/


















































































































































































































































































































































































































































































Автор: Векуа И.Н.
Теги: физика математическая физика теория обобщенных функций издательство физматлит
Год: 1988




Текст
И.Н.Векуа
ОБОБЩЕННЫЕ АНАЛИТИЧЕСКИЕ ФУНКЦИИ
М.: Наука. Гл. ред. флз.-мат. лит., 1988.— 512 с.
Излагаются основы теории систем уравнений с частными производными,
обобщающих систему Коши — Римана, а также ее приложений к задачам анализа,
геометрии и механики.
Автор — известный советский математик академик И. Н. Веку а A907— 1977)
— является одним из основателей этой теории.
Первое издание книги A959) было удостоено Ленинской премии.
Во втором издании внесены изменения, которые автор сделал в последние
годы своей жизни, занимаясь подготовкой книги к переизданию.
Для специалистов в области анализа, геометрии и механики, а также для
аспирантов и студентов.
ОГЛАВЛЕНИЕ
От редакторов второго издания 6
Предисловие к первому изданию 8
ЧАСТЫ
ОСНОВЫ ОБЩЕЙ ТЕОРИИ ОБОБЩЕННЫХ АНАЛИТИЧЕСКИХ
ФУНКЦИЙ И КРАЕВЫЕ ЗАДАЧИ
Глава 1. Некоторые классы функции и операторы 13
§ 1. Классы функций и функциональные пространства 13
§ 2. Классы кривых и областей. Некоторые свойства конформного 23
отображения
§ 3. Некоторые свойства интеграла типа Коши 26
§ 4. Неоднородная система Коши — Римана 27
§ 5. Обобщенные производные в смысле Соболева и их свойства 31
§ 6. Свойства оператора Т</ 39
§ 7. Формула Грина для класса функций Dlp. Ареоларная производная 51
§ 8. О дифференциальных свойствах функций вида Tg/i Оператор П/ 53
§ 9. Расширение оператора П/ 60
§ 10. Некоторые другие свойства функций классов Dz(G)n D-(G) 67
Глава 2. Приведение положительной дифференциальной квадратичной 70
формы к каноническому виду. Уравнение Бельтрами.
Геометрические приложения
§ 1. Вводные замечания. Гомеоморфизмы квадратичной формы 70
§ 2. Система уравнений Бельтрами 72
§ 3. Построение основного гомеоморфизма уравнения Бельтрами 72
§ 4. Доказательство существования локального гомеоморфизма 74
§ 5. Доказательство существования полного гомеоморфизма 81
§ 6. Приведение положительной дифференциальной квадратичной формы 89
к каноническому виду. Изометрические и сопряженно
изодгетрические сети линий на поверхности
§ 7. Приведение уравнений эллиптического типа к каноническому виду 105
Глава 3. Основы общей теории обобщенных аналитических функций 110
§ 1. Основные понятия, термины и обозначения 110
§ 2. Интегральное уравнение для функций класса G\MA, В, F, G) 116
§ 3. Непрерывность и дифференциальные свойства функций класса 118
§ 4. Основная лемма. Обобщения некоторых классических теорем 120
§ 5. Интегральное представление 2-го рода для обобщенных 129
аналитических функций
§ 6. Порождающая пара функций класса Ч1р2(А,В,Е). Производная в 133
смысле Л. Берса
§ 7. Обращение нелинейного интегрального уравнения D.3) 136
§ 8. Главные, функции и главные ядра класса G^p>2{A,B,G).p<2 137
§ 9. Сопряженное уравнение. Тождество Грина. Уравнения 2-го порядка 139
§ 10. Обобщенная формула Коши 142
§11. Непрерывные продолжения обобщенных аналитических функций. 146
Обобщенный принцип симметрии
§ 12. Компактность 147
§13. Выражение резольвенты при помощи ядер 151
§ 14. Представления обобщенных аналитических функций с помощью 154
обобщенных интегралов типа Коши
§ 15. Полные системы обобщенных аналитических функций. Обобщенные 157
степенные ряды
§ 16. Интегральные уравнения для вещественной части обобщенной 165
аналитической функции
§ 17. Свойства решений системы уравнений эллиптического типа общего 166
вида
Глава 4. Краевые задачи 178
§ 1. Постановка обобщенной задачи Римана — Гильберта. Характер 178
непрерывности решения задачи
о 1 О*}
§ 2. Сопряженная краевая задача А'. Необходимые и достаточные условия
разрешимости задачи А
§ 3. Индекс задачи А. Приведение краевого условия задачи А к 191
каноническому виду
§ 4. Свойства нулей решений однородной задачи А. Признаки 194
разрешимости задач А и А
§ 5. Рассмотрение специальных классов краевых задач типа А в случаях 205
0<п<т-\
§ 6. Об условиях корректности задачи А 224
§ 7. Решение задачи А при помощи интегральных уравнений по области. 232
Применение обобщенного принципа симметрии. Обобщенный
интеграл Шварца
§ 8. Краевая задача с наклонной производной для эллиптического 251
уравнения 2-го порядка
§ 9. Применения к краевым задачам сингулярных интегральных 263
уравнений по области
§ 10. Замечания о некоторых работах, относящихся к задаче А. 286
Постановки более общих проблем
Добавление к главе 4 (Б. Боярский). Об особых случаях задачи Римана — 289
Гильберта
ЧАСТЫ1
НЕКОТОРЫЕ ПРИМЕНЕНИЯ К ЗАДАЧАМ ТЕОРИИ ПОВЕРХНОСТЕЙ
И БЕЗМОМЕНТНОЙ ТЕОРИИ ОБОЛОЧЕК
Глава 5. Основы общей теории бесконечно малых изгибаний 305
поверхностей
§ 1. Уравнение бесконечно малых изгибаний в векторной форме 306
§ 2. Уравнение бесконечно малых изгибаний относительно декартовой 308
системы координат. Первое доказательство жесткости овалоидов
§ 3. Система уравнений для компонентов поля смещений относительно 315
произвольной системы координат на поверхности. Некоторые
признаки жесткости
§ 4. Об одном свойстве поверхностей 2-го порядка 326
§ 5. Поле вращений. Характеристическое уравнение бесконечно малых 330
изгибаний
§ 6. Поля изгибаний. Статическое поле 336
§ 7. Вариации различных геометрических величин при бесконечно малых 344
изгибаниях поверхности. Некоторые признаки жесткости
§ 8. Условия сопряжения па линиях склеивания. Некоторые признаки 358
жесткости поверхностей с краями. Втулочные связи. Идеальное
защепление
§ 9. Некоторые классы жестких замкнутых кусочно регулярных 378
поверхностей
§ 10. Некоторые классы жестких выпуклых поверхностей с краями 386
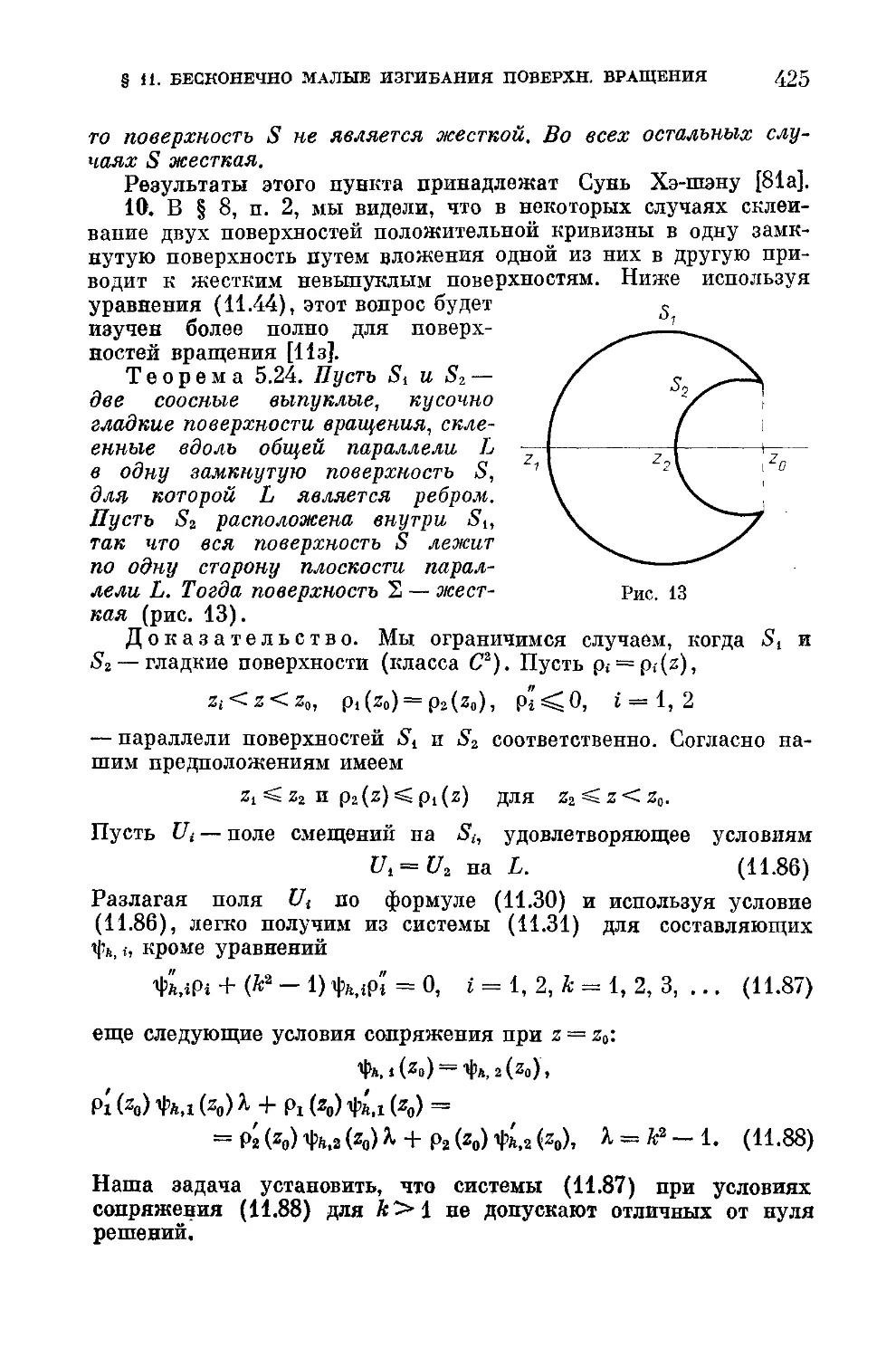
§11. Бесконечно малые изгибания поверхностей вращения 405
Глава 6. Вопросы безмоментной теории оболочек 435
§ 1. Усилия н моменты сил напряжений 437
§ 2. Основная система уравнений равновесия оболочки 441
§ 3. Система уравнений безмоментпого напряженного равпове-сия 451
оболочек. Геометрическая интерпретация
§ 4. Новый вывод характеристического уравнения 458
§ 5. Условия реализации состояния (Т). Краевые задачи 459
Список литературы 498
ОТ РЕДАКТОРОВ ВТОРОГО ИЗДАНИЯ
Илья Несторович Векуа A907—1977)—выдающийся совет-
советский математик и организатор науки, крупный государственный
и общественный деятель. Научные интересы И. Н. Векуа сфор-
сформировались под влиянием основателя грузинской школы матема-
математиков и механиков Н. И. Мусхелишвили, по рекомендации кото-
которого в 1930 г. Илья Несторович поступил в аспирантуру АН
СССР в Ленинграде. Его научным руководителем был знамени-
знаменитый ученый и инженер А. Н. Крылов. В 1939 г. И. Н. Векуа
защищает диссертацию «Комплексное представление решений
эллиптических уравнений и его применения» и становится док-
доктором физико-математических наук, профессором.
Всю свою жизнь Илья Несторович отдал беззаветному слу-
служению науке. Где бы он ни работал — в Тбилиси, Москве или
Новосибирске, он сочетает исследования с активной научно-ор-
гапизационной деятельностью. В первый период работы в Тби-
Тбилиси A933—1951) он пишет монографию «Новые методы ре-
тения эллиптических уравнений», удостоенную в 1950 г. Госу-
Государственной премии СССР, и принимает деятельное участие
в организации Математического института Грузинского филиала
АН СССР (ныне института им. А. М. Размадзе). В 1946 г.
И. Н. Векуа избирается членом-корреспондентом АН СССР и
действительным членом АН Грузинской ССР, становится aica-
демиком-секретарем этой академии.
В Москве, куда Илья Несторович переезжает в 1951 г., он
создает основы своей теории обобщенных аналитических функ-
функций. В то же время по приглашению ректора Московского уни-
университета И. Г. Петровского он занимается преподаванием
в университете и, кроме того, работает заместителем директора
Математического института АН СССР им. В. А. Стеклова.
В 1958 г. И. Н. Векуа избирается действительным членом
АН СССР и членом Президиума ее Сибирского отделения. Он
переезжает в Новосибирск, где занимается организацией уни-
университета нового типа, построенного на принципах объединения
с академической наукой, становится его первым ректором. Одно-
Одновременно Илья Несторович руководит теоретическим отделом
Института гидродинамики СО АН СССР, заведует кафедрой
математической физики, ведет исследования в различных областях
математики и механики, особенно в теории оболочек.
В 1965 г. Илья Несторович возвращается в Тбилиси и стано-
становится ректором Тбилисского университета, в котором начинал
ОТ РЕДАКТОРОВ ВТОРОГО ИЗДАНИЯ 7
свою научную деятельность. В 1972 г. он занимает пост прези-
президента Академии наук Грузинской ССР. На этом посту И. Н. Ве-
куа оставался до конца своих дней, многое сделав для развития
науки в Грузин. В частности, по его инициативе в Математи-
Математическом институте пм. А. М. Размадзе был организован отдел
механики, а в университете — проблемная лаборатория приклад-
прикладной механики, ныне реорганизованная в Институт прикладной
математики, носящий имя И. Н. Векуа.
Многолетний самоотверженный труд Ильи Несторовича Ве-
Векуа, его выдающиеся научные достижения были высоко оценены
как у нас в стране, так и за рубежом. Он был избран депутатом
Верховного Совета СССР, удостоен звания Героя Социалистическо-
Социалистического Труда, награжден пятью орденами Ленина и другими правитель-
правительственными наградами. Он являлся членом Академии наук ГДР,
членом Итальянской академии наук в Палермо, членом Поль-
Польского общества теоретической и прикладной механики и ма-
математики.
Илья Несторович скончался 2 декабря 1977 г. Его прах по-
покоится в Пантеоне выдающихся деятелей Грузии.
*
Первое издание этой книги, выпущенное в 1959 г. Государ^
ственным издательством технико-теоретической литературы,
было удостоено Ленинской премии и переведено на английский
и немецкий языки. В последние годы своей жизни, будучи тя-
тяжело больным, Илья Несторович занимался подготовкой нового
издания, но осуществить его ему не удалось. Многочисленные
пометки, сделанные рукой Ильи Несторовича на полях его эк-
экземпляра книги, послужили редакторам основой для подготовки
второго издания. Учтены все указанные им изменения. Мы стре-
стремились максимально сохранить текст и ограничились лишь
редакционными поправками и исправлением замеченных опеча-
опечаток и неточностей. В этом нам помогли И. И. Данилюк и другие
ученики Ильи Несторовича — всем им мы приносим искреннюю
благодарность.
Изложенные в книге идеи нашли свое продолжение в много-
многочисленных работах последователей И. Н. Векуа как у нас
в стране, так и за ее пределами. С некоторыми из последних
работ можно ознакомиться по книге «Доклады расширенных
заседаний семинара Института прикладной математики имени
И. Н. Векуа», вып. 1—3 (Тбилиси: Изд-во ТГУ, 1985—1986).
Там же можно найти ссылки на более ранние работы.
О. А. Олейник,
Б. В. Шабат
ПРЕДИСЛОВИЕ К ПЕРВОМУ ИЗДАНИЮ
Традиционные применения классической теории аналитиче-
аналитических функций связаны в основном с такими областями анализа
и его приложений, где дело имеют либо с системой уравнений
Коши — Римана, либо с другими уравнениями, решения кото-
которых сравнительно просто выражаются через решения системы
Коши — Римана. Таковы, например, плоские задачи гидродина-
гидродинамики и теории упругости. Но за последние десятилетия круг
применений этой теории существенно расширился. В частности,
она стала проникать и в общую теорию эллиптических уравне-
уравнений. Исследования в этом направлении сначала, естественно,
велись в рамках уравнений с аналитическими коэффициентами,
но за последние годы были охвачены также довольно широкие
классы уравнений с неаналитическими коэффициентами. Эти
исследования привели к результатам, позволившим существенно
расширить рамкп классической теории аналитических функций
и ее применений. Обобщения распространяются на семейства ре-
решений достаточно общих эллиптических систем дифференциаль-
дифференциальных уравнений 1-го порядка с двумя независимыми переменны-
переменными. Для класса таких решений, который содержит даже
некоторые семейства недифференцируемых в обычном смысле
функций, сохраняется ряд основных топологических свойств ана-
аналитических функций одной комплексной переменной (теорема
единственности, принцип аргумента и т. п.). Кроме того, на него
обобщаются такие аналитические средства, как разложения Тей-
Тейлора и Лорана, интегральная формула Коши и т. п. В силу этих
обстоятельств рассматриваемые нами функции названы в книге
обобщенными аналитическими функциями.
В первой части книги рассмотрены различные вопросы общей
теории обобщенных аналитических функций. Здесь изложены
основы этой теории и рассмотрен также довольно широкий круг
краевых задач. Наши построения основаны на ряде соотношений
и формул, которые связывают семейства решений рассматривав-
ПРЕДИСЛОВИЕ К ПЕРВОМУ ИЗДАНИЮ 9
мых систем дифференциальных уравнений с классом аналитиче-
аналитических функций одной комплексной переменной. Эти основные
соотношения и формулы составляют фундамент всей теории. Они
позволяют редуцировать исследования к классической теории
аналитических функций. Следует отметить, что эти результаты
получены путем естественного развития прежних исследований
по уравнениям с аналитическими коэффициентами. Здесь, как и
в аналитическом случае, важную роль играют интегральные
представления решений, ядра которых зависят лишь от коэф-
коэффициентов уравнения. В этих построениях используются инте-
интегральные уравнения по областям, напоминающие по своим свой-
свойствам уравнения типа Вольтерра, применявшиеся в аналитиче-
аналитическом случае.
Сила и значение всякой математической теории лучше всего
выявляются тогда, когда эта теория связывается с реальными
объектами исследования. Такая связь позволяет не только на-
наполнить теорию конкретным содержанием, но и правильно опре-
определить пути ее развития. Если результаты теории позволяют
существенно расширять рамки ее применений, то это, очевидно,
является признаком жизненности теории. В этом отношении
возможности теории обобщенных аналитических функций весьма
обширны. Она имеет глубокие связи со многими разделами ана-
анализа, геометрии и механики (квазиконформные отображения,
теория поверхностей, теория оболочек, газовая динамика п др.).
Новый аналитический аппарат позволяет, например, значи-
значительно расширить и углубить исследования геометрических и
механических задач, возникающих при изучении бесконечно ма-
малых изгибаний поверхностей положительной кривизны и состоя-
состояния безмоментного напряженного равновесия выпуклых оболо-
оболочек. Эти вопросы с достаточной полнотой рассмотрены во второй
части книги. Эти рассмотрения привели к ряду новых резуль-
результатов и, кроме того, позволили полнее раскрыть геометрическую
и механическую природу обобщенных аналитических функций.
К сожалению, в рамках этой книги не удалось осветить с
нужной полнотой ряд других важных применений теории обоб-
обобщенных аналитических функций. В самых общих чертах отмече-
отмечены применения к задачам квазиконформных отображений.
В этом направлении важные результаты получены в последнее
время Б. В. Боярским [11]. Указаны также некоторые примене-
{0 ПРЕДИСЛОВИЕ К ПЕРВОМУ ИЗДАНИЮ
ния к нелинейным задачам. Несмотря на то, что наши рассмот-
рассмотрения базируются главным образом на линейных дифферен-
дифференциальных уравнениях, полученные результаты могут быть су-
существенно использованы при изучении свойств нелинейных
эллиптических уравнений.
Отметим, что в книгу включены многие результаты автора
и его учеников, которые публикуются впервые. Кроме того, до-
добавление к гл. 4 написано Б. В. Боярским.
При подготовке к печати рукописи книги значительную по-
помощь оказали автору В. С. Виноградов, Л. С. Клабукова, Сунь
Хэ-шен. Тэн Ен Чер. Все чертежи выполнены Ю. П. Кривенко-
вым. Полный текст книги прочитали А. В. Бицадзе, Б. В. Бояр-
Боярский, И. И. Данилюк и Э. Г. Позняк, которым автор обязан ря-
рядом ценных замечаний и советов. Всем этим лицам автор
приносит свою искреннюю благодарность.
И. Векуа
2 июля 1958 г.
Москва
Часть I
ОСНОВЫ ОБЩЕЙ ТЕОРИИ
ОБОБЩЕННЫХ АНАЛИТИЧЕСКИХ ФУНКЦИЙ
И КРАЕВЫЕ ЗАДАЧИ
В этой частп книги главное внимание будет сосредоточено
на построении общей теории комплексных функций w(z) точки
z — x + iy, удовлетворяющих уравнению вида
д- e ± (A + t (j_)). (U)
Это уравнение является комплексной записью системы веще-
вещественных уравнений следующего вида:
Последняя является канонической формой линейной эллиптиче-
эллиптической системы уравнений более общего вида (гл. 2, § 7). К си-
системе вида A.2) приводится также весьма широкий класс урав-
уравнений с частными производными 2-го порядка (гл. 3, § 9).
Мы будем предполагать, что коэффициенты А и В уравнения
A.1) и его свободный член F являются суммируемыми функ-
функциями в рассматриваемой области с некоторой степенью р > 2.
Такое расширение класса изучаемых уравнений является целе-
целесообразным не только по чисто теоретическим мотивам, но оно
оправдано также, как мы в этом неоднократно убедимся ниже,
и по соображениям прикладного характера.
Но теория таких уравнений уже не укладывается в обычные
классические рамки. Для этой цели приходится пользоваться
аппаратом, требующим привлечения теории интеграла Лебега,
функционального анализа и др. Поэтому в гл. 1, имеющей ввод-
вводный характер, рассматриваются различные классы функций и
функциональных пространств, а также изучаются свойства не-
некоторых специальных операторов. Следует отметить, что для
понимания излагаемого здесь материала вполне достаточны по-
познания в объеме университетских программ по соответствующим
областям.
Глава 2 посвящена главным образом обоснованию возмож-
возможности глобального приведения к каноническому виду положи-
положительной квадратичной формы
а(х, у)йхг + 2Ъ{х, y)dxdy + c(x, y)dy\ A.3)
Исследование этого вопроса проводится с помощью метода, ука-
указанного ранее автором [14в] и основанного на использовании
|2 ОСНОВЫ ОБЩЕЙ ТЕОРИИ
простейшего сингулярного интегрального уравнения по области.
Нужно сказать, что изучение этого интегрального уравнения
существенно опирается на одну важную теорему Зигмунда —
Кальдерона '[36а, б] о свойствах сингулярного интеграла в смысле
главного значения по Коши (гл. 1, § 9, п. 2). В этой главе
доказывается основная теорема о том, что если а, Ь, с ограни-
ограничены, измеримы (на плоскости) и удовлетворяют всюду условию
строгой положительности формы ас — Ьг 5= Д„ > 0, то существует
преобразование
ж = *A, 11), У = У{Ч, л).
реализующее взаимно однозначное и непрерывное отображение
плоскости 2 = х + iy на плоскость t, = | + щ, и что квадратичная
форма A.3) приводится при этом к каноническому виду
Этот результат для нас имеет вспомогательное значение. Он ис-
используется, во-первых, при приведении к каноническому виду
эллиптического уравнения 2-го порядка, а также системы урав-
уравнений эллиптического типа и, во-вторых,— для доказательства
существования на поверхностях изометрических и сопряженно
изометрических сетей линий. Последние результаты существенно
используются во второй части книги, где изучаются геометриче-
геометрические и механические задачи бесконечно малых изгибаний по-
поверхностей и безмоментной теории оболочек. Следует также
отметить, что использованный в этой задаче метод исследования
открывает новые пути в теории квазиконформных отображе-
отображений [11 г].
Главы 3 и 4 в совокупности составляют основное ядро всей
книги. Эти главы написаны в значительной мере на основе ре-
результатов работы автора [14а]. В них нашли отражение также
более поздние результаты советских и зарубежных математиков,
в том числе исследования Л. Берса [5а, б, в].
В гл. 3 излагаются общие свойства решений уравнения вида
A.1), а в гл. 4 рассматриваются различные краевые задачи для
уравнений эллиптического типа, причем центральное место в этой
главе занимает обстоятельное исследование краевой задачи для
системы уравнений A.2) с граничными условиями вида
аи + $и = ч. A.4)
Мы не будем останавливаться здесь на более детальном из-
изложении содержания отдельных глав этой части книги. В этом
нет особой необходимости, если учесть, что, во-первых, в оглав-
оглавлении книги дан довольно полный перечень почти всех затро-
затронутых в ней вопросов и, во-вторых, каждая глава или каждый
параграф, за редкими исключениями, начинается с введения,
в котором дается краткая характеристика содержания соответ-
соответствующего раздела.
Глава 1
НЕКОТОРЫЕ КЛАССЫ ФУНКЦИЯ И ОПЕРАТОРЫ
§ 1. Классы функций и функциональные пространства
В этом параграфе мы рассмотрим некоторые классы функций
и функциональные пространства, которыми часто будем пользо-
пользоваться в дальнейшем. Мы ограничимся рассмотрением функций
двух независимых переменных.
1. Пусть C(G)—множество непрерывных в замкнутой обла-
области G функций*) точки z= x + iy. Если определил! норму эле-
элемента / множества C(G) по формуле
|, A.1)
то будем иметь полное нормированное пространство типа Банаха.
Нетрудно видеть, что если / и gsC(G), то произведение
C(G) причем
Следует отметить, что здесь и ниже мы пользуемся не сов-
совсем обычным обозначением для нормы элемента пространства
типа Банаха: если х — элемент пространства X, то через Х(х)
обозначаем норму элемента х. Иногда будем пользоваться и обыч-
обычным обозначением \\х\\х.
Пусть функция f(z) и ее частные производные по х и у до
порядка пг включительно непрерывны в области G. Множество
таких функций будем обозначать через Cm(G). Это множество
представляет собой линейное многообразие или, короче,
линеал над полем комплексных чисел. Если / и ее частные
производные до порядка m непрерывны в замкнутой области G,
то будем писать /sC"(G). Необходимо отметить, что в граничной
точке z0 производные определяются как пределы одноименных
*) В дальнейшем, если специально не будет оговорено противополож-
противоположное, будем рассматривать функции, принимающие, вообще говоря, комп-
комплексные значения.
14 ГЛ. 1. НЕКОТОРЫЕ КЛАССЫ ФУНКЦИЙ И ОПЕРАТОРЫ
производных внутри области:
pL к, Z = 0,1, ...
Если определим норму элемента / множества Cm(G) по
формуле
уУ ) A.2)
то будем иметь полное пространство типа Банаха.
Очевидно, если /, g^Cm (G), то fg е Cm (G) и
Условимся считать С s= С.
Пусть j(z) на замкнутом множестве G удовлетворяет условию
|/B1)-/B2)!<Я121-г2|а, 0<а<1, A.3)
где Zi и z2 — произвольные точки, принадлежащие G, а Н и
а — положительные постоянные, которые от выбора точек zt и
z2 не зависят. Нижнюю грань чисел Н, удовлетворяющих нера-
неравенству A.3), обозначим через H(f) (или Я(/, а) или еще
Я(/, а, G)) и назовем постоянной Гельдера функции /. Оче-
Очевидно,
1-z2\a, 0<а<1. A.4)
В последнем неравенстве постоянную #(/) нельзя, очевидно,
заменить постоянной //', меньшей, чем #(/).
В дальнейшем через Ha(G) будем обозначать множество
функций, удовлетворяющих неравенству вида A.4), причем а,
0<а«?1, одно и то же для всех функций множества Ha(G).
Неравенство A.4) называется условием Гельдера. Для_мно-
жества Ha.(G) часто употребляют еще обозначение Lip (a, G).
Обозначим через Ca(G) множество всех ограниченных функ-
функций /, удовлетворяющих неравенству A.4), причем постоянная
а, которая называется показателем Гельдера функции /, одна и
та же для всех элементов Са(П). _ _
Если G — ограниченная область, то множества Ca(G) и Ha{G)t
очевидно, совпадают: Ca{G) = Ha(G~). Но в случае неограничен-
неограниченной области Ca(G)<=:Jfa(G), причем можно указать функции,
принадлежащие Ha(G), но не принадлежащие Ca(G). Примером
служит функция га= \z\a. _
Если определим норму элемента / множества Ca{G) по
формуле
Са (/, G) -в Са (/) = С (/, G) + И (/, a, G), A.5).
§ I. КЛАССЫ ФУНКЦИЙ И ФУНКЦИОНАЛЬНЫЕ ПРОСТРАНСТВА
то будем иметь полное пространство типа Банаха. Если /,
C{, то fg<=Ca(G) и
Пусть f<^Ca(D), g<^Cfi(G). Если значения функции g при-
принадлежат области определения функции /, то
В самом деле,
Мы будем рассматривать еще пространство типа Банаха
Ca\G), элементами которого являются элементы Cm(G), удов-
удовлетворяющие условию
dmf -
" / (— Q lfi\ /J, __ А Л ,„\ А <-' „ <--- Л
дхы~кдук 1 > • • •» > ---.
Норма элемента этого пространства определяется по формуле
. A.6)
Если /, g e Ca(G), то произведение /^ еС™ (б), причем
(%(fg,G)^C2(f)CZ(g).
Отметим еще, что если /, g<^Ca(G~), то
Ce(fe, U)^Ca(f, G)C(g, G)+C(f, G)Ca(g, G). A.7)'
Если Ca(f)^M, Ca(g)sZM, C(f)<e, C(g)<e, то из A.7) следует:
A.8)
Иными словами, если элементы fug ограниченного множе-
множества иг Ca(G) малы по норме пространства C(G), то их произ-
произведение мало по норме пространства Ca(G). Этот факт будет
нами использован ниже (гл. 2, § 4, п. 1).
Данные выше определения можно распространить на тот
случай, когда G совпадает со всей плоскостью z, которую
в дальнейшем будем обозначать через Е.
Под Cm (E) (С™ (Е)) мы будем понимать множество функ-
функций f(z), удовлетворяющих условию: f(z) и /(— I е С (?j)
(С™^)), где Еу~ круг Ы<;1, Поэтому можно говорить
о пространствах типа Банаха Ст(Е) и С™(Е).
|g ГЛ. 1. НЕКОТОРЫЕ КЛАССЫ ФУНКЦИЙ И ОПЕРАТОРЫ
2. Пусть функция /(z), заданная в области G, удовлетворяет
неравенству
J J | / (z) fdx dy < М&, Р>1, A.9)
где G'— произвольное замкнутое (ограниченное) подмножество
области G, a Mqi —постоянная, которая, вообще говоря, зависит
от G', причем р одно и то же для всех G' e G. Множество таких
функций будем обозначать через LP(G).
Рассмотрим теперь множество функций, удовлетворяющих
условию
Lp (/) ^ Lp (/, Ъ) = Ш 1/B) f^ ^У/Р< ~. A-10)
Это множество мы будем обозначать через LP(G), а неотрица-
неотрицательное число Lj,(f) будем называть нормой элемента / множе-
множества LP(G). Как известно, LP(G)— полное пространство типа
Банаха. Это доказывается с помощью неравенств Гельдера н
Минковского, которые мы здесь приведем без доказатель-
доказательства ([79а]):
Неравенство Гельдера. Если
P \PX Pn
TO
LP(hh...UXLPi(fl)LPi(U)...LPn(fn), р>1. A.11)
Неравенство Минковского. Если
го
A.12)
Этими неравенствами мы будем часто пользоваться.
Отметим еще ряд свойств функций класса LP(G), которые
также приведем без доказательства ([78], [79а]).
Теорема 1.1. Если f^Lp(G), причем / = 0 вне G, то для
всякого е >0 найдется такое 6(е)>0, что
|/B + Az) — f(z)\pdxdy\p<e, если |Az|<6(e). A.13)
§ 1. КЛАССЫ ФУНКЦИЙ И ФУНКЦИОНАЛЬНЫЕ ПРОСТРАНСТВА J7
Это свойство будем называть*) непрерывностью функции
/eLj,(G) в смысле метрики LP(G) или непрерывностью в сред-
среднем порядка р. __
Будем говорить, что множество функций класса LP(G) рав-
равномерно непрерывно в смысле метрики Lp, если в A.13) 6(е)
не зависит от выбора элементов этого множества.
Теорема 1.2. Пусть последовательность /„ функций класса
LP(G), р > 1, сильно сходится к функции /е LP(G):
LP(f — fn)^>~ 0 при п ->¦ оо.
В таком случае: 1) последовательность /„ сходится к / по
мере, т. е. для любого фиксированного а > О
2) последовательность /„ сходится слабо к /, т. е.
lim j ] fngdx dy = § \ fg dx dy, A.14)
n-*°° G G
где g — любая функция сопряженного класса Lq(G), q= __ ^,
3) из последовательности fn можно выделить подпоследова-
подпоследовательность }nk, которая сходится почти везде в G к /.
Множество функций класса LP(G) называется компактным,
если любая бесконечная последовательность элементов этого
множества содержит подпоследовательность, сильно сходящуюся
(в метрике Lp) к элементу того же множества.
Теорема 1.3. Необходимым и достаточным признаком
компактности множества функций класса LP(G) является равно-
равномерная ограниченность и равномерная непрерывность его
(в смысле метрики Lp).
Полезно ввести еще понятие слабой компактности множества
в LP(G). Множество элементов LP{G) называется слабо ком-
компактным в LP(G), если любая бесконечная последовательность
элементов этого множества содержит подпоследовательность, сла-
слабо сходящуюся к некоторому элементу LP(G).
Теорема 1.3'. Необходимым и достаточным признаком
слабой компактности множества функций из LP(G) является
равномерная ограниченность этого множества в метрике Lp.
Доказательства теорем 1.3 и 1.3' можно найти, например,
в [79а].
Заметим._что из слабой сходимости последовательности эле-
элементов LP(G), вообще говоря, не следует сильная сходимость.
Но существуют подпространства LP(G), где сильная и слабая
сходимости эквивалентны.
*) В монографии С. Л. Соболева [79а], где приведено доказательство
неравенства A.13), это свойство функций класса Lp названо «непрерыв-
«непрерывностью в целом» (с. 16).
ГЛ. 1. НЕКОТОРЫЕ КЛАССЫ ФУНКЦИЙ II ОПЕРАТОРЫ
3. Пусть /е= Lv (G), / = 0 вне G и
?|A|a 0<1, A.15)
где Дг — любое комплексное число, а В — постоянная, которая
от Az не зависит. Наименьшую из постоянных В, удовлетворяю-
удовлетворяющих неравенству A.15), обозначим через B(f). Очевидно,
\ 1/р
I / (г + Az) - / (г) fdx dy
' , A.16)
I &z1
причем здесь а, р, G фиксированы, а Дг принимает любое зна-
значение. В неравенстве A.15), очевидно, можно в качестве -В взять
В (/), но нельзя брать постоянную, меньшую В (/).
Ясно, что величина A.16) зависит также от областп G и от
постоянных а и р. Поэтому вместо B(f) будем иногда писать
B(f,G,a,p).
Множество L%(G), которое содержит функции, удовлетворя-
удовлетворяющие неравенству A.15), превращается в полное пространство
типа Банаха, если норму его элемента задать равенством
L% {f) s L% (/, G) = Lp (/, G) + В (/, G, a, p). A.17)
4. Если G — ограниченная область, то, очевидно, имеют место
соотношения
С (G) с: Ст (G) с: Lp (G) с Lv, Щ)
(т>0, 0<а<1, р>р'>1).
Но в случае неограниченной области последние два соотно-
соотношения, вообще говоря, не выполняются.
Поэтому в случае неограниченной области целесообразно рас-
рассматривать следующие множества: 1) LpCa(G) — пересечение
множеств LP(G) и C™(G); 2) LPLP> (G) — пересечение множеств
Lp (G) и ЬрГ (G), Эти множества превращаются в банаховы
пространства, если нормы их элементов определить следующим
образом:
1) если /€= LPC% (G), то Lp<% (/) = Lp (/) + С (f)\
2) если / €= LPLP, (G), то LpLp,(f) =Lp(f) + Lp, (/).
Вообще, если имеются два пространства типа Банаха X и Y,.
причем их пересечение XY — непустое множество, то, определив
лорму элемента х множества XY по формуле XY(x) = X(x)Jr
+ Y(x), получим новое пространство типа Банаха, которое будем
обозначать через XY.
§ 1. КЛАССЫ ФУНКЦИЙ И ФУНКЦИОНАЛЬНЫЕ ПРОСТРАНСТВА
19
Можно также определять норму элемента х е XY по формуле
() (X() Y{))
(()
5. Важно рассмотреть также следующие пространства функ-
функций, заданных на всей плоскости Е.
Пусть f(z) задана на всей плоскости Е и удовлетворяет
условиям
l, A.19)
где Ei — круг Ы < 1, a v — некоторое положительное число.
Множество таких функций будем обозначать через LPiX(E) или
просто через Lp_ v. Если f^Lp (E), р Э* 1, то
1-4
Г Г! \гI р
П-т
dxdy.
Это означает, что LP(E) = L ^(Е). Если v^ —
\1\-*р при
l. Поэтому, очевидно,
то
1 \ г
— )| dxdy.
Отсюда вытекают соотношения
при pv ^ 4 ^ />[х.
Если определить норму элемента LPiV по формуле
A.19а)
A.196)
то, как нетрудно проверить, будем иметь полное линейное про-
пространство типа Банаха*). Если g — ограниченная измеримая
функция на плоскости, то, очевидно, fg_^Lpv, если /е LP|V.
Если G — ограниченное множество, то LP(G)<= LPiV(E)_, где v —
любое число, причем мы считаем, что элементы LP(G) продол-
*) Норму элемента / е LPlV можно определить также по формуле
L,.y(f, Е) = miLX(Lp(f, Ег), Lp(fv, Я,)).
20 гл- '¦ НЕКОТОРЫЕ КЛАССЫ ФУНКЦИЙ II ОПЕРАТОРЫ
жены вне G нулями. Нетрудно видеть, что если f^LP(G), то
L,,Y(/, E)^M0Lp(f, G), M0 = const*). A.20)
Пусть Сал(Е) или C<x,v — множество функций, непрерывных
на всей плоскости Е и удовлетворяющих условиям**)
^Ca(El), i A.21)
Множество Cay будет полным пространством типа Банаха,
если норму определим по формуле
C«.v(/) = ?«(/, ?.)+?»(/*, ^i). A-22)
6. Пусть /sfm(G) и, кроме того, существует такое замкну-
замкнутое подмножество Gf множества G, вне которого / = 0. Множе-
Множество таких функций / обозначим через D"m (G), причем нужно
иметь в виду, что подмножество G, для каждого элемента /
множества Dm (G) может быть свое. Очевидно, D°m (G) — ли-
линейное многообразие, т. е. линеал.
Подмножество Dm (G), состоящее из функций, допускающих
частные производные любого порядка, будем обозначать через
Dt>(G). Очевидно, DOX(G) есть также линеал. Важное свойство
линеала D!L(G) (а значит и любого Dom(G)) состоит в том,
что он плотен в пространствах С, С™, Lp и Lp. Приведем точ-
точную формулировку соответствующих теорем.
Теорема 1.4. Линеал D'lc(G) плотен в любом пространстве
l(), p, )
Иными словами, если / g ij (G), то найдется такая последо-
последовательность /„ элементов D°x (G), которая сходится к / в мет-
метрике пространства L^iG), т. е.
Lp (/ — /n, G)-*¦ 0 при п~*-оо.
Теорема 1.5. Если j^ С™(G), a G%—открытое множество
такое, что GcG^, то существует последовательность fn элемен-
элементов D°ca(G^.)j которая сходится к / в метрике С™ (G), т. е. С™ (/ —
— fn, С)-*-0 при п ->- оо.
*) Ниже, не оговаривая это каждый раз, буквой М (иногда снабжая
ее различными указателями) мы будем обозначать постоянные числа, при-
причем указателями мы будем пользоваться в том случае, когда захотим под-
подчеркнуть зависимость М от того или иного параметра. Например, если М
зависит только от р, то будем писать Мр, а если М зависит и от области,
то будем писать MP(G) и т. п.
**) Под Co(Ei) мы понимаем С(Е\).
***) Под ?* мы подразумеваем Ьр.
§ 1. КЛАССЫ ФУНКЦИЙ И ФУНКЦИОНАЛЬНЫЕ ПРОСТРАНСТВА 21
Доказательства этих теорем мы здесь приводить не будем;
их можно провести, используя свойства так называемых сред-
средних функций (см. [79а], гл. 1, § 2).
7. Пусть Ф(г)—однозначная аналитическая функция от z
в области G; она может иметь внутри G дискретное множество
особых точек — полюсов и существенно особых точек. Множе-
Множество таких функций будем обозначать через 9t0 (G). Если /, #е
е 9to> TOi очевидно,
f±g, fg, -L-, /Of(z))e<.
В последнем соотношении, конечно, подразумевается, что зна-
значения g принадлежат области определения /.
Мы будем рассматривать также множества 2t0C(G)^3C0(G),
9l0Lj,(G) и т. п.
Множества 9to(G)Ca(G) и %0(G) LP(G) представляют собой
замкнутые подпространства соответствующих пространств
С(С)и?;(С).
В отношении 5t0 (G) С™ (G) правильность этого утверждения
очевидна. Докажем теперь его для других множеств. Достаточ-
Достаточно доказать это для множества %O(G)LP{G), p^l. Нужно до-
доказать, что %o{G)Lv(G) — замкнутое линейное многообразие эле-
элементов LP(G). Пусть последовательность Фп элементов
%i,(G)Lp(G) удовлетворяет условию
Lp(Ф„ - Фт, G) ^0 при т, п — оо.
Отсюда следует, что последовательность Фп сходится в норме
Lp к некоторой функции Ф класса LP(G). Нужно доказать, что
Ф голоморфна внутри G, т. е. Ф sSto(G)tp(G).
Пусть Geo — множество точек области G, расстояние кото-
которых до границы G не меньше б0. Тогда, согласно формуле сред-
среднего значения для голоморфных функций, в точках множества
<?бо имеем равенство
О<б<бо, z^Gb0.
Отсюда с помощью неравенства Гельдера получим:
А ff |Ф«@-Ф
JJ |Фп©-Ф
\6
22 ГЛ. 1. НЕКОТОРЫЕ КЛАССЫ ФУНКЦИЙ II ОПЕРАТОРЫ
Это неравенство показывает, что последовательность Ф„ равно-
равномерно сходится на всяком множестве G«. Следовательно, пре-
предельная функция Фб голоморфна внутри Gb. Докажем, что Ф& =
= Ф. Это следует из неравенства
Lp (Ф, - Ф, Gt) < LP (Фв - Фп, Gb) + LP (Ф„ - Ф, G),
правая часть которого, очевидно, стремится к нулю при га -»- <»
для всякого положительного б. Таким образом, Ф голоморфна
внутри G, что и требовалось доказать.
Имеет место
Теорема 1.6. Если последовательность голоморфных в об-
области G функций Фп слабо сходится в LP(G), p > 1, то она рав-
равномерно сходится внутри G, 'и, следовательно, предельная функ-
функция голоморфна в G.
В самом деле, пусть Фп~^Ф0^ LP(G). В таком случае,
согласно_теореме 1.3', множество {Ф„} равномерно ограничено:
?р(Фп, G)^M. Но тогда из формулы среднего значения сразу
следует, что {Фп} равномерно ограничено внутри G в смысле
метрики С. Следовательно, но известной теореме Монтеля [57]
из [Ф„] можно извлечь подпоследовательность Ф«й, сходящуюся
равномерно внутри G к некоторому элементу Ф класса %LP(G),
причем, очевидно, Ф^-^Ф. Но по условию ФПь-*"Фо- Сле-
Следовательно, Фо = Ф е §1OLP(G). Нетрудно теперь обнаружить,
что Ф„ сходится равномерно внутри G к функции Ф, что и
требовалось доказать.
Отметим еще, что %0С(Е) есть множество постоянных,
a %LP(E) содержит только функцию, тождественно равную ну-
нулю. Это легко следует пз теоремы Лиувплля.
8. Мы будем рассматривать еще некоторые классы, вообще
говоря, не суммируемых функций.
Будем говорить, что /eS0Xip (G), если найдется такая
аналитическая функция Ф класса Sto (G), что Ф/ принадлежит
LP(G). В таком случае Ф будем называть аналитическим сум-
суммирующим множителем функции /, а функцию / — квазисумми-
руемой. Можно указать весьма широкий класс квазисуммируе-
мых функций. К такому классу принадлежат, например, изме-
измеримые функции, имеющие точечные особенности полярного ти-
типа I z — z01 ~а, где а — любое положительное чдсло. Суммирующим
множителем такой функции в окрестности точки z0 служит
(z — z0)lal, где [а] — целая часть а.
Если / €= «о* X Lp (G), геЯ,*Х Lq (G), -у + -~- = 1, то, со-
согласно неравенству Гельдера, fg^%0X L1(G). Но если / и
g е 2t0 X Lp (G), то f + g, вообще говоря, не принадлежит §10 X
X Lp (G), следовательно^ §10 X Lv (G) не есть линейное многообразие.
§ 2. КЛАССЫ КРИВЫХ И ОБЛАСТЕЙ 23
Поэтому мы рассмотрим еще множество 231q X Lp (G), которое
содержит все линейные комбинации квазисуммируемых функций
класса StJ X Lp (G).
Пусть f = Og, где OeSto(G), g^C(G). Множество таких
функций мы будем обозначать через % X С (G), а их линей-
линейные комбинации — через 29С X С (G).
В главе 3 налг встретятся также функции вида / = Фее, где
Ф <= 2Со (^)> а 8 е 2^о X Са (Е). Очевидно, функция /, вообще го-
говоря, не является квазисуммируемой. Этот класс функций мы
or* ч/ S9toxca№>
обозначим через щ X е
§ 2. Классы кривых н областей. Некоторые свойства
конформного отображения
1. Пусть Г — некоторая простая замкнутая или незамкнутая
спрямляемая кривая Жордапа. Тогда ее уравнение мы можем
записать в виде
z(s) = x(s)+iy(s), B.1)
где z(s)—аффикс точки кривой Г, соответствующей длине ду-
дуги s, отсчитываемой от некоторой фиксированной точки на Г.
Пусть / — длина кривой Г. Начало отсчета длины дуги мы мо-
можем всегда выбрать так, чтобы выполнялось условие 0 =S s s? I.
Функция z(s) непрерывна в промежутке OsSssgZ, причем
z(O)*=z(Z), если Г — замкнутая кривая. Поэтому в случае зам-
замкнутой кривой z(s) является периодической функцией с перио-
периодом, равным длине этой кривой.
Мы будем говорить, что кривая Г принадлежит классу Ст,
если все производные функции z(s) до порядка т включитель-
включительно непрерывны па сегменте 0 =S s ^ I. Если же, кроме того, про-
производная z(m) (s) порядка т удовлетворяет на сегменте 0 < s <
^ I усло'вию Гельдера с показателем а, 0 < a =S 1, то будем
±. . . Е(/а,
Пусть Г — кусочно гладкая простая замкнутая кривая, ко-
которая состоит из конечного числа дуг класса С™. Пусть vtn, ...
. .., Vfcix — внутренние углы при угловых точках этой кривой.
Будем предполагать, что 0 < Vj =S 2 (/= 1, .. ., к). Множество
таких кривых будем обозначать через Ca,v ,,.,vk-
Если z(s)—аналитическая функция аргумента s, то Г на-
назовем аналитической кривой. Класс таких кривых обозначим
через St. Можно рассматривать также кусочно аналитические
контуры класса %1...vh-
Если граница области G состоит из конечного числа простых
замкнутых или незамкнутых спрямляемых кривых Жордана,
24 ГЛ. 1. НЕКОТОРЫЕ КЛАССЫ ФУНКЦИЙ II ОПЕРАТОРЫ
которые не имеют между собой общих точек, то мы будем
говорить, что G принадлежит классу С. Если же эти кривые
все замкнутые и принадлежат классу Ст(С™, C™Vj Vft, 9t, $Vl.. .Vft)f
то мы будем говорить, что область G принадлежит классу
2. Пусть на спрямляемой простой кривой Жордана Г задана
функция /(z) точки зеГ. Полагая z~z(s), мы можем рас-
рассматривать эту функцию как функцию длины дуги s; обозна-
обозначим ее снова через 1(s). Если f(s) и все ее производные до
порядка т включительно непрерывны на сегменте 0 ^ s < I, то
будем говорить, что / принадлежит классу С (Г). Если же, кро-
кроме того, /(m) (s) удовлетворяет условию Гельдера с показателем
а, О < a=S 1, то будем говорить, что /е С™ (Г).
Множества С (Г) и С^(Г) будут пространствами типа Ба-
Банаха, если определим нормы их элементов следующим образом:
Ст (/, Г) = 2 С (% г), если / <= Сп (Г),
С (/, Г) = Ст (/, Т) + н[ ~1, Г, а), если / е= С (Г),
где под С(/, Г) и Я(/, Г, а) подразумеваются следующие
величины:
С (/, Г) ^ max | / @ |, Я (/, Г, а) ^ sup ' ^ ~/?a)'.
3. Пусть Gz — область плоскости z, дополнение которой со-
состоит из m + 1 континуума Go, ..., Gm. Мы будем считать, что
эти континуумы содержат по крайней мере по две точки. В та-
таком случае, как известно (см., например, [40а]), область Gz
можно конформно отобразить на каноническую область Gt пло-
плоскости ?, ограниченную окружностями Го, 1\, . .., Гт, причем
Го — единичная окружность |?| = 1, центр которой (? = 0) при-
принадлежит области GE, а окружности 1\, ..., Гт лежат внутри
Г'о. Функцию z = cp(?), реализующую указанное отображение
области GE на G2, можно подчинить следующему дополнитель-
дополнительному требованию
1 q>(O)=zo, <р'@)>0, B.2)
где z0 — произвольно зафиксированная точка области Gz. Усло-
Условиями B.2) функция ф(?), как известно, определяется одно-
однозначно.
Граничные свойства функции <р(?) и обратной функции tf(z),
очевидно, зависят от характера гладкости границы области Gz.
§ 2. КЛАССЫ КРИВЫХ И ОБЛАСТЕЙ 25
Мы здесь приведем без доказательства, с указанием соответ-
соответствующих источников, некоторые теоремы о гладкости этих
фувкций в замкнутых областях Gt и Gz при различных предпо-
предположениях относительно характера гладкости границы области Gc.
Теорема 1.7. Если Gz ограничена простыми замкнутыми
кривыми Жордана Ь„, ..., Lm, причем La содержит внутри себя
все остальные, то ф(?) и x|;(z) непрерывны в замкнутых обла-
областях Gz + Г и Gz + L соответственно, где L = L0 + ... + Lm, Г =
= Г! + ... + Г™, причем окружность Г,- является гомеоморфным
образом кривой Ц: Г.,-= of (Д) (/ = 0, 1, ..., га).
Теорема 1.8. Если кривые Lo, Ьи ..., imeCa (k^O,
О < а < 1), то
ф(?)е=Са(<% + Г), г|з (z) е= Са (Gz + L).
Теорема 1.9. Если LeCjiVi Vft @<а<1, 0<v;=S2),
где
у' = minf 1, —, .. ., —), v" = min(l, vlt .. ., vft).
V vi vfe/
Вблизи граничной угловой т&чки Zj с внутренним углом Vj-я
функция
Ъ(*)-*1Ж)~У-'} B-3)
(г ~ ziI Ъ
стремится при z -*¦ Zj к вполне определенному пределу tyj(zj)?= 0.
Кроме того, вблизи Zj производная от if(z) имеет вид
—-1
где i|"o(z)— непрерывная функция, причем ^(zj)^ 0.
Если "Qj — образ zh то вблизи %,, функция
<р (?)= ф(ь)~ф^> B.5)
(г - г/)
стремится при % -*¦ %j к вполне определенному пределу <
причем 9j(?j)?b: 0. Кроме того, вблизи %}
<p'(S) = E-Wv^4o(S), ¦ B.6)
•г9е фо(^)— непрерывная функция, причем
Доказательства этих теорем даны в трудах разных авторов
(см., например, [13]). Достаточно полный обзор литературы по
этому вопросу читатель может найти в [22J.
2E ГЛ. 1. НЕКОТОРЫЕ КЛАССЫ ФУНКЦИЙ И ОПЕРАТОРЫ
Мы покажем здесь, как можно доказать непрерывность по
Гельдеру в замкнутых областях функций ф(?) и ^(z), опира-
опираясь на проведенные выше формулы B.3) и B.4).
Как видно из B.3), в окрестности угловой точки з,- функ-
функция ф(г) имеет вид
-ZiI/v%B). ' B.7)
На каждой закрытой дуге контура L, которая не содержит уг-
угловой точки, if(z) имеет непрерывную производную. Поэтому
ограниченная фупкция i|v(z) имеет производную всюду вблизи
Z}, исключая самую эту точку, причем в силу B.4) в окрестно-
окрестности Zj выполняется неравенство
*ul°. | (А/о = const).
Но при этих условиях, как это доказано Н. И. Мусхелишвили
[60а] (гл. 1, § 7), функция вида B.7) в окрестности точки zt
на L принадлежит классу С /, где Vj = min|l, — .Назакрытых
Ч \ Ч.
дугах контура L, которые не содержат угловых точек, i|j(z)<s
е С,. Поэтому нетрудно видеть, что на всем контуре L функция
¦ф е CV' (L), где v' = min (l, v^, ..., v^). Отсюда же следует, что
г|) (z) e Cv/ (Gz + L) (см., например, [60а], гл. 1, § 22). Анало-
Аналогично доказывается, что (p(QeCv»(fr+ Г), где v" =
= min(l, vi, ..., \\).
§ 3. Некоторые свойства интеграла типа Коши
В этом параграфе мы докажем некоторые важные свойства
интеграла типа Коши, которыми неоднократно воспользуемся в
дальнейшем.
Теорема 1.10. Пусть G е= С„+\ а /еС"(Г), где Г — гра-
граница области б,ГеС™+11 0<а<1, пг>0. Тогда интеграл ти-
типа Коши
принадлежит классу Са (G + Г).
Доказательство. Интегрированием по частям легко убе-
убедимся, что
^Гт^-' ад
г
где
m @ = i = ^ («) -Г" U («) -T- • • • t (s) -4
§ 4. НЕОДНОРОДНАЯ СИСТЕМА КОШИ — РИМАНА 27
причем в правой части этого равенства операция t' (s) —=-
повторяется т раз*). Так как t'(s) и/еС(Г), то fm{t)<= Ca(T).
Поэтому, согласно известному свойству интеграла типа Коши
([60а], гл. 1,_§ 22), функция Фм(г)еС„(С) при 0 < а < 1,
т. е. Ф е Са (G), что и требовалось доказать.
Имеет место также следующее неравенство
С (Ф, G) < МС% (/, Г) (М = const). C.3)
При m = 0 доказательство этого неравенства легко получается
из рассуждении Н. И. Мусхелишвили [60а] (гл. 1, §§ 19, 20,
22). Оно легко переносится па общий случай га>0 с помощью
формулы C.2).
При m = 0 требование в отношении области можно несколько
ослабить. А именно, справедлива следующая ([60а], гл. 1, § 21)
Теорема 1.11. Если G^C1 и /еСо(Г), 0<а<1, то
O(z)e Ca(G + Г). Производная Ф'(z) имеет оценку
\ 0<а<1, C.4)
где б — расстояние от точки ъ до границы области G.
Из последнего неравенства вытекает, что Ф'(z)<^ LP(G), где
р — любое число, удовлетворяющее условию
причем, очевидно,
ЬР(Ф', G)<MCa{f, Г) (М = const). C.6)
В силу этого при условиях теоремы 1.10 будем иметь:
Lp (Ф(т+1), G) < МС1 (/, Г). C.7)
Из C.5) следует, что при -^- < а < 1 число р > 2.
§ 4. Неоднородная система Коши — Рнмана
1. Рассмотрим неоднородную систему уразнешш Коши —
Римана
-^-W = g(x,y), w + —=*:h(x,y), D.1)
где g, h — заданные вещественные функций вещественных пе-
переменных жиг/. Эту систему можно записать в следующей
, dt
*) Здесь мы воспользовались тем, что -jr
= 1, откуда -зг = «'(*)•
28 гл- 1. НЕКОТОРЫЕ КЛАССЫ ФУНКЦИЙ П ОПЕРАТОРЫ
форме:
?—/, / = ^ w-n + lv, D.2)
dz &
где
В дальнейшем мы будем рассматривать также операцию
dw „ 1 I dw . dw \ ,, ,,
—- = dzw = wz — -г-1 i -r- . D.4)
dz z 2 \c)x dy J v '
Величины dzw и 92г^ мы будем называть условно частными
производными от w no z и z соответственно. Как легко видеть,
производные по х и у выражаются через них по формулам
dw dw dw dw . dw . dw
9a; 9z ,й' dy dz fz'
Ниже д- и dz будем рассматривать как первичные дифферен-
дифференциальные операции, которые определим непосредственно, не при-
прибегая к рассмотрению частных производных по х и у (см. § 7,
п. 2).
Если операции д- и dz применим к аналитической функции
O(z), то будем иметь:
dz °z
Первое из этих равенств является комплексно]"! записью си-
системы Коши — Римана, а второе — представляет собой производ-
производную от аналитической функции по комплексному аргументу.
Если ы?еС"(С), a <?>^%0(G), то, очевидно,
д- (Фи;) = Фд-ро, д2 (Фт) = Wdzw. D.6)
Пусть G^C, a w^C'(G). Тогда с помощью известной фор-
формулы Грина легко выводятся соотношения
D.7)
Нетрудно видеть, что эти равенства остаются в силе, если
С'(б) и непрерывна в замкнутой области G *).
*) Более широкие обобщения этих формул будут указаны ниже (§ 7).
§ 4. НЕОДНОРОДНАЯ СИСТЕМА КОШИ — РИМАНА 29
Если ? — фиксированная точка области G, то в силу фор-
улы D.7) и равенства D.6) имеем
1 С w (z) dz i ¦ С w (z) dz _ С С dw (z) dx dy ,, л.
где Gt — пересечение области G н области |z —?|>е, причем
G'e <= G. Переходя в этом равенстве к пределу при е -> 0, получим:
,,., 1 Г w (л) dz 1 Г Г dw (z) dx dy ,, q..
G
Аналогично выводится также формула
,..(Г) = 1 Г w (z) dz 1 Г Г dw (z) dz dy D 10)
Ш^ 2niJ J—? л J J S« -,_j'
Эти тождества доказаны здесь при условии, что w(z) при-
принадлежит одновременно C(G) и С (G). Ниже мы обнаружим,
что они сохраняют силу и для более широкого класса функций
(§ 6, п. 1, с. 39).
Формулы D.9) и D.10) встречаются у многих авторов. По-
видимому, в приведенной выше форме они впервые были ис-
использованы в работе Д. Иомиейю [71] A912). На их основе
Помпейю дал обобщение понятий производных дг и д- (см.
ниже, § 7). Ниже мы убедимся, что именно в приведенной вы-
выше комплексной форме эти формулы особенно полезны для даль-
дальнейших применений.
2. Вернемся теперь к уравнению D.2). Если /eC'(G), то
нетрудно получить формулу, дающую все решения уравнения
D.2).
Если w непрерывна в G и в G удовлетворяет уравнению
D.2), то
L!i == ф (z) + гд D.11)
G
где
ф (z) = _ц
Г G
3. Формула D.11), вообще говоря, смысла не имеет, если
/ разрывна в G. Однако эта формула легко может быть обоб-
обобщена на случай уравнений вида D.2) с правыми частями, при-
принадлежащими % X C_(G) (см. еще § 5, п. 7).
Пусть / е 91* X С (G). Тогда найдется аналитическая функ-
функция Ф/(з) класса 9to(G) такая, что fOf^C(G). Умножая обе
30 гл- '• НЕКОТОРЫЕ КЛАССЫ ФУНКЦИЙ И ОПЕРАТОРЫ
части уравнения D.2) на Ф/ и учитывая, что
яш дФм
Ф, — = —4— ш
7 dz dz
будем иметь
Отсюда, в силу формулы D.11), получим
w(z) = Ф (г) - * f \ f ^ф? М ** dri D.13)
' ' 6
Здесь в качестве Ф(з) может быть взята произвольная ана-
аналитическая функция класса St0 (G).
Формула D.13) легко обобщается на тот случаи, когда / =
= U + U + • • • + in, причем
Тогда формула
(
где Ф — произвольная аналитическая функция класса §@
дает решение уравнения D.2).
В следующих параграфах настоящей главы мы более подроб-
подробно изучим различные свойства функций, представляемых фор-
формулами вида D,12) и D.13).
4. Если f = f(x, у)—-аналитическая функция переменных х
и у, то можно указать формулу, которая несколько упрощает
вычисление интеграла Т/; для определенности будем считать /
целой функцией. Заменпв аргументы х и у на — (г + z) и
yr (z — z) соответственно н вычислив неопределенный интеграл
(относительно I)
4- г г —
по формуле D.9) получим
G Г
Если z лежит вне G + Г, то будем иметь
§ 5. ОБОБЩЕННЫЕ ПРОИЗВОДНЫЕ В СМЫСЛЕ СОБОЛЕВА 31
Это следует пз того, что функция Т/ непрерывна на всей пло-
плоскости, голоморфна вне G + Г и обращается в нуль на беско-
бесконечности. Используя известные граничные свойства интеграла
типа Коши ([60а], гл. 1, § 17), легко убедимся, что правые
части равенств D.15) и D.16) совпадают на границе Г обла-
области G. Пусть, например, / = znzm, где п и т — неотрицательные
целые числа. Если G — круг \z\ < 1, то имеем (при гей)
(„ri
л J J t-i^1-|,^ri
g
[^ТТ прп n<m
Если z лежит вне G + Г, то
1
я
ff
JJ
G
?n--m
s
I 0
rrpii
при
n 5
re <
5 m
С иг
+
+
1,
1.
§ 5. Обобщенные производные в смысле Соболева
и их свойства
В этом параграфе мы изучим классы функций, которые до-
допускают производные в некотором обобщенном смысле.
1. Лемма 1. Пусть j e LP(G), / = 0 вне G. Тогда функция
<5Л>
2
непрерывна иа всей плоскости, если Р>т~г-
Доказательство. Второй из интегралов E.1) можем
считать взятым по некоторому кругу GR с центром в точке z = О
и фиксированного радиуса R. Так как
то в силу неравенства Гельдера A.11) будем иметь
j \GR
т + т^1- E-2>
Так как qk = —-—r < 2, то второй множитель правой части
Р — 1
неравенства E.2) ограничен. Что же касается первого множи-
множителя, то он в силу теоремы 1.1 стремится к нулю при \z1 — z2\ -*•
32
ГЛ. 1. НЕКОТОРЫЕ КЛАССЫ ФУНКЦИЙ И ОПЕРАТОРЫ
->¦ 0. Отсюда следует непрерывность g{z), что и требовалось
доказать.
Теорема 1.12. Пусть G — ограниченная область. Если,
i то интегралы
=тс/ = -—
G
Т/ = TG/= - — f f ^^¦~
G
E 3)
существуют для всех точек z вне G, причем Т/ и Т/ голоморфны
вне G относительно z и z соответственно и обращаются в нуль
на бесконечности.
Теорема очевидна.
Теорема 1.13. Пусть G — ограниченная область. Если
/<=Li(G), то Т/ и Т/ как функции точки z области Сосуществуют
(
почти всюду и принадлежат любому классу Lp
любое число, удовлетворяющее условию l=S/><2, a
ограниченная область плоскости.
Доказательство. Согласно лемме 1 функция
где р —
— любая
непрерывна, если g<^Lp(G), p>2. Поэтому \f\gi
f^Li(G), причем в силу теоремы Фубини
, если
Так как_ это равенство имеет место для любой функции g
класса LP(G), p>2, то согласно известному свойству суммируе-
суммируемых функций fi^L^G), q= P , <2. В силу этого TfezLJG),
Р — 1
ибо !T/l^/i. Здесь q — любое число, удовлетворяющее условию
1 < q < 2. Так как вне G функция Т/ голоморфна, то Т/ е
^ Lq (G*), где G* — любая ограниченная область плоскости. Для
Т/, очевидно, имеет место аналогичное утверждение.
Теорема 1.14. Если f ^L^G), то
E.5)
E.6)
G g
J f f / % dxdy + J j /ф dxdy- 0,
G '
где ф — любая функция класса D\ (G).
§ 5. ОБОБЩЕННЫЕ ПРОИЗВОДНЫЕ В СМЫСЛЕ СОБОЛЕВА 33.
Доказательство. Достаточно доказать первое равенство,
второе доказывается аналогично. Если ф е D\ (G)% то, согласно
формуле D.9), имеем
Отсюда и следует E.5)':
J дЪ Ъ [dz
G
Я
G
2. Следуя С. Л. Соболеву [79а], введем теперь понятие так
называемых обобщенных производных [14г].
Определение. Пусть /, g^L^G). Если / и g удовлетво-
удовлетворяют соотношению
где ф — любая функция класса D\ (G), то будем говорить, что
/ есть обобщенная производная по z (no z) от g*).
Если geC'(G) и / = d-g(f = dzg), то соотношение E.7),
очевидно, выполняется. Поэтому в дальнейшем обобщенные
производные по z и z будем обозначать, как и обычные произ-
производные, через д- и dz соответственно. Вообще, условимся, что
Непосредственно из определения вытекает, что функции,
допускающие обобщенные производные по z или по z, состав-
составляют линейные многообразия, которые в дальнейшем будем
обозначать через D-(G) и DZ{G) соответственно.
Ниже мы обнаружим, что классы D-(G) и DZ[G) сохра-
сохраняют ряд важных свойств в обычном смысле дифференцируемых
функций.
*) Обычно рассматривают обобщенные производные по вещественным
аргументам х и у. Но, имея в виду дальнейшие приложения, целесообраз-
целесообразнее рассматривать как первичные дифференциальные операции именно
д- и дг [14г], Нетрудно видеть, что эти определения вполне эквивалентны.
Кроме того, они эквивалентны понятию обобщенйой производной, которое
вводится при помощи обычных частных производных по х и у [61]. За-
Заметим также, что в равенствах E.7) можно ограничиться рассмотрением
функций ф из линеала D*L (G).
34 ГЛ. 1. НЕКОТОРЫЕ КЛАССЫ ФУНКЦИЙ И ОПЕРАТОРЫ
Из соотношения E.7) сразу следует, что если g^D-(G),
то g^Dz(G), и наоборот. Поэтому достаточно изучить свойства
одного из этих классов функций, например класса D- (G).
Отметим, наконец, что, согласно теореме 1.14, T/eZ)-(G),
T/eB,(G), если /<=?/(&), причем
fK '« Sz '¦ V-°>
3. Теорема 1.15. Если g^L^G) и д-g = 0, то g(z) голо-
голоморфна внутри G, т. е. g{z)^%(G).
Доказательство. Достаточно доказать, что g голоморфна
внутри некоторой окрестности каждой фиксированной точки z,
области G. Без ущерба для общности мы можем принять z0 — 0.
Возьмем достаточно малый круг GR с центром в точке z = 0 и
радиуса R, GR<=-G и рассмотрим бигармоническую функцию Гри-
Грина для этого круга ([146], § 44)
где z и ? — произвольные точки круга Ся. Фиксируя точку ?
внутри Gjj, легко убедиться, что Z(z, ?) при z^g удовлетворяет
бигармоническому уравнению AAZ = 0 и краевым условиям
ZdZ dZ n i i r>
= -г— = -— == 0 при z = л.
<Jx ду • '
Кроме того, Z, Zs и Zv непрерывны в замкнутом круге Ul «Si?.
Рассдютрим функцию
0, если |z|>i?,
причем Z, — фиксированная точка внутри GR. Очевидно, (f (z) e
efl°i(ff). Если f = d-g = 0, то, согласно равенству E.7),
имеем:
^ E.9)
GR Z
Это равенство имеет место для любой точки ? внутри G. Если
применим теперь к обеим частям равенства E.9) операцию 9?=,
то будем иметь:
^L^^^==0. E.10)
§ 5. ОБОБЩЕННЫЕ ПРОИЗВОДНЫЕ В СМЫСЛЕ СОБОЛЕВА 35
Нетрудно доказать законность произведенной здесь перестановки
порядка дифференцирования и интегрирования.
