эксцентриситет, Диаметр и начальная фаза вращения среднего
/
ролика k-fi рабочей роликоопоры; Mpg. ipfes’ dpkz' ^pks —то и'е* £‘го бокового ролика *'й Роликоопоры; р — угол наклона боковых рабочих роликов к горизонтали; ер£. сху—относительные геометрические эксцентриситеты fe-ro рабочего и /-го холостого ролика; ’Jx. rxj. dxj, <ь . ____
xj масса, относительный весовой эксцентри-
ситет, диаметр и начальная фаза вращения /-го холостого ролика; (Ор^, <ох/—частоты вращения
fc-го рабочего и /-го холостого ролика; у\ — координата оси конвейера; б (...) — дельта-функция.
Исходя из физического смысла и результатов экспериментальных исследований можно считать, что: а) начальные фазы вращений отдельных роликов являются случайными величинами и имеют равномерное распределение в интервале [0,2л]; б) диаметры, а следовательно, и частоты вращения роликов представляют собой нормальные случайные величины; в) пульсирующая составляющая грузопотока представляет собой нормальный стационарный случайный процесс с корреляционной функцией вида DM ехр(—а|т|) (D>0 — дисперсия грузопотока, а>0 — параметр корреляции [3]); г) относительные геометрические и весовые эксцентриситеты роликов являются случайными величинами, плотности распределения которых могут быть аппроксимированы наложенным нормальным законом; д) фазы, частоты вращений и эксцентриситеты роликов представляют независимые случайные величины.
В силу незначительного разброса диаметров однотипных роликов и достаточно узких границ флуктуации скорости движения ленты динамические нагрузки от конвейера могут быть представлены узкополосным случайным процессом. При этом спектральная плотность нагрузок имеет один острый максимум, если номинальные диаметры холостых и рабочих роликов равны, и два острых максимума, если они различны. Анализ динамических нагрузок от конвейеров показывает, что нагрузки от холостых роликоопор значительно меньше нагрузок от рабочих роликоопор. В связи с этим динамические нагрузки от холостых роликоопор могут быть учтены лишь при совпадении номинальных значений диаметров холостых и рабочих роликов.
Разложим динамические нагрузки от ленточного конвейера по собственным формам пролетного строения.
Обобщенная сила Q<(/), соответствующая r-ной собственной форме определяется соотношением
N, I
Qr (О = 3 f Ь V w2ir (у) dy = j=ib
\
v Ppk(t)Zr xfc 4 \ /
23*
355
+i; pxv co zT (x)
/=i
(15.13)
где Zr(x)— форма прогиба главных ферм.
Коэффициент Ti, в (15.13) определя
ют так:
для низшей собственной формы
где = [^. ^г]У”—норма вектор-функ-ции й?г
Для низшей симметричной и первой кососимметричной собственных форм норма || W'rlh может быть вычислена по формулам:
пи-, tub
tu = 1 + П21 sin cos —- ; (15.14)
I L
для первой кососимметрической собственной формы
ti2 = f 1 - "V" ) Г1 — 1 о, 67Т]22 (+ \ * / L \ 411
IIIFjIII = т1$г = tnL [1 + (1,273 +
+ 0,5x1ц) + е2т)21 (1,273 + 0,5^)); (15.18)
|K2|g=mLP2 = mL['-y(1 + 2eo) + J о
+ 0,0216(5!+£2)].
где Ui — расстояние от оси конвейера до главной фермы, принятой за начало отсчета, см; Ь—ширина станины конвейера, см.
Важной статистической характеристикой обобщенной силы является спектральная плотность. При детерминированных частотах вращения роликов спектральная плотность r-ной обобщенной силы имеет вид:
г NP
Ф<2г (“) = V2 5(<[тл-. л=1
~^~тт) ер Zlrk'T'Mp Гр Zrk] .
X %* (fi (“ — “ph) + «(<» +
* I/
а
(15.16)
а
а2 + ((о — шрь)?
Л'х
Спектральную плотность обобщенной координаты Tr(t) определяют через передаточную функцию системы по известной формуле [2]. Среднеквадратическое значение s^r-ной обобщенной координаты получим интегрированием по ю спектральной плотности. С учетом малости параметра корреляции грузопотока а для реальных конвейеров [3] выражение для sT^ имеет вид
"р
х 2i ([ [тл + тк) Zlrk + Zrk J2 + fe=l
Nx
- 2<A* mJ + mJ)-1 >1B ||1Г,||Г2. (15.19)
где k\=rpl tpl fy—'xl ex> mp. — погояяые массы рабочих и холостых роликов- гр. гх, е~р * ех — средние значения эксцентриситетов.
7=1
X J ®xj
(6(ш-
В практических расчетах среднеквадратическое значение (стандарт) колебательных перемещений середины пролета главной фермы вот может быть вычислено по формуле
операция осреднения.
Параметры стационарных случайных колебаний пролетных строений. Воспользовавшись алгоритмом Бубнова—Галеркина для решения неоднородной системы (15.1), получим уравнение относительно обобщенной координаты Tr(t):
Т* (0 + («+*> sign “) Тг (*) =
= /Ml- (15-17)
ST =s _^-(л=1,2),. (15.20)
Р ** /ng₽r у
где
Pd= 0,00271a2g
D _ I (mnj + /ПмГ + 2mpf)2 lpi + ' (^л; + + 2/nPl-)2 I pi
4-4 (>"„,•+ ™X()2'I< "P“ <‘pt=dxl-при dpi =3^ dxit
S56
«2 = [1 + 10 (/„/£)’ 4- 15 (lK/LY +
+ 6 (/K/L)6]-i;
i — номер конвейера; —общее число конвейеров с совпадающими значениями номинальных частот возмущения; g — ускорение свободного падения, м/с5; rip,- dx-—номинальные диаметры, рабочих н холостых роликов i-ro конвейера, м; 4rjr • — коэффициент, вычисляемый по формулам (15.14)—(15.15).
Среднеквадратические значения динамических прогибов поперечных балок покрытия и перекрытия, расположенных в середине пролета главных ферм, при резонансных колебаниях по низшей собственной форме определяют по формуле
Sjr — sor Ч/lr (j — 1 »2). (15.21)
При колебаниях по кососимметричной собственной форме динамические прогибы поперечных балок допускается не вычислять ввиду их малости.
Так как в пределах пролета располагается большое количество роликоопор, то обобщенная координата Tr(t) близка гауссову стационарному случайному процессу. Учитывая гауссовость и узкополосность процесса, распределение амплитуд колебаний несущих элементов пролетного строения достаточно надежно может быть аппроксимировано Релеевским законом [17].
15.3. Расчет несущих конструкций пролетных строений на прочность и выносливость при колебаниях
Необходимость в проверке прочности и выносливости элементов несущих конструкций при колебаниях возникает, если среднее значение частоты возмущающих нагрузок от рабочих роликоопор попадает в одну из резонансных зон, т. е. при Хг< <сОр<Х г. В противном случае проверку можно не выполнять.
Расчет на прочность и выносливость при колебаниях выполняют после статических расчетов и выбора сечений элементов.
Если в галерее расположено несколько конвейеров, создающих динамические нагрузки с совпадающими значениями номинальных частот, то расчет на прочность и выносливость выполняют с учетом группового воздействия от этих конвейеров. При несовпадении номинальных частот динамических нагрузок от конвейеров прочность и выносливость оценивают раздельно для каждой группы конвейеров, внутри котором номинальные частоты нагрузок совпадают. Наиболее неблагоприятный случай
принимают в качестве расчетного. Параметры собственных и вынужденных колебаний пролетных строений определяют с учетом загруження конструкций расчетными — при расчете на прочность и нормативными — при расчете на выносливость статическими нагрузками, имеющими массу. Нагрузки от толпы, просыпи и деталей, а также нагрузки, не имеющие массу (особые, ветровые, температурные, силы трения и т. п.), при определении параметров колебаний не учитывают.
Динамические усилия в элементах несущих конструкций. Динамические напряжения в элементах несущих конструкций линейно зависят от перемещения пролетного строения, поэтому они, так же как и перемещения, имеют распределение амплитуд напряжений, близкое к закону Релея.
Значения динамических напряжений, которые соответствуют среднеквадратическому значению вибросмещений, вычисляют исходя из формы колебаний известными методами [14].
Для эстакад с нижним расположением конвейеров срсднеквадратичсское значение динамических напряжений в стержнях главных ферм могут быть вычислены по формуле
%д = sd = 0 > 00082Sep <т0> (15.22)
где <ъ— статическое напряжение е рассматриваемом элементе, принимаемое равным расчетному значению — при расчете на прочность и нормативному — при расчете на выносливость, МПа.
Стандарты динамических изгибающих моментов в середине пролета поперечных балок покрытия и перекрытия определяются следующими соотношениями:
«Й1 = 10£, Z-2 s„2 = Ю£г /2 ,
.(15.23)
Проверка прочности элементов конструкций. При расчете конструкций на прочность исходят из недопустимости (с нормируемой вероятностью) превышения расчетного уровня напряжений в элементе за срок эксплуатации эстакады.
При уровне нормативной надежности Рв=0,9999, рекомендуемой в [10] для ответственных конструкций с внезапными отказами, и сроке службы 50 лет расчетное значение динамических напряжений в элементе можно вычислять по формуле
"d = Ma3 + 9’2/%)’ (15 24>
где
357
(a* — коэффициент использования конвейера по времени).
Прочность элемента считается обеспеченной, если
+ (15.25)
где R — расчетное сопротивление материала рас-р сматрнваемого элемента, МПа; по “ расчетное напряжение в элементе от статических нагрузок.
Выносливость элементов и соединений. Расчету на выносливость подлежат сечения основного металла и соединений элементов главных ферм, поперечных балок покрытия и перекрытия. Если группа элемента (соединения), согласно классификации, принятой в СНиП П-23-81, ниже третьей, то расчет на выносливость допускается не выполнять.
В связи с тем, что динамические усилия в элементах несущих конструкций представляют собой случайный процесс с переменной амплитудой, то оценка выносливости по методике, изложенной в СНиП П-23-81, оказывается затруднительной и может привести к значительным погрешностям как в запас, так и не в запас прочности. Более корректные результаты по оценке выносливости могут быть получены при использовании теории накопления усталостных повреждений при случайных колебаниях [2].
В соответствии с линейной гипотезой суммирования [2], меру усталостных повреждений для рассматриваемого случая определяют соотношением [6].
где ОЬ — статическое напряжение; — амплиту-
(15.26)
да динамических напряжений; N((Jo, aa) — по-О верхность усталости (6].
Усталостная прочность элемента (соединения) обеспечена, если G(Tn)<l.
В практических расчетах усталостная прочность элемента (соединения) может быть оценена следующим образом. Вычисляют параметр q, определяющий меру накопления усталостных повреждений, по формуле
aOsa—ci + q =----:---1--------. (15.27)
где sдинамическое напряжение в элементе (соединении), соответствующее среднеквадрати-ческому значению вибросмещення пролетного строения, МПа; Rv — расчетное сопротивление усталости, МПа. принимаемое по табл. 32 СНиП П-23-81, Gq — напряжение в элементе (соединении) от нормативных статических нагрузок, МПа; Оо, О|, аг, аз — коэффициенты, определяемые по таблице в зависимости от группы элемента (соединения).
Группу элемента (соединения) принимают в соответствии со СНиП П-23-81 (табл. 15.1).
Усталостная прочность элемента (соединения) обеспечена при дсО и не обеспечена при дз>1.
При 0<7<1 усталостная прочность рассчитываемого элемента обеспечена, если выполняется условие
G = 0,25©р (0,013 4-0,208g —
— 0,067g24- 0,853gs) < 1, (15.28)
где Юр— номинальная частота вынужденных колебаний, рад/с.
15.4. Меры по снижению уровня колебаний и обеспечению прочности несущих конструкций пролетных строений
В случае когда не обеспечивается несущая способность конструкций от совместного действия статических и динамических нагрузок, а также при невыполнении технологических или других требований по уровню колебаний, необходимо принять меры по снижению уровня колебаний пролетных строений.
Динамические нагрузки, генерируемые ленточными конвейерами, могут быть снижены следующими способами:
динамической балансировкой роликов конвейера или применением роликов, выполненных из листовой стали, вместо тяжелых роликов из прокатных труб;
увеличением натяжения ленты или снижением скорости ее движения при транспортировании крупнокусковых грузов; ' использованием специальных конвейеров с подвесными или обрезиненными роликами;
изменением шага роликов холостой ветви или скорости движения ленты в случае резонансных ее колебаний;
исключением возможности налипания частиц транспортируемого материала на ленту и ролики.
Резонансные режимы работы пролетного строения эстакады могут быть исключены изменением диаметров роликов или скорости движения ленты конвейера, а также изменением динамических параметров самого пролетного строения.
858
Снижение уровня колебаний пролетного строения может быть достигнуто также повышением демпфирующих свойств конструкций. Для этого могут быть использованы фрикционные соединения элементов конструкций.
Для повышения усталостной прочности конструкции целесообразно использовать соединения элементов на высокопрочных болтах, которые позволяют снизить концентрации напряжений.
Значение статического напряжения а0 а> а. а.
0,625 R > а*? > 0 v 0 19,65 3,33 0,904 0.260
3.41 Rv > > 0,625 Rv 21,50 3.28 0,430 0,133
> 3,41 R 0 о 39,30 3,32 0 0
а” < 0 (сжатия) 19,65 3,33 0 0
РАЗД ЕЛ 16. МАЧТЫ И АНТЕННО-МАЧТОВЫЕ СООРУЖЕНИЯ
А. С. Бернштейн, Б. В. Остроумов, М. М. Ройтштейн
К рассматриваемому классу сооружений относятся вантово-стержневые системы, представляющие собой либо отдельную мачту (рис. 16.1), состоящую из вертикального стержня — ствола и подкрепляющих его наклонных нитей — вант, либо совокупность вертикальных стволов, связанных между собой горизонтальными или наклонными вантами (рис. 16.2). Как правило, эти сооружения используют в области связи, хотя часто в виде мачт выполняют дымовые и вентиляционные трубы, опоры линий электропередачи, геодезические, метеорологические и т. п. вышки.
При расчете мачт и антенно-мачтовых систем (АМ.С) важное значение имеет учет динамических нагрузок, возникающих при действии ветра, сбросе гололеда, от работы технологического оборудования. Этим вопросам посвящены работы [1, 2, 7, 8]. Этот раздел посвящен динамическому расчету Мачт и АМС на ветровую нагрузку.
16.1. Уравнения движения
Для рассматриваемого класса сооружении можно указать расчетную модель, близко отвечающую действительной схеме их работы. Эта модель характеризуется еле-
Рис. 16.1. Отдельно стоящая телевизионная мачта
359
f45'*r'
Рис. 16.2. Связанная система мачт для коротковолновых антенн
Рв?. 16 3. Ориентация ствола и ванты относи» т^льг.э направления ветра
дующими допущениями:
1) мачту или АМС рассматривают как пространственную систему, состоящую из плоских элементов (стволов и вант), соеди-ценных в узлах. При этом предполагается, что деформация каждого элемента происходит в плоскости, образованной его осью и направлением установившегося ветрового потока (направлением ветра). Угол а, образованный направлением ветра, проходящим через узел, и перпендикуляром к хорде ванты, лежащим в плоскости ее деформирования, определяют из соотношения ‘(рис. 16.3):
sin а = cos 0 cos Р, (16.1)
где Р — угол наклона ванты к горнзо-<ту; 0 — угол в плане, образованный вантой и направлением ветра;
2) ствол считают недеформируемым в продольном направлении изгибаемым стержнем;
3) ванты, связывающие и подкрепляющие стволы, рассматривают как гибкие, пологие, растяжимые нити, при колебаниях которых не учитывают силы инерции, направленные вдоль хорды. Это допущение применимо к вантам, масса которых определяется материалом, работающим при растяжении ванты, так как в этом случае силы инерции в направлении хорды значительно меньше, чем упругие' силы, возникающие при растяжении ваиты;
4) исследуют вынужденные колебания под действием пульсаций давления ветра. Эти колебания происходят относительно положения статического равновесия, определяемого статической составляющей давления.
Уравнения движения элементов, примыкающих к £-му узлу, при этих предположениях имеют вид:
для k-ro и fe+1-го пролетов рассматриваемого ствола АМС
d2v
EIk-—T-Uk -ТГ +^kD[v (z, /)] = дг* дг2
= Ф°(2, t); (16.2)
hk—i <z<hk', h0 = 0;
для вант, примыкающих к узлу, д Г dwhj ' _ W — T°hi дх~~
- (х) + (*, 0] -
= ф£(*, о, (16,3)
360
те ось г направлена по оси ствола вверх: ось х — по оси ванты к рассматриваемому стволу; Е1 — жесткость ствола на нэгнб; N — нормальная сил? в стволе; т — погонная масса ствола; D — дифференциальный оператор, вид которого зависит от принятой модели рассеяния энергии при колебаниях. Для модели, описываемой гипотезой Фойхта, мера рассеяния е пропорцио-д* д
нальна частоте колебаний, a D — ~+ 2е
v(z, О — поперечные колебания ствола; (г, t) — функция, описывающая пульсаций давления D
ветра на ствол; Ф^, (х, t) — то же, на ванту; w(x, t) — поперечные колебания ванты; Шо(х)— статический прогиб ванты; Г0(х) — натяжение в ванте в положении статического равновесия; ц— погонная масса ванты; f — число вант, примыкающих к fe-му узлу; A— 1, 2.г (г — число узлов);
высота А-го узла.
Пульсационная составляющая натяжения в ванте может быть представлена в виде суммы:
rw(0=7V) + r;,(0:
(16.4) \ 2 дх dx j
где EF — жесткость ванты на растяжение; L — длина ваиты; U(t) — продольное смещение конца ванты, примыкающего к узлу.
Первое слагаемое в (16.4) представляет собой пульсационную составляющую натяжения в ванте в линейном приближении, если ванту рассматривать как струну, а второе слагаемое дает нелинейную добавку к натяжению, если перейти от струны к гибкой, пологой, растяжимой нити и учитывать геометрическую нелинейность при ее деформациях.
К уравнениям (16.2) и (16.3) следует присоединить граничные условия рассматриваемой системы. Для ствола, который имеет защемленный нижний и свободный верхний конец, эти условия имеют вид:
v(0, Z) = 0; v' (0, 0 = 0; 1
М (Н, 0 = 0; Q(H, 0 = 0, J ' ’ где Н — высота ствола;
для ванты, закрепленной нижним концом,
Whj (0, 0 = 0, (16.6)
где М(г, л и Q(z, <)—соответственнс, изгибаю-стволМ°МеНТ ** попеРечная снла« возникающие в Кроме того, в каждом узле должны выполняться геометрические:
v(hk — 0, 0 = v(hk + 0, О'. v'(hk — о, о = п'(Ла + о, о;
(L, 0 = о (Ль, 0 cos
(0 = — v (fth, 0 sin aAj
(16.7)
и силовые:
M(hk + 0, — 0 = 0;
Q(Aft + O, o-Q(/ift-O, o-
-Qft(0 = 0
(16.8)
условия совместности перемещений примыкающих элементов.
Реакцию &-го яруса вант Qk(t) на горизонтальное перемещение £-го узла также целесообразно представить в виде суммы линейной и нелинейной составляющих:
<?»(0 = <Й (0+ <2(0;
<?»«) = 2 [cosat,TteX /=1
Xwkj(L, 0-T^(0sinaftj.];
f
^(0=S [cosawTw(0X /=i
x {“'оа/(£)+ wkj(L> 0} —
-TKki(t)sinahJ\.
(16.9)
Стационарное решение системы уравнений (16.2), (16.3), удовлетворяющее условиям (16.5)—(16.8), описывает вынужденные колебания мачты или АМС при действии ветра.
16.2. Пульсационная составляющая ветровой нагрузки на мачты и АМС
Способ схематизации ветровой нагрузки, применяемый при расчете сооружения, подробно описан в разд. 10 т. 1 настоящего Справочника, поэтому здесь приводятся лишь те его особенности, которые характерны для рассматриваемых сооружений. -
Ветровая нагрузка представляется системой параллельных сил, приложенных к элементам АМС. Направление этих сил совпадает с направлением ветра, а величина является скалярной случайной функцией времени и пространственной координаты: для ствола
Ф(а, 0 = Ф5 (г) Ч-Ф°(г, /); (16.10)
для ванты
Фл/ (х, 0 = Ф5Л/ (х) + Ф£- (х, 0. (16.11)
Постоянную составляющую ветровой нагрузи;, определяют по формулам;
• для ствола
361
Os (г) = qjik (г) cx d; (16.12) для ванты
ФЛ/ W = %nkk. (x) cxkJ cos2 akj dkj, (16.13) ire q0 — скоростной напор; cx н c^j —коэффициенты лобового сопротивления для ствола и вертикальней ванты; d н d^j — поперечный размер мнделевого сечения ствола и ванты соответственно; п — коэффициент перегрузки.
Профили средней скорости ветра определяют по формулам:
k{z) = k0 (г/10)2а;
*W(x) = *o(xsin₽w/10)-a, (16.14) где а — параметр шероховатости подстилающей поверхности, определяющий тип местности; feo— значение профиля на стандартной отметке 10 м, определяют в зависимости от типа местности; z н х — в метрах.
Вычисленная по формулам (16.12)— (16.13) постоянная составляющая определяет положение статического равновесия АМС. Статический прогиб ш0(х) и натяжения в вантах Т0(х), вычисленные в этом положении, используются затем при исследовании колебаний.
Пульсационную составляющую ветровой нагрузки определяют по формулам:
Ф° (г, 0 = <DS (г) £ (г) X
X у', г. 0; (16 1S)
(х, о = ф%- (х) t,k. (х) X
X Vo(x'. у', z, I),
где коэффициент пульсаций
C(z) = Co(x/10)-a;
t,kj (х) = Со (X sin pft;/10)-a; (16.16)
(Со — коэффициент пульсаций на отметке 10 м определяют в зависимости от типа местности).
Как известно, коэффициент пульсаций пропорционален коэффициенту а, представляющему собой число стандартов реакции сооружения, которое следует взять в качестве расчетного ее значения, чтобы обеспечить требуемую надежность. Для линейных колебательных систем на число стандартов можно умножить интенсивность нагрузки, что и сделано при вычислении нормативных значений коэффициента пульсаций. При этом число стандартов принято а=2,5. При определении реакции АМС (перемещения или усилия в стволе или ванте) вследствие нелинейности рассматриваемой колебательной системы такой подход невозможен. В этом случае следует коэффициент to
уменьшить, а стандарт реакции АМС увеличить в одно и то же число а раз.
Функция Vq(x', у', z, t) в (16.15) описывает нормированное случайное поле пульсаций скорости ветра, определяемое следующими соотношениями (далее угловыми скобками обозначена операция осреднения): <^>=0; <(^)>=1; -
спектральная плотность между всеми парами точек пространства; SH- =и2/[3л(1 + °о
+п2) 4/3] —нормированный спектр пульсаций скорости; u=Ln/v0\ v0 — средняя скорость ветра на отметке 10 м; п — частота, Гц; L = 1200 м — интегральный масштаб длины;
Х 150 'Z1 60
1*1“ «3 +
150 ^21
— приведенное расстояние между точками с координатами (xv i/j. z) и (х2, у2, г) (см. рис. 16.3). При расчете АМС случайное поле v'^x', у', z, /) удобнее рассматривать как случайный процесс, полностью коррелированный по пространству, спектральная плотность которого не зависит от пространственных координат и определяется выражением
S , = 'v2SH/i "о "о
(16.17)
где х=Х1Х' — коэффициент пространственной корреляции для рассматриваемого сооружения, определяемый как отношение реакции X АМС при нагрузке (16.15) с учетом пространственной корреляции к реакции X', вычисленной без учета пространственной корреляции (в этом случае нагрузку (16.15) определяют при х= °)-
Подсчеты показывают, что значение v слабо зависит от жесткостных и инерционных свойств АМС и определяется главным образом размерами и конфигурацией наветренной поверхности, поэтому v в (16.17) следует находить как отношение главного вектора нагрузки, вычисленного с учетом пространственной корреляции к главному вектору нагрузки, определенному без учета пространственной корреляции;
e~*uudu jr
-----—•— dFt dr 2>
(1 +«2)4'3
(16.18)
362
где F — плошгдь наветренной поверхности АМС.
Для наветренной поверхности, имеющей форму прямоугольника высотой Н и шириной В, м, расположенной перпендикулярно направлению ветра, значения v приведены в табл. 16.1.
Из дальнейшего изложения будет вид но, что спектральную плотность нагрузки для АМС удобно задавать в виде дробнорационального выражения от частоты. Для этого нормированный спектр пульсаций скорости ветра целесообразно аппроксимировать выражением
$(<*>) =
_________________И2_______________________
[(ко)? -J- S2 t<o -f- S3] [(tCO3) — S2 <(0 4- S3]
(16.19) где co—2JtVou/b — круговая частота, а коэффициенты Si, S2 Ss определяют по табл. 16.2 в зависимости от ветрового района.
Таблица 16.1
В н
5 20 80 160 350
0,1 0,94 0.83 0,64 0,54 0,41
5 0,92 0,81 0,63 0,53 0,4
20 0,87 0,77 0,61 0.52 0,39
80 0,74 0,67 0,55 0,47 0,36
160 0,65 0,6 0,51 0,44 0,33
350 0,54 0.51 0,44 0,38 0,29
16.3. Расчетные модели мачт и АМС
Оценка реакции АМС при использовании уравнений движения (16.2)—(16.8) и модели ветровой нагрузки, описанной в п. 16.2 представляет собой достаточно сложную в вычислительном отношении задачу и требует применения мощной ЭВМ, поэтому важное значение имеют разработка и исследование приближенных расчетных моделей, с одной стороны, позволяющих упростить алгоритм расчета, а с другой, удовлетворительно описывающих действительную работу АМС. Приближенные модели получаются из (16.2)—(16.8), если прене
бречь некоторыми входящими в них членами.
1. Линейная пространственная система. Эта модель получается в предположении, что натяжение в вантах не зависит от времени, поэтому в уравнениях движения вант (16.3) следует положить Тkf(t) "-0. Кроме того, в уравнениях равновесия узлов (16.8) следует пренебречь нелинейной составляющей реакции яруса вант, т. е. положить в (16.9) Qa(O=0- Полученная модель представляет собой систему вертикальных изгибаемых стержней и присоединенных к ним струн, при этом не учитывается параметрическое влияние натяжения в струнах на колебания системы.
2. Стержень на линейно-податливых опорах. Эта модель получается из модели 1, если пренебречь массой струн. При этом реакция яруса вант имеет вид
f
Qh (0 = 'V'. v sin3 а*Ь Lhj j—i
(16.20)
поскольку можно пренебречь составляющей реакции, которая возникает при поперечных колебаниях струны, по сравнению с составляющей от продольных колебаний. Полученная модель представляет собой систему вертикальных стержней, связанных между собой пружинами, жесткости которых описываются коэффициентами при v(hkt) в (16.20).
3. Нелинейная пространственная система. Колебания этой модели описываются уравнениями (16.2), (16.3) и (16.5)—(16.8).
В этот перечень не вошла расчетная модель, естественно получающаяся из модели 3, если пренебречь массой вант. Связано это с тем, что в АМС горизонтальнее и наклонные ванты, примыкающие к узлу, представляют собой пологие нити, поэтому поперечная составляющая реакции примыкающего конца ванты значительно меньше
Таблица 16.2
Ветровой район I II 111 IV V VI VII
5. 0,883 0.963 1,05 1,12 1,21 1.30 1.37
S, 0,333 0,371 0.412 9,448 0,493 0.533 0,575
S, 0.0071 0,0092 0,0118 0,0145 0,0184 0.0224 0.0263
863
продольной составляющей и может стать сравнимой с ней только вследствие резонансного эффекта, вызываемого инерцией ванты при ее поперечных колебаниях.
Ответить на вопрос о том, в каких случаях целесообразно использовать приближенные модели АМС, а в каких необходимо пользоваться моделью 3, можно на основе результатов решения задачи о вынужденных колебаниях АМС при действии ветра.
16.4. Вынужденные колебания мачт и АМС
Модели 1 и 2 линейны. Для них решение задачи о вынужденных колебаниях может быть получено в виде разложения по собственным формам. Средний квадрат реакции (перемещения или усилия) в стволе определяется выражением
<Х? (г, 0> = 22 (г) Xs (z) X
п S
X О О Zns.
(16.21)
1 Г [(tto)4+ (<0* + м? — Y2 х
2Л Joo И I ('° + 1 Х
X а>п © ) (10))2 + $ (°)
х [(w)2+ ?“/<*) 4-
(16.24)
где mn—собственные частоты рассматриваемой системы; v— коэффициент неупругого сопротивления, а значком ||...|] обозначен модуль комплексного выражения.
Зависимость ковариации от собственных частот рассматриваемой системы для моделей 1 и 2 при значении у=0,048 показана на рис. 16.4. Здесь X=(os/(i)n, cosccon, еп=2лпо/ (Latn) •
При исследовании модели 3 используют метод статистической линеаризации [5]. Перемещения и усилия в АМС разыскиваются в виде разложений по собственным формам линейной модели 1. При этом нелинейную составляющую реакции яруса вант Qfe(Y) в последнем условии (16.8) следует рассматривать как нагрузку на ствол. Тогда уравнение (16.2) будет иметь вид
d^v d2v
£Ih “TV — Nk + mh D [f (z,0] = OZ* 02“
где Xn(z) — функция распределения реакции, соответствующая л-й собственной форме рассматриваемой системы.
Обобщенная сила имеет вид
нк
= V [2\ank & ФЛ & £ dz + k Ь
+21'Ьп>(*)Ф/(х)С/(х)^)].
7 ь
(16.22)
Здесь суммирование в первом слагаемом производят по всем стволам АМС, а во втором — по всем вантам; о —перемещения ft-го ствола по л-й собственной форме рассматриваемой системы; bnj— то же. для /-Й ванты (для модели 2 bnj^w
- Ф3 (z, t) - 6 (z - hk) QKk (t), (16.25)
где б (г) — дельта-функция, а последнее условие (16.8):
Q0ft + O,0-Q(/ift-O,/)-Q2(O = O
(16.26)
и ему, как и остальным условиям (16.5)— (16.8), будут удовлетворять собственные формы модели 1.
Уравнения относительно обобщенных координат pn(t) получаются из (16.3) и (16.25) методом Бубнова—Галеркина:
о [₽„ w] + ₽„ (о+2 31’ р. ю +
S
+ fn(0 = Qn<P(0. (16.27)
Совокупность собственных форм рассматриваемой системы предполагается удовлетворяющей помимо известных условий ортогональности на совокупности пролетов стволов и вант также условиям нормировки:
нк Ч
2J ^«nft^^+Sf H/n/«dx = l. ft б /о
(16.23)
Ковариацию обобщенных координат в (16.21) вычисляют по формуле
Центрированный стационарный случайный процесс <р(7) имеет спектральную плотность S(io). Процесс gn(t) выражается через обобщенные координаты следующим образом:
<?„(')= 22 д£5р,(0р1(') +
S I
+222®S5n₽.(o₽1('>V'>- <16-28>
s / q
Коэффициенты в (16.27) и (16.28) имеют вид:
364 '
-cosawmjw(L)<i„(y] X X [sin aw ag (hft) + Cg£] 4 + Cg> sin «„<>„ (/>„)];
+ <g„> = 0
(n = 1,2,..., N), (16.31)
где N — количество собственных форм, учитываемых в расчете.
2. Вычисление ковариаций обобщенных координат по формулам:
ns = 1 • f fis (*>) ,рр~ 2л ,) П Q (to) || а
$ (е>) Ло.
(16.32)
+ sinaw0Jftj][c$„-a„X X(Ab)cosaw.6;,„(L)] +
+ х
X (cosOytt^W-sinay)]);
k=l /=1
xilWe Ю]:
Ckjsl=~i bkJs^bkjl{x)dx-
о
0
Статистическая линеаризация уравнений (16.27) состоит в том, что функции gn(i) заменяются линейными относительно обобщенных координат выражениями
<16-30>
S
где нулем обозначена центрированная составляющая случайного процесса. Коэффициенты линеаризации <gn> и 6ns определяют из условий минимума среднеквадратического отклонения заменяющей функции (16.30) от заменяемой (16.28).
Получение статистических характеристик перемещений и усилий в элементах АМС представляет собой процесс последовательных приближений, состоящий из следующих этапов.
1. Получение средних значений o6j5-Щснных координат из системы алгебраических уравнений
Дробно-рациональные выражения от to под знаком интеграла в (16.32) получаются в результате развертывания по степеням to решений системы уравнений;
"(to)2 + yto +
вЙ> + «12
+ 51W
<?+621
(to)2 + ?to -|- <*>2 + ^22 . • •
B2W + 62W
Wl
N2
Pi
P2 («<*>)
PtfCHJ
в виде
„ SUM pfi
Известно [3], что при дробно-рациональном S(co) (16.19) вычисление интеграла (16.32) сводится к решению системы линейных алгебраических уравнений с числовыми коэффициентами, порядок которой равен 2N+2 (при вычислении интеграла (16.24) порядок системы равен 4).
3. Вычисление ковариаций случайных процессов gn(t) и рп(1) по формуле
365
Рис. 18.4. Зависимость ковариации обобщенных • ns координат брр (коэффициента динамичности) от собственных частот
N N
= 2 2 (<р >& +<₽;>&) +
0=1 /=1
N N N
+ 2 2 2 [<Pg><Pl><PTO>+ 9=1 /=1 m=l
N N N
+ <Pg>C +<Pi>C +<РИ>Й{]
(16.36) и 6ns из системы уравнений:
(16.35)
4. Определение коэффициента линеаризации <gn> по формуле
N N
<s„>= 2 2 (<pg><Pt>+iip) + 9=1 1=1
(« =1,2
N)
(16.37)
+342,25
trjA %
+363,74
¥302,25
+221,25
Рис. 16.5. Реакция трубчатой мачты на динамическое действие ветра
+264,59
+217,09
+72,09
Рис. 16.6. Реакция решетчатой мачты мическое действие верта
«ЛЯ 100 +-t
на днна-
366
В первый раз средние значения и ковариации обобщенных координат вычисляют при нулевых значениям коэффициентов линеаризации. Затем выполнение первого — четвертого этапов производят до тех пор, пока полученные два раза подряд значения ковариаций обобщенных координат не совпадут в пределах принятой точности вычислений. Тогда эти значения можно использовать при вычислении реакций в элементах АМС. Для ствола реакцию определяют по формуле (16.21).
На рис. 16.5, 16.6 показаны результаты динамического расчета двух мачт. Эпюры перемещений v, изгибающих моментов М и поперечных сил Q в стволе подсчитаны по модели 1 (показаны' цифрой 1), по модели 2 (цифра 2) и по модели 2 с сосредоточенными в узлах массами, каждая из которых равна */з массы яруса вант (цифра 3). Мачта на рис. 16.5 имеет трубчатый ствол и по три ванты в каждом ярусе, а мачта на рнс. 16.6 — решетчатый ствол и по три ванты в нижних четырех ярусах и 12 вант в верхнем ярусе, выполняющих помимо обычного конструктивного назначения роль радиоантенны. Приведенные эпюры иллюстрируют некоторые общие закономерности, которые удалось выявить при расчетах реальных мачт с использованием линейных расчетных моделей:
1) пренебрежение инерцией вант при их поперечных колебаниях приводит к завышению расчетных перемещений и усилий в стволе. По-видимому, ванты для ствола являются не только промежуточными упругими опорами, но и выполняют роль динамических гасителей;
2) часто рекомендуемый [12] прием приближенного учета масс вант при использовании модели 2 путем жесткого присоединения в узлах сосредоточенных масс является ошибочным. Лучше вообще пренебречь массами вант, чем учитывать их таким образом;
3) возможность использования модели 2 в каждом конкретном случае следует решать в зависимости от конструктивных особенностей рассматриваемой АМС. Увеличение нзгибной жесткости ствола и отношения масс ствола и примыкающих к нему вант уменьшает влияние инерции вант на колебания ствола.
Влияние геометрической нелинейности вант исследовалось на простейших схемах одноярусных мачт. Проведенные расчеты показывают, что переход от модели 1 к модели 3 снижает расчетные перемещения в усилия в стволе. Влияние нелинейности
уменьшается с увеличением предварительного натяжения в вантах и уменьшением отношения масс вант и ствола.
При разработке программ для расчета на ЭВМ АМС на действие пульсационной составляющей давления ветра в качестве расчетной модели следует использовать модель 3. Целесообразное построение алгоритма с использованием основной системы смешанного метода [2] позволяет реализовать расчет АМС на ЭВМ средней мощности. В программе необходимо предусмотреть возможность расчета любого участка АМС с использованием моделей 1 и 2.
16.5. Приближенный метод динамического расчета мачт
Для многих мачт изгибная жесткость их ствола на порядок меньше нзгибной жесткости консольного стержня, эквивалентного мачте, с учетом отпорностей, образованных оттяжками упругих опор. При расчетах таких мачт (без большой гибкой консольной части ствола и без больших сосредоточенных масс) можно ограничиться учетом только одной степени свободы, пренебрегая влиянием высших гармоник.
Расчетную ветровую нагрузку на fe-й участок ствола мачты высотой Н с текущей координатой г* определяют в соответствии с (16.10) как сумму статической qck „ d
и динамическом qk составляющих:
Q (Zft) = п (qck + q$) = nqck (1 + vx),
(16.38)
где п — коэффициент перегрузки обычно принимают равным 1,3 [II]; Cfe. v — соответственно коэффициенты пульсации скоростного напора и корреляции пульсации скорости ветра по высоте, определяемые но [13]; £—коэффициент динамичности, вычисляемый по рис. 16.7, в зависимости ог безразмерного периода е—Гио/1200 (Т — период колебаний, определяемый по формуле (16.43) и логарифмического декремента 6); х—коэффициент, учитывающий форму колебаний мачты к;«к эквивалентного однородного консол* -'ого стержня?
при шарнирном опирании
X = (2z2/#2) - (zft/tf); (16.39)
при защемленном опирании мачты
к = (фзн2)[(#№) - (ък/н) + 6];
(16.40)
для одноярусных мачт без консоли и мачт, верхний ярус оттяжек которых является опорой для крепления антенных полотен [7]
X = sin (jiZfe/H). (16,41)
При учете формы колебаний по (16.41) следует иметь в виду две схемы нагружения мачты динамической составляющей ветровой нагрузки, так как за один полупериод она нагружает верхнюю половину мач-
367
Рис. 16.7. Зависимость коэффициента динамичности Н, от безразмерного периода й при различных значениях логарифмического декремента колебаний и 1
С 247.8
2,45
3,04 2,49
FC, = 1,122 м"/м EU ‘6.7-И)1кН-иа 1.49
061 ГОСТ 76Б9-Б0
45*’\6в° П^/Сн9
7,76
7.5
3
Е
153,3
FCX = 1,122 м9/м £3 ^S,7-10skH-mq 0 52 ТОСТ .7069-69
0,65
0,55
0,66
Е
72,3
60 = 18 кН/см9 FCX * 1,122 мг/м £3 6.710е КН-мг О 52 ГОСТ 7669-69
CS
Ё
3
0,27
0,20 0,27
6*77 кН /см9
FCX*1,122 м9/н £3 = 10.2-10е кНм9
Рис. 16.S. Основные характеристики и результаты расчета мачты-антенны высотой 298 м
— модель /:----------сжато-изогнутый стержень на упругих опорах (описанный приближенный
метод динамического расчета);-------модель 2 с учетом шести собственных форм
ты и разгружает нижнюю, за второй — наоборот.
Расчетная ветровая нагрузка на оттяжки Л-го яруса с текущей координатой z*:
<?»(’*)= ««И' + Е* v), <16-42)
И где чс — нормативное значение статической составляющей ветровой нагрузки на высоте г/зг^; коэффициент пульсации скоростного напора для высоты 2/з2&; v—коэффициент пространственной корреляции пульсации скорости ветра, принимаемый: С,5 прн трех оттяжках в ярусе: 0,4 — при четырех и 0,35 — при шести и более.
На начальной стадии расчета период собственных колебаний мачты Т принимают (0,01—0,015) Я и по формулам (16.38) и (16.42) определяют расчетные ветровые нагрузки на ствол и на оттяжки мачты.
После выполнения квазнстатического расчета прочности ствола и оттяжек на следующем этапе период основного тона собственных колебаний Т уточняют, представ
ляя мачту в виде эквивалентного по отпор-ностям упругих опор приведенного консольного стержня с приведенной погонной массой ствола т, массой оттяжек Af* и приведенной изгибной жесткостью Д7
Т = 1.79Я? /т/(Е/), (16.43)
где
m=“й7 (S mh 'k г‘+тм"- $ Л=1
(16.44)
— приведенная погонная масса ствола;
г7 = —С№ (16.45)
— изгибная жесткость эквивалентного однород
ного консольного стержня;
(16.46)
ЗБ8
— приведенный коэффициент отпорное» упругих опор мачты, образованных оттяжками г ее узлов, линеаризованный в пределах динамической деформации; Cft—отпорность упругой опоры «.-го оттяжечного узла мачты при действии статиче ской составляющей ветровой нагрузки.
Далее ветровую нагрузку определяют снова по формулам с учетом уточненного периода собственных колебаний (16.43) и выполняют повторно расчет ствола как сжато-изогнутого стержня на нелинейно-упругих опорах и оттяжек мачты.
На рис. 16.8 приведены основные характеристики и результаты расчета в виде эпюр перемещений и и изгибающих моментов М мачты-антенны высотой 298 м на ветровую нагрузку пятого ветрового района. Ствол мачты треугольной решетчатой конструкции из труб со стороной треугольника 2,2 м и шарнирным опиранием поддерживается тремя ярусами оттяжек по три оттяжки в ярусе. Период основного тона собственных колебаний мачты, подсчитанный по формуле (16.42), равен 4,04 с. Эта же величина, подсчитанная для мачты с использованием расчетной модели 2, составляет 4,34 с.
Из приведенных эпюр видно, что изложенный расчет по приближенной методике дает немного большие значения перемещений и изгибающих моментов для верхней половины ствола мачты и меньшие — для нижней половины по сравнению с расчетом мачты по моделям 1 и 2.
16.6. Вихревое возбуждение трубчатых мачт
Причиной возникновения поперечных направлению ветра колебаний трубчатых мачт является четко действующий механизм срыва вихрей набегающего потока.
Натурные инструментальные наблюдения за колебаниями трубчатых мачт и башен при ветре показывают, что траектория их движения — вытянутый поперек потока ветра эллипс с отношением полуосей от 4 : 1 до 10:1 [9, 17, 18]. Регулярные поперечные ветру колебания трубчатых конструкций продолжаются длительное время. Этого нельзя сказать о продольных (по ветру) колебаниях, особенно при сильном ветре. С увеличением скорости ветра возрастает доля аэродинамического сопротивления системы, регулярность вихрей нарушается, колебания срываются, становятся нерегулярными.
Суммируя результаты натурных наблюдений и опытов в аэродинамических трубах, можно установить трн характерные об-
Рис. 16.9. Зависимость поперечных направлению ветра колебаний круглого цилиндра от средней ветра
ласти — интервалы скоростей потока, в которых поведение круглого цилиндра качественно отличается (рис. 16.9) [9].
Первая область — интервал скоростей ветра от нуля до скорости &Нач, определяемой начальными потерями (сопротивлениями), которые больше подводимой из потока энергии. Приток энергии приходит с помощью механизма срыва вихрей с цилиндра, а спектр колебаний цилиндра соответствует широкополосному случайному процессу.
Вторая область — интервал вблизи скорости ветра Окр, при которой частота взрывов вихрей близка к частоте собственных колебаний. Происходит вихревое возбуждение колебаний цилиндра, соответствующих узкополосному случайному процессу (ветровой резонанс). Амплитуды колебаний растут до наибольших, определяемых равенством собственной частоты цилиндра частоте срыва вихрей. С увеличением скорости потока амплитуды колебаний цилиндра сначала уменьшаются, а затем снова возрастают до тех пор, пока приток энергии превышает потери. Наибольшее значение амплитуды колебаний при равенстве подводимой и рассеиваемой энергии зависит от потерь, в том числе и аэродинамических.
У гибкого цилиндра могут быть несколько резонансных пиков, соответствующих нескольким формам собственных колебаний.
Третья область — сильный ветер — определяется превышением потерь над подводимой из потока энергии. В ней наблюдаются хаотические и периодические колебания цилиндра от сильных порывов ветра, спектральная плотность которых соответствует широкополосному случайному про
24—189
369
цессу с перидической составлющей [17].
По натурным наблюдениям за трубами, трубчатыми мачтами и башнями затягивание колебаний (принудительная синхронизация) при вихревом возбуждении происходит до скорости ветра в 3 раза большей, чем определенной числом Струхаля неподвижного цилиндра. Ветровая нагрузка на цилиндрический ствол мачты в направлениях поперек и вдоль потока в таком случае может' определяться скоростью ветра с*пред ~~ Зокр.
Расчет мачты на вихревое возбуждение при предельной скорости ветра иПред следует выполнять согласно указаниям: изложенным в [13], но при этом логарифмический декремент конструкции надо принимать равным 36, где 6=0,05 для стальных конструкций. Это следует из роста затухания, пропорционального кубу средней скорости потока вдали сооружения [9].
... 16.7. Колебания оттяжек антенно-мачтовых сооружений (АМС) и способы борьбы с ними
Опыт эксплуатации говорит о часто повторяющихся случаях колебаний разнообразных в конструктивном выполнении АМС. Количество случаев и продолжительность колебаний за последние годы увеличились, что связано с повышением гибкости и облегчением современных АМС.
Наиболее часто это явление замечено у оттяжек радиомачт, которые подвержены колебаниям двоякого рода: галопированию и вибрации. Низкочастотные колебания, называемые часто галопированием, наблюдаются при скоростях ветра 8—20 м/с. Частота таких колебаний не зависит от скорости ветра и составляет доли или единицы Гц. При этом на длине оттяжки располагаются одна-две полуволны (реже четыре—шесть) с амплитудой, достигающей нескольких метров. Вибрация наблюдается при небольших скоростях ветра (1—8 м/с) с частотой до 4 Гц и от 4 до 10 Гц.
По мере увеличения скорости ветра частота и амплитуда вибрации оттяжек обычно резко убывают и при скорости 8— 10 м/с не превышают нескольких миллиметров.
Наиболее опасен первый вид колебаний (галопирование), так как может привести к внезапным' поломкам деталей концевых креплений оттяжек после непродолжительного воздействия, . измеренного сутками или часами.
Второй * вид колебаний (вибрация)
представляет также серьезную опасность, поскольку неучет усталостной прочности может вызвать разрушение механических деталей оттяжек в течение времени эксплуатации, измеряемого от полугода до нескольких лет.
В большинстве случаев галопирующие колебания оттяжек сопровождаются метеоусловиями, способствующими образованию гололеда и наличием на оттяжках’односторонних отложений льда, изморози или мокрого снега.
Галопирующие колебания оттяжек часто становятся причиной изгибно-крутильных колебаний стволов мачт с амплитудами, доходящими до 0,5—1 м и числом полуволн, равным количеству ярусов оттяжек. Причиной интенсивных колебаний оттяжек при гололедных отложениях является аэродинамическая неустойчивость измененного гололедным отложением профиля сечения оттяжки, возникающая в результате возникновения явно выраженной подъемной силы и выполнения критерия неустойчивости Ден-Гартога [(dcv/da)+сх] <0 [4].
В практике эксплуатации АМС встречаются случаи колебаний оттяжек типа галопирования и при отсутствии гололеда. Возникновение таких колебаний трудно объяснить аэродинамической неустойчивостью или срывом вихрей с круглого цилиндра.
Возможная причина их — случайное возникновение периодической продольной составляющей пульсаций скоростного напора, действующего на мачту. Наличие в энергетическом спектре пульсаций ветра достаточной энергии в области частоты, равной одной из парциальных частот мачты (частота колебаний мачты по ярусам), предполагает возможность параметрических колебаний оттяжек. При отношении частот мачты и оттяжки, близком к кратному (например, 2:1), возникает параметрический резонанс оттяжки [9]. Частота f первой формы собственных колебаний оттяжки длиной I, площадью поперечного сечения F при напряжении и и линейной плотностью р равна
= (16-47)
Парциальные частоты колебаний мачты с достаточной точностью (до 10 %) можно определить по формуле (16.48) [7, 8]:
ft = — .
2л у тпь lh “Ь mh+i ffe+1 (16.48) где — отпориость или коэффициент жестко сти Л-й упругой опоры, образованной оттяжками
870
Рис. 16.10. Гаси* тель колебаний «тяжек мачт
Рнс. 16.11. Подвеска «асителя колебаний оттяжек мачт
Л-го яруса: т . т. . , — линейная масса fe-го k «+*
и (Л+1)-го пролетов ствола; /ft. ‘^+1 ~и* Длины.
Сравнением частот, получаемых по формулам (16.47) и (16.48), определяется возможность параметрического резонанса оттяжек, если они относятся как 2 : 1. Для подавления галопирующих колебаний оттяжки диаметром d, мм, применяют наклонные поводки-гасители неравной длины, устанавливаемые на расстоянии /mi.-., м, от натяжного приспособления:
/min = 0.0012dK7cp/p . (16.49) ГЛе 7"ср —среднеэксплуатацнонное усилие; (И) оттяжки, обычно соответствующие усилию TQ предварительного натяжения оттяжки при среднегодовой температуре воздуха; р — линейная плотность, кг/м оттяжки.
