/

















































































Автор: Иванов В.И. Воронов А.А. Бобров В.М. Глебов И.А.
Теги: электроэнергетика электродинамика
Год: 1959




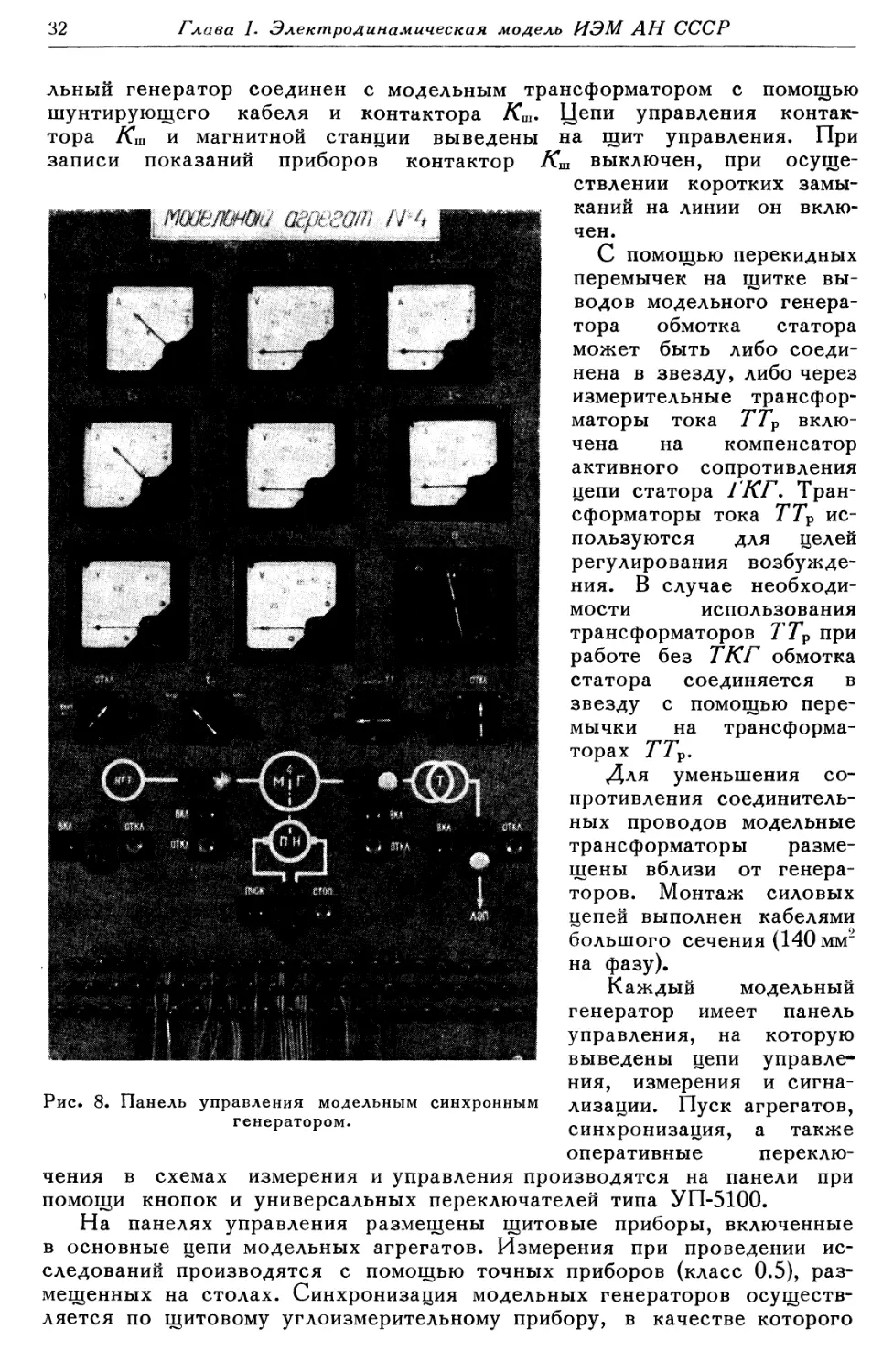
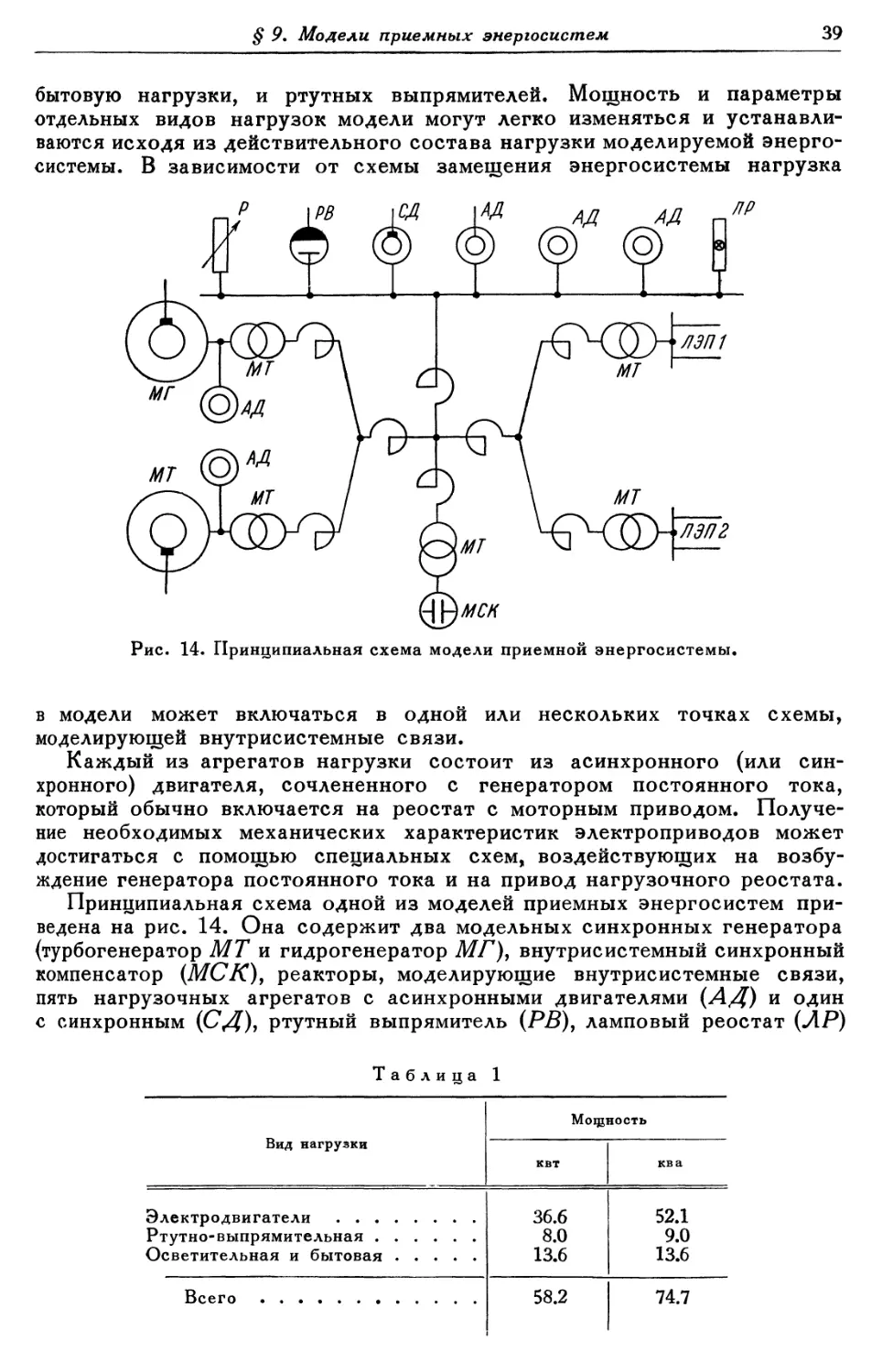
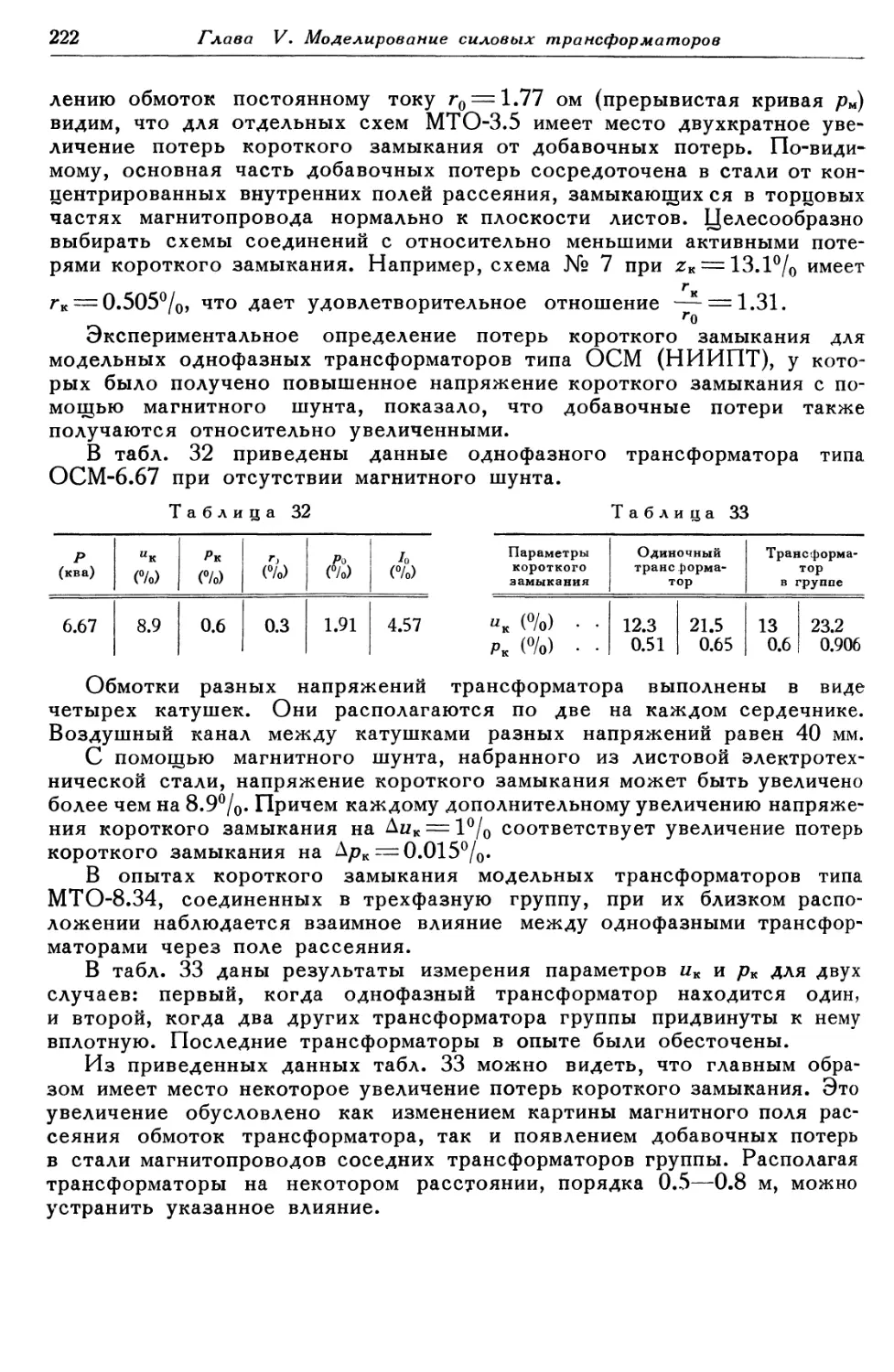
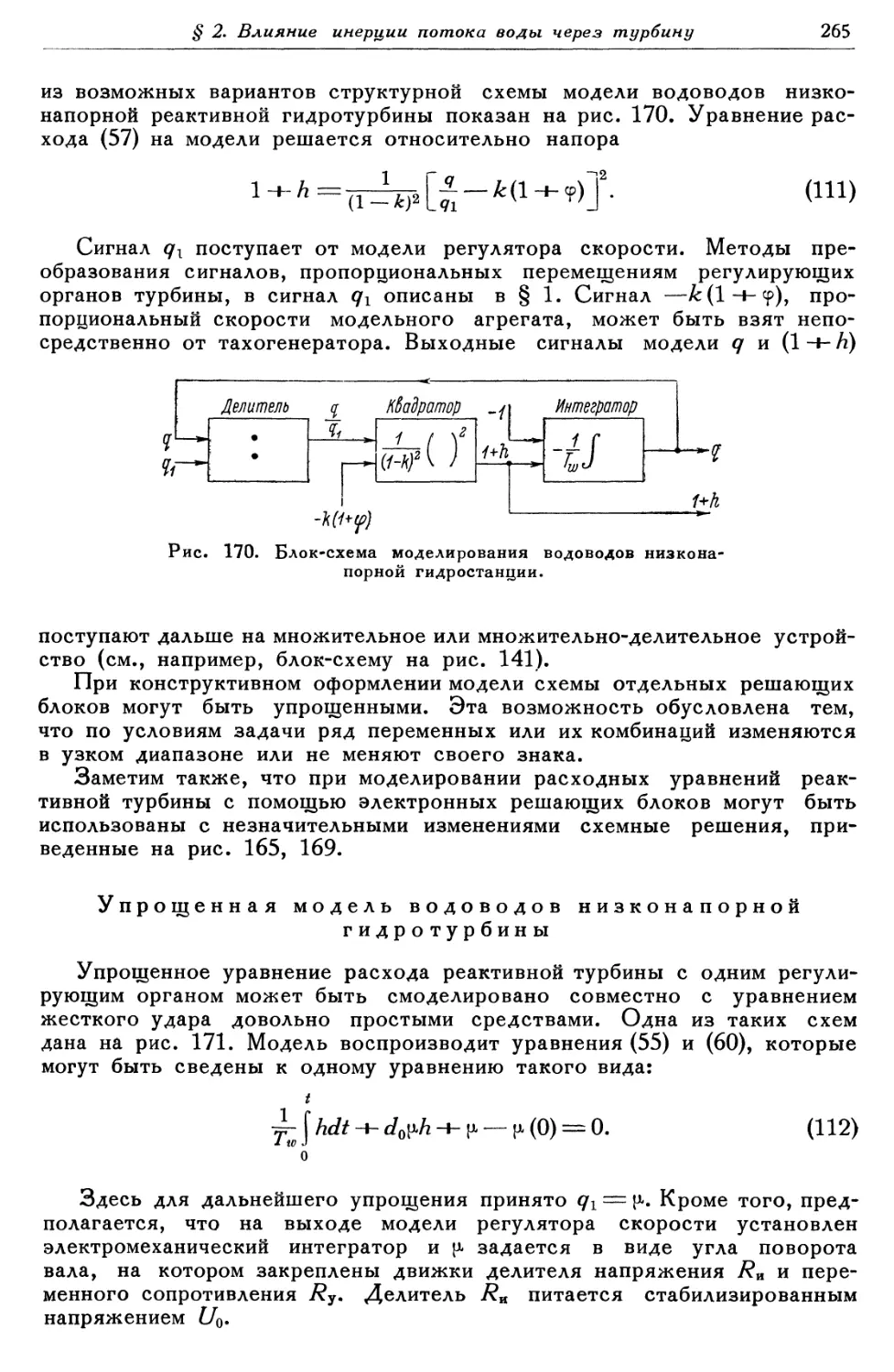
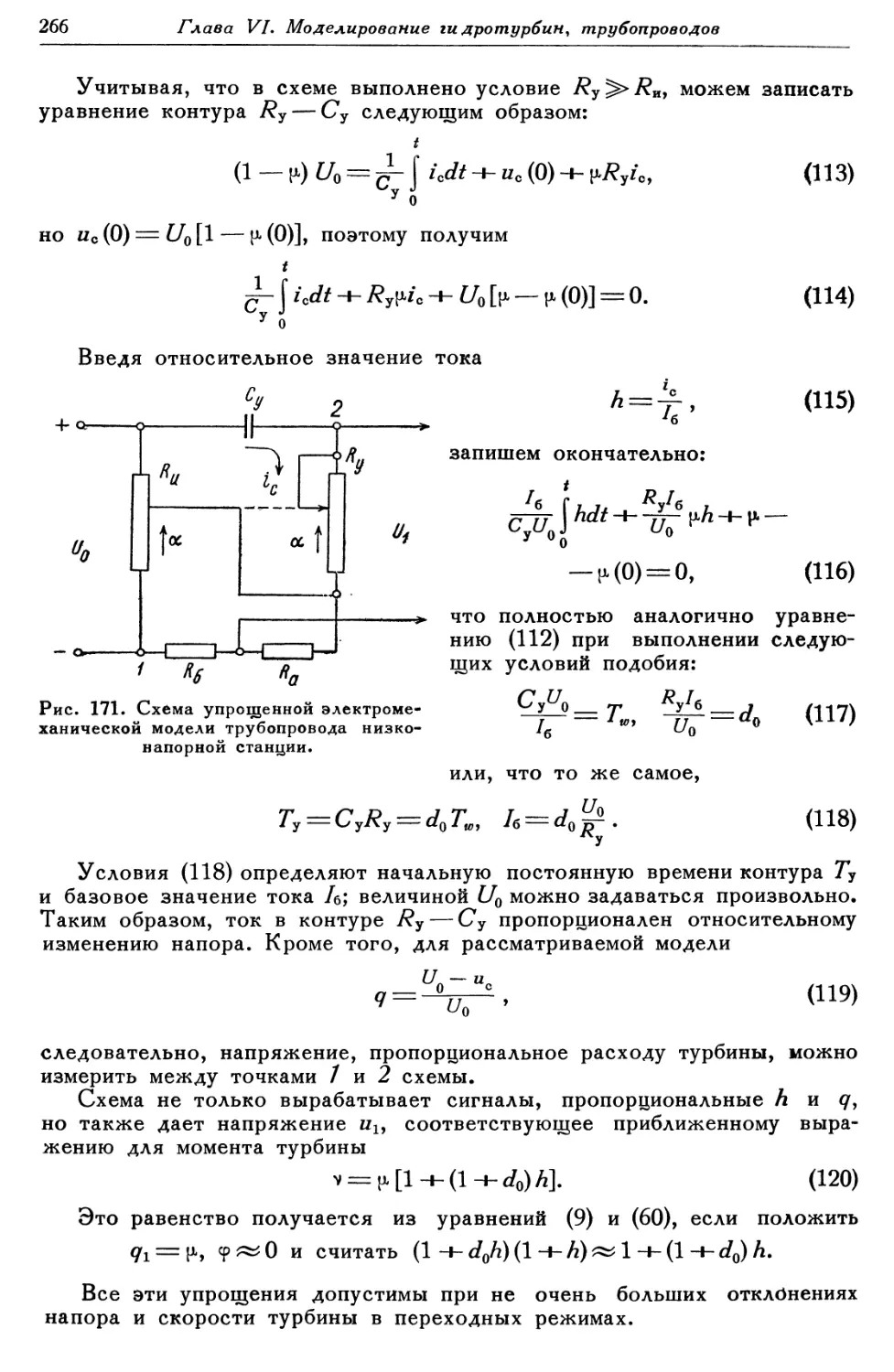
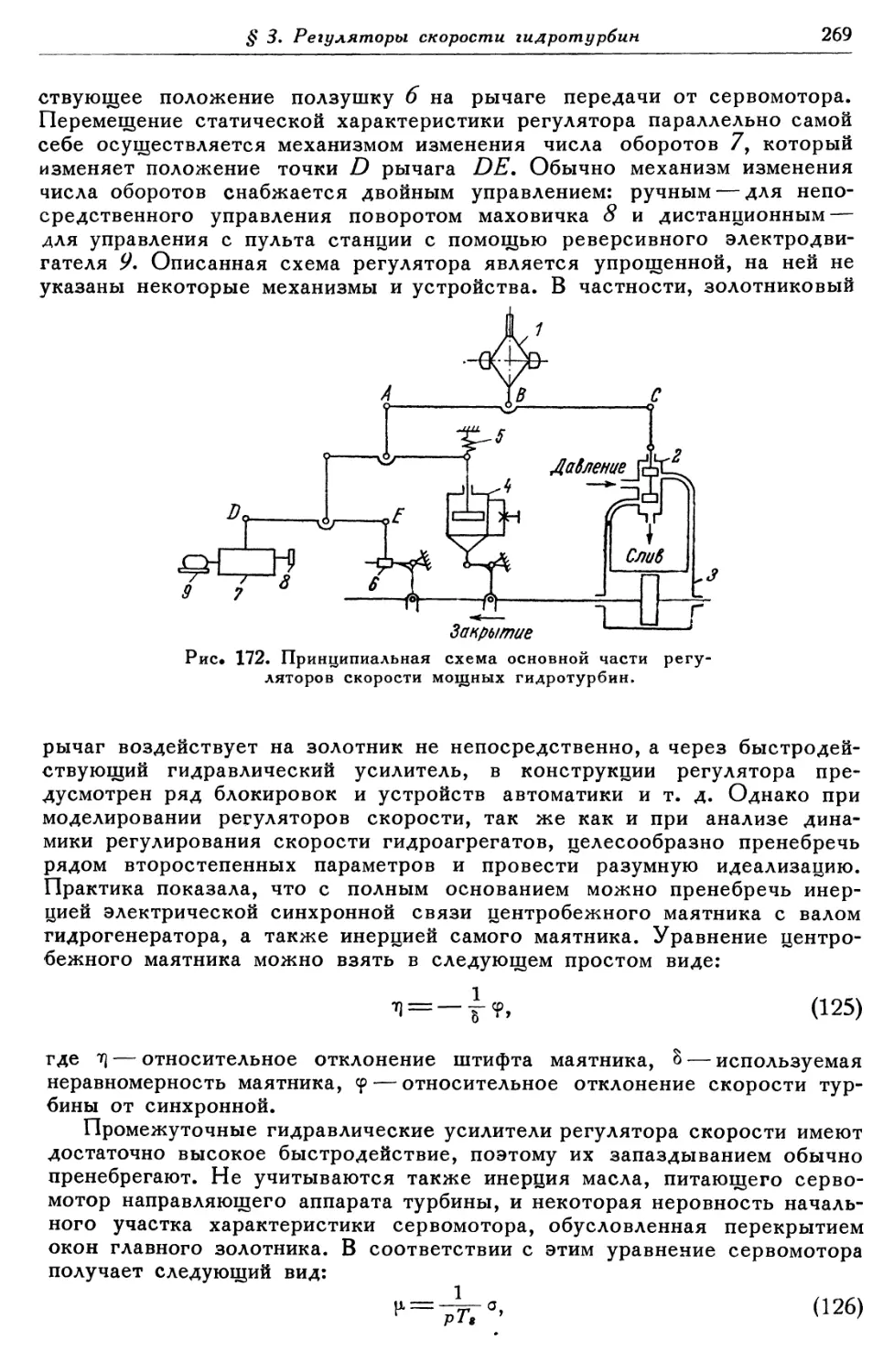
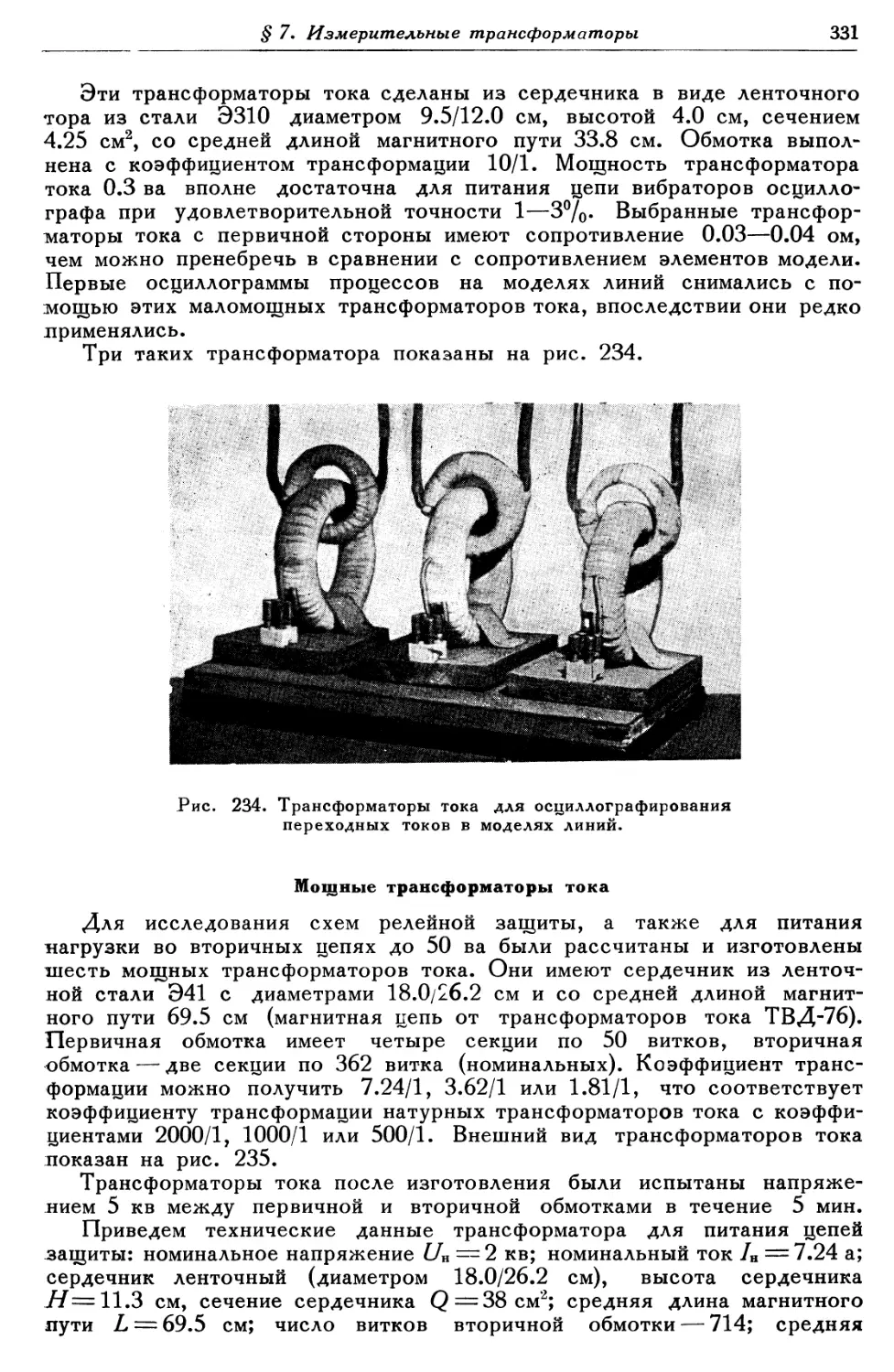
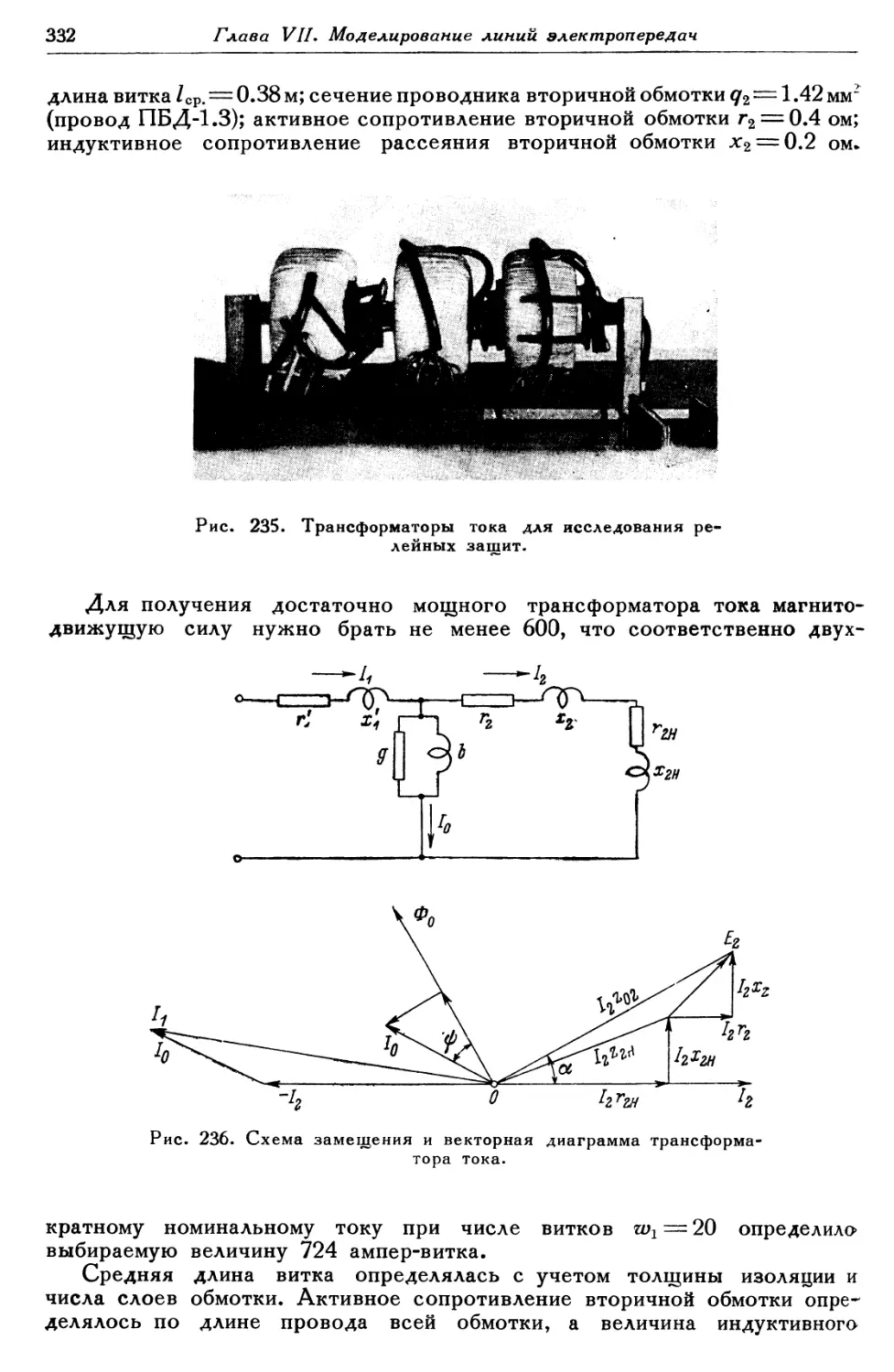
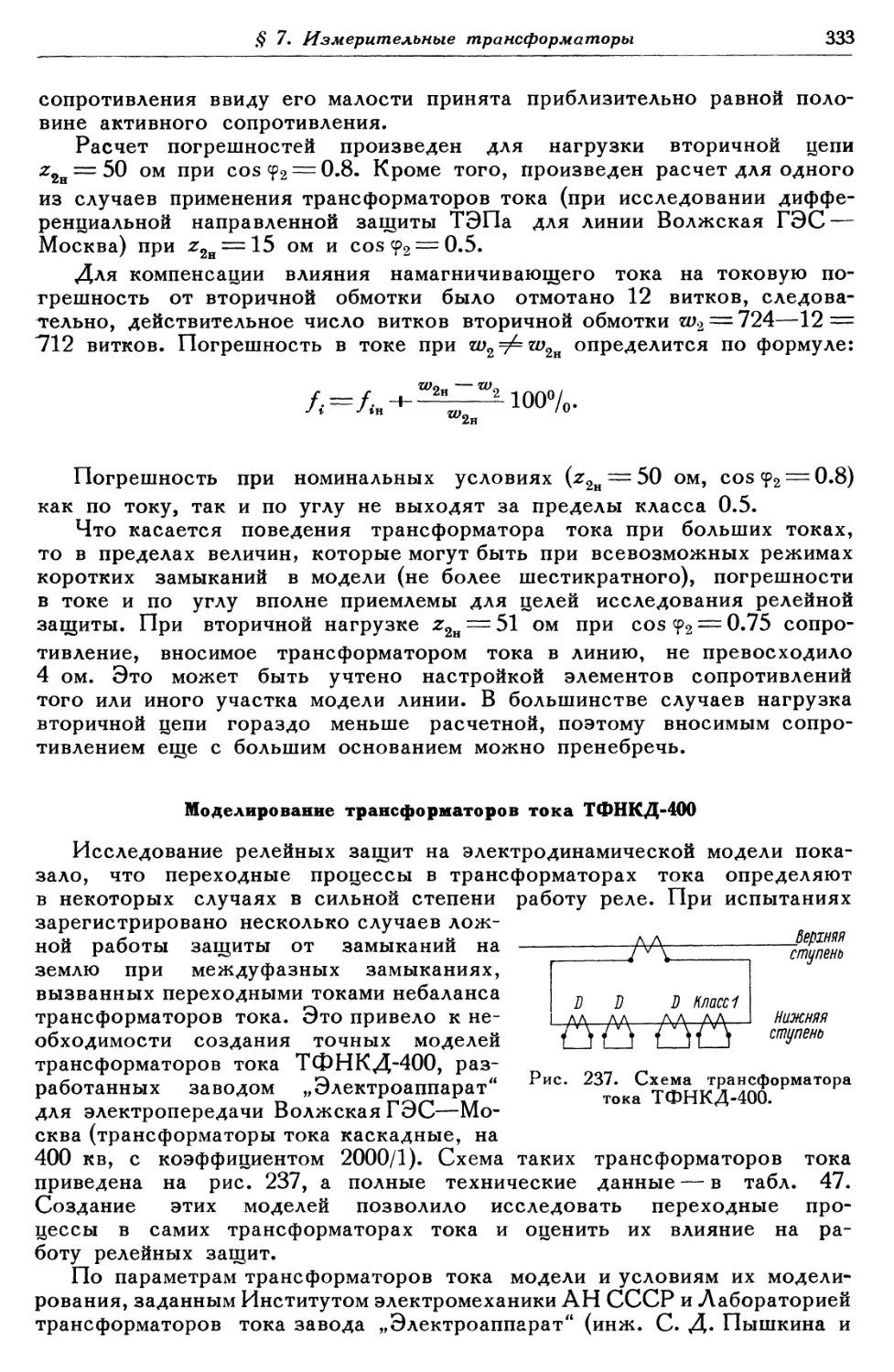
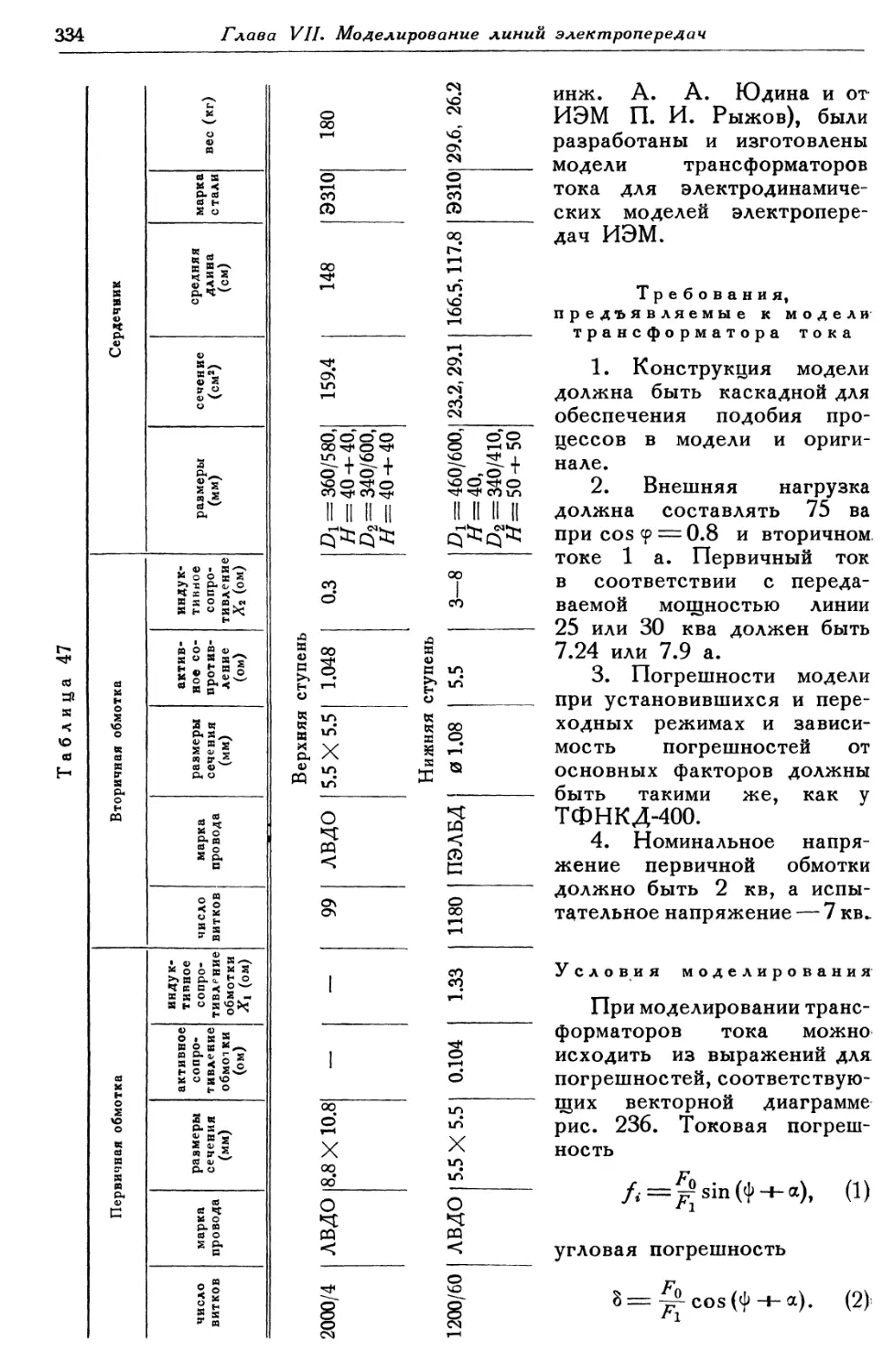
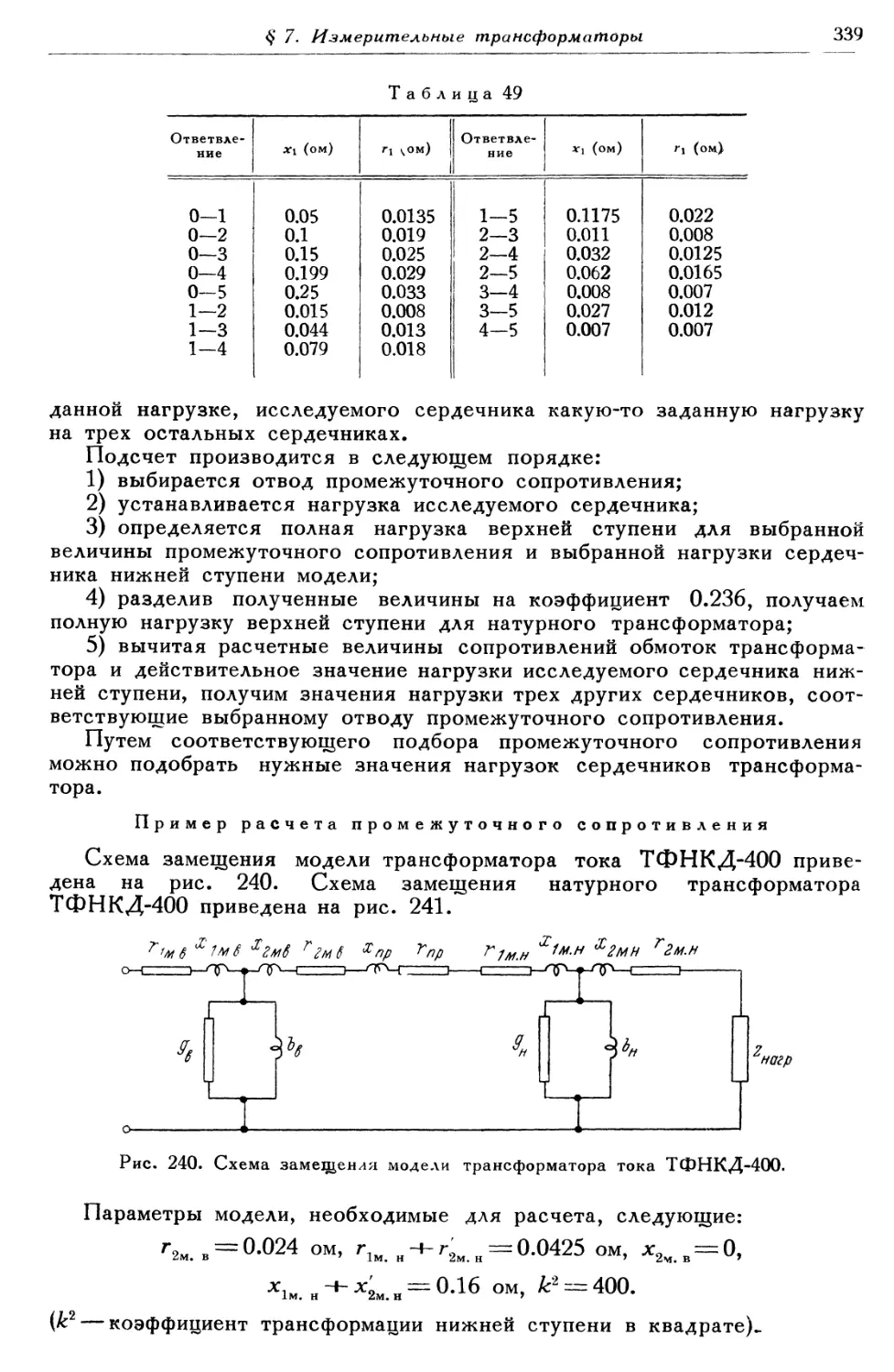
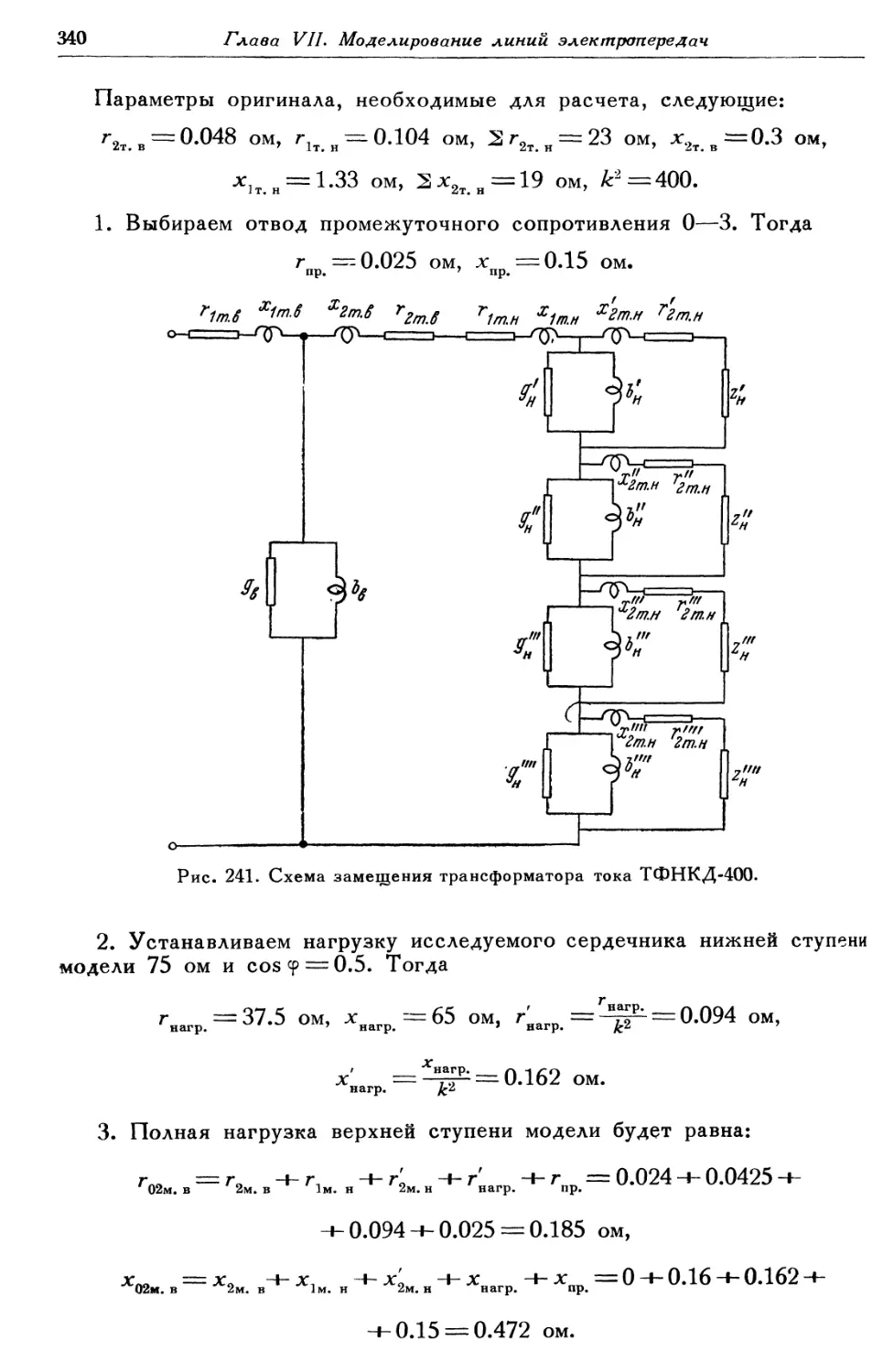
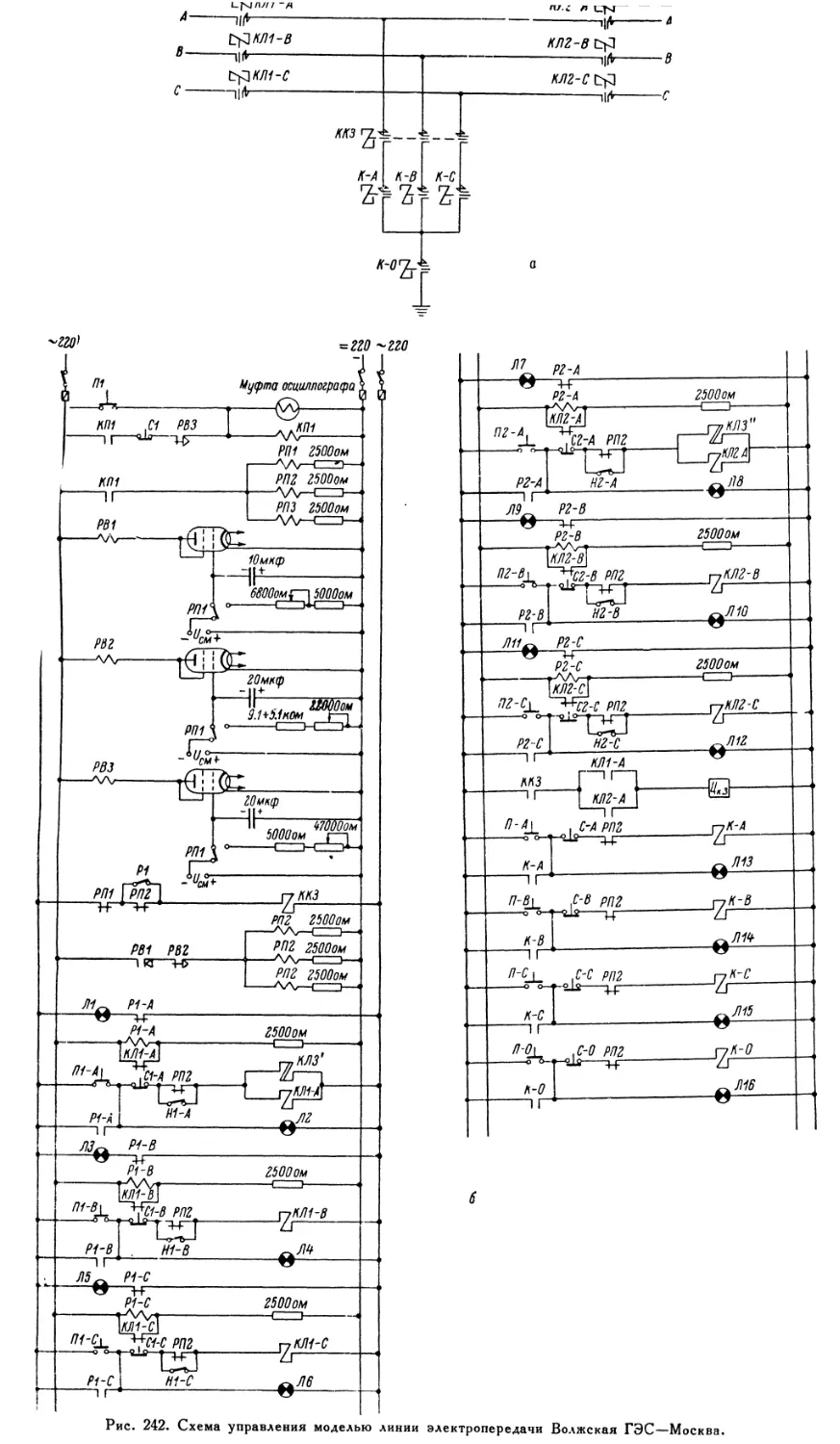
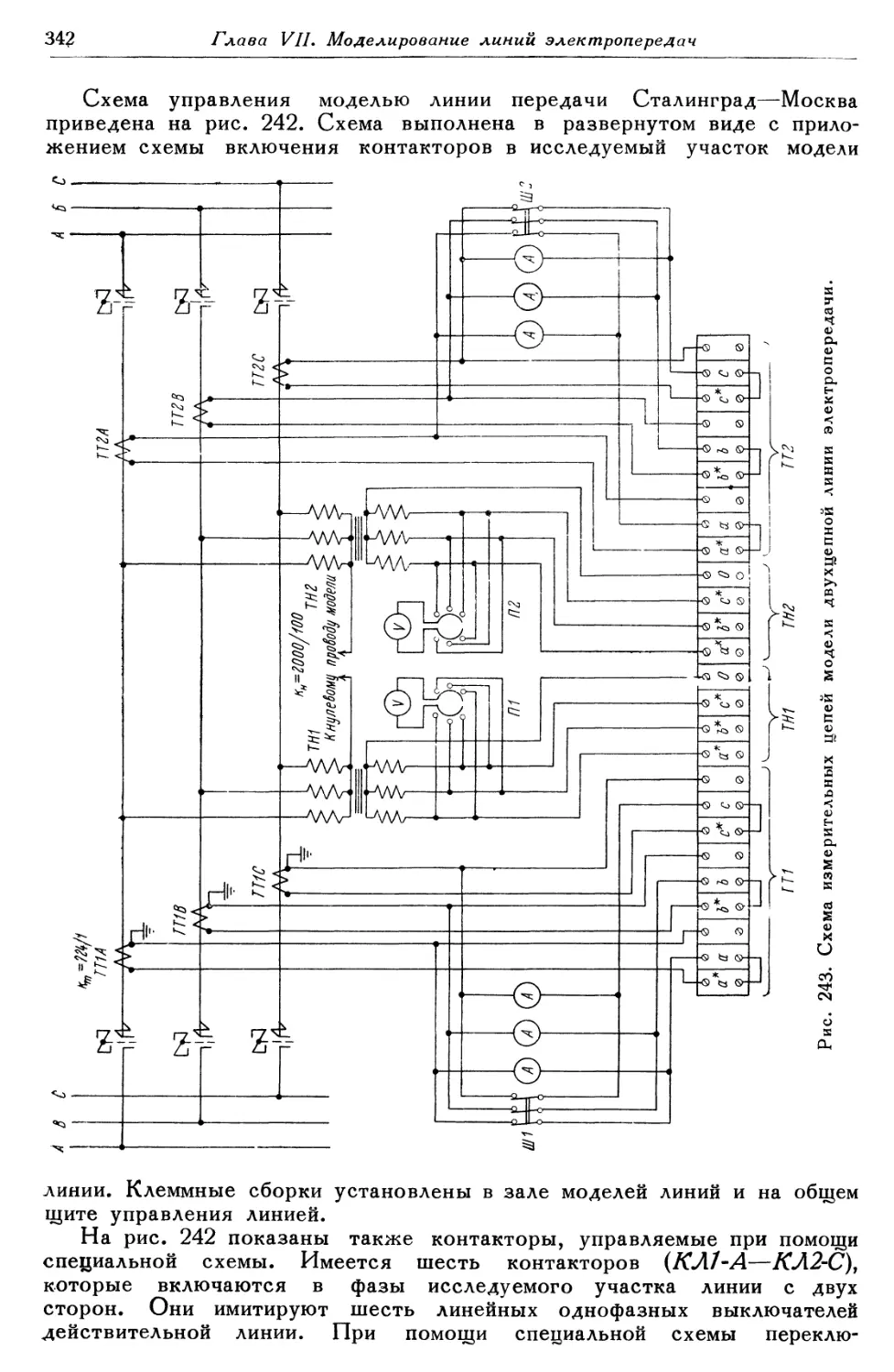
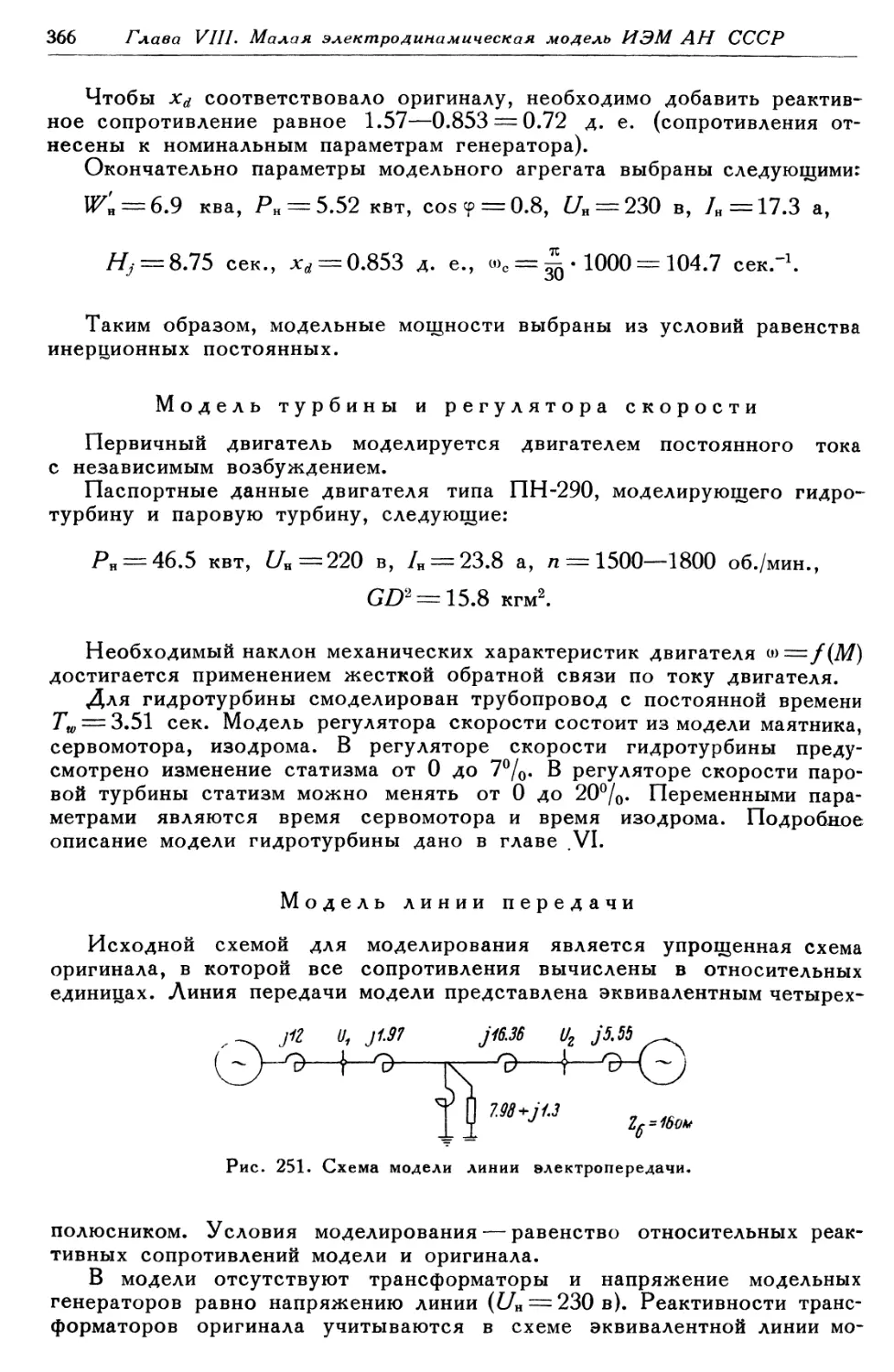
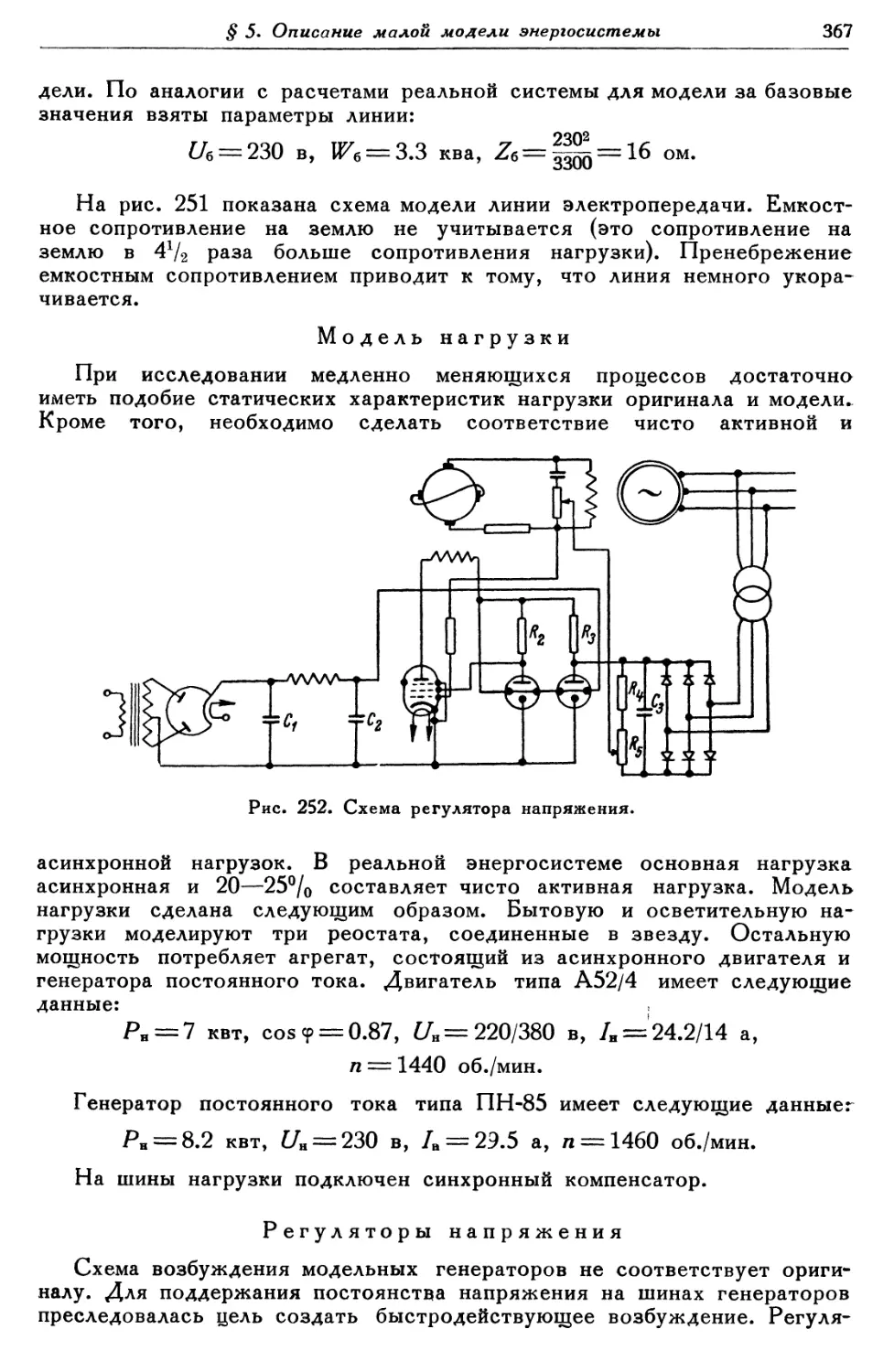
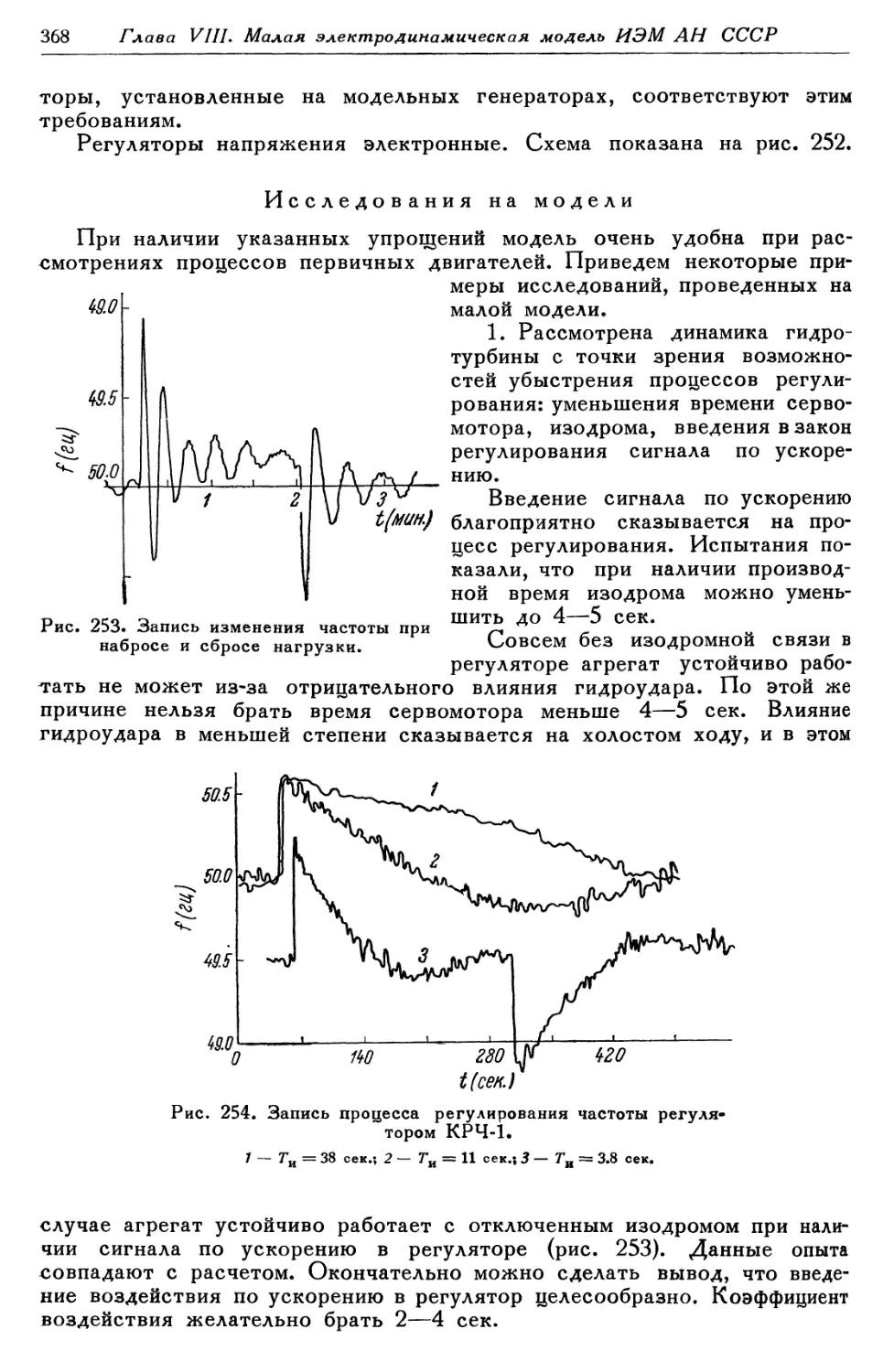
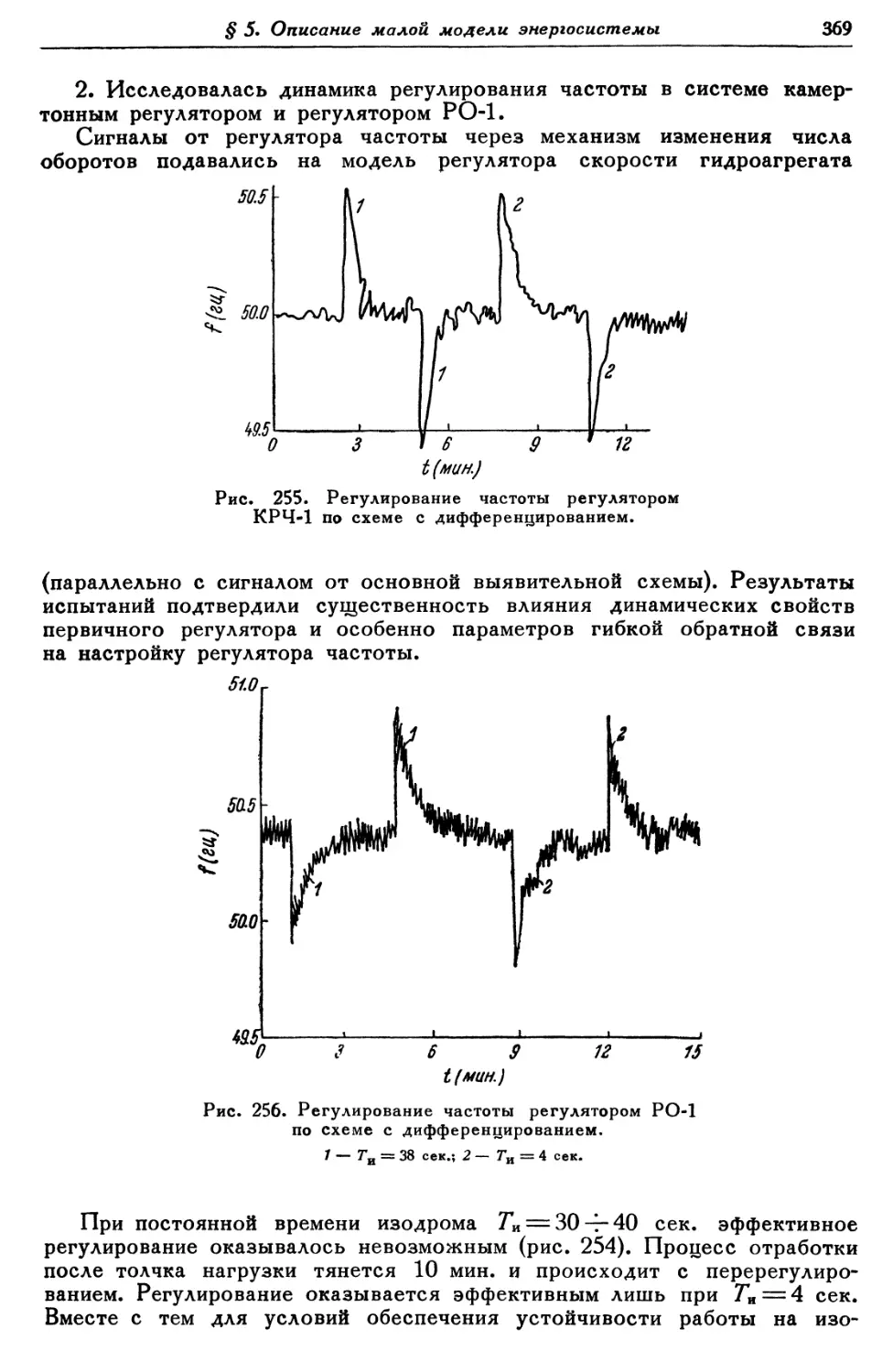
Текст
АКАДЕМИЯ НАУК СССР
ИНСТИТУТ ЭЛЕКТРОМЕХАНИКИ
ЭЛЕКТРОДИНАМ ИЧ ЕС КОЕ
МОДЕЛИРОВАНИЕ
ЭНЕРГЕТИЧЕСКИХ
СИСТЕМ
ПОД РЕДАКЦИЕЙ
АКАДЕМИКА М.П.КОСТЕНКО
ИЗДАТЕЛЬСТВО АКАДЕМИИ НАУК СССР
Москва • Ленинград
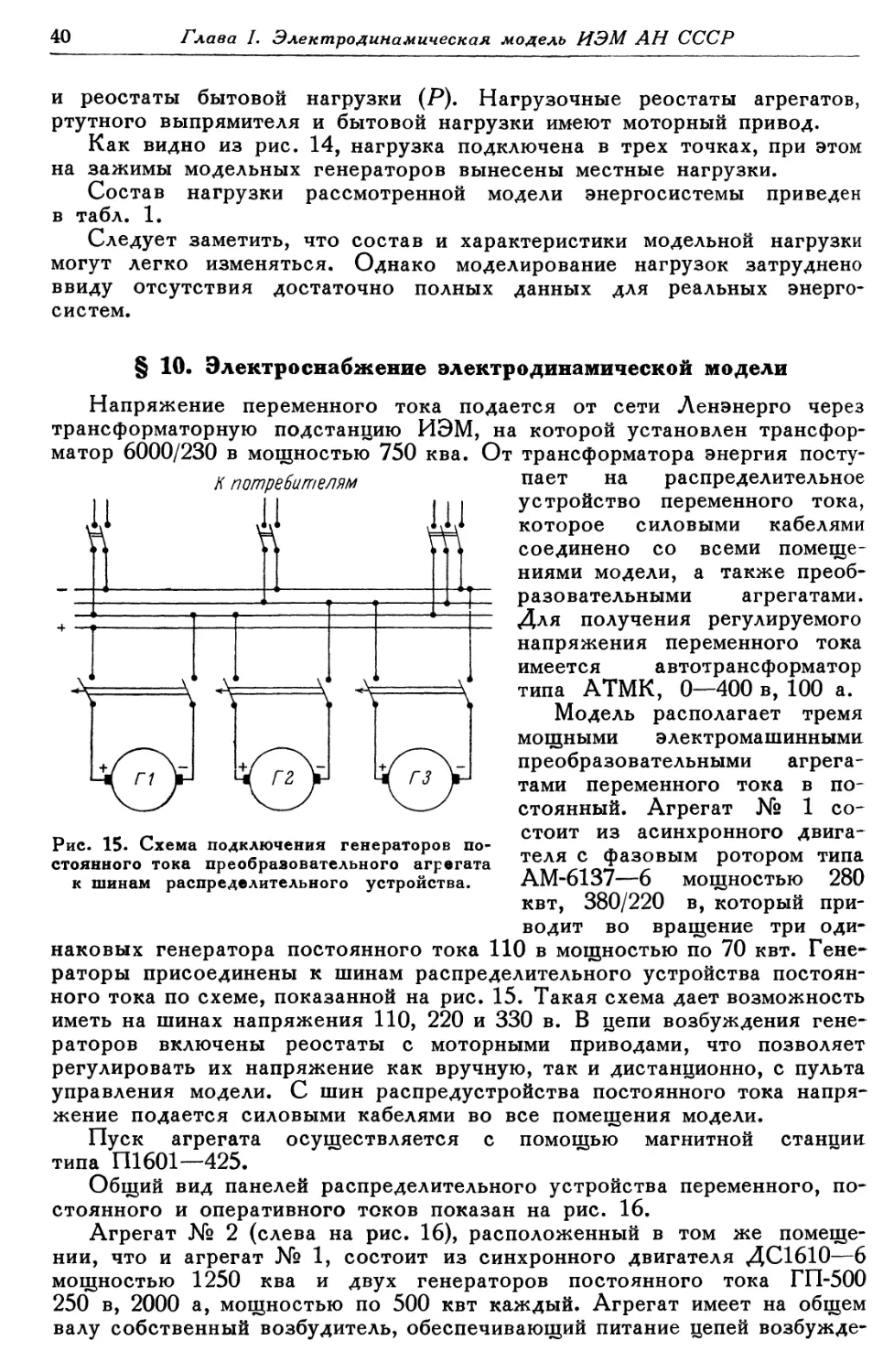
1959
Аннотация
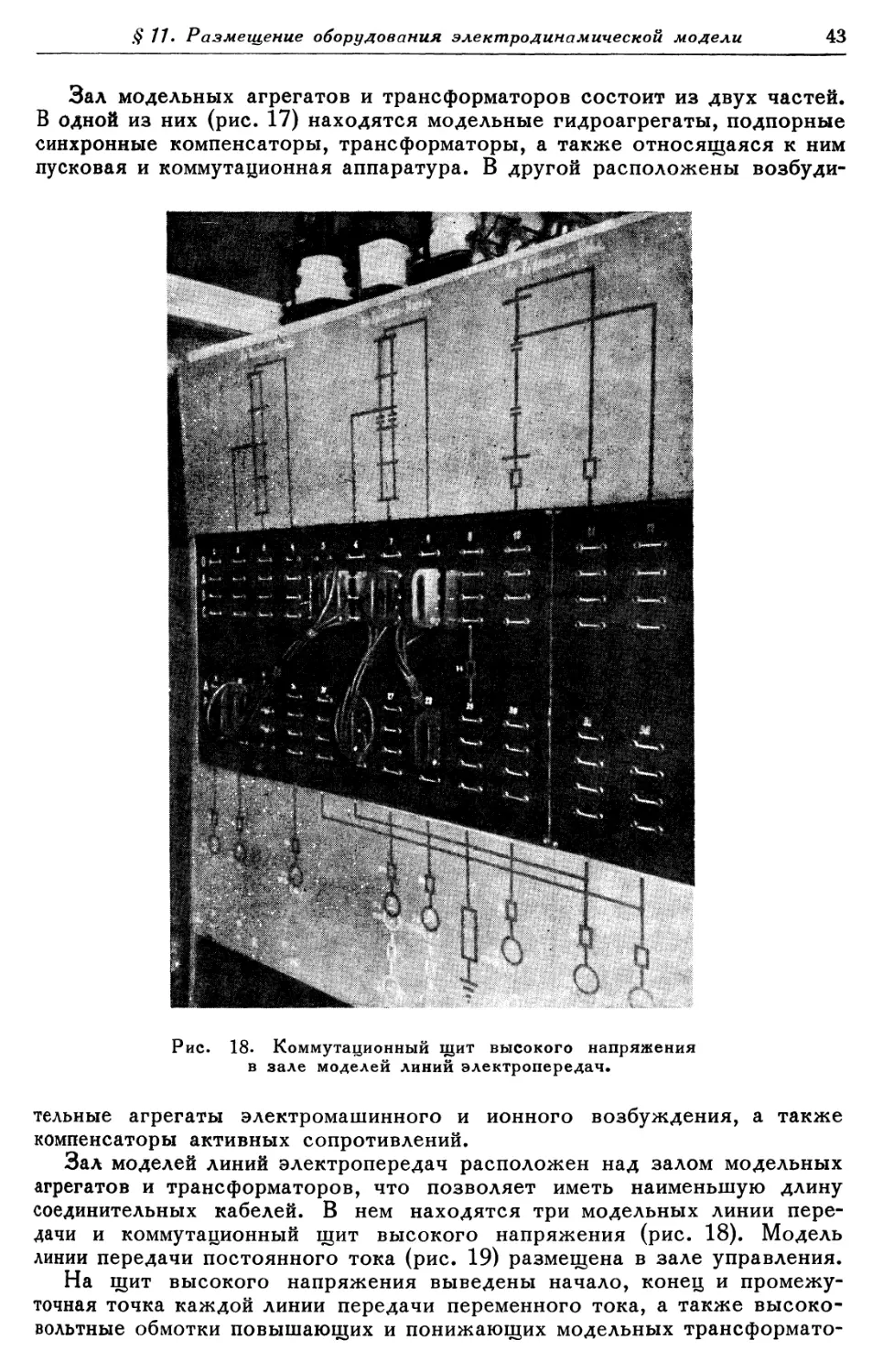
Монография посвящена изложению принципов электродинамического моделирования
мощных энергосистем и их элементов (синхронных генераторов, возбудителей,
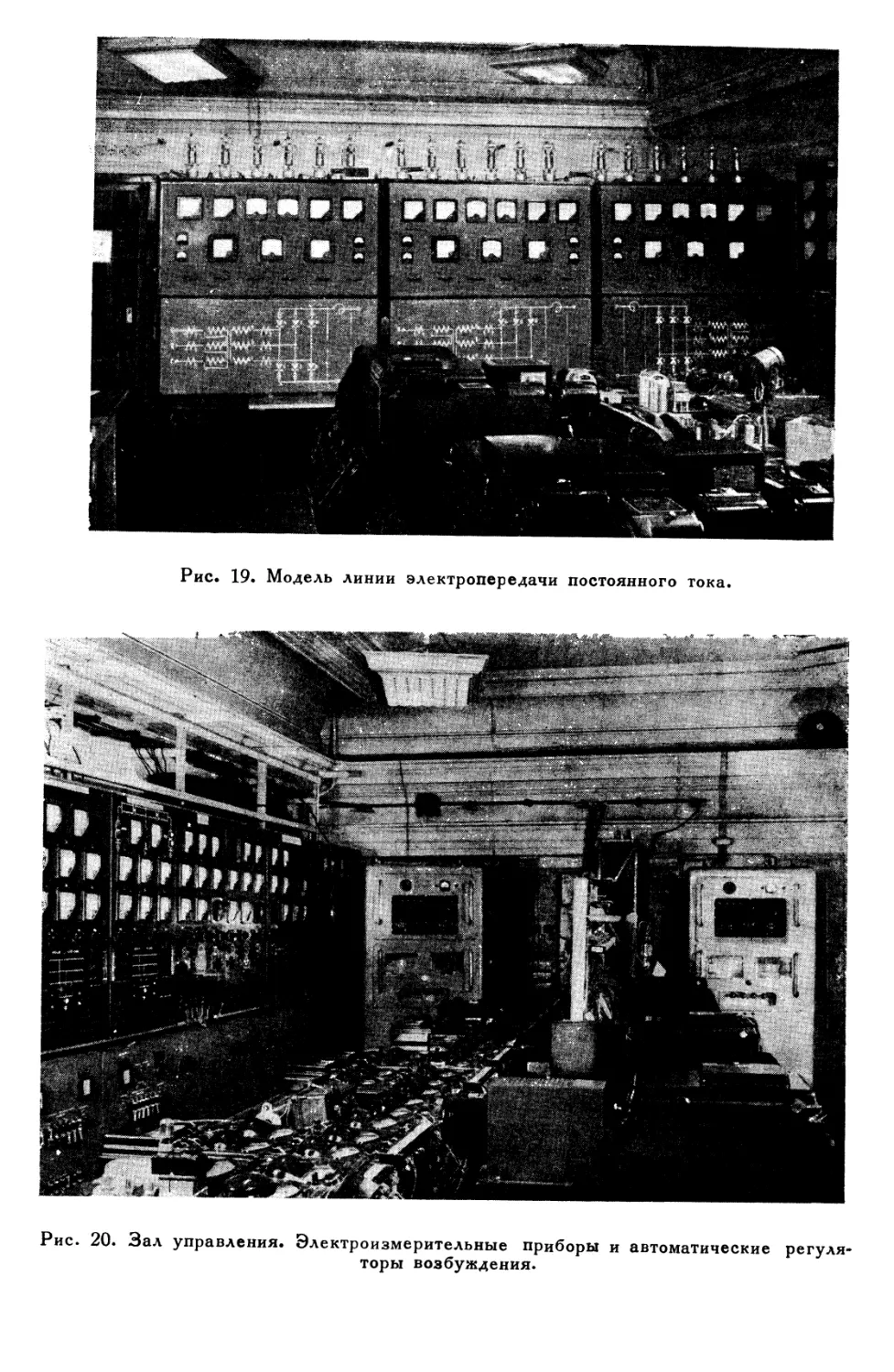
синхронных компенсаторов, гидро- и турбогенераторов, линий электропередач,
нагрузки). Дается обзор существующих моделей и описание электродинамической
модели Института электромеханики АН СССР. Приводятся описания аппаратуры
управления и производства измерений.
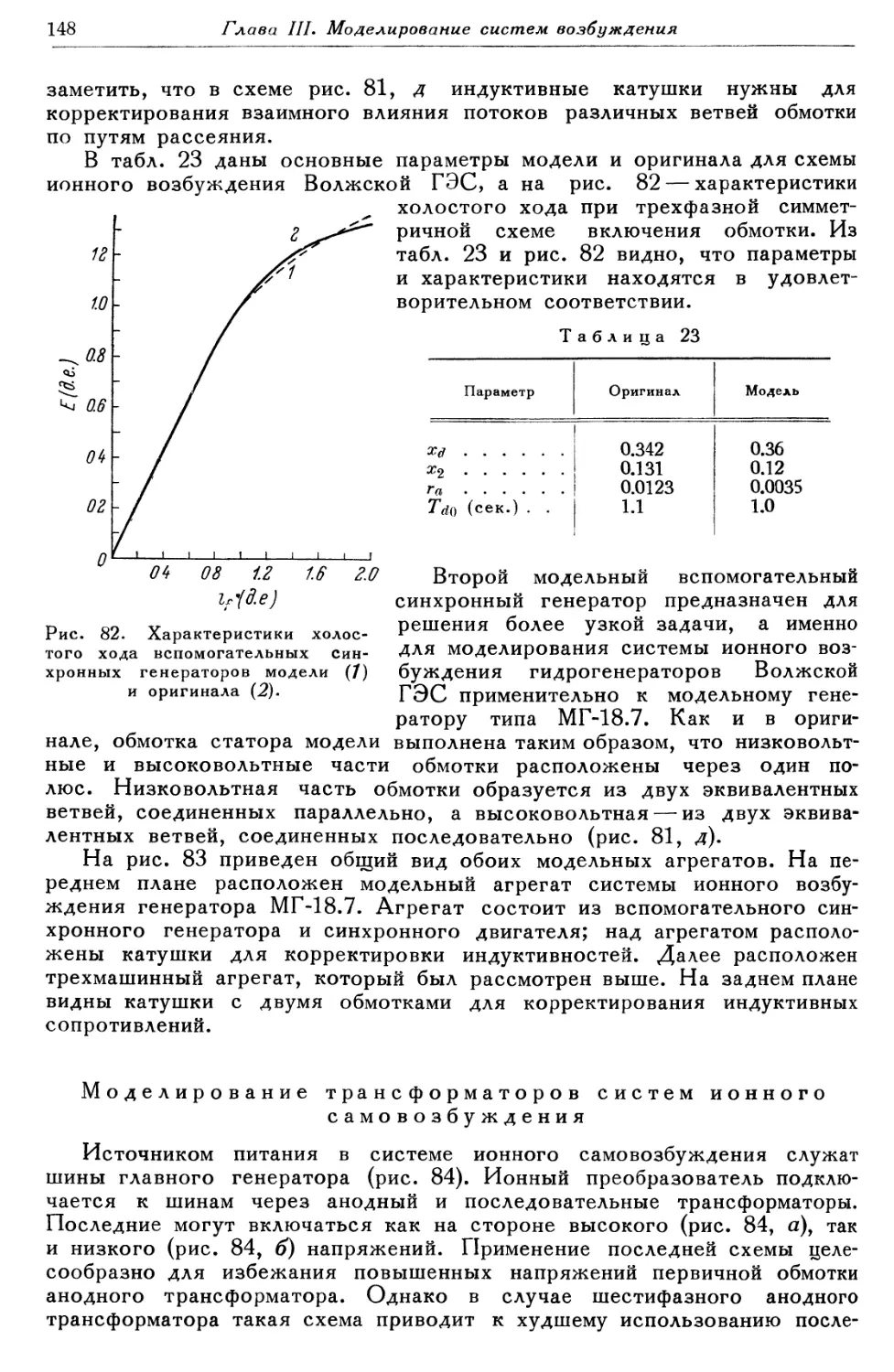
Книга послужит ценным пособием для лиц, работающих в области электродина-
мического моделирования, инженерно-технического персонала заводов, ведущих
рабочее проектирование и изготовление машин моделей, а также студентов электро-
технических вузов.
Работа, которой посвящена монография, удостоена Ленинской премии за 1958 г.
АВТОРЫ МОНОГРАФИИ:
В. М. БОБРОВ (гл. III, §2); А. А. В О Р О Н О В (гл. VIII, §§1—4);
И. А. ГЛЕБОВ (гл. I; гл. II, § 10; гл. III, § 2); В. И. И В А Н О В (введе-
ние, гл. VII); Г. В. КАРПОВ (гл. II, § 6); В. Е. К А Ш Т Е Л Я Н (гл. I;
гл. II, §10); В. В. СЕМЕНОВ (гл. VI); В. К. СИРОТКО (введе-
ние, гл. VII); Н. С. СИРЫЙ (гл. IX, § 1); Л. А. СУХАНОВ (гл. V);
И. Д. У РУ СО В (гл. II, §§1—5, 7—9 11—12); В. В. ФЕТИСОВ (гл. III,
§1; гл. IV); Е.Н. ФОМИНА (гл. V1II, §5).
ПРЕДИСЛОВИЕ
Решения XXI съезда КПСС по семилетнему плану развития народ-
ного хозяйства СССР поставили ряд ответственных задач перед проект-
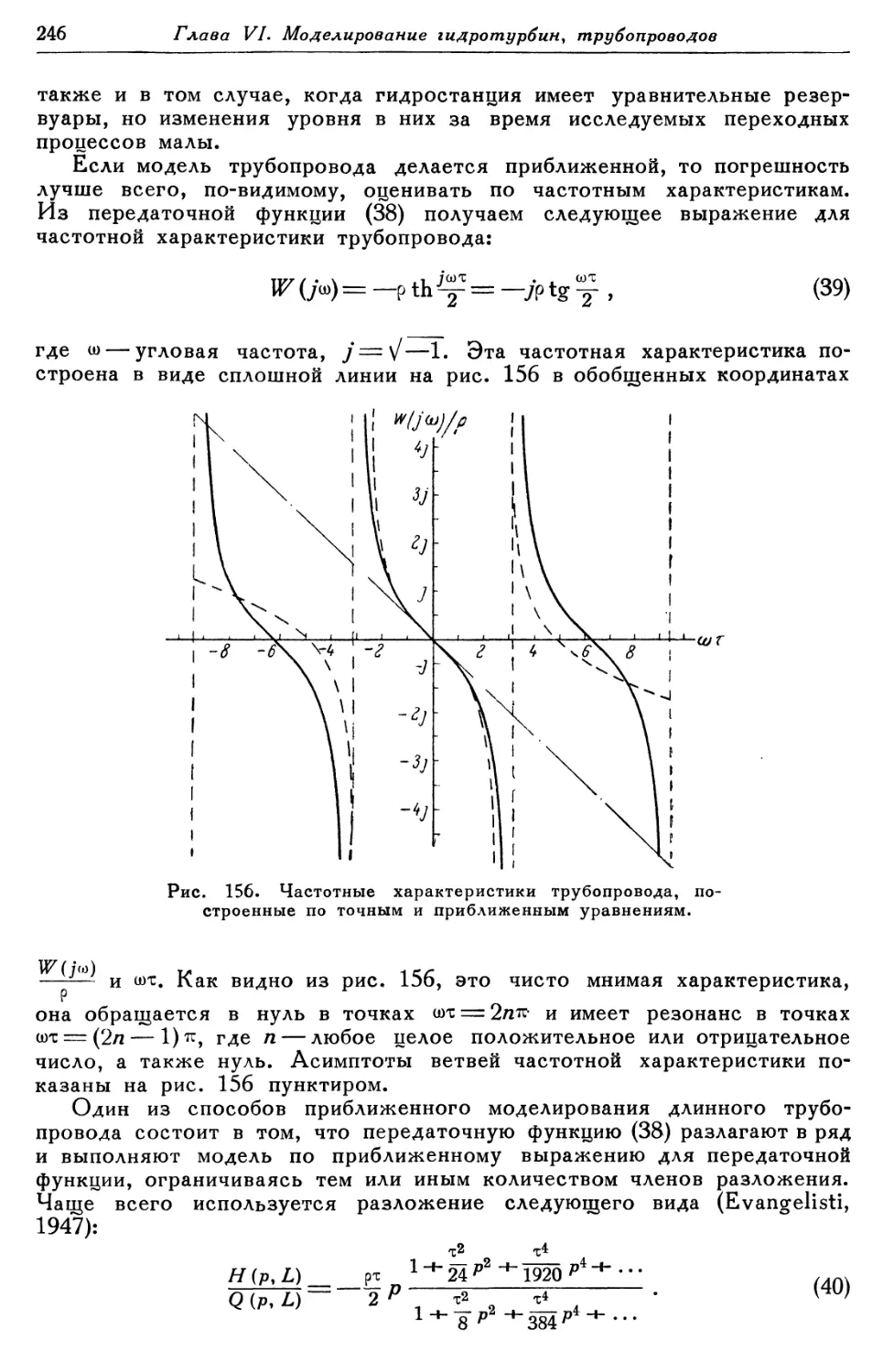
ными, производственными и научно-исследовательскими организациями
по широкому использованию энергетических ресурсов страны, строи-
тельству мощных тепловых и гидроэлектрических станций с агрегатами
до 300 мвт в единице, интенсивному развитию электрических сетей
и значительному повышению выпуска электрооборудования и аппаратуры.
По мере введения в строй новых мощных электростанций и электро-
передач будет происходить объединение отдельных энергетических
систем в единые энергосистемы. В текущем семилетии такие единые
энергетические системы будут созданы в Европейской части СССР
и в Центральной Сибири. Это создаст необходимые условия для образо-
вания единой энергетической системы Советского Союза в целом.
В Ленинградских филиалах Теплопроекта, Гидропроекта и Гидроэнерго-
проекта, а также в Сибирском отделении АН СССР разрабаты-
ваются проекты электростанций и сетей Сибирской единой энергетиче-
ской системы (ЕЭС). Строятся крупнейшие в мире Братская и Красно-
ярская ГЭС, а также мощные тепловые станции в угольных районах.
После построения мощных гидроэлектростанций на Амуре намечается
объединение с мощной энергосистемой северо-востока Китайской Народ-
ной Республики.
Советский Союз занимает ведущее положение в области передач
электроэнергии на высоком напряжении как переменного, так и постоян-
ного тока. В текущем семилетии войдут в строй ряд электропередач
переменного тока напряжением 500 кв и электропередача постоянного
тока Сталинград—Донбасс напряжением 800 кв.
Все это ставит перед наукой задачу разработки методов и средств
автоматического управления как энергосистемами, так и отдельными их
элементами. Если в предшествующий период автоматизация сводилась
в основном к созданию отдельных устройств автоматического управления,
то теперь на первый план выдвигаются задачи обеспечения и повышения
устойчивости энергосистем средствами автоматического регулирования,
автоматического учета экономических факторов при управлении объеди-
ненными энергосистемами.
Эти качественно новые задачи в области автоматизации энергосистем
должны быть решены широким фронтом научных исследований с исполь-
зованием достижений физики, автоматики, электроники и вычислительной
техники. Необходимо разработать новые системы автоматического
управления и регулирования, обеспечивающие возможность значительного
повышения дальности и пропускной способности электропередач, под-
держание наиболее экономически целесообразных режимов, повышение
надежности работы систем, сокращение числа возникающих в них аварий.
4
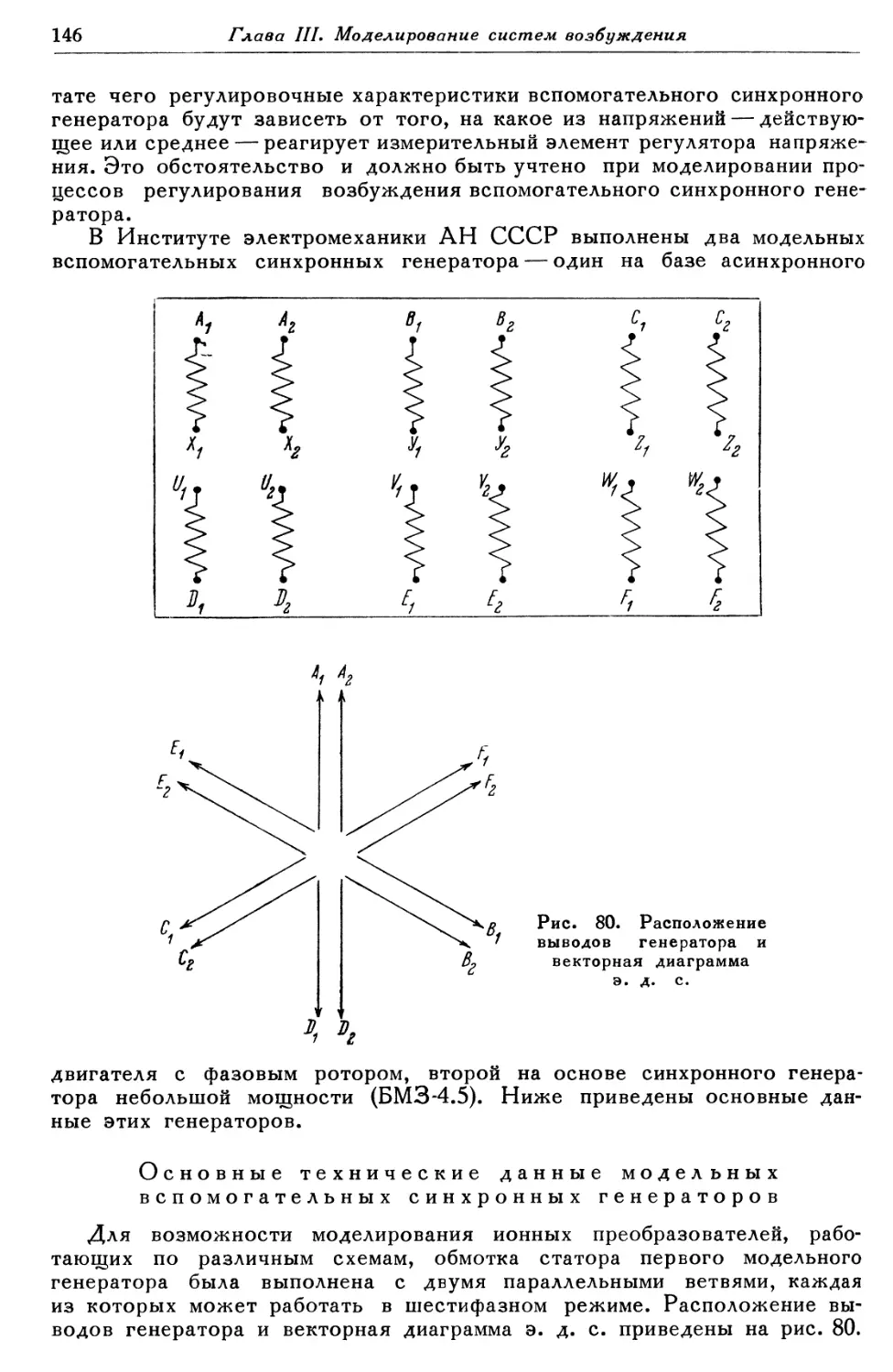
Предисловие
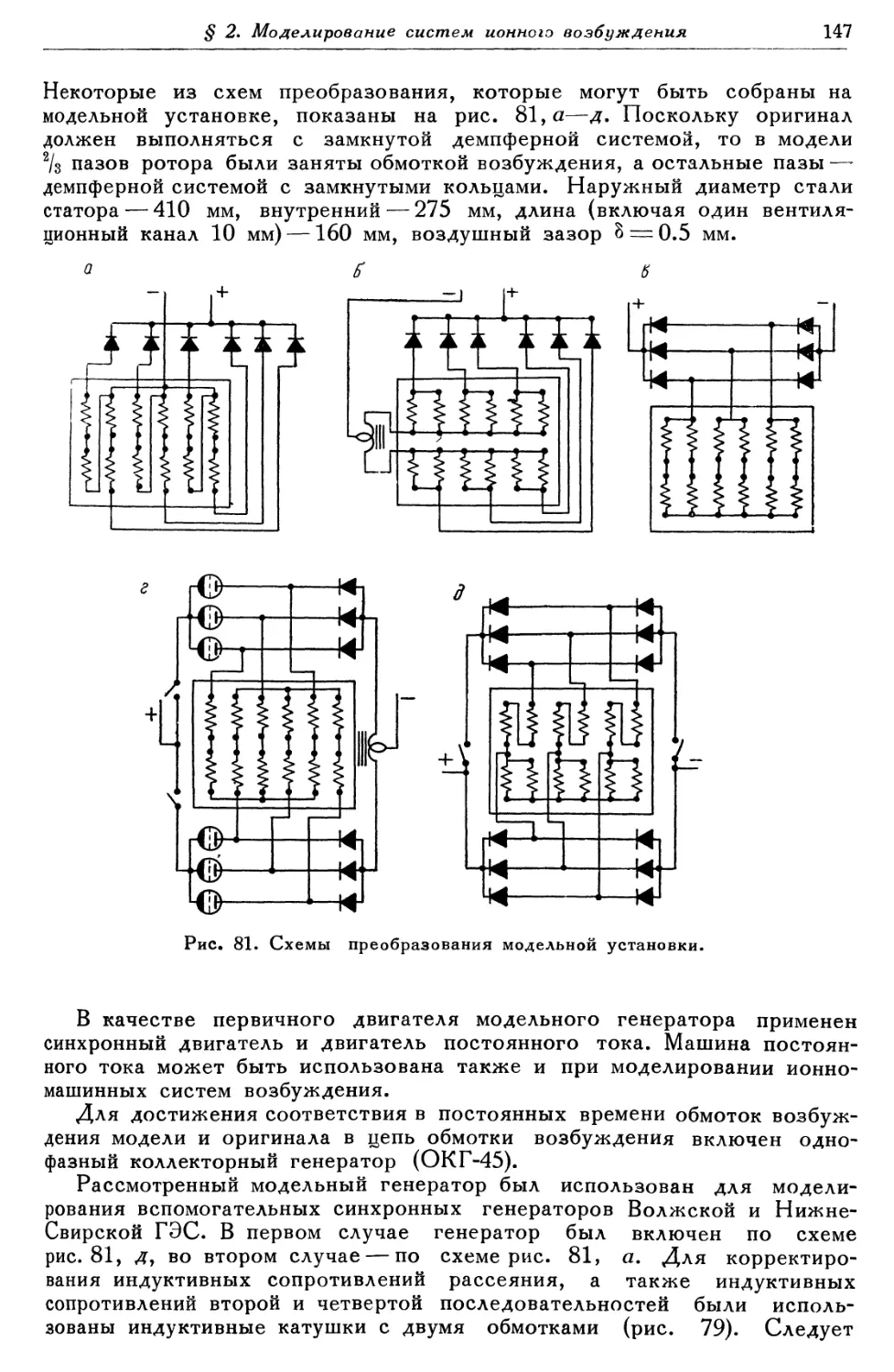
Решение поставленных задач требует сочетания всех методов
научного исследования — экспериментального в действующих системах,
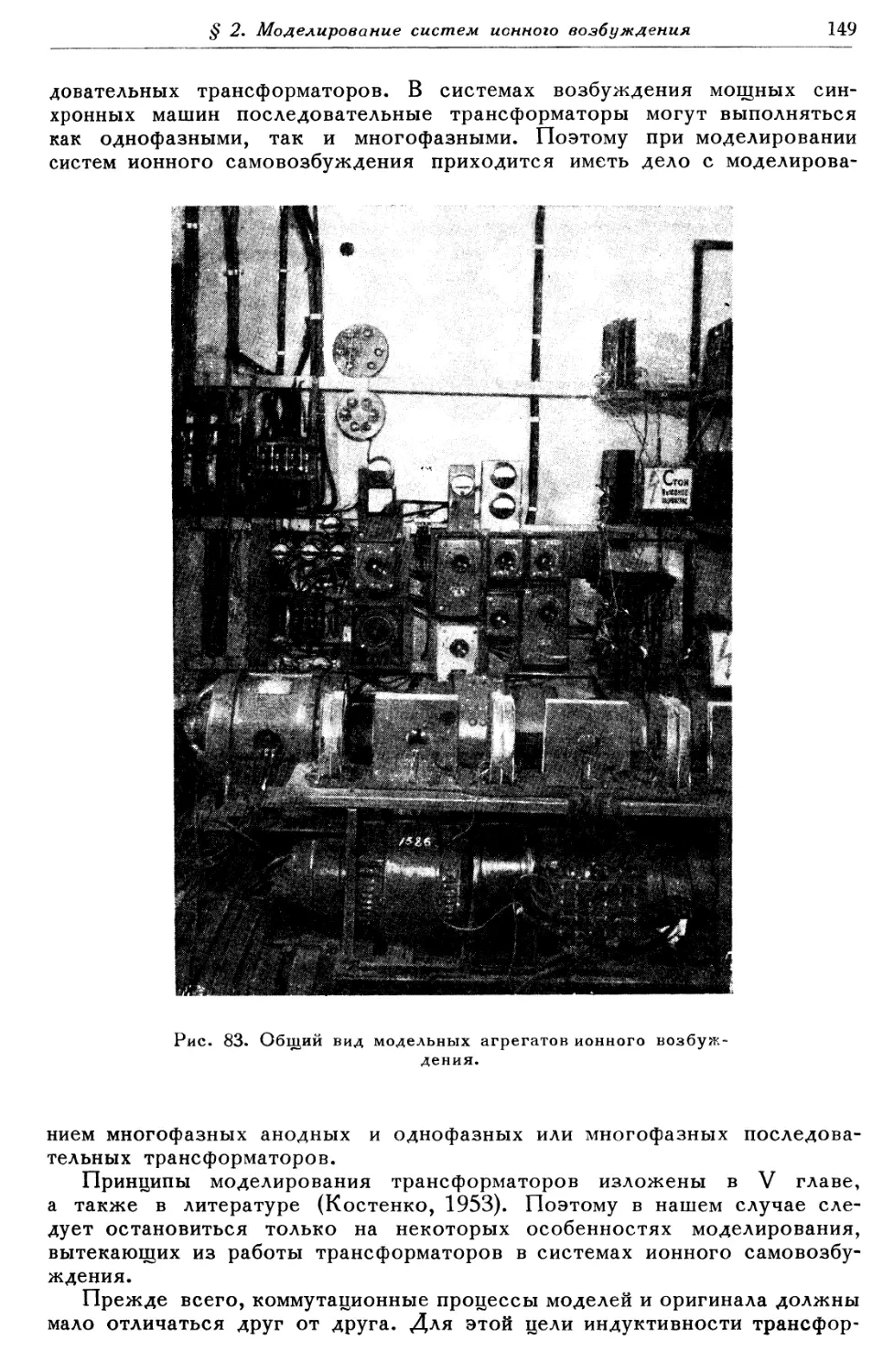
лабораторного и теоретического.
Метод исследования динамики работы энергосистем на физических
моделях получил в СССР за последние годы широкое распространение.
Начало этим разработкам было положено рядом советских ученых:
И. С. Бруком и В. А. Вениковым в Энергетическом институте АН СССР
им. Г. М. Кржижановского (ЭНИН), А. А. Горевым, М. П. Костенко
и В. А. Толвинским — в Ленинградском политехническом институте (ЛПИ).
В настоящее время особо широкое развитие этот метод получил в Инсти-
туте электромеханики АН СССР и в Московском энергетическом инсти-
туте.
Физическое моделирование применяется в ряде организаций [Научно-
исследовательский институт постоянного тока, Водноэнергетический
институт АН Армянской ССР (ВЭНИ), Транспортно-энергетический
институт Сибирского отделения АН СССР и др.].
Монография посвящена описанию методов моделирования и электро-
динамических моделей, созданных в Институте электромеханики АН СССР
(ИЭМ) под руководством академика М. П. Костенко. В монографии
излагаются принципы, положенные в основу электродинамических моделей
ИЭМ, расчеты отдельных элементов моделей, данные модельных машин
и трансформаторов, а также описываются схемы моделей.
Электродинамическое моделирование позволяет с большой интен-
сивностью и скоростью производить опытное исследование различных но-
вых устройств и выбор их вариантов, например при разработке вопросов
систем регулирования возбуждения и защиты энергосистем со сверх-
дальними линиями передачи. При этом можно исследовать не только
энергосистемы с линиями электропередач переменного тока, но и энерго,
системы, использующие передачу электроэнергии на постоянном токе-
а также совместную работу электропередач постоянного и переменного
тока.
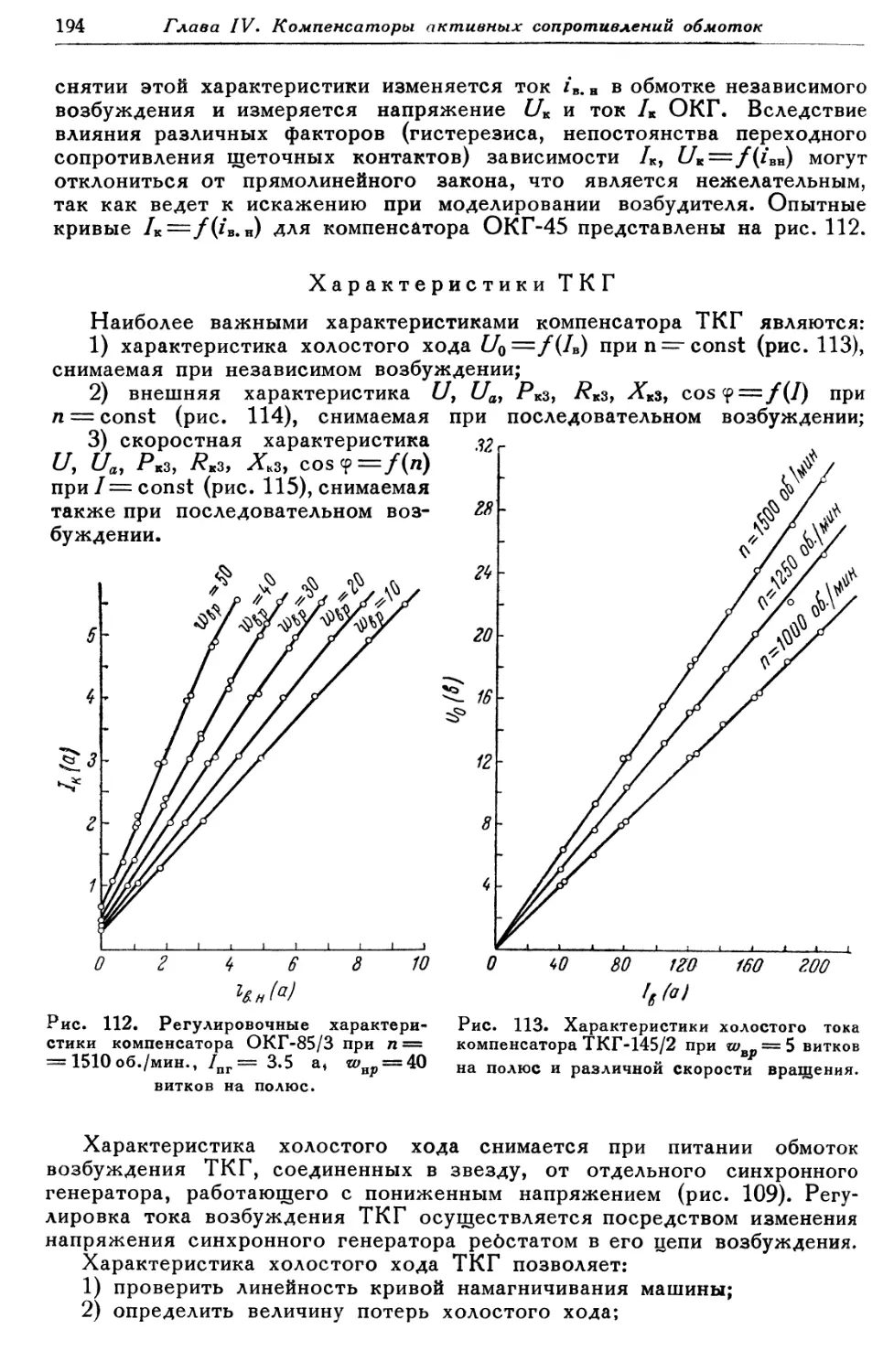
Электродинамическое моделирование открывает широкие возможности
не только для исследования устойчивости, но и для изучения режимов
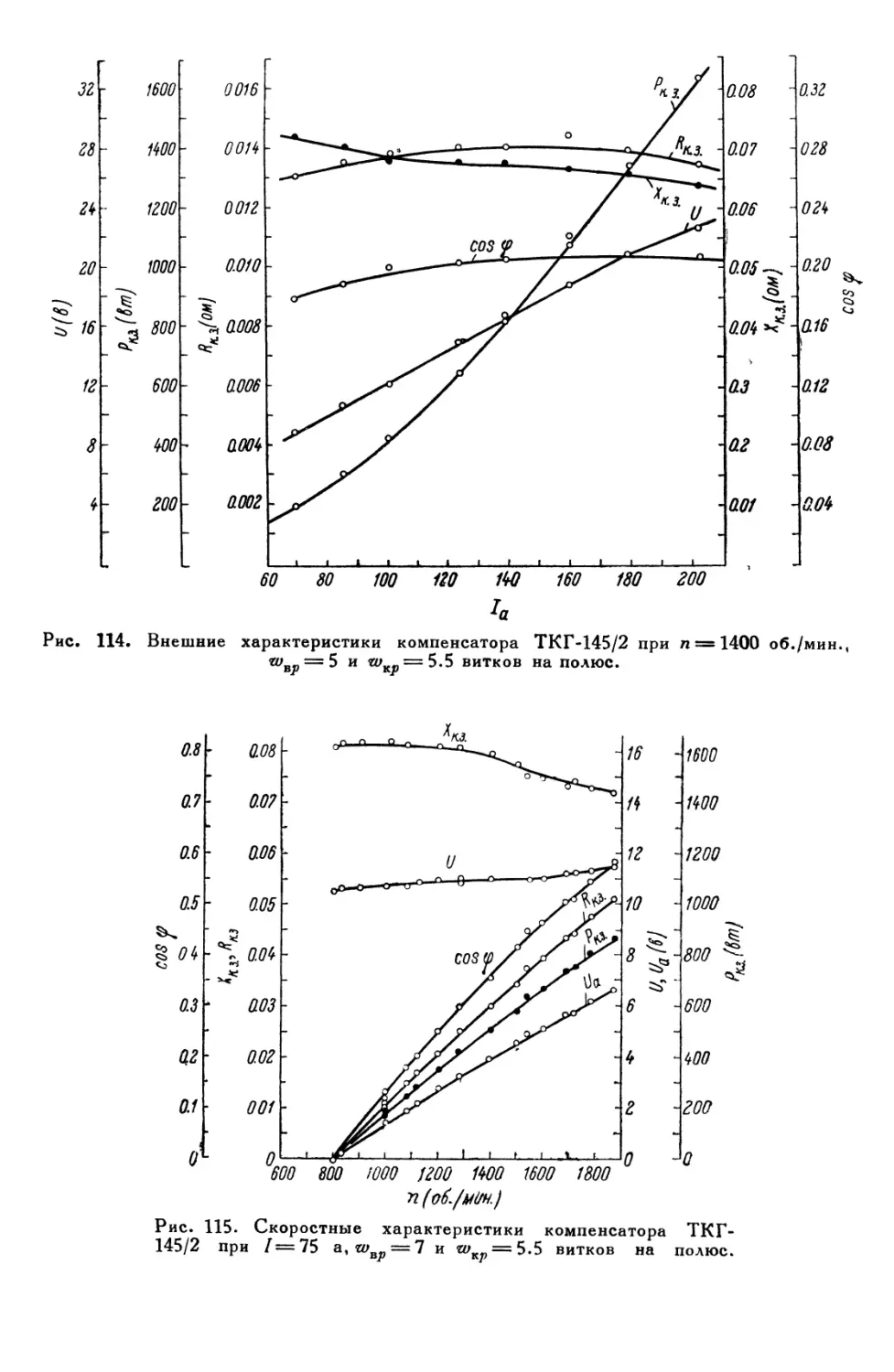
работы сложных энергосистем, объединяемых в единую энергетическую
систему.
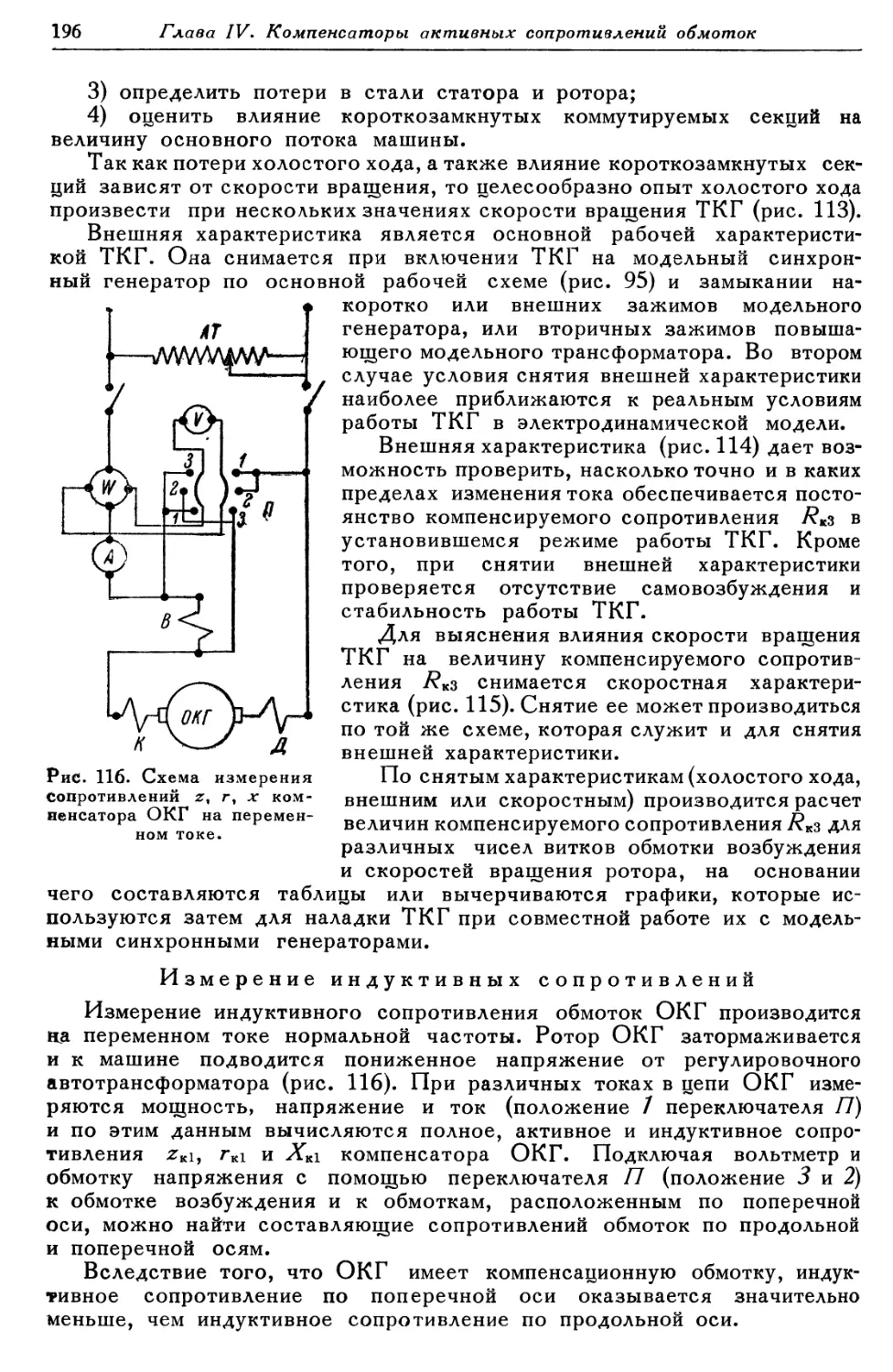
В настоящей работе изложены принципы электродинамического мо-
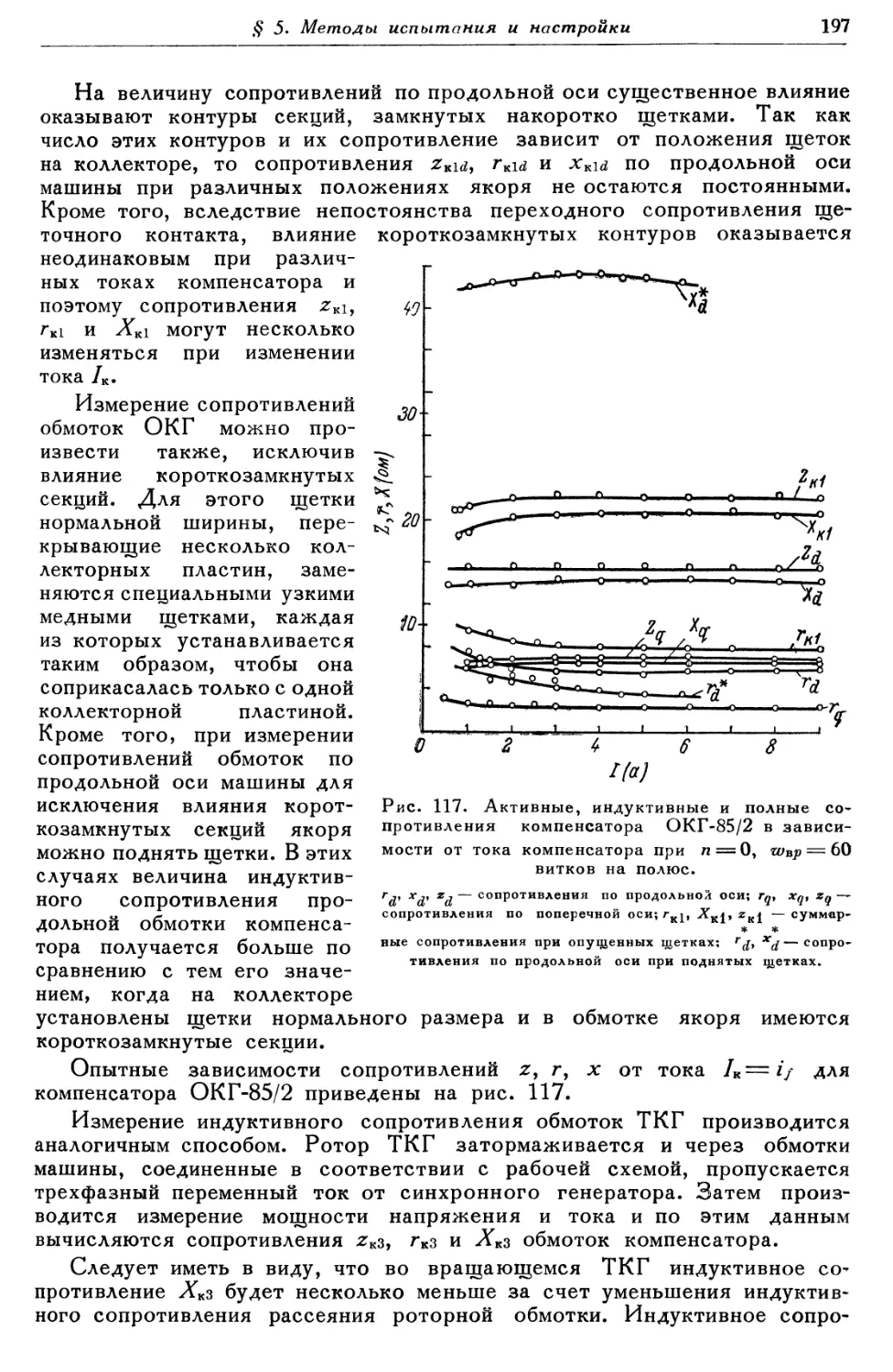
делирования энергосистемы и их элементов. Применение электродина-
мического моделирования для решения электроэнергетических задач,
а также результаты основных исследований с помощью этого метода
будут изложены в специальной работе, которая явится продолжением
данной монографии.
ВВЕДЕНИЕ
§ 1. Моделирование как метод изучения сложных явлений
в приложении к энергосистемам
Современные энергетические системы представляют собой сложнейшие
комплексы установок, обеспечивающие питание энергией, электрической
по преимуществу, нашего народного хозяйства, промышленных районов,
бытовых потребителей и т. д.
Они состоят из ряда электрических станций, вырабатывающих элек-
трическую энергию с помощью гидрогенераторов с их гидротурбинами
и всей водноэнергетической частью или турбогенераторов с их паровыми
турбинами, паросиловым и топливным хозяйством; трансформаторов,
повышающих напряжение; сложной сети высокого и сверхвысокого
напряжения, с помощью которой связываются отдельные электростанции
в общую систему, передается энергия на большие расстояния и распре-
деляется по отдельным районам потребления; ряда трансформаторов часто
в несколько ступеней понижающих напряжение до удобного для потребите-
лей; наконец, электрических установок различного характера у самих
потребителей.
Все это связано с применением в энергосистемах сложной аппаратуры
как коммутационной, так и автоматически регулирующей работу ответ-
ственных элементов и всей энергосистемы в целом, и, наконец, защитной
аппаратуры, которая автоматически локализует аварии и в возможно
кратчайшее время отключает поврежденные элементы и восстанавливает
нормальную работу всей энергосистемы.
Нарушение .нормальной работы энергосистемы и перерыв в энерго-
питании промышленных районов и даже отдельных энергообъектов дорого
обходится народному хозяйству.
Правильное построение энергосистем и их эксплуатация подлежат
серьезному изучению с целью создания условий бесперебойного снабжения
народного хозяйства качественной энергией. Решение этих задач связано
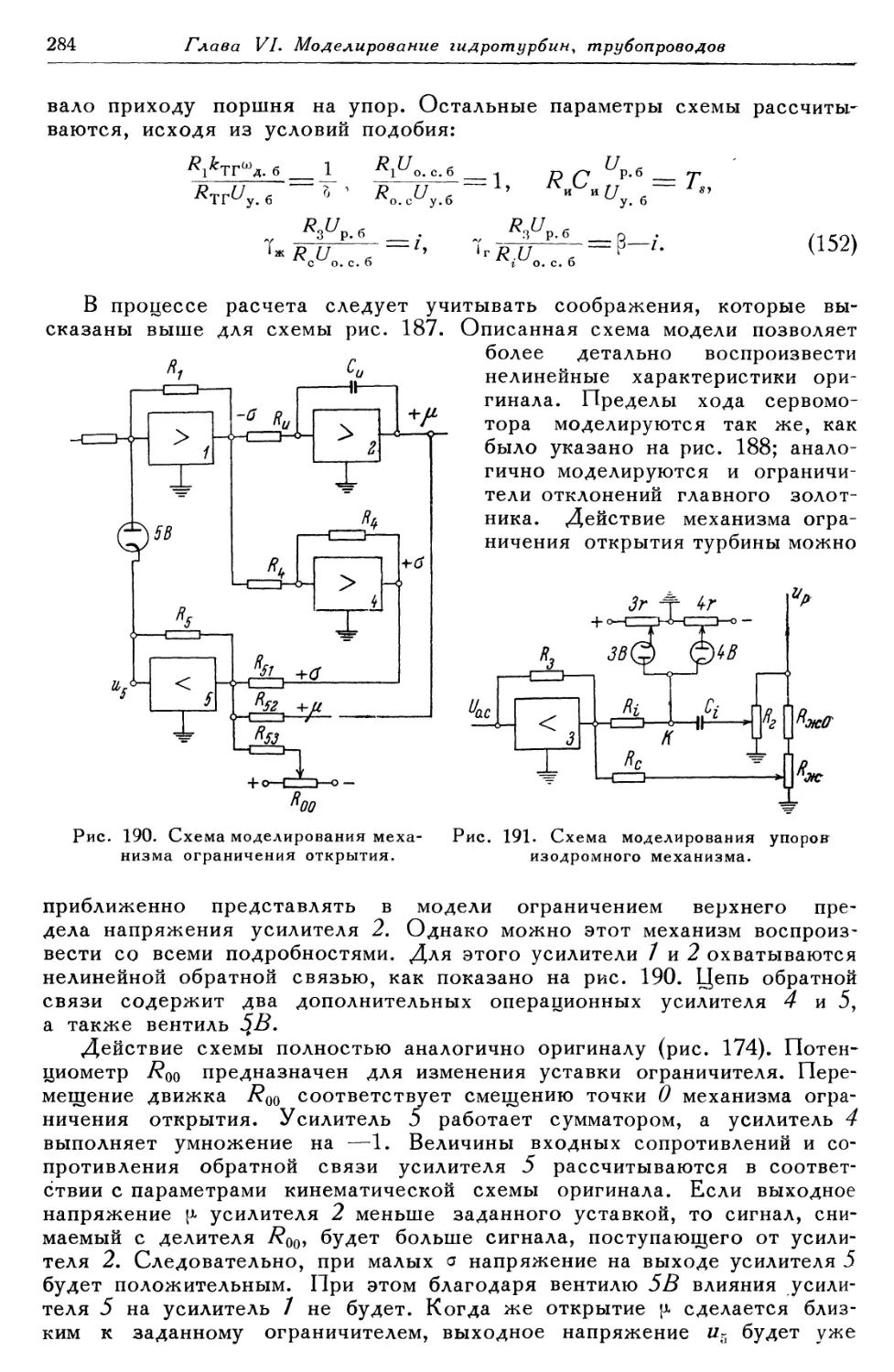
с немалыми трудностями.
Предстоящее и уже происходящее объединение отдельных энерго-
систем в единую энергетическую систему Союза (ЕЭС) ставит еще более
высокие требования к глубокому изучению свойств энергосистем и к более
четкому управлению ими.
Такой объект изучения, как современные энергосистемы, оказывается
весьма сложным как по количеству зависимостей, так и по их характеру.
Поэтому при изучении явлений особую ценность представляет эксперимент.
Произвольно вызывая в системе интересующие нас явления, мы имеем
возможность каждый раз наблюдать и изучать их протекание в естествен-
ных условиях и в натуральном масштабе. Однако такие эксперименты
в энергосистемах очень сложны по их постановке и дорого стоят, так
6
Введение
как нарушают нормальную эксплуатацию энергосистемы и, следовательно,
нарушают питание промышленных районов на довольно продолжительное
время. Время подготовки эксперимента и проведения различных страхо-
вочных мероприятий значительно превосходит время самого экспери-
мента. Надежность работы энергосистемы на это время значительно
снижается. Кроме того, во время экспериментов многие явления, близкие
к аварийным, в энергосистемах протекают настолько бурно, что ставят
их в тяжелые режимы, грозят уже настоящими авариями и разрушениями
аппаратуры. Только даже по этим причинам количество таких экспери-
ментов в энергосистемах должно быть ограниченным и допускается лишь
в качестве контрольных.
При проектировании новой энергосистемы особенно важное значение
имеет предварительная проверка ее свойств, когда проведение натурных
экспериментов еще невозможно. Все эти затруднения могут быть решены
построением энергосистемы в уменьшенном масштабе, в которой интере-
сующая нас группа явлений будет протекать, подобно явлениям в натур-
ной системе.
Этим и объясняется все более широкое применение моделирования
как метода изучения сложных явлений в энергосистемах и в других
областях современной техники.
Моделирование, так же как и эксперимент в натурной системе,
конечно, не исключает аналитического исследования, а наоборот, дает
материал для более точного анализа, так же как и анализ позволяет
уточнить эксперимент. Сравнение же явлений в модели и в энергосистеме
с их соответствующим анализом позволяет уточнять моделирование.
Решение задач, связанных с энергосистемами, чисто аналитическим
путем весьма трудно и даже часто не выполнимо из-за большого коли-
чества зависимостей и нелинейности характеристик некоторых элементов
и потому нуждается в проверке экспериментом в натуре или на модели.
Последнее проще, дешевле и более удобно, особенно при исследовании
различных вариантов.
Терминология в области моделирования еще не установилась. В лите-
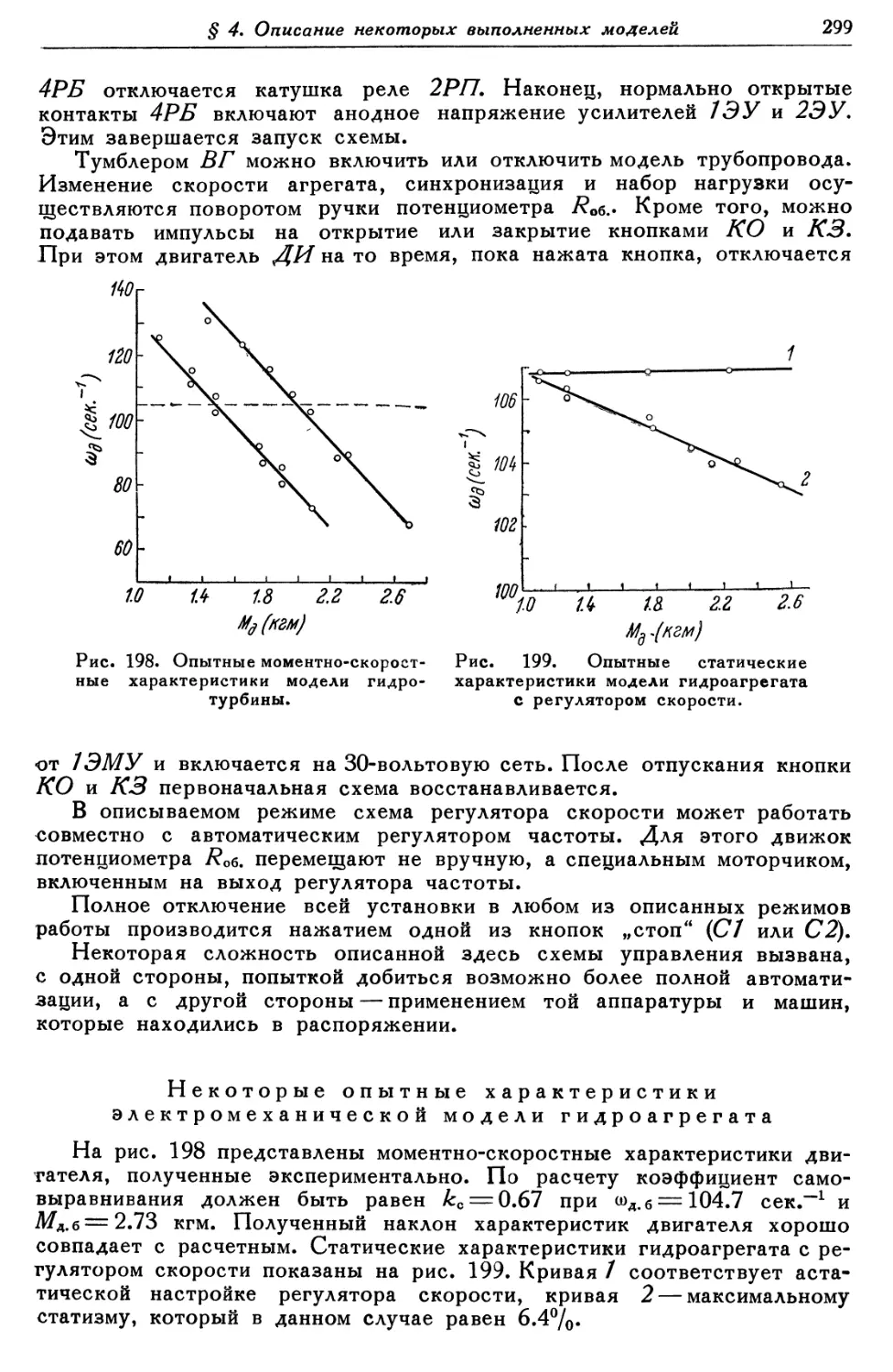
ратуре известно несколько попыток классификации моделей, они еще
далеки от совершенства. Несмотря на это, не останавливаясь на деталях,
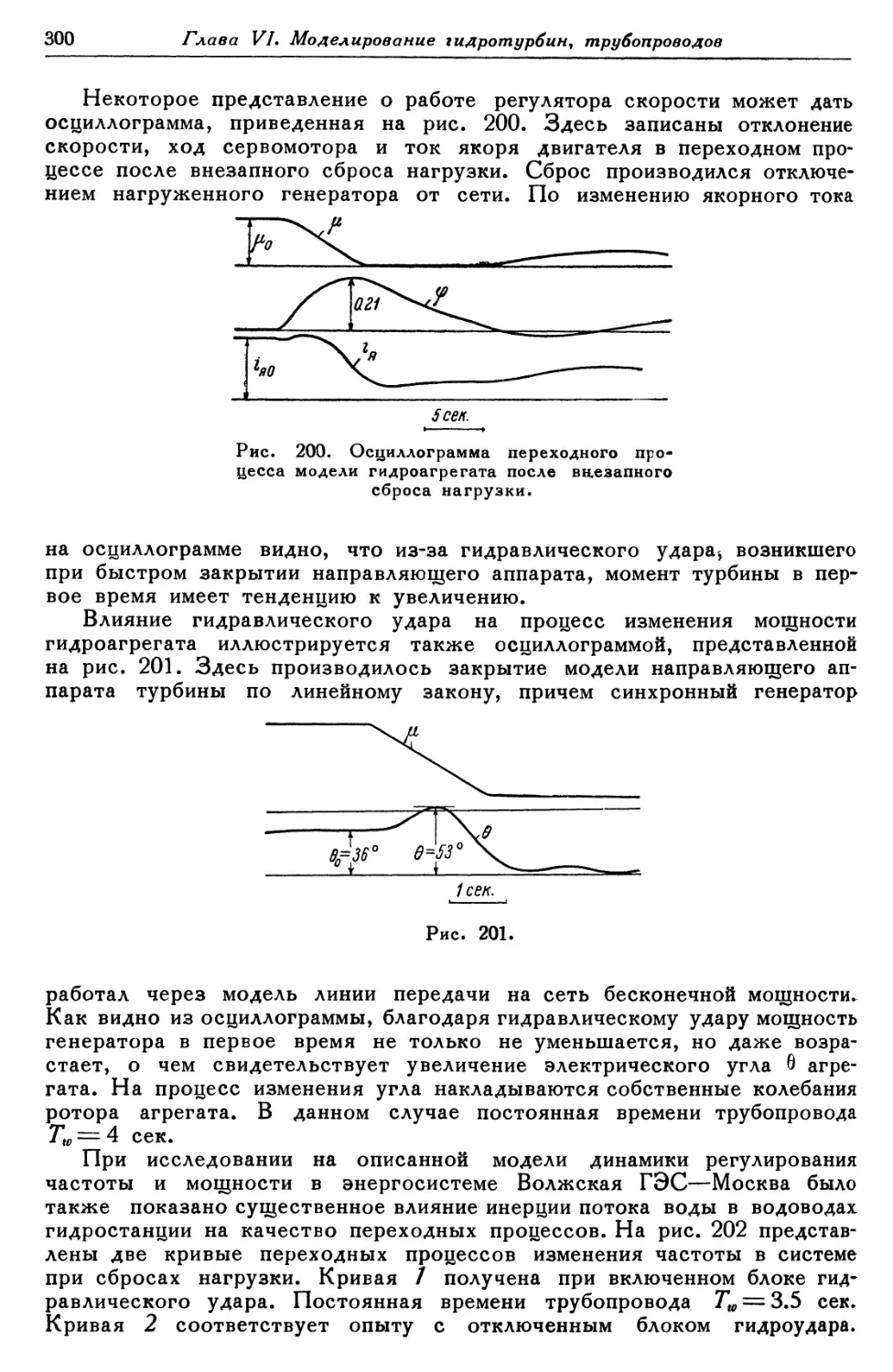
можно выявить некоторые основные типы моделирования, оценить их
возможности, области применения и их особенности.
