/


















































































































































































































Автор: Никулин Е.А.
Теги: автоматика автоматизация теория автоматического управления
ISBN: 5-93272-086-7
Год: 2000
Похожие




Текст
Основы теории автоматического управления. Частотные методы анализа и
синтеза систем: Учеб, пособие. 2-е изд., испр. и доп. / Е.А. Никулин
Рассматриваются основные задачи проектирования САУ, статические свой
ства нелинейных и линейных элементов и систем, применение преобразования
Лапласа для анализа динамики систем. Описываются основные соединения эле-
ментов и методы преобразования структурных схем, построение частотных ха-
рактеристик и погрешности их аппроксимации, методы расчета временных ха-
рактеристик, показатели качества переходных процессов и методы их оценки.
Приводятся различные критерии устойчивости автоматических систем, в том
числе с запаздыванием, алгебраические и частотные критерии обеспечения запа-
сов устойчивости. Описываются основные частотные и временные методы расче-
та переходных процессов. Дается классификация корректирующих устройств (ре-
гуляторов), рассматриваются частотные и спектральные методы расчета регуля-
тора, обеспечивающего желаемые статические и динамические свойства замкну-
той САУ, а также способы управления неустойчивыми объектами. Материал ка-
ждого параграфа иллюстрирован достаточным для понимания числом примеров,
предлагаются 120 вариантов заданий для курсового проектирования, лаборатор-
ных, практических и самостоятельных работ.
Предназначено для студентов специальности 220100 «Вычислительные ма-
шины, комплексы, системы и сети» всех форм обучения.
Рецензенты: д-р техн, наук А.Т. Надеев, канд. техн, наук С.Н. Рябов
СКАН - ГРУППА
PICBOOK
ISBN 5-93272-086-7
© Никулин Е.А.. 2000
ОГЛАВЛЕНИЕ
ВВЕДЕНИЕ 5
В. 1. Основные понятия теории автоматического управления 5
В.2. Классификация систем управления 5
’’ В.З. Задачи теории авгоматического управления 7
ГЛАВА 1. МАТЕМАТИЧЕСКОЕ ОПИСАНИЕ ЭЛЕМЕНТОВ
СИСТЕМ УПРАВЛЕНИЯ 10
11.1. Классификация элементов САУ 10
1.2. Статические свойства элементов и систем 10
1.2.1. Соединения статических элементов 11
1.2.2. Линеаризация статических элементов 12
1.2.3. Статические ошибки в замкнутых системах управления 14
1.3. Статический анализ и синтез схем на операционных усилителях 16
1.3.1. Нелинейные статические элементы на операционных усилителях 16
1.3.2. Линейные статические элементы на операционных усилителях 18
1.4. Описание динамики элементов САУ 22
1.5. Передаточная функция 26
1.6. Соединения элементов и преобразования структурных схем 27
1.7. Динамический анализ и синтез схем на операционных усилителях 31
1.7.1. Динамические элементы на операционных усилителях 31
1.7.2. Анализ и синтез многокаскадных схем на ОУ 38
ГЛАВА 2. ЧАСТОТНЫЕ ХАРАКТЕРИСТИКИ ЭЛЕМЕНТОВ
И СИСТЕМ УПРАВЛЕНИЯ 46
12.1. Основные частотные характеристики 46
2.2. Частотные характеристики типовых звеньев 48
2.3*. Погрешности аппроксимации ЛЧХ типовых звеньев 53
2.4. Частотные характеристики сложных систем 56
2.5*. Анализ полиномов 61
2.5.1. Полиномы низких степеней 63
2.5.2. Структура спектра полинома 65
gg 2.5.3. Локализация корней полинома 68
» 2.5.4. Уточнение корней полинома 72
ГЛАВА 3. ВРЕМЕННЫЕ ХАРАКТЕРИСТИКИ ЭЛЕМЕНТОВ
И СИСТЕМ УПРАВЛЕНИЯ
3.1. Обратное преобразование Лапласа
3.1.1. Метод разложения Хевисайда
3.1.2. Табличный метод преобразований Лапласа
3.1.3. Программный метод преобразований Лапласа
3.2. Импульсная и переходная характеристики
3.3. Взаимосвязь частотных и временных характеристик
3.4* . Аппроксимационный метод построения временных характеристик
3.5. Показатели качества переходных процессов САУ и их оценка
3.5.1. Спектральные оценки качества переходных процессов
3.5.2. Частотные оценки качества переходных процессов *
82
82
82
86
87
89
95
97
101
102
104
* Таким знаком обозначены параграфы вспомогательного назначения
ГЛАВА 4. УСТОЙЧИВОСТЬ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ 109
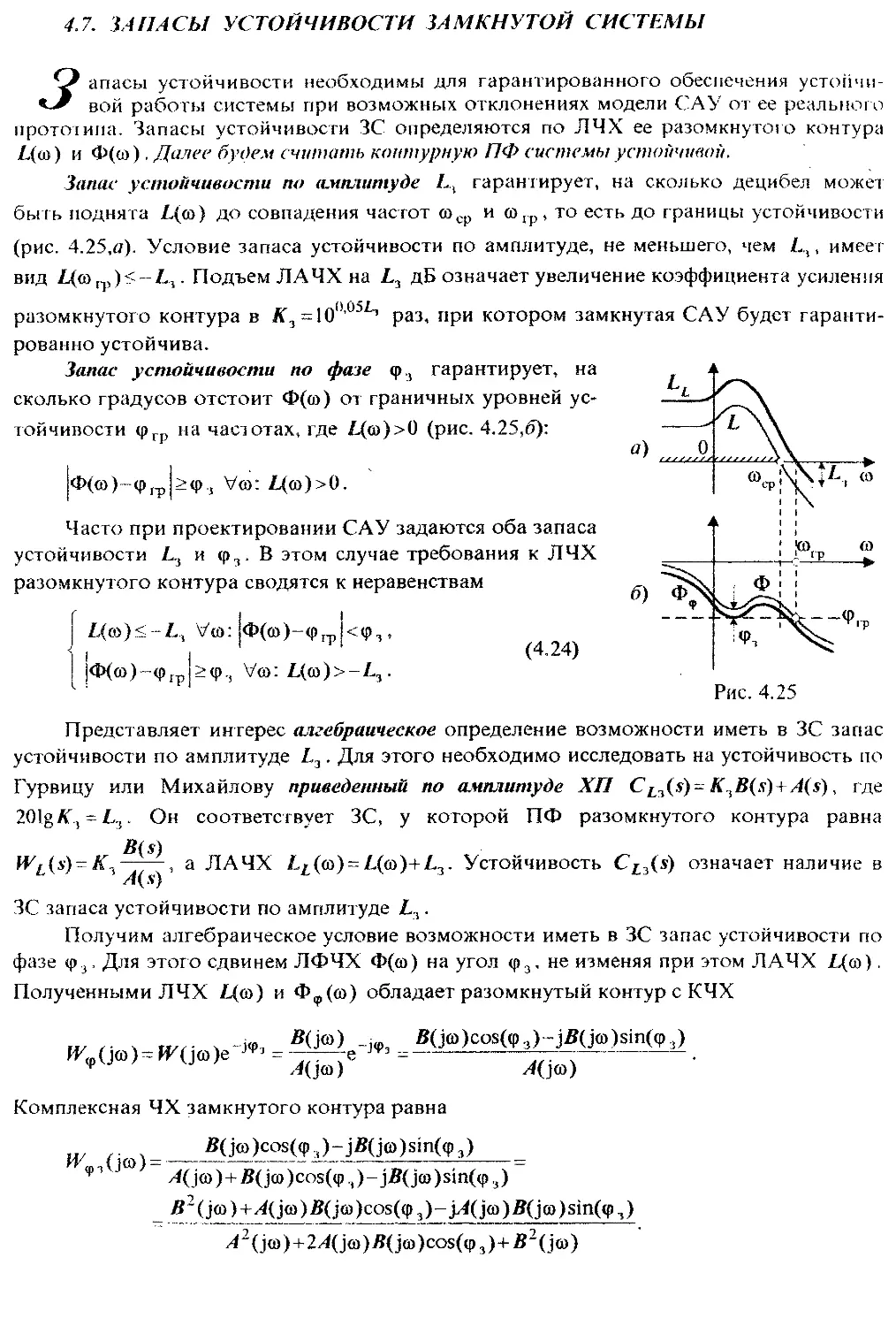
4.1. Понятие устойчивости 4.2. Условия устойчивости линеаризованных систем Ж 4.3. Алгебраические критерии устойчивости 4.3.1. Необходимые условия устойчивости Ц? 4.3.2. Критерий устойчивости Рауса - Гурвица 4.4. Построение областей устойчивости параметрических полиномов 4.5. Частотный критерий устойчивости Михайлова йЙ 4.6. Частотный критерий устойчивости Найквиста Ж 4.6.1. Вывод критерия Найквиста Щ 4.6.2. Логарифмический критерий устойчивости Найквиста Щ 4.7. Запасы устойчивости замкнутой системы ™ 4.8 ^Устойчивость систем с запаздыванием 109 1 10 111 112 113 115 1 18 122 122 125 131 135
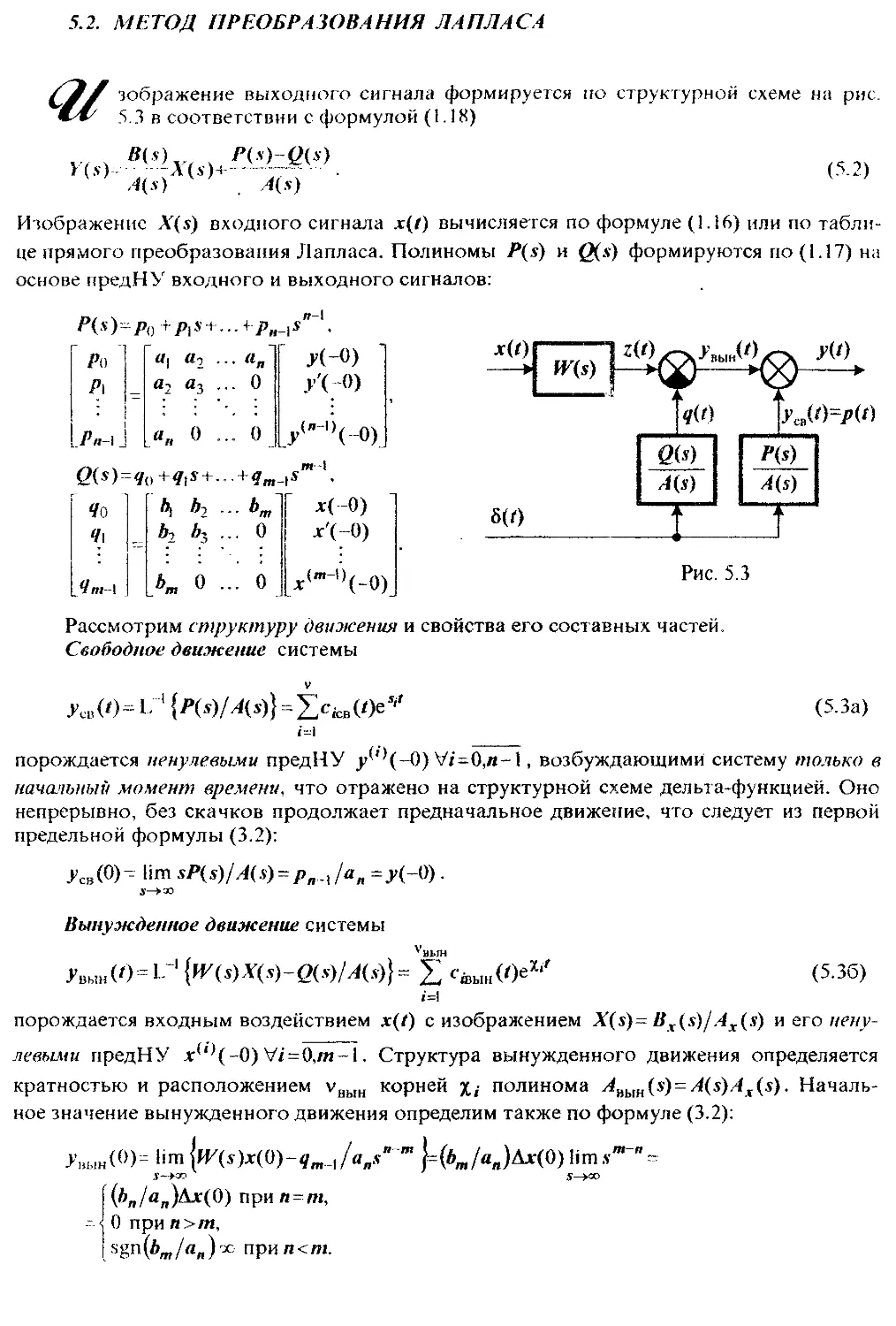
ГЛАВА 5. РАСЧЕТ ПЕРЕХОДНЫХ ПРОЦЕССОВ В СИСТЕМАХ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ Ц 5.1. Структура переходного процесса Ц| 5.2. Метод преобразования Лапласа Щ 5.3. Метод вариации произвольных постоянных |Ц 5.4. Метод интеграла Дюамеля HI 5.5. Метод пространства состояний 139 139 141 145 148 150
ГЛАВА 6. ЧАСТОТНЫЕ МЕТОДЫ СИНТЕЗА СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ 156
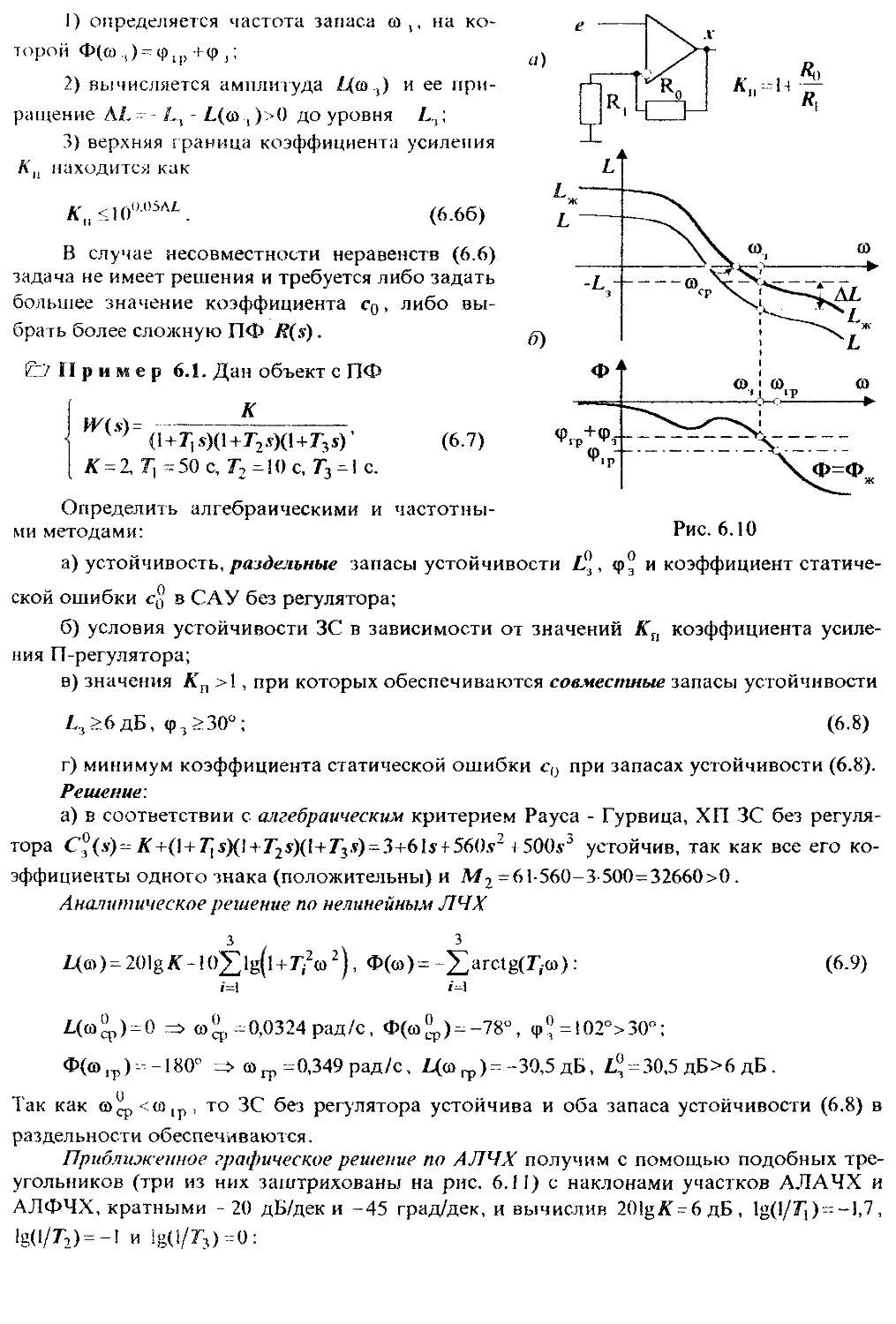
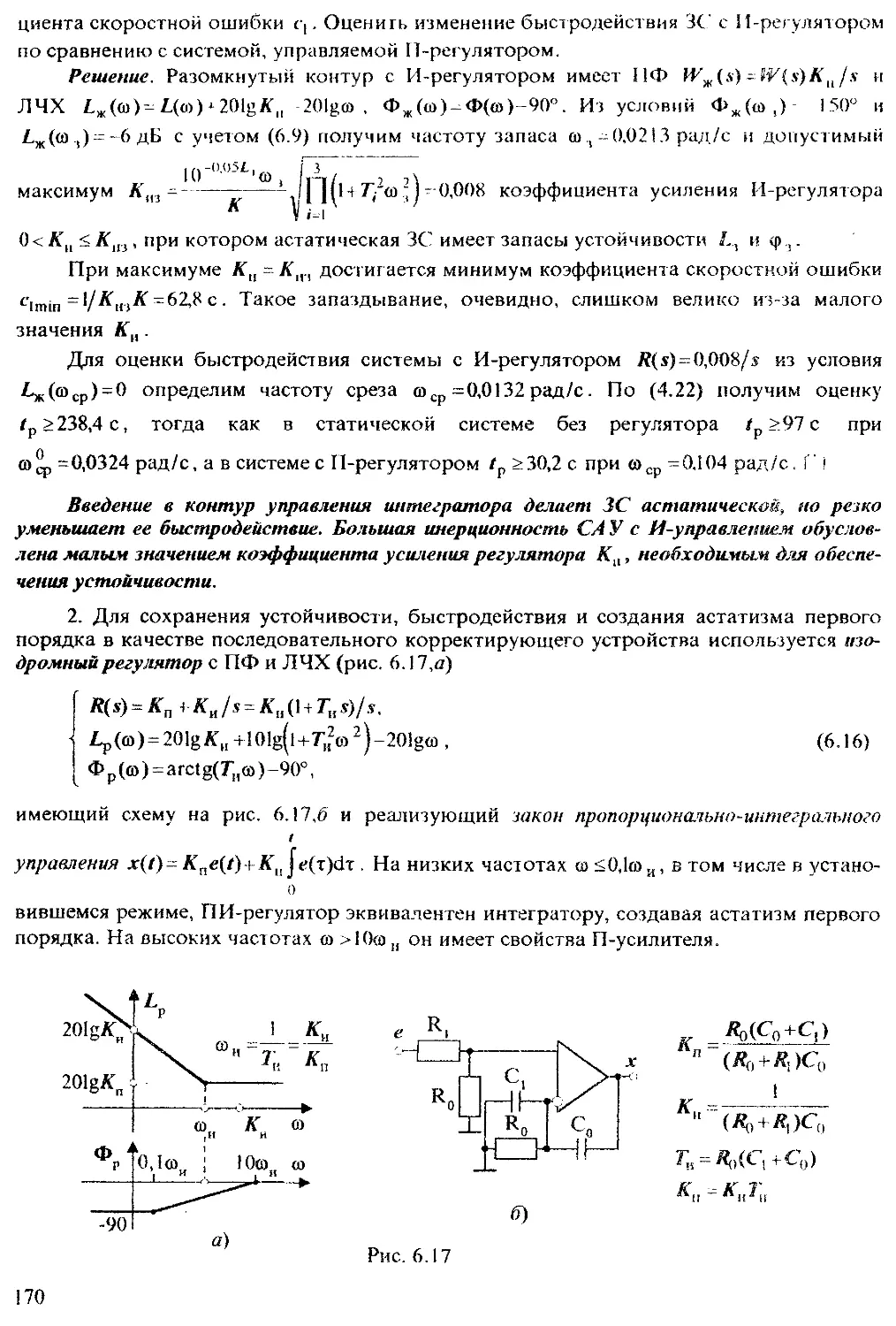
Щ 6.1. Основные задачи частотного синтеза САУ Ж 6.2. Методы повышения статической точности |Ц 6.2.1. Коэффициенты статических ошибок Щ 6.2.2. Статические системы управления Ж 6.2.3. Астатические системы управления |Ц 6.3. Методы улучшения динамических параметров Щ 6.4. Быстрый синтез систем управления методом логарифмических ж частотных характеристик Ш 6.5. Управление неустойчивыми объектами 6.6. Спектральный метод синтеза регуляторов 156 161 161 162 168 172 179 184 189
ПРИЛОЖЕНИЕ 1. Таблицы преобразований Лапласа ПРИЛОЖЕНИЕ 2. Задания для курсового проектирования БИБЛИОГРАФИЧЕСКИЙ СПИСОК 205 224 230
ВВЕДЕНИЕ
В. I. ОСНОВНЫЕ ПОНЯТИЯ ТЕОРИИ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Г ' еория автоматического управления (ТАУ) изучает процессы управления,
методы исследования и проектирования систем автоматического управле-
ния (САУ). Необходимость поддержания постоянного или заданного закона изменения
какой-либо величины возникает в различных отраслях техники: электроснабжении
(постоянство частоты и напряжения в сети); атомной энергетике (постоянство мощно-
сти реактора для обеспечения его безопасности и устойчивости работы); авиации и су-
довождении (движение по заданному курсу, стабилизация крена и дифферента); космо-
навтике (ориентация в пространстве); металлургической и бумажной промышленности
(постоянство толщины проката); робототехнике (движение рабочего органа по задан-
ной траектории).
Сами по себе объекты, в которых протекают процессы, часто не обеспечивают их
желаемого хода, не устраняют отклонений от заданных режимов. Поэтому такие объ-
екты управления (ОбУ) снабжаются регуляторами, или устройствами управления (УУ).
Управление - это воздействие на ОбУ, предназначенное для достижения цели управления.
Управление бывает ручным и автоматическим. Регулирование - это управление с целью
обеспечения близости управляемых координат объекта к их уставкам - заданным зна-
чениям. Следящее регулирование - это обеспечение близости управляемых координат к
значениям заранее неизвестных уставок путем их сравнения благодаря наличию
в системе контура обратной связи (ОС). Программное регулирование - это регулирова-
ние координат ОбУ при заранее известных уставках без использования ОС. Ста-
билизация - это регулирование управляемых координат к постоянным уставкам.
Таким образом, САУ есть объединение ОбУ и УУ.
Возмущение - это неуправляемое воздействие извне на любой элемент
САУ, как правило, затрудняющее достижение цели управления. Учет возмущений, то
есть возможность их измерить и использовать для корректировки управления, позволя-
ет противодействовать их вредному влиянию на ОбУ или, наоборот, использовать
(например, попутный ветер при управлении самолетом) для ускорения достижения цели
или экономии энергии.
В. 2. КЛАССИФИКАЦИЯ СИСТЕМ УПРАВЛЕНИЯ
CTjf лассификация САУ производится по следующим признакам:
«_Хс^ 1) по принципу регулирования-, разомкнутые с программным управлением
(рис. В. 1,о), с управлением по возмущению (рис. В. 1,6), замкнутые (рис. В.1,в) и комби-
нированные (рис. В.1,г). На рис. В.1 обозначено: ИУ - измерительное устройство, g -
уставка, х - управление, у - измерение, fo и fit - возмущения ОбУ и ИУ, е - невязка
(ошибка) регулирования.
Обратная связь - основной принцип функционирования сложных систем, позво-
ляющий в реальном времени по ходу процесса управления устранять ошибки регулиро-
вания на основе измерения текущего состояния объекта. Если можно измерить возму-
щения, нарушающие желаемый ход процессов, то введение в САУ дополнительного
контура управления по возмущению позволяет оперативно противодействовать его
вредному влиянию, не дожидаясь, пока это влияние заметно проявится в выходном сиг-
нале системы;
в)
Рис. В.1
2) по цели регулирования: системы программного управления (цель: y(t)-g(t) без
ОС), следящие (y(t)=g(t) с ОС), стабилизации (у(/)-^'-const с ОС) и экстремальные
(цель: экстремум некоторого показателя качества управления);
3) по способу формирования сигнала управления регулятором:
- непрерывные (рис. В.2,а);
- дискретные —г-> импульсные —с амплитудной модуляцией (рис. В.2,6);
(tk~kT)
-> с широтной модуляцией (рис. В.2,в);
*-► с фазовой модуляцией (рис. В.2,г);
-► релейные (х4=«Лх) (рис. В.2,д);
-> цифровые (/А=ЛТ, х.=гАх) (рис. В.2,е);
- с гармонической модуляцией.
Рис. В.2
В непрерывных системах управление вырабатывается аналоговыми устройствами
автоматики, например, схемами на операционных усилителях. В дискретных системах
производился квантование сигналов по времени ~кТ ) и (или) но уровню (х,=лЛх ). В
САУ, работающих на переменном токе, высокочастотные колебания несущей часто1ы
модулируются в соответствии с величиной и знаком управляющего сигнала низкой час-
тоты;
4) по количеству регулируемых координат: одномерные (с одним выходом) и мно-
гомерные, которые по взаимному влиянию координат друг на друга делятся на несвяз-
ные и многосвязные;
5) по характеру изменения параметров во времени: стационарные и нестационар-
ные;
6) по распределению параметров в пространстве: с сосредоточенными и распреде-
ленными параметрами;
7) по степени идеализации математического описания: линейные и нелинейные;
8) по соотношению сигнал/шум в передаваемой информации: детерминированные и
стохастические;
9) по характеру переходных процессов: устойчивые, неустойчивые и нейтральные.
В.З . ЗАДАЧИ ТЕОРИИ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
/(Дсновная задача ТАУ - обеспечение устойчивости системы путем выбора струк-
туры и параметров регулятора или изменения параметров объекта. Пример не-
устойчивости (рис. В.З,а) - самовозбуждение акустической системы (микрофон, усили-
тель и динамик), слышимое как свист при приближении микрофона к динамику даже в
отсутствие голоса. Причину неустойчивости упрощенно объясним с помощью коэффи-
циентов усиления устройств , ИИЧ, Wn и воздушного слоя имеющих, во-первых,
комплексный, а во-вторых, частотно-зависимый характер. Если на некоторой частоте
последовательное соединение блоков в контуре обратной связи имеет коэффициент
усиления амплитуды Л=|и/м)ГуИ/д(Гв|>1 и фазовый сдвиг <р-аг^И/'мИ/уИ/яК/в^-0, то ма-
лейший сигнал этой частоты, попав в микрофон из внешней среды, лавинообразно уси-
ливается в контуре обратной связи до максимальной мощности усилителя.
Устранение неустойчивости возможно следующими способами:
1) уменьшить |и^у|, то есть убавить громкость регулятором усилителя;
2) уменьшить )и^в|, то есть отодвинуть микрофон от динамика.
Таким образом, на плоскости |и^.существуют области устойчивости и неус-
тойчивости системы (рис. В.З,6). При неустойчивости переходные процессы расходятся
а)
Рис. В.З
до насыщения по максимальной мощности, что ведет к перегреву аппаратуры, аварии,
взрыву и другим нежелательным или катастрофическим последствиям.
Системы, устойчивость которых не может быть достигнута никаким изменением
параметров, называются структурно неустойчивыми.
Задача программного управления - изменение управляемой величины по заранее за-
данному закону (программе) независимо от внешних воздействий. Например, програм-
ма автопилота самолета или программа движения руки робота.
Задача следящего управления - изменение управляемой величины по произвольному
и заранее неизвестному закону (уставке). Цель слежения: y(t)-^g(t), e(t)—>0 (рис.
В.1,в). При e(f)^0 УУ отрабатывает ошибку управления (рассогласование выхода и ус-
тавки) в направлении уменьшения je(f)[. Примеры: слежение локатора за целью; повто-
рение манипуляций человека-оператора роботом, находящимся в агрессивной среде.
Задача стабилизации - то же при постоянной уставке g(f)-const. В качестве вычи-
тающих устройств в системах слежения и стабилизации применяются дифференциалы
(механические), гироскопы (электромеханические), дифференциальные усилители
(электронные).
Задача статического и динамического анализа САУ - исследование статических и
динамических свойств САУ с учетом взаимного влияния ее элементов друг на друга,
определение статических ошибок регулирования и параметров качества переходных
процессов в системе при различных входных воздействиях.
Задача синтеза устройства управления. Качество системы определяется парамет-
рами переходного процесса при отработке системой возникающих возмущений. Пока-
затели качества переходного процесса: время регулирования, колебательность, степень
затухания колебаний, максимальные выбросы (перерегулирования) координат системы
за установившиеся значения.
Основные функции регулятора'.
1) преобразование контролируемых величин в сигналы используемого регулято-
ром вида энергии (электрической, механической, гидравлической и т.д.);
2) формирование программных сигналов (уставок);
3) формирование ошибок регулирования;
4) квантование сигналов в дискретных системах;
S) выполнение аналоговых, логических и арифметических операций по расчету
управляющего воздействия;
6) хранение сигналов до момента их использования;
7) распределение сигналов по различным каналам управления;
8) преобразование управляющих сигналов к виду, необходимому для работы ис-
полнительных элементов.
Перечислены задачи регулятора в широком смысле, каким фактически является
вся САУ, за исключением объекта. Задачей регулятора в узком смысле можно считать
пятую функцию.
Разработка УУ заключается в выборе его структуры (из чего слагается управ-
ляющее воздействие) и расчете параметров (коэффициентов перед слагаемыми). Основ-
ными компонентами управления могут быть пропорциональное (П-управление) по
ошибке регулирования e(t)~g(t)-y(t), дифференциальное (Д-управление) по производ-
de(r) <•
ной ошибки ——— и интегральное (И-управлениё) по интегралу ошибки |е(т)дт .
О
Рассмотрим принципиальное назначение компонентов на примере автоматическо-
го движения судна по заданному компасному курсу g. Изменение направления движе-
ния достигается отклонением руля на угол х относительно оси судна (позиция А на рис.
В.4,а), что при наличии продольного движения создает вращающий момент и повора-
чивает судно в сторону отклонения руля.
Рис. В.4
Пропорциональное управление хп(Г)- Kne(t) выполняет главную задачу умень-
шения |e(r)j за минимальное время регулирования. При достижении в(/)-0 (позиция В
на рис. В.4,а) руль устанавливается в неотклоненное состояние. Поскольку судно имеет
определенный момент инерции, то оно продолжает и дальше вращаться, отходя тем са-
мым от заданною курса в противоположную сторону. Так возникают колебания регу-
лируемой величины у вокруг уставки g . Правильным выбором параметра регулятора
Ktl можно несколько сгладить (демпфировать) эти колебания, но общий характер пе-
реходного процесса остается колебательным.
Что делает опытный рулевой в таком случае? Он начинает заранее перекладывать
руль так, чтобы подойти к точке равновесия с минимальной угловой скоростью e'(t) и
компенсировать инерцию вращения противоположным вращательным моментом, соз-
даваемым рулем, который изображен пунктиром в позиции В на рис. В.4,ц. Дополни-
de(0
тельное Д-управление хд(/)-Ж'д—
способно уменьшить перерегулирование, демп-
фировать колебания, даже сделать систему апериодической (нс колебательной), улуч-
шить ее устойчивость, повысить быстродействие. Все эго означает повышение качества
управления.
Наконец, в реальных условиях плавания на море возможны различные неконтро-
лируемые возмущения (ветер, течения), сносящие судно с курса и создающие устано-
вившуюся ошибку отклонения от курса еуст (рис. В.4,6). Для ее устранения в закон
управления добавляется интегральная компонента xu(f )=ЛГИ|е(т)с1т , сводящая статиче-
о
скую ошибку к нулю за счет дополнительного отклонения руля в сторону, противопо-
ложную сносу судна (изображено пунктиром в позиции В на рис. В.4,б).
Более детальное изучение компонентов управления и порождаемых ими переход-
ных процессов будет продолжено в последующих параграфах книги.
Таким образом, структура управляющего воздействия может быть типа П, И, ПД,
ПИ, ПИД и более сложная, отражающая входящие в управление слагаемые. В общем
случае регулятор - это аналоговый или цифровой фильтр, выполняющий преобразова-
ние уставок и выходных сигналов системы в управляющие воздействия.
ГЛАВА 1. МАТЕМАТИЧЕСКОЕ ОПИСАНИЕ
ЭЛЕМЕНТОВ СИСТЕМ УПРАВЛЕНИЯ
Ал атематическое описание системы начинается с разделения ее на элементы,
C/z v для которых должны быть составлены уравнения, описывающие их функ-
ционирование. Уравнения составляются на основе анализа физических, химических,
экономических и других процессов, происходящих в системе, с помощью законов со-
хранения энергии и вещества, законов электротехники, гидравлики и т.д.
Система уравнений, с достаточной точностью описывающая поведение объекта во
времени и пространстве, называется математической моделью.
1.1. КЛАССИФИКАЦИЯ ЭЛЕМЕНТОВ САУ
СЭ лементы САУ классифицируются по следующим признакам [1]:
OS 1) по функциональному назначению: задающие (генераторы уставок), изме-
рительные (датчики), суммирующие и вычитающие, усиливающие, преобразующие
(корректирующие), исполнительные;
2) по виду используемой энергии: электрические, механические, гидравлические,
пневматические, комбинированные;
3) по наличию источника энергии: активные, пассивные;
4) по длительности переходных процессов: безынерционные (описываются алгеб-
раическими уравнениями), инерционные (описываются дифференциальными уравне-
ниями);
5) по характеру установившегося режима: статические, астатические.
1.2. СТАТИЧЕСКИЕ СВОЙСТВА ЭЛЕМЕНТОВ И СИСТЕМ
/О татическим называется элемент, у которого при постоянном входном воздей-
ствии x(t) с течением времени устанавливается постоянная выходная перемен-
ная у(Т). У астатического элемента выходная переменная не имеет установившегося
значения, а неограниченно возрастает с постоянной скоростью (угол поворота элек-
тродвигателя при постоянном входном напряжении), ускорением (перемещение мате-
риальной точки при действии постоянной силы) или производной высшего порядка.
Свойства статизма или астатизма не абсолютны, а зависят от выбора входной и
выходной переменных. Так, если при описании электродвигателя в качестве выходной
переменной выбрать не угол поворота <р , а угловую скорость со — dcp/dr, то получим
статический элемент. Признак астатизма - наличие хотя бы одного интегратора между
входом и выходом системы.
Рис. 1.1
Статической характеристикой (СХ) y-f(x) (рис. 1.1)
статического элемента называется зависимость установившего-
ся значения выходной переменной от значения постоянного
входного воздействия. Нелинейная, в общем случае, СХ может
быть гладкой или разрывной. Линейный статический элемент
имеет гладкую линейную СХ j(x)=a0+a)x. Астатический эле-
мент не имеет СХ, но может иметь СХ = Л(х) для i -й
1уст
10
производной. Минимальный порядок производной у(Г). имеющей СХ, называется по-
рядком астатизма. Статические элементы имеют астатизм нулевого порядка. Порядок
астатизма равен числу интеграторов между входом и выходом, не охваченных ОС.
1.2. 1. Соединения статических элементов
(Статическая характеристика системы, образованной соединением элементов, мо-
жет быть найдена двумя способами:
- аналитическим, если заданы формулы СХ всех исходных элементов:
- графическим, если СХ элементов заданы графиками.
Рассмотрим основные типы соединений двух статических элементов и методы
аналитического и графического расчета их СХ.
1. Параллельное соединение (рис. 1.2): /(x)=/j(x)+/2(x).
2. Последовательное соединение (рис. 1.3): /(x)=/2(/j(x)). Нелинейные элементы
нельзя переставлять местами, так как х)}. Например, для функций
/5(х)=1-е“л и /2(х)=х2 имеем 1-е-Л Ц1-е-х) . Последовательность построения /(х)
показана стрелками на рис. 1.3,6. Окончательный график расположен в четвертом
квадранте в осях х и у, для чего пришлось ось х продублировать вниз. Для привыч-
ного изображения график можно повернуть влево на 90°.
3. Соединение с ОС (рис. 1.4). В обозначениях «±» и « + » верхний знак означает
отрицательную ОС (ООС), а нижний - положительную (ПОС). Исключая переменную
е, получим уравнение связи входа и выхода: у=/(х+/^(у)). Оно имеет решение в виде
функции, обратной к СХ >’=/(х): f ~[(y)=f ~\у)± fz(y) Аналитическое обраще-
ние нелинейной функции не всегда возможно. Так, для функций /j(x)=l-e~* и
/2(х)-х2 получим /р!(у)=-1п(1->’), откуда x=-In(l-j’)±j’2. Явной зависимости
у=f(x) нет.
a)
Рис. 1.4
Последовательность е—>y = /j(e)—>z=/2(y)->x±z графического построения СХ
обратного соединения дает функцию у-f(x) для каждого значения е и показана
стрелками для случаев ООС на рис. 1.4,6 и ПОС на рис. 1.4,в.
1.2.2. Линеаризация статических элементов
Жаждый элемент системы имеет рабочую область изменения входных и выходных
переменных, причем некоторые точки этой области наиболее предпочтительны как
точки равновесия или как самые удаленные от границ рабочей области. Такие точки
называются номинальными, а координаты точки (xHj’H) - номинальным режимом. При
слабой нелинейности СХ достаточно иметь одну номи-
нальную точку, сильная же нелинейность СХ заставляет
разбивать область работоспособности на подобласти, ка-
ждую со своим номинальным режимом (рис. 1.5).
В окрестности номинального режима желательно
иметь линейное описание элемента как наиболее удобное
для решения задач анализа и синтеза. Линеаризация - это
замена реальных нелинейных уравнений, описывающих
функционирование объекта, близкими к ним линейными
уравнениями. Линеаризация гладкой функции у=f(x) в
окрестности номинальной точки (хн.ун) выполняется по
формуле у~у„ +d/’(x)/dx|H(x-xH). Это уравнение каса-
тельной к /(х) в точке (хн,ун) (рис. 1.6). Введем отклоне-
ния от номинального режима Ду-у-ун и Лх х хн , тогда
линеаризованное уравнение в отклонениях примет вид
Ду-А'Ах с коэффициентом jf=d/'(x)/dxl _ =tg(a). Если
л—жн
СХ y~f{x) - функция вектора переменных х-[х( ...хя]т,
то линеаризованная СХ в приращениях есть гиперпло-
скость, касающаяся поверхности у=/(х) в номинальной точке (хн,ун) и описываемая
А
векторным уравнением в приращениях Aj=VA'(Ax; V/(x)/\x , где V/(x)[A'] -
•=1
вектор-строка градиента /(х) в точке хн с элементами Ж',=6/'(х)/6х,1__ .
х~хн
Рассмотрим примеры линеаризации СХ.
& Пример 1.1. Устройство умножения (рис. 1.7): ду/дх^ =х2н, ду/дх2| -х1н,
•V = .Vh+*2н(*| ~*1н )+*1н(х2 ~Х2н ) . Г)
12
Рис. 1.7
Рис. 1.8
С7 Пример 1.2. Устройство деления (рис. 1.8): 5у/5х(|н =1/х2н , ~~х1н/х2н >
)”Л> +(х1 - ХЫ )/х2н <Х2 — х2н К,/ХЫ • f * 1
!'?7 Пример 1.3. Вольт-амперная характеристика (ВАХ) диода, то есть зависимость
тока I от напряжения U и температуры окружающей среды Т , имеет вид (рис. 1.9,а)
/(Г,Т)=/с(Т’)(е1'7’""'ч’тГ - 1). /,(7’)'уТ2е'<,!йГ",<₽'г
(1-1)
где фт =0,0257 и фб=0,7 - тепловой и барьерный потенциалы, В; л и у - индивидуаль-
ные для каждого диода коэффициенты. Справочные данные номинального режима
диода КД512А [16]: /н -10 мА при С'(| = ) В и Tlt = 25°С=298 К. Предельные параметры
диода: обратный ток /ои = 5мкА при максимальном обратном напряжении
(7огаах = 15В; максимальный прямой ток /та?.=20мА; диапазон температур от
Гт(п---25°С до Гтах=100°С.
Линеаризовать ВАХ диода в окрестности точки (С7Н,ТН,/Н). Построить рабочую
область диода в окрестности номинального режима. Оценить изменение тока при изме-
нениях напряжения на АСУ 100 мВ и температуры на АГ=-20°С.
Решение. Вычислим коэффициенты л и у решением системы уравнений (1.1) в
двух режимах (с/н,Гн,/н) и (-Сотах,Гн,/<>н). причем ехр(-(7О1пах/лф, )~0:
( /„ =уГн2е'<₽б <₽т (ef н "Фт -1),
[/1,н-у7]?е ч>б ,
11
л------т—у--------<*5,12,
ф , 1п(1+/н /((Н )
т еФб <Pi
у = «и— = 37,88 А/К2.
т-
1 н
Найдем производные
I(b\T) по U и Т :
«ф<.) «<₽! _0076i МА/Мв.
уТн (г
А/, =---- -- — —е
1 0U
„ «ЧП
Kr JJSyjLl lLre-<P6 Ф, [(eLH “fr - [)(2лф ,. +Лф6-7/J- 7/„1=0,7258 мА/К .
сГ н лФ1 I? ' J
Таким образом, линеаризованная ВАХ открытого диода в отклонениях XU , Л7'
и Л/ имеет вид А/ = KvkU+КтЛТ . В переменных 7/(мВ) и Т(°С) зависимость
Г 10+0,0761(7/- 1000)+0,7258(Г - 25)=0,07617/+0,72587-84,2 мА
есть уравнение плоскости в пространстве U , проходящей через точку (б'н, Тн, /н)
касательно к поверхности 7(77,7’) Рабочая область диода изображена на рис. 1.9,6 и
ограничена прямыми 7%-25°С, Т = 100°С, 0,07617/ +0,72587"-84,2 и
0,076177+0,72587-104,2. Левее рабочей области в пределах -25°С<Г<100°С располо-
жена область отсечки, а правее - область насыщения диода.
При заданных отклонениях Д7/ и АГ получим приращение тока
А7 -0,0761100- 0,726-20 =-6,91 мА и полный ток I-3,09мА. Истинное значение тока,
вычисленное по нелинейному уравнению (1.1), равно 4,8 мА. Большая относительная
погрешность линеаризации 5/ = 35,6% при небольших отклонениях аргументов от но-
минального режима объясняется сильной нелинейностью ВАХ. ГЗ
1.2.3. Статические ошибки в замкнутых системах управления
Основа функционирования САУ - принцип обратной связи, то есть зависимость
текущего управления объектом от его состояния, обусловленного предыдущими воз-
действиями. Обратная связь может быть естественной (присущей ОбУ) и искусственно
организованной для повышения качества регулирования. Отрицательная (положитель-
ная) ОС действует в сторону уменьшения (увеличения) отклонений выходных коорди-
нат ОбУ от уставок. Деление на ООС и ПОС условно: при определенных частотных
свойствах объекта может произойти инверсия знака ОС.
Обозначим (рис. В. 1,в): Ку и KQ - статические коэффициенты усиления УУ и, со-
ответственно, ОбУ вместе с ИУ. Тогда х=Куе и у-Кох, а ошибка регулирования
e=g-y-g-KyKoe=g/(\+KyKo)*0.
Вывод: в статической замкнутой системе всегда существует ненулевая статическая
ошибка регулирования. Будь она нулевой, были бы нулевыми управление х и выход у ,
что дало бы ненулевое значение e~g-y. Полученное противоречие доказывает основ-
ное свойство статических замкнутых систем.
Чтобы уменьшить статическую ошибку, нужно увеличивать значение КуКо. По-
скольку обычно объект неизменяем, то необходимо увеличивать Ку до максимально
возможного значения. Верхний предел увеличения Ку ограничен мощностью УУ и, в
большей степени, требованиями устойчивости замкнутой САУ. На величину статиче-
ской ошибки влияют также постоянные неконтролируемые внешние воздействия. Так,
если на объекте скачком изменилась нагрузка fo, то изменится и выходная координата
y(t). В установившемся режиме замкнутой статической системы благодаря ООС авто-
матически сформируются новые значения у , е и х, зависящие от новой нагрузки.
Для устранения нежелательного свойства статизма введем в УУ дополнительный
элемент - интегратор (рис. 1.10,а). Докажем от противного, что в установившемся ре-
жиме полученной системы всегда будет достигаться нулевая статическая ошибка. Про-
14
Рис. Li О
следим развитие процессов e(t), х(/) и y(t) в пошаговом режиме времени (рис. 1.10,6).
Итак, предположим, что к моменту времени /0 в системе установились постоянные
значения управления х(), выхода y^g^ и ошибки e^~gQ-KoXq*0. На первом шаге ин-
тегратор, отрабатывая постоянную ошибку, дает линейно изменяющееся управление
x(t)=x0+K„e0(t-f0). Оно.в свою очередь,приводит к линейно изменяющемуся выходу
у(Г)=КоХц+КоКиеа((-(ц), приближающемуся к уставке g0. Тем самым ошибка регули-
рования е(|‘)=е0-ЯнАГое()(/-/0) перестает быть постоянной и при правильно рассчи-
танном коэффициенте Кн начинает уменьшаться. На последующих шагах процессы
e(t). х(£) и /(О становятся нелинейными, но общая тенденция развития переходных
процессов такова, что с течением времени управление изменяется до тех пор, пока вы-
ход системы не сравняется с уставкой, а ошибка не станет исчезающе малой.
Таким образом, полученное противоречие позволяет сделать основной вывод: в
астатической системе всегда автоматически устанавливается нулевая ошибка регули-
рования. При этом выход интегратора равен g^/K^ при нулевом его входе. Это спра-
ведливо при любой статической нагрузке, действующей на объект. Скачкообразное из-
менение нагрузки порождает изменение выхода системы и новый переходный процесс
устранения статической ошибки благодаря интегратору в структуре регулятора и дей-
t
ствию ООС. Управление х(г)=Ж'н Je(x)dT называется интегральным.
го
Системы с И-управлением являются астатическими (с нулевой статической ошиб-
кой), но медленными, что объясняется инерционностью процесса интегрирования
ошибки. Системы с пропорциональным управлением x{t)~Kne{t) могут быть быстро-
действующими, но не имеют астатизма.
t
Комбинация х(()=Кпе(1)+Кя Je(t)dT
'о
пропор-
циональной и интегральной составляющих управления с оптимально подобранными
коэффициентами К„ и Кн делает двухканальную замкнутую систему (рис. 1.11) астати-
ческой и быстродействующей
[2,3]. При больших уровнях
ошибки работает преимуществен-
но пропорциональная состав-
ляющая управления, быстро сво-
дящая ошибку до значения
Окончательное точ-
ное сведение ошибки к нулю воз-
лагается на интегральную состав-
ляющую управления.
1.3. СТАТИЧЕСКИЙ АНАЛИЗ И СИНТЕЗ СХЕМ
НА ОПЕРАЦИОННЫХ УСИЛИТЕЛЯХ
/у<Ьля практической реализации и моделирования элементов и систем будем ис-
cJL-J пользовать широко распространенные средства аналоговой электроники -
операционные усилители (ОУ), позволяющие конструировать сложные и разнообразные
системы с широким спектром статических и динамических свойств [13,14,15]. Операци-
онный усилитель (рис. 1.12,а) - это аналоговое устройство усиления разности
&U-U-U напряжений на его прямом (U) и инверсном (U ) входах: 17вых ~ XyAZ7. Уси-
лительные свойства ОУ проявляются в области линейности его СХ при |At/|< Umax/Ky ,
иначе ОУ работает в областях насыщения (рис. 1.12,6).
Реальные ОУ серий 140, 153, 154, 157, 544, 553, 574 имеют следующие параметры:
коэффициент усиления разностного (дифференциального) сигнала А\.~1()4- 106=tg(a)
(рис. 1.12,6); входное сопротивление /?вх от 300 кОм (в ОУ с биполярным входным кас-
кадом) до 10 ГОм (в ОУ с входным каскадом на полевых или МДП-транзисторах); вы-
ходное сопротивление /?вых = 104-300 Ом; напряжение смещения (дрейф нуля)
едр=0,14-10 мВ, равное выходному напряжению при &.U-0; двухполярное напряжение
питания t/n=±(3< 40) В. На рис. 1.12,в приведена простейшая схема замещения ОУ.
В практических расчетах можно считать ОУ идеальным с параметрами Ху-оо,
Лвх = оо, Лвых - 0, e;Ir =0, что дает исходные соотношения для анализа и синтеза схем на
ОУ; U-V , /вх=0, /вых=°о. Первое условие означает потенциальное равенство напря-
жений входов ОУ, но не физическое их соединение. Последнее условие означает, что
выходной ток идеального ОУ не ограничен величиной сопротивления нагрузки. Второе
и третье условия означают токовую развязку каскадов на ОУ друг от друга. В дальней-
ших схемах мы будем изображать ОУ без выводов заземления и напряжений питания.
1.3.1. Нелинейные статические элементы на операционных усилителях
иповыми соединениями с ООС являются схемы прямого и инверсного включе-
ния ОУ. Допустим, навесные элементы простейших схем имеют ВАХ 7|=/j(t/j) и
/0=/з(С0) • В схеме с прямым включением ОУ (рис. 1.13,а) имеем V = х и /] = Г0 , откуда
получим f\(x)=fQ(y-x) и СХ
/(x)-x+/o''UW). (1.2a)
В схеме с инверсным включением ОУ (рис.
1.13,6) и =0 и /t =Iq , откуда f\(x)=f0(-y) и
/Ub-Zf'UU))- (1-26)
При графическом решении по
заданной ВАХ /о~/о(Ц)) и току /0
находится напряжение £70 для схем с
прямым (рис. 1.14,а) и инверсным
(рис. 1.14,6) включением ОУ.
Устойчивая работа схем на ОУ э
линейном режиме обеспечивается обя-
зательным соединением выхода у с
инверсным входом U проводом или
навесным двухполюсником ООС, бла-
годаря чему в схеме автоматически
поддерживается динамическое равно-
весие. Например, в схеме на рис. 1.13,а
изменения х, &U и у синфазны.
Часть приращения напряжения с выхода ОУ передается на вход U . Таким образом, в
системе с ООС устанавливаются новые равновесные значения AZZ и у . В схеме на рис.
1.13,6 изменения х, AU и у противофазны. Отрицательное приращение выходного
напряжения передается через элемент обратной связи на вход U , что устанавливает
новые равновесные значения АС и у .
Рассмотрим некоторые простейшие схемы функционального преобразования
электрических сигналов на ОУ с ООС (рис. 1.15,а - 1.18,а) и их СХ (рис. 1.15,6- 1.18,6).
1. Пропорциональный неинвертирующий усилитель (рис. 1.15): Ct=x, fx{v^=Ui/Rx,
UQ=y-x, /o(tzo)=tzo//co, у’=х+Я0(х//г1)=(1+/го/Л1)х=Лх с коэффициен-
том усиления схемы А'=1+?С0/Л1 =tg(a).
2. Пропорциональный инвертирующий усилитель (рис. 1.16): V\-x, R{ ,
<70=-j, Л(^о)-^о/^о> T=-^o(x/^i)^“(^o/^i)x=-Arx с коэффициентом
3. Логарифмический инвертирующий усилитель (рис.
1.17): /({фц/Я, ,
Л>(^о)-^о(е^о/лфт -1), /o-'Ub^Jnfl+Z/Zj, у~- лфт1п(14 х//о/?[).
17
Рис. 5.18
4. Экспоненциальный инвертирующий усилитель (рис. 1.18):
ЖИ'Л- >’ = -ад(ех/яфт 1).
Жч(^’4
1.3.2. Линейные статические элементы на операционных усилителях
рассмотрим схему на ОУ с ООС (рис. 1.19), к прямым входам хитх1н которой
подключены сопротивления Лц-^Л1я, к инверсным входам х2|Тх2т - сопротивления
Л2(<-/?2т’ а в Пепи ООС включено сопротивление R§. Для того, чтобы реальный ОУ
Рис. 1.19
можно было с достаточной точностью считать идеальным,
нужно выбирать сопротивления всех навесных резисторов хо-
тя бы на порядок (в 10 раз) меньше паспортного значения RBX
и на порядок больше Лвых.
Напряжения на прямом и инверсном входах можно най-
ти по законам Кирхгофа и Ома:
Л Л г —II
Z/.,=o => Е-у=«.
;=i R4
откуда получим напряжение U, а по аналогии и U:
Так как в идеальном ОУ U-U , то из последних выражений следует
т о
.-1 K2i
Таким образом, рассматриваемая схема выполняет л операций сложения и т
операций вычитания подаваемых на ее входы напряжений:
Проанализируем последствия добавления в схему заземленных входов х^^О и
х20=0, соединенных с входами ОУ через сопротивления Л10 и Л20 (на рис. 1.19 они
изображены пунктиром). Из (1.3) следует, что это влияет только на коэффициенты Ки.
18
В первом случае все они уменьшаются из-за увеличения знаменателей у K{j. Во втором
случае увеличиваются все числители и сами коэффициенты К^.
Задача синтеза схемы состоит в определении сопротивлений /ф, R^ и /ф по за-
данным значениям коэффициентов Аф и К^. Особенностью этой задачи является ее
недоопределенность (число неизвестных пл-т + \ меньше числа п + т заданных коэффи-
циентов) и вырожденность. Обозначим суммы коэффициентов усиления схемы по пря-
мым и инверсным входам: 5, = 7Xi; и ф-. Суммируя в (1.3) коэффициенты Аф,
получим ключевую зависимость между 5, и S2, существующую в любой готовой схеме
на ОУ (рис. 1.19) независимо от числа и сопротивлений навесных резисторов:
5ф/у о У-1 /у 1 =Sn + i. (1.4)
1 .7^2/ J7^7
Для численного расчета /н + 1 сопротивлений /?2» и по т коэффициентам К2,
необходимо доопределить (1.3) еще одним условием. Например, задать произвольно
сопротивление Ro , тогда сопротивления инверсных входов будут равны Rji=R0/K2i
Однозначное определение п сопротивлений Rxi по п коэффициентам K{i также
невозможно из-за условия вырожденности, вытекающего из уравнений (1.3) и (1.4):
RXj const Х7/=1,л .
Если задать произвольно любое сопротивление R\j , то остальные сопротивления, под-
ключенные к прямым входам, однозначно находятся как R^^K^R^/Ки j .
При произвольно заданных коэффициентах Аф и K2i условие (1.4) скорее всего не
выполнится. Это означает, что схема на рис. 1.19 структурно неполная. В ней не хватает
одного из заземленных навесных резисторов J?i0 или R2(i. Введение такого резистора
эквивалентно добавлению в первое уравнение (1.3) нулевого слагаемого ATl0x10=0 или
^20х20~0 с положительным коэффициентом усиления по заземленному входу
Аф, ~S2 +-1-5| или Афу = 5|-52 ~1 • Какой из этих резисторов нужно добавить, зависит
от соотношения сумм 5| и 52+1- Введение заземленных входов изменяет структуру
схемы и восстанавливает баланс (1.4), при этом уравнение схемы не изменяется.
Таким образом, при синтезе схемы принимаем независимыми сопротивления R,j и
/ф, а остальные сопротивления вычислим по формулам
R^K^/K^ R2i = R0/K2i.
Если в полученной схеме окажется единственный прямой
вход .Гц (рис. 1.20), то по (1.3) его коэффициент усиления
+ 1 не зависит от /?н . Поэтому можно выбрать это сопро-
тивление произвольным, в том числе и R} j - 0 (провод).
£ 7 Пример 1.4. Построить схемы на ОУ КР544УД1А
(/?вх>ЮМОм, /Гвых<200Ом [14]), реализующие следующие ал-
гебраические соотношения (рис. 1.21):
(1.5)
Рис. 1.20
a) y=3.rt ।+-4х12-6т2|: 5, = S2 4 1 = 7 R]}--4R}-,/3. /Ц -/?0/6. Сопротивления всех
резисторов должны лежать в диапазоне 2 кОм :1 МОм. Выберем значения
Рис. 1.21
/?12 =/?0=300 кОм , тогда = 400 кОм и Л2! = 50кОм;
б) y=3x;i+4x12-5x21: = 7>5'2+1=6 => /f20=<S|-<S2-l=l, /?ц =4Л|2/3, Л20=/?0,
Л21=Л0/5. Выберем /?12=Ло=ЗОО кОм , тогда /?ц=400кОм,. Л20=ЗООкОм и
Л2|=60кОм ;
в) /=ЗХ]i+4x[2-8x2[: S^7<S2 +1-9 АГ(0=52 +1-^=2, «H=Q^3, Л12=/2^}4,
Л21=/?о/8. Выберем /?10-/?0 240кОм , тогда /?[(=160кОм , /?-2=120кОЪл и
Я21=ЗОкОм. О
Рассмотрим некоторые принципиальные схемы на ОУ и соответствующие им
структурные схемы, выполняющие простейшие алгебраические операции.
1. Универсальный одновходовый усилитель (рис. 1.22) с
коэффициентом усиления
_ 14-Jgp/ig2 Ч-Д20 _ Rq_
\+RJRw R2 '
Выбором сопротивлений схемы можно получить лю-
бое желаемое по знаку и абсолютной величине значение К
в диапазоне -Rq/R2^.K<1+Rq/R2q , в том числе:
- для схемы инвертирующего усилителя (рис. 1.23,а)
K=-Rq/R2<0;
- для схемы неинвертирующего усилителя-делителя
Ркс- L22 (рис. 1.23,0 лг=(1+/?0//г20)/(1+/г1/1г10)>0;
- для схемы делителя напряжения (рис. 1.23,в) 0<K=Rlo/(Ry +Я10)<1;
- для схемы усилителя напряжения (рис. 1.23,г) Л7 =1 + /Со//?2D > 1;
Рис. 1.23
-для схемы повторителя напряжения (рис. 1.23,6) К~1. Операционный повтори-
тель аналогичен эмиттерному повторителю на транзисторе, но в нем обеспечивается
точное воспроизведение входного напряжения увеличенной мощности. Повторитель
используется для развязки каскадов схемы друг от друга благодаря параметрам /?bx=jc
и Лвь1Х-0.
2. Усилитель-вычитатель
(рис. 1.24), выполняющий опе-
рацию -ЛГ2х2 с коэффи-
циентами А.--—---------и
’ /*10
^0 п Rf) *ю „
К р ПРИ Р К он
Az л<2 Iwj
становится дифференциальным
усилителем: у=А'(х(-х2). При
/?1 = /?10 и Л2 = /?о получим вы-
читатель: y = Xt~X2-
3, Неинвертирующий уси-
литель-сумматор (рис. 1.25),
выполняющий операцию
Я
y-^KjXi со всеми положи-
«=|
тельными коэффициентами
Д' ^*0/'*20
j
Синтез схемы по задан-
Lrlli, jZ * Л? ^10 -- П
НЫМ Kj. ~~ и "2° = у]^7‘
i
Выбором сопротивлений можно
получить устройства усредне-
1 "
ния y-~'£,xi (рис. 1.26,и) и
i-1
п
суммирования у=У7х; (рис.
»=1
1.26,6) входных напряжений.
4. Инвертирующий усили-
тель-сумматор (рис. 1.27), вы-
полняющий операцию вычита-
п
ния с коэффициен-
ты
тами Ki~R{}/Ri.
Синтез схемы. /?£ - R^/K,.
Рис. 1.24
Рис. 1.25
Рис. 1.26
Рис. 1.27
1.4. ОПИСАНИЕ ДИНАМИКИ ЭЛЕМЕНТОВ САУ
✓сЛатические характеристики определяют лишь установившиеся режимы работы
элементов САУ. Переходные процессы описываются уравнениями динамики -
дифференциальными уравнениями (ДУ). Моделями систем с сосредоточенными пара-
метрами являются ДУ в полных производных, а с распределенными параметрами - ДУ в
частных производных. Для составления ДУ система делится на элементы. Пусть Л' -
количество элементов в системе, у,- - выход i-го элемента Э(. Его выход может быть
связан с выходами других элементов Э; непосредственно или через сумматоры (вычи-
татели). Эти элементы не являются динамическими, так как описываются алгебраиче-
скими уравнениями.
Для каждого динамического элемента составляются ДУ на основе законов меха-
ники поступательного и вращательного движений, электротехники и т.п. Порядок каж-
дого ДУ не выше второго. Таким образом, объединяя ДУ элементов, получим систему
из А в общем случае нелинейных ДУ [1]:
ЭлоТ/у.х-х'Ь0 V/=1,7V. (1.6)
Линеаризация гладкой дифференцируемой функции J•(...) заключается в разложе-
нии ее в ряд Тейлора в окрестности номинального режима
N 2
Z-iZ-1 (Л)
ду<*) + у_^й_
У1
н
Ах(А) + /^О Vi=l,(V,
н
г&е y'jn V/ = l,7V,xH, x^ j=0 удовлетворяет ДУ (1.6); Ду)*)=т/>-T/*1 и
t^x(k^ =х^-х^ - отклонения выходных и входных переменных и их производных к -го
порядка от номинальных значений; содержит производные по и второ-
го и высших порядков. После отбрасывания нелинейных функций F, линеаризованная
система ДУ примет вид
= Vi = 1,7V,
к^п oyj
г - AL-
* 0Х«>
С помощью оператора дифференцирования р--<Д<Л запишем ее в операторной форме
N ___
/ , Q^p^qw+qipp+qipp1. К,(р)^гю+гЦР
/=1
Полиномы Qq(p)
и Rjip) формируют TVxTV-матрицу Q(p)
••• Quv(p)
Qm(P) Qmv(P)
и
N -вектор Я(р)=[л1(/>) ... Лд,(р)]т. По правилам матричной алгебры (11,12] запишем
последнюю систему в виде £>(р)ЛУ(/)=Л(р)Ах(/) с 7V -вектором отклонений выходов
элементов ДУ=[Лу((/) ... Дуд-(/)]т. Решение системы ДУ имеет вид
АУ(/)-0'(р)1г(р)Ах(Г).
(1.7)
22
Выход линейной системы с одним входом есть линейная комбинация выходов эле-
ментов и входа:
Л
Ау=Ъ^Уi '+£>Ах,
/=1
где С-[с'| ... C/v] - 1x7V-матрица коэффициентов связи выходов элементов с выходом
системы; D ~ коэффициент прямой связи входа системы с ее выходом. Подставив (1.7) в
последнее выражение, получим Лу=(с@~1(р)В(р)+£>)Лх(/). Обратная операторная
матрица Q~](p) вычисляется делением присоединенной N x/V-матрицы adjg(p) на ха-
рактеристический полином системы - определитель A{p)=detQ(p). Обозначим полином
B(p)-C 'dd\Q{p) R(p)+DA{p). В итоге получим операторное уравнение связи отклоне-
ний входа и выхода системы A(p)Ay(t)=B(p)Ax(t) с полиномами А(р) и В(р). Ему
соответствует ДУ во временной форме
а1!Ау(Г)+а1Ау'(О+- -’«пАу(':)(/)-Л0Лл(О 'AzVr'(Oi. -'^Ar(m)(Z).
Порядок ДУ равен п и определяет порядок динамической системы. Порядок правой
части ДУ равен т<п. Так как каждый из N элементов имеет порядок ДУ не выше вто-
рого, то общий порядок системы удовлетворяет условию l<n<2/V.
Обычно в системах стабилизации номинальный режим - это состояние равновесия:
Ук=0Д, х^-0 VA-0,1. Поэтому операторная форма ДУ системы имеет вид
Л(р)>’(О=Я(р)х(О, А(р)=ао +а}р+...+а„ря = £,<№'<
t=° (1-8)
B(p)^bo+b[p+...+bmpm =^рг.
/=0
Операторной передаточной функцией (ОПФ) системы
называется
дробно-рациональная функция полиномов ДУ (1.8). Она позволяет компактно записать
ДУ в виде y(t)~W(p)x(t) [2].
Рассмотрим на практике процесс составления и линеаризации ДУ.
1с7 П р и м е р 1.5 [8]. Механическая система (рис. 1.28), со-
стоящая из тележки и шарнирно укрепленного на ней в неус-
тойчивом равновесии перевернутого жесткого маятника, дви-
гается горизонтально под управлением внешней силы /. Па-
раметры системы: 21 - длина маятника; т - масса маятника;
М - масса тележки; d - линейное перемещение центра масс те-
лежки; ф - угол отклонения маятника от вертикали; кф - коэф-
фициент вязкого трения в оси маятника. Момент трения в
оси пропорционален угловой скорости <о=ф' вращения маят-
ника; к, - коэффициент вязкого трения тележки о поверхность.
Сила Frp трения о поверхность пропорциональна скорости
v=d' движения тележки.
Получить нелинейную и линеаризованную модели движения системы в окрестно-
стях неустойчивого и устойчивого состояний равновесия маятника. Входная перемен-
ная - f(f), выходные - d(t) и ф(/).
23
Рис. 1.29
Решение. Составим уравнения динамики движения элемен-
тов сисяемы (рис. 1.29). используя второй закон Ньютона:
н
I /sin(<p(r))) H{t) ' горизонтальное движение центра
масс маятника;
it
т(/сх«(ф(Т))) V(/) nig - вертикальное движение центра
масс маятника;
Утр"(X) Z7V(r)sin(<p(/)) —/7/(Г)cos(<p(/)) Ат<р (/) - вращательное
движение маятника вокруг центра
масс;
f(t) kvd'(t) H(t) - горизонтальное движение те-
лежки;
O=R(t)- N(t)-Mg - вертикальное движение тележки;
I
1-2|рХ,2с1А.-2р/3/3-л|/2/з - момент инерции маятника с по-
о
тонной массой р--т/21.
Исключая силы Л' и Н , получим систему двух нелинейных уравнений
j /J (т/,ф) = mid " cos( ф )+р + nd 2 )ф " + к(1У ф' - mglsin( ф )=О,
[ /,(</,ф)~ (Л/4 m)rf" т-Аг</'+1«/ф"со5(ф)~т/(ф')28(п(ф)- f=0-
(1.9)
Линеаризуя эту систему в окрестности номинального режима </н d’^ d'J, = 0 и
Фи =ф^ -ф" -0, получим линейную модель системы
ndd " р т nd ~ ^ф " т к1£) ф' - mglty - 0, (М + т )d "+kvd ’ 4- ndq " - f=0,
или в матричной форме Q(p)Y(t)-- R(p)f (t), где
ndp^ + nd2^p2 +kap-mgl i
(M vni)p2 +kvp ndp J
о
1
HO-
</(0
ф(0.
.4(p )-niglk^.p+[(M + nt )nigl- kvkw2 - Ц J тnd2 Jkr+(M + nt)кш jp2 -
^M(j^nd2ytnJ^p4, Q=[l 0], Сф-[° O-
1 , , / r «2\ 2
) , mgl k.iyp 4 nd \p
; CdQ \p)R{p)f(t^---------
J f A(p)
i Ф(0-с<рс1(р)/г(р)/(0-^./(0-
I Ap)
Пусть параметры системы имеют численные значения /-1м, /и-6 кг,
(1.10)
М -11 кг ,
Аю ~К Н м с , Ау--10Н-с/м , примем для удобства расчетов g = l()м/с2, вычислим момент
инерции маятника J-2kim2 и запишем соответствующие уравнениям (1.10) численные
ОПФ системы «тележка - перевернутый маятник»;
? л , 60-8р—8р7 6л
Л(р>600р+940д2-216р^100/. Wd(P)- - 1 , W^p)^-/
•- '1(р} * Л(р)
24
Ясно, что в данном номинальном режиме перевернутый маятник неустойчив. Как это
можно определить ио передаточной функции, рассмотрим в четвертой главе.
Выполнив линеаризацию уравнений динамики (1.9) в окрестности устойчивого
номинального режима /,-0. - 0 и <р„ — ISO°, ф',-ф"-0. получим ОПФ сис-
темы «тележка - обычный маятник»:
т ч л 60 г8р + 8р 6 р~
J(/j)-600/>t 1100/С+216/>3 + 100/j4 , wd(p}= - ± -1 , WAp)=~/~ . (1.12)
4(/>) * А(р)
п
Операторный метод представляет ДУ в алгебраической форме, благодаря чему он
гораздо удобнее для преобразований по сравнению с преобразованиями в дифференци-
альной форме. После составления ДУ элементов системы рекомендуется сразу перейти
к их операторной форме формальной заменой производных y^k\t) на рку . Например,
компонентные уравнения радиоэлементов /?, С и L в дифференциальной и оператор-
ной формах имеют вид
dUr dlf
lc=CPUc, Ul = L~±-->Ul=LPIl. (1.13)
Р7 Пример 1.6. На рис. 1.30 приведена электрическая схема моста Вина - Робинсо-
на [13] с входным напряжением х и выходным y=Ux -U2. Составить ДУ этой схемы.
Решение. На основе законов Кирхгофа и формул (1.13) составим систему уравне-
ний функционирования элементов схемы:
f 2R7x=x-U,
r 2RIx~x-U{
R/x
RI2=x-U3 I2-I3 + I4
, , rd(r3-c/,) 12-c dt RI2=x-U3 I2^Cp(u3-U,
^3 = 1! 2 Я/3 = [/2
h~c dt y=Ux-U2 14 -CpUr y=--vx~v2
Рис. 1.30
Обозначив T-RC и последовательно исключая переменные Zi+/4 и +
x-lJ3~lJ2+TpU2 Urx-(]+Tp)U,.
x-U3-Tp((J3-U7) => TpU2-(\ + Tp)U2~ x 7px (\ + 7pVU-, U2 =-----
1 + 37/н Г2р2
x Tpx x+T p~x
l+37>+T2p2 ~3+9Tp + 3T2p2 ’
получим ОПФ и ДУ схемы
7-----^-—-<, Зу+9Ту’ + ЗТ2у" = х + Т2х" . (1.14)
3(l + 37jP + 7'2p2j
О
25
1.5. ПЕРЕДАТОЧНАЯ ФУНКЦИЯ
общем виде линейное ДУ системы с одним входом х(/) и одним выходом
y(t) имеет вид
(I 15)
/-=() t-0
Решение его методом вариации произвольных постоянных достаточно сложно. Для ал-
гебраического решения линейных ДУ с произвольными начальными условиями разрабо-
тан метод преобразования Лапласа [ 1,2,3,4,5,6,7,9,10].