Простые вычисления показывают, что
В силу этого из равенства E.10) получим
ФЖ E.11)
где
Л2-
Так как Ф(?) и Ф4E) голоморфны внутри GR, то, согласно
формулам D.5) и E.8), из E.11) имеем
т. е. g голоморфна внутри GR, что и требовалось доказать.
Эту теорему можно доказать еще, пользуясь свойствами сред-
средних функций [79а]. __
4. Теорема 1.16. Если /= д-g <= L1 (G), то
g{z) = ф B) _ -i- J Jlf^l^OB) + TG/, E.12)
G
где Ф — голоморфная внутри G функция. Наоборот, если Ф е
е Яо(G) ii/ei^G), го функция g = Ф + TG/ e D- (G), причем
Цг = /. E.13)
Доказательство. Первая часть теоремы вытекает из
предыдущей теоремы, так как 9- (g — Т/) = 5jg — 9-Т/ =/— / = 0.
Вторая часть теоремы очевидна*).
Из формул E.12) и E.13) сразу следует единственность
обобщенных производных.
Пусть D-(G)— множество функций g(z), для которых
^L^G). Очевидно, D-JG) cz D-(G).
*) Эта теорема была доказана в работе автора [14г].
3*
36 ГЛ. 1. НЕКОТОРЫЕ КЛАССЫ ФУНКЦИЙ И ОПЕРАТОРЫ
Формула E.12) дает общее представление функций класса
D-(G). Обозначая через TLP(G) множество функций вида Т/,
где f<=Lp(G), p~S* 1, получаем согласно формуле E.12)
т. е. D-(G) есть прямая сумма множеств % (G) и TLX (G).
Иными словами, всякий элемент множества D-(G) пред-
представляется единственным образом в виде суммь^ Ф + g, где
фе^о(С), g<=TLt(G). Множества %{G) и T?i(G), очевидно,
не имеют общих элементов, кроме нуля.
Теорема 1.17. Если g<=D-(G), mo ge= D-Z{GJ, где G4 —
любая подобласть области G.
Доказательство. Согласно теореме 1.16
где Ф1(г) = Ф(г)--
Так как Oi^^i0(Gi), то, в силу теоремы 1.16, правая часть
равенства E.14) принадлежит D-z(Gj), что и требовалось до-
доказать.
Из этой теоремы следует, что свойство дифферещируемости
функции по z (а также по z) в обобщенном смысле является
локальным свойством.
5. Пусть /(z) допускает обобщенную производную относи-
относительно z в каждой точке области G. Иными словами, каждой
точке z0 s G соответствует некоторая окрестность GQ: внутри
которой
В таком случае / обладает обобщенной производной относи-
относительно 1 во всей области, т. е. д-J = g e Lx (G).
Пусть Go и G, — окрестности точек z0 и z, области G, имею-
имеющие непустое пересечение GaG±. Так как в G0Gj
/ = Фо + To0g0 = Ф1 + TGi*a, Фо, Ф2 е % (Gfi,),
то, дифференцируя обе части этих равенств по z и используя
формулы D.5) и E.13), получим g<, = gi в Go^i.
§ 5. ОБОБЩЕННЫЕ ПРОИЗВОДНЫЕ В СМЫСЛЕ СОБОЛЕВА 37
Пусть G' — некоторая замкнутая подобласть области G.
Покроем G' конечным числом окрестностей Go, Gu ..., Gm,
внутри которых
/ = Ф; + Тс,а, Ф} *=
причем по доказанному выше g, = gk в Gfih Ф 0. Пусть g —
функция, равная gj в Gj. Очевидно, g e Li(G'). Если ге(?;, то
h (/ - Tog) = д- (/ - TGjg - TG'-Gjg) = 0,
ибо / — Tejgj = Oj и Тоу-Gjg голоморфны внутри Gj. Следова-
Следовательно, / = Ф + Teg, Ф s 3l0 (G'), что доказывает наше утверж-
утверждение. Нетрудно видеть, что g не зависит от подобласти G'.
6. Пусть /zeZ)j(G). Тогда, в силу теоремы 1.16,
где Go — некоторая подобласть области G, причем Go c G. Из
этого равенства имеем:
где щ — гармоническая функция в Go. Дифференцируя обе части
этого равенства по z, получим
Применяя к обеим частям операции дг, в силу теоремы 1.16 по-
получим
JL (Щ = 4г [К
dz \d~z) dz\d.
Таким образом, доказана следующая
Теорема 1.18. Если fze. D-(G), т. е. существует /2~, то
существует также f-z и f-z == fz-m
РТными словами, смешанные обобщенные производные по z
и г не зависят от порядка дифференцирования. Аналогичное
утверждение справедливо и для старших производных.
Если /eC2(G), то/2; =-?-(/** + fyy) = -^-Af. Исходя из это-
этого и опираясь на теорему 1.18, мы можем теперь ввести опреде-
определение обобщенного оператора Лапласа по формуле
Д/э4Д. E.15)
1 dzdz v '
yg ГЛ. 1. НЕКОТОРЫЕ КЛАССЫ ФУНКЦИЙ И ОПЕРАТОРЫ
Можно рассматривать и обобщенные производные высших
порядков.
Будем говорить, что функция /(z) принадлежит классу
DV4p(G), если внутри G все обобщенные производные
(г + к^.т, i, к = 0, 1, . . .)
существуют и принадлежат классу LP(G), р>1, причем случай
р = оо не исключается. Символом Dm будем обозначать Z)mi t.
Ниже мы изучим ряд свойств функций класса Dm,P (§ 6, пп.1,4).
В частности обнаруживается, что Dm р будет пространством типа
Банаха, если в нем ввести норму по формуле
i+k<m
Пространства вида Dm p в классе функций произвольного
числа переменных ввел в рассмотрение впервые С. Л. Соболев
[79а], обозначая их через PFpm). Важные свойства этих прост-
пространств (теоремы вложения) установлены в работах С. Л. Соболе-
Соболева и В. И. Кондрашева (см. [79а]), С. М. Никольского [616, в]
и других. Ниже, в § 6, мы доказываем некоторые из этих свойств
для функций двух переменных, причем главное внимание обра-
обращаем на те свойства, которые будут применяться в дальнейших
главах. Мы базируемся при этом на формуле общего представле-
представления класса функций D-^ которая выведена в п. 4.
7. Можно теперь ввести в рассмотрение более широкие клас-
классы функций D- и D*. Будем говорить, что / е D- (G), если
d-fe% XL(G). Аналогично вводится определение класса Z)*.
Нетрудно доказать, что общее представление функций клас-
класса D- (G) дается формулой
E.16)
где Ф и Фо — произвольные аналитические_ функции класса
91* ^' а 8 — произвольная функция класса L(G), причем
« = arVf- <5Л7>
Рассмотрим теперь неоднородное уравнение Коши — Римана
. ? = /« EЛ8)
OZ
§ 6. СВОЙСТВА ОПЕРАТОРА f Gf 39
причем предположим, что /eSl0 X L(G), т.е.
Назовем обобщенным решением уравнения E.18) всякую
функцию w(z) класса D\{G), удовлетворяющую уравнению
E.18) почти везде. Очевидно, все такие решения даются фор-
формулой
где Ф — любая функция класса &о ^'
§ 6. Свойства оператора То/
В этом параграфе мы изучим свойства оператора То для раз-
различных классов функций.
1. Теорема 1.19. Пусть G — ограниченная область. Если
j^Lp{U), p>2, то функция g — Taf удовлетворяет условиям
\g(z)\^MiLp(f, G), z^E, F.1)
\g{4)-gD)\<M2Lv{f,G)\Zl-z.2\«, a=2-f1, F.2)
где Zi и z2 — произвольные точки плоскости, a Mi и Мг — посто-
постоянные, причем Мг зависит от р и G, а Мг — только от р.
Доказательство. Применяя неравенство Гельдера A.11),
получим:
Г Г1 d\d4
F.3)
Так как q < 2, то
4-Vjfit-'i-
где d — диаметр области G, а = р~ . Поэтому из F.3) сразу
следует неравенство FЛ).
следует неравенство FЛ).
40 ГЛ. 1. НЕКОТОРЫЕ КЛАССЫ ФУНКЦИЙ И ОПЕРАТОРЫ
Так как
то в силу неравенства Гельдера имеем:
|- z
Оценим теперь интеграл вида
, cc<2,
• F-4)
. F.5)
Опишем вокруг точки z, круг G? радиуса p = 2|z, — z2l. Рас-
Рассмотрим также концентрический круг Go радиуса 2р0 такой, что
G<=G0. Если ^ лежит вне Gu то 2 \% — z2l ^ |? — zj. Поэтому
/0= JJ |С-г1|-«|С-22|-М^т1<я21+р J n-«-
Далее,
8л lg
а + р-2
Р°
32я
2 — а
при а + C > 2,;
при а + Р = 2, F-6)
при а -
<Гё
^ |
-1« | ? __ в»6 |В
Так как /(ос, P)</0 + /i, то будем иметь оценки*)
(¦^а,з121 — Z2 |2~а~ ПРИ а + Р>2,
tf Vw, ^^|Ж"а>р((?) + 8jx I lg | zx — z2|| при а + Р = 2, F.7)
Ма'.э^) при а + Р<;2,
*) Указанный здесь способ вывода неравенств F.6) принадлежат
Ж. Адамару (см., например, [30], § 563).
§ 6. СВОЙСТВА ОПЕРАТОРА TG/ 41
Вернемся теперь к неравенству F.4). Так как 1<д<2, то
в силу первого из неравенств F.7) будем иметь:
1/9 ^2
В силу этого из F.4) получаем неравенство F.2). Таким обра-
образом, теорема полностью доказана.
Неравенства F.1) и F.2) показывают, что Т/ — линейный
вполне непрерывный оператор в пространстве LP(G), отобра-
отображающий это пространство на Ca(G),a = ^-, p>2*), причем
Pi
/,C), a=-^, p>2. F.8)
р
2. Пусть j^C(G). Тогда из F.3а) легко следуют неравенства
где d— диаметр области G. Если же /eLe(G), то имеем
Из этих неравенств следует, что оператор То/ вполне непре-
непрерывен в пространствах C(G) и L«,(G), причем отображает эти
пространства на класс функций, удовлетворяющих условию
Дини.
3. Как следствие теорем 1.17 и 1.19 получаем следующий
результат:
Теорема 1.20. Если f<^D,iP(G), p>2, то Т/ принадлежит
классу Ср-2 внутри G.
р
Как увидим ниже, если р < 2, то функция f(z) может ока-
оказаться разрывной.
Из теоремы 1.19 легко вытекает также более общая
Теорема 1.21. Если f^Dm>p(G), p>2, m>\, то Т/ при-
принадлежит внутри G классу С™, где а = — .
Для этого достаточно производные порядка тп — 1 от / пред-
представить по формуле E.12) через производные порядка тп, а за-
затем использовать теорему 1.19.
*) Такие операторы называются иногда усиленно вполне непрерывны-
непрерывными операторами [79а].
42 гл- *• НЕКОТОРЫЕ КЛАССЫ ФУНКЦИЙ II ОПЕРАТОРЫ
Заметим теперь, что формула D.9) сохраняет силу при сле-
следующих условиях: 1) G — ограниченная область, граница кото-
которой состоит из конечного числа замкнутых жордановых кривых,
2) шеС(ё) и d-W€=Lp(G), p>2.
В самом деле, в силу формулы E.12) w (z) == Ф (z) + g (z),
где фе&0(С), &g(z) = TG(d-w). В силу теоремы 1.19 g<=Ca(E),
<%— .голоморфна вне G и обращается в нуль на бесконеч-
бесконечности. Так как, по условию, w непрерывна в G, то Ф = w — g
также непрерывна в G и в силу формулы и теоремы Копта
имеем
Таким образом, при указанных выше условиях имеет место
формула
J
Г
4. Неравенства F.1) и F.2) мы вывели в предположении,
что G — ограниченная область. В случае неограниченной области
¦неравенство F.1) теряет смысл, так как постоянная Mt, вообще
говоря, зависит от области G. Что же касается неравенства F.2),
то оно сохраняет силу, ибо постоянная М2 не зависит от G.
Следовательно, если f<^Lp(E), p>2, и Т/ существует в не-
некоторой фиксированной точке z = z0, то Т/еЯ,(Ё),а = 1
причем очевидно, что
—\
( \
Т/ = О [\ z | р } (вблизи z = оо). F.10а)
Надо заметить, что интеграл Т/ по неограниченной области пони-
понимается в смысле главного значения.
Мы сейчас докажем теорему для неограниченной области, из
которой можно получить и теорему 1.19.
Теорема 1.22. Пусть f^LpLp,(G), где LPLP, (G) — пересе-
пересечение множеств LP(G) и Lpr (G), причем р > 2, 1<р'<2. В та-
таком случае функция g = Т/ удовлетворяет неравенствам
\g(z)\^Mp,p,LpLp,(f,G), z<=E, F.11)
Р-2
I g (zi) - g (z.) I < MPtP,LpLpr {f, G) | Zl - z21 p , Zl, z2 e E, F.12)
), а = ^^, где
L9LP, (ft G) = Lp (U G) + W (Д G). F.13)
т.е. Tfe=Ca(E), а = ^^, где
§ 6. СВОЙСТВА ОПЕРАТОРА TG/ 43
Доказательство. Неравенство F.12) сразу следует из
F.2) в силу формулы F.13), если учесть, что постоянная Л/2
не зависит от области G. Остается доказать неравенство F.11).
Полагая / = 0 вне G, будем иметь:
Поэтому в силу неравенства Гельдера
<ЛГР,Р/ (Lp (/, G) + Lp. (/, G))*=Mp,p,LpLp, (f, G),
где
/ у/а , 1 / 2л
Таким образом, теорема полностью доказана. __ _
Так как в случае ограниченной области Lp (G) a Lpt (G) и
Lp/ (/, G)^.MLp(f, G), то неравенства F.1) и F.2) являются
следствиями неравенств F.11) и F.12).
Аналогично доказывается
Теорема 1.23. Если /<= LXLP> (G), 1<р'<2, то функция
g(z) = TGf удовлетворяет условиям:
I g (z,) - g (z2) | < MV.LJLP, (/, G)\z1-z2\\ln\z1-z2\\.
Здесь LxLp, (G) — пересечение множеств L*,(G) и LP,(G),
причем LooLp/ (G) есть пространство Банаха, нормированное сле-
следующим образом:
LJLV, (/, G) = vrai max | / (z) | + Lp, (/, G),
причем G — произвольная (ограниченная или неограниченная)
область. Если G — ограниченная область, то L0O> p/(/, G) ^
44 ГЛ. 1. НЕКОТОРЫЕ КЛАССЫ ФУНКЦИЙ И ОПЕРАТОРЫ
Докажем еще следующую теорему для случая бесконечной
плоскости.
Теорема 1.24. Пусть f<=LPiZ(E), p>2. Тогда функция
g{z) = TEf удовлетворяет условиям
lg{z)\^M,LPii{f), F.14);
|g(zi)-g(z2)l<Mp^p,2(/)lz1-z2|(p-2)/I> (z,,z2e?). F.15)
Кроме того, для заданного R > 1 найдется такое число MPj R, что
\g{z)\^MPiRLPi2{f)\z\l2-'»/* при \z\>R. F.16)'
Доказательство. Записав Те/ в виде Те / + Тв/, где
El = S'(lz\ =^1), /?2 = <<?(Ы ^1)*), и произведя замену перемен-
переменной ? на 1/5 в интеграле Тв„/, будем иметь:
1 С Cf(Qdjd4_
El
причем, как легко видеть,
g*{z
Согласно теореме 1.19 gt и g0 удовлетворяют условиям вида F.1),
ибо / и /0 е Lp(Ei), р > 2. Поэтому
Далее, gi(z), очевидно, удовлетворяет неравенству F.2), а для
gz{z) имеем
-—J Jn_^ мi
Если UJ, |z,Kl/2, то 11-^2,1^1/2, \1-Ъъ\>№ при
<1. Поэтому из F.17) имеем
f2BS)l <MpLP(fOl Ei)\zl-z2\<
*) ^"(...) обозначает множество элементов, удолетворяющих услови-
условиям, указанным внутри скобок.
Если
§ 6. СВОЙСТВА ОПЕРАТОРА TGf
<1/2, lz.lSsi/2, то
I g-2 (h) — gS (h) I < _2|. I1
45
@1
2/p
ибо
/2, | ^ К 1/2,
2/p
<2
2/p
Наконец, если lzt|, U2I 5=1/2, то
I ?2 (z2) - gг (Zi) I < I
2 1
(P~2)/p
Таким образом,
Далее, при \z\ > 1
M'pLp(f, Ex)
г
\
Отсюда сразу следует неравенство F.16) и теорема доказана.
Итак, если f^LPii(E), то
причем вблизи бесконечности Те/ убывает как |z|B~p)/p.
5. Из теоремы 1.24 вытекает следующая
Теорема 1.25. Пусть A(z)e LP2(E), p > 2. Тогда оператор
вида
Р/= J Гd^i^Ldgdrjг - яТЕ(Лу) F.18)
Е
вполне непрерывен в пространстве С(Е) и отображает это прост-
пространство в пространство Са(Е), а = (р — 2)/р, причем
С«(Р/, E)<MpLPi2{A)C{f, E). F.19)
Кроме того, вблизи бесконечности
, p>2. F.20);
?g ГЛ. 1. НЕКОТОРЫЕ КЛАССЫ ФУНКЦИЙ И ОПЕРАТОРЫ
Доказательство. Неравенства F.19) и F.20) сразу по-
получим из F.15) и F.16), учитывая, что Af^Lp2{E), р>2,
если f^C(E), и Lp,2(Af)<Lp,2(A)C(f, E).
Если имеется ограниченное множество функций {/} |/1<Л/,
то в силу F.19) множество {Р/} будет равностепенно непрерыв-
непрерывным и равномерно ограниченным. Отсюда в силу теоремы Ар-
цела следует, что оператор Р/ вполне непрерывен.
Имеет место также
Теорема 1.26. Пусть A(z)^Lp 2(Е), р>2. Тогда Р/ вполне
непрерывен в пространстве Lq0(E) при q>2p/(p — 2), причем
( )
Ca(Pf, E)<Mp,qLp,2(A)Lq,0(f). F.21)
Кроме того, вблизи бесконечности
| Р/1< MVALvfi (А) ЬЧЛ (/) | z Га, « = 1 _ 2 (i- + |). F.22)
тт тт 1 , 1 1
Доказательство. При выполнении условия ! < —
функция Af e Lr2 (Е), г = —-J-— > 2, и согласно неравенству
A.11)
L
Поэтому из F.15) и F.16) сразу получим F.21) и F.22).
Полная непрерывность оператора Р/ в пространстве LQi 0 (Е) сле-
следует из неравенства F.21). _
6. Теорема _1.27. Если f^Lp(G), 1<^2, то g = TGf
принадлежит •&" (G), где G — ограниченная область, у — любое
число, удовлетворяющее неравенству
1<Ч<2р/B-р). F.23)
При этом выполняются неравенства
LT(TG/, G)<Mp.r(G)LP(f, G), F.24)
| g (z + Az) - g (z) \y dx dyYh < M'V^LV (f~G) | Az |a, F.25)
Доказательство. Вначале предположим
< 2р/B — р). Тогда имеем
-+« рA
v \
§ 6. СВОЙСТВА ОПЕРАТОРА TG/ 47
где а = -i - -i + у > 0. Так как -i + 1—^- + 1 = 1, то с по-
помощью неравенства Гельдера A.11) получим
Xf \)\fg)\pdld4f~^[\ )\Z-z\-*+a«dldn) \ F.26)
'g
Так как при % > 0 постоянная
M (k, G) = sup J j | ? — г Г"+л d? drj < oo_,
то из F.26) легко получим:
| TG/ |v dx dy < 1 (M (qa, G)f (Lp (/, G)f-p X
X J J
G "G
< -L (M (ga, G)L"* M (ya, G) (Lp (/, G))\
Отсюда сразу следует неравенство F.24)*)'. Теперь ограничение
7 > р, очевидно, можно снять.
Пусть g(z)==Tof. Тогда
о .C-'IIC —A.I
a/v
I X
X (Lp (/, G)I-"v ^ J J |S - z 11 S - z - Az |
*) Пользуясь одним неравенством С. Л. Соболева ([796], с. 481), мож-
можно доказать, что неравенство F.24) остается в силе и при f = 2^/B — р).
48 ГЛ. 1. НЕКОТОРЫЕ КЛАССЫ ФУНКЦИЙ И ОПЕРАТОРЫ
Из этого неравенства имеем:
2 р
+ Az) — g (z) |v dx dy\1/V < MPty | Az |T (Lp(f, G)) v X
x f j f | Ю lp ад ff <l? - * 11 ? - * - Аз )Г2+7а
Важно заметить, что в этом неравенстве постоянная Мр,у
вовсе не зависит от области G, если ^ > 2. Но это всегда можно
предположить при р>1. Таким образом, теорема 1.27 доказана.
Из неравенств F.24) и F.25) следует, что То/—вполне
непрерывный линейный оператор в пространстве Lp(G), 1 =Sp =S
=S 2, и отображает это пространство в пространство Щ (Е), где
111
а = — Ь —, причем у — любое число, удовлетворяющее ус-
условию р^^< 2р/ B — р).
Заметим, что если G — ограниченная область, а у удовлетво-
удовлетворяет условию 2 < ^ < 2р/B — р), то вместо неравенства F.24)
справедливо более сильное неравенство
Ly (TG/, Е) < М'РгУ (G) Lp (/, G), 1< р < 2. F.27)
Из теоремы 1.27, используя теоремы 1.19 и 1.21, можно полу-
получить следующие две теоремы.
Теорема 1.28. Если f^Dm,p(G), m> 2, 1<р «? 2, то f при-
принадлежит внутри G классам Dm-i f и Су-?, где f — любое число,
X
удовлетворяющее неравенству 2 < у <С 2-_ р •
Теорема 1.29. Если f^Dm,i{G), пг^д, то / принадлежит
внутри G классам Dm-\,i, D -2у ? C^7-D' г^е Т — любое чис-
т~-Ч V
ло, удовлетворяющее неравенству 1 < "f < 2.
7. Теорема 1.30. Пусть G — ограниченное открытое мно-
множество и A(z)<^Lp(<7), р>2. В таком случае оператор
F.18)
вполне непрерывен в Lq(&) при у^ Ь -г ^ 1j причем если
целое число п удовлетворяет условию
§ 6. СВОЙСТВА ОПЕРАТОРА TG/ 49
ТО
L«h (Phf, E) < Мрл,а (G) LP (A, G)Lq(f,G) (к = 1, .. ., п), F.29)
C,(Pn+7, E)<Mp,q,a(G)Lp(A, G)Lg(f, G), F.30)
где
Ъ = 1 T^Jc (к=1,...,п), F.31)
F.32)
причем а—произвольное положительное число, удовлетворяющее
неравенству
<6-33>
Доказательство. Так как A^LP{G), j^Lq(G), — ^
< — + у <1, то А} е ЛГ1 (G), где rx = ~-j-, причем К г4 < 2.
Согласно теореме 1.27 функция Р/ е Z.™ (G), где—= —+ — —
—j + а, причем а — сколь угодно малое положительное число.
В силу этого AYj e= L. (G), где г2 = -§-, а Р2/ = л2Т (ЛР/) е
е ? (G), где — = Ь — — 1 + 2а. Повторяя эти рассуждения,
будем иметь Pfe/ e Z"fe (G) (k = l, ..., и), где if* определяется ра-
венством F.31). Поэтому AYnf <^LTn+1(G), где гп+1 = . "; .
Учитывая неравенства F.28), найдем, что гп+1 > 2, если а удов-
удовлетворяет неравенству F.33). Следовательно, в силу теоремы
1.19 Ря+7 = -лТ(ЛР"/)еСе(^), где ? определяется равенством
F.32). Неравенства F.29) и F.30) следуют из неравенств @.1),
F.2), F.23) и F.25).
8. Теорема 1.31. Пусть граница Г области G — совокуп-
совокупность конечного числа кусочно гладких контуров. Если f^Lp(G),
1<р^2, то Т0/еЬт(Г), где 7 — любое число, удовлетворяющее
условию
2, F.34J
причем имеет место неравенство
4 И. Н. Векуа
50 ГЛ. 1. НЕКОТОРЫЕ КЛАССЫ ФУНКЦИЙ И ОПЕРАТОРЫ
h (То/, Г) < ЛГР, т (G) Lp (f,G). F.35)
Доказательство. Вначале мы предположим, что р<4<
<р/B — р). Имеем
n| т |(9Г" W| « d|
12 1 V —¦¦ Р 1
где 2а = \- 1. Так как (- н = 1, то, применяя
равенство Гельдера, получим
F.36)
Так как при X < 1 постоянная
М (Я,, Г) = sup | | z — ? Г'" ds < oo*)f
2= В р
то из F.36) сразу следует неравенство F.35). Теперь, очевидно,
можно снять ограничение р < ч < р/B — р) **).
Как видно из F.23) и F.34), если р = 2, то в неравенствах
F.24), F.25) и F.35) в качестве у мы можем взять любое сколь
угодно большое положительное число. Однако это не значит, что
Т0/е?оо(<?) и Loo (Г), если j^L2(G). Например, если G есть
круг |zl < d < 1, то функция
/ B) = д- lnln ± = 2^, z = гег\
принадлежит классу L2(G), но Те/ = lnln— не ограничена.
*) Это легко доказывается, если воспользуемся некоторыми простыми
свойствами кусочно гладких контуров ([60а], гл. 1, § 2; добавление 1).
**) Приведенные выше неравенства F.24), F.25) и F.35) являются
частными случаями неравенств G. Л. Соболева а В. И. Кондрашева ([79а],
гл. 1, § 6).
§ 7. ФОРМУЛА ГРИНА ДЛЯ КЛАССА ФУНКЦИЯ Л1:Р 51
§ 7. Формула Грина для класса функций Д р.
Ареоларная производная
1. Рассмотрим теперь область G, граница Г которой состоит
из конечного числа простых, кусочно гладких кривых Жордана.
Пусть f(z)^LP(G), р>1. Тогда имеет место формула
_ * f V^.fTWC), еспи.ёС + Г, G1)
если
Докажем это. Пусть (¦?„ — последовательность_областей, удовлет-
удовлетворяющих условиям: 1) Gn c Gn+i сбв+1 сй] 2) б?„-> б при
?г -»- «о.
Рассмотрим функции
которые, очевидно, голоморфны вне Gn и обращаются в нуль на
бесконечности. Поэтому согласно формуле Коши имеем равенства
J_f?V?&f_Tn/B), если zie + Г, (?9)
2^J g —г | 0< если zeE#
При фиксированном значении z, очевидно, Пш Т„/ = Тс/. Кро-
П->оо
ме того, согласно неравенству F.35) последовательность Тп/ схо-
сходится к То/ в среднем порядка 7 на Г: LT(TG/ —Т„/, Г)-* 0, f > 1.
Поэтому, в результате предельного перехода, из G.2) получим
равенство G.1).
Из формулы G.1) при z -*• °о получим равенство
т. е.
±^TGfdz = ^dMdxdy. G.3)
Г G
Аналогично доказывается формула
^ G.4)
если /ei,(G), р> 1.
Если f^LP(G), p>2, то формулы G.3) и G.4) остаются в
силе для более общего случая, когда Г состоит из конечного чис-
числа спрямляемых простых кривых Жордана. Доказательство этого
утверждения не представляет трудности, так как в этом случае,
согласно теореме 1.19, функция Tof^Ca(E), a = (p — 2)/p.
4*
52 ГЛ. 1. НЕКОТОРЫЕ КЛАССЫ ФУНКЦИЙ И ОПЕРАТОРЫ
Пусть теперь d-w^Lv(GQ), р> У, где Go — область, которая
содержит область G, т. е. G <=¦ Go. В таком случае имеет место
формула
? G.5)
г V "
Если же dzw^ Lp(Go), р > 1, то имеем
2. i „ v~, iz = — ] j — dx dy. G.6)
Г G
Докажем эти формулы, которые были получены выше (§4)
в случае, когда шеС'(б) и C(G). Достаточно доказать равен-
равенство G.5).
_ Пусть_С' — подобласть области Go, удовлетворяющая условию
G <= G' cG' с Go. В таком случае внутри G'
>dl_dr\ _
> — г
я J J <j7 Х> — z я J J qT t, -
G ~ G'-G
где Ф — голоморфная внутри G' функция. Следовательно,
— z"
G'-G"''
2я« j I J J a: S —z /
Г \G'-G - /
Flo в силу теоремы Коши и формулы G.1)
G'-G = /
Поэтому из G.7) на основании формулы G.1) следует равенст-
равенство G.5).
Отметим, что формулы G.5) и G.6) остаются в силе и в том
случае, когда Г состоит из конечного числа спрямляемых кривых
Жордана, если w<^C(G~), д-w<= Lp(g) или dzw^LP(G), p>2,
соответственно.
2. Рассмотрим так называемую регулярную последователь-
последовательность областей Gn, которая стягивается к точке 5 е G, причем ?
принадлежит всем Gn ([78], гл. IV, § 2). Тогда согласно теореме
Лебега ([78], гл. IV, § 5) для любой такой последовательности
§ 8. ДИФФЕРЕНЦИАЛЬНЫЕ СВОЙСТВА ФУНКЦИЙ ВИДА TG/ 53
областей Gn и для любой функции f^Lp(G) имеем
f(z) G.8)
(почти везде в G). _
На основании этого из G.5) получим: если 5-we Lp(g),
> 1. то
— = hm уг- тгт w (z) dz G.9)
dz n^x mes Gn Li J w v '
Гц
(почти везде в G).
Правая часть этого равенства называется производной от w
в смысле Помпейю или ареоларной производной *), разумеется,
если она существует и не зависит от выбора регулярной после-
последовательности областей Gn, стягивающейся к точке %.
Таким образом, имеет место
Теорема 1.32. Если обобщенная производная 5-м;е LP\G),
р> 1, то функция w(z) допускает почти везде в G производную
в смысле Помпейю, равную обобщенной производной d-zw в смыс-
смысле Соболева.
В частности, если d-w^C(G), то w(z) принадлежит классу
C-(G) (и наоборот). Свойства этого класса функций рассмотре-
рассмотрены в работе автора [14а] (см. также [90], [94]).
§ 8. О дифференциальных свойствах функций вида Тс/>
Оператор П/
1. В этом параграфе мы выведем условия, при выполнении
которых функции вида То/ допускают производные в классиче-
классическом смысле. Мы уже видели, что функция TG/ допускает обоб-
обобщенную производную по z, равную f{z), если j^Li(G). Теперь
интересно выяснить, при каких условиях существует обобщенная
производная от То/ по z. Для этой производной, когда она суще-
существует, мы вводим обозначение
тт s 5TG^ TT4 dTf /о л\
Пе/ = -^- или П/^-^. (8.1)
Теорема 1.33. Пусть G <=C™+\ f{z) <=Ca{G), 0<сс<1,
тЭ=0. Тогда функция h(z) = T0f принадлежит классу C™+1(G),
причем Тс/—вполне непрерывный оператор в Ca{G). Кроме
*) Это обобщение понятия производной принадлежит румынскому ма-
математику Д. Помпейю [71] A912 г.), который назвал его «производной по
площади» (la derivee areolaire) [82 а, б].
54 ГЛ. 1. НЕКОТОРЫЕ КЛАССЫ ФУНКЦИЙ И ОПЕРАТОРЫ
того,
где
57-/ + П/, §? = -*/+Ш/, (8.2)
П/^Пс/ = --1 f ("-Шл^. (8.3)
я ^ <? —z)
особый интеграл существует в смысле главного значения
по Коши и принадлежит классу С« ((?). Кроме того, П/ я/?е<9-
ставляет собой линейный ограниченный оператор в Са (<?), ого-
бражающий это пространство в себя.
Доказательство. Пусть z — фиксированная точка области
G. В таком случае имеем
= hm—\ | i-i-i—Ц2! ?» dti — / (z) hm— I \—2—L (8.4)
(здесь G, — область, получаемая из G выбрасыванием круга
\% — z\ =S!e). Но, применяя формулу G.6), можно написать
= Фг(г), (8.5)
где
(8.6)
Г
Заметим, что если Г есть окружность \% — zol =Л и z лежит внут-
внутри нее, \z — Zol <Д, то Фг(г) = 0.
Таким образом, в силу (8.4) и (8.5)
По/ = - i j
G
Так как /ed(ff), то двойной интеграл в правой части послед-
последнего равенства следует рассматривать как обычный несобствен-
несобственный интеграл.
Таким образом, для любой функции / класса Ca(G) особый
интеграл (8.3) существует в смысле главного значения по Коши
§ 8. ДИФФЕРЕНЦИАЛЬНЫЕ СВОЙСТВА ФУНКЦИЙ ВИДА TGf 55
в каждой точке z внутри области G и выражается форму-
формулой (8.7).
Докажем теперь, что g(z) = П0/е ?<*(?), 0 < а < 1, если
/С5)
()
Если гиг, — точки G, причем z ?= z,, то
— z)
!LZirr_ni)^i!l)_
/Wh) Г Г dun ,
^^ .. (8.8)
ZHSZJ
Так как
л Jj (С - ^J (Е - М п (z - zi) У (Е - гJ
G Г
то, учитывая равенство (8.5), будем иметь
/7'f г!п Фр B) Z Z1 ФгBЛ '
"д аЧ г ' j 1 I I \ \<
(8.8а)
На основании этой формулы равенство (8.8) мы можем те-
теперь записать в следующем виде:
G
+ -~— j \ ^Ц dg dr\ +
(z — z, Фг, (гЛ — Фг (z) ,
J-Z1+ ,-, ~Фг
56 ГЛ. 1. НЕКОТОРЫЕ КЛАССЫ ФУНКЦИЙ И ОПЕРАТОРЫ
Так как ГеGа+\ 0<а<1, то интеграл типа Копта Фг(г),
заданный равенством (8.6), принадлежит Ca+1(G). Поэтому
;(ё)
[
Пусть j<=Ca(G), т. е.
\f(z)-f(Zl)\^H(f, а, ?Iг-2,|«, 0<а<1.
Тогда, учитывая еще неравенство F.7),
J_C? /@-/(*) ^ Ж/, в, б) Г Г ЗД ^^
"•У (?-*)г(?-М л JeJ 1С —«I26! 5 —*xl
< Л^Я (/, а, С) | z - 2l |а~\ (8.9а)
причем Ма не зависит от области G. С помощью этого неравен-
неравенства из (8.9) получаем
\g(z)-g(zi)\^Ma(G)Ca(f, Gjlz-zj», (8.10)
где
Ма (G) = 1 + 2М'а + Са (Фг, G) + Н (Фг, G).
Из (8.7) вытекает также следующее неравенство:
| Пе/1 < М'а (G) Н (/, a, G) + С (/, G) С (Фг, G) < М"а (G) Са (/, G).
(8.11)
Из (8.10) и (8.11) следует неравенство
Ca(nof,G)<M*(G)Ca{f,G). (8.12)
Таким образом, мы установили, что Пс/еСа(С!), если
^Ca(G)*). Более того, По/ — линейный оператор в Ca(G), ото-
отображающий это пространство в себя.
Переходим теперь к выводу формул (8.2). Обозначая Тс/ че-
через h(z), при z?=zy, z, Zi e G, имеем
1
При выводе этого равенства следует воспользоваться фор-
формулой (8.8а). Если f^Ca(G), то из (8.13) сразу получим
*) Это предложение впервые было доказано Жиро [34] (см. еще [54],
[56а]).
§ 8. ДИФФЕРЕНЦИАЛЬНЫЕ СВОЙСТВА ФУНКЦИЙ ВИДА TG/ 57
неравенство
h (Zjj — h (г)
¦/B)
Фг
\MaH{f,a,G)\z — zl\*
ФгОО-ФгК)
,G). (8.14)
Устремляя теперь z,kz вдоль луча, составляющего с вещест-
вещественной осью угол ¦&, Zi — z = Izi — zle"*, будем иметь
(8.15)
Таким образом, если Ge C«, f<^Ca{G), то
Положив здесь й = 0 и Ь — -^-, получим формулы (8.2), которые
можно записать еще в виде
(8.17)
"«(/). (8-18)
Это означает, что Тс/—вполне непрерывный оператор в Ca(G),
причем отображает это пространство в Ca(G).
Пусть теперь f^Cl(G). В таком случае с помощью формулы
G.6) найдем
При этом выполняются следующие неравенства:
Са (Пс/) < Ci (TG/)
G Г Г
Так как
Л»п " J J <?? ? — г я J J <?? ? — z'
58 ГЛ. 1. НЕКОТОРЫЕ КЛАССЫ ФУНКЦИЙ И ОПЕРАТОРЫ Г
то из (8.19) получим
п т (аЛ 1 Г/(?)ДЕ ,Я9т
По/ = TG {ш - ш J -р-г. (8.20)
г
Отсюда, согласно первой формуле (8.16),
^ = ^1, /eCx(g). (8.21)
Кроме того, если / е G^ (G), 0 < а < 1, то из (8.20) в силу (8.16)
будем иметь
^ (§i)Jjt<M (8.22)
Формулы (8.21) и (8^22) показывают, что если G е G|. /е
е Са(в), то Пе/е Ca(G). Продолжая аналогичные рассужде-
рассуждения, мы убедимся, что если GeC™+1, /eCa(G), 0<«<;1, то
Пс/еСЙТс/еС1^), причем
С (Пе/) < С+1 (ТОУ) < Мт,аС (/, G). (8.23)
Это означает,_что Тс/ является вполне непрерывным оператором
в любом С™ (G) при 0 *? a < 1, те = 0, 1, ... Таким образом, тео-
рема__ 1.33 доказана полностью. Следует иметь в виду, что под
C^{G) подразумевается С (G).
Следствие теоремы 1.33. Пусть i(z)eCo(G). Тогда
PG/ = TG (Af) является вполне непрерывным оператором, причем
если fs=C% (G), mo PG/ e C%+1 (С).
В самом деле, в силу (8.23)
Но, используя неравенство A.6а), будем иметь
C+1 (Pg/) < Л^.аС (A) Cl (/) < К.аС« (/)•
Отсюда легко следует, что Ро/ — вполне непрерывный оператор,
переводящий С« (G) в Ca+1 (G).
Из (8.15) следует также следующая
Теорема 1.34. Если f<^Ca.(G) и /(zo) = O, zo^G, то функ-
функция То/ моногенна в точке z0, т. е. в этой точке существует про-
производная от функции Тс/ по комплексному аргументу, причем
(ъ) ^5 "Л /о о/\
2. Как мы видели выше, функция То/ непрерывна на всей
плоскости, если }^LP{G), p>2. Что же касается Пс/, то она,
§ 8. ДИФФЕРЕНЦИАЛЬНЫЕ СВОЙСТВА ФУНКЦИИ ВИДА ТС/ 59
вообще говоря, испытывает разрыв при переходе через кон-
контур Г. _
Пусть ГеС2, a f^Ca(G). Тогда мы можем считать функцию
/ продолженной с сохранением класса и вне U. Поэтому формула
(8.20) остается в силе как при z e G, так и при zeG + Г.
Пусть некоторая функция i|)(z) задана как внутри G, так и
вне G. В таком случае через ty+(t) и if~(f) будем обозначать пре-
пределы if(z), если они существуют, когда^ z стремится к точке t
контура Г, оставаясь внутри G и вне G соответственно. Как из-
известно, для интеграла типа Коши C.1) имеют место формулы
([60а], гл. 1, § 17):
г г
(8.25)
Используя эти формулы, из (8.20) сразу получим равенство
[11а], [96]
(ff (8.26)
выражающее скачок функции Пс/ при переходе через контур Г.
3. Рассмотрим теперь случай, когда G совпадает со всей плос-
плоскостью Е. Этот случай имеет некоторые свои особенности. Поэто-
Поэтому необходимо на нем специально остановиться.
Прежде всего заметим, что теорема 1.33 остается в силе, если
/(z) a LPC™(E),l^p<2. Имеет место
Теорема 1.35. Если / e= LpCa (E), то TEf e= LpCZ+1 (E) и
C
Доказательство. Пусть G — круг \z\<R. Тогда
ФгB) = ~
и в силу неравенства (8.9а) из (8.9) получим
| g (Zl) - g (z) |< MaH (/, а, Е) | Zl - z |«, Ма=1 + 2М'а. (8.27)
Так как правая часть этого неравенства не зависит от R, то
оно сохраняет силу и при Д->°°. Следовательно, ПЕ/^^Г(Е)
если |еЯо(Е). Далее, так как
ТО
гл- '• НЕКОТОРЫЕ КЛАССЫ ФУНКЦИЙ И ОПЕРАТОРЫ
< К.* (lp (Л Е) + Н (/, а, Е)). {8.28}
Из (8.27) и (8.28) следует, что
Са (ПЕ/, Е) < М';>а [Lp (f, E) + И (/, Е)\.
Таким образом, TlEf^Ca(E), если f^LpCa(E), p> 1.
Согласно (8.14) внутри круга jzl ^R имеет место неравенство
h (Zl) - h (z)
Это неравенство, очевидно, имеет место и при R -*¦ °°. Отсюда
следует, что равенства (8.16) остаются в силе, если j<^LvC?.(E)r
р>1,т.в. Тв/ е Ci (?), если / е= LPCa (?).
Таким образом, теорема 1.35 доказана при пг = 0. Аналогично
доказывается теорема для любого т>0*).
§ 9. Расширение оператора П/
В этом параграфе мы покажем, что оператор П/ может быть
расширен до линейного (ограниченного) оператора в простран-
пространствах Lv, p > 1.
1. Докажем предварительно три леммы.
Лемма 1. Если / и # е D°x (E) то
U (9.1)
где {i,g)=[\j{z)glj)dxdy,
Е
Е
Доказательство. Если / е D°x (E), то согласно формулам
(8.20) и (8.21)
df\ dllf_df ,q4
*) Как указал нам И. И. Данилюк, доказательство этой теоремы тре-
требует некоторых уточнений. Оно проходит в следующей формулировке:
пусть / е 1рл1рС% (Я), 0 < о < 1. Если р > 2, то Т?/ г ^Р,(Р_2)/рСг^+1 (?)
и Пв/ s С™'(?). Если же р > 4, то Тв/ s ipC^+1 (Я) и П?/ е С™ (?). -
Примеч. ред.
§ 9. РАСШИРЕНИЕ ОПЕРАТОРА П/ Q\
С помощью интегрирования по частям, используя формулы
G.5) п G.6), получим:
(П/, g) = lim I Ufg dx dy = lim ^ g dx dy =
= - lira Г f T/| dxdy = lim f f /T fe) dsdy =
= lim f f flfgdxdy = (f, Eg).
При выводе этой формулы мы не выписали криволинейный
интеграл по окружности Ы ==/?, который равен нулю, так как
g == 0 при достаточно большом R. _
Формула (9.1) показывает, что П и П — взаимно сопряжен-
сопряженные операторы на линеале Die (E).
Лемма 2. Если f<=Dlc{E), то
ПП/ = /. (9.4)
Доказательство. По свойству (9.3) оператора П/ имеем
ПП/ = д{Г (д2Т/). (9.5)
Согласно формуле D.10) внутри круга Ы <R
T/=-J- Г 11Л — ± Г Г ат/ dl ац
2.11 J r_j л .) .1 5? 1 — з'
Так как Tj = 0{\г\~*), то
Следовательно,
Дифференцируя обе части этого равенства по z, согласно форму-
формуле (9.5) получим _ _
Формула (9.4) показывает, что на линеале Dlo (E) оператор
П имеет обратный П~', который совпадает с его сопряженным П.
Лемма 3. Если j и h<= D°x (E), mo
(П/, ГО») = (/, А). (9.6)
?2 ГЛ. 1. НЕКОТОРЫЕ КЛАССЫ ФУНКЦИЙ И ОПЕРАТОРЫ
Доказательство. Если в формуле (9.1) положим g = Hh
и учтем (9.4), получим (9.6)*).
Если / = /г, то формула (9.6) примет вид
(П/, Щ) = (/,/), т.е. U(Uf,E) = Ia(f,E)- (9-7)
В силу (9.6) оператор П оставляет инвариантным скалярное
произведение элементов линеала Dtc (Е), а согласно (9.1) и (9.4)
сопряженный оператор П совпадает с обратным П~1.
Таким образом, на линеале DU (Е) оператор П обладает свой-
свойствами унитарного оператора. Так как линеал Drc(E) плотен в
Ь2(Е), то согласно известной теореме функционального анализа
операторы П и П могут быть продолжены единственным образом
до взаимно сопряженных линейных унитарных операторов про-
пространства Lt(E).
2. Рассмотрим следующий оператор:
П^ ^ d-T^g, где T.,g = ±^e-^f. (9.8)
Применяя оператор П* к финитным функциям g, принадлежа-
принадлежащим линеалу D^ (E), получим бесконечно дифференцируемые
функции, которые убывают на бесконечности как Ы~2. Поэтому
можно рассматривать композиции вида П^П*^, и*П^, где
Il*g = дгТ^. (9.9)
Если ge Dm(E), m^ 1, то можно показать, что
3/T^ = T*Ejg), dz4*e = f*(dzg). (9.10)
Если учесть, что T%g — — \ ] [м dldr\, то равенства (9.10)
Ё
устанавливаются с помощью дифференцирований под знаком ин-
интеграла.
В силу формул (9.10) имеем
I С С С С
= д- lim \dtg(t)dEt
*) Нас не должно смущать то, что, вообще говоря, П/ е Z)^, (?). Не-
Нетрудно видеть, что формула (9.1) имеет место и в том случае, когда
g=Uh, h^D°x(E), так как вблизи бесконечности g = O(\z\~2), Tf =
=== О(|zl) и приведенное выше доказательство леммы сохраняет силу.
§ 9. РАСШИРЕНИЕ ОПЕРАТОРА ГУ 63
С помощью интегрирования по частям находим
Следовательно,
где
=ii™.??Я
U\<R
При вычислении этого интеграла мы можем считать, что точки z
и ? расположены на вещественной оси. Произведя теперь замену
переменных интегрирования по формуле t=\z — ?1ре'ф, (z=4=?),
получим
R
Я2 ^S Я-^ocJ , ' Z —
о 1- R
Следовательно,
= ?(*). (9.11)
Заменяя в этом равенстве g на g и переходя затем к сопряжен-
сопряженному равенству, получим П*П^^ = g. Легко устанавливаются
также следующие формулы:
(П./, g) = (/, П^), (П,/, 11^) = (/, g). (9.12)
С помощью равенств (9.11) и (9.12), которые справедливы для
любых финитных функций, теперь легко заключаем, что опера-
операторы П;,. и П* могут быть продолжены единственным образом до
взаимно сопряженных линейных унитарных операторов гильбер-
гильбертова пространства LZ(E).
Докажем теперь, что на линеале D*L (E) имеет место нера-
неравенство
, (9.13)
ОД гл- 1- НЕКОТОРЫЕ КЛАССЫ ФУНКЦИЙ II ОПЕРАТОРЫ
где Лр — положительная постоянная, которая зависит от р, но
не зависит от g.
Имеем
.oi ni J J \ дс \Z\ ' oif-13 ! ^ь
Ho
Если теперь во втором интеграле заменим переменные интегри-
интегрирования по формуле % = ре'ф и затем перейдем к пределу при
€ -*¦ 0, получим
о о
Учитывая, что
2Я Я
ri> + z)d<f= \ ei(f [g(pe^ + z) — g(— pei(o + z
о о
мы можем равенство (9.14) переписать еще так:
я
(9.15)
0
где g (г, ei(p) = —: I ^-—i—^ йр; заменяя здесь г через
— оо
(т + го) е'ф, получим
Вспомним теперь, что для преобразования вида
§ 9. РАСШИРЕНИЕ ОПЕРАТОРА П/ 65
имеет место следующее неравенство, принадлежащее Риссу [77]:
I \%{t)\vdt,
где Ар — положительная постоянная, которая зависит исключи-
исключительно от р. Используя это неравенство, из (9.16) получим:
j | g [(т + ia) e^, еЪ]\р dx < Л? J | g [(т + ta)'e^} \v dx.
— oo —oo
Интегрируя это неравенство вновь относительно о от — °° до +°°
и затем произведя замену переменных интегрирования по форму-
формуле ? = (т + га) e<v, получим
J \[g(Z, e**)\pdE^H*^\g(Q\'dEt. (9.17)
Е "Е
Из формулы (9.15) с помощью неравенства Гельдера получим
я
о
Отсюда в силу неравенства (9.17) получим неравенство
из которого сразу следует (9.13).
С помощью неравенства (9.13) мы можем обеспечить расши-
расширение оператора П^ до линейного оператора, действующего из
LP(E) в ЬР(Е) при любом р > 1.
Пусть g — элемент ЬР{Е), р> 1. Пусть gn — некоторая после-
последовательность элементов Die (E), которая сходится в среднем
к g; Lp(g — gn)-*- 0. В таком случае, в силу неравенства (9.13),
последовательность П^п сходится в норме Lp к некоторому эле-
элементу Ь„ (Е). Этот элемент мы обозначим через П^-g: Lp (Tl%g —
— n.,Y_gn) -> 0, п ->- оо. Если две последовательности gn и gn линеа-
линеала DX(E) сходятся к g, то П#„ и П#и также сходятся к одному
и тому же пределу. Оператор П^-g, очевидно, аддитивен и одно-
однороден. Кроме того, для него, очевидно, выполняется неравенство
(9.13). Следовательно, П„.^ — линейный ограниченный оператор
в любом Lp (Е), р > 1.
Рассмотрим теперь вопрос о расширении оператора П. На ли-
линеале Dlo{E) в силу (9.11), (9.8) и (9.9) имеем
П
(9.18)
gg ГЛ. 1. НЕКОТОРЫЕ КЛАССЫ ФУНКЦИЙ И ОПЕРАТОРЫ
Здесь мы воспользовались формулой
справедливость которой легко следует из теоремы 1.16, если
учесть, что Т*П*# обращается в нуль при z = °°.
Формула (9.18), очевидно, позволяет рассматривать П как
линейный оператор в любом LP(E), р>1.
Обозначим через Лр норму оператора П в LP(E): АР== LP(Tl),
р>1. Как мы видели выше, П — унитарный оператор в Ьг(Е).
Следовательно, Л2 = 1. Но согласно одной теореме М. Рисса [77]
(см. также [35], гл. 9) Лр является логарифмически выпуклой
функцией от р. Следовательно, для любого 8 > 0 можно указать
такое 6(е)>0, что
Л,-1<8, если |р-21<6(е). (9.19)
Этим свойством нормы Лр оператора П мы неоднократно вос-
воспользуемся ниже.
Замечание. Рассуждения, которые мы применяли выше в
этом пункте, заимствованы в основном из работ А. Зигмунда и
П. Кальдерона [36а, б], где изучены свойства более общих много-
многомерных сингулярных интегралов (см. еще [566]).
Выше в основу определения оператора П была положена
формула
П/ = <ЭгТ/, (9.20)
которая строго обоснована до сих пор лишь для случая функции,
непрерывных в смысле Гельдера. Естественно теперь встает во-
вопрос, сохраняется ли она и в более широких пространствах
LP(E), р>1. На этот вопрос отвечает следующая
Теорема 1.36. Если f^LP(E), р>1, то Т/ допускает обоб-
обобщенную производную по z, равную П/, т. е. в таком случае имеет
место формула (9.20), которую можно записать еще так:
^ = / + П/, = _»/ + ш/. (9.21)
Доказательство. Нужно доказать, что
/ = J j (T/ 6>z<p + <рП/) dx dy = 0, (9.22)
G
где ф — любой элемент D\ (G).
Пусть /я — последовательность элементов линеала Deo (G), КО'
торая сходится в норме LP к /: LP(f — fn)-*- 0 при п ->- <». Так как
7« = Я (W*4> + ФВД dxdy = 0 (n = 1, 2,...), (9.23)
§ 10. СВОЙСТВА ФУНКЦИЙ КЛАССОВ Dz (G) и D- (G) 67
z
то, учитывая, что последовательности Т/„ и П/п сходятся в норме
LP к Т/ и П/ соответственно, из (9.23) предельным переходом
яолучим (9.22).
Из теорем 1.16 и 1.36 вытекает следующая
Теорема 1.37. Если д-f е LP(G), р>1, то существует
dzf и принадлежит также LP(G).
Доказательство. Так как / = Ф + Т/-, ФеЯ0(Gx), то
U = Ф' + П/j е ?р (Gy, где Gt — любая подобласть G.
Как мы видели в предыдущем параграфе, оператор П/ в про-
пространстве Со. допускает интегральное представление в виде
где интеграл следует понимать в смысле главного значения по
Коши. Естественно также спросить, сохраняет ли силу эта фор-
формула в случае пространства LP(E), p > 1. Не останавливаясь на
подробностях доказательства, отметим, что из общих результатов
А. Зигмунда и П. Кальдерона [36а, б] можно вывести, что если
f^Lp(E), р>1, то правая часть равенства (9.24) существует
в смысле главного значения почти везде и равна П/.
§ 10. Некоторые другие свойства функций
классов DZ(G) и D~(fi)
Опираясь на предыдущие результаты, мы докажем в этом па-
параграфе еще ряд свойств функций классов DZ(G) и D~Z(G). Оче-
Очевидно, достаточно ограничиться рассмотрением лишь класса D-z.
1. Теорема 1.38. Пусть /sZ)liP(G), р> 1, gf=Dltpf(G), p' =
— ~р 9. Тогда произведение /g e D^ (G), причем
d-z{fg) = fd-g + gd-J. (Ю.1)
Доказательство. Пусть G4 — некоторая подобласть обла-
области G, Gx <= G. Тогда согласно формуле E.12)
g(z)=W(z)+ Tgi
Следовательно,
fg = h + T/tTft, к = Ф? + ФТ?, + W ТД.
Заметив, что формула A0.1) имеет место, если хотя бы одна из
функций / и g принадлежит C"(G), получаем, что
дф =
5*
68 гл- *• НЕКОТОРЫЕ КЛАССЫ ФУНКЦИЙ И ОПЕРАТОРЫ
Поэтому остается доказать формулу A0.1) лишь для произ-
произведения Т/,Т#„ т. е. нужно обнаружить, что если <р е D\ (Gt), то
J (ATft + glTft) <p]dzdy = 0. A0.2)
J J
G
Пусть /„ — последовательность функций линеала Da>{Gi),
которая сходится в норме Ьр к /4. Очевидно, имеем:
j
J j [ ] = 0. A0.3)
G
Так как /, е L,(G), Т& е= ?_s> (б), а ^ е= LP, (G), T/x е= L_?l_ (G),
p-i p'-i
то в результате предельного перехода из A0.3) получим A0.2).
Здесь следует учесть, что /„ и Т/„ сходятся в норме Ьр (следо-
(следовательно, и слабо) к /i и T/i соответственно.
2. Теорема 1.39. Пусть д-f^.L2(G). Пусть функция z =
= w(t,) реализует взаимно однозначное и непрерывное отобра-
отображение области G' плоскости % на область G плоскости z. Если
w(%)^ С1 (С) и якобиан преобразования нигде не обращается
в нуль внутри области, то сложная функция f (w(Q)^.D-AG'),
Di(G'), причем
dtf {w @) =*dzf (z) d^w + д-f (z) д-^w, (i o. 4)
(w (?)) = dtf (z) dtw + д-J (z) dzw. A0.5)
Доказательство. Достаточно доказать первую из этих
формул, вторая получится аналогично. Заметим прежде всего,
что согласно теореме 1.37 из условия d-J^L2(G) следует, что
dzf e L2{G). Так как внутри всякой подобласти G± области G
функцию / можно представить в виде
/ = Ф + Tg, где Ф е «о (GJ, g = d-f,
то формулу A0.4) достаточно доказать лишь для функции вида
Tg, где g^Lz{G), при этом следует иметь в виду, что формула
A0.4) справедлива, если /eC'(G), Пусть gn — последователь-
последовательность элементов Z)« (G), которая сходится в норме Lv к g. Тогда
последовательность fn(w(?)), где fn(z)—Tgn, будет сходиться к
f(w(?,)) в норме LP по области G' плоскости ?,.
Поэтому, если <р е D\ (G'), то
= lim \ IU {v> @) д«р (I) dgdtj =
71-* ОО Qt
§ 10. СВОЙСТВА ФУНКЦИЙ КЛАССОВ Dz (G) и D- (G) 69
= - lim f \ Ф @ (dzfn (z) дм + 9j/n (z) 5?ю) dl dr[ =
П-»ОО Q, * Ь
= — lim I f ф (Q [Ugnd-ptv + gn<%u;] d\ dr\ =
= - f f Ф (Q [UGgd-w + gd-м] d\ dx\ =
= - J f Ф @ [dzTgd-w + 5-Tg^] dg dr\t
G>
что и доказывает формулу A0.4).
Теорема 1.40. Пусть значения функции z% = f(z) класса
J9j(tr) принадлеокат некоторой ограниченной области G%, причем
g=d-J<=Lp(G), p>2.
Пусть функция Ф (z*) голоморфна внутри области G%, при-
причем G* cr G®. 5 таком случае сложная функция Ф [/(z)] = /^ (z)
принадлежит D-(G), причем
д,Ш = Ф'УМ)дЛ®. A0.7)
Доказательство. Внутри подобласти G4 области G
Пусть gn — последовательность элементов D^(Gi), которая схо-
сходится в норме Lp к g. Тогда последовательность /« = Ф + TGlgn
сходится к / равномерно на ??4. Поэтому последовательности
Ф(Л»B)) и Ф'(/пB)) будут сходиться равномерно внутри Gt к
Ф(/(г)) и Ф'(/(г)) соответственно. В силу этого,
то
J J ф {j (z)) <?-ф dx dy = lim J J Ф (fn (z)) d-z<p dx dy —
= — lim ф (z) Ф (/„ (z)) o-fn (z) dx dy =
n-*<x>''G''
= - lim J J ф (z) Ф' (/„ (z)) gn (z) dx dy = - j j ФФ' (/ (z)) ^ (z) d* dy,
что и доказывает формулу A0.6). Аналогично доказывается вто-
вторая формула A0.7).
Глава 2
ПРИВЕДЕНИЕ ПОЛОЖИТЕЛЬНОЙ ДИФФЕРЕНЦИАЛЬНОЙ
КВАДРАТИЧНОЙ ФОРМЫ К КАНОНИЧЕСКОМУ ВИДУ.
УРАВНЕНИЕ БЕЛЬТРАМИ. ГЕОМЕТРИЧЕСКИЕ ПРИЛОЖЕНИЯ
§ 1. Вводные замечания. Гомеоморфизмы
квадратичной формы
В этой главе основное место занимает изучение проблемы
приведения квадратичной формы
F = a(x, y)dx2 + 2b(x, y)dxdy + c(x, y)dy\ A.1)
д = ас — Ъг > О
к каноническому виду
F = A(du* + dv2), \Ф0. A.2)
Эта задача сводится к доказательству существования однолист-
однолистных решений (гомеоморфизмов) системы уравнений Бельтрами
-г ди dv ,dv п
ду ду дх
К этой проблеме приводится ряд задач анализа и геометрии (на-
(например, задача конформного отображения поверхности на плос-
плоскость, задача приведения к каноническому виду эллиптических
уравнений в двумерной области и др.). Впервые наиболее пол-
полное решение этой задачи было получено, по-видимому, Л. Лих-
Лихтенштейном D8], существенно использовавшим для этой цели
результаты Коебе по теории униформизации. Лихтенштейн счи-
считал коэффициенты квадратичной формы непрерывными в смыс-
смысле Гельдера. В более общем случае, когда коэффициенты просто
непрерывны, задача решена иным путем М. А. Лаврентьевым
[45а, б]. Дальнейшие обобщения можно найти в работах [46а],
[59], [18], [93].
В этой главе предлагается способ, указанный ранее автором
в [14в] и позволяющий дать глобальное решение проблемы при
весьма широких предположениях относительно коэффициентов
квадратичной формы A.1). Аналогичный метод доказательства
§ 1. ВВОДНЫЕ ЗАМЕЧАНИЯ 71
независимо был предложен несколько позже Л. Альфорсом [За]
(см. также [92], [5г]). Дальнейшее развитие и применение этого
метода к вопросам квазиконформных отображений имеется в ра-
работах Б. В. Боярского [116, в, г, д].
В дальнейшем мы все время будем считать выполненными
следующие условия:
1) а(х, у), Ь(х, у), с(х, у)— измеримые ограниченные функ-
функции на всей плоскости Е;
2) А = ас — Ъг S? До > 0, а > 0 почти везде на Е (До = const).
Из этих условий следует, что
Заметим, что условие A.4) будет всегда выполняться, если в
окрестности бесконечно удаленной точки а = с Ф О, Ъ = 0. Это
означает, что квадратичная форма A.1) в окрестности точки
z = оо имеет канонический вид_ A.2). Если а, 6, с заданы в огра-
ограниченной замкнутой области G, где они удовлетворяют условиям
1) и 2), то их всегда можно продолжить на всю плоскость так,
чтобы выполнялись все указанные выше условия. Для этого до-
достаточно вне G положить, например, а = с Ф 0, 6 = 0.
Главной целью настоящей главы является доказательство су-
существования такого преобразования независимых переменных
и = и{х,у), v = v(x, у), A.5)
в результате которого, во-первых, осуществляется взаимно одно-
однозначное и непрерывное (гомеоморфное) отображение заданной
области Gz плоскости z = х + iy на область Gw плоскости w =
— и + iv и, во-вторых, квадратичная форма A.1) приводится к
каноническому виду. Если такое преобразование существует, то
комплексную функцию w = и + iv будем называть глобальным
гомеоморфизмом квадратичной формы A.1). Если рассматривае-
рассматриваемые области Gz и Gw покрывают соответственно плоскости г и ю,
то соответствующий глобальный гомеоморфизм будем называть
полным гомеоморфизмом квадратичной формы.
Полезно ввести также понятие локального гомеоморфизма.
Функцию w(z) будем называть локальным гомеоморфизмом
квадратичной формы A.1), если она осуществляет гомеоморф-
гомеоморфное отображение некоторой окрестности точки z0 на окрестность
точки wo = w(zo) и при этом форма A.1) принимает вид A.2).
Ниже, при определенных условиях, мы докажем теоремы 6
существовании гомеоморфизмов квадратичной формы A.1). Мы
выясним также дифференциальные свойства гомеоморфизма
в зависимости от дифференциальных свойств коэффициентов
формы A.1).
72 ГЛ. 2. ПОЛОЖИТЕЛЬНАЯ ДИФФЕРЕНЦ. КВАДРАТИЧНАЯ ФОРМА
§ 2. Система уравнений Бельтрами
Очевидно,
aF = (adx + (b + гУД) dy) {a dx + (b — H~K) dy).
Если найдутся функции \х, = \х, (z) и w = u + iv, удовлетворяю-
удовлетворяющие равенству _
ndw = adx + (b + iHA)dy, Д = яс-Ь2>0, B.1)'
то будем иметь _ _
^ Л = ^. B.2)
Как видно из B.1), w удовлетворяет следующему (комплекс-
(комплексному) уравнению:
а?_(б-М/Д)?-0, B.3)
или
d-zw — q (z) dzw = 0, B.4)
где
gOO-. —V?+*- a~c+j^. B.4а)
^w a+УД —г& a + c + 21/д
Уравнение B.4) равносильно следующей системе двух вещест-
вещественных уравнений:
-a + b = 0, /5|2 _&|2. + ^ = 0. B.5)
дх ду ' дх ' ду ду дх х '
Эта система известна под названием системы дифференци-
дифференциальных уравнений Бельтрами. Она, очевидно, представляет собой
обобщение системы Коши — Римана, причем между ними, как
увидим ниже, имеется весьма тесня связь (§ 4, п. 4).
Таким образом, задача отыскания гомеоморфизмов квадра-
квадратичной формы A.1) сводится к доказательству существования
однолистных решений системы уравнений Бельтрами B.5), ко-
которые будем называть также гомеоморфизмами этой системы.
§ 3. Построение основного гомеоморфизма
уравнения Бельтрами
Будем говорить, что w(z) есть обобщенное решение уравне-
уравнения B.4) в области G, если существуют обобщенные производ-
производные d\w и д-р класса Lp (G), р > 1, удовлетворяющие уравнению
B.4) почти везде в G. Мы докажем сперва существование обоб-
обобщенных решений класса Dip, р > 2*).
*) Ниже мы выведем формулу, которая позволит строить еще более
широкие классы обобщенных решений, имеющих изолированные особен-
особенности, точки ветвления и др. (§ 4, п. 4).
§ 3. ПОСТРОЕНИЕ ОСНОВНОГО ГОМЕОМОРФИЗМА 73
Как уже было условлено выше, мы все время будем пред-
предполагать, что q(z)— измеримая и ограниченная функция на всей
плоскости, удовлетворяющая условию
\q(z)\<qo<l. C.1)
Кроме того, допустим, что q(z) принадлежит некоторому Lp, (E),
р' < 2. Тогда из неравенства | q (z) |р ^ | q (z) \p', p > р', следует,
что q принадлежит любому классу LP(E), p> р'. Мы в дальней-
дальнейшем освободимся от этого предположения, которое накладывает
определенные ограничения на характер убывания функции q(z)
вблизи бесконечности.
Докажем теперь, что при указанных условиях уравнение
Бельтрами B.4) допускает решение вида
^dE^z + Tft C.2)
где / — искомая функция, принадлежащая некоторому классу
L,(E),p>p'.
Согласно формулам (8.16) гл. 1 имеем:
diW = /, dzW = 1 + OzTf = 1 + П/. C.3)
Внося эти выражения в уравнение B.4), получим:
f-qllf=q. C.4)
Это уравнение принадлежит классу двумерных сингулярных
интегральных уравнений, изученных в свое время Ф. Трикоми
[856]. Мы рассмотрим его теперь как линейное уравнение в про-
пространстве LP(E) и докажем, что оно разрешимо.
В самом деле, так как Lp(Hf)^ ApLp(f), AP = LP(U), то
Lp(qllf)^ <7о?р(П/)< q0ApLp(f). Но постоянная Ар непрерывно
зависит от р [77]. Поэтому, учитывая, что qa < 1 и Л2 = 1 (см.
формулу (9.7) гл. 1), найдется такое е>0, что при 2 — б=^/?<
< 2 + е выполняется неравенство q0AP < 1. В силу этого, соглас-
согласно принципу сжатых отображений, решение уравнения C.4) су-
существует и принадлежит любому классу LV(E), \р — 2| < е.
Согласно теореме 1.21, функция W — z = Т/ будет принадлежать
CJB + б). Кроме того, она, очевидно, принадлежит Z>),2+s.
Важно отметить, что уравнение C.4) может быть решено ме-
методом последовательных приближений по схеме
/о = g, /n+i = q + дП/„ (п = 0, 1, ...). C.5)
Этот процесс приводит к ряду
f=q+qIlf+qU(qUq)+... C.6)
Этот способ позволяет находить приближения к функции со
сколь угодно большой наперед заданной точностью.
74 гл- 2- ПОЛОЖИТЕЛЬНАЯ ДИФФЕРЕНЦ. КВАДРАТИЧНАЯ ФОРМА
Ниже, в § 5, мы докажем, что функция C.2) реализует пол-
полный гомеоморфизм, причем она удовлетворяет на бесконечно-
бесконечности следующим условиям:
^1 При Z+°°. C.7)
Для доказательства этого основного предложения нам нужно
установить существование локальных гомеоморфизмов и изучить
некоторые их свойства. Этому вопросу посвящен следующий
параграф.
Условия C.7) легко следуют из формулы C.2), если учесть
формулу F.10а) гл. 1. Ниже мы убедимся, что этими условиями
полный гомеоморфизм однозначно определяется (§ 5, п. 3). По-
Поэтому гомеоморфизм, выраженный формулой C.2), мы будем
пазывать основным гомеоморфизмом уравнения Бельтрами B.4).
§ 4. Доказательство существования локального гомеоморфизма
1. Имеет место
Теорема 2.1. Пусть Go— окрестность некоторой фиксиро-
фиксированной точки z0. Если q(z)^Ca(G0), О<ос<1, то в некоторой
малой окрестности Go точки zo(Goc:Go) существует локальный
гомеоморфизм W0(z) уравнения B.4), принадлежащий классу
Cl(G'0),0<a<l.
Доказательство. В результате невырожденного аффин-
аффинного преобразования
% = z — zo + q(z0) (z — z0) D.1)
уравнение B.4) принимает вид
<9-PF - р (I) dtW = 0, p (E) = /^"rrl • <4-2>
6 1 — q (z) q (z0)
Так как \q(z) I < q0 < 1, то легко убедимся, что
В силу того, что р @) = 0, существует замкнутый круг
G& : |?| < б, где выполняются неравенства
-Sil", D.4)
Рассмотрим теперь функцию
@ если
Ра @ =
если ^-
D.5)
0, если |5|>в.
§ 4. СУЩЕСТВОВАНИЕ ЛОКАЛЬНОГО ГОМЕОМОРФИЗМА 75
Очевидно, рв(?)е СкB?) и обращается в нуль вне круга б5. Из
D.4) и D.5) легко получим, что
Поэтому, считая 6 < 1,
С(Ра,
Обозначим теперь через Са (Gg) множество тех элементов
Са(Е), которые обращаются в нуль вне Ge. Так как Ca(Gs) —
замкнутое линейное многообразие элементов Са.(Е), то можно
рассматривать его как пространство типа Банаха.