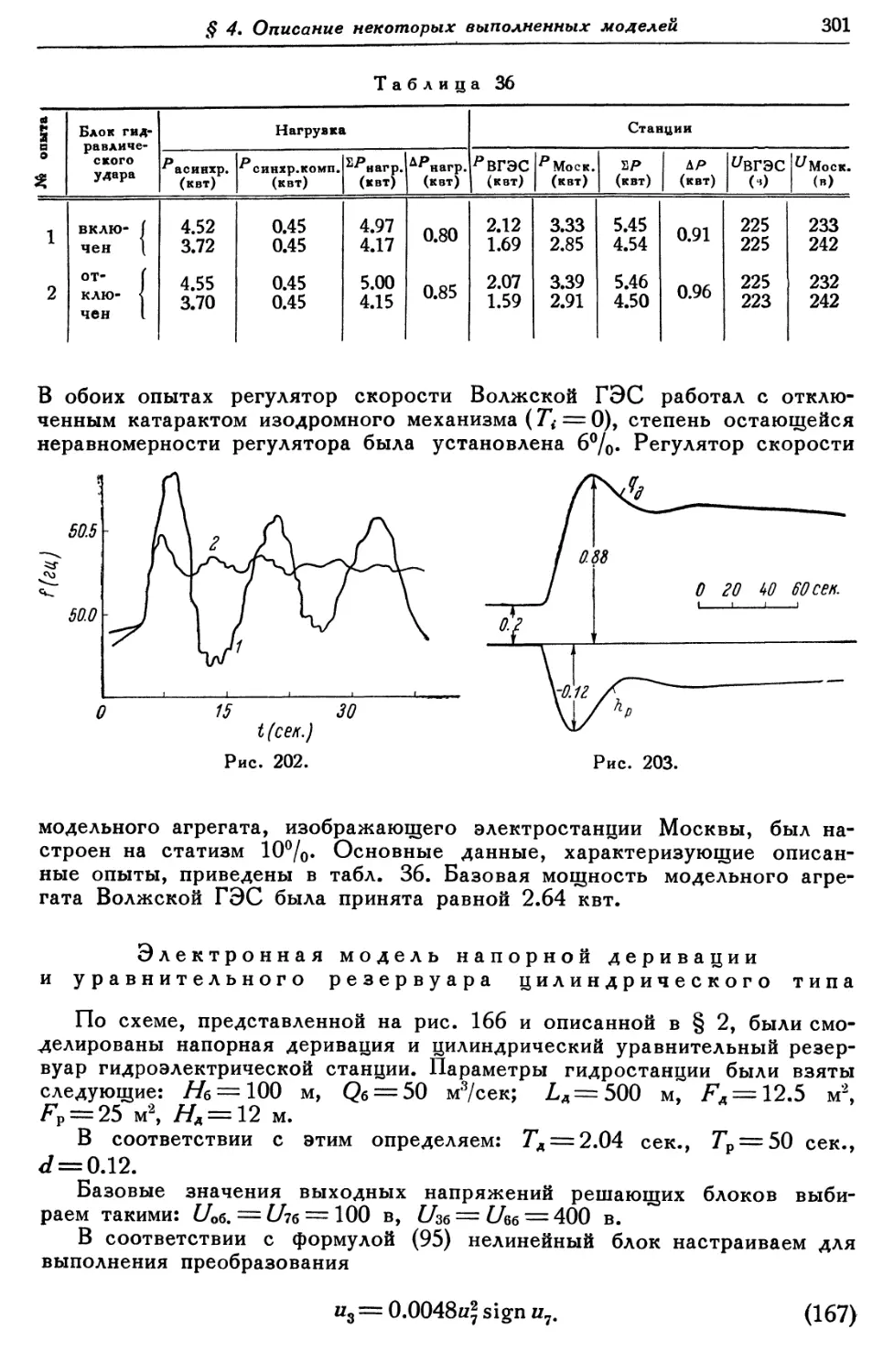
Назначение моделей, как это уже отмечалось, заключается в воспро-
изведении на них интересующих нас явлений, с достаточной точностью
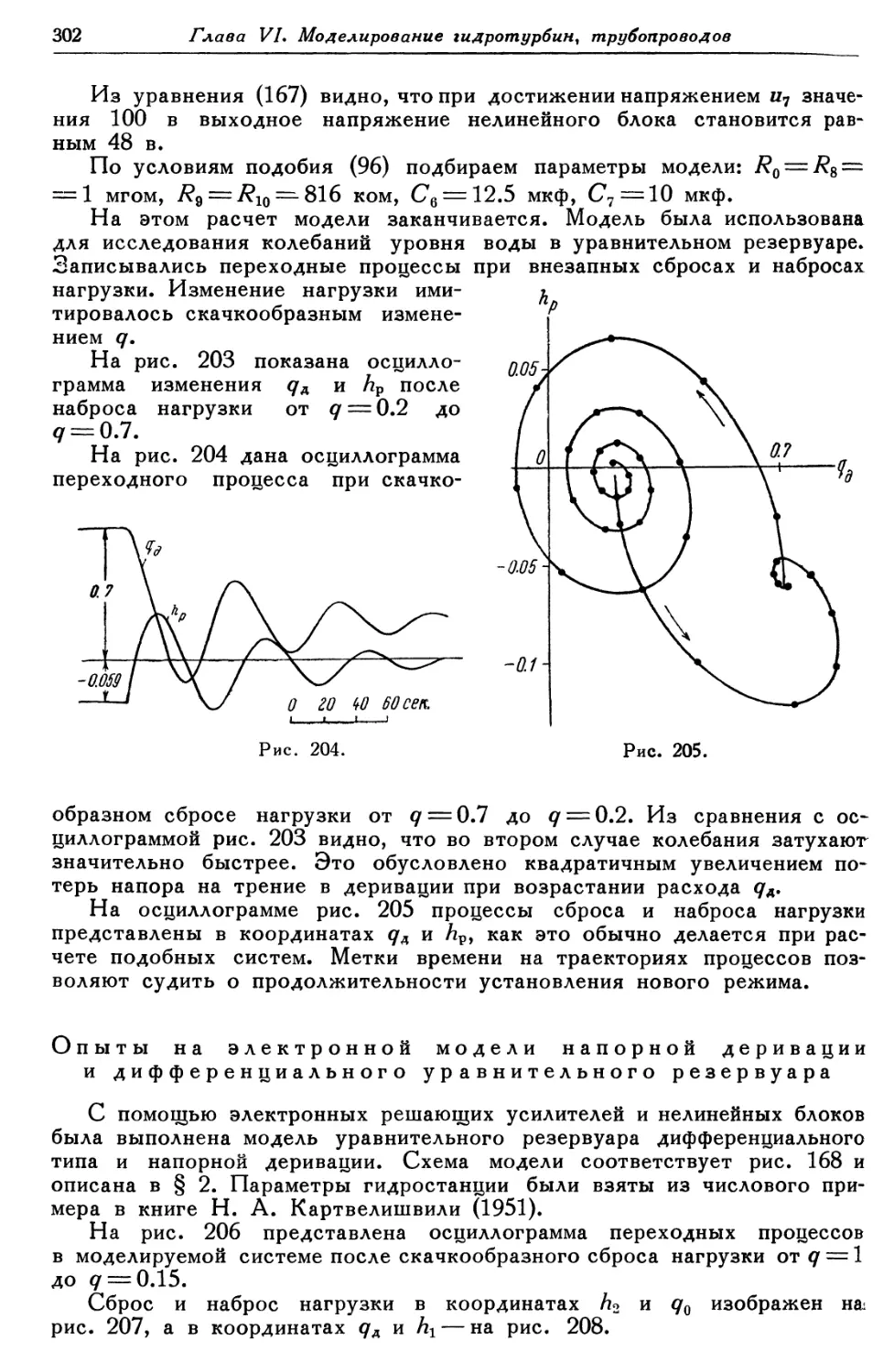
подобных явлениям в оригиналах. Очевидно, моделирование будет при-
ближенным. Поэтому соответственно поставленным задачам необходимо
выбирать подходящий тип моделирования и даже в самой модели уточнять
или пренебрегать теми или иными параметрами или зависимостями.
Однако эти обстоятельства не ставят каких-либо непреодолимых пре-
пятствий на пути изучения интересующих нас явлений. Известно, что
такое изучение характеризуется рядом последовательных уточнений и мы
всегда можем удовлетвориться приближением, достаточным для инженер-
ного решения задачи.
Физическое моделирование
Физическое моделирование является одним из основных принципов
моделирования, когда природа явлений при переходе от оригинала
к модели сохраняется.
Я. Моделирование — метод изучения сложных явлений в энергосистемах 7
Моделирование обычно связано с уменьшением размеров оригинала
до приемлемых величин модели с сохранением условий подобия.
Так называемое геометрическое моделирование основано на пропор-
циональном уменьшении размеров до величин, приемлемых для модели.
Такое моделирование во многих случаях оказывается приемлемым в меха-
нике, гидравлике и т. д. Но и в этих областях полное геометрическое
подобие не всегда применимо. Приходится прибегать к искажению
масштабов, к разным масштабам по разным координатам (афинное подо-
бие) и т. д.
Для большинства задач энергосистем геометрическое моделирование
их оказывается затруднительным и в ряде случаев неприемлемым.
Значительно более перспективным для энергосистем является другой
вид моделирования, когда при сохранении в модели природы явлений
оригинала обеспечивается подобие процессов в модели и в энергосистеме
путем воспроизведения на модели существенных для изучаемых явлений
параметров и характеристик отдельных элементов энергосистемы. Обычно
такое моделирование называют физическим или электродинами-
ческим, подчеркивая этим, что применение вращающихся машин в модели
позволяет воспроизводить на ней динамические процессы как в электри-
ческой, так и в механической части. При этом также должны быть
выдержаны условия полного или афинного подобия процессов. Очень
удобно для процессов на модели иметь натуральный масштаб времени.
При этом скорости протекания процессов в модели и в энергосистеме
будут одинаковыми и условия подобия этих процессов упрощаются.
Необходимо только параметры отдельных элементов модели и энерго-
системы, выраженные в относительных единицах, иметь одинаковыми
и характеристики (может быть нелинейные) этих элементов совпадаю-
щими.
Для того чтобы подобие процессов в модели и в энергосистеме было
выдержано не только в качественном, но и в количественном отношении,
необходимо соответствие параметров и характеристик модели и оригинала
выдержать с достаточной точностью и в пределах, соответствующих
изучаемым явлениям. Однако и при таком способе моделирования при-
ходится преодолевать некоторые трудности. Основные из них следу-
ющие:
1) трудность осуществления параметров и их соотношений больших
машин и других больших элементов энергосистемы в малых машинах
и малых элементах модели;
2) трудность поддержания соответствия параметров и вида нелинейных
характеристик в модели и в оригинале с достаточной точностью
и в достаточно широких пределах, в которых явление нами рассматри-
вается.
Особенно трудно выполнить модели машин, трансформаторов и даже
линий с малыми относительными потерями соответственно оригиналу.
Однако и эти затруднения так или иначе преодолеваются, как показано
в последующих главах.
Очень часто применяется и приближенное физическое моделирование.
Например, длинные линии с распределенными параметрами в модели
осуществляются в виде цепочек ряда П-образных или Т-образных звеньев
с сосредоточенными параметрами. Физическая природа явлений в такой
искусственной линии соответствует оригиналу, приближаясь к нему
с увеличением числа звеньев, изображающих все более короткие участки
линии.
8
Введение
Часто для задач общесистемного характера можно всю линию заменить
всего 1—2 звеньями. При исследованиях же процессов в самой линии
число звеньев, на которые она разбивается, доводится до 8—10, что
достаточно отражает особенности цепей с распределенными постоянными.
Математические модели
Совершенно с других позиций ведется так называемое математическое
моделирование. Модели этого типа содержат в себе физические звенья
(механические, электрические, релейные, электронные и другие устройства),
с помощью которых производятся операции, аналогичные тем, что соот-
ветствуют уравнениям, описывающим явления в натурной установке
(энергосистеме).
Не останавливаясь подробно на разнообразных устройствах этого
типа моделей, можно отметить, с одной стороны, как положительную
особенность весьма общий характер исследований на них, так как анало-
гичные уравнения и математические операции могут относиться к явлениям
разной природы, а с другой стороны, при таком методе исследования,
в большей мере чем при других методах, качество результатов зависит
от точности наших представлений, на основе которых составлялись
описывающие явление уравнения.
Кроме того, можно отметить и трудности такого метода исследований,
так как многие задачи, связанные с энергосистемами, требуют решения
систем уравнений очень высокого порядка (выше 50-го), например, при
исследовании работы релейных защит, так как схема вторичной комму-
тации и реле более сложны для описания их уравнениями, чем основная
часть энергосистемы.
Поэтому в чистом виде математическое моделирование редко при-
меняется и мало эффективно для многих задач исследования энергосистем.
Однако в сложных электродинамических моделях энергосистем отдель-
ные узлы могут с большим успехом моделироваться на математическом
принципе.
Аналогичного же характера замечания можно сделать и по отноше-
нию к машинам дискретного счета, ведущим расчет процесса по интер-
валам. Такие машины, обладая в принципе большими возможностями^
нуждаются в сложной предварительной подготовке к расчету и во многих
случаях не могут заменить электродинамические модели энергосистем^
например при исследованиях работы образцов аппаратуры релейной защиты,
регулирования, управления и др.
Модели-аналоги
Некоторое промежуточное положение между рассмотренными выше
моделями занимают модели-аналоги. Природа явлений в них обычно
отличается от оригинала и для моделирования используется лишь сходства
дифференциальных уравнений, описывающих, по существу, разные про-
цессы.
Как пример такого „математического аналога" можно привести устрой-
ство для изучения конфигурации полей, в котором кинематографируется
растекание вязкой жидкости между прозрачными стенками сосуда соот-
ветствующей формы.
Другой пример — это применение для исследования устойчивости
простейших систем электропередачи известного механического аналога.
£ 2. Некоторые особенности различных принципов моделирования
9
Грискома, в котором рычаги соответствующих длин изображают э. д. с,
станций; моменты от грузиков на блоках, связанных с рычагами, изо-
бражают механические моменты турбин; пружины, стягивающие концы
рычагов, соответствуют передаваемым мощностям и углы между рыча-
гами— углам между роторами электрических машин. Такая модель-аналог
очень полезна благодаря своей большой наглядности, но, конечно, не может
претендовать на применение в серьезных исследованиях энергосистем.
Важное значение имеют модели, в которых, несмотря на их физическое
отличие от оригинала, на выходе должны быть получены физические
величины в заданном масштабе, точно соответствующие оригиналу. Такие
модели, так сказать „физические аналоги", являются моделями-имитато-
рами. Например, в общей электродинамической модели энергосистемы
турбины могут быть заменены электродвигателями со сложным управле-
нием. Такой электропривод должен воспроизводить на валу модели
генератора вращающий момент со всеми особенностями статических
и динамических характеристик турбины включительно до учета влияния
гидравлических ударов в случае гидротурбины.
В данном участке электродинамической модели энергосистемы турбина
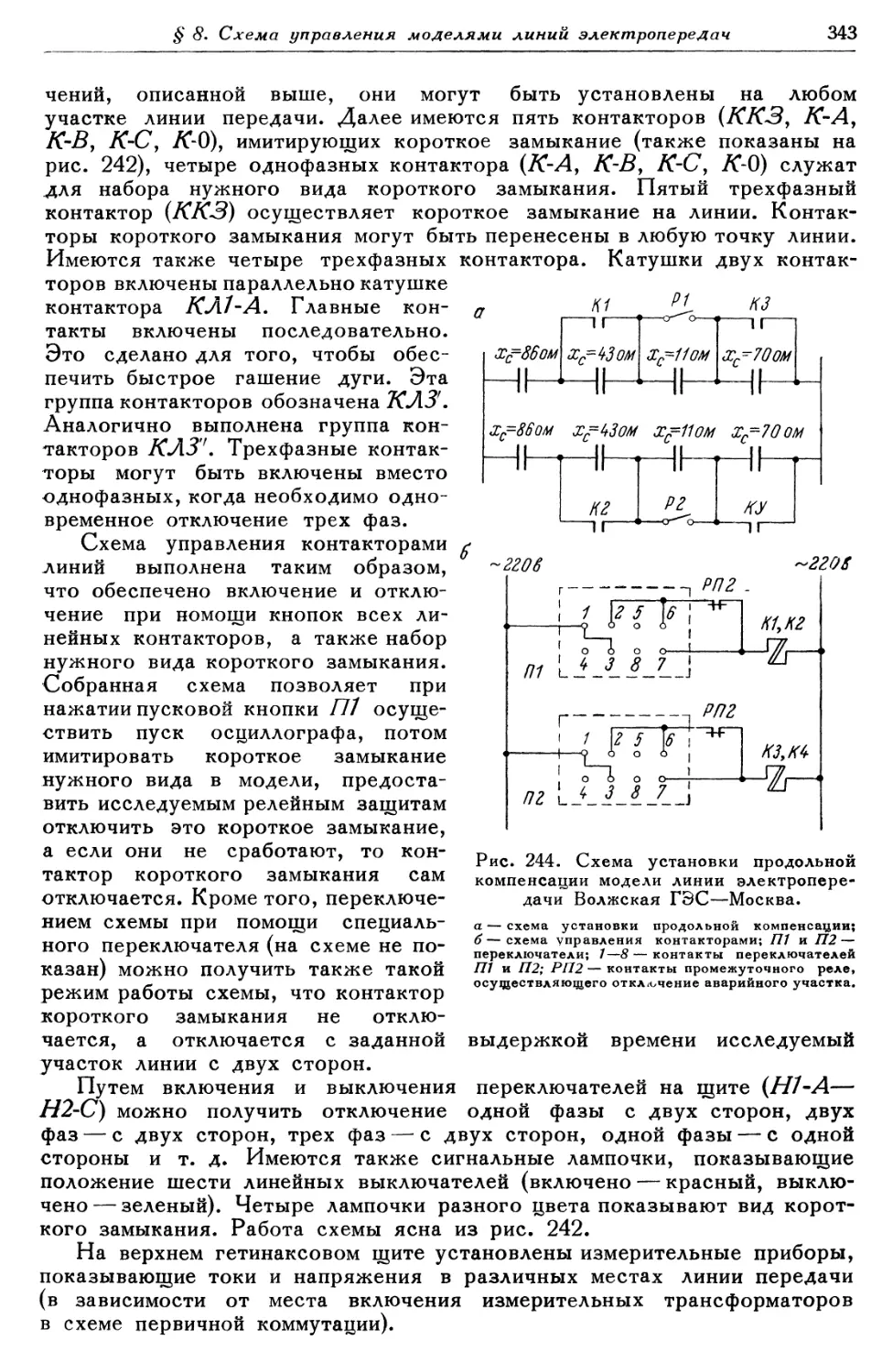
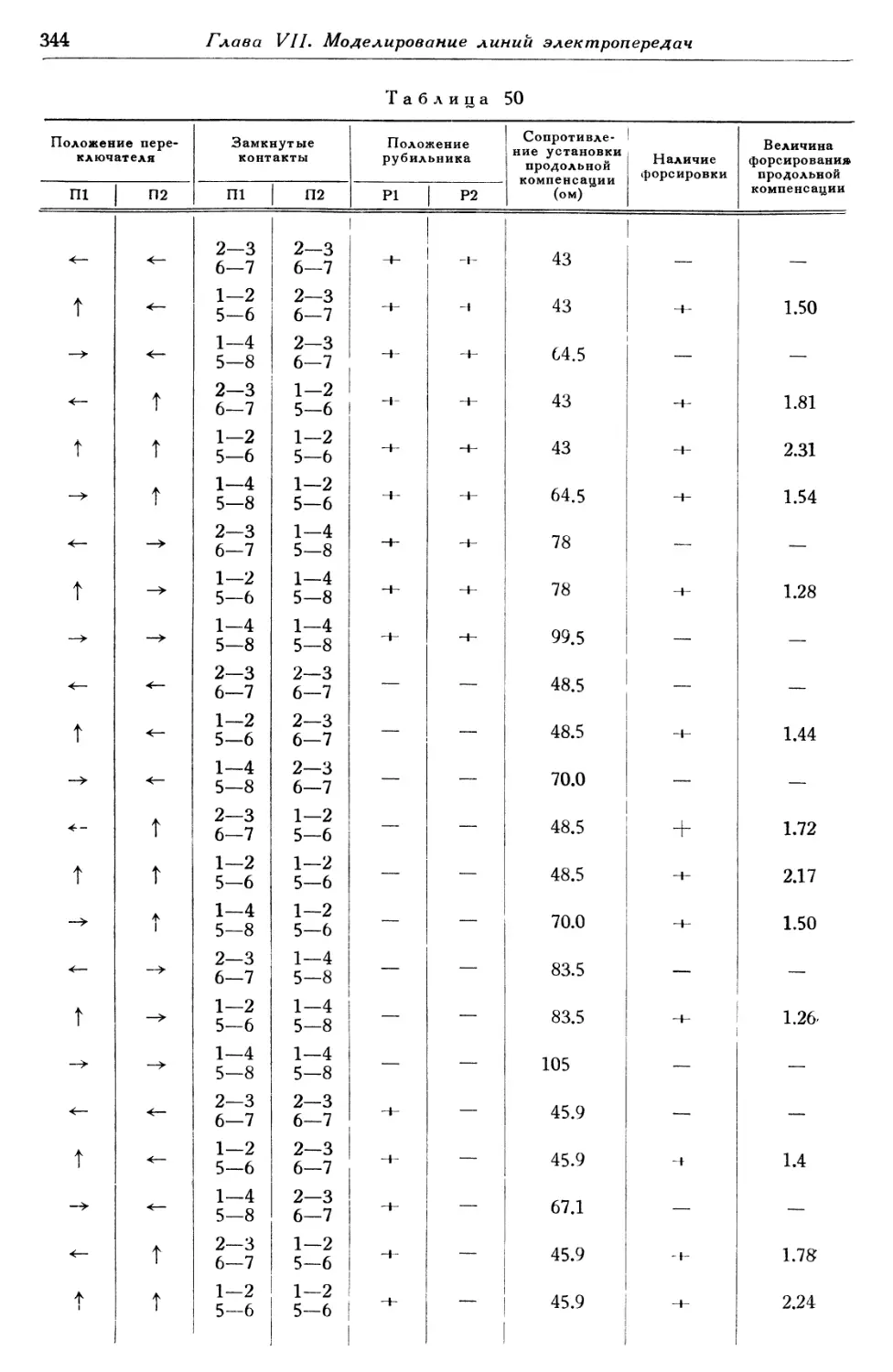
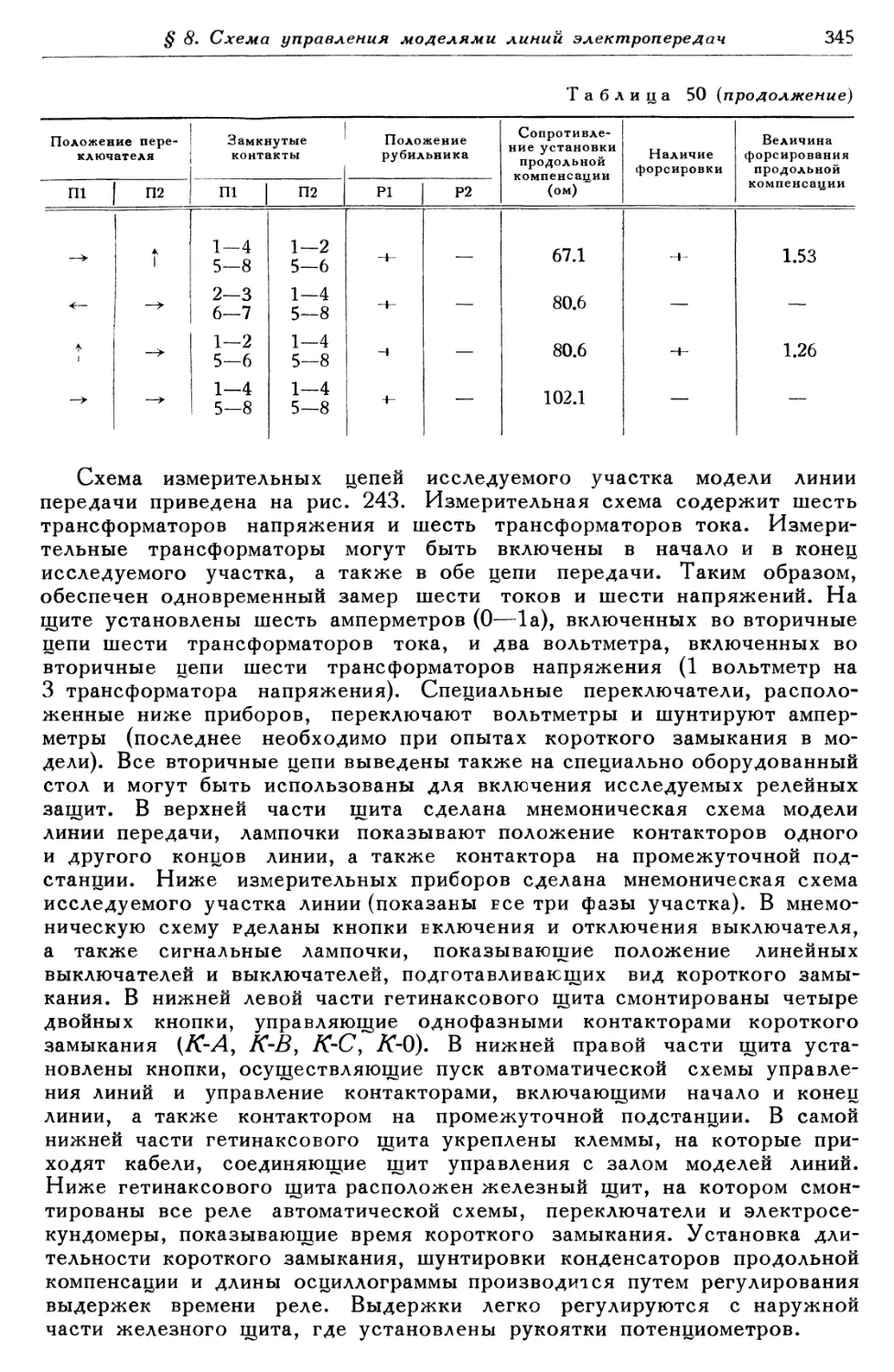
имитируется электродвигателем. Остальная же часть (схема управления)
может моделироваться не позвенно, а с помощью общего какого-либо
счетно-решающего или вычислительного устройства, охватывающего всю
группу остальных звеньев и соответствующую решению уравнений для
этой группы. Таким образом, часть данного участка модели с большим
удобством может быть выполнена на принципе математического модели-
рования.
§ 2. Некоторые особенности различных принципов моделирования
в применении к энергосистемам
1. Математическое моделирование предполагает очень хорошее знание
процессов в исследуемой системе, дающее возможность составить все
необходимые дифференциальные уравнения. Не для всех узлов такие
уравнения известны или могут быть написаны, так как еще сами про-
цессы недостаточно освоены. Необходимы упрощения в части некоторых
параметров и характеристик, а иногда и по числу уравнений, описываю-
щих систему. Последствия этих упрощений мы не всегда можем оценить.
При физическом моделировании мы должны осуществить все элементы
модели с такими же параметрами и характеристиками, как и у оригиналь-
ной системы. Эти трудности разрешаются значительно проще.
2. Заслуживает быть отмеченной еще одна особенность физического
моделирования.
Если при математическом моделировании мы имеем мощный вычисли-
тельный аппарат, то все же мы оперируем с уравнениями, отражающими
лишь наши представления о явлении, и точность ответа даже при высокой
точности вычислений определяется в основном правильностью наших
представлений, всегда в какой-то мере приближенных. Оценка значений
тех или иных упрощений, всегда необходимых, или упущений, иногда
возможных, затруднена даже при контроле экспериментом.
При физическом моделировании природа процесса в модели оди-
накова с процессом в оригинале. На обязанности экспериментатора
остается обеспечение условий близкого совпадения этих процессов..
Конечно, и здесь для получения результата желаемой точности
10
Введение
мы должны осуществить в модели достаточно точно параметры и
соответствующие характеристики отдельных звеньев модели. Это более
понятно и доступно для инженера в его исследованиях. Упрощения
и допущения, а также уточнения и введение новых параметров и зависи-
мостей, как и последовательная корректировка по эксперименту в ориги-
нале, для него более понятны и доступны.
В познавательном отношении физическое моделирование имеет большие
преимущества перед математическим и больше возможностей в изучении
новых сложных и малоизученных явлений, а также пригодно даже для
случаев, когда уравнения исследуемого процесса еще не могут быть
четко и точно сформулированы.
3. Можно утверждать (общее положение), что при осуществлении
модели энергосистемы узлы модели, подлежащие подробному исследова-
нию, следует осуществлять ближе к физическому принципу. Для узлов же
более удаленных от упомянутых можно позволять себе более смелые
отступления в сторону аналогов и математического моделирования, там
возможны более значительные обобщения и вместе с ними упрощения.
Такое построение модели будет наиболее удачным и удобным для иссле-
дований. Например, выше было показано, что при изучении общесистем-
ных вопросов (или исследований аппаратуры на модели) турбины могут
быть моделированы электродвигателями со специальным управлением, как
это сделано в ИЭМ АН СССР. В то же время, когда исследуется
работа турбин, физически подробно моделируется вся их гидравлическая
часть до трубопроводов и аванкамеры включительно, как это сделано
в ВЭНИ АН Армянской ССР; при этом электрическая часть энерго-
системы может быть моделирована весьма упрощенно.
Таким образом, современные электродинамические модели энерго-
систем обычно включают узлы, осуществленные на различных принципах:
чисто физических, физических аналогов (имитаторов), математических
аналогов и т. д.
4. Особенно яркий пример некоторых преимуществ физической модели
перед математической можно видеть из следующего.
Для ряда вопросов, в том числе и общесистемного характера, воз-
можно решение путем математического моделирования, а именно, допустимы
ответы типа „да“ и „нет" (например: устойчиво или неустойчиво),
а выявление зависимостей может быть получено по точкам путем вариации
какого-либо параметра. Однако для исследования работы аппаратуры,
например защиты, автоматики и т. д., необходимо иметь возможность
подавать на нее напряжения и токи, достаточно точно соответствующие
аналогичным в оригинале. Аппаратуру защиты и автоматики надо исследо-
вать обычно в том виде, в котором она будет устанавливаться в натурной
системе, т. е. в заводском исполнении. Роль ее весьма ответственна
в определении всего хода ликвидации аварий и ненормальностей в энерго-
системе. Эта аппаратура должна быть тщательно исследована перед
установкой и пуском в эксплуатацию. Моделировать ее (физически
или математически) чрезвычайно сложно. Исследование ее в натурном
виде на модели энергосистемы удобно и, пожалуй, единственно возможно
только на моделях физического типа достаточной мощности.
Определение же токов и напряжений для этой аппаратуры на мате-
матических моделях и затем воспроизведение их для питания аппаратов,
потребовало бы устройств не менее сложных, чем сами модели, если
учесть, что в процессе аварий как система, так и условия работы
аппаратуры (блокировки) меняются.
§ 2. Некоторые особенности различных принципов моделирования
11
5. На только что приведенном примере можно видеть и значение
выбора масштаба подобия модели, например по мощности, напряжению,
току и т. д.
Для математического моделирования вопрос выбора мощности модели
является маловажным и не очень связывает ее конструктора.
Для физической модели этот вопрос весьма существен.
При изображении энергосистемы в виде модели очень малой мощности
с машинами-генераторами порядка 1—2.5 квт получаются очень удобные
в обращении, так называемые микромодели типа моделей Робера (Франция).
Они дешевы, детали легко заменяемы, однако не могут нести нагрузки
от включения исследуемых приборов и даже самые измерения на них
представляют в этом отношении некоторые трудности. Наблюдения
за процессами общесистемного характера — вот, что они могут дать.
Если же, как в случае моделей ИЭМ АН СССР, Московского энерге-
тического института (МЭИ), Научно-исследовательского института
постоянного тока (НИИПТ) и ВЭНИ АН Армянской ССР, от моделей
отбирается еще и дополнительная нагрузка для питания приборов и питания
устройств автоматики (в их заводском исполнении), то эта нагрузка
должна составлять возможно меньшую часть от мощности модели, чтобы
не искажать условий ее работы по сравнению с натурной системой.
Кроме того, особо важен и другой момент, ранее упомянутый, — это
трудность воспроизведения свойств больших машин, трансформаторов,
линий и т. д. в малых, маломощных элементах модели.
С другой стороны, модели очень больших мощностей (например,
1000 ква и более, как в Институте электротехники АН УССР и др.)
также оказываются неудобными, так как эксплуатация их должна вестись
с учетом правил технической эксплуатации крупных энергоустановок (вклю-
чительно до получения разрешения от энергосистемы на каждое включение).
Эти модели, не давая каких-либо преимуществ, очень дороги, а потому
обычно для них используются случайные машины с немоделированными
параметрами и едва ли для таких моделей будут специально строится
машины такой мощности.
Так выявляется, что относительно подходящей мощностью для модели
генераторов и соответственно трансформаторов оказываются мощности
в 10—15 и 25—30 ква, как это подробнее рассматривается ниже.
6. Напряжение модели, в особенности линии, имеет также весьма
существенное значение. Сравнительно невысокое напряжение позволяет
производить измерения и осциллографирование путем непосредственного
включения приборов (модель МЭИ); высокое папряжение требует при-
менения специальных трансформаторов тока и напряжения, специальных
заземляющих и других защитных устройств.
С повышением напряжения (например, линии) при заданной мощности
уменьшаются токи, что тоже не должно быть чрезмерным, так как
затрудняет построение трансформаторов тока. Однако высокое напряже-
ние линии — 1—2.5 кв (модели ИЭМ, НИИПТ) позволяет пренебречь
вредными сопротивлениями, вносимыми многочисленными контактами,
которые неизбежны при желании иметь универсальность модели, дости-
гаемую путем переключений; то же относится и к сопротивлениям изме-
рительных приборов.
7. Универсальность и удобства перестройки математических моделей
для сложных систем могут быть обеспечены в физических моделях.
В последних совершенно четко видно, какую величину варьируют
в исследовании и как это сказывается на процессе.
12
Введение
§ 3. Историческое развитие электродинамических
моделей энергосистем
Метод электродинамического моделирования энергосистем начал раз-
виваться в 20-х годах, когда увеличение мощности энергосистем и услож-
нение их схем привело к тому, что анализ процессов в системах,
в особенности переходных, стал чрезвычайно затруднительным. Первые
электродинамические модели строятся в это время в США и СССР.
Однако, сооружение первых моделей встретилось со значительными
трудностями, связанными с необходимостью получения параметров, соот-
ветствующих крупным установкам, в малых установках. Делались попытки
преодолеть эти затруднения сооружением моделей большой мощности
(США), однако они не явились перспективными, так как такие модели
уже выходили за пределы лабораторной установки, отличались большой
громоздкостью, неудобством в эксплуатации и дороговизной.
В СССР, Франции и Австрии строились и находятся еще сейчас
в эксплуатации электродинамические модели малой мощности, 1—5 ква,
которые применяются для решения более узких вопросов, поэтому требо-
вания к полноте воспроизведения параметров оригинала в таких моделях
были понижены.
В настоящее время в СССР найдены пути создания моделей, еще
не выходящих за пределы лабораторной установки и в то же время
обеспечивающих получение необходимых параметров (ИЭМ АН СССР,
МЭИ, НИИПТ и др.). Эти модели предполагается в будущем расширять,
так как они являются мощным средством исследования процессов в энерго-
системах и позволяют быстро получить ответы на интересующие проекти-
ровщиков энергообъединений вопросы. Сооружаются также новые модели
такого типа [Сибирское отделение АН СССР, Всесоюзный научно-
исследовательский институт электроэнергетики (бывш. ЦНИЭЛ) и др.].
Модели энергосистем в США 1917—1926 гг.
В 1917 г. в США уже существовали искусственные линии, которые
являлись моделями телефонных линий, морских кабелей и линий передач
энергии. Примером такой модели является лабораторная линия Telluride
Power Со.
В 1923 г. при испытательной лаборатории General Electric Со была
создана модель сети с вращающимися машинами, которая являлась одной
из первых попыток создания электродинамической модели. На модели
намечалось производить следующие исследования:
1) изучение распределения токов при нормальной нагрузке с учетом
шунтовых реакторов;
2) изучение коротких замыканий в системе;
3) изучение поведения реле при коротких замыканиях;
4) исследование устойчивости параллельной работы генераторов.
Модель содержала: два синхронных генератора (Р = 3.75 ква, 2р = 4,
п = 1800 об./мин., £7=110 в,/=60 гц), приводимых во вращение двумя
двигателями постоянного тока (Р=10 л. с., л = 1700 об./мин, £7=230 в);
шесть трансформаторов (Р=2 ква, £7=110/230/440 в); реакторы
со стальными сердечниками и воздушным зазором, моделирующие индук-
тивность линии; конденсаторы, моделирующие емкость линии. Генераторы
и трансформаторы применялись стандартные, поэтому параметры их соот-
ветствовали оригиналу лишь приближенно. Реакторы и конденсаторы
§ 3. Историческое развитие электродинамических моделей
13
обеспечивали получение однофазной искусственной линии из 24 ячеек
и трехфазной искусственной линии из 8 ячеек. Два генератора и
шины энергосистемы давали возможность имитировать работу трех
станций. Эта модель использовалась в основном для изучения устано-
вившихся режимов. В небольшой мере проводились также испытания
и в переходных режимах. Эти испытания давали, конечно, только каче-
ственную картину явлений, так как модель в переходных режимах соот-
ветствовала оригиналу лишь приближенно.
В 1924 г. появилось сообщение о новой модели энергосистемы, имею-
щей значительно большую мощность (генератор имел мощность 625 ква)
(Evans and Bergcall, 1924). Модель имела две Т-образных схемы замеще-
ния линий передачи, работающих при напряжении 2380 в. Модели линий
передачи могли соединяться последовательно и параллельно. В системе
имелось два синхронных компенсатора (по 425 ква). Генератор и син-
хронные компенсаторы были снабжены регуляторами напряжения. Нагрузка
представляла собой два синхронных двигателя по 200 квт, спаренные
с генераторами постоянного тока, которые работали на изолированные
активные нагрузки (во избежание качаний, которые могли возникнуть при
обратной отдаче энергии в сеть постоянного тока). Изменяя возбуждение
этих генераторов постоянного тока, можно было плавно менять нагрузку.
В 1926 г. появилось сообщение о другой подобной модели энерго-
систем (Nickle and Lauton, 1926). Модель содержала несколько синхрон-
ных генераторов (по 225 ква), синхронные компенсаторы, агрегаты
нагрузки, модели линий передачи, вибрационные регуляторы напряжения
и т. д. Напряжение моделей линий передачи равнялось 2300 в, что соот-
ветствовало 220 кв оригинала. 180 ква модели соответствовало 150000 ква
оригинала.
Электродинамические модели этого типа имели слишком большую для
лабораторных условий мощность, что приводило к неудобствам эксплуата-
ции, громоздкости и дороговизне. Модели линий передачи составлялись
всего из 1—2 звеньев, что позволяло исследовать только явления
устойчивости и не давало возможностей исследовать переходные про-
цессы в самих линиях и аварийные режимы в них. Поэтому в дальнейшем
подобные электродинамические модели распространения не получили.
Модели энергосистем в СССР 1924—1948 гг.
Одновременно с созданием моделей энергосистем в США, создавались
модели энергосистем в СССР. Причем метод электродинамического моде-
лирования в СССР получил гораздо большее развитие, чем в США,
и в настоящее время наиболее совершенные и точные модели построены
в нашей стране. Они успешно используются для решения важнейших
вопросов создания единой энергетической системы СССР.
В 1924 г. в Лаборатории техники высоких напряжений Ленинградского
электротехнического института под руководством проф. А. А. Смурова
и по проекту инженера Г. И. Якобсона (1924) была создана модель линий
Свирь—Волхов—Ленинград. Это была первая модель электропередач
в СССР.
Масштабы моделирования были выбраны следующие: 30000 ква ори-
гинала соответствовали 8.65 ква модели и 110 кв оригинала соответство-
вали 1 кв модели. Генераторы моделировались катушками со втягиваю-
щимися в зависимости от тока железными сердечниками. Модель питалась
14
Введение
от сети 110 в через три однофазных трансформатора по 3 ква 110/1000 в
и упомянутые выше катушки-„генераторы“. Конечно, это слишком при-
митивное моделирование генераторов никак не соответствует современным
представлениям и задачам современных моделей по исследованию сложных
динамических процессов.
В модели недостаточно четко моделировались трансформаторы. Они
заменялись секционированными катушками с закрепленным железным
сердечником. Активная и индуктивная нагрузка моделировалась реоста-
тами и индуктивными катушками. Модель линии состояла из 10 ячеек.
Каждая ячейка моделировала 30 км натурной линии передачи. Было
показано, что получающаяся при таком моделировании линии погрешность
воспроизведения интересующих процессов незначительна.
Катушки индуктивности, моделирующие индуктивность проводов линии,
были приняты без железного сердечника и имели регулируемую индук-
тивность от 3.76 до 52.6 мгн, активное сопротивление катушек на полном
числе витков — 3.42 ом, добротность катушек»5. Конденсаторы при-
менялись в среднем по 0.135 мкф на рабочее напряжение 1000 в.
Несмотря на указанные выше недостатки, модель оказала большую
помощь при исследовании процессов на передачах Волхов—Ленинград
и Свирь—Ленинград. Еще в 1924 г. на этой модели были проведены
следующие работы:
1) проверено электромагнитное влияние на провода связи Мурманской
железной дороги;
2) исследованы режимы работы одной трехфазной линии Свирь—
Ленинград;
3) исследованы режимы работы двух трехфазных цепей Волхов—
Ленинград;
4) исследованы режимы однофазной линии 1200 км.
В 1927 г. в этой же лаборатории исследовалось методом моделиро-
вания распределение токов в сложной сети, содержащей большое коли-
чество многообмоточных трансформаторов и автотрансформаторов с раз-
ными схемами соединения при несимметричных коротких замыканиях.
В дальнейшем в моделях энергосистем начинают применяться вращаю-
щиеся машины. Однако синхронные генераторы малой мощности обычного
исполнения имеют параметры, очень сильно отличающиеся от соответ-
ствующих параметров оригинальных машин. Особенно велико отличие
в постоянных времени цепей ротора и статора.
В 1934 г. с использованием описанной выше модели было исследовано
поведение релейных защит дистанционного типа и других типов при кача-
ниях в системе до асинхронного хода включительно. Задавались периоды
биений, определялись центры качаний и осциллографировались процессы
и работа реле в зависимости от их положения в системе, от регулировки
и различных блокировок. Исследования, конечно, носили только каче-
ственный характер (Иванов, Рыжов, 1933).
В 1934—1935 гг. Р. И. Майером в возглавляемой С. А. Лебедевым
лаборатории электрических систем ВЭИ были проведены исследования
по искусственному увеличению постоянных времени цепей ротора при
помощи генератора постоянного тока последовательного возбуждения.
Р. И. Майер (1935) создал опытную установку с компенсатором активного
сопротивления — коллекторной машиной последовательного возбуждения.
Однако после первых экспериментов, обнаруживших большие искажения,
вносимые компенсатором, им были сделаны выводы о непригодности
^такого моделирования.
5. Историческое развитие электродинамических моделей
15
В 1936—1939 гг. в ЭНИН В. А. Вениковым (1939, 1941) проводились
работы по электродинамическому моделированию энергосистем. Им были
установлены условия подобия электрических систем и разработаны
машины-компенсаторы активного сопротивления, не вносящие искажений
при осуществлении компенсации в цепях возбуждения, разработаны
способы перемагничивания для устранения эффекта гистерезиса (Веников,
1945). Работы по созданию ксмпенсатора активного сопротивления имели
большое значение для дальнейшего развития электродинамических моде-
лей, так как они дали возможность регулировать постоянную времени
обмотки возбуждения синхронного генератора. Так, в опытах, проведен-
ных В. А. Вениковым в 1939 г., была получена возможность регулиро-
вания постоянней времени обмотки возбуждения от 0.5 до 5 сек., при
этом ксмпенсатор активного сопротивления не вносил искажений. Инер-
ционная постоянная машины изменялась путем изменения числа дисков,
укрепленных на валу агрегата.
В работе В. А. Веникова (1945) даны также указания о моделировании
первичного двигателя путем изменения величины напряжения, подводимого
к двигателю, а также с использованием двигателя смешанного возбужде-
ния, в котором надлежащим образом подбирается соединение обмоток.
В 1938—1940 гг. была создана по инициативе А. А. Горева
и В. А. Толвинского в Ленинградском политехническом институте
электродинамическая модель, предназначавшаяся для исследования
вопросов устойчивости проектировавшейся в то время электропередачи
Куйбышев—Москва (Иванов, 1941; Ассовский и др., 1941).
Для явнополюсного синхронного генератора отправного конца линии
передачи выбрана мощность 5.3 и 5.75 ква, для неявнополюсных син-
хронных генераторов приемного конца была выбрана мощность 12 ква.
Проектировалось 4 типа синхронных модельных генераторов: 1) явно-
полюсный синхронный генератор без успокоительной обмотки с широкой
регулировкой параметров; 2) такой же генератор с успокоительной об-
моткой, допускающий регулирование успокоительного момента; 3) явно-
полюсный синхронный генератор без успокоительной обмотки, допускаю-
щий работу при разных насыщениях магнитной цепи, но без регулировки
параметров; 4) неявнополюсный синхронный генератор с широкой ре-
гулировкой параметров.
Для регулирования параметров использовались следующие способы:
1) изменение величины базисного сопротивления модели zb (или, что
то же, величины условной единицы мощности Рв); этот способ
позволяет изменять все сопротивления в одинаковом отношении,
причем инерционная постоянная меняется при этом в обратном
отношении; 2) последовательное включение в цепь статора вне-
шнего реактивного сопротивления X/; этот способ позволяет увели-
Xq xd ХЦ
чивать Xd и изменять отношения — , — и — в сторону увеличения;
3) последовательное включение в цепь обмотки возбуждения реактив-
ности хп; при этом переходная реактивность x'd увеличивается, в то
время, как остальные сопротивления остаются без изменения; 4) изме-
нение числа витков обмотки статора (секционирование обмотки); 5) вклю-
чение в цепь возбуждения последовательного ненасыщенного генератора
постоянного тока; 6) регулирование напряжения возбудителя специаль-
ным электронным регулятором; 7) насаживание на вал маховика с регу-
лируемым маховым моментом; это дает возможность регулирования
инерционной постоянной.
16
Введение
Напряжение модели выбрано равным 220 в, частота 50 гц. Преду-
смотрена возможность изменения напряжения модели (до 350 в). Линия
передачи представляла собой трехфазную искусственную линию с нуле-
вым проводом; последний имитировал проводимость земли и заземляю-
щих тросов при изучении коротких замыканий на землю. Модель линии
передачи состояла из П-образных звеньев. В том числе имелось 10 трех-
фазных звеньев с самоиндукцией по 160 мгн и с емкостью по 350 мкф и
8 трехфазных звеньев с самоиндукцией по 30 мгн и емкостью по
65 мкф. Нулевой провод состоял из 10 катушек с самоиндукцией по
НО мгн и 8 катушек с самоиндукцией по 20 мгн. Емкость разбита на
емкость между фазами и нулевым проводом.
Активное сопротивление трехфазных звеньев равнялось около 10%
от реактивного; для нулевого провода это отношение составляло 20%.
Включение 10 трехфазных звеньев по 160 мгн позволяло изучить ком-
мутационные перенапряжения, при этом генераторы включались через
повысительные трансформаторы. Напряжение линии равнялось 1830 в.
При изучении динамической устойчивости трехфазные звенья включа-
лись без повысительных трансформаторов. Число ячеек выбиралось
от 1 до 4. В модели осуществлялась индукционная нагрузка в виде ин-
дукционных двигателей и осветительная нагрузка в виде ламповых ре-
остатов. Предусматривалось также включение обычных проволочных
нагрузочных реостатов. Шины бесконечной мощности представлялись
с помощью отдельного синхронного генератора, мощность которого
в 35 раз превышала суммарную мощность всех генераторов модели.
Первичные двигатели осуществлены в модели в виде двигателей
постоянного тока, снабженных специальными регуляторами вращающего
момента, дающими требуемые характеристики. Индукционные двигатели
модели, изображающие двигательную нагрузку приемной сети, приводили
во вращение генераторы постоянного тока, снабженные регуляторами
вращающего момента для получения требуемой характеристики момента
сопротивления.
В 1940 г. была осуществлена лишь часть спроектированной модели.
Выполненная часть модели соответствовала схеме работы одного блока
Куйбышевской электропередачи на выделенный район Московской сети.
Великая Отечественная война приостановила работы на модели ЛПИ
в лаборатории проф. А. А. Горева. Полный проект модели так и не был
осуществлен. Следует отметить, что в этой модели предусматривались
почти все способы, применяющиеся в настоящее время для получения
нужных параметров элементов модели и были разработаны способы мо-
делирования линий. Мощность модели была выбрана несколько заниженной.
В 1942—1944 гг. в Среднеазиатском индустриальном институте
акад. М. П. Костенко была создана Лаборатория электродинамического
моделирования энергосистем. В статье М. П. Костенко и Е. Д. Трей-
виш (1946) были сформулированы основные требования к электродина-
мическим моделям и описана построенная в Среднеазиатском индустри-
альном институте электродинамическая модель. Она была выполнена на
основе стандартных синхронных машин, изменив мощность которых
удалось получить довольно близкое совпадение параметров модельных
машин с требуемыми параметрами. В Лаборатории исследовались две
схемы электропередачи: от одной станции в систему бесконечной мощ-
ности и параллельная работа двух станций.
Исследование работы электростанции на шины бесконечной мощности
имело назначением предварительную проверку принципов моделирования
$ 3. Историческое развитие электродинамических моделей
17
и проверку работы элементов схемы. В этом исследовании в качестве
генератора электростанции был использован синхронный явнополюсный
генератор 10 ква, 220 в, 1000 об./мин. Для компенсации потерь обмотки
возбуждения и приведения их в соответствие с данными задания в эту
цепь был включен однофазный последовательный коллекторный гене-
ратор, а для соответственной компенсации потерь в цепи статорной
обмотки последовательно с ней со стороны нейтрали был включен трех-
фазный коллекторный генератор последовательного возбуждения.
Моделирование гидротурбины, вращающей генератор станции, было
осуществлено посредством двигателя постоянного тока с независимым
возбуждением, у которого в цепь якоря включалось значительное доба-
вочное сопротивление, понижающее примерно в 2 раза напряжение на
зажимах якоря при номинальном моменте по сравнению с напряжением
сети при заданном режиме нагрузки. Зависимость скорости от момента
на валу M=f(n) имеет вид падающей кривой. Полученная таким обра-
зом кривая достаточно хорошо моделировала соответствующую зависи-
мость M=f(n\ характерную для гидротурбины. На этой модели были
проведены разнообразные исследования по устойчивости.
В дальнейшем модель энергосистемы из двух станций также была
выполнена на основе стандартных синхронных машин. При исследова-
нии на лабораторной установке устойчивости параллельной работы двух
станций моделировались не только генераторы и соединительные линии
с трансформаторами, как в первом случае при работе одной станции на
шины бесконечной мощности, но также и нагрузки. На шинах станций
моделировалась по заданным параметрам бытовая и моторная нагрузки,
кроме того, на шинах одной из станций была моделирована специаль-
ная нагрузка. Данная специальная нагрузка состояла из мощной ртутно-
выпрямительной установки, в цепи выпрямленного тока который имеется
приемник с обратной э. д. с., величина которой составляет около 2/3 вы-
прямленного напряжения. На этой модели была исследована устойчи-
вость системы и влияние на нее изменения нагрузки.
В 1947—1948 гг. под руководством акад. М. П. Костенко (1950)
в ЛПИ был разработан проект лаборатории электродинамического
моделирования для изучения явлений, связанных с устойчивостью
энэргосистем. В этот проект входили четыре явнополюсные синхронные
машины, моделирующие гидрогенераторы, и шесть неявнополюсных син-
хронных машин, моделирующих турбогенераторы, мощностью 5, 10, 15,
20 ква с 50 вспомогательными машинами: двигателями, моделирующими
гидравлические и паровые турбины, возбудителями постоянного тока
и однофазными и трехфазными компенсаторами активных сопротивлений
роторных и статорных цепей синхронных машин. В этой модели синхронные
генераторы, моделирующие натурные машины, имели специальную кон-
струкцию, обеспечивающую получение заданных параметров.
В 1950 г. в лаборатории электрических машин ЛПИ была осуще-
ствлена часть этого проекта (малая электродинамическая модель) с че-
тырьмя синхронными машинами 5, 10 и 15 ква и с 29 вспомогательными
машинами.
Современные электродинамические модели в СССР
Строительство уникальной электропередачи Куйбышев—Москва и дру-
гих мощных электропередач в нашей стране потребовало решения мно-
гих важных и сложных вопросов устойчивости, регулирования, возбу-
18
Введение
ждения и мощности, релейной защиты и системной автоматики. Для
правильного решения этих задач нужно было исследовать громадное
количество самых разнообразных режимов новых электропередач 400 кв.
Аналитическое исследование этих вопросов потребовало бы очень
большого времени. Поэтому в 1945—1955 гг. интенсивно разрабаты-
вается метод электродинамического моделирования и сооружаются со-
вершенные и точные электродинамические модели, оказавшие существенную
помощь в проектировании электропередач и наладке вновь разработан-
ных регуляторов сильного действия, регуляторов мощности гидротурбин,
ионного возбуждения синхронных генераторов, устройств релейной за-
щиты и системной автоматики. При помощи электродинамических моде-
лей удалось эти вопросы решить в короткие сроки и во всей пол-
ноте.
В 1950—1953 гг. в Ленинградском отделении Института автоматики и те-
лемеханики АН СССР (в настоящее время Институт электромеханики
АН СССР) под руководством акад. М. П. Костенко была создана самая круп-
ная и совершенная электродинамическая модель, позволяющая модели-
ровать единую энергетическую систему Европейской части СССР. В на-
стоящее время ведутся работы по модели единой энергосистемы
СССР, объединяющей энергосистемы Европейской части СССР и Си-
бири. На электродинамической модели ИЭМ были проведены многочи-
сленные и важные исследования, а именно: устойчивости электропере-
дачи Куйбышев—Москва, регуляторов возбуждения сильного действия
различных типов, систем ионного и машинного возбуждения, вопросов
регулирования гидротурбин, нескольких типов новых быстродействующих
релейных защит линий 400 кв, работы устройств однофазного и трехфаз-
ного автоматического повторного включения и т. д. Подробно эта элек-
тродинамическая модель описана в главе I.
Модель Московского энергетического института
В 1945—1950 гг. под руководством проф. В. А. Веникова (1955,
1956) создается большая комплексная электродинамическая модель
в Московском энергетическом институте.
Модель МЭИ предназначается для проведения научно-исследователь-
ских работ и одновременно она является лабораторной базой для учеб-
ных занятий студентов.
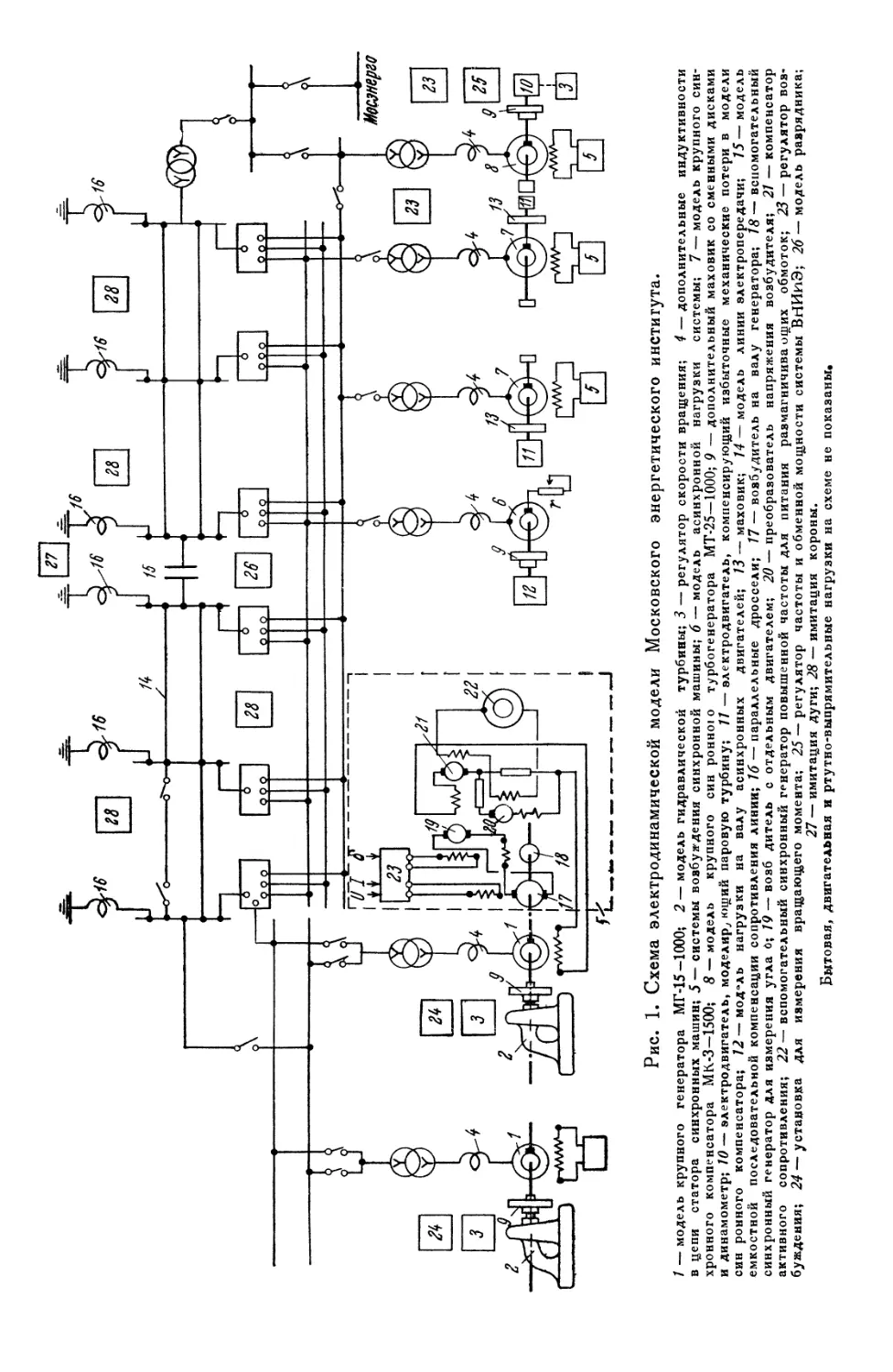
Эта модель состоит из одной линии электропередачи (Волжская ГЭС—
Москва) и пяти модельных синхронных генераторов. Схема модели по*
казана на рис. 1.
Основное силовое оборудование модели размещено в машинном
зале. Все установки модели универсальны, они имеют переменные па-
раметры, что позволяет „настроить" их для моделирования любой энер-
госистемы. Модель размещается в трех помещениях: машинном зале,
помещении сетевых автоматов и в помещении пульта управления. Здесь
расположены: две модели гидрогенераторов МГ-15—1000, привод кото-
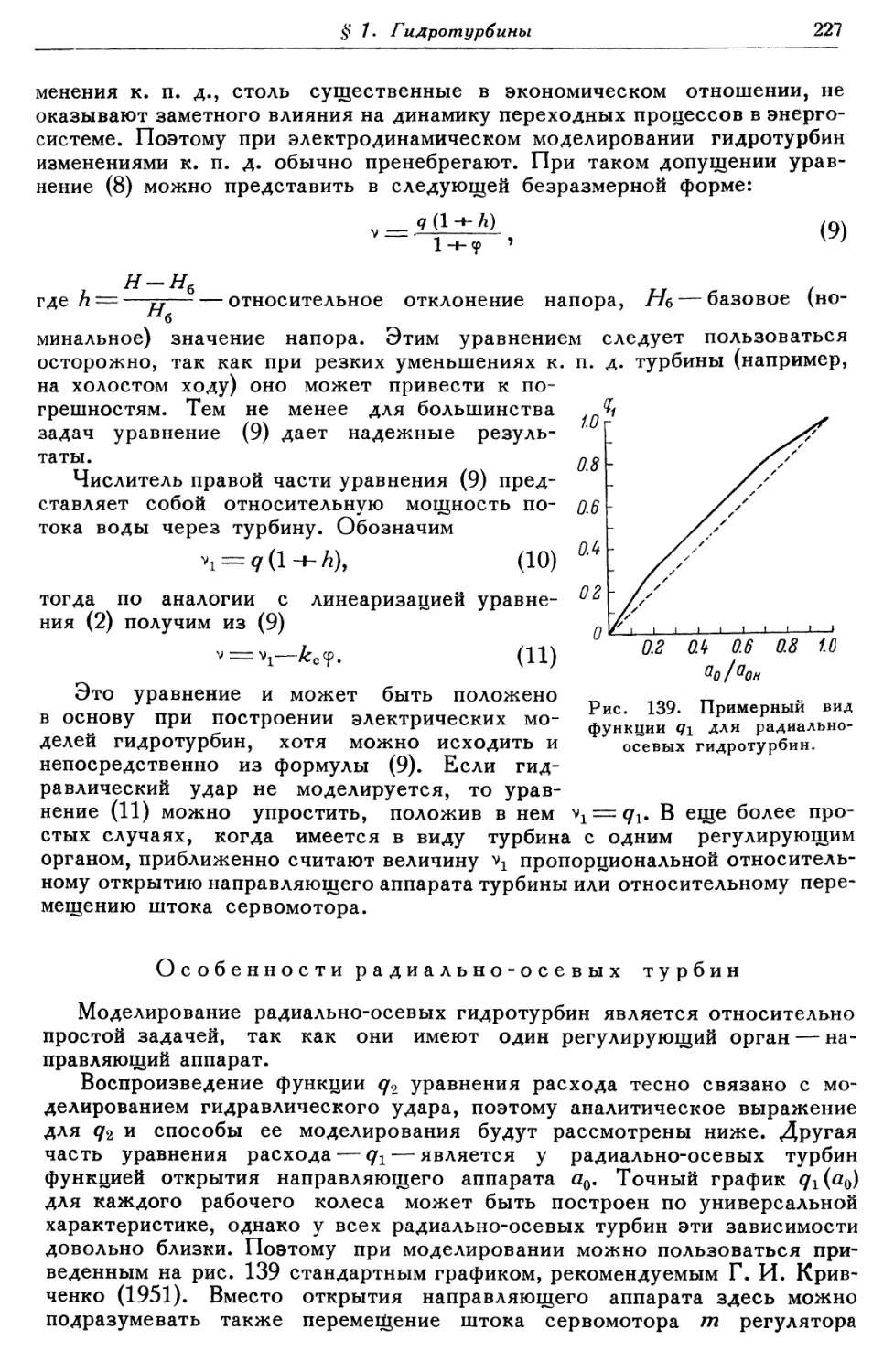
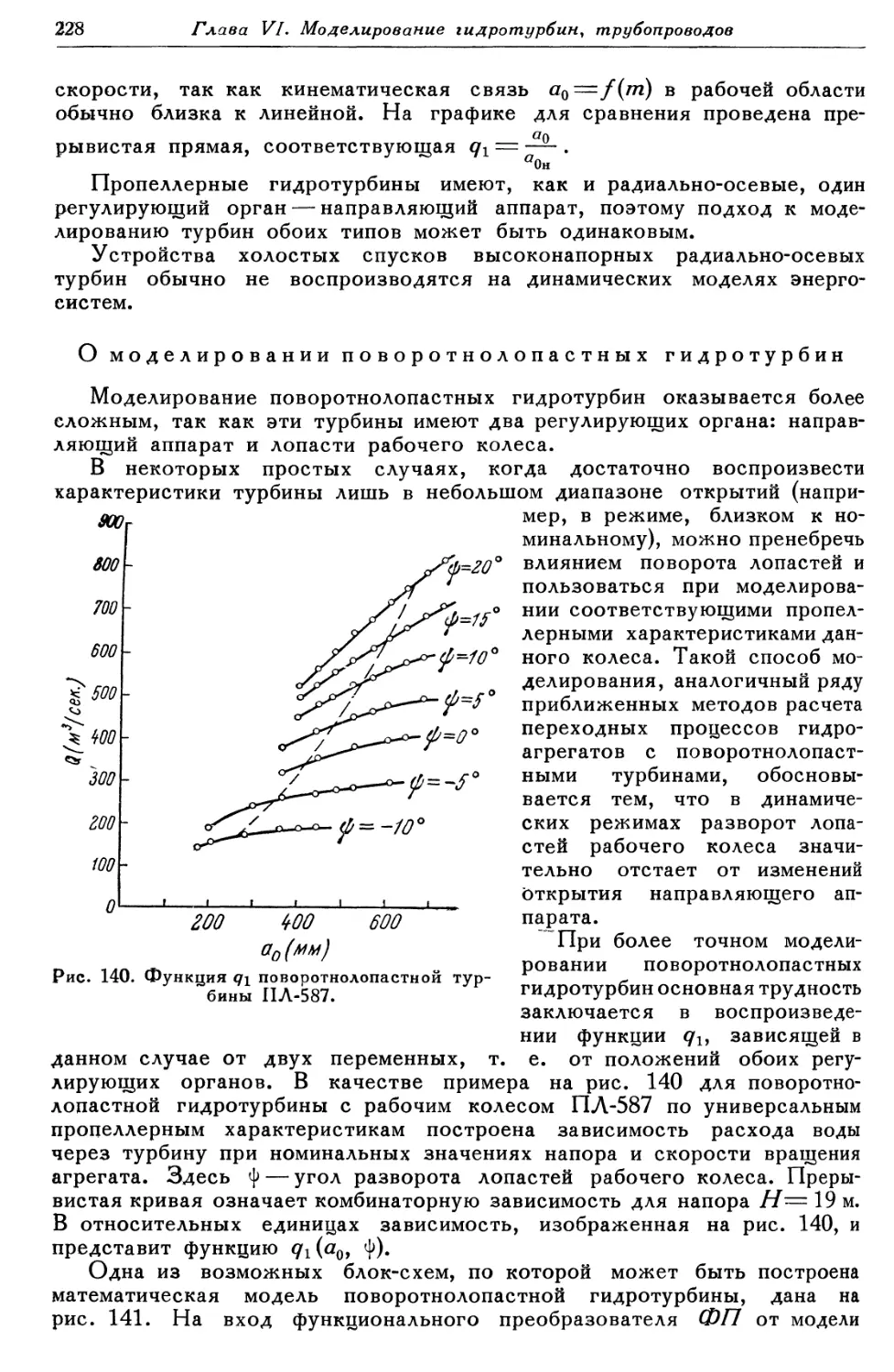
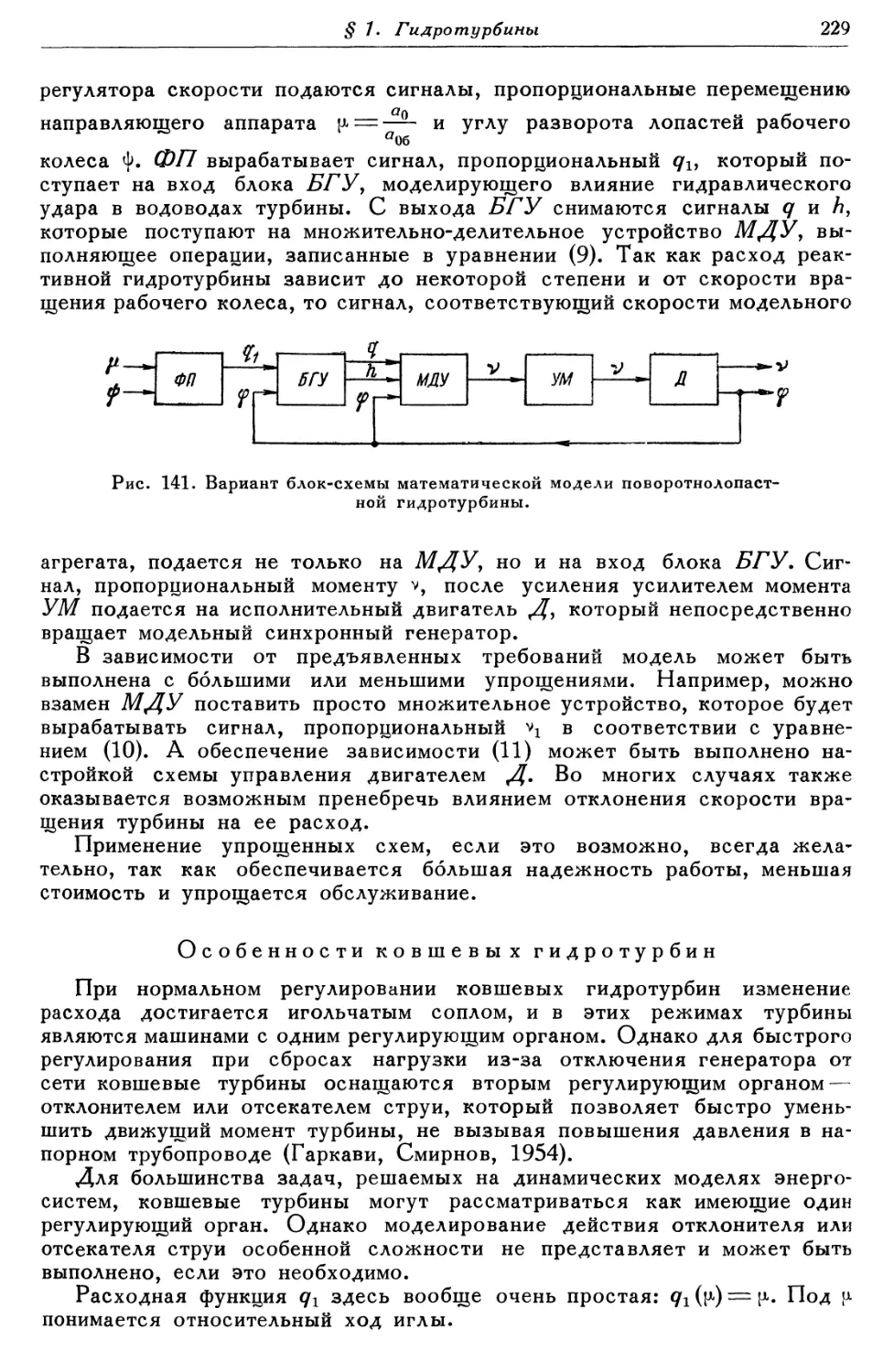
рых осуществляется гидротурбиной радиально-осевого типа Ф-11 -Г-25
с регулятором скорости Д50/28; модель турбогенератора МТ-25—1000
с электродвигателем постоянного тока ПН-290, включенным по спе-
циальной схеме и изображающим паровую турбину с ее регулятором
скорости; две модели синхронных компенсаторов МК-3—1500; модель
асинхронной нагрузки; модели возбудителей; вспомогательные машины
системы возбуждения. Там же расположены реакторы для увеличения
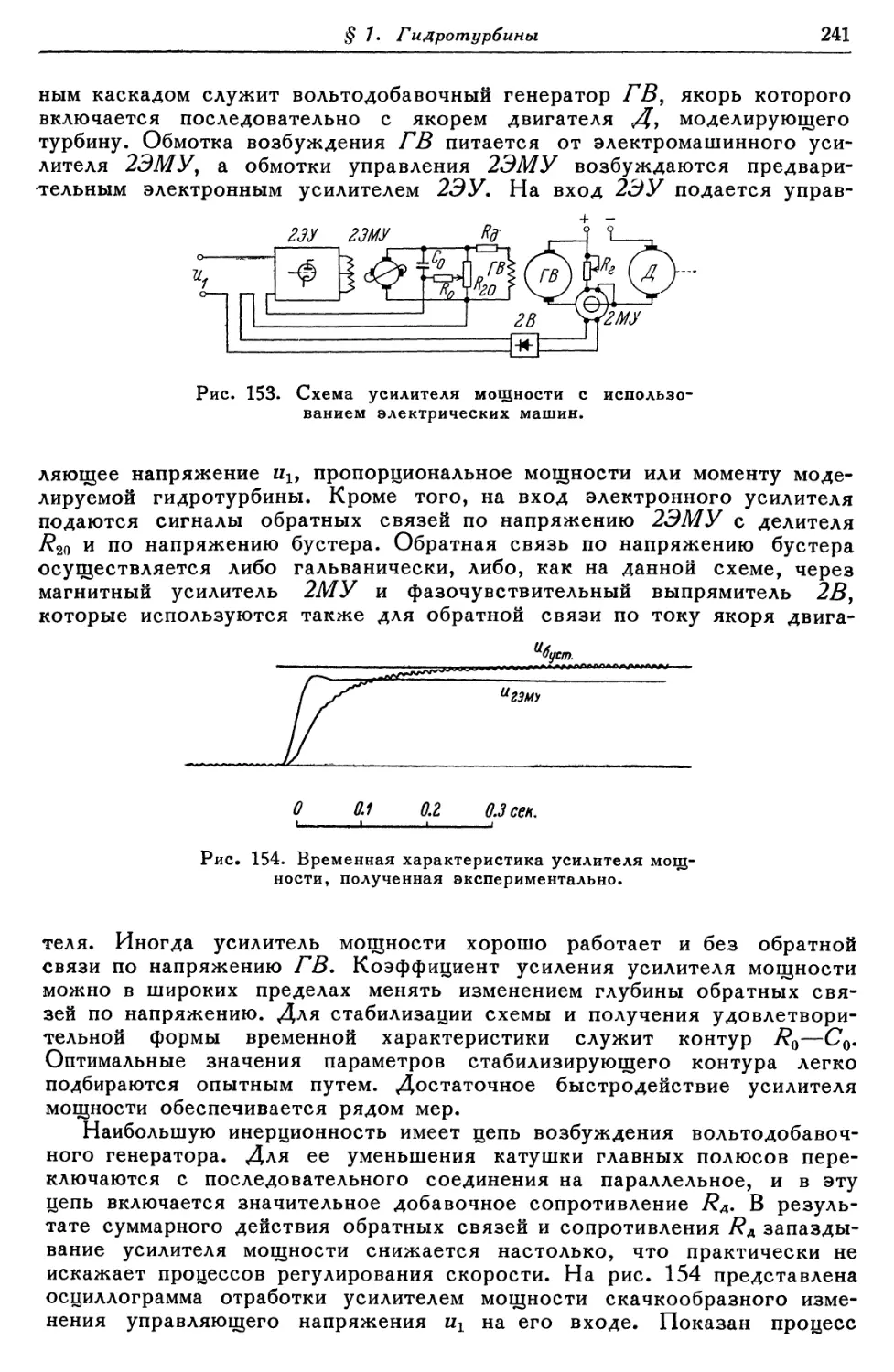
Рис. 1. Схема электродинамической модели Московского энергетического института.
1 — модель крупного генератора МГ-15—1000; 2—модель гидравлической турбины; 3— регулятор скорости вращения; 4— дополнительные индуктивности
в цепи статора синхронных машин; 5 — системы возбуждения синхронной машины; 6 — модель асинхронной нагрузки системы; 7 — модель крупного син-
хронного компенсатора МК-3—1500; 8 — модель крупного син ронною турбогенератора МТ-25—1000; 9 —дополнительный маховик со сменными дисками
и динамометр; 10 — электродвигатель, моделир7 ющий паровую турбину; 11 — электродвигатель, компенсирующий избыточные механические потери в модели
син ронного компенсатора; 12—модель нагрузки на валу асинхронных двигателей; 13— маховик; 14 — модель линии электропередачи; 15—модель
емкостной последовательной компенсации сопротивления линии; 16—параллельные дроссели; 17—возбудитель на валу генератора; 18—вспомогательный
синхронный генератор для измерения угла 6; 19— возб дитель с отдельным двигателем; 20 — преобразователь напряжения возбудителя; 21 — компенсатор
активного сопротивления; 22—вспомогательный синхронный генератор повышенной частоты для питания размагничива ощих обмоток; 23 — регулятор воз-
буждения; 24 — установка для измерения вращающего момента; 25 — регулятор частоты и обменной мощности системы ВНИиЭ; 26 — модель разрядника;
27 — имитация дуги; 28 — имитация короны.
Бытовая, двигательная и ртутно-выпрямительные нагрузки на схеме не показаны*
20
Введение
рассеяния в цепях статора и ротора синхронных машин, ламповые рео-
статы, изображающие осветительную нагрузку, и выпрямительные устрой-
ства для питания электродвигателя турбогенератора и других установок
постоянного тока. Генераторы могут присоединяться к своим секциям
непосредственно (в этом случае на секции имеется напряжение, соот-
ветствующее напряжению генератора) или через повысительный транс-
форматор с различными коэффициентами трансформации, или трансфор-
матор с коэффициентом трансформации 1:1. Назначение последнего
разделить в электрическом отношении цепи генератора и модели электро-
передачи и создать отвечающие натуре условия для протекания токов
нулевой последовательности. Присоединение генераторов к шинам от-
дельных секций может выполняться не только через трансформаторы,
обмотки которых электрически не связаны между собой, но и через
автотрансформаторы, имеющие специальные обмотки для моделирования
условий протекания токов нулевой последовательности.
Все агрегаты и сама модель управляются со специального пульта
управления, на котором установлены также и контрольно-измерительные
приборы.
В схеме гидравлической части модели МЭИ предусматривается воз-
можность изменения напора в турбине и длины напорного трубопровода.
Это позволяет изменять влияние эффекта гидравлического удара и на-
клон относительных механических характеристик турбины в пределах,
необходимых для моделирования крупных турбин. Синхронные машины
(модель гидрогенератора, турбогенератора и синхронного компенсатора)
спроектированы и изготовлены с целью получения максимального при-
ближения к параметрам оригинала. Повышенные потери в цепях возбу-
ждения компенсируются путем применения компенсаторов активного
сопротивления. В цепи обмотки возбуждения включается также дрос-
сель, при помощи которого моделируется рассеяние ротора синхронного
генератора.
Предусмотрена возможность исследования работы разнообразных
регуляторов возбуждения. Регулирование частоты на модели осуще-
ствляется при помощи специального регулятора частоты и обменной
мощности, сконструированного во ВНИИЭ. Схема модели предусма-
тривает возможность присоединения этого регулятора к любому ге-
нератору, хотя обычно он подключается к эквивалентному турбогене-
ратору, изображающему приемную систему.
Модель линии передачи выполнена в виде цепочечной схемы из
12 звеньев. Напряжение линии выбрано равным 400 в. Предусмотрена
возможность регулировки индуктивностей и емкостей в звеньях для по-
лучения нужных параметров модели линии. Несколько заниженное на-
пряжение модели линии привело к тому, что сечение обмоточного про-
вода катушек индуктивности получилось значительным. Это неудобно
при изготовлении и эксплуатации модели. В простейших случаях, не
требующих тщательного изучения несимметричных режимов, индуктив-
ности связи между фазами не создаются. Для моделирования неполно-
фазных режимов в модели линии имеются секционироганные катушки
индуктивности, позволяющие создавать взаимоиндукцию между фазами.
Отдельные участки цепей этих линий передачи могут отключаться при
исследовании аварийных процессов.
Установка продольной емкостной компенсации моделируется трех
фазной батареей емкостей, допускающей регулирование степени компен-
сации от 20 до 90%. Действие выключателей имитируется контакторами
£ 3. Историческое развитие электродинамических моделей 21
КТ-32, которые в сочетании с реле времени обеспечивают нужную вы-
держку короткого замыкания и время отключения аварийного участка.
Модель автоматизирована таким образом, что имитируется заданный
вид аварии и действие выключающей аппаратуры с одновременной за-
писью интересующих при исследовании величин на осциллограф.
На модели МЭИ были проведены большие научно-исследовательские
работы по исследованию устойчивости дальних электропередач, регуля-
торов возбуждения сильного действия и современных быстродействую-
щих релейных защит.
Модель НИИПТ
Электродинамическая модель НИИПТ была построена в 1953—
1955 гг. на основе имеющегося опыта создания моделей в ИЭМ и
в МЭИ (Шур, 1953). Оснащение модели оборудованием и принципы
ее построения аналогичны моделям ИЭМ и МЭИ. Мощность модели
такова, что 1 ква модели соответствует 100 мгва оригинала. Напря-
жение модельных генераторов 230 в. Напряжение линии 1200 в.
Первичные двигатели моделируются при помощи двигателей посто-
янного тока, аналогично модели ИЭМ. Модельные синхронные генера-
торы по своему выполнению аналогичны модельным синхронным гене-
раторам ИЭМ и МЭИ. Модельные силовые трансформаторы имеются
нескольких типов и обеспечивают широкую регулировку рассеяния и
коэффициентов трансформации. Модельные генераторы и трансформа-
торы установлены в двух машинных залах в крайних частях помещения.
В средней части здания расположен пульт управления и модели линий
электропередачи. Последние выполнены в виде цепочек, составленных
из отдельных блоков, представляющих звенья искусственной линии. Все
искусственные линии и их отдельные участки выведены на общий рас-
пределительный щит, на котором производится сборка исследуемой
схемы энергосистемы. Пульт управления выполнен на стандартных па-
нелях. Воспроизведение аварийных процессов автоматизировано, одно-
временно производится запись интересующих при исследовании вели-
чин на осциллографе.
На электродинамической модели НИИПТ были проведены большие
научно-исследовательские работы по исследованию устойчивости, ис-
следованию промежуточных синхронных компенсаторов и т. д. Кроме
главной электродинамической модели, в НИИПТ имеется модель линии
электропередачи в виде цепочечной схемы, специально предназначенная
для исследований внутренних перенапряжений в дальних электропереда-
чах. Линия оборудована шунтирующими дросселями, воспроизводящими
характеристики реальных дросселей и имеющих пониженные потери,
а также установками продольной компенсации, обеспечивающими широкую
регулировку степени продольной компенсации. В этой модели также
предусмотрено моделирование частотных характеристик сопротивлений
нулевой последовательности, осуществляемое специальным устройством
нулевого провода модели, а также моделирование потерь на корону.
На рис. 2 показана схема ячейки, моделирующей параметры нулевой
последовательности. На рис. 3 показана схема ячейки для моделирова-
ния явления короны.
Кроме этих установок, в НИИПТ имеется модель для исследования
колебательных процессов и внутренних перенапряжений в передаче по-
стоянного тока. Она состоит из нескольких стендов, на которых вос-
произведены преобразовательные подстанции и линия передачи (в ка-
22
Введени е
бельном и воздушном исполнении). Вентили имитируются высоковольт-
ными тиратронами. Аппараты защиты от перенапряжений, вентильные
разрядники, защитные промежутки воспроизводятся ламповыми схемами.
На модели возможно широкое варьирование схем преобразовательных
подстанций, собственных емкостей схемы и оборудования, индуктивно-
стей и других параметров схемы преобразования. Модель снабжена
управляющей релейно-тиратронной схемой, при помощи которой вызы-
ваются заданные переходные и аварийные процессы и производится
управление осциллографами. Модель передачи постоянного тока для
исследования устройств управ-
ления регулирования и защиты
позволяет воспроизводить
основные установившиеся и
переходные процессы, возни-
кающие в схемах преобразова-
телей и на линии передачи по-
Рис. 3. Схема модели короны (НИИПТ).
В числителе — 100%-я корона; в знаменателе — 6О°/о-я
корона.
Рис. 2. Схема ячейки, моделиру-
ющей частотные зависимости ну-
левой последовательности
(НИИПТ).
стоянного тока. Выпрямитель и инвертор модели имеют все устройства
сеточного управления, регулирования и сеточной защиты, которыми
оснащаются реальные передачи постоянного тока.
Модель рассчитана на возможность включения в ее схему регули-
рующих и защитных устройств, изготовленных для реальных передач.
Это позволяет производить их испытания в условиях, наиболее приб-
лиженных к реальным.
Модель ВЭНИ АН Армянской ССР
В 1950—1952 гг. под руководством акад. И. В. Егиазарова (1953а,б)
в Водноэнергетическом институте АН Армянской ССР была сооружена
электродинамическая модель. Эта модель предназначалась для иссле-
дований системных вопросов в Армянской энергосистеме, а также и для
решения более общих задач устойчивости и автоматического регулиро-
вания в мощных энергосистемах. Большое внимание в этой модели было
обращено на моделирование гидротурбин. Основная схема модели по-
казана на рис. 4. Модель имеет три агрегата мощностью около 5 квт,
моделирующие гидроэлектростанции. Первый агрегат состоит из син-
хронного генератора с успокоительной обмотки и электродвигателя, ха-
рактеристики которого могут быть сделаны подобными характеристи-
кам гидротурбин разных типов. Второй агрегат включает синхронный
£ 3. Историческое развитие электродинамических моделей
23
генератор без демпфер-
ной обмотки и анало-
гичный первичный дви-
гатель. Синхронный ге-
нератор третьего агре-
гата имеет демпфиру-
ющий воротник на по-
люсе и приводится во
вращение водяной спи-
ральной турбиной. Агре-
гаты, моделирующие
станции, снабжены ма-
ховиками с возможно-
стью широкого измене-
ния постоянной инер-
ции (сменные диски).
Диапазон возможных
изменений постоянной
инерции составляет от
5 до 20 сек.
Один из модельных
агрегатов снабжен
обычным автоматиче-
ским регулятором ско-
рости с масляным изод-
ромным сервомеханиз-
мом. Автоматический
регулятор непосредст-
венно воздействует на
реостат, последова-
тельно соединенный с
первичным двигателем —
электромотором. Этим
реостатом характери-
стики электродвигателя
приводятся к характе-
ристике турбины и осу-
ществляется автомати-
ческое регулирование
открытия турбины.
Остальные два агре-
гата снабжены элект-
ронно-электромеханиче-
скими автоматическими
регуляторами скорости.
В модели используются
регулятор частоты си-
стемы Острого и дру-
гие регуляторы частоты.
Пятикратный запас
по мощности у модель-
ных генераторов обе-
спечивает малые отно-
Рис. 4. Схема модели ВЭНИ АН Армянской ССР.
печная нагрузка; 2 — ртутно-выпрямительная нагрузка; 3— осветительная нагрузка; 4 — двигательная нагрузка.
24
Введение
сительные величины активных сопротивлений цепей ротора и ста-
тора. Кроме того, эти генераторы снабжены компенсаторами активного
сопротивления в цепях ротора и статора (КГО-45, КГО-85 и КГТ-85).
Модель линии электропередачи представлена соответствующим на-
бором индуктивностей, сопротивлений и емкостей. В дальнейшем эту
модель предполагается развить. Состав нагрузки соответствует Армян-
ской гидроэнергосистеме.
Моделированы следующие виды нагрузки: осветительная, асинхрон-
ная с моментом сопротивления на валу, пропорциональным скорости п,
асинхронная с моментом сопротивления, пропорциональным па (где а
может варьироваться), выпрямительная и печная. Последние виды на-
грузки воспроизводятся соответственно: трехфазным ртутным выпрями-
телем и сопротивлениями индуктивного характера.
Работниками Водоэнергетического института АН Армянской ССР
разработано и изготовлено несколько специальных приборов для изме-
рений в электродинамической модели.
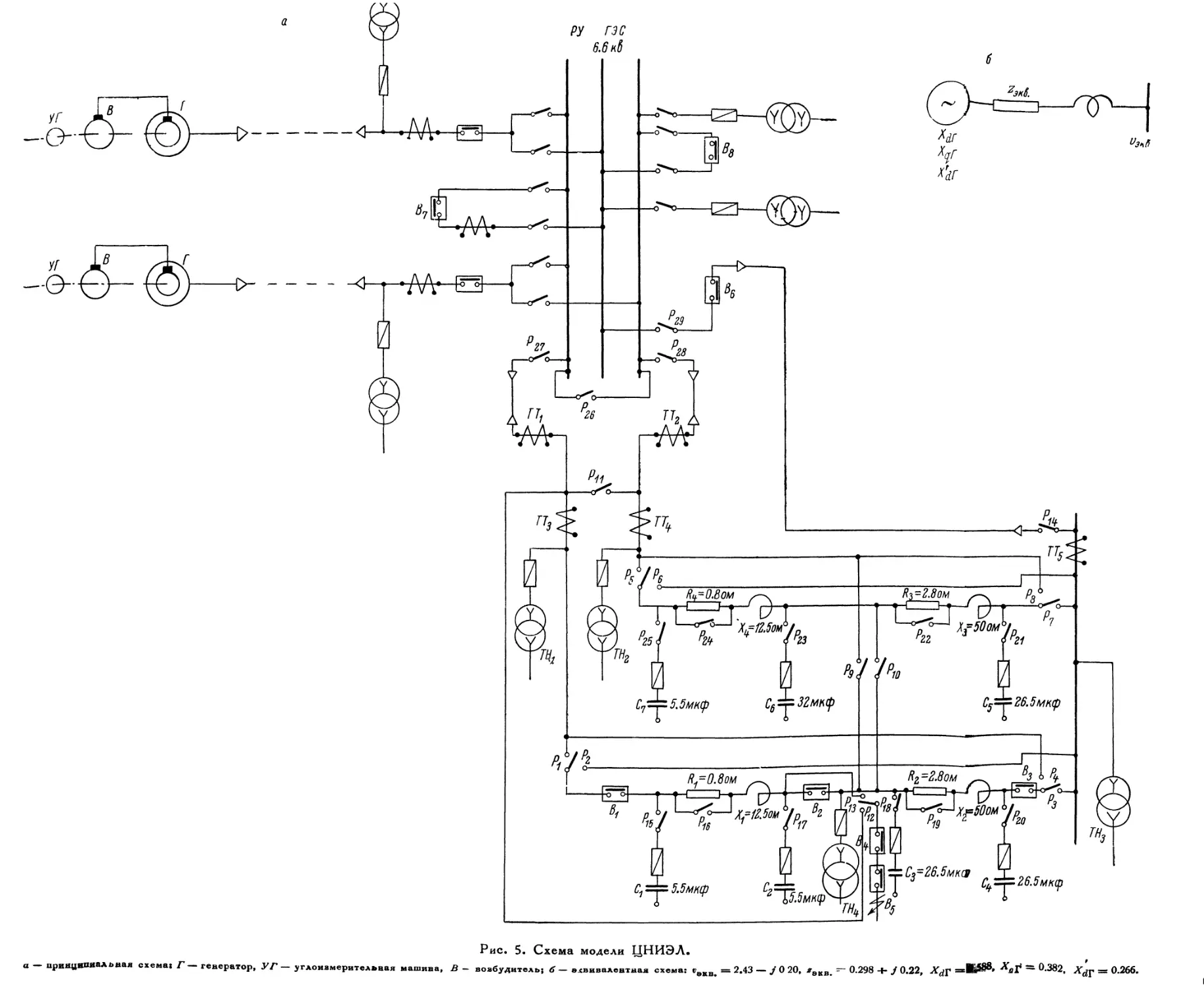
Модель ЦНИЭЛ
К 1954 г. ЦНИЭЛ (в настоящее время Всесоюзный научно-
исследовательский институт электроэнергетики) была сооружена на
одной из гидроэлектростанций канала им. Москвы модель линии электро-
передачи 400 кв (Труды ЦНИЭЛ, 1954). Для всех ее элементов было
использовано стандартное оборудование. Эта модель уже выходит за
пределы лабораторной и представляет собой промышленную установку.
Значительная мощность привела к очень большим габаритам отдельных
элементов и, конечно, затрудняла проведение исследовательских работ
на модели. Общая схема ее показана на рис. 5. В качестве генерато-
ров, моделирующих эквивалентный генератор удаленной ГЭС, исполь-
зованы, установленные на станции, гидрогенераторы без успокоительных
обмоток завода „Электросила" типа СВ-425/30—48:1360 квт, 1700 ква,
66ОО±5°/о в, 149 a, cos ф = 0.8, 125 об./мин. с возбудителями типа
В-112/15-8.50 квт, 115 в, расположенными на одном валу с гене-
раторами. Генераторы имеют следующие параметры: х^ = 0.71, xf/ = 0.46,
xd — 0.255, Гмех. = 6 сек., 7^= 1.74 сек.
Основная схема модели предполагает работу одного из двух уста-
новленных на станции генераторов через две цепи модели дальней ли-
нии передачи на шины 6.6 кв Мосэнерго. Для исследования условий
параллельной работы генераторов станции, связанной с энергосистемой
дальней линией передачи, предусмотрена возможность работы двух ге-
нераторов через модель линии.
На модели воспроизводится двухцепная линия передачи 400 кв дли-
ной 1100 км с промежуточным переключательным пунктом, делящим ли-
нию передачи на участки 200 и 900 км. Линия передачи на каждом
участке представлена П-образной схемой замещения. Номинальное на-
пряжение модели линии — 6.6 кв. Индуктивные последовательные со-
противления линии учитывают сопротивления рассеяния трансформаторов
передающего и приемного концов. Для имитации индуктивности линии
использованы четыре трехфазных масляных реактора мощностью 9000 ква
при 10 кв с сопротивлением в заводском исполнении 12.5 ом на фазу.
Два реактора были использованы без переделки для участков линии
длиной 200 км. Другие два реактора были пересоединены таким образом,
Рис. 5. Схема модели ЦНИЭЛ.
принципиальная схема: Г — генератор, У Г — углоизмерителнная машина, В - возбудитель; б — эквивалентная схема.- гвкв> = 2.43 — / О 20, *SKB> ~ 0.298 Ч- j 0.22, Xd? Xat ~ °-382, x’dy = 0.266.
§ 3. И сторическое развитие электродинамических моделей
25
чтобы их сопротивление было равно 50 ом на фазу. Эти реакторы были
использованы для схем замещения участков линии длиной 800 км.
Для имитации емкости линии применены статические конденсаторы
КМ-6—10—1. Конденсаторы собраны в группы по 6.5, 26.5 и 32 мкф,
которые через предохранители и разъединители подключены в соответ-
ствующих точках линии. Параллельно каждой группе конденсаторов
присоединены трансформаторы напряжения, обеспечивающие разряд кон-
денсаторов при отключенных разъединителях.
Активные сопротивления собраны из стандартных ящиков ЯС-190 по
0.4 ом. В случае надобности активные сопротивления могут быть шун-
тированы разъединителями. Коммутационная и измерительная аппаратура
расположена в отдельном распределительном устройстве, состоящем из
30 ячеек. Здесь расположены: пять масляных выключателей ВМГ-133
с дистанционным управлением, разъединители с приводами, измеритель-
ные трансформаторы тока и напряжения.
Щит управления модели расположен в отдельном от распределитель-
ного устройства помещении. На щите находится панель управления вы-
ключателями, оборудованная щитовыми приборами, панель возбуждения
и панель питания переменным током 220 в и постоянным током 110 в.
Два специальных стенда предназначены для размещения и присоеди-
нения лабораторных измерительных приборов. На щите устанавливаются
также испытуемые регуляторы возбуждения, осциллографы и устройство
для регулировки длительности коротких замыканий. Щит управления
модели, распределительное устройство, статические конденсаторы и ак-
тивные сопротивления расположены в здании ГЭС и связаны с реак-
торами, установленными на открытой площадке с РУ ГЭС и машинным
залом станции, кабелями.
Недостатком модели является ее громоздкость и трудоемкость из-
менения параметров передачи. Параметры генераторов модели лишь
приближенно соответствуют параметрам мощных синхронных генера-
торов.
Модель Института электротехники АН УССР
Для исследования регулирования возбуждения мощных синхронных
генераторов Институтом электротехники АН УССР к 1952 г. была
сооружена опытная промышленная моделирующая установка на ГЭС I
Киевэнерго (Цукерник, Крутикова, 1952).
Моделирующая установка аналогична установке ЦНИЭЛ и по-
добным устаногкам в США. Модель состояла из турбогенератора
мощностью 3500 квт (с выступающими полюсами), двух повышающих
трансформаторов 2 X 1800 ква, при помощи которых турбогенератор
присоединялся к шинам 10 кв районной подстанции через два последо-
вательно включенных реактора. Подстанция была связана с мощной
станцией системы Киевэнерго тремя кабельными реакторами 3°/0, 300 а,
10.5 кв.
Один из реакторов мог быть зашунтирован масляным выключателем;
при такой схеме моделировался нормальный режим электропередачи.
При размыкании масляного выключателя, шунтирующего реактор, ими-
тировался послеаварийный режим электропередачи с увеличенной реак-
тивностью линии.
Короткие замыкания последовательно осуществлялись двумя масля-
ными выключателями. Один из них предназначался для включения
26
Введение
короткого замыкания, другой — для отключения короткого замыкания.
Эта схема позволяла получать малые выдержки времени (0.1—0.15 сек.),
несмотря на большое собственное время работы выключателей.
Условия работы модели дальней передачи и ее связь с мощной
системой близко подходили к условиям работы электропередачи Куйбы-
шев—Москва. Так, нагрузка шин районной подстанции 10.5 кв отобра-
жала нагрузку Московской системы. Индуктивность реакторов кабелей
связи с мощной системой имитировала реактивное сопротивление гене-
раторных станций Московской энергосистемы. Параметры модели полу-
чились достаточно близкими к параметрам электропередачи Куйбы-
шев—Москва.
На модели были установлены регуляторы возбуждения, работа кото-
рых исследовалась. Модель оснащалась комплектом датчиков, позволяю-
щих измерять и осциллографировать все величины, представляющие
интерес при исследованиях статической и динамической устойчивости.
Так, например, имелся тахогенератор для измерения скорости вращения
и углоизмерительная машина для измерения угла между э. д. с. генера-
тора и каким-либо напряжением сети. Производилось также измерение
и осциллографирование тока, напряжения и мощности синхронного гене-
ратора. На модели были проведены исследования регулирования воз-
буждения и устойчивости. Недостатком модели являлись ее громозд-
кость и неудобство экспериментирования.
Современные электродинамические модели за рубежом
Модель Научно-исследовательского центра энергетического объединения Франции
В 1950 г. во Франции под руководством Ф. Кайена и М. Робера
(Robert, 1950, 1954) была создана электродинамическая модель. Эта
модель имеет малую в сравнении с моделями, существующими в СССР,
мощность синхронных генераторов и всех других элементов. Так, мо-
дели синхронных генераторов имеют номинальную мощность 1.5—2.5 ква.
Такая малая мощность позволяет создать в сравнительно небольшом
помещении модель сложной энергосистемы со многими машинами, так
как элементы модели получаются сравнительно небольшими, переклю-
чения в такой модели также осуществляются легко. Однако на этой
модели нельзя производить испытания аппаратуры релейной защиты и
системной автоматики в заводском исполнении, так как мощность, по-
требляемая этими устройствами, уже сравнима с мощностью модели
и может исказить процессы, происходящие в ней. Кроме того, получе-
ние нужных параметров модельных синхронных генераторов связано с
большими трудностями, чем в случае моделей 15—30 ква. Модельный
синхронный генератор выполнен явнополюсным. Оригинальная форма
полюсов позволяет увеличить рассеяние обмотки возбуждения. Зазор
между статором и ротором выбран минимальным, что позволяет полу-
чить постоянную времени обмотки возбуждения около 1.5 сек.
Дальнейшее увеличение постоянной времени в 5—10 раз произво-
дится при помощи „регулятора постоянной времени" (компенсатора
активного сопротивления, введенного в цепь возбуждения). Регулятор
постоянной времени выполнен в виде тиратронного выпрямителя, упра-
вляемого по специальной схеме.
Вместо явнополюсного ротора в каждый модельный генератор может
быть вставлен запасной неявнополюсный ротор (для моделирования
$ 3. Историческое развитие электродинамических моделей
27
турбогенераторов) или явнополюсный ротор с другим зазором (для из-
менения xad\ Имеется опытный ротор с поперечным возбуждением. Для
изменения постоянной инерции модельных генераторов применяются
сменные маховики. Для изменения параметров генератора также приме-
няются сменные короткозамкнутые сегменты и кольца успокоительных
обмоток, а в цепь обмотки статора вводятся добавочные индуктивные
сопротивления. Двигатель постоянного тока с независимым возбужде-
нием имитирует турбину. Якорь двигателя получает питание через до-
полнительное сопротивление от тиратронного выпрямителя с сеточным
управлением. Электронное устройство, имитирующее регулятор скорости,
воздействует на тиратронный выпрямитель и позволяет регулировать оста-
точную неравномерность хода в пределах 1—5°/0, время закрытия — от
2 до 6 сек.
Возбудитель изображается электрической схемой из емкостей и со-
противлений с постоянной времени 0.1—10 сек. Регулятор возбуждения
воздействует на переменное сопротивление в этой схеме. Модель линии
передачи состоит из 84 ячеек. Имеется несколько моделей трансфор-
маторов. Достоинством модели является большое количество машин-мо-
делей. Это позволяет производить исследования сложных электрических
систем.
Малая мощность модели, однако, как уже указывалось, затрудняет
исследования на модели достаточно мощных устройств системной авто-
матики.
Модель Венской высшей технической школы
Сооружение модели было начато в 1949 г. В настоящее время
модель состоит из трех машинных агрегатов мощностью 6, 4 и 3 квт,
трансформаторов, искусственных линий и модели нагрузки (Hochrainer,
1956). В трансформаторах моделирована только реактивность рассеяния,
что осуществляется путем включения специального реактора. Искус-
ственные линии выполнены обычным способом. Предусмотрено модели-
рование 110 и 220 кв линий. Нагрузка воспроизводится активными и
индуктивными сопротивлениями. Предусмотрена специальная клеммная
доска для переключения модели. Каждый двигатель постоянного тока
имеет обмотку возбуждения, разделенную на две части, одна из кото-
рых управляется специальным электронным устройством (открытие тур-
бины). Управляемая часть обмотки включена последовательно с четырьмя
мощными пентодами, которые соединены параллельно. Благодаря
высокому внутреннему сопротивлению пентодов удается значительно
уменьшить постоянную времени обмотки. Таким образом, подавая раз-
личные сигналы, можно получать быструю отзывчивость на них агре-
гата. Это позволяет воспроизводить различные свойства генератора
(демпфирование, инерционность) не при помощи параметров самого
генератора, как это обычно делается, а воздействием на его первичный
двигатель. Таким образом, свойства генератора могут удобно изменяться
в широких пределах.
Модель Венской высшей технической школы снабжена различными
оригинальными измерительными приборами, при помощи которых могут
быть измерены все интересующие нас при исследованиях статической
и динамической устойчивости величины.
Основное внимание в модели обращено на моделирование первичных
двигателей и их регуляторов. На модели могут быть также исследованы
короткие замыкания в энергосистеме.
28
Введение
Модель Мельбурнского университета (Австралия)
В 1955 г. было опубликовано сообщение об электродинамической
модели Мельбурнского университета (Mackley, 1955). Электродинамичес-
кая модель предназначается для исследования устойчивости мощных
энергосистем. Предполагается исследовать влияние параметров синхрон-
ных машин, регулирования возбуждения, регулирования первичных дви-
гателей на устойчивость энергосистем, содержащих большое количество
машин и связанных длинными линиями электропередачи.
В настоящее время сооружена модель, состоящая из двух синхрон-
ных машин, связанных через некоторую индуктивность. Базисная мощ-
ность модели — 5 ква, базисное напряжение — 200 в. Модельные генера-
торы выполнены четырехполюсными, с явно выраженными полюсами.
Номинальные данные:
Рн = 5 ква, £7н = 200 в, п— 1500 об./мин., /=50 гц.
Модельные синхронные генераторы имеют следующие параметры
(в относительных единицах): х^ = 1.09, х^ = 0.64, х^ = 0.27, х2 = 0.42,
х0 = 0.47, га = 0.032.
Постоянные времени модельного синхронного генератора имеют зна-
чения: 7^о = О.47 сек., Та = 0.11 сек. Предусмотрено увеличение постоян-
ных времени модельных машин. Для этого используется электромашин-
ный усилитель, возбуждение которого регулируется при помощи обрат-
ной связи таким образом, что напряжение амплидинного генератора
пропорционально току в цепи возбуждения модельного синхронного
генератора, чем обеспечивается увеличение постоянных времени син-
хронного генератора. Постоянные времени таким способом увеличи-
ваются до значений 7^0 = 13 сек., 7d = 3 сек.
Инерционные постоянные имеют следующее значение: для модели
№ 1 Hj = 1.'5 сек., для модели № 2 Hj —1.0 сек. Инерционные по-
стоянные могут быть увеличены при помощи сменных маховиков до зна-
чений: для модели №1 — 6.5 сек., для модели № 2 — 6.0 сек.
Для измерения мгновенного значения угла между двумя машинами
применяется углоизмерительная схема, которая измеряет фазовый угол
между э. д. с двух вспомогательных синхронных генераторов, сидящих
на одном валу с модельными синхронными генераторами.
Для имитации коротких замыканий применяется устройство с вра-
щающимся диском, который, замыкая и размыкая контакты, производит
включение и отключение контакторов, имитирующих короткое замыкание
с необходимыми выдержками времени.
Каждая машина имеет регулятор возбуждения, что позволяет про-
изводить исследования устойчивости с учетом регулирования возбужде-
ния. Предусматривается модель одноцепной линии электропередачи
на 74 волновой длины. Моделируемая линия имеет следующие парамет-
ры: х1 = 0.41 ом/км, Ci = 0.0141 мкф/км, гх = 0.08 ом/км, х0= 1.375 ом/км,
Со = 0.0087 мкф/км, г0= 0.228 ом/км.
Модель линии составляется из четырех трехфазных ячеек, соединен-
ных по Т-образной схеме. В ячейках предусмотрено индуктивно-ак-
тивное сопротивление в нулевом проводе, обеспечивающее необходимое
сопротивление ячейки для токов нулевой последовательности. Емкость
ячейки разделена на две части, соответственно моделирующих емкость
проводов между собой и емкости проводов на землю. Катушки индук-
тивности модели линии передачи выполнены со стальным сердечником,
£ 3. Историческое развитие электродинамических моделей
29
при этом предусматривается такой зазор, чтобы индуктивность катушек
изменялась незначительно при увеличении тока в них до двухкратного
по отношению к номинальному току модельного синхронного генератора.
Добротность катушек индуктивности имеет значение 22.
Дальнейшее развитие модели в части увеличения числа модельных
агрегатов, улучшения моделирования первичных двигателей, увеличения
числа ячеек моделей линий электропередачи значительно увеличит воз-
можности модели в части исследования устойчивости мощных энерго-
систем.
Глава I
ЭЛЕКТРОДИНАМИЧЕСКАЯ МОДЕЛЬ ИНСТИТУТА
ЭЛЕКТРОМЕХАНИКИ АКАДЕМИИ НАУК СССР (ИЭМ)
Как уже было отмечено выше, электродинамическое моделирование
как метод научного исследования проблем энергетики начало применяться
в довоенное время (1938—1941 гг.) и получило дальнейшее развитие
в послевоенный период. Однако элементы электродинамических моде-
лей в первоначальном исполнении имели ряд существенных недостатков.
Поэтому при разработке электродинамической модели ИЭМ потребова-
лись многочисленные исследовательские и расчетные работы, которые
проводились для всех основных элементов модели (электрические ма-
шины, трансформаторы, линии передачи, первичные двигатели, нагрузка
и т. д.). В результате этих работ к настоящему времени создана одна
из наиболее совершенных в мировой практике электродинамическая
модель, укомплектованная современным оборудованием, аппаратурой,
регуляторами, измерительными и регистрирующими приборами.
Электродинамическая модель ИЭМ уже в том виде, в каком она
осуществлена к концу 1957 г., позволяет проводить исследования про-
блем, относящихся не только к объединенной энергосистеме Европейской
части СССР, но и Сибири. В настоящее время проводятся работы по
совершенствованию элементов модели и оснащению ее новыми модель-
ными установками.
В связи с тем, что электродинамическая модель предназначена для
исследования электромеханических и электромагнитных процессов, про-
исходящих в энергосистемах, она должна включать модели всех основ-
ных энергосистем. При создании ее элементов не всегда следует
применять только физическое моделирование. Некоторые элементы це-
лесообразно выполнять в виде моделей-аналогов. Поэтому такие эле-
менты, как электрические машины, трансформаторы, ионные преобра-
зователи и др., являются физическими моделями, а первичные двига-
тели (турбины), их регуляторы скорости, механические нагрузки электро-
приводов — моделями-аналогами. Что касается устройств системной
автоматики, то выбранная мощность модельных агрегатов позволяет
использовать натурные образцы этих устройств.
Ниже рассматриваются основные элементы, входящие в состав
электродинамической модели ИЭМ.
§ 1. Модельные синхронные генераторы
К концу 1957 г. ИЭМ располагал 13 агрегатами с модельными гид-
ро- и турбогенераторами мощностью 7.5, 12.5, 18.7 и 30 ква. Модель-
ный агрегат состоит из синхронного генератора, электродвигателя по-
§ 1. Модельные синхронные генераторы
31
стоянного тока, углоизмерительного генератора, тахогенератора и инер-
ционных дисков (рис. 6). Между синхронным генератором и двигателем
Рис. 6. Общий вид модельного агрегата.
1 — углоизмерительный генератор с поворотг ым статором; 2 — инерционные диски;
3 — модельный гидро- или турбогенератор; 4 — промежуточ' ый вал, вместо которого встав-
ляется прибор для записи крутящих моментов; 5 — двигатель постоянного тока (ПН-290,
ПН-400 илн ПН-550); 6 — возбудитель; 7 — асинхронный двигатель с фазным ротором для
специальных измерений. Тахогенератор находится слева от углоизмерительного генератора
(на рисунке не виден).
МТ
р
ТТ
к
Рис. 7. Схема силовых
цепей модельного син-
хронного генератора.
—
имеется промежуточный вал, вместо которого может устанавливаться
устройство для измерения и регистрации вращающего момента.
Параметры и характеристики большей части
модельных синхронных генераторов могут из-
меняться в широких пределах. Это достигается
с помощью изменения схемы соединения ветвей
обмотки статора на щитке выводов, применения
роторов с разными диаметрами для получения
различных воздушных зазоров, изменения числа
инерционных дисков, выбора различных значений
номинальной мощности и напряжения. Кроме
того, для одного и того же статора имеются
роторы в явнополюсном и неявнополюсном испол-
нениях, что позволяет моделировать как гид-
ро-, так и турбогенераторы. Для возможности
получения вращения магнитного поля рото-
ров некоторые из них имеют одинаковые об-
мотки возбуждения в продольной и поперечной
осях.
Все модельные синхронные генераторы имеют
одинаковые схемы как силовых цепей, так и
цепей управления и измерений. Схема силовых
цепей модельного синхронного генератора при-
ведена на рис. 7.
Модельный генератор МГ подключен к мо-
дельному трансформатору МТ с помощью маг-
нитной станции типа СНЛ-5103, имеющей макси-
мальную защиту РМ, контактор К и рубильник
Р. В этой же цепи находятся трансформаторы тока ТТ для измерения
мощности и тока генератора. Кроме того, для уменьшения сопроти-
вления соединительных проводов при коротких замыканиях моде-
32
Глава I. Электродинамическая модель ИЭМ АН СССР
льный генератор соединен с модельным трансформатором с помощью
шунтирующего кабеля и контактора Кш. Цепи управления контак-
тора /Сш и магнитной станции выведены на щит управления. При
записи показаний приборов контактор Кш выключен, при осуще-
Рис. 8. Панель управления модельным синхронным
генератором.
ствлении коротких замы-
каний на линии он вклю-
чен.
С помощью перекидных
перемычек на щитке вы-
водов модельного генера-
тора обмотка статора
может быть либо соеди-
нена в звезду, либо через
измерительные трансфор-
маторы тока ТТР вклю-
чена на компенсатор
активного сопротивления
цепи статора Г КГ. Тран-
сформаторы тока ТТр ис-
пользуются для целей
регулирования возбужде-
ния. В случае необходи-
мости использования
трансформаторов ТТр при
работе без ТКГ обмотка
статора соединяется в
звезду с помощью пере-
мычки на трансформа-
торах ТТр.
Для уменьшения со-
противления соединитель-
ных проводов модельные
трансформаторы разме-
щены вблизи от генера-
торов. Монтаж силовых
цепей выполнен кабелями
большого сечения (140 мм2
на фазу).
Каждый модельный
генератор имеет панель
управления, на которую
выведены цепи управле-
ния, измерения и сигна-
лизации. Пуск агрегатов,
синхронизация, а также
оперативные переклю-
чения в схемах измерения и управления производятся на панели при
помощи кнопок и универсальных переключателей типа УП-5100.
На панелях управления размещены щитовые приборы, включенные
в основные цепи модельных агрегатов. Измерения при проведении ис-
следований производятся с помощью точных приборов (класс 0.5), раз-
мещенных на столах. Синхронизация модельных генераторов осуществ-
ляется по щитовому углоизмерительному прибору, в качестве которого
3. Компенсаторы активных сопротивлений
33
использован дифференциальный сельсин, работающий в режиме двойного
питания. Стрелка, укрепленная на оси сельсина, показывает сдвиг по
фазе между напряжениями, подведенными к его ротору и статору. При
исследованиях устойчивости обычно измеряется полный угол электро-
передачи. Для этого на сельсин подаются напряжения углоизмеритель-
ного генератора и приемной энергосистемы. Этот прибор позволяет из-
мерять фазовый угол и визуально наблюдать качания генераторов в пе-
реходных режимах.
Общий вид панели управления модельным генератором приведен
на рис. 8.
§ 2. Модельные синхронные компенсаторы
В соответствии с использованием синхронных компенсаторов в энер-
госистемах в ИЭМ имеются внутрисистемные и промежуточные подпор-
ные модельные синхронные компенсаторы. В моделях приемных энер-
госистем в качестве синхронных компенсаторов используются модель-
ные генераторы соответствующих мощностей. Что касается модельных
подпорных синхронных компенсаторов, то они имеются как нормального,
так и специального исполнения. Ввиду того, что мощность подпорных
синхронных компенсаторов в несколько раз меньше передаваемой по
линии мощности, их модели выполнены на 3—6 ква. Это позволило
использовать для их изготовления серийные синхронные машины габа-
ритной мощности 25 ква.
Специальное исполнение отличается от нормального конструкцией
ротора. В машинах специального исполнения демпферная система вы-
полнена так, что она действует в основном в поперечной оси и имеет
повышенную постоянную времени. Это позволяет с помощью последо-
вательных статических конденсаторов компенсировать большую часть
переходного индуктивного сопротивления x'd подпорных синхронных ком-
пенсаторов, что повышает их эффективность.
Для простоты и удобства в работе схемы силовых цепей модельных
синхронных компенсаторов, цепей возбуждения, управления и измере-
ний выполнены аналогично соответствующим схемам модельных синхрон-
ных генераторов. Модельные синхронные компенсаторы и генераторы
имеют также одинаковые панели управления.
Пуск модельных синхронных компенсаторов может осуществляться
как по частотному методу, так и с помощью вспомогательного двига-
теля постоянного тока. Этот двигатель в случае необходимости может
быть использован также для компенсации части потерь холостого хода
агрегата. В агрегате имеется, кроме того, углоизмерительный генера-
тор, который может быть использован также и для целей регулиро-
вания.
§ 3. Компенсаторы активных сопротивлений
Несмотря на то, что габаритная мощность модельных синхронных
машин обычно в несколько раз превышает их номинальную мощность,
получение необходимых значений активных сопротивлений цепей ста-
тора и особенно ротора связано со значительными трудностями. Поэ-
тому в электродинамических моделях, предназначенных для иссле-
дований устойчивости энергосистем, применяются компенсаторы актив-
ных сопротивлений, представляющие трехфазные и однофазные коллек-
торные генераторы с последовательным возбуждением. Эти генераторы
имеют обмотки возбуждения с большим количеством выводов и приво-
34
Глава I. Электродинамическая модель ИЭМ АН СССР
дятся во вращение двигателями постоянного тока. Регулирование сте-
пени компенсации в широких пределах осуществляется с помощью
переключения обмоток возбуждения и изменения скорости вращения.
В электродинамической модели ИЭМ применяются компенсаторы
активных сопротивлений нескольких типов. Однофазными коллектор-
ными генераторами (ОКГ), применяемыми для компенсации активных
сопротивлений роторных цепей, снабжены все модельные синхронные
генераторы и компенсаторы. В зависимости от параметров цепи воз-
буждения компенсаторы выполнены на различные напряжения и диапа-
зоны компенсируемых сопротивлений.
В связи с тем, что основные модельные синхронные генераторы
имеют малые активные сопротивления статорных цепей, обычно не тре-
буется применения трехфазных коллекторных генераторов (ТКГ). Эти
машины используются в ИЭМ в основном в схемах модельных синхрон-
ных компенсаторов, а также при исследовании некоторых вопросов,
связанных с необходимостью изменения активного сопротивления ста-
торных обмоток синхронных генераторов.
Компенсаторы активных сопротивлений выполнены на базе серийных
машин постоянного тока типа ПН. Однако статоры этих машин неяв-
нополюсные, аналогично тому, как это делается в асинхронных дви-
гателях. В зависимости от вида использованных машин постоянного
тока имеются следующие типы компенсаторов активных сопротивлений:
1) однофазные — ОКГ-17.5, ОКГ-45, ОКГ-85; 2) трехфазные — ТКГ-17.5,
ТКГ-45, ТКГ-85 и ТКГ-145.
§ 4. Системы возбуждения модельных синхронных машин
Синхронные генераторы и компенсаторы в зависимости от условий
их работы могут иметь нормальные или быстродействующие возбуди-
тельные системы. В соответствии с этим имеются специальные модель-
Рис. 9. Схема возбуждения мо-
дельного синхронного генератора.
ОВ — основной возбудитель; Б — вольто-
добавочный возбудитель (б /стер); С*"1В —
система ионного возбуждения; ОКР—ком-
пенсатор активного сопротивления цепи
возбуждения.
ные возбудители. Нормальные и быстро-
действующие электромашинные системы
возбуждения выполнены на основе серий-
ных машин постоянного тока типа ПН.
Необходимые величины постоянных вре-
мени их обмоток возбуждения достига-
ются за счет увеличения количества меди
на полюсах, уменьшения воздушного
зазора, а в некоторых случаях — вклю-
чения нелинейных реакторов с повышен-
ной добротностью.
Модельные возбудители, предназначен-
ные для работы с устройствами компаун-
дирования и коррекции по напряжению,
имеют несколько обмоток возбуждения
с повышенными постоянными времени.
Модели быстродействующих электрома-
шинных систем возбуждения имеют по
два возбудителя: опорный и вольтодоба-
вочный (бустер).
В моделях систем независимого ионного возбуждения и ионного само-
возбуждения применяются специальные вспомогательные синхронные
генераторы и трансформаторы, а в качестве вентилей — тиратроны.
§ 5. Автоматические регуляторы возбуждения
3S
Каждый модельный синхронный генератор имеет быстродействующую
электромашинную (бустерную) систему возбуждения и, кроме того, к нему
может быть подключена ионная система возбуждения (рис. 9). Обмотки
возбуждения и якорные цепи всех модельных возбудителей и компенса-
торов активного сопротивления ОКГ, а также обмотки возбуждения всех
модельных синхронных генераторов выведены на пульт управления. Это
позволяет быстро включить любой из модельных возбудителей в цепь воз-
буждения любого модельного генератора. Модельные возбудители (МВ)
приводятся во вращение двигателями постоянного тока, скорость кото-
рых регулируется со щита управления. Панелей управления МВ и ОКГ —
четыре. На каждую из них выведены цепи четырех МВ и четырех ОКГ.
§ 5. Автоматические регуляторы возбуждения
Как уже было указано, при выбранной мощности модельных агрега-
тов имеется возможность использования на модели натурных образцов
регуляторов, релейных защит, устройств линеинои автоматики и др
Электродинамическая модель
ИЭМ располагает современными ти-
пами автоматических регуляторов
возбуждения.
Институтом автоматики и теле-
механики совместно с ИЭМ был
разработан автоматический регуля-
тор возбуждения типа РЭН-3 (Ильин
и др., 1956). Регулятор действует
по отклонению и первой производ-
ной напряжения, отклонению, пер-
вой и второй производным фазо-
вого угла или тока, а также имеет
жесткую и гибкую обратные связи
и позволяет вводить в закон регу-
лирования нелинейную функцию фа-
зового угла 0 или тока.
Измерение угла 0 для целей
регулирования может производиться
с помощью имеющегося в модели
телефазометра (Каширин и др., 1956).
Поскольку, однако, на модели угол
8 может измеряться без телепередачи
фазы, регуляторы возбуждения мо-
дельных генераторов имеют, кроме Рис. 10 Автоматический регулятор воз-
того, специальные фазово-токовые буждения РЭН-3.
блоки, каждый из которых содержит
углоизмерительную схему и схему для измерения тока. Эти блоки с по-
мощью переключателя позволяют осуществлять регулирование возбужде-
ния по тому или другому параметру.
Выход фазово-токового блока подается на вход измерительного блока,
в котором производится дифференцирование и суммирование всех сигна-
лов. Суммарный сигнал измерительного блока поступает на силовой блок,
представляющий тиратронный усилитель мощности с фазовым управле-
нием. Силовой блок имеет два выхода, обеспечивающих нормальные и
36
Глава I. Электродинамическая модель ИЭМ АН СССР
форсировочные режимы быстродействующих систем электромашинного
и ионного возбуждения.
Внешний вид регулятора РЭН-3 показан на рис. 10, структурная
схема — на рис. 11. В модели имеется семь таких регуляторов.
Всесоюзным электротехническим институтом им. В. И. Ленина были
разработаны автоматические регуляторы возбуждения для гидрогенера-
Рис. 11. Структурная схема автоматического регулятора возбуж-
дения РЭН-3.
СВ — система возбуждения; СБ — силовой блок; РФ — реле форсирования возбуж-
дения; Э — источник ьталонного напряжения; В — выпрямитель; ДК — дифферен-
цирующий каскад; НЭ — нелинейный элемент; СУ—суммирующий усилитель.
торов Волжской ГЭС им. В. И. Ленина, структурная схема которых
дана (Герценберг и Штрафуй, 1955) на рис. 12. Регулятор действует по
отклонению и первой производной напряжения, отклонению, первой и
второй производным тока, имеет жесткую и гибкую обратные связи.
В режимах, близких к предельным по статической устойчивости, обес-
печивается некоторое повышение напряжения генераторов с помощью
введения нелинейной функции тока.
Для повышения эксплуатационной надежности все электронные лампы
в регуляторе дублированы. В случае необходимости регулятор может
быть переведен на работу по фазовому углу.
Суммарный сигнал измерительного блока подается на силовой блок,
расположенный в общем шкафу. Внешний вид регулятора показан
на рис. 13. В модели имеется четыре таких регулятора.
На модели, кроме регуляторов сильного действия, имеются также
регуляторы электромагнитного типа (система компаундирования с кор-
рекцией по напряжению), смонтированные из элементов стандартной
и. Г~1 ---
—->1— 1 —Fr
3*1006 . --- и I
Рис. 12. Структурная схема автоматического регулятора возбуждения гидрогенераторов Волжской ГЭС им. В. И. Ленина.
7 фильтр; 2 — реле форсирования возбуждения; 3 — инвертор; 4 — фильтр с катодным повторителем; 5— усилитель переменного тока; 6 сумматор:
7 — инвертор; 8—жесткая обратная связь; 9 — разделительное устройство.
§ 7. Модельные трансформаторы
37
панели ЭПА-161 завода „Электросила“. Поскольку в модели не тре-
буется большой мощности силового элемента, электромагнитный регуля-
тор содержит лишь два магнитных усилителя вместо шести в па-
нели ЭПА-161. Питание цепей переменного тока магнитных усилителей
производится от независимого источника. Выходные цепи электромаг-
нитных регуляторов включа-
ются на обмотки возбуждения
специально разработанных мо-
дельных возбудителей.
§ б. Модели первичных
двигателей и их регуляторов
скорости
Основным элементом модели
турбины является двигатель по-
стоянного тока, якорь и об-
мотка возбуждения которого
питаются от различных источ-
ников. Моделирование мо-
ментно-скоростных характери-
стик турбин осуществляется с
помощью вольтодобавочного
генератора и добавочных со-
противлений, включаемых по-
следовательно с якорем двига-
теля постоянного тока на ис-
точник постоянного напряже-
ния.
Модельные регуляторы ско-
рости выполнены по тем же
структурным схемам, что и
реальные регуляторы. Однако
их элементы моделируются
электронными, электромагнит-
ными и электромашинными
устройствами. Это позволяет
изменять в широких пределах
их параметры и характеристики. о ,о л „
г г- г- Рис. 13. Автоматический регулятор возбужде-
на переходные процессы ния гидрогенератора Волжской ГЭС.
энергосистем существенное
влияние может оказывать явле-
ние гидравлического удара. Поэтому модели гидравлических турбин
имеют специальные блоки, моделирующие гидравлический удар.
§ 7. Модельные трансформаторы
Для получения необходимых активных сопротивлений модельные
трансформаторы имеют пониженные плотности токов. Поэтому их номи-
нальные мощности значительно меньше габаритных. Требующиеся зна-
чения индуктивных сопротивлений короткого замыкания обеспечиваются
с помощью несимметричного расположения обмоток или за счет включе-
ния дополнительных реакторов. Модельные трансформаторы выполнены
38
Глава I, Электродинамическая модель ИЭМ АН СССР
как в однофазном, так и в трехфазном исполнениях. Их обмотки имеют
большое число отпаек, что позволяет изменять в широких пределах
коэффициенты трансформации и индуктивные сопротивления короткого
замыкания.
§ 8. Модели линий электропередач
Электродинамическая модель ИЭМ содержит три линии электропере-
дач на переменном токе. Кроме того, в помещении Электродинамической
модели находится модель передачи постоянного тока, принадлежащая
Энергетической лаборатории ЭНИН, что позволяет вести исследования
энергосистем, в состав которых входят передачи постоянного тока.
Линии электропередач моделируются цепочечными схемами, состоя-
щими из В—10 ячеек на цепь, что позволяет исследовать как вопросы
устойчивости, так и коммутационные процессы.
Две из модельных линий являются двухцепными, одна — одноцепная.
Двухцепные линии могут работать как по блочным, так и по связанным
схемам. Все линии снабжены установками продольной компенсации, шун-
тирующими реакторами, измерительными трансформаторами напряжения и
тока, коммутационной аппаратурой и др. Для исследования неполнофаз-
ных режимов двухцепных линий имеется специальная установка, которая
воспроизводит индуктивные связи между цепями. Получение необходимых
параметров линий осуществляется с помощью отпаек на индуктивных ка-
тушках, введения в катушки сердечников из электротехнической стали,
переключения конденсаторов, а также изменения числа используемых
ячеек. Это дает возможность моделировать линии различных протяжен-
ностей (до 1500—2000 км) и напряжений (до 600—750 кв), входящих
в состав как ЕЭС Европейской части СССР, так и Сибири.
С целью уменьшения влияния сопротивлений контактов и соедини-
тельных проводов номинальное напряжение модельных линий принято
равным 2000 в.
Схемы управления моделями линий позволяют осуществлять со щита
управления различные виды аварийных режимов в разных точках передач.
§ 9. Модели приемных энергосистем
Модели приемных энергосистем содержат модельные турбо- и гидро-
агрегаты, синхронные компенсаторы, различного вида нагрузки, внутри-
системные связи, а также регулирующую и коммутационную аппаратуру.
Мощности и параметры отдельных элементов модели приемной энерго-
системы определяются по упрощенной схеме замещения реальной системы.
При этом параметры модельных генераторов, первичных двигателей и ком-
пенсаторов устанавливаются в соответствии с эквивалентными параме-
трами машин оригинала. Модельные агрегаты снабжены регуляторами
возбуждения и скорости.
Внутрисистемные связи моделируются линейными реакторами, пара-
метры которых могут изменяться в широких пределах. Потери в этих
реакторах отражают потери в распределительных сетях и внутрисистем-
ных линиях электропередач. Параметры и схемы включения реакторов
определяются в результате приведения сложной схемы энергосистемы
к упрощенному виду, пригодному для моделирования.
В соответствии с характером нагрузок реальных энергосистем модель
нагрузки должна состоять в основном из асинхронных и синхронных
двигателей, электроламп и реостатов, представляющих осветительную и
9, Модели приемных энергосистем
39
бытовую нагрузки, и ртутных выпрямителей. Мощность и параметры
отдельных видов нагрузок модели могут легко изменяться и устанавли-
ваются исходя из действительного состава нагрузки моделируемой энерго-
системы. В зависимости от схемы замещения энергосистемы нагрузка
Рис. 14. Принципиальная схема модели приемной энергосистемы.
в модели может включаться в одной или нескольких точках схемы,
моделирующей внутрисистемные связи.
Каждый из агрегатов нагрузки состоит из асинхронного (или син-
хронного) двигателя, сочлененного с генератором постоянного тока,
который обычно включается на реостат с моторным приводом. Получе-
ние необходимых механических характеристик электроприводов может
достигаться с помощью специальных схем, воздействующих на возбу-
ждение генератора постоянного тока и на привод нагрузочного реостата.
Принципиальная схема одной из моделей приемных энергосистем при-
ведена на рис. 14. Она содержит два модельных синхронных генератора
(турбогенератор МТ и гидрогенератор МГ), внутрисистемный синхронный
компенсатор (МСК), реакторы, моделирующие внутрисистемные связи,
пять нагрузочных агрегатов с асинхронными двигателями (АД) и один
с синхронным (СД), ртутный выпрямитель (РВ), ламповый реостат (ЛР)
Таблица 1
Вид нагрузки Мощность
квт ква
Электродвигатели 36.6 52.1
Ртутно-выпрямительная 8.0 9.0
Осветительная и бытовая 13.6 13.6
Всего 58.2 74.7
40
Гла в а I. Электродинамическая модель ИЭМ АН СССР
и реостаты бытовой нагрузки (Р). Нагрузочные реостаты агрегатов,
ртутного выпрямителя и бытовой нагрузки имеют моторный привод.
Как видно из рис. 14, нагрузка подключена в трех точках, при этом
на зажимы модельных генераторов вынесены местные нагрузки.
Состав нагрузки рассмотренной модели энергосистемы приведен
в табл. 1.
Следует заметить, что состав и характеристики модельной нагрузки
могут легко изменяться. Однако моделирование нагрузок затруднено
ввиду отсутствия достаточно полных данных для реальных энерго-
систем.
§ 10. Электроснабжение электродинамической модели
Напряжение переменного тока подается от сети Ленэнерго через
трансформаторную подстанцию ИЭМ, на которой установлен трансфор-
матор 6000/230 в мощностью 750 ква. От трансформатора энергия посту-
К потребителям
Рис. 15. Схема подключения генераторов по-
стоянного тока преобразовательного агрегата
к шинам распределительного устройства.
пает на распределительное
устройство переменного тока,
которое силовыми кабелями
соединено со всеми помеще-
ниями модели, а также преоб-
разовательными агрегатами.
Для получения регулируемого
напряжения переменного тока
имеется автотрансформатор
типа АТМК, 0—400 в, 100 а.
Модель располагает тремя
мощными электромашинными
преобразовательными агрега-
тами переменного тока в по-
стоянный. Агрегат № 1 со-
стоит из асинхронного двига-
теля с фазовым ротором типа
АМ-6137—6 мощностью 280
квт, 380/220 в, который при-
водит во вращение три оди-
наковых генератора постоянного тока 110 в мощностью по 70 квт. Гене-
раторы присоединены к шинам распределительного устройства постоян-
ного тока по схеме, показанной на рис. 15. Такая схема дает возможность
иметь на шинах напряжения 110, 220 и 330 в. В цепи возбуждения гене-
раторов включены реостаты с моторными приводами, что позволяет
регулировать их напряжение как вручную, так и дистанционно, с пульта
управления модели. С шин распредустройства постоянного тока напря-
жение подается силовыми кабелями во все помещения модели.
Пуск агрегата осуществляется с помощью магнитной станции
типа П1601—425.
Общий вид панелей распределительного устройства переменного, по-
стоянного и оперативного токов показан на рис. 16.
Агрегат № 2 (слева на рис. 16), расположенный в том же помеще-
нии, что и агрегат № 1, состоит из синхронного двигателя ДС1610—6
мощностью 1250 ква и двух генераторов постоянного тока ГП-500
250 в, 2000 а, мощностью по 500 квт каждый. Агрегат имеет на общем
валу собственный возбудитель, обеспечивающий питание цепей возбужде-
£ 10. Энергоснабжение электродинамической модели
41
ния синхронного двигателя и генераторов постоянного тока. Кроме того,
в агрегате имеются углоизмерительный генератор и тахогенератор. Об-
мотка статора синхронного двигателя имеет 72 вывода, что позволяет
переключать ее на различные напряжения от 220 до 3000 в.