Временная функция ограниченного роста
f(t): {|/’(/)|<7Vfe"tr W>(), Д/Д0У/<())
имеет изображение, вычисляемое по формуле преобразования Лапласа:
Lj/(O} = F(i>-J/(/)e "d/ Vs: Re{s}>/H. (1.16)
о
b h
Применяя интегрирование по частям J«v'dr-«v|* J«'vdf (17], получим по индук-
а а
ции изображение л+1-й производной временной функции ограниченного роста:
ь{/<л+’Д)}ДеД/(л>(/)) dz-е Л/(П)(ОГ -7/й)(/)(-*е 5t)dr-
о '° о
J/<">(/)e'"d/Tlim(/'(",(7)e ^)-/,")(0)=sl{/'’,(/)} /<л*(0).
о
L{/'(/)}-sF(s)--ДО), Ь{ДД)Ь УД«)-V(0)- Г(Д),
L{/’"(/)}-s3F(s)-s7(0)-s/'(0)-/"(0). L{/H)(r)}-s'F(s)-Ey</O“U(0).
7=1
Подставим в левую часть ДУ (1.15):
i Л 1 п . ! п \ п г
L У«УД)Р£ДУ’(<)(=| Е«,?|г(.)-£«,Е?-уо>(0)=
7=0 J i-Д) У/_ 0 4=1 j-\
п 4-1 п-l п
=4(S)y(s)-EE«ryy'^_,>(0)-^(s)y(s)-Ey
i-I к =0 *=() i=А+1
л-1
,4(s)F(s)- Ер^' ~A(s)Y(s)~ P(s) , A(s)^a{l +a,s+...+a„s".
i=o
Коэффициенты полинома начальных условий P(s) могут быть вычислены по рекур-
рентной или матричной формулам:
26
P(^Pn + PiS+---+Pn-iSn~i, p, X«jy(J ‘ '’(°)
V7=0, л-1.
(1.17а)
Аналогично для правой части ДУ (1.15)
•Я(.у)Л(.у)(7(у), +V+-+ Vm-
т ___
6W=?oW+2>;Х(7~'-1)(0) V«=O,m-l,
/=«+!
~ Яо ’ А ^2 ••• Ьт х(0)
by 0 х'(0)
Я т-1. bm 0 ... 0 x(m4)(0)
(1.176)
Таким образом, изображение ДУ (1.15) имеет вид A(s)Y(s)-P(s)=B(s)X(s)-Q(s),
откуда
J(s) A(s)
Передаточной функцией (ПФ) называется отношение изображения выхода систе-
мы к изображению ее входа 7F(s)-F(s)/X(s) при нулевых начальных значениях входа,
выхода и их производных. Из (1.18) следует, что при нулевых начальных условиях ПФ
имеет вид
и/! У
As)
(1.19)
и равна ОПФ W(p) при формальной замене оператора дифференцирования р на опе-
ратор Лапласа х, что позволяет составлять ПФ непосредственно по ДУ системы.
7.6. СОЕДИНЕНИЯ ЭЛЕМЕНТОВ И ПРЕОБРАЗОВАНИЯ
СТРУКТУРНЫХ СХЕМ
определения ПФ системы, заданной структурной схемой, необходимо
знать ПФ основных соединений элементов (звеньев) [1,2].
1. Последовательное соединение звеньев (рис. 1.31,a): j|=W'1(s)x, у=HS(s)>’| , отку-
да FF(s)-H2(s)Hzi(s)=l:1>i(s)WZ2(Jf) • Для произвольного числа последовательно соединен-
ных звеньев
^посл(*)-П^о)-
(1.20а)
т
. р=0
Рис. 1.31
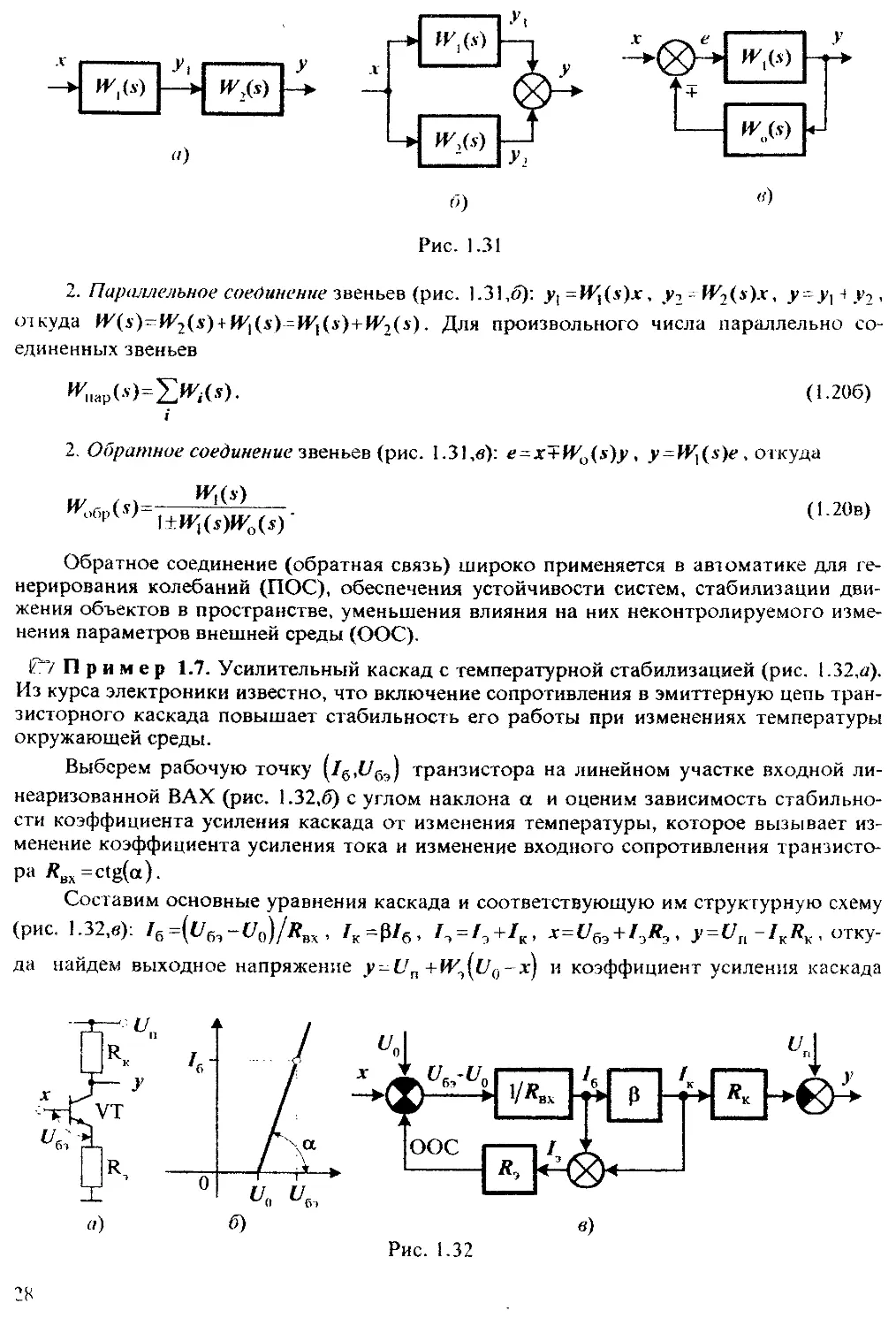
2. Параллельное соединение звеньев (рис. 1.31,6): y^lFjO)*, у2 - FF2(jf)x, г?,
откуда 1Р(у)-И/2(5)тИ/|(5) Иг1(.у) + И/?(.у). Для произвольного числа параллельно со-
единенных звеньев
^.ap(s)=2X(.v). (1.206)
i
2. Обратное соединение звеньев (рис. 1.31,в): е = х+И/о(х),у , у -(s)e , откуда
-------------- (1.20в)
«(НА > i+H^syp^s) v
Обратное соединение (обратная связь) широко применяется в автоматике для ге-
нерирования колебаний (ПОС), обеспечения устойчивости систем, стабилизации дви-
жения объектов в пространстве, уменьшения влияния на них неконтролируемого изме-
нения параметров внешней среды (ООС).
1Г7 Пример 1.7. Усилительный каскад с температурной стабилизацией (рис. 1.32,«).
Из курса электроники известно, что включение сопротивления в эмиттерную цепь тран-
зисторного каскада повышает стабильность его работы при изменениях температуры
окружающей среды.
Выберем рабочую точку (/б,С/бэ) транзистора на линейном участке входной ли-
неаризованной ВАХ (рис. 1.32,6) с углом наклона а и оценим зависимость стабильно-
сти коэффициента усиления каскада от изменения температуры, которое вызывает из-
менение коэффициента усиления тока и изменение входного сопротивления транзисто-
ра RBX=ctg(a).
Составим основные уравнения каскада и соответствующую им структурную схему
(рис. 1.32,8): /б=(б/бэ-Ц,)/Явх, /к=р/б, / х=и6э + 13Хэ, ^=(7П-/КЛК, отку-
да найдем выходное напряжение y--Un+H/3{u0~x) и коэффициент усиления каскада
в)
Рис. 1.32
в/?.
-------------. Без ООС (при /?.,-()) коэффициент усиления равен Иу = р/?к/1гвх .
ЛВХ4(3 + 1)^Э
Стабильность коэффициента усиления каскада оценим относительными измене-
aw aw
ниями W.y и Wq от относительных изменений йвх и р: — А/?вх +—-Ар, где
с/?нх ср
ан; (/?вх +л3)лк а% як
rL э₽ (явх+(в+1)Я.^ Лвх
1+/гэ//гвх
аи; ______-j,r*_____
dR- (явхт(рч)/?э)2
'вх 4
^0 Р*к
а/гвх
-1
8А’,.Х +—- —8ft и 81К -8R„V +8р .
1+(р+1)/гэ//гвх вх 1+(р+1)/гэ/лвх р 0 вх
Оценим температурную нестабильность каскада при /?вх = 100 0м, /?э = 1кОм.
р-100, Айвх = -50Ом и Ар=20: 5^=0,0026 или 0,26%, 8И^=0,7 или 70%. Г'З
зом, получим
Таким образом, введение ООС в виде резистора R3 уменьшает нестабильность ра-
боты транзисторного каскада весьма существенно и тем больше, чем больше значение
параметра Р и отношение Лэ//?вх . Физически стабилизирующее действие ООС объяс-
няется так: при повышении температуры возрастают токи транзистора. Эмиттерный
ток, протекая по сопротивлению R3, уменьшает напряжение £/б)Э, что уменьшает токи,
возвращая выходное напряжение каскада почти к первоначальному значению.
Структурную схему любой сложности путем последовательных преобразований
можно привести к простейшему виду с ПФ ff/(»)=Y(s)/A'(s), эквивалентному исходной
схеме относительно входной и выходной переменных. Подробные правила эквивалент-
ных структурных преобразований представлены в (1, табл. 3.3]. Основные преобразо-
вания приведены ниже в табл. 1.1. В процессе структурных преобразований ищется
простейшее соединение звеньев (последовательное, параллельное или обратное) и заме-
няется эквивалентным звеном с соответствующей ПФ (1.20). Для предупреждения оши-
бок следует обозначать выполняемое преобразование, вычерчивать структурную схему
после каждого шага и указывать на ней ПФ эквивалентных звеньев.
^“’/Пример 1.8. Разделить сцепленные контуры двухконтурной САУ. На рис. 1.33
представлены исходная структурная схема (й), схема после переноса узла е2 через звено
ИЛ вперед (б) и после преобразований обратного и последовательного соединений (в).
Окончательная ПФ системы равна
«1L____та_____
'w+w.wj/y I+1P2HZ4 W2) 1+0^3 ч-ИЛИ'д ’
Аналогичную ПФ получим аналитическим методом исключения вспомогательных
переменных и е2. Запишем уравнения звеньев системы e^x-W^e-,, -VK4y и
у=ИЛе2 в матричной форме и выразим выход системы у через ее вход х:
Рис. 1.33
11реобразование
Исходная схема
Таблица 1.1
Эквивалентная схема
Перестановка точек
разветвления
Перенос точки
через звено назад
Перенос сумматора
через звено вперед
Перенос сумматора
через звено назад
Перенос точки
через сумматор вперед
Перенос точки
через сумматор назад
I 1
[И7; ~(1 + »Г2Ж4
<?1
_«?2
~ О
ei
е2
Перестановка
сумматоров
Перенос точки
через звено вперед |
30
/ 7. ДИНАМИЧЕСКИЙ АНАЛИЗ И СИНТЕЗ СХЕМ
НА ОПЕРАЦИОННЫХ УСИЛИТЕЛЯХ
О адача динамического анализа схемы заключается в восстановлении решаемого
«-Л ею ДУ или определении ее ПФ. Обратная задача синтеза состоит в разработке
схемы по заданным ДУ или ПФ.
1.7.1. Динамические элементы на операционных усилителях
^^ассивными компонентами линейных схем на ОУ являются резисторы (Л), кон-
денсаторы (С), индуктивности (£) и их последовательные, параллельные и смешанные
соединения. Из компонентных уравнений (1.13) следуют операторные сопротивления
радиоэлементов Z(s):
Zr ^R, Zc(s)=± Zl(s)=Ls.
(1.21)
Последовательное и
параллельное соединения
элементов Z, и Z2 имеют
сопротивления Z( + Z2 и
Z|1|Z2=-^^-. В табл. 1.2
Zt l-Z2
приведены операторные
сопротивления Z(s) про-
стейших двухполюсников.
Смешанное соединение
двухполюсников представ-
ляется суперпозицией по-
следовательного и парал-
Таблица 1.2
лельного соединений.
С помощью операторных сопротивлений облегчается определение ПФ сложных
схем. Например, схема моста Вина - Робинсона на рис. 1.30 является параллельным со-
единением двух делителей напряжения х, поэтому напряжения в средних точках и их
разность равны (по прежнему Т= RC)
R
г R । R\\zc {+Ts______________Ts ____
1 2R + RX 3X'U' R+ZC+R\\ZCX 1 R X 1 + ЗТхтТ2?Х’
Л 4- “• -4-
Cs \ + Ts
r tr 1 Ts 1 + rV tro \ 1 + rV
=~X-------------yyX = —j----------У => fr(s)= —j----------------;
' 3 l + 37x+7’2.v2 з(1 + 3'Л + Т2.у2) 3(l + 37s + rj
Эта ПФ с точностью до замены 5 на р совпадает с ОПФ (1.14).
Рассмотрим схему динамического каскада на ОУ с ООС (рис. 1.34). Аналогично
схеме статического каскада (рис. 1.19) ее выход и ПФ входов равны:
31
Рис. 1.34
4 IX(л )лi,(/) рК,(у)х2Д/).
/
Обозначим суммы ПФ входов: Л’;(л') - ^И'|,(у) 11
5,(4)-zL^2i;(а)• Как и в (1.4), в работающей схеме между .ни-
ми суммами существует зависимость 5,(у) 5’2(у)+1. Для синте-
за схемы по заданным ПФ ее входов необходимо дополнить
<.V|(s) и (или) S7(s) недостающими ПФ И^0(л) и (или) W/20(v) с
положительными коэффициентами, чтобы стало выполняться
условие Sj(s)+ И10(х)-52( s)+l+Wz20(x). Схему надо дополнить
заземленными входами
х!0-0 и (или) х,о-О.
Приняв независимыми сопротивления Z)7(s) и Z0(y), остальные операторные со-
противления каскада с учетом дополнений определим по формулам, аналогичным (1.5):
{sjZ^/W^s) VUj, Z2,.(y)-Z0(y)/lT2l-(y).
(1.22)
Сопротивления Z|,(y), Z7j(s) и Z0(.v) выбираются произвольно, но так, чтобы
они соответствовали соединениям пассивных радиоэлементов (табл. 1.2), схема имела
минимальное число навесных деталей и, желательно, не содержала индуктивностей.
Разработаем схемы на ОУ, решающих заданные ДУ или имеющие заданные ПФ.
^Пример 1.9. y+y'-lx^ ] т 2xrf] +xr -2х21 - x2l. Операторное ДУ имеет вид
(l+5)j“2(l + s)X| [-т-Х] 2-(2+s)x2| .у^И/||(5-)Х|)т-И/12(у)Х|2-И/21(х)х21, где H/n(s)^2,
^!2(J’)~ 1/(1+*), И'7|(у)=(2 + у)/(14-у) . Вычисляем суммы 5')(у)-(3т 2у)/(1 + .у) и
(у)+1=(3+2у)/( 1+s). Поскольку 5|(у)=Л>2(у)+1 , то дополнительных заземленных вхо-
дов не требуется, а схема имеет два прямых входа х|(, х|2 и один инверсный вход х2|.
ИТ(у) Z.;(s) hi
Z)3(.V>^11SJ)Z 11(.^2(l + y)Z1!(S), Z2!(s)=^<-?4 tZ0(y). Вы-
бираем Z. |(s)~ 1/C| jS - конденсатор с емкостью C, ];
Z0(y)=7?0/(lTs) - параллельное соединение резистора с сопро-
тивлением и конденсатора с емкостью Со = !//?о (табл. 1.2,
пункт 5). Тогда Z12(s)-2(l+s)/CHs - последовательное соеди-
нение резистора с /fp-2/Сц п конденсатора с С|2--Си/2. Вы-
бираем Z21(.v)=I(2ту) - параллельное соединение резистора
с /?2! = Л()/2 и конденсатора с С2! = 1//?о . В результате получаем
схему на рис. 1.35. Г"1
►’+Л'=х(1т2х1'1-» х|2-2х21-х21 => j-»T11(s)xI|+iri2(s)x)2-4r21(s)x2|.
где t(y)=(l + 2y)/(l+y) ; И^2(у)=1/(1з у) ; И/21(у)=(2 + у)/(1+у) . Вычисляем S|(s)=2 и
52(у)+1=(3+2у)/(1+у). Так как 5|(у)^52(у) + 1 , то добавляем в схему заземленный вход
х10 с ПФ И/|0(у)=52(у)+1-51(у)=1/(1 гу), имеющей положительные коэффициенты. Вы-
бираем Z10(s)~/?10, тогда сопротивления прямых входов равны:
Zt 1(s)=Z10(y)Wz10(y)/W/| |(s)=/?0/(l + 2s) - параллельное соединение /?ц-J?|() и
По (1.22) определяем
Рис. 1.35
1С7 Пример 1.10.
Z)?(.v) 2Ги)(л)^0(л’)/И^2(.т)^/?|0 - резистор с R]2 = Rl{). Вы-
бираем Z()(.v) - /?0/(l + .v) - параллельное соединение резисто-
ра с R() и конденсатора с C()-]/R() , югда сопротивление
инверсного входа Z->1(x)=Z()(.v)/)F21(.v)-/?()/(2 + .v) - парал-
лельное соединение резистора с /?2|_/?о/2 и конденсатора с
С~[ 1//?о • В результате получаем схему на рис. 1.36. I" I
б У Пример 1.11. у -IF1|(s)X|1+W'p(.s’)-K|2 с ПФ
И 777 Тогда 11 52(.?) + 1-1. Так
как ЛДх )^52(.v)+1, то добавляем в схему заземленный вход
х,0 с ПФ HZ2o(s)--*S1(s)-51(s)-l-l. Выбираем Zx |($)-1/Сцл,
тогда Z!2(s)-Z||(s)W^)(5)/WZ|2(y)-(l+25’)/C1)s - последова-
тельное соединение /?|2 = 2/Сн и С|2=СИ. Выбираем
Z0(x)-/f0, тогда сопротивление заземленного инверсного
входа равно Z2^{s)~Zq{s}/W2q{s)-R(}. В результате получа-
ем схему на рис. 1.37. СЗ
Рис. 1.36
Простейшие типовые схемы динамических каскадов на ОУ и их ПФ сведены в
табл. 1.3, в которой использованы следующие условные обозначения:
RJRj , c^Ci/Cj , T^RtCj, x^L^Q^-L'/Rj.
(1.23)
При необходимости дополнительные схемы каскадов можно получить при г^=0 выбо-
ром Rt0 (провод) или R} ^ (разрыв), при -0 выбором С,-0 (разрыв) или Су-зс
(провод) и при 0jj-O выбором £,=0 (провод) или Rj t: (разрыв). Такие замены эле-
ментов проводом или разрывом следуют из формул операторных сопротивлений (1.21).
Применение табл. 1.3 вполне достаточно для построения большинства схем на
ОУ. Если задана сложная ПФ, для которой в таблице не находится нужной схемы, то
можно соединять каскады последовательно. Два последовательных каскада из второго
и третьего столбцов с ПФ И^Дх) и lT3(s) можно заменить одним каскадом с ПФ
H/2(s)lf/2(s). Это возможно благодаря развязке входной цепи от цепи в ОС. Например,
схема моста Вина - Робинсона ( рис. 1.30) на одном каскаде ОУ с ПФ (1.14) комбиниру-
ется из двух каскадов, имеющихся в табл. 1.3:
1) каскад с ПФ ---------------5 (пункт 23,6),
3+97х+37'"х“
имеющий коэффициенты с01 - 2, Tl0-9T, и па-
раметры элементов С0 = 2С|, /?(С0=9Г, £.|СО -ЗГ1 2;
2) каскад с ПФ W2(s)= \+T~s2 (пункт 6,в), имею-
щий коэффициент Tq] = Г2 и параметры элементов
L^ T2.
Рис. 1.38
1+Т2.г
В итоге получаем схему на рис. 1.38 с желаемой ПФ lV2(s)lV2(s)- --------------
33
Таблица 1.3
№ п/п Элементы схемы Принципиальная схема и ее передаточная функция
а) инвертирующий каскад ' z0 б) неинвертирующий каскад с входным делителем А [V I/ Г I С±—-J в) неинвертир с делител ующий каскад ем в ООС
1 Любой Любой Л)(у) ZO(5)+Z1(S) ;| ^о(^) + Z](s)
2 Со 7l0s 1 1 + Т[о4’ Сц.4'
3 с, *0 - ?01у 1 + Tois
4 7?, £() -e()!s Q tn5 1+6q[S 1+9,)!.?
5 £( /?о i 9|05 1 Н9105 !+6кЛ 9
6 4 -V)i*’2 1 4-Т,‘ч5'"
Со __ 1 Ti<)S: 1 1 rTf.,5' *! 'J
Продолжение табл. 1.3
/*"4. к + о 4 ь*} £ -+ + к + №°j + 0la+i s’ Ll+ °’^+i 1 «*з bf 4 4- 5*5 sO 4- ь? 4- ё 4- s(’°J+002)+I s°°2 + i 5*5 /~ч Ur + Ь7 ч-/ 4 ъ Ь7 £*J К4 4- Ьч 4 4 5*5 К 4 Г-1 «*> К ьО + !Л К~ 4 UF + if i + ч^ •—ч 5*5 ь8 4
sQOjh-I 5*3 /-^Ч J-? + о ь? ч»* 4 «*5 ъ /—ч Ur 4 Ч-^ 4 ъ о ъ L? 1 4- О Д. и 4 о Ь7 4 о и 4 ч к? + + » < о ь? ь-Г + + £ + 5*5 ь? + + ъ К + «— < 6*> ?*ч Ur 4* 4- 5*5 ь? + ь? + ь| т о к) 4 ь? js”j°°j:+s(1 !j+ ,01+00j)+i
UF + «— < И О 1 ь? Ъ Ь? 4 1 'ъ ч8 4 о 1 <г 5*3 К 4- 4Р bf + 4- т ь? й*> 5>? + «"Н fi2- 4 и о ^г 5*5 4 о □ Г ь? 'ъ' К + о ь? 4
ст + а? о as о + CJ as с* С? аГ а? о as о и 4 а? а?
S< и 4~ а? СТ и £ af £ af и as" 0" + а? и + а?
00 О' О —1 ГЧ 22 •—н tn ю г-
Окончание табл. 1.3
ГО5 Ь7 О 4 05 — 05 + Ьч о + о ь? Т л fc? + т ё 4- Оз 4 е» О> 4 Ъ \ КГ 4 о в 4 Оз О К" с-1 Оз о — 4 ь-, ч t « f£ + 4- 05 г) О 4 05 ь? 4 о <Г 4- .sni+s"j+i ГМ 05 Д-S ф 4 + о J? + 4 °О5 Г J Р 4 05 аГ 4 аГ 4 03 аГ Г 03 /*"4. гм ф 4 сд§ 4 03 а? 4 сч 05 OI S 4 OJ S ф 4 и 4 ф" + ei оз ед 2
^о? к 4 о + кг о t-? + Ь7 + + ь? + т ьт + К + о Ь7 + + ГЧоз сч§ 4 О) ь? 4 °оз гм S Ь» 4 03 /—Ч О кг 4 £ т Оз ""оз ^н" 4 оз КГ 4- + %, ед 8 о Н ГЧО i Э |8 t д <? + — Гоз гч2 W 4- 03 кг 4- S ?> 4 5^ О <х> 03 о ею 4 /—ч О О 4 8 CD 4 *^03 4 и. Ф 4 ед оз сч" 4 05 аГ 4 аГ 4 ^03 СМ О el ечо 4 еч§ Ь» 4 05 8 ф 4 ei 05 еЧ — 4 05 Ф 4 •—» ед оз /ч 4 с ед Ь» т «2^ ф“ 4
кг 4 X ъ ь? + 6*5 О КГ с^ кг 4 5*3 ь? 4 %з еД g ь» 4 оз ь? 4 Оз О Ь7 03 ь? ^н- 4 Оз кг + Оз см§ 4- 03 о к? + О и 1 о <ч 6^ ГМ Ь* 4- 62l Ь? 4- оз а? гм ъ rio W + «5 8 ф + ^03 ГМ ~~ 4 05 ф" 4 05 ф ^05 ед о ед ед§ 4 О) 8 Ф 4 4 05 ф" 4 —< ед О) гм S
и + о as о а? + + о as а? + С5 о as и а? а? £ у* о as СТ
и а? и af as" *+" и 4 as’ и "f и 4- Af af и с as"
00 О\ г""Ч 8 СЧ сч гч ел гч €4 *Г) еч \О СМ гч
Нетрудно заметить, что в табл, 1.3 нет ни одной схемы так называемого немини-
мально-фазового элемента, чья ПФ имеет полином Л(«) с правыми корнями и отрица-
тельными коэффициентами (1.23). Такие элементы только на ОУ с ООС реализованы
быть не могут и конструируются как системы с ПОС, то есть неустойчивые системы.
Р? Пример 1.12. Разработать каскад на ОУ с ПФ MP(s)=K/(l-7s), К>0, Т>0.
Решение. По заданной ПФ запишем ДУ элемента, выраженное относительно
старшей производной: у Ту'~Кх j'-(l/T)_y -\К/Т)х. Ему соответствует структур-
ная схема на рис. 1.39,а. Временно разорвав ОС вокруг интегратора, запишем опера-
торное уравнение элемента с двумя входами х и v~y: y(5) Bz!(s)F(s) B/2(.v)A'(s), где
1 К. К I Ts
ИИ|(у)-~^2(5)=—. Так как 5t(s)=l/Ts^52(*’)+l--———, то дополним схему зазем-
is Is Ts
ленными входами х10 с ПФ f₽J0(s)=52(s)+1 и х20 с ПФ
WK20(S)=5t(s).
Выбрав сопротивления Z|(s)=J?j и Zo(s)-1/Cos, по
(1.22) определим: - парал-
>Fio(s) l+(//ft)s
лельное соединение резистора с R^-RjK и конденсатора
с С1() = Т/О10; Z1{s}=Zq(s)IW1{s)=TIKCq = R1 - резистор;
Z20(s)-Z0(.v)/Wz20(s)=T/C0-/?20 " резистор. В результате
получаем принципиальную схему на рис. 1.39,6, выход ко-
торой связан с прямым входом ОУ по петле ПОС через ре-
зистор R{. Как будет показано в последующих главах,
системы с правыми полюсами неустойчивы. Разработан-
ный элемент имеет правый полюс s1 = l/T>0 и расходя-
щуюся составляющую переходного процесса е/ Г. ГД
Рис. 1.39
В устойчивых схемах на ОУ положительная обратная связь недопустима.
Приведем некоторые схемы динамических элементов на ОУ и их ПФ.
1. Универсальный одновходовый усилитель (рис. 1.40) с
ПФ
HZo(5)/Z2(s)+Zo(.)/Z2O(5) _ ZQ(s)
( J l+Z^J/ZjoCs) Z2(s)' ( ‘ }
Для синтеза схемы представим заданную ПФ в расщеп-
ленном виде Wz(s)=Ff/I(s)-W2(s’) и введем дополнительные ПФ
минимальной сложности с положительными коэффициентами
ИД(х) и (или) ^0(5) так, чтобы выполнилось условие
H^(s)+l₽J0(4)=Bz2(s)-i-l+W20(s). В крайнем (наихудшем) случае всегда можно задать
Bz10(s)=B2(s)+l и H20(s)=B^(s). Тогда, выбрав свободно сопротивления Z10(s) и
Z0(s), остальные сопротивления схемы определим по (1.22):
^(у)=^0(^10^)/^(5), Z2(s)=Z0(s)/lP2(s), Z20(s)=Z0(s)/H^0(s).
1С7 Пример 1.13. ДаноДУ j+ Т\у'~х-Т?х’ с 7j>0 и Т2>0. Расщепляем его ПФ:
Wz(s>y-y|-H/;(s)-WS(s), где f^(s)=—~ и JP2(s)=-^ , откуда 5i(s)=—l- и
1 + /1« 1+7]т I+Tj5 l + 7]s
Рис. 1.41
Рис. 1.42
1+(7]+7э)л'
Л2(<)+Ь--------~—. Вводим дополнительную ПФ
1 + Т\х
(Т, +7?).v
W()(s)-a7(.v)+l -S>(s)=-—--- и заземленный прямой вход
1тТ]5
х1()=0. Выбираем Z0 = /f0 - резистор и ZI0(s)=l/C10s - конден-
сатор, тогда получим на схеме (рис. 1.41):
- г2=г0/^^ад/т2 +Rq/T2s - последовательное соеди-
нение резистора с R2 = R^T\jT2 и конденсатора с C^T-JR^
(табл. 1.2, п.1);
- Z1=Z10^0/Wz1=(r1+T2)/C10 - резистор j?j. Г1
2. Неинвертирующий сумматор (рис. 1.42,д), выполняю-
п
щий операцию j=^W/(s)x<- с ПФ
W(s. ^Z^/Z^s)
XziWz/^)+zAs)/zio(s)’
J
Синтез схемы: Zf-(s)=ZI0(s)/W;(s), Z20(s)=Z0(s)/Xw<(x).
Выбрав Z^ R^ Zl0=Z0 = l/C0s и Z20 = 7?1||...||7?n, получим
иеинвертирующий интегросумматор (рис. 1.42,6), выполняю-
n t
щий операцию /=У^Л'1|х1(т)с1т с коэффициентами Я, - 1/Я,-С0 .
о
3. Инвертирующий сумматор (рис. 1.43,а), выполняющий
Рис. 1.43
Л
операцию у=-^И^(«)х; с ПФ
»=1
Wf(s)=Z0(s)/Z,(s), в том числе инверти-
рующий интегросумматор (рис. 1.43,6),
п *
выполняющий операцию у--]>Х|х;(т)Ф:
»=1 о
с коэффициентами К^Х/RjCq .
1.7.2. Анализ и синтез многокаскадных схем на ОУ
*?адача анализа схемы заключается в определении ее ПФ. При анализе схема делит-
ся на каскады четырехполюсников. Так как у ОУ /?ВХ»/?ВЬ1Х > то ПФ каскада на ОУ не
зависит от его нагрузки. При расчете каскада на пассивном четырехполюснике без ОУ
необходимо учитывать нагрузку, потребляющую часть его тока и изменяющую ПФ.
к'7 Пример 1.14. Последовательное соединение четырехполюсников (рис. 1.44). В
схеме (а) с развязывающим операционным повторителем ПФ последовательных каска-
дов перемножаются:
Без развязывающего операционного повторителя между первым и третьим каска-
дами получим схему (б), ПФ которой рассчитаем методом контурных токов:
Q!Px, yCI => yCQxPx, WCQ'P,
где e=[Z!^f2 z.JvfZ,} /=fb]: />=fo]; c=[° z<]= гг~ z, '
L -^2 ^-2 z-3+z-4J L/2J LUJ C[S C2S
Z4/?2. Отсюда получаем ПФ
Z2Z4 __________C,«______________________Га>_______
(z, +Z2)(Z3+Z4)+ZIZ2 (Kl+l/C,sX«2+l/C2O+«i/Cls (I + 7,.sXI+T^sj+Z;2s •
которая не совпадает с ПФ (1.25), так как второй каскад является нагрузкой для перво-
го и потребляет часть его тока. О
При последовательном соединении каскадов пассивных четырехполюсников необхо-
димо включать между ними развязывающие операционные повторители. Тогда ПФ кас-
кадов можно перемножать. Без повторителей должна учитываться нагрузка каскадов.
£7 Пример 1.15. Рассмотрим схему (рис. 1.45), состоящую из четырех каскадов,
первый из которых является пассив-
ным с нагрузкой Z3. Запишем уравне-
ния каскадов, определим их ПФ и ПФ
всей системы в целом методом эквива-
лентных преобразований структурных
схем (рис. 1.46):
>’1=&\Х, уг=-W2-W2у3,
J=-WV2« Л =^2 +^бУ .
Рис. 1.45
где
w2^-,w2^-,wA
z3 z4
^7 . w _ l+Zjp/Z,, . „z _ ^+Z10/Z[|
Z6 ’ 5 1+Z8/Z9 ’ 6 i+z9/z8 •
Z2Z4Z5Z7(Z8 +Z9 )Zt [
(Z|Z2 +Z]Z3 +Z2Z3 )[z4Z6(Z8 +Z9 )Z] । +Z5(Z6Z9 -Z7Z8 XZ10 +Z| ])]
39
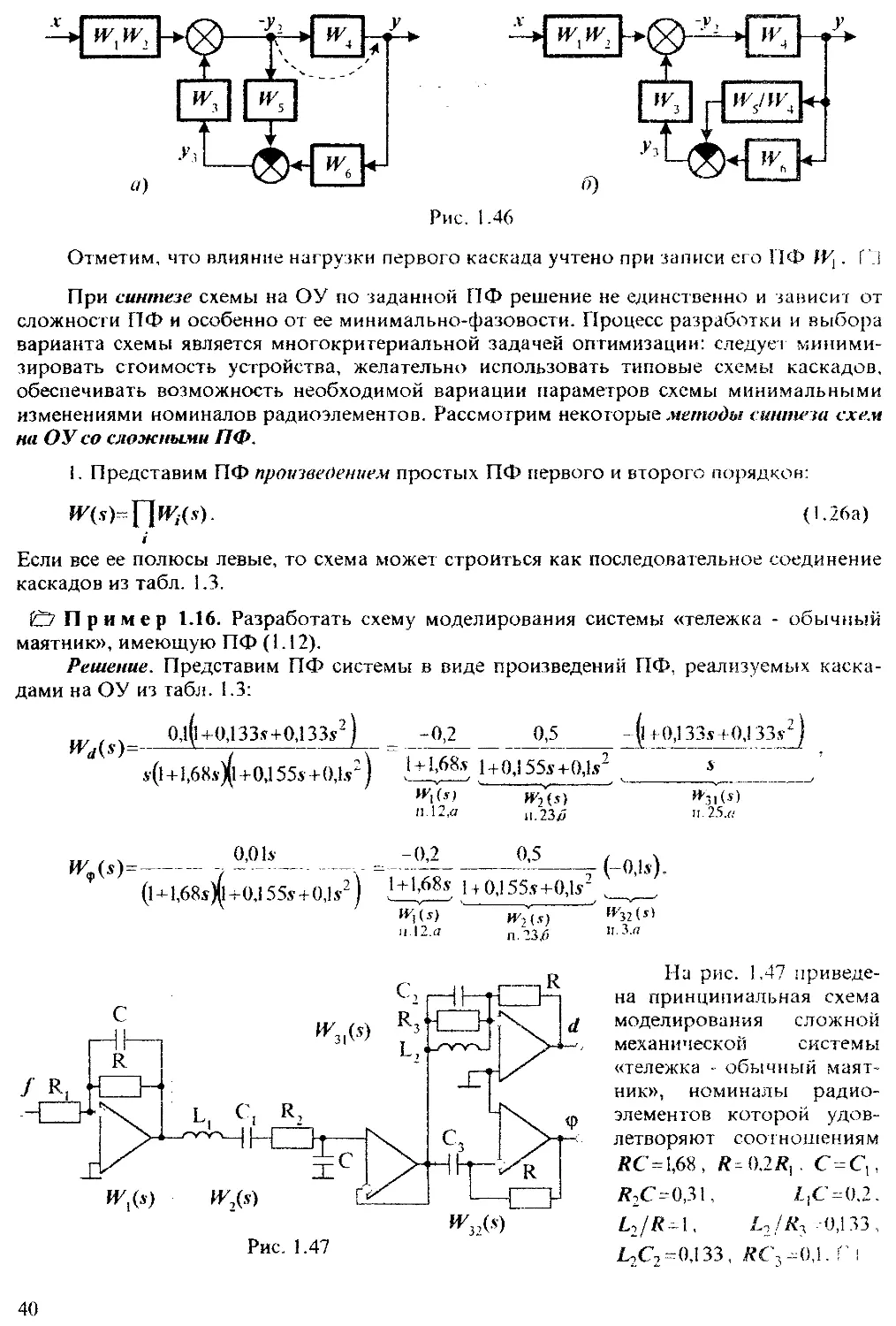
Рис. 1.46
Отметим, что влияние нагрузки первого каскада учтено при записи его ПФ . 171
При синтезе схемы на ОУ по заданной ПФ решение не единственно и зависит от
сложности ПФ и особенно от ее минимально-фазовости. Процесс разработки и выбора
варианта схемы является многокритериальной задачей оптимизации: следует миними-
зировать стоимость устройства, желательно использовать типовые схемы каскадов,
обеспечивать возможность необходимой вариации параметров схемы минимальными
изменениями номиналов радиоэлементов. Рассмотрим некоторые методы синтеза схем
на ОУ со сложными ПФ.
1. Представим ПФ произведением простых ПФ первого и второго порядков:
(1.26а)
i
Если все ее полюсы левые, то схема может строиться как последовательное соединение
каскадов из табл. 1.3.
Р7 Пример 1.16. Разработать схему моделирования системы «тележка - обычный
маятник», имеющую ПФ (1.12),
Решение. Представим ПФ системы в виде произведений ПФ, реализуемых каска-
дами на ОУ из табл. 1.3:
0,1(1+0,133s+0,133s2) -0,2_______0,5________ -(1+0,133^4-0,133s2)
s(l+l,68s)(l+0,155s+0,ls2) l+0,l55s+0,ls~ *,
n. 12,а 1к23Д и 25.e
__ _ -0,2__________°’5_______
(1 + l,68s)(l+0,155s + 0,1s2 ) ~1+0,155s+0,Is2
ИЦ*) ^(j)
'112.Я П.23Д
(0,1s).
И 32(j)
li. i.a
На рис. 1.47 приведе-
на принципиальная схема
моделирования сложной
механической системы
«тележка - обычный маят-
ник», номиналы радио-
элементов которой удов-
летворяют соотношениям
RC 1,68, Л= 0.2 Я, . С Су,
Я2С=0,31, ZjC^O.2.
Li/R-X, /_2/Яг 0,1 33,
^2=0,133, ЯС3-Ф,1. Г I
40
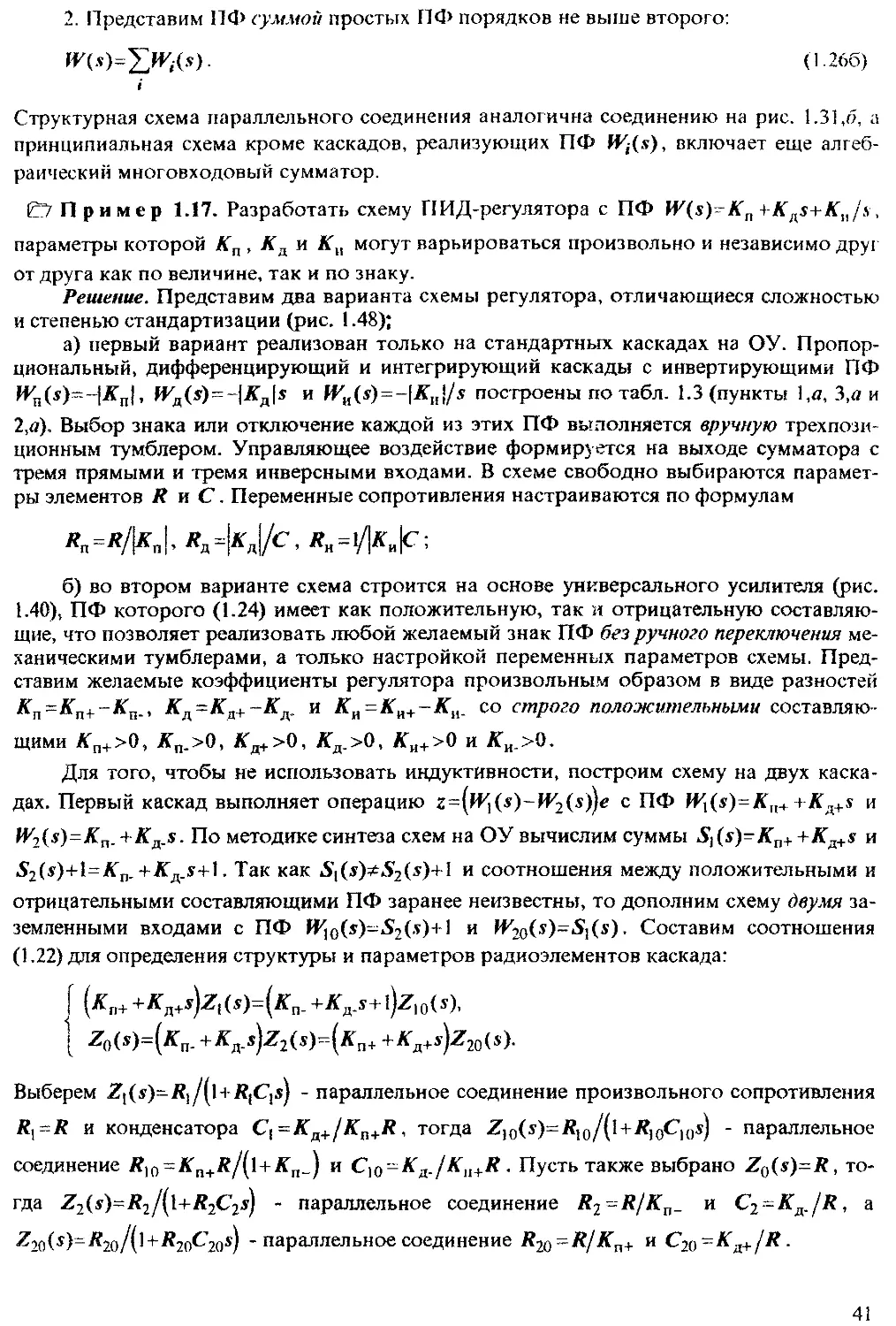
2. Представим ПФ суммой простых ПФ порядков не выше второго:
(1.266)
i
Структурная схема параллельного соединения аналогична соединению на рис. 1.31,б, а
принципиальная схема кроме каскадов, реализующих ПФ И^-(х), включает еще алгеб-
раический многовходовый сумматор.
£7 Пример 1.17. Разработать схему ПИД-регулятора с ПФ W(s)-Kn +Кл5+Кн/ь,
параметры которой Кп , Ка и Кн могут варьироваться произвольно и независимо друг
от друга как по величине, так и по знаку.
Решение. Представим два варианта схемы регулятора, отличающиеся сложностью
и степенью стандартизации (рис. 1.48);
а) первый вариант реализован только на стандартных каскадах на ОУ. Пропор-
циональный, дифференцирующий и интегрирующий каскады с инвертирующими ПФ
1ГП(^-|ХП|, и ^(S) = -|X,> построены по табл. 1.3 (пункты 13,а и
2,а). Выбор знака или отключение каждой из этих ПФ выполняется вручную трехпози-
ционным тумблером. Управляющее воздействие формируется на выходе сумматора с
тремя прямыми и тремя инверсными входами. В схеме свободно выбираются парамет-
ры элементов R и С. Переменные сопротивления настраиваются по формулам
Я„=Я/1М КД=|*'«1/С’
б) во втором варианте схема строится на основе универсального усилителя (рис.
1.40), ПФ которого (1.24) имеет как положительную, так и отрицательную составляю-
щие, что позволяет реализовать любой желаемый знак ПФ без ручного переключения ме-
ханическими тумблерами, а только настройкой переменных параметров схемы. Пред-
ставим желаемые коэффициенты регулятора произвольным образом в виде разностей
Кп~Кп^.-Кя_, Кя=Кя+-КДг и Кк=Кя+-Кя. со строго положительными составляю-
щими А'1И>0, Хп_>0, Жд+>0, Лд_>0, АГи+>0 и ЛГи_>0.
Для того, чтобы не использовать индуктивности, построим схему на двух каска-
дах. Первый каскад выполняет операцию z=(w/1(s,)-W/2(s))e с ПФ W/1(«)=A'n+ +Кя+я и
W2(s)=Kn. +Ka.s. По методике синтеза схем на ОУ вычислим суммы 51(у)=Лп+ +Кя+з и
52(«)+1=Ап. +Хд.у+1 . Так как 5|(s)*S2(x)+1 и соотношения между положительными и
отрицательными составляющими ПФ заранее неизвестны, то дополним схему двумя за-
земленными входами с ПФ W]0(s)-S2(s)+l и W^/s)-^^’). Составим соотношения
(1.22) для определения структуры и параметров радиоэлементов каскада:
[ К+ +^д+у)^1 (5)=(^п- +Ka.s+1)Z]0(s),
I ^o(s)=(^n- +^fl-s)^2(s)“(^n+ +^д+у)^2о(5)-
Выберем ZI(«)=/?1/(l+/?(C!s) - параллельное соединение произвольного сопротивления
/?,=/? и конденсатора С| -Ka+/Ka+R, тогда +/?]0C|0s) - параллельное
соединение /?|0 = К'п+/г/(1+Ж'п_) и С10 = Ka./Ka+R- Пусть также выбрано Z0(s)=/?, то-
гда Z2(«)=/?2/(l+/f2C2s) - параллельное соединение R2-R/Kn_ и C2 = Ka./R, а
Z20(s)=^20/(l+-K2oC2.0s) - параллельное соединение R20~R/Kn+ и C^-K^/R.
41
R
«)
Рис. 1.48
Второй каскад выполняет операцию х=г+(А'иД)с-г+(К'11+Д-Л'и./х)е. Вычисляем
S$(s)-l+Ktl+/s f S4(S)+i=i+KHJS, W^s^Kjs, W^{S)^Ka+lS и
Z3I(s)-A'„+Z32(s)/s-A'H.Z30(s)/s,
Выберем произвольно емкости С конденсаторов Z3i(s)=Z0(s)=l/Cs, тогда
^32~^4'“V^h+^' и ^30~^40 =
Если в (1.26) не все ПФ И-'Д.у) являются минимально-фазовыми, то соответствую-
щие им каскады имеют локальную ПОС и делают схему неустойчивой.
3. Недостаток последовательного и параллельного соединений каскадов - возмож-
ность дифференцирования высокочастотных шумовых составляющих сигнала, что ве-
дет к возрастанию уровня шума пропорционально его частоте. Другой недостаток -
разнотипность каскадов, нерегулярная структура схемы, трудоемкий расчет номиналов
ее радиоэлементов, наконец, необходимость вычисления корней полинома для получе-
ния разложений (1.26).
Метод реализации ПФ W(s)= B(s)/ J(s), свободный от указанных недостатков, ос-
нован на построении вспомогательной схемы, имеющей ПФ FFf(s)--1/J(x) и выход v(z),
удовлетворяющий ДУ
(1.27а)
«Л «л «л «л
Соединим последовательно л интеграторов, обозначим их выходы справа налево как
v, v’, ..., г(я~|>, а вход самого левого интегратора сформируем по уравнению (1.27а) с
помощью л+1-входового сумматора. Так как W{s)=B{s^¥f{s), то выход y(t) формиру-
ется как линейная комбинация выходов интеграторов (рис. 1.49,(7):
y=B(s)v=bGv+blv'+...+bnvl'n^. (1.276)
42
При т<п вводятся фиктивные коэффициенты Ьт+{-..=Ья~й. Методика построения
подобных схем унифицирована для любых ПФ, у которых т<п. Структуры схем явля-
ются каноническими (регулярными, повторяющимися), не имеют дифференциаторов,
строятся просто, хотя и не гарантируют минимальных затрат оборудования.
Для практической реализации канонической схемы необходимо п одновходовых
интеграторов и не более двух многовходовых сумматоров-вычитателей, обведенных на
структурных схемах (рис. 1.49) пунктиром.
Интеграторы можно строить по неинверти-
рующей (рис. 1.50,а) и по инвертирующей
(рис. 1.50,6) схемам с постоянной времени
ЛС=1. В схеме на инвертирующих интегра-
торах (рис. 1.49,6) необходимо учитывать че-
редование справа налево знаков производных
и коэффициентов сумми-
рования в цепях ОС и формирования выхода
системы.
Вынос точки съема влево за сумматор дает эквивалентные схемные решения
на рис. 1.51 с меньшим числом ОУ за счет совмещения функций многовходовым интег-
Рис. 1.51
росумматором, обведенным пунктиром. Ценой экономии оборудования несколько ус-
ложняется расчет схемы. Принципиальная схема интегросумматора строится по типо-
вой методике синтеза каскада на ОУ на основе операторного ДУ
(1.28а)
ans ans ans ans
Подставив из (1.27a) в (1.276), получим уравнение выхода системы
и~1
y=Xciv(i) /)х > D hnian , Ц =*,- - Dai V7--0. л-1. (1.286)
1=0
Пример 1.18. Разработать канонические схемы на ОУ, моделирующие систему
«тележка - обычный маятник», имеющую ПФ (1.12)
W /Tv b0+b[s+b2iS1 b22s2______
''d\sf 2 3 4 ’ ">3 4
a(s+a2s +a3s +a4s ats+a2s~ +a3s +a4s
с коэффициентами й^-60, Л]=8, 6^=8, ^=6, a(=600, a2=1100, a3 = 216, a4 = 100.
Решение. На рис. 1.52,а показана структурная схема на неинвертирующих интегра-
торах, моделирующая уравнения (1.28)
v"' = (l/a4s)/-(a3/e4s)v"'-(a2/a4s)v"-(e1/a4s)v', rf=V+*ir'+*2i‘’" > <₽=*22v" •
Начиная построение схемы с интегросумматора, сравниваем суммы St(s)=l/a4s,
^2(5’)+l=(ai+a2+a3+a4s)/a4s и вводим дополнительный прямой заземленный вход с
ПФ Wlo(s)=:iS2(s)+l-1S'1(s)=(a1 +a2 + a3-l+a4s)/a4s=(19,15+s)/s. Составим соотношения
для выбора структуры и параметров принципиальной схемы (рис. 1.53,а):
^!l(s)=(<»|+®2+«3-l+«4s)^lo(s). a4sZo(s)=alZ21(s)=a2Z22(s)=a3Z23(s)-
Выбирая значения R и С из условия /?С=1, положим ZI0(s)=/t10/(l+/tl0Cs) с
Kio-^4/(a}+a2+a3-\)C-Ofi522R, тогда Z11=/?11=(el+e2+a3-l)/?I0=a4/?=100/?. Выби-
рая Z0(s)=l/Cs, получим Z21 = /?21 =а4/а]С=0,167Л, Z22 = /?22=a4/a2C=0,09097? и
Рис. 1.52
44
-«4/а3С = 0,4637? .
Сопротивления выходных каскадов, формирующих значения d и <р , удовлетво-
ряют соотношениям /?//?3| =А0/й21 = 7,5, R/R2t2-bx/b2l~\, з-Л|+-621-1-75 и
7?//?5О=й22--1=5.
На рис. 1.52,6 показана структурная схема на инвертирующих интеграторах, моде-
лирующая уравнения
-у'"----—/’у"--у'), d = bov-bi(-v')+b,,v” , <p = b22v" .
a4s a4s a4s a4s
Начиная построение схемы с интегросумматора, сравниваем суммы 18,1(^)=а2/а4«,
52(s)4-!=(1+a|+a34-a4s)/a45’ и вводим дополнительные заземленные входы с ПФ И^о = 1
и И2()(«)=(а2-а1-e3-l)/a4^-2,83/s. Составим соотношения для выбора структуры и па-
раметров принципиальной схемы (рис. 1.53,6):
a2Zxx(s)=a4sZx0(s), a4«Z0(s)=Z21(s)=a1Z22(s)=a3Z23(s).
Выбирая значения R и С из условия RC-1, положим Z10(s’)=l/Cs’ и Z0(s)=l/Cs,
тогда ZH = /?и =a4/a2C=Q^Q9R , Z21 -a4/C-\00R , Z22 = R22~a4/axC=0,167R ,
Z23 =/?23=л4/л3С. = 0,4637? и Z2q =/?2ц = л4/(л2 — в| —я3 — 1)C=0,353Л.
Сопротивления выходных каскадов, формирующих значения d и <р , удовлетво-
ряют соотношениям 7?/7?31 = ^/^1 = 7,5, /?//?41 =6j=8, Rj7?4O=fy)+fr2]-6]-l=59 и
Л/Л50=*22-1=5. CJ
Рис. 1.53
ГЛАВА 2. ЧАСТОТНЫЕ ХАРАКТЕРИСТИКИ
ЭЛЕМЕНТОВ И СИСТЕМ УПРАВЛЕНИЯ
CJ/астотная характеристика (ЧХ) - это зависимость параметров (амплитуды и
фазы) гармонических колебаний выходной переменной линейного объекта оз
параметров и частоты колебаний входной переменной в установившемся режиме функ-
ционирования (рис. 2.1).
г(0 _ y(i)
ОбУ
х( t) - A v s in(<о t+<p т )
jyci(O=4J.sin(<o/+<p>.)
Ау = Ау(т), ф>,=фу(а>)
Рис. 2.1
2.1. ОСНОВНЫЕ ЧАСТОТНЫЕ ХАРАКТЕРИСТИКИ
Х^^ассмотрим линейный объект, описываемый ДУ (1.15)
я т .
Ёв^О)(о=^х<‘)(/)-
i=0
«=0
Гармонические колебания описываются формулой
КХ”'
Re{v}
Рис. 2.2
v(t)~ Л|>е-’(“/+ф'= Av cos(<»/+9 M)+sin(<BZ+q> v)
равномерного вращения в комплексной плоскости вектора длиной
(амплитудой) Av с угловой скоростью (частотой) ш(рад/с)=2я/ (Гц)
и начальным фазовым углом ф„ (рад)=(л/180)ф,, (град) (рис. 2.2).
Подставим в ДУ (1.15) значение входа x(t), установившееся зна-
чение выхода y(t) и их производные:
тогда
л т
Ave}Vy Xai(l® )' = A-eJ<₽x &(j®)'
/=0 /Д)
41е«ф,-ф. > = у6 Cffl у /f ). ЯЩ
г=0 / Й
О
Обозначим: A(et) = Ay(<d)/Ax - амплитудно-частотная характеристика (АЧХ);
Ф(®) = Ф ,.(ю)-фЛ - фазочастотная характеристика (ФЧХ); ^(j®)-А(а )е-’,,(“- ком-
плексная частотная характеристика (КЧХ), которая получается из ПФ ИДх) формаль-
ной заменой оператора s на комплексную функцию частоты ja> .
46
!т{ИЛ
ИХ»
^.Ф(©)
Р(ю)' Re (Ж)
0
Рис. 2.3
Представим КЧХ (рис. 2.3) в виде
Bz(j® )- Л(<й ){cos(q>(® ))+jsin(q>(® ))]-Р(© ) + j(>(© ),
где P(a>) = Re{^(j© )} = Л(ю )cos(tp(®)) - вещественная ЧХ
(ВЧХ); g(© > 1m {ИЛ j© )} = Л(© )sin(<p(<o )) - мнимая ЧХ
(МЧХ). Между АЧХ, ФЧХ, ВЧХ и МЧХ существуют сле-
дующие зависимости:
л(©)-/р2(®)+62(®). ^®>=arctg[p(^j)-
Указанные ЧХ принято строить в равномерном масштабе по оси частот о . Осо-
бое внимание следует уделить построению ФЧХ по ее аналитической зависимости с
помощью ЭВМ, в том числе и калькулятора. Так как функция arctg дает главное значе-
ние угла в диапазоне от +90 до -90°, то к нему следует добавить +180° или л (рад) при
{6(®)>0}Г|{Р(й)<0} либо-180° или -л (рад) при {£)(© )<0}П{Р(®)<0}.
Линия на комплексной плоскости Hz(jco ), образуемая точками КЧХ при измене-
нии частоты © от 0 до. оо, называется годографом или амплитудно-фазовой частотной
характеристикой (АФЧХ) Л(ф). Годограф строится как параметрическая функция час-
тоты по значениям любой из пар ЧХ {Л(©), ф(©)} или |Р(ю),Q(<n)} - На годографе не-
обходимо указать стрелкой направление возрастания частоты и отметить следующие
особые точки-, начало годографа при ©=0; конец годографа при ©->оо; пересечения с
осями координат Re{©} и Im{©}; пересечения с окружностью единичного радиуса.
В равномерном масштабе частот графики АЧХ и ФЧХ быстро изменяются на
низких частотах и медленно - на высоких. Поэтому в практических расчетах использу-
ются логарифмические ЧХ (ЛЧХ) в соответствующих масштабах по осям частоты и ам-
плитуды: £(© )= 201g(zi(© )) - логарифмическая А ЧХ (ЛАЧХ) и Ф(© ) - логарифмическая
ФЧХ (ЛФЧХ). Обратная зависимость АЧХ от ЛАЧХ есть А(<о )-10ОО5£^ш\ Значениям
£<0 соответствуют значения 0<Л<1, L=0 - Л=1, £>0 - А>1.
Единицей измерения логарифмической величины является декада (дек) - интервал,
на котором крайние значения величины отличаются друг от друга в 10 раз. Примеры
декад: (1, 10), (0,2, 2), (10я,10"+1). Если равномерная ось частот ®^0,<ю) - полубеско-
нечная, то логарифмическая ось Ig© е(-со, со) - бесконечная, поэтому начальные значе-
ния ЛЧХ при ©=0 отсутствуют. Принято ось £(©) проводить через частоту ©=!, где
1g© =0. Единица измерения логарифмической амплитуды - бел (Б); декада по оси £(© )
равна 20 дБ. В табл. 2.1 даны логарифмы Igx и 201gx величины х на декаде (1,10).
Таблица 2.1
х |..J 2 3 4 5 6 7 8 9 10
1g* 0 0,301 0,477 0,602 0,699 0,778 0,845 0,903 0,954 1
201gX ; 0 0,602 9,54 12,04 13,98 15,56 16,9 18,06 19,08 20
На других декадах lg^lOi’xj=n+!gx и 20Ig^l0"xj=20fl+201gx.
Расположение частот на нулевой, Первой, минус первой и i -й декадах логарифми-
ческой оси следующее:
47
) 1 1 2 3 ! 4 5 6 7 8 1 9 10
10 20 30 40 50 60 70 80 90 100
0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 1
10' 2 10* 3 10* 4 10* 5 10* 1О'+|
Если под руками нет ни калькулятора, ни табл. 2.1, то для быстрого логарифми-
рования достаточно запомнить следующие простые правила:
1) lg2«0,3 и ig3«0,48;
2) умножение (деление) числа на 2 увеличивает (уменьшает) его логарифм на 0,3
дек, то есть на 6 дБ;
3) умножение (деление) числа на 3 увеличивает (уменьшает) его логарифм на 0,48
дек. то есть на 9,5 дБ.
По этим правилам определим, например:
I) lg 15=lg(3-10/2)=0,48+1-0,3= 1,48;
2) lg250= lg(l 0 10-10/2/2)=3-0,3-0,3=2,4 ;
3) lg0,7=lg7-1 ~0,5 lg50-1=0,5(2 -0,3)-1=-0,15;
4) £=-22=-40+18=-40+20 (0,3-3)дБ Л=2-2 2/100=0,08;
5) Л=120 => L=201gl20=201g(10-3-4)=20 (1+0,48+0,6)= 41,6 дБ.
2.2. ЧАСТОТНЫЕ ХАРАКТЕРИСТИКИ ТИПОВЫХ ЗВЕНЬЕВ
/ иловые звенья - это элементы, ПФ которых имеют в числителе или знамена-
tJjrU/ теле полином минимального порядка с действительными коэффициентами:
- безынерционный усилитель нулевого порядка с ПФ W(s)~K ;
- дифференцирующее звено первого порядка с ПФ W(s)=Ks;
- форсирующее звено первого порядка с ПФ 1Е(.?)=АГ(1+7«);
- интегрирующее звено первого порядка с ПФ W{s)~K/s-,
- апериодическое звено первого порядка с ПФ W(s)=Kj(\±Ts) ‘,
- форсирующее звено второго порядка с ПФ W{s)-K(\+2l,Ts+T2s2);
- колебательное звено второго порядка с ПФ FF(s)=a7(1+2£Ts+T~s~)\
- звено чистого запаздывания с ПФ lV(s)=Ke~xs.
В перечисленных типовых ПФ значения коэффициента усиления К и постоянной
времени Т могут быть любого знака, коэффициент демпфирования должен быть
0<£<1, время запаздывания т>0. При £>1 полином l+2t,Ts+T2s2 имеет два действи-
тельных корня S] 2=|-^±-у/^-Т|/т' и равен (1-s/s})(1-s/s2), то есть данный элемент не
является типовым и его можно представить последовательным соединением двух апе-
риодических или форсирующих звеньев первого порядка.
& Пример 2.1. Последовательность построения ЧХ типовых звеньев с ПФ
fE(x)=B(s)/A(s) покажем на примере звена с 1Е(х)=А7(7х-1):
48
1) получим КЧХ, подставив в ПФ s-jco :
X ДО) Рв(& )+Шя(<°) _____К „ .
} Л(>) Л1(®)+Л2л(®) ’
2) получим ВЧХ и МЧХ, умножив 2?(j®) и А(j®) на комплексно-сопряженный
полином ^(-je>):
pj(»)+e^(®) i+rW
Построим в равномерном масштабе графики ВЧХ Р(и) и МЧХ (>(ф) (рис. 2.4,а,0:
р s pb(®)pa(®)+Qb(®)Qa<®) К
Pfa)+Qfa) 1+Т2<в2
П( Ч Qb(®>pa(®)-pb(®)Qa(®) КТ®
U{№) Pfo)+Qfa) нт2®2’
3) построим годограф Л(ф) как функцию Q(P) параметра со «^Д90) (рис. 2.4,в):
[Р+К/2)2 +Q2 =(К/2)2. Это уравнение полуокружности в соответствующем квадранте,
определенном знаками Р(ю) и б(©), радиусом |А'|/2 с центром в точке (~Л72,0);
Рис. 2.4
4) построим в равномерном масштабе графики
АЧХ Л(ш) и ФЧХ <р(<в) (рис. 2.5). Обратите вни-
мание на расположение ФЧХ arctg((-ATco )/(- К)) в
зависимости от знаков К и Т:
. X П2(®Й
J=-
Л(® )-7д2<®)+62(®)=(^|/у/Г+Г2®2 ,
arctg(7<a) приЛ7<0,
arctg(7c))-180o при Л'>0,7'>0,
arctg(T(o)+180° при К>0, Т<0;
5) построим ЛАЧХ £(ф) и ЛФЧХ Ф(ю) на
интервале частот ф с[0,1<х»с, 10ocJ , где происходят
основные изменения ЛЧХ (рис. 2.6). Желательно
сначала построить асимптотические ЛЧХ (АЛАЧХ
£а(<в) и АЛФЧХ Фа(<»)), состоящие из отрезков
прямых линий:
49
Таблица 2.2
Звено и его ПФ W(s) АФЧХ Л(ф) ЛАЧХ £(«>)
Безынерционный К<0 -|А| 0 t К>0 |А| Р £4 201g|K|
усилитель
К Р(а)=К > е(®)=о 0Л 1 L(to)= '10 <B 201g|A|
Дифференцирующее звено Л 1 к L 20igjA]
Ks 0 1 А<0 Г 4/|Ki 1 (й
Р(®) = 0, Q(&) = K& £((o) = 201g|A|+201g(o
ЛФЧХ Ф(ю)
К>0 „
--!---►
10 со
А'<0 '
f 0° при К>0
Ф(й -<[±180° приА<0
ф|
90° I
Ф(©) =
j 90° при К > 0
[-90= приАсО
Форсирующее звено
первого порядка
KG+Ts)
К<0' 7>0 к к ^А>0 7>0
К<0 7'<о'' -IA] 0 1 ** Р К>0 к Т<0
Р(го (?(со)-АТсо
2 дек
Ца ) = 201g|A|+!01g(l~T2ю :)
Jarctg(7®) ПРИ А" >0
' ' (arctg(7o))±180D при А <0
Продолжение табл. 2.2
Интегрирующее
звено
К
s
Р(и) = 0, 2(ю)=-Л7<в
£(®) = 201g|Al-201ga
Ф 4
90° T K<0
0,1 1] 10 ®
-90° 1 K>0
90° при/С <0
-90° при К>0
Апериодическое
звено
К
\-Ts
К<0, 7>0^t А>0. Г<0
K<Q. Г<0 । К>0, 1>0
£(®)-201g|AT10lg(urV)
Р(а^к/[\лТ2&2
б(®) = -ЛТ®/(1 + Т2®2)
_ f-arctg(7o>) при К >0
™®M-arctg(7®)±180° при К<0
Звено чистого
запаздывания
Ллет'
Р(® )~KCOS(T(D )
Q(a> )--A'sin(x®)
201g|AG
0J 1 '10 О
L(®)=201g|AT|
Окончание табл. 2.2
Форсирующее звено
второго порядка
*(i + 2^Ts+T2r)
Р(®) = *(1-72®2)
дек
e(®) = 2^T®
L(®)=201g|*|+
+ 101gM-TV)2+(2£7®)2|
lv J
f 24T®
arctg
ф(®)=
arctg----;—7
I. l-r-ffl"
при *>0
±180= при *<0'
Колебательное
звено
_____K______
\+2^Ts+T2s2
K<ti, T>0
]K\/%
1 1 r<0
|А| p
K>0
*<0, T<0
P(®)=------
(IT2®
6(a) ... _
(1-Г2®2)‘+(2£Лй)‘
L(o)=201g|*i-
I/ 1 э\2 . x21
-101g|(l-T-®-) +(2^T®) j
' 2^ To
-arctg----; приЛ'>0
ф(“'
i-arctg---;—yz 180° при К <0
I 1-T-ffl-
Z_(® )~201g|A|- 101g(l + T2®2),
j 201g|К| при co <®v.
>, 2()lg|A'| 201g|7'|a приюх9с.
L„(<d)
Частота ®c-l/|7'| называется частотой сопряжения
ветвей АЛАЧХ. Асимптотическая ЛФЧХ, например,
для случая А'>0 и Т>0 имеет вид
1 0, 1 ® ад 10® ®
|А/7]
Фа(®)
“180° при ® <®с,
< -135°+45°lg(7fi>) при 0,1®с <а <10®с,
90° при ю >10® с.
ф,.
180°--
90° -
А>0, 7’<0
Логарифмическая ФЧХ кососимметрична относи-
тельно средней точки Ф(фс)4Ф(0)4 Ф(ос))/2. П
Основное преимущество ЛЧХ - возможность их
быстрого построения для любых типовых звеньев по
передаточной функции без применения калькулятора
б)
0
-180'
-90°-
АХО, 7>0
I А<0, 7'<() ®
>0, 7>0
Рис. 2.6
или ЭВМ благодаря следующим свойствам'.
1) логарифмические ЧХ одинаковы по форме для различных значений К и Т
(можно изготовить шаблоны £(©) и Ф(ю) из плотного, желательно прозрачного ма-
териала) и отличаются лишь ориентацией относительно оси L (ЛАЧХ смещается по
вертикали в зависимости от (А7|), оси Ф (ЛФЧХ зависит от знаков К и Т) и оси 1g®
(ЛЧХ смешаются по горизонтали в зависимости от величины IT'D;
2) точные ЛЧХ можно приближенно аппроксимировать асимптотическими ЛЧХ,
состоящими из отрезков прямых линий и строящимися непосредственно по ПФ звена.
В табл. 2.2 приведены АФЧХ и ЛЧХ всех типовых звеньев.
2.3*. ПОГРЕШНОСТИ АППРОКСИМАЦИИ ЛЧХ ТИПОВЫХ ЗВЕНЬЕВ
'/сследуем погрешности А£(®)-£(® )-£а(® ) и АФ(ю)-Ф(®)-Фа(ю) аппрок-
симации нелинейных ЛЧХ с помощью АЛЧХ для типовых звеньев первого и
второго порядков с А">0 и Г>0. Для других значений К и Т ЛЧХ приведены в табл.
2.2. Используем нормированную логарифмическую частоту H’-lg(®/®c), где юс = 1/Г -
частота сопряжения.
К
!. Апериодическое звено с ПФ Их(.v)-- -——.
Логарифмическая АЧХ звена L(w)~ 201gA' - lOlg^l + lO'*4) аппроксимируется двумя
прямыми (рис. 2.1,а):
I 201gA" V>♦><() - горизонтальная прямая,
[201gAT-20H’ V»’>0-прямая с наклоном 20дБ/дек.
Четная функция А£(и')-101g(l + 1 02!н';) погрешности аппроксимации ЛАЧХ (рис,
2.7,6) наиболее отклонена при и’-0, где ® - ®с: Л, A£(0)=-101g2:«-3 дБ. На расстоя-
ниях T1L -21 дек отклонения равны A7.(QZ )-101gl,01--0,0432 дБ, что составляет 1,44%
от Л|. Таким образом, ЛАЧХ отличается от АЛАЧХ в основном на интервале частот
о е[0.1юс, 10® J шириной 2 дек вокруг частоты сопряжения ® L .
Рис. 2.7
Аппроксимируем ЛФЧХ Ф(н’)--агс1^10*') тремя прямыми (рис. 2.7,в):
0° Уи’<Оф - горизонтальная прямая,
Фа(м>)=< -45°(1+н’/Оф) Х/-Оф<н’<Оф - наклон -45/Оф (град/дек),
-90е Х/и>>-(1ф - горизонтальная прямая.