Рассмотрим оператор Па/ = рв(?)П/, где /еС(Сб). Оче-
Очевидно, Пв/ — линейный ограниченный оператор, отображающий
пространство Са(^б) в себя. Если f e Ca(Gs), то согласно фор-
формуле (8.7) гл. 1
Поэтому
\g(z)\^-Lh(f, a, Ge) j j —^П__<^Я(/, a, Gfl). D.7)
G6 l& Z|
Согласно формуле (8.9) гл. 1 мы имеем также
1*B.)-*(**I ^Ма|2,-22|КЯ(/, a, Ge),
Яа(П/, G)<MaH(f, a, G6). D.8)
Из неравенств D.8) и D.7) имеем
Са (П/, Gfl) < (м. + ^) Я (/, а, бв) < МаСа (/, бв), D.9)
Так как согласно формуле A.7) гл. 1
Са(рбП/, G6)<CK(pe, б,)С(П/, G6) + C(p6, б.)С.(П/, б4), D.10)
то в силу D.6), D.8) и D.10) будем иметь
/, бв) < МьСа (/, бв), МЬ = М (м* + ^-) ба. D.11)
Фиксируем S так, чтобы выполнялись неравенства
76 ГЛ. 2. ПОЛОЖИТЕЛЬНАЯ ДИФФЕРЕНЦ. КВАДРАТИЧНАЯ ФОРМА
В таком случае, как нетрудно видеть,
D.13)
Будем теперь искать решение уравнения D.2) в виде
W(?) = ?- \ JJ/(;)_fg?dy ^S + ТД /еС1(б.). D.14)
Так как
то получим для / уравнение
/E)-р.(?)П/ = р.(?). D.15У
На основании неравенств D.11) и D.13) к уравнению D.15)
можно применить принцип сжатых отображений. Следовательно,
это уравнение имеет единственное решение /(?), принадлежа-
щее C°a(Gu).
Из D.15) с помощью неравенств D.6) и D.11) получим
uCa(f, Gt).
Отсюда в силу D.13) и D.12)
Са(ДСв)<г^-<^5, т.е. A-fca(f,G6)<i. D.16)
Так как / е Са (Gg), то согласно теореме 1.33 функция
W(?) = Z, + Т/е Ca(Ge). Покажем теперь, что PF(?) осущест-
осуществляет гомеоморфное отображение окрестности точки ? = 0 на не-
некоторую окрестность точки PF(O).
Согласно уравнениям D.2) и D.15) якобиан преобразования
выражается по формуле
dW 2
dW
D.17)
Имея в виду неравенства D.3), D.7) и D.16), получим:
D.18)
Таким образом, при |?| <б якобиан /0(?)>0. Следовательно,
функция W(?) = E; + T/, где / — решение уравнения D.15), реа-
реализует взаимно однозначное и непрерывное отображение неко-
некоторого круга l?l < So < б на некоторую окрестность точки W(Q).
§ 4, СУЩЕСТВОВАНИЕ ЛОКАЛЬНОГО ГОМЕОМОРФИЗМА 77
Возвращаясь к переменному z = х + iy, согласно D.1) полу-
получим функцию
W0(z) = W(z - z0 + q(z0) (z - zo)), D.19)
которая, очевидно, является решением уравнения B.4), принад-
принадлежащим классу Ca(G0), где Go— эллипс с центром в точке za,
на который отображается круг | ? | < 8а при помощи аффинного
преобразования D.1). Кроме того, при помощи функции W0(z)
этот эллипс отображается гомеоморфно на некоторую окрест-
окрестность точки W7o(zo). Таким образом, W0(z) представляет собой
локальный гомеоморфизм уравнения B.4) в некоторой окрестно-
окрестности точки z0, что и требовалось доказать *).
Замечание. Можно доказать, что если q(z)^ Са(Е), 0<
< а < 1, то в качестве окрестности, где существует локальный
гомеоморфизм, можно взять стандартный круг Go радиуса б0, ко*
торый не зависит от положения точки zo._
2. Теорема 2.2. Если q (z) е С« (Go), где Go — некоторая
окрестность точки z0, то локальный гомеоморфизм Wo (z), по-
построенный выше, принадлежит классу **)
С+1(Я), 0<сс<1.
Доказательство. Теорема, очевидно, будет доказана, ес-
если мы обнаружим, что функция PF(?) = ? + T/, где / — решение
уравнепия D.15), принадлежит С™ Х(Е).
Как нетрудно видеть, мы можем считать, что функция рвE)
принадлежит С™(Е), причем рв(?) = р(?) при |U^"y и обра-
обращается тончдественио в нуль вне круга |?| < б. Такое продол-
женив функции рвE) вне круга iSI^-g"* очевидно,всегда воз-
возможно. В дальнейшем вместо ре будем писать просто <?(?). До-
Доказательство мы проведем для случая ш = 1. Легко убедиться,
что общий случай может быть рассмотрен аналогично.
Допустим теперь, что q^Ca(E), 0 < а < 1. Рассмотрим
уравнение
q*Tg = qz. D.20)
Оно представляет собой линейное уравнение в Са(Е). Так как
I — qll имеет обратный оператор, то уравнение D.20) приводится
*) Из принципа аргумента, который приводится ниже (с. 81), легко
•следует, что построенный нами по формулам D.14) и D.19) локальный
гомеоморфизм уравнения B.4) на самом деле отображает гомеоморфно всю
плоскость z на плоскость W. Он, однако, удовлетворяет уравнению B.4)
лишь в окрестности точки z0.
**) Точнее говоря, классу С™+1(Е) принадлежит функция W0(z) —
— (z — zo+ g(zo)(z —zo)).
7§ ГЛ. 2. ПОЛОЖИТЕЛЬНАЯ ДИФФЕРЕНЦ. КВАДРАТИЧНАЯ ФОРМА
к уравнению
g - (I - дП)-lq.1g = (I - qH)-%. D.21)
Так как Т — вполне непрерывный оператор, а (I — дЩ~* — ли-
линейный, то оператор (I — дП)?»^ является вполне непрерыв-
непрерывным в Са(Е). Докажем, что уравнение D.21) всегда имеет ре-
решение в Съ(Е) (правая часть его, очевидно, также принадлежит
Са (Е)). Пусть g0 — решение соответствующего однородного
уравнения, которое эквивалентно сингулярному однородному
уравнению
g0 - qUg0 - qzTg0 = 0, ga^Ca{E). D.22)
Из D.22) следует, что go = 0 в окрестности точки z = °°.
Вводя в рассмотрение функцию
Е
и учитывая, что (см. формулы (8.20), (8.22) гл. 1)
dz7g0 = go, дЩо + qzTg0 = d, (qUTg0),
равенство D.22) можем записать в виде
= 0,
т. е. Tg0 — ^ПТ^о = Фо(«), где Ф0(г)—целая функция. Но
Tg0 — ^ПТ^о обращается в нуль на бесконечности. Поэтому в си-
силу теоремы Лиувилля Ф0(г)=0, т. e. 1go — qTYIg0 = 0. Отсюда
следует, что Tg0 = 0 и go = 0. На основании этого заключаем,
что уравнение D.21) или, что то же самое, уравнение D.20)
имеет решение g, принадлежащее классу Са(Е), 0< а < 1.
Но уравнение D.20) можно записать в виде
qmg - q] = 0.
Отсюда легко заключаем, что Tg — <7ПТ# = q- Это означает, что
решение уравнения D.15) имеет вид f = Tg. Так как g^Ca(E),
то в силу теоремы 1.33 /eCj(?). Следовательно, Т/е Са(Е),
что и требовалось доказать.
Совершенно аналогичными рассуждениями доказывается
следующая
Теорема 2.3. Если q{z)e Dm,p(G0), m> 1, р > 2, где Go —
некоторая окрестность точки z0, то локальный гомеоморфизм
Wa(z), построенный выше, принадлежит классу Dmi.ip(E).
3. Теорема 2.4. Пусть q(z) принадлежит С™, 0 < а < 1,
тп > 0, в некоторой окрестности точки z0. Пусть Wa (z) — гомео-
гомеоморфизм уравнения
--2B)^ = 0, D.23)
§ 4. СУЩЕСТВОВАНИЕ ЛОКАЛЬНОГО ГОМЕОМОРФИЗМА 79
соответствующий окрестности Go точки z0. Тогда всякое обобщен-
обобщенное решение этого уравнения в области Go представляется по
формуле
z)] D.24)
и, следовательно, принадлежит классу С™ (Go). Здесь Ф(ш) —
произвольная голоморфная функция комплексного аргумента в
области Wo (Go).
Доказательство. Прежде всего непосредственной под-
подстановкой проверим, что функция вида D.24) действительно
представляет решение уравнения D.23). Очевидно также, что
Ф [W0(z)] ^ C™+1 в некоторой окрестности точки z0, ибо
FF0(z)eC™+1. Остается доказать, что всякое обобщенное реше-
решение уравнения D.23) в окрестности точки z0 можно представить
в виде D.24). В самом деле, рассматривая Wo — W0(z) как не-
независимую переменную, a z — как функцию, мы будем иметь
сложную функцию w(z(W0)), которая согласно теореме 1.40 до-
допускает обобщенные производные по Wo и Wo. Учитывая, что
и>B) удовлетворяет уравнению D.23), будем иметь:
dw(z(wo)) _dw dz dw d7 _ dw Г dz dl 1
^= ~7, ' *T* —ZZ —^П— 7. I ~f~ U I Z I — ' I •
лгтт riff ^rr/ f\ s\TT7 Г1Ъ I лгтт J. \ / *\XT7 I
U Vr UVr UZ О W I OVV Q
Так как W0(z) есть решение уравнения D.23), то
а о о / dz , , dz \
dW dz ' яи/ ^ ' "*" ''
о
ew0 о* \jw0 -' aw0
Из первого равенства следует, что -^ ф 0, Следовательно, в си-
силу второго равенства -=- + q (z) -=- = 0. Таким образом, в силу
dw (z (W ))
D.25) —^-=—— = 0. Согласно теореме 1.15 отсюда следует,
dW0
что w(z(W0)) есть голоморфная функция от Wo, что и требова-
требовалось доказать.
В силу теоремы 2.3, из формулы D.24) теперь немедленно
выводится следующая
Теорема 2.5. Если q(z)f= Dmp(G0), m>i, p>2, то вся-
всякое обобщенное решение уравнения D.23) в области Go принад-
принадлежит классу Dm+itP(G0).
4. Теорема 2.6. Если q(z)e=Ca(G), 0<а<1, то пули от-
отличного от постоянного решения w(z) уравнения D.23) изоли-
изолированы внутри G, т. е. каждый нуль имеет некоторую окрест-
80 ГЛ. 2. ПОЛОЖИТЕЛЬНАЯ ДИФФЕРЕНЦ. КВАДРАТИЧНАЯ ФОРМА
ностъ, внутри которой нет других нулей данного решения. Если
w (z0) = 0 в некоторой точке z0, то в окрестности этой точки
w(z)=*[(z-zt)+q(z.) (z - г„) ]nw(z), D.26)
где п — некоторое целое число >0, a w(z) —непрерывная в
смысле Гелъдера функция в некоторой окрестности точки z0, где
она не обращается в нуль.
Доказательство. Из формулы D.24) следует, что в ок-
окрестности точки z0
z)- Wt(zt)Y<bB(W,(z)), D.27)
где Фо(?)—аналитическая функция в окрестности точки ?<> =
= Wo(zo), причем Фо^о^О. Но в силу формул D.19) и D.14)
имеем:
Wo (z) - W0(z0) = W(Q-W@) = %W* Ц\ D.28)
где % = z — z0 + q (z0) (z — z0),
Так как l/(?) I < ^«(/, G6) Ша, то, очевидно,
Поэтому в силу теоремы 1.19 W% е Ср (?), S = (/? — 2) //?. Дока-
Докажем теперь, что W% @) Ф 0. В самом деле,
Отсюда, учитывая неравенство D.16),
Из формул D.28) и D.27) непосредственно вытекает форму-
формула D.26). Число п мы будем называть кратностью нуля z0.
5. Из формулы D.26) легко теперь получается следующая
Теорема 2.7. Пусть ?(г)еС„@<а<1) в некоторой ок-
окрестности точки z0. Если w(z)— гомеоморфизм уравнения Белът-
рами D.23) в окрестности z0) то при стремлении z к z0 вдоль лу-
луча ср = arg(z — zo)= const
w W ~ w (\) _+A(jA_q (Z(>) е-2»Ф^ D29)
§ 5. СУЩЕСТВОВАНИЕ ПОЛНОГО ГОМЕОМОРФИЗМА 81
где А0 Ф 0 — постоянная, которая от ср не зависит. Из соотноше-
соотношения D.29) следует, что локальный гомеоморфизм уравнения
Белътрами допускает в точке z0 производную по комплексному
аргументу z тогда и только тогда, когда q(zo)= 0.
6. Теорема 2.8 (принцип аргумента). Пусть q(z)<^
^Ca(G), 0 < а < 1. Пусть w{z)—решение уравнения Белътра-
Белътрами в области G, которое удовлетворяет следующим условиям:
1) w(z) непрерывна в G + Г, где Г — граница области G, и
2) 1и(г)Ф0 всюду на Г. В таком случае w(z) может иметь вну-
внутри G лишь конечное число нулей, которое определяется по
формуле
N = ±АТ arg w(z), D.30)
причем каоюдый нуль считается столько раз, какова его крат-
кратность
Доказательство. Ограниченность числа нулей функции
w(z) непосредственно следует из теоремы 2.6. Пусть zu ..., ziT
суть нули этой функции, причем каждый нуль повторяется столь-
столько раз, какова его кратность. В таком случае в силу формулы
D.26) имеем
W (*)'= И7„ (Z) П [2 - Ч + q (*ft) B - ift)], D.31)
ft
причем, очевидно, w0 (z) непрерывна в G + Г и нигде не обра-
обращается в нуль. Учитывая теперь, что
2^ Аг arg w0 (z) = 0, ^ Аг arg {(z — zh) + q (zh) (z — zft)} = 1,
из D.31) сразу получим равенство D.30).
7. В заключение этого параграфа приведем еще одно ваншое-
свойство гомеоморфизмов уравнения Бельтрами.
Теорема 2.9. Если q{z)e=Ca(G), 0<сс<1, и решение
w(z) уравнения D.23) отображает некоторую окрестность точки
z,sG взаимно однозначно на окрестность точки wo = w(za), то-
соответствующий якобиан преобразования в указанной точке от-
отличен от нуля:
^?2_ ^2>0. D.32)
5 dz
Это легко следует из теоремы 2.4 и неравенства D.18).
§ 5. Доказательство существования полного гомеоморфизма
1. В § 3 мы построили решение уравнения Бельтрами, кото-
которое имеет вид
6 И. Н. Векуа
g2 ГЛ. 2. ПОЛОЖИТЕЛЬНАЯ ДИФФЕРЕНЦ. КВАДРАТИЧНАЯ ФОРМА
где / удовлетворяет уравнению
/_дП/-д, П/-ЗЛ1/. E.2)
Так как мы предположили, что
l?B)|<go<l. q(z)e=Lp,(E), p'<2, E.3)
то / принадлежит любому классу LP(E), где 2 —е<^<2 + в.
Поэтому в силу неравенства F.11) гл. 1 вблизи бесконечно уда-
удаленной точки
= z[l + O(\z\-1)]. E.4)
Предположим теперь дополнительно, что?B)еС™(?), О<ос<1,
т>0, и докажем, что PF(z) представляет собой полный гомео-
гомеоморфизм. Впоследствии, в п. 4, мы освободимся от этого до-
допущения.
Если q (z) е С^(Е), то согласно теореме 2.4 функция PF (z) е
е C«+1 в окрестности любой фиксированной точки плоскости.
Отсюда легко следует, что z—W(z)^.Ca г(Е).
Докажем теперь, что W(z) принимает один и только один
раз каждое фиксированное значение Wo. В самом деле, функция
W* (z) = W(z) — Wo, которая, очевидно, удовлетворяет уравнению
Бельтрами
d-zw — q (z) dzw = 0, E.5)
не может быть равна тождественно постоянной, так как в силу
E.4) вблизи точки z = °° она имеет вид W# = z [I + О(\ zl)].
Отсюда же следует, что приращение g~ arg PF^ (z) вдоль некото-
некоторой окружности достаточно большого радиуса с центром в точке
z = 0 равно 1. В таком случае в силу принципа аргумента (тео-
(теорема 2.8) найдется лишь одна-единственная точка z0, где функ-
функция W% (z) имеет нуль 1-го порядка, т. е. в точке z0 и только в
этой точке функция W(z) принимает заданное значение Wo. Та-
Таким образом, доказана следующая
Теорема 2.10. Если 1) \q(z)\ < qo<lu2) q (z) e= LV,CZ. (E),
0<а<1, тХ), р'<2, то функция E.1) является решением
уравнения Белътрами, реализующим полный гомеоморфизм пло-
плоскости на плоскость. Этот гомеоморфизм обладает также следу-
следующим свойством:
W (г) - z e= C+1 (E).
2. Полный гомеоморфизм E.1) можно рассматривать как ло-
локальный гомеоморфизм любой окрестности произвольно фикси-
фиксированной точки z0. Поэтому из теоремы 2.4 непосредственно по-
получается
§ 5. СУЩЕСТВОВАНИЕ ПОЛНОГО ГОМЕОМОРФИЗМА 83
Теорема 2.11. Если выполнены условия: 1) \q{z) I < q<> < 1
и 2) q(z) <= Lp,Ca(E), 0<а<1, р < 2, го все функции, удовлет-
удовлетворяющие уравнению E.5) в некоторой области G, представля-
представляются по формуле
{ t(W()), E.6)
где Ф(?)—произвольная аналитическая функция в области
Gt = W{G).
Дополним теперь теорему 2.10 еще следующей.
Теорема 2.12. Если 1) \q(z)\ ^ qo<l, 2) q(z)e^Lp,Ca(E),
0<а<1,р'<2,вЗ)?(г)еС (G), 0 < а < 1, т>1, где G — не-
некоторая область плоскости z, то полный гомеоморфизм E.1)
удовлетворяет условиям: 1) W(z)^Ca(E) и 2) W (z)^ C%+1 (G).
Кроме того, все непрерывные решения уравнения E.5) в обла-
области G принадлежат классу С™ (G).
Доказательство. Пусть G' — некоторая замкнутая под-
подобласть G. Возьмем многоугольную область Go такую, что G' <= Go,
Ga^G, и продолжим функцию q (z) вне Go с сохранением всех
трех условий теоремы. Такое продолжение, как известно, воз-
возможно [44а]. Обозначим полученную таким образом функцию
через qo(z) и соответствующий ей полный гомеоморфизм урав-
уравнения w- — qowz — 0 через w0 (z). Согласно теореме 2.10 w0 (z) e
е С+1(^)' Так как qo = q в Go, то W(z) и wo(z), как решения
уравнения Бельтрами E.5), в силу формулы E.6) будут связаны
между собой соотношением W(z) = &o(wo{z)), где Фо^о) — голо-
голоморфная функция в области Gw^ = wo(G0). Отсюда следует, что
W е С™+1 (G'). Но G' — любая подобласть G. Следовательно,
W e Ca+1 (G). Остальная часть теоремы очевидна.
3. Как уже отмечалось в § 3, полный гомеоморфизм E.1)
удовлетворяет условиям
-+i при z-^oo. E.7)
Это означает, что полный гомеоморфизм E.1) сохраняет точку
z = оо и направления, параллельные вещественной оси в этой точ-
точке. Этими требованиями полный гомеоморфизм определяется
единственным образом. Это сразу вытекает из следующей
теоремы.
Теорема 2.13. Все полные гомеоморфизмы уравнения E.5)
имеют вид
%$$! , E.8)
где W(z) —полный гомеоморфизм E.1).
Доказательство. Согласно теореме 2.11, любой полный
гомеоморфизм уравнения E.5) представляется в виде
, E.9)
ГЛ. 2. ПОЛОЖИТЕЛЬНАЯ ДНФФЕРЕПЦ. КВАДРАТИЧНАЯ ФОРМА
где W(z)— основной гомеоморфизм, а Ф^)—аналитическая
функция комплексного аргумента W, которая должна осуществ-
осуществлять гомеоморфное отображение плоскости W на плоскость W#.
Но, как известно, только дробно-линейные функции обладают
этим свойством, что и доказывает формулу E.8).
Теперь очевидно, что полный гомеоморфизм, удовлетворяю-
удовлетворяющий условиям E.7), определяется единственным образом. По-
Поэтому гомеоморфизм E.1) мы и назвали выше основным гомео-
гомеоморфизмом.
4. Освободимся теперь от требования непрерывности функ-
функции q(z) в смысле Гельдера. Если q(z) удовлетворяет только
условиям E.3), то функция W{z*=z + Tj)<^DliP(E), \p — 21 «S в.
Согласно теореме 1.21 это означает, что Tf^Ce(E). Б. В. Бояр-
Боярский доказал [116], что и в этом случае функция W = z + T/ реа-
реализует взаимно однозначное и непрерывное отображение пло-
плоскости z на плоскость W. Мы здесь воспроизведем доказатель-
доказательство Б. В. Боярского [Иг].
Теорема 2.14. Пусть q (z) — измеримая функция, удовлетво-
удовлетворяющая условиям: 1) l<7(z)l ^ q0 < 1 (<7о = const) и 2) q(z) = О
вне некоторого фиксированного круга К с центром в начале ко-
координат. Тогда функция W(z) = z-hTf, где /— решение урав-
уравнения E.2), осуществляет гомеоморфное отображение плоскости z
на плоскость W. Функция W = W(z) и обратная функция z =
= z(FF) принадлежат некоторому Са(Е), 0<а<1, причем а за-
зависит только от круга К и постоянной q0: a = a(K, q0).
Доказательство. Пусть qn{z), n=i, 2, ...,— последова-
последовательность непрерывно дифференцируемых на всей плоскости
функций, удовлетворяющих условиям
qn(z)->- q(z) почти всюду,
l?»(z)K?o, E.10)
Qn (z) = 0 вне К.
Такую последовательность можно получить, например, осредне-
осреднением функции q(z). В силу E.10) имеем
Lp(qn—q)->-0 при любом р>0. E.11)
Рассмотрим последовательность функций
, E.12)
где fn — решение интегрального уравнения
U-qJifn = qn. E.13)
dW SW
Очевидно, /„ = 0 вне К; -^ — qn (z) -~ = 0. Из E.13) полу-
получаем оценку Lp(fn)^q0ApLp(fn) + Lp(qn) или для р, удовлетво-
§ 5. СУЩЕСТВОВАНИЕ ПОЛНОГО ГОМЕОМОРФИЗМА 85
ряющих условию q0Ap < 1, \р — 21 «S 8,
где с — постоянная, которая не зависит ни от п, ни от р.
Из E.13) получаем, далее,
fn - U = д„П (/„ - f,n) + (qn - qm) Л/™ + qn - qm,
откуда для р, удовлетворяющих условию q0AP < 1,
A - q0AP) Lp (/„ - fm) «S Lp ((gn - qm) Ufm) + Lp (qn - qm).
1 1
Ho Lp [(gn — qm) П/т] < LP9, (gn — qm) Lpp, (П/т), где -у +-^ = 1.
Поэтому, подбирая р' настолько близким к единице, чтобы
<7оЛрр'<1> и учитывая E.11) и E.14), убеждаемся, что
А> (/п — fm) < е„, md, е„, m -»- 0 при n, m -> оо,
где eWim = Lp9/ (gn — gm), a c4 — постоянная (зависящая от р, но
не от re и m). Пусть
/ = lira /„ в Lp (E), f<=Lp (К), / = 0 вне К.
П->оо
Очевидно, f-qllf = q. Полагая W(z) = z + Tf, HMeeMCa(PF- Wn)<
=S MLP (/ — /„), a = ?y-, P > 2. Следовательно, TFn -»- W(z) рав-
равномерно на всей плоскости. Очевидно, W(z)<^Ca(E). Согласно
теореме 2.10 Wn(z) есть непрерывно дифференцируемый гомео-
гомеоморфизм плоскости z на плоскость W. Докажем, что W(z) также
гомеоморфизм плоскости z на плоскость W. С этой целью рас-
рассмотрим последовательность непрерывно дифференцируемых
функций z = zn(W), обратных к функциям последовательности
E.12). Имеем
z))^z n Wn{zn(W))^W E.14а)
для всех W п z.
Легко проверить формулы
dW = ~~dz~'
1 Jn — якобиан преобразования 1
dW
Jn dz
(z), Jn =
2
E.
dz
из которых следует в силу E.12) и E.13), что z = zn(W) удов-
удовлетворяет квазилинейному уравнению
gg ГЛ. 2. ПОЛОЖИТЕЛЬНАЯ ДИФФЕРЕНЦ. КВАДРАТИЧНАЯ ФОРМА
В силу неравенства E.14) из E.13) выводим, что
\Wn(z)-z\<M0Lp(fn)^M, E.16а)
где постоянная М не зависит от п. Учитывая E.15), видим, что
-=И = 0 вне некоторого фиксированного круга Ки не зависящего
3W
от п. Поэтому, на основании теоремы 1.16, zn(W) допускает
представление
Zn (W) = W + Ф„ (W) + Т (/„) = W + Фп (W) - JL J ji^ d|rfr],
E.17)
в котором /«(?) = О вне Ки а функция ФП(РР) голоморфна на
всей плоскости.
При фиксированном п T(fn) ограничена и HmT(fn) = 0 при
W ->- оо. В силу E.16а) ограничена также Ф„(И^), и так как
lim|Tyn(z)-z| =0, z-^oo, т. е. lim \W-zn(W) I = 0, W-+°o. to
Фп(И/)-^-0 при FF-*-oo, Т. е. Ф„(И/)=0. Таким образом, E.17)
принимает вид
zn(W)=W + T(fn), fn^0 вне Ки E.18)
Из этой формулы и из E.16) получаем для fn уравнение
7« + qn (zn <W)) Wn=~qn (zn (W)),
причем I qn (zn (W)) I «S qu < 1.
Отсюда, аналогично E.14), выводим оценку Lp(fn)^c2 (c2 не
зависит от тг) для р>2 и удовлетворяющих условию д0ЛР<1.
Согласно неравенствам F.1) и F.2) гл. 1, оператор Т/ переводит
пространство Ьр в пространство функций, удовлетворяющих усло-
условию Гельдера вполне непрерывным образом. Поэтому из после-
последовательности E.18) можно выбрать подпоследовательность
Znk(W), равномерно сходящуюся к некоторой функции z(W),
удовлетворяющей условию Гельдера. Предельным переходом в
E.14а) по подпоследовательности пк, к -*¦ °°, получаем W(z(W))^
= W и z{W(z)) = z, т. е. w = W(z) есть гомеоморфное отображе-
отображение плоскости z на плоскость w, обладающее, вместе с обратным
z = z(w), всеми требуемыми свойствами. Теорема доказана.
Примечание. Из единственности предела z(W) подпосле-
подпоследовательности Znk(W) и компактности последовательности zn(W)
получаем, что zn(W)->- z(W) равномерно.
5. До сих пор мы считали, что q(z) = O в некоторой окрест-
окрестности точки z = оо. Теперь мы можем освободиться от этого огра-
ограничения. Имеет место следующая
Теорема 2.15. Если q{z)—измеримая функция на всей
плоскости и выполняется условие \q{z) I ^ q0 < 1, то существует
§ 5. СУЩЕСТВОВАНИЕ ПОЛНОГО ГОМЕОМОРФИЗМА ~ 87
полный гомеоморфизм W{z) уравнения Белътрами д-w —
— q (z) dzw — О, принадлежащий некоторому классу Са (Е), 0 <
<а<1.
Доказательство. Пусть WR(z) — основной гомеоморфизм
уравнения
d-2w-qB(z)dtw = 0, E.19)
где
fo(z), если z <;л,
О, если |,|>Д. E'2°)
Согласно теореме 2.14 функция WR существует и принадле-
зкит некоторому классу Са{Е), 0<а<1. Произведя в уравнении
E.19) замену переменных но формуле
будем иметь
diw-q1(?)diw = 0, E.22)
где
Как видно из E.21), ?(z) реализует однолистное непрерывное
отображение плоскости z на плоскость ^, причем окрестности
точек z = 0 и ? = °° отображаются друг на друга. В силу E.20)
и E.23) <7i(?) = 0 в некоторой фиксированной окрестности точки
t, = °°. Кроме того, очевидно, \q± (?) [^?ц<С 1. Таким образом,
?i (S) удовлетворяет всем условиям теоремы 2.13. Следовательно,
существует основной гомеоморфизм уравнения E.22), который
мы обозначим через Wi{t,). Рассматривая теперь функцию
мы получим некоторый полный гомеоморфизм исходного урав-
уравнения E.5).
Если учтем, что ?(z) как функция от z аналитична вне круга
Izl^i?, a W4(?;) как функция от g аналитична в области, где
<2i(?) = 0 (эта область является образом круга \z\<R), то полу-
получим следующие формулы дифференцирования:
если |*|>Д,
если |
Жз этих формул легко следует, что W* удовлетворяет уравнению
Бельтрами E.5). Учитывая, что ^(оо) = Wx%(<*>)] = ^г@)'
83 ГЛ. 2. ПОЛОЖИТЕЛЬНАЯ ДИФФЕРЕНЦ. КВАДРАТИЧНАЯ ФОРМА
убедимся, что дробная функция
реализует однолцстное и непрерывное отображение плоскости на
плоскость, сохраняя неподвижной точку z = °°. Так как ?(;)
и W\(?)—функции, непрерывные в смысле Гельдера, то, оче-
очевидно, W(z) также удовлетворяет условию Гельдера в любой
конечной части плоскости. Таким образом, теорема 2.15 пол-
полностью доказана.
6. Построенное выше отображение плоскости z на плоскость
W не будет, вообще говоря, непрерывно дифференцируемым. Мы
знаем только, что оно принадлежит классу Dit p при некотором
р > 2. Однако, как доказано в [116, 11 г], отображение W(z) =
— z+ Т/ обладает рядом свойств, аналогичных свойствам непре-
непрерывно дифференцируемых отображений. В отношении некоторых
основных операций анализа (интегрирования, обобщенного диф-
дифференцирования и др.) это отображение ведет себя как непре-
непрерывно дифференцируемые отображения. Эти результаты позво-
позволяют изучить свойства решений уравнения Бельтрами и>- —
— q (z) wz = 0 при единственном предположении, что q (z) — из-
измеримая функция, удовлетворяющая условию: \q(z) I < q0 < 1.
Например, справедлива следующая
Теорема 2.16. При указанных условиях все решения {клас-
{класса DitP{G), p>2) уравнения Бельтрами
w- — q (z) wz — О
даются формулой
()O(W()), E.24)
где W — основной гомеоморфизм уравнения E.2), а Ф — любая
аналитическая функция от W в области W(G).
Эта формула, очевидно, позволяет строить решения уравне-
уравнения Бельтрами, имеющие любые особенности типа полюса, су-
существенно особой точки, многозначности различных типов и т. п.
В частности, с помощью формулы E.24) мы можем строить раз-
различные однолистные решения, которые гомеоморфно отображают
область G на канонические области соответствующего типа.
В работе [11г] установлен ряд важных свойств этого рода одно-
однолистных отображений.
Наконец, приведем без доказательства следующую теоре-
теорему [Иг]:
Теорема 2.17. Пусть Gn, га = 1, 2, ...,— возрастающая по-
последовательность подобластей области G, GncGn+1, G — \imGn
при п-*-°°. Пусть в области G задано уравнение вида E.5).
Пусть sup | q (z) | = qn < 1, причем возможно qn -*¦ 1 при п -»- °°.
zSGn
Тогда в области G существует глобальный гомеоморфизм урав-
§ 6. ПРИВЕДЕНИЕ К КАНОНИЧЕСКОМУ ВИДУ 89
нения E.5). В каждой ограниченной и замкнутой подобласти
области G свойства этого гомеоморфизма аналогичны свойствам
гомеоморфизмов, изученных выше.
В предположениях теоремы 2.17 глобальный гомеоморфизм,
вообще говоря, уже не может быть представлен в виде простых
формул E.1) с f^Lp(G), p > 2. Однако он может быть построен
из гомеоморфизмов вида E.1) предельным переходом.
§ 6. Приведение положительной дифференциальной
квадратичной формы к каноническому виду. Изометрические
и сопряженно изометрические сети линий на поверхности
1. Возвращаясь к квадратичной форме
F = a dx2 + 26 dx dy + с dy\ F.1)
предположим, что: I) a, b, с ограничены и принадлежат классу
С« в некоторой области GGraX), 0<а<1), 2) А=ас —Ь2>
^ До > 0 в G, До = const. Рассматривая глобальный гомеоморфизм
W(z) = u(x, y)+iv(x, у) системы уравнений A.3), мы можем
привести квадратичную форму F.1) во всей области G к кано-
каноническому виду
F^A(u, v){du* + dv*), F.2)
где
Л = ^, J = \Wzf{\-\q{z)Y) F.3)
или
Л = ах\ + 2Ъхиуи + cyl = ах% + 2bxvyv + cy%. F.4)
В силу теоремы 2.10 всякий глобальный гомеоморфизм квадра-
квадратичной формы F.1) принадлежит классу C%+1 (G). Поэтому, как
видно из F.3), AgCJ в Ыэласти W(G).
Если a, b, c<^Dm+itP(G), m>0, p>2, то в силу теоремы 2.5
глобальные гомеоморфизмы формы F.1) принадлежат классу
Dm+2P и, следовательно, A^Dm+iiP.
При помощи конформных преобразований 1-го или 2-го рода
и;* = и% + ivx = Ф* (W (z)) или w* = Ф* (W (z)),:
где Ф%(]?)—любая однолистная голоморфная в W(G) функция,
можно получить любой глобальный гомеоморфизм квадратичной
формы F.1) относительно области G, причем, очевидно,
F^A^dul + dvl), A-AJOCHP. F.5)
В силу теоремы 2.15 приведение квадратичной формы F.1)
к каноническому виду F.2) можно осуществить и в том случае,
когда коэффициенты лишь измеримые ограниченные функции в
90 ГЛ. 2. ПОЛОЖИТЕЛЬНАЯ ДИФФЕРЕНЦ. КВАДРАТИЧНАЯ ФОРМА
некоторой области G, причем ас — Ъ2 > g0 > 0. Так как хи, xv <s Lp,
/? > 2, то из F.4) следует, что А^Ьр/2.
Пусть G представляет собой объединение областей Git G2, ...
..., Gh причем GtGh = 0, ЬФк. Пусть а, Ь, се С% (Ёг), i = 1, ..., Z,
причем как функции, так и их производные до порядка т вклю-
включительно могут иметь разрывы 1-го рода на контурах областей
G,. В таком случае, в силу теорем 2.12 и 2.15 существует гло-
глобальный гомеоморфизм W(z) класса Са(Е), но принадлежащий
классу С™ х (Gi) внутри каждой из областей G,-.
2. Применим теперь полученный выше результат к решению
геометрической задачи о построении на данной поверхности изо-
изометрической или изотермической сети линий х = const, у = const.
Относительно такой системы координат первая основная квад-
квадратичная форма поверхности принимает вид
l = A(dx2 + dy2), Л>0. F.6)
Во всем дальнейшем под поверхностью мы будем понимать
совокупность ее внутренних и граничных точек, т. е. к поверх-
поверхности будем причислять также ее граничные точки.
Пусть поверхность S отображена гомеоморфно на некоторую
область G плоскости, т. е. между точками S и G установлено
взаимно однозначное и непрерывное соответствие. В таком слу-
случае координаты х\ хг точки области G мы будем называть так-
также (внутренними) координатами соответствующей точки поверх-
поверхности. Область G, очевидно, замкнута. Если теперь отобразим
область G гомеоморфно на некоторую другую (очевидно, также
замкнутую) область G, то получим на поверхности новую систе-
систему координат х1, х2. Таким образом, всякому однолистному ото-
отображению области G на другую область соответствует вполне
определенная координатная система на поверхности. Следова-
Следовательно, на поверхности S существует бесчисленное множество
координатных систем, причем переход от одной координатной
системы х1, х2 к некоторой другой х1, х2 происходит с помощью
неособенных преобразований вида
xl = xl{x\ хг), х* = х{(х\ х2), г = 1, 2, F.7)
где хг(х1, х2) и х'(х1, х2) — непрерывные однозначные функции
ъ G ж G соответственно.
Рассматривая теперь в пространстве некоторую декартову си-
систему координат с ортами е1? е2, е3, можно радиус-вектор т(х\х2)
произвольной точки поверхности S выразить в виде
т{х\ хг) = Х{х\ x2)^ + Y{xl, x2)e2 + Z(x\ x2)e3,
где X, Y, Z — декартовы координаты точки поверхности с внут-
внутренними координатами х\ х2. Допустим, что функции Х(х\ х2),
Y(x\ х2), Z(x\ x2) непрерывны и имеют непрерывные производ-
производные порядка ^& в замкнутой области G. В таком случае будем
§ 6. ПРИВЕДЕНИЕ К КАНОНИЧЕСКОМУ ВИДУ QI
говорить, что поверхность S принадлежит классу С*. В диффе-
дифференциальной геометрии принято поверхность называть регуляр-
регулярной, если к > 3. В дальнейшем мы также будем употреблять этот
термин в указанном смысле. Мы будем рассматривать также
поверхности классов С\ и DhtP.
Если X, Y, Z — аналитические функции переменных х\ xz в
области G, то поверхность S будем называть аналитической по-
поверхностью или поверхностью класса 91.
В дальнейшем мы пользуемся элементами теории поверх-
поверхностей в векторном и тензорном изложении. По этим вопросам
для справок можно обращаться к книге [37]. Однако следует
иметь в виду, что мы не всегда придерживаемся обозначений,
принятых в [37] (см. также гл. 5, § 5).
Рассмотрим кусочно гладкую поверхность S, составленную из
конечного числа поверхностей класса С", /е > 1, которая гомео-
морфна некоторой области G плоскости (G может совпадать со
всей плоскостью). Дифференцируя уравнение поверхности в век-
векторной форме г = г(ж1, х2), по Xi и хг получим базисные векторы
координатной системы х1, х2:
г„-? (а =1,2).
Первая основная форма поверхности имеет вид
I = ds2 = aafi dxa dr", где aae = rare. F.8)
Для случая кусочно гладкой поверхности аа(, являются кусоч-
кусочно непрорывными ограниченными функциями в области G. Так
как а = йиа22 — а\2 ^ а0 > О, то согласно теореме 2.15 существует
глобальный гомеоморфизм формы F.8), которому соответствует
на всей поверхности изометрическая система координат х, у. Это
означает, что сеть линий х = const, у = const непрерывно покры-
покрывает всю поверхность, причем она является изометрической на
каждом гладком куске поверхности. На линиях склеивания ко-
коэффициент А(х, у) формы F.6) имеет разрывы 1-го рода. При
переходе через линии склеивания смежных гладких частей по-
поверхности координатные линии непрерывно продолжаются, но,
вообще говоря, на этих линиях изометричность нарушается.
Если поверхность принадлежит классу С™4, 0<а<1, то aaS
принадлежат С™(?), и, следовательно, в таком случае А(х,у)^
Заметим, что переход от одной системы изотермических коор-
координат х, у к некоторой другой системе таких же координат х', у'
производится путем конформных преобразований первого или
второго рода:
х' + iy' = ф (х + iy) или х + iy' = ЩхПу),
Q2 ГЛ. 2. ПОЛОЖИТЕЛЬНАЯ ДИФФЕРЕНЦ. КВАДРАТИЧНАЯ ФОРМА
где Ф — аналитическая функция, однолистная в области измене-
изменения переменных х, у. Если эта область совпадает со всей пло-
плоскостью z = х + iy, то Ф будет дробно-линейной функцией
3. Рассмотрим теперь задачу о приведении к каноническому
виду второй основной квадратичной формы поверхности
II = baSi dxa dx\ F.9)
Коэффициенты этой формы, как известно, вычисляются по фор-
формулам
Главная кривизна поверхности определяется равенством
Отсюда видно, что форма II является знакопостоянной для по-
поверхности положительной кривизны. Пусть поверхность 5 состав-
составлена из кусков поверхностей положительной кривизны класса
С%+2 (т^О). В таком случае, как видно из формул F.10), ко-
коэффициенты формы II будут кусочно непрерывные функции
класса С™.
По-прежнему будем предполагать, что поверхность гомеоморф-
на некоторой области G плоскости. Кроме того, будем считать,
что К> Ка > 0 (в ff), Кй = const. В таком случае согласно тео-
теореме 2.15 существует гомеоморфизм квадратичной формы II, ко-
которому на поверхности соответствует вполне определенная коор-
координатная система. Относительно этой системы вторая основная
квадратичная форма принимает вид
II = ksds* = Л (dx2 + dy*), ЛеС (G), F.12)
где ks — так называемая нормальная кривизна поверхности в на-
направлении s.
Если на поверхности координатной сетью являются линии
кривизны | = const, ц = const, то форма II = А2/^ й|2 + В2&2 drf
и соответствующий ей гомеоморфизм z(?) = #(g, r\)+iy(%, r\)
удовлетворяет следующему уравнению Бельтрами:
АТ/ДB/g
5 А/^ + В/* ? V '
§ 6. ПРИВЕДЕНИЕ К КАНОНИЧЕСКОМУ ВИДУ 9J
Так как аК = Л2, то либо Л = УаК, либо Л = —УаК. В даль-
дальнейшем мы все время будем считать, что
Л = УоК. F.14)
Этого всегда можно добиться посредством выбора ориентации
нормали п к поверхности: последняя должна быть направлена
в сторону вогнутости поверхности. В самом деле, согласно тео-
теореме Менье, ks — k cos 8. Но если учесть @.14), то это возможно
лишь в том случае, когда нормаль к поверхности составляет
острый угол 0 с главной нормалью кривой, которая всегда на-
направлена в сторону вогнутости поверхности, что и доказывает
наше утверждение.
Обозначая через ds и da соответствующие друг другу элемен-
элементы дуг поверхности н плоскости z, из F.12) имеем
ds = csdo, cs — УЛ/ка, \/rak2/k1 ^ cs ^ i^ak1/k2. F.15)
Таким образом, если поверхность положительной кривизны
отображается на плоскость z с помощью гомеоморфизма второй
основной квадратичной формы, то элемент дуги поверхности ис-
испытывает растяжение, обратно пропорциональное квадратному
корню из нормальной кривизны в направлении рассматривае-
рассматриваемой дуги.
Сеть линий на поверхности, относительно которой вторая ос-
основная квадратичная форма принимает вид F.12), называется
сопряженно изометрической системой координат.
Таким образом, сопряженно изометрическая сеть линий су-
существует на всякой поверхности класса С™+2, m > О, гомео-
морфнон некоторой области плоскости (или всей плоскости).
Если же поверхность гомеоморфна области G и склеена из ко-
конечного числа регулярных кусков поверхностей класса С™+2, то
по-прежнему существует на всей поверхности непрерывная сеть
линий х = const, у = const, которая на каждом регулярном куске
является сопряженно изометрической. В этом случае Л и ее про-
производные будут, вообще говоря, кусочно непрерывными функ-
функциями.
Если поверхность принадлежит классу Dm+3, P, р>2, то Ьа$
будут принадлежать классу Dm+liP ( следовательно, в силу теоре-
мы 1.21 ^s g Ci a == ¦—-—). Согласно теореме 2.5 гомеомор-
гомеоморфизм ж = ж(?, ц), у = уA, г\) формы II будет принадлежать
классу Dm+2, р в соответствующей области, следовательно,
AeDm+1,p. '
Так как К е Дп+1> р и Л = ~]/аК е Dm+i, Р, то, очевидно, у a s
s L/m+ij р.
Заметим, что, как и в случае изометрической сети линий, пе-
переход от одной сопряженно изометрической системы координат
ОД. ГЛ. 2. ПОЛОЖИТЕЛЬНАЯ ДИФФЕРЕНЦ. КВАДРАТИЧНАЯ ФОРМА
к некоторой другой совершается посредством конформных пре-
преобразований 1-го или 2-го рода.
Ниже мы изучим другие свойства сопряженно изометрической
сети линий, которые будут использоваться в главах 5 и 6 при
изучении геометрических и механических задач.
4. Рассмотрим на поверхности сопряженный базис координат-
координатной системы х\ хг
т« = аа% (а = 1,2), F.16)
где
au = a-f, а12 = а21 = - "-f, аю = ^, F.17)
а = а1Ха22 — а\г. F.18)
Следует иметь в виду, что ковариантные и контравариантные
метрические тензоры а^ и aaf} используются в дальнейшем для
поднятия и опускания индексов компонентов тензоров.
Дифференцируя орт нормали п, получаем
Так как при К Ф 0 векторы nt и п2 не коллинеарны, то будем
кметь
r« = _da|3np, dap = ~ c«Wvbky, F.20)
где
1
В силу равенств F.20)
^В ?p = Л?. F-22)
Рассматривая эти равенства в сопряженно изометрической си-
системе координат и учитывая, что
dii = cp= I di3==d2i = 0i F<23)
Т/аК
получаем
УЖ'
или !
а+ = а +а =^±Д/а, F.24)
ук
а~ = аХ1 — а22 + 2гя12 = —= {Ъ\ — Ъ\ — 2ibl) у а.
ук
§ 6. ПРИВЕДЕНИЕ К КАНОНИЧЕСКОМУ ВИДУ 95
Учитывая, что
Ъ\ + Ь\ = 2Н, \Ь\-Ъ\- 2ib\ |
= 2 /#2 - iT2 = 2 /1 = | &! - &21, F.25)
где Н — средняя кривизна, а Е — так называемая эйлерова раз-
разность, находим
Ц ^ F-26)
Так как
а12 = r4r2 = }'anaZ2cos со, а = aua22 sin2 со, F.27)
то
a12 = l/a"ctgco, F.28)
где со — угол между координатными кривыми, 0 < со < я.
Из F.28), F.27) и F.26) получим равенство
ctg со = |/|- sin ib, F.29)
выражающее ib через со. В силу F.24), F.26) и F.29) имеем:
а" = Vk (Н + УЪ cos ^)« а22 = ]/|- (Н - /Ё cos т|)),
«12 = «21 = У X Sln ^* F-30)
Отсюда следует, что
cos ^ 22 _ Н + УЁcos^ .„ яп
¦'
22 _
уж
а12 = а21 = ^^г sin ib.
УК т
В силу этих формул первая основная квадратичная форма имеет
вид
ds2 = aa&dxa dx^ = }/ g- (H + /Ё cos (г|з — 20)) da\ F.32)
где Ф — угол наклона дуги do на плоскости z, соответствующей
элементу дуги ds кривой на поверхности.
Из F.32), F.12) и F.14) следует, что
MH + rE"cos(ib-2fl)) = K. F.33)
Это равенство имеет место для любого касательного паправления
в данной (произвольно выбранной) точке поверхности. Написав
это равенство для главных направлений и учтя, что ф не зави-
-ggl ГЛ. 2. ПОЛОЖИТЕЛЬНАЯ ДИФФЕРЕНЦ. КВАДРАТИЧНАЯ ФОРМА
сит от выбора направления в рассматриваемой точке, будем иметь
cos(t-20i) = -l, cos(i|)-2#2)=l, F.34)
где #1 и 02 — углы наклона направлений с{ и а2 на плоскости z,
которые являются образами главных направлений St n s2 поверх-
поверхности. Из F.34) следует, что
г|з = 2#2, ^2 = ^х + — • [F.35)
Таким образом, мы выяснили геометрический смысл функции
i|:(x, у). Она равна удвоенному углу наклона того направления
на плоскости z, которое соответствует главному направлению s2
поверхности. Кроме того, главным направлениям s, и s2 поверх-
поверхности соответствуют на плоскости z взаимно перпендикулярные
направления <jt и о2, т. е. сеть линий кривизны на поверхности
отображается на ортогональную сеть линий на плоскости z.
Из F.35) и F.15), учитывая, что dsl = B2drf, получаем
iJ- F.36)
Зто означает, что если поверхность е Dm+3i р, то -ф е Д,+1> p.
Так как Н = -i (Ах + Аа), /Ё = 1 (Лх - /«2), (Лх > fta), то
Н - У Ё cos г)) = А2 sin2 -J + йя cos2 -|- = /с",
Н + /Ё cos г|з = /«! cos2 -| + Л, sin3 -? =¦ й\ F.37)
in -ф = Ц^2 sin 2-J = - т',
где к' ш xf — нормальная кривизна и геодезическое кручение по-
поверхности в направлении, составляющем с главным направлением
Si угол, равный -к- = '&2> а 'с" —нормальная кривизна в перпен-
перпендикулярном направлении. Поэтому
«11=^']/^ «22=*VjT. al*=-X'Vh F-38)
au = -^=, a22 = -^=. а12 = -^=.-. F.39)
1/аК УЖ УаК К '
Из F.29) имеем
— К
причем выбор знака здесь надо согласовать с равенством F.29).
§ 6. ПРИВЕДЕНИЕ К КАНОНИЧЕСКОМУ ВИДУ 97
Отсюда сразу следует неравенство
1 > sin со > УК/Н, F.41)
означающее, что существуют две положительные постоянные
О < б0 < 6j < я, которые зависят от поверхности, но не зависят
от выбора сопряженно изометрической сети линий, такие, что
0< 6„ sS со =s= б, < я.
При отображении поверхности, реализуемом посредством го-
гомеоморфизма второй основной квадратичной формы, углы между
кривыми, вообще говоря, не сохраняются и интересно выяснить,
как они искажаются. Прежде всего отметим, что величины иска-
искажений углов определяются свойствами поверхности и не зависят
от выбора конкретного гомеоморфизма. Это следует из того, что
любой гомеоморфизм второй основной формы получается из ка-
какого-либо одного посредством конформных преобразований пер-
первого или второго рода.
Пусть t и s — два орта, касательных к поверхности. Обозна-
Обозначая через Q угол между ними, имеем
cos Q = ts = aa^V, sin Q = n (t X s) = c^Ps*, F.42)
где Can — ковариантный тензор второго ранга, который определя-
определяется по формулам
Сн = с22 = 0, с12 = -с21 = Уа. F.43)
При выводе второго равенства F.42) мы воспользовались фор-
формулой
г„Хг( = cai)n. F.44)
В силу F.30) и F.15)
cos Q ?= sin ?l \,
Т/К /' F.45)
sin Q — yktks/K. sin Q,
где Q — угол между образами направлений t и s при рассматри-
рассматриваемом отображении, а Т; — геодезическая кривизна поверхности
в направлении t.
Если t и s совпадают с главными направлениями s, и s2 по-
поверхности, то kt = ки кв = к2 и из F.45) вновь получим равен-
равенства F.35). Если t и s взаимно перпендикулярны, то из F.45),
после простых выкладок, получим
sin Q = iKJktks,
J—L F.46)
cos Q xjikjt
Эти равенства равносильны следующему равенству, которое
7 И. Н. Векуа
gg ГЛ. 2. ПОЛОЖИТЕЛЬНАЯ ДИФФЕРЕНЦ. КВАДРАТИЧНАЯ ФОРМА
можно получить также непосредственно
dz dz it
^ +
Из F.45) имеем оценку
1 > sin Q > УК/Н. F.47а)
Как и следовало ожидать, формулы F.45), F.46) и F.47) не за-
зависят от специального выбора гомеоморфизма формы II. Два
касательных направления t и s называются взаимно сопряжен-
сопряженными, если они удовлетворяют равенству tns= ba^s^ = 0. Отно-
Относительно сопряженно изометрической системы координат это ра-
равенство принимает вид
sH1 + s2t2 = Re —- — = 0.
\ds dt \
Последнее равносильно равенству cos fi = 0. Это означает, что
направления, соответствующие на плоскости z взаимно сопря-
сопряженным направлениям s и t поверхности, перпендикулярны.
Таким образом, сопряокенно изометрическая система коорди-
координат любую сеть взаимно сопряженных линий поверхности пере-
переводит в ортогональную сеть линий на плоскости z.
5. Для любой сопряженно изометрической системы координат
выполняются условия Л= bn = b22, blz =0, т. е.
пгп == пг22, пг12 = 0, F.48)
пли в комплексной записи
Отсюда видно, что радиус-вектор г удовлетворяет уравнению
Пользуясь деривационными формулами Гаусса
г«э = Г^рг^ + Ьа?п, F.51)
где Г«р — символы Христофеля 2-го рода, а Ьар — коэффициенты
второй основной квадратичной формы, легко убедимся, что
А= 4" (Г-}2 -Г^ - 2Г?2) - I (Г222 - TL + 2ГУ ^ - (г1 - jr3) гг-,
F.52)
В= 4" (Г22-Г!! + 2Т\2) +
2Т\2) + 1 (Г222 - ТЪ - 2Т\2)^ - (г1
Уравнение F.50) является комплексной записью известных
уравнений Лапласа для декартовых координат точки поверхно-
поверхности относительно сопряженно изометрической системы координат.
§ 6. ПРИВЕДЕНИЕ К КАНОНИЧЕСКОМУ ВИДУ 99
Имеем также
rz- + Ct-z + Сгг - j Лп = 0, F.53)
где
С = _ 1 (Гх\ + Г,1,) + 1 (Г?х + Ц2). F.54)
Используя теперь равенства
а+ = 4г2г-, а~ = 4г-гг, а = -j (а+2 — \ сГ |2), F.55)
будем иметь
да+ , . да~ о 0а~ о
Отсюда с помощью равенств F.50) и F.53) получим
djL = _ (Л + С) а+ - Са" - 5а~,
52 _ F.56)
^=- = - 2Аа~ - 2Ва+, %- = - 2Са~ - 2Са+.
Из этих равенств имеем
. __ д!п\/а
А 71
8^ 2 1Г~ 1Г~ ~1» F-57)
_ 1 / л.да~ ——даГ
С — — тг— [а —= а —^
оа у qz oz
6. На основании равенств F.19)
пг ^^ " 'п! "¦" гп2' == 2~ ^Г "^ гг ) == ~ \а ~\т Ш ) Х%
или, ь силу F.31) и F.14),
пГ = — НгГ + /Ёе4фг2. F.58)
Дифференцируя F.50) и F.53) по z hz соответственно, а затем
используя те же равенства и формулу F.58), получим
г + (Az — АС — ВВ) г- и
-ВС-С* _ 1л/Ёе**) гг+ у (СЛ- Л-) п = 0.
+ (С;-ВС-С* 1л/Ёе**) г+ (С
7*
100 ГЛ. 2. ПОЛОЖИТЕЛЬНАЯ ДИФФЕРЕНЦ. КВАДРАТИЧНАЯ ФОРМА
Из этих равенств получим следующие соотношения:
Л-+ (,4 — С)Л = 0, F.59)
Аг — С- - ВВ + СС — -|- НЛ = 0, F.60)
Bz - C~z + (С - А) С + (С - А) В + i Л/Ёе*ф = 0. F.61)
Уравнение F.59) представляет собой комплексную запись си-
системы уравнений Кодацци. Из F.59) и F.57) имеем
А = - -4 In УаУКх F.62)
dz
C = ^lnK1/4. F.63)
Уравнения F.60) и F.61) эквивалентны уравнению Гаусса.
Учитывая F.62), F.63) и F.26), эти уравнения можем запи-
записать еще в виде
<521пЛ rj,
4 g) ? (ЛБ). F.65)
В силу F.62) из второй формулы F.57) получим
JE.±(-±L\
2а+ д1[аУк)- 2Н
На основании F.63) третье равенство F.57) может быть запи-
записано в следующем виде:
iV^ + ^YO. F.67)
Нетрудно убедиться, что равенство F.57) является следствием
равенств F.66) и F.67).
Равенство F.67) мы можем рассмотреть как уравнение, опре-
определяющее вещественные функции Уа и \|г, если известны средняя
кривизна Н и главная кривизна К заданной поверхности. Опре-
Определив из F.67) Уа и if, мы можем затем по формулам F.14) и
F.30) вычислить коэффициенты второй и первой основных квад-
квадратичных форм, а также символы Кристофеля 2-го рода, соот-
соответствующие рассматриваемой сопряженно изометрической систе-
системе координат.
§ в. ПРИВЕДЕНИЕ К КАНОНИЧЕСКОМУ ВИДУ ДО
Из F.66), используя равенство F.67), мы можем получить
для В следующее выражение:
В = - (Arch Л-Л '* _ iSv^ --= - 1/Г (-2-) е<* - ^- р^
F.68)
С помощью формул F.52), F.54), F.62), F.63) и F.68) легко
можно получить теперь следующие формулы, выражающие сим-
символы Христофеля второго рода:
Т\г = ?¦ In /а - Г212, ГЬ = - -^ In /Ж + Ц2,
Г^-^-Ы/ЙС + Г^, Ц2 = ^-Ь/а-Г?2, F.69)
Г?, - ffj, - (in /TjTK), - (Arch ^)У* - ^ e2i*.
(
7. Вводя еще в рассмотрение ковариантные производные по
z и z от комплексного ковариантного вектора ш# = их + ш2, бу-
будем иметь
y-w* = -S- (Vi + iV2) (Mi + to2) = w,- + Aw* + Вм*,
i — F-70)
yzw^. = _ (Vt — iVjj)^! + iu2) ^ ш*2 + Cw* + Cw*.
Если w* = ui + iuz — комплексный контравариантныи вектор,
то
V-w* = i- (Vx + iV2) (и1 + да2) = w* — Cw* — Bw*, F.71)
Azw* = -i (Vj - гV2) (и1 + ш2) = ы;2 — Зы;* - Cw*. F.72)
8. Пусть поверхность принадлежит классу С«+2. В таком
случае Н, К, Е принадлежат классу С«. Кроме того, по дока-
доказанному выше Л = ]/аК е С™, т. е. а е С™. Тогда из равенства
F.67) следует, что1|зеСа. Если теперь обратимся к формулам
F.62), F.63) и F.68), то убедимся, что
ДВ.СеС1, если щ>1. F.73)
Допустим теперь, что поверхность принадлежит классу Dm+3 P,
р>2. Тогда Н, К, Е, а, феДт+1 р и на основании F.62), F.63)
и F.68) имеем
А, В, C^Dm,p. F.74)
В частности, в этом случае выполняется условие F.73) и
Н, К, Е, a, ij>eC?\ a = ?^-. F.75)
102 ГЛ- 2- ПОЛОЖИТЕЛЬНАЯ ДИФФЕРЕНЦ. КВАДРАТИЧНАЯ ФОРМА
9. В результате конформного преобразования 1-го рода
z* = Ф(^) (пли 2-го рода z* = Ф(я)) сопряженно изометрическая
сеть линий переходит в подобную же сеть. В силу F.55) будем
иметь следующие формулы преобразования:
а+ = а+ | Ф' (z)T, a~=a-WJzf, F.76)
a = aJO'(z)\\ F.77)
arg аГ = arg «7 — 2 arS ф' (z)- F-78)
Отсюда следует, что
% = ф + 2х, где х = arg Ф' (z). F.79)
Эта формула следует также из формулы F.35), так как при
конформном преобразовании области угол 2 получит прираще-
приращение, равное х-
Из F.76) следует, что
а+dz dz = a'ldz* dz~, a~dz2 = a~dz\. F.80)
Таким образом, первая основная квадратичная форма поверхно-
поверхности, равная
l==ds2 = -| а+ dzdz + -j a" dl1 + i- a^"dz2, F.81)
представляет собой сумму трех инвариантных относительно кон-
конформных преобразований 1-го и 2-го рода квадратичных форм.
Эти квадратичные формы не зависят от специального выбора ко-
координатной системы.
Имеющийся в выборе сопряженно изометрической сети коор-
координатных линий произвол можно использовать для того, чтобы
подчинить определенным добавочным условиям коэффициенты
формы I и II. Например, можно добиться того, чтобы if = 0 па
граничной кривой или на ее части. (Это следует из того, что, как
видно из равенства F.79), if определяется с точностью до адди-
аддитивного слагаемого 2%, которая является гармонической функ-
функцией.) Это означает, что <z12 = 0 вдоль граничной кривой, т. е.
вдоль этой кривой рассматриваемая сопряженно изометрическая
сеть линий будет совпадать с сетью линий кривизны поверхно-
поверхности (следует иметь в виду также, что Ь12 = 0 всюду).
Если теперь обратимся к формулам F.62), F.63) и F.68),
то в силу формул F.69) и F.71) получим следующие формулы
преобразования величин А, В, С:
Л = Л#Ф'(*)-Щ-, B = B,y?L-, С = С#Ф'B). F.82)
Из последних двух формул видно, что если В и С обращаются
в нуль в одной какой-нибудь сопряженно изометрической систе-
§ 6. ПРИВЕДЕНИЕ К КАНОНИЧЕСКОМУ ВИДУ
ме координат, то они будут равны нулю относительно любой дру-
другой такой же системы координат.
Заметим, что В = С = 0 для сферической поверхности и толь-
только для нее. Это сразу следует из F.63) и F.68), если учтем, что
Е = О только для сферы.
В случае полного овалоида (т. е. замкпутой поверхности по-
положительной кривизны) переменная z будет изменяться во всей
плоскости. В таком случае в качестве Ф(г) можно брать лишь
дробно-линейные функции вида
ф(*)=]5т!. ссб-р7?=0. F.83)
Учитывая это, с помощью формул F.76), F.77) и F.82) полу-
получим следующие асимптотические выражения вблизи бесконечно
удаленной точки:
а+, or, ia~=O{\z\-"), > F.84)
-1), В, C = O{\z\-2). F.85)
Отсюда следует, что
р>2 F.86)
(см. гл. 1, § 1, п. 5).
10. Пусть рассматриваемая поверхность S положительной
кривизны принадлежит классу Dm+s, P, р>2. Тогда она заведо-
СШЛ-2 Р — 2 -,-,-
г „ _„ а , а = . Пусть на поверхности
S лежит кусочно гладкая кривая L. Обозначим через ф угол
между касательной кривой L в некоторой точке и главным на-
направлением Si в той же точке. Пусть U — некоторая гладкая
дуга кривой L (концы причисляем к L"). ф как функция длины
дуги s, очевидно, непрерывна на L'. Предположим, что
феС« (Z/), где m «? m. Отнесем для определенности поверхность
к системе координат в линиях кривизны. Тогда
I = КЧ%2 + ВЧц\ II = Ms2 - A-k.dl2 + B2k2dr\2, F.87)
d? cos Ф dr\ sinq> , r,4 ,„ oo.
*•=-/• di = т (вдоль L )• <6-88>
Так как А и ВеС^1, ю из F.88) сразу следует, что |(s),
Т] (s) e Ca'+1 (L') (мы предполагаем, что L' целиком лежит
внутри S).
Если введем теперь на поверхности S сопряженно изометри-
изометрическую систему координат
*-*(!, ц), у = у(Ь ц), i 16.89)
ГЛ- 2- ПОЛОЖИТЕЛЬНАЯ ДИФФЕРЕНЦ. КВАДРАТИЧНАЯ ФОРМА
соответствующую некоторому глобальному гомеоморфизму квад-
квадратичной формы II = Aikid\2 + B2/c2(iT]2, то будем иметь
F.90)
Пусть Г и Г' — образы кривых L и L' на плоскости z = x + iy.
Выясним теперь степень гладкости кривой Г'. Обозначая через
els и da соответствующие дуги кривых L' и Г' и учитывая, что
F.91)
ks Н +У! cos 2ф
имеем равенство
которое показывает, что a(s) (т. е. длина дуги кривой Г') пред-
представляет собой функцию от s (длины дуги кривой L'), принадле-
принадлежащую классу С«'+1. Рассматривая теперь s как функцию от о,
s(a), легко убедимся, что и она является функцией класса С™
Обозначая через Ф угол наклона касательной к Г', будем иметь
% _ *Е_ _ I™ ^1 , „ dx\\ds
da
dy
Отсюда видно, что ОеС"'(Г'), т.е. х(о) и г/(а)еС™'+1; здесь
надо учесть, что х%, г/|, ж,,, уц е С™, A, Be Ca+1 (Z)m+2,p). Подыто-
Подытоживая предыдущие результаты, приходим к следующему за-
заключению:
Пусть на внутренней части поверхности положительной кри-
кривизны класса Dm+s, р, р > 2, леоюит гладкая кривая L', которая
принадлежит классу С™'+\ т. е. ее координаты Ъ, (s), т) (s) e
е С™', причем а = ^ , т' ^ т. ?сла ввести на такой по-
поверхности сопряженно изометрическую систему координат, соот-
соответствующую некоторому глобальному гомеоморфизму х = жA, ц),
У = У(%, Ц) формы II = A2Ajd|2 + B2A2drJ, то кривая L' отобра-
отобразится в кривую Г' wa плоскости z, которая также принадлежит
классу Са'+1, т. е. ее координаты х(а) и у (а) как функции дли-
длины дуги кривой V принадлежат классу CS, , тп' ^ тп.
Пусть кривая L содержит угловую точку, лежащую на внут-
внутренней части поверхности S, причем примыкающие к ней дуги
I/ и L" по-прежнему принадлежат классу С™+1, тп'^тп.
Тогда их образы Г' и Г" на плоскости z также принадлежат
§ 7. УРАВНЕНИЯ ЭЛЛИПТИЧЕСКОГО ТИПА 105
классу С™'+1 и составляют кусочно гладкую кривую Г, являю-
являющуюся гомеоморфным образом кривой L. При этом угол между
кривыми Г" и Г" однозначно определяется по углу между кри-
кривыми L' и L" и, очевидно, не зависит от выбора глобального
гомеоморфизма формы II, с помощью которого задается сопря-
сопряженно изометрическая сеть линий на поверхности. Это следует
из того, что переход от одной такой системы к другой соверша-
совершается посредством конформного преобразования 1-го или 2-го рода.
Следует помнить, что речь идет об угловой точке кривой, лежа-
лежащей строго внутри поверхности.
Предположим теперь, что поверхность S вместе со своей гра-
границей целиком является строго внутренней частью некоторой по-
поверхности Sa класса Z)m+3, Р, р > 2, т 2* 0.
Пусть граница S, которую будем обозначать через L, состоит
из конечного числа кусочно гладких кривых Lo, Li, ..., Lk, при-
причем гладкие куски этих кривых принадлежат классу С™ , т' <!
<; т.
Рассматривая на So сопряженно изометрическую сеть коор-
координатных линий х = const, у = const, соответствующую некото-
некоторому глобальному относительно So гомеоморфизму х = х(%, т)),
У = У(%, ц) формы II = A2feidg2 + B2/c2drJ, поверхность S вместо
со своей границей L отобразится гомеоморфно на некоторую
замкнутую область G + Г, причем гомеоморфизм имеет место как
между S и G, так и между их границами L и Г. Как мы уже
видели выше, природа кривых L и Г будет одна и та же, т. е.
если Lo, Lu ..., Lh — гладкие кривые класса С™ , т' ^т, то их
образы Го, Г(, ..., 1\ также будут кривыми класса С™ . Если
же кривые Lo, Lt, ..., Lk имеют угловые точки, то угловым точ-
точкам (и только им) соответствуют угловые точки на Го, Г4, ..., 1\.
§ 7. Приведение уравнений эллиптического типа
к каноническому виду
В этом параграфе мы применим полученные выше результа-
результаты к задаче о приведении к каноническому виду уравнений эл-
эллиптического типа в случае двух независимых переменных.
1. Рассмотрим сначала систему уравнений вида
ди ди , dv , dv
a + a + ° + b
du , du , I. dv , I. dv , I. x ^^)
a21 Yx + aVl Yy + b21 Q-x + *22 (jy + U2U + °2V = /a»
где aih, bik, au b{, U — заданные функции двух независимых пе-
переменных в некоторой области G. Возьмем теперь квадратичную
форму
F = adx* + 2b dx dy + с dy\ G.2)
гл- 2- ПОЛОЖИТЕЛЬНАЯ ДИФФЕРЕНЦ. КВАДРАТИЧНАЯ ФОРМА
где
с
я , с г
Ь = — 2д («11*22 — «21*21 + «12fe21 — «22*11).
Д == (я12&22 — а22*12) (яц*21 — Й21*п) —
«12*21 — aZZ
Эта форма будет положительно определенной тогда п только
тогда, когда <z>0(c>0), A > 0. В этом случае система уравне-
уравнений G.1) называется системой эллиптического типа. Из условия
А > 0 следует, что *ц*22 — *i2*2i ^ 0. В противпом случае Ьц =
= И*12, *21 = М-*22 И
Д = — 1 К«11 — f*a12) *22 — («21 — f*«22) *23]2 < 0-
Поэтому эллиптическую систему уравнений G.1) можно всегда
привести к виду
—vy + a,izux + а12иу + diii + btv = /i,
+ btv /i,
vx + a2iUx + аагМу + a2u + b2v = /2.
Для системы G.5) условие эллиптичности примет вид
«и > 0 («22 >0), А = «ц«22 — J Кг + «2iJ > 0. G-6)
Если а12 = — «2i, «и = «22, то будем иметь систему
—vy + пцЫх + aiMy + aLu + bLv = /i,
Ух — «12«x + «цМ„ + в2М + *2У = /2,
которая в результате подстановки *)
U = апи, V = v — апи, ап > 0 G.8)
приводится к каноническому виду
Ux - Vy + a*U + **F = /,
«7„ + ^х + cJJ + d#7 = g.
Мы теперь покажем, что и систему уравнений общего вида
G.5) можно привести к виду G.9). В результате замены неза-
независимых переменных
G.10)
*) Считаем, что an и ац s Di, p, p > 2.
§ 7. УРАВНЕНИЯ ЭЛЛИПТИЧЕСКОГО ТИПА Ю7
система G.5) примет вид
l2ly) щ + (anr\x + апт\у) в„ + aji + b{v = /ь
me + («21Т1* + а^-Цу) ич + Ciu + a> = /».
Решая эту систему относительно v% и i;4) будем иметь
где
«11 = у (Яий + ^12 + a2l) ^« +
«12 = -j(aulxT]x + аш1,х\\у + а21|у
«21 = -j («uI^jc + a^ly1!» + a2i^=c
«22 = у («U^ + («12 + «2l) %Лу
Подчиним теперь преобразование G.10) условиям «12 = — а21,
«11 = «22» т.е.