Цепи возбуждения всех машин агрегата наряду с питанием от соб-
ственного возбудителя могут быть включены на шины оперативного
постоянного тока. В цепях возбуждения всех машин агрегата включены
Рис. 16. Панели распределительного устройства переменного, постоянного
и оперативного токов.
реостаты с моторными приводами, что позволяет регулировать токи воз-
буждения со щита управления модели.
Пуск агрегата осуществляется от шин распределительного устройства
постоянного тока с помощью одной из машин ГП-500. Синхронный дви-
гатель ДС1610 позволяет повышать коэффициент мощности подстан-
ции ИЭМ до 1. В необходимых случаях он может использоваться как
мощный генератор переменной частоты с диапазоном изменения напря-
жения до 3000 в.
Основным назначением генераторов постоянного тока ГП-500 является
питание моделей первичных двигателей гидро- и турбогенераторов. Кроме
того, схема коммутации дает возможность подключать генераторы ГП-500
к шинам распределительного устройства постоянного тока.
Пуск и синхронизация двигателя, включение генераторов постоянного
тока, а также регулирование возбуждения всех машин производится со
щита управления модели.
Агрегат № 3 находится в помещении моделей приемных энергосистем.
Он состоит из асинхронного двигателя с фазовым ротором типа МАМ-74—6
мощностью 140 квт, 380/220 в и генератора постоянного тока типа ПН-1750
мощностью 115 квт, 230 в, 500 а. Агрегат предназначен для питания пер-
42
Глава I. Электродинамическая модель ИЭМ АН СССР
вичных двигателей синхронных генераторов, входящих в модели прием-
ных энергосистем.
Шины распределительного устройства оперативного постоянного тока,
предназначенные для питания всех цепей управления, а также цепей воз-
буждения электромашинных преобразователей, подключены к двум агре-
гатам, каждый из которых состоит из генератора постоянного тока ПН-145
мощностью 13.5 квт, 110 в и короткозамкнутого асинхронного двига-
теля КД65/4 мощностью 22 квт, 380/220 в.
В каждом из помещений электродинамической модели имеются свои
шины переменного, постоянного и оперативного токов, получающие
питание от соответствующих распредустройств.
§ 11. Размещение оборудования электродинамической модели
Оборудование модели размещено в двух помещениях.
На первом этаже одного из них расположены зал распределительйых
устройств и преобразовательных агрегатов и зал модельных агрегатов
Рис. 17. Зал модельных агрегатов. Электромашинные агрегаты и модельные транс-
форматоры.
и трансформаторов. На втором этаже того же помещения находятся зал
моделей линий электропередач и зал управления.
Во втором помещении, удаленном от первого приблизительно на 100 м,
размещены модели приемных энергосистем. Оба помещения соединены
силовыми и контрольными кабелями.
Основное оборудование зала распределительных устройств и преоб-
разовательных агрегатов было описано при рассмотрении электроснаб-
жения модели.
§11, Р а смещение оборудования электродинамической модели
43
Зал модельных агрегатов и трансформаторов состоит из двух частей.
В одной из них (рис. 17) находятся модельные гидроагрегаты, подпорные
синхронные компенсаторы, трансформаторы, а также относящаяся к ним
пусковая и коммутационная аппаратура. В другой расположены возбуди-
Рис. 18. Коммутационный щит высокого напряжения
в зале моделей линий электропередач.
тельные агрегаты электромашинного и ионного возбуждения, а также
компенсаторы активных сопротивлений.
Зал моделей линий электропередач расположен над залом модельных
агрегатов и трансформаторов, что позволяет иметь наименьшую длину
соединительных кабелей. В нем находятся три модельных линии пере-
дачи и коммутационный щит высокого напряжения (рис. 18). Модель
линии передачи постоянного тока (рис. 19) размещена в зале управления.
На щит высокого напряжения выведены начало, конец и промежу-
точная точка каждой линии передачи переменного тока, а также высоко-
вольтные обмотки повышающих и понижающих модельных трансформато-
Рис. 19. Модель линии электропередачи постоянного тока.
Рис. 20. Зал управления. Электроизмерительные приборы и автоматические регуля-
торы возбуждения.
§11. Размещение оборудования электродинамической модели
45
ров. Повышающие трансформаторы находятся в зале модельных агрегатов и
трансформаторов, а понижающие — в помещении моделей приемных энерго-
систем. Так как на коммутационный щит высокого напряжения выведены
силовые цепи всех основных элементов электродинамической модели, то
может быть быстро собрана необходимая для исследования схема. Сборка
схем осуществляется с помощью специальных трехфазных и однофазных
высоковольтных штепсельных вилок.
В зале моделей линий электропередач находится также вся высоко-
вольтная коммутационная и измерительная аппаратура (выключатели,
трансформаторы напряжения и тока и др.).
В связи с тем, что оборудование зала моделей линий электропередач
находится под высоким напряжением (2000 в), на входной двери в него
имеется блокировка, которая при открывании двери отключает напряже-
ние питания всех оперативных цепей.
В помещении моделей приемных энергосистем размещены семь модель-
ных турбо- и гидрогенераторов, понижающие модельные трансформаторы,
агрегаты нагрузки, реостаты, ртутные выпрямители, реакторы для моде-
лирования внутрисистемных связей, а также пусковая, регулирующая и
коммутационная аппаратура и собственный щит управления. Кроме того,
как уже указывалось, имеется преобразовательный агрегат, а также
шины переменного, постоянного и оперативного токов. В связи с боль-
шим выделением тепла во время работы нагрузочные реостаты находятся
в изолированной комнате с усиленной вентиляцией. Имеющееся в поме-
щении моделей приемных энергосистем оборудование позволяет собирать
различные схемы приемных энергосистем.
Ввиду того, что электродинамическая модель представляет сложную
установку, расположенную в нескольких помещениях, управление всеми
ее элементами производится дистанционно с главного щита управления,
расположенного в зале управления. Для каждого из основных элементов
модели на щите имеется своя панель, на которую выведены цепи управ-
ления, регулирования и измерения. Кроме того, на панелях установлены
щитовые измерительные приборы, универсальные переключатели, кнопки,
сигнальные лампочки, а также нанесены мнемонические схемы соответ-
ствующих элементов модели. Всего на пульте управления имеется
25 панелей.
Точные измерительные приборы, по которым производятся отсчеты
во время исследований, находятся на лабораторных столах.
В зале управления имеется пять девятишлейфных осциллографов для
регистрации процессов во время исследований (кроме того, один такой
осциллограф находится в зале модельных агрегатов и один в помещении
моделей приемных энергосистем).
На лабораторных столах зала управления смонтированы преобразова-
тели моделей систем ионного возбуждения и устройства их управления.
Всего имеется четыре преобразователя, которые могут быть собраны по
разным схемам, что позволяет вести исследование различных систем
ионного возбуждения.
В зале управления размещены автоматические регуляторы возбужде-
ния сильного действия, а также многочисленные специальные схемы и
устройства. Оборудование зала управления показано на рис. 20. В на-
стоящей главе даны лишь основные сведения по электродинамической
модели ИЭМ. Более подробно ее элементы рассмотрены в последующих
главах.
Глава II
МОДЕЛИРОВАНИЕ СИНХРОННЫХ МАШИН
§ 1. Условия электродинамического подобия
Синхронная машина, работающая в качестве генератора, компенса-
тора или двигателя, является одним из основных энергетических звеньев
энергосистемы, определяя собой совокупность сложных явлений и про-
цессов, протекающих в ней при эксплуатации. Характер протекания этих
процессов определяется многочисленными параметрами синхронной
машины, число которых достигает 30 и которые лишь в грубом прибли-
жении могут рассматриваться как постоянные величины, а на самом
деле зависят от целого ряда факторов: магнитного насыщения, явле-
ния вытеснения тока, частоты, температуры и т. п.
Уравнение, описывающее в относительных единицах переходный
электромеханический процесс синхронной машины, снабженной в общем
случае поперечным контуром возбуждения, имеет вид:
^деч-м^р^лмр), (1)
где
= — (2)
где
[— pZq (р) — (1 — «)2 *д (р)] Gd (р) Ufd [Zq (р) — pxq (р)] X
• _ X Gg (р) U/q (1 — s) -ь UaZq (p) -t- Uqxq (p) (1 — s)
d Zd (p) Zg (p) Xd (p) Xq (p) (1 ~ S)2 ’ ' ’
\—Zd (p) -+- pxd (p)] GdUfd (1 — s) — [pZd (p) 4- (1 — s)2 Xd (p)] X
• _______X Gg (p) Ufg -4- UgZd (p) — Ud*d (p) (1 — s)_ /д\
’ Zd(p)Zg(p)^-Xg(p)xd(p)(\-S^ ’ W
где
Zd(p) = pxd(p)-*-r,
Zg(p) = PXq(p)~*-r,
p — оператор Хевисайда.
Для того чтобы электромагнитные и электромеханические процессы
в модели были подобны соответствующим процессам в оригинале, должно
выполняться основное условие
^-р2Д0 -ь Л7вд (р) = М,г (р) = idem. (la)
£ 7. Условия электродинамического подобия
47
При выполнении модели энергосистемы с масштабом времени 1 :1
(т. е. на 50 гц) условие сводится к требованию тождества уравнения (1а)
в модели и оригинале.* 1
В свою очередь это требование приводит к условию равенства всех
реактивных и активных сопротивлений и инерционных постоянных моде-
лей и оригинала, выраженных в относительных единицах:
х(м) — х(°р\ Нм> — т-(°р\ = /Лор\ (6)
Это условие приводит, как следствие, к равенству соответствующих
постоянных времени Т^=
Строго говоря, условия (6) должны выполняться для отдель-
ных значений параметров, предписываемых техническими услови-
ями или стандартом во всем возможном диапазоне их изменения.
Это обстоятельство создает особые трудности при проектировании
модельных синхронных машин и заставляет прибегать к некоторым спе-
циальным мерам.
В частности, одной из наиболее трудных задач является обеспечение
совпадения частотных характеристик для активных сопротивлений обмо-
ток (коэффициент Фильда) и для массивных роторов. Однако на пер-
вом этапе проектирования при выборе основных размеров модельных
машин целесообразно принять в качестве основного условия равенство
частных значений параметров оригинала и модели, устанавливаемых
техническими условиями или стандартом и определяемых на основании
принятых в электропромышленности типовых методик электрического
расчета.
При создании модели крупной синхронной машины естественным
является стремление использовать для этой цели нормальную машину
малой мощности. Однако получение в такой машине относительных пара-
метров крупного синхронного генератора оказывается практически не-
осуществимым.
В общем виде эта задача была рассмотрена ранее (Костенко, 1953;
Костенко и Трейвиш, 1946; Костенко и Урусов, 1955), и результаты
проведенного анализа сводятся к следующему. Мощность, реактивные
и активные сопротивления и инерционная постоянная синхронной машины
выражаются следующими уравнениями в инвариантной форме: синхрон-
ная реактивность продольной реакции якоря
х.^0.4^.^, (7)
МИН. О1
синхронная реактивность поперечной реакции якоря
xag = ydxad; (8)
реактивность рассеяния статорной обмотки
X, = 0.12 (3? н-1) н- 3.09 w -1)] : (9)
реактивность рассеяния обмотки возбуждения
г--- 1 до К х ) (Ю)
f 1 kad а вь1
1 Отступление от этого требования может иметь место в отдельных случаях,
о чем будет сказано в § 7 настоящей главы.
48
Глава II. Моделирование синхронных машин
реактивность рассеяния демпферной обмотки по оси d
то же по оси q
xkq = 0.75 Хм (для полной клетки),
= 2.0 (для неполной клетки);
активное сопротивление обмотки статора
г — 79 — — • — • 1 • — •
^kw а Ц QCuT В51’
активное сопротивление обмотки ротора
It
_ le Л
Г/ k4rfp В01 ’
активное сопротивление демпферной обмотки по оси d
гы = 252-( А-+-0.128;
а а \ ВдЪ It h qR / ’
то же по оси q (для полной клетки)
г*г = 1.89 —• р-4-0.256 у-* —;
q <* \Вдъ It It qR / В§! ’
то же для неполной клетки
г =578^(-^. А-ьО.Об37.- • —
3 * \ ВдЪ if It qR / BS1 ’
мощность (в квт)
Р = 14.2- 10-10 W(PkwABsl;
инерционная постоянная (в сек.)
Н —к
пи — ^ABiX
(И)
(12)
(13)
(14)
(15)
(16)
(17)
(18)
(19)
Примечание. Формулы для активных сопротивлений даны для темпера-
туры 75° С. При температуре 35° С, принимаемой для синхронных генераторов-моде-
лей, значение активных сопротивлений уменьшается в 1.15 раза. Обозначения, при-
нятые в статье, соответствуют общепринятым в литературе и расчетной практике
Нетрудно заметить из общей структуры приведенных формул, что
индуктивные и активные сопротивления определяются соответственно
соотношениями типа:
(20)
А (21)
r ~ Q * BS ’
§ 1. Условия электродинамического подобия
49
где X — магнитная проводимость для потокосцеплении, учитываемых дан-
ной реактивностью при геометрически подобном ряде машин
X — const;
Л = (22)
const.
Следовательно,
х ~ кх, (23)
где кх — отношение полюсных делений.
Таким образом, относительные реактивности машин изменяются про-
порционально изменению полюсного деления.
Q — площадь сечения меди данной электрической цепи на полюсное
деление
Q = z2. (24)
Следовательно,
(25)
т. е. относительные активные сопротивления изменяются обратно про-
порционально полюсному делению.
Подобными рассуждениями нетрудно доказать, что при указанных
условиях относительные потери в меди и в стали будут также следо-
вать закону
• (26)
Инерционная постоянная Hj с точностью до постоянных коэффи-
циентов изменяется по закону
Таким образом, как видно из соотношений (23) и (26), с уменьше-
нием х, т. е. при использовании малых машин нормального исполнения
при их номинальных данных, относительные реактивные сопротивления
всех цепей машин будут чрезмерно малыми, активные же их сопротив-
1
ления — увеличенными в отношении р .
Поэтому и законы выбора электромагнитной геометрии (магнитопро-
воды, сечения меди) должны отличаться от законов построения гео-
метрического ряда нормальных машин.
Чтобы выяснить, в каких направлениях должны быть сделаны эти
отступления, потребуем выполнения следующих основных условий:
= (27)
rjM) = (28)
(29)
р(м)
п(ор) =
50
Глава II. Моделирование синхронных машин
где kr 1 — коэффициент, характеризующий степень компенсации актив-
ного сопротивления роторной обмотки в случае применения компенса-
торов активного сопротивления (см. главу IV).
Следует указать, что если выполнено условие (28), то обеспечение
аналогичных условий для остальных цепей машины (статор, демпферная
обмотка) не встречает конструктивных трудностей.
Условия (27)—(30) на основании соотношений (7)—(19) могут быть
представлены в следующем виде:
/ т А \(м) / тЛ \(ор), ,
Ьтвг) <27а>
(р^АВ^ = (p^AB^kw, (30а)
где кх— коэффициент изменения величины xad (в дальнейшем принято
кх — 1), к — коэффициент возможного увеличения относительной пло-
щади сечения меди ротора на полюс в модели по сравнению с той же
площадью оригинала. к 3 //^ор) ’ к —к р(ор) ’ КР р(м> ” р(°р)' (31)
Введем также обозначение масштабов
, к<м) =-—<—г. А ^(Ор) > , _ S(m) _ т<м> п _ Л(м) > В5(м) 8 ’ т т(ор) ’ А Л(ор) ’ в 2?з(ор) * ^2)
Заданы обычно бывают следующие масштабы: масштаб мощности kw,
определяемый из общего проекта модели энергосистемы; масштаб отно-
сительной длины (для моделей обычно = 0.8 1.8); масштаб полюс-
ности кр (для моделей р = 4-4~6, что дает наиболее экономическое
решение); масштаб сопротивления кг, определяемый возможной степенью
компенсации (при отсутствии компенсации кг = 1; при наличии компен-
саторов практически можно компенсировать до 80% сопротивления,
т. е. кг = 1-^-5); масштаб инерционности kj9 определяемый условиями
задачи моделирования. Если при изучении процессов на модели ставится
задача исследования влияния инерционной постоянной, то, очевидно,
к} 1 с последующим варьированием величины за счет использо-
вания дополнительных съемных маховиков, насаживаемых на вал
модели (рис. 66, 67); масштаб использования площади полюсного окна к^
(ввиду весьма низких значений плотности тока, получаемых в моделях,
оказывается возможным заполнение медью межполюсного окна почти
на 100%, в результате чего имеем в моделях значения к^ 2).
Условия (27а)—(30а) получаются в виде:
к^в — к-Лдкхч
к^в = км (34)
= (35)
(зб)
§ 7. Условия электродинамическою подобия
51
Откуда получаются следующие зависимости:
/ЫуД'/ь (37)
(38)
= (39)
kB=(k^kr}~\ (40)
Эти соотношения устанавливают связь между заданными и искомыми
масштабами моделирования.
В самом деле, если исходить из условий kj = кх = кр = 1, получаем
из (37)
К = (41)
В геометрическом ряде нормальных машин при тех же условиях
имеем (Костенко и Трейвиш, 1946)
к =к1/^
Другим важным следствием является условие (38). Если ставить
условием равенство омических сопротивлений модели и оригинала, т. е.
kr—l и к^ = const, то это условие означает, что
Ъ?
= (42)
Л- Q
т. е. зазор в серии модельных машин должен изменяться пропорцио-
нально кубу полюсного деления, в то время как в сериях нормальных
машин из условия xad = const и А = ъ имеем кь — к^.
Поэтому при проектировании модельных машин основная трудность
заключается в обеспечении необходимой величины зазора. Чтобы удер-
жать величину кь в допустимых механическими условиями пределах,
необходимо стремиться к максимальному увеличению коэффициента
заполнения окна медью (к?). При снижении т ниже определенного пре-
дела, т. е. при выборе малогабаритных моделей, часто оказывается не-
избежным увеличение кг выше 1. В этом случае следует применять либо
компенсаторы активных сопротивлений, либо осуществлять приближенное
моделирование.
Этот последний случай (£г^>1) имеет место в так называемых микро-
моделях энергосистем, служащих в основном для выяснения качествен-
ной стороны изучаемых процессов (Robert, 1950).
Из соотношений (39) и (40) видны основные закономерности изме-
нения величин А и В§, где в отличие от закона изменения А в нор-
мальных серийных машинах (А = т) существует квадратичная зависимость
от т, в результате чего в модельных синхронных машинах имеют место
значительно более низкие по сравнению с машинами-оригиналами значе-
ния А.
Из рассмотренных зависимостей вытекает, как следствие, одно важ-
ное правило, применяемое при использовании существующих модельных
машин с измененными условиями задачи. В этом случае, очевидно,
кг = кг = к. = к)=кр = 1, (43)
кх =^= 1 и к } 1,
52
Глава II. Моделирование синхронных машин
поэтому из условия (33) имеем кп = к.к В А XI (44)
а из условия (35) к к к — "1 (45)
Откуда
=V kxkj ’ (46)
(47)
к -1- m~kj (48)
Например, если в исходной модели, имеющей Р=5 квт, //у = 3сек.,
U =220 в, /=16.5 a, xarf = 0.9, необходимо получить
Н? = 5 сек., xad — 0.5,
то имеем
Ъ=Ц = 1.67, £. = ^ = 0.555, ^=5=l= = 1.04,
*»=/таг-0-58' *.=137=0-6-
Новые данные модели, таким образом, будут:
Р — 5 • 0.6 = 3 квт, /7^ = 5 сек., хаб? = 0.5,
tZ= 0.58 • 220 = 127 в, 1=1.04 • 16.5 = 17.2а,
и модель может быть выполнена без электрических пересоединений.
В случае, если кв получается 1, следует проверить возможность
перегрузки магнитной цепи машины по условию насыщения и потерь.
Из условия (34) имеем
^_^ = Г04==18
r~ kB 0.58 •°’
т. е. относительные активные сопротивления цепей машины увеличатся
на 80%.
§ 2. Учет нелинейности магнитной характеристики
Все предыдущие рассуждения имели целью выяснить общие законо-
мерности при построении ряда моделей. С целью упрощения влияние
нелинейности характеристики холостого хода не принималось в расчет.
При проектировании модельных машин по конкретно задаваемым требо-
ваниям к условиям (27)—(30) следует добавить условие достаточного
сохранения вида относительной характеристики холостого хода
#8Лин. = к2^. (49)
Для лабораторных моделей можно принять &2^1«6, а 5 = 1.7... 2,
как это получается в нормальных сериях синхронных машин.
§ 2. Учет нелинейности магнитной характеристики
53
Требуемые реактивности рассеяния отдельных цепей машины полу-
чаются в результате варьирования размерами пазов и полюсной дуги
применения полузакрытых пазов с узкой щелью большой высоты и умень-
шения промежутка между полюсными башмаками при больших значениях
отношения -J*aKC' (см. § 3 настоящей главы).
Используя соотношения (7)—(19) и условие (49) при В = 2, получим
следующие приближенные формулы для основных размеров и загрузок
модели в зависимости от т;
А = 4^xad,
й>'=975.,.л
S„«H. = 0.00164Txad//y,
£- = 11.45-^ ,
Hjxad
Рис. 21. Спрямление кривой намагничи-
вания стали Вт =f (Fm) при Bq = 5000 гс.
/, = 0.71^ ,
м -
10.9 • 10-6x5
’A
В табл. 2 приведен идеальный ряд синхронных генераторов-моделей.
Как видно из табл. 2, наименьшая возможная мощность генератора-
модели Р = 42.4 ква получается при т = 31.7 см, Di = 60.5 см и = 1.62
и при сохранении в ней указанных параметров генератора Волжской
ГЭС. ц
В табл. 2 и 3 приведены значения Д, 5gl, §мин#, j- , lt и Р в зависимости
от полюсного деления. Значения последнего даны в пределах от 36.9
до 25.9 см для следующих значений параметров генератора Волжской
ГЭС: хай = 0.415, rf = 0.00032, Яу = 12.5 сек. и для коэффициента за-
полнения полюсного окна £м = 0.136.
В табл. 3 представлены полученные путем расчета величины сопро-
тивления Г/ в зависимости от воздушного зазора §мин> при наименьшей
мощности Р = 42.4 ква, при полюсном делении т = 31.7 см и разных
величинах ширины полюсного сердечника Ьт генератора-модели.
Расчет велся при постоянстве отношения
Fm (Вщ — Bq) hmk"
bm' K°m—* Bo) hmk"
Ъ B^k'
B^k’
= const,
(56)
что гарантировало неизменность характеристики холостого хода. Уравне-
ние (56) решалось относительно В§1^мин. при Во —0.5 вб/м2, Bq опреде-
лялось путем спрямления характеристики намагничивания стали (рис. 21).
При решении использовались формулы (7)—(19). В результате
ЯгАин. = 0.18 (20.85 р — 0.5),
\ от J
Таблица 2
(см) р (ква) ’и (см) ч и 18 = 0.71 т (см) GD2 (кг • м2) (см) ^т (см) (сек.) 2 w€qe xad rf А (а/см) Вы (гс) Вт (гс) о (мм) Вт Ъ
36.9 47.3 0.86 22.0 2.19 26.2 228 9.9 13.7 13.2 8800 0.136 0.415 0.00032 61.3 6500 16000 3.325 0.165
31.7 42.4 1.0 36.3 1.62 22.65 204 8.5 11.8 13.2 6500 0.136 0.415 0.00032 52.5 5650 13750 2.84 0.177
28.8 47.2 1.1 59.3 1.345 20.45 227.5 7.7 10.73 13.2 5360 0.136 0.415 0.00032 47.7 5140 12500 2.58 0.148
25.9 104.5 1.22 200.0 1.092 18.4 504 7.0 9.65 13.2 4350 0.136 0.415 0.00032 42.75 4640 11300 2.3 0.157
Таблица 3
(см) в81 (гс) л 29700 (а/см) А Вы 198 - Ьт (мм) 2 weqe км 5мин. (см) rf Вт Вт Ft
8.0 5460 54.4 0.00996 118 6800 0.142 0.304 0.00033 14100 0.079
8.5 5650 52.5 0.0093 ИЗ 6500 0.136 0.284 0.000322 13750 0.079
9.0 5850 50.7 0.00867 108 6200 0.130 0.265 0.000314 13500 0.079
10.0 6240 47.6 0.00765 98 5640 0.118 0.2335 0.000306 12900 0.079
11.0 6620 44.8 0.00676 88 5060 0.106 0.206 0.000301 12500 0.079
12.0 6990 42.5 0.00609 78 4490 0.0932 0.1857 0.000308 12000 0.079
§ 3. Особенности проектирования элементов магнитопровода
55
откуда
^2
108 — 240В81104 — 2.4 • 106 = 0.
от
Затем находилась индукция и остальные интересующие нас величины
для различных задаваемых значений ширины полюсного сердечника
(табл. 2, рис. 22).
Полученные данные ряда синхронных машин приведены на рис. 23.
Поскольку мощность первого, исходного генератора, принятого при рас-
Рис. 22. Зависимость ширины по- Рис. 23. Геометрический ряд синхронных машин
люсного сердечника Ът и актив- с различными величинами полюсного деления т,
яого сопротивления обмотки ро- изменяющимися по закону изменения для нор-
тора г/ (в отн. ед.) от воздушного мальных серий.
зазора &мин
7 ~ Ът — f (°МИН.)’**2 rf — %ин.
чете кривых рис. 23, оказалась несколько выше предельной мощности»
приемлемой по условиям лабораторного использования модели, мощность
генератора-модели была снижена путем уменьшения его длины до 26.5 см.
В результате
Р = 42.4 Цз = 31 ква.
Ввиду того, что отношение при этом возросло с 1.62 до 1.85, от-
носительное активное сопротивление также соответствующим образом
увеличилось. С другой стороны, коэффициент заполнения медью полюс-
ного окна получился равным 0.126, т. е. меньше предельного значения
этого коэффициента, достигнутого в генераторах-моделях и равного
0.136, поэтому
г, = 0.00032 = 0.00039.
J 1.о2 U.lzo
§ 3. Особенности проектирования элементов магнитопровода
Как указывалось выше, в генераторах-моделях значения отношения
Л
gy- оказываются значительно уменьшенными по сравнению с оригина-
лами, поэтому в них соответственно понижены и все индуктивности
56
Глава IL Моделирование синхронных машин
ствующего выбора
—J--1-f--*-L
30 60
О
90°
Рис. 24. Распределение полей
реакции якоря в расточке.
а — поле продольной реакции; б —
поле поперечной реакции.
рассеяния, вследствие чего оказывается необходимым искусственное
увеличение соответствующих магнитных проводимостей, о чем подробно
см. ниже.
Увеличение магнитной проводимости рассеяния полюсов достигается
путем развития полюсной дуги. При этом значения увеличиваются
до 0.8 и более, а требуемое отношение получается за счет соответ-
$ &
макс. тч л о макс.
отношения &----. Если принять зр = 0.о, а -г----=
мин. °мин.
= 3 5, то распределение индукции в воз-
душном зазоре получается синусоидальным
и будет обеспечено требуемое отноше-
Xaq
ние —
xad
Применение в моделях больших значений
б
макс.
отношения —----, дающих практически си-
Омин.
нусоидальное распределение магнитной про-
водимости зазора, не позволяет пользо-
ваться нормальной заводской методикой
расчета м. д. с.и потоков статора и ротора
по среднему зазору. При расчете моделей
следует исходить из максимальной магнит-
ной проводимости под серединой полюса и
учитывать ее синусоидальное распределе-
ние по полюсной дуге. Распределение маг-
нитной проводимости в междуполюсном
пространстве должно быть найдено графи-
чески путем построения магнитных силовых
трубок.
Общий порядок расчета следующий.
1. Для определения потока, создавае-
мого обмоткой возбуждения, рассчитывается
магнитная цепь по минимальному зазору и
определяется индукция под серединой по-
люса. В силу сказанного выше
^Змакс. —~
(57)
(58)
если пренебречь незначительным искажением синусоиды в междуполюс*
ном пространстве (рис. 24).
2. Поля реакции якоря находятся из следующих рассуждений. Индук-
ция поля реакции под серединой полюса
мин.
где
Fa маке. =44- = 2’7 • (60)
Z тс р р
£ 3. Особенности проектирования элементов магнитопровода
51
В любой другой точке полюсной дуги
F г> а макс. (61)
*^dx ro COS X,
где ь g мин. Х COS X • (62)
Следовательно, F R .. а макс- рп<г2 г (63)
Ddx Р'о L. X COS X. ^С°мин.
Значения амплитуды основной гармоники продольного поля реакции
якоря может быть получено из разложения в ряд Фурье (рис. 24, а)
2
Bdi = ~ J Bdx cos xdx (64)
о
или
тс
F F
Bdl = р0 • 4 J cos3 xdx = 0.8514 , (65)
мин. J *сС'°мин.
откуда
ь--*1 =0.85. (66)
<1 макс.
П Л — 1
Поскольку поле возбуждения распределено синусоидально, д —
о макс.
Следовательно,
^=д-^-:^1- = ^Р = 0.85. (67)
°d макс. ^3 макс.
Значение амплитуды основной гармоники поперечного поля реакции
якоря также получается из разложения в ряд Фурье (рис. 24, б):
х ж
2
Bql = — ( Bqx sin xdx = — • Г sin2 х cos X(JX — 0 425 t^a макс* . (68)
I u ^мин. J *Аин.
Следовательно, коэффициент поперечной реакции
= 0.425, (69)
Dq макс. макс,
реактивность якоря по оси d
F
7 а макс. /нЛ\
Xad = kd—, (70)
реактивность якоря по оси q
= (71)
л б
58
Глава II. Моделирование синхронных машин
Таким образом, благодаря синусоидальному изменению магнитной
проводимости зазора получается, с одной стороны, хорошая форма кри-
вой поля и напряжения (рис. 24) и, с другой — весьма близкое к зна-
чениям, соответствующим мощным машинам-оригиналам, отноше-
Следующим шагом после выбора геометрии междужелезного простран-
ства, обеспечивающего получение требуемого отношения — и синусо-
xaq
идального распределения поля при холостом ходе, является обеспечение
необходимых индуктивных
сопротивлений статора и
ротора.
Как было установлено
выше, изменение индук-
тивных сопротивлений в
моделях при сохранении
геометрического подобия
размеров пазов обратно
пропорционально квадрату
полюсного деления fc).
Это обстоятельство при-
водит к резкому уменьше-
нию относительных реак-
тивностей.
Как выше указано,
уменьшение реактивного
сопротивления роторной
обмотки частично компен-
сируется развитием полюс-
ной дуги Однако этого
часто бывает недостаточ-
но, что приводит к необ-
ходимости искусственного
увеличения реактивного
сопротивления.
Существуют два прин-
Рис. 25. Полюса ротора с магнитными клиньями» ципиально различных ме-
тода увеличения х.
1. Введение в цепи машины добавочных внешних индуктивностей.
Этот способ удобен, так как обеспечивает возможность плавного регу-
лирования х и, следовательно, более точного воспроизведения требуе-
мых значений. Недостатком его является то, что при этом одновре-
менно вводится и добавочное активное сопротивление, свойственное
любой внешней индуктивности. Это в свою очередь усложняет вопрос
компенсации активных сопротивлений.
2. Эти трудности могут быть преодолены путем искусственного уве-
личения магнитных проводимостей для той части потокосцеплении, ко-
торые определяют собой основную долю данного реактивного сопротив-
ления. Например, пазы статора выполняются более вытянутой формы,
полузакрытые, с достаточно большой высотой мостика. Это мероприя-
тие само по себе часто все же оказывается недостаточным. В таком
случае представляется целесообразным применение магнитных клиньев
в пазах статора.
§ 4, Выбор числа q и форма кривой э. д. с.
59
Преимуществом применения магнитных клиньев является возможность
выполнения открытых пазов и шаблонной обмотки. Кроме простоты
в изготовлении, шаблонная обмотка обладает значительно большим коэф-
фициентом заполнения по меди и более короткими лобовыми соедине-
ниями.
В качестве примера укажем на два варианта модели: с магнитным
клином и обычным исполнением всыпной обмотки. При одинаковой пло-
щади паза (за вычетом клина), равной 16X 89 = 1420 мм2, сечение меди
шаблонной обмотки получается равным 912 мм2, что дает коэффициент
912
заполнения ^0=0.64.
Для всыпной обмотки обычного типа коэффициент заполнения по
жди оказывается равным 0.42. Таким образом, при одинаковом объеме
пазов оказывается возможным уменьшение омического сопротивления
статорной обмотки в 1.5 раза.
При этих же условиях для реактивного сопротивления статора по-
лучено: для модели обычного исполнения Х/ = 0.02, для модели с маг-
нитным клином xz = 0.09, что весьма близко к значению xz оригинала.
Этот эффект достигается за счет регулирования зазора между клином
и стенками паза прессшпановыми прокладками.
Возможность регулирования величины реактивности рассеяния xz
достигается также за счет чередования в одних и тех же пазах магнит-
ных клиньев с немагнитными, для чего все клинья выполняются корот-
кой длины (30—50 мм).
Аналогичная система магнитных клиньев может быть использована
также и для повышения рассеяния цепи возбуждения, так как, несмотря
на значительное развитие полюсной дуги (рис. 25) с целью обеспечения
требуемого отношения , величины X/ оказываются все же понижен-
Xaq
ными.
§ 4. Выбор числа q и форма кривой э. д. с.
Как было показано выше [см. соотношение (46) и (47)], при комби-
нировании параметров модели требуется в зависимости от условий опыта
устанавливать новые номинальные данные модельных машин. Если, на-
пример, от исходной машины, данные которой приведены на стр. 52,
необходимо получить при сохранении Р = 5 квт и Hj = <3 сек. новые
значения: xad = 0.4, то кх = 0.445, кЛ = =1.5, кв~\/0.445 =
=0.665, то при неизменной схеме соединения статорной обмотки по-
лучаем
£4 = 145 в,
что практически может оказаться неприемлемым по условиям трансфор-
мации энергии в модель электропередачи.
В этом случае оказывается более целесообразным применение одной
из схем (рис. 26).
Для удобства комбинирования схемой обмотки с целью получения
каждый раз требуемой величины напряжения обмотка статора должна
выполняться из возможно большего количества параллельных ветвей.
В шести полюсных модельных генераторах возможно получение шести
равных и синфазных групп обмотки при условии, что q равно целому
60
Глава II» Моделирование синхронных машин
числу. Это условие реализовано во всех модельных генераторах ИЭМ.
Поскольку при целом q форма кривой э. д. с. может быть неблагоприят-
ной с точки зрения наличия в ней гармоник зубцовой частоты, в моде-
лях ИЭМ применяется скос паза на одно пазовое деление, что приво-
Рис. 26. Схема соединений статорной обмотки
при двух параллельных ветвях; в каждой из
них три последовательных группы.
дит практически к полному
устранению указанных гармоник
в кривых фазной и линейной
э. д. с.
§ 5. Моделирование
специальных характеристик
Выше при выборе основных
размеров и определении элект-
ромагнитной геометрии модель-
ных синхронных машин мы
исходили из удовлетворения
требований обеспечения ра-
венства параметров модели
стандартным параметрам ориги-
нала.
Однако в большинстве ис-
следовательских задач это
условие оказывается недоста-
точным, так как параметры, ко-
торые упрощенно рассматри-
ваются как постоянные, суще-
ственно зависят от ряда фак-
торов, что может сказываться
на результатах исследований,
заметно снижая их точность.
Главнейшим из этих факто-
ров является частота измене-
ния потокосцеплений статора
ф^ И и при различных пере-
ходных режимах, что и надлежит учитывать при моделировании пара-
метров машин.
В общем виде задача будет ясной, если воспользоваться известными
операторными соотношениями для составляющих тока ротора (Park, 1929):
г — ГGd G/d________(Ь Xd ~~ Xd 1
d d L Xd (p) XdXd (p) J ’
r _ v Г Gq (p) Ufd b Xq—_Xy (p)~l .
9 9 L xq (p) xqxq (p) J ’
(72)
(73)
здесь Id и lq — общие токи ротора в осях cinq.
При внезапных коротких замыканиях, несимметричных, колебательных
и асинхронных режимах величины ф^ и фд будут иметь периодический
характер, поэтому вторые члены правой части (72) и (73) свидетель-
5. Моделирование специальных характеристик
61
ствуют о наличии в роторных контурах токов соответствующей частоты.
Эти токи влияют на статорные токи, как это видно из соотношений
; ____ — Id . __________ф? — Iq
^d ТТЛ ’ V
Xd * Хд
(74)
и приводят к появлению составляющих момента вращения, обусловлен-
ных переменными составляющими токов ротора и Iq~
г_____Xd — Xd(p) Л
~ XdXd (?) ™
(75)
Т ____ Хд — Хд (р) , ' 7
ХдХд(р) 4q*
Для подобия процессов в модели и ори-
гинале необходимо условие
[** (р)](м) = [*» (Р)]о₽ (k = d, q), (76)
где
, T'dT^ + (Td + T'e)P^l
Xi {р} Ха TdTd0?+ (Td + Tc)P + V
(77)
и аналогично для оси q.
При установившихся периодических
процессах изменения с частотой оо вели-
чин и фд полагают р = /ш, в ре-
зультате чего получается критериальное
уравнение
Xd — (» = X
-TdTd^^14-^(T'e4-Td)
l-TtT'^ + juiTd+Tc)
(78)
Подобие процесса, определяемое тождеством критериального уравне-
ния (78) для модели и оригинала, будет иметь место только при условии
(7») = idem. (79)
При моделировании выполнение этого условия является наиболее
трудным, в особенности для цепей возбуждения, обладающих резко
выраженным эффектом вытеснения. При расчете обмотка возбуждения
уподобляется секции, укладываемой в паз шириной а и высотой Ь
(рис. 27).
В таком случае коэффициент увеличения активного сопротивления
определяется выражением (Костенко, 1949)
sh 2? -+- sin 26
ch 26 —cos 26 ’
где
| = ah h "J/^ s
(80)
(81)
является так называемой „приведенной высотой" проводника.
62
Глава II. Моделирование синхронных машин
В мощных машинах обычно h = 0.1—1 см, — ^0.5, таким образом,
например, при $ = 2 (/=100 гц), 0^5<^1 может быть использована
приближенная формула
fer = l-t-m2~0'2 (82)
2b
Пример. Для роторной обмотки, имеющей Л = 1 см, тп = 25, ~ = 0.5, полу-
чаем при s = 1 (/=50 гц)
5 = 1.0/63 = 0.71.
Для модели, имеющей &г = 0.5 при соблюдении геометрического по-
добия профиля обмотки и числа витков на полюс т, коэффициент до-
бавочных потерь будет кг = 1 -ь 17.7 (0.5)° 4 = 2.1, т. е. в 9 раз меньше,
чем в оригинале.
В действительности по условиям получения минимального напряже-
ния возбуждения оказывается необходимым в модельных синхронных
машинах применять многовитковые катушки возбуждения с малым сече-
нием проводников, при которых kr — l. Выполнение условия fcr=idem,
равносильного условию Td (о>) = idem, может быть осуществлено искус-
ственным методом. Обычно спектр частот бывает ограничен одной-двумя
частотами, стабильными в течение данного переходного процесса. Напри-
мер, в процессе трехфазного короткого замыкания в роторе имеет место
составляющая тока с частотой 50 гц, при несимметричном режиме —
100 гц, при качаниях — низкие частоты порядка 2—5 гц и т. д. В про-
должение одного такого процесса до последующей коммутации может
вводиться необходимое компенсирующее сопротивление в ротор.
§ б. Добавочные потери и эквивалентные активные сопротивления
Общ ие замечания
Правильное отражение в модельной синхронной машине величины
и состава добавочных потерь мощного оригинала и их влияния на ре-
жимы работы, особенно на протекание переходных и аварийных про-
цессов, является одним из наиболее трудных вопросов моделирования.
Для явнополюсных и неявнополюсных машин трудности заключаются
в том, что вследствие отступления в модели от геометрического подо-
бия оригиналу моделирование потерь требует достижения в модельной
машине удельных потерь значительно меньших, чем в обычной синхрон-
ной машине. Это не всегда достижимо даже при применении сталей
с самыми малыми удельными потерями и применением обмоток со значи-
тельно большим относительным сечением меди. Указанное в одинаковой
степени относится к моделированию основных и добавочных потерь.
Поэтому для решения задачи моделирования потерь, кроме выбора
соответствующих материалов, приходится искать оптимальные конструк-
тивные и расчетные решения. Но и здесь возникает целый ряд трудностей.
Существующие методы расчета добавочных потерь для мощных
оригиналов создавались в течение длительного времени. Они являются
в настоящее время установившимися методами, но не обеспечивают
достаточной точности. Так, например, для гидрогенераторов в ряде
случаев фактическая величина добавочных потерь короткого замыкания,
опытно определенная, превосходит расчетную величину в 1.6j—1.7 раза.
§ 6. Добавочные потери и эквивалентные активные сопротивления
63
Вместе с тем по мощным синхронным машинам нет достаточного коли-
чества экспериментальных данных, позволяющих уточнить расчетные
методики.
Еще более сложно обстоит дело с расчетом добавочных потерь
в модельных машинах. Вследствие своеобразия их геометрии, а также
отличия магнитных и электрических загрузок активных частей, для них
не применимы расчетные методики, созданные для обычных синхронных
машин.
Попытки применить расчетные методики, принятые для обычных
синхронных машин, при расчете добавочных потерь короткого замыкания
модельной машины с учетом указанных особенностей модельных машин,
не дали положительных результатов.
Проведенные по таким исправленным методикам расчеты дали боль-
шое расхождение с опытом. Причина, по-видимому, в том, что неко-
торые виды потерь, играющие существенную роль в модельных машинах,
неправильно учитываются расчетом. Опыт позволяет предположить,
что к этой категории потерь относятся, в частности, потери в массиве
конструктивных деталей. Кроме того, принятые в расчетных формулах
новые, исправленные в соответствии с иной геометрией модельных
машин коэффициенты, являются недостаточно обоснованными и непро-
веренными опытами. Так, например, для явнополюсных модельных
машин, у которых потери по абсолютной величине малы, расчет по таким
преобразованным формулам дает расхождение с опытом в 2 раза.
При этом в отличие от натурных машин здесь расчетные значения мо-
гут получаться не только меньше, но и больше опытных.
Поэтому одной из важнейших задач в создании модельных синхрон-
ных машин является разработка расчетной методики по добавочным
потерям. Этому должна предшествовать большая экспериментальная
исследовательская работа, которая позволит установить определенные
закономерности для тех соотношений и условий, которые существуют
в модельных машинах.
Особенная сложность возникает при моделировании добавочных
потерь в широком диапазоне токов и частот, которые могут иметь ме-
сто в контурах синхронной машины при аварийных и переходных про-
цессах. Этому ранее уделялось недостаточное внимание, прежде всего
потому, что по мощным машинам почти не производилось определение пара-
метров как непрерывно изменяющихся величин, зависящих от других элек-
трических величин, характеризующих протекание переходного процесса.
Следует также отметить сложность моделирования потерь и соответ-
ствующих им эквивалентных активных сопротивлений роторной цепи
машины при различных скольжениях. Основная доля потерь в роторе
мощной машины при скольжении находится в массивных проводниках
обмотки возбуждения и демпферной обмотки. В малой лабораторной
модели отразить эти потери в меди обмотки практически невозможно,
так как коэффициент вытеснения тока зависит от геометрических раз-
меров. Поэтому надо искать пути косвенного отражения в модели
указанных потерь.
Установившейся методики расчета потерь в роторной цепи явно-
полюсных машин при различных скольжениях вообще не существует.
Приближенные методы позволяют определить лишь потери от вытесне-
ния тока в меди обмоток. Потери же в сложном составе магнитных
контуров роторной цепи определить расчетно весьма затруднительно.
По потерям в роторной цепи мощных машин при различных скольже-
64
Глава II. Моделирование синхронных машин
ниях совершенно нет экспериментальных данных, позволяющих оценить
их по составу и по величине.
Для неявнополюсных машин вопрос о потерях в роторной цепи
еще более осложнен вследствие трудности аналитического учета
демпфирующего действия массива ротора и расчета потерь в массиве,
а также потерь в меди обмотки возбуждения, задемпфированной масси-
вом. По потерям в роторах турбогенераторов также отсутствуют
надежные экспериментальные данные.
Все это указывает на необходимость при решении вопросов физи-
ческого моделирования энергосистем и основного ее элемента — син-
хронной машины одновременно решать ряд вопросов по уточнению
расчетных методов определения некоторых важных параметров мощных
оригиналов. Необходимо также накопить экспериментальные данные,
которые позволяют с достаточной точностью и правильностью решать
аналитически задачи по переходным и аварийным процессам в энерго-
системах и более правильно осуществлять электродинамическое моде-
лирование сложных физических явлений, имеющих место в энергосистеме.
Необходимость в более углубленном исследовании параметров син-
хронных машин давно уже вызывается потребностями практики в связи
с созданием объединенных энергосистем, имеющих в своем составе
дальние линии электропередачи. Это определяется тем, что сложность
задач в области устойчивости, автоматического управления и регулиро-
вания энергосистем, требующих решений с большей точностью, значи-
тельно возросла. Появилась необходимость знания параметров синхрон-
ных машин не как единичных постоянных для определенных условий,
а как некоторых параметрических характеристик, некоторых кривых
в зависимости от различных электрических величин, определяющих
работу синхронной машины как в статических, так и в динамических
режимах (тока, напряжения, частоты и т. д.).
Особенно остро встал этот вопрос в связи с развитием экспери-
ментальных исследований в области энергосистем. Широкое применение
физических моделей для экспериментальных исследований заставляет
более глубоко вникать в сущность физических процессов в мощных
синхронных машинах и в сложных схемах энергосистем и быстрее
решать назревшие вопросы уточнения физики явлений в энергосистемах,
которые возникают зачастую даже независимо от моделирования.
В этом одно из существенных достоинств мощного средства науч-
ного исследования — электродинамического моделирования энергосистем.
В деле моделирования добавочных потерь синхронных машин сде-
ланы лишь первые шаги. Предстоит еще большая работа по уточнению
моделирования этих важных параметров, существенно влияющих на по-
ведение синхронной машины в энергосистеме.
В данном параграфе показано влияние добавочных потерь на пере-
ходные процессы и показано, как отражены в моделях общие законо-
мерности изменения добавочных потерь и их количественные значения.
Влияние добавочных потерь на переходные процессы
Переходный процесс в синхронной машине сопровождается всегда
двумя физическими явлениями: электромагнитными, связанными с изме-
нением токов во времени, и электромеханическими, связанными с влия-
нием электромагнитных и механических сил на изменение скорости
вращения ротора. При этом обычно имеет место взаимное влияние —
§ 6. Добавочные потери и эквивалентные активные сопротивления
65
изменение скорости движения ротора влияет на протекание процессов
в электрической цепи.
Добавочные потери и эквивалентные им активные сопротивления
оказывают влияние на оба указанных явления. В электромагнитных
явлениях они влияют на затухание периодических и апериодических
токов. В электромеханических явлениях они непосредственно влияют
на величину, а также на затухание электромагнитных моментов и, сле-
довательно, влияют на движение ротора.
Выявить достаточно точно степень влияния добавочных потерь
на постоянные времени затухания переходных токов, исходя из опытных
данных, весьма затруднительно. Причины затруднений заключаются
в том, что параметры, на основе которых можно вычислить значение
активного сопротивления, определяющего постоянную времени, получают
из различных опытов, по своим условиям существенно отличающихся
один от другого, поэтому получаемые опытные значения параметров
трудно сопоставимы.
Так, например, постоянную времени
гр _ х2__ 2х'дХд
а г (xfd -Ь Xq) Г
определяют из опыта трехфазного внезапного короткого замыкания,
индуктивное сопротивление х2 — из опыта установившегося двухфазного
короткого замыкания или из опыта обратно синхронного вращения,
xq — из опыта скольжения.
Кроме того, как известно, величина Та, полученная из опыта вне-
запного короткого замыкания, имеет различное значение для различных
фаз. Это объясняется вращением поля, образованного апериодической
составляющей и обусловленного активным сопротивлением статорной
цепи. Поэтому апериодический ток можно представить как некоторый
периодический очень малой частоты (долей герца).
По данным американской литературы, постоянная Та определяется
как отношение индуктивного сопротивления обратного следования фаз
к омическому сопротивлению цепи статора. Если принять это положе-
ние, то окажется, что по всем мощным гидрогенераторам и по их моделям
(за исключением МГ-5—1500) значение Та, вычисленное на основе опыт-
ных значений Х2 и гОм., значительно превосходит расчетное значение
и значительно больше по величине, чем Та, определенное из опыта
внезапного короткого замыкания (см. табл. 4, графы 7, 8 и 10).
Нет оснований предполагать, что это происходит потому, что полу-
чаемое опытным путем значение х2 является неверным и сильно завы-
шенным, а также и то, что расчет должен давать более высокие зна-
чения, чем те, которые получены из опыта внезапного короткого замы-
кания. Скорее следует предположить, что постоянная времени Та
определяется не омическим сопротивлением статорной цепи, а некоторым
эквивалентным активным сопротивлением, которое ниже, чем гк. з, полу-
ченное из опыта определения потерь трехфазного короткого замыкания
статора, но выше, чем омическое сопротивление.
Это предположение, сделанное на основании опытных данных, может
найти подтверждение из рассмотрения явления затухания апериодиче-
ского тока в обмотке статора. Изменяющийся апериодический ток будет
создавать изменяющийся во времени магнитный поток, со всеми сопут-
ствующими явлениями — вытеснением тока в проводнике и созданием
Таблица 4
Тип синхронного генератора Параметры
(Д. е.) гом. (д. е.) ГК, 3. (Д- е ) Хч гом. (сек.) ГК. 3. (сек.) Та (сек.) Та (сек.) определенное по опытному значе- нию Та (Д. е.)
опыт | расчет опыт * | расчет * опыт * опыт расчет опыт опыт* * расчет опыт**
СВ^-72(Н. Днепр) 0.364 0.26 0.00255 0.00264 0.00567 0.455 0 314 0.204 0.2-0.276 0.314 0.0058—0.0042
1340 СВ q 96 (Горький) г 1100 Св ——бо (Верхняя 0.257 0.212 0.00403 0.00407 0.00568 0.203 0.166 0.144 0.12-0.2 0.166 0.00682—0.0041
Свирь) 0.321 0.236 0 0038 0.00375 0.00724 0.269 0.20 0.141 0.07-0.185 0.20 0.0146—0.00552
1230 СВ — 96 (Углич) . 0.45 0.39 0.00382 0.00363 0.00603 0 375 0.342 0.238 0.24 0.342 0.00596
МГ-18.7—6, 8 = 1.5 мм (ИЭМ) 0.118 0.088 0.00195 0.00188 0.004 0.192 0.149 0.094 0.1-0.17 0.149 0.00376—0.00221
МГ-5—1500, 5 = 1.2 мм (НИИПТ) 0.158 0.162 0.00342 0.00319 0.00518 0.147 0.161 0.0973 0.105 0.161 0.0048
МТ-30—6, 5 = 1.4 мм (ИЭМ) 0.184 0.122 0.0031 0.003 0.017 0.189 0.13 0.0345 0.08—0.13 0.13 0.00734—0.0045
* Значения гом< и гк. 3>, взяты при температуре, соответствующей опыту по определению Тд.
* Приведенные цифры соответствуют тем фазам, для которых опыт дал максимальное и минимальное значения.
§ 6- Добавочные потери и эквивалентные активные сопротивления
67
вихревых токов от полей рассеяния в магнитных частях машины и в мас-
сиве конструктивных деталей. Кроме того, вследствие медленного
вращения потока, создаваемого апериодическими токами, на постоянную
времени Та будет в некоторой степени влиять и взаимосвязанный ро-
торный контур, в части добавочных потерь в нем.
Общий вывод, который можно сделать, сводится к тому, что доба-
вочные потери и эквивалентные им активные сопротивления в опреде-
ленной степени влияют на протекание переходного электромагнитного
процесса. Как видно из табл. 4, модельные машины в части постоянной
времени Та правильно отображают оригиналы.
Сказанное выше о постоянной времени Та относится и к постоянным
времени
лк. х^х°*.
и *d rf
И
xd rf ____xfxadxl ь xfxdxkd XadX^kd
xd d0 rkd {x fXd -+- XadXt)
Определение ту и rkd по опытным значениям 7^, TdQ и T"d также не
отличается достаточной точностью, поэтому строгих выводов на основе
опытных данных сделать нельзя. Но рассматривая физику явлений можно
утверждать, что в определенной степени добавочные потери будут опре-
делять и эти постоянные времени.
Опыты, проведенные на мощном гидрогенераторе, показывают, что
нарастание тока в обмотке возбуждения не идет по экспоненциальному
закону, и поэтому величина 7^0 не является постоянной для кривой
изменения тока во времени. Это связано не только с тем, что величина
эквивалентной индуктивности роторного контура изменяется в функ-
ции от тока, но также и с тем, что величина эквивалентного активного
сопротивления роторного контура в процессе изменения тока не равна
омическому сопротивлению и не остается постоянной.
Влияние добавочных потерь на электромеханические явления при
переходных процессах проявляется более наглядно.
Как известно, при внезапном коротком замыкании и при всяком
другом переходном процессе момент первичного двигателя не уравнове-
шивается электромагнитным моментом синхронной машины. Избыточный
момент того или иного знака приводит к изменению скорости ротора
и к появлению качаний, которые могут приводить к нарушению устой-
чивости работы генератора.
Здесь мы рассмотрим электромагнитный момент явнополюсного син-
хронного генератора при внезапном коротком замыкании, возникшем
при работе генератора в режиме холостого хода, и на этом примере
проследим влияние добавочных потерь на энергетику переходного про-
цесса. Электромагнитный момент синхронной машины при внезапном корот-
ком замыкании состоит из следующих составляющих:
где Мф — пульсационный момент, определяемый преимущественно реак-
тивными сопротивлениями;
68
Глава //. Моделирование синхронных машин
Мц — момент постоянного знака, определяемый эквивалентным актив-
ным сопротивлением статорной цепи;
—момент постоянного знака, определяемый эквивалентным актив-
ным сопротивлением роторной цепи.
Для внезапного короткого замыкания, возникшего при холостом ходе
генератора, выражения для отдельных составляющих электромагнитного
момента в форме записи, данной Р. А. Лютером (1950), с небольшими
изменениями дающими большую наглядность влияния отдельных пара-
метров, выглядят следующим образом:
где т\— эквивалентное активное сопротивление для прямой последова-
тельности;
г — эквивалентное активное сопротивление внешней цепи (трансфор-
матор, ЛЭП и т. д.);
гРот. — эквивалентное активное сопротивление роторной цепи
г2 — эквивалентное активное сопротивление обратной последователь-
ности;
^50
-----отношение, учитывающее изменение эквивалентного активного
сопротивления роторных контуров при переходе от $ = 2 к $ = 1.
Из приведенных формул видно, что добавочные сопротивления корот-
кого замыкания определяют составляющую момента М'^ Так как гх =
— гом -ь гдоб, то составляющая момента М'^ прямо пропорционально зави-
сит от эквивалентной величины активного сопротивления гдоб., соответ-
ствующей добавочным потерям.
Составляющая М'^ прямо пропорционально зависит от величины экви-
валентного активного сопротивления роторной цепи.
Пульсационный электромагнитный момент М'^ также зависит от вели-
чины добавочных потерь. Но здесь это проявляется главным образом
в скорости затухания момента и, следовательно, только косвенным обра-
зом влияет на изменение тормозного эффекта от пульсационного момента.
На рис. 28, 29 приводятся кривые изменения составляющих электро-
магнитного момента для гидрогенератора Волжской ГЭС, на рис. 30,
31 — для гидрогенератора Днепрогэс. Для обоих гидрогенераторов рас-
чет составляющих электромагнитного момента произведен по расчетным
магнитный пульсационный момент при внезапном трехфазном коротком замыкании.
Мф = /(г) при Р = Р^ 0о = 13°О5\ £=1.15.
X d — 0.505; АГ^ = 1.19; = 0.143; \'" = 0.152; Та = 0.132; 7^ =2.0; 7^ = 0.05.
1(зл рад.)
1500
Рис. 29. Гидрогенератор СВ 2qq—88 Волжской ГЭС им. В. И. Ленина.
Электромагнитные моменты постоянного знака при внезапном трехфазном
коротком замыкании. М^ = f (/) и = f (/) при Р = Р*.
е0 = 13°05'; Е = 1.15; гом.?5О = 0.00353; гдоб< = 0.000822; = 0.00433; rpoT.s=i = 0.00875.
момент при внезапном трехфазном коротком замыкании. при Р = 0,
ео==о, Е=и.
X. = 0.8;У = 0.31; У'7 = 0.24; У'= 0.26; Г = 0.263; Т. = 2.92; 7^ = 0.07.
а и cl q d и
Цэлрад)
Рис. 31. Гидрогенератор СВ • —72 Днепрогэс. Электромагнитные моменты
постоянного знака при внезапном трехфазном коротком замыкании.
и Мф —f(t) при Р = 0, 0о = 0, E=U.
г =0.00314; 7 - = 0.00191; 7. = 0.00505; / =0.0101.
ОМ. доб. 1 рот.£—1
Мф = У(/) при Р = 0, 0{) = 0, E—U.
Xd=QA92-, Xd-= 0.129; x“d = 0.0966; x" = 0.113; 7^ = 0.150; T^=1.8; 7^= 0.045.
Рис. 33. Модельный гидрогенератор МГ-18.7—6, №014043. 5 = 1.5 мм. Элек-
тромагнитный момент постоянного знака при внезапном трехфазном корот-
ком замыкании и при Р = 0, 0о = 0, E = U.
г =0 00157; г. = 0 00164; г, = 0.00321; г' з= 0.0114.
ОМ. ДОО. 1 pOT.g—।
§ 6. Добавочные потери и эквивалентные активные сопротивления
71
параметрам, считая их неизменными для всего процесса короткого замы-
кания. Из приведенных кривых (рис. 28—31) наглядно видна роль доба-
вочных потерь в энергетике переходного процесса; на этих рисунках
представлены данные при внезапном коротком замыкании на зажимах
генератора.
На рис. 32, 33 приводятся кривые составляющих электромагнитного
момента модельного гидрогенератора МГ-18.7—6, расчитанные по опыт-
ным значениям параметров, принимая их также неизменными в течение
всего переходного процесса.
Общие закономерности в изменении добавочных потерь
короткого замыкания
При переходных и аварийных режимах синхронной машины, а также
при несимметричных режимах, которые могут быть в условиях эксплуа-
тации, в обмотках статора и ротора будут возникать периодические токи по
величине и частоте значительно отличающиеся от номинальных значений.
Потери в статорной цепи и в роторном контуре от протекания этих
токов и соответствующие им эквивалентные активные сопротивления
будут отличаться от той величины активного сопротивления, которая
определена расчетом или опытом для статора при номинальных условиях
и для ротора при каком-то определенном значении скольжения и вели-
чине тока. Поэтому для правильного анализа и расчета электромагнит-
ных и электромеханических процессов мощной синхронной машины,
работающей в энергосистеме, необходимо знание закономерностей изме-
нения эквивалентных активных сопротивлений статорной и роторной
цепей в зависимости от тока и частоты.
Не менее важное значение имеет знание этих закономерностей для
целей физического моделирования энергосистем и создания моделей
мощных синхронных машин, которые будут правильно отражать в модели
энергосистем не только процессы протекания токов и затухание их при
переходных и аварийных явлениях, но также правильно отразят энерге-
тические соотношения и движение ротора в переходных режимах.
При исследовании закономерностей изменения эквивалентных актив-
ных сопротивлений в зависимости от токов и частоты для статора
целесообразно рассматривать лишь добавочные потери и соответствую-
щие им эквивалентные активные сопротивления, так как основные
потери будут сохранять строгую пропорциональность омическому сопро-
тивлению. Последнее можно принимать в переходных и аварийных
режимах неизменным, как в мощных машинах, так и в их моделях, так
как длительность этих режимов обычно невелика и нагрев не успеет
значительно сказаться на изменении омического сопротивления.
Для роторной цепи удобнее рассматривать полные потери и полное
эквивалентное активное сопротивление, потому что эквивалентное оми-
ческое сопротивление роторной цепи по сравнению с полным активным
сопротивлением невелико, составляя для мощных машин при s = 1
около 3—4°/0, а при $ = 2 — около 1.5—2% от полного сопротивления,
кроме того, выделение омического сопротивления вносило бы лишние
усложнения в рассмотрение вопроса.
Первым приближением к выявлению зависимостей эквивалентных
активных сопротивлений статорной цепи от токов и частоты и правиль-
ным отражением их в моделях могут явиться результаты опытов по
определению потерь короткого замыкания мощных синхронных машин
и модельных машин. По роторной цепи для мощных машин нет надеж-
72
Глава II. Моделирование синхронных машин
ных экспериментальных данных. Поэтому мы здесь воспользуемся экспе-
риментальными данными по моделям и сопоставим их с приближенным
расчетом для мощных машин, который, к сожалению, полностью не
отражает интересующих нас зависимостей, а также не учитывает доба-
вочных потерь в магнитных частях ротора.
Ниже рассматриваются зависимости изменения эквивалентных актив-
ных сопротивлений и добавочных потерь короткого замыкания для мощ-
ных явнополюсных машин и их моделей, по которым имеются достаточные
Рис. 34. Эквивалентные активные
сопротивления гидрогенератора
Днепрогэс.
Рис. 35. Потери короткого
замыкания гидрогенератора
Днепрогэс.
экспериментальные данные. По мощным турбогенераторам необходимых
надежных экспериментальных данных не имеется, поэтому приводятся
лишь данные по модельному турбогенератору МТ-30—6.
На рис. 34 приводятся зависимости и гДОб. —f{I) для
гидрогенератора Днепрогэс. Из рис. 34 видно, что с увеличением тока
статора гк.а. падает. Такой же характер изменения гк.а. в зависимости
от тока получен и для других гидрогенераторов, по которым имеются
удовлетворительные экспериментальные данные.
Эта закономерность определяется тем, что в то время как величина
основных потерь изменяется пропорционально квадрату тока, величина
добавочных потерь находится в степени от тока статора меньшей, чем
квадратичная. Поэтому величина гк.а. убывает с возрастанием тока.
Особенно наглядный характер изменения добавочных потерь в сопо-
ставлении с основными потерями виден на рис. 35, где приводятся зави-
симости QAQ6,=f{I) и Qon.—f(I) для гидрогенератора Днепрогэс.
Характер уравнения кривой Qno6.=f{I) может быть приближенно
определен из рассмотрения расчетных формул, применяемых в заводской
методике расчета потерь явнополюсной синхронной машины, и из ана-
лиза зависимостей отдельных составляющих потерь от тока статора.
Рассмотрим эти зависимости.
Потери от эффекта вытеснения тока в меди обмотки находятся
в квадратичной зависимости от тока статора, но их удельный вес в общей
сумме добавочных потерь невелик.1
1 В табл. 8—15 приведены данные о составе добавочных потерь мощных турбо-
и гидрогенераторов и синхронных компенсаторов.
$ б. Добавочные потери и эквивалентные активные сопротивления
13
Значительные по удельному весу потери в зубцах от третьей гармо-
нической составляющей индукции принимаются в расчете в степени 5/4
от величины индукции, но последняя в условиях малого насыщения
будет находиться в линейной зависимости от тока, следовательно, эти
потери могут приниматься в степени 5/4 от величины тока.
Рис. 36. Потери и эквивалентные активные сопротивления модельного
гидрогенератора МГ-18.7—6, № 014С68 с воздушным зазором
5мин. = 1-5 мм-
oM.^go ~ 0.0051 ом; г при вынутом роторе = 0.009 ом; гк> 3. = 0.0101 -4- 0.0116 ом.
Потери в полюсных башмаках от зубчатости м. д. с. и высших гар-
монических, согласно расчету, зависят от индукции в зазоре. Принимая
во внимание, что индукции в зазоре при коротком замыкании будут
ниже 1 вб/м2 и линейно зависят от тока, можно считать, что эти потери
изменяются в зависимости от тока статора в степени, близкой к 1.6.
Потери в нажимной плите принимаются в расчете в зависимости от
линейной нагрузки и в степени большей, чем квадратичная, но они неве-
лики по удельному весу в составе добавочных потерь.
Таким образом, из заводской расчетной методики следует, что состав-
ляющие добавочных потерь, имеющие наибольший вес в общей сумме
потерь, зависят от тока статора в степени меньшей, чем квадратичная.
74
Глава II. Моделирование синхронных машин
Поэтому и общая сумма добавочных потерь, определенная расчетно,
будет зависеть от тока в степени меньшей, чем квадратичная.
Следует отметить, что по этой же заводской расчетной методике
Рис. 37. Потери и эквивалентные активные сопротивления модельного гидро-
генератора МГ-18.7—6, № 014043 с воздушным зазором Ьмин =2.5 мм.
гом.15о== 0*0051 ом, г при вынутом роторе = 0.0095 ом, гк> 3. — 0.0101 — 0.0127 ом.
от нагрузки, что является нелогичным, противоречащим как самой
заводской расчетной методике, так и данным опыта.
Если даже принять, что в расчетной методике недостаточно точно
учитываются отдельные составляющие потерь, то из простого рассмо-
трения условий возникновения добавочных потерь при коротком замы-
кании, при котором добавочные потери находятся преимущественно
в магнитных частях машины и индукции не превосходят 1 вб/м2, можно
утверждать, что зависимость добавочных потерь от тока для явнополюс-
ных машин будет близка к степени 1.6 и во всяком случае будет ниже
квадратичной зависимости. Лишь при очень больших токах, соответ-
ствующих внезапному короткому замыканию, можно ожидать, что доба-
вочные потери в некоторых машинах будут относительно возрастать.
§ 6. Добавочные потери и эквивалентные активные сопротивления
75
Указанная зависимость отражается и в модельных синхронных гене-
раторах. На рис. 36, 37 приводятся зависимости потерь и активных
сопротивлений в функции от тока для двух машин МГ-18.7—6 с воз-
Рис. 38. Эквивалентные активные сопротивления модельного турбогене-
ратора МТ-30—6, № 014314 с воздушным зазором омин. = 1.4 мм.
Рис. 39. Потери короткого замыкания модельного тур-
богенератора МТ-30—6, № 014314 с воздушным
зазором ймин =1.4 мм.
душными зазорами & = 1.5 мм и S = 2.5 мм. Из рис. 36 и 37 видно,
что добавочные потери, превышающие основные потери в области малых
токов, с увеличением тока относительно уменьшаются, пересекают кри-
76
Глава II, делирование синхронных машин
вую основных потерь и далее идут ниже ее. Кривая изменения актив-
ных сопротивлений имеет падающий характер.
Аналогичный характер имеют кривые изменения потерь и активных
сопротивлений и для других модельных машин ИЭМ, а именно для
МГ-25—1000, МГ-15—1000 и МК2-3—1500.
Для модельного турбогенератора МТ-30—6 получены такие же зако-
номерности изменения гк.в. =/(/) и QAO6. =/(/), как и для явнополюсной
Рис. 40. Эквивалентные активные сопротивления в функции от частоты
1160
гидрогенератора СВ ^gg—72, № 13465 Днепрогэс.
п 'к. а. 0.01274 _ „ _со гк. а. 0.01336 .
Опыт:--------= - ~ 2.08; пересчет опыта на 75° С: ---- = _ - = 1.982; ра-
гом.60о 0.00612 F гом.75О 0.00674
Опытные кривые продолжены пунктирными линиями, построенными
по указанным при них уравнениям.
машины (рис. 38, 39). Отсутствие опытных данных по мощному турбо-
генератору не позволяет сделать сопоставления данных модели с ори-
гиналом.
Рассмотрев зависимости активных сопротивлений и добавочных потерь
короткого замыкания от тока статора, перейдем теперь к рассмотрению
второй, не менее важной для переходных процессов зависимости актив-
ных сопротивлений и добавочных потерь от частоты.
Зависимость эквивалентных активных сопротивлений статорной цепи
от частоты для мощных синхронных машин гк. 3. = /(п) приведена на
рис. 40 (для гидрогенератора Днепрогэс).
При обработке данных испытания, проведенных на генераторах Дне-
прогэс, оказалось, что если определить уравнение кривой гк.з. =f(n)
на участке ее, полученном в опыте, и затем на основе этого уравнения
продолжить кривую до нулевой скорости, то для всех значений токов
£ 6. Добавочные потери и эквивалентные активные сопротивления
77
короткого замыкания кривые пересекутся с осью ординат в одной точке.
Можно было бы ожидать, что полученное таким пересечением сопротив-
ление при нулевой скорости будет равно омическому сопротивлению.
Однако из данных опыта видно, что сопротивление при нулевой
скорости значительно превышает омическое сопротивление (рис. 40).
При этом для гидрогенератора Днепрогэс оказалось, что если из полу-
ченного для номинального тока при номинальной скорости значения гк. 3.
вычесть величину г о гЦ при нулевой скорости, то гдоб. = гк.3.— го гц совпа-
Рис. 41. Эквивалентные активные сопротивления в функции от
частоты для модельного гидрогенератора МГ-18.7—6 с воздуш-
ным зазором Вмин = 1.5 мм.
дает с тем значением, которое соответствует расчетной величине доба-
вочных потерь. Это позволяет предполагать, что гдоб> = гОгц— гом. соот“
ветствует тем добавочным потерям, которые не учитываются расчетной
методикой. Можно предположить, что физическая природа этих доба-
вочных потерь связана с магнитной и электрической несимметрией
машины. Это предположение требует для своего подтверждения соот-
ветствующих экспериментальных исследований.
Такой же, как и для мощного гидрогенератора, характер измене-
ния гк.з. =/(п) получен для модельных машин (рис. 41, 42). Но в мо-
дельных машинах разность между Гогц и гом. значительно меньше, чем
в мощном оригинале. Это можно объяснить тем, что несимметрии в малой
модельной машине будут значительно меньше, чем в моделируемой машине
с большими габаритами, так как в последней по технологическим и мон-
тажным условиям трудно обеспечить строгую магнитную симметрию.
Рис. 42. Эквивалентные активные сопротивления в функции от
частоты для модельного турбогенератора МТ-30—6 с воздушным
зазором ^мин = 1.4 мм.
Рис. 43. Эквивалентные активные сопротивления из опытов само-
1250
торможения гидрогенератора СВ = 17Q—% Угличской ГЭС.
§ 6» Добавочные потери и эквивалентные активные сопротивления
79
В характере изменения кривых гк. 3. = /(/) и гк. 3. = /(и) для мощной
синхронной машины и для модельных машин МГ-18.7—6 и МТ-30—6,
следует отметить плавный, монотонный ход их, что вполне объясняется
характером зависимостей потерь от тока и частоты. При недостаточно
доброкачественном эксперименте указанный вид кривых нарушается
(рис. 43).
Рассмотренные здесь закономерности изменения гк. з. = /(/) и гк. 3,= /(л)
для мощной явнополюсной машины, подтвержденные в модельных маши-
нах, должны приниматься во внимание при исследовании добавочных
потерь и эквивалентных им активных сопротивлений как в мощных
машинах, так и в их моделях. Это особенно следует подчеркнуть потому,
что при недостаточно доброкачественно поставленном эксперименте эти
закономерности могут быть не выявлены, примером чему служат испы-
тания гидрогенераторов Угличской ГЭС и некоторых других. Как видно
из рис. 43, кривые гк. а. =/(л) не только не имеют отмеченных выше
закономерностей, но вообще не отличаются какой-либо определенной
закономерностью, и даже уже при скорости 0.5 лНОм. пересекают или
близко подходят к величине сопротивления, которое было зафиксиро-
вано в опыте как омическое сопротивление обмотки статора с учетом
внешнего контура. Недостаточная доброкачественность эксперимента
на Угличской ГЭС прежде всего заключается в том, что во время
опыта самоторможения ток ротора не поддерживался строго постоян-
ным, что видно из записей в протоколах испытания.
Опытное определение добавочных потерь
Добавочные потери в синхронных машинах экспериментально при-
ходится определять как разность двух больших величин. Это одинаково
относится как к мощным машинам, так и в особенности к их моделям.
Поэтому точность и достоверность результатов опытного определения
целиком зависит от качества постановки самого эксперимента и от при-
нятого метода математической обработки опытных данных. Наиболее
надежным методом опытного определения потерь мощных синхронных
машин на местах их установки продолжает оставаться метод самотормо-
жения или выбега. Применявшийся до сих пор метод графической обра-
ботки данных опытов самоторможения, подробно разработанный в тру-
дах проф. В. А. Толвинского, все же не обеспечивал высокой точности
и отличался большой трудоемкостью. В настоящее время разработан
метод математической обработки экспериментальных данных по опреде-
лению потерь, отличающийся малой трудоемкостью и позволяющий вно-
сить закономерные поправки в опытные данные, исправляющие погреш-
ности измерения. Этим самым точность опытного определения потерь
мощных синхронных машин резко повышена. Приводимые данные по
гидроагрегату Днепрогэс получены на основе метода, повышающего
точность самого эксперимента и указанного метода математической
обработки, уточняющего результаты опыта.
Получение точных, надежных опытных данных по добавочным
потерям для модельных машин еще более осложнено, чем для мощных
машин. Причина заключается в том, что абсолютная величина этих
потерь очень мала. Так, мапример, для МГ-18.7—6 они составляют
около 40 вт, в то время как постоянные потери, сопутствующие опыту,
а именно механические и вентиляционные потери модельного генера-
ВО Глава II, Моделирование синхронных машин
тора и потери в приводном двигателе, составляют для МГ-18.7—6
около 1500 вт. Поэтому для точного определения добавочных потерь
в модельных машинах приходится обеспечивать особую тщательность
в проведении эксперимента и искать способы, позволяющие повысить
точность опытных данных.
Определение потерь в модельных машинах следует проводить двумя
методами: методом тарированного электродвигателя и методом само-
торможения для взаимного контроля получаемых опытных данных.
В постановке эксперимента как методом тарированного двигателя,
так и методом самоторможения следует обеспечить получение данных
по потерям в функции от тока статора и в функции от частоты. Для
этого тарированным двигателем непосредственно определяются потери
QK. а.—QK. з.—fот значении скорости 1.5 1.8 п ном. до наимень-
шей возможной скорости, при которой еще устойчиво сохраняется
постоянная величина тока короткого замыкания. Методом же самотор-
можения определяются потери для нескольких значений токов, причем
осуществляется большее число выбегов при токах превышающих номи-
нальный.
Кроме указанного, самым существенным в методе опытного опреде-
ления добавочных потерь модельной машины, повышающим точность
и обеспечивающим достоверность результатов, является измерение
потерь в очень широком диапазоне токов статора до пределов, превы-
шающих номинальные значения в 8—10 раз, что возможно делать
в модельных машинах, имеющих малые удельные нагрузки. При боль-
ших значениях тока полные потери короткого замыкания становятся
соизмеримы с постоянными потерями, участвующими в опыте, и даже
начинают их превышать. Поэтому искомые потери уже не определяются
как малая величина из разности двух больших величин. Точность их
определения становится значительно более высокой, зависящей уже
только от применяемых приборов и опытности экспериментатора. Одно-
временное измерение температур обмотки статора, как термопарами
и термометрами, так и по сопротивлению, позволяет точно определить
величину основных потерь в опыте и, следовательно, выделить доста-
точно точно величину добавочных потерь.
Примером такого определения добавочных потерь служат рис. 36, 37.
Далее производится вычисление гк. а.. Для больших токов это будет
точная, достоверная величина. Поэтому значительный участок кривой
/*к.в. =/(/), приходящийся на область больших токов, может быть при-
нят как опорный. Для продолжения кривой на область малых токов
следует иметь для нее возможно большее число опытных точек, учиты-
вая их неизбежный большой разброс. Далее, пользуясь строгими мето-
дами статической обработки экспериментальных данных, можно вполне
достоверно продолжить кривую гк. а. —f(I) в области малых токов. Прак-
тически это можно выполнить графическим способом, имея опорную
часть кривой для больших токов и много опытных точек для малых
токов. Такой способ проведения кривой не является простой экстрапо-
ляцией. В предлагаемом практическом приеме — совместное использова-
ние принципов экстраполяции и множества опытных точек.
Таким образом, проведенная указанным способом кривая гк. 3. =/(/)
и в области малых токов достаточно точна и достоверна.
На основе полученной кривой гк. 3. =/(/) вычисляется гдоб. =/(/),
принимая во внимание измерение температур обмотки статора в течение
всего опыта для точного определения вычитаемой величины гом..
§ 6. Добавочные потери и эквивалентные активные сопротивления
81
Переходя к способам повышения точности экспериментальных дан-
ных по зависимостям гк. 3. = /(л) и гдоб. = /(и) следует отметить, что
здесь это достигается несколько иным образом. Используя по-прежнему
два метода — метод тарированного двигателя и метод самоторможения,
для взаимного контроля получаемых опытных данных определяют потери
Qk.s. =/(л), проводя большое число опытов для токов статора, превы-
шающих номинальный в несколько раз. Вычисленные кривые гк. 3. = /(л)
и Гдоб. = /(л) на основе этих опытов будут более точны и достоверны
для больших токов. Пользуясь ими, можно уточнить ход аналогичных
кривых и для малых токов, в том числе и для номинального тока.
Пример таких кривых дан на рис. 41, 42.
Кроме использования двух методов определения потерь — метода
тарированного двигателя и метода самоторможения, что само по себе
уже повышает точность и достоверность получаемых результатов, может
быть использован для дополнительного контроля потерь QK. з. =/(/) и
(?доб. = /(/) опыт с вынутым ротором.
В опыте с вынутым ротором состав добавочных потерь будет не-
сколько отличным от состава потерь при коротком замыкании, однако
сопоставление хода кривых потерь и эквивалентных активных сопро-
тивлений из опыта короткого замыкания и опыта с вынутым ротором
вполне целесообразно в целях контроля и анализа.
Потери при вынутом роторе при наличии низкокосинусных ваттмет-
ров высокого класса, могут быть определены с большой точностью, так
как они получаются непосредственным измерением, а не как малая раз-
ность больших величин.
Может быть также проведен опыт питания статора от постороннего
источника, имеющего форму кривой напряжения, близкой к форме кри-
вой у исследуемой машины. Опыт должен производиться при строго
синхронной скорости вращения ротора. Этот опыт может дать ценные
данные не только для дополнительного контроля величины потерь, но
также и для анализа состава потерь.
Таким образом, при тщательной постановке эксперимента и взаимной
проверке результатов, полученных из различных опытов, имеется пол-
ная возможность преодолеть трудности в точном определении добавоч-
ных потерь короткого замыкания модельных машин, несмотря на их
абсолютную малость при номинальном токе, и получить вполне досто-
верные данные.
Экспериментальные данные по потерям короткого
замыкания
В табл. 5 приводятся экспериментальные данные по модельным
гидрогенераторам, построенным по проекту различных научно-исследо-
вательских организаций.
Модельные гидрогенераторы типов МГ-18.7—6 и СГД-18.7—6 м на
номинальную мощность 18.75 ква даны в двух вариантах: на свою номи-
нальную мощность и на мощность 15 ква для возможности сопостав-
ления между собой машин четырех организаций. При этом по машинам
МГ-18.7—6 ИЭМ, данные для 15 ква, взяты, не путем простого пере-
счета, а из опытных кривых, приведенных на рис. 36, 37. Для машины
СГД-18.7—6 м применен пересчет.
Если сопоставить приведенные в табл. 5 данные с теми, которые
даны в табл. 8, 9 по мощным оригиналам, то можно сделать вывод, что
Параметры
МГ-18.7—б, ИЭМ (6 = 1.5 мм) МГ-18.7—6, ИЭМ (6 = 2.5 мм) МГ-18.7—б, ИЭМ (8 = 1.5 мм) МГ-18.7—6, ИЭМ (8 = 2.5 мм)
S (ква) 18.75 18.75 15 15
и (в) 230 230 230 230
*d (д. е.) . . . . 0.614 0.466 0.490 0.373
Xad (д- е.) . . . . 0.552 0.409 0.442 0.326
Я/агр. (сек-) • • • 10.8 10.9 13.5 13.6
Q0M. 35° С (ВТ) . 37 37 23 23
Одоб. (вт) • • • • 38 44 25 29
Qk.8. (вт) • • • • 75 81 48 52
35° С (ом) . . 0.0055 0.0055 0.0055 0.0055
гк.а. (°м) • • • • 0.0113 0.0122 0.01135 0.0123
гои. 35° С (д. е.) . 0.00195 0.00195 0.00156 0.00156
гк.з. (д- е.) . . . 0.004 0.0043 0.00322 0.00349
Гк. 3. гом. 2.05 2.20 2.06 2.24
Таблица 5
Типы модельных гидрогенераторов
МГ-15—1000, ИЭМ (8=1 мм) МГ-15—1000, МЭИ (о = 0.95 мм) МГ-15—1000, МЭИ (8 = 2.2 мм) МГ-15—1000, НИИПТ (8 = 1.2 мм) СГ Д-18.7-6 м, ЛПИ (3 = 1.0 мм) 1 СГД-18.7—6 м, ЛПИ (8 = 1.0 мм) МГ5-1500, НИИПТ (8 = 1.2 мм) МГ5-1500. НИИПТ (8 = 2.3 мм)
15 15 15 15 18.75 15 5 5
230 200 200 230 230 230 230 230
0.775 0.875 0.524 0.875 0.775 0.620 0.635 0.40
0.732 0.835 0.468 — 0 74 0.592 — —
9.8 — — — 3.9 4.9 5.8 5.8
40 73 73 42 109 70 18 18
45 157 50 39 235 151 9 4
85 230 123 81 344 221 27 22
0.0095 0.013 0.013 0.0098 0.0164 0.0164 0.0383 0.0383
0.020 0.0407 0.0218 0.0190 0.052 0.0517 0.0574 0.047
0.00269 0.00485 0.00485 0.00278 0.0058 0.00465 0.00362 0.00362
0.00567 0.0153 0.0082 0.00539 0.0185 0.0146 0.00542 0.00444
2.11 3.15 1.69 1.94 3.15 3.15 1.50 1.22
§ 6* Добавочные потери и эквивалентные активные сопротивления
83
Таблица 6
Параметры Типы модельных турбогенераторов
МТ-30-6, ИЭМ, (8 = 1.4 мм' МТ-30-1000, ИЭМ (8 = 1.0 мм) i МТ-30-1000, НИИПТ (8 = 1.3 мм) МТ-25-1000, МЭИ СГТ-12.5—6, ЛПИ (8 = 0.75 мм) МТ-5-1500, НИИПТ (8 = 0.5 мм)
S (ква) 30 30 30 25 12.5 5
и (в) 230 230 230 400 230 230
Xd (д- е.) 1.57 2.06 1.53 1.60 1.45 1.31
Xad (д- е.) 1.49 1.96 1.40
Я/arp. <сек’) 10.9 5.4 7.8 6.63 3.23 5.4
Сом. 35° С (вт) 94 160 103 60 126 18
Сдоб. (вт) 416 475 235 185 64
Ск.,. <ВТ) 510 635 295 311 82
35° С (ом) 0.0055 0.0094 0.00607 0.0154 0.0425 0.0382
'к. а. (°м) 0.03 0.0372 0.0755 0.103 0.174
гом 35°С (д. е.) 0.0031 0.00534 0.00344 0.0024 0.010 0.0036
(д- е-) 0.017 0.0211 0.0118 0.0243 0.0164
гк.з. 5.48 3.95 4.9 2.43 4.55
Гом.
Таблица 7
Параметры Типы модельных компенсаторов
МКЗ-4, ИЭМ (8 = 0.6 мм) 1 МКЗ-1500, МЭИ МКЗ-1500, НИИПТ (8 == 0.75 мм)
S (ква) 3 3 3
и (в) 230 355 230
Xd (д. е.) 1.22 0.922
Xad (д. е.) 1.67
яАгР. (сек-) 6.09
Сом. 35° С (вт) 9.5 12 13.5
Сдоб. (вт) 16.8 30.3 12
Ск. а. (вт) 26.3 42.2 25.5
Гом. 35° С (ом) 0.0562 0.166 0.0795
гк.з. (°“) 0.155 0.591 0.151
'ом. 35° С (д. е.) 0.00318 0.00396 0.0045
'к.з. (д- е‘) 0.00878 0.01407 0.00855
гк.з. 2.76 3.56 1.9
Гом. i
1 Расчетная величина зазора.
84
Глава II. Моделирование синхронных машин
Таблица 8
Состав потерь Типы гидрогенераторов
| 0£Паи 250 ’ 235000 ква, Братская ГЭС св 1500 88 СВ 1бо~88’ 123500 ква, Волжская ГЭС сви ^-72- 103500 ква, 71500 ква, Горьковская ГЭС СВ^-96, 68750 ква, Щербаков- ская ГЭС 50000 ква, Рерхне-Свир- ская ГЭС
Омические 473 440 Килов 370 атты 336 308 219
Добавочные в меди .... 68.6 23 58.5 20 24.6 23.6
В зубцах от 3-й гармони- ческой 187.5 61 121.2 52.5 75 69
В полюсных башмаках от зубчатости м. д. с. ... 29.7 13 32.9 9.9 20.4 11.5
В полюсных башмаках от высших гармонических 2.6 0.5 1.0 1.1 — 1.0
В нажимной плите .... 20.2 4 7.4 3.7 11.2 2.1
Сумма добавочных потерь 308.6 101.5 221 87.2 131.2 107.2
Потери короткого замыка- ния 781.6 541.5 591 423.2 439.2 326.2
Таблица 9
Состав потерь Типы гидрогенераторов
“1^3, 235000 ква, Братская ГЭС CR 1500 R8 СВ 200 ~88’ 123500 ква, Волжская ГЭС Сви ^-72, 103500 ква, 71500 ква, Горьковская ГЭС Св^°-96, 68750 ква, Щербаков- ская ГЭС се ^-33, 50000 ква, Верхне-Свир- ская ГЭС
Омические 1 0.605 0.813 0.626 0.794 0.701 0.672
Добавочные в меди 1 . . . В зубцах от 3-й гармони- 0.0877 0.0424 0.098 0.047 0.056 0.0723
ческой 1 В полюсных башмаках от 0.24 0.112 0.206 0.124 0.171 0.21
зубчатости м. д.с.1 . . . В полюсных башмаках от 0.0379 0.024 0.0557 0.0234 0.0465 0.0352
высших гармонических1 0.0033 0.0009 0.0016 0.0026 0.0369 0.00306
В нажимной плите1 . . . . Сумма добавочных по- 0.0258 0.0074 0.0125 0.0087 0.0255 0.00643
терь 1 Потери короткого замыка- ния 2 0.395 0.187 0.374 0.206 0.299 0.328
1.65 1.23 1.59 1.255 1.42 1.49
Омические3 Потери короткого замыка- 0.00201 0.00356 0.00357 0.0047 0.00448 0.00438
ния 3 0.00332 0.00438 0.0057 0.00591 0.00638 0.00654
1 В долевых значениях по отношению к Q* я •
2 В долевых значениях к омическим потерям.
3 В долевых значениях к номинальной мощности генератора.
£ 6. Добавочные потери и эквивалентные активные сопротивления
85
Таблица 10
Состав потерь Типы турбогенераторов
Т2-25-2, 31200 ква Т2 50—2, 62500 ква ТВ-50—2, 62500 ква ТВ-100—2, 117500 ква ТВ2-100—2, 117500 ква ТВ2-150—2, 166600 ква
Омические 60.0 87.6 Киловатты 98.7 1 123.0 131 150
Добавочные в меди .... 8.6 14.6 16.5 32.0 39.3 42.2
На поверхности ротора от высших гармонических поля статора 13.4 24.2 27.3 34.6 29.3 31.0
На поверхности ротора от гармонических порядка зубчатости статора . . . 0.9 0.0 0.3 0.35 1.05 0.2
На поверхности статора от высших гармонических поля ротора 16.5 36.1 40.7 53.7 51.75 68.9
На поверхности статора от гармонических порядка зубчатости ротора . . . 11.6 16.0 18.1 23.8 29.4 26.2
Пульсационные в зубцах статора от гармониче- ских зубчатости ротора . 25.8 29.5 33.2 59.25 81.6 64.0
Сумма добавочных потерь . 76.8 120.4 136.1 203.7 232.4 232.5
Потери короткого замыка- ния 136.8 208.0 234.8 326.7 363.4 382.5
Таблица 11
Состав потерь Типы турбогенераторов
ТВФ-60—2, 75000 ква ТВФ-100—2, 117500 ква ТВВ-150—2, 176500 ква ТВВ-200—2, 235300 ква ТВВ-300 —2, 353000 ква ТВВ-400—2, 471000 ква
Омические 118.0 182.0 | Килов 283.0 атты 590.0 487.0 795.0
Добавочные в меди .... 24.0 28.0 83.0 308.0 168.5 199.0
На поверхности ротора от высших гармонических поля статора 16.3 25.4 28.9 60.0 65.0 83.0
На поверхности ротора от гармонических порядка зубчатости статора . . .
На поверхности статора от высших гармонических поля ротора 34.0 46.5 52.3 80.5 164.0 214.0
На поверхности статора от гармонических порядка зубчатости ротора . . . 24.0 26.4 29.7 45.5 61.5 57.5
Пульсационные в зубцах статора от гармониче- ских зубчатости ротора . 50.0 65.0 54.3 88.5 157.0 108.0
Сумма добавочных потерь . 148.3 191.3 248.2 582.5 616.0 661.5
Потери короткого замыка- ния 266.3 373.3 531.2 1172.5 1103.0 1456.5
86
Глава II, Моделирование синхронных машин
Таблица 12
Состав потерь Типы турбогенераторов
Т2-25—2, 31200 ква Т2-50-2, 62500 ква ТВ-50—2, 62500 ква ТЧ-100—2, 117500 ква ТВ2-100—2, 117500 ква ТВ2-150—2, 166600 ква
Омические 1 0.438 0.421 0.42 0.377 0.36 0.392
Добавочные в меди1 . . . 0.0629 0.0702 0.0703 0.098 0.108 0.1104
На поверхности ротора от высших гармонических поля статора 1 0.098 0.1164 0.116 0.103 0.0807 0.0811
На поверхности ротора от гармонических порядка зубчатости статора1 . . 0.0066 0.0 0.0013 0.0011 0.0029 0.0005
На поверхности статора от высших гармонических ротора1 0.1205 0.1735 0.173 0.167 0.143 0.180
На поверхности статора от гармонических порядка зубчатости ротора 1 . . . 0.085 0.077 0.0771 0.0728 0.081 0.0685
Пульсационные в зубцах статора от гармониче- ских зубчатости ротора 1 0.189 0.142 0.1415 0.181 0.224 0.167
Сумма добавочных потерь 1 0.562 0.579 0.58 0.623 0.64 0.608
Потери короткого замыка- ния 2 2.28 2.37 2.38 2.66 2.77 2.55
Омические3 0.00192 0.00140 0.00158 0.00105 0.00111 0.0009
Потери короткого замыка- ния3 0.00438 0.00333 0.00376 0.00278 0.00309 0.0023
Таблица 13
Состав потерь Типы турбогенераторов
ТВФ-60-2, 75000 ква ТВФ-100—2, 117500 ква 1 » 8* PQ® ТВВ-200—2, 235300 ква ТВВ-300—2, 353000 ква ТВВ-400—2, 471000 ква
Омические1 Добавочные в меди .... На поверхности ротора от высших гармонических поля статора 1 На поверхности ротора от гармонических порядка зубчатости статора1 . . На поверхности статора от высших гармонических поля ротора 1 На поверхности статора от гармонических порядка зубчатости ротора1 . . . Пульсационные в зубцах статора от гармониче- ских зубчатости ротора 1 0.443 0.0901 0.0612 0.1276 0.0901 0.1876 0.488 0.075 0.0681 0.1245 0.0708 0.174 0.533 0.156 0.0545 0.0986 0.056 0.102 0.504 0.262 0.0511 0.0686 0.0388 0.0754 0.442 0.1528 0.0589 0.1486 0.0557 0.1422 0.546 0.137 0.057 0.147 0.0395 0.074
Значения сносок к табл. 12, 13 и 15.
1 В долевых значениях по отношению к Q
К. 3.
2 В долевых значениях к омическим потерям.
Q D •
г> долевых значениях к номинальной мощности генератора.
£ 6. Добавочные потери и эквивалентные активные сопротивления
87
Таблица 13 (продолжение)
Состав потерь Типы турбогенераторов
ТВФ-60-2, 75000 ква ТВФ-100—2, 117500 ква ТВВ-150—2, 176500 ква ТВ В-200—2, 235300 ква ТВВ-300—2, 353000 ква ТВВ-400—2, 471000 ква
Сумма добавочных потерь 1 0.557 0.512 0.467 0.496 0.558 0.454
Потери короткого замыка- ния 2 2.26 2.05 1.88 1.99 2.27 1.83
Омические потери3 .... 0.00157 0.00155 0.0016 0.00251 0.00138 0.00169
Потери короткого замыка- ния 3 0.00355 0.00318 0.00301 0.0050 0.00313 0.00309
Таблица 14
Состав потерь Типы синхронных компенсаторов
КС-5000—б, 5000 ква, 6300 в КС-7500-6, 7500 ква, 6600 в КС-30000-11, 30000 ква, 10500 в КСВ-37500—11, 37500 ква, 10500 в КСВ-75—11, 75000 ква, 11000 в
Киловатты
Омические 32.6 46.5 133 172.5 252
Добавочные в меди .... В зубцах от 3-й гармони- 2.2 2.51 8.5 11.0 53.5 24
ческой 6.3 9.58 40.5 66
В полюсных башмаках от
зубчатости м. д.с. ... В полюсных башмаках от 1.18 1.89 6.3 10.0 22
высших гармонических . 0.72 — 7.5 12.0 15.5
В нажимной плите .... 8.72 9.95 21.6 48.0 154
Сумма добавочных потерь . Потери короткого замыка- 19.12 23.93 84.4 134.5 281.5
ния 51.72 70.43 217.4 307.0 533.5
Таблица 15
Состав потерь Типы синхронных компенсаторов
КС-5000-6, 5000 ква, 6300 в КС-7500-6, 7500 ква, 6600 в КС-30000-11, 30000 ква, 10500 в К СВ-37500-11, 37500 ква 10500 в КСВ-75—11, 75000 ква, 11000 в
Омические1 0.630 0.660 0.612 0.562 0.479
Добавочные в меди 1 . . . В зубцах от 3-й гармони- 0.0426 0.0357 0.039 0.0359 0.045
ческой 1 В полюсных башмаках от 0.122 0.136 0.186 0.174 0.124
зубчатости м. д. с. 1 . . . 0.0228 0.0269 0.029 0.0326 0.0412
88
Глава II. Моделирование синхронных машин
Таблица 15 (продолжение^
Состав потерь Типы синхронных компенсаторов
КС-5000-6, 5000 ква, 6300 в КС-7500-6, 7500 ква, 6600 в КС-30000-11, 30000 ква, 10500 в КСВ-37500—11, 37500 ква, 10500 в КСВ-75—11, 75000 ква, 11000 в
В полюсных башмаках от
высших гармонических 1 0.0140 — 0.0345 0.0391 0.0291
В нажимной плите 1 . 0.169 0.141 0.0995 0.156 0.289
Сумма добавочных потерь 1 Потери короткого замыка- 0.37 0.340 0.388 0.438 0.528
ния 2 1.59 1.51 1.62 1.78 2.12
Омические потери 3 . . Потери короткого замыка- 0.00652 0.0062 0.00444 0.0046 0.00336
ния 3 0.01034 0.00938 0.0072 0.0082 0.00712
все модельные машины позволяют, в части активных сопротивлений
статорной цепи, моделировать соответствующие параметры натурных
машин. Лишь для моделирования самых мощных гидрогенераторов сле-
дует применять компенсаторы в статорной цепи в виде трехфазных
коллекторных генераторов отрицательных сопротивлений или перехо-
дить для моделирования их на мощности в модели, отличные от номи-
нальных.
В табл. 6 приводятся экспериментальные данные по модельным тур-
богенераторам. Здесь активные сопротивления значительно большие,
чем в моделях гидрогенераторов, и для осуществления правильного
моделирования параметров мощных турбогенераторов необходимо при-
менять в цепи статора трехфазные коллекторные генераторы отрица-
тельных сопротивлений, о которых подробно говорится в главе III.
В табл. 7 приведены экспериментальные данные по модельным
синхронным компенсаторам.
Моделированию синхронны^сомпенсаторов уделялось меньше внимания
и эти модели можно считать лишь первым приближением к моделирова-
нию мощных синхронных компенсаторов. Требуется дальнейшая работа
по созданию моделей современных мощных синхронных компенсаторов,
устанавливаемых на дальних линиях электропередач и проектируемых
в качестве подпорных компенсаторов для дальних линий электро-
передач.
Для возможности сопоставления данных по потерям, присущих
модельным машинам, с данными для мощных оригиналов в табл. 8—15
приводятся потери для ряда гидро- и турбогенераторов и синхронных
компенсаторов.
Активные сопротивления роторного
контура
Выше было указано, что по расчету потерь роторного контура мощ-
ных синхронных машин нет расчетных методик и нет экспериментальных
данных. Результаты, полученные для скольжения s = 1 при произведен-
6. Добавочные потери и эквивалентные активные сопротивления
89
ных приближенных расчетах потерь и эквивалентных им активных сопро-
тивлений роторного контура, учитывающих лишь эффект вытеснения
тока в меди обмотки ротора и демпферной обмотки по ряду мощных
явнополюсных машин, приведены в табл. 16.
Таблица 16
Гидрогенераторы
Днепрогэс.....................
Свирьгэс .....................
Волжская ГЭС..................
Горьковская ГЭС...............
Грот.5=1
0.0101 28
0.0125 27.2
0.00875 26.8
0.0103 19
Эти приближенные значения позволяют иметь первую ориентировку
для оценки необходимых активных сопротивлений роторного контура
модельных машин.
Ранее уже отмечалось, что в модельных машинах нет возможности
отразить потери роторного контура мощного оригинала в полном соот-
ветствии с ним.
Рис. 44. Эквивалентные активные сопротивления
роторной цепи в функции от тока при s = 1 для
модельного гидрогенератора МГ-18.7—6, №,014068
с воздушным зазором ^мин =1.5 мм. ту =0.00197 ом.
Приводимые ниже данные по модельным машинам позволяют иметь
суждение о моделировании общей величины потерь роторного контура
по эквивалентным им активным сопротивлениям.
На рис. 44 дана кривая /от =/(/) для модельного гидрогенератора
МГ-18.7—6. Как видно из рис. 44 характер изменения эквивалентных
активных сопротивлений роторного контура в зависимости от тока ста-
тора такой же, как и гк з = /(/). Приведенные ранее соображения
о физической природе зависимостей добавочных потерь от тока при
коротком замыкании статорной цепи находят и здесь свое отра-
жение.
По величине эквивалентное активное сопротивление роторного кон-
тура для номинального тока статора превосходит приведенное омическое
90
Глава II. Моделирование синхронных машин
сопротивление обмотки возбуждения в -рот <~1 = п7ййг7==:203 раза. Сопо-
7*^ и.иии/
ставляя эту величину с данными, приведенными по мощным гидроге-
нераторам, можно сделать вывод, что в первом приближении в модели
001WO
001035
Л
000710
000355
Рис. 45. Эквивалентные активные сопротивления ро-
торной цепи в функции от частоты для модельного
гидрогенератора МГ-18.7—6, № 014068 с воз-
душным зазором ^мин =1.5 мм.
у == 0.0007 д. е.
количественно отражены активные сопротивления роторного контура
мощных оригиналов.
На рис. 45 даны грот. —/(Л) для различных токов статора. Харак-
тер этих кривых также отражает те закономерности, которые наблю-
дались для статорной цепи (рис. 41, 42).
ооиго -
001065 -
I §
0.00355 -
—I—> । । । । । । । t
0 500 1000
п(об/мин)
Рис. 46. Эквивалентные активные сопротивления
роторной цепи при включении внешних добавочных
сопротивлений для модельного гидрогенератора
МГ-18.7—6, № 014068 с воздушным зазором
5мин = мм’ 4т — 150 а.
= 32.14 ом г г = 0.0007 д. е.
рот. j
Представляет интерес рис. 46, на котором приведены эквивалентные
активные сопротивления роторного контура при включении в цепь
обмотки возбуждения внешних добавочных сопротивлений: однократного,
$ 8. Моделирование колебательных характеристик синхронных машин 91
десятикратного и стократного. Рис. 46 наглядно иллюстрирует, что
главные потери и главные эквивалентные активные сопротивления
роторного контура в модельной машине находятся не в обмотке воз-
буждения.
§ 7. Моделирование граничных условий
Если по причинам, изложенным в § 5, не удается достигнуть усло-
вия Мд = idem даже с применением компенсирующих машин, то задача
может быть решена путем моделирования граничных условий. Напри-
Рис. 47. Определение необходимой выдержки времени корот-
кого замыкания из условия совпадения скоростей роторов
модели и оригинала в момент отключения.
1 — приращение угла ротора для оригинала по расчету; 2 — то же для мо-
дели из осциллограммы.
мер, в случае изучения на модели динамической устойчивости опреде-
ляющим фактором является скорость изменения угла 6'к в момент отклю-
чения короткого замыкания. Поэтому пониженная величина 0* из-за
увеличенных сопротивлений гк и г8=1 может быть компенсирована искус-
ственным удлинением времени короткого замыкания (рис. 47). Для опре-
деления необходимого увеличения времени короткого замыкания к кри-
вой 0 = f(t) проводится касательная с наклоном (Г, который опреде-
ляется из расчета для машины-оригинала. Ход построения понятен из
рис. 50. Некоторое несовпадение по углу 6к в конце интервала корот-
кого замыкания не оказывает заметного влияния на динамическую
устойчивость (Урусов, Суханов, 1957).
§ 8. Моделирование колебательных характеристик синхронных
машин
Частным случаем воспроизведения на модели частотных характе-
ристик является моделирование колебаний ротора низкой частоты, воз-
никающих при различных динамических переходах. В этих случаях обес-
печение равенства стандартных параметров в модели и оригинале может
92
Глава II. Моделирование синхронных машин
оказаться недостаточным, так как при указанных колебаниях в созда-
нии синхронизирующих и тормозных моментов принимают участие кон-
туры, обычно не учитываемые при расчете параметров. Такие контуры,
в частности, создаются действием массивных частей ротора, которые
в модели и оригинале не бывают строго идентичными. В этом случае
следует путем изучения частотных характеристик колебательного про-
цесса оригинала добиваться их осуществления на моделях.
Рис. 48. Осциллограммы колебательного процесса нагруженного генера-
тора, работающего на дальнюю передачу без регулирования возбуждения.
а — без демпферной обмотки, ?] = 1.07, б— с демпферной обмоткой, т] = 1.1.
Основными характеристиками колебательного процесса синхронной
машины, как показано в работе И. Д. Урусова (1956), является частота
свободных колебаний
<og -4- ДЛ/gp]
(86)
и величина логарифмического декремента
In 7] - ._________________
V MgQ Ч- &М§р)
(87)
Обе эти величины определяются из осциллограммы малых колебаний
(рис. 48), которые в условиях эксплуатации могут быть возбуждены
путем либо незначительного мгновенного изменения внешней нагрузки,
либо слабого толчка тока в цепи возбуждения.
Поскольку для крупных машин-оригиналов величина инерционной
постоянной Hj бывает известна с достаточной степенью точности, то
из условий (86) и (87) могут быть определены интересующие нас истин-
ные величины синхронизирующего и асинхронного моментов: Мар и
Ms = Msq ^Msp, которые содержат в себе, очевидно, влияние всех
добавочных роторных контуров, не учитываемое обычно в расчете.
§ 9. О моделировании машин с массивным ротором
К этой категории машин относятся турбогенераторы и синхронные
явнополюсные машины со сплошными башмаками. Естественно, что
каждая из этих групп машин имеет свои резко выраженные, спе-
цифические особенности, отличающие ее от однородного, гладкого,
массивного ротора, однако характер явлений и общие закономерности,
вносимые массивом, будут такими же, как для гладкого ротора. Эти
закономерности могут быть выяснены следующим образом. Из урав-
§ 9. О моделировании машин с массивным ротором
93
нений Максвелла, в общем виде описывающих электромагнитный про-
цесс в сплошном массиве,
го//7=0.4^у, rot Ё = — ~-10~8, ру = Д В — ^Н, (88)
получаются для гладкого ротора следующие соотношения при коорди-
натной системе связанной с ротором (рис. 49).
Плотность тока в массиве ротора (по оси z)
J —у = y0s-^cos(u)/ — ay—Вх). (89)
„Глубина проникновения", т. е. эквивалентная глубина, на которой
поверхностная плотность тока у0 создает полные потери ротора
Vs (90)
Активное и реактивное со-
противление ротора на полюс-
ное деление
. /2теиш\*/г , х
г? = х2 = 4 Р (——) I. (91)
Как видно из этих соот-
ношений, глубина проникнове-
ния от х не зависит. Это при-
водит к тому, что активное
сопротивление ротора обратно
пропорционально не квадрату
т (что имеет место в обычных
машинах), а первой степени х.
Или в относительных единицах
Индуктивное сопротивление
__ К А
изменяется до закону х == у .
Для
геометрически подобного ряда = const, следовательно х = ^—
В машинах с сплошным ротором
1 А
т Вь
(93)
Из сказанного следует, что при моделировании массивных роторов
малыми машинами (к, < 1) имеет место пропорциональное увеличение
относительных сопротивлений г2 и х2.
Поскольку внешним путем компенсация сопротивлений г2 и х2 в мас-
сивном роторе невозможна, для получения соответствия с оригиналом
следует выполнить условие т~ — к., Нельзя, однако, упускать из виду,
кв
что данные рассуждения касаются только моделирования процессов
соответственно в массивных элементах ротора, в то время как для
моделирования процессов в основных цепях статора и ротора сохра-
няются условия, изложенные ранее. Это обстоятельство весьма уело-
94
Глава II. Моделирование синхронных машин
жняет задачу точного учета всех без исключения параметров и часто-
приводит к необходимости пренебрежения некоторыми из них.
Так, например, по указанным причинам, если при выполнении модели
ротора турбогенератора удовлетворить требованию соответствия всех
стандартных параметров и выполнить при этом ротор массивным, то
подобия процессов все же не будет иметь места. Поэтому целесообразно
выполнять модельные турбороторы шихтованными, пренебрегая явле-
ниями вытеснения тока, что вполне допустимо при исследовании дина-
мических процессов с малой частотой колебаний угла 9. При изучении
процессов с наличием высокочастотных составляющих влияние массива
может воспроизводится специальным подбором параметров демпферной
системы. Аналогичным образом запроектирована серия модельных
турбогенераторов (табл. 19).
§ 10. Учет насыщения при моделировании синхронных генераторов
Физические модели дают возможность наиболее полно учесть много-
численные факторы, влияющие на характер протекания процессов.
Одним из таких факторов является насыщение синхронных генераторов^
в связи с чем модель и оригинал должны иметь наиболее полное соот-
ветствие магнитных цепей машин по условиям насыщения. Поскольку
моделирование генераторов исходит из подобия цепей, а не полей, то
условия насыщения модельных генераторов могут несколько отли-
чаться от условий насыщения оригинала. Поэтому необходимо устано-
вить те требования, которые должны быть выполнены с достаточной
степенью точности для верного учета насыщения.
Проектирование генераторов физических моделей обычно произво-
дится таким образом, чтобы получить стандарную характеристику холос-
того хода. Однако насыщение влияет не только на поток взаимной
индукции, что учитывается характеристикой холостого хода, но и на
потоки рассеяния обмоток. Кроме того, оно проявляется во взаимном
влиянии потоков, в частности, потоков по продольной и поперечной
осям машины, а также потока рассеяния полюсов и основного потока
при нагрузке, в результате чего имеет место дополнительное насыще-
ние полюсов и ярма ротора.
Следует иметь в виду также и то, что характеристики холостого
хода модели и оригинала могут несколько отличаться. Так как генера-
торы обычно работают с некоторым насыщением, особенно при форси-
рованиях возбуждения, то в таких случаях для повышения точности
моделирования необходимо обеспечить совпадение параметров и харак-
теристик модели и оригинала в рабочем диапазоне. Для этой цели прежде
всего следует получить наиболее близкое соответствие характеристик
холостого хода модели и оригинала в относительных единицах при на-
пряжениях, равном и выше номинального, что, в частности, может
быть достигнуто путем некоторого изменения номинального напряжения
модельного генератора. Поскольку при этом прямолинейные участки
характеристик холостого хода могут иметь различные наклоны, то
ненасыщенное значение индуктивного сопротивления реакции якоря по
продольной оси xad™ модели должно несколько отличаться от соответ-
ствующего значения xad оригинала, т. е.
_ ^ам
Xad м-Xad j.g а ’
£ 10. Учет насыщения при моделировании синхронных генераторов
95
где ам и а — углы наклона прямолинейных участков характеристик мо-
дели и оригинала. Необходимая величина модели может быть обес-
печена соответствующим выбором номинальной мощности.
Если характеристики холостого хода модели и оригинала практиче-
ски совпадают во всем диапазоне, то вопрос подбора индуктивных
сопротивлений упрощается и сводится к достижению равенства их не-
насыщенных значений.
Для достижения соответствия модели с оригиналом по условиям
насыщения в режиме холостого хода необходимо, помимо совпадения
характеристик холостого хода в отно-
сительной системе единиц в рабочем
диапазоне, обеспечить совпадение за-
висимостей потоков рассеяния обмоток
возбуждения от токов возбуждения в
относительных единицах. Как известно,
полный поток обмотки возбуждения
состоит из двух составляющих: по-
тока Ф в воздушном зазоре и потока
рассеяния Ф'. Здесь Ф'— эквивалент-
ный поток прассеяния, при умноже-
нии которого на число витков полу-
чается правильное значение потоко-
сцеплений. Из потока Ф может
быть выделена основная гармониче-
ская составляющая Фр На рис. 50
построены все три потокаФ, Фх и Ф',
а также суммарный поток Ф -+- Ф^.
Поскольку дифференциальное рассея-
Рис. 50. Магнитные потоки при холос-
том ходе генератора.
ние ротора имеет сравнительно небольшое значение, то достаточно
обеспечить совпадение зависимостей Ф^ =/(//) в отйосйтельных едини-
цах. Для этого в цепь обмотки возбуждения модельного генератора
следует включить реактор. Характеристика последнего должна быть
такой, чтобы суммарная зависимость потоков рассеяния обмотки воз-
буждения модели и реактора от тока возбуждения совпала с зависи-
мостью Ф'= f(if) для оригинала.
Рассматривая магнитные потоки машины в режиме холостого хода,
следует обратить внимание на то, что отношения реактивностей и
z- Xad
особенно ----
, X8f
Ф1 и ф'в
ской ГЭС по
могут значительно отличаться от отношений потоков
соответственно. Так, для
расчетным данным получаются
гидрогенераторов Волж-
следующие значения:
Ф -+-ф'
1.32, --1 8 =1.22,
Ф1
Xad ____q -1 Ф1 __________
’ ’ Ф'8
т. е.
различие между отношениями достигает
в данном случае 5О°/о.
96
Глава II. Моделирование синхронных машин
Полная реактивность обмотки возбуждения без учета насыщения
может быть определена по формуле
X/ = kadxad 4-
где kad— коэффициент продольной реакции обмотки статора, а к$ —
коэффициент формы поля.
Таким образом, при определении полной реактивности обмотки воз-
буждения принимаются во внимание не только значения магнитных пото-
Рис. 51. Расчетные характеристики гидрогенератора
Волжской ГЭС им. В. И. Ленина.
7 — характеристика холостого хода; 2 — кривая Eftd', 3 — кривая
результирующей э. д. с. 4 — нагрузочная характеристика
(Z = /н, cos ср = 0).
ков, но и пространственное распределение обмоток, а также распреде-
ление потока в воздушном зазоре.
Влияние нагрузки на условия насыщения синхронного генератора
проявляется прежде всего в том, что зависимость э. д. с. по продоль-
ной оси EZd от результирующей м. д. с. несколько отличается от харак-
теристики холостого хода. Это различие обусловлено дополнительным
насыщением полюсов и ярма ротора потоками рассеяния. Для количе-
ственной оценки на рис. 51 в качестве примера построены кривая
результирующей э. д. с. по продольной оси Еъ при /=/н и cos<?=0
и характеристика холостого хода гидрогенератора Волжской ГЭС.
Соответствие модели и оригинала в части дополнительного насыщения
полюсов и ярма ротора будет иметь место при совпадении нагрузочных
характеристик при / = /н и cos — 0 или по крайней мере при
равенстве отношений индуктивного сопротивления Потье хр к индук-
тивному сопротивлению рассеяния обмотки xz.
Определение взаимного влияния потоков по продольной и попереч-
ной осям машины может быть выполнено опытным путем. Такие опыты
£ 10. Учет насыщения при моделировании синхронных генераторов
97
сравнительно просто осуществляются на модели и показывают, что это
влияние имеет место. Однако сопоставление модели и оригинала в этом
отношении не может быть сделано в связи с отсутствием соответствующих
данных для гидро- и турбогенераторов. Что касается влияния насыщения на
потоки рассеяния статорной и демпферной обмоток, то оно получается
заметным при очень больших индукциях в зубцовой зоне и полюсных
наконечниках. Ввиду того, что такое влияние имеет место и в модели,
оно в значительной мере оказывается учтенным.
При расчетах и опытном определении токов в цепях, нелинейность
которых вызвана зависимостью индуктивности от тока, удобно поль-
Рис. 52. Определение Т* по кривой Рис. 53. Определение Т„ по кривой
зоваться динамическим коэффициентом самоиндукции. В этом случае
уравнение для контура г, L может быть написано в виде
kg +" = и, (94)
где Ад—динамический коэффициент самоиндукции.
Уравнение (94) можно представить следующим образом:
= (95)
где ТА=-^~ — динамическое значение постоянной времени, зависящее
от тока, при котором оно определяется.
В соответствии с (95) постоянная времени может быть определена
графически, как и в линейной цепи (рис. 52).
Так как зависимость потокосцеплений от тока в нелинейной цепи
обычно изображается в графической форме, то постоянную времени ТА
удобно определять по кривой потокосцеплений, зная ненасыщенное
значение постоянной времени Т (рис. 53):
tg В
Т=Т^. (96)
д tg а \ s
Для синхронного генератора ненасыщенное значение постоянной
времени обмотки возбуждения равно
98
Глава II. Моделирование синхронных машин
В соответствии с рис 53 и уравнением (96) выражение для динами-
ческого значения постоянной времени получается следующим:
т — т tg
JdA — IdO tga •
Если сделать допущение, что разность потоков (Ф Ф') — Фг про-
порциональна току возбуждения, то, согласно рис. 54, найдем
Рис. 54. Магнитные потоки при ус-
ловии Ф$ = if.
рактеристике холостого хода.
М. П. Костенко (1939), имеем
т — Т —— Т tg tg 7
Лд dQ tg a tg a' + tg 7 *
Так как
tg tg r ________________
tg a' ’
где a — коэффициент рассеяния обмотки
возбуждения, то
tg ₽'
7--7 — 1 + a
пр ___ *т> tg a __
1 1 dQ a
L 1 /i
= TdQ [1 a (1 tg a'/ J ‘ (97)
Поскольку э. д. с. генератора про-
порциональна потоку основной гар-
монической составляющей, то углы
а' и Р' могут быть определены по ха-
Согласно работе А. Е. Алексеева и
А/ к ad ^ad
(98)
Подставив значение а из (98) в (97), получим
т ~т
2 1 dQ
kgdXad Л ____ РЛ
Xf V tga'/
(99)
Следует иметь в виду, что полученное выражение для динамического
значения постоянной времени является приближенным и может давать
значительные погрешности при повышенных токах возбуждения, так
как в этом случае нужно считаться с нелинейностью Ф^ =
Равенство (99) может быть положено в основу определения степени
компенсации сопротивления обмотки возбуждения. Как указано выше,
характеристики холостого хода модели и оригинала должны совпадать
в рабочем диапазоне. Поэтому динамическое значение постоянной вре-
мени достаточно определить для одной из идентичных точек рабочего
диапазона характеристик, например для точки, соответствующей номи-
нальному напряжению. По той же формуле (99) можно рассчитать по-
стоянную времени Tda модели, а затем и степень компенсации сопротив-
ления обмотки возбуждения. Полученное расчетным путем значение
постоянной времени Td в последующем может быть уточнено осцилло-
графическим методом. Для этой цели производится определение постоян-
£ 10. Учет насыщения при моделировании синхронных генераторов
99
ной времени по кривой нарастания тока в цепи возбуждения при том
значении тока, которое соответствует номинальному напряжению в режиме
холостого хода. Следует, однако, иметь в виду, что на характер изме-
нения тока возбуждения в процессе его нарастания влияют демпферные
контуры машины. Поэтому это влияние должно быть оценено при уточ-
нении величины степени компенсации.
Для ненасыщенного явнополюсного генератора, имеющего демпфер-
ную систему и работающего в режиме холостого хода, можно написать
Xjpif xadPhd ~ь rfif = £7,
xkPhd “Ь xadPlf “Ь rkdlkd = О,
где индекс f относится к обмотке возбуждения, индекс к— к демпфер-
ной системе, а После исключения тока демпферной системы
по продольной оси, получаем следующее дифференциальное уравнение:
тр2// н- (—к у-) pif -ь • T~if = 0, (100)
\ * «0 7 ко / 1 rfO кО
где
2 v-
__1 >р __ Л f >р _ Хк
Х (ОГ. ’ КО wr •
J K J к
Решая (100), находим коэффициенты затухания и выражение для
тока возбуждения
/ г 1 \ ГГ1 Г7 ~ I г-
( 7» ' Т I -+- \ / I Т Т I — 4т y* * Т
__ \1 dQ 1 к0 / V \ 1 dQ 1 к0 / 1 <70 1 к0
Р]' 2~ ~ ’ (101)
if = ~(1 — р,1 ~ Td(lP2 ч- р., - ~ е-йА .
rf\ Р1 — Р2 Pl — Р2 /
Если влияние демпферной системы на кривую нарастания тока воз-
буждения сравнительно невелико, и, кроме того, насыщение проявляется
главным образом в потоке взаимной индукции, то расчет эквивалентной
динамической постоянной времени можно приближенно выполнить по
формуле (99), приняв вместо TdQ эквивалентную постоянную времени
лр 2т
1 de = ------------- .....—. --
+ 1/ . (102)
1 dQ 1 к0 Т \ 1 dQ 1 к0 / У^02к0
Ниже с целью иллюстрации учета насыщения приведены данные,
полученные при моделировании гидрогенератора Волжской ГЭС по
расчетным данным. В качестве модельного генератора использовался
генератор типа МГ-30.
На рис. 55 построена характеристика холостого хода гидрогенера-
тора Волжской ГЭС. Необходимые расчетные значения параметров
по данным завода „Электросила" приведены в табл. 17. Номинальное
напряжение модельного генератора выбрано таким, чтобы обеспечива-
лось совпадение характеристик в рабочем диапазоне. Как видно из
рис. 55, наклоны линейных частей характеристик холостого хода мо-
дели и оригинала несколько отличаются друг от друга. Поэтому нена-
сыщенные значения индуктивного сопротивления реакции якоря xad и
100
Глава II. Моделирование синхронных машин
постоянных времени 7^0 модели не совпадут с соответствующими зна-
чениями для оригинала.
Поток рассеяния обмотки возбуждения модельного генератора
в относительных единицах получился меньше потока оригинала (Ф8м <Z Фв0)
рис. 56). Поэтому для достижения со-
ответствия зависимостей потоков рас-
Таблица 17
Пара- метр Значение Пара- метр Значение
Xad . • 0.416 rf • ’ 0.000331
X/ . . 0.55 rkd • 0.0104
Хк . . 0.531 kad • 1.054
сеяния от токов возбуждения потре-
бовалось включение линейного реак-
тора в цепь возбуждения. В результате
этого кривые потоков рассеяния модели
и оригинала совпали (Ф§м-ь ДФ$ = Ф80).
Следует заметить, что на рис. 56
для модельного генератора приведена
расчетная зависимость потока рас-
сеяния от тока возбуждения. Наряду
с расчетом указанная зависимость была определена и опытным путем
(рис. 57). Опытное определение потоков рассеяния производилось
с помощью флюксметра и двух витков. Один из них укладывался у осно-
Рие. 55. Характеристики холостого хода модели
и оригинала.
7 — генератор Волжской ГЭС; 2 — МГ-30.
вания неподвижного ротора,
второй — на статоре с охва-
том одного полюсного де-
ления.
Как указано выше, для
соответствия модели и ори-
гинала в части дополнитель-
ного насыщения полюсов и
ярма ротора необходимо
равенство отношений индук-
тивного сопротивления Потье
к индуктивному сопротивле-
нию рассеяния обмотки ста-
тора. Для оригинала ука-
занное отношение на осно-
вании расчетных данных по-
лучилось равным ^ = 1.3,
для модели по опытным дан-
ным ^=1.4. Таким обра-
зом, влияние дополнитель-
ного насыщения полюсов
и ярма ротора потоками рас-
сеяния получилось практи-
чески одинаковым.
С целью выяснения влияния токов в поперечной оси модельного ге-
нератора на характер изменения тока возбуждения был проведен ста-
тический опыт, схема которого приведена на рис. 58. Ротор генератора
с помощью индуктивного метода устанавливался в такое положение,
при котором оси магнитных потоков статора и ротора были перпенди-
кулярны. В обмотке статора устанавливался постоянный ток определен-
ной величины и при каждом значении этого тока производилось осцил-
лографирование нарастания тока возбуждения. Анализ осциллограмм
тока возбуждения показал, что даже при сравнительно больших значе-
10. Учет насыщения при моделировании синхронных генераторов
101
ниях токов в поперечной оси не получается заметного влияния этих
токов на характер нарастания тока возбуждения.
Для установления обратного влияния, т. е. влияния потока в про-
дольной оси на поток в поперечной оси, были проведены опыты по
Рис. 56. Потоки рассеяния модели и ориги-
нала.
определению индуктивного синхронного сопротивления xq при различных
нагрузочных режимах. С этой целью при помощи углоизмерительной
схемы измерялся угол 6 между векторами э. д. с. холостого хода и
Рис. 57. Кривые потоков рассеяния МГ-30.
7 — расчетная кривая; 2 — опытная кривая.
напряжения на зажимах генератора; кроме того, измерялись также
напряжение, ток и мощность машины.
Расчет xq производился по формуле
__ \U cos а -+- [г cos (<р — а)] tg (9 -+- а)
? I cos (^> — а) — I sin (у — cl) tg (9 -4- а)
(103)
где
г — активное сопротивление обмотки статора генератора. Формула (103)
следует из векторной диаграммы синхронного генератора (рис. 59).
Рис. 58. Схема статического опыта для проверки влияния по-
тока статора в поперечной оси на динамическую индуктивность
обмотки возбуждения.
Рис. 59. Схема опыта и векторная диаграмма для определе-
ния синхронного индуктивного сопротивления в поперечной
оси xq при различных нагрузочных режимах.
$ 10. Учет насыщения при моделировании синхронных генераторов 103
Зависимость xq = f(Ezd) для модельного генератора приведена на
рис. 60, из которого следует, что сопротивление xq несколько зависит
от результирующего магнитного потока в продольной оси.
Рис. 60. Влияние потока в продольной
оси на Xq модельного генератора.
Рис. 61. Осциллограммы нарастания токов в цепях
возбуждения генераторов при холостом ходе.
а — модельный генератор; б — гидрогенератор Вожской ГЭС.
Постоянная времени оригинала для одной из точек рабочего участка
характеристики холостого хода, например для точки, соответствующей
номинальному напряжению, согласно (99) и данным табл. 18,
Пд = 5.3 [ 1 — 1,О5^55Л16 (1 — 0.5)] = 3.18 сек.
•fcr
При этом отношение найдено из графического построения
(рис. 55).
104
Глава II. Моделирование синхронных машин
Дкя оценки влияния демпферной системы гидрогенератора в соот-
ветствии с формулой (102) и данными табл. 19 определено ненасыщенное
значение эквивалентной постоянной времени. Оно равно
2 - 0.407
причем
5.3 0.162
7-=5.39 сек.,
1 \2______________4.0.407
0.162/ "“5.3-0.162
0.55 • 0.531 314.0.000331
7*° “ 314 • 0.0104 ~ 0.162.
Рис. 62. Зависимости динамических по-
стоянных времени от тока возбуждения.
1 — гидрогенератор Волжской ГЭС; 2 — ъледекъъып
генератор.
Согласно (101), ток возбуждения для ненасыщенной машины при
включении обмотки возбуждения на источник питания с постоянным
напряжением U получается равным
if = — (1 — 0.98s~ — 0.02s~ i^7) •
1 rf
Таким образом, демпферная система в рассматриваемом случае ока-
зывает слабое влияние на характер изменения тока возбуждения в про-
цессе его нарастания.
Если учесть эффект демпферной системы так, как это показано
выше, то эквивалентная динамическая постоянная времени получается
равной ТйЛе = 3.24 сек., что
близко к определенному ранее
значению 77д = 3.18 сек.
В соответствии с этим был
произведен расчет необходимой
компенсации сопротивления цепи
возбуждения и снята осцилло-
грамма нарастания тока возбуж-
дения при холостом ходе мо-
дельного генератора. Такая же
осциллограмма была впоследствии
снята и на гидрогенераторе Волж-
ской ГЭС (рис. 61). По этим осцил-
лограммам на рис. 62 построены
зависимости динамических по-
стоянных времени обмоток воз-
буждения от тока ротора для
оригинала и модели. Как видно,
эквивалентные динамические по-
стоянные времени модели и ори-
гинала в рабочем диапазоне изме-
нения тока ротора практически
совпадают как между собой, так
и с соответствующими значе-
ниями, полученными расчетным
путем.
Достижение такого совпадения
указанных зависимостей модели
и оригинала важно для получения правильных результатов при иссле-
довании устойчивости и автоматического регулирования возбуждения»
$ 77. Модели синхронных машин ИЭМ АН СССР
105
наладке на модели реальных регуляторов возбуждения перед установкой
их на электростанции и пр.
Как видно из рис. 61, в связи с различием наклонов линейных частей
характеристик холостого хода необходимое ненасыщенное значение
постоянной времени 7% получилось в модели равным 6 сек. вместо
5.27 сек. для оригинала. Из рис. 61 видно также влияние демпферной
системы в начале процесса нарастания тока возбуждения. Это влияние,
определяющееся главным образом последним членом приведенного выше
равенства для тока возбуждения, на модели получается таким же
малым, как и в оригинале.
§ 11. Модели синхронных машин ИЭМ АН СССР
Данные и параметры для натурных синхронных машин, являющихся
исходными для создания синхронных машин-моделей и самих машин-
моделей Института электромеханики АН СССР, приведены в табл. 18.
Синхронные модельные генераторы выполняются на базе нормальных
синхронных явнополюсных машин.
В табл. 19 приведены основные данные и параметры выполненных
в СССР модельных синхронных машин, предназначенных для модели-
рования мощных турбогенераторов, гидрогенераторов и синхронных
компенсаторов. Приведенные в табл. 19 машины не представляют собой
закономерного ряда или серии машин. ИЭМ поэтому разработана
серия модельных генераторов и компенсаторов (табл. 20) с коэффициен-
том нарастания мощностей, равным 2.
Указанная серия в наиболее полной степени может обеспечить вы-
полнение комплексных моделей различных энергосистем для исследо-
вания проблем устойчивости и других задач. Более подробное описание
этой серии приведено ниже.
В машинах-моделях имеются следующие конструктивные изменения.
Размеры пазов статора модельных генераторов увеличены при со-
хранении их числа. Шихтованные полюса ротора в некоторых моделях
для увеличения насыщения магнитной цепи заполнены на 30% своей
длины немагнитными вырубками.
Синхронные неявнополюсные генераторы типа MTz-3.75—6 вы-
полняются на базе нормальных синхронных машин типа СГ-60, во всем
совершенно аналогично машине МГ-3.75—6, за исключением кон-
струкции роторов, которые выполнены неявнополюсными шихтованными
с мощной демпферной системой, образованной полукруглыми медными
клиньями, в пазах ротора, замкнутых массивными шайбами.
Эти машины предназначаются для моделирования систем, содержа-
щих турбогенераторы. В связи с тем, что гидрогенераторы Волжской
ГЭС имели пониженные параметры индуктивностей х^^0.5, % ^0.2
и повышенную инерционую постояннную Hj^ 13—15 сек., соответствую-
щие модельные машины выполнены так, чтобы они могли возможно
более точно воспроизводить данные и параметры этих гидрогенераторов.
Одновременно было обращено внимание на то, чтобы получить в новых
модельных машинах также и возможно более малые относительные
активные сопротивления статорных и роторных цепей для того, чтобы
компенсация недостающих значений по отношению к оригиналам была
возможно меньшей.
Наиболее крупные модельные синхронные машины МГ-30—6, МГ-15—6,
МТ-15—6 выполнялись на основе нормальной трехфазной синхронной
106
Глава II. Моделирование синхронных машин
Т а б ли
Обозначение величин Гидрогенераторы
гв 1ЯЮ СВ 200 ~88 СЕ11«> 72 СВ 180 72 CR 1130 4Я СВ 250 48
2р 96 88 72 48 48
«S' (ква) 71.5 123.5 90 85.5 235 '
COS ср • 0.8 0.85 0.8 0.85 0.85
Р МВТ 57.2 105 72 72.5 200
п (об./мин.) 62.5 68.2 83.3 125 125
иа (кв) 13.8 13.8 13.8 13.8 15.75
ZB(a) 3000 5175 3765 3580 8625
Ч (°/о) 96.75 97.42 97.36 97.63 98.25
Da (см) 1340 1488 1160 854 ИЗО
Di (см) 1292 1430 1100 782 1050
т (см) 42.3 51 48 51.2 68.8
it (см) 150 200 180 190 250
<7 23/8 219/22 2V4 2 3/4 33/4
Z 684 756 486 396 540
S (мм) 20 23 18 18 28
С • 10-4 21.9 22.6 20.2 17 14.7
GD2 (тм2) 47000 121000 39000 12800 50000
Hj (сек.) 7.05 12.5 1 8.3 6.4 9.1
В, (гс) 6740 7650 7020 7420 7100
А (а/см) 505 436 530 577 707
га (д. е.) 0.0047 0.00353 0.00314 0.0028 0.00201
г/ (д. е.) 0.00055 0.00033 0.00036 0.00044 0.000434
Xad (д. е.) 0.509 0.414 0.647 0.72 0.788
ха (д. е.) 0.633 0.506 0.80 0.873 0.915
Xq (д. е.) 0.464 0.332 0.534 0.587 0.65
x'd (л. е.) 0.284 0.194 0.31 0.317 0.345
(Д- е.) 0.207 0.143 0.24 0.227 0.205
Xf (д. е.) 0.232 0.134 0.205 0.213 0.302
Xf (д. е.) 0.741 0.55 0.85 0.933 1.09
х% (д. е.) 0.212 0.147 0.25 0.231 0.205
-го (Д- е.) 0.081 0.054 0.085 0.11 0.816
TdQ (сек.) 4.3 5.3 7.55 6.75 8.0
Td (сек.) 1.93 2.0 2.92 2.45 3.02
Td (сек.) 0.051 0.05 0.07 0.0612 0.72
Та (сек.) 0.144 0.133 0.252 0.264 0.325
Uf (в) 400 380 350 300 500
if (а) 1485 1820 1200 1215 2050
hn (мм) 128 134 170 182 202
Ьп (мм) 26.4 22.8 27.5 24.5 28.6
bm (мм) 235 285 270 285 390
1 Генераторы с Hj = 12.5 сек., выпущенные для Волжской ГЭС им. В. И. Ленина,
п орядка 7 сек.
