/



















































































































































Автор: Щедрин Н.Н.
Теги: электротехника электроника электрические сети электрооборудование издательство энергия
Год: 1966




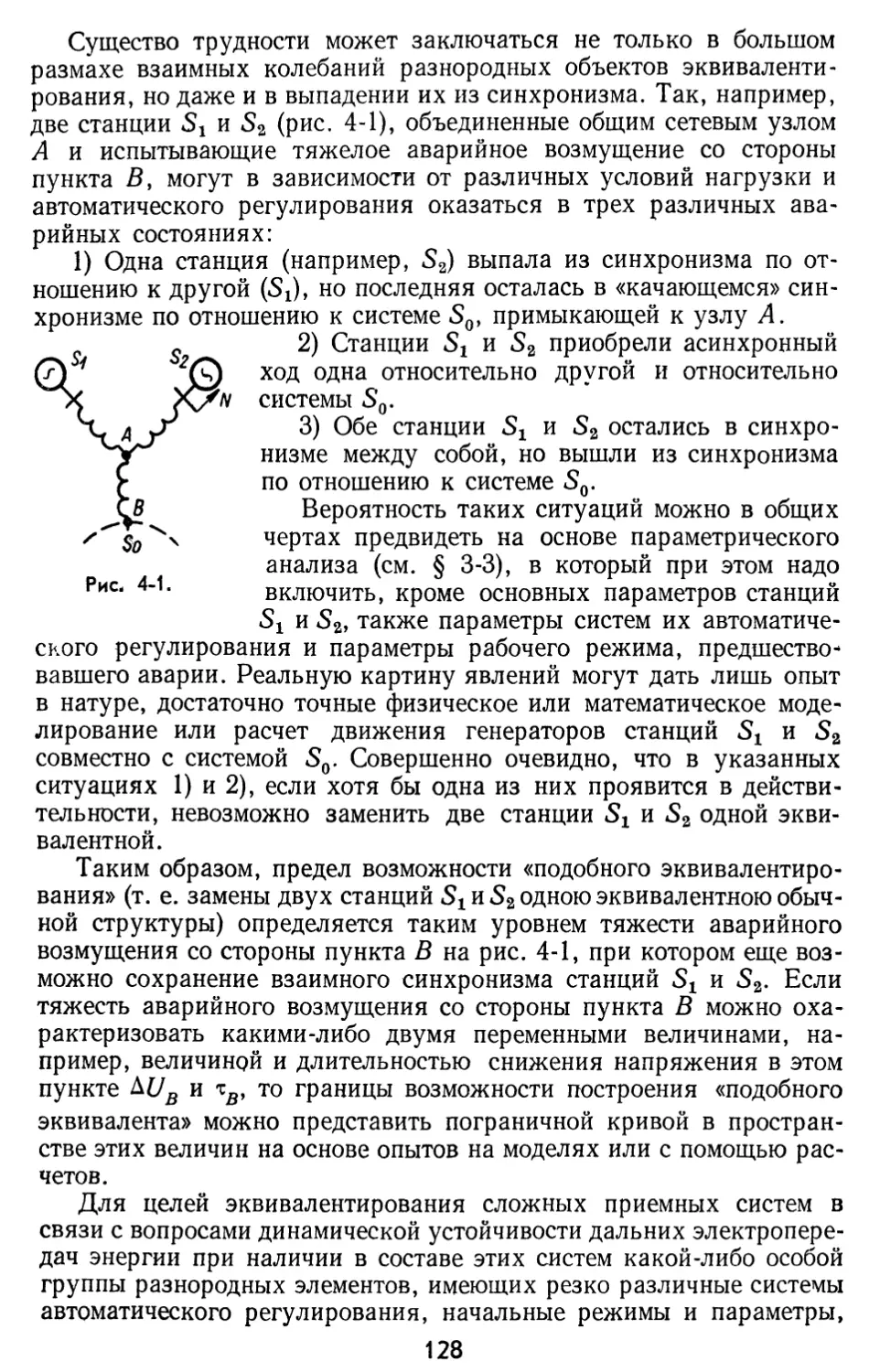
Текст
Н. Н. ЩЕДРИН
УПРОЩЕНИЕ
ЭЛЕКТРИЧЕСКИХ
СИСТЕМ
ПРИ
МОДЕЛИРОВАНИИ
ИЗДАТЕЛЬСТВО «ЭНЕРГИЯ»
МОСКВА 1966 ЛЕНИНГРАД
УДК 621.311.1.001.57
В книге изложены практические цели, тех-
нические условия и новые математические
способы упрощения сложных электроэнерге-
тических систем в связи с задачами их моде-
лирования и исследования поведения в ава-
рийных динамических режимах.
Книга предназначена для сотрудников
электроэнергетических научных и проектных
организаций, а также для инженеров, рабо-
тающих в группах режимов энергетических
объединений*
3—3—9
74—66
ПРЕДИСЛОВИЕ
В последние 6—8 лет к вопросу упрощения сложных электри-
ческих систем привлечено внимание довольно большого круга спе-
циалистов из области электроэнергетики. Эго объясняется расту-
щим усложнением энергетическйх систем в связи с объединением
линиями передачи и сетями высших классов напряжения все боль-
шего и большего числа генерирующих электрическую энергию
объектов.
За разрастанием электрических систем пока еще не может
угнаться даже яркий прогресс в таких средствах исследования, ка-
кими являются новейшие математические машины, цифровые и ана-
логовые, хотя почти несомненно, что полупроводниковая техника
или, может быть, молекулярная электроника в недалеком будущем
позволят отображать в лабораторных схемах процессы и режимы
энергетических систем любой сложности.
Тем не менее целесообразность разумного ограничения сложно-
сти в постановке первичных исследований сохранится, по-видимому,
еще на долгое время. Конкретно это означает, что и потребность
в рациональных методах упрощения сложных и сверхсложных элек-
трических систем будет ощущаться еще не малое число лет.
Автор предлагаемой вниманию читател'ёй теоретической работы
не имел целью составить на тему о методах упрощения электриче-
ских систем какое-либо стандартное, компилятивное пособие или
посвятить книгу чистой критике существующих подходов к этому
вопросу.
Цель работы заключалась в том, чтобы внести новый, хотя бы
и небольшой вклад в разработку таких методов упрощения энерго-
систем, которые при достаточной простоте основывались бы на бо-
лее полном использовании богатого арсенала идей современной
вычислительной и общей математики. Автор не обольщает себя
3
мыслью, что трактуемая в книге задача в ней нашла исчерпывающее
и строгое решение. Напротив, он полагает, что остаются открытыми
еще многие пути дальнейших исследований для поиска наилучшего
решения.
Что касается личного интереса автора, то он был направлен на
реальное практическое использование в широком плане метода
линеаризации, на установление чисто электрических схем замеще-
ния для электромеханических систем и, наконец, на реализацию
идей эквивалентирования «в пространстве параметров» и «в прост-
ранстве функций». Если автор не ошибается, то в этих пунктах он
предлагает нечто новое, еще не встречавшееся в соответствующей
литературе.
Автор
Глава первая.
ХАРАКТЕРИСТИКА ПРОЦЕССА УПРОЩЕНИЯ
ЭНЕРГОСИСТЕМ
1-1. Введение
В предлагаемой вниманию читателя работе рассматриваются
основные аспекты и новые принципы так называемого «эквивален-
тирования», применяемого при изучении процессов и при проекти-
ровании электроэнергетических систем, главным образом — даль-
них электропередач. Этим термином называют процедуру некото-
рого расчета,, имеющего целью упрощение данной существующей
или только еще проектируемой электроэнергетической системы с
тем, чтобы, сведя ее к меньшему числу элементов (электрических
станций, нагрузочных узлов, сетевых связей), использовать затем
полученную упрощенную систему для дальнейших исследований
и проектных расчетов, с применением физического моделирования
или математических машин.
Этот процесс упрощения в большинстве случаев до сих пор со-
вершенно неизбежен ввиду крайней сложности современных элек-
троэнергетических систем, заключающих в себе иногда несколько
десятков станций и еще большее число трансформирующих и рас-
пределяющих энергию подстанций.
Как показывает самое слово «эквивалентирование», оно подчи-
нено понятиям «эквивалентность» и «эквивалент», встречающимся
в различных отраслях знания. Хотя эквивалент вообще не является
тождественным тому первичному объекту, который он заменяет в
каком-то отношении, тем не менее в этом специальном отношении
эквивалент в ряде случаев является точным заменителем своего ис-
ходного объекта или явления. Так дело обстоит, например, в отно-
шении эквивалентности различных видов энергии. В нашем случае,
если даже эквивалентная энергосистема сохраняет физическую сущ-
ность и общий характер структуры исходной энергосистемы, отли-
чаясь от нее значительно меньшим числом неодинаковых основных
элементов, нельзя ожидать точного соответствия свойств эквива-
лента свойствам исходного объекта. Здесь будет иметь место по-
теря «разнообразия». [Л. 1 ] при переходе от исходного объекта
5
к эквиваленту, подобно потере четкости изображения в телеви-
зионной передаче при малом числе элементов его разложения.
К процессу эквивалентирования электрических систем можно
подходить со многих различных точек зрения, составляющих ос-
нову той или иной методики, а именно:
а) как к простому приближению решений исходных дифферен-
циальных или интегральных уравнений, например, путем сокра-
щения высших членов разложения в ряды, путем сокращения по-
рядка уравнений или, наконец, прерыванием алгоритма последова-
тельных приближений; сюда же можно отнести и все известные
способы приближения, усреднения и сглаживания функций, прямо
или косвенно выражающих переходный процесс;
б) как к усреднению совокупности определяющих движение
системы параметров ее основных элементов, в частности — по ме-
тоду наименьших квадратов.
Указанные выше приемы и методы эквивалентирования, конечно,
не равноценны и не во всех случаях одинаково целесообразны.
Существенным ограничивающим фактором применимости тех или
иных методов эквивалентирования является не только наличие до-
статочно мощных вычислительных средств, но также перспектива ис-
пользования эквивалента. Если последний будет использован в даль-
нейших расчетах устойчивости с помощью цифровых или аналоговых
вычислительных машин, то отпадает требование его физического
подобия исходной системе. Наоборот, это требование становится
весьма существенным для исследований на электродинамических
моделях, в которых устанавливается физическое соответствие ме-
жду главными элементами исходной системы и модели (между
генераторами, приемниками и сетевыми элементами соответст-
венно).
Эквивалентирование, удовлетворяющее этому требованию, мы
будем называть «физически-подобным» или для кратности — просто
«подобным».
В данной работе и будет рассматриваться только эта форма экви-
валентирования, сложившаяся уже свыше тридцати лет назад. По-
путно заметим, что отождествление понятий «эквивалентирование»
и «моделирование» или слияние их в одно понятие нельзя считать
правильным, поскольку ограничение числа основных элементов
для модели в принципе необязательно.
Обращаясь к «физически-подобному» эквивалентированию, можно
констатировать ряд его мыслимых разновидностей в зависимости
от существа методов и приемов, применяемых для получения
требуемого эквивалента.
На практике до последнего времени упрощение сложных элек-
трических систем осуществляется чаще всего в виде последователь-
ной серии операций, с помощью которых производится сокращение
числа узлов сети, станций и подстанций при сохранении общего
баланса мощности системы.
6
В состав этих операций входят и частичное эквивалентирование
(как, например, замещение нескольких станций, присоединенных
к тому или иному узлу, одною станцией) и целый ряд других прие-
мов, вроде переноса и объединения нагрузок по так называемому
«правилу моментов».
Сам по себе принцип постепенного, «шагового», упрощения' слож-
ной системы весьма удобен на практике. Но, к сожалению, боль-
шинство применяемых для этой цели приемов грубо-интуитивны и
не имеют достаточно убедительного экспериментального или теоре-
тического обоснования. Доводы, приводимые в пользу этих приемов,
в лучшем случае имеют силу для установившегося режима системы,
но не имеют под собой никакой почвы в ее динамических режимах.
В связи с этим в последние годы и возникло убеждение в необ-
ходимости пересмотра и обоснования принципов эквивалентирова-
ния электрических систем.
Первая достаточно основательная работа в этом направлении
выполнена И. А. Орурком,' В. Ф. Жеваржеевым и Г. В. Рощиным
[Л. 2 ]. Суть ее будет кратко изложена позже. В последние годы поя-
вился и еще ряд работ, посвященных установлению процедуры и
обоснованию принципов эквивалентирования сложных электриче-
ских систем [Л. 3, 4, 5, 6, 7].
Мы не имеем в виду подвергать здесь эти работы критическому
анализу.
Методы эквивалентирования могут быть основаны либо на экс-
периментальном изучении существующей сложной системы с по-
мощью специально создаваемых возмущений, либо на численном
анализе по ее схеме и заданным параметрам всех ее элементов. Ме-
тоды первого рода можно назвать «апостериорными»? второго рода—
«априорными». Очевидно, что для систем, еще не существующих
реально, или таких, в которых почему-либо не могут быть прове-
дены требующиеся эксперименты, можно говорить только о приме-
нении методов априорных, за исключением случаев, когда имеется
богатый материал автоматических записей аварийных процессов
в эксплуатации.
Основываясь на возможных различных подходах к эквивален-
тированию и учитывая ограничения по физическому подобию,
можно оба рода методов («априорный» и «апостериорный») в свою ,
очередь подразделить на следующие три категории:
а) прямое и косвенное функциональное эквивалентирование,
б) параметрическое эквивалентирование,
в) эквивалентирование в пространстве функций.
Прямое функциональное эквивалентирование характеризуется
тем, что по переходному процессу исходной системы, определяемому
некоторыми функциями времени, строятся какими-либо способами
соответствующие функции эквивалента, зависящие не только от
времени, но и от параметров, подлежащих определению [Л. 2,
3, 4].
7
Особый вид функционального эквивалентирования составляет
статистическое эквивалентирование, использующее теорию слу-
чайных функций.
В априорной форме такое эквивалентирование связано с зада-
нием тех или иных случайных возмущающих функций на входе
эквивалентируемой системы. Этот вид эквивалентирования здесь
не рассматривается.
Косвенное функциональное эквивалентирование характери-
зуется использованием невременных отображающих функций пе-
реходного процесса (операционных и частотных).
Специфической особенностью чисто параметрического эквива-
лентирования является использование не функций переходного
процесса, а непосредственно физических констант (инерционных,
индуктивных, демпферных и т. п.) первичной системы. Это в основ-
ном — чисто априорный метод.
Наконец эквивалентирование «в пространстве функций» основы-
вается на представлении функций числовыми совокупностями,
главным образом — совокупностями коэффициентов в разложении
функций по определенным базисным функциям или иными спосо-
бами, после чего эти числовые совокупности рассматриваются как
координаты функций в многомерном пространстве.
Прямое функциональное эквивалентирование по. сравнению с
его другими видами, указанными выше, имеет преимущество, за-
ключающееся в возможности прямых оценок погрешностей в пере-
ходных процессах при замещении данной первичной системы ее эк-
вивалентом. Значимость эюго преимущества существенно ослаб-
ляется требованием оценки погрешностей эквивалентирования не
уклонением аппроксимирующей функции (эквивалента) от действи-
тельной функции переходного процесса, а разностью между дей-
ствительным пределом мощности дальней передачи и тем пре-
делом, который получается при замене первичной системы ее экви-
валентом.
В данной работе рассмотрены в основном только априорные
методы эквивалентирования, при этом преимущественно те из них,
которые еще не были освещены в литературе.
Независимо от использования указанных методов эквиваленти-
рования весьма эффективной для упрощения анализа является пред-
варительная линеаризация уравнений динамики эквивалентируе-
мой системы. Это можно признать допустимым на первой и проме-
жуточной стадии эквивалентирования.
Как известно, для практических целей анализа находят приме-
нение простая линеаризация «в малом», линеаризация с ограниче-
нием конечных пределов аргумента линеаризуемых функций, а
также линеаризация гармоническая [Л. 8] и статическая [Л. 9].
Два последних способа линеаризации в данной работе не рассмат-
риваются, так как по сравнению с первыми двумя требуют более
сложных операций.
8
1-2. Предварительные условия анализа
В настоящем параграфе мы продолжим детализацию и конкрети-
зацию проблемы эквивалентирования.
1. Структура сложных электрических систем
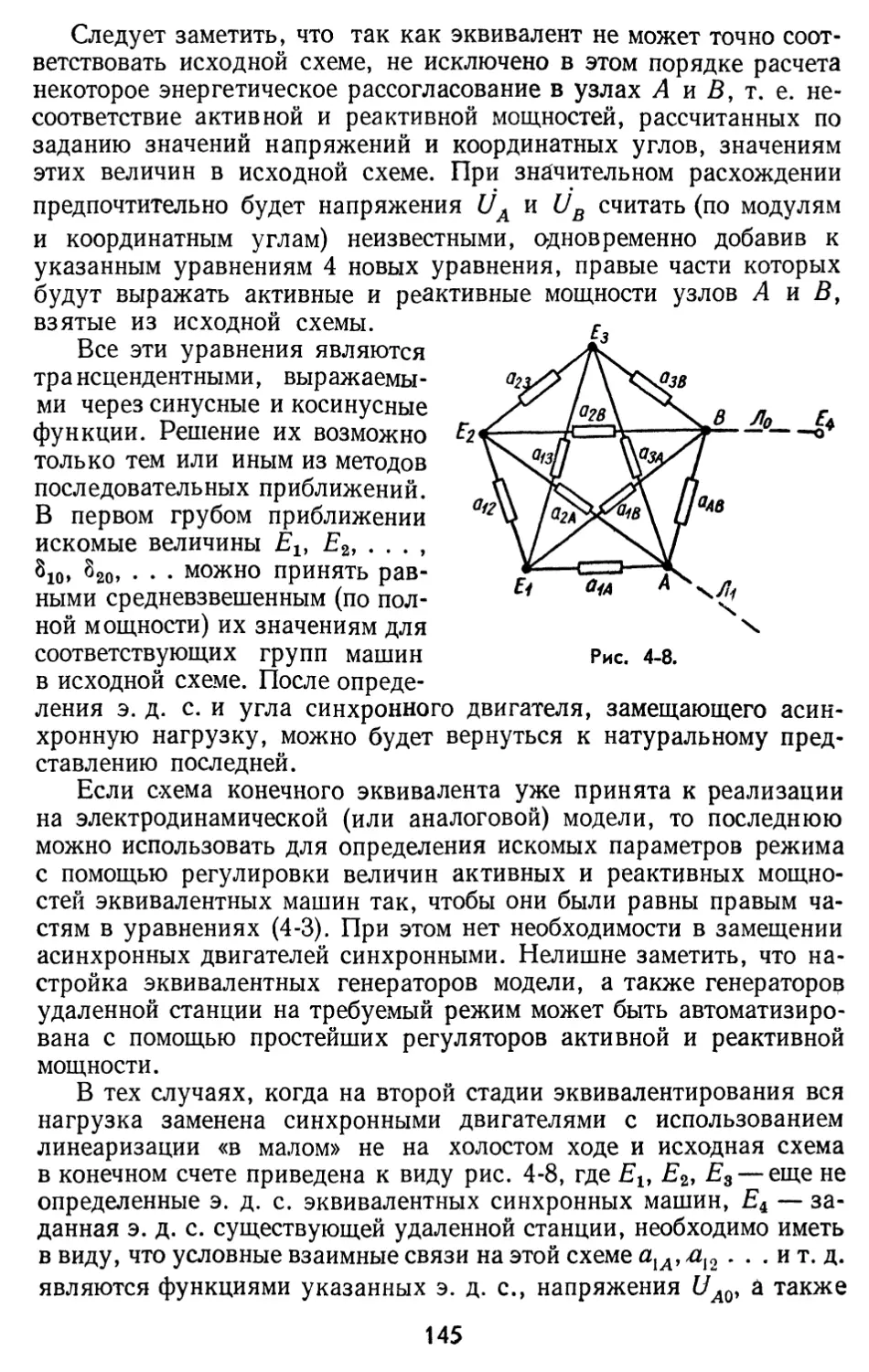
Типы электрических систем, с которыми приходится иметь дело
в рас'четах и исследованиях устойчивости параллельной работы
станций, весьма разнообразны. Мы ограничимся в дальнейшем рас-
смотрением так называемых локаль-
ных систем, которые состоят из ряда
станций и подстанций, объединенных
сетями разных классов напряжения
и расположенных в том или ином
пространственно ограниченном гео-
графическом районе. Примером могут
служить энергосистемы Северо-Запада
СССР, Урала, Донбасса и др. Разви-
тие энергетики СССР предусматривает
объединение всех подобных систем
в единую систему. Локальные системы
можно разделить на системы «концен-
трированные», с тесными электриче-
скими связями между энрегетиче-
скими узлами и системы «рассредото-
ченные», отличающиеся значительной
протяженностью и соответственно вы-
соким классом напряжений линий
энергетической связи.
На рис. 1-1 представлена харак-
терная структура локальной концен-
трированной системы с сетями разных
классов напряжения. Эти сети вообще
имеют тем более сложную конфигура-
цию, чем ниже «несущее» напряжение
сети, так как при более низких на-
пряжениях все более и болеедомини-
рующее значение приобретают распре-
делительные функции сети. Обычно концентрированная система яв-
ляется приемной системой для дальних передач энергии. Вопрос
об эквивалентировании исторически относился прежде всего именно
к контактированным приемным системам.
По мере развития энергосистем и «заселения» ранее свободных
географических пространств новыми электростанциями локаль-
ность отдельных систем будет постепенно изживаться. Соответ-
ственно по-новому будут ставиться вопросы устойчивости и эк-
вивалентирования. По-видимому, все же между отдельными
9
энергетически наиболее'уплотненными частями общегосударственной
системы будут существовать сравнительно более слабые связи, по
отношению к которым концентрированные энергетические скопления
можно замещать простейшими системами. Соответственно этому
получится схема «мета-системы», подобная локальной рассредото-
ченной системе, указанной на рис. 1-2, где отдельные мощные стан-
ции и районы потребления перевязаны линиями передачи высших
классов напряжения. Разумеется, такое представление является
пока не более как гипотезой.
Остановимся теперь на разновидностях и электрофизических
свойствах приемников энергии, определяющих нагрузку подстан-
ций и станций. Сюда отно-
сятся: асинхронные двигатели
для привода различных про-
изводственных механизмов;
синхронные двигатели для тех
же целей; осветительные и
бытовые приборы; электро-
плавильные (дуговые, индук-
ционные) устройства; выпря-
мительные устройства элек-
трохимии, электротранспорта
и т. п.
Как по характеру рабо-
чего режима, так и по своим
свойствам эти приемники су-
щественно отличаются между
собой. Даже приемники од-
ного рода в смысле влияния
их на устойчивость системы
могут отличаться один от другого в зависимости от их технических
функций. Это, в частности, относится к асинхронным двигателям,
динамические и статические характеристики которых связаны с за-
висимостью тормозного момента на валу от скорости вращения.
Однако наиболее существенным является отличие моторных
приемников от приемников статического типа, не связанных с ме-
ханической инерцией. Эти последние, как правило, обладают уме-
ренной нелинейностью и с достаточной точностью могут быть за-
менены комплексной проводимостью. В дальнейшем мы будем име-
новать их «пассивными» приемниками.
Иногда, и довольно часто, в процессе эквивалентирования асин-
хронную нагрузку замещают нагрузкой пассивной. Это ни в коем
случае нельзя считать допустимым. Асинхронный двигатель как
приемник, действительно, подобен пассивной активно-реактивной
проводимости, но только при условии, что его скольжение постоянно,
а это может иметь место (притом не.вполне точно) лишь при беско-
нечно большой инерции ротора двигателя и связанной с ним про-
10
изводственной машины. Более правильным для массовых асинхрон-
ных приемников является полное пренебрежение их инерцией,
в результате чего их поведение можно оценивать по статическим ха-
рактеристикам активной и реактивной мощности. Однако по ряду
соображений, изложенных ниже, мы считаем рациональным для
целей эквивалентирования сложных систем допускать замену асин-
хронных приемников синхронным, установив для этого специаль-
ную процедуру (§ 2-4).
Приемники выпрямительного типа, работающие в цепи выпрям-
ленного тока на постоянную противо-э. д. с. (например, на электро-
лизеры), можно принимать за чисто активные проводимости (g),
но с ярко выраженной разрывной зависимостью от приложенного
напряжения (U) со стороны пере-
менного тока (рис. 1-3).
Известно, что такие приемники
даже без специального сеточного
регулирования являются в энерго-
системах безынерционными стаби-
лизаторами динамических процес-
сов, оказывая положительное вли-
яние и на статическую устойчи-
вость.
Очевидно, что если относительная мощность подобных приемни-
ков в данной системе значительна, то при ее эквивалентировании
они подлежат выделению в особую группу.
Разделение и групповая концентрация различных типов прием-
ников должны составлять одну из важнейших и вместе с тем нелег-
ких операций эквивалентирования.
Трудности в этом вопросе зависят не только от разнородности
приемников, но также и от других обстоятельств: от сложности
распределительных (обычно, кабельных) сетей 6—10 кв; от наличия
взаимной связи между питающими эту сеть подстанциями; от «шу-
мовых» свойств самих приемников (т. е. от случайного характера
их рабочего режима).
Последним обстоятельством мы вынуждены пренебрегать, так
как «шумовые» характеристики реальных нагрузок совершенно
не изучены.
В расчетах устойчивости обычно считают приемники загружен-
ными по номинальным значениям их активных и реактивных мощ-
ностей, изменение которых в случае необходимости подчиняют за-
кону изменения средних суммарных мощностей на питающих
подстанциях. Но даже при таком упрощенном подходе в процессе
эквивалентирования все же остаются три важных вопроса:
1) на основании каких данных можно осуществить распределе-
ние нагрузок по их роду;
2) как установить инерционные параметры моторных прием-
ников;
11
3) каким путем можно осуществить сокращение числа и концен-
трацию нагрузочных узлов, исключив всякое слияние нагрузок
с генераторными элементами системы и по возможности избегая
применять такие приемы, как правило нагрузочных моментов.
Для обстоятельного решения первого и второго из этих вопросов
есть только два пути: либо осуществление специальных экспе-
риментальных исследований, либо тщательное обследование потре-
бителей электроэнергии по всем отдельным частям распределитель-
ной сети (6—10 хе). Первый путь практически нереален (организа-
ционные трудности, значительные затраты). Поэтому на практике
обычно пользуются типовыми структурами потребителей энергии
[Л. 10, 11, 12], согласовывая их с конкретными условиями данной
энергосистемы и приписывая отдельным видам приемников типо-
вые параметры и характеристики. Затем все же необходимо уделить
достаточно времени выявлению приемников особого типа и хотя
бы ориентировочной проверке нагрузочных структур по данным
эксплуатационных и проектных организаций. Если все это выпол-
нено, тогда остается провести операции преобразования и эквива-
лентирования, отвечающие на третий из поставленных выше вопро-
сов, предполагая, что схемы и параметры сетей всех классов напря-
жения известны.
2. Три стадии упрощения сложных систем
К первой стадии следует отнести всю первичную информацию
об эквивалентируемой системе и приведение ее к такой схеме, ко-
торая допускает не слишком трудоемкое определение собственных
и взаимных проводимостей между главными элементами. Сюда от-
носятся: выяснение конкретной структуры системы, поиск и оценка
достоверности всех необходимых данных о станционных агрегатах,
их автоматическом регулировании; данных о расположении и обо-
рудовании подстанций, о параметрах сетей разных классов напря-
жения; о схемах питания приемников, о характеристиках послед-
них и т. д.
В эту же стадию должно войти приведение всех основных пара-
метров элементов системы и характеристик рабочих режимов к об-
щей базисной системе единиц.
Далее к первой стадии эквивалентирования следует отнести
также объединение свободных от местных нагрузок станций с об-
щими узловыми точками, а также операцию сокращения числа и
концентрацию нагрузочных подстанций. Последние процедуры яв-
ляются довольно трудоемкими, если к ним относиться с должным
вниманием. Выполняются они на основе общих методов, изложен-
ных в § 3-5. '
После проведения всех предварительных упрощений первая ста-
дия заканчивается определением собственных и взаимных прово-
димостей между главными элементами.
12
Вся эта большая работа должна быть, строго говоря, дополнена
специальным исследованием внутренней устойчивости эквивален-
тируемой системы, чтобы выявить в ней недостаточно устойчивые
звенья, не подлежащие включению в общий эквивалент. Необхо-
димость такого исследования зависит от основных условйй и задач
эквивалентирования данной системы.
Если можно ожидать, что возмущения, которые будут служить
для проверки устойчивости каких-либо внешних объектов (напри-
мер, дальних ЛЭП), слабо или очень ограниченно воздействуют
на любые составные части эквивалентируемой системы, то можно
отказаться от упомянутого исследования. Однако, если внутри са-
мой этой системы существуют очаги самораскачивания или такие
элементы, которые могут впадать в резонанс с возмущенными ко-
лебаниями внешних объектов, то надлежащее исследование этого
вопроса является необходимым; «растворение» неустойчивых или
перспективно-резонансных элементов в общем эквиваленте поведет
к существенному искажению физической картины явлений.
Вопрос о том, какими простыми способами можно исследовать
внутреннюю устойчивость огромной сложной системы с учетом всех
видов имеющегося в ней автоматического регулирования, остается
пока еще открытым и здесь не рассматривается. Первые шаги в этом
направлении можно почерпнуть в работах [Л. 13, 14, 15]. Мы бу-
дем предполагать, что с помощью исследования опыта эксплуата-
ции подлежащей упрощению существующей системы выявлены
элементы, которые должны быть выделены из общего эквивалента.
Что касается резонанса колебаний внешних удаленных станций
с колебаниями каких-лцбо элементов внутри эквивалентируемой
системы или внутренних резонансов «свободных колебаний» в этой
системе, то обычно при наличии даже умеренного демпфирования
эти колебания несущественны [Л. 16]. Однако вероятность подоб-
ных явлений заметно возрастает в режимах ресинхронизации, а
также в случае, когда удаленная ГЭС оборудована капсульными
агрегатами с очень малыми инерционными постоянными.
Дальнейшее основывается на допущении, что кроме анализа дан-
ных эксплуатации исходной приемной системы и проектных данных
для удаленных станций, выполнены предварительные ориентиро-
вочные исследования возможности разного рода резонансных яв-
лений с учетом [Л. 4].
Для этой цели может быть полезна электрическая схема заме-
щения; обоснование которой дается в главе второй.
Вторая стадия эквивалентирования имеег целью на основе ре-
зультатов первой стадии и некоторых допущений привести систему
к существенно меньшему числу главных элементов (генераторов и
нагрузочных групп), а именно к такому их числу, при котором ока-
зывается возможным использовать математические машины для
построения конечного эквивалента в третьей стадии, отказавшись
от ряда упрощающих допущений, используемых на первой и второй
13
стадиях эквивалентирования (как, например, линеаризация, замена
асинхронной нагрузки синхронною и т. д.). Вопрос о наименьшем
числе элементов, остающихся после завершения второй стадии,
рассмотрен в § 4-4.
Третья стадия эквивалентирования предполагается выполняе-
мой по следующей программе;
1) Приведение конечного эквивалента системы к одной из ти-
повых схем, наиболее подходящей при данных конкретных усло-
виях исходной системы.
2) Определение основных параметров рабочего режима конеч-
ного эквивалента.
3) Оценка точности конечного эквивалента по данным исходной
схемы.
4) Определение параметров предельно простого эквивалента
на основе экспериментов в реальной системе или с помощью мате-
матических машин по промежуточному эквиваленту второй стадии
эквивалентирования.
Вопросам третьей стадии эквивалентирования посвящена в ос-
новном вся глава четвертая и специально § 4-4.
Изложенное деление процесса эквивалентирования на три ста-
дии основывается на уже упомянутом выше кибернетическом поня-
тии «разнообразия» и принципе «потери разнообразия», которое
по нашей гипотезе неизбежно влечет за собой уменьшение точности
эквивалента по мере уменьшения отношения числа т содержа-
щихся в нем различных основных элементов к числу п различных
основных элементов в исходной системе. Из этого положения выте-
кает, что при равнозначной результативной точности экви^аленти-
рования на каждой из трех указанных стадий точность отдельных
приемов эквивалентирования должна повышаться по мере умень-
шения отношения т/п. Поэтому, допуская на первой и второй ста-
диях, например, применение линеаризации, в принципе следует
от этого отказаться на третьей стадии при переходе к простейшему
эквиваленту, равно как и от замены приемников одного рода прием-
никами другого рода.
3. Основные допущения
Главные допущения, на которых основываются излагаемые в
дальнейшем методы и приемы эквивалентирования, следующие:
1) Эквивалентируемая система является устойчивой «в малом»,
а также динамически устойчивой по отношению к ожидаемым внеш-
ним возмущениям. Если последнее условие не соблюдается, то со-
ответствующие элементы системы (станции, группы нагрузок) не
включаются в общий эквивалент и должны быть обособлены.
2) Предполагается наличие у синхронных генераторов систем
автоматического регулирования возбуждения (с настройкой, исклю-
чающей самораскачивание), позволяющих принимать постоянною
14
э. д. с. за некоторой реактивностью в духе выводов, изложенных
в [Л. 10].
3) Предполагается отсутствие резких уклонений параметров
регулирования первичных двигателей от средних значений для
соответствующих типов агрегатов (турбо- и гидроагрегатов).
Кроме того, исходя из представлений, указанных в предыдущем
п. 2, можно считать уместными для первой и второй стадий эквива-
лентирования еще следующие допущения (без специальной про-
верки точности):
4) Применение методов линеаризации (глава вторая).
5) Использование (на второй и частично на первой стадии экви-
валенгирования) временной замены типовой нагрузки целиком на-
грузкой асинхронно-двигательной с постоянным тормозным момен-
том, а этой последней — нагрузкой синхронно-двигательной (глава
вторая).
6) Допущение постоянства момента первичных двигателей ге-
нераторов.
7) Пренебрежение активными сопротивлениями сетевых и гене-
раторных элементов.
8. Использование неканонических преобразований сетевых
структур (§ 3-3).
9) Реализация процесса эквивалентирования с помощью типо-
вых возмущений со стороны некоторого контрольного узла.
Наряду с указанными допущениями, которые не считаются при-
емлемыми на третьей стадии эквивалентирования (за исключением
принципа испытания эквивалента типовым возмущением), необхо-
димо признать обязательным соблюдение следующих требований.
1) Исключение замены асинхронно двигательной нагрузки ак-
тивно-реактивными, пассивными приемниками.
2) Исключение применения так называемого правила (нагру-
зочных) моментов.
3) Отказ от объединения генераторов с приемниками любого
рода в один эквивалент.
4) Отказ от объединения в один эквивалент групп генераторов
различного энергетического характера (турбогенераторов с гидро-
генераторами).
5) Выделение из общего эквивалента системы всех примыкаю-
щих к ней удаленных станций.
4. Исходные уравнения
Во всех рациональных приемах эквивалентирования .необходимо
основываться на некоторых фундаментальных дифференциальных
уравнениях исходной системы.
Так как число элементов последней обычно чрезвычайно велико,
а связи между ними очень сложны (рис. 1-1), то применение уравне-
ний типа Горева—Парка или их модификаций оказывается практи-
чески невозможным на первых двух стадиях эквивалентирования.
15
Поскольку глубокое эквивалентирование (п > т) неизбежно
связано с появлением неточности и в большинстве методов уравне-
ния системы служат в основном лишь для контроля процесса экви-
валентирования и для косвенной оценки его точности,— представ-
ляется вполне допустимым, по крайней мере на первой и второй
стадиях эквивалентирования, ограничиться использованием менее
точных уравнений динамики электрических систем. Ближайшей
ступенью упрощения этих уравнений можно считать уравнения
с зависимостью электромагнитных моментов как от всех взаимных
углов (8Х—82, 8Х—83 ...ит. д.), так и от всех абсолютных скоро-
стей генераторов системы (сох = 8Х, а>2 = 82, . . . , 8«) [Л. 17].
Однако и эта система еще достаточно сложна. Нам представля-
ется допустимым на первой и второй стадиях эквивалентирования
использовать известную форму уравнений, в которых вместо момен-
тов введены активные мощностй, а зависимости их от скоростей,
в том числе и демпфирование, исключены. Такие уравнения, допол-
ненные предположением о симметрии роторов синхронных машин,
широко использовались в прошлом не только для установления
критериев устойчивости [Л. 18], но и для численных расчетов ее.
Следует, однако, заметить, что исключение из уравнений всех
зависимостей от частоты не позволяет, конечно, использовать их
в таких процессах, в которых изменение частоты играет домини-
рующую роль. Другими словами, оказывается возможным только
анализ относительных колебаний машин с ограниченными уклоне-
ниями от средней частоты системы.
Сравнительно недавно было установлено важное значение в про-
цессах динамической устойчивости при коротких замыканиях раз-
ного рода пульсирующих и знакопеременных моментов, действую-
щих на ротор генератора [Л. 19, 20, 21]. Учет этих моментов едва
ли необходим на первой и второй стадиях эквивалентирования, так
как указанные моменты оказывают большое влияние лишь на ге-
нераторы удаленных станций, устойчивость которых исследуется
при коротких замыканиях далеко за пределами приемной системы.
На третьей стадии эквивалентирования рассматриваемые моменты,
которые мы будем называть «импульсными», можно учесть прибли-
женно, не прибегая к уравнениям Горева—Парка (§ 4-3).
В последующем изложении доминирующее значение отводится
анализу динамических процессов как основы эквивалентирования.
В соответствии с этим преобладающую роль играют выражения
активных мощностей, входящих в упомянутые дифференциальные
уравнения. Что касается реактивных мощностей, то, хотя они непо-
средственно не определяют движения преобразуемой системы, тем
не менее их приходится вводить в процесс эквивалентирования,
поскольку переходные изменения активных мощностей не дают
возможности установления всех параметров эквивалента. Учет ре-
активных мощностей содержит добавочную информацию о парамет-
рах эквивалентируемой системы; это можно непосредственно усмот-
16
реть из сопоставления выражений активных и реактивных мощно*
стей через электродвижущие силы системы и их взаимные угловые
сдвиги. Очевидно, что в любом найденном эквиваленте должны удов-
летворяться или, по крайней мере, оптимально отображаться опре-
деленные энергетические соотношения. Отсюда, в частности, воз-
никает задача о наилучшем отображении в эквиваленте всех
начальных энергетических условий, предшествовавших реальным
возмущениям в исходной" системе.
По изложенным соображениям при определении режимных па-
раметров (например модулей э. д. с., их угловых смещений и др.)
неизбежно надлежащее использование данных не только о распре-
делении активных, но и реактивных мощностей, что и предпола-
гается всюду в дальнейшем.
5. Контрольные возмущения
Эквивалентируемая система подвергается со стороны присое-
диненной к ней дальней ЛЭП множеству различных воздействий.
Сюда относятся и разнообразные виды коротких замыканий, могу-
щих происходить в любом месте ЛЭП, частичные или полные от-
ключения последней, автоматические повторные включения, фор-
сировки возбуждения, процессы электрического торможения,
наконец, неустановившееся движение машин удаленной станции,
передающей через данную ЛЭП энергию в приемную систему как
в послеаварийных режимах, так и при несимметричных коротких
замыканиях.
Не все эти воздействия одинаково существенны для определе-
ния проектных уровней динамической устойчивости удаленной
станции. Однако, если желательно иметь достаточно полную кар-
тину явлений и полную совокупность численных характеристик
динамической устойчивости, то неизбежно требование, чтобы экви-
валент, представляющий приемную систему в моделях, достаточно
правильно отображал ее реакцию на все без исключения указанные
выше воздействия. Достигнуть точного соответствия между пове-
дением приемной системы и эквивалентом, имеющим значительно
меньшее число основных элементов, принципиально невозможно
даже при идеальном моделировании.
Мало того, точность реакции эквивалента не может быть оди-
наковой по отношению к различным возмущениям. Параметры его,
выбранные в качестве оптимальных по отношению тому или иному
возмущению, несомненно будут более или менее отступать от оп-
тимума при других возмущениях. Выбирая же их по принципу оп-
тимума для каждого из множества возмущений, мы соответственно
получим и множество значений для каждого из основных парамет-
ров эквивалента. Поэтому по отношению -ко всей совокупности
возмущений значения параметров эквивалента, строго говоря, дол-
жны были бы выбираться как средневзвешенные по вероятности
17
возмущений, с некоторыми весовыми коэффициентами, учитыва-
ющими экономическую значимость различных уровней динамической
устойчивости. Однако от такого подхода приходится отказаться ввиду
его сложности. Заметим, что такие сильные возмущения на прием-
ном конце дальней ЛЭП, как трехфазное короткое замыкание, бо-
лее благоприятны по динамической устойчивости, чем аналогичные
аварии на отправном конце ЛЭП. Поэтому отнесение контрольных
возмущений к приемному концу, обеспечивая более сильную реак-
цию приемной системы, обеспечивает, по-видимому, более высокую
точность эквивалентирования для аварий в начале ЛЭП.
Что касается возмущений, испытываемых приемной энергоси-
стемой со стороны удаленной станции в восстановительном (после-
аварийном) режиме, то при допущении постоянства э. д. с. Ed этой
станции указанное возмущение эквивалентно изменению ее фазо-
вого угла 8 и может быть имитировано изменением фазы и модуля
напряжения U на приемном конце передачи.
В конечном счете представляется вполне допустимым и доста-
точным в качестве критериального возмущения принимать возму-
щение Д{7Л (/) = Д [{/л (/)/5л<0 j , отнесенное к точке примыкания
А исследуемой дальней ЛЭП к системе, подлежащей эквиваленти-
рованию. В ряде случаев допустимо использовать более простые
возмущения, полагая либо AUa (0 = 0, либо ДЗЛ (0 = 0.
6. Критерии эквивалентности
Принципиально важным является вопрос о критериях эквива-
лентности.