Нечетная функция погрешности аппроксимации ЛФЧХ (рис. 2.7,г)
A0(h»)=-
-arctg^lO**’) Х/м’<-£1ф,
-arctg(10"')+45o(l+v/n<I,)
V-Оф <м’<Оф,
(2.1)
-arctg(10**')+90° Vw>O0
существенно зависит от полуширины Оф среднечастотной части ЛФЧХ. Оптимальное
значение Оф находится решением минимаксной задачи
Оф = arg-
min max] ДФ^)] -.
Оф *
(2.2)
Данная запись означает следующий алгоритм определения Оф :
1) задается значение Оф и по (2.1) строится график функции ]ДФ(н’)|;
2) находится максимальная погрешность ЛФЧХ тахДФ-тах|ДФ(и')];
3) пункты 1 и 2 повторяются для разных
Оф , и из всех значений тахДФ выбирается ми-
нимальное. Соответствующее ему значение Оф
является решением минимаксной задачи поиска
оптимальной полуширины среднечастотной части
АЛФЧХ.
Так как функция |ДФ(м’){ не является глад-
кой ни по аргументу и>, ни по параметру Оф , то
решение задачи (2.2) может быть найдено только
численными методами на ЭВМ, что и было сде-
лано с помощью MathCAD. Результаты расчетов
приведены на графике тахДФ(Оф) (рис. 2.8) и
54
удобства пользования вполне приемлемо значение £2ф=1дек, при котором погреш-
ность аппроксимации ЛФЧХ не превышает 5,71°, или 6% от полного изменения фазы
|ф(оо)-ф(0)|=90°.
Вывод. Логарифмические ЧХ типовых звеньев первого порядка с ПФ К(\ + Тз) и
K/(\ + Ts) аппроксимируются с помощью АЛЧХ с максимальными погрешностями по
амплитуде 3 дБ и фазе 5,7°. Ширина среднечастотной части ЛЧХ равна 2 дек вокруг
частоты сопряжения ос=\j\T\.
2. Колебательное звено с ПФ W(s)=------------у-у .
1-ь2£7л'+Г"5
G > Л2 -> -> 1
Логарифмическая АЧХ звена Z.(H’)=201gX'-101gH 1-1+4^" Ю‘'ЧА аппрокси-
мируется двумя прямыми (рис. 2.9,а):
201g АГ Vm><0 - горизонтальная прямая,
201gA 40и’ Vh>>0 - прямая с наклоном -40 дБ/дек.
Четная функция АЦи’.Е,) = -1 Olgs11 -10 +4£2Ю > погрешности аппроксимации
ЛАЧХ зависит как от частоты, так и от коэффициента демпфирования 0<£<1. На рис.
2.9,6 изображено по одной из симметричных ветвей ДДн’,^) для разных £ . На частоте
сопряжения отклонения ЛАЧХ от АЛАЧХ равны
А 2«)=АЦОХ) = ~201g(24) « -6- 201g£ дБ.
(23)
Графики А2(£) и гоахА£(^) = тах|А£(н’,^)| построены на рис. 2.9,в. При 0,25<£<1 мак-
симальная погрешность лежит в пределах ±6 дБ и вместо ЛАЧХ можно строить только
АЛАЧХ. При 0<£<0,25 нужно обязательно строить полную ЛАЧХ с резонансным пи-
ком Л2(О для колебательного звена или впадиной -Л2(О для форсирующего.
Зависимость £1L(£,) полуширины среднечастотной части ЛАЧХ от £ получим из
следующего соображения. При £ = 1 колебательное звено становится последовательным
соединением двух апериодических звеньев, дающих на частоте £1L -1 дек суммарную
погрешность 201g1,01=-0,0864дБ. Будем определять значение О/Й) по минимальной
частоте, на которой jAL(H’,^)j <0,0864. Решение этой задачи изображено на графике
(рис- 2.9,в).
«)
55
Аппроксимируем ЛФЧХ Ф(и»)- -arctg
Л-!0-н’
тремя прямыми (рис. 2.10,</):
f 0° Vm’< -Г2ф - горизонтальная прямая,
Фа(н’)~А 90°(| <-н’/£1ф) V £1ф<Н’<Г2ф - наклон -9О/£2ф (град/дек).
1X0“ . Оф - горизонтальная прямая
Нечетная функция погрешности ЛФЧХ
|Ф(»г) Vh’< -£2ф,
ЛФ(и')-'!ф(»’)+90°(1-1 и-/Оф) V-Q0 <»’<Оф,
[ф(>р)+1Х0° Ун’>£2ф
аналогична графику на рис. 2.2.г. Оптимальное значе-
ние полуширины £1ф среднечастотной части ЛФЧХ
находится решением минимаксной задачи (2.2) для
каждого Е,. Результаты расчетов в среде MathCAD
приведены на графиках £2Ф(Е,) и тахДФ(Е,) (рис.
2.1().о): сплошные графики - оптимальные, пунктир-
ные - при £1ф . Для удобства допустимо принять
Оф -Е, , тогда 11° < шах ДФ< 23,4°, что составляет от 6
до 13% полного изменения фазы !ф(ос)-Ф(0)| 4X0°.
Вывод. Логарифмические ЧХ типовых звеньев
второго порядка с ПФ А"(1 з 2E,Ts + T2s2) и
К/(l + 2£,Ts+T2s2) хорошо аппроксимируются с по-
мощью АЛЧХ только при 0,25<£<1, при этом максимальные погрешности аппрокси-
мации не превышают значений 6 дБ по амплитуде и 22° по фазе. При 0<Е, <0,25 АЛАЧХ
необходимо дополнить резонансным пиком или впадиной величиной
Л2 =-6-201gE, дБ. Ширина среднечастотной части ЛАЧХ не превышает 2 дек, а шири-
на ЛФЧХ близка к значению 2Е, вокруг частоты сопряжения ® с - 1/|Г|.
2.4. ЧАСТОТНЫЕ ХАРАКТЕРИСТИКИ СЛОЖНЫХ СИСТЕМ
омплексную ЧХ системы с ПФ W^(.v)—jB(.s)/z4(,v) можно представить в виде
& произведения /V типовых КЧХ:
.V
А' Л' Г N 1 j2>((w)
H/(j®)=n^O>n44>)eJ'₽i(a,)= П40®) k=1 =A(jv)e^.
<=i /=1 [ т=1
Таким образом, АЧХ, ФЧХ и ЛАЧХ системы, представленной последовательным со-
единением типовых звеньев, имеют вид
( N У
; л(со)=ПлХ®)’
j /=i »=|
А А А
£(® )=201§П4(® )=S2°lg4(® )=1М® )
(2.4)
Возможность суммирования, в том числе и графического, ЛЧХ типовых звеньев
изменяет алгоритм построения ЧХ сложных систем, который теперь выглядит так:
1) найти нули (корни полинома B(s)) и полюсы (корпи Л(»))ПФ W (s)-B(s)j ,4{s) и
представить ее в виде произведения типовых ПФ И'(л). Нумерация постоянных време-
ни типовых звеньев сквозная по убыванию |7}|;
2) на частотном диапазоне со с|о,1/тах|7}|, 10/minj7}|], округленном до целого числа
декад, отметит ь по возрастанию частоты сопряжения 03ci - 1/|7}] и построить в общих
осях {£,lg®} АЛАЧХ и {Ф, 1g®} АЛФЧХ типовых звеньев:
3) согласно (2.4) графически сложить £а1(ю), Фа/(®) и получить £а(®) и Фа(ю);
4) с учетом погрешностей аппроксимации построить реальные ЛАЧХ £(®) и
ЛФЧХ Ф(®);
5) построить в равномерном масштабе график Л(® )=10оо5£<<о>;
6) по графикам Л(ю) и Ф(ю) построить годограф КЧХ IF(j®);
7) по проекциям точек годографа на оси координат построить в равномерном
масштабе графики Р(®)- RefH'O®)} и (?(® )=Im{Hz(j® )}.
Наиболее трудоемким является первый этап, требующий расчета корней полино-
мов. Остальные этапы выполняются графически за 5з-10 мин для систем любой степени.
После выполнения третьего этапа нужно проверить правильность построения АЛЧХ
по расположению асимптот на низших (при и—>0) и высших (при ®—>х) частотах. Эта
проверка легко выполняется непосредственно по ПФ.
На низших частотах ® «1/тах|7}| ПФ близка к HK(s—>0), то есть к:
1) Ь^/oq^Q для статических систем, при этом £а(® )=201g|^)/a0| - горизонтальная
прямая; Фа(®)=90о^п(л0/а(|)-1| начинается с угла 0° при 6о/ао>О или с угла ±180°
при b^/uQ <0;
2) ха^/й,), если числитель ПФ B(s)~sk(bk+bk+ls+..Abmsm~k), при этом АЛАЧХ
£а(ю)=201gj^/$y|+20Alg« проходит через точку £( 1)= 201g|z^/а0| с наклоном + 20А
дБ/дек; Oa(®) = 90o|sgn(z>A./a0)-l+£| начинается с угла 90° А при Ьк/а(,>(} или с угла
90°А±180° при Ьк/а(}<Х)‘,
3) , если знаменатель ПФ A(s)-sk(ak +ak+is+...+ansn к), при этом
АЛАЧХ £а(® )~2Olg|&o/«&|-20Alg® проходит через точку £(l)=201g|*0/«A| с наклоном
-20А дБ/дек; Фа(®) = 90°|5дп(бр/аА.) 1а| начинается с утла ~90°А при Ь$/ак>0 или с
угла -90°А±180° при Ьй1ак<Х .
На высших частотах ® »l/min[7'(| ПФ близка к значению W(s ->'*>)=sm~nb„Jan :
АЛАЧХ £а(® )=20Ig|&TO/«J > 20(/л- n)lg® имеет наклон (in-n)k дБ/дек и проходит через
точку £(!)-201g|&m/a„|; 0a(®) = 9O°|sgn(Z>,„/«n)-l+ni-n| сходится к углу 90°(/п-л) при
Лга/ая>0 или к углу 90°(/н-п) + 180° при Ь1П/ап<(з.
& Пример 2.2. Построить ЛЧХ схемы моста Вина - Робинсона (рис. 1.30) с ПФ
1+tV
---------’ постоянная времени которой Т соответствует частоте сопряже-
ЗП сЗТз cT~sj
ния /<. 5') Гц ,
Решение. Прежде всего определим значение Т= 1/шс =- 1/!0(>тг *3,183 мс . По-
липом знаменателя ПФ имеет действительные корни .V; 2 =(-3±V?)/27'~ { 120, -822,5} и
разложение на простые множители (1-s/sl)(l-s/s2)-(l + 7is)(l + 73s) с постоянными вре-
мени 7j- (зз у/5)т'/2~8,333 мс и 73-(З- 216 мс , причем 7J73Т2. Таким обра-
I 1 У' “ I
зом, ПФ имеет разложение IF(s)--------------------------на два апериодических звена и
1 -< 7J.v 3 1 + 735
предельный случай форсирующего звена второго порядка с £,-0.
Рис. 2.11
Обозначив частоты сопря-
жения ЛАЧХ типовых звеньев
со с1 = 120 рад/с, ®с- .314 рад/с и
сос2 -822,5 рад/с , построим в час-
тотном диапазоне о ер,105j
асимптотические ЛЧХ £а1, £а0,
А>2 (рис. 2.11,«) и Фа1, Фа0, Фа2
(рис. 2.11,6). Согласно (2.3) и
табл. 2.2 график £а() имеет асим-
птоту в -да на частоте ®с. Гра-
фик Фа0 представляет собой ска-
чок фазы с 0 до +180° на этой же
частоте.
Просуммировав АЛЧХ, по-
лучим графики Ь.л и Фа, а с уче-
том погрешностей аппроксима-
ции графики L(a> ) и Ф(®). Г 1
Вместо графического сложения АЛЧХ звеньев можно построить начальные уча-
стки ЛЧХ системы для ПФ РГ/з-эО) по описанным выше правилам и, двигаясь вдоль
оси 1g® слева направо, изменять наклоны АЛАЧХ на частотах ®С( и наклоны АЛФЧХ
на частотах ®С< ±ДФ.
& Пример 2.3. Построить все ЧХ системы с ПФ
„„ 50s+99s2+4998s3-100s4
s)=-------------------------—~.
-400-80005 +96s- +1920s3 + s4 + 20s5
s(50-s)(l+2s+100s2] 7
1. Разложим l¥(s)~— , где J4^(s)=A'1s, AT; = 0,125,
(l+20s)(s-2Xs+2)(1003 s2) ,=i
7>1(l)=201gjA'1|=3(-6)= -18 дБ, Ф|(0) = -90°; (P2(s)=l/(1+T3s), 7^ = 20 с, ®с2--0,05 рад/с;
l£3(sM+2£37'3s+7’32s2, 7’3 = 10с, ®с3 =0,1 рад/с, £3=0,1; ^(s)- 1/(I+T4s), T^-O.Sc,
®с4 = 2 рад/с; M^3(s)=l/(1- 7», 7^0,5 с, ®с5 = 2 рад/с; lT6(s)-l/(l t T2s2), Г6-0,1 с.
ш^Ю рад/с, £6=0; ^(sy-l-T^s, Т'7=0,02с, ®с7=50 рад/с .
2. На частотном диапазоне ® ^0,001, ЮОО] отметим на осях 1g® частоты сопряже-
ния ®с?+<оС7 и условные обозначения (наклонные риски) перегибов АЛЧХ (рис.
2.12, а,б). Построим начальные участки АЛЧХ: B/(s->())=50.v/(-400)'-0,125.s = B/j(.v),
Lal(®)=201g®-18 дБ, Фа|(<о) = -90°.
3. Двигаясь вдоль осей 1g® слева направо, изменяем наклоны £а(со) и Фа(со) в
соответствии с отмеченными перегибами. На конечном участке АЛЧХ проверяем пра-
вильность их построения: 1Г(5->зс)- -5/х, La)--14 - 201g<j) дБ. Фа1 (w)=90°s-270° .
4. Строим ЛЧХ, сглаживая перегибы АЛЧХ с учетом погрешностей аппроксима-
ции. На частоте сос3 ЛАЧХ имеет свойства форсирующего звена второго порядка с
^3=0.1: резонансный пик AA((oc3) = 6 b20lg(0,i)= -14 дБ и ширину интервала переворота
фазы 2Оф =0,2дек. Особенность ЛЧХ: разрыв в Ц<лс6)-на две ветви и скачок в
Ф(ос6) на АФ = -180°, так как эти свойства имеет колебательное звено с Е,6=0.
5. График Л(со) (рис. 2.12,в), начинающийся и заканчивающийся в нуле, также
имеет разрыв на частоте юс6.
6. Годограф ) (рис. 2.12,г) начинается и заканчивается в начале координат, а
на частоте разрывается на две ветви. Первая ветвь асимптотически стремится в
бесконечность под фазовым углом Ф(сос6-0)=-11,14°. Вторая ветвь выходит из беско-
нечности под углом Ф(юс6+0)=-191,14°.
7. Проходя по годографу, строим ВЧХ Р(со) и МЧХ (?(со) (рис. 2.12,д). СЛ
& Пример 2.4. Построить АЛЧХ и годографы системы «тележка - маятник». Еди-
ницы измерения выходных переменных: [</]=см , [<р]=град.
Решение. Система с перевернутым маятником с ПФ (1.11) (рис. 2.13):
59
1 0()(б0- 8s-8 s2 ) 1 ()(1 - r2 s)(l + Г4 s)
600s+940s2-216s3-100s4 ~ 4{1+Т1»Х,-7’3$Х,+7>)
(2.5a)
180-6s2 0,573s
W'rm(s) = —7-------------------------< --j----v------\7-----< град/Н. (2.56)
9 7t(600s+940s2-216s3 100s4) (h sXl-73sX1 + 75‘0
7j-l,72c, o)cl--0,58 рад/с; T2=0,438c, ® c2 = 2,28 рад/с ; 7’3 = 0,397c, = 2,52 рад/с;
Т4=0,305с, ®с4 = 3,28 рад/с ; 7'5=0,244с , <ос5 =4,1 рад/с .
Система с обычным маятником с ПФ (1.12) (рис. 2.14):
100(60+8s+8s2 ) 1 о(1+2£ 2T2s+Tfs2)
600s+1100s2+216s3+100s4 s(l+^sXl+2^3r3s-br32s2
180-6s2 0,573s
* 7r(600s+1100s2+216s3 + 100s4) (1+7>X1+2£3T3s+T32s2)
см/Н,
(2.6a)
(2.66)
7] = 1,68c, <acl= 0,6 рад/с; 7^= 0,37c, coc2-2,74 рад/с, ^2= 0,18;
Г3=0,316с, ©c3=3,16рад/с, £3=0,245.Г1
Рис. 2.13
Рис. 2.14
2.5* АНАЛИЗ ПОЛИНОМОВ
ля разложения сложной системы на типовые звенья необходимо найти корни и
множители полиномов A(s) и B(s) ее передаточной функции W(s)=B(s)/A(s),
Рассмотрим полином ^s)=«0+flp-+...+«n/ степени п с действительными коэффициен-
тами а, («я*0) и методы расчета корней уравнения ^(х)-0.
Основные задачи численного анализа полиномов:
- определение структуры спектра полинома: типа (действительного и комплексно-
го) и числа корней каждого типа;
- локализация корней (определение интервала расположения) и выбор их началь-
ных приближений;
- итерационное уточнение корней;
- формирование множителей полинома.
£7 Теорема 2.1 (Гаусса). Полином степени п имеет ровно п действительных или
комплексных корней (каждый кратный корень считается кратное число раз).
Следствие: Я(«)=аоП0”5Л«)=алП(ж~5«)- (2.7а)
/=1 /=1
Р7 Теорема 2.2. Комплексные корни действительного полинома всегда попарно
сопряжены: каждый корень Sj - цi + j®2- имеет сопряженный ему корень s/+1 =«,- = ч» ~ •
Доказательство. Поскольку s,- - корень A(s), то Л(«;)=0. Используя аксиомы
комплексной арифметики Zi+z2 = Zi+Z2> Z1-Z2 = Z1Z2 и свойство действительного числа
а=а, определим
д *,) - } (si У =lLajst=Xя j =Xajsi=®=o.
j j j j
Следовательно, также является корнем полинома A(s).
Следствие 1: если полином имеет комплексно-сопряженные корни sii+iit
то в (2.7а) произведения комплексно-сопряженных множителей дают действительные
множители второго порядка:
(s-sf-Xs-sw)= s2-2i]fs+nj +<в •, (1-s/s;)(l-s/sf-+i)-l+2^z7;-sCrfs1,
где T^l/y/ril+ol; =~x\i!.
Следствие 2: степень полинома и число его действительных корней одновременно
либо четны, либо нечетны. В частности, любой полином нечетной степени имеет хотя
бы один действительный корень. О
Обозначим числа действительных положительных, отрицательных и нулевых кор-
ней л+ , п_ и л0, а лк - число пар комплексно-сопряженных корней, тогда число дейст-
вительных корней лд-л++л_ н-Ло , общее число корней полинома л=лд+2лк, а разло-
жения полинома на действительные множители имеют вид
п+ +л_ лк
A{S^a^
i=l s-1
n+ +л як
A(s) = a„sn° П(8“ж;)Гц$2~2т],х+т],2 +<n2).
(2.76)
Для расчета корней и множителей полинома необходим определенный инстру-
мент: компьютер, калькулятор или, в крайнем случае, бумага с карандашом вместе с
хорошо обученной головой, понимающей сущность методов вычислений и критически
осмысливающей полученные результаты. Лучшим помощником студента, инженера,
исследователя и разработчика является профессиональный программный продукт типа
MathCAD с богатыми функциональными и интеллектуальными возможностями, разви-
тыми графическими средствами, удобным и дружественным интерфейсом [18]. Ниже
приведен листинг программы расчета корней, множителей и графика (рис. 2.15) поли-
нома пятой степени
А( s)- - 400- 20008s- 304s2 д 4802s3 ж101 s4 +50s5.
(2.8)
z
i ~ 0
a:: ( 400 20008 304 4802 101 50)
A(s)
Я; S
s : 4. 3.99 4
A(s) factor ->(50s* I) (s 2) (s t 2) 2s* 100
1 9.94991
polyroots(a) = j 1 - 9.9499i
i 0.02
Рис. 2.15
Далее мы будем изучать методы исследования действительных полиномов без ис-
пользования компьютера [11,1 2,19,20]. К сожалению, такое положение еще типично для
среднестатистического инженера или студента, имеющего в нужный момент на воору-
жении лишь калькулятор, который желательно должен быть программируемым.
Что касается расчета значения полинома ^(s)js, то следует делать это последо-
вательным умножением А(с)=(...(апс+ап^)с г-..,+ej)с+а(), а не суммированием слагае-
мых «,с‘, которые могут быть настолько разных порядков, что при округлении про-
изойдет потеря самых малых из них.
В процессе расчета корней рекомендуется периодически понижать степень поли-
нома А($) путем деления его на полином B(s)=bmsm +...-t-bls^bi}, образованный произ-
ведением найденных простых множителей типа (s-s,) или (1 + Tjs) для действительных
корней и (л'2-2т]^+г|2+(в2) или (1+2£,Г;.г+7}2$2) для комплексно-сопряженных. При
делении образуются полиномы частного C(s)=clsl +...+cIs+c() степени m>0 и ос-
татка £>(s)=tfm_,sm' 1+..,+rfjs+rfy. Деление полиномов можно выполнить вручную «угол-
ком» как деление обычных чисел:
62
ansn Z%.vm - hm4sm"' +...+^5 i Д,
' .........-............ ’ / / t " (2.9a)
C/.S 1С,.,5 K.. + C,.V + C()
A, l A’ •
В coo t веге гвии с л им методом деления последовательно рассчитываем коэффици-
енты е(1 --c'i и |i
ип , ап-\ ^т-1е1 « т ^т-\с\ ^тIе 1
С1 . • <7-1 7 > •••’ с(> ~ .
«т "т
dm-l~asn \ ^т-\с0 ••• ~^т ~а\ ~Ас0 ^0с1’ <А)“«() AlcO-
(2.96)
при этом Ьр О V/<(). Отсюда получаем рекуррентные
i тш{|л)
5 Cli ь an-i~ iLflm-jCl i+j V/АМ, di=ar- ^bi-jCjVi^ian^X (2.9в)
Пгп Л-t J /=0
и матричные формулы
ei bm 0 . .. 0 ’ -i «л ^m-l 1 т—{ Ьт-\ С1
ei 1 1 • .. 0 «л-1 «1 - 0 . .. ь. А С1 (2-9г)
/ • • . «0 - 0 . .. 0 *0 J с0_
для вычисления коэффициентов полиномов с определителем обращаемой матрицы,
равным Ь^1 ^0. Признак делимости Л($) на B(s) - нулевой остаток D(s). При грубом
расчете корней будет получен остаточный полином с ненулевыми коэффициентами
</0 сравнимыми ио величине с коэффициентами A(s) и B(s). В этом случае тре-
буется уточнить корни и построить новый полином В(л).
2.5.1. Полиномы низких степеней
•9Гри п~\ полином a^+a^s имеет единственный действительный корень
При заданном действительном корне s, и одном из желаемых коэффициентов а0 или а}
полином первой степени имеет разложения /f(s)-e0(l+7Js)-«|(s-S|), где
7J =-]/*-, -«, /«().
При л -2 полином «()+«ty; rt2s" имеет дискриминант d~ ар и корни
si,2=(~ai Если rf>0, то 5j и - два различных простых действительных кор-
ня. При заданных простых действительных корнях и одном из желаемых коэф-
фициентов а0 или а2 полином второй степени имеет разложения
^(s) = a2(.v-sI)(s-s2) = £f()(l4 7|S)(l + 72s), где Tj-A/si V/=l,2; ТхТ2-а2/а{}.
Если d-0, то - .?2 - один действительный корень кратности 2. При заданном
двукратном действительном корне Л] и одном из коэффициентов а0 или а2 полином
имеет разложения J(s) = «3(s д, )2 ---«0(1-*-7s)2, где T^-l/s, ; Т~^а2/ап .
Если г! <0, то sl2 = ritj<o - два простых комплексно-сопряженных корня с действи-
тельной т| — а}[2а2 и мнимой a -Jd jla-, частями. По заданным корням s12 иодному
из коэффициентов «0 или а2 полином второго порядка имеет разложения
J(s) = «2(s2-2T]s+T|2f®2j = fl()(l + 2£,7s+7"2s2j, где Г=1/-/ц2+®2 , цТ~- <®" ;
т'~а11а0 .
При л-3 полином а()+«|S+a2s2+a3s3 имеет корни, вычисляемые по методу Кар-
дано следующим образом.
1. Заменой аргумента s=z-«2/3a3 полином J(s) преобразуется к специальному
виду B(z)-bQ+biz+a3z3 с коэффициентами A()=a0-aIa2/3«3+2a3/27a| и Ь^а^- а2/За3.
2. Вычисляется модуль Г>0 и аргумент ф из комплексного выражения
v3 = -^/2л3 +/(b0/2a3)Z +(й> /За37=Р3ерф •
3. Находятся значения v, =Ие^ф+2х‘^ V*=1,3 и корни полинома B(z)
Г Г, *1 Г 2яС L А V Г щч
----------= V—~ ' cos Ф+— +j Г+-—~ sin ф+— . (2.10)
’ ' 3a3vt < 3a3Vj V 3 ) \ 3a3V ) V 3 7
удовлетворяющие условию z( +z2+Z3 =0.
4. Вычисляются корни полинома A(s): sf = zf-a2/3a3 Vr=l,3 . ГI
При заданных корнях S], s2, s3 и одном из коэффициентов а0 или а3 полином
третьей степени может иметь следующие разложения:
- если все три корня действительны, то
J(s)=a0(l+7]sXl+T2sXt+7'3s)=e3(s-sIXs-S2Ks-S3)’
где 7=-1Д. Vi=13; 7]Г27’3=а3/а();
- если один корень - действительный, а два s23 = r|±j® - комплексно-
сопряженные, то
3((s)=fl3(s-S]Xs2-2r|s+T]2+® 2) = a0(l+7'1sXl+2^7'2s+7'2s2),
где 7i=-l/s] ; Т2=1/7т]2+®2 ; = -0^2 =“Т1/7Т12+® 2 ; Т^=а3/а0 .
(67 Пример 2.5. Вычислить корни полиномов знаменателей ПФ обеих систем
«тележка - маятник» At(s) =600+940$-216s2- 100s3 и Л2(»)=600+1100s+216s2 +100s3.
Решение. Выполнив по методу Кардано в полиноме A}(s) замену аргумента
s=z-0,72, получим полином Вх(z)=-l51,45+1095,52z-100z3, тогда
у(3=-0,757+j6,937=6,978ejl’68 => =1,911, ф(=0,56.
По (2.10) вычисляем корни полинома ^(z), а затем ненулевые корни полинома At(s) и
его разложение:
Z] = -3,377 =>st = -4,097, z2 =0,139 - > s2 = -0,5815, z3 = 3,238 =>s3 = 2.518,
/f](s)=-100(s+4,097Xs+0,5815Xs-2,518)=600(l+0,244sXl+l,72s)(l-0,397s).
Заменив в полиноме A2(s) аргумент s=z-0,72, получим полином
64
B2(z)=--117,35+944,48z+100z3. тогда vf =6,204 F2=l,837, <p2=0, z, =0,124 Sj = -0,596.
Z2 =-0,062+ j3,075 -=> s2 = -O,782+j3,O75, z3 = -0,062-j.3.075 .=> s3 =-0.782-j3,075,
.42(,v)=l00(s+0,596X*-3 + l,564.v+10,067)=600(l + 1.678s)(l H).1554.v+0,0993.v2).
Так были получены разложения полиномов знаменателей ПФ (2.5) и (2.6) в приме-
рах 1.16 и 2.4. С1
Достаточно трудоемкие методы (Декарта - Эйлера, Феррари) расчета корней по-
линома четвертой степени, связанные с дополнительным решением полиномиальных
уравнений третьей степени, приведены в [11]. Корни полиномов степеней выше четвер-
той не имеют аналитических методов расчета и находятся в общем случае численными
приближенными методами.
2.5.2. Структура спектра полинома
Определить состав корней каждого типа можно по графику полинома или по его ко-
эффициентам. Графический метод сопряжен с многократными вычислениями Л(х) для
различных значений аргумента. Он позволяет оценить число действительных корней по
пересечениям графика с осью абсцисс и локализовать области размещения этих корней.
График полинома A(s) степени п, его коэффициенты а(), аЛ и корни \ имеют
следующие свойства (рис. 2.16):
1) при четном п противоположные пределы A(s~»±х) одного знака: Л(±до)->+оо
при ая>0 (график 7) и Л(±х>)—>-оо при ая<0 (график?).
Следствия:
а) при аоая <0 график хотя бы дважды пересекает ось s по разные стороны от оси
ординат, а полином четной степени имеет хотя бы два действительных корня разных
знаков;
б) при а0ал>0 график может не пересекать ось s, а полином не иметь действи-
тельных корней;
2) при нечетном п противоположные пределы графика разных знаков:
Л(±ас)—>±х> при ая>0 (график 3) и Л(±оо)—>+со при яя<0 (график 4).
Следствие: график всегда пересекает ось s хотя бы один раз, а полином нечетной
степени всегда имеет хотя бы один действительный корень sf->0 при аоая<0 и .$;<0 при
а0ая>0;
3) знакопостоянное касание кри-
вой Л(х) оси абсцисс (график 2) означа-
ет наличие действительного корня чет-
ной, а знакопеременное касание (график
3) - нечетной кратности;
4) локальные минимум при Л(х)>0
(графики 1, 3, 4) и максимум при A(s)<0
(график 4} означают наличие комплекс-
но-сопряженных корней ц ± j® с дейст-
вительной частью q в окрестности экс-
тремума. Обратное утверждение невер-
но: не каждая пара комплексных корней
дает на графике локальный экстремум.
Рис. 2.16
Если построение графика полинома затруднительно, то можно использовать сле-
дующие теоремы, устанавливающие структуру спектра полинома только по его коэф-
фициентам. Знание возможного числа каждого типа корней позволяет не искать те
корни, которых в принципе нет.
(''7 Теорема 2.3 (Декарта). У действительного полинома J(.v) :
1) л0-тах{<}: " кратность нулевого корня равна числу подряд сле-
дующих нулевых коэффициентов;
2) л+ равно или на четное число меньше числа инверсий знака в последовательно-
сти ненулевых коэффициентов полинома A(s);
3) л_ равно или на четное число меньше числа инверсий знака в последовательно-
сти ненулевых коэффициентов полинома А(-я). О
В связи с чрезвычайной простотой отделения нулевого корня любой кратности
далее будем исследовать полином с ненулевыми корнями, структуру спектра которого
можно уточнить с помощью следующих теорем.
£7 Теорема 2.4 (Фурье - Бюдана). Число действительных корней полинома A(s)
на интервале хе[л,Л] равно или на четное число меньше значения N(a)-N(h), где N(s)
- число инверсий знака в последовательности 6(s)={/f(S), А '(s) А<п)(s)| значений по-
линома и его производных. При расчете N(a) нулевые члены в Q(a) вычеркиваются.
Если при расчете N(b) окажется, что A{k\b)^0 и А^(Ь)*Ь,а Л^*>(Ь)—0 Уге[Д + 1,/-1], то
A(i)(b) заменяются на ( l)/ 'sgn^J</)(Zi)^. П
Благодаря возможности интервальной оценки структуры спектра эта теорема бо-
лее мощная, чем теорема Декарта. Подставив в Q(x) предельное значение з=+х, полу-
чим число инверсий знака последовательности (£(оо)={ая, ллл, л(«-!)«л, .., л!«я} , рав-
ное 7V(oc)=(), Учитывая, что числа инверсий знаков последовательностей
2(0)={л0, й], 1а2,.... л!дя} и коэффициентов A(s) равны, получаем верхнюю оценку
7V(0)-/V(oo)=7V(0) числа л+, соответствующую теореме 2.3.
Плата за простоту теорем Декарта и Фурье - Бюдана - возможная неопределен-
ность их оценок с точностью до четного числа.
Р? Теорема 2.5 (Рауса - Гурвица). У действительного полинома A(s) :
1) число правых (с Re{s,}>0) корней равно числу инверсий знака в последователь-
ности из л+1 элементов
М = [ап, Мх, М{М2, М2М3,..., Мн_хМп], (2.11)
где М, есть i -й главный минор п х л-матрицы Гурвица Г-
Следствие: если все элементы этой последовательности ненулевые и одного знака,
то все корни полинома - левые. Для этого, по крайней мере, необходимо, чтобы коэф-
фициенты ип j и ап были одного знака;
2) число левых (с Re{s;}<0) корней равно числу инверсий знака в последователь-
ности (2.1 1), построенной для полинома А( -s).
СлыД /пене: если все элементы этой последовательности ненулевые и одного знака,
то все корни полинома - правые. Для этого, по крайней мере, необходимо, чтобы коэф-
фициенты а,,, ( и (- !)"«„ были одного знака. Г I
Анализ миноров матрицы Г и элементов (2.11) показывает, что при переходе от
полинома Д«) к полиному Д-s) меняют знаки:
- при четном л миноры Л/2, Л/3, Л/6, Л/7, ... и элементы последовательности
{л/р М2М2, М4М5....};
- при нечетном п миноры Л/;, Л/2, Л/5, Л/6, ... и элементы последовательности
М\М2. МуМ4, ...|.
В дополнение к теореме Рауса - Гурвица приведем формулу Орландо [11]
Мач-(-1) 2 < *П П(5»+л'а) и следствие из нее; если М пА -0 при то поли-
г i А --О1
ном имеет пару корней с нулевой суммой (действительные корни S[=-s9 или мнимые
корни S[ 2 - Г jco), а два последних элемента в М равны нулю. Для соответствия теореме
нулевым минорам и элементам последовательности (2.11) нужно приписать знаки «+»
или «-» так, чтобы в случае действительных корней = -s2 числа инверсий знаков в по-
следовательностях, построенных для J(s) и А( s) , увеличивались на единицу.
Теорема Рауса - Гурвица дает более определенный результат по сравнению с тео-
ремами Декарта и Фурье - Бюдана за счет дополнительного формирования матрицы
Гурвица и расчета ее миноров. А если все миноры Л^-тО, то числа правых и левых
корней определяются точно.
1Г7 П р и м е р 2.6. Оценить структуру корней полинома (2.8).
Решение. Анализируя только степень полинома п-5 и знаки коэффициентов
ао--4ОО и «5~50, получим очень грубые оценки структуры спектра полинома: /Iq=0,
л+е{1,2,3,4,5}, л_ £{0,1,23,4} и п., е{0,1,2}.
Используя теорему Декарта, построим диаграммы знаков коэффициентов поли-
номов A(s) и Д-s):
A(s): -400 -20008 -304 4802 101 50
+ --------------------------------------
______ ^л+ = 1,
Д-s): -400 20008 -304 -4802 101 -50
-д л е{0,2,4},
лкД5-1-л_)/2е{0,1,2}.
Применим метод Рауса - Гурвица дня полинома A(s) :
101 -304 - 400 0 0
50 4802 -20008 0 0
Г= 0 101 -304 400 0 , «5 = 50 , М! = 101, Мг = 500202
0 50 4802 -20008 0 47,=50020200, Л/4=0, Л/5 -0
0 0 101 -304 -400
Так как Л/4-0, д0<0 и а5>0, то полином имеет действительные противоположные
корни и последовательность вида {+,+,+,+,+0,-0} с одной инверсией знака. Таким
образом. л+ = 1, а число левых корней равно четырем. Это равно числу инверсий знака
в последовательности {-, +, +, -0, -0}. построенной для полинома
/$(-s)=-400+20008s-304s2-4802s3+101s4-50s5 с минорами 4^=101, ЛЛ 500202,
Му=-50020200, Л/4-0, Л/5 = 0. Из четырех левых корней заведомо один - действи-
тельный s2 = -S|, а из оставшихся трех - не более одной пары комплексно-сопряженных
корней. Следовательно, л_ е{2,4} и лк е{0,1}. В действительности полином имеет сле-
дующие типы корней: л^-О, л+ = 1, л -2 и лк = 1. О
2.5.3. Локализация корней полинома
С/1 окализация корней - это приближенная оценка областей их размещения на дейст-
вительной оси или на комплексной плоскости. Наиболее быстрый способ локализации
действительных корней нечетной кратности заключается в построении графика A(s) и
поиске таких интервалов [\т1П-\так] его пересечения с осью s, что
В точках действительных корней четной кратности график A(s) лишь касается оси s,
поэтому локализовать их данным методом нельзя из-за однозначности функции A(s) на
концах тестируемого интервала. Некоторую ясность в вопрос о существовании дейст-
вительных корней на интервале [а, 6] с А(а)А(Ь)>0 может внести теорема Фурье - Бю-
дана. Ее результат /V(a)-/V(A)=0 означает отсутствие таких корней.
К сожалению, достоверная локализация комплексно-сопряженных корней поли-
нома высокой степени по его графику затруднительна. На рис. 2.15 в среде MathCAD
построен график функции (2.8), пересекающий ось s в окрестности действительных
значений 0 и ±2. Оставшаяся пара комплексно-сопряженных корней -1±уТо никаких
визуальных признаков своего существования не обнаруживает.
Далее рассмотрим некоторые вычислительные методы локализации корней без по-
строения графика функции A(s).
2.5.3Л. Метод обособленных корней [20]
Метод основан на предположении, что полином с предварительно отделенными
нулевыми корнями имеет близкие или удаленные от начала координат корни, обособ-
ленные (далеко отстоящие) от остальных корней.
В случае возможного существования близкого к нулю действительного корня
|s1|«|sf-|Vr=2,n пренебрежем в уравнении .4(sI)=0 слагаемыми , тогда из
уравнения а^+др^О следует оценка s^-ao/H]. Если существует удаленный от осталь-
ных действительный корень |S(j»[sf|X/i=2,n, то, пренебрегая в уравнении A(sl)=0 ела-
гаемымп а^ u„_2rf получим оценку - а„..Jan
Аналогично находятся оценки расположения обособленных от других комплекс-
но-сопряженных корней .V] и Лт Х| путем решения квадратных уравнений
«0+-«|S+«7s" - О и «я_, тл„ jS-t «яг=0 с отрицательными дискриминантами а12-4й0а2<0
и «2.1 - <>.
Полеченные оценки можно использовать как начальные приближения в алгорит-
мах итерационного уточнения корней.
2.5.3.2. Метод Макларена [19, 20]
Эффективный метод интервальной локализации действительных корней предло-
жен Маклареном. Из полинома Л(ж) формируются два вспомогательных полинома
.4j(s) и дЬ(л-) с единичными старшими коэффициентами:
J, (s)-(-1Г А(- s)la„ - s11 -- а s" ’ +... т (- 1)" 1 а (х+(-1 )”а0,
А2(s)- А( s)/а„ = s" та „ч s"4 +.. ,+а, sта 0 ,
где а,--«;7«в . 'Все действительные корни A(s) локализованы в интервале
(2.12а)
где и - максимальные индекс и модуль отрицательных коэффициентов полино-
ма Д(х).
Вместо неравенства (2.12а) можно использовать неравенство
-1 - a~"\l\l^a~\< Si < 1 г „1 (2.126)
для полиномов A\(s)-А( - s) и A2(s)-A(s), приведенных к виду с положительными
старшими коэффициентами ап Если |Л/]/«я]»1 или |Л/2/«л|»1, то формула (2.126)
дает сильно завышенные границы. Для сужения интервала локализации рекомендуется
представить полиномы ЛДз) и A^(s) суммами полиномов с положительными старшими
коэффициентами и приблизительно равными отношениями максимальных модулей к
старшим коэффициентам. Для каждого слагаемого A{i(s) и Л2,(«) по (2.12) находится
интервал локализации его действительных корней. Тогда интервал локализации дейст-
вительных корней полинома A(s) есть объединение интервалов локализации корней
слагаемых полиномов. При удачном разбиении полиномов границы локализации опре-
деляются значительно точнее, чем без такого разбиения.
2.5.3.3. Метод кругов Гершгорина [11, 12]
Любому действительному полиному .4(s)--a0+aIs+...+an_|S”4+s" с приведенны-
ми коэффициентами можно поставить в соответствие лхл-матрицу F, соб-
ственные числа которой (корни уравнения ].v/H fj-0) равны корням полинома, кото-
рый в этом случае называется характеристическим. Из бесконечного множества по-
добных матриц с одинаковым характеристическим полиномом A(s) выделяются осо-
бые канонические формы Фробениуса
(2.13)
элементы которой есть числа 0, 1 и коэффициенты -а,- W-O,n-I. В теории матриц из-
вестны методы кругов Гершгорина, применяемые для локализации собственных чисел
яхл-матрицы F-{/$}. Круг Гершгорина G, для i -го диагонального элемента опи-
сывается неравенством |ж то есть имеет UeHTP в точке /й оси Re{s} и ради-
ус Rj- В частности, в (2.13) матрица F} имеет w l совпадающих кругов единич-
л-2
ного радиуса с центрами в начале координат и один круг радиуса Rn - с центром
<=о
в точке -ая_] (рис. 2.17,а). Матрица F2 имеет л-1 кругов с центрами в начале коорди-
нат и радиусами /?, =|а0|, 2^=|а,-_||+1 Vi=2, л-1 и круг Gn единичного радиуса с цен-
тром в точке -ая_] (рис. 2.17,5).
Размещение корней полинома Л(х) и собственных чисел матрицы F, согласно ме-
тоду кругов Гершгорина, удовлетворяет следующим условиям:
1) любой корень лежит, по крайней мере, в одном из кругов и ни один из корней
не лежит вне кругов: Xfi 3/. |s, -/^|< Rj;
2) если т кругов образуют область, изолированную от остальных кругов, то в
этой области размещено ровно т корней;
3) если какой-либо один круг Гершгорина изолирован, то есть
3i: + то он имеет ровно один действительный корень
Если все круги изолированы, то каждый из них имеет по одному
действительному корню.
Во многих случаях анализ совместного расположения кругов Гершгорина, постро-
енных для обеих матриц Ft и fy, позволяет сузить области локализации корней харак-
теристического полинома этих матриц.
В заключение приведем дополнительные оценки модулей корней полинома, в том
числе и комплексных [1, 20], при следующих соотношениях между коэффициентами:
- если 0<а0<а] <..<ая , то ]sf|<l Хт7=1,я; (2.14а)
- если 0<ая <...«?] <а0, то Х//=1,я; (2.146)
- если 0<m<aj/a<М , то Vi=l,n ; (2.14в)
0
а)
Рис. 2.17
70
- если для действительных неотрицательных чисел </г - \\ал г/ап\ выполняются ус-
ловия qt >ц~, >.. ,>qn . то модули всех корней
1 Э </2, z? ,ЛИ
{ (s,?.^ +0,6lty2 =0,2213г/з+0,0Х83^_) +0,0375^5 U).01X5^ г0,0074?7+0,008 |</к. '
Каждую полученную оценку обособленного корня полинома желательно прове-
рить на принадлежность областям локализации корней, найденным методами кругов
Гершгорина или Маклорена.
Р7 Пример 2.7. Локализовать расположение действительных корней полинома
(2,8) подходящими для него методами.
Решение. Предполагая наличие обособленных действительных корней, получим
S| ®-101/50= -2,02 и х2~ 400/20008=-0,019992. Судя по тому, что отношение модулей
этих чисел составляет два порядка, можно считать эти приближения соответственно
большим и малым.
Из двух оценочных полиномов второго порядка -400-20008.V- 304.S" и
4802+101S + 50? лишь второй имеет отрицательный дискриминант и оценки комплекс-
но-сопряженных корней x45~-l,01±j9,7478 с большим модулем.
Круги Гершгорина, рассчитанные по матрицам (2.13) для полинома
4(s)=50(s5+2,02s4 з 96,04s3 - 6,08s2-400,16s 8), образуют односвязные области и отсе-
кают на действительной оси s интервалы [-512,24,508,2] для матрицы Г] и
[-401,16,401,16] для матрицы F2. Пересечение этих интервалов дает область локализа-
ции действительных корней [-401,16,401,16].
По методу Маклорена для полинома ,4(s) получим л = 5 и
4(s) = s5 -2,02? +96,04? +6,08? -400,!6s+8 => шр-4, Л/, =400,16;
Л(х) = ? + 2,02?+96,04?-6,08?-400,16s-8 /п2=2, Л/2 = 400,16.
Таким образом, получили интервал локализации действительных корней
(-1-^40036,1 + ^400.Гб)Ц-401,16, 7,37). (2.15)
Для сужения левой границы представим zf](s) = ](s) + /ll2(s) + +l]3(s) :
Я,|(s)=?-2,02?-2,O2s+8 => ли=5. /нн=4, Л7и--2,02, -1-М,, =-3,02;
.412(.у)=96,04?-388,01s => л12 = 3, mi2 = l, -1 - 7388Д1/96Д)4 = -3,О1;
z(l3(s)=6,08? -10,13s -> л!3 = 2, m13-l, -1 10,13/6,08= -2,67.
Для сужения правой границы представим 42(s)=^21(s) + /l22(s) + 4>3(s) :
/f21(s)=?-6,08?-6,08s-6 =4> л21=5, /п2| =2, 1+^6Д8 = 2,83;
,422(s)=2,02s4 - 15,68s-2 л22 = 4, /и22 = 1, 1+5,6x7^02=2,98 ;
43(s)=96,04s3 378,4s л2,=3, /п23 = 1, 1+^378,4/96,04 = 2,98.
Таким образом, интервал (2.15) сузился до (-3,02,2,98)=Д-3,3), то есть в 68 раз.
Полученные выше оценки s( и s2 лежат в действительном интервале (-3,02,0), а поло-
жительный действительный корень локализован в интервале (0, 2,98). О
2.5.4. Уточнение корней полинома
осле локализации корней следует завершающий этап их уточнения с желаемой
точностью. Выбирается начальное приближение , желательно из областей локали-
зации. Итерационный процесс уточнения (настройки) норождаш последовательность
приближений s^1’, .v<2> ,..., к некоторому корню и заканчивается на Д'-й итера-
ции при достижении абсолютной са или относительной с,, погрешностей:
(2.16)
Нет никакой возможности рассмотреть здесь огромное число алгоритмов, отли-
чающихся объектом настройки (интервала, корня или множителя полинома), характе-
ром сходимости (глобальным или локальным) и ее скоростью (геометрической, квадра-
тичной, осциллирующей и т.д.). Остановимся лишь на некоторых методах, которые
можно реализовать без использования компьютера (желателен программируемый каль-
кулятор).
2.5.4.1. Метод дихотомии (дробления)
Начальный интервал A<0)=p/0>,.vJ0,| локализации корня должен удовлетворять
условию <0, где и = - значения полинома на левой и
правой границах. Дихотомическое сужение интервала Л(А) (.£ = 0,1.2,...) - это
дробление его на две части внутренней точкой .?z,+i) Для следующей
итерации из двух подынтервалов и .«•***j выбирается тот, на концах
которого значения полинома разных знаков: <0. Достигнув сходимость на
/V-й итерации, получим корень S; = x<;v+i\
Простейшими методами дробления интервала Л(А) являются:
- половинное с коэффициентами dt -dr = 0,5 . Гарантирует монотонную сходимость
длины интервала к нулю со скоростью геометрической прогрессии
~Х,А)/2, знаменатель которой q-2 даст примерно три новые значащие цифры
корня за каждые десять итераций настройки:
- пропорциональное с коэффициентами дробления
Длина интервала монотонно сужается как прогрессия л А+|'- Л( *\/у<А' со знаменателем
f<A) = l/dv<A) , в котором индекс ve{/,r} такой, что А^'1 А(я\к"^ )<0 . В некоторых случа-
ях на начальных итерациях q^»\, а интервал быстро сужается; на последующих ите-
рациях ^(*'~1, а интервал практически перестает сужаться, при этом один из его кон-
цов сходится к корню полинома.
Следует предостеречь от использования отличных от (2.16) критериев останова
72
итерации. Например, выход по длине интервала X(/V) <еа в методе пропорционального
дробления может стать невозможен при слишком малом значении са . При половинном
дроблении никогда не выполнится условие — I —1<ео относительного суже-
ния длины интервала.
67 Пример 2.8. С равнить половинный и пропорциональный методы расчета дей-
ствительного корня полинома (2.8) с погрешностями Еа~Ер--I0 h при начальном ин-
тервале Л1'0- |-3, 3J.
Решение. На рис. 2.18 изображены процессы сужения Л(А):
а) метод половинного дробления сходится за 21 итерацию и дает корень
s3 = 1,999999;
б) метод пропорционального дробления сходится за 24 итерации и дает корень
Л'з = -1,999998.
Отметим, что при выборе начального интервала А<°)=[~3,02, 2,98] оба метода схо-
дятся к одному и тому же корню .s, - 2. Иногда пропорциональный метод демонстри-
рует очень быструю сходимость. Например, при Л(0)-[--1,5,0] он сходится к корню
St = -0,02 всего за три итерации с коэффициентами сужения интервалов q^ «33,13,
$^«2,26, q(^ «1,0008 и «1,0000004, тогда как половинный метод сходится к этому
же корню за 20 итераций. С!
2.5.4.2. Метод итерации
Исходное полиномиальное уравнение a0+ajS+.=0 преобразуется к виду
s=\|/(s). Выбирается начальное приближение корня х<°> и строится последовательность
приближений s(A+l) j. Достаточные условия ее сходимости к некоторому дейст-
вительному корню х,- - существование вокруг него окрестности, во всех точках которой
[\|f'(s)|<l, а во-вторых, попадание приближения в эту окрестность. Хорошо, если
это будет начальное приближение . Скорость сходимости метода близка к геомет-
рической со знаменателем f = l/y'(s/)- При |t|/'(s,-)|&l последовательность к корню
73
st- не сходится.
Успешность применения метода итерации весьма чувствительна к выбору функ-
ции \|/(.v) и значения х(0). Приведем возможные варианты *р(*) и ее производной ty'(.v):
Vi'Cv) -1 + ЛЛ'(л);
у (»
< я-/
i=0
«2 , Д'и-1 V
/ [ /L,ai<As‘ I
;=o / ^/--0 y
В функции ч/|(х) параметр h выбирается так, чтобы в возможно более широком
интервале выполнялось условие сходимости |1+/l4'(s)|<I - откуда следует -2<ЛЛ'(»)<0.
Если задать из условия Л'(.?'^)>0, то й= -1/Л'(у(0))<0 и у ,(»)-.v A(s)/A'fs^), а в
точке начального приближения ) l A'(sm)/A'(s^r>)--(i. Это удовлетворяет ус-
ловию | ц/ '(''/)!< 1 -
При выборе дробно-рациональных функций типа ц/2(‘¥) ш,и Ч/з(А) их полюсы не
должны совпадать с корнями A(s). Допустим, это условие не выполняется для простого
действительного корня т, = т], тогда ч/(.у)-Я(л)/(.у-rj)D(.v), D(q)?tO и
A(s)=s(s- t\)D(s)-B(s). Поскольку Л(ц)--Я(р)-0, то B(s)~(s-q)£(s). £(q)^0 и
4>(s) = E(s)/£)(s). Таким образом, при совпадении корня A(s) с полюсом ^(.s) метод
итерации никогда не сойдется к этому корню, так как он фактически работает с поли-
номом A(s) = sD(s)-E(s), для которогоq не является корнем: T(q)zO. Если корень А(.ч)
очень близок к полюсу y(s), то окрестность, в которой выполнено условие сходимости,
будет, скорее всего, отсутствовать. Это объясняет невозможность нахождения всех дей-
ствительных корней полинома при неудачном выборе разрывной функции ф(у) .
Для того чтобы исключить действительные полюсы \j/(s), ее знаменатель подби-
рается так, чтобы он нигде не обращался в нуль на интервале локализации корней. Но
так как никакая непрерывная функция ц/(у) не может в двух соседних точках пересекать
прямую .у, имея в них обеих производные |y'(s)|<l, то такой выбор \|/(s) в принципе не
может дать все действительные корни полинома.
РЭ Пример 2.9. Вычислить действительные корни полинома (2.8) методом итера-
ции с погрешностями Еа=Ео~1()*6 при начальных приближениях .у<0)--!,5. s<0^~0,8 и
s<°>^3.
Решение. Исследуем возможности различных функций q/(s). Пусть вначале
i|/I(s)-5+ft(s(0,)J(s) , где h[s) ~ -1Д--20008-608.У+14406s2+404.y3+250s4j. На рис. 2.19,й,б.в
приведены функции уДу), ц/Дз) и итеративные процессы уточнения корней полинома.
Графики 1 соответствуют начальному условию s(n' = - 1.5 и коэффициенту
Л(-!,5)=-7,56 10-5. Так как области сходимости очень узкие и не включают ни одного
корня полинома, то последовательность , имеющая периодический характер, нико-
гда не сходится. Графики 2 построены для s<0) -0,8 и Л(0,8)-9,12 10 5. /(остаточно ши-
рокая область сходимости, включающая корень у,--0,02, обеспечивает его получение
74
Рис. 2.19
за 70 итераций. Хорошими свойствами сходимости к корню х3 = 2 обладает начальное
приближение = 3 с коэффициентом Л(3)--7,210“6 (графики 3). Применяя функцию
\P](s) с коэффициентом А(3) для ?}> - -1,5. получим последовательность приближений,
сходящуюся к корню з, за 21 итерацию (график 4). Более того, исследование в среде
MathCAD показало, что при h=ft(3) любые начальные приближения - 0,02)
сходятся к л,, а любые s<0) +(0,02 3] - к s3 .
400
Выберем функцию ш-,(з)---------------------г-----т-----у. Графики 5 wAs).
-20008-3045+4802?+101?+50?
\|/з(з) и изображены на рис. 2.19,г,(),е. Все три начальных приближения сходятся к
одному и тому же корню s2 за 3 итерации. Нет ни одного значения , сходящегося к
корням S, и «з. Это объясняется близостью корней к полюсам ч/3(х), равным --2,01 =
и l,99^s3, в окрестностях которых не выполняется условие сходимости |у'(х)|<1.
, 400< 40016s+304?-101s4
Составим гладкую функцию ----------------------з----i--, не имеющую дейст-
20008+4802s- +50.?
вительных полюсов. На рис. 2.19,?.О,е изображены графики б \|/ 4(л), 4/4(4) и s^'. На-
чальное приближение s,0? --I.5 сходится к х( за 4 итерации, а х'0)=0,8 и х(0>=3 - к х3 - 2
за 6 и 5 итераций. Нез ни одного значения №0). сходящегося к корню х2, соседнему с Х|
и х3. Это объясняется отсутствием около нею окрестности, в которой выполняется ус-
ловие сходимости |\|?'(s)h-l • !” :
2.5.4.3. Метод Ньютона
Э го г метод уточнения простых корней известен еще как метод касательных и
описывается итерационной формулой
?k +| ’ -s* k ’
(2.17)
Налицо сходство (2.17) с методом итерации, использующим функцию
V1(s)-s-/4(s)//i'(s(l,)) с фиксированным знаменателем A'(s(>>)). Можно ожидать срав-
нительного ускорения и расширения области сходимости алгоритма Ньютона благода-
ря вычислению на каждой итерации производной полинома T'(s), которая в точке
корня должна быть ненулевой, то есть корень - некратным.
Задав начальное приближение s^ в области локального притяжения какого-
нибудь корня полинома, рекуррентно вычисляем приращения =-Л(«(Л))/Л’(ж<*)) и
новые приближения s(k+l)+А^к) до выполнения условий остановки (2.16). Метод
Ньютона имеет квадратичную скорость сходимости , более
высокую, чем скорость сходимости геометрической прогрессии: за одну итерацию чис-
ло верных знаков корня примерно удваивается. При выборе s^0* вне областей локаль-
ного притяжения алгоритм расходится или зацикливается.
(О Пример 2.10. Вычислить все корни полинома (2.8) методом Ньютона с погреш-
ностями Еа=во- 10ч при начальных приближениях s^=0,8, s(0) =1,1 и s(0)=3.
Решение. На рис. 2.20 показаны процессы уточнения корней методом Ньютона.
При начальном приближении s<0)-0,8 последовательность знакопеременно сходится к
корню s2--0,02 за 4 итерации; при s^=l,l - с большим выбросом к S]=-2 за 8 итера-
ций; при —3 наблюдается монотонная сходимость к корню s3 -2 за 5 итераций.
Для получения оставшихся корней разделим по алгоритму (2.9) исходный полином
A(s) на произведение трех полученных множителей
B(s)=(s- s^)(s-s2)(s- ss)=s3 + 0,02s2-4s-0,08:
50s5+10Is4+4802?-304?-20008s-400 ?+0,02?-4s-0,08
50s5 + s4 — 200s3- 4s2 50s2 +100s+5000
100s4 +5002s3 -300? - 20008s
100 s4 + 2?-400?- 8 s
_ 5000?+! 00s2-20000s-400
5000?+100?-20000s-400
0
Полином частного имеет комплексно-сопряженные корни s4>5 — !±jV99.
Таким образом, найдены все корни полинома, имеющего в результате следующие
формы разложения на множители:
/l(s) = -400(l+50sXl+0,5sX(-0,5sXl+0,02s+0,01?) = 50(s+0.02Xs+2)(s-2)(s2 +2s+ioo). Cl
Мы рассмотрели основные численные методы расчета действительных корней по-
линомов. Что касается ко мплексных корней, то график функции Л(л) не дает оценок их
действительных и мнимых частей. Локализация, часто очень грубая, возможна методом
кругов Герин орина или но (2.14). Задав комплексное начальное приближение
х(0) + j®используем для уточнения корня метод Ньютона с учетом следующих
замечаний:
1) все вычисления в (2.17) производятся в комплексных числах и без применения
ЭВМ достаточно сложны:
2) скорость сходимости алюршма Ньютона на комплексной плоскости значи-
тельно меньше, чем на действительной оси;
3) не любое комплексное приближение сходится к комплексному корню, а области
сходимости алгоритма Ньютона могут иметь самые разнообразные формы, быть невы-
луклыми и неодносвязными, что затрудняет выбор начальных приближений и нахож-
дение всех комплексных корней.
На рис. 2.21,а изображены корневые траектории ньютоновского итерационного
процесса для начальных приближений s(O)=0+j7, s<o^=O+j8 и s^-0+j9, сходящиеся к
корням и х4 соответственно за 12, 10 и 6 итераций. Сложность структуры облас-
тей сходимости к пяти корням полинома (2.8), найденным в примере 2.10, проиллюст-
рирована на рис. 2.21,6. Вблизи границ области s2 расположены мелкие «острова» схо-
димости к другим корням, не связанные со своими «материками». При увеличении
масштаба изображение обнаруживает типичные фрактальные свойства: отсутствие
гладких границ и бесконечную степень их дробимости.
Эти особенности могут затруднить выбор начальных приближений корней: очень
близкие значения сходятся к разным корням Например, приближение
s<0) = -0,8+j7,62 сходится к комплексному корню s5 за 20 итераций; приближение
?0)--0,8 +j7,63 - к действительному корню s2 за 26 итераций; =-0,8+j7,64 сходится
к S, за 27 итераций; приближение =-0,8+j7,65 сходится к комплексному корню s4 за
25 итераций; =-О.82з j7,63 сходится к s3 за 28 итераций. Для этих итерационных
процессов характерны скачки приближений с одного «острова» на другой до попада-
ния в «материковую» область с быстрой сходимостью к соответствующему корню.
б)
Рис. 2 21
Существует труппа итерационных методов нахождения множителей Л,(х) задан-
ного полинома вместо его корней. Их рекомендуется применять, если конечной целью
являезся не вычисление спектра полинома, а разложение его на множители Дх) -1 ].4Дх).
/
В ряде случаев (полином четной степени с комплексными корнями или с кратными дей-
ствительными корнями) данные методы, работающие с действительными числами, эф-
фективнее комплексных вариантов корневых методов. Если полином разложен до про-
стых множителей первой и второй степеней, то расчет его корней прост.
Таким образом, объектом настройки является приведенный полином в линейной
в(х)-х+6() или квадратичной B(s)-s2 +bls+b() формах. Начальное приближение 5(0\х)
рекомендуется выбирать по старшим коэффициентам полинома Л(х):
в<0,(х)«х+ал_|/ал или В<°\.х)«х2+(алЧ/ал)х-з «л_2/яп • В ходе итерационного процесса
рассчитываются приближения 5<А)(х). Условия остановки этого процесса на /V -й ите-
рации аналогичны (2.16) для каждого коэффициента множителя.
Если найденный множитель B^N\s) имеет вторую степень, то далее определяется
тип его корней по знаку дискриминанта d -460. При rf>0 5(х) имеет два действи-
тельных корня и разлагается на два множителя первой степени. В противном случае
B(s) является простым множителем второй степени. Далее по алгоритму (2.9) выполня-
ется деление полиномов С(х)~ A(s)jB(s) и ищется множитель полинома частного С(х),
являющийся и множителем A(s). Процесс разложения заканчивается, когда полином
остатка имеет первую или вторую степень.
Если имеет место сходимость для начальных приближений B^(s) и первой, и
второй степеней, можно использовать несовпадающие делители обоих полученных
множителей для понижения степени А(з).
2.5.4.4. Метод Лина
Вычисления на каждой итерации настройки полинома B(s) первой или второй
степени очень просты:
1) по алгоритму (2.9) полином A(s) делится на sjB(A)(s);
2) полученный полином остатка D(s) такой же степени, что и B(s), делением на
<7, или d2 приводится к виду B^+i\s) = s^bQl+^ или В(*+|\х)=.х2+Л1(А+')х+Ло*+!).
Условия сходимости последовательности В^*\х) к 5(х)=(х-х,)(х-ху) имеют вид
ryy -|C(sg )/с0-1|<1. Скорость сходимости оценивается знаменателем геометрической
прогрессии max {г^и}. При алгоритм расходится. Таким образом, метод
Лина, как и все локальные методы, не гарантирует получения результата наверняка. В
случае расходимости или зацикливания последовательности полиномов l№(s) первой
степени следует повторить алгоритм для множителя второй степени.
( 7 Пример 2.11. Разложить полином (2.8) на множители методом Лина с погреш-
ностями расчета коэффициентов бя=ео -10 6.
Решение. Анализируя выполнение условий сходимости для множителей первой
степени Гц=199>1, Г22=4,96\(Г4 <А и г33 = 217,16>1, заключаем, что можно получить
лишь один такой множитель В(я)=я-ь-> s+0,02. Ни одна из пар {Г|1| 1. Гр 1 -0,0096},
0j3! 100, г13 3 - 108,08}, {г232 — 0,0 104, г23з —1,16} и {г45, - г455 ~ 12988} не удовлетворяет ус-
ловиям сходимости. Следовательно, нельзя получить ни одного множителя второй сте-
пени. Выводы анализа подтверждаются графиками итерационных процессов на рис.
2.22:
а) выбрав начальное прибли-
жение ZJ(0)(s)- s+101/50 , получим
быструю сходимость за 5 итераций
к В(s)= s+0,02 (график /). Экспери-
ментальная проверка показала, что
любое начальное приближение
B^\s)-s+^ приводит к тому же
результату;
б) никакое начальное прибли-
жение jB(0,(s)=s2+A|<0^+^ не дает
установившегося полинома. Например, при s2 т2,'.2«4 96,04 итерационный про-
цесс зацикливается на полиномах № +6,4710”4s+1,29-10~5 и 52 + 85,515s+l,303.
Таким образом, найдены первый множитель ,4|(s)-s+0,02 и полином частного
C(s)=50s4 +100s3+480052 - 400s—20000. Принимая B^(s)=s+2, сразу получаем нулевой
остаток отделения C(s) на B'°\s), следующее частное C(s)~ 50s4 +4800s-10000 и вто-
рой множитель Л2(5)=5+2. Начиная с jB(0)(s)=s, получим за 6 итераций (график 2 на
рис. 2.22,а) третий множитель 43(s)=s-2 и очередное частное
C(s)=50s2+100s+5000-,44(s). Это последний множитель второй степени с отрицатель-
ным дискриминантом. В результате разложение полинома (2.8) имеет вид
T(s) (s+0,02)(s+2)(.s 2)(50s2+ 100s+5000) . Г.1
Z.5.4.5. Метод Бэрстоу
Метод итерационного уточнения множителя B(s) первой или второй степени ос-
нован на линеаризации коэффициентов полинома остатка Z)(s) и вычислении прира-
щения B(.s) так, чтобы свести остаток к нулю. Итерация настройки включает три шага,
выполняемые с помощью алгоритма (2.9):
1) вычисляем полиномы частного C(*\s) и остатка Z>(s)=rf0 или D(s)=rf0+rf]S от
деления Л(з) на B(*\s):
2) вычисляем полином остатка E(s)=e0 или £(s)-e0+e;S от деления C(*\s) на
В(к\з);
3) обновляем множитель первой степени по формуле = , а для B(s)
второй степени решаем систему линейных уравнений
.(*)
е0
,(*)
«I е0
[ 4)
14
«о ~еЛк) |Ч)
«1 l4_
А^*\
79
и обновляем его коэффициенты о0 -Ь() +Ао0 , Л, Л| +Ао, .
Как и все алгоритмы ньютоновского типа.даниый алгоритм является локальным,
имеет сложные условия и квадратичную скорость сходимости.
£7 Пример 2.12. Разложить полином (2.8) на множители методом Бэрстоу с по-
грешностями расчета коэффициентов еа -ео =1(Г6
Решение. Приняв jB(o)(s)-s+2,O2, получим очень быструю сходимость за 2 итера-
ции к первому множителю Л((х)=х42 первой степени. Начиная с jB(O)(s)-s2 + 2,02st-96.
метод также быстро сходится за 3 итерации к множителю zf2(s)~.<’i 2s т 100 второй сте-
пени, не имеющему общих корней с A^s). Разделив A(s) на произведение множителей
/l1(s)/l2(s)=s3+4.«2+104s+2()(), получим полином частного C(s)-50s2~99s--2 второй
степени с положительным дискриминантом, имеющий множители A3(s)=50(s-2) и
J4 = s+0,02. О
2.5.4.6. Улучшение сходимости итерационных методов
Любой метод итерационного уточнения какого-либо параметра р (им .может
быть корень полинома s; или коэффициент множителя 6,) дает последовательность
приближений р(0\ р^, р^, ... . Часто эта последовательность сходится очень медлен-
но или колебательно, и требуется сделать очень много итераций до выполнения усло-
вий остановки (2.16). Тем не менее процесс имеет скрытые закономерности, обнаружив
которые по уже вычисленным приближениям, можно существенно ускорить дальней-
шую сходимость.
Таким образом, итерационный процесс состоит из двух частей:
- по основному алгоритму настройки вычисляется необходимое число приближе-
ний параметров;
- оценивается закономерность их появления, и выполняется расчет следующего
приближения.
Последовательность {р^}, сходящаяся к числу р* как геометрическая прогрес-
сия p^-p*«4jtk~^-p*)lq, оценивается знаменателем прогрессии q . Вычитая из этого
соотношения аналогичное равенство р(*~|)-/7*®(р<*~2)~р*),4, получим трехточечные
оценки знаменателя и параметра:
р(А-1)_р(^2) * р^р^-[р^
Ч* р(*)_р(*-П ’ Р** l-q "р^-2р^Ц^^' (2’l8a)
Вместо вычисления p^k^ по основному алгоритму положим р(*+1) -р* и продолжим
итерационный процесс далее. После расчета новой пары приближений {p^k^\p^k^}
выполняется оценка и т.д.
Последовательность {р^} с квадратичной сходимостью оценивается параметром
*)-//* 2)) . Полагая его независимым от номера итерации, по-
лучим трехточечную оценку приближения
Рис. 2.23
p<k+^p^<t{p(k}
(2.186)
вычисляемую по данной формуле вместо основного алгоритма настройки.
На рис. 2.23 показана эффективность алгоритма (2.18а). Процессы I и 2 соответст-
вуют аналогичным процессам уточнения корней s( и s2 методом итерации (рис. 2.19,е).
В первом случае несходящийся процесс {s^} (изображен пунктиром) сошелся за 15
итераций. Во втором случае медленная сходимость за 70 итераций (изображена
пунктиром) ускорена до 9 итераций. Процесс 3 на рис. 2.23,6 улучшает изображенную
на рис. 2.22,6 настройку коэффициента методом Лина. Применение на каждой треть-
ей итерации формулы корректировки (2.18а) позволило достигнуть сходимости за 33
итерации к множителю Z?(.v)=s2 + 2,02s+0,04=(s+2)(s+0,02).
ГЛАВА 3. ВРЕМЕННЫЕ ХАРАКТЕРИСТИКИ
ЭЛЕМЕНТОВ И СИСТЕМ УПРАВЛЕНИЯ
CZf инамические свойства элементов и систем оцениваются их временными ха-
рактеристиками (ВХ) - реакциями на типовые входные воздействия: гармо-
ническое, импульсное и ступенчатое. При гармоническом входном воздействии дина-
мика системы характеризуется изменением амплитуды и фазовым сдвигом установив-
шегося выходного сигнала, то есть ПФ и ЧХ системы.
Рассмотрим методы расчета ВХ системы при подаче на ее вход импульсного и
ступенчатого входных воздействий. Среди множества различных методов расчета пере-
ходных процессов в инженерной практике наиболее распространен операторный метод
преобразования Лапласа. Согласно (1.18), основные моменты этого метода заключены
в прямом преобразовании ,¥(.v)- L{x(Z)} входного сигнала (оригинала) и обратном пре-
образовании у(Г) ~ L1 (У(х)} изображения выходного сигнала.
3.1. ОБРАТНОЕ ПРЕОБРАЗОВАНИЕ ЛАПЛАСА
S'} J зображения большого числа экспоненциально ограниченных временных сиг-
налов /(/):|/(z)|<Afe"tf W>0 (степенных, экспоненциальных, гармониче-
ских) имеют вид дробно-рациональных функций
дга “ . * .
, А^^Га^' (3.1)
<=o /=о
с действительными полиномами /?(s) и A(s) степеней m и л соответственно. Извест-
ная в теории функций комплексного переменного [1,2,3,9,10] формула обратного пре-
образования Лапласа с абсциссой сходимости от
e+j®
Л')^- р(5)ейФ
*C-j0D
математически сложна и потому имеет ограниченное применение. Рассмотрим более
практичные методы получения изображений как вручную, так и с помощью программ.
Правильность расчета оригинала проверяется по предельным формулам для на-
чального и конечного значений:
/(0) = lim sF(s), /(да) = lim sF(s) . (3.2)
S—*30 »->()
Истинное установившееся значение f(<x>) совпадает с оценкой (3.2), только если в (3.1)
изображение F(s) имеет все левые полюсы.