£ 77. Модели синхронных машин ИЭМ АН СССР
107
да 18
Г идрогенераторы Синхрон- ный ком- пенсатор Т урбогенераторы
генератор фирмы ASEA 4<5 свж~16 КСВ-75000—11 Т4376/142 ТВ2-100-2 ТВ2-150—2 ТВФ-200—2
36 16 8 4 2 2 2
105 66 75 55.5 117.5 166.5 235.3
0.9 0.85 0 0.9 0.85 0.9 0.85
94.5 56 — 50 100 150 200
167 375 750 1500 3000 3000 3000
16 10.5 11 10.5 13.8 18 11
3790 3630 3940 3050 4925 5350 12370
98 97.4 — 97.89 98.78 98.9 98.82
920 465 325 226 233 250 253
840 390 250 142 109.5 120 122
73.3 76.5 98.2 111.5 172 188.5 191.5
245 210 230 376 525 625 545
4 33/4 7 9 9 9 12
432 180 168 108 54 54 72
30.5 20 21 42.5 47.5 62.5 72.5
27.5 18.3 14.4 20.5 16 16.2 10.3
21360 1200 225 46.0 21 30 26.4
15.6 7.0 4.61 3.41 4.4 4.4 2.78
6500 7790 6200 6475 7950 8100 8340
413 534 844 740 733 766 1160
0.0036 0.0019 0.0034 0.00219 0.00118 0.001 0.001
0.0004 0.00042 0.00078 0.00051 0.000435 0.000395 0.00087
0.559 0.851 2.22 1.38 1.69 1.39 1.735
0.65 0.942 2.34 1.493 1.8 1.49 1.875
— 0.562 1.216 1.493 1.8 1.49 1.875
0.22 0.213 0.35 0.225 0.203 0.18 0.25
0.15 0.213 0.205 0.138 0.14 0.12 0.165
0.17 0.144 0.25 0.125 0.09 0.09 0.115
0.73 0.995 2.47 1.505 1.78 1.48 1.85
— 0.346 0.209 0.168 0.168 0.146 0.201
— 0.08 0.097 0.062 0.082 0.066 0.094
4.5 7.55 10.1 9.45 13.0 11.9 6.83
2.0 1.71 1.51 1.42 1.46 1.44 0.91
— 1.71 0.098 0.178 0.182 0.18 0.114
— 0.582 0.198 0.196 0.386 0.422 0.513
270 200 220 214 319 427 400
1210 890 1220 620 648 668 2140
144 149 150 180 230 230 240
35 26 22 21 26.5 32.8 26.7
400 480
Для Сталинградской ГЭС подобные
генераторы имеют Ну = 10.3 сек. и одна машина
108
Глава //. Моделирование синхронных машин
Т а б л и
Обозначение величин Модельные гидрогенераторы
МГ-ЗО-б, ИЭМ МГ-18.7—6, ИЭМ МГ-15-6, МЭИ МГ-15-6, НИИПТ СГ-18.7—6, ЛПИ МГ-5-4, НИИПТ
2Р 6 6 6 6 6 4
S (ква) . . 30 18.75 15 15 18.75 5
cos ср ... 0.8 0.8 0.8 0.8 0.8 0.8
Р (квт) . . 24 15 12 12 15 4
п (об./мин.) 1000 1000 1000 1000 1000 1500
ив (в) . . . 230 230 230 230 230 230
1„ (а) . . . 75.5 47.2 43.3 37.7 47.2 12.55
q (%) • • 93 91.8 90.65 90.65 91.05 —
Da (см) . . 85 85 85 85 56 44.4
Di (см) . . 60.5 49 45 45 40.42 26.0
т (см) . . . 31.7 25.7 23.6 23.6 21.2 20.45
It (см) . . . 26.5 32.4 30 31.5 36.4 27.5
я 4 3 3.5 3 3 3
Z 72 54 63 54 54 36 ;
& (мм) . . . 2.9 2.2 2.2 2.2 1.2 2.3
С • 10-4 . . 323 415 405 405 318 560
GD- (кгм2) 147 63 38 41 32 3.72
Hj (сек.) . 13.5 9.2 7.0 7.5 4.67 4.6
(гс) . . 5650 4300 3400 3600 3670 3865
А (а/см) . . 51 53 57.1 48 66.5 44.2 i
га (д. е) . . 0.00186 0.00169 0.0044 0.00221 0.0066 0.0034
г/ (д. е.) . 0.00038 0.00065 0.00108 0.00108 0.00108 0.0015
xad (д. е.) . 0.4 0.5 0.514 0.402 0.785 0.423
Xd (д. е.) . 0.43 0.544 0.539 0.435 0.826 0.442
xq (д. е.) . 0.23 0.292 0.318 0.216 0.448 0.258
x'd (д- е-) • 0.1 0.121 0.12 0.0985 0.0773 0.108
xd (д- е-) • 0.055 0.079 0.069 0.0564 0.062 0.069
х/ (д. е.) . 0.088 0.0945 0.117 0.078 0.038 0.114
Xf (д. е.) . 0.49 0.596 0.637 0.48 0.823 0.537
х2 (д. е.) . 0.055 0.086 0.073 0.0565 0.061 0.072
я?0 (д. е.) . 0.0175 0.0254 0.036 0.0195 0.0115 0.0180
TdQ (сек.) . 4.1 2.91 1.87 1.414 2.42 1.13
T'd (сек.) . 0.96 0.67 0.413 0.32 0.226 0.276
Г^(сек.) . 0.039 0.046 0.03 0.149 0.01 0.0402
Та (сек.) . 0.095 0.163 0.0525 0.0815 0.0294 0.0675
Uf (в) . . . 95 82.5 16.3 25.7 49.6 75
V (а) . . . 2.1 2.12 8.6 12.4 4.0 1.6
hn (мм) . . 65 105 40.0 65 43.5 38
Ьп (мм) . . 17.5 24.4 17.2 21 16.5 16.5
Ьт (см) . . 8.5 6 6.5 6.5 6.5 4.7
£ . . . . т 0.126 0.136 0.1 0.0935 0.144 0.134
кщ .... 0.451 0.49 0.495 0.47 0.445 0.726
0.279 0.287 0.199 0.199 0.25 0.185
§ 77. Модели синхронных машин ИЭМ АН СССР
109
•ца 19
Модельные турбогенераторы Модельные синхронные компенсаторы
МТ-ЗО-б, ИЭМ МТ-25-6, МЭИ МТ-30-6, ниипт СГТ-12.5—6, ЛПИ МТ-5—4, НИИПТ МК-3—4, ИЭМ МК-З—4, МЭИ МК-З-4, НИИПТ
6 6 6 6 4 4 4 4
30 25 30 12.5 5 5.6 3 з
0.8 0.8 0.8 0.8 0.8 0 0 о
24 20 24 10 4
1000 1000 1000 1000 1500 1500 1500 1500
230 230 230 230 230 230 355 230
75.5 63 75.5 31.5 12.55 14.05 4.87 7.52
94 93.1 92.7 87.5
85 85 85 44.5 44.4 42.3 42.3 44.4
49 45 45 33 26 24.5 23.9 26.0
25.7 23.6 23.6 17.3 20.45 19.25 18.7 20.45
32.4 44 45 25 27.5 18 18 17.5
3 3.5 3 3 3 3 3.5 3
54 63 54 54 36 36 42 36
1.45 1.0 2.0 0.75 0.75 0.6 0.3 0.75
259.5 360 303 216 560 290 513 356
63 63 63 14 3.8 2.2 2.0 2.44
5.75 7.0 5.85 3.07 4.7 2.43 4.11 5.0
4420 4100 3960 4900 3940 4110 3420 3780
87.3 74.2 77 87.5 44.2 78.9 45.5 43.1
0.0027 0.00635 0.00298 0.0092 0.0034 0.00561 0.00386 0.0045
0.0017 0.0022 0.0021 0.0043 — 0.00405 0.0028 0.00156
1.53 1.9 1.13 1.47 1.35 2.22 2.0 1.22
1.57 1.95 1.16 1.51 1.37 2.29 2.12 1.242
1.57 1.95 1.16 1.51 1.37 1.175 1.49 0.662
0.173 0.154 0.085 0.116 0.09 0.367 0.33 0.171
0.113 0.072 0.053 0.061 0.054 0.134 0.204 0.069
0.11 0.114 0.07 0.05 0.08 0.347 0.22 0.170
1.61 2.014 1.2 1.52 1.45 2.57 2.22 1.39
0.138 0.098 0.065 0.0745 0.066 0.131 0.209 0.069
0.021 0.015 0.012 0.035 — 0.0654 0.022 0.016
2.2 2.89 1.82 1.13 2.34 2.02 2.53 2.8
0.242 0.229 0.133 0.087 0.236 0.324 0.394 0.385
0.03 0.0286 0.0166 0.0077 0.0296 0.02 0.064 —
0.163 0.044 0.07 0.0258 0.062 0.075 0.172 0.0485
83 15.9 22.6 55 55.4 80 7.0 53
1.95 5.42 14.7 7.2 0.935 0.63 4.1 0.56
105 80 65 33 38 55 40 38
24.4 17 21 12.8 16.5 16.5 11.05 16.5
•— — — — — 5 5 4.7
0.151 0.127 0.125 0.0735 0.133 0.111 0.0715 0.134
0.474 0.321 0.332 0.28 0.388 0.445 0.49 0.726
0.287 0.394 0.378 0.263 0.344 0.25 0.146 0.185
110
Глава II. Моделирование синхронных машин
Т а б ли
I 11 1
производная серия модельных гидро
Обозначение величин серия основных модельных машин (гидрогенера- торов) xd = 0.4 из I серии изменением мощности воздушного за
МГ-30—6 МГ-15—6 МГ-7.5—6 МГ-3.75—6 МГ-30-6 МГ-15—б МГ-7.5—6
2р .... 6 6 6 4 6 6 6
S (ква) . . 30 15 7.5 3.75 60 30 15
cos ср . . . 0.85 0.85 0.85 0.85 0.85 0.85 0.85
Р (квт) . . п(с . .4 ии (в) . . . 25.5 12.75 6.375 3.185 51 25.5 12.75
1000 1000 1000 1500 1000 1000 1000
230 230 230 230 230 230 230
4 (а) . . . 75.5 37.7 18.85 9.43 151 75.5 37.7
V) (%) * . . 93 91 86 88 94 92 91.2
Da (см) . . 85 85 56 44.4 85 85 56
Dt (см) . . 60.5 49 40.5 24.5 60.5 49 40.5
т (см) . . . 31.7 25.7 21.2 19.25 31.7 25.7 21.2
Z/ (см) . . . 26.5 32.4 36.4 27.5 26.5 32.4 36.4
q 4 3 3 3 4 3 3
z 72 54 54 36 72 54 54
б (мм) . . . 2.9 2.2 0.85 1.5 2.9 2.2 0.85
С • 10-4 . . 323 519 795 660 161.5 259.5 398
GD2 (кгм2) . 147 63 32 3.5 147 63 32
Н< (сек.) Въ (гс) . . 13.5 11.5 11.7 5.75 6.75 5.75 5.85
5650 4300 3670 4100 5650 4300 3670
А (а/см) . . га (д. е.) . 51 42.4 26.7 35 102 84.8 53.4
0.0186 0.00135 0.0024 0.00151 0.00372 0.0027 0.0048
г/ (д. е.) . 0.00038 0.00052 0.000453 0.0014 0.00076 0.00104 0.0009
Xad (д- е.) . 0.4 0.4 0.4 0.4 0.8 0.8 0.8
ха (д. е.) . 0.43 0.435 0.42 0.44 0.86 0.87 0.84
Х<1 (д. е.) . 0.23 0.234 0.226 0.23 0.46 0.468 0.452
(д- е.) . 0.1 0.097 0.0465 0.115 0.2 0.194 0.093
(д- «•) • 0.055 0.063 0.032 0.056 0.11 0.126 0.064
(д. е.) . Xf (д. е.) . 0.088 0.0755 0.0254 0.109 0.176 0.151 0.0508
0.49 0.477 0.425 0.525 0.98 0.954 0.85
х2 (д. е.) . х0 (д. е.) . 0.055 0.069 0.033 0.055 0.11 0.138 0.066
0.0175 0.0203 0.0123 0.0151 0.035 0.0406 0.0246
Td§ (сек.) . 4.1 2.91 2.1 1.2 4.1 2.91 2.1
т\ (сек-) • 0.96 0.67 0.231 0.312 0.96 0.67 0.231
T"d (сек.) . 0.039 0.046 0.0084 0.023 0.039 0.0046 0.0084
Та (сек.) . 0.095 0.163 0.044 0.116 0.095 0.163 0.044
Z7/ (в) . . . Ч (*)••• 95 82.5 34 118 110 100 78
2.1 2.12 2.5 0.7 2.43 2.56 3.0
hn (мм) . . 65 105 43.5 65 65 105 43.5
Ьп (мм) . . 17.5 24.4 16.7 18 17.5 24.4 16.7
Ьт (см) . . 8.5 6 6.5 5 8.5 6 6.5
кткт= кп . т т р 0.126 0.136 0.144 0.111 0.126 0.136 0.144
кт .... 0.451 0.49 0.504 0.445 0.451 0.49 0.504
кр .... 0.279 0.287 0.286 0.25 0.279 0.287 0.286
ki — lth 0.835 1.26 1.72 1.43 0.835 1.26 1.72
kla=Tt .. 1.72 1.62 1.55 1.58 1.72 1.62 1.55
£ 77. Модели синхронных машин ИЭАН СССР
Ш
ца 20
,1 [I III IV
производная серия модель-
генераторов, получаемая производная серия модельных турбогенераторов, ных синхронных компенса-
х^=0.о и изменением юра получаемая из I серии заменой явнополюсных роторов на неявнополюсные торов, получаемая из 1 се- рии изменением активной длины
МГ 3.75-6 МГ-3.75—6 МТ-30-6 МТ-15—6 МТ-7.5—6 МТ-3.75—6 МК-3.75—6 МК-3.75—6
4 4 6 6 6 4 4 4
7.5 3.75 60 30 15 7.5 3 5.6
0.85 0.85 0.8 0.8 0.8 0.8 0.0 0.0
6.37 3.19 48 24 12 6 —
1500 1500 1000 1000 1000 1500 1500 1500
230 230 230 230 230 230 230 230
18.85 9.43 151 75.5 37.7 18.85 7.66 14.05
90 88 95 94 89 91
44.4 44.4 85 85 56 44.4 43.3 42.3
24.5 24.5 60.5 49 40.5 24.5 24.5 24.5
19.25 19.25 31.7 25.7 21.2 19.25 19.25 19.25
27.5 27.5 26.5 32.4 36.4 27.5 18.0 18.0
3 3 4 3 3 3 3 3
36 36 72 54 54 36 36 36
1.5 0.75 2.1 1.45 0.65 0.9 0.6 0.6
330 660 161.5 259.5 398 330 532 290
3.5 3.5 147 63 32 3.5 2.2 2.2
2.88 5.75 6.75 5.75 5.85 2.9 4.45 2.43
4100 4100 4950 4420 4770 4340 4110 4110 -м
70 35 110.6 87.3 53.2 70.5 43 78.91
0.003 0.00151 0.00372 0.0027 0.00481 0.00302 0.00306 0.0056
0.0028 0.0014 0.00175 0.0017 0.00127 0.00427 0.00221 0.00405
0.8 0.8 1.49 1.53 1.5 1.47 1.21 2.22
0.88 0.835 1.55 1.57 1.533 1.514 1.247 2.29
0.46 0.435 1.55 1.57 1.533 1.514 0.64 1.175
0.23 0.152 0.153 0.173 0.127 0.12 0.2 0.367
0.112 0.063 0.101 0.113 0.051 0.072 0.073 0.134
0.218 0.137 0.095 0.11 0.1 0.08 0.19 0.347
1.05 , 0.937 1.58 1.61 1.6 1.55 1.4 2.57
0.11*1 0.062 0.101 0.113 0.051 0.072 0.0715 0.131
0.0302 — — 0.021 0.0155 0.0181 0.0356 0.654
1.2 2.13 2.28 2.2 1.45 0.665 2.02 2.02
0.312 0.39 0.225 0.242 0.12 0.053 0.324 0.324
0.023 0.026 0.028 0.03 0.0015 0.0066 0.02 0.02
0.116 0.131 0.0865 0.133 0.034 0.074 0.075 0.075
136 91 91 83 108 91.5 60 80
0.83 0.54 3.78 1.95 0.83 1.13 0.47 0.63
65 65 65 105 43.5 65 55 55
18 18 17.5 24.4 16.7 18 16.5 16.5
5 5 — — — — 5 5
0.111 0.111 0.148 0.151 0.138 0.128 0.111 0.111
0.445 0.445 0.418 0.474 0.334 0.334 0.445 0.445
0.25 0.25 0.279 0.287 0.286 0.25 0.25 0.25
1.43 1.43 0.835 1.26 1.72 1.43 0.935 0.935
1.58 1.58 2.55 2.02 1.76 2.0 1.81 1.81
112
Глава II. Моделирование синхронных машин
машины 14-го габарита С-14—6, который представляет синхронную
машину наименьшей мощности нормального исполнения тех заводов,
на которых строились модельные синхронные генераторы.
Необходимо отметить следующие конструктивные особенности мо-
дельных синхронных генераторов:
1) изменение обмоточных данных, размеров пазов статора и раз-
меров полюсного сердечника;
2) наличие съемной демпферной системы, позволяющей путем замены
материала и числа стержней регулировать параметры генераторов,
а также выполнять как полную демпферную систему, так и только
продольную систему;
3) наличие третьего контактного кольца и токоподвода, позволяющих
путем заложения в пазы демпферной системы изолированной поперечной
обмотки осуществлять поперечное регулирование возбуждения;
4) наличие достаточно высокой щели полузакрытого паза статора,
что дает возможность несколько повышать индуктивное сопротивление
в синхронных машинах-моделях, которое имеет пониженное значение
по сравнению с оригиналами и исходными машинами.
Наиболее мощной модельной явнополюсной машиной является син-
хронный генератор МГ-30—1000.
Синхронный модельный генератор МГ-30, имеющий внешний диаметр
статора 850 мм и диаметр расточки статора 605 мм, может развивать
30 ква, что позволяет при моделировании всей Волжской передачи в виде
одной машины иметь в линии модельной передачи около 24 квт.
Следующей группой модельных синхронных машин ИЭМ являются
машины типа МГ-18.7—6, имеющие тот же внешний диаметр статора 850 мм
и диаметр расточки статора 490 мм. Эти модельные синхронные гене-
раторы при параметрах гидрогенераторов Волжской ГЭС позволяют
иметь 15 ква, что дает возможность осуществлять на той же модельной
линии передачи моделирование передаваемой мощности Волжской пере-
дачи посредством двух машин данного типа.
Электродинамическая лаборатория ИЭМ располагает четырьмя ма-
шинами этого типа, из которых две имеют воздушный зазор § = 1.6 мм
и две — зазор § = 2.2 мм. Все четыре указанные модельные машины
также выполнены на базе синхронных машин нормального исполнения
14-го габарита.
В указанных четырех модельных генераторах явнополюсные роторы
могут быть заменены неявнополюсными запасными роторами, что дает
возможность получать путем простой замены роторов при тех же ста-
торах модельные синхронные генераторы, которые позволяют разви-
вать 30 ква при параметрах, соответствующих крупным турбогенераторам.
Один из неявнополюсных роторов имеет, кроме основной нормальной
обмотки возбуждения, также поперечную обмотку возбуждения, соеди-
ненную, с одной стороны, с одним из контактных колец обмотки воз-
буждения и, с другой стороны, с третьим кольцом. Это дает возмож-
ность получать одновременно с обычной системой возбуждения также
и поперечную систему возбуждения.
На рис. 63 и 64 даны продольный и поперечный разрезы модель-
ного генератора с явнополюсным ротором, а на рис. 65, 66 — продоль-
ный и поперечный разрезы с неявнополюсным ротором. Явнополюсный
ротор модельного синхронного генератора МГ-18.7 дан на рис. 67.
Кроме того, выполнены три модельных синхронных явнополюсных
генератора, позволяющих получать параметры гидрогенераторов Волж-
1800
Рис. 63. Продольный разрез Модельного синхронного генератора МГ-18.7.
Рис. 64. Поперечный разрез модельного синхронного генератора
МГ-18.7.
Рис. 65. Продольный разрез модельного синхронного генератора МТ-30.
Рис. 66. Поперечный разрез модельного синхронного генератора МТ-30.
£ 77. Модели синхронных машин ИЭМ АН СССР
115
ской ГЭС при мощности в модели 7.5 ква. Эти модельные генераторы
имеют тот же внешний диаметр статора 850 мм, что и более мощные
модельные генераторы МГ-30 и МГ-18.7, но внутренний диаметр расточки
статора у этих генераторов меньше — 450 мм, при длине активной
стали 315 мм.
Кроме основных модельных синхронных генераторов, в лаборатории
электродинамического моделирования выполнены также модельные син-
Рис. 67. Явнополюсный ротор модельного синхронного гене-
ратора МГ-18.7.
хронные компенсаторы двух типов, данные и параметры которых при-
ведены также в табл. 19.
Первый тип синхронного компенсатора выполнен на базе синхронного
четырехполюсного нормального генератора С-82 на 30 ква. Компенсатор
дает возможность получать 3 ква с параметрами, необходимыми для
промежуточных компенсаторов, которые могут использоваться в дальних
линиях электропередач. Компенсатор выполнен с использованием конструк-
тивных узлов нормального генератора С-82 с увеличением внешнего
диаметра статора с 394 до 423 мм и соответственно с новыми увели-
ченными сечениями пазов и применением трансформаторной листовой
стали толщиной 0.35 мм для уменьшения потерь. Сечение полюсных
окон ротора также увеличено, обмотка возбуждения выполнена на по-
вышенное напряжение и, кроме того, в башмаки полюсов заложены
демпферные стержни.
Второй тип синхронного компенсатора МК-3—4 выполнен, как проме-
жуточный компенсатор, также на 3 ква. В этом случае применен новый
специальный компаундный штамп для ротора, при котором полюса
оказываются неразъемными, а обмотка возбуждения укладывается через
щели между полюсами. Данная система позволяет получать с доста-
точной точностью необходимые малые зазоры, так как зазоры между
сердечниками полюсов и валом ротора отсутствуют..
116
Глава II. Моделирование синхронных машин
Обмотка возбуждения выполняется также относительно тонким про-
водом на повышенное напряжение возбуждения.
На рис. 68 дан обмотанный ротор компенсатора. В полюсных башма-
ках ротора укладывается по шесть разъемных демпферных стержней,
что дает возможность изменять число стержней, их расположение
и материал.
Имеющиеся в лаборатории три модельных компенсатора данного
типа могут применяться как промежуточные компенсаторы и как ком-
пенсаторы приемной системы.
Рис. 68. Ротор модельного
компенсатора МК-3—4.
Компенсаторы выполнены на базе использования ряда конструктив-
ных элементов нормальных синхронных генераторов СГ-25—6, причем
в них применена для уменьшения потерь трансформаторная сталь
с толщиной листов 0.35 мм.
§ 12. Дальнейшее развитие серии модельных машин
В результате проведенных работ в различных научных организа-
циях СССР (ИЭМ, МЭИ, ЛПИ и др.) была выявлена весьма большая
эффективность метода электродинамических моделей для исследования
дальних передач, связывающих в единые энергосистемы не только
отдельные мощные электрические станции, но и их объединения.
Накопленный большой опыт по построению электродинамических
моделей позволяет в настоящее время создать серии модельных синхрон-
ных генераторов и синхронных компенсаторов с их возбудительными
системами, модельных трансформаторов и реакторов на базе наименьшего
количества конструктивно-производственных типов, что должно в значи-
тельной степени облегчить дальнейшее распространение и совершенство-
вание этого метода исследований.
В настоящее время уже создана первая очередь модельных генера-
торов и возбудителей для электродинамической модели энергосистем
в Сибирском филиале АН СССР, данные по которым приведены
$ 12, Дальнейшее развитие серии модельных машин
117
в табл. 19, и проектируется дальнейшее ее расширение для возможности
исследования объединенных энергосистем Сибири.
На основании опыта ИЭМ, МЭИ и НИИПТ в настоящее время
представляется возможным иметь один и тот же габаритный тип как
для модельных явнополюсных гидрогенераторов, так и для модельных
неявнополюсных турбогенераторов с одними и теми же статорами
и основными активными и конструктивными размерами. Эти два типа
машин отличаются только выполнением роторов, которые являются
взаимозаменяемыми, что весьма существенно снижает необходимое
количество типоразмеров машин для лабораторий электродинамического
моделирования.
При моделировании гидрогенераторов с обычными параметрами можно
или увеличивать мощность модели, имеющей параметры гидрогенератора
Волжской ГЭС, приблизительно в 2 раза, или при той же мощности
иметь запасной ротор с уменьшенным примерно вдвое воздушным за-
зором. При неявнополюсном выполнении ротора и при том же статоре
модельный турбогенератор дает примерно удвоенную мощность по отно-
шению к исходному типу с параметрами гидрогенератора Волжской ГЭС.
Модельный генератор МГ-18.7 при мощности 15 ква имеет параметры
Волжского гидрогенератора, при мощности 30 ква и том же воздушном
зазоре он имеет обычные параметры. Обычные параметры получаются
также и при мощности 15 ква, но при другом воздушном зазоре.
Этот же модельный генератор с неявнополюсным ротором при мощ-
ности 30 ква имеет параметры мощного турбогенератора. Для возмож-
ности изменения инерционной постоянной имеются съемные инерционные
диски (рис. 65 и 66).
В лабораториях электродинамического моделирования весьма удобно
иметь модельные генераторы с коэффициентом нарастания мощности,
равным 2. Тогда моделирование какой-либо электростанции одним мо-
дельным генератором может быть легко заменено без особой пере-
стройки всех модельных линейных устройств двумя генераторами поло-
винной мощности или тремя генераторами, из которых один будет иметь
половину мощности всей передачи, а два остальных — по одной четверти
этой мощности. При параллельной работе этих двух или трех генера-
торов возможно иметь те же эквивалентные параметры, как и при одном
модельном генераторе, что позволяет изучить влияние параллельной
работы генераторов с их возбудительными и регулирующими устрой-
ствами.
В хорошо оборудованной лаборатории электродинамического моде-
лирования достаточно иметь модельные генераторы четырех мощностей
с запасными роторами, имеющими увеличенный воздушный зазор 30, 15,
7.5 и 3.75 ква.
При увеличении мощностей вдвое и прежних воздушных зазорах
или при замене роторов явнополюсного выполнения на неявнополюсное
эти же конструктивные типы будут иметь мощности в моделях 60, 30,
15 и 7.5 ква и параметры обычных синхронных генераторов.
Обмотки возбуждения роторов модельных генераторов рационально
выполнять с достаточно высоким напряжением возбуждения порядка
80—120 в для того, чтобы иметь возможность непосредственно вклю-
чать системы не только электромашинного, но и ионного возбуждения,
имеющие значительное падение напряжения в дуге вентелей. Обмотки
возбуждения должны выполняться с возможно большим заполнением
медью полюсного сектора (порядка 0.12—0.14) для получения возможно
118
Глава II. Моделирование синхронных машин
меньших относительных величин активных сопротивлений цепей воз-
буждения. Соответственным образом рационально выбирать повышенные
величины высоты статорных пазов для достижения также возможно
меньших относительных величин активных сопротивлений статорных
обмоток.
Кроме основных модельных синхронных машин, лаборатории элек-
тродинамического моделирования должны иметь соответствующие мо-
дельные возбудительные системы как электромашинного типа, так и
ионного. Затем необходимо в этих лабораториях иметь компенсирую-
щие коллекторные машины однофазного тока для компенсации излишних
значений активных сопротивлений цепей возбуждения, а также трех-
фазного типа — для статорных цепей, причем оба вида этих машин могут
иметь по существу один и тот же конструктивный тип, отличаясь только
системами обмоток статора и ротора и токособирательными щеточными
аппаратами. По расчетным данным активные сопротивления обмоток
статоров модельных синхронных машин могут иметь столь же малые
активные сопротивления, что и моделируемые оригиналы. Однако при
осуществлении модельных установок электропередач сопротивления со-
единительных кабелей, приборов, контактов и обмоток трансформаторов
могут давать, особенно в модельных машинах меньших мощностей,
некоторое результирующее увеличение активного сопротивления ста-
торных цепей, что важно при коротких замыканиях вблизи от генера-
тора. Поэтому полезно иметь также компенсаторы излишних активных
сопротивлений статорных цепей трехфазного типа. Это может иметь
особое значение для модельных установок с промежуточными синхрон-
ными компенсаторами, на самораскачивание которых имеют влияние
активные сопротивления статорных цепей.
В табл. 20 даны основные данные и параметры серии модельных
синхронных машин четырех указанных выше типоразмеров, разработан-
ные на основе материалов Института электромеханики АН СССР,
Ленинградского политехнического института им. М. И. Калинина и
Научно-исследовательского института постоянного тока.
Глава III
МОДЕЛИРОВАНИЕ СИСТЕМ ВОЗБУЖДЕНИЯ
§ 1. Моделирование систем электромашинного возбуждения
Общие замечания
Задачей моделирования систем возбуждения является обеспечение
подобия переходных процессов, протекающих в роторных цепях модели,
аналогичным процессам в оригинале. Для выполнения этой задачи
необходимо, чтобы: 1) относительные параметры роторных цепей
(ту, Xf, Xfy T^q и T'd) модели и оригинала были равны; 2) возбудители
модели и оригинала были подобны в отношении статических и динами-
ческих характеристик; 3) характеристики регуляторов возбуждения мо-
дели и оригинала были одинаковы.
Для обеспечения первого из этих условий избыточное электриче-
ское сопротивление роторной цепи модели компенсируется с помощью
специальных однофазных коллекторных генераторов (ОКГ} последова-
тельного возбуждения (см. главу IV, § 2), а недостающее индуктивное
сопротивление восполняется посредством включения в роторной цепи
добавочной индуктивности ^Х/.
Из второго условия вытекает необходимость создания и использо-
вания в электродинамической модели маломощных модельных возбуди-
телей, подобных по своим характеристикам возбудителям крупных син-
хронных генераторов. При этом для исследования влияния на переход-
ные процессы модели различных факторов (скорости нарастания
напряжения возбудителя, потолков форсировки и развозбуждения) не-
обходимо, чтобы параметры модельных возбудителей поддавались изме-
нению в достаточно широких пределах.
Процессы регулирования возбуждения в модели должны быть подобны
соответствующим процессам в оригинале. Поэтому для регулирования
возбуждения должны применяться специально созданные модельные
регуляторы, по своим характеристикам подобные регуляторам возбужде-
ния, используемым в эксплуатации. Однако наряду с этим весьма целесо-
образным является применение в модели натурных регуляторов возбу-
ждения для проведения на них испытаний в условиях, приближающихся
к естественным условиям их эксплуатации. Регуляторы возбуждения,
применяемые в электродинамической модели, должны обладать универ-
сальностью характеристик, позволяя осуществлять регулирование
по углу 9, току и напряжению и их производным в соответствии с за-
данным законом регулирования.
120
Глава III. Моделирование систем возбуждения
Схемы включения модельных возбудителей
В электродинамической модели возможно применение нескольких
схем включения модельных возбудителей: 1) непосредственное включе-
ние возбудителя в роторной цепи (рис. 69); 2) включение возбудителя
Рис. 69. Непосредственное включение модельного возбу-
дителя в роторной цепи модельного генератора.
через преобразователь напряжения (рис. 70); 3) включение возбудителя
на обмотку независимого возбуждения компенсатора ОКГ (рис. 71).
В случае применения первой схемы, модельный возбудитель вклю-
чается в цепи ротора модельного синхронного генератора последова-
Рис. 70. Включение модельного возбудителя [через [преобра-
зователь напряжения.
тельно с компенсатором ОКГ. Следовательно, напряжение на кольцах
модельного синхронного генератора Uf будет равняться сумме напря-
жения возбудителя £7в и напряжения компенсатора С7к. Соотношение
Рис. 71. Включение модельного возбудителя на обмотку независимого
возбуждения коллекторного генератора.
между напряжениями Z7K, UB и Uf будет зависеть от требуемой по усло-
виям моделирования степени компенсации активного сопротивления
роторной цепи [см. далее формулу (16) в главе IV, § 2]. Чем выше
степень компенсации, тем большую часть от напряжения Uf будет
составлять напряжение С7К и, наоборот, тем меньшую часть от Uf будет
7. Моделирование систем электромашинного возбуждения
121
составлять напряжение £7в. Например, при степени компенсации 80%,
что означает уменьшение результирующего сопротивления роторной
цепи благодаря компенсации в 5 раз, Z7K = 0.80 Uf и Z7B = 0.20 Uf,
Таким образом, при больших степенях компенсации напряжение возбу-
дителя £7в оказывается малым, особенно если обмотка ротора рассчи-
тана на низкое номинальное напряжение. Так, при С7/ = 30 в и степени
компенсации 80% напряжение £/в = 6в. При этих условиях моделирова-
ние мощного возбудителя при помощи типовой машины малой мощности
затрудняется.
Вследствие этого при высоких степенях компенсации становится
целесообразным каскадное включение модельного возбудителя по схе-
мам, приведенным на рис. 70 и 71. Обе эти схемы позволяют приме-
нять возбудитель с любым значением номинального напряжения, которое
выбирается исходя из условий моделирования возбудителя. В этих
схемах напряжение возбудителя преобразуется в более низкое напря-
жение и вводится в роторную цепь либо с помощью машинного пре-
образователя П (рис. 70), либо с помощью генератора ОКГ (рис. 71).
В последнем случае генератор ОКГ работает и как компенсатор актив-
ного сопротивления, и как преобразователь напряжения.
В соответствии с этим э. д. с. ОКГ имеет две составляющие
Ек. — Ек1 । Ек0,
где Ек1 — э. д. с., пропорциональная току if в главной цепи ОКГ, ком-
пенсирующая активное падение напряжения в роторной цепи, a EkQ—
э. д. с., пропорциональная току /в в обмотке независимого возбужде-
ния ОКГ.
Для того чтобы в схемах, приведенных на рис. 70 и 71, преобра-
зователь напряжения и компенсатор ОКГ работали в статических и
динамических режимах без искажения, необходимо: 1) обеспечить стро-
гую линейность характеристик холостого хода преобразователя и ком-
пенсатора Епр. или EK$=f(iv) и соответственно зависимостей Епр. или
£ко=/(^7в); 2) исключить запаздывание в изменении тока zB и соответ-
ственно э. д. с. Епр. и Eva при изменении напряжения модельного воз-
будителя Z7B; 3) обеспечить постоянство сопротивления роторной цепи
при заданных пределах изменения тока if.
Для выполнения первого условия магнитные цепи преобразователя
и компенсатора выполняются ненасыщенными, а влияние гистерезиса
сводится до минимума с помощью специальных противогистерезисных
обмоток (см. главу IV, § 2).
Для уменьшения запаздывания в изменении э. д. с. Епр. и Еко по-
стоянные времени цепей независимого возбуждения в преобразователе
и компенсаторе снижаются до минимальной величины посредством вклю-
чения в эти цепи добавочных сопротивлений г .
Изменение сопротивления роторной цепи, вызванное непостоянством
переходного сопротивления щеточных контактов, имеющихся в этой
цепи, приводит к нелинейности зависимостей if=f (Епр.) и if—f (Еко),
а также if—f (zB), вследствие чего нарушается прямая пропорциональ-
ность между напряжением возбудителя £/в и током if роторной цепи.
Для устранения этого явления в роторной цепи модельного генератора
применяются щетки специальных марок, имеющие пониженное переход-
ное падение напряжения и большее постоянство переходного сопротив-
122
Глава III. Моделирование систем возбуждения
ления. Весьма целесообразным является, кроме того, применение обмо-
ток на роторе синхронной машины, рассчитанных на большее напряже-
ние (порядка 80—100 в), так как при этом относительное значение
переходного сопротивления щеточных контактов уменьшается.
Следует отметить также, что с точки зрения уменьшения влияния
щеточного контакта, более выгодной является схема, приведенная на
рис. 71, так как в этой схеме число щеточных контактов, включенных
в роторную цепь, уменьшается по сравнению со схемой, данной
на рис. 70. Некоторым недостатком схемы на рис. 71 является нали-
чие электромагнитной связи между обмотками независимого и последо-
вательного возбуждения ОКГ, которая приводит к дополнительному
взаимному влиянию друг на друга цепей ротора и возбудителя в пере-
ходных режимах, отсутствующему в реальной схеме возбуждения. Однако
вследствие того, что индуктивности обмоток возбуждения ОКГ малы
по сравнению с индуктивностью обмотки ротора, это взаимное влияние
невелико и не вносит заметной погрешности в результаты исследований.
Влияние это можно совсем исключить, если последовательно с обмот-
ками независимого и последовательного возбуждения ОКГ включить
первичную и вторичную обмотки специального дросселя Д (на рис. 71
показано пунктиром). Взаимная индуктивность между обмотками этого дрос-
селя подбирается при этом равной по величине взаимной индуктивности
между соответствующими обмотками возбуждения ОКГ, а включение
дросселя производится таким образом, чтобы э. д. с. взаимоиндукции
в каждой из цепей независимого или последовательного возбуждения
ОКГ действовали навстречу друг другу и в сумме давали нуль.
Дополнительно следует указать, что схемы, приведенные на рис. 70
и 71, отличаются от реальной схемы рис. 69 еще тем, что в этих
схемах всплеск тока в цепи ротора при внезапном коротком замыкании
модельного генератора (МГ) не оказывает такого воздействия на воз-
будитель, какое имеет место в схеме рис. 69, где всплеск тока ротора
вызывает уменьшение напряжения возбудителя из-за возрастания в нем
падения напряжения и влияния реакции якоря. Однако это воздействие
играет лишь второстепенную роль и при необходимости может быть
приближенно учтено в модели посредством включения в роторную
цепь МГ добавочной обмотки возбуждения модельного возбудителя,
размагничивающей его при всплесках тока ротора, как показано пункти-
ром на рис. 70.
Схемы рис. 70 и 71 дают большую гибкость по сравнению со схе-
мой рис. 69 при подборе характеристик модельного возбудителя, так как
позволяют за счет изменения добавочного сопротивления гд и числа
витков обмотки независимого возбуждения преобразователя или ОКГ
регулировать напряжение и ток модельного возбудителя.
В схеме рис. 69 ток возбудителя не поддается регулированию,
так как он определяется величиной тока ротора модельного генератора.
Напряжение же возбудителя можно регулировать либо посредством
изменения его скорости вращения, либо посредством введения в цепь
ротора добавочного источника постоянного напряжения. В послед-
нем случае для введения дополнительного постоянного напряже-
ния может быть использована одна из обмоток компенсатора, вклю-
чаемая на отдельный источник напряжения или на сеть. При этом
для уменьшения демпфирующего влияния этой обмотки на магнитный
поток компенсатора полезно включить последовательно с ней большое
активное и индуктивное сопротивление.
§ 7. Моделирование систем электро машинного возбуждения
123
сопротивления гф в цепи
Рис. 72. Схема соединения обмоток
возбуждения возбудителя.
Условия моделирования мощных возбудителей
Для того чтобы найти условия моделирования возбудителей рас-
смотрим уравнения переходного процесса форсировки напряжения воз-
будителя при шунтировании форсиров
параллельного возбуждения (рис. 72).
Предположим, что, кроме обмотки /
параллельного возбуждения, возбуди-
тель имеет еще две обмотки 2 и 3
независимого возбуждения, причем на-
пряжения на этих обмотках во время
переходного процесса могут подвер-
гаться регулированию. Кроме того,
будем полагать, что возбудитель при-
водится во вращение приводным дви-
гателем, скорость которого во время
форсировки может изменяться.
Тогда для рассматриваемого переходного процесса можно написать
следующие уравнения напряжений, токов и моментов вращения:
+ = (1)
+ (2)
£ £л A Qf Щ £лО Clt '
(3)
о о > df oi dt at «>“ х '
— (4)
с.лф--4?г <5>
В этих уравнениях г, А, М, i и Z7, взятые с соответствующими
индексами, представляют собой сопротивления, собственные и взаимные
индуктивности, токи и напряжения цепей возбуждения возбудителя,
причем все величины, относящиеся к обмоткам 2 и 3 (рис. 72), приве-
дены к числу витков первичной обмотки; z’a, z‘, Ф, GD~ и п представ-
ляют собой ток якоря, ток возбудителя, полезный поток, маховой
момент и скорость вращения возбудителя; Мг — вращающий момент,
приложенный к валу возбудителя со стороны приводного двигателя.
Напряжение возбудителя Z7B в уравнении (1) может быть выражено
следующим образом:
UB=--E-iara-La^, (6)
где ra,La,ia и Е — сопротивление, индуктивность, ток и э. д. с. якоря
возбудителя, причем
Е = СепФ. (7)
124
Глава III. Моделирование систем возбуждения
Будем считать, что до процесса форсировки возбудитель работал
в номинальном режиме. Тогда для этого режима уравнения (1)—(6)
будут иметь вид:
Уравнение (8)
г’1,(г1ч-гф) = £4,1 (8)
* 2н Г2 = •) (9)
*3н Г3 ^Зн 1 (Ю)
(И)
Мн =См/аФн=М1Н, (12)
ивя = = “ *лнГа = СЛФН — Га- (13)
можно переписать в следующем виде:
Vt тт И ганга (8а)
где КГ1 — коэффициент, показывающий, во сколько раз уменьшается
сопротивление цепи параллельного возбуждения возбудителя при фор-
сировке:
= (14)
Введем следующие обозначения:
и ^2
М12 м' С13’ 7W13 °21, ^21
£3 (15)
./ °23, Л*23 °31, Дз1 —— — а32, ^32
где а12, а13... представляют собой коэффициенты рассеяния между соот-
ветствующими обмотками возбуждения возбудителя.
Произведем теперь преобразование уравнений (1)—(5). Для этого
каждое из этих уравнений разделим на соответствующие выражения?
(8а)—(12). Учтя при этом формулы (6), (7) и (15) и заменив знак диф-
ференцирования по времени символом р, после преобразования получим?
;3н _ ~УЕ, ~ 7>УЕн
Чн 1-ДЕ,
i2 ч _Т2 ni «21 Р 1 Z1h *2н , Т2 • / *3н жр 1 Pin Vq а23Г 3 г1, 2’
*зч Т’з • ч, г3н . _?3 •' *2, IP 1 ®32i ^3’ 32 г3я
1а
(16)
(17)
(18)
(19)
1аФ-ь//врп=М1.
(20)
В этих уравнениях ib i2, ,i3, ia, i, n, U3, Ф и ML — величины, выражен-
ные в долях от своих номинальных значений; 7^, Т3 и Та — постоян-
ные времени цепей возбуждения и якоря, представляющие собой отно-
§ 7. Моделирование систем электромашинного возбуждения
125
шение индуктивности L к сопротивлению г каждой цепи; ДЕН — относи-
тельное падение напряжения в якорной цепи при номинальном режиме,
равное
AEB=^L; (21)
7/в — инерционная постоянная возбудителя, равная
Полученные уравнения (16)—(20) одинаково справедливы как для
возбудителя-оригинала, так и для модельного возбудителя. Поскольку
эти уравнения написаны в безразмерной форме (в относительных еди-
ницах), то для обеспечения подобия переходных процессов в модели и
оригинале необходимо, чтобы решения этих уравнений и сами уравнения
были одинаковыми в обоих случаях. Для этого необходимо, чтобы чис-
ленные значения всех постоянных коэффициентов, а также зависимости
для переменных параметров, входящих в эти уравнения, были бы оди-
наковы для модели и оригинала.
На основании этих соображений, согласно уравнениям (16)—(20),
можно сформулировать следующие условия моделирования возбудителей:
1) соотношение м. д. с. обмоток возбуждения *1h:*2H:Z3h в номиналь-
ном режиме (и в других режимах) должно быть одинаковым в модели
и оригинале;
2) кривые намагничивания (^—/в), построенные в относитель-
ных единицах, должны быть одинаковы для модели и оригинала;
3) постоянные времени цепей возбуждения и якоря в модели и ори-
гинале должны быть соответственно равны, поскольку масштаб времени
для электродинамической модели обычно берется таким же, как и для
оригинала;
4) коэффициенты рассеяния а12, а1з • • • обмоток возбуждения возбуди-
теля-оригинала и его модели должны быть соответственно равны;
5) относительные падения напряжения ДЕН в номинальном режиме
в цепи якоря модельного возбудителя и оригинала должны быть оди-
наковы;
6) в натурном и модельном возбудителях должны быть соблюдены
одни и те же соотношения между током обмотки параллельного возбу-
ждения и током якоря возбудителя;
7) инерционные постоянные возбудителя модели и оригинала должны
быть равны;
8) напряжение U2 и U3, приложенные к обмоткам независимого воз-
буждения (от подвозбудителя или регуляторов), выраженные в относи-
тельных единицах, должны изменяться одинаковым образом как в ори-
гинале, так и в модели;
9) механические характеристики приводного двигателя Mj=/(n)
в статических и динамических режимах в модели и оригинале должны
быть одинаковыми;
10) коэффициент Kri изменения сопротивления в цепи параллельного
возбуждения должен быть одним и тем же в модели и оригинале.
Анализируя сформулированные выше условия, можно видеть, что
первые семь из них касаются обеспечения подобия самих возбудителей,
в то время как последние три условия требуют обеспечения подобия
126
Глава III. Моделирование систем возбуждения
внешних воздействий, оказываемых на возбудители со стороны внешних
источников электрической или механической энергии (регуляторов на-
пряжения, приводного двигателя и т. п.).
Следует заметить, что из семи условий, относящихся к моделирова-
нию возбудителей, наиболее важными являются первые три условия»
Четвертое условие обычно выполняется без принятия каких-либо
специальных мер. Это объясняется тем, что поскольку все обмотки
возбуждения у возбудителей помещаются, как правило, на одних и
тех же полюсах, их взаимное рассеяние близко к нулю и коэффициенты
рассеяния а12, а1з • • • оказываются близкими к единице как в модельных
возбудителях, так и в возбудителях-оригиналах.
Выполнение пятого условия также не составляет особых трудностей.
Относительное падение напряжения ДЕН в номинальном режиме в круп-
ных возбудителях составляет всего лишь 3—5%, в мелких машинах по-
стоянного тока оно несколько повышается. Однако уменьшая значение
тока, выбираемого в качестве номинального, легко получить в модель-
ных возбудителях требуемую величину ДЕН. Кроме того, можно заметить,
что точное выполнение этого условия не является обязательным, так
как некоторое несоблюдение его не ведет к заметной погрешности.
Несоблюдение шестого условия при некоторых пределах изменения
тока z\ в обмотке параллельного возбуждения также не приводит
к большим погрешностям, так как падение напряжения в якоре и явле-
ние реакции якоря, вызываемые током возбуждения z\, обычно невелики.
Однако слишком большое значение тока z\ выбирать не следует, так
как при форсировках возбудителя этот ток резко возрастает (в 6—8 раз)
и его влияние на напряжение модельного возбудителя становится за-
метным.
Выполнение седьмого условия является существенным лишь в тех
случаях, когда натурный возбудитель имеет привод от отдельного дви-
гателя (асинхронного или постоянного тока). В тех же случаях, когда
возбудитель сидит на одном валу с генератором, важно получить тре-
буемую величину инерционной постоянной всего модельного агрегата
и необязательно добиваться равенства инерционных постоянных в мо-
дельном и натуральном возбудителях. Если пренебречь изменением ско-
рости модельного возбудителя при колебаниях синхронного генератора
и влиянием изменения электромагнитного момента возбудителя в пере-
ходных режимах на колебания генератора, то модельный возбудитель
можно приводить во вращение отдельным достаточно мощным двигате-
лем, независимо от того, что в действительности натурный возбудитель
находится на одном валу с генератором. В последнем случае величина
инерционной постоянной модельного возбудителя также не имеет зна-
чения, если только мощность приводного двигателя достаточно велика,
чтобы обеспечить постоянство скорости вращения возбудителя при его
форсировках.
Поскольку первые три условия моделирования возбудителей являются
наиболее существенными, рассмотрим их более подробно.
Обеспечение надлежащих соотношений между
м. д. с. обмоток возбуждения в модельном возбудителе
Согласно первому условию моделирования, имеем следующее соот-
ношение между м. д. с. обмоток возбуждения в модели и оригинале:
F™ : F*-.F™ = FfP : F°p-: F^\ (23)
$ 7. Моделирование систем электромашинного возбуждения
127
Выполнение этого условия является обязательным, так как даже
небольшое отклонение от него может привести к заметной погрешности
в работе модели.
Следует отметить, что из условий моделирования переходных про-
цессов вытекает обязательное выполнение определенных соотношений
для м. д. с., но для токов в отдельных обмотках возбуждения (кроме
параллельной) каких-либо определенных соотношений условия моделиро-
вания не дают. Поэтому числа витков обмоток возбуждения в модели
можно выбирать произвольно и именно так, как это оказывается удоб-
ным по другим соображениям.
Нетрудно видеть, что при заданной плотности тока общее сечение
меди отдельных обмоток возбуждения независимо от числа витков
определяется величиной их м. д. с. Поэтому если принять для всех
обмоток возбуждения в модели одинаковую плотность тока, то соотно-
шение между общими сечениями этих обмоток в модельном возбудителе
будет также определяться уравнением (23).
Моделирование кривых намагничивания
При тщательном моделировании подобие кривых намагничивания
Ф=/(Л) в модели и оригинале должно быть обеспечено как для холо-
стого хода, так и для режимов нагрузки возбудителей при различных
значениях тока якоря. Это означает, что, кроме моделирования харак-
теристики холостого хода, необходимо также в модельном возбудителе
осуществить моделирование реакции якоря.
Рассмотрим сначала моделирование характеристики холостого хода
возбудителя, полагая, что реакция якоря в возбудителе и его модели
примерно одинакова.
При моделировании характеристики холостого хода практически
удовлетворяются совпадением лишь насыщенных и ненасыщенных участ-
ков этих характеристик, принимаемых за прямые линии, что дает, как
показывают соответствующие расчеты и опыты, достаточную точность
при моделировании. В этом случае получаются следующие условия
геометрического подобия характеристик модели и оригинала (рис. 73):
1) отношение угловых коэффициентов спрямленных участков кривых
tg а2
холостого хода -~g-- в модели и оригинале должно быть одно и то же;
2} отношение отрезков 6, отсекаемых на оси ординат при продолже-
нии спрямленной насыщенной ветви характеристики холостого хода
оригинала и модели должно быть равно отношению их номинальных
напряжений (или масштабу моделирования напряжения возбудителя).
При выполнении моделей возбудителей на основе использования
машин постоянного тока нормального исполнения указанные соотноше-
ния, необходимые для моделирования характеристики холостого хода,
могут быть получены за счет подбора величины воздушного зазора.
При использовании в качестве модельных возбудителей готовых
машин постоянного тока в тех случаях, когда по каким-либо причинам
изменять воздушный зазор оказывается нецелесообразным, можно при-
бегнуть к несколько иному способу моделирования характеристики хо-
лостого хода, добиваясь совпадения начальной части этих характеристик
и двух точек N и Л/, соответствующих номинальному Еп и потолоч-
ному Еп значению э. д. с. возбудителя.
128
Глава Ill. Моделирование систем возбуждения
Если ненасыщенную и насыщенную ветви характеристики холостого
хода заменить прямыми у=ах и у=.Ь-\- сх, то для упомянутых двух
точек можно написать следующие зависимости:
Е
-^-=^ = КЕ, (24)
ил '
У1 = ахъ
(26)
У2 = Ь -+- сх2.
(27)
Здесь КЕ и К. — кратности потолка э. д. с. и суммарного тока возбу-
ждения возбудителя, а —коэффициент насыщения возбудителя в но-
минальном режиме.
Решая эти уравнения, получим значения координат для точек N и
Л/, лежащих на кривой холостого хода модельного возбудителя и соот-
ветствующих номинальному режиму (К^х19 у±) и режиму потолочного
возбуждения (х2, у2). Зная эти координаты, нетрудно найти номиналь-
ные и потолочные значения результирующего тока возбуждения и э. д. с.
модельного возбудителя, определяемые условиями наилучшего совпаде-
ния характеристик холостого хода. Так, для номинального режима
получается:
Z!h = тГу.Х1 ~ Кца-сК К ' (28)
» |Л
mvab
ЕИ = тЕу} = __ сК К^, (29)
где т. и тЕ—масштабы тока и э. д. с.
£ 7. Моделирование систем электромашинного возбуждения
129
Для моделирования поперечной реакции якоря необходимо, чтобы
распределение магнитного поля в воздушном зазоре при нагрузке было
одинаковым в возбудителе и его модели. Это можно получить при
условии, если относительные переходные характеристики Вь = f(F%+z)
модели и оригинала совпадут, а отношение м. д. с. реакции якоря ASbj
при нагрузке к м. д. с. воздушного зазора и зубцов Fz+Z нри холостом
ходе в модели и оригинале будет одним и тем же. Подбирая при рас-
чете модельного возбудителя соответствующим образом величину воз-
душного зазора, коэффициент полюсного перекрытия линейную
нагрузку AS, можно получить одинаковое влияние поперечной реакции
якоря в модели и оригинале.
В том случае, когда моделирование поперечной реакции осуществить
не удается, следует добиваться совпадения не характеристик холостого
хода, а внутренних нагрузочных характеристик модельного и натурного
возбудителей, построенных в относительных единицах. При этом в слу-
чае непосредственного включения возбудителей в цепь ротора синхрон-
ного генератора внутреннюю нагрузочную характеристику следует строить
исходя из предположения i — = i^ —const, принимая для процесса
форсировки (Касьянов, 1951). В случае каскадного включения
модельного возбудителя по схеме рис. 70 и 71 при построении его
внутренней нагрузочной характеристики следует исходить из предполо-
жения, что нагрузкой для возбудителя является чисто активное сопро-
тивление ге и его ток / = / =—
е в ге
Кроме поперечной реакции якоря, на магнитный поток возбудителя
и его напряжение при резких всплесках тока может оказать существен-
ное влияние коммутационная реакция якоря, возникающая вследствие
кратковременного расстройства коммутации. Поэтому при детальном
моделировании возбудителей необходимо было бы учесть и это явление.
Однако этого обычно не делают, ограничиваясь обеспечением удовлет-^
ворительной коммутации для установившихся режимов работы модельных
возбудителей.
Моделирование постоянных времени обмоток
возбуждения возбудителя
Для моделирования переходных процессов в возбудительной системе
необходимо, как было показано, чтобы постоянные времени цепей воз-
буждения модельного возбудителя были равны постоянным времени
соответствующих цепей возбудителя-оригинала.
При анализе данного вопроса необходимо иметь в виду, что в на-
стоящее время наряду с системами возбуждения сравнительно медленно-
действующими находят себе применение для целей повышения устойчи-
вости синхронных машин при работе их на дальние линии передачи
быстродействующие системы возбуждения. В первом случае применяются
возбудители сравнительно малоотзывчивые с потолком возбуждения,
обычно не превышающим двухкратной величины номинального напряже-
ния. Постоянные времени цепей возбуждения у этих возбудителей до-
стигают достаточно больших значений и в общей сумме могут составить
несколько секунд.
К быстродействующим системам возбуждения предъявляются значи-
тельно более высокие требования в отношении скорости нарастания
напряжения и потолка возбуждения. Для этих систем в настоящее
130
Глава III, Моделирование систем возбуждения
время требуется, чтобы постоянная времени, определяющая скорость
нарастания напряжения была равна 0.1—0.15 сек., а потолок возбужде-
ния составлял трех-четырехкратное значение номинального напряжения.
Поэтому для обеспечения быстродействия в этих системах принимаются
все меры для снижения постоянных времени цепей возбуждения возбу-
дителей до минимальных значений.
Для постоянной времени обмотки возбуждения машины постоянного
тока можно написать следующее уравнение:
у» _ _____ 2pwG$>q _
rB — zB2pwpZw—
или
Т^Т^гУ <3»“>
где о — коэффициент рассеяния главных полюсов;
bi и Ц — расчетные значения ширины и длины полюсного башмака;
8 — воздушный зазор;
Къ и — коэффициент воздушного зазора и коэффициент насыщения;
р— удельное сопротивление материала катушки;
QK — сечение меди катушки одного полюса;
В? и у — магнитная индукция в воздушном зазоре и плотность тока
в катушке.
Формула (30а) показывает, что с возрастанием габаритов машины
постоянная времени Тв ее обмотки возбуждения увеличивается, так как
при этом возрастают размеры полюсов и Zz, а с возрастанием диа-
метра якоря растет обычно и магнитная индукция В8 в воздушном за-
зоре. Этот же результат дает и формула (30), которая показывает, что
постоянная времени Тв увеличивается при возрастании размеров bi и
Ц и сечения меди катушки полюса QK.
Таким образом, постоянные времени обмоток возбуждения в мощных
возбудителях могут в несколько раз превышать постоянные времени Тъ
небольших машин нормального исполнения. Например, тихоходный воз-
будитель B-285z42—16 мощностью 550 квт со скоростью вращения
68.2 об./мин. имеет, как видно из табл. 21, суммарную постоянную вре-
мени 7s всех обмоток при 75° С в ненасыщенном состоянии, примерно
равную 5.5 сек., в то время как в нормальных машинах типа ПН,
начиная с ПН-17.5 и кончая ПН-290, эта постоянная времени имеет
значения в пределах от 0.3 до 0.6 сек.
Из сказанного следует, что в случае использования нормальной ма-
шины типа ПН в качестве модели мощного тихоходного возбудителя
необходимо значительное увеличение (в 4—5 раз и более) постоянной
времени ее обмотки возбуждения. Для типовых машин небольшой мощ-
ности с высоким использованием материалов эта задача является до-
статочно трудной, так как увеличение постоянной времени требует
соответствующего увеличения общего сечения QK меди обмотки, рас-
положенной на главных полюсах [см. формулу (30)], а это оказывается
затруднительным из-за недостатка места.
Увеличение постоянных времени обмоток возбуждения в модельном
возбудителе можно достигнуть либо посредством создания специальной
модельной машины, отвечающей предъявляемым к ней требованиям,
либо посредством использования для этой цели специального реактора,
§ 7. Моделирование систем электро машинное о возбуждения
131
Таблица 21
Наименование величины Оригинал В-285 '42—16 Мо ’ель К В-17.5 Оригинал В-235 90-16 Модель МВ-Ъ5 1
Номинальная мощность Р (квт) . 550 0.72 770 0.124
Номинальное напряжение U (в) . 420 80 350 73
Номинальный ток i (а) 1310 До 9.0 2200 1.7
Номинальная скорость вращения п (об./мин.) 68.2 1000 68.2 1000
Число помосов 2р 16 2 16 2
Постоянные времени (ненасы- щенные значения при t = 75°С): 1) обмотки параллельного возбуждения Тпр (сек.) . . 2.67 0.418 1.43 0.41
2) обмотки независимого воз- буждения Тн (сек.) .... 1.171 0.332 0.334 0.334
3) обмотки согласованновклю- ченной коррекции Тс. к (сек.) 0.281 0.013 0.216 0.215
4) 1-ой копоткозамкнутой об- мотки Тк1 (сек.) — 0.293 — —
5) обмотки противовключен- ной коррекции Тп к (сек.) . 1.241 0.013 0.216 0.215
6) 2-ой короткозамкнутой об- мотки Тх2 (сек.) — 0.571 — —
7) усилительной обмотки Т? (сек.) — — 0.58 0.585
8) суммарная всех обмоток Тъ (сек.) 5.46 1.66 2.776 1.759
9) цепи параллельного воз- буждения при номиналь- ном режиме Тпр н (сек.) . 0.10 0.10 — —
10) цепи параллельного воз- буждения при форсировке Т’пр.ф (сек-> 0.30 0.30 0.407 0.41
11) цепи независимого воз- буждения па и номинальном режиме Гн н (сек.) .... 0.33 0.332 0.0975 0.0975
12) ссновной гармоники вих- ревых токов в станине 7^ х (сек.) 0.41 0.044 — —-
включаемого последовательно с обмотками возбуждения модельного
возбудителя.
Первый из этих способов является наиболее правильным, так как
при разработке конструкции специальной модельной машины можно
полнее и точнее удовлетворить всем необходимым условиям моделиро-
вания возбудителей. Изготовление такой специальной машины может
быть выполнено на базе нормальной машины типа ПН, причем для
размещения в ней необходимого количества меди обмотки возбуждения
оказывается целесообразным перейти с четырехполюсного исполнения
на двухполюсное, сократив несколько длину полюсов. Так как линейная
нагрузка в модельном возбудителе обычно выбирается небольшой, то
132
Глава III, Моделирование систем возбуждения
для увеличения постоянных времени обмоток возбуждения его можно
также уменьшить воздушный зазор.
Применение специального реактора для увеличения постоянных вре-
мени является целесообразным в тех случаях, когда в качестве модель-
ного возбудителя используется нормальная машина ПН без переделки
ее магнитной системы. Схема включения добавочного реактора Р при-
Рис. 74. Схема включения у еактора для увеличения по-
стоянных времени обмоток возбуждения модельного возбу-
дителя.
ведена на рис. 74. Для того чтобы включение реактора давало требуемый
результат и не вносило искажений в переходные процессы модельного
возбудителя, необходимо, чтобы 1) соотношение между индуктивностями
обмоток в реакторе и в возбудителе было одинаковым и 2) влияние
Рис. 75. Кривая намагничивания модель-
ного возбудителя (а) и реактора (б).
насыщения на индуктивности обмо-
ток в реакторе и в возбудителе было
одним и тем же.
Из первого условия следует, что
число витков обмоток реактора
должно быть пропорционально числу
витков обмоток возбудителя:
w, w9 W* Шл
— = — = — = — = KW. 31)
W1 W2 W3 W4. 7
Для выполнения второго условия необходимо, чтобы:
а) кривые намагничивания реактора и возбудителя были
(рис. 75) и, значит,
tg а'2 tg а2
tg a, tg
подобны
(32)
где otg, а', а? и ат — углы наклона спрямленных участков кривых намаг-
ничивания реактора и модельного возбудителя;
б) отношение Kw числа витков обмоток реактора к числу витков
обмоток возбудителя было выбрано таким образом, чтобы точки, опре-
деляемые результирующими значениями м. д. с. обмоток, имели подоб-
ное расположение на кривых намагничивания реактора и возбудителя
и, следовательно,
(33)
7. Моделирование систем электромашинною возбуждения
133
где FA и Fa— значения м. д. с., соответствующие точкам Аг и А, полу-
ченным при пересечении спрямленных участков кривых намагничивания
реактора и возбудителя (рис. 75).
При включении реактора значения индуктивностей и сопротивлений
отдельных цепей возбуждения получатся следующими:
= L. -ь L'. = Lf (1 + = KLLt, (34)
r^ = r,-^r'i = Knrt, (35)
где Ky — -у--есть отношение проводимостей магнитных цепей реак-
тора и возбудителя, а Кь и КГ1 — коэффициенты возрастания индуктив-
ности и сопротивления цепи возбуждения.
Результирующая постоянная времени отдельной цепи возбуждения
получит значение
Формула (36) показывает, что при соответствующих значениях коэф-
фициентов Kl и КГ1, зависящих от размеров сердечника и воздушного
зазора, а также числа витков и сечения провода обмоток реактора*
постоянные времени обмоток возбуждения модельного возбудителя могут
быть увеличены до требуемых значений.
В случае применения описанного метода, необходимо иметь в виду,
что соотношение между сечениями обмоток возбуждения и регулирова-
ния в модельном возбудителе определяется не только постоянными вре-
мени, требуемыми по условиям моделирования, но зависят также при
заданной плотности тока от значений м. д. с. этих обмоток. Так как
в номинальном режиме работы возбудителя м. д. с. обмоток параллель-
ного и независимого возбуждения составляет основную долю суммарной
м. д. с. (около 90%), то общее сечение меди этих обмоток, рассчитан-
ное по условию допустимой плотности тока, оказывается значительным
и эти обмотки занимают основное место в модельном возбудителе. На
обмотки регулирования остается мало места, поэтому их постоянные
времени в модельном возбудителе оказываются сниженными в большей
степени, чем постоянные времени обмоток возбуждения. При увеличе-
нии постоянных времени обмоток регулирования до необходимых зна-
чений посредством включения реактора одновременно растут постоян-
ные времени обмоток возбуждения и, в частности, обмотки параллель-
ного возбуждения. Так как в номинальном режиме постоянная времени
цепи параллельного возбуждения должна быть небольшой (табл. 21), то
оказывается необходимым вводить добавочное сопротивление в эту цепь.
Это приводит к возрастанию мощности, расходуемой на собственное
возбуждение модельного возбудителя. Чрезмерное возрастание этой
мощности и соответственно тока в цепи параллельного возбуждения
является нежелательным, так как это приводит к резкому нарушению
шестого условия моделирования возбудителей.
Таким образом, применение реактора для цели увеличения постоян-
ных времени обмоток возбуждения модельного возбудителя не во всех
случаях может дать желательный результат, что еще раз подтверждает
необходимость выполнения специальных машин для моделирования круп-
ных возбудителей.
134
Глава III, Моделирование систем возбуждения
В мощных возбудителях, имеющих массивную станину, большое влия-
ние на переходные процессы могут оказать вихревые токи, индукти-
руемые в массивных участках магнитопровода (главным образом в ста-
нине). Для постоянной времени Тхх первой гармонической вихревых
токов можно написать следующую формулу (Рюденберг, 1955):
(37)
Мт-7/
где а и Ь — размеры сечения ярма; I — средняя длина магнитной линии
в ярме; р — удельное сопротивление материала ярма (для литой стали
равное 0.2 • 10~6 ом • мм2/м); — эквивалентный воздушный зазор, маг-
нитное сопротивление которого равно магнитному сопротивлению всей
магнитной цепи машины.
Эквивалентный зазор может быть определен из формулы
где 7% и Bj — суммарная м. д. с. возбуждения и соответствующая ей
магнитная индукция в ярме при отсутствии насыщения магнитной цепи
машины.
Формула (37) показывает, что постоянная времени пропорцио-
нальна объему станины и, следовательно, в крупных машинах значи-
тельно больше, чем в мелких. Так, в возбудителе В-285/42—16 постоян-
ная времени 7% — 0.41 сек., в то время как в машинах ПН она имеет
значение от 0.014 (ПН-28.5) до 0.06 сек. (ПН-290).
Таким образом, при выполнении модельных возбудителей необходимо
также моделировать влияние вихревых токов. Это можно сделать
с некоторым приближением посредством устройства дополнительной
короткозамкнутой обмотки, наматываемой вокруг станины модельного
возбудителя и охватывающей 65.7% от всей площади поперечного сече-
ния станины (Фетисов, 1959). Общее сечение меди этой обмотки должно
быть выбрано таким образом, чтобы постоянная времени ее была
равна разности постоянных времени станины в оригинале и модели
Выше говорилось главным образом о моделировании сравнительно
медленнодействующих тихоходных возбудителей, предназначенных для
возбуждения мощных гидрогенераторов, работающих с достаточным
запасом устойчивости.
Моделирование быстродействующих возбудителей, используемых для
возбуждения гидрогенераторов, имеющих малый запас устойчивости,
например бустерных возбудителей, осуществляется более просто. По-
стоянные времени цепей возбуждения и регулирования в быстродей-
ствующих возбудителях невелики и поэтому при моделировании этих
возбудителей нормальными машинами типа ПН необходимые параметры
обмоток возбуждения модельных возбудителей могут быть получены без
особых затруднений. Кроме того, быстродействующие возбудители вы-
полняются, как правило, с расслоенной станиной и вследствие этого
отпадает необходимость моделирования вихревых токов.
Моделирование быстроходных возбудителей турбогенераторов также
не представляет особых трудностей, так как постоянные времени цепей
возбуждения этих возбудителей не имеют больших значений.
£ 7. Моделирование систем электро машинною возбуждения
135
Соотношение мощностей обмоток возбуждения
модельного возбудителя и способы включения
регуляторов возбуждения
Предположим, что обмотка 2 в схеме, изображенной на рис. 72,
предназначена для регулирования напряжения возбудителя и к ней под-
ключен соответствующий регулятор возбуждения.
Согласно первому условию моделирования, отношение м. д. с. обмотки
возбуждения к м. д. с. обмотки регулирования F> в модели должно
быть таким же, как и в оригинале, т. е.
_ ^ор.
гм гор.
г2 Г2
(23а)
Так как обмотки регулирования и возбуждения в возбудителях поме-
щаются на одних и тех же полюсах, то для постоянных времени 7°р-
и Г2М обмотки регулирования возбудителя и его модели можно написать
следующие зависимости:
Т’ор.^
г?р-
г°₽-
(39)
(39а)
Согласно третьему условию моделирования 7’°р = У" и =
Приравнивая в соответствии с этим условием правые части уравнений
(39) и (39а) друг другу и учитывая соотношение (23а), получим
м
Р2
„м
Pl
Р-Г
Р°р'
(40)
Это означает, что при точном моделировании соотношение между
мощностью регулятора р2 и мощностью возбуждения возбудителя р1
в модели должно быть таким же, как и в оригинале. Так как мощность
возбуждения р* в модели во много раз (в несколько сотен или даже
тысяч раз) меньше мощности р°р* в оригинале, то в таком же отноше-
нии должна быть уменьшена и мощность регулятора, включаемого на
модельный возбудитель, и, следовательно, он нуждается в соответ-
ствующем моделировании.
Однако наряду с модельными регуляторами в электродинамической
модели представляется весьма целесообразным использование типовых
регуляторов, предназначенных для работы с мощными возбудителями.
При этом возможны следующие схемы включения этих регуляторов:
1) непосредственное включение силового элемента регулятора на
обмотку регулирования возбудителя;
2) подключение обмотки регулирования к регулятору согласно потен-
циометрической схеме;
3) включение регулятора на цепь, состоящую из обмотки регулиро-
вания и соответствующего добавочного сопротивления.
В первом способе включения регулятора мощность силового эле-
мента должна быть уменьшена в соответствии с уравнением (40), и,
136
Глава III. Моделирование систем возбуждения
таким образом, силовой элемент будет практически работать в режиме
холостого хода. Это является допустимым в том случае, если нагру-
зочная характеристика и характеристика холостого хода регулятора
будут подобны, что, например, имеет место в случае применения тира-
тронного силового элемента.
Во втором способе включения условия работы регулятора в устано-
вившихся режимах в модели и в оригинале одинаковы, так как мощ-
ность регулятора в этом случае остается одной и той же, а мощность,
поступающая в обмотку регулирования модельного возбудителя, благо-
даря применению потенциометрической схемы включения соответствую-
щим образом снижается. Однако в переходных режимах работа регуля-
тора в модели будет происходить с некоторым искажением, так как
в данной схеме почти полностью исключается обратное влияние тока
в обмотке регулирования на регулятор. В ряде случаев это искажение
практически оказывается незначительным и такая схема может с успе-
хом применяться.
При третьем способе включения регулятора мощность его также
остается неизменной.
Полагая в уравнениях (39) и (39а) Р^' = Р™ и Т°р-=Т™, а также
учитывая соотношение (38), после преобразования этих уравнений
получим
(41>
Это уравнение показывает, что в данном случае постоянная времени
цепи регулировочной обмотки за счет включения добавочного сопротив-
ления уменьшится пропорционально отношению мощностей возбужде-
ния модели и оригинала. Уменьшение постоянной времени цепи регули-
рования в модели приведет к нарушению третьего условия моделиро-
вания переходных процессов. При тесной магнитной связи между
обмотками возбуждения, помещаемых в возбудителях на одних и тех же
полюсах, процесс изменения основного потока машины, как известно,
определяется суммарной постоянной времени всех цепей возбуждения
и регулирования. Поэтому для обеспечения подобия переходных про-
цессов в модельном возбудителе необходимо поместить на его полюсах
дополнительную короткозамкнутую обмотку, рассчитанную таким обра-
зом, чтобы сумма постоянных времени Т™ -ч- Т% этой обмотки и цепи
регулирования в модели была равна постоянной времени цепи регу-
лирования в оригинале.
Так как необходимое значение постоянной времени в модели обеспе-
чивается за счет добавочной короткозамкнутой обмотки, то обмотка
регулирования в данном случае может быть рассчитана исходя из усло-
вия получения требуемой м. д. с. (а не постоянной времени), и поэтому
она получается небольшой.
Условия работы регулятора при данном способе включения практи-
чески такие же, как и в предыдущей схеме, а именно: в установив-
шихся режимах регулятор в модели работает в тех же условиях, что
и в оригинале, а в переходных режимах имеют место некоторые иска-
жения вследствие того, что воздействие тока в обмотке регулирования
на работу регулятора в модели получается несколько иным, чем в ори-
гинале.
1. Моделирование систем электромашинного
возбуждения
137
Примеры моделирования возбудителей и систем
возбуждения
На основе приведенных выше теоретических соображений были раз-
работаны и выполнены модели крупных возбудителей и произведено
моделирование электромашинных систем возбуждения.
В качестве примера выполнения модельных возбудителей могут слу-
жить возбудители типа МВ-17.5, МВ-85/1, МВ-28.5 и МВ-85/2, основные
данные которых вместе с данными возбудителей-оригиналов приведены
в табл. 21 и 22.
Таблица 22
Наименование величины Оригинал ГП-1600—750 Модель
МВ-28.5 МВ-85/2
Длительная мощность Рп (квт) 800 0.2 0.2
Кратковременная мощность Рк (квт) .... 3200 0.8 0.8
Длительное напряжение Un (в) —400 -95 —95
Кратковременное напряжение UK (в) .... 800 190 190
Длительный ток / (а) 2000 2.1 2.1
Кратковременный ток / (а) 4000 4.2 4.2
Номинальная скорость вращения п (об./мин.) 750 1600 1000
Число полюсов 2р 10 4 4
Ненасыщенные значения постоянных времени при t = 75° С:
1) 1-й обмотки независимого возбуждения Гн, (сек-) 1.7 0.16 0.30
2) 2-й обмотки независимого возбужде- ния Т (сек.) н2 0.7 0.16 0.30
3) цепи независимого возбуждения Тп^
(сек.) 0.06 0.06 0.06
Возбудители МВ-17.5 и МВ-85/1 являются моделями сравнительно
малоотзывчивых тихоходных возбудителей В-285/42—16 и В-285/90—16,
имеющих большие постоянные времени цепей возбуждения. Возбудители
МВ-28.5 и МВ-85/2 представляют собой модели быстроотзывчивого
бустерного возбудителя ГП-1600—750, применяемого в быстродействую-
щей системе возбуждения с большим потолком напряжения (четырех-
кратным).
Модельный возбудитель МВ-17.5 выполнен из нормальной машины
постоянного тока типа ПН-17.5, у которой были перемотаны катушки
главных полюсов. В результате более полного использования площади
полюсного окна удалось увеличить общее количество меди обмоток,
размещаемых на полюсах. Вследствие этого, а также благодаря умень-
шению воздушного зазора с 0.8 до 0.5 мм суммарная постоянная вре-
мени обмоток возбуждения возросла до 1.64 сек. (вместо 0.6 сек.
в машине ПН-17.5).
Обмотки регулирования (коррекции) в модельном возбудителе МВ-17.5
выполнены с малыми постоянными времени, исходя из предположения,
138
Глава III. Моделирование систем возбуждения
что корректор промышленного типа будет включаться на эти обмотки
согласно третьему способу через добавочные сопротивления. Для вос-
В качестве примера
полнения недостающих значений по-
стоянных времени обмоток коррек-
ции в возбудителе МВ-17.5 поме-
щены две дополнительные коротко-
замкнутые обмотки.
Как видно из табл. 21, в мо-
дельном возбудителе МВ-17.5 все же
не удалось получить для всех об-
моток требуемые значения постоян-
ных времени. Поэтому для более
точного моделирования необходимо
увеличить эти постоянные времени
посредством включения по схеме
рис. 74 специального реактора.
При выполнении модельного воз-
будителя МВ-85/1 исходная машина
ПН-85 подверглась существенным
конструктивным изменениям, а
именно: вместо четырех полюсов
в модельном возбудителе было при-
менено два полюса специальной кон-
фигурации. Это позволило размес-
тить больше меди в обмотках по-
люсов и получить, как видно из
табл. 21, требуемые значения по-
стоянных времени для всех обмо-
ток, кроме параллельной. Однако
вследствие того, что в цепи парал-
лельного возбуждения оригинала при
форсировках остается включенным
добавочное сопротивление, постоян-
ную времени обмотки параллельного
возбуждения в модели можно взять
равной постоянной времени цепи па-
раллельного возбуждения оригинала
в режиме форсировки.
Модельные возбудители МВ-28.5
и МВ-85/2 изготовлены из нормаль-
ных машин типа ПН-28.5 и ПН-85
путем соответствующей перемотки
катушек полюсов. В данном случае
при получении требуемых значений
постоянных времени затруднения не
возникают, так как эти постоянные
в оригинале имеют небольшие зна-
чения.
моделирования систем возбуждения приведем
две схемы:
1) схему моделирования медленнодействующей системы возбуждения
гидрогенератора, работающего с достаточным запасом устойчивости
(рис. 76);
£ 7. Моделирование систем электромашинного возбуждения
139
2) схему моделирования быстродействующей системы возбуждения
гидрогенератора, работающего с малым запасом устойчивости (рис. 77).
В первой схеме применено включение модельного возбудителя МВ
на независимую обмотку однофазного коллекторного генератора ОКГ,
который в данном случае работает и как компенсатор активного сопро-
тивления роторной цепи, и как преобразователь напряжения возбуди-
теля. Принятая схема включения модельного возбудителя дала возмож-
ность уменьшить число щеточных контактов в роторной цепи модель-
ного генератора, влияние которых является весьма существенным в тех
случаях, когда обмотка ротора рассчитана на малое напряжение и
вместе с тем требуется высокая степень компенсации активного сопро-
тивления роторной цепи.
Для уменьшения запаздывания, которое может возникать при изме-
нении напряжения модельного возбудителя, в цепь независимого возбу-
ждения ОКГ введено значительное добавочное сопротивление гд, резко
снижающее постоянную времени этой цепи. С целью уменьшения вза-
имного влияния цепей независимого и последовательного возбужде-
ния ОКГ применен дроссель компенсирующий взаимоиндукцию
обмоток ОКГ. В некоторых случаях, особенно при большом добавоч-
ном сопротивлении гд, это взаимное влияние невелико и можно обой-
тись без включения дросселя.
Для обеспечения требуемого значения параметра X/ модельного гене-
ратора в роторной цепи его включено добавочное индуктивное сопро-
тивление ДА/.
В качестве модельного возбудителя в рассматриваемой схеме (рис. 76)
может быть использован либо возбудитель МВ-17.5 (с дросселем для
увеличения постоянных времени), либо МВ-85/1.
Схема регулирования напряжения возбудителя сохранена той же,
что и в оригинале, т. е. для регулирования возбуждения в модели
использован двухсистемный электромагнитный корректор промышленного
типа и соответствующим образом смоделированное устройство компаун-
дирования. При этом принят третий способ включения корректора через
добавочные сопротивления г'ск и /к на обмотки согласно включен-
ной СК и противовключенной ПК коррекции. Сопротивления г'ск и г^к
служат для регулирования мощности корректора и могут быть выбраны
так, что суммарные сопротивления г"к + гск и гпк“|“гпк в м°Дели будут
соответственно равны сопротивлениям и в оригинале.’ В этом
случае выходные данные корректора в модели и в оригинале будут
одинаковыми.
Для моделирования постоянных времени обмоток коррекции в модели
возбудителя устроены две добавочные короткозамкнутые обмотки
и К>, постоянные времени которых могут изменяться с помощью рео-
статов гк1 и гк2. Вентили и В^ включенные в цепи обмоток Кх и
служат для моделирования запирающего действия, которое оказывают
выпрямительные элементы корректора в переходных процессах при
индуктировании в коррекционных обмотках токов обратного направле-
ния. В случае равенства постоянных времени обмоток коррекции в ори-
гинале вместо двух обмоток Кх и К) в модели можно иметь только
одну обмотку К с постоянной времени, равной разности — Т™к или
^пк — ^пк» и тогДа включение вентиля в цепи этой обмотки не тре-
буется.
140
Глав! III. Моделирование систем возбуждения
Подвозбудитель I7B, применяемый в модельной системе возбужде-
ния, практически не нуждается в моделировании. Поэтому в качестве
него может быть выбрана обычная машина постоянного тока небольшой
мощности.
Во второй схеме моделирования электромашинкой системы возбу-
ждения (рис. 77) модельные возбудители, основной МВО и вольтодоба-
вочный МВБ, включены непосредственно в роторной цепи модельного
синхронного генератора МГ последовательно с компенсатором ОКГ
активного сопротивления. Этот способ включения оказывается возмож-
Рис. 77. Схема моделирования быстродействующей (бустерной)
системы возбуждения
ным в том случае, если напряжение на кольцах ротора модельного
генератора выбрано достаточно большим (порядка 100 в) и требуется
лишь небольшая компенсация активного сопротивления роторной цепи.
По сравнению с предыдущей схемой данная схема более правильно
моделирует явления, происходящие в натурной системе возбуждения,
так как в этой схеме моделируются также воздействия тока ротора на
работу возбудителей.
В качестве бустерного возбудителя МВБ в схеме используется
модельный возбудитель МВ-28.5 или МВ-85/2. Обмотки возбуждения
этого возбудителя подключаются так же, как и в оригинале, к ионному
устройству, соответствующим образом моделированному, служащему для
питания обмоток и регулирования возбуждения в установившихся и
переходных режимах. Требуемая величина постоянных времени цепей
возбуждения достигается за счет регулирования реостатов гд1 и гд2.
Основной возбудитель МВО в рассматриваемой системе возбужде-
ния не подвергается регулированию. Поэтому при моделировании этого
возбудителя нужно лишь учесть изменение падения напряжения и реак-
ции якоря в нем при всплесках тока ротора модельного генератора.
Практически оказывается возможным в качестве модели основного
возбудителя в данной схеме взять обычную машину постоянного тока
небольшой мощности. В качестве подвозбудителя ПВ также может быть
использована типовая машина постоянного тока.
§ 2. Моделирование систем ионного возбуждения
141
§ 2. Моделирование систем ионного возбуждения
Общие замечания
В связи с применением ионных преобразователей для целей возбу-
ждения синхронных машин, в первую очередь мощных генераторов и
синхронных компенсаторов дальних электропередач, возникает необхо-
димость моделирования систем ионного возбуждения. Это моделирова-
ние нужно как для исследования устойчивости энергосистем, процессов
регулирования и т. п., так и для исследования установившихся и пере-
ходных процессов самих возбудительных систем, особенно при разра-
ботке новых преобразовательных установок.
Системы ионного возбуждения могут быть выполнены по независи-
мом схемам и по схемам самовозбуждения. В первом случае источником
питания служит генератор переменного тока, расположенный на валу
главного агрегата, во втором случае — шины главной синхронной ма-
шины. Могут быть также и системы смешанного возбуждения, а также
ионно-машинные системы, где ионный преобразователь вводится допол-
нительно для повышения кратности форсирования и быстродействия.
Системы независимого ионного возбуждения состоят из синхронного
генератора и ионного преобразователя, причем синхронный генератор
имеет свою возбудительную систему и, кроме того, может снабжаться
регулятором напряжения. В случае ионного самовозбуждения, помимо
ионного преобразователя, имеется анодный трансформатор для сниже-
ния напряжения и в общем случае — последовательные вольтодобавоч-
ные трансформаторы для стабилизации напряжения при коротких замы-
каниях в системе. Поэтому моделирование систем ионного возбуждения
сводится к моделированию электрических машин, трансформаторов и
ионных преобразователей. Поскольку вопросы моделирования электри-
ческих машин были изложены выше (см. главу II), то в данном случае
будут рассмотрены только специфические особенности моделирования,
вытекающие из условий работы электрических машин и трансформато-
ров в схемах ионного возбуждения.
Моделирование вспомогательных синхронных
генераторов
В системах ионного возбуждения могут применяться как трехфазные,
так и шестифазные вспомогательные синхронные генераторы. Поскольку
шестифазная обмотка может быть получена из трехфазной путем над-
лежащего соединения катушек, то моделирование удобно проводить
на базе вспомогательных трехфазных генераторов с симметричными ста-
торными обмотками. В этом случае непосредственно применимы полу-
ченные выше расчетные соотношения (см. главу II).
Действующие значения токов, напряжений и мощности модели опре-
деляются на основании 1) номинальных данных оригиналов и 2) номи-
нальных напряжения и тока возбуждения главного модельного гене-
ратора.
Особое внимание при моделировании должно быть обращено на со-
ответствие коммутационных процессов преобразователей модели и ори-
гинала. Как известно, вследствие индуктивностей цепей переменного
тока, переход тока с одного вентиля на другой происходит не мгно-
венно, а в течение некоторого интервала времени. Этому интервалу
142
Глава III. Моделирование систем возбуждения
времени соответствует угол коммутации 7. Длительность коммутацион-
ного процесса, а следовательно, и величина угла коммутации зависят
от сверхпереходного индуктивного сопротивления x"d и сопротивления
отрицательной последовательности х2 (Шехтман, 1940). Поэтому иден-
тичность в протекании коммутационных процессов достигается прежде
всего за счет соответствия сопротивлений x"d и х2 модели и оригинала.
Корректировка величины индуктивного сопротивления рассеяния об-
мотки статора xz, а следовательно, и сопротивлений x"d и х2 в трехфаз-
ных генераторах может осуществляться включением дополнительных
индуктивных катушек. Корректирование индуктивных сопротивлений
в шестифазных вспомогательных синхронных генераторах получается
значительно сложнее. Это объясняется тем, что коммутационные про-
цессы преобразователей в данном случае зависят от большего количе-
ства параметров.
Как известно, любую несимметричную тп-фазную систему векторов
можно разложить на т симметричных систем. На рис. 78 такое раз-
ложение выполнено для шестифазной системы. В соответствии с этим
разложением можно говорить о сопротивлениях шести последователь-
ностей.
Эквивалентное индуктивное сопротивление хг, определяющее дли-
тельность коммутационного процесса преобразователя с шестифазным
генератором, зависит ог схемы преобразования.
В простой шестифазной схеме преобразования (рис. 81, а) во время
коммутации происходит короткое замыкание двух фаз, смещенных друг
относительно друга на 60 эл. град. Эквивалентное индуктивное сопро-
тивление получается в этом случае равным (Завалишин и Глебов, 1951)
____ Л*1 -+- Зх2 -+“ 4х3 Зх4 -Ь -Г 5
хг — й ’
где хь х2, х3, х4, х5 — сопротивления первой, второй, третьей, четвер-
той и пятой последовательностей соответственно.
В схеме с двухфазной уравнительной катушкой (рис. 81, б), а также
в схемах с двумя мостовыми группами вентилей (рис. 81, г) короткие
замыкания во время коммутации получаются между фазами, смещенными
друг относительно друга на 120 эл. град. Сопротивление хг будет еле-*
дующим:
„ A'i + Х2 4- j4 4- х5
лг 4
В схеме с трехфазной уравнительной катушкой во время коммута-
ции замыкаются накоротко диаметральные фазы. Поэтому сопротивле-
ние хг равно
v __-И -ь х3 -ь х5
хг з
С целью уменьшения влияния высших гармонических м. д. с. обмотки
статора на нагрев демпферной системы шестифазную обмотку целесо-
образно образовать из трехфазной двухслойной обмотки путем соедине-
ния в одну фазу групп катушек, следующих одна за другой через
360 эл. град. При переходе от трехфазной схемы соединения обмоток
к шестифазной, фазное напряжение и сопротивления уменьшаются
в практической системе единиц в 2 раза. Поэтому сопротивления в от-
$ 2. Моделирование систем исннсго возбуждения
143
носительной системе единиц получаются равными для обоих случаев
включения обмотки. Если принять ео внимание, что в трехфазной
обмотке группы катушек, смещенные на 180 эл. град., соединяются
встречно, то симметричные режимы первой, третьей и пятой последова-
тельностей шестпфазного генератора получаются аналогичными режимам
соответственно прямой, нулевой и обратной последовательностей трех-
фазного генератора. Поэтому для индуктивных сопротивлений в относи-
тельной системе единиц справедливы следующие равенства:
U6);=x(3) х(6) = х(3) х(6) = х(3)
1 1 7 о и 7 о z
Здесь х^\ — индуктивные сопротивления прямой, нулевой
и обратной последовательностей трехфазного генератора, отличающегося
Рис. 78. Несимметричные и симметричные системы векторов шести-
фазной системы.
от шестифазнсго генератора только схемой соединения групп катушек
обмотки. Следует заметить, что во время коммутации хг = x"d.
Индуктивные сопротивления второй и четвертой последовательностей
в существенной степени зависят от сокращения шага обмотки. В об-
мотке с диаметральным шагом диаметральные фазы, например фазы А
и Z), будут расположены в одних и тех же пазах. Так как токи диа-
метральных фаз совпадают во времени (рис. 78, а—е), то токи нижнего
слоя обмотки направлены встречно токам верхнего слоя. Поэтому ин-
дуктивные сопротивления второй и четвертой последовательностей об-
мотки с диаметральным шагом являются очень малыми. В обмотке
с сокращением шага сопротивления х2 и х4 будут больше.
Поскольку индуктивное сопротивление нулевой последовательности
в трехфазной машине и соответственно третьей последовательности
в шестифазной машине также в существенной мере зависят от сокра-
щения шага обмотки, то при моделировании шестифазных вспомогатель-
ных синхронных генераторов следует стремиться к соответствию шагов
статорных обмоток модели и оригинала.
144
Глава III. Моделирование систем возбуждения
Картина полей рассеяния статорной обмотки для прямой последова-
тельности отличается от картины полей при протекании токов третьей
и особенно второй и четвертой последовательностей. Это различие об-
условлено тем, что в первом случае токи диаметральных фаз (при шаге,
равном полюсному делению) совпадают по направлению в верхнем и
нижнем слоях обмотки, а в последнем случае имеют противоположные
направления. В связи с этим для корректировки указанных сопротивле-
ний может быть использована схема, показанная на рис. 79. В этой
схеме используются три индуктивных катушки. Каждая катушка имеет
Рис. 79. Схема включения индуктив-
ных катушек с двумя обмотками.
М — коэффициент взаимной индукции.
две обмотки с различным числом вит-
ков, что позволяет изменять как ве-
личину индуктивности, так и коэф-
фициент связи между обмотками. При
согласном протекании тока в обмотках
катушки индуктивность получается
больше, нежели при протекании токов
встречного направления. Поэтому
такого вида катушки и могут быть
использованы для корректирования ве-
личин индуктивностей статорной об-
мотки шестифазного генератора. Сле-
дует заметить, что точность при этом
получается наибольшей для обмотки
с шагом, близким к диаметральному.
Если шаг статорной обмотки значи-
тельно отличается от диаметрального,
то точность корректировки может быть
повышена за счет введения дополни-
тельных обмоток в катушках, а также за счет пространственного рас-
положения последних друг относительно друга. Эти добавочные меры
позволяют уточнить взаимное влияние других фаз.
Рассмотрев особенности моделирования индуктивных сопротивлений
вспомогательных синхронных генераторов, перейдем к активным сопро-
тивлениям.
Достижение соответствия в постоянных времени обмоток возбужде-
ния модели и оригинала может быть обеспечено с помощью однофаз-
ного коллекторного генератора, т. е. так же, как и для модели главного
генератора. Что касается активных сопротивлений обмотки статора,
то при работе генератора на выпрямитель важно, чтобы различие в ак-
тивных сопротивлениях модели и оригинала не привело к значительному
несоответствию внешних характеристик преобразователей. Допустимая
величина несоответствия в активных сопротивлениях зависит от тре-
буемой точности моделирования и может быть определена по формулам
внешних характеристик преобразователей с учетом активных сопро-
тивлений.
В этих условиях обычно не требуется частичной компенсации актив-
ных сопротивлений статора, что упрощает модель преобразователя, осо-
бенно при шестифазном исполнении вспомогательного синхронного ге-
нератора.
Кроме того, в связи с небольшой мощностью, требующейся для
возбуждения главного модельного генератора, может быть выполнен
модельный вспомогательный синхронный генератор, у которого актив-
ные сопротивления статорных цепей будут равны или даже меньше
£ 2. Моделирование систем ионного возбуждения
145
соответствующих сопротивлений оригинала. При расчете такого генера-
тора следует использовать выражение для активного сопротивления
в относительных единицах (Костенко и Урусов, 1955)
— 17Л 1 1 AS
ls 'QCux4 ’
Задавая индукцию в воздушном зазоре jBs, определив линейную на-
грузку AS из выражения
AS
0.4т
“V
и подставив соответствующие значения для оригинала, можно найти
сечение меди обмотки статора на полюсное деление Qcut. Для опреде-
ления полюсного деления т может быть получено следующее выра-
жение:
т = 1/_____^CuT___
к (Da — Di)2
тде л — отношение сечения меди статора к площади -------------j,
а к = * Принимая для заданного р значения Хи к на основе
данных выполненных машин, получаем величину полюсного деления
модельного вспомогательного синхронного генератора.
Следует заметить, что для получения малой величины га приходится
иметь малое значение линейной нагрузки AS*. Индукция не должна
быть малой, так как характеристики холостого хода модели и оригинала
в относительных единицах должны быть близкими. Из выражения для
А? видно, что в этих условиях модельные вспомогательные синхронные
генераторы следует выполнять с малыми воздушными зазорами.
Вспомогательный синхронный генератор может иметь как систему
независимого возбуждения, так и систему самовозбуждения. Так, на-
пример, на Волжской ГЭС им. В. И. Ленина применена система незави-
симого электромашинного возбуждения. Моделирование возбудителя
такой системы может быть осуществлено по нагрузочным характеристи-
кам с учетом потолочного напряжения, получающегося при шунтирова-
нии сопротивления в цепи возбуждения. Однако нарастание напряже-
ния при этом в модели может получиться более быстрым по сравнению
с оригиналом (из-за недостаточной величины постоянной времени цепи
возбуждения). Для достижения соответствия в скоростях изменения на-
пряжения следует ввести в цепь возбуждения возбудителя реактор
повышенной добротности. Поскольку цепь возбуждения является нели-
нейной, то реактор должен иметь зависимость потокосцеплений от тока,
аналогичную соответствующей зависимости обмотки возбуждения возбу-
дителя.
В заключение следует остановиться на вопросе регулирования на-
пряжения модельного вспомогательного синхронного генератора. При
работе генератора на выпрямительную нагрузку его напряжения иска-
жаются за счет коммутационных процессов, причем эти искажения по-
лучаются тем больше, чем больше нагрузка генератора. Поэтому коэф-
фициент формы кривой напряжения не остается постоянным, в резуль-
146
Глава III. Моделирование систем возбуждения
тате чего регулировочные характеристики вспомогательного синхронного
генератора будут зависеть от того, на какое из напряжений — действую-
щее или среднее — реагирует измерительный элемент регулятора напряже-
ния. Это обстоятельство и должно быть учтено при моделировании про-
цессов регулирования возбуждения вспомогательного синхронного гене-
ратора.
В Институте электромеханики АН СССР выполнены два модельных
вспомогательных синхронных генератора — один на базе асинхронного
Рис. 80. Расположение
выводов генератора и
векторная диаграмма
э. д. с.
двигателя с фазовым ротором, второй на основе синхронного генера-
тора небольшой мощности (БМЗ-4.5). Ниже приведены основные дан-
ные этих генераторов.
Основные технические данные модельных
вспомогательных синхронных генераторов
Для возможности моделирования ионных преобразователей, рабо-
тающих по различным схемам, обмотка статора первого модельного
генератора была выполнена с двумя параллельными ветвями, каждая
из которых может работать в шестифазном режиме. Расположение вы-
водов генератора и векторная диаграмма э. д. с. приведены на рис. 80.
2. Моделирование систем ионною возбуждения
147
Некоторые из схем преобразования, которые могут быть собраны на
модельной установке, показаны на рис. 81, а—д. Поскольку оригинал
должен выполняться с замкнутой демпферной системой, то в модели
2/з пазов ротора были заняты обмоткой возбуждения, а остальные пазы —-
демпферной системой с замкнутыми кольцами. Наружный диаметр стали
статора — 410 мм, внутренний — 275 мм, длина (включая один вентиля-
ционный канал 10 мм) —160 мм, воздушный зазор ^ = 0.5 мм.
Рис. 81. Схемы преобразования модельной установки.
В качестве первичного двигателя модельного генератора применен
синхронный двигатель и двигатель постоянного тока. Машина постоян-
ного тока может быть использована также и при моделировании ионно-
машинных систем возбуждения.
Для достижения соответствия в постоянных времени обмоток возбуж-
дения модели и оригинала в цепь обмотки возбуждения включен одно-
фазный коллекторный генератор (ОКГ-45).
Рассмотренный модельный генератор был использован для модели-
рования вспомогательных синхронных генераторов Волжской и Нижне-
Свирской ГЭС. В первом случае генератор был включен по схеме
рис. 81, д, во втором случае — по схеме рис. 81, а. Для корректиро-
вания индуктивных сопротивлений рассеяния, а также индуктивных
сопротивлений второй и четвертой последовательностей были исполь-
зованы индуктивные катушки с двумя обмотками (рис. 79). Следует
148
Глава IIL Моделирование систем возбуждения
заметить, что в схеме рис. 81, д индуктивные катушки нужны для
корректирования взаимного влияния потоков различных ветвей обмотки
по путям рассеяния.
В табл. 23 даны основные параметры модели и оригинала для схемы
ионного возбуждения Волжской ГЭС, а на рис. 82 — характеристики
холостого хода при трехфазной симмет-
ричной схеме включения обмотки. Из
табл. 23 и рис. 82 видно, что параметры
и характеристики находятся в удовлет-
ворительном соответствии.
Рис. 82. Характеристики холос-
того хода вспомогательных син-
хронных генераторов модели (7)
и оригинала (2).
Таблица 23
Параметр Оригинал Модель
Хд 0.342 0.36
х2 0.131 0.12
Га 0.0123 0.0035
TdQ (сек.) . . 1.1 1.0
Второй модельный вспомогательный
синхронный генератор предназначен для
решения более узкой задачи, а именно
для моделирования системы ионного воз-
буждения гидрогенераторов Волжской
ГЭС применительно к модельному гене-
ратору типа МГ-18.7. Как и в ориги-
выполнена таким образом, что низковольт-
нале, обмотка статора модели
ные и высоковольтные части обмотки расположены через один по-
люс. Низковольтная часть обмотки образуется из двух эквивалентных
ветвей, соединенных параллельно, а высоковольтная — из двух эквива-
лентных ветвей, соединенных последовательно (рис. 81, д).
На рис. 83 приведен общий вид обоих модельных агрегатов. На пе-
реднем плане расположен модельный агрегат системы ионного возбу-
ждения генератора МГ-18.7. Агрегат состоит из вспомогательного син-
хронного генератора и синхронного двигателя; над агрегатом располо-
жены катушки для корректировки индуктивностей. Далее расположен
трехмашинный агрегат, который был рассмотрен выше. На заднем плане
видны катушки с двумя обмотками для корректирования индуктивных
сопротивлений.
Моделирование трансформаторов систем ионного
самовозбуждения
Источником питания в системе ионного самовозбуждения служат
шины главного генератора (рис. 84). Ионный преобразователь подклю-
чается к шинам через анодный и последовательные трансформаторы.
Последние могут включаться как на стороне высокого (рис. 84, а), так
и низкого (рис. 84, б) напряжений. Применение последней схемы целе-
сообразно для избежания повышенных напряжений первичной обмотки
анодного трансформатора. Однако в случае шестифазного анодного
трансформатора такая схема приводит к худшему использованию после-
$ 2. Моделирование систем ионного возбуждения
149
довательных трансформаторов. В системах возбуждения мощных син-
хронных машин последовательные трансформаторы могут выполняться
как однофазными, так и многофазными. Поэтому при моделировании
систем ионного самовозбуждения приходится иметь дело с моделирова-
ние. 83. Общий вид модельных агрегатов ионного возбуж-
дения.
нием многофазных анодных и однофазных или многофазных последова-
тельных трансформаторов.
Принципы моделирования трансформаторов изложены в V главе,
а также в литературе (Костенко, 1953). Поэтому в нашем случае сле-
дует остановиться только на некоторых особенностях моделирования,
вытекающих из работы трансформаторов в системах ионного самовозбу-
ждения.
Прежде всего, коммутационные процессы моделей и оригинала должны
мало отличаться друг от друга. Для этой цели индуктивности трансфор-
150
Глава III. Моделирование систем возбуждения
маторов должны быть равными, а активные сопротивления могут отли-
чаться на величину, зависящую от точности моделирования.
В случае использования мостовых схем преобразования с одной
группой вентилей, длительность коммутационных процессов зависит от
индуктивных сопротивлений прямой и обратной последовательностей, кото-
рые для трансформаторов являются равными. В случае применения шести-
фазных анодных трансформаторов их эквивалентное индуктивное сопро-
тивление, как и для шестифазных вспомогательных генераторов, зависит и
от других последовательностей. Так, например, для простой шестифазной
Рис. 84. Принципиальные схемы ионного самовозбуждения.
1 — синхронный генератор; 2 — повышающий трансформатор; 3 —
анодный трансформатор; 4 — последовательные трансформаторы; 5 —
ионный преобразователь.
звезды, помимо обычных сопротивлений короткого замыкания прихо-
дится иметь дело с сопротивлениями второй, третьей и четвертой после-
довательностей (Гикис, 1949). Как уже отмечено выше, индуктивное
сопротивление третьей последовательности совпадает с сопротивлением
нулевой последовательности в трехфазном режиме. Сопротивления вто-
рой и четвертой последовательностей в существенной мере зависят
от расположения вторичных обмоток. Поэтому в модельных анодных
трансформаторах вторичные обмотки желательно располагать аналогично
обмоткам оригинала. Корректирование индуктивностей в случае необхо-
димости может быть выполнено с помощью индуктивных катушек, для
шестифазных схем — индуктивными катушками с двумя обмотками.
Выполнение требования равенства активных сопротивлений приводит
к увеличенным габаритным размерам трансформаторов и затрудняет
моделирование условий насыщения, что весьма важно для анодных и
последовательных трансформаторов в условиях форсирования возбужде-
ния и коротких замыканий главного генератора. В связи с этим целе-
сообразно допустить некоторые несоответствия в активных сопротивле-
ниях. Для оценки погрешности, которая получается в результате такого
несоответствия, могут быть использованы расчетные соотношения для
токов и напряжений преобразователя. Так, например, для системы ион-
ного самовозбуждения с использованием простой шестифазной схемы
§ 2. Моделирование систем ионною возбуждения
151
можно построить зависимость снижения напряжения возбуждения -у~-
от р, где р— отношение активного сопротивления к индуктивному. Кри-
вая / (рис. 85) относится к режиму работы преобразователя с углом
регулирования а = 60° и углом коммутации у — 30°; кривая 2 относится
к режиму с углами а = 0° и у — 60°.
Определение предельных режимов системы ионного самовозбуждения
при коротких замыканиях требует моделирования условий насыщения,
в первую очередь последовательных трансформаторов. Это объясняется
тем, что при коротком замыкании,
даже трехфазном, система обычно
должна оставаться самовозбужда-
ющейся.
Этот процесс самовозбуждения,
в случае длительного трехфазного
короткого замыкания, может про-
должаться до тех пор, пока не про-
изойдет насыщения по крайней мере
одного из элементов системы воз-
буждения. С целью уменьшения мощ-
ности последовательных трансфор-
маторов ограничение токов гене-
ратора целесообразно осуществлять
за счет насыщения этих трансфор-
маторов. В этих условиях требуется
моделирование последних не только
по параметрам, но и по магнитным
полям. В последнем случае транс-
Рис. 85. Зависимость снижения напря-
жения возбуждения от р.
форматор модели должен быть геометрически подобен трансформатору
оригинала.
Поскольку индуктивные сопротивления первичных обмоток трансфор-
маторов модели и оригинала должны быть равными в относи-
тельных единицах, то можно определить эти сопротивления в практи-
ческих единицах. Обозначим отношения этих сопротивлений через
т. е.
т
Последовательные трансформаторы выполняются с воздушными зазо-
рами что обусловлено различием м. д. с. первичных и вторичных
обмоток. Поэтому приняв во внимание геометрическое подобие транс-
форматоров, можем написать
-ор.
Д1
Д1
Ьм5ор'
6°5"
где п — отношение линейных размеров.
Отсюда
п — т
(42)
152
Глава III. Моделирование систем возбуждения
Так как напряженности магнитного поля должны быть равными,
то имеем
Я°р-
----i---------=1.
Из (42) и (43) находим
(43)
(44)
На основании равенств (42) и (44) можно определить линейные раз-
меры и число витков первичной обмотки модельного трансформатора.
Рис. 86. Последовательные вольтодобавочные трансформаторы.
а — оригинал: гщ = 12, w2 — 240; б — модель: wi = 26, w? — 576.
При определении числа витков вторичной обмотки используется значе-
ние коэффициента трансформации анодного трансформатора. Следует
заметить, что, как справедливо указано в литературе (Веников и Ива-
нов-Смоленский, 1956), плотность тока в геометрически подобных мо-
делях должна возрастать обратно пропорционально геометрическим раз-
мерам. Однако для низковольтных машин, какими являются модельные
генераторы, удается значительно повысить коэффициент заполнения
медью окна трансформатора. При этом сохраняется отношение пло-
щади, занимаемой обмоткой, к площади окна трансформатора. В резуль-
тате увеличения коэффициента заполнения достигается соответственное
снижение плотности тока в обмотках трансформаторов.
К настоящему времени система ионного самовозбуждения осуществ-
лена только на опытной промышленной установке для гидрогенератора
мощностью 55 мгвт, поэтому моделирование систем ионного самовозбужде-
ния проводилось в Институте электромеханики главным образом для раз-
личных расчетных вариантов. Наряду с этим была выполнена модель ион-
ного самовозбуждения для указанной промышленной установки. На рис. 86
показан модельный последовательный трансформатор, геометрически по-
добный трансформатору оригинала. Различие, однако, состоит в том,
£ 2. Моделирование систем ионного возбуждения
153
что с целью упрощения выполнения число воздушных зазоров модель-
ного трансформатора уменьшено до двух на один сердечник, а также
увеличен коэффициент заполнения медью той части окна, которая
занимается обмоткой.
Наряду с последовательными трансформаторами, имеющими подобие
полей, выполнены также трансформаторы с подобием цепей в линейной
части характеристик. Достоинством таких трансформаторов является то,
что они имеют уменьшенные значения активных сопротивлений, позволяя
поэтому более точно моделировать характеристики преобразователей.
Моделирование ионных преобразователей
Ионный преобразователь состоит из одной или нескольких вентиль-
ных групп, устройств управления, защиты и сигнализации. Поэтому
моделирование в общем случае должно осуществляться для вентильных
групп, устройств управления и защиты.
Рис. 87. Принципиальная схема переключения преобразователей и со
единения групп вентилей.
Если не рассматривать процессов, протекающих в вентилях, что яв-
ляется самостоятельной задачей, а также влияния параметров вентилей
на высокочастотные колебательные процессы, вызванные коммутацион-
ными процессами преобразователей, то при моделировании достаточно
сохранить коммутационные свойства вентилей. В этих условиях одно-
анодные ртутные выпрямители или запаянные вентили при моделирова-
нии могут быть представлены тиратронами. Тогда моделирование вен-
тильной группы сводится к достижению равенства отношений
Д^ор. _ д^
где &Lf—падение напряжения в дуге вентиля.
154
Глава III. Моделирование систем возбуждения
Равенство этих отношений может быть достигнуто за счет включе-
ния в цепь выпрямленного тока вентильной группы аккумулятора, на-
пряжение которого должно равняться
и™
Uax,=&U*—-^AU°p-.
С целью моделирования различных преобразовательных схем вы-
полнена универсальная схема (рис. 87). Переход от одной схемы пре-
образования к другой осуществляется поворотом ключа УП и измене-
нием соединения зажимов вспомогательного генератора (рис. 81). Шести-
фазной схеме преобразования соответствует замыкание контактов с 1 по
8 ключа УПу а мостовой схеме — с 1 по 14 (рис. 87).
Моделирование устройств управления и защиты сводится к обеспе-
чению функций и задач этих устройств при сохранении одинаковой
инерционности. Поэтому устройства управления и защиты в модели мо-
гут значительно отличаться в схемном и конструктивном исполнении
ют соответствующих устройств оригинала.
Управление вентильными группами в модели осуществляется маг-
нитно-пиковой системой (рис. 88), имеющей пиковые трансформаторы
Т’п, дроссели в цепях переменного и постоянного тока ,41 и Д2> сопро-
тивления в цепи сеток тиратронов Rc и емкости между сетками и ка-
тодами С.
§ 2. Моделирование систем ионного возбуждения
155
Дроссели имеют значительно большие сопротивления, чем пер-
вичные обмотки пиковых трансформаторов. Поэтому ток первичной
обмотки почти не зависит от насыщения магнитной цепи пикового трансфор-
матора, в связи с этим напряжение первичной обмотки получается
максимальным при ненасыщенной магнитной цепи и приблизительно
равным нулю при насыщенном состоянии магнитопровода. Таким образом,
на первичной обмотке, а следовательно, и на зажимах индуктивно свя-
занной с ней вторичной обмотки (подключаемой к тиратрону через
сеточное сопротивление) получается напряжение пикообразной формы.
Момент получения пикообразного напряжения можно регулировать
путем наложения на переменную м. д. с. первичной обмотки постоян-
ной м. д. с. обмоток подмагничивания. Амплитуда пика в последнем
случае получается (при пренебрежении влиянием гистерезиса и вихре-
вых токов) тогда, когда суммарная м. д. с. обмоток равна нулю.
С целью расширения диапазона регулирования фазы напряжения пико-
образной формы целесообразно пропускание по первичной обмотке
тока приблизительно треугольной формы. В этом случае производная
тока, а следовательно, и амплитуда пиков сохраняется приблизительно
неизменной в наиболее широком диапазоне изменения м. д. с. обмоток
подмагничивания.
Ток, близкий по форме к треугольной, получается при наличии
в нем нечетных гармонических составляющих. Такой ток получается
за счет некоторого насыщения дросселей Дг. Изменение угла регули-
рования может быть осуществлено также и с помощью фазорегулято-
ров Ф. Для снижения переменных токов в цепях обмоток подмагни-
чивания включены дроссели Снижение этих токов необходимо для
ослабления их размагничивающегося действия, а следовательно, и для
уменьшения искажений пиков. Кроме того, включение индуктивности
в цепь подмагничивания позволяет избежать ложных пиков при быстрых
изменениях постоянной составляющей магнитного потока.
В связи с необходимостью работы вентилей в мостовых схемах
преобразования, применены четыре источника запирающих напряже-
ний. С целью наибольшей четкости в зажигании вентилей величина за-
пирающего напряжения выбрана такой, чтобы зажигание тиратронов
происходило при максимальной крутизне пика. Сеточные сопротивле-
ния 7?с были выбраны в требующемся диапазоне с таким расчетом,
чтобы снижение амплитуды пика не превышало 5%. Для улучшения
чрормы кривой управляющего импульса между сеткой и катодом венти-
лей включены конденсаторы С. Величина емкости подобрана такой,
чтобы при незначительном снижении амплитуды пиков погасить высшие
гармонические составляющие в управляющих напряжениях.
При моделировании системы управления ионным преобразователем
гидрогенераторов Волжской ГЭС, имеющим две группы вентилей
(рис. 81, д) (Глух и др., 1956), были удовлетворены те же требова-
ния, которые предъявляются и к оригиналу, а именно:
1) автоматическое обеспечение устойчивого возбуждения генератора
от 0 до 120% номинальной нагрузки;
2) автоматическая пропорциональная форсировка при значительных
посадках напряжения и коротких замыканиях;
3) автоматическое интенсивное развозбуждение главного генератора
в случае, когда этого требует режим регулирования, например при ка-
чаниях генератора;
156
Глава III. Моделирование систем возбуждения
4) автоматический перевод возбуждения генератора при выходе
из строя автоматического регулятора возбуждения в режим, соответ-
ствующий номинальному режиму генератора.
Рис. 89. Схема управления двумя группами вентилей.
Рис. 90. Схема электронного усилителя.
Указанные требования удовлетворяются при включении обмоток
управления пиковыми трансформаторами низковольтной (//) и высоко-
вольтной (В) групп вентилей по схеме, показанной на рис. 89. С по-
мощью фазорегуляторов высоковольтной и низковольтной групп венти-
§ 2. Моделирование систем ионною возбуждения
157
лей устанавливается номинальный ток возбуждения и желаемое распре-
деление тока возбуждения между параллельно включенными группами
вентилей. При этом угол регулирования низковольтной группы подби-
рается таким, чтобы было возможным повышение тока возбуждения
до 120% за счет изменения угла регулирования вентилей низковольтной
группы. Обмотки управления //3 и включаются на источник по-
стоянного напряжения для обеспечения требующихся диапазонов регу-
лирования обмоток Н19 Н2, Blf В2, а именно до 30—40° для обмотки
Н2 и до 120—130° для обмотки В2, При этом с помощью фазорегуля-
торов восстанавливается исходный режим.
Как видно из рис. 89, обмотки Н19 Н2, В19 В2 включены на усили-
тель, действующий от регулятора возбуждения главного генератора.
При увеличении тока в обмотке Нг происходит уменьшение угла регу-
лирования низковольтной группы, чем и обеспечивается устойчивое
возбуждение вплоть до 120% номинальной нагрузки. К моменту дости-
жения этим углом значения, близкого к нулю, напряжение ветви 7—2
получается равным напряжению аккумулятора, и дальнейшее увеличе-
ние тока усилителя не изменяет угла регулирования низковольтной
группы. Обмотки подмагничивания В19 В2 включены встречно. Поэтому
сначала угол регулирования высоковольтной группы остается неизмен-
ным, а затем после достижения напряжением ветви 7—2 значения,
равного напряжению аккумулятора, угол регулирования высоковольтной
группы может уменьшаться вплоть до значения, равного нулю, чем и
обеспечивается пропорциональная форсировка.
В случае необходимости уменьшения тока возбуждения ток управ-
ления, задаваемый регулятором возбуждения, протекает по обмотке
158
Глава III. Моделирование систем возбуждения
управления низковольтной группы Н2. В зависимости от величины тока
этой обмотки напряжение возбуждения уменьшается до нуля и, более
того, преобразователь переводится в инверторный режим, вследствие
чего изменяется полярность напряжения на кольцах ротора, а следо-
вательно, обеспечивается интенсивное развозбуждение.
Как следует из рассмотренной выше настройки схемы управления,
при отключении регулятора возбуждения генератор остается работать
с номинальным током возбуждения.
Для устранения из схемы управления силового блока, предусмот-
ренного в оригинале и выполненного на тиратронах (Штрафуй, 1956),
для модельной установки выполнен электронный усилитель (рис. 90).
На вход этого усилителя подключается регулятор возбуждения, а вы-
ход усилителя подается на обмотки подмагничивания магнитно-пиковой
системы управления. Для модели ионного возбуждения Волжской ГЭС
место присоединения усилителя показано на рис. 89.
Общий вид модельных ионных преобразователей приведен на рис. 91.
На переднем плане видны две группы вентилей, использованных в си-
стеме модели ионного возбуждения типа Волжской ГЭС, на заднем
плане — две группы вентилей универсальной модельной установки ион-
ного возбуждения.
Глава IV
КОМПЕНСАТОРЫ АКТИВНЫХ СОПРОТИВЛЕНИЙ ОБМОТОК
СТАТОРОВ И РОТОРОВ МОДЕЛЬНЫХ СИНХРОННЫХ
МАШИН
§ 1. Общие замечания
Необходимость применения компенсаторов
Как уже указывалось во II главе, при моделировании мощных син-
хронных генераторов машинами небольшой мощности возникают труд-
ности в получении необходимых значений относительных активных со-
противлений га и ту обмоток статора и ротора модельной машины. Эти
сопротивления в малых машинах получаются значительно больше, чем
в крупных машинах, и поэтому для их снижения в модельных маши-
нах приходится применять специальные конструктивные меры, позво-
ляющие увеличить сечения меди обмоток. Однако эти меры не во всех
случаях дают надлежащий эффект. Так, например, при моделировании
турбогенераторов, имеющих низкие инерционные постоянные (/// =
= 4.54-6.5 сек.) и вместе с тем большие постоянные времени цепи
возбуждения 7^0 = 10—12 сек., получение в моделях надлежащих зна-
чений га и в особенности г/ становится весьма затруднительным.
При! моделировании гидрогенераторов, имеющих более высокие инер-
ционные» постоянные {Hj = 12 4- 16 сек.), затруднений возникает меньше
и в ряде случаев, идя на увеличение габаритов, можно получить тре-
буемые по условию моделирования значения га и г/. Однако увеличе-
ние размеров модельных машин ведет к другим нежелательным явле-
ниям (возрастанию потерь в стали, механических и добавочных потерь).
Поэтому часто ограничиваются соблюдением подобия только в отно-
шении параметра га, оставляя сопротивление ту в модельных машинах
несколько завышенным.
Наряду с указанным следует еще иметь в виду, что сопротивления
статорных и роторных цепей модельного генератора при его работе
в модели могут заметно возрасти по сравнению со значениями га и ту
самого генератора вследствие наличия в этих цепях различных допол-
нительных сопротивлений. Так, общее сопротивление роторной цепи
увеличивается из-за включения в нее одного, а при бустерной системе
возбуждения двух возбудителей и добавочной индуктивной катушки
с ферромагнитным сердечником, необходимой для обеспечения надле-
жащей величины индуктивного сопротивления Лу модельного генера-
тора.
160
Глава IV, Компенсаторы активных сопротивлений обмоток
Суммарное сопротивление статорной цепи модельного генератора
существенно увеличивается за счет наличия в ней соединительных ка-
белей, контакторов, обмоток измерительных трансформаторов и шунтов.
Кроме того, следует заметить, что сопротивление статорной цепи в зна-
чительной мере зависит от добавочных потерь, возникающих при на-
грузке или коротких замыканиях синхронного генератора в обмотках,
стальных сердечниках и вторичных контурах как самого генератора,
так и трансформатора, работающего совместно с генератором. Относи-
тельная величина добавочных потерь в модели в некоторых случаях
(например, в модельных турбогенераторах) может оказаться больше,
чем в оригинале, и поэтому даже при равенстве омических сопротивле-
ний активное сопротивление статорной цепи в модели может получиться
больше, чем в оригинале.
Из сказанного следует, что даже при условии обеспечения надле-
жащих значений га и ту в модельном генераторе суммарные сопротив-
ления статорных и роторных цепей в модели могут оказаться выше
значений, требуемых по условиям моделирования. Если учесть еще,
кроме того, и невозможность соблюдения во всех случаях требуемых
значений параметров га и rj в модельных машинах, то становится яс-
ной необходимость применения в электродинамической модели специ-
альных машин или устройств для компенсации избыточных сопротивле-
ний в статорных и роторных цепях. Такие машины или устройства
носят название компенсаторов активных сопротивлений.
Так как компенсаторы предназначаются для покрытия активных
потерь в электрических цепях, то они по своей сущности должны пред-
ставлять собой источники электрической энергии (генераторы). При
постоянной величине компенсируемого сопротивления 7?к мощность ком-
пенсатора, выдаваемая в электрическую цепь, должна быть пропорцио-
нальна квадрату тока компенсируемой цепи, т. е. Рк — Отсюда
следует также, что активная составляющая напряжения на зажимах
компенсатора (или при постоянстве внутреннего сопротивления компен-
сатора активная составляющая э. д. с.) должна быть пропорциональна
току в рассматриваемой электрической цепи.
Источниками электрической энергии, удовлетворяющими сформули-
рованному выше требованию, могут явиться, как известно, однофаз-
ные или трехфазные коллекторные генераторы последовательного воз-
буждения (ОКГ или ТКГ). Эти генераторы в настоящее время и полу-
чили преимущественное применение для компенсации активных
сопротивлений роторных и статорных цепей в электродинамической модели.
Кроме того, для целей компенсации сопротивлений возможно при-
менение электромашинных усилителей, управляемых таким образом,
чтобы их напряжение было пропорционально току в компенсируемой
цепи. Однако этот способ компенсации по сравнению с предыдущим
является менее совершенным вследствие того, что напряжение электро-
машинного усилителя изменяется с некоторым запаздыванием по отно-
шению к изменению тока в компенсируемой цепи из-за инерционности
усилителя.
Наряду с машинными компенсаторами возможна разработка схем
компенсации с электронными и ионными устройствами. Такого рода
схема была применена в маломощных модельных установках Робера
во Франции (Robert, 1950, 1954). Электронные схемы компенсации мо-
гут быть целесообразными при создании микромоделей. Однако при
выполнении электродинамической модели из машин мощностью 5—30 квт,
§ 7. Общие замечания
161
наиболее удобных для проведения лабораторных исследований, преиму-
щества оказываются на стороне машинных компенсаторов. Поэтому
в данной главе им уделяется основное внимание.
Требования, предъявляемые к компенсаторам
При работе в электродинамической модели компенсаторы должны
удовлетворять ряду требований. К этим требованиям относятся:
1) постоянство компенсируемого сопротивления в статических и ди-
намических режимах в заданном диапазоне изменения тока;
2) возможность регулирования величины компенсируемого сопро-
тивления;
3) обеспечение допустимых значений индуктивных сопротивлений
компенсаторов ХК1 и Хкз, не превышающих по условиям моделирова-
ния определенных пределов, вытекающих из условий моделирования;
4) стабильность работы компенсаторов и отсутствие самовозбуждения
их как на постоянном, так и на переменном токе;
5) простота конструкции, наименьшая стоимость изготовления и на-
дежность работы.
Обеспечение постоянства компенсируемого сопротивления составляет
одно из главнейших требований, предъявляемых к компенсаторам. Вы-
полнение этого требования является необходимым условием получения
надлежащей точности в результатах исследований, проводимых на мо-
делях. Непостоянство величины компенсируемого сопротивления может
привести к значительным погрешностям, что снижает ценность резуль-
татов, полученных при исследованиях.
Регулирование величины компенсируемого сопротивления необходимо
для того, чтобы:
1) при настройке компенсатора на заданный режим компенсации
иметь возможность отрегулировать надлежащим образом величину /?к;
2) обеспечить возможность включения одного и того же компенса-
тора на различные модельные генераторы;
3) при моделировании одним и тем же модельным генератором раз-
личных генераторов-оригиналов иметь возможность изменить его пара-
метры га и Г/ в достаточно широких пределах.
Ограничение величины индуктивного сопротивления XKi и Хкз ком-
пенсаторов имеет значение с точки зрения получения надлежащих ве-
личин параметров X/ и Xi модели. Эти параметры в модельных гене-
раторах, как правило, получаются ниже требуемых значений. Поэтому
при моделировании для подгонки требуемых значений Xj и Xi нужно
включать в цепях ротора и статора модельного генератора добавочные
индуктивные сопротивления &Xf и АХ/. При наличии в этих цепях
компенсаторов такими добавочными индуктивными сопротивлениями
являются сами компенсаторы. Однако при этом индуктивные сопро-
тивления однофазного и трехфазного компенсаторов XKi и Хкз не должны
превышать соответствующие величины АХ/ и АХ/, так как иначе ре-
зультирующие значения параметров X/ и X/ будут чрезмерно большими.
Данное требование касается главным образом трехфазного коллектор-
ного генератора, у которого индуктивное сопротивление Хкз получается
одного порядка с параметром X/ модельного генератора. Индуктивное
сопротивление ХК1 однофазного коллекторного генератора, предна-
значенного для компенсации активного сопротивления роторной цепи,
как показывают соответствующие расчеты, получается обычно весьма
162
Глава IV. Компенсаторы активных сопротивлений обмоток
малым по сравнению с параметром Л/, поэтому рассматриваемое тре-
бование в случае однофазных компенсаторов удовлетворяется без осо-
бых затруднений.
Стабильность характеристик и отсутствие самовозбуждения компен-
саторов являются важнейшими условиями удовлетворительной работы
их в электродинамической модели. Отсутствие стабильности в работе
компенсаторов может выразиться в „ползучести" характеристик (изме-
нении их с течением времени) или в таком явлении, когда компенсатор
не возвращается в исходное состояние после окончания переходного
режима. Поскольку изменение характеристик компенсаторов приводит
к изменению величины компенсируемого сопротивления, то требование
стабильности работы компенсатора частично совпадает с первым тре-
бованием, касающимся обеспечения постоянства величины 7?к.
Самовозбуждение компенсаторов представляет собой весьма не-
желательное явление, так как, нарушая нормальную работу модели, оно
может привести к возникновению в электрических цепях больших то-
ков, опасных как для самих машин, так и для измерительных прибо-
ров, включенных в этих цепях. Условие отсутствия самовозбуждения
накладывает ограничение на величину сопротивления которое может
быть скомпенсировано с помощью компенсаторов. При увеличении
компенсируемого сопротивления 7?к по мере его приближения к омиче-
скому сопротивлению 7% компенсируемой цепи возможность самовоз-
буждения возрастает и работа компенсаторов становится менее ста-
бильной. Практически оказывается возможным получить вполне устой-
чивую работу компенсаторов, если компенсируемое сопротивление 7?к
составляет не более 80—85% от сопротивления 7?^0.
Последнее из сформулированных выше требований касается кон-
струкции компенсаторов. Компенсаторы ОКГ и ТКГ представляют со-
бой специальные машины лабораторного типа, предназначенные для
специфических условий работы. Конструкция этих машин отличается
большей сложностью по сравнению с конструкцией машин нормального
исполнения, вместе с тем к компенсаторам предъявляются повышенные
требования в отношении удобства работы с ними. Так, конструкция
щитка зажимов у компенсаторов должна обеспечивать наибольшее
удобство включения различных комбинаций обмоток в случае использо-
вания их в различных схемах для осуществления необходимых настроек.
Кроме того, в компенсаторах должен быть предусмотрен хороший до-
ступ к щеткам для наблюдения за их работой и установки их на ней-
трали.
При всем этом конструкция компенсаторов должна быть такой,
чтобы изготовление их было бы наиболее простым и требовало бы
минимальных затрат средств и времени. Для выполнения этого усло-
вия проектирование компенсаторов ведется, как правило, на базе нор-
мальных машин постоянного тока типа ПН при сохранении неизмен-
ными большинства основных конструктивных узлов и элементов этих
машин. Необходимо, однако, заметить, что стремление к возможно
большему использованию деталей исходных машин накладывает неко-
торые ограничения при расчете машин, снижающие их качественные
характеристики.
Для выполнения всех перечисленных требований при проектировании
компенсаторов принимается целый ряд специальных мер, благодаря
которым удается выполнить их в достаточном соответствии с этими
требованиями.
£ 2. Компенсаторы активного сопротивления типа ОКГ
163
§ 2. Компенсаторы активного сопротивления типа ОКГ
Краткое описание устройства и основные уравнения
ОКГ
Как уже указывалось, для компенсации активного сопротивления
в роторной цепи модельных синхронных генераторов применяются одно-
фазные коллекторные генераторы (ОКГ) последовательного возбужде-
ния. Электрическая схема такого генератора и его включения в цепи
ротора модельного генератора приведена на рис. 92.
По своему устройству компенсаторы ОКГ близки к однофазным
последовательным коллекторным двигателям. Статор ОКГ выполняется
неявнополюсным. Сердечник статора делается расслоенным и состоит
из отдельных изолированных лис-
тов электротехнической стали.
В пазы сердечника статора, вы-
штампованные по внутренней его
окружности, размещаются четыре
обмотки: возбуждения (5), ком-
пенсационная (К)9 добавочных
полюсов (ДП) и противогистере-
зисная (ПГ). Ось обмотки воз-
буждения сдвинута в пространстве
по отношению к осям обмоток
Рис. 92. Схема включения ОКГ в роторной
цепи модельного генератора.
добавочных полюсов и компенсационной на 90 эл. град. Ротор ОКГ
представляет собой обычный якорь машины постоянного тока.
Для цепи ротора при включении ее на напряжение возбудителя f7B
в случае холостого хода генератора можно написать следующее урав-
нение:
в к / j j at
(1)
Напряжение возбудителя С7В и напряжение компенсатора U* при
этом будут определяться уравнениями
UB = EB-r„i-LBd-^ (2)
и
и =Е —ri.—L
к к к*/ к dt
(3)
В уравнениях (1)—(3) Е* и Ек— э. д. с. возбудителя и компенсатора,
Гр Lp гв, Лв, гк и Лк — сопротивления и индуктивности роторной цепи
синхронного генератора, якорной цепи возбудителя и якорной цепи ком-
пенсатора.
Сопротивления гк, гв и гвключают сопротивления соответствующих
обмоток и переходные сопротивления контактов щеток, установленных
на кольцах или коллекторах, т. е.
rf rf« %’
(4)
(5)
(6)
164
Глава IV, Компенсаторы активных сопротивлений обмоток
Э. д. с. компенсатора Ек может быть найдена по общеизвестному
выражению
£к = -Дк-пф = С>ф. (7)
Полезный магнитный поток компенсатора, входящий в уравнение (7),
где FB и wb — м. д. с. и число витков обмотки возбуждения компен-
сатора на пару полюсов, a R^— магнитное сопротивление магнитной
цепи компенсатора.
Подставляя значение потока Ф из формулы (8) в (7), получим
Е =-^- nw i = R (9)
к в в к» р
где
(10)
Величину RKv назовем полным сопротивлением, компенсируемым ге-
нератором ОКГ.
Заменяя э. д. с. Ек в уравнении (3) выражением (9), получим
(11)
где
= (12)
Величину А*к1 назовем внешним сопротивлением, компенсируемым
генератором ОКГ.
Подставляя значения UB и UK из уравнений (2) и (11) в (1), после
небольшого преобразования получим
Постоянная времени Td0, определяющая
в цепи возбуждения модельного генератора
^согласно уравнению (13), получается равной
_ Lf+LB-+-LK
скорость нарастания тока
при разомкнутом статоре,
(14)
Полученные выражения (11), (13) и (14) показывают, что по отно-
шению к внешней цепи однофазный последовательный коллекторный
генератор представляет собой сочетание отрицательного активного со-
противления RkY и некоторой добавочной индуктивности Лк. Таким об-
разом, с помощью ОКГ общее сопротивление роторной цепи синхрон-
ного генератора может быть уменьшено или, как говорят, частично
скомпенсировано.
§ 2. Компенсаторы активного сопротивления типа ОКГ
165
Величина компенсируемого сопротивления 7?к1 может быть найдена
по формулам (12) и (10).
Отношение компенсируемого сопротивления 7?к1 к сопротивлению
роторной цепи синхронного-генератора до включения компенса-
тора назовем степенью компенсации Ск:
С.= 1^7- <15>
Наряду с этим может быть дано и другое определение степени ком-
пенсации, как отношения полного компенсируемого сопротивления jRKi
к суммарному сопротивлению роторной цепи:
п
CKi=r.r\r • <15а>
/ в Гк
Умножая числитель и
степеней компенсации Ск
знаменатель формул (15) и (15а) на ток /’/, для
и Ск- получим также и другие выражения:
С
к»
(16)
(16а)
Благодаря компенсации активного сопротивления в цепи ротораг,
постоянная времени TdQ модельного синхронного генератора, как пока-
Рис. 93. Осциллограммы переходного процесса при включении ро-
торной цепи модельного генератора МГ-25—1000 на напряжение
возбудителя.
а — при скорости вращения ОКГ-85/2 п = 0: б — при скорости вращения О К Г-85/2
п = 1300 об./мин.
зывает уравнение (14), может быть увеличена до значения, требуемого
по условиям моделирования. Для иллюстрации этого на рис. 93 пред-
ставлены две осциллограммы переходного процесса, происходящего при
включении роторной цепи модельного генератора МГ-25—1000 на напря-
166
Глава IV. Компенсаторы активных сопротивлений обмоток
жение возбудителя. Первая осциллограмма снята при отсутствии ком-
пенсации (неподвижном ОКГ). При снятии второй осциллограммы ОКГ
был приведен в действие, причем степень компенсации Ск>. составляла
около 51%.
Обеспечение постоянства компенсируемого
сопротивления
Условия работы компенсаторов в электродинамической модели тре-
буют, чтобы величина компенсируемого сопротивления 7?к1 оставалась
неизменной во время переходных режимов при изменении тока в ши-
роких пределах. Однако, как показывают полученные выше уравнения,
на величину ^к1 оказывают влияние многие факторы. К этим факторам
относятся:
1) непостоянство магнитного сопротивления магнитной цепи ОКГ
вследствие нелинейности кривой намагничивания и явления гистерезиса;
2) поперечная и коммутационная реакции якоря, вызывающие изме-
нение потока Ф машины при ее нагрузке;
3) наличие вторичных короткозамкнутых контуров, оказывающих
демпфирующее действие на поток Ф при переходных режимах;
4) непостоянство переходного сопротивления щеточного контакта
[см. формулы (12) и (6)].
Для уменьшения влияния перечисленных факторов в компенсаторах
ОКГ принимаются специальные меры, которые заключаются в следую-
щем.
1. Магнитная цепь машины делается ненасыщенной. Магнитная ин-
дукция в зубцах статора и ротора выбирается такой, чтобы даже при
максимальных всплесках тока насыщение зубцов было бы незначительно,
т. е. индукция при этом не превышала бы 1.2—1.4 вб/м2.
2. Для снижения влияния гистерезиса и уменьшения остаточного
магнитного потока в ОКГ применяется высоколегированная сталь и,
кроме того, устраиваются специальные противогистерезисные обмотки,
питаемые переменным током нормальной или повышенной частоты и
создающие „растряхивающий" переменный поток в сердечнике статора.
3. Для устранения влияния поперечной реакции якоря в компенса-
торах ОКГ устраивается компенсационная обмотка, обеспечивающая
степень компенсации, равную 1.
4. Для уменьшения влияния коммутационной реакции в компенсато-
рах ОКГ предусматривается устройство добавочных полюсов. Кроме
того, при расчете компенсаторов ОКГ выбирается малая линейная
нагрузка якоря, что также облегчает условия коммутации и уменьшает
величину м. д. с. коммутационной реакции.
5. Для снижения демпфирующего влияния вихревых токов магнит-
ная система компенсаторов ОКГ выполняется расслоенной. В компен-
саторах остаются только короткозамкнутые контуры, образуемые ком-
мутируемыми секциями, но их влияние невелико.
6. Для уменьшения влияния непостоянства сопротивления щеточных
контактов в компенсаторах ОКГ применяются специальные медно- или
бронзографитные щетки (марки МГ или БГ), которые, во-первых, обла-
дают малым переходным падением напряжения (0.2—0.3 в), а, во-вто-
рых, имеют более постоянное переходное сопротивление по сравнению
со щетками других марок. Так как в цепи возбуждения модельного
2. Компенсаторы активного сопротивления типа ОКГ
167
синхронного генератора, кроме щеток ОКГ, имеются еще две пары
щеток (а при бустерной системе возбуждения три пары щеток), то для
обеспечения постоянства результирующего сопротивления 7?ук роторной
цепи необходимо также применить специальные щетки с малым пере-
ходным падением напряжения на кольцах модельного генератора и на
коллекторе возбудителя. С этой точки зрения может оказаться целесо-
образным уменьшение числа щеток в цепи возбуждения МГ посредством
использования схем каскадного включения возбудителей (см. главу III,
§ 1).
Все перечисленные выше меры, как показывает практика, являются
достаточно эффективными и позволяют добиться практически постоян-
ной величины 7?к1 в тех случаях, когда степень компенсации активного
сопротивления электрической цепи не слишком велика (порядка 75—85%).
При возрастании степени компенсации, когда результирующее сопро-
тивление цепи становится очень малым по сравнению с некомпенсиро-
ванным значением сопротивления, влияние всех факторов заметно воз-
растает и обеспечение постоянства величины ^к1 становится весьма
затруднительным.
Регулирование величины компенсируемого
сопротивления
Регулирование величины компенсируемого сопротивления 7?к1 в ком-
пенсаторе ОКГ, как видно из формул (10) и (12), может выполняться
двумя способами: 1) посредством изменения скорости вращения ОКГ,
что дает плавное регулирование и 2) посредством изменения числа
витков wb последовательной обмотки возбуждения, что дает ступенча-
тое регулирование. Для изменения числа витков wb последовательная
обмотка возбуждения разделяется на несколько отдельных ветвей, концы
которых выводятся для удобства переключений на доску зажимов.