Прочность поводков-гасителей рассчитывают исходя из' значения опорной’ реак
ции R в месте их крепления при колебаниях оттяжки по первой форме [9]:
Я*=4-РУОХ?(» (16.50)
2 где vo — прогиб оттяжки при усилии Т 0; Kj == —4я"д — квадрат круговой частоты первой формы колебаний оттяжки.
Установку дополнительных поводков-гасителей на оттяжках мачт выполняют таким образом, чтобы равнодействующая сил их натяжения лежала в плоскости ствола и оттяжки.
Для подавления высокочастотной (4— 40 Гц) и низкочастотной (1—4 Гц) вибрации оттяжек, сопровождающейся, скоростью ветра 2
d_ /^aF икр — 2,5п ’ р ‘
24*
371
Табл nita 16.3
Марка виброгасителя а. мм Ь, мм С, мм k, мм е. мм g. ММ d. мм Масса. мм Диамезтр частот. Гц
IX СК-2 350 430 300 200 120 26 20 17,7 2 < Ло < 4
IX ск-з 450 530 400 200 120 26 20 18.1 1,2 <Л0 <2
IX СК-4 550 630 500 200 120 26 20 18,5 0,8 <Л0 < 1.2
ГВН-5-34 250 300 200 162 90 18 13 9,1 4 < Хо < 40
Таблица 16.4
Марка подвески виброгасителя а, мм ь. мм мм Масса, кг Диаметр каната оттяжки, мм
IX СК-5 58 104 23 5,8 31,5—34
IX СК-6 66 100 27 5.9 36—42
IX СК-7 75 95 32 6 46,5—50,5
IX СК-8 80 93 34 6 55
IX СК-9 84 91 36 6,1 59
IX СК-ю 87 92 40 6,2 63—67,5
IX ск-п 48 109 18 5.7 20—23,5
при которой частота срыва образовывающихся за канатом оттяжки воздушных вихрей совпадает с одной из п частот собственных колебаний оттяжки, применяют соответственно типовые гасители ГВН-5-34 (ГОСТ 2740—79) и IXCK-2, 3, 4 (разработанные ЦНИИПроектстальконструкцией) [10] (рис. 16.10, табл. 16.3). Для удвоения демпфирующего эффекта эти гасители устанавливают на оттяжках парами с помощью подвесок (рис. 16.11, табл. 16.4), которые обеспечивают их положение в одной плоскости с канатом оттяжки. Первую пару гасителей (низкочастотных) IX-CK, выбираемых в зависимости от соотношения частот основного тока оттяжки и гасителя (табл. 16.3), устанавливают на расстоянии li, м, от натяжного приспосбления оттяжки, вторую пару (высокочастотную) ГВН-5-34 устанавливают на расстоянии 2Z1 от натяжного приспособления:
/, = 0,00041dKTCp/p. (16.51)
16.8. Оценка точности расчета на основе экспериментального натурного исследования работы мачты
Как известно, ветер, возникающий в атмосфере, представляет собой турбулентное движение среды, которое характеризуется чрезвычайно нерегулярным и беспорядочным изменением скорости во времени в каждой точке пространства. Мгновенное значение скорости в турбулентном потоке можно представить как результат наложения пульсационной составляющей скорости на ее среднее значение.
Случайный характер атмосферной турбулентности придает задачам расчета сооружений на эти воздействия статистический характер. Элементы статистического подхода к решению такого рода задач представлены на рис. 16.12.
При решении задачи о вынужденных колебаниях мачты под действием пульсационной составляющей можно выделить два этапа. Первый этап заключается в преобразовании пульсаций скорости ветра в действующие на сооружение возмущающие силы. Это преобразование осуществляется с помощью передаточной функции (аэродинамической), зависящей от относительных размеров сооружения и от длин волн-гармоник пульсаций скорости ветра. Второй этап состоит в преобразовании возбуждения в движение сооружения, осуществляемом с помощью второй передаточной функции (механической), которая зависит от собственных частот колебаний сооружения и от суммарного коэффициента диссипации энергии колебаний.
Как на втором, так и, особенно, на первом этапах расчета вводят ряд допущений. Допущения, связанные с описанием расчетных моделей мачт и относящиеся ко второму этапу, приведены в п.п. 16.1 и 16.3. Особенности способа схематизации ветровой нагрузки в части учета пульсационной составляющей приведены в п. 16.2. Основными допущениями, которые связаны со способом учета пульсационной составляющей ветровой нагрузки и относятся к первому этапу, можно считать:
приведенный способ определения ветровой нагрузки основан на статистическом анализе записей горизонтальной компоненты скорости ветра в точке; при этом предполагается, что статистические характеристики пульсаций скоростного напора линейно связаны с соответствующими характеристиками пульсаций скорости ветра, а стандарт пульсаций скорости не меняется с высотой;
используется нормированный спектр пульсации скорости ветра (спектр Давенпорта), который достаточно прост для рас-
372
Скорость ветра
ТйНо
Реакция
Логарисрмы частоты
Рис. 16.12. Элементы статистического подхода к нагрузке от порывов
чета, но имеет два существенных недостатка. Во-первых, форма спектра и частота его максимума постоянны и не зависят от высоты, средней скорости н параметра шероховатости. Во-вторых, форма спектра недооценивает энергию в низкочастотном участке и поэтому не согласуется полностью с измерениями во всем частотном диапазоне. Кроме того, средняя скорость ветра, входящая в выражение спектра, имеет часовое осреднение, в то время как в СССР принято двухминутное осреднение;
используется коэффициент взаимной корреляции, получаемый как корень квадратный из когерентности, при вычислении которой пренебрегают мнимой частью взаимного спектра (квадратурным спектром).
В п. 16.4 приведены некоторые общие закономерности, позволяющие оценить точность расчета мачт с использованием той или иной расчетной модели и описанного в п. 16.2 способа задания ветровой нагрузки. Однако эти теоретические исследования не могут дать критерия оценки точности расчета, каковой может быть получен на основе экспериментального исследования действительной работы мачты.
Приведем некоторые результаты экспериментального исследования (более полно они приведены в [15]), проведенного на мачте высотой 350 м, с позиций оценки вклада в точность расчета принятых в рассматриваемой методике допущений, а также краткое изложение основных методических положений экспериментального иссле
дования, позволяющих оценить степень их корректности и репрезентативности.
Мачта, на которой проводились экспериментальные исследования, представляет собой решетчатый ствол с элементами из труб треугольного сечения в плане со стороной 2200 мм. Ствол мачты по высоте расчален четырьмя ярусами оттяжек.
Измерительная система, установленная на мачте, позволила производить измерение и синхронную регистрацию скорости (в том числе и безынерционными датчиками) и направления ветра, градиента температуры и параметров колебания мачты. Датчики метеорологических параметров размещались на шести уровнях по высоте мачты на выносных консолях, а параметров колебаний — на десяти уровнях.
В результате обработки экспериментальных данных, представленных в виде временных рядов модуля мгновенной скорости ветра и амплитуд колебаний сооружения, получена информация о статических свойствах поля скоростей ветра и динамических перемещений. Теоретическая сторона методов обработки временных рядов достаточно полно изложена в [16]. Однако значительную роль в этом вопросе играют практические возможности реализации обработки экспериментальных данных на ЭВМ, поскольку каждая реализация представляет собой объем в несколько десятков тысяч чисел, а также навыки в выборе сглаживающих фильтров и аппроксимации.
Статистические характеристики нссле-
373
Рис. 16.13. Изменение интенсивности турбулентности ,с высотой при различных стратификациях и шероховатостях подстилающей поверхности
•дуемого процесса описываются далее в последовательности, соответствующей рис. 16.12.
Средняя скорость ветра — из сравнения профилей рассчитанных значений средней скорости ветра и построенных по данным СНиП IL6-74 для района расположения мачты.(второй ветровой район территории СССР) можно сделать вывод о том, что последние являются как бы огибающими, т. е. хотя показатели, степени при аппроксимации степенным законом профиля рассчитанных значений средней скорости достаточно согласуются с принятыми в нормах, при сильных ветрах (безразличная стратификация) и соответствующих значениях шероховатости подстилающей поверхности эпюра рассчитанных значений средней скорости ветра по площади, а следовательно,. л ветрового давления на сооружение, как правило, меньше, чем аналогичная эпюра, построенная по данным СНиП II-6-74. Это указывает на завышение суммарной поперечной силы на сооружение в некоторых случаях до 17 % (см., рис. 16,15).
Стандарт пульсации скорости ветра и интенсивность турбулентности -г- принятое в рассматриваемой выше методике допущение о постоянстве по высоте стандарта пульсаций — оправдывается примерно в - 45 % случаев; однако, в реализации при сильны.#. ветрах. значение о&1 .убывает с высо
той, причем более четко до отметки 55270 м. Интенсивность турбулентности, связанная со стандартом пульсаций выражением ут = а /о (z), где o(z)—средняя скорость ветра на уровне а, с увеличением высоты, естественно, уменьшается. Полученные численные значения интенсивности турбулентности (см. рис. 16.13) достаточно хорошо согласуются с литературными данными [19], однако имеют значений меньшие, нежели учитываемые при расчетах по описанной ранее методике на 5—7 %.
Масштаб турбулентности — интегральные масштабы длины (продольный,’ • поперечный и вертикальный) определяют характерные, размеры энёргосодержащИх вихрей. Наибольший интерес для рассматриваемого вопроса представляют значения продольного интегрального масштаба, который введен в выражение спектра в виде числовой константы, равной 1200. Tib результатам, полученным на основании экспериментальных данных, можно сделать выводы, в достаточной степени согласующиеся с литературными данными, например, [19] о том, что численные значения продольных интегральных масщ.табов''подвер-жены значительным колебаниям даже- на одном уровне и их максимальные значения изменяются от 125 м на отметке 36 м до 750 м на высоте около 350 м.
Энергетический спектр — или спектральная плотность пульсаций скорости ветра представляет собой рас-пределеНйе энергии турбулентного потока по частотам и является одним из основных статистических параметров, необходимых при расчете сооружений, чувствительных к динамическому воздействию ветра. На рис. 16.14 приведены спектры, вычисленные на основе экспериментальных данных,' по эмпирическим формулам Давенпорта и Кармана с подстановкой в них величин, полученных в результате обработки экспериментальных данных;
Общей закономерностью изменения спектральной плотности с высотой, полученной нз анализа экспериментальных данных, является уменьшение частоты, соответствующей • максимуму спектральной плотности. Функция когерентности, необходимая в дополнение к энергетическому, спектру-для описания пространственного-распределения порывов ветра, определяет корреляционную связь порывов ветра в двух .точках пространства для данной частоты. - В приведенной методике- .применяют коэффициент взаимной корреляции, пред-
374
Рис. 16.14. Спектры пульсаций скооости ветра
/ — спектр Давенпорта L—1200 м: 2 — спектр Давенпорта L(z); 3 — спектр Кармана L(z); 4 — экспериментальный
ставляющий собой квадратный корень из когерентности. Для проверки влияния не-учета мнимой части коэффициента взаимной корреляции, а следовательно, и принятого квадратурного спектра были проведены вычисления функции когерентности с учетом этих предположений По полученным данным можно сделать вывод о том, что пренебрежение квадратурным спектром незначительно влияет (5—7 %) на значе-
ние. 16.15. Эпюра изменения скорост-, ветра с высотой по СНиП П-6-74-------------и фактически
------(а) и средние квадраты перемещений, рассчитанные от нагрузки по СНи<Т 11-6-74 (б), фактической (в) н полученные экспериментально (г)
ние «С» в показателе степени выражения, аппроксимирующего коэффициента взаимной корреляции показательной функцией.
Опенка влияния описанных выше отличий характеристик поля ветра от принятых в приведенной ранее методике -будет дана ниже. Здесь же необходимо отметить, что все сказанное касается воздействия пульсационной части составляющей скорости ветра на любые высотные сооружения,-чувствительные к такого рода воздействиям.
Оценка- точности, расчета мачт по- изложенной ранее методике -проводилась сравнением реакций сооружения-, в частности средних квадратов динамических перемещений, рассчитанных по этой методике, с их значениями, полученными из обработки экспериментальных данных, в частности записей амплитуд колебаний сооружения.
Теоретическое определение средних квадратов перемещений мачты производилось по программе динамического- расчета мачт на оттяжках. Эта программа, разработанная в -институте ЦНИИпроектсталь-конструкния, является составной- частью подсистемы комплексной автоматизации проектирования металлических конструкций зданий и сооружений. В алгоритме программы учет ветрового воздействия -выполнен в соответствии с приведенной ранее методикой, а в качестве расчетной модели мачты принята пространственная система, описанная в п. 16.1. Для рассматриваемой мачты результаты двух теоретических -расчетов в одном из которых ветровая нагрузка на сооружение была задана исходя из фактически полученных результатов обработки экспериментальных данных, -при веде-
375
ны на рис. 16.15. Сравнение этих результатов, особенно экспериментальных средних квадратов, с вычисленными теоретически при нагрузке, заданной исходя из фактически полученных, данных, показывают, что последние больше в среднем в 1,5—1,9 раза в зависимости от высоты над поверхностью земли. Это расхождение объясня
ется , в основном, несовершенством задания поля ветра.
Распространение полученных результатов сравнения реакций мачты от динамического ветрового воздействия на другие сооружения, чувствительные к такого рода нагрузкам, может носить лишь качественный характер.
РАЗДЕЛИ. ДИНАМИКА ВОЗДУШНЫХ ЛИНИЙ ЭЛЕКТРОПЕРЕДАЧИ И ОТКРЫТЫХ РАСПРЕДЕЛИТЕЛЬНЫХ УСТРОЙСТВ
А. А. Зевни, А. И. Курносов
Основными элементами воздушных линий (ВЛ) электропередачи и открытых распределительных устройств (ОРУ) подстанций, проектирование которых включает статические и динамические расчеты, являются несущие конструкции опор ВЛ и ОРУ, провода, грозозащитные тросы.
При расчетах опор и фундаментов ВЛ учитывают динамическое воздействие ветровой нагрузки. Конструкции и провода ОРУ подстанций, кроме того, рассчитывают на динамические воздействия, возникающие при коротких замыканиях.
В проводах и тросах, покрытых гололедом, при определенных скоростях ветра возможно возбуждение галопирующих колебаний (пляска проводов). Динамический характер имеют также воздействия, возникающие при сбросе гололеда с проводов (тросов).
Расчеты проводов и тросов должны обеспечить не только их механическую прочность, но и исключить возможность перекрытий между проводами разных фаз, между проводами, тросами и опорой, а также ВЛ, пересекаемыми наземными сооружениями.
Для линий напряжением до 500 кВ включительно расстояния между проводами, проводами и грозозащитными тросами определяются в соответствии с требованиями [10], которые учитывают динамические явления, возникающие при пляске проводов и их подскоке, вследствие сброса гололеда. Аналогичные ограничения [3,9] для линий сверх и ультравысоких напряжений (750 кВ повыше) не охватывают всех встречающихся на практике случаев, поэтому расчет этих линий должен включать проверку расстояний Между проводами и тросами при сбросе гололеда и в условиях пляски.
При расчетах опор башенного типа и опор на оттяжках на динамические воздействия ветровой нагрузки допустимо не учитывать влияние подвешенных проводов и тросов ввиду существенной разницы в частотах собственных колебаний. Плоскошарнирные опоры совместно с тросами и возможно проводами (если провода крепятся к опорам с помощью натяжных гирлянд) представляют в пределах анкерного участка единую механическую систему, что необходимо учитывать при статических и динамических расчетах.
Основными нормативными документами, регламентирующими учет динамиче-ческих воздействий ветра на конструкции опор, являются [10, 12, 14]. Некоторые методы статического расчета и рекомендации по учету динамических воздействий имеются в работах [5, 6, 13], содержащих также основные конструктивные схемы опор ВЛ и ОРУ подстанций.
17.1. Расчет опор, ВЛ и ОРУ на динамическое воздействие ветровой нагрузки
Динамическое воздействие ветра на свободно стоящие опоры и опоры иа оттяжках условно учитывают добавлением динамической составляющей к статической ветровой нагрузке. Допускается динамическую составляющую не учитывать в следующих случаях [12]:
при расчете деревянных опор ВЛ и опор под оборудование ОРУ;
при расчете железобетонных свободно стоящих опор (без оттяжек), если изгибающий момент в заделке от статического давления ветра на конструкцию опоры не превышает 20 % суммарного момента, создаваемого давлением ветра на провода, грозозащитные тросы и конструкцию опоры.
376
Для опор высотой до 50 м допускается динамическую составляющую ветровой нагрузки определять приближенно умножением статической составляющей на усредненный динамический коэффициент ka, который принимают 0,5 — для свободно стоящих опор башенного типа; 0,6 — для свободно стоящих опор портального типа; 0,65 — для опор на оттяжках. Эти коэффициенты получены в результате динамических расчетов типовых опор в широком диапазоне конструктивных параметров [1].
Расчет свободно стоящих опор башенного типа высотой более 50 м выполняют в соответствии с методикой [14], т. е. определение динамического воздействия ветра приводится к нахождению инерционных сил, сосредоточенных в середине участков, на которые башню условно разбивают по высоте.
При выборе расчетной схемы опор ВЛ целесообразно середины участков верхней части опоры увязывать с местами расположения траверс, что позволяет массу траверс объединять с массой участка ствола. Массу проводов, тросов, гирлянд допускается не учитывать, так как частота маятниковых колебаний проводов и тросов намного ниже наименьшей из частот собственных колебаний опоры.
Наиболее трудоемкая часть расчета по методике [14]—определение периодов 7\ и относительных амплитуд собственных колебаний а!к. При параметрах, применяемых на практике конструкций опор, влияние высших форм колебаний на инерционные силы незначительно, поэтому разрешается учитывать только первую форму [1, 12], При этом период 7\ допускается определять приближенно энергетическим методом:
*1/ 3 miA
, (17.1) Г «и
где юасса fe-ro участка; г — число сосредоточенных масс.
Относительные амплитуды в (17.1) можно принять равными перемещениям массы k от единичной силы, приложенной на уровне первой (верхней) массы. Для стальных опор они могут быть определены по формуле
= V (2Л^ + .s-i) 4-
s=fe+l
+ -'Wi.s-1 (2Mft,s_! + Mhs) 1 (17.2)
(Д$—i — EI s—j), где — изгибающий момент иа уровне а-ft массы от единичной силы, приложенной к А-й массе; hs —расстояние между массами т£ и ^sl+T • & — модуль упругости; Is— момент инерции участка между массами т£ и .
Для железобетонных опор также может быть использована формула (17.2), в которой следует принять
Bs-i = р, где Ms_— изгибающий момент от расчетных нагрузок: р — радиус кривизны, определяемой с учетом образования трещин.
Аналогично рассчитывают стойки свободно стоящих порталов, причем масса тра* версы объединяется с массой верхней части стойки.
17.2. Расчет анкерного участка системы плоскошарнирных опор
Анкерный участок включает несколько промежуточных опор, представляющих со-
377
бой- плоские рамы или • фермы,- -опорные закрепления которых допускают поворот- от- • носительио оси, леж-ащей-в плоскости опоры и перпендикулярной оси ВЛ. Промежуточные опоры удерживаются в вертикальном положении стальными канатами, выполняющими одновременно функции грозозащитных тросов, которые на концах участ-ка крепятся к анкерным конструкциям. Длйна анкерного участка может достигать 3—4 км.
Такие системы применяются при пересечении труднопроходимых участков местности (болот, пойм рек), а также рек, озер, водохранилищ. При колебаниях системы вызванных ветровыми нагрзками вдоль оси ВЛ, перемещения проводов, тросов и повороты опор относительно осей шарниров приводят к изменению расстояний между проводами й Тросами, проводами и землей. Таким образом, целью динамического расчета является определение не только усилий, но и перемещений системы.
В- п. Г будут • приведены нелинейные уравнения, описывающие движение системы с учетом инерций проводов и тросов. Решение этих уравнений реализуется на ЭВМ [11]. В п. 2 дана упрощенная методика определения динамической составляющей ветровой нагрузки на опоры анкерного участка, основанная на линеаризации системы.
1. Расчетная схема и динамические уравнения. Расчетная . схема анкерного участка приведена на рис. 17.1. Каждая опора представлена в виде жесткого стержня с массой, равномерно распределенной по длине, гирлянды изоляторов — в виде жестких стержней с массами, сосредоточенными на концах. Тросы (провода) в каждом пролете приведены к одному эквиваленту, который представлен конечным числом сосредоточенных масс, взаимосоединенных линейными упругими связями.
Ветровую нагрузку на провода, тросы и гирлянды изоляторов не учитывают. Воздействие ветра на опоры моделируют импульсами произвольной формы Pj(t), приложенными к вершинам опор. Предполагается, что движение системы плоское.
Принята следующая система обобщенных координат: x.j. ziJ~ горизонтальное и вертикальное перемещения i-той массы провода в /-ном пролете относительно положения эавиовесия;
uiJ' viJ — то же, тРоса: w j — горизонтальное перемещение верхней точки /-ной опоры; sj — ворнзонтальное перемещение конца гирлянды.
Движение системы описывается системой нелинейных дифференциальных уравнений:
X
5L? А;
riJ+l _ j
3
Wj = ---
m0
^-1
*7
X
т
X
X
<71,7+1
<7ij+i,
?n+i,7__j
4
X
<7n+i, J
а>/ ~h~
<7п+1,7 Згнт
т0
m0
3
2
378
масса нити сосредоточена в <п точках/ с.о--единенных- упругими связями; длина кото- рых в ненапряженном состоянии
(n-f-I) (S0/fi—1) где длина напряженной' инти
(B = £F), (17.7)
, Р213
L — / + —-----;
24S?
ru = V (ч + хи — х,—t j)2+
ЯП = У (cii + «U — ««-и)8 — *
— + vii — vi—i./)2;
Sj — awj ( Wi \
Xi = --------— Xj = a I ~7~ + Xj); (17-4)
*r \ /
S—1.Г bim-Vi-iJ -разности декартовых кгордичат масс провода ь /-м пролете в положении равновесия (рис. 17.2); c-j. d^-то ж,. троса; fin=' nfii- \=Ет^ г £п" Ет- Fn. FT-- модули упругости г. площади сечений провода и. троса; ,ri pj- mrj~ приведенные сосредоточенные массы моделей провода и троса в / ном пролете; ш<> — масса опоры; тг — приведенная масса гирлянды; g — ускорение силы тяжести; а—йг/й, (h — высота опоры); йг —расстояние от опорного шарнира до точки крепления гиоляиды провода; /г — длина гирлянды; А,п
/ — длина упругой связи между массами провода в /-ном пролете в ненапряженном состоянии; Л/—то же, троса.
Условия неразрывности имеют вид:
*о1 ~ го1 = uoi = °oi = xn+t.A4-i ==
*= гп+1.ЛЧ-1 = un+i,/v+i= Оп-нЛ-н = 0;
“0./+1 — “п+1./ - wp
°o,/+i — ил+1,/ ~ а>//2Л; (17.5)
*oj+i = xn4-l.i = sJi
2о. j+i = Zn+iJ = О (/ = 1.......W),
где ‘
2Л 2/р
Начальные условия:
(17.6)
ХН = 2ц = иц =* гц = Wj = Sj = 0;
ХН = ?ti “И = = wj= Sf=O.
Приведенные уравнения учитывают геометрическую нелинейность модели анкерного участка.
Параметры модели троса (провода) и координаты масс в положении равновесия в /м пролете определяют следующим образом (индекс- / опушен). Предполагается, что
(17Л).
/ — длина пролета; р — погонный вес нити; So — заданное начальное натяжение.
Приведенная масса m^kpllnj, где k — число тросов в пролете.
Координаты масс в положении равновесия (рис. 17.2):
£/ == У l[ cosqjf i)i = 2 (f Sin <pt-. (17,9). k=i k=i
Здесь:
<pf = arctg
cosq>f
tg Ф1 (1 — (/ —
(17.10)"
Параметр ф определяют из уравнения
— / = 0, (17.11)
R = nmg/2.
Решение приведенной системы уравнений реализовано в программе [11].
Пример 1. По программе [11] на прямоугольный ветровой импульс амплитуды 25 кН и длительности 5 с рассчитан трех
пролетный анкерный участок на плоскошар-ннрных опорах с параметрами: масса опоры 4,98 т; высота опоры 34 м; суммарная площадь поперечного сечения тросов 203 мм2; проводов 1335 мм2; длина гирлянды 2,42 м; длина пролетов 530 м; число приведенных масс в пролете 3.
В табл. 17.1 представлены отношения полных напряжений (с учётом динамики) в тросах первого пролета к напряжению в тросах при статическом воздействии ветровой нагрузки (ос га г=377 МПа) в моменты времени, соответствующие максимумам Сдав-.
Рис. 17.2. Модель троса (провода)
375’
Рис. 17.3. Линеаризованная расчетная схема анкерного участка
Таблица 17.1
°дин^°стат 1,406 1.279 1,164 1,215 1,106
Время, с 2.6 4,6 10,5 11.1 17.7
По результатам статического расчета изменение габарита (расстояния от провода до земли) в третьем пролете Д[стат=6,82 м, в то время как динамический расчет дает изменение габарита, равное Д/ДИв = 10,98 м.
Таким образом, при определении габарита учет динамического воздействия ветра оказывается существенным.
2. Расчет на основе линейной модели. Линеаризация системы основана на допущении, что тросы представляют собой линейные упругие связи, и силами инерции проводов и тросов можно пренебречь. Тогда расчет сводится к определению динамической добавки к статической ветровой нагрузке по методике [14]. Линеаризованная расчетная схема анкерного участка приведена на рис. 17.3.
Рассчитываемую опору (с номером s) разбивают по высоте на п участков, массы которых полагают сосредоточенными в их серединах, остальные опоры участка рассматривают как жесткие стержни с массами, приведенными к точкам крепления несущих тросов.
Приведенные массы тп,.... тп+г-з определяют из условия равенства моментов инерции относительно опорного шарнира:
п—1
mkih2ki)^ (17.12) Z=1
где т^. — масса i-го участка й-й опоры; — ее расстояние от опорного шарнира.
- Коэффициенты податливости связей между опорами, полученные в результате линеаризации уравнений состояния несущих тросов i-ro пролета;
kEFi \ 12Sq у
(17.13)
где /j — длина пролета; F-— сечение троса; рг- — погонный вес; So — начальное натяжение; k — число тросов в пролете.
Для определения инерционных сил, приложенных к массам s-той
опоры, необходимо вычислить периоды и относительные амплитуды собственных колебаний системы.
Периоды Tt определяют по известной формуле
Tf=2nVX, (17.14)
где Zj — собственные числа матрицы:
C(s) = [/nfe6<f], (17.15)
а относительные амплитуды колебаний совпадают с компонентами et собственных векторов а..
В рассматриваемом случае матрица С имеет порядок п+г—3.
Единичные перемещения определяют по следующим формулам: для /=1 п—1
$’= "TT-+ V W» <?м*+ V=1
+ + A4;.v-1 (2^.v-l + Mfev)l
(fc = /,..., n—1); (17.16)
(Es-rl + • • • + Er) (Ei + • • Ей—n+l)_
(Ei + • • •+ Er)
(k = n,..., s + n — 2); (17.17)
«J? =
(Ei+•••+Е$) (Еь-п+з + -••+&). (Ei+.-.+ Er)
(fc = $4-n— 1,..,. r-j-n — 3); (17.18)
380
для /*=«,..., s+n—2; fes+n—2
(17.19)
для j=s+n—1,..., r+n — 3; Л=/,..., r+ +n — 3
(£i + - • + Ej—n+г)x (li +
(£fe—п+з + • • + £r) .--+lr)
В выражении (17.16)
(17.20)
_ fa+ +Mfe+1++£,) s (11++&•)
Остальные обозначения ясны из рнс. 17.4.
После определения периодов и амплитуд собственных колебаний расчет инерционных сил выполняется по методике [14].
Пример 2. В табл. 17.2 приведены результаты расчетов по изложенной методике средней опоры одного из вариантов пе-
Таблица 17.2
1 2 3 4 5 6 7
1 10 12,8 29,2 15,4 13.1 13,3
2 10 13 29,7 27,9 23 23,5
3 6 7,7 17 33,6 27 28
4 11 12.4 28,6 42,1 32,5 34
5 11 12,8 28,2 47,6 35.3 36,8
6 11 13.2 28,8 49,9 35,5 37
7 11 13,3 26,5 49 33,5 35
8 11 14,9 26,1 45,3 29,5 30,9
9 11 16,1 30,1 38,7 23,8 25
10 И 16,7 29,4 28,7 16,7 17,6
11 11 17,2 21,4 15,5 8.6 9,1
12 11 — — — — —
Таблица 17.3
1 2 3 4 5 6 7
1 6 1,31 12 1,48 1.17
2 7 1,31 12 2,37 1,72 1.74
3 7 1,31 12 2,42 1,57 1,62
4 7 1,31 12 1,63 0,92 0,06
О 7 — — —• —•
Примечания к табл. 17.2. 17.3: 1 — номера
участков опоры; 2 — длины участков 1 < , м; 3 —
массы гл - между участками, т; 4 — статические
ветровые нагрузки Pf. кН; 6 — изгибающие мо-
менты от статической нагрузки Atf-lO—5 . Н-м;
6 изгибающие моменты от динамической со-
ставляклцей ветровой нагрузки AfC.ur * прн
учете колебаний по первой форме; 7 — то же,
«ри учете колебаний по трем формам.
рехода ВЛ через Каховское водохранилище. Переход включает три промежуточные плоскошарнирные опоры высотой 125 м, массой 150 т, удерживаемые в вертикальном положении 12 стальными тросами сечением 432 мм2. Пролеты: /|=1050, /г= = 1450, 1з=1450, /4=1050. Динамические составляющие ветровой нагрузки определялись с учетом одной и трех форм колебаний. Как видно, влияние высших форм на инерционные силы оказалось незначительным.
17.3. Расчет провода на динамические воздействия при сбросе гололеда
Пример 3. В табл. 17.3 приведены результаты расчетов по методике, изложенной в п.1 анкерного участка, параметры которого даны в примере 1 и существенно отличаются от параметров перехода, рассмотренного в примере 2. Влияние высших форм колебаний на инерционные силы также оказалось незначительным.
Провода и тросы ВЛ при эксплуатации могут покрываться гололедом. Сброс гололедных отложений, который, как правило, в разных пролетах происходит неодновременно, сопровождается перемещениями проводов и отклонениями гирлянд изоляторов, что может привести к нарушению нормальной работы линии.
Для практики проектирования наибольший интерес представляет определение перемещений точек провода в том пролете, где произошел полный илн частичный сброс гололеда.
Рис. 17.4. Опора s
а—«схема; б — эпюра моментов /-го состояния; в — эпюра моментов fe-ro состояния
331
Рис. 17.Б. Расчетная схема
Для линий 330 кВ прн двухъярусном расположении проводов и для линий 330— 500 кВ при горизонтальном расположении проводов расстояния между проводами или проводом и тросом при сбросе гололеда проверяют при следующих условиях [4]: на верхней фазе или грозозащитном тросе гололедные отложения имеют нормированную толщину стенки [9]; на нижней фазе гололед остается с нормированной толщиной стенки во всех пролетах анкерного участка, кроме среднего, в котором происходит его сброс в размере 75 %-
В работах [15, 16] предлагаются различные приближенные формулы для определения максимального подскока провода в пролете с анкерным креплением проводов. Для определения подскока провода в одном из пролетов анкерного участка с креплением проводов к промежуточным опорам на подвесных гирляндах' в отечественной практике находит применение эмпирическая формула [2]:
• к/т- (/о-Л)(2- (Z/1000)], (17.21) где — максимальное вертикальное перемещение Средней то°ки провода рассматриваемого пролета: I — длина пролета, м: fo — стрела провеса провода, покрытого гололедом; h — статическая стрела провеса провода после сброса гололеда, определяемая с учетом влияния смеж ных пролетов, в которых гололед на проводах сохранился.
Формула (17.21) дает погрешность до 20 % для пролетов средней величины (до 450 м). При больших пролетах необходимо выполнение уточненного динамического расчета.
1. Расчетная схема и динамические уравнения [8] .Провод Моделируют конечным числом сосредоточенных масс, включающих массы гололедных отложений, соединенных упругими связями. Схема анкерного участка приведена на рис. 17.5. Гирлянды рассматривают как жесткие стержни с массами на концах.
Принимают следующие допущения: погонная масса гололедных отложений на проводах всех пролетов одинакова; число пролетов анкерного участка нечетное, сброс гололеда (частичный или полный) происходит в среднем пролете мгновенно и рав
номерно по пролету, система симметрична относительно оси среднего пролета. Вследствие симметрии рассматривают колебания только правой половины системы.
Положения масс проводов определяются перемещениями отсчи-
тываемыми от положения равновесия до сброса гололеда (i-ный номер массы в /-ном пролете); масс гирлянд — углами отклонения от вертикального положения Т.(0-
Параметры модели провода и началь-о о ные координаты масс х(, zt- определяют методом, изложенным в п.17,2, подп. 1; углы отклонения <р<(0) равны нулю.
Движение системы описывается системой нелинейных дифференциальных уравнений:
I = 1, ... , 2р — 1 при / = 2,
... , п и i = 2, ... , р при / = 1;
/л, г15 -- 2р?1 4- mj g\
X cos ф;-(₽1 >/+1_pw -— mTjg) sin ф>;
(/=2, ... , n—1);
mri lr Ф1 = (а1.2-ас+1.1 )x X cosqjj-fP,.,- ₽P+liI —
(17.22)
Здесь:
Pf j —
qii (17.23)
382 .
Т а б л и п a 17.4
1 2 3 4 5 6 7 8 9
АС-1Я5/43 300 IV 75 13,39 7.34 10,3 12,26 16
АС-ЗОО/З!) 240 III 75 5,51 3.19 4,05 4.61 11
АС-300/39 240 IV 75 7,16 3,73 6,04 6.84 11
АС-4ДО/22 400 IV 75 17.72 10,4 10,92 13,72 20
Примечание: t — марка провода; 2 — средний пролет, м; 3 — нормируемый район по гололеду; 4 — часть сбрасываемого гололеда, %; 5 — стрела провеса провода до сброса гололеда, м; 6 — то же, после сброса гололеда; 7 — подскок середины провода по формуле (17.21). м; 8 — то же. по нзлож-енному методу; 9 — расхождение, %. . . . . •
а^-х^, i=l, ... , 2р для j = 2, ... , п и i= 2 ... , р + 1 для j = 1;
m; — приведенная масса среднего пролета с учетом части гололеда, оставшегося после сброса:
— приведенные массы оетальных пролетов с учетом полного гололеда.
Условия неразрывности:
“2P7=a0./+i =/rsin(f/ °2р,/= и0./+1 =— 4sinW2) (j = 2, ... , n=l);
’ %.n=O2P.n = “l.l=0’
“p4-i,i = “о,2 = sin %'•
=t,0.2=
Начальные условия:
Uij (0) = 0; (0) = 0;
<pj(0) = 0; q?tJ(0) = 0. (17.25)
$>=0; »f/(0)=0.
Возмущение системы обусловлено тем, что начальное положение не является положением равновесия после сброса гололеда.
Пример 4. В табл. 17.4 приведены результаты сравнительных расчетов подскока провода в среднем пролете многопролетного анкерного участка по формуле (17.21) и изложенным методом [8]. Как видно, формула (17.21) недооценивает подскок.
17.4. Расчет порталов ОРУ подстанций на динамические воздействия
при коротких замыканиях
Типичная схема концевых порталов ОРУ приведена на рис. 17.6. При коротких замыканиях (КЗ) в системе резко возрастает сила тока, что сопровождается появлением значительных электромагнитных сил между гибкими шинами открытых распределительных устройств подстанций. Эти силы вызывают увеличение натяжений, пе
редаваемых на порталы ОРУ, . и отклонения шин от вертикального положения, что может привести к недопустимым по условиям пробоя сближениям.
Приведенный далее метод расчета ос-, нован на дискретизации системы. Порталы представлены в виде конечного числа, масс, соединенных невесомыми упругими стержнями (рис. .17.7), гибкие шины — в виде сосредоточенных масс, соединенных линейными упругими связями (рис. 1.7.8). Гирлянды также рассматриваются как упругие, невесомые связи с массами, приведенными, к концам.
Параметры модели шины и начальные, координаты масс определяют, так же как и. параметры .модели провода, по методике, приведенной в п.,17.2, подп. 1.
Рассмотрим .случай двухполюсного, за,-, мыкания, когда электромагнитные силы, действуют между двумя соседними шинами. Движение системы описывается следующими параметрами: ui}(t), и, ДО’. «?«(/)—перемещения i-ной массы /-той шины относительно положения равновесия, /=1,2; щ(1)—перемещение вдоль оси- х-i-ной массы портала (перемещения масс портала вдоль осей у и г не учитывают).
Для определения электромагнитных сил использована формула Лапласа Био — Савара:
,р Но /i IzdSidSz . .
ar =—-------- sin p, . (17:26)
4л r2
где dF — усилие, действующее направленное перпендикулярно
кн в отрезках dSI и dS-,, лежащих в одной плоскости; Цо — магнитная проницаемость среды, г — расстояние между dSi и dS~-, (э_-~ угол между направлением dSx и векторам г.
При определении сил взаимодействия между шинами принято, что отрезки шин 1ц, соответствующие массам- т^, направ-< лены параллельно оси х. Тогда проекции на оси х, у, z электромагнитных сил, дей* • ствующих на массы т^\ и ni,-2, определяют приближенно по формулам:
на элемент dSi. ему; li и /г—то- .
383 ’
Fulfkasr
Z (0 = — Лз [exp (— tJTa— cos©01;
(17.28)
ХЦ = *?/ + “z У И = У°И + VH •
2ij = 2ij wi j ’
A3 — амплитуда периодической составляющей тока трехполюсного КЗ; Та — константа времени.
Уравнения, описывающие движение си-
стемы, имеют вид:
+ ?И) + ё (i = 1» • • • » п);
%+i./ (*«+!,/
-4+i,/) + g(/=U2);
(17.29)
Рис. 17.7. Модель портала
а — с консольной траверсой; б —- с бесконсольной траверсой
р
2 mi ui + “ft =
t=1
(A = 1, ... , p).
Здесь:
(17.27)
р 72 kz hi djh .
?ik = ~T~ r3
4л rik
ds-k = У (yi2-yki)2 + (zkl-zi2y. ;
Г ь — 1//Z ^,7- ~r (x-n xhi}2 j
ift r ik 1 V i2 klf
Здесь проекции усилий в связях на оси координат:
““ = в< (’х“-1)х
gi +“и.
Z4 >
Qii
₽u = e<(v—0х
Bi = Br; (17.31)
(17.30)
+ “у - “<-1. i Г +
•*+ )= + (»(+ )П
384
X 1~~ длине 7-го участка шины в ненагружеином состоянии; — перемещение по оси х kH точки портала от единичной горизонтальной силы, приложенной в i-й точке;
О
<Х],- — горизонтальные составляющие усилий в гирляндах, передаваемые на поотал в исходном состоянии. Для точек i портала, ие связанных с о
шинами, ар'-О; р—число масс портала; uq/ = где kj — номер массы портала, к которой примыкает/-я и ина; u^-Wgj-0
Начальные условия:
uii (0) = vu (0) = WiJ (0) = uh (0) (17.32)
(i = 1, ... , n + 1; j=l,2;
k= 1.......p).
Пример 5. Изолированный анкерный пролет ограничен железобетонными опорами портального типа со следующими параметрами: высота портала h=ll м; расстояние между стойками 5=9 м; вылет консоли ригеля С=2 м; масса стойки тс= =2600 кг; масса ригеля гпр=3150 кг. Провод АС 150/24 с погонной массой р= =6,87 кг/м.
При токе короткого замыкания /нав =50 000 А усилие в проводе достигло максимума через 0,06 с и составило 78 кН (при начальном 7’о=0,93 кН). Максимальный изгибающий момент в портале возрос в 3,9 раза, причем достиг максимума через 0,11 с,
17.5. Галопирование и субколебания проводов
1. Галопирование проводов (галопирующие колебания). В проводах и тросах, покрытых гололедом, при скорости ветра 10—12 м/с, направленного под углом более 30° к оси ВЛ, появляются условия для возникновения специфических колебаний, вызываемых пляской или галопированием проводов. Размах колебаний может достигать 12—15 м [4].
Наиболее частый вид повреждений линий в результате галопирования — перекрытие электрической дугой между фазами или между фазами и тросами линии. В настоящее время пока отсутствует удовлетворительное математическое описание галопирования.
Наблюдения и измерения параметров галопирования на испытательных полигонах и эксплуатирующихся линиях показывают, что при галопировании области перемещений сечений проводов находятся в пределах некоторых эллипсов пляски.
Рекомендации по проектированию [4, Ю] сводятся к регламентированию взаимного расположения проводов и тросов. Для
ВЛ до 330 кВ требования [10] обеспечивают минимальную вероятность перекрытий электрической дугой. Для ВЛ выше 330 кВ взаимное расположение проводов и тросов определяют в результате построения эллипсов галопирования. Параметры эллипсов принимают для наиболее часто возникающих колебаний с одной полуволной в пролете.
При проверке минимальных расстояний между проводами, расположенными на различной высоте, параметры эллипсов галопирования принимают одинаковыми.
При проверке расстояний между проводами и тросами принимают, что провод галопирует, а трос только отклоняется ветром. Это объясняется тем, что одновременное галопирование проводов и тросов не наблюдается, ввиду существенной разницы их параметров и различных условий образования гололеда (провода нагреваются током, тросы — нет).
В табл. 17.5 приведены параметры эллипсов галопирования и углы отклонения проводов (тросов) [4]. Обозначения параметров приведены на рис. 17.9.
Таблица 17.5
Расчетный параметр ВЛ 330 кВ в районах с галопированием ВЛ 500 кВ ВЛ 750 кВ ВЛ 1150 кВ СО £ с; 00
умеренным частым и интенсив- ным
аЦ 0,675 0.9 1 1 1 1
b/f 0,25 0,125 0,45 0,25 0,25 0.5 0.5
апр, град 10 15 10 10 10 10
“эл- г₽ад 5 15 5 10 10 10
6, м 0,8 1.4 0,8 1.4 1.15 2 1.5 2.4 2,2
Параметры атр, at, а2 во всех случаях принимают равными 15°; 0,2 f ; 0,8f (/ — габаритная стрела провеса провода). Во второй строке и втором столбце табл. 17.5 даны значения b/f для f <4 м и f = = 16 м (для промежуточных значений f параметр b/f определяют по линейной интерполяции). В последней строке над чертой даны минимальные расстояния между проводом и тросом, под чертой — то же, между проводами. Для ВЛ 750 кВ и вы-
25—189
385
Рис. 17.9. Проверка габаритов по условиям пляски проводов
ше, как правило, применяют горизонтальное расположение фаз, поэтому минимальные б между проводами в табл. 17.5 не приведены.
Для линий, сооружаемых на опорах большой высоты, при которой габаритная стрела провеса провода может превышать 20 м, большую ось эллипса рекомендуется ограничивать этим значением, поскольку в пролетах большой длины галопирования с одной полуволной не наблюдается.
На линиях с нерасщепленной фазой и линиях 330 кВ с фазой, расщепленной на два провода, борьбу с галопированием ведут установкой гасителей. На линиях более высоких напряжений с многочисленными
проводами в фазе гасители не эффективны, поэтому параметры опор следует определять такими, чтобы при галопировании перекрытий не происходило. В качестве борьбы с галопированием рекомендуется также . плавка гололеда [4].
2. Субколебания проводов. Этот вид колебаний возникает при боковом ветре в проводах расщепленных фаз. Как и колебания, называемые «галопирование», они имеют аэродинамическую природу. Подвет--ренный провод испытывает переменные аэродинамические воздействия, периодически попадая в ветровую тень он наветренного провода. Колебания совершаются вследствие энергии ветрового потока. Их интенсивность определяется скоростью ветра, относительным расстоянием между прово--дами и углом между плоскостью, в которой находятся наветренные и подветренный провода, и ветровым потоком. Существенное влияние на характер и интенсивность колебаний оказывает также конструкция распорок и их расположение в пролете. При небольшом шаге расщепления колебания сопровождаются соударениями' проводов, приводящими к их разрушению. Разрушения проводов в этих условиях наблюдаются и в месте установки распорок от перегибов. В отечественной практике при выборе конструкции фазы руководствуются критериями, полученными в опытах. Основным критерием является отношение расстояния между проводами в фазе к диаметру провода. Его рекомендуется принимать не менее 15. На действующих линиях с проводами диаметром от 24 до 33 мм и шагом расщепления 400 мм это отношение варьируется в интервале 12—17.
РАЗДЕЛ 18. ДИНАМИКА РАДИОТЕЛЕСКОПОВ
М. А. Гусев, А. Г. Соколов
18.1. Общие сведения
Радиотелескоп — система для приема электромагнитного излучения из внешнего пространства. Излучение улавливается антенной, преобразуется в электрический сигнал, который затем детектируется и усиливается для дальнейшего использования.
Для длин волн в сантиметровом и близком к нему диапазонах наиболее эффективной формой антенны является параболоид вращения. Разрешающая способность
такой антенны прямо пропорциональна ее диаметру и обратно пропорциональна длине волны, поэтому тенденцией в радиоте-лескопостроении являются создание антенн все больших диаметров и переход к работе на более коротких волнах, включая миллиметровые.
Увеличение разрешающей способности радиотелескопа приводит к сужению диаграммы направленности, что повышает требования к точности наводки антенны на источник излучения.
386
Для современных радиотелескопов диаметром до 100 м, работающих в сантиметровом диапазоне длин волн, точность в определении положения антенны может составлять 10—20 угловых секунд. Необходимо, чтобы погрешность наведения антенны не выходила из указанного поля допуска при заданных погодных условиях, включая порывистый ветер, оказывающий динамическое воздействие на антенну. У радиотелескопов, работающих в миллиметровом диапазоне длин волн, или имеющих большие диаметры (100 м и более) диаграмма направленности еще уже и, соответственно, требования к точности наводки антенны более жесткие, а вопросы динамического действия ветра приобретают особую важность.
Динамическое воздействие порывов ветра может привести к колебаниям антенн радиотелескопов относительно исполнительных осей (угломестной и азимутальной), что вызовет угловые отклонения оптической оси антенны. Если угловые отклонения оптической оси превысят заданный допуск, определяемый шириной диаграммы направленности, то качество работы радиотелескопа может стать неудовлетворительным.
Исследование динамического ветрового воздействия на антенны радиотелескопов имеет большое значение для оценки н прогнозирования качества работы всей установки при различных скоростях ветра.
18.2. Особенности воздействия турбулентного ветрового потока на конструкции радиотелескопов
Сведения о структуре атмосферной турбулентности и методах расчета зданий и сооружений на динамическое воздействие ветра содержатся в [5].
Основным элементом конструкций радиотелескопов, на который действует ветровая нагрузка, является антенна. Турбулентные порывы ветра характеризуются пространственным и временным масштабами [1]. Пространственный масштаб турбулентности в пограничном слое атмосферы изменяется в широких пределах — от сантиметров до сотен метров [1]. Если антенна направлена «в горизонт» и на ветер (рис. 18.1), то порывы, пространственный масштаб которых превышает диаметр антенны, создают симметричную относительно исполнительных осей радиотелескопа нагрузку. Такая нагрузка нс вызывает по-25*
ворота антенны относительно осей н не приводит к ошибкам наведения.
Порывы ветра, пространственный .масштаб которых меньше диаметра антенны создают кососимметричную динамическую нагрузку и вызывают ее колебания относительно исполнительных осей, что приводит к ошибкам наведения.
Временной масштаб порывов ветра характеризует частоту их динамического воздействия на сооружения. На рис. 18.2 представлен нормированный спектр порывов ветра Давенпорта |6], широко используемый в настоящее время для динамических расчетов зданий и сооружений на ветровое воздействие [3]. Этот спектр представляет распределение энергии . порывов по частотам. Временной масштаб турбулентности в пограничном слое атмосферы меняется в широких пределах — от нескольких минут до долей секунды, или в частотной области — от тысячных долей герца до десятков герц.
Порывы ветра, частоты которых значительно ниже частот собственных колебаний антенны, вызывают квазистатическую реакцию, характеризующуюся сравнительно медленными изменениями положения антенн и, соответственно, оптической оси. Порывы ветра, частота которых близка и сов---падает с частотами собственных колебаний антенн, приводят к резонансным колебаниям.
В отличие от обычных сооружений, рассчитываемых на прочность, для которых определяется суммарная реакция на ветер (квазистатическая плюс динамическая) [3, 5], для радиотелескопов при расчете на деформативность необходимо знать распределение реакции сооружения по частотам. Это позволит на стадии проектирования предусмотреть правильные меры для уменьшения ошибок наведения от ветра, поскольку высокочастотные и низкочастотные составляющие ошибки устраняются различными способами.
Отличием динамического расчета радиотелескопов иа действие ветра от расчета обычных зданий и сооружений является то обстоятельство, что учет пространственной корреляции [7] порывов ветра (т. е. неравномерности распределения порывов по на- • ветренной площади сооружения) на них всегда уменьшает ветровую нагрузку, т. е. расчет без учета корреляции идет в запас, в то время как при действии ветра на радиотелескопы неравномерность распределения порывов ветра по поверхности антенны приводит к возникновению. неурав-
387
Рис. 18.2. Энергетический спектр турбулентных пульсаций скорости ветра в нижнем слое атмосферы (спектр Давенпорта)
новешенных крутящих моментов относительно исполнительных осей, ухудшает их работу и может вызвать ошибки наведения. Поэтому при расчете радиотелескопов особенно важно правильно учесть в расчетной математической модели пространственную корреляцию порывов ветра.