«11 (Й — Л2) + («12 + «2l) ffi«g» - TWhl) + «22 (gff - П1) = С /у Н)
2anlxt]x + (a12 + a21) (|хт]у + Еу^х) + 2a22^r]y = 0.
Вводя в рассмотрение комплексную функцию ? = | + ?т|, послед-
последнюю систему уравнений можем записать в виде
«ий + («12 + «2i) ЪхЪу + a22^=0. G.12)
Этому соотношению удовлетворяют решения уравнения
) = о G.13)
или, в комплексной записи,
n iiV + yA2 + 21)
= O, где д = , . G.14)
Предположим, что в рассматриваемой замкнутой области G вы-
выполняется условие: А > Ао > О, До = const. Тогда lq(z) I < q0 < 1
в G. Если, кроме того, q(z)^ Dm+ip(G), р>2, т > 0, то в силу
результатов § 4 существует глобальный гомеоморфизм ?(z) =
= |(ж, г/)+1Т)(ж, ^) уравнения G.14), принадлежащий классу
Ап+2, p(G) (теорема 2.5).
ГЛ. 2. ПОЛОЖИТЕЛЬНАЯ ДИФФЕРЕ1Щ. КВАДРАТИЧНАЯ ФОРМА
В силу равенства G.12) имеем
2а'12 = а12 — «21 = -j («12 — «2i) (ЪхЧи—ЪуЧх) = Чг —«21. G.15)
2«i'i = аи + Й22 =
= у И anfcx i 2— ^/ ^x + ^аз2Ьу t
Из G.13) следует, что
Внося эти выражения в G.16), получаем
Таким образом, система G.5) принимает вид
+ ^
Вводя в рассмотрение новые функции
и=УЪи, V = v-ai2~U21u, G.18)
приходим к канонической форме системы уравнений эллиптиче-
эллиптического типа
где
a -a' dVA i
а* - «1 - д% 2
- _„' ai/A I a(flia-a2i) rf _fc' _v
Если fltt, ^^^^^(Cr), ай b{, /ieDB,,(G), ??г ^ 0, p > 2, то,
очевидно,^, b%, c%, d%, f и gefl«,,(G'), где G' — образ G при
гомеоморфизме ? = t, (z).
2. Рассмотрим теперь уравнение 2-го порядка эллиптическо-
эллиптического типа
+ F (*, у, и, % g) = 0 G.21)
§ 7. УРАВНЕНИЯ ЭЛЛИПТИЧЕСКОГО ТИПА Ю9
(Л
му
= ас — Ъ
виду
>2>0
в
; +
G).
Чтобы
+ Рг (б,
привести
его
к
0,
каноническо-
G.22)
мы должны использовать гомеоморфизм уравнения
С а (г) Сг = 0, где q = ^= , G.23)
Для определенности будем предполагать, что на всей плоскости
Е выполнено условие равномерной эллиптичности А > До > О
До = const. В таком случае \q(z) I =S qa < 1, и, следовательно,
существует полный гомеоморфизм уравнения G.23), если
а, Ъ, с — измеримые ограниченные функции. Но этого еще недо-
недостаточно для того, чтобы уравнение G.21) привести к канони-
каноническому виду. Для этого нужно обеспечить еще существование
первых и вторых производных функции ?(z) хотя бы в обобщен-
обобщенном смысле. Для этой цели достаточно предположить, что
а, Ь, с ев Di:P(E),p > 2. Тогда согласно теореме 2.5 Z,(z)e= D2,P(E).
При этих условиях преобразование переменных
1 = 1 (*, У), Ц = Ц(Х, у), G.24)
где ! + ?r] = ?(z)—гомеоморфизм уравнения G.23), приводит
уравнение G.21) к виду G.22).
Если начальное уравнение линейно:
а —г, + 2Ъ -г—з- + с —5 + d -г- + eir + fu = g, G.25)
то преобразованное уравнение имеет вид
^Г5 + ^ja + P(S, Л)а| + дA, л)^ + г(^ Т1)и = А(Е, л), G.26)
где
Р = ггтт(а^х + Щху + clyy + dlx + elv),
4|А
G.27)
т]ж + ет]„),
G.28)
Здесь Д = ас—Ь2, a / — якобиан преобразования G.24).
Вообще, если а, й, с е= Д„+1 ,р (?"), m > 0, /» > 2, то ?B)s
е Dm+2 р(?). Если же а, Ь, с(= С« (Е), то ? (z) e C+1 (-Б) (теорема
2.12). '
Наконец, пусть а, Ь, c^Dm+ip(G), d, e, /, g^Dmp(G), m>
>0, р>2. Так как тогда %(х, у), r\(x, y)e?)m+2p(G), то
/e=Z>m+1 P(G), и следовательно, /е С» (G), а = (р — 2)/р. Поэто-
Поэтому в силу G.27) и G.28) имеем:
p,q,r,h&Dn,P(G') (G'-S(G))-. G.29);
Глава 3
ОСНОВЫ ОБЩЕЙ ТЕОРИИ
ОБОБЩЕННЫХ АНАЛИТИЧЕСКИХ ФУНКЦИЙ
§ 1. Основные понятия, термины и обозначения
1. Эта глава посвящена изучению свойств решепий эллипти-
эллиптических уравнений с частными производными определенного клас-
класса, линейных и нелинейных, в двумерной области. Будет развита
конструктивная теория, позволяющая изучать структурную и ка-
качественную природу решений. Сначала рассматриваются систе-
системы в канонической форме
ди ди , , , , ди ди , ., .-
а затем эллиптические системы более широкого класса.
Уравнение 2-го порядка вида
Aw + pwx + qwy = 0 A.2)
эквивалентно системе уравнений A.1). В самом деле, если обо-
обозначим wx = и, wy = —v, то получим систему уравнений
их—Vy + pu—qv = 0, uy + vx = O. A-3)
Ниже будет доказано (§ 9, п. 2), что и, наоборот, система урав-
уравнений вида A.1) всегда может быть приведена к уравнению 2-го
порядка вида A.2).
Как было доказано выше (гл. 2, § 7, п. 1), система A.1)
является канонической формой общей линейной эллиптической
системы уравнений в двумерной области. Поэтому результаты,
полученные для системы вида A.1), легко переносятся на слу-
случай общих линейных систем. Многие свойства решений этой си-
системы распространяются также на случай квазилинейных систем.
Вводя в рассмотрение комплексную функцию
w(z)=u(x, y)+iv(x, у), A.4)
систему уравнений A.1) можно .записать в виде
6 (w) = д-w + Aw + Bw = F, A.5)
§ 1. ОСНОВНЫЕ ПОНЯТИЯ, ТЕРМИНЫ И ОБОЗНАЧЕНИЯ
где д-w = -^ (wx + iwy), А =-^-(а + d + ic—ib), В = ^-(a — d +
+ ic + id), F = i- (/ + f?).
Ниже мы убедимся, что такая форма записи системы A.1)
имеет много преимуществ и хорошо отвечает существу дела. По-
Поэтому в дальнейшем мы почти все время будем ею пользоваться.
В классическом смысле решением системы уравнений A.1)
называется пара вещественных непрерывно дифференцируемых
функций и(х, г/), v(х, у) вещественных переменных х и г/, ко-
которая удовлетворяет этой системе всюду в некоторой области G.
Но такие решения существуют лишь для сравнительно узкого
класса уравнений. Например, уравнение A.5) при непрерывных
А, В и F может вовсе не иметь решений в классическом смыс-
смысле. Простым примером служит следующее уравнение:
w-z = f, z = % ()
In —
правая часть которого, очевидно, непрерывна в окрестности точ-
точки 2 = 0. Всякое непрерывное внутри некоторой окрестности
точки z = 0 решение этого уравнения выражается формулой
iv (z) = — 2z In In -у + Ф (z),
где Ф (г) — произвольная голоморфная функция в окрестности
точки 2 = 0. Дифференцируя это равенство по z, получим
wz = 4- К - iwy) = - 2 In In -Jr + -1Е(
Отсюда видно, что производные по х и у всякого непрерывного
внутри окрестности точки z = 0 решения уравнения (*) разрыв-
разрывны в точке z = 0.
Рассмотрим еще пример уравнения с непрерывным коэффи-
коэффициентом
Общее решение его выражается по формуле
где Ф(г)—произвольная аналитическая функция от z. Отсюда
видно, что w непрерывна в точке z = 0 тогда и только тогда,
когда Ф непрерывна в этой точке. В таком случае w-, очевидно,
всегда непрерывна в той же точке, a wz непрерывна лишь при
условии Ф@) = 0. Если Ф@)?=0, то мы получаем непрерывные
в окрестности точки z = 0 решения уравнения (*), имеющие раз-
ГЛ- 3- ОСНОВЫ ТЕОРИИ ОБОБЩЕННЫХ АНАЛИТИЧЕСКИХ ФУНКЦИЙ
рывные производные 1-го порядка в точке 2 = 0. Другие приме-
примеры указаны в работе [86].
Ниже будет доказано, что решение в классическом смысле
всегда существует, если коэффициенты и правая часть уравне-
уравнения A.5) непрерывны в смысле Гельдера в рассматриваемой об-
области. Но ограничиваться изучением только таких уравнений
нецелесообразно. Сошлемся хотя бы на то, что многие приклад-
прикладные задачи приводят к уравнениям даже с разрывными коэффи-
коэффициентами. Поэтому следует изучать и более широкие классы
уравнений.
Ниже мы рассмотрим класс уравнений вида A.5), для кото-
которого А, В, F e Lp, p > 2. Но в таком классе понятие решения
необходимо толковать в обобщенном мысле. Эти обобщения мож-
можно вводить различными путями, но в дальнейшем мы будем
пользоваться понятием обобщенного решения, которое естествен-
естественным образом определяется с помощью обобщенных производных
в смысле С. Л. Соболева (гл. 1, § 5). Обычно обобщенные реше-
решения в этом смысле отыскиваются в классе суммируемых функ-
функций. Но такое ограничение в нашем случае явилось бы слишком
стеснительным. Это заставило бы нас, например, исключить из
класса обобщенных решений уравнения Коши— Римана d-w = 0
мероморфные функции. Ниже мы вводим такое определение
обобщенного решения уравнения A.5), которое в случае уравне-
уравнения Коши — Римана приводит к классу аналитических функций,
допускающих дискретное множество изолированных особых то-
точек внутри области.
Будем говорить, что функция w(z) удовлетворяет уравнению
A.5) в окрестности точки z0, если в некоторой окрестности Go
этой точки w — обобщенная функция класса D-(G0)n ©(«;)==
== d-w + Aw + Bw = /^почти везде в Go. Если w удовлетворяет
уравнению (S(^) = F в окрестности каждой точки области G,
исключая, быть может, точки некоторого дискретного относи-
относительно G множества Gw, то будем говорить, что w является
обобщенным решением уравнения A.5) в области G. Множество
Gw, которое содержит лишь изолированные точки, вообще гово-
говоря, зависит от выбора w. Это множество мы будем называть
множеством особенностей или множеством особых точек обоб-
обобщенного решения w(z) относительно области G. Если Gw — пус-
пустое множество, то обобщенное решение w будем называть регу-
регулярным решением уравнения A.5) в области G.
Иными словами, регулярное в области G решение w (= D-(G)
и удовлетворяет уравнению <5(w) = F почти везде в G. Ниже
будет установлено, что уравнение Qi(w) = F всегда имеет как
обобщенные, так и регулярные решения, если А, В, F^LP(G),
р > 2. Более того, будет доказано следующее важное свойство
§ 1. ОСНОВНЫЕ ПОНЯТИЯ, ТЕРМИНЫ И ОБОЗНАЧЕНИЯ
регулярных решений: если А, В, F e LP(G), p > 2, го всякое ре-
регулярное в области G решение уравнения A.5) принадлежит
классу Dip(G), а следовательно, и классу Ca(G), а = р~ (§ 3).
Введем теперь понятия обобщенного и регулярного решений
системы уравнений A.1). Пару вещественных функций и{х, у)
и v(х, у) будем называть обобщенным (регулярным) решением
системы уравнений A.1), если комплексная функция w = и + io
есть обобщенное (регулярное) решение соответствующего комп-
комплексного уравнения A.5) в области G.
Введем следующие обозначения. Пусть %*(А, В, F, G)X
X($L(A, В, F, G)) обозначает весь класс обобщенных (регуляр-
(регулярных) решений уравнения A.5) в области G. Если А, В. F <s
е LP(G) (А, В, F^ Lp2{E)), то будем писать соответственно
«• (А, В, F, G) и Яр (А, В, F, С)(Яр,2 (А, В, F, G) и %,г (А, В, F,G)).
Соединение (теоретико-множественную сумму) классов 21Р (А,
В, F, G), соответствующих всевозможным функциям А, В, F
класса LP(G) при фиксированном р, обозначим через %P(G). Ана-
Аналогично определяем также классы %P(G), 3tPi2 (&) и ^р,2 (?)•
Для обозначения классов обобщенных и регулярных рсшенпй
однородного уравнения
© (w) = д-w + Aw + Bw = 0, A.6)
эквивалентного системе однородных (вещественных) уравне-
уравнений вида
--- + au + bv=0, _ + _+Cu + di; = O, A.6a)
в области С? будем употреблять символы %*(А, В, G) и
Sf(^4, В, G) соответственно. Будем также употреблять обозначе-
обозначения %*р (А, В, G), % (А, В: G), s?a (А, В, G), Яр,2 (А, В, G), Я* (G),
Яр(б!), 9tp>2 (G) и ЯР_2(С), смысл которых очевиден.
Условимся называть коэффициенты А и В уравнения A.6)
образующей парой класса $И*(А, В, G).
В силу теоремы 1.15 класс обобщенных решений в области G
уравнения Копта — Римана d-w = 0 совпадает с классом анали-
аналитических функций от 2, которые могут иметь любые изолирован-
изолированные особые точки внутри G — полюсы и существенно особые
точки, а также точки ветвления. Этот класс функций, как мы
уже условились в гл. 1 (§ 1, п. 7), будем обозначать через
9@ (G). Класс регулярных решений уравнения d-w = 0, очевид-
очевидно, совпадает с классом голоморфных в G функций, который мы
обозначаем через %{G). Очевидно, %(G) = %fi
8 И. Н. Векуа
ГЛ- 3- ОСНОВЫ ТЕОРИИ ОБОБЩЕННЫХ АНАЛИТИЧЕСКИХ ФУНКЦИЙ
Отметим следующие свойства классов Ш(А, В, G) и $tp(G):
I. Класс §1*(Л, 5, G)—линейное многообразие над полем ве-
вещественных чисел, т. е. если wit w2<=%*(A, В, G), то ciwi +
+ c2w2 s SI* (Л, В, G) {сi, c2 — произвольные вещественные по-
постоянные).
П. Если /(z) и lnf(z)^Dip(G), a we.%p(G), то произведе-
произведение /u>e %P(G).
Свойство I очевидно. Приведем доказательство свойства И.
Имеем:
(fw)- = f-w + fw- = f-w — Ajw — 5/ш =
i
Так как Л — д- In / и ^ <= Lp (G), то /w e Sip (G).
Ниже, в § 4, будет выяснена структура обобщенных решений
уравнения A.6). Будет установлено, что если A,B^LPii(E),
р > 2, то обобщепные решения в любой заданной области G
имеют вид
w(z) = <b(z)e«X*\ Фе<(С), соеСр-з(Я). A.7)
Эта формула показывает, что между классами обобщенных ре-
решений уравнений вида A.6) и классом аналитических функций
от z имеются глубокие связи. Ниже мы увидим, что формула
A.7) и ряд других соотношений, которые будут выведены в этой
главе, позволяют распространить на обобщенные решения весь-
весьма широкого класса уравнений вида A.6) многие свойства ана-
аналитических функций от z. Поэтому обобщенные решения уравне-
уравнения вида A.6), т. е. функции класса 3lP (G), мы будем назы-
называть обобщенными аналитическими функциями. В соответствии
с этим уравнение вида A.6) назовем обобщенным уравнением
Коши — Римана.
В этой и следующей главах будет развита достаточно полная
теория обобщенных аналитических функций, представляющая
собой существенное расширение классической теории, но вместе
с тем сохраняющая ее основные характерные черты.
2. Уравнение A.5) сохраняет свой вид при конформных ото-
отображениях области. Это обстоятельство в ряде случаев сущест-
существенно упрощает исследование свойств обобщенных аналитиче-
аналитических функций (в связи_с этим (см. [58а]).
Если А, В, F^LP(G), то условимся говорить, что уравнение
®(w) = F принадлежит классу LP(G), причем число р будем на-
называть порядком этого класса.
§ 1. ОСНОВНЫЕ ПОНЯТИЯ, ТЕРМИНЫ И ОБОЗНАЧЕНИЯ Ц5
Пусть функция z = cp(?) реализует конформное отображение
области Gz на область Gz плоскости ?. Тогда уравпение A.5)
преобразуется в уравнение
J + Ф' {I) Л (Ф) ш + Ф' (?) В (Ф) w = Ф'Д) /? (ф). A.8)
Внутри области Gz это уравнение, очевидно, принадлежит к то-
тому же классу, что и исходное уравнение, ибо ф'(?)—голоморф-
ф'(?)—голоморфная функция внутри Gi. В замкнутой же области GE оно может
и не принадлежать исходному классу. Это зависит уже от ха-
характера гладкости границ областей Gz и G:.
Пусть граница L области Gz принадлежит классу Cj,iV ,...)Vft
(гл. 1, § 2, п. 1). Предположим, что G;— каноническая область,
ограниченная окружностями Го, Г,, ..., Тт, совокупность кото-
которых обозначим через Г. В таком случае ф(?) непрерывна в
замкнутой области Gz + Г, причем L отображается на Г гомео-
морфно. Производная ф'(?) функции ф(?) может иметь разрывы
в точках границы, соответствующих угловым точкам контура L.
В окрестности точки ?,-, соответствующей угловой точке z} с
внутренним углом, равным Vj-я, О < v3-^ 2, ф'(?) имеет вид
(гл. 1, § 2, п. 3)
где фо(?)—непрерывная функция в окрестности ?,-, причем
фо(Сг)^О. Пусть все Vj ^ 1. Тогда коэффициенты и свободный
член уравнения A.8), очевидно, принадлежат классу LP(GC + F),
т. е. в этом случае при конформном отображении области на ка-
каноническую область класс исходного уравнения сохраняется. Ес-
Если же хотя бы одна из постоянных v, < 1, то коэффициенты и
свободные члены уравнения A.8) будут принадлежать классу
Lpy (G% + Г), где Pi — любое число, удовлетворяющее условию
2<Pl<2+ ,Jl(Pp^v) <P, v = min(l, vx, ...,vft). A.9)
Таким образом, при конформном отображении области Gz
класса C^iVii...>Vft на каноническую область Gt, ограниченную
окружностями, порядок класса уравнения A.5), вообще говоря,
понижается, но всегда остается >2.
Заметим, что при р = 2 порядок уравнения в новых перемен-
переменных сохраняется.
В дальнейшем, если специально не будет оговорено против-
противное, будем предполагать выполненным следующее условие:
A(z),B(z)tF(z)eLpj(E), p>2. A.10)
—J e Lp2(E), если /е
, p > 2. На основании этого легко убедимся, что при
ГЛ. 3. ОСНОВЫ ТЕОРИИ ОБОБЩЕННЫХ АНАЛИТИЧЕСКИХ ФУНКЦИЙ
дробно-линейном преобразовании переменной
коэффициенты и свободный член нового уравнения A.8) также
будут удовлетворять условию A.10). Иными словами, при дроб-
дробно-линейном преобразовании независимого переменного класс
5lp,2> P > 2, сохраняется
В частности, если z = l/?, то получим уравнение
дгю0 + Ао (?) w0 + Во (Qw0 = Fo, A.11)
где «,„(?) = и; Ш, Л0 = _1ЛШ, В, = -15Ш
1 / 1 \
—=2-^ -т- • Так как при этом окрестность G,*, точки z = °°
отображается на окрестность Go начала координат, то мы примем
следующее определение:
Будем говорить, что w(z)<^%*(A, В, F, ??«,), если wo(z) =
= w(l/z)^%*(Ao,B0,F0, Go).
Это позволяет исследование характера поведения решения
уравнения д\ю + Aw + Bw = F вблизи бесконечности свести к
исследованию поведения решения уравнения A.11) вблизи нача-
начала координат. В частности, если функция wQ(z) класса
$L(A0, Во, Go) непрерывна в точке z = 0, то функция w(z) =
= wa(l/z) по определению непрерывна в точке г = » и принад-
принадлежит Ш(А, В, Go).
§ 2. Интегральное уравнение
для функций класса Ц(А,В, F, G)
Согласно данному выше определению всякое регулярное в об-
области G решение уравнения <$>{w) = F принадлежит классу
D- (G), т. е. d-zw s= — Aw — Bw + F e Lx (G). Рассмотрим теперь
случай, когда д-w е Ьг (G), причем класс таких решений обо-
обозначим через %(А, В, F, G). Очевидно, ^(^4, В, F, G)cz
<=*(A,B,F,G).
Если щеЯD, В, F, G), то в силу формулы E.12)гл. 1 имеем
w-Paw = O(z)+TaF, Фе«,(С), B.1)
где мы воспользовались обозначениями
B.2)
§ 2. ИНТЕГРАЛЬНОЕ УРАВНЕНИЕ ДЛЯ КЛАССА ^ <л- В, F, G)
Таким образом, всякая функция класса %(А, В, F, G) удов-
удовлетворяет интегральному уравнению B.1), причем аналитиче-
аналитическая функция Ф однозначно определяется по заданному реше-
решению w уравнения QZ(w) = F. Имеет место и обратное пред-
предложение:
Если для некоторой голоморфной в G функции Ф интеграль-
интегральное уравнение B.1) имеет своим решением функцию w, для ко-
которой Aw + Bw s Li(G), то она удовлетворяет также уравнению
(&(w) = F. В самом деле, если применим к обеим частям равен-
равенства B.1) операцию д-, то в силу формулы E.8) гл. 1 сразу
придем к равенству Qi(w) = F.
При F s 0 имеем уравнение
w — Раи> = Ф(г), B.3)
где Ф — произвольная аналитическая функция от z в области G.
Это есть интегральное уравнение для обобщенных аналитиче-
аналитических функций класса St(А, В, G). _
Если выполнены условия A.10) и, кроме того, w<^C(G), то
р 2
согласно теореме 1.19 ?aw и TGFе Са(Е), а= „ . Поэтому из
B.1) следует, что O(z)eC(G). Пусть граница Г области G со-
состоит из конечного числа спрямляемых кривых Жордана. Учи-
Учитывая, что VGw и TGF голоморфны вне G + Г и обращаются в
нуль на бесконечности, в силу теоремы и формулы Коши из
B.3) получим
Таким образом, интеграл типа Коши B.4) представляет со-
собой непрерывную в замкнутой области & функцию, если его
плотность w{%) совпадает с граничными значениями непрерыв-
непрерывной в & обобщенной аналитической функции класса %Р (G), р > 2.
Следует заметить, что интеграл типа Коши с произвольной
непрерывной плотностью не является, вообще говоря, непрерыв-
непрерывной функцией в замкнутой области.
В дальнейшем мы будем заниматься исключительно теми
классами уравнений вида A.5), которые допускают внутри рас-
рассматриваемой области непрерывные (обобщенные) решения.
Мы увидим, что этому классу принадлежат все уравнения, для
которых выполнено условие A.10).
Ниже, в § 5, мы докажем, что в этом смысле интегральное
уравнение B.1) всегда имеет решение. Таким путем будет полу-
получено одно из общих представлений класса функций %(A,B,F,G)
через аналитические функции от z. Будут также рассмотрены
гл- 3- ОСНОВЫ ТЕОРИИ ОБОБЩЕННЫХ АНАЛИТИЧЕСКИХ ФУНКЦИЙ
более узкие классы уравнений, решения которых допускают не-
некоторое число непрерывных и обобщенных производных. Рас-
Рассмотрение таких случаев важно в особенности с точки зрения
различных геометрических и механических приложений.
§ 3. Непрерывность и дифференциальные свойства
функции класса Ш(С
В этом параграфе, используя интегральное уравнение B.1) г
мы докажем несколько теорем о характере гладкости и диффе-
дифференциальных свойствах регулярных решений уравнения
1. Имеет место следующая
Теорема 3.1. Если we%pz(A, В, F, G), р>2, то
C(G) B)/
() ()p
Доказательство. Так как, согласно определению,
w^ D-(G)(t. е. d-we L1(G)^, то в силу теоремы 1.27 we L7(G)r
где y — любое число, удовлетворяющее условию 1 < y < 2. По-
Поэтому мы можем считать, что Y > р/(р — 1). _
Рассмотрим две подобласти Gt и G2 области G: G± <= G^ <= G% <=
cG2cG. Тогда д-w e L1 (G2), w s L7(G2). Поэтому согласна
равенству B.1) будем иметь:
w (z) - P2w = h (z), h = Фо (z) + T2F C.1)
где Фо — функция^ голоморфная внутри G2, a T2F e C(p-2)/P(E).
Так как ifei,(Gz), y > /»/(p — 1), то в силу теоремы 1.30
1111
,(), /(p
1111
V2w e L^ (G), — = —- Ч 2~~*~^' где ^ ~~ Д°статочно малое
положительное число. Поэтому из C.1) сразу следует, что
h e Ly (G2), ибо 7!>7^ —^j" Путем итераций из C.1) получим
уравнения вида
w = P?w + h + Pah+ ...+ Р^-Ч. C.2)
Согласно теореме 1.30 существует целое число п такое, что
P?-1we СF?). Поэтому, фиксируя такое п, в силу теоремы
1.30 имеем
Р> = Р2 (РГМ 6= Са (Е), а = (р - 2I р.
Пусть G' — подобласть G2 такая, что Gt <= G', G' <= G2. В таком
случае, очевидно, Р2 = Р' + Р", Р' = Pg', P" = Ро2-в-л причем
§ 3. НЕПРЕРЫВНОСТЬ И ДИФФЕРЕНЦ. СВОЙСТВА КЛАССА йр (G) Ц9
Р"Л. очевидно, голоморфна внутри С?'_и, следовательно, непре-
непрерывна в смысле Липшица на Gu ибо Gt <= Q'. Так как h непре-
непрерывна на G', то согласно теореме 1.25 Р7г е ClP-2)lv(E). Поэтому
Р2/г = P'/i + Р " /i с С(р-2)/2 (Gi). Аналогичным рассуждением до-
докажем, что Pg/t е С(р_2)/2 (Gj) (А = 1, 2, ...).
Таким образом, при некотором целом п правая часть равен-
равенства C.2) принадлежит классу C(p_a)/j,(Gi). Следовательно,
u'(z)e C(P-.Z)/P(G), так как в качестве G4 можно взять любую
подобласть области G. Тем самым теорема полностью доказана.
2. Теорема 3.2. Если А, В, FeDm>P(G) {m>0, р>2),
го всякая функция w(z) класса %(А, В, F, G) принадлежит клас-
классу Dm+i.P(G).
Доказательств о. Если т = 0, то А, В, F e.Lp(G), p>2
и в силу предыдущей теоремы w e Cp-2 (G). Поэтому, как это
_ р
следует из уравнения w- + Aw + Вш = F, w- e Lp (G), p > 2. Но
тогда в силу теоремы 1.37 wz^LP(G), /?>2, т. е. w^Di%p{G).
Рассмотрим теперь случай т ^ 1. Так как по доказанному w e
efl,, p{G), то имеем
Wrz+ AiW + BJJ> + Awl + B^-z = FS ,o оч
wz- + Л2ю + Bzw + 4m;z + Bwz = F2.
z
Отсюда следует, что w<^DZiP(G). Таким образом, при т = \ тео-
теорема доказана. Если же т = 2, то, дифференцируя обе части ра-
равенств C.3) по z иг, мы убедимся, что w^D3v{G). Продолжая
аналогичные рассуждения далее, мы убедимся, что производные
порядка т+ 1 от w принадлежит классу LP(G), p > 2, а это до-
доказывает нашу теорему.
Из теоремы 3.2 в силу теоремы 1.21 вытекает, что
Если А, В, F^Dn „(G) (т>0, р>2), то ю(г)еСF),
а = (р - 2)/2.
Теорема 3.3. Если А, В, F^ C%(G)(m>0, 0<а<1), то
функция w(z) класса %{А, В, F, G) принадлежит классу
+1
Доказательство. При то = 0 мы имеем w- = — Aw —
— Bw + F^Ca- Тоща согласно теореме 1.33 и wz^Ca,(G),
т.е. шеСа(С). Если то = 1, то из равенств C.3) следует, что
we C&(G). Рассуждая дальше аналогично предыдущему случаю,
мы убедимся, что теорема имеет место для любого целого тоХ).
Как видно из теоремы 3.3, для существования решений в клас-
классическом смысле уравнения A.5) или соответствующей системы
уравнений A.1) достаточно, чтобы А, В, FeCa{G), 0<«<l.
В таком случае всякое регулярное решение имеет непрерывные
|20 ГЛ- 3- ОСНОВЫ ТЕОРИИ ОБОБЩЕННЫХ АНАЛИТИЧЕСКИХ ФУНКЦИЙ
в смысле Гельдера частные производные 1-го порядка внутри
области.
3. Доказанные выше теоремы 3.1, 3.2 и 3.3 устанавливают сте-
степень гладкости и дифференциальные свойства функций класса
Ш(А, В, F, G) в зависимости от степени гладкости и дифферен-
дифференциальных свойств функций А, В, F внутри области G. Степень же
гладкости функций этого класса и их дифференциальные свой-
свойства в замкнутой области G, очевидно, зависят еще от степени
гладкости и дифференциальных свойств функций А, В, F в замк-
замкнутой области, а также от степени гладкости границы области и
граничных значений рассматриваемых функций.
Теорема 3.4. Пусть GeC. Если A,B,Fe= LP(G+T), p>2,
то решение уравнения A.5), непрерывное в G + T и принадле-
принадлежащее на Г классу Са(Т), принадлежит и классу Cf,(G + T), где
P=min(a, -у), 7=^-
Доказательство. При этих условиях мы можем предста-
представить w в виде w = PGw + TGF + Ф(г), где Ф выражается интегра-
интегралом типа Коши B.4). В силу теоремы 1.10 Фе= Ca(G +Г). Так
как Vow и TGF^Ci(G + T), to сразу получим, что »eCp(G+r),
(
P (, ч)
В §§ 1, 7 гл. 4 будут указаны еще другие условия, обеспечи-
обеспечивающие непрерывность обобщенных аналитических функций
класса 9tP(G), p > 2, и их производных до некоторого порядка в
замкнутой области.
4. Особо следует сказать о случае, когда А, В и F—анали-
F—аналитические функции вещественных переменных х и у. При этих
условиях регулярные решения уравнения Qi(w) = F являются
аналитическими функциями х и у внутри области и задачу их
построения можно привести к интегральному уравнению типа
Вольтерра в комплексной области. Таким путем можно получить
различные интегральные представления решений уравнения
QZ(w) = F и изучить их свойства. Изложение этого метода можно
найти в работе автора [14а] (§ 10) (см. также [85в], § 3.13). По-
Поэтому в дальнейшем мы не будем особо останавливаться на рас-
рассмотрении этого случая.
§ 4. Основная лемма. Обобщения некоторых классических
теорем
В этом параграфе мы дадим вывод формулы A.7), которая,
как уже отмечалось выше, позволит нам доказать ряд теорем,
обобщающих свойства аналитических функций от z.
1. Прежде всего мы докажем следующую основную лемму.
Основная лемма. Пусть w(z) — обобщенная аналитиче-
аналитическая функция класса %Pti(A, В, G),
§ 4. ОСНОВНАЯ ЛЕММА. ОБОБЩЕНИЯ НЕКОТОРЫХ ТЕОРЕМ
если w (z) фО, z^G,
W D.1)
A (z) + В (z), если w (z) = 0, z (= G.
5 таком случае функция
Ф(z)=w(z)e-a(z), D.2)
где
/- \ 1 Г Г S (?) d| ИГ] „ //ON
со (z) = —- —~ _ ' ^ — 1 eg, D.za)
G
принадлежит классу % (&)•
Доказательство. Так как \g(z)\ <\A{z)\ + \B(z)\, то
~" p > 2. Поэтому согласно теореме 1.19 _функция
а = (» — 2)/р. Так как — g — д~а> е LV(G), p > 2,
то в силу теоремы 1.40 функция е"|!|ей|,,(б), причем
де
Пусть Сщ — множество особенностей функции w. По опреде-
определению, Gw — дискретное множество относительно области G. Вну-
Внутри открытого множества G — Gw функция w, очевидно, явля-
является регулярным решением уравнения d-w + Aw + Bw = 0. Сле-
Следовательно, в силу теоремы 3.2 w e DltP (G — Gw). Поэтому к
функции Ф = we", которая в силу теоремы 1.39 принадлежит
классу D-(G — G*), мы можем применить формулу дифферен-
дифференцирования произведения
д-Ф = е~а (д-w + wg)= e~a(— Aw — B~w + wg).
Отсюда в силу D.1) имеем:
д-ф — 0 почти везде в G — G*w.
Z
Это означает, что Ф голоморфна внутри G — Gw. Так как Gw
содержит только изолированные точки, то, очевидно, Ф е 2l0 (G).
Таким образом, лемма доказана.
В частности, если w — регулярное решение уравнения d-w +
+ Aw + Bw = 0 в области G, то Ф голоморфна в G.
Формула D.2) была доказана в работе автора [14а] A952)
с помощью теоремы единственности Карлемана [38а] (см. ниже,
п. 3). Данное здесь доказательство, которое не использует тео-
теорему Карлемана, было предложено несколько позже в другой
работе автора [14д] A953). Теорема Карлемана, очевидно, есть
простое следствие доказанной выше леммы (см. теорему 3.5).
122 ГЛ- 3- ОСНОВЫ ТЕОРИИ ОБОБЩЕННЫХ АНАЛИТИЧЕСКИХ ФУНКЦИЙ
В следующих пунктах мы приведем некоторые важные след-
следствия этой леммы.
2. Из формулы D.2) видно, что множество точек, где w{z)~
= 0, совпадает с множеством нулей аналитической функции Ф(г).
Точно так же множество особых точек w(z) совпадает с множест-
множеством полюсов и существенно особых точек Ф(г). Отсюда следует,
что если w тождественно не равна нулю, то ее нули и полюсы
изолированы, причем кратность нуля и порядок полюса являются
целыми положительными числами. Кроме того, вблизи полюса
функция w(z), очевидно, не ограничена, а поведение ее в окрест-
окрестности существенно особой точки характеризуется теоремой Со-
хоцкого — Вейерштрасса. Первое утверждение очевидно, докажем
второе.
Если w(z) тождественно не обращается в нуль, то формулу
D.2) можно записать в виде
w (z) = Ф (z) еш(г), D.3)
где
со (z) = —
Пусть z0 — существенно особая точка функции w (z), а с — лю-
любая фиксированная постоянная. Тогда в силу D.3)
| w (z) - с |< | Ф (г) 11 em(z) - eQ(zo) | + | Ф (z) eQBo) - с |. D.5)
Так как z0 является существенно особой точкой для Ф(г), то в
силу теоремы Сохоцкого — Вейерштрасса найдется последователь-
последовательность zft, сходящаяся к z0 и удовлетворяющая условию:
Ф Bft) еы^°^ -*-с при к-+°°. На основании этого, учитывая непре-
непрерывность со (z), из неравенства D.5) получим w (zh) -> с при
zk -*¦ z0, что и требовалось доказать.
Формулу D.3) мы будем называть представлением i-го рода
или формулой взаимности для обобщенных аналитических функ-
функций*). Как увидим ниже, она имеет фундаментальное значение
для построения общей теории обобщенных аналитических функ-
функций. Поэтому мы к ней часто будем обращаться в дальнейшем.
3. Из формулы D.3) непосредственно вытекает следующая
теорема единственности для обобщенных аналитических функций,
доказанная иным путем Т. Карлеманом [38а] в 1933 г.
Теорема 3.5. Если обобщенная аналитическая функция
w(z) класса 5tp2(G), p > 2, обращается в нуль на некотором
бесконечном множестве Ш точек области G, имеющем хотя бы
одну предельную точку, принадлежащую G, то w(z) = 0 всю-
всюду в G.
*) В работах Л. Берса [5а, б] эта формула названа «принципом по-
подобия».
§ 4. ОСНОВНАЯ ЛЕММА. ОБОБЩЕНИЯ НЕКОТОРЫХ ТЕОРЕМ 123
С помощью формулы D.3) на обобщенные аналитические
функции можно распространить также многие известные гранич-
граничные теоремы единственности из теории аналитических функций
[72]. Например, имеет место следующая
Теорема 3.6. Пусть граница области G содержит спрям-
спрямляемую дугу у. Пусть А и 5<sLp(G +-у), p>2. Если w(z)ez
<s$l(A, В, G) и угловые граничные значения w(z) на у равны
нулю, то w = 0 всюду в G.
Доказательство. Из D.2а) следует, что в граничной
полосе внутри G, примыкающей к дуге ¦у, co(z) непрерывна. По-
Поэтому угловые граничные значения аналитической функции Ф(з)
будут равны нулю на у. Следовательно, в силу известной теоре-
теоремы [72] (гл. IV) Ф(г) = 0, т. е. w = 0, что и требовалось доказать.
Теоремы 3.5 и 3.6 допускают важную геометрическую интер-
интерпретацию (см. гл. 5, § 3, п. 5).
4. Если Z? = О, то формула D.3) принимает следующий вид:
w(z) = O(z)en'G fc z , Фе=5?(С). D.6)
Эта формула дает представление общего решения уравнения
д-w -h ^1^ = 0 D.7)
через аналитические функции от z. Она была получена впервые
Н. Теодореску [82а, б] A931) для случая ограниченной измери-
измеримой функции А.
Нужно отметить, что формулу D.3) для общего случая можно
получить из формулы D.6). В самом деле, уравнение Е(и;) = 0
мы можем записать в виде _
Так как A0^LPi2{E), p>2, то решение последнего уравнения
можно представить в виде D.6), что, очевидно, сразу приведет
к формуле D.3). Таким путем и были выведены формулы D.3)
и D.4) в работе автора [14а] A952), причем формула D.6) была
получена как следствие теоремы Карлемана. (Тогда автор не
знал, что эта формула еще до работы Карлемана A933) имелась,
по существу, у Теодореску [82а]). Аналогичный вывод формулы
D.3) дан в работе Л. Берса [56] A953), опубликовавшего ее без
доказательства еще раньше A951) в работе [5а]. У Берса также
нет ссылки на Теодореску. Отметим, что в работах [56], [6а] не
приведено явного выражения D.4) для со, которое имеет сущест-
существенное значение при различных применениях формулы D.3).
5. Формула D.3) допускает обобщение на случай класса ква-
знсуммируемых функций А ж В (гл. 1, § 1, п. 8) [14е].
Теорема 3.7. Пусть существуют аналитические фуикции
ФЛ(я) в Фл(г) класса §C(G) такие, что произведения A(z)OA(z)
124 ГЛ- 3- ОСНОВЫ ТЕОРИИ ОБОБЩЕННЫХ АНАЛИТИЧЕСКИХ ФУНКЦИЙ
и B(z)OB(z)ei,(G), р>2*). Если w(z) — обобщенная аналити-
аналитическая функция класса Я*(А, В, G), то найдется аналитическая
функция Ф(г) класса %*(G) такая, что
w(z) = <S>(z)e«(z\ D.8)
где
co(z) =
G G
D.9)
Доказательство. В тривиальном случае w = 0 мы будем
считать Ф = 0. Поэтому в дальнейшем будем предполагать, что
w{z) тождественно не обращается в нуль Так как A(z)OA(z)&
е= Lp (G) и В (z) Фв (z) ^ е Lp (G), р>2, то в силу теоре-
теоремы 1.19 интегралы, фигурирующие в правой части равенства
D.9), принадлежат классу С(р-2)/Р(Е), причем почти везде в G
выполняется равенство
В силу этого для функции Ф(г)= w(z)e~a<z) согласно теоремам
1.39 и 1.40 можем написать:
- + Aw + Bw\ = 0.
dz ' \dz j
Это равенство выполняется на всякой замкнутой подобласти G'
области G, которая не содержит нулей и особых точек аналити-
аналитических функций OA(z) и Фв(г), а также особых точек функции
w(z). Но множество таких точек дискретно расположено внутри
G. Поэтому Ф(з) е Яо (G), т. е. Ф(г) — аналитическая функция
в G всюду, за исключением, быть может, некоторого дискретного
относительно G множества точек. Таким образом, теорема дока-
доказана.
Формула D.8) легко обобщается на тот случай, когда А и В
имеют вид
А=А± + ... + Ап, B = Bt + ... + Bn, D.10)
где А} и Bj е ?* х Lp (G), р>2 (/ = 1, ..., п). В таком случав
*) Если G — неограниченная область, то будем считать, что A(z)Oa(z)
и В (z) Фв B) s LvLp, (G), р > 2, 1< р' < 2 ...
§ 4. ОСНОВНАЯ ЛЕММА. ОБОБЩЕНИЯ НЕКОТОРЫХ ТЕОРЕМ
формула D.8) сохраняется, если в качестве со (z) взять функцию
/ ч V 1 Г Г Ак (О фк (В d5 <*Л
со (z) = У . . .¦ \ — тА V
J v \ъ — z) w ^у
G
Таким образом, если 4 и 5 — функции вида D.10), где А}
п 5, — квазисуммируемые функции класса Яо X Lp (G), то обоб-
обобщенные аналитические функции класса %*(А, 5, G), как пока-
показывают формулы D.8) и D.11), принадлежат классу 910Х
XeS«'xce(B)> где а = ?^2 (гд_ 1( § 4j n> g)>
Приведенные выше обобщения формулы взаимности D.3)
были указаны в работе автора [14е].
6. Из D.8) и D.11) следуют неравенства
где
Эти неравенства имеют место для всех функций класса
%*(А, В, G), причем Q(z) зависит лишь от образующей пары
А и В, но не зависит от выбора функции w.
Если А, В е Lp_ 2 (Е), р > 2, то Фа = Фв = 1 и в силу неравен-
неравенства F.14) гл. 1 имеем
Д(ЕI |g|). D.12а)
G
7. Функции Ф и со, фигурирующие в формуле D.8), будем
называть аналитическим делителем и логарифмической разностью
обобщенной аналитической функции w{z). Если Фо(г)—произ-
Фо(г)—произвольная голоморфная в G функция, то имеем
w (z) = Ф (z) еи(г) = Ф (z) е-фо(г>ефо^'+<в(г> = ф* B) еш*B).
Отсюда видно, что аналитический делитель и логарифмическая
разность не выражаются однозначно через и>. Это обстоятельство
дает возможность подчинять эти функции тем или иным доба-
добавочным условиям. В частности, можно указать различные ус-
условия, позволяющие определять их однозначно. Например, для
ГЛ- 3- ОСНОВЫ ТЕОРИИ ОБОБЩЕННЫХ АНАЛИТИЧЕСКИХ ФУНКЦИЙ
всякой функции класса ЯР|2(^)> Р > 2, представление D.3), где
со (z) задается по формуле D.4), является единственным. Для
этого представления характерно то, что в(г)еС,(?), а.=
= (р — 2)/р, голоморфна вне G + Г и обращается в нуль на беско-
бесконечности (см. теорему 1.19). В самом деле, если бы мы имели
два представления вида D.3):
w (z) = Ф1 (z) etoi(z), w (z) = Ф2 (z) ей*(г), D.13)
то получили бы равенство
|i| = Л«-*> (в G). D.14)
Так как coi(z) и co2(z) принадлежат классу Ga(E), a = (p — )р
голоморфны вне G + Г и обращаются в нуль на бесконечности,
то левая часть равенства D.14), очевидно, голоморфна внутри
G, непрерывна в G + Г и продолжается вне G + Г голоморфной
функцией, равной 1 на бесконечности. Отсюда в силу теоремы
Лиувплля следует, что Oi = Ф2 и, следовательно, <Bi = co2. Таким
образом, единственность представления функции класса 3tP|2 (G),
р>2, по формулам D.3) и D.4) установлена.
В дальнейшем логарифмическую разность o(z), задаваемую
формулой D.4), будем называть нормальной логарифмической
разностью функции w(z) класса SIPi2 (А В, G), а аналитическую
функцию Ф(г), фигурирующую в D.3),— нормальным аналити-
аналитическим делителем w(z).
В силу теоремы 1.24 нормальные логарифмические разности
функций класса 91р;2 (-4, В, G) удовлетворяют неравенствам
I©(z1)-u)(z2)| s=^pLP,2(U| + !5|)U1-z2!'I>-2)/p, D.15)
lo>(z)KMPZ,1)i2(U! + |?|)|z|(!!-*)/J> при \z\ >R >1. D.16)
Неравенства D.15) имеют место для всех точек z, zt, zz плоско-
плоскости Е, а неравенство D.16) справедливо при Ы>/?>1, при-
причем R — фиксированная постоянная. Заметим также, что постоян-
постоянная Мр и неравенствах D.15) и D.16) зависит исключительно от
Р> Р > 2- м
Пусть 9lj,>2 (G) — мнон^ество всех обобщенных аналитических
функций, образующие пары которых удовлетворяют условию
LPt2(\A\ + \B\)<M, M- постоянное. D.17)
Из неравенств D.15) сразу следует
Теорема 3.8. Множество {co(z)} нормальных логарифми-
логарифмических разностей, соответствующих элементам множества
%>,2 (Q» равномерно ограничено и равностепенно непрерывно па
§ 4. ОСНОВНАЯ ЛЕММА. ОБОБЩЕНИЯ НЕКОТОРЫХ ТЕОРЕМ 127
плоскости, т. е. множество {a(z)} компактно в простран-
пространстве С{Е).
8. Если воспользуемся принципом максимума модуля анали-
аналитической функции, то из формулы D.3) получим принцип мак-
максимума модуля для обобщенной аналитической функции в сле-
следующей форме.
Принцип максимума. Если ше^^Л, В, G), р > 2,
и непрерывна в G, то
\w(z)\^Mmax\w(t)\, zeG + Г, D.18)
где М—положительная постоянная !3=1, которая зависит исклю-
исключительно от А, В, р.
С помощью неравенства D.15) легко получим для М нера-
неравенство
1 < М < e*Mr4№+W\ D.19)
Если М приравняем к е2ммр, то неравенство D.18) будет выпол-
выполняться для всякой функции класса 9l^2 (Q-
С помощью принципа максимума может быть доказана
Теорема 3.9. Пусть последовательности Ап и Вп элементов
LP2{E), p>2, сходятся в среднем (в норме Ьр2(Е)) к А и В.
ПустьзеЯР|2Dп, Вп, G) (и = 1, 2, ...), причем wn непрерыв-
непрерывны в G. Если последовательность wn равномерно сходится к не-
некоторой функции w (z) на границе Г, то wn сходится равномерно
в замкнутой области к функции iv(z), принадлежащей классу
%,2(A,B,G),p>2.
Доказательство. Последовательности Ап и Вп, очевид-
очевидно, удовлетворяют неравенству вида D.17). Следовательно, и>ле
е 9t?fa (G) и в силу принципа максимума последовательность и?„
равномерно ограничена. Остается доказать, что она равномерно
сходится в G к функции w(z), w<^%(A, В, G), где A =\imAn,
B = limBn (в норме Lv). Легко доказать компактность {wj в С,
используя формулы
Отсюда следует, что всякая сходящаяся подпоследовательность
{и>п} сходится к функции класса ЧИ(А, В, G), удовлетворяющей
уравнению
„(,) =, * Г±а«_± Г Г л(рЮ(р + д(рйр dld
Г G
Здесь функция it? (?) = lira wn(E;), ? es Г — одна и та же для всех
j. Тогда в силу принципа максимума все wnh сходятся и
гл 3- ОСНОВЫ ТЕОРИИ ОБОБЩЕННЫХ АНАЛИТИЧЕСКИХ ФУНКЦИЙ
внутри G к одному и тому же пределу (см. еще § 12). Попутно
мы доказали также следующую теорему.
Теорема 3.9'. Если последовательность wn сходится равно-
равномерно внутри G, то предел принадлежит классу 3tP, 2(А, В, G).
Нетрудно обобщить также лемму Шварца.
Теорема 3.10. Если 1) w^%vi(A, В, Et), p>2, Et =
= <Г(Ы <1), 2) w^C(Et) и 3) и;@) = 0, то
\w(z)\^\z\kMmax\w(t)\, z<=Ex, D.20)
где к — кратность нуля г = 0.
С этом легко убедимся, если учтем, что
Be-Zih\ Et), <p = argz.
Следует отметить, что постоянная М в неравенствах D.18)
и D.20) одна и та же.
9. Мы можем обобщить также теорему Лиувилля [14а, в].
Теорема 3.11. Если непрерывная на всей плоскости обоб*
щенная аналитическая функция iv(z) класса %р г(Е), р>2, ог-
ограничена и обращается в нуль в некоторой фиксированной точ-
точке z, плоскости (в частности, может быть zo = °°), то w(z) = 0
всюду.
Доказательство. Как видно из D.3) и D.4), функция
Ф(г), очевидно, целая функция. Она ограничена на плоскости
(следует принять во внимание неравенство D.16)) и обращается
в нуль в точке z0. В силу теоремы Лиувилля отсюда следует, что
Ф() = 0, т. e. w = 0 всюду.
В главах 5 и 6 будут указаны геометрические и механические
интерпретации теоремы 3.11.
Если w(z) — непрерывная и ограниченная на плоскости функ-
функция класса ^1р2(Е), р>2, то, как следует из D.3), <P(z) =
= с = const*).
Таким образом, имеет место
Теорема 3.12. Всякая непрерывная и ограниченная на
плоскости функция w{z) класса %рг{Е), р>2 имеет вид
w (z) = сем(г), с = const, D.21)
где co(z) = — Те ( А + 5— \и, следовательно, со (г) удовлетворяет
условиям D.15) и D.16).
Функции вида D.21), как это мы увидим ниже, в § 6, зани-
занимают особое место в классе функций %,р Z(E). Они здесь лграют
примерно такую же роль, как постоянные в классе аналитиче-
аналитических функций 9to(G) (при А = В = 0 правая часть равенства
*) Достаточно вместо ограниченности потребовать условие: w(z) =
= <9(|z|a), a < 1 (вблизи точки z = оо).
§ 5. ИНТЕГРАЛЬНОЕ ПРЕДСТАВЛЕНИЕ 2-ГО РОДА {29
D.21), очевидно, равна постоянной). Поэтому мы их назовем
обобщенными постоянными. Таким образом, обобщенной постоян-
постоянной класса 5tp>2 (А, В, Е) мы называем любое ограниченное
на всей плоскости решение уравнения
d\w + Aw + Bw = 0, 4,Bg Ьрл(Е), р>2, D.22)
нормальный аналитический делитель которого равен постоянной.
Введем также понятия обобщенного полинома и обобщенной
рациональной функции. Функцию класса §tp,г(Щ, Р > 2, мы бу-
будем называть обобщенной рациональной функцией, если она
имеет конечное число полюсов на расширенной плоскости. В та-
таком случае нормальный аналитический делитель есть рациональ-
рациональная функция, полюсы которой совпадают с полюсами соответ-
соответствующей обобщенной рациональной функции. Если обобщенная
аналитическая функция имеет единственных"! полюс z = oo; то ее
будем называть обобщенным полиномом. В таком случае порядок
полюса будем называть степенью обобщенного полинома. Обоб-
Обобщенные полиномы нулевой степени будут обобщенными по-
постоянными.
Нетрудно теперь теорему Лиувилля обобщить следующим
образом:
Теорема 3.11'. Если 1) w^%Pt2(E), p>2, и 2) w =
= 0(Ы") вблизи точки z = °o, где п — целое неотрицательное
число, то w есть обобщенный полином класса %р 2{Е) степени п.
10. В классе обобщенных аналитических функций сохраня-
сохраняются принцип аргумента и вытекающие из него следствия
(в частности, теорема Руше). Это непосредственно следует из
формулы D.3) (мы имеем в виду случай, когда А и Beip2(?)',
р > 2). Формулировки этих теорем мы здесь приводить не будем,
так как они пичем не отличаются от классического случая.
§ 5. Интегральное представление 2-го рода
для обобщенных аналитических функций
1. Как было показано в § 2, решения уравнения &(w) = F
удовлетворяют интегральному уравнению вида
/-Р/^/(*)-Т*(Л/ + В/) = г(г). E.1)
Докажем, что это уравнение всегда разрешимо, если 4, Be
e=Lp,Z(E), p>2, a ge=Lq0(E), q>p/{p — l). Так как Р — впол-
вполне непрерывный оператор в пространстве Ь„_0 (см. теорему 1.26),
то достаточно обнаружить, что соответствующее однородное
уравнение / — Р/ = 0 не имеет решения, кроме тривиального
/-0.
Пусть /о (z) — решение класса А,, 0 (Е) уравнения /0 — Р/о = 0.
Тогда оно является также решением всех уравнений /0 — Р"/о = О
(» = 1, 2, —). Но согласно теореме 1.30 найдется такое целое
9 и. Н. Векуа
130 ГЛ- 3- ОСНОВЫ ТЕОРИИ ОБОБЩЕННЫХ АНАЛИТИЧЕСКИХ ФУНКЦИЯ
число п, для которого /о = Рп/о е Са (Е), а = (р — 2)/р. Кроме
того, вблизи бесконечности, в силу неравенства F.22) гл. 1
/o(z) = P/o = 0(|zha). Но решение уравнения /О —Р/0 = 0 удов-
удовлетворяет также дифференциальному уравнению d~f0 + Af0 +
+ Bf0 = 0, т. е. /o(z) — непрерывная обобщенная аналитическая
функция класса 5tP, 2 (Е), р > 2, обращающаяся в нуль на беско-
бесконечности. Согласно теореме 3.11 /0 = 0 всюду. Это доказывает,
что уравнение E.1) имеет решение класса Lqi0(E), притом един-
единственное для всякой правой части g(z)et,|0(?), Я^р/(Р~1)~
Это решение мы можем представить в виде
f(z) = g(z) + Rg, E.2)
где R — вполне непрерывный линейный оператор в пространстве
Lq<0(E), q^—zrj' который называется резольвентой опера-
оператора Р.
2. Вернемся теперь к уравнению
g (w) = д-vo + Aw + Bw = F E.3)
и рассмотрим сначала случай, когда A, B^LP(G), p>2, F <s
е L, (G), причем G — ограниченная область. Отыскивая решение
класса Lq(G), q^p/(p — l), уравнения E.3), мы будем иметь
интегральное уравнение
f
G
E-4)
где g = TF + Ф (z), причем
Функция Ф может иметь простые полюсы в области G. ибо мы
можем взять число д_ меньше 2. _
Так как F^Li(G), то согласно теореме 1.27 TF^L-,(G), где
7 — любое число, меньшее 2. Поэтому согласно формуле E.2)
решение уравнения E.4) всегда имеет вид
w(z) = wo(z) + u>t(z), E.5)
где
" ~' E.6)
E.7)
Формула E.6) сопоставляет каждой аналитической в области
G функции Ф(г), принадлежащей Lq(G), q>p/(p — i), обобщен-
обобщенную аналитическую функцию w (z) класса L$!^fi (А, В, G).
Эту формулу мы будем называть представлением 2-го рода функ-
функций класса 9tp,2 (А, В, G).
§ 5. ИНТЕГРАЛЬНОЕ ПРЕДСТАВЛЕНИЕ 2-ГО РОДА
Формула E.7) дает частное решение неоднородного уравне-
уравнения E.3). Если Fe=LPiZ(E), р>2, то TFeC,,.2)/p(?) и
С" (#)
* рр
3. Пусть плоскость Е разделена на конечное число областей
Go, Gi, ..., Gm, причем будем предполагать, что Go — неограни-
неограниченная область, а остальные G1( ..., Gm — ограниченные области.
Более общий случай, когда имеется несколько неограниченных
областей, можно привести к предыдущему при помощи дробно-
линейного преобразования. Как уже отмечалось выше (§ 1, п. 2),
при таком преобразовании класс %V2(E), р>2, сохраняется.
Пусть Ф(г)— кусочно голоморфная функция, удовлетворяю-
удовлетворяющая следующим условиям: 1) Ф голоморфна внутри каждой из
областей Go, Gu ..., Gm и непрерывна вплоть до их границ,
исключая лишь конечное число граничных точек, причем вблизи
каждой такой граничной точки ф = O(\z — zo\~a), 0<а<
<2(р — 1)/р; 2) Ф ограничена в окрестности точки z = oo. В та-
таком случае фе^,(?), Q^p/ip—l), и мы можем строить ре-
решение уравнения &(и>) = 0 по формуле E.6). Так как w =
= O-T(Aw + Bw), и T{Aw + Bw) <=ClP-i)/P(E), то характер
непрерывности и разрыва w в граничных точках областей G,
будет таков же, как и у функции Ф. Если Ф удовлетворяет на
кривых Fj, ограничивающих области Gh условиям вида
(граничная задача Гильберта [26], [60а], гл. 2, § 37),
то и w(z) удовлетворяет этим же условиям. Таким образом, при
помощи решения неоднородной задачи Гильберта E.8) для ана-
аналитических функций получаем решение аналогичной задачи для
обобщенных аналитических функций. Результаты в этом направ-
направлении получены в работе Л. Г. Михайлова [53а, б] (см. так-
также [1а]).
4. Интегральное уравнение E.4) можно рассматривать как
аппарат построения любого решения уравнения E.3). Каждой
аналитической в области G функции Ф(г)е?8(ё),^ _^ , оно
сопоставляет вполне определенное решение. Это уравнение мож-
можно решать последовательными приближениями по следующей
простой схеме:
±^^±pL^dil + 9iz) + TF E.9)
причем Wo = Ф + TF. Эту схему можно еще упростить, полагая
А = 0, т. е. рассматривая уравнение вида
д-w + B~w = F. E.9а)
ГЛ. 3. ОСНОВЫ ТЕОРИИ ОБОБЩЕННЫХ АНАЛИТИЧЕСКИХ ФУНКЦИЙ
К этому виду уравнение можно привести всегда посредством
подстановки
w(z) = w(z)e G . E.96)
Поэтому в дальнейшем, когда найдем это целесообразным, будем
ограничиваться рассмотрением уравнения вида E.9а). Следует
заметить, что подстановка E.96) не выводит нас из класса урав-
уравнений Ьр 2 (Е).
5. Но наряду с E.4) можно рассматривать целый ряд других
интегральных уравнений, позволяющих также строить решения
уравнения E.3), причем эти уравнения можно выбирать так, что-
чтобы искомые решения подчинялись некоторым заранее заданным
условиям. Для примера покажем, как можно получать интеграль-
интегральные уравнения, позволяющие строить решения уравнения E.3),
принимающие в заранее фиксированных точках zu ..., zn наперед
заданные значения. Для этой цели введем в рассмотрение поли-
полином (п — 1) -й степени относительно z следующего вида:
Р (z, ?, zx, ..., zn) =
(z - zj . . . (z - zk^) (z ~ zk+1) ...(*-«„) 1 v
(Zh ~zi)--- (zk - zk-l) (zh - zft+l) ¦ • • (zh ~zn) С - zft"
и рассмотрим интегральное уравнение
w(z)+fG(Aw + Bw) = O(z) + faF, E.10)
где
Нетрудно видеть, что решение этого уравнения является реше-
решением дифференциального уравнения E.3) и, наоборот, любое
решение последнего всегда можно представить в виде E.10).
Докажем, что это интегральное уравнение разрешимо для лю-
любой правой части из Lq(G), q^p/(p — l). Рассматривая соответ-
соответствующее однородное уравнение, мы легко убеждаемся, что его
решение wo(z) удовлетворяет следующим условиям: 1) E(u?0) = 0
(в G), 2) wo^Ca{E), a = (p — 2)/p и 3) wo(z) голоморфна вне
G + Г и имеет на бесконечности полюс порядка п — 1 и
4) w(zh) = 0 (к = 1, ..., п). Представляя wo(z) по формуле D.3),
мы убедимся, что соответствующий аналитический делитель
cpo(z) голоморфен на всей плоскости, имеет на бесконечности
полюс порядка и —1 и обращается в нуль в п точках zu ..., zn.
Поэтому Фо = 0, т. е. w0 = 0, а это доказывает, что однородное
интегральное уравнение, соответствующее E.10), имеет лишь
тривиальное решение. Следовательно, это интегральное уравне-
уравнение имеет решение для любой правой части из Lq, q&* р/ (р — 1).
§ 6. ПОРОЖДАЮЩАЯ ПАРА ФУНКЦИЙ КЛАССА %р<2 (А, В, Е)
Если мы теперь в правой части E.10) в качестве Ф(г) возь-
возьмем аналитическую функцию, удовлетворяющую равенствам
<t>(zk) = ah+ibh (fc = l, ,.., п),
где ah п Ьк — заданные вещественные постоянные, то получим
решения уравнения E.3), принимающие в точках zh значения
ак + ibh. В частности, таким путем можно строить решения урав-
уравнения E.3), имеющие заранее фиксированные нули.
На основании этого результата нетрудно теперь видеть, что
всякое решение уравнения E.3) можно представить в виде
суммы
где wo(z)—решение однородного уравнения G?(w) = 0, принима-
принимающее в точках zh значения w(zh), a w% — решение неоднородного
уравнения E.3), обращающееся в нуль в точках zh.
§ 6. Порождающая пара функций класса %VZ(A, B,E).
Производная в смысле Л. Берса
1. Если G совпадает с Е, a w{z) ограничена и принадлежит
9LPi2(A, В, Е), р>2, то согласно формуле E.4) имеем
(
Е
ибо F = 0, а Ф, очевидно, равна постоянной. Следовательно, со-
согласно формуле E.6)
w(z)= cowo(z)+ CiWt(z), F.2)
где iVo(z) и Wi(z)— решения уравнений
w0 — T?w0 = 1, Wi — Fwi — i. F.3)
Согласно теореме 3.12 имеют место формулы
wo(z) = ea>o(z\ w1(z) = ie^'\ F.4)
где
у-0,1).
Таким образом, Wj?=Q всюду в Е, причем wo(°°)=l, wi(oo) = i.
Формула F.2) дает общий вид обобщенной постоянной класса
%,г{А,В,Е).
134 ГЛ- 3' основы ТЕОРИИ ОБОБЩЕННЫХ АНАЛИТИЧЕСКИХ ФУНКЦИЙ
В силу теоремы 3.12 обобщенная постоянная может обра-
обратиться в нуль в какой-нибудь фиксированной точке плоскости
тогда и только тогда, когда с® = ct = 0. Отсюда следует, что
u'o(z) и Wi(z) удовлетворяют всюду на плоскости условию
lm[wo{z)-wl(z)]>k0>0, /co = const. F.6)'
Так как _ _
д-ги-0 + Aw0 + Bw0 = 0, d-w\ + Awx + Bwx = 0,
то имеем _ _
А = V^o-%yi B = ygi-V;",, ?
Таким образом, между парами (А, В) и (w0, Wi) имеется
взаимно однозначное соответствие. Если заданы А ж В, принад-
принадлежащие LTi2(E), то мы можем определить w0 и Wi однозначно,
решая интегральные уравнения F.3), причем w0, wx g Cp_2 (E)
2
и допускают обобщенные производные по z, принадлежащие
Lp2(E). Кроме того, на всей плоскости выполняется усло-
условие F.6).
Если же заранее задана пара функций w0, wit удовлетворя-
удовлетворяющая перечисленным выше условиям: 1) wa, w± e C(p-2)/P(E),
2) d-w0, d-wx e Lv<i (E) и 3) выполняется на всей плоскости
неравенство F.6), то по формулам F.7) однозначно определя-
определяется соответствующая пара А, В. Поэтому пару функций wo{z),
wt(z), следуя Л. Берсу, будем называть порождающей парой
класса 9tp2D, В, Е). Такая пара функций была положена Бер-
сом в основу построения своей теории псевдоаналитических
функций ([5а, б, в], [7а, б]).
2. Всякую функцию w{z) однозначно можно представить в
каждой точке в виде
w (z) = %о (z) w0 (z) + Xi (z) Wi (z), F.8)
где %o> }(, — вещественные функции. Следуя Берсу, определим
производную по паре (w0, Wi) в точке z0 следующим образом:
w (z0) = lixn »<*-**('№*-W№\ F.9)
Нетрудно теперь доказать, что для существования w(z0) не-
необходимо и достаточно, чтобы в точке z0 имело место равенство
2. + A (z0) w (z0) + В (z0) w (z0) = 0, F.10)
z
dzo
где А и В — функции вида F.7). По Берсу функция w(z) на-
называется псевдоаналитической функцией 1-го рода в области G,
§ 1. ПОРОЖДАЮЩАЯ ПАРА ФУНКЦИЙ КЛАССА Яр|2<А, В, Е) 135
если она непрерывна и имеет почти везде в этой области про-
производную w (z) по паре (u>0, ^i).
Таким образом, класс псевдоаналитических функций в смыс-
смысле Берса, соответствующих паре (w0, Wi), совпадает с классом
обобщенных аналитических функций 51(^1, В, G) в нашем
смысле.
3. Еслп функция w удовлетворяет уравнению F.10), то со-
согласно равенству F.8) ей однозначно сопоставляется комплекс-
комплексная функция % = Хо ~Ь i%i, которую, следуя Берсу, назовем псев-
псевдоаналитической функцией 2-го рода. Как легко видеть, она
удовлетворяет уравнению
F.11)
Если учтем F.6), то легко убедимся, что
\q(z)\ ^ qo< i (в Е), q0 — постоянная. F.12)
Ниже мы докажем, что всякое решение уравнения F.11) в
области G можно представить в виде (§ 17)
%(z)=O[W(z)], F.13)
где W(z)—полный гомеоморфизм некоторого уравнения Бель-
трами вида
<*• F.14)
а Ф(?) —аналитическая функция от ? в области W(G).
Из формулы F.13) сразу вытекает следующая важная тео-
теорема, доказанная Л. Берсом [5в]:
Всякая псевдоаналитическая функция 2-го рода x(z) = %o(z) +
+ iXi(z), отличная от постоянной, реализует внутреннее отобра-
отображение по Стоилову.
4. Теперь естественно возникает вопрос о свойствах отобра-
отображений, реализуемых обобщенными аналитическими функциями.
Легко доказывается следующее предложение:
Для всякой заданной точки za можно найти функцию в лю-
любом классе %V2.{E), p>2, однолистную внутри некоторой окре-
окрестности Go этой точки.
Этому условию удовлетворяет, например, функция любого
класса Йр2(Е) с нормальным делителем z — z0. Таким образом,
всегда существуют локально однолистные решения любого урав-
уравнения вида S (w) == d-zw + Aw + Bw = 0(i,fie LPi2 (?)). Мож-
Можно указать примеры, показывающие, что, вообще говоря, тео-
теоремы Римана для таких уравнений не сохраняются. Однако,
как показал И. И. Данилюк [32в], всегда можно построить клас-
классы решений уравнения вида ®(ы?)=0, реализующие внутренние
отображения по Стоилову (см. еще [706]).
-[36 гл- 3- ОСНОВЫ ТЕОРИИ ОБОБЩЕННЫХ АНАЛИТИЧЕСКИХ ФУНКЦИЙ
§ 7. Обращение нелинейного интегрального уравнения D.3)
Формула E.6) позволяет для каждой голоморфной в G функ-
функции Ф(г) построить соответствующую обобщенную аналитиче-
аналитическую функцию w(z). Эту формулу можно применять даже тог-
тогда, когда Ф имеет простые полюсы в G. Но если Ф имеет внут-
внутри пли на границе области особенности высокого порядка, то
формула E.6), вообще говоря, не имеет смысла. В связи с этим
естественно ставится вопрос о том, как можно строить обоб-
обобщенные аналитические функции, соответствующие аналитиче-
аналитическим функциям, имеющим произвольного вида особенности. На
этот вопрос отвечает следующая
Теорема 3.13. Пусть G— открытое множество, а Ф— ана-
аналитическая в G функция, которая может иметь любые особен-
особенности. Пусть t — фиксированная точка G. Тогда существует
функция w (z) точки z^G, которая удовлетворяет следующим
условиям: функция wo(z)= w(z)/<b(z) непрерывна в G и непре-
непрерывно продолжима на всю плоскость, причем
1)шоеС„(?), 2) wo(z)^O (в Е), 3)и>0@ = 1. G.1)
v
Кроме того, в точках регулярности Ф(г) функция w удовлет-
удовлетворяет уравнению К (w) = д-w + Aw + Bw = 0.
Доказательство. Рассмотрим интегральное уравнение
W° W - n J J (E_,)(E_t) dS di\ - 1, (/.2)
G
Во = ВФ/Ф.
Оно имеет единственное решение, ибо соответствующее однород-
однородное уравнение не имеет нетривиального решения (это сразу
следует из теоремы 3.11). Решение уравнения G.2) удовлетво-
удовлетворяет всем трем условиям G.1). Первое и третье из этих условий
очевидны. Докажем, что имеет место и второе условие. Пусть
zro(zo) = O, где z0 — фиксированная точка. Тогда из G.2) по-
получаем
Но это однородное уравнение, как мы уже отмечали выше,
имеет лишь тривиальное решение w0 = 0.
Рассматривая теперь функцию w = Фюй, мы легко убедимся,
что ®(ш)=0 всюду в G, исключая множество особых точек
функции Ф(г). Нетрудно убедиться, что w = Фи?„ удовлетворяет
§ 8. ГЛАВНЫЕ ФУНКЦИИ И ЯДРА КЛАССА Яр2 (А, В, G) 137
нелинейному интегральному уравнению
, W - ФW
Существование решения этого уравнения было доказано не-
несколько иным путем в работе Л. Берса [5а]. Мы здесь воспро-
воспроизвели доказательство, указанное в работе автора [14е].