С целью получения большего числа комбинаций числа витков этих вет-
вей должны выбираться различными, причем некоторые из этих ветвей
для облегчения точных настроек и подгонок должны иметь небольшое
число витков.
В некоторых случаях, когда сопротивление, компенсируемое ОКГ,
оказывается слишком большим, подгонку общего сопротивления ротор-
ной цепи можно произвести посредством включения в эту цепь доба-
вочного реостата.
Индуктивное сопротивление компенсатора ОКГ
Индуктивное сопротивление XK1 компенсатора ОКГ получается, как
правило, незначительным по сравнению с параметром Xf модельного
генератора. Это объясняется, во-первых, наличием компенсационной
обмотки, компенсирующей почти полностью поперечное поле якоря, и,
во-вторых, тем, что магнитный поток ОКГ, исходя из условия отсут-
ствия насыщения, выбирается в значительной степени пониженным и
число витков последовательной обмотки возбуждения оказывается не-
большим.
168
Глава IV. Компенсаторы активных сопротивлении обмоток
Стабильность работы и условие самовозбуждения ОКГ
Стабильность характеристик ОКГ зависит от ряда факторов и в пер-
вую очередь от постоянства сопротивлений обмоток компенсатора и
переходных сопротивлений щеточных контактов, имеющихся в роторной
цепи модельного генератора, при изменении тока и температуры, отсут-
ствия гистерезной петли в кривой намагничивания ОКГ и устойчивости
работы приводного двигателя.
Рассмотрим сначала влияние на работу
ОКГ непостоянства сопро-
Для этого на рис. 94 представим кри-
тивлений щеточных контактов.
вую холостого хода ОКГ
£’к=/(/у), сместив ее
вверх от начала коорди-
нат на величину э. д. с.
возбудителя £’в. Проведем
также линию ON, выра-
жающую падение напря-
жения в роторной цепи
модельного генератора
ПРИ постоян-
ном значении суммарного
сопротивления =
-4-гв-Ык = const. Точка
пересечения В характери-
стики холостого хода с
линией ON определит
установившийся режим ра-
боты компенсатора. Сте-
пень компенсации при
этом, согласно уравнению
(16а), будет равна
__ £к. у ВВ%
+ ~ ВВг ’
Теперь предположим, что вследствие нагревания переходное сопро-
тивление контактов щеток, установленных как на коллекторах ОКГ и
возбудителя, так и на кольцах модельного генератора, уменьшилось.
В этом случае наклон линии ON уменьшится, и она займет новое по-
ложение ON'. При этом ток if в роторной цепи возрастет и соответ-
ственно увеличится э. д. с. компенсатора, которая достигнет значения Е*
Новый режим работы ОКГ будет теперь уже характеризоваться точкой В'.
Степень компенсации в этом режиме увеличится, так как она теперь
будет определяться соотношением
с = = в'в*
к‘ £в-<у
Увеличенное значение тока if может вызвать дальнейшее уменьше-
ние переходного сопротивления щеточных контактов вследствие чего
наклон линии ON еше уменьшится и точка В' будет дальше переме-
£ 2. Компенсаторы активного сопротивления типа ОКГ
169
щаться по характеристике. В результате этого ток if и э. д. с. Ек
будут возрастать и далее, вследствие чего может наступить самовоз-
буждение ОКГ.
Нетрудно видеть, что особенно благоприятные условия для описан-
ного выше процесса получаются при высоких степенях компенсации,
когда наклон характеристики холостого хода ОКГ приближается к на-
клону линии падения напряжения ON.
Рассмотрим теперь влияние гистерезиса на работу ОКГ. Предполо-
жим, что при работе ОКГ в установившемся режиме, характеризуемом
на рис. 94 точкой В, произошло внезапное короткое замыкание син-
хронного генератора, в результате которого в цепи ротора возник
всплеск тока. Пусть апериодическая составляющая тока ротора (перио-
дической составляющей в рассуждениях будем пренебрегать) достигла
при этом значения /утах. Тогда вместе с возрастанием тока ротора бу-
дет расти в соответствии с восходящей ветвью кривой намагничения
и э. д. с. ОКГ £'к. В момент максимума тока э. д. с. Ек достигнет
значения Ек тах, определяемого точкой С кривой намагничения.
В дальнейшем при затухании тока э. д. с. Ек будет также зату-
хать, но ее изменение будет уже происходить в соответствии с нисхо-
дящей ветвью кривой намагничения. Установившийся режим после за-
тухания тока if будет теперь характеризоваться точкой Z), лежащей
на пересечении верхней ветви характеристики холостого хода с линией
ON. Таким образом, после окончания переходного процесса из-за ги-
стерезиса ОКГ не вернулся к исходному режиму работы, вследствие
чего ток в цепи ротора i" и э. д. с. компенсатора Е"к у получились
увеличенными по сравнению с их первоначальными значениями.
Для устранения влияния перечисленных факторов и увеличения ста-
бильности работы ОКГ необходимо:
1) уменьшить нагрев обмоток компенсатора в длительных и кратко-
временных режимах, что достигается посредством выбора при расчете
компенсатора пониженных значений плотности тока;
2) применять щетки специальных марок, переходное сопротивление
которых менее подвержено влиянию температуры и само по себе
невелико;
3) при проектировании модельных синхронных генераторов напря-
жение обмоток возбуждения выбирать достаточно большим (порядка
50—100 в), так как относительная величина переходного сопротивления
щеточных контактов в цепи ротора при этом будет меньше и влияние
непостоянства этого сопротивления будет слабее;
4) применять в компенсаторах ОКГ противогистерезисные обмотки
для сужения гистерезисной петли;
5) в качестве приводных двигателей к компенсаторам применять до-
статочно мощные двигатели постоянного тока, имеющие жесткие меха-
нические характеристики. При регулировке скорости не допускать зна-
чительного ослабления поля возбуждения в двигателях постоянного тока.
Самовозбуждение компенсатора ОКГ возможно, как показывает тео-
ретический анализ, только постоянным током. Условия самовозбужде-
ния ОКГ ничем не отличаются от обычных условий самовозбуждения
генератора постоянного тока параллельного или последовательного воз-
буждения. Из уравнения (13) видно, что самовозбуждение ОКГ возни-
кает тогда, когда 7?к -+- гв), т. е. когда омическое сопротивление
170
Глава IV, Компенсаторы активных сопротивлений обмоток
внешней по отношению к компенсатору цепи будет полностью скомпен-
сировано. Так как при моделировании параметров цепи возбуждения
синхронного генератора активное сопротивление роторной цепи ком-
пенсируется частично, то тем самым условия самовозбуждения ОКГ
при его правильной настройке исключаются.
Однако в некоторых случаях при высоких степенях компенсации,
превышающих 85—90%, во время переходных режимов ОКГ может
самовозбудиться, что объясняется уменьшением переходного сопротив-
ления щеточных контактов, имеющихся в роторной цепи модельного
генератора, при всплесках тока. Поэтому с точки зрения исключения
вероятности самовозбуждения, а также для получения большей стабиль-
ности характеристик более выгодной является работа ОКГ при неболь-
ших степенях компенсации, не превышающих 75—80%.
§ 3. Компенсаторы активного сопротивления типа ТКГ
Краткое описание устройства и основные уравнения ТКГ
Для компенсации активного сопротивления статорных цепей модель-
ных синхронных генераторов служат трехфазные коллекторные генера-
торы (ТКГ) последовательного возбуждения. Схема соединения обмоток
Рис. 95. Схема включения ТКГ в статорной цепи модельного генератора.
компенсатора и включения его последовательно с модельным синхрон-
ным генератором показана на рис. 95.
Компенсаторы ТКГ имеют следующее устройство.
Статор ТКГ выполняется неявнополюсным, так же как в синхронной
или асинхронной машине. Сердечник статора собирается из изолирован-
ных листов электротехнической стали и запрессовывается в корпус ма-
шины. В пазы укладываются две трехфазные обмотки: возбуждения (5)
и компенсационная {К). Оси этих обмоток сдвинуты в пространстве на
90 эл. град. Для удобства регулирования и настройки обмотка возбу-
ждения и компенсационная обмотка разделены на несколько отдельных
ветвей. Ротор ТКГ имеет такую же конструкцию, как и якорь нормаль-
ной машины постоянного тока, и отличается от него лишь своими обмо-
точными данными.
§ 3. Компенсаторы активного сопротивления типа ТКГ
171
При работе компенсатора магнитный поток в нем создается резуль-
тирующей намагничивающей м. д. с. F*, которая является геометрической
суммой м. д. с. всех обмоток: возбуждения (7%), компенсационной (7К) и
ротора (7*V). Соответственно для намагничивающего тока можно на-
писать уравнение
4=7в-ьа?)
где 7В •— ток в обмотке возбуждения, в масштабе которого выражены
все м. д. с., а /к и 1Г — приведенные значения токов в компенсационной
обмотке и обмотке ротора.
Поскольку обмотка возбуждения включена последовательно с дру-
гими обмотками, ток 7В равен току генератора 7, т. е. /в=/.
Учитывая пространственный сдвиг между осями обмоток, токи Г* и Гг
можно выразить следующим образом:
. W j-
4=4^% (18)
в
. W
1'г = 1в^Г^, (19)
в
где 1ГВ, Wr— эффективные числа витков обмоток возбуждения,
компенсационной и ротора, представляющие собой произведения реаль-
ного числа витков w3, wK, wr на соответствующий обмоточный коэффи-
циент 7гв, &к, кг, а р — угол сдвига между осями обмоток возбуждения
и ротора, зависящий от положения щеток на коллекторе.
Для правильной работы компенсатора необходимо, чтобы реакция
якоря в нем была полностью скомпенсирована. Поэтому эффективные
числа витков компенсационной обмотки И^к и обмотки ротора Wr выби-
раются равными, а щетки устанавливаются в положение, при котором
__ гр
р = -+-^-. Тогда
4 + 4 = 0 (20)
и
(21)
Ток вызывает в машине вращающийся магнитный поток, равный
<22>
где Ху, — проводимость магнитной цепи ТКГ для потока Ф, приближенно
равная проводимости воздушного зазора, а — угол магнитного запазды-
вания, вызванный потерями в стали.
Вращающийся магнитный поток, пересекая обмотки статора и ротора,
индуктирует в них э.д. с.:
Д = (23)
(24)
_ _/ ( р 4-
v 2/. (25)
172
Глава IV. Компенсаторы активных сопротивлений обмоток
Э. д. с. Ев, индуктируемая в обмотке возбуждения, отстает во времени
от потока Ф на 1/4 периода.
Так как ось компенсационной обмотки сдвинута в пространстве на
90 эл. град. по. отношению к оси обмотки возбуждения навстречу вра-
щения потока Ф, то э. д. с. Ек, индуктируемая этим потоком в компенса-
ционной обмотке, опережает э. д. с. Ев на 1/4 периода, что и отражено
в формуле ,(24).
Э. д. с. Ёг, индуктируемая в обмотке ротора, сдвинута от э. д. с. Ев на
р эл. град., т. е. при р — -4- ~~ отстает от э. д. с. Ёв на 1/4 периода и от
якоря.
э. д. с. Ек на г/2 периода. Величина
э. д. с. Ег, как и в асинхронных маши-
нах, зависит от скорости вращения
потока Ф по отношению к ротору.
Иначе говоря, э. д. с. Ег пропор-
циональна скольжению причем
s=n1-n (26)
где п4 — скорость вращения поля,
п — скорость вращения ротора.
При неподвижном роторе, когда
скольжение 6* = 1, э. д. с. Ег оказы-
вается равной по величине и об-
ратной по направлению э. д. с. Е* и,
таким образом, сумма + Ег~ 0.
При синхронной скорости 5=0 и
э. д. с. Ёг =0.
Ток/, протекающий по обмоткам
ТКГ, создает в машине активные и
индуктивные падения напряжения
izn = Г ~+~ jiXn = (Гв Гк + Гг Ч- Гщ) Ч- ji (хв -4- Хк Ч- х'г), (27)
где гв, rK, гг и гщ — активные сопротивления всех обмоток и переход-
ного слоя щеточных контактов; хв, хк, х'г—индуктивные сопротивления
обмоток от полей рассеяния; zn, гп и хп — суммарные сопротивления
обмоток и щеточных контактов.
Г = Г -4- Г -4- Г -+- Г ,
п В К Г Щ Ч
(28)
п в
(29)
Индуктивное сопротивление рассеяния ротора хг из-за влияния выс-
ших гармонических м. д. с. на коммутацию не остается постоянным при
изменении скорости вращения ротора. Как показано в работах М. П. Ко-
стенко (1933, 1949), индуктивное сопротивление хг может быть опреде-
лено по формуле
х' = (0.3-4-0.75) хп, (30)
где хг1 — индуктивное сопротивление обмотки ротора при неподвижной
машине.
£ 3. Компенсаторы активного сопротивления типа ТКГ
173
Уравнение напряжения для установившегося симметричного режима
работы ТКГ будет иметь следующий вид:
^=4 4 Ёг — rnl—jxni. (31)
В соответствии с полученными уравнениями э. д. с. и м. д. с. (31) и (17)
может быть построена векторная диаграмма. Такая диаграмма для слу-
чая полной компенсации реакции якоря = у- , И^к = при ско-
рости вращения ниже синхронной представлена на рис. 96.
Э. д. с. Ев может быть выражена через составляющие, уравновеши-
вающие активное и индуктивное падения напряжения в обмотке возбу-
ждения:
£.=-V-A./ <32>
где согласно уравнениям (21)—(23)
г = - • — IFBVA sin а (33)
В[1 \ /
И
х = — • — 1Г2/А cos а. (34)
вр- «те р в j 1 р. \ /
Суммарную э. д. с. (Е* -+- Е^} можно также разложить на составляющие
по отношению к вектору тока /. В этом случае, согласно векторной
диаграмме, получим
4+4= гкгА'— (35)
Параметры гкг и хкг могут быть определены из уравнений (21), (22),
(24) и (25). Они получаются равными:
'•.,=4-virx^(i--s)\<=o»« ре)
И
(37)
Подставляя уравнения (32) и (35) в (31), получим
U=Rrti—jX^i, (38)
где
R^ = rKr — rBV.— rn (39)
= (40)
Напряжение t/c, приложенное к ТКГ со стороны синхронной машины,
является обратным по знаку по отношению к напряжению U. Поэтому
U=-O=-Rj+jXj. (41)
Уравнение (41) показывает, что по отношению к модельному син-
хронному генератору ТКГ представляет собой отрицательное активное
сопротивление 7?кз и добавочное индуктивное Л^з. Этот вывод получен
для установившегося симметричного режима работы машины при полной
компенсации реакции якоря в ТКГ.
174
Глава IV, Компенсаторы активных сопротивлений обмоток
В общем случае переходных режимов при неполной компенсации реакции
якоря, как показано в работе А. И. Важнова и Э. С. Мкртчян (1952),
для фазы А ТКГ можно написать следующее уравнение (для фаз В и С
уравнения будут аналогичными):
иА = ^кз 1'а 2к/7 ~dt~ (42)
где — угловая скорость вращения ротора,
M = Wr(Wr-WK^ (43)
-— результирующее число витков компенсационной обмотки, опреде-
ляемое при сдвиге щеток с нейтрали на угол у по формуле (48).
При полной компенсации реакции якоря последний член в уравне-
нии (42) становится равным нулю, следовательно, ТКГ в переходных
режимах будет представлять собой также отрицательное активное и
дополнительное индуктивное сопротивления. При этом, как показывает
уравнение (42), работа каждой фазы не будет зависеть от других фаз и
ТКГ можно представить в виде сочетания трех отдельных ОКГ, рабо-
тающих независимо друг от друга. При несимметричной нагрузке в дан-
ном случае независимая работа фаз ТКГ также не нарушается и сохра-
няется надлежащая компенсация активного сопротивления в каждой из
фаз (если только не учитывать влияние потерь в стали и изменения
условий комутации).
При неполной компенсации реакции якоря, как видно из уравнения
(42), возникает электромагнитная связь между различными фазами ТКГ
за счет индуктирования полем реакции якоря дополнительной э.д.с.
вращения в обмотке ротора. Вследствие этого правильная работа ком-
пенсатора ТКГ при переходных режимах и несимметричных нагрузках
оказывается невозможной.
Обеспечение постоянства компенсируемого
сопротивления
На основании уравнений (28), (36) и (39) для компенсируемого со-
противления можно написать следующую формулу:
R = CWn\ — г — г 5 - г , (44)
ко в р. вр. оэ. щ7 ' '
где С — коэффициент пропорциональности, гоб — сопротивление обме-
ток ТКГ.
Отсюда видно, что кроме числа витков последовательной обмотки W3
и скорости вращения п, которые поддаются регулированию, на вели-
чину &к3 могут влиять и такие факторы, как:
1) насыщение магнитной цепи, машины, вызывающее изменение маг-
нитной проводимости X ;
2) потери в стали, обусловливающие активное сопротивление гв(Х;
3) нагрев обмоток ТКГ, вызывающий изменение их сопротивления гоб ;
4) непостоянство переходного сопротивления щеточных контактов г .
Для устранения вредного влияния этих факторов на величину ком-
пенсируемого сопротивления 7?кз принимаются следующие меры.
£ 3. Компенсаторы активного сопротивления типа ТКГ
175
1. Магнитная цепь ТКГ делается ненасыщенной с таким расчетом,
чтобы магнитная индукция в зубцах статора и ротора не превышала бы
1.2—1.4 вб/м2 при пяти-шестикратных всплесках тока.
2. М. д. с. реакции якоря ТКГ полностью компенсируется с помощью
компенсационной обмотки.
3. Потери в стали сводятся до минимума, что достигается:
а) выбором пониженных значений магнитной индукции в стали;
б) применением высоколегированной электротехнической стали;
в) вращением ротора по направлению вращения поля со скоростью,
близкой к синхронной.
4. Плотность тока в обмотках ТКГ выбирается в значительной сте-
пени пониженной, что резко уменьшает нагрев обмоток как в устано-
вившихся, так и в переходных режимах.
5. Выбираются щетки специальных марок, переходное сопротивление
которых подвержено меньшим изменениям, или берется пониженная
плотность тока в щетках обычных марок. Следует заметить, что умень-
шение переходного сопротивления щеток с возрастанием тока способ-
ствует увеличению компенсируемого сопротивления 7?кз. Это до некоторой
степени является благоприятным, так как компенсирует влияние других
факторов (насыщения, реакции якоря, нагрева), которые при возрастании
тока действуют в обратном направлении, способствуя уменьшению со-
противления /?кЗ •
Кроме перечисленных факторов, для обеспечения постоянства ком-
пенсируемого сопротивления 7?кз во всех режимах работы большое зна-
чение имеет хорошая коммутация ТКГ. Получение хороших условий
коммутации в ТКГ представляет собой достаточно сложную задачу
вследствие того, что устройство добавочных полюсов в ТКГ связано
с применением специальных штампов для сердечника статора и с услож-
нением статорных обмоток.
Поэтому часто в ТКГ добавочных полюсов не делают, а ограни-
чиваются мерами, направленными на снижение э.д.с., индуктированных
в короткозамкнутых секциях в процессе коммутации. В ТКГ’ таких э. д. с.
две: реактивная ег и трансформаторная et. Для этих э. д. с. могут быть
написаны известные формулы (Костенко, 1949):
ег = 2грв-иаЛ/ХрЧ) sin ~ (45)
и
et = (46)
где w8 и I — число витков в секции и активная длина проводника обмотки
якоря; иа и А — окружная скорость и линейная нагрузка якоря; X и
т — удельная магнитная проводимость полей рассеяния коммутируемой
секции и число фаз ротора (тп=3).
Э. д. с. ег совпадает по фазе с током /, проходящим через щетку,
а э. д. с. et отстает от потока Ф на угол -у. Как видно из рис. 96, э. д. с.
ег и е/ находятся приблизительно в квадратуре по отношению друг
к другу и результирующая э. д. с.
(47)
Формулы (45) и (46) показывают, что реактивная э. д. с. ег пропор-
циональна числу витков в секции и линейной нагрузке А обмотки
176
Глава IV. Компенсаторы активных сопротивлений обмоток
якоря, а трансформаторная э.д.с. et — числу витков wg, потоку Ф и
скольжению -S'.
Для уменьшения э.д.с. ег и et в ТКГ число витков ы8 выбирается
минимальным (ws = 1), а линейная нагрузка А и поток Ф в значитель-
ной мере понижаются по сравнению с их значениями в нормальных
машинах. Скорость вращения ТКГ выбирается близкой к синхронной
скорости, при которой дУ=0 и et — 0.
Таким образом достигают удовлетворительной коммутации в ТКГ
при достаточно широких пределах изменения тока.
Однако в некоторых случаях, особенно при работе ТКГ с большими
всплесками тока, указанные способы улучшения коммутации могут ока-
заться недостаточными и тогда является целесообразным устройство
в машине добавочных полюсов. При этом возможно применение следую-
щих конструкций ТКГ (Костенко, 1949):
1) статор выполняется с тремя явновыраженными основными и до-
бавочными полюсами на потенциальную волну, обмотка ротора делается
2
с сокращенным шагом до (по типу машины Шербиуса);
2) статор выполняется с распределенными обмотками возбуждения
и компенсационной и с шестью явновыраженными добавочными полюсами
на потенциальную волну, обмотка ротора — диаметриальная;
3) на неявнополюсном статоре укладывается специальная обмотка
с сокращенным шагом = по схеме М. П. Костенко, образующая
магнитные поля в зонах коммутации; обмотка ротора — диаметральная.
Наиболее целесообразным является второй вариант, так как в этом
случае, во-первых, можно применить обычный сердечник статора без
изменения штампа, используя в качестве добавочных полюсов зубцы
статора, и, во-вторых, имея отдельную обмотку добавочных полюсов,
легче произвести их настройку, например посредством изменения
числа витков. В четырехполюсной машине при диаметральном шаге
обмотки якоря необходимо иметь 12 добавочных полюсов. Так как на
статоре компенсаторов ТКГ обычно выполняется 24 паза, то получается
при этом равномерное распределение проводников обмотки добавочных
полюсов по пазам статора.
Регулирование величины компенсируемого
сопротивления
Регулирование величины компенсируемого сопротивления А’кз, как
показывает уравнение (44), в компенсаторе ТКГ может производиться
так же, как и в ОКГ, посредством изменения числа витков последова-
тельной обмотки возбуждения или скорости вращения ротора.
Индуктивное сопротивление ТКГ
Индуктивное сопротивление компенсатора ЛкЗ, как видно из уравне-
ния (40), обусловлено полями рассеяния всех его обмоток и основным
полем обмотки возбуждения. Поле реакции якоря полностью компенси-
руется компенсационной обмоткой и потому индуктивное сопротивление,
соответствующее этому полю, равно нулю и в уравнении (40) отсут-
ствует. Индуктивностью хкг в уравнении (40) можно пренебречь, так как
угол магнитного запаздывания а мал и sin а в формуле (37) можно при-
£ 3. Компенсаторы активного сопротивления типа ТКГ
177
нять равным нулю. Индуктивность рассеяния роторной обмотки х'г, как по-
казывает формула (30), зависит от скорости вращения ротора. Поэтому
полное индуктивное сопротивление Лк.з ТКГ во вращающейся машине
несколько меньше, чем в неподвижной машине.
Следует заметить, что поскольку компенсаторы ТКГ предназначаются
для компенсации малых активных сопротивлений, составляющих сотые
доли ома, они рассчитываются на малое напряжение и сравнительно
большой ток. Поэтому обмотки статора и ротора ТКГ выполняются
с малым числом витков и индуктивное сопротивление Лкз обычно полу-
чается небольшим. При увеличении компенсируемого сопротивления 7?кз
индуктивное сопротивление Лкз соответственно возрастает и может до-
стигнуть значения, сравнимого с индуктивным сопротивлением Л/ рас-
сеяния обмотки статора модельного синхронного генератора. Это об-
стоятельство необходимо учитывать при моделировании.
Стабильность работы и условия самовозбуждения ТКГ
На стабильность характеристик ТКГ могут оказать влияние такие
факторы, как:
1) изменение сопротивления обмоток и переходного сопротивления
щеточных контактов вследствие нагревания;
2) плохие условия коммутации, приводящие к искрению щеток на
коллекторе и возникновению коммутационной реакции якоря;
3) неустойчивость работы приводного двигателя.
Поскольку ТКГ работает на переменном токе, гистерезис не влияет
на стабильность его характеристик.
Для повышения устойчивости работы ТКГ принимаются специальные
меры, к которым относятся следующие:
1) плотности тока в обмотках и щеточных контактах выбираются
пониженными по сравнению с нормальными значениями;
2) обеспечиваются наилучшие условия коммутации;
3) подбирается достаточно мощный приводной двигатель, обеспечи-
вающий постоянство скорости вращения при всех режимах нагрузки ТКГ.
Самовозбуждение ТКГ, как показывает теоретическое рассмотрение
этого вопроса (Костенко, 1949; Важнов и Мкртчян, 1952; Несговорова,
1953), может произойти как постоянным, так и переменным током.
Самовозбуждение постоянным током может возникнуть только при
полной компенсации якоря в ТКГ. В этом случае условие самовозбу-
ждения ТКГ остается таким же, как и для ОКГ, а именно: самовозбу-
ждение возникает тогда, когда омическое сопротивление Reo внешней
цепи будет полностью скомпенсировано, т. е. при 7?кз Reo» При частич-
ной компенсации сопротивления Ree, когда 7?кз <С Reo, самовозбуждение
ТКГ постоянным током возникать не будет.
При неполной или избыточной компенсации реакции якоря ТКГ благо-
даря возникновению взаимной связи между фазными обмотками [см. урав-
нение (42)] становится возможным самовозбуждение ТКГ переменным
током. При этом процесс самовозбуждения может носить затухающий,
возрастающий или установившийся характер. Характер процесса будет
зависеть от степени компенсации внешнего активного сопротивления Re,
а именно: при RK3<ZRe процесс самовозбуждения будет затухающим,
при RK3^> Re — возрастающим, а при RK3 = Re — установившимся. В дан-
ном случае величина Re будет представлять собой не омическое, а актив-
ное - сопротивление внешней цепи, т. е. Rg — 7?е0 АТ?, где АТ? есть
178
Глава IV. Компенсаторы активных сопротивлений обмоток
добавочное сопротивление, обусловленное влиянием вторичных контуров,
имеющихся во внешней цепи. При работе ТКГ совместно с модельным
синхронным генератором, как показано в работе А. И. Важнова и
Э. С. Мкртчяна (1952), на величину Д/? оказывает влияние электро-
магнитная связь между статором и ротором синхронного генератора, при-
' ЮОи
1!; -Ша ’•B.OWtiM
Рис. 97. Осциллограммы внезапного короткого замыкания син-
хронного генератора, работающего совместно с ТКГ, снятые при
неполной (а) и полной (б) компенсации реакции якоря ТКГ.
чем в зависимости от знака величины определяемого формулой (43),
ДА? может принимать как положительное, так и отрицательное значение.
При 7?кз<С^е компенсатор ТКГ в статическом режиме самовозбу-
ждаться не будет. Однако в динамическом режиме могут возникнуть
затухающие колебания низкой частоты (Важное и Мкртчян, 1952). Та-
кие колебания, например, появляются в апериодической составляющей
тока статора при внезапном коротком замыкании синхронного генератора,
работающего совместно с ТКГ (рис. 97, а). Эти колебания вносят иска-
£ 3. Компенсаторы активного сопротивления типа ТКГ
179
жение в переходные процессы модельного генератора и потому являются
нежелательными.
При 7?кз> Re возникает нарастающий процесс самовозбуждения ТКГ,
характеризующийся появлением возрастающего свободного тока низкой
частоты. Возрастание свободного тока будет происходить до тех пор,
пока под влиянием различных факторов (насыщения, коммутационной
реакции якоря, нагревания обмоток) сопротивление /?кз не уменьшится
и не станет равным сопротивлению Re. Установившееся значение сво-
бодного тока /у, если не учитывать ток нормальной частоты, который
будет накладываться на свободный ток в случае работы ТКГ совместно
с синхронным генератором, определится
характеристики компенсатора UKa—f{l)
с линией активного падения напряжения
во внешней цепи IRe = f(I) (рис. 98).
Так как по условиям работы компенса-
тора внешняя характеристика его близка
к прямой линии и начинает отклоняться
от прямой только при больших токах,
то, как видно из рис. 98, установившийся
свободный ток может достигнуть недо-
пустимо большой величины.
Таким образом, для нормальной ра-
боты компенсатора ТКГ в электродина-
мической модели необходимо исключить
возможность самовозбуждения его пере-
менным током (см. осциллограмму на
рис. 97, б). Это можно сделать, как сле-
Рис. 98. Внешняя характеристика
ТКГ и линия активного
падения напряжения во внешней
цепи IRe~f (/).
дует из сказанного, посредством на-
стройки полной компенсации реакции
якоря в ТКГ. При этом величина сопро-
тивления /?к, которое может быть скомпенсировано с помощью ТКГ,
оказывается ограниченной по условию отсутствия самовозбуждения значе-
нием омического сопротивления RfQ внешней по отношению к ТКГ цепи
(практически 7?к 0.8 4- 0.85 Reo). Из этого следует, что с помощью ТКГ
можно скомпенсировать только основные потери в меди статорной цепи
модельного генератора; добавочные потери в этой цепи из-за возник-
новения самовозбуждения ТКГ скомпенсировать не удается.
Настройку компенсации реакции якоря в ТКГ можно произвести
следующими способами: 1) изменением числа витков компенсационной
обмотки и 2) сдвигом щеток на коллекторе.
Первый способ возможен, если предусмотрено устройство в ТКГ
добавочной компенсационной обмотки с малым числом витков. Этот способ
позволяет изменять степень компенсации реакции якоря только ступенями.
Для более точной настройки компенсации может применяться второй
способ, дающий возможность плавного изменения степени компенсации.
Разложив действующие витки компенсационной обмотки и обмотки воз-
буждения по двум осям q и J, первая из которых совпадает с осью
щеток, а вторая ей перпендикулярна (рис. 95), можно получить следующие
выражения для результирующих поперечных и продольных витков статора:
UZkS= Д7К cos у-ь IFB sin 7
и
(4$)
HZBS=rBcos7—IT.sinT.
(49)
180
Глава IV» Компенсаторы активных сопротивлений обмоток
Эти формулы показывают, что при сдвиге щеток с нейтрали по на-
правлению вращения ротора результирующая м.д.с. компенсационной
обмотки Л'кз возрастает, а результирующая м.д.с. обмотки возбуждения
FB? уменьшается и, наоборот, при сдвиге щеток в противоположном
направлении м.д.с. FK% уменьшается, а м.д.с. FBv возрастает. Таким
образом, при сдвиге щеток изменяется не только результирующее число
витков компенсационной обмотки H^Ks, но изменяется также и результи-
рующее число витков обмотки возбуждения следовательно, меняется
величина компенсируемого сопротивления /?к. Это является некоторым
недостатком второго метода настройки компенсации реакции якоря в ТКГ.
§ 4. Серия компенсаторов ОКГ и ТКГ
Типы компенсаторов и их назначение
Развитие электродинамического моделирования привело к созданию
серии модельных синхронных генераторов, выполняемых на различные
мощности. Это в свою очередь вызвало необходимость в разработке
серии однофазных и трехфазных компенсаторов, предназначенных для
совместной работы с модельными генераторами.
В настоящее время на базе нормальных машин постоянного тока типа
ПН-17.5, ПН-45, ПН-85 и ПН-145 созданы однофазные и трехфазные
компенсаторы типа ОКГ-17.5, ОКГ-45/1, ОКГ-45/2, ОКГ-85/1, ОКГ-85/2,
ОКГ-85/3 и ТКГ-17.5, ТКГ-45, ТКГ-85, ТКГ-145/1 и ТКГ-145/2.
В обозначениях типа компенсатора цифры, стоящие после букв, ука-
зывают на тип исходной машины постоянного тока, а цифры, стоящие
в виде знаменателя дроби, отмечают различные исполнения одного и
того же типа, отличающиеся друг от друга главным образом обмоточ-
ными данными.
Основные данные перечисленных выше компенсаторов приведены
в табл. 24; в этой же таблице указаны также типы модельных синхрон-
ных машин, для которых предназначены эти компенсаторы.
Конструкция компенсаторов
Конструкция компенсаторов отличается большей сложностью по срав-
нению с конструкцией машин нормального исполнения (рис. 99 и 100).
Статор компенсаторов ОКГ и ТКГ выполняется неявнополюсным.
Сердечник статора собирается из отдельных изолированных листов
электротехнической стали толщиной 0.5 мм, имеющих по внутренней
окружности выштампованные пазы овальной формы.
Внешний диаметр сердечника выбирается несколько больше внутрен-
него диаметра станины исходной машины типа ПН в соответствии
с нормальными диаметрами, применяемыми электромашиностроительными
заводами. Внешняя окружность листа статора штампуется отдельным
вырубным штампом, имеющимся на заводе, а для вырубки пазов при-
меняется одиночный пазовый штамп, изготавливаемый по расчетным
данным машин. Число пазов на статоре обычно выбирается равным 24.
Сердечник статора или запрессовывается в станину машины ПН после
небольшой ее расточки, или крепится на ребрах, приваренных внутри
специально изготовленного корпуса (рис. 99 и 100). В последнем случае
для более свободного размещения лобовых частей обмоток статора и
4. Серия компенсаторов ОКГ и ТКГ
181
облегчения выполнения обмоток кор-
пус машины делается увеличенных
размеров. В пазы статора укладыва-
ются следующие обмотки: в компен-
саторе ОКГ — обмотка возбуждения
(5), компенсационная (К), обмотка
добавочных полюсов (Д) и противо-
гистерезисная (ПГ); в компенсаторе
ТКГ — обмотка возбуждения (В), ком-
пенсационная (К) и обмотка добавоч-
ных полюсов (Д), если она предусмат-
ривается.
Для изменения величины 7?к об-
мотки возбуждения ОКГ и ТКГ раз-
деляются на несколько отдельных
ветвей, имеющих различное число
витков. В компенсаторе ТКГ-145 пре-
дусматривается также дополнительная
компенсационная обмотка для настройки
компенсации реакции якоря.
Все статорные обмотки выполня-
ются однослойными, катушечного типа.
Укладка обмоток производится через
шлицы пазов по способу „всыпания".
Противогистерезисная обмотка ОКГ
наматывается вокруг спинки статора
и укладывается в тех пазах, которые «
менее заняты другими обмотками. <©
Развернутые схемы обмоток статора *
ОКГ и ТКГ представлены на рис. 101
и 102.
Концы всех обмоток выводятся на
щитки зажимов, которые в компенса-
торах ОКГ и ТКГ получаются весьма
развитыми. Конструкция щитков должна
обеспечивать большую надежность кон-
тактов и удобство подключения обмо-
ток по самым разнообразным схемам.
Роторы компенсаторов сохраняют
ту же конструкцию, которую имеют
якори исходных машин ПН (рис. 99 и
100). Отличаются только обмоточные
данные: в роторах ОКГ обмотка
обычно делается с большим числом
витков в секции, в роторах ТКГ, на-
оборот, число витков в секции выби-
рается минимальным.
К компенсаторам ОКГ и ТКГ предъ-
являются повышенные требования в
отношении хорошей и надежной ра-
боты щеток на коллекторе, так как от
этого существенно зависит точность
компенсации и стабильность харак-
Рис. 99. Продольный и поперечный разрез компенсатора ОКГ-85/2.
ш-
Рис. 100. Продольный и поперечный разрез компенсатора ТКГ-145/1.
320
184
Глава IV. Компенсаторы активных сопротивлений обмоток
теристик компенсаторов. Поэтому в конструкциях этих машин
должен предусматриваться хороший доступ к щеткодержателям для
ухода и наблюдения за щетками. Кроме того, для облегчения установки
а
1 г 3 5 6 7 8 9 10 11 12 13 16 15 16 17 18 19 20 21 22 23 26
4л S6k <i
6
Рис. 101. Развернутая схема обмотки статора компенсатора ОКГ-85/2.
а — противогистерезисная обмотка ( ЧГ)', б—обмотка возбуждения (Z?); в — компенсационная
обмотка (К); г — обмотка добавочных полюсов (Л)«
щеток на нейтрали и настройки компенсации реакции якоря ОКГ и ТКГ
должны обеспечиваться удобными приспособлениями для поворота и
крепления щеточной траверзы и соответствующими указателями и шка-
лами для измерения углового положения щеток.
Важное значение с точки зрения стабильности характеристик ком-
пенсаторов имеет правильный выбор щеток. В компенсаторах ОКГ при-
меняются меднографитные щетки марки МГ или БГ, в компенсаторах
£ 5. Методы испытания и настройки
185
ТКГ обычно применяются электрографитированные щетки ЭГ-4, но при
этом плотность тока в них берется пониженной по сравнению с обычным
значением.
&А1н &А2н ®АЗн $А1к ^А2к ^АЗк^В1н ^ВВн^ВЗн ^В1к &В2к ^ВЗМ^С1н ®С2н SC3h ^С1к $С2к &СЗк
Рис. 102. Развернутая схема обмотки статора компенсатора ТКГ-145/1.
а — компенсационная обмотка (fC)i б — обмотка возбуждения (В).
§ 5. Методы испытания и настройки компенсаторов
Программа испытаний
Компенсаторы OKI' и ТКГ после изготовления подвергаются испы-
таниям, цель которых заключается в следующем:
1) проверка исправности машин;
2) наладка машин для работы в качестве компенсаторов активных
сопротивлений;
3) определение характеристик и оценка пределов применимости ком-
пенсаторов;
4) проверка расчетных методов путем сопоставления расчетных и
опытных данных.
186
Глава IV. Компенсаторы активных сопротивлений обмоток
Испытание компенсаторов производится по программе, которая,
с одной стороны, включает испытания, общие для всех электрических
машин, а с другой стороны, предусматривает специальные испытания,
предназначенные для наладки и определения характеристик компенса-
торов.
К общим испытаниям относятся:
1) измерение сопротивления изоляции обмоток;
2) измерение постоянным током сопротивлений обмоток;
3) испытание при повышенной скорости вращения;
4) испытание изоляции обмоток от корпуса;
5) испытание изоляции витков.
К специальным испытаниям относятся:
1) проверка маркировки концов обмоток и согласование включения
обмоток в машине;
2) настройка полной компенсации реакции якоря;
3) согласование направления вращения ротора с направлением вра-
щения поля в компенсаторах ТКГ;
4) снятие основных характеристик компенсаторов;
5) измерение индуктивных сопротивлений обмоток;
6) настройка необходимой величины компенсируемого сопротивления
/?к при совместной работе компенсаторов с модельным синхронным гене-
ратором.
Поскольку специальные испытания компенсаторов имеют свои осо-
бенности, остановимся на них более подробно.
Проверка маркировки обмоток
Проверку маркировки обмоток ОКГ можно произвести несколькими
способами, из которых наиболее удобным оказывается следующий. Через
одну из обмоток возбуждения от отдельного источника пропускают по-
стоянный ток (рис. 103) и, размыкая и замыкая рубильник Р, измеряют
милливольтметром э.д.с., индукти-
рованную в других обмотках возбу-
ждения.
Рис. 103. Схема для проверки марки- Рис. 104. Схема включения обмо-
ровки концов обмоток возбуждения ОКГ. ток ОКГ.
Предположим, что ток, пропускаемый через первую обмотку, имеет
направление от начала к концу обмотки. Тогда э.д.с., индуктированная
в других обмотках, будет направлена от начала к концу обмоток при
размыкании рубильника Р и от конца к началу — при замыкании этого
$ 5. Методы испытания и настройки
187
рубильника. Поэтому если соединить зажим „—“ милливольтметра с на-
чалом, а зажим с концом обмотки, маркировку которой мы хотим
проверить, то при правильной маркировке стрелка милливольтметра
в момент размыкания рубильника Р отклонится в положительном на-
правлении, а в момент замыкания — в отрицательном направлении.
Проверив описанным способом правильность маркировки обмоток
возбуждения и сделав соответствующие исправления в случае обнару-
жения неправильностей, устанавливают далее обозначение концов об-
мотки якоря для генераторного режима в соответствии с данным на-
правлением вращения машины. Для этого, сдвинув щетки с нейтрали
о б
Рис. 105. Схема для определения соответствия фаз обмоток возбу-
ждения или компенсационных обмоток ТКГ.
против направления вращения и подключив к зажимам якоря милливольт-
метр, определяют начало и конец якорной обмотки описанным выше
методом по отклонению стрелки прибора в момент выключения и вклю-
чения тока в обмотке возбуждения. Нетрудно убедиться, что для полу-
чения генераторного режима работы ОКГ при заданном направлении
вращения начало обмотки якоря нужно соединить с концом обмотки
возбуждения.
Далее, установив щетки на нейтрали, проверяют правильность обо-
значения концов обмоток компенсационной и добавочных полюсов. Это
можно сделать по предыдущему методу, включая и выключая ток
в обмотке якоря и измеряя э.д.с., индуктированную в обмотке добавочных
полюсов и компенсационной. Необходимо при этом помнить, что обмотка
добавочных полюсов и компенсационная для правильной работы машины
должны включаться навстречу по отношению к обмотке якоря, т. е.
так, как показано на рис. 104.
Проверку маркировки обмоток ТКГ можно произвести на переменном
токе по следующему способу.
Обмотка неподвижного ротора включается на трехфазное напряжение,
пониженное в такой степени, чтобы ток в роторе не превышал номи-
нального значения. В качестве источника трехфазного напряжения может
служить отдельный синхронный генератор, работающий в режиме, близ-
ком к короткому замыканию. Испытуемую статорную обмотку (возбу-
ждения или компенсационную) соединяют в звезду, измеряют фазные и
линейные э.д.с., индуктированные в этой обмотке вращающимся полем
якоря и проверяют тем самым симметрию и равенство чисел витков
в фазах испытуемой обмотки.
Для проверки соответствия фаз у отдельных обмоток возбуждения
(или компенсационных обмоток) соединяют между собой нулевые точки
этих обмоток (при соединении каждой из них в звезду) и на зажимах,
188
Глава IV. Компенсаторы активных сопротивлений обмоток
оставшихся свободными, измеряют напряжения, действующие между
различными обмотками (рис. 105).
Для правильной маркировки концов обмоток напряжения на зажимах,
относящихся к одним и тем же фазам (например: Вятн—Ва2н, Bbih—
~ Ток
Рис. 106. Схема для определения соответствия фаз компенсационной
обмотки и обмотки возбуждения ТКГ.
—Вв2н, Ван—Вс2н)9 будут минимальными и равными арифметической
разности фазных напряжений проверяемых обмоток.
Для проверки соответствия фаз обмотки возбуждения и компенса-
ционной обмотки соединяют между собой нулевые точки этих обмоток
при соединении каждой из них в звезду и на свободных зажимах из-
меряют напряжения, действующие между этими обмотками (рис. 106, а).
а
~ Ток
Рис. 107. Схема для определения соответствия фаз роторной и
компенсационной обмоток ТКГ.
По этим данным, зная также фазные напряжения на обеих обмотках,
строят потенциальную диаграмму (рис. 106, б) и из нее определяют со-
ответствие фаз. Сдвиг между фазными напряжениями компенсационной
обмотки и обмотки возбуждения для одной и той же фазы должен со-
ставить 90°.
Для определения соответствия фаз роторной и компенсационной
обмоток поступают следующим образом. Сначала проверяют возможность
передвижения щеток на коллекторе и устанавливают щетки в такое
положение, от которого их можно было бы сдвигать в ту или иную
сторону примерно на равное расстояние. Затем через обмотку возбуж-
$ 5. Методы испытания и настройки
189
дения, соединенную в звезду, от отдельного источника тока пропускают
трехфазный переменный ток, величина которого выбирается не более
его номинального значения. Нулевую точку компенсационной обмотки,
соединенной звездой, присоединяют к одному из зажимов обмотки ро-
тора (рис. 107, а), а на свободных зажимах измеряют напряжения,
действующие между обмотками. По этим данным строят потенциальную
диаграмму (рис. 107, б, в), посредством которой и определяют соответ-
ствие фаз роторной и компенсационной обмоток.
Соответствие фаз обмоток возбуждения, компенсационной и ротора
Рис. 108. Схема для определения фаз обмоток воз-
буждения, компенсационной и ротора при однофазном
питании одной из обмоток возбуждения.
можно также найти и другим путем, не требующим построения потен-
циальных диаграмм. Для этого нужно через одну из фаз, например
фазу Д, обмотки возбуждения пропустить переменный ток и измерить
фазные напряжения на компенсационной обмотке и линейные напряжения
на роторе (рис. 108). Нетрудно видеть, что к той же фазе А будет
принадлежать та фазная компенсационная обмотка, на которой напряже-
ние равно нулю. Два зажима обмотки якоря, на которых напряжение
получится наибольшим, будут принадлежать к другим фазам В и С,
а оставшийся третий зажим будет относиться к той же фазе А»
Настройка полной компенсации реакции якоря
В генераторах ОКГ настройка полной компенсации реакции якоря
осуществляется посредством:
1) установки щеток на геометрической нейтрали, чем обеспечивается
отсутствие продольной реакции якоря;
2) правильного включения компенсационной обмотки, компенсирующей
поперечную реакцию якоря;
3) надлежащей настройки добавочных полюсов, хорошая работа ко-
торых является необходимым условием отсутствия коммутационной
реакции якоря.
Установка щеток на геометрическую нейтраль в ОКГ производится
обычным индуктивным способом посредством измерения напряжения,
индуктированного в обмотке якоря при включении и выключении тока
в цепи возбуждения.
Настройку добавочных полюсов можно произвести путем определе-
ния безыскровой зоны работы щеток при подпитке добавочных полюсов.
Наладка добавочных полюсов в ОКГ, однако, затруднена из-за невоз-
можности регулирования зазора под добавочными полюсами и может
190
Глава IV. Компенсаторы активных сопротивлений обмоток
быть произведена только в том случае, если на них имеется специаль-
ная регулировочная обмотка.
Настройка компенсации реакции якоря в ТКГ выполняется двумя
этапами: сначала устанавливаются на геометрическую нейтраль щетки и
подбирается оптимальное число витков компенсационной обмотки, дающее
наилучшую компенсацию, а затем производится окончательная настройка
компенсации посредством сдвига щеток с нейтрали.
Для установки щеток на нейтраль обмотка возбуждения ТКГ соеди-
няется в звезду и включается на отдельный источник трехфазного пе-
ременного тока, а компенсационная обмотка соединяется последовательно
Рис. 109. Схема для установки щеток
на нейтраль с помощью вольтметра и
определения направления вращения поля
в ТКГ.
Рис. 110. Схема для установки щеток
на нейтраль в ТКГ с помощью электрон-
ного осциллографа.
с якорем (рис. 109). Число витков компенсационной обмотки подбирают,
используя добавочную обмотку таким образом, чтобы линейные напря-
жения на якорной и компенсационной обмотках были бы равны. Пере-
двигая щетки по коллектору при неподвижном якоре, измеряют напря-
жения на зажимах компенсационной обмотки, оставшихся свободными.
Щетки устанавливаются в такое положение, при котором измеряемые
напряжения оказываются минимальными.
Установку щеток на нейтраль можно произвести также при помощи
электронного осциллографа по способу, предложенному Е. Д. Несгово-
ровой. Согласно этому способу через обмотку возбуждения ТКГ про-
пускается трехфазный переменный ток, а с двух зажимов ротора и с двух
одноименных зажимов компенсационной обмотки, соединенной в звезду,
подаются линейные напряжения на отклоняющие пластины вертикальной
(#) и горизонтальной (х) разверток электронного осциллографа (рис. 110).
При действии одного только напряжения, индуктированного в роторе,
луч осциллографа будет чертить на экране вертикальную прямую. При
действии напряжения, индуктированного в компенсационной обмотке, на
экране будет изображаться горизонтальная прямая. При совместном
действии обоих напряжений, имеющих в общем случае сдвиг по фазе,
на экране осциллографа луч будет описывать эллипс, оси которого
в случае равенства напряжений при одинаковых масштабах их изобра-
жений будут расположены под углом 45° к осям координат. При пере-
мещении щеток ближе к нейтральному положению эллипс будет сужаться
$ 5. Методы испытания и настройки
191
и при установке щеток на геометрической нейтрали эллипс превращается
в прямую, проходящую под углом 45° к осям координат.
После установки щеток на нейтраль с помощью электронного осцил-
лографа необходимо проверить правильность включения компенсацион-
ной обмотки с обмоткой якоря. Для этого эти обмотки соединяются
последовательно, согласно схеме рис. 109, и на пластины вертикальной
или горизонтальной развертки электронного осциллографа подается
линейное напряжение с внешних зажимов компенсационной обмотки.
При правильном включении компенсационной обмотки и надлежащем
выборе числа витков ее это напряжение близко к нулю и поэтому луч
на экране будет изображать точку или при больших усилениях корот-
кую черту. В случае неправильного включения компенсационной обмотки
при одном и том же масштабе изображения черта на экране будет по-
лучаться значительно большей длины.
Установкой щеток на геометрической нейтрали и подбором числа
витков компенсационной обмотки обычно не удается добиться полной
компенсации реакции якоря вследствие различия обмоточных коэффи-
циентов якорной и компенсационной обмоток, а также влияния комму-
тационной реакции якоря, возникающей во гращающейся машине при
замедленной коммутации. Поэтому точную настройку компенсации реак-
ции якоря в ТКГ производят, сдвигая щетки с нейтрали и осциллогра-
фируя при этом процесс внезапного короткого замыкания синхронной
машины, работающей совместно с ТКГ. Настройка производится до тех
пор, пока при коротком замыкании синхронного генератора не будут
возникать колебания низкой частоты в апериодической составляющей
тока статора (Важное и Мкртчян, 1952).
Согласование направления вращения ротора
с направлением вращения поля в ТКГ
Для улучшения условий коммутации и снижения потерь в стали
ротора ТКГ необходимо, чтобы направление вращения ротора совпадало
с направлением вращения поля. Поэтому при включении ТКГ на модель-
ный синхронный генератор нужно определить направление вращения
поля в ТКГ и сопоставить его с направлением вращения ротора в ге-
нераторном режиме ТКГ.
Для определения вращения поля необходимо обмотку возбуждения ТКГ,
соединенную звездой, подключить к зажимам модельного синхронного
генератора (совместно с которым предназначен работать компенсатор),
соблюдая при этом соответствие фаз, и измерить напряжение Ur на
зажимах ротора ТКГ во время пуска приводного двигателя, вращающего
компенсатор (рис. 109). При совпадении направления вращения ротора ТКГ
с направлением вращения поля измеренное напряжение Ur, как видно
из уравнения (25), будет уменьшаться с возрастанием скорости и при
достижении ротором синхронной скорости станет равным нулю. В слу-
чае же вращения ротора в сторону, обратную направлению вращения
поля, вместе с возрастанием скорости ротора будет расти и напряже-
ние Ur,
Для определения направления вращения ротора ТКГ в генераторном
режиме обмотки машины соединяются последовательно, согласно рабо-
чей схемы соединения (рис. 95), и она включается на источник трех-
фазного переменного тока, в качестве которого может служить модель-
192
Глава IV. Компенсаторы активных сопротивлений обмоток
ный синхронный генератор. В момент включения напряжение синхронного
генератора должно быть снижено до минимальной величины (примерно
до 10—20 в). Затем напряжение синхронного генератора постепенно
увеличивается до тех пор, пока ротор ТКГ не начнет вращаться. Таким
способом узнается направление вращения ротора ТКГ для двигательного
режима. Для получения генераторного режима ротор ТКГ нужно вра-
щать приводным двигателем в сторону, противоположную по сравнению
с двигательным режимом. Определив направление вращения поля и
направление вращения ротора в генераторном режиме, сопоставляем их
между собой и в случае несовпадения изменяем или направление вра-
щения поля, или направление вращения ротора. При этом для измене-
ния направления вращения поля нужно изменить порядок следования
фаз обмоток ТКГ, а для изменения направления вращения ротора в ге-
нераторном режиме необходимо поменять местами начала и концы обмо-
ток возбуждения ТКГ в каждой фазе.
Характеристики ОКГ
Основными характеристиками ОКГ, представляющими наибольший
интерес для оценки свойств компенсатора и определения величины
компенсируемого сопротивления, являются:
1) характеристика холостого хода Ек =f(iB) при n~ const, снимае-
мая при независимом возбуждении ОКГ;
2) внешняя характеристика — при n = const, снимаемая при
последовательном возбуждении;
3) регулировочная характеристика t7K, /к = /(*вн) при n = const, сни-
маемая при смешанном (независимом и последовательном) возбуждении.
Характеристика холостого хода снимается обычным способом при
независимом питании последовательных обмоток возбуждения и при
включении через автотрансформатор противогистерезисной обмотки на
источник переменного тока.
Она имеет большое значение, во-первых, с точки зрения оценки
влияния насыщения на вид характеристики и определения максимальных
значений м. д. с. возбуждения и э. д. с. якоря, при которых еще со-
храняется прямолинейность характеристики, во-вторых, выяснения влияния
гистерезиса и выбора такого значения переменного тока в противоги-
стерезисной обмотке, при котором гистерезисная петля получается до-
статочно узкой, и, в-третьих, определения величины полного компенси-
руемого сопротивления /?к»[см. уравнение (9)].
Характеристики холостого хода компенсатора ОКГ-85/2 при отсут-
ствии и при наличии тока в противогистерезисной обмотке, охватываю-
щей спинку статора, приведены на рис. 111. Сравнение характеристик
показывает, что при „растряхивании“ спинки статора переменным по-
током гистерезисная петля заметно уменьшается, но величина остаточ-
ной э. д. с. снижается сравнительно мало. Наличие остаточной э. д. с.,
однако, не оказывает сколько-нибудь существенного влияния на ра-
боту ОКГ.
Внешнюю характеристику целесообразно снимать при включении ОКГ
по схеме, приведенной на рис. 92, последовательно с возбудителем.
Изменение тока в цепи ОКГ производится посредством регулирования
напряжения возбудителя. В некоторых случаях для этой ^цели может
быть использован регулировочный реостат, включаемый дополнительно
в общую цепь.
£ 5. Методы испытания и настройки
193
Внешняя характеристика ОКГ дает возможность определить внеш-
нее компенсируемое сопротивление 7?к и при сопоставлении его с вну*
тренним сопротивлением оценить влияние на работу ОКГ при на-
грузке таких факторов, как переходного падения напряжения в щеточ-
ных контактах и реакции якоря. При одинаковой скорости вращения и
одном и том же числе витков обмотки возбуждения внешняя характе-
ристика лежит ниже характеристики холостого хода на величину паде-
РиС. 111. Характеристика холостого хода и внешние
характеристики компенсатора ОКГ-85/2 при
п = 1500 об./мин.
ния напряжения в главной цепи ОКГ (если отсутствует реакция якоря).
Внешние характеристики компенсатора ОКГ-85/2 приведены на рис. 111.
По характеристике холостого хода или внешним характеристикам
производится расчет величины компенсируемого сопротивления для
различных чисел витков обмотки возбуждения и различных скоростей
вращения и составляются соответствующие таблицы или вычерчиваются
графики, которые служат затем для выбора схемы соединения обмоток
и скорости вращения ОКГ при его наладке для совместной работы
с модельным генератором.
Регулировочная характеристика представляет собой интерес в том
случае, если модельный возбудитель включается по каскадной схеме,
приведенной на рис. 71, на отдельную обмотку возбуждения ОКГ. При
194
Глава IV. Компенсаторы активных сопротивлений обмоток
снятии этой характеристики изменяется ток /в. н в обмотке независимого
возбуждения и измеряется напряжение UK и ток /к ОКГ. Вследствие
влияния различных факторов (гистерезиса, непостоянства переходного
сопротивления щеточных контактов) зависимости 7К, UK=f{iвн) МОГуТ
отклониться от прямолинейного закона, что является нежелательным,
так как ведет к искажению при моделировании возбудителя. Опытные
кривые /к=/(/в. и) для компенсатора ОКГ-45 представлены на рис. 112.
Характеристики ТКГ
Наиболее важными характеристиками компенсатора ТКГ являются:
1) характеристика холостого хода при n~ const (рис. 113),
снимаемая при независимом возбуждении;
2) внешняя характеристика £7, £7а, Ркз, 7?кз, Хз, cos <?=/(/) при
п — const (рис. 114), снимаемая
3) скоростная характеристика
£7, £7а, Рк3, 7?кз, Хз, cos =f(n)
при 7= const (рис. 115), снимаемая
также при последовательном воз-
буждении.
при последовательном возбуждении;
ЧнИ Iglal
Рис. 112. Регулировочные характери-
стики компенсатора ОКГ-85/3 при п =
= 1510об./мин., /пг== 3.5 a, wh^==40
витков на полюс.
Рис. 113. Характеристики холостого тока
компенсатора ТКГ-145/2 при == 5 витков
на полюс и различной скорости вращения.
Характеристика холостого хода снимается при питании обмоток
возбуждения ТКГ, соединенных в звезду, от отдельного синхронного
генератора, работающего с пониженным напряжением (рис. 109). Регу-
лировка тока возбуждения ТКГ осуществляется посредством изменения
напряжения синхронного генератора ребстатом в его цепи возбуждения.
Характеристика холостого хода ТКГ позволяет:
1) проверить линейность кривой намагничивания машины;
2) определить величину потерь холостого хода;
Рис. 114. Внешние характеристики компенсатора ТКГ-145/2 при п = 1400 об./мин.,
wBJ0 = 5 и wkJ9 = 5.5 витков на полюс.
Рис. 115. Скоростные характеристики компенсатора ТКГ-
145/2 при /=75 а, ыър — 1 и wK^ = 5.5 витков на полюс.
196
Глава IV. Компенсаторы активных сопротивлении обмоток
АТ
РиС. 116. Схема измерения
Сопротивлений г, г, х ком-
пенсатора ОКГ на перемен-
ном токе.
3) определить потери в стали статора и ротора;
4) оценить влияние короткозамкнутых коммутируемых секций на
величину основного потока машины.
Так как потери холостого хода, а также влияние короткозамкнутых сек-
ций зависят от скорости вращения, то целесообразно опыт холостого хода
произвести при нескольких значениях скорости вращения ТКГ (рис. ИЗ).
Внешняя характеристика является основной рабочей характеристи-
кой ТКГ. Она снимается при включении ТКГ на модельный синхрон-
ный генератор по основной рабочей схеме (рис. 95) и замыкании на-
коротко или внешних зажимов модельного
генератора, или вторичных зажимов повыша-
ющего модельного трансформатора. Во втором
случае условия снятия внешней характеристики
наиболее приближаются к реальным условиям
работы ТКГ в электродинамической модели.
Внешняя характеристика (рис. 114) дает воз-
можность проверить, насколько точно и в каких
пределах изменения тока обеспечивается посто-
янство компенсируемого сопротивления /?кз в
установившемся режиме работы ТКГ. Кроме
того, при снятии внешней характеристики
проверяется отсутствие самовозбуждения и
стабильность работы ТКГ.
Для выяснения влияния скорости вращения
ТКГ на величину компенсируемого сопротив-
ления ^кз снимается скоростная характери-
стика (рис. 115). Снятие ее может производиться
по той же схеме, которая служит и для снятия
внешней характеристики.
По снятым характеристикам (холостого хода,
внешним или скоростным) производится расчет
величин компенсируемого сопротивления 7?кз для
различных чисел витков обмотки возбуждения
и скоростей вращения ротора, на основании
чего составляются таблицы или вычерчиваются графики, которые ис-
пользуются затем для наладки ТКГ при совместной работе их с модель-
ными синхронными генераторами.
Измерение индуктивных сопротивлений
Измерение индуктивного сопротивления обмоток ОКГ производится
вд переменном токе нормальной частоты. Ротор ОКГ затормаживается
и к машине подводится пониженное напряжение от регулировочного
автотрансформатора (рис. 116). При различных токах в цепи ОКГ изме-
ряются мощность, напряжение и ток (положение / переключателя /7)
и по этим данным вычисляются полное, активное и индуктивное сопро-
тивления zKi, rKi и Ха компенсатора ОКГ. Подключая вольтметр и
обмотку напряжения с помощью переключателя П (положение 3 и 2)
к обмотке возбуждения и к обмоткам, расположенным по поперечной
оси, можно найти составляющие сопротивлений обмоток по продольной
и поперечной осям.
Вследствие того, что ОКГ имеет компенсационную обмотку, индук-
тивное сопротивление по поперечной оси оказывается значительно
меньше, чем индуктивное сопротивление по продольной оси.
§ 5. Методы испытания и настройки
197
На величину сопротивлений по продольной оси существенное влияние
оказывают контуры секций, замкнутых накоротко щетками. Так как
число этих контуров и их сопротивление зависит от положения щеток
на коллекторе, то сопротивления zkhz, rKw и xKi<z по продольной оси
машины при различных положениях якоря не остаются постоянными.
Кроме того, вследствие непостоянства переходного сопротивления ще-
точного контакта, влияние короткозамкнутых контуров оказывается
неодинаковым при различ-
ных токах компенсатора и
поэтому сопротивления jzki,
rKi и Xi могут несколько
изменяться при изменении
тока /к.
Измерение сопротивлений
обмоток ОКГ можно про-
извести также, исключив
влияние короткозамкнутых
секций. Для этого щетки
нормальной ширины, пере-
крывающие несколько кол-
лекторных пластин, заме-
няются специальными узкими
медными щетками, каждая
из которых устанавливается
таким образом, чтобы она
соприкасалась только с одной
коллекторной пластиной.
Кроме того, при измерении
сопротивлений обмоток по
продольной оси машины для
исключения влияния корот-
козамкнутых секций якоря
можно поднять щетки. В этих
случаях величина индуктив-
ного сопротивления про-
дольной обмотки компенса-
тора получается больше по
сравнению с тем его значе-
Рис. 117. Активные, индуктивные и полные со-
противления компенсатора ОКГ-85/2 в зависи-
мости от тока компенсатора при п = 0, w^p = 60
витков на полюс.
rd' Xd' Zd — сопРотивления по продольной оси; Xq, Zg —
сопротивления по поперечной оси; rRp Хкр zK^ — суммар-
* *
ные сопротивления при опущенных щетках; гх(£—сопро-
тивления по продольной оси при поднятых щетках.
нием, когда на коллекторе
установлены щетки нормального размера и в обмотке якоря имеются
короткозамкнутые секции.
Опытные зависимости сопротивлений z, г, х от тока /к = if для
компенсатора ОКГ-85/2 приведены на рис. 117.
Измерение индуктивного сопротивления обмоток ТКГ производится
аналогичным способом. Ротор ТКГ затормаживается и через обмотки
машины, соединенные в соответствии с рабочей схемой, пропускается
трехфазный переменный ток от синхронного генератора. Затем произ-
водится измерение мощности напряжения и тока и по этим данным
вычисляются сопротивления zK3, гкз и Лкз обмоток компенсатора.
Следует иметь в виду, что во вращающемся ТКГ индуктивное со-
противление Лкз будет несколько меньше за счет уменьшения индуктив-
ного сопротивления рассеяния роторной обмотки. Индуктивное сопро-
198
Глава IV. Компенсаторы активных сопротивлений обмоток
тивление Акз во вращающейся машине можно определить по данным,
полученным при снятии внешней характеристики ТКГ.
Опытные зависимости £кз, гкз и X&=f(I) для компенсатора ТКГ-145/2
приведены на рис. 118.
Настройка компенсаторов для совместной работы
с модельными генераторами
При наладке совместной работы компенсаторов с модельным син-
хронным генератором нужно предварительно рассчитать требуемые ве-
личины компенсируемых сопротивлений ^Ki и 7?кз в роторной и статор-
Рис. 118. Опытные зависимости
гкз, ZK3=y(Z) прип = 0,
Wep = 5 и wKJ9 = 5.5 витков на по-
люс для компенсатора ТКГ-145/2.
ной цепях. Далее, пользуясь таблицами
(или графиками), в которых приведены
значения 7?Ki и ^кз для различных ско-
ростей вращения и чисел витков обмоток
возбуждения ОКГ и ТКГ, нужно подо-
брать соответствующие схемы соедине-
ния обмоток компенсаторов и их ско-
рости вращения.
Для полученных схем соединения об-
моток ОКГ и ТКГ путем пересчета, про-
изведенного на основании опытных дан-
ных, или посредством дополнительного
опыта находятся значения индуктивных
сопротивлений AKi и Акз компенсаторов
и, исходя из условия моделирования па-
раметров X/ и Xi синхронного генера-
тора, определяются значения добавочных
индуктивных сопротивлений ДА/ и ДА/,
включение которых необходимо для обес-
печения подобия модели и оригинала. В
качестве добавочного индуктивного со-
противления ДА/, включаемого в ротор-
ную цепь модельного генератора, может быть использован однофазный
индукционный регулятор, индуктивное сопротивление которого регули-
руется посредством перемещения ротора относительно статора. В ка-
честве индуктивного сопротивления ДА/ могут применяться индуктивные
катушки, включаемые в линии со стороны высшего напряжения модель-
ного трансформатора.
После сборки схемы модели и включения в нее компенсаторов и
добавочных индуктивностей все машины приводятся в действие и про-
изводится проверка настройки компенсаторов в установившемся номи-
нальном режиме работы модели.
Путем измерения напряжения, тока и мощности компенсаторов опре-
деляются величины компенсируемых сопротивлений ^Ki и /?кз и полу-
ченные значения ^Ki и 7?кз сопоставляются с требуемыми. В случае
несоответствия, производится дополнительная регулировка скорости
вращения или числа витков обмоток возбуждения компенсаторов до
тех пор, пока не будут получены требуемые значения ^Ki и ^кз.
После настройки компенсаторов в статическом режиме работы, для
того чтобы окончательно убедиться в правильности настройки, необхо-
димо проверить работу компенсаторов в динамическом режиме. С этой
целью производится осциллографирование процесса внезапного корот-
$ 5. Методы испытания и настройки
199
кого замыкания модельного генератора, работающего совместно с ком-
пенсаторами. По осциллограммам токов статора (рис. 97) проверяется
отсутствие самовозбуждения компенсатора ТКГ. Посредством обработки
кривых токов статора и ротора /, находятся постоянные вре-
мени Td и Та модельного генератора и сравниваются со значениями
этих постоянных в оригинале. В случае расхождения производится
дополнительная регулировка компенсаторов и осциллографирование про-
цесса внезапного короткого замыкания модельного генератора повто-
ряется.
Настройка компенсаторов считается законченной после того, как
постоянные времени Т'(1 и Т совпадут в модели и оригинале.
Глава V
МОДЕЛИРОВАНИЕ СИЛОВЫХ ТРАНСФОРМАТОРОВ
§ 1. Условия подобия силовых трансформаторов
При моделировании силовых трансформаторов в зависимости от харак-
тера исследований оказывается необходимым выполнение подобия либо
электромагнитных полей, либо основных электрических процессов. В пер-
вом случае требуется осуществление подобия во времени и простран-
стве (Abetti, 1953). Силовые трансформаторы, предназначенные для
электродинамической модели энергосистем, можно проектировать не соб-
людая подобия магнитных полей. Такие трансформаторы должны подобно
воспроизводить процессы только во времени.
Поскольку электродинамические модели энергосистем, как правило,
работают при стандартной частоте, то рассмотрим условия подобия
силовых трансформаторов при натуральном масштабе времени.
Как известно, переходные процессы во времени симметричного
ненасыщенного в общем случае трехобмоточного трансформатора под-
чиняются следующей системе операторных уравнений:
«1 = (п -+- pxj) h -+- (р) (z\ -+- i2 н- i3),
—«г = (r2 -+- px2) i2 H- Zv (p) (z'i -+- i2 -+- z3),
—«3 = (гз -+- px3) i3 -+- Z^ (p) (z\ -4- i2 z3),
где и, i — мгновенные значения напряжений и токов соответствующих
фазных обмоток, г, х — активные и индуктивные сопротивления фазных
обмоток, (р) — эквивалентное операторное полное сопротивление
намагничивающего контура, р — символ дифференцирования по времени.
Из условия тождественности вышеприведенной системы уравнений
для модели и оригинала получаются следующие условия подобия сило-
вых трансформаторов.
Силовые трансформаторы будут подобными, если в относительных
единицах равны соответственно для модели и оригинала:
1) индуктивные сопротивления обмоток трансформаторов от полей
рассеяния;
2) индуктивные сопротивления намагничивающих контуров;
3) активные сопротивления фазных обмоток;
4) потери в стали магнитопроводов.
Известно, что условия подобия, справедливые для линейных систем,,
могут быть распространены и на нелинейные системы при дополнитель-
ном требовании совпадения соответствующих относительных характе-
ристик нелинейных величин.
£ 2. Особенности проектирования
201
В рассматриваемом случае следует потребовать совпадения в отно-
сительных единицах зависимостей хи=/(£7), где U—напряжения
на намагничивающих контурах.
Отметим, что индуктивные сопротивления, обусловленные полями
рассеяния, достаточно точно можно считать не зависящими от насыще-
ния стали магнитопровода.
При исследовании динамической устойчивости электропередач ока-
зывается необходимым также соблюдение равенства относительных
потерь короткого замыкания. Как известно, потери короткого замыка-
ния состоят из потерь в электрических сопротивлениях обмоток и доба-
вочных потерь в меди и в баке трансформатора.
Условия подобия силовых трансформаторов удобно выражать в отно-
сительных единицах через следующие величины, которые приняты
в расчетной практике, так как они удобно определяются эксперимен-
тально в изготовленных трансформаторах:
1) равенство напряжений коротких замыканий между соответствую-
щими зажимами обмоток трансформатора — пк;
2) равенство потерь коротких замыканий — рк;
3) равенство электрических сопротивлений соответствующих фазных
обмоток — г0;
4) равенство потерь холостого хода — р05
5) совпадение характеристик холостого хода — UQ = /(Ц).
К этому следует еще добавить следующие очевидные условия:
6) одинаковое соединение фаз обмоток трансформатора;
7) однотипность магнитных систем модели и оригинала.
Условия 6 и 7 являются необходимыми для обеспечения равенства
сопротивлений нулевой последовательности.
В заключение отметим, что условия подобия для трансформаторов
можно было бы сформулировать также в виде требования идентичного
распределения соответствующих токов и напряжений в обмотках модель-
ного и натурного трансформаторов.
§ 2. Особенности проектирования модельных силовых
трансформаторов
При проектировании модельных трансформаторов встречается ряд
принципиальных трудностей, которые затрудняют удовлетворение выше-
указанных условий подобия.
Если рассматривать ряд геометрически подобных трансформаторов
при условии постоянства индукции в магнитопроводе, средних плот-
ностей тока в обмотках и их чисел витков, то, как это показано
в работе М. П. Костенко и Е. Д. Трейвиша (1946), получается, что
при уменьшении геометрических размеров в К раз номинальная мощ-
ность уменьшается в Ю раза. При этом относительные значения потерь
короткого замыкания, тока и потерь холостого хода возрастут в К раз.
В то же время напряжение короткого замыкания и относительный вес
выемной части трансформатора уменьшаются соответственно в К и
К3/< раза.
Для подтверждения указанных закономерностей на рис. 119—121
проведено сравнение между сплошными кривыми, построенными для
геометрически подобных трансформаторов, и прерывистыми кривыми,
проведенными как средние по каталожным данным для параметров сило-
вых трехфазных двухобмоточных трансформаторов типов ТМ и ТДГ..
202
Глава V. Моделирование силовых трансформаторов
По оси абсцисс отложены мощности в логарифмическом масштабе.
Необходимые данные взяты из каталогов на силовые трансформаторы
СССР №№2104 и 2101. При расчете сплошных кривых за основу был
принят силовой трансформатор ТМ-1000/35 с номинальной мощностью
1000 ква, имеющий следующие параметры (в °/0):
^к=1.5, нк = 6.5, /о = 5.5, р0 = 0.51.
Как следует из рис. 119—121, указанные закономерности довольно
^хорошо согласуются с данными нормальных трансформаторов. Имеющие
ных потерь и напряжения короткого
замыкания от логарифма номиналь-
ной мощности.
тока холостого хода и логарифма веса
выемной части трансформатора от
логарифма номинальной мощности.
место некоторые отклонения для трансформаторов с мощностью
меньше 100 ква вызваны снижением их удельных электромагнитных
нагрузок по сравнению с трансформаторами больших мощностей. Отме-
тим также, что напряжения коротких замыканий в каталожных силовых
трансформаторах выдерживаются постоянными в соответствии со стан-
дартом. Последнее достигается главным образом за счет регулирования
размеров каналов между обмотками.
Из рис. 119 следует, что получение малых потерь короткого замы-
кания в малогабаритных трансформаторах, равными, в относительных
единицах потерям мощных трансформаторов возможно только за счет
значительного снижения электрических нагрузок. Однако выбор транс-
форматоров сравнительно малой мощности и снижение их электрических
нагрузок приводит при проектировании модельных трансформаторов,
в частности, к значительному понижению напряжения короткого замы-
§ 2. Особенности проектирования
203
кания. С целью его повышения до значений, имеющих место в мощных
трансформаторах — 13—17%, оказывается необходимым принятие искус-
ственных конструктивных мер. Одной из таких мер является специаль-
ное распределение обмоток высшего и низшего напряжений, при кото-
ром их намагничивающие силы на каждом сердечнике оказываются не-
уравновешенными и, таким образом, разность этих намагничивающих
сил вызывает значительный дополнительный магнитный поток рассеяния.
J____!___I___I---1---1---£---1---i---г
1 г з 4 5
Рис. 122. Трансформаторы с повышенным
напряжением короткого замыкания.
а — при цилиндрическом типе обмоток; б — при
чередующемся типе обмоток; 1 — обмотка высшего
напряжения; 2 — обмотка низшего напряжения.
Рис. 121. Зависимости относи-
тельных потерь холостого хода
для силовых трансформаторов с
номинальным напряжением 10 и
35—110 кв от логарифма номи-
нальной мощности.
Во избежание концентрированных местных магнитных полей следует
стремиться к равномерному расположению катушек разных напряжений
по сердечнику. В противном случае увеличиваются добавочные потери
короткого замыкания.
На рис. 122 показаны возможные способы получения повышенных
полей рассеяния трансформаторов соответственно для случая обмоток
цилиндрического и чередующегося типов. В трансформаторах, которые
были сделаны для электродинамических моделей дальних электропере-
дач, действующих в Институте электромеханики АН СССР, за счет
комбинированного расположения катушек оказалось возможным полу-
чить напряжение короткого замыкания в пределах 6—22% без пере-
шихтовки магнитопровода, что сделало излишним включение последо-
вательных индуктивных катушек, которые вносят дополнительные актив-
ные сопротивления, соизмеримые с собственными сопротивлениями
обмоток трансформатора.
204
Глава V. Моделирование силовых трансформаторов
Неплохие результаты в создании модельных трансформаторов
с повышенными индуктивными сопротивлениями были получены Инсти-
тутом постоянного тока в Ленинграде за счет использования магнитных
шунтов. Шунт помещается в канале между обмотками разных напряже-
ний. Данным способом можно получить необходимые напряжения корот-
кого замыкания как для однофазных, так и для трехфазных трехстер-
жневых трансформаторов.
При проектировании модельного трансформатора оказывается затруд-
нительным обеспечить одновременно совпадение относительных харак-
теристик холостого хода и равенство относительных потерь короткого
замыкания. Удается получить либо совпадение потерь короткого замы-
кания и действующих значений токов холостого хода при соответствую-
щих номинальных напряжениях, либо подобие характеристик холостого
хода при нарушении равенства потерь короткого замыкания.
Причина указанных затруднений заключается в следующем. Как
указывалось выше, для получения малых потерь короткого замыкания
приходится значительно уменьшать мощность модельного трансформа-
тора (в 5—8 раз) по сравнению с габаритной, т. е. с той мощностью,
которая получается из условия полного использования трансформатора
в тепловом отношении. При этом относительные значения тока холостого
хода и потерь в стали, которые для маломощных трансформаторов
по сравнению с мощными и так являются в несколько раз большими
(рис. 120, 121), в случае уменьшения электрических нагрузок обмоток
еще больше увеличиваются.
Применение холоднокатаных сталей, например марки Э310, с тол-
щиной листов 0.35 мм вместо обычно применяемой в силовых транс-
форматорах марки Э42 с той же толщиной листов дает снижение в сред-
нем намагничивающего тока на 50%, а потерь в стали на — 25%, что,
однако, является недостаточной мерой.
Поэтому приходится уменьшать индукцию в магнитопроводе модельного
трансформатора до значений 0.85—1.0 вб/м2. Естественно, что при
таких индукциях обеспечить хорошее совпадение относительных харак-
теристик холостого хода модели и оригинала, индукция которого в маг-
нитопроводе составляет 1.5—1.75 вб/м2, не представляется возможным.
В силу этого трансформаторы для электродинамических моделей
целесообразно разделить на следующие два типа:
1) трансформаторы с малыми потерями короткого замыкания, но
с нарушением подобия характеристик холостого хода;
2) трансформаторы с немоделированными потерями короткого замы-
кания, но с выполнением подобия характеристик холостого хода, по-
строенных в относительных единицах по пиковым значениям тока.
Первый тип используется при исследовании динамической устойчи-
вости электропередач, второй может найти применение при анализе ре-
жимов линий, где подобие характеристик холостого хода модели и ори-
гинала окажется необходимым.
Что касается величины потерь холостого хода модельного трансфор-
матора, то последняя может быть допущена в 4—6 раз большей, чем
в оригинале без существенной погрешности в опытах по исследованию
динамической устойчивости синхронных генераторов на электродинами-
ческих моделях.
При исследовании явлений феррорезонансных колебаний в линии
электропередачи оказывается необходимым точное моделирование не-
линейных характеристик и всех потерь включенных устройств. Трансфор-
§ 3. Выбор основных размеров модельных трансформаторов первого типа 205
маторы, строго удовлетворяющие этим требованиям, в лабораторных
^габаритах не могут быть осуществлены.
При создании трансформаторов второго типа целесообразно идти по
пути применения ленточных сердечников или сборки их из штампован-
ных колец. Обмотки наматываются „впротяжку" проводом ЛВДО и рас-
пределяются по тору так, чтобы создать неуравновешенные намагничи-
вающие силы между обмотками разных напряжений для получения
повышенных полей рассеяния.
§ 3. Выбор основных размеров модельных трансформаторов
первого типа
Прежде чем перейти к изложению методики выбора размеров модель-
ного однофазного трансформатора, приведем вывод ряда основных со-
отношений, необходимых для указанной цели.
Основными размерами трансформатора являются: расчетный диаметр
сердечника Z), высота окна магнитопровода /7, ширина обмотки Ь (вклю-
чая расстояние между катушками и сердечником). Примем, что электри-
ческие сопротивления двух фазных обмоток разных напряжений г, при-
веденные к одной ступени трансформации, равны между собой. Тогда
электрическое сопротивление трансформатора в относительных единицах
/^н
равно rQ—2r-~. Указанное условие в первом приближении имеет место
U н
и для натурных трансформаторов.
Учитывая, что сопротивление обмотки в омах при температуре 35° С
выражается, как
I
г = 1.08-IO"4
Siqa ’
тде ZCp.— длина среднего витка обмотки (см), q — поперечное сечение
эффективного проводника обмотки (см2), а — число параллельных ветвей,
а также используя известные выражения для напряжения
U — 4A4fwi®
и магнитного потока в веберах
-104,
получаем
_ 3.42 • 10-2 D ь Рн
Го— ^fBcaq ' D2 'ия'
где Вс — магнитная индукция в сердечнике (вб/м2), ас — коэффициент
использования поперечного сечения сердечника, в среднем равный 0.81.
Таким образом, находим
£> = с-ь \/с2-*-2с6, (1)
106 Рн
где с = 1.71 —ТБ----• тг •
Из вышеуказанных выражений для U и Ф получаем число витков
обмотки
w1 2870 G D2,
С* с
(2)
206
Глава V» Моделирование силовых трансформаторов
но так как q-^ = H$b (рис. 122), где X — коэффициент заполнения медью
окна магнитопровода, равный в среднем 0.37, то после алгебраических
преобразований получаем выражение для определения высоты окна маг-
нитопровода:
я"=2870^-да- <3>
Относительный намагничивающий ток трансформатора, выраженный
в процентах, можно представить как сумму трех составляющих токов:
на сердечники /с, на ярма /я и на „стыки" Д, которые равны:
= (4>
Л = 2.37 D2(D -+- b), (5>
ц = (6)
где g— удельная намагничивающая мощность при соответствующих ин-
дукциях (ва/кг), кя — отношение активных сечений ярма и сердечника.
Формулы для относительных потерь в стали при холостом ходе
трансформатора аналогичны формулам (4)—(6), если под g понимать
удельные потэри в стали в вт/кг.
Предварительный выбор основных размеров может быть произведен
нижеописанным способом. Сразу же отметим, что поскольку трансфор-
матор является составной частью электродинамической модели энерго-
системы, то его масштабная мощность, напряжения высшей и низшей
ступеней оказываются заданными.
Для получения малых значений тока холостого хода величины маг-
нитных индукций в магнитопроводе рекомендуется принимать в пределах
0.85—1.0 вб/м2. При больших значениях индукций удельные намагничи-
вающие мощности в стали магнитопровода и в „стыке" при сборке его
„внахлестку" для стали Э310 с толщиной листов 0.35 мм сильно уве-
личиваются. Диаметр сердечника и высота окна магнитопровода опре-
деляются согласно формулам (1) и (3).
Сечение эффективного проводника обмотки низшего напряжения
желательно ограничить величиной порядка 1.25 X 1.25 см, так как с уве-
личением размеров проводника для трансформатора с большими полями
рассеяния возможно увеличение добавочных потерь в обмотках. Правда,
в случае необходимости может быть применена транспозиция проводов,
что, однако, значительно усложняет намотку обмотки. Поперечное се-
чение проводников обмотки высшего напряжения следует выбрать
равным сечению проводников обмотки низшего напряжения, деленному
на коэффициент трансформации. Это обеспечит равенство приведенных
к одной ступени трансформации сопротивлений обмоток разных напря-
жений, что в первом приближении имеет место и для натурных трансфор-
маторов.
При выборе ширины обмотки необходимо иметь в виду, что при
одном и том же весе меди электрическое сопротивление обмоток
получается тем меньше, чем меньше размер Ь, При этом выбор малой
$ 3. Выбор основных размеров модельных трансформаторов первого типа 207
ширины обмотки увеличивает ее высоту Н, что является целесообразным
при применении обмоток цилиндрического типа. Для обмоток чередую-
щегося типа малая ширина приводит к большому количеству катушек
по высоте и, следовательно, растет число междукатушечных паек,
а также суммарная толщина изоляции катушек по высоте сердечника.
В то же время малое число катушек ограничивает возможности со-
ставления схемы обмотки, которая обеспечивала бы широкое регулиро-
вание напряжения короткого замыкания.
Индуктивные сопротивления обмоток в случае модельных трансфор-
маторов с повышенными полями рассеяния не могут быть рассчитаны
Рис. 123. Картина силовых линий магнитного поля рассеяния
трансформатора МТО-8.34 в режиме короткого замыкания.
по обычным формулам для нормальных трансформаторов, так как первые
имеют иную картину магнитных полей рассеяния. На рис. 123 показаны
силовые линии поля рассеяния, которые были получены с помощью
железных опилок для трансформатора типа МТО-8.34 в режиме корот-
кого замыкания на номинальных отводах АпХ (рис. 124). Для расчета
относительного индуктивного сопротивления короткого замыкания одно-
фазного трансформатора может быть предложена приближенная фор-
мула (7), при выводе которой были сделаны следующие допущения:
1) разность намагничивающих сил между обмотками разных напряже-
ний распределена равномерно по площади их поперечного сечения;
2) магнитные силовые линии внутри обмоток замыкаются по прямо-
угольному пути, а вне обмоток — по полуокружностям, опираясь на
боковую часть магнитопровода, как это показано на рис. 125;
3) потокосцепления от силовых линий, которые замыкаются между
наружными торцами ярем, при выводе формулы не принимаются во вни-
мание; они учитываются в конечном результате опытным коэффициентом,
который оказался близким к 1.2:
хж = (х1ч-1.2 г>), (7)
208
Глава И. Моделирование силовых трансформаторов
где
х, = 1.54-10-‘|Г;
1 Ч- —- ин
2Ь0
х2 = 3.02 • 10'4 IF2 [Z> In к ч- Н(к — 1)] ;
здесь обозначено: хх и х2— индуктивные сопротивления в процентах
соответственно от внутренних и внешних полей рассеяния относительно
обмоток; — эквивалентное
число витков, равное разности
приведенных к одной ступени
А.
А.
трансформации чисел витков
катушек высшего и низшего
напряжений одного сердечника;
к
Ац^//////7^
Рис. 125. Расчетная картина магнит-
ного поля рассеяния обмоток транс-
форматора МТО-8.34,
1>ис. 124. Схема соединений катушек одно-
фазного трансформатора МТО-8.34.
k — -^ — отношение высоты магнитопровода к высоте обмотки (рис. 122).
На примере выбора основных размеров трансформатора МТО-8.34
покажем последовательность пользования вышеуказанными формулами.
Пример расчета однофазного модельного
трансформатора МТО-8.34
В соответствии с данными большой электродинамической модели
электропередачи, действующей в Институте электромеханики АН СССР,
трансформатор должен иметь масштабную мощность Рн = 8.34 ква и на-
пряжения обмоток j-r- = 1265/230 в.
Примем по соображениям, указанным в § 3, поперечное сечение
обмотки низшего напряжения (?н = 1.1 см2, индукцию в сердечнике маг-
$ 4, Модельные силовые трансформаторы моделей ИЭМ АН СССР 209
нитопровода 2?с = 1.0 вб/м2 и размер 6 = 9.5 см (рис. 122#). Для того
чтобы модельный трансформатор имел омическое сопротивление г0 рав-
ное 0.3%, необходимый расчетный диаметр D сердечника, согласно
формуле (1), должен быть равен 15.5 см, а соответствующая высота
окна магнитопровода по формуле (3) /70 = 21 см. При расчете было
принято Х = 0.37, ас = 0.81.
Для обеспечения места дополнительным катушкам, которые необхо-
димы для ^повышения высшего напряжения в \/2 раза, высота окна маг-
нитопровода была увеличена до 25 см. Поскольку межосевое расстоя-
ние МО = D -f-26, то МО = 34.5 см. Число витков обмоток соответ-
ствующих напряжений определяется согласно формуле (2). Подставляя
необходимые данные, получим wH=69 витков, wB=380 витков (с уче-
том же дополнительных катушек будет w'b = 532 витка).
Если катушки высшего напряжения намотать тройным проводом
1.35X5.1
ПЬД 5 а/ ? а катушки низшего напряжения намотать проводом
™ - 2*26 X 64 .
11ЬД ~2 7з на широкое ребро по восемь проводов „впараллель ,
то может быть составлена схема обмоток, которая показана на рис. 124.
Полученных выше данных достаточно для проведения полного рас-
чета трансформатора, что может быть сделано по нормальной методике
расчета силовых трансформаторов. Исключение составляет определение
индуктивных сопротивлений рассеяния обмоток модельного трансформа-
тора при коротком замыкании. Для этого случая выше были приведены
формулы (7). Например, для МТО-8.34 при коротком замыкании на но-
минальном отводе АпХ (рис. 124), эквивалентное число витков полу-
чается равным «?э = 38 X 6 = 228.
Согласно формуле (7), находим
Хм = 2 (0.58 ч-и1.2 • 4.7) = 12.5%.
При этом ширина обмоток 60 = 7.5 см, £ = 2.35. Намагничивающий
ток трансформатора, определенный через свои составляющие по фор-
мулам (4)—(6), равен 4.3%. Компоненты намагничивающего тока соста-
вили: на сердечники 1.6%, на ярма 1.9%, на „стыки" 0.8%. Принима-
лись следующие индукции в сердечнике и ярме: Z?c —0.98 вб/м2;
£я = 0.82 вб/м2.
§ 4. Модельные силовые трансформаторы, используемые
в электродинамических моделях энергосистем ИЭМ АН СССР
По мере развития электродинамической модели в Институте электро-
механики АН СССР были созданы различные модельные трансформа-
торы. В первых из них не обеспечивалось достаточно точного соответ-
ствия параметрам мощных трансформаторов, поэтому они являлись
моделями первого приближения. Однако при исследовании на электро-
динамической модели процессов, для которых известное несоответствие
между параметрами модельных и натурных трансформаторов являлось
несущественным, эти трансформаторы позволили провести необходимые
исследования с достаточной степенью точности. Так, например, при
исследовании работы дальней электропередачи на станцию большой
мощности трансформатор приемной системы можно моделировать в до-
статочной мере приближенно.
210
Глава V. Моделирование силовых трансформаторов
Первоначально были взяты стандартные трехфазные трансформаторы
типа КП мощностью 240 ква и с напряжением обмоток 6000/230 в.
Основные данные модельного трансформатора первого приближения
типа КП даны в табл. 25. За счет частичного использования катушек
Таблица 25
Тип трансформатора (ква) и. (в) и2 (в) “к (%) Го (%) Рк (%) Ро (%) /о (%) Вес меди (кг) Вес стали (кг)
КП 30 1265 230 11.8 1.27 1.92 0.72 1.24 310 480
ТМ-30 30 1265 230 2.89 0.847 0.876 1.48 0.72 120 200
Примечание. Сопротивления даны при температуре 20° С.
высшего напряжения и переключения катушек низшего напряжения
(применяются обмотки чередующегося типа) был получен нужный коэф-
фициент трансформации и уменьшен до необходимой величины намагни-
чивающий ток. При этом индук-
Рис. 126. Вид спереди модельного однофаз-
ного трансформатора МТО-8.34.
тивные сопротивления рассея-
ния получились достаточно
высокими. Трансформатор КП
трехстержневого типа, поэтому
параметры нулевой последова-
тельности не соответствуют
параметрам нулевой последо-
вательности мощных трансфор-
маторов в том случае, когда мо-
делированию подлежит группа
однофазных трансформаторов.
Активное сопротивление корот-
кого замыкания получается уве-
личенным по сравнению с ори-
гиналом.
Были изготовлены также два
трехфазных модельных транс-
форматора типа ТМ-30 на базе
стандартных трансформаторов ТМ-100. Основные данные трансформа-
тора первого приближения ТМ-30 даны в табл. 25. Так как индуктив-
ное сопротивление оказалось недостаточным, то к таким трансформаторам
необходимо добавлять индуктивные катушки высокой добротности.
Дальнейшие работы на модели потребовали более точного подобия
трансформаторов в некоторых режимах, например при коротких замыка-
ниях на шинах высокого напряжения передающей станции. Для прове-
дения работ по исследованию дальних электропередач с подпорными
синхронными компенсаторами оказались необходимыми трансформаторы
малой мощности (1—3.5 ква). Это привело к необходимости создания
специальных трансформаторов, которые бы более точно моделировали
мощные однофазные трансформаторы. Такие трансформаторы были
спроектированы и изготовлены. Описание их конструкции приводится
ниже.
$ 4. Модельные силовые трансформаторы моделей ИЭМ АН СССР 211
Внешний вид модельного однофазного трансформатора типа МТО-8.34
представлен на рис. 126. При соединении трех однофазных трансфор-
маторов в группу по схеме Yo/A—11 они моделируют натурную тран-
сформаторную группу передачи Волжская ГЭС—Москва при номинальной
мощности 25 ква с напряжениями 2165/230 в.
Рис. 127. Магнитопровод трансформатора МТО-8.34.
Расположение катушек на сердечниках модельного трансформатора
показано на рис. 124. Обмотка высшего напряжения, кроме 10 основ-
ных катушек (ДНЛ), имеет четыре дополнительных, которые позволяют
получить напряжение в \/ 2 раза больше номинального. Это дает возмож-
ность исследовать параллельную работу двух генераторов без измене-
ния параметров модельной линии электропередачи, а также увеличивает
пределы регулирования напряжения короткого замыкания без переших-
товки магнитопровода. Катушки высшего напряжения намотаны по 38 вит-
212
Глава V. Моделирование силовых трансформаторов
ков каждая, тройным проводом ПБД
1.35X5.1
1.62X5.37
. Катушки низшего напря-
*7 1 пня 2.26X6.4
жения состоят из / витков, которые намотаны проводом 11ЬД
У /\ О. / О
на широкое ребро по восемь штук „впараллель". Вес меди обмоток
трансформатора, включая дополнительные катушки, составляет 130 кг.
Магнитопровод трансформатора собран „впереплет" из листовой
лакированной стали марки Э310 с толщиной листов 0.35 мм. Вес стали
магнитопровода 183 кг. Крепление
магнитопровода осуществлено с по-
мощью деревянных консолей, стя-
нутых латунными шпильками, на что
следует обратить внимание, так как
наличие сплошных стальных частей
значительно увеличивает потери ко-
роткого замыкания. Магнитопровод
трансформатора МТО-8.34 показан
на рис. 127, а на рис. 128 даны
опытные характеристики холостого
хода. Охлаждение трансформатора
воздушное естественное.
В табл. 26 приведены основные
параметры натурных и модельных
трансформаторов (в °/0). Из табл. 26
следует, что параметры модельного
трансформатора достаточно хорошо
/4 6 8 10 12 /4
Рис. 128. Опытные характеристики холо-
стого хода трансформатора МТО-8.34.
1 — в функции от действующего значения тока;
2—в функции от пикового значения тока.
соответствуют параметрам мощных
трансформаторов. Как указывалось
раньше, значения потерь в режиме
холостого хода р0 могут быть допу-
щены повышенными.
Опытные данные для различных
схем соединений приведены в табл. 27.
Примененное в табл. 27 обозначение схем соединений катушек (рис. 124)
расшифровывается следующим образом. Две крайние буквы показывают
начало и конец обмотки, а средние указывают соединение между груп-
пами катушек, расположенных на разных сердечниках.
Сравнение относительных характеристик холостого хода модельного
трансформатора и понижающего трансформатора электропередачи
Волжская ГЭС—Москва дано на рис. 129. По оси абсцисс отложены
пиковые значения тока холостого хода. Укажем, что относительное
Таблица 26
Мощность го Рк “к /о Ро
123—82 тыс. ква . . 0.2—0.4 0.33 —0.56 13—15 3.1—4.5 0.3-0.56
8.34 ква 0.274 0.515-0.65 12.5 4 1.6
3.5 0.388 0.43 —0.565 5.5—17.4 3.21 1.9
Примечания. 1. Сопротивления для модельного трансформатора даны при t = 20° С. 2. Приве-
дены действующие значения токов холостого хода.
1 Одна катушка низшего напряжения имеет 6 витков.
§ 4. Модельные силовые трансформаторы моделей. ИЭМ АН СССР 213
Таблица 27
Ц, (в) *к (°м) гк (ом) Гп (ом)
А2-А"А'—X .... 7.72 1775 37.2 1.95 0.878
X .... 7.15 1645 38.7 1.89 0.779
А’-Х 6.60 1518 40 1.78 0.688
АВ-ХА"-А2. . . . 6.60 1518 22.5 1.33 0.688
А2-А_аА"-Х . . . 6.05 1392 17.1 1.11 0.601
А\—А!А"—Х' .... 6.05 1392 43 1.81 0.601
Ау-А"Ая—X. . . . 6.05 1392 23.6 1.23 0.601
5.5 1265 24.8 1.15 0.527
Аг-А^''-X' . . . 4.95 1138 26 8 1.13 0.444
А^-Х 4.95 1138 19.1 0.972 0.444
А^-A'A''-Ai . . 4.40 1012 22.7 1.24 0.374
А_2-А' 3.85 886 23.8 1.15 0.309
А_2-АВА"-А2. . . 3.85 886 10.5 0.736 0.309
А_2-ХА2-А" . . . 3.85 886 3.39 0.519 0.309
A^-AiX-A" . . . 3.30 759 3.48 0.44 0.249
А_2—Ав 2.75 633 11.4 0.57 0.194
А-2-Х 2.75 633 3.9 0.394 0.194
Примечания. 1. Сопротивления даны при температуре 2(Г С. 2. Обмотка низшего напряжения
имеет 69 витков, be сопротивление постоянному току составляет С.СС88 ол. 3. Г ринг ты следующие обо-
значения: kr — коэф рициент трансформации по напряжению; 17 в—напряжение обмотки высшей стороны;
хк» гк — полное и актитное сопротигление короткого замыкания; г0—сопротивления обмоток постоян-
ному току, приведенные к стороне высшего напряжения.
действующее значение тока холостого хода оригинала при номинальном
напряжении составляет 0.04 д. е., при коэффициенте формы кривой,
равном 2.2.
Потери холостого хода трансформатора МТО-8.34 № 955634 при
номинальном напряжении 230 в составили 134.7 вт. Опытные данные
показали, что имеет место квадратичная зависимость потерь холостого
хода от напряжения в широком диапазоне его изменения. Осциллограммы
напряжений и токов режимов холостого хода и короткого замыкания
модельного трансформатора МТО-8.34 показаны на рис. 13Q.
В качестве номинальных данных однофазного трансформатора типа
МТО-3.5 принято: мощность 3.5 ква, напряжения обмоток высшего и
низшего напряжений 1265/230 в, токи 2.75/15.2 а.
Модельный трансформатор МТО-3.5 по внешнему виду похож на
трансформатор МТО-8.34 (рис. 126).
Основные размеры трансформатора следующие: диаметр сердечника
12.7 см, высота окна магнитопровода—33.5 см, расстояние между
осями сердечников — 31 см. Активное сечение сердечника — 97.8 см ,
ярма —106 см2. Магнитопровод собран „впереплет“ из листовой марки-
рованной стали Э-310 с толщиной листа 0.35 мм. Вес стали 135 кг.
Магнитопровод трансформатора показан на рис. 131. Параметры
модельного трансформатора МТО-3.5 приведены в табл. 26. В транс-
214
Глава К. Моделирование силовых трансформаторов
форматорах МТО-3.5 большое напряжение короткого замыкания полу-
чается, так же как в трансформаторах МТО-8.34, за счет специального
расположения катушек обмоток разных напряжений по сердечникам.
Рис. 129. Характеристики холостого хода для мо-
дельного трансформатора МТО-8.34 (7) и для по-
нижающего трансформатора ЛЭП (2).
Рис. 130. Осциллограммы режимов модельного трансформатора МТО-8.34.
а — напряжение и ток холостого тока трансформатора; б—напряжение и ток при
внезапном коротком замыкании с напряжением 230 в.
На рис. 132 показано расположение катушек обмоток высшего (они
заштрихованы) и низшего напряжений по сердечникам и схема их сое-
динений. Катушки высшего напряжения (14 катушек) намотаны на 66 вит-
1.35 X 5.1
ков каждая двойным проводом ПБД 165Х 5*4 ’ катушки низшего напря-
§ 4. Модельные силовые трансформаторы моделей ИЭМ АН СССР 215
3 8 12 5
жения (5 штук) имеют 30 витков каждая, провод ПБД 12*3 ’ ®ес
провцдов обмоток 115 кг.
По сравнению с трансформатором МТО-8.34 схема МТО-3.5 имеет
большее число катушек и отводов. Для получения номинального коэф-
Рис. 131. Магнитопровод трансформатора МТО-3.5.
фициента трансформатора, равного 5.5, необходимы только десять кату-
шек высшего напряжения и четыре — низшего. С помощью дополни-
тельных четырех катушек высшего напряжения и одной катушки низшего
напряжения оказывается возможным осуществить широкое регулирование
коэффициента трансформации и величины напряжения короткого замыка-
ния, или, что то же самое, полного сопротивления короткого замыкания.
В табл. 28 приведены сопротивления короткого замыкания — полное
216
Глава V, Моделирование силовых трансформаторов
Таблица 28
Номер схемы Схема соединения катушек ДГ катушек высшего напряжения Як (ом) Гк (ом)
высшее напряжение низшее напряжение
1 Л2-*1Лб-*4 ai— 3 25.3 2.53
2 Ai—XiAi—Xi ai—а?1 3.5 28.5 1.96
3 А%—X^Ai—Л® Qi a?i 4 32.65 2.49
4 «1—^1 4.5 38.5 2.54
5 Az-XqAq-Xq ai—^1 5 43.8 3.38
6 А 2—Л1Л5—Xq a<2,—x2 5.5 55.5 2.88
7 Ai—XyAi—Xi a2—x2 6 59.8 2.31
8 Ai-X^-Xt (7 2—x2 6 79.4 2.58
9 Az—X3A3—Xq a 2—#2 7.5 93.4 3.28
Примечания. 1. Коэффициент трансформации равен 5.5. 2. Базисное сопротивление 457 ом»
3. Сопротивления обмоток высшего и низшего напряжений, измеренные на постоянном токе, соответст-
венно равны 0.680 и 0.036 ом. Таким образом, сопротивление обмоток, отнесенное к стороне высшего
напряжения г0 =1.77 ом. 4. Ток холостого хода при 230 в составляет 3.21%.
Таблица 29
№№ п.п. КоЕф фИ- циент транс рор- мации «К (ом) Число возможных вариантов №№ п.п. Коэффи- циент трансфор- мации «к (ом) Число возможных вариантов
1 7.7 49.9 —112 2 18 6.17 56.9 1
2 7.42 44 —113 5 19 5.94 49.4 —50.6 2
3 7.15 39.2 —112.5 6 20 5.72 43.6 —56.4 3
4 6.88 40 —100.9 7 21 5.5 38.5 —50.1 4
5 6.6 26.9 —105.5 10 22 5.28 33.4 —58 3
6 6.325 25.5 —106.9 13 23 5.06 28.9 —55.6 7
7 6.05 26.9 —106.8 16 24 4.84 29 —57 7
8 5.78 24.1 —100.9 13 25 4.62 27.5 —57.5 7
9 5.5 25.3 — 93.4 Ц 26 4.18 28.1 —49.4 5
10 5.225 23.8 — 80.6 10 27 4.4 26.8 —50.7 4
11 4.95 23.6 —101.1 6 28 3.96 26.7 —67.2 3
12 4.67 25.5 —100.8 9 29 3.74 58.9 —69.3 2
13 4.42 8.4 —101 8 30 3.52 7.83—64.8 4
14 4.125 11 — 90.1 8 31 3.3 10 -57.2 5
15 3.85 35.1 — 76.8 6 32 3.08 37.4 —49.6 3
16 3.58 8.1 — 66.9 8 33 2.86 32.2 —64.8 4
17 3.3 4,16— 55.9 8 34 2.64 1.08—36.6 5
Примечания. 1. Для №№ ]—17 число катушек низшего напряжения равно 4, ток холостого
хода при напряжении 230 в — 0.488 а. 2. Для №№ 18—34 число катушек низшего напряжения равно 5, ток
холостого хода при напряжении 230 в — 0.289 а.
zK и активное гк, при коэффициенте трансформации 5.5. Здесь же ука-
зана разность намагничивающих сил А/7 на сердечнике, которая для
удобства выражена эквивалентным числом катушек высшего напряжения.
Из приведенных в табл. 28 данных видно, что полное сопротивление
короткого замыкания при коэффициенте трансформации 5.5 может быть
получено в пределах 5.5—20.4% при довольно плавном ступенчатом
изменении своей величины.
В табл. 29 приведены возможные крайние значения полного сопро-
тивления короткого замыкания для различных коэффициентов трансфор-
^3 ^4 ^6
Рис. 132. Схема соединений катушек однофаз-
ного трансформатора МТО-3.5.
Рис. 133. Картина силовых линий магнитного поля рассеяния транс-
форматора МТО-3.5 в режиме короткого замыкания (к схеме № 2).
218
Глава V. Моделирование силовых трансформаторов
мации; дано также число возможных вариантов при каждом коэффи-
циенте трансформации внутри приведенных крайних значений полного
сопротивления короткого замыкания zK.
Потоки рассеяния модельного трансформатора рассматриваемого типа
удобно разделить на внешние, которые сцепляются со всеми катушками,
Рис. 134. Картина силовых линий магнитного поля рассеяния транс-
форматора МТО-3.5 в режиме короткого замыкания (к схеме № 7)
и внутренние, имеющие частичное сцепление. На рис. 133 и 134 пока-
зано магнитное поле рассеяния для схем №№ 2 и 7 (табл. 28), полу-
ченное с помощью мелких железных опилок. На рис. 135 приведено
а г ~| ,
ьшжз Y////A7/7/A
WMtyWA 1 - 1
। ! ।
1 । ]
6
C=F=J
г ;т'" / i
L _
Ш///Л
L-__L_L'_I
I---г---1
I 1 ..1
Рис. 135. Расположение катушек на сердечниках.
а — схема 2, б — схема № 7, 1 — обмотка высшего на-
пряжения, 2 — обмотка низшего напряжения
расположение на сердечниках катушек, которые обтекаются током (они
заштрихованы).
Отметим, что картины магнитных полей, полученные для других
схем соединений табл. 28, имеют сходный вид. Полное сопротивление
определяется главным образом внешним потоком рассеяния. Можно
видеть, что для схем №№ 3—9 (табл. 28) хорошо соблюдается квадра-
тичная зависимость между полными сопротивлениями zK и разностью
100! %
Рис. 136. Характеристика короткого замыкания трансформатора МТО-3.5 для различ-
ных схем соединений катушек (7—9).
Рис. 138. Потери холостого хода трансфор-
матора МТО-3.5.
Обозначения те же, что и на рис. 137.
Рис. 137. Характеристики холостого хода
трансформатора МТО-3.5 при различных
числах катушек обмотки низшего напря-
жения.
7 — включены 4 катушки (at—*1); 2 — включены
5 катушек (aj—х2); 3 — включены 3 катушки
(а2—*1). Номинальные данные: Ua — 230 в,
ZH = 15.2 а.
220
Глава И. Моделирование силовых трансформаторов
намагничивающих сил обмоток разных напряжений AF. Для схем №№ 1, 2,
имеющих малые внешние поля рассения (zK <С 29.4 ом), начинают сказы-
ваться внутренние потоки рассеяния, что нарушает указанную квадра-
тичную зависимость.
Характеристики из опыта короткого замыкания для соответствующих
схем табл. 28 приведены на рис. 136. Цифры, обозначающие кривые,
соответствуют номерам схем табл. 28.
На рис. 137 даны опытные характеристики холостого хода тран-
сформатора МТО-3.5 при разном числе катушек низшего напряже-
ния. Получение более насыщенных характеристик приводит к увели-
чению потерь в стали и несоответствию намагничивающего тока при
номинальном напряжении, как это можно видеть из кривых рис. 138.
Например, для варианта № 1 (кривая 7) относительные потери холо-
стого хода составили 2%. Тем не менее, как показал опыт, для боль-
шинства исследований устойчивости энергосистем, релейной защиты
и системной автоматики, некоторое несоответствие в потерях холостого
хода и приближенное моделирование характеристик может быть допу-
щено без существенной погрешности в конечных результатах. К тому
же часто оказывается возможным отнести потери к местной нагрузке,
а реактивную мощность — к мощности шунтирующего реактора, спе-
циально подобрав характеристику последнего.
В случае исследования феррорезонансных явлений в линии рассмо-
трение качественной стороны процессов может оказать также суще-
ственную помощь анализу.
§ 5. Добавочные потери модельных трансформаторов в режиме
короткого замыкания
При исследовании динамической устойчивости электропередач с по-
мощью электродинамических моделей одним из необходимых условий
подобия является обеспечение малых сопротивлений короткого замыка-
ния до места аварии. В связи с этим приобретает важное значение
вопрос уменьшения добавочных потерь короткого замыкания модельных
трансформаторов. Однако даже в специально спроектированных транс-
форматорах опытные значения добавочных потерь короткого замыкания
в относительных единицах составляют 0.002—0.003, т. е. оказываются
сравнимыми с основными потерями в меди обмоток (табл. 26).
Добавочные потери в модельных трансформаторах сосредоточены
главным образом в стали магнитопровода. Отметим, что элементы кон-
струкции таких трансформаторов (нажимные консоли, стягивающие
шпильки) выполняются из немагнитных материалов, поэтому потери
в них отсутствуют.
Расчет добавочных потерь при относительно сложной картине маг-
нитного поля модельного трансформатора в режиме короткого замыка-
ния представляет известные трудности. Поэтому для трансформатора
МТО-8.34 были проведены измерения магнитных потоков при коротком
замыкании. Измерительные катушки располагались на серединах сер-
дечников и ярме. Для контроля были использованы также дополнитель-
ные катушки, служащие для повышения напряжения в ^2 раза. Изме-
рения напряжений катушек проводились электронным вольтметром,
имеющим большое внутреннее сопротивление. Магнитные потоки при
коротком замыкании определялись как для нормальной схемы соедине-
ния (питание через отводы нк = 12.3°/0), так и для схемы с повы-
§ 5. Добавочные потери в режиме короткого замыкания
221
шенным напряжением короткого замыкания («к — 21.5%, питание через
отводы Полученные при коротком замыкании значения магнит-
ных индукций приведены в табл. 30.
Таблица 30
«к (%) £С1 (вб/м2) Вс2 (вб/м2) Вя ( вб/м2) В8 (вб/м2)
12.3 1 0.157 —0.035 0.0528 0.096
21.5 0.216 —0.063 0.0662 0.139
Примечания. 1. Активное сечение сердечника МТО-8.34 равно
153 см2, а ярма — 177 см2. 2. Приняты следующие ооозначения: Вс — индук-
ция в сердечниках; Bg — индукция в сердечнике, соответствующая потоку
рассеяния; Вя — индукция в ярмах.
При коротком замыкании однофазного трансформатора магнитная
индукция в одном сердечнике, где расположена обмотка к которой при-
ложено напряжение, всегда оказывается больше, чем во втором. Это
является следствием того, что потоки взаимоиндукции обмоток и их
рассеяния при коротком замыкании, будучи совпадающими во времени
по фазе, суммируются в одном сердечнике и вычитаются в другом.
Таблица 31
«К (%) Дрс (вт) ДРм (вт) ДРс + ДРм рм(вт)
расчет опыт
12.3 4.2 4.6 8.8 19.7 22.8
21.5 8 10.1 1 18.1 31.4 22.8
В табл. 31 приведены результаты расчета потерь в стали магнито-
провода Дрс при коротком замыкании трансформатора типа МТО-8.34,
при этом были использованы значения индукции, приведенные в табл. 30.
В той же табл. 31 даны добавочные Дрм и основные рм потери в меди
обмоток при коротком замыкании трансформатора.
Из данных табл. 31 следует, что добавочные потери, полученные
из опыта короткого замыкания, примерно в 2 раза больше расчетных.
Указанное расхождение расчетных и опытных данных объясняется ниже-
следующими трудноучитываемыми при расчете факторами:
1) неравномерностью распределения магнитных индукций в магнито-
проводе и в зоне обмоток;
2) увеличение потерь от механической обработки стали магнитопро-
вода (резка листов);
3) потерями от вихревых токов в листах стали, индуктируемых маг-
нитными потоками рассеяния, которые направлены перпендикулярно
к поверхности листов; укажем, что для стали Э310 с толщиной листов
0.35 мм удельные потери на вихревые токи составляют до 70% от пол-
ных удельных потерь.
Потери короткого замыкания для различных схем соединений модель-
ного трансформатора типа МТО-3.5 приведены на рис. 136. Цифры
на кривых потерь соответствуют номерам схем табл. 28. Сравнивая
потери ксроткого замыкания с потерями, рассчитанными по сопротив-
222
Глава V. Моделирование силовых трансформаторов
лению обмоток постоянному току г0 = 1.77 ом (прерывистая кривая рм)
видим, что для отдельных схем МТО-3.5 имеет место двухкратное уве-
личение потерь короткого замыкания от добавочных потерь. По-види-
мому, основная часть добавочных потерь сосредоточена в стали от кон-
центрированных внутренних полей рассеяния, замыкающих ся в торцовых
частях магнитопровода нормально к плоскости листов. Целесообразно
выбирать схемы соединений с относительно меньшими активными поте-
рями короткого замыкания. Например, схема № 7 при zK = 13.1% имеет
гк = 0.505%, что дает удовлетворительное отношение — = 1.31.
го
Экспериментальное определение потерь короткого замыкания для
модельных однофазных трансформаторов типа ОСМ (НИИПТ), у кото-
рых было получено повышенное напряжение короткого замыкания с по-
мощью магнитного шунта, показало, что добавочные потери также
получаются относительно увеличенными.
В табл. 32 приведены данные однофазного трансформатора типа
ОСМ-6.67 при отсутствии магнитного шунта.
Таблица 32
Таблица 33
р (ква) “к (%) РК (%) (7о) Ро (%) /о (%) Параметры короткого замыкания Одиночный транс форма- тор Трансформа- тор в группе
6.67 8.9 0.6 0.3 1.91 4.57 (%) • • Рк (%) • 12.3 0.51 21.5 0.65 13 0.6 23.2 0.906
Обмотки разных напряжений трансформатора выполнены в виде
четырех катушек. Они располагаются по две на каждом сердечнике.
Воздушный канал между катушками разных напряжений равен 40 мм.
С помощью магнитного шунта, набранного из листовой электротех-
нической стали, напряжение короткого замыкания может быть увеличено
более чем на 8.9%. Причем каждому дополнительному увеличению напряже-
ния короткого замыкания на Дик = 1% соответствует увеличение потерь
короткого замыкания на Арк = 0.015%.
В опытах короткого замыкания модельных трансформаторов типа
МТО-8.34, соединенных в трехфазную группу, при их близком распо-
ложении наблюдается взаимное влияние между однофазными трансфор-
маторами через поле рассеяния.
В табл. 33 даны результаты измерения параметров ик и рк для двух
случаев: первый, когда однофазный трансформатор находится один,
и второй, когда два других трансформатора группы придвинуты к нему
вплотную. Последние трансформаторы в опыте были обесточены.
Из приведенных данных табл. 33 можно видеть, что главным обра-
зом имеет место некоторое увеличение потерь короткого замыкания. Это
увеличение обусловлено как изменением картины магнитного поля рас-
сеяния обмоток трансформатора, так и появлением добавочных потерь
в стали магнитопроводов соседних трансформаторов группы. Располагая
трансформаторы на некотором расстоянии, порядка 0.5—0.8 м, можно
устранить указанное влияние.
Глава VI
МОДЕЛИРОВАНИЕ ГИДРАВЛИЧЕСКИХ ТУРБИН, ТРУБОПРОВОДОВ
И РЕГУЛЯТОРОВ СКОРОСТИ
§ 1. Моделирование гидротурбин
В первых физических моделях электропередач, созданных в США
и в СССР, характеристики первичных двигателей не моделировались.
Впервые вопрос о воспроизведении моментно-скоростных характеристик
турбин был поставлен в 1939 г. В. А. Вениковым (1939). В 1940 г.
в Ленинградском политехническом институте была создана модель пере-
дачи Куйбышев—Москва; характеристики первичных двигателей моде-
лировались с помощью специального электронного регулятора момента,
разработанного С. М. Гохбергом (1947).
Во время войны, начиная с 1942 г., в Энергетическом институте
АН Узбекской ССР под руководством М. П. Костенко была создана
модель электропередачи от Фархадской и Чирчикской ГЭС в Ташкент.
Гидротурбины моделировались двигателями постоянного тока с незави-
симым возбуждением. Нужный наклон механических характеристик дви-
гателей обеспечивался включением активного сопротивления в цепь якоря
(Костенко, Трейвиш, 1946).
В послевоенные годы в Московском энергетическом институте под
руководством В. А. Веникова для динамической модели энергосистем
был разработан ряд схем физического и математического моделирования
первичных двигателей (Веников, 1949; Веников, Иванов-Смоленский,
1953; Краткое описание динамической модели..., 1955; Лившиц, 1956).
В частности, для модельных гидрогенераторов использованы специаль-
ные радиально-осевые гидротурбины типа Ф-11-Г-25 с горизонтальным
валом и металлической спиральной камерой. Питание турбин осуще-
ствляется от довольно сложной гидротехнической системы, обеспечи-
вающей статический напор воды около 30 м.
Начиная с 1951 г. в Институте электромеханики АН СССР под
руководством М. П. Костенко велись работы по электродинамическому
моделированию энергосистем. Разработкой схем электрических моделей
первичных двигателей руководили Т. Н. Соколов и А. А. Воронов.
В основе моделей гидротурбин использовался электрический двигатель
постоянного тока с независимым возбуждением. Управление скоростью
и моментом двигателя осуществлялось изменением приложенного к якорю
напряжения. Необходимый вид механических характеристик электродви-
гателя, а также действие регулятора скорости обеспечивалось специаль-
ной электрической схемой управления (Воронов, Первозвонский, Семе-
нов, 1956; Семенов, 1957).
224
Глава VI, Моделирование гидротурбин, трубопроводов
В 1951 г. в Ленинградском политехническом институте для исследо-
вания процессов регулирования частоты и активной мощности в энерго-
системе Г. М. Павловым (1953) была построена электродинамическая
модель гидроагрегата. Турбина моделировалась трехфазной коллекторной
машиной переменного тока, управление которой осуществлялось поворо-
том щеточного аппарата по коллектору.
В тот же период была создана модель дальней передачи в киевском
Институте электротехники АН УССР. В качестве модели гидротурбины
использовалась машина постоянного тока с независимым возбуждением,
управляемая по системе Г-Д. В 1952—1953 гг. ряд моделей был по-
строен лабораторией гидроэнергосистем Водноэнергетического инсти-
тута АН Армянской ССР (Егиазаров, 1953а). Здесь гидротурбины
моделировались как физически, так и математически. В последнем слу-
чае использовались электродвигатели постоянного тока с независимым
возбуждением и регулируемым сопротивлением в цепи якоря.
Разработка динамических моделей первичных двигателей ведется еще
в нескольких организациях, из которых в первую очередь следует от-
метить Институт постоянного тока.
За границей в послевоенный период наиболее значительная работа
по моделированию гидротурбин для динамических моделей энергосистем
была проделана во Франции Р. Робером (1954), а также в Австрии
в Высшей технической школе в Вене (Hochrainer, 1956). В модели
Робера использован электрический двигатель постоянного тока с неза-
висимым возбуждением, питаемый от управляемого тиратронного выпря-
мителя. В австрийской модели гидротурбина также моделируется двига-
телем постоянного тока, однако регулирование момента двигателя осу-
ществляется с помощью электронного усилителя в цепи возбуждения.
Основные характеристики гидротурбин, подлежащие
моделированию
Важнейшими характеристиками гидравлических турбин, которые
должны учитываться при исследовании процессов автоматического регу-
лирования энергосистем, являются их моментно-скоростные (механиче-
ские) характеристики (Гаркави, Смирнов, 1954), маховые массы и урав-
нения расхода (Картвелишвили, 1951; Кривченко, 1951).
Точность, с которой следует моделировать эти характеристики,
а также область изменения переменных, в которой должны выполняться
условия подобия, диктуются задачами исследования и могут быть опре-
делены в каждом конкретном случае при проектировании модели или
ее настройке.
Точное воспроизведение статических моментно-скоростных характе-
ристик гидравлических турбин в динамических моделях энергосистем
вряд ли можно признать целесообразным. Эти характеристики справед-
ливы лишь для установившихся режимов и при фиксированных положе-
ниях регулирующих органов. В переходных процессах статическая зави-
симость момента от скорости, естественно, нарушается. Происходит это
главным образом из-за влияния инерции потока воды в водоводах гидро-
станции. Кроме того, подавляющее большинство решаемых на моделях
энергосистем задач (устойчивость синхронных машин, регулирование
частоты, испытание защитных и регулирующих устройств и т. д.) пред-
полагает очень небольшие отклонения скорости машин от синхронной:
1—О.4°/о, а обычно еще меньше. Ввиду слабого самовыравнивания гидро-
§ 1. Гидротурбины
225
турбины соответствующие приращения ее вращающего момента будут
при этом столь же малы. Поэтому довольно большие изменения наклона
моментно-скоростной характеристики гидротурбины практически не
влияют на результаты опытов.
Внутренние явления в гидравлических турбинах при переходных про-
цессах еще очень мало изучены. Однако в первом приближении коэф-
фициент самовыравнивания, который будет соответствовать небольшим
отклонениям скорости турбины в динамике, можно найти из общего
соотношения
(1)
где N — мощность, вырабатываемая турбиной, М—ее вращающий мо-
мент, (о — угловая скорость вращения.
В относительных единицах это уравнение можно записать так:
а = v (1 -ь ср); (2)
N
здесь ---------условно назовем относительным открытием турбины,
2V6
М <*> “ w6
v = -jv--относительный момент, ф —-----------относительное отклоне-
w6
ние скорости, причем в качестве базовых значений TVe, Me, с°б взяты
номинальные значения переменных. Коэффициент самовыравнивания для
какого-либо открытия а0 и в районе ср = 0 определится из соотношения
ка = ( !?)«=«<,= “° ‘
ср=О
Таким образом, величина k0 зависит от открытия турбины, оставаясь
меньше 1.
Однако в свете вышесказанного при построении модели энерго-
системы нет надобности стремиться точно воспроизвести параметр kc.
В частности, при моделировании турбины электродвигателем можно для
упрощения и удешевления установки допускать увеличение коэффициента
самовыравнивания до kc 2 и пренебречь его изменениями от открытия.
Это положение подтверждается большим опытом создания и эксплуата-
ции динамических моделей энергосистем.
Очень важным является вопрос о моделировании инерционной по-
стоянной гидроагрегата. Момент инерции гидротурбины обычно состав-
ляет лишь малую часть от суммарного момента инерции агрегата, однако
в модельном агрегате относительное распределение маховых масс может
быть произвольным, так как с точки зрения динамики регулирования
интерес представляет лишь суммарный маховый момент. При этом мо-
дельный агрегат, кроме двигателя и синхронного генератора, может
иметь вспомогательные машины (например, тахогенератор, углоизмери-
тельную машину) и добавочные маховики. Естественно поэтому, что
вопрос об инерционной постоянной модельного агрегата должен ре-
шаться с учетом всех данных и требований.
Движение ротора гидроагрегата описывается обычным уравнением
= (4)
226
Глава VI. Моделирование гидротурбин, трубопроводов
где J—суммарный момент инерции агрегата, Мс — момент сопротивле-
ния, представляющий собой реакцию синхронного генератора. В безраз-
мерной форме получим
(5>
Т Т Ыб > Мс
где * a —J J#--инерционная постоянная агрегата, ----------относитель-
ный момент сопротивления.
Требование равенства инерционных постоянных оригинала и модели
является одним из условий подобия
Та — idem.
Это условие справедливо, если масштаб времени при моделировании
принят равным 1. Ненатуральный масштаб времени практически не при-
меняется для динамических моделей энергосистем, так как обычно пре-
дусматривается возможность включать и испытывать реальную аппара-
туру.
Уравнение расхода гидравлической турбины связывает расход воды
через турбину с открытием регулирующих органов, напором и скоростью
вращения рабочего колеса. В общем виде уравнение расхода гидротур-
бины можно представить как произведение двух функций (Кривченко,
1951)
9 = <h42, (7)
где <7 = 7Г--относительный расход, Qs — базовое значение расхода Q.
V6
В формуле (7) <71 есть функция положений регулирующих органов и
представляет собой как бы эквивалентное открытие турбины, a q2—
функция напора и скорости вращения рабочего колеса. При этом пред-
полагается, что в установившемся режиме при номинальных значениях
скорости турбины и напора q2 = l. Вид функций </х и q2 обычно уста-
навливается на основании универсальных характеристик гидротурбин
(Смирнов, 1956), построенных по результатам статических испытаний
модельных колес, однако предполагается, что уравнение расхода (7) вы-
полняется и в переходных режимах (Картвелишвили, 1951; Жмудь, 1953).
Воспроизводить на модели расходную функцию q1 целесообразно лишь
тогда, когда моделируется также и регулятор скорости. Точно так же
моделировать функцию q2 имеет смысл лишь в том случае, если вос-
производится влияние инерции потока воды через турбину.
Исходные уравнения для момента гидравлической
турбины
Движущий момент гидротурбины любого типа может быть выражен
следующим уравнением:
м = ^, (8)
где Н—напор, — коэффициент полезного действия. Переменные пра-
вой части этого уравнения не являются независимыми, а связаны друг
с другом, что особенно характерно для реактивных турбин. К. п. д.
турбины в свою очередь зависит от Q, Н и Однако величина и из-
£ 1. Гидротурбины
227
менения к. п. д., столь существенные в экономическом отношении, не
оказывают заметного влияния на динамику переходных процессов в энерго-
системе. Поэтому при электродинамическом моделировании гидротурбин
изменениями к. п. д. обычно пренебрегают. При таком допущении урав-
нение (8) можно представить в следующей безразмерной форме:
_<7(1-ьЛ)
1-ь?
(9)
где Л = —Jr—- — относительное отклонение напора, Не— базовое (но-
минальное) значение напора. Этим уравнением следует пользоваться
осторожно, так как при резких уменьшениях к. п. д. турбины (например,
на холостом ходу) оно может привести к по-
грешностям. Тем не менее для большинства
задач уравнение (9) дает надежные резуль-
таты.
Числитель правой части уравнения (9) пред-
ставляет собой относительную мощность по-
тока воды через турбину. Обозначим
^ = 9(1+ Л), (10)
тогда по аналогии с линеаризацией уравне-
ния (2) получим из (9)
V = V1—(11)
Это уравнение и может быть положено
в основу при построении электрических мо-
делей гидротурбин, хотя можно исходить и
непосредственно из формулы (9). Если гид-
Рис. 139. Примерный вид
функции <71 для радиально-
осевых гидротурбин.
равлический удар не моделируется, то урав-
нение (11) можно упростить, положив в нем = В еще более про-
стых случаях, когда имеется в виду турбина с одним регулирующим
органом, приближенно считают величину пропорциональной относитель-
ному открытию направляющего аппарата турбины или относительному пере-
мещению штока сервомотора.
Особенности радиа льно-о севых турбин
Моделирование радиально-осевых гидротурбин является относительно
простой задачей, так как они имеют один регулирующий орган — на-
правляющий аппарат.
Воспроизведение функции q2 уравнения расхода тесно связано с мо-
делированием гидравлического удара, поэтому аналитическое выражение
для (/2 и способы ее моделирования будут рассмотрены ниже. Другая
часть уравнения расхода — qT — является у радиально-осевых турбин
функцией открытия направляющего аппарата aQ, Точный график 7i(«o)
для каждого рабочего колеса может быть построен по универсальной
характеристике, однако у всех радиально-осевых турбин эти зависимости
довольно близки. Поэтому при моделировании можно пользоваться при-
веденным на рис. 139 стандартным графиком, рекомендуемым Г. И. Крив-
ченко (1951). Вместо открытия направляющего аппарата здесь можно
подразумевать также перемещение штока сервомотора т регулятора
228
Глава VI, Моделирование гидротурбин^ трубопроводов
скорости, так как кинематическая связь а0=/(ттг) в рабочей области
обычно близка к линейной. На графике для сравнения проведена пре-
«о
рывистая прямая, соответствующая qr =-----.
°0н
Пропеллерные гидротурбины имеют, как и радиально-осевые, один
регулирующий орган — направляющий аппарат, поэтому подход к моде-
лированию турбин обоих типов может быть одинаковым.
Устройства холостых спусков высоконапорных радиально-осевых
турбин обычно не воспроизводятся на динамических моделях энерго-
систем.
О моделировании по в оротнол опа стн ы х гидротурбин
Моделирование поворотнолопастных гидротурбин оказывается более
сложным, так как эти турбины имеют два регулирующих органа: направ-
ляющий аппарат и лопасти рабочего колеса.
В некоторых простых случаях, когда достаточно воспроизвести
характеристики турбины лишь в небольшом диапазоне открытий (напри-
100
q\---1—-J----1----i---1---i---
200 WO 600
а0(мм)
Рис. 140. Функция <71 поворотнолопастной тур-
бины ПЛ-587.
мер, в режиме, близком к но-
минальному), можно пренебречь
влиянием поворота лопастей и
пользоваться при моделирова-
нии соответствующими пропел-
лерными характеристиками дан-
ного колеса. Такой способ мо-
делирования, аналогичный ряду
приближенных методов расчета
переходных процессов гидро-
агрегатов с поворотнолопаст-
ными турбинами, обосновы-
вается тем, что в динамиче-
ских режимах разворот лопа-
стей рабочего колеса значи-
тельно отстает от изменений
Открытия направляющего ап-
парата.
При более точном модели-
ровании поворотнолопастных
гидротурбин основная трудность
заключается в воспроизведе-
нии функции qu зависящей в
данном случае от двух переменных, т. е. от положений обоих регу-
лирующих органов. В качестве примера на рис. 140 для поворотно-
лопастной гидротурбины с рабочим колесом ПЛ-587 по универсальным
пропеллерным характеристикам построена зависимость расхода воды
через турбину при номинальных значениях напора и скорости вращения
агрегата. Здесь ф — угол разворота лопастей рабочего колеса. Преры-
вистая кривая означает комбинаторную зависимость для напора Н~ 19 м.
В относительных единицах зависимость, изображенная на рис. 140, и
представит функцию qv (а0, ф).
Одна из возможных блок-схем, по которой может быть построена
математическая модель поворотнолопастной гидротурбины, дана на
рис. 141. На вход функционального преобразователя ФП от модели
7. Гидротурбины
229
регулятора скорости подаются сигналы, пропорциональные перемещению
направляющего аппарата = и углу разворота лопастей рабочего
а0б
колеса ф. ФП вырабатывает сигнал, пропорциональный qx, который по-
ступает на вход блока БГУ, моделирующего влияние гидравлического
удара в водоводах турбины. С выхода БГУ снимаются сигналы q и Л,
которые поступают на множительно-делительное устройство МДУ, вы-
полняющее операции, записанные в уравнении (9). Так как расход реак-
тивной гидротурбины зависит до некоторой степени и от скорости вра-
щения рабочего колеса, то сигнал, соответствующий скорости модельного
Рис. 141. Вариант блок-схемы математической модели поворотнолопаст-
ной гидротурбины.
агрегата, подается не только на МДУ, но и на вход блока БГУ. Сиг-
нал, пропорциональный моменту >, после усиления усилителем момента
УМ подается на исполнительный двигатель Д> который непосредственно
вращает модельный синхронный генератор.
В зависимости от предъявленных требований модель может быть
выполнена с большими или меньшими упрощениями. Например, можно
взамен МДУ поставить просто множительное устройство, которое будет
вырабатывать сигнал, пропорциональный vx в соответствии с уравне-
нием (10). А обеспечение зависимости (11) может быть выполнено на-
стройкой схемы управления двигателем Д. Во многих случаях также
оказывается возможным пренебречь влиянием отклонения скорости вра-
щения турбины на ее расход.
Применение упрощенных схем, если это возможно, всегда жела-
тельно, так как обеспечивается большая надежность работы, меньшая
стоимость и упрощается обслуживание.
Особенности ковшевых гидротурбин
При нормальном регулировании ковшевых гидротурбин изменение
расхода достигается игольчатым соплом, и в этих режимах турбины
являются машинами с одним регулирующим органом. Однако для быстрого
регулирования при сбросах нагрузки из-за отключения генератора от
сети ковшевые турбины оснащаются вторым регулирующим органом—
отклонителем или отсекателем струи, который позволяет быстро умень-
шить движущий момент турбины, не вызывая повышения давления в на-
порном трубопроводе (Гаркави, Смирнов, 1954).
Для большинства задач, решаемых на динамических моделях энерго-
систем, ковшевые турбины могут рассматриваться как имеющие один
регулирующий орган. Однако моделирование действия отклонителя или
отсекателя струи особенной сложности не представляет и может быть
выполнено, если это необходимо.
Расходная функция qT здесь вообще очень простая: qT (р) = р. Под р
понимается относительный ход иглы.
230
Глава VI. Моделирование гидротурбин, трубопроводов
+ U -
Рис. 142. Схема с добавочным сопро-
тивлением в якорной цепи.
Так как ковшевые турбины являются активными, то и другая часть
уравнения расхода, т. е. функция q2, оказывается проще, чем у реак-
тивных турбин. Подробнее этот вопрос рассмотрен ниже.
Схемы электрических моделей гидротурбин
ИЭМ АН СССР
В Институте электромеханики АН СССР был разработан и выпол-
нен ряд схем электрического моделирования гидротурбин. В качестве
первичного двигателя в этих схемах используется машина постоянного
тока с независимым возбуждением. Управляющим воздействием служит
изменение напряжения, приложенного к якорю двигателя, для чего по-
следовательно в якорную цепь дви-
гателя включается вольтодобавочный
генератор (бустер). Возбуждение
бустера управляется электромашин-
ным и электронным усилителями, об-
разующими вместе с бустером усили-
тель мощности. Получение нужного
коэффициента самовыравнивания ме-
ханических характеристик двигателя
достигается увеличением активного
сопротивления якорной цепи и вве-
дением обратных связей. Основную
энергию двигатель получает из сети постоянного тока, которая должна
быть достаточно мощной, чтобы исключить опасность взаимного влияния
нескольких агрегатов друг на друга из-за связи через источник питания.
При слабой сети постоянного тока или вообще при ее отсутствии схемы
моделей гидротурбин несколько видоизменяются, причем питание и управ-
ление двигателем осуществляется по обычной схеме Г-Д. Однако в боль-
шинстве случаев следует предпочесть схему с вольтодобавочным гене-
ратором, так как управляющий генератор здесь может быть значительно
меньшей мощности и будет работать на среднем (т. е. более линейном)
участке своей характеристики холостого хода, что существенно упро-
щает управление генератором.
В последующих параграфах описаны несколько схем моделей гидро-
турбин и выведены условия подобия.
Схема с добавочным сопротивлением
Схема представлена на рис. 142. Модельный синхронный генератор
СГ приводится во вращение двигателем постоянного тока Д, якорь
которого через добавочное сопротивление Rx включен на сумму напря-
жений сети постоянного тока и вольтодобавочного генератора ГВ. При-
водом постоянной скорости для ГВ служит двигатель ДГВ. Нужный
наклон механических характеристик двигателя обеспечивается надлежа-
щей величиной Rx, а переход с одной характеристики на другую осу-
ществляется изменением напряжения ГВ.
Рассмотрим основные соотношения для этой схемы. Если пренебречь
суммарной электромагнитной инерцией якорей Д и ГВ, то уравнение
этой цепи можно записать так:
и ~+~ +R J : (12)
с ГВ е д яО яч ' '
$ 1. Гидротурбины
231
здесь ис — напряжение сети постоянного тока, егв— э. д. с. якоря
вольтодобавочного генератора, шд— угловая скорость двигателя, гя — ток
якоря, /?яо — суммарное активное сопротивление якорной цепи, кг—
коэффициент пропорциональности. Полезный вращающий момент двига-
теля будет равен
(13)
где км— коэффициент пропорциональности, Ми— момент потерь, т. е.