18.3. Расчет динамических крутящих моментов от порывов ветра, действующих на антенны радиотелескопов
При расчете угловых отклонений, определяющих ошибки наведения антенн радиотелескопов от действия порывов ветра, наихудшим является положение антенны, перпендикулярное направлению ветра (см. рис. 18). При направлении ветра под углом к антенне динамические моменты на осях радиотелескопа снижаются вследствие уменьшения плеч приложения сил, а также из-за объемной корреляции порывов ветра.
Предполагается, что максимальная сила приложена на верхнем краю антенны
Рис. 18.3. Воздействие динамической ветровой нагрузки на антенну радиотелескопа
при вычислении моментов относительно угломестной (горизонтальной) оси и на боковом краю антенны при вычислении моментов относительно азимутальной (вертикальной) оси (рис. 18.3). Такое предположение идет в запас.
Коэффициент корреляции порывов ветра в вертикальном направлении [7] определяется выражением
/?в = ехр
(18.1)
где С"8 — коэффициент спада в вертикальном направлении; со — частота порыва; Az — расстояние по вертикали; V — средняя скорость ветра на верхнем краю антенны.
Коэффициент корреляции порывов вет-горизонтальном направлении [7] определяется выражением
/?г = ехр — с'
©Ау V
(18-2)
где с'=20 — коэффициент спада в горизонтальном направлении; Ар — расстояние по горизонтали.
Распределенная динамическая нагрузка от порывов ветра, действующая на антенну, определяется выражением
<7д (У. z) = q0RBRr = 8ш
ехр
где г — радиус антенны;
антенны; — нагрузка
20©
(18.3) на краю
= <7о ехр
(18.4)
С--1Л-Л>ам-
<7о = рСх V Av'
(р—0,125 кгс2/м*— плотность воздуха; коэффициент лобового сопротивления; плитуда пульсаций скорости ветра, зависящая от
частоты порывов). ге1
Амплитуда пульсаций находится 1о|из
выражения
4'
SV' (©) KVq А© , ц8 5) ©
Sv„ (со) — ординаты нормированного энергетического спектра порывов ветра Давенпорта
где
388
Рнс. 18.4. Значения стандартов крутящих моментов от порывов ветра на угломе-стиых осях радиотелескопов
Рис. 18.5. Значения стандартов крутящих моментов от порывов ветра ка азимутальных осях радиотелескопов
[6] (см. рнс. 18.2); К — коэффициент сопротивления подстилающей поверхности, принимаемый согласно (3. 7J; Vo — средняя скорость ветра иа стандартной высоте анемометра (10 м); со — частота порывов; Дю — ширина полосы компоненты турбулентности.
Здесь используется ширина полосы, потому что график спектра порывов представлен так (см. рис. 18.2), что площадь под кривой между двумя какими-либо частотами пропорциональна среднеквадратичной величине этой компоненты скорости.
Умножая нагрузку (18.3) на плечо и интегрируя по всей площади антенны, получим расчетное выражение для динамического момента относительно угломестной оси (на рис. 18.3, ось у);
г Угг—уг
Му (со) = 2<7о (о) [ f exp X °
Г 8to "I Г 20ш 1
X------=- (г — z) exp — -=— у zdzdy
J (18.6) Соответственно для нахождения динамического ветрового момента относительно азимутальной оси (на рнс. 18.3, ось z) имеем
г Vr? —ife
Mz (со) = 2<?о (со) [ f exp X о у r
8co
X — ~=~z exp
20ш
у) ydydz.
(18.7)
С помощью выражений (19.6), (19.7) определяются значения крутящих моментов в 20 частотных интервалах, на которые разбивается энергетический спектр пульсаций скорости ветра (см. рис. 18.2). Стандарт крутящего момента определяется как
20
1/2
(18.8).
и используется для оценки вклада динамической ветровой нагрузки в общую нагрузку-
Значения стандартов моментов в зависимости от диаметра антенны представлены на рис. 18.4 и 18.5. При этом за расчетную скорость ветра V принимались значения, равные половине ураганной на соответствующей высоте [3], что составляет примерно 97 % обеспеченности.
389
Рис. 18.6. Моменты инерции вра- •' щающихся масс радиотелескопов
18.4. Расчет динамических перемещений антенн радиотелескопов от порывов ветра
При определении динамических перемещений оптической оси антенн радиотелескопов наибольшее значение имеют повороты. антенн относительно исполнительных осей, зависящие от упругих перемещений, которые возникают в элементах механизмов наведения антенн. При этом можно пренебречь упругостью антенны, рассматривая ее как абсолютно жесткое тело. Угловые перемещения антенны определяются выражением
М
-----г " , (18.9) iV (V — ©2)2 + 4дш2
где М — динамический крутящий момент в определенной частотной зоне; I — момент инерции
Ю
вращающихся масс; Л — собственная частота качания антенны относительно осей; ш — частота, действующей нагрузки; b — коэффициент затухания.
Значения моментов инерции в зависимости от диаметра антенны приведены на рис. 18.6. При этом использована пропорциональность линейному масштабу в степени 4,85 [4]. За отправные значения приняты моменты инерции радиотелескопа РТ-64 (/утл=0,205-108 кгм-с2; /аэ= 1,397-108 кгмХ
/ D, \4.85
ХС2), Т. е. /<= I . I = /(подобия-\ ^64 /
Частота качания антенны относительно исполнительных осей определяется моментом инерции и жесткостью приводных систем (угломестной и азимутальной). К настоящему времени пока имеется мало сведений об этих частотах. В [6] дается значение частоты для угломестного привода радиотелескопа с антенной диаметром Д= =42 м (Х=2 Гц). Для радиотелескопа с антенной диаметром D=70 мм замеренная частота качания относительно угломестной оси составляет Х=1,5 Гц, а относительно азимутальной Л, = 1,25 Гц.
Взяв за основу данные по радиотелес-: копу РТ-70 и учитывая, что Х~/(подобия, получим значения частот для возможных размеров антенн от 8 до 200 м (рис. 18.7)*
Рис. 18.7. Частоты собственных’ колебаний аи' теин радиотеле-
• • СКОПОВ
зи>
Рис. 18.8. Номограмма для определения стандартов угловых отклонений антенн радиотелескопов от порывов ветра относительно уг-ломестиой оси
Рис. 18.9. Номограмма для определения стандартов угловых отклонений антенн радиотелескопов от порывов ветра относительно азимутальной оси
Как видно, с этими данными хорошо согласуются данные из [6] о частоте Х=2 Гц для антенны диаметром 42 м. Таким образом, частоты колебаний антенн радиотелескопов относительно исполнительных осей могут лежать в пределах 0,5—10 Гц.
Коэффициент затухания при колебаниях антенн радиотелескопов, согласно [6], составляет около 0,25 % критического затухания (при котором свободные колебания отсутствуют, что соответствует декременту 6=0,016. Таким образом, рассеяние энергии прн колебаниях антенн типа качания незначительно.
С помощью выражения (18.8) рассчитывались угловые перемещения в двадцати узких спектральных интервалах, на которые был разбит спектр порывов ветра.
Стандарт отклонения вычислялся по фор
муле
СЛФ
20
24
1=1
1/2
(18.10)
Номограммы для определения стандартов угловых отклонений антенн радиотелескопов (оптических осей) приведены на рис. 18.8 и 18.9. По оси ординат отложены значения перемещений в угловых секундах, умноженные на квадрат диаметра антенны в метрах. Номограммы приведены к собственной частоте Х=1 Гц для всех размеров антенн, предусмотренных на оси абсцисс. Для получения значения отклонения при любой другой собственной частоте в диапазоне 0,2—10 Гц необходимо разде-
391
Рнс. 18.10. Энергетические спектры отклонений антенн радиотелескопов под действием порывов ветра
лить результат, соответствудщий Х=1 Гц, на X, текущее в герцах.
Номограммы рассчитаны для семи ветровых районов при шероховатости местности типа Б по классификации главы СНиП 2-6-74 «Нагрузки и воздействия». Указанная шероховатость соответствует коэффициенту лобового сопротивления подстилающей поверхности, равному А=0,01 [3]. В случае расположения сооружений в открытой местности типа А (£=0,05) отклонения антенн мало изменятся, поскольку наряду с ростом средней скорости ветра уменьшится энергия порывов. Оценки показывают, что эти два фактора взаимно компенсируются с достаточной степенью точности. Расположение антенн в местности типа В (центры крупных городов К=0,04)
маловероятно.
Рис. 18.11. Номограмма для определения резонансных отклонений антенн радиотелескопов от порывов ветра относительно угломестной осн
Рис. 18.12. Номограмма для определения резонансных отклонений антенн радиотелескопов от порывов ветра относительно азимутальной осн
392
Отклонения антенн радиотелескопов под действием порывов ветра происходят в достаточно широком диапазоне частот. На рис. 18.10 для примера приведены рассчитанные спектры отклонений антенн ра-диолескопов. Хорошо видно, что наряду с узким резонансным пиком на собственной частоте имеет место обширный квазиста-тический максимум с периодами колебаний от десятков секунд до нескольких минут.
Следует отметить принципиальную разницу чисто динамических (резонансных) и квазистатических отклонений антенн радиотелескопов. Достаточно медленные ква-зистатические перемещения могут быть компенсированы без существенных изменений следящей системы радиотелескопа. Резонансные колебания происходят на достаточно высоких частотах и их компенсация требует принципиальных изменений следящей системы радиотелескопа.
В связи с этим на рис. 18.11 и 18.12 представлены номограммы для определения чисто динамических перемещений радиотелескопов на резонансных частотах. Здесь по оси ординат отложены отклонения в угловых секундах, умноженные на куб диаметра антенны в метрах. Номограммы приведены к собственной частоте Х=1 Гц. Для получения значений отклонений на частотах Х>1 Гц необходимо разделить снятое с номограммы значение на К3,5, текущее в герцах. Для получения отклонений при частотах Х<1 Гц нужно разделить снятое с номограммы значение на X4’5 текущее.
В том случае, когда моменты инерции вращающихся масс проектируемых телескопов отличаются от значений, представленных на рис. 18.6, нужно значения, снятые с номограмм, умножить на отношение момента инерции для данного диаметра антенны по рис. 18.6 к текущему значению момента инерции.
18.5. Использование полученных результатов для проектирования
При проектировании радиотелескопа должна быть обеспечена точность наводки антенны на исследуемый объект. Допуск на отклонения оптической оси радиотелескопа равен [4]
А<р = 1/4 ... 1/86, (18.11)
где 6 — ширина диаграммы направленности, определяемая выражением [4];
0=1,1£/D (18.12)
—длина излучаемой (принимаемой) волны; Диаметр антенны).
Рис. 18.13. Допустимые отклонения антенн радиотелескопов в зависимости от даметра антенны и длины волны принимаемого (излучаемого) сигнала
Минимальные значения допустимых отклонений оптической оси в зависимости от D и g представлены на рис. 18.13.
Для примера возьмем радиотелескоп РТ-70 с диаметром антенны D=70 м, расположенный в третьем ветровом районе и имеющий собственные частоты качания антенны относительно исполнительных осей ХУгл=1,5 Гц; Хаз=1,25 Гц. С помощью номограмм (см. рис. 18.8 и 18.9) определим стандарт полного отклонения антенны (оптической оси) под действием порывов ветра.
Снятое с угломестной номограммы значение Л<рД2=41 ООО делим на 702 и 1,5е. Получим 0.4фугл=3>?//- Снятое с азимутальной номограммы значение ЛфД2=6837 делим на 702 и 1,252. Получим оАраз = =0,89". Используя «правило трех сигм», находим ^фмакс.угл =Н,1 ; ЛфМаксаз = =2,67". Далее, поскольку выход оптической оси из пределов диаграммы направленности определяется векторной суммой угломестных и азимутальных перемещений, то необходимо определить корень квадратный из суммы квадратов указанных отклонений, т. е. Лфмакс = /11.12+2,612= 11,4".
Откладывая полученную величину на рис. 18.13, видим, что при работе радиотелескопа РТ-70 на волне |=3 см и выше заданная точность наведения обеспечена. Однако при работе на более коротких волнах действие порывов ветра может нарушить нормальную работу радиотелескопа.
С помощью номограмм, приведенных на рис. 18.11 и 18.12, выделим резонансную часть перемещений. Для угломестного перемещения имеем о уГЛ рез = ^8 000/703Х Х1,53-5 = 0,14", а для азимутального
893
олъ.рез -=8400/70s-1,253.s-0,01". Соответственно максимальные перемещения будут Д — 0 49"- д _nnQzz
сг мако.угл.рез • «ф макс.аз.рез •
Таким образом, в данном случае высокочастотные резонансные перемещения составляют очень малую долю от низкочастотных квазистатических. Этот вывод имеет большое значение при разработке компенсационной следящей системы в приводе радиотелескопа, поскольку медленные перемещения отработать гораздо проще, чем высокочастотные.
Если подобные оценки сделаны на стадии проектирования и предполагается работа радиотелескопа на длинах волн короче 3 см, то можно попытаться повысить жесткость приводных систем радиотелескопа, например, за счет увеличения диаметра осей и зубчатых колес, что приведет к возрастанию частоты собственных колебаний.
Так, например, в случае увеличения собственной частоты колебаний на угломестном приводе до Д=2 Гц максимальное перемещение от порывов ветра уменьшается до 6,4", что позволяет устойчиво работать на длине волны £=2 см. При увеличении частоты до А=2,5 Гц максималь
ное перемещение уменьшается до 4". что дает возможность работать на длинах волн до 1 см (см. рис. 18.13).
В случае невозможности изменения собственной частоты колебаний (например, по конструктивным соображениям) необходимо предусмотреть компенсацию ошибок наведения с помощью дополнительных корректирующих звеньев в следящей систему радиотелескопа.
При этом следует отметить большую сложность отработки ошибок наведения на высоких (резонансных) частотах в связи с большой инерционностью вращающихся конструкций радиотелескопов и необходимостью использования корректирующих звеньев с малыми постоянными времени [2].
В подавляющем же большинстве случаев при реальных соотношениях масс и жесткостей в современных радиотелескопах частоты собственных колебаний антенн относительно исполнительных осей весьма высокие и квазистатическая часть реакции антенн на порывы ветра существенно преобладает над резонансной.
Р А 3 Д Е Л 19. ДИНАМИКА ГРАДИРЕН
Н. В. Колкунов
19.1. Общие сведения
В практике мирового градирнестроения наибольшее распространение получили конструкции градирен из монолитного железобетона. Оболочка градирни в форме однополостного гиперболоида вращения (иногда в сочетании с конусом), усиленная по верхнему краю кольцом жесткости, связана с кольцевым фундаментом стержневой колоннадой. Характерные геометрические параметры градирни показаны на рис. 19.1.
19.1. Геометрия градирни
В табл. 19.1 приведены значения этих параметров для некоторых градирен, построенных в СССР. Применены следующие обозначения:
а -- /—
Г = г0 + ~ V Ьг -\-г2. (Zb<.2<. Za},
а, Ъ — параметры гиперболы-меридиана; г — радиус широтного круга; ги и z& — координаты нижнего и верхнего краев оболочки соответственно; Н — общая высота градирни; г0 — абсцисса действительной оси гиперболы-меридиана; г с— =Гс+а—минимальный радиус гипербол'ида (радиус горловины); R\ — радиус кривизны оболочки вдоль меридиана; Rt — радиус кривизны оболочки вдоль параллели; h — толщина оболочки.
Если действительная ось гипербола совпадает с осью вращения Oz, то ге=0 и
г = V Ь2. + z? .
и
Если оболочка состоит из гиперболоида и конуса, которые состыкованы на кр)ге z=zK, то на участке zacz<Zk
гк +
ra — rR
“*
(г—?к)г
894
Таблица 19.1
Тип градирни Н не гс гь 2а ГЬ га h
Типовая S* —1600 м3 62 56,5 14,25 10,5 46 15,04 23,808 0,14
Типовая S—3200 м2 88,55 81,05 20 13,55 67,5 20,91 33,55 0.16
Западно-Украинская АЭС 150 138 31,5 22 116 32,89 58,9 0.2
• S — площадь орошения.
где г к— радиус верхнего торца усеченного конуса.
Когда конического участка нет, то г^га...
Толщина оболочки на большей части поверхности (примерно % по длине меридиана) постоянна. В нижней трети оболочки. толщина линейно увеличивается с h до ha.. Напряженное состояние оболочки градирни складывается из. усилий, возникающих от собственного веса, ветровой нагрузки . и температурных воздействий. Особо учитывают напряженное состояние от осадки опор и сейсмических воздействий. Градирня, обладая большой парусностью, активно реагирует на переменное во времени и пространстве ветровое давление.
Динамический расчет градирни состоит в определении частот и форм свободных колебаний оболочки, а также напряженно-деформированного состояния в процессе вынужденных колебаний, вызванных переменной во времени ветровой нагрузкой.
Анализ колебаний градирен стал возможен только после создания численных методов расчета оболочек и применения ЭВМ.’ Аналитических способов расчета динамики градирен нет.
Наиболее полно изучены свободные колебания оболочек градирен как численно (1, 4, 7, 13, 16], так и экспериментально на моделях и в натуре [10, 18, 19, 24]. Расчет вынужденных колебаний значительно осложнен неполнотой сведений о динамическом характере ветровых воздействий на оболочку градирни [2, 8, 9, 19]. Получили развитие три подхода к такого рода расчетам — квазистатический [14, 20, 21, 22], детерминированный [23, 25] и статистический [8, 12, 17].
19.2. Свободные колебания оболочки градирни
На практике реализуются два подхода к определению частот и форм свободных колебаний градирни — численное решение задачи о собственных значениях для си
стемы уравнений теории оболочек при заданных граничных условиях и решение, связанное с дискретизацией поверхности оболочки и применением метода конечных элементов (МКЭ). Разновидностью этого метода является способ, по которому оболочку расчленяют на п конусных поясов, а в местах их стыка вводят фиктивные кольца жесткости. Ответственность за из-гибное состояние оболочки при колебаниях несут только кольца, конусы принимают безмоментными. Этот способ изложен з работе [3].
Применение МКЭ позволяет относительно просто учесть влияние на колебания конструктивных особенностей градирни — форму меридиана, переменность толщины оболочки, податливость колоннады, кольцо жесткости по верхнему краю. Основные конструктивные особенности несложно учитывать и при решении континуальной задачи.
Уравнения свободных колебаний оболочки градирни в системе координат st) (рис. 19.2) имеют вид:
drNi п
——L-h nS — cos q>N2 + “#+
ds R2
Qi
r----- — гЛрХ2 a = 0;
Я1
drS
--— nN2 4- cos <pS 4-
ds
d cos <r
— (sin q>H) 4- —H ds
4- sin (jpQ2 — rhpk2 v = 0;
+ nQ2 — ds
(19.1)
— —— N} — sin <p N2—
— rhp№ w = 0;
drMj _ .
------4- nH— cos <f M2—rQi~0; ds
drH .
---— nM2 4“ COS Ф^ — ^2=0 • ds
395
Рис. 19.2. Расчетные усилия в оболочке градирни
Положительные направления перемещений и внутренних усилий показаны на рис. 19.2. При выводе уравнений (19.1) принималось, что все расчетные значения изменяются во времени гармонически, а по параллели — по закону синуса или косинуса:
и (s, 6, t) = и (s) cos п 6 sin "kt [и, w, «1, e2, Xi, x2, Ni, Mi, M2, qx, q?\', v (s, 0, t) = v (s) sin n 0 sinM [о, у, Л, S,
Qzt 9г!> где n — число воли по параллели.
Принимая линейные или нелинейные физические соотношения и геометрические уравнения в форме, предложенной, например, в [6], получают систему из восьми обыкновенных дифференциальных уравнений первого порядка относительно неизвестных yi (i=l,.... 8):
= п, к, yit ... , уа), (19.2) az
где
yi = S + nH-, yz = Mx, y3 = Ni,
У4 = Qi -I- пЯ;
Уъ — v"t Уъ = 61! У? ~ ya=w.
Коэффициенты системы (19.2) приведены в [5].
Значения X, при которых существуют нетривиальные решения уравнений (19.2), определяют спектр частот собственных колебаний оболочки градирни. В большинстве решенных задач верхний край градирни принимался свободным от закреплений, нижний — защемленным, т. е.
2 = zb; yt = у2 = у3 = у4 = 0;
z = z0; у5 = ув=у7 = ув = 0. (19.3)
Задача о нахождении частот и форм свободных колебаний градирни состоит в определении собственных значений системы уравнений (19.2) при удовлетворении граничных условий (19.3). Алгоритм решения задачи основан на методе прогонки по Годунову [6].
Типичный вид частотной кривой для железобетонной градирни с размерами Н= =82 м, Л=14 см, полученной-этим способом, показан на рис. 19.3.
Частотные кривые для оболочек градирен с меридианами различной кривизны. Выбор формы меридиана-гиперболы существенно влияет на частоты свободных колебаний. В гиперболоиде, защемленном по нижнему краю, низшие частоты возрастают с увеличением кривизны меридиана. На рис. 19.4 приведены частотные кривые для оболочек градирен в форме однополостного гиперболоида вращения при различных значениях геометрических параметров: k0~ =a/b\ ki=H/rc и k2=Hlzb. При практическом использовании графиков на рис. 19.4 [21] следует помнить о принятых размерностях — Е, МПа; р, т/м3, Н, м.
Влияние характера опирания оболочки градирни на частоты свободных колебаний. По расчетам, приведенным в [16], низшая частота свободных колебаний гиперболоида с шарнирно опертым нижним и свободным верхним краем для реальных параметров кривизны меридиана в 2 раза меньше, чем в случае защемленного нижнего края. Результаты расчетов показаны на рис. 19.5: кривая 1 соответствует случаю защемления оболочки на нижнем крае при свободном верхнем; кривая 2 — неподвижно шарнирно опертому нижнему и свободному верхнему краям. По оси абсцисс отложен параметр а, определяемый по формуле:
ra «. 2a
где рн=— ; •
гс гс
Частоты свободных колебаний оболочки градирни, опертой на стержневую колоннаду, исследованы в [26]. Для практических целей в этом случае можно определять частоты по графикам на рис. 19.4 и уменьшать их на 10—15 %.
Влияние жесткости верхнего подкрепляющего кольца. Верхнее кольцо жесткости влияет на собственные частоты только в области их низких значений. На рис. 19.6 показано увеличение fmln (п=5) в оболочке градирни, усиленной верхним кольцом с прямоугольным сечением, при увеличении стороны элемента жесткости. Максимальное увеличение частоты свободных колебаний не превышает 20 % частоты колебаний оболочки без верхнего кольца жесткости.
Влияние толщины оболочки. Толщина оболочки влияет на свободные колебания при низших частотах и на формы колебаний, которые соответствуют восходящей ветви частотной кривой, т. е. для п>5. Теоретические и экспериментальные исследования влияния толщины на частоты сво
396
бодных колебаний оболочки градирни позволили установить зависимость между частотами:
(19Л)
Увеличение толщины оболочки в 1,5 раза
Гис. 19.3. Частотная кривая (градирня //=82 м)
приводит, например, к увеличению низшей собственной частоты примерно на 30 %.
На рис. 19.7 приведены частотные кривые, вычисленные для железобетонной оболочки градирни высотой 100 м, га = 44, гь = =28 м, а=0,1605 для трех разных толщин [15].
Формы свободных колебаний оболочки градирни. На рис. 19.8 приведены рассчитанные формы прогибов при свободных колебаниях оболочки градирни, соответствующие первым тонам и значениям п= = 1...6. Предполагается, что нижний край
защемлен, верхний — свободен, //=150 м, 2а= 116 м, 2ь=22 м, /г=20 см, гс=31,5 м, за=58,9 м. Для пятой гармоники (п=5), которой соответствует низшая частота, приведены формы колебания для первых пяти тонов (рис. 19.9).
Частоты и формы свободных колебаний градирни хорошо изучены на моделях г применением голографической интерферро-
Кривая
*0 *2
0,3 4 4 1
0,3 4 6 2
0,3 5 4 3
0,3 5 6 4
0,3 6 4 5
о,4 4 4 6
0,4 4 6 7
0,4 5 4 В
0,4 5 6 9
0,4 6 4 10
0.5 4 4 11
0,5 4 6 12
0,5 5 4 13
0,5 5 6 14
0.5 6 4 15
Рнс. 19.4. Частотные кривые для гиперболических градирен разных форм
897
Рис. 19.5. Частотные кривые прн разном . характере опирания нижнего края
Рис. 19.6. Влияние кольца жесткости на частоту свободных колебаний
рве. 19.8. Формы свободных колебаний, оболочки градирни
Рис. 19.7. Частотные кривые для оболочек разной толщины
метрии [10, 24]. Критерий подобия устанавливают из равенства динамических членов уравнений колебания натурной конструкции и геометрически подобной модели:
п—5
7 —m—1; 2— т—2; 3—-т—3; 4 — т—4; 5 — т—Б
^=м2-г--Г -М-й <19-5> Рм Со
Нм
где М — масштаб модели; иидечс «м» указывает на принадлежность параметра исследуемой модели; индекс «о» соответствует натурной конструкции.
На рис. 19.10 приведены фотографии с голограмм колеблющейся модели оболочки градирни со свободным верхним и защемленным нижним краем; на рис. 19.10 (сверху) показана форма колебаний, соответствующая п=4; на рис. 19.10 (снизу) п=6.
19.3. Вынужденные колебания оболочки градирни
Ветер, действующий на градирню, представляет собой турбулентное движение воздуха, которое характеризуется чрезвычайно нерегулярным и беспорядочным изменением скорости во времени и пространстве. Решающее значение в определении ветровой нагрузки на градирню имеет про
дольная составляющая скорости, которую можно представить в виде
р(0 = Г+г/(/). (19.6)
Она имеет достаточно большую постоянную составляющую v, на которую накладывается пульсационная составляющая и'(/).
Первый этап расчета состоит в преобразовании ветрового потока (19.6) в действующие на градирню нагрузки. Аэродинамические передаточные функции могу> быть построены на основе модельных или натурных испытаний, измерений пульсация давления на поверхности градирни. На втором этапе определяют движение градирни под действием возмущающих сил и напряжения, которые прн этом возникают. На этом этапе передаточные функции зависят от частоты свободных колебаний градирни.
Разработано несколько подходов к расчету вынужденных колебаний градирни. Ввиду трудностей в оценке реальных вет-
398
Рнс. 19.10. Фермы ммебаняй медели градирни сверху — л-4; снизу — п-6
ровых нагрузок на практике широко применяют квазистатический расчет с введением динамических коэффициентов.
В соответствии с (19.6), нормальная нагрузка на градирню представляется в виде
в, t)=q(z, 0)4-<7' (z, 0, t), (19.7) где <1 — средняя нагрузка, соответствующая пд-стоянной (средней) скорости ветрового потока:
9= -у рср(0) v2(z);
q‘ — переменная составляющая ветрового давления (для простоты полагают, что закон распределения нагрузки по параллельному кругу Ср (0) не зависит от г; р — плотность воздуха).
Реакция градирни1 SmM на нагрузку (19.7) в некотором интервале времени складывается из статической части S (от q) и динамической Smax(oT д'):
$тах =$ + $,««• (19-8)
Динамический коэффициент определяют так:
kg = S™aKfS. (19.9)
При квазистатическом подходе динамическое воздействие ветровой нагрузки учитывают введением эквивалентной постоянной нагрузки q3, вызывающей ту же реакцию Smax, что и нагрузка (19.7):
Яэ 0) = ср (0) дэ (г). (19 Ю)
Для определения q э можно записать выражение для динамического коэффициента как отношение максимального к среднему продольному усилию в оболочке с наветренной стороны при 0=0. Это меридиональное усилие пропорционально опрокидывающему моменту от ветровой нагрузки:
н
*r»ax f cF(z)g3(z)d(z)zdz
/vi о
——— = kg = — -----------------------— ,
Л/ **
1 j cF (z) q (z) d (z) zdz
(19-1 1)
2 f я где с Аг. 0) cos 040: d(z) — диаметр обо
Л ’0 v лочкя иа уровне г.
Полагая ср и d независимыми от г, а
<?э («) — “у Р (»(«) + Ди)2 » (!9-12) из (19.11) получим
н
I (Г 4- Ди)5 zdz
kg =-----~----------• (19.13)
| о2 zdz
Приращение До приближенно можно считать постоянным по высоте градирни.
1 Под реакцией градирни S понимают любой силовой или деформационный фактор ее напряженно-деформированного состояния.
399
Рис. 19.11. Функции N,(t) и Л1|(0, полученные замерами в натурной kohctovkuhh градирни
М,, к Нм/м 0.12 г
0.08 -
•0.08 -
'0,1?'-’
Рис. 19.12. Эпюра безразмерного меридионального усилия
1 — статическая составляющая; 2 — квазистати-ческая добавка; 3 — резонансная добавка
Выражение (19.13) устанавливает связь между kg и Ди. Если из (19.13) определить Ди, то по (19.12) можно найти эквивалентную ветровую нагрузку.
Ветровой турбулентный поток и соответствующую ему нагрузку трактуют как нормальный случайный процесс. Основные характеристики такого процесса — математическое ожидание, дисперсия и спектральная плотность. Применительно к ветровому потоку математическое ожидание означает среднее значение скорости (давления) ветра, дисперсия определяет пульсационные составляющие скорости (давления). Обе эти характеристики зависят от времени осреднения. Спектральная плотность опреде-
Рис. 19.13. Зависимость коэффициента Kgq от параметра Vrpan/dfmin
ляет распределение дисперсий по различным частотам, т. е. описывает частотный состав стационарного процесса. Соответствующие характеристики имеют место и в описании реакции градирни на ветровую нагрузку.
На рис. 19.11 показаны записи колебаний продольных усилий Ni и изгибающих моментов Mi, записанные для градирни при натурных испытаниях [19]. Замеры обработаны с временным интервалом 0,2 с так, что на графике видны частоты до 2,5 Гц. Градирня, на которой проводились замеры, имела низшую собственную частоту 1,2 Гц. Из приведенных на рис. 19.11 характерных графиков видно, что: 1) изгибине напряжения в процессе колебаний составляют примерно 1% мембранных на
400
□ряжений; 2) колебания.. связанные с резонансным возбуждением, слабо ощутимы.
Дисперсию реакции оболочки градирня на ветровую нагрузку разделяют на две 2 части: квазистатическую и резонансную
"s = + »?« (19.14)
Реакция градирни Sma* может быть выражена так:
Smax=S4-tos, (19.15)
где k — пиковый коэффициент, устанавливающий связь между Smax и <т$. Пиковый коэффициент нетрудно установить из графиков, изображенных, например, на рис. 19.11; k принимают равным 3-4.
На рис. 19.12 показаны эпюры меридионального усилия N\ для градирни высотой 200 м с наветренной стороны (6 = 0°). Низшая собственная частота этой градирни 0,72 Гц. Квазистатическая реакция башни имеет тот же порядок величин, что и статическая составляющая. Резонансные добавки малы.
Пренебрегая afR в (19.14), можно, учитывая (19.15), записать динамический коэффициент при квазистатической реакции в виде
kgq = 1 A (crs9/S )• (19.16)
Этот коэффициент не зависит от среднего динамического давления q, поскольку квазистатическая реакция подобна статической, т. е. пропорциональна q.
Общий динамический коэффициент может быть связан с kgq так:
kg — kg г Ьвч >
(19.17)
где kg г — резонансный коэффициент:
s + а ]/~ alse] +
Ад г ~ .
S + Aos9
(19.18)
Коэффициент kgT отражает меру вибрационной чувствительности оболочки градирни к ветровым порывам. Эпюры на рис. 19.12 показывают, что этот коэффициент мало отличается от единицы. Коэффициент kgr
зависит от размеров градирни, от q (или v), а также от низшей собственной частоты колебаний и логарифмического декремента колебаний.
На рис. 19.13 коэффициент kgT показан как функция от безразмерной скорости 1’ = УгРад/с1/т1п, где Оград — среднечасовая
1 Градиентной называют скорость ветра на больших (градиентных) высотах, где не сказывайся влияние трения о поверхность земли, н движение воздуха происходит вследствие градиента Давления. Градиентная высота зависит от шероховатости подстилающей поверхности земли.
скорость ветра на градиентной высоте1; d — диаметр горловины (/—6 = 0,02; d= = 100 м; 2 — 6 = 0,02; d = 80; 3 — 6=0,04; d=100; 4—6=0,04; J=80 м); 6 — коэффициент демпфирования.
Расчетное ветровое давление, учитывающее динамическое воздействие ветра, определяют по формуле
<70 (г, 6) = Ag г уь дээ A (z) ср (6), (19.19)
<79q — эквивалентное ветровое давление на отметке 10 м над поверхностью земли, определяемое по (19.12); — плотность бетона.
Приращение Ди, входящее в (19.12), определяют из (19.13):
где G. — показатель степени в выражении профиля ветра k(z).
Расчет градирни на нагрузку q0(z, 6) проводят обычными методами строительной механики.
В Международных рекомендациях по проектированию градирен [21] расчет оболочек градирен предлагается проводить на динамическое воздействие ветра квазистатически на нагрузку, определяемую по формуле
<7 = ?ioCp(e)A(2)Ag, (19.20) 2
где GiQ—O/’lpt’io (ощ — осреднениая скорость ветра на высоте 10 м над поверхностью земли).
Динамический коэффициент определяют в зависимости от безразмерного параметра он/7гс — скорость ветра у вершины градирни; f — минимальная частота свободных колебаний); при v^/fr ^Q,8k =1,85; при v^/frс“1,6Лд *=2; прн о„/р-С=2Й =2,15.
Н' с д
При вычислении изгибающих моментов динамический коэффициент рекомендуется увеличивать на 15 %.
В детерминированном анализе используют специфические результаты реальных замеров ветрового давления, переменного во времени и пространстве. Этот дорогой метод может быть применен только при наличии надежных сведений о ветровой нагрузке. Он связан с использованием численных методов расчета оболочек и метода конечных элементов.
На основе натурных наблюдений определяют ветровое давление на градирню как функцию времени. Как и при статических расчетах ветровую нагрузку раскладывают в ряд Фурье по параллельному кругу:
п
q (z, е, f) = q (0 А (г) 2 Ап (0 cos лб, и
(19.21)
26—189
401
Рис. 19.14. Пульсация ветрового давления
Рис. 19.15. Изменение продольного меридионального усилия во времени
где <7(Л — Функция изменения ветрового давления во времени.
На рис 19.14 показана функция q (t). полученная замерами в натуре в точке градирни с наветренной стороны на уровне горловины на отрезке времени 15 с [23]); k(z) — функция распределения ветрового давления по высоте градирни (если надежные сведения о распределении ветрового давления по высоте отсутствуют, то функцию k(z) принимают равной единице (23)); ЛП(Г) — коэффициент разложения ветровой нагрузки в ряд Фурье по 6.
Предполагается, что ветровое давление симметрично относительно направления ветра 6=0°.
Раскладывая искомые перемещения в ряд Фурье, учитывая (19.21), записывают динамические уравнения равновесия для каждой гармоники и момента времени t в виде ’
IM] [i/n ] + [С] I t/J + [К] [4/п] = 1Яп1 -
(19.22)
Здесь 117) — вектор перемещений; [М] — матрица масс; (С] — матрица демпфирования; [ЛС] — матрица жесткости; [J?] — вектор нагрузки.
Матрицу демпфирования представляют как линейную комбинацию матриц масс и жесткости:
[С] а[М] + р[К]. (19.23)
Если коэффициент демпфирования задан, то а и р нений
Ь =
тле Х2 — две
той формы колебаний, которая рассматривается.
Решение уравнений (19.22) проводят дЛй каждой гармоники п шаговым численным способом. Важнейшее значение в это.м расчете имеет выбор постоянного шага времени. Расчетами показано [23], что ка-
определяют из системы урав-
а
2Z.! 2
Р^.2
2
(19.24)
низшие собственные частоты для
явственное решение задачи можно получить в том случае, когда Л/ равно ‘/го наименьшего периода'колебаний ветровой нагрузки, дающей наибольший вклад в динамическую реакцию градирни.
Исследования вынужденных колебаний градирни детерминированным способом показали следующее:
1) при реальной интенсивности турбулентности ветра, равной 0,11—0,12 (интенсивностью турбулентности называют отношение стандарта пульсации продольной компоненты скорости к ее среднему значению на некотором уровне над поверхностью) вклад резонансной составляющей не превышает 8—9 % общей реакции градирни. Этот вывод справедлив для случая, когда низшая собственная частота колебаний градирни значительно меньше частоты турбулентности ветра. Как показали замеры в натуре, соотношение частот всегда бывает именно таким;
2) динамическая реакция запаздывает по отношению ко времени действия нагрузки примерно на 0,1 с и колеблется около значений квазистатической реакции с периодом, близким к периоду собственных колебаний с низшей частотой.
На рис; 19.15 показано изменение ме-ридиоальный усилий в оболочке градирни на интервале времени, соответствующем рис. 19.14; пунктир — квазистатическая реакция и колеблющаяся около нее резонансная добавка.
Стохастический анализ вынужденных колебаний оболочки градирни связан с решением системы уравнений движения оболочки и использованием характеристик спектра ветровой нагрузки. Преимущество спектрального подхода состоит в том, что характеристики получаются в виде, непосредственно применимом при проектировании градирен.
Стохастический анализ вынужденных колебаний для реальной градирни может быть проведен как с учетом резонансного вклада в реакцию, так и без него. Учитывая реальное соотношение частот турбулентного ветра и собственных колебаний градирни, можно заключить, что первый подход практического значения не имеет. Расчету вынужденных колебаний градирен с учетом резонансных добавок к реакции статистическим способом посвящены работы [8, 17], без них— [12].
Приведем данные о расчете оболочки градирни на вынужденные колебания стохастическим методом в предположении о малости вклада в реакцию резонанса. Вёт-
402
ровую нагрузку и реакцию градирни на нее рассматривают как стационарный случайный процесс. Вместо того, чтобы оценивать работу градирни в отдельные моменты времени, как это имеет место при детерминированном подходе, получают некоторые суммарные характеристики. Предполагается, что частоты и формы свободных колебаний градирни известны. Динамические перемещения оболочки задаются в форме:
и = (5, 6, О = [р„ (0 c°s «6 +
+ рп (t) sinn6]ifn (s);
v(s, е, o = 2[p„(osinn0+ (19 25) + рп (0 cos пб] vn (s);
w (s, 0, t) = [рл (/) COS Л0 +
+ pn (0 sin Л0] te»n (s),
где pn(f). pn (О — симметричная и кососимметричная обобщенные координаты; ип. vn, а>п — функции, зависящие только от s (в частности, это могут быть ряды по собственным формам колебаний); я — номер гармоники ' прн разложении в ряд по 0.
Уравнения движения оболочки можно представить в виде:
где т, п — номера гармоник;
___________ 5ц Sy -Л '№
Qn«)Qm(t) <= f I’ f Ио(«, 6, ox-b‘o "о о ...
X q0 (s', 0' , 0 te»n (s) ш (s') cos nd X
X cos nO' r (s) r (s') dGdG' dsds' . (19.29)
Здесь s' и 6'— переменные значения s н 0:
q (s, s') Co (0t 0') =
_ <7o(s, 6. 0 <7o (s' . 6. tT . [<7o($, 0) <7o (s' • в*)]1/2 Q(s, S')C2(616') = ?o (sx 6j Q <70 (s', 0'77)
<4 (si 6i) 4 <s) 4 (^)F2(6)F2(0')
(19.30)
Здесь dp (S|, 0i) — дисперсия ветрового давления в точках s 0г, Ft, Ft — функции формы.
Подставляя (19.29) в безразмерной
форме и учитывая (19.30), получим
Qn(t}Qm Ю °Р (S101) so
I 1
JJci(Z, Р)Л(/)А(/’')х
о о
Xwn(l)wm(l')i\(l)4](l')dldl' х
• Рп'
2 _ Qn (0
'пРп~ мп
О)
(19.26)
2 '
п Рп
Здесь — круговая частота ннй; Qn, Qn — обобщенные
Mn свободных
силы; Ь'п
колеба-
— обоб-
щенная масса; /> —б/л — коэффициент де?.1пфиро-ваиия (б — логарифмический декремент ннй);
2л Sg
Qntt) = I’ I q0(s, 0, t) X
6 0
X wn(s) cos nGr (s) dGds, Q'n (t) —
2 л Sy
= [ ( q0 (s, 00 wn ($) sin л0 x b b
колеба-
(19.27)
Хг (s) dGds;
*0
X phr (s) dGds, где p — плотность материала оболочки; Щниа оболочки; — полная длина меридиана; г Уравнение меридиана; qB — нормальная к поверхности пульсация давления ветра.
Ковариация обобщенных имеет вид
h — тол-
координат
Qn (t)Qm (!)
Pn(t)Pm(t) -- „
444.4.
(19.28)
X cos лб cos /710' dGdG' + •
—0 —0 rs rs + f f c.,(0i6')fo(6)F2(6') X
*s
X cos П0 cos /И0' dGdG' ] =
= Л1{Л2^Л3}=Лтп,‘ (19.31)
где 0S — угол, соответствующий началу области солутной струи (0S-100-120°); l—s/sB; T)-r(s)/s0. Коэффициенты A, .4, и Л3 определяют экспериментально прн обдувках градирен в аэродинамических трубах (12].
Зная Qп (!) можно определить
средний квадрат. любой., реакции (например, прогиб по. формуле
а2 (и) = Рт wn wm cos nG X
X cos mG + pn pm wn wm sin n 6- sin m 6 + + 2pn Pn wn u>m cos r.0 COS /710) .
Третьим членом ввиду малости обычно пренебрегают. При суммировании ограничиваются небольшим числом членов ряда — т и п принимают от 4 до 6.
Имеется несколько приближенных способов нахождения ковариации обобщенных координат (19.28) и, следовательно, дисперсии о2(х>). Однако решающую’ роль играют здесь экспериментальные исследования. Результаты продувки модели градирни
4
26*
403
fyt)
Рис. 19.16. Изменение стандарта давления по высоте градирни
/— с наветренной стороны; 2 — с заветренной стороны
Рис. 19.17. Изменение стандарта давления ветра по параллельному кругу
в трубе турбулентным потоком с интенсивностью турбулентности 0,11 позволяют, вычислить коэффициенты корреляции и ковариацию обобщенных координат. На рис. 19.16 и 19.17 показано изменение безраз-
Рис. 19.18. Корреляционный коэффициент С2
Рнс. 19.19. Корреляционный коэффициент
мерного стандарта динамического давления вдоль меридиана (с наветренной и заветренной сторон) и по параллельному кругу у горловины. На рис. 19.18 приведены замеренные коэффициенты корреляции с2(6, 6') в области горловины, а на рис. 19.19 изменение Ci(s, s') вдоль меридиана.
Зная о2(ш) и, следовательно, расчетные значения перемещений, по известным соотношениям теории оболочек получают расчетные усилия.
РАЗДЕЛ 20. ДИНАМИЧЕСКИЕ ГАСИТЕЛИ КОЛЕБАНИИ СПЕЦИАЛЬНЫХ СООРУЖЕНИЙ
Б. Г. Коренев, Л. М. Резников
20.1. Общие сведения
Многие важные задачи расчета специальных сооружений, оборудованных динамическими гасителями колебаний (ДГК), совпадают или близки к тем, которые рассматриваются при расчете обычных конструкций и сооружений, поэтому для специальных сооружений в значительной мере могут быть использованы материалы, содержащиеся в опубликованных работах, посвященных различным вопросам виброгашения и виброзащиты [1, 2, 6, 9—11, 20, 28, 32, 42]. Однако в некоторых случаях расчет специальных сооружений требует более детального исследования влияния различных воздействий, рассмотрения иных расчетных схем защищаемых сооружений, изучения возможности применения услож
ненных конструкций гасителей колебаний. Содержание этого раздела в основном определено целью осветить эти аспекты проблемы; вместе с тем в сжатой форме излагаются отдельные общие вопросы теории виброгашения.
В этой связи значительное внимание уделено расчету гасителей колебаний массивных сооружений, взаимодействующих с грунтом. Приведены данные об эффективности ДГК при импульсивных и случайных воздействиях. Даны сведения о виброзащите оборудования, чувствительного к вибрациям и установленного на сравнительно гибких конструкциях, связанных с массивными сооружениями. Обсуждается эффективность комбинированного применения виброизоляции и ДГК. Рассматривается вопрос о применении гасителей, представ
404
ляющих системы с конечным числом степеней свободы. Описаны конструктивные формы ДГК.
Кратко перечислим конкретные области возможного применения гасителей колебаний специальных сооружений. Виброгашение наиболее эффективно для сооружений, выполненных из металла, в частности, для виброзашиты башенных сооружений, мачт с оттяжками, опор линий электропередач, висячих мостов и переходов, металлических каркасных зданий и специальных сооружений горнорудной промышленности. При этом снижение уровня колебаний, вызванных пульсациями ветрового давления, ветровым резонансом и галопированием, как правило, сопровождается уменьшением динамических напряжений и увеличением долговечности гибких стальных сооружений [13].
Гасители колебаний используют для дополнительной виброзащиты сооружения в случаях, когда возможно появление повышенных вибраций отдельных элементов оборудования или гибких конструктивных элементов. Такие ситуации могут возникнуть, например, в зданиях атомных электростанций, а также в сооружениях с точной измерительной аппаратурой. При этбм гасители могут быть достаточно эффективными при сравнительно небольших затратах.
Значительный интерес представляет применение гасителей для борьбы с вибрациями жестких сооружений и. их элементов, в частности жестких сооружений башенного типа, в которых при действии горизонтальных нагрузок общие перемещения в большой мере определяются углами поворота и горизонтальными перемещениями фундаментов. Подобные ситуации возможны и для сравнительно жестких сооружений каркасного типа, высоких устоев мостов и эстакад, а также массивных фундаментов под машины, в особенности существующих фундаментов, в которых виброизоляция отсутствует или ее эффективность недостаточна.
При сейсмозащите с помощью виброизоляции для части спектра частот, которая находится в окрестности собственной частоты виброизолированной системы, происходит увеличение амплитуд колебаний, а для частот, расположенных ниже ее, эффект виброизоляции отсутствует. Это имеет место при виброизоляции ответственного оборудования, испытательных стендов и отдельных зданий, в которых размещены измерительные комплексы. В таких случа
ях на виброизолированную конструкцию целесообразно устанавливать ДГК.
Применение ДГК на виброизолирован-ных фундаментах весьма эффективно при периодических импульсивных воздействиях, поскольку гасители позволяют компенсировать неточности настройки фундаментов в отрицательные эффекты, связанные с отклонениями воздействий от строго периодических. Несомненный интерес представляет сочетание применения гасителей колебаний и других конструктивных мер, направленных на снижение уровня вибраций. Для примера можно указать на систему виброзащиты Большого солнечного вакуумного телескопа, описанную в этом разделе.
Вибрации подземных сооружений, оборудованных гасителями, еще не изучены в должной мере; получены лишь оценочные данные для простейших задач о воздействии на массивное подземное сооружение падающей гармонической волны. Возможности применения ДГК для виброзашиты платформ, эстакад и буровых установок при действии ветра и морского волнения .также изучены пока недостаточно. Однако сочетание данных, относящихся к динамике подобных сооружений, и материалов по гасителям даст возможность использовать ДГК для виброзашиты указанных гидротехнических сооружений. При этом представляют интерес рассмотренные в этом разделе задачи виброгашения при случайных воздействиях. Эти же материалы будут полезны при проектировании виброзащиты транспортных галерей, трубопроводов и гибких пролетных строений мостов от действия ветра.
Важной особенностью задач проектирования виброзащиты специальных сооружений является наличие ситуаций, в которых должны применяться не одномассовые, а многомассовые гасители или система гасителей. Усложнение конструктивной схемы при этом оправдывается возможностью достигнуть эффекта гашения колебаний в более широкой полосе частот, снизить оптимальное значение демпфирования гасителя и уменьшить местные напряжения в зоне контакта с сооружением. Вопрос о применении многомассовых гасителей не нашел еще достаточно полного отражения в литературе, здесь он обсуждается значительно подробнее, чем в работе [9]. Эта же задача представляет собой лишь частный случай более общей проблемы создания пассивной гасительной дискретно-континуальной системы, присоединяемой к защищаемой конструкции с целью ее виброзащиты.
405
20.2. Конструктивные формы динамических гасителей колебаний
Пассивные ДГК представляют в общем случае колебательные системы, присоединяемые к защищаемому сооружению для снижения уровня его колебаний. Параметры этих систем, влияющие на конструкцию ДГК, определяют в результате расчета. Многообразие характера работы гасителей в зависимости от рода динамических воздействий, расчетной схемы защищаемого сооружения и его размеров, критериев качества и габаритов, в которые вписывается конструкция ДГК, предопределяют необходимость рассмотрения- ’ различных конструктивных форм. Наиболее часто применяют одномассовыё гасители, которым далее уделяется основное внимание,
С механической точки зрения одномассовый гаситель . состоит из трех частей — жесткого тела, так называемой--массы гасителя т, упругой связи с0 и демпфирующего устройства ро, присоединенных к защищаемому объекту М (рис. 20.1). В маятниковых гасителях упругая связь как конструктивный элемент отсутствует и ее роль выполняет составляющая гравитационной силы, которая входит в дифференциальное уравнение колебаний математического маятника. Обычно массу гасителя выполняют в виде стальной, чугунной, железобетонной призмы или цилиндра. Применяют также контейнеры, заполненные отдельными грузами, сыпучими материалами или жидкостью.