Таким образом, уравнение G.3) мы можем рассматривать
как оператор, позволяющий сопоставлять каждой аналитической
в области G функции Ф(г) и каждой фиксированной точке t
плоскости вполне определенное решение w(z, t) уравнения
&(и>)= 0. В дальнейшем будем обозначать этот (нелинейный)
оператор через $г(Ф). Оператор $((Ф) позволяет строить ре-
решение уравнения ®(ы?)=0, имеющее в качестве аналитического
делителя произвольную аналитическую в G функцию. В частно-
частности, в качестве Ф(г) можно брать кусочно голоморфные функ-
функции. Если, например, кусочно голоморфная функция Ф(г) есть
решение однородной краевой задачи Гильберта ([60а],
гл. 2, § 34)
O+(z) = g(z)<t>-(z) (на Г), G.4)
то соответствующая кусочно аналитическая функция w(z) =
= $г[Ф(;г)] удовлетворяет тому же краевому условию {55а, б]
w+{z) = g{z)w-{z) (на Г). G.5)
Формула G.3) (и, следовательно, теорема 3.13) сохраняет
силу и в предельном случае t = °°. Тогда оператор $„ (Ф) со-
сопоставляет любому заданному нормальному аналитическому де-
делителю Ф(з) соответствующее решение уравнения (&(w) = О*).
§ 8. Главные функции и главные ядра класса 9tPi2 (А, В, G), р^>2
1. Пусть Xj(z, t) = М{[Ф}(г)] (у = 1, 2) —решения уравнения
(S(w) = 0, соответствующие функциям
Ф1B) = 27Т=1)' Ф^ = 2ПгЬр С8'1)
где t — некоторая фиксированная точка плоскости. Очевидно,
выполняются условия
lim(*-«)X1(«,«) = 4, Hm (t - z) X2 (z, t) = ^-. (8.2)
'*) В работе [23*а] эта теорема неправильно приписывается Л. Г. Ми-
Михайлову [55а].
138 гл- 3- ОСНОВЫ ТЕОРИИ ОБОБЩЕННЫХ АНАЛИТИЧЕСКИХ ФУНКЦИЙ
Нетрудно видеть, что Xt и Х2 являются решениями интеграль-
интегральных уравнений
2 (Z, О - — J J s ^ ! de^ = 2TTrnj-. (8-4)
' в
J J
в
Представляя Xi и Х2 в виде G.3), получаем
где
г_г f f 4(OXj(E, t)+B&)X}{?, t)
»*Ь V = — }J (е-«)(|-ох,(е,|)— ^' (8-6>
7 = 1,2.
На основании неравенств D.15) и D.16) нетрудно показать,
что ft)j(z, t) удовлетворяют следующим условиям:
| со,- (z, t) |<i; | со^ (z, t)\^M'p\z-t |(р)/р, (8.7)
(Oj (z, t) < M'v ( | z \i2~p)/p + | * |B~p)/p) при | z |, |; | > Д > 1,. (8.8)
| e>} (Zl, <) - со,- (z,, f) |< м; I z1 - z2 fp~2)/p, (8.9)
| щ B, 0 - co2 (z, 0 [ < Ml \z - t fp'2)fp, (8.10)
где
' r; (8.11)
Функции Xi и Х2 мы будем называть главными функциями
класса StPi2(J, В, Е). Эти функции непрерывны в смысле Гель-
дера всюду на плоскости, исключая точку t, где они имеют
простой полюс. Кроме того, они, очевидно, удовлетворяют урав-
уравнениям (z Ф t)
d-Xl + A(z)X1 + B(z)^1 = 0,
д-Х2 + A(z)X2+B (z) Х2 = 0. (8Л2)
2. Вводим в рассмотрение функции
Q.(z, 0-=Xi(z, 0+*Ха(М),
Qi(z,t)=Xl(z,t)-iXi(z,t),
которые в силу (8.12) удовлетворяют системе уравнений:
дрх + A{z)Qx + B (z) Q3 = 0,
_ (8t14)
д-п2 + A(z) Q2 + B(z)Qt = 0.
§ 9. СОПРЯЖЕННОЕ УРАВНЕНИЕ 139
Так как
то в силу неравенств (8.7) и (8.10) имеем
Q1(z,t)-T^1 = O[\z-t\~il Qa(z,t) = o(\z-t\~i). (8.16)
При фиксированном %Ф <*> та. t -+ °° имеем оценки
). (8.17)
Следует заметить, что, как это видно из (8.6), при Z? = 0 «>! =
= со2 и, следовательно, fi2 = 0.
Нетрудно доказать, что условиями (8.14), (8.16) и (8.17)
Qi{z, t) и Q2(z, t) определяются однозначно. Функции Qt и Q2
мы будем называть главными ядрами класса %pi{A, В, Е),
р>2.
§ 9. Сопряженное уравнение. Тождество Грина.
Уравнения 2-го порядка
1. Рассмотрим наряду с уравнением
6 (м;) == д-w + Awr\- Bw = F (9.1)
сопряженное с ним уравнение
©' (w1) = д-у — Aw' — Bw' = F'. (9.2)
Если iy и w' непрерывны в G + Г и принадлежат классу
Di,p(G), P > 2, то на основании интегральной формулы G.5)
гл. 1 имеем:
w (z) w (z) dz = —— dxdy — lw —=- + w —=- dx dy =
J J dz J J \ dz dz J
Г G G
= J j [wE' (гг/) + m/@ (w) + i?wj<;' — Bww'] dx dy.
G
Отсюда получаем равенство
w') + w'(S,(w))dxdy, (9.3)
которое и выражает свойство взаимной сопряженности уравне-
уравнений (9,1) и (9.2).
140 ГЛ' 3- ОСНОВЫ ТЕОРИИ ОБОБЩЕННЫХ АНАЛИТИЧЕСКИХ ФУНКЦИЙ
Если ®(и;) = 0 и 6'(u/)=0, то
4i§w ® w' ® dz) = 0< (9
Эта формула, которую в дальнейшем будем называть тожде-
тождеством Грина, справедлива для двух произвольно взятых реше-
решений w и w' уравнений <S(u;)=0 и @'(и/) = 0, непрерывных
в G + Г.
В вещественной записи взаимно сопряженные системы урав-
уравнений имеют вид
-з -г- + «и + ftp = 0, -г \. h си + dv = 0* (9.5)
дх ду ду дх л \ /
ди' dv' , , п ди' dv' ,ii j i а /п а\
Ц---д7-аи ~cv =°> Ty- + Jh- + bu ~dv =0* (9-6^
а формула (9.4) примет вид
iuv' + vu') dx + (ци' — w') dy = 0. (9.7)
2. Пусть G — односвязная область. Рассмотрим веществен-
вещественную функцию
(z) = Re
(9.8)
где s0 — фиксированная точка, a w и w' — произвольные непре-
непрерывные решения уравнений ©(ы?)=0 и ®'(и>')=0 соответствен-
соответственно. В силу (9.4) <p(z) однозначна в области G и
dz^^~-w(z)w'{z), d-z<f = ~-±rw(z)w'(z). (9.9)
Учитывая, что д-w = — ^lu? — 5гу, 5jiy' = Aw' + 2? и/, находим
для ф эллиптическое дифференциальное уравнение второго по-
порядка
= r-=^q>- + ф ,
или
Аф + щх + Ьц>у = 0, (9.10)
где
a = -4~Re{Bw'/w'), Ъ =-ilm(Bw'/w'). (9.11)
Здесь в качестве w' можно взять любое решение уравнения
@(u/) = 0. Беря в качестве w' какое-нибудь фиксированное
решение последнего уравнения, всякому решению w уравнения
@(ц?)=0 по формуле (9.8) можем сопоставить вполне опреде-
§ 9. СОПРЯЖЕННОЕ УРАВНЕНИЕ 141
ленное решение эллиптического уравнения 2-го порядка (9.10),
и наоборот, если ф — решение уравнения (9.10), то формула
даст нам решение уравнения @(г#)=0. В силу этого всякое ве-
вещественное решение уравнения (9.10) мы будем называть по-
потенциальной функцией или просто потенциалом уравнения
(?(«>)= 0, а уравнение (9.10)—уравнением потенциала.
Полученные выше результаты показывают, что задачи интег-
интегрирования уравнения 2-го порядка вида (9.10) и системы урав-
уравнений вида (9.5)— эквивалентные задачи.
Следует заметить, что эллиптическое уравнение 2-го порядка
более общего вида
Аф + афв+ Ьц>у-\- Сф = 0, с Ф 0, (9.13)
вообще говоря, не приводится к системе вида (9.5) ('[14а],
§ 4, п. 6).
3. Пусть А = 0, 5^0. Тогда всякое решение уравнения
д-w + Bw = 0 удовлетворяет также следующему уравнению 2-го
порядка:
d / 1 dw\ , d~w __ „
~dz [~B~ ~Jj J + ~dz ~ '
пли, учитывая, что dzw = —Bw,
—-= D-is—^— BBw = Q. (9.14)
dzdz В dz dz
Если w — решение уравнения (9.14), то нетрудно убедиться,
что функции
__J__( ^_2k\ = — ( +J-^.^ (9 15)
Wl~^r\w"BOzj- W2~ 2i \w в dz]
будут удовлетворять уравнению diw + Bw = 0. Но из (9.15)
следует, что
w = Wi + iwz. (9.16)'
Таким образом, любое решение уравнения 2-го порядка (9.14)
можно представить в виде (9.16), где wt и w^ — произвольные
решения уравнения 1-го порядка o\w + Bw = 0. И наоборот,
любое решение уравнения dlw + ^w ~ 0 можем получить из
формул (9.15), причем достаточно воспользоваться одной из
них, так как заменой w на iw одна из формул (9.15) переходит
в другую. Здесь следует иметь в виду, что если w есть решение
уравнения (9.14), то iw также есть его решение.
142 ГЛ- 3- ОСНОВЫ ТЕОРИИ ОБОБЩЕННЫХ АНАЛИТИЧЕСКИХ ФУНКЦИЙ
Решения уравнения (9.14), которые являются, вообще говоря,
комплексными функциями, можно назвать комплексными потен-
потенциалами уравнения 1-го порядка д-w + Bw = 0.
Если Bz Ф 0, то уравнение (9.14) имеет комплексные коэф-
коэффициенты, которые могут иметь особенности в тех точках, где
В обращается в нуль. Таким образом, может случиться, что ко-
коэффициент уравнения 2-го порядка вида (9.14) имеет более
сильные разрывы, чем коэффициент соответствующего уравнения
1-го порядка d-zw + Bw = 0.
§ 10. Обобщенная формула Коши
1. Обозначим через Хх (z, t) и Х2 (z, t) главные решения
сопряженного уравнения 6'(w')= 0. Тогда главные ядра этого
уравнения будут задаваться по формулам (см. (8.13))
Q'1(z,t) = X'1(z,t) + iX's(z,t),
Q'2(z,t) = X'1(z,t)-iX'2(z,t).
В этом параграфе мы выведем формулы, в явной форме выра-
выражающие X} (z, t) через главные решения Xj(z, t) уравнения
<3(w) — 0 и обратно. Кроме того, будет выведена формула, обоб-
обобщающая классическую интегральную формулу Коши.
Пусть t<^G, причем G — некоторая область, ограниченная
конечным числом простых кусочно гладких замкнутых кривых
Жордана, совокупность которых обозначим через Г. Пусть ГЕ —
окружность \z — t\ = е, где е — достаточно малое положительное
число. Беря в качестве и>' главные решения Xj (z, t) и Х2 (z, i)
сопряженного уравнения @'(м/) = 0 и применяя формулу (9.4)
к области, ограниченной Г и Ге, получаем, что
) w (z) X'h (z, t)dz— w (z) X'k (z, t) dz =
г
= { w(z) X'k (z, t) dz — w(z) X'h(z, t) dz, к =1,2.
re
Умножив второе из этих уравнений (к = 2) на i и сложив
с первым, получим
\ w (z) Q[(z, t) dz— w(z)Qj (z. t) dz =
г
= \ w(z) п[ (z, t) dz — w(z) Q'2 (z, t) dz.
Отсюда при 8-*0в силу оценок (8.16) получим:
w (z) Qx (z, t)dz — w (z) Q2 (z, t)dz = — 2niw (t), t<=G.
г
§ 10. ОБОБЩЕННАЯ ФОРМУЛА КОШИ 143
Если feT или feG + Г, то получим аналогичные равенства,
где в правых частях фигурируют — aniw(t) или 0 соответствен-
соответственно, причем ал — внутренний угол в точке t, 0 < а < 2, т. е. име-
имеет место формула
Г
[ и; (z), если zeG,
= j-|-a;(z), если геГ, A0.2)
0, если zeff.
Пусть ? — некоторая фиксированная точка плоскости. Пусть
Г8 и Г7.8 — окружности |z — ?| = е п | z — ? I = — соответствен-
но. Так как X4(z, ?) и X2(z, ?)—непрерывные решения урав-
уравнений (9.1) в замкнутой области е^| г—?|^—, то согласно
О
формуле A0.2) имеем равенство
Х
А (г, 2) 5^ J Хл (t, t) Q[ (t, z) dt - Xh(t, t) Q'2{t,z) dt +
r1/e
+ ^ j X, (t, I) Qj (*, 2) dt - XlWT) Q't(t,z) dt. A0.3)
У нас Q; (t, z) Xk (t, l) = O (e2), п'2 (t, z) Xft (t, Q = О (г\ если | * -
- CJ = 1/e, a
, если \t — ? j = e,
поэтому, переходя в равенствах A0.3) к пределу при е ->¦ 0,
получим
х, (г, I) = - 4- [ai (Б, z) + q;(c)
, г , A0.4)
Ха («,0—1| Qi (S, z) - Q; (?, «)J.
Так как Xi + iX2 = Qi(z, t), Xi — iX2 = Q2(z, ?), то из A0.4)
заключаем, что
144 ГЛ- 3- ОСНОВЫ ТЕОРИИ ОБОБЩЕННЫХ АНАЛИТИЧЕСКИХ ФУНКЦИЙ
т. е.
A0.5а)
Формулы A0.5) были установлены в работе автора [14а].
2. На основании этих равенств формулу A0.2) мы можем
теперь записать в виде
[w(z), если геС,
-тр w (z), если z e Г,
0, если геС,
(Ю.6)
Если А = В = 0, то Qi=(^ —г)~\ Q2^0 и формула A0.6M
превратится в классическую формулу Коши
w(z), если геб,
2ш-.ГГ=~?= Т^')' еСЛИ геГ' A0-7)
г 0, если z e G.
Поэтому формулу A0.6) мы будем называть обобщенной фор-
формулой Коши.
Используя равенства A0.5), обобщенную формулу Коши для
сопряженного уравнения <5'(и/) = 0 можем записать в виде
- ы
г
J ю' (г), если zgG,
= ! -|- и/ (г), если геГ, A0.8)
' 0, если zeG,
Нетрудно убедиться, что формулы A0.6) и A0.8) сохраняют си-
силу и в случае неограниченной области, если дополнительно по-
потребуем, чтобы w и w' обращались в нуль на бесконечности:
w(z) = O(\z\~l), w'(z) = O(\z\~i) (вблизи точки z = oo).
Если w(z) непрерывна в G + Г, а в G удовлетворяет неодно-
неоднородному уравнению
= F(z),
5 to. ОБОБЩЕННАЯ ФОРМУЛА КОШИ
то имеем формулу
± j Q, (z, I) w (I) d? - Q2 (z, l) ЙГ) d\ -
i w (z), если zeG,
= 1-%-w(z), если геГ, A0.9)
@, если гёб + Г.
Если же w' (z) непрерывна в G + Г, а в G удовлетворяет со-
сопряженному неоднородному уравнению
6' (и/) = д-у — Aw' — Bw' = F' (z),
то
г
С, z)
G
[ w' (z), если z e G,
= j-|-«/(z), если геГ, (Ю.9'>
[о, если zeG+Г.
Приведенный выше вывод формул A0.6) A0.8) указан в ра-
работе автора [14а]. Несколько иначе получены эти формулы в ра-
работе Л. Берса [5а]. В одном частном случае, а именно, для систе-
системы уравнений вида их — pvy = 0, uv + pvx = 0, еще раньше ана-
аналогичные формулы были получены Г. Н. Положим [70а]. Для
эллиптической системы вида
аих + buy — Vy — 0,
dux + сиу + vx = 0
формула Коши была обобщена Б. В. Шабатом [92в] (см. также
[70в]).
3. Из обобщенной формулы Коши легко вытекает
Теорема 3.14. Если последовательность wn непрерывных
в G + T функций класса %^(А, В, G) сильно сходится на Г
к некоторой, функции fQei,'(T), p'^1, то она сходится
Ю и. Н. Векуа
ГЛ. 3. ОСНОВЫ ТЕОРИИ ОБОБЩЕННЫХ АНАЛИТИЧЕСКИХ ФУНКЦИИ
равномерно внутри G к функции
w Ф = ia I Qi(г' ?>ф ® ^ ~ Q2 (*, о фш 4, (ю. ю)
г
которая, очевидно, принадлежит классу %р>г(А, В, G).
Теорема легко доказывается с помощьх неравенства Гельдера
и теоремы 3.10.
§ ii. Непрерывные продолжения обобщенных
аналитических функций. Обобщенный принцип симметрии
Используя теорему единственности 3.5 и обобщенную форму-
формулу Коши A0.6), можно обобщить понятие и ряд признаков ана-
аналитического продолжения на класс обобщенных аналитических
функций, замепяя термин «аналитическое продолжение» терми-
термином «непрерывное продолжение». Мы ограничимся рассмотрени-
рассмотрением класса %Pti(G), p>2. Функции этого класса непрерывны по
Гельдеру с показателем, равным (р — 2)/р.
Теорема 3.15. Пусть wi^%,2{A,B, G,), w2^%,2(A, В, G2),
р > 2, причем Gi и G2 — области, границы которых имеют общую
спрямляемую жорданоеу дугу у. Если u>i ^C(Gi + ¦у), и?2<=
е C(G2 + f) и и\ — w2 на y, то функция
i(z), если z^zG±,
s(z), если z^G2,
принадлеоюит %Pi % (А, В, Gt + G2 + 7), p > 2.
Доказательство этой теоремы проводится с помощью обобщен-
обобщенной формулы Коши A0.6). Достаточно дословно воспроизвести
известное рассуждение, относящееся к случаю аналитических
функций [57] (гл. II, § 26).
Из этой теоремы легко вытекают следующие теоремы.
Теорема 3.16 (обобщенный принцип симметрии
Римана — Шварца). Пусть G — область, лежащая в верхней
полуплоскости и прилегающая к отрезку f вещественной оси.
Пусть G% — зеркальное отображение G относительно у. Если
1) w^%iZ{A, В, G), р>2, 2) weC(G + f) и 3) Re(w) = 0 на f,
то функция
iw (z), если z^G,
-Г г (П-2)
— w (z), если z e Cr*,
принадлежит классу%Р<°,(А%, B%, G + G* + у), где А% и В% опре-
делены_в G + G* по формулам
(z), 5(z), если геб,
(г), В (г), если геС4,
§ 12. КОМПАКТНОСТЬ 147
Теорема 3.17. Пусть G — область, лежащая внутри круга
Ы < 1 и прилегающая к дуге f окружности \z\ = 1. Пусть G* —
зеркальное отображение G относительно у. Если 1) w^
ейРр2D, В, G), р>2, 2) »eC(G + ]) и 3) Re(j?>) = 0 на ^t
то функция
f w(z), если zgG,
w/z\ — \ —^z A13)
* 1—w(i/z), если z<^G%
принадлежит классу SfPi2(Ао, Во, G + G* + у), р>2, где
A(z), В(z), если геС,
г2
Доказательство. Можно ограничиться доказательством
последней теоремы. Непосредственной проверкой устанавливает-
устанавливается, что d-w.M + Auw% + Buw% = 0 в G*. Кроме того, и>^ = w~ на 7»
что легко следует из условия: w(z)+w(z) = 0 на ¦у. По теореме
3.15 мы заключаем, что
Нетрудно сформулировать эту теорему также для любого кру-
круга \z — zol <R.
§ 12. Компактность
1. Будем говорить, что множество {w(z)} функций класса
%{А, В, G) компактно в области G, если из любой бесконечной
последовательности элементов этого множества можно выделить
равномерно сходящуюся внутри G подпоследовательность.
Заметим, что равномерная сходимость последовательности
обобщенных аналитических функций внутри области G обеспечи-
обеспечивается слабой сходимостью в некотором LP(G), p > 1. Имеет
место
Теорема 3.18. Пусть w(^%i2 (А, В, G), p>21i = l, 2, ...
Если последовательность и?{ сходится слабо в LP(G), р>1, та
она сходится сильно, а также равномерно внутри G к некоторой
функции w класса %_ 2(А, В, G)LP(G~).
Доказательство. Будем считать, что G — ограниченная
область. Как нетрудно доказать, что последовательность голо-
голоморфных в G функций Ф4 = u?i — Реи>< сходится слабо в Lp(G)
к функции Ф = w — PGw, где w есть слабый предел последова-
последовательности wt. Но, как мы показали в гл. 1, § 1, п. 7, Ф голоморф-
голоморфна в G. Следовательно, w^%(A, В, G). Кроме того, Ф< сходится
к Ф сильно в Lp, а также равномерно внутри G. В силу этого
148 Гл- 3- ОСНОВЫ ТЕОРИИ ОБОБЩЕННЫХ АНАЛИТИЧЕСКИХ ФУНКЦИЙ
ы>( = ф; + ДеФг сходится сильно в LP, а также равномерно внутри
G к w, что и требовалось доказать.
Теорема 3.19. Множество {w} функций класса %P:2{A,B,G)
компактно в области G тогда и только тогда, когда множество
{Ф} соответствующих нормальных аналитических делителей ком-
компактно.
Доказательство. Множеству iw) сопоставляются множе-
множества {Ф} и {со} по формулам
ф) (
= JL Г Г
я J ,]
(? — г) w
Как это следует из неравенств D.15), множество {со} равно-
равномерно ограничено и равностепенно непрерывно на всей плоско-
плоскости Е. На основании этого из A2.1) сразу получим, что множе-
множество {и>} равномерно ограничено и равностепенно непрерывно на
всяком замкнутом множестве, на котором равномерно ограниче-
ограничено и равностепенно непрерывно множество {Ф}, и наоборот, что
доказывает теорему.
Из этой теоремы сразу следует
Теорема 3.20. Множество {w} функций класса %pz(A, B,G)
компактно в области G, если оно равномерно ограничено внутри G.
Заметим, что компактность семейства iw) функций класса
$р, 2.{А, В, G) обеспечивается условием слабой компактности в
LV(G). В самом деле, если iw) слабо компактно в Lv, то
Lp(w, G)^M, где М — постоянная, которая пе зависит от эле-
элементов семейства {w} (теорема 1.3). Тогда семейство (Ф) нор-
нормальных аналитических делителей функций семейства Ы) также
будет слабо компактно в ЬР:ЬР(Ф, G)^M'. Но из последнего
неравенства легко вытекает, что семейство {Ф} равномерно огра-
ограничено внутри G, т. е. {Ф} компактно (гл. 1, п. 7). Тем самым
наше утверждение доказано.
2. Признаки компактности можно распространить на более
широкие семейства обобщенных аналитических функций.
Будем говорить, что множество {w} элементов 4LPiz(G) ком-
компактно в G, если любая бесконечная последовательность содер-
содержит подпоследовательность, сходящуюся равномерно внутри G
к некоторому элементу %V2{G).
Теорема 3.21. Пусть WI — некоторое компактное множество
функций класса LVi 2 (Е). Пусть %,i2 (G) — множество обобщен-
обобщенных аналитических функций, соответствующих образующим па-
парам (А, В), которые принадлежат WI.
SJJJ
В таком случае бесконечное множество {w} элементов Яр,2 (G)
компактно тогда и только тогда, когда компактно множество {Ф)
соответствующих нормальных аналитических делителей.
§ 12. КОМПАКТНОСТЬ 149
Доказательство. Если задано множество {w), то ему
сопоставляем множества {Ф} и {со} однозначно по формулам
A2.1). Если же задано множество {Ф}, то множество {w} задаем
следующим образом: сопоставляем каждому элементу Ф некото-
некоторую пару (А, В) из компактного множества 5Ш и затем строим
функцию iv класса 91 (Л, 5, G) с нормальным аналитическим де-
делителем Ф. Таким образом, каждому множеству {Ф} можно со-
сопоставить бесконечное множество {w) и {<в}.
В силу компактности {А} и {В) из D.15) следует, что множе-
множество {со} равномерно ограничено и равностепенно непрерывно на
всей плоскости. В силу этого, если одно из множеств {w} и {Ф}
равномерно ограничено и равностепенно непрерывно в некоторой
замкнутой области, то и второе будет обладать тем же свой-
свойством. Поэтому, очевидно, если {и>} компактно, то и (Ф) будет
компактно. Остается доказать обратное предложение. Из ком-
компактности {ф} и {со} следует, что из любой бесконечной последо-
последовательности элементов {и>} можно выделить сходящуюся равно-
равномерно внутри G подпоследовательность wu w2, ... Очевидно,
^»(г) = Ф„(г)ЛB> (га = 1,2, . ..),
где со„ (z) = 4-Ц (Ап ® + Вп ® ^
Ц (^
следовательности и>п, Фп, соп равномерно сходятся на всяком
замкнутом подмножестве области G к функциям w, Ф и со соот-
соответственно, которые, очевидно, удовлетворяют соотношению
и;(г) = Ф(г)еш(г\ A2.2)
причем Ф(г) голоморфна внутри G, a a(z) — непрерывна на всей
плоскости. Если Ф sa 0, то w = 0 и теорема доказана, ибо нуль
входит в 5tpJ(G). Предположим, что Ф(г)^0. Тогда w(z)
имеет лишь изолированные нули внутри G.
В силу компактности Эй из последовательности {AJ и {Вп}
мы можем выделить подпоследовательности, которые опять обо-
обозначим через {Aj и {Вп}, сходящиеся в среднем к некоторым
А и В из ЗЛ:
Ьр,г(Ап-А)-+0, LPiz{Bn-B)-+0 при га->°°.
Пусть
con(z) =
Нетрудно видеть, что последовательность ^„ = Л„ + Bnwjwn силь-
сильно (в норме Lp, 2) сходится к g = А + Bw/w. Поэтому со„ -*- соо
150 ГЛ- 3- ОСНОВЫ ТЕОРИИ ОБОБЩЕННЫХ АНАЛИТИЧЕСКИХ ФУНКЦИЙ
при п -*¦ °°, т. е. <о = ©о и формула A2.2) примет вид
w (z) = Ф (z) exp
Это доказывает, что i»eS!p,2(G). Таким образом, теорема 3.21
доказана.
Из этой теоремы сразу следует
Теорема 3.22. Множество {w) элементов множества $р,г(?)
компактно в области G, если оно равномерно ограничено внутри G.
3. Теорема 3.23. Пусть Ап, Вп-*-А, В (в смысле нормы
LPiz). Если последовательность {Фп} нормальных аналитических
делителей последовательности {wn} функций класса 9t(Ап, Bn, G)
равномерно сходится внутри G к функции Ф(г), то после-
последовательность и>п равномерно сходится внутри G к функции w
класса %{А, В, G) с нормальным аналитическим делите-
делителем Ф.
Доказательство. Так как множество {wj ограничено, то
оно в силу теоремы 3.22 компактно. Но любая сходящаяся рав-
равномерно внутри G подпоследовательность {u?nh} последовательно-
последовательности {и>п), очевидно, сходится к функции w класса 91D, В, G) с
нормальным делителем, равным Ф. Это означает, что wn -*- w ir
теорема доказана.
Из этой теоремы вытекают два следствия.
Следствие 1. Если А„, Вп-+А, В (в норме ?Р,2), то для
любой функции w класса §1 (А, В, G) можно указать такую по-
последовательность функций wn класса %(Ап, В„, G), которая рав-
равномерно сходится к iv внутри G.
В самом деле, если Ф — нормальный аналитический делитель
функции w, то в качестве wn можно взять функцию класса
ЩАп, Вп, G) с тем же нормальным делителем Ф.
Следствие 2. Если А„-+ А, Вп-+ В (в смысле нормы LPi2),
то при гФ% последовательности элементарных решений XiTl(z, ?)
и ядер Qjn(z, %) (]' = 1, 2) уравнений д-w + Anw + Bnw = 0 схо-
сходятся к элементарным решениям ХДг, ?) и ядрам Qj(z, ?) урав-
уравнения &^w + Aw + Bw = 0, причем сходимость будет равномер-
равномерной относительно обоих аргументов z и ?, если z<=G' и 5 е G",
где G' и G" —произвольные замкнутые множества на плоскости,
не имеющие общих точек.
В самом деле, достаточно заметить, что элементарные реше-
решения Х)„ и X] имеют одни и те же нормальные аналитические де-
делители -g- (? — z)~x и -tjt- (? — z)~\
§ 13. ВЫРАЖЕНИЕ РЕЗОЛЬВЕНТЫ ПРИ ПОМОЩИ ЯДЕР
§ 13. Выражение резольвенты при помощи ядер
1. Обозначим через Q4(z, t, G) и Q2(z, t, G) главные ядра
класса Щ.Р%2(А, В, G), р>2, если А=В = Ь вне G. Будем назы-
называть их нормированными ядрами относительно области G.
Согласно (8.4)
d-zQ, (zt L С) = 0, d-Q2 (z, t,G) = O (вне G).
Еслп t<=G, то, очевидно, Qi(z, t, G) и Q2(z, t, G) голоморфны
относительно z вне G и обращаются в нуль на бесконечности.
Аналогично найдем, что Qi(t, z, G) и Q2(?, z, G) голоморфны от-
относительно z вне G и обращаются в нуль на бесконечности. Здесь
следует учесть, что
Q, (z, t,G) = — Qi (t, z, G),
/ A3.1)
Q2 (zi t* Щ == — ^2 ifi z? G),
где Qt и i32— нормированные ядра класса йр2(—Л, —Л, G),
Пусть Ф(г) — функция, которая голоморфна вне G, непрерыв-
непрерывна вплоть до границы и обращается в нуль на бесконечности.
Тогда в силу теоремы Коши будем иметь (при z ^ G):
J-.[Qi (г. *, G)ф' V)dt — Q2 (г. *, G) Ф~ (t) dT= 0, A3.2)
г
где Ф~@—граничные значения Ф(г) извне. _
Пусть u)(z)GSlp|2(i, В, G), р>2, и непрерывна в U. Тогда
при геб
w (г) = -L ГQx (г, f, G) w(t) dt — Q2 (z, г, G) ip(i) df. A3.3)
Г
Вводим в рассмотрение аналитическую функцию
которая, как было доказано в § 2, непрерывна в замкнутой обла-
области G. В силу равенств (8.25) гл. 1 имеем
и?(«) = Ф+(*)-Ф-('). «еГ. A3.5)
Так как и?(?) и Ф(*)=Ф+(*) непрерывны на Г, то из A3.5) сле-
следует, что Ф~(?) также непрерывна на Г. Подставляя A3.5) в
правую часть A3.3) и учитывая равенство A3.2), получим
w (z) = Ж (Ф, G) = 2^7 j Qi (z'f' G>Ф (^ dt — Й2 (z' *•
A3.6)
{52 гл- 3- ОСНОВЫ ТЕОРИИ ОБОБЩЕННЫХ АНАЛИТИЧЕСКИХ ФУНКЦИЙ
Эта формула сопоставляет каждой голоморфной в G и непре-
непрерывной в G + T функции Ф(г) определенную функцию w(z)
класса 9tP,2(Л,В, G), р>2, также непрерывную в G + Г, причем
Ф выражается через w по формуле A3.4). Следовательно, фор-
формулу A3.6) можно рассматривать как аппарат построения всех
функций класса <&Pt 2(A, В, G).
Общее представление решений сопряженного уравнения
_ Aw' — Ш = 0 A3.7)
в силу A3.1) и A3.6) имеет вид
w' (г) = Ж' (Ф, G) =
= - г^ j «I (S, г, G) Ф @ dS - адДГё) ФШ dt A3.8)
г
2. Применяя формулы Грина к правой части равенства A3.6),
мы можем написать:
= lim |i J j d^i, (z, ?, G)
+
e-,0 I ^ni J _ г 2 » » .
где Ge — пересечение областей G и |? — zl>e. Учитывая форму-
формулы (8.16), получаем
и>(г) = Ж(Ф, G) =sФ(z) + f f I\ (z, ^, G)Ф (?) dgdr] +
^, G)O(Qd|dri, A3.9)
где
r1B,?,G) = -i-agQ1B,?,e),
A3.10)
SC!)
Так как в силу A3.1) — Й4(?, z, G) и —fi2(S. z, G) являются яд-
ядрами сопряженного уравнения A3.7), то согласно уравнениям
(8.14) имеем
(z, Z,G)-A (Q Q, (z, Z,G)-Bffi fi2 (г, С G) = 0,
(z, ?, G) - Щ) Q2 (Z, ?, G) - В № (г, ?, G) = 0
§ 13. ВЫРАЖЕНИЕ РЕЗОЛЬВЕНТЫ ПРИ ПОМОЩИ ЯДЕР 153
или в силу A3.10)
Гх (z, ?, G) = i- Л (?) Q, B, ?, G) + i ЩГ) Q2 (z, S, G),
4 ! A3.12)
Г2 (z, S, G) = ^A(QQ2 (z, S, б) + itf @Q2 (z, ?, 6).
Следует иметь в виду, что здесь Ф(г)— голоморфная в G
функция, связанная с w(z) по формуле A3.4). Поэтому формула
A3.9) выражает решение интегрального уравнения
' G
J
G
= ф
? любой правой части Ф(г), голоморфной в G и непрерывной
в G. Однако эта формула остается в силе для любой правой ча-
части, принадлежащей Lq(G), q^ т (см. § 5). Иными словами,
Р !
резольвента интегрального уравнения A3.13) выражается по фор-
формуле
Rg = f (Tt (z, I G) g (I) dl йц + J J Г2 (z, S, G) F(9 rfg dr\, A3.14)
Таким образом, все решения уравнения
d-zw + Aw + Bw = 0, A, B<=LPt2(E), p>2, A3.15)
принадлежащие классу Lq(G), q>p/(p — l), представляются по
формуле A3.9), где O(z) —любая аналитическая внутри G функ-
функция, принадлежащая Lq(G), q^p/(p— 1). Если q < 2, по Ф мо-
может иметь простые полюсы.
Если принять во внимание формулы A3.1) и A3.12), то для
резольвент сопряженного уравнения A3.7) можно получить вы-
выражения
я1\ (г, %,G) = A (Q Qx (S, г, G) + В (Q Q2 (?, z,6) = - ^Qx (S, z, G),
A3.16)
пГ; (z, ?, G) = Z(Q Q8(S,z,G) + S (Q Qx (S, z, G) = - 5?Q2 (?, z, G).
Следовательно, формула A3.8) может быть записана в виде
w' (z) = Ж' (Ф, G) =Ф(г) +
+ \ J Г; (z, ?, G) Ф (Q dg йл + j f Г; (z, S, G) ФЩ dl di], A3.17)
G G'
где Ф (z) — любая аналитическая функция в G, принадлежащая
Lq(G), q^~г^-Эта формула дает все решения класса Lq{G)
сопряженного уравнения A3.7).
J ГЛ. З. ОСНОВЫ ТЕОРИИ ОБОБЩЕННЫХ АНАЛИТИЧЕСКИХ ФУНКЦИЙ
3. Частное решение неоднородного уравнения
6 (и>) = д-jjo + Aw + Bw = F A3.18)
согласно E.7) можно строить по формуле и\ = TF + RTF. Эта
формула легко приводится к виду
G
— - \ j Q2 (z, I, G) F (?) dg dr\. A3.19)
"g
Частное же решение сопряженного неоднородного уравнения
®' («>') = Зги/ — Ли?' — ft? = F' A3.20)
имеет вид
wx = — Qj (?, z, G) F' (О dldr\ + -\ Q2 {t, z, G) F'
G G
A3.21)
Приведенные в этом параграфе формулы и соотношения были
установлены в работе автора [14а].
§ 14. Представления обобщенных аналитических функций
с помощью обобщенных интегралов типа Коши
1. Если Г — совокупность конечного числа спрямляемых кри-
кривых Жордана, а ф (t) — суммируемая на Г функция, то интеграл
w B) = -L- \ Qx (z, t) ф {t) dt — Q2 (z, t) ф it) dt, A4.1)
г
где Qt и Q2 — нормированные ядра класса Sip, 2 (Л, 5, Е), будем
называть обобщенным интегралом типа Коши. Он представляет
собой регулярное решение уравнения A3.15) вне Г, причем
w = O(\z\~1) вблизи бесконечности. Эти утверждения непосред-
непосредственно проверяются с помощью равенств (8.14) и (8.15).
Пусть Г содержит дугу у класса С1, имеющую два берега —
внешний и внутренний, которые мы отмечаем знаками «—» и
«+». Если ?<=Т и феСа('у), 0<а=^ 1, то имеют место формулы
,«г<а-—Ц(9 + «;<а сеТ. A4)
где
г г
§ 14. ПРЕДСТАВЛЕНИЯ ОБОБЩЕННЫМИ ИНТЕГРАЛАМИ ТИПА КОШИ 155
причем первый интеграл правой части последнего равенства сле-
следует понимать в смысле главного значения по Коши, а второй —
сходится в обычном смысле. При А = В = 0, как мы уже указы-
указывали выше, Qi=(g — z), Q2 = 0, и мы будем иметь известные
формулы для интеграла типа Коши
Формулы A4.2) получаются с помощью последних равенств, если
учесть еще соотношения (8.16).
2. Если ф принимает граничные значения непрерывной в
G + T функции w{z), удовлетворяющей внутри G уравнению
(S (w) = д-w + Aw + Bw = 0, то в силу A0.6) будем иметь ра-
равенство
~ Qx (г, t) ф (t) dt — Q2 (z, t) ф7П dt = 0, A4.5)
r
которое выполняется для любой точки г, лежащей вне G + Г.
В силу A4.2) это равенство равносильно следующему:
Ф (?) - 1 f Qx (?, i) ф (t) dt - Q2 (?, г) ^(Г) d7 = 0, С е Г. A4.6)
г
Здесь достаточно предположить, что Г е С1.
Если же ф принимает граничные значения непрерывной вне
G функции w(z), удовлетворяющей уравнению 6(ю) = 0 вне
G + T ж обращающейся в нуль при z = °°, то равенство A4.5)
будет выполняться для любой точки z, лежащей внутри G. В этом
случае оно равносильно равенству
Ф (?) J- -L \ Qx (?t f) ф (i) df — Q2 ($, i) ф~(Г) di = 0, ^еГ. A4.7)
г
Нетрудно доказать также достаточность приведенных усло-
условий. Например, если функция ц>^Са(Т), 0<сс<1, и удовлетво-
удовлетворяет равенству A4.5) или A4.6), то это означает, что она в каж-
каждой граничной точке принимает значение, равное граничному
значению обобщенного интеграла типа Коши A4.1) изнутри об-
области G. Следовательно, выполнение равенства A4.5) или равно-
равносильного ему равенства A4.6) есть необходимое и достаточное
условие того, что ф(?) принимает граничные значения некоторой
функции класса %„, 2 (А В, G), р>2, непрерывной в G + T.
Аналогично, выполнение равенства A4.7) на контуре Г или
равенства A4.5) для точек, принадлежащих G, является необхо-
156 ГЛ- 3- ОСНОВЫ ТЕОРИИ ОБОБЩЕННЫХ АНАЛИТИЧЕСКИХ ФУНКЦИЙ
димым и достаточным условием того, что q>(t) принимает гранич-
граничные значения некоторой функции класса %Р>2(А, В, G'), р>2,
непрерывной в G'-hT и обращающейся в нуль на бесконечности,
причем G' обозначает дополнение G + Г до полной плоскости.
Аналогичные предложения легко можно сформулировать для
сопряженного уравнения @'(и/) = 0. Условия A4.6) и A4.7)
в этом случае примут вид
Ф (9 + ^ J Й1 (*, I) Ф (t) dt - ОЖТ) W)di = 0, A4.8)
г
ф (?) _ A. f Q2 (t, t) Ф (t) dt - ОЛП) W) dt = 0. A4.9)
ni
г
Здесь мы воспользовались равенствами A3.1).
3. Теорема 3.24. Пусть A, B^LPj2(E), G^C\ Если
q>(t)<= Ca(T), 0<сс<1, то обобщенный интеграл типа Коши
A4.1) принадлежит Сц(С), где p = min(cc, (p — 2)/p).
Доказательство. Равенство A4.1) можно записать еще
в виде
w (г) = Ф (г) + j J Гх (z, I) Ф (?) dl dr\ + J j Г2 (z, Q Ф~(р dg d^,
где G G A410>
Следовательно, w удовлетворяет интегральному уравнению w =
= — H0{Aw + Bw)-\r Ф(г), и так как в силу теоремы 1.10 Фе
еС„(С + Г), то w непрерывна в G + Г. В тажш случае TG(Aw +
+ Bw)<^Cv(E), v = (p — 2)/p и, очевидно, w e=Cti(G +Г), где
Р = min(cc, v), что и требовалось доказать.
4. Интегральные представления обобщенных аналитических
функций, в том числе и обобщенные интегралы типа Коши, име-
имеют много применений. Они используются, в частности, при изу-
изучении различных краевых задач. Эти представления можно
получить из формулы A3.6), пользуясь для этой цели различ-
различными интегральными представлениями голоморфных функций
[14ж], [60а]. Поэтому формы этих представлений можно варьиро-
варьировать в весьма широких пределах, стремясь максимально приспо-
приспособить их каждый раз к конкретным условиям изучаемой задачи.
В качестве примера мы здесь укажем одну форму интегрального
представления обобщенных аналитических функций, которой по-
полезно пользоваться при изучении краевой задачи, рассматривае-
рассматриваемой нами в следующей главе ([14а]).
Теорема 3.25. Пусть G^Cl, 0_<cc=^l. Если функция
% p>2, и непрерывна в G, то найдется непрерыв-
§ 15. ПОЛНЫЕ СИСТЕМЫ ОБОБЩЕННЫХ АНАЛИТИЧЕСКИХ ФУНКЦИЙ
ная действительная функция \x(t) точки t — t(s) контура Г и
действительная постоянная с такие, что
w(z)= \ц (t) M (z, t) ds + cwx (z), геб, A4.12)
r
где
*) = 4fQ^z' *•G)- Чтп*^ *•G)' <14лз>
w1(z) = K(i, G),
причем, если G — односвязная область, то между w(z) и парой
(\i(t), с) существует взаимно однозначное соответствие. Если же
G — (тп+ 1)-связная область, то постоянная с выражается одно-
однозначно через w, а действительная функция \a{t) определяется
с точностью до аддитивного слагаемого вида c4p,i + .. .4- cmu.m, где
Ci, ..., Cm — произвольные постоянные, a \it, ..., \im — функции,
определенные равенствами
A, если t <=Tj (j = 1, .. ., m)
^{t) = (о, если t<=Tk, к ф ) (к = 0, 1, ..., тп). а4Л4>
Здесь Г4, ..., Гт — «внутренние» граничные контуры области G,
а, Го—«внешний» контур (положительное направление на Г бе-
берется так, чтобы область оставалась слева).
Если w непрерывна в смысле Гелъдера в G + T, то и ц удов-
удовлетворяет условию Гелъдера на Г, и наоборот.
Доказательство. Для класса голоморфных функций тео-
теорема известна ([14ж], [60а], гл. 3, II). В этом случае формула
A4.12) принимает вид
Подставляя это выражение в правую часть формулы A3.6), мы
получим формулу A4.12). Если учесть, кроме того, что Ф вы-
выражается через w по формуле A3.4) однозначно, то получим
полное доказательство теоремы.
§ 15. Полные системы обобщенных аналитических функций.
Обобщенные степенные ряды
1. Пусть задана некоторая система частных решений wn
(п = 1, 2, ...) уравнения
d-w + Aw + Bw = 0 (A,B<=LPr2(E)). A5.1)
Будем говорить, что она является полной системой решений от-
относительно области G, если любое регулярное в G решение ш
этого уравнения можно равномерно приблизить внутри G с по-
помощью линейных агрегатов вида dWi + ... + cnwn с веществен-
вещественными коэффициентами.
158 ГЛ- 3' ОСНОВЫ ТЕОРИИ ОБОБЩЕННЫХ АНАЛИТИЧЕСКИХ ФУНКЦИЙ
Полные системы решений можно строить, например, с по-
помощью формулы A3.6). Можно доказать, что всякой полной от-
относительно области G системе аналитических функций Ф„, не-
непрерывных в G + Г, она сопоставляет полную систему решений
юп = Ж'(Фп, G) уравнения A5.1). Рассмотрим, например, следу-
следующую систему рациональных функций от z:
(/ = 1, ..., т; п, к = 1, 2, ...),
где z0, г,. ..., ът — фиксированные точки. Как известно [87], эта
система полна (в классе голоморфных функций) относительно
любой области G, которая ограничена простыми кривыми Жор-
дана Го, Гь ..., Гт, причем Го содержит внутри кривые 1\, ...
..., Г-:, а точки Zj расположены внутри Т3 (/ = 1, ..., т). Системе
функций A5.2) с помощью формулы A3.6) сопоставляется сле-
следующая полная относительно G система частных решений урав-
уравнения A5.1):
w2n(z, zo) = X((z-zo)n,G),
win+1 (z, z0) = X(i(z- zo)n, G) (n = 0, 1, ...),
3n-*Q (z, z., G) й"-1О2 (z, «., G)
«;_in+1 (z, z-) = э;п1/ ; + ^_,3 ', A5.3)
(n = l, 2, ...; / = 1,2, ..., m).
Здесь мы учли, что при ге(? ядра Q((z, %, G) и Q2(z, %, G)
голоморфны относительно % вне G + Г.
Нетрудно видеть, что wn(z, z0) есть обобщенный полином
степени у— , a «/'-„(z, z,)—обобщенная рациональная функция
Ги + ll
с единственным полюсом z,- порядка —s— , ооращающаяся в
I z J
нуль на бесконечности. Ниже мы увидим, что wn(z, z0) пред-
представляют собой коэффициенты разложения функций Q3(z. 5> ^)
относительно ? в окрестности бесконечно удаленной точки.
В самом деле, если zeG, а ? лежит вне G + Г, то в силу
формулы Коши
§ 15. ПОЛНЫЕ СИСТЕМЫ ОБОБЩЕННЫХ АНАЛИТИЧЕСКИХ ФУНКЦИЙ 159*
Разлагая теперь правые части этих равенств при достаточна
больших ? по отрицательным степеням ? — z0 и ? — z0, в силу
формулы A3.6) получим:
оо
Qx (z, ?, G) = -j 2 [w2fe (Z) zo) — ^ft+i (z, z0)] (? — z,,)-*-1,
A5.5)
Q2 (z, S, G) = -j 2 ^ B, «o) + iw2k+i (z, z0)] (? - z0)
ft \
Пусть G есть круг |z —zol<p. Тогда эти ряды равномерно схо-
сходятся относительно z и % внутри и вне этого круга.
Если выполнены условия \z — zol>p, l? — zo|<p, то имеем
разложения
\?г (Z, Q, (jt) = — ~2 ^ [Щк (hi zo) — lw2h+l (bt zo)l (z — zo) s
«2 (Z> b» = Ъ 2u W2h (Si Zo) — гЦ72й+1 (fe. Zo) (Z — Zo)
где wn (z, z0) — обобщенные полиномы степени -j , удовлетво-
удовлетворяющие сопряженному уравнению
d-w' — Aw' — Ъ~ш' = 0; A5.7)
[(zz0)\G],
[i(z-z0)k,G].
Разложения A5.6) получаются из формул
ii!'-zG)dt (/=1.2), A5.9)
которые имеют место, если % е G, a z лежит вне G + Г.
2. С помощью системы обобщенных рациональных функций
wn(z, zo)(ra = O, ±1, ±2, ...) можно получать разложения про-
произвольных решений уравнения A5.1), аналогичные рядам Тей-
Тейлора и Лорана для аналитических функций [14а], [5а].
Пусть G — круг ]z — zol<p, а Г — окружность \z — zo\=p.
В таком случае соответствующие обобщенные полиномы wn (z, z0)
будем обозначать через wn(z, z0, p). Если w(z) удовлетворяет
внутри G уравнению A5.1) и непрерывна в G + Г, то она пред-
представляется по формуле
A5.10)
100 ГЛ. 3, ОСНОВЫ ТЕОРИИ ОБОБЩЕННЫХ АНАЛИТИЧЕСКИХ ФУНКЦИЙ
ИЛИ
A5.11)
где
d^*- A5Л2)
Разлагая правую часть последнего равенства в ряд по степеням
(z — zo)n, получим
Ф (z) = 2 (ctk + ic2ft+1) (z - zo)\ A5.13)
где ск — вещественные постоянные, которые определяются из
равенств
§ (Л = 0, 1 ). A5.14)
Рассмотрим теперь следующую систему решений уравне-
уравнения A5.1):
.~ п
Wn (Z) = 2 chwk (г, г0, p)sj? (Фя, G), A5.15)
где
Фи (z) = 2 (c8ft + ic-ik+i) (z - zo)ft.
Так как w(z)- wn(z) = Ж{Ф- Фп, G)^X(w-<$n, G), справед-
справедливо неравенство
Если z принадлежит некоторому замкнутому подмножеству G'
круга G, то имеем
\w(z)-wn(z)\^M(G')Li(O-On, Г). A5.16)
Так как на окружности Г ряд A5.13) в силу формул A5.14)
является рядом Фурье непрерывной функции Ф(?)> то он схо-
сходится к Ф на Г в смысле нормы любого LV(T), p^l. Поэтому
?,(ф — ф„, Г)-*-0 при ге-»-оо. В силу этого из A5.16) имеем,
что последовательность wn(z) равномерно сходится к w{z)
§ 15. ПОЛНЫЕ СИСТЕМЫ ОБОБЩЕННЫХ АНАЛИТИЧЕСКИХ ФУНКЦИЙ |gj
внутри G. Таким образом, доказано, что w(z) разлагается в ряд
оо
w(z) = 2 ckwk(z, z0, p), A5.17)
fc=o
который сходится равномерно внутри круга G. Коэффициенты
этого ряда выражаются по формулам A5.14), в точности совпа-
совпадающим с известными интегральными формулами для коэффи-
коэффициентов ряда Тейлора аналитической функции. Поэтому ряд
A5.17) будем называть обобщенным рядом Тейлора.
Пусть теперь G есть кольцо 0 =? р < \z — zo\ < рь ограничен-
ограниченное окружностями \z — zol=p0 и \z — zol=Pi, которые будем
обозначать через Го и Гь Соответствующие этой области обоб-
обобщенные рациональные функцип wn{z, z0) (п — 0, ±1, ...) обо-
обозначим через wn(z, z0, р„, р,).
Если w(z) удовлетворяет внутри G уравнению A5.1) и не-
непрерывна в G, то она разлагается в следующий ряд:
w(z) = J\chwk(z, z0, р0. р^, A5.18)
где ch — вещественные постоянные, которые вычисляются по
следующим формулам:
г,
-1,-2,
Ряд A5.18) сходится равномерно внутри кольца 0 ^ р0 <
<|z —zol<pi. Это утверждение доказывается почти дословным
повторением предыдущего рассуждения для ряда A5.17).
3. Всякому степенному ряду вида
2 - 4)h A5.20)
мы можем сопоставить ряд
+°°
Svi^VPo-Pi). A5.21)
где 0 ^ ро < \z — zo\ < pj есть кольцо сходимости ряда A5.20).
Этот ряд будем называть обобщенным степенным рядом 1-го ро-
рода. Эти ряды обладают следующим важным свойством.
Теорема 3.26. Ряд A5.21) сходится равномерно внутри
области (круга, кольца) сходимости степенного ряда A5.20).
11 И. ТТ. Веку а
162 ГЛ- 3- ОСНОВЫ ТЕОРИИ ОБОБЩЕННЫХ АНАЛИТИЧЕСКИХ ФУНКЦИЙ
Доказательство. Мы ограничимся доказательством тео-
теоремы для случая, когда в A5.20) входят лишь положительные
степени z — z0. Рассуждение переносится и на общий случай без
принципиальных затруднений.
Пусть \z — zo\ < р — круг сходимости степенного ряда
2 Ы + ic2h+1) (z - z/. A5.22)
о
Мы должны доказать равномерную сходимость обобщенного сте-
степенного ряда вида
оо
2 chwh (z, z0, p) A5.23)
о
во всяком круге I z — z01 < р' < p.
Пусть Ап и5„ — функции, совпадающие с А и В внутри кру-
круга Gn: | z — z01 < i . р и равные нулю вне его. Пусть G' — замк-
замкнутое множество точек круга \z — zol <p. Тогда найдется такое
целое число щ, что при п > п0 множество G' принадлежит всем
кругам Gn. Пусть G"—замкнутое множество, которое не пере-
пересекается с G'. В таком случае, согласно следствия 2 теоремы 3.23,
последовательности ядер QJn(z, g, G)^Qj(z, ?, Gn) уравнения
д-w + Anw + Bnw = 0 равномерно сходятся к ядрам Qj(z, S, G)
уравнения д-w + Aw + 5г« == 0 относительно обоих аргументов z и
если геС и l^G". Так как при zsC функции Qln(z, ^, G)
и Q2n(z, Si ^) голоморфны относительно аргумента % вне G, то
wn<p (z) = 2й Jfii (г, С, б) Ф„,Р @ dS - Q» (г, ?, G) Ф^Щ (Щ =
lira ± f Qt (z, I, Gm) Фп>р (Q dl - Q2 (z, ?, Gm) Ф^Ш) d?, A5.24)
1 m
где Гт — окружность \z — zo\ = j^-j
n+P
Wn,V (Z) = 2 CfeWfe(z, Zo),
) (z - zo)\
ft=n
В силу принципа максимума (§ 4, п. 8) существуют положи-
положительная постоянная М и точка z на окружности Г„о такие, что
Мах|и;П1р(г)|<м|«;„,р(г)|. A5.25)
2=G'
g 15. ПОЛНЫЕ СИСТЕМЫ ОБОБЩЕННЫХ АНАЛИТИЧЕСКИХ ФУНКЦИЯ
Так как в силу A5.24)
|wn>p(z)|<
< ± Ш \ (| Q, (z\ С, Gm) | + | Q.2 (?, S, Gm) |) | Фп,р (?) | <fc,
то можно указать такое целое число m0 > п„, что в силу A5.25)
будем иметь неравенство
^ J (| Qlme (Г, С) | + [ Йа™0 (г, S) |) [ Ф„.р (С)
ds.
Так как ряд A5.22) равномерно сходится внутри круга
\z — zo|<p, то Фп,„(?)->-0 равномерно на Гто. В силу этого
wnp(z)-+ 0 равномерно на G', что доказывает нашу теорему.
4. Ряды обобщенных аналитических функций, аналогичные
рядам Лорана и Тейлора, можно получить еще следующим
образом.
Пусть w2n(z, 20) и w2n+i(z, z0) — обобщенные полиномы класса
Шр<2(А, В, Е), р>2, соответствующие нормальным аналитиче-
аналитическим делителям (z — zo)n и i(z — zo)n (§ 7):
w2n(z, zo) = .fZo((z-z0)n), wtn+1(z, zo) = ^o(i(z-z/). A5.26)
Эти функции определяются однозначно и удовлетворяют следу-
следующим неравенствам (§ 4, п. 6):
e-°.w<l?n(».'ji|<e°.wt A5>27)
причем в силу неравенства F.15) гл. 1 и формулы G.3) для
Qo имеем оценку
-z0p-2)/*. A5.28)
Функции Wn(z, za) будем называть обобщенными степенны-
степенными функциями класса $„, г{А, В, Е), р > 2.
Сопоставим теперь степенному ряду
z - zo)n A5.29)
ряд
f 2, z0), A5.30)
71= — оо
который назовем обобщенным степенным рядом 2-го рода.
С помощью неравенств A5.27) легко доказывается
Теорема 3.27 (обобщенная теорема Абеля). Ря-
Ряды A5.29) и A5.30) имеют одинаковые области (кольцо, круг)
И*
164 гл- 3- ОСНОВЫ ТЕОРИИ ОБОБЩЕННЫХ АНАЛИТИЧЕСКИХ ФУНКЦИЙ
сходимости и расходимости, причем внутри области сходимости
ряды сходятся абсолютно и равномерно. В частности, если ряд
оо
^ cnwn(z, z0) A5.31)
7J=o
сходится в точке z' Ф z0, то он сходится абсолютно и равномерно
внутри круга \z — zo\ < W — zo|. Если же ряд A5.31) расходится
в точке z' Ф 20, то он расходится при \z — 2о I > \z' — zol.
Так как в силу теоремы 3.14 в области сходимости ряда
A5.31) его сумма есть функция класса %рг{А, В, G), р>2, то
этот ряд можно рассматривать как (линейный) оператор, сопо-
сопоставляющий каждой аналитической в этой области функции (или,
что то же самое, соответствующему степенному ряду) функцию
класса 9^, 2 (А, В, G), р>2.
Пусть w(z)—сумма ряда A5.31). Тогда коэффициенты этого
ряда вычисляются по следующим рекуррентным соотношениям:
со + ict = w(z0),
» («) - 2 С2Лй (»¦ 2о) + С2й+Лй+1 (Z' Zo)
с2П + ic2n+i = lim — г^
MZo B ~ zo)
(в = 1, 2, 3, ...). A5.32)
Можно, по-видимому, доказать такое утверждение.
Пусть w(z)—функция класса %р<г{А, В, G), р>2, где G —
круг \z — Zn\ <R. Пусть сп — вещественные постоянные, найден-
найденные по рекуррентным формулам A5.32). Тогда имеет место раз-
разложение
w
(z) = У, cnwn (z, 20), A5.33)
которое равномерно и абсолютно сходится внутри круга
\z-zo\ <R.
Разложив wn(z, Zo) в обобщенный ряд Тейлора вида A5.17)
и, следовательно, вычисляя коэффициенты разложения по фор-
формулам A5.14), получим
wn (z, z0) = anowQ (z, z0) + ... + ащп wln (z, z0), A5.34)
где ani — вещественные постоянные, ln = n + 1 при четном п и
ln = n при нечетном п. Отсюда видно, что
wn (z, г,) = X [Р{1п-1)!г (z - z0), E], A5.35)
где
Aя-1)/«
^in-iB)= 2 (an>2ft + wn>2ft+1)zfe. A5.36)
-г— ft=O
§ 16. ИНТЕГРАЛЬНЫЕ УРАВНЕНИЯ ДЛЯ ВЕЩЕСТВЕННОЙ ЧАСТИ
В заключение заметим, что несколько иным путем построена
теория обобщенных степенных рядов в работах Л. Берса и
С. Эгмона [6] и Л. Берса [5а, Ь].
§ 16. Интегральные уравнения для вещественной части
обобщенной аналитической функции
Построение общего решения уравнения
6 (w) == d-w + Aw + Bw=F A6.1)
можно выполнить также с помощью интегрального уравнения
с вещественным ядром, который содержит либо только веще-
вещественную, либо только мнимую часть искомой функции w =
= и + iv.
Записав уравнение A6.1) в виде
д-w + {A — B)w + 2Bu = F A6.2)
и вводя в рассмотрение функцию
A(\ZBZ°
G
+ Фо W, A6.3)
где Фо — произвольная аналитическая функция в G, непрерыв-
непрерывная в G + Г, равенство A6.2) можем переписать так:
-. [емB4 + 2Bea(z)u = F (г) еиB).
dz
Отсюда имеем
где
Fo (z) = Ф (z) — ^ J j F {P_^ г ¦ ¦ d% d\]. A6.5)
G
Здесь Ф — произвольная аналитическая функция от z, которая
выражается через w по формуле
г
Если умножим обе части равенства A6.4) на е~шB) и затем от-
отделим вещественную часть от мнимой, то получим
»@ Re [ ^fffe] « A, = / («), A6.7)
» <В1ш
Jgg ГЛ. 3. ОСНОВЫ ТЕОРИИ ОБОБЩЕННЫХ АНАЛИТИЧЕСКИХ ФУНКЦИЙ
где
g (*) = Im [е~^Ф (z)] - Im |l
Таким образом, для вещественной части u(z) функции w{z)
мы получили вещественное интегральное уравнение типа Фред-
гольма A6.7). Докажем, что оно имеет решение при любой не-
непрерывной правой части. Для этого нужно доказать, что соответ-
соответствующее однородное уравнение
не имеет нетривиального решения. Это уравнение мы можем за-
записать в виде
где
w, (z) = —
G
Нетрудно видеть, что wt удовлетворяет уравнению
Но, как видно из равенства A6.11), wL непрерывно продолжает-
продолжается на всю плоскость, причем она голоморфна вне G+Г и обра-
обращается в нуль на бесконечности. Согласно обобщенной теореме
Лиувилля 3.11 wl = 0, т. е. и = 0, что и требовалось доказать.
Найдя из уравнения A6.7) вещественную часть и функции
w(z), по формуле A6.8) мы можем восстановить ее мнимую
часть v.
Заметим, что в ядре уравнения A6.7) содержится одна про-
произвольная голоморфная функция Ф0(г), выбор которой всецело
зависит от нас. Путем подходящего выбора Ф> можно добиться
того, чтобы и» (г) удовлетворяла тем или иным специальным
условиям.
§ 17. Свойства решений системы уравнений
эллиптического типа общего вида
Многие свойства решений уравнения вида d^w -f Aw + Bw = F
можно распространить на решения эллиптической системы урав-
уравнений с частными производными 1-го порядка общего вида. Это,
•чевидно, можно сделать, если предварительно привести систему
§ 17. РЕШЕНИЯ СИСТЕМЫ ТИПА ОБЩЕГО ВИДА
к каноническому виду. Но такой путь имеет, однако, тот недо-
недостаток, что на коэффициенты системы приходится при этом на-
накладывать несколько более сильные ограничения, чем это нужно
на самом деле. Обобщения в этом направлении были получены
независимо друг от друга в работах Б. В. Боярского [11г] и
Л. Берса и Л. Ниренберга [7а]. Мы ниже изложим основные
результаты, следуя главным образом Б. В. Боярскому [Иг]
(пп. 2, 3, 4, 6).
1. Систему уравнений мы будем рассматривать в виде (гл. 2,
§ 7, п. 1)
— vy + пцпх + а12иу + а „и + bov = /,
, . , , 7 A7.1)
vx + «21^* + аггиу + сои -г aov = g.
Будем предполагать, что коэффициенты aih — ограниченные из-
измеримые функции в плоскости Е, удовлетворяющие следующим
условиям эллиптичности системы:
о„>0, А = Й11а22-^(а12 + а21J>А0>0 (в Е), A7.2)
До = const.
Если а(к заданы в ограниченной области, где выполнены ус-
условия A7.2), то достаточно продолжить их вне G по правилу
йц = Й22 = 1, «12 = 021 = 0. В отношении других коэффициентов и
свободных членов системы будем считать, что они принадлежат
LMEJ
Вводя в рассмотрение комплексную функцию w = и + iv, си-
систему A7.1) можно записать в следующем виде:
(р + 1) d-zw + (р — 1) д-w + 'g (dzw + dzw) + Aw + Bw = F, A7.3)
где
(
=
2
Рассматривая также комплексно сопряженное с A7.3) уравне-
уравнение и исключая затем из этих уравнений dzw, мы приходим
к уравнению
d-jo — ?i (г) dzw — q2 (z) д-w + Aw + Bw = F, A7.4)
где
Простой подсчет показывает, что
I 1 + РI2 — I ? I2 = 1 + A + atl + a22 + ^(a21 — a12J> 1 + Д,
„,
Jgg ГЛ. 3. ОСНОВЫ ТЕОРИИ ОБОБЩЕННЫХ АНАЛИТИЧЕСКИХ ФУНКЦИЙ
где 6 = Д + -т-(а21 — ci12)". Учитывая условие Д>А0>0 (в Е),
из равенства A7.6) сразу получим
l<7iB) I + 192B) | sS q0 < 1 (д0 —постоянная). A7.7)'
Таким образом, в дальнейшем мы будем иметь дело с комп-
комплексным уравнением A7.4), которое в силу A7.7) полностью
эквивалентно исходной системе уравнений A7.1). Коэффициен-
Коэффициенты qt и д2 — измеримые функции в Е, удовлетворяющие усло-
условию A7.7), а А, В, F — функции, принадлежащие классу Ьр г{Е),
р>2.
Решение уравнения A7.4) мы будем искать в некотором клас-
классе Dt P(G), p^2, не оговаривая это каждый раз специально*).
При конформном преобразовании области z = cp(?) уравне-
уравнение A7.4) переходит в уравнение
dziv — qi*drw — q.2*dzw + Atw + B*w = F^, A7.8)
где
Таким образом, для нового уравнения A7.8) условие A7.7) так-
также выполняется, причем постоянная д0 остается прежней.
В частности, это позволяет исследование поведения решения
уравнения A7.4) вблизи точки z = °o привести к исследованию
поведения решения уравнения A7.8) в окрестности точки ? = 0.
Для этого достаточно в качестве ср(?) взять 1/?.
2. В этом пункте мы изучим свойства решений однородного
уравнения вида
d-w-q(z)dzw +Aw + Bw = Q, |?(г)|<до<1. A7.9)
Наряду с решениями уравнения A7.9) будем рассматривать ре-
решения соответствующего уравнения Бельтрамн, которые в этом
параграфе будем обозначать буквой /:
d-J-q(z)dzf = O. A7.10)
Мы будем рассматривать эти уравнения в некоторой ограничен-
ограниченной области G. Докажем следующую теорему, которая является
обобщением основной леммы (§ 4, п. 1).
Теорема 3.28. Пусть w = w(z) — решение {возможно, до-
допускающее изолированные особые точки) уравнения A7.9)
*) Можно показать, что если решение w(z) уравнения A7.4) принад-
принадлежит некоторому классу Dlpl, р' > 1, то w(z) eDi, P(G) при некотором
Р > 2 и, следовательно, w(z) e Ca(G), а = (р — 2) 1р.
§ 17. РЕШЕНИЯ СИСТЕМЫ ТИПА ОБЩЕГО ВИДА 169
в некоторой области G. Тогда w(z) представимо в виде
A7.11)
где /(z) — решение уравнения A7.10), wei,(G), P>2,
функция q>(z)<=Ca(E), a = (p — 2)/p голоморфна вне G и исче-
исчезает на бесконечности.
Доказательство. Пусть w(z)—рассматриваемое реше-
решение. Положим
I—I A + B-) в G, rzew=?0, шфоо,
h(z) = \ \ w' A7.12)
[О во всех остальных точках плоскости.
Рассмотрим интегральное уравнение
и — дПсо = h, Пю = <?2Т<о = — - f Г w{Q dl di\t (ПАЗ)
Я Е ^"~ Z)
причем мы считаем q — 0 и h = 0 вне G. Фиксируем р > 2 так,
чтобы
д.Л,<1, где ЛР = ^(П) (Л2 = 1). A7.14)
Тогда уравнение A7.13) имеет единственное решение a>^
при любом feeLV(G), причем, очевидно, <» = 0 вне G.
Рассматривая функцию /(z)= w(z)e~viz), находим
\f- — q (z) /z] e9 = w- — w [(o — (/Псо] — gwz = w- — wh — qwz = 0.
Итак, /(z) — решение уравнения A7.10); но w = je<l, что дока-
доказывает A7.11). Остальные утверждения теоремы следуют из
приведенных формул для cp(z).
При указанных в теореме свойствах функции ф представле-
представление вида A7.11) единственно.
Действительно, предполагая, что w — j (z) еф = fx (z) еф!( * ви-
видим, что частное -т—т^ = e<f~<r'i есть голоморфная функция в об-
области G, аналитически продолжимая на всю плоскость и равная 1
на бесконечности. В силу теоремы Лиувилля такая функция
тождественно равна 1. Единственность доказана.
Следует заметить, что в формуле A7.11) ф(г) зависит от
представляемого решения, если ВФО. Но если 5^0, то <р за-
зависит лишь от коэффициентов q и А и формула A7.11) дает
общее решение уравнения
д-гт — q (z) dzw + Aw = 0. A7.15)
|70 гл- 3- ОСНОВЫ ТЕОРИИ ОБОБЩЕННЫХ АНАЛИТИЧЕСКИХ ФУНКЦИЙ
Тогда в формуле A7.11) /(z) —любое решение уравнения Бельт-
рами A7.10), которое может иметь любые особенности (полюсы,
существенно особые точки, точки ветвления, линии разрыва
и т. д.). Согласно теореме 2.15 гл. 2, f(z) имеет вид
/(г) = Ф(ИЧг)), A7.16)
где W(z) — основной гомеоморфизм уравнения A7.10), а Ф —
произвольная аналитическая функция в области W{G).
Напомним, что W(z)^Div{E), p>2, и, следовательно,
W е Са (Е),а = (р- 2) 1р.
В формуле A7.16) в качестве W(z) можно брать также лю-
любые глобальные относительно области G гомеоморфизмы уравне-
уравнения A7.10).
Представление A7.11) не является единственно возможным.
Оно характеризуется тем, что в нем функция qp(z) продолж_има
непрерывным образом на всю плоскость, голоморфна вне G и
исчезает на бесконечности. Если отказаться от этих свойств <p(z),
то можно указать другие представления вида A7.11). Так, на-
например, мы сформулируем следующую теорему (в частном слу-
случае, когда G — единичный круг).
Теорема 3.29. Пусть G — единичный круг Ы<1. Тогда
всякое решение уравнения A7.9) в G представило в виде
w(z) = f(z)e™, A7.17);
где
G
p>2t
и Rei|)(z) = 0 для Ы = 1, a /(z) — решение уравнения A7.10)'.