3.1.1. Метод разложения Хевисайда
£0пя вычисления несобственного интеграла дробно-рацнональной функции F(s)
разложим полином ее знаменателя A(s), имеющий v различных корней s,- кратностей
Uj > 1, на множители:
4(Г < in^n-
<=i <=i
(3.3)
Оригинал изображения F(.v) может быть вычислен по формуле разложения Хевисайда-.
v я,--! -Л/-1-А jA
£ -A)!ch*r JU,
Сложная на первый взгляд формула имеет простую структуру:
/(О=£сДОеМ. -=гю+€лг
. »=1 *=о
О л 1 к =----~------d—L-X )П' /'(.,)]
tn‘ 1
(3.4)
(3-5)
Оригинал есть сумма v экспонент е3'5, умноженных на полиномы времени Cj(c). При
вычислении полинома сД/) степени л,--1 сначала находится вычет F(s) по пи-
кратному полюсу .v( путем исключения из A(s) множителя (s-.V/) ‘ Вычет дифферен-
цируется я, 1 раз по s, в полученные производные А-го порядка подставляется л-л,,
и они делятся на произведение факториалов к!(л,--!+&)!. В результате получаются в об-
ратном порядке числовые коэффициенты cin , см.
Более простой метод, не требующий дифференцирования вычетов по кратным по-
люсам, заключается в расщеплении F(s) на сумму изображений F^s) по числу различ-
ных полюсов - корней полинома A(s) в (3.3):
Г(5)=ХВД. (3.6)
«=1
Рассмотрим возможные типы слагаемых Fj(s).
1. Если степени полиномов B(s) и A(s) связаны условием т>п, то в (3.6) есть
изображение /Дх), порождающее оригинал
Fi(S)=ei()+caS+...xcim^Sm-n , /Дг) = сю&(Г)+сЙ&'(г)+..^ct^„8(mn)(0- (3-7)
Если F(s) рассматривать как ПФ системы, то при т>п существует прямая связь между
входом х(/) и выходом j(0- При т<п прямой связи нет.
2. Если в изображении полюс s, - действительный и простой (л, !), то в (3.6) есть
изображение F-(.v), порождающее оригинал /Д/):
(3.8а)
S .V/
Подставив s = sf- в вычет (.v-s,)f(s) , получим коэффициент
c/0=(s-si)F(s)| _ A'(si) > A'(s)-<X4(s)/is. (3.86)
5-- Sj
3. Если в изображении полюс st- - действительный и кратный (л >!), то в (3.6) есть
83
изображение Щя), порождающее оригинал f^t} '
f}(s) = ^-T-^-I
fi({) - (сю 4 сл *+• • +с/,л/ -1
V'___Sik___
\n, “2L/ \k’
-sj k=l(s-sj
n,-l
-i\,y j'r'v., Д
Iе ' ‘ l^ik* •
k=0
(3.9а)
Коэффициенты g^ и с& вычисляются в обратном порядке:
Г 1
/ 57ч Sg
Sik =(*-*.) *О)- Z 7—
Сначала находятся коэффициенты g^
’^-’"(Й)! УА-П/1’
(3.96)
(вычет F(s) по некратному
полюсу «,) и ^gin. Дл;-1)1. Сократив F(s) -g^ ^s-s^"1 на s-s;, получим изо-
бражение F(s) с л,--1-кратным полюсом s,-. Теперь можно вычислить коэффициенты
и с«,л,-2 =1?»,^ч/(я«_2)! • Повторяя этот прием, последними
определяем коэффициенты g^ -Q>.
4. Если в изображении комплексно-сопряженные полюсы я,- -ц, + j®: и я,-^-jc);
- простые, то в (3.6) есть изображение F/(s), порождающее оригинал /,(?):
F(s)-Pi+PIi i Pi~l9i- 8®+8*ts
' S-Sj S-Si S2-27]fS+T)f +&1
fi(t>(Pi +ж)е5'' +(A. -j?,)es'' =
= 2e n‘z (^Pi cos(®,-/) - sin(®,-/)) - cf-e сов(ш ;Г i- ® Д
где
gio = -ifaiPi +<» i4i\ gi\ = 2Pb Pi^gn /2.
^•=Uio+n,-^i)/2c»;, Ci-^pj+qj, t^^qi/Pi-
Коэффициенты p, и q, можно получить аналогично (3.86)
А+]?, = Я(^)/Л'(«г) или Pi-jq^B^s^/A'^Si)
(3.10а)
(3.106)
(3.10в)
как комплексные вычеты F(s) по простым полюсам s#- либо Sg. Ввиду неудобства со-
кращения действительного полинома J(s) на комплексные полиномы s-s^ = s-^,--jc>l-
или s-s, - s-r|J +j®i, сократим A(s) на действительный полином
(s-s,)(s-s,)=s2-2^,s+r|2 . Тогда
(s-Si)(s- ы)р(s)| = gjQ +g,i Si = -2® i(qi +jpi),
откуда
/-* .I Is-si
r=S:
Si.iif-l
84
Pi inrus -2т];5 + л,7 *<n,JF(s) .
q, Res s -2n,.v+n--t-io •
(3.10г)
5. Наконец, если комплексные полюсы -ц - i jco, и s, - - имеют кратность
iij >1, то в (3.6) есть изображение F;(s), порождающее оригинал (\{():
С ' А
Л, • П, -1
F^) X 7—“i 4 Е<+* c°s(® it+Фд) • (3-11 а)
A=i((s-sJ (s“s«) J *=°
Параметры р%, q^, и фЛ находятся аналогично (3.96) и (3.106):
PiK 4<fik =(5 М
(3.116)
с* ^Pi.k+i+<rtko /к\, tg((Paа+1/P,.k+\-
„ .. 8(5+ s)
Г7 Пример 3.1. Найти оригинал изображения F(s) = ~----------—<----—-т.
.?(l+sX’-s) (5+2s+s2)
Решение. Полюсы изображения и их кратности равны: =0 , - 2; s2 = “L п? ~-1:
s3 -1, л3 = 3; s45 = - l±j2 (л4--1, ® 4 ~ 2 ), л4-л5-I . Вычислим коэффициенты разло-
жения
р(S)-: "1-1. |.&2 j с20 | ^31 ( #32 f #33 t #40+#415' .
s S2 5+1 s —I (S_|)2 (S_|)3 s2+2s+5'
#!2 =s2M (1 -8 , e20 =(.v+1)F(s)!s_ , -1, §33 -(.s i)3 F(s)| =-3;
•S—V Л"~ 1 I 5—1
+/4 r.z « 1 3 x7+7?--?-Ils4-72s3+4? Alls
F (s) = г ( s) - —. -+--- =----------------,--------г----=
s2 s+1 (.v_|)3 s2(s+1)(1-s)3(s2+2s+5)
= -•у4-7^3+4д + 72 §i_L §31 §32 #4p2#412 .
s(l-s)2(s2 +2s+5j s '! (s-1)2 s2+2st5
§H-sF(s)| -14,4, §32 =(s-l)2F(s)l -8,5;
S-v I s—I
~ ч 4 14,4 8.5 -15,4s4-15,5s3-45,8s2+76,7s -15,4s2-30,9s-76,7
F( s) - F( s) -- ------=---—--------7—-------------- .1-1— ---------
s (s~l)~ s(s-l)2(s2+2s+5) (s-1)(s2+2s+5)
#31 #40~*~#41‘v .
s-I s2+2st5‘
§31 =(s-l)F(s)| =-15,375;
6=1
#4o+#4iA' ,5’375 -0,025s-0,175
---------: _ f ( S) + - - — - ------_
s"+2s+5 si s'--t2s+5
Вычислим no (3.86) - (3.106) коэффициенты оригинала:
85
+ С'], /)ev +t-,oe +(с3() +с311з-су2Г )е +с4е'14/ cosfto 4/ +q>4):
СЮ - £i I -14,4, <[ ] - 2 ~8, с2() = 1, с30 = /»3! = --15,37?», с3| ~ gy2 ~^,5,
с32 = «зз/2'- -1,5 , р4 - ff4) /2 = 0,0125, q4 ^g40 + п4ДГ41 )/2со4 -0,0375 ,
с4 - 2^р4+^4 -0,079 , ф4-arctg(^4//?4)~ -1,893рад- -108,4°.
Таким образом, получили временную функцию
/(/) - 14,4+8/ +е~' -(15,375 8,5/+1,5? )е' +0,079е-/ cos(2/-1,893). f ‘ 1
3.1.2. Табличный метод преобразований Лапласа
.вычисления F(s) по (1.16) и /(/) по (3.4)-(3.11) достаточно сложны. Популяр-
ность операторного метода в том, что изображения большого числа временных функ-
ций давно вычислены и протабулированы. Если бы в докомпьютерную эпоху этого не
было сделано, то высокая трудоемкость выполнения интегральных преобразований в
каждой отдельной задаче не позволила бы операционному исчислению стать мощным
инструментом решения самых разнообразных математических и технических задач.
Приведенные в прил. 1 таблицы преобразований Лапласа заимствованы из учеб-
ника-справочника [1, табл. П. 1.2 и 4.1]. Необходимость дублирования таблиц в данной
книге объясняется желанием автора сделать их более доступными для работы, так как
справочная литература по автоматическому управлению стала в наше прагматическое
время библиографической редкостью. Подробные таблицы преобразований Лапласа
приведены также в [19, табл. 8.4-1 и 8.4-2].
Изображения наиболее часто встречающихся временных функций приведены в
табл. П.1, а табл. П.2 удобнее использовать для обратного преобразования Лапласа
дробно-рациональных функций. Возможности этих таблиц расширяются благодаря ис-
пользованию свойств оригиналов и изображений, перечисленных в табл. П.З.
Согласно устоявшейся в ТАУ терминологии, в табл. П.1 и П.2 использованы сле-
дующие обозначения параметров (с индексами и без них) оригиналов, изображений и
формулы их связи:
аир- показатели затухания экспоненциальных функций;
Гит- постоянные времени типовых звеньев,
о - частота колебаний звена второго порядка;
0<£<1 - коэффициент демпфирования звена второго порядка;
аГ=1, рГ = £. ®Г=^/1Ч2 , (р2+®")г2-1 .
В табл. П.2, начиная о пункта 72, встречаются выражения типа angle = arctg(q / р), в
которых знаменатель р может быть нулевым или отрицательным. Во избежание сингу-
лярности (при р-0) или ошибки (при р<0) вычисления фазового угла функции
sin(a/+<р) нужна коррекция главного значения, возвращаемого функцией arctg, с уче-
том знаков р и q.
0
л/2
-л/2
angle
angle - л
Ф
прии q-0,
приp=Q и q>0,
при p = Q и q<0,
прир<0 и q>0.
при/><0 и ^<0.
(3.12)
86
3. 1.3. Программный метод преобразований Лапласа
настоящее время появились компьютерные программы типа MathCAD, имеющие
в своем арсенале высокоразвитое интеллектуальное средство - символический процес-
сор, способный выполнять множество сложных символьных операций, в том числе и
преобразования Лапласа - прямое и обратное. Теперь пользователю (студенту, инжене-
ру, академику) не обязательно иметь под рукой справочник с таблицами для решения
задач операторным методом. Достаточно овладеть несложными навыками работы с
программой и далее испытывать бесконечное удовольствие от быстро полученного ре-
зультата.
Символические преобразования в среде MathCAD (версии 6 и выше) можно вы-
полнить, по крайней мере, двумя способами:
а) вводим преобразуемое выражение (оригинал /(/) или изображение F(s)), уста-
навливаем курсор на переменной t либо s и выбираем пункт меню «Symbol-
ics->Transform->[Inverse] Laplace». Результат преобразования появляется строкой ниже.
Далее его можно скопировать в буфер и присвоить функции F(s) или f(t);
либо F(s) : *~| , вводим справа преобразуемую функцию.
F(s) . К t)
б) набрав I КО
Ниже печатаем выражение
часть. Нажав кнопку меню
цию «laplace» либо «invlaplace». В пустое поле (после запятой) полученного шаблона
вводим параметр преобра-
зования t либо s. Нажав «F9» или установив курсор вне формулы, справа от стрелки
«->» получим результат, который одновременно присвоен функции F(s) либо f(i). По-
F(s) := f(t) laplace
КС F(s)
и выделяем его правую
Ы, выбираем в палитре символических вычислений функ-
или
или КО F(s) iavlaplace, ।
следнее действие выгодно отличает данный способ преобразования от первого: любое
следующее изменение структуры или параметров преобразуемого выражения автома-
тически обновляет результат.
Если символический процессор не может выполнить необходимое преобразова-
ние, то результат повторяет исходное выражение.
Ниже приведен листинг MathCAD-программы обратного преобразования изо-
_ 1+TS
бражения F(s)=-/----------уу с параметрами т-1, 7-10 и £=0,2. Для сравнения
s(1+2£7s+7'7s*)
оригинал вычисляется тремя способами:
1) функция /ДО получена символическим процессором. Результат всегда выво-
дится на экран с полным разрешением чисел без переноса строки, поэтому пришлось
его обрезать. С меньшим числом значащих цифр оригинал имеет вид
f (t) = 1 0,102062е '°02' sin^^SO-e0112' cos(0,09798z);
2) функция f2(i) вычисляется по табл. П.2 (пункт 74) без коррекции угла по (3.12),
В итоге получен фазовый угол <р = -84,172° и неверный оригинал;
3) функция /ДО вычисляется таблично с коррекцией угла, поскольку
т-ДТ2 = -[<(). Правильное значение угла лр срч 180°=95,828°. Корректное вычисление
угла возложено на функцию atg(<f,р).
Отметим, что при т-2 получим т-РГ2=0 и сообщение «Found a singularity. You
. .. ... , f ® Т2 )
may De dividing by zero» при вычислении угла m := atani-у I, что и означает деление
кт-ртд
на нуль.
atg( q,p) ' I atan - • (p< 0) if(q> 0 ,л , к ) if p
P/
| if(q> О, I ,if(q, 1,0))-x 0.5 otherwise
1 ; 1.0 T 10 £ : 0.2
0
к т о ; ----
________________ 1 T
2 „2 / •> \
+ (1 2-Н)-Г 4 w T"
€ -------------------- Ф - atan ------------
© T2 \t - 0 -Т/
ц/ at go -T2,t 0 -T2)
f 2(t) 1 C-e'₽’l-eb(e -t - q> )
f 3(t) 1 + C-e p4.sta(© t - у) F(s) У r T _2 2\
s- V1 4- 2-^ -T-s ь T s j
|fj(t) F(s) invlaplace,s 1.- . 10206207261596575409exp( ,02000000000(
t O,0.1..200 t3: 0,10.. 200
0 = 0.02
® - 0.098
C = 1.005
Ф = 84.172 -deg
t|/ - 95.828 «deg
i 0 T2 = 1
88
3.2. ИМПУЛЬСНАЯ И ПЕРЕХОДНАЯ ХАРАКТЕРИСТИКИ
/ мпульсное (ударное) воздействие в момент времени т бесконечно малой дли-
l-'C' тельности и бесконечно большой амплитуды описывается оельта-фуакцией,
являющейся пределом конечной функции х(/,е) (рис. 3.1):
jonpii/-T,
5(/-т) limx(/,e)-J ,
с->() 10прЮ*Т.
Воздействия импульсного типа в электронных схемах выраба-
тываются устройствами синхронизации, возникают при разря-
дах конденсаторов, при дребезге кош актов переключателей, в
результате электромагнитных наводок и т.п. Сигнал можно
Рис. 3.1
считать импульсным, если его конечная длительность сущест-
венно (на несколько порядков) меньше минимальной постоянной времени элементов
системы.
Дельта-функция 8(/) принадлежи! классу обобщенных функций и является недиф-
ференцируемым пределом при с~»0 непрерывных функций х(/,е) , имеющих следую-
щие свойства'.
- четность относительно аргумента t: х(Ле) = х(-э,е);
- начальное и конечное значения х(-ос,с) = х(оо,£)-0;
- площадь под функцией равна 1 при любых значениях е ;
- предел х(0,е —>0) -> х , а ширина функции при е —>0 стремится к 0.
Примерами приближающих функций являются функции плотности вероятности:
х(ЛЕ) = е-/ 25 /ел/2л: - Гаусса, х(Т,е)-1/тге^1+Г2/е2^ - Коши, x(t,e)=C^/E/2е - Лапласа.
«На дельта-функцию нужно смотреть как на удобное обозначение, которое всегда мо-
жет быть записано в равносильном, но более громоздком виде» (П. Дирак).
Свойства смещенной дельта-функции З(г-т):
1) чезность относительно аргумента /-т : 3(/ -т) = 8(т-/);
2) дифференцирование: d8(r r)/d/~0. Это неочевидное свойство иллюстрируется
на примере предела при е - -»0 производной функции плотности Гаусса:
1 Д'-Д Зе /'-,..2
~ , limx;(/,E)= lim-^-7=e =0.
е \/2п с-щ £-*°С\12я
Производная 8Дг-т) состоит из двух 5-подобных функций, дейст- §'4 *
вующих в момент времени т и дающих в сумме 0 (рис. 3.2). Но нельзя
игнорировать ЗД/-т), если она интегрируется в произведении с не-----------
которой гладкой функцией x(Z) (см. пятое свойство). И вообще, нуж- ° Т
(л) ▼
но рассматривать п-ю производную 3, (t-т) тоже как обобщенную
функцию; Рис. 3.2
3) ин)егрчрование j 8(r-r)d/ -1 - площадь под 3-функцией равна 1. В конечных
* I
. 1 при а<х<Ь,
пределах интегрирования 18(Г т)<1/ = ( п ,
J 0 при т<а или т>6;
(I
4) x(f)8(z т)-х(т)8(/-т) - фиксация сомножителя х(т)
х(/) и 8 -функции:
произведения функции
5) jx(08(f-T)d/= |х(т)5(Г-т)ск = х(т) |5(Г-т)<1* = х(т) - фильтрация значения х(т)
функции x(z). В конечных пределах интегрирования
* г
J (0 при х<а или х>Ь.
Интеграл произведения х(г) и 5Д/-т) берется по частям:
Jx(O8 4/ -T)d/ -:x(f)S(Z-T) JxX/)8(/ T)d/ x(T)5(f T) x'(T)j8(r T)df.
По индукции получаем формулу интегрирования произведения х(Г) с
|х(/)8*л)(/-т)а/=Хс!)'х<'\т)8<Л1“'')(/-т)-х(т)б‘л')(/т)-
i=0
-х’(т)8*я2,(Гт)+...4-(-1)^'х<л”|)(т)8(/-т)+(-1)лх"1,(т)/б(Гт)аг;
6) L{8(z-t)} = je *8(/-x)d/=e л - изображение смещенной 5-функции. Для не-
о
смещенной 8 -функции L{S(t)} = е° = I.
Импульсная характеристика (ИХ) »#(г) - это реакция системы на действие на ее
входе несмещенного дельта-импульса 8(г) при нулевых начальных условиях. Согласно
(1.18), при этих условиях изображение ИХ системы равно ее ПФ W(s). И, наоборот,
m<Z) есть оригинал W(s):
m<O=L4(FF(S)} . (3.13)
Единичное (ступенчатое) воздействие в момент времени т с
бесконечно малой длительностью фронта описывается единич-
ной функцией Хевисайда - пределом функции х(Г,е) (рис. 3.3):
Z ч Г 1 при />т,
l(Z-T)=hmx(/,e)-s п ,
Е-»о I Опри/ст.
Рис. 3.3 Ступенчатые воздействия в электронных схемах возникают при
переключении напряжения питания, скачкообразном изменении
нагрузки, характерны для выходных напряжений реле, триггеров и других дискретных
элементов. Сигнал можно считать ступенчатым, если конечная длительность его фрон-
та существенно меньше минимальной постоянной времени элементов системы.
Единичная функция !(/) принадлежит классу обобщенных функций и является не-
дифференцируемым пределом при с—>0 непрерывных функций х(/,е), имеющих сле-
дующие свойства-.
- х(-оо,е)=0, x(0,s)=0,5 и х(оо,е)=1;
- кососимметричность относительно среднего значения х(0,е) ;
- интервал изменения х(/,е) от 0,05 до 0,95 сужается до 0 при е >0.
Примеры приближающих функций - функции распределения вероятности:
х(/,е)=0,5+Ф(//е) - Гаусса, x(Z,e)=0,5+arctg(//E)/n - Коши, х(г,е)- 0,5^1+sgn(r)(l-e4/, <;
- Лапласа.
90
Свойства смещенной единичной функции 1(г—т) и ее связь с дельта-функцией:
1) инвертирование при изменении знака аргумента: 1(/ -т) — 1 — 1(т—Г);
2) дифференцирование: dl(Z-T)/dZ=5(r-t), dl(t-7)/dZ= -8(/-т);
3) интегрирование (неопределенное):
Jl(z -r)d/--(/ t)I(Z-t)tC , J1(t-z)dr- (/- т)1(т- /) + С ;
4) формализация третьего свойства дельта-функции:
Jo(v-T)dv-1(Л т), |8(v-T)dv= 1(т-/);
х t
5) дифференцирование разрывных функций:
^•(х(/)1(/-т))-х'(г)1(/-т)+х(т)5(/-т), ^(x(/)1(t-Z))=x'(0Kt-z)-x(t)5(Z-t);
6) интегрирование разрывных функций:
b b b mtn(ft,T)
Jх(7)1(7-т)<1/ = 1(Л-т) Jx(/)dr , Jx(Z)1(t /)d/- 1(т-л) Jx(/)d/;
л max(e.t) a а
CC 00 e - yr
7) L{1(/-т)} - |e'* l(Z-T)dZ= |e~"df— - изображение смещенной единичной
, J s
о т
функции. Для несмещенной функции Ц1(г)} =e°/s= 1/s.
Переходная характеристика (ПХ) h(t)- это реакция системы на действие на ее
входе несмещенной единичной функции !(/) при нулевых начальных условиях. Согласно
(1.18), при этих условиях изображение //($) и ПХ h(f) системы находятся как
L{A(OI = H(s) = W{s)js, h(t) ~ L'1 {FF(s)/s}. (3.14)
Из (3.13) и (3.14) следуют соотношения связи между ИХ и ПХ:
и</) = ^“, A(r) = Jw<T)dT. <3-15)
Вычисления ВХ выполняются любым методом обратного преобразования Лапла-
са. Если при расчете ИХ можно напрямую использовать формулу Хевисайда (3.4) для
ПФ W{s)~B{s)jA(s), то ПХ находится обращением изображения
H(.v)^^s-=-^^=5(.v)/an2(5-sJ)',‘. 2Х =п+| (316)
5 SA(S) j н /=1
В (3.16) числа v и л, отличаются от тех же чисел в W\s) из-за дополнительного нуле-
вого полюса изображения l/'s единичной функции. По аналогии с (3.4) получим
А(0=2>*£ —--------"СР
П -Л)! ds* L
л, B(s)
sA(s)
(3.17)
S=Sf
В ПФ статической системы нет нулевых полюсов, а изображение H(s) имеет про-
стой полюс .S| =0 входного сигнала. Согласно (3.8а), он порождает составляющую ПХ
<>r
<-,e
s.4(s)
-7Г(0), коюрая является установившимся значением h{t) при >тс.
.«=о
Правильность расчета ВХ проверяется но предельным формулам (3.2):
ю(0) lim sH/(s) , и< х) lim sW^-v), ft(0) -JFfx), h(-x)-JV(O). (3.18)
y—>OC ,v—>0
Истинные установившиеся значения ВХ совпадают с оценками (3.18) только при отсут-
ствии в ПФ правых полюсов.
Пример 3.2. Методом разложения Хевисайда рассчитать ВХ схемы моста Вина
l + 7’2s2 . ,
- Робинсона (пример 1.6) с ПФ --------х7 к , где Т 1/100л-3,183 мс,
3(1 + 7| + 73 $7
Т{ =(з+х/5)т/2«8,333 мс и Т2 =(з-х/5)г/2«1,216 мс .
Решение. Вычислив полюсы ПФ S] =-l/7| ——120 и s2 -1/73 ---822,5, найдем сна-
чала ПХ схемы (рис. 3.4,а), представив ее изображение в виде
Рис. 3.4
t Tl
3 / 111! - 12 )
s
. г 1 ()Г
2 т
3s (i i Т} s/i+Jjs)
Т ¥ Т
=-е -—т---------те' -—--------,-е ‘ -
3 7Д1+r2s.) T2(lf7',s2)
=_L__L...e-<^ +.е+л..
3 тг-т2 т}-т2
= l/3+(e-f/T2 -e-,/7i)/V5
«0,333+0,447(е 822/ - е 12(1?).
Граничные значения й(0)-й(х:)-1/3 точно совпа-
дают с оценками (3.18).
Импульсную характеристику (рис. 3.4.6) по-
лучим по (3.15) с учетом скачка ее начального зна-
чения с Л(—0) —0 до Л(+0) = 1/3:
—--------те'''7’2 «0,3335(0+53,67е 120/ - 367,8е-822'.
7’2(г1-7'2)
Граничные значения w(0) = =c и и4») =0 совпадают с оценками (3.18). Г 1
П Пример 3.3. Рассчитать табличным методом временные характеристики систе-
мы «тележка - маятник» и объяснить их физический смысл.
Решение. Используя выводы примера 2.4. запишем обе ПФ системы с переверну-
тым маятником в виде
(град/Н), (3.19)
sD(s) D(s)
где D(s)=(l + r1s)(l-T3s)(l+r5s); 7]=1,72с; Г3=0,397с; Т5 =0,244 с ; Z»()=10; b}=h2^ 1,333;
b2 =0.573. Проиллюстрируем использование табличного обращения Лапласа при вы-
числении ИХ H’rf(Z)=L~1[^)/sD(s)| + L”‘[ft1/D(.v)}4 L"1 (a2s/Z>(s)} . В табл. П.2 (пункты 57,
56 и 59) находим необходимые составляющие изображения IV^s) и их оригиналы:
10-9,468е~”’58' - LI62e252/ +0,63e '4!'.
_ Vi_ r, _ л1гз _________________ел_________Mb_______e’r3 ..
1О(./)Г(Г,.7',)(ТгГ5) (Г,(7-,)(т,<-7'5) (Т5-Т,)(Л + Т3)
-- -0,734е °58' Н),39е2'52' +0,344е~41'.
t ' Л
г-d h-v L lh________________/т______Ь__________________________
lZ)(s)J (г. + ГзХг.-ТЬ) (Л + ^ХГз + Тз) (Г5 ^ХТ'з + Т’з)
-0,427e4l'5S? +0,98 2е2-52' -1,409е 41'.
Суммируя составляющие, получим wd(t), а по аналогии и остальные ВХ на рис. 3.5:
H-rf(O-10-9,775e"o'58/ +0,21 le252г -0,436е~41',
hd(t) --1 Or -17 rl6,81е~0-58' +0,0846е2 52z +0,1 Обе '4,г,
-0,183e (l'5Mf -0,422e2 52z +0,606е ~4’',
Лф (/)=0,315е’°'58' -0,168ei52/ -0,148е 41'.
Рис. 3.5
Нулевые начальные значения всех ВХ совпадают с оценками (3.18), а оценки устано-
вившихся значений ВХ неверны, так как ПФ (3.19) имеют правый полюс ж3 = +2,54.
Физическое объяснение возникающих движений следующее. В исходном (номи-
нальном) положении тележка стоит на отметке d = 0cM, а маятник находится в состоя-
нии неустойчивого равновесия вертикально вверх при 9=0°. Под действием импульс-
ной СИЛЫ единичной энергии (например, (00 1-1 в течение О,О( с) тележка скачком при-
обретает начальную скорость и’^(0) = 8 см/с, а далее катится с торможением и через
3/0,58=5,2 с остановилась бы в точке rf-10 см . Маятник после удара, сохраняя по инер-
ции свое положение, отклоняется влево (<р <()), теряет равновесие и падает (отклонение
ф = -90° достигается за 2,12 с), толкая при этом тележку вперед и разгоняя ее. Похожие
процессы hd(t) и Лф(г) происходят и при действии ступенчатой единичной силы.
Таким образом, в окрестности номинального состояния неустойчивого равнове-
сия система с перевернутым маятником имеет расходящиеся ВХ (3.20). Причина неус-
тойчивости - правый полюс s3 = +2,54. Пунктиром на рис. 3.5,а изображена ИХ wd{t)
без неустойчивой составляющей 0,211е2,52/ и соответствующая системе с жестко закреп-
ленным вертикальным маятником.
В системе с обычным маятником ПФ имеют вид (3.19) со следующими параметра-
ми: D(.v)=(l + ri.v)(l + 2^3rvv+rfv2), Г|-1,678с. 'Л=0,316с, -0,245, Л()-10.
А, =Ь2 -1,333. Л- -0,573. Используя табл. П.2 (пункты 99. 101 и 94), получим ВХ на рис.
3.6:
Предельные значения устойчивых ВХ (3.21) совпадают с оценками (3.18).
Физическое объяснение возникающих движений следующее. В исходном устойчи-
вом положении равновесия маятника под действием импульсной силы тележка начинает
катиться с торможением и примерно через 3/0,596=5 с останавливается в точке 0,1 м.
Маятник совершает затухающие колебания с частотой /к =3,О75/2л «0,5 Гц или с пе-
риодом Тк -2 с, максимальным отклонением от вертикали на 0,66° и временем затуха-
ния 3/0,782=3,84 с. Эти очень малые колебания маятника слабо воздействуют на тележ-
ку ввиду близости комплексных полюсов -0,782+j3,075 и нулей -0,5±j2,69 ПФ Hz^(s).
Под действием единичной ступенчатой силы тележка разюняется и далее катится
с постоянной скоростью. Маятник в это время совершает слабые несимметричные зату-
хающие колебания. Графики ВХ на рис. 3.6 свидетельствуют, что в окрестности состоя-
ния устойчивого равновесия система с обычным маятником нейтральна по выходу d и
устойчива по выходу ф . СП
Практическое построение ВХ позволяет сделать следующие выводы.
I. При равенстве полюса зу и нуля Xу можно сокращать полиномы ПФ на одина-
ковые сомножители (s-s,) и (s-Xy) благодаря полной компенсации составляющей
, при которой вычет l¥(s) по полюсу имеет сомножитель х,- -Ху =0.
2. Нуль Ху, близко расположенный к полюсу st-, частично компенсирует состав-
ляющую (Cj «0) за счет ^-Ху«О.
3. Начальные и установившиеся значения ВХ для систем без правых полюсов
удовлетворяют предельным условиям (3.18) и могут быть найдены по ПФ без расчета
самих характеристик.
94
3.3. ВЗАИМОСВЯЗЬ ЧАСТОТНЫХ И ВРЕМЕННЫХ ХАРАКТЕРИСТИК
(ункция времени y(t) и ее КЧХ (спектр) F(j®) связаны прямым и обратным
преобразованиями Фурье.
F(j®)~ Jj’(/)e J<rtjdz и Jy(j®)ej"fd®. (3.22)
О -ж
Условия сходимости несобственных интегралов в (3.22):
1) МОК-* V/>0 - ограниченность оригинала у(0 ПРИ
2) У(0-0 V/<0 - нулевой оригинал при t <0;
3) все полюсы изображения Y(s) - левые;
4) IY(ja})I ^O при ю ->ос .
Подставив комплексную функцию F(j®)-Pv(®)+jQy(<o) и комплексную экспо-
ненту eJ“' -cos(©r)+jsin(w/) в (3.22), получим для t>Q
у(/) = у- | ^Р(.(® Jcos)®/)^,)® )sin(®/)^d®+— j |pj,(®)sin(®/)+0>,(®)cos(®/)|d® =
-ОС *
Четная функция &
Гх'(
= - - J | Ру (® )cos(® г)-Qy (®) sin(® t) Id®.
71 о
Нечетная функция а
(3.23)
По этой формуле методом численного интегрирования можно рассчитать временной
сигнал ио его спектру. Функции Ру(<л) и <2>(®) определяются по амплитудной и фазо-
вой частотным характеристикам сигнала:
Ру(®) - /4..(®)cos((p?,(®)j = 100 5£у<ш) СОЗ^ф^Д®
Qy (®) = А (®) sin^tp у (®) j = 1 Qlj'Q:>Ly(<D * sin^ip Л. (®
(3.24)
Возможно [2] упрощение формулы (3.23) благодаря условию у(0 = 0 Vf<0. Заменив в
ней t на -t, получим взаимосвязь частотных характеристик Рг(ш) и 2у(ю):
М_0-~ f |PJ,(®)cos(®0+Q>,(®)sin(®/)|d® =0 V< >0. (3.25)
Складывая и вычитая (3.23) и (3.25), получим зависимости y(t) отдельно от веществен-
ной Рг(со) и мнимой (?,, (®) ЧХ сигнала:
2 ''
y(t) = — [ P.,(®)cos(®/)d® - — fg.,(®)sin(®/)d® .
% %
Установим зависимости между ЧХ и ВХ системы. При нулевых начальных усло-
виях
Y(ja)=W()m )X(j®)- {P(®)+j6(® )}{Рд(ю)+)вх(® )) =
-{Р(® )PV(® )~Q(m )Qx((o )} + j{P(w )Qx(a> )+0(® )PX(&)},
откуда Py(o)) P(®)PX(®) O(®)Ox(w), Qy(a )~Р(т )Qx((o)^Q(a )PX(®). Если входной
сигнал .r(/)-S(Z). то Л'0®)И. Pv(®)-1, Qk(®)-0, P,.(®) = P(®), Qv((XCQ(<o) и вы-
ходной сигнал есть ИХ, связанная с ВЧХ и МЧХ соотношениями
и(/)- —J/’(®)cos(®/)d® - -- jg(co)sin(®/)d® .
(3.26)
Если входной сигнал х(/)-1(/), то Л'О)- j/® , Рг(®)^0, 0Г(®)- 1/ш,
РД®)-£7(ш)/ф , (?, (®) = ~/*(©)/© и выходной сигнал есзь ИХ, связанная с ВЧХ и МЧХ
соотношениями
2'r/X®)sin(®0 . 2 rg(®)cos(®f)
h(t) - — I---------d® = — -------------d® .
n' ® n ' ®
(3.27)
По формулам (3.26) и (3.27) методом численного интегрирования на ЭВМ можно рас-
считать ВХ системы по ее ВЧХ и МЧХ, которые определяются по АЧХ и ФЧХ, анало-
гично (3.24): P(®) = 10°’05L^‘e^cos(<p(®)), ^(®) = 10oo5£(“)sin(<p(®)). Подставив в (3.22)
W/(j®) = и = -л 2^ вместо K(j®), получим зависимости ВХ
j® и
от АЧХ и ФЧХ:
17 / \ 1 74(®)sin(®ntp(®))
и</) =—JJ(®)cos(®Z+q>(®))d® , h(t) j---------------d® .
(3.28)
Исследуем, как изменяются ВХ системы при трансформации ее ЧХ по амплитуде и
частоте. Для этого введем эталонную КЧХ ^(j®), которой соответствуют ВХ н’Дг) и
АД/). Пусть Hza(j®)=aWzI(j®) - КЧХ, полученная из fPi(j®) умножением на константу
а , что эквивалентно последовательному соединению системы с широкополосным уси-
лителем. Соответствующие ВХ и»а(/) и Ла(/) изображены на рис. 3.7:
_ 00 X
0 - fFFa(j®)ej®rd® =~ [H''i(j®)eJ<e'd© -анД/).
2л J 2л J
-00 -00
Рис. 3.7
Вывод. Умножение КЧХ системы на константу приводит к пропорциональной
трансформации ВХ по амплитуде.
Пусть Wptjo) = И/1 (j®/Р) - КЧХ, полученная из Wt(j®) трансформацией по часто-
те в р раз. При р>1 это эквивалентно расширению полосы частот КЧХ, а при р<1 -
сужению. Соответствующие ВХ м'р(Т) и Лр(/) изображены на рис. 3.8:
2л pM>/P)eja,'d<» = ~ f^^e^'d® =pW1 (pr),
-Xi —00
t t
йр (/)=J м-р (x)dt = P J h’j (px)dT=hi (pf).
Вывод. Трансформация КЧХ системы по частоте приводит к пропорциональной
трансформации ИХ по амплитуде и обратно пропорциональной трансформации обеих
ВХ по времени.
При трансформации КЧХ W/ap(j®)=aWzI(j®/Р) одновременно по амплитуде в a
и частоте в р раз ВХ изменяются следующим образом:
W’aP (О=apH’l (РО , *а₽ (О = «А1 (00 •
(3-29)
3.4* АППРОКСИМАЦИОННЫЙ МЕТОД ПОСТРОЕНИЯ
ВРЕМЕННЫХ ХАРАКТЕРИСТИК
ри численном интегрировании по формулам (3.26)-(3.28) неизбежны методи-
ческие погрешности из-за усечения бесконечного интервала конечным и
трудности подбора оптимального шага интегрирования функций, изменяющихся с пе-
ременной частотой. Рассмотрим численно-аналитический метод расчета ВХ по кусоч-
но-линейной аппроксимации ВЧХ Р(®) и формулам (3.26), (3.27). Для сходимости не-
собственных интегралов необходимо, чтобы ВЧХ была интегрируемой, то есть абсо-
лютно ограниченной и стремящейся к нулю при <о -><ю.
тт „ г,,,,, n z ч [ 1-® VOS(j)<l, z „ Л „
Для системы с треугольной ВЧХ РЛ(®)=< о \/<» >1 (Рис- 3,9’а) рассчитаем
нормированные ИХ и’д(г) (рис. 3.9,6), йд(г) (рис. 3.9,в) и их параметры:
2fsin(®r) cos(®r)+®/sin(®/H <в“ 1 fsin(f/2)')
’MO=~-J(l-e>)cos(®r)d®=-—— ---—- =-—i-f-q , (3.30а)
"о ‘ t1 >
(°)= и н’д(ю)--0 - начальное и установившееся значения ИХ, время сходимости
97
Рис. 3.9
ИХ к уровню 0,05н'д(0)=0,016 не более Зл с;
2 г 1-ю 2( cos(to^)) 2f_ !-cos(/)'|
йЛ(/) | — sin(o)/)d©-— Si(<o/)+----—- =—ISi(/)-—— , (3.306)
nJn (0 K\ t J „ я\ t 7
о <o=O
йд(0)-0 и Лд(оо)=1 - начальное и установившееся значения ПХ, время монотонной
сходимости ПХ к уровню 0,95йЛ(ю) 0.95 не более 4л с. В первом приближении h&(t)
можно аппроксимировать функцией 1--е”*'/л. Интегральный синус в (3.306) вычисляется
разложением в степенной ряд
СТА Г«П(Х)л t
81(0= I-----dx=/
1 x
t3 Г
33! + S5!~
------
(2Л + 1) (2А+1)!
и медленно сходится к я/2. В [1, табл. 4.6] приведены значения функции ЛЛ(/).
Пусть имеются расчетные или снятые
экспериментально ЛЧХ Цаз) и Ф(ю). По
формуле Р(и)=10ад5/(в>,соз(ф(®)) рассчита-
ем ВЧХ и аппроксимируем ее непрерывной
кусочно-линейной функцией из п отрезков
[(Т’м,ф<м)! [Р(,аз f )j X/i-\,n так, чтобы было
®о=О и Рв=0 (рис. 3.10,я). Представим эту
характеристику суммой треугольных ВЧХ
aip&((й/P,) с коэффициентами трансформа-
ции по амплитуде аг- g и частоте
рг-=0,71^0., где P-=(Pi-Pw)/(<», -га<_]) -
тангенс угла наклона i -го отрезка к частот-
ной оси. Для единообразия расчета коэффи-
циента а п Р^а я введем дополнительную
точку Ря+1 —0 на частоте юя+4 >® я. В соответствии с закономерностями (3.29) измене-
ния ВХ при трансформации ЧХ запишем суммарное действие всех п отрезков ВЧХ:
пл п п
’♦’(о=Ха;р/н’л(Р<4=Е^/м'А(ю<0> Л(о=Ха<АА(₽!'0=ХЛгл(®^)> <331)
i=I <=! <--! <=I
где и Hi =(р'+| —Pfjfdj - весовые коэффициенты.
Таким образом, ВХ системы есть взвешенные суммы нормированных ВХ (3.30).
сжатых пропорционально частотам a t сопряжения отрезков, аппроксимирующих
ВЧХ. Весовые коэффициенты И') и Ht пропорциональны изменениям наклона отрез-
98
ков, квадратам частот (для (К,-) или самим частотам сопряжения (для Н,).
При невыполнении условии интегрируемости интегралы (3.26)-(3.28) расходятся.
Это бывает, когда ПФ имеет не все строго левые полюсы или степень полинома числи-
теля ПФ не меньше степени полинома знаменателя. В таком случае необходимо выде-
лить из ПФ И/(5)--И/и(5) । ИИцО) интегрируемую и неинтегрируемую части, порождаю-
щие устойчивые, нейтральные и расходящиеся (неустойчивые) слагаемые ВХ:
н</)-и\.(/) ги'„(/)4 и'р(/), Л(/) А. (/) + Л,,(/) + Лр(/). (3.32)
Устойчивые слагаемые ВХ рассчитываются по изложенной методике для интегрируе-
мой части ПФ И/||(5). Нейтральные и расходящиеся слагаемые, порождаемые неинтег-
рируемой частью ПФ имеют следующий вид:
W„(S) = K ^(0^5(0. К'); (3.33а)
lV„(s)^K/s => 1(0, hH(t) = Kt; (3.336)
И/н(5)---Л'/(1+7’252) wH(0=(/(/r)sin(r/r), AH(0=A’(l-cos(r/T)); (З.ЗЗв)
WU(S)=K/(1-Ts) (к/тУ Т , Лр(/) = 7f(l-efT); (3.33г)
1 л *V * F л S
Ap(0-^-^/7F42%^rcos^7^7^^-arctg^/7n^) • (З.ЗЗд)
IC7 Пример 3.4. Рассчитать аппроксимационным методом все ВХ системы «тележка
- обычный маятник» с ПФ (3.19)
, 10+1,3335+1,333s2 0,573«
s-+l,833s~+0,36.?+0,167 s4 ф 1+1,8335+0,36s2 +0,167s3
Решение. Учитывая, что ПФ fVj(s) неинтегрируемая, представим ее суммой
м/ < ч 10 > м/ / Л 17-+2.2675+1,667.?
^(«Ь —+^„(5), где Ж (S) = —-----------------------—
* 1+1,8335+0,36?+0,16753
Построим ВЧХ Р„(с£)) и Рф(®) (рис. 3.11). Они хорошо аппроксимируются восе-
«)
0
Рис. 3.1 1
i аилица j. i
i 0 1 2 3 4 5 6 7 8
0 1 2,4 3 3,5 4 7 11 16
Pw -17 -4,264 -0,623 -0,386 -0,482 -0,468 -0,166 -0,067 0
Pni 12,736 2,6 0,397 -0,194 0,03 0,1 0,025 0,013
-10,136 -12,694 -5,313 2,736 1,134 -3,704 -1,398 -3,412
-10,136 -5,289 -1,771 0,782 0,284 -0,529 -0,127 -0,213
Лн 0 0,3 0,52 0,286 -0,12 -0,226 -0,079 -0,03 0
Рф 0,3 0,157 -0,39 -0,812 -0,212 0,049 0,012 0,006
-0,142 -3,153 -3,795 7,348 4,175 -1,795 -0,77 -1,532
-0,142 -1,314 -1,265 2,099 1,044 -0,256 -0,07 -0,096
мью отрезками. В табл. 3.1 приведены параметры отрезков и расчет весовых коэффици-
ентов И+ и для Ри(о) и /*,(©). Используя табличные данные, на основе (3.31),
(3.32) и (3.336) построим требуемые графики ВХ системы:
м’|у(/)=10-10,136н’А(Г)-12,694»«'д(2,4Г)-5,313и’д(3/)+2,736и’Л(3,5/)+
+U34vA(4r)-3,704vA(7/)-1,398^(1 1Г)~ 3,412и’Л (16г),
Arf(r)=10/-17-10,136AA(O-5^89AA (2,4/)-1,771йл (3/)+0,782Ал (3,50+
+0,284Лд(4О-0^29йд(7г)-0,127Лд(11/)-0,213йд(16О,
»*ф(^)=-0Л42м’д(/)-3,153и’д(2,4Г)-3,795и'д(ЗГ)+7,348^д(3,5Г)+
+4,175h»a(4O-1,795va(7/)-O,77^(110-1,532^(160,
Лф(О=-0,142Ад(/)-1314Лд(2,4/)-1,265Лд(ЗО+2,099Лд(3,5О+
+1,044Лд(4О-0Д56Лд(7г)-0,07Ад(1 к)-0,096Ад(16Г).
Они очень близки к истинным графикам ВХ (рис. 3.6,6), построенным на рис. 3.12
пунктиром. О
Рис. 3.12
3.5 ПОКАЗАТЕЛИ КАЧЕСТВА ПЕРЕХОДНЫХ ПРОЦЕССОВ
С.4 У И ИХ ОЦЕНКА
//Чтя оценки способности САУ отрабатывать с необходимым качеством произ-
ж/вольные входные воздействия используется ПХ fi(t). Но характеру протека-
ния переходных процессов ПХ бывают:
- с перерегулированием (рис. ЗАЗ.а) и без него (рис. 3.13,6);
- апериодические (/) и колебательные (2) (рис. 3.13,д,6).
Основные показатели качества 1IX:
1) начальное hiy limA(/) и установившееся
г-ю
Лж -- lim h(z) значения;
Г- >=с
2) точность регулирования Ар -0,05\hx в
установившемся режиме;
3) время регулирования /р: |й(/)-Ла0)<Ар X/t>tv
- время окончательного вхождения П.Х в трубку
й^+Лр шириной 2Ар вокруг установившегося
значения hx ;
4) перерегулирование - мера выброса ПХ за ус-
тановившееся значение:
1^тах_ !
I^-Aol
100%;
(3.34а)
5) отрицательное перерегулирование - мера
выброса ПХ за начальное значение (пунктирный
график (.3) на рис. 3.1 З.л):
..JVAhJ }оо%
(3.346)
6) параметры колебаний (рис. 3.13,в): часто-
та /к--<вк/2я Гц; периоО Тк=\/ к с; чис-
ло колебаний в переходном процессе 1ХК-(1У^ТК\
степень затухания колебаний за период
(3.35)
Совокупность статических (Лу.йд.) и динамических (/р, о, о_, /к, Гк , (VK, С)
показателей качества образует допустимую область протекания переходных процессов,
ограниченную мажорантой hM(t) и минорантой hm(t) (верхней и нижней границами):
й/й(г)<й(О<Лм(г).
Расчет h(t) дает точные значения ее показателей качества, но он, как известно,
очень трудоемок. Существуют косвенные методы оценки показателей качества, позво-
ляющие быстро получить представление о статических и динамических свойствах сис-
темы без построения ее ВХ. Некоторое представление о таких оценках мы уже получили
при построении ВХ и изучении влияния на них трансформации ЧХ по амплитуде и час-
тоте.
3.5.1. Спектральные оценки качества переходных процессов
Спектральные оценки качества основаны на анализе расположения полюсов \ и
нулей X. j
плоскости
ПФ системы
W(s)=B(s)/A(s) = bm
П(--ХУ)/».П(,-,,)-
;=1 / /=1
на комплексной
Согласно (3.17), ПХ й(/) есть сумма экспоненциальных составляющих
и по (3.18) сходится к конечному значению Л(оо)-JF(O), только если все полюсы
ПФ левые. Чем левее полюс тем быстрее сходится порождаемая им составляющая
е ,г. Если не все полюсы ПФ левые, то ПХ не сходится к конечному значению: она рас-
ходится или совершает незатухающие колебания. Чем правее полюс s,-, тем быстрее
расходится составляющая es,t. Характер расходимости (апериодический или колеба-
тельный) определяется типом правого полюса.
К основным спектральным параметрам относятся:
а)
Рис. 3.14
I) степень устойчивости
ij-minjRe^)) - расстояние от
мнимой оси до ближайшего лево-
го полюса ПФ при отсутствии не
левых полюсов. В ПХ доминиру-
ют самые медленные составляю-
щие, характеризующие длитель-
ность реакции системы на вход-
ные воздействия:
а) для действительного по-
люса = (рис. 3.14,й) - аперио-
дическая составляющая с,е_,,Л
(рис. 3.14,6);
б) для пары комплексных
полюсов s«7+i=~11±®k (рис.
3.14,в) - колебательная состав-
ляющая c,e~nrcos(<oKf+<pK) (рис.
3.14,г);
2) степень быстродействия у = max|Re(sI)| - расстояние от мнимой оси до наиболее
удаленного левого полюса ПФ. В ПХ составляющая с^е уг изменяется быстрее осталь-
ных и характеризует скорость реакции системы на входные воздействия;
3) степень жесткости г = у/ц - отношение показателей затухания самой быстрой
к самой медленной составляющей ПХ. Если г >10, то система является жесткой. Прн
численном расчете переходных процессов в жестких системах возникают проблемы с
выбором периода временного квантования, удовлетворяющего противоречивым тре-
бованиям достаточной частоты дискретизации (зависит от параметра у ) и уменьшения
времени расчета (зависит от параметра ц);
4) степень колебательности ц - tg(i|/)co к/г| - тангенс угла раствора для ближай-
ших к мнимой оси левых комплексных полюсов -т|± j® к.
Основные спектральные оценки качества устойчивой ПХ следующие.
1. Оценки времени регулирования-, верхней границей Zp является степень устойчиво-
сти Т], а нижней - степень быстродействия у :
102
У у <tv <3/q.
(3.36)
Действительно, поскольку функция еИе(А,,/ - монотонная, io, например, для s,--q она
сходится к нулю с точностью 5% (то есть к стандартному уровню 0,05) за время
г,,: е”'1’ -0,05 (р -ln(2O)/q«3/q .
Если доминирующим в ПФ системы является типовое звено с ПФ A'/(l i Ts), то q -1/7’ и
г <ЗТ. В случае доминирования колебательного звена с ПФ ЛГ/(1 + 2Е,7’у+Г2у2) полу-
чим q-^/Г и 1р\УГ!£,.
2. Верхняя оценка перерегулирования определяется степенью колебательности:
ст<е‘*ц100%. (3.37)
Действительно, если ближайшими к мнимой оси являются комплексно-сопряженные
полюсы q±jfi) к с углом раствора цт =arctg((o K/q), то в ПХ доминирует колебательная
составляющая Л<Л) -Aoo|i-e~n/sin(a)к/+»y)/sin(iy)^. Из условия Л'(/)=0 получим значе-
ния й(/,) в точках максимумов h(f), чередующихся с точками минимумов (рис. 3.13,«):
h\t)4h^ /sin(vy ))e v | q sin(<o K / + v) ~® K cos(o K t+ц/ )| - 0,
откуда tg(© K/ + 4>)-tg(iy) и f, “ (2/‘1)/<d k - моменты i -x максимумов h(t). Значение
первого максимума в момент времени Т, =л/о к равно
Л(*1 > = Л< sin(n + i|/)/sin(i|/)} = Лда(1 +е~я/ц ),
откуда по определению (3.34а) находим перерегулирование
о - (й, тах /йХ1 -00% - (|+е g -1) 00% =еX00% .
3. Оценка степени затухания также зависит от степени колебательности:
£-1-е~2я и100%. (3.38)
Действительно, из предыдущего пункта находим значение i -го максимума ПХ в мо-
мент времени /, и перерегулирование ст,- в i -м периоде:
Лй„,„
Тогда, по определению (3.35), С,-Остi+1 /ст-1-е 2к и .
Измерив перерегулирования ст; на графике колебательной ПХ, по обратной к
(3.38) формуле можно найти параметр ц = -2л/1п(1-£) ,
4. Оценка числа колебаний в переходном процессе определяется как
Хк=Ц./2. (3.39)
Действительно, ближайшие к мнимой оси комплексно-сопряженные полюсы -r]±ja)K
дают период колебаний Тк - 2я/® к . С учетом оценки (3.36) по определению находим
X t р /X 3® к /2лщ == ц/2 .
103
5. Оценки влияния нулей ПФ на качество переходных процессов:
- нуль Ху, близкий к полюсу ж,-, компенсирует составляющую c(e',z, порождаемую
этим полюсом. Условие близости Ху и v, имеет вид |Ху 5,|<<max j|Xy|,|.v(|} . Действи-
тельно, при выполнении этого условия в (3.17) получим Д(а;)Н), так как Я(Ху) О,
благодаря чему коэффициент ez==0. Оценки качества (3.36)-(3.39), выполненные по
скомпенсированному полюсу, являются недостоверными',
- нули ПФ, не компенсирующие близкие полюсы, как правило, ухудшают пара-
метры качества переходного процесса. Действительно, при невыполнении условия бли-
зости значение |£?(sf-)| в (3.17) тем больше, чем дальше полюс s, удален от нулей Xу;
- правый нуль с Re{Xy}>0 может привести к отрицательному перерегулирова-
нию ПХ (3.346) из-за инверсии знаков Я(.^-Ху) в некоторых вычетах (3.17) но сравне-
нию со случаем всех левых нулей. Отрицательное перерегулирование означает наличие
в переходном процессе попятного движения и затягивает его длительность.
3.5.2. Частотные оценки качества переходных процессов
Частотные оценки качества могут быть получены по ПФ H'(s), ВЧХ /*(®) и зави-
симости (3.27) переходной характеристики от ВЧХ:
2 г/X<»)sin(fi)/) fP(v/)sin(v)
n(t) = — —— ------do = —I---------------dv.
no “ яо v
1. Оценки начального значения ПХ Ло:
- в соответствии с (3.18) по коэффициентам ПФ определяем
О при т<п,
Ao = lim ИДу)=Д Ьп]ап при тп.
S—>оо
sgn(ftm /ап )оо при т > л;
- подставив в (3.40) значение / — 0, получаем оценку й0 по ВЧХ:
2 ?P(ac)sin(v) 2P(3o)<rsin(0 . .
ho = —-------------dv---------------dr - Р(л)
TCJ V 7С J V
так как интегральный синус сходится к л/2.
2. Оценки установившегося значения ПХ Лж :
- в соответствии с (3.18) по коэффициентам ПФ определяем
s->o [sgn(A0 )ао при л0 =0;
- подставив в (3.40) значение t -ос, получаем оценку йж по ВЧХ:
йх—dv=—J—Р(0)
ло v 71 i ”
(3.40)
(3.41а)
(3.42а)
(3.426)
104
Следующие оценки динамических показателей качества выполняются на основе
ВЧХ, построенных для интегрируемой части ПФ И'.Дл). Соответственно это будут
оценки устойчивой части ПХ /ц(/).
3. Оценки времени регулировании / :
- по частоте полосы пропускания ВЧХ ®„: ^|/>(®)|<0,05|Р(0)| V<b ><в „| (рис. 3.15).
Так как нормированная ПХ (3.306) сходится за время 4л с,
то самая быстрая составляющая Л(/) сходится за 4я/ю п с. рк
Получаем нижнюю границу быстродействия системы Р(0) \
/р>4я/ю„. (3.43а) \
Если ПФ имеет дифференцирующие свойства и Р(0)-0, то I
допуск Л --5% берется от максимального модуля ВЧХ '
J г Г U <0я и)
|Ртах|. Полученная оценка быстродействия согласуется с Р 3 15
выводом (3.29) о том, что чем шире полоса пропускания
системы, тем более она быстродействующая;
- по частоте ® {|Р(с>) — Л*(0)|<0,05}Т*(0){ Vto первого резкого перегиба ВЧХ
(если он ecib) (рис. 3.15). По (3,31) определяем самую медленную составляющую ПХ
Н1ЛЛ(®,г) ”(^2 j® I Ал(® 10 ’ которая сходится за 4ti/(b1 с. Получаем верхнюю границу
быстродействия системы
Гр <4тг/®, .
4. Оценки перерегулирования о :
- если ВЧХ Р(<а) - абсолютно убывающая (|Р'(<й )j<0) и
выпуклая вниз (Р”(и)>0) функция частоты (рис. 3.16), то
ПХ удовлетворяет условию монотонности о=0. Действи-
тельно, перерегулирование в h(t) возможно, когда в (3.31)
коэффициенты Н, разных знаков, так как нормированная
ПХ АЛ«) монотонна. При выполнении условий, наложен-
ных на />(со), получим Р{<Р^ и Яг =(Р/+1-Р/)<В;>0 Vi, что
дает монотонную функцию h(l);
- если ВЧХ имеет jf*(O)|-тах[Р(а>)| (рис. 3.17), то пере-
регулирование удовлетворяет условию
оь!Х%. (3.44а)
Действительно, если )/<)/’(0)? V® >0, то из (3.40) и (3.416)
следует h(t)s 2/’(0)max]Si(x)|/n - 2Р(0)- 1,85/л «1,18Р(0)= 1,1 ;
- если ВЧХ Р(о) - однозначная функция, имеющая пик
^пах (рис. 3.18,а), то ПХ имеет перерегулирование
1,18^пач-Р(0)
Р(0)
100%.
(3.446)
Для доказательства представим Р(го) и h(t) в виде Р(®) -(®)+А(ю) и
Л(г) - h|(г)тА?(0 (рис. 3.18 Де). 1аккак h^t) порождается низкочастотной ВЧХ А(®).
Рис. 3.18
то перерегулирование h(t) определяется только функцией А, (г), и из (3.44а), (3.426)
следует тах{Л(/)| = тах{Л[(/)}<!,! 8Ртах , Аж = А|ас +А2оо = Р(0). По определению (3.34а),
^(*max /Аоо - 0100%=(1,18Ртах /Ро -1)100% ;
Рис. 3.19
- если ВЧХ имеет экстремумы Ptnax и /*min разных
знаков (рис. 3.19), то ПХ имеет перерегулирование
l,18Pmax+0,27/>min-/>(0)
Р(0)
(3.44в)
5. Оценки параметров колебаний ПХ:
- острый пик Р(<о) на частоте <вр с коэффициентом
резонанса Sp -Pmax/P(0) (рис. 3.19) свидетельствует о зату-
хающих колебаниях ПХ с оценками качества
Л"®к/27С’ Гк~2лД45р /(1+45р)/®р,
/„<12Sp/(on, о<е~”'/48р100%, ^>1-е Х/2йр, 7VK<25O.
< г г / И к Р
(3.45)
Получение этих оценок параметров колебаний основано на аппроксимации ПФ в
окрестности частоты сор колебательным звеном с ПФ Р(0)Д1 + 2£,Гл’+Т2х2] и ВЧХ
Р(0)(1-Т2<о2)
Р((в) = ^———(2ЁД )2 Условия 7>'(®р)=0 определяем максимум ВЧХ
Pmax=F(0)M(l-O на частоте со р = 71-24/7'- Корень квадратного уравнения
4£(1 -£,) = 1/5р есть коэффициент демпфирования £ = оД1-Д-Т/5р j<0,5. Найдем пара-
метры полинома I+2£Ts+7’2s2 как функции 5р и <ор:
Т = ^/1-2^/(о р =^1-1/5р До р - постоянная времени;
лЦ/Т=.р/(^+^5р-1 j^Sp^5р -1 j - показатель затухания колебаний;
а>к /т = Jo,5+^25p р ~Дсор - частота колебаний;
Ц = Д—^2 Д—^8р т^5р--1 jxpSр +1 + 2-^5 Дб р -1) - степень колебательности.
106
При остром резонансном пике (8р »1) заменим 8р -i на 5р, тогда т}~а>р/4йр ,
й)к , р~43р. Подставляя эти оценки в (3.36)-(3.39), получим оценки пара-
метров ПХ в (3.45).
Если комплексные полюсы ПФ не являются доминирующими в ее спектре, то ре-
зонансный пик ВЧХ располагается в среднечастотной части и коэффициент резонанса
8р показывает усиление на частоте <вр по сравнению с близкими частотами, где пик
ВЧХ отсутствует. Быстрые колебания ПХ совершаются вокруг медленно изменяющейся
во времени апериодической функции, опред&пяембй до-
минирующим действительным полюсом (рис. 3.14,6).
Оценки параметров колебаний /р, а, £ и NK, выполнен-
ные по (3.45), являются, скорее всего, слишком грубыми;
~ разрыв непрерывности ВЧХ на частоте ®р (рис.
3.20) свидетельствует о незатухающих колебаниях ПХ с
частотой ©к-(вр вокруг среднего значения Р(0). Дейст-
вительно, при 8 р = <ю из (3.45) следует tp = , а = 100%,
£=0, JVK=<x), а это параметры незатухающих колебаний
нейтральной системы с чисто мнимыми полюсами ± jto к.
100-20S+10? „
& Пример 3.5. ИЧ«) =---------;---г. Полюсы и нули ПФ (рис. 3.21): $. --0,5,
50+102s+5?+2s3
x23 = “l±j7, X12 = l±j3. Параметры спектра: ц=0,5, у=1,
г = 2, р--7. Спектральные оценки качества ПХ, выполненные
по (3.36)-(3.39): 3<Zp<6c, о <63,8%, <ок=7рад/с,
/к = 1,11 Гц, Тк -0,9 с , £=0,59, Л'к = 3,5. Поскольку комплекс-
ные полюсы s2,3 ' не Доминирующие, то оценка а может
оказаться слишком завышенной. Правые нули А.12 могут
ухудшить показатели качества, в частности, дать отрицатель-
ное перерегулирование из-за переворота фазы колебаний.
50(10 - со 2) 2 -40® 2 (51 -со Д
Построим ВЧХ (рис. 3.22,а) Р(<в) = —---------— — --------——— с параметрами
25(10-® 2) 2+4© 2 (51-о2)2
Л
*3
s
<lIrn{s}
-3 о
-3 AiRe{«}
--7
Рис. 3.
Р(0)2. Р(оо)=0, 8р ~4, фр «7,3, соп «16,9. Частотные оценки качества ПХ по (3.416),
(3.426), (3.43а), (3.44а): Л0=0, h^-2, /р>0,74 с, ст<18%. Частотные оценки качества
ПХ по (3.45) /к =1,2 Гц, Тк =0,84 с, tp <6,58 с, а<82,2%,£>0,32, NK <8 могут быть не-
107
достоверными, так как пик ВЧХ находился в среднем ас гот ной области (его величина
сравнивается с условным значением изображенной пунктиром ВЧХ без резонансного
пика). Истинные показатели качества ПХ определим, построив оригинал Л(т) по изо-
бражению W{s)/s (табл. П.2): h(t) - 2-2,607е 0:>z 0,943е ,sin(7z-0,7) > /г0- 0, Лх-2.
= 6,6 с, о = 0%, о =46,6% , fK = 1,11 Г'ц, Т - 0,9 с , с, =0,61, /V =4 (рис. 3.22,6).
Оценки и истинные значения показателей качества Л(Т) сведены в табл. 3.2. Срав-
нение этих данных свидетельствует о практическом совпадении оценок с истинными
показателями, за исключением времени регулирования. Небольшая затяжка длительно-
сти переходного процесса объясняется наличием правых нулей ПФ. По этой же причи-
не ПХ имеет и относительно большое отрицательное перерегулирование. ГЗ
Таблица 3.2
Показатели качества Спектральные оценки Частотные оценки Истинные значения
Начальное значение Ло=0 Ло=0
Установившееся значение =2 йсо-2
Время регулирования 3</р <6 с 0,74 <Тр <6,58 с / =6,6 с
Перерегулирование о <63,8% ст <18% ст=0%
Период колебаний Тк =0,9 с Тк =0,84 с Тк =0,9 с
Степень затухания колебаний £=0,59 £>0,32 £=0,61
Число колебаний IV к = 3,5 /¥к <8 /V ~ 4
Сопоставляя эти показатели с их оценками, делаем следующие выводы:
1) спектральные оценки /р и ст согласуются с истинными значениями лишь для
доминирующих полюсов ПФ и в отсутствие правых нулей;
2) спектральные оценки fK, Тк и С, точно совпадают с истинными значениями.
Состав спектра ПФ помогает определить частоты гармонических колебаний переход-
ного процесса системы по мнимым частям комплексных полюсов:
3) спектральные методы не дают оценок статических параметров Ло и hx,;
4) спектральные методы не дают оценок амплитуд составляющих ПХ, поэтому
оценки /р и ст , сделанные не по доминирующим полюсам, могут быть грубыми;
5) частотные (по ВЧХ) методы дают точные оценки параметров й0 и Лх только
для устойчивых систем;
6) частотные оценки параметров колебаний ПХ близки к истинным значениям
лишь при низкочастотном расположении пика ВЧХ относительно ее других изменений.
В других случаях оценки могут стать недостоверными.
108
ГЛАВА 4. УСТОЙЧИВОСТЬ СИСТЕМ
А В ТОМА ТИЧ ЕС КО ГО У ПР А ВЛ ЕН ИЯ
результате изучения в третьей главе методов расчета ВХ стало понятно, чго
характер их изменения целиком зависит от ПФ системы, а именно от распо-
ложения корней полинома ее знаменателя. Продолжим более глубокое исследование
качественных свойств элементов и систем САУ, определяющих их работоспособность
во времени и пространстве.
4.I. ПОНЯТИЕ УСТОЙЧИВОСТИ
С// стойчивость является важнейшим и самым необходимым условием работо-
способности автоматических систем, так как включает в себя требование за-
тухания переходных процессов во времени. Система с расходящимся переходным про-
цессом неработоспособна. Устойчивость СА У означает, что ее реакция на любое огра-
ниченное воздействие также является ограниченной. Понятие устойчивости нелинейной
динамической системы и условия устойчивости установлены А.М. Ляпуновым.
Как показано в п. 1.4, модель объекта в виде системы нелинейных ДУ (1.6) может
быть линеаризована в операторной форме A(p)^y(t) = B(p)Ax(t) с отклонениями
Ау(О = УЧ)~Ун(Ч и Ах(/) = х(Г)~хн(/) от номинальных режимов JK(0 и хи(/). Номи-
нальное движение является невозмущенным. Согласно (1.18) и (1.19), изображение от-
клонения выхода объекта равно
А У(.?) - ИД s) А.\( s)+
Л-у)-6(5)
Л(.у)
(4.1)
Устойчивость - это свойство, присущее сугубо объекту и не зависящее от внешних воз-
действий. Полагая в (4.1) AX(s) = 0 и ()(х) = 0, получим уравнение
АУсв(.»)-Р(5)М(а) (4.2)
л П -1 я ____
с полиномами .4(s)-^T«(-.v' , Р(я)С]Рр^1 , pj = "^а jAy^"1и,(0) V( = 0,п-1, описываю-
»=0 (-0 j=M
щее свободное движение объекта из ненулевых начальных отклонений Aj(0), ,
Ау(лЧ)(0) от невозмущенного движения.
Аналитическое определение понятия устойчивости по Ляпунову (рис. 4.1): невоз-
мущенное движение Уц(() называется устойчивым по Ляпунову, если
Ve >0 35г(е)>0: |Ау<'Ч0)|<5Дс)^|ДусД0|<е У/>0.
В неустойчивой системе малейший выход из но-
минального режима приводит к неограниченному дви-
жению (в реальности - к насыщению по мощности или
к разрушению объекта). Если Аусв(/->ж)-»0, то такое
движение называется асимптотически устойчивым.
Асимптотически устойчивое движение называется экс-
поненциально устойчивым, если |AjCR(/)j< Me-"*, где
Л/<х ; т>0. Движение, асимптотически устойчивое
109
при любых начальных отклонениях, называется устойчивым в целом. Иначе,существуют
определенные границы начальных отклонений, внутри которых движение будет устой-
чивым в малом.
4.2. УСЛОВИЯ УСТОЙЧИВОСТИ ЛИНЕАРИЗОВАННЫХ СИСТЕМ
/(Д ценка устойчивости есть оценка возможности осуществлять управление, по-
этому с нее начинается исследование любой САУ. Для установления условий
устойчивости линеаризованной системы (4.1) в силу принципа суперпозиции рассмот-
рим отдельно движения, вызванные начальными отклонениями и входным воздействи-
ем. Без потери общности примем невозмущенное движение нулевым: ун(/)-0, хн(г)=0.
Из (4.2) вытекает, что свободное движение полностью определяется полиномом
A(s) знаменателя ПФ, а формула разложения Хевисайда (3.4) раскрывает его характер:
V
_усв(0=^с4(0е*'/ Отсюда следует спектральное необходимое и достаточнее условие ус-
«=1
тойчивости (НиДУУ) линеаризованных систем:
Re(s,}<0 Vi~l,v. (4.3)
Для устойчивости линеаризованной системы необходимо и достаточно, чтобы все
полюсы ее ПФ были левыми.
Мнимая ось Im{у} является границей устойчивости. Если в процессе работы ус-
тойчивой системы в результате дрейфа ее параметров хотя бы один полюс перейдет в
правую полуплоскость s, то система станет неустойчивой. Точка s=0 мнимой оси на-
зывается апериодической границей устойчивости, а полюс s.-^O кратности я,- порождает
в свободном движении составляющую УмЛО-с^Ое0* = с;0+сгД-к..+с1Я._1{а'~1 неколеба-
тельного характера. Остальные точки мнимой оси составляют колебательную границу
устойчивости, а пара мнимых полюсов + jco к кратности л,- порождает колебательную
составляющую jfcB(/)=c,-(f)sin(<oKZ+<pK).
Системы, имеющие полюсы слева и на границе устойчивости, называются ней-
тральными. Строго говоря, переходные процессы в нейтральных системах не расходят-
ся,только если граничные полюсы - простые. Поэтому понятие границы устойчивости
весьма условное и при проектировании САУ необходимо добиваться безусловной ус-
тойчивости с определенным запасом, задаваемым степенью устойчивости д. Если вы-
полнено условие устойчивости с запасом Refs,}:; -т) Vz, то свободное движение затуха-
ет за время не более 3/т] с.
Аналогично свободному ведет себя возмущенное движение, вызванное ненулевы-
ми начальными отклонениями Ах(0), ..., Ах(я' !)(0).
Рассмотрим вынужденное движение, вызванное входным воздействием x(t). Его
изображение в (4.1) равно yBbin(s)=Wz(s)X(s). По теореме свертывания [1,2] произведе-
нию изображений fV(s)X(s) соответствуют оригиналы - интегралы Дюамеля
г t
]Ри<т)х(/-т)(1т, Jм^/-т)х(т)с1т. (4.4)
о о
Действительно, по определению преобразования Лапласа (1.16), имеем
110
fF(A )A'(v)“ je~JS»’(T)dT |е~'Ъ.(ф)бф-jje '<г+'*>)н,(г)х(ф)бт<1ф =
о о oo
X -J. -- X t XI
J Je w h’( т )x( t - т )d/dx = Je j»v( т )x( t - т )dxd/ -= L< Jн’(т )х(/ - т )dr
0г О 0 (о
Ввиду симметричности t и т справедлив и второй оригинал в (4.4). Пусть входное воз-
действие абсолютно ограничено: |х(/)|< М Тогда выходной сигнал должен удов-
летворять условию
г t
квын ( oj7 f IН t )| к( t ~ "Г)! df М jjw( т )| dx < ОС.
о о
Отсюда следуют временные условия устойчивости линеаризованной системы. Не-
обходимое и достаточное условие - абсолютная интегрируемость ее ИХ. Необходимое,
но не достаточное условие - сходимость ИХ к нулю:
11ти'(/)=0. (4.5а)
В соответствии с предельными формулами (3.18) это необходимое условие равносильно
требованию к ПФ
Нт{л’Ж(х))-0. (4.56)
Л-—>0
S
На примере системы с перевернутым маятником и ее ПФ (3.19) можно убедиться,
что выполнение второго предельного условия (3.18) для ифэд) не гарантирует устойчи-
вости, если не все полюсы левые.