Следует учесть, что. для .настройки гасителя на требуемую частоту при его монтаже в ряде случаев необходимо в определенных пределах (порядка 10—15%) изменять его массу, поэтому желательно к основному телу присоединять несколько сравнительно небольших съемных грузов, а иногда включать в комплект небольшие грузы, которые можно использовать для увеличения массы гасителя.
В качестве упругой связи в гасителях обычно используют цилиндрические стальные пружины (реже — резиновые элементы), а также работающие на кручение или изгиб упругие стержни или пластины. В гасителях с ’ вертикальным перемещением массы возможны два варианта установки пружин — опорный, при котором пружины сжаты, и подвесной с пружинами, работающими на растяжение. При необходимости получения сравнительно низкой частоты гасителя целесообразно применение растя--нутых пружин; при- опорном варианте в -'.68
случаях, когда ожидаемая амплитуда колебаний массы гасителя меньше начального статического перемещения, можно применять заневоленные пружины. Так как расчетные перемещения пружин могут отличаться от действительных, вследствие неточности задания длины «мертвого» витка, то значения квазиупругих коэффициентов требуют экспериментального уточнения. При проектирований упругой связи следует предусматривать возможность корректировки ее жесткости.
Практически демпфирующие элементы обычно имеют такую же конструкцию, как и демпферы виброизолированных установок. Наиболее часто применяют демпферы вязкого трения, имеются случаи использования пневматических демферов, демпферов сухого трения. В ГДР использовались демпферы, по - конструкции напоминающие гидравлические, в которых жидкость была заменена сыпучим гтелом с гранулами из пластмассы. Для демпфирования колебаний может быть использовано внутреннее трение в деформируемых .опорных элементах (рис. 20.2), которые выполняют в виде отрезков стальных канатов или из материалов с повышенными диссипативными свойствами/- например из резины, пластмасс. При этом функции упругой связи и демпфера совмещаются; такое решение в течение длительного времени используется в гасителях Стокбриджа, с помощью которых снижается уровень колебаний проводов линий электропередач».
При гашении горизонтальных колебаний отдельных конструктивных элементов, можно применять схемы, аналогичные показанной на рис. 20.1..
Для гашения колебаний башенных сооружений широко используют маятниковые гасители колебаний. Расчетная модель маятникового гасителя — математический маятник с демпфирующим устройством. В этом случае парциальная частота практически не зависит от массы маятника и для ее регулирования в процессе настройки необходимо предусмотреть возможность изменения его длины; для более точной регулировки, кроме .того, целесообразно присоединить к основной массе сравнительно небольшую дополнительную, положение которой относительно основной можно изменять в процессе настройки гасителя.
Существенную роль играет крепление маятника. Нити из стального троса можно крепить так, как показано на- рис. 20.3. Дополнительная опора является причиной возникновения изгибных деформаций, • ко-
Рис. 20.1. ДГК с вязким трением
Рис. 20.2. ДГК с внутренним трением
Рис. 20.5. Гаситель с канатами разного диаметра
Рис. 20.4. Гаситель с дополнительной опорой вблизи массы
Рис. 20.6. Гаситель с подвижным сердечником и тормозной площадкой
торые носят местный характер и вызывают диссипативные силы. Подобное устройство широко применялось для гашения колебаний стальных башен [12]. Оно обладает простотой и высокой надежностью, на его эффективность практически не влияет температура, однако с его помощью получаются сравнительно невысокие коэффициенты демпфирования. В этой связи целесообразно применять дополнительную опору (рис. 20.4), создающую эффект частичного защемления нижних концов тросов и увеличивающую демпфирование. Использование канатов разного диаметра (рис. 20.5), центр жесткости которых не совпадает с центром массы гасителя, позволяет- повы-
Рнс. 20.7. Многомассовый маятниковый гаситель сить демпфирование ввиду наложения нагибных и крутильных деформаций канатов.
407
Рис. 20.8. Гаситель с регулируемой длиной подвеса
Рис. 20.9. Гаситель с вращающимися массами
Эксперименты показали, что коэффициент демпфирования маятника, закрепленного, как показано на рис. 20.3—20.5, уменьшается при увеличении его амплитуды, что Должно учитываться в расчете. Этот фактор влияет на амплитуды колебаний гасителя, которые возрастают быстрее, чем динамическая нагрузка; в этой связи должно быть обращено внимание на то, чтобы за
зор между подвижной частью гасителя и конструкцией был достаточным.
Для демпфирования колебаний маятника может также применяться устройство, схема которого ясна из рис. 20.6; в этой конструкции использовано сухое трение подвижного сердечника 1 о тормозную площадку 2. Естественно, что в необходимых случаях возможно комбинированное применение указанных выше устройств. Для повышения эффекта изгиба можно применить устройство (рис. 20.7), которое по существу, является многомассовым гасителем. На рис. 20.8 показана схема гасителя, который работает как физический маятник, подвешенный к упругому элементу /, причем длина подвеса регулируется винтом 2, упругий элемент закрепляется подвижными зажимами 3.
Установка тросов маятникового гасителя под некоторым углом к вертикали и применение подвижной перемычки, стягивающей их в одном из направлений, позволяет получить разные частоты колебаний гасителя в двух взаимно перпендикулярных плоскостях колебаний (авт. свид. СССР N? 456106), что весьма важно для виброга
408
шения гибких сооружений, обладающих неодинаковыми жесткостями в двух направлениях.
Если необходимо гасить низкочастотные колебания гибких высоких сооружений при собственной частоте порядка 0,15— 0,4 Гц, то длина маятника становится весьма большой; в этих случаях целесообразно обеспечить движение массы гасителя по криволинейной траектории. Таким образом, уравнение направляющей определяет квазиупругий коэффициент, и ту роль, которую играла длина маятника, принимает на себя радиус кривизны направляющей. В этом случае возможно получение изохронного маятника. Очевидно, что если направляющая является поверхностью вращения, то гаситель будет работать в двух направлениях.
Недостаток подобной конструкции в том, что изменение квазиупругого коэффи-ента в процессе настройки гасителя практически весьма сложно и требует создания направляющей с изменяющейся кривизной, что вряд ли может быть рекомендовано. В этом случае необходимо соединять направляющую с защищаемой конструкцией с помощью упругой связи, которая может во время настройки гасителя изменить общую свою жесткость. Однако подобное устройство позволит изменять общую жесткость лишь в сравнительно узких пределах. Для улучшения условий настройки и повышения эффективности гасителя без увеличения его массы в некоторых случаях можно использовать усложненную конструкцию, которая имеет и самостоятельный интерес. Масса гасителя (рис. 20.9) выполнена в виде двух маховиков, установленных на раме 1 и вращающихся в противоположные стороны при поступательном перемещении рамы, опертой с помощью колес '2 на сооружение 3 (авт. свид. СССР № 808624).
При конструировании многомассовых гасителей для каждой из масс и упругих связей остаются в силе рекомендации, относящиеся к одномассовому гасителю.
20.3. Гашение колебаний приведенной системы с одной степенью свободы с помощью одномассовых гасителей
При расчете гасителей колебаний обычно большую роль играет рассмотрение наиболее простой задачи, когда защищаемая конструкция обладает одной степенью свободы, а гаситель колебаний является одно
массовой системой. Таким образом, здесь задача сводится к исследованию системы с двумя степенями свободы. При этом масса гасителя обычно значительно меньше массы защищаемой системы; в большинстве случаев гаситель обладает демпфированием и лишь при гармонических воздействиях с малой нестабильностью частоты можно применять гасители без учитываемого в расчете неупругого сопротивления.
Цель расчета — определение параметров гасителя и его эффективности. Обычно отношением массы гасителя к массе защищаемой системы задаются предварительно и при расчете находят лишь квазиупругий коэффициент гасителя и его демпфирование, выбирая их значения так, чтобы эффективность гасителя была максимальной; однако в тех случаях, когда амплитуда колебаний гасителя ограничена ввиду габаритов или по условию прочности упругого элемента, массу гасителя также определяют из расчета.
Значение теории виброгашения системы с одной степенью свободы, очевидно, состоит в том, что во многих случаях указанная модель достаточно хорошо отображает работу защищаемого сооружения; кроме того, для систем с большим и даже бесконечным числом степеней свободы, имеющих разреженные спектры частот свободных колебаний, задача о гашении резонансных колебаний может быть с достаточной точностью сведена к рассмотрению этой простейшей модели.
Не менее важно принципиальное и методическое значение рассмотрения одномассовой защищаемой системы. Простота расчетной модели позволяет детально изучить многообразие инженерных постановок задач виброгашения; в частности, здесь могут быть обсуждены различные критерии .качества и подробно рассмотрено влияние различных законов изменения нагрузки, передаваемой на защищаемую конструкцию; наконец, можно рассмотреть вопрос о влиянии изменчивости параметров, от которых зависят динамические характеристики системы и гасителя.
Б Справочнике [9] приведены подробные данные о виброгашении систем с одной степенью свободы. Ниже дан обзор основных результатов, которые представляют интерес для специальных сооружений и в [9] не рассматривались или обсуждались весьма кратко. Вопрос о виброгашении систем с одной степенью свободы, связанных с .упругим основанием, вынесен в отдельный п. 20.7.
£00
1. Гармоническое воздействия
При рассмотрении действия гармонической нагрузки основную роль играет изменчивость ее частоты. Даже при сравнительно высокой степени стабильности частоты при расчете системы с гасителем во многих случаях следует, рассматривать весь диапазон возможных ее изменений. Наряду с небольшими отклонениями частоты (например, при нагрузках от синхронных двигателей) приходится учитывать и более заметные, но все же ограниченные изменения частоты (например, при нагрузках от асинхронных двигателей). В этом случае имеет значение зависимость амплитуды динамической нагрузки от частоты; последняя может находиться внутри промежутка, ограниченного частотами свободных колебаний системы с присоединенным гасителем. При достаточно широком изменении частоты нагрузки, выходящем за рамки указанного диапазона, рассматривают наиболее опасные случаи — резонансные ситуации. При этом принято называть частоту воздействия нестабильной (в литературе эта задача изучена наиболее подробно). Здесь должна быть учтена также зависимость амплитуды нагрузки от частоты; обычно рассматривают два частных случая— амплитуда не зависит от частоты или пропорциональна ее квадрату.
Влияние ДГК на колебания линейной системы. Основные результаты теории ДГК :при гармонических воздействиях приведены в п. 12.2 [9]. Даны сведения о выборе оптимальных параметров и эффективности ДГК без демпфирования, с вязким или частотно-независимым неупругим сопротивлением. Принципы • действия гасителей без демпфирования и с демпфированием резко различаются. ДГК без демпфирования раздвигает резонансные частоты конструкции с присоединенным гасителем за пределы возможного диапазона изменения частоты возмущающей силы. Гаситель настраивается на некоторую частоту, лежащую в указанном диапазоне. Такие гасители обычно применяют, если нестабильность частоты возмущения невелика, причем эффективность виброгашения зависит от ширины диапазона изменения частоты возмущения и относительной массы гасителя.
ДГК с оптимальным демпфированием не исключает возможности резонанса, но ограничивает амплитуды колебаний защищаемого объекта минимально возможными значениями. Наличие демпфера, усложняя конструкцию, вместе с тем делает гаситель более универсальным и менее чувствительным к возможным отклонениям действи
тельных параметров гасителя и системы от расчетных. Гаситель настраивается с некоторым сдвигом на собственную частоту колебаний объекта, в окрестности которой находится диапазон частот возмущающей силы.
Именно этим объясняется различие эффективностей гасителей обоих типов и/ в частности, тот факт, что при весьма узком диапазоне изменения частоты возмущения эффективность гасителя без демпфирования может оказаться выше, чем с демпфированием. Вместе с тем для демпфированного ДГК, настройка которого зависит от собственной частоты колебаний системы, существенное значение имеет точность определения последней. На этапе проектирования системы расчет ДГК преследует цель установить целесообразность его применения и приближенно определить его параметры. Конструкция гасителя должна допускать возможность изменения в некоторых пределах его параметров при установке и при эксплуатации, тем самым компенсируя неточности исходной информации и расчета.
Пусть в некоторой точке системы, совершающей вынужденные гармонические колебания с частотой р0, установлен ДГК с параметрами: m — масса; fo — парциальная частота; ро — коэффициент вязкого сопротивления. Гаситель можно рассматривать как некоторую опору, комплексный квази-упругий коэффициент которой зависит от частоты ро и параметров гасителя и равен: Чг=— mpo^o + l.u°P°)/^o—Ро +1ЦоРо)- Влияние гасителя на колебания системы можно качественно оценить, рассматривая изменение коэффициента V при характерных соотношениях ро и fo.
При poCfo упругая связь гасителя почти не деформируется, гаситель рассеивает незначительную часть поступающей энергии, амплитуда перемещения его массы мало отличается от амплитуды точки подвеса. Иначе говоря, влияние гасителя примерно такое.- же, как при жестком присоединении его массы. При Po~fo значение Т определяется главным образом демпфированием гасителя. Так, при ц0=О'гаситель эквивалентен абсолютно жесткой опоре (ЧР=«) и амплитуда колебаний точки его подвеса равна нулю. При po^fo гаситель работает в зарезонансном режиме, его масса почти не колеблется, деформация упругой связи приблизительно равна смещению точки подвеса, в результате часть энергии колебаний рассеивается гасителем, т. е. в этом случае установка гасителя эквивалентна опиранию
410
Т а б л и а а 20.1
V2 v=o,*i)5 V=0.0) .. v»=iJ.O2- - .•=•:,СГ->
Р .4 Р А Р ’.4 Р Д
0,01 • 0.05 0,992 1,00.5 20 • •2i' 0.99 1.005 18,3 18,2 0,981 1.005 .17.8 . 17,7 0,95 1.01 17,3. . .17,0.
0.1 0,992 1 16,9 16.7 0,989 1,004 13.1 13,0 ’ П.976 1.003 11,3 11.2 0.947 : ’ 1.01 10.0 ‘ 10,0
0,2 1 1 27,4 27.5 1 1 15,8 15.7 • 0.975 1 9.2 • • 9,о 0.944 ‘ 1 6,8 6.5
0,05 0,1 0,99 1.01 10,5 . 10.5 0,988 1.01 9.4 9.2 0,975 1,02 8.1 8,0 0,9-5 1.0-25 7.4 7.4 .
. 0.2 1 1 13.2 13.2 1 1,01 9.5 . Э.2 0,973 1.01 7.0 6.9 0.94 1.02 5.5 5.3
0,1 0,1 0,974 1,02 7.6 7,6 0,98 1.025 6.9 6.8 0,97 1,025 6.4 6.3 0.94 1.04 6.1 6.0
0,2 1 1,02 7.5 7,5 0,98 1.02 6.9 6.8 0,968 1.02 5.Я 5.7 0.93 1.025 4.8 4,7
системы через его упруговязкую связь на неподвижное основание.
Аналогичные выводы справедливы и для гасителя с частотно-независимым внутренним трением^ Приведенные соображения можно использовать при разработке упрощенных способов расчета систем с несколькими ДГК, настроенными на разные частоты.
Оптимальная настройка и эффективность ДГК при ограниченном демпфировании. На практике не всегда удается реализовать оптимальное значение демпфирования гасителей, в особенности если последнее осуществляется вследствие повышенного внутреннего неупругого сопротивления. Ввиду этого эффективность ДГК уменьшается. Однако снижение эффективности при отклонении демпфирования от оптимального значения намного меньше, чем при отклонении настройки (9]. Приращение критерия Качества R по сравнению с его ’ оптимальным значением /?ОПт, вследствие отклонения коэффициента р, вязкого сопротивления гасителя от оптимального значения • Цопт оценивают приближенной формулой (обозначения соответствуют приведенным на с. 150, 151 [9]):
. ___1 / И , ?к>пт \
^опт 2 \ Ропт И /
В частности, при р/цюпт=1,25 критерий R= l,025/?QnT. Аналогичное выражение можно использовать и для гасителя-с внутренним неупругим сопротивлением.
При существенных отклонениях демпфирования гасителя от оптимального значения во избежание значительного снижения эффективности виброгашения целесообразно назначить оптимальную настройку р с учетом конструктивно реализуемого значения коэффициента неупругого сопротивления. Так, если система передемпфиро-вана, что может наблюдаться при весьма малых значениях относительной массы гасителя. V, то имеется лишь один резонансный пик, и оптимальная настройка гасителя близка, единице.
Однако чаше всего требуемый оптимум демпфирования гасителя не достигается. В табл. 20.1 приведены данные об - оптимальной настройке р -гасителя с частотно-независимым внутренним неупругим ..сопротивлением. и динамическом коэффициенте А, равном отношению амплитуды колебаний- к статическому прогибу защищаемого объекта, для некоторых фиксированных значений коэффициентов неупругого сопротивления системы уь гасителя у2 и относительной массы гасителя v. Для двух рассмотренных вариантов возмущающей силы (амплитуда силы постоянна — над чертой, пропорциональна квадрату частоты — под чертой) достигается примерно одинаковая эффективность ДГК, при этом значения оптимальной настройки, которая находилась из условия равенства двух резонансных пиков системы с присоединенным гасителем,-могут существенно различаться. Вопрос об опти'-мальной настройке ДГК при заданном
411
демпфировании более подробно рассматривался в [28].
Статистическая оптимизация параметров ДГК. Вероятностная постановка задачи вызвана, с одной стороны, тем, что расчетные параметры представляют лишь прогноз этих величин как вследствие неточности исходной информации (например, приведенная масса системы и квазнупругий коэффициент), так и ввиду невозможности точно реализовать на практике оптимальные значения (в особенности демпфирование гасителя). С другой стороны, некоторые параметры могут изменяться при эксплуатации, например масса системы. Частоту воздействия также можно рассматривать как случайную величину. Влияние случайного характера частоты воздействия носит в известной мере определяющий характер, поэтому даже в традиционной постановке [1,8] этот фактор упрощенно учитывают, полагая, что частота является нестабильной и принимает самое неблагоприятное значение.
Таким образом, парциальные частоты и коэффициенты неупругого сопротивления главной массы и гасителя, а также частоту внешнего воздействия рассматривают как случайные статистически независимые величины. Находят оптимальные значения математических ожиданий Р и ц, при этом другие величины, характеризующие законы распределения Р и ц (например, дисперсии), полагают заданными. Параметры гасителя Р и р, назначают таким образом, чтобы его относительная масса v была минимальна при соблюдении двух условий. Условие первое касается движения главной массы и требует, чтобы вероятность Fao превышения допускаемой амплитуды Ао была меньше заданного значения Fo. Условие второе ограничивает амплитуды колебаний массы гасителя ввиду необходимости соблюдения допускаемых габаритов или прочности упругой связи.
Так как увеличение v ведет к снижению амплитуд колебаний главной массы и гасителя, а изменение р, ц может приводить как к увеличению, так и к уменьшению амплитуд, то в качестве начального принимают минимально возможное из конструктивных соображений значение v. Далее методом скорейшего спуска определяют оптимальные параметры р и ц, минимизирующие вероятность Fao.
Если (/'до}ш1п>/го. то значение v увеличивают и заново находят р и ц, в противном случае проверяют условие второе.
При его соблюдении расчет заканчивают; если оно не выполняется, следует увеличить значение v. Поскольку при этом может оказаться (/7ло}пип=О при некоторых значениях Р, ц, то параметры оптимизируют из условия минимума амплитуды 4fo, вероятность превышения которой равна Fo. Отыскание Аго производят методом последовательных приближений. Для определения вероятности Fao при числе случайных параметров более двух целесообразно воспользоваться методом Монте-Карло.
Вероятностный анализ обобщает детерминистскую методику выбора параметров гасителя. Так, если для возмущающей частоты р принять закон равномерной плотности на участке, включающем оба резонансных пика, а остальные параметры считать детерминированными, то при Fo=O применение вероятностного и обычного подходов приведет к одинаковым результатам. С уменьшением интервала изменения р требуемое сопротивление гасителя снижается до нуля, т. е. также резуль
таты совпадают.
Для примера рассмотрим случай гармонической силы, вызванной работой асинхронного двигателя. Такие двигатели мощностью 0,6—100 кВт главным образом и устанавливают на перекрытиях промышленных зданий. Нестабильность их частоты может достигать 10 %. Далее учитывают случайный характер лишь частоты возмущения и парциальной частоты главной массы, поскольку именно они оказывают основное влияние на закон распределения амплитуды. Всё остальные величины, в том числе
параметры гасителя, полагаются детерминированными.
Для относительной парциальной частоты (o=wo/(0o главной массы принимают
нормальное распределение
f (©) =------ехр
а® У 2л
(<о- О2'
с математическим ожиданием <о=1 и дис-х 2
Персией ош.
Работа асинхронного двигателя характеризуется скольжением s=(pc—Р)/Р<=> где р — угловая скорость ротора; рс — синхронная скорость. Номинальное скольжение асинхронного двигателя составляет 0,015 0,09, а критическое sK= (3...4,5)зВом- Поскольку скольжение в рабочем режиме изменяется от 0 (при р=рс) ДО критического 5к (при р=рк), причем наиболее вероятное номинальное значение з11Ом делит этот интервал в отношении примерно (1:2)
412
Таблица 20.2
рс °s v=0 v=0.05 v=0,l
А А Ц Г А Ц Г
0,02 4,13 0.01 0,74 0,68 0,01 0.75
0,9 0,04 4,02 2,23 0,02 0,65 1,35 0.01 0.67
0,06 3,91 2,41 0,04 0,61 1,87 0,10 0.61
0,08 3.80 2,48 0,04 0,59 2,11 0,04 0,54
0,02 86,8 1,43 0,01 0,93 0,68 0.01 0.94
0,04 65.8 3,69 0,04 0,86 1.57 0,01 0.86
1 0,06 50,2 4,45 0,19 0,88 3.09 0,19 0,80
0,08 39,9 4,16 0,15 0,85 3.06 0,15 0.77
0,02 15,6 1,33 0,01 1.15 0,66 0,01 1,15
1.1 0,04 96.9 3,58 0,01 1,09 1,52 0.01 1.08
0,06 99,1 5,89 0.27 0.95 3,58 0,03 0,98
0,08 98,9 5,89 0,27 0.95 4,15 0,34 0,92
0,02 4,69 1,19 0,01 1.38 0.63 0,01 1,37
1.2 0,04 9,92 2,56 0,01 1.34 1,34 0,01 1,31
0,06 63,5 5,42 0,18 1.04 2.58 0,01 1.26
0.08 92,7 5,80 0.29 0,95 4.25 0.29 0.95
(1:3.5), то для скольжения можно принять распределение Релея с дисперсией в- = =s2 Тогда плотность распределения чаном*
стоты возмущающей силы
Рс—Р
f(p) =
°sPl
exp
при р
(Pc — Р)3
2cts Рс
Рс
0 при р > рс»
а дисперсия о2 =
Для случая инерционной возмущающей силы, амплитуда которой пропорциональна квадрату частоты, минимизированные значения динамического коэффициента Лр0 при Fo=O,Ol и оптимальные параметры гасителя (было принято р.ппа—0,01) даны
в табл. 20.2 (ош=0, yi = 0,01) и 20.3 (yi= =0,05).
Анализ этих и приведенных в [23] результатов позволяет сделать следующие выводы. Если v^-0,05 и os<0,04, то система оптимальна при малом сопротивлении гасителя или при его отсутствии. В этом случае значения (А)mln и f2 почти не зависят Fn опт
от уь а Цопт повышается с увеличением уь При иОпт=0,01 значение р2—f2 не зави-
С ’ опт
сит от р, т. е. гаситель настраивается с некоторым сдвигом на синхронную частоту Рс. Большое сопротивление гасителя требуется лишь при ов>0,04, однако не при всех значениях рв и Fo. В этом случае, как правило, гаситель настраивают с некоторым сдвигом на математическое ожидание парциальной частоты главной массы независимо от ре. Значения минимизированных амп-
Таблица 20.3
рС Qs 0(0=0,03 о^О, 1
v=0 v=0.05 v=0 v=0.05
А А Ц Г А А И Г
0,02 8,11 1.29 0,01 0,75 19,87 1,84 0,01 0,75
0,9 0,04 6,61 2,42 0,07 0,68 19,74 2,88 0,09 0,72
0.06 5.75 2,54 0,08 0,62 19.54 3,70 0,12 0,66
0,08 5.20 2,35 0,03 0.59 19,19 4,11 0,13 0,63
0,02 20.00 1.47 0,01 0,94 19,98 1.65 0,01 0,94
1.0 0,04 19,99 3,73 0,06 0,85 19,97 3.45 0,08 0,88
0,06 19.95 4,19 0,09 0,82 19,96 4,12 0,17 0.81
0,08 19,85 3.75 0,08 0,75 19,93 5,01 0.18 0.79
0,02 19,77 1.35 0,01 1.14 19,97 1,48 0,01 1.14
0,04 20,00 3,57 0,06 1,06 19,98 3,59 0.06 1.07
1,1 0,06 20.00 4.74 0,19 1,00 19,98 3,95 0.18 0,98
0,08 20,00 5,22 0,19 0,95 19,98 5,50 0,21 0,94
0.02 6,38 1.20 0.01 1.38 19.71 1,27 0,01 1,38
1.2 0,04 13,20 2,46 0,04 1,31 19.89 3.92 0,10 1.24
0,06 19,72 4,67 0.18 1,16 19,94 4,70 0,18 1.19
0,08 19,96 5,48 0,26 1,03 19,96 4,99 0,23 1.06
413
литуд (j4Fo)nfn оказываются выше, чем в Предыдущем случае.
2. Периодические импульсы
В промежутке между любыми последовательно действующими импульсами система с гасителем совершает свободные колебания, описываемые при. учете вязкого сопротивления для обеих масс выражениями:
1 4
* = y=^AjB}e^
/=i /=1
(О < т = <о( < 7), которые являются решениями уравнений:
* + ^o* + <o2a 4-vy = 0; "у +.Ho(i/—x)4-
+ /о(У-*) = °- I20-1)
Здесь:
= (/2 + ^/)/(^ 4-и-^ + /^);
f = /0/со; р = Цо/<°;
h = йо/<о; 7 — со7о;
Sj — корни характеристического уравнения системы.
A(s) = ^ + |ft+(i+v)p]s» +
4-[Ap+l + (14-v)f2]s2 +
+ (hf2 4- ц) s 4- Р = 0: (20.2)
— произвольные постоянные, удовлетворяющие условиям периодичности решения:
/=1
2 Aj sj (/'Т — 1 ) =— ли; /=1
3^(/'7-1) = 0;
7=1
2 AjBjSj [esf- 1) = 0; /=1
u—UIMnas\ (JTt> — значения и период повторения импульсов; М — масса защищаемого объекта.
При нестабильной частоте р0=2л/7о наибольшую опасность для конструкций представляет случай, когда импульсный резонанс вызывается первой гармоникой разложения последовательности периодических импульсов в ряд Фурье:.
СО
и- 2 6(/—£70) = Л=—оо
Ро . Ро
2л л
COS rpo t .
Рис. 20.10. Импульсно-частотные характеристики системы с ДГК
Частота этой гармоники р.э .может принимать самое неблагоприятное значение в окрестности собственной частоты ю. Оптимальные параметры гасителя, минимизирующие наибольшие отклонения главной массы, и данные об эффективности гасителя, приведены на с. 156 [9].
Если относительная частота действия импульсов р=ро/ш ~ 1/п (где п — целое число), то импульсный резонанс вызывает одна из высших гармоник (г=п). Оказывается, что в этом случае оптимальные параметры гасителя можно принимать такими же, как при п=1.
Как видно из рис. 20.10, резонансные пики, находящиеся слева и справа от частот р=*/2. ’/з и т.д., при выбранных параметрах гасителя'[9, с. 156], практически одинаковы. При увеличении п межрезонансные интервалы частот уменьшаются, прячем иногда проявляется общий резонансный пнк
414
для разных значений ti. В качестве расчетных выбирают "наибольшие отклонения главной массы в заданном диапазоне изменения относительной .частоты р действия импульсов, который назначают с учетом нестабильности частоты Ро источника возмущения и возможного отклонения от расчетного значения собственной частоты со колебаний главной массы.
При отсутствии гасителя перемещение главной массы вычисляют по формуле
h Г h _ 1
--------тт
х е ’ 1е 2 sin Л (Г—т)+э!пПт1 —=jr ---------------------------- h-?— ’
и ( __2. т \
тД1 —2e 2 cos ПТ + e~hTJ
где И = 1— Л?/4 .
При импульсном резонансе (т]Т = 2лл) наибольшее перемещение X достигается при Г)т==л/2. Оно может быть найдено из выражения: Х/и=яе“Ал/4/[ я (1 —• е"^лп)], При малых значениях будет т]«1,
X/u^ne~hnl^ /0.5 4- —-— к Сопоставив
\ • Imn /’
этот результат с данными (рис. 20.10), можно судить об эффективности ДГК при различных значениях п, h, v.
Обычно наиболее благоприятными считают такие соотношения р0 и w, при которых р=р07<й=1/(п—0,5). В этом случае импульсы направлены навстречу движению, и перемещения системы оказываются меньше, чем при действии одиночного импульса. В частности, в отсутствие гасителя Х/и = «ле-Ля/4/{ лП+е’-/г1ЦП~0,51]}, а ПРИ перемещение
„ n/i(n — 0,5)
Х/и«ле-йл/4 0,5 +------~
4
Такую настройку системы называют аити-резонансной; на графике импульсно-частотной характеристики указанным частотам соответствуют минимальные ординаты.
При малой нестабильности частоты действия импульсов ро в случае антирезо-нансной настройки с п=1,2 установка гасителя нецелесообразна, так как в межре-зонансных интервалах он лишь повышает .амплитуды колебаний .главной массы. Прн межрезонансные интервалы частот становятся настолько узкими, что реализовать антирезонансную настройку с учетом нестабильности частоты р0 и возможного отклонения собственной частоты со практически не удается. В таких случаях необходимо принимать во внимание вероятность появления импульсного резонанса с часто
той р=1/п, причем резонансные амплитуды могут быть существенно уменьшены при установке ДГК.
3. Переходные режимы колебаний
Для ослабления вредного воздействия вибраций на обслуживающий персонал,’ а также по технологическим соображениям в некоторых случаях желательно уменьшить длительность переходного процесса колебаний конструкций при действии .мгновенного импульса, начального смещения или внезапно приложенной нагрузки. Для примера можно указать фундаменты под молоты, штампы, прессы и другие машины с импульсными воздействиями. Установка динамического гасителя в подобных случаях позволяет ввести в систему дополнительное неупругое сопротивление, тем самым благоприятно влияя на переходный процесс
Затухающие колебания системы с ДГК. Решение уравнений (20.1) при заданных начальных условиях, полученное применением преобразования Лапласа, записывают при простых корнях (5, характеристического уравнения (20.2) в виде
2
х(т) = 2wRe 2 Нт ($— s/) X («) е'* 5 /=• <'*SJ
при кратных корнях (s.=s • «sj—s,). которые часто соответствуют оптимальным параметрам гасителя,
х (т) = 2<о Re I(s — $f)? X (s) s = s«;
ds •
перемещение гасителя у(т) вычисляют аналогично с заменой Х($) ва У(.ч). Изображения по Лапласу:
X (з) = A, (sj/A (s); V (s) = Аа (s)/A(s), (20.3)
где A, ($) = {х (0) ($2 + ps + /2) +
+ х (0) [(s + + U5 + f2) + vgs] +
+ У (0) v (М* + f 2} + у (0) v/2 s}/(02;-
A3(s)= {i (0) (gs + ?2)+x(0)[f2 (h + s) - g]+
+ У (0) ($2 + M-s + 1 + vgs + v/2) +
+ У (0) [VS (LIS + /2) + (g + s)($2 +
+ fts+ I)]}/©2;
A(s) —левая часть уравнения (20.2).
При кинематических возмущениях эквивалентные начальные условия: х(0) — = м(0) =f/(0) =0 и х(0)=соН— в случае мгновенного единичного смешения основания защищаемого объекта; х(О)=соЛ, У(0)=0, х(0) «=о>г(1—-Л2—vg/i) и ^(0)-
415
Рис. 20.11. Огибающие переходных процессов колебаний главной массы
=©2g/t — в случае движения основания по
закону мгновенного импульса.
Критерии качества переходных процессов. При оптимизации переходных процессов можно использовать разные критерии качества. В частности, выбор оптимальных параметров гасителя из условия, чтобы наибольшая из вещестзенных частей корней характеристического уравнения, определяющая темп затухания переходного процесса, была минимальна, приводит к скорейшему затуханию процесса на бесконечном интервале времени при произвольных начальных условиях. Корни S|, s2 характеристического уравнения (20.2) при этом оказываются
кратными, оптимальные параметры гасителя и значение б=—2Res! определяют из
переходный режим, сопровождающийся биениями, который иногда более приемлем, чем равномерно затухающий на бесконечном интервале времени процесс. При этом можно потребовать, чтобы вещественные части корней характеристического уравнения (20.2) достигали возможных минимальных значений, а их отношение Resi/Re$2=r, где г — некоторое заранее заданное число. Если не учитывать влияния собственного неупругого сопротивления для главной массы (h=0), то оптимальные параметры гасителя, найденные по указанному критерию, будут равны:
4т = '/(|+'’)2.
выражений:
v
1 _|_ V — Л2/4
+ (1 —v)/t /(1 + v)2;
MH|x(l+v)]/2.
Численные значения g, f2, 6, а также приближенная формула для g даны в [9, с. 156]. Огибающие оптимальных переходных процессов при действии на главную массу мгновенного импульса показаны на рис. 20.11. Рассматриваемые переходные процессы затухают без биений примерно так же, как в одномассовой системе с высоким демпфированием.
Если за конечный промежуток времени необходимо уменьшить до заданного уровня колебания главной массы, вызванные кратковременным воздействием или начальными условиями, то надо использовать
В случае, если не удастся обеспечить Ц=Цопт, то при произвольном значении g<2 v/(l-]-v)3 настройку гасителя опре-
деляют по формуле
Я =----------(1 — v + г6% (1 + v) ±
' (1 -j-V)? ( Т 2 1 -I" /
1 + V
где б2 = — 2Re % = — g.
Если принять f2=ll/(l+v)2, то при X=g2(14-v)3/4v>l значение г=2%—1± ±2}/ х(х—D1 при х<1 получается
1 4-е
Г~ 1—е ’
416
Нетрудно убедиться в том, что при Х< 1, f2=l/(l+v)2 декременты колебаний по обеим собственным формам одинаковы и равны
4(1 + f)2 ~
Г ( 1 4- v)3 р2
К переходному процессу типа биений приводит также применение интегрального квадратичного критерия качества:
ОО
/ = — С [х=(/) +₽*?(/) Л, (|) J
О
где R — константа.
Минимизация этого критерия ограничивает длительное существование значительных отклонений и скоростей, позволяя получить быстро затухающий переходный процесс.
Используя формулу Парсеваля, можно записать критерий качества в виде
ОО
7 = — [ [|Х (s)|* + R |sX (s) - X (0)1=] ds, JT J
0
где X(s) — определяется выражением (20.3).
Интеграл от дробно-рациональной функции сводят к табличному и вычисляют в замкнутой форме, что позволяет из условий dI/d[i=dIldp=Q найти fOnT, рОпт •
Если, например, на главную массу подействовал мгновенный импульс, то
7 = U* [hv (1 + R) (1 + v) (1 + v +/?)]-
- /2 Н [2 + v - W _ нц (1 + v) +
Н- R (2- hp.-й2)] _|_ р. [(1 _|_ h[L +
+ И2) (1+7?) + vg2]}/2 {hf* [hv +
+ Н (1 + v)2J + /2йИ [Л2 — 2 + йр. (1 + v)] +
+ И [Ий2 + h + ftp (1 + v) + pv]} .
При й=0 имеем:
2 1 + 0,5v + /?
onT (!+*)(!+* + ₽)’
Но пт —
1 ГV + 0,75v2 + v/?(2 + V + R ) |/ (i + v)(l+v+/?)=
-j/"1 + 0,75v + P (2 + v-}-P) 'min — I/ ---------------
V v(l+v)
(20.4)
При h=£0 значение ропт можно оставить таким же, как при й=0, а настройку найти из биквадратного уравнения /«ft (vft + р (1 + V)- 4- lXR (2 + 2v — Д2)] + + 2/2ц № + и (1 + v)2 + р (Ц + _ h_
~ 7i2p)] — р l/i + 2|л + pv +
+ pR (2 + pft)J =0.
Если переходный процесс в системе вызван начальным смещением главной массы и массы гасителя от положения статического равновесия, то при й=0:
f2 = (l+v)(2 + R) 4-7? .
'опт 2 (1 + v)2 (1 + v +/?) 1+R "
Р°пт [/ (1 + v) (1 4-v + R)
£ К1+у)(2 + у)+7?]2 4(1 + v)3(l + у + 7?)? ’
7 min = Р*опт (1 +v) (1 + у+ 7?)/v.
Вычисления по приведенным формулам показывают, что влияние начальных условий на оптимальные параметры гасителя невелико, поэтому при произвольных начальных условиях для координат системы значения /опт* Нопт м°жно принимать такими же, как, например, при действии мгновенного импульса [формулы (20.4)].
Сравнение переходных режимов колебаний, вызванных действием мгновенного импульса на систему с гасителем, параметры которого выбраны из условий min7 и min™ax Res,-, показывает, что в начале переходного процесса наибольшие отклонения главной массы при использовании первого критерия затухают более быстро, чем для второго критерия. В дальнейшем эта картина меняется на противоположную, однако сами максимальные отклонения главной массы при этом весьма малы. Значение Иопт, минимизирующее интегральный критерий, примерно вдвое меньше, чем во втором случае, что упрощает реализацию рСпт-Зависимости интегрального критерия от v, h при 7?=0 приведены на рис. 20.12 для параметров гасителя, выбранных из условия min™ax Re sj (штриховые линии) и согласно (20.4) (сплошные).
Переходные режимы при затухающем кинематическом воздействии. Вопросы гашения колебаний гибких элементов конструкций при перемещении их основания по закону затухающей синусоиды или пакета таких синусоид могут возникать при нагружении конструкций сейсмическими, взрывными и другими нестационарными воздействиями. Такая же постановка задачи характерна для случая, когда гибкий элемент опирается на значительно более массивную конструкцию, которая подвергается действию мгновенного импульса. Одним из важных применений является виброзащита точных измерительных приборов, а также отдельных гибких элементов конструкций,
27—189
417
Ряс. 20.12. Зависимости интегрального квадратичного критерия качества от относительной массы гасителя
Рис. 20.13. Влияние показателя затухания воздействия на эффективность гасителя
расположенных внутри специальных сооружений.
В рассматриваемой задаче влияние вибраций защищаемого гибкого элемента на динамические перемещения поддерживающей конструкции мало и может не учитываться. При действии мгновенного импульса поддерживающая конструкция совершает свободные затухающие колебания. При совпадении некоторых собственных частот поддерживающей конструкции и защищаемого элемента в последнем возникает резонансное повышение амплитуд колебаний. Особенно ярко оно проявляется в конструкциях с малым демпфированием. Вследствие наложения собственной и вынужденной составляющих в защищаемом элементе возникают колебания типа биений, амплитуды которых вначале нарастают, затем затухают. При этом установлен
ный на защищаемом элементе гаситель включается в работу до появления наибольших амплитуд колебаний и уменьшает их. Результат существенно отличается от получаемого при импульсном воздействии непосредственно на защищаемую конструкцию. Как известно [42], в последнем случае гаситель, практически не снижая наибольшую амплитуду колебаний в точке его присоединения, заметно повышает темп затухания колебаний.
Для одномассовой расчетной схемы защищаемого элемента при перемещении его основания по закону F(t) =e~°,:>/,bTsin Хт представление об эффективности гашения колебаний дает рис. 20.13 (аналогичные зависимости при й=0,025 приведены на рис. 12.4 [9]). При этом т=со/; Ак= =Лон/Л1|<(о; Л--йо/Л1(о; Х=Хо/<о; v=mr/M-К — коэффициент уменьшения амплитуд колебаний; М, ho, (о — приведенная масса, коэффициент вязкого трения, парциальная частота защищаемого элемента; Мк, hOK, Хо — приведенная .масса, коэффициент вязкого трения, парциальная частота поддерживающей конструкции; тг — масса гасителя.
Рассматривался резонансный случай (Х=1±в), причем предполагалось, что вследствие нестабильности параметров системы X может принимать самое неблагоприятное значение в диапазоне 0,75—1,25, т. е. е=0,25. Оптимальные значения параметров гасителя можно найти по формулам:
(H-v)(2 + v) ’ 1 + 3,5u (h -|- hK) 1+v
(20.5)
Если параметры системы известны достаточно точно и при эксплуатации остаются стабильными, то при выборе параметров гасителя и оценке его эффективности можно уменьшить значение е. Для примера в табл. 20.4 приведены оптимальные значения р, р, а также максимальные амплитуды А колебаний защищаемого элемента при v=0,05; е=0,05; К=Х±е. Ооти-
Таблица 20.4
X ft=*K=(),025 Л=0,025; Л =0,1 Г»
А Ц г- А U г- А Р Р
0.8 0.9 1,0 1.1 1.2 2,37 3.33 3,90 3.48 3,26 0,15 0.10 0,11 0,17 0.18 0,88 0.8J 0,93 1,04 1.11 2.05 2,о2 2.93 2.91 2,78 0.13 0.08 0,07 0,12 0,15 0.85 0,87 0,9.3 1,01 1,07 1,65 2.03 2,43 2.59 2.43 0.07 0.04 0.04 0,07 0.11 0,85 0.93 0.91 0,99 1.03
418
мйлъное значение ц здесь оказывается меньше, чем при е=0,25, что упрощает конструкцию гасителя. Однако эффективность гасителя при W=l также уменьшается, так как в этом случае амплитуды колебаний защищаемого элемента и в отсутствие гасителя невелики.
Предположим, что поддерживающая конструкция имеет зоны сгущения собственных частот. Тогда при действии импульсной нагрузки на поддерживающую конструкцию закон движения основания защищаемого элемента представляет собой пакет затухающих синусоид. Учитывая лишь ближайшую к о зону сгущения, которая имеет границы ©(, ©2, и полагая, что она равномерно заполнена бесчисленным множеством частот, а соответствующие формы колебаний вносят равный вклад в начальную скорость основания защищаемого элемента, можно определить перемещение основания защищаемого элемента: Г(т) =
—е 2 X[Si(©2x)—Si(©ix)]/(©2—©4,
а ч f sin а где Si (а) = I ---da —
J а О
интегральный синус.
Изображение
F & = ---------TrWTTT arct£ х
(©2 — ©,) (<+ 0,5йн)
(<а2 — foi) (5 4~ о»5ftK)
(S -f- 0,5ftK )2 4" ©2е0!
Если границы зоны сгущения удовлетворяют условию (©2—©1) <0,5(1+©|©2), которое обычно выполняется, то функцию arctg (...) можно заменить ее аргументом. Тогда F(s) = 1/[(s+0,5/ik)44-©2©i] соответствует изображению одной затухающей синусоиды с частотой X— |/" ©|©2- Это позволяет в указанном случае расчет системы и оптимизацию параметров гасителя при действии возмущения в виде пакета затухающих синусоид заменить расчетом на действие одной эквивалентной затухающей синусоиды.
ДГК с частотно-независимым внутренним трением. Трение в упругих элементах гасителя и главной массы описывается теорией [30], с учетом [24]. Уравнения свободных колебаний системы с гасителем имеют вид
Л4х -]- С (и, 4- 1‘рщ) х 4- гш/ = 0;
тУ 4- с («э + Ф^г) (У — х) = 0.
Здесь p=sign(Imsoj) — множитель, принимающий значения ±1 к зависимости от С знаков мнимых частей корней so>(/e1.4) характеристического уравнения. Обозначим)
v = т/Л4; © = VС/М ;
fn = ]/c/m ; i2 = f~Q/u?-,
ai = 4- фо,; <p = f? («2 4- Ф»2);
sj = soj/©; x = ©/.
Корни характеристического уравнения системы
s4 4- [а 4- (1 -j- v) ф] s2 4- аф = ° равны
$1_= 0,5 {— а — ф— Уф ± [(о 4- Ф + ГФ)2 — 4йф]0,5}.
При р= + 1 вычисляют st.2, для которых lmsI12>0, ResM<0. Корням s3>4 соответст-вует р=—1, поэтому 4=S1,2. Наибольшая из вещественных частей корней s— будет минимальна, если Resj = Res2, наименьший из декрементов колебаний ду будет максимален, если dj=d2. Результаты оптимизации параметров гасителя по критериям приведены в табл. 20.5 для двух вариантов зависимостей между uj, vj, — согласно [30 и 34]. При фиксированном значении у2 оптимальные значения f по первому критерию указаны в первой строке таблицы, оптимальные — по второму критерию настройки гасителя и получаемые декременты колебаний — соответственно в третьей и второй строках. Если не вводить ограничений на у2, то результаты оптимизации по обоим критериям (третья, четвертая, шестая строки таблицы) совпадают ввиду кратности корней (si=s2). Так как с увеличением v оптимальные значения у2 практически не реализуются с помощью известных демпфирующих материалов и конструкций (например, при yi=0,025 и v=0,025; 0,05; 0,075 требуемые значения [30] Y2e =0,342; 0,474; 0,575), то необходимо, задавшись максимально реализуемым значением у2, определить по пятой строке таблицы оптимальное значение v. Декременты колебаний при этом значении v можно найти из выражений в шестой строке, а в случае превышения указанного значения v — по данным второй строки независимо от у, настройку гасителя — в зависимости от критерия по первой или третьей строке таблицы.
4. Случайные колебания
Эффективность ДГК при случайных воздействиях существенно ниже, чем при гармонических колебаниях. Однако она все
27*
419
420
Таблица М.5
Критерий Величина При использовании зависимостей [30] При использовании зависимостей [34]
Re St = Re $, f
?» + Vj +V (У«-Vi)* — 4vyty, 2 (l-Ь V) Vi (4 + У?)/(4 4- у?) []/ i Y(1 + V?) (1 + ¥2) -2“ 2 О + «V) + 4-2 Im (1 4-/V1) (1 4-<У») ]/[ 2(1 4. v) ?, }/ (14- У?)/(1 + У2)]
Примечание. Приведенные в первых двух строках результаты справедливы, если значения v не меньше указанных в пятой строке, для первой строки требуется также соблюдение условия: ‘2f Re (а, 4- lvt) (и, 4- ivj — (1 4- v) р — и, < 0.
же вполне достаточна для того, чтобы в некоторых случаях отдать предпочтение применению ДГК по сравнению с другими способами уменьшения колебаний. Некоторые сведения о выборе оптимальных параметров и оценке эффективности ДГК при воздействии белого шума (без учета трения главной массы) и случайного процесса, спектральная плотность которого описывается дробно-рациональным выражением, изложены в [9]. Эти материалы дополняются приведенными ниже результатами, относящимися к случайным воздействиям различных видов.
Воздействие белого шума. Белый шум часто используют как идеализацию широкополосного случайного процесса. Пусть на главную массу, жесткость упругого элемента которой обозначим С, действует белый шум с ординатой спектральной плотности С2(2л)“1. В предположении, что свободные колебания системы с гасителем описываются уравнениями (20.1), дисперсии перемещения х, скорости и=х/о и
•• '2
ускорения ю=х/ы главной массы можно определить по формулам:
а2={/*1ц(1 + v)«4-vft] +
+ /2Ц [—2 — v -f- ц/t (1 -J- v) + 4- А2] 4-ц [1 4-ц2 (1 4- v) 4-
-|- ц/И}/Д;
°v= {Лив +*) + *&] +
+/2 ц (- 2 + ц1г 4- Л2) + ц (1 4-4- и34- иА)}/Д;
2 Р ° 2
% — о^,;
л
°2
= I/6 vft 4- Z4 [ц 4- vft — vp,2 х X (1 4-v) (2-|-v)^-H(l+v4-4- 2v2) ft- — v/z3] — /2ц [2 — v — — ц (1 4- 3v) h — 3ft2 4- цЧ (2 4-4- v) ft2 4- ц (1 4- 2v) ft3 4- ft4] 4-
+ ц [1 4- ц2 (1 - V-V2) 4-4~ Ц (1 — 2v — 2vp,2 — v2p,2) h — — (1 4- И2 4- 2тц2) ft2 - pA»]} /Д;
Д = 2 {Ph [p, (1 4- V)2 4- vft] 4-+ /2pA [-24-gft(l4-v)4-H- Л2] 4- p [vp -4- ft 4- p2 (1 4-+ v)^4-hA2]},
(20.6)
где — p, +p —границы отсечения белого шума иа оси частот при приближенном вычислении вклада в интеграла от целой части подынтегрального выражения.
При кинематическом воздействии, когда движение основания системы представляет собой процесс типа белого шума с ординатой спектральной плотности (2л)“!, дисперсия абсолютного перемещения % главной массы о2=ст24-Л2ст2., дисперсия перемещения главной массы относительно основания of, ~ (р/л)—Л+q2.