момент сопротивления, создаваемый механическими потерями и потерями
в стали всего агрегата. Этот момент в первом приближении будем счи-
тать величиной постоянной, хотя составляющие, пропорциональные ско-
рости, учесть нетрудно. Исключив из полученных уравнений переменную
/я, найдем
kekM Ki!
-- п ^ГВ г> р «С 'Мп* (I2*)
Яя0 яО Кя0
В режиме холостого хода, когда Мд=0, и а>д = о)д.б, получим
пkekM км
О-- г> ^ГВО /? ^Д-б-Ьр «с
Кя0 ^яО ^яО
Вычтя почленно (15) из (14), получим
& м м
— -р— (егв ^гво) #7“ ^д-б)-
яО яО
Запишем полученное выражение в безразмерной форме:
^>еГВб б
(15)
(16)
(17)
здесь v = ------относительный момент, v, =--------------относительное
Мд.б еГВб
а) — СО 6
приращение э. д. с. бустера, ? =-------2---относительное отклонение
0)Д« б
скорости агрегата. Начальное значение э. д. с. бустера егво опреде-
ляется из соотношения (15) и соответствует холостому ходу гидротур-
бины. Коэффициенты к6 и км пропорциональны магнитному потоку воз-
буждения двигателя Д. Почти всегда целесообразно возбуждение дви-
гателя иметь максимальным. Это означает, что коэффициенты ке и км
можно считать заданными при расчете схемы. Аналогично тому, как
это было сделано для оригинала, в качестве <од.б следует принять син-
хронную скорость модельного агрегата, а в качестве Л/Д.б— номинальное
значение момента, принятое при расчете модели.
Уравнение (17) будет идентично исходному уравнению (11) при вы-
полнении следующих условий подобия:
^еГВб -< б __
’ ^яО^д.б “
(18)
Из этих условий однозначно определятся базовое значение егвб и
полное сопротивление якорной цепи Няо. Зная 7?яо, нетрудно найти вели-
232
Глава VI» Моделирование гидротурбин, трубопроводов
чину добавочного сопротивления Rx, которое следует включить в якор-
ную цепь модельного двигателя.
Инерционная постоянная модельного агрегата определится формулой
Ta-J^ (19)
и должна быть равна инерционной постоянной оригинала в соответствии
с условием подобия (6); JA — суммарный момент инерции модельного
агрегата. Описанная схема проста, надежна и хорошо зарекомендовала
себя на практике. Однако для моделей значительной мощности (более
10 квт) применение этой схемы оказывается очень неудобным. Вольто-
добавочный генератор и его привод должны быть примерно такой же
мощности, что и сам модельный двигатель Д. Это сильно удорожает
всю установку. Кроме того, в сопротивлении Rx выделяется и теряется
значительная энергия. Сами ящики сопротивлений занимают много места
и сильно нагревают воздух в помещении. В связи с этим для моделей
большой мощности были разработаны более экономичные схемы, которые
описаны ниже.
с обратной связью
току двигателя.
Рис. 143. Схема
якорному
Схема с обратной связью по якорному току двиг ателя
Требуемый наклон механических характеристик электродвигателя
может быть также получен путем введения отрицательной обратной
связи по току якоря. Такая схема в упрощенном виде показана на
рис. 143. Обратная связь по току
осуществлена при помощи магнит-
ного усилителя МУ, управляющей
обмоткой которого служит про-
вод, соединяющий бустер с дви-
гателем. Выходное напряжение
магнитного усилителя выпрям-
ляется фазочувствительным вы-
прямителем В и подается на вход
усилителя У. Такое исполнение
по обратной связи имеет ряд преиму-
ществ: отсутствие добавочных со-
противлений в якорной цепи, без-
возможность плавно в широких пределах менять крутизну
ынерционность, возможность плавно в широких пределах менять крутизну
обратной связи. Усилитель У и вольтодобавочный генератор ГВ вместе
составляют усилитель мощности с общим коэффициентом усиления по
напряжению ку. Ряд специальных мер, о которых сказано ниже, по-
зволяют уменьшить инерцию усилителя мощности настолько, что его
запаздывание становится меньше 0.1 сек. Это запаздывание в сравнении
с инерционной постоянной Та и постоянными времени регулятора ско-
рости почти в 100 раз меньше, поэтому им можно пренебречь. В соот-
ветствии с этим отклонение э. д. с. бустера от начального значения
егво будет равно
Д<?ГВ=А(И1 —₽</я),
(20>
где Hi — управляющее напряжение, Ро— коэффициент передачи обратной
связи. Начальное значение э. д. с. бустера определяется также из
$ 7. Гидротурбины
233
равенства (15) и может устанавливаться в данной схеме подачей на вход
усилителя мощности некоторого постоянного сигнала.
Уравнение якорной цепи и выражение для момента двигателя имеют
такой же вид, что и для предыдущей схемы, т. е. (12) и (13). Учиты-
вая (20) получим в безразмерной форме
_ кМкуи1б
(*яО-₽О*УИЛ.б V1
kek.w'!,A.6
(*яО-ЬРо*УИд.б
(21)
И]
где =--------относительная величина управляющего напряжения, М1б —
ы1б
базовое значение и19
Условия подобия уравнению (11) следующие:
*лЛУ“1б кекЛшл.б
(*я0 - !Vy) ^д. 6 ’ (*я0 -₽0*У) Мд.б Ке‘
(22)
Изменение управляющего напряжения иг от нуля до базового значе-
ния соответствует изменению момента двигателя Д от нуля до МА. б.
При расчете схемы обычно задаются величиной П1б по конструктивным
соображениям, тогда коэффициент усиления усилителя мощности рас-
считывается по формуле
. _ 1 ^“д-6
у -- к ‘ W ’
м1б
(23)
а коэффициент передачи обратной связи находится из соотношения:
, __ ^>и1б ^я0
>0 М к '
жд.б Ку
(24)
В описанной схеме благодаря отсутствию добавочных сопротивлений
в якорной цепи двигателя мощность вольтодобавочной машины и ее
привода можно уменьшить в несколько раз по сравнению с предше-
ствовавшей схемой. Возможность эта обусловливается тем, что самовы-
равнивание турбины требуется воспроизводить лишь в небольшой области
изменения скорости вблизи синхронной. Применение для обратной связи
по току магнитного усилителя содержит возможность моделирования
более сложных характеристик, так как коэффициент передачи Ро можно
плавно изменять в функции от каких-либо переменных, изменяя напря-
жение питания или ток начального намагничивания магнитного усили-
теля. Инерционность усилителя мощности благодаря своей незначитель-
ной величине практически совершенно не искажает процессы регулиро-
вания скорости. Однако она может стать заметной при исследовании на
модели быстропереходных процессов, например поведения синхронного
генератора при коротких замыканиях. Существенно уменьшить влияние
запаздывания усилителя мощности можно, включив некоторое добавочное
сопротивление в якорную цепь двигателя. Формулы для расчета схемы
остаются при этом в силе, только из-за увеличения 7?яо несколько
уменьшится коэффициент ^0. Однако лучше в подобных случаях приме-
нять одну из схем, описанных ниже.
234
Глава VI. Моделирование гидротурбин, трубопроводов
Схема с добавочным сопротивлением и обратной
связью по току
Схема представлена в упрощенном виде на рис. 144. Уравнение для
отклонения э. д. с. бустера от некоторого исходного значения егво имеет
следующий вид:
Дегв = ку (“1 — ₽ АО- (25)
Это уравнение сходно с уравнением (20), но здесь вместо ро стоит
3i^x, Pi — коэффициент делителя напряжения причем считается, что
Для рассматриваемой схемы Щб также выбирается по кон-
структивным соображениям, а к? рассчитываются по формуле (23). Ве-
личиной 7?х задаются в соответствии с требованиями к моделированию
быстропротекающих процессов, причем полное сопротивление якорной
цепи 7?яО = 7?я.с-+-7?х, где Ra.c — собственное сопротивление якорных
Рис. 144. Схема с добавочным сопротивле-
нием и обратной связью по току.
обмоток машин. Коэффициент Pi
подсчитывается по формуле
<26>
\ жд.б Ку
Естественно, что в данной
схеме добавочное сопротивление
не может быть меньше
кл1и16
М„ «
д. б
*я.
ку
1-ь V
(27)
ky
что соответствует случаю ?i = l.
Известным конструктивным недостатком описанной схемы является
наличие гальванической связи между якорной цепью двигателя и входом
усилителя.
Схема с использованием противокомпаундной обмотки
бустера
Глубокая отрицательная обратная связь по току двигателя может
быть также осуществлена с помощью последовательной обмотки воз-
буждения вольтодобавочного генератора, включенной таким образом,
чтобы уменьшать приложенное к якорю двигателя напряжение при уве-
личении нагрузки. Если действие противокомпаундной обмотки окажется
недостаточно для моделирования быстропереходных процессов, то
в якорную цепь двигателя следует включить необходимое добавочное
сопротивление. При моделировании сравнительно медленных процессов
(регулирование частоты-скорости) нужное самовыравнивание двигателя
можно обеспечить введением дополнительной отрицательной обратной
связи по току якоря.
Преимущество противокомпаундной обмотки на бустере заключается
в том, что она очень просто позволяет создать значительный наклон
механических характеристик двигателя, причем действие якорного тока
на э.д.с. бустера, естественно, не имеет запаздывания.
Один из возможных вариантов такой схемы модели гидротурбины
дан на рис. 145. Здесь предусмотрена дополнительная обратная связь
по току якоря, использующая магнитный усилитель и фазочувствитель-
§7. Гидротурбины
235
ный выпрямитель. Усилитель мощности охвачен жесткой отрицательной
обратной связью по напряжению. Во избежание гальванического соеди-
нения якорной цепи с входом усилителя эта связь заведена через вто-
рую обмотку управления того же магнитного усилителя. Глубина связи
устанавливается реостатом 7?г. В представленном варианте схемы откло-
нение э.д.с. бустера выражается уравнением
ДеГв = (их — Р0/я — р2^гв) — £г*я, (28)
где £у— коэффициент усиления усилителя мощности при разомкнутой
обратной связи по напряжению, р2— коэффициент отрицательной обрат-
ной связи по напряжению бустера, кТ— коэффициент последовательной
обмотки возбуждения бустера. При наличии обратной связи по напря-
жению коэффициент усиления усилителя
мощности уменьшается до величины
и может легко настраиваться на тре
буемое значение изменением величины
Условия подобия схемы уравнению
(11) следующие:
Рис. 145. Схема с использованием
противокомпаундной обмотки бустера
и дополнительными связями по току
и напряжению.
_________Му«1б_____________
[^яО “Ь ^уРо (1 ^уР2)] 4.6
___________________________________
[Ао -+- к (1 - *у₽2)] Мд б
При настройке схемы величины о)д.б, Мд.б, км, к^ кг, uiq можно
считать заданными. Коэффициент усиления к? рассчитывается все по
той же формуле (23). Коэффициенты к? и 32 должны удовлетворять
соотношению (29), а коэффициент обратной связи по току 30 находится
из уравнения
> _ ^н1б ЯяОн-£г(1 — £ур2)
°- ^Д.6 *у
(31)
Кроме рассмотренных здесь вариантов, можно представить себе еще
значительное количество различных схем моделирования гидравлических
турбин по уравнению (11). В частности, для получения нужного наклона
механических характеристик электродвигателя может быть использована
положительная обратная связь по скорости агрегата (Воронов, Перво-
.званский, Семенов, 1956).
Мно ж ительно-делительное устройство для
динамических моделей гидротурбин
Моделирование гидротурбин по уравнению (9) будет более точным,
хотя и более сложным по выполнению. Одна из структурных схем
такой модели для случая поворотнолопастной турбины была дана на
рис. 141. Схемы этого типа должны содержать множительно-делитель-
ное устройство (МДУ) и усилитель момента (УМ). В качестве МДУ
можно использовать известные средства современной техники электри-
236
Глава VI. Моделирование гидротурбин, трубопроводов
Рис. 146. Схема множительно-
делительного устройства на
дросселях насыщения.
ческого моделирования (Г. Корн, Т. Корн, 1955; Трапезников, Коганг
1955; Somerville, 1956). Это либо чисто электронные схемы, либо
устройства с электромеханическими следящими системами. Однако вы-
полненный таким образом блок МДУ получается довольно громоздким
и дорогим. В Институте электромеханики АН СССР для решения
уравнения (9) была предложена простая схема с дросселями насыщения
(Семенов, 1957). Если для сердечников использовать обычную электро-
техническую сталь, а дроссели соединить по мостовой дифференциаль-
ной схеме (рис. 146), то при правильном подборе параметров, выходное
напряжение f/Bbrx. будет в достаточно ши-
роком диапазоне пропорционально току
управления zy. С другой стороны, t/вых.
будет меняться также пропорционально из-
менению питающего напряжения перемен-
ного тока f/n. Следовательно,
t/вых. = bJJniy, (32)
где Ьг — коэффициент, зависящий от
конструктивных параметров и величины тока
смещения ic. Уравнение (32) показывает,
что схема позволяет производить непрерыв-
ное статическое умножение двух электри-
ческих сигналов. Экспериментальная про-
верка показала, что без каких-либо спе-
циальных мер точность умножающего устрой-
ства получается вполне удовлетворительной.
На рис. 147 приведены опытные характе-
ристики схемы, работающей в режиме умноже-
ния. В данном случае устройство имеет следу-
ющие конструктивные данные. Сердечник
каждого из четырех дросселей состоит из 25 пластин Ш-19 стали Э4АА
толщиной 0.35 мм. Обмотки переменного тока й^п содержат по 250 витков
провода ПЭШО диаметром 0.41 мм. Обмотки смещения й^с охватывают
каждая по два сердечника и имеют по 1000 витков провода ПЭ диа-
метром 0.2 мм. Обмотка управления И^у, общая для всех сердечников,
имеет 5000 витков провода ПЭ диаметром 0.2 мм.
Для схемы, приведенной на рис. 146 было также показано, что
в определенных, довольно широких пределах коэффициент Ьх обратно
пропорционален току смещения z*c, если ампервитки смещения AWG по
модулю больше, чем ампервитки управления ДИ^У. Это подтверждают
приведенные на рис. 148 опытные характеристики, снятые при Un —
= const для различных значений тока управления. Таким образом,
уравнение (32) может быть представлено в следующем виде:
ивт. = если | AIFO | > | А1ГУ |; (33)
с.
здесь коэффициент Ь2 определяется только конструкцией. Полученное
уравнение подобно исходному (8), а при переходе к относительным
переменным будет тождественно уравнению (9). Если материал сердеч-
ников не обеспечивает достаточной линейности характеристики t/вых. =
=/(zy) при t/n = const и z’c = const, то характеристики могут быть ис-
правлены высверливанием небольших сквозных отверстий в стали сер-
дечников. Диаметр отверстий подбирается опытным путем.
§ 1. Гидротурбины
237
В ряде случаев описанное устройство может выполнять более про-
стые функции. Так, например, его можно использовать для получения
управляющего напряжения, пропорционального произведению (10). При
этом ток смещения дросселей должен оставаться неизменным. При со-
хранении напряжения питания постоянным схема будет давать сигнал,
пропорциональный отношению двух входных величин. Применение схемы
в качестве делительного и множительного блоков при моделировании
гидравлического удара и уравнения расхода будет рассмотрено ниже.
Рис. 147. Опытные характеристики мно-
жительно-делительного устройства в ре-
жиме умножения.
Рис. 148. Опытные характеристики
множительно-делительного устрой-
ства в режиме деления.
Усилитель момента в случае использования МДУ представляет со-
бой быстродействующую следящую систему, повторяющую на выходе
.двигателя Д вращающий момент в соответствии с изменениями управ-
ляющего напряжения, снимаемого с МДУ» При этом момент двигателя
измеряется косвенно — по якорному току. Усилитель момента может быть,
в частности, выполнен по схеме, приведенной на рис. 143, если коэф-
фициент усиления к? будет достаточно большим. Если к запаздыванию
усилителя момента предъявляются жесткие требования, приходится от-
казаться от электромашинного усиления и использовать мощные ионные
выпрямители с сеточным управлением, быстродействие которых доста-
точно велико.
О моделировании нелинейных особенностей расходной
функции qx радиально-осевых гидротурбин
Как уже указывалось, точное моделирование расходной функции qx
ведется на основе универсальной характеристики радиально-осевой
гидротурбины с учетом вида кинематической связи aQ = f(rri). При
отсутствии этих характеристик можно пользоваться графиком (рис. 139).
Вопрос о средствах воспроизведения функции q± должен решаться
в соответствии с техникой моделирования регулятора скорости. Если
ходу поршня сервомотора соответствует в модели электрическое на-
пряжение, то функция вида рис. 139 может быть воспроизведена при
помощи несложной схемы с сопротивлениями и 2—3 вентилями. В ка-
238
Глава VI. Моделирование гидротурбин трубопроводов
честве примера на рис. 149 дана схема функционального устройства,
позволяющего произвести аппроксимацию тремя линейными отрезками.
Здесь ит — напряжение, пропорциональное ходу штока сервомотора,
а щ— напряжение, пропорциональное qr. При малых значениях ит вы-
ходное напряжение иг = ит, так как вентили BY и В2 заперты напря-
жением, снимаемым с делителей г10 и
г20. Питание делителей осуществляется
от стабилизированного источника на-
пряжением t/ст.. С увеличением ит от-
крывается сначала вентиль В19 а затем
В2 и выход схемы шунтируется сопро-
тивлениями т*! и г2. Надлежащим вы-
бором напряжений подпора и шунти-
рующих сопротивлений можно получить
зависимость щ от достаточно близ-
кую к изображенной на рис. 139. Если
модель сервомотора выполнена в виде
электромеханического интегратора, то
Рис. 149. Схема цепи для кусочно-
линейной аппроксимации функции ра-
диальноосевых турбин.
можны и другие варианты
на его выходной вал можно поместить
фигурный потенциометр или линейный
потенциометр с шунтированными сек-
циями (Г. Корн, Т. Корн, 1955). Воз-
моделирования. ~
В упрощенных моделях
полагают просто <7i = —, что соответствует
рис. 139.
прерывистой
прямой на
Моделирование расходной функции q±
поворотнолопастных гидротурбин
Примерный вид функции qt поворотнолопастной гидротурбины был
дан на рис. 140. Получение функции двух переменных ф) воз-
можно многими способами. Если модель регулятора скорости собрана
из стандартных электронных решающих усилителей, то функциональным
преобразователем может служить устройство с электронно-лучевой труб-
кой, фотоэлементом и ширмой с переменной прозрачностью (Г. Корн,
Т. Корн, 1955) либо специально составленная аппроксимирующая схема
с диодами (Meissinger, 1955). В тех случаях, когда на выходе модели
регулятора скорости используются электрические серводвигатели, функ-
циональный преобразователь можно выполнить с помощью решающих
потенциометров с отводами. Однако все эти устройства достаточно
сложны. В Институте электромеханики был разработан очень простой
функциональный преобразователь на дросселях насыщения, который
можно использовать при любом типе модели регулятора скорости (Се-
менов, 1957). Было замечено, что характеристики, подобные приведен-
ным на рис. 140, имеют большинство магнитных усилителей на пермал-
лоевых сердечниках, если изменять не только сигнал управления, но
и напряжение источника питания. Задаваясь различными масштабами
по осям координат и изменяя начало отсчета, можно без особого труда
получить вполне удовлетворительное совпадение характеристик модели
и оригинала в рабочем диапазоне, т. е. вблизи комбинаторной кривой.
На рис. 150 изображены совмещенные характеристики гидротурбины и
функционального преобразователя. Совпадение кривых достаточно хо-
рошее и находится в пределах точности исходных данных. Схема маг-
§ 1. Гидротурбины
239
нитного усилителя дана на рис. 151. Ток iy обмотки управления соот-
ветствует в определенном масштабе открытию направляющего аппарата,
напряжение питания ип — углу разворота лопастей рабочего колеса,.
iy/W/
Рис. 150. Результаты моделирования расходных характеристик
поворотнолопастной гидротурбины магнитным усилителем.
а выходной сигнал нВых. — расходной функции Магнитный усилитель
собран на четырех кольцевых сердечниках из пермаллоя ЭН80МЗ.
Объем каждого сердечника 5 см3. Обмотки переменного тока И^п имеют
Рис. 151. Схема функционального преобразователя
на магнитном усилителе.
по 800 витков провода ПЭ диаметром 0.31 мм. Обмотки начального
смещения IFC охватывают каждая два сердечника и имеют по 220 вит-
ков провода ПЭ диаметром 0.31 мм. Обмотка управления Wy охватывает
все четыре сердечника и содержит 1385 витков провода ПЭШО диа-
240
Глава VI, Моделирование гидротурбин, трубопроводов
метром 0.14 мм. Следует отметить, что требуемый вид характеристик
магнитного усилителя можно получить не только подбором материала
сердечников, но также выбором схемы усилителя, введением обратных
связей и т. д.
Усилитель мощности
На усилитель мощности возлагается задача изменять приложенное
к якорю двигателя напряжение и тем самым управлять его моментом и
скоростью. Для выполнения условий подобия инерционность усилителя
Рис. 152. Блок-схема усилителя мощности с управляемыми вы-
прямителями и множительно-делительным устройством.
мощности должна быть достаточно малой. С этой точки зрения лучше
всего отвечает поставленным требованиям силовой ионный выпрямитель
с сеточным управлением. Такой усилитель на тиратронах используется
во французской модели Р. Робера (Robert, 1954), правда, для электро-
двигателей сравнительно малой мощности. Преимуществом ионного уси-
лителя мощности является также и то, что в этом случае не требуется
мощной сети постоянного тока. Модель турбины может быть построена
как на основе уравнения (11), так и по уравнению (9). Блок-схема
управления двигателем для второго варианта должна быть такой, как
показано на рис. 152. На множительно-делительное устройство МДУ
поступают сигналы q и 1 ч- h от блока гидроудара и напряжение 1 ч- ср
от тахогенератора ТГ, находящегося на валу модельного агрегата.
Управляющее напряжение у, пропорциональное моменту гидротурбины,
подается через электронный усилитель ЭУ на схему сеточного управ-
ления силовыми ионными вентилями, питающими двигатель Д. Для того
чтобы момент двигателя был пропорционален управляющему напряжению
у, усилитель мощности охвачен жесткой отрицательной обратной связью
по току якоря. Связь можно осуществить как с помощью шунта 7?ш,
так и на магнитном усилителе. Высокое быстродействие усилителя мощ-
ности с ионными вентилями позволяет с помощью обратных связей по
углу У синхронного генератора С/ , а также по и изменять такие
характеристики модельного гидроагрегата, как синхронизирующий момент,
демпфирование и инерционная постоянная. Трудность практического
выполнения ионного усилителя мощности заключается в том, что при-
ходится применять нестандартную аппаратуру, да и силовые управляе-
мые вентили не всегда бывают в распоряжении. В частности, по этим
причинам в Институте электромеханики была разработана схема усили-
теля мощности с использованием электрических машин. В упрощенном
виде схема представлена на рис. 153. Для получения на выходе доста-
точной мощности усилитель приходится делать многокаскадным. Выход-
$ 7. Гидротурбины
241
ным каскадом служит вольтодобавочный генератор ГВ, якорь которого
включается последовательно с якорем двигателя Д, моделирующего
турбину. Обмотка возбуждения ГВ питается от электромашинного уси-
лителя 2ЭМУ, а обмотки управления 2ЭМУ возбуждаются предвари-
тельным электронным усилителем 2ЭУ. На вход 2ЭУ подается управ-
Рис. 153. Схема усилителя мощности с использо-
ванием электрических машин.
ляющее напряжение и19 пропорциональное мощности или моменту моде-
лируемой гидротурбины. Кроме того, на вход электронного усилителя
подаются сигналы обратных связей по напряжению 2ЭМУ с делителя
7?2о и по напряжению бустера. Обратная связь по напряжению бустера
осуществляется либо гальванически, либо, как на данной схеме, через
магнитный усилитель 2МУ и фазочувствительный выпрямитель 2В,
которые используются также для обратной связи по току якоря двига-
Рис. 154. Временная характеристика усилителя мощ-
ности, полученная экспериментально.
теля. Иногда усилитель мощности хорошо работает и без обратной
связи по напряжению ГВ. Коэффициент усиления усилителя мощности
можно в широких пределах менять изменением глубины обратных свя-
зей по напряжению. Для стабилизации схемы и получения удовлетвори-
тельной формы временной характеристики служит контур /?0—Со.
Оптимальные значения параметров стабилизирующего контура легко
подбираются опытным путем. Достаточное быстродействие усилителя
мощности обеспечивается рядом мер.
Наибольшую инерционность имеет цепь возбуждения вольтодобавоч-
ного генератора. Для ее уменьшения катушки главных полюсов пере-
ключаются с последовательного соединения на параллельное, и в эту
цепь включается значительное добавочное сопротивление 7?д. В резуль-
тате суммарного действия обратных связей и сопротивления RA запазды-
вание усилителя мощности снижается настолько, что практически не
искажает процессов регулирования скорости. На рис. 154 представлена
осциллограмма отработки усилителем мощности скачкообразного изме-
нения управляющего напряжения и± на его входе. Показан процесс
242
Глава VI. Моделирование гидротурбин^ трубопроводов
нарастания напряжения на якоре 2ЭМУ и на бустере. Приведенная
осциллограмма относится к усилителю мощности, предназначенному
для управления двигателями постоянного тока мощностью до 25 квт.
Об использовании э л е к т р и ч е с к и х м о д е л е й заводами,
изготовляющими мощные гидравлические турбины
Заводы, производящие мощные гидравлические турбины, при раз*
работке нового типа рабочего колеса широко пользуются физическими
моделями. С помощью моделей отрабатывается оптимальная форма ра-
бочего колеса, отсасывающей трубы и других частей агрегата. На фи-
зических моделях снимаются и основные характеристики будущей
гидротурбины, причем основное внимание уделяется установившимся
режимам и получению максимального коэффициента полезного дей-
ствия.
Рабочие испытания готовых натурных гидротурбин большой мощ-
ности в заводских условиях по понятным причинам невозможны.
А из-за этого оказываются невозможными полные испытания и на-
ладка натурных регуляторов скорости. В связи с этим работниками
Ленинградского металлического завода была высказана интересная
мысль об использовании электродинамической модели гидроагрегата
для испытания и настройки натуральных регуляторов скорости гидро-
турбин в заводских условиях.
Электромеханическими средствами должны быть смоделированы
гидравлический удар, уравнение расхода, сама турбина, синхронный ге-
нератор, регулятор напряжения и линия электропередачи. Регулятор
скорости устанавливается натуральный, а связь между выходом регу-
лятора и входом модели осуществляется специальным преобразовате-
лем. Приводной электродвигатель центробежного маятника регулятора
должен питаться от специального синхронного генератора, установ-
ленного на валу модельного агрегата. Для того чтобы энергия, потреб-
ляемая двигателем маятника, не оказывала заметного действия на по-
ведение модели гидроагрегата, мощность модели должна быть доста-
точно большой, по-видимому, не менее 10 квт. Известные трудности
могут возникнуть из-за того, что у различных регуляторов скорости
синхронная частота пендель-мотора может быть различной. Сейчас
трудно сказать, как лучше разрешить эту задачу. Можно на время
испытаний устанавливать в регулятор скорости пендель-мотор выбран-
ной частоты, можно иметь сменные пендель-генераторы или генератор
с переключениями полюсов. Могут быть и другие пути.
В отношении преобразователя сигналов от регулятора скорости
к электрической модели трудностей не предвидится. Выходная мощ-
ность регулятора более чем достаточная, а преобразователем в простей-
шем случае может быть обыкновенный электрический реостат или по-
тенциометр, механически связанный со штоком сервомотора регулятора
скорости. Модельный синхронный генератор, регулятор напряжения и
линия передачи в данном случае могут быть сделаны гораздо более
просто, чем в моделях энергосистем, так как здесь будут исследо-
ваться только процессы регулирования скорости, которые протекают
относительно медленно. Основной задачей описанной установки
является создание условий для работы регулятора при замкнутом кон-
туре регулирования. На таком стенде можно еще на заводе настраи-
вать регуляторы скорости гидротурбин в условиях, близких к реальным.
2. Влияние инерции потока воды через турбину
243
§ 2. Моделирование влияния инерции потока
воды через турбину
Воспроизведение на динамических моделях энергосистем влияния
гидравлического удара в водоводах турбин имеет большое значение для
исследования многих режимов автоматического регулирования энерго-
систем.
Физическое моделирование явления гидравлического удара было
выполнено под руководством И. В. Егиазарова (Егиазаров, 19536;
Егиазаров, Картвелишвили, Первозванский, 1957) в Водноэнергетиче-
ском институте АН Армянской ССР. Для изменения и регулирования
скорости распространения волны гидравлического удара в напорный
трубопровод был введен резиновый шланг с воздухом. В результате
этого удалось снизить скорость волны удара почти в 20 раз, что по-
зволило на одной и той же установке моделировать трубопроводы раз-
ной длины при сохранении натурального масштаба времени.
Работы по физическому и математическому моделированию трубопро-
вода велись также в Московском энергетическом институте (Веников,
Иванов-Смоленский, 1953). В 1947 г. Е. Л. Сиротинский (1947) пред-
ложил моделировать трубопровод посредством цепочечной схемы, за-
мещающей длинную электрическую линию. Эта идея была позже осу-
ществлена А. К. Фоминым (1955). Однако выполнить такую модель
при сохранении масштаба времени равного единице, что является прак-
тически необходимым условием для моделей энергосистем, пока еще
не удалось. Препятствием здесь является трудность изготовления ин-
дуктивных катушек с очень малым активным сопротивлением.
Ряд электрических и электромеханических моделей трубопровода
был разработан начиная с 1953 г. в Институте электромеханики.
Краткое описание этих моделей будет дано ниже.
Требования к модели трубопровода
Инерция потока воды в водоводах турбины оказывает существен-
ное влияние на процессы изменения мощности гидроагрегатов. При мо-
делировании энергосистем в большинстве случаев интересно воспро-
извести не сами переходные процессы по всей длине трубопровода,
а лишь влияние этих процессов на момент и скорость турбины. Поэтому
представляет большой интерес математическое моделирование, которое
может быть выполнено сравнительно простыми средствами.
Исходные уравнения для моделирования высоконапорных и низко-
напорных гидроагрегатов различны. В первом случае напорный трубо-
провод имеет большую длину, время пробега волны гидравлического
удара туда и обратно оказывается сравнимым с постоянными времени
турбины и регулятора скорости. Поэтому приходится воспроизводить
волновой характер явлений в трубопроводе. Кроме того, высоконапор-
ные гидростанции могут содержать уравнительные резервуары и на-
порные деривации. Инерционные постоянные, характеризующие коле-
бания масс воды в системе уравнительный резервуар—напорная дери-
вация, относительно велики и измеряются десятками секунд. Поэтому
в большинстве случаев уровень воды в уравнительном резервуаре можно
считать заданным и постоянным, что позволяет не моделировать урав-
нительный резервуар. Однако при исследовании относительно длитель-
ных переходных процессов в энергосистеме, таких, как регулирование
244
Глава VI, Моделирование гидротурбин, трубопроводов
частоты, уравнительный резервуар и напорную деривацию приходится
моделировать.
Водоводы низконапорных гидротурбин имеют сравнительно неболь-
шую длину и, как правило, довольно сложную конфигурацию. При этом
напорного трубопровода может не быть совсем. Однако кинетическая
энергия водяного потока в спиральной камере, в камере рабочего ко-
леса и в отсасывающей трубе существенным образом влияет на пере-
ходные процессы гидроагрегата при изменении открытия турбины. При
анализе процессов регулирования, а также при моделировании энерго-
систем целесообразно водоводы низконапорных гидротурбин представ-
лять в виде так называемого эквивалентного простого трубопровода
(Жмудь, 1953). Благодаря сравнительно небольшой протяженности
низконапорных водоводов и изменению их поперечного сечения
по длине волновой характер явления гидравлического удара здесь
не проявляется и трубопровод может рассматриваться как инерционное
звено первого порядка. Такое упрощение означает пренебрежение
упругостью воды и стенок трубопровода и математически приводит
к так называемому уравнению жесткого удара. Для средненапорных
гидроагрегатов упругость воды и стенок трубопровода может учиты-
ваться приближенно.
Входной величиной для математической модели трубопровода слу-
жит сигнал, пропорциональный расходной функции qx, т. е. величине,
характеризующей эквивалентное относительное открытие турбины.
На выходе модели трубопровода должны вырабатываться сигналы,
пропорциональные относительному расходу q через турбину и относи-
тельному отклонению напора Л. При этом в модели должна также вос-
производиться зависимость расхода воды через турбину от напора и
скорости агрегата, т. е. функция входящая в состав уравнения
расхода (7).
Естественно, что в соответствии с требованиями к модели уравне-
ния трубопровода и расхода могут быть взяты с теми или иными упро-
щениями. Это позволит в ряде случаев существенно упростить кон-
струкцию блоков модели.
Необходимо также подчеркнуть, что математическое моделирование
трубопровода не исключает физического моделирования и не конкури-
рует с ним. В физических моделях могут быть воспроизведены такие
факторы, которые мы не можем или не умеем учесть в уравнениях.
Имея в составе модели энергосистемы хотя бы один гидроагрегат,
у которого гидравлическая часть смоделирована физически, можно про-
вести ряд чрезвычайно интересных и важных исследований по влиянию
спецефических гидродинамических явлений на работу агрегата.
Уравнения трубопровода высоконапорной
гидростанции
Высоконапорные гидростанции обычно имеют длинные напорные
трубопроводы, однородные на всем протяжении. Расчетная схема для
этого случая дана на рис. 155. Здесь х — координата, отсчитываемая
вдоль оси трубопровода, z— координата, направленная против силы
тяжести, //ст. — статический напор. На конце напорного трубопровода
в точке x = L находится регулирующий орган турбины; L — длина
трубопровода. При выводе дифференциальных уравнений трубопровода
обычно пренебрегают трением, которое весьма мало, влиянием скорости
§ 2. Влияние инерции потока воды через турбину
245
воды на скорость распространения звука вдоль трубопровода и рядом
других второстепенных факторов. Основными переменными, характери-
зующими процессы в трубопроводе, целесообразно взять относительное
изменение пьезометрического напора Л= тт- и относительный расход
-а
. Пьезометрический напор, как известно (Жмудь, 1953), равен
Р
7о
где Р— давление в рассматриваемом
сечении трубопровода, 70 — удельный
вес воды. В качестве базового значе-
ния напора обычно выбирают номи-
нальную величину статического напора
гидростанции.
Исходные дифференциальные урав-
нения имеют следующий вид:
dh р dq
dx a dt ’
dq___ 1 dh (35)
dx ap dt ’
Рис. 155. Расчетная схема напорного
трубопровода высоконапорной гидро-
станции.
где а — скорость распространения волны гидравлического удара в трубо-
проводе, р = —^lj-ударная характеристика, г — поперечное сечение
трубопровода, g— ускорение силы тяжести.
Рассмотрение уравнений (35) и их моделирование проще производить,
если перейти к операционной форме. Обозначим лапласовы изображения
переменных следующим образом:
Н(р, x)-+h(t, х),
Q(p, х).
Тогда решение уравнений (35) для конца трубопровода (x=L) за-
пишется так:
Hip, L) = H(P, O)ch^-pQ(p, O)sh^,
Q(p, L) = Q(p, 0)ch§—jH(p, O)sh^,
2L
где t = ——фаза гидроудара, равная удвоенному времени
волны гидравлического удара по всему трубопроводу. В тех случаях,
когда гидростанция не имеет уравнительных резервуаров, напор в на-
чале трубопровода (х=0) можно считать постоянным, что означает
/7(р, 0) = 0. Тогда из (37) легко найти передаточную функцию трубо-
провода:
(36)
(37)
пробега
н (р, L)___ 1 рт
Q(P, L)— Pth2-
Полученное соотношение может быть положено в основу при по-
строении модели трубопровода. Эта формула может быть использована
(38)
246
Глава VI. Моделирование гидротурбин, трубопроводов
также и в том случае, когда гидростанция имеет уравнительные резер-
вуары, но изменения уровня в них за время исследуемых переходных
процессов малы.
Если модель трубопровода делается приближенной, то погрешность
лучше всего, по-видимому, оценивать по частотным характеристикам.
Из передаточной функции (38) получаем следующее выражение для
частотной характеристики трубопровода:
IF(»=-pth74T=-jptg^, (39)
где со — угловая частота, j = \J—1. Эта частотная характеристика по-
строена в виде сплошной линии на рис. 156 в обобщенных координатах
—— и шт. Как видно из рис. 156, это чисто мнимая характеристика,
она обращается в нуль в точках т = 2п~ и имеет резонанс в точках
о)т==(2л — 1)^, где п — любое целое положительное или отрицательное
число, а также нуль. Асимптоты ветвей частотной характеристики по-
казаны на рис. 156 пунктиром.
Один из способов приближенного моделирования длинного трубо-
провода состоит в том, что передаточную функцию (38) разлагают в ряд
и выполняют модель по приближенному выражению для передаточной
функции, ограничиваясь тем или иным количеством членов разложения.
Чаще всего используется разложение следующего вида (Evangelisti,
1947):
Н(р, L)
Q (Р, L)
рт
2Р
т2 т4
1-ьЙр2 "ь1920 р4-ь •••
т2 т4
1 -4-g- Р2 -+-384Р4
(40)
£ 2. Влияние инерции потока воды через турбину
247
В некоторых случаях лучшие результаты дает такое разложение:
= _₽1 р А — ± Р2 р4
Q(p,L) 2Р\1 12р 120р
(41)
правда, это разложение действительно лишь для частот | | <С тс, т. е.
в пределах главной ветви частотной характеристики (39), изображенной
на рис. 156.
Методы приближенного моделирования обосновываются тем, что
совпадение частотных характеристик модели и оригинала требуется
не при всех частотах, а лишь в области существенных частот. Границы
диапазона существенных частот, а значит и точность модели опреде-
ляются в соответствии с теми задачами, для исследования которых
строится модель.
Для примера на том же рис. 156 построены частотные характе-
ристики по двум первым приближениям разложения (40). Штрих-пунктир-
ная прямая линия, проведенная под углом, соответствует наиболее
простому приближению:
Н(р, L)______рт
Q (р, L) ~ 2 р'
(42)
Как видно из рис. 156, прямая достаточно близка к основной ветви
частотной характеристики оригинала лишь в области низких частот.
Пунктиром вычерчена частотная характеристика, найденная из разло-
жения
т2
H(p,L) рт 1ч-24?2
Q(p,£)~ 2 Р ’
1н- g-p2
(43)
юна дает неплохое совпадение с главной ветвью характеристики ориги-
нала и имеет два резонанса при частотах = ±2.828.
У последующих ветвей совпадение кривых хуже, и дальше они
вообще расходятся. Разложение с учетом четвертых степеней р дроби
выражения (40) дает несколько лучшее совпадение характеристик. Кри-
вая имеет разрывы при (от: = ±3.18 и orc = ±6.16. На рис. 156 эта
характеристика не нанесена.
О моделировании гидростанций с уравнительными
резервуарами
Многие высоконапорные гидростанции снабжаются уравнительными
резервуарами различных типов. На рис. 157 изображена схема уста-
новки с уравнительным резервуаром цилиндрического типа. При выводе
уравнений для данной схемы можно принять ряд упрощающих допуще-
ний, которые обосновываются специфическим назначением модели.
Прежде всего будем полагать, что волновые изменения давления в трубо-
проводе не проходят в напорную деривацию. Иными словами, напор
в начале напорного трубопровода считаем равным Нх=ъ = Н& ±
где ДЯР— повышение уровня воды в уравнительном резервуаре. В от-
ДЯ
носительных единицах ^р = —~у причем Н(р, 0) -> h(t, 0) = hp. Таким
б
образом, переменная /?р должна быть использована при моделировании
уравнений (37). Разница мгновенных значений расхода в начале трубо-
провода q (/, 0) и у его конца q (t, L), обусловленная упругостью воды
248
Глава VI. Моделирование гидротурбин, трубопроводов
и стенок трубопровода, настолько мала, что может не учитываться
в уравнениях напорной деривации и уравнительного резервуара. Следо-
вательно, будем считать
Qa=Q-^Fpd-^-, (44)
где QA— расход в напорной деривации, Q — расход воды через турбину,
/*р—площадь поперечного сечения уравнительного резервуара. Кроме
того, для системы напорная деривация—уравнительный резервуар можно
записать следующее уравнение:
§? = (), (45)
где Нд— потеря напора в деривации при Q4=Q6, LA— длина дерива-
ции, FA — площадь ее поперечного сечения.
Как показывает второй член левой части уравнения (45), потери
Рис. 157. Схема гидростанции с уравнительным
резервуаром цилиндрического типа.
напора от трения в напорной деривации мы считаем пропорциональными
квадрату абсолютной величины QA. Инерция массы воды в уравнитель-
ном резервуаре не учитывается. Для перехода к относительным пере-
менным используем такие обозначения:
ЛР— Яб, d — Нб, q* — Q6, ТА— gF^6, ТР — Qe . (46>
Тогда уравнения (44) и (45) примут вид:
7’рл>ч-?-^==0’ (47>
J^sign9A-+-Ap = 0. (48)
Полученные уравнения и следует использовать для моделирования.
Еще три типа уравнительных резервуаров изображено на рис. 158»
На рис. 158,а рабочая камера уравнительного резервуара имеет значи-
тельные размеры и соединена с напорным трубопроводом коротким
патрубком П малого поперечного сечения. При быстрых закрытиях
турбины в уравнительный резервуар через патрубок устремляется поток
воды, причем в рабочей камере образуется струя. При точном модели-
ровании необходимо учитывать не только потери напора от прохожде-
ния потока воды через патрубок, но и потери напора на преодоление
инерции потока воды в патрубке и струе. При вытекании воды из ре-
зервуара в рабочей камере струи не возникает. Некоторые уравнитель-
§ 2. Влияние инерции потока воды через турбину
249
ные резервуары для более быстрого гашения колебаний уровня воды
снабжаются сопротивлением. В качестве примера на рис. 158, б изобра-
жен резервуар, у которого при входе в рабочую камеру установлена
специальная диафрагма Д, причем патрубок здесь может вообще от-
сутствовать. Работа уравнительных резервуаров первых двух типов,
данных на рис. 158, подробно рассмотрена у Г. И. Кривченко (1951) и
при их моделировании надлежит пользоваться приведенными там урав-
нениями.
На рис. 158, в представлен дифференциальный уравнительный резер-
вуар (Картвелишвили, 1951). Он имеет две рабочие камеры: централь-
Рис. 158. Различные типы уравнительных резервуаров.
ный стояк с площадью зеркала воды FA и внешнюю часть с площадыо
F%. Обе части резервуара сообщаются между собой через отверстия О
в нижней части стенок стояка. Отклонения уровней воды в резервуаре
от уровня верхнего бьефа станции для краткости обозначены уг и
Уравнение (44) заменяется следующим:
• (49)
Уравнение (45) остается прежним с той лишь разницей, что
заменяется на уг. К этим двум уравнениям необходимо добавить урав-
нение, выражающее перетекание воды из стояка во внешнюю часть
резервуара и обратно через отверстия в стояке:
I ^1— ^21 sign (z/i —у2), (50)
где Fo — площадь отверстий в стояке, k0 — их коэффициент расхода.
Для перехода к относительным переменным обозначим:
Л1~А’ Ъ~Н6’ Q6
, = (51)
Тогда уравнения, описывающие напорную
ный резервуар дифференциального типа, будут
деривацию и уравнитель-
иметь следующий вид:
(52)
- A VI - Л21 Sign (Ах - Л2) = 0. (54)
250
Глава VI. Моделирование гидротурбин, трубопроводов
Уравнение гидравлического удара в водоводах
низконапорных гидротурбин
Как уже указывалось выше, при моделировании влияния гидравличе-
ского удара на процессы регулирования низконапорных турбин следует
пренебречь упругостью воды и стенок водоводов и пользоваться поня-
тием эквивалентного простого трубопровода (Жмудь, 1953). Соответ-
ствующие расчеты показали, что эти существенные упрощения в случае
низконапорных установок совершенно не влияют на точность результа-
тов. Следовательно, модель низконапорной гидротурбины должна вос-
производить лишь влияние инерции массы воды в водоводах турбины.
Напор и расход здесь связаны уравнением жесткого удара:
<«>
Коэффициент правой части уравнения называют постоянной времени
трубопровода
т„ = ^. (56)
Уравнение (55) может быть получено как при непосредственном рас-
смотрении кинетической энергии водяного потока через турбину, так и
из формул (40) и (41), если отбросить все члены разложения, содержа-
щие р в степени выше первой. Легко видеть, что уравнение (55) экви-
валентно передаточной функции (42). Частотная характеристика, соот-
ветствующая уравнению (55), представлена на рис. 156 в виде наклон-
ной прямой линии. Необходимо отметить, что влияние гидравлического
удара на момент и скорость турбины у низконапорных установок ока-
зывается, как правило, больше, чем у высоконапорных, несмотря на бо-
лее простое уравнение жесткого удара.
Уравнение расхода гидротурбины
Уравнение расхода (7) гидравлических турбин было приведено в са-
мом общем виде. Для реактивных турбин функция q> зависит не только
от напора, но и от скорости вращения агрегата. Уравнения расхода
реактивных турбин даны у Н. А. Картвелишвили (1951) и у Г. И. Крив-
ченко (1951). При моделировании, видимо, наиболее удобно представлять
функцию </2 в такой форме, как это делает Н. А. Картвелишвили. В Нс.-
ших обозначениях это уравнение расхода запишется так:
q = qi [(1 - к) у/ГГЛ -ь к (1 -ь Т)], (57)
где к — коэффициент, определяемый по характеристикам турбины. Выра-
жение заключенное в квадратные скобки и представляет собой функ-
цию (?2.
В ряде случаев при моделировании энергосистем уравнение расхода
может быть взято в упрощенном виде. Так, если не ожидается значи-
тельных отклонений скорости гидроагрегата, можно положить =0. Тогда
получим
<7 = <71 [(1 — к) у/1 h -+- £].
(58)
§ 2. Влияние инерции потока воды через турбину
251
Если отклонения напора в переходных процессах невелики, то можно
считать приближенно
(59)
Это позволит для малых отклонений напора и скорости представить
уравнение расхода реактивной гидротурбины в значительно упрощенном
виде:
9 = 91(l-bJ0A), (60)
где =
Для радиально-осевых гидротурбин коэффициент к является величи-
ной постоянной и практически не зависит от открытия направляющего
Рис. 159. Зависимость величины коэффициента к от
положений регулирующих органов для турбины ПЛ-587.
аппарата и других изменений режима. Как указывает Н. А. Картвели-
швили (1951), величина коэффициента к д\я ряда радиально-осевых гидро-
турбин ЛМЗ изменяется примерно от —0.4 до -4-0.4, увеличиваясь
с ростом коэффициента быстроходности. В частности, для турбины типа
РО-123 коэффициент &=0.
Уравнение (57) справедливо и для поворотнолопастных гидротурбин,
однако значение коэффициента к не остается постоянным при изменении
положений регулирующих органов. На рис. 159 представлена зависи-
мость Q = /(а0, ф) при номинальных значениях скорости и напора. Эта
расходная характеристика для турбины с рабочим колесом типа ПЛ-587
уже приводилась нами на рис. 140. На рис. 159 для различных точек
нанесены значения коэффициента к, вычисленные по универсальным про-
пеллерным характеристикам. Из рассмотрения рис. 159 следует, что
252
Глава VI. Моделирование гидротурбин, трубопроводов
вблизи сочетаний а0 и ф, определяемых комбинаторной связью, вели-
чина k остается практически постоянной. Следовательно, для моделиро-
вания переходных процессов, во время которых комбинаторная зависи-
мость нарушается не особенно значительно, пользование уравнением (57)
или его упрощенными вариантами можно считать обоснованным. В слу-
чае резких рассогласований положений регулирующих органов допуще-
ние о постоянстве к следует делать более осторожно.
Необходимо также оговориться, что уравнение расхода (57) и коэф-
фициент к выведены и проверены по статическим характеристикам
турбин. Однако специалисты считают вполне допустимым пользоваться
этими формулами для динамических расчетов. А. Е. Жмудь (1953) обо-
сновывает это положение следующими соображениями. Скорость воды
в зависимости от напора и типа турбины может достигать в направляю-
щем аппарате реактивной турбины величины 10—40 м/сек., а относи-
тельно лопастей рабочего колеса — порядка 20—40 м/сек. При этом ча-
стица жидкости находится с этими органами во взаимодействии макси-
мум 0.1 сек. За этот промежуток времени положение регулирующего
органа, скорость рабочего колеса и скорость набегающего потока могут
измениться незначительно.
Расход свободноструйных ковшевых (активных) гидротурбин не за-
висит от скорости вращения колеса турбины, так как сопло располо-
жено на известном расстоянии от ковшей. Уравнение расхода в этом
случае ____
q = у. V'l А; (61)
здесь — относительный ход иглы.
Линеаризация (59) может быть использована и в уравнении расхода
(61), если это допустимо по условиям моделирования. Отсекатель или
отклонитель, перерезающий струю вблизи выходного отверстия сопла,
может, конечно, несколько уменьшить пропускную способность сопла,
но это явление при электрическом моделировании обычно не учи-
тывается.
О двух подходах к математическому моделированию
д ли иных трубопровод о*в
При математическом моделировании влияния трубопровода на регули-
рование гидротурбин возможны два подхода. В первом случае в основе
построения модели используется тот факт, что в устройствах различ-
ной физической природы — напорный трубопровод, электрическая длин-
ная линия без потерь, длинный механический вал с распределенной мас-
сой и упругостью, — которые предназначены для передачи энергии на.
расстояние, описывающие их дифференциальные уравнения аналогичны..
При этом модели приходится делать приближенными, собирая цепную*
схему из нескольких ячеек с сосредоточенными параметрами. Чем мельче-
ячейки и больше их количество, тем точнее получается модель.
Во втором случае просто используются электронные или электро-
механические счетно-решающие устройства, которые непосредственно ре-
шают уравнения трубопровода и расхода в натуральном масштабе
времени.
Следует сказать, что моделирование по второму методу приводит
обычно к более простым и точным схемам, а поэтому чаще исполь-
зуется.
§ 2. Влияние инерции потока воды через турбину
253
Схема фильтра крутильных колебаний
Приближенная математическая модель трубопровода высоконапорных
гидростанций может быть выполнена с помощью несложного механиче-
ского фильтра крутильных колебаний. На рис. 160 изображена схема
фильтра, состоящего из к отнотипных ячеек. Каждая ячейка представ-
6
ляет собой два диска с моментами инерции у , связанных между собой
пружинами с податливостью е. Диски свободно вращаются на общем
валу. Крайними дисками фильтра являются роторы двух однотипных
машин постоянного тока, одна из которых работает как двигатель, а дру-
гая— как генератор. Граничные условия моделируются при помощи
специальных электрических схем. При этом расход через турбину соот-
ветствует угловой скорости вращения последнего диска фильтра, а на-
пор— крутящему моменту на выходе этого диска. Параметры модели
определяются следующими условиями подобия:
Л_ Р2 мр-б __2. Q t>- в
2 ’ ’ е~ 2Р кМ^б ’
(62)
где б и £2ф. б—базовые значения крутящего момента и угловой ско-
рости вращения, принятые для данного фильтра. Чем больше будет
число ячеек Аг, тем точнее модель. Для суждения о точности моделиро-
вания целесообразно сравнить частотные характеристики модели и ори-
гинала. Расхождение частотных характеристик возрастает в области
высоких частот. Наиболее полное представление можно получить, если
построить графически совмещенные частотные характеристики.
Недостатком описанной модели является ее сравнительно небольшая
гибкость, так как изменение инерции дисков и жесткости пружин со-
пряжено с определенными трудностями. Кроме того, моделирование гра-
ничных условий (уравнения расхода и закона изменения напора в начале
трубопровода) здесь довольно сложно. Подробно модель описана в ра-
боте А. А. Первозванского и Р. А. Полуэктова (1956).
Схемы электрических L—С фильтров
На рис. 161 изображена схема электрического L—С фильтра, кото-
рый совершенно аналогичен рассмотренному выше механическому фильтру.
Параметры звеньев находятся из соотношений:
__ ф. б Ар. £
~2”1Г“7’ Т?'ku~-
ф» о » ф» о
(63)
254
Глава VI» Моделирование гидротурбин, трубопроводов
Напору соответствует напряжение в конце фильтра, а расходу—ток.
Граничные условия здесь моделировать гораздо проще, чем в предыду-
щем случае, однако осуществление такой модели весьма сложно, так
как расчеты приводят к большим величинам индуктивности одной ячейки
при сохранении активного сопротивления крайне малым. Количество
ячеек здесь определяется на основании тех же соображений, что и
в случае механического фильтра. Эта схема подробно рассмотрена в ра-
ботах Е. Л. Сиротинского (1947), А. К. Фомина (1955) и А. А. Перво-
званского и Р. А. Полуэктова (1956).
На примере электрического L—С фильтра удобно показать, как
можно моделировать трубопроводы средненапорных гидростанций при
1
г
—WV
Рис. 162. Схемы приближенных электрических мо-
делей трубопровода.
частичном учете упругости воды и трубопровода. За основу возьмем
приближенное выражение для передаточной функции трубопровода по
формуле (43). Такую же передаточную функцию имеет электрическая
цепь, изображенная на рис. 162, а:
LC 2
» 1Н~ 3 р ; (64\
Цр) ~~ 2 Р 1ч-LCp*
здесь U(p)^u
Перейдем к относительным переменным
(65)
тогда вместо (64) получим
LC
Н(Р)_ 3LI6 l+JP2 (66}
Q(p)~ 2U6 Р l+LCp* *
Сравнивая передаточные функции оригинала (43) и модели (66), на-
ходим условия подобия:
ЗА/б
2 ~'2U6
и
из которых определяются параметры схемы
__ рт _ Зт
— “з* 7? 8р’ ^б
(67)
(68)
О том, какие получаются значения параметров, можно судить по
следующему примеру. Возьмем трубопровод средненапорной гидростан-
ции с такими данными: напор Н6 z== 100 м, длина L = 500 м, скорость
£ 2. Влияние инерции потока воды через турбину
255
звука а = 1000 м/сек., номинальная скорость воды в трубопроводе
и = 4 м/сек.1 Для этих данных получаем т = 1 сек. и р = 4.08. Как по-
казывает второе условие подобия (67), произведение LC не зависит от
выбора базовых значений напряжения и тока модели. Однако технически
всегда проще выполнить большие емкости, нежели большие индуктив-
ности. Для этого, как видно из уравнений (68), нужно выбирать малые
значения U& и большие величины для /б. Но с другой стороны, в низко-
вольтной модели с большими то-
ками крайне неудобно воспроиз-
водить нелинейное уравнение рас-
хода. Таким образом, при выборе
базовых значений напряжения и
тока нужно идти на компромисс.
Для рассматриваемого примера
примем Ue = 50 в и /б = 10 ма.
Тогда из соотношений (68) най-
дем: £=6800 гн, С = 18.4 мкф.
Естественно, что выполнить такую
индуктивную катушку с высокой
добротностью и постоянством
самой величины L практически
чрезвычайно трудно.
Во многих случаях и особенно,
когда р 1, электрический фильтр
для модели трубопровода целесо-
образнее делать на основе схем,
Рис. 163. Отклонение частотных харак-
теристик различных приближенных моде
лей трубопровода от оригинала.
которые являются дуальными по
отношению к рассмотренным.
Здесь токи и напряжения, индук-
тивности и емкости взаимно ме-
няются ролями. Так, две схемы, приведенные на рис. 162, являются
дуальными. Поэтому для второй схемы (рис. 162, б) следует принять
1 1 и
h = T ’ ? = 7Г’
7б иб
а условия подобия определят параметры следующим образом:
р,_____рт /б т____________Зт ^б
° — 3 ’£7б’ Д — 8р * /б ’
(69)
(70)
Для того же числового примера в этом случае получим L = 460 гн,
С = 272 мкф. Величина индуктивности уменьшилась в р2 раз. Важным
преимуществом последней схемы является также и то, что при устано-
вившемся режиме она не потребляет тока. Поэтому наличие некоторого
активного сопротивления у индуктивных катушек не будет искажать
статических режимов. По-видимому, более простые результаты в смысле
конструкции даст и переход к дуальной схеме механического фильтра
крутильных колебаний.
Следует также отметить, что фильтр, собранный по схеме, приведен-
ной на рис. 162, в соответствии с передаточной функцией (43) модели-
рует трубопровод более точно, чем одна симметричная ячейка L—С
1 Числовые данные взяты из примера № 3 в книге Г. И. Кривченко (1951).
256
Глава VI. Моделирование гидротурбин, трубопроводов
фильтра или механического фильтра. Погрешности моделей трех типов
удобно оценивать по рис. 163. Здесь в полулогарифмическом масштабе
представлена погрешность £ между частотной характеристикой оригинала
и модели. Погрешность вычислялась по формуле
e = tg-_yBfe>, (71)
где W(/со) — частотная характеристика модели. Кривая / соответствует
модели, выполненной по уравнению жесткого удара (55), т. е. по пере-
даточной функции (42). Кривая 2 вычислена для модели, построенной
на основании формулы (43). Наконец, кривая 3 найдена для того слу-
чая, когда моделью трубопровода является одна симметричная ячейка
электрического L—С фильтра или механического фильтра крутильных
колебаний. Так как на рис. 163 даны значения погрешности е без учета
ее алгебраического знака, то можно указать, что для кривой / в дан-
ном интервале частот £ > 0, для кривой 2 £ < О, для кривой 3 вначале
£>0, а затем £<0. Перемена знака ошибки в последнем случае выз-
вана пересечением частотных характеристик оригинала и модели.
Выяснение погрешностей, которые создаются у моделей типа цепо-
чечных фильтров из-за активного сопротивления индуктивных катушек
или из-за наличия трения у инерционных дисков, представляет собой
более сложную задачу. Ввиду сравнительно малой популярности моде-
лей такого типа, мы не будем здесь касаться этого вопроса.
Моделирование высоконапорных трубопроводов
с помощью блока постоянного запаздывания
Использование блоков постоянного запаздывания (Гуров, 1955; Гриня,
Копай-Гора, 1956; Иванов, 1956) открывает большие возможности для
моделирования трубопроводов высоконапорных и средненапорных гидро-
станций как с уравнительными резервуарами, так и без них. В послед-
нем, более простом случае передаточную функцию трубопровода (38)
можно представить в такой форме:
L) = 1е~~Рт
Q(p, L) Н 1-*-е-Рх * V2/
Отсюда
Hip, L) — ^Q(p, L)-H(P, L)e-f\ (73)
Переходя от операционного изображения к обыкновенной форме
записи, получим
— — t) — pg(O — hit — т). (74)
Это уравнение совместно с уравнением расхода свободноструйной
турбины (61) может быть смоделировано средствами электрической
счетно-решающей техники с использованием звена чистого запаздывания.
Чистое запаздывание осуществляется либо при помощи запоминающих
конденсаторов (Гуров, 1955; Гриня, Копай-Гора, 1956), либо путем за-
писи на магнитную ленту (Иванов, 1956) или на магнитный барабан.
В модели трубопровода могут быть как специально изготовленные
электрические, магнитные или электромеханические решающие блоки,
так и стандартные блоки электронных моделей, выпускаемых промыш-
§ 2. Влияние инерции потока воды через турбину
257
ленностью. На рис. 164 представлена схема электронной модели высоко-
напорного трубопровода, без уравнительного резервуара (Семенов, 1958а,
19586). Модель собрана из решающих блоков, выпускаемых Заводом
счетно-аналитических машин (САМ) в городе Пензе. Схема содержит
блок нелинейностей типа БН-3, блок произведения типа БП-2, блок по-
стоянного запаздывания типа БПЗ-1 и два операционных усилителя по-
стоянного тока 4 и 5. Для ясности направление прохождения сигна-
лов указано на блоках стрелками. Схема моделирует уравнения (61) и
(74), причем входным сигналом служит напряжение пр, поступающее от
Рис. 164. Схема электронной модели длинного трубо-
провода, использующей блок постоянного запаздывания.
модели регулятора скорости турбины, а напряжения и2 и и5 являются
выходными сигналами. Относительные величины обозначены следующим
образом:
и = Л = = h-9q = -f±. (75)
Up.6 U26 ^56 ^36 ^46
Блок БП-2 выполняет операцию умножения
«2 = С2ири^ (76)
где С2— коэффициент, определяемый конструкцией блока.
Для того чтобы уравнение (76) правильно моделировало уравнение
расхода (61), должно выполняться следующее условие подобия:
= (77)
U26
Нелинейный блок БН-3 осуществляет преобразование
«з = С3 -+- И5. (78)
Подобие будет выполнено при следующем условии:
С3
^36
V^56
(79)
Операционные усилители 4 и 5 играют роль сумматоров. Сигнал,
пропорциональный —А, может быть получен с того же блока БН-3 бла-
годаря особенности его схемы. Сопротивления первого сумматора нужно
рассчитывать в соответствии с условиями подобия
едб ’ ед6“р-
(80)
258
Глава VI. Моделирование гидротурбин, трубопроводов
Условия подобия для второго сумматора выражаются такими уравне-
ниями:
R&Ui6_ 1 R5U26 _
ВДб ’ ^56 “Р-
(81)
Для расчета схемы можно рекомендовать следующий порядок. Все
входящие в модель блоки и усилители допускают изменения входных
и выходных напряжений в пределах от —100 до -4—100 в. Поэтому можно
принять /7р.б = 100 в. Выбор величины зависит от того, какие
экстремальные значения принимает переменная h в исследуемых режи-
мах. Если, например, | h | 1, то можно взять £75б = Ю0 в.
Рис. 165. Вариант модели с блоком запаздывания.
Величину t/зб следует согласовывать с Z7s6. Так, если 1Ль =
= 100 в, то целесообразно принять 1/зб= - ^,в =70.7 в. После этого
находится по формуле (79) коэффициент С*3 и блок нелинейностей БН-3
настраивается в соответствии с уравнением (78). Моделирование функ-
ции (78) в данном блоке осуществляется путем кусочно-линейной аппро-
ксимации 12—14 отрезками прямых. Ошибка аппроксимации получается
меньше 1%. Конструктивный коэффициент блока произведения С2 =
= 0.01 в"1, поэтому при Up. б = 100 в получаем из условия подобия (77)
Ute = f/зб. Величина U^e должна быть такой, чтобы в переходных про-
цессах напряжение и4 по абсолютной величине не превысило 100 в.
Здесь можно, например, считать, что напряжению и4 =—100 в соот-
ветствует такой предельный режим, когда д = 1, а Л=—1. Тогда
100 в
и.Л = 1---.
46 1 -Ь р
Требуемое значение фазы гидроудара т устанавливается при на-
стройке блока запаздывания БПЗ-1. Сопротивления jR>—R? рассчиты-
ваются по условиям подобия (80) и (81), причем рекомендуемые значе-
ния сопротивлений лежат в пределах 100 ком—1.0 мгом.
Выходные напряжения модели трубопровода и2 и и5 подаются на
множительное или множительно-делительное устройство для получения
сигнала, пропорционального мощности или моменту турбины.
Решение уравнений трубопровода (61) и (74) по рассмотренной струк-
турной схеме возможно и с другими решающими блоками. Умножающее
устройство может быть выполнено на дросселях насыщения (см. выше),
а в том случае, когда входной сигнал р- задается в виде угла поворота
(т. е. когда на выходе модели регулятора скорости установлен электро-
механический интегратор), умножение осуществляется на простом линей-
ном потенциометре (Г. Корн, Т. Корн, 1955). Если для модели допу-
стима линеаризация (59), надобность в нелинейном блоке отпадает. Для
блока чистого запаздывания может быть использована магнитная запись
и т. д.
§ 2. Влияние инерции потока воды через турбину
259
Уравнения (61) и (74) можно моделировать также на основе другой
структурной схемы. Представим эти уравнения в такой форме:
(82,
(83)
На рис. 165 дана одна из возможных схем электрической модели,
которая воспроизводит эти уравнения. Относительные переменные обо-
значены так:
{1 = ^,9 = -^, /1=7^, = (84)
^р. б ^56 ^36 ' Н / ^26 Р ^46
Делительный блок вырабатывает сигнал, пропорциональный отноше-
нию двух входных напряжений,
и2=С2^, (85)
р
где С2 — коэффициент, определяемый конструкцией и настройкой дели-
тельного блока.
Нелинейный блок БН-3 настраивается так, чтобы осуществлять пре-
образование, записанное в уравнении (82). Для напряжений это пре*
образование имеет следующий вид:
u3 = -^ul-U36. (86)
^26
Моделирование будет правильным при соблюдении условий подобияг
_1 я/Ли-1 ВДб_ ед6_1 ,R74
р ’ едб ~ ~ ’ ^56 ~ р • ' '
Выполнение нелинейного преобразования (86) и настройка блока
БПЗ-1 на запаздывание т также являются условиями подобия для дан-
ной модели. Делительный блок проще всего может быть выполнен на
дросселях насыщения; схема такого устройства приведена и описана
в § 1. Отношение двух сигналов можно получить также и с помощью
стандартных промышленных блоков электронных моделей постоянного
тока (Трапезников, Коган, 1952). Кроме рассмотренных здесь двух
основных схем моделирования трубопровода, с помощью звена чистого
запаздывания можно составить еще много других вариантов. Выбор
того или иного варианта схемы определяется условиями и возможно-
стями в каждом конкретном случае.
Если гидростанция имеет уравнительный резервуар и колебаниями
уровня в нем нельзя пренебречь, то моделировать напорный трубопро-
вод приходится непосредственно по уравнениям (37). Исключив из этих
уравнений переменную Q(p, 0) и сделав необходимые преобразования,
получим
Н{р, L)=—qQ(р, L) th -+-Н(р, 0) sch £ . (88)
260
Глава VI. Моделирование гидротурбин^ трубопроводов
Учитывая, что
2
th?=TT^ .
найдем:
Н(р, L)=pQ(p, L)e~?'-PQ(p, L) — H(p, L)e~pT-t-2H(p, 0)е“Я (90)
Этому операционному уравнению соответствует следующее:
h(t)=pq(t — x) — pq(t) — h(t — x)-i-2h0 (* —у) , (91)
где Ло — относительное отклонение напора воды у начала трубопровода.
Если уравнительный резервуар цилиндрического типа, то ЛО=ЛР.
В случае уравнительного резервуара дифференциального типа hQ = h1.
Сравнивая полученное уравнение (91) с уравнениями (74) и (83), за-
мечаем, что оно содержит один дополнительный член — напор Ло с за-
паздыванием на у. При моделировании уравнения (91) можно взять за
основу любую из схем, приведенных на рис. 164 и 165. Изменение бу-
дет состоять в том, что на вход усилителя 5 через второй блок постоян-
ного запаздывания должен подаваться сигнал, пропорциональный —Ло.
Пример полной схемы, моделирующей напорный трубопровод, уравни-
тельный резервуар и напорную деривацию, приведен ниже.
Схема моделей уравнительного резервуара и напорной
деривации
При математическом моделировании дифференциальных уравнений
с помощью электрических схем предпочитают использовать интегрирую-
щие блоки, а от включения дифференцирующих устройств по возмож-
ности отказываются, так как последние усиливают разного рода высоко-
частотные помехи и пульсации. Поэтому при подготовке к моделирова-
нию представим дифференциальные уравнения напорной деривации и
уравнительного резервуара цилиндрического типа (47) и (48) в интеграль-
ной форме:
Лр = — j(<7 — qA)dt, (92)
9-д = —— JfApH-rfgjsigngJrft (93)
Один из возможных вариантов схемы моделирования этих уравнений
изображен на рис. 166. Схема содержит два интегрирующих усили-
теля 6 и 7 и нелинейный блок типа БН-3. Приняты следующие обозна-
чения относительных величин:
<7 = ^-, h q dq signq . (94)
U06 p U86 A u 76 A A ^36
Базовые значения напряжений следует выбирать так, чтобы напря-
жения на выходе блоков при воспроизведении моделируемых процессов
не превосходили допустимых величин (практически ±100 в).
£ 2. Влияние инерции потока воды через турбину
261
Входным сигналом для модели является напряжение, пропорциональ-
ное расходу q турбины. Это напряжение берется от схемы, моделирую-
щей трубопровод (рис. 164 или 165). По условиям подобия нелинейный
блок БН-3 должен осуществлять функциональное преобразование
U3 = J ^-6 sign и7, (95)
в соответствии с которым он и настраивается. Кроме того, с блока
БН-3 снимается и подается на вход усилителя 6 напряжение —щ.
Остальные условия подобия выражены следующими соотношениями:
R.c. =ад = гР, ад = ад = тд. (96)
^06 и7б и3б
Напряжение п6, пропорциональное относительному отклонению уровня
в уравнительном резервуаре, является выходным сигналом дан-
воды Лр
ной схемы. Рассмотренная схема
совместно с одной из схем, изобра-
женных на рис. 164 и 165, будет
моделировать весь гидравлический
Рис. 166. Схема модели уравнительного
резервуара и напорной деривации.
Рис. 167. Схема модели турбинного тру-
бопровода, уравнительного резервуара и
напорной деривации.
комплекс: напорный трубопровод, уравнительный резервуар и напорную
деривацию. При этом сигнал q поступает с модели трубопровода на мо-
дель резервуара и деривации, а сигнал ЛР = ЛО с модели резервуара и
деривации через блок постоянного запаздывания с временем запазды-
вания ~2 подается на модель трубопровода. Одна из возможных схем
совместного включения моделей представлена на рис. 167. Принимая
во внимание* то обстоятельство, что колебания уровня воды в уравни-
тельном резервуаре совершаются значительно медленнее переходных
процессов в напорном трубопроводе, можно вместо второго блока БПЗ
ставить простой операционный усилитель, меняющий знак напряжения
усилителя 6 на обратный. При этом переходные процессы практически
не будут искажены.
При моделировании уравнительного резервуара дифференциального
типа схемы моделей получаются несколько сложнее, чем в случае ци-
262
Глава VI. Моделирование гидротурбин, трубопроводов
диндрического резервуара (Семенов, 1958а). Подготавливая уравнения
{52)—(54) для моделирования, полезно ввести новую переменную
<7о=Г2^, (97)
представляющую собой относительный расход воды через отверстия
_________________________________________Qo r-r
в стоянке уравнительного резервуара q0— Представим уравнения
в интегральной форме:
hi = — J (q -ь q0 — ЧЛ) dt, (98)
Яа = — 7^ f (^1-ь sign 7д) Л, (99)
Чо = VI Ai — Л21 sign (Aj — А2), (100)
*Аг = j q^dt. (101)
Эти уравнения моделируются электронной схемой, данной на рис. 168.
Легко заметить, что правая половина схемы является повторением
Рис. 168. Схема моделирования уравнительного резер-
вуара дифференциального типа.
схемы рис. 167. Это обусловлено тем, что интеграторы 6 и 7, а также
нелинейный блок 1БН-3 моделируют напорную деривацию и цилиндриче-
ский центральный стояк уравнительного резервуара. Три блока левой
половины схемы воспроизводят внешнюю часть резервуара и перетека-
ние воды через демпфирующие отверстия.
Приняты следующие обозначения для относительных переменных
„ — цо п — ц7 п — _Е1_ / _ “6 1 ____Ц8
’ 9°~^2б ’ Л1~^вб’ Л2— ^86
ensign? Ах — А2= — £*-. (102)
А А ^36 и9б
Базовые величины напряжений выбираются на основании тех же со-
ображений, что и в предыдущих случаях. Нелинейный блок 1БН-3 дол-
жен выполнять преобразование согласно уравнению (95). Другой нели-
нейный блок, 2БН-3, настраивается для выполнения следующего функ-
ционального преобразования:
Щ —
—[=- VI «9 I sign и9.
V%6
(103)
$ 2. Влияние инерции потока воды через турбину
263
Остальные условия подобия сводятся к таким соотношениям:
Г) /Пг ^6 б Г) ^66 О ^66 пр Г) ^86 гр
•^0^0 и ^8^0 TJ Tj •* 1» ^12^8 JJ * 2>
^06 ^76 <"у2б ^26 /1 пл\
„ „ Ulf. R„U™ R.JJ^ <104'
r> Z> '6 __ jp 76___ гр 15 об_____ 15 об__ -J
^9^7 П ---- /M0V>7 77 - 2Д, D 7/ -- О JJ 1в
^66 ^36 ^14^96 ^13U96
Рассмотренные в этом параграфе схемы моделей структурного типа
удобны тем, что позволяют записывать или наблюдать изменения в пере-
ходных режимах многих промежуточных переменных. В связи с этим
некоторые схемы могут иметь самостоятельное значение при изучении
определенных процессов в гидросооружениях.
Приближенная модель высоконапорного трубопровода,
не содержащая звена чистого запаздывания
Как было показано выше, с помощью звена чистого запаздывания
уравнения длинного трубопровода моделируются очень просто, причем
точность модели принципиально может быть весьма высокой. Однако
не всегда блок постоянного запаздывания находится в распоряжении,
а изготовить его вне заводских условий не очень просто. Поэтому мо-
жет быть рекомендована счетно-решающая схема, приближенно модели-
рующая высоконапорный трубопровод в соответствии с формулой (43).
Путем несложных алгебраических преобразований можно из (43) полу-
чить обратную передаточную функцию в таком виде:
рт3р3
Q <Р, L) _
Н(ру L) ~
48 . 6
Рт7>
24
т2р2
(105)
Нетрудно видеть, что передаточной функции (105) соответствует
следующее уравнение:
Полученное уравнение совместно с уравнением расхода свободно-
струйной турбины (61) воспроизводится на электронной модели, схема
которой дана на рис. 169. В верхней части схемы, включающей в себя
три интегратора и один инвертер, изображена та часть модели, которая
решает уравнение (106). Условия подобия для этой части модели могут
быть в общем виде записаны следующим образом:
ВД = g, адададg• (Ю7)
Относительные переменные модели обозначены так:
h = Tr- 1 = ТГ- = = = (108)
^46 и7б °р.б 47 36 и2б
Три решающих блока в нижней части схемы рис. 169 воспроизводят
уравнение расхода турбины. Эта схема представляет интерес по своему
построению, так как отличается от аналогичных узлов моделей, рас-
смотренных выше. Если входными величинами являются р- и Л, то урав-
264
Глава VI. Моделирование гидротурбин, трубопроводов
нение расхода обычно берется в форме (61) и для его решения исполь-
зуется умножающий блок. Примером служит модель, приводившаяся на
рис. 164. Если входные сигналы суть рь и <?, то уравнение расхода бе-
рется в форме (82), а в модели используется делительный блок. Так
выполнена модель, схема которой приводилась на рис. 165. В данном же
случае, несмотря на то, что на вход этой части модели поступают и
и —7, моделирование выполнено с помощью умножающего блока. Нели-
нейный блок БН-3 и блок произведения БП-2 включены в цепь обрат-
ной связи решающего усилителя 4. Алгебраическая сумма токов, при-
Рис. 169. Электронная схема приближенного моделиро-
вания высоконапорного трубопровода.
текающих на вход усилителя 4 через сопротивления 7?! и Т?2, равна
нулю. Следовательно, выдерживается соотношение
7 = 0, (109)
что тождественно исходной зависимости (61).
Интересно отметить, что, удалив в схеме рис. 169 усилители 5 и 6
и относящиеся к ним цепи, мы получим модель трубопровода, воспро-
изводящую уравнение жесткого удара (55) или, что то же самое, пере-
даточную функцию (42). Для получения подобия постоянная времени
Т?7С7 должна быть в этом случае увеличена так, чтобы выполнялось
условие
ад^-б=^. (по)
U46 Z
С другой стороны, добавлением в схему рис. 169 еще двух интегра-
торов, можно получить более точную модель трубопровода, учитываю-
щую следующие члены разложения (40), и т. д.
О моделировании водоводов низконапорных
гидротурбин
Электрическая модель, воспроизводящая уравнение жесткого удара
(55) совместно с уравнением расхода реактивной турбины (57), (58) или
(60), может быть выполнена по различным структурным схемам с ис-
пользованием тех или иных средств счетно-решающей техники. Один
£ 2. Влияние инерции потока воды через турбину
265
из возможных вариантов структурной схемы модели водоводов низко-
напорной реактивной гидротурбины показан на рис. 170. Уравнение рас-
хода (57) на модели решается относительно напора
1-+-Л
(111)
Сигнал qx поступает от модели регулятора скорости. Методы пре-
образования сигналов, пропорциональных перемещениям регулирующих
органов турбины, в сигнал qx описаны в § 1. Сигнал —&(1-+-ср), про-
порциональный скорости модельного агрегата, может быть взят непо-
средственно от тахогенератора. Выходные сигналы модели q и (1 -+- Л)
Рис. 170. Блок-схема моделирования водоводов низкона-
порной гидростанции.
поступают дальше на множительное или множительно-делительное устрой-
ство (см., например, блок-схему на рис. 141).
При конструктивном оформлении модели схемы отдельных решающих
блоков могут быть упрощенными. Эта возможность обусловлена тем,
что по условиям задачи ряд переменных или их комбинаций изменяются
в узком диапазоне или не меняют своего знака.
Заметим также, что при моделировании расходных уравнений реак-
тивной турбины с помощью электронных решающих блоков могут быть
использованы с незначительными изменениями схемные решения, при-
веденные на рис. 165, 169.
Упрощенная модель водоводов низконапорной
гидротурбины
Упрощенное уравнение расхода реактивной турбины с одним регули-
рующим органом может быть смоделировано совместно с уравнением
жесткого удара довольно простыми средствами. Одна из таких схем
дана на рис. 171. Модель воспроизводит уравнения (55) и (60), которые
могут быть сведены к одному уравнению такого вида:
t
~\hdt + d&h + y.— (1(0) = 0. (112)
о
Здесь для дальнейшего упрощения принято qx = Iх- Кроме того, пред-
полагается, что на выходе модели регулятора скорости установлен
электромеханический интегратор и р- задается в виде угла поворота
вала, на котором закреплены движки делителя напряжения Rn и пере-
менного сопротивления 7?у. Делитель RK питается стабилизированным
напряжением Z70.
266
Глава VI. Моделирование гидротурбин, трубопроводов
Учитывая, что в схеме выполнено условие 7?у^> RK, можем записать
уравнение контура 7?у— Су следующим образом:
t
(1 — |А) ий = J iadt -ь wc (0) -ь (MJyZ., (113)
у о
НО «с (0) = Uq [1 — р- (0)], поэтому получим
t
J icdt -ь 7?у|1/с -Ь Uq О — и (0)] = 0. (114)
у о
Введя относительное значение тока
Рис. 171. Схема упрощенной электроме-
ханической модели трубопровода низко-
напорной станции.
h = ^, (115)
7б
запишем окончательно:
— [х(0) = 0, (116)
что полностью аналогично уравне-
нию (112) при выполнении следую-
щих условий подобия:
С Л _ f J (117)
/6 — 2“” и<> ° U °
или, что то же самое,
Условия (118) определяют начальную постоянную времени контура Ту
и базовое значение тока А; величиной £70 можно задаваться произвольно.
Таким образом, ток в контуре /?у — Су пропорционален относительному
изменению напора. Кроме того, для рассматриваемой модели
7
ио-“.
и0
(119)
следовательно, напряжение, пропорциональное расходу турбины, можно
измерить между точками / и 2 схемы.
Схема не только вырабатывает сигналы, пропорциональные h и q,
но также дает напряжение соответствующее приближенному выра-
жению для момента турбины
v = |i [1 ч-(1 ч~ Jo) А]. (120)
Это равенство получается из уравнений (9) и (60), если положить
qi = р-, ср^О и считать (1 -ь dQh) (1 -+- А) » 1 -ь (1 -ь dQ) h.
Все эти упрощения допустимы при не очень больших отклонениях
напора и скорости турбины в переходных режимах.
§ 3. Регуляторы скорости гидротурбин
267
Покажем, что выходной сигнал их модели пропорционален моменту v,
определенному уравнением (120). Действительно,
М1 = |х7?у/с -+-
где
Ra
(121)
(122)
Обозначив перейдем
^16
условия подобия (118). Тогда
к относительным величинам и учтем
^6
(123)
что совпадает с (120) при выполнении дополнительных условий подобия:
^0
1-*-^о’
U16— РгЦ).
(124)
Для того чтобы напряжение, снимаемое с делителя 7?и, не искажа-
лось нагрузкой, нужно выбирать суммарную величину сопротивлений
в 2—3 десятка раз больше 7?и-
§ 3. Моделирование регуляторов скорости гидротурбин
До недавнего времени электродинамические модели энергосистем
строились главным образом для исследования статической и динамиче-
ской устойчивости электропередач. Поэтому моделировать регуляторы
скорости первичных двигателей особенной надобности не было. Однако
в последние годы в связи с необходимостью исследовать на моделях
динамику автоматического регулирования частоты и мощности, ресин-
хронизацию синхронных генераторов, асинхронный ход энергосистем
и другие задачи понадобилось оснащать модельные агрегаты регулято-
рами скорости. Использовать в моделях натурные регуляторы скорости
крупных гидротурбин не представляется возможным, так как регуляторы
вместе с маслонапорной установкой занимают много места и очень
дороги. Регуляторы скорости гидротурбин малой мощности имеют прием-
лимые габариты, но их параметры и характеристики не соответствуют
регуляторам крупных турбин и они не могут быть использованы без
серьезной переделки. Кроме того, мощность, отбираемая таким регуля-
тором с вала модельного агрегата, может оказаться заметной, что при-
ведет к искажению ряда исследуемых процессов.
По всем этим причинам в настоящее время при создании динамиче-
ских моделей энергосистем предпочтение отдается математическим моде-
лям регуляторов скорости гидротурбин.
Основные требования при моделировании регуляторов скорости гид-
равлических турбин состоят в следующем. Модель регулятора скорости
должна иметь такую же структурную схему, как у оригинала. Постоян-
ные времени, коэффициенты усиления и коэффициенты обратных связей
модели должны иметь возможность изменения в довольно широких пре-
делах с тем, чтобы можно было быстро настроить регулятор на задан-
ные показатели. Из динамических параметров прежде всего следует
предусмотреть воспроизведение времени сервомотора направляющего
268
Глава VI, Моделирование гидротурбин, трубопроводов
аппарата и постоянной времени изодромного механизма. Очень важно
иметь возможность менять статизм модельного регулятора вплоть до
нуля. Большой интерес представляет также моделирование основных
нелинейностей регулятора скорости: пределов хода сервомотора, огра-
ничения хода главного золотника и механизма ограничения открытия
турбины. Воспроизведение нелинейных характеристик регулятора ско-
рости совершенно необходимо при изучении на модели больших коле-
баний. При моделировании поворотнолопастных гидротурбин возникает
также задача воспроизведения комбинаторной зависимости и следящей
системы поворота лопастей рабочего колеса. Следует учитывать, что
ограничение хода золотника сервомотора рабочего колеса сказывается
даже при не очень больших отклонениях и поэтому его необходимо
моделировать. Регуляторы скорости ковшевых гидротурбин имеют меха-
низмы отсекателей или отклонителей струи. Для тех же целей предна-
значены устройства холостых спусков, связанные с регуляторами ско-
рости высоконапорных радиально-осевых турбин. В моделях энергосистем
влияние этих устройств обычно не воспроизводится.
Структурная схема модели регулятора скорости должна иметь воз-
можность изменения, например для введения сигнала, пропорциональ-
ного ускорению агрегата, для введения сигналов от регулятора частоты
или других системных регуляторов и т. д. Естественно, что всем этим
требованиям больше всего отвечает электрическая модель, обеспечиваю-
щая наибольшую гибкость, компактность и простоту. Кроме того, элек-
трическая модель удобна для всякого рода измерений и осциллографи-
рования.
Необходимо подчеркнуть, что структурное моделирование регулято-
ров скорости облегчает воспроизведение нелинейных характеристик
отдельных механизмов регулятора и позволяет получить все промежу-
точные переменные, характеризующие движение элементов регулятора.
Исходные уравнения для моделирования регуляторов
скорости
Отечественные гидротурбины большой мощности оснащаются регу-
ляторами скорости типа УК (УК-100, УК-150, УК-250) или типа РК
(РК-100, РК-150, РК-200, РКО-250) конструкции Ленинградского метал-
лического завода (Гаркави, Смирнов, 1954). Регуляторы РК предназна-
чены специально для поворотнолопастных гидротурбин. При использо-
вании же для управления поворотнолопастными турбинами регулятора
типа УК к нему дополнительно устанавливается колонка комбинатора.
Принципиальная схема основной части регуляторов обоих типов (без
комбинатора) одинакова; она представлена на рис. 172. Воздействие от
центробежного маятника 7 через золотниковый рычаг АВС передается
на золотник 2, который управляет сервомотором 3 направляющего аппа-
рата турбины. Гибкая обратная связь от сервомотора выполнена с по-
мощью изодромного механизма, содержащего катаракт 4 с пружиной 5.
Глубина гибкой обратной связи устанавливается соответствующим под-
бором плеч рычагов, а постоянная времени изодромного механизма —
величиной перепускного отверстия катаракта. Нужный наклон статиче-
ской характеристики регулятора обеспечивается механизмом остающейся
неравномерности, который представляет собой жесткую обратную связь
от штока сервомотора на золотниковый рычаг. Изменять уставку меха-
низма остающейся неравномерности можно, устанавливая в соответ-
$ 3. Регуляторы скорости гидротурбин
269
ствующее положение ползушку 6 на рычаге передачи от сервомотора.
Перемещение статической характеристики регулятора параллельно самой
себе осуществляется механизмом изменения числа оборотов 7, который
изменяет положение точки D рычага DE, Обычно механизм изменения
числа оборотов снабжается двойным управлением: ручным — для непо-
средственного управления поворотом маховичка 8 и дистанционным —
для управления с пульта станции с помощью реверсивного электродви-
гателя 9. Описанная схема регулятора является упрощенной, на ней не
указаны некоторые механизмы и устройства. В частности, золотниковый
Рис. 172. Принципиальная схема основной части регу-
ляторов скорости мощных гидротурбин.
рычаг воздействует на золотник не непосредственно, а через быстродей-
ствующий гидравлический усилитель, в конструкции регулятора пре-
дусмотрен ряд блокировок и устройств автоматики и т. д. Однако при
моделировании регуляторов скорости, так же как и при анализе дина-
мики регулирования скорости гидроагрегатов, целесообразно пренебречь
рядом второстепенных параметров и провести разумную идеализацию.
Практика показала, что с полным основанием можно пренебречь инер-
цией электрической синхронной связи центробежного маятника с валом
гидрогенератора, а также инерцией самого маятника. Уравнение центро-
бежного маятника можно взять в следующем простом виде:
71 = — т?» (125)
где — относительное отклонение штифта маятника, 8 — используемая
неравномерность маятника, — относительное отклонение скорости тур-
бины от синхронной.
Промежуточные гидравлические усилители регулятора скорости имеют
достаточно высокое быстродействие, поэтому их запаздыванием обычно
пренебрегают. Не учитываются также инерция масла, питающего серво-
мотор направляющего аппарата турбины, и некоторая неровность началь-
ного участка характеристики сервомотора, обусловленная перекрытием
окон главного золотника. В соответствии с этим уравнение сервомотора
получает следующий вид:
н = (126)
270 VL Моделирование гидротурбин, трубопроводов
где — относительный ход штока сервомотора, о — относительное откры-
тие главного золотника, Т8 — время сервомотора.
Численно Т6 равно времени хода штока сервомотора на номиналь-
ную величину при номинальном открытии главного золотника. Относи-
тельное открытие золотника можно считать пропорциональным алгебраи-
Рис. 173. Структурная схема регуля-
тора скорости.
ческой сумме сигналов маятника и об-
ратной связи:
а = 71 — С, (127)
где С — относительное перемещение ры-
чага обратной связи.
Действие жесткой и гибкой обрат-
ных связей, т. е. изодромного меха-
низма, отражается таким уравнением:
(128)
где Ti — постоянная времени изодромного механизма, Р — коэффициент
обратной связи, i — коэффициент жесткой обратной связи.
Приведенные линейные уравнения могут быть положены в основу
при построении математической модели регулятора скорости гидротур-
бин. Воздействие от механизма изменения числа оборотов и от систем-
ных регуляторов может быть учтено дополнительным членом в правой
части уравнения (127). Структурная схема регулятора скорости пред-
ставлена на рис. 173, там же вписаны передаточные функции отдельных
звеньев, соответствующие приведенным выше уравнениям. Общая пере-
даточная функция всего регулятора скорости, как это легко найти, поль-
зуясь рис. 173, имеет следующий вид:
L (М — J_____________pTi^-1________
<f 6г о Тг.-ьрТ,-
Р2—--ьр---------- н-1
(129)
Основные нелинейные характеристики регуляторов
скорости
Одной из основных нелинейностей регулятора скорости является
ограничение хода сервомотора направляющего аппарата турбины. Эта
нелинейность обусловлена конструктивной длиной цилиндра сервомотора;
ее воспроизведение желательно во всякой модели регулятора скорости,
так как этим определяется минимальное и максимальное открытие тур-
бины. При отсутствии соответствующего ограничения в математической
модели могут получаться открытия больше максимального и отрицатель-
ные открытия, не имеющие физического смысла.
Роль механизма ограничения открытия турбины понятна из его назва-
ния. Принципиальная схема этого устройства представлена на рис. 174.
С помощью передачи /, тяги 2 и рычага 3 осуществлена нелинейная
отрицательная обратная связь от сервомотора на вход золотника (точка С
золотникового рычага). Положение точки О рычага 3 определяет уставку
механизма ограничения открытия. Если, например, гидроагрегат ставят
на ограничитель, то точку О перемещают вниз. При этом рычаг 3 упи-
рается в золотниковый рычаг и смещает золотник вверх. Сервомотор
будет работать на закрытие до тех пор, пока тяга 2 обратной связи не
отведет вниз рычаг 3 и не возвратит золотник в среднее положение.
£ 3. Регуляторы скорости гидротурбин
271
Механизм ограничения открытия применяется в тех случаях, когда по
условиям эксплуатации нельзя допускать открытия турбины сверх неко-
торой допустимой величины; он широко используется для пуска и оста-
новки турбины, а также как механизм ручного регулирования, позво-
ляющий управлять турбиной независимо от системы автоматического
регулирования.
Если на модели предстоит исследование переходных процессов, свя-
занных с быстрыми перемещениями
Закрытие
Рис. 174. Схема механизма ограни-
чения открытия.
направляющего аппарата гидротур-
бины, то необходимо воспроиз-
вести действие устройства,
ограничивающего ход главного
золотника. Ограничение хода
Рис. 175. Действие устройства
ограничения хода золотника.
главного золотника приводит к ограничению скорости перемещения на*
правляющего аппарата турбины и служит для предотвращения динамиче-
ского повышения напора. Математически это сводится к следующим
условиям:
а = 7] с при ^2 < С7! — С
при ц —С >*1, (130)
о = а2 при 71 —С <°2,
причем предполагается, что а2 И, вообще говоря, !^il =Н= l^l-
Эта нелинейная зависимость показана также графически на рис. 175.
Величина пределов хода золотника на открытие и на закрытие о2
может устанавливаться произвольно. Естественно, что эти пределы не
могут превышать максимальный конструктивный ход золотника.
При более детальном моделировании регулятора скорости можно
также воспроизвести нелинейности изодромного механизма: некоторое
изменение параметра 7^ при быстрых перемещениях стакана катаракта
и упоры, ограничивающие отклонения поршня катаракта. Кроме того,
можно воспроизвести влияние потерь давления масла в трубопроводах
на скорость перемещения сервомотора, упоры центробежного маятника
и т. д. Однако обычные исследования, проводимые на электродинами-
ческих моделях энергосистем, не требуют такого подробного моделиро-
вания регуляторов скорости. Все эти нелинейные подробности нужно
воспроизводить тогда, когда исследуется работа регулятора скорости
отдельного гидроагрегата на больших колебаниях, например, при сбросах
нагрузки.
272
Глава VI, Моделирование гидротурбин, трубопроводов
Моделирование комбинаторов поворотнолопастных
гидротурбин
Комбинаторная зависимость устанавливает соответствие между откры-
тием направляющего аппарата и углом разворота лопастей рабочего
колеса поворотнолопастной турбины для различных значений статиче-
ского напора. Таким образом, комбинатор задает функцию двух незави-
симых переменных
Ф=/(«о, ЯсТ.), (131)
Рис. 176. Комбинаторная
зависимость поворотноло-
пастной турбины ПЛ-587
для напора 19 м.
отработка которой обеспечивает максимальный коэффициент полезного
действия турбины в разных установившихся режимах. Однако для дина-
мических моделей энергосистем сравнительно
очень медленные изменения статического напора
не представляют интереса. Обычно задаются не-
которой постоянной величиной напора (чаще
всего номинальным расчетным напором); это
позволяет считать комбинаторную зависимость
функцией одной независимой переменной:
Ф =/(*«)• (132)
В качестве примера на рис. 176 приведена
комбинаторная зависимость для поворотнолопаст-
ной гидротурбины с рабочим колесом типа ПЛ-587
для статического напора Нсг. = 19 м.
Управление сервомотором рабочего колеса воз-
можно по параллельной и последовательной схе-
мам (Гаркави, Смирнов, 1954). В настоящее время
применяется только последовательное управление; принципиальная схема
устройства дана на рис. 177. Сервомотор 7 направляющего аппарата
является ведущим, а сервомотор 7, разворачивающий лопасти рабочего
колеса, — ведомым. Ролик 3 комбинатора с помощью пружины 4 при-
Рис. 177. Схема управления сервомотором рабочего
колеса.
жимается к кулачку 2. При перемещениях штока ведущего сервомотора
комбинаторный механизм через золотниковый рычаг 5 отклоняет золот-
ник 6 ведомого сервомотора. Благодаря жесткой отрицательной обрат-
ной связи от сервомотора 7 на золотник 6 этот сервомотор работает
в режиме следящей системы, отрабатывающей перемещения ролика ком-
бинатора. Модель комбинатора и сервомотора рабочего колеса может
быть выполнена по структурной схеме, представленной на рис. 178.
В модель должны входить функциональный блок комбинаторной завися-
£ 3. Регуляторы скорости гидротурбин
273
мости, воспроизводящий функцию (132), ограничитель и интегратор. Это
устройство должно работать совместно с моделью поворотнолопастной
турбины, выполненной, например, по блок-схеме, приведенной на рис. 141.
Функциональный
рлок Ограничитель Интегратор
Рис. 178. Структурная схема модели комбинатора и сер-
вомотора рабочего колеса.
Схема модели регулятора скорости
с электромеханическим интегратором
На рис. 179 представлена одна из схем модели регулятора скорости,
разработанная в Институте электромеханики (Воронов, Первозванский,
Семенов, 1956). Интегратор здесь электромеханический — двигатель
постоянного тока ДИ с независимым возбуждением и потенциометр 7?и,
движок которого через редуктор соединен с выходным валом двига-
Рис. 179. Схема модели регулятора скорости с интегрирую-
щим электродвигателем.
теля. Потенциометр 7?и подключен к источнику стабилизированного
напряжения [70, а снимаемый сигнал «р является выходом модели регу-
лятора. Таким образом, электродвигатель ДИ и потенциометр /?и являются
моделью сервомотора направляющего аппарата гидротурбины. При этом
напряжение «1ЭМу, подаваемое на якорь двигателя, соответствует откры-
тию главного золотника, а выходное напряжение «р—положению штока
сервомотора. Электромеханическая постоянная времени двигателя ДИ
не вносит заметных искажений в работу модели регулятора, так как она
мала в сравнении с временем Ts. Нечувствительность интегратора,
вызываемая статическим трением в двигателе, обычно не сказывается,
так как напряжение на выходе 1ЭМУ содержит пульсации, перекры-
вающие зону нечувствительности. При необходимости переменная состав-
ляющая в напряжение 1ЭМУ может быть введена специально. Кроме
того, значительное уменьшение нечувствительности интегратора и улуч-
шение его частотной характеристики может быть достигнуто введением
обратной связи по скорости двигателя ДИ на вход электронного уси-
лителя. Уравнение электромеханического интегратора запишем так:
и-Ььи (133)
ПР-- р “1ЭМУ*)
274
Глава VI. Моделирование гидротурбин, трубопроводов
где кк— конструктивная постоянная интегратора, измеряемая веек.'1.
Величина кп определяется параметрами электродвигателя, передаточным
отношением редуктора и напряжением питания потенциометра /?и. Для
управления скоростью вращения двигателя ДИ в схеме использован
электромашинный усилитель 1ЭМУ с возбуждением от электронного
усилителя 1ЭУ. Оба усилителя охвачены жесткой отрицательной обрат-
ной связью, снимаемой с делителя 7?10. Обратная связь делает резуль-
тирующие характеристики всего усилителя весьма линейными, кроме того,
перемещая движок делителя R1Q, можно легко изменять общий коэффи-
циент усиления по напряжению кг в широких пределах. Запаздывание
усилителей при' наличии обратной связи составляет примерно 0.01—
0.03 сек. и может не учитываться. Поэтому сам коэффициент кг можно
считать передаточной функцией усилителя.
Для измерения скорости модельного агрегата здесь использован
тахогенератор постоянного тока ТГ. Поток возбуждения тахогенератора
создается постоянными магнитами и, следовательно, отличается хорошей
стабильностью. Выходное напряжение тахогенератора пропорционально
скорости
итг= (134)
где к^г — коэффициент передачи тахогенератора. Знак минус принят
в соответствии с исходным уравнением (125). Связь между модельным
гидрогенератором и ротором ТГ может быть как непосредственная, так
и электрическая, наподобие пендель-связи оригинала. Во втором случае
синхронная скорость пендель-мотора может быть иной, чем у генера-
тора; это должно учитываться коэффициентом £тг.
Напряжение тахогенератора сравнивается на входе усилителя с неко-
торым заданным эталонным напряжением, снимаемым с делителя
Результирующее напряжение пропорционально отклонению скорости.
Кроме того, на вход усилителя подаются падения напряжения на соп-
ротивлении и на части делителя 7?х. С помощью этого электриче-
ского контура из сопротивлений R\—Т?4 и емкости Ci моделируется
жесткая обратная связь и изодромный механизм регулятора скорости.
Величина жесткой связи определяет статизм модельного агрегата, она
устанавливается движком делителя R±. Коэффициентом у4 обозначено
относительное положение движка Rlt Общий коэффициент жесткой
обратной связи для рассматриваемой схемы будет
Суммарное сопротивление Т?3-ь^4 контура гибкой обратной связи
обычно выбирается в 2—3 десятка раз больше 7?4. Поэтому можно счи-
тать, что постоянная времени контура
Ti = Ci(R^R4).
(136)
Коэффициент гибкой связи при этом будет
тг —(! Тж) z?3^-3/?4 •
(137)
£ 3. Регуляторы скорости гидротурбин
275
Результирующее напряжение обратной связи определяется следующим
уравнением:
ио.е = (тж-«-Тг^^Т)ир. (138)
Для неискаженного суммирования напряжений на входе электронного
усилителя 7ЭУ он должен иметь высокое входное сопротивление.
С другой стороны, сопротивление делителя напряжения 7?и должно быть
небольшим, чтобы ток, потребляемый контуром обратной связи, не влиял
на выходное напряжение ир.
На рис. 180 изображена структурная схема модели регулятора ско-
рости, там же вписаны передаточные функции звеньев. Как видно из
Тахогенератор Усилитель Интегратор
Рис. 180. Структурная схема модели регуля-
тора скорости.
сравнения рис. 173 и 180, структурные схемы оригинала и модели оди-
наковы. Передаточная функция модели регулятора скорости запишется
так:
ыр. (р) —_k k k __________________________
дШд w - V A p2Ti + р [1 Н- (7г - 7ж) Т
Перейдем к относительным переменным, получим:
р- 7 х 03д. б^ТГ . ___________ 1
ыр.б7ж * Тг 1
Р kTl
(139)
(140)
&1&И7Ж
Сопоставляя полученное с передаточной функцией оригинала
найдем условия подобия:
1
(129),
03д. б^ТГ
Ыр. б7ж
— 1, 7\ = idem.
(141)
и а 7
р. о » .
-+- 1
(И ’
1
Ц J
При настройке модели регулятора скорости на нужные параметры,
величины Юд.б, «р. б, &тг, £и можно считать заданными, а остальные коэф-
фициенты рассчитываются и устанавливаются в модели. В § 4 приво-
дится последовательность расчета параметров модели с регулятором
скорости такого типа.
Выше уже указывалось, что напряжение 1 ЭМУ в определенном мас-
штабе соответствует ходу главного золотника. Если обозначить а =
— —-1ЭМУ и привести уравнение (133) к виду (126), то базовое значение
напряжения 1ЭМУ определится соотношением
и1эмуб“ kT ’ (1^2)
276
Глава VI» Моделирование гидротурбин, трубопроводов
Аналогично относительное отклонение напряжения тахогенератора
Д и-рр
т,=------ будет равно относительному перемещению штифта центробеж-
иТГб
ного маятника, если выбрать
птгб — ^тгшд.б- (143)
Для относительного напряжения обратной связи С = —базовое
ио. с.б
значение нужно выбрать равным
И — ' (144)
О. С. б 7 х 7
Делитель напряжения 7?Об. может выполнять функции механизма изме-
нения числа оборотов регулятора. Движок 7?об. может перемещаться
Рис. 181. Схема электронного уси-
вручную либо от регулятора частоты.
Кроме того, воздействия от регулятора
частоты и других системных регулято-
ров могут подаваться в виде электри-
ческих сигналов непосредственно на
вход электронного усилителя 1ЭУ.
Электронный усилитель обычно одно-
каскадный. На рис. 181 приведена
часто применяемая в моделях ИЭМ
схема усилителя. В качестве ламп
и Л2 используются выходные пентоды
или тетроды с большой крутизной ха-
рактеристики (6ПЗ, 6П6, 6П9). Об-
мотки управления электромашинного
усилителя включены в анодные цепи
ламп таким образом, что при отсутствии
на входе усилителя сигнала результиру-
ющая магнитодвижущая сила обмоток управления равна нулю. Входной
сигнал подается на управляющую сетку первой лампы. Вторая лампа
управляется падением напряжения на общем сопротивлении смещения /?к.
Питание экранных сеток ламп разделено во избежание самовозбужде-
ния усилителя, причем напряжение экрана первой лампы берется со ста-
биловольта Л3. Переменным сопротивлением R9 в цепи экранной сетки Л2
производится регулировка нуля усилителя. Описанная схема достаточно
проста, не требует стабилизации питания и имеет большое входное
сопротивление. Постоянная времени цепи управляющих обмоток электро-
машинного усилителя значительно уменьшается благодаря высокому внут-
реннему сопротивлению ламп усилителя. Аналогичная схема электрон-
ного усилителя используется в усилителе мощности.
Воспроизведение нелинейностей в модели регулятора
скорости с электромеханическим интегратором
Описанная в § 2 схема модели регулятора скорости позволяет легко
воспроизводить основные нелинейные характеристики оригинала. Прежде
всего следует отметить, что в данном случае моделирование пределов
хода штока сервомотора получается само собой, так как перемещения
движка делителя ограничены. В схеме управления двигателем ДИ
£ 3. Регуляторы скорости гидротурбин
277
должны быть предусмотрены конечные выключатели, останавливающие
двигатель, когда ползунок делителя 7?и приходит в крайнее положение.
В моделях ИЭМ для этой цели используется схема, представленная на
рис. 182. На оси потенциометра 7?и установлен специальный кулачок,
размыкающий нормально закрытые конечные выключатели КВО и КВЗ.
Причем КВО размыкается при максимальном открытии модели серво-
мотора, а КВЗ — при закрытии. Параллельно якорю 1 ЭМУ через доба-
Рис. 182. Схема ограничения хода двигателя ДИ.
1РП
КВО КВЗ
вочное сопротивление 7СД включено поляризованное реле 1РП, кон-
такты которого шунтируют выключатель КВО при работе двигателя ДИ
на закрытие и выключатель КВЗ при работе ДИ на открытие. При
нормальной работе, когда оба конечных выключателя замкнуты, катушка
оттормаживающего реле РТ получает питание и нормально открытыми
контактами РТ якорь ДИ подключается к усилителю 1ЭМУ. Если пол-
зунок потенциометра 7?и приходит в одно из крайних положений, ка-
1W 1ЭМЗ
Рис. 183. Схема моделирования нелинейных характе-
ристик регулятора скорости.
тушка РТ отключается от источника питания и якорь двигателя ДИ
через нормально замкнутые контакты РТ переключается на тормозное
сопротивление С Т. Происходит интенсивное динамическое торможение
двигателя, и ползунок 7?и останавливается. Обратное перемещение потен-
циометра будет лишь тогда, когда изменится полярность напряже-
ния ЮМУ, при этом контактом поляризованного реле шунтируется
разомкнутый конечный выключатель, катушка РТ получает питание,
и двигатель ДИ переключается с сопротивления СТ на якорь 1ЭМУ.
Схема введения двух других нелинейностей представлена на рис.183.
Ограничению хода главного золотника регулятора скорости соответ-
ствует в модели ограничение напряжения 1ЭМУ, которое обеспечи-
вается дополнительной сильной нелинейной отрицательной обратной
связью, использующей магнитный усилитель 1 МУ и охватывающей уси-
лители 1ЭУ и 1ЭМУ. На рис. 184, а дана характеристика цепи обратной
связи, а на рис. 184, б показана результирующая статическая характе-
278
Глава VI. Моделирование гидротурбин, трубопроводов
которого задается та или иная
Рис. 184. Статические характеристики цепи
обратной связи и усилителей, охваченных
обратной связью.
ристика усилителей 1ЭУ и 1ЭМУ при действии нелинейной обратной
связи. Величина ограничиваемого напряжения 1ЭМУ при работе на
открытие и на закрытие может порознь устанавливаться изменением
напряжений подпора Un\ и t/n2 (рис. 183) в цепи вентилей. Действие
механизма ограничения открытия имитируется введением дополнительной
нелинейной обратной связи на вход усилителя 7ЭУ. Параллельно 7?и под-
ключается еще один линейный делитель напряжения Ro. о, при помощи
а ограничителя. К движкам 7?и и
7?о. о через вентиль подключена
вторая обмотка управления маг-
нитного усилителя 1МУ. Пока
открытие модели сервомотора не
превысило заданного уставкой,
вентиль не пропускает ток в
обмотку управления 1 МУ. Если же
открытие сделается больше пред-
писанного уставкой, то через
управляющую обмотку пойдет ток
и на выходе 1 МУ появится на-
пряжение, которое будет усилено
электронным и электромашинным
усилителями и подано на якорь двигателя ДИ. Полярность этого напря-
жения подбирается такой, чтобы двигатель ДИ работал на закрытие.
Двигатель ДИ будет закрывать модель сервомотора до тех пор, пока
не сравняются потенциалы движков 7?и и Ro, о. Кроме того, описанное
устройство позволяет производить ручное регулирование открытия модели
турбины простым перемещением уставки ограничителя, т. е. именно так,
как это делается на реальных установках.
Электромеханическая модель комбинатора
и сервомотора рабочего колеса
Если модель регулятора скорости, описанная выше, предназначается
для работы с моделью поворотнолопастной гидротурбины, к ней добав-
ляется устройство, моделирующее комбинатор и сервомотор рабочего
колеса. Схема этого устройства дана на рис. 185. Двигатель ДИ и де-
литель напряжения Rn моделируют сервомотор направляющего аппарата
и являются выходом регулятора скорости в соответствии с рис. 179.
На одной оси с 7?и установлен потенциометр R.b с отводами. Надлежа-
щим шунтированием секций потенциометра R,^ обеспечивается воспроиз-
ведение комбинаторной зависимости (132). На рис. 185 для получения
кривой вида, приведенной на рис. 176, используется всего четыре отвода.
С помощью отвода В закорачивается нижняя часть потенциометра; этим
создается излом кривой ф (^) в нижней части. Верхний излом комбина-
торной кривой создается шунтированием другого конца R,^ с помощью
отвода Е. С помощью шунтирующих сопротивлений 1\ и г2 осущест-
вляется кусочно-линейная аппроксимация средней части комбинаторной
кривой.
Рассматриваемая модель выполнена в соответствии со структурной
схемой, которая была приведена на рис. 178. Сигнал, снимаемый с по-
тенциометра 7?,р подается на вход следящей системы, в состав которой
входят электронный усилитель ЗЭУ, электромашинный усилитель ЗЭМУ,
интегрирующий двигатель ЗДИ с линейным потенциометром 3R». На вход
$ 3. Регуляторы скорости гидротурбин
279
усилителя ЗЭУ поступает разность потенциалов ползунков потенцио-
метров и 3RKy а также подаются обратная связь по напряжению ЗЭМУ
с делителя 7?ЗО и нелинейная обратная связь через магнитный усили-
тель ЗМУ. Легко видеть, что интегратор и ограничитель* сделаны так же,
как в основной схеме регулятора скорости.
Рис. 185. Схема электромеханической модели комбинатора и сервомотора
рабочего колеса.
Таким образом, модель регулятора скорости поворотнолопастной
гидротурбины имеет два выходных напряжения, которые пропорцио-
нальны р- и ф. Эти сигналы поступают дальше на функциональный пре-
образователь, вырабатывающий напряжение, пропорциональное дг (см.,
например, структурную схему
рис. 141).
Что касается расчета по-
тенциометра и его шун-
тов, то эта задача доста-
точно простая.
Прежде всего следует
вычертить в достаточно
крупном масштабе комбина-
торную кривую Ф=/(|х)«
Затем нужно графически
произвести кусочно-линейную
аппроксимацию среднего (кри-
волинейного) участка кривой.
Количество отрезков аппрок-
симирующей ломаной линии
определяется заданной точ-
ностью аппроксимации. В
качестве примера на рис. 186
Рис. 186. Кусочно-линейная аппроксимация комби-
наторной зависимости.
представлена аппроксимация комбинаторной кривой, приводившейся
ранее на рис. 176. В данном случае криволинейный участок ком-
бинаторной зависимости заменяется тремя прямолинейными отрезками.
Погрешность аппроксимации не превышает 1%. Исходные данные для
расчета секций функционального потенциометра следующие: напряжение
питания £/о=1О5в (снимается со стабиловольта СГЗС), полное сопро-
тивление обмотки потенциометра R^ = 20 ком, координаты точек сопря-
жения записаны непосредственно на рис. 186. Весь расчет сведен
в табл. 34.
В 1-й графе табл. 34 помещены наименование отводов потенцио-
метра R^ (А и F — концы намотки потенциометра), отводы соответ-
280
Глава VI. Моделирование гидротурбин, трубопроводов
Таблица 34
Наиме- нование отводов р- 4 (град.) « (в) Др. Дф (град.) Ди (в) Д7?ф (ком) W (ма) (ма) Гш (ком)
Е ’ : Г) 1.000 0.840 0.620 0.422 0.265 0.000 *21.5 -4-21.5 -+- 5.25 — 6.0 —12.0 —12.0 105.0 105.0 54.1 18.8 0.0 0.0 0.160 0.220 0.0 16.25 0.0 50.9 3.20 4.40 0.00 11.58 11.58 0.00 0.00
и . с 0.198 11.25 35.3 3.96 8.92 2.66 13.27
Lz . О 0.157 6.0 18.8 3.14 5.98 5.60 3.36
D А . . 0.265 0.0 0.0 5.10 0.00 11.58 0.00
ствуют одноименным точкам аппроксимирующей ломаной. Данные 2-й
и 3-й граф взяты из рис. 186. Данные 4-й графы рассчитаны по дан-
ным 3-й причем принимается, что при ф = —12° п = 0, а при ф = -+-21.5°
и = 105 в; напряжение и соответствующих точек потенциометра R,^
отсчитывается от его конца А. В 5—7-й графах вычислены приращения
величин. Данные 8-й графы находятся из соотношения = «20 ком.
Токи в каждой секции потенциометра (9-я графа) находятся как отно-
ки
шение г
Максимальный ток 11.85 ма получился в секции ED,
которая соответствует самому крутому отрезку комбинаторной зависи-
мости. Поэтому шунтируются все секции потенциометра, кроме этой.
Токи шунтов (10-я графа) находятся как разность /ш = 11.85 — iR . Со-
противления шунтов в последней графе табл. 34 рассчитаны по фор-
муле гш = ^—• Выходное напряжение и,^ модели комбинатора снимается
между отводом и ползунком потенциометра 3/?и. Для того чтобы при
ф = 0 было и,^ = 0, отвод располагается на относительном расстоянии
12°
—21-^5 = 0.358 от минусового конца потенциометра. Связь между соот-
ветственными переменными оригинала и модели следующая:
Ф =
Масштабный коэффициент равен = • В нашем примере
12°-ь21.5° nQ1Q ,
——105" в =0.319 град./в.
Схема модели регулятора скорости, использующей
электронный решающий усилитель постоянного тока
Большие возможности открывает использование средств и методов
современной техники электронных моделей постоянного тока. Так, на-
пример, линейная модель регулятора скорости гидротурбины может быть
выполнена всего с одним решающим усилителем (Семенов, 1958а).
Схема модели показана на рис. 187. Сигнал от тахогенератора ТГ срав-
нивается на входе решающего усилителя с некоторым заданным напря-
жением Uct. . Усилитель работает в режиме интегратора. Делителем жест-
кой обратной связи 7?» можно устанавливать статизм модели гидро-
агрегата от нуля до максимальной величины, которая определится
£ 3. Регуляторы скорости гидротурбин
281
сопротивлением 7?с. Глубина гибкой обратной связи регулируется дели-
телем 7?г, при этом постоянная времени 1\ = С\Ri. Для удобства рас-
чета и управления моделью следует выбирать R^^Rc и Rr<^Rt.
Воздействия от регулятора частоты или других системных регулято-
ров могут быть поданы на вход решающего усилителя через соответ-
ствующие сопротивления. Роль механизма изменения числа оборотов
может, в частности, исполнять переменное сопротивление /?Об. • Не
останавливаясь подробно на анализе схемы, приведем условия подобия:
(од. б^ТГ^с _ 1 ___Т8 7Г^С
^р. б^ТГ^ж * 7
---1, Ti— idem.
(145)
Рис. 187. Схема модели регулятора ско-
рости с одним решающим усилителем.
выбираться в пределах 100 ком—
При расчете параметров схемы можно руководствоваться следую-
щими соображениями. Величины б и &тг являются обычно заданными.
Базовое значение выходного на-
пряжения модели регулятора ско-
рости Up. б выбирают в соответ-
ствии с конструкцией используе-
мого операционного усилителя и
схемой того блока модели (обычно
это блок гидравлического удара),
для которого Up является вход-
ным сигналом. Большинство опе-
рационных усилителей постоян-
ного тока имеют линейную харак-
теристику в пределах от —100
до -+-100 в, поэтому можно вы-
бирать Up. б = 200 в, если нет
других ограничений. Для нор-
мальной работы решающих усили-
телей сопротивления входных
цепей и обратных связей должны
1.0 мгом. А так как постоянные времени Ts и измеряются несколькими
секундами, целесообразно задаваться максимальными величинами сопро-
тивлений Rc — Rt —1.0 мгом. Остальные параметры схемы находятся
из условий подобия. Емкость цепи, моделирующей изодром, равна
Ri *
(146)
Коэффициент гибкой связи 7г соответствует коэффициенту ориги-
нала и должен выбираться с учетом возможного увеличения при изме-
нениях настройки модельного регулятора. Если, например, Р может быть
увеличен вдвое по сравнению с заданным, то следует принять коэф-
фициент 7г = 0.5. Коэффициент жесткой обратной связи рассчитывается
по формуле
__ i
— L £7 • • (147)
Практически получается 7Ж <С 0.1, и для обеспечения плавной регу-
лировки статизма модельного агрегата потенциометр включают не
прямо на выход операционного усилителя, а через добавочное сопро-
тивление. Максимальная величина коэффициента определяет наиболь-
282
Глава VI. Моделирование гидротурбин, трубопроводов
ший статизм модели. Величина интегрирующей емкости находится из
соотношения
7 Т
<148>
с
а сопротивление в цепи тахогенератора — из уравнения
(л)
\ С£Л (149>
°р. б • ж
Следует отметить, что обычный дрейф усилителя постоянного тока,
используемого в схеме, не
сказывается на работе модельного регуля-
тора скорости. Это обусловливается, во-
первых, жесткой отрицательной обратной
связью в самой схеме регулятора, а, во-
вторых, обратной связью по скорости
агрегата. В связи с этим операционный
усилитель и его стабилизированный ис-
точник питания могут быть собраны по
упрощенным схемам. Воспроизведение
Рис. 188. Схема ограничения мак-
симальных значений выходного
напряжения усилителя.
пределов хода сервомотора проще всего
может быть сделано правильным выбо-
ром Up. б так, чтобы насыщение опера-
ционного усилителя соответствовало
крайним позициям штока сервомотора.
Ограничения выходного напряжения иР
усилителя можно добиться также при-
менением нелинейных обратных связей (Ко-
ган, 1955). Одна из возможных схем
представлена на рис. 188. Для отсечки
^десь использованы диоды 1В и 25, а напряжение подпора устанав-
ливается потенциометрами 1г и 2г. Ограничение хода золотника
в этой схеме не моделируется. Действие механизма ограничения от-
крытия турбины можно приближенно представлять той же схемой
(рис. 188), изменяя уставку верхнего предела.
Рассмотренная модель регулятора скорости с одним решающим уси-
лителем очень проста и надежно работает. Однако эта схема не позво-
ляет измерять и осциллографировать промежуточные переменные, харак-
теризующие работу отдельных механизмов регулятора: отклонение золот-
ника, перемещение рычагов обратной связи и т. д. Поэтому при необхо-
димости воспроизводить работу регулятора скорости более подробно
следует применять схемы с несколькими решающими усилителями.
Схема с тремя операционными усилителями
На рис. 189 представлена схема модели регулятора скорости с тремя
операционными усилителями постоянного тока (Семенов, 1958а). Уси-
литель /, работающий в режиме сумматора, моделирует золотниковый
рычаг и золотник оригинала; усилитель 2, работающий в режиме инте-
гратора, воспроизводит действие сервомотора направляющего аппарата,
л усилитель 3 вместе со входными цепочками моделирует изодромный
$ 3. РеЪуляторы скорости гидротурбин
283
механизм и механизм остающейся неравномерности. В соответствии
с этим обозначим:
«у _____ мр мр0 ________________ ио. с ио. с. О _________
— -- О , & ’1, jj
Uy. б Up. б Uo.c. б
(150)
Здесь Uy.б, Up. б, Uo. с. б — базовые значения напряжений на выходах
усилителей; мРо и ио. с. о — начальные значения напряжений на выходах
решающих усилителей 2 и 5, соответствующие ^ = 0 при установив-
шемся режиме. Знак минус перед правой частью первого и третьего
Рис. 189. Схема модели регулятора скорости с тремя ре-
шающими усилителями.
равенств (150) поставлен в связи с тем, что операционные усилители
поворачивают фазу сигнала на тс. Если в схеме модели регулятора ско-
рости использованы нормальные решающие усилители с диапазоном
линейности по выходному напряжению от —100 до -F-100 в, то целесо-
образно принять /Ту.б =100 в. В качестве базового напряжения для
усилителя 2 хорошо взять /7р.б = 200 в. Выбор базового значения для
выходного напряжения усилителя 3 должен быть произведен соответ-
ственно принятой величине Up. б, параметрам оригинала и режиму работы
модели, так как при неправильном выборе Uo. с. б усилитель 3 будет
насыщаться при небольших перемещениях сервомотора, нарушая подо-
бие. Если же, опасаясь насыщения, взять слишком малую величину Uo. с. б,
то это приведет к уменьшению точности его работы. Можно дать сле-
дующие рекомендации по выбору Uo. с.б. Максимальное отклонение сиг-
нала обратной связи можно ожидать в режиме работы регулятора,
когда золотник полностью открыт и сервомотор совершит перемещение
из одного крайнего положения в другое. Для схемы рис. 189 в таком
режиме максимальное напряжение на выходе усилителя 3 будет
Если теперь допустить, чтобы ио. с max = 100 в, то соответствующее
значение Uo. с. б определится уравнением (151).
В тех случаях, когда нужно моделировать действие упоров, огра-
ничивающих отклонения поршня катаракта, величину Uo. с.б следует
выбрать с таким расчетом, чтобы насыщение усилителя 3 соответство-
284
Глава VI. Моделирование гидротурбин, трубопроводов
вало приходу поршня на упор. Остальные параметры схемы рассчиты-
ваются, исходя из условий подобия:
^ЛтГ^д. б __ 1 *Дс.б _______ г, ир.б _________
*ТГ^У.б *о.А.б ’ И И^У.б~
Y ^Р. б ______ . „ *з^р.6 ___ о__.
Г**А.с.б ’ '^/Л.е.б '
(152)
В процессе расчета следует учитывать соображения, которые вы-
сказаны выше для схемы рис. 187. Описанная схема модели позволяет
/?z Со
^оо
Рис. 190. Схема моделирования меха-
низма ограничения открытия.
более детально воспроизвести
нелинейные характеристики ори-
гинала. Пределы хода сервомо-
тора моделируются так же, как
было указано на рис. 188; анало-
гично моделируются и ограничи-
тели отклонений главного золот-
ника. Действие механизма огра-
ничения открытия турбины можно
Рис. 191. Схема моделирования упорон
изодромного механизма.
приближенно представлять в модели ограничением верхнего пре-
дела напряжения усилителя 2. Однако можно этот механизм воспроиз-
вести со всеми подробностями. Для этого усилители / и 2 охватываются
нелинейной обратной связью, как показано на рис. 190. Цепь обратной
связи содержит два дополнительных операционных усилителя 4 и 5,
а также вентиль 5*В.
Действие схемы полностью аналогично оригиналу (рис. 174). Потен-
циометр Rqq предназначен для изменения уставки ограничителя. Пере-
мещение движка 7?оо соответствует смещению точки 0 механизма огра-
ничения открытия. Усилитель 5 работает сумматором, а усилитель 4
выполняет умножение на —1. Величины входных сопротивлений и со-
противления обратной связи усилителя 5 рассчитываются в соответ-
ствии с параметрами кинематической схемы оригинала. Если выходное
напряжение усилителя 2 меньше заданного уставкой, то сигнал, сни-
маемый с делителя 7?Оо> будет больше сигнала, поступающего от усили-
теля 2. Следовательно, при малых о напряжение на выходе усилителя 5
будет положительным. При этом благодаря вентилю 5В влияния усили-
теля 5 на усилитель / не будет. Когда же открытие ч сделается близ-
ким к заданному ограничителем, выходное напряжение иь будет уже
§ 3. Регуляторы скорости гидротурбин
285
небольшим и величина сигнала а на открытие будет ограничиваться
тем больше, чем ближе открытие р- к заданному. Ограничение напряже-
ния о усилителей 7 и 4 происходит из-за того, что как только напря-
жение становится отрицательным, вентиль 5В открывается и возни-
кает сильная отрицательная обратная связь, охватывающая усилители
7, 4 и 5. Благодаря отсутствию между выходом усилителя 5 и входом
усилителя 7 добавочных сопротивлений действие напряжения и5 несрав-
ненно сильнее всех других сигналов, подаваемых на вход усилителя 7.
Описываемое устройство позволяет производить ручное регулирова-
ние модели турбины. Если при каком-то открытии мы передвинем
уставку 7?оо на меньшее значение, то напряжение сделается отрица-
тельным, вентиль ЗВ откроется, а напряжение о станет отрицательным
(на закрытие). При этом напряжение будет уменьшаться до тех пор,
пока не сделается равным уставке ограничителя.
В схеме модели регулятора скорости, приведенной на рис. 189,
добавлением несложной нелинейной цепочки можно воспроизвести дей-
ствие упоров изодромного механизма. Схема цепочки представлена на
рис. 191. Два вентиля ЗВ и 4В нормально заперты напряжениями, сни-
маемыми с потенциометров Зг и 4г. Вентили открываются тогда, когда
потенциал точки К схемы делается по абсолютной величине больше
соответствующего напряжения подпора. Так как открытый вентиль
вместе с потенциометром Зг или 4г имеет сопротивление во много раз
меньшее, чем Rt, напряжение точки К практически не будет выходить
за пределы, установленные на потенциометрах Зг и 4г. Таким образом,
воспроизведение упоров изодромного механизма сводится к ограничению
потенциала точки К модели. Эта нелинейная цепочка может быть также
использована в схеме, приведенной на рис. 187, а с некоторыми изме-
нениями— в схеме, изображенной на рис. 179.
Электронная модель комбинатора и сервомотора
рабочего колеса
Электронная модель комбинатора и сервомотора рабочего колеса
выполнена в соответствии со структурной схемой, которая приводи-
лась на рис. 178. Полная схема модели дана на рис. 192. В состав
модели входят четыре решающих электронных усилителя постоянного
тока (Семенов, 1958а). Усилитель 6 вместе с входными цепями и цепью
обратной связи является функциональным преобразователем и моделирует
собственно комбинаторную связь. Усилитель 7 воспроизводит ограниче-
ние хода золотника, схема ограничителя аналогична ранее рассмотрен-
ной (рис. 188); пределы ограничения выходного напряжения усилителя 7
устанавливаются потенциометрами 8г и 9г в цепи обратной связи. Уси-
литель 8 работает в режиме интегратора и моделирует сервомотор
рабочего колеса. Усилитель 9 находится в цепи обратной связи и пред-
назначен для изменения знака напряжения н8 на обратный : м9 = —н8.
Для модели приняты следующие соотношения:
^="^«9, а2 = 77- , «> = — «6, Н = . (153)
^76 Р-6
Здесь /Иф — масштабный коэффициент, и,^ — напряжение, пропорцио-
нальное углу фк, задаваемому комбинатором. Таким образом, напряже-
ние щ воспроизводит угол, задаваемый следящей системе разворота
286
Глава VI. Моделирование гидротурбин, трубопроводов
лопастей рабочего колеса, а напряжение н9 — отработанный угол. Ком-
бинаторная зависимость фк =/ (ji) оригинала представлена в модели
функциональной зависимостью н6 — /(wp).
Условия подобия и расчет параметров модели сервомотора рабочего
колеса очень несложны, и мы их опускаем. Расчет функционального
преобразователя комбинаторной зависимости лучше всего поясняется
конкретным примером. Функциональное устройство, данное на рис. 192,
Рис. 192. Электронная модель комбинатора и сервомотора рабочего колеса.
позволяет аппроксимировать комбинаторную кривую ломаной линией,
состоящей из пяти прямолинейных участков. В данном примере мы
используем ту же аппроксимацию, которая была ранее сделана на
рис. 186. Заданная ломаная линия представлена на рис. 193 в коорди-
натах р- и ф; там же нанесены координаты модельных переменных мр
и причем считаем фк — или, что то же самое, —
Как видно из рис. 193, /71^ = 0.25 град./в. Соответствие между |л и пр
установлено по формуле (153), причем взято ир, о — —100 в и £/Р. б =
= 200 в. Предварительные расчеты сведены в табл. 35.
Таблица 35
Наимено-
вание И ф (гРад.)
точек
k bo Q >|
1.000 -+-21.5
0.840 -4-21.5
0.620 н- 5.25
0.422 — 6.0
0.265 —12.0
0.000 -12.0
«р (в) «Ф (в) «6 (в)
1Э0 86 —86
68 86 —86
24 21 -21
— 15.5 —24 24
— 47 —48 48
—100 —48 48
д“р (в) Лиф (в) 1*1
32 0 0.000
44 65 1.477
39.5 45 1.140
31.5 24 0.762
53 0 0.000
В 1-й графе табл. 35 помещены наименования точек аппроксими-
рующей ломаной. В последующих четырех графах даны координаты
$ 3. Регуляторы скорости гидротурбин
287
этих точек в соответствии с рис. 193. В 6-й графе указаны значения
выходного напряжения усилителя 6. В 7-й и 8-й графах вычислены
приращения напряжений ир и и.ь для прямолинейных отрезков ломаной.
В последней графе табл. 35 даны значения абсолютной величины коэф-
фициента усиления функционального устройства на каждом отрезке.
Величины сопротивлений и уставки потенциометров рассчитываются по
участкам.
Участок CD. При работе на этом участке все вентили функцио-
нального устройства (т. е. 6В, \
фициента усиления определяется
отношением
1
Задаемся 7?13 = Т?14 =100 ком.
Из табл. 35 находим 1^]^ =
= 1.14. Следовательно, 7?6 =
= I k \св (Я13 -ь /?и) = 1.14- 200 -
= 228 ком. Кроме того, из рис. 193
находим, что при ир = 0 имеем
Нф=—6.5 в, т. е. п6 = -ьб.5 в.
Для создания этого начального
напряжения на выходе усилителя
6 на его вход через сопротив-
ление Т?12 подается небольшой
отрицательный сигнал, снимае-
мый с потенциометра 72г, который питается от стабилизированного
выпрямителя напряжением Z7CT.. Соотношение здесь следующее:
П6---- Р12^Тст. .
В разбираемом примере UCT, = —350 в. Задавшись величиной T?i2 =
= 470 ком, найдем относительную уставку потенциометра:
D ___ w6^12 _____ ^*5 • 470 __pw OQQQ
Pi2— UCT PQ~ —350 * 228 — и.иэоэ.
Участок ВС. При переходе с участка CD на участок ВС r точке
сопряжения С должен открываться вентиль 10В. Следовательно,
в точке С потенциал катода вентиля 10В должен стать равным напря-
жению, снимаемому с потенциометра Юг*.
В нашем примере /7Ст. =—350 в, и для точки С получим ир = —15.5 в.
Относительная уставка потенциометра
В
Рю — и
^14
2?13 -4- Т?14
—15.5 • 100
—350 • 200
0.0221.
238
Глава VI. Моделирование гидротурбин, трубопроводов
Благодаря шунтирующему действию сопротивления 7?10 модуль коэф-
фициента усиления схемы на участке ВС уменьшается и становится
равным
I £ I —________________
1 Г, О ^14'
*13 *14 "+-
Из этого соотношения находим
р ___ ^13^34 ___ 100 ’ ЮО ___-J qq
K1Q — ---------------— ~228------— IvU ком.
(^13-ь/?14) 0.762 ~200
Участок DE. При переходе с участка CD на участок DE в точке
сопряжения D должен открываться вентиль 11В. Стало быть, в этот
момент потенциал движка потенциометра 11г должен проходить через
нуль. Для выполнения этого условия относительная уставка по-
тенциометра 11г должна быть равной
В рассматриваемом примере t/CT'. =—350 в, и для точки D получим
Up = 24 в, следовательно,
₽"= 211^0 =0-0642-
При открытом вентиле 11В сопротивление R1± увеличит на участке DE
коэффициент усиления на величину
В нашем случае | A&J = | k —| k \CD— 1.477—1.14 = 0.337, поэтому
(1 - Рн) =---6337----= 634 ком-
Участок АВ. Воспроизведение участка АВ комбинаторной кри-
вой сводится к ограничению выходного напряжения усилителя 6\
н6<^-1-48 в. Это ограничение достигается применением нелинейной
обратной связи с вентилем 6В и потенциометром 6г. Уставка потен-
циометра находится по следующей формуле:
В —________ _____48--— 0 1 205
рб —Иб-^ст 48-ь 350
У ч а с т о к EF. На этом участке ограничивается отрицательное вы-
ходное напряжение усилителя w6 —86 в. Нелинейная связь содержит
вентиль 7В и потенциометр 7г. Уставка потенциометра
В =________—_____~8-___= 0 197
Р7 «6-/7ст. —86 — 350
В приведенном примере расчета функционального преобразователя
не учитывались внутренние сопротивления вентилей в прямом направ-
§ 4. Описание некоторых выполненных моделей
289
лении, так как это сопротивление порядка 0.5 ком и им практически
можно пренебречь. Сопротивление потенциометров, с которых снимается
напряжение подпора, должно быть таково, чтобы отбираемые с движ-
ков токи практически не искажали распределения напряжений на по-
тенциометрах.
Заметим также, что в качестве функционального устройства в мо-
дели комбинаторного механизма можно использовать стандартные функ-
циональные преобразователи, которыми комплектуются нелинейные
электронные моделирующие установки.
§ 4. Описание некоторых выполненных моделей
Работы по электрическому моделированию гидротурбин и регуляторов
скорости для динамических моделей энергосистем велись в Институте
электромеханики АН СССР с 1951 г. За это время было разработано
и выполнено семь моделей мощных гидроагрегатов с электрическими
регуляторами скорости. Расчет моделей и их опытные характеристики
приведены в выпущенных отчетах. Кроме того, что модель гидротур-
бины позволяет создать правильные граничные условия на валу синхронных
генераторов при работе электродинамической модели энергосистем,
оказалось возможным также провести ряд интересных исследователь-
ских работ по структурным схемам регуляторов скорости гидротурбин, по
динамике автоматического регулирования частоты в объединенных
энергосистемах (Первозванский, 1957), по влиянию гидравлического
удара и нелинейных факторов на процессы регулирования скорости
гидротурбин, по использованию явления гидроудара для повышения
динамической устойчивости гидроагрегатов (Арутюнян, 1957), по влия-
нию регулирования возбуждения генератора на процесс регулирования
турбины по углу (Юревич, Линде, 1957).
Ниже помещено описание нескольких выполненных электрических
моделей гидротурбин, трубопроводов и регуляторов скорости, а также
приведены некоторые опытные характеристики.
Поисковая модель гидротурбины и регулятора
скорости, выполненная на машинах типа ПН-17.5
В 1952 г. для исследования по поручению ЛМЗ нескольких новых
структурных схем регуляторов скорости гидротурбин была создана спе-
циальная электродинамическая модель небольшой мощности. Схема
основной части модели представлена на рис. 194. Турбина моделируется
двигателем постоянного тока Д с независимым возбуждением. Так как на
модели предстояли исследования только переходных режимов гидроагре-
гата после сброса нагрузки, то синхронный генератор не моделировался,
а для изменения нагрузки двигателя Д использован генератор постоян-
ного тока Г. Нужная нагрузка на модельный агрегат устанавливается
соответствующим регулированием тока возбуждения генератора Г и
величиной сопротивления нагрузочного реостата 7?я. Сброс нагрузки
осуществляется размыканием рубильника Р.