Условия устойчивости САУ требуют расчета полюсов ПФ, что для систем высо-
кого порядка представляет сложную задачу. Однако нужно знать не сами полюсы, а их
расположение на комплексной плоскости относительно мнимой оси. Правила, позво-
ляющие исследовать устойчивость системы без вычисления полюсов ее ПФ, называются
критериями устойчивости (КУ), которые делятся на две группы:
- алгебраические (Рауса, Гурвица и Льенара - Шипара);
- частотные (Михайлова и Найквиста).
Математически все КУ эквивалентны, гак как устанавливают условия принадлеж-
ности полюсов ПФ левой полуплоскости s. С их помощью оценивают влияние пара-
метрических или структурных изменений на устойчивость, определяют границы допус-
тимых изменений параметров, при которых в САУ сохраняется устойчивость или же-
лаемые показатели качества.
4.3. АЛГЕБРАИЧЕСКИЕ КРИТЕРИИ УСТОЙЧИВОСТИ
лгебраические КУ работают с характеристическим полиномом (ХП)
~ * п
C(s}-c{) г с. жч.. ,+спs'1
i=V
(4.6)
- полиномом знаменателя ПФ той системы, устойчивость которой исследуется. Полу-
чим ПФ W\(s) и ХП Cp(s) и C3(s) разомкнутой и замкнутой систем (рис. 4.2):
а) в разомкнутой системе IK(s)~ B(s)/A(s), Ср(ж) = Л(х);
б) в замкнутой системе с единичной ОС /K(s) = B(s)/A(s), FK/s)~ FK(s)/(l±Hz(x)),
<>)
Рис. 4.2
«)
C3(s) = J(s)±B(s);
в) в замкнутой системе с неединичной ОС ЙИ(х)= В(х)/А(у), И^Д») - В0(.у)/.40(\),
^(s) = lV(S)/(l+lV(s)lV0(S)), Ct(.y)~ A(s)A0(S)±B(s)B{}(s).
В обозначениях « + » и «± » верхние знаки соответствуют ООС, а нижние - ПОС.
Полином, все корни которого - левые , называется устойчивым. Если коэффициен-
ты ХП - числа, то алгебраические КУ устанавливают факт устойчивости или неустой-
чивости системы с данным ХП. Если некоторые коэффициенты ХП зависят от парамет-
ров, то КУ дают соотношения для построения областей устойчивости системы в про-
странстве параметров.
4. 3.1. Необходимые условия устойчивости
97еобходимые условия устойчивости (НУУ) полинома: все его коэффициенты долж-
ны быть одного знака, то есть
{с, >0 Vi=0,n}u{c/ <0 x/i=0,л}. (4.7)
Доказательство. Используем формулы Виета
si+s1+...+s„=-c^cn,
siS2+sxsz+..As,,_}sn^cn^lcn,
. M2 - Sn=(-l)"co/c»>
связывающие коэффициенты полинома с его корнями. Для к -й формулы Виета
С* к
ZFIs =(-!)*с._*(4.86)
1 7=1
Суммирование в (4.86) ведется по всем С* возможным сочетаниям произведений к
разных корней полинома (кратные корни считаются разными).
Допустим противное: в устойчивом полиноме существует хотя бы один коэффици-
ент сп_к, знак которого противоположен коэффициенту са. Если к - четно, то в (4.86)
слева сумма произведений четного количества левых корней положительна, а справа
с»-к1сп<^- Если к - нечетно, то слева сумма произведений нечетного количества ле-
вых корней отрицательна, а справа ~са_к/са >0. Полученные противоречия доказыва-
ют необходимость условий (4.7) для устойчивости полинома, f 1
Например, система «тележка - перевернутый маятник» с ПФ (1.11) имеет ХП
C(s) = 600s+940s2-216s3-100s4 с коэффициентами разных знаков, к тому же со=О. Ус-
ловия (4.7) не выполнены, что подтверждается наличием не левых корней =0 и
= 2,52.
112
Приведем пример неустойчивого полинома с положительными коэффициентами
C(s)=68+9.v+2s2+53 = (44-.v)(I7 2.v+?), (4.9)
имеющего левый действительный корень - -4 и пару правых комплексно-
сопряженных корней .v-, з - +l+4j. Правое расположение именно комплексных, а не дей-
ствительных корней неустойчивого полинома с коэффициентами одного знака является
не частным случаем, а правилом', если выполняются НУУ (4.7), то все действительные
корни полинома - обязательно левые. Комплексные корни могут и не быть все левыми.
Достаточные условия устойчивости (ДУУ) полинома устанавливают дополни-
тельные ограничения на его коэффициенты, которые совместно (по правилу «И») с
НУУ составляют полный набор ограничений.
4. 3.2. Критерий устойчивости Рауса - Гурвица
Исследуя вопрос о расположении корней полинома (4.6) с действительными коэф-
фициентами, Раус и независимо от него Гурвиц доказали теорему 2.5, гласящую: число
правых корней действительного полинома C(s) равно числу инверсий знака в последова-
тельности
м {сп, М{, MiM2, М2М3..
(4.Ю)
где М, есть i -й главный минор пхл-матрицы Гурвица Г:
/и2 м3. ,м„ -1
cn-i ‘-'лЗ сл-5 • .. 0 0
сп сп-2 сп- 4 .. 0 0
Г 0 0 7 7 & с J. J .. 0 .. 0 0 0
0 0 0 . .. с2
-л-1 >
м2 - 1 1 с с <‘л 1с'л- 3 спсп-3 '
сп-1 сл-3 ^л-5
м3 = сп сп-1 Сл4 ,Л/л=с0Л/л-
0 сл-1 ^л-З
Как частный случай, из теоремы следует критерий Рауса - Гурвица устойчивости
действительного полинома (условия, при которых число его правых корней равно ну-
лю): для устойчивости действительного полинома необходимо и достаточно, чтобы все
элементы последовательности (4.10) были одного знака:
(sgnc„)‘ >0 УГ-1,л .
(4-11)
Если ся>0, то все главные миноры должны быть положительны. Если сп<0, то
знаки миноров должны чередоваться, начиная с -- сп [ <0. Можно сменить знаки ко-
эффициентов ci (от этого спектр полинома не меняется) и к полученному полиному
применить критерий устойчивости (4.11) для положительных коэффициентов.
Границам устойчивости соответствует любое обнуление неравенств в (4.7) и (4.11).
Например, при простых корнях ХП значение со = О дает Мп-с0Мя_1 =0 - апериодиче-
скую границу устойчивости. Если со*0, а Мп_} =0, то Мп -с^Мп_{ = 0 - колебательная
граница устойчивости.
Для ХП первой степени C(s)-c0+crv НиДУУ имеет вид (sgnc1)c0>0, то есть ко-
эффициенты с0 и с1 должны быть одного знака.
Для ХП второй степени C(.v)=c03 CyS+c2s2 к требованию однозначности коэффи-
f I ’ 01
циентов <<), q и с2 приводят НиДУУ {(sgnc2)q >o}nj(sgnc2)2j(^ .
Для ХП третьей степени C’(s)--c0+c1.v+c2s2+c353 НиДУУ имеют вид
{(sgnc3)c2 >o)n{Af2>o}n{(sgnc3)3M2c0>o|, то есть с0, с2 и с3 должны быть одного
знака и Л/2=с2С|-е3ео>0.
& П р и не р 4.1. Проверим по критерию (4.11) устойчивость полинома (4.9) с поло-
жительными коэффициентами: sgn(c3) sgn(l)>0, Afj=c2-2>0, М2--с2Су туо = -50<0,
Л/3-~-спМ2 =-3400 <0. Условия (4.11) не выполняются, поэтому полином (4.9) неустой-
чив. □
£7 Пример 4.2. C(s)=4+4s+s2 + s3 - НУУ (4.7) выполнены. Составив матрицу Гур-
1 4 О
1 4 О
О 1 4
вица Г=
, по ее минорам
Му —1>0, M2-\-4~4\-Q и коэффициенту со-4*0 де-
лаем вывод о колебательной границе устойчивости. Действительно, полином
C(.v)-(l + sX4+$2) имеет один левый корень S] =1 и пару мнимых корней .?2 3 =±2j. □
В альтернативной форме критерия, предложенной Раусом, строится таблица из
л+1 строк в виде перевернутого ступенчатого треугольника:
Р\\ Р11 Р12 Р22 •• Р\щ -Р2П,
р= Рп\ Рп2 .. ...
Рп+\,\ Рп+1,2
Pl I - ’ Pl 2 Р1Л] c«+2-2i'| -
Рц ~ * Л1 * Р22 ~СЛ-3’."“> P'llii ~ Сn+l-lvj ‘
Pij ~ Pi-2,.j+1 ~Pi-l,j-H Pi-2,1 /'Рг-1,1 ’
где V, =1+[л/2], v2-1+[(л+1)/2], а [х] - целая часть числа х. В [11] показано, что эле-
менты первого столбца таблицы Рауса составляют последовательность рп=сл,
p2i ~cn-i -Му, р31 ~М2/Му , ..., pi+l । -МДМ}_{ с числом инверсий знака таким же,
как у последовательности (4.10). По Раусу критерием устойчивости действительного
полиноми является постоянство знаков всех элементов первого столбца таблицы Рауса.
Число инверсий знака у элементов первого столбца равно числу правых корней полинома.
Очевидно, что в НиДУУ Рауса - Гурвица (4.11) почти не используются более про-
стые НУУ (4.7) и в то же время требуется вычислять л-2 главных минора М2хМ„А
(миноры Му-сп_у и Мп-с^Мп_у элементарны), что затруднительно для полиномов
высоких степеней. Льенаром и Шипаром получены НиДУУ, использующие НУУ (4.7) и
миноры либо с четными, либо нечетными индексами [11]. Действительный полином со
всеми коэффициентами ci >0 устойчив, если либо М2к >0, либо M2k+i >0. Полином со
всеми коэффициентами с; <0 устойчив, если либо М?к >0, либо M2k,.A <0.
Критерий Льенара - Шипара дает свободу выбора анализируемых миноров. Нуж-
но так выбирать индексы, чтобы уменьшить количество и степени вычисляемых мино-
ров. Например, при л=8 достаточно найти либо М2, М4, М6, Мп, либо М2, М5,
М2. Очевидно, что второй набор миноров предпочтительнее как по количеству, гак и
по максимальной степени.
114
4.4. ПОСТРОЕНИЕ ОБЛАСТЕЙ УСТОЙЧИВОСТИ
ПА РА МЕТР И ЧЕСКИХ ПОЛИНОМОВ
/С] собый интерес представляет полином, коэффициенты которого зависят от од-
кого или нескольких параметров:
п
С(.ч,р)-с()(р)+с1(р)л+...+сй(р)л" (412)
»=0
При изменении вектора параметров р могут нарушаться НиДУУ (4.11). Такие системы
называются условно устойчивыми. Системы, в которых условия устойчивости выпол-
няются при любых физически допустимых значениях параметров, называются безуслов-
но устойчивыми. Системы, в которых НиДУУ не выполняются ни при каких физически
допустимых значениях параметров, называются структурно неустойчивыми. Множест-
во точек в пространстве параметров полинома, в которых выполняются НиДУУ, со-
ставляют область устойчивости полинома.
С.7 Пример 4.3. Исследовать устойчивость разомкнутой (PC) и замкнутой (ЗС)
единичной ООС систем в зависимости от параметра р ПФ PC
,, 3p-10+2ps
W {s)~--------------------------.
p (P“6)+(p+6)s+(p-2)s2+2ps3
Решение Cp(s,p)-p-6+(p+6)s+{p-2)s2 + 2p s3. Область устойчивости PC Op
cpiAP') Ср1(д) Срг(р} Грз(Р)
удовлетворяет условиям (рис. 4.3)
fcp,(p)>0 V/-0,2,3)u(cp;(p)<() V/-0,2,3))
П
tWP2(/s)>°}-
где
^р2(Р)-"Ся(/’кр2<Р)-сро(/’крз(/’)-
-(р+6)(р-2)~ 2р(р-6)--(/> 0,8)(р 15,2).
Таким образом, PC устойчива при />е(6, 15,2).
В ЗС С}(х,р)-4(р-4)+3(р + 2)хь(р-2)ж2 +
<Чо</О <h\(p) <-МР)
удовлетворяет условиям (рис. 4.4)
{(сДр)>0 V/-0,2,3)U(ci(P)<0 Vz- 0,2,3)}
П
{Mj2(p)>0}.
где
Л/.12(р)-с,|(р)с.}2(р)-сзО(р)сз3(р)^
-3(/> । 2)(р -2) -8/?(/>- 4)- 5(/>--0,4)(/г- 6).
2р s3, а область устойчивости ЗС О,
?зАр)
Cj4. Cj+ С> +
2Z<L..__1J,____0,
0 2 4 р
И м, м,
з2 ч2
! ; 0,4 6 р
vj Оз
-___________________________►
4 6 р
Таким образом, ЗС устойчива при ре(4, 6).
5+ Ср+ Ср+
0 2 6 р
и м , м,
___
i ; 0,8 15,2 р
Л °р
-____.______________________►
6 15,2 р
Рис. 4.3
Рис. 4.4
ГС-
Общей области устойчивости PC и ЗС нет, так как О, ПО, =0 . I" I
0 7 Пример 4.4. Определить структуру ПФ
1Ер(.\) и ограничения на параметры последова-
тельного регулятора (рис. 4.5), обеспечивающе-
го устойчивость ЗС «тележка - перевернутый
маятник» с ПФ (1.11) с ООС по углу отклоне-
ния маятника. Степени полиномов ПФ регуля-
тора должны быть не выше второй, а ее полю-
сы должны быть левыми.
Решение. Запишем ПФ объекта управления и регулятора:
(4-)=_____________________w ________________________________
ф 600+940s-216s2 -100s3 D(s) p a0+ais+a2s2+a2s3 4p(s)
Замкнутая система имеет ХП
C3(s)=D(s)Ap(s)+Bv(s)Bp(s)~ Cq +<?^5г +6'55
(4.13а)
с коэффициентами с0=600а0, q = 940а0 тбООа, +6й(), с, - 216ло+94О«( тбООлз+б^ ,
с2-- 1ООао-216Л[ +940а2+6А2, с4 ~-100а|-216д2, с5 = -100а2.
В соответствии с ограничениями на ПФ регулятора ее полином Jp(s) должен
иметь коэффициенты ai одного знака. Но тогда коэффициенты q не будут удовлетво-
рять НУУ (4.7) при степенях Лр($), равных 1 и 2. Единственно возможная структура
ПФ регулятора допускает полином Jp(s) = a0 нулевой степени. Полагая в0 = 1, получим
W/p(s) = Ao+i|S+A2s2 и ХП замкнутой системы C3(s)-c0 +c1s+c,s2+c3s3 с коэффициен-
тами со=6ОО, С| =94О+6Ао, с2 ~ - 216+6Л], с2-~ 100+6й2. Так как со-6ОО>О - константа,
то НиДУУ (с2 >0)А(сз >0)П(Л/2 = С|С2 -с0с3 >0) имеют вид
^>36, Ь2 >16,7, (Ло+156,7)(А|-36)-1О0(Л2-16,7)>0.
(4.136)
С целью графического изображения области устойчивости в пространстве пара-
Рис. 4.6
метров регулятора {Ь^.Ь^Ь-)} выполним перенос
осей координат:
р0=й0+156,7, р, =Л]-36, р2Л216,7.
В новых осях область устойчивости удовле-
творяет неравенствам Р, >0, р2 >0, РоР|>1ООР2.
Уравнение роР|~1ООр2 описывает поверхность ги-
перболического параболоида, а неравенства (4.136)
- область первого октанта пространства PoxPj хРг
между поверхностью параболоида и плоскостью
р2 -0 (рис. 4.6).
Регулятор с ПФ Wp(s)~bCl +6|.s+62s2 требует
измерения угла <р отклонения маятника от верти-
кали (если из области устойчивости выбрать А0^0),
обязательного измерения или вычисления угловой
скорости ф' и углового ускорения ф" . С 1
116
Алгебраические критерии позволяют определить наличие в системе заданной сте-
пени устойчивости q . Для этого в (4.12) подставим x=z-q и получим условия, при ко-
торых все корни полинома C(z,jp) лежат левее оси а полинома C(s,p) - левее
прямой ж- q на плоскости s. Для получения предельного быстродействия /,niri необ-
ходимо найти максимальное значение q>0, при котором область устойчивости поли-
нома C(z-T],p,) стягивается в точку. Тогда оценка быстродействия /1ПШ ~3/qmax .
П р и ме р 4.5. Построить допустимую область изменения коэффициентов ПФ ре-
гулятора минимальной сложности l't/p(s) = bis+b2S2 из примера 4.4, в которой ЗС устой-
чива с временем регулирования /р<3с. Найти параметры регулятора, доставляющие
системе предельное быстродействие.
Решение. По (3.36) определяем степень устойчивости q = 3//p=l. Подставим
s-z -q в (4.13а):
C3(z-п)=600т 94O(Z-q)+(6A1-216Xz -n)2+(6fr,-lOOXz-q)3=/io+ftIZ+A2Z2+*3z\(4.13B)
где ft0=6&q2-6A2q3+600-940q-216q2+IOOq3; h{ = -12^4+18A2q2+940+432q-300q 2;
А2 =6А(-18A2q-216+300q й3 =6Л2-100. Подставив q = l в условия устойчивости
{(Ло >0)(й2 >0Хй3 >О)1)(Ло <0)(й2 <0)(Л3 <0))П(й1Л2 >ЛоЛ3),
получим область О, заштрихованную на рис. 4.7,а. Значению ц=0 соответствует об-
ласть устойчивости (ограничена пунктиром), целиком включающая область степени ус-
тойчивости Т)=1.
Для определения предельного быстродействия на рис. 4.7,б построена поверхность
границы устойчивости полинома (4.1 Зв) в пространстве параметров Л] хА2 хц, Поверх-
ность имеет ступенчатый характер из-за того, что параметр q изменялся с шагом
Aq=0,1. Основанию полученной «пирамиды» соответствует область устойчивости сис-
темы при q = 0. Десятая ступенька ограничивает область степени устойчивости t|=l.
Вершина пирамиды в точке (й, =117,24, 62= 31,24) соответствует максимальной степени
устойчивости qmax =1,9 и предельному быстродействию /min ~ 3/1,9= 1,58 с. Cl
Рис. 4.7
4.5. ЧАСТОТНЫЙ КРИТЕРИЙ УСТОЙЧИВОСТИ МИХАЙЛОВА
Q/ петитные критерии устойчивости работают с ХП C(s) или ПФ PKf.v) после
построения необходимых ЧХ. Подставив в (4.6) s-jw , получим КЧХ
C'(jco)-P(tt)) f j(7((B) с четной ВЧХ Р(го) и нечетной МЧХ £)((о):
1 Пр Т
Р((0 )=с0 -с2® 2 +с4(0 4 -.. £(-1)* с2/® 2t, пр = [л/2],
'X (414)
-с3® 3 +С5® 5 -.. .= £(-1)' смш nf = [(л + 1)/2].
Годограф С(» при изменении частоты <в от 0 до да называется годографом Ми-
хайлова. Он имеет следующие предельные свойства'.
1) начальное значение C(jO) = P(O)+j(J(O)~co TjO=co - годограф Михайлова начи-
нается на действительной оси Re{C(jto)};
2) конечное значение С()да)->с„)п(да)" - годограф стремится асимптотически в
бесконечность под углом sgn(c„)лл/2 к действительной оси.
а л
Выполнив разложение C(s)=c„PJ(s-Sj) и C(j®) = cnPJ(j©-х,), найдем прираще-
«=1 «=1
ния (разности между конечными и начальными значениями) фазовых углов А,- ком-
плексных функций )=j<n -si при изменении to от 0 до оо для корней х, различных
типов (рис. 4.8):
а) если s, - действительный корень, то А_=л/2-0-я/2 для левого корня и
А, -л/2-т1--п/2 для правого;
б) если s, и - комплексно-сопряженная пара корней, то сумма приращений ар-
гумента равна 2A_=A!+A2=7t для левой пары и 2А+=А3+А4=-л для правой.
Пусть полином С(з) степени л имеет ровно л+ правых, л_ левых корней и ни од-
ного корня на мнимой оси. Тогда суммарные изменения аргумента комплексной функ-
ции C(jto) в радианах Аф и квадрантах АА равны
( Аф=л+А++л_А_=(л_-л+)л/2=(2л_-л)л/2 = (л-2л+)л/2,
} АА л л+ 2л л л 2л+. ' * '
По этим формулам можно найти число правых и левых корней полинома C(s), постро-
ив годограф C(j®) и определив приращение фазового угла Aarg{C(jo)|:
л+=л/2-Аф/л =(л-АА)/2, л_= л/2+Аф/л =(л+АА)/2. (4.16)
Рис. 4.8
Если C(.v) имеет корни на мнимой оси, то годограф Михайлова на частоте о-О
(при =0) или со - -со к (при «| 2 - ij<D к ) проходит через начало координат, a arg{C(jco))
не определен. В таких случаях ХП может быть нейтральным.
Для устойчивости полинома C(s) потребуем, чтобы его годограф C(j<n) нигде не
проходил через начало координат и было л+(). Тогда из (4.15) следует Дф-дтс/2 или
ЛА п . Отсюда получаем критерий устойчивости Михайлова: для устойчивости линей-
ной системы необходимо и достаточно, чтобы изменение аргумента годографа ее ХП
степени п было определенным и составляло лп/2 рад или п квадрантов при изменении
частоты от Одо оо. При выполнении критерия Михайлова годограф C(jw), начинаясь
на действительной оси, проходит последовательно п квадрантов против часовой стрел-
ки. нигде не обращаясь в нуль.
Прохождение годографа через начало координат является необходимым (есть кор-
ни полинома на мнимой оси), но не достаточным (могут быть и правые корни) услови-
ем нейтральности полинома. Для разрешения граничной неопределенности используем
метод вариации коэффициентов ХП, разрешив им изменяться (с;±е,-, е, »0). При этом
граничные корни ХП сдвинутся влево или вправо от мнимой оси, а годограф сместится
от начала координат. На рис. 4.9 приведены годографы нейтрального ХП (/) третьей
степени и неустойчивого ХП (2)
четвертой степени. Исходный го-
дограф соответствует нейтраль-
ной системе, если хотя бы один из
двух модифицированных годогра-
фов. изображенных пунктиром и
не проходящих через начало коор-
динат. удовлетворяет условиям
устойчивости. График / на рис.
4.9,д соответствует апериодиче-
ской, а на рис. 4.9,б - колебатель-
ной нейтральности.
Построим годографы для полинома Ср(х,/?) = p-6+(p+6)s+(p-2)s2 +2ps3 из при-
мера 4.3 для значений параметра /?е{-6, 0,8, 6,10, 15,2, 20} (рис. 4.10). В соответствии с
рис. 4.3 лишь ХП Cp(s, 10) устойчив, что подтверждается его годографом.
При р-(> и p-2Q изменения аргумента годографа равны ДА -1, что по (4.16)
дает число правых корней Ср(х,-6) и Cp(s,20), равное л+=2, а соответствующие ХП
делает неустойчивыми.
При />—0,8 годограф проходит через начало координат, а небольшие изменения
/>=0,8±0,2 дают л+ =1 (/>=0,6) и л + =3 (/> = 1). Следовательно, при р = 0,8 система явля-
ется не нейтральной, а неустойчивой. При /? = 6 годограф выходит из начала коорди-
нат. Вариации параметра />=6±1 смещают годограф влево (неустойчивость при р-5)
или вправо (устойчивость при р = 7). Следовательно, при /?=6 система нейтральна.
При /? = 15,2 годограф также претендует на нейтральность. Вариации /> = 15,2+2 дают
л+=0 ( устойчивость при />=17,2) и л+ = 2 (неустойчивость при /> = 13,2). Следователь-
но, значение параметра р-15,2 доставляет системе с ХП Cp(s,15,2) нейтральные свой-
ства устойчивости.
Перейдем к математической формулировке критерия, позволяющей исследовать
устойчивость как числовых полиномов C(s), так и параметрических C(s,p). Пронуме-
руем корни полиномов (4.14) в порядке чередования:
Р(а,р)-0 При ® =CD1(/?)<CO }(/?)<..«о 2лр-1(р) ’
Q(a,p)-Q при ® =®0=0<®2(p)<'...<®2n^(jp).
При нахождении ®,-(р) решаются алгебраические уравнения относительно ® ’ и из по-
лученных корней выбираются только допустимые:
ОДЗ. ®-(р)>0 = (4.17)
Требование к годографу начинаться на действительной оси удовлетворяется авто-
матически в силу действительности коэффициентов полинома C(s): годограф начина-
ется в точке с0. Требование к годографу поочередно пересекать оси при возрастании
частоты о от 0 до ад налагает на параметры полинома и-1 ограничений - неравенств,
полностью поглощающих условия (4.17):
0=®^<®f(^)<...<®;4(^). (4.18)
Требование к годографу вращаться против часовой стрелки в сторону увеличения
аргумента <р(со) = arctg(^(co)/7э(со)) означает ф ’(®)>0 V® >0, где
-Р2(о) №№)"g(a)nm) Q'(®)P(®)-g(®)P'(®)
р 2(ю)+е с®) р2(®) ic(j®)i-
Подставив сюда производные частотных функций (4.14) при ® -0, получим условие оо-
нозначности ненулевых коэффициентов ХП с0 и q:
ф'(О) = С1(р)со(р)/со(» = с|(^)/с()(р)>О с0(р)с1(р)>0. (4.19)
Таким образом, получена математическая формулировка критерия устойчивости
Михайлова: для устойчивости линейной системы необходимо и достаточно, чтобы ко-
эффициенты с0 и С] ее ХП C(s) были ненулевыми и одного знака, а корни (a i уравне-
120
ний Re{С(j®)} -0 и Im{C(j®)}=0 чередовались по возрастанию в соответствии с (4.18).
Для ХП первой степени НиДУУ (4.18) и (4.19) имеют вид с(|с( >0, то есть коэффи-
циенты с0 и с( должны быть ненулевыми и одного знака. Для ХП второй степени
= с(!/с2 >о|п{с,()с1 >()} , то есть с0, с( и е2 должны быть ненулевыми и одного знака.
Для ХП третьей степени 2 ~с^/с2 >о|п^с(>/с2 <® 1 -с‘|/сз}п{с0С| >0|, то есть пары ко-
эффициентов }, {<?0,с2} , {с2,с3} должны быть одного знака и Г|С2>сос3. Таким
образом, НиДУУ Михайлова совпадают с НиДУУ Рауса - Гурвица: коэффициенты с,- -
ненулевые одного знака и Л/7 = с1с2-сос3 >0.
1Г7 Пример 4.6. Исследовать устойчивость числовых полиномов:
a) C(.v) = 5+14s+14s2+6s3 + s4 : Р(®)-5-14® 2+®4 =0 при ®2=0,37 и ®2 = 13,6;
2(®) = 14®-6®3 -О при ®о=0 и ®2-2,33. Так как корни Р(ш) и §(©) чередуются, а
также с0 5>0 и с( 14>0, то годограф C(j®) (кривая 1 на рис. 4.11) обходит последо-
вательно п = 4 квадранта против часовой стрелки, а полином устойчив;
б) C(.s')- 68+9.v+2.v2 + .v3: P(®) = 68-2® ~ = 0 при
®2=34; £>(®) = 9® ®3 при ®q=0 и ®|=9. Так как кор-
ни Р(®) и <2(®) не чередуются, хотя со=68>0 и
ct =9>0, то годограф не обходит последовательно л = 3
квадранта против часовой стрелки (кривая 2 на рис.
4.11), поэтому полином неустойчив. Изменение аргумен-
та годографа ДА--1. По нему определяем, что из трех
корней полинома число правых корней п+ = (3+1)/2=2, а
левых л--(3-1)/2=1. CJ
“Im {С}
Рис. 4.11
8'7 Пример 4.7. Исследовать, при каких значениях параметров К, 7J и Т2 разомк-
нутая и замкнутая единичной ООС системы будут устойчивыми. Передаточная функция
PC есть W?(s)^K/s(\ + Txs)(\ + T2s).
Решение. Характеристический полином PC равен
Cp(s) = s(l+7] s)(l+T2.v) = ,т+(7] +T2)s2 +T{T2s3.
Так как ср0 = 0, то один полюс Wp(s) - нулевой, поэтому PC устойчивой быть не может.
Она может быть нейтральной, если полином Cp(s)=(?p(s)/s=l+(7'1 + T2)s+T]T2s2 устой-
чив. Определим корни его вещественной и мнимой функций: 0(®) = (Т|+Т2)® =0 при
®0=0: Р(ю)=1-Г1Т2® 2 =0 при ®2 = \11\Т2. Критерий Михайлова (4.18), (4.19) дает
{1/7] Т2 >0}(Т{Т) +Т2 >0} : при 7] >0 и Т2>0 полином Cp(s) устойчив, а PC нейтральна.
При остальных 7j и Т2 она неустойчива.
В ЗС с единичной ООС C3(s)=K+ s-^(Tx+T2')s1 +TxT2s3, б(®) = ®7]Г2®3=0 при
®о=О, Р(<о) = К-(Т{+Т2)<о2 =0 при ®2 = ЛГ/(Т] +Т2). Критерий Михайлова
дает условия устойчивости {г, >о)п{т,2 >о}п|о<ЛГ<ЛГгр|. Превышение коэффициентом
К граничного значения =\/7]+\/Т2 ведет к неустойчивости ЗС.
Годографы C3(j®), построенные на рис.
4.12 для различных значений К, удовлетворя-
ют правилу огибания начала координат на три
квадранта против часовой стрелки только при
()<К<К При К О годограф выходит из
начала координат и соответствует апериоди-
ческой границе устойчивости, а при К К1Т
пересекает его - что колебательная граница ус-
тойчивости. 1? I
4.6. ЧАСТОТНЫЙ КРИТЕРИЙ УСТОЙЧИВОСТИ НАЙКВИСТА
s')етод проверки устойчивости, разработанный Г. Найквистом, определяет
VXZ</ устойчивость замкнутой системы по ЧХ разомкнутой. Метод широко при-
меняется в радиоавтоматике благодаря его простоте и возможности использовать экс-
периментально полученные ЧХ фактически без знания ПФ. Критерий имеет простой
физический смысл и дает условия, при которых отрицательная ОС превращается в по-
ложительную и делает ЗС неустойчивой.
4.6.1. Вывод критерия Найквиста
.рассмотрим систему, образованную замыканием объекта с ПФ W(s)= B(s)jA(s)
контуром ООС, имеющим ПФ Иф(у) - B(l(s)/A,,(s) (рис. 4.13). Замкнутая система имеет
ХП C\(s)-A(s)A0(s)+ B(s)Bq(s) и ПФ ЖДу)-B(s)A(}(s)/C\(s) от входа х до выхода у.
Временно разорвем ООС в точке z и определим контурные ПФ и ХП разомкнутого
контура от входа х до выхода z:
B(s)Bn(s)
^K(s) = ^(5)^0(S)-—, CK(S)-/i(sMo(s)•
VK(s)
Сформируем операторную функцию Найквиста".
_ Л(х)4)(у)+Л(у)Д0($) _ С, (s)
Вектор Найквиста УУ(jro) = 1 + WK(j®) соединяет на ком-
плексной плоскости точку Найквиста K=(-i, jO) с точкой
годографа Mz1<(joT) (рис. 4.14). Допустим, ПФ H'Js) имеет
«+, а ПФ И'Ду) - л33 правых полюсов. Из (4.20) и (4.15)
получим изменение аргумента вектора Найквиста в квад-
рантах при изменении частоты аг от 0 до оо:
AA(V - АА3 - АА = (я-2лз+ )-(л- 2л4 )- 2(л . - лз+) . (4.21)
Построив годограф CK(jco), определим изменение его
аргумента АА , а по (4.16) - число л+ правых корней CK(s).
Далее потребуем, чтобы ХП ЗС С3(у) был устойчивым, то есть не имел правых корней
(«з+ =0). Тогда из (4.21) следует критерий устойчивости Найквиста: для устойчивости
122
ЗС ( контурной ПФ И^Дх), имеющей п + правых полюсов, необходимо и достаточно,
чтобы вектор Найквиста 7V( ) = 1 + ИД (jco) при изменении частоты со от Одо <» имел
изменение аргумента 2п, квадрантов (18(Еп + или пл4 рад).
Если критерий Найквиста не выполняется, то ЗС неустойчива или нейтральна. В
первом случае число правых полюсов ее ПФ можно определить ио (4.21) и (4.16):
п3 + л+ - ААЛ,/2 = (я- txk - .
Прохождение годографа через точку 6? является необ-
ходимым (есть полюсы ЖДх) на мнимой оси), но не дос-
таточным (могут быть и правые корни) условием ней-
тральности ЗС. Для разрешения граничной неопределен-
ности используем метод вариации коэффициентов ПФ, раз-
решив им изменяться в малых окрестностях. При этом гра-
ничные полюсы ПФ отойдут от мнимой оси, а годограф
сместится от точки Найквиста. Исходный годограф соот-
ветствует нейтральной системе, если хотя бы один из двух модифицированных годо-
графов, изображенных на рис. 4.15 пунктиром и не проходящих через К, удовлетворяет
условиям устойчивости.
Назовем охватыванием точки изменение угла поворота вектора, проведенного из
этой точки, на четыре квадранта (360° или 2л рад) против часовой стрелки. Тогда ус-
ловие изменения аргумента вектора /V на 2«+ квадрантов можно заменить альтерна-
тивным условием охватывания годографом ИД (jo) точки Найквиста ровно п^/2 раз.
Третье альтернативное условие устойчивости
использует значения переходов годографа ИД()т) че-
рез действительную ось левее точки К (рис. 4.16).
Знак перехода равен знаку изменения аргумента. Оче-
видно, что число охватов годографом точки К равно
сумме переходов им через действительную ось левее
этой точки. Таким образом, мы получили четвертую
альтернативную формулировку частотного критерия
устойчивости Найквиста, не требующую подсчета
„X \ с _ ___________________,
-‘J—=ю-о-с>-(—Ь—с-----------►
\ V» ' i, К 0 }
<ДГ72> Ср
Рис. 4.16
изменения аргумента вектора 7V: для устойчивости ЗС с контурной ПФ имею-
щей п+ правых полюсов, необходимо и достаточно, чтобы годограф разомкнутого кон-
тура ИД(jar) пересекал действительную ось левее точки Найквиста в сумме п_,/2 раз.
На что надо обратить внимание, применяя критерий Найквиста?
1. Число правых полюсов контурной ПФ ^(s) можно найти по (4.16), построив
годограф Михайлова CK(j®): л+ ~(п -\к)/2, где АЛ - изменение угла поворота годо-
графа при изменении частоты от Одо со.
2. Особенно аккуратно надо строить годограф ИДО») в окрестности точки Найк-
виста. Если годограф проходит точно через эту точку и при небольшой вариации фор-
мы удовлетворяет критериям устойчивости, то ЗС находится на границе устойчивости.
3. Пересечения годографом действительной оси правее точки Найквиста в сумме
переходов не учитываются.
4. Если ПФ ИД(х) = Як(х)/Лк(х) имеет порядок астатизма v, то Лк(х)svDK(s),
где DK(s)=av +av+}s+...+a nsa~v, и при ® >0 годограф ИД. (jeo) начинается в бесконеч-
ности под углом <p(O)-(sgn(Ao/«v) v-l)90°, что затрудняет определение охвата годо-
графом точки Найквиста. Для преодоления этого заменим прямую линию .v jeo при
()<®<е на начальном участке мнимой оси дугой окружности радиуса с (рис. 4.17,а):
х-Ее34', где е—>0; 0<ф-®л/2е<л/2. При этом полюс -(> должен оставаться левее
направления обхода. Теперь годограф при ()< св <е имеет вид
W (1(0)=-^ (i«) е ivo.n .A.-e-J''0”
К * у . у
е Djj®) £ av
На малых частотах он представляет собой дугу окружно-
сти радиуса /f, — |л0/е v«v|, начинающуюся на положи-
тельной (при >0) либо отрицательной (при
b0]av<Q) действительной полуоси Re^EK| и описы-
вающую угол - уя/2 по часовой стрелке (рис. 4.17,6). В
пределе при е—>0 радиус /?1~>ос, но начальное направ-
ление и угол поворота сохраняются. Принято такую дугу
бесконечного радиуса изображать пунктиром и называть
пунктирным дополнением астатического годографа.
5. Если И'Дх) имеет пару мнимых полюсов
s12 = ±jco к , то Лк(х)=($2+® 2k?K(s) и при ®—->0 годо-
граф )РК(» разрывается на две ветви, асимптотически
сходящиеся в бесконечности к прямой, проходящей под
углом <р(® K) = arg{5K(j® K)/(7K(j® к)}. Как и в случае ас-
татической ПФ, заменим s=j® в малой е -окрестности
частоты ®к дугой окружности радиуса е >0 (рис.
4.18,а): s = joK+EeJ4’, где -я/2< ф <я/2. При этом полюс
= jco к должен оставаться левее направления обхода.
Годограф И^О®) на частотах ®к-е<ш<®к+е
представляет собой дугу полуокружности радиуса R2,
описывающую угол 180° по часовой стрелке от одного
конца асимптоты до противоположного (рис. 4.18,6). В
пределе при е->0 радиус колебательного пунктирного
дополнения .
Два последних замечания позволяют сделать следующие выводы.
Если пунктирное дополнение годографа астатической или колебательной ПФ начи-
нается на действительной оси левее точки (-1, j()) или пересекает ее, то такие отрица-
тельные переходы должны быть включены в общую сумму переходов годографа.
Во многих учебниках по автоматике истинными критериями устойчивости Найк-
виста объявляются формулировки, которые являются лишь частными случаями рас-
смотренных выше альтернативных форм этого критерия:
1) при единичной ООС (^(х)-!) контурная ПФ ^(s) равна ПФ PC И (') С ней
и работает критерий Найквиста;
2) если контурная ПФ не имеет правых полюсов, то есть л+--0, то годограф
И'Д]®) должен иметь нулевую сумму переходов через действительную ось левее точки
(-1, j0), то есть не охватывать эту точку.
124
4.6.2. Логарифмический критерий устойчивости Найквиста
^Логарифмическая форма критерия Найквиста основана на однозначном соответст-
вии амплитудно-фазовой и логарифмических ЧХ.
Интервалу (-х,-1) оси Re(JFK(j®)} соответствую!
значения фазы ф~7с3 2лА и амплитуды А>1, то есть
£>(). Переходу годографа через действительную ось
левее точки Найквиста соответствует пересечение
ЛФЧХ Фк(®) уровней л±2тгА' только при Ек(®)>0.
Знаки перехода и изменения фазы совпадают. Если
IEK(s) имеет нулевые или мнимые полюсы, то в раз-
рывах ЛФЧХ проводятся пунктирные дополнения свер-
ху вниз - в сторону уменьшения фазы. После построе-
ния ЛЧХ и выделения интервалов частот, где
Ек(®)>0, необходимо подсчитать на этих интервалах
сумму переходов Фк(ю) через граничные уровни
<pfp = 180°±360°А, руководствуясь рис. 4.19.
Логарифмический критерий устойчивости Найквиста-, для устойчивости ЗС с кон-
турной ПФ ^К(к). имеющей л+ правых полюсов, необходимо и достаточно, чтобы на
интервалах частот, где £к(®)>0, число пересечений Фк(ю) граничных уровней фазы
Ф =180°±360°А составляло в сумме п^/2. При устойчивом разомкнутом контуре лога-
рифмический критерий Найквиста требует, чтобы сумма фазовых переходов через фгр
при £к(®)>0 была нулевой либо этих переходов не было совсем.
Частота последнего перехода £к(®) вниз через ось частот называется частотой
среза ®ср. Она определяет рабочий диапазон частот системы, или полосу пропускания.
Высокочастотные гармоники уставки с частотами ®^>®ср отрабатываются системой
тем хуже, чем меньше значение Z.K(® ?)<0. Частота среза определяет предельное быст-
родействие ЗС, а именно: время регулирования /р ограничено снизу неравенством, ана-
логичным (3.43а):
Zp>7i/®vp (С).
(4.22)
Поведение ЛЧХ вблизи критических переходов £к(®)--0 и Фк.(®) = ф1Т определя-
ет устойчивость ЗС. Частоту перехода ЛФЧХ через граничный фазовый уровень назо-
вем граничной частотой устойчивости ® 1р. Если ПФ WK(s) состоит только из мини-
мально-фазовых типовых звеньев и имеет порядок и<5, то частота ®,р может быть
только одна.
При совпадении частот ®ср =®гр ЗС находится на границе устойчивости, если не-
большое смещение £к(ю) вниз или вверх дает необходимую для ее устойчивости сумму
переходов Фк(ю) через уровень ф1р. Сформулируем логарифмический критерий Найк-
виста для устойчивых разомкнутых систем в виде следующих математических условий:
{“ср -“[Р}а{£к(м,р)<о),
®ср: фк(“гр):тф1р-
(4.23)
'/'У Г1 ример 4.8. Определить устойчивость ЗС с единичной ООС и ПФ разомкнуто-
го контура W/p(s)=(100.v-52)/(l1 2s г 2s2 + 40.v3).
Решение. Получим число правых полюсов ГЕр(.%’) по критерию устойчивости Ми-
хайлова: Cp(.v) = l+2s+2s2 +40.v3 , Р(<1> )1- 2®2-0 при со 2 =0,5, (>(®) = 2<в-40о>4 =0 при
Рис. 4.20
Юр=0 и со 2 =0,05. Гак как коэффициенты с0 -1 и с, = 2 - ненуле-
вые и одного знака, но не выполняются условия (4.18) чередова-
ния частот 0<cd( <со2, то PC неустойчива. Построив годограф
Михайлова Cp(j(») (рис. 4.20), определим изменение его аргумен-
та АА = -1 и по (4.16) число правых полюсов PC л+=(3+1)/2 = 2.
Тот же результат получим по критерию Рауса - Гурвица, подсчи-
тав число л+=2 инверсий знака в последовательности (4.10)
{с3, Л/р М1М2, Л7,Л73} = {40, 2, -72, 129б}.
Для определения устойчивости ЗС по критерию Найквиста разложим контурную
ПФ (s)=1Гр(5)= /Су(1 -Т3$)/(1 +7] s)(l -2^2T2s-^T2 s1^ на типовые звенья с параметрами
К=100, Т{-4, cOj—0,25, Г2=3,16, <й2 = 0,316, ^2 =0,316, 7’3=0,01, ю3 = 100. Построим
ЛЧХ и годограф для IVK(s) (рис. 4.21). Единственный переход Фк(®) через уровень
Фгр=180° на интервале положительности LK(<a) и переход годографа ГРД)©) через
действительную ось левее точки (-1, j0) равны 1. По критерию Найквиста они должны
быть равны л+/2=1. Следовательно, ЗС устойчива. СЗ
126
/ 7 Пример 4.9. Определить устойчивость ЗС с прямой и обратной ПФ
W(s)-(1+O,25s2)/(1 + .v)(1 + x?) и JE0(.v)-l/.v.
Решение. Разложим контурную ПФ ИЛк(х) = ИЛ(х)И/0(5) = (1 I T$s2 Д .^l + ^.v^l тТ^х")
на типовые звенья с параметрами 7] = 1, со, = 1, Т~2 — 1, со 2 = 1, £2-0, 7^ 0,5, <о3~2,
^з=(). Звенья с ПФ 1Д1 + Т2s2j и It T-2s2 разрывают ЛАЧХ и ЛФЧХ (рис. 4.22,п) на
частотах а», и <в3. Переход Фк(со2) через уровень <ргр = -180° равен-1. Звено с колеба-
тельной ПФ 1/(1 + T2V) разрывает годограф (рис. 4.22,6) на частоте <в2 на две ветви.
Пунктирное дополнение разрыва дает переход, равный -1.
Таким образом, контурная ПФ не имеет правых полюсов, а сумма переходов не-
нулевая. Следовательно, ЗС неустойчива. Если строить годограф без пунктирного до-
полнения, го сумма переходов будет нулевой, что даст неверное заключение об устой-
чивости системы. Для проверки исследуем ее устойчивость по точному алгебраическо-
му критерию Льенара - Шипара:
С, (s) = 1+0,25s2 + s(l + s)(l + s2) = 1 + s+l,25s2 + № + s4,
11 0 0
1 1,25 1 0
0 1 10
0 1 1,25 1
Af3 =
1 1 0
1 1,25 1
0 1 1
--1,25-1-1 = -0,75.
Все коэффициенты ХП положительны, и <0, значит, ХП и ЗС неустойчивы. Г)
Рис. 4.22
127
Пример 4.10. Исследовать устойчивость ЗС с прямой НФ 5#(s)- - в
' i 6s 4 5.С
зависимости от коэффициента ООС Иф(л) - К .
Решение. Разомкнутая система устойчива (л. О), так как имеет левые полюсы
ж, = - 1/7] и s2 = -l/T'i контурной ПФ Ж,, (,v) = 10Л'(1 - 7\х)Д1 + Г, v)(l +Г2Х) с параметрами
7]-5,©!=(),2, 7э -1, (Oi-I, 1\ =0,1, (в j = 10 . Влияние параметра К на ЛЧХ заключает-
ся в подъеме или спуске ЛАЧХ Ск(®) без изменения ЛФЧХ Фк(а>). При инверсии зна-
ка К ЛФЧХ сдвигается по вертикали на 180° без изменения ЛАЧХ. Влияние К на го-
дограф H^Jj®) заключается в изменении модулей его точек относительно начала ко-
ординат при сохранении аргументов, как при надувании воздушного шара. При инвер-
сии знака К годограф поворачивается на 180°.
Построим АЛЧХ и годографы для К =1 и К~-\ (рис. 4.23).
При К 1 значение ЛФЧХ
<р = — 180° достигается на частоте
Ig(® !р)=0,5 с запасом по амплитуде
С, = 14 дБ, а на частотах, меньших
lg(® ср) = 0,15, где £.к(ш)>0, переходов
ЛФЧХ через фгр нет, поэтому ЗС ус-
тойчива. Подняв ЛАЧХ на 14 дБ, то
есть увеличив К в 1014 20 = 5 раз, по-
лучим границу устойчивости ЗС.
Дальнейшее увеличение К приводит
к ее неустойчивости.
При К = 1 годограф не охватыва-
ет точку Найквиста (и не должен ее
охватывать), поэтому ЗС устойчива.
При фк =-180° модуль годографа ра-
вен 0,167=1/6<1. Увеличив К в 6 раз,
получим граничный годограф, прохо-
дящий через точку 8. Дальнейшее
увеличение К дает неустойчивый го-
дограф, охватывающий 8.
При К-- 1 ЛФЧХ начинается с
уровня ф)р=180° при £к(®) = 20>0,
что дает -1/2 перехода и делает ЗС
неустойчивой. Опустив ЛАЧХ на 20
дБ (уменьшив К в 10 раз), получим
граничную, а при -0,1 < К<0 - устой-
чивую ЗС.
(-10, J0) левее точки Найквиста, дает
-1/2 перехода, следовательно, ЗС неустойчива. Чтобы получить нейтральный годо-
граф, проходящий через 8, параметр К необходимо уменьшить в 10 раз.
Вывод. По логарифмическому критерию Найквиста приближенно определили, что
ЗС устойчива при -0,1<#<5. Точный ответ дает критерий Рауса - Гурвица для ХП
второго порядка СД$) = #(10-«)+(1 + х)(1 + 55) = 1+10#+(6- -K)s+5s2: {1+10#>0}Л{6-#>0}.
откуда получаем -0,1 <К <6. СЛ
128
Логарифмический критерий, пожалуй, единственный, пригодный для исследования
устойчивости систем, ПФ которых неизвестны, но могут быть экспериментально полу-
чены ЛЧХ, например, анализатором спектра или с помощью САПР электронных схем
(программа MicroCAP или ей подобные). Если нельзя экспериментально снязъ ЛФЧХ
<М®)- то ее можно восстановить по ЛАЧХ £к(м) при условии, что ПФ И^Дх) не име-
ет правых нулей и полюсов, го есть является минимально-фазовой.
Методика восстановления минимально-фазовой ЛФЧХ Ф(®) и ПФ ИДх) по
ЛАЧХ £(ш) следующая.
1, Логарифмическая АЧХ заменяется кусочно-линейной АЛАЧХ £а(ю), отрезки
которой горизонтальны или имеют наклоны, кратные ±20 дБ/дек.
2. По начальному участку La(<f>) и изменениям наклонов ее отрезков определяют-
ся ПФ типовых звеньев, произведение которых дает ПФ системы W(s).
3. С помощью табл. 2.2 определяются ЛФЧХ Ф,(ю) типовых звенев, сумма кото-
рых дает ЛФЧХ системы Ф(ш).
С'7 Пример 4.11. По экспериментальной ЛАЧХ усилителя звуковой частоты (рис.
4.24,а) определить ПФ усилителя и построить его ЛФЧХ.
Решение. Так как размерность частоты f - герц, то постоянные времени типовых
звеньев ПФ усилителя определяются по частотам сопряжения ft как 7) -1/2%/ (с).
Обозначим некоторые характерные точки ЛАЧХ буквами А-: G . Начальный уча-
сток £(/), асимптота которого La{f) проходит через точку А(/0«10Гц, /^«ОдБ) с
наклоном 20 дБ/дек, дает ПФ Wi}(s)-Ks.. где 201g(A) = £(® =1) = £(/=1/2л) =
- £р - 20 lg(2я/,), откуда К= \/20л =0,016.
В точке В (^ «50 Гц, £( «-6 дБ) имеется впадина. Значит, в ПФ усилителя есть
форсирующее звено + с постоянной времени 7] =1/2л/=3,18 мс , а
коэффициент демпфирования определяется по (2.3): 201g(l/2£]) = £a(/j)-£(/) = 20дБ ,
откуда =0,05. Вправо от точки La(/j) = 14 дБ проводим асимптоту £а(/) с накло-
ном 20+40=60 дБ/дек.
В точке С(/2 «100Гц, £-,«40 дБ) у ЛАЧХ наблюдается резонансный пик. Значит,
в ПФ усилителя имеется колебательное звено W2(s) = 1Д1+?£,2Тг8+ Т2 s2) с параметрами
Т-. =1/2л/2 =1,6 мс и £2 = 10 0’0^£^"’£а^У2=10~°'4/2=0,2. Вправо от точки
£а(/т) = 32дБ проводим асимптоту с наклоном 20 дБ/дек.
В точке D ЛАЧХ L(f) сходится к горизонтальной асимптоте 40 дБ, которая ме-
жду точками С и D сопрягается с уже построенной АЛАЧХ на частоте /3 «250 Гц.
Типовое звено, уменьшающее наклон на 20 дБ/дек, имеет ПФ Wz3(s) = l/(l + 7'3s) с посто-
янной времени Т'з - 1/2тг/3 =0,64 мс .
В точке Е(/4 «3,16 кГц, £4«45дБ) ЛАЧХ имеет резонансный пик. Значит, в ПФ
усилителя имеется колебательное звено ИЛ4(х) = 1Д1+2^47'4х+Г42х2) с параметрами
Т4 = 1/2тг/4 = 50 мкс и £4 =10~°'25/2 = 0,28. Вправо от точки £а(/4) = 40дБ проводим
асимптоту с наклоном -40 дБ/дек.
Конечный участок ЛАЧХ имеет в точке С(/^«20кГц, /^«ОдБ) установившийся
наклон -60 дБ/дек. Эта асимптота пересекается с уже построенной АЛАЧХ на частоте
/5 «10 кГц Следовательно, последнее типовое звено есть Bz5(.v) = l/(1 + T5.y) с постоянной
• 29
времени Т5 = 1/2я/5 =16 мкс.
Из полученных ПФ типовых звеньев FF,-(s) формируем ПФ усилителя:
5 Ksh+^i^+Ti2)
W(s)=ГТ Wi(s)=7-----------г-*-----------------------=
/=о (l+2^2T2S+T22Xl+r3S)(l+2^47'4S+T42Xl+7’5S)
____________________0,016s+5-10~%2+1,61-10 V___________________
~ 1+1,31103 s+3-1S2 +1,75-1 О’9 * * * S3 +8,02-10'14 / +4,94-10 * *“'8 s5 +6,55-10-23 / ’
На основе минимально-фазовых типовых звеньев (табл. 2.2) построим АЛФЧХ
усилителя как сумму АЛФЧХ Ф0+Ф5 типовых звеньев (рис. 4.24,6). По графикам ЛЧХ
на рис. 4.24,в,г построены годографы FT(j©) в крупном и мелком масштабах. (? )
При исследовании радиоэлектронных схем целесообразно выполнять временное
масштабирование = mtt, в котором масштабный коэффициент mt переводит время
из реального t в модельное tM. Например, масштаб mt =1000 переводит 1 с в 1 мс. Так
как оператор Лапласа s одновременно является и символом дифференцирования d/d/,
то s=mzd/dZM =mzsM, где новый оператор sM =d/dZM масштабирует частоту в l/mz раз.
Масштабирование позволяет получить более удобную форму записи ПФ высоко-
частотных систем. Например, при mt =1000 ПФ усилителя из примера 4.11 преобразу-
ется в
_ _________ 16 Нм__________________
l+l,31s„ +3s2 +l,75s3 +8,02-10~г $4 +4,94-10-3 4 +6,55-1О5 4
130
4.7. ЗАПАСЫ УСТОЙЧИВОСТИ ЗАМКНУТОЙ СИСТЕМЫ
апасы устойчивости необходимы для гарантированного обеспечения устопчи-
вой работы системы при возможных отклонениях модели САУ от ее реального
прототипа. Запасы устойчивости ЗС определяются по ЛЧХ ее разомкнутого контура
Цш) и Ф(®). Далее бурем считать контурную ПФ системы устойчивой.
Запас устойчивости по амплитуде Е. гарантирует, на сколько децибел может
быть поднята £(®) до совпадения частот ®ср и ®гр, то есть до границы устойчивости
(рис. 4.25,а). Условие запаса устойчивости по амплитуде, не меньшего, чем £.,, имеет
вид Ц& 1р)<-£,. Подъем ЛАЧХ на L3 дБ означает увеличение коэффициента усиления
разомкнутого контура в К, = 1 о0,0311 раз, при котором замкнутая САУ будет гаранти-
рованно устойчива.
Запас устойчивости по фазе ф3 гарантирует, на
сколько градусов отстоит Ф(ю) от граничных уровней ус-
тойчивости фгр на частотах, где £(®)>0 (рис. 4.25,6):
|ф(®) фрр|>ф3 V®: £(®)>0.
Часто при проектировании САУ задаются оба запаса
устойчивости L3 и ф ,. В этом случае требования к ЛЧХ
разомкнутого контура сводятся к неравенствам
Г I I
£(©)<-£3 V®: Ф(ю)-фго|<ф3,
т । I (4.24)
I |Ф(®)-фгр|>ф., V®: £(®)>-£3.
Рис. 4.25
Представляет интерес алгебраическое определение возможности иметь в ЗС запас
устойчивости по амплитуде £3. Для этого необходимо исследовать на устойчивость по
Гурвицу или Михайлову приведенный по амплитуде ХП С[ДД-K3B(s)+A(s), где
201g/C, = £3. Он соответствует ЗС, у которой ПФ разомкнутого контура равна
B(s)
А*) ’
а ЛАЧХ £г(®) = £(®)+£3. Устойчивость Ci3(s) означает наличие в
ЗС запаса устойчивости по амплитуде £3.
Получим алгебраическое условие возможности иметь в ЗС запас устойчивости по
фазе ф3. Для этого сдвинем ЛФЧХ Ф(®) на угол ф3, не изменяя при этом ЛАЧХ £(ю).
Полученными ЛЧХ £(®) и Фф(®) обладает разомкнутый контур с КЧХ
, и/(. , ж £(j®) B(j®)cos(93)-jB(j®)sinto3)
Ж = ,Ф’------------------------------------------
Комплексная ЧХ замкнутого контура равна
W / ю) = B(j®)cOS^:i)-jB(j®)sin^3) =
Jfi> Л()®)+В()®)со5(ф3)-)В(»8т(ф3)
_ ^2О) + ^(»Д(»с05(Фз)~Ж>)^(]0>)51П(ф3)
^2(j®)+2^(j®)B(j®)costo3)+B2(j®)
Характер порождаемой ей комплексной ИХ определяется действительным приведенным
по фазе ХП Cv.i(s')-=A2(s)+2A(s)B(s)co^.^ + B2(s), алгебраическая устойчивость ко-
торого означает наличие в исходной системе запаса устойчивости по фазе ф3
Алгебраический анализ возможности иметь оба запаса устойчивости £3 и фсво-
дится к проверке устойчивости действительного приведенного по амплитуде и фазе ХП
С£ф3(ж> Л2(.?)+240°’°5Г' A(s)B(sy.os(^ 11B2(s). (4.25)
В отсутствие любого из запасов или ф3 его нужно занулить. Тогда ХП (4.25) экви-
валентен Сф3(ж) (при L3=0), Ci3(s) (при ф3=0)либо C3(s) (при £3=0и ф3=0).
При запасе по фазе <р3 *0 корни ХП (4.25) имеют следующие свойства.
1) общее количество корней равно 2тах{л,ш}, где пит- степени полиномов
A(s) и B(s);
2) все действительные корни имеют четную кратность (2, 4, ...) и являются общими
корнями полиномов A(s) и B(s);
3) остальные корни являются комплексно-сопряженными.
Эти свойства вытекают из представления действительного полинома (4.25) в виде
произведения комплексно-сопряженных полиномов
= /4s)=^(«)+*’T^(s)cos(q)3)+jJir3B(s)sin(v3)
Степень P(s) равна max{n,m}, что доказывает первое утверждение. Если действитель-
ное число sf- есть корень P(s), то оно также и корень P(s). Отсюда следует четная
кратность этого корня полинома С£фз(ж). Если действительное число в, есть корень
P(s), то оно является решением системы уравнений
^)+К3В(51)соз^ 3)=0
tf3j9(s,)sin(q)3)=0
Л(5,)=0,
#(*,•)=--о,
то есть общим корнем полиномов 4(s) и B(s). Наконец, как и все корни действитель-
ного полинома, комплексные корни С£ф3(.?) сопряжены.
Типовые значения запасов устойчивости: 7.3 6 :20дБ, <р3 = 30-е-60°.
Рис. 4.26
Области ЛЧХ, не удов-
летворяющие условиям
(4.24), называются запрет-
ными зонами. Графики ЛЧХ
не должны заходить в за-
претные зоны (рис. 4.26,я),
иначе не будут обеспечи-
ваться требуемые запасы ус-
тойчивости или сама устой-
чивость. Запретная зона есть
и на комплексной плоскости
годографа JTYj®) (рис.
4.26,6). Она имеет вид внеш-
него сектора, ограниченного
лучами фгр-ф3, фгр+ф, и
дугой окружности радиуса
132
\/К к - iO'ot,5Z' < 1. Аналогичная (4.24) разрешенная область годографа удовлетворяет
условиям запасов устойчивости
[ /1(®)<1/А, V®: |ф(®) Ф1Г|<Ф ,,
I I / (4’26)
I |Ф(«)-Ф,Г|^Ф » v<1): -4(®)> \[ К,.
1-6.VT 100?
V 7 Пример 4.12. Для контурной ПФ W„(s)~ К-------------— определить значения
sfl + s,
К, при которых ЗС будет: а) устойчива; б) иметь запасы устойчивости £3>6дБ,
Ф, >60°.
Решение. Полиномы ПФ равны /4(s) = s(l + s)2, B(s) = a(16s+100? j.
Алгебраические критерии дают точные решения задач:
а) характеристический полином ЗС C\(s) = A(s)+B(s) - A+(l-6A")s+(2+100A")s2 + ?
устойчив по Гурвицу при 0< К<0,1652= А]р;
б) определяем А\ =106 20 <2 и со8(ф3)=0,5. Приведенный ХП (4.25)
6
CL<f3(S)^A2(s)+2A(S)B(S)^4B2(s)=X4(^)^
i=0
с параметрическими коэффициентами
с0(А~) = 4А'2, с,(К) = 2А(1-24ЛГ), с2(К) = 944А2-8А+1,
с3(К)~-4800А2 +178А+4 , с4(K)^40QK2 +388К+6,
с5(А) = 200Аь4, с6(А) = 1
устойчив по Льенару - Шипару, если выполняются необходимые с, (/0>О Vf=0,5 (от-
сюда 0< К<0,05285 ) и достаточные условия
с решением 0< К <0,03466 = Kv. Сте-
пени полиномов МУ{К) и М5(К)
равнь! соответственно 6 и 9, поэтому
аналитическое решение неравенств
весьма затруднительно. Практиче-
ски целесообразнее в среде Math-
CAD построить графики М3(К) и
М5(К) в интервале допустимых
значений 0< К <0,05285 и найти
удовлетворяющий обоим условиям
интервал 0<К<Ку (рис. 4.27).
Быстрое приближенное реше-
ние по критерию Найквиста полу-
133
чим по асимптотическим ЛЧХ (рис. 4.28). Построим их дая К=\:
а) асимптотическая ЛФЧХ Фа(га) пересекает граничный фазовый уровень
Фгр = 180° на частоте -0,1, где £а(со,р)- 20 дБ. Для устойчивости ЗС АЛАЧХ нуж-
но опустить вниз не менее чем на 20 дБ, то есть значение К уменьшить в 10 и более раз.
Таким образом, ЗС устойчива при 0< К <0,1 ~ Kiv ;
б) по графику Фа(га) определим частоту запаса га ,из условия равенства в (4.24)
Фа(га ,) = ф[р +ф3 =240° : 1g® э =-1-0,3-90760° = -1,2, откуда о 3 =0,0632. При АГ = 1 значе-
ние La(® 3)=-20+20-0,2-24 дБ. Для обеспечения заданных запасов устойчивости и
Ф3 АЛАЧХ нужно опустить вниз на 24+6=30 дБ, то есть уменьшить К в 31,6 раза. Та-
ким образом, запасы устойчивости обеспечиваются при 0< АГ <0,0316~ К\. Приблизи-
тельность результатов связана с погрешностями аппроксимации ЛЧХ.
Точное частотное решение получим по аналитическим формулам ЛЧХ
101 g(l -164® 2 +10000®4201g® - 201g(l +®2),
—- -90° 2arctg(®):
1-100®-)
а) Ф(®гр) = 180° при го1р =0,094, откуда получаем Ц® t р) -15,64 дБ,
К.р = 10ч 5,64/20 = 0,1652 , а устойчивость ЗС обеспечивается при 0<К <0,1652 ;
б) Ф(®3) = 240° при ®3 =0,0532, откуда получаем £(® 3) = 23,35 дБ,
A'v = 1()-/"3 35+6)/2<) =0,03408, а заданные запасы устойчивости ЗС обеспечиваются при
0< К <0,03408. П
L(o)=201g&+
Ф(®)=-arctg
134
4. 8*. УСТОЙЧИВОСТЬ СИСТЕМ С ЗАПАЗДЫВАНИЕМ
рактически в любой системе точки приложения управляющих воздействий
пространственно разделены с точками измерения выходных координат. Из-
за конечной скорости распространения сигналов любой участок системы имеет транс-
портное запаздывание, которое обычно не учитывается либо в силу идеальности ньюто-
новской физики, либо для упрощения математической модели объекта.
Звено чистого запаздывания на время т секунд имеет ВХ и(/) = 5(/~т),
Л(/) -1(/ т) , НФ H'(s)-L{S(/-x)|=e " и ЧХ jy(j<o) = e=cos(tw)-jsin(rco),
/’(co) cos(t(l>), Q(m) = -sinfrro), A(tii)~l, L((o)-0, <p(®) = arctg{-tg(T(£>)) = -T(B Разделяя
выполняемую объектом функцию от задержки ее проявления на выходе объекта, запи-
шем его ПФ в виде ИДу)е TS, где W(s)- B(s)/A(s) - линейная часть ПФ без учета чисто-
го запаздывания еТЛ. Тогда ХП ЗС с неединичной ООС, имеющей ПФ ИИ0(5)е t()S, ра-
вен
C.,(s)- /f(s)J0(s)+5(s)50(s)e“TK\ (4.27)
где тк т+т() - суммарное контурное запаздывание системы. Эта трансцендентная
функция раскладывается в бесконечный ряд Тейлора по степеням s, поэтому спектраль-
ные НиДУУ (4.3) и алгебраические НиДУУ (4.11) неприменимы. Благодаря существо-
ванию ЧХ звена с чистым запаздыванием, исследование устойчивости таких систем ус-
пешно выполняется по критериям Михайлова и Найквиста [1,2].
Подставив в (4.27) s=jco , получим комплексную частотную функцию
С3 (jco) = А( jro) АД j®)+В( j <») Во (jco )(cos(t к® )-jsin(r к® ))=
-- Д (<в, cos(x к<в), sin(x к(в ))+j б, (<в, cos(t к©), sin(x к®)).
Для устойчивости ЗС ее годограф C3(jo>) с колебательными действительной и мнимой
составляющими должен по критерию Михайлова огибать начало координат против ча-
совой стрелки, нигде не обращаясь в нуль. На границах устойчивости при определен-
ных критических значениях частоты <вкр и запаздывания ткр выполняются условия
Л (® кр, cos(t кр® кр), sin(T кр® кр ))=Q- (<в кр,cos(r кр® кр), sin(x кр<в кр )) - 0, (4.28)
определяющие границы областей устойчивости ЗС в пространстве ее параметров.
По критерию устойчивости Найквиста строится годограф ИфД)®) для линейной
части И/к0(х) = ^(.^^(.v) контурной ПФ И/к(л)“И/к0(Де’ХкЛ. Влияние запаздывания на
годограф ЖД]®) = Лк0(<о)е^,кв(<в)е'-’Тк‘о = Лк0(го)е^Фк(,(“^-Тк“^ проявляется в его спираль-
ном «закручивании» по часовой стрелке (в сторону уменьшения аргумента) на угол
тк<о , пропорциональный частоте, без изменения амплитуды (рис. 4.29,а). Эффект «за-
кручивания» не нарушает условий устойчивости замкнутой системы (неохватывание
точки Найквиста годографом IEK(jco)), только если Лк0(®)<1 V® >0, то есть когда весь
годограф И'Д» лежит внутри единичной окружности.
В остальных случаях запаздывание может привести к неустойчивости ЗС, в том
числе и для минимально-фазовых систем первого и второго порядков, которые без за-
паздывания безусловно устойчивы.
Астатические системы с запаздыванием, всегда условно устойчивы, так как на низ-
ких частотах кчеют АЧХ ЛкО(со) > 1
Рис. 4.29
Рассчитаем критическое запаздывание ткр для системы с устойчивым годографом
^коО®) так» чтобы при тк<ткр ЗС оставалась устойчивой. При тк-() годограф
Ifjjffl) совпадаете И/к0(]ш) и тоже устойчив, то есть не охватывает точку Найквиста
(рис. 4.29,6). При увеличении тк точка пересечения И/к(jo) с единичной окружностью
приближается к точке Найквиста, а при достижении критического запаздывания совпа-
дает с ней. Это есть граница устойчивости на частоте среза <вср: l¥K(j<oср) = 1, где
Ао(®сР) = 1 и = фгр. Отсюда найдем
Ф ко(® ср) Фгр Ф кр
X “ —
р ®ср ®ср
(4.29а)
где фкр =Фко(®ср)^Фгр * запас устойчивости по фазе системы без запаздывания. Для
обеспечения запасов устойчивости £3 и ф3 найдем частоту ®.,: Лк0(со3)=10“°’05£’ и из
условия Фко(® э)“Т|ср®3-Фз-Фгр получим критическое запаздывание
(4.296)
Фко(®э)-Фгр-Ф3
х ----------------
®з
При использовании логарифмического критерия Найквиста строятся ЛЧХ £к0(<в)
и Фк,:)((») системы без запаздывания (рис. 4.29,в). Из условия £к0(а>3)=-£3 вычисляется
частота запаса <в3 и на ней допустимое уменьшение фазы Фк0(<в3 ) ф1р ~Ф3 • Критиче-
ское запаздывание определяется по (4.296). При тк >ткр ЛФЧХ Фк(со) = Фк0(<в)-тк<в
быстрее пересечет уровень ф[р +ф3, чем ЛАЧХ £к(® ) станет меньше уровня -£3.
1с7 Пример 4.13. Для контурной ПФ HzK(s) = 2Kse~xs/() + s)2 с запаздыванием по-
строить области устойчивости в пространстве параметров К и т>0 методами Михай-
лова и Найквиста.
Решение. По методу Михайлова составим ХП (4.27) в операторной и комплексной
формах: C3(s) = l+2(l + Xe’xs)s+s2, C.,(j®) = jPj(®)+j03(®), где Р3(®) = 1-® ~+2К&sin(x«);
<23(ф) = 2ф(1 + Асо5(х(в)) . На границе устойчивости система уравнений (4.28)
^з(®кр) 1 ® крKpSin(xKp® кр) О,
Q.3(® кр)~ 2® кр(н~ A'kPCOS(t Кр® кр)) — О
имеет параметрические (от <окр >0 и / = 0,1,2,...) решения (получите их самостоятельно)
Рис. 4.30
ткр {(3+4f)TC-4arctg(®кр)}/2®кр, tfKp-(и~р +1)/2®кр >0;
*кР = {(i+4j)7t-4arctg(®Kp)}/2fflKp, А'кр=--(ф2р+1)/2®кр<0.
Исключая критические частоты ®кр -l/CKp|±-jA^p -1, получим зависимости критическо-
го запаздывания от критического коэффициента усиления ПФ:
{2+sgn(^Kp)+4f jn-4arctg[ ^кр|±^р -1 ]
ткр ----------------------------------------Vi=0,1, 2,... . (4-30)
2^Kp|+^p-lj
При |ЛГ|< 1 критические частоты отсутствуют, а ЗС устойчива при любом запазды-
вании т. При |А]=1 есть единственное значение <вкр=1, при котором набор критиче-
ских запаздываний равен ткр ~(\+И)л = л,3л,5тг,... при К-\ и ткр =2/тс = 27г,47г,б7г,... при
К’ = -1. При|Л7|>1 существуют две критические частоты & кр) = \К\+у1 К2 ,
®кр2=И-з/л'2--1 и соответствующие им по (4.30) два критических запаздывания
ткр1<ткр2> формирующие на плоскости {А\т} границы заштрихованных областей ус-
тойчивости ЗС (рис. 4.30).
На рис. 4.31 построены годографы C1(j®) для шести пар {АГ,т}, отмеченных точ-
ками на рис. 4.30: {ЛГ- I, 1, т е{0, 2, 3,76}} и {A'-l, 4, т е{0, 1, 3,64}) . Очевиден цикличе-
ский характер годографа системы с ненулевым (опаздыванием. Сплошные графики, про-
ходящие через начало координат и при малой вариации имеющие положительное на-
правление, соответствуют нейтральной системе; пунктирные, огибающие начало коор-
динат в положительном направлении, - устойчивой, а штрих-пунктирные - неустойчи-
вой ЗС. Годограф для 4, 1-3,64} на втором цикле проходит через начало коорди-
нат, но, тем не менее, является не граничным, а неустойчивым, так как на первом цикле
Рис. 432
имеет отрицательное направление.