Оптимальные значения ц мало зависят от Л и могут быть приняты такими же, как при ft=0, т. е. по данным табл. 12.7 [9]. Оптимальная настройка f2 зависит от выбранного критерия качества: из условия mino 1Х формула для f2 приведена в [9, с. 157]; из условия min о2 значение
, 2 4- uh
р =------—------
24-2v —Л2 ’
° 2
из условия min о ~w настройку находят из уравнения
+ с1/2 4~ со = 0, где с2 = h {(3 4- 2v?) ц 4- ft [— 1 4- 2v 4-4- v2 4- ц2 (1 4- v)] 2v 4- Л2ц (— 4 4-6v4-4-3v2) — ft3 (2 4- 4v)};
q = 2ц {ц — 2ft — Л2ц (3 — v) — — ft3 [1 4- 2ц2 (1 4- 2v)};
c0 = — P- (2 — v) + PA [1 — 2ц? (1 — v)] 4-4-ft? (2ц? 4-v — 2v2);
из условий min ст2, min u2u настройка
/На2/;
9 9 Л • 2
где fx соответствует min a", iv—minOj,.
Для критерия оптимальности min(ox4" +R($, где R — заданная константа, вследствие равенства Парсеваля, результаты можно найти согласно выражениям (20.4).
В табл. 20. 6 приведены оптимальные значения ц, f2 и соответствующие значения ст2, av°°u ПРИ использовании разных критериев оптимальности: I — min о2, II — min ст’2, III — min ст2;_ При кинематическом воздействии результаты для критерия — минимум ст2, ст2 легко получаются с помощью данных этой таблицы и указанных выше соотношений. Сопоставив дисперсии колебаний главной массы при у=0: ст2 = = о^= l/2ft, ст£, = (1—A2) /2ft (силовое воздействие), ст2= (1+А2)/2Л; о(р/л)4-[(1— —Л2)/2Л] (кинематическое воздействие) и данные табл. 20.6, можно сделать вывод о достаточной эффективности гасителя, хотя
421
Рис. 20.14. Зависимости коэффициента снижения дисперсий от продолжительности действия белого шума
Рис. 20.15 Зависимости коэффициента снижения дисперсий от показателя затухания огибающей белого шума
присоединенным ДГК целесообразно определять интегрированием уравнений моментов [27]. При внезапном действии белого шума дисперсии перемещений асимптотически устойчивой предварительно невозбужденной механической системы являются неубывающими функциями времени, возрастая от нуля до стационарных значений.
После прекращения действия белого шума дисперсии перемещений являются невозрастающими функциями, убывая в переходном процессе до нуля. Расчеты показали, что присоединение ДГК уменьшает дисперсии перемещений защищаемой конст-
Таблица 20.6
1 II III
V Л %пт f2 ' опт Q С 14 & (У %пт г2 'опт to Q е tc %пт f2 'ОПТ <* О2 W
(» 0,964 6,31 6,27 6,30 0,976 6,33 6,25 6,24 0,987 6,38 6,27 6,22
0,025 0,025 0.154 0,962 5,08 5,05 5,07 0,156 0,978 5,09 5,03 5,02 0,160 0,994 5,14 5,05 5.00
0,05 0,960 4,21 4.20 4,20 0,981 4,23 4,18 4,16 1,003 4,28 4,20 4,15
0,1 0,956 3,12 3.10 3,08 0,988 3,13 3,09 3,05 1,032 3,18 3,11 3,04
0 0,930 4,45 4.39 4,44 0,952 4,47 4,36 4,35 0,975 4,56 4,39 4.33
0,05 0,025 0,212 0.928 3,80 3.76 3.79 0,218 0,955 3,83 3,73 3.72 0.228 0,984 3,90 3,76 3,69
0,05 0,925 3,31 3.27 3,29 0,959 3,33 3.25 3,22 0,994 3,40 3,27 3.20
0.1 0,920 2.60 2,58 2,57 0.967 2,62 2,56 2,51 1,025 2,69 2,58 2,49
0 0,868 3,13 3,05 3,10 0,909 3.17 3,02 2,99 0,950 3,29 3.06 2,95
0,1 0,025 0,284 0,865 2,79 2,73 2,76 0.302 0,913 2,83 2,70 2,66 0,331 0,961 2,94 2,73 2.62
0,05 0,862 2,52 2,47 2,48 0,917 2,55 2,43 2,39 0,974 2,65 2,46 2,35
0,1 0.856 2.10 2,06 2,05 0,927 2.13 2,03 1,97 1,007 2.21 2.05 1,93
и не столь высокой, как при узкополосных воздействиях.
Нестационарные случайные воздействия. Весьма часто динамические воздействия (ветровые, сейсмические, взрывные) при проведении расчетов сооружений моделируют нестационарными случайными процессами, представленными в виде произведения детерминированной функции F(t) на стационарную случайную функцию <р(/). Максимумы дисперсий нестационарных случайных выходных процессов системы с
рукции и намного ускоряет протекание в системе переходных процессов. Об этом свидетельствуют значения коэффициента снижения дисперсий перемещений конструкции для —1(0—1(*—(Рис-
20.14), где !(•) — единичная функция Хевисайда, т=т0со/2л и в случае F(t) = = 1(/)е—e,f (рис. 20.15) при Л=0,05, е= = е0/(о. Сплошные линии соответствуют v=0,025, штриховые — 0,05, штрих-пунктирные — 0,1. Эти результаты получены [27] при параметрах ДГК:
422
Рис. 20.16. Зависимости коэффициента снижения дисперсий от продолжительности сейсмического воздействия
Рис. 20.17. Зависимости коэффициента снижения дисперсий от показателя затухания огибающей сейсмического воздействия
1 + 0.5V . f (1+v)2 ’
_ 1 f vH-0,75v2~ (l+v)3 ’
оптимальных при h=G и действии на систему стационарного белого шума. Вычисления показали, что эффективность виброгашения мало чувствительна к отклонениям параметров ДГК от указанных значений.
При проектирований сейсмостойких сооружений рассматривают также нестационарные колебания, вызванные возмущением, для которого <р(0 — стационарная случайная функция с нормированной спектральной плотностью
(₽о)= 2ао(ао + РоУ( л[ро +
+2 W+й) р»+Н+₽о)2|) • <207) где р,, — круговая частота; On, р0 — параметры (Оо>0).
При внезапном приложении узкополосного воздействия, максимум спектральной плотности которого удален от собственных частот колебаний системы, в переходном режиме вполне возможно превышение дисперсиями перемещений стационарных значений. При этом значение демпфирования
не оказывает большого влияния на перемещения системы, уровень которых в целом весьма мал. Присоединение гасителя здесь не может исключить выброс дисперсий за стационарный уровень, хотя и несколько снизит их пиковые значения.
При увеличении эффективной ширины спектра воздействия (а=а0/(о>0,2) выбросы исчезают, и дисперсии в переходном режиме нарастают монотонно. Эффективность гасителя здесь примерно такая же, как при действии белого шума, поскольку механическая система является узкополосным фильтром и в зоне частот ее собственных колебаний ординаты спектральной плотности воздействия мало зависят от частоты. Так как максимальные дисперсии перемещений системы достигаются, если максимум спектральной плотности воздействия находится вблизи ее собственных частот, то при оценке эффективности виброгашения в этих, наиболее опасных случаях полагают, что параметр а — фиксированный, а р принимает самое неблагоприятное значение, соответствующее максимальной дисперсии перемещений.
Коэффициенты снижения дисперсий перемещений главной массы при Л=0,05 показаны на рис. 20.16, 20.17 соответственно для модулирующих функций /'(/)» Рав* ных: 1(/) — 1(/+т0) и 1(0 е~8’*. Здесь в переходном режиме выбросы дисперсий за стационарный уровень не наблюдались как в системе с гасителем, так и без него даже при весьма малых а и Л. Параметры гасителя назначались в соответствии с оптимальными их значениями [9] для стационарного случайного воздействия. Численная оптимизация параметров ДГК не дала существенного эффекта, дисперсия перемещений системы уменьшилась не более чем на 5—7 %•
Таким образом, при нестационарных случайных воздействиях вполне допустимо
423
использование гасителей с оптимальными для стационарного режима параметрами. ДГК значительно уменьшает длительность переходного режима. По критерию уменьшения дисперсий ускорений и скоростей оценка эффективности виброгашения при нестационарных случайных воздействиях не столь благоприятна как по критерию уменьшения дисперсий перемещений. Если ДГК предназначен для уменьшения колебаний при стационарных воздействиях, то переходный режим, возникающий после -начала или окончания действия возмущения, как правило, не создает более опасной ситуации, чем установившийся, и его можно не учитывать.
Периодически действующие случайные импульсы. Совокупность значений UK импульсов в периодической последовательно-
СО
сти Uk8(t—kT0) рассматривают как
k=—оо
ансамбль реализаций случайного значения U с математическим ожиданием U и центрированной составляющей 77°, характеризующейся дисперсией Спектральная плотность такой последовательности:
содержит непрерывную компоненту pu<fyl (белый шум) и дискретную компоненту, состоящую из б — функций на частотах р, кратных относительной частоте ри действия импульсов. Здесь u=U/Mna>; ри = = 2л/ю7’о.
Колебания системы с гасителем при действии случайных импульсов можно представить в виде суммы детерминированной [дискретная компонента Su(p)] и случайной [непрерывная часть Su(p)] составляющих. При нормальном законе распределения флуктуаций импульсов наибольшее перемещение главной массы х+3их определяют как сумму математического ожидания и утроенного стандарта. В качестве х можно принять максимальное по t отклонение главной массы при действии периодических импульсов величиной и; для параметров гасителя, оптимальных без учета флуктуаций импульсов, значения х соответствуют ординатам импульсно-частотной характеристики (рис. 20.10). Дисперсию перемещения главной массы при Su(p) = 'l2X, вычисляют согласно (20.6), обозначим ее /. При конкретных параметрах системы н га
сителя значения 7 даны в табл. 20.6. Тогда стандарт <Гх=<ти лра//2.
Эти данные позволяют оценить эффективность ДГК при небольших флуктуациях значений импульсов. По сравнению с х относительный вклад последних в рассматриваемый критерий качества возрастает при уменьшении частоты ри, так как при увеличении номера п импульсного резонанса (что соответствует уменьшению ри) математическое ожидание х уменьшается приблизительно пропорционально 1/п, а стандарт Ох — пропорционально 1/у^п-
Как видно из формулы для Ох, вклад флуктуаций импульсов в критерий качества неодинаков для частот, которым соответствуют соседние резонансы в импульсно-частотной характеристике. При выборе оптимальных параметров гасителя с учетом флуктуаций импульсов коэффициент вязкого сопротивления ц можно оставить без изменения (см. [9, с. 156]), а настройку f2 принять из условия примерного равенства критерия качества в инвариантных точках, т. е.
VnZ (v + 2Лр,) п (v-J-3/ijA»)
При этом следует ожидать наименьших значений критерия качества при изменении частоты действия импульсов ри в окрестности n-го импульсного резонанса.
Наряду с рассмотренным часто применяют и другой критерий качества виброгашения — второй начальный момент перемещения главной массы:
2—2 Рии
Здесь X (•)—частотная характеристика системы с гасителем.
Так как гаситель реагирует в основном лишь на резонирующую гармонику (г=п), частота которой pvn близка к его парни альной частоте f, то приближенную оценку влияния нерезонируюших гармоник можно получить без учета гасителя и демпфиро
424
вания главной массы. Амплитуду резонирующей гармоники при инвариантных частотах ри=р\л, которые удовлетворяют уравнению
П2 \
(п2. — г2)2 I ' 4hn
„4 Pi .2
+ V) + йр. 1р? 2'
-^_=0, (2 + v) Л*
определяют как в случае жесткого присоединения массы гасителя. В результате
Присоединение гасителя позволяет значительно уменьшить первое слагаемое в круглых скобках (резонирующую гармонику), вносящее основной вклад в Ьх, и не так эффективно, ио все же уменьшить последнее слагаемое в Ьх, относительный вклад которого определяется соотношени-2 — 2
ем о „ и и .
При антирезонансной настройке системы (pu = l/(n—0,5)) влияние флуктуаций значений импульсов приводит к наложению случайных отклонений на детерминированную составляющую колебаний главной массы. Если уровень колебаний в целом неприемлем по санитарно-гигиеническим или технологическим соображениям, то целесообразно установить ДГК. При этом при малой нестабильности частоты действия импульсов оптимальные параметры и эффективность гасителя оценивают как в случае широкополосного случайного возмущения типа белого шума.
Первое слагаемое в фигурных скобках, умноженное на п2р2 , приблизительно равно квадрату полусуммы резонансных отклонений главной массы при действии гармонической силы с постоянной и пропорциональной квадрату частоты амплитудой. Для некоторых значений v, h такие данные приведены в табл. 12.3 [9].
Вычисления показывают, что относительный вклад в среднеквадратичный критерий нерезонирующих гармоник и флуктуаций импульсов намного ниже, чем в критерий максимального отклонения главной массы, поэтому можно оптимальное демпфирование гасителя оставить без изменения, а при определении оптимальной настройки из условия равенства bx(pi) ~ теЬх(р2) пренебречь влиянием нерезонирую-щих гармоник. Тогда
9 ло^ l + 0.5v + -^
X Zn(v + 2a/ l,5v )2].
Для системы без гасителя критерий качества
20.4. Многомассовые гасители колебаний
В некоторых случаях применение ДГК с одной степенью свободы не дает необходимого эффекта. Хорошо известна и подробно изучена теория группы параллельно установленных гасителей колебаний [9, 18, 21, 35]. При густом спектре частот свободных колебаний группа гасителей может уменьшить колебания на нескольких резонансных частотах; при разреженном спектре наряду с одиночными гасителями с оптимальным демпфированием можно использовать систему несвязанных одиночных гасителей, обладающих малым затуханием и настроенных на разные частоты в пределах заданного диапазона. Однако при этом амплитуды колебаний гасителей могут принимать большие значения, что ограничивает их применение случаями, когда амплитуды колебаний защищаемой конструкции без гасителей сравнительно небольшие.
Наряду с группой одиночных гасителей можно использовать многомассовые гасители, которые представляют системы с конечным числом или при континуальном законе распределения масс — с бесконечным
425
Рис. 20.18. Система с лнухмас совым ДГК
Ряс. 20.22. АЧХ системы с обычным (/) и дсух-массовым (2) гасителями
Рис. 20.19. АЧХ системы с обычным (/) и двух-массовымн (2, 3)
ДГК
Рис. 20.23. Система с трехмассовым Дгк
Рис. 20.20. Зависимости вффек-тивносТи от расстройки гасителей
Рнс. 20.24. АЧХ системы с трехмассовым ДГК
4fi8Q92qS6J 1р4 1fl0p
A
з 2 .7 Я
Ц32Ц94 OJ&OJMI Ц)21,04 1,06 р
Рис. 20.21. АЧХ системы без гасителя (/), с обычным без затухания (2) и двухмассовым с затуханием (3) гасителями
Рис. 20.2Б. АЧХ системы при различном демпфировании двухмассового гасителя
ненных гасителя обычного типа с основной
числом степеней свободы. При проектировании многомассовых гасителей возникает необходимость оптимизации их структуры и параметров для получения максимальной эффективности. При этом следует выяснить, не превзойдут ли допускаемых значений амплитуды колебаний отдельных масс. Среди подобных задач практически наиболее важная состоит в расширении зоны эффективной работы гасителя колебаний при ограниченной нестабильности частоты возмущающей силы. Вторая задача — формирование гасителей, для которых можно было бы рассмотреть другие, более общие критерии качества. Как пример, можно назвать задачу о виброгашении системы с несколькими зонами сгущения частот.
Далее принято, что защищаемая конструкция приводится к системе с одной степенью свободы, гармоническое воздействие с нестабильной частотой р0 приложено к защищаемой массе М. Простейший из многомассовых гасителей (рис. 20.18) представляет собой два последовательно спеди-
(гП]) и дополнительной (т2) массой, причем cx=m2//nI<^ 1. Обозначим: и?=С1М, ^=сх/т\, ii?=c2/m2, P=Po/w,
-\-гп\)/М, е= |а>2—Wjj /со2. Ниже даны сведения [14] об эффективности виброгашения в случае, если v=0,05.
Оказывается, что такой гаситель эффективнее обычного при малой нестабильности частоты возмущения. В качестве меры эффективности принята ширина х=рк— —рн интервала [ри, рк] частот возмущения, в котором амплитуда А колебаний защищаемой системы не превышает заданного уровня R.
На рис. 20.19 показаны амплитудно-частотные характеристики (АЧХ) главной массы и зоны эффективной работы обычного гасителя (кривая 1), двухмассового без затухания (2) и с затуханием (5). При 2__ настройке двухмассового гасителя — ©i--=©5, со2= со? / (1 + а), е « а — спектр частот системы почти симметричен относительно р= 1, что позволяет максимально расширять интервал х. При отсутствии Демпфирования
426
в звеньях гасителя увеличение а расширяет зону [а,- д] неэффективной работы. Отношение.^—а)/(Рк—Рн' Равно: 0,4 при е= = 0,01; 0,56 при е=0,3; 0,7 при е = 0,09 Для уменьшения резонансного пика при
1 необходимо ввести в гаситель неупругое сопротивление.
На рис. 20.20 показан характер изменения эффективности (кривые 2, 3 — соответственно с демпфированием в гасителе и без него), а также расчетной амплитуды колебаний главной массы (кривая /) в зависимости от расстройки е гасителей. Коэффициенты неупругого сопротивления были приняты: в защищаемой системе 0,02, в нижней ступени гасителя 0,04, в верхней 0,08.
Как видно из рис. 20.21, при А?=2 двухмассовый гаситель (кривая 3, е=1,3%) примерно на 30 % расширяет зону эффективной работы обычного гасителя (кривая 2).
Если принять а= 1, то при определенной настройке гасителя резонансная частота в окрестности р=1 отсутствует и АЧХ главной массы имеет вид кривой 2 на рис. 20.22. По сравнению с обычным гасителем (линия 1), эффективность выше на 20 %. Амплитуда колебаний массы т2 значительно .меньше, чем при первом варианте (а<^1), для которого характерны большие перемещения дополнительной массы, ограничивающие область применения двухмассовых гасителей.
Из сопоставления этих двух вариантов видно, что для выбора оптимального следует учитывать несколько критериев. Ясно, что число критериев возрастает с числом масс гасительной системы, нарастает число положительных и отрицательных свойств гасителей. Как следует из рассмотрения приведенного простейшего примера, неучет какого-либо из этих факторов может полностью обесценить результаты оптимизации параметров гасителя.
АЧХ, аналогичные изображенным на рис. 20.21 и 20.22, можно получить и для Других схем многомассовых гасителей. Рассмотрим трехмассовую гасительную систему (рис. 20.23) при соотношениях: т2=тя; rn^ni2-t а—т2(М<&1’, /n1+m2+^3=0,05M.
В отличие от предыдущего случая, здесь Две дополнительные массы, присоединенные к главной массе гасительной системы. С помощью еще одной дополнительной массы сбивается резонансный пик при р=»1, но при этом немного уменьшается зона эффективной работы. Это нетрудно объяснить: в
рассматриваемом интервале частот возмущения дополнительные массы не позволяют основному гасителю раскачиваться слишком сильно и тем самым понижают его эффективность. На рис. 20.24 приведены при Yo=0,02; v2=Y3=0,08 АЧХ главной массы, которые имеют резонансные пики, менее выраженные, чем у кривых на рис. 20.21. Это указывает на повышение стабильности виброгашения. Заметим, что массы т2, пг9 имеют амплитуды, гораздо большие амплитуд перемещения массы М, что также ограничивает область применения такого гасителя.
Для многомассовых гасителей возможность наложения дополнительных связей и ограничений на звенья в процессе эксплуатации для улучшения их свойств является важным преимуществом в сравнении с обычным гасителем.
Из приведенного следует, что многомассовые гасители комбинированного типа без дополнительных связей между массами и без специальных демпфирующих устройств значительно эффективнее по сравнению с обычным гасителем без затухания (в смысле расширения зоны эффективной работы) и оказываются при нестабильности частоты возмущения до 8 % примерно втрое эффективнее (по снижению амплитуд), чем обычный гаситель с оптимальным затуханием.
Для двухмассового гасителя, показанного на рис. 20.18, при выборе оптимального затухания в звеньях эффективность гашения более высокая, чем у обычного гасителя с оптимальным затуханием. Например, для а=0,1 характерные АЧХ главной массы при различных коэффициентах у внутреннего трения в звеньях гасителя приведены на рис. 20.25. Судя по уровню расположения узловых точек, даже при неоптимальной настройке повышение эффективности в сравнении с обычным гасителем, для которого А=6,4, составит примерно 30 %•
Остановимся на гасителях с дополнительными связями. Многомассовые гасители, содержащие помимо необходимых связей (т. е. минимального числа связей элементарного типа, обеспечивающих совместность функционирования гасительной системы) еще и дополнительные связи, которые играют вспомогательную роль, обладают удобством настройки, монтажа и коррекции их свойств.
Гаситель, изображенный на рис. 20.26, содержит пять одинаковых масс (т,=т), взаимосоединенных гибкой связью (стержнем, пластинкой или мембраной) и с помо-
427
Рис. 20.26. Система с пятимассовым гасителем
Рнс. 20.29. Спектральные кривые для системы с многомассовым гасителем
Рис. 20.27. АЧХ системы с обычным (/} и пятимассовым (2) гасителями
Рис. 20.30. Завися- X мость амплитуды колебаний системы от S3 соотношения жестко-стей гасителя 'z
П to
О 0,1 ZJ2 0,} 0,4 0,5 0,6 ЦО-
Рис. 20 28. АЧХ си-
стемы при рациональных настройках пятимассового гасителя
Рис. 20.31. АЧХ системы при разных настройках пятимассового гасителя
шью упругих элементов с,- с изолируемой массой М. За настроечные параметры мож-
но принять: pi=mi/M; с3; ki=C2/c3; k2= =ci/c3; G=c3/c*, где с, — изгибная жесткость дополнительной связи (в случае стержня c»=6EIfa3). Фиксируя отношение ki/k2, можно выразить все настройки через один параметр, например f2=Wj/0j (wj = =ci/mb 0‘f = C/M).
На рис. 20.27 приведены АЧХ главной массы системы с многомассовым гасителем при G=l; £i = 0,44; £2=0,73; f2=l,15 (кривая 2) и с обычным гасителем (кривая /). При R=2 интервал гасимых частот возмущения примерно на 30 % шире в сравнении с обычным гасителем. Из рис. 20.28 следует, что возможны две выгодные для виброгашения настройки гасителя: f2=l,15 позволяет получить расширение интервала гасимых частот возмущения, а /2=0,66 соответствует уровню наименьших амплитуд. Необходимая настройка может быть определена графическим способом по спектральным кривым системы (рис. 20.29).
В обоих случаях желательно, чтобы спектр системы был приблизительно симметричным в окрестности р=1. Свойства сложных многомассовых гасительных систем
в большой мере определяются характером изменения спектральных кривых в зависимости от изменения настроечных параметров. Важным показателем является степень сгущения этих кривых, на которую в данном случае влияет отношение ki/k2 и значение G. Наименьший при заданном затухании в звеньях системы уровень амплитуд также зависит от жесткости дополни
тельной связи (рис. 20.30). При сильном разрежении спектра получаются АЧХ, изображенные на рис. 20.31. Гасители с такими свойствами можно использовать при внешних воздействиях полигармонического типа.
Приведенные результаты [14] касаются многомассовых гасителей с незначительным затуханием в звеньях. Анализ показывает, что возможны различные настройки гасителей, которые придают им отличающиеся качественные особенности, которые могут быть использованы в различных ситуациях практики виброгашения. Общая особенность рассмотренных многомассовых гасителей состоит в том, что главную часть массы гасителя используют на более широком интервале частот возмущения, чем в случае гасителя обычного типа. Важным достоинством многомассовых гасителей является также возможность коррекции их свойств, не прекращая при этом эксплуатации гасителей системы на длительный срок.
20.5. Расчет многомассовых и континуальных систем с присоединенными гасителями колебаний
Место установки ДГК выбирают весьма просто, если конструкция представляет собой систему с одной степенью свободы. Для конструкций с распределенной массой (балки и плиты перекрытий, башенные сооружения и т. п.) для повышения эффективности ДГК обычно устанавливают в точке, в которой без гасителя наблюдается наибольшее динамическое перемещение. В
428
некоторых случаях, когда внешнее воздействие на конструкцию носит четко выраженный локальный характер (неуравновешенная машина на балке перекрытия), вполне оправдана установка гасителя в месте локализации воздействия.
При выборе расчетной схемы защищаемой конструкции необходимо учесть все факторы, влияющие иа ее частотный спектр: характер распределения жесткости и массы конструкции, упругость и инерцию ее опорных закреплений. Следует также принять во внимание внутреннее и внешнее демпфирование конструкции, так как при его увеличении эффективность гасителя снижается. Правильный учет перечисленных факторов позволяет прогнозировать динамические качества защищаемой конструкции, обоснованно выбрать оптимальные параметры н оценить ожидаемую эффективность ДГК.
При динамическом расчете систем с конечным и бесконечным числом степеней свободы необходимо иметь в виду, что установка гасителя приводит к существенному снижению вклада резонирующей формы колебаний, на частоту которой он настроен. В связи с этим относительное влияние остальных форм колебаний оказывается больше, чем без гасителя. Однако, как показали расчеты, для слабодемпфированных конструкций с разнесенными частотами это влияние все же невелико. Приближенно амплитуды высших форм колебаний, частоты которых удалены от парциальной частоты гасителя, можно принимать такими же, как и при его отсутствии.
При оценке эффективности виброгашения весьма важен тщательный учет демпфирования как защищаемых конструкций, так и гасителей. Иногда элементы конструкций и присоединяемые ДГК могут иметь различные механизмы демпфирования, последние чаще ::сего описываются в виде вязкого и частотно-независимого трения. Не меньшее значение имеет точность применяемых методов расчета. Обычно различают системы с «пропорциональным» трением, которые обладают вещественными формами собственных колебаний, разделяющими уравнения колебаний в главных координатах, и системы с «непропорциональным» трением, характеризуемые комплексными формами собственных колебаний и связанными уравнениями.
Большинство конструкций с ДГК имеет «непропорциональное» трение, так как Даже в случае однотипного механизма демпфирования коэффициенты неунругого со
противления защищаемой конструкции и ДГК, как правило, существенно различны. Для таких систем зачастую приходится уточнять обычные методы динамического расчета, пригодные для слабодемпфированных конструкций. В этой связи далее уделяется внимание построению решений для систем с двумя видами демпфирования, приведению континуальных систем с ДГК к моделям с конечным числом степеней свободы и некоторым методам расчета этих моделей.
Конечно-мерные модели систем с присоединенными гасителями. Во многих случаях расчетная схема защищаемой конструкции с ДГК может быть представлена в виде многомассовой системы с вязким и частотно-независимым трением. Для учета двузначности мнимых частей комплексных членов уравнений колебаний вводят [24] множитель р=sign (Ims), где s— любой из корней sj (j=l,2n) характеристического уравнения или показателей ipk при поли-гармонических воздействиях. Уравнение
Aly + Но у -|- (С01 + »рСо2) у = У] Fk е Рк fe=i
(20.8) имеет общее решение
у = Uest b+U* es** d + Yh ePh * . k=i
(20.9) Здесь M. Ho, Coi+iCot—nxn — матрицы инерционных. диссипативных и комплексных квазиупругих коэффициентов; п — мерный вект>р возмущений; U, S — комплексные пХл — матрицы собственных векторов и соответствующих нм собственных значений, которые лежат в верхней (Р“ “ + !) полуплоскости комплексного переменного, т. е. удовлетворяющих уравнению: MUS2+HoUS+ + (Coi+iCo2)£J—0; Y^— вектор, определяемый урав-2
иением: f—Мр^ +HoiPk+ (Coi+tsign р&Сэг)1 Yk=Fk‘. знак «х> — признак комплексного соппяжения матрицы без транспортирования: предполагается, что кратные собственные значения отсутствуют н вязкое трение не достигает критической величины.
Наличие 2п произвольных постоянных (векторы b, d) позволяет удовлетворить заданным начальным условиям. Решение (20.9) асимптотически устойчиво, так как Res;-<0 (/=1,2п) при положительно определенной матрице Но и симметричных матрицах Coi, Со2-
При воздействии Fk cos pkt (Fk sin ptf) решение получают удержанием вещественной (мнимой) части решения (20.9) или суперпозицией результатов от воздействий Fke , Fke я . При негармонических воздействиях можно использовать импульсные переходные функции или частотные характеристики, отличия результатов невелики [24, 25].
420
При симметричных матрицах уравнения (20.8) собственные векторы удовлетворяют условиям ортогональности: U'MUS+SU'X XMU + U'H0U=E-, SU'MUS— U'(Col +
+ iC02)U=S, где E — единичная матрица. В частном случае «пропорционального» трения или «непропорционального», но при Яо=О, справедливо при другой нормировке матрицы U условие ортогональности Li'M(J=E. Система (20.8) имеет «пропорциональное» трение, если НйМ~1С01 = = и Сй\М~*Со2= C02M-‘Coi.
Если ДГК присоединены к континуальной системе с «пропорциональным» трением, то весьма эффективны при вычислении АЧХ описанные в [9] методы сил, перемещений и смешанный, которые позволяют перейти к системе с конечным числом степеней свободы. Для такого перехода в случае «непропорционального» трения защищаемого объекта целесообразно применить метод Бубнова—Галеркина, принимая в качестве координатных функций формы колебаний недемпфированной системы.
Дифференциальное уравнение колебаний континуальной системы с вязким и частотно-независимым трением:
/ d \
тх у + Ьх у -j- 1 + ах —— 1 у 4- ipfl2 х \ at )
Xy=--Qx(t) <20.10) в результате замены координат
у = W(f, — \ тх W ydt и х
<7(П = \W' Qx(t)dx (20.11) X
приводится к матричному уравнению
Ф 4" Й + ^ + Мф = <?(/). (20.12) которое разделяется на несвязанные уравнения лишь при «пропорциональном» трении, когда матрицы h= \ W'[bx+axRi]-Wdx\ с2= х
= \W'R2Wdx диагональные. Здесь тх, ах, х
— функции, описывающие распределение по координате х массы, коэффициентов вязкого внешнего и внутреннего трения; Rt, R2 — линейные дифференциальные операторы с зависящими от х коэффициентами упругих и неупругих сил; Qx(t)— действующая нагрузка; у — перемещения; Q2 — диагональная матрица размера п квадратов собственных частот; U7=[U7j]'1' — вектор-строка соответствующих форм колебаний, удовлетворяющих уравнению—тхЖ22-|-4-/?i1F=0 и условиям ортогональности \mxW'Wdx=E-, £ —единичная матрица х
размера п; % — область изменения х; п —
число учитываемых форм колебаний. Точно также получается модель (20.12) для двумерных и трехмерных континуальных систем, необходимо лишь скалярный аргумент считать векторным и одномерные интегралы заменить кратными соответствующей размерности.
Для континуальной системы с присоединенными в отдельных точках (т] = 1, 0 гасителями, колебания которых описываются уравнениями:
% + И(гП “ *п) + /! ("о + i₽%) Х
Х(гп-('Л) = О(Ч“ I. <)•
в правой части (20.10) следует добавить ре-I
акции гасителей 2 6(х—xq) —Уп)+
п=1
где Уц, zf) — абсолютные перемещения системы и гасителя в точке т); б(-)—функция Дирака.
Используя соотношения (20.11), вводя
векторы:
и матрицы:
f2 (и + i pv) = (Ur) + t;
ГЛ 4- F' mp.F — F* my 1
H Г
_ Й2 + F' mp uF — F' mP и 1
C1 = —PuF Pu J’
Г c2 4- F' mp vF — F'm p v C2=|_ — PvF Pv J,
можно получить матричное уравнение
Y 4- HY + (Ct 4- tpC2) У = g (O - (20.13)
которое далее решают в частотной области методами, разработанными для систем с конечным числом степеней свободы.
Приведенные формулы в частных расчетных случаях намного упрощаются. Гак, при установке гасителя (масса тТ, коэффициент вязкого трения р.г, квадрат парциальной частоты f г) на сооружении, для которого учитывают лишь первые две формы собственных колебаний (частоты —-Ш1, <х)2» ординаты в точке установки гасителя — U7n, №г2), векторы и матрицы в (20.13) имеют вид;
430
g(t) =
<71(0
<h (0
о
н =
г “г г1 гг
-HrW'ri
'"гНЛгЛгг -'"гНЛн xmr Цг ^‘г2 Wr2 — тт Иг ^г2
Мт Г2 Мт
©‘j и + тг f* W2.
mrf~Wr} Wr2 ~№ri
тг /? №Г1 ^2 - mr ft ^rl
X ©2 й + mr /г ^г2 mrfr I
-/Ml ft
О О
С2 = О Ы2У 0 , 0 0 0
где — §Wj(x)qx(t)dx; и, и—константы [30, 34]
X
частотно-незавнснмого трения в сооружении.
При учете частотно-независимого трения в комплексной форме временной подход к исследованию нестационарных колебаний непосредственно не применим, поэтому в некоторых случаях целесообразно перейти к эквивалентной в том или ином смысле модели системы, для которой пригодны различные методы решения задачи. Для уравнения (20.8) при неизменной матрице М можно подобрать множество вариантов матриц квазиупругих и диссипативных коэффициентов, при которых сохраняются частоты, формы, декременты колебаний, импульсные переходные функции системы. Наибольший практический интерес представляет эквивалентная упруговязкая модель [25], матрицы которой:
Но = Но + С02 [Im (USU-1)]-1; с02---О; С01 = С01 - Со2 [Im (fASf/-1))-1 Rs (USU-1) .
Если система с «непропорциональным» трением имеет невысокие декременты колебаний, то, пренебрегая влиянием трения на формы собственных колебаний, можно определить их из уравнения — MUQ2 + COiL/=Q (Q2 — диагональная матрица квадратов собственных частот) и найтн матрицы /^о**^о-|-Со2С/Я| Ii7~1f-Coi«»Coi-f-“Co2t7Q{ х
X p+aQf11/, где /Q2—₽?¥4;
P=diagh; a=diagc2; h = U'H0U\ с2— = U'CwU- Относительно квазиглавных координат ip=U~ly уравнения эквивалентной модели
Ф + (h + с2 fif1 )<р + |й2 + с2 Q~X X
X (p + aQf1)] (p = q(t),
где q(t) = U'Q(t) разделяются на независимые лишь при «пропорциональном» трении, когда h, с2 — диагональные матрицы.
Методы расчета систем с конечным числом степеней свободы. При «непропорциональном» трении весьма эффективен способ вычисления АЧХ, основанный на разложении решения уравнения (20.13) по формам колебаний недемпфированной системы и применении метода последовательных приближений. Из уравнения (—(a2E+Ci) Vj=O определяют формы и частоты свободных колебаний и после подстановки: g(t) = GeiJ,t;
п+1
У=Хе'р<; Х= У AjVj систему уравнений /=1
относительно коэффициентов разложения
п+1
V'k G —i 2 (Pc2jh + phjh)
__________/=I(/Vfe)_________________
-p2 + ^ + i(pc2ftft+p^ft)
(* = i, « + /)
решают, например, методом Зейделя. Здесь c2jk= VkC2Vj; hjk=V hHVj. Сходимость процесса обусловлена тем, что в резонансном случае (р~(о,<) в разложении X преобладает, как правило, k-e слагаемое, а в не-резонапсном — демпфирование вообще слабо влияет на ординаты АЧХ. Этот способ можно применять для линейных, гармонически или статистически линеаризованных систем.
При стационарных случайных колебаниях, наряду с частотным подходом, основанным на вычислении АЧХ, эффективны методы непосредственного определения дисперсий и корреляционных моментов из систем линейных алгебраических уравнений. Для этого получают уравнение конечномерной эквивалентной упруговязкой модели системы. Затем, решая матричное алгебраическое уравнение Ляпунова, являющееся частным случаем уравнения (12.12) [9] при f—>-оо, F(7)=const, I(t)=0, определяют матрицу корреляционных моментов координат системы. Дисперсии координат можно также вычислить [22] по коэффициентам
431
дробно-рациональных аналитических выражений частотных характеристик.
Аналогичные приемы применяют для вычисления интегральных квадратических оценок качества переходных процессов на бесконечном интервале времени, возникающих после действия на систему мгновенного импульса. Временной подход к расчету линейных систем с присоединенными ДГК при прохождении через резонанс и при нестационарных случайных воздействиях описан в [9, 27].
Если защищаемая система или гасители имеют нелинейности, то при случайных воздействиях целесообразно воспользоваться методом статистической линеаризации [4, 22]. Далее к статистически линеаризованным уравнениям применяют частотный или временной подход. Однако поскольку коэффициенты линеаризации зависят от неизвестных заранее математических ожиданий и корреляционных моментов координат, то при частотном подходе приходится прибегать к методу последовательных приближений. При нестационарных случайных воздействиях часто более предпочтительным оказывается временной подход, при этом математические ожидания и корреляционные моменты координат определяют интегрированием системы уравнений, которая формируется непосредственно по коэффициентам статистически линеаризованных дифференциальных уравнений.
20-6. Эффективность гашения колебаний некоторых строительных конструкций
Консольный стержень. Расчетные схемы многих специальных сооружений, таких, как радио- и телебашни, антенные сооружения, дымовые трубы, высотные здания, мемориальные объекты — обелиски и т. п., могут быть представлены в виде консольного стержня постоянного или переменного поперечного сечения. Некоторые данные о гашении продольных и поперечных колебаний консольных стержней при гармонических воздействиях, колебаний типа ветрового резонанса и галопирования поперек ветрового потока, а также стационарных случайных колебаний при ветровых и сейсмических воздействиях приведены в [9]. Далее будут даны результаты расчетов, связанных с оценкой эффективности виброгашения консольных стержней при других характерных режимах колебаний.
- Затухающее кинематическое воздействие [17]. Предположим, что консольный стержень установлен .на значительно более
массивной поддерживающей конструкции, которая совершает свободные затухающие колебания, вызванные действием на нее мгновенного импульса. Если частота этих затухающих колебаний близка к одной из частот колебаний консоли, то амплитуды консоли в переходном режиме типа биений могут быть уменьшены с помощью ДГК, установленного на свободном конце. При перемещении
ехр
тI sin рх
основания консоли расчеты выполнялись для стержня постоянного сечения длиной /=10 м, погонная масса которого т= =262 кг/м, жесткость Е1= 1,57-107 Н-м2, первые четыре частоты 2,82; 17,6; 49,3; 96,7 рад/с, коэффициент вязкого неупругого сопротивления Л=0,025. Учитывалась нестабильность частоты р в окрестности низшей частоты колебаний стержня с гасителем. Численная оптимизация параметров гасителя показала, что их можно находить приближенно расчетом приведенной системы с одной, соответствующей резонирующей форме колебаний, степенью свободы, с присоединенным ДГК, т. е. по формулам (20.5).
Максимальные амплитуды колебаний конца консоли при различных значениях отношения массы гасителя к массе стержня приведены в табл. 20.7. Число I учитываемых форм колебаний стержня оказывает слабое влияние на результаты.
Таблица 20.7
Лк i тг!т1, %
0 0,5 1 • 1,5 2 2,5
1 21,5 9,86 7,43 6,21 5,38 5,04
0,025 2 21,5 10.03 7,52 6,28 5,44 5,08
3 21,5 10,07 7.54 6,29 5,44 5,08
1 9,70 6,72 5,57 4,98 4,62 4,34
0,1 2 9,70 6,81 5,63 5,03 4,65 4,36
3 9,70 6,83 5,64 5,04 4,65 4,36
Исследована также эффективность гашения колебаний стержня, жесткость и погонная масса которого изменяются по законам: EIx=EIR(xfR) "+2; тх=тп{х1К)п Было принято: /?=13 м; г= = 3 м; £/я=1,57-107 Н-м2; /пл=262 кг/м; h=0,025. Учитывались первые четыре формы колебаний стержня. Зависимости коэффициентов гашения наибольших перемещений свободного конца от отношения * массы гасителя к массе стержня показаны на рис. 20.32. При увеличении п приведен-
432
Рис. 20.32. Эффективность гашения колебаний стержне при действии затухающей синусоиды
ная к свободному концу консоли масса уменьшается, что приводит к повышению относительной массы и эффективности гасителя.
Из полученных результатов следует, что при установке гасителя вклад высших нерезонирующих форм колебаний стержня хотя и повышается, но все же остается незначительным, поэтому при оптимизации параметров можно пользоваться данными для соответствующей приведенной одномассовой системы, оборудованной ДГК. Если гаситель настраивают на одну из высших частот, то необходимо учитывать влияние всех предшествующих частот и форм свободных колебаний стержня.
Приведенные результаты могут быть использованы для предварительной оценки эффективности виброгашения башенных сооружений при сейсмических воздействиях, расчетные модели которых принимают в виде пакета затухающих синусоид.
Нестационарное случайное воздействие. Исследованы колебания консольного стержня постоянного сечения (параметры такие же, как в предыдущем пункте) с двумя ДГК на свободном конце при перемещении основания в виде мультипликативного нестационарного процесса [27]. Детерминированная модулирующая функция полагалась: F(t) = (р0//20л)ехр(1—Ро^/2Ол), спектральная плотность стационарного сомножителя соответствовала известному дробнорациональному выражению (20.7) с параметрами: осо=7с~1; ро=18 с-1. Параметры гасителя, настраиваемого на j-ю частоту свободных колебаний стержня со/, определяли по формулам: foy=<Oj/(l +v,); Ho/=co/jZ Njl (1 +v/), где vj — отношение массы гасителя к приведенной в точку его установки массе стержня при колебаниях По /-й форме. Рассматривались различные значения масс гасителей mh т?, настраиваемых на первую и вторую частоты колебаний стержня, а также их суммарной массы N*^mi+mi)/rnL
Рис. 20.33. Эффективность гашения колебаний стержня при нестационарном случайном воздействии
Рис. 20.34. Области сти
параметрической неустойчиво-трубы с ДГК
Кривые, показывающие коэффициент К уменьшения дисперсий прогибов свободного конца консоли прн установке гасителей, приведены на рис. 20.33 сплошными линиями при нестационарном воздействии, штриховыми— при стационарном (F(t) = l). В данной задаче, несмотря на то, что ордината спектральной плотности воздействия в окрестности (о2 в 2 раза превышала ординату вблизи Wi, основной вклад в прогибы стержня без гасителей вносят все же колебания по первой форме (94 %), составляющая по второй форме близка к 5 %, поэтому целесообразнее по критерию уменьшения дисперсий прогибов стержня использовать лишь один гаситель суммарной массы, настроенный на основную частоту. Эти результаты представляют практический интерес при проектировании башенных сооружений для сейсмически активных районов.
Галопирование в ветровом потоке. Башенные сооружения с аэродинамически неустойчивой формой сечения (квадрат, прямоугольник, ромб и т. п.) при определенных скоростях потока способны совершать длительные колебания поперек потока, частота и форма которых, как правило, соответствуют основному тону. Это явление имеет автоколебательную природу и называется галопированием. При описании не-
28-189
433
линейных аэродинамических сил, которые • действуют на колеблющееся тело, обычно используют квазистатический подход, аппроксимируя коэффициент Сх в выражении погонной аэродинамической нагрузки полиномом с нечетными степенями отношения скоростей сечения и потока [40]. Такой подход приводит к экспериментально подтвержденному выводу о том, что критическая скорость ветра, вызывающая галопирование, прямо пропорциональна декременту колебаний конструкции. Именно поэтому одним из эффективных средств борьбы с галопированием являются ДГК, значительно повышающие демпфирование сооружений и соответственно критические скорости.
Оптимальные параметры ДГК с вязким трением, найденные из условия максимума критической скорости ветра для основного тона колебаний сооружения, определяют по формуле (12.18) [9]. При рассмотрении автоколебаний сооружений, оборудованных гасителями, в которых демпфирование осуществляется благодаря повышенным диссипативным свойствам упругого элемента, можно воспользоваться моделью частотно-независимого трения и частотным подходом (см. п. 20.5). К уравнениям колебаний сооружения, рассматриваемого как консольный стержень переменного сечения, и гасителя применяют процедуру Бубнова—Галеркина в предположении автоколебаний по основному тону и гармоническую линеаризацию аэродинамических сил. Далее исследование корней характеристического уравнения позволяет определить, что критическая скорость ветра будет максимальна при параметрах гасителя: p=uj^ 1 +v; u2+iv2= (1-Н|Л v)/ /p^l+v, где ui — вещественная часть сомножителя в выражении комплексной жесткости сооружения.
Оптимальный коэффициент у2 неупругого сопротивления гасителя при использова-нйи соотношений [30] между и, v, у равен у2= у/v/(l+0,5v). Если применить формулы [34], то у2=рГ v.
Сопоставление эффективности ДГК с вязким и частотно-независимым трением показывает, что при оптимальных параметрах оба типа гасителя имеют одинаковую эффективность, поскольку критическая скорость ветра повышается в (1+уЛ v/yj раз, где у1 — коэффициент неупругого сопротивления сооружения. Вместе с тем оптимальное значение у2 не всегда удается реализовать, особенно с увеличением v, что, однако, компенсируется простотой конструкции 434
и надежностью работы ДГК с частотно-независимым трением.
Динамическая устойчивость при пульсирующей нагрузке. Поведение недемпфированного консольного стержня, несущего на свободном конце сосредоточенную массу М, к которой перпендикулярно оси стержня присоединен ДГК, при действии продольной сжимающей силы. F=FO(1 + + ecosp/), было исследовано в [33]. Главная область неустойчивости находится вблизи частоты р=2соо, где ©о — круговая частота колебаний, которая для стержня без гасителя равна 3/" 2EI/Mlz. Присоединение ДГК без демпфирования раздваивает эту область неустойчивости иа две области простого параметрического резонанса, начинающиеся при е—>-0 от точек, для которых pi,2=2toi,2. Здесь частоты собственных колебаний системы с гасителем определяют по формуле
±/[14-(l+v)f?]2 — 4/2} .
Кроме того, появляется еще область суммарного комбинационного резонанса, которая начинается при е->-0 от точки pi+2= = (01+<02.
Подбирая настройку f2 гасителя, при стабильной частоте р возбуждения можно добиться такого расположения областей простого и комбинационного резонанса, что на упоминавшихся критических частотах системы без гасителя динамическая неустойчивость появляется лишь при достижении определенного уровня пульсации нагрузки.
При нестабильной частоте возбуждения необходимо устанавливать ДГК с демпфированием. Это позволяет отодвинуть от оси р/соо области неустойчивости, т. е. они начинаются лишь при значениях е, превышающих некоторое минимальное. Задача оптимизации параметров ДГК по критерию максимального запаса динамической устойчивости при нестабильной частоте возбуж-max min 6 ппия нё дения, т. е. из условия р/со0 » пока не решена. Тем не меиее можно рекомендовать параметры ДГК с вязким или частотно-независимым трением, обеспечивающие скорейшее затухание переходного процесса системы с гасителем (см. п. 20.3). При этих параметрах модули вещественных частей корней характеристического уравнения системы с ДГК достигают максимума и корни оказываются кратными. Следовательно, можно ожидать появления лишь одно
главной области динамической неустойчивости, которая ввиду максимально возможного с помощью ДГК демпфирования системы должна быть отодвинута от оси р/соо больше, чем при других параметрах гасителя.
Виброгашение двухступенчатого стержня. Особо важной является частная задача о гашении колебаний телевизионных башен, расчетные схемы которых часто могут быть представлены в виде двухступенчатого стержня. Нижняя ступень — железобетонный или металлический ствол башни, верхняя — антенная часть, всегда металлическая и значительно более гибкая. При вибрациях в антенной части перемещения значительно больше, чем в стволе. В подобных сооружениях эффективность ДГК обычно выше, чем для сооружения постоянного сечения, и для них возможно применение гасителей с меньшей относительной массой. Приведем результаты расчета, выполненного С. Р. Букейхановым для башни высотой 210 м. Высота ствола 160 м, антенной части — 50 м. Изменение жесткости и массы происходит по законам:
для ствола;
£1 h (*) = £1 ho (*1/G)4'. mi (x) = = m10 (xj/G)?;
для антенной части:
£2 h (ж) = £-2 ho (ж2//2)3; rn-2 (x) = = /я20 x2l /2,
где £,/io= 1,5- 10е т-м2; E2Im=l,5-107 т-м2; m10=l т-с2/м; /«20=0,00015 t-c2/m.
Коэффициенты внутреннего неупругого сопротивления приняты для ннжней части Yi=0,l, для верхней — у2=0,05; предполагалось, что башня загружена гармонической равномерно распределенной нагрузкой, имеющей амплитуду q=0,01 т/м и нестабильную частоту. Основание рассматривалось как упругое однородное инерционное полупространство, учитывалась также масса фундамента. Отношение массы гасителя к массе сооружения составляло 0,01, коэффициент неупругого сопротивления уг=0,2.
При установке такого гасителя на верхнем конце башни наибольшая амплитуда колебаний уменьшилась в 9—10 раз, одновременно значительно понижались и амплитуды динамического изгибающего момента в основании башни. Однако ход гасителя, установленного в антенной части, чрезмерно велик и соответствующая конструкция трудно реализуема, поэтому гасители обычно устанавливают на верхней части стизда. Назначая требуемый ход, следует 28*.
суммировать амплитуду колебаний гасителя относительно башни при расчетной динамической нагрузке, половину габаритного размера массы в направлении колебаний, необходимый зазор между гасителем и конструкцией и, для маятниковых гасителей, дополнительный прогиб, равный произведению длины маятника на угол поворота башни от статической нагрузки и температурного перепада.