Ввиду того, что по этому вопросу нет согласия в мнениях и он
вообще недостаточно ясен, необходимо условиться о смысле, кото-
рый вкладывается в это понятие в данной работе.
Вообще термином «критерий» в ряде отраслей математики и тео-
ретической механики часто называют аналитически заданное усло-
вие того, что некоторое сложное явление будет или не будет иметь
месго; эти условия именуют иногда «признаками». Сюда относятся,
например, критерии устойчивости, признаки сходимости разложе-
ний в ряды и т. п.
В других случаях под словом «критерий» понимают какую-либо
числовую характеристику, сжато отображающую свойства функций,
распределение масс в пространстве или указывающую на правиль-
ность тех или иных гипотез в отношении статистических законов
распределения. Сюда же можно отнести и всевозможные приближен-
ные оценки соответствия результатов вычислений или измерений
реальным фактам, т. е. оценки точности.
Наконец «критериями» иногда называют некоторые обязатель-
ные условия, вводимые в тот или иной расчет для обеспечения спе-
циальных требований к результатам.
18
Как отмечено ранее, эквивалентирование сложных электромеха-
нических систем не может быть точным при переходе от п различ-
ных элементов к меньшему их числу т, за исключением эквивален-
тирования в установившихся режимах. Поэтому трудно указать
универсальные точные критерии эквивалентности, подобные ука-
занным выше критериям первого рода, или некоторым критериям
полного тождества, имеющим место в установившихся режимах.
Можно говорить лишь о применении критериев второго рода, ха-
рактеризующих в той или иной мере оптимальность эквивалентиро-
вания. Естественно использовать те из них, которые апробированы
практикой многих лет. Сюда относятся все критерии минимума
среднеквадратичных уклонений, моменты функций и числовых
совокупностей.
На этой основе и должны строиться методы эквивалентирования,
которые как бы сливаются с соответствующими критериями.
Что касается особых добавочных требований (которые будем
именовать «специальными добавочными критериальными' услови-
ями»), то необходимость подчинения им процесса эквивалентиро-
вания должна быть либо вполне очевидной, либо достаточно обос-
нованной. Вполне очевидной, например, является необходимость
введения таких требований, чтобы суммарные комплексные мощ-
ности для исходной и эквивалентной систем в установившемся ре-
жиме, предшествовавшем любому возмущению, были между собой
равны. Вместе с тем нельзя согласиться заранее с критериями, вво-
димыми произвольно, если этот произвол не получает оправдания
в дальнейших специальных достаточно широких исследованиях.
В данной работе основные критерии органически входят в про-
цесс эквивалентирования. В основном, это методы обобщенных ус-
реднений е возможностью оценки отличия эквивалентной системы
от исходной. Однако результативная оптимальность эквиваленти-
рования должна оцениваться по величине разницы между пределами
устойчивости какой-либо важнейшей из удаленных станций в ис-
ходной системе и при замене последней системой ей эквивалентной.
Поскольку эта разница несомненно будет зависеть от характера
возмущений на дальней передаче энергии, необходимо исходить
из наиболее типичных аварий (так называемых «расчетных»).
Оптимальный эквивалент, очевидна, должен соответствовать
минимуму указанной разницы или иначе — погрешности по пре-
делу мощности. Попытка оценки этой погрешности приводится в
§ 4-4. Практически оказывается невозможным установить прямую
аналитическую связь погрешностей, обусловленных любой проце-
дурой обобщенного усреднения, с погрешностями по пределам мощ-
ности; поэтому представляется весьма желательным дополнитель-
ное исследование последних в заключительной стадии любого ме-
тода эквивалентирования.
Глава вторая.
ЛИНЕАРИЗАЦИЯ ИСХОДНЫХ УРАВНЕНИЙ
И СХЕМЫ ЗАМЕЩЕНИЯ
2-1. Линеаризация «в малом»
в области рабочего режима
Уравнения относятся к периферийной точке А системы, приве-
денной к многоугольнику,* состоящему из взаимных реактивностей
(рис. 2-1).
Предполагается, что во взаимных реактивностях схемы рис. 2-1
учитываются и собственные реактивности синхронных машин, имею-
щих некоторые постоянные э. д. с.
Ev Е3, Е±. Для общности, кроме
того, предполагается, что в систему
входят как синхронные генера-
торы (с э. д. с. Ер Е2), так и син-
хронные двигатели (с э. д. с. Е3, Е4),
представляющие нагрузку системы.
Введение в систему синхронных
двигателей вместо асинхронных
рассматривается ниже (§ 2-4).
Все величины предполагаются
с 2 1 выраженными в относительных еди-
ис' ’ ' ницах при постоянстве частоты
системы. Рассматриваются про-
цессы малых угловых колебаний вблизи установившегося режима,
причем механические мощности на валах синхронных машин при-
нимаются постоянными. Если считать по отношению к сети актив-
ные электрические мощности генераторов положительными, а двига-
телей — отрицательными, то их выражения, без учета демпфиро-
вания, определяются следующими хорошо известными, вполне
идентичными формулами, в которых 8Л, 8р 82, 83, 84 — угловые
сдвиги напряжения UA и э. д. с. Ev Е2, Е3, Е4 относительно неко-
торой синхронной оси:
* Для простоты взят случай четырех машин.
20
Q<Pi-El
o<p2^e2
£=4
у Pa sin (8, - 8д) + 2 ylkEk sin (8, - 8ft)
k~ 1 ,
E= I
sin (32 - 8Л) + 2 y2kEk sin (§2 -
k~ 1
(мощности генераторов I\ и Г2);
Ik = 4
y3UА sin 03 8Д) + y^k s*n 0з ^k)
k^i
0 > p - E
-^4 4
k = 4
У Pa sin (34 ~ 8Л) + 2 УиРк sin (84 - 8ft)
k=] }
(2-1)
(2-2)
(Мощности двигателей Д3 и Д4),
где
У} = —; 1/м = ^/ = —; / = 1, 2, 3, 4; k= 1, 2, 3, 4=4/.
Xj Xjk
Надо иметь в виду, что выдаваемая в сеть электрическая мощ-
ность любого генератора является тормозящей силой в его агрегате
с первичным двигателем; напротив, поглощаемая из сети действи-
тельная мощность электрического двигателя является ускоряющей
силой в его агрегате с приводным механизмом. Поэтому, обозначив
модули значений механических мощностей соответственно через
Мъ Л43, Л43, Л44, получим следующую систему дифференциальных
уравнений относительного движения элементов системы [совместно
с уравнениями (2-1) и (2-2)]:
ЕтР^т = Мт Рт, 1 (2 2)
Hkp2Sk —— Mk —Pk)
(Нт, Hk — инерционные постоянные; т=1, 2; k=3, 4).
Уравнения малых колебаний при постоянстве механических
мощностей, соответственно будут:
HjPW>f = ДР/. (2-4)
Результативная мощность, подводимая к узлу Л, очевидно, равна
(Р1 + Р2) + (Рз + Р4) = Рд.
Выбрав в качестве малого возмущения системы со стороны узла
А изменение амплитуды напряжения UA (рис. 2-1) на величину
Д£/д (0 без изменения фазового угла 8Д, получим из (2-1) и (2-2):
(k = 4 \ А=4
“, + 2“» <2'5)
k^l /
(/=1,2, 3,4; k= 1, 2, 3, 4=^/),
21
где
Kj = [У)Е] Sin (8/ ~ Mo > aj = [y}UAEi C0S (8у - Мо ’
ajk={УцРтcos (Л - Mo- /=1 > 2> 3>4;
k= 1, 2, 3, 4^/
(2-6)
Индекс 0 означает исходный установившийся режим. При до-
статочном запасе устойчивости исходного режима все а;-, aft — по-
ложительны. Коэффициенты К, могут быть как положительными,
так и отрицательными. Если Дид (0) < 0 (скачок напряжения узла
А вниз), то момент t = 0 и все модули электрических мощностей
уменьшаются. Это ясно из общих свойств системы и означает (при
Рис. 2-2.
принятом выше допущении постоян-
ства э. д. с. всех машин) скачкообраз-
ное уменьшение синхронных момен-
тов всех машин (без учета добавочных
моментов, связанных с электромаг-
нитными переходными процессами
в статорных и роторных цепях).
Вследствие сброса электрической
мощности, при АС/А (0) < 0, генера-
торы получают ускорение, двига-
тели —замедление. С этого начинается
колебательный процесс выравнивания
небалансов на валах машин. При отсутствии демпфирования (что
допущено в данном случае) этот колебательный процесс будет не-
затухающим. Он определяется совокупностью уравнений (2-4),
(2-5), если положить ^UA (t) = const. В общем случае будем пола-
гать Д£/д (/) некоторой произвольной функцией времени, равной
нулю для t < 0. Представив Д(/д (0 операционным изображением
Д£7д (р) и исключив с помощью уравнений (2-4) все ДР;- из урав-
нений (2-5), получим в матричном виде систему операционных
уравнений относительно ДЗу:
ЛД8, = — Kv, (2-7)
где v = MJ А (р), а А и К — соответствующие матрицы коэффици-
ентов:
((H^ + Aj, — а12, — а13, — ам.\
— а12, (Я2р2 + Л2), — а23, — а21. |
----а13> а2Э> (^зР2 + ^з)> а34- I
— au, — a2i, — a3i, (Hipi + Al)J
К,
Кз
К*
Ai — аг + а12 + а13 а14; Л2 — а2 + а12 + а23 -}- а24;
^3 — а3 4' а13 4" а23 4“ а3«; ^4 — а4, 4“ а14 Н~ а24 4" а34‘
(2-8)
22
Не трудно убедиться, что системе (2-7) отвечает чисто электрическая
схема замещения согласно рис. 2-2, в которой Lx, L2, . . . , Lx2,
L23, ... — некоторые индуктивности, Cv С2, С3, Cit ... — емко-
сти; ex, e2, e3, eit . . . — одновременно включаемые (при t = 0)
э. д. с.
Действительно, для этой схемы, например,,имеем:
1 «2 + цз +
.. Р \ ^-1 Мз ^-13 ^-14/
1 “ / 1 , 1 , 1 , 1 \
I + + + \ + С1р
\ Ll ь12 Ь13 Ь14/
или если -т— —-т— — Аг — -j- ~Ь #13 *4" то
Li bjk
(СХР2 4- Лх) f—j — аХ2 'j — а13 f—яХ4 = ai ~»
\ р / \ Р / \ Р / \ р / р
аналогично:
(С2р2 4- А2) f—'j — а12 (—'j — а2з (—} — a2i f—= а2 —;
\р/ \ р / ~ \р/ \р/ р
(С3р* 4- Л8) (- а13 ( - а23 - a J/fl) = а3 А. ;
\Р/ \ р J \Р/ \Р/ Р
(£tP2 4“ Л4) (—} — аи /—} —Й24 —°34 = а« ~~ ’
\ р / \ р I \ р / \ р J р
Установив соответствия:
±£=ьД5,, С, = Я, и
р Р
(2-9)
снова получим матричное уравнение (2-8); это и требовалось дока-
зать. Заметим, что при указанной системе соответствий токи в схеме
рис. 2-2 будут представлять изменение активных мощностей на со-
ответствующих участках исходной схемы рис. 2-1.
Надо иметь в виду, что реактивности схемы рис. 2-1 отнюдь не
равны реактивностям схемы рис. 2-2, которые определяются выра-
жениями коэффициентов ajr afc (2-6).
Казалось бы, в только что указанной системе уравнений можно
сократить множитель и вместо соответствия -А-лДЗу ввести
более простое: «у =Н= Д§;-. Однако это повело бы к нарушению пря-
мого соответствия между токами схемы рис. 2-2 и изменениями ак-
тивных мощностей схемы рис. 2-1.
Очевидно, что схему рис. 2-2 можно заменить схемой с идеаль-
ными трансформаторами, имеющими различные коэффициенты
трансформации и соответствующее включение обмоток (в зависимо-
сти от знака величин Kj}, причем первичные обмотки трансформа-
торов будут включаться на общее входное напряжение (pv).
23
Если в качестве контрольного возмущения в узловой точке А
(рис. 2-1) взять только угловое смещение ДВЛ вектора напряжения
UA при постоянстве модуля UA, то система уравнений малых коле-
баний заметно упрощается и ей будет соответствовать и значительно
более простая электрическая схема замещения рис. 2-3, в которой
и =^= рДВ, а основные параметры будут иметь те же значения, что
и в схеме рис. 2-2. Следует, однако, заметить, что контрольное воз-
мущение данного типа (ДВЛ ф 0; Д[7Л = 0) не позволяет в процессе
эквивалентирования отделить с помощью анализа малых колеба-
ний генераторы системы от двигателей. Поэтому такое возмущение
Рис. 2-4.
без добавочного анализа целесообразно применять только в слу-
чаях, когда группа генераторов и группа двигателей не имеют иных
взаимных связей, кроме как связь через узловую точку А (рис. 2-1).
В этом случае группа генераторов эквивалентируется отдельно от
группы двигателей.
В схемах рис. 2-2 и 2-3 обращает на себя внимание то, казалось
бы, странное обстоятельство, что инерционные параметры пред-
ставлены емкостями, а не индуктивностями (как в обычных элек-
трических схемах), а упругие связи отображаются индуктивностями,
а не емкостями. Однако попытка заменить в схемах рис. 2-2 и 2-3
индуктивности на емкости, и наоборот, не приводит к простому адек-
ватному отображению электромеханической системы рис. 2-1. Это
обнаруживается уже на простейшем примере рис. 2-4, где единст-
венная синхронная машина присоединена к узловой точке А.
Приняв в качестве контрольного возмущения ДЗЛ =# 0; Д(/л = 0,
имеем:
t
— р24-1
—-Р2+1
(2-10)
24
где
UA Е,
^(8!-8а)0-
(2-11)
Х1
В то же время для чисто электрической схемы рис. 2-4
• С1Р
t ~=----——и.
L1C1P2 + 1
Из сопоставления (2-10) и (2-11) ясно видно, что соответствие
ДРХ будет достигнуто только при условиях
С1=Н1;
Вышеизложенный вывод об адекватном соответствии (изомор-
физме) схем рис. 2-1 и 2-3 можно распространить на любое число
узлов возмущения.
Рассмотренные электрические схемы замещения (рис. 2-2 и 2-3)
открывают широкую возможность моделирования процессов малых
колебаний синхронных машин с помощью набора индуктивностей и
емкостей.
2-2. Линеаризация в конечном диапазоне*
Если желательно учитывать специфические особенности исход-
ного установившегося режима и, кроме того, приблизить линеари-
зированные уравнения к более точному соответствию достаточно
широкого диапазона динамических процессов в конечных (а не бес-
конечно малых) пределах, тогда целесообразно пользоваться за-
меной синусоиды функциями с разрывом их производных в отдель-
ных точках, а именно — треугольной или трапецеидальной формы
(рис. 2-5 и 2-6).
Параметры этих фигур можно выбрать различными способами,
в частности — как приближение по методу наименьших квадратов.
Однако представляется достаточным выбрать их из условия, что
охватываемая ломаными линиями площадь равна площади 2sin,
ограниченной синусоидой в пределах 9 = 0 4- я, которая (при вы-
ражении углов в радианах), как легко вычислить, равна 2, т. е.
Соответственно для рис. 2-5 получим:
4-^ = 2, ут = ±, tg^-^^0,81
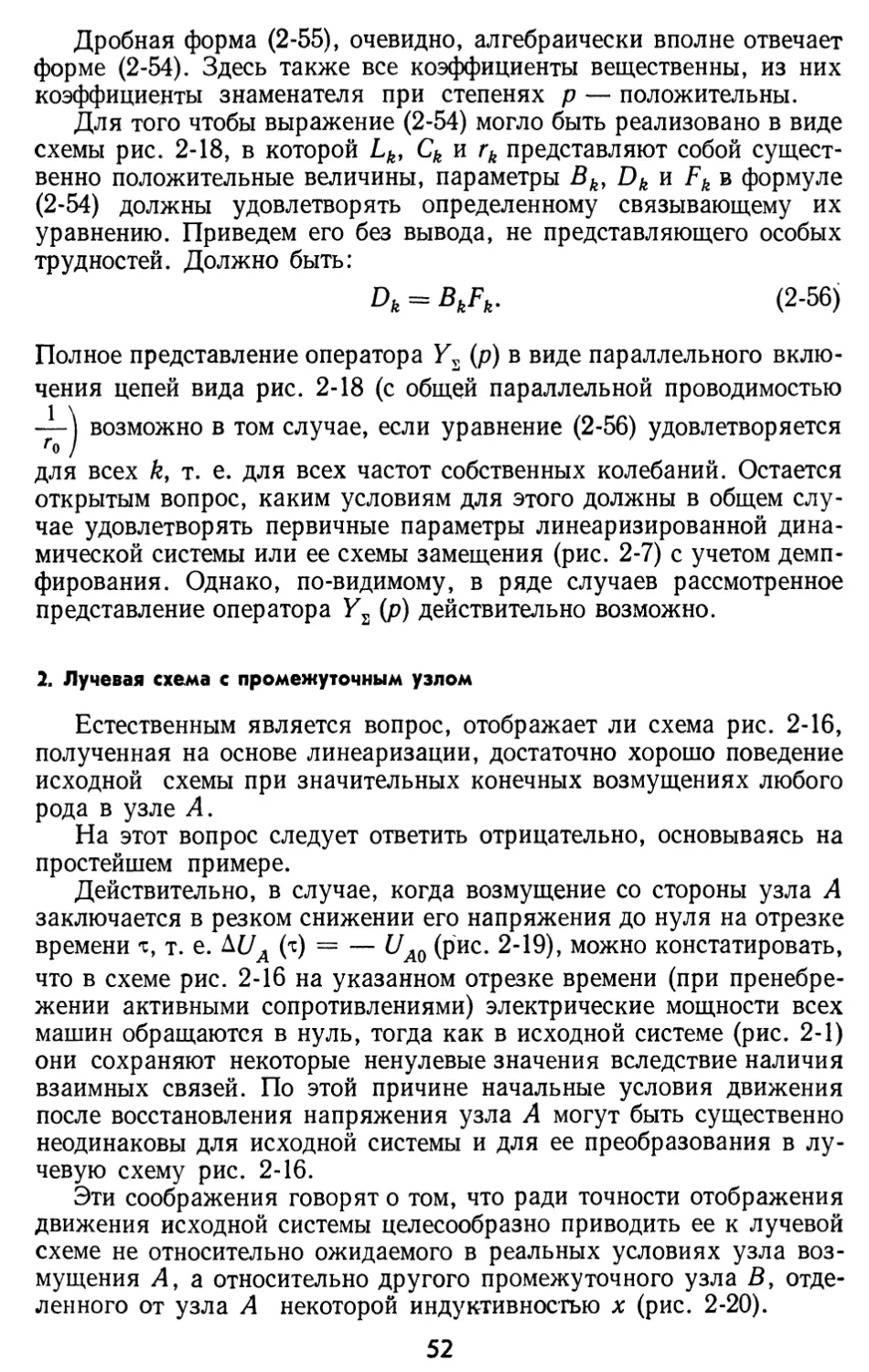
* Сокращенно будем применять термин «ли-неаризация в большом».
25
и для рис. 2-6:
— (2а 4-к) = 2, а ^0,43, tgp =--------!---^0,876.
--z — а
2
Амплитуда основной гармоники для первой фигуры:
1,03
Рис. 2-6.
и для второй фигуры:
4-1
sin
» ж 1,015.
Если для выбора параметров ввести условие, чтобы при «толчке
мощности» от нуля до величины упх>, равной 0,727, которая является
предельной по динамической устойчивости согласно правилу пло-
щадей в применении к нормальной синусоиде, для фигур рис. 2-5
и 2-6 также соблюдалось то же условие устойчивости, то найдем
для .рис. 2-5: ут = 1,24; tg р = 0,79 (причем амплитуда основной
гармоники приблизительно равна 1,005); для рис. 2-6: ут = 1;
а = 0,406; tg р = 0,87.
Как видно, параметры, определенные по этим двум критериям,
не слишком расходятся, и в среднем можно принять для рис. 2-5:
tg р = 0,80 и соответственно ут — 1,25; для рис. 2-6:
tg р = 0,87; а = 0,42 == 24°. 2
Сопоставляя свойства приближений по фигурам рис. 2-5 и 2-6,
видим, что первое завышает статический предел мощности при-
близительно на 25%, второе уменьшает зону устойчивой работы
на 24°, снижая предельный угол с 90° приблизительно до 66°.
Поскольку исходные уравнения не учитывают демпфирования,
можно приближение по рис. 2-5 считать более предпочтительным,
что и принято в дальнейшем. Приняв для этого рисунка tg р = 0,8,
26
получим, что уравнение sin 9 = 0,8 9 удовлетворяется при значе-
нии 9ж 66°^- w — aj . Для 9 = 80° получится разность:
0,89 —sin 9 = 0,13.
Считая допустимым для углов 9 в пределах 0 9 80° заменять
синусоиду прямой линией
= (tg ?) 6 = 0,89,
получим взамен системы уравнений (2-3) следующую линейную ап-
проксимирующую систему уравнений при постоянстве модуля уз-
лового напряжения (применительно к рис. 2-1):
И,Р-г,_М,-»,(81-811)_6|2(8,_82)-
- М8.- у- М8.~ У.
V, = Л11-»,(8!-8Л)-1>12(82-8,)-
«Л = - «, - <>»(«. - 8л) - »,з (8з - 8.) ~
— У (8з 8г) У (8,— 8.) > ,<2 I •> ,
V8. = - м, - Ъ, (8, - 8„) - Ьи (8, - 8,) - (2-‘
- М8<~ У” 634(8< — 8з)
где
&/ = 0,8^Х, (/=1,2, 3,4); 6/t = 0,8^,
xi xjk
(Л =1,2, 3,4 = /) (2-14)
В этих уравнениях зависимость коэффициентов от начального
режима сохраняется только в значениях э. д. с. Elt Е3, Е3, Et и на-
пряжения UA. Очевидно, что и уравнениям (2-12), (2-13) можно со-
поставить чисто электрическую схему, как это изложено в § 2-1,
с тем отличием, что в данном случае (вследствие ограничения
О 9 80°) исключено появление в электрической схеме «отрица-
тельных индуктивностей».
Аппроксимацию, аналогичную рис. 2-5, можно применять также
для грубых численных расчетов методом последовательных интер-
валов динамических процессов с большими размахами углов, вплоть,
до 9 > 90°. Однако при этом надо иметь в виду, что для 0 9 90°
синусоида заменяется уравнением у = 0,8 9, а для 90° 9 270°—
уравнением у = 0,8 (к—9).
В предыдущем предполагалось, что модуль узлового напряже-
ния не меняется и возмущения состоят лишь в изменении его фазо-
вого угла 8Д. При значительных возмущениях типа Д[/А(0, при
Д§А = 0, нельзя пренебрегать произведениями вида Д(/АДЗу,
27
и линеаризация синусов в уравнениях исходной системы уже не при-
водит сама по себе к линейным уравнениям с постоянными коэффи-
циентами. Если будет применена линеаризация «в большом», то
в произвольном режиме ограниченных колебаний уравнение для
любой машины j получит форму:
V8/ = Ч- - //'л (0 (8; - 8л) - Ь, (8; - 8.) - • • • - bJ* (8> - 8*) ’
(2-15)
где
0,8Ez 0,8EzEft 2 d?_
fi = ~х~ ’ bik = xjk ’ Р ~ dt* '
Рассматривая возмущенное движение относительно нормаль-
ного установившегося режима, при котором электрическая мощ-
ность Ру = М], а фазовые углы равны 8у0, 8Л0, и положив
+ г, = г„ + м„ ил « = ию + ьил (/),
получим из (2-15) уравнение возмущенного движения:
W + /дил (/) + /.(/„„ + б;1 +... + б„] -
_ _... _ = -^ил (0. (2-16)
где 0уО = 8у0—Вло; Д1/A(t) — некоторая произвольная (в частно-
сти — случайная) функция времени.
Не трудно преобразовать (2-16) так, что &UA(t) сохранится
только в левой части. Для этого достаточно положить
Д8у = — 0/о сру, Д5Л = — 0уо + <pk.
Тогда будем иметь:
[Hlp’ + flWjm + flUm+ bi+ .. . + 4J
= Л/-В/=Г/, (2-17)
Al = (fPM + l’n + --- + bli)Bla-,
=fey10lo 4- fey202O + ... + ^у^&о-
Таких уравнений будет п (по числу машин в системе). При t = О
будет с?у = 0уО, ~ 0fco, но все производные этих величин равны
нулю. Очевидно, только в единственном случае, когда Д(7л(0 =
= const, в системе уравнений (2-17) все коэффициенты постоянны;
вообще же это линейная система с переменными коэффициентами
fj&UA (/). Если \UA (/) — периодическая функция, то в принципе
система (2-17) может быть, как известно, приведена к системе с по-
стоянными коэффициентами, что, однако, составляет довольно слож-
ную процедуру и едва ли оправдано для целей эквивалентирования.
Оставляя в стороне вопрос об определении вероятностных ха-
рактеристик величин Д8;. или когда Д£/л (/) — случайная функ-
28
ция, заметим, что достаточно простым, с вычислительной точки зре-
ния, является случай, если WA(t) представляет однократное воз-
действие в форме прямоугольного блока, определяемого условиями:
Д[/л(0 = — UA0 для 0 < t < т и Д£7Л(/) = 0 для t < 0 и t > т.
Тогда на отрезке времени 0 < t < т в скобках левой части уравне-
ний (2-17) исчезает сумма \f^UA (/) + fjUAQl, а для t > т отсутст-
вует слагаемое fAUA (/), т. е. оказывается достаточным рассмот-
реть последовательно одна за другой две системы уравнений с по-
стоянными коэффициентами, с учетом начальных условий при t = 0
и t = т.
Указанное возмущение соответствует трехфазному короткому
замыканию длительностью т в контрольном узле А.Трехфазному
короткому замыканию неограниченной длительности, очевидно,
также отвечает система уравнений типа (2-16) с постоянными ко-
эффициентами, но с правыми частями вида f^jQUA0. Она может быть
представлена электрической схемой замещения, подобной показан-
ной на рис. 2-2.
Сравнительно простой случай представляет собой и возмущение
типа &UA(f) (при ДВЛ = 0), воздействующее на приемную систему
в начальном режиме холостого хода по активной мощности, когда
все 0/о равны нулю, и соответственно обращаются в нуль все правые
части уравнений (2-16), хотя левые их части будут содержать пере-
менные коэффициенты. В этом случае линеаризированную динами-
ческую систему можно также представить электрической схемой
замещения, подобной схеме на рис. 2-3, однако с тем отличием, что
все Lj должны быть представлены переменными индуктивностями
(/) по соответствию:
(Кроме того, на рис. 2-3 следует положить и = 0.) Между узловыми
напряжениями Uj и вариациями углов ДВ;- будет существовать
интегральное соответствие:
t
Д8у = j* Ujdt.
Если Д{7Л (/) — случайная функция, то электрическая схема за-
мещения получится как бы с «шумящими элементами», т. е. изме-
няющимися как случайные функции времени.
К сожалению, осуществление электрических схем замещения
для уравнений с переменными коэффициентами, периодическими
или непериодическими, не является достаточно простой лаборатор-
ной задачей. Поэтому применение таких схем для целей эквивален-
тирования едва ли перспективно, оставаясь в принципе возможным.
29
2-3. Учет демпфирования
В предыдущем демпфирование качаний синхронных машин пред-
полагалось исключенным. Теперь рассмотрим линеаризированные
уравнения и соответствующую электрическую схему замещения
с учетом демпфирования. Последнее проявляется, во-первых, по
причине относительного движения машин, обусловливающего воз-
никновение моментов скольжения, и, во-вторых, вследствие изме-
нения моментов вращения первичных двигателей при изменении
скорости их вращения.
Сначала рассмотрим демпфирование первого рода. Возьмем одну
из синхронных машин системы, обозначив ее номером 1, а прочие
машины — номерами 2, 3, ... В качестве основного положения
(которое оставляем без доказательства) примем, что демпферный
момент исследуемой машины (№ 1) должен зависеть от скорости ее
движения по отношению к эквивалентной э. д. с. (Ё1э) «подсистемы»,
образованной всеми прочими машинами (№ 2, 3, . . .) и напряже-
нием UА данного контрольного узла (Л). Эта эквивалентная э. д. с.
по общему правилу выражается соотношением:
р-р Л - угил е>'‘А + г/12£2е?Ьа + • • • + У1ПЕп^п
с1э — с1эе — =7
А = У1 + Уг + • • • + У1п> = >
Л1 Л1
1 1
У1 = — > У tk = —
*1 xlk
(хх, х12, . . . , х1п — взаимные индуктивности на рис. 2-1).
Отсюда
cos Зэ = ^UA cos 8Д + Д llkEk cos 3* = Gi,
£1Э sin 8э = \UA sin 8Д + Д \kEk sin = G2,
tg 8Э = -^ — сложная функция углов,
Е1э = Of + Gi.
(2-18)
Демпферный момент Md в общем случае, очевидно, также яв-
ляется сложной нелинейной функцией относительно разности
д8 ).
dt dt 1 э'
30
В линеаризированной системе можно принять:
ДМ1а = ^1р(Д81-Д8э),
причем коэффициент демпферного момента gx будет близко пропор-
ционален величине
г2 *
£1э
^13
где х1э = 4-, так что & = и
/1
ДМ1(/ = Р1Е2эД1р(Д81-Д8э). (2-19)
Коэффициент Dx примем за постоянную величину, хотя, строго
говоря, он в свою очередь зависит от относительной скорости
Р А-М-
Ввиду крайней сложности указанных выше функциональных
зависимостей £1э и 8Э от основных э. д. с. и углов, будем ради мак-
симального упрощения исходить из метода «линеаризации в конеч-
ном диапазоне» (см. § 2-2), полагая, что все углы не выходят (при
надлежащем выборе оси отсчета) за пределы 0-^75°, и принимая
для любого угла 8 в этих пределах sin 8 = 0,8 8, а для cos 8— по-
стоянное среднеквадратичное значение 0,75. Тогда согласно (2-18)
будет:
п
= + (2-20)
И
+ (2-21)
с1э й1э k=2
Соответственно для вариаций эквивалентного угла и демпферного
момента, учитывая выражения коэффициентов |х, через прово-
димости связей рис. 2-1, получим:
д§1э = ^£|^ + ^
ЛГ1э k=2
{п
»,мд8.-48л)+2/а(д8.--48*
(2-22)
Полное отклонение электрической мощности ДРХ в относитель-
ных единицах равно сумме отклонений синхронизирующей ДР5Х
и демпфирующей ДРЛ мощностей:
п
ер, = 6, (Двх-Мд) + 2 М“. - Ч) + % (Д8.-Ч.) +
* Это вытекает из аналогии с работой генератора на шины бесконечной
мощности через некоторую линию передачи.
31
п
Л8,-ДЗЛ) +
п
+ §(''„. +7^) <2'И)
где
1 _ Р1£1Э^А 1 _ DlE13Ek
Rj *1 Rik xik
Отсюда уравнения малых движений данной машины (№ 1) и по ана-
логии — прочих машин системы будут:
(/ = 1, 2,..., n; k = 1, 2,..., п =/= j),
1 _DiEi3UA . 1
Rj xj R jk xjk
Этой системе уравнений можно сопоставить чисто электрическую
схему замещения вида рис. 2-7 (для случая п = 3), где операторные
проводимости yv у2, у3, #12, #1з, #23 представляют собой параллель-
ные соединения некоторых индуктивных и активных проводимостей;
1 । 1 1,1- 1,1
например: #i = ------1---, #2 = -----1---, у12 = -----1---и т. д.
LiP L2p r2 L12p 7*12
При этом должно иметь место следующее соответствие парамет-
ров и переменных указанной схемы параметрам и переменным си-
стемы уравнений (2-24).
= ДР,
р 1 р 1
8'‘=Г’
L/ Ljk
В/ v Г/, Rjk “ f'jk •
(2-25)
Из параметров системы уравнений (2-24) только определение
величин D] (в выражениях RJk) представляет известную трудность.
Однако для'целей эквивалентирования представляется допустимым
эти величины (Dy) определять для каждой машины (или станции)
в предположении прямой связи ее с узлов А через индуктивность
X/ и считая при этом, что демпферный момент определяется на ча-
стоте собственных колебаний машины, когда узел А принимается
за шины бесконечной мощности [Л. 20].
32
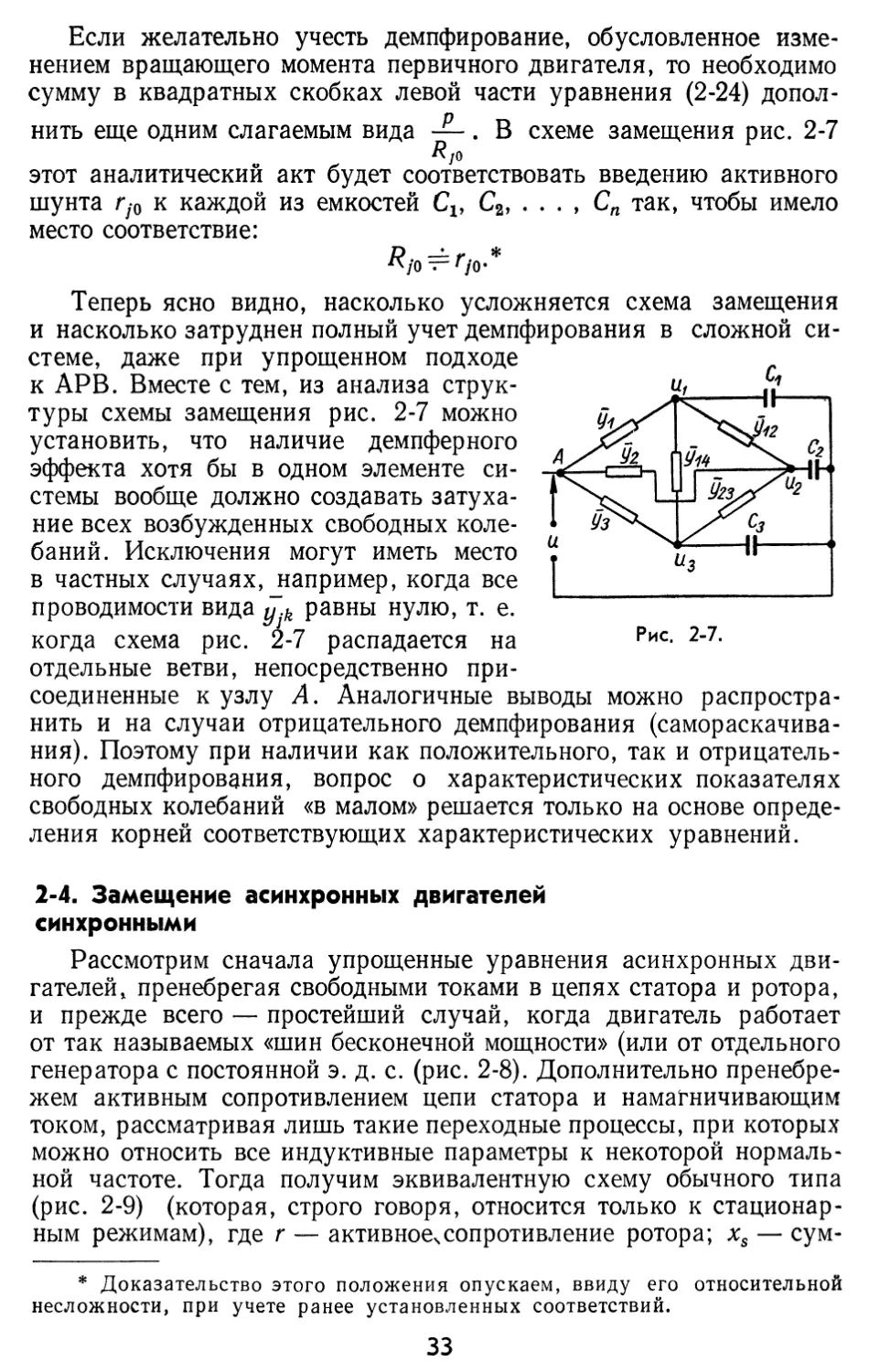
Если желательно учесть демпфирование, обусловленное изме-
нением вращающего момента первичного двигателя, то необходимо
сумму в квадратных скобках левой части уравнения (2-24) допол-
нить еще одним слагаемым вида . В схеме замещения рис. 2-7
этот аналитический акт будет соответствовать введению активного
шунта гуо к каждой из емкостей С19 С2, . . . , Сп так, чтобы имело
место соответствие:
#/о = Г/о.*
Теперь ясно видно, насколько усложняется схема замещения
и насколько затруднен полный учет демпфирования в сложной си-
стеме, даже при упрощенном подходе
к АРВ. Вместе с тем, из анализа струк-
туры схемы замещения рис. 2-7 можно
установить, что наличие демпферного
эффекта хотя бы в одном элементе си-
стемы вообще должно создавать затуха-
ние всех возбужденных свободных коле-
баний. Исключения могут иметь место
в частных случаях, например, когда все
проводимости вида y.k равны нулю, т. е.
когда схема рис. 2-7 распадается на
Рис. 2-7.
отдельные ветви, непосредственно при-
соединенные к узлу А. Аналогичные выводы можно распростра-
нить и на случаи отрицательного демпфирования (самораскачива-
ния). Поэтому при наличии как положительного, так и отрицатель-
ного демпфирования, вопрос о характеристических показателях
свободных колебаний «в малом» решается только на основе опреде-
ления корней соответствующих характеристических уравнений.
2-4. Замещение асинхронных двигателей
синхронными
Рассмотрим сначала упрощенные уравнения асинхронных дви-
гателей, пренебрегая свободными токами в цепях статора и ротора,
и прежде всего — простейший случай, когда двигатель работает
от так называемых «шин бесконечной мощности» (или от отдельного
генератора с постоянной э. д. с. (рис. 2-8). Дополнительно пренебре-
жем активным сопротивлением цепи статора и намагничивающим
током, рассматривая лишь такие переходные процессы, при которых
можно относить все индуктивные параметры к некоторой нормаль-
ной частоте. Тогда получим эквивалентную схему обычного типа
(рис. 2-9) (которая, строго говоря, относится только к стационар-
ным режимам), где г — активное^сопротивление ротора; xs — сум-
* Доказательство этого положения опускаем, ввиду его относительной
несложности, при учете ранее установленных соответствий.
33
марное (приведенное к цепи статора) реактивное сопротивление его
обмоток; s — скольжение, отнесенное к потоку, определяемому
напряжением UB в точке В схемы.* Этой схеме соответствует век-
торная диаграмма рис. 2-10, на которой / — ток в цепи статора
двигателя;
9S — переменный угол скольжения ротора, связанный со скольже-
нием s уравнением:
dt
(О — (О
В R
(№в — (Од)
(2-27)
“в = ™В>
где <»в и — абсолютные скорости векторов [)в и (/^ на рис. 2-10.
При указанных выше условиях и пре-
небрежении активными потерями электро-
магнитная мощность, подведенная к дви-
гателю и передаваемая ротору, очевидно
будет:
P=-^s sin 9. (2-28)
X
Полагая все величины выраженными
n п в относительных единицах, можно считать
Рис. 2-10. v
и электромагнитный момент двигателя рав-
ным Ра.
Так как согласно диаграмме рис. 2-10
UB = (/дсоз9,
то из (2-28) получим:
£72 1 L72
Ма = Ра = — sin & cos 9 =--------- sin 29. (2-29)
х 2 х
* Скольжение s, строго говоря, следовало бы относить к напряжению
точки С схемы рис 2-9, здесь допущено упрощение.
34
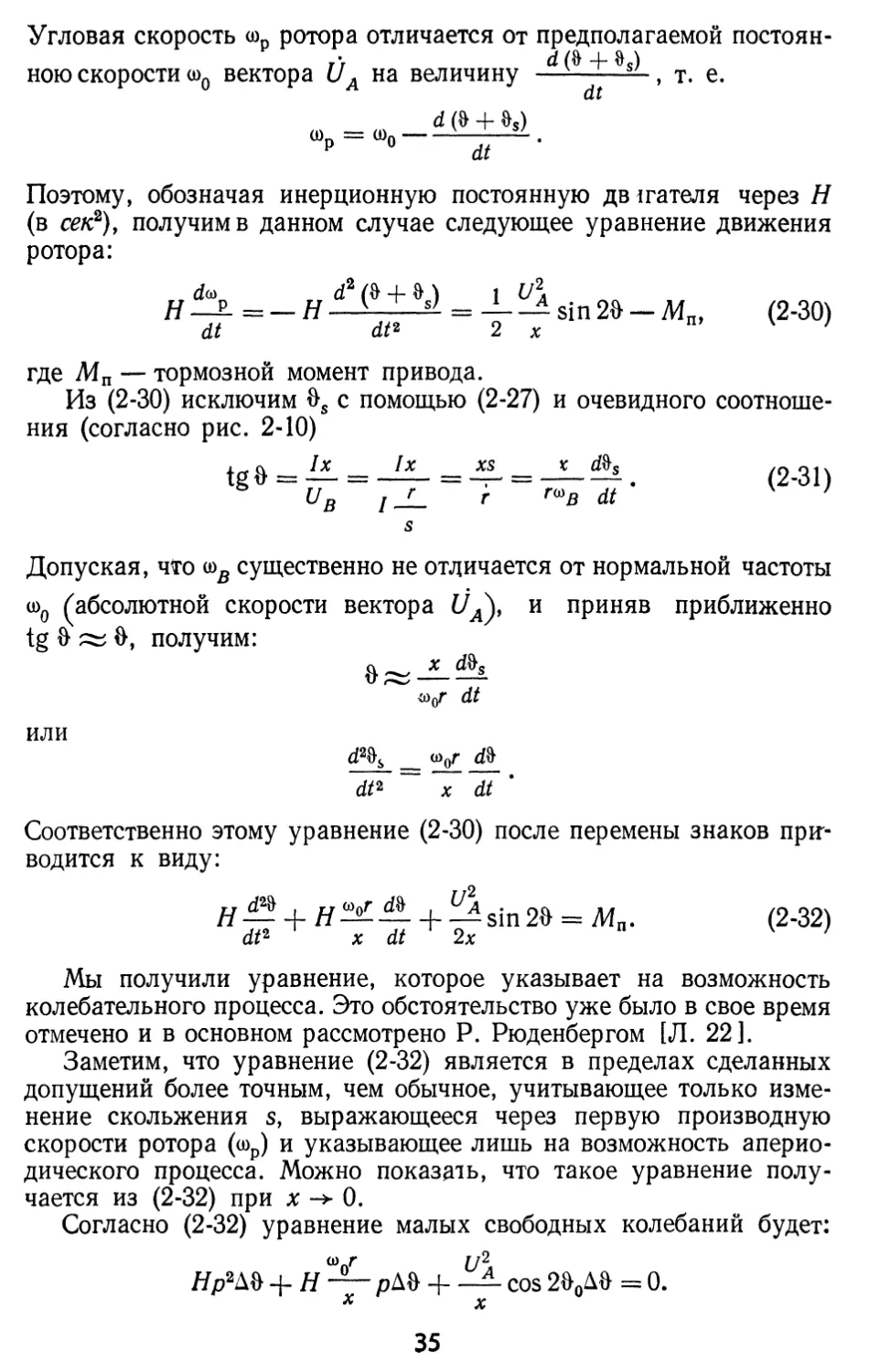
Угловая скорость <пр ротора отличается от предполагаемой постоян-
ною скорости ф0 вектора иА на величину —, т. е.
d (& + &s)
~ 0)0 dt '
Поэтому, обозначая инерционную постоянную дв1гателя через Н
(в сек2), получим в данном случае следующее уравнение движения
ротора:
d<o d2($ + $) i lA
Н-^-= — Н \.Л.4 = 2—-sin20' —Мп, (2-30)
dt dt* 2 х п, \ )
где Мп — тормозной момент привода.