Двигатель Д и генератор Г представляют собой совершенно оди-
наковые машины типа ПН-17.5 (110 в, 1 квт, 1000 об./мин.). На
одном валу с ними установлен тахогенератор постоянного тока ТГ.
Ток возбуждения тахогенератора стабилизируется барретером. Нужный
наклон механических характеристик двигателя обеспечивается сопротив-
290
Глава VI. Моделирование гидротурбин., трубопроводов
лением Rx в якорной цепи. Роль направляющего аппарата турбины и
сервомотора регулятора скорости в модели играет вольтодобавочный
генератор ГВ, в качестве которого была использована машина типа
ПН-17.5 (220 в, 1.75 квт, 1450 об./мин.). Приводом для ГВ служит
асинхронный двигатель соответствующей мощности. С помощью дели-
теля напряжения —Т?9 генератор ГВ был поставлен в режим крити-
ческого самовозбуждения. Это в первом приближении создало генера-
^500zu.
Рис. 194. Схема основной части малой поисковой модели гидроагрегата.
тору ГВ астатическую характеристику, близкую к характеристике серво-
мотора.
Для сужения гистерезисной петли характеристики холостого хода
вольтодобавочного генератора вдоль его ярма при помощи специально
сделанной обмотки возбуждался переменный магнитный поток с частотой
50 гц. Сигнал, поступающий на обмотку возбуждения бустера, предвари-
тельно усиливается двухкаскадным электронным усилителем на лампах и
Д2 и электромашинным усилителем ЭМУ. Небольшая емкость Сх во входной
цепи электронного усилителя предназначена для фильтрации высокоча-
стотных помех и стабилизации усилителя. Конденсаторы С3, шунтирую-
щие обмотки управления электромашинного усилителя, препятствуют
влиянию на работу электронного усилителя помех, наводимых в обмот-
ках ЭМУ из-за пульсации магнитного потока с частотой зубцовых гар-
моник, а также помех от работы коллектора. На вход усилителя поступает
разность между заданным напряжением, снимаемым через делитель Roq,
со стабилизатора СГ, и напряжением тахогенератора, а также сигналы
обратных связей. Потенциометр 7?Об. при этом моделирует механизм
изменения числа оборотов регулятора скорости.
Действие изодромного механизма воспроизводится электрическим
контуром из сопротивлений —Т?4 и емкости Сг. Степень остающейся
неравномерности регулятора устанавливается движком потенциометра Rx.
Жесткая отрицательная обратная связь по напряжению ЭМУ, сни-
4. Описание некоторых выполненных моделей
291
маемая с делителя ^10, позволяет в значительной степени линеаризо-
вать характеристики и увеличить быстродействие всей цепи усиления.
Кроме того, потенциометром 7?10 очень удобно устанавливать коэффи-
циент усиления, рассчитанный по условиям подобия. Электрическая
цепь, в которую входят два двойных диода Л5 и батарея напряжения
подпора Сп, предназначена для воспроизведения ограничения хода
золотника. Когда напряжение на якоре ЭМУ делается по абсолютной
величине больше напряжения 77п, соответствующие вентили открываются,
и обратная связь по напряжению ЭМУ практически
В результате этого общий коэффициент усиления
усилителей уменьшается примерно до 1. Сопро-
тивление ^12 выбирается значительно больше внут-
реннего сопротивления диодов Л5. Действие этого
ограничивающего устройства в сравнении со схе-
мой, приведенной на рис. 183, не такое резкое, но
все же достаточно заметное.
Новые схемы регуляторов скорости гидротур-
бин, которые исследовались на описываемой мо-
делается полной.
Усилитель
Рис. 195. Структурная
схема введения воз-
действия по производ-
ной.
дели, предусматривали введение сигналов по уско-
рению агрегата. Измерение ускорения в оригинале
предполагалось не непосредственное, а косвенное
(Гаркави, Смирнов, 1954). Для этой цели гидравли-
ческий усилитель регулятора скорости охватывался
гибкой положительной обратной связью с помощью
второго изодромного механизма. При определенных соотношениях
плеч рычагов на выходе усилителя сигнал оказывается пропорциональ-
ным сумме входного воздействия и его производной. Сказанное пояс-
няется структурной схемой, представленной на рис. 195. Там же вписаны
передаточные функции усилителя и цепи обратной связи. Так как связь
положительная, результирующая передаточная функция устройства будет
(154)
где Т’и — постоянная времени второго изодромного механизма;
а4 — коэффициент обратной связи.
Для правильной работы устройства задаются таким значением аь
чтобы произведение T = a1£1 было близко к 1, но все же несколько
меньше 1. Тогда в области существенных частот функцию (154) можно
представить приближенно
ТГ(р) = Аг1(р7’и-Ы). (155)
Такое же дифференцирующее устройство, только электрическое,
предусмотрено и в модели регулятора скорости (см. рис. 194).
Напряжение якоря ЭМУ (рис. 194) через электронный модулятор
на лампе Л3, разделительный трансформатор Тр. 7 и демодулятор на
лампах Л4 поступает на дифференцирующий контур 7?и—Си, который
находится на входе электронного усилителя. Глубина обратной связи
устанавливается делителем напряжения Rn, а постоянная времени — под-
бором величин Си и R*. Интересно отметить, что описанная модельная
установка работала с ненатуральным масштабом времени. Это оказалось
возможным благодаря тому, что синхронный генератор, линия передачи
и другие подобные звенья здесь не моделировались.
292
Глава VI. Моделирование гидротурбин^ трубопроводов
Большинство экспериментов было проведено с масштабом времени
1 :16, т. е. переходные процессы в модели протекали в 16 раз быстрее,
чем в оригинале. Применение такого масштаба времени оказалось целесо-
образным из-за того, что для оригинала инерционная постоянная гидро-
агрегата была задана 7^ = 8 сек. и время сервомотора Т8 = 6 сек., в то
время как инерционная постоянная модельного агрегата для оптималь-
ных значений Мд, б и и>д.б оказалась порядка 0.5 сек. Так же облегча-
лось и воспроизведение времени сервомотора, так как индуктивность
обмотки возбуждения ГВ составляла около 150 гн, а номинальный ток
возбуждения 0.2 а. Точность работы модели оценивалась по сравнению
осциллограмм с заранее рассчитанными переходными процессами. Во
всех пробах погрешность не превышала 1Оэ/о, что было вполне доста-
точно, так как по условиям задачи требовалось лишь получить прибли-
женную качественную оценку.
На описываемой модельной установке делались попытки также
учесть в самом грубом приближении влияние инерции воды в водоводах
гидротурбины. С этой целью в якорную цепь двигателя Д последова-
тельно включался дроссель со значительной индуктивностью. Обмотка дрос-
селя была секционированной, благодаря чему можно было выбирать разные
значения индуктивности. Введение индуктивности ухудшало переходные
процессы и тем сильнее, чем на большее быстродействие настраивался
регулятор. При больших значениях индуктивности и 7^ = 0 система
вообще становилась неустойчивой.
Проведенные на этой модели исследования показали положительное
действие сигналов по ускорению и выявили необходимость дальнейшего
исследования этого вопроса с более точным учетом инерции воды и
нелинейных характеристик регулятора. Такие исследования позже про-
водились на другой установке.
Электромеханическая модель низконапорног о
гидроагрегата малой модели ИЭМ АН СССР
Описываемая ниже электромеханическая модель низконапорного
гидроагрегата была разработана и построена в Институте электроме-
ханики АН СССР в 1954—1955 гг. (Воронов, Первозванский, Семе-
нов, 1956). Упрощенная принципиальная схема установки дана на
рис. 196. Моделируется гидравлическая турбина с одним регулирующим
органом. Нужный наклон механических характеристик двигателя Д по-
лучается при помощи отрицательной обратной связи по якорному току
двигателя. Для осуществления этой связи использован магнитный уси-
литель 2МУ и фазочувствительный выпрямитель 2В. Усилитель 2МУ
имеет еще одну обмотку управления, которая позволяет использовать
его и для обратной связи по напряжению вольтодобавочного генера-
тора ГВ. Электронный усилитель 2ЭУ, электромашинный усилитель 2ЭМУ
и генератор ГВ — все вместе образуют усилитель мощности, коэффи-
циент усиления которого настраивается перемещением движков реоста-
тов обратной связи и Т?2о* Тахогенератор ТГ приводится во враще-
ние синхронным реактивным двигателем ДМ, который получает питание
от вспомогательного синхронного генератора С ГС, находящегося в агре-
гате с двигателем Д и модельным синхронным генератором СГ. В мо-
дели регулятора скорости используются электронный усилитель 7ЭУ и
электромашинный усилитель 1ЭМУ. Общий коэффициент усиления уси-
лителей настраивается реостатом обратной связи Л\о. Интегратором
£ 4. Описание некоторых выполненных моделей
293
является двигатель постоянного тока
ДИ и связанный с ним через редук-
тор потенциометр R^. К выходному
напряжению модели регулятора ско-
рости, снимаемому с потенциометра
7?и, подключается цепь обратной связи,
составленная из сопротивлений
и емкости Ci.
Этим контуром воспроизводится
жесткая обратная связь и изодромный
механизм регулятора. С помощью вен-
тилей и магнитного усилителя 1МУ
моделируются ограничение хода зо-
лотника и механизм ограничения от-
крытия. Установка ограничения откры-
тия задается перемещением движка
потенциометра Ro. о. Влияние инерции
потока воды в водоводах турбины мо-
делируется контуром 7?у—Су. Движок
переменного сопротивления Ry нахо-
дится на одной оси с движком по-
тенциометра 7?и. Модель трубопровода
в любой момент может быть отклю-
чена или введена в действие замы-
канием или размыканием выключателя
ВТ. Для выполнения условия подобия
(124) на вход усилителя мощности по-
ступает не все напряжение, снимаемое
с потенциометра Rn, а только часть
его, определяемая соотношением
Приведенная на рис. 196 схема
показывает взаимосвязь только основ-
ных элементов модели. Полная схема
установки, содержащая приводные дви-
гатели, релейно-контакторную автома-
тику для автоматизированного запуска
модели, устройства управления и сиг-
нализации, источники питания и т. д.,
приведена на рис. 197 и описана ниже.
Примерный порядок расчета
основных параметров
модели, выполненной по
схеме рис. 196
Основные параметры электромеха-
нической модели низконапорного гид-
роагрегата, схема которой представлена
на рис. 196, можно рассчитать по дан-
Рис. 196. Упрощенная принципиальная схема электромеханической модели низконапорного гидроагрегата.
294
Глава VI» Моделирование гидротурбин, трубопроводов
ным оригинала и в соответствии с конструктивными параметрами самой
модели в следующем порядке.
1. Синхронную скорость модельного агрегата принимаем за базовое
значение скорости:
б — ^синхр. (сек ).
2. По заданному значению инерционной постоянной Та, зная момент
инерции модельного агрегата /д, находим базовую величину момента
двигателя:
Мд.б=/д-^- (кгм). (157)
л а
В некоторых случаях может быть задана величина Мд, б- Тогда опре-
деляется нужный момент инерции модельного агрегата.
3. Выбирается напряжение f70, которым питается потенциометр
При наличии конечных выключателей, защищающих потенциометр 7?и от
поломки, движок потенциометра в крайних положениях может не дохо-
дить до упоров. В этом случае под величиной UQ следует понимать
изменение напряжения, снимаемого с 7?и, при полном ходе его движка.
4. В соответствии с условиями подобия (124) находим:
Рг = г^ и (в). (158)
Здесь коэффициент dQ берется по уравнению (60).
5. Задаемся для модели коэффициентом самовыравнивания кс. Выбор
величины кс зависит от характера исследуемых на модели процессов.
Во многих случаях можно принять kG = 2.
6. Определив для модельного двигателя Д коэффициент ке (в • сек.),
находим коэффициент усиления по напряжению усилителя мощности
= (159)
7. Для нахождения коэффициента передачи обратной связи по току
двигателя нужно знать общее активное сопротивление всей якорной
цепи 7?яо. Тогда
<ом)- <16°)
д. б у
Здесь км = 0.102&©
8. Зная коэффициент передачи тахогенератора &тг, а также пара-
метры 8 и i оригинала, находим
*TrPrWA.6
I»— 8/ . (161)
и1б
9. Другой коэффициент равен:
т, = т.(|—1). (162)
10. Коэффициент усиления усилителя модели регулятора скорости
находится из соотношения
к‘=т;-тт- <163>
8 и 'ж
§ 4. Описание некоторых выполненных моделей
295
Здесь коэффициент (сек-1) электромеханического интегратора
определяется конструкцией блока и напряжением Uo.
11. Задаемся величиной R5 так, чтобы оно не нагружало заметно
потенциометр /?и, т. е. Т?5 = (20 ~ 40) 7?и (ом).
12. Имея Т?5, определяем величины сопротивлений:
= /?2 = /?54^-(ом). (164)
13. Задаемся величиной емкости С<, тогда сопротивления
= 2?3(om). (165)
Здесь нужно следить, чтобы сумма R$-+-R± была в 2—3 десятка раз
больше /?!.
14. По заданным параметрам эквивалентного простого трубопровода
и выбранному значению 7?у (выбирают Ry R^ находим величину
емкости Су
Су = ^(ф). (166)
У
Схема управления моделью низконапорног о
гидроагрегата
Схема управления моделью разработана так, чтобы облегчить ее
запуск, исключить возможность неправильных операций и создать удоб-
ства при проведении экспериментов. С этой целью предусматривается
автоматизированный пуск всей установки, ряд защитных блокировок и
сигнализация. Схема представлена на рис. 197. Для упрощения здесь
не приведены цепи, моделирующие механизм ограничения открытия и
ограничение хода золотника.
Модельная установка может работать в трех режимах. В первом
режиме осуществляется автоматизированный запуск двигателя модели
от сети постоянного тока. Режим предназначается для всякого рода
наладочных работ и опытов с моделью синхронного генератора, поэтому
в этом режиме не моделируются ни самовыравнивание турбины, ни
регулятор скорости. Двигатель Д работает на своей естественной харак-
теристике. Во втором режиме также производится автоматизированный пуск
установки. Однако в этом режиме включается также усилитель мощ-
ности и обратная связь по току двигателя. Благодаря этому обеспечи-
вается нужное самовыравнивание механических характеристик двигателя.
Регулятор скорости отключен. Открытие и закрытие модели направляю-
щего аппарата производится неавтоматически. В третьем режиме вклю-
чается также и регулятор скорости.
Модель трубопровода может по желанию вводиться или отключаться
во втором и третьем режимах. Тот или иной режим выбирается пере-
ключателем ПР. Установка питается от трехфазной сети переменного
тока 220 в, от трехпроводной сети постоянного тока 110—220 в, а также
содержит два преобразовательных агрегата, дающих 30 в постоянного
тока для питания низковольтных машин и реле и 36 в переменного тока
500 гц для питания магнитных усилителей.
296
Глава VI. Моделирование гидротурбин, трубопроводов
Работа схемы управления в режиме № 1
(Запуск агрегата для наладочных работ)
Включают на пусковой панели рубильники 1Р и 2Р, а также рубиль-
ник ЗР, подающий питание в якорную цепь со стороны генератора ГВ.
Пакетным выключателем ПВ-1 подается напряжение на схему управ-
ления. Переключатель режимов ПР ставится в положение № 1, при
этом замыкается контакт 1ПР переключателя, подготавливая цепь
катушки контактора КР. Затем нажимается одна из пусковых кно-
пок 77/ или /72. Кнопки пуска и останова дублируются, чтобы эти опе-
рации можно было производить как на самой модели, так и с общего
щита управления. При нажатии пусковой кнопки срабатывает и само-
блокируется контактор КР. Главным контактом/СР шунтируется якорь ГВ.
Нормально замкнутый блок-контакт КР разрывает цепь катушки
контактора КГБ, этим предупреждается запуск вольтодобавочного
генератора в режиме № 1. Наконец, нормально открытый блок-
контакт КР включает схему автоматизированного запуска дви-
гателя Д. На сигнальном щитке загорается лампа /ЛС, включенная
в цепь катушки КР. Так как при включении ПВ-1 подается питание
на обмотку возбуждения вспомогательного синхронного генератора С ГС,
в режиме № 1 тахогенератор ТГ будет приводиться во вращение, и
вольтметр, подключенный к его якорю, укажет скорость модельного»
агрегата. В некоторых пределах скорость агрегата можно менять воз-
буждением двигателя Д.
Работа схемы управления в режиме № 2
(Турбина работает без регулятора скорости)
Для запуска модели в режиме № 2 следует проделать подготови-
тельные операции — включить рубильники 1Р, 2Р, ЗР, 4Р, 5Р, а также
ПВ-1. Переключатель ПР ставят в положение № 2, при этом замы-
кается контакт 2ПР, чем подготавливается цепь катушки 2РБ, и цепь-
обмотки начального смещения магнитного усилителя 2МУ.
Другим контактом 2ПР подготавливается цепь катушки 4РБ. Затем
нажимается пусковая кнопка. Включается и самоблокируется реле 2РБ..
Нормально открытым блок-контактом 2РБ включается контактор КЗА,
который запускает двигатель ДЗА, приводящий во вращение генера-
тор ГЗА. Другим нормально открытым контактом 2РБ включаются
электронные выпрямители, питающие второй электронный усилитель 2ЭУ
и цепи блока сервомотора и трубопровода. Еще один нормально откры-
тый контакт 2РБ замыкает цепи катушек реле /РНъРКЗ. Одновременно
с включением реле 2РБ запитывается через барретер 7Б обмотка на-
чального смещения 2МУ. Затем реостатом в цепи возбуждения генера-
тора ГЗА устанавливается вручную нужное напряжение (30 в) и вклю-
чается пакетный выключатель ПВ-2. При этом срабатывает реле
напряжения 1РН (реле 1 PH осуществляет защиту от понижения напря-
жения ГЗА) и реле РКЗ, если замкнут конечный выключатель КВЗ,
связанный с механизмом потенциометра 7?и. Реле 1РН подает питание
на обмотку возбуждения двигателя ДИ и на катушку реле РТ, если
замкнут конечный выключатель КВО. Реле РТ подготавливает якорную
цепь двигателя ДИ. Одновременно через нормально открытые контакты
1РН и РКЗ и через нормально замкнутые контакты 5РБ и РО вклю-
чается реле РЗ. Это реле подключает двигатель ДИ на напряжение
30 в. Двигатель ДИ начинает работать на закрытие, так как запускать
пв-г
11'РН Г РКЗ 5Р6 Lon ~2ПР л L V Liny 1 CWI - w
44- ~ " 1РП 1РП < 1 у"**"1* gO g>3 \ЗР6 gJ
< ^глс{ w b i
\ДИ ,РЗ ,Р0 . 5РЬ пгсш МР6
J) < ) (L
Рис. 197. Схема модели низконапорв
ггоб
дели низконапорного гидроагрегата.
§ 4. Описание некоторых выполненных моделей
297
модель на холостом ходу можно только при минимальном открытии,
иначе в главной цепи двигателя Д и генератора ГВ будут недопустимые
толчки тока.
Реле 1РН включает также контактор КГВ, который запускает дви-
гатель ДГВ, приводящий во вращение генератор ГВ. Кроме того,
реле 1 PH включает контактор 1 К, в результате чего запускается пре-
образователь ДВМ—ВМ, подающий питание 36 в 500 гц на магнитные
усилители. Одновременно нормально открытыми блок-контактами КГ В
подготавливается цепь автоматизированного запуска двигателя Д. Как
только двигатель ДИ, работая на закрытие, приведет движок потенцио-
метра /?и в крайнее положение, разомкнется конечный выключатель
КВЗ. Реле РКЗ отключится и в свою очередь отключит реле РЗ
и РТ. Этим двигатель ДИ отключится от сети 30 в и резко затормо-
зится на сопротивление СТ. Одновременно нормально замкнутыми кон-
тактами РКЗ включится панель автоматизированного запуска двига-
теля Д. СГС при этом возбужден, поэтому тахогенератор приводится
во вращение, и вольтметр показывает скорость агрегата. По окончании
пуска двигателя Д срабатывает реле ОП. Своим нормально открытым
контактом реле ОП включает катушки реле 5РБ и 4РБ. На сигнальном
щитке загорается лампа 2ЛС, находящаяся в цепи катушки 4РБ. Нор-
мально замкнутый контакт реле 5РБ, через который питалась катушка
реле РЗ, размыкается.
Нормально открытым контактом 4РБ напряжение электронного вы-
прямителя подается на лампы усилителя 2ЭУ. Другим нормально от-
крытым контактом 4РБ включается контактор 2КУ. Этот контактор
запускает приводной двигатель 2ДУ электромашинного усилителя 2ЭМУ.
Запуск схемы на этом заканчивается.
Кнопками открытия КО или закрытия КЗ можно изменять положе-
ние движка 7?и. Реле РО и РЗ снабжены взаимо запретительной бло-
кировкой, исключающей их одновременное срабатывание. В крайних
положениях движка Rn срабатывают защитные концевые выключатели
КВО и КВЗ. Возможность обратного движения при перемене поляр-
ности напряжения, приложенного к якорю ДИ, обеспечивается поляри-
зованным реле 1РП.
При желании модель трубопровода включается тумблером ВГ. При
этом срабатывает реле РГ и на сигнальном щитке загорается
лампа 4ЛС.
Работа схемы управления в режиме № 3
(Турбина с регулятором скорости)
Перед запуском модели в режиме № 3 включают рубильники 1Р,
2Р, ЗР, 4Р, 5Р и выключатель ПВ-1. Переключатель ПР ставят в по-
ложение № 3. При этом замыкаются контакты ЗПР, один подготавли-
вает цепи 2РБ и 2МУ, а другой — цепь ЗРБ. Нажимается кнопка пуска.
Включается и самоблокируется реле 2РБ, а также получает питание
обмотка начального смещения 2МУ. Реле 2РБ дает импульс на запуск
генератора ГЗА и включает электронные выпрямители, питающие уси-
литель 2ЭУ и модель сервомотора. Кроме того, нормально открытый
контакт 2РБ подготавливает цепь катушек реле ЗРБ, 1 PH, РКЗ. За-
тем на генераторе ГЗА вручную устанавливается нужное напряжение
(30 в) и включается пакетный выключатель ПВ-2. При этом срабаты-
вают реле ЗРБ, 1 PH и РКЗ (если КВЗ замкнут).
298
Глава VI. Моделирование гидротурбин, трубопроводов
Реле ЗРБ своим нормально открытым контактом включает катушку
пневмоэлектрического реле времени РВ, которое размыкает свой нор-
мально замкнутый контакт в цепи катушки КУ. Кроме того, через дру-
гой нормально открытый контакт ЗРБ включается электронный выпря-
митель, питающий усилитель 7ЭУ. Наконец, нормально открытый и нор-
мально замкнутый контакты ЗРБ подготавливают цепь катушки реле 4РБ.
Реле 1 PH через контакторы /К и КГВ запускает высокочастотную
машину ВМ и вольтодобавочный генератор ГВ. Кроме того, через нор-
мально открытый контакт 1 PH подается возбуждение на двигатель ДИ
и оттормаживающее реле РТ, а также через контакты РКЗ, 5РБ, РО
на катушку РЗ. Реле РЗ включает двигатель ДИ на закрытие. Кон-
тактор КГ В при включении своим нормально открытым блок-контактом
подготавливает цепь автоматизированного запуска двигателя Д. Другой
нормально открытый блок-контакт КГВ включает контактор 1 КУ, от ко-
торого запускается двигатель 7ДУ, приводящий во вращение 1 ЭМУ.
Блок-контактом 1 КУ подготавливается цепь самоблокировки реле
4РБ, а другим блок-контактом 1 КУ через контактор 2КУ включается
агрегат 2ДУ—2ЭМУ. Как только двигатель ДИ „закроет" турбину,
конечным выключателем КВЗ отключается РКЗ, а затем РЗ и РТ.
Двигатель ДИ затормозится. Одновременно нормально замкнутыми кон-
тактами РКЗ включится панель автоматизированного запуска двига-
теля Д. По окончании пуска двигателя Д срабатывает реле ОП. Своим
нормально открытым контактом реле ОП включает катушку реле 5РБ
Нормально замкнутый контакт реле 5РБ, через который питалась ка-
тушка реле РЗ, размыкается. Другой нормально замкнутый контакт 5РБ
отключает катушку реле времени РВ, и оно начинает отрабатывать
заданную выдержку времени. Нормально открытым контактом 5РБ
замыкается цепь катушки поляризованного трехпозиционного реле 2РП.
Если напряжение тахогенератора отличается от заданного эталон-
ного напряжения более чем на 1—2 в, то один из контактов 2РП за-
мыкается. При этом срабатывает промежуточное реле 7РБ или 8РБ и
от него — реле 6РБ. Одновременно на сигнальном щитке загорается
лампа 5ЛС или 6ЛС. Нормально замкнутый контакт 6РБ дополнительно
разрывает цепь катушки КУ, и только после этого с выдержкой вре-
мени замыкается нормально замкнутый контакт РВ в этой цепи. Таким
образом, цепь катушки КУ продолжает все это время оставаться ра-
зомкнутой.
Сигнальные лампы 5ЛС и 6ЛС показывают, в какую сторону сле-
дует изменять эталонное напряжение (потенциометром 7?Об.), чтобы сде-
лать его приблизительно равным напряжению тахогенератора. Это пре-
дусмотрено для избежания толчков в системе регулирования при ее
включении.
Когда напряжения тахогенератора и эталонное будут уравновеши-
ваться, реле 2РП разомкнет свой контакт, отключится 7РБ (8РБ),
а за ним и 6РБ. Погаснет лампа 5ЛС (6ЛС). Нормально замкнутым
контактом 6РБ будет включена катушка КУ. Нормально открытым кон-
тактом КУ двигатель ДИ подключится к якорю 1ЭМУ. Нормально
замкнутый контакт КУ дополнительно разорвет цепь катушек РО и РЗ.
Наконец, через нормально открытый контакт КУ, через нормально от-
крытый контакт ЗРБ и сигнальную лампу ЗЛС получит питание реле
4РБ. Оно срабатывает и самоблокируется.
Кроме того, нормально отктытым контактом 4РБ блокируются кон-
такты 6РБ и РВ в цепи катушки КУ. Нормально замкнутым контактом
£ 4. Описание некоторых выполненных моделей
299
4РБ отключается катушка реле 2РП. Наконец, нормально открытые
контакты 4РБ включают анодное напряжение усилителей 1ЭУ и 2ЭУ.
Этим завершается запуск схемы.
Тумблером В Г можно включить или отключить модель трубопровода.
Изменение скорости агрегата, синхронизация и набор нагрузки осу-
ществляются поворотом ручки потенциометра 7?Об.* Кроме того, можно
подавать импульсы на открытие или закрытие кнопками КО и КЗ»
При этом двигатель ДИ на то время, пока нажата кнопка, отключается
Рис. 198. Опытные моментно-скорост-
ные характеристики модели гидро-
турбины.
1
Рис. 199. Опытные статические
характеристики модели гидроагрегата
с регулятором скорости.
от 1 ЭМУ и включается на 30-вольтовую сеть. После отпускания кнопки
КО и КЗ первоначальная схема восстанавливается.
В описываемом режиме схема регулятора скорости может работать
совместно с автоматическим регулятором частоты. Для этого движок
потенциометра 7?Об. перемещают не вручную, а специальным моторчиком,
включенным на выход регулятора частоты.
Полное отключение всей установки в любом из описанных режимов
работы производится нажатием одной из кнопок „стоп“ (С/ или С2).
Некоторая сложность описанной здесь схемы управления вызвана,
с одной стороны, попыткой добиться возможно более полной автомати-
зации, а с другой стороны — применением той аппаратуры и машин,
которые находились в распоряжении.
Некоторые опытные характеристики
электромеханической модели гидроагрегата
На рис. 198 представлены моментно-скоростные характеристики дви-
гателя, полученные экспериментально. По расчету коэффициент само-
выравнивания должен быть равен £с = 0.67 при о)Деб = 104.7 сек.-1 и
Л7д.б = 2.73 кгм. Полученный наклон характеристик двигателя хорошо
совпадает с расчетным. Статические характеристики гидроагрегата с ре-
гулятором скорости показаны на рис. 199. Кривая 7 соответствует аста-
тической настройке регулятора скорости, кривая 2 — максимальному
статизму, который в данном случае равен 6.4%.
300
Глава VI. Моделирование гидротурбин, трубопроводов
Некоторое представление о работе регулятора скорости может дать
осциллограмма, приведенная на рис. 200. Здесь записаны отклонение
скорости, ход сервомотора и ток якоря двигателя в переходном про-
цессе после внезапного сброса нагрузки. Сброс производился отключе-
нием нагруженного генератора от сети. По изменению якорного тока
Рис. 200. Осциллограмма переходного про-
цесса модели гидроагрегата после внезапного
сброса нагрузки.
на осциллограмме видно, что из-за гидравлического удара, возникшего
при быстром закрытии направляющего аппарата, момент турбины в пер-
вое время имеет тенденцию к увеличению.
Влияние гидравлического удара на процесс изменения мощности
гидроагрегата иллюстрируется также осциллограммой, представленной
на рис. 201. Здесь производилось закрытие модели направляющего ап-
парата турбины по линейному закону, причем синхронный генератор
Рис. 201.
работал через модель линии передачи на сеть бесконечной мощности.
Как видно из осциллограммы, благодаря гидравлическому удару мощность
генератора в первое время не только не уменьшается, но даже возра-
стает, о чем свидетельствует увеличение электрического угла 6 агре-
гата. На процесс изменения угла накладываются собственные колебания
ротора агрегата. В данном случае постоянная времени трубопровода
Tw = 4 сек.
При исследовании на описанной модели динамики регулирования
частоты и мощности в энергосистеме Волжская ГЭС—Москва было
также показано существенное влияние инерции потока воды в водоводах
гидростанции на качество переходных процессов. На рис. 202 представ-
лены две кривые переходных процессов изменения частоты в системе
при сбросах нагрузки. Кривая 7 получена при включенном блоке гид-
равлического удара. Постоянная времени трубопровода /^ = 3.5 сек.
Кривая 2 соответствует опыту с отключенным блоком гидроудара.
§ 4. Описание некоторых выполненных моделей
301
Таблица 36
св 5 С о 3 Блок гид- равличе- ского удара Нагрузка Станции
р 'асинхр. (квт) р г синхр.комп. (квт) Е^нагр. (квт) Д^нагр. (квт) рвгэс (квт) ^Моск. (квт) SP (квт) ДР (квт) ^вгэс (з) ^Моск. (в)
1 вклю- | 4.52 0.45 4.97 0.80 2.12 3.33 5.45 0.91 225 233
чен 1 3.72 0.45 4.17 1.69 2.85 4.54 225 242
2 от- ( клю- < чен 1 4.55 3.70 0.45 0.45 5.00 4.15 0.85 2.07 1.59 3.39 2.91 5.46 4.50 0.96 225 223 232 242
В обоих опытах регулятор скорости Волжской ГЭС работал с отклю-
ченным катарактом изодромного механизма (7^ = 0), степень остающейся
неравномерности регулятора была установлена 6%. Регулятор скорости
модельного агрегата, изображающего электростанции Москвы, был на-
строен на статизм 10%. Основные данные, характеризующие описан-
ные опыты, приведены в табл. 36. Базовая мощность модельного агре-
гата Волжской ГЭС была принята равной 2.64 квт.
Электронная модель напорной деривации
и уравнительного резервуара цилиндрического типа
По схеме, представленной на рис. 166 и описанной в § 2, были смо-
делированы напорная деривация и цилиндрический уравнительный резер-
вуар гидроэлектрической станции. Параметры гидростанции были взяты
следующие: //б = Ю0 м, Q6 = 50 м3/сек; Лд=500 м, F4 = 12.5 м2,
ГР = 25 м2, Яд = 12 м.
В соответствии с этим определяем: 7^ = 2.04 сек., Гр = 50 сек.,
<7 = 0.12.
Базовые значения выходных напряжений решающих блоков выби-
раем такими: 77об. = £/7б = 100 в, 7/3б = 776б = 400 в.
В соответствии с формулой (95) нелинейный блок настраиваем для
выполнения преобразования
и3= 0.0048^2 sign п7.
(167)
302
Глава VI. Моделирование гидротурбин, трубопроводов
Из уравнения (167) видно, что при достижении напряжением п7 значе-
ния 100 в выходное напряжение нелинейного блока становится рав-
ным 48 в.
По условиям подобия (96) подбираем параметры модели: /?0 = Т?8 =
= 1 мгом, R9 = R1q — 816 ком, С6 = 12.5 мкф, С7=10 мкф.
На этом расчет модели заканчивается. Модель была использована
для исследования колебаний уровня воды в уравнительном резервуаре.
Записывались переходные процессы при внезапных сбросах и набросах
нагрузки. Изменение нагрузки ими-
тировалось скачкообразным измене-
нием q.
На рис. 203 показана осцилло-
грамма изменения qA и Ар после
наброса нагрузки от q = 0.2 до
д = 0.7.
На рис. 204 дана осциллограмма
переходного процесса при скачко-
образном сбросе нагрузки от <7 = 0.7 до <7 = 0.2. Из сравнения с ос-
циллограммой рис. 203 видно, что во втором случае колебания затухают
значительно быстрее. Это обусловлено квадратичным увеличением по-
терь напора на трение в деривации при возрастании расхода qA.
На осциллограмме рис. 205 процессы сброса и наброса нагрузки
представлены в координатах qA и Лр, как это обычно делается при рас-
чете подобных систем. Метки времени на траекториях процессов поз-
воляют судить о продолжительности установления нового режима.
Опыты на электронной модели напорной деривации
и дифференциального уравнительного резервуара
С помощью электронных решающих усилителей и нелинейных блоков
была выполнена модель уравнительного резервуара дифференциального
типа и напорной деривации. Схема модели соответствует рис. 168 и
описана в § 2. Параметры гидростанции были взяты из числового при-
мера в книге Н. А. Картвелишвили (1951).
На рис. 206 представлена осциллограмма переходных процессов
в моделируемой системе после скачкообразного сброса нагрузки от q = 1
до <7 = 0.15.
Сброс и наброс нагрузки в координатах Л2 и <70 изображен Hai
рис. 207, а в координатах qA и — на рис. 208.
§ 4. Описание некоторых выполненных моделей
303
Модель высоконапорного трубопровода с блоками
постоянного запаздывания
Электронная модель напорного трубопровода высоконапорной гидро-
станции была описана в § 2. По схеме рис. 164 был смоделирован
трубопровод, характеризуемый следующими данными: номинальный рас-
ход—17.4 м3/сек., напор —125 м, длина трубопровода L = 290 м,
фаза гидравлического удара ^ = 0.6 сек., ударная характеристика трубо-
провода р = 3.03 сек. Эти параметры взяты из числового примера, кото-
рый приводит в своей книге А. Е. Жмудь (1953).
Было принято, что 100 в напряжения в модели соответствуют = 1,
Л = 1 и 9 = 1.5. В соответствии с условиями подобия величины сопро-
Рис. 209.
тивлений были взяты следующие: /?2 — Т?4 = 7?6 = Т?7 = 100 ком,
7?з = 7?5 = 454 ком. Блок постоянного запаздывания был настроен на
задержку 0.6 сек.
На рис. 209 представлена снятая на модели осциллограмма переход-
ного процесса при линейном закрытии сопла турбины от |^ = 1.0 до
^ = 0.1. Скорость движения иглы была принята равной —0.25 сек.-1.
Максимальное повышение напора перед турбиной достигает значения
h = 0.30. По окончании движения иглы возникают, как видно из осцил-
лограммы, характерные медленно затухающие колебания напора. На
рис. 210 дана осциллограмма изменения расхода и напора при быстром
линейном открытии сопла от ^ = 0.15 до рь = 1.0. Скорость открытия
^ = 1.0 сек.""1. Максимальное понижение напора перед турбиной в конце
304
Глава VI, Моделирование гидротурбин, трубопроводов
первой фазы гидравлического удара достигает 72°/0. На рис. 211 пока-
зан полученный на модели процесс при очень быстром частичном за-
крытии от рь = 0.53 до р, — 0.22. Скорость закрытия ^ =—3 сек.-1 со-
ответствует в этом случае полному ходу иглы за 0.3 сек. Повышение
напора в течение первой фазы удара достигает Л = 0.83, а переходный
процесс имеет явно выраженный волновой характер.
Рис. 210.
§ 5. Об электромоделировании паровых турбин
Физическое моделирование паровых турбин в динамических моделях
энергосистем не применяется из-за своей сложности. Электрические
модели паровых турбин могут быть выполнены по схемам, аналогичным
схемам моделей гидротурбин.
Особенностью паровых турбин с точки зрения регулирования их
мощности является наличие парового объема, который создает некото-
рое запаздывание между перемещением регулирующего органа и изме-
нением мощности турбины. В первом приближении это запаздывание
может быть учтено дифференциальным уравнением апериодического
звена первого порядка:
= (168)
где Th — эквивалентная постоянная времени парового объема, и — отно-
сительное открытие регулирующего органа турбины, v — относительная
мощность или относительный момент турбины (при малых отклонениях
скорости это одно и то же).
Самовыравнивание турбины при моделировании может быть учтено
постоянным коэффициентом Таким образом, в качестве исходного
уравнения можно принять следующее:
v = ptJh- i н — (169)
Наилучшим образом это уравнение моделируется по схеме, представ-
ленной на рис. 145. Необходимое значение коэффициента самовыравни-
вания должно обеспечивать действие противокомпаундной обмотки вольто-
добавочного генератора, а запаздывание усилителя мощности следует
настроить так, чтобы оно равнялось эквивалентной постоянной времени
парового объема Th.
£ 5. Об электро моделировании паровых турбин
305
При моделировании регуляторов скорости паровых турбин можно,
как правило, не учитывать инерции центробежного маятника и запазды-
вания гидравлических усилителей, так как постоянные времени этих
звеньев малы в сравнении с инерционной постоянной турбоагрегата.
Если регулятор скорости оригинала не содержит устройств для введе-
ния в закон регулирования производных, он может быть приближенно
представлен апериодическим звеном первого порядка:
К
(170)
где К—коэффициент усиления регулятора скорости, Т8 — постоянная
времени сервомотора, охваченного обратной связью. Коэффициент К
выбирается таким, чтобы модельный агрегат имел заданную степень
остающейся неравномерности. Постоянные времени Th и Ts в большин-
стве случаев колеблются от 0.1 до 0.4 сек.
Гл а в а VII
МОДЕЛИРОВАНИЕ ЛИНИЙ ЭЛЕКТРОПЕРЕДАЧ
§ 1. Основные положения, принятые при моделировании
линий электропередач
В Институте электромеханики АН СССР построены три модели
дальних линий электропередач, соответствующих линиям передачи 400 кв
Единой высоковольтной сети Европейской части СССР (Волжская ГЭС—
Москва, Волжская ГЭС—Урал, Сталинград—Москва).
Осуществление модели линии электропередачи, на которой точно
воспроизводились бы все поля реальной линии электропередачи и все
переходные процессы, возникающие в ней (т. е. физическое моделиро-
вание), представляет чрезвычайно трудную задачу. В соответствии
с изменением геометрической длины линии потребовалось бы построение
модели, работающей на очень высокой частоте и применение проводни-
ковых материалов очень высокой проводимости и специальных условий
изоляции (корона).
Возникающие при осуществлении такой модели трудности настолько
велики, что построение ее является практически невозможным и, как
дальше будет показано, ненужным. Поэтому при моделировании линий
приходится идти по пути применения моделей-аналогов, по возможности
сохраняя природу явления (от физического моделирования). Модели-
аналоги обеспечивают достаточную точность при воспроизведении про-
цессов, которые обычно исследуются на электродинамической модели:
исследование устойчивости параллельной работы генераторов в системе,
исследование работы регуляторов напряжения и мощности, исследова-
ние устройств релейной защиты и системной автоматики и т. д.
Линия электропередачи воспроизводится в виде цепочечных схем
замещения. Цепочечная схема (искусственная линия) выполняется из
симметричных Т-образных или П-образных звеньев. Чем большее число
звеньев будет содержать такая искусственная линия, тем точнее она
будет воспроизводить распределенные параметры линий, тем точнее
будут воспроизводиться переходные процессы реальной линии. Важное
значение при проектировании моделей линий электропередачи имеет
вопрос о минимальном числе звеньев искусственной линии, при котором
интересующие нас при исследовании переходные процессы в линии
имитируются достаточно точно.
В работах Ленинградского политехнического института им. М. И. Ка-
линина в 1941 г. (Ассовский, 1941; Иванов, 1941) показано, что доста-
точную точность воспроизведения переходных режимов включения и
отключения в длинной линии мы можем иметь, если искусственная линия
§ 7. Основные положения
307
состоит из 8—10 звеньев. Как показали расчеты искажения переходных
процессов при включении и отключении, имеющие место в искусствен-
ной линии по сравнению с реальной, незначительны и лежат в пределах
точности осциллографирования. Волны прямоугольной формы проходят
почти без искажений.
По условиям исследования аппаратуры релейной защиты и систем-
ной автоматики необходимо имитировать короткие замыкания в начале,
середине и в конце каждого участка. Число участков в моделируемых
линиях (Волжская ГЭС—Москва, Волжская ГЭС—Урал, Сталинград—-
Москва) обычно 3—4.
Учитывая предыдущие соображения о точности воспроизведения
процессов включения и отключения длинных линий и число участков
моделируемых линий, число звеньев искусственных линий принято рав-
ным 8—9. Это вполне достаточно для исследования вопросов динами-
ческой устойчивости, процессов регулирования и различных исследова-
ний аппаратуры релейной защиты и системной автоматики.
Мощность модели линии электропередачи может быть выбрана только
в соответствии с мощностью всей электродинамической модели в целом.
Вопрос выбора мощности всей электродинамической модели является
весьма важным и определяется ее назначением (величиной нагрузок от
испытуемой аппаратуры) и возможностью получения необходимых пара-
метров модельных синхронных генераторов и других элементов модели.
Таким образом, при проектировании модели линии электропередачи
номинальная мощность модели линии, соответствующая по масштабу
номинальной мощности реальной линии, является заданной.
Также важным вопросом является выбор напряжения модели линии.
В электродинамических моделях, предусматривающих возможность ис-
следования на них автоматической аппаратуры, целесообразно применять
повышенное напряжение (1—3 кв). Как показали расчеты, это обеспе-
чивает достаточно малое сечение обмоточного провода, применяемого
для изготовления катушек индуктивности, и приемлемые размеры и
стоимость конденсаторов. При этом можно применить стандартные кон-
денсаторы типа КБГП6—10 кв, имеющие сравнительно малые габариты
и высокое качество изготовления. Применение пониженного напряжения
(400—200 в) для таких моделей нецелесообразно, так как сечение обмо-
точного провода получается значительным, что вызывает неудобства
в изготовлении катушек индуктивности и притом для высших гармоник
такие катушки имеют повышенные потери.
Следует указать также, что выбор такого достаточно высокого
напряжения обеспечивает относительно малое сопротивление контактных
соединений. Таким образом, представляется возможность осуществить
для удобства работы большое количество переключающих устройств,
необходимых при некоторой универсальности модели, которые при низ-
ком напряжении были бы громоздкими. Первой была спроектирована
модель линии электропередачи Волжская ГЭС—Москва. Были заданы
следующие базисные величины реальной электропередачи: Ре = 1480 мгва,
t/б =400 кв, /б =2040 a, Ze = 119 ом. Также была задана схема линии
передачи и длины отдельных участков линии передачи.
По приведенным исходным данным было рассмотрено несколько
вариантов моделирования параметров передачи. Основные варианты,
подлежащие сравнению в первую очередь, приведены в табл. 37.
Наиболее удобным, как по напряжению и току, так и по величине
индуктивности и емкости отдельных элементов, признан вариант № 6.
308
Глава VII. Моделирование линий электропередач
Таблица 37
| № варианта 1 Напря- жение 1/(в) Мощ- ность р (ква) Ток одной цепи 1 (а) Катушки индуктив- ности Конденсаторы (попе- речные) Конденсаторы (про- дольные)
индуктив- ность одной ка- тушки (мгн) число катушек емкость одного кон- денсатора (мк р) число конден- саторов емкость одного кон- денсатора (мк р) число конден- саторов
1 4000 120 8.65 98.5 48 6.25 96 172 24
2 1000 30 8.65 24.2 48 2.48 96 692 24
3 2000 30 4.325 97.8 48 0.618 96 173.5 24
4 2000 24.2 3.5 121 48 0.50 96 140.5 24
5 2400 35.0 4.2 121 48 0.50 96 140.5 24
6 2000 12.1 3.5 60.5 48 0.25 30 140.5 12
7 2000 24.2 7.0 60.5 24 1.0 30 281 12
Примечания. 1. Вариант №6 — для одной цепи из 16 звеньев длиной до 1600 км. 2. Вариант
№7 — для одной цепи из 8 звеньев.
Он и был принят за основной при моделировании электропередачи
Волжская ГЭС—Москва.
В дальнейшем в связи с уточнением параметров синхронных генера-
торов были приняты следующие базисные величины модели, соответ-
ствующие базисным величинам оригинала:
Оригинал Модель
Рб = 1480 мгва Рб — 30 ква
и& = 1120 кв £7б=2190в
/б = 2040 а /б = 7.90 а
2Гб = 119 ом Z6 = 160 ом.
Остальные две линии спроектированы исходя из этих базисных
величин, принятых для модели линии электропередачи Волжская ГЭС—
Москва, так как они входят в общую энергосистему с ней.
сгг
г
ПТ
год ход
Рис. 212. Схема одного элемента модели
линии электропередачи.
§ 2. Элементы моделей линий электропередач
Каждое звено цепочечной модели линии передачи представляет собой
П-образную трехфазную схему, составленную из катушек индуктивности,
включенных последовательно для
моделирования индуктивности про-
водов и конденсаторов, включен-
ных в параллельные ветви схемы
и моделирующих емкости проводов
между собой и на землю. Для полу-
чения повышенной величины сопро-
тивления нулевой последователь-
ности модели линии в нулевой про-
вод элемента включается некоторое
добавочное сопротивление.
Схема одного звена модели
линии приведена на рис. 212 (звено
показано на одну фазу). Коэффи-
циент моделирования по сопротивле-
ниям при принятых в модели ИЭМ базисных условиях (см. выше)
равен
£=-^-=1.345.
^ориг.
§ 2. Элементы моделей линий электропередач
309
Таблица 38
№»ле- меата Г\ (ом) XI (ом) С'п» (мк£) (мхф) ГОД (ом) ХОД (ом) ® X «о; 0) П (ом) (ом) Ст (мк р) Со (мк р) ГОД (ом) •*ОД (ом)
1 2 3 4 5 6 7 8 9 10 11 12 13 14
1,1 2.54 1.83 35.4 35.4 0,258 0.264 0.580 0.577 5.62 5.62 19.6 20.7 2,1 2.54 1.85 35.4 36.3 0.258 0.258 0.580 0.582 5.62 5.62 19.6 20.0
1,2 2.54 1.81 35.4 35.7 0.258 0.255 0.580 0.581 5.62 5.40 19.6 20.5 2,2 2.54 1.86 35.4 36.7 0.258 0.258 0.580 0.515 5.62 5.43 19.6 20.0
3,1 3.46 2.20 48.4 48.5 0.353 0.355 0.792 0.792 7.70 7.70 26.8 29.0 4,1 3.46 2.32 48.4 49.0 0.353 0.352 0.792 0.788 7.70 7.75 26.8 27.5
3,2 3.38 2.19 47.2 47.4 0.344 0.345 0.775 0.775 7.50 7.46 26.2 27.0 4,2 3.38 2.28 47.2 47.5 0.344 0.344 0.775 0.775 7.50 7.61 26.2 27.1
5,1 3.46 2.22 48.4 48.9 0.353 0.252 0.792 0.790 7.70 7.45 26.8 27.6 6,1 3.46 2.70 48Д 49.2 0.353 0.350 0.792 0.799 7.70 7.45 26.8 27.6
5,2 4.25 2.41 59.4 57.2 0.434 0.434 0.974 0.975 9.43 9.49 33.0 34.1 6,2 4.25 2.62 59.4 57.7 0.434 0.429 0.974 0.974 9ДЗ 9.49 33.0 34.0
7,1 2.68 1.86 37.4 36.7 0.273 0.273 0.612 0.609 5.94 6.06 20.7 22.3 8,1 3.3 2.28 46.1 46.4 0.336 0.335 0.757 0.763 7.32 7.29 25.5 26.8
7,2 2.50 1.87 35.0 34.8 0.255 0.252 0.514 0.567 5.56 5.74 19.4 20 — — — — — —
9,1 3.64 2.61 52.0 52.0 0.350 0.350 0.780 0.781 9.58 9.56 31.2 30.8 — — — — — — —
9,2 3.64 2.61 52.0 52.2 0.350 0.350 0.780 0.781 9.56 9.56 31.2 31.2 — — — — — —
10,1 5.17 2.82 58.7 59.4 0.400 0.402 0.900 0.900 11.65 11.65 46.2 46.2 — — — — — —
11,1 3.37 2.09 39.0 38.0 0.262 0.262 0.588 0.588 7.54 7.54 30.2 30.8 — — — — — —•
11,2 3.37 2.11 39.0 38.8 0.262 0.262 0.588 0.588 7.54 7.54 30.2 31.2 — — — — — — —
11,3 3.37 2.17 39.0 40.0 0.262 0.262 0.588 0.588 7.54 7.54 30.2 30.8 __ — — — — —
12,1 4.23 2.49 48.8 48.5 0.328 0.328 0.730 0.730 9.45 9.45 37,9 37.6 — — — — — — —
13,1 2.80 2.10 40.5 40.5 0.290 0.290 0.600 0.611 7.03 3.66 29.1 30.5 14,1 2.80 2.16 40.5 40.5 0.290 0.293 0.600 0.609 7 03 зЗб 29,1 31.0
13,2 2.80 2.10 40.5 40.6 0.290 0.290 0.600 0.612 7.03 3.12 29.1 30.7 14,2 2.80 2.17 40.5 40.4 0.290 0.289 0.600 0.586 7.03 3.18 29.1 31.3
13,3 2.80 2.10 40.5 40.6 0.290 0.286 0.600 0.604 7.03 3.25 20.1 30.5 14,3 2.80 2.19 40.5 41.0 0.290 0.295 0.600 0.595 7.03 3.25 29.1 30.5
15,1 3.60 2.70 52.0 52.6 0.370 0.373 0.770 0.764 9.05 3.60 37.5 37.5 16,1 3.60 2.81 52.0 52.2 0.370 0.374 0.770 0.762 9.05 3.60 37.5 37.5
15,2 3.60 2.72 52.0 52.5 0.370 0.373 0.770 0.768 9.05 3.65 37.5 37.5 16,2 3.60 2.80 52.0 52.5 0.370 0.374 0.770 0.766 9.05 3.65 37.5 37.5
17,1 2.51 1.95 36.3 36.3 0.260 0.262 0.538 0.538 6.54 3.20 27.7 27.5 18,1 2.51 1.95 36.3 36.3 0.260 0.260 0.558 0.539 6.54 3.00 27/7 27.5
310
Глава VII. Моделирование линий электропередач
Таблица 38 (продолжение)
№ эле- мента г (ом) хХ (ом) (мк р) Со (мкр) год (ом) ХОД (ОМ) !ЛЬле- мента П (ом) хх (ом) Ст (мк р) С0 (мкр) ГОД (ом) *<м (ом)
1 2 3 4 5 6 7 1 8 9 10 11 12 13 14
17,2 2.51 36.3 0.260 0.538 6.54 27.7 18,2 2.51 36.3 0.260 0.538 6.54 27.7
1.95 36.3 0.262 0.538 3.00 27.5 1.95 36.3 0.256 0.541 3.00 27.5
19,1 3.42 49.5 0.354 0.730 8L93 37.8 20,1 3.82 55.0 0.394 0.816 9.92 41.9
2.55 48.6 0.364 0.728 3.90 37.5 3.05 55.4 0.389 0.816 4.15 42.0
19,2 3.42 49.5 0.354 0.730 8.93 37.8 20,2 3.82 55.0 0.394 0.816 9.92 41.9
2.60 49.2 0.354 0.722 4.00 38.0 2.98 54.6 0.412 0.816 4.10 42.0
Примечание В числителе даны расчетные значения параметров, в знаменателе — опытные.
Номера элементов поставлены в соответствии с рис. 224, при «том первая ци рра обозначает номер уча-
стка линии, а вторая — номер элемента на этом участке, считая снизу вверх.
В соответствии с этим производится пересчет для модели парамет-
ров натурных линий. Емкости в каждом плече разделены на две группы,
одна из которых моделирует емкость между фазами, а другая — емкость
на землю. Емкости между фазами включаются по схеме звезды (для
удобства монтажа).
В табл. 38 приведены величины i\xly rou> *ou> гопд, *oiu, Со, Ст
(приведено к сопротивлению модели), из которых составляются отдель-
ные элементы моделей этих линий передач.
Сопротивления гои, хои, ПШд, xoiu представляют собой добавочные
сопротивления, включаемые в нулевой провод искусственной линии и
обеспечивающие моделирование сопротивлений нулевой последователь-
ности реальной линии.
Рассмотрим, как должны выбираться эти сопротивления.
Падение напряжения в фазе а может быть выражено через симме-
тричные составляющие
Связь между падениями напряжений в фазах и токами в них (при
наличии транспозиции проводов фаз)
ЯЛ — IZ ч I- Ic^mi
ЯЛ — I Z - *“ IbZs Ч L_ I 7
ЯЛ — IZ - 1 т ь IbZm - I 7 “ 1S*
Симметричные составляющие падения напряжения в фазе а
ЯЛа1) = |(Д£7Я ь-ДUb -+-ЯЛ) = (Z, ь2Zm) = Ia0Z0,
^Ual = (ЯЛ а>ЯЛ) = (Z, b aZm -+- a2Z,„) -
— Л1 (Zs
ЯЛ1 = (ЯЛ +- <ЛЯЛ аД£Л) = a!Zn ь aZm) =
^I^Z.-Z^l^Z,.
§ 2. Элементы моделей линий электропередач
311
Таким образом,
АС7а = Д£Ло ^Ual -+- Д£7а2 — 41Д
При однофазном коротком замыкании
Z»o 4i Z»2—Л»,
следовательно,
&Ua — — “3 (Zo -+- + ^2),
z±=z^
j _______у , у ______ Z. -+- 2Zi _ у , Zq Z\
Z/одноф.-г.1-*-Г»0д-- з ----------Z/j “t” 3
7 ___Zq Z±
^Од з •
Катушки индуктивности
Катушки индуктивности в моделях ИЭМ принято выполнять без
стальных сердечников, что обеспечивает линейность характеристик и
малую зависимость параметров катушки от частоты. Применение сталь-
ных сердечников позволит сократить стоимость индуктивных катушек
и уменьшить их размеры. В Институте электромеханики в настоящее
время ведутся работы по применению катушек со стальными сердечни-
ками для электродинамических моделей; так, например, в устройстве
для моделирования неполнофазных режимов, описанном ниже, исполь-
зуется стальной сердечник. Исследования показали, что искажающее
влияние стали в этих устройствах незначительно.
В настоящее время все модели линий ИЭМ построены с использо-
ванием катушек без стального сердечника. При проектировании был
выбран обмоточный провод ПБД • Геометрические размеры катушки
определены из условий расчета на минимум меди. При этом получена
добротность — = 20, что несколько больше необходимой по расчету
добротности, равной 14.
Большая величина добротности взята исходя из того, что множество
контактов в модели будет вносить некоторое сопротивление, а также
некоторые катушки используются не на полном числе витков, т. е.
с несколько пониженной добротностью. Все катушки выполнены одина-
ковыми, с отводами, позволяющими регулировать их индуктивность.
Некоторые катушки имеют две секции, что позволяет регулировать
индуктивность катушек в более широких пределах. Индуктивное сопро-
тивление может быть определено по формуле
v г 25D2 Ж2 • 10—6
XT — u>L — 3D _|_9Лч_10, ,
ср.
где DCp.—средний диаметр намотки катушки, W—число витков ка-
тушки, h — осевой размер катушки, t — толщина намотки катушки.
312
Глава V/Г Моделирование линий электропередач
По условиям получения наибольшей добротности катушки необхо-
димо, чтобы
£)ср. =/30400
где L — заданная индуктивность, d — диаметр обмоточного провода, и
чтобы
h = t = 0.663£>Ср..
При таком выборе геометрических размеров катушки добротность
ее определяется весом обмоточного провода. Добротности порядка 20
могут быть получены при весе индуктивных катушек около 40 кг.
Слоев Витков
Рис. 213. Геометрические размеры и обмоточные данные катушек
индуктивности моделей линий электропередач.
При необходимости иметь добротность около 30 (как это имеет место
для линий 600 кв) вес катушки возрастает. Добротность катушек
может быть повышена путем применения стальных сердечников,
$ 2. Элементы моделей линий электропередач
313
вставляемых внутрь катушек. Как показали эксперименты, прове-
денные в Институте электромеханики, при весе катушек около 50 кг
этим способом может быть получена добротность порядка 30. Искажаю-
щее влияние стали при этом незначительно.
Рис. 214. Общий вид модели линии электропередачи.
Геометрические размеры катушки, число витков и отводы приведены
на рис. 213, а.
В табл. 39 приведены данные сопротивлений одной катушки на всех
отводах, показывающие возможность регулирования индуктивности ка-
1 81
тушки. Катушки нулевого провода выполнены из меди ПБД у'% . Размеры
катушки и обмоточные данные показаны на рис. 213, б. Параметры
одной катушки приведены в табл. 40.
314
Глава VII. Моделирование линий Электропередач
Таблица 39
Ответв- ление z (ом) г (ом) £ 100%
0—6 32.2 1.86 5.78
0—7 37.9 2.08 5.50
1—7 34.9 1.97 5.65
3—8 33.8 1.94 5.74
2—8 37.5 2.06 5.50
1—8 40.8 2.18 5.35
0—8 44.4 2.30 5.19
4—9 36.2 2.03 5.62
3—9 40.0 2.17 5.43
2—9 44.1 2.30 5.22
1—9 47.6 2.47 5.19
0—9 51.1 2.57 5.03
Таблица 40
Ответв- ление i (ом) г (ом) ~ 100»/.
0—6 16.4 2.34 14.25
0—7 20.0 2.62 13.10
1-7 17.4 2.46 14.10
3—8 16.0 2.44 15.25
2—8 18.8 2.60 13.85
1—8 21.4 2.76 12.9
0—8 24.0 2.86 11.9
4—9 17.0 2.44 14.3
3—9 20.0 2.68 13.4
2—9 22.6 2.88 12.75
1—9 25.6 3.06 11.95
0—9 28.6 3.24 11.3
Конденсаторы, моделирующие емкость проводов
между собой и на землю
Конденсаторы выбраны типа КБГП-6—10 кв, емкости 0.01, 0.025,
0.05, 0.10, 0.25 мкф. По заводским данным они рассчитаны на приме-
нение при постоянном напряжении. Поэтому их пришлось по номиналь-
ному напряжению выбирать с запасом. Опыт показал, что конденсаторы
этого типа могут использоваться при переменном напряжении, состав-
ляющем 25—ЗО°/о от их номинального постоянного напряжения. Для
модели линии Волжская ГЭС — Москва и Сталинград—Москва взяты кон-
денсаторы на 10 кв, что позволяет при увеличении мощности в 2 раза
повышать напряжение в V2 раза, т. е. с 2.2 до 3 кв.
Набор конденсаторов обеспечивает достаточно точный подбор тре-
буемых величин емкостей. Тангенс угла потерь этих конденсаторов
очень мал (0.01).
Соединение внутри одного звена модели выполнено неизолирован-
ным проводом сечением 10 мм2 (главная цепь) и более тонким (присо-
единение конденсаторов). Установленные изоляторы с укрепленными
на них контактами обеспечивают быстрые переключения в модели.
На рис. 214 показано фото модели линии электропередачи Волжская
ГЭС—Москва, из которого видно расположение отдельных элементов
модели (катушек и конденсаторов), составляющих звенья искусственной
линии.
§ 3. Модели компенсирующих устройств
1. Модель установки продольной компенсации выполнена из стан-
дартных конденсаторов типа КМ-0.24. Емкость таких конденсаторов
порядка 300 мкф на фазу. Они могут использоваться на переменном
напряжении 230 в. Из общей оценки величины возможных перенапря-
жений на установке продольной компенсации признано необходимым
включать 5—6 конденсаторов последовательно. Величина емкости уста-
новки продольной компенсации при этом получилась близкой к расчет-
ной. Подбором различных конденсаторов удалось получить нужные ем-
кости установки продольной компенсации.
2. Модель шунтирующего реактора должна была обладать опреде-
ленной характеристикой и в то же время малыми потерями. Одну из
a
250
к 6—
W=20b
W&100
10*450
w=50
V)~50
Ho—
—°K
w=200
w=100
w^bSO
w=50
w=50
—о»
Рис. 215. Геометрические размеры и обмоточные
данные модели шунтирующего реактора.
а —магнитная цепь шунтирующего реактора; б—катушка шун
тирующего реактора; в — расположение отводов в катушках.
Рис. 216. Расчетная (7) и опытная (2) ха-
рактеристики модели шунтирующего реак-
тора.
316
Глава VII. Моделирование линий электропередач
этих задач, а именно получение требуемой характеристики удалось ре-
шить, применив реактор с регулируемым зазором в магнитной цепи и
регулируемым числом витков. Изменяя зазор и число витков, можно
получить нужную характеристику реактора. Вторая задача — получение
малых потерь — оказалась более трудной и требовала специальных
сортов стали. По данным Московского трансформаторного завода,
потери в реакторе должны были составлять при номинальном:
напряжении О.6°/о. Для модели потери в этом режиме составляли
3.5—4.О°/о (по опыту). Однако поскольку абсолютная величина потерь
мала в сравнении с мощностью модели, для большей части режимов
это допустимо.
Размеры магнитной цепи и обмоточные данные катушек модели шун-
тирующего реактора приведены на рис. 215. Для намотки катушек при-
менен провод ПБ Д-1.35/1.55.
На рис. 216 приведены расчетная и опытная характеристики одного
из шунтирующих реакторов. Эти характеристики показывают близкое
совпадение оригинала и модели, однако увеличенные потери в модели
по сравнению с оригиналом являются недостатком. В настоящее время
в Институте электромеханики найдены пути создания моделей шунти-
рующих реакторов, обладающих меньшими потерями. Здесь приходится
идти по пути применения местного насыщения и специальных сортов
стали.
§ 4. Описание установки, моделирующей линии передан 400 кв
единой высоковольтной сети (ЕВС) Европейской части СССР
Установка содержит три модели линий передачи 400 кв ЕВС Европей-
ской части СССР: Волжская ГЭС—Москва, Сталинград—Москва, Волж-
ская ГЭС—Урал. Кроме того, имеется еще специальное устройство, обеспе-
чивающее точное моделирование неполнофазных режимов двухцепных
электропередач. Линии снабжены компенсирующими устройствами (шун-
тирующие реакторы, сериесные конденсаторы продольной компенсации),
соответствующими действительным компенсирующим устройствам.
Модели линий электропередачи смонтированы в отдельном высоко-
вольтном зале. Элементы моделей линий передачи (катушки индуктив-
ности, конденсаторы), модели компенсирующих устройств (шунтирующие
реакторы, продольные конденсаторы), модели измерительных трансфор-
маторов тока и напряжения установлены на специальных деревянных
стеллажах. Элементы двухцепных линий передачи Волжская ГЭС—
Москва и Сталинград—Москва расположены на двухэтажных стеллажах.
На первом этаже расположена одна цепь линии, на втором — другая цепь
линии. На каждом этаже имеются две полки, на одной из которых располо-
жены катушки индуктивности, а на другой — конденсаторы, моделирующие
емкости проводов между собой и на землю. Между двумя этажами
имеется, кроме того, промежуточная полка, на которой располагаются
нулевые провода обеих цепей модели линии передачи и частично ком-
пенсирующие устройства (шунтирующие реакторы, конденсаторы продоль-
ной компенсации).
Третий стеллаж выполнен одноэтажным. На нем установлены эле-
менты модели линии передачи Волжская ГЭС—Урал. В верхней части
этого стеллажа сделан специальный широкий помост, на котором смон-
тировано устройство для моделирования неполнофазных режимов, под-
робно описанное ниже. На полках, вделанных в стены, кроме того,.
13 /4 15
Ыб-11
о-цфо ОЛ
оп’по <Л
o-tlfto О'!
О
о
о
30
35
34
24
16
ТТ-6
°м«
17 18 19
25
29
31
33
36
8-0
В-1
в-з
Г-2
ГЗ,
-2206
МГ-25
Т-10
ТС-ЗО
Г-1
МГ-2Г
МГ-18.7
4206
'2206 с/(-2 СК-1 ^^МГ-18.7
Рис. 217. Общая схема высоковольтного щита моделей линий электропередач.
&
оМс
ТГ
о о
о о
о о
о ф
40
О о
о о
о о
о о
МТО-35
Т-5
МТО-35
л/!о! 1 т~3
МТ0-8.з№ МТО-8.34
МТО-8.34
тс-зо
318
Глава VII. Моделирование линий электропередач
размещаются модели измерительных трансформаторов тока и напряжения
и частично модели шунтирующих реакторов. На стенах и на стеллажах
установлены контакторы, моделирующие линейные выключатели, и позво-
ляющие имитировать на линиях различного вида короткого замыкания.
Управление контакторами выведено на общий щит, установленный
в зале управления. Вторичная коммутация выполнена таким образом,
что обеспечивается действие выключателей от выходных реле иссле-
дуемых защит, а также действие выключателей, имитирующих короткие
замыкания и отключение линейных выключателей от специальной схемы
автоматики. Эта схема может обеспечить необходимую длительность
коротких замыканий в модели и предоставить возможность действовать
исследуемой защите или произвести отключение линейных выключателей
с заданной выдержкой времени. Подробно схема описана ниже.
Модели линий, модели генераторов вместе с трансформаторами и
трансформаторы связи с системой Ленэнерго (шины низменного напря-
жения) выведены на специальный высоковольтный распределительный
щит, сюда же выведена часть измерительных трансформаторов, обеспе-
чивающих возможность испытания элементов линий и снятие характе-
ристик линий.
Общая схема высоковольтного щита приведена на рис. 217.
На рис. 2181 приведена общая схема расположения стеллажей с мо-
делями линий, контакторов, измерительных трансформаторов и компен-
сирующих устройств. Там же показано соединение всех этих элементов
между собой с общим высоковольтным щитом.
Трансформаторы тока и напряжения выполнены таким образом, что
обеспечивают достаточно точное моделирование действительных транс-
форматоров (см. ниже). Вторичные цепи выведены в испытательный
зал и обеспечено быстрое подключение к ним исследуемых защит.
Линия Волжская ГЭС—Москва оборудована специальными переклю-
чательными щитами, на которые выведены линейные выключатели по-
следовательно с трансформаторами тока, трансформаторы напряжения
и выключатели, имитирующие короткие замыкания. Схема щитов пре-
дусматривает быстрое переключение линейных выключателей (однофазных
и трехфазных) вместе с трансформаторами тока, трансформаторов напря-
жения, выключателей, имитирующих короткие замыкания, в любой участок
исследуемой линии.
§ 5. Параметры моделей линий электропередач
Моделирование линий Единой высоковольтной сети (ЕВС) Европей-
ской части СССР выполнено по расчетным данным Всесоюзного госу-
дарственного проектного института ТЭП для этих линий электропередач.
Параметры линий на 1 км приведены в табл. 41.
Общая схема модели высоковольтной сети, включающая три модели
дальних линий электропередач, приведена на рис. 219. На моделях линий
установлены компенсирующие устройства (конденсаторы продольной
компенсации, шунтирующие реакторы), размещение которых в схеме
модели ЕВС Европейской части СССР также показано на рис. 219.
Параметры компенсирующих устройств даны в табл. 42 и 43.
Схема линии передачи Волжская ГЭС—Москва, параметры участков
и компенсирующих устройств приведены на рис. 220, а. На рис. 220, б
1 Рис. 218, 220, 221, 222 см. на вклейках между стр. 320—321.
(моб Мухцепнои линии
переключения продольной компенсации Волжская ГЭС - Моск6а~\
Ш ------------------------
Москва
УстроистВо для моделирования неполнофазных режимов дВухцепнои линии
-р Модель линии электропередачи ВолжскаяГЭСУ рал 1F
рЛу;
Keep
Лини
Вперекшоиателлным щиткам
линии Волжская ГЗС - Москва
Модель линии электропередачи
Волжская РЭС-МоскВа
К переключательным щиткам
линии Сталинград-МоскВа
Модель линии электропередачи Сталинград - МоскВа
Рис. 218. Общая схема модели сети 400 кв.
згэс
180 км ZMkm 7k0 —IF— 274 км 184км 117 км M
Z^SJM+jlO.B, Z0=72.7+j2fy 2^6.86^95.8, Z0=98.9+j326 Z1=7.79+jlO7.7, Zo=110.7+j367 3.3+j 98.1, 2g=25.1+j126
\ См=0.516, СО=1.16 '8.75+j1750 8.75+j1750 l_ CM= 0.516, Cg-1.16 ' Л,=0.697, Cg=1.567 ) 8.75+j 1750 Z Cu=0.697 , Cg= 1.567 \ CM=0.787, Co = 1.766 8.75+j1750 8.75+j1750 / Cu=0.787, Ca= 1.766 CM-i336 , C0=0.757 CM=0.528 , Co= 1.182
Z,= 5.08+] 70.8 , Z0=7Z.7+j292 2^6.86+j958, Zg=98.9+j326 2^7.79+^107.8 , Zg=110.7+j367 21=5.18+j7Z.9 , Zg—39.7+j 198
а
ВГЭС
2^3.71^73.0, 2g= 70.6+j 222.7 2^9.60^96.5, Zg=96.1+j306.7 79.0 2^5.3^106.9 , Zg=105.2+j393.9 2^2.28+^96.9 , Zg-29.1+j 126.9
\ CM-0.516, CO=1.158 ' , X52+j 1750 52 +j 1750 ! 0.517, C0=1.15S ' C"=0.696 , Cg= 1.562 ! 52+jl7507 Of 0.698 , Cg= 1.566 \ ' CM=0.788 , Cg—1.773 ' 52+j 1750 5Z^jl75Q / 0.785 , Ctr 1.766 CM= 0.336 , Cg=0.769 CM= 0.525 , Cg= 1.177 M
2^3.64+j 61.19 Z(r71.1+j ZZM 2^9.39+398.1, Zg-95.9+310.9 { Zi= 9.63+j 106.7 , Zg=110.2+j392.6 I 2^3.73+^71.5, Zg=39.1+j198.5
Рис. 220. Схема модели линии электропередачи Волжская ГЭС—Москва.
а параметры линии электропередачи; б—параметры модели Ливии электропередачи.
302 км
254км
228 км
213 км
195 км
С
10.2+j20W
[ 2^8.60+3119,
См= 0.822
Zo-l38+j032
C0=1.96
2^7.23+jlOO,
См= 0.692.
2(т 116 +J 360
С0=1.65
2^6.50+390.0, Zo=1OO+j325
CM=0.621
С0=1Л8
Z^5.55+j77.0, Zo=07.07+j205
~ C0=1.27
см=о.5зг
2^8.60^119
0^0.822,
10.2+j 2090
2^138+3032
~Cf196
Z^7.23+j100
См=0.692,
Z0=116+j360-
Cq-1.65
2^6.50^90.0
См=0.621
Z(j=100+j326
C0=1.08
Z^6.0l+j84.2
Z0=51.36+j268
0.580, С0=,1.38
а
С
69.3+j2022
j 2^6.03+31ZZ, Z0=137+j039 2f= 5.30+j 101, 2g=115+j366 2g= 103+33ZS г^ол 7+j 76.9 20=05.76+j 205
0^0,827. Cg=1.95 CM=0.699, Cg=1.63 0M=0.6Z6, C0*1.53 vrO.517 C0=1.25
Zf=6.06+j122 , Z0=137-,j039 2^0.78+399.5 , 2g = HO+j360 2^5.85+3'91.0, Zg=103+j330 2^0. ^9+j80.1 2д-50.06+з267
T CM=0.827 , c0=i.93 ; ' CM= 0.692. C0^1.63 ; 0M= 0.600, Cg = 1.50 r—. ',M=0.572 Co = 1.36
65.4+j2022
0
0.121 0.195 0.195 0.145 0.103
0.123
0.161 0.187 0.186 0.161
0.131 0.132 0.169 0-183
0.121
0.128
0.128 0.132
00.5]_ _]£. 77+J 00.6_
0.3бГ~
0.310
14.5+j 30.5
693+j2022
65.4+jZ022
14.5+j30.8
0.310
>395
0.303
145+j 30.5
14.5+j 30.5
0.373
0.309
0.289
0.297
14.5+j30.6
>5.20
Z.15+j00.5
M22
0.366
_2.06+jW.6_
'0.300
0.430
Ш* 399.6^ _]2.70+j51.3
О.З80Г 0.881
18.2+j37.5'
17.75+J36.8
5.05
>700
14.5+j30.8
18.2+j 37.5
17.63+j36.8
0.298
0.372
2.19+J41.0
2.12+J00.5
0.107 0202 М01 0.106 0.123
HI jo.436 mj_ ^LL
2.05+J09.7
0362 M87
0.435
0.319
глт^зм
0.320
14.0+J27.3 '
0.437
\7.20
1.51
14.0+J27.3
0.320
^.73^’52.7
о.ооТ~ ~г"
>6.60
0.321
0.443
18.7+j37.5 '
18.7+]37.5
0.434
,8.30
0.434
0.312
219^38.0
Г 0.31Г
6. »+j27.6
8.23+] 33.4
368
2.08^’38.5
0.31Т~
0.31~~
6,92+j26.4
6.96+j27.5
0.369
0.312
0.311
2^3+j09.1
0187 М2
2J07+j38.9y_ j2.78+j52.5
M30 0229 M88 0388
2 45+j 45.5
2.00+j38.5l
МО МО 0Л28
6
Рис. 221. Схема
моделй линии электропередачи Сталинград—Москва.
Обозначения те же, что и на рис. 220.
М
О
0
вгэс 258 км 1k8 км i 290 км i 121км
Zf7.28+j109 20=62.9+)291 8.75+J1750 fa*5.17+59.7, Z0=37.8+j 198 g tZ^ 10.1+j 117, l0=79.1+j389 ( 8.75+J1750 , Z1-9.23+j98.8,Zo=3O.9+j162 ]
См=0.700, С0=1.5б 6^=0.900, Св=0.900 " CM=i.785 С0=1.76 '.'Cu=0.328, Сд=0.730 ’ AQ J 3 i* 0 Aq J 33.1
(2
ВГЭС 2^5.7^^109, Zs=62,5+jZ90 52+j1750 { 2^2^59.9, Zg=37.8+j198 2^6.37+^17, Z0=7k.3+j395 52+j1750 ..Z^=2,99+j98.5, Z/f30.8+jl62\ У
CM=0.W0. C0=1.56 C„=0.W2, C0=0.900 x"=_j5U 0.785, Cg=1.75 ^0.730 aq- J33.1
ВГЭС 0Л 175 0.K - s —/^p—< 15 0.1\ 75 O.t 75 ОЛ 71 O.Z , /~Д~\ - 0.1 55.0 = II 31_ 0.1L , r^\ , 11 0.11 11 0,1. r^\ , - 31 o.n гк\ 11 0Л 58.0 = ll n 0.1t rrc\ . Ik У
0.390 z 2№j52.0 = 0.390^ 0.391 - r , Z.61+J5Z.3 -0.390 II 2.82+j 59.9 -0.950 = -0Я50 II 0.2M- 2.09+j 38.0 = 0.2M = ^0.299 2,11+j38.3 ~ 0.29Г ~0.29k 2.17+j90.0 ~ 0.299- It 0.365- r < 2.99+jk8.5 I
J 1— I *<ъ 0
9.56+j30.8 9.56^31.2 Рис. 222. Схема модели линии 75k+J 30.8 6 электропередачи Волж 7.5k+j31.2 ская ГЭС :-уР 7.5k+j30.8 ал. 9.95 +j 37.6
Обозначения те же, что и на рис. 2'30.
£ 5. Параметры моделей линий электропередач
319
Таблица 41
Линия передачи F1 (ом/км) Xl (ом/км) У1 (1/ом • км) г01 (ом/км) х01 (ом/км) У 01 (1/ом • км) г01 (ом/км' хоп (ом/км)
Волжская ГЭС— Москва .... 0.021 1 0.293 3.93 • 10-6 0.160 0.80 2.72 • 10-6 0.30 1.00
Сталинград—Мо- сква 0.021 0.303 3.8 • 10-6 0.180 0.96 2.56 • 10-6 0.34 1.08
Волжская ГЭС— Урал 0.021 0.303 3.8 • 10-6 0.180 0.96 2.56 • 10-6 — —
приведена схема модели этой линии передачи.
На этой схеме показаны
параметры отдельных элементов модели линии (сопротивления — в омах,
емкости — в микрофарадах), а также пара-
метры участков, которые можно сравнить 4.95880.0 4.417+] 93.5
с параметрами участков действительной l~L J i I.................J
линии, приведенными к базисному сопро- |
тивлению модели (z6 = 160 ом). |
-1.184-j 224
Рис. 219. Общая схема моделей ЕВС Европей-
ской части СССР.
7—20 — номера участков линий электропередач; I—XV—но-
мера компенсирующих устройств.
Рис. 223. Эквивалентные Т-образ-
ные схемы замещения моделей
линий электропередач: Волжская
ГЭС—Москва, Сталинград—Мо-
сква, Волжская ГЭС—Урал.
На рис. 221 то же самое показано для линии Сталинград—Москва
(z6 —194 ом), а на рис. 222 — для линии Волжская ГЭС—Урал —
160 ом).
320
Глава VII, Моделирование линий электропередач
Для некоторых работ, в особенности при исследовании динами-
ческой устойчивости энергосистемы, необходимы схемы замещения
Таблица 42
№ устрой- ства Продольная компенсация
храсч. (ом) гопыт (ом) с '-'опыт (мк р)
I 70.0 70.5 45.2
II 57.7 — —
III 55.0 — —
всей линии в виде эквивалент-
Таблица 43
№ устрой- ства Шунтирующие реакторы
*расч. (ом^ грасч. (ov0 *опыт (ом) гопыт (ом)
IV 1750 8.92 1750 72.0
V 1750 8.92 1750 69.0
VI 1750 8.92 1750 69.0
VII 1750 8.92 1750 69.0
VITI 1750 8.92 1750 70.0
IX 1750 8.92 1750 70.0
X 1750 8.92 1750 70.0
ных четырехполюсников.
На рис. 223 показаны эквива-
лентные Т-образные схемы замещения моделей линий электропередач
Волжская ГЭС—Москва (223, а), Сталинград—Москва (223, б), Волж-
ская ГЭС—Урал (223, в). Схемы замещения определены по опытным
данным измерений отдельных элементов (катушек индуктивности и
конденсаторов). Компенсирующие устройства не учитывались.
§ 6. Моделирование неполнофазных режимов двухцепных
линий электропередач
Принцип моделиро вания
При исследовании релейных защит на электродинамических моделях
линий электропередач важно правильно воспроизводить не только
полнофазные, но и неполнофазные режимы, когда из шести проводов
двухцепной передачи один провод выключен. Особенно это важно при
исследовании защит, работающих на токах нулевой последовательности.
В случае моделирования двухцепных электропередач, работающих
по связанной схеме, какими в большинстве случаев являются дальние
линии передачи, при обычном способе моделирования, неполнофазные
режимы воспроизводятся неправильно. В Институте электромеханики
АН СССР построены модели трех дальних линий электропередач, описан-
ные выше. Две из этих моделей являются двухцепными (модели линий
Волжская ГЭС—Москва и Сталинград—Москва).
Эти модели электропередач осуществлены в виде двух трехфазных
параллельных цепей из симметричных П-образных звеньев, содержащих
реакторы, последовательно включенные в провода линий (%i А) и парал-
лельно к ним подключенные конденсаторы (Со и См). Схема элемента
модели двухцепной линии показана на рис. 224. Линейные реакторы,
индуктивно друг с другом не связанные, моделируют рабочую индук-
тивность цепи участка. Так как добавочные сопротивления (хд), учиты-
вающие увеличение индуктивного сопротивления линии токам нулевой
последовательности, включены только в нулевой провод модели, то токи
нулевой последовательности, замыкающиеся помимо нулевого провода
модели, не будут соответствовать действительности. Это приведет и
к некоторому изменению величины токов положительной и отрицательной
§ б. Неполнофазные режимы двухцепных линий электропередач
321
последовательности в параллельных цепях участка, но наиболее резкая
разница все-таки будет в величине токов нулевой последовательности и
в распределении их по параллельным цепям участка линии передачи.
На рис. 225 приведена комплексная схема последовательностей для
случая обрыва фазы А на одном участке двухцепной электропередачи
400 кв длиной около 1000 км, работающей в режиме передачи мощности
от станции I к станции II. Участок с оборванным проводом имеет длину
около 250 км. За единицу сопротивлений принято сопротивление поло-
жительной последовательности участка дли-
ной 250 км. Остальные сопротивления вы-
ражены в долях единицы по отношению к
этому сопротивлению. На рис. 226 показана
комплексная схема последовательностей в
том же режиме для модели этой электро-
передачи, выполненной обычным способом.
За единицу тока принят ток положительной
последовательности, протекающей от стан-
ции I к станции II. Как видно из рис. 225
и 226 разница в величине токов по парал-
лельным цепям участка получается значи-
тельной; так, например, токи нулевой последо-
вательности отличаются более чем в 1г/2
раза.
То же явление будет иметь место и
при коротких замыканиях в неполнофазных
режимах. Между тем вследствие наибольшей
вероятности возникновения однофазных ко-
ротких замыканий и применения пофазного
отключения на таких электропередачах не-
полнофазные режимы работы и аварии в Рис. 224. Схема одного эле-
ЭТИХ режимах работы будут составлять мента модели двухцепной
значительную долю всех возможных аварий. линии.
Поэтому исследование неполнофазных режи-
мов работы дальних электропередач и их влияния на работу, например,
релейных защит является весьма важным. Разработанное в ИЭМ
АН СССР устройство для моделирования неполнофазных режимов
линий, исправляет этот существенный недостаток моделей линий. Это
устройство осуществляет индуктивные связи между проводами двух
параллельных линий в таких же соотношениях, как и в действительной
электропередаче.
Из многих вариантов наиболее простым оказался следующий: на
обеих линиях реакторы линейных и нулевых проводов заменяются
трехфазными, имеющими каждый общий шестиугольный сердечник с воз-
душными зазорами (для линейности характеристик) и расположенными
на нем катушками (рис. 227).
Катушки аъ Ьг и сг первой линии при протекании по ним состав-
ляющих токов положительной и отрицательной последовательностей
(сбалансированные составляющие) имеют только поля рассеяния (не соз-
давая общего потока в сердечнике) и моделируют активные и реактив-
ные сопротивления данных участков при трехфазных и двухфазных
режимах.
Катушки a', b'v c'v b", c”v а”, Ь”, с” на втором сердечнике имеют
в этих режимах весьма малую реактивность рассеяния.
Рис. 225. Распределение токов последовательностей для ори-
гинала.
11
Раз рыб фазы А
0654
1.г
Рис. 226. Распределение токов последовательностей для
модели.
$ 6. Неполнофазные режимы двухцепных линий электропередач
323
При протекании по первой линии составляющих токов нулевой по-
следовательности появляется замыкающийся по сердечнику поток, что
приводит к соответствующему увеличению реактивности для этой состав-
ляющей тока до х01 одной цепи.
При протекании токов по второй линии составляющие ее токов
нулевой последовательности с помощью катушек с2’ а2> ^2> с2^
a", Ь'”, с£ дополнительно увеличивают поток в первом сердечнике и тем
производят соответствующее увеличение индуктивного сопротивления
Рис. 227. Схема соединений двух трехфазных реакторов параллельных
линий.
составляющим токов нулевой последовательности первой линии до вели-
чины хоп, соответствующей работе двух параллельных линий. Совер-
шенно так же протекают явления и на второй линии с соответствую-
щими для нее катушками на тех же сердечниках.
Подбором величины воздушных зазоров и числа витков в катушках
легко можно получить соотношения реактивностей соответственно соот-
ношениям их для действительной двухцепной передачи 400 кв (Волж-
ская ГЭС—Москва):
1) для токов положительной и отрицательной последовательностей
х2 = х2 = 0.293 ом/км;
2) для токов нулевой последовательности при одиночной линии
х01 = 0.8 ом/км;
3) для токов нулевой последовательности при параллельной работе
двух линий хоп = 1.О ом/км.
В таком устройстве ввиду линейности его характеристик (общая
длина воздушного зазора порядка 1 см) все процессы будут протекать
так же, как и в действительной линии, все индуктивные сопротивления
и соответствующие токи будут воспроизводиться точно, а следовательно,
324
Глава VII. Моделирование линий электропереда
на такой модели можно точно воспроизводить и любые неполнофазные
режимы.
Используя описанное устройство, можно всю модель двухцепной
линии выполнить при помощи трехфазных реакторов, связанных между
собой в режиме токов нулевой последовательности. Однако проще
выполнить только один участок модели, используя указанный принцип,
а остальные участки модели линии выполнить обычным способом.
В таком случае также обеспечивается правильное воспроизведение
неполнофазных режимов на исследуемом участке.
Рис. 228. Элемент модели линии, обеспечивающей моделирование
неполнофазных режимов двухцепной линии.
Участок, правильно воспроизводящий неполнофазные режимы, можно
выполнить регулируемым по длине, обеспечив возможность включения
его вместо любого участка модели, выполненной обычным способом.
Так это и предусмотрено в моделях линий передачи ИЭМ. На рис. 228
показан один элемент линии, выполненный указанным выше способом.
Один такой элемент при принятом в модели масштабе сопротивлений
моделирует часть линии длиной около 75 км. Соотношения сопротивле-
ний для токов положительной, отрицательной и нулевой последователь-
ностей получаются такими же, как и в действительной электропередаче,
и могут быть отрегулированы на любые параметры линий, даже с уче-
том несимметрии расположения проводов.
В моделях линий ИЭМ участок, обеспечивающий моделирование
неполнофазных режимов, выполнен отдельно в виде 8 элементов (по 4
на каждую цепь). Каждый элемент может моделировать отрезок линии
передачи длиной от 30 до 75 км, обеспечивая длину всего участка
от 120 до 300 км. Обычно три элемента не изменяют, и при переклю-
чении участков достаточно регулировки, которая может быть получена
при помощи четвертого элемента. Фазы участка выведены на соответ-
ствующие респределительные щитки, обеспечивая быстрое включение
этого участка вместо любого участка модели линии передачи.
£ б. Н еполнофазные режимы двухцепных линий электропередач
325
Для оценки величины погрешности, получающейся при применении
обычного способа моделирования в сравнении с новым способом моде-
лирования линий, был произведен расчет нагрузочного режима при
обрыве фазы а на втором участке электропередачи Волжская ГЭС—
Отключена фаза А
ВГЗСК
ЗчпЧ^в
к.з В СО
-К5УМ ВГЗСК(ХО>-
М
Z V2-0.182а 2lo
Iо опытн. _ 0.852 _
^орасч 0.17k
Рис. 229. Осциллограммы некоторых несимметричных режимов, иллюстрирующие
необходимость моделирования взаимной индукции.
опытн. _ 0.350 _
^орасч. 0k55
21 о в9
Москва и двухфазном коротком замыкании на землю (ВСО) в середине
второго участка. Угол между э. д. с. генераторов Волжской ГЭС и
напряжением приемной системы принят равным нулю, э. д. с. и напря-
жения равны по величине. Эти же режимы были воспроизведены на
электродинамической модели в случае применения обычного способа
моделирования линий и нового способа. На рис. 229 приведены осцил-
лограммы этих режимов, где записаны Д и 3/0. Осциллограммы а
и б соответствуют новому способу моделирования линий, а осцилло-
граммы в и г — обычному способу. Из этих осциллограмм видно, что
в случае применения нового способа моделирования имеем достаточно
326
Глава VII. Моделирование линий электропередач
точное совпадение с расчетом для натурной линии (расчет был произ-
веден без учета емкости линий и активного сопротивления, значения
токов показаны на осциллограммах), в то время как при обычном спо-
собе моделирования величина тока нулевой последовательности в первом
режиме в 1х/2 раза больше, а во втором в 1х/2 раза меньше (приблизи-
тельно). Следовательно, указанное устройство дает существенное уточ-
нение в неполнофазных режимах линии. Применение этого устройства
в электродинамической модели ИЭМ обеспечило возможность проведе-
ния исследований релейных защит в неполнофазных режимах.
В 1956 г. проведено исследование новых дистанционных детекторных
направленных реле сопротивления с круговой и эллиптической характе-
ристикой с целью оценки влияния на их работу неполнофазных режимов
в линии передачи Волжская ГЭС—Москва.
Из сопоставления осциллограмм в одинаковых режимах при замеще-
нии участка линии однофазными или трехфазными реакторами видно,
что характер переходных процессов в обоих случаях одинаков. Наличие
в реакторах стали не вносит никаких искажений в величины токов и
напряжений в переходном режиме. Возникающие высшие гармоники
(до 9-й) затухают практически с одинаковыми постоянными времени.
Поэтому описанное устройство обеспечивает достаточно точное моде-
лирование неполнофазных режимов линии передачи. Электродинамиче-
ская модель ИЭМ, таким образом, может воспроизводить достаточно
точно все практически важные режимы работы дальних электропередач.
Описание установки для моделирования неполнофазных
режимов. Параметры элементов
Установка для моделирования неполнофазных режимов двухцепной
линии состоит из 8 элементов (по 4 элемента на каждую цепь). Каждый
элемент представляет собой трехфазный реактор, принцип работы кото-
рого описан выше. Этот реактор моделирует собственные и взаимные
индуктивности проводов в таких же соотношениях, как и в действи-
тельной электропередаче. Емкости проводов между собой и на землю
моделируются путем набора соответствующих батарей конденсаторов.
Схема соединений предусматривает возможность регулировки длины
участка и имитирования коротких замыканий в различных точках, вклю-
чение этого участка вместо любого участка исследуемой двухцепной
передачи, например модели линии Волжская ГЭС—Москва. Трехфазный
реактор состоит из магнитной цепи в виде шестиугольника с зазорами
и катушек.
Магнитная цепь
Магнитная цепь элемента устройства для моделирования неполнофаз-
ных режимов набрана из пластин электротехнической стали Э42 толщи-
ной 0.35 мм. Пластины изготовляются путем штамповки их специальным
штампом. Размеры и форма одной пластины показаны на рис. 230.
Сечение магнитной цепи Q = 7.5 X 7.5 = 56 см2, вес магнитной цепи
GCT. = 7.55 X 6 X 2.568 X 0.752X 10~3 = 65 кг.
Катушки
Каждый элемент имеет три больших катушки и девять малых кату-
шек. Расположение их на магнитопроводе показано на рис. 227. Обмо-
точные данные и размеры катушек приведены на рис. 231. Для изго-
§ 6. Неполнофазные режимы двухцепных линий электропередач
327
2 63
товления катушек используется провод ПБД "2~96~ ’ вес одн°и большой
катушки —10.5 кг, вес одной малой катушки — 0.64 кг. Изоляция обмо-
ток относительно корпуса имеет пробивное напряжение 8000 в.
Регулирование сопротивления положительной последовательности
трехфазного реактора (хх) осуществляется путем изменения числа витков
больших катушек Кроме основных пяти отводов, верхний слой
Рис. 230. Пластина сер-
дечника трехфазного ре-
актора для моделирова-
ния неполнофазных ре-
жимов.
Рис. 231. Обмоточные дан-
ные катушек трехфазного
реактора для моделирования
неполнофазных режимов.
а — большая катушка; б — малая
катушка.
витков выполнен в виде изолированной секции, которая может вклю-
чаться последовательно с каждым из отводов основной обмотки. Это
обеспечивает возможность регулировки сопротивлений хг реактора при
сравнительно малом количестве выводов от 14 до 32 ом, при этом
ступень регулирования имеет величину порядка 1 ом, т. е. можно полу-
чить достаточную точность подбора желаемой величины сопротивления
моделируемого участка линии.
Для оценки постоянства параметров элемента были произведены
измерения сопротивлений z и г при различных токах.
Результаты показаны на рис. 232. Как видно, сопротивления остаются
практически постоянными при изменении тока в широких пределах.
В табл. 44 приведены опытные величины сопротивлений положитель-
ной последовательности трехфазного реактора на различных отводах.
В табл. 45 приведены опытные данные сопротивлений z^ zoi, ^оп для
этого же элемента.
328
Глава VII. Моделирование линий электропередач
Таблица 44
Включение отводов /д (а) lb (а) h (а) иа (в) иъ (в) Uc (в) za (ом) *6 (ом) zc (ом>
0—8 5.0 5.0 5.0 73 74.5 73.0 14.6 ! 14.9 14.6
(0—8)-+-(12.0—12.1) 4.82 4.82 4.88 76 78.0 75.0 15.75 16.2 15.4
(0—8) (12.0—12.2) 4.68 4.71 4.71 80 81.5 79.0 17.10 17.20 16.8
(0—8) -+- (12.0-12.3) 4.50 4.55 4.51 81.9 85.0 81.3 18.20 18.70 18.05
0-9 4.46 4.53 4.49 81.7 85.2 81.3 18.35 18.80 18.20
(0—9)-+-(12.0—12.1) 4.36 4.36 4.40 86.2 86.3 85.2 19.80 19.80 19.40
(0—9) -+- (12.0—12.2) 4.25 4.25 4.25 90.0 90.0 87.6 21.20 21.20 20.7
(0—9) -+- (12.0—12.3) 4.12 4.10 4.08 91.5 92.3 90.0 22.20 22.50 22.0
0—10 4.10 4.10 4.10 91.8 93.0 90.4 22.30 22.60 22.1
(0—10) -+- (12.0—12.1) 3.95 3.95 3.95 94.2 95.0 93.2 23.90 24.10 23.6
(0—10) -+- (12.0—12.2) 3.83 3.83 3.83 98.0 98.0 95.2 25.60 25.60 25.10
(0—10) -+- (12.0—123) 3.70 3.70 3.70 100.0 100.8 98.0 27.10 27.50 26.50
0—11 3.70 3.70 3.70 98.7 100.2 97.5 26.60 27.20 26.30
(0—11)-+-(12.0—12.1) 3.55 3.55 3.55 101.2 102.2 90.6 28.50 28.80 28.10
(0—11)-+-(12.0—12.2) 3.41 3.41 3.41 104.0 104.2 102.0 30.60 30.60 30.00
(0—11)-+-(12.0—12.3) 3.27 3.27 3.27 105.0 106.0 103.2 32.30 32.4 31.8
Таблица 45
Сопротивление
реактора
Отношение
сопротивлений
реактора для
токов нулевой
и положитель-
ной последо-
вательности
Линия 1, трех-
фазный ре-
жим . . . .
Линия 1, одно-
фазный ре-
жим ....
Линия 2, трех-
фазный ре-
жим ....
Линия 2, одно-
фазный ре-
жим ....
Линия 1 ли-
ния 2, одно-
фазное пита-
ние ....
118.5 113 118.0 4.0
218 220 220 2.7
110.5 110.0111.0 3.75
213 215 214 2.65
134 134 134 1.28
3.85
2.7
3.75
2.65
1.28
4.0
2.7
3.75
2.65
1.28
29.7
80.7
29.5
80.5
104.5
29.5 29.7
81.4 81.4
29.4 29.6
81.2 80.9
z\ — 29.6 ом
z0I ~ 81.0 ом
*! = 29.5
г01 81.0 ом
^011 — 104 ом
= 2.74
Первоначально у каждого элемента было только три основные и три
дополнительные катушки, которые осуществляли индуктивную связь со
второй линией. Испытания показали, что при этом сопротивления первой
линии зависят от величины токов положительной и отрицательной
последовательностей, протекающих по второй линии, что не должно
иметь места. Зависимость сопротивления линии 7 от величины токов
положительной последовательности линии 2 показана на рис. 233.
Из рис. 233 видно (см. кривую при отсутствии „транспозиции"), что
потоки рассеяния катушек а'2, Ь2, с2 оказывали размагничивающее дей-
ствие на потоки рассеяния катушек аъ Ь19 с1 и это действие значитель-
£ 6. Неполнофазные режимы двухцепных линий электропередач
329
ное. Так, при токе 14 а сопротивление реактора, моделирующего
первую линию, уменьшалось почти вдвое. Для устранения этого явле-
ния каждая катушка (а', 6', с', ^2» была разбита на три катушки,
Рис. 232. Сопротивления положительной последо-
вательности трехфазного реактора в зависимости
от тока.
1 = 2-^-lW>/0=f (/); 3~r = f (I).
включаемые в фазы Л, В, С параллельной линии. При этом поток рас-
сеяния такой группы из трех катушек при уравновешенных системах
токов в ней сведен к минимуму. При помощи этого мероприятия (транс-
позиции) удалось устранить влияние
линий друг на друга при уравно-
вешенных системах токов в них.
При испытаниях было также
установлено, что расстояние между
центрами не должно быть меньше
1.5 м, в противном случае потоки
рассеяния катушек оказывают
влияние на потоки рассеяния кату-
шек а2, Ь2, с2, т. е. линии влияют
друг на друга при уравновешенных
системах токов в них.
В табл. 46 приведены параметры
всех элементов устройства, как они
установлены в настоящее время.
Батареи конденсаторов состав-
ляются из конденсаторов типа КБГП
на напряжение 6—10 кв (постоян-
ное напряжение). Емкости конденса-
торов имеют величины от 0.01 до
0.25 мкф.
Таким образом, выполненная в ИЭМ установка обеспечивает доста-
точно точное моделирование неполнофазных режимов двухцепных электро-
передач. Параметры могут регулироваться в широких пределах. Обеспе-
чено быстрое включение установки вместо любого участка моделей:
двухцепных линий электропередачи.
4 М
Рис. 233. Изменение сопротивления ли-
нии при трехфазной симметричной на-
грузке параллельной линии Д = 0 4- 15 а,
/2 = 3.0 а (прямая последовательность).
7 — z\— f (Zi) при отсутствии транспозиции; 2 —
21— f (Zi) при наличии транспозиций.
330
Глава VII. Моделирование линий электропередач
Таблица 46
№ эле- мента г\ (ом) «1 (ом) г01 (ом) *01 (ом) гоп (ом) *011 (ом) См (мкф) Со (мкф)
1, 1 1.69 23.6 12.9 64.5 24.2 80.5 0.172 0.170 0.387 0.394
2, 1 1.69 23.6 12.9 64.5 24.2 80.5 0.172 0.170 0.387 0.380
1, 2 1.69 23.6 12.9 64.5 24.2 80.5 0.172 0.169 0.387 0.385
2, 2 1.69 23.6 12.9 64.5 24.2 60.5 0.172 0.171 0.387 0.386
1, 3 1.69 23.6 12.9 64.5 24.2 80.5 0.172 0.175 0.387 0.383
2, 3 1.69 23.6 12.9 64.5 24.2 80.5 0.172 0.177 0.387 0.382
1, 4 1.86 26.0 14.2 71.0 26.6 89.0 0.180 0.175 0.406 0.415
2, 4 1.86 26.0 14.2 71.0 26.0 89.0 0.180 0.174 0.406 0.412
Примечание. В двух последних графах в числителе даны расчетные значения параметров
элементов, а в знаменателе — опытнЪге. В обозначении номера элемента ^первая цифра соответствует
номеру линии, а вторая — номеру элемента этой линии.
§ 7. Моделирование измерительных
трансформаторов
Моделирование трансформаторов
напряжения
Измерительные трансформаторы в моделях дальних линий электро-
передачи предназначаются для включения приборов релейной защиты и
системной автоматики, разрабатываемых для этих линий. Наиболее
существенное влияние на работу релейной защиты оказывают переходные
процессы в трансформаторах тока и меньшее — в трансформаторах
напряжения. Поэтому наибольшее внимание было обращено на модели-
рование трансформаторов тока. Трансформаторы напряжения были взяты
стандартные, типа НОСК-6, при этом был сделан дополнительный
вывод обмотки для возможности получения нужного коэффициента
трансформации. Коэффициент трансформации трансформаторов напряже-
ния 2190/100 в и 3000/100 в.
Моделирование трансформаторов тока
Маломощные трансформаторы тока
Для наблюдения по амперметру или для осциллографической записи
токов на моделях линий электропередач были рассчитаны и изготов-
лены 6 штук маломощных трансформаторов тока переносного типа для
включения в любой участок линии модели.
§ 7. Измерительные трансформаторы
331
Эти трансформаторы тока сделаны из сердечника в виде ленточного
тора из стали Э310 диаметром 9.5/12.0 см, высотой 4.0 см, сечением
4.25 см2, со средней длиной магнитного пути 33.8 см. Обмотка выпол-
нена с коэффициентом трансформации 10/1. Мощность трансформатора
тока 0.3 ва вполне достаточна для питания цепи вибраторов осцилло-
графа при удовлетворительной точности 1—3%. Выбранные трансфор-
маторы тока с первичной стороны имеют сопротивление 0.03—0.04 ом,
чем можно пренебречь в сравнении с сопротивлением элементов модели.
Первые осциллограммы процессов на моделях линий снимались с по-
мощью этих маломощных трансформаторов тока, впоследствии они редко
применялись.
Три таких трансформатора показаны на рис. 234.
Рис. 234. Трансформаторы тока для осциллографирования
переходных токов в моделях линий.
Мощные трансформаторы тока
Для исследования схем релейной защиты, а также для питания
нагрузки во вторичных цепях до 50 ва были рассчитаны и изготовлены
шесть мощных трансформаторов тока. Они имеют сердечник из ленточ-
ной стали Э41 с диаметрами 18.0/26.2 см и со средней длиной магнит-
ного пути 69.5 см (магнитная цепь от трансформаторов тока ТВД-76).
Первичная обмотка имеет четыре секции по 50 витков, вторичная
обмотка — две секции по 362 витка (номинальных). Коэффициент транс-
формации можно получить 7.24/1, 3.62/1 или 1.81/1, что соответствует
коэффициенту трансформации натурных трансформаторов тока с коэффи-
циентами 2000/1, 1000/1 или 500/1. Внешний вид трансформаторов тока
показан на рис. 235.
Трансформаторы тока после изготовления были испытаны напряже-
нием 5 кв между первичной и вторичной обмотками в течение 5 мин.
Приведем технические данные трансформатора для питания цепей
защиты: номинальное напряжение Un = 2 кв; номинальный ток 1п = а;
сердечник ленточный (диаметром 18.0/26.2 см), высота сердечника
7/=11.3 см, сечение сердечника Q=38cm2; средняя длина магнитного
пути L — 69.5 см; число витков вторичной обмотки — 714; средняя
332
Глава VII. Моделирование линий электропередач
длина витка ZCp. = 0.38 м; сечение проводника вторичной обмотки g2 — 1 «42 мм2
(провод ПБД-1.3); активное сопротивление вторичной обмотки г2 = 0.4 ом;
индуктивное сопротивление рассеяния вторичной обмотки х2 = 0.2 ом.
Рис. 235. Трансформаторы тока для исследования ре-
лейных защит.
Для получения достаточно мощного трансформатора тока магнито-
движущую силу нужно брать не менее 600, что соответственно двух-
Рис. 236. Схема замещения и векторная диаграмма трансформа-
тора тока.
кратному номинальному току при числе витков = 20 определило»
выбираемую величину 724 ампер-витка.
Средняя длина витка определялась с учетом толщины изоляции и
числа слоев обмотки. Активное сопротивление вторичной обмотки опре-
делялось по длине провода всей обмотки, а величина индуктивного
§ 7. Измерительные трансформаторы
333
сопротивления ввиду его малости принята приблизительно равной поло-
вине активного сопротивления.
Расчет погрешностей произведен для нагрузки вторичной цепи
z2h = 50 ом при coscp2 = 0.8. Кроме того, произведен расчет для одного
из случаев применения трансформаторов тока (при исследовании диффе-
ренциальной направленной защиты ТЭПа для линии Волжская ГЭС —
Москва) при £2н = 15 ом и cos ?2 = 0*5.
Для компенсации влияния намагничивающего тока на токовую по-
грешность от вторичной обмотки было отмотано 12 витков, следова-
тельно, действительное число витков вторичной обмотки w2 = 724—12 =
712 витков. Погрешность в токе при w2^w2h определится по формуле:
Погрешность при номинальных условиях (j2t2h = 50 ом, cos <р2 = 0.8)
как по току, так и по углу не выходят за пределы класса 0.5.
Что касается поведения трансформатора тока при больших токах,
то в пределах величин, которые могут быть при всевозможных режимах
коротких замыканий в модели (не более шестикратного), погрешности
в токе и по углу вполне приемлемы для целей исследования релейной
защиты. При вторичной нагрузке z2h = 51 ом при cos ?2 = 0.75 сопро-
тивление, вносимое трансформатором тока в линию, не превосходило
4 ом. Это может быть учтено настройкой элементов сопротивлений
того или иного участка модели линии. В большинстве случаев нагрузка
вторичной цепи гораздо меньше расчетной, поэтому вносимым сопро-
тивлением еще с большим основанием можно пренебречь.
Моделирование трансформаторов тока ТФНКД-400
Исследование релейных защит на электродинамической модели пока-
зало, что переходные процессы в трансформаторах тока определяют
в некоторых случаях в сильной степени
зарегистрировано несколько случаев лож-
ной работы защиты от замыканий на
землю при междуфазных замыканиях,
вызванных переходными токами небаланса
трансформаторов тока. Это привело к не-
обходимости создания точных моделей
трансформаторов тока ТФНКД-400, раз-
работанных заводом „Электроаппарат"
для электропередачи Волжская ГЭС—Мо-
сква (трансформаторы тока каскадные, на
400 кв, с коэффициентом 2000/1). Схема
приведена на рис. 237, а полные технические данные — в табл. 47.
Создание этих моделей позволило исследовать переходные про-
цессы в самих трансформаторах тока и оценить их влияние на ра-
боту релейных защит.
По параметрам трансформаторов тока модели и условиям их модели-
рования, заданным Институтом электромеханики АН СССР и Лабораторией
трансформаторов тока завода „Электроаппарат" (инж. С. Д. Пышкина и
реле.
D D
и испытаниях
D Класс 1
Нижняя
ступень
-верхняя
ступень
Рис. 237. Схема трансформатора
тока ТФНКД-400.
таких трансформаторов
тока
334
Глава VII. Моделирование линий электропередач
Таблица 47
180 29.6, 26.2
О о
1—4 Г-4
со СО
ф
°0.
г—<
00 1—4
i—4 1П
ю
ЧО
т-Ч
т-4
л
О'
О' см
1П 1—<
сб
о o' o' о о
00 о О 1-4 ш
ш | Ю . ^о_ 4-
О Т О Т о -о т
о о о Q О
со СО СО ш
h II II II II II II II
00
со 1
о’ 1 СО
5 00 л я
И- о В 1П
и о
5 ш
BS 1Г>’ я 00 д О
g. X эе 1-4
Be 5.5 X ®
ЛВДО ПЭЛБДj
О' о
О' 00
г-4
Т-4
СО
1 СО
1—4
О
Г—*
О
00 kD
о in
М
X X
00 tn
00 tn
о о
•ч
CQ
<
О
S 1
8 Ol T—4
к
Вторичная обмотка i S ь й >» -В PU з о в В В s О В . м я ь ° S>< Ем
актив- ное со- против- ление (ом)
размеры сечения (мм)
марка провода
о £ S Я * а
Первичная обмотка | J • о • S х о о в * S >» я в. ® Н О Ч в в < X я о В 2 - S h «
активное сопро- тивление обмотки (ом)
размеры сечения (мм)
марка провода
« * S S ® в
инж. А. А. Юдина и от
ИЭМ П. И. Рыжов), были
разработаны и изготовлены
модели трансформаторов
тока для электродинамиче-
ских моделей электропере-
дач ИЭМ.
Требования,
предъявляемые к модели
трансформатора тока
1. Конструкция модели
должна быть каскадной для
обеспечения подобия про-
цессов в модели и ориги-
нале.
2. Внешняя нагрузка
должна составлять 75 ва
при cos ср = 0.8 и вторичном
токе 1 а. Первичный ток
в соответствии с переда-
ваемой мощностью линии
25 или 30 ква должен быть
7.24 или 7.9 а.
3. Погрешности модели
при установившихся и пере-
ходных режимах и зависи-
мость погрешностей от
основных факторов должны
быть такими же, как у
ТФНКД-400.
4. Номинальное напря-
жение первичной обмотки
должно быть 2 кв, а испы-
тательное напряжение — 7 кв.
Уело вия моделирования
При моделировании транс-
форматоров тока можно
исходить из выражений для
погрешностей, соответствую-
щих векторной диаграмме
рис. 236. Токовая погреш-
ность
угловая погрешность
г=^со3(<р-ьа). (2)
§ 7. Измерительные трансформаторы
335
Чтобы погрешности модели (индекс м) были одинаковы с
стями натурного трансформатора (индекс т), необходимо
условия
Л)М __ Л)т
Ли ~ лт ’
Ли “ ^1Т ’
или
а = а .
м т
Чтобы поведение модели при установившихся и особенно
ходных режимах сделать одинаковым с поведением натурного
матора, нужно обеспечить одинаковые кривые намагничивания
Hq = /(2?макс.),
ф =/Свмакс.),
тогда из (4) получим первое условие моделирования
погрешно-
соблюсти
(з>
(4>
(5>
(6)
при пере-
трансфор-
(7)
(8)
(9)
(Ю)
моделиро-
С другой стороны, из выражения для индукции
D ___________________________ /2*02 __/2*02
/5макс. — 4.44yW2Q — W2q j
где z02— ^(г2~Ьг2н)2“1“(х2“1“х2н)2> вытекает второе условие
вания
4mZ02m__ Ат^огт
W2mQm w2tQt ’
откуда для обеспечения одинаковой погрешности при установившемся
и переходном режимах и одинаковой постоянной времени вторичной
цепи необходимо
% = % ИЛИ аГС *2 7----= аГС *2 7--- * (12)
г02м г02т
Условия (9), (11) и (12) все вместе будут обеспечивать равенство
погрешностей трансформатора и модели при установившихся и переход-
ных режимах. Эти условия нужно выполнить для каждой ступени кас-
када в отдельности.
Расчет модели трансформатора тока
Схема модели приведена на рис. 238. Модель состоит из одного
сердечника верхней ступени и одного сердечника нижней ступени.
В трансформаторе ТФНК Д-400 в нижней ступени выполнено четыре
сердечника. Для упрощения модели нижняя ступень была выполнена
только с одним сердечником. Чтобы восполнить отсутствие трех сер-
336
Глава VII. Моделирование линий электропередач
дечников было введено добавочное индуктивное сопротивление, вклю-
чаемое в промежуточный контур (роль его подробнее будет изложена
ниже).
При принятом варианте число ампервитков обмоток и средняя длина
магнитного пути обеих ступеней уменьшились в 2 раза.
Нижняяступень. Принимаем, что
----Верхняя
। ступень
^Промежуточное
Sj сопротийяение
1200
2
600 а,
тогда
Нижняя
ступень
из условия
2
(9)
имеем
/м.
0.1665
2
0.0832 м
И ---
2
D
Рис. 238. Схема модели и
трансформатора тока г
ТФНКД-400. _ 6QQ (выполнено 599).
Из соотношения (11) имеем
________ Qt. hW2t. и ^2м. н2Г02м. н о ГЛ ________ л С Л 1П 3 2
м. н=-7— ------------------------------------------------------------------------—-— 2QT,H = 4.64 • 10 м\
^2т. «п02т. н w2m. н
z02m » полное сопротивление вторичной цепи, должно быть равным
полному сопротивлению 2г02т моделируемого трансформатора.
Основным сопротивлением вторичной цепи является
z~ = ^„^ = 75 ом при cos ср = 0.8.
н т * •
Задачей моделирования является достижение одинаковых сопротив-
лений обмоток модели и моделируемого трансформатора
Г2м = Г2т> Х2м = Х2т*
Сопротивление вторичной обмотки должно быть х2м —8 ом. Чтобы
это значение получить в модели при числе витков о>2м = 600, вдвое
меньшем, чем в натурном трансформаторе тока (о>2т = 1200), вторичная
обмотка намотана не на двух третях сердечников, как в натурном, а на
половине сердечника. Но и это еще не обеспечивает нужного значения
х2м = 8 ом, поэтому для увеличения рассеяния вторичной обмотки пер-
вичная обмотка отнесена от нее и выполнена в виде петли соответ-
ствующих размеров. Была подобрана круглая форма петли первичной
обмотки нижней ступени с диаметром петли 33.5 см.
При первичном токе нижней ступени Д = 20 а число витков первич-
ной обмотки соответственно величине магнитодвижущей силы = 600
принимается равным = 30.
Верхняя ступень. Аналогично имеем:
j-r в 2000 1 лло
*1м. в — 2 — 2 —1000 а,
7 __ ZT. в _0.148_л .
/м.в=-Г‘==-Т-==0-074 м-
7. Измерительные трансформаторы
337
Вторичный ток /2м — 12т = 20 а, тогда
____ Г2м. в_1000_ £
я?2в==Х^==^о- =
При уменьшенных вдвое магнитодвижущей силе FiM и длине ZM верх-
ней ступени следовало бы для сохранения условия равенства индукций
сечение сердечника принять в 2 раза большим. Однако моделирование
только одного (вместо четырех) сердечника нижней ступени позволяет
Рис. 239. Модель трансформатора тока ТФНКД-400.
почти в 4 раза уменьшить требуемое сечение сердечника верхней сту-
пени. Исходя из этого сечение сердечника верхней ступени подбирается
примерно в 2 раза меньшим, чем у натурного.
Подобраны размеры сердечника: внутренний и внешний диаметры 0.180
и 0.292 м соответственно; высота 0.160 м. Сечение сердечника —
7.45 • 10-3 м2.
Для соблюдения условий одинаковых индукций соотношение сопро-
тивлений нагрузок модели и натурного трансформатора из (11)
^2м. в2Г02м. в _ вг02т. в
W2m. в <?м. в W2t. в^т. в
откуда после подстановки численных значений
А?м. в ’ ^2м. в’ ^м. в’ ^2т. в’ ^2т. в’ ^т. в
имеем
Z02m. в = 0*236z02t. в.
Это соотношение принимается при расчете нагрузок и выборе вели-
чины промежуточного сопротивления.
Число витков первичной обмотки модели определяется из величины
номинального тока модели 7.24 а (при мощности модели 25 ква) и 7.9 а
(при мощности модели 30 ква):
1000 1QQ 1000 1ГГ7
™1M. „= 714 = 138 при W1M.B = 71-=127
338
Глава VII. Моделирование линий электропередач
Таблица 48
Для получения коэффициента
трансформации с первичными то-
ками 3.62 и 3.95 а соответственно
коэффициенту трансформации на-
турного трансформатора 1000/1а
обмотки выполняются двумя па-
раллельными ветвями, которые
могут включаться и последова-
тельно.
Из табл. 47 видно, что у на-
турного трансформатора тока со-
противление первичной обмотки
очень мало. Для достижения этого
условия в модели первичная и
вторичная обмотки верхней сту-
пени модели наматываются вплот-
ную и равномерно по всей окруж-
ности.
Параметры модели трансфор-
матора тока ТФНКД-400 при-
ведены в табл. 48. Вид модели
трансформатора тока показан на
рис. 239.
Промежуточное
сопротивление
Промежуточное сопротивление
представляет собой плоскую воз-
душную катушку индуктивности
с ответвлениями от х — 0.094 ом
до х = 0.427 ом через 0.1 ом.
Параметры промежуточного со-
противления приведены в табл. 49.
Назначение промежуточного
сопротивления следующее:
1) заменять собой сопротивле-
ние трех отсутствующих сердеч-
ников с их внешней нагрузкой
(приведенной и умноженной на
коэффициент 0.236);
2) отражать изменение внеш-
ней нагрузки сердечника Д;
3) восполнять отсутствие ин-
дуктивного сопротивления вто-
ричной обмотки верхней ступени.
Для моделирования определен-
ной нагрузки трансформатора не-
обходимо исходить из заданной
нагрузки исследуемого сердеч-
ника нижней ступени, а проме-
жуточное сопротивление выбрать
таким, чтобы обеспечить при за-
$ 7. Измерителъные трансформаторы
339
Таблица 49
Ответвле- ние (ом) П чом) I II Ответвле- ние Х1 (ом) П (ом)
0-1 0.05 0.0135 1-5 0.1175 0.022
0—2 0.1 0.019 2—3 0.011 0.008
0—3 0.15 0.025 2—4 0.032 0.0125
0—4 0.199 0.029 2—5 0.062 0.0165
0—5 0.25 0.033 3—4 0.008 0.007
1—2 0.015 0.008 3—5 0.027 0.012
1-3 0.044 0.013 4—5 0.007 0.007
1—4 0.079 0.018
данной нагрузке, исследуемого сердечника какую-то заданную нагрузку
на трех остальных сердечниках.
Подсчет производится в следующем порядке:
1) выбирается отвод промежуточного сопротивления;
2) устанавливается нагрузка исследуемого сердечника;
3) определяется полная нагрузка верхней ступени для выбранной
величины промежуточного сопротивления и выбранной нагрузки сердеч-
ника нижней ступени модели;
4) разделив полученные величины на коэффициент 0.236, получаем
полную нагрузку верхней ступени для натурного трансформатора;
5) вычитая расчетные величины сопротивлений обмоток трансформа-
тора и действительное значение нагрузки исследуемого сердечника ниж-
ней ступени, получим значения нагрузки трех других сердечников, соот-
ветствующие выбранному отводу промежуточного сопротивления.
Путем соответствующего подбора промежуточного сопротивления
можно подобрать нужные значения нагрузок сердечников трансформа-
тора.
Пример расчета промежуточного сопротивления
Схема замещения модели трансформатора тока ТФНКД-400 приве-
дена на рис. 240. Схема замещения натурного трансформатора
ТФНКД-400 приведена на рис. 241.
х 1м $ гш хпр ?пр Г]М'„ х1м.н х2мн г2м.н
Рис. 240. Схема замещения модели трансформатора тока ТФНКД-400.
Параметры модели, необходимые для расчета, следующие:
г2 =0.024 ом, г н-ы9 =0.0425 ом, х9 R = 0,
^м. в 7 1м. н 2м. н ’ 2м. в ’
Х1м н +Л2Ч н = °-16 ОМ> — 40°-
(k2 — коэффициент трансформации нижней ступени в квадрате)-
340
Глава VIL Моделирование линий электропередач
Параметры оригинала, необходимые для расчета, следующие:
г2т. в = 0-048 ом, г1ТгН = 0.104 ом, Зг2т н = 23 ом, х2т в=0.3 ом,
х, =1.33 ом, 2х„ = 19 ом, £2=400.
1 Т« Н 4Т« н
1. Выбираем отвод промежуточного сопротивления 0—3. Тогда
г =0.025 ом, х =0.15 ом.
пр. 7 пр.
Рис. 241. Схема замещения трансформатора тока ТФНКД-400.
2. Устанавливаем нагрузку исследуемого сердечника нижней ступени
модели 75 ом и cos с? = 0.5. Тогда
г = 37.5 ом, х =65 ом, г = нго- — 0.094 ом,
нагр. > нагр. ’ нагр. 7
3. Полная нагрузка верхней ступени модели будет равна:
Г02м. в = Г2м. в Г1М. н Г2„. н Гвагр. Гпр. = 0’024 0’0425
-ь 0.094 ч-0.025 = 0.185 ом,
Х02м. в = *2М. в-*- Х1м. н Х2И. н ' Хнагр. Ь Хвр. = 0 +~ 0Л6 0Л62 Ч“
-4-0.15 = 0.472 ом.
A
В-
C-
LJ4J л//7
-Jl/t-------
-lilt-------
£^КЛ1-С
“lilt-------
"/•< л t_pj — —
>|Л------4
клг-в ср
--------ufl-в
КЛ2-С СР
--------Iht------с
к'°ъ>
КП1
~1Г
РВ1
рвг
=гго 'гго
^фта осциллографа^ I
ZI^lZZ.
рги гэооом
WjMOoi*-
рог zsooom
PB1 рвг
Рис. 242. Схема управления моделью линии электропередачи Волжская ГЭС—Москва.
§ 8, Схема управления моделями линий электропередач 341
4. Определяем полную нагрузку верхней ступени натурного транс-
форматора ТФНКД-400:
___ г02м. в 0.185
г02т. В 0.236 0.236
0.785 ом,
___§ **'о2м. в 0.472 q ~~
Х02т. в 0.236 ~0136 2-00 Ом
5. Нагрузка, приходящаяся на четыре сердечника,
S4 —гю —(г9 -+-Г ) = 0.785 —(0.048-ь 0.104) = 0.633 ом,
02т. н 02т. в \ 2т. в 1т. н/ v 7
2 Х02т. н = Х02т. в — (Х2т. в Х1т. н) = 2-00 — (0-30 1 -33) = 037 ОМ>
2 ^т. в = & з г02т „ = 400 • 0.633 = 253 ом,
2 х02т. в = к2 2 <2Т. в = 400 • 0.37 = 148 ом.
6. Нагрузка нижней ступени, кроме испытуемого сердечника,
2 н - S Г2т. н - гнагр. = 253 - 23 - 37.5 = 192.5 ом,
2 Х02т. в — 2 Х2т. в — Хвагр. = 148 — 19 — 65 = 64 ОМ.
Следовательно, на каждый из трех оставшихся сердечников в этом
случае будет приходиться нагрузка
ХваГр. =4=21.3 ОМ.
Поступая подобным образом, можно получить нужные нагрузки сер-
дечников и исследовать работу трансформаторов с такими нагрузками.
Таким образом, в ИЭМ разработано несколько типов трансформа-
торов тока для электродинамических моделей дальних электропередач.
Эти трансформаторы обеспечивают исследование процессов на линиях
и исследование релейных защит.
Модели трансформаторов тока ТФНКД-400 позволяют исследовать
аварии в системах с учетом переходных процессов в самих трансфор-
маторах тока и оценить их влияние на работу исследуемых релейных
защит.
§ 8. Схемы управления моделями линий электропередач
Схемы измерения и управления моделями линий передачи Волжская
ГЭС—Москва, Сталинград—Москва, Волжская ГЭС—Урал выполнены
одинаково, за исключением некоторых особенностей, вызванных отли-
чием в первичной коммутации этих моделей. Схемы первичной коммута-
ции моделей линий и соединение линий с высоковольтным переклю-
чательным щитом (рис. 217) описаны подробно выше. Здесь подробно
описывается схема управления и измерения модели линии передачи
Сталинград—Москва (в виде примера). Некоторые особенности в выпол-
нении схем измерения и управления другими моделями линий передачи
в дальнейшем указаны.
342
Глава VII. Моделирование линий электропередач
Схема управления моделью линии передачи Сталинград—Москва
приведена на рис. 242. Схема выполнена в развернутом виде с прило-
жением схемы включения контакторов в исследуемый участок модели
линии. Клеммные сборки установлены в зале моделей линий и на общем
щите управления линией.
На рис. 242 показаны также контакторы, управляемые при помощи
специальной схемы. Имеется шесть контакторов (КЛ1-А—КЛ2-С),
которые включаются в фазы исследуемого участка линии с двух
сторон. Они имитируют шесть линейных однофазных выключателей
действительной линии. При помощи специальной схемы переклю-
£ 8. Схема управления моделями линий электропередач
343
чений, описанной выше, они могут быть установлены на любом
участке линии передачи. Далее имеются пять контакторов (ККЗ, К-А,
К-В, К-С, Л’О), имитирующих короткое замыкание (также показаны на
рис. 242), четыре однофазных контактора (ЛЧ4, К~В, К-С, К-0) служат
для набора нужного вида короткого замыкания. Пятый трехфазный
контактор (ККЗ) осуществляет короткое замыкание на линии. Контак-
торы короткого замыкания могут быть перенесены в любую точку линии.
Имеются также четыре трехфазных контактора. Катушки двух контак-
торов включены параллельно катушке
контактора КЛ1-А. Главные кон-
такты включены последовательно.
Это сделано для того, чтобы обес-
печить быстрое гашение дуги. Эта
группа контакторов обозначена КЛЗГ.
Аналогично выполнена группа кон-
такторов КЛЗ'1. Трехфазные контак-
торы могут быть включены вместо
однофазных, когда необходимо одно-
временное отключение трех фаз.
Схема управления контакторами
линий выполнена таким образом,
что обеспечено включение и отклю-
чение при помощи кнопок всех ли-
нейных контакторов, а также набор
нужного вида короткого замыкания.
Собранная схема позволяет при
нажатии пусковой кнопки /7/ осуще-
ствить пуск осциллографа, потом
имитировать короткое замыкание
нужного вида в модели, предоста-
вить исследуемым релейным защитам
отключить это короткое замыкание,
а если они не сработают, то кон-
тактор короткого замыкания сам
отключается. Кроме того, переключе-
нием схемы при помощи специаль-
ного переключателя (на схеме не по-
казан) можно получить также такой
режим работы схемы, что контактор
короткого замыкания не отклю-
чается, а отключается с заданной
рпг
/ГЛ/Г4
Рис. 244. Схема установки продольной
компенсации модели линии электропере-
дачи Волжская ГЭС—Москва.
а — схема установки продольной компенсации;
б—схема управления контакторами; П1 и П2 —
переключатели; 7—8 — контакты переключателей
П1 и П2; РП2 — контакты промежуточного реле,
осуществляющего отключение аварийного участка.
выдержкой времени исследуемый
участок линии с двух сторон.
Путем включения и выключения переключателей на щите (//7-Д—
Н2-С) можно получить отключение одной фазы с двух сторон, двух
фаз — с двух сторон, трех фаз — с двух сторон, одной фазы — с одной
стороны и т. д. Имеются также сигнальные лампочки, показывающие
положение шести линейных выключателей (включено — красный, выклю-
чено — зеленый). Четыре лампочки разного цвета показывают вид корот-
кого замыкания. Работа схемы ясна из рис. 242.
На верхнем гетинаксовом щите установлены измерительные приборы,
показывающие токи и напряжения в различных местах линии передачи
(в зависимости от места включения измерительных трансформаторов
в схеме первичной коммутации).
344
Глава VII» Моделирование линий электропередач
Таблица 50
Положение пере- ключателя Замкнутые контакты Положение рубильника Сопротивле- ние установки продольной компенсации (ом) I Наличие форсировки Величина форсирования продольной компенсации
П1 П2 П1 П2 Р1 Р2
ч— <- 2—3 6—7 2—3 6—7 -ь 43 — —
t 4— 1—2 5-6 2—3 6—7 Ч ч 43 Ч 1.50
—> <- 1—4 5—8 2—3 6—7 ч ч €4.5 — —
<- t 2—3 6—7 1—2 5—6 -4- ч 43 ч 1.81
t t 1—2 5—6 1—2 5—6 Ч ч 43 ч- 2.31
-> t 1—4 5—8 1—2 5—6 ч- ч 64.5 ч 1.54
<— -ч 2—3 6—7 1—4 5—8 Ч-- ч 78 — —
t -ч 1—2 5—6 1—4 5—8 ч ч 78 ч 1.28
—> -ч 1—4 5—8 1—4 5—8 ч ч 99.5 — —
4— 2—3 6—7 2—3 6—7 — — 48.5 — —
t <- 1—2 5—6 2—3 6—7 — — 48.5 ч- 1.44
-ч <— 1—4 5—8 2—3 6—7 — — 70.0 — —
ч- t 2—3 6—7 1—2 5—6 — — 48.5 1 + 1.72
t 1—2 5—6 1—2 5—6 — — 48.5 ч- 2.17
-ч * 1 1—4 5—8 1—2 5—6 — — 70.0 ч 1.50
<— -4 2—3 6—7 1—4 5-8 — — 83.5 —
t —4 1—2 5—6 1—4 5—8 — — 83.5 ч 1.26,
—ч —4 1—4 5—8 1—4 5—8 — — 105 — —
«с- <- 2—3 6—7 2—3 6—7 ч — 45.9 — —
t <- 1—2 5—6 2—3 6—7 ч- — 45.9 ч 1.4
-ч <— 1—4 5—8 2—3 6—7 ч — 67.1 — —
«с- t 2—3 6—7 1—2 5—6 ч — 45.9 ч- 1.78
t 1—2 5—6 1—2 5—6 ч- — 45.9 ч 2.24
§ 8. Схема управления моделями линий электропередач
345
Таблица 50 (продолжение)
Положение пере- ключателя Замкнутые контакты Положение рубильника Сопротивле- ние установки продольной компенсации (ом) Наличие форсировки Величина форсирования продольной
П1 П2 П1 П2 Р1 Р2 компенсации
1-4 5—8 1—2 5—6 4 — 67.1 1.53
<— 2—3 6—7 1—4 5-8 4 — 80.6 — —
ф. 1—2 5—6 1—4 5-8 -4 — 80.6 н- 1.26
-> —> 1—4 5-8 1—4 5—8 4- — 102.1 — —
Схема измерительных цепей исследуемого участка модели линии
передачи приведена на рис. 243. Измерительная схема содержит шесть
трансформаторов напряжения и шесть трансформаторов тока. Измери-
тельные трансформаторы могут быть включены в начало и в конец
исследуемого участка, а также в обе цепи передачи. Таким образом,
обеспечен одновременный замер шести токов и шести напряжений. На
щите установлены шесть амперметров (0—1а), включенных во вторичные
цепи шести трансформаторов тока, и два вольтметра, включенных во
вторичные цепи шести трансформаторов напряжения (1 вольтметр на
3 трансформатора напряжения). Специальные переключатели, располо-
женные ниже приборов, переключают вольтметры и шунтируют ампер-
метры (последнее необходимо при опытах короткого замыкания в мо-
дели). Все вторичные цепи выведены также на специально оборудованный
стол и могут быть использованы для включения исследуемых релейных
защит. В верхней части щита сделана мнемоническая схема модели
линии передачи, лампочки показывают положение контакторов одного
и другого концов линии, а также контактора на промежуточной под-
станции. Ниже измерительных приборов сделана мнемоническая схема
исследуемого участка линии (показаны все три фазы участка). В мнемо-
ническую схему вделаны кнопки включения и отключения выключателя,
а также сигнальные лампочки, показывающие положение линейных
выключателей и выключателей, подготавливающих вид короткого замы-
кания. В нижней левой части гетинаксового щита смонтированы четыре
двойных кнопки, управляющие однофазными контакторами короткого
замыкания (/С-Л, К-В, К-С, /i-О). В нижней правой части щита уста-
новлены кнопки, осуществляющие пуск автоматической схемы управле-
ния линий и управление контакторами, включающими начало и конец
линии, а также контактором на промежуточной подстанции. В самой
нижней части гетинаксового щита укреплены клеммы, на которые при-
ходят кабели, соединяющие щит управления с залом моделей линий.
Ниже гетинаксового щита расположен железный щит, на котором смон-
тированы все реле автоматической схемы, переключатели и электросе-
кундомеры, показывающие время короткого замыкания. Установка дли-
тельности короткого замыкания, шунтировки конденсаторов продольной
компенсации и длины осциллограммы производится путем регулирования
выдержек времени реле. Выдержки легко регулируются с наружной
части железного щита, где установлены рукоятки потенциометров.
346 Глава VII, Моделирование линий электропередач
Установка продольнвй компенсации модели линии электропередачи
Волжская ГЭС—Москва оборудована контакторами, позволяющими пере-
ключать конденсаторы и получать различные степени продольной ком-
пенсации. Степень продольной компенсации может также изменяться
заданным образом во время отключения участков при авариях. Схема
установки продольной компенсации и цепи контакторов показаны на
рис. 244. В табл. 50 приведены сопротивления установки продольной
компенсации в омах, которые могут быть получены при переключениях
переключателей П1 и /72.
Глава VIII
МАЛАЯ ЭЛЕКТРОДИНАМИЧЕСКАЯ МОДЕЛЬ ИЭМ АН СССР
§ 1. Возможности упрощенного моделирования элементов
энергосистем
Напряженный режим работы Лаборатории электродинамического мо-
делирования Института электромеханики АН СССР, большое число
разнообразных исследований, выполняемых на модели, заставили искать
пути к дублированию экспериментальных исследований на нескольких
моделирующих установках.
Исследования динамики автоматического регулирования скорости
первичных дригателей, регулирования частоты и активной мощности
в энергосистеме имеют ряд специфических особенностей, связанных
с тем, что данные процессы протекают медленно (по сравнению с элек-
трическими процессами) и в этих исследованиях режим системы остается
сравнительно спокойным: отклонения скорости и частоты в системе,
когда она работает в синхронизме, невелики, внезапные толчки нагрузки
имеют небольшие значения, а если нагрузка изменяется в широких
пределах, то такие существенные изменения ее происходят с малой
скоростью.
Естественно было ожидать, что для исследования этих процессов
электрическая часть модели (синхронные генераторы, трансформаторы,
синхронные компенсаторы, линии передачи) может быть смоделирована
значительно проще, чем в точной модели.
В Институте электромеханики была построена „малая“ электродина-
мическая модель энергосистемы, в которой синхронные генераторы моде-
лировались машинами уменьшенного габарита (СГ-18.7, СГ-12.5), причем
активное сопротивление статора машин не компенсировалось.
Трансформаторы, линия передачи со всеми ее шунтирующими реак-
торами и статическими продольными конденсаторами, а также постоян-
ная часть нагрузки моделировались простой Т-образной схемой заме-
щения, рассчитанной обычным методом для синхронной частоты.
Часть нагрузки, зависящая от частоты и влияющая на эквивалент-
ное демпфирование в системе, моделировалась асинхронным двигателем.
Анализ динамики регулирования частоты и напряжения в системе
Волжская ГЭС—Москва, выполненный М. В. Мееровым в Институте
автоматики и телемеханики АН СССР и А. А. Первозванским в Институте
электромеханики показал, что использование регуляторов возбуждения
с большими коэффициентами усиления и введение в закон регулирования
производных, даст возможность исследовать процессы регулирования
частоты и мощности в предположении наличия идеальных регуляторов
348
Глава VIII. Малая электродинамическая модель ИЭМ АН СССР
напряжения, обеспечивающих постоянство напряжения на клеммах гене-
ратора. В соответсвии с этим малая модель была снабжена весьма
быстродействующими регуляторами напряжения, собранными по простой
схеме. С целью повышения быстродействия системы возбуждения ком-
пенсация сопротивления обмотки возбуждения не использовалась.