¦ Такое представление единственно.
Доказательство повторяет доказательство предыдущей теоре-
теоремы с той разницей, что вместо интегрального уравнения A7.13J
приходится решать уравнение вида
и — дПи — h,
где оператор П определяется по формуле
G
Продолжая и (z) вне G по формуле
«(O-^-^Ij, |?|>1, A7.19)
получаем
(?-2J
§ 17. РЕШЕНИЯ СИСТЕМЫ ТИПА ОБЩЕГО ВИДА
Продолжая с помощью этого интеграла Псо на всю плоскость и
обозначая g(z) = n«>, легко убедимся, что
A7.20)
В силу равенств A7.20) и A7.19) имеем (см. § 9, п. 1)
I ПсоПсо dx dy = -к- \ \ g (z) g (z) dx dy —
G E
= — j I coco dx dy = | I co«» dx dy.
" 'e g
Отсюда следует, что норма оператора П в L2 равна 1. Поэтому^
фиксируя р > 2 так, чтобы q0Lp(H)< 1, мы легко убедимся, что
уравнение со — дПсо j=/г имеет единственное решение a^Lp(G)
для всякого fee Lp(G).
3. В этом пункте доказанные выше теоремы будут обобщены
на случай более общего уравнения вида
d-zw — д1 (z) dzw — q.2 (z) d-w + Aw + B~a = 0. A7.21)
Наряду с A7.21) будем рассматривать уравнение
d-w - qt (z) dzw — q2 (z) d-w = 0. A7.22)
Если w = w(z)—его решение, то w(z) удовлетворяет уравнению
d-zw — q (z) dzw = 0, A7.23)
где
f wz
, \q\(z) -\- Qi — в G, где wz =Ф 0,
?(«) = j w*
[0, где wz = 0 и вне G.
Очевидно, \q(z)\ < igi(-z)! + \q2(z)} < qa< 1, qa — константа. По-
Поэтому из теоремы 2.15 гл. 2 следует непосредственно
Теорема 3.30. Всякое решение уравнения A7.22) пред-
представило в виде
A7.24)
где f(W) — функция, аналитическая в W(G), W(z)—основной
гомеоморфизм уравнения A7.23).
В качестве W(z) можно взять и любой глобальный относи-
относительно G гомеоморфизм уравнения A7.23).
При помощи такого же приема из теоремы 3.28 выводится
Теорема 3.31. Всякое решение уравнения A7.21) пред-
ставимо в виде
A7.25)
-J72 ГП- 3- ОСНОВЫ ТЕОРИИ ОБОБЩЕННЫХ АНАЛИТИЧЕСКИХ ФУНКЦИЙ
где f(W)— функция, аналитическая в W(G), W(z) — основной
гомеоморфизм уравнения A7.23), a q>(z)<=DiiP(E), p>2, голо-
голоморфна вне G и обращается в нуль на бесконечности.
Условия, наложенные на W и ф, обеспечивают единственность
представления A7.25). Но эти условия можно разнообразить,
Ф и W можно подчинить и другим условиям, не нарушая един-
единственности представления A7.25).
Представления A7.24) и A7.25) годятся также в случае ре-
решений, допускающих изолированные особенности. Тогда все син-
сингулярности переносятся на аналитическую функцию f(W).
Теоремы 3.30 и 3.31 тем отличаются от теорем 3.28 и 3.29,
что в них гомеоморфизм W(z) нельзя считать фиксированным,
однпм и тем же для всех решений. В самом деле,И7(z) удов-
удовлетворяет уравнению A7.23), в котором коэффициент q(z) за-
зависит от представляемого решения. Поэтому формулу A7.25)
нельзя рассматривать как аппарат для получения решений урав-
уравнения A7.21). Несмотря на это, она является важным инстру-
инструментом для изучения различных свойств решений уравнения
A7.21). Она позволяет перенести целый ряд свойств аналити-
аналитических функций на решения уравнений вида A7.21). Так, для
систем уравнений вида A7.21) справедливы в дословной фор-
формулировке: принцип максимума, принцип аргумента, теорема об
однозначной продолжимости по непрерывности и теорема изоли-
изолированности нулей, аналоги теорем об устранимых особенностях,
о поведении решений вблизи полюсов или существенно особых
точек, критерии однолистности отображения и т. д.
Для справедливости приведенных выше теорем несуществен-
несущественно ограничение g± = g2 = А = В = 0 вне ограниченной области G.
Как легко проследить, достаточно принять, например, что Л,
Z?<=?p 2(Z?) и \qj + \q2\ ^ q0 < 1, ?о = const на всей плоскости Е.
Эти предположения накладывают лишь некоторые условия на
порядок убывания А и В при z -*¦ <», вовсе не требуя тождествен-
тождественного исчезания этих функций.
. В этой связи отметим следующую теорему, которой восполь-
воспользуемся в дальнейшем и которая справедлива при выполнении
лишь условия l#il + !g2! ^ ?о< 1, ?о — const на всей плоско-
плоскости Е.
Теорема 3.32. Решение уравнения
d-zw-qidzw- qtd-p = 0, |?i| + M<?e<lf A7.25a)
ограниченное на всей плоскости Е и исчезающее в одной точке
20-s?, обращается е нуль тождественно, если его производная
w-z(=Lp,Lp(E), p^2, 1<//<2.
В самбм деле, представляя решение w{z) в виде
Й^ + ФB)* и==5^ A7.256)
§ 17. РЕШЕНИЯ СИСТЕМЫ ТИПА ОБЩЕГО ВИДА 173
где Ф(г)—целая функция, в силу теоремы 1.21 и условий тео-
теоремы 3.32 получаем, что Ф(г) = const. Подставляя A7.256)
в уравнение A7.25а), находим и — дП«> = 0, |<?| < go< 1. Отсюда
получаем ш = 0, т. е. w = const = 0.
Замечание. Теоремы 3.30 и 3.31 верны также для реше-
решений неравенств
Lpr р>2,- A7.26)
4. В этом пункте мы укажем способ построения решений
уравнения A7.4). Отыскивая решения в некоторой ограниченной
области G, мы будем предполагать, что коэффициенты и свобод-
свободный член уравнения равны нулю вне G. Словом, вне G мы бу-
будем иметь уравнение Коши — Римана д-ш = 0. Имеет место
Теорема 3.33. При указанных условиях уравнение A7.4)
всегда допускает решение w — w(z), продолжимое вне G анали-
аналитически и такое, что
w(z)~ Ф(г) для z ->¦ оо,
где Ф (z) — любая наперед заданная целая функция.
Такое решение единственно.
Доказательство. Решения уравнения A7.5), удовлетво-
удовлетворяющие условиям теоремы, можем искать в виде
w
(z) = Ф (z) - 1 j J ^ dl d4 э Ф (z) + Т<о, A7.27)
считая и = 0 вне G. Подставляя A7.27) в A7.5), получаем для
oj уравнение
(о — qjla — gjlco + AT® + ВТШ = F*, A7.28)
где _ _
F* = АФ + ВФ + F + дгФ' + д2Ф', г е G, A7,28а)
Fq, = 0, когда z лежит вне G.
К уравнению A7.28) применима теория Фредгольма. В са-
самом деле, обозначая через R оператор, обратный оператору I —
— qjl — <72П, который существует в некотором Lp (E), р > 2,
видим, что уравнение A7.28) эквивалентно уравнению и =
= — RATa — RBbo + RF^^R^ +RF*. Так как Т вполне
непрерывен, то вполне непрерывен и i?4. Это означает, что к
уравнению A7.28) применимы теоремы Фредгольма. Рассмотрим
однородное уравнение
Ш 0. A7.29)
174 гл- 3 ОСНОВЫ ТЕОРИИ ОБОБЩЕННЫХ АНАЛИТИЧЕСКИХ ФУНКЦИЙ
Пусть wel,i р>2 — решение этого уравнения. Тогда u'1(z) =
= T(oeC0(g), <%~(p — 2)//?, будет решение однородного урав-
уравнения A7.21), голоморфное вне G и исчезающее на бесконечно-
бесконечности. В силу A7.25) wt(z)= Ф0(\?(г))е*и\ где W(z)— основной
гомеоморфизм уравнения A7.23), Фо— голоморфная функция в
области W(G), q(z)^ Dlf(E), р>2, голоморфна вне G и равна
нулю на бесконечности. Переходя тогда от переменной z к пере-
переменной W и учитывая, что W(z)—голоморфная функция z вне
G, увидим, что Ф0(И7) продолжается аналитически на всю плос-
плоскость, причем Ф0(И0=0 Для W = °°. Поэтому Ф0(\?)^0, т. е.
Wi (z) ^ 0, откуда a» (z) = <9-ifx = 0.
Итак, нами доказано, что однородное уравнение A7.29) до-
допускает лишь тривиальное решение. В силу этого заключаем,
что неоднородное уравнение A7.28) всегда допускает единствен-
единственное решение ю. Тогда формула A7.27) дает искомое решение
уравнения A7.4). Единственность следует из замечания, что по
теореме 1.16 всякое решение, удовлетворяющее условиям теоре-
теоремы 3.33, представимо в виде A7.27). Если Ф(г) не целая функ-
функция, а лишь удовлетворяет условию Ф'(г)е LP(G), p > 2, то
указанным выше методом можем также получать решения урав-
уравнения A7.5), но, вообще говоря, уже не продолжимые аналити-
аналитически на всю плоскость. Легко видеть, что уравнения A7.28)
могут быть решены методом последовательных приближений по
схеме
)„ — BTwn + F*. A7.30)
Таким образом, интегральное уравнение A7.28) позволяет
строить все решения уравнения A7.4) класса Dip, р > 2— е
(где е — некоторое достаточно малое число, е > 0). Каждой про-
произвольно взятой аналитической в G функции Ф(г) класса
Di,p{G), /?>2 —e, таким путем сопоставляется вполне опреде-
определенное решение уравнения A7.4), причем очевидно, что этим
способом мы можем получить все решения класса Div в рас-
рассматриваемой области G. Но следует иметь в виду, что это не
единственный способ, позволяющий строить решения уравнения
A7.4). Видоизменяя различным образом форму представления
решения A7.27), можно получить различные интегральные урав-
уравнения, позволяющие строить решения, удовлетворяющие тем или
иным заранее заданным условиям.
5. Покажем, например, как строить решения, принимающие
в заранее фиксированных точках Zi, ..., zn наперед заданные
значения. Введем, как в п. 5 § 5, в рассмотрение полином
(п— 1)-й степени относительно z:
Р (Z, l\Zx, ..., Zn) =
n
.{z~zn)
§ 17. РЕШЕНИЯ СИСТЕМЫ ТИПА ОБЩЕГО ВИДА
и будем искать решение уравнения A7.4) в виде
...,zn)dtdx\, A7.31)
где Ф —^аналитическая функция от z в G, причем считаем, что
ие1,(С), р > 2, и « = 0 вне G. Напомним, что коэффициенты
и свободный член уравнения A7.4) мы также считаем нулями
вне G. Как это нетрудно видеть, в точках z,- функции w(z) и
Ф(г) принимают равные значения. Внося выражение A7.31) в
уравнение A7.4), получим для « интегральное уравнение вида
и — qiUti) — qzHco + Т0о = Fo, A7.32)
где То — вполне непрерывный оператор, явный вид которого не-
нетрудно выписать. Важно отметить, что для любой функции
ше!,E), р > 2, « = 0 вне G, функция Тоие Са(Е), а —
— (р— 2)/р, голоморфна вне G и в бесконечности имеет полюс
порядка п — 1. Первая часть Fo имеет вид A7.28а) и равна ну-
нулю тождественно вне G. Рассуждениями, аналогичными тем,
с помощью которых мы доказали выше разрешимость уравнения
A7.28), можем установить, что уравнение A7.32) имеет реше-
решение для произвольной правой части Fo е Ьр, р > 2, Fo s 0 вне G.
В самом деле, рассматривая решение и>0 соответствующего одно-
однородного уравнения (Ф = F = 0) и пользуясь по-прежнему фор-
формулой A7.25), wa = Q>s,(W(z))e't{z\ мы убедимся, что Фо анали-
аналитически продолжается на всю плоскость и на бесконечности име-
имеет полюс порядка п — 1. Отсюда следует, что Фо полином
{п—1)-й степени. Так как Фо вместе с w0 обращается в нуль в
п точках zu ..., zn, то, очевидно, Фо = 0, а это доказывает спра-
справедливость нашего утверждения.
Таким образом, наряду с A7.28) мы можем пользоваться и
интегральным уравнением A7.32) как аппаратом построения
решений уравнения A7.4). Последнее интегральное уравнение
позволяет строить решения, принимающие наперед заданные
значения в заранее фиксированных точках, что составляет его
важное преимущество перед уравнением A7.28). Для этого до-
достаточно в качестве Ф(г) в формуле A7.31) взять аналитиче-
аналитическую функцию, принимающую в точках zh значения, равные за-
заданным значениям искомого решения. В частности, таким путем
мы можем строить решения, имеющие заранее фиксированные
нули.
Отметим теперь одно следствие, которое легко вытекает из
этого результата.
176 ГЛ- 3- ОСНОВЫ ТЕОРИИ ОБОБЩЕННЫХ АНАЛИТИЧЕСКИХ ФУНКЦИЙ
Всякое решение w(z) уравнения A7.5) можно представить
в виде суммы
w(z) = wo(z) + wt(z), A7.33)
где Wo — решение, принимающее в фиксированных точках zu ...
..., 2„ значения функции w(z): wo(zk) = w(zh) (&=1, ..., п),
a и>% —решение, которое обращается в нуль в этих точках.
В самом деле, выражая w{z) по формуле A7.31), мы можем
аналитическую функцию Ф представить в виде суммы двух ана-
аналитических функций:
ФB) = Ф0B) + Ф*(*), A7.34)
где Фо (zh) — w (zh) и Ф^. (zh) = 0 (к = 1, ..., п). Так как Ф входит
аддитивно в правую часть интегрального уравнения A7.32), то
его решение имеет вид со = ю0 + со^..
Подставляя это в правую часть A7.31), мы получим разбие-
разбиение решения w на сумму вида A7.33).
6. Для уравнения A7.4) известны еще другие теоремы, по-
позволяющие строить решения с заданными свойствами. В этой
связи без доказательства приведем следующую теорему, анало-
аналогичную теореме 3.31.
Теорема 3.34. Пусть G — единичный круг |?| < 1 и ФE)—
произвольная аналитическая функция в G, возможно, обладаю-
обладающая изолированными особенностями произвольного характера
внутри и на границе G. Тогда существуют две функции W0(z) и
ф(г) класса DiV(G), p>2, непрерывные по Гелъдеру в замкну-
замкнутом круге, такие, что формула
определяет решение уравнения A7.21). Функция t, = W0(z) осу-
осуществляет гомеоморфное отображение круга G на себя; это ото-
отображение можно нормировать, задав наперед три точки границы
G и их образы, или одну внутреннюю и одну граничную точку и
их образы соответственно. От ф требуется, чтобы она продолжа-
продолжалась на всю плоскость как непрерывная, голоморфная вне G и
равная нулю на бесконечности функция переменного z. Если
А = В = 0, то ф выбираем равным нулю тождественно.
Все утверждения теоремы 3.34 остаются в силе, если вместо
условий, наложенных на ф, потребовать, чтобы Re ф = 0, фA) =
¦=0 на границе единичного круга G. В теореме 3.34 круг можно
заменить любой односвязной областью; в частности, эта область
может совпадать со всей плоскостью переменного z.
Доказательство теоремы 3.34 дано в работе Б. Боярского
[11г]. Оно опирается на принцип неподвижной точки Шаудера.
Теорема 3.34 позволяет строить в односвязных областях плос-
плоскости z решения уравнения A7.21) с многими наперед заданны-
заданными свойствами. Так, например, в любой односвязной области су-
§ 17. РЕШЕНИЯ СИСТЕМЫ ТИПА ОБЩЕГО ВИДА
ществует решение уравнения A7.21) с заданным (в качествен-
качественном смысле) распределением нулей, полюсов и существенно осо-
особых точек. Любая односвязная область оказывается областью
существования регулярного обобщенного решения уравнения
A7.21), которое не может быть продолжено ни на какую более
широкую область. Теорема 3.34 может быть использована для
построения решений уравнения A7.21) типа степеней zn
(ге = ±1, ±2, ...); в частности, таким путем можно получить
введенные Л. Берсом глобальные «формальные степени» [5а, Ь],
[6]. Теорема 3.34 может также служить для построения функций
Грина, фундаментального решения для уравнения A7.21) и для
уравнения 2-го порядка на плоскости.
В частном случае, когда А = В = 0, теорема 3.34 содержит
основные теоремы существования теории квазиконформных ото-
отображений с двумя парами характеристик при весьма общих
предположениях о характеристиках отображения ([Ив]).
Если область задания аналитической функции Ф(?) не пред-
предполагать односвязной, то для справедливости теоремы 3.34 нуж-
нужно несколько изменить ее формулировку.
Замечания. Построения, имеющие целью различные обоб-
обобщения аналитических функций одного комплексного аргумента,
встречаются у многих авторов (см., например [67]). Наиболее
существенные из них естественным образом связаны с опреде-
определенными узловыми проблемами анализа, геометрии или механи-
механики. Глубокие результаты в этом направлении впервые были по-
получены в исследованиях М. А. Лаврентьева [45а, б, в] по квази-
квазиконформным отображениям, которые связаны также с задачами
газовой динамики. В этих работах многие геометрические и ана-
аналитические свойства решений уравнений Коши — Римана обоб-
обобщены на весьма широкий класс линейных и нелинейных уравне-
уравнений эллиптического типа. К этому кругу проблем относятся
также работы [46а], [93а, б], [94], [19].
Исследованию свойств решений некоторых классов линейных
систем уравнений вида A7.1) посвящены работы Г. Н. Положе-
го [70а, б, в].
Недавно Б. В. Боярский обобщил многие результаты, изло-
изложенные в этой главе, на эллиптические системы уравнений с
In (и> 1) неизвестными функциями [Ни, к].
Упомянем также обобщения на случай эллиптических урав-
уравнений 2-го и высших порядков. Этим вопросам посвящены ис-
исследования С. Бергмана, И. Н. Векуа, А. В. Бицадзе, Я. Б. Ло-
патинского, 3. И. Халилова и др. (Библиографические указания
можно найти в работах [4*], [146], [49], [90*].)
Глава 4
КРАЕВЫЕ ЗАДАЧИ
В этой главе будут изучаться некоторые краевые задачи для
эллиптической системы уравнений 1-го порядка и эллиптическо-
эллиптического уравнения 2-го порядка в двумерной области. Рассматривае-
Рассматриваемые задачи по своему характеру не укладываются в обычные
классические рамки. Имеется в виду то обстоятельство, что для
них, вообще говоря, не сохраняются известные альтернативы
Фредгольма. В этом отношении весьма типична так называемая
обобщенная краевая задача Римана — Гильберта, изучению ко-
которой отводится большое место в настоящей главе. Особый инте-
интерес к ней объясняется еще тем, что она имеет весьма широкий
круг применений в различных вопросах анализа, геометрии и
механики. В отношении коэффициентов и других данных изу-
изучаемых задач принимаются сравнительно слабые ограничения.
Поэтому приходится рассматривать решения в обобщенном смыс-
смысле. Попутно изучаются дифференциальные свойства решения
в зависимости от дифференциальных свойств данных задачи.
Следует отметить, что рассмотренные в этой главе краевые за-
задачи являются частными случаями общих граничных задач, изу-
изученных в работе [146] для эллиптических уравнений с аналити-
аналитическими коэффициентами.
§ 1. Постановка обобщенной задачи Римана — Гильберта.
Характер непрерывности решения задачи
1. Вначале мы изучим следующую краевую задачу.
Задача А. Требуется отыскать в области G решение w(z)=*
= и+ iv уравнения
& (w) = 5-и; + A(z)w + B(z)w = F (z) (в G)t A.1)
удовлетворяющее краевому условию
w] = 4(z) (на Г), X = a + i$. A.2J
При ЛаВ = ?эО мы получим известную задачу Римана —
Гильберта *) для аналитических функций. Поэтому поставлен-
*) Мм пользуемся терминологией, принятой в книге Н. И. Мусхели-
швили [60а].
§ 1, ОБОБЩЕННАЯ ЗАДАЧА РИМАНА — ГИЛЬБЕРТА J79
ную задачу A.1) —A.2) будем называть обобщенной задачей
Римана — Гильберта или, короче, задачей А. При F = О, if = О
будем иметь однородную задачу А.
Как мы увидим в гл. 5 и 6, к краевому условию вида A.2)
приводят многие задачи теории бесконечно малых изгибаний
поверхностей положительной кривизны, а также статические за-
задачи безмоментной теории оболочек.
В отношении данных задачи А мы примем следующие
предположения, совокупность которых мы будем называть в
дальнейшем условиями I.
Условия I.
2) Г€=СД,У1 ?ft,
3) X = a + ip и <уеСу(Г), 0 < v < 1, причем Ia(z)| = 1.
Решение задачи А мы будем искать в классе непрерывных в
замкнутой области G + Г функций*).
2. Внутри области G, как это следует из теоремы 3.1, искомое
решение, если оно существует, принадлежит классу Са, а =
— (р — 2)//>. В замкнутой же области решение может не при-
принадлежать этому классу. Характер непрерывности в замкнутой
области, очевидно, зависит еще от характера гладкости границы
области и функций а, $, if, фигурирующих в краевом условии.
Ниже мы докажем, что при выполнении условий_1 решение за-
задачи А можно искать в некотором классе Сц(G), р < а. Это
следует из теоремы, к доказательству которой мы сейчас пе-
переходим.
Теорема 4.1. Если выполнены условия I и задача А имеет
решение w(z), непрерывное в замкнутой области G + Г, то
w(z)^Cx(G + T), где
х = ov'v", 0 < т < Е=1Ж A.3)
причем
а = min (v, ?lil), v' = min (l, J-, ..., ±}t A.4)
v" =min(l, v,, ..., vk).
Доказательство. Решение задачи А можно представить
в виде w = Wo + w, где w0 — решение однородного уравнения
&(«;)= 0, и, следовательно, имеет вид (гл. 3, § 4)
*) В некоторых случаях мы будем рассматривать также решения в
классе .разрывных функций. Но эти случаи и соответствующие условия
всегда будут оговорены особо,
12*
180 ГЛ. 4. КРАЕВЫЕ ЗАДАЧИ
a w — частное решение неоднородного уравнения $(w) = F, ко-
которое можем взять в виде (гл. 3, § 13, п. 4)
HJJ A.5)
"g g
Функции и и г? принадлежат Ca(G + T), а =(р — 2)/р, а голо-
голоморфная в G функция Ф непрерывна в G + V и удовлетворяет
краевому условию
11еМг)Ф(г)] = т,(г) (на Г), A.6);
где
Яо (г) =1G) ею(г), То (г) ="Г (г) - ИеЩ^) Щ.
Очевидно, Хо и Yo е С„(Г), а = mini v, -——I. Если мы сейчас до-
докажем, что решение Ф(г) задачи Римана — Гильберта A.6)
принадлежит классу Ct(G + T), то теорема будет доказана.
Рассмотрим сперва случай круга Ы < 1. Тогда A0(z) можно
представить на Г в виде
Я7B)= \X<,(z)\z-ne*z)e-*M, A.7)"
где %(z) = p + iq — голоморфная функция в круге Ы < 1, мни-
мнимая часть которой на окружности Ы = 1 равна q — — arg^0(z)+;
+ «argz, причем целое число п выбирается так, чтобы любая
ветвь q(z) была однозначной функцией на окружности (и, сле-
следовательно, внутри нее). Функцию % можно построить с по-
помощью интеграла Шварца:
J
г
Так как деС„(Г), то x(z)s C°(G + г) (теорема 1.10). Более
того, из A.8) следует, что (см. гл. 1, § 3)
С(х, G + Г) < МаСа(д, Г), М, = const.
Внося выражение A.7) в краевое условие A.6), получим
Очевидно, ^1 е Сц(Г). Если и < 0, то из A.9) следует, что
г
где Со — вещественная постоянная. Отсюда в силу непрерывно-
непрерывности Ф(г) следует, что
«о = О, J Tx (eift) е"н* dd = 0 (к - 0, ...,,-л + 1).
§ 1. ОБОБЩЕННАЯ ЗАДАЧА РИМАНА — ГИЛЬБЕРТА
Эти равенства обеспечивают непрерывность Ф(г) в точке 2 = 0.
В таком случае Ф(г) имеет вид
Я! J t — Z
Г
Отсюда сразу следует, что Ф(г)е Ca(G + Г). Более того,
са(Ф, с + г)<л/;са(т, г).
Если п > 0, то решение задачи A.9) выражается по формуле
г
2Н
т+°~x{z)
h=o
где сА — комплексные постоянные, которые удовлетворяют
условиям
с2п-А = — ск (к = 0, 1, ..., и).
Из A.10) вытекает, что Ф(г)е Ca(G + Г).Таким образом, в слу-
случае круга UI < 1 наша теорема доказана.
Если G — односвязная область, то с помощью голоморфной
функции z = qp(?) можно отобразить G конформно на круг |?1 <
< 1, при этом краевое условие A.6) принимает вид
l), A.11)
где Xi(?) = U<P(S)], Ф1(?) = Ф[<РE)], "fi(U = To[9(Ul- Так как
по условию Г е CjiV ,Vft, 0 <; (.i ^ 1, 0 < Vj ^ 2, то ф (Q e Cv»
в круге 1^1 < 1, где v" = min(l, Vi, ..., vh). Поэтому, очевидно,
^i (D и Vi (Qs С<™'(Г'), где Г' — окружность |?1 = 1. В силу
доказанного выше предложения голоморфная функция Ф,(^),
удовлетворяющая краевому условию A.11) и непрерывная в
|?l ^ 1, принадлежит классу C0V" в круге i^l ^ 1. Так как
функция ^ = rj3(z), обратная ф(?), принадлежит классу Cv> (G + T)t
где v' = min(l, l/v1? ..., l/vft) (теорема 1.9), то Ф(г) =
= Ф11[ф(г)] принадлежит классу Caviv» (G + Г). Это означает,
что u;(z)e Ct(G + Г), где T = av'v", и теорема в случае одно-
связной области доказана.
Остается теперь рассмотреть случай многосвязной области.
Пусть Го, 1\, ..., Гт — кривые класса С\^ Vft, ограничивающие
область G, причем Го — внешний контур, который содержит
внутри себя кривые 1\, ..., Гт. Функцию Ф(г), непрерывную в
G + Г и голоморфную в G, можем представить по формуле Ко-
ши в виде
ГЛ. 4. КРАЕВЫЕ ЗАДАЧИ
где
причем <J>0(z) голоморфна в односвязной области ?0, ограничен-
ограниченной кривой Го, a Oj(?), /^ 1, голоморфна в бесконечной одно-
связной области Gj, ограниченной кривой Г,-, причем Ф,-(°°) = 0.
В силу A.12) краевое условие A.6) можем записать в виде
^(z)] = 1;(z) (на ГЛ, A.13)
где
Ъ (z) = Yo (z) — Zi Re IK (z) фк (?)]¦
Так как Ф0(г), ..., Ф^^г), Oj+1(z), ..., Фт(г) голоморфны
вдоль Гл, то ^еСо(Гз). Поэтому, согласно доказанному выше,
решение Ф} краевой задачи A.13) принадлежит классу
Cm,v» (Gj — f j). Следовательно, Ф = Ф0 + ф1 + .. . + Фт е C<,V'vX
X(G + F), и это означает, что решение w(z) задачи А при-
принадлежит классу CX(G + Г), где t = ov'v", и наша теорема пол-
полностью доказана.
3. Покажем теперь, что задачу А можно всегда свести к слу-
случаю канонической области G, ограниченной окружностями
Го, rlt ..., Тт, причем Го — единичная окружность, центр кото-
которой совпадает с точкой t, = 0, принадлежащей области G,
a Tj, ..., Гт лежат внутри Го.
Пусть г = ф(?)—функция, реализующая конформное отобра-
отображение G на заданную область в плоскости z. В результате этого
отображения уравнение A.1) и краевое условие A.2) при-
примут вид
dzwx + A, (Q Wl - Вх (?) щ = Fx (ц),
Re [Я, {l)Wi (g)].= Ъ (I) (на Г),
где Ai(l)=
() Цф(?)], ТГ(?)Т[Ф(?)]
Так как ф(?) непрерывна по. Гельдеру в замкнутой области
(теоремы 1.8 и 1.9), то ?и(?) и Yi(t) также непрерывны по
Гельдеру на границе Г канонической области. Функции же
Аи Ви Fi, как это было нами показано в гл. 3, § 1, принадле-
принадлежат некоторому Lv(G), р > pt > 2.
Таким образом, мы пришли к новой задаче, которая пол-
полностью эквивалентна исходной, но обладает тем преимуществом,
что граница новой области состоит из окружностей, причем ос-
остальные условия 1 сохраняются в прежнем виде.
Как увидим ниже, это обстоятельство значительно упрощает
исследование свойств решения задачи А. Поэтому ниже, когда
§ 2. СОПРЯЖЕННАЯ КРАЕВАЯ ЗАДАЧА Л' 183
это окажется целесообразным, в качестве области G будем брать
каноническую область указанного выше вида, не оговаривая это
специально каждый раз.
4. Изучение задачи А всегда можно, также без ущерба для
общности рассуждений, привести к случаю, когда F = 0, т. е.
можно ограничиться отысканием решения однородного уравнения
E (w) = d-w + Aw + J?w = О, A.14)
удовлетворяющего краевому условию вида A.2). Для этого до-
достаточно решение задачи искать в виде суммы
w = ?i>0 + w, A.15)'
где w — некоторое частное решение уравнения A.1). Такое част-
частное решение мы можем получить, например, с помощью форму-
формулы A.5). Тогда для ш0 мы будем иметь краевую задачу для од-
однородного уравнения A.14) с граничным условием
Re[k{z)w,(z)]="i(z)-Re[K(z)w{z)] (на Г).
Исследование краевой задачи А можно привести также к за-
задаче отыскания решения неоднородного уравнения A.1), удов-
удовлетворяющего однородному краевому условию (^ = 0). Этого мож-
можно добиться опять-таки с помощью подстановки вида A.15),
если в качестве w взять некоторую непрерывно дифференцируе-
дифференцируемую функцию, удовлетворяющую краевому условию A.2).
Отметим, наконец, что можно ограничиться рассмотрением
случая А = 0,— к нему можно привести общий случай подста-
подстановкой E.98) (см. гл. 3, § 5, п. 4).
о
§ 2. Сопряженная краевая задача А'. Необходимые
и достаточные условия разрешимости задачи А
1. Для дальнейших исследований важно ввести в рассмотре-
рассмотрение так называемую сопряженную краевую задачу А', С этой
целью обратимся к формуле (9.3) гл. 3. Если в этой формуле
в качестве w' возьмем какое-либо решение сопряженного с
A.14) однородного уравнения
<5' (ц,') = d-w' — Aw' — Bw' = 0, B.1)
непрерывное в G + Г, то получим:
Re \Yi
\
184 гл- 4- КРАЕВЫЕ ЗАДАЧИ
Пусть, кроме того, w' удовлетворяет граничному условию
Re [Л (г) г'(*)и;'(«)] = 0. z' (*) = ^j? РГ), B.3)
т. е.
w'(z) = Il(J)Z(s)x(z) (на Г), B.4)
где %(z)—вещественная функция точки z границы Г. В силу
теоремы 4.1 она удовлетворяет условию Гельдера.
Подставляя B.4) в B.2), получаем
L г
Re Г| \ЩХ (t) tl
L
Отсюда видно, что если w — решение задачи А, т. е. удовлетво-
удовлетворяет уравнению A.1) и краевому условию A.2), то выполняется
равенство
4 J X @ 7 (*) ds~^l W {z)\F (z) dxdy = 0
Г С
или, в силу B.4),
5J J" 40 w' @ Y @ ??i — Re J J ы/F B) dz с?г/ = 0. B.5)
Г G
Таким образом, выполнение этого равенства является необходи-
необходимым условием разрешимости задачи А. Здесь w' — любое реше-
решение уравнения B.1), удовлетворяющее краевому условию B.3).
Ниже мы докажем также достаточность этого условия. Поэто-
Поэтому задачу отыскания решения w' уравнения B.1), удовлетворя-
удовлетворяющего граничному условию B.3), будем называть в дальнейшем
сопряженной относительно задачи А однородной краевой зада-
задачей, или, короче, задачей А'.
Без ущерба для общности рассуждений предположим,
что F = 0.
Кроме того, в этом параграфе мы будем предполагать, что
Г е Сц, 0<{г<1. Это также не ограничивает общности полу-
полученных результатов (см. § 1, п. 3).
2. Согласно формуле A0.8) гл. 3 обобщенная формула Коши
для сопряженного уравнения B.1) имеет вид
г
§ 2. СОПРЯЖЕННАЯ КРАЕВАЯ ЗАДАЧА Л' 185
О
Если w' — решение задачи А', то в силу B.4) будем иметь:
w (г) = - ^ J(Qi(t, z, G)l + Qa(t, z,G)Ц xds. B.7)
r
Переходя здесь к пределу, когда точка z из области G стремится
к граничной точке ?, согласно формуле A4.2) гл. 3 получим
J о С О X (*) ^ S е Г, B.8)
г
где о — длина дуги, соответствующая точке % контура Г,
Ко (t, D = - ^ [Й! (t, S, G) ЦТ) + Qa(i, S, С)Л (f)]. B.9)
Так как у, — вещественная функция, то, подставляя выраже-
выражение B.8) в краевое условие B.3), получим
B.Ю):
о
Таким образом, решение однородной задачи А' представляет-
представляется в виде B.7), где %(t)—вещественная функция точки t гра-
границы Г, удовлетворяющая однородному интегральному уравне-
уравнению B.10).
3. Уравнение B.10) содержит интеграл в смысле главного
значения по Кошн. Поэтому оно относится к классу так называ-
называемых сингулярных интегральных уравнений. В настоящее время
теория такого рода уравнений в достаточной степени хорошо
разработана. Для этого класса уравнений имеют место так на-
называемые теоремы Не тер, обобщающие известные теоре-
теоремы Фредгольма.
Приведем без доказательства некоторые факты из теории
сингулярных интегральных уравнений ([60а], гл. 2).
Уравнение B.10) является частным случаем уравнения сле-
следующего вида:
ДЦ^11'=/(д, ?еГ, B.11)
г
где a(l), K(%,t), /(?)еС»(Г), 0<v<l, причем функции
a(t,) + К(?,, ?,) и а(?)—/?(?, ?) нигде не обращаются в нуль на
Г. В теории сингулярных интегральных уравнений важную роль
играет понятие индекса.
Индексом уравнения B.11) называется целое число х, равное
приращению функции
1 (а*(Е?)
186 ГЛ- 4- КРАЕВЫЕ ЗАДАЧИ
когда точка ? один раз опишет границу Г области G в направ-
направлении, оставляющем эту область слева, т. е.
х - 2я г arg c (D + # (? «• (' '
Для уравнения B.10) у, = 0, ибо в этом случае а(
Рассмотрим союзное однородное уравнение
Пусть к ж к' — числа линейно независимых решений одно-
однородных уравнений isTcp = 0 и K'ty = 0 соответственно.
Эти числа конечны и удовлетворяют соотношению
к - к' = %. B.14)
Уравнение B.11) разрешимо тогда и только тогда, когда вы-
выполняются равенства
(?)ifi (?)<*? = 0 (/=1 *'). B-15)
г
где ijji, .... i|v— полная система линейно независимых решений
союзного однородного уравнения B.13).
Если Ге=С1, 0<ц<1, в(?), К{%, t)^C.(T), 0<v<l, то
найдется такое число а, 0 < о < 1, что все решения однородных
уравнений Kq> — 0 и K'ty = 0 принадлежат классу Са(Т), причем
а зависит лишь от ц и v.
Если /еСг(Г), 0<т=?1, то решения уравнения Ку —
= f(K'^ — j), если они существуют, принадлежат некоторому
классу СР(Г), 0< р < 1, причем р зависит от \и, v, т, но не за-
зависит от конкретного вида функции а(?), К(?„ I) и /(?). Кроме
того, если уравнение Kq> = / имеет решения, то среди них можно
указать такое, которое имеет вид <р = Н/, где II — линейный опе-
оператор, действующий из СХ(Т) в Се(Г).
В частности, уравнение B.11) разрешимо для всякой правой
части тогда и только тогда, когда союзное однородное уравнение
B.13) не имеет нетривиальных решений. Б этом случае уравне-
уравнение B.11) всегда имеет такое решение, которое удовлетворяет
условию вида
CV.(<P, Г)<Л/вСу(/, Г), 0<v'<v<l, Mo = const. B.16)
Для этого достаточно заметить, что Кар является линейным опе-
оператором в некотором пространстве CV (Г) ([60а], гл. 2, § 49) и,
следовательно, обратный оператор К~\ когда он существует, так-
также является линейным.
§ 2. СОПРЯЖЕННАЯ КРАЕВАЯ ЗАДАЧА Л' 187
Заметим, что К<р является линейным оператором также в
Lp(T), р > 1. Рассматривая B.11) как линейное уравнение в LP,
можно доказать справедливость вышеприведенных результатов
и при /еЬр(Г), р > 1, сохранив остальные предположения в
прежнем виде (см. работу Б. В. Хведелидзе [91]). Неравенство
B.16) в этом случае имеет вид
L,(q>, T)<MPLp(f, Г), Р>1. B.17)
4. Пусть "/л; • • ч X* — полная система линейно независимых
решений уравнения B.10). Подставляя эти функции в правую
о
часть равенства B.7), получим решения задачи А'. Однако не-
некоторые из этих решений могут оказаться тривиальными. Как
мы видели выше (гл. 3, § 14), это имеет место в тех случаях,
когда функция h(t)%(t)t' (s) на каждом граничном контуре
fj (/= 0, 1, ..., т) принимает значения некоторой голоморфной
в области Gj функции ФДг), причем Ф0(°°) = 0. Пусть Хи •••
...,%г/—те решения уравнения B.10), которым соответствуют
линейно независимые решения wL, ..., wi> задачи А. В таком
случае остальные решения уравнения B.10) удовлетворяют крае-
краевому условию вида
%(t)=iX(t)t'($)$>-(t) (на Г), B.18)
где Ф(г)—некоторая голоморфная вне G функция, причем
Фо(°°)~0. Из B.18) следует, что Ф~ удовлетворяет краевому
условию
Ro[K(t)t'(s)<b-{t)] = 0 (на Г). B.19)
Эту задачу мы будем именовать сопутствующей задачей в от-
отношении задачи А' или, коротко, задачей А#. Пусть /„ — число
линейно независимых решений этой задачи. Очевидно,
*' + /; = к, B.20)
где к — число решений однородного уравнения B.10).
5. Вернемся теперь к рассмотрению задачи А. Если w — ее
решение, то его контурные значения имеют вид
w(t) = K(t)^(t)+il(t)ii(t), *еГ, B.21)
где [i(t)—некоторая, пока еще неизвестная, вещественная функ-
функция точки t контура Г. В силу теоремы 4.1 она непрерывна в
смысле Гельдера. Пользуясь теперь обобщенной формулой Коши
A0.6) гл. 3, получаем
w{z)=wl(z)+w2(z), B.22)
188 ГЛ- 4- КРАЕВЫЕ ЗАДАЧИ
где
-± \Q2(z, t,G)K(f)y(t)df,
г г
B.23)
w2 (z) = ± f Qt (z, t, G) К (t) 11 (t) dt + ^Q2 (z, t, G) Щ yi (t) Ж
г г
B.24)
Если в равенстве B.22) перейдем к пределу, когда точка z
из области G стремится к граничной точке ?, то получим
w+ &) = i К @ [у (?) + f и (?)] + »! (Б) + м;2 (Б).
Подставляя это в краевое условие A.2) и учитывая, что Y и Iх —
вещественные функции, находим
Vo (9. B-25)
г
где
7о@ ¦= ? (?) - Re [Я (Q w+ (?)] ^ - Re [Л (Б) wj (Б)]. B.26)
Таким образом, все решенпя задачи А выражаются по фор-
формуле B.22), где ц удовлетворяет уравнению B.25).В частности,
о
решение однородной задачи А будет выражаться по формуле
B.24), где \х является решением однородного интегрального
уравнения
\KAL t)u(t)ds~O, B.27)
г
союзного с уравнением B.10). Так как индексы уравнений
B.10) и B.27) равны нулю, то в силу формулы B.14) числа их
линейно независимых решений равны:
& = &'. B.28)
о о
6. Рассматривая теперь задачу А*, сопутствующую задаче А,
будем иметь для нее краевое условие
O, B.29)
где Ф~(?)—граничное значение функции, голоморфной вне
G + Г, причем Ф(°°)=0. Обозначая числа линейно независимых
о о
решений однородных задач А и А* через I и 1# соответственно
и учитывая равенства B.20) и B.28), получим
1 + 1* = к. B.30)
§ 2. СОПРЯЖЕННАЯ КРАЕВАЯ ЗАДАЧА А' 189
7. Вернемся теперь к неоднородному уравнению B.25). Сог-
Согласно B.15) необходимым и достаточным условием разрешимо-
разрешимости его является выполнение равенств
С То @ Xi @ ds = 0 (/ = 1, ..., к). B.30а)
г
где %!, ..., Ха — полная система решений союзного однородного
сингулярного интегрального уравнения, которое в данном слу-
случае совпадает с уравнением B.10). Как мы видели, эти решения
разбиваются на две группы: Xi> • • •¦> 7j' и Xi'+i» • ¦ ¦-. Xk, причем
согласно B.4) и B.18) имеем
Ь" (*) = & @ *' (s) Щ @ 0 = 1, ..., Z', * е= Г), B.31)
и (t) = а (о *' (*) ф, (г) (; = г + 1, ..., к, t <= Г), B.32)
где Wj и Ф3- — решения задач А н А» соответственно.
Но согласно B.26), B.31) и B.2)
f То (*) t4 (*) ds = i\y (t) X (t) w'j {t) dt - Re \i f ^+ (/) u;) (f) л
г г [г
Я @ w] (t) dt + 2 Re f J Wj
= i
г
Отсюда в силу B.5) имеем
Далее, при j > V в силу B.32) и B.26)
I То @ 30 @ ds = Re p J юГ @ Ф? (*) dij = 0,
ибо wt и Ф; голоморфны вне U, причем Wi(°°) = ФД«>)==0.
Таким образом, если имеют место равенства B.5), то выпол-
выполняются также и равенства B.30а), т. е. условия B.5) достаточ-
достаточны для разрешимости задачи А. Доказана*)
Теорема 4.2. Неоднородная краевая задача А разрешима
тогда и только тогда, когда выполнено условие B.5), где w' —
о
любое решение сопряженной однородной краевой задачи А'.
Отсюда сразу следует
Теорема 4.3. Неоднородная краевая задача А разрешима
для любой правой части тогда и только тогда, когда сопряжен-
о
ная однородная задача А' не имеет решения.
*) Эта теорема доказана в работе автора [14а] несколько иным путем.
Там использована формула A4.12) гл. 3, с помощью которой задача А при-
приводится к сингулярному интегральному уравнению, отличному от B.25).
190 ГЛ. 4. КРАЕВЫЕ ЗАДАЧИ
8. Если неоднородная задача А разрешима, т. е. если выпол-
выполнены условия B.5), то решение определяется формулой
i
w(z)^wo(z)+ %ckwh(z), B.33)
fe=i
где н>и ..., wi — полная система линейно независимых решений
однородной задачи A, d, . . ., ct — произвольные вещественные
постоянные, a wa — частное решение неоднородной задачи А. Это
частное решение всегда можно представить в виде
wo(z)=[y(t)Mo(z,t)ds, B.34)
г
где Мо B, t) — заданная функция, которая строится с помощью
уравнения A.1) и краевого условия A.2), но не зависит от_^.
Заметим, что если f ^CV(T), то согласно теореме 4.1 w9^ Ca(G),
причем можно доказать, что
Са (w0, G) < MCS (у, Г), о = min (v, p-~ ). B.35)
9. Предыдущие результаты можно обобщить на случай общей
линейной эллиптической системы уравнений с частными произ-
производными 1-го порядка. Как было выяснено в гл. 2, § 7, такую
систему всегда можно привести к виду
—vy + апих + ai2uy + atu + btv = /t,
i i i i i s B.36)
vx + a2iux + altuy + a2u + b2v — /2,
an>0, Д = я;1а22 г-(a12 — «2iJ^^o>^i До = cons*-
Рассмотрим для нее краевое условие
att+py = Y. B.37)
Как было показано в гл. 2, § 7, посредством специально выбран-
выбранного преобразования независимых переменных и подстановки
вида
U = /Дм, V = v - Й12~Й21 и B.38)
система уравнений B.36) приводится к каноническому виду,
а краевое условие B.37) принимает вид
a.JJ + pF =7* (па Г*), B.39)
где Г,,. — образ контура Г,
Если a2 + f > 0 на Г, то а. + Р2 > 0 на Г*.
§ 3. ИНДЕКС ЗАДАЧИ А. ПРИВЕДЕНИЕ КРАЕВОГО УСЛОВИЯ \Q\
Относительно коэффициентов и свободных членов системы
B.36) достаточно принять следующие ограничения:
1) аае /?,,,(?), р>2; 2) at, btft e LP (G), р > 2.
Тогда коэффициенты и свободные члены преобразованной кано-
канонической системы будут принадлежать классу Lp (Gt), p>2.
Еслп, кроме того, область принадлежит CJ,, 0<ц.<1, а, 0, fs
еС,(Г), то, как нетрудно видеть, предыдущие теоремы, дока-
доказанные относительно задачи А, остаются в силе и для задачи
B.36) —B.37) (см. еще § 3, п. 2 и § 9 гл. 4).
§ 3. Индекс задачи А. Приведение краевого условия
задачи А к каноническому виду
1. Как мы убедимся ниже, при изучении задачи А важную
роль выполняет рассмотрение так называемого индекса, который
мы сейчас определим.
Обозначим через Дг/@ приращение функции f(t), когда точ-
точка t один раз опишет кривую Г в положительном направлении
(оставляющем область G слева). Вводим в рассмотрение целое
число:
п = п0 + пх + ... + пт = ^п дг arg % (t), C.1)
где
щ = ^ Аг; arg X (t) (j = 0, .. ., т). C.2)
Представим комплексную функцию Я(?) в виде единичного
вектора K(t) с компонентами a(t) и $(t), причем будем считать,
что начало этого вектора закреплено. Когда точка t опишет один
раз границу Г области G в направлении, оставляющем эту об-
область слева, вектор К вернется в свое исходное положение, со-
совершив вокруг своего начала некоторое число п+ полных оборо-
оборотов против движения часовой стрелки и некоторое число п~
полных оборотов в противоположном направлении.
Нетрудно видеть, что число п, заданное равенством C.1),
равно разности п+ — п~. Эту разность мы будем называть в даль-
дальнейшем индексом функции X(t) относительно границы Г области
G или еще индексом краевой задачи А.
Заметим, что индекс задачи А не изменяется как при топо-
топологических преобразованиях области, так и при подстановках
вида w = woea, где ю — некоторая функция класса Dtp(G), p>
> 2. Такой вид имеет подстановка E.96) гл. 3, § 5, п. 4, при
помощи которой уравнение задачи приводится к виду d-w +
+ Bw = F.
ГЛ. 4. КРАЕВЫЕ ЗАДАЧИ
Мы можем теперь, пользуясь формулой C.2), вычислить ин-
индекс сопряженной задачи А'. Имеем
ri = ^ Аг arg (Щ FJsj) = - ^ Аг arg I (t) - 1 Лг arg t' (*).
Так как argi'(s) при обходе внешнего граничного контура
Го получает приращение, равное 2я, а при обходе внутреннего
граничного контура Г;- — приращение, равное — 2я, то
п' = -п+т-1. C.3);
2. В результате преобразования переменных и подстановки
B.38), которые позволяют привести систему уравнений общего
вида B.36) к каноническому виду, индекс краевого условия B.37)
не изменится. Это следует из того, что мнимые части функции
К = а + ф и Я^ = а* + if> равны и, следовательно, разность их ар-
аргументов по абсолютному значению не превосходит я. Поэтому
в силу непрерывности Я (z) и Я.,, (z) легко убеждаемся, что при-
приращения argA-(z) и arg Х% (z) вдоль Г и Г* совпадают.
3. Пусть Zi, ..., zm — некоторые фиксированные точки, лежа-
лежащие вне G, но внутри контуров 1\, ..., Гт соответственно. Кроме
того, зафиксируем внутри области G совершенно произвольно
точки Oi, ..., аА, где к — п, если п^О, и к = —п, если га<0. Вве-
Введем обозначение
п
По—«о. «>о,
1, в = 0, C.4)
i-n
|Д(г~ аг)~\ П<0.
В частности, если а, = ... = ak = 0 (мы считаем, что точка z = О
принадлежит области G), то, очевидно,
Qn(z) = z\ C.5)
Рассматривая теперь функцию
m
л0 (z) = Я. (z) Qn (z) П (z — zfe) fte~TA, C.6)
легко убедимся, что
lMz)|>0, ^Г, Arjarg^oB) = O (/ = 0, .... m).
Поэтому
()U|^>
C.7);
§ 3. ИНДЕКС ЗАДАЧИ А. ПРИВЕДЕНИЕ КРАЕВОГО УСЛОВИЯ
где
т
a (z) = arg X (г) - arg Qn (г) + 2 nk arg (z - zk) + Im (FA); C.8)
так как К еС,(Г) и ТЛ еСа(Г),а = v——, то о(z)—однозначная
вещественная функция на каждом контуре Г, и принадлежит
СХ(Т), 0<r = min(v, a).
Как это будет доказано ниже (§ 5, п. 3, см. также [60а]),
функцию a(t) можно представить в следующем виде:
o(t) = p(t)-io#(t) + na(t),
где p(z) — функция, голоморфная в G и непрерывная в смысле
Гельдера в G + Г, а* — мнимая часть p{t), a a{t) — кусочно по-
постоянная вещественная непрерывная функция на Г, причем а =
= 0 на Го и a = aj = const на Г,- (/= 1, ..., ш). При этих усло-
условиях р и а однозначно выражаются посредством a(t). В таком
случае в силу C.7) и C.8) краевое условие A.2) можем записать
в виде
Re [?Ще-'в('>и>0(*)] = ?«(') (на Г), C.9)
где
= w (z) е-'^)+тА Д B _ 2ft)% (ЗЛ0)
ft=i
[ЖI e"(i>+Re ТАI °*«IП I' - ъ \щ- (З.И)
Как нетрудно видеть, функция i#o удовлетворяет уравнению
d-w0 + Bow0 = Fo(z), C.12)
где
f m 1
-2«(Rep(z) —1тТЛ- 2 «А) , C.13)
I k=i )
M ()Tl{.)
Здесь ¦O'j = arg (z — z,-) (/ = 1, ..., m). Очевидно, Bo = LP (G), p > 2,
ибо | Д„ I = 151.
Таким образом, задачу А всегда можно привести к эквива-
эквивалентной задаче для уравнения вида д-w + Bow = 0 с краевым
условием более простого вида C.9). Эту форму задачи А будем
называть канонической (см. также [39а]).
о
Однородная задача А, очевидно, эквивалентна однородной
задаче для уравнения d-w + Bow = 0 с краевым условием
RePMi)e-"tell)u;] = 0 (на Г), C.14)
13 и. Н. Векуа
194 ГЛ. 4. КРАЕВЫЕ ЗАДАЧИ
а сопряженная однородная краевая задача А' приводится к эк-
эквивалентной задаче для сопряженного уравнения
d-w' - В0То' = 0 C.15)
с краевым условием вида
Re [Qn(z)z'enia^ w' (z)] = 0, z' = ^ (на Г). C.16)
с
§ 4. Свойства нулей решений однородной задачи А.
Признаки разрешимости задач Аи А
В этом параграфе будут доказаны некоторые свойства нулей
обобщенных аналитических функций, удовлетворяющих однород-
однородному краевому условию
Re[Mz)u?(z)] = 0 (на Г). D.1)
Будет выведено соотношение, связывающее числа внутренних и
граничных нулей с индексом задачи. Будет получено также ос-
основное соотношение между числами решений однородных задач
А и А'. Кроме того, будут установлены новые достаточные
признаки разрешимости неоднородной задачи А.
В дальнейшем, если не будет оговорено противоположное, мы
будем все время предполагать, что FeCj, 0<ц^1, a K(z) =
1. Как мы уже знаем, непрерывная в области G функция
w(z) класса 5tp(G), р > 2, может быть представлена в виде (гл. 3,
§ 4, п. 2)
w(z) = O(z)e°>M, D.2)
где Ф(г) голоморфна в G, a co(z) непрерывна на всей плоскости
в смысле Гельдера, шеС(Р-ад(?), причем co(z) голоморфна
вне G + Г и обращается в нуль на бесконечности. Из этой фор-
формулы следует, что если w(z) тождественно не равна нулю, то
нули ее, принадлежащие области G, изолированы, причем каж-
каждый такой нуль имеет кратность целого порядка, т. е. если в
точке z,eG функция w{z) обращается в нуль, то существует
целое положительное число к такое, что в окрестности z0 имеет
место равенство
/\/ \Ь/\ / / О\
W(Z)Z=(Z — Zo) Wo\Z), D.0)
где wo(z) — непрерывная функция, причем wo(zo)'?=O. Отсюда,
очевидно, следует, что на всяком замкнутом множестве, принад-
принадлежащем G, может лежать лишь конечное число нулей функции
w(z). В отношении нулей функции w{z), лежащих на границе
области G, эти утверждения не сохраняют силу даже в том слу-
§ 4. СВОЙСТВА НУЛЕЙ РЕШЕНИЙ ЗАДАЧИ А 195
чае, когда w(z) непрерывна в замкнутой области G + Г. Но ока-
оказывается, что для решений однородной задачи А эти свойства
сохраняются во всей замкнутой области G + Г (разумеется, при
тех условиях, которые нами уже были приняты выше относи-
относительно данных задачи).
Теорема 4.4. Пусть Г е С^, 0<ц«?1. Если w(z)—не-
w(z)—нетривиальное решение задачи А, то
w(z) = P(z)w(z), D.4)
где P(z)—полином, все корни которого принадлежат G + T, а
w(z) непрерывна и нигде не обращается в нуль в G + T.
Доказательство. Посредством конформного преобразова-
преобразования z = ф(?) область G можно отобразить на область G', ограни-
ограниченную окружностями, совокупность которых обозначим через
Г'. Функция «>i(?)=H;[(p(?)], очевидно, непрерывна в G' + T',
принадлежит классу 5lp(G'), p > 2, и удовлетворяет краевому
условию
Re IMS) «>.(?)] = О (на Г'), *i = M<p(S)]. D.5)
Здесь следует учесть, что в силу теоремы 1.8 ф(?) удовлетворяет
условию Липшица в G' + T'. Поэтому, очевидно, 1,(^)еС,(Г').
Посредством подстановки вида C.10) краевое условие D.5) при-
приводится к виду
Re[rne-nia(E)^o(?)] = O (на Г'), D.6)
где
П (? - Ы%, D.7)
Вне произвольно малой окрестности точки % = 0 функция
ю% (?,) = ?,~пш0 (?) принадлежит классу 5tP, /? > 2, и непрерывна
вплоть до Г'. Поэтому в силу обобщенного принципа симметрии
она непрерывно продолжима вне G' с сохранением класса на бо-
более широкую область G", которая содержит внутри замкнутую
область G' + T'. Следовательно, функция wo(?), равная ?пи>*(?)|
может иметь на G' + T' лишь конечное число нулей. Это утверж-
утверждение в силу D.7) имеет место и для функции h>i(?). Отсюда
следует, что существует такой полином Pi(t,), что
D-7а)
где wz(t,) непрерывна и нигде не обращается в нуль на G' + T'.
Возвращаясь теперь к функции w(z), получаем
i»(z) = P,№B)]ii;Ji|)(z)], D.76)
13*
196 гл- 4- КРАЕВЫЕ ЗАДАЧИ
где if(z)—функция, обратная qp(?). Из этого равенства следует,
что w(z) может иметь на G + Y лишь конечное число нулей.
Обозначая эти нули через zt, ..., zh, имеем Pi[ty(zj)] — 0 (/ = 1, ...
..., к). Поэтому мы можем написать: w(z) — P(z) w(z), где
3 = 1
д^) D.8,
Так какГеС^, то г|з(г) имеет производную я|/B), которая не-
непрерывна и отлична от нуля в G + T (гл. 1, § 2). В силу этого
из D.8) сразу следует, что w(z) непрерывна п не обращается
в нуль на G + Г.
Замечание. Если же Г е С^у ,...,vA и w(z0) = 0 в граничной
точке z0, которая не является угловой, то из D.76) опять сле-
следует, что вблизи 20 функция w(z) — (z — z^n^wu (z), где па— це-
целое число >0, a w0 непрерывна в окрестности z0 и Юо(га)ФО.
Если же z0 является угловой точкой, то из D.76) в силу форму-
формулы B.3) гл. 1 вытекает, что
w (z) = (z — z0)"o/vou;o (г) (вблизи z0), D.8а)
где па — целое число > 0, von равно внутреннему углу при z0,
a w0 непрерывна в окрестности точки z0 и wo(zo)^=O.
о
2. Если w(z) — нетривиальное решение задачи А, то согласно
предыдущей теореме мы можем представить w(z) в виде D.4),
где P(z) — полином, a w{z) — непрерывна и не обращается в
нуль на G + Г.
Пусть
D.9)
Пусть at, ..., at — корни полинома P(z), лежащие внутри об-
области G, а а1и .-.., ujij — корни -P(z), принадлежащие граничной
кривой Г; G = 0, 1, ..., то). Обозначим через kt и кц¦ — кратно-
кратности корней at и ая соответственно.
В силу D.4) и D.9) краевое условие D.1) запишется в виде
ei<e+?-#) = t (_ if (k — целое число). D.10)
Фиксируя в некоторой точке z, кривой Г3-, не являющейся кор-
корнем полинома P(z), значения 6, 6 и 0, а затем, обходя эту
кривую один раз в положительном направлении, в силу D.10)
получаем
2лщ = Дг.^ = Дг.9 + Др.9 0 = 0, 1, ..., т). D.11)
8 4. СВОЙСТВА НУЛЕЙ РЕШЕНИЙ ЗАДАЧИ А 197
Но, как нетрудно видеть, для внешнего контура Го
го I m lj
дге = я2 *;„, + 2я2 fci + 2я2 2 ъ» =
i=0 i=l j=l i=l
= nNTo + 2я (NTi + ... + Nrm) + 2nNG, D.12)
а для внутренних контурав
Ч
АТ.в = - л 2 ЛлЧ = - шУг. (/ = 1, ..., то), D.12а)
где
ivG = 1^+ ... + kt, Nr. = ftjt
r.
обозначают числа нулей функции w(z), лежащих внутри G и на
контуре Т] соответственно. Нужно учесть, что нуль считается
столько раз, какова его кратность.
В силу D.12) и D.12а) равенство D.11) можем переписать
еще такз
2nQ = Nr0 + 2 (NTi + ...+ Nrn) + 2NG + 2n0,
2щ = — NT. + 2щ (/ = 1, . . •, m),
где nj = ^— Ar.9. Складывая эти равенства и учитывая C.2),
находим
2n = NF(i + Nr1+ ... + NTn + 2NG + 2», D.13)
Но в силу принципа аргумента (гл. 3, § 4, п. 10) п =^
= 0, ибо w — обобщенная аналитическая функция, непрерывная
в G + Г и не обращающаяся в нуль нигде. Таким образом, имеем
следующее соотношение:
2ге = 2NG + Nr, D.14)
где Nr = Nr0 +NTi+ ...+ NFm.
Предыдущие результаты легко обобщаются на более широ-
широкий класс обобщенных аналитических функций, имеющих конеч-
конечное число особых точек, принадлежащих области и ее границе.
В дальнейшем мы ограничимся рассмотрением того случая, когда
о
вблизи каждой особой точки z0 решение w (z) задачи А имеет вид
w(z) = O(\z-z0\-h), D.15I
где к — некоторое положительное число. Как это сразу следует
из формулы D.2), число к будет целым, если z0 лежит внутри
193 ГЛ. 4. КРАЕВЫЕ ЗАДАЧИ
области G. Докажем, что к — целое число и в том случае, когда
особая точка z0 принадлежит гладкой дуге на границе области.
Пусть Г' — граничная дуга, содержащая единственную осо-
о
бую точку г0 решения w задачи А. Без ущерба для общности
рассуждений мы можем допустить, что г0 = 0 и Г' есть отрезок
[—р', р] вещественной оси. Общий случай приводится к этому
с помощью конформного преобразования. Представляя w в виде
D.2), мы можем всегда добиться того, чтобы co(z) принимала
на Г" значения, равные argA.(z). В таком случае функция Ф(г)
голоморфна внутри некоторого полукруга Кр: Ы<р<р',
Im(z)>0, непрерывна на его замыкании ivp, исключая лишь
точку z = 0, вблизи которой она имеет вид Ф = 0(|г|~*). Кроме
того, она удовлетворяет краевому условию
Re[O(z)] = 0, если ге[-р, р], z?=0.
Продолжая функцию Ф по принципу симметрии в нижний
полукруг Кр. |z]<p, Im(z)<0, легко убедимся, что для нее
точка z — 0 является полюсом, т. е. к — целое число, что и тре-
требовалось доказать (см. еще [60а], гл. 1, § 15).
Из этого результата легко выводится, что всякое решение
w(z) однородной задачи А, имеющее внутри области G и на
границе ГеСр конечное множество особых точек типа D.15),
представляется в виде
w(z)=*R(z)w(z), D.16)
где R{z) — рациональная функция, нули и полюсы которой рас-
расположены на G + T, а и> — некоторая функция класса ^(G),
р > 2, непрерывная в смысле Гельдера и не обращающаяся
в нуль нигде на G + Г.
Из формулы D.16) сразу вытекает следующее равенство:
2NG + JVr - 2PG - Рг = 2л,' D.17)
где Na, PG, Nr и Рг — числа нулей и полюсов функции w(z)
внутри G и на Г соответственно.
Из формулы D.17а) сразу вытекает следующая теорема:
Если при п<0 числа внутренних и граничных полюсов ре-
решения w(z) однородной задачи А удовлетворяют неравенству
2РО + Рт<~2п, D.17а)
то w(z) = 0.
3. Приведем еще ряд теорем, которые легко вытекают из
формул D.4), D.14) и D.17).
(¦ Теорема 4.5. Если индекс п задачи А — отрицательное
число, то однородная задача А не имеет нетривиального решения.
Другое доказательство этой теоремы будет дано ниже
в § 5, п. 4.
§ 4. СВОЙСТВА НУЛЕЙ РЕШЕНИЙ ЗАДАЧИ А
О
Теорема 4.6. Если при п = 0 задача А имеет нетривиаль-
нетривиальные решения, то все они выражаются по формуле
w(z) = cowo(z), D.18)'
где Со — произвольная вещественная постоянная, a w0 (z) — част-
ное решение задачи А, которое нигде не обращается в нуль
в G + T.
Доказательство. При ге = 0 из D.17) следует, что iVr =
= NG = 0. Это означает, что полином P(z) в формуле D.4) вы-
вырождается в постоянную с0. Таким образом, любое нетривиальное
решение задачи А имеет вид D.18) и, следовательно, оно нигде
не обращается в нуль в G + Г.
Докажем, что при п = 0 два решения задачи А всегда линей-
линейно зависимы. В самом деле, если wt и w2 — нетривиальные ре~
о
шения задачи А, то их линейная комбинация w = c4m/"i + c2w2
с вещественными коэффициентами также является ее решением.
Но в силу граничного условия wt = ik%i и w2 = iX%z на Г, где %i
и %2 — действительные функции, которые нигде не обращаются
в нуль на Г. Поэтому постоянные с( и с2 всегда можно выбрать
так, чтобы в некоторой фиксированной точке z0, принадлежащей
Г, w(zo) = clwl(z0) + c2w2(z0) = 0. Но это возможно только тогда,
когда CiWi(z) + c2w2(z) = 0. Отсюда следует, что все нетривиаль-
о
ные решения задачи А имеют вид D.18), где с0 ¦—произвольная
вещественная постоянная, что и требовалось доказать.
Теорема 4.7. Если при п > 0 однородная задача А имеет
нетривиальное решение w(z), то оно имеет нули в замкнутой
области G + Г, причем число NG нулей внутри G и число NT
нулей на Г связаны между собой соотношением
Nr + 2NG = In. D.19)'
Кроме того, на каждом граничном контуре Г,- может лежать
лишь четное число нулей (с учетом их кратностей).
Доказательство. Теорема следует из равенств D.13); из
них видно также, что JV^- — четные.
Из D.19) вытекает, что число внутренних нулей нетривиаль-
нетривиального решения однородной задачи А не превосходит п, а число
граничных нулей =S2rc, причем возможны крайние случаи:
jVr = O, NG = n, NT = 2n, NG = 0. D.19a)
Степень полинома P(z), фигурирующего в равенстве D.4), равна
P = NT + NG = 2n-NG D.20)
и, следовательно,
п^р^2п. D.21)
200 ГЛ- 4- КРАЕВЫЕ ЗАДАЧИ
Имеет место также следующая
о
Теорема 4.8. Если п > 0, то однородная задача А не мо-
может иметь более чем In +1 линейно независимых решений.
о
Доказательство. Если w0 — решение задачи А, то функ-
функция w = z~nw0 удовлетворяет уравнению д-w +Aw + Be~iin4w— 0
(<p = argz) всюду в G, кроме точки z = 0, где она может иметь
полюс порядка ?gn. Поэтому мы можем представить ее в виде
(гл. 3, § 15, п. 4)
w (z) = w* (г) + Clw_x (z) + . .. + c2nuL2n (z) D.22)
(cft — вещественные постоянные),
где w* (z) удовлетворяет уравнению д-w + Aw 4- Be~2in<i>w = 0, не-
непрерывна в G + Г и подчинена краевому условию
2П
Re [«>* (z)] = - 2 cft Re [^_fe (z)] (на Г). D.23)
Так как соответствующая однородная задача: Re [w* (z)] = 0, со-
согласно теореме 4.6, не может иметь более чем одно (линейно
независимое) решение, то краевая задача D.23) имеет не более
чем 2п +1 линейно независимых решений. Возвращаясь к ра-
о
венству D.22), мы убедимся, что исходная задача А не имеет
более чем 2га + 1 решений.
4. Теорема 4.9. Разность чисел решений однородных крае-
краевых задач А и А' равна разности соответствующих индексов,
т. е. *)
l-l' = n-n' = 2n + l-m. D.24)
Доказательство. Из B.20) и B.30) следует, что
l — r = l* — lt, D.25)
где 1% и I* — числа решений сопутствующих однородных крае-
о о ^
вых задач А* и А* с краевыми условиями B.29) и B.19).
Эти числа можно найти в явном виде. Для простоты будем счи-
считать краевые задачи приведенными к канонической форме.
Кроме того, без ущерба для общности мы можем считать, что
внешний граничный контур Го есть окружность |z[=l и что
начало координат принадлежит к рассматриваемой области G.
Так как краевые условия задач А и А/ мы можем брать
в виде Re[z~nM;(z)] = 0 и Re[z"z'«/(z)] = 0, то краевые условия
*) Эта формула была доказана в работе автора [14а] несколько иным
путем (см. также § 6, п. 4).
§ 4. СВОЙСТВА НУЛЕЙ РЕШЕНИЙ ЗАДАЧИ А 201
о о f
сопутствующих задач А* и А* имеют вид
Re [Г"Ф-(*)] = (), (еГ, D.26);
Re [ft'(«)?-(*)] = 0, (еГ, D.27);
где Ф п ? — искомые функции, голоморфные в областях Go,
Gt, ..., Gn, причем Ф(оо) = Т(оо) = 0.
Рассматривая краевое условие D.26) на внутренних гранич-
граничных кривых, сразу получим, что
Ф(г) = щгп, если zeGj (у = 1, ..., т), D.28)
где с} — произвольные вещественные постоянные. Условия D.27)
мы можем переписать в виде
nY@df = 0, z<=T} (/ = 1 m).
Так как фигурирующий в этом равенстве интеграл представляет
собой голоморфную функцию в области Gj, то имеем:
?(z) = 0, если zeG, (/ = 1, ..., т). D.29)
Переходим теперь к рассмотрению краевых условий на внеш-
внешнем контуре Го. Рассмотрим сперва случай п>0. Тогда в силу
условия Ф(°°) = 0 из D.26) следует, что Ф(г) = 0 при z^Ga.
Следовательно, в силу D.28) число решений сопутствующей
однородной задачи А* равно то, т. е.
I* = т. D.30)
Так как по предположению Го — окружность UI = 1, то i'(s) =
= it и условие D.27) примет вид
Учитывая, что Т~(°°) = 0, легко убедимся, что эта задача
имеет 2п + 1 линейно независимых решений:
Поэтому в силу D.29) число решений сопутствующей однород-
ной задачи А* равно 2га + 1, т. е.
I* = 2га + 1. D.32)
Из D.30) и D.32) в „.силу D.25) сразу следует форму-
формула D.24),
Пусть теперь га < 0. Тогда краевая задача D.26) для внеш-
внешней области Go будет иметь — Bга+ 1) решений (учитывается
202 ГЛ- 4- КРАЕВЫЕ ЗАДАЧИ
условие Ф(°о) = 0):
izn, i(zn-l + zn+i), zn-1-zn+1, ..., i(z-l + z2n+1), z-'-z2". D.33)
Учитывая еще формулы D.28), получим
1# = — 2п + т — 1. D.34)
Из D.27) следует, что 4r(z) = 0 при z^G0, т. е.