Из (2-30) исключим ds с помощью (2-27) и очевидного соотноше-
ния (согласно рис. 2-10)
lx lx XS X d$s ZOQIX
tg& = —= —-=T==—(2-31)
s
Допуская, что существенно не отличается от нормальной частоты
ш0 (абсолютной скорости вектора С/л), и приняв приближенно
tg & О, получим:
"Wq/* dt
или
d2&s ______________________o>0r d$
~~dt ‘
Соответственно этому уравнение (2-30) после перемены знаков при-
водится к виду:
т г 2
+ + —sin2f) = Mn. (2-32)
dt* х dt 2x
Мы получили уравнение, которое указывает на возможность
колебательного процесса. Это обстоятельство уже было в свое время
отмечено и в основном рассмотрено Р. Рюденбергом [Л. 22].
Заметим, что уравнение (2-32) является в пределах сделанных
допущений более точным, чем обычное, учитывающее только изме-
нение скольжения s, выражающееся через первую производную
скорости ротора (шр) и указывающее лишь на возможность аперио-
дического процесса. Можно показать, что такое уравнение полу-
чается из (2-32) при х -> 0.
Согласно (2-32) уравнение малых свободных колебаний будет:
+ Н—р^ + — cos 2&0Д& = 0.
х X
35
Этому отвечает характеристическое уравнение:
X п
(2-33)
ГД£
а = — cos 2&0.
х
Отсюда
При д2 > — будет иметь место апериодический процесс; при
?2
асинхронный двигатель будет совершать
затухающие
колебания с частотой
Наибольшая частота соответствует cos 2% = 1, т. е. &0 = О,
следовательно — холостому ходу.
По подсчетам Р. Рюденберга постоянная времени затухания ко-
лебаний двигателя средней мощности (с номинальным относитель-
ным скольжением s^l%, относительной реактивностью в 25%
и инерционной постоянной в 1 сек, по обычной мере) равна 0,16 сек,
а собственная частота v 5,55 гц. Это значительно выше частоты
колебаний мощных синхронных машин в энергосистемах. Данные
Р. Рюденберга мы положим в основу некоторых заключений в даль-
нейшем.
Введение асинхронных двигателей в общую систему линеаризи-
рованных уравнений, указанных в § 2-1 и 2-2, представляет значи-
тельные трудности как вследствие их многочисленности, так и в
силу особенностей наблюдающихся в них физических процессов,
обусловленных в основном отсутствием собственных автономных
э. д. с. В этом мы убедимся на следующих примерах, соответствую-
щих схемам рис. 2-11 и 2-13, где электрические связи представлены
взаимными реактивностями, включающими в себе и реактивности
машин (генераторов и двигателей). На этих рисунках узел Л соответ-
ствует шинам бесконечной мощности, узлы М и N отвечают внутрен-
ним точкам эквивалентных схем асинхронных двигателей, подобным
точке В на рис. 2-9, и узлы D и F на рис. 2-11 —воображае-
мым точкам приложения э. д. с. ED и Е? двух синхронных генера-
торов. Индуктивные проводимости взаимных связей ниже обозна-
чены соответственно концевым узлам: yAD, yAF, yDM, уАМ, . . . и т. д.
36
Для рис. 2-11 эквивалентная э. д. с. относительно узла М выра-
жается, очевидно, формулой:
р — Улм^л &р
Мэ Уам + у DM + уРМ
Обозначив фазовые углы величин UA, Ёо и ЁР относительно неко-
торой синхронно вращающейся
оси соответственно через 8Л, 3D
и о?., получим:
Ё — Е е^э — Е U I Е Е e*D -k Е F e*F —
ВМэ — ^Мэ ~ ^AMU А ^DM^De ^FAf CFC ""
“ (^АмР A C0S °А “Ь ^DM^D C0S + ^РМ^Р C0S ^f)
“Ь 1 (^AM^ASin6A “Ь ^DM^DSm6D + ^PM^P S^n ®f) = ^ + /Qr
где
> __ Уам fc __ Уйм t __ У pm
W- ’ ^M- ,
% ~ Уам + У dm + Урм ’
откуда
£k = №+Q1 2, tg89=-^-. (2-34)
Соответственно изложенному можно построить диаграмму
(рис. 2-12), аналогичную рис. 2-10, однако с учетом того, что как
ЁМэ, так и Зэ теперь в процессах колебаний суть переменные вели-
чины; при этом
= tg& = —,
s’ ь 4/sr
1 dbs
S ------------- .
co0 dt
(2-35)
37
Допустив, что tg & ~ &, взамен (2-35) имеем:
Vsr dt '
а 1 d^s (2‘36)
dt ш^г dt2
Квазимгновенное значение электромагнитной мощности двигателя
(или, полагая, что скорость вращения потока несущественно укло-
няется от синхронной,— электромагнитного момента) аналогично
(2-29) будет:
М.~~уА,Лп20.
Ускорение ротора следует отнести к суммарному углу
82 = Зэ + & + &,.
В результате получаем:
d2b . db , d2b3 , 1 Р2 M„
dt2 + Ш°^Г dt dt2 2HM Мз~ HM '
Если положить 8э + & = ^Д1, то это выражение приводится к виду:
<2-37>
где
= Е,.и cos Р,, — 8?).
Уравнение (2-37) следует присоединить к уравнениям синхрон-
ных машин, входящих в систему рис. 2-11, которые будут подобны
(2-3), но в каждое из которых теперь неизбежно будет входить в ка-
честве множителя в одном из слагаемых переменная величина UM,
выражаемая через величины ЕМз и 8Э, определяемые формулами
(2-34), в сложной зависимости от переменных угловых координат
и V
Поэтому даже линеаризированные уравнения малых колебаний
системы рис. 2-11 получаются достаточно сложными. Еще большие
осложнения уравнения обнаруживаются для системы рис. 2-13.
Для определения напряжений в узлах М и N (рис. 2-13) при
заданных комплексных значениях UA и Ео приходится решать сов-
местно два уравнения:
Л — а + ^мо + *mnUn / _ 1 \
1+и Vм (2.38)
7Z — А + ^МОЕа + м / _ 1 \
1 + 7^2 \TyV .
38
где rx, г2 и si> s2 — соответственно активные сопротивления и «мгно-
венные» скольжения роторов двигателей; у^м = уАМ + ума + yMN;
Ум = У AN + у NG + у MN’ ^АМ’ • • • и т- коэффициенты, опре-
деляемые подобно аналогичным коэффициентам для схемы рис. 2-11.
Решение уравнений (2-38) относительно l)M и U N дает:
j, _ С1 + TNsi) + ^mn^n
им~ д
(2-39)
гт 0 + Lwsi) An + ^nm^m
un~ д
“ "Ь ^MO^G* ^AN^A + ^NG^G*
A — (1 + 7a(si) (1 + 7ns2) ^mn^nm •
Полученные выражения (2-39) непосредственно не позволяют
для каждого двигателя независимо от другого найти эквивалент-
ную э. д. с. и повторить рассуждения, при-
мененные к системе рис. 2-11. Этого можно до- м дАу
стигнуть только с каким-то приближением, пола- eg
гая в формулах для [)м и [)N соответственно j ? (~У
yNs2 lMsi О’ т- e* исключив влияние пере- •
ходных режимов одного двигателя на другой. jv
В режимах, близких к холостому ходу (sx о ------
и s2^0) эго вообще вполне допустимо. Однако 13
в ряде реальных практических случаев такой ис‘ ‘ ‘
прием может оказаться неприемлемым. Прием-
лемость его должна быть оценена в каждом отдельном случае кон-
кретным расчетом проводимости связи yMN и отношением ее к дру-
гим проводимостям схемы рис. 2-13.
Трудности анализа, проявившиеся в приведенных простых слу-
чаях, станут, естественно, еще большими при увеличении числа
узлов, питающих моторную нагрузку, а таких узлов в любой ре-
альной энергосистеме, конечно, гораздо больше, чем узлов генера-
торных. Это создает значительные трудности в построении линеари-
зированных уравнений, которые могли бы быть с успехом исполь-
зованы в процедуре эквивалентирования. Поэтому представляется
целесообразным пойти предварительно на априорное упрощение,
а именно — на замену любой асинхронной нагрузки синхронными
двигателями с возбуждением постоянным током, как это уже не-
однократно допускалось в анализе динамики энергосистем.*
Следует признать, что если такая замена служит для получе-
ния окончательных представлений о процессах в энергосистемах,
* Нелишне отметить, что при г -> 0 выражение электромагнитной мощ-
ности в (2-29) становится подобным выражению ее для явнополюсного синх-
ронного реактивного двигателя.
39
то есть основания сомневаться в достаточной точности получаемых
результатов. Однако в данном случае замена асинхронных двигате-
лей на синхронные будет являться лишь промежуточным этапом
эквивалентирования, поскольку в конечном эквиваленте синхрон-
ные нагрузочные элементы будут выделены в особый частный экви-
валент, который снова подлежит превращению в асинхронную ма-
шину. Можно надеяться, что ошибка, допускаемая на первом этапе
заменой асинхронных двигателей на синхронные, будет в значи-
тельной степени скомпенсирована обратной операцией — заменой
полученного эквивалентного синхронного двигателя на асинхрон-
ный. Отсюда возникает задача об установлении оптимальных усло-
вий соответствия между синхронными и асинхронными двигателями.
В предыдущем в основу линеаризированных уравнений поло-
жено допущение, что крупные синхронные машины представлены
своими постоянными э. д. с. за некоторыми реактивностями, и со-
ответственно именно последние вводятся в уравнения. Это сделано
для того, чтобы динамические переходные процессы в системах от-
ражались простейшими уравнениями наиболее точно, и это оправ-
дывается как большими значенияд и постоянных времени роторных
цепей (7\/о), так и наличием в системах автоматического регулиро-
вания возбуждения, эффект которого примерно соответствует усло-
вию Ed = const. Однако эти условия не могут быть распространены
на синхронные двигатели, предназначенные в процессе эквивален-
тирования заменять собою большое число мелких асинхронных
двигателей, отличающихся весьма малыми постоянными времени
протекающих в их роторах электромагнитных процессов при тех
или иных переходных режимах и качаниях. Эти постоянные времени
порядка 0,05—0,1 сек, вследствие чего асинхронные двигатели в
процессах короткого замыкания, как известно, могут оказывать
заметное влияние только на так называемый «сверхпереходный
режим» и на ударные токи.
К процессам же качаний энергосистем с полным основанием
можно применять выражения» моментов и мощностей асинхронных
двигателей, соответствующие стационарным режимам, с учетом из-
менения скольжения, как это и нашло отражения в уравнениях
(2-32). Отсюда следует, что и синхронные двигатели, заменяющие
в процессе эквивалентирования асинхронные машины, должны
в общих уравнениях системы представляться выражениями момен-
тов и мощностей, отвечающими стационарным режимам, что равно-
сильно пренебрежению ответной реакцией обмоток ротора в процес-
сах качаний, иными словами — равносильно допущению очень ма-
лых постоянных времени роторных цепей.
На основании изложенного следует выбирать заменяющий син-
хронный двигатель из условий, что его статический предел мощно-
сти и частота малых колебаний — в одинаковом по мощности и при-
ложенному напряжению режиме — равны соответствующим ана-
логичным величинам для заменяемого асинхронного двигателя.
40
Что касается коэффициента затухания колебаний, то для целей
эквивалентирования на первой и второй стадиях мы исключим его
из рассмотрения, так как внесение элементов с затухающими коле-
баниями даже в линеаризированные уравнения чрезвычайно ослож-
няет анализ системы. Таким образом от асинхронного двигателя
с затуханием мы временно переходим к синхронному идеализиро-
ванному двигателю без затухания.
Обратившись к простейшему случаю рис. 2-8 и предположив
для простоты, что синхронный двигатель имеет круглый ротор с сим-
метричной (например продольно-поперечной) обмоткой возбужде-
ния, найдем, что его предельная мощность будет:
р и*Е‘
г тс . >
+ Хс
где хс и Ес — синхронная реактивность и э. д. с. двигателя.
В то же время для асинхронного двигателя согласно (2-29)
р - 1 -
та 2 x„ + xs '
В соответствии с первым из указанных условий замены получим
уравнение: ^Л*с 1 "л
Хл + А'с 2 Хл + xs
или Ес 1
Хл + ХС 2 Хл + Xs
Положив Ес = ^А ХС = К’
перепишем последнее уравнение в виде
2а (хл + xs) = хл + ₽xs. (2-40)
Требования тождества исходного установившегося режима опре-
делим как требование равенства активных мощностей и коэффици-
ентов мощности при одном и том же питающем напряжении (UA)>
т. е. Рс = Ря и cos <рс = cos <ра (или <рс = <ра).
Если в стационарном режиме принять:
для асинхронного двигателя
и для синхронного двигателя
^Л> £с = »с,
41
то из условия равенства активных мощностей получим:
UaEc sin 0с = -----sin 2&а.
Хл + хс 2 ХЛ + xs
или в другом виде, учтя (2-40):
sin&c = sin2&a. (2-41)
Угловой сдвиг LUa, /а для асинхронного двигателя (при пренебре-
жении намагничивающим током) будет:
<ра^йа.
Аналогичный угловой сдвиг <рс для синхронного двигателя не-
трудно определить с помощью выражения тока:
/ __ L/a(1—«cosac + «jsin»e)
j (хд + хс) / (хд + хс)
Отсюда найдем, с учетом требования <рс = <ра:
tg?c = = tg<Pa = tg»a. (2-42)
a sin vc
При заданном значении из уравнений (2-40), (2-41) и (2-42)
однозначно определяются величины &с, аир. Действительно, сог-
ласно (2-41) в пределах до 90°:
&с = 2&а. (2-43)
Соответственно (2-42) преобразуется к виду:
sin&a _ 1 — а (1 — 2 sina &а)
COS&a 2а sin &а cos Э-а ’
откуда и получим:
а=1, Ес = иА. (2-44)
Из (2-40) находим теперь:
p = 2+-^L. (2-45)
Заметим, что, если в xs включить не только собственную реактив-
ность асинхронного двигателя, но также и реактивность линий и
трансформаторов до ближайшей узловой точки питания в мощной
сети более высокого класса напряжения, то коэффициент р як 2.
Остается сопоставить частоты собственных колебаний; при этом,
поскольку влияние демпфирования будет исключено, следует срав-
нивать идеальные частоты колебаний, которые для асинхронного
и синхронного двигателей равны соответствнено:
У “а У Че
42
где
(2-46)
а —-------d_ cos 2&а; ас = - —U~ cos &с,
ХЛ + XS ХЛ + ХС
Нг, Нс — инерционные постоянные.
Следует принять
т. е.
ас _____________________________ &
нс-^
Согласно (2-43) cos $с = cos 2&а и согласно (2-44) ECUА = U2A; по-
этому условие (2-46) приводится к виду:
Я с ('“л ^с) = На (хл xs)
или, так как по (2-40)
хс = (2 + xs = 2xs + хл,
имеем:
нс (2хл + 2х£) == Яа (хл + xs),
т. е.
Яс = 4-Яа- <2'47)
Таким образом, эквивалентный синхронный двигатель должен
иметь вдвое меньшую инерционную постоянную (совместно с при-
водной машиной или станком) по сравнению с замещаемым асин-
хронным агрегатом. Этот вывод является как бы «абсолютным» (не-
зависимо от хл).
Остается ввести еще одно условие. В сложных системах, даже
если пренебречь взаимовлиянием групп асинхронных двигателей,
для эквивалентного синхронного двигателя следует принять Ес =
= Еэ, причем Еэ в процессе качаний будет переменной величиной
[см. формулу (2-34)]. Имея в виду только линеаризацию «в малом»,
можно ограничиться для каждой группы асинхронных двигателей
определением эквивалентной э. д. с. лишь в исходном установив-
шемся режиме, что не представит особых затруднений. Эти эквива-
лентные э. д. с. затем, в силу условия (2-44), и придется принять
в качестве э. д. с. замещающих синхронных двигателей.
Что касается синхронной реактивности замещающих синхрон-
ных двигателей, то и в сложной системе она не зависит от качаний,
и, например, для замещающих двигателей рис. 2-13 в узлах М и
N будет в соответствии с (2-45) выражаться формулами:
хсЛ1 = 2хш + -J7— > xcN = 2^Л' + ~7777 ’ <2’48)
43
где xsM и xs/v — собственные суммарные (приведенные к обмоткам
статора) реактивные сопротивления рассеяния за-
мещаемых асинхронных двигателей;
у1М и Ум — суммарные проводимости ветвей, примыкающих
к узлам М и N рис. 2-13, определенные с учетом
указанных реактивностей асинхронных двигателей.
После замены последних синхронными двигателями проводимо-
сти всех ветвей схемы рис. 2-13 (как и в общем случае) получат но-
вые значения уАМ, yAN, уАа, .... которые должны быть определены
по общим правилам с заменой в исходной схеме системы реактив-
ностей xsM, xsN на реактивности хсЛ|, xcN.
2-5. Применение второй теоремы разложения Хевисойда
к преобразованию электрических систем
1. Основной анализ
В тех случаях, когда рассматривается реакция на возмущение
электромеханической системы со стороны одного узла, линеаризи-
рованные уравнения самой системы и уравнения соответствующей
„ ей индуктивно-емкостной электрической
.ууСч /* схемы замещения допускают применение
/ второй теоремы разложения [Л. 23].
II—При известных условиях оказывается,
—IpZi—'X что реакция системы на узловое возмуще-
* \ ние РаспаДается на составные колебания
и с-"-*-' 1 разНЫх частот, каждому из которых может
[быть сопоставлена простая цепь из после-
довательно включенных индуктивности и
-------------------- емкости. Так, например, пренебрегая демп-
Рис. 2-14. ферными моментами, обращаясь к схеме
рис. 2-3 и предполагая, что она соответ-
ствует группе четырех генераторов (или станций простой струк-
туры), можно в ряде случаев реакцию системы на возмущение со
стороны узла А совершенно точно представить по второй теореме
разложения как сумму реакций на то же самое возмущение со
стороны четырех элементарных цепей С^\ j= 1—4), присо-
единенных к узлу А, причем индуктивности L/# и емкости С,*
оказываются однозначно определенными.
Общее количество необходимых и достаточных параметров
сильно сокращается по сравнению с исходной схемой; например,
для схемы рис. 2-3 вместо 14 параметров в результативной лучевой
схеме (рис. 2-14) получим всего лишь 8. Таким образом, преобразо-
вание по теореме разложения является в то же время эквивалентиро-
ванием, поскольку происходит сокращение числа необходимых для
определения реакции системы параметров: оно является точным
в такой степени, в какой линеаризированная система способна ото-
44
бразить свойства заданной исходной нелинейной динамической си-
стемы.
Распространяя схему рис. 2-3 на любое число п машин, не трудно
показать, что уравнения, отнесенные к входным токам /2, . . . ,
in, протекающим по ветвям Lv L%, . . . , Ln, будут в матричной
форме иметь вид
Bi = ара,
где
/(₽' + ?!). -<.........-еьл
8= -а (Р“ + ©................-й. , « =
.......о! + иу
(2-49)
V- — = -i- S? =-Ll a=-L.
Сi Ljj Lj C]LjLjk 1 Lj
e=i
Суммарный (входной в схему) ток is представится оператором:
( П \
а = 5а/) ’ (2'50)
где М (р) и N (р) — четные * полиномы от р вида
2л . 1 2л—2 . । г 2 (л—1) . <’ 2 (л—2) . . i'
р +btp + ... +ьп и р + 01Р '+...+ &п_(.
Уравнение М (р) = 0 определяет частоты свободных колебаний
в заданной схеме, а уравнейие N (р) = 0 — для случая, когда узел
А не имеет никаких прямых связей с обратным проводом, т. е. когда
между этим проводом и узлом бесконечно большое сопротивление.
Поскольку в индуктивно-емкостной схеме (рис. 2-3) не может
быть ни убывающих, ни возрастающих свободных колебаний или
апериодических процессов,— все коэффициенты полиномов М (р)
и N (р)-должны быть положительны и сами полиномы должны до-
пускать разложение на множители по собственным частотам vj,
v2.....\ и Тр Т2......Тл_р т. е.:
М (р) = (р2 + v2) (р2 + v2) . . . (р2 + V2),
N (р) = (р2 + Т?) (р2 + т|) • • • (р2 + T2_i)
Если все частоты v;. различны, то рациональная дробь
разлагается на простейшие вида
Ф
р2 + >2
М(р)
, т. е. будем иметь тож-
дество:
* При отсутствии активных сопротивлений.
45
N(p) .... dj
W) P2+^
;=i 7
где все d7- — вещественные числа.
Соответственно
adjp
Р2 +
и.
В то же время для схемы рис. 2-14 имеем:
обеспечим тоджественное преобразование исходной схемы рис. 2-3
в схему рис. 2-14, состоящую из разделенных ветвей.
Несложными рассуждениями можно показать, что для положи-
тельности всех dy необходимо и достаточно, чтобы на числовой оси
частоты у2, . . . , располагались по одной в промежутках
между частотами v2, . . . , vn, считая, что те и другие пронуме-
рованы в порядке возрастания, т. е. чтобы при любом k было:
у/г v£+r (2-52)
Вопрос о’ том, каким аналитическим условиям должны удовлет’
ворять параметры исходной схемы рис. 2-3 (Llt L2, . . . , Ln\ L12, . . •
Ljk\ Cv C2, . . . , Cn)f чтобы соблюдались условия (2-52), в общем
случае остается открытым вследствие алгебраической сложности
вопроса. Достаточно сказать, что определение корней уравнения
Л4 (р) = 0 через радикалы в символах его коэффициентов при
п > 4, по известной теореме Абеля, вообще невозможно, а при
п > 2 — для указанной цели — не эффективно. Для п = 2 условие
(2-52) удовлетворяется при любых (существенно положительных)
значениях параметров исходной схемы, которая в этом простейшем
случае имеет вид рис. 2-15. Ему соответствуют уравнения;
(ра + ₽1)«1 — ^У2 = а1Ри’
— ?21 + (Р2 + ₽2)‘2 = а2Р«-
46
При этом
02 ^12 + ^1 02 = ^2
1 C1L1L12 12 C1L1L13
02___ ^12 + ^2 . Q2 ___
‘2 Г Т I ’ °21 г г г
U 2-Ь 2-^12 ^2^2^12
Суммарный ток i2 выражается формулой:
2 М (р)
где
/ 1 । 1 \( 1 । 1
(2-53)
М(р) = р‘ + 2?тУ + Д,
а=v да+А=ж - м,=44 > °-
4 х х L^L, 2Ь12^ 1V2
В данном случае разложение is на простейшие дроби имеет два
слагаемых. Поскольку частоты vx и v2 легко определяются из уравне-
ния М (р) = 0 и квадраты их соответственно равны ($2т — — Д)
«(а+1/и,-4 условие (2-52) приводит к требованию:
а - Уа-д а+/а-д.
т. е.
или, наконец:
тКт!-2&)<-А-
Учтя (2-53), найдем:
„ L?C. + L2C2
у2 — 282 =____1...4_.2 2
“ <т (£x+L2) L^CiC, ’
и требование (2-52), в конечном счете, после несложных преобразо-
ваний приводится к простому всегда удовлетворяющемуся условию:
(L1C1-L2C2)2>0.
Отсюда и следует, что схема рис. 2-15 во всех случаях (при >х =4 v2)
приводится относительно узла А к двум независимым цепям, со-
стоящим из последовательно включенных L1#, Сыи L2*, С2*, опре-
деляемым согласно (2-51).
Если параметры исходной схемы рис. 2-3 заданы в конкретном
численном выражении, то принципиально в сколь угодно сложных
случаях можно определить все частоты v1( v2, . . . , v„ и ух» Тг> • • • >
Тл_р а затем проверить соблюдение условия (2-52), т. е. возможность
преобразования к схеме рис. 2-14.
47
В ряде случаев возможность упрощения схемы рис. 2-3 очевидна
без специального исследования. Так, например:
а) если все Ljk = оо или очень велики относительно Lj, то схема
рис. 2-3 сама собой точно или с достаточной точностью распадается
на независимые цепи (Llt Сх; L2, С2: . . . ; Ln, С„У,
б) если, напротив, все Ljk — 0 или очень малы сравнительно
с Lj, то схема рис. 2-3 точно или приближенно приводится к одной
цепи с последовательно включенными L3 и Сэ, причем
в) если при любом j (от 1 до п) имеет место условие, что LjCj
есть инвариант, то при любых значениях Ljk схема рис. 2-3 предста-
вима отдельными, не тождественными, цепями (Lj, Cj) с одинако-
вой собственной частотой. Это утверждение вытекает из того, что
при указанном условии напряжения узловых точек uv «2.......ип
оказываются тождественно равными между собой, а потому связи
Ljk не имеют значения.*
Важно отметить, что приближение исследуемой системы к слу-
чаю а) или б) зависит от первичных реальных связей контрольной
узловой точки (рис. 2-1) с основными элементами системы (генера-
торами и двигателями), причем увеличение индуктивностей этих
связей ведет к некоторому уменьшению расчетных Ljk, и наоборот.
Представляется естественным в качестве реальной контрольной
узловой точки А брать конец линии передачи (у понизительных
трансформаторов), устойчивость которой подлежит изучению. В та-
ком случае существенную роль будут играть понизительные транс-
форматоры.
Если изучаемая ЛЭП сравнительно маломощна, то относитель-
ное значение реактивности ее понизительных трансформаторов бу-
дет велико, и линейный эквивалент по своим свойствам будет при-
ближаться к случаю б). С другой стороны, присоединение мощной
ЛЭП к компактной системе соизмеримой мощности требует большей
точности эквивалентирования, и потому в этом случае целесооб-
разно узловую контрольную точку А перенести на вторичные шины
понизительных трансформаторов. Тогда несомненно линейный эк-
вивалент в большей мере будет отвечать случаю а).
Как уже отмечалось выше (§ 2-1), контрольное возмущение
ДЗЛ (t) (при Д(7д = 0) относится безразлично к энергетическому
составу эквивалентируемой системы (при замене асинхронных дви-
гателей синхронными), т. е. не дает возможности в результативной
схеме, образуемой по теореме разложения, отделить цепи генерато'
ров от цепей двигателей.
* Это утверждение справедливо только для возмущений при нулевых
начальных условиях схемы рис. 2-3.
48
Представляется все же возможным на основе того же узлового
возмущения До (t) (при Д{/л — 0), которое приводит к более про-
стым уравнениям и более простой схеме замещения (рис. 2-3), опре-
делить частоты полинома М (р) и затем члены разложения на про-
стейшие распределить на две группы (рис. 2-16), отнеся к «генера-
торной» группе столько членов с низшими частотами, сколько
имеется генераторов в исходной системе, а к нагрузочной («двига-
тельной») группе — все остальные члены с более высокими часто-
тами. Такой прием оказывается единственно возможным при экви-
валентировании системы в режиме абсолютного холостого хода,
когда все мощности и взаимные угловые сдвиги (8;-—8ft) равны
нулю, а э. д. с. и напряжения — единице.
Существенная особенность преобразования линеаризированных
«в малом» уравнений системы по теореме разложения в режиме хо-
лостого хода заключается в том, что в таком режиме
полностью стирается различие между синхронными
генераторами и двигателями; результаты преобра-
зования вовсе не зависят от предварительного (ис-
ходного) режима, причем все индуктивности (£,, '
£/fc) схемы замещения (рис. 2-3) оказываются про-
сто численно равными собственным и взаимным
индуктивностям (Ху, x/fe) заданной динамической
системы (рис. 2-1). Таким образом, линейное пре- ис‘
образование системы по теореме разложения явля-
ется в данном случае только специфическим преобразованием
основных структурных параметров — индуктивностей (ху, x/ft) и
инерционных постоянных (Я,).
Если в результате такого преобразования будет получено п не-
зависимых (относительно контрольного узла) цепей, то использо-
вание их в качестве «генераторов» или «двигателей» будет связано
с вопросом о том, какой режим должен быть представлен в преобра-
зованной системе так, чтобы он отражал заданный режим исходной
системы.
К этому следует добавить, что в случае применения линеариза-
ции «в большом» (§ 2-2) при выборе всех э. д. с. и напряжений (в от-
носительных единицах) так, что 0,8 EfEk = 1, все величины Ь/,
bjk оказываются обратными индуктивностями xjt xjk, и преобразо-
вание по теореме разложения дает тот же результат, что и при ли-
неаризации системы «в малом» на холостом ходу.
Этот факт указывает на то, что, по крайней мере приближенно,
линеаризация и преобразование системы в режиме холостого хода
дает действительно правильное структурное преобразование си-
стемы.
Применение преобразования с помощью разложения входной
операторной проводимости [Уа(р)] на простейшие дроби может
быть весьма полезным и при учете демпферных моментов в системе
49
(§ 2-3), хотя разыскание корней характеристического уравнения
при большом числе машин, очевидно, становится довольно трудо-
емкой вычислительной задачей.
Рассмотрим этот вопрос в предположении, что в рациональной
дроби
is=ya(p).l =
N(P)
М(р)
произведено сокращение общих множителей числителя и знамена-
теля и что уравнение М (р) = 0 не имеет ни кратных, ни нулевых
корней, причем
ЛГ(О)
М(0)
0. Тогда по теореме разложения
. = ЛГ(О) у, N(pk) epkt
Е М (0) -Г PkM'(pk)
Л=1
тт W (0) 1
Положим = — и введем представление об универсальных
символических параметрах rk и Ck, соответствующих тому или иному
корню pk характеристического уравнения.
Так как при учете демпфирования все корни вообще комплексны
(и, конечно, попарно сопряжены), то пусть
Pk — — Ч + hk (ak > 0)
и
=Лт7-\ = ak + jbk <flk и 3= 0).
Pk™ (Pk)
Если положить
?--- и -t_L- = — pk
<*k + ibk ckrk
или
7^ __ ak + jbk
bk —------:— >
ak — ^k
то каждый член суммы
у 7?
Z4pkM'(Pk)
*=i
представится символической электрической схемой рис. 2-17, для
которой оператор входного тока равен ik (р) =------------.
7ft + J—
СцР
50
Поскольку каждому корню pk соответствует с ним сопряженный
корень pk = — afe — j\, очевидно:
N (Pk) ., 1
„ - '— = ak — ibk = -—,
PkM'tPk) '* rk
Q ak — jbk
ak + bk
Следовательно, цепи рис. 2-17 соответствует сопряженная и парал-
лельно включенная с ней цепь rk, Ck, входной ток (проводимость)
которой при U = 1 будет:
* 1
. 1
rk + —
Qp
Рис. 2-18.
Рис. 2-17.
1 —
Сумма------h (ik 4- ik) дает полное представление колебаний с ча-
стотой причем операторная входная проводимость равна
1 , 1 = JCkCk (rk + rk)p^ + (Ck + Ck) p =
Yk- ~— (rkrkCkPk) P1 2 * * s + (TkCk + rkC^p +1
C*P CkP „
_ DkP* + fftp /П EM
Akp* + Bkp + 1’ 1 '
Коэффициенты Ak, Bk, Dk и Fk, очевидно, вещественны, из них Ak
и Bk — положительные.
При известных условиях выражение (2-54) представимо одной
реальной цепью вида рис. 2-18, которая согласно изложенному в
§ 2-3 соответствует синхронной машине в малых колебаниях при на-
личии первого из указанных ранее двух родов демпфирования (ро-
торного и приводного). Для этой схемы найдем входную проводи-
мость
Y, (р) = а»Рг + а1Р (2-55)
s V2 + &iP + l
где
йо = ~-> a1 = Ck,
'k
b0 = LkCk- =
' л
51
Дробная форма (2-55), очевидно, алгебраически вполне отвечает
форме (2-54). Здесь также все коэффициенты вещественны, из них
коэффициенты знаменателя при степенях р — положительны.
Для того чтобы выражение (2-54) могло быть реализовано в виде
схемы рис. 2-18, в которой Lk, Ck и rk представляют собой сущест-
венно положительные величины, параметры Bk, Dk и FkB формуле
(2-54) должны удовлетворять определенному связывающему их
уравнению. Приведем его без вывода, не представляющего особых
трудностей. Должно быть:
Dk = BkFk. (2-56)
Полное представление оператора (р) в виде параллельного вклю-
чения цепей вида рис. 2-18 (с общей параллельной проводимостью
—возможно в том случае, если уравнение (2-56) удовлетворяется
/
для всех k, т. е. для всех частот собственных колебаний. Остается
открытым вопрос, каким условиям для этого должны в общем слу-
чае удовлетворять первичные параметры линеаризированной дина-
мической системы или ее схемы замещения (рис. 2-7) с учетом демп-
фирования. Однако, по-видимому, в ряде случаев рассмотренное
представление оператора (р) действительно возможно.
2. Лучевая схема с промежуточным узлом
Естественным является вопрос, отображает ли схема рис. 2-16,
полученная на основе линеаризации, достаточно хорошо поведение
исходной схемы при значительных конечных возмущениях любого
рода в узле А.
На этот вопрос следует ответить отрицательно, основываясь на
простейшем примере.
Действительно, в случае, когда возмущение со стороны узла А
заключается в резком снижении его напряжения до нуля на отрезке
времени т, т. е. Д[/д (т) = — UA0 (рис. 2-19), можно констатировать,
что в схеме рис. 2-16 на указанном отрезке времени (при пренебре-
жении активными сопротивлениями) электрические мощности всех
машин обращаются в нуль, тогда как в исходной системе (рис. 2-1)
они сохраняют некоторые ненулевые значения вследствие наличия
взаимных связей. По этой причине начальные условия движения
после восстановления напряжения узла А могут быть существенно
неодинаковы для исходной системы и для ее преобразования в лу-
чевую схему рис. 2-16.
Эти соображения говорят о том, что ради точности отображения
движения исходной системы целесообразно приводить ее к лучевой
схеме не относительно ожидаемого в реальных условиях узла воз-
мущения А, а относительно другого промежуточного узла В, отде-
ленного от узла А некоторой индуктивностью х (рис. 2-20).
52
Отсюда следует, что если узел А является концом исследуемой
на устойчивость длинной линии передачи, то лучевую схему целе-
сообразно относить ко вторичным шинам понизительных трансфор-
маторов, которые, однако, не должны рассматриваться как узел
первичных возмущений в конечном анализе устойчивости дальней
ЛЭП. В то же время узел В можно условно рассматривать как узел
возмущения для целей преобразования приемной системы к луче-
вой схеме на основе линеаризации «в большом» с последующим при-
менением теоремы разложения.
В тех случаях, когда узел А реальных возмущений по каким-то
соображениям должен быть взят где-либо в основной сети приемной
системы, причем не имеется реально предвключенной между ним и
прочей сетью индуктивности, можно, вообще говоря, построить
Рис. 2-19.
лучевую схему замещения типа рис. 2-20 с искусственно образо-
ванным промежуточным узлом В и некоторой ограниченной индук-
тивностью х между ним и узлом А.
Действительно, допустим, что входное операторное сопротив-
ление приемной системы относительно узла А в электрической схеме
замещения типа рис. 2-3 получено для холостого хода приемной
системы при линеаризации «в малом» или для специального режима
(§ 2-5, п. 1) при линеаризации «в большом» и представлено в виде
[см. формулу (2-50)]
Тогда, положив
Z (р) = Lp 4- = aLp^Nijp) + Mi (p)
apNi(p) apNi(p)
найдем
A\(p) = W(p),
M1(p) = M(p)-aLp2N(p).
Как указано ранее [к (2-50) ], четные полиномы М. (р) и N (р) имеют
степени соответственно 2п и 2 (п—1); следовательно, и полином
Мг (р) будет вообще степени 2п, причем все его коэффициенты
fl при степенях 26 > 2 будут выражаться через соответствующие
коэффициенты Ь,- и cf полиномов М (р) и р2М (р) равенством
fl = bt — aLCj.
53
Если все fj положительны, чего всегда можно достигнуть выбо-
ром достаточно малого значения L, то вообще не исключена воз-
можность применения теоремы разложения к оператору —=
= > в результате чего и образуется схема рис. 2-20.
3. Реализация преобразования по теореме разложения
Если имеется в виду осуществление эквивалентов на электроди-
намических моделях, то приведение заданной системы с помощью
линеаризации и теоремы разложения (с пренебрежением демпфи-
рованием) к совокупности независимых цепей вида рис. 2-16 следует
считать законченным лишь тогда, когда определены не только инер-
ционные постоянные всех генераторов Г,- и двигателей Дк, но также
и индуктивности Xj, хк, начальные угловые сдвиги (8;ОЛо) и модули
э. д. с. (£/, Ек), т. е. параметры нормального режима. Эта задача
вообще неопределенна, поскольку добавочно в установившемся ра-
бочем режиме должны быть твердо соблюдены лишь два условия,
а именно: чтобы в схеме рис. 2-16 суммарные активная и реактивная
мощности по группам генераторов и двигателей были равны тако-
вым же в исходной схеме. Неопределенность может быть снята вве-
дением, более или менее рациональных условий, что и будет рассмот-
рено здесь.
Предположим, что была проведена линеаризация «в большом»
(§ 2-2) и после применения теоремы разложения на базе уравнений
(2-12) и (2-13) для всех п ветвей схемы рис. 2-16 получены результа-
тивные инерционные постоянные Hi, Н2, . . . , и коэффициенты
линеаризации blt b2, ... , Ьп. Последние, как указано ранее, только
при особом подборе режима и э. д. с. в исходной схеме * являются
величинами обратными реальным реактивностям. Вообще же при
линеаризации «в большом» для схемы рис. 2-16 следует согласно
(§ 2-2) принять:
0,8 - A^k- =Ьк (6 = 1, 2, . . ., л), (2-57)
где UAQ — заданное напряжение узла А в нормальном режиме.
Если, далее, допустить соответствие между убывающим рядом
приведенных к общей базисной мощности инерционных постоянных
Н19 Н2, . . . , Нп всех машин (отдельно по группам генераторов и
двигателей) исходной системы и аналогичным рядом инерционных
постоянных, полученных по теореме разложения для линеаризи-
рованной системы, а именно //*, И?, . . . , Н*п так, что каждому Hk
первого ряда соответствует H*k второго ряда, то тем самым будет
установлено и соответствие между инерционными постоянными Hk
* При линеаризации «в малом» — только при холостом ходе системы.
54
и мощностями активными Pk и реактивными Qk машин исходной си-
стемы в рабочем режиме, другими словами — все мощности ветвей
схемы рис. 2-16 будут определены. Тогда будем иметь еще 2п урав-
нений:
U^Ek sin efc = Pk, (2-58)
xk
rV U A„Ek
^-^-cosBk=Qk, (2-59)
xk R
где — угловой сдвиг между Ek и UM, т. е. Bk = — 8Л0.
Здесь Q представляет собой «внутреннюю» реактивную мощность
Л-й машины, равную алгебраической сумме реактивной мощности
на зажимах машины и потере реактивной мощности в ее расчетном
реактивном сопротивлении, т. е.
Qk “ Qk3 i ^нк-^мк
(знак «плюс» соответствует режиму генерации, а «минус» — режиму
потребления реактивной мощности).
Из уравнений (2-57), (2-58) и (2-59) легко определяются все Ek,
fi4. хк-
Глава третья.
ОСНОВНЫЕ МЕТОДЫ И ЧАСТНЫЕ ПРИЕМЫ
ЭКВИВАЛЕНТИРОВАНИЯ
3-1. Прямые функциональные методы
и приемы эквивалентирования
В данной работе эквивалентирование понимается в ограничен-
ном смысле, а именно — как построение некоторой физической
системы, подобной по своим качественным физическим характери-
стикам другой, уже существующей системе, но с меньшим числом
различных основных элементов. Требование физического цодобия
усложняет эквивалентирование; оно, например, затрудняет воз-
можность рассматривать математический процесс эквивалентирова-
ния как задачу приближенного решения дифференциальных (или
интегральных) уравнений исходной системы, так как не каждое
приближенное решение может годиться для построения эквивалента,
физически подобного исходной системе.
Во введении отмечены методы, которые позволяют выполнить
указанное требование. В настоящем параграфе мы лишь весьма
кратко рассмотрим метод, названный нами «прямым функциональ-
ным». Этот метод разработан И. А. Орурком совместно с В. Ф.Же-
вержеевым и Г. В. Рощиным и достаточно подробно освещен в ли-
тературе [Л. 2, 3, 4], к которой и следует обратиться для деталь-
ного с ним ознакомления.