Как видно из рассмотренных примеров, в основном при виброгашении башенных сооружений расчеты можно проводить как для системы с одной степенью свободы, используя при этом результаты для стержней, жесткость и масса которых постоянны или изменяются по степенным законам. В ответственных случаях для сооружений более сложной формы необходимо рассматривать колебания трех ступени этого стержня или стержня, жесткость и масса которого изменяются по законам, заданным численно; кроме того, при расчете телевизионных башен учитывают дополнительные массы служебных и других помещений. Тогда определение форм и частот свободных колебаний, а также расчет на вынужденные колебания и ветровой резонанс производят на ЭВМ с учетом рекомендаций [28].
Как показали расчеты, проведенные при участии авторов, и в этом случае основной вклад в расчетные величины дают колебания по первой форме, поэтому в большинстве подобных случаев можно ограничиться после определения первой частоты и формы (с учетом действительного характера изменения массы и жесткости) расчетом для одномассовой модели защищаемого сооружения. При необходимости также точно учитывают влияние второй гармоники.
В башенных сооружениях наряду с йз-гибными колебаниями могут возникать и крутильные колебания. Причиной их могут быть искривления оси башни, вызванные как статической составляющей ветрового давления, так и влиянием неравномерного нагрева вследствие инсоляции. В башенных сооружениях, присоединенных к зданиям или обладающих существенной асимметрией, в опорах радиорелейных линий при несимметричном расположении антенны также возникают заметные крутильные колебания. Во всех этих случаях для их уменьшения можно использовать ДГК. Методы расчета не отличаются от применяемых при виброгашении изгибных колебаний.
Мачтовые сооружения, оборудованные гасителями колебаний, после определения частот и форм свободных колебаний следу
435
ет рассчитывать в соответствии с изложенным в этом пункте. Важная для определения эффективности гасителей особенность мачтовых сооружений состоит в том, что их частоты, в том числе первая, менее стабильны, чем частоты свободных колебаний башен, поэтому при проектировании гасителей колебаний надо обязательно учитывать указанную нестабильность частот, а в некоторых случаях, если она достаточно велика, проверить целесообразность применения двухмассовых гасителей колебаний, расчет которых описан в п. 20.4.
Трубопроводы. Наземные трубопроводы цельносварной конструкции имеют весьма низкие декременты (0,02—0,05), что обусловливает легкую возбуждаемость автоколебаний трубопроводов при действии ветра, а также при пульсациях скорости движущегося жидкого или газообразного продукта. Так как ДГК не могут существенно изменить частоты колебаний трубопровода и вывести их за пределы резонансного (опасного) диапазона, то основное назначение гасителей состоит в повышении декрементов системы, что позволяет уменьшить амплитуды колебаний при ветровом резонансе и в области динамической неустойчивости при параметрическом резонансе. Алгоритм расчета и вопросы виброгашения неразрезных трубопроводов при ветровом резонансе обсуждались в [9].
Рассмотрим задачу [41] о динамической устойчивости шарнирно опертой на концах трубы с присоединенным в середине пролета ДГК с вязким трением. Параметрическая неустойчивость трубы может возникать при наложении на среднюю скорость течения жидкости гармонической составляющей, т. е. при изменении скорости движения по закону V= V0(l+ecos pt). Симметрия задачи позволяет записать уравнение колебаний трубы как стержня с равномерно распределенной движущейся нагрузкой, а реакцию ДГК отразить в граничном условии для перерезывающей силы при х=//2. Далее применяют стандартную методику [3] построения областей неустойчивости.
При установке ДГК, масса которого составляла 0,2 массы конструкции с протекающей жидкостью, границы главных областей без учета собственного демпфирования трубы показаны на рис. 20.34: штрих-пуиктирными линиями при f=0,9, g=0; штриховыми при [=0,9, g=0,18; пунктирными при [=0,9, |д.=0,9; сплошными с крестиками при [=0,7, р=0,1. Сплошные ли
нии показывают границу области неустойчивости при отсутствии гасителя.
Как и в случае консольного стержня [33], ДГК раздваивает главную область простого параметрического резонанса трубы на две области, соответствующие низшим частотам колебаний полной системы. Изменение настройки гасителя изменяет взаимное положение этих областей. Так, при g=0,18 увеличение f от 0,7 до 0,9 сужает и отодвигает вправо верхнюю область, расширяет и сдвигает влево нижнюю область. Повышение демпфирования до определенного значения при [=0,9 сближает и отодвигает вправо области неустойчивости, при g=0,9 наблюдается лишь одна область неустойчивости. Оптимизацию параметров ДГК следует производить исходя из максимального сдвига областей неустойчивости вправо.
Сделанное в предыдущем пункте замечание о возможности использования параметров гасителя, обеспечивающих максимально возможные декременты колебаний полной системы, остается справедливым и в этой задаче. Так как приведенная в точку установки ДГК масса составляет лишь половину общей массы конструкции, то в рассмотренном примере относительная масса гасителя v=0,4, параметры, обеспечивающие наибольшие декременты, равны: f= ==l/(l+v) =0,714; g=2/v/(l+v)»=
=0,762. При этих параметрах следует ожидать более высокое значение е, которому соответствует начало главной области неустойчивости.
Виброизолированные конструкции. В некоторых случаях гасители колебаний позволяют улучшить качество виброизоляции и упростить конструкции демпфирующих элементов. Это относится к силовой, противоударной и кинематической виброизоляции.
Простейшим примером является применение ДГК на виброизолироваиной установке для уменьшения нестационарных колебаний при прохождении через резонанс. Гаситель настраивают на частоту, близкую к собственной частоте виброизолироваиной установки, параметры его определяют по формулам (12.8) [9]. Поскольку сравнительно сложные и дорогостоящие демпферы при этом будут заменены гасителями со значительно меньшими коэффициентами неупругого сопротивления и соответственно размерами, то виброизоляция может стать более дешевой.
При виброизоляции гибких конструк ций, в спектре частот свободных колебаний
436
которых присутствуют гармоники, близкие к частоте вынужденных колебаний в эксплуатационном режиме, возможно возникновение резонанса. В этом случае при стабильной частоте возмущающей силы целесообразно применение ДГК, настроенных на частоту возмущающей силы; подобное решение остается целесообразным и при малой нестабильности возмущения, причем эффективными здесь являются многомассовые гасители с расширенным интервалом частот эффективной работы (см. п. 20.4).
Совместное применение динамических гасителей и виброизоляции полезно при по-лигармоническом возбуждении. Например, если возмущающая нагрузка имеет две гармоники, одна из которых близка к обычным частотам свободных колебаний виброизо-лированной установки, а другая значительно выше, то виброизоляция будет снижать эффект действия высокочастотной составляющей и, наоборот, усиливать влияние низкочастотной. В подобных случаях гаситель, настроенный иа частоту собственных колебаний установки, намного улучшает работу виброизоляции; в отдельных случаях при относительно большом значении низкочастотной составляющей его применение необходимо, поскольку без него виброизоляция не будет эффективной. Аналогичная ситуация возникает, если низкочастотная составляющая нагрузки соответствует до или зарезонансной зоне виброизолированной установки; в этом случае гаситель настраивают иа частоту указанной составляющей нагрузки.
Применение гасителя колебаний весьма целесообразно и при высоких частотах возбуждения (более 60—80 Гц), поскольку при подобных частотах возможен волновой резонанс в виброизоляторе и его эффективность при указанных частотах резко уменьшается. Это явление провала характеристик виброизолятора хорошо известно в литературе по звукоизоляции.
При достаточно стабильной частоте внешнего возбуждения точно настроенный ДГК без демпфирования позволяет уменьшить коэффициенты передачи усилий одно-или многозвенной виброизоляцией в стационарных режимах колебаний [7]. Приведем данные [29] о применении ДГК с демпфированием для улучшения характеристик двухступенчатой виброизоляции.
В двухступенчатой схеме (рис. 20.35) Додвески верхней и нижней ступеней разделены промежуточной массой А42. Благодаря этому коэффициент Т передачи усилия на основание уменьшается по сравнению с
Рис. 20.35. Двухступенчатая система виброизоляции с ДГК
Рис. 20.36. АЧХ виброизолированной системы с ДГК
Рис. 20.37. АЧХ виброизолированной системы при оптимальных параметрах ДГК
одноступенчатой виброизоляцией в области высоких частот (см. рис. 20.36), где
Р = М2/М1, р = р0/со0;
437
2Ci C2 (Ci C2) C2=(1 + P)C:.
Однако наличие второго резонанса является недостатком двухступенчатой схемы подвешивания. Существенно снижает резонансный пик ДГК, присоединенный к массе Л12 (рис. 20.36). Гаситель настраивают на частоту, близкую к второй резонансной частоте двухмассовой схемы. Вблизи этой частоты амплитуда колебаний массы гасителя становится относительно большой, а амплитуда колебаний массы М2 и коэффициент передачи Т уменьшаются. На рис. 20.37 приведены результаты, полученные при установке гасителя с оптимальными параметрами, относительная масса которого v= =mr/Af2=0,2. Рассматривались резиновые подвески виброизоляции с коэффициентом неупругого сопротивления у=0,05. В случае стальных пружин вторые резонансные пики на рис. 20.36 увеличатся, а на рис. 20.37 практически не изменятся, т. е. эффективность ДГК будет выше.
Весьма перспективно также применение ДГК для демпфирования колебаний вибро-изолированных фундаментов кузнечных молотов. Для ковочных молотов, практически не уменьшая максимальной амплитуды колебаний, ДГК позволяют намного повысить затухание колебаний, при этом возможны уменьшение числа или размеров обычных демпферов, а также их полная замена гасителями.
. Представляет значительный интерес использование ДГК для штамповочных молотов. В этом случае частота колебаний фундаментного блока на виброизоляторах обычно в несколько раз превышает частоту ударов молота. Для исключения резонансных явлений необходимо обеспечить затухание колебаний за период времени между двумя последовательными ударами (амплитуда должна быть уменьшена примерно в 10 раз) или осуществить антирезонансную настройку виброизоляции (см. п. 20.3).
Выполнение этих требований может вызвать затруднение при слабодемпфирован-иой и низкочастотной виброизоляции, а также при нестабильности частоты и нестрогой периодичности ударов. Установка ДГК позволяет значительно повысить демпфирование колебаний. Сравнение эффективности двух ДГК (гаситель иа фундаментном блоке настраивался на первую частоту колебаний фундамента, на шаботе — на вторую) и одного ДГК такой же массы, установленного на фундаментном блоке, по
казало целесообразность последнего варианта. При этом гаситель настраивают на частоту, близкую к основной частоте свободных колебаний виброизолированного фундамента. Оптимальные параметры ДГК при действии периодических ударов назначают с учетом возможной нестабильности частоты и случайных значений импульсов (см. п. 20.3), при непериодических ударах можно принять параметры, обеспечивающие скорейшее затухание переходного процесса.
Не менее важно использование ДГК при кинематической виброизоляции. Обычно в спектре частот колебаний поддерживающей конструкции присутствуют и низкочастотные гармоники, имеющие частоты, близкие к частотам свободных колебаний виброизолированных фундаментов; поэтому довольно часто возникает необходимость установки демпферов. В этом случае эффективно применение ДГК; расчет на действие случайных перемещений поддерживающей конструкции описан в [15, 26]. Весьма эффективно также применение ДГК в полностью виброизолированных зданиях. Следует отметить также возможность совмещения в одной конструкции ДГК и виброизолятора.
Подвижные объекты. Транспортируемые строительные конструкции. Первое применение ДГК было связано именно с подвижными объектами. Так, цистерны для успокоения качки кораблей представляют собой простейший тип ДГК. Разнообразные современные конструкции судовых виброгасителей описаны в [1, 11, 19, 31]. Гасители использовались и в автомобилях для уменьшения крутильных колебаний валов двигателей. Известен также опыт применения ДГК на железнодорожном транспорте для создания более благоприятных условий при перевозке грузов, особо чувствительных к вибрациям. Перспективно использование ДГК для уменьшения колебаний длинномерных строительных конструкций, аппаратов химических производств и других ответственных объектов, транспортируемых по железным или автомобильным дорогам.
Действующие на транспортируемые конструкции возмущения хотя и являются случайными, тем не менее имеют сравнительно узкополосный спектр, ввиду фильтрации процесса рессорным подвешиванием транспортного средства. Собственные частоты колебаний большепролетных конструкций балочного типа образуют достаточно разреженный спектр, поэтому установка в необходимых случаях ДГК с демпфированием будет способствовать уменьшению амплитуд колебаний при транспортировке.
438
При установке гасителей на длинномерные конструкции должно быть обращено внимание на выбор места их крепления к защищаемой конструкции с тем, чтобы они находились вблизи пучностей резонирующей формы колебаний. Гасители должны являться, очевидно, съемным инвентарным устройством. Для того чтобы они имели универсальный характер, необходимо снабжать их приспособлениями для изменения парциальной частоты при монтаже. Следует отметить целесообразность применения не только обычных, но и многомассовых гасителей.
В последнее время создано несколько типов скоростных пассажирских вагонов, облегченные кузова которых изготовлены из алюминиевых сплавов и имеют пониженную по сравнению со стальными жесткость прн изгибе. При высоких скоростях движения эти вагоны обладают неудовлетворительными показателями плавности хода. Исследования динамических качеств одного из таких вагонов показали целесообразность установки ДГК с вязким трением, настроенного на частоту, близкую к низшей частоте изгибных колебаний кузова. Оптимальные параметры гасителя определялись по формулам табл. 12.7 [9]. Для примера на рис. 20.38 приведены зависимости относительных показателей плавности хода от скорости движения вагона по пути со стыковыми неровностями. Сплошными линиями показаны результаты без ДГК, штриховыми — с ДГК массой 1000 кг, цифрами 1, 2, 3 обозначены результаты для свободного конца консоли, пятника, середины кузова, причем в качестве №ном принят показатель плавности хода на пятнике вагона без ДГК.
Учитывая сравнительно слабую чувствительность показателя плавности хода к изменению параметров системы, следует отметить, что снижение W даже на 10—20 % указывает на значительное уменьшение максимальных ускорений кузова. Такое же
улучшение динамических качеств вагона повышением изгибной жесткости кузова требует существенного расхода металла и менее экономично, чем применение ДГК.
20.7. Виброгашение массивных фундаментов под оборудование
Вопрос о защите массивных фундаментов от колебаний, вызванных действием обо,-рудования, в тех случаях, когда виброизоляция отсутствует, может быть нередко решен путем применения ДГК. Такая ситуация возникает, в частности, при реконструкции предприятий и замене оборудования.
Далее будут даны сведения [16] об оптимальных параметрах и эффективности ДГК, установленных на массивном жестком круговом штампе, который опирается и а податливое основание. Модель основания — однородное упругое инерционное полупространство. В связи с тем, что эффективность гасителя для сооружений, находящихся на грунте, сравнительно быстро падает при повышении нестабильности нагрузки, то ниже все результаты получены для гармонического воздействия при заданном, сравнительно узком диапазоне изменения частот, и при нестабильной частоте (т. е. без указанного ограничения).
Дифференциальные уравнения вертикальных или горизонтальных колебаний фундамента с ДГК имеют вид:
т0 w + тг wr + Zo eipt = Zelpt;
mr+ Hr (wr — tw) + Лг (a»r — w) = 0.
Здесь mo, m r, w, и>г — массы и перемещения (вертикальные или горизонтальные) фундамента и гасителя; kr, цг— коэффициенты жесткости н вязкого трения гасителя; Z, р — амплитуда и круговая частота динамического воздействия; Zg— - (Ло+ШоТо) —амплитуда динамической реакции основания; W — амплитуда колебаний фундамента; kt, уд — коэффициенты, характеризующие упругие и диссипативные свойства системы штапм — полупространство, полученные согласно [5]; Оо“
439
<-prJci— безразмерная частота воздействия; г0 — радиус опорной площади штампа; с-— VG/p — скорость волн искажения в упругой среде; G, р — модуль сдвига и плотность упругой среды.
Безразмерная амплитуда колебаний фундамента
| W | Gr0 _ , 2t/i I \V _l_
— Go 1 + vu) ] +
+ (Yo + ao bw)2}-’/2, где
•« = lH2 g2 + (f2 ~ g2) f2]/[H2 g2 + (f2 - g2)2]; ^ = Hg3/[(/2-g2)2 + H2g2];
k0 = ko/Gro; y0 = y0 a0/Gr0;
6 = /n0/pr§; v = mv/m0;
f — АЛ; fo = kr/mr\ p. = pr/mr ©j;
g = p/tiJi, Wi — собственная частота колебаний системы штамп — полупространство.
На рис. 20.39, а, б приведены значения коэффициента гашения Л соответственно для вертикальных и горизонтальных колебаний в зависимости от уровня х нестабильности частоты, определяемого отношением разности максимального и минимального значений к среднему значению частоты. На рис. 20.39, а кривым 1 (2) соответствует v=0,02 и 6=20(10); кривым 3 (4)—v= =0,05 и 6=20(10). На рис. 20.39,6 значения v такие же, 6 — в 2 раза меньше, чем на рис. 20.39, а. Из графиков видно, что при х<0,1 эффективность гасителя сравнительно высока. При возмущении с нестабильной частотой эффективность виброгашения значительно снижается; в этом случае оптимальные параметры гасителя:
для вертикальных колебаний:
^, = 0,94/(14-3,96»);
^nT=2,08v/(l+v)3;
для горизонтальных колебаний: fom= 0,914/(1 4-3,08»);
напт= 1,84v/(l + V)3.
Рассмотрим вращательные колебания фундамента с ДГК. Колебания вокруг горизонтальной оси, лежащей в плоскости контакта фундамента с основанием и проходящей через центр основания, для краткости условно назовем изгибными; вокруг вертикальной оси, проходящей через центр основания, — крутильными. Задачу рассмотрим точно так же, как и при поступательных колебаниях, следует лишь взамен масс ввести соответствующие моменты инерции
Рис. 20.39. Зависимости коэффициента гашения колебаний фундамента от уровня нестабильности частоты
масс, а при использовании решений контактной задачи исходить из результатов, полученных при действии моментов на жесткий штамп. Результаты вычислений показывают, что при вращательных колебаниях значения коэффициента Л (рис. 20.39, в, г, где кри вые пронумерованы так же, как на рис.
440
20.39,6), при одинаковых х больше, чем при поступательных колебаниях. Виброгашение достаточно эффективно и при нестабильной частоте. В этом случае оптимальные параметры ДГК:
для изгибных колебаний:
/2ПТ= 1/(1 + 2,32v);
1.52v/(l + v)2;
для крутильных колебаний ^=0,981/(1 4-2,21v); l4T= 1,435v/(l 4- v)2.
Рассмотрим горизонтально-вращательные колебания фундамента высотой h с ДГК, вызываемые горизонтальной гармонической силой, действующей на расстоянии h от поверхности полупространства. Центр тяжести фундамента лежит на одной вертикали с центром опорной площади на высоте 2ц.
Дифференциальные уравнения горизонтально-вращательных колебаний фундамента, оборудованного гасителями поступательных и угловых колебаний, имеют вид:
тоих+то2циф4-трияр4’
+ Poeipt = Pxetpt;
IУ и<р 4" т0 2Ц Uh 4" А» ифг 4“ X
Xeipt = Pxhetpt;
4" Р-ХГ (ИХГ -^х) 4" ^ХГ (иХГ-tlx) = 0;
Гр ИфГ 4“ Рфг ^ифГ “ф) 4” ^фг(ИфГ ^ф ) 0, где тс, 1у — масса и момент инерции массы фундамента относительно оси. проходящей в плоскости контакта через центр опорной площади штампа; тГ. /р— масса и момент инерции массы гасителей горизонтальных и вращательных колебаний; k , и , к , ц — коэффициеи-хг хг фг фГ _ _
ты жесткости и затухания гасителей; Рв, Мв— амплитуды динамических реакций грунтового основания, впоеделяемые выражениями:
^o=or0(Pi + iP!)ux-, м0=а^х
(Pi. Pi. Mt. Мз — составляющие реакции, характеризующие упругие и диссипативные свойства основания; U ; U — амплитуды горизонтального и х ф
углового смещений штампа).
При установившемся режиме колебаний результаты вычислений представлены на рис. 20.40 и в табл. 20.8, где приведены данные, характеризующие влияние относительной высоты центра тяжести 2=2ц!г0 фундамента на коэффициенты гашения горизонтальных (Ki) и вращательных колебаний (Кг), а также на оптимальные параметры гасителей: (f?=*„/,nr<o2; /Нф1.//Г<»2; Н1 — Ихг/тг®,; ц2=цфг//гш1;
©1 — первая собственная частота колебаний системы штамп—полупространство. На рис. 20.40 штриховые линии соответствуют Ки сплошные — К2, результаты, приведенные в табл. 20.8, получены при v=0,05, значениях b и 1У /р/д, равных 10 (верхняя строка) или 5 (нижняя строка).
Рассмотрим вертикальные колебания виброизолированного фундамента с ДГК. Виброизолированные фундаменты обеспечивают высокую эффективность снижения уровня динамических реакций в тех случаях, когда частота гармонического воздействия намного превышает частоту свободных колебаний фундамента. Если при эксплуатации возможно появление нагрузок, вызывающих основной резонанс, то целесообразно применить ДГК, настроенный на частоту, близкую к частоте свободных колебаний виброизолированного фундамента. Аналогичная задача, обсуждавшаяся в литературе, возникает при широкополосном спектре воздействия на пассивно виброизолирован-ный фундамент. Здесь рассмотрен вопрос об эффективности применения гасителей при вибрациях, вызванных только низкочастотной составляющей динамической нагрузки. При этом учитываются колебания виброизолированного блока и опорной конструкции (короба), жестко связанной с основанием, расчетной моделью которого является упругое инерционное полупространство. Гасители устанавливают на блок и опорную конструкцию.
Если минимизируется амплитуда колебаний блока, то задача сводится к рассмотрению колебаний системы с четырьмя степенями свободы. Решение получается так же, как и в случае горизонтально-вращательных колебаний. Приведем лишь численные результаты.
На рис. 20.41 показаны зависимости коэффициента гашения при v=0,05, v(=« =0,2 (a), vi=0,5 (б) от параметра Ooi = = j/" KdmortJci, характеризующего упругие свойства виброизоляции (vi=mofmr, k\ — квазиупругий коэффициент виброизоляции: т0, т\ — массы виброизолированного блока и короба). Кривые соответствуют разным вариантам оптимизации параметров гасителей: /(2)—обоих по смещению верхней (нижней) массы; 3—верхнего — по смешению нижней массы, нижнего — по смещению нижней; 4(5)—случай 1(2) при наличии одного гасителя сверху (снизу). Зависимости коэффициента гашения от относительной массы гасителей при первом (сплошные линии) и третьем (штриховые)
441
Рис. 20.40 Эффективность гашения колебаний фундамента с различной высотой центра тяжести
Рис. 20.41. Зависимости коэффициента гашения колебаний фундамента от упругих свойств снб-роизоляции при разных вариантах оптимизации
вариантах оптимизации изображены на рис. 20.42.
Схема вычислений сохраняется, если опорная площадь фундамента представляет круговое кольцо и необходимо лишь использовать решение задачи о кольцевом штампе. Вычисления показали, что при этом эффективность гасителя повышается.
Для фундаментов с прямоугольной площадью контакта приближенное решение можно найти, заменив прямоугольник равновеликим кругом. Более точный результат получается при использовании приближенного решения динамической задачи о прямоугольном штампе. Можно применить также схему расчета [9, 37], предполагая, что законы распредепения реактивных динамических и статических давлений совпадают. При этом, используя решение задачи Лэмба о действии сосредоточенной силы и интегрируя его по площади фундамента, получим закон изменения перемещений основания. Для задачи о вертикальных колебаниях необходимо ввести в расчет среднее значение найденных перемещений под штампом.
Таблица 20-8
Рис. 20.42. Зависимости коэффициента гашения колебаний фундамента от относительной массы гасителя
Z Ki Кг fi Ui счсч №
0,0 1,137 1,000 0,900 0,257 0,900 0.143
1,089 1,000 0,900 0,257 0,900 0,143
0,2 1,561 2,630 0.957 0,125 0,975 0,190
1,226 1,884 0,957 0,200 0,968 0,197
0.4 1.640 1,868 1.000 0,079 0.979 0.184
1.377 1,588 1,975 0,100 0,967 0,190
0,6 1,654 1,662 1.015 0.085 0,972 0.171
1,394 1,446 1,004 0,085 0,963 0,179
0,8 1,409 1,619 1,015 0.085 0.950 0,168
1,426 1,394 1,021 0,100 0,960 0,171
1.0 1,572 1,583 1.025 0,100 0,957 0,175
1,382 1,362 1,015 0,085 0,961 0.161
Таким образом, во всех рассмотренных задачах при гармонических колебаниях с частотой, изменяющейся в сравнительно узких пределах, весьма эффективно применение многомассовых гасителей. Изложенные данные могут быть также использованы для решения задач виброзащиты других жестких сооружений.
20.8. Примеры применения гасителей колебаний специальных сооружений
Данные об эффективности ДГК, установленных с целью уменьшения амплитуд колебаний башенных сооружений при ветровом резонансе, содержатся в [9]. Приведем сведения о применении ДГК для не-
442
которых специальных сооружений характерных типов.
Металлическая башня-труба. Выхлопная башня-труба высотой 150 м была построена на одном из химических предприятий [12]. Несущая башня представляет до отметки 96 м решетчатую трехгранную пирамиду, выше этой отметки — трехгранную призму. Выхлопная труба, расположенная внутри несущей башни, выполнена в виде тонкостенной цилиндрической оболочки диаметром 2,4 м. После окончания монтажа отмечалось появление повышенных вибраций башни-трубы поперек ветрового потока. Они были хорошо заметны с земли; для быстрой ликвидации их в качестве временного решения были введены дополнительные опоры — три оттяжки. На башне-трубе, временно усиленной оттяжками, был установлен маятниковый ДГК. Размещенный на отметке 145 м, он представлял систему трех маятников по 600 кг каждый, что составляло 0,01 массы защищаемой конструкции. Длины маятников определены из условия равенства частоты колебаний маятника и защищаемой конструкции. Для осуществления демпфирования грузы подвешивали на канатах с промежуточной опорой, описанной в п. 20.2. Некоторое отступление от проекта снизило демпфирование в канатах. Эксперимент показал, что декремент колебаний башни после установки ДГК увеличился в 2,1 раза. После снятия оттяжек длительное время колебания типа ветрового резонанса не наблюдались.
Большой солнечный вакуумный телескоп. Телескоп был создан в Сибирском институте земного магнетизма, ионосферы и распространения радиоволн АН СССР (см. «Исследования по геомагнетизму, аэрономии и физике Солнца. М., 1984, ст. Б. Г. Коренева, А. К. Китова). Конструкция телескопа состоит из вертикальной башни (главной опоры высотой 24 м) и наклонной части длиной 42 м, являющейся трубой телескопа. Для снижения уровня колебаний в оптической системе башня телескопа выполнена двойной. Внешняя часть башни непосредственно воспринимает ветровую нагрузку и служит основанием купола. На внутреннюю башню опираются оптико-механические устройства. Во время наблюдения купол открыт и на зеркало телескопа действует ветер, что вызывает колебания внутренней башни и зеркала и ухудшает качество изображения. Хотя башня телескопа представляет жесткую, невысокую конструкцию и амплитуды колебаний ее верхушки при ветре со скоростью 10 м/с составля
ют около 0,1 мм, они все же с точки зрения эксплуатации чрезмерно велики, так как превышают допустимые значения почти в 4 раза.
Для снижения уровня колебаний были использованы ДГК, которые уменьшили амплитуды до допустимого уровня. Наличие подкоса — наклонной части телескопа — изменило характер колебаний по сравнению с наблюдаемым в обычных башнях. Было выявлено, что наибольшее значение имеют колебания изгиба из плоскости, в которой расположены оси вертикального и наклонного стержней (плоскости треугольника), кроме того, наблюдались колебания вращения башни вокруг ее оси (крутильные колебания). Для снижения уровня колебаний на башне установлены три ДГК. Один из них — основной имеет массу 1650 кг, два других, предназначенные для гашения крутильных колебаний, имеют массы по 500 кг.
Конструкция гасителя представляет контейнер с наборным грузом, присоединенный с помощью вертикальных плоских пружин и снабженный войлочным демпфером. Масса основного гасителя составляет 6,25 % приведенной массы сооружения. При действии гармонической нагрузки с нестабильной частотой коэффициент эффективности системы гасителей был равен 9. В результате обработки записей, выполненных при различных скоростях ветра, выяснилось, что гасители снижают амплитуды колебаний более чем в 3,5 раза. Таким образом, их применение, оказавшись, по существу, необходимым, позволило обеспечить нормальные условия работы телескопа.
Здания. Колебания зданий могут вызываться разнообразными причинами: . динамическим действием ветра, сейсмическими воздействиями, неуравновешенными динамическими нагрузками при работе установленного оборудования, нагрузками от проходящих средств наземного транспорта и т. п.
Снижение уровня колебаний зданий состоит в решении двух самостоятельных задач — уменьшения амплитуд вертикальных колебаний междуэтажных перекрытий и снижения уровня горизонтальных колебаний каркаса здания. Первая из этих задач возникает, когда на перекрытии устанавли. вают машины, а также когда заметно влияние работы вентиляторов, насосов, моторов лифтов и др. Как правило, наиболее опасны резонансные явления, обычно происходящие в диапазоне 8—15 Гц. Задача виброгашения
443
облегчается тем, что такие вибрации могут носить локальный характер, охватывая лишь часть (иногда очень небольшую) всей площади перекрытия. Трудность, которая возникает при этом, в том, что частота основного тона междуэтажного перекрытия не является постоянной, поскольку его масса зависит от уровня полезной нагрузки, которая при эксплуатации может изменяться.
Частота свободных колебаний практически зависит и от фактического закона распределения полезной нагрузки по площади перекрытия, поэтому необходимо считаться с нестабильностью частоты, которая, однако, является ограниченной, поскольку разброс ее обычно составляет до 15 %. В этом случае эффективно применение многомассового гасителя колебаний. При сравнительно повышенной нестабильности частоты перекрытия можно использовать группы из двух многомассовых гасителей. Ограничения на амплитуду колебаний элементов гасителя, о которых упоминалось в п. 20.4, в данном случае не имеют значения, так как амплитуду колебаний рассматриваемой защищаемой конструкции измеряют долями миллиметра. Особенно эффективно использование гасителей для виброзащиты участков с повышенными требованиями качества (установка прецизионных приборов).
При установке на перекрытиях вибро-изолированных машин применение гасителей снижает уровень колебаний при прохождении через резонанс. Известен случай эффективной виброзащиты перекрытия на Асбестовом комбинате (там были применены ударные гасители, но эффективность ДГК должна быть примерно такой же).
Колебания каркасов зданий обычно происходят по первой форме, которой соответствует частота порядка 1,5—4 Гц. Эта частота является стабильной, изменение полезной нагрузки здесь играет меньшую роль и, как правило, при расчете гасителя его можно не учитывать. Вместе с тем при сравнительно слабом заполнении каркасов возможно возникновение трещин и снижение жесткости, поэтому при проектировании должна предусматриваться возможность уменьшения парциальной частоты гасителя и его повторная настройка.
Интересный опыт применения ДГК для уменьшения колебаний одного нз корпусов обогатительной фабрики накоплен Уральским ПромстройНИИпроектом [36]. Сооружение имело размеры в плане 51X84 м, максимальную высоту 66 м. Колебания с частотой 3,8 Гц вызывались группой мощных конусных дробилок с асинхронным при
водом. Гасители были размещены группами в пяти точках здания. В результате их установки амплитуды колебаний этих точек были уменьшены в 2—5 раз.
Известен опыт применения вязкоупругих демпферов и ДГК для уменьшения колебаний • высотных зданий от ветровой нагрузки. В частности, в [39] имеются сведения об использовании ДГК массой 360 т на одном из высотных зданий (274 м) конторского типа в Нью-Йорке. Гаситель представлял собой бетонный блок, опирающийся через тонкую масляную пленку на перекрытие одного из верхних этажей. Жесткость горизонтальных пружин, соединяющих массу гасителя с конструкциями здания, выбиралась таким образом, чтобы гаситель был настроен на основную частоту колебаний здания. Демпфирование осуществлялось гидравлическим амортизатором. Были предусмотрены также устройства для остановки массы гасителя при высоких уровнях возбуждения. Однако эта проблема, по-ви-димому, еще не вполне решена, так как выход из строя гасителя лишает сооружение защиты от вибраций, причем как раз в критической ситуации. Расчетное перемещение массы гасителя относительно здания составляло 1,07 м для урагана, повторяющегося один раз в 10 лет. Стоимость такого гасителя должна быть значительно ниже затрат при других решениях, направленных на уменьшение колебаний здания от действия ветра. В статье [39] имеется также упоминание о ДГК, состоящем из двух масс по 270 т каждая и предназначенном для установки на башенном здании в Бостоне.
Мосты. В литературе отмечены случаи возникновения повышенных вибраций висячих стальных мостов, а также их аварии, которые объяснялись в основном явлениями вихреобразования и автоколебаниями. Один из эффективных способов предотвращения и уменьшения амплитуд автоколебаний — повышение демпфирования и в этой связи применение ДГК для висячих мостов представляет интерес.
В статье [38] даны сведения об использовании ДГК для уменьшения колебаний пешеходных мостов. Многие современные конструкции таких мостов обладают весьма низкими значениями декрементов колебаний, а частоты их соответствуют диапазону, в котором колебания легко возбуждаются идущими или бегущими пешеходами. Приведем результаты [38] экспериментального исследования эффективности ДГК с вязким трением, установленного посередине однопролетного балочного моста длиной
444
30 м. Несущая стальная балка массой 22,5 т имела основную частоту изгибных колебаний 2,97 Гц, логарифмический декремент 0,008. Масса гасителя была 87 кг, или 1/130 приведенной к середине продета массы балки. Настройка и демпфирование гасителя принимались как при действии гармонической силы с постоянной амплитудой.
Испытания проводились для двух типов динамических воздействий — гармонической силы, действующей посередине пролета балки, и гармонической силы, движущейся с заданной скоростью по балке. Для первого типа воздействия резонансные пики перемещения балки посередине пролета при установке гасителя уменьшались в 5,5—6 раз. При движении по балке гармонической си
лы в отсутствие гасителя максимальное перемещение посередине пролета балки составляло 3 мм и достигалось оно к моменту схода силы с балки. При установленном гасителе максимальное перемещение балки было 0,7 мм и наблюдалось оно в момент прохождения нагрузкой середины пролета. Следовательно, при движущейся гармонической силе гаситель уменьшал максимальные перемещения примерно в 4 раза. Полученные результаты достаточно хорошо соответствовали данным теоретического расчета эффективности ДГК.
Гасители колебаний весьма эффективно могут быть применены также в транспортных галереях для защиты от вибраций, вызванных действием ветра.
СПИСОК ЛИТЕРАТУРЫ
К РАЗДЕЛУ 1
1. Ананьев И. В. Справочник по расчету собственных колебаний упругих систем. — М.: Гос-техиздат. 1946. — 172 с.
2. Андреев В. Е., Поверский А. С., Нежур-ко И. Я. Определение коэффициентов поглощения энергии колебаний ка-штов шахтного подъема. — Горный журнал. 1968, Ns 10. — с. 46—46.
3. Андреев В. Е., Поверский А. С., Обухов А. Н. Определение динамических усилий в головных канатах многоканатной подъемной установки при заклинивании поднимающегося сосуда. — В кн.: Стальные канаты вып. 6. Киев.: Техника, 1969. — с. 365—368.
4. Бабаков Н. М. Теория колебаний. Учеб. пос. для втузов. — М.: Наука, 1968, 600 с.
5. Белый В. Д., Найденко И. С. Шахтные многоканатные подъемные уста -iobkh. — М.: Недра, 1956. — 312 с.
6. Бровман Я. В. Надшахтные копры. — М.: Гос-гортехнздат, 1961. — 239 с.
7. Ивович В. А. Переходные матрицы в динамике упругих систем. — М.: Машиностроение, 1969. — 199 с.
8. Ивович В. А., Литвинов А. А., Поверский А. С. Исследование динамики башенных сооружений многоканатных подъемных установок. — В кн.: Надшахтное строительство, № 4. — М.: Недра. 1964. — с. 65—74.
9. Ивович В. А.. Литвинов А. А., Поверский А. С. Уточненье методики динамического расчета башенного сооружения миогоканатного шахтного подъема. — В кн.: Совершенствование строительства надшахтных зданий и сооружений № 5. — М.: Недра 1965. — с. 28—39.
10. Инструкция по расчету несущих конструкций промышленных зданий и сооружений ла динамические нагрузки. — М.: Стройнздат, 1970. — 288 с.
11. Инструкция по расчету перекрытий на импульсивные нагрузки. — М.: Стройиздат, 1966. — 134 с.
12. Инструкция по определению динамических нагрузок от машин, устанавливаемых на п> рекрьпиях промышленных зданий. — М.: Стройнздат, 1966. — 132 с.
13. Коренев Б. Г. Об изгибных колебаниях стержней переменного сечения. — В кн.: Исследования по динамике сооружений. — М.: Гос-стройиздат. 1957.— с. 83—92.
14. Поверский А. С., Нежурко И. Я., Макаренко Л. П. Расчет башенных сооружений для гоканатных шахтных подъемов. — М : Стройиздат, <967. — 239 с.
15. Савии Г. Н., Горошко О. А. Динамика нити переменной длины. — Киев : Фнзматгнз 1962.— 33? с
16. СНиП 2.01.07. Строительные нормы и правила. Нагрузки и воздействия. Нормы проектирования. — М.: Стройиздат, 1985.— 60 с.
17. СНиП 11-7-81. Строительство в сейсмических районах. — Нормы проектирования. — М.: Стройиздат, 1977. — 54 с.
18. Томсоя О. И., Усачева Г. С. Определение собственных частот колебаний стержня со сту-пенчато-изменяюшимся сечением. — В кн.: Колебания зданий и сооружений. — М.: Гос-стройиздат, 1963. — с. 145—149.
19. Флоринский Ф. В. Динамика шахтного подъемного каната. — М.: Углетехнздат, 1955. — 240 с.
20. Инструкция по проектированию и расчету несущих конструкций зданий под машины с динамическими нагрузками. — М.: Госстрой-издат, 1955. — 128 с.
21. Вибрация. Общие требованяя безопасности, ГОСТ 12.1.012—78.—М., Изд-во стандартов 1978. — 22 с.
22. Вибрация. Машины стационарные. Расчет виброизоляции поддерживающей конструкции. ГОСТ 12 4.093—80. — М.: Изд-во стандаотов. 1981.-1-40 с.
23. Санитарные нормы проектирования промыш
ленных предприятий (СН 245-71), Госстрой СССР. — М.: Стройиздат, 1972.—97 с.
24. Инструкция по мерам борьбы с вибрационными воздействиями технологического оборудования при проектировании зданий и сооружений промышленности нерудных строительных материалов. — М.: Стройиздат, 1966. — 111 с.
25. Руководство по проектированию внброизоля-ции машин и оборудования. — М.: Стройнздат, 1972. - 160 с.
26. Строительные нормы и правила. Фундаменты машин с динамическими нагрузками. Нормы проектирования, СНиП 11-19-79. — М.: Стройиздат, 1980.— 41 с.
27. Динамические нагрузки от дробильно-размольных тягодутьезых машин и центрифуг. Ростовский ПромстройНИИпроект. — Ростов-на Дону, 1966. — 48 с.
28. Справочник по динамике сооружений. — Стройиздат, 1972. — 511 с.
К РАЗДЕЛУ 2
1. Общие положения обеспечения безопасности атомных электростанций прн проектировании, строительстве и эксплуатации. — М.: Минэнерго СССР, 1973. — с.
2. Правила ядерной безопасности атомных электростанций (ПБЯ-04-74). — М.: Атомнздат, 1976. — с.
3. Нормы радиационной безопасности (НРБ-76) — М.: Атомнздат, 1977. — с.
4. Правила радиационной безопасности прп эксплуатации атомных электростанций (ПРБ-АЭС). — М.: Минэнерго СССР (974, — с.
5. Санитарные правила проектирования и эксплуатации атомных электростанций (СПАЭС-79). — М.: Энергоиздат, 1981.— с.
6. Попов Н. Н., Расторгуев Б. С. Вопросы расчета и конструирования специальных сооружений — М.: Стройнздат, 1980. — 192 с.
7. Кириллов А. П., Саргсяи А. Е. — Расчет защитной оболочки иа воздействие падающего самолета. — Материалы конференций и совещаний по гидротехнике. Предельные состояния бетонных и железобетонных конструкций энергетических сооружений. — Л.: Энергоиздат, 1982.— с. 151—159.
8. Кириллов А. П. — Выносливость гидротехнического железобетона. — М.: Энергия. 1978, — 271 с.
9. Руководство по расчету зданий и сооружений па действие ветра. — Л.: ЛГУ 1978, — 224 с.
10. Wen Y. К. Dynamic tornado wind loads on tall buildings.—Journ. of the Struct. Div., Proc. ASCE, 1975, STI, p. 169.
11. Кириллов А. П., Лапшин А. Л., Амбрнашви-ли Ю. К. Проблемы создания сейсмостойкие АЭС. Сб. науч, трудов Гндропроекта. Проектирование и научно-исследовательские работы в области атомной энергетики. — М., 1979, с. 84—87.
12. Кириллов А. П. О назначении характеристик сейсмических воздействий для атомных станций. — В кн.: Сейсмические воздействия на гидротехнические и энергетические сооружения. М.: Наука, 1980, с. 11 — 16.
13. СувнлоБа А, В. Способ моделирования расчетных сейсмических воздействий для крупных энергетических объектов. — Гидротехническое строительство, № 6, 1982. — с. 16—19.
14. Амбриашвилн Ю. К. Комплексные исследования сейсмостойкости конструкций и оборудования АЭС. Сборник материалов семинара Интератомэнерго по проблеме «Создание сейсмостойких АЭС» —М.. 1982, с.
15. Дзюба К. И., Хохлова Н. В. Разработка универсальной программы расчета оболочек н ЭВМ. — Научные исследования по гидротехнике в 1973. № 1 Энергия 1974, с.
16. Хохлова Н. В.— Расчет защитных оболочек АЭС совместно с внутренней конструкцией на статические, температурные и динамические
446
воздействия. Сб. научи, ст. IV Всесоюзной конференции по статике и динамике пространственных конструкций. — Киев. 1978. с.
17. Нормы расчета на прочность оборудования и трубопроводов атомных электростанций с водо-водяными реакторами на сейсмические воздействия. — М., Госгортехнадзор СССР, 1980. — с.
18. Панкратов Н. А. Исследование сейсмостойкости трубных каналов с внешними и внутренними присоединенными массами. Методы исследований и расчетов сейсмостойкости гидротехнических и энергетических сооружений. — Тезисы докладов Всесоюзного научно-технического совещания 2—4 июня 1981. — Л., 117 с.
19. Кириллов А. П., Амбриашвилн Ю. К., Калибер-да И. В. Расчет трубопроводов АЭС на сейсмостойкость. — Энергетическое строительство № 6, 1982, с. 66-68.
К РАЗДЕЛУ 3
1. Абашидзе А. И. Динамика фундаментов паровых турбин. — М.—Л., 1960. — 134 с.
2. Абашидзе А. И., Сапожников Ф. В., Казаид-жян П. Т. Фундаменты машин тепловых электростанций. — М., 1975. — 256 с.
3. Абашидзе А. И., Беренштейн С. А., Сапожников Ф. В. Фундаменты парвых турбин. — М—Л., 1963. — 335 с.
4. Вибрации энергетических машин. — Справочное пос. — Л., 1974. — 464 с.
5. Динамика турбоагрегатов. Библиографический указатель. — Л., 1972. — 164 с.
6. Динамика фундаментов турбоагрегатов. Библиографический указатель. — Л.. 1972. — 228 с.
7. Динамический расчет сооружений па специальные воздействия. — М., 1981. —215 с.
8. Изв. ВНИИГ т. 127. Динамика и сейсмостойкость ГЭС, ТЭС и АЭС.— Л., 1978.— ПО с.
9. Изв. ВНИИГ, т. 140. Динамика и сейсмостойкость. ГЭС, ТЭС и АЭС.— Л.. 1980.— 114 с.
10. Изв. ВНИИГ, т. 148. Статические и динамические исследования сооружений ГЭС. ТЭС и АЭС.—Л. 1981. — 139 с.
11. Изв. ВНИИГ, т. 161. Прогнозирование вибрационного состояния сооружений электростанций при эксплуатационных воздействиях. — Л., 1982. — 79 с.
12. Крои Г.. Исследования сложных систем по частям — диакоптика. — М., 1972. — 542 с.
13. Литвин И. С., Свердлов И. С. Совершенствование конструкций фундаментов турбоагрегатов. Обзорная информация Минэнерго СССР. — М.. 1980. — 58 с.
14. Метод суперэлемеитов в расчетах инженерных сооружений./Авторы: В. А. Постнов, С. А. Дмитриев, Б. К. Елтышев А. А. Родионов. — Л.. 1979. — 288 с.
15. Николаи Е. И., Лурье А. И. Вибрации фундаментов рамного типа. — Л.—М.. 1933. — 83 с.
16. Осоловский В. П„ Венгеровский Д. П., Краиц-фельд Я. Л. Эксплуатация фундаментов энергетического оборудования. ТЭС. — М., 1980. — 168 с.
17. Повышение надежности системы турбоагрегат — фундамент — основание мощных энергоблоков тепловых электростанций. Динамика энергосооружений. Труды координационных совещаний по гидротехнике вып. 109. — Л., 1976, 178 с.
18. Повышение надежности гидротехнических сооружений при динамических воздействиях. Труды координационных совещаний по гидротехнике, вып. 116. — Л., — 312 с.
19. -Повышение надежности энергетических сооружений при динамических воздействиях. Материалы конференций и совещаний по гидротехнике. ВНИИГ им. Веденеева. — Л., 1982. — 262 с.
20. Руководство по проектированию фундаментов машин с динамическими нагрузками (НИИОСП Госстроя СССР). —М., 1982.—с. 129.
21. Прочность и колебания электрических ма-шнн./Загородная Г. А., Фастовскнй В. М. н ДР- — Л., 1969. — 440 с.
22. Рауш Э. Фундаменты машин. — М., 1965. — .420 с.
23. Савинов О. А. Современные конструкции фундаментов под машины н их расчет — Л 1979.— 200 с.
24 ?972аВО1512К П° дииамике сооружений. — М.,
25. Станиславский Л. Я., Гаврилов Л. Г., Остер-инк э. С. Вибрационная надежность мощных
26 1урбогсиеРаторов. — М., 1975. — 239 с.
Тезисы докладов на всесоюзном научно-техни
ческом совещании «Проблемы вибрации турбоагрегатов ТЭС и АЭС». —М., 1982. — 73 с.
27. Трояновский Б. М. Турбины для атомных электростанций. — М., 1978. —232 с.
28. Турбогенераторы. Расчет и конструкция/Ти-тов В. В., Хуторецкнй Г. М. Загородная Г. А. и др./Под ред. Н. П. Иванова н Р. А. Лютера. — Л., 1967. — 896 с.
29. Щегляев А. В. Паровые турбины. — М., 1976. —* 357 с.
30. Major S. Dynamics in civil engineering. Analysis & Design. Budapest: Akad. klado, 19— ISBN 963—05—2206—3. Vol. 1. Fundamentals In vibration theory and practice including machine foundations. Soil dynamics. Instrumentation. Vibration tolerance. 1980. — 320 p.
31. Major S. Dynamics in civil engineering. Analysis & Design. Budapest: Akad. klado, 19— ISBN 963—05—2206—3. Vol. 2. Foundations for hammers, reciprocating engines, and other machines. Vibration isolation and damping. 1980.— 302 p.
32. Major S. Dynamics in civil engineering. Analysis & Design. Budapest: Akad. klado, 19— ISBN 963—05—2206—3. Vol. 3. Foundations for high speed machinery. Steam and nuclear power plants. Structural details. 1980. — 291 p.
33. Major S. Dynamics in civil engineering. Analysis & Design. Budapest: Akad. kiado, 19— ISBN—963—05. Vol. 4. Vibrations in buildings and industrial structures. Dynamics in hydraulic structures and bridges. 1980. — 306 p.
34. 44th Euromech. Colloquium «Dynamics of Machine Foundations». Politechnic Institute Bucharest, Bucharest, Romania. 1973.—381 p.
35. Turbine — Generator engineering. Published by AEI Turbine — Generators Ltd., Trafford Park, Manchester, 17, England. — 168 p.
К РАЗДЕЛУ 4
1. Коренев Б. Г.. Яковлев А. С. Труды коллоквиума «Евромах-44» по динамике фундаментов под машины. Новые книги за рубежом, сер. Б., 1974, № 7 с. 102—107.
2. HUffmann G. Spring Mounting of Turbo set Foundations. 44th Euromech Colloquium Dynamics of Machine Foundations, 1973, — c. 199— 209.
3. Probst Paul H.t Joyce John S. The Development of Helical—Spring Foundations for Large Steam Turbine — Generators. Volume 34 — Proceedings of the American Power Conference, 1972, — c. 424—437.
4. Klotz H. Stand von Konstniktion und Berech-nung der Fundamente fiir grosse Turbosatze. VGB—Sondeitagung Bauwesen, 1969, c. 37—43.