Для оценки влияния параметра К на
устойчивость по методу Найквиста постро-
им (рис. 432) годографы линейной части ПФ
... . 2К ..... . 2|АГ|(в
и/ко(А')^----у по АЧХ \ и
(1 + s)" (1+0)“)
ФЧХ tp(®)=sgn(A')7r/2-2arctg(®), откуда
видно, что при |А'|<1 никакое запаздывание
не может закрутить годограф так, чтобы он
охватил точку Найквиста, Поэтому ЗС ус-
тойчива.
При |А'|~! годограф касается единич-
ной окружности на единственной частоте
среза <»ср: Л((оср) = 2сосрД1+<в2р) = 1 шср=1, q>(<»cp) = {sgn(A')-l}7r/2. По (4.29) нахо-
дим набор фиксированных критических запаздываний:
<Р(®ср)-Фгр { ) ,
гкР =-----------= {sgn(X)-l}n/2+2TO =
®ср
л +2тй-п, Зл, 5л,... при К = 1,
2л/ = 0, 2л,4л,... приАГ = -1.
При |ЛГ]>1 годограф ИДД)®) дважды пересекает единичную окружность на час-
тотах ®ср1 и оср2:
Люср) = 2|/Г|<йср/(1+<й2р) = 1 шср1 , ®ср2-|АЙ-Л~2-1.
Им соответствуют критические запаздывания (430), формирующие на плоскости {А',т}
границы заштрихованных областей устойчивости ЗС (рис. 430).
Построенные иа рис. 433 годографы PC с запаздыванием имеют спиральный ха-
рактер при т>0. Выводы об устойчивости ЗС совпадают с результатами анализа ус-
тойчивости методом Михайлова для соответствующих параметров {АГ,т}. ГП
138
ГЛАВА 5. РАСЧЕТ ПЕРЕХОДНЫХ ПРОЦЕССОВ
В СИСТЕМАХ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
асчет переходных процессов является одной из основных задач анализа САУ,
<3^ позволяющей моделировать поведение реальной системы в различных усло-
виях эксплуатации, предусмотреть аварийные ситуации или повышенные нагрузки на
элементы системы без риска их разрушения. Будем использовать символ s как опера-
тор Лапласа и вместо символа р как оператор дифференцирования d/dz, тем более
что при переходе от ДУ к ПФ оператор р формально заменяется на s.
5.1. СТРУКТУРА ПЕРЕХОДНОГО ПРОЦЕССА
Рис. 5.1
зменение состояния системы во времени осуществляется в форме движения.
Внешне проявляемое как единое целое, движение в действительности скла-
дывается из ряда составляющих, порождаемых различными причинами. Классифика-
ция основных видов движений приведена на рис. 5.1.
Движение, вызванное влиянием на
объект внешнего воздействия, называется
вынужденным (возмущенным) движением.
При длительном (большем времени регу-
лирования Zp) установившемся характере
внешних воздействий объект функциони-
рует в установившемся режиме вынужден-
ного движения, при котором параметры
его состояния (значения координат, скоро-
сти их изменения, амплитуды и фазы коле-
баний и т.п.) постоянны во времени.
Установившийся режим включает в
себя состояние равновесия (покоя) - это ус-
тановившийся режим в отсутствие внешних
воздействий. Характер состояния покоя
определяется корнями ХП A(s) - знаменателя ПФ объекта IT(s) = B(s)/A(s). Тривиаль-
ное состояние равновесия - нулевое у=у’ =...=у^"-1) =0, удовлетворяющее ДУ объекта
п т
A(s)y(t)= B(s)x(t), Л(5) = ^? , B(s) = Xbisi (5 1)
»=0 j=0
при x(Z)-0. Если все корни ХП левые, то нулевое состояние покоя - устойчивое. Нуле-
вой корень ХП при остальных левых корнях дает неопределенное состояние покоя. Па-
ра мнимых корней при остальных левых корнях дает колебательное равновесие. Доста-
точно одного правого корня ХП, чтобы равновесие стало неустойчивым.
Переходным режимом называется движение объекта между двумя установившими-
ся режимами. В устойчивых системах переходный режим заканчивается за время zp по-
сле окончания внешнего воздействия или установления его постоянных параметров.
Свободным называется движение объекта из ненулевого состояния в состояние равнове-
сия без учета внешнего воздействия. Собственным называется движение во время пере-
хода из одного установившегося режима в другой без учета свободного движения. На
139
рис. 5.2 показано соотношение движений системы на примере колебаний маятника в
вязкой движущейся среде.
При расчете переходного процесса определенный момент времени выбирается
начальным. Состояние объекта при называется начальным состоянием или началь-
ными условиями (КУ). Начальное состояние с нулевыми значениями координат объекта
и их производных называется нулевыми НУ. В некоторые моменты времени /0, , /2, ...
входное воздействие х(А) может изменять свое описание, иметь разрывы, изломы и т.д.
При определенных свойствах системы это даст разрывы в функции y(t) и ее производ-
ных y^(t). Например, если в ПФ полиномы A(s) и B(s) имеют равные степени п = т ,
то коэффициент прямой связи входа с выходом равен D~bn/an , а скачки входного
сигнала Ах(/;) дают выходные скачки . В связи с этим НУ
могут отличаться от предначальных условий (иредНУ)
е->0
y^(/o~O)=Hmy^(zo-e) на величины скачков • Переход-
Е-И)
ный процесс рассчитывается как последовательность процессов на интервалах постоян-
ства описания x(t). В конце Л-го интервала моделирования рАч. ] формируются
предНУ для следующего Л+1-го интервала рд, гЛ+|].
Аналитические методы расчета переходных процессов САУ делятся на частотные
и временные. Частотные методы выполняют обратное преобразование Лапласа изо-
бражения выходного сигнала с помощью таблиц или по формуле разложения Хевисай-
да. К основным временным методам относятся методы вариации произвольных посто-
янных, интеграла Дюамеля и пространства состояний.
Состояние покоя "I" -р
Свободное движение "t" "t"
Вынужденное движение “Iе- *4"
Собственное движение “Iе-
Установившийся режим +
Рис. 5.2
5.2. МЕТОД ПРЕОБРАЗОВАНИЯ ЛАПЛАСА
зображение выходного сигнала формируется по структурной схеме на рис.
5.3 в соответствии с формулой (1.18)
^)A(s)+7^>
(5-2)
Изображение A(.v) входного сигнала х(г) вычисляется по формуле (1.16) или по табли-
це прямого преобразования Лапласа. Полиномы P(.v) и Q(s) формируются по (1.17) на
основе предНУ входного и выходного сигналов:
/>(s>p0+pis + ... +
Pt) «1 «2 • ап Я-0)
Pl - а2 а3 ... 0 У(-0)
_Ри-|. а„ 0 ... 0 у<я1)(-0)
~-Чо+Ч^ + --+Чт т 4 _tx .
Чо А Ь-) . Ьт х(-0)
4t - Лэ ь? : .. 0 х'(70)
Чт-t о . .. 0 х<т~|)(-0)
Рис. 5.3
Рассмотрим структуру движения и свойства его составных частей.
Свободное движение системы
Лв(О= I {P(s)M(S)} = Е^сВ(Ое5(/ (5.3а)
i=i
порождается ненулевыми предНУ ^^(-О) \//=0,л-1, возбуждающими систему только в
начальный момент времени, что отражено на структурной схеме дельта-функцией. Оно
непрерывно, без скачков продолжает предначальное движение, что следует из первой
предельной формулы (3.2):
jCB(0)- lim sP(s)/A(s) = рп.х jan = j(-0).
Л’->30
Вынужденное движение системы
Яын(О= L-* {Ж(х)У(5)-0( v)M(^)} = Z сшын(ОеХ,/ (5.36)
«=1
порождается входным воздействием x(f) с изображением X(s)= Bx(s)/ Ax(s) и его нену-
левыми предНУ х(‘\-0) V/=0jh~1. Структура вынужденного движения определяется
кратностью и расположением vBbIH корней X/ полинома AHblH(s) = A(s)Ax(s). Началь-
ное значение вынужденного движения определим также по формуле (3.2):
>’ВЬ1Н(0)^ lim {ж(х)х(0)-?т Ja„sn m }=(бт/а„)Ах(0) lim.v'"" -
5->О? 5—>00
(й„/ап)Лх(0) при л = /п,
0 при п>т,
прпп<т.
С учетом непрерывности свободного движения полное движение системы
Я')=Усн(')+УВ1,.н(') КО (5-4)
корректно вычисляет начальное у(0) и предначальнос у(-0) значения. Скачок выход-
ного сигнала равен Av(0) = jcl,(0)+j’Bbllt(()) jn,(-0) - jBblll(0). При п т система имеет
коэффициент статической прямой связи D hnjan , а входной скачок Д.т(О) дает на вы-
ходе скачок £>Дд(0). При п>т выходной скачок отсутствует, а при п<т ПФ имеет
прямую связь дифференцирующего типа и входной скачок порождает на выходе дельта-
функцию и ее производные.
При вычислении оригиналов в (5.3) числители и знаменатели дробно-
рациональных функций допускается сокращать на общие множители, так как вычеты
по полюсам, совпадающим с нулями ПФ. равны нулю. В то же время не рекомендуется
поспешное сокращение полиномов ПФ на одинаковые множители, так как в (5.3а) будег
потеряна составляющая свободного движения срсп(/)ел'7, соответствующая сокращен-
ному полюсу ж,-.
В реальных системах входное воздействие х(1) имеет свое описание xk(t) на каж-
дом из N интервалов времени [/А_|, k-l,N, в том числе скачки на границах интер-
валов. Алгоритм расчета переходного процесса в системе с ПФ , кусочно опреде-
ленным входным воздействием x(t) и заданными предНУ ^^(-0) У»=0,л-1 включает
следующие шаги в цикле k-l,N .
О 1. По предНУ j(^(/A_1-0) и х('\гл ч-0) вычисляются полиномы F(s) я (7(s).
2. По оригиналу хк(х) в смещенном времени x = t~tk находится изображение
Хд.(5).
3. По формуле (5.2) вычисляется изображение УА.(.«).
4. С помощью формулы разложения Хевисайда или таблицы преобразований Ла-
пласа определяются оригиналы j>a(t) в смещенном и yk(t) в реальном времени.
5. Рассчитываются предНУ у('\/А-0) и x(,\tk-0) для следующего временного
интервала /ft+J как конечные условия текущего интервала. СЗ
Основные недостатки данного алгоритма заключаются в необходимости вычис-
лять на каждом интервале производные функции и предНУ для следующего интервала.
Можно избежать этих трудоемких операций, представив входной сигнал суммой полу-
бесконечных смещенных составляющих:
у
0-г() <Г( <..<гл,, (5.5)
*=о
в которой tk - моменты изменения описания входного сигнала. Изображения входного
и выходного сигналов с учетом запаздываний tk равны
X(s)='£xk(Systk . r(S)-£^(S)XA(S)e-^ + У „(s),
*=о *=о A(s) *=о
где Xk(s) и Yk(s)=W(s)Xk(s) - изображения несмещенных сигналов входа xk(t) и вы-
хода yk(f), а У 0(s) - изображение реакции системы на ненулевые НУ по входу и выхо-
ду в нулевой момент времени. Отсюда получаем формулу расчета выходного сигнала
142
где уА.(/)-1, 1 - несмещенная реакция на несмещенную к -ю составляющую
входного сигнала; J'-of/)— L 1 {(P(S) C(.v))/.4(.v)) Л,,(/)-v(0 - реакция на предНУ.
В отличие от предыдущего
алгоритма в (5.6) не требуется
вычислять производные, а пред-
НУ используются только один
раз для получения /_Ч)(/). Еще
более простой, но приближенный
метод построения переходного
процесса основан на кусочно-
постоянной аппроксимации вход-
ного сигнала (рис. 5.4):
х(О=х0 |(г-/0)+
/VI
к-А
А) <1\ -
Подставив в (5.6) реакции
системы на ступенчатые состав-
ляющие входного воздействия
y<}(t)---xnh{t-to) и yk(t)=Axk/i(t-tk), где h(t) - переходная характеристика, получим
формулу
/V-i
ЯI)-X-,) h(t - г0)-1 У\хк h(t - tk )+ J_o(f),
/<=!
(5.7)
особенно простую при нулевых предНУ, когда уЧ)(О--0-
Для численного расчета переходного процесса нужно дискретизировать входной сиг-
нал по времени и уровню. Тогда выходной сигнал (5.7) есть взвешенная сумма смещенных
во времени ПХ и реакции на ненулевые предНУ.
(Д Пример 5.1. Объект описывается ДУ у”+3у'+2у -х'\х с полиномами ПФ
Л(х)=2+3ж+л-2 --(l + .v)(2-rs), ZJ(s) = l+s и предНУ _у(-0) = 1,
у'(-0)=0. Входное воздействие имеет вид (рис. 5.5)
[ 0Vf<0,
х(г)-(/т1)1(/)-(^+1)1(г-2)--( /+1VO<7<2,
[oV/>2.
Решение. В спектре ПФ И/(у)=(1+ .?Х2+«)/(1 + 5) полюс
Si — — 1 совпадает с нулем Рассчитаем составляющие движения, зависящие от
произвольных предНУ:
Р(х) = а{у(-0) + «24',( ’ ^) ' <г9.Р< 6)Х ' Зу(-О) t j'( ()) t y(- ()).v,
„ r/A-i 43M"0b/(-on я о)-И _
Ли'*/ ] f
[ (Hs)(2 + s) J
_.3Я-О)+У(-О)-Я-О)С-/, Ъ’(-<))+У(-<))-2Я-0)е
' 2-1 1 2
~[2_y(—O)+ /(-())> 7 -[Я-О)4 /(-(})>л
y(r)-L’'|—e 2/)
(5.8)
Отметим, что если бы мы сократили полиномы ПФ на общий множитель (1+s), то но-
вая ПФ ИДА) = 1/(2+s) дала бы в (5.8) jCB(0 = j(-0)e”2/ и .
На первом временном интервале 0</<2, x(/)-/tl, X(s)-l/s2+\/s,
2
+ -----=^+——- Подставив в (5.8) предНУ j(-0)=1, _у'( 0)=0 и
sz(l + s)(2+s) sz » 2+s
x(-0) = 0, получим j’CB(/) 2e ' e~2/, q(t) = O и с учетом (5.4) полное движение объекта
y(t)-2e~f -е-2' +(o,5/+0,25-0,2 5e 2')1(Z), (5.9)
в котором 0,5/+0,25 есть установившаяся, a -0,25e”2/ - собственная составляющая вы-
нужденного движения. Вычислив производную
/(г)=-2е-г +2е~2' +(р,5+0,5е~2')1(г)+(о,5/+О,25-О,25е“2')5(/)=
=-2е-г +2е-2' +(о,5+0,5е“2') 1(г),
найдем предНУ для второго интервала времени:
у(2-0> 1,498, у'(2-0)«0,275, х(2 0>3. (5.10)
Проверим правильность полученного решения (5.9) подстановкой его в ДУ объек-
та у"+3у'+2у-х'+х при х(/)=(/’+1)1(0 и х'(/) = !(/)+5(/):
/(/)=2е r-4e~2/-e~2r 1(г)+5(г), y”+3y’+2y=(t+2) 1(/)+5(Г)-х'+х.
Если в (5.4) и (5.9) опустить функции 1(г), то получим у(/) ~-0,5г+0,25+2е— 1,25е 2/,
j'(r)=0,5-2e-'+2,5е~2/, у’'(Г) 2е г 5е 2' и у"+3у'+2у^х'+ х.
На втором временном интервале t>2, х(т) = 0, .Y(s)-0, где t = l-2 - смещенное
время. Подставив в (5.8) предНУ (5.10), получим усв(т) = 3,271е~х -1,773е-2т,
7(т) = 3^е~х -е-2х) и полное движение объекта
Ят)=3,271е-Т -1,773е~2т +(зе 2т -Зе"т)1(т), (5.11)
сходящееся за 3 с к нулевой установившейся составляющей. Проверим правильность
решения (5.11) подстановкой его в ДУ объекта при х(т)-0 и х’(т) = -35(т):
у'(т) = -3,271е’х +2-1,773е'2т +(-6е’2т +3е”х )1(т),
у"(т) = 3,271е-г -41,773е”2х + (12е 2т -Зе’х)1(т)-З5(т),
у''(т)+3^'(т)+2Ят) = -35(т), х'+х = -35(т).
144
Составим из уравнений (5.9) и (5.1 1) формулу переходного процесса в едином вре-
мени t по интервалам функционального описания х(/) (рис. 5.6щ):
I 0.5/ t-0,25+2e~' -!,25е~2' V0</<2, ч
у(<уИ о д д/.д (5. г 2а)
0,27 lez “ -Н,227е J У/>2.
Для расчета по формуле (5.6) представим входное воздействие в виде (5.5)
х(7) - х, (/)+х2(/)- Зх,(/ 2)-х2(/ 2), х((/) = !(/) , х2(/)=!(/)/.
Вычислим реакции объекта на составляющие xt(Z) и х2(/):
(/)=М0-1Уг [w{s)/s }=L" ’ {\/s(2 + s) И,5(1 -e'2/ )1(/),
j2(/)=j'A(T)dT=L4{w'(s)/s2 }-L“'{l/s3(2 + s)}-=0,25(2z-l+e”2/)l(/).
0
Переходный процесс на выходе объекта (рис. 5.6,0 с учетом свободного движения
описывается единой формулой
ЯО--=Лв(О+У|(О+/2(О-3ли-2)-y2(t-2)=
=2е-,-е 2^+0,25^2/+l-c-2/)l(/)-0,25(2r т1-е-2<-2>/)1(/-2), (5.126)
которая в интервальной записи совпадает с (5.12а). C.J
Метод преобразования Лапласа, несомненно, наиболее быстр и удобен для расче-
та переходного процесса в динамической системе при наличии соответствующей табли-
цы. В отсутствие таблицы использование формул прямого и обратного преобразований
Лапласа весьма трудоемко. Рассмотрим некоторые альтернативные методы моделиро-
вания движения систем при произвольных входных воздействиях.
5.3. МЕТОД ВАРИАЦИИ ПРОИЗВОЛЬНЫХ ПОСТОЯННЫХ
лассический временной метод вариации произвольных постоянных, приме-
няемый для расчета переходного процесса в системе, описываемой ДУ (5.1) с
вектором предНУ
У-о-[я 0) J'(-O)... j<n4)(-0)]1,
(5.13)
включает следующие этапы.
145
1. Находятся корни XII системы Л(л) ая .v,, где v - количество/шз-
»=|
V
личных корней, а ti; - кратность корня .v,-, причем Xя. -п .
гД
2. Формируется фундаментальный вектор-столбец Y(t) [j'iCO ... _уп(0]' решений
однородного ДУ A(s)y(/)- 0 со следующими элементами:
- простому действительному корню соответствует решение еЛ,/;
- л(- -кратному действительному корню v, соответствуют л; линейно независимых
решений ev, te*,..., ;
- паре простых комплексно-сопряженных корней =п,±jo, соответствуют два
линейно независимых решения ел,г cos(<o,7) и en,rsin(a)(-/);
- л, -кратной паре простых комплексно-сопряженных корней 5((+1 =T|/-±j<ol- соот-
ветствуют л,- пар линейно независимых решений
еп'*cos(co jf), /e’1,/cos(e)fr),...) tHi-lел,/cos(e>,7),
en^ sin(co ,-Г), Ze^sin^tn‘“'e*1''sin(<o,7).
Решение однородного ДУ с точностью до произвольных постоянных с,-, состав-
ляющих вектор-строку С=[с[ ... ся], имеет вид
^(0=&Л.(/)=СУ(Г). (5.14)
<=1
3. Составляется невырожденная лхл -матрица Вронского
У1(0 У1(0 •• • уГ'Чо'
г(о=«я Уг(О Уз(О •• • уГ!)(0 =ая[У(0 У'(/) - Г(я ,)(/)
у-(0 уА(О • • у1я_,)(0.
с det{K(/)| 7:0, так как функции у ДО и их производные линейно независимы.
4. Для получения решения неоднородного ДУ (5.1) произвольные константы с,
заменяются переменными функциями сД/), производные которых находятся решением
системы л линейных алгебраических уравнений
<д (ОУ i (0+- • +?’„(*)?„ (0=0,
(Оу {(0+- (Оу п (0=о,
<
<(0yt("4) (0+. • (0у (0=,
или в матричной форме С'(0^(0=[о ... 0 l]S(s)x(f) , откуда
С'(0=[0 ... о iJp-'cOWxW^MOSGO^O• (515)
где Кя(0 - последняя строка матрицы
146
r w 1 r*'ti(0 ••• %w
... = ....................
vn\W V«AO
^(0
Интегрированием системы (5.15) с точностью до постоянного вектора А' находим
вектор С(Г) = А г |и„(т)#(л)х(т)бт .
5. Подстановка C(t) в (5.14) вместо вектора С дает решение неоднородного ДУ
(5.1):
y(t)-KY(t) + Jr„(T)fl(s)x(T)dT Y(t).
V-0 7
6. Из этого выражения и его л-1 производных при t--0 находится вектор А' на
основе предНУ (5.13): Y^ - KV(-())/a„ => Ar=a„rJoK-l(-O).
7. Решение неоднородного ДУ (5.1) с предНУ (5.13) имеет вид
y(t)-anY~0V~[ (~0)Y(t) + frn(T)B(S)x(T)dx Y(t)=
' TZo ' Ld*__________________
•Гвын(^)
/Л
yi;X<y)(T)dT .
(5.16)
Свободная составляющая 3^(0 переходного процесса (5.16) порождается ненуле-
выми предНУ (5.13). Как вектор Y(t) фундаментальных решений однородного ДУ и
матрица Вронского Y(t), так и структура свободного движения системы и его устойчи-
вость зависят только от коэффициентов ХП A(s).
Вынужденная составляющая упы!1(г) переходного процесса порождается ненуле-
вым входным воздействием x(t) и его производными. Зависимость от т производных
обусловлена степенью полинома B(s), равной т . Из-за дифференцирования скачков
х(г) или его производных вынужденное движение может включать скачки и дельта-
функции. В связи с этим полное движение системы должно записываться в виде (5.4).
Как и в частотном методе, расчет переходного процесса можно выполнять от-
дельно по интервалам функционального описания входного воздействия либо целиком
на всем интервале моделирования. В последнем случае предНУ учитываются только
один раз и не требуется сопряжения интервалов друг с другом по конечным и началь-
ным условиям.
& Пример 5.2. Решить пример 5.1 методом вариации произвольных постоянных.
Решение. Во избежание потери составляющих свободного движения нельзя со-
кращать полиномы A(s) и B(s) на (1 + s). Система второго порядка имеет следующие
полюсы ПФ, фундаментальную систему решений, прямую и обратную матрицы Врон-
ского: Sj=-I, s,=-2, у((г)-е
(5.16) получаем:
- свободное движение, совпадающее с (5.8):
Лв(0=[у(-0) /(-0)] J J
е г
е-2'
=(2у(-0)+у'(-0))е-'-(Я-0)+/(-0))е~2' = 2е~' -е’2';
147
- вынужденное движение при
х(/)-(/ + 1)!(/)-(/ + 1) l(/-2), х'(/)- !(/) tS(/) I</-2)-3S(/-2),
Л(«)х(/)=х(/)+х'(ОЧ^+2)1(/)+5(/)-(/+2)1(/ 2)-35(/ 2):
- O,25(2r+ 1
е 2')!(/) (),25(2/1 1
5е 2<*-2>)ц/ 2);
- полное движение (5.4), совпадающее с (5.12):
j(/)=2e^z-e~2z+0,25(2/+l-e 2/jl(/) 0,25^/ + 1- 5e 2<z 2))l(<f -2)=
0,5/+0,25 + 2е"'-1,25е“2' V0</<2,
0,271е4'~2)+1,227е~2(''2) V/>2.
5.4. МЕТОД ИНТЕГРАЛА ДЮАМЕЛЯ
торой альтернативный метод расчета переходного процесса без применения
<3^0 преобразования Лапласа использует ИХ w(t} блока, через который прохо-
дит входной сигнал х(/) [ 1,2,3]. Выход этого блока при нулевых начальных условиях
t t
z(/) = |и’(т)х(/-т)<1т-<[х(т)н’(/-г)<1т (5.17)
о о
называется интегралом Дюамеля (4.4) с ядром w(t). Благодаря встречным направлениям
интегрирования ядра и входного сигнала, выражения (5.17) называются также интегра-
лами свертки. В соответствии с выводом, следуемым после (4.4), z(t) есть оригинал
изображения Z(s) = W'(s)X(s), где W(s) - передаточная функция блока.
Согласно (5.4) и структурной схеме на рис. 5.3, выход системы формируется как
_P(0=.Fcb(0+{z(0~?(0} КО из следующих интегралов Дюамеля:
г
- свободного движения J’CB(O“f t)dT-p(O с ядром p(t) - импульсной ха-
0
рактеристикой блока с ПФ P(s)jA(s), возбуждающего систему ненулевыми предНУ
выхода j’^(-O) V/=O,n-l. Функция р(0 является решением ДУ A(s)p(f)~- P(s)8(t);
t
- части вынужденного движения |^(т)5(/-т)0т=^(/) с ядром q(t) - импульсной ха-
0
рактеристикой блока с ПФ Q(s)/A(s), возбуждающего систему ненулевыми предНУ
входа х(‘) (-0) Vi-O.m-l. Функция q(t) является решением ДУ A(s)q(t) = Q(s)8(f);
t
- части вынужденного движения z(O-fи>(т)х(/-т)с!т с ядром и4/), являющимся
о
решением ДУ А($)н>(!) = B(s)8(t).
Для выделения в вынужденном движении собственной и установившейся
д>уст(/) составляющих запишем
148
.’’вин(z)JH<T)x(/-T)dT Xz) = fx(x)Xz Odx-XO (5.18)
l> 0
относительно момента начала внешнего воздействия /0 0:
Jх(т)и’(/-т)с1т- q(t).
‘о
Установившийся процесс в устойчивой системе в момент времени t равен [2]
' Г-T=V 00
Ас.(0 = lim fx(TMr-T)dT- lim q(t) - [xO-t(z“ v)dv , (5.19)
r^-oo. 0
так как вследствие необходимого условия устойчивости (4.5а)
lim q(t) = lim q(t-to)-O.
fy-t-x- >06
Вычитая (5.19) из (5.18), получим собственное движение
.VcooCO - -_[H’(T)x(/-T)dT . (5.20)
t
Отсюда видно, что в устойчивой системе собственное движение (5.20) затухает, а вы-
нужденное сходится к установившемуся.
Птусоб(/)-0 lim yBbIHO)=yVCT(O •
t—>'» ty—>-</:
Как и в ранее описанных методах, если входной сигнал не имеет единого функ-
ционального описания на всем интервале моделирования, то, представив его в виде
(5.5), получим выходную переменную (5.6) в виде
t N N»
Х0-|и<г-т)^хА.(т-/Л)1(т rA)dT + y_o(O=2L ^)dT+y-o(t)=
О k=o k=Otk
N ttk /у
= E pC'-'fc t)-v*(T)dT+y_0(z)=2LyA(r-/A)l(z-rft)+y_()(/).
Л=() о k=®
t
где интегралы Дюамеля y*(/)=Jw(z-T)-rfc('r)dT есть реакции системы на несмещенные
о
входные сигналы xk(t) при нулевых начальных условиях. В частности, кусочно
постоянное описание х(/) (рис. 5.4) дает формулу (5.7).
УЗ Пример 5.3. Решить пример 5.1 методом интеграла Дюамеля.
Решение. Предварительно по формуле интегрирования по частям получим выра-
жение J/(05'(0df -/(0)3(0-/(О) Определим необходимые ИХ решением соответст-
вующих ДУ:
1) w"(t)+3w'(t)+2w(t)=5 ’(0+5(0.
’КО-
- е2х](5(т)+5'(т))бт
%, =[5(0 1-5(0] %
2) р"(t) 4 Зр '(0+2X0 = j(-0)5 '(0 +(3у(-0)+у Ч-0))5(/)=5'(/)+35(/).
149
p(J)=J p
1 J
- e" ]{35(т)+3'(т))с1т | e
-[2+8(0 -1 S(Z)]
f
e
-2f
e
2e e
3) q"(f) + 3q'(t)l 2q(t) = x( <))8(/) > q(t) -0.
Рассчитаем интегралы Дюамеля для входных воздействий .гД/)-1(7) и х2(/)- !(/)/:
/ ' / \
у,(Г)=|и>(т) 1(Г-т)ёт-|е’ 2хс1т - 0,5(1 е 2,)1(Г),
о о
г t / \
>’2(0=- т)1(/ x)dt-Je 2т(/ т)<1т-О.25(2/-1+е 2/)1(г).
о о
Переходный процесс на выходе объекта описывается формулой (5.126). til
5. 5. МЕТОД ПРОСТРАНСТВА СОСТОЯНИЙ
fCJ овременные методы анализа и синтеза САУ предполагают использование ком-
пьютеров для решения трудоемких в вычислительном плане задач. К таким за-
дачам относится моделирование переходных процессов при произвольных входных
воздействиях. Разработано множество алгоритмов решения разнообразных ДУ. Каж-
дый алгоритм требует определенной формы задания исходных параметров системы для
моделирования ее движения.
Метод моделей в пространстве состояний (МПС) основан на представлении ДУ
A(s)y(t)= B(s)x(t), в котором степень т полинома числителя B(s) не превышает степе-
ни п полинома знаменателя A(s), в виде системы п линейных ДУ первого порядка
v,'(/) = й| , »| (/)+.. .+а j „ v„ (I) + Л, х(0,
и алгебраического уравнения выходной переменной
У(0 = <т (0+- • -+с„ % (0 + Dx(t).
(5.21а)
(5.216)
Эти уравнения имеют эквивалентную векторную форму
v\t)= Av(t)+Bx(l),yO)=Cy(t) ! Dx(t)^
(5-22)
в которой v,(/) Vi = l, л - переменные состояния модели, однозначно и достаточно опре-
деляющие изменение ее выхода y(t) в зависимости от изменения входа х(0 и вектора
начального состояния v(-0). Матрицы АеКг“<я, ЛеКях|, CtRlx” и коэффициент D
связывают переменные состояния с входной и выходной переменными.
Векторная форма МПС позволяет компактно записать аналогичное (5.16) решение
задачи моделирования:
150
t t
v(t) = eAtv(-Q)+ |ел<г'х)Bx(x)dx , ^(O^Ce^'K -0)+C|еЛ(Гх>Вх(т^т+Ох(г) . (5.23)
-<i -o
Матричная экспонента ем
M2 М2
=/+ло~+---+
- абсолютно сходящийся ряд,
вычисляемый за конечное число шагов с любой наперед заданной точностью; I - еди
ничная матрица размерности лхл .
В (5.22) и (5.23) требуется знать вектор предначального состояния »>(-0). Для его
получения составим систему п предначальных векторных уравнений
у(-0) = 0(-0)+Рх(-0),
у '(-0)=Cv '(-0)+Dx '(-0)=С A v(-0)+СВх(0)+Dx '(-0),
/я-,) (-0) = С А яЧ v(-0)+САп~2 Вх(-0)+.. .+СВх(*~2} (-0)+Dx^ (-0),
имеющую решение
т(-0)-Яч Я-о) /(-0) ~H~'L х(-0) х'(-0)
Уя"!,(-о). х(я~‘\-0)
с блочными матрицами
(5.24)
с D 0 . 0 0’
СА СВ D . 0 0
САа~1 САп 2В САа 3В .. . св D
(5.25)
Матрица Н называется матрицей наблюдаемости. Ее невырожденность позволяет оце-
нить вектор состояния модели по измерениям входа и выхода системы . Совокупность
формул (5.23)-(5.25) дает аналитическое решение задачи построения переходного про-
цесса в МПС с известными параметрами {a,B,C,d} и заданными предНУ входной и
выходной переменных.
Рассмотрим методы получения параметров МПС. Основная трудность заключает-
ся в выборе переменных состояния. Согласно (5.21), они должны представлять процес-
сы, в которых скорости изменения некоторых величин зависят от значений этих же ве-
личин и входного воздействия. Количество различных МПС бесконечно из-за свободы
выбора переменных состояния. Из множества возможных параметров {a,B,C,d} ,
имеющих всего л2+2л+1 коэффициент, можно выделить некоторые особенные канони-
ческие (регулярные) формы (КФ). Число независимых коэффициентов КФ должно быть
равно п+т+1 - числу коэффициентов приведенной ПФ системы
Ъп T&i ХЧ-.. .+b„S
IT(s)=---------,
&0‘+«я
(5.26)
полученной делением полиномов ПФ ЙИ(х)= B(s)/А(з) на старший коэффициент ая^0
полинома J(.v) и дополнением полинома числителя фиктивными слагаемыми
^m+i-v”,+! = • =0. Остальные п2 +п-т параметров КФ - числа 0 и I.
В первой главе рассмотрена последовательность получения канонической струк-
Рис. 5.7
турной схемы динамического объекта. При-
менительно к ПФ (5.26) она изображена на
рис. 5.7, а ее уравнения состояния (5.21) и па-
раметры МПС (5.22) принимают вид
Vj' V, ,
’ (5.27)
v'n = ~а^-..an-ivn+
j-qv! +...+c„v„ + Dx,
сЦе, ... c„], с^Ь^-а^Ьп, D bn.
(5.28)
Заметим, что прямая связь от входа к выходу существует лишь при равных степе-
нях полиномов B(s) и A(s), так как при т -п в (5.27) и (5.28) получим Z)^0. При
т<п прямая связь отсутствует (Z) 0), а при /и<л-1 матрица С имеет нулевые коэф-
фициенты ст+2-^сп. Таким образом, КФ имеет л+/н+1 независимый параметр.
Полученная МПС не вполне удобна для расчета переходных процессов по (5.23) и
(5.24), так как ее матрица наблюдае-
мости Н - общего вида. Целесооб-
разно строить МПС с единичной Н.
Для этого нужна матрица
С=[1 0 ... б] и структурная схема на
рис. 5.8. Уравнения состояния этой
модели имеют следующий вид:
< ^-1 =*»+РЯ-1Х, (5.29)
’’;=-зд-..~ап-1,’й++м>
y = +Dx.
Рассчитаем параметры модели, выразив переменные состояния в (5.29) через вход-
ную и выходную переменные:
i-2
vi = s‘4 j-^p i \ js^x-1 x Vi = l,n .
/=0
Подставив эти зависимости в формулу sv„ =-а0»>1-...-ап_1»'л+Рпх и сгруппировав по-
добные слагаемые, получим уравнение
п-1 Л-1Г я-1
'Xais‘yis!ty'^ Yai^j-i+aiD
i=0 »=0\ /=<+! /
s'x+Ds"x
n~\ n
Сравнивая его с операторным уравнением ^jaisly + s"y = ^bisix, получим рекуррент-
/=0 1=0
ную и матричную формулы расчета параметров МПС:
152
О 1
1
(5.30)
о о
аЧ "«1
Р/ hn i /+7рJ ^a-ihn Vi-\,n,
/=1
I) «0 «1 «л-1 1 -1
Р, «1 «2 ••• 1
л 1 «„ । 1 ... 0 0
k J 1 0 ... 0 0 ь„
Это решение всегда существует, так как обращается треугольная матрица с еди-
ничной диагональю. Коэффициент прямой связи 0*0 лишь при т-п. При пкп пря-
мая связь отсутствует, а при т<п-1 матрица В имеет нулевые коэффициенты
Pi ^Рп-л»-1 Таким образом, КФ имеет л+л-(л-т-1)=л+m+l независимый параметр.
Каноническую модель (5.29), (5.30) удобно использовать для расчета переходных
процессов программным методом, например, в среде пакета MathCAD, имеющего ши-
рокий набор встроенных функций для решения обыкновенных ДУ и удобные графиче-
ские средства отображения результатов вычислений. Несмотря на различные методы
решения, каждая функция требует задания следующих величин:
- само ДУ в каноническом виде v'(t)~F(y,t,...). Должна быть определена вектор-
ная функция F(y,t, ...)gR" векторного аргумента yeRn, времени t и, возможно, дру-
гих ранее определенных аргументов, например, входного воздействия х(1). Вместо еди-
ничной функции 1(Г) можно использовать аналогичную функцию MathCAD Ф(0;
- границы временного интервала tK 1 и число К подынтервалов между точ-
1К ~*0
к
ками вывода решения tk -tc> +
к;
начальное значение вектора v(tu);
5F: dF
- при необходимости матрица Якоби J размерности л х(л+1): J = ——:--
L dt _
В результате расчета функции возвращают
(ЛГ+1)х(л + 1)-матрицу (рис. 5,9), левый столбец которой со-
держит отсчеты времени от /0 до /А-, а строки оставшейся
части заполнены векторами решений v(tk) .
Перечислим функции MathCAD, предназначенные для
решения обыкновенных ДУ:
1) rkfixed(v,f0,rA,K,F) - использует хорошо зарекомен-
довавший себя метод Рунге - Кутта четвертого порядка с по-
стоянным шагом интегрирования К;
2) Rkadapt(v,/n,/A, К, F) - аналогична функции rkfixed ,
»(*,)
f tf+1
Рис. 5.9
выполняет адаптацию
шага интегрирования к скорости изменения решения, что повышает точность на быст-
рых и ускоряет расчет на медленных участках решения;
3) Bulstoer(v,Z0,/A, К, F) - дает повышенную точность для гладких решений;
4) Stiffb(v,/0,, АГ, F.J) - использует метод функции Bulstoer для решения жест-
но
*0
к
л
ких ДУ;
5) Stiffr(M(),fjr >К, F,J) - использует метод Розенброка для решения жестких ДУ.
При построении графика переходного процесса по оси абсцисс откладываются
значения tk первого столбца матрицы решений (рис. 5.9), а по оси ординат - значения
У(^к)~у1^к)+^х(1к), формируемые из элементов второго столбца и дискрет входного
воздействия.
£.7 Пример 5.4. Решить пример 5.1 методом пространства состояний с помощью
программы MathCAD.
Решение. Ниже приведен листинг MathCAD-программы с решением задачи моде-
лирования переходного процесса.
а0 а1 1
tk ;= 6 К ; 6()0
x(t) : (t + 1)-Ф (t) Ф (2 t)
-ао
В .= submatrix(p, 1,2,0,0) С: (1 0)
D Ро
D 0
(С В)0 D
F(t,v) A v +- В x(t)
v0 ; YO - LXO
А
L .
О
Р- Я1
О Ь
1 о о
о
M ; Rkadapt(vO,0,tk,K ,F)
k 0.. К
xk := x(*k)
0 1
A =
-2 -3
0 0
L =
1 0
*k : ~ Mk,0
Ук: Mk,l + Dxk
1
-2
1
0
vO =
4
Результат моделирования полностью совпадает с графиками j’(t), полученными
другими методами. О
£7 Пример 5.5. Рассчитать переходный процесс на выходе схемы моста Вина - Ро-
бинсона (пример 1.6), описываемой ДУ (1.14) Зу+9Ту'+ЗТ2у"=х+Т2х". Входное на-
пряжение представляет собой линейно частотно-модулированное (ЛЧМ) колебание
единичной амплитуды: x(/) = sin((coo+Q/)z), где <в0 - начальное значение частоты при
t-0, а £2-(<о-®о)Ах ' скорость изменения частоты с ш0 до <ag за время tK. По-
строить графики г(/) и j(/) для следующих исходных данных: сое = 1/Г = 100я рад/с,
(оо = юс/А , юА- (осА, A-3J6, /А--О,3с. Проанализировать полученные результаты
совместно с ЧХ схемы (пример 2.2).
Решение. Ниже приведен листинг MathCAD-программы с решением задачи расче-
та переходного процесса на выходе схемы моста Вина - Робинсона методом перемен-
ных состояния. Параметр девиации частоты Л -т/Г() задан так, чтобы диапазон частот
ЛЧМ сигнала <в()<(о(/)<(ок составлял 1 дек, а частота сйс, на которой согласно ЛАЧХ
(рис. 2.1 I) происходит полное подавление колебаний, располагалась в его середине (в
логарифмическом масштабе).
В результате моделирования наглядно проявляются свойства схемы моста как ре-
жекторного фильтра, согласующиеся с ее ЛЧХ. Увеличение частоты входного сигнала
при (b(Z)<(oc приводит к постепенному уменьшению амплитуды выходных колебаний
от 0,333 вплоть до их полного исчезновения. Дальнейшее увеличение частоты вновь
увеличивает амплитуду до предельного уровня 0,333, что равно коэффициенту усиления
схемы на высоких частотах. Что касается фазового сдвига, то при <о(/)<сос он отрица-
тельный (выходной сигнал отстает от входного), а при <о(/)>®с ' положительный (пики
Х0 опережают пики x(Z)), что также соответствует построенной на рис. 2.11 ЛФЧХ
Ф(сэ).С1
ш Гц 2 it toe - 50 Гц
г ? , (1)С~ • ; 3'Ш€ 1 b; 2 1 fflc ! i 0 |-з V; i ; r0 j „i P' 0 j a0 al 1 ai 1 ! А.-Д0 1 ° ! b ! | <oO г A <bc 0 0! ®k : A <i>c
А- i ° 1 -а0 aj В := submatrix(p, 1,2 C (1 0) D Po ,0,0) <oO - 15.81 1-Гц ас=50-Гц »k - 158.114-Гц
tk; X(t) М 0.3 К : 3000 ®(t) .- ®0 4- ®----- t tk : - sin(«o(t) t) F(t, v) ;= A v t Bx(t) k Rkadapt(v,0,tk,K,F) tk : Mk Q 0.. 0 1 ! A 4 9.87-104 -942.478 1 К 314.159 ! В s 1 ! 2.961.10 1
С - [ 1 0 D 0.33.3
Ук :: Mk,i ’ D xk
155
ГЛАВА 6. ЧАСТОТНЫЕ МЕТОДЫ СИНТЕЗА
СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
6.1. ОСНОВНЫЕ ЗАДАЧИ ЧАСТОТНОГО СИНТЕЗА САУ
ложная проблема создания САУ с хорошими статическими и динамическими
свойствами включает следующие основные задачи:
I) обеспечение устойчивости (стабилизация) системы и повышение запаса ее ус-
тойчивости;
2) повышение точности регулирования в статическом режиме, или обеспечение ас-
татизма;
3) улучшение показателей качества переходных процессов (уменьшение времени ре-
гулирования, перерегулирования и колебательности).
Исходя из требований к статическим и динамическим свойствам САУ необходимо
найти оптимальную с точки зрения выбранных критериев структуру (состав элементов
системы) и определить параметры элементов. Эти данные позволяют определить же-
лаемые характеристики системы на основе компромисса между качеством и точностью,
с одной стороны, и простотой технической реализации - с другой.
Обеспечение устойчивости и желаемого качества регулирования в САУ достигает-
ся двумя способами;
1) целенаправленным выбором основных элементов системы. К функционально
необходимым элементам САУ относятся датчики сигналов, измерительные устройства,
усилители мощности, преобразователи сигналов, исполнительные устройства. Они вы-
бираются по каталогам на основе требований к развиваемой мощности, быстродейст-
вию, предельным скоростям и ускорениям, допустимым статическим погрешностям,
помехоустойчивости и т.д.;
2) если имеющаяся система не удовлетворяет желаемым характеристикам, то наи-
более действенным способом обеспечения желаемых свойств САУ является введение в
нее дополнительного элемента, который исправляет (корректирует) поведение системы
в нужном направлении.
Корректирующее устройство (регулятор) - это функциональный элемент САУ,
доставляющий ЗС необходимые свойства: устойчивость и желаемые показатели качества
переходных процессов.
Как отмечалось во введении, регулятором в широком смысле является вся САУ, за
исключением объекта. Задачей регулятора в узком смысле является выполнение анало-
говых, логических и арифметических операций по расчету управления.
Рассмотрим основные типы регуляторов в САУ и их свойства.
1. Последовательный регулятор с ПФ /?n(s) (рис. 6.1) включается в прямую цепь
системы непосредственно после сравнивающего элемента или после предварительного
усилителя. Передаточная функция ЗС с последовательным регулятором равна
Рис. 6.1
1 + Rn (s)jy(s) ’
(6-1)
Данное устройство может, например, форми-
ровать производную от ошибки регулирования
e(t), что, как мы увидим ниже, увеличивает запас
устойчивости и улучшает качество переходного процесса. При использовании интегра-
ла и производной e(t) обеспечивается астатизм системы управления (ошибка evcr=0),
устойчивость и качество переходного процесса. Применяются и более сложные после-
довательные регуляторы.
156
2. Прямой параллельный регулятор с
ПФ /?1Ш(х) (рис. 6.2) включается параллель-
но какой-либо подсистеме ^(.v) в прямой
цепи системы kV(s)~ И/1(.ч)Я/1(х) . Сравнивая
(6.1) с ПФ ЗС с данным типом регулятора
Рис. 6.2
^(.s) + /?„u(y))F3(s)
1 +)С(5)+ ЯШ|(5))Г2(5) ’
получим усло-
вия эквивалентности регуляторов
/?„(.V)=H /?пп (.0/^(5), /?1п1(5) = (/?11(5)-1)И/1(5),
(6.2а)
позволяющие перейти оз одного типа регулятора к другому, возможно, более простому
в технической реализации.
Прямой параллельный регулятор может быть полезным, например, для устране-
ния в подсистеме с ПФ Wx(s) = (1т।s)/(l+Тхs) правого нуля Л] -+1/т| , дающего в пере-
ходном процессе отрицательное перерегулирование, выбором
т. 1 +
Rim(s)-Knn>~ ^(S)+Knn =---------—Чп
х 1 1 -г х । Л
1 + *пп
или для придания подсистеме форсирующих свойств без использования дифференциа-
торов, усиливающих помехи:
/С К< 4- Л'пп -г К ,,п 7] 5
и'|<”=17г? д»п«=х„„ => (»)+«„„ =-J—гС----
1 П X | □ 1+/{ J
3. Обратный параллельный регулятор Ron($) (рис. 6.3) охватывает локальной ПОС
или ООС какой-либо элемент системы, чаще
всего оконечный каскад усилителя или ис-
полнительный элемент.
Сравнивая с (6.1) ПФ
l+W(s)±Ron(s)fP2(s)
ЗС с данным типом регулятора, получим ус- рис
ловия эквивалентности регуляторов
г» 1 1 - Rn (s)
,,(5р1±^)^2(5-)’ *on(s) = ±tfn(.f),r2(s) - (6 2б)
Локальная ПОС используется для увеличения статического коэффициента усиле-
ния элемента в существенно большем диапазоне, чем при последовательном включении
усилителя. Например, охватив подсистему ^(s)- K2/(\+T2s) контуром ПОС с ПФ уси-
лителя Rw(s) = Коп <\/К2 , получим
tv2(s)______К К2
\~W2(s)RQn(s) ' l+7s ’ К~ \-К2Кт1 >У Кг
При выборе К.т>\/К2 подсистема приобретает инвертирующее свойство: ЛГ<0.
Локальная ООС широко применяется в автоматике для стабилизации и улучшения
качества работы элементов системы, склонных к неустойчивости или слишком инерци-
онных (с большой постоянной времени). При этом неустойчивые или близкие к границе
157
устойчивости полюсы ПФ ИЛО), охваченной локальной ООС, сдвшаются влево, что
либо делает систему устойчивой, либо повышает степень устойчивости, быстродейст-
вие и уменьшает колебательность:
К. 7', ИЛ
a) ^,0)--^, /?О|1(х) -Т()пх при (+и/?~
мени Т --Т2 >0 устойчивого звена;
К, ИА Л
б) ><-<Ч . « .14 л > -=,;Ъ
Кг . ИЛ
la 7s
\\K2KW
к-,
с постоянной вре-
?2;
в) HC(.v)-------------, /?o„(.v) = T,S =>-----------.-=-----——
1+2£,272stT22s2 J-t-WS/foll l+2t,T2s+T?s2
ентом демпфирования £ -Е,2 + К2Топ/2Т2 >£2 . Выбрав постоянную времени гибкой ООС
7^п >2(1-^2)^2/^2 > можно из колебательного звена получить два апериодических, так
как теперь £ > 1.
Если в системе с локальной ООС в рабочем диапазоне частот выполняется условие
L2(<o)+Lon((o)>20 дБ, то ООС является глубокой. Тогда ПФ
подсистемы, охваченной глубокой ООС,
ИЗД 1
с коэффици-
или
б)
Рис. 6.4
равна -—~ , а изменения па-
l + >F2(s)/?on(s) /fol,(s)
раметров этой подсистемы слабо влияют на
свойства системы, определяемые только па-
раметрами обратного параллельного регуля-
тора. Например, неидеальный ОУ с коэффи-
циентом усиления Ку.<ло, охваченный четы-
рехполюсником с ПФ (Pq(s) (рис. 6.4,й), име-
ПФ l¥(Ky)--Ky/(\+KyW{}) (рис. 6.4.<5). Чем качественней ОУ
ет структурную схему с
(—>ос), тем ближе ПФ устройства к И'(ос)- 1/Wq . Принцип глубокой ООС - основной
способ навязывания системе желаемых динамических и статических свойств и подавле-
ния нежелательных свойств.
Рис. 6.5
4. Регулятор в обратной связи системы с ПФ Ra(s) (рис.
6.5) является обобщением локальной ООС на всю систему и
выполняет аналогичные функции применительно ко всей сис-
теме. Эквивалентность регулятора в ООС и последовательно-
го регулятора устанавливается формулами
(6.2в)
^r,(s)- ~7--------\----. /fo(s)= - ----
l+(tfo(s)-1)^(5-) /fu(OW^(s)
Из всех типов регуляторов регулятор в ООС наиболее удобен при проектировании
следящих систем с масштабированием уставки (роботов, манипуляторов, тренажеров,
прецизионных устройств микроэлектроники), где требуется точное воспроизведение
формы задающего воздействия с увеличением или уменьшением масштаба. Получим
условия инвариантности воспроизведения уставки g(t') на выходе ЗС y(t) с масштабом
М и требуемую ПФ регулятора в ООС:
Ифу) I I
158
Отсюда при М -\ следуез условие точного воспроизведения уставки на выходе системы:
1 1/И/(л). По формулам эквивалентности (6.2в) получим ПФ соответствующего
„ М 1
последовательного регулятора /cu(.v)---— откуда видно, что при М = \ в прин-
\ М ИД.?)
ципе невозможно точное слежение за изменяющейся во времени уставкой с помощью по-
следовательного регулятора.
Как правило, условия инвариантности выполнимы лишь в определенном диапазо-
не частот. Если этот диапазон накрывает полосу пропускания системы, то при любых
уставках g(f) на выходе системы будет y(t)~Mg(t). Удовлетворив условие инвариант-
ности только на частоте <о =0 выбором /?о(л)- l/Af-l/W^O), получим астатическую сис-
тему масштабного слежения без введения в контур управления интегратора, обычно за-
медляющего переходные процессы.
5. Комбинированный регулятор по уставке и ошибке (рис. 6.6) формирует управ-
ляющее воздействие x(t)~xg(t)+xe(t) с изображением X(s)=Rn(s)E(s)+Rg(s)G(s).
Слагаемое xe(t) = Rn(s)e(t) есть управление по ошибке и решает главную задачу стабили-
зации системы. Второе слагаемое xg(t) - Rg(s)g(t) в виде прямой связи уставки с вхо-
дом объекта есть управление по уставке и решает задачу улучшения динамических
свойств ЗС.
Рассчитав ПФ ЗС
(/?„(«)+ R^))иДз)
К
X
\ + R^s)W(s)
сделаем три вывода: 1--------------------------1
1) введение в САУ регулятора по ус-
тавке Rg(s) доставляет ей форсирующие Рис- 6.6
свойства, увеличивая быстродействие в отработке уставки;
2) условие инвариантности воспроизведения уставки ^(s)^! дает ПФ регулятора
по уставке Rg(s)-\/W{s), точно отслеживающего любые изменения уставки g(t).
Удовлетворив условие статической инвариантности ИС,(0)-1, получим ПФ регулятора
Rg(s) -- Kg ~ l/fF(O) системы слежения без введения в контур управления интегратора,
замедляющего переходные процессы;
3) сравнивая ГЕ3(х) с (6.1), получим формулу перехода от комбинированной сис-
темы с регуляторами /?п(л) и Rg(s) к системе с последовательным регулятором, имею-
щим ПФ
/?„(.v) + 7?g(y)
/?,,oc;1(^”l-^(5)^(5) '
(6.2г)
6. Комбинированный регулятор по возмущению и ошибке с ПФ RB(s) и /?п(з) пред-
назначен для компенсации действующих на объект внешних (не управляющих) воздей-
ствий. Пусть точка приложения возмущения f(t), проходящего через фильтр с ПФ
^(ж) , делит систему на две подсистемы с ПФ ИДж) и W2(s) (рис. 6.7). Система управ-
ления может включать ранее спроектированный регулятор по ошибке, например, по-
следовательного типа Rn (s).
Для компенсации возмущения необходимо, во-первых, его знать или измерить, а
во-вторых, сформировать дополнительное управление, противодействующее возмуще-
159
пню. Записав операторное уравнение выхода системы F(.v) = jy.,(s)(7(x) Bzy(.y)F(.v) с НФ
ПА) /гп(*)н^) w . Н') /?„(5)и/(Ж)т^(х)>г2(.у)
ОД /=0 1 + Rn(s)W(s) ' /(А) 7(s) l + /?H(S)^(.v)
Рис. 6.7
сделаем два вывода:
1) условие инвариантно-
сти по возмущению H/y(s) = 0
дает ПФ регулятора по воз-
мущению R^(s)--WK(s)IWx(s),
полностью компенсирующего
любое возмущение f(t).
Удовлетворив условие стати-
ческой инвариантности
Ну(0) = 0, получим ПФ регулятора RB(s) = KB=~W'B(0)/W/'l(0), полностью компенси-
рующего постоянное возмущение /0 в установившемся режиме-,
2) проектирование главного регулятора по ошибке Rn(s) может проводиться не-
зависимо от регулятора по возмущению /fB(s), так как последний даже при неполной
инвариантности слабо влияет на ХП ЗС, а значит, и на показатели ее качества.
В САУ применяются также сочетания различных типов
регуляторов. Далее мы будем рассматривать системы управле-
ния с последовательным регулятором /?(«), имея в виду, что
другие типы регуляторов могут быть пересчитаны к последова-
тельному типу по формулам эквивалентности (6.2). Используе-
мое во всех замкнутых САУ сравнивающее устройство, вычис-
ляющее ошибку регулирования e = gy, имеет простейшую
реализацию на одном ОУ (рис. 6.8).
Исходными данными для проектирования регулятора являются:
1) передаточная функция >F(s) разомкнутого контура системы;
2) желаемые показатели качества функционирования ЗС: время регулирования zp,
перерегулирование о , статические ошибки регулирования, запасы устойчивости по
амплитуде L3 и фазе ф3 и т.д.
Методика синтеза регулятора основана на соотношениях
Чж(.у)-/?(.у)И'(.у), Цуо), Фж(®) = Фр(а>)+Ф(<в),
в которых индекс «ж» обозначает желаемые ПФ и ЧХ разомкнутого контура, и на за-
висимости свойств ЗС (главное из них - устойчивость) от ЛЧХ разомкнутой. Отдельные
участки ЛЧХ избирательно влияют на показатели качества.
Низкочастотная (НЧ) часть определяет погрешности регулирования в устано-
вившемся режиме, от среднечастотной (СЧ) части зависят устойчивость, запасы устой-
чивости L3 и <р3, динамические показатели качества /р и о , а высокочастотная (ВЧ)
часть должна максимально ослаблять влияние шумов на работу САУ. Каждая из задач
обеспечения отдельного показателя качества решается соответствующими методами.
Иногда несколько частных задач могут быть решены совместно, в других случаях они
оказываются противоречивыми. В зависимости от приоритетов разработчик принимает
компромиссное решение выбора варианта, облегчая второстепенные, на его взгляд,
требования к системе управления.
160
6.2. МЕТОДЫ ПОВЫШЕНИЯ СТАТИЧЕСКОЙ ТОЧНОСТИ
(низкочастотный синтез регуляторов)
6.2.1. Коэффициенты статических ошибок
Остановившийся режим системы управления определяется НЧ частью ее ЛЧХ.
Рассмотрим ПФ ошибки регулирования e(t) в замкнутой САУ, разомкнутый контур
которого имеет ПФ 0 :
0/ <+bis+...+bmsm
•^ж(®) Йо+«] s+.. .+aasn
1 1К(л) и^(5) Лж(ж) + Вж(у)
Разложим ПФ ошибки в ряд Тейлора по степеням s:
00
ГТ)
1 d'
(°>Г7
*• US’
7
Uq 4-Д] 4-.,.
4Jq +(#| )5’+(й2 +
(63)
5-0
Тогда изображение и оригинал ошибки регулирования, а также выход системы при ну-
левых начальных условиях имеют вид
E(s) = ГТДs)<7(s) = c0Cr(s)+CjsG(s)+c2«2(»(s)+...,
e(/) = L4{E(s)} = c0j?(0+H^'(0+^2<?"(0+---. (6-4)
т(0 = ?('Н(0 - С -A) '(О-^'ЧО-- - -
Коэффициенты ci называются коэффициентами ошибок и характеризуют отно-
сительное содержание уставки g(t) и ее производных в функции ошибки e(f). Конечно,
эти коэффициенты можно вычислить по (6.3) непосредственным дифференцированием
ПФ We(s), Удобнее, однако, получить нужное количество коэффициентов су+Су
(обычно их требуется немного) делением полинома Аж(ь) на полином Аж(я)+Вж(у):
с а1~(а1+Мс0 «2~(fll+6|)н -(а2+Ы^о
° a()+fyj 1 a0+^0 2 a0+*0
По индукции следуют рекуррентная и матричная формулы
и и у j
(6.5а)
(6.56)
С) г ао +Z>o 0 0 1 «о
С1 а1 +Z>1 а() +6у 0 а\
сх : aN Й1 +Й1 йо+^о aN
(6.5в)
Недостающие в (6.5) коэффициенты или Л, равны 0. Нижняя треугольная матрица в
(6.5в) всегда не вырождена и имеет обратную.
6.2.2. Статические системы управления
(Система управления, в которой коэффициент ошибки с()^о. называется статиче-
ской. Из (6.5) следует, что признак статизма - коэффициент «0 эФ.. Допустим, на входе
статической системы действует постоянная уставка g(t) = gu (рис. 6.9). Тогда ошибка
регулирования, выход системы в установившемся
режиме и относительная погрешность регулирова-
ния равны
«уст
У ус г =(1“со)^о = £() “«уст *8(1 ’
8(1 У уст
go
100%=|со| 100%.
В статических С А У в принципе недостижимы нулевая статическая ошибка и точ-
ное слежение выхода за уставкой. Но значениям коэффициента статической ошибки
с0^0 или относительной погрешности 80 статические САУ делятся на группы:
- грубые, в которых |с0|>0,05 или 8() >5%;
- обычные, в которых 0,02<|ео|<О,05 или 2%<60<5%;
точные, в которых 0,01 <|с0|.<0,02 или 1 %<80 < 2%;
- прецизионные, в которых |с0|<0,01 или 50<1%.
Пусть K^W(fd) и ^-^/«0 = ^(0) - коэффициенты статического усиления ис-
ходной и желаемой систем, связанные по (6.5а) с соответствующими коэффициентами
статических ошибок формулами с" -1/(1 + К) и с0 =1/(1 + Кж). Для уменьшения статиче-
ской ошибки еуст нужно увеличивать значение Кж= KR(0) . Так как ПФ 1У(х) неизме-
няема, то увеличение Kv возлагается на регулятор R(s). Это реализуется, например,
включением в САУ последовательных регуляторов следующих видов.
1. Простейшее решение состоит в выборе широкополосного усилителя (рис. 6.10,а)
с ПФ R(s)=Kn >1 , реализующего закон пропорционального (П) управления x(t)-Kne(t).
Значение Кп , гарантирующее коэффициент ошибки ct) <с^, удовлетворяет условию
Кп >(1/с0 -l)/(l/e0°-l)=(l, сп -1)/АГ. (6.6а)
Влияние усилителя на ЧХ системы проявляется в подъеме ЛАЧХ на величину
Ln((o) = 201gjK’11 >0 дБ при неизменности ЛФЧХ (рис. 6.10,^>). При этом частота среза
Юср, смещаясь вправо, может превысить граничную частоту л>1р, тем самым нарушая
условия (4.23) устойчивости по Найквисту. Следовательно, существует и верхняя гра-
ница Кп, определяемая требованием устойчивости ЗС. С учетом желаемых запасов ус-
тойчивости по амплитуде и фазе ф., верхняя граница усиления Кп вычисляется сле-
дующим образом:
162
1) определяется частота запаса со ,, на ко-
торой Ф(<о .,) = ф1р+ф
2) вычисляется амплитуда Ца> .,) и ее при-
ращение АЛ - - - £(<о)>0 до уровня L3;
3) верхняя граница коэффициента усиления
Ан находится как
К„ <1()<и,5ЛД-. (6.66)
В случае несовместности неравенств (6.6)
задача не имеет решения и требуется либо задать
большее значение коэффициента с0, либо вы-
брать более сложную ПФ P(s).
Пример 6.1. Дан объект с ПФ
< v/ (l+T'p^l+r^Xl+^s)’ (6.7)
К=>2, Т| = 50 с, Г, =10 с, Г3 = 1 с.
Определить алгебраическими и частотны-
ми методами:
Рис. 6.10
а) устойчивость, раздельные запасы устойчивости , <p° и коэффициент статиче-
ской ошибки Cq в САУ без регулятора;
б) условия устойчивости ЗС в зависимости от значений Л",, коэффициента усиле-
ния П-регулятора;
в) значения Ки >1, при которых обеспечиваются совместные запасы устойчивости
£3 >6 дБ, <р 5 >30°;
(6.8)
г) минимум коэффициента статической ошибки с0 при запасах устойчивости (6.8).
Решение:
а) в соответствии с алгебраическим критерием Рауса - Гурвица, ХП ЗС без регуля-
тора C3(s) =A’+(l + 7j5)(l+7'2s,)(l+7'3x) = 3+61s4-560.v2 r500s3 устойчив, так как все его ко-
эффициенты одного знака (положительны) и М2 = 61-560-3-500=32660>0.
Аналитическое решение по нелинейным ЛЧХ
з з
£(®)- 201gК-10^1g(l+7)2<o 2), Ф(<о)= ^arctg(r,w):
ГД <д
(6-9)
Z.(o^) = 0 =х> ©J, =0,0324 рад/с, Ф(® ^) =-78°, <р(’=102°>30°;
Ф(<о,р) -180° => ®1р =0,349 рад/с, Ц® tp)=-30,5 дБ, £3 = 30,5 дБ >6 дБ.
Так как ф^<<о1р) то ЗС без регулятора устойчива и оба запаса устойчивости (6.8) в
раздельности обеспечиваются.
Приближенное графическое решение по АЛЧХ получим с помощью подобных тре-
угольников (три из них заштрихованы на рис. 6.11) с наклонами участков АЛАЧХ и
АЛФЧХ, кратными - 20 дБ/дек и -45 град/дек, и вычислив 201g А'-6 дБ, ^(1/7]) = -1,7,
18(1/Г2) = -1 и 1«(1/Г?) = 0:
Цв, , )=0 => lg® - ig( 1/7]) i- 1g К -1,4 , <» - 0,04 рад/с ,
Ф((о",) = 00-45°0,7-90°0,6 = 85,5° ю <p(’=94.5% 30%
Ф(<п1р) = -!80° + lg®,p-- 45/90= -0,5, <o Ip «0,316 рад/с,
£(<d ,p) -6-200,7 40 0,5 =-28 дБ => ^=28дБ>6дБ.
Вычисленные приближенные значения
со°р, <о1р, 1^1 и ф3, во-первых, близки к их
точным величинам, во-вторых, подтверждают,
что ЗС без регулятора устойчива и оба запаса
(6,8) в раздельности обеспечиваются.
Значение коэффициента статической
ошибки с(() =1/(1 + К) = 0,33 показывает, что без
регулятора ЗС является очень грубой с относи-
тельной погрешностью воспроизведения по-
стоянной уставки 5q = 33%;
б) характеристический полином ЗС с FI-
регулятором
С3 (5) = Кп К+(1 + 7] у)(1+Т2 у)(1+T2s) =
= Кж +1+(Г, +Г2 +Г3)5+(Г| Г2 +7] Г3 +Г2Г3)? +
+г1т2г3?
устойчив по Гурвицу при
/ \1 1 1 1 I
-1<ЯЖ <(т; +Г?+Т3) —+—+— -1=67,32,
ж \ I 2 3^ т т т J
где Кж = Кп К = 2Кп . Учитывая требование Кп >1, получим алгебраические условия ус-
тойчивости 2<КЖ <67,32 и 1 < АГ,, <33,66.
Аналитическое решение получим на основе (6.9) по ЛЧХ разомкнутого контура с
П-регулятором L)K(a)) = 201g.Kn+Ц(»), Фж(ш) = Ф(ю) из условий обеспечения границы
устойчивости по Найквисту
{® сР = ю гр =0,349 рад/с)П{£ж (® ср)=0)П{Фж (® рр )=-180°):
201ёАГжгр = IOlgn(l+7]2®^) о 7Гжгр= П(1+Т]2®2р) =67,32, =33,66.
«=1 V «=1
Продолжая графическое решение по АЛЧХ (рис. 6.11), поднимем Дю) вверх на
=28=40-6-6 дБ до выполнения условия ®ср=®Гр. Это эквивалентно введению в
контур управления последовательного усилителя с коэффициентом усиления
T^nip =100/2/2=25, что недалеко от истинного значения Япгр =33,66;
в) подставив ЧХ объекта
А(<о)=К ,|Г](1 + 7;-2® 2), <p(®) = -^arctg(7]-®) (6.10)
/ V ;=i ;=i
164
с параметрами (6.7) и значения К, = 1 Oo,o5£j = 2, ф1р =-180° , ф3 = ЗО° в условия (4.26),
взятые в форме нелинейных уравнений для границы устойчивости приведенной по ам-
плитуде и фазе системы, определим частоту <о 3 и верхнюю границу коэффициента ЛГЖЗ:
Фж(® ,)--150° ~> ® 3 = 0,16 рад/с,
Лж(®3)=0,5 => К = 0,5= 7,734 #=3,867 и 1<#„ ^3,867.
V »=1
При этом частота среза ©ср =0,104<®1р =0,349.
Графическое решение на рис. 6.11: Ф(®3)=-150°, Ф(0,1) = -45°-0,7-90°=-121,5° =>
1g® 3 =-1+28,5/135=-0,789, Це> 3)=6-200,7-40-0,211 = -16,44 дБ. Условия Лж(®3)=0,5 и
Фж (©.,) = -! 50° достигаются подъемом Дю) вверх на А£=-#3-Д®3) = 10,44 дБ, то есть
вводом в контур управления усилителя с коэффициентом усиления Кт = 3,328.
Таким образом, для совместного обеспечения запасов устойчивости П-регулятор
должен иметь коэффициент усиления 1<#п< 3,328, что близко к истинному интервалу
1<#п< 3,867;
г) минимуму коэффициента статической ошибки с0 соответствуют наивысшее до-
пустимое положение £ж(ю) = £жз(а) и максимум #„= #пз. Тогда с0 -1/(1+7,734)=0,114,
то есть минимальная относительная погрешность в системе (6.7) с П-регулятором со-
ставляет 11,4%, что больше стандартной погрешности 5%. Полученная САУ является
грубой. Г.П
2. При втором способе уменьшения статической ошибки, сохраняющем условия ус-
тойчивости, используется регулятор с ПФ и ЛЧХ (рис. 6.12,а)
#(S) = #p(l+Tns)/(l+rps) = #n(x+®n)/(s+®p),
Lp(®) = 201g#p +101g(l+T2®2)-101g(l+Tp2®2), (6.11)
Ф р (о) = arctgCTn © )-arctg(Tp® ).
Он имеет схему реализации на рис. 6.12,6 и отличается от П-регулятора дополнитель-
ным подъемом НЧ части ЛАЧХ на частотах, меньших ® п, и завалом ЛФЧХ в центре
диапазона частот ^0,1® р, 10® п | максимум на угол arctg^#p/#п -arctg_J#n/#p <90°.
Четыре параметра Кр, КП, Тр и Тп ПФ регулятора (6.11) связаны соотношением
Рис. 6.12
Kp[Kn ~TV/Тп=ю р , то есть при знании любых трех из них всегда можно вычис-
лить четвертый. Коэффициент статического усиления /Ср находится по формуле (6.6а)
обеспечения желаемой статической точност и с():
А'р>(1 с„-1)/к. (6.12а)
Выбор двух из трех оставшихся параметров должен обязательно обеспечить устой-
чивость ЗС с желаемыми запасами устойчивости £3 и ф3. На границе устойчивости
приведенной по амплитуде и фазе системы неравенства (4.26) обращаются в систему
двух нелинейных уравнений с тремя неизвестными <оТр и Та :
’ {612б)
Ф(® 3)+arctg(£n® 3)-arctg(7p®i)<ptT = фз.
Задавая свободно параметр ® 3 в некотором диапазоне частот, возможно разрешить
эту систему относительно Гр(®3) и Тп(<о3).
Недоопределенность системы (6.126) позволяет оптимизировать замкнутую САУ
по дополнительному критерию. Например, можно выбрать решение с минимальным
отношением x-TpfTn , что дает минимальное отклонение желаемой ЛФЧХ Фж(ю) от
исходной Ф(®) после введения регулятора. По другому критерию максимального быст-
родействия минимизируется длительность переходного процесса Zp >л/юср , где частота
среза есть корень нелинейного уравнения Лж(юср) = 1:
®ср: А(ас?)Крф + Т^,
По третьему критерию минимума скоростной ошибки ct выбирается параметр ®:!, при
котором значение этого коэффициента ошибки из (6.5а) становится минимальным.
Подводя итог сказанному, приходится признать, что многопараметрический син-
тез ПФ регулятора (6.11) является весьма сложной задачей, требующей многократного
решения системы нелинейных уравнений (6.126) и оптимизации полученных решений
по дополнительному критерию, который необходимо заранее задать. При многокрите-
риальной оптимизации ищется определенный компромисс между решениями, оптими-
зирующими отдельные критерии.