В прямом функциональном методе независимой переменной яв-
ляется время /, причем сопоставляются реакции на входах исход-
ной и эквивалентной систем при заданном характере контрольного
узлового возмущения. Если для исходной схемы реакция на входе
представляется функцией /(/), а для эквивалента — функцией
? (Л «1, а2, . . . , ат), где а1? , . а2 . . , ат — его искомые параметры,
то последние определяются из условия минимума интеграла:
F(t, ах, а2, . . . , ат) = J [/(/) — <?(t, ах, а2, ...» ат)]2 dt (3-1)
о
с вариацией параметров <х1( а2, . . . , ат, причем выбор верхнего
предела интегрирования должен быть связан с быстротой затуха-
56
ния свободных колебаний или с моментом времени, соответствую-
щим наибольшему значению углового смещения роторов удаленной
станции относительно синхронной оси.
Заметим, что в [Л. 3, 4] рекомендовано определять параметры
эквивалента По минимуму более сложного интеграла:
со
О
куда входят в качестве сопоставляемых функций времени не только
активные (РА и РАэ), но также и реактивные мощности (Q4 и фЛэ);
весовой коэффициент вводится для того, чтобы более точно характе-
ризовать свойства эквивалентируемой системы.
Аналитическое представление функции с? (f, ах, а2, . . . , ат)
через неизвестные основные параметры эквивалента в случае его
сложной структуры может даже при использовании линеаризации
сказаться чрезвычайно громоздким, а последующее интегрирова-
ние согласно (3-1) — весьма трудоемким. Поэтому рассматривае-
мый метод для непосредственного практического применения го-
дится лишь при предельно простой структуре эквивалента, как,
например, в случае замены исходной системы одним генератором.
Такое упрощение в большинстве случаев по многим физическим
{в частности — энергетическим) признакам не является допусти-
мым,* за исключением вопросов из области анализа колебаний ча-
стоты.
Трудности, связанные с применением рассматриваемого метода,
проявляются уже в том относительно простом случае, когда уместно
поставить задачу построения линеаризированного эквивалента по
типу лучевой схемы (рис. 2-14) с заданным числом (т) элементов.
В этом случае при возмущении со стороны общего узла в виде еди-
ничной функции и (t) = 1 имеем:
«1, а2....®т)
где
V/ = VT~C^
Искомыми параметрами являются и у,-. Необходимо будет
найти аналитическое выражение интеграла (3-1), где подыинтеграль-
ная функция получает довольно сложную форму даже при условии,
что входная реакция исходной схемы f (t) будет аналитически пред-
ставлена с помощью наиболее удобных функций.
* Прежде всего вследствие явной необходимости отделения генерирую-
щих элементов от нагрузочных.
57
В связи с этим будет целесообразно использовать приближен-
ные способы интегрирования: в частности — разложение всех функ-
ций по целым степеням t; но все же результативная функция F (т,
vi, »2> • • • , yv у2, ... , ут) окажется весьма сложной.
Существенное упрощение можно получить (за счет некоторого
отступления от оптимума), если предварительно определить все
методом «эквивалентирования в пространстве параметров», как
изложено далее в § 3-3. Тогда, во-первых, неизвестными парамет-
рами будут только величины у,; во-вторых, окажется возможным
применять несложную процедуру численного интегрирования из-
вестных функций. После определения амплитуд yt можно уточнить
оптимальные значения частот v,-, полагая
~ v/o + А/>
где v/0 — значения частот, полученные методом параметрического
эквивалентирования, и выражая синусоидальные функции двумя
первыми членами разложения в ряд Тейлора, т. е. принимая
sin v/ sin (v/0 + Д;) t = sin (v/0Z) + cos (v/0Z) Д;/.
В результате в (3-1) искомыми параметрами будут теперь яв-
ляться только поправки частот Д;-, причем, считая их достаточно
малыми, допустимо в подынтегральной функции исключить все
члены, содержащие эти поправки в степенях выше первой.
Процедуру оптимизации можно продолжить и далее, снова вер-
нувшись к определению амплитуд yt при фиксированных новых
значениях частот Таким образом, может идти речь об использо-
вании определенного алгоритма последовательной оптимизации.
В тех случаях, когда исходная система представляет собой мно-
голучевую схему или может быть приведена к ней с помощью тео-
ремы разложения (§ 2-5) или сетевого неканонического преобразо-
вания (§ 3-3), возможна разбивка ее на несколько близких между
собой групп лучей (по критериям параметрической близости) с
целью замены каждой группы одним эквивалентным лучом на ос-
нове минимума функции, определяемой интегралом (3-1); при этом,
очевидно, для каждой группы I, II, III, . . . должна быть заранее
определена входная реакция (/), /п (/), /ш (/), . . . В подобных
случаях для каждой группы будет не более двух (если пренебрегать
демпфированием колебаний) искомых параметров (yk, vft), через
которые без труда определяются соответственные основные пара-
метры эквивалентного элемента, т. е. Lk и Ck-, все выкладки и вычис-
ления при этом чрезвычайно упрощаются.
В [Л. 2] предложен и разработан функциональный метод, ко-
торый, в основном, также применим (просто и непосредственно)
только к исходным схемам лучевого типа, допускающим разбивку
на отдельные группы близких между собою элементов (генераторов,
двигателей), каждая из которых может быть заменена одним экви-
валентным элементом. При этом исключается необходимость пред-
58
варительной линеаризации и аналитического выражения переход-
ной функции эквивалента ср (/, ах, а2, . . .).
Суть этого метода кратко заключается в следующем. Допустим,
например, что контрольное возмущение со стороны общего узла
(Л) задано функцией UA (t) модуля узлового напряжения при не-
изменном его угловом смещении относительно базисной синхрон-
ной оси. Обозначим суммарные электрическую и механическую мощ-
ности подлежащей эквивалентированию группы машин соответст-
венно через PE(t) и Рм, их разность через ДР (/), а изменяющееся
угловое смещение, инерционную постоянную, индуктивность (от-
носительно узла Л) и принимаемую за постоянную э. д. с. эквива-
лентной машины — соответственно через 3*, Н*, х*, Е*. Тогда
будем иметь:
Я* = ЬР (/), (3-2)
E*U*(<) sin (8* — 8Д) = РЕ (0 (3-3)
(8а = 8ао = по-
переменные РЕ (/), Рм и ДР (f) легко могут быть определены хо-
рошо известным методом последовательных интервалов.
К уравнениям (3-2) и (3-3) присоединим еще уравнения энерге-
тического баланса для рабочего режима, предшествовавшего воз-
мущению со стороны узла А:
(3-4)
t/2
----(3-5)
('• = (3'6>
где P£0 и Qe0 — суммарные, активная и реактивная мощности (при-
текавшие к узлу А от той же группы машин исходной системы в
упомянутом рабочем режиме), а также условие
/* = 4,
выражающее требования равенства тока трехфазного короткого
замыкания * в узловой точке А со стороны искомого эквивалента
аналогичному суммарному току замещаемой группы машин. Учи-
тывая (3-6) из (3-4), получим:
S; = arcSm-^- + S„. (3-7)
* Периодической составляющей, определяемой по Е* и х*.
59
Далее, в предшествующем установившемся рабочем режиме следует
считать ---- — О.
dt
Поэтому из (3-2) повторным интегрированием находим:
t t -
S* = J dt J ДР (0 di + 8‘ = Ф (0 + 8. t (3-8)
о 0
где ЧГ (0 обращается в нуль при t = 0.
С другой стороны, из (3-3) имеем:
8* — 8лп = arc sin —- = Ф (/) (3-9)
или
8* = Ф (/)-}-8Д0>
отсюда
г; = Ф(О) + 8ло, 8*—8ло = Ф(О).
Сопоставив (3-8) и (3-9), определим величину К*н — —^-из условия
минимума интеграла: н*
т
F (*я) = J [ф (0 - бо - КнЧ (/)]2 di
О
(где 9* = — 8Л0), т. е. по методу наименьших квадратов.
Определение минимума функции F (Кн) при известных Ф(/) и
Ф (/) в данном случае также не представляет существенных затруд-
нений.,
Таким путем будет определена инерционная постоянная эквива-
лента данной группы машин. Что касается его реактивности х*
(относительно узла Л), то при условии (3-6) она непосредственно
определяется из уравнения (3-5), где /* = /L. После определения
х* находим и эквивалентную э. д. с. Е* = х*1*.
Применяя рассматриваемый метод без использования какой бы
то ни было линеаризации, приходится иметь в виду, что численные
значения искомых параметров эквивалента могут существенно за-
висеть от вида и амплитуд контрольных возмущений. В связи с
этим мыслимы два основных подхода: либо установить типовые
формы возмущений, соответствующие наиболее часто встречаю-
щимся на практике (подобно тому, как при импульсных испыта-
ниях высоковольтной изоляции применяют стандартные формы
волн), либо рассматривать возмущающую функцию как случай-
ную. Второй путь в данной работе не рассматривается.
В прямом и в излагаемых ниже косвенных методах эквивален-
тирования по независимому переменному t необходимо иметь либо
аналитическое выражение, либо табулированную совокупность
большого числа значений функции f (/), т. е. входной реакции ис-
60
ходной системы. При достаточно сложной структуре последней это
требует большой затраты времени и труда.
Однако следует подчеркнуть, что основная трудность заключается
в необходимости аналитического представления реакции эквива-
лента по его качественно заданной структуре. В связи с этим при-
ходится обращаться к фундаментальным уравнениям движения
эквивалента и изыскивать метод численного их интегрирования по
какой-либо известной реакции на то или иное возмущение. Эта за-
дача (при некоторых ограничениях) весьма успешно решена в [Л. 31
и дополнительно рассмотрена И. А. Орурком в [Л. 4]. Практиче-
ская реализация содержащихся здесь рекомендаций затрудняется
лишь требованием правильного представления нагрузочных сово-
купностей.
Достоинство прямого функционального метода заключается
в возможности прямой оценки точности эквивалентного переход-
ного процесса и в том, что соответствующая этой оценке оптималь-
ная совокупность искомых параметров эквивалента системы полу-
чается как бы автоматически, т. е. без специального поиска.
3-2. Косвенные функциональные методы
Рассмотренный в § 3-1 метод, основанный так или иначе на оты-
скание минимума интеграла (3-1), мы назвали «прямым» функцио-
нальным; поводом к этому является Заложенное в метод требование
такого выбора параметров эквивалента, который обеспечивает ми-
нимум квадратичного уклонения входной реакции эквивалента от
входной реакции исходной схемы в пределах заданного отрезка
времени, причем эти обе реакции характеризуют переходный про-
цесс во времени.
Все другие методы и способы, в которых производится сопостав-
ление входных реакций как функций времени не на основе метода
наименьших квартатов, а на основе иных принципов, а также ме-
тоды, оперирующие с реакциями, отображенными в область других
независимых переменных, таких, как оператор р в преобразовании
Лапласа или частота оз в преобразовании Фурье,— естественно
назвать «косвенными» функциональными методами и способами. Та-
ких методов и способов, вносящих в задачу эквивалентирования
значительные упрощения; можно указать большое число. Остано-
вимся на важнейших из них.
1. Метод моментов
Предполагая входную функцию / (/) реакции исходной системы
известной, вычислим все ее моменты, т. е. интегралы вида J tsf (t) dt
(для заданного промежутка времени 0, t) для всех значений s от
61
s = 0 до s = tn—1 включительно; получим tn чисел ц0, . . .,
Этим числом приравняем аналогичные интегралы от входной
функции эквивалента, т. е. положим:
J tm W, «1, «2» • • • , = nm_r
О
Будем иметь т уравнений с tn неизвестными ах, а2, . . . , ат. Отсюда
и могут быть определены эти параметры. Если принять высшее
значение s > т—1, то получим для определения параметров а;.
избыточное число уравнений, позволяющее определить искомые
параметры уже по методу наименьших квадратов, т. е. из условия
минимума суммы квадратов:
S=k Г т “12
2 P's—'рМЛ “1. а2, • • • > ^m)dt
s=0 L О
при k > т—1.
Не трудно видеть, что все необходимые в (3-10) интегралы вы-
числяются несколько проще, чем в изложенном выше прямом методе,
но остается трудность аналитического выражения ср (/, ах, ... , ат).
2. Метод частных значений
Допустим существование тождества
<?(Л ах, .... ат)=/(0 (3-11)
в пределах 0 < < т и зададимся в этом промежутке рядом дис-
кретных значений времени /2, . . . , таких, которые обеспечи-
вают достаточно точное представление функции f (t) интерполя-
ционным полиномом [Л. 24]. Тогда, полагая t в левой и правой
частях равенства последовательно равным выбранным значениям,
получим при k > т избыточное число уравнений для определения
искомых параметров ау- по методу наименьших квадратов, т. е. из
условия минимума суммы
k
2 [/(**)—<*i..........mi2-
1
В данном методе вообще нет необходимости вычислять какие-
либо интегралы; все сводится к решению некоторых нелинейных
уравнений.
62
Следует отметить, что для применения рассматриваемого метода
нет необходимости иметь аналитическое выражение функции <р (/,
ар а2, . . . , ат), если полную систему дифференциальных уравне-
ний удается свести к одному уравнению относительно переменной
cpz, которая отождествляется с аналогичной переменной ft в исход-
ной системе.
Определив все производные от ft для ряда частных значений t
(способами, излагаемыми в курсах численного анализа) и подставив
их в упомянутое дифференциальное уравнение вместо производных
от <ро можно получить достаточное число алгебраических уравнений
для определения искомых параметров аь а2, . . . , ат эквивалента.
Рассматриваемый метод не содержит прямых оценок точности
и по своему характеру является родственным точечной интерполя-
ции функций. Несомненно, что его можно применять лишь для за-
ведомо гладких функций переходного процесса.
3. Операционный метод
Этот метод следует отнести к косвенным функциональным. Он при-
меним только к линеаризованным системам. Вместо функций вре-
мени в процессе эквивалентирования рассматриваются функции
оператора дифференцирования \ Операционный метод уже
\ dt )
был использован нами в вопросах об электрических схемах за-
мещения, о применении теоремы разложения и в дальнейшем при-
менен для установления принципов эквивалентирования «в про-
странстве параметров». Рассмотрим его более подробно, причем
ради наглядности будем относить его к электрической схеме заме-
щения типа рис. 2-3.
Поскольку в линейных пассивных системах переходная функция
h (/), соответствующая возмущению в виде единичной функции
и (t) -ь 1 со стороны контрольного узла, т. е. со стороны «входа»
в исследуемую систему, предопределяет поведение последней при
всех других возмущениях, мы будем для простоты предполагать
именно это возмущение. При таком условии эквивалентность двух
систем, казалось бы, будет вполне определяться эквивалентностью
их входных операторных проводимостей:
Y (р) = —L- и Ym(p) = ——.
Zn(p) Zm(P)
Однако эти проводимости содержат обедненную информацию и
не могут отражать всех свойств заданной конкретной системы. Дей-
ствительно, обратившись к схеме рис. 2-3 и предположив в ней п
внутренних узлов (исключая узел Л), будем иметь в этой схеме
вообще 2п + п<'п~^ независимых параметров; в то же время вход-
ная проводимость У„ (р), как это следует из изложенного в § 2-5,
63
будет содержать не свыше 2 п независимых коэффициентов. Таким
образом, определив последние, мы не получим достаточного числа
уравнений для определения всех параметров указанной схемы: не-
достаток выразится числом -±-п(п—1) уравнений.
Несомненно, что потеря информации, в связи с применением
входных проводимостей линеаризированных систем как критериев
эквивалентности, неизбежно привнесет дополнительные погреш-
ности после возвращения к нелинейной системе. Это обстоятельство
особо резко подчеркивается, когда линеаризированная система
преобразуется к лучевому виду «совершенно точно» по теореме раз-
ложения относительно контрольного узла А, В этом случае все
взаимосвязи, содержащиеся в схеме рис. 2-3, как бы исчезают, и
колебания основных элементов становятся независимыми одно от
другого. Совершенно очевидно, что наличие в реальной системе
столь разнородных элементов, как синхронные генераторы и асин-
хронные двигатели, определяет большую существенность их вза-
имных влияний через промежуточную сеть. Поэтому сохранение
в эквивалентных схемах цепей взаимосвязи является достаточно
важным. Это непосредственно не может быть обеспечено изучением
входных проводимостей, а следовательно, и любых переходных
процессов на входе линеаризированных систем по типу рис. 2-3.
Далее (в § 3-3 и 3-4) и изложены методы, позволяющие проводить
эквивалентирование с сохранением общего структурного подобия.
Операционный метод все же можно с успехом использовать для
эквивалентирования отдельных групп физически родственных эле-
ментов, присоединенных к общим узлам исходной системы по лу-
чевой схеме, а кроме того — для ориентировочного преобразования
заданных сложных структур в лучевые или другие удобные схемы.
Мы рассмотрим теперь основные приемы и способы, которые
можно применить для этих целей.
а. Сравнение коэффициентов при
одинаковых степенях оператора
Предположим, что исходная система в соответствии с рис. 2-3
имеет входную проводимость, представленную рациональной
дробью:*
Y(n)=-^PL,
' М(Р)
где
М(р) = ра + 1,,р!и-"+ ... +6„,
«(₽) = ₽“"" W"-2I+ ... +с„_„
* При условии пренебрежения активными сопротивлениями и проводи-
мостями.
64
причем требуется, чтобы и входная проводимость Y3 (р) эквива-
лента имела аналогичный вид, но с меньшим порядком (2m < 2п)
знаменателя:
л1‘(р)=р2'п+&у(,п“1)+
и соответственно числителя
0-РлС(р)=«-р(рг<”-1'+»;р,м+...
Для определения неизвестных коэффициентов а* ,Ь*} и cj эквивалент-
ной проводимости условно допустим возможность равенства
Y3(p) = Y(p),
т. е.
a*pN* (р) _ apN (р)
М*(Р) ~ М(р)
ИЛИ
а*М (р) N* (р) = аМ* (р) 7V (р).
Полиномы, получающиеся в результате перемножения сомно-
жителей в левой и правой частях последнего равенства, будут иметь
одинаковую высшую степень оператора р, а именно 2 (п + т—1),
причем коэффициентами при этих степенях явятся числа а и а*,
откуда и следует:
а* = а.
Результативные полиномы правой и левой частей указанного
равенства после сокращения их на равные множители а и а* будут
иметь одинаковый вид, но различные множители при степенях р,
меньших чем 2 (п + т—1), а именно в правой части получим поли-
ном
п+т—-1
2 А/Р2{п+т-^
и в левой
п+т—1
2 в,р2(п+т-1-у),
где коэффициенты А] и будут являться функциями искомых ко-
эффициентов проводимости Уэ (р) и известных коэффициентов про-
водимости Y (р):
для правой части
Д>= 1,
л, = ^ + 6;,
^2 = С2 + + ^2’
Ап ~ Cn-fil "Ь сп—<р2 + • • • + cn—nfiln'
65
^п+т—1 ^п—
для левой части
Во= 1,
В 2 = С2 + ^1С1 + ^2’
вт = с_д + с;_л+ ... +с;ьт_1
В.„ , = с* J).
Приравняв коэффициенты А/ и В/ при одинаковых степенях
левых и правых полиномов, получим (п + иг—1) алгебраических
нелинейных уравнений для определения (2т—1) оставшихся
(кроме а*) неизвестных коэффициентов эквивалентной проводимо-
сти; так как по условию п>т, то число уравнений будет избыточ-
ным, и потому искомые коэффициенты для эквивалента следует оп-
ределять по методу наименьших квадратов в параметрической форме
из условия минимума функции
j=n+m—1
......4...............с»-.)= 2 (A~B;)2-
7=1
б. Разложение операционных
проводимостей Y (р) и Y3 (р) по степеням
и сравнение коэффициентов при одина к о вых
степенях
Этот прием используется нами далее при рассмотрении метода
эквивалентирования «в пространстве параметров». Поскольку раз-
ложение рациональных дробей, представляющих Y (р) и Y3 (р),
приводит к бесконечным степенным рядам от —, мы получаем со-
ответственно и бесконечное число уравнений для определения пара-
метров эквивалента. С целью применения метода наименьших квад-
ратов в параметрической форме указанные ряды, очевидно, при-
дется оборвать на некоторой степени от . Оценка допускаемой
при этом функциональной погрешности относительно переменной t
может быть получена на основании известного соотношения опера-
ционного изображения и соответствующего ему оригинала:
1 / 1 \
~~ргг - При этом степенной ряд функции У (/) = У I—j сле-
дует рассматривать как ряд Маклорена с надлежащим остаточным
членом.
66
в. Использование операционных
выражений с положительным
вещественным аргументом
Здесь имеется в виду метод, в некотором отношении родствен-
ный методу, обстоятельно и строго разработанному И. А. Орурком
[Л. 25, 26 ]. Однако мы считаем возможным для целей эквиваленти-
рования исходить из более простых представлений, целиком осно-
ванных на одностороннем преобразовании Лапласа—Корсона.
Допустим, что структура операционного изображения функции
Y (t) заведомо представляет собой рациональную дробь (числитель
и знаменатель — полиномы от р), причем
XJpL = J e-ptY (t) di.
о
Тогда, задавшись достаточным числом положительных веществен-
ных значений р в правой и левой частях написанного равенства и
найдя для каждого из них значения интеграла правой части, можно
найти все коэффициенты упомянутой рациональной дроби.
Считая, далее, допустимым для тех же целей эквивалентирова-
ния пренебрегать активными сопротивлениями, необходимо в ука-
занной процедуре исключить значение р = 0, поскольку в схемах
типа рис. 2-3 придется иметь дело с синусоидальными, вообще с пе-
риодическими функциями, для которых интеграл Лапласа при
р = О теряет смысл (не сходится). Поэтому в операционных выра-
жениях в дальнейшем будем вещественное значение р полагать
больше нуля. Так как операционная проводимость Y (р) исходной
схемы может быть построена без использования оригинала Y (t),
то для определения коэффициентов проводимости эквивалента
Y3 (р) (из т элементов) достаточно составить 2т уравнений вида
Y3(Pi) = Y(Pl) (3-12)
ИЛИ
Кэ(^ = Г(р),
где все р} > а > 0 и q,-= —.
Пример использования такого приема указан ниже при допол-
нительных условиях выбора границ р7-. Если вместо дискретных
значений р рассматривать непрерывное множество его положитель-
ных значений, то искомые коэффициенты эквивалента и с! (не
считая коэффициента а*, всегда равного а) должны определяться
методом наименьших квадратов по минимуму интеграла:
F= (s>0)- (3'13)
J [ м* <р) м (р) J
5
67
Если воздействующее со стороны контрольного узла возмуще-
ние представлено на основе одностороннего интеграла Лапласа и
имеет форму рациональной дроби от р, то (3-13) можно распростра-
нить на общее выражение входного тока в виде и(р) • В связи
с этим нелишне отметить следующее обстоятельство. При исполь-
зовании дискретных значений р по способу, указанному выше,
форма узлового возмущения не оказывает никакого влияния на
результат определения параметров эквивалента, так как в опера-
ционной форме это возмущение вошло бы одинаковым множителем
в левую и правую части уравнений (3-12). Однако влияние формы
возмущения должно обнаруживаться в случае определения этих
параметров на основе интеграла, аналогичного (3-13), но для об-
щего выражения тока, так как в подынтегральную функцию теперь
войдет квадрат операционного выражения и (р) узлового возмуще-
ния.
Отсюда вытекает важное принципиальное заключение: не только
для нелинейных, но и для линейных или линеаризированных си-
стем операция эквивалентирования по методу наименьших квадра-
тов на основе функциональных уравнений является операцией не-
линейной, результаты которой зависят, в той или иной мере, от вида
возмущения. Это обстоятельство имеет наибольшее значение для
третьей стадии эквивалентирования.
Те из указанных выше в п. «а», «б» и «в» приемов эквивалентиро-
вания, в которых метод наименьших квадратов не используется
вовсе или используется только на основе параметрических уравне-
ний, являются более простыми для практики, но они не могут обес-
печить оптимального результата эквивалентирования с функцио-
нальной точки зрения. Эти приемы по своему значению примыкают
к излагаемому далее в § 3-3 методу эквивалентирования «в простран-
стве параметров» и требуют проверки точности полученных с их
помощью результатов на основе прямого функционального
метода.
Если положить
ду(0 = К(0-Кэ(0
и обозначить через | им |т максимальное абсолютное значение узло-
вого возмущения в пределах 0 < t < т, то, как легко показать,
среднеквадратичная погрешность эквивалентирования входной ре-
акции (входного тока) для линеаризированной системы не превзой-
дет величины
^n = |uM|T у
68
Качество эквивалентирования упрощенными методами, изложен-
ными выше, можно оценивать величиной:
I |т
[&Y(t)]2dt.
(3-14)
Из указанных выше разновидностей операционного эквивален-
тирования (п. «а», «б» «в») наиболее подходящим для инженерной
практики несомненно является использование операторных выраже-
ний с положительным аргументом р (п. «в»). Для любых исходных
схем вида рис. 2-3 функцию проводимости Y (р), при вещест-
венном р, можно построить с помощью расчетных столов постоян-
ного тока, применяемых для определения токов короткого замыка-
ния в сложных энергосистемах, так как любые элементы этих схем
^LyP, —~—j представятся существенно положительными числами,
которым можно поставить в соответствие определенные значения
омических сопротивлений с соблюдением законов Ома и Кирхгофа.
Следовательно, рассматриваемый прием эквивалентирования, в от-
личие от двух других (п. «а», «б»), не требует аналитического опера-
ционного представления входной проводимости исходной схемы.
При таких условиях основная трудность будет заключаться только
в необходимости аналитического операционного представления
входной проводимости эквивалента Уэ (р).
Как указывалось выше, при наличии т основных элементов и
пренебрежении демпфированием, эквивалент, определяемый только^
по входной реакции, не будет содержать более 2/тг неизвестных па-
раметров; соответственно, наиболее простой структурной схемой
эквивалента является лучевая схема (рис. 2-14), состоящая из т
параллельных ветвей. Для такой схемы согласно (3-12)
Z7?
У 9 = 2 1 + ^q2 = Y
7=1 }
где
2 1
— -----
j L*C*
Если т не велико, то Уэ (q) выражается сравнительно несложной
рациональной дробью, например, при т = 3 имеем:
=yto),
9 w i+^v+w+w
(3-15)
где
69
«+о+о?+-»+с?+«•'
А* — у2 I ^2 I ^2 А* —- ^2^2 _| ^2^2 _1_ ^2^2
и\ V1 v v2 ‘ 3» U2 12 2 3 » 13»
I)* = у2у2у2
М3 12 3- J
Из (3-15) получим:
a*q + dtf + dtf = (1 + b\q* + btf + ЭД Y (q).
(3-16)
В данном случае необходимо и достаточно задаться какими-либо
подходящими шестью значениями q, и тогда коэффициенты a*, d^,
d‘2> b*, b2, b*3 будут определяться с помощью шести линейных алге-
браических уравнений. Выбранные шесть значений q должны быть
таковы, чтобы все искомые коэффициенты оказались положитель-
ными. К сожалению, затруднительно указать общие критерии, при
которых соблюдается это требование, необходимое для построения
эквивалента лучевой структуры. Кроме того, область значений q
должна быть ограничена условием, чтобы рациональная дробь, вы-
ражающая Уэ (</), разлагалась в сходящийся ряд по целым степе-
ням q, как это будет иметь место для функции Y (q) исходной си-
стемы, если |р| превосходит наибольшую из частот ее свободных
колебаний, т. е. при
I °
> ^макс"
Если это условие не будет соблюдено, то ряд по степеням q не
будет представлять функцию Y (q) и, следовательно, не может быть
использован для эквивалентирования ее структуры (хотя, может
быть, и определит оригинал исходного операционного изображения).
Только при соблюдении всех указанных требований можно быть
уверенным в возможности построения эквивалента лучевой струк-
туры, близкого к исходной системе. Если эти условия соблюдены и
коэффициенты bv b2, b3 определены, то соответствующие им частоты
vi> v2> v3 эквивалента определятся из уравнения:
р6 + ЭД + 6*р2 + &* = 0.
Вслед за этим легко определятся по коэффициентам a”, d*, d* и
величины а*, а2, а3 из первых трех уравнений (3-16).
Изложенная процедура поиска лучевого эквивалента зна-
чительно упрощается, если частоты его свободных колебаний будут
определены заранее на основе принципов эквивалентирования в
пространстве параметров (§ 3-3, п. 2); тогда в рассмотренном при-
мере потребуется выбрать лишь три частных значения q > 0, удов-
летворяющих указанным выше условиям.
Укажем еще один эффективный подход к использованию функции
проводимости Y (q) исходной схемы при положительных веществен-
70
ных значениях q = -у-. Вместо функций Y (<?) и Уэ (q) рассмотрим
функции Ф (q2) = qY (q) и Фэ (q2) = qY3 (q). Тогда для /n-лучевого
эквивалента будем иметь:
9 . »♦ 4 , «* 6 , . ,* 9 т 1
a q + d{q + + . . . + dm_tq ]
э\Ч ) i , * 2 > t* 4 । । t* 2/тг
1 + brf- + M + .. • + bmq-m
(3-17)
Допустим, далее, что исходная функция ЧТ (q2) тем или иным
путем, например с помощью методов интерполяции, представлена
в виде конечного ряда
Ф G2) = Л172 4- Л2/ + . . . + Aimq4m. (3-18)
Тогда рациональную дробь (3-17) можно рассматривать в качестве
так называемой подходящей дроби для ряда (3-18) [Л. 27, 28]. Ко-
эффициенты рациональной дроби (3-17) найдутся из следующих
линейных алгебраических уравнений:
ЛЛ + -4Л-.+ + A.^ + A„+1 =»,
+ «,- + + л.+г -0.
л А + Ат..,^ + ... + + Агт = 0,
Лх— а* — 0,
Л1Ь* + Л2— 4* = 0,
(3-19)
Afi^. + АгЬ‘^, + . . . + Ат_}Ь* + Ат - = 0.
Необходимо, чтобы определитель, составленный из коэффици-
ентов при членах, содержащих b*j (/ = 1, 2, . . . , /л) в уравнениях
(3-19), не был равен нулю. Этому условию должно быть подчинено
разложение функции Ф (д2) по четным степеням q. Если любое та-
кое разложение не будет оптимальным с точки зрения метода наи-
меньших квадратов, то это, вероятно, будет означать, что и пред-
ставление эквивалента в виде лучевой схемы также не является оп-
тимальным.
3-3. Параметрическое эквивалентирование
Из всех возможных видов параметрического эквивалентирова-
ния здесь будут рассмотрены только: 1) приближенное преобразова-
ние многоугольных схем типа рис. 3-1, а в лучевые схемы и 2) экви-
валентирование «в пространстве параметров».
71
1. Приближенное («неканоническое») преобразование многоугольных схем
в лучевые
Как известно, лучевая схема рис. 3-1, б с любым числом ветвей
может быть однозначно и точно преобразована в многоугольник
[Л. 18 ]; напротив, точное преобразование многоугольника с задан-
ными взаимными сопротивлениями xjk (или проводимостями y>Jk)
в лучевую схему возможно лишь при некоторых жестких условиях,
которым должны удовлетворять величины xjk. Даже приближен-
ное преобразование (эквивалентирование) многоугольника в луче-
вую схему не всегда допустимо, так как может приводить к грубому
Рис. 3-1.
искажению соотношений между совокупностью заданных в верши-
нах (узлах) многоугольника напряжений и совокупностью опреде-
ляемых этими напряжениями токов. Однако в тех случаях, когда
индуктивные сопротивления сетевых связей между станциями и
подстанциями невелики по сравнению с индуктивностями машин,
повысительных и понизительных трансформаторов, вся система
в целом по своим свойствам может быть близка к свойствам лучевой
системы, и тогда приближенное преобразование многоугольника
взаимных индуктивностей в лучевую звезду будет вполне допусти-
мым. Соответствующий расчет индуктивностей лучевой схемы можно
проводить многими различными способами, которые вообще приво-
дят к не вполне совпадающим результатам. Мы рассмотрим про-
стейшие из них, применительно к схеме полного пятиугольника
(рис. 3-1, а). Пусть вершины его обозначены /, 2, 5, 4, 5, а заданные
взаимные реактивности — х12, х13, х14, х15, х23, х24> х25, хз^ х45-
Обозначим лучи искомой эквивалентной звезды (рис. 3-1, б), соот-
ветственно обозначению вершин многоугольника, через xv х2, х3,
х4, х0. Предположим, что их значения так или иначе определены.
Тогда этим значениям должен был бы точно соответствовать полный
пятиугольник, имеющий взаимные индуктивности xj2, х'3, . . . , х'5,
определяемые из известных соотношений:
72
Х12 = Х,Х2У>
Х13 = Х1ХзУ’
x'jk = xixky^
где
представят собою относительные погрешности эквивалентирования.
Подчиним их условию, чтобы сумма их квадратов, являющаяся
функцией величин хх, х2, . . . , х5,
(' \а / ' \2
— — 1 + — —1 + • • •
х1г / \ *13 /
/ X V
(3-21>
была минимальной.
Это приводит к системе нелинейных алгебраических уравнений
относительно хх, х2, . . . , х&-
— = 0 (k= 1, 2, . . . , 5).
dxk
Вопрос о решении этих уравнений относится к области числен-
ного анализа и мог бы здесь не рассматриваться. Однако нелишне
указать способы, которые специфичны для рассматриваемой задачи
преобразования схем и которые доступны в инженерной практике.
Таких способов можно указать довольно много. Сами по себе они
не обеспечивают минимума функции F (хх, х2, . . . , xft), но дают
значения параметров хх, х2, . . . , xk искомой лучевой схемы, до-
статочно близкие к тем, которые соответствуют этому минимуму.
Дальнейшее уточнение может быть получено с помощью линейного
приближения.
Все способы, о которых идет речь (здесь будут рассмотрены
только три из них), основаны на некоторых мысленных эксперимен-
тах, сопровождаемых надлежащими вычислениями, или на соответст-
вующих измерениях, если многоугольник представлен лаборатор-
ной схемой, допустим, на расчетном столе постоянного тока.
Первый способ — условное многократное приведение за-
данного многоугольника (рис. 3-1, а) к виду треугольника путем
глухого («накоротко») соединения всех вершин многоугольника г
73
кроме каких-либо двух. Так, например, соединив вершины 3, 4 и 5
в один узел А 3 4 5, получим треугольник, так как связи х13, х]4 и
х15, а также, аналогично, связи х23, х24 и х25 окажутся в параллель-
ном соединении между собой, образуя соответственно две стороны
треугольника, третью сторону которого представит связь х12, а вер-
шинами его будут узлы 1, 2 и Л3 45. При выполнении такой же
операции (объединения вершин 3, 4, 5) в лучевой схеме (рис. 3-1, б)
получим трехлучевую звезду, двумя лучами которой будут искомые
сопротивления х4 и х2, а третий луч, не принимаемый во внимание,
образуется параллельным соединением искомых лучей звезды х3,
х4 и х5.
Допуская, что будем иметь соответствие между указанным пре-
образованием многоугольника в треугольник и преобразованием
многолучевой звезды в трехлучевую, легко определим сопротивле-
ния двух ее лучей х4 и х2 путем точного (канонического) преобразо-
вания треугольника в звезду.
Повторив такую же операцию во всех возможных комбинациях
связей и узлов заданного многоугольника, оставляя попарно и по-
очередно свободными его вершины 1 и 2, 1 и 3, 1 и 4, 1 и 5, 2 и 3,
2 и 4, 2 и 5, 3 и 4, 3 и 5, 4 и 5, получим в данном случае для каждого
искомого сопротивления лучей звезды по четыре значения, вообще
отличающихся одно от другого; например, для луча х4 — значения
Х1 (1)’ Х1 (2)’ Х1 (3)’ Х1 (4)*
В качестве первого приближения естественно принять среднее
Xj — -^-(Xj {1) + х( (2) + х1 (3) + х( (4)) и аналогичные значения для
прочих сопротивлений лучевой схемы: х2, х3, х4, х6.
Считая, что эти величины близки к тем, которые соответствуют
минимуму функции F (х4, х2, . . . , х5), можно получить следующее
приближение, положив
xj (/ = 1, 2, . . . , 5);
и соответственно (отбросив члены с произведениями Д/Д*):
х[2 = х'^у^х^-|- у(х^Л2 + х2Д,),
Xyft — x.xky ~ XjXky + у (XjAk + хД).
Подстановка этих выражений величин x’jk в выражение функции
F (х4, х2, . . . , X/) позволяет рассматривать последнюю уже как
линейно-квадратичную функцию переменных Дх, Д2, . , . , Д6, и
74
минимум ее определится системой линейных алгебраических урав-
нений:
= 0, = 0, .... = О
ЗД2 дД5
относительно Дх, Д2, Д3, Д4, Д6.
Таким путем (если потребуется, с дальнейшими уточнениями}
можно найти наилучший, в смысле метода наименьших квадратов,
лучевой эквивалент заданного полного многоугольника, после чего
среднеквадратичная погрешность определится по формуле:
$ = р/ F (х1< хп)мт # (3-22)
Второй способ характеризуется опытом, в котором нако-
ротко смыкаются между собой четыре узла (например 2, 3,4 и 5) за-
данного многоугольника и соответствующие четыре входных зажима
лучевой схемы (т. е. 2, 3, 4 и 5); затем вычисляется или измеряется
сопротивление между оставшейся свободной вершиной (/) и узлом,
образовавшимся при коротком смыкании прочих вершин (2, .. . ,5)
многоугольника. Эта операция повторяется столько раз, сколько
вершин имеет многоугольник (в нашем случае 5 раз). Отсюда по-
лучаем п нелинейных алгебраических уравнений для определения
п неизвестных проводимостей ветвей лучевой схемы; в данном слу-
чае:
У1 У у, +« _1 — У\ J — У2 1 ' (3-23)
У12 + 1/13 + Уи + 1/15 1
У12 + У23 + У2А + У2Ь
—+- Уь У J __ 1
— Уь 1/15 + У2Ь + УЗЬ + 1/45 J
где в правой части — известные проводимости заданного МНОГО-
угольника, а в левой части - — искомые параметры лучевой схемы:
5
1 1 1‘ V 1
У1 = —, 1/2 = — , Z/s = —, У = •
«1 х2 X]
Уравнения (3-23) без особых затруднений решаются методом
последовательных приближений, причем в качестве первого, гру-
бого, приближения можно пренебречь вторыми слагаемыми левых
частей этих уравнений, т. е. принять
f/i(l) У а + Ухз + Ун + 4/15
Полученные рассматриваемым способом значения проводимостей
и сопротивлений (х1У х2, ... , х5) лучевой схемы могут быть затем
75
уточнены линейно-квадратичным приближением функции F (хп
х2, . . . , х5) и ее минимизацией, как было указано выше.
Третий способ основан на последовательном определении
сопротивлений между всеми возможными парами узловых точек за-
данного многоугольника (/ и 2, 2 и 3, 1 и 4,1 и 5,2 и 3 и т. д.) в пред-
положении, что при определении сопротивления между какой-либо
парой узлов (например 1 и 2), все прочие узлы (например 3, 4 и 5)
отключены от всех внешних источников напряжений.
Предполагая, что такие же операции проводятся применительно
и к лучевой схеме, в общем случае получим для определения п со-
противлений (хъ х2, . . . , х„) этой схемы — п(л — 1) алгебраиче-
ских уравнений вида: 2
sjk = xj + xk ~ sjk'
Tj\e все sjk определяются по заданным параметрам многоугольника
(при п = 5 будет 10 уравнений).
Оптимальными будем теперь считать такие значения сопротив-
лений х1; х2, . . . , х„, при которых относительная среднеквадратич-
ная погрешность сумм s’jk, определяемых по лучевой схеме, будет
минимальной. Для этого необходимо, чтобы был обеспечен мини-
мум функции
г.(С,. .....+,) = -1? + -11 +
L si2 J L si3
+... + Гх* + х< — 11a + ...
L ski J,
(при n = 5 число слагаемых в последнем выражении равно 10).
Так как эта функция имеет квадратичную форму, то соответст-
вующие алгебраические уравнения, определяющие ее минимум,
т. е. уравнения:
dFs __ 0. 3FS _ q dFs _______g
дхг дх2 ’ дхп
оказываются линейными; поэтому решение их не представляет прин-
ципиальных затруднений. Эти уравнения имеют простую симмет-
ричную матричную форму: _
^4^.х = В
76
причем
1
о
%
__ 1 __ 1 1 .
Sjk — Skf> 9 2 _2 Г
Sjj SJ1 SJ2
Все Sjk находятся измерением или вычислением.
Следует заметить, что в данном способе оценка погрешности от-
несена не к сопоставлению результатов обратного преобразования
лучевой схемы в многоугольник с соответст- 7
вующими параметрами заданного многоуголь- .
ника, а к сопоставлению как бы двух серий
идентичных измерений (или вычислений)
в схемах многоугольника и звезды. Такой
метод должен приводить вообще к несколько
иному результату. Отсюда возникает жела-
тельность уточнения полученных рассматри-
ваемым способом сопротивлений лучевой
схемы на основе приближенного определения
минимума функции F (хх, х2,.. . хп), как ука-
зано при рассмотрении первого способ^.
Достоинство третьего способа заключается
в простоте операций по определению величин
Sjk = Xj + xk, причем для их выполнения, как,
впрочем, и в случае использования первых
двух способов, нет необходимости исходную
первичную схему предварительно преобразо-
вать в полный п-угольник.
Числовой иллюстрацией изложенного мо-
гут служить указанные ниже результаты
преобразования схемы рис. 3-2, а в четырех-
лучевую схему (рис. 3-2, б). Схема рис. 3-2, а
имеет 4 точки приложения внешних напряжений (или э. д. с.): /,
2, 3, 4. Центральную часть схемы составляет четырехугольник без
диагоналей с вершинами а, 6, с, d, который сам по себе в лучевую
схему преобразован быть не может; в то же время при заданных
сопротивлениях (указанных на рис. 3-2, а в условных единицах)
схема в целом такое преобразование допускает с удовлетворитель-
ной точностью. (Искомые индуктивные сопротивления лучей на
схеме рис. 3-2, б обозначены через хх, х2, х3, х4.)
Соответствующий схеме рис. 3-2, а полный многоугольник пред-
ставлен на схеме рис. 3-3, где цифры в десятичных дробях означают
взаимные проводимости (#12, у23 и т. д.). Они вычислены по схеме
рис. 3-2, а общеизвестным способом.*
* Все расчеты выполнены с помощью логарифмической линейки.