I* = 0. D.35)
Из D.34) и D.35) в силу D.25) опять получаем формулу
D.24). Таким образом, теорема полностью доказана.
Теорема 4.8 устанавливает верхнюю грань для числа решений
задачи А. Теорема 4.9 позволяет установить также нижнюю
грань для этого числа. Так как V ^ 0, то, очевидно, I не меньше,
чем 2га + 1 — то. Вообще, имеет место неравенство
max@, 2п+1-т)^1^2п+1. D.36)
Но при п<0 и п> т— 1 можно получить еще более точные
результаты.
Из теорем 4.5 и 4.9 непосредственно следует
Теорема 4.10. Если га<0, то
Z = 0, l' = m-2n-l. D.37)
Если же п>т — 1, то
l = 2n + i-m, Г = 0. . D.38)
В частности, в случае односвязной области (?п = 0) имеет
место следующая
Теорема 4.11. Если то = 0, то 1) при п<0 однородная за-
о
дача А не имеет нетривиального решения (I = 0), а сопряжен-
сопряженная однородная задача А' имеет ровно V = — 2п — 1 решений]
о
2) при пХ) однородная задача А имеет ровно I = 2п + 1 реше-
о
ний, а сопряженная задача А' не имеет нетривиальных решений.
В частности, при п = 0 задача А имеет одно {линейно неза-
независимое) решение, причем оно не обращается в нуль нигде
в G + T.
Другое доказательство этой теоремы мы приведем ниже, в § 7.
Из теорем 4.3 и 4.10 непосредственно вытекает следующая
Теорема 4.12. Если п>тп — 1, то неоднородная задача А
всегда разрешима и ее общее решение дается формулой
2 CjW}(z) D.39)
3=1
(с,-—вещественные постоянные),
§ 4. СВОЙСТВА НУЛЕЙ РЕШЕНИЙ ЗАДАЧИ А 203
еде 1рг, ..., w2n+i-m — полная система решений однородной задаг
о
чи A, a w0 — частное решение неоднородной задачи А. Если же
п < 0, то неоднородная задача А имеет решение (и притом един-
единственное) тогда и только тогда, когда выполняются равенства
f у (t) го] (t)k(t)dt = O (/ = 1, ..., m — 2» — 1), D.40)
г
где Wi, . . ., u'm_2n-! — полная система решений сопряженной
о
однородной задачи А'.
5. Доказанные выше теоремы содержат важные сведения
о задаче А. С помощью довольно простых признаков они позво-
позволяют установить наличие тех или иных свойств ее решений не
прибегая к фактическому их построению, которое в общем слу-
случае, очевидно, осуществить очень трудно. В этом отношении мы
достигли наиболее полного результата в тех случаях, когда ин-
индекс задачи удовлетворяет условиям
п<0, n>m-l. D.41)
При этих условиях теоремы 4.10 и 4.12 дают возможность уста-
устанавливать факты разрешимости или неразрешимости задачи А,
а также определять в отдельности числа решений однородных
задач А и А'. Такого полного результата мы еще не имеем
в том случае, когда индекс задачи удовлетворяет условию
0<n^m-l. D.42)
В этом случае приведенные выше теоремы не позволяют найти
числа I и Г в отдельности. Разумеется, достаточно найти одно
из них, ибо другое сразу вычисляется с помощью формулы D.24).
Поэтому мы можем ограничиться рассмотрением тех случаев,
когда индекс задачи удовлетворяет условию
0 *? п < т/2, D.43)
так как при п ~Sz т/2 это условие выполняется для индекса со-
0
пряженной задачи А', который равен т — п—1.
о
Чтобы подсчитать число решений однородной задачи А, оче-
очевидно, достаточно краевое условие взять (см. § 3, п. 3) в форме
Re [Qn(z)w (z)] = 0, Qn (z) = П (z - ah), ak e G. D.44)
ft=i
Тогда краевое условие сопряженной задачи будет иметь вид
Re[Qn(z)z'(s)«/(z)] = 0 (на Г) D.45)
или, вводя в рассмотрение новую функцию
<(z) = OB(z)«/(z),, D.46)
204 гл- 4- КРАЕВЫЕ ЗАДАЧИ :
получим
Re[z'(sM'(z)] = 0 (на Г). D.47)
Очевидно, w' является обобщенной аналитической функцией, не-
непрерывной в G + Г. Чтобы подсчитать число решений задачи
D.47), рассмотрим сопряженную с ней задачу
Re[u5(z)] = 0 (на Г). D.48)
Так как индекс последней задачи равен нулю, то согласно тео-
теореме 4.8 число I ее решений не превосходит единицы, т. е.
Г=0 или 7=1. D.49)
Ниже мы приведем примеры, показывающие, что оба эти случая
могут быть реализованы (§ 5, п. 1). Индекс краевой задачи
D.47) равен те —1, и поэтому число решений, согласно форму-
формулам D.24), определяется равенством
? = 2{т - 1)+ 1 +?- т = т - 1 +?.
Следовательно, учитывая D.49),
Т' = ш-1 или ?' = то. D.50)
Таким образом, общее решение краевой задачи D.47) имеет вид
и/ (z) = cxw[ (z) + ... + сро~, (z) D.51)
(ck — вещественные постоянные).
Решение задачи D.45) мы получим из формулы D.46), если
w' (z) подчиним следующим условиям:
ш>.) = 0, ..., Ъ'(ап) = 0. D.52)
Эти равенства дают 2п линейных уравнений для определения V
вещественных постоянных сг, ..., с-р», В силу D.50) и D.43)
V ^ 2п. Поэтому ранг системы уравнений D.52) удовлетворяет
условию
0<г^2п. D.53)
Теперь легко видеть, что число решений задачи D.45) опреде-
определяется формулой
Z'=»?-/•, D.54)
т. е. в силу D.50)
Г = т — г—1 или Z' = /re —г. D.55)
о
Число решений задачи А в силу D.24) и D.54) выражается
равенством
Z = 2n + l+T'-r-TO, D.56)
§ 5. РАССМОТРЕНИЕ СПЕЦИАЛЬНЫХ КЛАССОВ КРАЕВЫХ ЗАДАЧ 205
т. е.
Z = 2n + l-r или 1 = 2п~г. D.57)
Теперь естественно встает вопрос: возможны ли для г все
значения, удовлетворяющие условию D.53), или же некоторые
из них вовсе исключаются?
о
Задача А, очевидно, имеет минимальное число решений (I =
= 0 или / = 1) в том случае, когда г = 2п. Ниже мы покажем,
что именно эти случаи встречаются наиболее часто. Вместе с тем
будет установлено, что при выполнении условия D.43) имеет
место неравенство (§ 6, п. 4; Добавление к гл. 4)
0<г<»+1, D.58)
причем случай I = п +1 реализуется. Однако это имеет место
только для специального вида краевых задач (§ 5, п. 8).
§ 5. Рассмотрение специальных классов краевых задач
типа А в случаях 0 =S п ^ т— 1
1. Рассмотрим сперва две простые, но типичные задачи, соот-
соответствующие случаю п = 0 и т > 1.
При ге = 0 согласно D.53) и D.56) 1 = 1 + 1 — т. Следова-
Следовательно, в силу D.50)
1 = 0 или 1 = 1. E.1)
Покажем, что оба эти случая реализуемы. Рассмотрим, на-
например, следующую задачу:
Отыскать в G голоморфную функцию Ф(г), непрерывную в
G + Г и удовлетворяющую краевому условию
Re[e™^<2>(z)] = 0 (Hfl Г); E.2)
где a(z)—вещественная кусочно постоянная функция,
а = 0 на Го, a = afc = const на I\ (fc = l, 2, ..., m). E.3)
Индекс этой задачи, очевидно, равен нулю.
Если все ak = 0 (modi), то задача E.2) допускает решение
Ф = ic (с — вещественная постоянная) и, следовательно, реали-
реализуется случай 1 = 1.
Допустим теперь, что найдется хотя бы одна из постоянных
ось, которая удовлетворяет условию
<V^0 (modi). E.4)
В этом случае, как мы докажем ниже, задача E.2) не имеет не-
ненулевых решений. Таким образом, это будет соответствовать
случаю 1 = 0.
206 гл- 4- КРАЕВЫЕ ЗАДАЧИ
G помощью принципа симметрии убеждаемся, что решение
задачи аналитически продолжается через окружности Го, Г4, ...
..., Гт. Поэтому мы можем дифференцировать обе части равен-
равенства E.2) по дуге соответствующей окружности; в результате
получим;
Re[e*ialt)O'(z)z'{s)] = Q (на Г). E.5)
Но в силу E.2) функция ie лшФ(г) принимает действительные
значения на Г. Умножая на нее обе части равенства E.5),
находим
Re[iO(z)(D'(z)z'(s)] = 0 (на Г).
Интегрируя обе части этого равенства по Г и применяя форму-
формулу Грина, получим:
\i \ (Щ Ф' (z) dz] =
1 г J
Re \i \ (Щ Ф' (z) dz] = - 2 ^ \Ф' (z)\2 dx dy = 0,
1 J
т. e. O'(z)s=0. Следовательно, Ф = с — const. Но из краевого
условия E.2) с учетом неравенства E.4) следует, что с = 0.
Несколько иным путем изучена задача E.2) в работе
Д. А. Квеселава [39а].
2. Представляет интерес рассмотрение также следующих спе-
специальных краевых задач:
Re[z'(s)i|)(z)] = 0 (на Г), E.6)
Re[e"'"(I»z'(s)i|>(z)] = 0 (на Г), E.7)
где ij)(z) — искомая голоморфная в G функция, a <x(z)— по-преж-
по-прежнему кусочно постоянная функция вида E.3), удовлетворяющая
условию E.4). Индексы этих задач равны т — 1, но числа их
решений равны соответственно
l' = m, l' = m-l. E.8)
Эти равенства сразу получаются из формулы D.24), если учесть,
что сопряженные краевые условия имеют вид
Re[<D(z)] = 0 и Re[e-"faO>(z)] = O. E.9)
Как мы видели в предыдущем пункте, для первого из них 1 = 1,
а для второго Z = 0 (если, конечно, выполнено условие E.4)).
Мы сейчас покажем, что нетрудно построить все решения зада-
задачи E.6).
Пусть uh(x, у)—гармоническая функция в G, удовлетворяю^
щая следующему краевому условию:
.. и„ = 0 на La, uA = 8Ai на L{, i = l, ..., т E.10)
(A = l, ..., т; 8hk = 1, 8ki = 0 при i Ф к).
§ 5. РАССМОТРЕНИЕ СПЕЦИАЛЬНЫХ КЛАССОВ КРАЕВЫХ ЗАДАЧ 207
Функция uh является гармонической мерой контура Г* относи-
относительно области G. Очевидно, эти функции зависят исключительно
от области. Они строятся по формулам
Uh{x, У) = J -^r^dst (Л=1 m), E.11)
где g(z, ?)— функция Грина для области G, соответствующая
задаче Дирихле. Она, как известно, имеет вид
где go(z, t,)—гармоническая функция в G (по переменному z),
удовлетворяющая краевому условию (^-фиксированная точка)
g0 = — 2^- In | г — 1\ при гЕ Г. E.13)
Рассмотрим сопряженную с g(z, ?) относительно точки z функ-
функцию g% (z, ?). Она определяется криволинейным интегралом
g, (z, ?) = J Щ& dst + const E.14)
и, очевидно, многозначна в G. Если точка z опишет замкнутую
кривую, гомологичную Тк и не содержащую внутри точки ?, то
g* (z, ?) получит приращение, равное кк(?). Если эта замкнутая
кривая ограничивает область, принадлежащую G и содержащую
точку ?, то ## получит приращение, равное 1.
Из равенств E.10) сразу следует, что
du, ди, riz ди, X
_i. = _^fi + ^?i= о (на Г), E.15)
ds dz ds qz ds \ /> \ /
т. e.
(s) ^51 = 0 (на Г).
v ' dz J N '
Эти равенства имеют место вдоль всякой линии уровня функ-
функции ик.
Таким образом, задача E.6) имеет m решений:
ф (z\ _ 2 — (к = 1 т) E 16)
Эти функции зависят исключительно от области. Они линейно
независимы. Это сразу следует из линейной независимости гар-
гармонических функций iii, ..., ит- Так как задача E.6), как мы
уже видели выше, имеет т линейно независимых решений, то
208 гл- 4- КРАЕВЫЕ ЗАДАЧИ
общее решение ее дается формулой
Ф (z) = с,Ф, (*) + ...+ стФп (z), E.17)
где с,, ..., ст — произвольные вещественные постоянные.
В силу E.15) имеем:
dn i dz ds i g~z ds i dz ds i h\/\ /'
т. e.
du.
Фк (z) = iz' (s) -^ (на Г) (к = 1, . .., m), E.18)
где п — внешняя нормаль к Г. Докажем, что функция Фй(г)
нигде не обращается в нуль на Г. Из краевого условия E.10)
следует, что внутри G выполняются неравенства
0<uh(x, у)<1 (в G) (fc=l, ..., т). E.19)
Отсюда вытекает, что
——^0 на Г,- при тфк, ——^0 на Th.
an ^ ' г ' дп '
Покажем, что в этих неравенствах знак равенства нигде не мо-
может иметь места. В противном случае функция Фк(г) имела бы
нуль на Г и соответствующая точка была бы критической точкой
для гармонической функщш ик. Это означает, что через эту точ-
точку проходит, кроме Г, по крайней мере еще одна линия уровня
uh — бы, которая, очевидно, заходит и внутрь области G. Но это
противоречит неравенствам E.19). Таким образом, установлено,
что
ди, диь
-^<0 на Tj при ]фк, ^>0 на Г4 (},к=1, ...,т).
E.20)
Это означает, что функции Фй(г) нигде не обращаются в нуль
на границе Г области G.
Если теперь обратимся к равенству D.14), то убедимся, что
каждая функция ФА имеет ровно m — 1 нулей (с учетом их
кратностей) внутри области G. В самом деле, так как индекс
задачи E.6) равен пг — 1, то согласно формуле D.14)
iVr + 2Na = 2m - 2, E.21)
где iVr и NG — числа граничных и внутренних нулей решения
задачи E.6). Так как для Фй, как мы уже доказали выше,
Nv = 0, то из E.21) следует, что NG — m — 1.
3. Рассмотрим теперь следующий частный случай задачи А.
Задача D. Отыскать голоморфную в G функцию Ф(г), не-
непрерывную в G и удовлетворяющую условию
Re[O>(z)] = 4(z) (не Г). E.22)
§ 5. РАССМОТРЕНИЕ СПЕЦИАЛЬНЫХ КЛАССОВ КРАЕВЫХ ЗАДАЧ 209
Так как сопряженная однородная задача E.6) имеет т ли-
линейно независимых решений E.16), то согласно общей теоре-
теореме 4.2 для разрешимости краевой задачи D необходимо и доста-
достаточно выполнение следующих равенств:
<ds==0 (k=l,...,m). E.23)
Возьмем теперь в качестве у функцию вида
Т(г) = ?о(г)+с, на Г, (/= 0, 1, ..., т), E.24)
где Cj — вещественные постоянные, причем с0 = 0, a f0 — некото-
некоторая непрерывная функция на Г. Покажем, что всегда можно
выбрать (притом единственным образом) такие значения для
постоянных Cj, чтобы выполнялись все условия E.23)*). Для
этого необходимо и достаточно, чтобы постоянные Cj удовлетво-
удовлетворяли равенствам
\^ E.25)
i=i г
где
A*i=\l^ds U,k = l, ...,m). E.26)
Используя условия E.10) и применяя формулу Грина, получим
E.27)
Это означает, что детерминант системы E.25) является детер-
детерминантом Грама для линейно независимой системы функций
cPi, ..., Фт. Поэтому система E.25) имеет единственное решение,
которое мы можем записать в виде
i^-^o^ds G = 1, ...,т), E.28)
и* = ailu1 + ... + ajmum. E.29)
Назовем функции Uj, которые также зависят исключительно от
области, каноническими гармоническими функциями области.
*) В такой видоизмененной постановке задача Дирихле изучена
Н. И. Мусхелишвили [60а] (гл. 3, § 60). Ниже указывается несколько иной
способ решения этой задачи.
14 и. Н. Векуа
210 ГЛ- 4- КРАЕВЫЕ ЗАДАЧИ
Из E.27) сразу следует, что
г,
т.е. JfgLds-J^ds. E.30)
В силу этого aih = аы и, кроме того,
т
2 Auai} = 6W. E.31)
г=1
Отсюда, если учтем равенства E.29) и E.26), получим
ди*
Постоянные ад зависят исключительно от рассматриваемой обла-
области. Гармонические функции и также зависят исключительно
от области, ибо они однозначно определяются своими граничны-
граничными значениями
и* = 0 на Го, u* = ajh на Th (j, к = 1, . .., /га). E.33)
*
1ак как мй линейно независимы, то в качестве системы линейно
независимых решений задачи E.6) можем взять еще функции
Ф; (z) = 2 ^f- = г? (в) ^ (А = 1, ..., т). E.34)
Здесь производная г' (s) рассматривается вдоль дуги линии уров-
уровня функции uhl а производная этой функции берется по нормали
этой дуги.
Если воспользуемся равенствами E.32), E.10) и затем фор-
формулой Грина, то получим
i *- Т Я*** = Sfapldxdy. E.35)
^ г g
Таким образом, системы функций Фк и Ф,- биоргогональны от-
относительно области G. Из E.35) вытекают еще следующие ра-
равенства:
aih = I «ii6jft = J J Ф* S ai}Q>}dx dy = §§ Ф*Мйх dy. E.36)
j=l G j —1 G
Равенства E.28) мы можем теперь записать в виде
ch = i \у0Фк (z)dz (k = l,...,m). E.37)
г
§ 5. РАССМОТРЕНИЕ СПЕЦИАЛЬНЫХ КЛАССОВ КРАЕВЫХ ЗАДАЧ 211
Таким образом, задача D для правой части вида E.24) имеет
всегда решение, и притом единственное, если постоянные ch оп-
определены но формулам E.28) или, что то же самое, E.37)
(с, = 0).
Запишем теперь краевое условие E.22) в виде
Re[<2>(z)] = 4o(z)+c(z) (на Г), E.38)
где
Ч„B)=Т(г)-ф), E.39)
с (z) = 0 на Го, с (z) = ck = | Г Y<Dt (z) dz (на Tk) E.40)
г
(fc = l, ..., т).
Функция Yo удовлетворяет условиям E.23), и, следовательно,
существует голоморфная в G функция t|H(z), удовлетворяющая
краевому условию
Re№o(z)] = To (на Г). E.41)
Из этого следует, что
у (г);= % (z) - iy* (z) + с (z) (на Г), E.42)
где у% — мнимая часть функции г|H.
Таким образом, всякую функцию i класса СУ(Г), 0<v<l,
можно представить в виде E.42), где tj)o(z)—голоморфная в G
функция, удовлетворяющая краевому условию E.41), a c(z) —
кусочно постоянная функция, заданная по формулам E.40).
4. На основе этого результата мы можем дать еще новое до-
доказательство теоремы 4.5. Как мы видели выше (§ 3, п. 3),
о
краевое условие однородной задачи А можно записать в виде
¦Re[z-neiaiz)w(z)] = 0 (на Г).
Пользуясь теперь представлением функции w в виде D.2), по-
последнее краевое условие мы можем переписать так:
Re[z-y°oB)<D (z)] = 0 (на Г), E.43)
где Ф — голоморфная функция в G, a 0<>{z) — вещественная, не-
непрерывная в смысле Гельдера функция на Г. Представим а0 по
формуле E.42) и будем считать п < 0. Тогда краевое условие
E.43) примет вид
Re [e"iaB4 (z)] = 0, Фо = 2-V*°(lH> (z), E.44)
где а — кусочно постоянная функция, а = 0 на Го, a = ah = const
на Гд (k = l, ..., m), а Фо — голоморфная функция в G и не-
непрерывная в G + Г. Кроме того, Фо @) = 0, так как по условию
п < 0. Но, как мы уже видели выше (п. 1), при этих условиях
14*
212 ГЛ- 4- КРАЕВЫЕ ЗАДАЧИ
краевая задача E.44) не имеет ненулевых решений, а это дока-
доказывает теорему 4.5.
5. Полезно ввести в рассмотрение еще следующие многознач-
многозначные аналитические функции:
1С* (г) = и* (z) + ivk (z), к = 1, ..., т, E.45)
где Vk(z')—гармонические функции, сопряженные с uk(z). Они
выражаются по следующим формулам:
гг ds + сь< E-46)
где ck — вещественные постоянные, are — нормаль к линии ин-
интегрирования, соединяющей фиксированную точку z0 с перемен-
переменной точкой z области G. Эти функции можно назвать сопряжен-
сопряженными каноническими гармоническими функциями области.
Если точка z опишет в области G замкнутую кривую, гомо-
гомологичную граничному контуру Г,- (/ = 1, ..., тп), то в силу E.46)
п E.32) wk получит приращение, равное Шм. Эти функции, как
мы сейчас убедимся, позволяют сконструировать функцию, кон-
конформно отображающую рассматриваемую область на одну из ка-
канонических (многосвязных) областей.
Рассмотрим следующую билинейную форму:
h0 (z, I) = щ (?) wl (z) + .. . + un (?) w*m (z). E.46a)
Эта функция аналитична относительно z, причем если z описы-
описывает в области G замкнутую кривую, гомологичную Г, (/ = 1, ...
..., тп), то она получает приращение, равное шД?). Рассмотрим
еще аналитическую функцию
±h(z,l) = g (z, D + ig* (z, S) - h0 (z, S), E.47)
где g(z, t,) — функция Грина E.12), a g# (z,t,)]—гармоническая
функция, сопряженная с g(z, t,) (no переменному z). Если z
опишет в области G замкнутый контур, гомологичный 1\ (к =
= 1, . •., пг), то g%, как уже отмечали выше, получит прираще-
приращение, равное Uft(?). Поэтому функция
является однозначной аналитической функцией относительно z
в области G. В силу этого функция
Ф (z, I) = eh{z-l) = (*-?) A(Z'D E.48)
однозначна и аналитична в G. Она обращается в нуль при z = ?
§ 5. РАССМОТРЕНИЕ СПЕЦИАЛЬНЫХ КЛАССОВ КРАЕВЫХ ЗАДАЧ 213
и удовлетворяет краевым условиям
при
ф (*,?) =
E.49)
где
р (z, Q = 2л [g^ (z, ?) — и1 (р v* (z) — ... — ит (?) v*m (z)\. E.50)
С помощью этих равенств нетрудно убедиться, что функция w =¦
= ф(г, t,) (? — фиксированная точка области G) реализует кон-
конформное отображение области G на каноническую область Go,
которая ограничена единичной окружностью Го с центром
в начале координат и концентрическими дугами окружностей
_/ 2.roftQ)
1 а, радиусы которых соответственно равны е (к = 1, ...
..., т.). При этом, очевидно, точке z = t, соответствует начало
координат w = 0 [96].
Из формулы E.49) можно получить ряд других конформных
отображений области G на канонические области различных
типов [96].
6. Представляет интерес особо рассмотреть еще следующую
неоднородную краевую задачу.
Задача D'. Пусть требуется отыскать в G голоморфную
функцию Ф(г), непрерывную в G и удовлетворяющую краевому
условию
Re[e-ItiaUH(z)] = 'Y(z) (на Г), E.51)
где а (г) — кусочно постоянная вещественная функция, ее = 0 на
Го, а = ak = const на 1\ (к = 1, ..., тп), причем предполагаем,
что выполнено условие E.4). К этой задаче приводит, например,
следующая краевая задача: _
Отыскать в G решение w^C (G) уравнения
d-w + A(z)w = F(z) (A,F^Lp(G),p>2), E.52)
удовлетворяющее краевому условию
Re[w(z)] = i(z) (на Г). E.53)
В самом деле, общее решение уравнения E.52) можем предста-
представить в виде (см. гл. 3, § 4, п. 4)
«7(z)=wo(z)+<D(z)eB(z), E.54)
где
Л=^й^Л, E.55)
w0 (z) = - e— J j ?_7?) dg dr). E.56)
214 ГЛ- 4- КРАЕВЫЕ ЗАДАЧИ
Пусть <йо и «I — вещественная и мнимая части co(t). Внося вы-
выражение E.54) в E.53), получим
Re [Ф (z) el^iz)] = ylt Yi = Че~% - e~%Re (w0). E.57)
Так как &х^.Су,(Е), v= , то мы можем представить эту
функцию согласно формуле E.42) в виде
«1 B) = P (z) — ico* (z) — лес (г) (на Г), E.58)
где p(z)—голоморфная функция в G, ох,..— ее мнимая часть,
oc(z)—кусочно постоянная функция на Г, которая согласно
формуле E.40) выражается единственным образом через со4:
а = 0 па Го, а = ah = ^-i \ щФ1 (z) dz на Th (к = 1, . . ., иг).
E.59)
Имея в виду, что o>i = Im [со (z)] и Re [Ф& (z) z'] = 0 (на Г), выво-
выводим, что
1 (—if * 1 — ° f Г *
ocft = - Im — ] со (z) Фй (z) dz' = -^ ImJ J <3-юФй(г) & cfy
или, учитывая, что (?-со = — ^4 (z), получим:
° Г Г *
аЙ = — Im 1 Л(?) ФА (?) dg dr] (/с = 0, ..,, т). E.60)
G
Подставляя теперь E.58) в E.57), находим
Re [ея{а(г) Ф* (z)] = у*» E,61)
где
Ф* (z) = егр{г)Ф (з), 7* = е~и* Vi- E.62)
Если а (г) == Nh на 1\, где iVft — целые числа, то краевое условие
E.61) приводится к краевому условию E.22), которое мы уже
рассмотрели выше, в п. 3. Небезынтересно заметить, что этот
случай реализуется в задачах бесконечно малых изгибаний по-
поверхностей 2-го порядка положительной кривизны. Как мы уви-
увидим в гл. 5 (§ 3, п. 5; § 4; § 6, п. 6), в этом случае основные
уравнения задачи приводятся к виду E.52), где
A (Z) = _ д- In ]/aVT, F = 0. E.63)
Здесь К — главная кривизна поверхности, а — дискриминант пер-
первой основной квадратичной формы относительно сопряженно
изометрической системы координат (гл. 2, § 6, п. 3). Поэтому в
§ 5. РАССМОТРЕНИЕ СПЕЦИАЛЬНЫХ КЛАССОВ КРАЕВЫХ ЗАДАЧ 215
силу формул E.60), E.34)
Ф* (г) dz = i- Im J In
r
^J- ^s = 0.
Вернемся опять к общему случаю, когда выполняется условие
E.4). Тогда согласно теореме 4.2 задача E.51) имеет решение
тогда и только тогда, когда выполняются равенства
=l, ...,771-1),
E.64)
где ifi, ..., tj)m-i — полная система решений сопряженной одно-
однородной задачи E.7). Мы уже видели выше, что эта задача име-
имеет 7/1 — 1 решение. При этом важно отметить, что задача D' име-
имеет единственное решение, так как соответствующая однородная
задача, как мы видели выше (п. 1), не имеет решения.
В частности, при т= I условия E.64) ьовсе отсутствуют и,
следовательно, задача D' в случае двусвязной области всегда раз-
разрешима. Это — существенное обстоятельство, которое уже не
имеет места для задачи D.
В частности, в случае двусвязной области задача отыскания
решения уравнения E.52) по краевому условию вида E.53) все-
всегда допускает решение, и притом единственное, если коэффи-
коэффициент А удовлетворяет условию
\N {N-целое число). E.65)
Заметим, что уравнение E.52) является комплексной записью
эллиптической системы уравнений вида
ди dv , , ди , dv ,
= 1 Ь аи + bv = /, \- Ъи + av = g.
Ох ду '' ду дх ь
7. Рассмотрим теперь общую однородную краевую задачу
Римана — Гильберта в классе аналитических функций
Re[A~G)O(zK = 0 (на Г).
E.66)
В силу формул C.6) и C.7) это краевое условие можно запи-
записать в виде
Re[Qn(z)e-io<z><D0(z)] = 0 (на Г),
E.67)
216 гл- 4- КРАЕВЫЕ ЗАДАЧИ
где
п
a (z) = arg Я (г) — arg Qn (z) + % nk arg (z — zk), E.68)
0() ()й(н)
k=i
Представим функцию o(z) согласно равенству E.42) в виде
o(z) = q (z) — го* (z) + па (z),
где q(z)—голоморфная в G функция, а а(з)—кусочно постоян-
постоянная функция вида
= 0 на Го, a---=ah = ^-\o(z)O*h(z)dz на 1\ E.69)
Тогда краевое условие E.66) примет вид
Re [О^Ще~Ма(г)Ф^ (z)] = 0 (на Г), E.70)
где
Кусочно постоянная функция a(z) зависит не только от функ-
функции X(z), но также от выбора точек аи ..., а„ области G. Считая
эти точки временно переменными, имеем (в силу E.69) и E.68)):
} г
или в силу E.34)
E.71)
а * 1
3io означает, что uh и -aft являются взаимно сопряженными
гармоническими функциями по каждой переменной а,. Следова-
Следовательно,
aft = а°к + 2 2 v*h (а}) (к = 1, ..., тп), E.72)
где у* — гармоническая функция, сопряженная с ик, а а' —
некоторые фиксированные вещественные постоянные. Отсюда
следует, что при обходе точками щ замкнутой кривой, лежащей
в области G, в силу равенств E.72) ah получит приращение, рав-
равное некоторому четному числу или нулю. Поэтому eniaiz) является
однозначной функцией точек аи ..., а„.
§ 5. РАССМОТРЕНИЕ СПЕЦИАЛЬНЫХ КЛАССОВ КРАЕВЫХ ЗАДАЧ 217
Аналогичным приемом доказывается, что постоянные ah не
зависят от выбора точек zu ..., zm, лежащих вне G и фигури-
фигурирующих в выражении E.68).
Если flj = ... = а„ = а, то равенства E.72) примут вид
а* (а) = а% + 2nv*h (а) (к = i, ..., т). E.73)
Теперь можно указать, при каких условиях краевая задача
E.66) приводится к более простому виду:
Re[Qn(z)O(z)] = 0. E.74)
Очевидно, это имеет место в том и только том случае, когда а (г)
принимает целочисленные значения на каждом контуре 1\
(к = \, ..., т). Для этого необходимо и достаточно, чтобы су-
существовали такие точки аи . .., ап в области G, для которых
выполняются равенства
2
2 2 ^* Ы = Nk (к - 1, . . •, т), E.75)
j
х\
где Nh — целые числа. Так как числа <х\ зависят от произвольно
задаваемой функции К, то для данных точек а} всегда можно
указать такую функцию K{z), чтобы имели место равенства
E.75).
В частности, если существует такая фиксированная точка а
области G, что имеют место равенства
a°h + 2nv*k (a) = Nk (к = 1, ..., т), E.76)
то краевое условие E.66) приведется к следующему эквивалент-
эквивалентному виду:
Re[(z-a)-n<p(z)] = 0 (на Г). E.77)
8. Приведем еще один простой пример, который показывает,
что задача А может допускать п + 1 линейно независимых ре-
решений, если 0 ^п^т— 1 [14 м]. Ниже, в § 6, мы обнаружим,
что это число максимальное. Допустим, что существует функция
? = i|j(z), конформно отображающая область G на плоскость t,
с разрезами a0fro, atbi, ..., ambm вдоль вещественной оси и пере-
переводящая точку z — a в точку ?= °°. Вблизи точки а функция
i|)(z) имеет разложение
y(z) = j±-a{b0 + bt{z -a)+...), ЬОФО, E.78)
а на контурах Г,- она принимает вещественные значения, так
как эти контуры по условию отображаются на отрезки веществен-
вещественной оси. В силу этого i|)(z) удовлетворяет краевому условию
Re[if(z)] = 0 (на Г). E.79)
218 гл- 4- КРАЕВЫЕ ЗАДАЧИ
Теперь нетрудно убедиться, что функции
i{z-a)n, i(z-a)"$(z), i(z - a)"i|;2(z), ..., i(z -a)*$n(z) E.80)
являются линейно независимыми решениями задачи E.77). Обо-
Обозначим эту задачу через А„(а), а число ее решений через 1„.
Очевидно, 1п>п+1. Заметим теперь, что если Ф„ — решение
задачи А„(а), то (z — а)Ф„ будет решением задачи An+i(a). Но
задача А,1+1(а) имеет также своим решением функцию
i"(z — a)"+1i|f+1(z), которая не обращается в нуль в точке z = a
и, следовательно, не представима в виде (z — а)Фп. Это означа-
означает, что ln<L+i. Так как 10 = 1 и 1т = т+1 (последнее вытекает
из теоремы 4.10), то
1 «S п + 1 «? /„ < ln+i «? /га + 1 (п = 0, 1, ..., т - 1).
Отсюда сразу следует, что
ln = n + l, OsSnsStfi-l. E.81)
В силу формулы D.24) число решений сопряженной однородной
задачи Ап(а), краевое условие которой имеет вид
- а)п g Ф (z)] =0 (на Г), E.82)
равно
1п — т — п. E.83)
9. Рассмотрим теперь краевую задачу вида E.77) для случая
произвольной (многосвязной) области G. Решение этой задачи,
очевидно, можно искать в виде
Ф (г) = -сп - cn_, (z - а) - ... - с, (г - а) "-• + (z - а) пФ0 (z), E.84)
где ct, ..., сп — неопределенные комплексные постоянные, а Фо —
новая искомая голоморфная функция. Тогда для Фо имеем краевое
условие
Re [Фо (z)] = Re 2 ch (z — а)~\ E.85)
ft=i
Согласно равенствам E.23) условие разрешимости этой задачи
имеет вид
(/=1, ..., /га).
Таким образом, имеем следующую систему уравнений:
(а) + с[Ф} (а) + .. . + с'пФ^ («) + ^ФГ (а) = 0
(/ = 1,..., т), E.86)
§ 5. РАССМОТРЕНИЕ СПЕЦИАЛЬНЫХ КЛАССОВ КРАЕВЫХ ЗАДАЧ 219
_ ¦
дели выше, в п. 3, зависят исключительно от области. Поэтому
ранг г матрицы коэффициентов системы E.86) зависит исклю-
исключительно от области G и от выбора точки a: r = r(a, G).
Так как 2п < т, то, очевидно,
0<rs?2rc. E.87)
Краевая задача E.85) очевидно имеет 2п — г+1 линейно неза-
независимых решений. Следовательно, в силу формулы E.84) краевая
задача E.77) имеет столько же решений
l = 2n-r+i. .E.87а)
Пусть v — некоторое число, удовлетворяющее неравенству
E.87). Через Мч(а, G) будем обозначать множество тех точек
аеС, для которых ранг матрицы коэффициентов системы E.86)
равен v.
В предыдущем пункте мы видели, что существуют области
G, для которых Мп(а, G) непусто. Теперь мы докажем, что
MZn{a, G)Bn<m) для всякой области G является открытым
множеством, всюду плотным в G.
Докажем предварительно следующую лемму.
Лемма 1. Пусть /i(z), ..., /n(z)—голоморфные в области G
функции. Пусть An(z)— детерминант п-го порядка, k-я строка ко-
которого имеет своими элементами
fh, h, fk, fh,---,fk2 , /ft , E.88)
если п — четное число, и
/п-3\ /п-з_) /Л--1Ч
hJk,...,f\ 2 ,/* 2 ,А 2 . E-89)
если п — нечетное число. Для того чтобы система голоморфных
в области G функций fit ..., /„ была линейно независима над по-
полем вещественных чисел, необходимо и достаточно, чтобы су-
существовала хотя бы одна точка z0 области G, где
An(zo)^O. E.90)
Доказательство. Достаточность этого условия доказы-
доказывается весьма просто. Если /,, ..., /„ линейно зависимы, то
c1/1(z)+... + cB/B(z)-0, E.91)
где си ..., с„ — некоторые вещественные постоянные, причем
с\ + ... + Сп > 0. Дифференцируя последовательно ^—— раз
220 ГЛ- 4- КРАЕВЫЕ ЗАДАЧИ
равенство E.91) и рассматривая также комплексно сопряжен-
сопряженные с ними равенства, получим линейную однородную систему
уравнений для Ci, ..., с с детерминантом An(z), и если &n(z)?=-Q
хотя бы в одной точке, то, очевидно, все с} равны нулю. Тем са-
самым достаточность условия E.90) доказана.
Переходя к доказательству необходимости этого условия, рас-
рассмотрим вначале случай п = 2. Если
A2(z) = /,(z)/7(I)-Mz)Mz) = 0 (в G),
то система уравнений
c1/1(z)+c2/2(z) = 0, cJl{z)+ctfi(z) = O
имеет нетривиальное вещественное решение Ci, c2, причем в ок-
окрестности точек, где /i(z)?=0, очевидно, с2 не может тождественно
обратиться в нуль. Поэтому
Л
E.92)
Дифференцируя обе части этого равенства по z, получим
Так как а — вещественная величина, то отсюда следует, что
а = const. Следовательно, в силу E.92) функции /4 и /2 линей-
линейно зависимы, что противоречит нашему предположению.
Чтобы теперь доказать лемму для любого п, достаточно обна-
обнаружить, что если лемма справедлива для к функций Д, ..., fk,
к<п, то она справедлива также pi для к +1 функций /ь ..., fk,
fk+i. Допустим, что это не так, т. е. пусть существует некоторая
окрестность Go точки z0, где
A,(z)?=0, aAw(z)-0 (в С),
Предположим сперва, что к — четное. Тогда в силу последнего
равенства система уравнений
ft+i ft+i
сг]г \z) — ui
E.94)
имеет нетривиальное решение с1( ..., ch, ch+i, причем ch+i нигде
не может обращаться в нуль в Go. Это сразу следует из условия,
что Ah(z):?=0 в Go.
§ 5. РАССМОТРЕНИЕ СПЕЦИАЛЬНЫХ КЛАССОВ КРАЕВЫХ ЗАДАЧ 221
Разделив все равенства E:93) и E.94) на ck+i, получим
2 сц/i»(z) = - /ftx (z), 2 a~ff(J) = - fp+1 (z) E.95)
il fe=l
/ = 0,1, ...,Ц
2 «i/V2 (z) + hli (z) = 0, a, = -^-. E.96)
Так как А6(г)?=0, то система E.95) имеет единственное нетри-
нетривиальное вещественное решение аи ..., ак, которое удовлетворяет
также равенству E.96). Дифференцируя равенства E.95) по z,
а затем учитывая эти равенства и еще E.96), получим
ocCj ,.. y "aj "TJj / к 2
~~Г Ji (Z) = ' jmd ~^Г~ '* 'Z' == (/ == ' - - ' ' 7
¦i —x i=l
Но детерминант этой системы равен Ab(z), который по условию
отличен от нуля в Go- Следовательно,
да-
—^-==0, т. е. cq = const (i = 1, ..., А1).
<3z
Но это означает, в силу равенства E.95), что функции /4, ..., fk,
/ft+i линейно зависимы, что противоречит условию леммы. Не-
Нетрудно аналогичное доказательство провести также и для случая
нечетного к. Этим самым лемма будет доказана в общем случае.
Вернемся теперь к краевой задаче Ал (а):
Re.[(z-a)-'tO(z)] = 0 (на Г) E.77)
и предположим, что точка а выбрана так, что детерминант А2п(я)
для системы функций Ф{^), ..., O2«(z) отличен от нуля. В та-
таком случае система E.86), очевидно, допускает лишь тривиаль-
тривиальное решение с?=0, ..., сп = 0 Bп<т). Следовательно, задача
E.85) имеет единственное решение Фо = гс (с — вещественная
постоянная), и согласно формуле E.84) краевая задача E.77)
имеет лишь единственное решение Ф = ic(z — а)п. Таким образом,
в рассматриваемом случае задача А„ (а) имеет минимальное число
решений, т. е. I — 1 и, как видно из E.87а), г = 2п. Множество
точек а, для которых это имеет место,— открытое и всюду плотно
в G. Это указывает на то, что задача А„(а) может допускать
более одного решения лишь в исключительных случаях: при спе-
специальном выборе точки а и, возможно, области G. Такие случаи
не исключены. Это показывает пример предыдущего пункта.
222 ГЛ- 4- КРАЕВЫЕ ЗАДАЧИ
10. Рассмотрим теперь краевое условие E.74), которое мы
можем записать в виде (задача A(fli, ..., ап))
Re [щ$г] ' n () Й
где Ф — искомая голоморфная функция в G. Мы можем эту
функцию представить в виде (считаем я; Ф ак при 1Ф к)
-А- + ФоB). E.98)
Q,
Тогда для Фо будем иметь краевое условие
п
2 7S
ft=i ft
Согласно равенствам E.23) условие разрешимости этой задачи
имеет вид
Re 2 скФ} К) = 0 (/ = 1, ..., т). E.100)
Пусть г — ранг матрицы коэффициентов этой системы. Он, оче-
очевидно, зависит лишь от выбора точек at, ..., ап и области G: г =
= г(а{, ..., ап, G), причем
0<г(а„ ..., an, G)^2n. E.101)
Число решений однородной задачи E.97), очевидно, равно
Ъг + 1 — г. Обозначим через Мг{а{, ..., ап, G) множество точек
а(, ..., ап области G, для которых выполняется условие E.101).
Важно теперь выяснить, существует ли для всякого фиксирован-
фиксированного г, 0^r«S2re, область G, для которой множество Л/Г(а,, ...
..., а„, G) непусто. Ниже мы убедимся, что Мгп{аи ..., а„, G)
непусто для всякой области G. Более того, это множество — от-
открытое и всюду плотно в G.
Докажем теперь следующую лемму.
Лемма 2. Пусть A(z), ..., /n(z)—голоморфные в G функ-
функции. Пусть An(zi, ..., zn')> п> = \ 2 — детерминант, к-я стро-
строка которого имеет элементами
), /ft(Zl), • • -, /fe(Zn'),
если п — четное число, и
/ft(zX), /ft(Zi), ..., fk(Zn'-l), /ft(Zn'-l), /fe(Zn'),
re — нечетное число. Функции /i, ..., /n линейно независимы
над полем вещественных чисел тогда и только тогда, когда су-
§ 5. РАССМОТРЕНИЕ СПЕЦИАЛЬНЫХ КЛАССОВ КРАЕВЫХ ЗАДАЧ 223
ществует хотя бы одна система точек zu ...,zn> области G,
для которой
An(Zl, ...,Zn-)?=0. E.102)
Доказательство. Достаточность этого условия доказыва-
доказывается точно так же, как и условия E.90). Поэтому эти рассуж-
рассуждения здесь повторять не будем. Необходимость условия E.102)
при п = 2 очевидна, ибо в этом случае леммы 1 и 2 совпадают.
Следовательно, чтобы доказать лемму для любого п > 2, доста-
достаточно обнаружить, что если лемма имеет место для функций
/i, ..., fh, то она остается в силе и для функций fu ..., fh, /k+1
(&<«—1). Допустим, что это не так, т. е. существует система
точек zx, ...,zh,, для которой
[^] E-103)
в то время как для любой точки z имеет место равенство
Afe+iK, . .., zh,, z) = 0.
В силу последнего равенства система уравнений
h + 1 h+1
2 Ci/i (Zj) = 0., 2 Ci/i (z}) = 0 (; = 1, .. ., fc')>
i=1 i=1 E.104)
k+i
имеет нетривиальное решение ct, ..., ck, ck+i, причем ck+i, кар;
нетрудно видеть, нигде не обращается в нуль в области G. По-
Поэтому, разделив все равенства E.104) на ck+l, получим:
оц/i (Z-) = - fh+1 &), 2 a JT^) = - W*j) E-105)
(/=1, ...,П
= 0, o, = -^-. E.106)
c
В силу E.103) система E.105) имеет единственное решение
«1, ..., as, причем а3- вещественны, зависят исключительно от
zx, ..., гй/, но не зависят от z и, кроме того, удовлетворяют ра-
равенству E.106) для любого значения z. Таким образом, /(, ..., fh,
fh+t линейно зависимы, что противоречит нашему предположению.
Очевидно, что множество точек, для которых выполняется
условие E.102), всюду плотно и открыто в множестве всевозмож-
всевозможных систем (zx, ..., Zn'), Zj e G. Иными словами, не сущест-
существует такого открытого подмножества топологического произведе-
224 гл- 4- КРАЕВЫЕ ЗАДАЧИ
ння G X G X ... X G, все точки которого удовлетворяют условию
п' раз
Д„ (zlt . . ., Zn/) = 0.
Возвращаясь теперь к задаче E.97) допустим, что точки
аи ..., ап выбраны так, что детерминант An(ai, ..., ап) для функ-
функций Фь ..., Ф2„_1 отличен от нуля. Это возможно в силу лем-
леммы 2, так как по условию 2п — 1 < т и функции Ф4, ..., Ф2п-1
линейно независимы. В таком случае система уравнений E.100)
допускает только нулевое решение сх = ... = сп = 0 и, следова-
следовательно, задача E.97) имеет лишь решения вида
Ф = icQn(z) (с — вещественная постоянная).
Таким образом, в рассматриваемом случае задача A(ai, ..., а„)
имеет минимальное число решений, т, е. 1 = 1 н, следовательно,
г~2п. Кроме того, очевидно, что множество M2n(ai, ..., а„, G),
для которого это имеет место,— открытое и всюду плотно в
GXGX...XG. Это обстоятельство указывает на то, что одно-
однородная краевая задача E.97) может допускать более одного ре-
решения лишь в исключительных случаях: при специальном выборе
системы точек аи ..., ап и, возможно, области G. Однако такие
случаи безусловно возможны*).
§ 6. Об условиях корректности задачи А
1. Как принято говорить, краевая задача корректна в отно-
отношении некоторой группы параметров, фигурирующих в поста-
постановке задачи, если ее решение всегда существует, единственно и
непрерывно изменяется при непрерывном изменении этих пара-
параметров. Следует заметить, что здесь термин «параметр» употреб-
употребляется в весьма широком смысле. Под параметрами можно
подразумевать величины различной природы, от которых зависит
решение задачи (постоянные параметры, коэффициенты и правые
части уравнения и краевого условия, граница области и др.).
Кроле того, непрерывное изменение и непрерывную зависимость
относительно различных параметров можно толковать в различ-
различных смыслах. В одних случаях непрерывность можно понимать
в смысле обычной евклидовой метрики или метрики пространства
С, в других случаях — в смысле метрики разных пространств
Банаха или же в смысле сходимости в разных топологических
пространствах.
В частности, для задачи А
6 (кг) == д-w + Aw + Bw = F (z) (в G), F.1)
Re[Mz)w(z)] = 4(z) (на Г) F.2)
*) Во время написания этого параграфа Б. В. Боярский, заинтересо-
заинтересовавшись затронутыми здесь вопросами, получил ряд дальнейших резуль-
результатов в этом направлении [Не], которые изложены в специальном добав-
добавлении к настоящей главе.
§ 6. ОБ УСЛОВИЯХ КОРРЕКТНОСТИ ЗАДАЧИ Л 225
имеет смысл изучать вопросы корректности как в отношении
коэффициентов и правых частей уравнения и краевого условия,
так и в отношении некоторых непрерывных (малых) деформаций
границы Г области G. В этом параграфе мы укажем некоторые
признаки корректности задачи А относительно правых частей
уравнепия и краевого условия (см. также § 7, п. 4; гл. 5, § 10,
п. о и добавление к гл. 4).
2. Задача А, очевидно, может быть корректна относительно
правых частей f ну лишь в том случае, когда однородная задача
А не имеет решения, а неоднородная задача А всегда разрешима.
(Последнее имеет место только тогда, когда сопряженная одно-
однородная задача А' не имеет нетривиальных решений.) Но в таком
случае согласно теореме 4.3 задача А пмеет единственное реше-
ппе w, которое может быть представлено по формуле вида
и- (г) = \ М (г, 0 у @ ds + \ \ (М, (г, t) F © + М2 (с, С) /' (?)) d% dx\,
r g"
(G.3)
где М, AIt и М2 — функции, которые однозначно определяются
с помощью коэффициентов уравнения F.1) и краевого условия
F.2), но вовсе не зависят от их правых частей F и ¦у. Правая
часть равенства F.3) представляет собой линейный оператор,
сопоставляющий всякой паре функций F и ^(F e Lv (G), р > 2,
^eCv(r), 0<v<l) решение задачи А, которое принадлежит
классу CC(G + Г), а = min /v, ^— j. Следовательно, пря выпол-
выполнении условия I = V = 0 задача А является корректной в отно-
отношении функцпй F и у в классах LP(G), р>2, и СУ(Г), 0< v < 1,
соответственно.
Как следует из D.24), в этом случав
то = 2ге + 1, F.4)
т. е. задача А может быть корректна в отношении f и F лишь
для областей четной связности (то = 1, 3, ...). На последнее
обстоятельство обратил внимание впервые Б. Боярский [На, а'].
Из теорем 4.10 и 4.12 следует, что задача А заведомо не явля-
является корректной, если ге<0 или п>тп — 1. В первом случае
(п < 0) задача А не всегда разрешима, но в случае разреши-
разрешимости она имеет единственное решение. Во втором же случае
(п>т — 1) задача А всегда разрешима, но решение не единст-
единственно. Таким образом, вообще говоря, задача А не поставлена
корректно. Поэтому важно выяснить, какие видоизменения не-
необходимо внести в постановку задачи А, чтобы были обеспечены
существование и единственность ее решения, а также в извест-
известном смысле непрерывная зависимость решения от данных. Эти
вопросы приобретают и практический интерес в связи с тем, что
15 И. Н. Веиуа
226 ГЛ- 4- КРАЕВЫЕ ЗАДАЧИ
многие задачи геометрии и механики приводят к задаче А (см.
гл. 5 и 6).
Видоизменения постановки задачи А в указанном выше смыс-
смысле можно осуществить многими разными путями. Например, при
п>т — 1, присоединяя к краевому условию F.2) равенства вида
li{w) = c, (/ = 1, ..., к), @.5)
где lj ¦— некоторые однородные аддитивные функционалы от w,
а с, — постоянные, можно добиться, чтобы полученная видоиз-
видоизмененная задача всегда была разрешима и имела единственное
решение. Например, достаточно взять функционалы, удовлетво-
удовлетворяющие условиям
*Ли>0 = бя (б« = 1, 6* = 0, j^i), F.6)
где wt (?=1, 2, ..., 2п + 1 — т)— полная система решений одно-
о
родной задачи А. Но эти функционалы практически неудобны,
так как их структура зависит от решении однородной задачи.
Больший интерес с практической точки зрения представляет
рассмотрение таких функционалов 1}, которые вовсе не зависят
от данных задачи и, следовательно, от решений соответствующей
однородной задачи. Такие функционалы были указаны в случае
односвязной области И. Ниче [64а], а для многосвязной области
В. Шмидтом [97а]. Но условия, предложенные Ниче, имеют
весьма специальный характер и трудно поддаются геометриче-
геометрической и механической трактовке.
3. В этом пункте мы покажем, что в качестве добавочных
условий F.5) можно взять равенства, фиксирующие на некото-
некотором конечном множестве точек области и ее границы значения
искомого решения.
Пусть Zi,..., zh и Zj, . . ., zhr —произвольно зафиксированные
точки области G и ее границы Г соответственно, причем соблю-
соблюдены следующие два условия:
1) числа кик' удовлетворяют соотношению
2k + k' = 2n+l-m (га>тге-1); F.7)
2) среди m + 1 граничных кривых Го, Г,, ..., Г,„ имеется /та
кривых, например, 1\, ..., Гт, на каждой из которых располо-
расположено нечетное число фиксированных точек Zj.
Назовем удовлетворяющую этим условиям систему фиксиро-
фиксированных точек области G и ее границы Г нормально распределен-
распределенным (к, к', G + Г) множеством. При выборе к я к' возможны
следующие крайние случаи: 1) к = 0, к' — 2п+1 — тп и 2) & =
к' = т + 1. Следовательно, О^к^п — т, т + 1^к'^
§ 6. ОБ УСЛОВИЯХ КОРРЕКТНОСТИ ЗАДАЧИ А 227
Зададим теперь на этом множестве значения искомого реше-
решения задачи А:
w (zj) = щ + ibj (/ = 1, ..., к),
где а,-, Ь, и с3- — произвольно заданные вещественные постоянные,
Kj=X(z'j) и Yj = y(z'j). Равенства F.8), относящиеся к гранич-
граничным точкам zp согласованы, как и следовало ожидать, с краевым
условием задачи А:
Докажем, что задача А при добавочных условиях F.8) всегда
допускает решение и притом единственное.
Согласно теореме 4.12 общее решение задачи (при /га<тг+1)
имеет вид
2П + 1—ГЛ.
Z) == i^n (ZJ -f" J/\ CtjlVj (Z), ^O.yj
где u>a — частное решение неоднородной задачи A, d,- — произ-
произвольные вещественные постоянные, w, — полная система решений
однородной задачи А. Подчиняя это решение добавочным усло-
условиям F.8), мы получим для определения постоянных dj следую-
следующую линейную систему уравнений:
2П+1—m
2 diWi (zj) = aj + ibj — w0 (z)) (j = 1, ..., k),
,Л» , f F-10)
2 diWi (z'j) — Kj (у- + 1сЛ — w0 (z'j) (/ = 1, ..., k').
Докажем, что эта система имеет решение для любой правой
части. Пусть d] — некоторое нетривиальное решение соответст-
соответствующей однородной системы. В таком случае функция
2П + 1 — ГП
«>*(г) = 2 d\wi(z) F.11)
о
является решением однородной задачи А и, кроме того, удовлет-
удовлетворяет однородным точечным условиям
и» (г,-) = 0 (/ = 1, ...,/г),
* , '] F.12)
Это означает, что w* (z) имеет нулями внутренние точки zt, ...
..., zh и граничные точки zx, ..., zh. По условию на m граничных
контурах Fi, ..., Fm имеются по нечетному числу точек мно-
15*
228 гл- i- КРАЕВЫЕ ЗАДАЧИ
жества zu ..., zh>. Но в силу теоремы 4.7 на каждом граничном
контуре может лежать лишь четное число нулей решения одно-
о
родной задачи А. Поэтому на указанных контурах лежат по
крайней мере еще по одному нулю функции ^(z). Следователь-
Следовательно, и>% (z) имеет по крайней мере NT = к' + т + 1 граничных и
NG = k внутренних нулей. Но эти числа iVr и Na в силу F.7)
удовлетворяют соотношению
2NG + Nr = 2л + 2,
которое противоречит теореме 4.7. Отсюда следует, что w% (г) == О
и, следовательно, d° = 0 (/ = 1, ..., 2га + 1 — т?г). Это доказывает,
что система F.10) имеет решение при любой правой части. Та-
Таким образом, доказана
Теорема 4.13. Если на нормально распределенном
(к, к', G + Г) точечном множестве заданы условия вида F.8),
то при п>тп—{ задача А имеет всегда решение, удовлетворяю-
удовлетворяющее этим условиям, причем такое решение определяется единст-
единственным образом и непрерывно зависит от F и у. Оно непрерыв-
непрерывно зависит также от точек z,- и Zj и линейно содержит постоян-
постоянные щ, Ь} (/ = 1, ..., к) и с, () = 1, ..., к').
В следующих главах будут выяснены геометрический п ме-
механический смысл условий F.8).
4. Рассмотрим теперь случай «<пг —1. Тогда задача А, во-
вообще говоря, не всегда имеет решения в классе непрерывных
функций. Поэтому естественно встает вопрос: нельзя ли в этих
случаях существование и единственность решения задачи А обес-
обеспечить путем некоторого расширения класса искомых решений?
Мы ниже докажем, что это можно обеспечить, если будем искать
решение задачи в классе функций, имеющих некоторое количе-
количество заранее фиксированных полюсов внутри области G.
Пусть Zj, ..., z,, — некоторые фиксированные точки внутри
области G, где к = т — п. Будем искать решение задачи А в клас-
классе функций вида
w (z) = Q(z)w (z), Q (z) = П (z - Zj)-1, F.13)
где w(z) — непрерывная в G + Г функция, которая является ре-
решением следующей краевой задачи:
д-w + Aw + Bw = 'F (в G),
2 F.14)
Re[l(z)w(z)] = y (на Г),
где
§ 6. ОБ УСЛОВИЯХ КОРРЕКТНОСТИ ЗАДАЧИ А 229
Индекс этой краевой задачи равен
п = п + к = т.
Присоединяя к задаче F.14) точечные условия вида
kjiv {z'j) = XjW (z'j) = Vj + iCj (/ = 0, 1, .. ., m),
где Zj — произвольно фиксированная точка на Т} (/ = 0, 1,.... т)
и с, — произвольно заданные вещественные постоянные, мы по-
получим задачу, которая в силу теоремы 4.13 всегда разрешима и
имеет единственное решение, причем это решение можно выра-
выразить по формуле
т
w (z) = щ (z) + 2 c-Wi(z),
где w# — решение указанной задачи, соответствующее случаю
с4 = 0 (i = 0, I, ..., т), a wt — решения однородной задачи (F =
= 0, 7 — О), удовлетворяющие равенствам
^i(zD = 6y (/,/ = 0, l,...,m). F.15)
Отсюда в силу формулы F.13) сразу заключаем, что имеет
место следующая
Теорема 4.14. Если п<т, то задача А допускает всегда
единственное решение вида F.13), удовлетворяющее добавочным
условиям вида
V7B;) = 7j + ^- (j = 0, 1,..., m), F.16)
где Zj— произвольно фиксированная точка контура Г^, а с0, Ci,...
..., cm — произвольно заданные вещественные постоянные.
Мы можем теперь написать необходимые и достаточные ус-
условия разрешимости задачи А в классе регулярных функций. Эти
условия, очевидно, состоят в выполнении следующих равенств:
т — п). F.17)
г=о
Таким образом, мы имеем 2т — 2п вещественных уравнений
для определения т + 1 вещественных постоянных.
Пусть г — ранг матрицы системы F.17): r<min(m + l,
2т — 2п). Задача А, очевидно, имеет I = т + 1 — г решений, а не-
неоднородная задача А разрешима тогда и только тогда, когда вы-
выполнены равенства
т—п
2 Х^ (Zj) =0 (г = 1, . . ., Г = 2т — 2п — г),
230 ГЛ- 4- КРАЕВЫЕ ЗАДАЧИ
где Xij — миноры матрицы системы F.17). Эти равенства, оче-
очевидно, должны совпадать с полученными выше необходимыми
и достаточными условиями B.5) разрешимости задачи А
(§ 2, п. 1).
Так как 1 = т+ 1~ г, V = 2т — Ъъ — г, то мы вновь получили
формулу I — V = In + 1 — т, выражающую разность чисел реше-
решений взаимно сопряженных однородных задач Аи А' (§ 4, п. 4).
Из неравенства D.17а) следует, что при п<0 однородная
о
задача А не имеет решения, имеющего внутри G полюсы, если
число последних меньше — п. В силу этого при п<0 1 = т + 1 —
— г = 0, т. е. ранг матрицы системы F.17) равен т + 1. На осно-
ванип этого легко доказывается
Теорема 4.15. Если п<0, то задача А всегда разрешима в
классе функций, имеющих внутри G произвольно фиксированные
полюсы, число которых определяется равенством
р = -7J- (ш — 2ге — 1), если m нечетно,
или
1
р = -77-(т — 2п), если т четно.
Кроме того, если лг — нечетное число, то решение задачи
определяется однозначно, а если же m — четное число, то много-
многообразие решений задачи содержит линейно одну произвольную
вещественную постоянную.
Для случая односвязной области эта теорема была получена
несколько иным путем В. Шмидтом [976].
Предыдущие результаты дают определенное представление
о степени некорректности задачи А. Присоединяя к условиям
задачи А некоторые новые условия, ограничивающие определен-
определенным образом класс искомых решений уравнения, или же, на-
наоборот, расширяя этот класс (например, рассмотрением решений,
имеющих полюсы), или, наконец, по определеннохиу способу
одновременно и суживая и расширяя класс решений, мы при-
приходим к корректной постановке задачи. В частности, при п>
> тп — 1 нам приходится суживать определенным образом (на-
(например, присоединением точечных условий вида F.8)) класс не-
непрерывных решений, чтобы обеспечить корректность задачи А.
Поэтому в указанном случае (п>т — 1) задачу А будем назы-
называть квазикорректной задачей.
В других же случаях, когда нам приходится, наоборот, рас-
расширять класс решений рассмотрением функций, имеющих по-
полюсы, будем говорить, что задача А псевдокорректна.
Заметим, наконец, что в случае псевдокорректных задач мож-
можно прийти к корректной постановке в классе непрерывных ре-
решений за счет неполного задания правых частей уравнения и
§ 6. ОБ УСЛОВИЯХ КОРРЕКТНОСТИ ЗАДАЧИ А 231
краевого условия. В классе аналитических функций такая видо-
видоизмененная постановка в одном частном случае изучена Н. И. Мус-
хелишвили [60а] (гл. 3, § 1, см. также выше § 5, п. 3), аналогич-
аналогичный вопрос разбирается у Нпче [64а] в случае односвязноп об-
области.
5. Рассмотрим теперь особо случай 0</гг?т — 1. Если г<
о
<т + 1, то задача А допускает непрерывное решение, которое
имеет по крайней мере по одному нулю на т — г различных гра-
граничных контурах. В самом деле, без ущерба для общности рас-
рассуждений мы можем допустить, что главный минор порядка г
матрицы системы F.17) отличен от нуля. Тогда решение соот-
соответствующей однородной системы будем иметь вид
Ci = AirCr + ... + Aimcm (t = 0, ..., г —1).
о
В соответствии с этим однородная задача А допускает непрерыв-
непрерывные решения вида
}=Т
где
w'j (z) = Wj (z) + 2 AijWi (z) (/ = r, r + 1, ..., m).
i=0
Но в силу F.15) Wj (zj) = 0, если i ^ г и i^j. Таким образом,
однородная задача А имеет непрерывное решение w = Qwr{z),
которое имеет пг — г нулей zr+1, ..., zm, расположенных, по усло-
условию, на различных граничных контурах. Следовательно, в силу
теоремы 4.7 оно имеет по крайней мере 2т— 2г нулей на Г, и из
D.19) получим неравенство г^т — п, дающее нижнюю грань
для г. В силу этого справедливо неравенство 1 = т + \ — г ^
=^га + 1, дающее верхнюю грань для числа решений однородной
о
задачи А, причем, как мы уже видели выше (§ 5, п. 8), эта
грань в действительности достигается.
Таким образом, установлено, что при 0 < п sg m — 1 число ре-
о
шений однородной задачи А удовлетворяет неравенству
O«?Z<»+1, F.18)
которое было отмечено нами выше (§ 4, п. 5). Это неравенство
является точным в том смысле, что крайние значения для I, 1 = 0
и I = п + 1 реализуемы. Но, как показывают рассмотрения пре-
предыдущего параграфа, наиболее часто реализуются случаи 1 = 0,
если п <J -у т. Остальные же случаи могут встретиться лишь при
специальном подборе краевого условия (т. е. функции X), коэф-
коэффициентов уравнения QZ(iv) = O и области.
232 ГЛ- 4- КРАЕВЫЕ ЗАДАЧИ
В § 5 были указаны примеры, соответствующие случаям 1 = 0,
1 и п + 1. Представляет интерес указать примеры, соответствую-
соответствующие и другим случаям: 1 < I < п + 1.
Для ознакомления с другими результатами, относящимися к
о
особым случаям О «S п ^ т — 1 задачи А, отсылаем читателя к
добавлению к гл. 4, где, в частности, содержится доказательство
неравенства F.18), данное впервые в работе [Не].
§ 7. Решение задачи А при помощи интегральных уравнений
по области. Применение обобщенного принципа симметрии.
Обобщенный интеграл Шварца
1. В этом параграфе мы выведем новые интегральные урав-
уравнения типа Фредгольма, позволяющие решать задачу А, не при-
прибегая к формулам общего представления решений посредством
контурных интегралов. В отличие от предыдущих случаев здесь
мы будем иметь дело с уравнениями, содержащими интегралы
по области ([14а], § 8, п. 9).
Мы ограничимся изучением случая односвязыой области,
причем другие предположения относительно данных задачи
сохраним прежние. В таком случае без ограничения общности
результатов мы можем считать область G кругом \ъ\ < 1. Кроме
того, будем считать, что краевое условие задачи А приведено к
каноническому виду (§ 3):
д-и- + Bw=F (в G),
Re[z-nwB)] = 'Y(z): (на Т), GЛ)
где п — целое число.
Искомое решение задачи А, очевидно, удовлетворяет инте-
интегральному уравнению
,f f^ G.2)
G
где Ф (z) — некоторая аналитическая в G функция, а
G
Интегральное уравнение G.2) будет эквивалентно задаче А, если
нам удастся аналитическую функцию Ф представить в таком
виде, чтобы решение уравнения G.2) удовлетворяло краевому
условию задачи G.1).
~ § 7. РЕШЕНИЕ ЗАДАЧИ А ПРИ ПОМОЩИ ИНТЕГР. УРАВНЕНИЙ ?33
2. Рассмотрим сперва случай п ^ 0 п представим функцию
Ф в виде
G
- G.4)
где Фо — новая искомая аналитическая в G функция. Подстав-
Подставляя выражение G.4) в правую часть равенства G.2), получим
следующее интегральное уравнение типа Фредгольма для иско-
искомой функции w.
w(z) + Pn(Bw) = O0(z) + PnF, G.5),
где
Обозначая через G' внешность круга \z\ «S 1, можно Рп1 пред-
представить еще в виде
Pnf = TG/ + z2n+1TG,/lf G.7)
ад,—^
В силу теорем 1.25, 1.26 и 1.30 из G.7) следует, что оператор
G.9)!
линеен (над полем вещественных чисел) и вполне непрерывен
в пространствах C(G) и Lq(G), q^ _ ., причем он отображает
C(G) в C(,_g)/,(C), a L9(G) при <]>~г в Cv(^, где v=l —
— 2 (у+ -7)' Если же T^I^^^F^' т0 ^ принадлежит
классу L^ (G), где
Здесь а — достаточно малое фиксированное положительное число.
Кроме того, существует такое целое число т, что (?"/ принадле-
принадлежит некоторому Ср(Щ, 0<{}<!, если /sLg(G), <?^&——:.
234 ГЛ- 4- КРАЕВЫЕ ЗАДАЧИ
Легко видеть, что для любой функции / из класса ?Р ((?)',
р > 2, выполняется условие
Re[z-"Pnfl = 0 (на Г). G.10);
Поэтому, если аналитическая функция Фо удовлетворяет крае-
краевому условию
Re[z-*O0(z)] = 4 (на Г), G.11J
то решение интегрального уравнения G.5) является решением
поставленной задачи А. Наоборот, если w — решение задачи А,
то найдется такая аналитическая в G функция Фо, удовлетворяю-
удовлетворяющая краевому условию G.11), что w удовлетворяет интеграль-
интегральному уравнению G.5).
Общее решение задачи G.11), как мы уже видели выше,
в § 1, дается формулой
2П
где ск — комплексные постоянные, удовлетворяющие соотноше-
соотношениям
сгп-к = -ск (к = 0, 1, ..., п), G.13);
т. е.
2» П—1
2 CftZ* = 2 «ft (zfe - z5"*) + фк (z» + г*»-*) + icoz»,
где Co, ah и Cft — произвольные вещественные постоянные.
Таким образом, при п 5» 0 задача А приводится к следую-
следующему эквивалентному интегральному уравнению типа Фред-
го льм а:
w + Qnw = PnF + |-J Y@ l±f ii + ^ cftZ*. G.14)
г ft=o
Каковы бы ни были комплексные постоянные ск. удовлетворяю-
удовлетворяющие условиям G.13), решение уравнения G.14) является ре-
решением задачи А.
Докажем теперь, что уравнение G.14) имеет решение для
любой правой части, принадлежащей Lq(G + T), q^ _^ 1. Как
было показано выше, Qn — вполне непрерывный оператор в лю-
любом Lq при q^—3-7. Поэтому наше утверждение будет доказано,
если мы обнаружим, что однородное уравнение w + Qnw — 0 не
имеет нетривиального решения класса Lq, q ^ ——г. Но с по-
помощью теоремы 1.30 легко обнаруживается, что решения класса
J этого уравнения непрерывны в G + Г. Поэтому
§ 7. РЕШЕНИЕ ЗАДАЧИ А ПРИ ПОМОЩИ ИНТЕГР. УРАВНЕНИЯ 235
вопрос сводится к доказательству того, что уравнение w + Qnw =
= 0 не имеет нетривиального непрерывного решения. Это урав-
уравнение мы можем записать в виде
Правая часть его голоморфна в G и непрерывна в G + Г, а ин-
интеграл, фигурирующий в левой части, представляет собой не-
непрерывную на всей плоскости функцию, которая голоморфна вне
G + Г и обращается в нуль на бесконечности. Пусть геГ. Умно-
Умножим обе части равенства G.15) на
1 dZ *с=Г
и затем возьмем от обеих его частей интеграл по Г. Тогда в силу
теоремы и формулы Коши получим:
2т,) z — t л J itt
Г G te
Если разложим в ряд левую и правую части последнего равен-
равенства по степеням t, \t\ < 1, то получим:
\w{z)e-md$ = 0 (к = 0, 1, ..., 2га, z = ei0). G.16)
г
Кроме того, решение уравнения G.15) удовлетворяет однород-
однородному уравнению <5(w) = 0. Поэтому ю можно представить в виде
(гл. 3, § 4)
w(z) = O(z)e^'\ G.17)
где Ф — аналитическая в G функция от z, a
- 2 ! _
Но w удовлетворяет также однородному краевому условию
Re[z-*u;(z)] = 0 (на Г). G.18),
Так как Re[ip(z)] = O на Г, то краевое условие G.18) в силу
G.17) принимает вид
Re[z-"O(z)] = 0. G.19)
Следовательно, согласно формуле G.12) общее решение этой за-
задачи представляется в виде
271
O(z)= Sv»,
ft=o
236 гл- 4- КРАЕВЫЕ ЗАДАЧИ
где ск — комплексные постоянные, удовлетворяющие условию
G.13). Поэтому в силу G.17) решение уравнения G.15) должно
иметь вид w(z)~\ 2 ckzh] ep(-z\ Внося это в равенства G.16),
U=o /
получпм:
z4-W*dz = 0 {I = 0, 1, ..., 2n). G.20)
г
2"
2 ch
Отсюда следует, что cft = 0 (Л = 0, 1, ..., 2п), ибо детерминант
системы G.20) отличен от нуля как детерминант Грама для си-
системы линейно независимых функций
№»* (fc = 0, ..., 2n; p(z) = J^), zsry.