5. Trombik G. Spring—mounted Foundations for Turbo-Generator Sets. 44th Euromech Colloquium Dynamics of Machine Foundations. 1973, c. 265-272.
v v
6. Masopust R. Zascita technologlceskogo oborudo-vanija i konstrukeij jadernycn elektrostancij ot
v
seismiceskich vozdejstvij—principy projektlro-v
vanija i rasceta (odevzdano pro 5. seminar v
Interatomenergo v zijnu 1981 v SFRJ na tema «Problemy budovani seismicky odolriych jader-nych elektraren»), c. 1—24.
7. Коренев Б. Г., Кедрова Г. Л. Проблемы повышения эффективности виброизоляции фундамента турбоагрегатов средней и большой мощности. — В кн.: ГлавНИИпроект н ВНИИГ им. Веденеева. Материалы конференций и совещаний по гидротехнике. — Л.: Энергоатом-нздат, 1982. с. 208—212.
8. Коренев Б. Г.. Кедрова Г. Л. Внброизолятор. А. с. № 69S260, БИ Ns 41. 1979. — 140 с.
9. Коренев Б. Г.. Кедрова Г. Л., Калашников А. В. Виброизодятор. А. с. № 796540 БИ Ns 2, 1981. — 161 с.
10. Руководство по проектированию виброизоля-цни машин и оборудования. — М.: Стройиздат, 1972.—с. 66—68.
И. Типовые конструкции и детали зданий и сооружений. Серия 3.001-2. Каталог пружин и рессор для внбронзоляторов и пружинных внброизо-ляторов, вып. 1, 2, 1976. —59 с.
12. Малинин Н. Н. Заневоливание цилиндрических и конических пружин. — В кн.: Новые методы расчета пружин. — М.: Машгиз, 1946 с. 11—26.
13. Пономарев С. Д. Расчет заневэленных пружин с учетом кривизны витков. — В кн.: Расчеты не прочность, Ns 8. —М.: Машгиз, 1962. с. 161— 186.
447
14. Пасутман Б. В. Метод расчета заневолеиных цилиндрических винтов пружин сжатия минимального веса. Изв. вузов. Машиностроение, 1961, № 7. с.
15. Коренев Б. Г., Кедрова Г. Л. Применение заневолеиных пружин сжатия в качестве виб-ронзоляторов для машин с динамическими нагрузками. — Строительная механика и расчет сооружений, 1976, № 4, с. 51—54.
16. Коренев Б. Г., Кедрова Г. Л. Эффект заиево-лнвания пружин — виброизоляторов как источник получения повышенного демпфирования в системе.—Строительная механика и расчет сооружений, 1978, № 4. с. 51—52.
17. Klein G. Tuning of Foundations for steam Turbine — Generators and Consequences for Power-station Operations. 44th Euromech Colloquium Dynamics of Machine Foundations, 1973, c. 211—219.
18. Лнтвин И. С., Рыбаков С. Н. Фундамент турбоагрегата мощностью 50 МВт с применением пружинной виброизоляции. Устройство фундаментов под машины с динамическими нагрузками. ЛДНТП. — Л., 1980. с. 23—27.
19. Литвин И. С., Свердлов П. М. Современное состояние проектирования фундаментов турбоагрегатов. — Энергетическое строительство, газами и парами. — М. 1982. — 376 с.
20. Филиппов А. П., Шульженко Н. Г., Билетчен-ко В. П. Колебания рамных фундаментов мощных турбоагрегатов. — Строительная механика и расчет сооружений, 1978. № 1, с. 34— 38.
21. Шульженко Н. Г., Дзюба В. Ф. Колебания рамиых фундаментов с виброизоляцией. — Строительная механика и расчет сооружений, 1982, № 6. с. 56—60.
22. Цейтлин Б. В. Метод и программа расчета вибраций фундаментов с шарнирными узлами и вибронзолнрующими элементами. Труды координационных совещаний по гидротехнике. ВНИИГ им. Веденеева, 1977. вып. 116, с. 250— 256.
23. Шейнин И. М., Цейтлин Б. В. Теоретическое исследование динамических характеристик ряда фундаментов под мощные турбоагрегаты. — Сб. научных трудов. Изв. ВНИИГ им. Веденеева, 1981, т. 151.-е. 81—87.
24. Шейнин И. С. Низкочастотная вибронзоляция в мощных турбоустановках. Первый опыт. Изв. ВНИИГ им. Веденеева, т. 148, 1982. — с. 1—12.
25. Голоскоков Е. И., Филиппов А. П. Нестационарные колебания механических систем.— Киев: Наукова Думка, 1966. — 336 с.
26. Голоскоков Е. Г., Филиппов А. П. Нестационарные колебания деформируемых систем. — Киев: Наукова Думка, 1977. — 339 с.
27. Коренев Б. Г., Пикул ев Н. А. Способ демпфирования колебаний виброизолнрованной машины или фундамента. — «Бюллетень изобретений». № 5, 1960, а. с. № 126692.
28. Пикулев Н. А. О роли упругой вставки между демпфером и колеблющейся массой. — Строительная механика и расчет сооружений, Ks 2, 1959, с. 45-48.
29. Пикулев Н. А. Демпфирующее действие силы сухого треиия прн колебаниях с неустаиовив-шейся амплитудой. — Строительная механика и расчет сооружений. № 6, 1959. с. 47—49.
К РАЗДЕЛУ 5
1. Берсзии И. С., Жидков Н. П. Методы вычислений, т. 2. — М., 1962. — 635 с.
2. Давыдов С. С. Колебания грунта в упруго-пластической стадии от кратковременной нагрузки. — М„ 1957. — 64 с.
3. Динамический расчет сооружений на специ-. альные воздействия. Справочник проектировщика. — М., 1981, с. 6—28.
4. Ляхов Г. М. Основы динамики взрыва в грунтах и жидких средах. — М., 1964. — 216 с.
5. Пономарев Г. Д., Бидерман В. Л., Лихарев К. К. и др. Расчеты на прочность в машиностроении, т. 3. — М.. 1959, с. 653—710.
6. Руководство по проектированию строительных конструкций убежищ гражданской обороны. — М.. 1974. — с. 297.
7. СНиП П-11-77. Защитные сооружения гражданской обороны. — М., 1978. — 63 с.
9. Справочник по динамике сооружений. — М., 1972. —511 с.
10. Попов Н. Н., Жарницкий В. И., Беликов А. А. Метод расчета железобетонных конструкций в упругопластической стадии основанный на использовании диаграмм о—е материалов.
«Железобетонные конструкции» (Труды вузов Литовской ССР). 1978, № 9. с. 77—86.
К РАЗДЕЛУ 6
1. Справочник проектировщика. Динамический расчет сооружений на специальные воздействия.— М.: Стройиздат, 1981. —215 с.
2. СНиП 2.01.07. Нормы проектирования. Нагрузки и воздействия. — М.: Стройиздат, 1985. — 54 с.
3. Зельдович Я. Б., Воеводский В. В. Тепловой взрыв и распространение пламени в газах. — М.. 1947. — 147 с.
4. Иващенко П. Ф., Румянцев В. С. Конвективный подъем и скорости распространения больших очагов пламени. — Физика горения и взрыва, 1978, Xs 3. с.
5. Льюис Б., Эльбе Г. Горение, пламя и взрывы в газах. Пер. с англ. — М-, 1968. — 582 с.
6. Розловский А. И. Научные основы техники взрывобезопасности при работе с горючими газами и парами. — М., 1982. — 376 с.
7. Станюкович К. П. Физика взрыва./Под ред. К. П. Станюковича. — М., 1975. — 584 с.
8. Хитрин'Л. И. Физика горения и взоыва.— М., 1957. — 442 с.
9. Щелкни Е. И., Трошин Я. К. Газодинамика горения. — М.. 1963. — 182 с.
10. Пилюгин Л. П. Нагрузки, возникающие при взрывном горении газовоздушных смесей в помещениях взрывоопасных производств. — В кн.: Взрывобезопасность в строительстве. — М., 1983. — 123 с.
11. Bradley D., Mltchoson A. The Venting of Gaseous Explosions in Spherical Vessels. I — Theory, II—Theory and Experiment. Combustion and flame, 32, 221—236, 1978.
К РАЗДЕЛУ 7
1. Баркан Д. Д. Расчет и проектирование фундаментов под машины с динамическими нагрузками. — М.: Госстройиздат. 1938. — 284 с.
2. Баркан Д. Д. Динамика оснований и фундаментов. — М.: Стройвоеимориздат, 1948. — 411 с.
3. Глушков Г. И. Статика и динамика сооружений, заглубленных в грунт. — М.: Госстройиздат, 1967. — 211 с.
4. Глушков Г. И. Расчет сооружений, заглубленных в грунт. — М.: Стройиздат, 1977. — 294 с
5. Давыдов С. С. Колебания разнородного грунта в упругопластической стадии от кратковременной нагрузки. Доклады к Международному конгрессу по механике грунтов и фундамен-тостроенню.—М.: Госстройиздат, 961.—
202 с.
6. Кардер Д. С., Клоуд К. К. Колебания грунта при крупных подземных взрывах. — В кн.: Подземные ядерные взрывы. — М.: ИЛ, 1962. — 220 с.
7. Кошелев Л. И. Исследования работы конструкций в грунте при действии динамической нагрузки. — Труды МИСИ нм. Куйбышева, 1968 вып. 53. — 200 с.
8. Миронов П. С. Взрывы и сейсмостойкость сооружений. — М.: Недра, 1973. — 167 с.
9. Покровский Г. И. Взрыв. — М.: Недра, 1973. — 180 с.
10. Приспособление подвалов существующих зданий под убежища. — М.: Стройиздат, 1971. Авт. Ганушкни В. И., Морозов В. И., Никонов Б. И., Орлов Г. И. — 207 с.
11. Расчет сооружений на импульсивные нагрузки. — М.: Стройиздат 1970. Рабинович И. М-. Синицын А. П.. Лужин О. В.. Теренин Б. И. — 303 с.
12. Расчет конструкций убежищ — М.: Стройиздат, 1974. Боданский М. Д-. Горшков Л. М., Морозов В. И., Расторгуев Б. С. 204 с.
13. Синицын А. П. Практические методы расчета сооружений на сейсмические нагрузки. М.: Стройиздат, 1967.— 143 с.
14. Савияов О. А. Фундаменты под машины. М.: Госстройиздат. 1955. — 291 с.
15. Снитков Н. К. Динамика сооружения. М.г Госстройиздат, 1960. — 355 с.
448
16. Справочник проектировщика Динамический расчет сооружений на специальные воздейст-вия/Под ред. Б. Г. Коренева и И. М. Рабиновича.— М.: Стройиздат, 1981. —215 с.
К РАЗДЕЛУ 8
1. Владиславлев Л. А. Вибрация гидроагрегатов гидроэлектрических станций. — М.: Энергия, 1972, — 176 с.
2. Гидротехнические сооружения, под редакцией М. М. Гришина. — М.: Высшая школа, 1979 ч. I. — 615 с.; ч. И. — 336 с.
3. Динамика гидротехнических сооружений. Труды координационных совещаний по гидротехнике. вып. 28. — Л.: Энергия 1966. — 358 с., вып. 54.—Л.: Энергия, 1970.—475 с., вып. 64. — Л.: Энергия, 1972. — 212 с. вып. 64, ч. 11. — Киев: Наукова думка, 1972. — 38 с Дополнительные материалы. — Л: Энергия 1972. — а8 с. вып. 116. — Л.: Энергия. 1977,— 286 с. Изв. ВНИИГ, т. 127, 197S. — ПО с., т. 140. 1980.— 113 с., т. 148. 1981. — 139 с.
4. Динамический расчет сооружений на специальные воздействия. Справочник проектировщн-ка/Под ред. Б. Г. Коренева. И. М. Рабиновича.— М.: Стройиздат, 1981. — 216 с.
5. Исаев А. А., Сиволожская М. Н. Функции спектральной плотности пульсации гидродинамической нагрузки, действующей на плиты водобоя водосливных плотин. — Труды коорд. совещаний по гидротехнике, вып. 116.— Л.: Энергия, 1977. с. 28—36.
6. Использование водной энергии/Под ред. Д. С. Щавелева —Л.: Энергия, 1976.—656 с.
7. Кириллов А. П. Выносливость гидротехнического бетона. — М.: Энергия. 1978. — 272 с.
8. Кульмач П. П. Гидродинамика гидротехнических сооружений. — М.: Изд-во АН СССР, 1963 — 189 с.
9. Лятхер В. М., Борзенко И. И., Халтурина Н. В. Свободные колебания жестких плит на песчаном водонасыщенном основании. — Гид-ротехническое строительство, 1972, № 1, с. 25— 30.
10. Лятх р В. М., Складнее М. Ф.. Шейнин И. С. Исследования в области динамической гид-роупругостн гидротехнических сооружений. — Гидротехническое строительства 1971, № 8. с. 13—20.
11. Лятхер В. М. Турбулентность в гидросооружениях — М.: Энергия, 1968. — 408 с.
12. Максимов Л. С., Шейнин И. С. Измерение вибрации сооружений. Справочное пос. — Л.: Стройиздат, 1974. — 254 с.
13. Нагрузки и воздействия на гидротехнические сооружения (волновые, ледовые и от судов). СНиП 11-57-82. — М., 1982.—41 с.
14 Рекомендации по гидравлическим расчетам водобойных стенок. 1179-79/ВНИИГ. — Л., 1979. — 9 с.
15 Рекомендации по компоновке затворных камер н расчетам гидродинамических воздействий потока на плоские, сегментные и дисковые затворы гидротехнических сооружений. П84-79/ВНИИГ — Л.. 1980. — 123 с.
16. Рекомендации по определению гидродинамических нагрузок, воздействующих на плнты водобоев и рисберм водосливных плотин. П73-78/ВНИИГ. — Л.: 1979. — 52 с.
17. Рекомендации по определению динамических нагрузок, передаваемых вертикальным гидроагрегатам на сооружение. П14-73/ВНИИГ — Л„ 1974,— 12 с.
18. Рекомендации по учету влияния водной среды на частоты собственных колебаний глубинных затворов н стальных облицовок затворных камер. П39-75/ВНИИГ. — Л.. 1976. — 44 с.
19. Семенов Н. А., Варламов Н. Н., Балании В. В. Судоходные каналы, шлюзы и судоподъемники. — М.: Транспорт, 1977. — 286 с.
20. Справочник по динамике сооруженнй/Под ред. Б. Г. Коренева, И. М. Рабиновича. — М.: Стройиздат, 1972. — 512 с.
21 • Труды Гидропроекта. Сб. 7. — М.: 1962 —
299 с.; Сб. 10. — М.: 1963.— 364 с.: Сб. — М.: Энергия. 1966. — 304 с.
22. Турбинное оборудование гидроэлектростанций./ Под ред. А. А. Морозова. — М.—Л.: Энергия 1958.-519 с.
-3. Шейнин И. С., Воронова Л. С. Влияние затухания в основании на колебания пластинки в жидкости при локальной податливости дна. — Труды координационных совещаний по гидротехнике. вып. 54. — Л.; Энергия, 197J. — с. 210—222.
24 Шейнин И. С.. Заболотная В А. Движение многофазной жидкости с переменной по глубине плотностью прн колебаниях ограждающих конструкций. — Изв. ВНИИГ. т. 91. Л., 1969, с. 113—121.
25. Шейнин И. С. К вопросу об оценке гидродн-намических нагрузок иа констоукции гидросооружений. Изв. ВНИИГ, т. 154. — Л., 1982, с. 3-7.
26. Шейнин И. С. Колебания конструкций гидросооружений в жидкости. Справочное пос. — Л.: Энергия, 1967. — 314 с.
27. Шейнин И. С. Колебания пластин в водоеме с податливым дном. — Изв. ВНИИГ, т. 88. — Л., 1969, с. 80—94.
28. Шейнин И. С. Об учете поверхностных волн, возникающих при колебаниях вертикальной стенки в жидкости. — Изв. ВНИИГ, т. 83. — Л., 1967. — с. 204—213.
29. Шейнин И. С. О влиянии жидкости на формы колебаний гибких вертикальных стенок при кинематическом возбуждении. — Труды координационных совмещений по гидротехнике, вып. 47. — Л.: Энергия, 1969. — с. 254—256.
30. Шейкин И. С. О многопараметрических вада-чах динамической гидроупругсстп для оболочек и пластин.—Труды IX ВсссоюзнсТ конференции по теории оболочек н пластин. Л.г Судостроение, 1975. — с. 103—109.
31. Штеицель В. К.. Соколов М. А. Порты и портовые сооружения. — М.: Транспорт, 1977. — 335 с.
32. Шульман С. Г. Сейсмическое давление воды па гидротехнические сооружения. — Л.: Энергия, 1970. — 196 с.
К РАЗДЕЛУ 9
1. Александров М. Н. Судовые устройства. — Л.: Судпромгнз, 1968. — 372 с.
2. Гершуиов Е. М., Смирнов Г. Н. Некоторые вопросы динамического расчета оградительных сооружений. Труды коорд. совеш. по гидротехнике. — М.—Л.: Энергия, 1965, вып. 20, с. 17— 28.
3. Гольдепблат И. И., Карцизпдзе Г. II., Напет-варидзе Ш. Г., Николаенко Н. А. Проектирование сейсмостойких гидротехнических граис-пертиых и специальных сооружений. — М.: Стройиздат, 1971. — 280 с.
4. Динамический расчет сооружений на специальные воздействия. Справочник проектиров-щика/Под ред. Б. Г. Коренева, И. М. Рабиновича. — М.: Стройиздат 1981. — 215 с.
5. Замышляев Б. В., Яковлев Ю. С. Динамические нагрузки при подводном взрыве. — Л.: Судостроение, 1967. — 387 с.
6. Заритовский Н. Г. Колебания якорной цепи при движениях плавучего объекта. — Азербайджанское нефтяное хозяйство, 1979. № 8—9, с. 59—60.
7. Ивович В. А. Динамический расчет внсячнх конструкций. — М.: Стройиздат, 1975. — 191 с.
8. Корсакова Ж. С., Логинов В. Н. Исследование устойчивости оградительных сооружений под воздействием волн с учетом нелинейного изменения упругой реакции основания. Труды СоюзморНИИпроекта.—М.: Транспорт, 1979, вып. 52 с. 74—84.
9. Корчииский И. Л., Поляков С. В., Быховский В. А., Дузинкевич С. Ю., Павлык В. С. Основы проектирования зданий в сейсмических районах. — М.: Стройиздат, 1961. — 488 с.
10. Кравчук Ю. Д.. Мялкин Б. А., Марченчо Д. В. Статический расчет системы заякорения плавучих причалов на цепях с подвесными массивами. Труды коорд. совещ. по гидротехнике. — Л.: Энергия, 1967 вып. 40, с. 375—387.
11. Кульмач П. П. Гидродинамика гидротехнических сооружений. — М.: нзд-во АН СССР, 1963. — 192 с.
12. Кульмач П. П. Сейсмостойкость портовых гидротехнических сооружений. — М.: Транспорт. 1970 — 310 с.
13. Кульмач П. П. Якорные системы удержания плавучих объектов (вопросы статнкн и динамики плавучих сооружений на якорях). — Л.: Судостроение, 1980. — 336 с.
14. Кульмач П. П. Вопросы развития исследований плавучих заякоренных сооружений. Труды коорд. совещ. по гидротехнике. — Л.: Энергия, 1972, вып. 75, с. 103—119.
15. Логинов В. Н. Определение величины импульса давлений на вертикальную стенку при ударе разбитой волны. Труды ЦНИИМФ. — Л.: Морской транспорт, 1980, вып. 26, с. 65—76
29—189
449
(см. также Труды СоюзморНИИпроекта. — М.: Морской транспорт, 1962. вып. 2. — с. 47—59).
16. Логинов В. Н. Изучение колебаний оградительных сооружений под волновым воздействием. Труды коорд. совещ. по гидротехнике. — М.—Л.: Энергия, 1965, вып. 20, с. 5—15, 88— 97.
17. Лужин О. В., Салаев? Г. Н. Динамика прямоугольных железобетонных эстакадных рам с прямоугольным сечением под действием морских волн. — Изв. высш. учеб, заведений «Строительство и архитектура». — Новосибирск 1977, № 6, с. 19—24.
18. Марченко Д. В. К динамически? у расчету якорной цепи с одиночным грузом. Труды коорд. совещ. по гидротехчике. — Л.: Энергия. 1972, вып. 75. с. 136—140.
19. Медведев С. В. Инженерная сейсмология. — М.: Стройиздат. 1962. — 284 с.
20. Мороз Л. Р., Смирнов Г. Н. Определение динамических напряжений в основании оградительного сооружения прн воздействии разбитой волны. Труды СоюзморНИИпроекта. — М.: Транспорт, 1969, вып. 22, с. 75—84 (см. также Сб. трудов МИСИ нм. Куйбышева 1970. № 78, с 4—31).
21. Назаров А. Г. Метод инженерного анализа сейсмических сил. — Ереван, изд-во АН Армянской ССР, 1959. — 286 с.
22. Напетварндзе Ш. Г. Сейсмостойкость гидротехнических сооружений. — М.: Стройиздат, 1959. — 216 с.
23. Петрашень В. И. Динамический расчет оградительных сооружений типа вертикальной стенки. Сб. трудов ВНИИГС. — Л.: Стройиздат, № 5. — с. 69—93.
24. Руководство по определению нагрузок и воздействий на гидротехнические сооружения (волновых, ледовых и от судов) (к СНиП 11-57-75). —Л.: ВНИИГ им. Веденеева, 1977.— 316 с.
25. Руководство по учету сейсмических воздействий при проектировании гидротехнических сооружений (к СНиП I1-A. 12-69). — Л.: ВНИИГ им. Б. Е. Веденеева, 1977. — 164 с.
26. Савинов О. А. Современные конструкции фундаментов вед машины и их расчет. — Л.: Стройиздат. 1979. —200 с.
27. СН 288-64. Указания по проектированию гидротехнических сооружений подверженных волновым воздействиям. — М.: Стройиздат,
1965— 131 с.
28. СНиП II-7-81. Строительство в сейсмических районах. — М.: Стройиздат, 1982. — 48 с.
29. СНиП 11-51-74. Гидротехнические сооружения морские. Основные положения проектирования. — М., Стройиздат, 1974. — 8 с.
30. СНиП П-57-82. Нагрузки и воздействия па гидротехнические сооружения (волновые, ледовые и от судов). — М.: Стройиздат, 1983.— 39 с.
31. Справочник по динамике сооруженнй/Под ред. Б. Г. Коренева, И. М. Рабиновича. — М.: Стройиздат, 1972.— 511 с.
32. Харрнс С. М., Крид Ч. И. Справочник по ударным нагрузкам. — Л.: Судостроение, 1980. — 360 с.
33. Хасхачих Г. Д., Морозов А. М. Исследование модели секции плавучего волнолома в условиях плоской задачи. — Труды ВНИИ транспортного строительства, 1967, вып. 67, с. 3—17.
34. Шехтер О. Я. Динамический расчет свай, соединенных поверху жестким ростверком. — Сб. трудов НИИ оснований н фундаментов, 1948, № 12, с. 34—50.
К РАЗДЕЛУ 10
1. Барштейн М. Ф. Воздействие нерегулярной волны иа сквозные инженерные сооружения. — Строительная механика и расчет сооружений, 1964. № 1, с. 31—41.
2. Барштейн М. Ф., Зубков А. И., Маслов Б. Е., Шкляревский П. К. Экспериментальное изучение колебаний нефтепромысловых сооружений прн нерегулярном волнении. — М.: Стройиздат, 1974, с. 180—190 (Тр. ЦНИИСК им. Кучеренко, вып. 34).
3. Барштейн М. Ф. Динамическое воздействие нерегулярной волны на сквозное сооружение, расположенное е глубоководной зоне моря. — М.: Стройиздат, 1974. с. 52-62. (Тр. ЦНИИСК им. Кучеренко, вып. 34).
4. Барштейн М. Ф. Расчет пространственных глубоководных сооружений на волновые, ветро
вые и сейсмические воздействия. — Строительная механика и расчет сооружений. 1982, № 1, с. 47-54.
5. Болотин S. В.. Чирков В. П., Щербаков А. Н. К расчету конструкций глубоководных нефтепромысловых сооружений «а сочетание нагрузок — Строительная механика и расчет сооружений, 1980, № 5, с. 6—10.
6. Глуховский Б. X. Исследование морского ветрового волнения.—М.: Гндрометеонздат; 1966. - 284 с.
7. Каспарсон А. А., Халфин И. Ш. О выборе коэффициента лобового сопротивления цилиндрических тел, обтекаемых волной. — Л.: Энергия, 1967. с. 44—54 (Тр. Коорд. совещ. по гидротехнике, вып. 34).
8. Каспарсон А. А., Халфин И. Ш., Фуртенко В. П. Затухание по глубине удельных волновых нагрузок на жесткие цилиндрические элементы морских нефтепромысловых сооружений при нерегулярном волнении. — В кн : Нефтепромысловое строительство, № 2, — М.:
ВНИИОЭНГ, 1974, с. 19—23.
9. Крылов Ю. М. Спектральные методы исследования и расчета ветровых волн. — М.: Гидро-метиоиздат, 1966. — с. 256.
10. Крылов Ю» М., Стрекалов С. С., Цыплухин В. Ф. ветровые волны и их воздействие'' на сооружения. — Л.: Гидрометеоиздзт, 1976. — 255 с.
11. Кожевников М. П. Гидравлика ветровых волн. — М.: Энергия, 1972. — 263 с.
12. Лаппо Д. Д. Силовое воздействие гравитационных волн при обтекании гндротехчических сооружений. — АН СССР, 1962.— 116 с.
13. Лаппо Д. Д., Соколов А. В., Мищенко С. С., Каплуи В. В. Некоторые из основных положений корректировки V раздела СН 92-60 — Л.: Энергия, 1967, с. 86—98 (Тр. коорд. совещ. по гидротехнике, вып. 34).
14. Лаппо Д. Д. Некоторые уточняющие представления об основных характеристиках теории волн малой амплитуды. — Л.: Энергия, 1969, с. 209—215. (Тр. коорд. совещ. по гидротехнике, вып. 50).
15 Лаппо Д. Д., Иванова С, В., Каплун В. В., Мищенко С. С., Шестаков Ю. Н. Кинематические характеристики бегущих волн. — Изв. БНИИГ нм. Веденеева, т. 112.— Л.: Энергия, 1976. — с. 51—57.
16. Лаппо Д. Д., Иванова С. В., Каплун В. В., Мищенко С. С. Метод расчета нагрузок от волн на обтекаемые преграды. — Изв. ВНИИГ им. Веденеева, т. 112, — Л.: Энергия, 1976, с. 58—64.
17. Лнтонов О. Е. Динамический расчет самоподъемных буровых установок при нерегулярном воздействии волнения и ветра. Вопросы судостроения. Сер. Проектирование судов, вып. 9. 1976, с. 31—47.
18. Лужин О. В., Каспарсон А. А., Халфин И. Ш., Мирзев Д. А., Фуртенко В. П. Усовершенствование методов расчета морских оснований на воздействие ветровых волн. — В кн.: Нефтепромысловое строительство, № 12. — М.: ВНИИОЭНГ. 1974, с. 19—22.
19. Лужин О. В., Халфин И. Ш. Динамический расчет глубоководных сквозных сооружений на воздействие случайного штормового волнения, — в тематич. иаучно-техннч. обзоре «Волновые воздействия на морские нефтепромысловые сооружения», сер. «Нефтепромысловое строительство», ч. II, ВНИИОЭНГ. — М.: 1977 с. 42—84.
20. Лужин О. В., Халфин И. Ш., Фуртенко В. П., Плешаков А. А. Совершенствование методов динамического расчета самоподъемных плавучих буровых установок. Деп. ЦНИИ «Румб», № 1305, 17 янв. 1979.
21. Лужин О. В., Халфин И. Ш., Чижевский А. Н. Математическое моделирование динамических реакций глубоководных морских сооружений прн воздействии волн конечной высоты. — В кн.: Методы исследований и расчетов волновых воздействий на сооружения и берега. — Л.: Энергия, 1982, с. 95—98.
22. Леонтьев А. Н. Моделирование на ЭВМ колебаний сквозных гидротехнических сооружений прн воздействии нерегулярных волновых нагрузок. Деп. ЦИНИС Госстроя СССР—М., 1978, стр-во и арх-ра. Сер. проектир. и стр-во. 1979, вып. 2 № 1251.
23. Регистр СССР. Ветер и волны в океанах и мооях. Справочные данные. — Л.: Транспорт. 1974.— 359 с.
24. Руководство по определению нагрузок и воздействий иа гидротехнические сооружения
450
П-58-76 (волновые, ледовые п от судов), ВНИИГ доп. 4. — Л.. 1977, с. 230—239.
25. СНиП 11-57-82. Нагрузки и воздействия на гидротехнические сооружения (волновые ледовые и от судов).—М.: Стройиздат, 1983.— 37 с.
26. Сретенский Л. Н. Теория волновых движений жидкости. 2-е изд. — М.: Наука. 1977.—81 с.
27. Саркисов 3. Г., Семенова II. И., Смагин И. Ф. Определение периода собственных колебаний плавучих буровых установок. Азербайджап-- ское нефтяное хозяйство, 1976, № 7, 1976, с. 48—52.
28. Халфин И. Ш. Лабораторные исследования кинематики нерегулярных волн. — Гидротехническое строительство, 1975, № 8, с. 31—36.
29. Шестаков Ю. Н. Влияние формы обтекаемой преграды на волновую нагрузку. — Тр. ксорд. совет, по гидротехнике, вып. 75. — Л.: Энергия 197z. — с. 69—75.
30. Тимошенко С. П. Колебания в инженерном деле. — М.: Стройиздат 1967. — 444 с.
31. Berge В., Pcnsien J., Three-dimensional sto-hastic response of offshore towers to wave force's, 6-th Ann. Off. Techn. Conf., Houston, Texas, 6—8 may, 1974, Vol. 2, pp. 173—190.
32. Fish P., Rainey R., The Impotence of stractu-ral motion in the calculation of wave loads on an offshore structure, <Boss-79», Proc. 2-nd Int. Conf. Behaviour Off. struct., London, 1979, Vol. 2, Bedford, 1979, pp. 43-60.
33. Sarle E. H., Mandery W. L. Determination of dynamic chaiacterlstics offshore platforms from random vibrations, 5-th Ann. Offsh. Techn. Conf. Houston, Texas, apr, — may, 1973,
К РАЗДЕЛУ 11
1. Ананьев И. В., Колбин Н. М., Сереб-янский Н. П. Дннамнка конструкций летательных аппаратов. — М.: Машиностроение, 1972.—415 с.
2. Дерябин В. С., Доценко П. Д. О колебаниях трубопровода постоянной кривизны. — Прикладная механика, т. XI, вып. 1 1975, с.
3. Доценко П. Д. О колебаниях прямолинейного трубопровода с учетом демпфирования. — В кн.: Рассеяние энергии при колебаниях механических систем. — Киев. 1974, с. 86—93.
4. Доценко П. Д. Об уравнениях колебаний пространственного криволинейного трубопровода. — В кн.: Самолетостроение. Техника воздушного флота, вып. 38. — Харьков, 1975. с. 70—78.
5. Доценко П. Д. Об уравнениях малых колебаний криволинейного трубопровода. — Механика твердого тела. 1974, № 5, с
6. Жуковский Н. Е. О гидравлическом ударе в водопроводных трубах. Поли. собр. соч., т. VII. ОНТИ НКТП. 1937. - 410 с.
7. Ильгамов М. А. Колебания упругих оболочек, содержащих жидкость и газ. — М.: Наука, 1969. — 182 с.
8. Лю Хуан-Сунь. Моут М. Л. (Лю Хун-Сунь). Динамические характеристики труб. — В кн.: Конструирование и технология машиностроения. 1971 № 2. — М.: Мир, с. 211—217.
9. Ковровский А. П. Динамика трубопроводов, содержащих неустаповившийся поток жидкости. — Прикладная механика, т. VI, вып. 8. — Киев. 1970.
10. Гусейн-заде М. А., Юфин В. А. Неустаповив-шееся движение нефти и газа в магистральных трубопроводах. — М.: Недра, 1981.—232 с.
11. Натанзон М. С. Параметрические колебания трубопровода, возбуждаемые пульсирующим расходом жидкости — Изв. АН СССР. 1962, Сер. Механика и машиностроение, № 4, с. 42—
12. Мпкншев Г. Н., Рабинович Б. И. Ди -шинка тонкостенных конструкций с отсеками, содержащими жидкость. — М.: Машиностроение, 1971.-546 с.
13. Рашидов Т. Динамическая теория сейсмостойкости сложных систем подземных сооружений. — Ташкент: Фан. 1973.— 180 с.
14. Светлицкий В. А. Статика, устойчивость и малые колебания гибких стержней заполненных движущейся идеальной несжимаемой жидкостью. — ® кн-: Расчеты иа прочность, вып. 14, 1969. с. 332—350.
*5. Сейфутдннов А., Темирбенков А. Сейсмостойкость трубопроводов, транспортирующих сплошную среду. Вопросы механики, вып. 12, 1973, Ташкент, с. 36—42.
16. Тармеи, Моут. Нелинейные колебания цилиндра с протекающей жидкостью. Конструирование и технология машиностроения. Лё 4 — М.: Мир. 1969, с. 233—242.
17. Чарный И. А. Неустановившееся движение реальиой жидкости в трубах. — М.: Недра, 1975. — 294 с.
18. Фсодосьев В. И. О колебаниях и устойчивости трубы при протекании через нее жидкости. АН СССР. Инж. сб., 1951, т. X с. 169— 170.
19. Чжень Розенберг. Свободные колебания оболочек с протекающей жидкостью. — В кн.:-Конструирование н технология машинстроеиня. т. 96, сер. В. № 2— М.; Мир, 1974.
20. Чжень. Внеплоскостные колебания и устойчивость крипол инейных трубопроводов. — Прикладная механика, № 2 —М.: И.—Л., 1973. С. 43—49.
21. Пнсаревский Б. М. О неустановившемся движении газа в трубах. — Изв. вузов. Сер. Нефть и газ, 1971, As 3, с. 66—70.
22. Самарин А. Л. Вибрации трубопроводов энергетических установок и методы их устранения. — М.; Энергия, 1979. — 288 с.
23. Сорокин Е. С. К теории внутреннего трення. — М.: Госстройиздат, 1960. — 238 с.
24. Колесников К. С., Самойлов Е. А., Рыбак С. А. Дннамнка топливных систем ЖРД. — М.: Машиностроение 1975. — 172 с.
25. Уразбаев М. Г. Сейсмостойкость упругих и гндроупругих систем. — Ташкент, Фан, 1966. — 254 с.
26. Катаев В. П. К вопросу динамической устойчивости криволинейных трубопроводов с протекающей жидкостью. Науч. тр./Красноярскнй политехи, ин-т. — Красноярск. 1970, с. 85—88.
27. Анни Т., Мартин Е., Дьюб и Р. Гидроупругая неустойчивость труб постоянной кривизны с жидкостью. — Тр. Америк, об-ва инж.-механи-ков. Прикладная механика, т. 37, Xs 3 М.: Ил.—Л. 1970. — с. 244—250
28. Казакевич М. И. Аэродинамическая устойчивость надземных и висячих трубопроводов. — М.: Недра, 1977. — 200 с.
29. Кондрашов Н. С. Параметрические колебания трубопроводов на упругодемпферных опорах, вызываемые пульсирующим потоком. — В кн.: Рассеяние энергии при колебаниях механических систем. — Киев, 1968, с. 427—433.
30. Башта О. Т. Некоторые вопросы колебаний прямолинейных трубопроводов с протекающей жидкостью. — В кн.: Рассеяние энергии при колебаниях механических систем. — Киев, 1968. — с. 206—211.
31. Шашта О. Т. Колебания криволинейных трубопроводов с протекающей жидкостью под дав-давлсинсм. — В кн.: Рассеяние энергии при колебаниях механических систем. Киев 1968. — с. 433—438.
32. Филипов А. П. Колебания трубы при протекании в ней жидкости со скоростью v- — В кн.: Колебания механических систем. — Киев; Нау-кова думка, 1965. — 608 с.
33. Грештейн М. С., Камерштейн А. Г., Прокофьев В. И. Задачи динамики магистральных тру-
бопроводов. — В кн.: Расчет пространственных . конструкций, вып. 15. — М.? 1973, с. 177—185.
34. Герштейн М. С., Климовский Е М. Об учете динамических воздействий на надземный газопровод при его продувке. — Строительство трубопроводов, 1970 № 10, с.
35. Гехман А. С., Меликян А. А. Вопросы проектирования трубопроводов и специальных сооружений в сейсмических районах. — М.: ВНИИЭгазпром, 1973. — 52 с.
36. Березин В. Л., Бородавкин П. П., Шадрин О. Б. К определению собственной частоты колебаний подводных и надземных трубопроводов. — Изв. вузов. Сер. Нефть и газ, 1971, № 1. с. 79—83.
37. Петров И. П„ Спиридонов В. В. Надэемн; я прокладка трубопроводов. — М.: Недра, 1973. — 472 с.
38. Ильюшин А. А., Рашидов Т. Р. О действии сейсмической волны на подземный трубопровод. Изв. АН УзССР. Сер. техн, наук, 1971, № 1, с. 37—42.
39. Напетваридзе Ш. Г. Сейсмостойкость магистральных трубопроводов и других специальных сооружений нефтяной и газовой промышленности. — М.: Наука, 1980. — 172 с.
40. Болотин В. В. Статистические методы в строительной механике. — М.: Стройиздат. 1965. — 279 с.
41. Кидае К., Снраки К., Фупудзаза К. Антисейсмическая прочность подземных трубопрсво-
29*
451
дов. — Микубиси дзюкр гихо, 1974 т. 2, № 4, с. 38—54. На яп. языке.
42. Коган В. Д. О действии подвижной нагрузки на надземные многопролет^ые балочные системы трубопроводов. — Строительная механика и расчет сооружений. 1975. № 2, с. 57—60.
43. Петров И. П., Фомичев В. Д. Определение частот и максимальных пролетов балочных систем надземных трубопроводов — Труды ВНИИСТ, вып. 32. — М„ 1976, с. 68—75.
44. Герасимов А. В., Салькаев А. 3. О силовом воздействии волнения на полностью погруженный цилиндр. — В кн.: Качка и управляемость судна, материалы по обмену опытом, вып. 47. — Л.. 1963. с. 68—76.
45. Лаппо Д. Д. Силовое воздействие гравитационных воли при обтекании гидротехнических сооружений. — М.: АН СССР 1962. — 116 с.
46. Грнголюк Э. И., Горшков А. Г. Определение гидродинамических нагрузок при взаимодействии слабых нестационарных волн давления с упругими оболочками. — В кн.: Колебания излучения я демпфирование упругих структур. — М.: 1973, с. 3—11.
47. Мнев Е И., Перцев А. К- Гидроупругость оболочек. — Л., 1970, — 365 с.
48. Буйвол В. Н. Колебания цилиндрической оболочки в жидкости у поверхности раздела (пл. задача). — В ки.: Гидромеханика, 1971, вып. 19. с. 39—44.
49. Гершунов Е. М. Присоединенная масса жидкости при колебаниях балки лежащей под слоем жидкости. — Прикладная механика, т. X, вып. 3, 1974. с. 109—116.
50. Ишков П. К. Определение частот колебаний упругих стержней в жидкости. — П. М. М., 1937, т. I, вып. 1, с. 3—1Б.
51. Кульмач П. П. Колебания упругих цилиндрических стержней в жидкости. — Изв. ВНИИГ, т. 79. 1965. с. 90—99.
62. Шейнин И. С. О колебаниях упругого тонкостенного стержня в жидкости. — Изв. ВНИИГ, т. 80, 1966, с. 131—140.
53. Справочник по динамике сооружений/Под ред. Б. Г. Коренева, И. М. Рабиновича. — М.: Стройиздат, 1972. — 511 с.
64 Гольденблат И. И., Сизов А. М. Справочник по расчету строительных конструкций на устойчивость и колебания. — М.: 1952. — 251 с.
55. Камерштейн А. Г.. Рождественский В. В., Ручимский М. Н. Расчет трубопроводов на прочность. — М.: 1969, — 427 с.
56. Becker О. Zur Berechnung von Integralen fiber die Balkenfunktionen ZAMM 61, N 6, 1981. 269-272.
К РАЗДЕЛУ 12 г, -
1. Николаенко H. А. Современные проблемы и пути развития исследовательских работ в области теории сейсмостойкого строительства. — Строительная механика н расчет сооружений. 1982, № 5. с. 44-48.
2. Николаенко Н. А. Вероятностные методы динамического расчета машиностроительных конструкций. — М.: Машиностроение, 1967. — 365 с.
S. Николаенко Н. А., Ульянов С. В. Статистическая динамика машиностроительных конструкций. — М.: Машиностроение, 1977. — 367 с.
4, Микншев Г. Н., Рабинович Б. Я. Динамика твердого тела с плоскостями, частично заполненными жидкостью. — М.: Машиностроение. 1968. — 631 с.
Б. Николаенко Н. А. Динамика и сейсмостойкость конструкций, несущих резервуары. — М.: Госстройиздат, 1963. — 155 с.
6. Николаенко Н. А. Нелинейные динамические задачи теории сейсмостойкости пространственных конструкций. Сейсмостойкое строительство (отечественный и зарубежный опыт), 1974, № б, с. 60—54.
7. Николаенко Н. А.. Назаров. Динамика и сейсмостойкость пространственных конструкций н сооружений. — В ки.: Исследования по теории сооружений. 1977, вып. XXIII, с. 66—98.
8. Рекомендации по расчету резервуаров и газгольдеров на сейсмические воздействия. — М.э Стройиздат, 1969. — 46 с.
9. Николаенко Н. А., Поляков С. В., Назаров Ю. П. Оценки интенсивности и спектрального состава компонент векторов сейсмического воздействия. — Строительная механика и расчет сооружений, 1982 № 1. с. 58—63.
10 Назаров Ю. П., Айюнц В. А.. Джинчвелашви-ли Г. А. Численные параметры интенсивности
состава сейсмического воздействия. Гаэлийско-го землетрясения 1976. — Строительная механика ч расчет сооружений, 1984, № 1, с. SO-52.
11. Николаенко Н. А., Назаров Ю. П. Векторное представление сейсмического воздействия. — Строительная механика н расчет сооружений, 1980 № 1, с. 53—60.
12. Руководство по расчету зданий и сооружений на действие ветра. — М.: Стройиздат, 1978. — 223 с.
13 Справочник по динамике сооружений/Под ред. Б. Г . Коренева н И. М. Рабиновича. — М.: Стройиздат, 1972. — 510 с.
14. Справочник проектировщика. Динамический расчет сооружений на специальные воздейст-вня/Под ред. Б. Г. Коренева и И. М. Рабиновича. — М.: Стройиздат, 1981—215 с.
15. Строительные нормы и правила. СНиП
П-7-81. — М.: Стройиздат. 1982. — 48 с.
16. Строительные нормы и правила, СНиП
2.01.07.: Стройиздат, 1985.—51 с.
К РАЗДЕЛУ 13
1. Бернштейн С. А. Очерки по истории строительной механики. — М.: Госстройиздат
1957. — 236 с.
2. Болотин В. В. О воздействии подвижной нагрузки на мосты. — В кн.: Труды МИИТ, вып. 74. — М.: Трансжелдорнэдат. 1950. с. 5—9.
3. Болотин В. В. Задача о колебаниях мостов под действием подвижной нагрузки — Изв. АН СССР. ОТН. — Механика и машиностроение. 1961. № 4. с. 109—115.
4. Бондарь Н. Г. О частоте свободных колебаний арочных конструкций массивных мостов. — В кн.: Труды ДИИТ, вып. 20. — М.; Транс-желдориздат 1950, с .121—147.
5. Бондарь Н. Г. Динамическая устойчивость и колебания бесшарнирных параболических арок. — Инж. сб. АН СССР, т. XIII, 1952, с. 87—102.
6. Бондарь Н. Г., Дорошенко Е. В. Опыт изучения динамических характеристик аоок железобетонных мостов. — Железнодорожное строительство, 1952, № 9 — с. 27—29.
7. Бсидарь Н. Г., Дорошенко Е. В. Экспериментальное исследование некоторых вопросов работы арочных пролетных строений массивных мостов. — В кн.: Труды ДИИТ. — М.: Транс-желдориздат, 1953, вып. 23. с. 210—247.
8. Бондарь Н. Г. Динамический расчет балок на движущиеся нагрузки. — В кн.: Исследования по теории сооружений, т. VI. — М.: Стройиздат. 1964, с. 11—23.
9. Бондарь Н. Г. Основы динамики металлических пролетных строений железнодорожных мостов. — Днепропетровск: изд. ДИИТ.
1975. — 42 с.
10. Бондарь Н. Г. Колебания вагонов иа мостах. — Днепропетровск: изд. ДИИТ, 1958. — 29 с.
11. Взаимодействие железнодорожных мостов с подвижным составом. Авторы: Н. Г. Бондарь, Ю. Г. Козьмин. 3 Г. Ройтбурд и др./Под ред. Н. Г. Бондаря. — М.: Транспорт 1984. — 272 с.
12. Гасители колебаний вагонов. Авторы И. И. Челноков, Б. И., Вишняков и др. — М.: Трансжелдорнэдат. 1963. — 176 с.
13. Динамика железнодорожных мостов. Авторы Н. Г. Бондарь, И. И. Казей, Б. Ф. Лесохин, Ю. Г. Козьмнн/Под ред. Н. Г. Боидаря. — М.: Транспорт, 1965. — 412 с.
14. Динамика вагона. Авторы: С. В. Вершинский, В. Н. Данилов И. И. Челноков. — М.: Транспорт, 1978. — 304 с.
15. Железнодорожный путь и подвижной состав для высоких скоростей движения. Авторы: А. Ф Золотарский, С. В. Вершинский и др-М.: Транспорт, 1964. — 212 с.
16. Запорожец X. К-, Хохлов А. А. О динамических коэффициентах для неразрезных и кои-сольных металлических пролетных строении мостов. — В кн.: Труды ДИИТ, вып. 73. М.:
Трансжелдорнэдат, 1968.-е. 105—113.
17. Ильясевич С. А. Основы динамического расчета балочных металлических мостов. М.: Госмашнздат, 1934. — 200 с.
18. Исследование динамической работы металлических мостов с нераэрезнымн пролетными строениями. Авторы: Д. К. Запорожец, В. и-Тарасенко А. А. Хохлов. — В кн.: Труды ДИИТ. — М.: Транспорт, вып. 64, с. 158 — к*-
19. Казей И. И. Динамический расчет пролетных строений железнодорожных мостов, м— Трансжелдорнэдат, 1960. — 467 с.
452
20. К вопросу о влиянии сил инерции неподрес-сорениых масс подвижной нагрузки на взаимодействие системы «мост — поезд». —В кн.: Труды ДИИТ, вып. 186/21. — Днепропетровск, 1977, с. 74—77.
21. Козьмин Ю. Г. Основные факторы, определяющие допускаемые в эксплуатации прогибы пролетных строений железнодорожных мостов. — В кн.: Труды ЛИИЖТ, сып. 270. — Л.: Транспорт 1957, с. 110—130.
22. Козьмин Ю. Г., Васильев Д. И. Влияние изменяющегося профиля пути на мостах на колебания подвижного состава. — В кн.: Труды ЛИИЖТ, вып. 270. — Л.: Транспорт, 1967. — с. 131—151.
23. Металлические мосты/Под ред. И. И. Казея. — Труды ЦНИИСа, вып. 29. — М.: Траисжел-дорнздат, 1959. — 188 с.
24. Свободные колебания арочных пролетных строений железнодорожных мостов. Авторы: Н. Г. Бондарь, Б. М. Высочнн, В. В. Тимошенко — В кн.: Труды ДИИТа, вып. 27. — М.: Траисжелдорнздат 1958, с. 65—84.
25. Сорокин Е. С. Динамический расчет несущих конструкций зданий. — М.: Госстройнздат, 1956. — 230 с.
26. Строительные нормы и правила. Часть II. . Раздел Д. Глава 7. Мосты н трубы. Нормы проектирования. СНнП П-Д 7-62. - - М.: Госстройнздат, 1962. — 62 с.
27. Тарасенко В. П. Свободные пространственные колебания и жесткость балочных пролетных строений металлических мостов. — В кн.: Труды ДИИТ, вып. 32. 1961, с. 32—62.
28. Тарасенко В. П. Вынужденные пространственные колебания загруженных балочных мостов под воздействием влияния подвижного состава. — В кн.: Труды ДИИТ, вып. 45, 1963, с. 76—97.
29. Технические условия проектирования железнодорожных автодорожных и городских мостов и труб, СН 200-62. — М.: Траисжелдорнздат, 1962. — 328 с.
30. Фрыба Л. Динамический расчет пролетных строений мостов. — Строительная механика и расчет сооружений, 1964, № 2, с. 31—35.
31. Хохлов А. А. Исследование свободных колебаний мостов под совмещенную езду. — В кн.: Труды ДИИТа, вып. 38, 1962, с. 111—121.
32. Хохлов А. А. О динамических коэффициентах для мостов под совмещенную езду. — В кн.: Труды ДИИТ вып. 45, 1963, с. 66—75.
33. Экспериментальное изучение влияния вагонов на мостах. — В кн.: Труды ДИИТ, вып. 32, 1961, с. 24—31.