77
Результаты преобразования схемы 3-2, а в схему рис. 3-2, б
тремя изложенными выше способами указаны в сводной табл. 1.
Относительная среднеквадратичная погрешность для оптималь-
ных значений оказалась приблизительно 10,5%.
Таблица показывает, что третий способ дает сам по себе, по-ви-
димому, менее близкие к оптимальным значениям сравнительно с
двумя другими способами.
Рассматриваемое приближенное преобразование полного много-
угольника в лучевую схему является весьма удобным для практики
эквивалентирования. Оно не требует предварительной линеариза-
Рис. з-з.
ции уравнений электромеханической системы, значительно менее
трудоемко сравнительно с применением теоремы разложения и до-
пускает использование расчетных столов (моделей) постоянного
тока.
Таблица 1
Сопоставление результатов трех способов преобразования
схемы рис. 3-2, а в лучевую схему
Способ преобразования Реактивные сопротивления Реактивные проводимости
X, | X, | х3 х4 Уз Уз | Уз sy
Первый 10,7 9,21 13,23 6,95 0,0935 0,1090 0,0758 0,1445 0,4230
Второй 10,60 9,25 13,24 6,90 0,0943 0,1080 0,0755 0,1450 0,4228
Третий 10,54 8,83 13,30 7,03 0,0950 0,1130 0,0752 0,1420 0,4252
Оптимальное значение 10,9 9,0 13,1 6,91 0,092 0,1110 0,0762 0,1445 0,4237
Примечание. В таблице указаны параметры лучевой схемы рис. 3-2, б в тех же
условных единицах, что и на рис. 3-2,а.
Важно отметить, что изложенные выше приемы параметрического
эквивалентирования применимы для преобразования различных
схем не только к виду звезды, но и к другим типам схем, могущих
оказаться в частных случаях по тем или иным соображениям более
удобными, чем схема лучевая. Так, например, схема рис. 3-2, а
при известных условиях допускает преобразования в схему рис. 3-4.
78
Поскольку рассматриваемое приближенное сетевое эквиваленти-
рование относится только к параметрам связей электрических си-
стем, не касаясь инерционных констант и природы ее основных
энергетических элементов,— сам собой разрешается и вопрос об
отделении генераторов от приемников, что весьма важно для про-
цедуры глубокого (т. е. со значительным уменьшением числа основ-
ных элементов) эквивалентирования.
2. Эквивалентирование в пространстве параметров
а. Предварительные соображения
и определения
Как уже отмечалось в главе первой, современные локальные
(«концентрированные») электроэнергетические системы могут со-
стоять из весьма большого числа генерирующих и нагрузочных
узлов (станций и подстанций).
Обычно априори, но, вообще говоря, с достаточным основанием,
генераторы, принадлежащие одной станции, заменяются одним эк-
вивалентным генератором, а совокупность приемников, относя-
щихся к одному нагрузочному узлу, одним эквивалентным прием-
ником. В этом заключается процедура начальной стадии эквивален-
тирования, которая будет рассмотрена позже.
После завершения начальной стадии, система приводится к со-
вокупности все еще достаточного большого числа генераторов и
нагрузок, объединенных взаимными сетевыми связями и если усло-
виться представлять все нагрузки синхронными двигателями (см.
§ 2-4), то по отношению к контрольному узлу систему можно пред-
ставить схемой вида рис. 2-1. Последнюю в свою очередь, путем
линеаризации можно привести к чисто электрической схеме
рис. 2-3.
Однако следует заметить, что основная идея рассматриваемого
метода сама по себе не связана с линеаризацией системы и основана
на отличительной характеристике главных элементов системы до-
статочным числом важнейших параметров, с учетом или независимо
от того или иного установившегося режима.
К таким параметрам в первую очередь относятся инерционные
постоянные и взаимные индуктивности связей (хх, х2, . . . , -Чг,
х13, ... на рис. 2-1). Сюда можно присоединить еще и другие число-
вые характеристики, например, удельные показатели демпфиро-
вания, коэффициенты усиления автоматического регулирования
и др.
Таким образом, каждый основной элемент системы можно пред-
ставить определенной точкой i в многомерном пространстве с коор-
динатами ait bt, ct, . . . , соответствующими значениям характер-
ных параметров и откладываемыми по координатным осям а, Ь,
с, . . ., причем каждая ось отвечает только одному какому-либо роду
параметров.
79
В результате заданная электрическая система представится со-
вокупностью п точек — по числу различных главных элементов
системы.
Эта совокупность характеризует основное «разнообразие» [Л. 1 ]
заданной системы, поскольку позволяет видеть совпадение или
несовпадение отображающих точек.
Если при каких-то исходных условиях первичное разнообразие
может быть точно сведено к меньшему числу элементов (т. е. с мень-
шим числом различных отображающих точек), то будет иметь место
естественное «ограничение разнообразия» или, в нашей терминоло-
гии, точный эквивалент с меньшим разнообразием. Однако в подав-
ляющем большинстве случаев в отношении электроэнергосистем
оказывается возможным только приближенное, как бы принуди-
тельное ограничение разнообразия, которое соответствует прибли-
женному эквивалентированию.
С математической точки зрения эквивалентирование в простран-
стве параметров означает требование оптимальной замены совокуп-
ности п точек многомерного пространства, совокупность меньшего
числа т точек в том же пространстве.
В качестве удобного (но не единственного) критерия оптималь-
ности представляется целесообразным использовать обобщение на
многомерное пространство метода моментов, который для простых
вещественных совокупностей находит широкое применение в теории
вероятностей [Л. 29].
К сожалению, числовые характеристики многомерных прост-
ранств существенно ограничены. Как известно, аналогами обычных
комплексных чисел являются только кватернионы, соответствующие
четырехмерному пространству [Л. 30]. Несомненно, что с помощью
этих гиперкомплексных чисел можно построить эквивалентирова-
ние в четырехмерном пространстве параметров на основе принципа
числовых моментов, но вследствие особенностей алгебры кватернио-
нов (некоммутативности умножения) такой способ эквивалентиро-
вания при больших пит едва ли был бы удобным для практики.
Поэтому в дальнейшем рассмотрим иные приемы эквиваленти-
рования в пространстве параметров, которые различаются по ма-
тематической процедуре и по критериям эквивалентности.
Отметим также, что практические приемы эквивалентирования
в пространстве параметров при известных условиях можно устано-
вить на основе изложенных выше функциональных методов, приме-
ром чего может служить эквивалентирование систем лучевого типа,
рассматриваемое ниже.
В общем случае кроме вопроса об оптимальной процедуре экви-
валентирования в пространстве параметров весьма существенным
является правильный выбор этих параметров. Очевидно, что идея
рассматриваемого метода может иметь смысл и достаточные основа-
ния только при условии полного подобия уравнений динамики ис-
ходной и эквивалентной систем.
80
б. Эквивалентирование линеари-
зированных систем лучевого типа
На второй стадии эквивалентирования придется иметь дело со
схемами типа рис. 2-1 или соответствующими электрическими схе-
мами рис. 2-3. Эти схемы можно привести к лучевым, согласно схеме
рис. 2-14, путем применения теоремы разложения (см. § 2-5) или,
если это оказывается невозможным, путем приближенного преобра-
зования многоугольных схем в лучевые (см. выше § 3-3, п. 1). Пред-
положим, что это выполнено и что в качестве точки контрольных
возмущений взята общая точка А лучевой схемы, другими словами,
будем рассматривать схему рис. 2-14, однако с разделением ее на
две группы ветвей — генераторные и нагрузочные (двигательные)
с тем, чтобы эквивалентирование одной группы проводилось неза-
висимо от эквивалентирования другой. При принятых допущениях
это вполне возможно. В обоих случаях процесс эквивалентирова-
ния будет совершенно одинаков. Для определенности предположим,
что имеется п генераторных ветвей с индуктивностями Lv L2, . . .,
Ln и с емкостями соответственно Сг, С2.С„ и что требуется сок-
ратить число ветвей с п до т (< п).
Предполагая, что возмущение со стороны узла А представляет
собой единичную функцию, получим при нулевых начальных усло-
виях суммарный ток для исходной схемы (с разнообразием п) в опе-
рационной формС:
п
»’s(«) = 2s-(1 + vy) ’
где q = —; А = —-— = т;, (квадрат собственной частоты), и после
Р 1 Lict 1
суммирования рядов разложения по степеням q\
п. п 9
J-1 н
п 4 п 2k
+ ?5 У Т • • • (- о*<?2ft+ ’У ТГ(3-25)
. 1 1 it
Аналогично для эквивалента с разнообразием, уменьшенным до
совокупности т элементов:
Приравняв множители при одинаковых степенях q в этих рядах,
для первых 2т слагаемых каждого ряда, будем иметь минимально
81
необходимое число уравнений для определения неизвестных экви-
валентной системы (L; и vj при i = 1, 2, . . . , т)\
(3-26)
ТТ 1 1 7
Не трудно видеть, что в этих выражениях величины —, — (не-
Ly Lj
которые условимся называть «индуктивными проводимостями»)
играют весовую роль, аналогичную роли точечных масс ил'и сосре-
доточенных сил, а величины vj2, vj — роль «расстояний» этих масс
от начальной точки на прямой, вследствие чего выражения левых и
правых частей последних уравнений, начиная со второго, оказы-
ваются аналогичными выражениям механических моментов первого,
второго, третьего и, наконец, (2т—1)-го порядка сосредоточенных
масс или сил относительно начала координат. Соответственно, первое
из уравнений выражает как бы требование сохранения суммарной
массы, а последующие — требования сохранения моментов соот-
ветствующих порядков — не свыше порядка (2т—1). Тем самым
выражаются приближенные требования эквивалентирования при
переходе от п к т цепям в схеме рис. 2-14.
При больших значениях п и т (например^ при п = 10 и т = 9)
удовлетворению этих требований соответствует разложение опера-
торных выражений (3-25) тока i2x(n) до весьма высоких степеней q
(при т = 9 требуемая высшая степень равна 35). Это несомненно
обеспечивает и достаточную точность эквивалентирования. Однако
при сильном снижении разнообразия т точность эквивалентирова-
ния на основании указанного ограничения моментов до порядка
(2m—1) может оказаться недостаточной, хотя при этом чрезвычайно
упрощается система уравнений (3-26), которая в предельном случае
т — 1 сводится всего лишь к двум:
82
метров [уэ
Для проверки точности эквивалентирования при таких резких
снижениях разнообразия необходимо взять дополнительно более
высокие моменты, и значения эквивалентных параметров определять
по методу наименьших квадратов. Так, для т = 1, учтя, кроме сумм
Ло и Л1 в (3-26), еще дополнительно следующие по порядку два мо-
мента, получим уравнения для определения эквивалентных пара-
i-э
dF п dF п
— = 0 и — = 0,
дуэ
где
р = (У3 - Л)2 + ta - А)2 + (уЛ - Аг)2 + (уЛ ~ А)2- (3-27)
Выражение функции F и весь расчет по методу наименьших квад-
ратов можно упростить, допустив как обязательное требование
сохранения «массы», т. е. суммарной индуктивной проводимости.
Это требование является достаточно обоснованным, так как при
переходе к исходной электромеханической системе оно означает
требование точного эквивалента по суммарному сверхтоку * трех-
фазного короткого замыкания в контрольной узловой точке А,
соответственно параметрам так называемого «переходного процесса»
[Л. 31]. В свою очередь, требование точности токов к. з. связано
с необходимостью достаточно правильного отображения в эквива-
ленте «импульсных моментов», воздействующих на генераторы и
двигатели приемной системы (см. § 4-3).
При допущении уэ = Ло выражение функции F для рассматри-
ваемого примера будет иметь вид
== (4ч. - л- лгу + (V,; - Asf,
и минимум ее будет определяться уравнением с одним неизвест-
ным 7]э:
^ = 0.
Поскольку рассматриваемому параметрическому усреднению
вообще должна быть отведена самостоятельная роль метода эквива-
лентирования лишь для первого этапа второй стадии, когда тре-
буется перейти от большего разнообразия п к меньшему, но все еще
довольно значительному разнообразию т, то возникает вопрос о
наилучших способах перехода ступенями в одну единицу, т. е. по-
следовательно от п элементов к (п—1) элементам, от (п—1) элемен-
тов к (п—2) элементам и т. д.— до требуемого уровня разнообразия.
* Термин «сверхток» здесь означает, что имеется та составляющая тока
к. з., которая непосредственно не зависит от э. д. с. приемной системы и ко-
торая как бы налагается на рабочий ток, протекающий через контрольный
узел А [Л. 31].
83
Постепенный переход является значительно более трудоемким
сравнительно с весьма часто практикуемым переходом от и к zn=l,
который, однако, в общем случае нельзя признать обеспеченным
по точности даже на основе функционального эквивалентирования,
гак как последний сам по себе не может обеспечить необходимой
точности, если спад разнообразия (п—т) слишком велик.
Изложенный выше параметрический метод моментов оказыва-
ется слишком трудоемким для ступенчатого эквивалентирования;
поэтому следует учесть возможность для лучевых схем попарного
или вообще группового объединения отдельных ветвей. Процесс
такого объединения, вообще говоря, не будет оптимальным, но
чрезвычайно прост и удобен для применения на практике.
Не трудно убедиться, что в линеаризированных лучевых схемах
рис. 2-14 объединение двух любых цепей с параметрами yh vjy и yz,
будет вполне точным, если точно удовлетворяется требование
равенства величин ц и т. е. квадратов собственных частот. При
соблюдении этого требования напряжения uf и ut на емкостях С7-
и С1 будут тождественно равны между собой при любых возмуще-
ниях со стороны контрольного узла Л, и, следовательно, обе цепи
можно объединить параллельным соединением емкостей Cz и Cz,
а также проводимостей у; и yz. В полученном частном эквиваленте
проводимость уэ и емкость Сэ будут равны соответственно сумме
проводимостей и емкостей объединяемых цепей.
Таким образом, только различие в частотах собственных коле-
баний (или их квадратов) является в данном случае показателем
разнообразия, и при объединении цепей с точно одинаковыми ча-
стотами происходит уменьшение числа элементов без уменьшения
точности эквивалентирования. Это справедливо не только для по-
парного, но и вообще для группового объединения цепей в лучевых
схемах.
Если частоты не одинаковы, но достаточно близки, то можно
считать допустимым объединение соответствующих цепей на основе
только двух требований — сохранения суммарной проводимости
(«массы») и суммы моментов первого порядка, т. е. определять пара-
метры частного эквивалента равенствами:
Уэ = У/ + У/> 1 (3-28)
Уэ'^э = У/7!/ + y^t- J
При каждом таком приближенном * объединении цепей па-
раллельно с уменьшением разнообразия будет происходить и умень-
шение общей точности эквивалентирования. Чтобы погрешность
возрастала возможно медленнее, необходимо всю данную совокуп-
ность величин Tji, т]2, . . . , расположенных на числовой оси в
* Предполагается, что цепи с равными частотами предварительно объе-
динены, как указано выше.
84
порядке возрастания, разбить на подходящие зоны соответственно
требуемому уменьшению разнообразия от п до т < п. Для этой
цели возьмем на числовой оси еще два дополнительные значения
квадратов частот:
-»1о = "'ll-(''la — ^i) = 1. 5rli — °>571а
И |
^+1 = \ + Y С1'1 “= 1 ,571п ~ 0,571л-1 *
Всю область между и т] р заключающую в себе, очевидно,
все заданные vjy, разобьем на т неравных смежных участков так,
чтобы верхняя граница (т^в) любого из них, с порядковым номером
Л, отличалась от нижней его границы (^н) на один и тот же множи-
тель а > 1, т. е. чтобы было т^в = а^н, причем, очевидно, должно
быть:
^(£—1) в’
^1Н =
V|T
Из этих условий найдем:
т
^п+1 = а ’io-
и
а I’M'"”
а = -----
\ Vo /
Отсюда же вытекает, что величина каждого последующего участка
dA+1 отличается от величины предыдущего участка dk на один и тот
же множитель а:
Изложенная система разбиения области т]0, т]л+1 на т участков
учитывает необходимость равномерной точности эквивалентирова-
ния для всех показателей частот от высших до низших.
После указанного разбиения можно все показатели частот из
заданной совокупности, приходящиеся на каждый из участков, за-
менить одним показателем частоты из условия равенства первых
моментов и сохранения суммарной проводимости (3-28).
Таким путем будет достигнута если не оптимальная, то, по-ви-
димому, достаточно высокая точность эквивалентирования. В кон-
кретных случаях это всегда можно проверить сопоставлением
достаточного числа моментов более высоких порядков резуальтатив-
ного эквивалента с соответствующими моментами исходной луче-
вой схемы.
85
.в. Эквивалентирование в простран-
стве параметров в общем случае
Не исключено, что схема общего вида (рис. 2-1), даже будучи
линеаризована, не может быть приведена к лучевой схеме. Кроме
того, по некоторым соображениям может оказаться целесообраз-
ным вести эквивалентирование при условии, чтобы сохранялось
структурное подобие исходной и эквивалентной системы. В подоб-
ных случаях задача эквивалентирования в пространстве парамет-
ров становится достаточно сложной. Однако параметрические ха-
рактеристики исходных и эквивалентных систем следует признать
полезными для уяснения структурных соотношений и для грубой
оценки точности эквивалентирования.
Необходимо отметить, что среди параметров, определяющих
динамику и режимы электрических систем, встречаются как допу-
скающие, так и не допускающие естественное физическое суммиро-
вание. Примером параметров первого рода могут служить индук-
тивные проводимости, активные и реактивные мощности и т. д.
Суммирование подобных параметров может входить в комплекс
обязательных критериев эквивалентности. К числу параметров
второго рода следует отнести постоянные времени цепей возбужде-
ния синхронных машин, коэффициенты усиления автоматических
регуляторов и др. В отношении этих параметров в процессе эквива-
лентирования может быть реализовано только требование того или
иного вида оптимального усреднения. Очевидно, что при построе-
нии любого способа эквивалентирования в пространстве параметров
должно быть учтено разделение их на два рода.
В связи с трудностями использования фундаментальных число-
вых представлений в многомерных пространствах, а также учитывая
вспомогательную роль рассматриваемого метода лишь как средства
снижения разнообразия на первых стадиях упрощения систем,—
представляется ч целесообразным процесс эквивалентирования в
многомерном пространстве свести к серии отдельных процессов
в двумерных пространствах. Это дает возможность применять про-
стой и привычный всем аппарат комплексных чисел.
Если из совокупности параметров ait bt, c-L, ... , которые
должны явиться основой эквивалентирования, выделить какие-либо
два вида главнейших at и bL, то можно многомерный процесс эквива-
лентирования разбить на ряд двумерных процессов с попарными
сочетаниями параметров:
(1)
(2) az<-*cz,
(3) at^dt,
При этом естественно принять, что эквивалентные значения са-
мого главного параметра (az), определенные в первой процедуре
86
(ai<—>bl)f остаются неизменными во всех последующих процедурах
(2), (3), . . . и т. д.
Этим будет обеспечено соответствие всех эквивалентных пара-
метров многомерной совокупности.
Естественным является также требование, чтобы все попарные
процедуры эквивалентирования проводились одним и тем же спо-
собом, с дополнительными критериальными условиями, если это
требуется при наличии суммируемых параметров.
Рассмотрим два из таких способов.
1) Использование формул центральных числовых моментов.
Допустим, что все главные (или координирующие) параметры at
относятся к вещественной оси, а прочие параметры bt, cit ... —
к мнимой оси комплексной плоскости. Тогда каждому элементу i
исходной системы (i = 1, 2, . . . , п) будут соответствовать в пло-
ских подпространствах a/b, а/с, aid, . . . комплексные числа (az +
+ (ai М)> (ai + jdi) , . . . и т. д. Аналогично должны отоб-
ражаться и элементы эквивалентной системы с параметрами
&*, с* ... (Z = 1, 2, ..., т).
Если не вводится никаких дополнительных критериальных тре-
бований, то в первой попарной процедуре эквивалентные параметры
п* и Ь] подлежат определению из условия равенства центральных
моментов исходной и эквивалентной системы, т. е. в данном случае
из уравнений:
т п
-i--------= ---------= Ми
tn п
2^+ц,--м,у 2 («, + ;»-mJ
—-------------= _!-------------= m2j
tn п
(3-29)
т п
2 (аГ + 2 (ai+ibt -
i i
до моментов порядка s включительно.
Каждое из написанных s комплексных уравнений распадается
на два вещественных; с другой стороны, для эквивалентной системы,
имеющей т различных элементов, будем иметь 2т неизвестных
параметра в плоскости а/b. Отсюда следует, что минимальный по-
рядок моментов в последнем уравнении должен быть не ниже s — т.
При т < 3 целесообразно взять з > т, чтобы повысить точность эк-
вивалента с помощью усреднения по методу наименьших квадратов.
Прочие попарные процедуры эквивалентирования в плоскостях
а/с, aid, . . . и т. д. должны проводиться аналогично, с тем отличием,
что для них число уравнений может быть уменьшено до порядка
87
s = 1/2 tn, так как в этих уравнениях величины убудут известными
из первой процедуры.
Если кроме требования равенства центральных моментов будут
введены какие-либо другие обязательные критериальные условия,
выраженные дополнительным числом специальных уравнений, то
структура системы уравнений моментов должна соответственно видо-
измениться.
Допустим, например, что введено требование равенства суммы
параметров а* эквивалента сумме параметров исходной схемы, т. е.
Это условие можно соблюсти без изменения общей формы написан-
ных выше уравнений моментов, если вместо исходных параметров
at ввести пропорциональные им параметры:
(3-30)
Такое преобразование можно рассматривать как смещение за-
данной совокупности точек исходной системы параллельно вещест-
венной оси.
В случаях, когда требование равенства сумм параметров экви-
валента и исходной системы относится к обоим координатным пара-
метрам и &z, аналогичное преобразование распространяется на
оба эти параметра и, следовательно, на составленные из них комп-
лексные числа. Соответственно в уравнения моментов вводятся
комплексные числа:
z,. (a, b)=— (fit + /&,).
т
2) Приведение эквивалентирования в пространстве параметров
к эквивалентированию полиномов. Разбиение процесса многомер-
ного эквивалентирования на попарные процедуры с использованием
комплексных чисел открывает возможность приведения задачи эк-
вивалентирования в пространстве параметров к функциональному
эквивалентированию простых степенных многочленов.
Действительно, каждому комплексному числу + jb^ одно-
значно соответствует сопряженное с ним число (ц—jb^. Оба эти
числа можно рассматривать как корни многочлена 2-й степени от
произвольного переменного х.
Всем п точкам на комплексной плоскости, соответствующим па-
раметрам at и bt исходной системы при i = 1, 2, . . . , и, очевидно,
можно сопоставить полный многочлен степени 2п:
^’ип) = х2л + Д1х2л-1 + ... + Л„ =
= (х2 — 2а{х + а2 + (х2 — 2а^х +
+ а2 + Ь2)... (х2 - 2апх + а2 + Ь2п). (3-31)
88
Аналогично для искомого эквивалента из т элементов должен су-
ществовать отвечающий ему полином:
Г(х)т = х2т + А>2'"-1 + ... + Л;т.
Задача эквивалентирования теперь сводится к приближению
полинома F (х)п степени 2п полиномом F (х)т меньшей степени
2m, который подобно полиному F (х)п должен иметь корни только
в первой четверти (+ 1, + /) комплексной плоскости. Это можно
выполнить на основе общей теории интерполирования и приближе-
ния функций, а также упрощенными методами функционального
эквивалентирования (см. § 3-1, 2).
При использовании этих упрощенных методов предпочтитель-
нее процесс эквивалентирования отнести к обратным функциям:
1
Ф(х)„ = ~L_ и f(x)m =---------,
F (x)„ ,m F (x)m
которые в отличие от F (х)п и F (х)т остаются ограниченными при
любых чисто вещественных значениях х.
В том случае, когда необходимо ввести требование равенства
сумм каких-либо параметров одного рода для эквивалентной и ис-
ходной систем, это легко достигнуть, относя эти параметры к веще-
ственным частям комплексных чисел. Тогда, как легко видеть,
указанное требование выразится простым уравнением:
Ai=Alt
г. Соображения о выборе
координатных параметров
Необходимо отметить, что рассмотренные способы — 1) и 2), —
вообще говоря, не дают тождественных результатов. Последнее
является следствием того общего факта, что способов усреднения
чисел и функций можно указать неограниченное множество, и все
эти способы дают нетождественные, хотя и близкие при известных
условиях результаты.
С указанным фактом тесно связан и вопрос о выборе базисных
параметров в качестве координат для точек многомерного простран-
ства, отображающих исходную систему. Остановимся кратко на
этом вопросе.
Выше уже отмечалось, что выбор надлежащего комплекса коор-
динатных параметров должен быть прежде всего связан с формой
и физическим смыслом основных уравнений, определяющих дина-
мику системы.
Ограничимся представлением системы линеаризированными урав-
нениями по типу формул (2-49), соответствующих обобщению схемы
рис. 2-3. Непосредственно из рассмотрения структуры матрицы В
и выражения суммарного, входного в схему тока видно, что в ка-
честве главных откладываемых по вещественной оси параметров
89
следует принять проводимости at — 1/Lj, которые должны быть
подчинены требованию равенства их сумм для эквивалента и исход-
ной системы, а в качестве сопрягаемых с ними параметров мнимой
оси — величины ₽?0 = ——. Последние должны и могут быть под-
LjCj
чинены только процессу усреднения, поскольку их суммирование
не имеет под собой никаких физических оснований. Указанный вы-
бор главных параметров находится в достаточном соответствии с ус-
ловиями эквивалентирования лучевых схем (для которых все
Ljk = °°)-
Выполнение первой процедуры эквивалентирования на комплекс-
ной плоскости в отношении параметров и р?0 даст возможность
определить соответствующие им эквивалентные параметры aj и
(/ = 1, 2, . , . , т), а, следовательно, и все Lj, Cj.
Из прочих параметров эквивалентной схемы по типу рис. 2-3
останутся неопределенными лишь эквивалентные проводимости
внутренних связей y*jk = 1/LJA, входящие в выражения квадратов
эквивалентных комбинированных частот:
L*
^ = -^4^ (£=1,
LjLiLjk
Совокупность аналогичных частот исходной схемы, содержащей
п различных элементов, можно для каждого узла j заменить сово-
купностью некоторого числа q центральных моментов по формулам:
(3-32)
После этого все процедуры попарного эквивалентирования
можно отнести к совокупностям координат (а;*—, (а;- <—> /п/2).. .
и т. д., учитывая при этом, что эквивалентные проводимости а* уже
будут определены из вышеуказанной первой процедуры (af<—► $>).
Если требуемый эквивалент, сохраняя подобие исходной схеме
по типу рис. 2-3, должен иметь т различных основных элементов,
то число подлежащих определению комбинированных частот pj*
90
составит -~т(т— 1). Поскольку для каждого из т элементов бу-
дет найдено q числовых моментов по данным исходной схемы и этим
моментам следует приравнять аналогичные моменты эквивалентной
схемы, то тем самым будет обеспечено для определения эквивалент-
ных комбинированных частот mq уравнений вида
т—1
2 $
1
m—1
2
Очевидно, что для возможности определения всех — т(т—1)
эквивалентных комбинированных частот необходимо соблюдение
условия
mq > т (т— 1)
или
7>^-(m — 1).
После определения всех ₽)*, при уже известных значениях L;
и С/, легко определяются эквивалентные проводимости внутренних
связей, а также квадраты эквивалентных главных частот ₽)2, входя-
щие в матрицу В* эквивалентной схемы.
Заметим, что в принципе следовало бы исходить из непосредст-
венного эквивалентирования именно этих величин (вместо эквива-
лентирования квадратов условных частот [320). Однако это повело
бы к усложнению определения первичных параметров Q и Ljk-
Легко видеть, что изложенная процедура по существу является
частным случаем эквивалентирования матриц типа В.
Для схем многоугольного типа (рис. 2-3) эквивалентирование
в пространстве параметров до т = 1 невозможно, так как в этом
случае не существует никакого конечного параметрического экви-
валента для совокупностей взаимных индуктивных связей исход-
ной схемы.
Принцип попарного эквивалентирования на комплексной пло-
скости дает возможность достаточно просто выполнять эквиваленти-
рование систем с любым числом параметров, сверх входящих в урав-
нения (2-49). Эти дополнительные параметры, как правило, не
являются суммируемыми и не требуют указанного выше преобра-
зования.
91
Очевидно также, что изложенный метод позволяет включить в
процесс эквивалентирования не только неизменные машинные и
сетевые параметры, но также и меняющиеся параметры рабочих ре-
жимов, в первую очередь — активные и реактивные мощности, ко-
торые в отношении входных точек системы обычно подчиняются
критериальному требованию равенства их сумм для эквивалента и
исходной схемы.
Режимные параметры, в силу их изменчивости, нельзя в процессе
изложенного метода эквивалентирования относить к категории
главных: они должны включаться лишь в последние процедуры по-
парного эквивалентирования на комплексной плоскости. Этот прин-
цип отвечает и практике использования электродинамических мо-
делей.
д. Определение эквивалентных
параметров установившегося режима
Здесь имеется в виду установившийся режим, который в реаль-
ной системе предшествует возмущению со стороны присоединенной
к ней дальней электропередачи.
Изложенные выше общие основы метода эквивалентирования
в пространстве параметров дают возможность — в применении к
приемным системам с одним узлом контрольных возмущений (или
с одним «входом» от удаленной станции) — непосредственно опреде-
лить все режимные параметры эквивалентной системы [Р*, Q.>
Е*, 6*k (j = 1, 2,..., т\ k= 1, 2, ..., m /)]. При этом необ-
ходимо учитывать положенные в основу преобразований указанные
во введении предварительные допущения, а именно — отсутствие
активных потерь, замену комплексных нагрузок синхронными дви-
гателями и т. д.
При использовании приемов попарного эквивалентирования мо-
гут оказаться не обеспеченными правильные аналитические связи
между упомянутыми параметрами. Во избежание этого приемами
параметрического эквивалентирования следует определять лишь
часть режимных параметров, достаточную для последующего опре-
деления прочих параметров непосредственно из выражений актив-
ных и реактивных мощностей. При такой постановке вопроса мо-
жет быть много вариантов последовательности вычислительных
операций. Рассмотрим два из них, представляющихся наиболее
целесообразными, причем будем предполагать, что все эквивалент-
ные сетевые индуктивные взаимосвязи уже определены из пред-
шествующих попарных процедур эквивалентирования нережимных
параметров.
Согласно первому варианту предположим, что с помощью по-
парного эквивалентирования далее определены активные и реак-
тивные мощности всех элементов упрощенной системы с соблюде-
нием обязательных требований, чтобы их суммы соответственно
92
были равны аналогичным суммам активных и реактивных мощностей
исходной системы и чтобы сохранялись значения активной и реак-
тивной мощностей притекающих к узлу А от удаленной станции.
Если эквивалент должен состоять из т элементов, то в качестве
неизвестных мы будем иметь модуль узлового напряжения U*a, элек-
тродвижущие силы Е*\, Е2, . . . , Е*т и угловые сдвиги последних
относительно узлового напряжения (б[д = 8j—оЛ1 62 = 82—
и т. д.), т. е. всего (2m + 1) неизвестных.
Вместе с тем мы будем иметь значения 2 (т + 1) активных и
реактивных мощностей, выражаемых аналитически через указан-
ные неизвестные. Это дает возможность составить (2m + 1) неза-
висимых уравнений, поскольку для активных мощностей автома-
тически будет соблюдаться условие
т
2 Р) = РА‘
Л=1
Вследствие наличия реактивных потерь в сети для реактивных мощ-
ностей такого условия не будет.
Таким образом, мы будем иметь необходимое и достаточное число
уравнений для определения всех еще неизвестных режимных пара-
метров эквивалента, в том числе и модуля узлового напряжения UA.
Активная мощность удаленной станции, очевидно (если пренеб-
речь потерями в линии), будет равна РЛ, а реактивная легко опре-
делится по уже найденному значению UA и по заданным значениям
Qa и ?а-
Укажем теперь другой вариант порядка вычислений, не тре-
бующий совместного решения (2m + 1) нелинейных уравнений.
Предположим, что процедура попарного эквивалентирования
распространена на заданные модули э. д. с. и их угловые сдвиги
относительно напряжения узла А для всех элементов упрощаемой
т
приемной системы, при сохранении требования
с остающимся пока еще неизвестным значением модуля UA узлового
напряжения. В качестве необходимых связывающих (или «коорди-
нирующих») параметров при попарном эквивалентировании ука-.
занных величин на комплексной плоскости можно выбрать соот-
ветствующие отдельным элементам инерционные постоянные (Hj)
или какие-либо другие из постоянных (нережимных) параметров.
т
Для суммы активных мощностей эквивалента 2^7 мы ПОЛУЧИМ
следующее уравнение:
т
1
93
где после выполнения указанной процедуры эквивалентирования
в пространстве параметров единственной неизвестной величиной
будет являться лишь UA. После определения UA без труда опреде-
ляются все Pj и Qp а также полная мощность удаленной станции.
Сложный вопрос о том, какой из указанных двух или из числа
других возможных вариантов будет ближе к оптимуму с точки зре-
ния минимума погрешности в предельной (по динамической устой-
чивости) мощности удаленной станции, остается открытым. Этот
вопрос нуждается в дальнейшем исследовании.
Вопрос о применении эквивалентирования в пространстве пара-
метров к случаю приемных систем со многими «входами» (т. е. со
многими не вводимыми в эквивалент элементами или удаленными
станциями) кратко рассмотрен в § 3-6.
3-4. Эквивалентирование в пространстве функций
1. Предварительные замечания и предпосылки
Вторую стадию эквивалентирования, при возможности исполь-
зования надлежащих вычислительных средств, ради повышения
точности можно разбить на два этапа: отнести изложенный выше
метод параметрического эквивалентирования к первому этапу для
перехода от заданного числа различных основных элементов п к не-
которому промежуточному их числу т < и, а далее, на втором
этапе, применить более точный метод перехода еще к меньшему
числу элементов m0 < т, которое допускало бы уже эквиваленти-
рование нелинеаризованной системы на третьей завершающей его
стадии.
Таким более точным методом, по-видимому, может служить
кратко излагаемый ниже метод эквивалентирования «в пространстве
функций». Он основывается на представлении совокупности одно-
родных непрерывных функций ЧТ, (f) на отрезке времени (6, х),
обобщенными полиномами [Л. 24] вида
(0 = ku^ (0 + м2 (0 +... + ksl<?s (0 = i k^, (t). (3-33)
7 = 1
При этом предполагается, что числа ku, k2i, . . . , ksl можно
рассматривать как составляющие функционального вектора Ф,
в ортогональных осях линейного пространства s измерений.
Вообще говоря, число измерений з для точного представления
функций Чгг должно быть бесконечным. Однако при надлежащем
выборе базисной системы функций ср, (/).••• , ?s(0> учитывая
существенно приближенный характер эквивалентирования электри-
ческих систем, несомненно можно ограничиться конечным числом
измерений з, т. е. конечным числом членов разложения функций
ЧР’ДО, по нашему мнению, вплоть до минимального числа з = 2.
Коэффициенты klc, k2l, . . . , ks[ можно рассматривать как рав-
ноправные кооординаты функций W((f) (без введения добавочных
94
весовых коэффициентов) только в том случае, если они действи-
тельно характеризуют значимость отдельных слагаемых выражения
(3-33), которую можно определить числом, квадрат которого:
= — (/= 1, 2, ..., s).
т о
Если система ?2, . . . , ?s нормирована в промежутке (0, т),
т. е. если
j/f ^t)dt = = .. . = 1,
TO
7? = -^-. (3-34)
Следовательно, при указанном условии коэффициенты кц действи-
тельно можно принять за координаты функций (t).
В случае ортонормированных функций (/) эти коэффициенты
определяются наиболее просто:
= (3-35)
Представление функций точками векторного пространства s
измерений позволяет привести задачу эквивалентирования «в про-
странстве функций» к задаче эквивалентирования «в пространстве
параметров», рассмотренную в § 3-3.
В частности, открывает возможность применения указанного
там разбиения всей процедуры эквивалентирования в многомер-
ном пространстве на отдельные попарные процедуры эквиваленти-
рования на комплексной плоскости. Следовательно, всегда можно
выбрать достаточно большое s для получения требуемой точности
представления функций обобщенными полиномами.
По сравнению с указанными ранее прямым и косвенными функ-
циональными методами рассматриваемый метод в принципе имеет
то преимущество, что не требует решения фундаментальных диффе-
ренциальных или интегральных уравнений эквивалентной системы.
Необходимо иметь лишь полную функциональную картину про-
цессов в исходной системе при заданных контрольных возмущениях.
Так, например, применительно к схеме замещения по типу рис. 2-3,
необходимо знать временные функции токов, протекающих через
все индуктивные связи схемы. Все эти токи для отображения в про-
странство функций подлежат представлению обобщенными поли-
номами, как указано выше.
Процедура эквивалентирования в пространтсве функций несом-
ненно обеспечивает результат, более близкий к оптимальному,
нежели простое эквивалентирование в пространстве параметров,
95
поскольку функциональная картина, характеризующая движение
системы, более точно отображает относительное значение различных
факторов, хотя вычисления в данном случае существенно услож-
няются.
Поэтому большее практическое значение, по-видимому, может
иметь использование смешанных методов, например, сочетание
рассматриваемого метода эквивалентирования «в пространстве
функций» с одним из функциональных методов, кратко изложен-
ных ранее, или сочетание его с эквивалентированием на заданных
частотах и т. п.
В нижеследующем рассмотрены два таких смешанных метода
применительно к схеме замещения по типу рис. 2-3. Первый назван
нами методом «эквивалентирования в пространстве главных функ-
ций», второй — «частотно-амплитудным методом». Смысл этих наи-
менований будет ясен из конкретного изложения их сущности.
2. Эквивалентирование в пространстве главных функций
Предположим, что заданная схема по типу рис. 2-3 имеет п ос-
новных элементов и что при заданном воздействии на входе в виде
приложенного в момент t — 0 напряжения и (t) и при нулевых
начальных условиях определены токи icv iC2, . . . , iCn, . . . в ветвях
Сх, С2, . . . , Сп как функции времени в пределах отрезка 0, т. Эти
переменные и будут являться главными в процессе эквивалентиро-
вания. Каждому из п узлов соответствует только одна из совокуп-
ности п таких функций. Непосредственно видно, что они по физи-
ческому смыслу допускают коммутативное и ассоциативное сумми-
рование.
В то же время узловые напряжения ulf ц2, . . . , ип последнему
условию не удовлетворяют, так как их суммы не имеют определен-
ного физического смысла в схемах рассматриваемого типа.
Вместо этих величин введем функции:
t
v^CjUj^i^dt,
удовлетворяющие указанному условию.
Не трудно видеть, что если токи ic. будут надежно представлены
обобщенными полиномами согласно формуле (3-33), то для пере-
менных Vj автоматически получится аналогичное представление
через функции w = причем координатные коэффициенты
kn (j = 1, 2, . . . , s) останутся неизменными.
Если все эти коэффициенты так или иначе найдены для всех то-
ков ic.t то в нашем векторном пространстве ($ измерений) по сово-
купности векторов iCj приемами эквивалентирования в пространстве
параметров мы можем построить эквивалентную группу из tn < п
96
векторов i*Cj (j = 1, 2, . . . , т) и соответствующую группу эквива-
лентных функций Vj = \i*Cjdt.
В процессе эквивалентирования от п к т элементам, кроме мо-
ментных критериев, вводим обязательное критериальное требова-
ние:
п
2tC/-
т
? ‘с/
Это, как мы знаем, приводит при использовании формулами
числовых моментов к необходимости замены исходных функций
пропорциональными.
После того как будут определены все i*cj и и*, для эквивалента
из т элементов можно одним из простейших функциональных ме-
тодов определить все без исключения параметры, входящие в этот
эквивалент. Для этого следует, придерживаясь структуры эквива-
лента по типу рис. 2-3, использовать соответствующую систему диф-
ференциальных уравнений в предположении, что на входе схемы
эквивалента будет приложена, при нулевых начальных условиях,
та же функция напряжения и (/) ~ и (р), что и в исходной
Не трудно показать, что требуемую систему уравнений
привести к следующей интегральной форме:
*С1 = — { + Я12^2 + • • • + а\гпРт aiU (₽)} ’
tC2 = ~ {П21^1 a22V2 a2mVm + a2U »
схеме,
можно
'ст = ~ М + ачг2и2 + * ’ • “>
V* (/ = !> 2.........
(3-36)
где
1 t
7^
р о
__ 1
аИ ~ L' С*
Ljrj
i=m
1
‘и
а‘1 ь*Ис
(i = 1, 2, . .., т Ф j).
Задавшись значениями времени tv /2, . . . , в промежутке
(О, т) и определив для них соответствующие значения всех функций
t
z* а также функции fzz(/)d/, получим m(m+ 1) линейных
J 1 о
97
алгебраических уравнений, достаточных для определения всех ко-
эффициентов (n.j, afj, ajt) уравнений (3-36).
Все основные параметры эквивалентной системы, число которых
не превышает т (иг + 3), должны определяться по указанным
алгебраическим уравнениям, естественно, с помощью метода наи-
меньших квадратов (за исключением случая т = 1, который для
схем по типу рис. 2-3 нереален).
Рассмотренный пример линеаризированной системы по типу
рис. 2-3 показывает, что даже только частичное эквивалентирование
в пространстве функций, а именно — главных переменных ici,
iC2, . . . , iCn; v2, . . . , vn, устраняет необходимость применения
сложных процедур интегрирования уравнений эквивалента со мно-
гими еще неизвестными параметрами при наличии всего лишь од-
ного дополнительного критериального требования:
т п
S ^Cj ~ S 1'су-
3. Частотно-амплитудный метод
Этот метод вытекает из общих представлений, указанных в п. 1.
Относя по-прежнему все соображения к схемам типа рис. 2-3,
поставим себе задачу найти для каждого заданного синусоидального
возмущения и (о) определенной частоты о все установившиеся
токи и узловые напряжения эквивалентной схемы по заранее опре-
деленным аналогичным токам и напряжениям исходной схемы,
с переходом от п к т узлам (за исключением узла контрольных
возмущений), при соблюдении топологического подобия этих схем.
Частота со не должна быть близка ни к,одной из частот собствен-
ных колебаний как исходной, так и эквивалентной схемы.