Метод приближенного расчета параметров Кп и ТП (отсюда 7р = Тп Кр [Кп ) за-
ключается в выборе, во-первых, коэффициента общего усиления Кп из условия (6.66)
обеспечения запасов устойчивости на частоте ®3: Ф(® 3) = фгр+ф3, во-вторых, постоян-
ной времени Гп-1/®п из свойства совпадения Ф(ю) и Фж(ю) на частотах
® >®3>10®п:
7;>10/®3. (6.12в)
Конечно, из-за погрешностей аппроксимации ЛЧХ такое быстрое решение не гаранти-
рует точно заданных запасов устойчивости. В частности, запас ф3 может,согласно (2.1),
уменьшиться на величину до 5,71°.
& Пример 6.2. Для объекта (6.7) разработать последовательный регулятор, дос-
тавляющий ЗС устойчивость с запасами (6.8) и относительной статической погрешно-
стью 50 <1%.
Решение. Для уменьшения коэффициента q' =V),33 до желаемого значения с() =й,\У1 ,
согласно (6.6а), коэффициент статического усиления должен быть равен
/Гр=(1(Ю 1)/2 = 49,5. Остальные параметры регулятора найдем аналитическим и при-
ближенным частотными методами.
Аналитическое решение. Построим с помощью MathCAD зависимости критериев
^7}+7р(®,)-(^Г;+Гр(«>3) + ^р7;1((о|))с()
т(ю3), и сдш,)-----------------—-—---------- - --------- от параметра
1 + л л р
ел., е[0,022,0,16] (рис. 6.13). По графику с'|(®3) выбираем оптимальную частоту запаса
<а3=0,11 рад/с со значениями критериев т = 24,69, /р =44,92 с и clmin =7,58 с. При этом
параметры регулятора и ПФ (6.11) равны
Кр =49,5, 7р = 734,16 с, Тп = 29,72 с , К„ = 2,01,
ВД=
49,5(1 +29,72s)
1 + 734,16s
(6.13а)
В приближенном решении (рис. 6.14) ис-
пользуем результаты задачи в) примера 6.1.
Вначале найдем уровень подъема ста-
тического участка ЛАЧХ желаемой системы
L (0) = 201gK =39,91 дБ .
Далее определяем, что для обеспечения
обоих запасов устойчивости на частоте
о э = 1О*0,789 =0,1626 рад/с нужен общий
подъем ЛАЧХ на А£ = -£3-£(ю 3) = 10,44 дБ,
откуда Кп = 3,328 . Выберем по (6.12в) по-
стоянную времени Тп =61,5 с, соответст-
вующую частоте <»„ =0,1<в3 =0,01626. Правее
соп проводим £ж(<в) параллельно £(ю) и
выше ее на 10,44 дБ.
Левее <в(1 проводим участок £ж(о>) с
наклоном -20 дБ/дек до пересечения с гори-
зонтальным участком на уровне 39,91 дБ в
39,91-16,44
точке lgo> р =-1,789---—-----= -2,963. От-
сюда находим частоту о р-0,00109 и посто-
янную времени Тр = 1Двр = £пЛр/Кп =914,7с.
Таким образом, ПФ последовательного
регулятора (6.11) примерно равна
49,5(1+61,5s)
<б,зб>
Истинные значения запасов устойчиво-
сти на частоте со 3 =0,1626 рад/с составляют
7,49>6 дБ по амплитуде и 24,04°<30° по фа-
зе. ГД
0 0,05 0,1 0,15 0,2 ш,
Рис. 6.13
167
6.2.3. Астатические системы управлении
С помощью последовательного регулятора можно в принципе свести к нулю коэф-
фициенты ошибок с0, ... , cv j, навязав системе астатизм v-го порядка. Изучим свой-
ства систем с астатизмом низших порядков. Из (6.5) следует, что признаком астатизма
v-ro порядка является наличие в ПФ PC коэффициентов «0 =... - «V | -0 .
Допустим, на входе САУ с астатизмом первого порядка ( v-1, с0 = 0, С\ -д, /Ь{} ^0)
действует постоянная уставка (Рис- 6.15.Д).
Тогда, согласно (6.4), ошибка регулирования, выход
системы в установившемся режиме и относительная
погрешность регулирования равны
= =°> 5о =0%, jyci. =(1 -со)£о
Если уставка является линейной временной
функцией (например, угол поворота локатора или ва-
ла двигателя) g(t) = go+g\t (рис. 6.15,6), то в устано-
вившемся режиме выход ЗС отстает от уставки на по-
стоянное время, равное q (с):
*уст*0, Туст=£(')-Н£1
В СА У с астатизмом первого порядка коэффициент скоростной ошибки с, имеет
физический смысл отставания установившегося выхода системы от линейной уставки.
В системе с астатизмом второго порядка (v = 2, сй~сх =0, сг~аг1Ьй^) постоян-
ная и линейная уставки отслеживаются точно, а равноускоренная g(t) = g$+ g}t ^g-A1 - с
постоянной ошибкой густ ~2£2gi ^0.
При астатизме v-ro порядка полиномиальные уставки v-l-го порядка
g(t) = go +f>A+---+gv-ltV ' отслеживаются точно, а уставки v-ro порядка - с постоянной
установившейся ошибкой еусх = v!cv#v ^0, где cv ~av /Ьа . В статических же системах
полиномиальные уставки отслеживаются с нарастающей ошибкой. Понятно, что ста-
тические системы непригодны для слежения за быстрыми целями, для прецизионного
управления технологическим оборудованием в микроэлектронике, микрохирургии, то
есть там, где недопустимы любые ошибки, особенно статические.
Из уравнения (6.5в) следует, что условием реализации в ЗС статической инвари-
антности v -го порядка с0 =.-0, <•„ -/ () является астатизмразомкнутого конту-
ра v-го порядка а0 -...~ау_{ -0, av^0. Такая система имеет контурную ПФ
Ь() +6] S+.. .+6 х
W/k(s) = -T7^”J------ ——7^ , а ее структурная схема содержит v последовательно
sv\av+av+ls+...+aRsn v)
соединенных интеграторов. Замыкание астатической системы единичной ООС должно
дать устойчивую САУ с ХП
C3(.v)=60 ri|j+...+6V_|SV 1 +(av +Av)sv +... +-(a„ +b„)sa,
(6.14)
имеющим желаемый спектр. Из НУУ (4.7) следует, что все коэффициенты b^,...,bv^ и
av+bv,...,a„+b„ ХП (6.14) должны быть ненулевыми и одного знака. Необходимые и
достаточные условия устойчивости даны в (4.11).
168
Объект может сам иметь интегрирующие звенья. Тогда ЗС и без регулятора будет
астатической. В отсутствие у объекта астатизма он должен быть создан регулято-
ром, вносящим в спектр ПФ H/)K(s) = B(s)H/(s) нужное количество нулевых полюсов.
Рассмотрим методы выбора последовательного регулятора, создающего в ЗС ас-
татизм первого порядка, и свойства получаемых систем. Исходную систему полагаем
статической с конечным коэффициентом статического усиления К ИДО).
1. Простейшее решение состоит в использовании в контуре управления интегра-
тора (рис. 6.16,а) с НФ R(s)-Kn/s, ЛАЧХ Lp(<a)= 201gД',, -201g® и ЛФЧХ
г
Фр(®)=-90°, реализующего закон интегрального управления x(t)~ Klt |е(т)6т . Для дос-
о
гижения желаемой скоростной ошибки q нижняя граница коэффициента усиления ин-
тегратора Ktl выбирается из условия
Кн >Л/Кс} .
(6.15а)
Влияние интегратора на ЧХ системы проявляется в сдвиге ЛФЧХ вниз на 90° и
изменении наклонов участков ЛАЧХ на -20 дБ/дек (рис. 6.16,6). При этом граничная
частота ю,р сдвигается далеко влево, что создает условия для неустойчивости ЗС даже
при структурно устойчивом объекте. Следовательно, может существовать верхняя гра-
ница Klf, определяемая требованием устойчивости ЗС. С учетом желаемых запасов ус-
тойчивости £3 и <р3 верхняя граница Klf вычисляется следующим образом (рис. 6.16,6):
1) строится ЛФЧХ Фж(ю) = Ф(®)-90°;
2) определяется частота запаса ю 3 из условия
Фж(®з)=Фгр+Ф3;
3) строится ЛАЧХ £ж(®), проходящая через
точку (©.,,-£,) с наклонами участков на 20 дБ/дек
меньше, чем у ЛАЧХ Цен). Низкочастотный уча-
сток £ж(®) или его продолжение с наклоном -20
дБ/дек пересекаются с осью L в точке 2О^ЛГЖ;
4) вычисляется разность амплитуд
А2> 201g -£(0);
5) верхняя граница коэффициента усиления
Кц задается условием
Кп <ю005Л£ . (6.156)
Неравенства (6.15) могут оказаться несовме-
стными из-за конфликта требований статической
точности (поднимает £ж(ю)) и устойчивости
(опускает £ж(®)). В этом случае следует изменить
требования к системе либо использовать иной метод обеспечения астатизма.
Серьезным недостатком И-управления является значительное снижение быстро-
действия ЗС в связи с обратной зависимостью rp>7t/®cp времени регулирования от
частоты среза и уменьшением последней.
к 7 Пример 6.3. Для объекта (6.7) разработать последовательный И-регулятор,
обеспечивающий в ЗС устойчивость с запасами (6.8) и минимальное значение коэффи-
169
циента скоростной ошибки с,. Оценить изменение быстродействия ЗС с И-регулятором
по сравнению с системой, управляемой П-регулятором.
Решение. Разомкнутый контур с И-регулятором имеет ПФ ~W(s)Kn js и
ЛЧХ £ж(®)--£(®р2018Кн 201g® , Фж(®)-Ф(®) 90°. Из условий Фж(® ,) 150° и
£ж(® ,)--6 дБ с учетом (6.9) получим частоту запаса ®.( = 0,0213 рад/с и допустимый
I Q -0.051, Гз
максимум Кт-------------~||ц1 + Т}2®.2)= 0,008 коэффициента усиления И-регулятора
К У Д1
0< Ktl < К1П , при котором астатическая ЗС имеет запасы устойчивости и <р.3.
При максимуме Кц ~ Кт достигается минимум коэффициента скоростной ошибки
qmin = W = 62,8 с. Такое запаздывание, очевидно, слишком велико из-за малого
значения Кн.
Для оценки быстродействия системы с И-регулятором R(s) 0,008/5 из условия
Лк(®ср)~^ определим частоту среза ®ср =0,0132 рад/с. По (4.22) получим оценку
/р >238,4 с, тогда как в статической системе без регулятора /р >97 с при
® Ф =0,0324 рад/с, а в системе с П-регулятором 1р >30,2 с при © ср =0,104 рад/с. Г !
Введение в контур управления интегратора делает ЗС астатическом, но резко
уменьшает ее быстродействие. Большая инерционность СА У с И-управлеиием обуслов-
лена малым значением коэффициента усиления регулятора Кл, необходимым для обеспе-
чения устойчивости.
2. Для сохранения устойчивости, быстродействия и создания астатизма первого
порядка в качестве последовательного корректирующего устройства используется изо-
дромныйрегулятор с ПФ и ЛЧХ (рис. 6.17,а)
' R(s) = Kni-Ku/s=Ku(\ + Tus)/s,
• £p(®) = 201gA-1I+101g(l+T„2052)-201g® , (6.16)
®p(®)=arctg(TH®)-90o,
имеющий схему на рис. 6.17,6 и реализующий закон пропорционально-интегрального
t
управления x(t) = Kae(t)+Ku J<'(t)<1t . На низких частотах ® <0,1® и, в том числе в устано-
о
вившемся режиме, ПИ-регулятор эквивалентен интегратору, создавая астатизм первого
порядка. На высоких частотах ® >10® н он имеет свойства П-усилителя.
170
Передаточная функция в (6.16) имеет три параметра Кц , и Ти, два из которых
независимы, а третий связан с ними соотношением Ки -KltTu. Соответственно можно
поставить задачу синтеза ПИ-регулятора ио двум желаемым требованиям к ЗС, а имен-
но запасам устойчивости L3 и ф3. Условия (4.26) приводят к аналогичной (6.126) сис-
теме двух нелинейных уравнений стремя неизвестными со ,, Кп и Тп:
! л(«>.,) л;, (6 17)
[ Ф(ю J+arctgCT,,©3)-90°<р|р = ф3.
Считая <в.( свободным параметром, можно дело разрешить эту систему относительно
параметров ПИ-регулятора:
Аи ^-й)351п(ф((в3)-ф3)/А'3Л((в3),
Т„ = i/co 3tg(cp(<o3)-ф3), (6.18)
[ А'„ = ЛГИГИ = -СО5^ф(® 3)-ф 3)/A'3J(®3).
Как и в (6.126), недоопределенность системы (6.17) позволяет оптимизировать
замкнутую САУ по некоторому дополнительному критерию. Например, по критерию
минимума скоростной ошибки вычисляются частота <в3 и соответствующий ей ПИ-
регулятор, минимизирующий значение q - \/К.цК. По критерию максимального быст-
родействия минимизируется длительность переходного процесса tp >7г/<вСр , где частота
среза желаемой системы является корнем нелинейного уравнения Лж(<вср) = 1:
® ср • Л(ф ср )^Н ср — ®ср*
Быстрый приближенный расчет ПИ-регулятора с минимальным коэффициентом
скоростной ошибки выполним с помощью ЛЧХ следующим образом (рис. 6.18):
1) определим частоту запаса ю3 из условия
Ф(ю3) = Фгр+Ф?;
2) разность амплитуд А£ = -А3 - Пул 3) дает ко-
эффициент усиления регулятора КП < 1 о005д£, а часто-
та й)и-0,1(в 3 - постоянную времени ТИ -1/® „ . Тогда
Аи^п/гн;
Для проверки расчетов можно построить ЛАЧХ
Аж(<в), проходящую через точку (®3,-L,): правее
частоты сон параллельно Ц®), а левее - с наклонами
на 20 дБ/дек меньше, чем у £(<о). Отрезок, отсекае-
мый на оси L НЧ частями Аж(ю) и Ца>), должен
быть равен 201g А-,,.
ро Пример 6.4. Для объекта (6.7) разработать ПИ-регулятор, дающий ЗС астатизм
первого порядка с запасами устойчивости (6.8) и минимум коэффициента скоростной
ошибки <]. Оценить изменение быстродействия ЗС с ПИ-регулятором.
Решение. Подставив в (6.18) ЧХ объекта (6.10) и значения К3-2, ф1р-- -180°,
<р., =30°, получим аналогичные рис. 6.13 графики ct (о> 3) и /р(а)э), по которым выбира-
ем оптимальную частоту запаса ® 3-0,107 рад/с и минимальный коэффициент
(6.19а)
riimn -7,717 с. При этом параметры ПИ-регулятора Кц =1,933, =0,0648, 7’, = 29,83 с,
его ПФ в (6.16) равна
I+29,83s
7?(s)-------,
15,43s
частота среза ®ср -0,068 рад/с и оценка быстродействия /р >46,1 с .
Приближенное решение по АЛЧХ: Ф(о),) = 150° при <в 3 =0,1626 рад/с , откуда
о> „ =0,01626 рад/с и 7'1|-61,5с; Ц<й.,)- 16,44 д Б , откуда Д£ = 10,44дБ, Кп = 3,328 и
Кп =0,0541 . Полученный изодромный регулятор с ПФ
(6.196)
l i 61,5s
7f(s)------
’ 18,48s
дает коэффициент скоростной ошибки с, -9,24 с, частоту среза е>ср =0,104 рад/с и вре-
мя регулирования /р =30,2 с, что равно быстродействию системы с П-регулятором. С1
Для практических приложений приближенное графическое решение задачи синтеза
регуляторов с помощью АЛЧХ дает быстрый и вполне приемлемый результат.
Сравнение ПФ (6.11) с (6.16) и (6.13) с (6.19) показывает, что ПЙ-регулятор может
быть получен из регулятора (6.11) предельным переходом <вр ->0, то есть при ЛГр ->х
и 7^—>оо. При этом коэффициент ошибки с0-->0, а система становится астатической,
сохраняя все свойства устойчивости и быстродействия статической системы.
6.3. МЕТОДЫ УЛУЧШЕНИЯ ДИНАМИЧЕСКИХ ПАРАМЕТРОВ
(среднечастотный синтез регуляторов)
/Сл сновная задача проектирования эффективной САУ - обеспечение ее устойчиво-
го функционирования с учетом возможных изменений параметров объекта. Ус-
тойчивость ЗС по Найквисту определяется очередностью пересечения уровней
£(е>ср)=0 и Ф(®гр) = Фгр ЛЧХ PC. В частности, если разомкнутый контур имеет устой-
чивую ПФ, то для устойчивости ЗС должно выполняться условие <вср <<в 1р . Если нуж-
ной для устойчивости последовательности чередования частот нет либо недостаточны
запасы устойчивости, то в контур управления необходимо включить последовательный
регулятор, корректирующий желаемые ЛЧХ в сторону перестановки или раздвигания
частот юср и е>гр друг от друга. Если запасы устойчивости без регулятора обеспечива-
ются с избытком, то назначение регулятора - улучшить показатели качества переход-
ных процессов за счет допустимого уменьшения запасов.
Рассмотрим некоторые возможные способы стабилизации замкнутых СА У, устой-
чивых в разомкнутом состоянии.
1. Простейшее решение состоит в выборе усилителя (рис. 6.19,«) с ПФ
7?(s) = A’n<l, опускающего ЛАЧХ на £n(<a) = 201gAn <0 дБ при неизменности ЛФЧХ
(рис. 6.19,6). При этом частота <вср, смещаясь влево, должна встать левее частоты и>1р,
тем самым восстанавливая условие юср <гогр устойчивости по Найквисту. С учетом же-
лаемых запасов устойчивости по амплитуде С и фазе ф3 верхняя граница Кп вычис-
ляется в следующей последовательности:
1) из условия Ф(<в3) = фгр+ф3 определяется частота запаса <в3;
172
2) находится необходимое уменьшение ам-
плитуды L(to .,)+£) до уровня
3) верхняя граница коэффициента усиления
А'п задается условием
К„<игад5л/-. (6.20)
Недостатки стабилизации с помощью П-
регулятора: увеличение коэффициентов статиче-
ских ошибок в \/Ки раз из-за сдвига ЛАЧХ
вниз; уменьшение быстродействия ЗС из-за сдви-
га влево частоты ®С1..
Если позволяет ЛАЧХ PC, то П-регулятор
можно использовать для повышения быстродей-
ствия и уменьшения статических ошибок САУ
примерно в Кп раз путем поднятия ЛАЧХ на ве-
личину А£ = £3-А(®3)>0дБ. При этом вычис-
ленное по (6.20) значение А'(1>1 , а схема реали-
зации регулятора изображена на рис. 6.10,а.
С.7 Пример 6.5. Для объекта (6.7) с К = 200
определить:
а) устойчивость ЗС без регулятора;
б) условия устойчивости ЗС от коэффициента усиления П-регулятора Кп >0;
в) значения Кп >0, обеспечивающие запасы устойчивости (6.8);
г) минимальный коэффициент статической ошибки с0 при заданных запасах ус-
тойчивости.
Решение:
0 2 3
а) характеристический полином ЗС без регулятора C3(s)=201+61s+560s +500s
неустойчив по Гурвицу, так как М2 = 61 560-201-500 =-66340<0.
По критерию устойчивости Найквиста, использующему ЛЧХ (6.9), ЗС также неус-
тойчива, поскольку (Oq, =0,583>® гр =0,349;
б) в ЗС с П-регулятором полином C\(.v) = 200A'n +l+61s+560s2+500s3 устойчив по
Гурвицу при условии 0< Кп <АГпгр =(61-5бО/500-1)/200=0,337.
Аналитическое решение по ЛЧХ: для устойчивости ЗС нужно опустить Ц®) более
чем на Цуя гр) = 9,46 дБ с помощью П-регулятора с коэффициентом усиления
Кп < А'пгр =1О4’05'9,46 = 0,337;
в) для обеспечения обоих запасов устойчивости (6.8) на частоте ®3 =0,16 рад/с
нужно опустить Цо) более чем на Ц® 3)+£3 = 28,25 дБ. Тогда по (6.20) получим допус-
тимые значения Кп <Кт =10~°’05 28,25 = 0,0 3 8 7;
г) минимально возможные коэффициент статической ошибки в системе с П-
регулятором cOmin = l/(l+200ji'|n)=0,l 14 и относительная погрешность 80min=ll,4% сов-
падают с результатами примера 6.1.
Полученный регулятор Я($)=0,0387 для системы (6.7) с К = 200 дает ЗС, полно-
стью эквивалентную системе с регулятором /?(з) = 3,87 и А-= 2. Г.)
2. Широко распространен способ стабилизации САУ с помощью фильтра низких
частот (ФНЧ), имеющего схему реализации на рис. 6.20,а, ПФ /?(*) = 1/(1 +Tp.v) и ЛЧХ
(w)= -lOlg^l + '/pW2), Фр(<о)--arctg(7 р®). Фильтр демпфирует (сглаживает) ВЧ коле-
бания за счет уменьшения наклонов ЛАЧХ на 20 дБ/дек на частотах <о >® р ~1/7р • Вы-
бором параметра Тр можно добиться, чтобы частота шср стала меньше частоты <о |р,
восстановив условие устойчивости по Найквисту
(рис. 6.20,0. При достаточно малой частоте ®р
можно обеспечить и желаемые запасы устойчиво-
сти £., и ф3.
Аналитический расчет ФНЧ'. на границе ус-
тойчивости приведенной по амплитуде и фазе сис-
темы неравенства (4.26) дают два уравнения с дву-
мя неизвестными ®3 и Гр:
Л(®3)/71+Тр2®М*э.
ф(®,) -arctg(Tp® 3)-ф1р =ф3.
Решая нелинейное уравнение
ф(® 3)~arctg7/C2J2(®3)-l -ф^ =ф3, (6.21)
получим частоту запаса ®3, а по ней определим
постоянную времени ФНЧ:
(6.22)
При использовании ФНЧ сохраняется коэффициент статической ошибки с0, но
увеличиваются, то есть ухудшаются, остальные коэффициенты с3, инерционность и
время регулирования гр.
Графический приближенный расчет постоянной времени ФНЧ Тр может быть вы-
полнен методом последовательных приближений.
Шаг I. Начальное значение Гр=оо, откуда ЛФЧХ Фж(®) = Ф(®)-90°.
Шаг 2. Определим частоту <в3 из условия Фж(® 3) = фгр+ф3.
Шаг 3. Через точку (®3,-£3) проведем ЛАЧХ £x(®) = 7.(®)-201g® с наклонами
асимптот на 20 дБ/дек меньше, чем у £(®).
Шаг 4. Определим частоту ®р<®3 в точке пересечения асимптот £ж(®) и Ц<о),
новые приближения Тр-\/<йр и ФЖ(®) = Ф(®)-arctg(7j,®).
Шаг 5. Если <в р >0,1® 3, то идти на шаг 2, иначе конец.
£7 Пример 6.6. Для объекта (6.7) с К = 200 определить:
а) условия устойчивости ЗС от постоянной времени ФНЧ Гр;
б) значения Тр, обеспечивающие запасы устойчивости (6.8);
в) максимальное быстродействие ЗС с ФНЧ при заданных запасах устойчивости.
Решение'.
а) характеристический полином ЗС с ФНЧ C3(s)= A'+(l+7’]5)(l+7'2sXI+7’3s)(l + 7'ps)-
174
- 201 -I- (Гр +61)*+(61Гр + 560).v2 +(560Гр + 500)? +5007’p.v4 устойчив по алгебраическому
критерию Льенара - UJunapa при условиях
{Гр >0}П{Л/3 =33660Гр -60666740Гр-93150400Гр - 33!70000>0j,
откуда следует область устойчивости ЗС Гр >Гр1р -1803,87 с .
Аналитическое частотное решение, совпадающее с алгебраическим решением, по-
лучим по(6.21) при L3=0, ф3=0°, ЛГ.}=1, ф1р--180°, ®.,-®ср и ЧХ (6.10) при # = 200:
ф(®Ч))-агс1ё^Л2(®ср)-1=180° ®ср =0,043 рад/с, Трф = ^?(®cp)-l =1803,87 с ;
б) применение алгебраического критерия устойчивости неэффективно из-за высо-
кой (восьмой) степени приведенного по амплитуде и фазе ХП (4.25) с Z?(s) = 200,
Л(«) = 1+(Гр +61)$'+(61Гр +560)s2 +(560Гр +500)? +500Гр? , К, = 2, coscp., =Тз/2.
Аналитическое частотное решение. Так как Фж(®)=ф(®)-arctg(rp®) - монотонно
уменьшающаяся функция, то запасы устойчивости обеспечиваются значениями
Гр >Грэ. где Гр., находится по (6.21) и (6.22) при К, = 2:
ф(® 3)-arctg-j4J2(® 3)-1 =-150° => ® , =0,0214 рад/с , 7р., =^4Л2(®ср)-1 =12460 с;
в) решая уравнение Л(®ср)/^1+Гр2ш2р =1, определяем частоту ®ср =0,0133 рад/с и
оценку времени регулирования /р >236,9 с, что равно быстродействию системы с И-
управлением и в 7,8 раза больше, чем в
системе с П-регулятором.
Приближенное графическое реше-
ние (рис. 6.21):
а) опустим Ф(®) вниз на 90°. Из
условия Ф(® 1р) -90°=-180° определим
Igo|р =-1,35. Через точку (®гр,0) про-
ведем граничную ЛАЧХ #жгр(®) с на-
клонами на 20 дБ/дек меньше, чем у
£(©), до пересечения с Ц&) на часто-
те 1g® ргр — — 3,3<lgco рр -1. Таким обра-
зом, за одну итерацию получили час-
тоту ® ргр =0,0005 рад/с и постоянную
времени Гргр =2000 с, что близко к ис-
тинному значению Гр1р =1803,87 с;
б) из условия Ф(® 3)-90°=-150°
найдем 1g® 3 =-1,68. Через точку
(®3,-6дБ) проведем ЛАЧХ £ж(®) с
наклонами на 20 дБ/дек меньше, чем у
Цеь), до пересечения с £(ю) на часто-
те 1g® р., = -4,28< 1g® э-I. Таким обра-
зом, за одну итерацию получили час-
175
тогу со , =0,000052 рад/с и постоянную времени 7р,=19200 с , что недалеко от истинно-
го значения 7^,, = 1 2460 с ;
в) определяем частоту среза lg(ncp= -1,98 => <оч, =0,0105 рад/с и оценку быстро-
действия ЗС /р >300 с. 1’1
3. Наилучшим средством стабилизации С А У является форсирующее устройство с
ПФ и ЛЧХ (рис. 6.22,а)
/?(s) = А7П +Л:д^=Л7п(1д 7\s),
< Ср (со) = 201g А'п +101^1+7^(0 2), (6.23)
Op(co) = arctg(rao),
имеющее схему на рис. 6.22,6 и реализующее закон пропорционально-дифференциального
управления x(t)=Kne(t)+K— . Форсирующий ПД-регулятор сдвигает по вертикали
df
всю ЛАЧХ на 201gX'tI дБ и, кроме того, правее частоты юд пропорционально удале-
нию от нее. В диапазоне частот о >О,1со д ЛФЧХ поднимается на угол от 0 до 90°. Бла-
годаря этим изменениям, во-первых, повышается быстродействие ЗС из-за сдвига впра-
во частоты среза со ср , во-вторых, улучшаются условия устойчивости за счет еще боль-
шего сдвига вправо частоты со гр при правильном выборе параметров ПД-регулятора.
Более того, ПД-регулятор может сделать ЗС абсолютно устойчивой благодаря отсут-
ствию граничной частоты со |р.
Передаточная функция в (6.23) имеет три параметра Кп , КД и Гд , два из которых
независимы, а третий связан с ними условием ЛД = ЖП7'Д. Соответственно можно по-
ставить задачу синтеза ПД-регулятора по двум желаемым требованиям к ЗС, которыми
можно считать запасы устойчивости 7.3 и <р3. Условия (4.26) приводят к аналогичной
(6.17) системе двух нелинейных уравнений с тремя неизвестными со,, Ка и Гд :
, A^3)K,iy[icr^^/K,,
Ф(со ,)+arctg(7'a(n 3)- Фгр =ф.,.
Принимая со 3 свободным параметром, можно явно разрешить эту систему относитель-
но параметров ПИ-регулятора:
176
‘ A'n ~--cos((p(tt>,) -ф ,), (6-24)
К»Тл =sin(<|>(®.,)-ф.,)/а> ,/<,//(©_,).
Как и в (6.17), недоопределенное г ь системы (6.24) позволяет оптимизировать ЗС
по некоторому дополнительному критерию. Например, по критерию максимального бы-
стродействия минимизируется длительность переходного процесса /р>л/<оср , где час-
тота среза желаемой системы является корнем нелинейного уравнения Лж(госр) = 1:
® ср • ср)АГП ^1+Тд(йср 1.
(6.25)
Если разомкнутый контур системы устойчив, то ПД-регулятор улучшает показа-
тели качества переходного процесса: повышает быстродействие и запасы устойчивости
при выборе частоты сопряжения юд вблизи и немного левее частоты среза Для
значительного увеличения быстродействия можно включать последовательно несколь-
ко форсирующих устройств. Первый каскад предназначен для стабилизации, а осталь-
ные - для повышения качества переходных процессов системы.
Недостаток ПД-регулятора - в усилении дифференцирующих свойств системы,
проявляющихся в снижении помехоустойчивости и соотношения сигнал/шум.
Быстрый графический расчет стабилизирующего ПД-регулятора с максимальным
быстродействием выполним с помощью ЛЧХ следующим образом (рис. 6.23):
1) из условия Ф(<в :,)+90°=фгр+ф., определим
частоту запаса <о 3;
2) разность амплитуд А£ = -£3-Цы 3) дает ко-
эффициент,усиления регулятора Кп < < 0(),05Л£ 1 , а час-
тота <в д - 0,1<в 3 - постоянную времени 7^ — 1/се> д . То-
гда КД = КпТа.
Для проверки расчетов можно построить ЛАЧХ
£ж(ш), проходящую через точку (сэ3,-£3): левее
частоты 0Д параллельно Цю). а правее - с наклона-
ми на 20 дБ/дек больше, чем у Цы). Отрезок, отсе-
каемый на оси L НЧ частями £ж(со) и £(а>), должен
быть равен 201g Кп .
Рис. 6.23
^' 7 Пример 6.7. Для объекта (6.7) с К = 200 :
а) определить область устойчивости ЗС с ПД-регулятором в пространстве его па-
раметров А„>0 и Ад >0;
б) рассчитать первый каскад регулятора, дающий запасы устойчивости (6.8) и ми-
нимальное значение коэффициента статической ошибки с0;
в) с помощью второго форсирующего каскада увеличить быстродействие ЗС в 10
раз, восстановив исходное значение с0.
Решение'.
а) характеристический полином ЗС с ПД-регулятором
C.t(.v)-А(Ап+Ад5)+(1+Т|уХ1 + Г2‘,?)(1 + 7з-0= 200А„ +1+(200Ад +61)s+560s2+500s3
устойчив по Гурвицу при
{К„ >-0,05ОЛ\ >-0,305]П{Л/2 -1,12ЛГД К„ +0,3366>0] .
С учетом Klt >0 и Кл>® получим в плоскости {Л'„,ЛСД}
(рис. 6.24) область устойчивости САУ с ПД-регулятором
(0< Кп < 1,12КЛ +0,3366}П{Л'д >0}.
Анализ устойчивости частотным методом Найквиста в
пространстве двух параметров затруднителен;
б) аналитическое решение по (6.24) и (6.25) с ЧХ (6.10)
при К' 200 дает в диапазоне частот соо[0,165, 1,955] зави-
симости с0(ю ,) и /р(е> ,), подобные графикам на рис. 6.13. Оптимальные значения:
частота запаса о> 3 = 1,325 рад/с, минимальный коэффициент статической ошибки
Qhnin -0,00641, частота среза <оср1 =0,858 рад/с, оценка максимального быстродействия
/р >3,66 с , параметры первого каскада регулятора =0,775, jfal = 2,701, Гд1 =3,483 с,
частота сопряжения юд| =0,287 рад/с и ПФ R{(s)=0,775(1+3,483®). На рис. 6.25 построе-
ны ЛЧХ объекта Цо), Ф(со) и желаемого разомкнутого контура Аж1(<в) , Фж1(го) сис-
темы с первым каскадом регулятора;
в) для расчета параметров ПФ второго форсирующего каскада /?2(л) = ЛГд2(1+Тд2«)
используем два условия;
1) желаемая частота среза должна быть равна ffltp = 10® ср, =8,58 рад/с;
2) для восстановления исходного коэффициента с0 ПФ должна иметь параметр
Ка1 =1,29. Постоянную времени Гд2
определим из условия Лж2(юср) = 1:
'д2~ э / \ 1 ’
®срр2(®ср)(1 + Г2®2р)
На рис. 6.25 построены ЛЧХ £,ж2(ю), Фж2(ю)
желаемой системы с двумя каскадами регуля-
тора.
Таким образом, полная ПФ регулятора
равна
R(s)= /?t(s)/?2(s) = 1+9,68s+21,59s2,
а замкнутая этим регулятором система имеет
следующие свойства:
1) оценка /р >0,366 с, что в 82,5 и 650,3
раз лучше, чем, соответственно, в системах с
П-регулятором и ФНЧ. Реальное быстродей-
ствие, полученное по ПХ ЗС, составило
Гр «1,38 с при отсутствии перерегулирования.
Отличие этой цифры от оценки Гр>л/юср
примерно в 4 раза объясняется тем, что оцен-
ка (4.22) является практически гарантирован-
ной, полученной с большим запасом для по-
давляющего числа реальных систем;
2) относительная погрешность регулирования 50 =0,498% в 23 раза меньше, чем в
системе с П-регулятором, и совпадает с САУ с ФНЧ;
3) абсолютная устойчивость и запасы устойчивости £3=оо и <р.}>90°, недостижи-
мые другими регуляторами. I ]
Рассмотренные методы синтеза позволяют получить ПФ последовательного регу-
лятора, решая частные задачи регулирования в НЧ и СЧ диапазонах. Точное решение
этих задач требует расчета корней нелинейных уравнений, что достаточно сложно.
Приближенное графическое решение кроме наглядности дает приемлемый результат и
рекомендуется для качественных, быстрых расчетов, уточняемых затем аналитическими
методами.
Резюмируя сказанное, выбираем наилучшие типы регуляторов'.
- в НЧдиапазоне частот ПИ-регулятор с ПФ (6.16) /?„(л)= KH(\+TBs)l s;
- в СЧ диапазоне частот ПД-регулятор с ПФ (6.23) Rc(s) = Kc(\+Tcs).
Полная ПФ последовательного регулятора имеет ПИД-свойства
KHKc(\+Tas)(\+Tcs) КИ
/г(5)=ад^(5)=-й-^—^—--=Kn+—^-+Ks.
S S
Влияние пропорциональной, интегральной и дифференциальной составляющих регули-
руется коэффициентами Кп , Ка и Кл. В ВЧ диапазоне для уменьшения уровня шумов
желательно включать ФНЧ с ПФ RB(s) = i/(l+Tns) и постоянной времени Тв <0,1/юср .
6.4. БЫСТРЫЙ СИНТЕЗ СИСТЕМ УПРАВЛЕНИЯ МЕТОДОМ
ЛОГАРИФМИЧЕСКИХ ЧАСТОТНЫХ ХАРАКТЕРИСТИК
етодика быстрого расчета ПФ последовательного регулятора включает в
"V себя следующие этапы (рис. 6.26).
На первом этапе строятся логарифмические (достаточно строить асимптотиче-
ские) ЧХ, соответствующие ПФ W(s).
Наиболее сложным является второй этап формализации желаемых свойств ЗС в
виде желаемых ЛЧХ £ж(<в) и Фж(<в). Их формирование производится отдельно на
разных частотных диапазонах (рис. 6.27). Низкочастотная часть желаемой ЛАЧХ
Рис. 6.26
179
Рис. 6.27
на интервале частот 0f®<®„ должна имей, наклон
О или - 20 дБ/дек и отсекать на оси L желаемое
значение £ж(1). Среднечастотная часть желаемой
ЛАЧХ на интервале <йс<да<дав должна иметь на-
клон - 20 или 40 дБ/дек и пересекать ось да на же-
лаемой частоте среза <ot}). Низко- и среднечастот-
ная части соединяются на интервале частот
®н <©<(£>с сопрягающей частью с наклоном 40
или —60 дБ/дек. Высокочастотная часть желаемой ЛАЧХ при <а>юв должна иметь
отрицательный наклон от -40 дБ/дек и более, гак как она предназначена для макси-
мального ослабления влияния высокочастотных шумов на работу системы управления.
При формировании желаемой ЛАЧХ необходимо стремиться максимально совме-
щать частоты сопряжения и изменения наклонов АЛАЧХ. £(<о) и £ж(да) для упрощения
(исключения лишних звеньев) ПФ регулятора R(s).
На третьем этапе графическим вычитанием
£Р(®)=£ж(®)-£(да). Фр(да) = Фж(ю)-Ф(ю) (6.26)
находятся ЛЧХ регулятора, по которым на четвертом этапе восстанавливаются типо-
вые звенья и ПФ регулятора /?(х) по следующей методике'.
1) начальному НЧ участку £р(а>) с наклоном ±20v() дБ/дек соответствует типовое
звено /?(5)-ФХ'0$±'’0, усиление которого /Го =!0°'°5/'р^) определяем по координате
£р(1), отсекаемой на оси L НЧ асимптотой £р(да) или ее продолжением;
2) смещаясь слева направо по оси <о , фиксируем частоты сопряжения да,- АЛАЧХ
£р(<в). Каждому изменению ее наклона в точке да у на ±20ve- дБ/дек соответствует ти-
повое звено регулятора с ПФ Rj(s)~-(l@s/& i)s±v'. Символ Ф означает плюс для мини-
мально-фазовых звеньев и минус - для неминимально-фазовых;
/V
3) составляем из типовых звеньев ПФ регулятора R(s) - Rj(s)
Назначение пятого этапа проектирования регулятора - получение фактических
показателей качества ЗС путем моделирования ее ПХ й(/) = Ь-1 где ПФ ИСДл)
вычисляется по (6.1). Статические и динамические свойства ПХ на шестом этапе срав-
ниваются с желаемыми. Если в процессе проектирования желаемые свойства ЗС дос-
тигнуты, то на седьмом этапе выполняется техническая реализация полученной ПФ ре-
гулятора: последовательный регулятор преобразуется к желаемому типу; и разрабаты-
вается устройство, реализующее регулятор в требуемой элементной базе. Иначе желае-
мые ЛЧХ корректируются и цикл проектирования повторяется со второго этапа.
На рис. 6.26 пунктиром обозначена модификация алгоритма синтеза регулятора.
На третьем этапе по желаемым ЛЧХ восстанавливается ПФ желаемой системы ИИж(х),
а на четвертом вычисляется ПФ последовательного регулятора R(s) = H'K(s)/H/(s).
По сравнению с описанными ранее аналитическими методами ускорение расчета
регулятора достигается;
1) за счет использования кусочно-линейных АЛАЧХ, быстро строящихся по ПФ и
позволяющих быстро восстанавливать ПФ по ЛЧХ;
2) применения номограмм, заменяющих с достаточной точностью решение нели-
нейных уравнений.
180
Рассмотрим подробнее правила построения частей желаемой ЛАЧХ разомкнутого
контура на основе требований, предъявляемых к свойствам ЗС.
Низкочастотная часть ЛАЧХ определяет статическую точность САУ в устано-
вившемся режиме и характеризуется верхней частотой <вн пропускания сигналов без
ослабления (для статических систем), коэффициентом усиления К и коэффициентом
астатизма vH (рис. 6.28). Начальный участок НЧ части Еж(<о) должен иметь:
а) наклон 0 дБ/дек, если проектируется статическая САУ.
По допустимой относительной погрешности 5()% определя-
ются коэффициенты статической ошибки со-8о/1ОО% и
Л'-И'^О) - статического усиления разомкнутого контура:
Х>1/с0-1; (6.27а)
б) наклон - 20v„ дБ/дек, если проектируется астатическая
САУ. Порядок астатизма vH выбирается из условия точного
воспроизведения в установившемся режиме уставки g(t) в виде полинома степени
vH-1. Коэффициент усиления статической части ПФ Х = 11/ж(1) выбирается из условия
обеспечения в ЗС желаемого коэффициента статической ошибки с{):
K>1/cVh . (6.276)
Большой класс следящих систем работает при гармонически изменяющихся устав-
ках g(t) -At sin(®r./+q>j). В установившемся режиме на выходе ЗС также будут гармо-
нические колебания у(()' sin(® гГ+<р д.), а ошибка регулирования равна
е(/)~Ае sin(® гг+фг). Определим, каким условиям должна удовлетворять ЛАЧХ £ж(ш),
чтобы гарантировать желаемый коэффициент гармонической ошибки сГ ~ Ае[Ау :
I I 1 А- 11
А, = 4<,(i®,) Аг. =-----А, «л-------г => с,. —1---т~————.
|+^о.) К(>г)| К(>г)| л(в>г)
Следовательно, при заданном минимальном коэффициенте гармонической ошибки с,
АЧХ Аж(а) разомкнутого контура должна удовлетворять условию Лж(®1)>1/с, , а
ЛАЧХ £ж(<в) проходить не ниже точки (®r, -201gcr) (рис. 6.28). Если проектируется
САУ с порядком астатизма v„ , то коэффициент К выбирается из условия
К>а^/сТ .
Среднечастотная часть ЛАЧХ £ж(<в) с наклоном
-20 vc дБ/дек (рис. 6.29) определяет устойчивость и динами-
ческое качество ЗС. Для обеспечения условия устойчивости
по Найквисту сэср <0^ разомкнутый контур в окрестности
частоты среза ®ср должен иметь свойства абсолютно ус-
тойчивого минимально-фазового звена первого (vc = l)
или, в крайнем случае, второго ( vc =2) порядка. Частота ®ср выбирается по заданным
показателям качества переходного процесса (t и о ) с помощью изображенных на рис.
6.30 номограмм tршCp(/’max/Pq) и о(ртах//о), где Ртах и Ро - максимальное и началь-
ное значения ВЧХ ЗС Р,(®) , задающей вспомогательный аргумент Ртах/Рп
181
Рис. 6.30
Последовательность ис-
пользования номограмм пока-
зана стрелками. По желаемому
перерегулированию ст (%) нахо-
дим аргумент и соот-
ветствующее ему произведение
Zp®cp. Деля последнее на же-
лаемое время регулирования
(с), получим частоту среза
®ср (рад/с)- По дополнитель-
ным номограммам Ф3(/^пах//е)
и Pq} оцениваются
запас устойчивости по фазе (за-
пас по амплитуде полагается
равным 6 дБ) и минимальные
значения краевых амплитуд
£с ~£ж(®с) и £в = £ж(® в) (дБ), по которым можно определить границы СЧ диапазона
,, /20vr V I л/,./20V,-
®г<10 ©СП, ®н>10^
UJJ 7 г> С1>
(6.28а)
Для обеспечения достаточного запаса устойчивости ширина СЧ диапазона должна
быть не менее декады , а частота среза - примерно в его середине:
®в/ю >10, 2<®сп/®„<4.
в / V ' VU /
(6.286)
Впрочем, если наклон СЧ части ЛАЧХ равен -40
дБ/дек (в этом случае система в СЧ диапазоне име-
ет свойства колебательного звена), то частоту сре-
за желательно выбирать ближе к частоте ® с.
Низкочастотная и среднечастотная части
ЛАЧХ в диапазоне ®е[®н,юс] соединяются со-
прягающей частью, имеющей наклон -40 или -60
дБ/дек. Сопряжение горизонтальным участком
длиной более половины декады (рис. 6.31 ,а) неже-
лательно, так как он дает затягивание переходного
процесса на промежуточном уровне с большой
статической ошибкой (рис. 6.31,6). Этот недоста-
ток устраняется дополнительным сдвигом вверх
НЧ части ЛАЧХ, что также уменьшает статиче-
ские ошибки.
Высокочастотная часть желаемой ЛАЧХ строится вправо от частоты ® в, повто-
ряя наклоны £(ю). Создание необходимого для фильтрации шумов наклона не менее
-40 дБ/дек достигается введением ФНЧ с постоянной времени Гв <1/® в .
С целью упрощения структуры регулятора рекомендуется сдвигать найденные
частоты сопряжения асимптот £ж(®), совмещая их с частотами сопряжения £(®). В
этом случае ЛЧХ регулятора в (6.26) будут иметь минимальное число перегибов, ПФ
/?(s)-- минимум типовых звеньев, а схема реализации - простейшую
структуру и стоимость.
182
!/' > Пример 6.8. Для объекта (6.7) с К 200 рассчитать и реализовать на ОУ по-
следовательный регулятор, дающий ЗС астатизм первого порядка с коэффициентом
скоростной ошибки <] =0,1 с , показателями качества гр <2 с , о<20% и запасами устой-
чивости (6.8) £(>6дБ и (^>30°.
Решение. Построив на рис. 6.32
АЛЧХ объекта Цю) и Ф(сэ), из усло-
вия (6.276) определим коэффициент
усиления статической части желаемой
системы А'ж ~ 1/<?{ =10. Влево от точки
(1, 20) проводим пунктиром НЧ асим-
птоту ЛАЧХ с наклоном -20 дБ/дек.
По номограммам для ст = 20% опреде-
ляем /р<о ср ®2,5л «8 и частоту среза
шср «4 рад/с (Igco ср «0,6). Через точку
(соср,0) проводим СЧ асимптоту
ЛАЧХ также с наклоном -20 дБ/дек.
По номограмме определяем
«18дБ, а по (6.28а) - границы
СЧ диапазона
фс <0,504 рад/с,
>31,8 рад/с.
(6-29)
Так как НЧ и СЧ части £ж(о) не
пересекаются, то нужна сопрягающая
часть с наклоном -40 дБ/дек. Совмес-
тим ее левую границу с частотой со-
пряжения ЛАЧХ объекта Иэ =0,1 рад/с ,
ются на частоте Igo = -0,6, откуда со р
тогда сопрягающая и СЧ асимптоты пересека-
=0,25 рад/с , Тр =4 с, что удовлетворяет усло-
вию (6.29). Также по (6.29) выберем частоту сов =40 рад/с сопряжения СЧ и ВЧ частей,
откуда Тв =0,025 с. На рис. 6.32 изображены ЛЧХ £ж(со) и Фж(ю), по которым восста-
новим ПФ желаемого разомкнутого контура:
Ц, s ^(1+rPy)_________________10(1+45)
5’(1+7'25)(1+7» ~ .v(l+10s)(l+0,025s) ’
Рассчитаем реальные показатели полученной ЗС:
1) переходная характеристика
Л(Г)
= L"‘<
s(l +4,Н+l,0025.v2 +0,025s3)
------------------------------1 = 1 +0,044e'°-26' +0,14e“35'5' - lf19e-4'33z
( 5(l+3,84sXl+-0,0285X1+0,2315) j
имеет апериодический характер, перерегулирование ст=0%, быстродействие
/р =0,6<2 с и нулевую статическую ошибку =0;
2) по ЛЧХ £ж(со) = 2О18(Яж) + IOlg(l + Тр2<л 2)-101ё(1ч-Т^2)-10lg(l+T„2® 2) -201g® и
Фж(ш) = агс»й^7'р® j- aictg(r2w)-arctg(]r й>)-90° проверим существование частотного
диапазона Л®3 =[ю (), ®.(э], на границах которого один из фактических запасов устой-
чивости обеспечивается точно:
£ж(<о .(1) = -6 дБ > со (| -7,84 рад/с , Фж(® i2) = -150° -> и i2 =68,9 рад/с .
Так как {о><® .12}п{фж(<о н)=102п>-150°}п{^ж(® ,?)= -30,7< 6 дБ}, то желаемые
запасы устойчивости в системе обеспечиваются в диапазоне частот [со (), а> 12].
Желаемые свойства ЗС достигнуты за одну итерацию. Вычислив коэффициент
статического усиления Хр = Л"ж /A" - 0,()5 и ПФ последовательного регулятора
^ж(т) /trp(l + Tps)(l+T1s)(l+TJ.v) 0,05(1 +4s)(l+50s)(l + s)
№(*) ~ s(l + TBs) ~ s(l+O,O25.O
конструируем схему регулятора на ОУ с помощью табл. 1.3 (рис. 6.33). Г1
/Кр = !/(/?! +/?2)СО
Гр = Я2(с()+С,)
Ту^С\
6.5. УПРАВЛЕНИЕ НЕУСТОЙЧИВЫМИ ОБЪЕКТАМИ
С./] ° сих пор мы изучали частотные методы управления объектами, устойчивы-
ми в разомкнутом состоянии. В соответствии с логарифмическим критерием
Найквиста для устойчивости ЗС регулятор K(s), спектр которого не имеет правых по-
люсов, должен обеспечивать нулевую сумму переходов ЛФЧХ через граничный уро-
вень фазы на интервале частот с положительной ЛАЧХ.
Неустойчивость разомкнутого контура порождается наличием хотя бы одного
правого полюса в спектре его ПФ. Рассмотрим возможные способы принудительной
стабилизации ЗС.
1. В числитель ПФ регулятора включаются звенья, совпадающие с неустойчивыми
звеньями знаменателя ПФ. Тем самым в контурной ПФ IFK(s)= R(5)^(5) все правые
полюсы теоретически компенсируются равными им правыми нулями. Оставшаяся
часть регулятора должна обеспечить устойчивость ЗС при устойчивой разомкнутой, то
есть нулевую сумму переходов по критерию Найквиста. Недостаток данного способа -
в возможном фактическом количественном несовпадении компенсируемых полюсов и
нулей из-за временного дрейфа параметров объекта или неточного их расчета. Это ка-
чественно меняет задачу регулятора в смысле обеспечения уже ненулевой суммы перехо-
дов. Ясно, что одно и то же устройство не может решать противоположные задачи.
184
2. Регулятор изначально конструируется под неустойчивый объект с правыми
полюсами, обеспечивая л+/2 переходов Фж(®) через граничный уровень фазы при
L*(®)>0 с учетом пунктирного дополнения. Для получения дробного числа переходов,
возможно, придется включить в регулятор инвертор, изменяющий сумму переходов на
1/2. Предусмотрев желаемые запасы устойчивости, можно избежать качественной пере-
стройки регулятора при количественном изменении параметров объекта.
В отличие от (4.24) условия обеспечения запасов устойчивости L3 и ф3 принима-
ют вид
|Л(а>)|>£3 V®: |ф(со)-фгр|<ф.(,
|ф(со) <р 1р|>ф3 V®: |£(®)|<£,.
На рис. 6.34 заштрихованы запретные области, куда не должны заходить контурные
ЛЧХ £ж(ю), Фж(®) и годограф ЖД)®) при условии, что достигается необходимая
сумма переходов п+/2 вне запретных областей. В противном случае ввиду изменения
значения п+ в результате дрейфа параметров возможна потеря устойчивости ЗС.
& Пример 6.9. Для описанного в примере 1.5 объекта «тележка - перевернутый
маятник» разработать астатическую систему слежения угла отклонения маятника ф(г)
за уставкой g(t) с быстродействием zp<0,5c, перерегулированием о <30%, коэффици-
ентом скоростной ошибки q <0,01 с, запасами устойчивости £3>6дБ и ф3>30°. По-
строить графики /(г) (Н), d(t) (см) и ф(/) (град) движения ЗС с нулевых начальных
условий при уставке ^(/)Ю(|(г)-1(/-2)).
Решение. Будем строить систему управления на основе критерия Найквиста для
неустойчивых PC. Основная задача проектирования - обеспечение устойчивости систе-
мы «тележка - перевернутый маятник», неустойчивой в разомкнутом состоянии из-за
наличия правого полюса s3 = 1/Г3 - +2,5 в ПФ (2.5)
(град/н)
с параметрами ^ = 10, =0,573, £=1,72 с, Т2 =0,4.38 с, Т3 =0,397 с, £4=0,305с,
7'5 =0,244 с . На рис. 2.13 и 6.35 построены ЛЧХ объекта 7.ф(ю) и Ф (о). Структура ПФ
последовательного регулятора формируется из следующих соображений:
Рис. 6.35
1) для обеспечения астатизма пер-
вого порядка нужно изменить наклон
НЧ части ЛАЧХ с +20 па -20 дБ/дек пу-
тем введения в регулятор двух изодром-
ных каскадов с ПФ
/?i(.v)=(l+xt.vXl+T2s)/«2 • При этом НЧ
часть ЛФЧХ опустится вниз на угол от
-180 до 0°:
2) для устойчивости по Найквисту
необходимо, чтобы на частотах, где
£ж (со ) >0, сумма переходов Фж(®) через
уровень фгр=180° была равна +1/2 с
учетом пунктирного дополнения НЧ час-
ти ЛФЧХ. Для этого введем в регулятор
следующие элементы:
инвертор, сдвигающий всю
ЛФЧХ вверх на 180° без изменения
ЛАЧХ. Теперь пунктирное дополнение
будет начинаться с уровня фгр вниз, что
дает -1/2 перехода;
форсирующее звено с ПФ
R2(s) X"(1+t3s) , поднимающее ВЧ
часть ЛФЧХ на угол от 0 до 90° и изме-
няющее наклон ВЧ части ЛАЧХ на +20 дБ/дек. При соответствующем выборе парамет-
ров К, Т[, т2 и т3 это даст пересечение Фж(ю) уровня ф1Т при £ж(®)>0. Тогда сум-
ма переходов составит нужное значение -1/2+1=+1/2;
3) для подавления ВЧ шумов нужно ввести в регулятор НЧ фильтр с ПФ
ЛвО) = 1/(1+-твдО.
Таким образом, мы получили необходимую структуру ПФ регулятора
7?(5)=-7г1(У)/г2(5)7гв(Ж)=-^1+11|1(|+т25Х1+тзу) , (6.з i а)
S‘(1+TBS)
параметры которой определим следующим образом (рис. 6.35):
1) построим НЧ часть £ж(®) с наклоном -20 дБ/дек, проходящую через точку
(1,40) для удовлетворения требования скоростной ошибки с1 = 1/К = 0,01, откуда
К = 100/ =174,533;
2) по номограммам на рис. 6.30 для перерегулирования а = 30% определяем
гр<оср «3,72л «11,7 и частоту среза ®ср «23,4 рад/с (1g®ср «1,37). Через точку (<оср,О)
проводим СЧ асимптоту с наклоном -20 дБ/дек;
3) сопряжение НЧ и СЧ частей желаемой ЛАЧХ должно иметь наклон -40 дБ/дек.
По номограмме определяем Lc = L^ = 13,4 дБ, а по (6.28а) - границы СЧ диапазона
®е <5 рад/с и со в = 1/тв >109,5 рад/с . Проведем сопрягающую часть ЛАЧХ так, чтобы
она пересекалась с СЧ частью на частоте со , = 1/tj , меньшей 5 рад/с. Для упрощения ре-
гулятора совместим частоту СО] первых перегибов Дсо) и £ж(со). Графически опреде-
186
ляем частот}' пересечения lg<i> т ~<),38 , откуда т, = I/®т = 0,416 с^Т^. Выбираем постоян-
ную времени Tt = Г3 =0,397 с;
4) назначим частоту последнего перегиба ЛАЧХ ®н = 125 рад/с и постоянную вре-
мени ФНЧ тв =0,008 с . Правее проводим ВЧ часть ЛАЧХ с наклоном 40 дБ/дек;
5) с учетом (6.31а) запишем ПФ желаемой PC
-100(l+r3sXl+T2s)(l+T3s)
(s) (S) ф(») - v([ + 7, v)(1 Гз№ r5sXl+tB.v) ’
Сравнив ее с восстановленной по ЛАЧХ на рис. 6.35 ПФ —;—...-----------7, получим ос-
s(1 + 7]s)(1 + tbs)
тальные параметры регулятора: т2 = 7~3 =0,397 с, т3 = Г5 =0,244 с .
Таким образом, ПФ последовательного регулятора имеет вид
ч -tf(l + r3s)2(l+r5s)
Ж*) =-------------------=
s2(l + Tns)
= -100(1+0397s)2(l+0,244s) ]
s2( 1+0,008s)
В полученной замкнутой астатической сис-
теме коэффициент скоростной ошибки
С] - \1КК.^ =0,01 и удовлетворяются запасы
устойчивости, так как желаемые ЛЧХ на
рис. 6.35 не заходят в запретные области,
аналогичные областям на рис. 6.34,п.
Построим на рис. 6.36 графики пере-
ходных процессов в системе управления уг-
лом отклонения маятника с регулятором
(6.316) при нулевых предНУ (маятник вер-
тикален и неподвижен, тележка неподвижна
в начале координаты d) и ступенчатой ус-
тавке g(f)=I0(l(f)- 1(г-2)). В соответствии с
принципом суперпозиции переходные про-
цессы в системе имеют вид
d(t) = \0hd(t)-\0fid(t-2) ,
Ф(0 = 10йф(0-10Лф(Г-2),
Рис. 6.36
где hf(t), hd(t) и Лф(0 - переходные характеристики ЗС в точках f, d и ф . Вычислим
их методом разложения Хевисайда соответствующих изображений:
Н (д)_ *<*) _ A'(l+rls)(l + r3s)2(l-73s)(l + T5s)
f J sG+H'kO)) s2(/C/C<p(l + T3s)2-s(l + rls)(l-7'3s)(l + TBs))
1,745+4,12s+l,818s2 -0,359s3 -0,33s4 -0,0459s5
s2(l+0,784s+0,l 44s2 +0,00672s3 +0,0000546s4) ’
Az(O=(l,745f+2,752-1034,9e 97'43' + 196,2e"18,21'-3,439e 5'56'-0,232e~ L85')1(O;
187
H ККЛ[ ?>)C tas1_________________=
d S) л(1+и^ж<л)) ?(«-Jf4)(l + 7'35r-.v(| + 7'|A)(l-ri.v)(l+Tns))
17,453 +11,533s 1,423s2 -2,215s3-0,367s4_
s3(l+0,784s f-0,144s2 +0,00672s3 f 0,0000546s4) ’
Arf(/)=(s,727/2 - 2,l 53/ 2,255 -0,883e 97'43'+5,l 1 le ~18-21' - l,5e~5’56' -0,473e !85')1(/);
fK.(s) KK (\ + Tys)2
l^=~jT^7TT\=~r------------------T ----------------------r
.^1+^(5)) s(K^(| + r3s)2-s(b7'1s)(l-T3sXl + TBs))
___________ l+0,794s+0,158s2_________________
s(l+0,784s+0,144s2 + 0,00672s3 +0,0000564s4)’
йф(О=(1 + 0,3837e 97'43z - 2,38 le“i8’21' +1,115e 5'56' -0,1 i 8e~'S5t )l(r).
Показатели качества Лф(/): zp -0,425<0,5 с , о~24,1 %<30% . Основные требования
к частотным и временным показателям качества ЗС удовлетворены.
Обсудим характер переходных процессов в устойчивой ЗС с последовательным ре-
гулятором (6.31). Формула уставки g(0-lo(l(0-l(/-2)) означает, что устройству
управления дано задание в течение 2 с удерживать угол отклонения неустойчивого ма-
ятника (рис. 1.28) на уровне 10°, а затем вернуть его в вертикальное положение. Какой
должна быть сила f(t), воздействующая на маятник массой т~6 кг косвенно через те-
лежку массой М1кг, чтобы обеспечить заданный закон движения этой системы? Из
физических соображений ясно, что для вывода маятника из нулевого состояния в поло-
жительном направлении необходимо краткое воздействие на тележку в направлении
d<0, а затем резкое изменение направления действия силы для стабилизации начавше-
гося падения маятника. Действительно, как видно из рис. 6.36, начальное значение
/(0)=-8396Н, а уже /(0,0455)=+733,3 Н. Дальнейшее изменение силы стабилизирует
угол <р(/) в диапазоне 10°±0,5° за время /р «0,425 с, идо момента времени t-2c тележ-
ка движется равноускоренно под действием линейно растущей силы
/усг(0~ 17.45/+27,52. На втором временном интервале />2с с нулевой уставкой пере-
ходные процессы развиваются в противоположных направлениях и к моменту времени
t~2,425 с маятник возвращается в вертикальное положение, тогда как тележка движет-
ся равномерно вперед со скоростью 21,53 см/с .
На рис. 6.37 построена схема реализации ПФ регулятора (6.31) вместе со сравни-
вающим устройством на ОУ. Номиналы радиоэлементов удовлетворяют соотношениям
ЯС = 1, /?С| 0,397, R{C2 7\-0,244, Л2С -тв =0,008, R2/R{ = # = 174,533. !%
188
6.6. СПЕКТРАЛЬНЫЙ МЕТОД СИНТЕЗА РЕГУЛЯТОРОВ
fCp) п. 3.5.1 получены зависимости (3.36) - (3.39) оценок показателей качества
ПХ (Гр, о , С,, 7VK) от параметров (т|, у, ц , ® к ) спектра ПФ системы. Вы-
сокая достоверность этих оценок позволяет синтезировать регулятор, доставляющий
ЗС желаемое качество, спектральным методом навязывания ПФ И-^О) желаемого спек-
тра, то есть распределения полюсов st и нулей Л j .
Расчет последовательного регулятора спектральным методом выполняется по-
этапно (рис. 6.38).
1. На основе требований к желаемому качеству переходных процессов формирует-
ся спектр ЗС {s;, А.
2. Требования к статической точности ЗС и последовательное соединение типовых
звеньев (l -s/Xy) и 1/(1-$/^) дает ПФ И<3($) = ВДв)/ A.t{s).
3. Определяются фактические показатели качества ЗС путем моделирования ее ПХ
A(/) = L-‘{^3(S)/s}.
4. Статические и динамические свойства ПХ сравниваются с желаемыми. Если в
ходе проектирования не достигнуты желаемые свойства ЗС, то нужно перейти на пер-
вый этап для изменения спектра или пересмотра требований.
5. Определяется ПФ желаемого разомкнутого контура:
И'зС*) =СО= Вж(х)
1-^(5) АДв)-ВДв) Аж(ж)
6. Определяется ПФ последовательного регулятора:
^ж(4) =_____ICQ) _ B3(s)A(s)____
^(s) \\-fV3(s))fV(S) (a3(s)-B3(s))B(s)'
(6.32)
(6.33)
7. Выполняется техническая реализация полученной ПФ: последовательный регу-
лятор преобразуется к желаемому типу, а далее разрабатывается устройство, реали-
зующее регулятор в требуемой элементной базе.
Наиболее сложными являются первый и второй этапы формализации требуемых
показателей качества ЗС в виде ее спектра и ПФ. Они включают выбор структуры ПФ
(степеней полиномов Л,}(х) и B3(s)) и ее параметров (коэффициентов полиномов). Син-
Рис. 6.38
189
тез подразделяется на статический, обеспечивающий желаемые коэффициенты
статических ошибок с0, с(, ... из (6.5), и динамический, гарантирующий желаемые пока-
затели качества переходною процесса / а и т.п.
Обозначим ПФ замкну того и желаемого разомкнутого кон гуров
bi) i Ь) 54-... Cb„. S bt, 4 Ь\ 54-.. ,+Ьт S
^.,(5)--- ----------П1 --- , И/Ж(л)--------------------“““„л a/-«if,.
«()4-«|S4-...4-an.v a0 4-«[5+...4a„5
(6.34)
При статическом синтезе в первую очередь задается порядок астатизма желаемой PC
v, соответствующий желаемой степени полинома уставки g(t) = gQ +AM+ -.4#v ttv-|,
отслеживаемой с нулевой ошибкой.
Если проектируется статическая система (v = 0), то задается максимальный модуль
с0 коэффициента статической ошибки:
~ =|1-^3(0)| = |1-/Г3|<с().
а0 а0
Отсюда получаем связь коэффициентов а0, Ьа и допустимый коэффициент статическо-
го усиления ЗС К^-Ь^/а^ :
ао~аосо -ao+aocO’ 1—Cq — — *4-е0.
(6.35а)
Иногда дополнительно задается максимальный модуль q коэффициента скорост-
ной ошибки:
а1 ~а0д| /д0
«о
д1*юЛ
В итоге получим дополнительное условие связи параметров ПФ Ж((5):
«(Ку-а$С\ <Ьу . (6.356)
В общем случае, если задан /V 4-1 максимальный модуль коэффициентов ошибок
со^сл > то по (6 5в) степени полиномов B3(s) и A3(s) должны быть не менее Лг, а коэф-
фициенты удовлетворять векторным неравенствам
51 । "Д0 д! 0 ... д0 ••• 0 ' 0 । < < i 4- «0 д! 0 ... й() ••• 0 ' 0 с\
а!Ч _ _ДЛ' ... «, «0. Av. aN _ Йдг ... а, «о. cN
(6.35в)
Если проектируется САУ с астатизмом v-ro порядка, то в ПФ И/ж(5) должно
быть осо-...-ау_(-0, Лж(5) = 5у(а v4-...4-a/!5n~v), а v младших коэффициентов ошибок
равны с0--...-cv_1 =0. Исключив их из (6.35в), получим условия связи параметров ПФ
W3(s) для заданных максимальных модулей коэффициентов СуЭ-Сд,:
К3-\, a,Vi = 0, v-1,
«V «v+l «0 д! 0 ... «о ••• 0 ' 0 Су Cv+I < Лу *v+1 Д V Д V+1 4- ’ й0 Д1 0 ... «0 ... 0 ~ 0 <4- G +
«дг «Л'-У ... а, «о_ . СЛ' _ . b.K' . _ ЯЛ' _aN-v ... a, “о_ _f7V
(6.36а)
190
В частности, при v = 7V -| проектируется САУ с астатизмом первого порядка и ограни-
чением С| на модуль коэффициента скоростной ошибки. Тогда ее ПФ (Г'.Дд) должна
иметь параметры, удовлетворяющие условиям
А'( - 1, «j а$с{<Ь(}<ах зд0С| . (6.366)
При V —1 и /V - 2 задаются ограничения ct и с2 на коэффициенты ошибок по скорости
и ускорению. То1да ПФ ЗС должна иметь параметры, совместно удовлетворяющие ус-
ловиям (6.366)и
«э -л(С| -«ог2 -^2 ~а1 +а1с'1 +яос? • (б.Збв)
Таким образом, статический синтез дает минимальные степени полиномов ВДз),
.1,(5) и соотношения между их коэффициентами, обеспечивающие заданную точность.
Динамический синтез ПФ ЗС
т \ / а
И".,(з) = К3 ПО - у ) / ПО - )
>1 / ;=1
заключается в назначении ее спектра (полюсов s, и нулей Ху) так, чтобы спектральные
оценки качества ПХ h(f) по (3.36) - (3.39) не превышали заданных значений времени
регулирования /р (с), перерегулирования о (%), степени затухания колебаний Q, числа
колебаний в переходном процессе /VK. Дополнительно могут быть ограничены жест-
кость системы г , полоса пропускания fn (Гц) и другие динамические показатели.
Полюсы ж,- нужно размещать в области 5 левой полуплоскости, ограниченной
степенью устойчивости ц , степенью быстродействия у и
углами ±4/=±arctg(p), определяемыми степенью колеба-
тельности ц (рис. 6.39):
3/zp<n<min{rn,2n/n),
ц < пнп{-7с/1п(о/100),—2тг/1п(1 -£), 2/VK |.
Размещение полюсов в области 5 дает полином знамена-
теля ПФ A3(s) = flO-A) -
/=1
Прямой алгебраический метод выбора /(,(.?) состоит в анализе устойчивости ХП
со смещенным аргументом. Соответствующие (6.37) условия -у ^Re^-Js-t] эквива-
лентны устойчивости полиномов Л.((г-ц) и АД-z-y), что налагает определенные ог-
раничения-неравенства на коэффициенты АДя). Дополнительные ограничения дают
условия ц, <ц , при которых степени колебательности Ц; -<в,/т), комплексных полюсов
si.i+i = “П| не превосходят заданного значения ц. На основе формул Виета (4.8),
связывающих корни полинома с его коэффициентами, составляются условия связи ко-
эффициентов друг с другом и со значением ц . В пересечении с областями устойчивости
полиномов АДг-тД) и Л3(-2-у) получим допустимые области коэффициентов АДв).
При выборе 1ХДя) желательно выполнять следующие рекомендации.
1. На случай возможного разрыва цепи ОС рекомендуется обеспечить устойчи-
вость ХП Аж(я) = АДя)- ВДз) желаемого разомкнутого контура.
2. Характеристический полином .4,(s) должен иметь невысокую степень л ~2-г4
для облегчения размещения полюсов в допустимой области 5, упрощения структуры
переходного процесса и его расчета, увеличения грубости системы (слабого влияния ма-
лых изменений ее параметров на устойчивость).
3. Для упрощения структуры ПФ регулятора (6.33) полиномы B3(s)A(s) и
[A3(s)~ B3(s)^B(s) должны иметь совпадающие корни. Желательно в И^Дх) сохранить
полюсы , а в fV3(s) сохранить нули Ху от ПФ W(s), то есть выбрать полиномы
B3(s) и B(s) кратными, если это не противоречит условиям (6.35)-(6.36).
4. Для уменьшения амплитуд составляющих ошибки регулирования и повышения
быстродействия желательно близкие к мнимой оси полюсы компенсировать размещением
рядом с ними нулей.
5. В fV3(s) нежелательны правые нули, порождающие в ПХ отрицательное перере-
гулирование.
6. Во избежание явления резонанса полюсы W3(s) необходимо удалять от ком-
плексных полюсов изображения уставки G(s).
Рассмотрим некоторые типовые ПФ W3(s) и методы расчета их параметров.
6.6.1. Замкнутая система второго порядка с ПФ
1+& s
fP3(s)=K3-----у (6.38)
l+a(s+a2s
устойчива при {ai >0}П{«2 >0} • Степень числителя m = t позволяет выполнить статиче-
ский синтез по (6.35в) при 7V< 1:
f 1-с0<.К'3<1+с0,
I <а1(1+с0)+С].
Получим прямые ограничения на допустимые значения at и а2 (рис. 6.40), эквива-
лентные размещению полюсов в области (6.37):
а) Re{sf }<-p => A3(z-Ti)=(l~T[a{+Ti2a2)+(a}-2r\a2)z+a2z2,
rja]-t]2a2 <1, а}-2ца2>0, a2>0; (6.40а)
6) Re{sf}>-Y => A3(-z-y)=(l~yal+y2a2)-(al-2ya2)z+a2z2,
ya, -у2а2<1, at-2ya2 <0, a2>0; (6.406)
в) для комплексных полюсов 2 --цк ±jwK co степенью колебательности
Рис. 6.40
0 I/п 2/ц at
а)
192
ц к - ш к /т| к по формулам Виета (4.8) +.v2 =-2ц|(. - • «,/й2 и si-v2 И к (•+ И к) = 1/Л2 по"
лучим допустимое соотношение коэффициентов:
ц к < ц .д> 4«2/«(2 < ц2 +1. (6.40в)
На рис. 6.40,# 'заштрихована область коэффициентов полинома с действительными
корнями, для которого рк =0.
Пересечение трех областей, изображенных на рис. 6.40, дает область расположе-
ния коэффициентов полинома Л3(я), соответствующую желаемому спектру.