В данной главе рассматриваются некоторые положения, обосновы-
вающие принятые в малой модели упрощения.
Необходимая степень подробности моделирования отдельных эле-
ментов, входящих в электродинамическую модель энергосистемы, зави-
сит от динамических особенностей процессов, которые подлежат изуче-
нию. Так, например, при изучении коротких замыканий требуется
достаточно тщательное моделирование электрических цепей машин и
линии передачи в районе короткого замыкания, но моделирование
первичных двигателей, их регуляторов может быть весьма грубым,
поскольку за время протекания изучаемого процесса состояние механи-
ческой части практически не успеет измениться. При изучении медлен-
ного процесса регулирования частоты в энергосистеме, наоборот, моде-
лирование динамических параметров электрических цепей может быть
весьма приближенным, в то время как первичные двигатели и их регу-
ляторы и те параметры нагрузки, которые влияют на фактор, носящий
название „регулирующий эффект нагрузки", должны быть воспроизве-
дены более тщательно.
Для приближенной оценки влияния различных факторов при моде-
лировании того или иного процесса в энергосистеме весьма удобным
средством анализа являются частотные характеристики элементов энерго-
систем и изучаемых процессов.
Пусть, например, мы изучаем качания роторов синхронных машин.
Этот процесс представляет собой сравнительно медленное затухание
колебаний низкой частоты порядка 0.5—1.5 гц в зависимости от типа
машины и характера ее нагрузки. Необходимо, чтобы в полосе суще-
ственных для данного режима частот, ширину которой мы можем
принять с запасом равной 0—3 гц, частотные характеристики упрощенной
модели были бы близки к частотным характеристикам оригинала. За пре-
делами полосы существенных частот совпадение характеристик уже
необязательно.
Частотные методы труднее применить для оценки влияния точности
моделирования на апериодические процессы, так как в этом случае
процессы не содержат явно выраженных гармонических составляющих.
Для того чтобы определить, как следует поступать в данном случае,
воспользуемся интегралом Фурье для разложения непериодических
функций в непрерывный спектр гармоник (Воронов, 1954; Солодовни-
ков, 1954).
Пусть f(f) — непериодичное воздействие на систему, Ф (р) — ее пере-
даточная функция, x(t)— переходный процесс. Имеем
-boo -1-со
(щ)= A- J Ф (»6>(«>)e^drn,
— 00 —00
где ^((d) — спектральная плотность процесса х(£), 6/((d)— спектральная
плотность воздействия f(f).
Для элементарной составляющей процесса
dx (t) = 2^- (<d) ejwtd^ = Ф ( J<*>) Sj ((d) ej(ntd(v
§ 7. Возможности упрощенною моделирования элементов энергосистем 349
ИЛИ
5а,(а>) = Ф(>)5/(«>).
Так как малые значения З’До) несущественны для определения пере-
ходного процесса, выполнение последнего равенства оказывается суще-
ственным лишь в той полосе частот, где 3^((,)) не является малым.
Таким образом, полосой существенных частот для непериодического
процесса x(t) мы можем считать ту полосу, внутри которой модуль
спектральной плотности процесса 6^ (ф) будет не меньше некоторой
малой величины, например 3 или 5% от максимального значения Sx ((w),1
и вне которой он меньше этой малой величины.
Спектральная плотность
4-00
SAW) = [ x(t)e^fdt
— 00
является комплексной величиной, и при оценке полосы существенных
частот данного непериодического воздействия мы будем пользоваться
величиной модуля | Sx (to) |.
Так как типичный апериодический процесс, получаемый в линейной
системе, обычно может быть представлен суммой экспонент, рассмотрим
модуль спектральной плотности экспоненциальной функции, возникшей
в момент / = 0 и отсутствовавшей при
i < 0: |*WI = 00 j’ 0 1 # -+• gj2 ’ Таблица 51
Т (сек.) a)w (рад./сек.) fn (гц)
отношение Sx (о>) к его максималь- ному значению, которое имеет место при w = 0, равно: l^rfto)! а 1 /-j ч 15а, (0)| Va2^Z>2 V1 -+- Т 1 где / =— постоянная времени рас- 0.001 0.01 0.1 0.2 0.5 1 2 5 20000 2000 200 100 40 20 10 4 3180 318 31.8 15.9 6.4 3.2 1.6 0.64
сматриваемой экспоненты.
Если мы примем при оценке полосы существенных частот, что суще-
ственные значения ^(w) — это те значения, которые больше, чем 5°/0
от 5^ (°>)макс., т. е. т = 0.05, то получим для разных значений Т сле-
r ________________________________________________________ ton
дующие значения границы существенных частот % или jn = гц
(табл. 51).
Приближенная формула, достаточно хорошо определяющая границу
полосы существенных частот, при т = 0.05 будет:
Таким образом, при изучении коротких замыканий, имеющих в со-
ставе переходного процесса сверхпереходные составляющие с постоян-
ной времени порядка сотых долей секунды, мы имеем полосу сущест-
венных частот порядка 300 гц и выше; при изучении быстродействующего
1 За исключением, может быть, отдельных интервалов, внутри которых кривая
Sx (со) пересекает ось со.
350
Глава VIII. Малая электродинамическая модель ИЭМ АН СССР
регулирования возбуждения с постоянными времени порядка 0.2 сек.
полоса существенных частот сужается до 16 гц; при изучении быстро-
действующих регуляторов скорости паровых турбин с постоянными ре-
гуляторов порядка 0.5 сек. полоса существенных частот сужается до
6 гц; при изучении регулирования гидротурбин и процессов регулирова-
ния частоты, где постоянные времени измеряются секундами, можно
ограничиться полосой существенных частот до 0.5—1 гц.
Поясним, как рассмотренные критерии можно использовать для вы-
бора принципов моделирования в различных практически интересных
случаях.
§ 2. Выбор числа ячеек при моделировании дальних линий
Длинные участки линий передач с распределенными по их длине
параметрами описываются дифференциальными уравнениями в частных
производных. Учитывая, что частоты, существенные для процессов ре-
Рис. 245. Т-образная схема замещения
длинной линии.
гулирования, сравнительно невелики, прибегают к обычному упрощению —
замещению участков с распределенными параметрами ячейками с сосре-
доточенными параметрами. Оценим, в каких пределах длин участков
такая замена будет правомерной.
Операторное уравнение длинной линии
U(p, l)=U(p, 0)ch^l — ZcI(p, O)shyZ,
Цр, I) = I(p, 0) ch V — YcU(p, 0) sh 1Z, (3)
где U(p, Z), I(p, I) — изображения напряжения и тока на расстоянии Z
от начала линии; U(py 0) и /(р, 0) — изображения напряжения и тока
в начале линии; Zc, Yc — характеристическое сопротивление и проводи-
мость линии;
у __1 f ZqP Z?p .
Zc—Г Сор-ьСо’
7 = \/(LqP -ь 7?о) (CqP -ь Go) — коэффициент распространения волны; Ло,
Со, 7?0, Go — параметры единицы длины линии.
Сопоставим уравнение (3) с уравнением цепочечной схемы, заме-
щающей линию и состоящей из п ячеек (Круг, 1948).
U(p, n)=U(p, 0)chn^ — ZI(p, 0)shn[3, , .
l(p, n)= Цр, O)chnP— YU(p, 0)sh/2₽.
§ 2. Выбор числа ячеек при моделировании дальних линий
351
Величина р зависит от схемы ячейки. Для Т’-образной схемы (рис. 245)
oh₽=l + -' (Lp + RMCp+G). (5)
z <р)=.
Из сопоставления уравнений выводим следующие необходимые усло-
вия моделирования:
= 11, Z{p) = Zc(p).
Расшифровывая эти условия для Т’-образной схемы, получим
ch₽==l-4-v(£p-+-/?)(Cp-F-G)=ch^-, (5а)
Ар-ь/гг-. (Lp-t-R) (Ср-t-G) __LnP-t-Ro
Cp+gL 4 J” C0p + G0’ W
Пусть L — ~L0, R = ^R0,
C = ^C0, G = ^-Go. (6a)
Тогда, подставляя (6a) в (5a) и
учитывая выражение 7, получим
1 _
2и2 ~
*1 Г-1 . МгЧ2^2 ___
k2 L 4и2 J —
Отсюда
получаем
(7)
Точное моделирование посредством элементарных ячеек с сосредо-
точенными параметрами, при котором коэффициенты k\ и £2 должны
быть вещественными и постоянными, осуществимо лишь для установив-
шегося гармонического режима одной определенной частоты. Удовле-
творяя условиям моделирования при синхронной частоте <*>с и учитывая
со2
весьма малую относительную величину потерь, получаем у2 = , где
v — скорость света.
wcZ
Разложение кг и к2 в ряды по степеням и отбрасывание малых
высших порядков дает приближенное выражение для этих коэффициен-
тов, известных под названием коэффициентов Кеннеди (Круг, 1939).
2/2 2Z2
b ~ 1 __ c
12t/2n2 ’ 2 6v2n2
(8)
При изменении частоты переменного тока условия моделирования
неизбежно нарушаются. При изменении величины амплитуд напряжения
352
Глава VIII. Малая электродинамическая модель ИЭМ АН СССР
(при модуляции) мы можем выделить основной спектр в огибающей кри-
вых напряжения — спектр модуляции — и найти соответствующую этому
спектру полосу боковых частот. И в том и в другом случае — или не-
посредственного изменения частоты, или же модуляции кривой напря-
жения несущей частоты низкой частотой — мы получаем в модели по-
грешность в переходных процессах, которую непосредственно оценить
весьма трудно. Следуя обычному в теории регулирования методу, заме-
ним эту оценку оценкой погрешности в частотных характеристиках
модели, выразив ее как функцию ширины полосы частот, внутри кото-
рой могут происходить отклонения основной частоты или же возникать
Рис. 246. Зависимость числа ячеек
модели от постоянной времени мо-
делируемого процесса.
боковые частоты, вызванные модуляцией.
Коэффициенты Кеннели представляют
собой коэффициенты пропорциональности
между удельными параметрами линии и
модели при данной частоте, т. е. мас-
штабы моделирования. Потребуем, чтобы
изменения этих коэффициентов в задан-
ной полосе частот Дю не превышали 5%.
Так как приращение коэффициента k2
вдвое больше, чем приращение коэффи-
циента достаточно добиться задан-
ной точности только для коэффициента k2.
Имеем при изменении частоты юс на Дю
[7и> -Ь Дсо)2 — о?] /2 2 G) Д(0 /2
IЛЬ I — с 7 cJ L — с_______________
I 21 v2 п2 ft v2 п2
Тогда, считая ^^^0.05, найдем
^2
L < * -|/ 0Л5“с
п ые Г Дш 4-0.025(0,,
(9)
Отсюда по заданндй Дю и длине линии
I легко найти необходимое число ячеек п.
Воспользовавшись результатами § 1, найдем значения п для линии
Волжская ГЭС—Москва (Z = 960 км) в функции постоянной времени
наиболее быстро затухающей экспоненты в данном переходном процессе
(табл. 52).
Необходимое число ячеек п в функции постоянной времени Т или
частоты f (гц) показано на рис. 246.
Таблица 52
Т беек.) Дсо (сек.""1) А/ (гц) 1 , ч — (км) п п
0.01 2000 318 71 13.3
0.02 1000 159 125 7.7
0.05 400 63.8 254 3.78
0.1 200 31.8 507 1.725
0.2 100 15.9 683 1.400
0.5 40 6.38 970 0.99
§ 3, О моделировании активною сопротивления статора
353
Таким образом, при исследовании процессов с постоянными времени
более 0.2 сек. допустимо заменить линию передачи одной ячейкой.
При постоянных времени меньших 0.1 сек. (или при частотах выше
40 гц) потребное число ячеек резко возрастает.
На этом основании малая электродинамическая модель ИЭМ, пред-
назначенная для исследования процессов регулирования скорости пер-
вичных двигателей, регулирования частоты и активной мощности в си-
стеме Волжская ГЭС—Москва, имеет в качестве модели линии передачи
простую Г-образную схему замещения.
§ 3. О моделировании активного сопротивления статора
синхронных генераторов
Известно много способов математического описания процессов работы
синхронного генератора, различающихся степенью детализации. Это есте-
ственно, так как в зависимости от того, какие стороны процесса работы
генератора подлежат изучению, круг параметров и явлений, существен-
ных для поставленной задачи, изменяет свои границы. Соответственно
и моделирование синхронного генератора в различных задачах может
осуществляться с разной степенью подробности.
Часто считают, что система уравнений Парка—Горева дает наиболее
полное математическое описание синхронной машины. В отношении ряда
явлений это не лишено оснований. Но система Парка—Горева основы-
вается на введении ряда допущений, одно из которых — допущение
о линейности кривой намагничивания машины. Только приняв это допу-
щение, т. е. приняв, что магнитная индукция в любой точке магнитного
поля машины пропорциональна намагничивающей силе, мы получаем право
написать систему линейных уравнений для потокосцеплений фаз, в основе
которой лежит принцип суперпозиции,
’FK = 2AKM/m) (10)
и из которой выводятся уравнения Парка—Горева.
Для нелинейных кривых намагничивания эти уравнения теряют силу,
а другие уравнения, которые были бы равноценны им по строгости и
вместе с тем давали бы возможность провести анализ практически, пока
еще не известны. Однако при математическом анализе весьма часто
пользуются результатами, полученными из уравнений Парка—Горева,
вводя в них „насыщенные" параметры. Эти приемы не имеют строгого
математического обоснования и тем не менее использование их оправ-
дывается тем, что расхождение теоретических и экспериментальных
исследований во многих случаях оказывается вполне допустимым.
Такое состояние теории синхронных машин на сегодня дает основа-
ние считать, что физическая модель синхронной машины, в которой
соблюдены все основные условия физического подобия и ориентиро-
вочно отражены не воспроизводимые уравнениями факторы, более до-
стоверна, чем самая точная ее математическая модель, построенная на
базе известных сегодня уравнений. Этим обстоятельством, по-видимому,
и объясняется в значительной мере тот факт, что „точные" математи-
ческие модели синхронных машин не получили практического распро-
странения, хотя схемы их и предлагались различными авторами.
Для аналитической оценки влияния таких факторов, как сопротивле-
ние статора и параметры демпферных обмоток, воспользуемся линеари-
зованными уравнениями Парка—Горева.
354
Глава VIII. Малая электродинамическая модель ИЭМ АН СССР
При работе синхронного генератора на шины бесконечной мощности
при начальном угле % линеаризованные уравнения Парка—Горева можно
привести к следующему виду:
-1'’) 'г'' 'г- 'i “s ’• * р°и”
(т~7пГ [sin 0о -+-р cos %] = О,
Usin 0о (-----Ц) — Г£~ 6Zcos6° ч- t/Ц-гcos 60 1 ^Нр^ =
У \Xq Ха(р)) L *d Xq(p) 5 Г
= mt — £^UsinQ[j (11)
Xd (p) u J x '
Нас интересует вопрос, с какой точностью необходимо моделировать
сопротивление статора г при изучении процессов регулирования первич-
ных двигателей.
Рассмотрим случай, когда воздействие на направляющий аппарат
имеет место, т. е. mt изменяется, а изменение напряжения возбуждения
отсутствует, т. е* Uf = 0. Тогда, исключая переменные и получаем
Рассмотрим машину без демпферных обмоток. Тогда
М{р) = Ь()р3 -+- ьгр2 ч- Ь2р ч- Ь3,
Z? (р) = а0р5 ч а^р* ч- а2р3 ч- а3р2 а3,
причем
а0 = шлНТ'<]-,
§ 3. О моделировании активного сопротивления статора
355
а5 — U2 (—------- ) cos 2% ч- — cos 60 ч-
5 \Xq Xd) ° Xd U
ч-г U2
1 \ • Л Л UE . л
T sin % cos % ч-------sinOo
xd / xd
Ь()= Td.
b^l + rT*
\ x,< Xq /
r2Td
.Xd Xq
qxd
b3 = l -4-----
XdXg
Для генератора Волжской ГЭС, работающего в режиме 9о = 6О°,
имеем (с учетом линии передачи)
xd = 1.505, xq = 1.322, xd = 1.194, /7=1, 5=1.3, //=13.2 сек.,
юс//=4150 синхр. сек., Td — 4.2 • 314 = 1318.8 синхр. сек.
При этих данных:
а0 = 5 480 000, аг = 4150 (1 ч- 2100 г), а2 = 5 481 000 ч- 5900 г ч- 3 480 000 г2,
а3 = 4150ч- 587 г ч- 2080 г2, а, = 680 f 836 г, а5 = 0.386 ч- 0.553 г;
6о=132О, 6, = 1ч-2100 г, 62 = 1320 ч-1.421 г ч-963 г2, 63 = 1 ч- 0.503 г2.
В табл. 53 приведены результаты расчета частотных характеристик,
а на рис. 247 показаны вещественные частотные характеристики, по-
строенные для значений г равных 0, 0.01 и 0.03 д. е.
Рис. 247. Вещественные частотные характеристики
генератора Волжской ГЭС при разных значениях г.
1 — г = 0 д. е.; 2 — г = 0.01 д. е.; 3 — г — 0.03 д. е.
Из рис. 247 мо^кно сделать вывод, что так как частотные характе-
ристики, составленные для движения ротора, незначительно различается
между собой, если сопротивление статора лежит в пределах 0<Сг<С0.03,
356
Глава VIII. Малая электродинамическая модель ИЭМ АН СССР
Таблица 53
2 г — 0 г = 0.01 г = 0.03
веществ. мним. веществ. мним. веществ. МНИМ.
0 2.59 0 2.555 0 2.49 0
0.001 2.12 — 0.285 — — — —
0.002 2.06 — 0.184 — — — —
0.006 2.74 — 0.121 .— — — —
0.010 2.91 — 0.970 — — — —
0.0105 17.6 — 2.89 — — — —
0.0108 29.6 - 8.55 25.11 — 6.07 19.36 -3.52
0.0110 52.5 — 36.1 — — — —
0.01102 54.7 — 43.15 — — — —
0.01101 56.3 — 54.3 48.7 —28.0 32.6 —10.4
0.01106 55.8 — 65.4 — — — —
0.01108 50.6 — 81.8 — — — —
0.01110 41.2 — 95.5 — — — —
0.01112 21.6 —109.2 — — — —
0.01114 1.067 —113.7 54.4 —72.75 43.35 —20.15
0.01116 —19.8 —110.3 — — — —
0.01118 —40.5 — 97.3 — — — —
0.01120 -50.7 — 83.6 — — — —
0.01125 -56.7 — 48.0 —42.4 —96.0 57.3 —58.6
0.01130 —50.2 — 29.3 — — — —
0.01140 —36.5 — 12.9 — — — —.
0.01100 —22.2 — 4.31 — — — —.
0.01180 —15.7 — 2.09 — — — —
0.012 —12.02 — 1.19 — — — —-
0.014 — 3.35 — 0.08 — — — —
0.016 — 1.83 — 0.02 — — — —
0.018 — 1.21 — 0.008 —1.215 —0.038 —1.23 —0.008
0.020 — 0.87 — 0.004 —0.88 —0.004 —0.89 —0.004
то при выполнении малой модели нет надобности компенсировать актив-
ное сопротивление статора, поскольку значения для оригинала и модели
лежат внутри указанной полосы.
При моделировании синхронных генераторов, предназначенных
для исследования регулирования первичных двигателей, частоты и
активной мощности, в отличие от исследований вопросов устойчивости
энергосистем, нет необходимости точно моделировать активные сопро-
тивления статора, так как частотная характеристика оригинала в по-
лосе частот 0—5 гц мало отличается от характеристики моделей, име-
ющей в 3 раза большее сопротивление.
При аналитическом исследовании динамики регулирования уравнение
движения ротора можно аппроксимировать уравнением второго порядка
вида
(мсНр~ -+- 2Лр -ь Мс) 6 = mt,
где
М^ = и2(^~Г-) cos 2904-^coS00,
\ха xq /
а коэффициент Л, характеризующий демпфирование колебаний, может
быть определен или из частотной характеристики, или, как будет пока,-
зано ниже, аналитическим путем.
§ 4. О моделировании демпферных обмоток синхронных генераторов 357
§ 4. О моделировании демпферных обмоток синхронных
генераторов
Теперь перейдем к вопросу о моделировании демпферных обмоток.
Учитывая сказанное выше, будем считать г = 0 и писать уравнение
генератора в виде
{ (Ос//?2 Ч- U2 Г — - “I COS2 0О — U2 Г-------Ц1 Sin2 60 Ч-
I L-v?(p) Xd J ° L xq Xd(p)J u
UE A I A G(p)
— cos4 6 = m‘ — 7777) «/•
xd j ха \pj
Операторы xrf(p) и xq (p) можно представить в виде
, ч__ W + ft + Tjp + l
хл\р)—хл ’
x9(p) — xq Tq0P^_1 ,
где Td, Td, Tq — общепринятые обозначения (Лебедев, 1934),
2 дгП(г —
т _ xUdxd~xayd т _XJJ± т _____________________х№
Kd rXd 9 dQ r/d ’ ld0 rTd ’
TgQ = ^L (Лютер, 1939).
Для крупных синхронных генераторов, во-первых, Т"а в 40—50 раз
меньше Тл', такой же порядок малости имеет и Гк</, во-вторых, 7^,
TlfiQ в 80—100 раз меньше TdQ. Заменив в коэффициентах при р числи-
теля и знаменателя дроби xd(p) TKd на Тd и T\d на соответственно,
мы изменим коэффициенты при р не более чем на 0.5—1%, что лежит
в пределах точности их практического измерения. Тогда с ошибкой, не
превышающей ошибку измерения параметров, получаем
(T’dP(т"др
Xi (1 doP Н-1) (TiduP +1)
Подставив xd(p) и xq (р) в уравнение машины, мы можем путем не
сложных преобразований привести левую часть к виду
77" .иНГ’ LnWT" -1-1) {(Kp4-l)(Tdp^-l)(Tdp^l)[^H^^
(Tqp-t-l)(Tdp-+-l)(Tdp4-1) I L
-"’(^-7) “s20«*™ ео,»0]-ьр[(Т„-ГЭ(Г;-ьГЭ^ +
4-T“q(Td0— Td^Tuo-T^^-^-^U-^-p^iTqo— rq)(T'd4-Td)^^--i-
xd J L xq
+ (Tq(Tdo - Td 4- Tld0— Td) -b TdbTuo - TdTd)s-^ 1 u2
Xd J
-ч-p3ГT'dTdfJ^-T''r-^—T"q(Td.Tid0- T'dT"d)s^-'\}U\
L xq Xd J f
35S
Глава VIII. Малая электродинамическая модель ИЭМ АН СССР
Выражение, стоящее в фигурных скобках, представим в виде
(Т"р 1) (Т'лр ч- 1) ( Тар ч-1) Г<»сЯр2 -+- f/2 Ц-—-Ч cos 29О ч-
L \-*q ла /
ч- ^| cos % 1 ч- ар ч- Зр2 ч— 7Р3 = D} (р),
ха
где выражения а, р и 7, содержащие в качестве множителей разности
малых величин, также могут считаться малыми.
Используя это обстоятельство, мы получаем возможность разложить
jDi(p) на множители. Введем обозначение
А, (р) = ^Нр1 ч- и2 Р---cos 26О ч— cos %.
Dq(p) имеет пару чисто мнимых корней:
Отбросив поправку к мнимой части Дуй, поскольку она в нормальных
режимах машины (не слишком близко к пределу устойчивости) является
малой в сравнении с /20, найдем поправку к нулевой вещественной
части корня. Эта поправка, очевидно, и может быть принята за первое
приближение вещественной части корня.
Воспользуемся для нахождения первого приближения формулой
Ньютона:
D, (р ч- А) = Д (р) ч- h = 0.
Пренебрежем поправками, имеющими малость порядка а, р или у
к первым трем корням
_ 1 _ 1 _ 1
гт. ч > Р‘2 Т*' ’ гг"
1 q 1 d 1 d
и к мнимой части корней — Ц/--^ тогда будем иметь только веще
ственную поправку к нулевой вещественной части корней р3, р4.
Из формулы Ньютона получаем
или, отбрасывая малые члены в знаменателе
h = — Re
= — Re
Т" C/2 COS2 0О
\ xq xq /
2шсН(Г;Рч-1)
§ 4. О моделировании демпферных обмоток синхронных генераторов 359
(7- р - (^о - T'dМ- Tld0 - T"d)±
—------- (Т> .'п-----------sin20О
2шсн (TdP -+ 1) (TdP +!)
Учтем, что
Лг/О ~ ?d Т'! IJ_____1 \ <^ TdO~ ?d ?' ( —____-
Xd ~*d d\x" 4)^ xd — Xc
(меньше в 40—50 раз). He будет существенной погрешности, если мы
Xd
эту малую левую часть неравенства увеличим в — и примем
xd
Тогда получим
чн(т;Р-ь1)
t/2 Sin® 60
2Ыс//(7’й'Рч-1)
2^(7^-+-1)
(12)
Таким образом, оказывается, что влияние демпферных обмоток при-
ближенно можно учесть, не повышая порядка упрощенного уравнения,
путем введения в уравнение ротора демпфирующей составляющей. В сум-
марном выражении демпфирующего момента мы получаем раздельными
в виде трех слагаемых моменты, создаваемые продольной и поперечной
демпферными обмотками, и момент, создаваемый обмоткой возбуждения.
Сам факт возможности подобной аппроксимации использовался давно,
однако численное выражение для подсчета эквивалентного демпфиро-
вания не давалось.
Изучая вынужденные колебания роторов, И. Д. Урусов (1956), идя
иным путем, нашел для составляющих асинхронного момента выражения,
аналогичные приведенным.
Окончательно приближенное уравнение движения ротора будем за-
писывать в виде
vMtjP+Vhp ч- 2*) е = mt — Uf,
где
(13)
Для проверки соответствия расчетных данных эксперименту вос-
пользуемся их сравнением с результатами опытов Гамильтона (Hamilton,
360
Глава VIII. Малая электродинамическая модель ИЭМ АН СССР
1932) для генератора 7200 квт и Урусова (1956) для модельного гене-
ратора для Волжской ГЭС.
В опыте Гамильтона исследовался генератор, работающий через
дальнюю линию передачи на шины большой мощности со следующими
данными:
Р = 9000 ква (7200 квт), Un = 13 800 в, iB. хол. х= 180 а, —0.306.
Без учета линии:
x<f = 0.91, х^=0.26, х" = 0.14, х, = 0.524, х" = 0.368, Г;=2.86 сек.у
7^ = 0.055 сек., Г" =0.044 сек., /70 = 1.78 сек.
С учетом линии:
xrf = 1.216, х;=0.566, х" = 0.446, xq = 0.830, х; = 0.677, Г; = 4.67 сек.,
Г" = 0.0804 сек., Г^ = 0.0508 сек.,
о>с = 2к • 60 = 376.8 рад./сек.
Написав характеристическое уравнение в форме
л ш . т . т а п
4'п:/7/0 7^0 — 0,
Гамильтон из опыта определяет Td для нескольких значений тока воз-
буждения. Нетрудно видеть, что в наших обозначениях
где 7^, Т'^ Т" выражены в синхронных секундах: 7^ =2.86 • 376.8 = 1080,
Г'= 20.8, Г; = 16.6.
В наших обозначениях //=2//0 = 3.56 сек.
Результаты опыта Гамильтона и расчета по предлагаемым формулам
сведены в табл. 54.
Сопоставляя данные опыта и расчета мы видим, что расчетные
цифры в большинстве опытов меньше экспериментальных на 1—1.25
синхр. сек. Этого следовало ожидать, так как в расчете не учтен ряд
факторов, оказавших влияние на опыт, и прежде всего такой фактор,
как самовыравнивание первичного двигателя.
Оценим наиболее существенный из неучтенных факторов — само-
выравнивание гидроагрегата.
Уравнение движения ротора синхронной машины
с
где P — ^t (в отличие от использовавшегося в уравнениях Парка—Го-
1 .
рева может быть приведено к виду
Нру -=-Mt —
Д(О 1 dQ
где <р = — = —•-ут—относительная скорость вращения вала агрегата.
§ 4, О моделировании демпферных обмоток синхронных генераторов 361
Таблица 54
Та (опыт) . . . Та (расчет) . . F ХОЛ. X
1 1.11 1.25 1.42 1.61
5.63 4.46 5.22 6.09 6.10 5.45 । 6.10 4.92 5.78 4.53
Таблица 55
Машина без демп рерной обмотки Машина с демпрерными обмотками
Опыт . . . 1.07 1.10
Расчет . . 1.10 1.11
Выделим в кривой
висящее от скорости
движущего момента турбины Mt слагаемое, за-
Hpjf = Mi0 — kd<? —
или
(Hp-*-kd)<? — Mi() —Мв.
Величина kd, как показывают экспериментальные данные, лежит
обычно в пределах kd = 0.4 -7- 0.6. Однако в некоторых агрегатах kd
может доходить до 1.
Перейдем снова к уравнению в отклонениях угла
с с
и теперь путем замены р = <пср к уравнениям в синхронных секундах
Отсюда можно сделать вывод, что точность подсчетов по предлагае-
мым формулам вполне удовлетворительна, так как kd примерно равно
разности между экспериментальными и расчетными данными.
И. Д. Урусовым было проведено сравнение расчетных и опытных
данных по определению коэффициента демпфирования на модельном
генераторе с параметрами генератора Волжской ГЭС, работающего
через длинную линию электропередачи на шины бесконечной мощности»
Результаты проведенного И. Д. Урусовым экспериментального и
расчетного определения логарифмического декремента колебаний приве-
дены в табл. 55.
Сопоставим коэффициент демпфирования для машины без демпфер-
ных обмоток, вычисленный по приведенной выше приближенной фор-
муле, с коэффициентом демпфирования, определенным из частотной
характеристики системы.
По приближенной формуле
"'(гг-)7'''51"”"
Так как /1 1 \ UЕ U2 1 — —• ) COS 29п -4- COS On О2 \Xq Xdf U Xd ° °
362
Глава VIII. Малая электродинамическая модель ИЭМ АН СССР
ТО
f/2 sin26
Xd'
** z г /1 1 \ UE *
2Т 'Л LU* “ Т) cos 20о cos ®оJ
Подставляя цифры, найдем
л=----------(та-ПкН------------- 1.31 .10-.,
2.314 • 4.2 |_1#5О5 • 0.5 — 0.5 322 — L5O5)J
Теперь найдем h из частотной характеристики системы. Замещаем
уравнение машины упрощенным уравнением
о>с/7(р2 -+- 2Лр -+- 22) 0 = т(,
построим частотную характеристику системы
1 Q? — Q2 — 2/2Л
Ф (72) =----------------—------2-------------
V 7 <псЛф’2-22-ь2/А2] [(Qq — Q2)2 h-4A222J шс/7 ’
при этом
i/2 (— — COS 20о -+• — COS 02
22 = ————77---------—------= 0.93 • 10-“.
° шсЯ
Потребуем, чтобы приближенная и точная характеристики пересекли
мнимую ось в одной точке.
Вещественная часть приближенной характеристики обращается в нуль
при = ^0. Мнимая часть при этом равна
__ 2QiA _ 1 _ 11Ч7
У1~ 4h^eH~ 2Л20ШоЯ—
(последняя цифра взята из графика).
Тогда
Л ~ 2а0<осЯ113.7' = 2 • 0.965 • 10 — 4150 • 113.7 = 1-1 ’ Ю"4-
Таким образом, h определяется с погрешностью в 16%.
Примерно с такой же погрешностью определяется и частота, при
которой происходит пересечение с мнимой осью (0.965 • 10~4 вместо
1.14 • 10“4).
Выводы
При моделировании процессов регулирования частоты нет необходи-
мости моделировать демпферные обмотки машины, поскольку в полосе
частот, существенных для этих процессов, они не оказывают практи-
чески влияния на динамику движения ротора. Основная часть демпфер-
ного момента создается обмоткой возбуждения и самовыравниванием
турбины и нагрузки. На моделирование этих последних факторов и
должно быть обращено главное внимание.
Моделирование моментно-скоростных характеристик турбин играет
весьма существенную роль. Оно подробно рассмотрено в VI главе.
£ 5. Описание малой модели энергосистемы
363
§ 5. Описание малой модели энергосистемы
Внешнее оформление модельной установки
Малую модель составляют следующие основные части:
1) модель синхронного гидрогенератора;
2) модель синхронного турбогенератора;
3) модель гидротурбины;
4) модель паровой турбины;
5) модель линии передачи;
6) модель нагрузки;
7) две модели регуляторов скорости;
8) две модели регуляторов напряжения;
9) натурный регулятор частоты.
Принципиальная схема модели показана на рис. 248, блок-схема —
на рис. 249. Эквивалентный гидроагрегат системы работает на шины
нагрузки через длинную ли-
нию электропередачи. На
общие шины системы под-
ключены еще эквивалентный
турбогенератор, активная и
моторная нагрузки (реостат
и асинхронный двигатель),
синхронный компенсатор.
Первичные двигатели имеют
регуляторы скорости; гене-
раторы тоже снабжены элект-
ронными регуляторами на-
пряжения. Кроме того, экви-
валентныйгидроагрегат имеет
регулятор частоты системы
Энергетического института
АН СССР (ЭНИН) или си-
стемы Острйго.
Внешний вид модели по-
казан на рис. 250, на ко-
тором видны два модельных
агрегата, на переднем плане—
стенды регуляторов скорости
с измерительными приборами
параметров турбины.Имеются
приборы для измерения скорости, открытия направляющего аппарата,
момента модельной турбины (ток якоря двигателя).
В верхней части стенда расположена сигнальная панель. Имеется
еще щит управления электрической частью модели, на котором распо-
ложены: амперметры для измерения токов статора, возбуждения гене-
раторов, возбуждения приводного двигателя; вольтметры для напря-
жения генераторов, сети; затем синхроноскоп, сельсин для измерения
электрического угла между шинами нагрузки и э.д.с. эквивалентного
гидрогенератора. Кроме того, имеются кнопки управления сетевым и
генераторными контакторами и ключи синхронизации. На отдельных
столах расположены регуляторы напряжения, углоизмерительная схема
364
Глава VIII, Малая электродинамическая модель ИЭМ АН СССР
и регуляторы частоты системы ЭНИН и Острого. Для записи ча-
стоты в системе имеется точный регистрирующий частотомер.
Модель генераторов
Условиями моделирования генераторов являются равенства величин
относительных активных и реактивных сопротивлений, инерционных
постоянных и геометрическое подобие кривых намагничивания.
Рис. 249. Блок-схема модели.
В малой модели выполнены лишь следующие условия эквивалент-
ности: равенство инерционных постоянных »агрегатов Hj и относитель-
ных реактивных сопротивлений генераторов xd.
Рис. 250. Общий вид малой модели.
Как уже указывалось, исходная энергосистема представлена двумя
эквивалентными агрегатами, связанными четырехполюсником (схема за-
мещения линии, трансформаторов, нагрузки при синхронной частоте).
5. Описание малой модели энергосистемы
365
Для моделирования эквивалентного гидрогенератора был использован
генератор СГ-12.5. Ниже приведены расчеты для выбора параметров
модельных агрегатов. Исходные параметры соответствуют системе
Волжская ГЭС — Москва.
Паспортные данные генератора СГ-12.5:
IFH = 12.5 ква, РН = Ю квт, cos с? = 0.8, £/н = 230 в, /н — 31.5 а,
п = 1000 об./мин., GZ>2 = 15.8 кгм2 (для агрегата),
77у = 2.74- (ййй) =3.46 сек., х^ = 0.95 д. е. (при а = 3).
"ква
Так как инерционная постоянная модельного агрегата в 3.8 раза
меньше инерционной постоянной эквивалентного агрегата системы, то
и номинальная мощность агрегата была уменьшена в 3.8 раза:
й^н' = 3.3 ква.
Для нового значения номинальной мощности реактивное сопротив-
ление генератора xd изменится:
хг/ = 0.95 • = 0.25 (при а = 3),
xd = 0.95 ~(|)2 = 0.565 (при а = 2),
где а — число параллельных ветвей на фазу статора.
Реактивное сопротивление генератора xd достаточно близко по
своему значению реактивному сопротивлению генератора системы
(xd = 0.503).
Окончательно параметры модельного агрегата выбраны следующими:
И^'н^З.З ква, Рн = 2.64 квт, cos ср = 0.8, Z7H = 230 в, /н = 8.5 а,
Я, = 13.2 сек., xd = 0.565, ^ = ^1000 = 104.7 сек.’1.
Для моделирования турбогенератора был использован генератор
СГ-18.7, имеющий следующие паспортные данные:
Гн = 18.75 ква, Рн —15 квт, cos ср = 0.8,t7H = 230 в, = а,
л = 1000 об./мин., GZ)2 = 22 кгм2 (для агрегата),
Яу = 2.74- ^(^о)2 = 3.22 сек., xd = 1.03, а = 3.
Соотношение мощностей эквивалентных агрегатов принято равным
2.09. Поэтому мощность модельного турбогенератора соответствует
1Г' = 2.09 -3.3 = 6.9 ква.
Другие параметры определяются:
Яу= 2.74»^-=8.75 сек,
хл = 1.03 -2.25- ^ = 0.853 (при а = 2).
366
Глава VIII. Малая электродинамическая модель ИЭМ АН СССР
Чтобы xd соответствовало оригиналу, необходимо добавить реактив-
ное сопротивление равное 1.57—0.853 = 0.72 д. е. (сопротивления от-
несены к номинальным параметрам генератора).
Окончательно параметры модельного агрегата выбраны следующими:
IFH = 6.9 ква, Рн = 5.52 квт, cos ср = 0.8, £7н = 230 в, /н=17.3 а,
Hj = %.T5 сек., xd — 0.853 д. е., с»с = • 1000 = 104.7 сек.”1.
Таким образом, модельные мощности выбраны из условий равенства
инерционных постоянных.
Модель турбины и регулятора скорости
Первичный двигатель моделируется двигателем постоянного тока
с независимым возбуждением.
Паспортные данные двигателя типа ПН-290, моделирующего гидро-
турбину и паровую турбину, следующие:
Рн = 46.5 квт, £/н=220 в, /н = 23.8 а, и = 1500—1800 об./мин.,
GZ?2 = 15.8 кгм2.
Необходимый наклон механических характеристик двигателя = f(M)
достигается применением жесткой обратной связи по току двигателя.
Для гидротурбины смоделирован трубопровод с постоянной времени
Tw — 3.51 сек. Модель регулятора скорости состоит из модели маятника,
сервомотора, изодрома. В регуляторе скорости гидротурбины преду-
смотрено изменение статизма от 0 до 7%. В регуляторе скорости паро-
вой турбины статизм можно менять от 0 до 2О°/о. Переменными пара-
метрами являются время сервомотора и время изодрома. Подробное
описание модели гидротурбины дано в главе VI.
Модель линии передачи
Исходной схемой для моделирования является упрощенная схема
оригинала, в которой все сопротивления вычислены в относительных
единицах. Линия передачи модели представлена эквивалентным четырех-
1 1 *
Рис. 251. Схема модели линии электропередачи.
полюсником. Условия моделирования — равенство относительных реак-
тивных сопротивлений модели и оригинала.
В модели отсутствуют трансформаторы и напряжение модельных
генераторов равно напряжению линии (£7Н = 230 в). Реактивности транс-
форматоров оригинала учитываются в схеме эквивалентной линии мо-
§ 5. Описание малой модели энергосистемы
367
дели. По аналогии с расчетами реальной системы для модели за базовые
значения взяты параметры линии:
£4 = 230 в, Г6 = 3.3 ква, Z6 = ^ = 1G ом.
ээии
На рис. 251 показана схема модели линии электропередачи. Емкост-
ное сопротивление на землю не учитывается (это сопротивление на
землю в 4% раза больше сопротивления нагрузки). Пренебрежение
емкостным сопротивлением приводит к тому, что линия немного укора-
чивается.
Модель нагрузки
При исследовании медленно меняющихся процессов достаточно
иметь подобие статических характеристик нагрузки оригинала и модели.
Кроме того, необходимо сделать соответствие чисто активной и
Рис. 252. Схема регулятора напряжения.
асинхронной нагрузок. В реальной энергосистеме основная нагрузка
асинхронная и 20—25% составляет чисто активная нагрузка. Модель
нагрузки сделана следующим образом. Бытовую и осветительную на-
грузки моделируют три реостата, соединенные в звезду. Остальную
мощность потребляет агрегат, состоящий из асинхронного двигателя и
генератора постоянного тока. Двигатель типа А52/4 имеет следующие
данные:
Рн = 7 квт, cos ср = 0.87, ин =220/380 в, 1п — 24.2/14 а,
п = 1440 об./мин.
Генератор постоянного тока типа ПН-85 имеет следующие данныег
Рп — 8.2 квт, £7н = 230 в, /а = 29.5 а, п = 1460 об./мин.
На шины нагрузки подключен синхронный компенсатор.
Регуляторы напряжения
Схема возбуждения модельных генераторов не соответствует ориги-
налу. Для поддержания постоянства напряжения на шинах генераторов
преследовалась цель создать быстродействующее возбуждение. Регуля-
368
Глава VIII. Малая электродинамическая модель ИЭМ АН СССР
торы, установленные на модельных генераторах, соответствуют этим
требованиям.
Регуляторы напряжения электронные. Схема показана на рис. 252.
Исследования на модели
Рис. 253. Запись изменения частоты при
набросе и сбросе нагрузки.
При наличии указанных упрощений модель очень удобна при рас-
смотрениях процессов первичных двигателей. Приведем некоторые при-
меры исследований, проведенных на
малой модели.
1. Рассмотрена динамика гидро-
турбины с точки зрения возможно-
стей убыстрения процессов регули-
рования: уменьшения времени серво-
мотора, изодрома, введения в закон
регулирования сигнала по ускоре-
нию.
Введение сигнала по ускорению
благоприятно сказывается на про-
цесс регулирования. Испытания по-
казали, что при наличии производ-
ной время изодрома можно умень-
шить до 4—5 сек.
Совсем без изодромной связи в
регуляторе агрегат устойчиво рабо-
тать не может из-за отрицательного влияния гидроудара. По этой же
причине нельзя брать время сервомотора меньше 4—5 сек. Влияние
гидроудара в меньшей степени сказывается на холостом ходу, и в этом
Цсек.)
Рис. 254. Запись процесса регулирования частоты регуля-
тором КРЧ-1.
1 — Ги = 38 сек.; 2 — Ги = И сек.; 3 — Тц — 3.8 сек.
случае агрегат устойчиво работает с отключенным изодромом при нали-
чии сигнала по ускорению в регуляторе (рис. 253). Данные опыта
совпадают с расчетом. Окончательно можно сделать вывод, что введе-
ние воздействия по ускорению в регулятор целесообразно. Коэффициент
воздействия желательно брать 2—4 сек.
§ 5. Описание малой модели энергосистемы
369
2. Исследовалась динамика регулирования частоты в системе камер-
тонным регулятором и регулятором РО-1.
Сигналы от регулятора частоты через механизм изменения числа
оборотов подавались на модель регулятора скорости гидроагрегата
Рис. 255. Регулирование частоты регулятором
КРЧ-1 по схеме с дифференцированием.
(параллельно с сигналом от основной выявительной схемы). Результаты
испытаний подтвердили существенность влияния динамических свойств
первичного регулятора и особенно параметров гибкой обратной связи
на настройку регулятора частоты.
Рис. 256. Регулирование частоты регулятором РО-1
по схеме с дифференцированием.
1 — Ги = 38 сек.; 2 — Тп= 4 сек.
При постоянной времени изодрома Тя = 30 4“ 40 сек. эффективное
регулирование оказывалось невозможным (рис. 254). Процесс отработки
после толчка нагрузки тянется 10 мин. и происходит с перерегулиро-
ванием. Регулирование оказывается эффективным лишь при 7^ = 4 сек.
Вместе с тем для условий обеспечения устойчивости работы на изо-
370
Глава VIII, Малая электродинамическая модель ИЭМ АН СССР
лированную нагрузку и на холостом ходу, для облегчения синхрониза-
ции необходимо более значительное демпфирование (7^ = 10 сек.).
Положительные результаты дало исследование схемы, где сигнал
от регулятора частоты подается через изодромный механизм, который
является сильным дифференцирующим устройством. В этом случае глав-
ный сервомотор практически без запаздывания отрабатывает сигнал от
моторчика изменения числа оборотов. Кривая /, приведенная на рис. 255,
получена при сбросе и набросе нагрузки для схемы с 7^ = 38 сек.,
кривая 2 — для схемы с 7^ = 4 сек. Характер отработки при этом почти
не изменяется и определяется лишь коэффициентом усиления регулятора
частоты.
Все вышеприведенные результаты относились к опытам с камертон-
ным регулятором (непрерывного действия). Однако оказалось, что дина-
мика процесса регулирования частоты при действии импульсного регу-
лятора (для интервалов чередования между импульсами до 4 сек.) прак-
тически не отличается от динамики непрерывного регулирования. Это
хорошо видно, например, на осциллограмме (рис. 256), снятой при вклю-
чении регулятора РО-1 по схеме с использованием изодрома в качестве
дифференцирующего элемента.
Глава IX
МЕТОДЫ ИЗМЕРЕНИЙ НА ЭЛЕКТРОДИНАМИЧЕСКОЙ МОДЕЛИ
Особый интерес при исследовании на электродинамических моделях
переходных процессов в энергосистемах представляет изучение харак-
тера изменения момента приводного двигателя (турбины), активной
мощности, отдаваемой генератором в сеть, и электрического угла О
между векторами э. д. с. генератора и напряжения приемной системы.
Эти величины являются основными, определяющими статическую и
динамическую устойчивость электропередач. В аварийных режимах
избыточным1 моментом турбины определяется разгон генератора и его
динамическая устойчивость. Критерием устойчивости является угол 0.
Данные измерения угла 9 используются при регулировании энерго-
систем и при определении параметров элементов энергосистемы, в част-
ности параметров электрических машин.
Запись указанных величин на осциллографе связана с некоторыми
трудностями. Если другие величины, характеризующие переходный про-
цесс в энергосистеме (токи, напряжения), могут записываться непосред-
ственно, то для измерения и записи в переходных режимах момента,
средней мощности и угла необходимы специальные, иногда довольно
сложные измерительные устройства. Некоторые такие устройства, опи-
сание которых дается ниже, были разработаны и используются на
модели в* Институте электромеханики АН СССР.
§ 1. Измерение угла2 сдвига фаз 9
Исследование установившихся и переходных режимов на электро-!
динамических моделях связано с измерением углов сдвига фаз между
векторами э. д. с. синхронной машины и напряжения в определенной
точке системы, между векторами двух машин или двух напряжений
в различных точках.
Измерение электрического угла между осями полюсов ротора и ста”
тора синхронной машины 9 необходимо при исследовании устойчивости
машины и условий синхронизации.
Наиболее точные данные о перегружаемости машины получают
построением характеристики Р=/(9) при различных режимах. Измере-
ние угла напряжений „по линии" существенно для определения величин
передаваемой мощности и т. п. Во всех этих случаях недостаточно
1 Разность между моментом турбины и электромагнитным моментом генератора
в момент короткого замыкания.
2 Параграф написан совместно с В. В. Ковалевской.
372
Глава IX. Методы измерений на электродинамической модели
визуальное определение угла, но необходима регистрация его на осцил-
лограмме вместе с другими исследуемыми параметрами. Желательным
является получение выходного параметра, пропорционального углу,
пригодного для воздействия на регулятор, а также возможность полу-
чения производных угла 6. В связи с указанными требованиями выпу-
скаемые промышленностью типы фазометров мало пригодны для про-
ведения исследований, поэтому, как правило, разрабатываются специаль-
ные приборы или методы измерений.
Известные в настоящее время фазометры можно разделить на две
группы:
1) приборы для контроля качества вырабатываемой электрической
энергии, измеряющие коэффициент мощности cos <р;
2) приборы, измеряющие угол между векторами двух напряжений.
Приборы первой группы имеют измерительный механизм, на который
воздействует произведение или отношение векторов тока и напряжений.
Показания прибора пропорциональны гармонической функции угла —
синусу, косинусу или тангенсу (ваттметры, логометры, фазометры).
Приборы могут выполняться регистрирующими, но обладают относи-
тельно большой инерцией. Для измерения приборами функций угла О
требуется замена токовой катушки катушкой напряжения.
Недостатки приборов этой группы: сравнительно большое потребле-
ние энергии, узкий частотный диапазон и малые пределы допустимых
изменений амплитуд исследуемых векторов.
Выходной величиной прибора является механический вращающий
момент, что затрудняет использование его для записи на осциллографе.
Вращающий момент неудобен также и для воздействия на регулятор,
при необходимости регулирования по углу. Тем не менее ваттметровый
метод измерения угла используется с целью получения визуального
отсчета и градуировки других устройств.
Приборы второй группы в основном созданы для специальных целей
и весьма разнообразны по используемым методам. По принципу вос-
приятия угла методы измерения можно разделить следующим образом:
1) измерение геометрической разности векторов — фазовый и ампли-
тудный детектор, фазовый мост, ваттметровый метод;
2) измерение отношения активного тока к току возбуждения — метод
Гутенмахера;
3) определение относительного положения в пространстве ротора
синхронной машины — контактный, фотоэлектрический, магнитный и дру-
гие способы.
Существует ряд видоизменений указанных способов.
Первый из перечисленных методов основан на использовании угло-
измерительной машины, служащей для создания вектора, синфазного
вектору э. д. с. синхронной машины.
Углоизмерительная машина имеет число полюсов, равное числу полю-
сов синхронной машины, и независимое возбуждение. Использование
углоизмерительной машины отличается большой простотой и надежностью
аппаратуры, но не обладает высокой точностью. Ошибка возникает
из-за недостаточно точного совпадения осей полюсов основной син-
хронной и углоизмерительной машин. Погрешность пропорциональна
произведению ошибки в геометрических градусах расположения осей на
число пар полюсов машины. Используя фазорегулятор, можно в извест-
ных пределах скомпенсировать указанную ошибку.
Методы с фиксацией положения ротора машины конструктивно
£ 7. Измерение угла сдвига фаз Q
373
просты, но требуют ряда вспомогательных устройств для стабилизации
напряжения, исправления формы кривой и устранения искрения. Налиг
чие в устройстве движущихся частей делает устройство менее надеж-
ным и требующим систематического наблюдения.
Рассмотрим подробнее наиболее интересные методы измерения угла.
Электронный фазометр
Триггерная схема измерения угла с импульсным выходом
и с использованием углоизмерительной машины
Принцип работы основан на измерении промежутка времени между
моментами прохождения измеряемых напряжений через нуль (Гор-
ский, 1956). Два напряжения Ux и t/2, между которыми измеряется
сдвиг фаз, подаются по двум каналам на электронную схему. В ре-
зультате ряда преобразований входного напряжения образуются стар-
товые импульсы, которые поступают на сетки триггера.
Схема позволяет преобразовать время между прохождением старто-
вых импульсов в прямоугольные импульсы, длительность которых про-
порциональна сдвигу фазы. Пределы измерения — от 0 до 360°; в этих
пределах сохраняется линейная зависимость выходного параметра от
угла. Выход схемы практически не зависит от входного напряжения.
Сложность схемы (14 электронных ламп) и мелкий масштаб записи
угла на осциллограмме (1 мм — 6—8°) ограничивают точность измерения.
Следует отметить, что при надлежащем методе отсчета — разделении
шкалы на несколько пределов измерения, увеличении ширины бумаги
или, наконец, уменьшении предела — может быть получена высокая
точность, так как принцип измерения весьма надежен.
Триггерная схема измерения угла 6 с амплитудным выходом
Схема позволяет получить на выходе плавную кривую угла с малЬтМ
запаздыванием в пределах от 0 до 180°. Выполнена она на 16 лампах
(Электронный прибор..., 1952). К вышеперечисленным недостаткам
таких схем относится также весьма сложная настройка и регулировка
при большом количестве ламп.
Ваттметровая схема измерения угла О
Схема измерения угла основана на измерении произведения векто-
ров с помощью ваттметра. В работе Ю. М. Горского (1956) указы-
вается, что такая схема измерения угла 6 может считаться наиболее
точной и применяется для градуировки других приборов. Этот вывод
сделан в предположении, что напряжение и ток ваттметра — величины
постоянные; последнее можно обеспечить в условиях градуировки.
В процессе работы эти величины изменяются, что вызывает погреш-
ность в измерении угла 0. Наличие искажений формы кривой и рассин-
хронизации также вызывают значительные погрешности.
Контактный способ1 измерения угла 6
Метод измерения угла основан на непосредственном определении
вектора э. д. с. электрической машины с помощью контактного кольца
(рис. 257).
1 Разработан Водноэнергетическим институтом АН Арм, ССР.
374 Глава IX. Методы измерений на электродинамической модели
Контактное кольцо 3 на валу машины / имеет число проводящих
пластин, равное числу полюсов машины. Две неподвижные щетки,
180°
скользящие по кольцу, сдвинуты на угол —, где р — число пар полю-
сов. Напряжение, относительно которого необходимо измерить угол
сдвига фаз вектора э. д. с. синхронной машины, включено в цепь 2
последовательно со щетками, контактным кольцом 3 и вибратором осцил-
лографа 10. В цепи находятся катушки индуктивности 7 и 9, конденса-
тор 8 и ограничительное сопротивление 4. Уменьшение погрешности
/ Без конденсатора
С конденсатором
Рис. 257. Электрическая схема контактного устройства для
измерения угла 6.
от влияния напряжения достигается включением твердых выпрямите-
лей 5 с подпорным напряжением от батарей 6. В результате вместо
синусоидальной форма кривой напряжения получается трапецеидальной.
Наличие индуктивностей приводит к еще большему искажению формы
импульса, длительность которого пропорциональна углу сдвига фаз
напряжений.
Временная диаграмма работы схемы также показана на рис. 257.
Величина тока вибратора может быть найдена из уравнения
г di' .
И = £^--ьгг;
пренебрегая членом г/, найдем
/ = Н иЛ = ^(#2-#1)=ге-
л
Методическая погрешность отрицательна и пропорциональна углу.
Предел измерения угла ограничен большой погрешностью в конце
шкалы, так как зависимость от угла нелинейна. Вторым недостатком
схемы является необходимость проведения огибающей, так как запись
получается в форме импульсов.
Достоинство устройства — простота конструкций, возможность не-
прерывной записи угла в интервале от 0 до 180°. Недостатком является
отсутствие точно линейной зависимости от угла и наличие искрения,
нарушающего при определенных значениях угла работу устройства.
§ 7. Измерение угла сдвига фаз 9
375
Измерение угла на модели ИЭМ АН СССР
В Институте используются несколько различных методов в зависи-
мости от поставленной задачи.
Дифференциальный фазный детектор
Регистрирующее угол устройство построено на принципе измерения
геометрической разности векторов напряжений; выходное напряжение
пропорционально среднему значению выпрямленного тока. Прибор рабо-
тает совместно с углоизмерительной машиной.
В общем случае векторы э. д. с. и напряжения имеют следующий
вид:
ё = Е„е^т*+^ = Ем [cos (<»!# -+- <Pi) ч-у sin («V ч- <Pi)], (1)
й = UMe^at+v^ = U„ [cos (ш/ ч- <р2) + j sin («>£ ч- <Рг)].
При E = U мгновенное значение разности напряжений uai будет
йаЬ = ё — й==и„ [cos (<%/ ч- Cpj) — cos (art ч- <р2) ч—
Ч-убшСа^ ч-<рх)— ysin(o)f 4-<f>2)] (2)
или
n.,=U. [-2 sin (2^ t + sin (^-1 +
Начальные углы векторов равны соответственно <рх и <р2 — ?i
Подставляя эти значения углов, найдем выходное напряжение
й<л =— 2t7Msin^ (t>12 ™ t — yj| sin^-1^0" 7 ч- cpj—
— j cos f ч- , (4)
0
где <р = ^ч--2 .
При синхронном вращении векторов = <о) имеем
йаь — 2UK sin у [sin (со/ -Ь <р) — j cos (otf-+- ср)]. (5)
Напряжение йаЬ — синусоидальная функция времени, изменяющаяся
с угловой частотой ш . Амплитуда напряжения 2£7Msin — yj
при несинхронном вращении гармонически изменяется с угловой часто-
0>1----- 0)
той —g— > поэтому на осциллограмме получаем кривую несущей ча-
0)1 -ь <0 (От — со
стоты —2----, промодулированную частотой —-----.
Подобная запись представляет трудности при расшифровке, так как
для получения кривой изменения угла необходимо нанести на осцилло-
грамму огибающую несущей частоты. Непосредственная запись кривой
376
Глава IX. Методы измерений на электродинамической модели
угла может быть осуществлена при подаче на осциллограф составляю-
щей, зависящей только от угла
и = 2£/м sin . (6)
2/
Задача устранения несущей частоты решается при использовании
балансной электронной схемы измерения угла с двухполупериодным
Рис. 258. Блок-схема включения фазового детек-
тора.
выпрямлением переменного тока. Выходное напряжение схемы пропор-
ционально синусу угла.
Преимущество балансной схемы заключается в удвоении выходного
напряжения и увеличении отклонения шлейфа.
Схема включения измерительного устройства представлена на рис. 258.
Напряжение, соответствующее вектору э. д. с. генератора, снимается
а
Рис. 259. Выявительный элемент дифференциаль-
ного фазового детектора.
с зажимов дополнительного синхронного генератора типа СГС-4.5, нахо-*
дящегося на одном валу с основным генератором.
Совмещение вектора напряжения углоизмерительной машины с век-
тором э. д. с. синхронного генератора с целью исключения угловой
ошибки, обусловленной несовпадением осей полюсов, производится
фазорегулятором ФР, включенным в цепь статора машины.
Выявительный элемент схемы измерения угла приведен на рис. 259.
Напряжение, соответствующее э. д. с. генератора, через трансформа-
$ 7. Измерение угла сдвига фаз О
377
отсутствии сигналов на сетках устанав-
Рис. 260. Временная диаграмма прохождения
сигналов в схеме фазометра.
тор Тр. 7, подается на аноды ламп 6Н7. Напряжение сети через транс-
форматор Тр. 2 подается на сетки ламп.
Напряжение иаЬ на выходе схемы равно разности напряжений на
сопротивлениях 7?их и /?Н2:
Uab = Щ — «2- (7)
Баланс схемы (иаЬ = 0) при
ливается потенциометром 7?ni.
Напряжение на сопротив-
лении 7?И1, создаваемое лам-
пами Л1 и Л2, зависит от от-
носительной длительности ра-
боты ламп за период, т. е. от
угла сдвига по фазе между
анодными и сеточными напря-
жениями ламп, как видно из
временной диаграммы рис. 260.
Величина этого напряжения их
определяется средним арифме-
тическим за период напряже-
ний, создаваемых лампами:
тс
7Лср. = ~~ J sin urtd (wf) =
а
= (1 -+- cos а), (8)
где _
_ V2 и^я
R^R, ’
77a — амплитудное значение па-
дения напряжения на нагрузоч-
ном сопротивлении, а — угол
сдвига между анодными и сеточными напряжениями.
Аналогичное падение напряжения на сопротивлении, создаваемое Л2
и Л4, будет:
а
U2cv. = j sin wtdwt = (1 — cos а), (9)
о
откуда
о
£/«&=—U. cos а. (10)
Угол а может быть представлен как сумма углов
ос = 9-ьр, (11)
где Р — угол между осями роторов синхронного генератора и углоизме-
рительной машины СГС-4.5.
Для компенсации угла Р вектор напряжения углоизмерительной машины
может быть посредством фазорегулятора повернут на угол у. Тогда зави-
симость между выходным напряжением и углом 6 будет:
£/at = |Ucos(0-1-P-bT) = |£ZMsin(9-+-p-bT-b^). (12)
7Ь \ Z /
318
Глава IX. Методы измерений на электродинамической модели
При
₽-+-Т+-у = Ф=О (13)
имеем
Uab=^UMsinb. (14)
В схеме установлен постоянный сдвиг фаз ф = —72°. Зависимость
выходного напряжения от угла 0 имеет вид:
о
Uab = ~UM sin (0 — 72°). (15)
С целью увеличения четкости записи угла на осциллограмме в схему
включен заградительный П-образный фильтр. Этим несколько увеличи-
вается инерционность схемы, однако постоянная времени все же не
превышает 0.02—0.03 сек.
Выходное напряжение Uab зависит не только от угла 6, но и от
величины £7М, являющейся функцией анодного и сеточного напряжений
ламп. С целью устранения этого недостатка схемы должны быть при-
няты специальные меры. Напряжение углоизмерительной машины при
работе машины на шины бесконечной мощности изменяется мало и не
требует стабилизации. Уменьшение влияния напряжения сети достигается
использованием неоновых стабилизаторов (лампы Л5 и Л6 на рис. 259).
При работе станций соизмеримой мощности напряжение в точке на-
грузки имеет значительные колебания по величине, что может суще-
ственно увеличить погрешность измерения угла между векторами напря-
жений генератора и нагрузки. С целью повышения точности работы
схемы лампы в ней переведены в режим насыщения, что практически
исключает влияние напряжения сети. Одновременная стабилизация анод-
ных напряжений ламп позволяет исключить влияние изменения величины
напряжения углоизмерительной машины в переходных режимах на выход
схемы и приблизить зависимость между углом и выходным напряже-
нием к линейной.
Стабилизация анодных напряжений осуществляется стабиливольтами
типа СГ-4 (лампы Л7 и Л8), включенными во вторичную цепь трансформа-
тора Тр.7 (на рис. 259). На аноды ламп в этом случае подается срезан-
ная синусоида. В этой схеме отклонения напряжения углоизмерительной
машины от нормального на ±10% вызывают изменения величины выход-
ного напряжения примерно на ±1%. *
Диапазон измерения углов ограничен пределами 0—180°.
Выходная величина устройства, напряжение, может быть использо-
вана для непосредственного воздействия на регулятор.
Схема измерения угла 0 в регуляторе напряжения РЭН-3
Выявительный элемент схемы измерения угла представлен на рис. 261.
Схема двухполупериодная. Напряжение сети в этой схеме через транс-
форматор Тр. 7 подается на сетки лампы Лх, служащей для преобразо-
вания синусоидального напряжения в напряжение прямоугольной формы.
Напряжение углоизмерительной машины через трансформатор Тр. 2
подается на сетки лампы Л2. Величина сеточного напряжения доста-
точна для обеспечения работы ламп в режиме насыщения. Лампы
соединены последовательно.
§ 7. Измерение угла сдвига фаз 0
379
Анодное питание подается от выпрямителя. Регулировка напряже-
ния на анодах ламп Лг и Л2 осуществляется переменными сопротивле-
ниями 7?д и /?10. Выходное напряжение схемы снимается с общей точки
катодов лампы Л2 и регулируемого сопротивления R%.
Сопротивление Т?8 позволяет скомпенсировать напряжения при уста-
новке нуля на выходе схемы. Амплитуду выходного напряжения схемы
можно изменить регулировочным сопротивлением 7?i0. Зависимость
лтежду выходным напряжением схемы и углом близка к линейной.
Рис. 261. Выявительный элемент регулятора РЭН-3.
Лампы работают в режиме насыщения, что обеспечивает малую чув-
ствительность схемы к колебаниям величин входных напряжений.
Пределы измерения схемы — от 0 до 180°. Схема пригодна и для
записи угла на осциллограммах, но из-за однополярного выхода мас-
штаб записи получается уменьшенным.
Контактное устройство 1 измерения угла О
Контактное устройство, разработанное в Институте электромеханики,
является видоизменением устройства Водноэнергетического института
АН Армянской ССР.
1 Описание этого устройства дано М. 3. Гургенидзе и И. К. Севрюгиным.
380
Глава IX. Методы измерений на электродинамической модели
Устранение явления искрения удалось обеспечить расположением
коммутирующего контактного устройства после ограничителя в цепи
малых токов (рис. 262).
Рис. 262. Электрическая схема контактного устройства Института
электромеханики АН СССР.
Обозначения те же, что и на рис. 257.
Рис. 263. Осциллограммы, снятые при измерении
угла 0: запись измерений угла при измерении
контактным устройством (7) и фазовым детекто-
ром (2).
Разрываемая на контактах мощность оказывается значительно мень-
шей, изменяется в меньших пределах при изменении угла и искрение
отсутствует.
Наличие щетки III дает возможность энергии, запасаемой в индук-
тивности 7 и 9 фильтров, разряжаться через шлейф 10 при размыка-
нии цепи щеток I и //, что
способствует стабильности
и сглаживанию тока шлейфа
так же, как и включение
конденсатора 12 и сопро-
тивление 11.
При вращении иссле-
дуемой синхронной машины
коммутационным устройством
осуществляются следующие
операции: замыкание в те-
чение 0.01 сек. цепи щеток
I и II и размыкание цепи
щеток II и III; в течение
последующих 0.01 сек. раз-
мыкание цепи щеток I и II и
замыкание цепи щеток II и
III. Далее картина повто-
ряется. Цепь щеток I и III
остается всегда разомкну-
той. Поэтому третья щетка позволяет контролировать изоляцию между
соседними сегментами контактного диска при работе испытуемой машины
путем измерения изоляции между щетками I и III. На рис. 262 приве-
дены временные диаграммы, которые поясняют работу схемы.
§ 7. Измерение угла сдвига фаз Q
381
Анализ работы схемы показывает, что влияние скольжения на точ-
ность практически невелико и им можно пренебречь при s=0±0.1,
последнее покрывает зону возможных скоростей изменений 9, встре-
чающихся в практике эксплуатации синхронных машин.
На рис. 263 изображена одновременная запись изменения угла 9
(при прохождении через синхронную скорость), произведенная двумя
.различными устройствами — контактным и дифференциальным фазовым
„детектором с углоизмерительным генератором (описанным выше).
Контактное устройство обладает лучшей линейностью и независи-
мостью отклонений от напряжения при меняющемся скольжении.
Схема визуального наблюдения угла 6 на модели
С целью определения знака относительной скорости вращения машины,
момента включения в синхронизм или выпадения из синхронизма, а также
для непосредственного наблюдения за углом генератора на модели при-
меняются специальные углоизмерительные устройства. В одной из таких
схем выявительным элементом является сельсин. На статор и ротор
сельсина в этом случае подаются трехфазные напряжения соответ-
ственно углоизмерительной машины и сети. Эти напряжения предвари-
тельно снижаются до 40 в. Ротор сельсина отклоняется на угол, равный
углу между результирующими векторами магнитных потоков.
Несимметрия приложенных напряжений изменяет положение резуль-
тирующего вектора потока, поэтому отклонение ротора сельсина зави-
сит от изменения величины приложенных напряжений. Точность изме-
рения невелика, однако устройство отличается большой простотой.
Схема определения фазы электронным осциллографом
Обычно использование с этой целью горизонтальных и вертикаль-
ных пластин (фигуры Лиссажу) не дает удовлетворительных результа-
тов. Такое измерение угла позволяет только ориентировочно опреде-
лить величину угла. Точность измерения угла с помощью осциллографа
можно повысить применением метода круговой развертки, использован-
ного в Институте электромеханики.
Одно из двух напряжений подается на горизонтальные и вертикаль-
ные пластины, причем с помощью цепочки RC вектор напряжения вер-
тикальных пластин сдвигается на 90° по отношению к вектору напря-
жения горизонтальных пластин. При соответствующем подборе отноше-
ния UJUy луч на экране описывает окружность. Второе напряжение
подается на генератор пиковых напряжений. Генератор состоит из элек-
тронной лампы и дифференцирующего звена. Лампа выполняет роль
преобразователя напряжения синусоидальной формы в прямоугольную.
Переменное напряжение подается на сетку лампы через ограничитель-
ное сопротивление. Анодное питание лампы осуществляется от выпря-
мителя.
Дифференцирующее звено превращает напряжение прямоугольной
формы в пиковое, причем пики напряжения соответствуют моментам
перехода синусоидального напряжения через нуль. С генератора пико-
вых напряжений сигнал поступает на модулятор яркости луча осцилло-
графа. В момент перехода синусоидального напряжения через нулевое
значение на окружности, описываемой лучом, вспыхивает яркая точка
(или луч потухает).
382
Глава IX. Методы измерений на электродинамической модели
Для отсчета угла необходимо окружность экрана осциллографа раз-
бить на градусы. Положение яркой точки на окружности по отношению
к линии отсчета будет соответствовать величине угла между векторами
напряжений. Пики можно получить очень острые, что обеспечит малые
размеры яркого пятна и повысит точность отсчета. Изменение по вели-
чине напряжения углоизмерительной машины повлияет только на вели-
чину диаметра окружности, описываемой лучом, фаза пиков не меняется.
Диапазон измерения угла можно регулировать изменением числа
полюсов углоизмерительной машины (при числе полюсов, в 2 раза
большем, чем в основной машине, окружность экрана будет иметь
только 180 эл. град.). Если вместо круга использовать эллипс, то мас-
штаб измерений значений угла можно еще увеличить.
Стрелочный фазометр
Простой метод измерения угла сдвига фаз с помощью вольтметра
переменного тока (Ковалевская и Попов, 1959) основан на определении
геометрической разности двух векторов. Измеряемые напряжения пред-
Рис. 264. Электрическая схема стрелочного фазометра.
варительно стабилизуются. Затем геометрическая разность их йас — &ъс =
= йаь подается на измеритель переменного тока (рис. 264). В качестве
стабилизатора напряжения в фазометре использованы термисторы.
Соответствующий выбор активных сопротивлений обеспечивает по-
стоянство напряжения на термисторах при изменении измеряемых
напряжений в определенных пределах. Сдвиг фаз 0 между измеряемыми
напряжениями будет определяться геометрической разностью векторов
стабилизированных напряжений Uac и и может быть непосредственно
измерен прибором переменного тока, подключенным к зажимам цепи ab.
В качестве измерителя может быть использован вольтметр переменного
тока. Для этого наиболее пригодны приборы выпрямительной, электро-
статической или ламповой систем.
Определение ошибки измерений при изменении величины составляю-
щих напряжений произведем для модуля вектора разности
иаЬ = —2££/coSe.
Дифференцируя это выражение, получим
dUab_l/dE dU\
Uл 2\Е~*~ U /’
7. Измерение угла сдвига фаз Q
383
Отсюда относительная приведенная погрешность измерения составит
* de г 0 idE du\
где 9Ж — номинальное значение измеряемой величины.
С увеличением сдвига фаз tg непрерывно возрастает и стремится
к бесконечности при 6 -> 180°. Отсюда следует, что верхний предел
измерения фазометра нужно ограничить углами порядка 120—150°.
Основными причинами, вызывающими изменение напряжения на
термисторах, являются:
1) изменение температуры окружающей среды;
2) старение термисторов во времени;
3) чрезмерно большая или чрезмерно малая величина измеряемого
напряжения (Ег или t/2).
Влияние двух первых факторов можно устранить путем соответствую-
щей регулировки чувствительности измерителя.
Влияние погрешности от изменения измеряемых напряжений можно
уменьшить как путем применения термисторов с большим коэффициен-
том стабилизации, так и за счет ограничения диапазона измерения изме-
ряемых напряжений.
Недостатком устройства является погрешность, возникающая при
изменении измеряемых напряжений в широком диапазоне. Практически,
при использовании углоизмерительной машины напряжения меняются
незначительно и сравнительно в небольших пределах колеблется напря-
жение сети, кроме случаев короткого замыкания.
Как показало исследование, дополнительная погрешность фазометра
при изменении измеряемых напряжений в 8 раз не превышает 1.5%.
Посредством высокоомного делителя рабочий диапазон напряжений
может быть значительно расширен. В качестве делителя в приборе
использованы непроволочные сопротивления, поскольку изменение со-
противлений делителя влияет только на величину входных напряжений,
а последние могут изменяться в широких пределах.
В фазометре использованы разделительные конденсаторы большой
емкости, во избежание искажений измеряемых напряжений по фазе.
Это весьма существенно при работе на низких частотах. Дополнитель-
ная погрешность фазометра, обусловленная изменением частоты от 10
до 5000 гц по данным эксперимента составляет 1.5% от номинального
значения измеряемой величины. Погрешность фазометра, обусловленная
сменой ламп, не превышает 0.2%. Погрешность фазометра, обусловлен-
ная колебаниями напряжения питания электронных ламп на ±20%, не
превосходит 0.5%. Прибор рассчитан на измерение фаз в пределах
от 0 до 120°. Для измерения разности фаз свыше 120° следует произ-
вести коммутацию одного из измеряемых напряжений с изменением фазы
на 180°.
Фазометр не чувствителен к знаку угла, т. е. не позволяет устано-
вить характер фазового сдвига (индуктивный или емкостный). Опреде-
ление знака угла в фазометре осуществляется специальной фазосдви-
гающей цепью, которая поворачивает вектор измеряемого напряжения Ux
на положительный угол.
Прибор весьма прост в обращении, надежен и обладает удовлетво-
рительной точностью.
384 Глава IX. Методы измерении на электродинамической модели
§ 2. Измерение крутящего момента1
К числу основных измерений на электродинамической модели отно-
сится измерение крутящего момента турбины в установившемся и пере-
ходном режимах. В настоящее время известно большое количество спо-
собов измерения крутящего момента, все эти методы основаны на
измерении угла скручивания вала машины и различаются способами
преобразования механической величины в электрическую.
Практическое применение нашли следующие методы преобразования
угла скручивания вала: индуктивный, тензометрический, емкостный,
вход
220 S Выход
$Огц Вма на дкгм
Рис. 265. Схема индуктивного моментомера Водноэнергетического института
АН Армянской ССР.
магнитострикционный, фотоэлектрический, электроакустический, индук-
ционный. Ниже приводится краткая характеристика каждого из указанных
методов и более подробно описывается метод, принятый в Институте
электромеханики.
Индуктивный метод
В индуктивных торзиометрах используется явление изменения реак-
тивного сопротивления катушки с ферромагнитным сердечником при
изменении воздушного зазора между полюсами сердечника и якорем.
Схема индуктивного торзиометра приведена на рис. 265 (Егиазаров,
Овсенян, Григорян, 1955). Измерителем деформаций является индук-
тивный мост, состоящий из четырех катушек с, зазор h между их сер-
дечниками е и якорем изменяется при скручивании вала зазор у двух
катушек убывает, а у двух других — возрастает. Катушки с находятся
на вращающейся части вала. Мост питается напряжением переменного
тока промышленной или звуковой частоты. Питание стабилизировано
посредством стабиловольта b и мостика выпрямителей а. Ток разба-
ланса моста через контактное токосъемное устройство g поступает на
выпрямитель, а после фильтрации С\, С2, — на измерительный прибор.
Чувствительность измерительного устройства индуктивного торзио-
метра, разработанного в Водноэнергетическом институте АН Армян-
1 Параграф написан В. В. Ковалевской и Н. П. Поляковым.
£ 2. Измерение крутящею момента
385
ской ССР, благодаря применению своеобразного „множительного" пере-
даточного бесшарнирного устройства составляет 0.4 ма/кгм, вследствие
чего выходной ток может быть измерен непосредственно прибором
Магнитоэлектрической системы без предварительного усиления.
К числу недостатков этого устройства следует отнести наличие
скользящих контактов и некоторую сложность конструкции. Кроме того,
применение фильтров на выходе измерительной схемы неизбежно при-
водит к запаздыванию показаний, что недопустимо при исследованиях
переходных режимов электродинамической модели.
Индуктивные торзиометры могут и не иметь скользящих контактов
в токосъемном устройстве. В этом случае связь между подвижными и
неподвижными частями измерительного элемента определяется не элек-
трической, а магнитной цепью (Туричин, 1956). Однако и в этом случае
наличие фильтров приводит к искажению показаний торзиометра при
исследовании переходных режимов.
Тензиометрический метод
На торсионный вал наклеиваются четыре тензодатчика, включенных
по схеме моста, таким образом, что при скручивании вала сопротивле-
ния в двух противоположных плечах моста увеличиваются, а в двух
других — уменьшаются. В отсутствие скручивания вала сопротивления
всех четырех тензодатчиков одинаковы.
Напряжение разбаланса моста, пропорциональное углу кручения вала
и, следовательно, крутящему моменту, усиливается ламповым усилите-
лем и регистрируется прибором магнитоэлектрической системы. Питание
измерительного моста и съем выходного напряжения осуществляется
посредством контактного токосъемного устройства (Волчок, 1955).
Благодаря простоте конструкции и достаточно высокой точности
измерения торзиометры, основанные на методе проволочной тензо-
метрии, получили сравнительно широкое распространение. Однако нали-
чие скользящих контактов требует принятия специальных мер для
уменьшения переходного сопротивления, что влечет значительное услож-
нение контактного устройства при реализации этого метода.
Емкостный метод
Емкостный метод измерения деформаций кручения основан на изме-
нении при скручивании вала электрической емкости измерительного
конденсатора, образованного зубцами двух фасонных дисков, укреплен-
ных неподвижно на торсионном валу. Измерительный конденсатор вклю-
чается в мост переменного тока высокой частоты (порядка 100 кгц),
выходное напряжение которого является однозначной функцией угла
скручивания вала. После усиления и выпрямления измеряемое напря-
жение регистрируется осциллографом магнитоэлектрической системы
(Волчок, 1955).
Основными элементами торзиометра этого типа являются: торсион-
ный вал с измерительным конденсатором, ламповый генератор высокой
частоты, электронный усилитель напряжения и фазочувствительный вы-
прямитель.
К недостаткам этого устройства относится наличие скользящих кон-
тактов для включения измерительного конденсатора во внешнюю элек-
трическую цепь, известная сложность изготовления измерительного
386
Глава IX. Методы измерений на электродинамической модели
элемента, зависимость показаний регистрирующего прибора от измене-
ний с течением времени характеристик электронных ламп.
В принципе переменная емкость измерительного конденсатора торзио-
метра может быть использована для управления частотой лампового
генератора. При этом в значительной мере снижается влияние измене-
ний характеристик ламп на показания регистрирующего прибора.
Магнитострикционный метод
В основе этого метода измерения деформаций кручения лежит явле-
ние зависимости магнитной проницаемости ферромагнитных материалов
от величины механических напряжений, возникающих в материале при
упругой деформации. Основным измерительным элементом магнитоупор-
ного торзиометра является стальной торсионный вал, служащий сердеч-
ником для двух катушек индуктивности. При скручивании вала магнит-
ная проницаемость его изменяется, а следовательно, изменяется индук-
тивность катушек, включенных в мост индукционностей.
Напряжение разбаланса моста, однозначно зависящее от величины
механических напряжений в металле, усиливается электронным усили-
телем, а затем после выпрямления подается на регистрирующий прибор
или шлейф магнитоэлектрического осциллографа.
Для компенсации температурных погрешностей устройства исполь-
зуется вторая пара подобных катушек, сердечником которых служит
такой же вал, не подверженный деформациям.
Торзиометры, основанные на магнитострикционном методе, несложны
в изготовлении, не имеют скользящих контактов и допускают стати-
ческую тарировку.
К числу недостатков такого рода устройств относятся слишком ма-
лый магнитоупругий эффект в стали, вследствие чего устройства эти
весьма чувствительны к наличию внешних полей, и зависимость пока-
заний регистрирующего прибора от наличия остаточных механических
напряжений.
По данным отчета Водноэнергетического института (Егиазаров,
Овсенян, Григорян, 1955), погрешности изготовленного и исследован-
ного в Тбилисском научно-исследовательском институте сооружений и
гидравлики торзиометра, основанного на магнитоупорном методе, лежат
в пределах 4—10% от максимального значения вращающего момента.
Фотоэлектрический метод
В фотоэлектрических торзиометрах используется пропорциональная
зависимость между фототоком и освещенностью фотоэлемента (Прибор
для измерения... , 1956).
Изменение освещенности фотоэлемента при скручивании вала осу-
ществляется с помощью двух неподвижно укрепленных на валу дисков
с радиальными отверстиями по периферии. Луч света от неподвижной
лампы проходит через линзу и отверстия дисков и попадает на фото-
элемент. При скручивании вала диски поворачиваются один относительно
другого на угол, равный углу скручивания вала, благодаря чему изме-
няется площадь отверстия, через которое проходит световой луч, а сле-
довательно, и освещенность фотоэлемента. Ток фотоэлемента регистри-
руется чувствительным гальванометром, а при измерениях быстро изме-
няющихся крутящих моментов, после предварительного усиления, —
магнитоэлектрическим осциллографом.
§ 2. Измерение крутящего момента
387
Достоинством этого метода являются: отсутствие трущихся кон-
тактов, достаточная простота устройства, наличие пропорциональной
зависимости между выходным током фотоэлемента и измеряемым кру-
тящим моментом на валу, возможность статической тарировки устройства.
Как недостаток, следует отметить зависимость показаний регистри-
рующего прибора от изменений во времени характеристик фотоэлемента
и электронных ламп усилителя фототока и от изменений силы света
лампы осветительной установки торзиометра.
При отсутствии стабилизации этих величин погрешность может быть
велика.
Струнный (электроакустический) метод
Одним из наиболее совершенных способов измерения деформаций
кручения вала является струнный, или электроакустический, метод,
основанный на зависимости частоты собственных колебаний струны от
ее натяжения.
Рис. 266. Схема струнного моментомера Водноэнергетического института АН
Армянской ССР.
а — вал; б — крепление; в — струна; г — контактное токосъемное устройство; д — токосъемный транс-
форматор; е — катушка; з — электромагнитный возбудитель.
Примером реализации этого метода может служить устройство для
измерения крутящего момента, разработанное Ф. Григоряном и изго-
товленное в Водноэнергетическом институте под руководством И. В. Егиа-
зарова (Егиазаров, Овсенян, Григорян, 1955).
Принципиальная схема этого устройства приведена на рис. 266.
388 Глава /ЛГ. Методы измерении на электродинамической модели
Стальная струна прикреплена своими концами с некоторым первона-
чальным натяжением к фланцам муфт б, сидящих на валу а так, что при
скручивании вала в ту или иную сторону натяжение струны в зависи-
мости от знака крутящего момента уменьшается или увеличивается.
Соответственно изменяется и частота ее собственных колебаний.
При колебаниях струны в электромагните е наводится напряжение
переменного тока с частотой, равной частоте колебаний струны. Напря-
жение через токосъемный трансформатор д подается на вход двухкаскад-
ного усилителя (лампы 6Ж8 и бФб), Выходное напряжение усилителя
(лампа 6Ф6) подводится через трансформатор, с одной стороны, к об-
мотке электромагнита, возбуждающего колебания струны, а с другой —
подается на триггер, собранный на лампе 6Н9.
Выходное напряжение триггера, прямо-
угольной формы, имеющее частоту струны и
амплитуду, не зависящую от амплитуды вход-
ного сигнала, подается на усилитель мощности
(6ПЗ), а с выходного трансформатора этой
лампы — на схему преобразователя частоты
(контуры и L2C^,
Контуры настроены так, что при средней
частоте, соответствующей нулевому значению
вращающего момента, сопротивления их оди-
наковы и среднее значение суммарного тока
на выходе измерительной схемы равно нулю.
При изменении частоты сопротивление одного
из контуров возрастает, а другого — убывает,
в результате чего на выходе появляется по-
стоянная составляющая тока, пропорциональ-
ная вращающему моменту.
Регистрация осуществляется вибраторным
осциллографом, включенным через фильтр.
Достоинствами струнного моментомера являются: частотный метод
измерения, менее подверженный внешним влияниям, чем методы тока и
напряжений, отсутствие вносящих искажения в измерения скользящих
контактов, возможность измерения быстроизменяющихся крутящих мо-
ментов, возможность статическсй тарировки устройства и независимость
показаний от скорости вращения.
Недостатком является некоторая сложность конструкции.
На рис. 267 приведены кривые записи показаний струнного и индук-
тивного моментомеров, а также кривая тока якоря электромашины по-
стоянного тока, моделирующей первичный двигатель, и расчетная кри-
вая измерения момента исследуемого переходного процесса. Как
из этих кривых, расхождение между ними не превышает 4°/0, что
считать вполне удовлетворительным.
В динамических условиях моментомеры Водноэнергетического
тута проверены на модели целой гидроэнергетической системы
ратории института (Егиазаров, Овсенян, Григорян, 1955).
Кривые, снятые
Водноэнергетиче-
Рис. 267.
на модели
ского института АН Армян-
ской ССР.
1 — расчетная кривая; 2 — ток ро-
тора; 3 — струнный моментомер;
4 — индукционный моментомер.
ВИДНО
нужно
инсти-
лабо-
Индукционный метод
Индукционный метод измерения угла скручивания вала обеспечивает
бесконтактную электромагнитную связь измерительного элемента торзио-
§ 2. Измерение крутящего момента
389
метра с .электрической измерительной схемой и дает возможность одно-
временного измерения крутящего момента передаваемой через вал
мощности и скорости вращения вала (Туричин, 1956; Электронное
устройство..., 1956; Freer, 1955).
Измерительным элементом индукционных торзиометров является тор-
сионный вал с укрепленными на концах его двумя индукционными ге-
нераторами переменных э. д. с., амплитуда и частота которых пропор-
Рис. 268. Схема индукционного моментомера.
циональны скорости вращения вала, а разность фаз — углу скручивания
вала, т. е. крутящему моменту.
Роторами измерительных генераторов служат два зубчатых диска из
мягкого железа, а статорами-—два постоянных магнита с полюсными
наконечниками, имеющими такую же зубчатую форму. На статорах рас-
положены обмотки, в которых при вращении вала с дисками индуци-
руется э. д. с. (рис. 268).
Измеряя частоту, разностную амплитуду и сдвиг фаз этих э. д. с.г
измеряют тем самым скорость вращения вала, мощность на валу и
крутящий момент. Измерительными или регистрирующими приборами
в этом случае являются частотомер, вольтметр и фазометр, шкалы ко-
торых градуируются соответственно в единицах угловой скорости,
мощности и момента.
Оценивая индукционный метод в целом, следует отметить сравни-
тельную простоту конструкции индукционного торзиометра и наличие
достаточно совершенных способов измерения разности фаз двух элек-
трических напряжений.
К числу недостатков следует отнести невозможность статической
тарировки индукционных торзиометров, вследствие чего возникает необ-
ходимость использования для тарировки торзиометра специального
устройства — баланс-динамо соответствующей мощности. Кроме того,
поскольку амплитуда и частота выходного напряжения измерительных
генераторов индукционного торзиометра находится в прямой зависимости
от скорости вращения, применение торзиометров индукционного типа
становится затруднительным при регулировании в широких пределах
скорости вращения ротора исследуемого двигателя. Индукционные тор-
390
Глава IX. Методы измерений на электродинамической модели
зиометры по этой причине для исследований пусковых режимов, харак-
теризующихся значительными изменениями скорости, непригодны. Таким
образом, индукционные торзиометры (с фиксацией фазы) следует реко-
мендовать для измерений крутящего момента, в основном при устано-
вившейся скорости вращения.
Оценивая перечисленные методы измерений крутящего момента, необ-
ходимо заметить следующее. Большинство из указанных методов нахо-
дит практическое применение и используется в течение ряда лет, однако
полные эксплуатационные данные о результатах исследований, а в ряде
случаев и описание конструкции подобных устройств, в литературе
отсутствуют. Результаты измерений определяются в первую очередь
качеством конструкции измерительного устройства. Как правило, наличие
трущихся контактов является серьезным недостатком устройства, так
как может служить причиной погрешностей и ненадежной работы.
В Водноэнергетическом институте применяется электроакустический
(струнный) способ измерения, а тензометрический метод отвергнут по
причине наличия трущихся контактов. С другой стороны, в исследова-
тельской лаборатории завода „Электросила“ и в ряде других организа-
ций с успехом используется после усовершенствования токосъемного
устройства тензометрический метод измерений, как наиболее простой и
обеспечивающий весьма стабильные показания. В Центральном научно-
исследовательском институте дизелестроения неплохо зарекомендовал
себя емкостный метод измерений крутящего момента (Волчок, 1955).
В Ленинградском политехническом институте разработан индуктивный
измеритель крутящего момента с бесконтактным съемом. Однако в усло-
виях работы, имеющих место при проведении исследований на электро-
динамических моделях и характеризующихся возникновением в режимах
короткого замыкания быстрых измерений крутящего момента с эквива-
лентной частотой порядка 100 гц и с амплитудой, достигающей десяти-
кратного значения номинального момента, ни одно из вышеперечислен-
ных устройств не использовалось.
В связи с этим сделать окончательное заключение о наиболее целе-
сообразном методе измерений крутящего момента на валу электродина-
мической модели в настоящее время затруднительно.
Устройство для измерения вращающего момента
на электродинамической модели ИЭМ АН СССР
Как следует из приведенного обзора, к числу наиболее совершенных
способов измерения крутящего момента следует отнести бесконтактные
методы и, в частности, электроакустический, фотоэлектрический и индук-
ционный методы.
В соответствии с этим для измерений крутящего момента на электро-
динамической модели в установившемся и переходном режимах в Инсти-
туте электромеханики разработан торзиометр индукционного типа как
более простой в конструктивном отношении по сравнению со струнным
и фотоэлектрическим торзиометрами.
Условия работы торзиометра определяются следующими основными
характеристиками электродинамической модели Института электромеха-
ники:
1) номинальная мощность, передаваемая через вал Рн=25 квт;
2) максимальная мощность Рмасс. = 2РН = 50 квт;
3) скорость вращения машины п=1000 об./мин.;
£ 2. Измерение крутящего момента
391
*—500----
\+-200—*|
Рис. 269. Конструктивное устройство индук-
ционного фазового моментомера.
и содержащим три листочка
4) соответственно номинальная и максимальная величины вращаю-
щего момента Мн = 25 кгм, Л7макс. = 27ИН = 50 кгм;
5) минимальные регистрируемые значения вращающего момента
Ммя. = Мн = 6 кгм;
6) в установившемся режиме наблюдаются периодические изменения
крутящего момента с Эквивалентной частотой порядка 1—2 гц и с ампли-
тудой порядка -$Рн.
Измерительным элементом торзиометра является торсионный вал
диаметром 35 мм с укрепленными на его концах индукционными генера-
торами. Роторы генераторов
представляют собой сталь-
ные шестерни диаметром
300 мм. Каждая шестерня
имеет 600 зубьев с модулем
0.5. Таким образом, при но-
минальной скорости враще-
ния двигателя п = 1000
об./мин. частота выходного
напряжения измерительных
генераторов составляет
10000 гц.
Статор каждого из гене-
раторов состоит из двух ка-
тушек с сердечником, на-
бранным из П-образного
трансформаторного железа
0.15 мм.
Зазор между сердечником статора и зубцами ротора составляет
около 0.3 мм. При этом, как показывает расчет и данные эксперимента,
в выходных обмотках статоров наводится э. д. с. с амплитудой порядка
нескольких десятков милливольт.
Э. д. с. каждого генератора усиливается трехкаскадным ламповым
усилителем-ограничителем, собранным на лампах 6Н9С и 6Ж4, на вы-
ходе которого напряжение имеет форму, близкую к трапецеидальной
с большой крутизной заднего фронта. Это напряжение в результате
дифференцирования, детектирования и усиления преобразуется в им-
пульсы отрицательной полярности длительностью порядка 1.5 мксек,
с амплитудой около 30 в и крутизной переднего фронта примерно
100 в/мксек. Импульсы следуют с частотой, равной частоте э. д. с.
генератора.
Таким образом, выходные напряжения измерительных генераторов
преобразуются в две независимые последовательности импульсов, управ-
ляющие релаксационным реле, собранным на лампе 6Н8.
При отсутствии скручивания вала (вращающий момент равен нулю)
импульсы обеих последовательностей, поступая во входные цепи триг-
гера, чередуются между собой через равные промежутки времени, сле-
довательно, длительности положительной и отрицательной „полуволн"
выходного напряжения триггера равны между собой. При этом постоян-
ная составляющая выходного напряжения равна нулю.
При скручивании вала изменяется разность фаз между выходными
э. д. с. измерительных генераторов, при этом нарушается равномерность
392
Глава IX. Методы измерений на электродинамической модели
чередования импульсов первой и импульсов второй последовательностей,
а также нарушается равенство длительностей положительной и отрица-
тельной полуволн входного напряжения триггера, в котором появляется
постоянная составляющая, пропорциональная углу сдвига фаз между
э. д. с. измерительных генераторов и, в конечном счете, пропорцио-
нальная передаваемому валом вращающему моменту.
Градуировка производится при установке торзиометра на баланс-
динамо путем измерения выходного напряжения триггера при значениях
Рис. 270. Электронная часть индукционного моментомера.
момента, равных номинальному значению момента электродинамической
модели и противоположных по знаку.
Очевидно, постоянная составляющая выходного напряжения триггера
при этих двух значениях момента должна быть неизменной по величине,
а полярность ее при изменении знака момента должна измениться на
противоположную. Схема конструкции -торзиометра и его электриче-
ская схема приведены на рис. 269 и 270.
§ 3. Измерение мощности переменного тока1
При исследовании установившихся и переходных процессов на элек-
тродинамической модели энергосистем наряду с другими параметрами
необходимо регистрировать среднее значение активной и реактивной
мощностей. Обычно для этой цели используют вибраторный осциллограф,
1 Параграф написан В. С. Поповым и В. В. Ковалевской.
3» Измерение мощности переменного тока
393
который позволяет с достаточной скоростью одновременно регистриро-
вать целый ряд электрических величин. Активную или реактивную мощ-
ность можно измерять непосредственно вибратором мощности или спе-
циальным ваттметровым преобразователем. Постоянное напряжение на
выходе преобразователя пропорционально измеряемой мощности и может
быть записано при помощи вибратора напряжения. Для измерения реак-
тивной мощности достаточно приложить к преобразователю напряжение,
сдвинутое по фазе на четверть периода.
Основные требования, предъявляемые к преобразователям, состоят
в следующем:
1) постоянная времени преобразователя не должна превышать 100—►
120 мсек.;
2) напряжение на выходе преобразователя должно быть пропорцио-
нально среднему значению измеряемой мощности;
3) выходная мощность преобразователя должна быть достаточна для
работы вибратора осциллографа;
4) основная и дополнительные погрешности преобразователя, вклю-
чая погрешность от изменения напряжения на ±20% и погрешность
от изменения частоты на ±20%, не должны превышать 2—2.5%.
Существующие преобразователи мощности можно подразделить на
два типа:
1) динамические преобразователи мощности, отличающиеся наличием
движущихся частей;
2) статические преобразователи мощности, не имеющие движущихся
частей.
Выходным параметром динамических преобразователей мощности
является угловое перемещение. Для преобразования углового переме-
щения в постоянный ток или в напряжение требуются дополнительные
устройства, усложняющие преобразователь, понижающие его точность
и повышающие его инерционность. Недостатком динамических преобра-
зователей является также большая постоянная времени.
Применение вибраторов мощности, регистрирующих мгновенное зна-
чение измеряемой величины, несмотря на простоту и быстродействие,
создает известные неудобства при обработке осциллограммы, так как
они регистрируют мгновенное, а не среднее значение измеряемой мощности.
Из целого ряда преобразователей наиболее пригодными для измере-
ния мощности на электродинамической модели следует признать стати-
ческие преобразователи — электронные, выпрямительные и болометри-
ческие. Преобразователи, основанные на эффекте Холла, и термоэлек-
трический преобразователь мощности обладают низкой выходной
мощностью, недостаточной для управления вибратором осциллографа.
Применение добавочного усилителя постоянного тока существенно услож-
няет преобразователь и понижает его точность. Магнитный преобразо-
ватель мощности не может быть использован ввиду значительной частот-
ной погрешности.
Электронный преобразователь мощности
Электронный преобразователь мощности показан на рис. 271.
Как известно, вольтамперные характеристики некоторых типов элек-
тронных ламп могут быть аппроксимированы уравнением вида
/в = а-ь₽ио-+-Ти»,
где а, Р, у — постоянные коэффициенты.
394
Глава IX. М&тьды измерений на электродинамической модели
Полагая характеристики ламп идентичными, определим напряжения
на их анодах:
Рис. 271. Принципиальная схема элек-
тронного преобразователя мощности.
Рис. 272. Принципиальная схема выпрями-
тельного преобразователя мощности.
Рис. 273. Принципиальная Схема
преобразователя мощности с подо-
гревными сопротивлениями.
Если ^ = 0^4-02^, а £7 =с111л?— с2/ж, то разность напряжений
на анодах ламп составит
е = ei — е2 = 2/?Pc2rr -+- 4/?7с1с2ия;/л; = с3^ -ь
Отсюда среднее значение выходного напряжения пропорционально
мощности
Т т т
Е= у- J edt = Y f У' f uJxdt = c4Pv
ООО
Постоянную слагающую выходного напряжения обычно выделяют
при помощи фильтров. Постоянная времени преобразователя со всеми
фильтрами составляет около 70 мсек. Недостатком преобразователя
является малая точность и сложность настройки схемы.
$ 3. Измерение мощности переменного тока
395
Выпрямительный преобразователь мощности
Принципиальная схема выпрямительного ваттметра приведена на
рис. 272. Вольтамперная характеристика сухого выпрямителя может быть
описана уравнением вида
u~ai — Ы2.
Такая аппроксимация вполне удовлетворительно отражает физический
процесс в начальной части характеристики выпрямителя и практически
оказывается приемлемой до напряжений 0.5—0.10 в.
Для мгновенных значений в подобном преобразователе имеем
Их = aix — bi2 —a (с^ -+- c2ix) — b (с^ -+- c2ix)2,
и2 = ai2 — bi2 = а (схих — c2ix) — b (с^ — c2ix)2.
Разность этих напряжений равна:
и = щ — и2 = 2ас21ж — ^bc^uix.
Полученное выражение аналогично полученному для электронного
преобразователя. Следовательно, у выпрямительного ваттметра среднее
значение выходного напряжения также пропорционально средней актив-
ной мощности.
Очевидно, что переменная слагающая напряжения на выходе преоб-
разователя мощности должна быть отфильтрована при помощи дополни-
тельный фильтров.
Преобразователь мощности с подогревными
сопротивлениями (болометрический преобразователь
мощности)
В качестве нелинейных сопротивлений для создания преобразовате-
лей мощности могут быть использованы подогревные металлические
сопротивления, состоящие из вольфрамовой или платиновой спирали,
внутрь которой продет нихромовый нагреватель в тонкой стеклянной
изолирующей трубке.
В отличие от электронного и выпрямительного ваттметров, рабо-
тающих на начальном приблизительно квадратичном участке вольт-
амперных характеристик электронных ламп или полупроводников, ватт-
метровые преобразователи с подогревными сопротивлениями конструкции
Института электромеханики основаны на использовании широкого пара-
болического участка омамперной характеристики подогревных сопротив-
лений.
Омамперная характеристика подогревного сопротивления с высокой
степенью точности может быть аппроксимирована уравнением
R = Rq-л- сГ,
где с и а — постоянные, причем величина показателя нелинейности а =
= 1.7 = const для избыточных температур спирали 200°^ 6 ^30°.
Для коррекции характеристик подогревных сопротивлений в ваттметре
использованы низковольтные лампы накаливания, работающие при на-
пряжениях значительно ниже номинального. Для получения высокой
стабильности нити накала этих ламп приварены к держателям.
Принципиальная схема ваттметра с подогревными сопротивлениями
приведена на рис. 273. При отключенной нагрузке (7^ = 0) через оба
396
Глава IX. Методы измерений на электродинамической модели
нагревателя протекает одинаковый ток Iu = F(UiX^. Шунтируя нагрева-
тели лампой накаливания и регулируя сдвоенные сопротивления R,
можно в определенном диапазоне изменения напряжения Ux получить
зависимость вида
4=(WJ".
где цоказатель нелинейности п зависит от сопротивления R.
Рассмотрим случай, когда
П = а—1 = 1.7 —1.0 = 1*43- (16)
При включенной нагрузке по одному из нагревателей ваттметра
(рис. 272) будет протекать ток
Л = (kJJxm)n sin «rf -+- kvlxm sin (orf — 6),
а по другому — ток
*2 = (kJ}*,,? sin orf — kjxm sin (orf — 6).
В результате прирост
сопротивления составит
сопротивления спирали первого подогревного
а/2
= С
A/?1 = c
Т
о
т
-f- f [(Шт)" -+- Ш COS О]2 sin2 vatdt —
о
т
— у-1 2 [(^1 Uxmf -F- k2Ixm cos 6] kjxm sin 0 sin vt>t cos vatdt
о
T ча/2
T J sin 6)2 C°S2 ~ C { t *“ cos 0]24~
0 J
1 I’/2
+ 2 (^24».sinO)2j .
Аналогичным путем находим прирост сопротивления второго подо-
гревного сопротивления
A/?2=c{l[(^1i7(tTO)"-W^cos 0]2H- |(^4msin0)2}°/2.
Разлагая правые части полученных уравнений в ряд и пренебрегая
членами разложения высоких степеней, с учетом формулы (16) получим
А/?! Д/?2 = cos 0 -+- [О.ЗЗс^^ (а 1) (а 2) cos2 0 -4-
- -Ь- (а — 2) sin2 0] ^U^)» j cos 6 =
= 2с2Рг 4- c2 (a — 2) [ T[0-33 - г) C°s2 ° sin2 6]
где Ci = c (0.5)a2, c2 = cjcjc^.
£ 3. Измерение мощности переменною тока
397
Рассмотрим отношение второго слагаемого к первому при а = 1.70:
1- = - (0.035 cos’ в + 0.150 sin’ в) [ J.
Разность сопротивлений чувствительных элементов (спиралей) опре-
деляется исключительно измеряемой мощностью и прямо пропорциональна
ей по величине при условии, что значение Т достаточно мало по сравне-
нию с единицей.
Погрешность измерения у будет достаточно мала, если часть тока,
протекающего по нагревателям за счет приложенного напряжения Д =
= (^1£7а?)л, будет значительно больше слагающей тока, пропорциональной
току нагрузки Ii~k2Ix.
Таблица 56
Технические характеристики ваттметра с подогревным
сопротивлением
Основная приведенная погрешность (%) ....
Дополнительная погрешность от изменения на-
пряжения на ±10% от номинального значе-
ния (%).....................................
Дополнительная погрешность от изменения на-
пряжения на ±20% от номинального значе-
НИЯ (%).....................................
Дополнительная погрешность от изменения коэф-
фициента мощности от 1.0 до 0.5 (%).........
Дополнительная погрешность от изменения тем-
пературы на 10° С (%).......................
Максимальная выходная мощность (зависит от
шага намотки спиралей подогревного сопро-
тивления) (мвт).............................
Мощность, потребляемая от измерительного транс-
форматора напряжения (вт)...................
Мощность, потребляемая от измерительного транс-
форматора тока (вт) ........................
Величины
измерения
0.4
0.6
1.4
0.4
0.5
0.5 ±1.0
2.8
0.6
Спирали болометров включены в два смежных плеча одинарного
моста. Измерение разности сопротивлений спиралей может быть осу-
ществлено либо путем измерения величины сопротивления Т?5, посред-
ством которого уравновешивается мост, либо путем измерения э. д. с.
в диагонали моста при неизменной величине сопротивлений плеч отно-
шения и стабилизированном источнике питания моста. В первом случае
процесс уравновешивания может быть осуществлен как вручную, так
и автоматически путем включения спиралей Rr и Т?2 в два смежных
плеча автоматически уравновешенного моста. В этом случае единствен-
ным условием правильного измерения является равенство сопротивлений
плеч отношения R> и R±. Во втором случае, кроме указанного условия,
должно быть соблюдено неравенство R± = Rs^Rr. Напряжение Ug
в диагонали моста, пропорциональное измеряемой мощности, может быть
записано на вибраторе осциллографа. Постоянная времени ваттметра
составляет около 100 мсек.
Данные, полученные в результате испытаний преобразователя мощ-
ности, приведены в табл. 56.
398
Глава IX. Методы измерений на электродинамической модели
Погрешности от влияния внешних магнитных полей и частотная
погрешность преобразователя мощности практически отсутствуют. Пре-
образователь выдерживает десятикратную перегрузку в параллельной
цепи. Это достигнуто за счет использования измерительных трансфор-
маторов тока, работающих в режиме, сравнительно близком к насы-
щению.
Благодаря тепловой инерции болометра сопротивление спирали реа-
гирует только на действующее значение подогревного тока. Напряжение
на выходе ваттметра не содержит переменной слагающей.
Как следует из табл. 56, преобразователь с подогревными сопротив-
лениями имеет значительные преимущества по сравнению с другими
типами. Основным достоинством является точность и надежность.
* *
*
Запись различных величин при исследовании переходных процессов
и режимов работы на моделях и аварийных условий в эксплуатации
производится в настоящее время вибраторными осциллографами.
Наряду с бесспорным преимуществом этого метода, обеспечивающим
быстроту записи и отсутствие фазовых искажений, осциллографическая
запись имеет и ряд существенных недостатков. Невозможность наблю-
дения кривых в процессе исследования, необходимость проявления,
фиксирования и увеличения осциллограмм представляет некоторые труд-
ности и замедляет работу. Расшифровка осциллограмм также приводит
к ошибкам и требует дополнительного времени. Применение для этих
целей самопишущих приборов не практиковалось из-за их недостаточ-
ного быстродействия.
В настоящее время разработаны достаточно быстродействующие при-
боры: потенциометры со временем прохождения всей шкалы 0.2—0.25 сек.
и стрелочные приборы со временем успокоения —0.2 сек. Самопишущие
приборы дают видимую в процессе измерения запись в необходимом
масштабе и значительно большую точность измерения. Самопишущие
стрелочные приборы выпускаются многосистемными с записью одновре-
менно 3—6 величин. Потенциометры имеют непрерывную запись одной
величины, либо точечную запись 6—12 и более величин. Использование
подобных приборов может обеспечить запись всех величин, подлежащих
измерению на моделях. Переход на запись самопишущими приборами
позволит значительно повысить точность и облегчит работу по реги-
страции процессов, поэтому в дальнейшем следует рекомендовать их
применение.
Перспективным является также использование новых типов осцил-
лографов с видимой записью, не требующей проявления. В осциллогра-
фах с видимой записью исключается весьма трудоемкий процесс обра-
ботки осциллограмм.
ЛИТЕРАТУРА
К „Введению"
Ассовский С. Н., Ф. А. Гутбир и др. 1941. Искусственная линия для экспе-
риментального исследования коммутационных и аварийных перенапряжений.
Тр. ЛПИ, № 2.
Веников В. А. 1939. Моделирование электрических систем при помощи вращаю-
щихся машин. Электричество, № 9.
Веников В. А. 1941. Изучение электрических систем на моделях с вращающимися
машинами. Электричество, № 2.
Веников В. А. 1945. Сериесный генератор постоянного тока как отрицательное
сопротивление. Электричество, № 1—2.
Веников В. А. и Л. А. Ж у к о в. 1953. Переходные процессы в электрических
системах. Госэнергоиздат, Л.—М.
Веников В. А. и др. 1955. Краткое описание динамической модели электрических
систем МЭИ. Техническая информация, Изд. МЭИ, М.
Веников В. А., А. В. Иванов-Смоленский. 1956. Физическое моделирова-
ние электрических систем. Госэнергоиздат, Л.—М.
Егиазаров И. В. 1953а. Задачи научных исследований по изучению режимов
работы гидроэнергосистем и их автоматического регулирования. Изв.
АН Арм. ССР, сер. физ.-мат. техн, наук, т. VI, № 1.
Егиазаров И. В. 19536. Моделирование гидравлического удара. ДАН СССР,
т. 92, № 3.
Иванов В. И. 1941. Электродинамическая модель электропередачи Куйбышев—
Москва. Тр. ЛПИ, № 2.
Иванов В. И., П. И. Рыжов. 1933. Быстродействующие дистанционные защиты
и качания. Отчет лаборатории им. Смурова. Л.
Конференция по физическому моделированию энергетических систем. 1954. Элек-
тричество, № 5.
Костенко М. П. 1950. Электродинамическая модель для исследования устойчи-
вости. Электричество, № 9.
Костенко М. II. 1953. Моделирование электромашинного оборудования при изуче-
нии устойчивости параллельной работы энергосистем, связанных с дальними
линиями передачи. Изв. АН СССР, ОТН, № 12.
Костенко М. П., Е. Д. Трейвиш. 1946. Моделирование электрических машин
и трансформаторов при экспериментальном исследовании устойчивости.
Тр. ЛПИ, № 1.
Майер Р. И. 1935. Модель для экспериментального исследования устойчивости.
Бюлл. Всесоюзн. электротехн. инет., № 2.
Труды ЦНИЭЛ. 1954. Вып. 2.
Ш у р С. С. 1953. Модель для исследования внутренних перенапряжений в электро-
передачах переменного тока. Отчет НИИПТ. Август, М.
Цукерник Л. В., В. Е. Крутикова. 1952. Разработка и исследование устрой-
ства компаундирования регулятора скорости гидротурбин для повышения устой-
чивости дальних электропередач. Отчет Инет, электротехники АН УССР.
Якобсон Г. И. 1924. Лабораторная линия Свирь—Волхов—Ленинград. Электри-
чество, № 9.
Mackley К. W. 1955. Development of model power sistem. Electrical engineer
(Melbourne), July 15.
Evans R. D. and R. С. В e r g v a 11. 1924. Experimental analysis of Stability and
Power Limitations. Trans. AIEE, vol. XLIII.
400
Литература
Hochrainer Н. 1956. Das dynamische Kraftwerks und Netzmodell an der Techni-
schen Hochschule Wien. Electrotechnik und Maschinenbau, Wien, 15. April,
Heft 7/8.
Nickle C. A. and F. L. Lauton. 1926. An Investigation of Transmission-Sistem
Power Limits. Journ. AIEE, vol. XLV, № 9, September.
Robert M. R. 1950. Micromachines et microreseaux: etude des problemes de stability
transitoire par la realisation de modeles, electromecaniquement semblables aux
machines et reseaux existants. CIGRE, t. III.
Robert M. R. 1954. Le „Microreseau": Modele dynamique des reseaux* Bull. Soc.
franc. Electr., Fevrier.
К I главе
Герценберг Г. P. и Я. Н. Штрафуй. 1955. Автоматический регулятор возбу-
ждения гидрогенераторов Куйбышевской гидроэлектростанции. Вести, электро-
промышл., № 5.
Ильин В. А., В. Е. Каштелян, Н. В. Поз ин и И. Д. Урусов. 1956. Элек-
тронный регулятор возбуждения для синхронных генераторов, работающих на
дальние линии электропередач. Изв. АН СССР, ОТН, № 12.
Каширин В. А., И. А. Косте цк а я и Н. В. II оз ин. 1956. Телефазометр.
Сб. „Телемеханизация в народном хозяйстве", Изд. АН СССР, М.
Ко II главе
Алексеев А. Е. иМ. П. Костенко. 1939. Турбогенераторы. Госэнергоиздат,
Л.—м.
Костенко М. П. 1949. Электрические машины. (Специальная часть). Госэнерго-
издат, Л.—М.
Костенко М. П. 1953. Моделирование электромашинного оборудования при изуче-
нии устойчивости параллельной работы энергосистем, связанных с дальними
линиями передачи. Изв. АН СССР, ОТН, № 12.
Костенко М. П. и Е. Д. Т р е й в и ш. 1946. Моделирование электрических машин
и трансформаторов при экспериментальном исследовании устойчивости парал-
лельной работы электрических станций. Тр. ЛПИ, № 1.
Костенко М. П. и И. Д. Урусов. 1955. Электродинамические модели гидрогене-
раторов Куйбышевской ГЭС. Электричество, № 8.
Лютер Р. А. 1950. Расчет моментов вращения синхронных машин при коротких замы-
каниях. Сб. „Электросила", № 7.
Суханов Л. А. и И. Д. Урусов. 1957. Исследование движения ротора синхрон-
ного явнополюсного генератора при внезапном коротком замыкании. Изв.
АН СССР, ОТН, № 4.
Урусов И. Д. 1956. Анализ колебательного процесса синхронной машины с учетом
регулирования возбуждения. Изв. АН СССР, ОТН, № 10.
Р а г k R. Н. 1929. Two Reaction Theory of Synchronous Machines I. Transact, of AIEE,
vol. 48.
Robert R. 1950. Micromachines et microreseaux: etude des problemes de stabilite
transitoire par la realisation de modeles, electromecaniquement semblables aux
machines et reseaux existants. CIGRE, XIII session, t. III.
К III главе
Алексеев A. E. и M. П. Костенко. 1939. Турбогенераторы. Госэнергоиздат,
Л.— М.
Веников В. А. и др. 1955. Краткое описание динамических моделей электрических
систем. Изд. МЭИ.
Веников В. А. и А. В. Иванов-Смоленский. 1956. Физическое моделиро-
вание электрических систем. Госэнергоиздат, Л.—М.
Г и к и с А. Ф. 1949. Перекрытие анодных токов. Электричество, № 8.
Глух Е. М., Ю. В. Чалый, Е. Л. Эттингер. 1956. Система ионного возбужде-
ния гидрогенераторов. Сб. „Электросила", № 14.
Завалишин Д. А., И. А. Г л е б о в. 1951. Установившийся режим синхронного
шестифазного генератора, работающего в схеме ионного возбуждения. Сб. „Элек-
тросила", № 10.
Литература
401
Касьянов В. Т. 1951. О расчетном определении скорости нарастания возбуждения.
Сб. „Электросила", № 9.
Костенко М. П. 1953. Моделирование электромашинного оборудования при изуче-
нии устойчивости параллельной работы энергосистем, связанных с дальними
линиями передачи. Изв. АН СССР, ОТН, № 12.
Костенко М. П., И. Д. Урусов. 1955. Электродинамические модели гидрогене-
раторов Куйбышевской ГЭС. Электричество, № 8.
Рюденберг Р. 1955. Переходные процессы в электроэнергетических системах.
Изд. иностр, литер., М.
Ф е т и с о в В. В. 1959. Об эквивалентности массивного участка магнитопровода
системе короткозамкнутых катушек с расслоенными сердечниками. Тр. ЛПИ,
№ 209.
Ш е х т м а н М. Г. 1940. Работы генератора на выпрямительную нагрузку. Тр. ЛПИ, № 3.
Штрафуй Я. Н. 1956. Автоматика регулирования возбуждения гидрогенераторов.
Сб. „Электросила", № 14.
К IV главе
Важное А. И. и Э. С. Мкртчян. 1952. Трехфазный последовательный коллек-
торный генератор как отрицательное сопротивление. Электричество, № 11.
Веников В. А. 1945. Сериесный генератор постоянного тока как отрицательное
сопротивление. Электричество, № 1.
Веников В. А. 1949. Применение теории подобия и физического моделирования
в электротехнике. Госэнергоиздат, Л.—М.
Веников В. А. и др. 1955. Краткое описание динамических моделей электрических
систем. Изд. МЭИ.
Веников В. А и А. В. Иванов-Смоленский. 1951. Синхронный генератор
для динамического моделирования электрических систем. Электричество, № 8.
Веников В. А. и А. В. Иванов-Смоленский. 1955. Развитие физических
моделей электрических систем. Электричество, № 8.
Веников В. А. и А. В. Ив анов-Смоленский. 1956. Физическое моделиро-
вание электрических систем. Госэнергоиздат, Л.—М.
Костенко М. П. 1933. Коллекторные машины переменного тока. КУБУЧ, Л.
Костенко М. П. 1949. Электрические машины. (Специальная часть). Госэнерго-
издат, Л.—М.
Костенко М. П. 1950. Электрическая модель для исследования устойчивости.
Электричество, № 9.
Костенко М. П. 1953. Моделирование электромашинного оборудования при изу-
чении устойчивости параллельной работы энергосистем, связанных с дальними
линиями передачи. Изв. АН СССР, ОТН, № 12.
Костенко М. П. иЕ. Д. Трейв и ш. 1946. Моделирование электрических машин
и трансформаторов при экспериментальном изучении устойчивости. Тр. ЛПИ,
№ 1.
Несговорова Е. Д. 1953. Принципы самовозбуждения коллекторных машин.
Тр. ЛПИ, № 3.
Robert М. R. 1950. Micromachines et microreseaux: etude des problemes de stabilite
transitoire par la realisation de modeles, electromecaniquement semblables aux
machines et reseaux existants. CIGRE, XIII session, t. III.
Robert M. R. 1954. Le Microreseau Modele dynamique de Reseaux. Bulletin de la
Societe Fran^aise des electriciens, Fevrier.
К V главе
Костенко M. II. и Е. Д. Т р е й в и ш. 1946. Моделирование электрических машин
и трансформаторов при экспериментальном исследовании устойчивости парал-
лельной работы электрических станций. Тр. ЛПИ, № 1.
Суханов Л. А. 1957а. Моделирование мощных силовых трансформаторов. Тр. меж-
вузовской научно-техн, конференц, по дальним электропередачам, Секция III,
Изд. ЛПИ.
Суханов Л. А. 19576. Трансформатор для электродинамической модели энерго-
систем. Электричество, № 4.
Abetti Р. А. 1953. Transformer Models for the Determination of Transcient Volta-
ges. Trans. ATEE, part III, vol. 72.
402
Литература
К VI главе
Арутюнян Г. Г. 1957. Аварийное регулирование гидротурбин как мера повышения
динамической устойчивости гидроэлектрической системы. Изв. АН Арм. ССР,
сер. техн, наук, № 1.
Веников В. А. 1939. Моделирование электрических систем при помощи вращаю-
щихся машин. Электричество, № 9.
Веников В. А. 1949. Применение теории подобия и физического моделирования
в электротехнике. Госэнергоиздат, М.—Л.
Веников В. А., А. В. Иванов-Смоленский. 1956. Физическое моделиро-
вание электрических систем. Госэнергоиздат, М.—Л.
Воронов А. А., А. А. Первозванский, В. В. Семенов. 1956. Электроди-
намическая модель гидравлической турбины и ее регулятора скорости.
Изв. АН СССР, ОТН, № 1.
Гаркав и Ю. Е., М. И. Смирнов. 1954. Регулирование гидротурбин. Машгиз, Л.
Гохберг С. М. 1947. Электронный регулятор вращающего момента машин постоян-
ного тока в электродинамической модели электропередачи. Тр. ЛПИ, № 5.
Гриня Я. И., П. Н. К о п а й - Г о р а. 1956. Блок запаздывания с использованием
решающих усилителей и конденсаторов. Автоматика и телемеханика, № 6.
Гуров В. В. 1955. Устройство для создания постоянного запаздывания. Труды
II Всесоюзн. совещ. по теории автоматич. регулирования, т. III.
Егиазаров И. В. 1953а. Задачи научных исследований по изучению режимов ра-
боты гидроэнергосистем и их автоматического регулирования. Изв. АН Арм. ССР,
сер. физ.-мат. естеств. и техн, наук, т. VI, № 1.
Егиазаров И. В. 19536. Моделирование гидравлического удара в особых условиях
динамического моделирования целой гидроэнергосистемы. ДАН СССР, т. 92,
№ 5.
Егиазаров И. В., Н. А. Картвелишвили, А. А. Первозванский.
1957. К влиянию резинового шланга с воздухом при моделировании гидравли-
ческого удара. Изв. АН СССР, ОТН, № 11.
Жмудь А. Е. 1953. Гидравлический удар в гидротурбинных установках. Госэнерго-
издат, М.—Л.
Иванов В. А. 1956. Блок задержки с применением магнитной записи. Автоматика
и телемеханика, № 4.
Картвелишвили Н. А. 1951. Неустановившиеся режимы в силовых узлах
гидроэлектрических станций. Госэнергоиздат, М.—Л.
Коган Б. Я. 1952. Моделирование систем автоматического регулирования при на-
личии типичных нелинейных характеристик. Автоматика и телемеханика, № 2.
Корн Г., Т. Корн. 1955. Электронные моделирующие устройства. Изд. иностр,
литер., М.
Костенко М. II., Е. Д. Т р е й в и ш. 1946. Моделирование электрических машин
и трансформаторов при экспериментальном исследовании устойчивости парал-
лельной работы электрических станций. Тр. ЛПИ, № 1.
Краткое описание динамической модели электрических систем (Техническая инфор-
мация). Под редакцией Веникова В. А. 1955. Изд. Моск, энерг. инет., М.
Кривченко Г. И. 1951. Гидравлический удар и рациональные режимы регулиро-
вания турбин гидроэлектростанций. Госэнергоиздат, М.—Л.
Лифшиц Л. С. 1956. Моделирование первичных двигателей мощных гидроэлектри-
ческих станций при изучении электрической части энергетических систем.
Тр. МЭИ, вып. XIX, Гидроэнергетика, М.—Л.
Павлов Г. М. 1953. Исследование регулирования частоты и активной мощности на
электродинамической модели гидроагрегата. Электричество, № 6.
Первозванский А. А. 1957. О качестве автоматического регулирования частоты
в энергосистемах. Изв. АН СССР, ОТН, № 1.
Первозванский А. А., Р. А. Полуэктов. 1956. Моделирование явлений
гидравлического удара в напорных трубопроводах гидроэлектростанций. Автома-
тика и телемеханика, № 4.
Семенов В. В. 1957. Электродинамическое моделирование гидротурбин. Тр.
межвузовск. научно-техн, конфер. по дальним электропередачам, Секция 2, Л.
Семенов В. В. 1958а. Электродинамическое моделирование гидравлической части
гидростанций. Научн. докл. высшей школы, Энергетика, № 2.
Семенов В. В. 19586. Электродинамическое моделирование напорных трубопрово-
дов. Вести. АН СССР, № 10.
Сиротинский Е. Л. 1947. Электромоделирование гидроэнергетических систем
с напорными установками. Дисс., М.
Литература
403
Смирнов И. Н. 1956. Гидравлические турбины. Госэнергоиздат, М.—Л.
Трапезников В. А., Б. Я. Коган. 1952. Принципы построения электронных
моделирующих устройств для исследования систем автоматического регулирова-
ния. Автоматика и телемеханика, № 6.
Фомин А. К. 1955. Электрическая модель гидроэнергетической установки. Сб. ста-
тей научн. студ. общ. Моск, энерг. инет., изд. МЭИ.
Юревич Е. И., М. Р. Линде. 1957. Регулирование по углу в крупных энерго-
системах. Тр. межвузовск. научно-техн, конфер. по дальним электропередачам,
Секция 2, изд. ЛПИ.
Evangelisti G. 1947. La regolazione delle turbine idrauliche. Nicola Zanichelli
Editore, Bologna.
Hochrainer H. 1956. Das dynamische Kraftwerks — und Netzmodell an der Tech-
nischen Hochschule Wien. Elektrotechnik und Maschinenbau, Wien, 15. April.
Meissinger H. F. 1955. An electronic circuit for the generation of functions of
several variables. IRE Convention Record, part 4, N. Y.
Robert M. R. 1954. Le „Microreseau**: Modele dynamique de reseaux. Bull. Soc.
Fran^. Electr., № 38, Fevrier.
Somerville M. J. 1956. A circuit for analogue formation of xyjz* Electronic Engi-
neering, vol. 29, № 343, September.
К VII главе
Асеевский С. И., Ф. А. Гут би р и др. 1941. Искусственная линия для иссле-
дования коммутационных перенапряжений. Тр. ЛПИ, № 2.
Веников В. А. и др. 1955. Краткое описание динамической модели электрических
систем. Изд. МЭИ.
Веников В. А. и А. В. Иванов-Смоленский. 1956. Физическое модели-
рование электрических систем. Госэнергоиздат, М.—Л.
Иванов В. И. 1941. Электродинамическая модель. Тр. ЛПИ, № 2.
Иванов В. И., И. И. Рыжов, В. К. С и р о т к о. 1955. Устройство для модели-
рования неполнофазных режимов двухцепной линии. Изв. АН СССР, ОТН, №3.
Краснушкин П. Е. 1947. Нормальные волны в цепочечных схемах. Журн. техн,
физ., т. XVII, вып. 6.
Краснушкин II. Е. 1949. О методах моделирования волновых процессов. Вести.
МГУ, № 11.
Robert М. R. 1954. Le „Microreseau": Modele dynamique des reseaux. Bulletin de la
Societe Francaise des Electriciens, Fevr., 67.
S h u r i n g O. 1923. A miniature a—c transmission system for the practical solution
of network and transmission problems. Tr. AIEE, June.
К VIII главе
Воронов A. A. 1954. Элементы теории автоматического регулирования. Воен-
издат, М.
Круг К. А. 1939. Основы электротехники. Госэнергоиздат, М.—Л.
Круг К. А. 1948. Переходные процессы в линейных электрических цепях. Гос-
энергоиздат, М.—Л.
Лебедев С. А. 1934. Устойчивость параллельной работы электрических систем.
Госэнергоиздат, М.—Л.
Лютер Р. А. 1939. Теория переходных режимов синхронной машины с примене-
нием операторного анализа. Л.
Мееров М. В. 1956. Введение в динамику автоматического регулирования элек-
трических машин. Изд. АН СССР, М.
Первозванский А. А. 1957а. Некоторые вопросы динамики регулирования
частоты в энергосистемах. Дисс., Л.
Первозванский А. А. 19576. О качестве автоматического регулирования
частоты в энергосистемах. Изв. АН СССР, ОТН, № 1.
Солодовников В. В. 1954. Частотный метод анализа качества систем автома-
тического регулирования. В кн.: Основы теории автоматического регулирова-
ния, Машгиз, Л.
Урусов И. Д. 1956. Анализ колебательного процесса синхронной машины с учетом
регулирования возбуждения. Изв. АН СССР, ОТН, № 10.
Hamilton F. 1932. Field Test to Determine the Damping Characteristics of Synch-
ronous Generators. Trans. AIEE, Sept.
404
Литература
К IX главе
Бобов К. С. 1937. Измерение угла в синхронных машинах. Электричество, № 20^
Веников В. А. и др. 1955. Краткое описание динамической модели электрических
систем. Изд. Моск, энерг. инет.
Горский Ю. М. 1956. Измерительные установки при физическом моделировании
энергосистем. Тр. МЭП, Электроэнергетика, вып. 20.
Волчок Л. Я. 1955. Методы измерений в двигателях внутреннего сгорания. Маш-
гиз, М.
Гутенмахер Л. Н. 1937. Непосредственное измерение угла сдвига фаз между
э. д. с. и напряжением синхронной машины. Электричество, № 20.
Егиазаров И. В., К. X. О в с е н я н, Ф. А. Григорян. 1955. Регистрация
момента вращения первичного двигателя. Технический отчет, изд. Водноэнерг.
инет. АН Арм. ССР, Ереван.
Ивахненко А. Г. и И. К. П а р р а. 1949. Триггерное устройство для измерения
угла выбега ротора турбогенератора. Сб. трудов Инет, электротехн. АН УССР,
вып. 4.
Измерение механических величин электрическими методами. 1952. Под. ред-
Н. И. Пригоровского. Госэнергоиздат, М.
Ковалевская В. В. и В. С. Попов. 1959. Об одном методе измерения сдвига
фаз. Приборостроение, № 2.
Прибор для измерения крутящего момента. 1956. Экспресс-информация № ОТ—18г
изд. Инет, научн. информ. АН СССР, М.
Тер мен Ф. и Д. Петтит. 1955. Измерительная техника в электронике. Изд.
иностр, литер., М.
Т уричи н. 1956. Электрические измерения неэлектрических величин. Госэнерго-
издат, М.
Электронное устройство для измерения крутящего момента. 1956. Экспресс-
информация, № ОТ—11, изд. Инет, научн. информ. АН СССР, М.
Freer J. А. 1955. A transistor torqnemeter. Electronic Engineering, October.
ОГЛАВЛЕНИЕ
Стр.
Предисловие . . . . ............................................................................................. 3
Введение......................................................................................................... 5
§ 1. Моделирование как метод изучения сложных явлений в приложении к энерго-
системам .................................................................. —
§ 2. Некоторые особенности различных принципов моделирования в применении
к энергосистемам........................................................... 9
§ 3. Историческое развитие электродинамических моделей энергосистем ... 12
Глава I. Электродинамическая модель Института электромеханики Академии
наук СССР (ИЭМ)...................................................... 30
§ 1. Модельные синхронные генераторы ............................ —
§ 2. Модельные синхронные компенсаторы......................................... 33
§ 3. Компенсаторы активных сопротивлений............................ —
§ 4. Системы возбуждения модельных синхронных машин..................... 34
§ 5. Автоматические регуляторы возбуждения.............................' 35
§ 6. Модели первичных двигателей и их регуляторов скорости..................................................... 37
§ 7. Модельные трансформаторы .................................................................................. —
§ 8. Модели линий электропередач.......................................; , 38
§ 9. Модели приемных энергосистем............................................................................... —
§ 10. Электроснабжение электродинамической модели............................................................... 40
§ 11. Размещение оборудования электродинамической модели........................................................ 42
Глава II. Моделирование синхронных машин........................................................................ 46
§ 1. Условия электродинамического подобия........................................................ —
§ 2. Учет нелинейности магнитной характеристики ................................................ 52
§ 3. Особенности проектирования элементов магнитопровода..... 55
§ 4. Выбор числа q и форма кривой э. д. с...................... 59
§ 5. Моделирование специальных характеристик.................................................... 60
§ 6. Добавочные потери и эквивалентные активные сопротивления. 62
§ 7. Моделирование граничных условий.............................. 91
§ 8. Моделирование колебательных характеристик синхронных машин ....
§ 9. О моделировании машин с массивным ротором.................................................. 92
§ 10. Учет насыщения при моделировании синхронных генераторов.................................... 94
§ 11. Модели синхронных машин ИЭМ АН СССР ...................................................... 105
§ 12. Дальнейшее развитие серии модельных машин................................................. 116
Глава III. Моделирование систем возбуждения.............................. 119
§ 1. Моделирование систем электромашинного возбуждения..................... —
§ 2. Моделирование систем ионного возбуждения ........................... 141
Глава IV. Компенсаторы активных сопротивлений обмоток статоров и роторов
модельных синхронных машин............................................. 159
§ 1. Общие замечания ......................................................... —
§ 2. Компенсаторы активного сопротивления типа ОКГ........................ 163
§ 3. Компенсаторы активного сопротивления типа ТКГ........................ 170
§ 4. Серия компенсаторов ОКГ и ТКГ.......................................... 180
§ 5. Методы испытания и настройки компенсаторов............................. 185
Глава V. Моделирование силовых трансформаторов............................ 200
§ 1. Условия подобия силовых трансформаторов .............................. —
§ 2. Особенности проектирования модельных силовых трансформаторов .... 201
§ 3. Выбор основных размеров модельных трансформаторов первого типа . . . 205
406
Оглавление
Стр.
§ 4. Модельные силовые трансформаторы, используемые в электродинамических
моделях энергосистем ИЭМ АН СССР......................................... 209
§ 5. Добавочные потери модельных трансформаторов в режиме короткого замы-
кания ................................................................. 220
Глава VI. Моделирование гидравлических турбин, трубопроводов и регуля-
торов скорости . • ............................................... 223
§ 1. Моделирование гидротурбин ............................................. —
§ 2. Моделирование влияния инерции потока воды через турбину ............. 243
§ 3. Моделирование регуляторов скорости гидротурбин ...................... 267
§ 4. Описание некоторых выполненных моделей............................... 289
§ 5. Об электромоделировании паровых турбин............................... 304
Глава VII. Моделирование линий электропередач............................. 306
§ 1. Основные положения, принятые при моделировании линий электропередач —
§ 2. Элементы моделей линий электропередач................................ 308
§ 3. Модели компенсирующих устройств...................................... 314
§ 4. Описание установки, моделирующей линии передач 400 кв единой высоко-
вольтной сети (ЕВС) Европейской части СССР............................... 316
§ 5. Параметры моделей линий электропередач............................... 318
§ 6. Моделирование неполнофазных режимов двухцепных линий электропередач 320
§ 7. Моделирование измерительных трансформаторов.......................... 330
§ 8. Схемы управления моделями линий электропередач....................... 341
Глава VIII. Малая электродинамическая модель ИЭМ АН СССР.................. 347
§ 1. Возможности упрощенного моделирования элементов энергосистем .... —
§ 2. Выбор числа ячеек при моделировании дальних линий ................... 350
§ 3. О моделировании активного сопротивления статора синхронных генераторов 353
§ 4. О моделировании демпферных обмоток синхронных генераторов............ 357
§ 5. Описание малой модели энергосистемы................................. 363
Глава IX. Методы измерений на электродинамической модели ................. 371
§ 1. Измерение угла сдвига фаз 0............................................ —
§ 2. Измерение крутящего момента ........................................ 384
§ 3. Измерение мощности переменного тока................................. 392
Литература................................................................ 399
ЭЛЕКТРОДИНАМИЧЕСКОЕ МОДЕЛИРОВАНИЕ ЭНЕРГЕТИЧЕСКИХ СИСТЕМ
Утверждено к печати
Институтом электромеханики Академии наук СССР
Редактор издательства П. С. Долматов
Технический редактор А. В. Смирнова
Корректоры Н. И. Журавлева и Г. В. Трекало
Сдано в набор ЗДХ 1959 г. Подписано к пе-
чати 4/XII 1959 г. РИСО АН СССР № 73-
65В. Формат бумаги 70X108’/ie« Бум. л. 123/«.
Печ. л. 251/2 = 34.93 усл. печ. л. +6 вкл.
Уч.-изд. л. 33.8+6 вкл. (1.54). Изд. № 862.
Тип. зак. № 317. М-04740. Тираж 2500.
1]ена 25 р. 85 к.
Ленинградское отделение Издательства
Академии наук СССР. Ленинград, В-164,
Менделеевская лин., д. 1
l-я тип. Издательства Академии наук СССР.
Ленинград, В-34, 9 линия, д. 12
ИСПРАВЛЕНИЯ И ОПЕЧАТКИ
Страница Строка или формула Напечатано Должно быть
30 15 снизу энергосистем элементов энергосистем
60 формула (73) tf/rf Ufq
61 „ (78) ХЛ = (j о>) = X Xd (j <о) = Ad
67 14 сверху л II Л ’ U =5 е> “ у- do d 1 1
68 формула (85) Х d q "2 "2 Х d Х q
93 „ (93) X *2
145 18 снизу электромашинного ионного
337 1 „ при и
364 рис. 249 направление направляющего
377 17 снизу
Электродинамич. моделирование.