Решение поставленной задачи, очевидно, даст возможность опре-
делить все параметры эквивалентной схемы при заданной частоте.
Допустим, что исходная схема не содержит никаких активных
сопротивлений. Естественно, это условие сохранится и для эквива-
лентной схемы. При соблюдении его все токи по сотношению ко всем
напряжениям могут иметь фазовый сдвиг только + —тс, а между
собой будут находиться в фазе или в противофазе так же, как и уз-
ловые напряжения между собой.
Отсюда следует, что все токи и напряжения можно будет пред-
ставлять положительными и отрицательными числами на соответст-
вующих осях координат. В качестве таких чисел можно принять
амплитуды токов и напряжений, условившись приписывать ампли-
тудам узловых напряжений Uf знак «плюс» (+) при совпадении их
по фазе с вынуждающим напряжением и (ш), а амплитудам токов
98
I.- — этот же знак при опережении ими вынуждающего напряже-
1
ния на —л.
2
Предположим, далее, что для исходной схемы определены ам-
плитуды всех узловых напряжений Uj и всех токов /J, l],
I(рис. 3-5) с соответствующими им фазовыми знаками.
Тогда, рассматривая эти амплитуды как числовые параметры,
можно определить амплитуды аналогичных напряжений токов
для эквивалентной схемы на основе изложенной в § 3-3 теории экви-
валентирования в многомерном пространстве, которая непосредст-
венно применима к определению эквивалентных узловых напряже-
ний U*j, а также токов // и Ij по способу попарного эквиваленти-
рования на плоскости. Для этой цели до-
статочно рассмотреть две процедуры попар-
ного эквивалентирования:
1) в плоскости Л, jUi,
2) » » h, jh,
При этом должны быть соблюдены кри-
териальные условия:
т т п
2'7 = 2'7=24 Рис3-5’
1 1 1
Несколько более сложной задачей является определение эквива-
лентных обменных ТОКОВ
Для решения этой задачи можно указать несколько приемов и
в частности — процедуру, вполне аналогичную рассмотренной в
§ 3-3, п. 2, г для определения квадратов взаимных частот эквивалента
(Рд) применительно к схемам типа рис. 2-3 и к уравнениям (2-49)
с тем отличием, что первый числовой момент (т. е. среднее арифме-
тическое) для обменных токов каждого узла / эквивалентной схемы
должен удовлетворять очевидному условию
т — 1
= 0,
где суммирование является алгебраическим (т. е. с учетом знаков,
приписываемых амплитудам токов).
Наиболее простой прием эквивалентирования обменных токов
заключается в предварительном допущении существования проме-
жуточного эквивалента параметров взаимных связей в виде лучевой
схемы рис. 3-6 с индуктивностями Li, L2, . • • , Lm и общей узловой
точкой В. Алгебраические амплитуды всех токов/1в, Лв, ...» /^в,
99
протекающих по этим индуктивностям, определяются из токовых
узловых уравнении:
+ С = 0.
z2*b + /;* + /;* = о,
г
тВ
= 0,
причем, очевидно, соблюдается и условие:
Рис. 3-6.
С другой стороны:
где
т
2 ajuj
UB= = fB(U\, и;,..., 1Гт, а\, а'2, <),
a'j= Ц- (/ = 1, 2, . . ., т).
Ч
Уравнения (3-37) независимы, хотя сумма их правых частей и
равна нулю. Поэтому этих уравнений (нелинейных относительно
величин aj), вообще говоря, достаточно для определения всех а'г
Лучевая схема (L\, L2 , . . . , Lm), если это желательно, может
быть точно преобразована в соответствующую многоугольную,
вслед за чем легко определятся и все обменные токи Гц эквивалента.
Очевидно, что изложенный прием значительно проще и естест-
веннее предыдущего, хотя требование оптимальности в нем непо-
средственно не отражается.
Таким образом, возвращаясь к основной задаче, можно утверж-
дать, что для любой заданной частоты, в отсутствие резонансных
явлений, мы можем только приемами усреднения функций напря-
жений и токов исходной схемы, с применением метода числовых мо-
100
ментов, определить все основные параметры эквивалентной схемы,
не прибегая к решению дифференциальных, операторных или ин-
тегральных уравнений.
Для того чтобы полученные таким путем параметры эквивалента
могли отвечать широкому диапазону возможных режимов, нельзя,
очевидно, ограничиваться определением их лишь для одной частоты.
Необходимо выбрать некоторую достаточно широкую совокуп-
ность (или спектр) контрольных частот w2, . . . , для каждой
из которых должна быть проделана изложенная процедура опреде-
ления параметров эквивалента. Последние вообще будут получаться
различными для различных частот; в результате каждый из иско-
мых параметров, например С*, С*, . . . , С*т\ L\, L*, . . . ,
окажется некоторой функцией задаваемой частоты w:
Для выбора окончательных значений параметров эквивалента снова
придется прибегнуть к методу наименьших квадратов так, чтобы
в заданном диапазоне частот <ox, w2 искомый параметр, например
С}, определялся из условия минимума интеграла
О)2
другими словами, все параметры надлежит определять из условия
минимума квадратичного уклонения.
3-5. Особенности эквивалентирования нагрузочных
совокупностей и операции первой стадии
эквивалентирования
1. Учет пассивных нагрузок
В связи с задачами физического моделирования к числу особых
электрических систем следует отнести и такие системы, приемники
энергии в которых — все целиком или в значительной части — по
своей физической сущности являются постоянными комплексными
проводимостями #н = gn—jbn (или комплексными сопротивлениями
4 = 4" Мн)’
Замещение таких приемников синхронными машинами, в отли-
чие от приемников класса асинхронных двигателей, явилось бы,
по-видимому, существенным нарушением свойств приемной системы
с точки зрения реакции на возмущения со стороны исследуемой
дальней ЛЭП, хотя и повело бы к упрощению анализа. Отсюда воз-
никает сравнительная трудность эквивалентирования приемных
систем с нагрузкой указанного типа в том случае, когда эквивален-
тирование связано с последующим использованием электродина-
мических моделей. Дело в том, что все собственные и взаимные про-
101
водимости, через которые выражаются мощности генераторов [Л. 10,
12] и узловых пунктов, оказываются зависящими от комплексных
проводимостей пассивных нагрузок, а эти последние частично как
бы «растворяются» в собственных и взаимных проводимостях, сли-
ваясь с сетевыми реактивностями. Это обстоятельство само по себе
не препятствует построению эквивалентов по принципам, изложен-
ным в предыдущем, причем полученные эквиваленты можно исполь-
зовать для анализа устойчи-
вости с помощью аналоговых
математических машин.
Однако при физическом
моделировании на электроди-
намических моделях нагрузки
Рис. 3-8.
Рис. 3-7.
должны быть отдельно представлены своими комплексными пара-
метрами (рис. 3-7). Отсюда возникает необходимость в таких при-
емах эквивалентирования, которые либо не связаны с упомянутым
выше «растворением» нагрузки в собственных и взаимных прово-
димостях, либо позволяют на последних этапах эквивалентирова-
ния снова выделить пассивные нагрузки.
Следует прежде всего заметить, что в принципе на основе урав-
нений узловых напряжений для тех узлов, где присоединены пас-
сивные нагрузки, соответствующие этим узлам напряжения Ult
й2, . . . , Uk (см. рис. 3-8) можно представить как сложные функции
заданных электродвижущих сил и угловых координат всех синхрон-
ных машин (Е„ Е2, . . . ; 8Р 82, • • •)> модуля и угловой координаты
напряжения узла возмущений (UA, 8Д), взаимных индуктивностей
системы (приведенной к виду рис. 3-8) и, наконец, активных и ре-
активных параметров всех нагрузок (г1н, х1н; г2н, х2н, . . .).
При заданных же значениях модулей электродвижущих сил и
прочих постоянных параметров системы любое нагрузочное узловое
напряжение йи1 = Unie ‘ai можно рассматривать лишь как функ-
цию F (8р 82, . . . 8л; UA, 8Д) переменных величин системы: угловых
координат синхронных машин 81, 82.....8П и параметров возму-
щающего напряжения UA и 8Д. В конечном счете можно активную
102
мощность любой синхронной машины с индексом i представить вы-
ражением:
Pl=^-Sin(Zl-b1) + ... +-^-sin0t-^+ ... +
Е U л
+ + ......8л. иА), (3-38)
где Ф — весьма сложная нелинейная функция переменных Вг
32. • • Sn, характеризующих динамику системы и заранее неиз-
вестных .
Очевидно, что и к уравнениям вида (3-38) можно в принципе при-
менить тот или иной способ линеаризации и затем провести эквива-
лентирование одним из ранее рассмотренных методов.
Для приведения системы к простейшему виду рис. 3-7 необхо-
димо, при заданных UA и 8Д как функциях времени, определить сум-
марную активную и реактивную мощности узла возмущения: РА (0
и Q.A (О Для исходной системы. Даже если это выполнено, остается
еще довольно сложная вариационная задача: параметры эквива-
лента согласно рис. 3-7, а именно £э, х1э, х2э> гнэ и хнэ. определить
так, чтобы аналогичные функции PAa(t) и QAs(t) давали наимень-
шее квадратичное уклонение от действительных реакций РА (t) и
Qa (0 в пределах некоторого ограниченного отрезка времени т,
в соответствии с длительностью существенных возмущений со сто-
роны исследуемой ЛЭП.
На первых стадиях эквивалентирования нельзя рассчитывать
ни на экспериментальное определение в натуре функций РА (t) и
QA (0, ни с помощью вычислительных машин, ввиду очень большого
числа основных элементов (синхронных машин и нагрузок). По-
этому непосредственный переход от заданной сложной приемной
системы к простейшему эквиваленту по рис. 3-7 практически исклю-
чается. С другой стороны, и применение выражений вида (3-38) для
постепенного эквивалентирования связано, по крайней мере на пер-
вой стадии, с весьма трудоемкими вычислениями.
В связи с указанными выше трудностями эквивалентирования
на первых его стадиях, важное значение приобретают достаточно
удобные для практики частные приемы упрощения, основанные на
различных критериях.
Некоторые такие приемы известны уже давно и к ним, в частно-
сти, относится распределение нагрузок по «правилу моментов».
К сожалению, все эти привычные приемы основаны либо на интуи-
ции, либо на не вполне законном распространении на динамические
системы приемов, заимствованных из теории установившихся ре-
жимов простейших сетей.
Ниже рассматриваются некоторые новые способы упрощения
систем с пассивными нагрузками, основывающиеся на принципах»
103
изложенных ранее (главы вторая и третья). Эти способы можно
считать допустимыми на первой и второй стадиях эквиваленти-
рования.
а) Предположим, что в эквивалентируемой системе, кроме гене-
раторов, имеются в общем случае как нагрузки асинхронного типа,
Рис. 3-9.
которые допускают замену синхрон-
ными двигателями, так и нагрузки пас-
сивные, типа ZH = гн + 1хн-
Далее предположим, что определены
все собственные и взаимные реактивно-
сти между заданными электродвижу-
щими силами синхронных машин, на-
пряжениями на шинах нагрузок и нап-
ряжением узловой точки контрольных
возмущений (с пренебрежением актив-
ными сопротивлениями машин и сети).
Соответственно этому получится схема
полного многоугольника с п вершинами
Е2, . . . U2, , . . ,UA (рис. 3-8,
для п = 7), в котором все стороны и диа-
гонали будут являться чистыми реактив-
ностями. Приемами, указанными в § 3-3,
этот многоугольник в ряде случаев можно приближенно свести
к эквивалентной лучевой схеме рис. 3-9 с центром В. Очевидно,
что все нагрузки Zx, Z2, Z3, ... с их добавочными реактивностями
Рис. 3-11.
можно заменить одной эквивалентной пассивной нагрузкой Z3,
присоединенной непосредственно к центру В. Применением лине-
аризации «в большом» (§ 2-2) можно, наконец, группу синхрон-
ных машин одним из методов, указанных в главе третьей, привести
к новой эквивалентной группе с меньшим числом главных элементов,
сообразуясь с составом этих элементов в исходной схеме (по нали-
чию генераторов и двигателей).
б) Весьма часто случается, что целая группа станций, имеющих
нагрузки на шинах генераторного или средних ступеней напряже-
104
ния, присоединена к общему узлу А сети более высокого напряже-
ния. После пересчета электродвижущих сил и реактивностей всех
станций, а также параметров нагрузок к общему базисному напря-
жению на уровне нормального напряжения узла А соответствую-
щая схема примет вид, указанный на рис. 3-10.
При соблюдении некоторых условий эту схему можно привести
к другой (рис. 3-11), в которой все пассивные нагрузки будут пере-
несены в узел А при надлежащем выборе их параметров, а также
новых значений э. д. с., инерционных постоянных генераторов
станций и реактивностей связи между э. д. с. станций и узловым
напряжением UA. Так как возмущающее воздействие со стороны
узла А является одновременным и одинаковым для всех присое-
диненных к узлу цепей, то для установления упомянутых условий
достаточно рассмотреть лишь одну из цепей, например, с индексом
i, основываясь при этом на простой линеаризации «в большом».
Для активной электрической мощности станции i имеем:
F2 F II
р sin + 810(8,-8Л-агд). (3-39)
‘И С1А
Предполагая синусную функцию относительных углов линеаризи-
рованной и рассматривая только достаточно ограниченные уклоне-
ния от предшествовавшего рабочего режима под действием возму-
щения Д1/А = MJAeA, из (3-39) находим изменение активной
электрической мощности в виде
ДР; = a^UA + Ь. (Д8. - Д8д), (3-40)
где
/7.
a/=7^sin(8/o-8M-aiA>
6, = О,8- -^ол .
* г1А
(Заметим, что формула (3-40) предполагает пренебрежение членами
с произведением д£/д(Д8, — Д8д.)
Допустим, далее, что механическая мощность станции i остается
неизменной; получим следующее операторное уравнение для опре-
деления Д8,-:
Д8 — ~ а^и л + Ь/&А
1 HiP* + bt
(Н[ — инерционная постоянная машин станции /).
Для активной мощности, получаемой узлом А, имеем:
у2 Е U
РА1 = --ГГ Sin “Л + S*n (8/ - 8Л + “м).
А * t Д 4
г1А
(3-41)
105
откуда
ДРд. = аАША + ЬА(М. - Д8д), (3-42)
причем
W ЯЛ Е1
аА =------— sin а,. -]--sin(8.n — 8,п + а-Л
А гА А г1А ‘° А0 lA->' (3.43)
bA=br
Подставив в (3-42) выражение ДЗ, из (3-41), получим:
ДРд. = ^лр2 ~ bl (0< ~ ад)Я~Ч ^А ~ biP^A . (3-44)
А‘ p2+btH-1
Рассмотрим теперь схему рис. 3-11 и выпишем для цепи с э. д. с.
Е* выражения относящихся к ней активных мощностей и их изме-
нений под действием возмущений со'стороны узла А.
Мощность, притекающая к узлу А от станции с э. д. с. Е?
Р. = ^—4-sin (8* — 8.
А * \ I А
Х1 х
Изменение той же мощности
(3-45)
где
F*
* • /л* * \
а. —----sln (8 — J
i * I *0 АО Р
xi V 7
t* П Q
bt =0,8---г-‘.
xi
Изменение угла
Д8* — ~ а‘ ^Ua + Ь'1
‘ iW + b*
Операторное изображение ДР' после подстановки
(3-46) в (3-45):
ДР' А-Н*Ь*р2!^А
А Н^р2 + Ь*
(3-46)
выражения
(3-47)
Абсолютное значение активной мощности, поглощаемой пассив-
ной нагрузкой из узла А:
и2л
РАг=~^*Г
г1
106
Изменение этой мощности при изменении UA:
^Az^A>
где
- 2УД0 . .
а.- = —— sin а.
* * I
ч
(линейное приближение).
Алгебраически суммарная активная мощность узла для схемы
рис. 3-11 (цепь г):
Р* = Р' —Р
а га rAz-
M>W'a-M>az==
Изменение этой мощности в операторной форме:
аЛр2 — а&Н*, '] Д1/д — 6*р2Д8
J-------1-— А . (3-48)
9 . 1 * тт*— I
Р +biHi
Для того чтобы выражения (3-44) и (3-48) были тождественно
равны при произвольных значениях независимых переменных &UA
и Л8Д, необходимым и достаточным является соблюдение следующих
уравнений:
(2) aibl = bi(a-aA)
Н-
(4) -4-=-^
Н* Hi
(1) a. ui—
(3) b* = bi
Из (3) и (4) следует: (5) Hi = Hi,
из (2) и (4):
(6) аА,
из (1):
(7) az=a*— аА
и, наконец, из (6) и (7):
(8) a*t=a..
Таким образом, окончательно требуемые условия сводятся к сле-
дующим:
о')
(2') »;=»,.
(3') az* = di,
(4') а.=а.—аА.
107
Или, конкретизируя три последних условия (2'), (3'), (4'):
(2„) Е^а0 EUao ,
X* ZiA
(3") A sin (8- _ 8ЛВ) = sin (8„ - Здо-
xi
qtj p
<4") —sin a;H = sin (8Z0 - 8Д0 - а.д) +
Z/H 1
2U p.
+ sin “a — T7 sin (Si0 — SA0 + ам) = 110-
A i A
He трудно видеть, что условие (4”) равносильно требованию
одинакового изменения мощности нагрузки цепи i в схемах рис. 3-10
и 3-11 при любых ограниченных изменениях напряжения UM.
Соотношения (2"), (3”) и (4") еще не определяют однозначно
выбора начальных параметров рабочего режима эквивалентной
схемы рис. 3-11. Однако для всей совокупности цепей исходной
схемы рис. 3-10, очевидно, следует принять:
(5')
Тогда для определения параметров эквивалентных нагрузок в схеме
рис. 3-11 получим из (4") единственное условие:
Далее еще остается некоторая свобода выбора параметров экви-
валентной схемы рис. 3-11, и это говорит о возможности несколь-
ких вариантов. Естественно вводить наиболее простые дополнитель-
ные условия, например, принять Ё[ — Et (6'), и тогда, согласно
(2") и (5'), получим:
(7') х* - ziA.
Теперь для окончательного установления параметров каждой
пассивной нагрузки ZZH, перенесенной в узел А (рис. 3-11), следует
ввести требование равенства реактивных мощностей узла А в ис-
ходной (рис. 3-10) и эквивалентной (рис. 3-11) схемах для каждой
ветви i в начальном режиме.
Учитывая уже принятые соотношения (3"), (5'), (6'), (7'), из ко-
торых следует, что В*о—Вдо = 8.0—&ло—а/д, на основании требо-
108
вания Q*a = QiA путем несложных выкладок получим следующее
уравнение:
<8') ТУТsin - Мsin
г/н 'Л 4 A ZIAU АО
Отсюда определяем
(8") > = Л0
г/н
и в связи с (4"')
(9,г^7Й'
Из установленных соотношений не трудно вывести заключение,
что «правило моментов», которым иногда пользуются для распреде-
ления импедансных нагрузок, вообще говоря, не оправдывается,
хотя и удовлетворяет условию (Г).
Приняв во внимание условия (5') и (7') и помножив левую и пра-
вую части равенства (3") на UAQ, получим следующее выражение
начальной рабочей электрической, а стало быть и механической,
мощности для каждой из станций эквивалентной схемы рис. 3-11:
P;=^-sin(8;0-3A0-aM> (3-49)
Отсюда видно, что при обязательных условиях (Г), (2'), (3'), (4')
и дополнительных условиях (5'), (6') и (7') активная мощность стан-
ции в схеме рис. 3-11 оказывается равной лишь обменной мощности
соответствующей станции в схеме рис. 3-10. Этот результат не пред-
ставляется парадоксальным, если учесть, что в выражениях мощ-
ностей станций в исходной схеме рис. 3-10, согласно (3-39), присут-
ствуют слагаемые, которые являются постоянными при постоянстве
соответствующих э. д. с. (EJ. Аналогичную ситуацию мы имеем и
в случае применения «правила моментов».
В заключение отметим, что обязательное условие (Г) было уста-
новлено, исходя из грубой линеаризации «в большом» синусных
функций, согласно § 2-2.
Если применить линеаризацию «в малом» согласно § 2-1, то вме-
сто условия (1) придется ввести:
(1") = cos (5го~5ло + ам)
Hi cos (8/0-8A0-au)
При существенно-активной нагрузке обычно а/л < 0, и условие
(1") не всегда может быть реализовано, а именно — при
^z0 ^А0 aiA > *
когда окажется, что H*ilHi<zQ.
109
Это как раз соответствует статически неустойчивому режиму
станции i в схеме рис. 3-10. Таким образом, требование HiieIHl > О
есть одновременно и требование статической устойчивости стан-
ции i относительно узла А.
Перенос пассивной нагрузки в узел возмущения А можно рас-
пространить и на более общий случай рис. 3-12, где Elt Е2, ... ,
Еп — э. д. с. группы п синхронных машин. Если в эту группу вхо-
дят только генераторы, то их на основе метода линеаризации или
по методу, указанному в § 3-1, можно заменить одним эквивалент-
ным генератором; рассматривая при этом узел Б как узел контроль-
ных возмущений. Тогда задача переноса нагрузки ZH в узел А при-
водится к уже рассмотренному случаю.
Если же в состав синхронных машин рис. 3-12 входят и синхрон-
ные двигатели, то непосредственно результатами решения задачи
для схемы рис. 3-10 воспользоваться уже нельзя, придерживаясь
требования, чтобы приемники никогда не объединялись с генера-
торами в один эквивалент. В таком случае решение рассматриваемой
задачи для схемы рис. 3-12 несколько усложняется.
Если ограничиться лишь эквивалентированием по условиям
тождества изменения активных мощностей узла при малых возму-
щениях, то схеме рис. 3-12 может быть сопоставлена схема рис. 3-13,
где сопротивление нагрузки имеет некоторое новое значение, отли-
чающееся от заданного сопротивления ZH активной и реактивной
частью (т. е. г* ги; х* =/= хн), и где реактивности х*, х*, . . ., х* от-
личаются от реактивностей исходной схемы. Вводя дополнительные
условия, что в сопоставляемых схемах модули всех э. д. с. и все
инерционные постоянные соответственно равны, т. е. Et = Et и
Hi = Ht, а также, что все х* = ?х/ (при i = 1, 2, . . . , п), получим
для изменения активных мощностей узла А при произвольных ма-
110
лых возмущениях Д{/л и ДЗд идентичные выражения для обеих
схем:
п
М>А
Г ajHiP2 + gi
IW + bi
[cjHiP* 1
|.я,Рг+Н A*
(3-50)
ДР*
Д</Л+
(3-51)
Величины a*, b*, с* и g* окажутся функциями четырех неизвестных
параметров х‘, г* и х*, для определения которых из условия тож-
дества (3-50) и (3-51) будем иметь четыре уравнения:
< =at, с*=с.,
у у •}*
Ь1 = & = Si-
Очевидно, что такого рода эквивалентирование, не содержащее
требование сохранения мощностей исходного режима (Рло, фло)
не может обеспечить вполне точную информацию о свойствах исход-
ной схемы. Если будет введено это дополнительное требование, то
придется использовать вариацию рабочего режима эквивалента
(Е*о, §z*o) так, чтобы оно удовлетворялось. В результате задача о
переносе пассивной нагрузки в рассматриваемом случае существенно
усложняется.
Однако на первой стадии эквивалентирования при наличии не-
обыкновенной сложности исходной структуры системы (см. рис. 1-1)
неизбежно приходится идти на использование менее строгих тре-
бований.
в) Несмотря на применение тех или иных приемов переноса
пассивных нагрузок от узла к узлу, мы можем на практике все же
столкнуться с такими случаями, когда эти приемы не дадут воз-
можности получить заключительную эквивалентную структуру си-
стемы с одной или немногими концентрированными пассивными
нагрузками, выделенными из состава реальных нагрузок подстан-
ций системы. В связи с этим возникает необходимость иметь какие-
либо общие алгоритмы преобразований, обеспечивающие доста-
точно правильную концентрацию пассивных нагрузок, кроме
способа, рассмотренного выше в п. а). Мы можем здесь указать
некоторые алгоритмы, имеющие в принципе весьма общее значение.
Допустим, что после разделения подстанционных нагрузок на
пассивные и асинхроно-двигательные, после замены последних
синхронно-двигательными, и, наконец, после проведения элементар-
ных операций по типу изложенных выше перемещений пассив-
ных нагрузок — получившаяся структура системы приведена
111
к совокупности активно-реактивных связей между узлом контроль -
ных возмущений и всеми синхронными элементами (включая псевдо -
синхронные, полученные из асинхронных двигателей), как указано
на рис. 3-14. При этом предполагается пренебрежение активными
сопротивлениями как всех синхронных элементов, так и всех участ-
ков сети. Отсюда следует, что активно-реактивный характер взаим-
ных связей на рис. 3-14 будет обусловлен исключительно наличием
пассивных нагрузок, которые, следовательно, окажутся частично
как бы «растворенными» в этих связях.
Отбросив все пассивные нагрузки Zx, Z2, • • • < 2П, получившиеся
в результате первичного преобразования и отнесенные к э. д. с.
синхронных машин с надлежащим изменением механических мощ-
ностей, применим к системе рис. 3-14 новое неканоническое преоб-
разование к лучевой схеме по типу рис. 3-12 с общей пассивной на-
грузкой ZH в центральном узле Б и с чисто реактивными лучами хх,
х2.....хп. Всего будем иметь (п + 3) неизвестных величины (х0,
хх, . . . , х„; гн, хн), для определения которых можно составить
-±-п(п+ 1) комплексных уравнений или соответственно п (п + 1)
вещественных алгебраических (нелинейных) уравнений. Значитель-
ное превышение числа уравнений над числом неизвестных не обе-
щает большой точности и провидит к необходимости применения
метода наименьших квадратов.
Точность преобразования можно повысить, рассматривая более
сложную эквивалентную структуру, например, по рис. 3-15. В по-
следнем случае подлежат определению 4n + 1 неизвестных (х0, х1х,
Хх2, • • • > х1п> Х2П; г1н> Х1н> • • • > глн> Хпн), причем для п > 4 опять
неизбежно применение метода наименьших квадратов с поиском
минимума сложной функции.
Изложенное достаточно ясно характеризует осложнения, свя-
занные с наличием существенных пассивных активно-реактивных
нагрузок, выделение которых необходимо для осуществления фи-
зического моделирования (т. е. использования электродинамиче-
ских моделей).
112
По-видимому, в тех случаях, когда пассивные активно-реактив-
ные нагрузки играют превалирующую роль и не могут быть выде-
лены и концентрированы с помощью простейших приемов переноса,
рассмотренных выше, более целесообразным является применение
для исследований устойчивости аналоговых математических машин.
2. Концентрация нагрузок и другие операции
первой стадии эквивалентирования
Наиболее трудным является вопрос о концентрации нагрузок
распределительной сети (6—10 кв), питающейся одновременно от
нескольких подстанций, которые в общем случае могут, в свою оче-
редь, получать питание от сетей разных классов высшего напряже-
ния, как это указано на рис. 1-1 и 3-16.
Однако указанный вопрос вполне удовлетворительно разре-
шается методом неканонического преобразования схемы питания
нагрузок к лучевому (радиальному) виду рис. 3-17, если за опорные
точки принять точки А, В, С, D (рис. 3-16) присоединения понизи-
тельных трансформаторов к соответствующим сетям высшего напря-
жения. При этом вполне допустимо пренебречь активными сопро-
тивлениями сетевых элементов. JB схеме рис. 3-17 все нагрузки
можно суммировать, заменив одновременно все отдельные индук-
тивности х19 х2, . . . , х7 эквивалентной индуктивностью (по правилу
параллельного включения).
Очевидно, что таким же путем можно осуществить и концентра-
цию нагрузок всех других распределительных сетей 6—10 кв, пи-
тающихся от сетей разных классов напряжения или от шин генера-
торных станций (см. рис. 1-1). После выполнения этой операции
концентрированные нагрузки следует разложить по крайней мере
на два рода составляющих: электромоторные, и пассивные. В том
случае, когда нагрузки выпрямительного типа не имеют отдельного
113
питания, их неизбежно придется объединять с активно-реактив-
ными, заменив некоторой средней постоянной проводимостью gQ
(пунктирная линия на рис. 1-3).
Для возможности дальнейших удобных преобразований на ос-
нове линеаризации отделенную асинхронно-моторную нагрузку
следует заменить синхронно-моторной. После этого в отношении
схемы рис. 1-1 остается на первой стадии эквивалентирования не-
Рис. 3-18.
обходимым выполнить еще следующие про-
стейшие операции:
1) Объединить (эквивалентировать) сво-
бодные от местных нагрузок генераторные
станции с общими узловыми точками одним
из методов, изложенных в главах второй и
третьей.
2) Перенести все пассивные нагрузки
на основные контуры и участки сетей соот-
ветствующих классов напряжения прие-
мами, указанными в § 3-5.
3) Устранить с помощью способов, опи-
санных в § 2-5, все общие узлы, объединя-
ющие синхронные генераторы с синхрон-
ными двигателями (в том числе заменяю-
щими асинхронные двигатели), располо-
женные вне основных контуров. (При этой
операции все узловые точки синхронных
машин переносятся на основные контуры
сетей соответствующего класса напряже-
ния.)
4) В том случае, когда ряд подстанций или узлов, предназначен-
ных для питания нагрузок, расположен на одной линии основного
контура между двумя крупными генераторными узлами, можно
число нагрузочных узлов свести к одному путем эквивалентирова-
ния на основе использования статических характеристик нагрузок.
Этот прием является более правильным сравнительно с нагрузоч-
ным методом моментов. Он изложен ниже.
Выполнением операций, указанных в п. 1)—4), завершается со-
вокупность простейших операций первого этапа эквивалентирова-
ния. Дальше остается чисто вычислительная, но достаточно трудо-
емкая процедура определения собственных и взаимных реактивных
сопротивлений между э. д. с. синхронных машин, напряжениями
точек примыкания пассивных нагрузок и узлом (или рядом узлов)
контрольных возмущений.
Если для анализа устойчивости дальних ЛЭП предполагается
использование не электродинамических моделей, а каких-либо ма-
тематических машин, то в выделении пассивных нагрузок нет не-
обходимости, и тогда вместо определения собственных и взаимных
реактивностей возникает задача определения собственных и взаим-
114
ных комплексных проводимостей с учетом нагрузок указанного
типа. О способах определения собственных и взаимных проводимо-
стей с помощью вычислительных машин имеется литература [Л. 32].
Определением собственных и взаимных проводимостей (или
реактивностей) в общем случае можно считать законченной первую
стадию эквивалентирования. Однако если основная сеть какого-
либо класса напряжения (рис. 1-1) достаточно компактна, т. е. имеет
сравнительно большие проводимости отдельных участков, то уже
на первой стадии можно сделать дальнейший шаг к упрощению
данной концентрированной системы путем применения к этой сети
принципа неканонического приведения к лучевой схеме. Если та-
кая операция окажется допустимой в отношении сетей всех классов
сопряжения данной системы, то схема рис. 1-1 будет приведена
относительно узла А к виду схемы рис. 3-18 (где стрелками пока-
заны пассивные нагрузки; кружками — синхронные машины).
Последняя иногда может быть непосредственно подвергнута даль-
нейшему упрощению, вплоть до приведения к цепной схеме. Это
значительно облегчит процесс второй стадии эквивалентирования.
Первая стадия эквивалентирования рассредоточенной локальной
схемы (рис. 1-2) при прочих равных условиях менее трудоемка,
поскольку в таких системах сетевые связи обычно более просты.
3. Эквивалентирование нагрузочных подстанций, расположенных
на одной линии между двумя генерирующими узлами
Задача состоит в замене схемы рис. 3-19 схемой рис. 3-20. Часто
эту задачу решают по правилу нагрузочных моментов, что, однако,
не дает никакой уверенности в близком соответствии свойств экви-
валентной схемы свойствам исходной.
Можно дать ряд более обоснованных путей решения этой задачи.
В частности, если все нагрузки Nlf . . . , Nn исходной схемы
являются в основном асинхронно-двигательными, допускающими
замену синхронно-двигательными, то данную задачу можно решать
методом линеаризации с применением одного из приемов, указан-
ных в главе третьей, учитывая, что в операторной форме уравнения
токов iA (р) и iB (р) будут в линеаризированной схеме рис. 3-19
иметь вид*
1д(Р) = У А (Р) «А + УАВ (Р)“В,
iB(p) = Улв(Р)иА+Ув(р)ив
и для схемы рис. 3-20
1А(р) = УА(р, *р xiv хэ> ^“а + УавСР’ *р *п> хэ> Н^ив>
iB(P) ~ Уав(Р’ ХР Х1Р Хэ’ ^э)иА~^ Ув(р' Х1> Х1Р Хэ’ ^э)ив-
* Схемы 3-19 и 3-20 должны быть замещены чисто электрическими сог-
ласно § 2-1, причем Н^С.
115
Отсюда для определения искомых параметров эквивалентной схемы
Хр хи; хэ и Hs (индуктивность и инерционная постоянная эквива-
лентной нагрузки) будем иметь уравнения:
У\(р> xv Нэ)=уА(р),
Ув(р, X], .... Яэ)=^(р),
Уав(Р' xi’ • • > ^э) =Уав(р)’
которые затем решаются по методу наименьших квадратов для ряда
положительных значений р (см. § 3-2) или путем разложения правых
и левых частей по степеням 1/р с последующим сопоставлением ко-
эффициентов при одинаковых степенях и т. п.
Если нагрузки Nv N2, . . . , Nn не однородны и содержат, кроме
моторных приемников, также комплексные постоянные проводи-
ла Xi 7 2 п-1 п Хп+1 уо • „ *
—0О уА С Ув
Nl Уг Уп-1 Nn n\
Рис. 3-19. Рис. 3-20.
мости, то при наличии в составе нагрузок предвключенных, свойст-
венных им или добавочных сетевых (например, кабельных и транс-
форматорных) индуктивных сопротивлений, возможно применение
«некононического» преобразования исходной схемы к лучевому
виду с последующим переносом пассивных нагрузок в общий узел
и эквивалентированием моторных приемников как псевдосинхрон-
ных.
Мы не будем в деталях рассматривать все эти способы и остано-
вимся более подробно лишь на составлении эквивалента типа,
рис. 3-20 на основе статических характеристик нагрузок по напря-
жению типа Р = f (U) и Q = <р ((/), которые будем считать извест-
ными для каждой нагрузки рис. 3-19. Допустим также, что при не-
изменном по модулю и фазе напряжении йв узла В и неизменном
модуле напряжения йА узла А последнее имеет относительно UB
переменный сдвиг 0, т. е.
£7В=0 = var.
Предположим, далее, что для любого значения 0, используя задан-
ные статические характеристики нагрузок Nlt Nit . . . , Nn, мы оп-
ределяем значения токов 1А и 1В в схеме рис. 3-19 так, что каждый
из них явится комплексной функцией вещественного переменного:
'л = АГО. '« = f, ro-
lls
Для этого наиболее подходящим является расчет по методу уз-
ловых напряжений, разработанный в [Л. 33], хотя для целей экви-
валентирования можно использовать и другие менее точные приемы,
например, метод «шагового» изменения угла 6, когда напряжение
нагрузочного узла для шага k находится по значениям токов, опре-
деленных в конце шага (k—1).
Полагая, что исходная схема приведена к схеме рис. 3-20, имеем
комплексное уравнение:
(3-52)
которое приводится к двум вещественным, определяющим значения
реактивностей х} и хи; последние, очевидно, являются веществен-
ными функциями 9:
*1=?1(0)- Хц = ?2(0)-
Ограничив изменение угла некоторыми пределами, например
60<;9<;9п-|-—тс, где 90— значение угла в нормальном рабочем
и 4
режиме, усредним значения и хц в этих пределах:
4 01
%
4 0*
9о
и положим в схеме эквивалента
х =х. = const,
хп = х11э = const.
Тогда из уравнений (3-52) для каждого значения 9 найдем два во-
обще различных значения модуля напряжения Uc, которые, однако,
заменяем одним средним значением UC3 = ЧГ (9). Последнему бу-
дет соответствовать полная (комплексная) мощность эквивалент-
ной нагрузки N (рис. 3-20):
Учтя зависимость между UC3 и 9, получим статическую характе-
ристику эквивалентной нагрузки:
Sv,
Допустим теперь, что нагрузки исходной схемы рис. 3-19 можно
разбить на две категории — моторных и пассивных, причем их
статические характеристики, отнесенные к единичной полной
117
мощности, известны; обозначим их соответственно через 50м = РОм 4-
+ iQoM И S02 = РОг + J Qoz И ПОЛОЖИМ
+ KS„.
принимая М и К. за чисто вещественные числа. Для определения
последних будем иметь уравнения:
MQOu + KQOz = Q3(UCa).
Для каждого заданного значения (7Сэ из этих уравнений для
М и К получим, вообще говоря, различные значения. Так как
UC3 = W (6), соответственно будем иметь также:
м = <?„№, лг = ?2(0)-
Очевидно, что остается лишь усреднить полученные выражения
М и К в тех же пределах угла 0:9О < 0 < 90 + ~
В изложенной процедуре эквивалентирования наиболее трудо-
емкой операцией является определение токов 1А и 1В в исходной
схеме как функций угла 0.
Остается открытым еще вопрос об эквивалентной инерционной
постоянной для моторной части нагрузки. В качестве этой постоян-
ной для первой стадии эквивалентирования представляется достаточ-
ным взять сумму п средневзвешенных по мощности значений от
инерционных постоянных моторных нагрузок в исходной схеме.
3-6. Частичное эквивалентирование
сложной электрической системы
В предыдущем рассмотрены подлежащие упрощению приемные
системы с одним узлом примыкания к ним одной или нескольких
удаленных-станций. Этот узел и рассматривался как узел контроль-
ных возмущений. На практике бывает необходимость в упрощении
приемных систем, составляющих как бы ядро более сложной си-
стемы, имеющей несколько удаленных станций, присоединенных
к различным сетевым узлам. При этом обычно ставится задача ис-
следования устойчивости какой-либо дальней передачи при ава-
риях на других линиях, примыкающих к ядру, или задача исследо-
вания устойчивости при одновременных авариях на двух или не-
скольких линиях.
Одновременные аварийные возмущения на более чем двух линиях
маловероятны. Поэтому всякую приемную систему можно было бы
эквивалентировать по возмущениям, отнесенным не более, чем к
Двум контрольным узлам («входам»). Прибегнув к линеаризации
основных уравнений динамики системы и используя функционально-
118
операционный метод, не трудно получить подходящий эквивалент
для ядра системы.
К сожалению при числе «входов» более двух возникает вопрос,
не будут ли получаемые таким путем параметры эквивалента за-
висеть от выбора пары контрольных входов. Вероятно, какая-то
зависимость такого рода будет существовать. Для того чтобы су-
дить о возможном расхождении параметров, следует сделать не-
сколько расчетов, варьируя попарные комбинации контрольных
входов. При заметном расхо-
ждении одних и тех же пара-
метров эквивалента в разных
вариантах, придется параметры
усреднять тем или иным спосо-
бом, учитывая интенсивность
воздействий на приемную си-
стему.
Если не гнаться за большой
точностью эквивалента, оценка
Рис. 3-21.
которой в данном случае стано-
вится особенно трудной, то наиболее простой путь заключается
в переходе по принципу параметрического эквивалентирования
(§ 3-3) к лучевой схеме с центральным узлом, используя который
как узел контрольных возмущений, легко эквивалентировать по-
лученную лучевую приемную систему к меньшему числу главных
элементов, не затрагивая при этом группу удаленных станций.
Только что отмеченный прием связан с существенным принуди-
тельным ограничением сетевого «разнообразия» в исходной системе
и не всегда допустим.
Более точный результат будет достигнут на основе параметри-
ческого преобразования исходной схемы рис. 3-21 к нелучевой
схеме рис. 3-22.
Пусть исходная система состоит из п = tn + k синхронных ма-
шин, в числе которых имеются и псевдосинхронные двигатели, вре-
менно замещающие асинхронную нагрузку, причем требуется уп-
ростить часть системы из т элементов до заданного уровня т0 < т.
Допустим, что для исходной системы известны все взаимные
119
реактивные * проводимости уц (рис. 3-21) относительно э. д. с. Е,-, Eir
принимаемых за постоянные. Таких проводимостей будет у п (п— 1).
Предположим, что схема рис. 3-21 приведена к схеме рис. 3-22,
имеющей центральный узел А, причем значения взаимных проводи-
мостей, относящихся только к левой (несжимаемой) и только к пра-
вой (сжимаемой) частям схемы рис. 3-21, остаются неизменными и
в схеме рис. 3-22. Проводимости же между левой и правой частями
схемы рис. 3-21 в новой схеме заменяются неизвестными пока про-
водимостями между соответствующими элементами и узлом А (на-
пример, у1А, у2А, . . . , y(k+1)A, y{k+2)A- •)• Таких неизвестных про-
водимостей будет в схеме рис. 3-22, очевидно, п. Обозначим их уп-
рощенно с индексами главных элементов: ylt у2, .... ,уп. Через
эти проводимости по известным правилам не трудно выразить про-
водимости всех связей между левой и правой частями исходной
схемы рис. 3-21, общее число которых будет равно km. Соответст-
венно получим km уравнений с п неизвестными:
fa (У1, У2, • • • . Уп)^Уд.
где
/=1, 2.......k; i = (k+l), (k + 2), . . . , (k + m).
При km > k + tn — n значения проводимостей ylt . . . , yn
определяются по методу наименьших квадратов из условия мини-
мума функции:
• • •, Уп)—Уц]3-
При km < k + т задача в указанной постановке неопределенна.
Однако это будет иметь место лишь при k = 1 или т = 1. В первом
случае (k = 1) единственный элемент левой части достаточно рас-
сматривать как контрольный узел, во втором (m= 1) задача эквива-
лентирования правой части рис. 3-21 теряет смысл.