При размещении в области S двух полюсов возможны следующие варианты.
1. Простые полюсы st ^з2 на отрезке [-у, -ц]е5 действительной оси дают ХП
/i.i(s)=(l-s/s)Xl-s/s2)^0+^i‘v)(^4 У?5) с постоянными времени апериодических звеньев
Г,---!/«,• и коэффициентами
я, “-1/Sj-l/s2 +-7'->, ai~^ls\s2'~T\T2- (6.41)
Переходная характеристика ЗС с действительными левыми простыми полюсами
имеет апериодический характер:
h(t)^K3 1+У—
\ £ 3,(^2^) .
I V7!
1+-=г~е
\ г,-г2
тг-т}
Исследуем влияние нуля A.j -1/A] на свойства
h(t), считая для определенности 1\>Т2. Анализ мо-
нотонности и экстремумов ПХ показывает, что при
0<6) <Т\ она монотонна с перерегулированием о=0,
а увеличение форсирует (ускоряет) переходный
процесс (рис. 6.41). При >7j h(t) имеет по (3.33) по-
ложительное перерегулирование
7j Тг
су^(1ц1Т{-\)т}-т2[ьх1Т2-\)т^Ту .
Рис. 6.41
При Ь} <0 ПХ имеет по (3.34) нежела-
тельное отрицательное перерегулирова-
ние
О 1ц /7]) Tj-r2 (1 /Т2)т2 У 1.
Построим графики о(Л|), о (Ь\) и
^р(^1) (рис. 6.42) для ПФ
1 s
С полюсами
Sj --1, »2--2 и постоянными времени
7] =1 с и 7^-0,5 с. Значение /р опреде-
ляется по вхождению h(t) в трубку 5%
от установившегося значения Лус., - К3.
Изучение влияния 1ц на показатели ка-
чества ПХ позволяет понять общий
-4 -3 -2 -10 1 2 3 4 5 Л,
Рис 6.42
принцип размещения нулей ПФ п -го порядка.
Для повышения быстродействия без увеличения перерегулирования системы с дей-
ствительными полюсами желательно размещать ее нули в интервале между крайними
полюсами ближе к правой границе, а постоянную времени А] выбирать в интервале меж-
ду крайними постоянными времени ближе к максимальной:
min{st-} < A,j <max{.s,} <0, 0<min{7}} <6j <тах{ГД.
(6.42)
Допустимы также нули А. у <min{s,-} ( 0< < min {ГД ): они не увеличивают перере-
гулирование, хотя и не форсируют переходный процесс. Нули max{sf}<A,y <0
(Л, > max {ГД) дают положительное перерегулирование н уменьшают быстродействие.
Нежелательны правые нули А.у>0 (£]<()): они дают отрицательное перерегулирование и
существенно затягивают переходный процесс во времени.
2. Разместив два действительных полюса в одной точке -y<S] -s2<-ti, получим
коэффициенты
а{ = -2/sj - 2Г, а2 = 1/s2 - Г2.
Переходная характеристика ЗС с действительным двукратным левым полюсом равна
й(0= К3 {l-[l-st(l+M Vp'} = /7')r/7']e~r/r } .
Влияние коэффициента на показатели качества h(t) аналогично случаю про-
_zA_
стых полюсов. На рис. 6.42 пунктиром изображены зависимости о=(А(/Г-1)е^~г при
*1
>Г, <j_=(l-Vr)e7,-41
-1 при Ъ{ <0 и /p(^) для ЗС с ПФ W3{s)-K3
1+ijS
(1+s)2
. Нуль
Aq -\jb\ желательно размещать слева и вблизи от полюса st.
3. Разместив в области S пару комплексно-сопряженных полюсов S|2=-qK±j<oK с
углом раствора ±ц/ = ±arctg(<jj к/т)к) , получим коэффициенты ХП
«1=-l/s1~l/s2=2nK/(n2+<o2)=2^KTK,
й2=1/5152=1/(пк+®к) = Гк>
где Г^Д/ц2 и = ЧЛ =COS(VK) * постоянная времени и коэффициент демп-
фирования колебательного звена второго порядка. При выборе значений г|к, <вк и ц/к
полезно знать, что по (3.37) перерегулирование не превышает 5%, если степень колеба-
тельности p. = arctg(\|/)<-7i/ln(O,O5) = l,O5»l. Отсюда следуют простые условия выбора
частоты колебаний <вк и угла раствора tgK без учета расположения нуля ПФ (6.38), то
есть при =0:
юк<т|к, \|/к<45°. (6.43)
1 + ^3
Переходная характеристика ЗС второго порядка с ПФ (T3(s)- К3 у2 г'
194
б)
Рис. 6.43
и комплексно-сопряженными левыми полюсами имеет затухающий колебательный ха-
рактер A'3^l-jl7Ke“11,<rsin((i)Kr+<pK)| с параметрами
Фк =arctg —
1Пк
х
<вк
(Пк+®к)*Ь
=arctg
sm(yK)
cos(yK)-p
Р = 6,/Гк.
Изобразим на рис. 6.43 влияние коэффициента и коэффициента демпфирования
колебаний £к на динамические свойства h{t). Анализ экстремумов ПХ показывает,
что перерегулирование <у = 7р2-2^кЗ+1 *0 при всех значениях 6) и ми-
нимально при Л] =0\ то есть при 1] ->-ос: omjn =е_’с,,1к . Это значит, что никакой дейст-
вительный конечный нуль в принципе не может полностью компенсировать колебатель-
ность, порождаемую комплексными полюсами.
Отрицательное перерегулирование о„--\/р2 2^кР+1 е (Фк _фк)/Рк-1 появляется
только при выборе <0,то есть правого нуля 1! -\jb} >0.
Начальная амплитуда колебаний h(f) минимальна (//к -1) при
р2-2^кр+1=(р-^к)2+1 -£2 —>min, откуда следуют оптимальные значения Р = £к,
₽
х1=-1Дкгк . Зависимости быстродействия от и £к (рис. 6.43,6) получены
моделированием ПХ нормированной системы с ПФ (1+р.$)Д1-1-2£к$+$2). С учетом по-
ведения графиков на рис. 6.43,а (резкое увеличение перерегулирования при Ь} >^КТК)
получаем области выбора значений 0<fy <£КТК и Xt <-1/£кТк .
Положение нуля = -Ц |/cos(y к), минимизирующее колебания Л(г) системы вто-
рого порядка, легко найти графически (рис. 6.44). Из подобия треугольников (о, Sj.Xj)
195
Л. ’ “<
.г-----. , t А. -....»
X, -nK |о Re{s}
Рис. 6.44
и (о,— т|к., .v, \ следует, что оптимальный нуль лежит па пересе-
чении перпендикуляра к лучу ^0,s^ с действительной осью.
На основании проведенного анализа сделаем следующие
выводы относительно размещения нуля ПФ второго порядка.
Для уменьшения колебательности и повышения быстро-
действия системы с комплексными полюсами Sj 2---цк ± (
желательно размещать действительный нуль левее точки пере-
сечения действительной оси с перпендикуляром к лучу (о, 3|} :
<--(т)к +«к)/пк •
(6.44а)
Правый нуль А,] >0 дает нежелательное отрицательное перерегулирование и является не-
допустимым. Неравенству (6.44а) соответствует следующее условие выбора постоянной
времени :
05*12Пк/(пЬ®к)-^кП-й|/2- (6.446)
Если ПФ высокого порядка содержит несколько пар комплексно-сопряженных
полюсов, то частичная компенсация действительным левым нулем производится для
пары с максимальным углом раствора ц/ к, дающей наименьшее затухание колебаний
переходного процесса.
Таким образом, параметры ПФ второго порядка вычисляются следующим обра-
зом. Сначала по (6.37) строится область спектра 5, а по (6.39) определяется коэффици-
ент статического усиления КЛ. Далее находятся коэффициенты и а2 ' либо по (6.40),
либо по (6.41) после выбора типа и размещения полюсов s( и s2, И, наконец, по (6.39),
(6.42) и (6.44) выбирается коэффициент Ь\ —1/Х1 .
Е7 Пример 6.10. Для объекта (6.7) с Л--200 и спектром {S]°--0,02, s2 =-0,1,
«з = -1} рассчитать регулятор, дающий ЗС второго порядка астатизм первого порядка
с коэффициентом скоростной ошибки с, <0,1 с, показателями качества t <2 с , о<20%
и жесткостью у < 10.
Решение. Для создания астатизма первого порядка по (6.39) при с0=0 определяем
К3 -1. На основе (6.37) получим параметры допустимой области размещения полюсов
ЗС (рис. 6.39):
5: ti>1,5, у <15, ц < 1,952, у<63°. (6.45)
Выберем действительный тип полюсов -15< s7 <s, < -1,5, дающих апериодический
характер h(t). Записав с помощью (6.32) и (6.41) ПФ замкнутой и желаемой разомкну-
той систем как функции параметра и постоянных времени 7] =-l/s| >Т2 = -l/s2
,,, z „ 1 + 6. S 1+6, S 1 + 61S
--------%-------WAS).--------------1---—- -- A%-----1—,
l+(Ti+r2)s+7^7'2s2 s(71+7’2-Ai+7;T2s) жз(1+Гж5)
где К^^лТ^Ь.) и 7ж=7]7'/(7,+7'2-^), перечислим условия, которым должны
удовлетворять параметры b\, 7j и 7.
К обязательным условиям относятся:
1) принадлежность полюсов st и s2 области (6.45), а параметров 7j и 72-обласги
196
внутри и на границе треугольника (рис. 6.45):
{А|, ,v2)с5 => 0,0667< Т2 <Т{ <0,667; (6.46а)
2) условие (6.366) обеспечения желаемой ста-
тической точности:
с, <0,1 -о Т\ +Т2 <1] + Т2 4-0,1. (6.466)
К желательным условиям относятся:
I) условия (6.42) предпочтительного разме-
щения нуля X) = -1/6, :
s2 <Xj <3| => 7'2<6[<7^; (6.46в)
2) сохранение в ПФ В"ж(\) наиболее удален-
ного полюса $з=-1 объекта для повышения бы-
Рис. 6.45
стродействия ЗС и упрощения структуры ПФ регулятора:
ГЖ=Г3°=1 => Ь^Тх+Т2-Т\Тг.
(6.46г)
Подстановка (6.46г) в (6.466) и (6.46в) дополнительно к (6.46а) ограничивает вы-
бор параметров 7] и Г, следующими неравенствами, отраженными на рис. 6.45 облас-
тями с пунктирными границами:
-0,1<Т|Т2<0,1, ^>1, 0<Т2<1. (6.46д)
Видно, что желаемое неравенство Т{ > 1 несовместно с обязательным условием (6.46а) и
должно быть заменено неравенствами 0<Т, <1, что в (6.46в) эквивалентно выбору
Л'[ < А., <0 и Ь{ >7]. В результате возможно увеличение перерегулирования и уменьшение
быстродействия.
Выберем постоянные времени 7] =0,4 с и Т2 =0,2 с (рис. 6.45), тогда
Я| = Т} +Т2 =0,6 , а2 = Т1Т2=О,О8, Л, -7, +Т2-Т}Т2 =0,52, К ж = \jl\ Т2 = 12,5,
1Г3(5) =
l+0,52s
l+0,6s+0,08s2
12,5(1 +0,525)
s(l + s)
а ПФ последовательного регулятора имеет ПИД2-характер:
ТГЖ(5) (1+50sX1+105)(1+0,525)
0,0625
----- +3,7825+33,2s+l 6,255^.
5
Замкнутая система имеет коэффициент скоростной
ошибки С] =0,08 <0,1, полюсы ^=-2,5 и s2 = -5 внутри
области (6.45), жесткость г = 2<10 и ПХ
. 1 . 61 ~Г> р-б'7! . -72 -t/T2
------е ‘ ч------—-е ' L-
Т\~Т2 Т2-Т{
= 1+0,6е'‘2’5'-1,6е~5'
с показателями качества Гр=0,83<2с и ст-5,6 <20%
(рис. 6.46).
Все требования выполнены с большим запасом. %]
Рис. 6.46
197
(6.49а)
6.6.2. Замкнутая система третьего порядка с ПФ
1 I th .V I ЛтЛ ‘
----- / ; (6.47)
14 a|S+a2.v“ i-«3s‘
устойчива по критерию (4.11) при , >0}П!«|«2 >аъ - Степень числителя т - 2 по-
зволяет выполнить статический синтез по (6.35в) при /Vs 2:
1 е:</(, Ис,
а|(1-с0)-с, <К3Ь\ <«|(1+<•„)+€,, (6.48)
a2(l--c0)-a|f| -сг < К,Ь2 <«2(1+<.,0)+Д|С1 +с2.
По прямому методу динамического синтеза получим ограничения на допустимые
значения alt а2 и а3, эквивалентные размещению полюсов в области (6.37). При этом
используем критерий (4.11) для полинома третьей степени с учетом положительности
коэффициента а3:
a) Re{sJ<-T] => Л.,(г-ц)=(1-тЩ! +т]2а2-т]3а3)+(а| -2ца2+Зц2л3)г+(я2 -Зт|д3)г2 +
3 2 3
+a3z -a0 + a|Zi-a2z +a3z устойчив или нейтрален при
а0>0 => ца!-ц2«2+т|3а3
а2>0 ;> а2-Зтщ3>0,
| а3>0 л» (ц >0,
а!а2>аоа3 (а|-2т)а2+Зт)2а3Ха2~Зт(а3)+(т(«|-т)2а2 + ц3е3 1)а3>0;
б) Re{s,}>-Y => J.)(-z-Y)=(l-ya|+у2а2 -у3а3)-(а|-2у«2+3y2a3)z+(a2
-a3z3 — — Pi —P3z3 устойчив или нейтрален при
Р()<0 => y«i~Y2«2
Р?<0 => л2-Зуа3<0,
' р3>0 ==> а3>0,
. Р102^РоРз => («12у«2 ^3у 2«зХ«2 - Зу«з)+(Y«i Y2«2 +Г3дз О«з- °;
в) для комплексных полюсов 5,2 -~т|к ±jfi) к со степенью колебательности
цк-юк/т)к и действительного полюса s3 - -т]д по формулам Виета (4.8)
а2 2 э ai 9^1
-51-52-4’3=т1д+2т|к.VjS2 «|А-3+^^3=2т|дЦк+Цк(1+Вк) = -- И -»!*253=ПдПк(1-Н*кЬ~
«3 а3 а3
получим поверхности уровня ц в пространстве {Л|,л2,л3}, которые можно представить
как семейство параметрических функций - границ области 5 ц<цк<у и цк<ц:
J at -ц2(1+ц2)Яз+2/цк(1+ц2),
<6-4’В’
По методу размещения в области S трех полюсов возможны варианты:
1) действительные (в том числе и кратные) полюсы , s2 11 Ъ №!СТ ХП
^3(S)=((~-V/S1)(^—VS2)C-s/s3)=(1s)(l + ^2 5)('+ ^3s) c коэффициентами
3y«3)z2-
(6.496)
198
«, ~ -l/.v, l/s3 -7] t-Г, +-Г3 ,
' и у = 1/лу Sy з\/s*। S’3 +l/s? s3 = 717 у +7| 73 -f 73 Ту ,
«з —1/л'р'тЛ’з — /| ТуТу;
(6.50а)
2) один действительный полюс sf=-цд и пара комплексных полюсов
s, 3 - -цк ±j®дают XI I A!(s’)-(1 + 7';is)(1 +2^KTKs’+7'K2s’2 ) с коэффициентами
| «, = 1/ц ( + 2ц k /(ц2 +® 2 )= 7Д + 2^ к Гк ,
' л2=(ц.,-(2цк)/цд(ц2+<о2)=(2^кГд I ГК)7К, (6.506)
«з = 1/пд(Пк+®к)=7лГЛ
где 7}Л-1/ттл ; Т~ = 1/(цк +® 2); цк7; = cos(vK) = l/Jl+p2 ; цк -<вк/цк .
Для быстрого затухания колебаний комплексные полюсы желательно размещать у
левой границы спектра: цк <у . Переходная характеристика системы с доминирующими
комплексными полюсами будет иметь малое перерегулирование, если полюсы размес-
тить согласно (6.43). Если доминирующим выбран действительный полюс, то угол рас-
твора комплексных полюсов можно увеличить.
Степень полинома В3(з) ограничена снизу числом заданных коэффициентов оши-
бок c0+cN: m>N. Коэффициенты ^bm, порождающие нули ‘ki+'km, выбираются из
желательных условий (6.42), (6.44), сохранения левых нулей объекта и подавления близ-
ких к мнимой оси полюсов.
7 Пример 6.11. Решить пример 6.10 для ЗС третьего порядка.
Решение. Выберем следующие типы и размещение
полюсов ЗС в области спектра S, определенной в
(6 45) (рис. 6.47):
а) действительный полюс st — —1,5 (ему соответст-
вует постоянная времени Тд-0,667 с) разместим на
правой границе 5 с дальнейшим расчетом частично
или полностью скомпенсировать его нулем Xj ~.V|;
б) комплексно-сопряженные полюсы s2 у - - 15± 15j
(цк-<ок-15, Гк=0,0471с, цк-1, -0,707 ) разместим
на левой границе S согласно рекомендациям (6.43).
Вычислив по (6.35а) при - 0 значение К3 = \, а
по (6.506) коэффициенты ПФ ЗС
«1=0,733, «2=0,0467, а3=0,00148,
составим по (6.34) ПФ желаемого разомкнутого контура:
w (ss X + b^s+byS1 ~ *ж(1+Т|Л)(1 + т2*)
s^a!-6, +(а2b2 )s+a3s2} Л'04 ^kIs)(14 ^k2s)
«1-^1 '
(6.51)
Получим параметры Т] >0, т2>0, />1=т1+т2>0 и 62=т1т2>0 полинома B3(s) из
обязательного условия (6.366) обеспечения желаемой статической точности
Cj <0,1 => «, -0,1 <Ь{ <«, +0,1 0,633< Tj +т2<0,833 (6.52а)
и следующих желательных условий в приоритетном порядке:
- уменьшения перерегулирования и колебательности (6.44а):
Л2 < +0) ’ )/г|к - -30 => 0<т2 <0,0333 с ;
(6.526)
- сохранения в ПФ И/Ж(х) полюса Xj - 1 PC:
а{ - А] +(л2 )s3 та3(х~ )2 -0 => т, -)т3 -Т|Т2 7 а\ ~а2 +яз “0,688; (6.52в)
- повышения быстродействия компенсацией полюса х( нулем Х|:
(6.52г)
т^Гд-0,667 с.
0,5 0,6 0,7 0,8 0,9 т,
Рис. 6.48
Построив допустимую область значений Т| и т2
(рис. 6.48), отметим несовместность условий (6.526)
решению по равенствам (6.52в) и (6.52г). Примем
компромиссное решение
т2 = 0,0333 с, Т|=(0,688-т2)/(1-т2)=0,677 с,
удовлетворяющее (6.526), (6.52в) и достаточно близ-
кое к (6.52г). Тогда ЗС имеет параметры *] =0,711,
*2=0,0226, ПФ
l + *|S + *j.V2
(F3(s)=?-----’
(l + ^Xl + 2^.TKs+rKV)
коэффициент ошибки q-1/А’ж ~а^ =0,0226<0,1, а ее ПХ
*(/)=L1 {(Г3 (s)/sj = 1+0,0169е-1,5/ -1,0169е"‘5' cos( 15t +0,05°)
сходится за время ?р=0,219<2с с перерегулированием о = 8,16<20% . Желаемая система
имеет ПФ (6.51) с параметрами Кж =44,237, Гж1=Г3 = 1с, Гж2=0,0655с, а ПФ последо-
вательного регулятора имеет вид
(1+мХ1+т2.УХ1+^Хз+^) С!
^(5) К 4+Тж2г)
6.6.3. Замкнутая система п-го порядка с ПФ fV3(s)= B3(s)/A3(s) , имеющей харак-
теристический полином Баттерворта
< Ы (6.53)
х,=®оеж =<o0(cos(<p;)+jsin(q);)), q>,-=4 1+^—1 Vi=l^t.
2у п )
Его корни s,-, равномерно размещенные на окружности радиуса ®0 в левой полуплос-
кости {ж,-}, образуют распределение Баттерворта (рис. 6.49,а). Если п - нечетно, то
(л+1)/2-й корень действителен и равен -0)0, а остальные л-1 корней образуют ком-
плексно-сопряженные пары. Если л - четно, то все корни являются комплексно-
сопряженными парами с постоянными времени - 1/ю 0 .
200
Благодаря совпадению постоянных времени всех типовых звеньев в (6.53), систе-
ма, имеющая ПФ фильтра Баттерворта 1/Л3(х), является наилучшим приближением к
идеальному ФНЧ при больших степенях п :
I 1/Ч(»| = 1/д/щЗ»2" о ’
Асимптоты ее ЛАЧХ имеют наклоны 0 дБ/дек при 0<®<а>0 и -20л дБ/дек при <о ><о0
(рис. 6.49,6). Частота называется частотой срыва фильтра Баттерворта. Макси-
мальная погрешность аппроксимации ЛАЧХ Баттерворта на частоте срыва не превы-
шает 3 дБ по сравнению с Зл дБ для ФНЧ с ПФ 1/(1 + Tas)n и похожими ЧХ.
На рис. 6.49,в изображены ПХ фильтров Баттерворта для л от 1 до 5, имеющие
перерегулирование не более 12,8% и быстродействие от ЗГ0 до 7,65Г0.
Таблица 6.1
л П ©о Y ®0 Y г = — П у, ° Н а1 Т0 1а а3 70 а4 у-4 70 I'-'’ zp о ,%
1 1 1 1 0 0 1 3 0
2 0,71 0,71 1 45 1 1,41 1 2,93 0
3 0,5 1 2 60 1,73 2 2 1 5,97 8,2
4 0,38 0,92 2,41 67,5 2,41 2,61 3,41 2,61 1 6,85 10,8
5 0,31 1 3,24 72 3,08 3,24 5,24 5,24 3,24 1 7,65 12,8
При выборе подходящей степени л и частоты срыва <з0 необходимо разместить
корни ХП Баттерворта в области спектра S (6.37), пользуясь табл. 6.1, в которой я, -
коэффициенты полинома Баттерворта л-й степени.
Коэффициенты полинома числителя B.^jta) находятся из обязательных условий
статического синтеза (6.35), (6.36) и желательных условий повышения быстродействия,
уменьшения перерегулирования и упрощения структуры ПФ регулятора.
201
6.6.4. Неустойчивая разомкнутая система
6нейтральный метод синтеза регуляторов очень удобен для решения задачи стаби-
лизации объектов, неустойчивых в разомкнутом состоянии, ввиду определенной неза-
висимости размещения желаемого спектра ЗС от спектра объекта. Особенностью спек-
тра неустойчивой системы явля-
ется наличие хотя бы одного
правого полюса ее ПФ. Задача
стабилизации такого объекта
состоит в компенсации всех
правых полюсов IV (s) равными
им правыми нулями компенси-
рующего каскада регулятора с
ПФ RK(s) (рис. 6.50). Собствен-
но, регулирующий каскад с ПФ
Rp(s) решает задачу регулиро-
вания устойчивой системы с за-
данным качеством. Физический
смысл введения компенсирую-
щего каскада состоит в подав-
лении им неустойчивых состав-
ляющих переходного процесса,
порожденных правыми полюса-
ми.
Построим схемы компен-
сирующих каскадов на ОУ (рис.
6.51) по методике, изложенной в
п. 1.7:
а) схема с ПФ RK(s) = 1-Ts с действительным правым нулем А,( =1/7] >0 и номина-
лами элементов ^1^1 - ЛоС2 -7';
б) схема с ПФ RK(s) = \-2£,Ts+T2s2 с комплексно-сопряженными правыми нулями
^i,2=VT’±j-Jj -^2/т и номиналами элементов Л,/R^Lq/R22^T, Л,С(=Г/2^, Ц)С2:-Т2;
в) схема с ПФ RK(s)=(\-Ts)/(\+Ts) с равными по модулю правым нулем = \/Т>0
и левым полюсом $] = -1/Т<0 и с номиналами элементов Q,5RiC{ R{}C2 = Т;
г) схема с ПФ tfJs)=(l-2£7yr7'V)/(l+2£7\+7'2 s2) с комплексно-сопряженными
правыми нулями A.t 2 = ^/7'± j-^/1 — 2/т и симметричными им левыми полюсами
si,2 = ~^/7” ±jy/l~^2/т и с номиналами элементов Ц/R{ = 2R()C1 ~4^Т,
L2/RQ = 2R,Cl=T/2E>.
Две последние схемы фазовращателей компенсируют своими правыми нулями
равные им правые полюсы ПФ объекта и создают симметричные последним левые по-
люсы. Тем самым сохраняется порядок системы, а неустойчивость устраняется.
& Пример 6Л2. Для системы «тележка - перевернутый маятник» с выходом ф(г)
разработать последовательный регулятор, обеспечивающий в ЗС астатизм первого по-
эядка, коэффициент скоростной ошибки с( <0,1 с, быстродействие гр<1 с, перерегули-
эование о < 5% и жесткость г < 3.
’02
Решение. Передаточная функция ^(s) неустойчивого объекта (см. пример 6.9)
имеет третий порядок с простыми действительными полюсами: двумя левыми
sj* — —1/7] = -0,582, /7’ -~\)Т5 = -4,097 и одним правым s3 = 1/Г3 -2,518 . Выберем ЗС также
третьего порядка с устойчивой ПФ (6.47) и прямой метод синтеза ее коэффициентов
A,, «j >0, д,>0, д3>0, 6] и Ь2. Из условия астатизма первого порядка со-О по (6.48)
получим К, = 1. Определим по (6.37) параметры области спектра S: ц-З, у =9,
ц = 1,048^1 .
Перечислим условия, которым должны удовлетворять ПФ (6.47) и желаемой ра-
зомкнутой (6.51) систем. К обязательным условия относятся:
I) второе условие (6.48) обеспечения желаемой скоростной точности:
q <0,1 -0,1<д( -6] <0,1; (6.54а)
2) условия (6.49) размещения полюсов S] +s3 в желаемой области S:
Re{s,}<-3 =>
Re{sJ>-9
/q = 3д( -9д2+27д3-1<0,
5 А( =Д|-6д2+27л3, Л2 =л2-9д3 >0,
й3 = h'y ~ьк^а2 2? 0,
g0=9at -81д2+729д3-1>0,
' Si -fli-18д2+243д3, g2 = д2-27а3 <0,
. S3 = Si Si +Soa2 <0,
(6.546)
(6.54в)
(6.54r)
Im{sJ «I = 2ЛкяЗ + 1Л1К,
Re{s;} 4 — «2 = 2т]кд3 +1/2п^
Уравнения (6.54г) определяют параметрическую кривую /н(цк), ограничивающую в
пространстве {Л|,д2} область со степенями колебательности цк<1.
К желательным условиям относятся:
1) сохранение в ПФ W^s) левого полюса s2 и инвертирование правого полюса
s3 неустойчивого объекта:
| SIjk=S2 Я1 +(fl2~^z)s2+яз(х2 ) -0’
I »’2ж=-5з л1-А1-(д2-Л2)^ + д3(^)2^-0;
2) предпочтительное размещение нулей в соответствии с (6.42):
[ -2^*2 >о j [ -2yb2<o j ‘
Система уравнений (6.54д) имеет решение
Я1 — ^2 $3я3 ’ я2 ^2 — (5'3 — $1 )я3 *
(6.54д)
(6.54е)
(6.55)
В соответствии с (6.54а) выберем д( =q =0,1, тогда д3 = ~cj s2s2 =0,0097. Под-
ставив это значение в (6.546) - (6.54д), построим на рис. 6.52,а область допустимых зна-
чений коэффициентов д( и д2. Выбрав в ней точку {д| =0,6, д2 =0,13}, получим ХП ЗС
.43(s) = 1+0,6s+0,l 3s2+0,0097s3, корни которого S] 2 =-3,79+1,89j и s3 = -5,83 имеют спек -
203
Рис. 6.52
тральные параметры ц = 3,79>3, у = 5,83<9, г = 1,54<3, ц=0,5<1. Определив по (6.55)
коэффициенты =а{ -0,1 = 0,5 и Л2= йз _(уз _у2)йз =0,066 полинома B3(s), убедимся, что
они удовлетворяют желаемым условиям (6.54е) (рис. 6.52,0).
1 г 0,5s+0,066?
Замкнутая система с полученной ПФ H<.(s) =----------------------г имеет ПХ,
1+0,6$+0,13.С+0,0097?
аналогичную ПХ на рис. 6.46, с показателями качества гр =0,317 <1 с, сг = 3,8<5%, удов-
летворяющими желаемым значениям. Последовательный регулятор имеет ПФ
Ji+^ $+^s2 )(i+Tj-QQ - Т^Х1 + T5S) „
S) (Л3($)-Л3($))Вф($) С1Хф52(1+Гз5Х1 + Г55)
1 —T3S? ( 1 + 7}$
I + T3SJ c}s
и схему моделирования на ОУ (рис. 6.53) с номиналами радиоэлементов
0,5/f|C| = RqCi = ’ ^2^-'о , Я5С0 = и Z.C0 = ft2.CJ
l + l^s + b^s"
Рис. 6.53
>04
ПРИЛОЖЕНИЕ 1. I АБЛ ЦЫ РЕ БРА5 БА НИ И ЛА1 ЛАСА
Таблица 11.1
Прямое преобразование Лапласа
JSfo п/п Оригинал /(/) Изображение F(s)
1 6(0 1
2 1(0 l/s
3 t 1/s2
4 1я n!/s"+I
5 -at е 1 T A’+(X l + 7\
6 1-е at a 1 s(s4-a) s(l + Ts)
7 1 T2 (лч-a)2 (l + 7s)2
8 tne-at л! л!Гя+1 ($+а)я+1 “(l+Ts)"*1
9 sin(®/) о T s2+©2 1+T2s2
10 zsin(caz) 2®s (s2+(0 2)~
11 z2sin(®0 2®^352-o) 2) (s2+o)2j
12 e-^ sin(cDZ) о r/]-^2 (S+P)2+® 2 ~ l+2^Zs+r25’2
13 2co (5+P) ((s+P)2+<O2j
14 e^Z2sin(o)Z) 2<о(з(5+Р)2-® 2j ((s+P)2+a)2)
15 sin(<Df+ф) 5sin(<p)+o) cos(<p) 2 2 S +(BX
16 Zsin(wZ+((>) ^52-© 2 )sin((p)+25a) cos(<p) ( 2 2)2 (5 +(0 j
17 e^rsin(®Z+<p) (5+P)sin(<p)+<D cos(<p) (5+p)2+®2
70S
Окончание таол. 11.1
18 1 cos(o>0 s T2s s2+®2 l+r2s2
19 Zcos(®Z) 2 2 S '<B / 2 2\“ (s 4(0 J
20 Z2cos(®/) 2s^s2-3® 2j / 2 2\3 (s +® J
21 e~₽*cos(®Z) s+P = Щ+П) (s+p)2+®2 l+2£7s+T2s2
22 e-^Zcos(®/) (я~Р)2 ~co 2 ((S+P)2+©2 j"
23 e-^/2cos(®r) 2(s+p)((^+p)2-3co2) ((5+p)2 +(0 ? )3
24 cos(®z+q>) 5cos(<p)-co sin(<p) 2 2 S' +(0
25 /cos(®r+q>) (s2 -® “ jcos(<p)-2.V(» sin(<p ) (s2+cd2)
26 e"^fcos(G>/+q)) (s+P)cos(<p)-(o sin(q>) (s+P)"+® 2
27 sin(® tZ)sin(® 2O 2®]® 2s (.V2+(®1 +C02)2)(s’2 +(®1 -02)2)
28 sin(® |?)cos(<b 2f) (1 2 21 1 2 f ( 2 , 42V 2 / >,2\ Is +(©[+© 2) И $ +(®1 —® 2) )
29 cos(<D jr)cos(® 2Z) / 2 2 2^ si S Ч-СО | +©2/ ^S2+(ffl] +®2)2j(s2+(® j ® ?)2)
30 sh(®r) ® ~2 2 s -®
31 e~^sh(®Z) ffl (s+P)2-® 2
32 ch(®/) s 2 2 s -®
33 e“^ch(®/) S+p (s+p)2-® 2
?06
Таблица 11.2
Обратное преобразование Лапласа
№ п/п Изображение F(.v) Оригинал f(t)
1 J п $ tn~x («1)!
2 1 1+Ь ae-<M
3 1 s(l+b) l-e~ar
4 1+TS s(l+b) l+(ax-l)e~a/
5 1^ ?(l+b) 7’(ea/l)u
6 1+TS 52(1 + Ts)
7 1 +ts+gs" s2(l+b) A+t+Be^: A=t-T, B-ga-т+Т
8 1_ ?(l+b) Г2(1-е~а')-П+/2/2
9 1 (1 + b-)2 a2/ear
10 1 s(l + b)2 1-(1+а/)е~а/
11 1 ?(l + b)2 2r(sa'-l)fr(e~a'+l)
12 I_ ?(l + b)2 372 (l-e~a' )- b(2+6^ }i72/2
13 S’ (1 + b)2 a2(l-aZ)e~a/
14 1 + TS (1 + b)2 а2(т+(1-ат)/)е~а/
15 1+ts s(l + b)2 1 - (1+a(l--ат )z)e-aZ
16 l+TS+gS2 .v(l+b)2 l+(j-5/)e-a/: Л-^а2-1, B = ga3-та2 +a
17 1 0 + Г5)3 a3Z2e-a//2
Продолжение табл. П.2
18 1 s(l + 7s)3 1 - (1 + af +a2/"/2^ M
19 2 ?(1 + П)3 1-ЗТ+[уГ+ 2t+at2/2^~а/
20 (l + Ts)3 a3t(i- at/2)e-aZ
21 ? (1 + 7\)3 a3(l-2af+a2/2/2^ af
22 1 (l+7s)4 аУе^/б
23 1 v(l +7s)4 1 Д1+а*+а2г/2+а3*3/б)г~а/
24 (l+7s)4 a4^2 /2-а/3 /б)г-аГ
25 s2 (l+7\)4 a4^-af2 +а2/3/б^а/
26 ? (l+7s)4 а4(1-За/+За2/2/2-а3/3/б^-а/
27 1 (l+W+7^) __1 7“’' _е-з') 7]-Т/ 7
28 (I+W+T^) -С^1' +С2Ле~“2': С, = L
29 1+TS (l+TlsXl+r2s) qe-^'-Qe^2': _ 1 Г,(Г(-Г2)
30 1 s(l+7isXl+72s) l-Ge-**1' +С,е-а2/: 1 " 7]-Тг
31 1 + TS Xi+T^Xi+T^) 1-С1е‘'а,'+С2е~а2': 1 2 ' Г,-Г2
32 1+w+gs’2 Xl+TlsXl+T'zs) 1-С1е“а‘г +С2е^2': С,-+^2 1 2 Ti(T.-T2)
33 1 s2(l+7]sXl+r2s) t-T{-T2+C^-c2^f /] z2
34 1 s3(l+T>Xl+T2s) A-Bt+t2 /2-C}e~ait +C2e^a2t: /1 = 7’12+Г1Г2 + Т22, Л = Т1+Г2, C,-^. yl -/2
35 1 (l + TisXl + T2s)2 C^-iBt+C)^1: L-, S= J_ (T]-r2)2 T2{TX-T2}
208
/родолжение табл. I .2
36 1 + Т5 (1 4 Г| Л>)(1 + 7^ -V) “ Се^1,г-(Л+С)е ,I2': C=—B?T (7\ T2)2 T2{TX-T2)
37 1 +T.v + gs2 (1 + 7;s)(1 + 7'25)2 Ce aft+(A-Bf)e~a2t: W-T,)2 A ^(Г1-2Т2)+(г-Т1)Г£ B_g-xT2 + T2- Т^Ту-Тг)1 ’ (TX-T2)T3
38 1 s(l + T]sXl + ?2s)2 lCea'f+(./ + BZ)ea-’r: c__ ?i2 aJW-T2)T2 b 1 (Тх-Т2)2' ' (T\-T2)2 ’ Tx-T2
39 1 +TS Xi+T?xi+r2s)2 I Ce a,f-<(/* ! c_(Tl-x)Tl aJ2Tx-T2)T2~Txt r_ T2~r (7]-T2)2’' (Tj-T2)2 ’ T2{Ty-T2)
40 l+TS’+gS’2 Xl+^s’Xi + Tz5)2 l-Ce^ +(A+Bl)e~ait: C=g+(T'—У1, (тх-т2Г A g-xT^{2Tx~T2)T2 д g+(T2-T)T2 (Т,-Г2)2 ’ (7]-Г2)Г22
41 1 Ai+T^xi+T^')2 -4 +r+Cea'' ~(A2 +Bt)e~a2t: Ах=7] +2TZ, ^(37]-2T2)T22 b T2 c 7]3 2 (T]-r2)2 ’ (71-Гг)’ (71 ~T2 )2
42 s (l + TjsXl + T^)2 -Се^,г+(С+Вф-а2/: C= ? 5— —T (T(-T2)2 (Tt-T2)T22
43 y2 (1 + 7>X1 + T»2 Ce~ait +(A~Bt)e~a2t: (71-T2)-rt (71-T^)2?'/ (T\-T2)T23
44 1 (1 + 7>X1+W Ae~ai‘-(A + Bt+Ct2)e~ait: A^ 5-^-, B- , C= 1 v (7',-72)3 (JI-?',)2?', 2(71-7-2)Т;
45 1 + ТУ (l+7]sXl + W Ле~“г'- (л+вг+С?)е~“2': л= д= . С.- (71-Г,)3 (71-Г2)27-2 2(Г(-Г2)Г/
46 1+TS + gS2 (1 + TjsXl+W Ae^,-t4 + Bl+Cr}e~a2t-. A^~xT\-tlL (?1-Г2)3 B_g{2T2-Tx)+{Txx)Tz c_g+(T2-x)T2 (Тх-~Т2)гТ3 ' 2(Тх-Т2)Т?
?09
Продолжение тадл. il l
47 1 sO + rp’Xl + ^sj3 l~J(e ai'+(.4?+fl/+C/2)e aiJ: 4,^-5’ ^4->. к .c--^ (7i-r2)3 (l\ T2Y A7\~T2)T2
48 1+TS s(l + 7]^Xb T2s)3 l-4e~air + L+5/H7r)e-tt2': A^(-^^, (т^т.у c= 7^. fa-T,)2?; 2(7J-T2)T£
49 s (l+Tp^ + T2s)3 -Ле'а1,+(л+Вх+а2)е“а2/: л„L B=- L— c= 1 {т\-т2У' {т{-т2Ут2 1{тх-т2)тУ
50 1 (i+T^Hi+r^)2 (-А + В^'Л.А+В,)^”: (г,-т2)!
51 1+T.V (1 + T|S)2(1+T2s)2 (A+Blt)e~ait-(A-B2t)e~a2t: ._(т^тг)1-гт,тг в - т’~~' ’ ‘ (tj-t,)2/;
52 i 2 1+TS4-£S (l+7js,)2(l+r2s’)2 (А + В^е-*1*-(A-B2t)e~a2t: A_2g-x(Tx+T2)+2T{T2 B^g^(Ti~x)Ti {т2-тху ’ ‘ (г1-г2)2г2
53 1 ®(1+7^)2(1 + 7>)2 1 +(4 - B{t) е~а,/ - (А2 +B2t)e -агГ: (зг2-г,)т,2 _(зт;-г2)л2 Tj {т}-т2У (т{-т2У ’ ' {т\-т2У
54 s (l+T^Hl+T^)2 Й-Я,/)е-а1Г-(A + B2t)ea2t: л- т^т2 в _ 1 (Т(-Г2)3’ ' (т1-7'2)27’/
55 2 (l+T,S)2(l+T2l)2 -(Л-B1^)e“ttl/+(Л+B2/)e*a2,: л=__2 В=__J (г, <г2)3’ ' (т}-т2)2т3
56 1 П(1 + 7>) <=i 3 Т" gc,e c<-(Ti_T^T^Tjy Г У2 с = ^з 2 {т2-т(ут2-т2у 3 (Тз-^ХЛ-Т,)
57 1 sflO^) i=l 3 'г-2 С!=7 i -v С Ti С Тз 2 (т2-т^т2-т,у 3 (Гз-тДТз-г,)
?IO
Продолжение табл. /7.2
58 1 3 <=1 z+z(c«e ^_Т^_ъу С2~(т2~т[Хл -т3у Ci (г3 - г,\т3 -т2)
59 S П(нт?) <=| 3 1 ^С,е ‘ C1“(7i-r2X7i-r3)’ с 1 с L 2 {т^тг\тг-тъу '
60 7 S~ П(1+7» /=| 3 1 УС^1': С,=7 г-, % (Т.-ГгХ^-Тз)/] с _ 1 с = 1 2 fa-T^-T^' Л (Тз-^ХТз-Г,)^
61 1 П(1 + 7>) i=i п 'Г’П—2. £С,е-“'': ,=| П(л A=i, А*/
62 £ п О+*?) «=1 П 'г Л~1 1-ХС,е^': С(= , ‘ ГК<-7<) Л=|, А*»
63 1 <=1 Л Л *г>П --4 + (+£С^'-. А^Т^С^--^ П(г.-п) *=1.А^
64 S fl(l^s) 1=1 Л тгЛ—3
65 2 V п П(1+7?) 1=1 п -j^n-4 2;с,е-а'': С, =—р- ,=l ГВ7;-тк) A=I, k^i
66 1 (1 + П)2П(1 + 7>) «=1 (~A+Bt)e-a'+Xc^a‘': i=l *рЛ~! п 'г ’Т'П~2 А=— -у_А_, В=— , П(г-г,)'-'г“7; П(т-г,) 1=1 1=1 rvw Л Ci = -i (Ti-т)2 nfr-n) A=l,
211
Продолжение табл. П. 2
67 1 я(ЬГл)2П(1 + Т>) 7" 1- (//+Я/)е-,и-ХС,А- г-1 <тр Я 1 у f В , ,С;~ П(Г-7}) (Т -Т,)2 ] i=i /< Я у ь-У i я ' П6 rj /=| +1 я тк) ,k*i
68 1 »2(|+^)2П(|+7)5) «=1 -A+t+(C+Bt)e ‘lt + XCie ар; i-l п т У 7'я+| 'r .’V . Ъ __ л 1 ” ^~Ч Т A=2T + XTi ' С= - 12 ,=l П(г-Ъ) »=1 у fl уИА~2, в—L сг L л ' я П(7’-т1) (t-tJ- flfr-r 1=1 Аг=|, ksi t к)
69 S (i+rs^fJO+/;.«) ;=1 тп 2 (A-Bt^'-fc^*-. А= ы I X гу Я 3 у f В= , ti- Я 1 П(Т-7}) (Т’-Г,)2 ] «=1 й= z Я -Т" 1+У -1’ я Кг-*;) =i -1 я ,k^i
70 ? (1+п)2П(1+7?) «=1 (- А+В()еа,+^С^-а'*: А= <=1 уЯ~"Л *у / , с, = -j~ П(7 Tf) (ГТ,)2 ] <=1 к= п т А 2 + У— П(г -TJ X—1 -2 1(7}-Гй) .k&i
212
Продолжение табл. 11.2
71 J I t 2£73+T2s2 Ce ^sin(co/): C=—--- (o7'"
72 1 + TS' 1+ 2t,Ts+T2s2 -pr ( 7o~2Pt)^ +t~ , ( <°t Ce K sinlco/ + <p): C , <p = arctg - — иГ3 U-Pa 1 )
73 _ 1 s(1+2^7’5+7’2.v2 ) l-Ce~^sin(«>Z + (p): C-—, <p-arctg| — 1 <oC <PJ
74 1 + T5 5(112^73 +TV) . pr . / t ч „ J? + (1-2рт)Г2 f <йГ2 1 + Ce * sin(<oZ-(p): C -—tp=arctg ffll 14T-P7’-J
75 1 + TS + gi'2 5(1 + 2^ Ts + T2s2) 1+Ce ^sin(®z+tp): 4~p^~TiL^S!a2 j?L-zi иг2 Vt-Pw + 7’2j /
76 1 .v2(1+2£,7s+7'2s2 ) ~A+t+Ce sin(<at+<p): Л=2р7'2, C = —, (p = 2arctgj — 1
77 s l+Z^Ts+T’2»2 -Ce~P,sin(<BZ-(p): C-—Ц-, <p = arctg| —| tai V.PJ
78 1 (l+2^7’s+r2s2)2 Ce^(sin(tof)-«)fcos(G)/)): C-—5 2o 3T4
79 1+TS (1+2£7s+T2s2)2 e *,t(Csin(<i)Z)-C|rcos((i)/+(p)): 1-рт „ /т2+Т2(1-2рт) f «г C~ 3 4’ C'= is ’ 4)“arctg , D 2<o3T4 2®“T5 U-PV
80 9 1 + T.V+gS (1+2£75+T2s2)2 e ^(С51п(ш/)+С]Гсо5(со/+ф)): с^+Т2(1-рт) с + 2<о3Г6 ‘ 2<o2 T5 f ®fc-7'2J (co '| (p=arctg —И arctg \T-p(^+r-jJ Ш
81 1 «(l+^Ts+T'V)2 1+Ce (co T cos((of+2(p)-sin((oz+(p)+(ozcos(®z+(p)): C= ,(p=arctgf 1 2o37'3 iPj
82 s (l+2^7s+T2s2)2 Cc ^% P73in((oz)+(oZcos(co/ (p)): C=—;—^,<p = arctg - 2co 37’5 At
83 (l+2£7s+T2s2)2 Ce P'(sin((oz)-(ozcos((0f-(p)): C-—, (p=2arctgf — j 2®3T6 iPj
213
Продолжение табл. П. 2
84 1
(ч-г^т^+тД2) 1 (1+2£2T2s+T22s2)
85 1
s(l+2^17’1s+Tl2s2) J (1+2^2T2s + T22s2)
86 I
s2(1 + 2№+7]2s2) I (l+2^2r2s + 7-22s2)
87
(нг^т^+Г!2®2) i (1 + 2^2Т2® + Г22®2)
-С|е P|fsin(©|/ + ф]) С\е sin(m2t + <р2):
® J(r>2 - < 4(Pi - Р2)(Pi?i2 -Р2Гг)ггГТ
Ф1 -arctg <2р2Г22 --₽1(г,2+Г22) y 4 arc,gfe)
( ( т z\ У (0? 17 -Ti \ OJq
Фг-arctg + arctg| --
12Р1Т,2-р2(г12 ч Т<) y < P? )
1 + C|e sin(<O|Z + ф|)+C,e ^2rsin(<»?/4 фэ):
__ T-
Ф1 =arctg
®,Ж-7’2 У +4(р, -Рг^.Г,2 ^Т^т;-
®lfa2
грг^г-р,
+ 2arctg
®2V2 ~ *
ф2 =arctg
- +2arctg —
^р.^рД/;2^)) IM
A + t-C\&~^xtsin(«*if 4-ф] )-C2e_P2?sin(<B2M ф2):
/^(р.ГГ+РгГ2)
®i^r-r22) +4(p1-p2)|pl^-p2r22)rr^2
Ф, =arctg - -
(2p2T<-p,^S
+ 3arctg
® 2
Ф2 =arctg
-i 3arctg —-
С|б Р!/5т(с0|/+ф|)+C2e *5;,sin(<»2^ + <p2)'
фЛ-Ж-г
л2
<p, -arctg
<p2=arctg
а>э|/7 J
2
гр,/;2 p2(:
214
Продолжение табл. П.2
88 № ... x (U2^r,.v4 7i2.v2) s (1 + 2^72s4 72V)
89 1
n(i+2^.7',.s+7;V) i=i
90 1
5Р](1+2£Л5 + 7Л2) «=1
91 _2 .у2П(н2^7;.у+гД2) «=1
92 s
n(l+2^7’,s + r/.V) <=i
-С\е ^sin^^ + cpi) С2е ^sin^jZ + qb):
л у2(л 2) я
J/T.e^'sin^+cp,): 6;=-*-^, R,= ПЯЛ’
/=1 k=i.k*i
Г \
п <р2л—3 п
l-SC«e_₽/'sin(t»;/-b<Prf)- G = ‘’у--, я,= ПЯ*’
/=| ^i\Ri k=\,k*i
к* =(б -rtf +4(₽, -Р,)Ь;Г/-РкТ&Тр
^±MaL_*“b-M.
%. 1(0/ --pJ2-(fi>;-fflU
+arctg —'-
-A+t+^Cfi ^r/sin(®,7+q>,):
«=|
л -г 2(л-1) л
А^2^,Т^ R' П**’
«=1 ®iv^> fc=l,fc*i
Я» -(л2 +4(₽, -₽4^г; ^-)г,гтр
<Pj-Varctg----_PjJ— <2arclgf—
« J lsJ
-ЁСе Cl'sin((M+<P;): C, =-^7J=, «, = П*!»
i=l k=i,k*i
Rik =(rt2-rtf +4(0, -0*)(0,7]2 - $кТ?)т^к,
<Pl=Z>rct8--------Ю*(Р' P*} -arctgl^
Продолжение табл. 11.2
93 0 s" n jr 2 VC,e ’’'/sin(co;/+<p,): C.-—- л-З) „ , R; Пл».
n(l + 2e,T,.v+7;2.v2) «=1 «Н k=l,k*i **-rf +4(р, -pi.7}2-P*r;Wr*2,
n = £агсц AH 2ar W fa._R,v_L2 ™21 Ш
k*i 4 7 ' ' K> J
94 j Ce^rsin(©z-< pl+Ge -atr. c __ i
(1+2£75+тЛ2)(1+7]«) c - 0) ] ^T2(l-207])+7]2 в»7!
Cl - 2 T2 (1-20] ^)+7i2’ (12 — C 'rcVpd
95 1+TS -“H. г 1 1 7’2(1-20t)+t2
(l+2^Ts+r2s2)(l+7]s) V- с c_ T~^-2$l U+Cie r l)+3f . c - , Ф~агс1 u)T r 0 2 V 7"2(1-207])-ь7]2 ’ i)7] ( от —— -arctg 37] J \l-0rj
96 1+ts+^s2 C=— 1 ®T^ <p=arctg Се ^,з1п(®г-ф)+С1е “|Г:
(l+2£7s+T2s2)(l+7]s) ®2(20^-t)2 +(g(p2 -<b2)-0t + 1)2
c>=- ojT] 1-07] T2(l- . s+(7i (t2(1-2 + arctg 20^)+^ 07])+7]2)’ <p(20g-T) ^(p2-®2) -0T+1,
97 1 1-Ce ^sin(©r-(p)-C(e
s(l+2£7s,+7'2s2)(l+7js’)
®7т'20-2РГ Ф~ arctg )+7]2’~‘ 7’2(l-207])+7]2 ( QlT] fffl'j ^1-07]J \0j
98 1+ts s^1+2£7s+7'2s2)(1+7]s) 1-Ce ^sin^/^^Cje a,r: 1 I 7'2(1-2рт)+т2 (7]-t)7]
«’7'^7’2(1-2рТ])+7]2 f ®7] Ф=аг^1 pM arctg Г2(1-207])+7]2’ ' <оГ2 Ip^-tJ
116
Продолжение гпабл. П. 2
99 1 XXS+gS2 s(l+2^7'.v+7'2.v2)(l+7js) 1+Ce Prsin(®/-<p)- C,e a'r:
c 1 <d2(g-T2\ +(r-p(ff + T2)f
'air'j Т2(\-1$ТХ}+Т2 c .. ' Г2(1-20Т|)+7]2
9=arctg^_p^J+arctg <яу ~£J
t-rL + T21
\ - / /
100 1^ s2(1i2£7s<7’2s2) 1 X(l+7]s) -/l + z+Ce~P/sin(<oZ-(p)+C|e~air: C- r. T - G= S , <^T2(\-1$TX)+T2 r2(l-2pr,)+7i2 Л=7!+2РГ2, (p=arctg^^ 2arctgQj
101 s (1+2£7s+T2s2)(1+7]s) -Ce^sin(m/-<p)’C|e ai/: c=-— 1 q =-y-—-1-- ©7’2-^7'2(1-2р7])+7]2 T (l-2p7])+7]2 f 0)7] fcD^I ф V₽^J (J
102 s' Ce ^sin(o)/-<p)+ д, Cr ©7'3y r2(l-2p7])+7j2 f ©7, ) n <p=arctu *- +2 \1-P7]J
(1+2£7s4-T2s2)(1+7]s) 7](т’2(1-2р7])+7]2)’ arctgf— APJ
103 _ 1 (l+2£7s+7'V) 1 X(l+7]sX1+72s) Ce^sin(o>f+<p)+C1e_a|r-C2e~a2 1 t f ©7] ( &T2 \P7]-1J \PT2-1J t. P7])+7}2,
104 1-1 TS' (l+Z^Ts+rV) J Х(14 7>)(1ьГ2.у) Ce ^sin(©/+<p)+C]e a*z-C2e “2*: c=~ к2-2ргГ2 +T2 c = T^Tj-x) ©T\ RiR2 ’ ‘ (Т]-Г2)/г/ Ri T (l-2p7})+7;-
-) 17
218
Продолжение табл.
Продолжение табл. П.2
111 1 (1+24Ля-Г2?) 1 Х-- — л П0+*>) г=1 Се sin(®/+q>)+^C,-e а</: с с = К ® fl«i Ri Г№~г*) V ;_| >=1,Ази /г^Г2(1-2₽7;)+тД *=Zarct^j
112 1 s(li2^s+T2$2j 1 X ПО+т?) г=| л l-Ce~*sin(<BZ+<p)-^ C=-UEL.C,=— ®JriR« Ri 1 J <=1 Л;=Т2(1-2Р^)+Т;2. <|>=farctg j=i ;c,e-' T’" ,k*i W-1J + ЧХ 1 Й5 2. та! 8^
113 1 s2(l+2£7s+T2s2) 1 П('+М 1=1 - J + f+Ce"^ sin((of+q>)+ Х=2₽Т2+ХГ«’ ( V i=l ^=r2(l-2p7})+7}2, <P-£arctg i=i S s '1 £M* 7 -4 Э -J Л > * । ' Л.Н—< ₽ * ic ? •• X w 2 1 to |8^ ,
114 (1+247s+T2s2)X 1 ПО+М <=1 -Ce ^zsin(oZ+<p)-^Cle a,/: с^-гу-^^Ци., R^T^-IPT^T?, i г.Я' a "i та | e
115 s2 (l+^Ts+T2?) 1 х—— П0+^) «=1 _____ с=(-гГ^^Ць, С^ТГ Л^Т\\-2$Т^Т?, <p = 2>rctgl i=l \ <-< Z 3 [C£l г* ч s< oo H sbs •» Я —. * ГЧ «Е*. I >—«Т Z 4 % ... * ... T ? * л -3 S-
21 ‘7
Продолжение табл. П.2
Ct ^'Г S’n(® i( + Ф i У
Ri= П
А=1.*#Д
п
Ф,= arctg
Jt=l, 4*i
2f0»(P,-Pt)
(0/-Р*)2 -(»/ -<о*Л
(о,Т
p,^i
117
s(l+7s)X
________1 _____
П(1+7}«+т;-2у2)
i=i
l-Ce”®* +yc<e~^,zsin(<p<f 4-<р,-):
«=1
у^2( л—1)
-5—, П=(\-2^Т)Т? + Т\
2л
R, И Р'7'2 'г'2
А=1,А#«
л
Ф; = L arct^
А=1,А**
2<в,(Р,-Ра)
(Р/-Р*)2-
J <°/г I J
л +arctg —1— +arctg
р,-
118
?(l+7s)X
1
х--------------
П(1+7}«-гЛ2)
1=4
-A+t+Ce^ /Лир,-):
i=i
(1-2р,т)т;2+г2,
2 2
Ri= П РА^7}2-рАГ^2тД
*=1,***^
* ( 2<в.(р.--рл) Л (&Д
X arct£ 7; - \2 Т 2 "П +arctg ТгН +2arctg ”
*=4,Л** <(Р«-Рл) ~ \Р»^ V \ Р« )
220
Продолжение табл П. 2
1 19 (| + 7\)Х 1 n(R7>+7;.V) T‘ C=— I *.= П A=+A ф,= arCt£ A =4, k*i -Ce^+^Qe^'s l(a-l) j'Ztn-Z) , , r lr, =i [(т}2-гЯ+4(р,.-рА 2в,-Ф,-Ра) Д-Р^-^-ш2) n(<D,-1+<₽,): ={i-2P,t)t;2 + )(рл2-Ра7;2)7 / ®jT +arctd —-— \P,r-l J r1, f^A2) )-°4й
120 s2 гХ (1 + 75) 1 Ce -^CIe-*}',sin(c)/+(pI ): /=1 <y^2/i“3 т2л 2) Г-— Г- *—— r. =/i_7R.t\t.2+T2
П(1+7;«+7}2?) i+i 7 *= П A=U л <₽,-= X arct^ к -4,k*i =4 ^Д-Р*) Ж -Ра)2-^-®*) / v /-/ )(p^2-PA7i2)7 J aiT +arctg —-— ^a) -2arclfc]
121 1 (l + 247s + r2.v2) 1 Ce ₽/sin(<aZ-<p)+(^+j?/)e~ctir: C=—, B=roC, Л=2Г27'12(1-2р7'1)в2 car r-(12p7j)7’2+Tj2, q>=2arctgf V P71 J
122 1 1-Ce sinfp (-<?)+(d-В i)e a,t:
41+2£7s + 7’252) 1 Х(1+гР)2 C=—, B -, J=(4p7'2 ©Г Г V r=(l-2P7'|)7’2 + ТД (p=2arct; т;-зг2- Г coTj 41 V-pyJ arc4nj
123 s -Ce_*}/sin(®/-<p)+(>4-jB/‘)e_air: C-——,
(l+2^b + 7'V) 1 X(1+7JS)2 я=j_, r=( r *\r q>=2arctgf-^-5— 4 \i-prly 1-2PTJT -arctgf— \P, (Olr
221
Окончание табл. 11.2
124 S" (1+2£7л’+Г2?) I X(l + 7»2 Ce ^sin((o/-q>)+(j+B/X ' C-— a 2®t2 -t;) „ i /, •> Л=-£ — Ц ZT-—, ^(l-^prjT^+Tf, r- 1\ r f оT, 'l fto'l ф=2агс,8Ь-|Дг 4₽j
125 I (l+2£7s + r2?)X _ I X(l+TlSXl + r2s)2 c Се ^sin(a)/+ф)+С(е ° , т с _ ' (г,-т2у 2(1-р7~2)Г2 f Т, г2 ^1 ~ Т2 J Г ®?i К ’=агсЧ₽г,-1>2 l|'-C2(j+r>_a2t: __ c - r, 2 , r^(l-2^)r2 + T?. t f ©T2 > a%r2-(J
126 1 l+Ce-₽ Г81п(ю/+ф)-С|е 1|'+С2(Л+Х>-а2Г:
s(l+2£7s+r2s2)A X(1+7]SX1+7'2s)2 C= А=Тг ф= г2 2(1- ч arctg /Т’ С| = уд)?2 г2 f <о7] W-1, 2]4 гт,-тг Тх-Т1 +2arctg \ c2 n j 'И1 юГ2 ' pr2-i? (т,-т2у2’ -2$Ti)T2 + T2, +arctg — \PJ
127 s (1+2£7®+Г2?) 1 X(l+7>Xt+3202 < с ^т2 <р= 7е₽': 1^ 2(1- к arctg sin(a)/+< рг2)г2 г2 f юТ] ?)-qe-a т2 тг У +—— T^T2j / +2 arctg 4c2(j c2 n . Л-Ч1- соГ2 ' P^-i, +/)e_a2*: 1_ ^-T2)r2 2$Т{)Т2+Т2, ( -arctg — w
128 .v2 — Сс^‘ sin(cof + ф)+С|в “|Л-С2(Л+/)е “2/:
(l+2^Ts+r2s2)A 1 X(1+7>X1+M2 с=- с ЛТ2 ф= I эТг2^ 2(1- к arctg r. G- /л ЪТ2}Т2 ч со 7] 71 ,2r2-7j 7i-r2 +2arctg^ G = и . >i=(l / шГ2 pr2-ij -2рГ,)Г2+7}2, -2arc,g(f)
22
Таблица П.З
Свойства оригиналов и изображений
№ п/л Оригинал /(/) Изображение F(s)
1 ^/1(0+0/2 0 q^0+C2F2(s)
2 /(') 5^3 '"'V' — । i 1 !
3 /(*-*) e xsF(s)
4 e“"/W F(s+a)
5 -F'(S)
6 'V0
7 /'(') sF(s)-f(Q)
8 /”’(>) S"F(4-i>"“7‘4)(0) i=l
9 Д) t jc(a)da 5
10 J/(x)dT 0 F(») s
И sin(<B t)f(t) 0,5 j(C(.s + jo)- F(s - jco ))
12 cos(®z)/(r) 0,5 j(f(s + jco)+F(s - j®))
13 0
14 t—>0 lim.vF(.v) 5—>00
15 lim/0 t—>oo lims/'G) 5->0
223
ПРИЛОЖЕНИЕ 2. ЗАДАНИЯ ДЛЯ КУРСОВОГО ПРОЕКТИРОВАНИЯ
иже предлагаются варианты заданий для курсового проектирования, прак-
• тических и лабораторных работ по курсу «Основы теории автоматического
управления». Каждый студент выполняет индивидуальное задание. Номер варианта за-
дания равен двум последним цифрам зачетной книжки (студенческого билета) и опре-
деляет состав исходных данных для проектирования согласно табл. П.5 - П.7.
Большое число (120) вариантов заданий достигается соединением шести видов ти-
повых звеньев (табл. П.4) друг с другом небольшим числом способов (15), вариацией
параметров звеньев и исходных данных для анализа и синтеза системы управления. Па-
раметры типовых звеньев (коэффициенты усиления К, постоянные времени Т, коэф-
фициенты демпфирования £,), составляющих устройство, указаны в скобках. Они яв-
ляются числами, за исключением одного звена, параметр которого обозначен буквой
К или Т. Важнейшей составной частью курсовой работы является исследование ус-
Рис. П.1
тойчивости разомкнутой и замкнутой
систем от этого буквенного параметра.
Например, в варианте I задано устройст-
во, структурная схема которого после
подстановки численных параметров
принимает вид, изображенный на рис.
П.1. Переменным параметром исследо-
вания устойчивости является коэффици-
ент усиления К дифференцирующего
звена с ПФ Ks.
План выполнения курсовой работы
1. Построить все частотные характеристики блоков структурной схемы и прин-
ципиальные схемы моделирования блоков на операционных усилителях.
Строятся по семь (ВЧХ /*(©), МЧХ <2(®). АЧХ Л(со), ФЧХ <р(со), годограф Л(ф),
ЛАЧХ £(®) и ЛФЧХ Ф(©)) характеристик каждого блока структурной схемы. Для
блока с буквенным параметром в ПФ строятся по три ЧХ для значений параметра раз-
ных модулей и знаков. Для построения графика каждой ЧХ выводится ее формула. Оси
на всех графиках должны быть обозначены и размечены. При синтезе схемы блока на
ОУ используется методика, изложенная в пп. 1.3 и 1.5. Правильность схемы проверяет-
ся по табл. 1.3.
2. Получить ПФ fKp(s) разомкнутой системы.
Вывод ПФ производится любым (или обоими) из методов алгебраических и
структурных преобразований блок-схемы.
3. Исследовать устойчивость разомкнутой системы от буквенного параметра ме-
тодами Гурвица и Михайлова.
4. Получить ПФ W3(s) системы, замкнутой единичной отрицательной обратной
связью.
5. Исследовать устойчивость замкнутой системы от буквенного параметра мето-
дами Гурвица и Рауса. Получить диапазоны устойчивых и неустойчивых значений пара-
метра в классе вещественных чисел.
В пунктах 3 и 5 анализы устойчивости каждой из систем от параметра разными не-
зависимыми друг от друга методами должны дать одинаковые результаты.
6. Сформировать набор значений параметра, включающий все граничные значения и
по одному значению из каждого диапазона устойчивости и неустойчивости замкнутой
системы.
Всего должно быть не более пяти значений параметра (исключая нулевое) из ка-
ждой области и границы устойчивости ЗС. Лишние значения параметра исключаются
224
из набора ио согласованию с преподавателем. Нежелательно выбирать не граничные
параметры очень близко к границам устойчивости во избежание затруднений с анали-
зом устойчивости. После выбора параметров вернитесь в пункт 3 и постройте для них
годографы Михайлова PC. которые будут необходимы в пункте 7.
7. Для каждого значения параметра из набора построить частотные характери-
стики. необходимые Оля исследования устойчивости замкнутой системы от параметра
по критериям Найквиста и Михайлова.
Не менее трех пар ЛЧХ (ЛАЧХ+ЛФЧХ) должны быть построены вручную по ти-
повым звеньям. Обязательно доказательство устойчивости по Найквисту и Михайлову,
а не простая констатация фактов устойчивости. При анализе устойчивости ЗС по
Найквисту можно использовать годографы из пункта 3.
8. Выбрать из набора параметров значение, при котором разомкнутая система ус-
тойчива. получить числовую ПФ системы с этим параметром и построить каноническую
схему моделирования разомкнутой системы на операционных усилителях.
Если PC структурно не устойчива, то выбрать значение параметра, при котором
устойчива ЗС.
9. Получить оценки качества временных характеристик разомкнутой системы
спектральными и частотными методами.
10. Рассчитать частотными методами временные характеристики разомкнутой
системы, построить их графики и сравнить показатели качества с оценками из пункта б.
Одна из ВХ должна быть рассчитана вручную по формуле Хевисайда, вторая - по
таблице преобразований Лапласа.
11. Рассчитать реакцию разомкнутой системы на нетиповое входное воздействие
(табл. П.6) при нулевых начальных условиях. Построить графики входного и выходного
сигналов.
12. Методом, соответствующим табл. П. 7, рассчитать ПФ последовательного ре-
гулятора, доставляющего замкнутой системе желаемые показатели качества:
- астатизм первого порядка с коэффициентом статической ошибки С\ минимум в
10 раз меньшим, чем коэффициент с} в PC;
- быстродействие I минимум в 10 раз лучше, чем в PC;
- перерегулирование о не более 20%;
- запасы устойчивости £3>6дБ и <р3>30°.
13. Рассчитать переходную характеристику замкнутой системы и сравнить ее
статические и динамические показатели качества с желаемыми. Построить схему мо-
делирования замкнутой системы управления с последовательным регулятором на опера-
ционных усилителях.
14. Исследовать с помощью MathCAD влияние параметров Кп, К.{ и КИ последо-
вательного ПИД-регулятора на устойчивость и показатели качества tp и о переходной
характеристики замкнутой системы. Оптимизировать систему управления с ПИД-
регулятором согласно желаемым показателям качества из пункта 12.
Таблица П. 4
w^kYk HS2(K)=Ks s
\ + Ts W5(K,T)=K(\ + Ts) W6(K,T£)= —-T1 l+2t,Ts+Ts
225
Таблица .5
226
Продолжение табл. П. 5
Окончание табл. П.5
228
Таблица П б
Входные воздействия
Номера вариантов
Л с
4
х
2sin(0,2/+30°)-cos(0,k)
1, 8, 11, 18, 21, 28, 33, 40, 43, 50,
53, 60, 62, 65, 72, 75, 82, 85, 94,
97, 104, 107, 114, 117
2, 5, 12, 15, 22, 25, 34, 37, 44, 47,
54, 57, 66, 69, 76, 79, 86, 89, 91,
98, 101, 108, 111, 118
6, 9, 16, 19, 26, 29, 31, 38, 41, 48,
51, 58, 63, 70, 73, 80, 83, 90, 92,
95, 102, 105, 112, 115
3, 10, 13, 20, 23, 30, 32, 35, 42, 45,
52, 55, 64, 67, 74, 77, 84, 87, 96,
99, 106, 109, 116, 119
4, 7, 14, 17, 24, 27, 36, 39, 46, 49,
56, 59, 61, 68, 71, 78, 81, 88, 93,
100, 103, НО, 113, 120
ТаблицаП. 7
Методы синтеза регулятора Номера вариантов
Логарифмических частотных характеристик Четные
Спектральный Нечетные
229
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
I. Макаров И.М., Менский Б.М. Линейные автоматические системы. - М.: Маши-
ностроение, 1982. 504 с.
2. Цыпкин Я.З. Основы теории автоматических систем. - М.: Наука, 1977. 560 с.
3. Попов Е.П. Теория линейных систем автоматического регулирования и управ-
ления. - М.: Наука, 1989. 304 с.
4. Воронов А.А. Основы теории автоматического управления. 4.1. - М.: Энергия,
1965. 396 с.
5. Математические основы теории автоматического регулирования/ Под ред. Б.К.
Чемоданова. - М.: Высш, шк., 1977. 366 с.
6. Справочное пособие по теории систем автоматического регулирования и управ-
ления/ Под ред. Е.А. Санковского. - Минск: Вышейш. шк., 1973. 584 с.
7. Толчеев Ю.И., Цыплаков А.П. Задачник по теории автоматического регулиро-
вания. - М.: Машиностроение, 1977. 592 с.
8. Квакернаак X., Сиван Р. Линейные оптимальные системы управления. -М.:
Мир, 1977. 650 с.
9. Свешников А.Г., Тихонов А.Н. Теория функций комплексного переменного. -
М.: Наука, 1967. 304 с.
10. Соломенцев Е.Д. Функции комплексного переменного и их применение. - М.:
Высш, шк., 1988. 167 с.
11. Гантмахер Ф.Р. Теория матриц. - М.: Наука, 1988. 548 с.
12. Воеводин В.В., Кузнецов Ю.А. Матрицы и вычисления. - М.: Наука, 1984. 318
с.
13. Алексенко А.Г., Шагурин И.И. Микросхемотехника. - М.: Радио и связь, 1990.
496 с.
14. Алексеев А.Г., Войшвилло Г.В. Операционные усилители и их применение. -
М.: Радио и связь, 1989. 120 с.
15. Пейтон А., Волш В. Аналоговая электроника на операционных усилителях. -
М.: Бином, 1994. 352 с.
16. Диоды: Справочник / О.П. Григорьев, В.Я. Замятин, Б.В. Кондратьев, С.Л.
Пожидаев. - М.: Радио и связь, 1990. 336 с.
17. Двайт Г.Б. Таблицы интегралов и другие математические формулы. -М.: Нау-
ка, 1977. 228 с.
18. Плис А.И., Сливина Н.А. Mathcad 2000. Математический практикум для эко-
номистов и инженеров: Учебное пособие. - М.: Финансы и статистика, 2000. 656 с.
19. Корн Г., Корн Т. Справочник по математике (для научных работников и ин-
женеров). - М.: Наука, 1978. 832 с.
20. Загускин В.Л. Справочник по численным методам решения алгебраических и
трансцендентных уравнений. - М.: Гос. изд-во физ.-мат. литературы, 1960. 216 с.
230