К РАЗДЕЛУ 14
1. Александров А. В. Динамика транспортных сооружений. — М.: МИИТ, 1976. — 150 с.
2. Барченков А. Г. Динамический расчет автодорожных мостов. — М.: Транспорт. 1976. — 199 с.
3. Барченков А. Г., Ананьин А. И., Хмыров А. Ф. Динамический расчет разрезных пролетных строений мостов, расположенных на кривых в плане.— Изв. вузов «Строительство и архитектура» 1980, № 7, с. 128—133.
4. Барченков А. Г., Биджиев Р. X., Сафронов В. С. О динамическом воздействии тяжелых автомобилей и автопоездов на многопролетные мосты. — Транспортное строительство, 1980, № 8, С. 46—47.
5. Бируля А. К. Эксплуатации автомобильных дорог. — М.: Транспорт, 1965. — 326 с.
6. Болотин В. В. Статистические методы в строительной механике. — М.: Стройиздат, 1965.— 279 с.
7. Вибрация в технике. — М.: Машиностроение, 1980 т. 3. — 544 с.
8. Гибшман Е. Е. Безопасность движения на мостах. — М.: Транспорт, 1967. — 198 с.
10. Динамика железнодорожных мостов/Под ред. Бондаря Н. Г. — М.: Транспорт, 1965.— 412 с.
11. Ефимов П. П. Исследование динамики автодорожных мостов. — В кн.: Теоретические и экспериментальные исследования мостов. — Омск, 1980, с. 69—81.
12. Закора А. Л., Казакевич М. И. Гашение колебаний мостовых конструкций. — М.: Транспорт, 1983. — 133 с.
13. Казакевич М. И. Аэродинамическая устойчивость надземных висячих трубопроводов.—М.: Недра, 1977. — 200 с.
14. Лившиц Н. А., Пугачев В. Н. Вероятностный анализ систем автоматического управления.— М.: Советское радио, 1963. — 896 с.
15. Расчет эксплуатационных параметров автомобиля и автопоезда. — М.: Транспорт 1982. — 364 с.
16. Сафонов В. С. Расчет висячих и ьантовых мостов на подвижную нагрузку. — Воронеж, ВГУ, 1983. — 196 с.
17. Справочник по динамике сооружений/Под ред. Б. Г. Коренева, И. М. Рабиновича. — М.: Стройиздат, 1972.—511 с.
18. Строительные нормы: 1) СН 200-62.—М.: Траисжелдорнздат, 1962. — 328 с.; 2) СНиП П-6-76. — М.: Стройнздат, 1976.—61 с.
19. Труды Гнпродорнин. — М.: Изд. м> . стр-ва и эксплуат. автомоб. дорог РСФСР, 1973, вып. 6: 1979 вып. 23. — 130 с.
20. Труды МИИТ/Под ред. А. А. Петпопавлов-ского. — М., 1977, вып. 561. — 180 с.
21. Яценко Н. Н., Прутчиков О. К. Плавность хода грузовых автомобилей. — М.: Машиностроение. 1969. — 220 с.
22. Gaunt J. Т., Aramraks, Gutz Wilier М. J., Lee R. H. Highway Bridge Vibration Studies, «Transp. Res. Rec.» 1977, N 645, p. 115—134.
23. Markuard E. Zur Berechnung von Brucken schwingungen unter rollenden lasten. «Inge-nieur Archiv» 1955, N 5, s. 451—482.
24. Fryba L. Vibration of solids and structures under Moving Loads. Prague, Czechoslovak academy of sciences, 1972, 486 p.
К РАЗДЕЛУ 15
1. Беляез Б. И., Корниенко В. С. Причины аварий стальных конструкций и спссобы их устранения. — М.: Стройнздат, 1968. — 206 с.
2. Болотин В. В. Статистические методы в строительной механике. — М.: Стройиздат, 1965. — 279 с.
3. Дьяков В. А., Дмитриев В. Г. Определение эксплуатационной производительности конвейера, транспортирующего крупнопусковой груз. В кн.: Шахтный и карьерный транспорт. —» М.: 1977, с. 75—80.
4. Методические указания по расчету несущих конструкций эстакад с ленточными конвейе-рами/Уральский промстройНИИпроект; Пасынков Б. П., Ним А. Д. — Свердловск, 1971.— 87 с.
5. Михлин С. Г. Вариационные методы в математической физике. — М.: 1970. — 512 с.
6. Ним А. Д. Надежность главных ферм транспортерных эстакад при случайных колебаниях. — Б кн.: Исследования в области надежности инженерных сооружений: Сб. трудов/ Ленинградский промстройннипроект. — Л.: 1979, с. 64—68.
7. Пасынков Б. П., Ним А. Д. Динамический расчет пролетных строений эстакад, несущих ленточные конвейеры. — Строительное проектирование промышленных предприятий, 1970, № 1, с. 33-37.
8. Пасынков Б. П. Исследование поперечных динамических нагрузок от ленточных конвейеров и гх воздействие на конструкции эстакад. — Строительное проектирование промышленных предприятий, 1970, № 1, с. 23—28.
9. Пасынков Б. П. Расчет пролетных строений эстакад на случайные динамические нагрузки. — Строительная механика и расчет сооружений, 1973, № 2, с. 46—49.
10. Рекомендации ио оценке надежности строительных конструкций/Уральскнй промстройНИИпроект; Тнмашев С. А. — Свердловск. 1974, — 103 с.
11. Рекомендации по расчету на выносливость несущих металлоконструкций пролетных строений транспортерных эстакад/Уральский промстройНИИпроект; Ним А. Д., Бармина Е. А., Гольц И. И. — Свердловск, 1982. — 32 с.
12. Руководство по проектированию транспортерных галерей/Ленннградскнй промстройНИИпроект. — М.: Стройнздат, 1979. — 105 с.
13. Солодарь М. Б., Плишкин Ю. С.. Кузнецова М. В. Металлические конструкции для строительства на севере. — Л.: Стройиздат, 1981. — 206 с.
14. Справочник по динамике сооружений/Под ред. Б. Г. Коренева, И. М. Рабиновича. — М.: 1972. —511 с.
15. Транспортерные галереи комплектной поставки с пролетными строениями прямоугольного сечения пролетами 24, 36 и 48 м для одного транспортера с шириной ленты до 1200 мм. Типовые конструкции изделия и узлы зданий н сооружений. Серия 3.016.3-7. Введены с
453
01.06.03/ГПИ Ленинградский промстройпроект, ГПИ Ленпроектстальконструкция. — Л.: 1983, вып. 0-25 с; вып. 1—25 с.
16. Транспортерные галереи отапливаемые пролетами 18, 24 и 30 м с облегченными ограждающими конструкциями: Типовые конструкции, изделия и узлы зданий и сооружении. Серия. 3.016-3. Введены с 1.11.79/ГПИ Ленинградский промстройпроект, Л/О ЦНИИПро-ектстальконструкцня: — Л.: 1979 вып. 0—33 с; вып. 1. — 113 с.
17. Тихонов В. И. Выбросы случайных процессов. — М.; 1970. — 392 с.
К РАЗДЕЛУ 16
1. Берштейн М. Ф., Бернштейн А. С. Динамика мачт на вантах при действии ветра. Темат. сб науч. тр./ЦНИИСК. — М., 1975 —вып. 56.
с. 114—131.
2. Бернштейн А. С. О динамическом расчете мачт. — Строительная механика н расчет сооружений. 1973, № 2, с. 11—17.
3. Градштейн И. С., Рыжик И. М. Таблицы интегралов, сумм, рядов и произведений 1971. — 1100 с.
4. Ден-Гартог Д. П. Механические колебания. — М.: 1980. — 580 с.
5. Пугачев В. С., Казаков И. Е„ Евланов Л. Г. Основы статистической теории автоматических систем — М.: 1974. — 400 с
6. Либерман А. Я. Методические указания по защите от вибрации проводов и тросов воздушных линий электропередач напряжением 35—750 кВ. — М.: 1982. — 51 с.
7. Савицкий Г. А. К расчету мачт на ветровую нагрузку. — Строительная механика и расчет сооружений. 1977, № 4. с. 49—52.
8. Савицкий Г. А. Расчет антенных сооружений. — М.: 1978. — 150 с.
9. Савнцкнй Г. А. Поведение телевизионных мачт прн ветре. Проектирование и строительство сооружений связи. Вып. 2. — М.: 1980, с. 12—18.
10. Селезнева Е. Н. Защита оттяжек мачт от вибраций. — В кн.: Материалы по металлическим конструкциям, вып. 14. М.: 1969, с. 152—162.
11. Динамический расчет сооружений на специальные воздействия. Справочник проектнров-щика/Под ред. Б. Г. Коренева и И. М. Рабиновича. — М.: 1981. — 215 с.
12. Металлические конструкции. Справочник про-ектировщика/Под ред. Н. П. Мельникова, 2-е изд. М.: 1980. —776 с.
13. Справочник по динамике сооружений/Под ред. Б. Г. Коренева и И. М. Рабиновича. — М.: 1972. —510 с.
14. Остроумов Б. В. и др. Об опыте применения математических фильтров при расчете корреляционных и спектральных функций турбулентных пульсаций горизонтальной составляющей скорости ветра. — М.: 1974.-е. 139—148 (Тр. ЛГМИ, вып. 51).
15. Остроумов Б. В. Динамическое воздействие ветра на мачтовые опоры. — Труды ЦНИИ-проектсталькоиструкцин. М.: 1981, с. 104—115.
16. Бендат Д., Пнрсол А. Измерение и анализ случайных процессов — М.: 1971. — 408 с.
17. Novak М. The wind induced lateral vibration of circular guyed masts. IASS. Symposium on Tower—Shaped steel and reinforced concreete structures. Preliminary Report. Paper N 33. 34 p Bratislava, June, 1966.
18. Plrner M., Fisher O. Theoretical and actual displacements of the «Central Bohemia» tele-v
vision tower. Acta technica. CSA V, N 1, 1976, p. 100—111.
19. Duchene— Marullaz. Full-Scale Measurements of Atmospheric Turbulence in a Suburban Area. Proc, of the Fowhh Juter. Conference of Wind Effects on Building and Structures, London 1975. p. 23-31.
К РАЗДЕЛУ i7
1. Баранов E. И., Зевни А. А., Курносов А. И. Динамические воздействия ветровых нагрузок на металлические опоры ВЛ башенного типа. — Энергетическое строительство, 1978, № 6, с. 70—72.
2. Бургсдорф В. В. Сооружение н эксплуатация линий электропередачи в сильно гололедных районах. — М.: Госэнергонздат 1947,- 196 с.
3. Временные технические условия на проектирование линии электропередачи 1150 кВ (ВТУ 1150-83). — ОДП Энергосетьпроект. М.: 1983.— 36 с.
4. Зсличенко А. С., Смирнов Б. И. Проектирование механической части воздушных линий сверхвысокого напряжения. — М.: Энергоиздат, 1981. — 336 с.
5. Крюков К. П., Курносов А. И., Новгородцев Б. П. Конструкции и расчет металлических и железобетонных опор линий электропередачи. — Л.: Энергия, 1975. — 456 с.
6. Крюков К. П., Новгородцев Б. П. Конструкции и механический расчет линий электропередачи. — Л.: Энергия, 1970, 1970. — 391 с.
7. Крюков К. П., Курносов А. И., Тихонов А. Н. Расчет проводов и порталов ОРУ подстанций на воздействия, возникающие при коротких замыканиях.'—В кн.: Проектирование конструктивно-строительной части линий электропередачи и подстанций. — М.: Энергия, 1982, с. 89—102.
8. Курносов А. И., Тихонов А. Н. Работа линий электропередачи при сбросе гололеда. — В кн.: Проектирование,' строительство н эксплуатация линий электропередачи напряжением 35 кВ и выше. Труды института «Энергосеть-проект». вып. 6. — М.: Энергия, 1975, с. 154— 163.
9. Правила устройства воздушных линий электропередачи напряжением 750 кВ, Минэнерго СССР. Главное техническое управление по эксплуатации энергосистем. — М.: 1978, — 54- с.
10. Правила устройства электроустановок, раздел II, гл. П-1, П-2 П-5. — М.: Атомиздат. — 96 с.
11. Разработка методов оптимального проектирования опор ВЛ башенного типа, включая переходные и анкерные участки систем шарнирных опор (отчет). Шифр 0.01.06.07.Н6, иив. № 7067 тм — т. 2, СЗО Энергосетьпроект, Падва И. Г. — Л.: 1979. — 44 с.
12. Руководство по проектированию опор и фундаментов линий электропередачи и распреде-лнтелы.ых устройств подстанций напряжением выше 1 кВ. Разд. 1. Общие положения; разд. 2. Сочетания нагрузок. Нормативные н расчетные нагрузки. — М.: Энергосетьпроект 1976. —47 с.
13. Справочник по проектированию линий электропередачи. — М.: Энергия, 1980. — 295 с.
14. СНиП 2.01.07. Строительные нормы и правила. Ч II. Нормы проектирования, гл. 6. Нагрузки и воздействия. — М.: Стройиздат, 1985. — 64 с.
15. Haberland F. BerecHnung der Schellhche von Freileitungen. Electrotechnische Zeitschrlft, 1942, N 5, s. 61—64.
16. Perlich P. Ortsnetsbau mit Holzmasten.—Electrotechnische Zeitschrlft, 1941, N 6, s. 114—121.
К РАЗДЕЛУ 18
1. Монин A. C„ Яглом A. M. Статистическая гидромеханика. Часть 1, 2. — M.: Наука, 1967. - 720 с.
2. Ньютон Д. К., Гулд Л. А., Кайзер Д. Ф. Теория линейных следящих систем. — М.: Гос. изд-во физ.-математической лит-ры. 1961. — 407 с.
3. Руководство по расчету зданий и сооружений на действие ветра. М.: Стройиздат. 1978. — 224 с.
4. Соколов А. Г., Поляк В. С. Развитие конструктив» ых способов увеличения эффективности полноповоротных параболических антенн. Изв. вузов. Радиофизика, т. XVI, 1973, с. 655—660.
5. Справочник по динамике сооружений/Под ред. Б. Г Коренева И. М. Рабиновича. — М.5 Стройиздат, 1972.— 511 с.
6. Davenport A. G. The buffeting of large superficial structures by atmospheric turbulence. Annals of New—York Academy of Science, v. 116, art. 1, June 26, 1964, pp. 136—159.
7. Davenport A. O. Gust loading Factors.
of the structural division Proceedings of tne American Society of Civil Engineers, v. wi. June, 1967, pp. 4-19-472.
8. Macdonald A. J. Wind loading on Buildings. London, 1975, p, 265,
454
К РАЗДЕЛУ 19
К РАЗДЕЛУ 20
1. Андронов В. И., Болтухов А. А., Коволоцкий Б Н. Исследование свободных колебаний башен градирни. — Строительная механика и расчет сооружений. 1966, № 4 с. 46—48.
2. Беспрозванная И. М., Соколов А. Г., Фомин Г. М. Воздействие ветра иа высокие сплошные сооружения. — М.: Стройнздат, 1976. — 182 с.
3. Болтухов А. А. Расчет градирен на колебания. — Строительное проектирование промышленных предпрнитнй, 1963, № 2. с. 15—20.
4. Гордон Л. А., Ляхина Л. И., Царицына И. В. Влияние конструктивных особенностей на собственные частоты и формы колебаний железобетонных башен градирен. Изв. ВНИИГ. т. 116, 1977, с. 121—130.
5. Григолюк Э. И., Мальцев Б. Н„ Мяченков В. И., Фролов А. Н. Об одном методе решения , задач устойчивости и колебаний оболочек. Изв.
АН СССР. Механика твердого тела, 1971, Хе 1 с. 9—19.
6, Кармишин А. В., Лясковец В. А., Мяченков В. И., Фролов А. Н. Статика и динамика тонкостенных оболочечных конструкций. — М„
' Машиностроение, 1975.— 375 с.
7. Кол кунов Н. В. Проблемы прочности оболочки гиперболической градирни. — В кн.: Пространственные конструкции зданий и сооружений. вып. 3 1977, с. 31—37.
8. Руководство по расчету зданий и сооружений на действие ветра. — М.: Стройиздат, 1978. — 223 с.
9. СНиП 2.01.07. Нагрузки и воздействия. Нормы проектирования. — М.: Стройиздат, 1985. — 60 с.
10. Солодклов В. Е., Чернышев Г. Н., Колкунов Н. В. Исследование сборных колебаний однополосного гиперболоида вращения. Тезисы докладов. XI Всесоюзная конференция по теорий оболочек и пластин. — Харьков, 1977. — 1 с.
11. Царицына И. В., Самокнш Б. А. Построение неосесимметричных собственных форм оболочек вращения методом конечных элементов. — Изв. ВНИИГ, т. 103 1973. с. 113—123
12. Abu—Sitta S. Н., Hashish М. G. Dinamic wind stresses In hyperbolic cooling towers, J. Struct. Div., 1973, 99, N 9, 1823—1835.
13. Carter P„ Robinson A., Schnobrlch W. Free vibrations of hyperboloidal shells of revolution, J. Eng. Meeh. Div., ASCE, 1969, 95, N 5, 1033— 1052.
14. Davenport A. G. Gust loading factors, J. Struct. Div., 1967, 93. N 3, 11—34.
15. Натре E. KuhltOrme, 1975, Verlag fur Bauwe-sen, Berlin, 192.
16. Hashish M. G., Abu—Sitta S. H., Free vibration of hyperbolic cooling towers, J. Eng. Meeh.
- Div., ASCE, 1971, 97, N 2. 253-269.
17. Hashish M. G., Abu—Sitta S. H., Response of hyprrbolic cooling towers to turbulent wind, J. Struct. Div., 1974, 100, N 5, 1037—1051.
18. Neal G. B. Natural frequency of cooling towers, J. Strain Analysis, 1967. 2, N 2. 2057—2075.
19. Niemann H. Wind Pressure Measurements on Cooling Towers, Proc. IASS Conferenc on Tower Shaped Structures, 1969, 47—57.
20. Niemann H. Ein Windiastkonzept fur die sta-tische und dynamlsche Beanspruchung von Na-turzugkithltuimen, Konstruktiver Ingenierbau Berlchte, Hefte 29/30, Essen, Vulkan—Verlag, 1977, 56—66.
21. Recommendations for design of hyperbolic or other similary shaped cooling towers, 1977, Brussels, pp. 32.
22. Singh M., Gupta A. Gust factors for hyperbolic cooling towers, J. Struct. Div., 1976, N 2, 371 — 386.
23. Steinmetz R. L., Billington D. P., Abel I. F. Hyperbolic cooling towers dynamic response to wind. J. Struct. Div.. 1978, 104, N 1. 35-53.
24. Wlnney P. E. The modal properties of model and full scale cooling towers, J. of Sound and Vibration, 1978. 51, N 1, 131 — 148.
25. Yeh C.. Shleh W. Stability and dynamc analysis of cooling towers, J. of the Power Div. ASCE. 1973, 99, N 2, 339—347.
26. Nelson R. L., Thmas D. L., Free vibration analysis of cooling towers with column suppot ts. J. of Sound and Vibration, 1978, 57, N 1, 149-153,
1. Алексеев A. M., Сборовский А. К. Судовые виброгасителн. — Л.: Судпромгиз, 1962. — 196 с.
2. Ананьев И. В., Тимофеев П. Г. Колебания упругих систем в авиационных конструкциях и их демпфирование. — М.: Машиностроение, 1965. — 526 с.
3. Болотнг В. В. Динамическая устойчивость упругих систем. — М.: Гостехнздат, 1956. — 600 с.
4. Болотин В. В. Статистические методы в строительной механике. — М.: Стройнздат, 1965. — 270 с.
Б. Бородач.ев Н. М. Динамическая контактная задача для штампа с плоским круговым основанием, лежащего иа упругом полупространстве. — Изв. АН СССР, ОТН, Механика и машиностроение, 1964, Xi 2, с. 82—90.
6. Вибрации в технике. Справочник, т. 6. Защита от вибрации и ударов/Под ред. К. В. Фролова. — М.: Машиностроение, 1981. — 456 с.
7. Глазырин В. С. Способы уменьшения динамических нагрузок, передаваемых на несущие конструкции. — Строительная механика и расчет сооружений 1971, № 3, с. 43—47.
8. Ден-Гортог Дж. П. Механические колебания. — М.: Физматгнз, 1960. — 580 с.
9. Динамический расчет сооружений на специальные воздействия. Справочник проектировщика. — М.: Стройиздат, 1981, —216 с.
10. Ильинский В. С. Защита аппаратов и г динамических воздействий. — М.: Энергия, 1970. — 320 с.
И. Клюкин И. И. Борьба с шумом н звукспой вибрацией на судах. — Л.: Судостроение, 1971. —416 с.
12. Кореиев Б. Г., Блехерман А. Н., Данилов П. С. и др. Опыт применения динамических гасителей колебаний в башенном сооружении. — Промышленное строительство 1978, № 12. с. 18—19.
13. Коренев Б. Г., Микитаренко М. А. О влиянии гашения колебаний на долговечность гибких стальных сооружений. — Строительная механика н расчет сооружений. 1982, № 4. с. 33—36.
14. Коренев Б. Г., Олейник А. И. Эффективность многомассовых динамических гасителей колебаний. — Деп. ВНИИИС, 1982 — 13 с.
15. Коренев Б. Г., Резников Л. М. О колебаниях конструкций с динамическими гасителями прн стационарных случайных воздействиях. — Строительная механика и расчет сооружений. 1969. № 4 с. 33-39.
16. Коренев Б. Г., Сердобольский А. И. О вибро-защите фундаментов под машины. — Строительная механика и расчет сооружений, 1983. № 1, с. 53—57.
17. Коренев Б. Г., Фишман Г. М. Колебания системы с линейным динамическим гасителем при импульсном воздействии па поддерживающую их конструкцию. — Строительная механика н расчет сооружений, 1977, № 6 с. 43—46.
18. Манапов А. 3., Пикулев Н. А. Оптимальные параметры группы виброгаситслей при нестабильной частоте гармонического ‘ воздействия. — Строительная механика и расчет сооружений, 1975. Хв 1, с. 33—35.
19. Никифоров А. С. Вибропоглощенне на судах. — Л.: Судостроение, 1979. — 184 с.
20. Пановко Я. Г. Присоединенные дннампческиг системы как гасители колебаний. — В кн.: Прочность, устойчивость, колебания, т. 3. — М.: Машиностроение, 1968, с. 331—346.
21. Пикулев Н. А., Эрделевский А. Н. К вопросу проектирования группы виброгасителей с учетом расстроек. — Строительная механика и расчет сооружений, 1971, Хв 5, с. 4—9.
22. Пугачев В. С. Теория случайных функций и ее применение к задачам автоматического управления. — М.: Фнзматгиз, 1962. — 884 с.
23. Резников Л. М. Вероятностный анализ системы с динамическим гасителем. — Машиноведение 1969, X» 2, с. 25—31.
24. Резников Л. М. Об учете внутреннего нсупру-гого сопротивления при исследовании случайных колебаний конструкций. — Строительная механика н расчет сооружений, 1974, Xs 4, с .48—53.
25. Резников Л. М. Эквивалентная модель много-масссвой системы с вязким и частотно-независимым трением. — Строительная механика и расчет сооружений, 1979, Хв 4, с. 44—48.
26. Резников Л. М„ Фишман Г. М. Оптимальные параметры и эффективность динамического
455
гасителя при широкополосных случайных воздействиях. — Машиноведение, 1981 № 3.
с. 36—4L
27. Резников Л. М., Фишман Г. М. Эффективность динамических гасителей колебаний при нестационарных случайных воздействиях. — Строительная механика и расчет сооружений. 1981, М> 1, с 56-59.
28. Рекомендации по проектированию гасителей колебаний для защиты зданий и сооружений, подверженных горизонтальным динамическим воздействиям от технологического оборудования и ветра. — М.: Стройиздат, 1978. — 68 с.
29. Сноудон. Двухступенчатые системы подвески, содержащие динамические гасители колебаний. — Труды амер, об-ва инж.-механиков. Сер. Б. Конструирование и технология машиностроения. 97, 1975, № 4, с. 57—64.
30. Сорокин Е. С. К теории внутреннего трения при колебаниях упругих систем. — М.: Гос-стройиэдат. 1960. — 131 с.
31. Справочник по судовй акустнке/Под ред. И. И. Клюкина, И. И. Боголепова. — Л.: Судостроение. 1978. — 503 с
32 Фролов К. В., Фурман Ф. А. Прикладная тео--рия виброзашитпых систем. — М.: Машиностроение 1980. — 276 с.
33. Цвениашвили Д. X., Карамышкин В. В. Области динамической неустойчивости консольного стержня с гасителем колебаний. — Сообщения АН ГССР, 1969, 54. Ne 3. С. 641—644.
34. Цейтлин А. И., Гусева Н. И. Статистические методы расчета сооружений на групповые ди
намические воздействия. — М.: Стройиздат, 1979. — 176 с.
35. Шринивасан. Исследование параллельных динамических виброгасителей с демпфированием.— Труды амер, об-ва инж.-механиков. Серия Б. Конструирование и технология машиностроения, 91. 1969, A'e 1, с. 292—297.
36. Эрделевскнй А. Н. Об опыте применения динамических гасителей колебаний для корпуса среднего дробления обогатительной фабрики. — Материалы координационного совещания по динамике строительных конструкций и методам борьбы с вибрациями. — М.: Стройиздат 1975 с 82______85
37. Arnold R. N., Bycroft G. N., Warburton G. B. Forced vibration of a body on an infinite elastic solid. — J. of Appl. Meeh., 22, 1955, N 3, p. 391—400.
38. Jones R. T., Pretlove A. J. Vibration absorbers and bridges. — The Highway Engineer, 1979, 26, N 1, p. 2-9.
39. McNamara R. J. Tuned mass dampers for buildings. — J. Struct. Div. Proc. Amer. Soc. Civ. Eng. 103. 1977, N 9. p. 1785—1798.
40. Parkinson G. V., Smith J. D. The square prism an earo—elastic non—linear oscillators. Quarterly J. of Meeh, and Appl. Math., 17, pt 2, 1964, p. 225—239.
41. Singh K., Malik A. K. Use of dynamic absorbers to control parametric instabilities of pipe.— J. of Appl. Meeh., 45, 1978, N 4, p. 949—951.
42. Snowdon J. C. Vibration and shock in damped mechanical systems, New York, 1968, 486 p.
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
А
Амплитуда пульсаций скорости ветра 389
Амплитудно-частотная характеристика (АХЧ)
— ДГК 427, 429
— пролета фундамента турбоагрегата 90
Анкерные участки ОРУ 378
Антенны радиотелескопов 389
Атомные электростанции АЭС 21
В
Вес элементов канала охлаждения отражателя на АЭС 45
Внброизоляторы
— гидравлические 83
— пружинные 81
— пружинные с демпфированием 84
Виброизоляцня
— грохотов 9
— дробилок 13
— массивных фундаментов 440
— транспортерных подвижных конструкций 439
Водосливная плотина 187
Возбуждение вихревое трубчатых мачт 370
Воздействие белого шума 422
Воздушные лнннн электропередач (ВЛ) 377 Волны
— морские нерегулярные 229
---регулярные 228
— воздушная ударная 23, 96, 128
— отраженная сжатия в грунте 96
— сжатия в грунте 96
Выносливость гидротехнических сооружений 150
Вязкость жидкости 159
Г
Газовоздушные смеси 117
Галопирование проводов 386
Грохоты 7, 9
Д
Давление
— грунта активное 143
пассивное 143
— критическое жидкости в трубопроводе 226 Диаграмма
— арматуры и бетона напряжений — деформаций 100
— билинейная напряжений — деформаций 96
Динамический гаситель колебаний (ДГК) 405
— многомассовый 427
— конструктивные формы 407
— с частотным независимым внутренним грением 420
ДГК — здания 444 — металлической башенной трубы 444 — моста 445
— солнечного вакуумного телескопа 444 Дисперсия волновых колебаний 230
3
Защемление сосуда в стволе шахты 16 Здания ГЭС 168
К
Колебания
— автодорожных мостов случайные 346
— вагонов на мостах
---грузовых 319
---пассажирских 317
— оттяжек антенно-мачтовых сооружений 371
Компенсатор трубопроводов
— П-образный 264
— треугольный 265
Конвейер ленточный 351
Копры башенные 15
Коэффициент
— динамичности 105, НО, 217, 236, 237, 288, 307, 308
— жесткости грунта свайного основания 191 ---свайных опор 191, 193
— затухания колебаний --- антенн 392
---балочных железнодорожных мостов 297
---морских волн 235
— защемления трубопровода в грунте 272 — кинематической вязкости жидкости 283 — корреляции порывов ветра 389
— ответственности трубопроводов 272
— отражения 96
— перегрузки для дробилок 6
— присоединенного вязкого трения 164
— присоединенной массы воды 164
— упругого сжатия грунта 131
— условий работы арматуры в гидросооружениях 150
— учета кратковременности сейсмического воздействия 37
— учета свойств грунта 127
Л
Легкосбрасываемые конструкции (ЛСК) 116 Логарифмический декремент колебаний 235, 283, 284, 297
М
Масштаб турбулентности 375
Метод Бубнова—Галеркина 253, 335, 353, 357, 435
Модуль затухания 132
4Б7
Мосты — землетрясения 29
— автодорожные вантовые 339 ~~ модели провода 381 — пролетных строений транспортерных эстакад-
висячие 343 галерей 353
— железнодорожные арочные 298, 302, 306, 308 балочные 293, 299, 303, 307, 309 — пружин виброизоляторов 85 — случайных колебаний пролетных строений эстакад-галерей 357
Н Плавучие сооружения на якорях 214 Показатель интенсивности при горении газо-воз-
Надежность душной смеси (ГВС) 124
— автодорожных мостов 349 Нагрузка — аварийная иа АЭС 22 — башенных копров 17 — ветровая на АМС 362 — взрывной волны на покрытие 98 • на полностью заглубленные стены 98 на фундаменты 100 — воздушной ударной волны 23 — газовоздушной смесн 23 — гидроагрегатов 154 — гидродинамическая на АЭС 22 Порталы ОРУ 384 Потеря устойчивости магистральных трубопроводов 264, 266 Предельные состояния 101 Предохранительное торможение 17 Преобразование Лапласа 25, 36 Присоединенная масса жидкости 39, 164, 241 Проезжая часть автодорожного моста 336 Профиль средней скорости ветра 363 Пульсация давления ветра 361 Р Радиотелескоп 388
здания ГЭС 156 подводные трубопроводы 275 стенку резервуара 285, 286 Разгрузочная балка 10 Резервуар — круговой 282, 284
— горизонтальных ударов колес подвижного состава 324 — ленточных конвейеров 355 — морских нерегулярных волн 233 регулярных волн 231 — падения самолетов 24 *- разрушающая стекло 133 — реактивная при разрыве трубопровода на АЭС 23 — прямоугольный 282, 286 — сферический 282, 287 — цилиндрический 282, 284 Ростверк 189 С Самоподъемные передвижные буровые установки (СПБУ) 227
— сейсмическая 28, 36, 202, 204, 268, 290 — ураганов 26 — фундаментов турбоагрегатов 62 Надежность — автодорожных мостов 349 — башенных копров 17 — ленточных конвейеров 353 Неоднородность жидкости 160 Сжимаемость жидкости 159 Сейсмические исследования 29 Сейсмостойкость — сооружений АЭС 28 — электротехнического оборудования АЭС 52 Скорость — ветра 27 средняя 375
О — критическая движения жидкости по трубопроводу 262
Опоры моста автодорожного 340 — распределительных устройств (ОРУ) 377 Оптимальная настройка ДГК 412 Оптимизация статистических параметров ДГК 412 Случайный процесс 229 Спектр — ответа 35 — пульсаций скорости ветра 364 — сосредоточенной волновой нагрузки 233
П Спектральная плотность — волновых колебаний 229, 243 — пульсации скорости ветра 375
Параметры — волны сжатия в грунте 95 — ДГК 411 — затухания в жидкости 283 Стандарт — колебаний морских волн 229 — пульсации скорости ветра 375 Стационарные свайные платформы (ССП) 227
468
Стехиометрическая концентрация взрывной смеси 124, 125
Субколебання проводов 2S6
Т
Технологическое оборудование АЭС 37
Транспортерная эстакада-галерея 350
Трубные элементы АЭС канального типа 43
Трубопроводы магистральные
— АЭС 37, 46, 48
— надземные 253
— подводные 274
— подземные 268
Турбоагрегаты 71
Ф
Фундамент энергетических турбоагрегатов 55
— внброизолированный 86
— на 3000 об/мин 68
— на 1500 об/мин 70
Функция
— Бесселя 286
— корреляционная 332
— Крылова 256
— обеспеченности периодов глубоководных волн 229
— случайного поля пульсаций скоростей ветра 363
— фундаментальная 254
X
Характеристика жесткостная якорной системы 215
Ч
Частота возбуждения нестабильная 433
Число
— Рейнольдса 283
— Фруда 161
Э
Экспериментальные исследования
— АЭС 53
— мачт 373
Эффект демпфирования при течении жидкости по трубопроводу 264
Эффективность ДГК 412, 423
СОДЕРЖАНИЕ
Предисловие
РАЗДЕЛ 1. ДИНАМИКА СООРУЖЕНИИ ГОРНОРУДНОЙ ПРОМЫШЛЕННОСТИ (В. А. ИВОВИЧ, А. С. ПОВЕРСКИЙ)
1.1. Общие сведения...................
1.2. Динамические нагрузки от машин иа горно-обогатительных комбинатах
1.3 Методы защиты от вибраций иа горно-обогатительных предприятиях .
1.4. Основные вопросы динамики башенных копров ...........................
РАЗДЕЛ 2. ДИНАМИЧЕСКИЕ НАГРУЗКИ В АТОМНЫХ ЭЛЕКТРОСТАНЦИЯХ (Ю. К. АМБРИАШВИЛИ, А. П. КИРИЛЛОВ)
2.1. Биды динамических нагрузок
1. Внутренние нагрузки . . . .
2. Внешние нагрузки . . . .
2.2. Сейсмические нагрузки иа АЭС .
1. Основные положения . . . .
2. Сейсмология и определение расчетных параметров землетрясения
2.3. Расчет колебаний строительных конструкций .............................
1. Учет основания..................
2. Расчет стержневых систем
3. Расчет пространственных рамных систем . ...................
4. Расчет реакторных отделений .
5. Расчет спектров ответа
6. Экспериментально-теоретический метод ...............................
2.4. Определение сейсмических сил
1. Строительные конструкции
2. Технологическое оборудование и трубопроводы .........................
2.5. Методы расчета отдельных видов технологического оборудования
1. Методика расчета трубных элементов канального типа . . . .
2. Методика расчета трубопроводных систем АЭС.........................
3. Методика расчета насосов
2.6. Принципы оценки сейсмостойкости электротехнического оборудования
I. Общая характеристика методов испытания . . . . . . . .
2. Экспериментальные методы
3. Испытания на платформах
3 РАЗДЕЛ 5. РАСЧЕТ КОНСТРУКЦИ Й ЗАГЛУБЛЕННЫХ СООРУЖЕНИЙ НА ДЕЙСТВИЕ ВЗРЫВНЫХ ВОЛН (В. И. ЖАРНИЦКИЙ. Н. Н. ПОПОВ, Б. С. РАСТОРГУЕВ)
_ 5.1. Действие взрывных волн . . 94
° 5.2. Динамические нагрузки иа элементы
_ конструкций .................. 98
5 5.3. Общие положения по расчету конст-
„ рукций . . ..................100
и 5.4. Расчет внецентренно сжатых балоч-иых конструкций иа основе диаграммы
4 о—е арматуры и бетона .... 102
5.5 Динамический расчет внецентренно сжатых конструкций как системы с двумя степенями свободы.......................104
5.6. Динамический расчет кольца в грунте ИЗ
21
22
23
28
28
29
РАЗДЕЛ 6. ЗАЩИТА ПРОМЫШЛЕННЫХ ЗДАНИЙ ВЗРЫВООПАСНЫХ ПРОИЗВОДСТВ ЛЕГКОСБРАСЫВАЕМЫМИ КОНСТРУКЦИЯМИ (Г. Г. ОРЛОВ, Н. А. СТРЕЛЬЧУК)
30 6.1. Определение нагрузок, возникающих
31 при взрывном горении газовоздушных сме-
32 сей и мгновенном вскрытии легкосбрасы-ваемых конструкций .... 116
32 6.2. Определение величины н характера
32 нагрузок при использовании инерционных
35 ЛСК................................ 120
6.3 Определение нагрузок, разрушающих
35 стекло..............................123
36 6.4. Расчет требуемой площади ЛСК . 124
36
37
43
43
46
49
52
52
53
54
РАЗДЕЛ 3. ФУНДАМЕНТЫ МОЩНЫХ ТУРБОАГРЕГАТОВ ТЕПЛОВЫХ И АТОМНЫХ ЭЛЕКТРОСТАНЦИЙ (И. С. ЛИТВИН, И. С. ШЕЙНИН)
3.1 Особенности работы системы турбоагрегат — фундамент — основание
3.2. Динамические нагрузки . . . .
3.3. Расчетные схемы................
3.4. Методы динамического расчета
РАЗДЕЛ 4. ВИБРОИЗОЛИРОВАННЫЕ ФУНДАМЕНТЫ ТУРБОАГРЕГАТОВ (Г. Л. КЕДРОВА, Б. Г. КОРЕНЕВ)
4.1. Конструкция виброизолированного фундамента, область применения, преимущества и недостатки ... . .
4.2. Расположение вибройзоляторов, их конструктивные формы, расчет пружинных вибройзоляторов ................
4.3. Расчет виброизолированиых фундаментов турбоагрегатов ..............
55
62
68
73
РАЗДЕЛ 7. РАСЧЕТ СООРУЖЕНИЙ, ЗАГЛУБЛЕННЫХ В ГРУНТ (Г. И. ГЛУШКОВ)
71. Виды динамических нагрузок и их воздействие иа сооружения .
7.2. Условия работы заглубленных сооружений при динамических воздействиях и принципы их расчета..................
7.3. Динамический расчет сооружений с учетом сопротивления грунта
I. Сооружения неглубокого заложения
2. Сооружения глубокого заложения
3. Расчет сооружений с учетом перемещения грунта, вызванного динамической нагрузкой .................
7.4. Динамический расчет заглубленных в грунт сооружений с учетом предельного сопротивления грунта ................
7.5. Динамический расчет заглубленных в грунт сооружений с податливыми прослойками
РАЗДЕЛ 8. РЕЧНЫЕ ГИДРОТЕХНИЧЕСКИЕ СООРУЖЕНИЯ (А. П. КИРИЛЛОВ, И. С. ШЕЙНИН)
8.1. Общие положения
79 8.2. Динамические нагрузки .
8.3. Учет влияния водной среды при дина мических расчетах гидросооружений .
80 8.4. Знания ГЭС • •
8.5. Водосливные плотины водио-транспор
66 тные и другие сооружения • • • 1
127
129
131
131
138
141
142
144
147
153
158
169
187
460
РАЗДЕЛ 9. ДИНАМИКА ПОРТОВЫХ
МОРСКИХ И РЕЧНЫХ
ГИДРОТЕХНИЧЕСКИХ СООРУЖЕНИИ (П. П. КУЛЬМАЧ, Н. Г. ЗАРИТОВСКИЙ)
9.1. Основные расчетные положения для свайных сооружений, коэффициенты жесткостей свайных опор.................
9.2. Уравнения свободных колебаний свайных сооружений с жестким ростверком 9.3. Уравнения вынужденных колебаний свайных сооружений с жестким ростверком при сейсмических воздействиях .
9.4. Основные расчетные положения для гравитационных сооружений, жесткостные характеристики оснований . . . .
9.5. Уравнения свободных колебаний гравитационных сооружений . . . .
9.6. Уравнения вынужденных колебаний гравитационных сооружений при сейсмических воздействиях ................
9.7. Основные расчетные положения для плавучих сооружений иа якорях, жест-костиые характеристики якорных связей 9.8. Частные колебания плавучих сооружений иа якорях в линейной постановке задач ..............................
9.9. Горизонтальные колебания плавучих сооружений иа якорях в нелинейной постановке задачи.....................
9.10. Колебания якорных связей при движениях плавучего сооружения
'9.11. Колебания якорных связей с подвесными грузами . •••«it
9.12. Колебания якорных связей при действии горизонтальной нагрузки .
12.4. Расчет сооружений, несущих резервуары, на ветровую нагрузку
12.5. Расчет сооружений, несущих резервуары, на сейсмическую нагрузку . ,
287
289
189 РАЗДЕЛ 13. ДИНАМИЧЕСКИЙ РАСЧЕТ ПРОЛЕТНЫХ СТРОЕНИЙ
194 ЖЕЛЕЗНОДОРОЖНЫХ МОСТОВ
(Н. Г. БОНДАРЬ, Ю. Г. КОЗЬМИН) 201
13.1. Общие положения...........
13.2. Параметры свободных колебаний 204 пролетных строений...............
13.3. Вынужденные колебания пролетных 206 строений ........................
13.4. Приближенный динамический расчет
13.5. Динамические коэффициенты
211 13.6. Примеры расчета..........
13.7. Колебания вагонов иа мостах в вертикальной плоскости. Нормирование верти-213 кальной жесткости пролетных строений
13.8. Боковые колебания вагонов на мостах. Нормирование горизонтальной жест-216 кости пролетных строений . , . .
218
220 РАЗДЕЛ 14. ДИНАМИКА
АВТОДОРОЖНЫХ МОСТОВ
222 (А. И. АНАНЬИН, А. Г. БАРЧЕНКОВ,
224 В- С. САФРОНОВ)
И ® 8 МИ' g S S Ш § § g § § §
РАЗДЕЛ 10. РАСЧЕТ МОРСКИХ ГЛУБОКОВОДНЫХ НЕФТЕГАЗОПРОМЫСЛОВЫХ СООРУЖЕНИЙ ПРИ ВОЗДЕЙСТВИИ ВОЛН (О. В. ЛУЖИН, И. Ш. ХАЛФИН)
10.1. Морские волны, их параметры и кинематическая структура . . . •
10.2. Нагрузки от волн на сооружения
10.3. Динамический расчет отдельно стоящей опоры при действии регулярных воли конечной высоты ..................
10.4. Динамический расчет сквозных сооружений на действие нерегулярных волн
РАЗДЕЛ 11. ДИНАМИКА ТРУБОПРОВОДОВ (Н. Г. ФИГАРОВ, А. С. ГЕХМАН, И. Д. КРАСУЛИН)
11.1. Особенности движения жидкости п трубопроводах ...............
11.2. Конструктивные решения магистральных трубопроводов .....................
11.3. Особенности конструктивных решен! й трубопроводов, прокладываемых в сейсмических районах..................... .
11.4. Колебания надземных трубопроводов 11.5. Колебания трубопровода вследствие пульсации давления и изменения скорости протекающей жидкости . . . .
11.6. Динамика подземных трубопроводов 11.7. Динамика подводных трубопроводов
РАЗДЕЛ 12. РАСЧЕТ СООРУЖЕНИЙ, НЕСУЩИХ ЧАСТИЧНО ЗАПОЛНЕННЫЕ РЕЗЕРВУАРЫ, НА ВЕТРОВУЮ И СЕЙСМИЧЕСКУЮ НАГРУЗКИ (Н. А. НИКОЛАЕНКО)
12.1. Основные положения расчета и допущения. Расчетные динамические модели сооружений ..................
12.2. Решение гидродинамических задач для кругового, цилиндрического, сферического и прямоугольного резервуаров (плоская задача) .... . .
12.3. Расчет наземных резервуаров иа сейсмические нагрузки , ..............
14.1. Общие сведения................
14.2. Расчет по действующим строительным нормам ....
14.3. Динамическое воздействие автомобилей иа проезжую часть...............
14.4. Расчет системы мост — автомобиль
14.5. Оценка случайных колебаний
14.6. Определение динамических коэффициентов ............................
14.7. Воздействие автомобиля прн криво-линейном движении . . . .
14.8. Оценка эксплуатационной надежности проезжей части..................
234
236 РАЗДЕЛ 15. ДИНАМИКА
ТРАНСПОРТЕРНЫХ ЭСТАКАД-ГАЛЕРЕЙ (Б. П. ПАСЫНКОВ, А. Д. НИМ)
15.1. Общие сведения.....................
15.2. Колебания пролетных строений транспортерных эстакад-галерей . .
245 15.3. Расчет несущих конструкций пролет-
ных строений иа прочность и выносли-248 вость при колебаниях
15.4. Меры по снижению уровня колебаний и обеспечению прочности несущих конст-251 рукций пролетных строений .
252
264
267
273
РАЗДЕЛ 16. МАЧТЫ И АНТЕННОМАЧТОВЫЕ СООРУЖЕНИЯ (А. С. БЕРНШТЕЙН, Б. В. ОСТРОУМОВ, М. М. РОЙТШТЕЙН)
16.1. Уравнения движения . . . .
16.2. Пульсационная составляющая ветровой нагрузки иа мачты и АМС
16.3. Расчетные модели мачт и АМС
16.4. Вынужденные колебания мачт и АМС
16.5. Приближенный метод динамического расчета мачт ..........................
16.6. Вихревое возбуждение трубчатых 278 мачт ....................................
16.7. Колебания оттяжек аитеино-мачтовых сооружений (АМС) и способы борьбы с ними .............................
281 16.8. Оценка точности расчета на основе
экспериментального натурного исследова-283 ния работы мачты.........................
370
372
461
РАЗДЕЛ 17. ДИНАМИКА ВОЗДУШНЫХ ЛИНИЙ ЭЛЕКТРОПЕРЕДАЧИ И ОТКРЫТЫХ РАСПРЕДЕЛИТЕЛЬНЫХ УСТРОЙСТЗ (А. А. ЗЕВИН, А. И. КУРНОСОВ)
17.1 . Расчет опор. ВЛ и ОРУ на динамическое воздействие ветровой нагрузки 376
17.2 Расчет анкерного участка системы плоскошарнирных опор..................377
17.3 . Расчет провода на динамические воздействия прн сбросе гололеда . . . 381
17 4. Расчет порталов ОРУ подстанций на динамические воздействия при коротких вамь.каинях . . 383
17.5 Галопирование и субколебания проводов . ............................ 38о
РАЗДЕЛ 18. ДИНАМИКА РАДИОТЕЛЕСКОПОВ (М. А. ГУСЕВ. А. Г. СОКОЛОВ)
18.1. Общие сведения.......................386
18.2. Особенности воздействия турбулентного ветрового потока на конструкции радиотелескопов .............................387
18.3. Расчет динамических крутящих моментов от порывов ветра, действующих на аитеины радиотелескопов 388
18.4. Расчет динамических перемещений антенн радиотелескопов от порывов ветря 390
18.5. Использование полученных результатов для проектирования .... 393
РАЗДЕЛ 19. ДИНАМИКА ГРАДИРЕН (Н. В. КОЛКУ НОВ)
19.1. Общие сведения....................394
19.2. Свободные колебания оболочки градирни ..................................395
19.3. Вынужденные колебания оболочки градирни . .............................398
РАЗДЕЛ 20. ДИНАМИЧЕСКИЕ ГАСИТЕЛИ КОЛЕБАНИЙ СПЕЦИАЛЬНЫХ СООРУЖЕНИИ (Б. Г. КОРЕНЕВ. Л. М. РЕЗНИКОВ)
20.1. Общие сведения....................404
20.2. Конструктивные формы динамических гасителей колебаний . . 406
20.3. Гашение колебаний приведенной системы с одной степенью свободы с помощью одномассовых гасителей . . . 409
1. Гармонические воздействия . . 410
2. Периодические импульсы . . 414
3. Переходные режимы колебаний . 415
4. Случайные колебания . 419
20.4. Многомассовые гасители колебаний 425
20.5. Расчет многомассовых и континуальных систем с присоединенными гасителями колебаний................... 428
20.6. Эффективность гашения колебаний некоторых строительных конструкций . 432
20.7, Виброгашепие массивных фундамен-
тов под оборудование .... 439
20.8. Примеры применения гасителей ко-
лебаний специальных сооружений . . 442
Список литературы . . 446
Предметный указатель . . . « . 457
Юрий Константинович Амбриашвили Александр Иванович Ананьин Александр Григорьевич Барченков и др.
ДИНАМИЧЕСКИИ РАСЧЕТ СПЕЦИАЛЬНЫХ ИНЖЕНЕРНЫХ СООРУЖЕНИИ
И КОНСТРУКЦИИ
СПРАВОЧНИК ПРОЕКТИРОВЩИКА
Редакция литературы по строительным материалам и конструкциям Зав. редакцией П. И. , Ф и л и м о н о в
Редактор Л. И. Круглова
Внешнее оформление художника А. Г. Моисеева
Технические редакторы В. Д. Павлова, Н. Г. Алеева
Корректор Г. Г. Морозовская ИБ № 3012
Сдано в набор 19.04.85. Подписано в печать 20.02.86. Формат 70Х108'/|з- Бумага типогр. № 1. Гарнитура «Литературная». Печать высокая. Усл. печ. л. 40.6. Усл. кр.-отт. 40,6. Уч.-изд. л. 49,27. Тираж 23 000 экз. Изд. № А-9991. Зак. № 189. Цена 3 р. 10 к.
Стройиздат, 101442, Москва, Каляевская, 23а
Владимирская типография Союзполиграфпрома при Государственном комитете СССР по делам издательств, полиграфии и книжной торговли
600000, г. Владимир, Октябрьский проспект, д. 7