После приведения исходной схемы к виду рис. 3-22 узел А можно
принять за узел контрольных возмущений и соответственно исполь-
зовать для эквивалентирования правой части методы, указанные
в главах второй и третьей^
Изложенное выше чисто параметрическое преобразование схемы
рис. 3-21 к схеме рис. 3-22 имеет следующий недостаток. Поскольку
число главных элементов остается неизменным, не должны изме-
няться все активные и реактивные мощности узлов. Это для реак-
тивных мощностей приводит к и аналитическим условиям, а для
активных — к п—1 условию, при отсутствии в указанных схемах
активных потерь. Всего будем иметь 2п—1 условий, подлежащих
удовлетворению в схеме рис. 3-22. В связи с этим придется устано-
* При пренебрежении активными сопротивлениями и отсутствии ак-
тивно-индуктивных нагрузок.
120
вить новые значения модулей и взаимных угловых сдвигов всех
э. д. с., что составит 2п—1 неизвестных, определяемых на основе
указанных 2п—1 условий, т. е. уравнений мощности. В результате
получим для схемы рис. 3-22 значения э. д. с. и угловых сдвигов,
вообще отличающиеся от соответствующих значений этих величин
в исходной схеме рис. 3-21, так как в сопоставляемых схемах неко-
торые взаимные индуктивные проводимости различны; это—взаимные
проводимости между левыми и правыми частями сравниваемых схем.
Такой результат в известных отношениях может быть неприем-
лем (меняется возбуждение синхронных машин, в какой-то мере
искажаются переходные процессы на линиях передачи удаленных
станций и т. п.). Для ослабления этого недостатка переход от схемы
рис. 3-21 к схеме рис. 3-22 можно осуществить, сохраняя неизмен-
ными, кроме указанных требований в отношении мощностей, мо-
дули всех э. д. с., в результате чего будем иметь в схеме рис. 3-22 п
неизвестных лучевых проводимостей (yv . . . , уп) относительно
узла А и п—1 угловых сдвигов между заданными по модулю элек-
тродвижующими силами, т. е. снова 2п—1 неизвестных при нали-
чии 2п—1 уравнений (по мощностям главных элементов).
Сюда целесообразно присоединить еще одно критериальное тре-
бование, указанное в [Л. 4], а именно — сохранение для всех эле-
ментов непреобразуемой части системы величин так называемых
собственных проводимостей, которые в данном случае просто равны
соответствующим суммам взаимных проводимостей каждого из k
элементов по отношению ко всем прочим элементам. Это требование
можно оправдать тем, что оно определяет важные слагаемые в вы-
ражениях реактивных мощностей (вида yuEfy
Таким образом, будем иметь 2п—1 + k уравнений для опреде-
ления 2п—1 неизвестных, т. е. предпосылки для применения метода
наименьших квадратов. При значительных т избыточное число
(k) уравнений будет относительно невелико.
Изложенный подход к преобразованию и упрощению сложных
систем является частным случаем принципа, который можно назвать
«эквивалентированием под заданную структуру». Не останавли-
ваясь подробно на этом принципе, отметим только, что всякое ап-
риорное задание структуры эквивалента вводит в скрытом виде не-
которые добавочные условия, относящиеся к взаимным связям в си-
стеме. Хотя такое эквивалентирование в своих рамках и может быть
оптимальным, тем не менее оно, вообще говоря, не обеспечивает
абсолютного оптимума, достигаемого лишь при возможности варьи-
рования всех параметров предельно полной структуры типа
рис. 3-21, без их предварительного ограничения.
Рассмотренное предварительное приведение системы рис. 3-21
к виду рис. 3-22 также, по-видимому, не обеспечивает оптимально-
сти следующего затем упрощения правой части системы от т эле-
ментов к их меньшему числу т0. Положительной стороной этого
преобразования является лишь возможность непосредственного
121
использования общих методов эквивалентирования, изложенных
в главах второй и третьей.
Однако эквивалентирование правой части схемы рис. 3-21 мыс-
лимо и без преобразования ее к схеме 3-22. Для этой цели также
необходимо априорное введение тех или иных критериальных тре-
бований. К числу важнейших из них относятся [Л. 41:
1) сохранение значений активных и реактивных мощностей всех
k станций непреобразуемой части системы;
2) сохранение модулей и взаимных угловых сдвигов э. д. с. этих
же станций;
3) сохранение всех взаимных индуктивных связей между этими
же станциями;
4) сохранение собственных индуктивных проводимостей этих же
станций;
5) сохранение сумм всех активных и реактивных мощностей т
станций эквивалентируемой части системы.
Эти критериальные требования сами по себе представляются
разумными, хотя вопрос о необходимости некоторых из них ос-
тается недостаточно ясным.
Число уравнений, доставляемых перечисленными требованиями,
как легко подсчитать, составляет М = k (k + 9) + 1. В то же вре-
мя полное число необходимых в аналитических выражениях мощно-
стей режимных и нережимных («сетевых») параметров для эквива-
лента из т0 элементов [учитывая взаимоиндуктивные связи между
всеми (k + m0) станциями ] составляет в общем случае:
N =-Y(k + m0)(k + m0—l) + 2(k + m0).
Если схема исходной системы не допускает очевидных или во-
обще точных сокращений числа сетевых индуктивностей, то лишь
при mQ < 3 будем иметь:
Последнее условие необходимо для определения всех режимных и
нережимных параметров эквивалента.
Упрощенный эквивалент, имеющий менее трех главных элемен-
тов, нельзя считать приемлемым во всех случаях по соображениям,
изложенным в § 4-4. В ряде случаев конечный эквивалент должен
быть представлен не менее чем двумя станциями и хотя бы общей
нагрузкой, т. е. в нашей интерпретации при т0 = 3. В подобных
случаях эквивалентирование придется вести на основе каких-либо
дополнительных требований.
В изложенной постановке эквивалентирование постоянных ин-
дуктивных параметров тесно связано с эквивалентированием чисто
режимных параметров (например, э. д. с.). Следовательно, в полу-
ченном эквиваленте постоянство индуктивных параметров вообще
122
может оказаться фиктивным, и они будут меняться от перераспреде-
ления мощностей в исходной схеме. В этом заключается основной
недостаток такой постановки эквивалентирования, по крайней мере
для mQ > 2.
Далее следует отметить, что в применении к большим значениям
mQ (> 3) тот же указанный путь эквивалентирования не обеспечи-
вает оптимального распределения активных и реактивных мощно-
стей между элементами эквивалента, т. е. не отражает картины рас-
пределения мощностей в исходной приемной системе.
Эти недостатки нетрудно устранить частичным использованием
эквивалентирования «в пространстве параметров», когда эквива-
лентирование постоянных (машинных и сетевых) параметров можно
выполнить преждеэквивалентирования параметров чисто режимных.
Такой порядок представляется нам более правильным и содержит
в себе вполне здоровую предпосылку для возможности эквивален-
тирования бездействующей системы или системы на холостом ходу.
Даже только частичное применение эквивалентирования «в про-
странстве параметров» (для установления инерционных постоянных
и взаимных индуктивных связей) существенно снижает число не-
известных и обеспечивает указанное выше требование (Л4 > N)
при значительных mQ.
Перейдем к краткому рассмотрению применения эквиваленти-
рования в пространстве параметров для частичного упрощения
сложных систем.
Возможно большое число различных вариантов сочетания экви-
валентирования в пространстве параметров с дополнительными кри-
териальными условиями, указанными выше согласно [Л. 4]. Выбор
наиболее подходящего сочетания зависит от частных свойств и осо-
бенностей исходной системы, а потому должен производиться в
каждом отдельном случае.
Ниже рассматривается эквивалентирование в пространстве па-
раметров всех взаимных связей заданной приемной системы для
случая mQ — 3 и k = 3 применительно к схеме рис. 3-21. При этом
будут учтены критериальные требования, чтобы в непреобразуемой
части общей системы сохранялись для каждого из k элементов соб-
ственные проводимости, а также внутренние взаимные связи, число
которых вообще равно -^k(k—1), в данном же случае равно 3.
Всего надлежит определить 12 проводимостей взаимных связей;
сюда входят 3 внутренних связи эквивалента и 9 связей его с непре-
образуемой частью системы, подчиняющихся условию 4.
Число связей каждого из т элементов исходной системы с эле-
ментами непреобразуемой части в данном случае (при k = 3) райно
трем. Следовательно, в отношении этих связей каждый элемент
исходной системы можно представить точкой в трехмерном подпро-
странстве параметров с координатами, численно равными проводи-
мостям связей этого элемента с каждым из внешних элементов (т. е.
123
элементов непреобразуемой части системы). Таким образом, каждому
внешнему элементу должна соответствовать отдельная координат-
ная ось. Всего в таком подпространстве будет т точек. Их (при
т0 = 3) надлежит свести к трем эквивалентным точкам при соблю-
дении требования 4), которое совместно с требованием 3) будет озна-
чать равенство сумм соответствующих координат эквивалентной и
исходной схем. Это значит, что все координаты данного подпрост-
ранства должны рассматриваться как суммируемые по координат-
ным осям параметры (см. § 3-3).
Поскольку это подпространство входит в полное пространство
параметров системы, необходимо для обеспечения надлежащего
соответствия между параметрами, при переходе от исходной при-
емной системы с т элементами к приемной системе с тремя элемен-
тами, воспользоваться разбиением процесса эквивалентирования на
отдельные попарные процедуры согласно § 3-3.
Выбрав для этой цели в качестве связывающих параметров инер-
ционные постоянные и присоединив к ним в качестве сопутствующих
параметров суммы внутренних взаимных проводимостей приемной
системы
уЛ1> /= 1. 2, . . . , /п; 1=1,2,..., m^i ,
можно провести первое попарное эквивалентирование до уровня
трех элементов на комплексной плоскости Н., у3 (j, i). Этим будут
зафиксированы значения инерционных постоянных в последующих
попарных процедурах и одновременно будут определены три внут-
ренние взаимные проводимости (у*2, у*3, у23) для эквивалента при-
емной системы. Последние находятся по трем определенным в про-
цессе эквивалентирования суммам у12, у23, у33 этих проводимостей
из уравнений:
У12 + ^13 ~ У^’
У\2 "Ь У%3 ~ У?Ь’
У\з У%з ~ Узя."
Выбрав в дальнейших попарных процедурах эквивалентирова-
ния сочетания параметров Н,- с проводимостями y!lt связывающими
элементы исходной приемной системы с каким-либо внешним эле-
ментом /(/=1,2, 3), получим в результате эквивалентирования на
плоскости (Н), у(при соблюдении условия суммируемости вели-
чин уц) проводимости взаимных связей всех элементов эквивалента
с каждым из трех внешних элементов.
В результате будут определены значения всех (12) незаданных
проводимостей эквивалентной схемы. С учетом заданных взаимных
проводимостей внешних элементов будем иметь значения всех 15
124
возможных взаимных проводимостей в завершенном частичном
эквивалентировании.
Из числа режимных и нережимных параметров, входящих в ана-
литические выражения активных и реактивных мощностей упро-
щенной системы, останутся неопределенными только 3 модуля
э. д. с. эквивалента и 3 угловых сдвига между этими э. д. с. и э. д. с.
какого-либо из внешних элементов, всего 6 параметров. Для их оп-
ределения будем иметь два обязательных уравнения баланса актив-
ных и реактивных мощностей эквивалента, т. е.
т0 т
^Р- = ^РР
1 7 1 7
т0 т
и кроме того 6 уравнений, соответствующих заданию активных и
реактивных мощностей внешних элементов, согласно указанному
ранее требованию 1), а всего 8 уравнений. Отсюда, с применением
метода наименьших квадратов, будут определены все указанные
режимные параметры. После этого определятся активные и реак-
тивные мощности эквивалента.
При таком методе эквивалентирования остается неизвестным,
в какой степени полученный эквивалент преобразуемой части си-
стемы будет правильно отображать распределение мощностей в
установившемся режиме для этой части. Соответствующую про-
верку легко провести, разбив в исходной приемной системе все эле-
менты на три группы (при /тг0 = 3) по родственности энергетических
характеристик (турбо- и гидростанций и нагрузки) и определив
отдельно для каждой группы суммы активных и реактивных мощ-
ностей.
При существенном расхождении соотношений полученных груп-
повых мощностей с распределением мощностей по элементам экви-
валента следует исключить из числа параметров последнего, опре-
деляемых в процедурах попарного эквивалентирования, внутрен-
ние взаимные проводимости эквивалента. При этом первое попарное
эквивалентирование придется выполнить на одном из указанных
выше сочетаний (Н^ уц). Исключенные из параметрического экви-
валентирования параметры войдут в состав неизвестных, число ко-
торых теперь окажется равным девяти.
Приняв, далее, в качестве обязательного дополнительного кри-
терия соотношения как между активными, так и реактивными мощ-
ностями эквивалента, в соответствии с результатами указанного
подсчета мощностей исходной приемной системы по группам, при-
дем фактически к заданию активных и реактивных мощностей для
всех элементов эквивалента, поскольку соответствующие суммы
125
этих мощностей, согласно требованию 5), должны быть равны анало-
гичным суммам исходной схемы.
В результате такого изменения процедуры эквивалентирования
будем иметь для девяти неизвестных одиннадцать уравнений по
активным и реактивным мощностям упрощенной системы в целом.
Эта процедура несколько проще первой в отношении эквивален-
тирования в пространстве параметров и соответствует лучшему
отображению заданного установившегося режима системы. Однако
в ней величины внутренних взаимных связей эквивалента оказы-
ваются зависящими от изменчивого установившегося режима.
Глава четвертая.
НЕКОТОРЫЕ СПЕЦИАЛЬНЫЕ ВОПРОСЫ
И ЗАВЕРШАЮЩАЯ СТАДИЯ УПРОЩЕНИЯ СИСТЕМ
4-1. Особые случаи
В предыдущем предполагалось, что в составе эквивалентируемой
системы нет элементов с резким уклонением от средних типовых
значений основных параметров (реактивностей, постоянных времени
и инерции и т. п.) и, в особенности, параметров автоматического
регулирования возбуждения генераторов и скорости первичных
двигателей. Кроме того, предполагалось, что основная цель экви-
валентирования заключается в подыскании подходящих эквивален-
тов приемной системы с точки зрения правильной реакции на воз-
мущения, идущие со стороны некоторой линии дальней передачи
электрической энергии при возникновении на ней аварий, ограни-
ченных быстродействующей релейной защитой. При существенном
ограничении длительности возмущения, одновременно с ограниче-
нием величины последнего дальностью очага его возникновения от
энергетического центра мощной приемной системы, можно быть
уверенным в допустимости методов эквивалентирования, изложен-
ных выше.
Однако от указанных допущений на практике могут обнаружи-
ваться существенные отступления. Это, в первую очередь, может
быть связано с изменением цели эквивалентирования. Последнее
может оказаться желательным как операция частичного упрощения
данной сложной энергосистемы при авариях в ней самой, при утя-
желенных аварийных условиях, например, при отказе основной
релейной защиты, когда отключение короткого замыкания будет
производиться резервной защитой с большой выдержкой времени,
скажем, до 2—3 сек. В подобных случаях резкое различие в пара-
метрах, режимах и в системах автоматического регулирования
возбуждения и скорости вращения генераторов, расположенных до-
статочно близко от очага аварии, может создать значительные труд-
ности в задаче их эквивалентирования и даже сделать ее неразре-
шимой, по крайней мере в смысле «подобного эквивалентиро-
вания».
Существо трудности может заключаться не только в большом
размахе взаимных колебаний разнородных объектов эквиваленти-
рования, но даже и в выпадении их из синхронизма. Так, например,
две станции Sx и S2 (рис. 4-1), объединенные общим сетевым узлом
А и испытывающие тяжелое аварийное возмущение со стороны
пункта В, могут в зависимости от различных условий нагрузки и
автоматического регулирования оказаться в трех различных ава-
рийных состояниях:
1) Одна станция (например, S2) выпала из синхронизма по от-
ношению к другой (SJ, но последняя осталась в «качающемся» син-
хронизме по отношению к системе So, примыкающей к узлу А.
$ 2) Станции Sj и S2 приобрели асинхронный
(7Vy 2Q ход одна относительно ДРУгой и относительно
ЪхгМ системы 5’0.
X, д wZ 3) Обе станции Sx и 32 остались в синхро-
низме между собой, но вышли из синхронизма
г по отношению к системе So.
G5 Вероятность таких ситуаций можно в общих
чертах предвидеть на основе параметрического
анализа (см. § 3-3), в который при этом надо
Рис- 4-1. включить, кроме основных параметров станций
Sx и S2, также параметры систем их автоматиче-
ского регулирования и параметры рабочего режима, предшество-
вавшего аварии. Реальную картину явлений могут дать лишь опыт
в натуре, достаточно точные физическое или математическое моде-
лирование или расчет движения генераторов станций Sx и S2
совместно с системой So. Совершенно очевидно, что в указанных
ситуациях 1) и 2), если хотя бы одна из них проявится в действи-
тельности, невозможно заменить две станции Sx и *$2 одной экви-
валентной.
Таким образом, предел возможности «подобного эквивалентиро-
вания» (т. е. замены двух станций Sx и S2 одною эквивалентною обыч-
ной структуры) определяется таким уровнем тяжести аварийного
возмущения со стороны пункта В на рис. 4-1, при котором еще воз-
можно сохранение взаимного синхронизма станций Sx и S2. Если
тяжесть аварийного возмущения со стороны пункта В можно оха-
рактеризовать какими-либо двумя переменными величинами, на-
пример, величиной и длительностью снижения напряжения в этом
пункте &UB и то границы возможности построения «подобного
эквивалента» можно представить пограничной кривой в простран-
стве этих величин на основе опытов на моделях или с помощью рас-
четов.
Для целей эквивалентирования сложных приемных систем в
связи с вопросами динамической устойчивости дальних электропере-
дач энергии при наличии в составе этих систем какой-либо особой
группы разнородных элементов, имеющих резко различные системы
автоматического регулирования, начальные режимы и параметры,
128
можно ограничиться введением в расчеты функционального экви-
валента для этой особой группы элементов в виде комплексной функ-
ции
S(/, Х) = Р(/, k) + /Q (/, к),*
исходя из типовых возмущений, характер йых для узловой точки
А системы, через которую особая группа элементов S* связывается
с остальной частью системы So и с линией дальней передачи энергии
(рис. 4-2) от станции Sy. Очевидно, что предварительно должна быть
•f % )
Рис. 4-2.
осуществлена операция выделения осо-
бой группы S* из состава приемной
системы.
Далее возможны по крайней мере два
простейших варианта типовых возму-
# щений:
а) возмущение типа простого сниже-
ния напряжения узла, согласно графику
рис. 4-3, с постоянной величиной At/*
Рис. 4-3.
t-
и длительностью спада т, с варьированием величины спада от
At/* = 0 до At/* = A(//t/Z0 =
б) возмущение типа нормального трехфазного короткого замы-
кания на линии передачи при постоянной его длительности т, но
при различной его удаленности от узла А, измеряемой реактив-
ностью хд (рис. 4-2).
В последнем варианте спад напряжения узла А при коротком
замыкании в точке k не задается заранее и должен быть рассчитан
с учетом всех переходных процессов как электромагнитных, так и
электромеханических. Это, конечно, для определенной конкретной
системы дает лучшее представление функции S (£, X), хотя и свя-
зано с более трудоемкими расчетами, чем по первому варианту.
Чтобы по возможности упростить расчет функции S (Л X) во втором
варианте, можно считать допустимым всю приблизительно одно-
родную часть системы (So на рис. 4-2) привести к предельно про-
стому эквиваленту в виде одной станции с одной нагрузкой, поль-
зуясь методами второй стадии эквивалентирования (главы вторая
и третья).
* Параметр X характеризует изменчивость возмущения.
129
В обоих вариантах функция S (t, X) предполагается зависящей
не только от времени, но и от параметра X, причем для первого ва-
рианта X = Д[7* = ^UIUA^ а для второго X = х* =-----.
Зависимость от параметра Хв обоих случаях весьма существенна.
Она должна явственно выражать предел устойчивости особой
группы S* элементов системы. Для того чтобы исследуемый процесс
в этой группе не осложнялся во втором варианте выпадением из
синхронизма удаленной станции Sy, исходный рабочий режим по-
следней в предварительном анализе следует взять ниже предела
ее динамической устойчивости при любом хд в пределах (0, хл).
Нащупать этот предел можно предварительными ориентировоч-
ными расчетами.
Для получения достаточно надежных данных, выявляющих
зависимость S от X, необходимо в обоих вариантах проделать не
менее 10 расчетов или модельных исследований переходных процес-
сов, задаваясь различными значениями Xz в пределах 0—1. Для
каждого определенного значения X вычисление или модельное ис-
следование даст две функции времени:
Л = 7(0 и
Эти функции по общим правилам [Л. 24] могут быть представлены
в пределах t = 0, . . . , т в виде линейных комбинаций каких-либо
классических ортогональных полиномов р0 (0, Pi (0» • • • , Рп (0
до некоторого порядка п:
ft (О = С,оРо (О + (0 + • • • + СщРп (0>
(О = diOpo (/) + ditpt (/) + ... + dinpn (t).
Уже при п = 5 такие суммы достаточно хорошо выражают даже
разрывные функции.
Коэффициенты q и dL находятся, как известно, по способу наи-
меньших квадратов и выражаются готовыми интегральными фор-
мулами. Все эти коэффициенты являются функциями X, которые
можно построить по результатам вычисления их для частных зна-
чений Xz. Это дает возможность в свою очередь представить каждый
из указанных коэффициентов через те же полиномы:
С, = й/оРо (О + а/1Р1 (0 + • • • + ajnpn G),
dj = blopo (X) -j- Ь^рг (0 + • • • + bjnpn (/<)•
Таким образом, мы можем при вышеуказанных допущениях
представить реакцию группы S* особых элементов аналитическими,
как бы независимыми функциями S (Z, X), что даст возможность на
третьей стадии эквивалентирования не вводить в расчет указанную
группу ее дифференциальными уравнениями и тем самым сократить
130
объем расчетов на третьей стадии. Это может оказаться существен-
ным, поскольку в специальных расчетах на третьей стадии все эле-
менты, входящие в систему So на рис. 4-2 должны быть представлены
отдельно, и число их может быть еще достаточно велико к концу
второй стадии эквивалентирования.
Очевидно, что в группу «особых» элементов может быть иногда
допустимым и включение другой удаленной станции, чувствитель-
ной к авариям на исследуемой линии передачи.
После приведения системы So к конечному эквиваленту, пригод-
ному для дальнейшего использования на электродинамической
модели, особую группу станций S* можно представить отдельно
необходимым числом машин с параметрами и автоматическими ре-
гуляторами, соответствующими натуре. Это открывает возможность
проверки точности изложенного приема эквивалентирования путем
сопоставления предварительно определенной функции S (/, К) с ана-
логичной функцией, получаемой уже на совместной конечной мо-
дели-системы So и группы S*.
4-2. Учет автоматических регуляторов возбуждения
и скоростных регуляторов первичных двигателей
Все изложенное ниже связано с задачами эквивалентирования
для расчетов и моделирования процессов динамической устойчивости
дальних ЛЭП и не затрагивает некоторых вопросов эквивалентиро-
вания, поставленных в недавнее время рядом авторов [Л. 13, 14,
15,' 34] в связи с определением «устойчивости в малом» сложной
автоматизированной системы.
К концу второй или к началу третьей стадии эквивалентирова-
ния все основные генерирующие элементы полученной эквивалент-
ной системы следует предполагать оснащенными автоматическими
регуляторами возбуждения (АРВ) и регуляторами скорости пер-
вичных двигателей (РСПД), поскольку процесс эквивалентирова-
ния на третьей стадии предполагается основанным на расчетах
динамической устойчивости с учетом всех существенных факторов,
без применения или с ограниченным применением методов линеари-
зации. Предъявление таких же жестких требований к процессу экви-
валентирования на второй стадии практически неосуществимо, по
крайней мере на первых этапах этой стадии, вследствие наличия
очень большого числа основных элементов. Поэтому эквиваленти-
рование на второй стадии приходится основывать на упрощающих
допущениях.
Прежде всего можно допустить, что основная совокупность гене-
рирующих энергию элементов объединяется сходными свойствами
в отношении наличных видов АРВ и РСПД, а также по номиналь-
ным значениям реактивных и инерционных параметров и по удален-
ности относительно узла контрольных возмущений.
131
При наличии отдельных элементов или групп элементов с резким
уклонением от средних характеристик АРВ, РСПД и других пара-
метров данной системы такие элементы или их группы не должны
включаться в общий эквивалент (см. § 4-1). В нижеследующем мы
будем основываться на общих представлениях метода эквивален-
тирования в пространстве параметров, предполагая, что в составе
исходной системы нет каких-либо особых элементов. В таком слу-
чае вопрос об эквивалентировании параметров АРВ и РСПД ре-
шается на основе изложенного в § 3-3 разбиения процесса эквивален-
тирования на отдельные попарные процедуры. Однако возможно
применение и более простого приема для нахождения эквива-
х лента из числа вышеуказанных параметров.
Пусть некоторые основные параметры hs,
р Xj исходной схемы (например, инерционные
• * постоянные и реактивные проводимости отно-
сительно контрольного узла) приняты за коор-
динаты точек 1, 2, п на пло-
I----------hj скости (рис. 4-4) и определены любым подхо-
/ дящим методом т (< п) эквивалентных зна-
/ чений, представленных на той же плоскости.
/ Возьмем один (любой) из этих эквивален-
тов, обозначим его В* и найдем ближайшие
Рис. 4-4. к нему, по среднеквадратичному расстоянию,
три точки а, р и у, соответствующие парамет-
рам трех основных элементов исходной системы. Этим трем точкам
соответствуют три вполне определенных параметра, из числа пара-
метров, подлежащих эквивалентированию: пусть их численные зна-
чения будут соответственно са, и с. Такими параметрами, напри-
мер, могут быть кратности форсировок, соответствующие исходным
элементам а, р и у. Если теперь числа са, и представить отрез-
ками, параллельными оси Cj, ортогональной к плоскости hjt xs, то,
будучи отложены от точек а, р и у, эти отрезки определят неко-
торую плоскость (77с) параметров с,. Тогда при оговоренных выше
условиях можно считать, что эквиваленту 5* основных элементов
на этой плоскости соответствует эквивалент с (;*) из совокупности
неглавных элементов.
Очевидно, что рассматриваемая процедура есть не что иное, как
линейная интерполяция в трехмерном пространстве. Отсюда сле-
дует, что для всех точек , изображающих эквиваленты основных
параметров, должны быть построены отдельные интерполяционные
плоскости из условия, чтобы выбранные для их построения три
точки исходных основных параметров (как а, р и у) были наиболее
близки к точке h.
Уравнение плоскости Пс можно записать в виде
ci = fhi + Sxi + k>
132
где hr xjt Cj — текущие координаты по осям hr Х; и с;;
f, g, k — коэффициенты, подлежащие определению из ли-
нейных уравнений:
fha + ёХа + k = С«’
fh$ + gx9 + k = Cy
fht+ gxy + k = cr
После определения f, g и k находим:
Ч«;)=л:+я<+*-
В отношении АРВ возможен иной, более грубый способ учета,
основанный на ориентировочном представлении, что действие АРВ
сводится к некоторому эквивалентному уменьшению синхронной
реактивности xd генератора, а именно при компаундировании или
пропорциональном электронном регулировании примерно до 0,95 xd
и при сильном регулировании даже до xd = 0. Как известно [Л. 10 ],
это связано с допущением отсутствия самораскачивания. В соответ-
ствии с этим каждому генератору, в зависимости от наличной си-
стемы АРВ, можно приписать некоторую реактивность и некоторую
постоянную э. д. с. Тогда все эквивалентирование можно проводить
так, как если бы АРВ не было.
В результативном эквиваленте (к концу второй стадии эквива-
лентирования) следует провести обратную операцию: для каждого
генератора по найденной для него эквивалентной реактивности
подобрать подходящую систему АРВ. При этом в процессе эквива-
лентирования необходимо отделение внешних, сетевых реактивно-
стей от генераторных.
Указанный упрощенный способ учета АРВ приемлем при рас-
смотрении статических режимов. ОДнако эквивалентирование в за-
вершающих стадиях необходимо подчинять более жестким требова-
ниям, связанным с динамическими процессами. Этим требованиям
в известной мере удовлетворяет изложенный выше метод линейной
интерполяции, который в одинаковой мере распространим и на
РСПД.
Однако если в эквивалентируемой системе имеются элементы,
резко уклоняющиеся от среднего уровня характеристик автомати-
ческого регулирования, то, как уже указывалось, необходимо либо
выделить их в отдельную группу, либо перейти к принципиально
иному методу эквивалентирования, который практически сравни-
тельно легко осуществим после преобразования заданной исходной
схемы к лучевому виду. В этом случае основным показателем дина-
мического процесса может служить энергия, отданная генератором
(или полученная двигателем) при глубоком возмущении в уз-
ловой точке А с заданной длительностью т, т. е. интеграл вида
133
J PjAdt = А,, где индекс j относится к определенной машине. Вычис-
о
ление мощности PJA — fj(t) методом последовательных интервалов
следует выполнять с учетом действия всех автоматических регу-
ляторов.
Каждой машине / будет соответствовать одно определенное (при
данном t и максимальном значении Д8д) значение Лу.
Все реальные параметры, характеризующие машины, входящие
в систему (постоянные инерции, суммарные реактивности до узла А,
параметры АРВ и РСПД) могут быть табулированы или построены
в функции от А,- (см. примерный график на рис. 4-5 некоторого па-
раметра k, например, кратно-
сти форсировок или какого-
либо коэффициента усиления).
п чисел А) должны быть
заменены (эквивалентирова-
ны) наиболее подходящими т
А а3 а,, а5 ап Aj числами Bj так, чтобы удов-
летворялось требование
Рис. 4-5. л т
У! Aj = 2 В/ {tn < и).
При этом эквивалентирование ряда чисел Л;- можно вести по методу
числовых моментов [Л. 29] с предварительной заменой чисел Л,-
числами А. — — А. (§ 3-3).
J т j '
Рассматривая числа Л,- как весовые показатели известных пара-
метров kj оригинала и эквивалентные числа В{ как весовые показа-
тели искомых аналогичных параметров kj эквивалента, можно со-
ставить т уравнений моментов (от 1-го до т-го порядка):
B{k\ + B2k2 + . . . + Bmkm = Afa + A2k2 + . . . 4- Ankn = Dv
B^ + B2^+ . . . + BJQ = Aft + A& + ... + Ank^ = D2,
B^ + Bji2m + ...+ Bmk'-=A^ + A2k- + ...+ Ank™ =Dm.
Отсюда и определятся все kj. В частном случае при т = 1, очевидно,
----- (4-1)
2 Ai
i
Изложенная процедура определения эквивалентных параметров
по весовым показателям Д7- несколько обременительна для практики.
134
Поэтому идти на ее применение целесообразно лишь в тех случаях,
кбгда доступно использование вычислительных машин и когда
можно ожидать существенного влияния параметров автоматиче-
ского регулирования отдельных элементов на результативный эк-
вивалент.
По-видимому, в большинстве случаев практики можно довольст-
воваться более грубым приемом, который заключается в следующем.
Произведя сглаживание кривой рис. 4-5 (состоящей вообще из пря-
молинейных отрезков) так, как это делается при обработке экспе-
риментальных данных, следует на оси Лу отложить значения вели-
чин В\ = В/ и найти на оси соответствующие им значения па-
раметров kt, которые и принимаются за искомые эквивалентные.
Если этот прием при т = 1 дает большое уклонение от средневзве-
шенного значения (4-1), то пользоваться им едва ли допустимо.
Изложенный метод определения параметров по весовым значе-
ниям Лу требует выбора определенного т при заданном определен-
ном возмущении ДЗЛ. Величина т должна быть выбрана достаточно
большой, чтобы проявилось не только действие любых формировок
возбуждения, но и регуляторов скорости первичных двигателей.
В предыдущем весовые факторы Лу определялись по изменяю-
щимся во времени активным мощностям Ру, определяемым специ-
альными расчетами относительного движения машин при возмуще-
нии типа Д§л в точке Л. Однако в некоторых случаях при эквивален-
тировании параметров регулирования машин более чувствительным
аппаратом может оказаться совокупность аналогичных интегралов
реактивных мощностей I J QjAdt I, соответствующих возмущению
\ о /
Д[/л («посадка напряжения» в контрольной точке); эти весовые
показатели Л,- (Q) должны быть эффективны в особенности при эк-
вивалентировании систем автоматического регулирования возбуж-
дения; их, конечно, также можно найти на основе специальных
расчетов электромеханических и электромагнитных процессов при
возмущении Д£/л. В остальном процедура эквивалентирования па-
раметров регулирования остается той же, что и при использовании
показателей Л у.
Что касается вопроса о том, какие параметры систем регулиро-
вания возбуждения и скорости первичных двигателей должны быть
эквивалентированы тем или иным из указанных способов, то это
зависит, вообще говоря, от вида конкретных устройств такого рода
в исходной системе.
АРВ сильного действия, как известно, может осуществляться на
основе использования различных параметров режима (их отклоне-
ний и производный): напряжения, относительного угла, тока, ча-
стоты и даже в различных их комбинациях [Л. 10].
135
Для обычных компактных приемных систем, как правило, ха-
рактерно применение так называемого компаундирования по току
или электронного пропорционального регулирования по отклоне-
нию напряжения (без производных).
В общем случае для второй стадии эквивалентирования можно
ограничиться рассмотрением автоматического регулирования по
отклонениям относительных углов и их производным (Д0/, Д0;,
Д07), поскольку этот вид регулирования является наиболее уни-
версальным по своей эффективности. При этом другие виды АРВ,
имеющиеся в исходной системе, можно заменить эквивалентным ре-
гулированием по углу на основе имеющегося опыта сопоставления
различных систем АРВ или по грубо-приблизительному подобию
их действия:
| \U | -> Д0, | \U -> Д0', | ДС71" Д0",
Д/ -> Д0, Ы' Д0', Д7" Д0",
Д/->Д0', Д/Д0".
При таких условиях индивидуальные системы АРВ можно ха-
рактеризовать параметрами [Л. 10]: Те, Тр, kQ, k2, где Те — по-
стоянная времени возбудителя; Тр — результативная постоянная
самого регулятора (сумма постоянных времени преобразовательного,
измерительного и усилительного устройств); &0, kr и k2 — коэффи-
циенты усиления по отклонению, по первой и второй производным
параметра регулирования (Д0). За исключением удаленных стан-
ций вообще будем иметь kr = k2 = 0. Но в таком случае можно
использовать изложенный выше упрощенный способ учета и экви-
валентирования регуляторов возбуждения путем замены синхрон-
ной реактивности ее уменьшенным значением, если все особые стан-
ции будут при этом выделены из эквивалента в особую группу.
В качестве основных параметров скоростных регуляторов пер-
вичных двигателей в принципе следует принять [Л. 10]:
Ts — постоянную времени серводвигателя,
а — коэффициент неравномерности,
Тр — постоянную времени маятника регулятора скорости,
Tk — постоянную времени демпфера,
Т\ — то же изодрома,
Тт — » » трубопровода,
Аи — условную массу изодрома.
Полный комплект этих параметров вообще характерен лишь для
высоконапорных ГЭС.
На практике систему дифференциальных уравнений РСПД для
целей расчета относительного движения роторов машин обычно зна-
чительно упрощают, сводя все параметры лишь к четырем (Т3, Th
ke [Л. 10]. Такое упрощение в особенности допустимо в процес-
сах первого и второго этапов эквивалентирования.
136
В заключение заметим, что хотя мы допускаем некоторый произ-
вол в выборе критериальных возмущений (Д8, Д{/), тем не менее
этим значительно упрощается процедура эквивалентирования, по-
зволяющая учитывать, так сказать, интимные тонкости различных
систем регулирования.
Изложенный подход не исключает статистических методов, по-
скольку может быть выбрана рациональная система вероятностных
величин Д8 и Дt7 на основе имеющихся статистических данных по
длинным ЛЭП. Также ничто не мешает приписать этим величинам
те или иные универсальные статистические характеристики (напри-
мер, нормальный закон распределения), и получить, соответственно,
на основе изложенных принципов, статистические распределения
эквивалентных параметров с тем, чтобы за основу моделирования
принять их математические ожидания, а дисперсии их — за оценку
точности моделирования параметров по этим эквивалентам.
4-3. Учет влияния импульсных моментов
Термином «импульсные моменты» мы условно называем электро-
магнитные моменты, действующие на ротор синхронной машины
при внезапных скачкообразных изменениях параметров или схемы
коммутации внешней сети [Л. 19, 20J.
Только в сравнительно недавнее время эти моменты начали учи-
тывать в расчетах динамической устойчивости [Л. 21]. Их жела-
тельно учитывать на третьей стадии эквивалентирования при со-
поставлении эквивалентов Э (т-^ и Э (т2) (при тх > т2), где тг
и т2 — числа главных элементов системы, причем основное значе-
ние имеют импульсные моменты при внезапных замыканиях на даль-
них ЛЭП; учет аналогичных моментов при отключении цепей после
короткого замыкания более сложен, но в то же время является ме-
нее существенным, а потому мы ограничимся рассмотрением только
импульсных моментов при коротких замыканиях вне эквиваленти-
руемой системы.
Поскольку импульсные моменты связаны только с появлением
свободных токов в цепях статоров и роторов синхронных машин,
эти моменты в порядке первого приближения, достаточного для
целей эквивалентирования, можно рассматривать как дополнитель-
ные, налагающиеся на квазистационарные электромагнитные мо-
менты, определяемые в предположении полного отсутствия свобод-
ных токов в цепях статора и ротора. При этом, хотя указанные мо-
менты в принципе и зависят от общей динамики системы, допустимо
все же считать, что они определяются по начальным условиям пе-
реходного процесса и не зависят от дальнейшего движения системы.
Тогда оказывается возможным довольно просто осуществить при-
ближенный учет импульсных моментов на основе допущений, часто
принимаемых при расчетах начальных токов коротких замыканий,
а именно: пассивная нагрузка замещается реактивными шунтами,
137
асинхронные двигатели — синхронными и взаимные угловые сдвиги
э. д. с. синхронных машин принимаются равными нулю. При таких ус-
ловиях можно воспользоваться готовыми выражениями импульсных
моментов, установленных для случая трехфазного короткого замыка-
ния непосредственно на зажимах синхронной машины [Л. 20],
рассматривая, однако, аналогичные короткие на дальней ЛЭП,
примыкающей к эквивалентируемой системе. Возникающие при этом
импульсные моменты, действующие на роторы синхронных машин
системы, в конечном счете оказывают на них тормозящее действие,
которое может быть существенным лишь для коротких замыканий
вблизи точек примыкания дальних ЛЭП к системе. Хотя подобные
короткие замыкания не столь важны для динамической устойчиво-
сти дальних ЛЭП, но могут иметь значение при сравнении эквива-
лентов приемной системы, если в последней наблюдается значитель-
ная структурная асимметрия.
Как видно из приведенных ниже выражений, величины импульс-
ных моментов при коротких замыканиях в цепях статоров отдель-
ных машин зависят, кроме параметров предшествовавшего режима
(напряжений, токов, фазовых сдвигов и т. п.), главным образом от
основных параметров цепи короткого замыкания:
^d = Xd + Хл» Xd — Xd +
Т'а, Та, T'q, Та,
где хл — внешняя индуктивность от зажимов машины до места
трехфазного короткого замыкания, а постоянные времени (Та,
Та, . . . и т. д.) предполагаются определенными с учетом хл.
При указанных выше допущениях для каждой из синхронных
машин эквивалентируемой системы можно определить эквивалент-
ную удаленность короткого замыкания, принимая все э. д, с. рав-
ным нулю, считая приложенным к данной системе единичное (U = 1)
трехфазное напряжение нормальной частоты в заданной аварийной
точке с замещением всех машин их известными параметрами (по-
очередно xd, x'd, xd, х") и находя каждый раз коэффициенты распре-
деления токов для всех машин по отношению к току в аварийной
точке (эта процедура, как известно, легко выполняется на расчет-
ных моделях постоянного тока).
Общие суммарные эквивалентные реактивности для каждой
синхронной машины при данном конкретном роде всех собственных
реактивностей машин (xd, xd и т. д.) будут являться, как легко видеть,
взаимными их реактивностями (х//г) относительно точки короткого
замыкания и получаемые отсюда значения эквивалентной внешней
реактивности хл окажутся, вообще говоря, различными для различ-
ных родов машинных реактивностей. Поскольку, однако, действие
138
импульсных моментов достаточно ограничить лишь отрезком вре-
мени т0, в течение которого еще ощущается так называемый сверх-
переходный процесс свободных токов статора [Л. 31], целесооб-
разно упомянутые взаимные реактивности (xjk) определять лишь
по значениям сверхпереходных реактивностей синхронных машин
по продольной оси, соответственно чему найдем:
х. = х.ь — х".,
л у j k aj
гдехл;-— эквивалентная внешняя реактивность для данной машины/.
После нахождения всех хл1 легко определятся и все суммарные
реактивности Xdj, X'dj и т. д.
Более сложным является вопрос о выборе эквивалентных зна-
чений постоянных времени, которые зависят не только от индук-
тивных удаленностей короткого замыкания (хл/), но также и от
активных сопротивлений заданной сложной сети; последнее в особен-
ности относится к Та. Однако едва ли целесообразно в целях сопо-
ставления эквивалентов вводить сложные расчеты постоянных
времени. Для Td и Tq, а также и для Та допустимо принять общее
среднее значение, равное 0,1 сек [Л. 31], и в соответствии с этим
t0 ss 0,3 сек. и Td ~ со, т. е. не учитывать изменение так называе-
мого «переходного тока короткого замыкания» (принять Ed = const).
В результате, согласно [Л. 20], мы получим выражение импульс-
ного момента M3j (/) для синхронной машины j при трехфазном
коротком замыкании на приемном конце ЛЭП, состоящее из трех
слагаемых:
где
I
Xdj
1
XdJ
UjCosQjo x
___t__
X Sin (<й0/ + e/0) — Uj sin 9/0 | —I-----| e 0,1 cos (o)0/ + 9/0) —
\Aqj Aq /
___t__ )________t__
“VlV------------V-)e 0,1 tf/Sin(2<V + 9/0) °’'
2 \ Adj Aqj / J
{^d/o
-^+
_1_
XdJ
1 \ ‘
—7— e
Xdj /
0,1
1________
XdJ Xdj
11 2
t//cos9/0 r/9i
—2t
«;ю=4 "Kvr+TrV0,1
2 J \Xd] Xqj /
139
В этих уравнениях все величины предполагаются выраженными
в относительных единицах, причем EdjQ — э. д. с. рабочего возбуж-
дения машины /, Uj — напряжение в точке короткого замыкания
и 6/0 — фазовый сдвиг между векторами Е^о и Ц- перед моментом
короткого замыкания; ri3 — эквивалентное активное сопротивле-
ние статора; гр/9 — то же для роторных цепей (в совокупности).
С достаточной для рассматриваемых целей точностью можно
принять:
~ 1 ;6(X’ + X"
2ш0Та о, 4-Л V dj qj.
rfi3 = 2b(r2j-ri)’
где г2/ и rj — собственные реальные активные сопротивления ге-
нератора i для обратной и прямой последователь-
ности;
if — коэффициент приведения от частоты 100 гц к частоте
50 гц, который приблизительно равен 0,9.
В выражениях моментов Л43 (/), Л4з(£), Мз (t) величины
Uj и 9/0 вообще являются некоторыми эквивалентными вели-
чинами, соответствующими реальному рабочему режиму данного
генератора j перед аварией на ЛЭП. Они должны быть определены
так, чтобы реальный эффект трехфазного короткого в заданной
точке k, с рабочим напряжением Uk, наиболее точно отражался эф-
фектом эквивалентного трехфазного короткого замыкания непо-
средственно в цепи данной машины j.
Самыми существенными величинами, определяющими моменты,
действующие на ротор машины, являются величина рабочего тока
возбуждения перед моментом короткого замыкания и, следова-
тельно, Edjo, а также разность векторов (/;—/н/), которая, как
известно, определяет начальное значение апериодической состав-
ляющей тока статора и ответную реакцию цепей ротора, проявляю-
щуюся в виде апериодических экстратоков. Поэтому указанную
разность желательно было бы найти для каждой машины j специ-
альным расчетом исходной схемы, для чего можно без большой по-
грешности принять xd = х” = х или в крайнем случае
*"=4~«+ч)-
Согласно известному принципу наложения имеем:
или
-и
140
Аналогичное соотношение должно иметь место и для трехфаз-
ного короткого замыкания в эквивалентной цепи каждой машины,
т. е.
откуда Uf = Uk для всех j.
Из сказанного следует, что в выражениях моментов величины
EdjQ должны быть равны реальным значениям э. д. с. возбуждения
в предшествующих рабочих режимах машин; угловые сдвиги 0/О
должны равняться угловым сдвигам между действительными э. д. с.
EdjQ и напряжением Uk в действительной аварийной точке перед
моментом короткого замыкания.
После определения функции момента Af3/ (/) можно найти из
дифференциальных уравнений динамики данной машины j дополни-
тельное влияние, которое оказывает этот момент на движение ее
ротора на основе сформулированного выше допущения независи-
мости действия импульсных моментов от последующего движения
ротора.
Обозначив дополнительное ускорение ротора, обусловленное
действием момента M3j. (/), через 8Ду., имеем:
После первого интегрирования получим:
(предполагая, что при t — 0 8Д^ = 0; == 0). После двух интег-
рирований будет:
8д/Оо) =
t
dt.
Учитывая относительно медленное движение ротора машины
под влиянием других моментов, можно принять, что это движение
при наличии импульсных моментов начинается для каждой машины
не при обычно допускаемых начальных условиях 8;. = 8/0 и 8/0 = 0,
а при иных, именно при
«;»- 1 (4 2)
I
Следовательно, учет действия импульсных моментов при коротких
замыканиях можно свести к изменению начальных, условий в со-
ответствии с (4-2); в остальном расчет движения системы будет
141
выполняться обычным методом последовательных интервалов или
другими методами [Л. 35].
Мы полагаем, что изложенная методика учета влияния импульс-
ных моментов может быть использована не только для целей экви-
валентирования, но и для первого уточнения расчетов динамиче-
ской устойчивости.
В заключение заметим, что величины 8Д;. (т0) и 8Д^ (т0) в (4-2)
нормально должны быть отрицательными.
4-4. Третья стадия эквивалентирования
Вопросы и операции, относящиеся к третьей стадии эквивален-
тирования, указаны в § 1-2, Рассмотрим их по порядку:
1. Типовые схемы
Соблюдение требования максимальной точности эквиваленти-
рования в увязке с возможностью представления эквивалента на
электродинамической модели приводит к необходимости, строго
говоря, иметь в конечном эквиваленте следующий комплект основ-
ных элементов:
1) Генератор, отображающий неанормальные (по параметрам)
турбогенераторы тепловых станций центральной части данной ло-
кальной системы.
2) Генератор, отображающий неанормальные гидрогенераторы
той же системы.
3) Гидро- или турбогенератор, отображающий имеющиеся в си-
стеме гидро- или турбогенераторы с анормальными параметрами
(например, капсульные гидрогенераторы; гидрогенераторы с попе-
речной и продольной обмотками возбуждения; турбогенераторы
с исключительно большими значениями реактивностей и постоян-
ных времени цепи возбуждения и т. п.).
4) Генераторы, эквивалентные генераторам достаточно удален-
ных станций, связанных с центром локальной системы через длин-
ные ЛЭП с небольшим запасом устойчивости.
5) Асинхронно-нагрузочный агрегат.
6) Пассивно-нагрузочный элемент.
7) Элемент нагрузки особого рода (например, электролизерной,
транспортной и т. п.).
Примененный в п. 1) и 2) термин «неанормальные» турбо- и гид-
рогенераторы означает, что основные параметры этих машин не
уклоняются слишком сильно от средневзвешенных значений по си-
стеме в целом для каждого из этих типов машин.
Если особые типы машин и нагрузок, упомянутые в п. 3) и 7),
в данной системе отсутствуют, то, кроме контрольного узла, к ко-
торому ожидается присоединение какой-либо новой дальней ЛЭП,
в типовой схеме все же останется, вероятно, не менее 4—5 узлов
142
с присоединенными к ним элементами, указанными в п. 1) 2) 4)
5) и 6).
Соответственно этому мы получим общую типовую схему в виде
шестиугольника с чисто сетевыми диагоналями (рис. 4-6).* Чтобы
получить эту схему к концу второй стадии эквивалентирования
с полностью определенными связями, практически возможным ока-
зывается только применение линеаризации и эквивалентирования
в пространстве функций на холостом ходе исходной системы, если
не считать более простой, но менее точный метод эквивалентирова-
ния в пространстве параметров.
Рис. 4-6.
Приведение схемы рис. 4-6 к лучевой с помощью неканониче-
ского преобразования (§ 3-3), очевидно, дает максимально упро-
щенный эквивалент с одним узлом в центре, что, однако, может быть
неприемлемым при тех или иных конкретных условиях моделиро-
вания. Поэтому может оказаться целесообразным использовать ко-
нечный эквивалент с двумя или тремя узлами. Хотя схема с тремя
узлами (рис. 4-7) имеет на один узел больше, однако она проще,
так как не требует разбивки общей асинхронной и пассивной на-
грузки между двумя узлами.
Схему рис. 4-7 можно получить из схемы рис. 4-6 путем надле-
жащих неканонических преобразований. Если ориентировочная
оценка точности конечных эквивалентов окажется благоприятной,
скажем, для схемы рис. 4-7, то можно на ней и остановиться.
В некоторых случаях, однако, идут дальше, стремясь свести всю
приемную систему к одному генератору с одной нагрузкой и даже
просто к одной синхронной машине. Если эквивалент с одним гене-
ратором и нагрузкой еще можно считать при известных условиях
допустимым, а именно — при включении данной локальной системы
* На рис. 4-6 через АН и ZH обозначены соответственно асинхронная и
пассивная нагрузки.
143
в объединенную «мета-систему», то замена всей локальной системы
одной синхронной машиной едва ли приемлема вообще, поскольку
этим искажаются самые элементарные физические качества исход-
ной системы.
X Определение параметров рабочего режима
для конечного эквивалента
Процедура определения параметров рабочего режима и самый
состав этих параметров для конечного эквивалента зависят от
схемы последнего и от использования метода эквивалентирования.
Во всех случаях следует считать заранее определенными (в пред-
шествующем процессе эквивалентирования) инерционные постоян-
ные генераторов и двигателей эквивалента, отнесенные к некото-
рой общей базисной мощности.
Если во второй стадии эквивалентирования асинхронные двига-
тели были замещены синхронными по правилам, изложенным
в § 2-4, причем реактивности этих двигателей, как и реактивности ге-
нераторов, уже определены для конечного эквивалента по схеме
рис. 4-6, то на третьей стадии необходимо вернуться к нормальному
представлению асинхронных двигателей. Только после этого, строго
говоря, следовало бы определять параметры рабочего режима ге-
нераторов эквивалента для рис. 4-6, учитывая как асинхронную,
так и пассивную нагрузку их статическими характеристиками.
Хотя в такой постановке задачу и можно решить методом узло-
вых напряжений [Л. 33], однако значительно более простым будет
расчет в другом порядке, а именно сохранив сначала представле-
ние эквивалентной асинхронной нагрузки синхронным двигателем
(с э. д. с. Е3 и углом З3о). Тогда, считая модули напряжений и их ко-
ординатные углы для узлов А и В заданными, можно определить
собственные и взаимные проводимости относительно э. д. с. син-
хронных машин и узлов А и В (с учетом пассивной нагрузки), а за-
тем непосредственно написать уравнения активных и реактивных
мощностей по группам синхронных машин (в том числе замещаю-
щих асинхронную нагрузку):
= Ег, Е- SI0, 8„) = 2Р„. '
е; = ф, (Е,. Е,. е;, у, у, у = V у.
р‘, = Е,(Е,, е2, е,; г», у у = 2₽„, ( ’
<г:, = фг(Е„ Е„ Е,; у у у = 2С„;
е:„=е,(е,. е2........у у ...) = 2Р„.
в:. =Ф(Е,. Ег, у у
где правые части находятся суммированием активных и реактив-
ных мощностей по соответствующим группам машин исходной
схемы.
144
Следует заметить, что так как эквивалент не может точно соот-
ветствовать исходной схеме, не исключено в этом порядке расчета
некоторое энергетическое рассогласование в узлах А и В, т. е. не-
соответствие активной и реактивной мощностей, рассчитанных по
заданию значений напряжений и координатных углов, значениям
этих величин в исходной схеме. При значительном расхождении
предпочтительно будет напряжения UA и UB считать (по модулям
и координатным углам) неизвестными, одновременно добавив к
указанным уравнениям 4 новых уравнения, правые части которых
будут выражать активные и реактивные мощности узлов Л и В,
взятые из исходной схемы.
Все эти уравнения являются
тра нсцендентными, выражаемы-
ми через синусные и косинусные
функции. Решение их возможно
только тем или иным из методов
последовательных приближений.
В первом грубом приближении
искомые величины Elf Е%, ... ,
8ю> §20, • • • можно принять рав-
ными средневзвешенным (по пол-
ной мощности) их значениям для
соответствующих групп машин
в исходной схеме. После опреде-
ления э. д. с. и угла синхронного двигателя, замещающего асин-
хронную нагрузку, можно будет вернуться к натуральному пред-
ставлению последней.
Если схема конечного эквивалента уже принята к реализации
на электродинамической (или аналоговой) модели, то последнюю
можно использовать для определения искомых параметров режима
с помощью регулировки величин активных и реактивных мощно-
стей эквивалентных машин так, чтобы они были равны правым ча-
стям в уравнениях (4-3). При этом нет необходимости в замещении
асинхронных двигателей синхронными. Нелишне заметить, что на-
стройка эквивалентных генераторов модели, а также генераторов
удаленной станции на требуемый режим может быть автоматизиро-
вана с помощью простейших регуляторов активной и реактивной
мощности.
В тех случаях, когда на второй стадии эквивалентирования вся
нагрузка заменена синхронными двигателями с использованием
линеаризации «в малом» не на холостом ходе и исходная схема
в конечном счете приведена к виду рис. 4-8, где Elf Е21 Е3 — еще не
определенные э. д. с. эквивалентных синхронных машин, — за-
данная э. д. с. существующей удаленной станции, необходимо иметь
в виду, что условные взаимные связи на этой схеме aiA, zz12 . . . и т. д.
являются функциями указанных э. д. с., напряжения Уло, а также
145
реальных взаимных реактивностей х1А, х)2, ... и начальных угло-
вых сдвигов; например:
Е U
Х1А
Я12 = cos (810 — 8г0),
аАВ — хАВ COS(8A0 %)'
аАВ является величиной, отдельные сомно-
Из этих величин только
жители которой можно было бы заранее считать определенными
в исходной схеме уже в конце первой стадии эквиваленти-
рования. Число уравнений рабочего режима превышало бы
число неизвестных, и последние подлежали бы определению па
методу наименьших квадратов. Чтобы избежать такого усложнения,
допустим, что напряжение и его координатный угол для узла
В, а также все реактивности связи последнего с другими
узлами схемы рис. 4-8 подлежат определению наравне с другими
неизвестными £,, Е2, . . . ; 810 , 820, . . . ; х1А, х2А, х1В, х2В, . . . ,
х12, х13 . . . и т. д. Тогда, считая напряжение UA0 и координатный
угол 8Д0 контрольного узла А заданными, будем иметь 18 искомых
величин. Учитывая, что все условные проводимости аи, а2А, . . .
и т. д. будут определены в предшествующей стадии эквивалентиро-
вания и что для схемы в целом будет иметь место равенство узло-
вых комплексных мощностей суммам мощностей исходной схемы
(для соответствующих групп машин и опорных узлов), составим
для определения неизвестных 18 уравнений:
Е 'Е i
—^-cos(8/0 —8го) = а/г
р 11
-i-^cos(8.0-8A0) = flM
xjA
EjUB0
xjB
UА(РВО_____/s> » \ „
ХАВ C°S ^Л° °В0) ~
c°s 0;.о — а.в
(3 уравнения)
/7 = 1, 2; 1, 3; 2, 3.
(3 уравнения)
/ = 1, 2, 3.
(3 уравнения)
/ = 1, 2, 3.
(1
уравнение)
P;=F;(E„ Е,....1/м;
810’ •
У*
(6 уравне-
ний)
= е2................ив0-,
(/* — число элементов
8ю> • • • ’ 8во)— Qj*O ,
исходной схемы в группе /)
146
FB(EV E2, ...» UBq, 810, . . . , §во) PB
Ы£Г £2.....U^- 8»....4=<2b
(2 уравнения).
Нетрудно видеть, что в данном случае число неизвестных ра-
бочего режима и трансцендентных уравнений для их определения
по сравнению с предыдущим случаем возросло в три раза. Приме-
нение линеаризации «в большом», не устраняя этого обстоятельства,
лишь несколько упрощает систему необходимых уравнений.
Если к схеме рис. 4-8 применить неканоническое преобразование
к лучевой схеме с центральным, еще неизвестным напряжением Uc,
то, считая комплексы напряжений узлов А и В заданными из исход-
ной схемы, можно свести число неизвестных и соответствующих им
уравнений до 13, что остается еще значительно большим, чем это
было указано для схемы рис. 4-6, в которой все связи предполага-
лись известными.
3. Оценка точности эквивалента
Как уже указывалось во введении, безупречной можно считать
только оценку эквивалента на основе прямого сопоставления его
с исходной системой по главному эффекту, для исследования кото-
рого предпринимается упрощение заданной системы. Так, в случае
динамической устойчивости дальней ЛЭП сопоставлению подлежат
пределы передаваемой мощности при одинаковых аварийных усло-
виях; при исследовании статической устойчивости должно быть по
крайней мере установлено изменение ее запасов при замене исход-
ной системы ее эквивалентом.
К сожалению, указанные сопоставления эквивалента с первич-
ной системой требуют либо проведения дорогих экспериментов в на-
туре, либо чрезвычайно большой вычислительной работы с исполь-
зованием математических машин.,
Смысл второго пути вообще не вполне ясен, так как, если идти
на использование сложных вычислительных процедур, то можно
обойтись и без эквивалентирования. Тем не менее, в следующем
пункте кратко будет рассмотрен и этот путь в некоторой упрощен-
ной модификации.
Здесь мы остановимся на приближенной оценке точности экви-
валента по динамической устойчивости, которая возможна и на
основе ручного счета и на основе применения электродинамических
моделей или каких-либо математических машин. Предположим,
что конечный эквивалент приведен к схеме рис. 4-7 и что к контроль-
ному узлу присоединена конкретно заданная ЛЭП Л19 передающая
энергию от некоей проектируемой станции; и та и другая будет
иметь только испытательное значение, а потому параметры их можно
выбрать ориентировочно, с некоторым ухудшением против реально
ожидаемых по проекту. Тогда следует сделать серию расчетов (или
147
опытов на электродинамической модели) с целью выявления пре-
дельных по динамической устойчивости нагрузок ЛЭП для трех
вариантов:
1. Машинам ГЭС и ТЭС приписаны наихудшие по динамической
устойчивости параметры: наименьшие инерционные постоянные и
наименьшие реактивности,* отнесенные к номинальным мощностям
и выбранные из параметров комплекта соответствующих машин
исходной (первичной) схемы.
2. Тем же машинам приписаны наилучшие по динамической ус-
тойчивости параметры: наибольшие инерционные постоянные и
реактивности, выбранные из параметров комплекта машин исход-
ной схемы.
3. Тем же машинам приписаны аналогичные параметры, опреде-
ленные для конечного эквивалента.
Пусть, далее, расчетом или на модели для указанных случаев
найдены предельные по динамической устойчивости мощности для
двухполюсного на землю к. з. в начале ЛЭП Лг (т. е. на отправном
конце): Рпр, ?пР, Рэпр. Тогда можно из общих физических сообра-
жений утверждать, что при правильном эквивалентировании по-
грешность последнего (ДР11р) по пределу динамической устойчиво-
сти не превысит разности (РПр—РПр), т. е. будет иметь место соот-
ношение:
Р' <Р' .
пр эпр пр
При наличии достаточно мощных вычислительных средств можно
использовать для оценки точности эквивалента иной способ — экс-
траполяцию.
Так как несомненно, что при постепенном переходе от п элемен-
тов исходной системы к конечному эквиваленту с т0 (<^ п) элемен-
тами точность эквивалентирования падает, то, выбрав в процессе
эквивалентирования второй стадии некоторый уровень эквивалента,
характеризуемый т главными элементами, именно такой, что при
т > mQ уже становится возможным прямое определение предель-
ных по динамической устойчивости мощностей, передаваемых по
ЛЭП JIlt и определив эти мощности в одинаковых условиях аварии
на ЛЭП Л± для т, т—1, т—2, . . . , т0 элементов, можно построить
кривую зависимости:
PDp=/(mv), (4-4)
где
m0 < тх < т.
При этом метод постепенного эквивалентирования должен быть
однообразным, чтобы можно было рассчитывать на выявление опре-
* Таким выбором параметров обеспечивается наиболее сильное торможе-
ние машин приемной системы при коротком замыкании на отправном конце
ЛЭП
148
деленной закономерности. Если ход указанной кривой подтвердит
наличие такой закономерности, то можно считать допустимым экс-
траполяцию зависимости (4-4) до т = п, т. е. получить оценку дей-
ствительного динамического предела мощности.
Такой способ, конечно, не прост и должен рассматриваться лишь
как один из мотивов детальных исследований процессов эквивален-
тирования.
4. Определение параметров простейших эквивалентов
Простейшими мы называем эквиваленты, состоящие из одной
синхронной машины с обобщенной асинхронной нагрузкой. Про-
должая методы второй стадии эквивалентирования до уровня т0 =
= 2 (генератор + двигатель), мы, конечно, можем прийти к про-
стейшему эквиваленту.
Такой предельный эквивалент, вообще говоря, не является не-
обходимым для обычных целей проверки устойчивости дальних
ЛЭП. Однако он может быть желателен для включения данной ло-
кальной системы в «мета-систему» (например, ЕВС).
Самый надежный путь определения оптимальных параметров
предельного эквивалента данной локальной системы — это, конечно,
проведение экспериментов в натуре, что, однако, является далеко
не всегда осуществимым.
Едва ли не единственным случаем возможности (и то — только
в принципе) экспериментального определения параметров простей-
шего эквивалента опытами в натуре является случай, когда упро-
щаемая локальная система войдет в «мета-систему» единственной
связью, присоединенной к той же узловой точке В, к которой при-
соединена и существующая, относящаяся к локальной системе
дальняя уединенная ЛЭП Ло (рис. 4-9). Тогда, если допускают ус-
ловия эксплуатации, в принципе возможна постановка достаточ-
ного числа опытов короткого замыкания на ЛЭП Ло с тем, чтобы,
меняя длительность и место искусственных аварий, с последующим
успешным АПВ, определить предельные по динамической устойчи-
вости мощности удаленной станции для реальной системы.
К числу параметров простейшего эквивалента (в который рабо-
тающая через ЛЭП Ло станция не войдет), подлежащих определе-
нию, следует отнести инерционные постоянные (Нг и Я2) эквива-
лентного генератора Г и нагрузочного асинхронного двигателя АД,
их реактивности (хх и х2) до общего узла С (рис. 4-9), постоянную
времени цепи возбуждения генератора (TdQ)\ активное сопротивле-
ние (гл) ротора асинхронного двигателя, общее реактивное сопро-
тивление (х3) до точки присоединения ЛЭП Ло, демпферные пара-
метры и др.,— всего 8—10 постоянных параметров.
Для упрощения расчетов и поиска оптимума можно пойти на
принятие некоторых параметров по средним типовым значениям
(например, постоянную времени цепи возбуждения, демпферный
149
коэффициент для генератора). И все же останется не менее шести
подлежащих определению постоянных параметров и еще два варьи-
руемых по режиму параметра, а именно — модуль и угловой сдвиг
э. д. с. эквивалентного генератора. Следовательно, на ЛЭП Ло,
должно быть поставлено большое число существенно различных опы-
тов, в каждом из которых — достаточное число «подопытов» (с варьи-
рованием передаваемой по ЛЭП мощности), вплоть до выпадения
удаленной станции из синхронизма.
Последнее обстоятельство является несомненно нежелательным
в реальных условиях эксплуатации. Поэтому предпочтительно
Рис. 4-9.
ориентироваться на какие-либо косвен-
ные способы выявления динамического
предела мощности. При наличии хоро-
ших измерительных регистрирующих
приборов электрической активной мош-
Рис. 4-10.
ности и угловых сдвигов (относительно синхронной оси) можно,
например, придерживаться следующего порядка экспериментальных
исследований.
Меняя для всех фиксированных условий коротких замыканий
на ЛЭП JIQ (место, длительность, пауза АПВ) лишь передаваемую
по ней активную мощность (Рнг) и регистрируя для каждого ее зна-
чения предельные угловые отклонения роторов удаленной станции
и соответствующие им превышения (APt) электрической мощности
относительно данного ее начального значения, получим возмож-
ность построить график APt- = F примерный характер кото-
рого показан на рис. 4-10.
Предельная по динамической устойчивости мощность (Рпр) со-
ответствует на этом рисунке точке k пересечения кривой ДР. с осью
абсцисс. Дальнейшее увеличение Ры угрожает выпадением удален-
ной станции из синхронизма. Во избежание этого точку k следует
определять экстраполяцией кривой ДРГ = F которую необ-
ходимо строить точка за точкой паралллельно с выполнением опытов
при постепенном увеличении Рн/ от достаточно малых значений
(превышающих, однако, эффект естественного торможения при ко-
ротких замыканиях).
150
При некоторых определенных значениях искомых параметров
эквивалента (обозначим их все через т^, т)2, . . . , т]6) с помощью ма-
тематических машин нетрудно построить зависимость типа рис. 4-10
и для предполагаемого эквивалента, не прибегая ни к какой линеа-
ризации и задавая синхронные и другие машины в схеме рис. 4-9
достаточно точными уравнениями, с учетом импульсных моментов.
К сожалению, не представляется возможным даже для схемы
рис. 4-9 выразить достаточно точно и аналитически просто зависи-
мость предельной мощности ЛЭП Ло от параметров эквивалента
т]1, т|2..т]6. Это затрудняет определение их оптимальных значе-
ний. Последнее можно в принципе выполнить методами «поиска»
[Л. 36].
Однако целесообразнее предварительно определить приближен-
ные значения этих параметров одним из методов второй стадии экви-
валентирования. В особенности наиболее подходящим по точности
представляется прямой функциональный метод, не требующий ли-
неаризации (§ 3-1).
Если приближенные значения указанных параметров т;10, т;20,...,
т]в0 определены, то, фиксируя по очереди каждое из них, кроме од-
ного f\j, которому задается вариация Ат)/, не трудно для схемы
рис. 4-9 также с помощью математических машин определить част-
ные производные --Рпр = /. (i) для заданных конкретных условий
аварии на ЛЭП Лй. Тогда для всей серии i опытов на линии Ло,
(i > 6) получим i линейных алгебраических уравнений относительно
всех Дт);-:
А (1^+А (1)^4 + ... 4-А(1)Дт)6 = р1п-р;п,
А (2) Д7), + /2 (2) Дт)2 + . . . + /6 (2) Дт;6 = р2п - Р*п,
А (6) д71, + а (в) Дг12 + ... + а (6) дт)6 = р6п - р;п,
где Р1П, Р2п, • • • , Р6п — предельные мощности из опытов в реаль
ной системе;
Р1*п, Рзп, . . • , Рбп — те же величины, вычисленные для при-
ближенных значений искомых парамет-
ров эквивалента.
Вся описанная процедура уточнения оптимальных значений па-
раметров простейшего эквивалента отпадает, если не представится
возможным провести необходимое число опытов «в натуре», не пред-
ставится возможным использовать подходящие вычислительные
машины или, наконец, если будет доказана с помощью оценки точ-
ности достаточность использования для построения простейшего
эквивалента функциональных методов второй стадии, в частно-
сти использования некоторых типовых воздействий на входе А
151
приемной системы в виде комплексной функции напряжения
UА = UАе , где UA и 8Л суть функции времени.
Эти воздействия должны быть приложены, с одной стороны, к
какой-либо промежуточной схеме второй стадии эквивалентирова-
ния при т > mQ (см. выше п. 3), а с другой — на входе схемы про-
стейшего эквивалента (т0 = 2). Согласно [Л. 3,4], в качестве вход-
ных реакций следует использовать активные и реактивные мощно-
сти. Если входные реакции РА (/, tri) и QA (t, tri) промежуточной
схемы второй стадии эквивалентирования (с т элементами) принять
за реальную действительность, то параметры эквивалента будут
определяться при тех же воздействиях на входе из условия мини-
мума функционала:
J([P,(i, Ч1, ч,)р +
О
+ «В[<2Л(Л .... Ti6)]2jd/,
где Вв — некоторый весовой коэффициент.
Типовые входные возмущения было бы целесообразно выбрать
на основании анализа реальных переходных процессов, в большом
количестве изучавшихся за ряд лет в различных научно-исследова-
тельских организациях.
Подходящее значение весового коэффициента Вв можно устано-
вить лишь на основе предварительных исследований (хотя бы на
моделях), долженствующих показать относительное влияние не-
точностей активной и реактивной мощностей реакции эквивалента
на предельную по динамической устойчивости нагрузку дальней
передачи.
ЗАКЛЮЧЕНИЕ
1. Прежде (лет 20—30 тому назад) в распоряжении инженера
или исследователя имелись только элементарные средства для вы-
числительной работы. Поэтому оказывались неизбежными прими-
тивные способы эквивалентирования. В последние годы выдвинуты
и развиваются значительно более обоснованные методы с широким
использованием новых вычислительных средств и моделей [Л. 2,
3, 4, 5, 6, 7]. Однако во многих работах по эквиваЛентированию
до сих пор по традиции сохранились некоторые недопустимые опе-
рации, например замена асинхронной нагрузки пассивною и дру-
гие.
2. В данной работе автор отказался от всех приемов упрощения
электрических систем, которые явно и грубо противоречат физике
явлений. Такой подход следует считать первым шагом к повышению
точности эквивалентирования.
3. В работе впервые подробно рассмотрены вопросы линеари-
зации исходных дифференциальных уравнений и построены чисто
электрические схемы замещения линеаризированных электромеха-
нических систем; рассмотрено применение второй теоремы разложе-
ния Хевисойда для приведения линеаризированных систем к лучево-
му виду; разработана теория приближенной замены асинхронной
моторной нагрузки синхронною; указана возможность и целе-
сообразность применения.для эквивалентирования ряда математи-
ческих методов, еще не нашедших здесь отражения; предложены
и рассмотрены, в принципиальном отношении, совершенно новые
методы: неканоническое преобразование многоугольных сетевых
структур, эквивалентирование «в пространстве параметров» и эк-
вивалентирование «в пространстве функций», допускающие даль-
нейшее развитие.
Кроме того, в работе рассмотрен ряд частных задач и вопросов,
относящихся к случаю преобладания в электрической системе пас-
сивных (активно-реактивных) нагрузок; рассмотрено эквиваленти-
рование систем автоматического регулирования возбуждения и ско-
рости первичных двигателей; предложен приближенный учет им-
пульсных моментов, действующих на роторы генераторов сложной
системы; даны рекомендации по ориентировочной оценке точности
конечных эквивалентов.
153
4. Исходя из.несомненной связи процесса упрощения электри-
ческих систем с кибернетическим понятием «потери разнообразия»,
характеризующим снижение точности по мере упрощения системы,
автор рекомендует разделение этого процесса на три стадии, имею-
щие свои специфические особенности. К третьей, завершающей
стадии, предъявляются наиболее высокие требования в отношении
точности: отказ от линеаризации, от замещения асинхронной на-
грузки синхронною и т. д.
5. Автор рекомендует следующую схему использования рассмот-
ренных или кратко отмеченных в работе методов и частных приемов
упрощения электрических систем отдельно по трем стадиями
На первой стадии — частные приемы концентрации нагрузок;
неканоническое преобразование многоугольных сетевых контуров;
прямой (без линеаризации) функциональный метод для объединения
станций, имеющих общий сетевой узел.
На второй стадии, для первого этапа — неканоническое преобра-
зование многоугольных сетевых структур; эквивалентирование
«в пространстве параметров»; линеаризация с применением теоремы
разложения; использование операционных функций с положитель-
ным аргументом в соединении (если требуется) с использованием
расчетных столов постоянного тока.
На второй стадии, для второго этапа, так же как и на первом
этапе — линеаризация и все известные косвенные функциональные
методы и, кроме того, «эквивалентирование в пространтве функций»,
в том числе «частотно-амплитудный» метод, а также комбинация
эквивалентирования в пространстве параметров с прямым функ-
циональным методом.
На третьей стадии, по мере реальной возможности:
а) метод прямого определения параметров простейшего эквива-
лента, на основе достаточного числа экспериментов в натуре, по
оценке динамических пределов мощности;
б) то же, но на основе использования мощных вычислительных
машин;
в) сочетание экспериментов в натуре с прямым функциональным
методом (без линеаризации), с последующим определением поправок
к полученным параметрам эквивалента на основании пределов ди-
намической устойчивости, найденных из опыта;
г) использование только прямого функционального метода пу-
тем сопоставления входных реакций двух эквивалентов системы:
эквивалента с уменьшенным (на второй стадии) числом т элемен-
тов (т < п) и простейшего эквивалента с двумя элементами (условно
принимая реакцию для эквивалента с т элементами за истинную
для исходной системы).
6. Самыми трудными вопросами теории априорного эквивален-
тирования являются вопрос об оценке точности эквивалента и еще
вопрос об установлении хотя бы высшего предела допустимой не-
точности.
154
К сожалению, убедительная оценка точности не может основы-
ваться только на среднеквадратичной погрешности переходного
процесса. В настоящей работе сделана весьма скромная попытка
установить некоторые способы оценки погрешности пределов дина-
мической устойчивости при априорном эквивалентировании.
Этот вопрос заслуживает дальнейшего изучения.
Что касается второго вопроса, то он тесно связан с более широ-
ким вопросом о необходимой общей точности определения пределов
устойчивости, а этот последний — с вопросом о требуемых запасах
устойчивости, который имеет уже технико-экономический характер.
Вследствие обнаруживающихся здесь трудностей, до выполения
надлежащих обстоятельных исследований неизбежно пользоваться
лишь косвенными оценками точности эквивалентирования.
7. В настоящей работе рассмотрено эквивалентирование, в ос-
новном, применительно к локальным системам с одним входом (с
одним узлом возмущений). Следует признать своевременным и важ-
ным постановку и исследование в ряде работ, например в [Л. 4, 5]
вопроса об эквивалентировании расчлененных сверхсложных си-
стем. Этому вопросу в данной работе уделено относительно мало
внимания, причем изложено главным образом применение к указан-
ной задаче метода эквивалентирования «в пространстве параметров».
8. В ряде работ [Л. 13, 14, 15, 34] делаются шаги в направле-
нии оптимизации автоматического регулирования сложных систем,
также с использованием частичного их эквивалентирования. Этот
сложный вопрос также требует дальнейшей разработки. В данной
работе он не рассматривался, если не считать процедуры эквивален-
тирования параметров автоматического регулирования на основе
представлений о параметрических пространствах.
ЛИТЕРАТУРА
1. У. Росс Эшби, Введение в кибернетику, Изд-во иностр, лит.,
1961.
2. О р у р к И. А., Жеверже-ев В. Ф., Рощин Г. В., Эквива-
лентирование группы синхронных генераторов, связанных линиями передачи
одной машиной из условия подобия колебаний, Сборник работ по вопросам
электромеханики, вып. 6, Изд-во АН СССР, 1961.
3. О р у р к И. А., Р о щ и н Г. В., Моделирование групп параллельно
работающих генераторов, связанных линиями передачи, одним агрегатом из
условия подобия колебаний, Доклады четвертой межвузовской конференции
по применению физического и математического моделирования в различных
отраслях техники, Сб. 4, МЭИ, 1962.
4. О р у р к И. А., Эквивалентное замещение групп станций сложных
энергосистем в колебательных режимах, Изв. АН СССР, Энергетика и транс-
порт, 1964, № 2.
5. Ж у к о в Л. Л., О преобразованиях сложных систем при расчетах
устойчивости, Изв. АН СССР. Энергетика и транспорт, 1964, № 2.
6. Коваленко В. П., Эквивалентное преобразование сложных си-
стем, Изв. АН СССР. Энергетика и транспорт, 1964, № 2.
7. Г у с е й н о в Ф. Г., Некоторые вопросы эквивалентирования мно-
гомашинной системы, Труды ЭНИН Азерб. ССР, 1964, т. XVI.
8. П о п о в Е. П., Динамика систем автоматического регулирования,
Гостехиздат,, 1954.
9. Первозванский А. А., Случайные процессы в нелинейных
автоматических системах, Физматгиз, 1962.
10. В е н и к о в В. А., Переходные электромеханические процессы
в электрических системах, Госэнергоиздат, 1962.
11. Азарьев Д. И., Математическое моделирование электрических
систем, Госэнергоиздат, 1362.
12. Ж д а н о в П. С., Устойчивость электрических систем, Госэнерго-
издат, 1948.
13. М и х н е в и ч Г. В., Об электромеханическом эквивалентировании
в автоматически регулируемой энергосистеме, Изв. АН СССР. Энергетика и
транспорт, 1964, № 2.
14. М о р о з о в с к и й В. Т., К вопросу об эквивалентировании гене-
раторов автономных электрических систем при расчетах статической устой-
чивости, Изв. АН СССР. Энергетика и транспорт, 1964, № 2.
15. Т а г и р о в М. А., Устойчивость в малом сложных систем при на-
личии симметрии, Труды Сибирского научн.-исслед. энергетического инсти-
тута, 1964, вып. 1 (20).
16. С т р е л к о в С. П., Введение в теорию колебаний, ч. II, Гостех-
издат, 1950.
17. Жданов П. С., О статической устойчивости сложных электриче-
ских систем, Труды ВЭИ, вып. 40, Госэнергоиздат, 1940.
18. Г о р е в А. А., Введение в теорию устойчивости параллельной ра-
боты электрических станций, ч. 1, КУБУЧ, 1935.
156
19. К а з о в с к и й Е. Я., Переходные процессы в электрических ма-
шинах переменного тока, Изд-во АН СССР, 1962.
20. В а ж н о в А. И., Основы теории переходных процессов синхрон-
ной машины, Госэнергоиздат, 1960.
21. Е ж к о в В. В. и А. Н. Ц о в ь я н о в? Уточнение методики рас-
чета динамической устойчивости, Доклады четвертой межвузовской конфе-
ренции по применению физического и математического моделирования в раз-
личных отраслях техники, Сб. № 4, МЭИ, 1962.
22. Р ю д е н б е р г Р., Переходные процессы в электрических систе-
мах, Изд-во иностр, лит., 1955.
23. Л е в и н ш т е й н М. Л., Операционное исчисление и его прило-
жения к задачам электротехники, «Энергия», 1964.
24. Демидович В. П., Марок И. А., Шувалова Э. 3., Чис-
ленные методы анализа, Физматгиз, 1962.
25. О р у р к И. А., Расчет переходных режимов телеграфной линии
по методу характеристик вещественного аргумента, вып. 151, Сборник
ЛИИЖТ, 1956.
26. О р у р к И. А., Новые методы синтеза линейных и некоторых нели-
нейных динамических систем, «Наука», 1965.
27. Марков А. А., Избранные труды, Гостехиздат, 1948.
28. Д е м и д о в и ч Б. П., М а р о н И. А., Основы вычислительной
математики, Физматгиз, 1960.
29. В е н т ц е л ь Е. С., Теория вероятностей, Физматгиз, 1962.
30. Большая Советская энциклопедия, 1953, т. 20, стр. 473.
31. Ульянов С. А., Короткие замыкания в электрических системах,
Госэнергоиздат, 1952.
32. Качанова А., Методика расчета на цифровых вычислительных
машинах собственных и взаимных сопротивлений сложных энергосистем,
Сб. «Вопросы применения вычислительной техники в энергетических систе-
мах», Изд-во АН СССР, 1962.
33. Ф а з ы л о в X. Ф., Методы режимных расчетов электрических
систем, Изд-во «Наука» УзССР, 1964.
34. Л и т к е н с И. В., М а ч и н с к и й М. В., Упрощение исследова-
ния устойчивости сложных автоматически регулируемых систем при внутри-
групповой симметрии, Доклады четвертой межвузовской конференции по при-
менению физического и математического моделирования в различных отрас-
лях техники, Сб. № 4, МЭИ, 1962.
35. Ц у к е р н и к Л. В., Приведение к нормальной форме уравнений
возмущенного движения сложных систем при расчетах устойчивости, Сб.
«Вопросы применения вычислительной техники в энергетических системах»,
Изд-во АН УССР, 1962.
36. Энциклопедия современной техники, Автоматика производства и
промышленная электроника, т. 3, изд. «Советская энциклопедия», 1963,
стр. 11.
ОГЛАВЛЕНИЕ
Предисловие ................................................... 3
Глава первая. Характеристика процесса упрощения энергосистем ... 5
1-1. Введение ..............................................—
1-2. Предварительные условия анализа....................... 9
1. Структура сложных электрических систем...............—
2. Три стадии упрощения сложных систем.................12
3. Основные допущения..................................14
4. Исходные уравнения..................................15
5. Контрольные возмущения..............................17
6. Критерии эквивалентности . . .......................18
Глава вторая. Линеаризация исходных уравнений и схемы замещения 20
2-1. Линеаризация «в малом» в области рабочего режима .... —
2-2. Линеаризация в конечном диапазоне.....................25
2-3. Учет демпфирования ...................................30
2-4. Замещение асинхронных двигателей синхронными..........33
2-5. Применение второй теоремы разложения Хевисойда к преобра*
зованию электрических систем...........................44
1. Основной анализ......................................—
2. Лучевая схема с промежуточным узлом.................52
3. Реализация преобразования по теореме разложения ... 54
Г лава третья. Основные методы и частные приемы эквивалентирования 56
3-1. Прямые функциональные методы и приемы эквивалентирова-
ния .......................................................
3-2. Косвенные функциональные методы........................61
1. Метод моментов ......................................—
2. Метод частных значений..............................62
3. Операционный метод..................................63
3-3. Параметрическое эквивалентирование .................. 71
1. Приближенное («неканоническое») преобразование много-
угольных схем в лучевые............................72
2. Эквивалентирование в пространстве параметров........79
3-4. Эквивалентирование в пространстве функций.............94
1. Предварительные замечания и предпосылки..............—
2. Эквивалентирование в пространстве главных функций . . 96
3. Частотно-амплитудный метод . ./.....................98
3-5. Особенности эквивалентирования нагрузочных совокупностей
и операции первой стадии эквивалентирования...........101
1. Учет пассивных нагрузок..............................—
2. Концентрация нагрузок и другие операции первой стадии
эквивалентирования ....................................ИЗ
3. Эквивалентирование нагрузочйых подстанций, расположен-
ных на одной линии между двумя генерирующими узлами 115
3-6. Частичное эквивалентирование сложной электрической си-
стемы .............................................118
Глава четвертая. Некоторые специальные вопросы и завершающая ста-
дия упрощения систем .....................127
4-1. Особые случаи.......................................—
4-2. Учет автоматических регуляторов возбуждения и скоростных
регуляторов первичных двигателей....................131
4-3. Учет влияния импульсных моментов...................137
4-4. Третья стадия эквивалентирования...................142
1. Типовые схемы.....................................—
2. Определение параметров рабочего режима для конечного
эквивалента.........................................144
3. Оценка точности эквивалента......................147
4. Определение параметров простейших эквивалентов . . . 149
Заключение....................................................153
Литература ........................................-.........156
Щедрин Николай Николаевич
УПРОЩЕНИЕ ЭЛЕКТРИЧЕСКИХ
СИСТЕМ ПРИ МОДЕЛИРОВАНИИ
М.—Лм издательство «Энергия», 1966,
159 стр. с рис
Редактор Е. А. Алексеева
Техн, редактор О. С. Житников*
Корректор А. Л. Павлова
Обложка Б. Н. Сегаль
Сдано в производство 11/1 1966 г.
Подписано к печати 6/IV-1966 г. М-16650.
Печ. л 10 Уч-изд. л. 9,2. Бум. л. 5.
Типографская № 1, 60 X 90*/1б« Тираж 3500
Цена 66 коп. Заказ 151.
Ленинградская типография № 4
Главполиграфпрома Комитета по печати
при Совете Министров СССР,
Социалистическая, 14.