Это доказывает, что однородное уравнение G.15) не имеет не-
нетривиального решения. Следовательно, неоднородное уравнение
G.14) имеет (единственное) решение для всякой правой части,
принадлежащей Lq(G + Г) при g^g= ^_ ,.
Таким образом, при п > 0 неоднородная задача А имеет все-
всегда решение, а однородная задача A(F = 0, 1 = 0) имеет ровно
2п + 1 линейно независимых решений. Последнее следует из того,
о
что задача А эквивалентна интегральному уравнению
w + Qnw = icozn + 2 [«ft Bft - z2n-ft) + iPfc (z» + z°-n-k)], G.21)
k=0
правая часть которого является линейной комбинацией с произ-
произвольными вещественными коэффициентами линейно независимых
функций
izn, zh-zZn-h, i(zh + z*n-h) G.22J
(* = 0, 1 »—1).
3. Переходим теперь к рассмотрению случая п < 0. В этом
случае интегральное уравнение G.14), очевидно, непригодно, ибо
оно содержит члены с множителями z2n+l, имеющие разрывы вы-
высокого порядка в точке z = 0. Поэтому введем в рассмотрение
функцию ш0 = zkw, где к = —п. Так как к > 0, то w0 непрерывна
в G и удовлетворяет уравнению
d-zw0 + Вощ = zkF (z), Bo = В 4, G.23)
z
и краевому условию
Re(z"w) = Re(u;o) = T (на Г). G.24)
Но эта задача соответствует рассмотренной в предыдущем пункте
задаче в случае п = 0. Следовательно, функция w0 = zhw удовлет-
§ 7. РЕШЕНИЕ ЗАДАЧИ А ПРИ ПОМОЩИ ИНТЕГР. УРАВНЕНИЙ 237
воряет интегральному уравнению
zho (z) + Ро [2* (Bow)] = PQ {zkF) + ± J у (t) i±± Ц- + ;с0. G.25)
Нетрудно получить следующие тождества:
^j яг J fi+i + яг.)
+ lkW))dld4 + ...
••• -^ir-Я (
где
Оператор Pkf можно представить еще так:
где
/* @ =
fg)
E
при
при
<7-26»
G.27)
G-28)
Поэтому указанные выше на с. 233 общие свойства оператора
Qnf распространяются дословно и на оператор
*~ G.29)
т. е. этот оператор вполне непрерывен в любом Lq(G + T) при
Ч ^ pl (Р ~ 1) •
Уравнение G.25) мы можем переписать в виде
wlz) + Quw = PhF -\ г I . f- Zjaiz~3f G.29a)
Г- J—*
238 гл- 4- КРАЕВЫЕ ЗАДАЧИ
где
а;. ^ a, (w) = ±^[(Bw-F) tf'1 + 12кЧ~г (Bw
1 Г y(t)dt ,
^TJ th-j+i ' 7 = 1, 2,
г
Из формулы G.29а) видно, что для непрерывности функции
w(z) внутри G необходимо и достаточно выполнение следующих
равенств:
ai(w) = 0, az{w) = O, ..., ah{w) = 0. G.31)
Таким образом, при п < 0 задача А приводится к интегральному
уравнению
±^fJL-r G,32)
причем решение последнего удовлетворяет краевому условию
G.24) тогда и только тогда, когда выполнены равенства G.31).
Докажем теперь, что однородное уравнение
w + P*h(Bw) = 0 G.33)
не имеет нетривиального решения. Нетрудно проверить, что для
любых двух непрерывных в G + Г функций |и j выполняется
тождество
Im (j J [g (/ + Qlf) -f(g + Qhg)] dx dy\ ^ 0.
Пусть / — нетривиальное решение уравнения G.33). Тогда спра-
справедливо равенство
которое должно выполняться для любой непрерывной функции g.
Но в предыдущем пункте мы доказали, что уравнение g — Qkg —
= k имеет решение для любой функции k класса Lq(G),q^ ^_,.
Приравнивая h к if, приходим к равенству J J \f\2dxdy = 0, про-
с
тиворечащему допущению / Ф 0.
Таким образом, установлено, что неоднородное уравнение
G.32) имеет единственное решение, которое, очевидно, однозначно
§ 7. РЕШЕНИЕ ЗАДАЧИ А ПРИ ПОМОЩИ ИНТЕГР. УРАВНЕНИЙ 239
выражается через F и у в виде
+ 1" J ОГ (z, Г) F (?) с?? dn + f J Q* (г, Q F© dg f7r,. G.34)
Найденное решение уравнения G.32) мы должны подчинить еще
равенствам G.31), чтобы получить искомое решение задачи А.
Но условия G.31) содержат 2к вещественных равенств. Выпол-
Выполнение одного из них, а именно, условия Im ak = 0, можно обес-
обеспечить посредством подходящего выбора постоянной с0. Следова-
Следовательно, остается еще 2/с — 1 условий, которые приводят к равен-
равенствам вида (для исходной задачи А)
Re К j ъ (?) F @ d\ diA + j xJ Q 7 Ш ds = O G 35)
(/ = 1, 2, ..., 2A-1),
где %j и jj — линейно независимые функции, которые не зави-
зависят от функций F и у. Равенства G.35) являются необходимыми
и достаточными условиями разрешимости задачи А (при п<0).
Поэтому они содержат необходимое условие B.5) (считаем, что
достаточность его не доказана)
Re If J и/ (г) F (z) dx dy\ — ¦— J X (t) w'(t)y (t) dt = 0, G.36)
>¦ g > r
о
где ц;' — любое решение сопряженной однородной задачи А':
6' (и/) = д-у —Ш' = 0 (в G), G.37)
Re [Я, (z) z' (*) w' (z)] = 0 (на Г). G.38)
Индекс этой задачи п = —п +1 = & + 1>0, и согласно результа-
результату предыдущего пункта она имеет ровно 2к — 1 линейно незави-
независимых решений и?1, ..., w2h-i- Теперь нетрудно доказать, что мы
можем положить:
Xi B) = Щ B), %"} (г) = - ^-Я (z) z' (*) и,,' (z) G.39)
(/ = 1, .... 2А-1).
Таким образом, условия G.35) и G.36) совпадают. Мы здесь
получили новое доказательство достаточности условия G.36).
Результаты этого и предыдущего пунктов полностью совпада-
совпадают с теоремой 4.11, доказанной нами выше (§4) иным путем.
: 4. Мы теперь сделаем одно замечание, которое будет нами ис-
использовано в следующем параграфе. Интегральные уравнения
240 гл- i- КРАЕВЫЕ ЗАДАЧИ
G.14) п G.32) позволяют решать задачу А при более слабых
требованиях в отношении правой части уравнения (S.(w) = F.
Допустим, что F °^Lq{G + Y), q>l, сохраняя остальные пред-
предположения условия I. Б таком случае решение задачи А естест-
естественно искать в классе Dit , (G + Г), причем уравнение и краевое
условие задачи удовлетворяются лишь в обобщенном смысле, ибо
искомое решение может не быть непрерывным в G + Г, Нетрудно
убедиться, что и в этом случае решение задачи А приводится к
интегральным уравнениям G.14) (при п>0) и G.32) (при п <
<0). Так как в силу теоремы 1.29 PnF nPuF (к = — п) принад-
принадлежат любому классу Lr{G + T), где г — любое число <2, то мы
можем положить r^= j_-.. Но, как мы уже указывали выше,
операторы Qn и Qn вполне непрерывны в любом Lr при г^= __ .
Поэтому к уравнениям G.14) и G.32) применимы теоремы Фред-
гольма и, следовательно, теорема 4.11 остается в силе и в рас-
рассматриваемом нами здесь случае, когда F ^ Lq(G + T), q^l.
По-видимому, такое же положение имеет место и в отноше-
отношении других теорем § 4, относящихся к многосвязным областям.
Нетрудно также убедиться в том, что интегральные уравне-
уравнения G.14) и G.32) позволяют значительно ослабить требования
и в отношении правой части f краевого условия задачи А. До-
Достаточно, например, потребовать, чтобы ^е?г(Г), г>2. Разу-
Разумеется, при этом и в отношении решения задачи надо ослабить
требование соответствующим образом. Математический аппарат,
который потребуется здесь, читатель может найти в работе
Б. В. Хведелидзе [91а].
5. Интегральные уравнения, построенные нами в предыдущих
пунктах, содержат искомую комплексную функцию w и имеют
комплексные ядра. Они, по существу, являются системами двух
вещественных уравнений, содержащих вещественную и мнимую
части искомого решения задачи А. Но во многих случаях вовсе
не требуется фактического нахождения всей функции w, а до-
достаточно лишь найти значения ее вещественной или мнимой ча-
части. В этих случаях, очевидно, целесообразно иметь уравнения,
которые позволяют определять только либо вещественную, либо
мнимую часть искомого решения задачи А. Б этом пункте мы
покажем, что такие интегральные уравнения можно получить,
используя результаты § 16 гл. 3 ([14а], § 8, п. 10).
Как было нами установлено в § 16 гл. 3, вещественная часть
и (х, у) решения уравнения 6 (w) == d-zw + Aw + Bw = F удовлет-
удовлетворяет интегральному уравнению
u (Z) — 4- 1 и (О Re
J ь
G
§ 7, РЕШЕНИЕ ЗАДАЧИ А ПРИ ПОМОЩИ ИНТЕГР. УРАВНЕНИЙ 241
где
со (*) = Фо <*) - 4-
f (z) = Бе [е~»МФ (г)] - Re Г-i-
причем Фо ii Ф — произвольные голоморфные в G функции.
В дальнейшем будем предполагать, что G есть круг Ы < 1.
Кроме того, мы рассмотрим только случай, когда индекс краевой
задачи А — неотрицательное целое число: п^О.
Взяв в качестве Фо аналитическую функцию
получим
G.43)
Эта функция, очевидно, непрерывна в G + Г и принимает на Г
вещественные значения.
Другую аналитическую функцию Ф всегда можно предста-
представить в виде
d G>44)
где Ф, — новая голоморфная в G функция.
Внося это в правую часть G.42), получим следующее (веще-
(вещественное) интегральное уравнение:
и{х,у)-Цк B, 0 и (I, ц) dl d4 = Re [e-^Ф, (z)] + Fx (z), G.45)
где
к (г, о ~f в. (.-*
G.47)
16 И. Н. Векуа
242 ГЛ- 4- КРАЕВЫЕ ЗАДАЧИ
Пусть и(х, у) — решение уравнения G.45). Рассмотрим функцию
w (z) = и (х, у) + iv (х, z) =
2 Я-ШB)
' G
(?? ^У) G.48,
G
легко убедимся, что она непрерывна в G+^Г, удовлетворяет урав-
уравнению &(w) = F и краевому условию
= e-M(z)Re[z-nO1(z)] (на Г). G.49)
Здесь следует учесть, что со (z) = со (z) на Г. Если функцию Ot
подчиним краевому условию
nO1(z)] = 'Y(z)e0)(z), 2еГ, G.50)
то функция w(z), заданная формулой G.48), в силу G.49) будет
решением краевой задачи А, т.е. Q(w) = F (в (?) и Re[z~nw(z)] =
= 4(z) (на Г). Как мы уже видели выше (с. 234)^голоморфная
в G функция, удовлетворяющая условию G.50), имеет вид
п-1
+ ico*n + 2 ah (zh - *2п-р:) + Фк (z* + 2*"-»), G.51)
ft=0
где с0, ah и р4 (к = 0, 1, ..., re — 1J — произвольные вещественные
постоянные.
Таким образом, решение задачи А эквивалентно решению ин-
интегрального уравнения G.45) с вещественным ядром и вещест-
вещественной правой частью, определяющего вещественную часть иско-
искомой функции. Почти дословно воспроизведя рассуждения п. 2
этого параграфа относительно разрешимости интегрального урав-
уравнения G.15), мы убедимся, что уравнение G.45) имеет решение
для любой непрерывной правой части. Полагая f = 0, F ^ 0, по-
получим неоднородное интегральное уравнение
G
I П~1 \)
= Re |е-ш(г> icQzn + 2 l^h(zh — z2n-ft) + if>h(zk + z^n-h)] , G.52)
которое дает нам вещественные части решений однородной за-
задачи А.
§ 7. РЕШЕНИЕ ЗАДАЧИ А ПРИ ПОМОЩИ ИНТЕГР. УРАВНЕНИЙ 243
Следуя пути, указанному в п. 3 этого параграфа, мы можем
построить интегральное уравнение для вещественной части иско-
искомого решения задачи Айв случае отрицательного индекса п < 0.
Так как здесь никаких принципиальных трудностей не встреча-
встречается, то на рассмотрении этого случая более подробно не будем
останавливаться.
6. Решение задачи А мы дюжем выразить через резольвенты
полученных в этом параграфе интегральных уравнений. Это при-
приведет нас к интегральным формулам, выражающим решение за-
задачи через функции F и у. Таким путем мы получим формулы,
обобщающие известные интегральные формулы Пуассона и
Шварца.
Ниже мы ограничимся рассмотрением случая п ^ 0.
Допустим, что п 3s 0, и рассмотрим следующие интегральные
уравнения:
L)G.53)
(
я -2П+1
v, (z) + QnW = —L\-L- + 1—_j, G.54)
4 / Л - +
„,(Z) + QnV,= -± [j^-z-f-^J, G.55)
где t — произвольно фиксированная точка плоскости. Так как
правые части этих уравнений принадлежат любому Lq(G + T),
q < 2, то, как было уже установлено нами выше, в п. 2 настоя-
настоящего параграфа, они допускают решения, которые будем обозна-
обозначать через Xn(z, t), Xn(z, t) и Xn(z, t) соответственно.
Пусть
Q'n(z, t) =-y (Xn + iX"n)t
, G.56)
Q"n(z, t) = ±-(x'n-iX"n).
Назовем функции Х„, Qn и Qn резольвентами задачи А в слу-
случае круга. Докажем теперь, что формула
2Л
'n (z, Q F (Q dl di\ + J J Q; (z, 0 F Ц) dl dn G.57)
дает решение задачи А, т. е. 6 (w%) = F в G и
Re [z-"u;% (z)] = у (на Г). G.58)
16*
244 • ГЛ- 4- КРАЕВЫЕ ЗАДАЧИ
Так как прп геГв силу G.53)
(t-z)t* '
TO
2Л
<. —П-
[2л
г-» f Хп (г, в**) у №
о
[
Г"Х„ (?, в**) у
о J о
Учитывая теперь, что Re[?-"Xn(?, e'*)] = 0, ? е Г, убедимся, что
w;i (г) = j Х„ (г, в1*) у ft) di|) G.59)
о
удовлетворяет краевому условию G.58)'. Кроме того, очевидно,
<5(иО = 0, ибо@(Хп(г, е'*)) = 0 при z e G.
Обозначая через / и —g вещественную и мнимую части функ-
функции F, получим
w'l (z) = f J (Q'nF + Q'nF) dg сЦ =
= J j (x; (z, 97 (Q + Х'я (г, Q ^ (?)) d% d4. G.60)
Так как при г^Г, t, s G,
Re [z-nX; (z, p] = 0, Re jV^ (z, Q] = 0,;
T0 w"* удовлетворяет однородному краевому условию Re [z~nwt ] =
= 0 (на Г). Далее, так как
JX i (t — z) it / i i — '
TO
G
D dl dn
' ^~^~ 1 1 c. " 1 1
Я J J L, — 2 njj J_
- zt
G G ъ
Применяя к обеим частям этого равенства операцию 9-, получим
G
= F(z)-
= F(Q-B(z)wm(z).
§ 7. РЕШЕНИЕ ЗАДАЧИ А ПРИ ПОМОЩИ ИНТЕГР. УРАВНЕНИИ 945
Таким образом, установлено, что функция и>% = w'% + ц>^, заданная
равенством G.57), является частным решением задачи А. Чтобы
получить общее решение этой задачи, надо сложить с iv* реше-
решение интегрального уравнения G.21).
При п = 0 п F = 0 общее решение задачи А имеет вид
2 Л
w (z) = j Xo (z, в**) v W dif + с0^ (z). G.61)
о
Здесь Со — произвольная вещественная постоянная, aw — реше-
решение однородной задачи A; w удовлетворяет интегральному урав-
уравнению
w + (W = i-
Формулу G.61) будем называть обобщенным интегралом Швар-
Шварца. Она выражает обобщенную аналитическую функцию в круге
Izl < 1 через граничные значения ее вещественной части. Мни-
Мнимая часть функции w на окружности Izl = 1 выражается по
формуле
2Л
. G.62)
7. Формулу G.61) можно вывести также с помощью обобщен-
обобщенного принципа симметрии Римана — Шварца.
Продолжая вне круга G(lzl<l) коэффициент уравнения
К (w) 2= d-w + Bid = 0 по закону (гл. 3, § 11)
будем рассматривать это уравнение на всей плоскости, причем,
очевидно, В eLp,2(?), p>2. Пусть ?24(г, ?)'и Q2(z, ^ — нор-
нормальные ядра полученного таким путем уравнения. Если w(z)
удовлетворяет,уравнению ($,(w) = 0 внутри G и непрерывна в G,
то функция w# (z) = w\\jz) непрерывна вне G и удовлетворяет
уравнению 6(ц;) = 0 вне G + Г. Поэтому согласно обобщенной
формуле Коши A0.6) гл. 3
w (z) = JL J Qx (Z) Q и, (?) dS _ Q2 (z? S) ^j й|, z e G, G.63)
г
0 = гЫ Qi (z> 9 ЙТ)d^ ~ «2 (z, S) и; (S) d? -
¦ г
- 2Hi f Qx (z, p w*.@ й? - Я* (г. S) ^7® С z e 6, G.64)
246 ГЛ- 4- КРАЕВЫЕ ЗАДАЧИ
где Гв — окружность достаточно большого радиуса R с центром
в точке z = 0. Если в равенстве G.64) перейдем к пределу при
Д -э- оо и учтем, что
w* (оо) = w @) = с0 — ic-y
то получим, что
СйЩ B) - ClWl (z) = JL j Qx B, S) J^j dS _ Q2 (Z) ?) „, (S) dgf G.65)
где u>0 и Wi — константные решения уравнения ®(w) = 0, удов-
удовлетворяющие условиям (гл. 3, § 4, п. 9, § 6, п. 1)
Если сложим равенства G.63) и G.65), то получим
w(z)= J Xo (z, Q у (ф) йф - соы;о (z) + c1w1 (z), G.66)
о
где
7(i|;) = Reu>(eirt),
Хо (Z> S) = 4" ГД1 (z- 0 ? + ^2 (z, ?) ?], I = e(*. G.67)
Приравнивая в G.66) z нулю, получим
c0A + u;0@)) + Cl(i- wx @)) = f Xo@, в«Ф) Т (ф) йф. G.68)
г
Но одновременно не могут иметь место равенства и?0@) = —1,
z^i(O) = j, ибо это противоречит неравенству (§ 6 гл. 3)
Im [1^0B)^B)]> 0.
Поэтому, полагая, например, ^(О)^—1, из G.68) получим
о
Внося это выражение в правую часть G.66), находим
2Л
u; (z) = J Xo (z, в**) v (ф) йф + с» (z) (с = Cl), G.69)
о
где
5п<«)-^§|А G.70)
t — w @)
' B) = wx (z) + @ wo(z).
§ 7. РЕШЕНИЕ ЗАДАЧИ А ПРИ ПОМОЩИ ИНТЕГР. УРАВНЕНИЙ 247
Таким образом, мы вновь получили формулу G.61), обобщаю-
обобщающую формулу Шварца. В дальнейшем функцию X0(z, ?), фигури-
фигурирующую в формуле G.69), назовем ядром обобщенной формулы
Шварца для уравнения @(ы;) = 0.
8. Мы теперь покажем, как можно при п > 0 получить реше-
решение задачи А, используя формулу G.69). Представим искомое
решение в впде
~ 2n ~
w(z) = w(z)+ 2 сл(г) (Cft — веществ, пост.), G.71)
где
5;2S-I(z) = ^o(zb-1); w2h(z) = ^(izk-1) (fc = l, ..., 2п), G.72)
w{z) = ®o(zn<?(z)), G.73),
причем здесь Ф (z) — некоторая (искомая) голоморфная в G
функция. Через $0(Ф) мы обозначаем оператор, введенный в § 7
гл. 3 и сопоставляющий аналитической функции Ф и точке t = °о
решение уравнения 6(ы;) = 0 вида
ш^^Ф^е^, G.74);
где ю непрерывна на всей плоскости, голоморфна вне G + Г и об-
обращается в нуль на бесконечности. Очевидно, что функция iv% =
= z~ w (z) непрерывна в G, удовлетворяет уравнению
п; 0, Bn = B(l/z)n G.75)
п краевому условию
ЧП
Re [wt (z)] = v B) - 2 с* Re [г-»ц,й (z)], геГ. G.76)
ft=i
Применяя формулу G.69), получаем
«* (z) =
2Л 2П 2Я
= J Хо (г, S) Т (г])) dt|3 - 2 cft J Хо <г- S) ^е [Г"^й (?)] dt|> + со^о (z).
о fe==1 о
G.77)
Здесь Х„ — ядро обобщенной формулы Шварца для уравнения
G.75), Wo — решение уравнения 6„(ы;) = 0, удовлетворяющее кра-
краевому условию Re[w] = 0 (на Г), а со — произвольная веществен-
вещественная постоянная. Так каки> = znrv^, то формула G.71) принима-
принимает вид
w(z)=\ Xn (z, I) у (я])) йф + У>съшк (z), G.78)
Г h=0
248 ГЛ- 4- КРАЕВЫЕ ЗАДАЧИ
X»(z, l) = z"Xa(z, ?), G.79)
a Wo, Wi, ..., ir2n — линейно независимые решения однородной
задачи А, причем
ivk (z) - wk (z) - f znX0 (г, 0 Re [Г"?й (?)] е/ф G.80)
г
(? = e<*, ft = l, ..., 2n);
wo(z) = znwo{z). G.81)
Формула G.78) дает общее решение задачи А при п ~> 0 и F = 0.
9. В этом пункте мы изучим дифференциальные свойства ре-
решения задачи А в замкнутой области. Очевидно, эти свойства за-
зависят от дифференциальных свойств коэффициентов и свободных
членов задачи, а также от характера гладкости контура области.
Имеет место следующая
Теорема 4.16а. Если 1) G e= Cj.+\ 2) А, В, F е= СЦ(С + Г) и
3) Я м у ^ ^и+1 (Г)> г0 решение задачи А, если око существует,
принадлежит классу С^+1 (G + Г) (А; ^ 0, 0 < ц < 1).
Доказательство. Рассмотрим сперва случай круговой об-
области G(\z\ < 1).
Пусть п—индекс функции K(z) относительно окружности Г.
Тогда имеем:
%(z) = z-ne^z)e^M, G.82)
где % = р + iq — голоморфная в G функция, которая выражается
следующим интегралом Шварца:
где q(t)=—SiTg%(t)+nsagt, t^T. Так как по условию ge
е Cl+1 (Г), то в силу теоремы 1.10 х (z)e cl+1 (G + г)- В си-
силу G.82) краевое условие задачи А приводится к виду
Re[z-"Wi(z)] = Yi(z), G.83)
где
Wi (z) = ez(z)u> (z), ^ (z) = 7 (z) ерB).
Очевидно, что Vie ^+1 (Г). Для iy4 получим уравнение
5-Ш! + ^i^i + 5!^! = Flf
где Лх = A, B1 = Bex"x1 F1 = exF. Следовательно, Аи Вг и Fx^
§ 7. РЕШЕНИЕ ЗАДАЧИ А ПРИ ПОМОЩИ ИНТЕГР. УРАВНЕНИЙ 249
Рассмотрим сперва случай п ^ 0. Тогда, как мы показали вы-
выше, в п. 2 настоящего параграфа, ин удовлетворяет интегрально-
интегральному уравнению
wx + Qnw1 = PnF1 + ~ f vi (П г=Нт- + 2 c'zl (™)
(С2к-г = -сг, 1 = 0, 1, ..., п).
Согласно формулам G.7) и G.9) имеем
Qniv, = TG (A^v, + BjPj + z-n+1TG, (Л,»-* + Bti7j,
где G' — внешность круга \z\ < 1, a
«'* (9 =
Если обратимся теперь к следствию теоремы 1.33, то легко убе-
убедимся, что Qnw — вполне непрерывный оператор, отображающий
С\ (G + Г) в Cl+1 (G + Г). На том же основании PnF, e= С^+1Х
X(G + F). Кроме того, в силу теоремы 1.10 интеграл по окруж-
окружности Г, фигурирующий в правой части G.84), также принадле-
принадлежит C[i+1 (G + Г). Следовательно, правая часть уравнения G.84)
принадлежит классу С^+1 (G + Г). Так как существует обратный
оператор (I + Qn)~\ который, очевидно, является оператором, пе-
переводящим C^(G + T) в Cji+1 (G + Г), то решение Wi(z) уравне-
уравнения G.84) принадлежит классу С^ l (G + Г). Возвращаясь теперь
к функции w(z) = w\e~x, являющейся решением исходной за-
задачи А, получаем, что w(z) s C^+1 (G + Г). К такому же резуль-
результату мы придем и в случае п < 0, рассматривая интегральное
уравнение G.32). Таким образом, теорема для круговой области
доказана.
Переходим теперь к рассмотрению случая произвольной одно-
связной области класса С^+1. Отображая эту область на единич-
единичный круг G': |?| < 1, мы увидим, что функция w% (?) = w [ц> (?)]
(w — решение исходной задачи А, ср(?) — функция, реализующая
конформное отображение) удовлетворяет уравнению
(в
и краевому условию
Re [^ (Q w* (?)] = у* (?) (на Г),
250 ГЛ- 4- КРАЕВЫЕ ЗАДАЧИ
где
Так как согласно теореме A.8) cpeC^,+1(G' + Г'), то легко ви-
видеть, что
Л», Д„, ^ е= С? (С + Г'), К и Y* e= СЦ+1 (Г').
Поэтому в силу теоремы 4.13, которая для круговой области нами
уже доказана, w* (ь) s C^+1 (С + Г'). В таком случае, очевидно,
w (z) = «7# (ф (z)) e Сд+1 (G + Г). Здесь следует учесть, что функция
ty{z), обратная для ф(?), принадлежит Cft+1 (G + Г) (теорема
1.8). Таким образом, теорема 4.16 полностью доказана в случае
односвязной области.
Переходим к доказательству теоремы для случая многосвяз-
многосвязной области. Учитывая, что контуры области принадлежат классу
Сц+1, функции А, В, F, принадлежащие по условию классу
С?(С+Г), можно продолжить вне G + Г с сохранением класса
на всю плоскость, причем мы можем добиться, чтобы А = В =
= F = 0 вблизи бесконечности. С помощью обобщенной формулы,
Коши мы можем решение задачи А представить в виде
w{z)=W0{z)+ Wi (z) +. . .+ Wm (z) ,
где
wi (z) = 2T/
(/ = 0, 1, .... те).
Здесь Qi и Q2 — нормальные ядра уравнения Ш,(гр)=О, соответ-
соответствующие всей плоскости. В силу теоремы 3.3 w и wt (j = 1,2,...
..., т) принадлежат классу Сд+1 соответственно внутри Го п
вне Tj. Кроме того, w5(z) (/= 0, 1, ..., т) удовлетворяет краево-
краевому условию
т
Re [к (z) Wj (z)] = у (z) E= v - 2 Re (lw{) (на Г,).
у i=0
2
i=0
Очевидно, У;еСд+1(Г;). Поэтому, согласно уже доказанному
выше, Wj (z) e C^,+1 (G,- + Г,-) (/ == 0, 1, ..., т). Отсюда следует, что
w (z) e Cu+1 (G + Г), и наша теорема полностью доказана.
§ 8. КРАЕВАЯ ЗАДАЧА С НАКЛОННОЙ ПРОИЗВОДНОЙ 251
§ 8. Краевая задача с наклонной производной
для эллиптического уравнения 2-го порядка
В этом параграфе мы изучим некоторые задачи для эллипти-
эллиптических уравнений 2-го порядка с краевыми условиями, содержа-
содержащими искомую функцию и ее производные 1-го порядка или, как
их обычно называют, задачи с наклонной производной. Подобные
задачи впервые были рассмотрены А. Пуанкаре в связи с тео-
теорией приливов [73]. Нужно сказать, что рассмотрение этих задач
представляет принципиальный интерес хотя бы потому, что они
не укладываются в обычные классические рамки. Использование
классического метода потенциалов в этих задачах приводит, как
правило, к сингулярным интегральным уравнениям, для которых
обычная альтернатива Фредгольма не сохраняется. В силу этого
к задаче с наклонной производной за последние два-три десяти-
десятилетия появлялся повышенный интерес. Она изучалась как с по-
помощью классического метода потенциалов и интегральных урав-
уравнений [54], так и (в особенности за последние годы) методами
функционального анализа [16], [17]. Применением сингулярных
интегральных уравнений достигнуты наиболее полные результа-
результаты в случае двух независимых переменных, особенно для урав-
уравнений с аналитическими коэффициентами [146], [91]. Эти резуль-
результаты ниже обобщены на случаи уравнений с неаналитическими
коэффициентами [14з]. Здесь удалось выйти за пределы класси-
классических рамок и изучить весьма широкие классы задач, для кото-
которых альтернатива Фредгольма не сохраняется. В многомерных же
задачах достигнуты более или менее конкретные результаты
лишь ценой очень сильных ограничений, которые, по существу,
исключают из рассмотрения все нефредгольмовы случаи. Основ-
Основное ограничение здесь относится к направлению дифференциро-
дифференцирования в краевом условии. В двумерном случае эти ограничения
гораздо менее стеснительны, чем в многомерном. Именно из-за
этого в двумерных задачах встречаются случаи, когда классиче-
классическая альтернатива Фредгольма не имеет места. Вместе с тем, как
показывают многочисленные примеры, взятые из разных областей
математики и ее приложений, эти более общие случаи представ-
представляют не меньше интереса, чем классические. Поэтому очень важ-
важно дальнейшее продвижение в многомерных задачах в направле-
направлении изучения нефредгольмовых случаев *).
*) Многомерная задача с косой производной в настоящее время изу-
изучена достаточно полно. См. Бицадзе А. В. «Краевые задачи для эллипти-
эллиптических уравнений второго порядка» (М.: Наука, 1966); Егоров Ю. В., Конд-
Кондратьев В. А. «О задаче с косой производной» (Мат. сб.—1969.— Т. 78.—
С. 148—176); Мамонтов М. Б. «О краевой задаче Пуанкаре» (Тр. ММО.—
1969.—Т. 20.—С. 173—203); Мазья В. Г., Паненх Б. П. «Вырождающиеся эл-
эллиптические псевдодифференциальные операторы и задача с косой произ-
производной» (Тр. ММО.—1974.—Т. 31.—С. 237—255).— Примеч. ред.
252 ГЛ- 4- КРАЕВЫЕ ЗАДАЧИ
1. Вначале мы изучим краевую задачу, которая сразу приво-
приводится к изученной в предыдущих параграфах задаче А.
Задача В. Требуется отыскать в области G решение U(x,y)
уравнения
AU + a(x,y)Ux+b(x,y)Uy = j(x, у), (8.1)
удовлетворяющее краевому условию
aUz-Wy^t. (8.2)
Вводя обозначения
и = [/„ v = -Uv, (8.3)
уравнение (8.1) приводим к системе
ux + vy = 0, ux —vy +аи —bv = f, (8-4)
а краевое условие примет вид
аи + ру = у, (8.5)
или в комплексной записи, вводя функцию w = и + iv:
д-w + -L(a+ib)w + -j-(a — ib)w = ±-f, (8.6)
Re[Mz)u;(z)] = 7, Я = а + ф. (8.7)
Таким образом, мы пришли к задаче А, изученной в предыду-
предыдущих параграфах.
Если функция w = и + iv — решение уравнения (8.6), то в
силу (8.3) решение исходного уравнения (8.1) получится с по-
помощью следующего криволинейного интеграла:
z
?/(*, i0 = co + Reja>(?)d?, с0 = const. (8.8)
2о
Если G — односвязная область, то правая часть равенства (8.8)
не зависит от пути интегрирования, т. е. является однозначной
функцией точки z (при фиксированных z0 и с0).
Таким образом, в случае односвязной области G решение за-
задачи В полностью эквивалентно решению соответствующей зада-
задачи А. Это означает, что задача В разрешима тогда и только
тогда, когда разрешима задача А и решение задачи В строится
по формуле (8.8). Следует заметить, что однородная задача
В (^ = / = 0) всегда имеет решение, равное постоянной. Поэтому,
о
если однородная задача А имеет I линейно независимых реше-
решений, то однородная задача В будет иметь 1+1 линейно незави-
независимых решений.
§ 8. КРАЕВАЯ ЗАДАЧА С НАКЛОННОЙ ПРОИЗВОДНОЙ ?53
Говоря о решении уравнения (8.1), мы имеем в виду обоб-
обобщенное решение, которое определяется следующим образом.
Пусть w(z)— u(x, y)+ iv(x,y)—обобщенное решение уравнения
(8.6). Тогда функцию U(x, у) будем называть обобщенным ре-
решением уравнения (8.1) в окрестности точки z0, если она в этой
окрестности представляется по формуле (8.8). Функцию U(x, у)
будем называть решением уравнения (8.1) в области G, если она
является решением этого уравнения в окрестности каждой точки
области. В дальнейшем, говоря о решении уравнения (8.1) в об-
области, мы будем иметь в виду непрерывные однозначные
решения. _
Пусть a, b, /e?P(G), p>2. Тогда непрерывные решения
уравнения (8.6) принадлежат классу Dip внутри G. Следова-
Следовательно, в этом случае непрерывные решения уравнения 2-го по-
порядка (8.1) принадлежат классу Dzv внутри области. Если же
a, b, f е= С™, 0< v< 1, то u; <= C+\ a V (х, у) е= С+2 внутри G.
Если область G многосвязна, то правая часть равенства (8.8)
будет, вообще говоря, многозначной функцией. Пусть Го, 1\. ...
..., Гт — простые замкнутые спрямляемые контуры, ограничи-
ограничивающие область G, причем 1\, ..., Гт расположены внутри Го.
Тогда для однозначности правой части (8.8) необходимо и до-
достаточно, чтобы выполнялись равенства
Re f wdZ= \ udx — vdy = O (j = 1, 2, . .., m). (8.9)
Эти равенства указывают на то, что в случае многосвязной об-
области задача В, вообще говоря, не эквивалентна соответствую-
соответствующей задаче А. Решение исходной задачи В мы получим лишь в
том случае, когда решение задачи А удовлетворяет дополнитель-
дополнительно равенствам (8.9), т. е. к условиям разрешимости краевой за-
задачи А добавляется еще m равенств (8.9).
2. Пара функций а, A в каждой точке контура Г определяет
направление 1, такое, что
cos(l, x)=a, cos(l, i/)=— p (а2 + ,32 = 1). (8.10)
Поэтому условие (8.2) можно записать еще в виде
ж = у- (8Л1>
Направление 1 меняется от точки к точке и составляет с нор-
нормалью v кривой Г некоторый угол ¦б1, являющийся, вообще гово-
говоря, переменной функцией положения точки на контуре. Поэтому
задачу В и называют еще задачей с наклонной производной.
Если 1 совпадает в каждой точке кривой Г с ее нормалью, то
мы получаем вторую основную краевую задачу для уравнения
(8.1), называемую обычно задачей Неймана. Если же I совпада-
совпадает в каждой точке границы Г с касательной, то равенство (8.11)
254 ГЛ- 4- КРАЕВЫЕ ЗАДАЧИ
эквивалентно условию
з
U = \ у (s) ds + с0, с0 = const, (8.12)
и, следовательно, мы получаем первую основную краевую задачу
для уравнения (8.1), называемую обычно задачей Дирихле.
В этом случае, чтобы обеспечить однозначность и непрерывность
искомой функции U на каждом граничном контуре, необходимо
потребовать выполнения следующих условий:
\yds = O (/ = 0, 1, ...,m). (8.13)
Таким образом, известные классические краевые задачи Дирихле
и Неймана представляют собой частных"! случай задачи В и, сле-
следовательно, могут быть сведены к изученной нами в предыду-
предыдущих параграфах краевой задаче А.
3. Рассмотрим теперь более общую краевую задачу.
Задача С. Требуется отыскать в области G решение U(x,y)
уравнения
a(x, y)Ux+b(x, y)Uv + ec(x, y)U = f(x, у), (8.14)
удовлетворяющее краевому условию
aUx—$Uy+e-iU=:8, а2 + $2 ^ 1, (8.15)
где а, Ь, с, f — заданные вещественные функции точки z = x + iy
области G, a, P, if> 6 — заданные вещественные функции точки
контура Г, ограничивающего область G, а е — постоянный пара-
параметр. Краевое условие (8.15) можно записать еще в виде
-^ + еТС/ = б, (8.16)
где 1 — направление, определяемое равенствами (8.10).
Ограничившись случаем односвязной области, мы изложим
здесь способ решения задачи С, тесно связанный с развитым в
предыдущих параграфах методом решения задачи А. Этот спо-
способ был предложен в работе автора [14з].
С помощью конформного преобразования области задачу мож-
можно привести к аналогичной задаче для единичного круга Ы < 1.
Поэтому будем считать, что область G для рассматриваемой
задачи есть круг Ы < 1, а контур Г — окружность Ы = 1.
В отношении других данных задачи примем следующие допуще-
допущения: 1) а, Ь, с, f^LP(G + T), р>2, 2) а, р, f и беС0(Г),
0 < о < 1, 3) ГеС^, к > 1, 0 < ц «? 1. Искомое решение будем
толковать в обобщенном смысле. Оно принадлежит Cl(G) и
D2,P(G),p>2.
§ 8. КРАЕВАЯ ЗАДАЧА С НАКЛОННОЙ ПРОИЗВОДНОЙ 255
Если введем в рассмотрение комплексную функцию
w(z)=Ux-iUv = 2dzU, (8.17)
то уравнение (8.14) и краевое условие (8.15) примут вид
д-w + -±-(a+ib)w + -±-(a-ib)w + -±-EcU = -j- f, (8.18)
Цги>] + ет*7 = 6, А = а + ф. (8.19)
Справедлива
Лемма. Если вещественная функция^ U(x, у) принадлежит
классу DiP(G), p>2, и непрерывна в U, то она представила
в виде
1 (8.20)
где с0 — вещественная постоянная, a w = 2dzU.
Доказательство. По формуле F.10) гл.1
U(x, у) = -± jj^
G (8-21)
г
Так как U — U, то для z, принадлежащих окружности Г, имеем
Из этого равенства с помощью формулы и теоремы Коши о вы-
вычетах получаем
^f^ z^G, (8.22)
G
где
l со> ^о = Со- (8.23)
Внося в правую част^ь (8.21) вместо Ф ее выражение из (8.22)
и учитывая, что U = U, получим равенство (8.20).
Из (8.17) следует, что w удовлетворяет равенству
d-zw — dzw = 0. (8.24)
Поэтому остается доказать, что если_и; удовлетворяет равенству
(8.24) в области G и непрерывна в G, то вещественная функция
256 ГЛ- 4- КРАЕВЫЕ ЗАДАЧИ
вида (8.20) удовлетворяет равенству (8.17). Применял к (8.20)
операцию дг, находим
- (8-25)
Используя формулы Грина п учитывая равенство (8.24),. легко
получим:
) г ln(l — Qz) <% — -?¦) w In (I — gz
G tZ Г Г
— ) j dziv In [(l, — z) (и — z)] ас, ац.
G
Дифференцируя эти равенства по z, получаем
1_>г 2г J ? — г ' 2г J I — zf
r ' r
д ' 1Ш'
I Cwdt , 1 Г w dt,
h J ? — z 2j J ^ — z
Г Г
На основании последних формул правая часть равенства (8.25)
равна -z- м>, что и требовалось доказать.
Как мы уже неоднократно делали выше, пользуясь подста-
подстановками
Щ = z- VB)e-pW, ^ (г) = ех(г)и; B), (8.25а)
где %(z) = p-\-iq — голоморфная в G функция, заданная интег-
интегралом Шварца,
/ ч 1 Г м1-1-г Л , ,
^(г)== 2nJ *^Г^7~Г' g = -arg?t +«argz,,
г
уравнение (8.18) и краевое условие (8.19) можем привести
к виду
d-zw* + Л»* + 5ш# + zCU = F (в G), (8.26)
Re [Г"», (z)] + еу*^ = 8* (на Г), (8,27)
§ 8. КРАЕВАЯ ЗАДАЧА С НАКЛОННОЙ ПРОИЗВОДНОЙ 257
где А = ±(а + Щ, Я = -L (о - ib) e2iq, С = -i-cex, F = -i- ex/,
7* = 7еР' ^* = °V. Формула (8.20) в силу второго равенства
(8.25а) принимает теперь вид
U(x,y) = ca + Vir*. (8.28)
где Со — вещественная постоянная, а
- «• [- ш я i^^
я
4. Рассмотрим сперва случай п ~5* 0. Тогда, переписав уравне-
уравнение (8.26) и краевое условие (8.27) в виде
д-и-* + Aw* + Bw* = /'' - гСи (в G), (8.30)
Re [z-nw* (z)] = 6, - ev*L- (на Г) (8.31)
и считая правые части этих равенств временно известными, полу-
получаем задачу, изученную нами в предыдущем параграфе. Реше-
Решение ее можно представить в виде
-^ 2П+1
и-л (z) = w (z) + eP'U + 2 CfeWfe (z), (8.32)
fei
где с* — произвольные вещественные постоянные, шь ..., wln+i—
линейно независимые решения однородной задачи:
д-w + Aw + Bw = 0 (в G),
Re[z~nw] = 0 (на Г), (8.33)
a w + eP'f/ — частное решение задачи (8.30) — (8.31). В силу
формулы G.57) для w и VU имеем выражения
2 Л
w (z) = J Xn (z, e1^) б (if) dty + | | Qn (z, ?) / (|, i]) d| cZi"),
о 'g"
2Я
P'27 = — j Xn (z. e*'t) y (яр) f/ dij) —
о
- f [ [Q; (z, Q С (?) + Q; (z, ?) СЧШ f/ (|, il) d| с1ц,
* G
где
^-n^Z, в )=== A.n ^Z? 6 f€ ,
Q~ /¦- f-\ _L.O' ^7 П а^Й _L О" (г f\ р*№
n \z, У — 2 п \ ' =/ 2 ^ ' '
Таким образом, ы; — известная функция от z, a VU зависит от
неизвестной пока функции U. Внося в правую часть равенства
17 И. Н. Векуа
258 ГЛ- 4- КРАЕВЫЕ ЗАДАЧИ
(8.28) вместо w% выражение (8.32), получим для U следующее
интегральное уравнение:
U - гРи = Vw (z) + с0 + 2 Ck~Pwh (z). (8.34)
Легко видеть, что Р = РР' — вполне непрерывный оператор в
C(G + Y) и любом Lq(G + Г), q~^-——т. Поэтому к уравнению
(8.34) можно применить теоремы Фредгольма.
Таким образом, если задача С имеет решение U(x, у), то оно
является решением уравнения (8.34) при некоторых фиксиро-
фиксированных значениях постоянных с, с4, ..., c2n+i. Обратно, если
при некоторых заданных значениях постоянных с0, Ci, ..., c2n+i
уравнение (8.34) имеет решение V, то оно является решением
задачи С.
Пусть 6i, е2, ... (О < lej «? le2l «S ...)—собственные значе-
значения однородного уравнения
0. (8.35)
Если е Ф 8А, то интегральное уравнение (8.34) имеет решение
для любых значений постоянных с0, си ..., c2n+i. Следовательно,
в этом случае решение задачи С существует для любых функций
f(x, у) и b(z), фигурирующих в правых частях уравнения (8.14)
и краевого условия (8.15). Это решение строится по формуле
2Л
U (х, у) = \ Sn Е (х, у, тЭ1) б (ft) d$ +
о
2П+1
ft=0
+ f J S'n,E (x, y, 1, Tj) / (I, 11) d\ dr\ + 2] ckUk (x, y), (8.36)
где ^п,г и <S^n,e — вполне определенные функции, которые зависят
исключительно от коэффициентов рассматриваемого уравнения
(8.14), от функций а, р, "у, фигурирующих в краевом условии
(8.15) и от параметра е; U0(x, у), Ut(x, у), ..., U2n+i(x, у) —
о
линейно независимые решения однородной задачи С(/ = 6 = 0).
Таким образом, доказана следующая
Теорема 4.17. Если п^О, то задача С имеет решение для
всех значений параметра г, исключая, быть может, дискретный
ряд значений е4, е2, ... @< letl < lej <...)» которые являют-
являются собственными значениями однородного уравнения (8.35). При
о
е Ф ek однородная задача С (/ = 8 = 0) имеет ровно 2/г + 2 ли-
линейно независимых решения.
В частности, из этой теоремы следует, что при достаточно
малых значениях параметра е @< 1е| <е,) однородная задача
§ 8. КРАЕВАЯ ЗАДАЧА С НАКЛОННОЙ ПРОИЗВОДНОЙ 259
С имеет ровно 2п + 2 линейно независимых решения, а неодно-
неоднородная задача всегда разрешима.
При гФгк (к = 1, 2, ...), как видно из формулы (8.36), за-
задача С допускает частное решенпе
U (х, у) =
= f Sn,e (х, у, Ъ) б (О) d-д + j J S'n,e (х, у, I, Г]) / (|, Ti) d| dt],. (8.37)
Г G
которое непрерывно зависит от заданных функций. В этом слу-
случае, добавляя к краевому условию (8.15) еще 2п + 2 условия то-
точечного типа (§6), можно добиться того, чтобы задача приобре-
приобрела корректный характер. Поэтому при е^е4 и п > О задачу С
мы можем назвать квазикорректной.
Пусть е — собственное зпачение ранга р уравнения (8.35).
Написав, согласно третьей теореме Фредгольма, условие разре-
разрешимости неоднородного уравнения (8.34), мы получим алгебраи-
алгебраическую систему из р линейных уравнений; для определения
2п + 2 постоянных с0, си ..., c2n+i. Пусть г — ранг соответству-
соответствующей матрицы, 0 =^ г =^ ппп(|?, 2п + 2).
Очевидно, имеет место
о
Теорема 4.18. Если п ^ 0, то однородная задача С имеет
N = 2п + 2-\- р — г линейно независимых решений, а неоднород-
неоднородная задача С будет разрешима тогда и только тогда, когда будут
выполнены равенства вида
\ bgds + \ f fh}dx dy = 0 (/ = 1, ..., р - г), (8.38)
Г G
где gj и hj — линейно независимые функции, которые зависят
исключительно от коэффициентов уравнения (8.14) и от функ-
функций a, J3, if, входящих в краевое условие (8.15).
В частности, доказана следующая
Теорема 4.18а. Если п^О, то однородная краевая задача
С имеет конечное число N линейно независимых решений, при-
причем N>2n + 2.
5. Переходим теперь к рассмотрению случая п < 0. Пусть
к = ¦—п. Тогда, согласно результатам п. 3 § 7, решение уравне-
уравнения (8.30), удовлетворяющее краевому условию (8.31) (считая
временно V известной), будет удовлетворять интегральному
уравнению
Г
fk{t_
Г
17*
dt
260 гл- 4- КРАЕВЫЕ ЗАДАЧИ
Так как оператор / + Qh обратим, то, решая уравнение (8.39) и
подставляя и>% в правую часть (8.28), получим для U уравне-
уравнение вида
2Я
U _ ер*[/ = f х* я (z, е'+) б (г|з) cty + J J Q* „ (г, С) / (?, *l) dg ЙЛ + с0,
О G
(8.40)
где Р* — вполне непрерывный оператор. Кроме того, удовлетво-
удовлетворение равенств G.31) приводит к 2к — 1 равенствам вида
е f j %jU dx dy + f J /yj Дс dj/ + f 6yJ ds + e\ ?/?¦ cZs = 0 (8.41)
'g 'g г г
G = 1, 2,..., 2fc-l),
где %],%],%},%}—линейно независимые функции, которые от вы-
выбора / п б не зависят.
Пусть е не является собственным значением однородного ин-
интегрального уравнения w — zV*w = 0. В таком случае уравнение
(8.40) разрешимо для любой правой части. Подчиняя его реше-
решение условиям (8.41), мы получим 2/с—1 равенств вида
& dxdy+\ 8%-ds + cfifi = 0 (8.42)
Г
G = 1, ..., 2k-1).
Следует заметить, что линейно независимые функции Xj, Xj и по-
постоянные ЯДе) не зависят^от выбора / и б.
Если все постоянные Н, — 0, то необходимыми и достаточны-
достаточными условиями разрешимости задачи С являются равенства
j j ?' dxdy + f бь- ds = 0 (/ = 1, . .., 2k - 1). (8.43)
G Г
Если же хотя бы одна из постоянных Н, отлична от нуля, то из
соответствующего равенства (8.42) постоянная с0 выразится од-
однозначно через / и б. Подставляя это значение в остальные ра-
равенства (8.42), мы получим следующего вида необходимые и до-
достаточные условия разрешимости задачи С:
f I fu, dx dy + j &&i ds = ° (j = l, ...,2k- 2). (8.44)
G Г
Таким образом, доказана следующая
Теорема 4.19. Если п < 0, то однородная задача С для
всех значений параметра е, исключая, быть может, дискретный
ряд значений 8|, е2, ... @ < lej ^ le2l ^...), либо вовсе не
имеет нетривиального решения, и тогда неоднородная задача С
§ 8. КРАЕВАЯ ЗАДАЧА С НАКЛОННОЙ ПРОИЗВОДНОЙ 261
имеет решение только при выполнении 2к — 2 равенств (8.44),
либо же она имеет одно нетривиальное решение, и тогда неод-
неоднородная задача С имеет решение только при выполнении 2k — 1
равенств (8.43).
Если е — собственное значение однородного уравнения
w — eP*w — 0, то рассмотрение условий разрешимости уравне-
уравнения (8.40) и равенств (8.42) приводит к следующему результату.
Теорема 4.20. Если п < 0 и р — ранг собственного значе-
значения г уравнения w — zY*w = 0, то однородная задача С имеет I
линейно независимых решений, I ^ р + 1, а неоднородная задача
С имеет решение тогда и только тогда, когда выполняются
2к — 2 + 1 равенств вида
\ J fyj dxdy+\ 6XJ ds = 0 0 = 1, ..., 2к - 2 + I), (8.45)
"g г
где %j и yj —линейно независимые функции, которые от выбора
f и б не зависят.
Из теоремы 4.20 вытекают следующие два важных следствия,
которые мы сформулируем в виде теорем.
Теорема 4.21. Задача С корректна, т. е. всегда разрешима
и имеет единственное решение, тогда и только тогда, когда вы-
выполнены следующие условия: 1) однородная задача С не имеет
нетривиального решения и 2) индекс п = —1.
В этом случае, очевидно, решение задачи С непрерывно зави-
зависит от заданных функций / и б.
Теорема 4.22. Если п<—1, то неоднородная задача С не
может иметь решения для любых заданных функций / и б, при-
причем число условий разрешимости не меньше 2к — 2 (к = —п).
6. Степень гладкости и дифференциальные свойства решения
задачи С, очевидно, определяются степенью гладкости коэффи-
коэффициентов и свободных членов уравнения и краевого условия,
а также свойствами границы области. Имеет место
Теорема 4.23. Если 1) Г е= С\ф< |j,< 1), 2) а, Ъ, с, /е
e/Jp(G + r), р>2 и 3) а, 0, 1, 6еС„(Г), 0<v<l, то реше-
решение U(х, у) задачи С принадлежит классу C\(G + Г), где
р-2'
р
= mini v,
Доказательство. Достаточно ограничиться рассмотрени-
рассмотрением односвязной области и провести доказательства для случая
п ~> 0. Аналогичное рассуждение приводит к цели и при п < 0.
Как мы видели в п. 4, решение задачи С выражается по форму-
формуле (8.28): U = с0 + Ри;ф, где w# — решение краевой задачи (8.30)
и (8.31). Но U есть решение уравнения (8.34) и, следовательно,
непрерывна в смысле Гельдера в G. Поэтому w% непрерывна в
262 гл- 4- КРАЕВЫЕ ЗАДАЧИ
G + Г и в силу (8.28) U e Cp_2 (G + Г). В таком случае в силу
р
теоремы 3.1 w* принадлежит Cr(G -f Г). Но
Это означает, что U e C\ (G + Г), что и требовалось доказать.
Очевидно также, что U ^ D2,P.
С помощью теоремы 3.1 аналогичным образом доказывается
следующая
Теорема 4.23а. Если 1) Ге= Ch/\ 2) а, Ъ, с, / е= С? (G + Г)
и. 3) а, Р, у, 6 е Сц+1 (Г), то решение задачи С, если оно суще-
существует, принадлежит классу С^+2 (G + Г) (к > 0, 0 < ц < 1).
7. К предыдущей задаче приводится краевая задача с наклон-
наклонной производной и для более общего уравнения 2-го порядка
эллиптического типа
а(х, у)^ + 2Ъ(х,
+ d(x,y)d^+e (x, y)^ + f (x, y)U = g (x, у), (8.46)
ас— Ь2> Ао > 0 (вС + Г), До = const.
Пусть a, b, c^Dk+iiP(G + T),k>0, p>2, ГеС^+1, 0<о^
^ 1. В таком случае а, Ъ, с е С* (G + Г), /с ^ 0, v =(/? — 2)/р,
и мы можем продолжить эти функции на всю плоскость с сохра-
сохранением класса, причем вблизи бесконечности всегда можно обес-
обеспечить выполнение условий а == с = 1, 6 = 0. Тогда существует
основной гомеоморфизм %,{%)= \{х, у)~гщ{х, у) квадратичной
формы a dx2 — Ibdxdy + с dy2, и в результате замены пе-
переменных
1 = 1{х, У), Ч = Л(*. У)
уравнение (8.46) принимает вид (гл. 2, § 7, п. 2)
= h(l, ц). (8.48)
Так как ? (z) e ?>ft+2,P (Я), то ? (г) е= С^+1 (?), v = (р - 2) /р. По-
Поэтому, как легко видеть, образ Г' контура Г также принадлежит
классу C^t1, o' = min(o, (p — 2)/р).
Пусть d, е, /, ge.DAP(G + Г). В таком случае, как видно из
формул G.29) гл. 2,
p,q, r, *s^,(G' + r'), G'
Краевое условие
aUx — p?7y + уС/ = б (на Г) (8.49);
§ 9. ПРИМЕНЕНИЯ СИНГУЛЯРНЫХ ИНТЕГРАЛЬНЫХ УРАВНЕНИЙ ?63
в результате замены переменных (8.47) примет следующий вид:
a'Ut - p'Z/, + y*7 = б (на Г), (8.50)
где
а'= ag, — Р?„, р" = —атц + рЧ,- (8.51)
Так как ?*, gy, rix, i],eCv(?)i то а' и р" принадлежат классу
С* (Г), если а, р е С*0(Г), причем k' = min(k0, к). Из (8.51)
следует, что
а' - ф' = (а - ф) tz + (а + ф) ?.
Но, как мы видели в § 7 гл. 2, ?(z) удовлетворяет уравне-
пию вида
S-q(z)§ = 0, |g(Z)Kgo<l. (8.52)
В силу этого
а' _ /р' = (а- ф) (l + J±| q (Z)) |i. (8.53)
Но якобиан
3-
dz
3.
dz
i
(i-kl2)
dz
¦o,
и, следовательно, -^гФи всюду на плоскости.
С другой стороны, дифференцируя уравнение (8.52) по z, по-
лучим, что -г- удовлетворяет уравнению
вида A7.15) гл. З. Но тогда в силу теоремы 3.28 к функции dzt,
применим принцип аргумента. Поэтому из (8.53) следует, что
приращение arg (a' + if>') вдоль Г' равно приращению arg(a + j[i)
вдоль контура Г. Это означает, что индекс первоначального крае-
краевого условия (8.49) совпадает с индексом преобразованного крае-
краевого условия (8.50). Поэтому результаты предыдущих пунктов,
относящиеся к краевой задаче с наклонной производной, оста-
остаются в силе и для уравнения общего вида (8.46).
§ 9. Применения к краевым задачам сингулярных
интегральных уравнений по области
До сих пор, изучая краевые задачи, мы предварительно при-
приводили дифференциальное уравнение к каноническому виду,
а это требует, как известно, построения некоторого гомеоморфиз-
гомеоморфизма соответствующей системы Бельтрами. Последняя задача в
свою очередь, как мы видели в гл. 2, решается при помощи
264 гл- 4- КРАЕВЫЕ ЗАДАЧИ
сингулярного интегрального уравнения вида
f-qnf-P, nz-w—
¦
Igl <?о<1.
Но после приведения дифференциального уравнения к канониче-
каноническому виду необходимо строить еще новые интегральные урав-
уравнения для решения краевой задачи. Кроме того, для построения
формулы общего представления решений канонического уравне-
уравнения (если таковая понадобится) приходится решать еще другие
интегральные уравнения. Это ясно показывает, что такой подход
к решению краевой задачи создает значительные практические
трудности и неудобства. Поэтому естественно встает вопрос
о том, нельзя ли, минуя все указанные выше промежуточные
звенья, изучать краевые задачи непосредственно с помощью
сингулярных интегральных уравнении вида (*). Оказывается,
как мы увидим в настоящем параграфе, в ряде случаев это воз-
возможно. Более того, указанный способ позволяет даже значитель-
значительно расширить класс изучаемых уравнений, так как при этом
становятся излишними многие дополнительные предположения
относительно коэффициентов уравнения, обеспечивающие закон-
законность приведения дифференциального уравнения к каноническо-
каноническому виду. Кроме того, метод применяется как к линейным, так и
к квазилинейным уравнениям. Этот метод был указан в работе
автора [14и]. Дальнейшие применения были даны в работах
В. С. Виноградова :[15а, б, в, г].
\. Рассмотрим квазилинейное дифференциальное уравнение
следующего вида:
а (х, у, и, их, щ) ию + 2& (х, у, и, их, щ) иху +
+ с(х, у, и, их, uy)uyy + d(x, у, и, их, иу)=0. (9.1)
В дальнейшем будем считать выполненными следующие условия:
1) а(х, у, и, р, q), b{...), с(...) ограничены и измеримы при
(х, j)s(j + r, иг + р2 + q2 ^ М, где М — произвольно фиксиро-
фиксированное положительное число;
2) при тех же значениях аргументов ас — Ъг Зз До > О (До =
= До (М) = const);
3) d(x, у, и, р, q)—измеримая функция, причем d(x, у, О, О,
0)^LP(G + T),p>2;
4) функции а, Ъ, с относительно аргументов и, р, q удовлет-
удовлетворяют условию Липшица вида
\f(x, у, щ, ри ?,)— f(x, у, щ, рг, ?2) I <
^Mi(\ul — uz\ + \Pl — рг\ + \qt— ga|),
где Mi — постоянная, которая не зависит от х, у,
§ 9. ПРИМЕНЕНИЯ СИНГУЛЯРНЫХ ИНТЕГРАЛЬНЫХ УРАВНЕНИЙ 265
5) d(x, у, и, р, q) удовлетворяет условию вида
\й{х, у, щ, р^ qi)— d(x, у, щ, р2, q2)\ <
<do(x, y){\iii— uz\ + \pi — p2\ + \qi— q2\),
i№dt(x,y)=Lf(G + r), p>2.
Мы ограничимся рассмотрением случая односвязной области,
ограниченной в достаточной мере гладкой кривой Г. В таком
случае посредством неособенного преобразования вида
? = Ф(*, у), л = Ф(*, у) (9.2)
область G и ее границу Г можно гомеоморфно отобразить на
единичный круг §2 + ц2 < 1 и на окружность %2 + ц2 = \ соот-
соответственно. Мы будем предполагать, что ф и г|) е Dz,p(G), p>2.
Для этого достаточно, чтобы FeCj., -^<^\i<d. В таком случае
преобразование (9.2) можно считать конформным. При этих ус-
условиях ф и г|) будут непрерывны в G + Г вместе со своими про-
производными 1-го порядка: ф, г|) е С\ (G + Г), Р = —^—•
В результате такого преобразования уравнение (9.1) перей-
перейдет в новое уравнение, которое будет удовлетворять всем пере-
перечисленным выше условиям, причем область, в которой рассмат-
рассматривается задача, будет уже единичным кругом %2 + ri2 < 1.
В дальнейшем мы сохраним прежние обозначения, а область G
будем считать кругом х2 + у2 < 1.
Перепишем уравнение (9.1) в следующей комплексной форме:
z, и, иг) ^ 1
dz J
-f± + Re Г A (z, и, иг) ^ 1 + В (z, и, uz) = 0, (9.3)
dz dz l dz J
, а — с 4-2ib r, d n y
где А = -ц , В = . с(ти функции удовлетворяют следу-
следующим условиям:
1) для любого фиксированного М > 0 существует постоянная
q = q {M) < 1 такая, что
\A(z, и, v)\ <q<l при zeG+Г, \и\ + \иЫ М; (9.4)
2) В (z, и, v) — измеримая функция, причем
B(z, 0,0)^ LP{G + T), p>2; (9.5)
3) \А (z, ии Vi) — A (z, u2, v2) I s?
(9.6)
где Mi — постоянная, не зависящая от z;
4) \B(z, в„ vt)-B(z, u2, vz)\<
(9.7)
260 гл- 4- КРАЕВЫЕ ЗАДАЧИ
где
Bt(z)e=Lp(G + T), p>2. (9.8)
Граничное условие задачи, не ограничивая общности рассуж-
рассуждений, мы можем взять в виде
и = 0 (на Г: x2 + z/2 = l). (9.9)
Назовем эту задачу задачей D и будем искать ее решение и(х, у)
в классе функций D2P(^G + T), p>2. Это означает, что и^.
<=СЧС + Г) к - р ~~ 2'
Докажем, что всякую функцию класса D2,P(G + T), удовлет-
удовлетворяющую краевому условию (9.9), можно представить в виде
и (х, у) = j j ?0 (г, ?) р (?) dg dn = Пор, (9.10)
G
2 1
^п = — In
где р(?) — вещественная функция точки ?, принадлежащая клас-
классу Lj,(G+r), р > 2, а -т-^о—функция Грина для единичного
круга.
В самом деле, если peLp(G+r), то
(9.11)
Дифференцируя это равенство по z, получим
1^е=р(О. (9.12)
9z d
Поэтому, если положим р = uz-, то будем иметь
А (и — П0р) = 0, т. е. и — Пор = мо,
где и0 — гармоническая функция в G, причем она, очевидно, не-
непрерывна в G + Г. Так как м = 0и Пор = 0 на Г, то и0 = 0 в G
и формула (9.10) доказана. ,
Продолжая функцию p(z) на всю плоскость по закону
p(z) при |z|<lj
1-|>« (9Л2>)
§ 9. ПРИМЕНЕНИЯ СИНГУЛЯРНЫХ ИНТЕГРАЛЬНЫХ УРАВНЕНИЙ 267
равенство (9.11) мы можем записать в виде
^. (9.13)
Бели p^Lp(G + T), то р* е LP(E). Как было нами доказано в
гл. 1 (§ 9, п. 2), если р%^Ьр, р>1, то Тр* допускает произ-
производную по z, которая выражается сингулярным интегралом*)
dz dz
21 dz dz л J J (Г 2J b " v '
причем П2р — линейный оператор, действующий из Lp в LP.
Следовательно,
?р(П8р, G)<A,LP(p, G). (9.15)
Докажем, что Л2 = 1. Пусть р е Die (G). Имеем:
Г
G
4г J p*tp* ^ + JI
Г G
Здесь мы произвели несколько раз интегрирование по частям с
использованием формул Грина. Эти операции законны, так как
фигурирующие в подынтегральных выражениях функции непре-
непрерывны и допускают производные любого порядка в С + Г(
G
())
Так как р* = р (в G) и р* = р = 0 на Г, то имеем:
(П2р, П2р) = /„(р) + (р, р), (9.16)
где
Вычислим теперь этот криволинейный интеграл. Так как Пор = О
на Г, то, дифференцируя это равенство по дуге кривой Г,
*) Представление дгТф с помощью сингулярного интеграла нами было
доказано в § 8 гл. 1 в случае, когда р е Са. При р е Lp, p > 1, это дока-
доказательство содержится в общих результатах Зигмунда и Кальдерона
[36 а, б].
268 ГЛ- 4- КРАЕВЫЕ ЗАДАЧИ
получим
dU О
2_ == ,>niP - /zniP =е ,zTp* - /zTp* = 0 (на Г),
т. е. Тр* = z2Tps|I на Г и, следовательно, в силу (9.17)
г
По условию р = 0 вне некоторого круга Ы=?г<1. Поэтому
где Gt и G, — области \z\ <r и |z| ^ 1/r соответственно. Имея в
виду, что Tip голоморфна вне d и равна нулю на бесконечности,
a T-jP* голоморфна внутри круга Ы < 1/г, получим, что /0 (р) =
= — 4йо + /((>), где
Внося теперь сюда вместо Т(р и ТаР,,. их выражения из (9.18),
находим
р*
<?») ^'dT|» rr
s2-2 JJ
Переставляя здесь криволинейные интегралы с двойными интег-
интегралами, что, очевидно, вполне законно, получим
l 4 f JpGi) d^i ^2 f f P*
или в силу (9.12а)
§§§§p(x, y)-^dz dy.
§ 9. ПРИМЕНЕНИЯ СИНГУЛЯРНЫХ ИНТЕГРАЛЬНЫХ УРАВНЕНИЙ 269
Отсюда имеем
Таким образом, /0(р)^0, причем знак равенства достигается для
функций, удовлетворяющих равенствам
JJ = O (А = 0,1, .-.)• (9-19)
G
В силу равенства (9.16) имеем
(П,р, Шр)*?(р, р), (9.20)
причем знак равенства достигается для функций, удовлетворяю-
удовлетворяющих условию (9.19). Так как D«,(G) плотно в L2(G + T), то
последнее неравенство (9.20) сохраняет силу для любой функ-
функции p^L2(G + F). Отсюда следует, что норма оператора П2 в
пространстве L2 равна 1, т. е.
A2 = L2(n2)^|n2||L2 = l. (9.21)
Возвращаясь теперь к нашей краевой задаче, мы можем ее
решение искать в виде (9.10). Подставляя это выражение в урав-
уравнение (9.3), в силу (9.11), (9.12) и (9.14) получим для р сле-
следующее функциональное уравнение:
p(z)+Re[A(z, П„р, n,p)n2p] + 5(z, П„р, П.р) = 0. (9.22)
Это уравнение, вообще говоря, нелинейное. Исследуем его раз-
разрешимость в пространстве LP(G + T), p>2. Если p^Lp(G + T),
р>2, то, как видно из (9.10) и (9.11),
(9.23)
П,реСа(С + Г), а = (р-2)/р. (9.24)
Поэтому оператор
*, Пор, П1Р)П2р]-5B, П„р, П.р) (9.25)
переводит пространство LP(G + F) в LP(G + F), если р > 2. Да-
Далее, если pi, p2eLp(G + r), то имеем:
!Ppi-Pp2l <\A{z, n,pt, niiPl)-^(z, П„р2, n,p,)lln,pil +
+ \А (z, П„р2, Пф2) 11П2 (Pl - р2) I +
+ \B(z, noPl, U1pl)-B{z, П„р2, П,р,)|.
270 Гл- 4- КРАЕВЫЕ ЗАДАЧИ
Используя условия (9.4), (9.6), (9.7) и неравенства (9.23), по-
получим
IPpi - Pp2l ^q(M) |П2(р, - р») I +
+ [2MlK\Hlpl\+2KBt(z)]Lp{pi-pi), (9.26)
где q(M)<i, a M — постоянная, которая подчинена условию
|П„р2! + т$г\<2КЬ,{рг)<>М.
Применяя неравенство Минковского, из (9.26) получим:
4>[P(pi-p2)]<tf,?,(pi-pO, (9-27)
где
Кр = q (М)ЛР + 2М,КАРЬР (Pl) + 2KLP (Bo). (9.28)
Согласно теореме Рисса [77] (гл. 1, § 9) Ар = LP(H2) непрерывна
по р. Так как Л2 = ?2(П2) = 1, то для всякого фиксированного
М > 0 найдется такое е = е (М) > 0, что выполняется неравенство
q(M)Ap<l, если 0< р-2^е(М). (9.29)
Фиксируя теперь некоторое р, удовлетворяющее этому условию,
возьмем числа г > 0 и б > 0, удовлетворяющие неравенствам
2Кг < М (9.30)
и
l. (9.31)
Подчинил!, кроме того, функцию B0(z) неравенству
LP(B0, G)<6. (9.32)
В таком случае для любых функций р! и р2, принадлежащих
сфере
S@,r): LP(p)<r, (9.33)
в силу (9.33), (9.32), (9.31), (9.28) и (9.27) будем иметь:
p2)]<aZ,p(p1-p2), Кр<а<1. (9.34)
Имея в виду, что оператор Р, примененный к нулевому элемен-
элементу 6=0, дает B(z, 0, 0), предположим:
z, 0, 0)]<A-а)г.
При этих условиях мы можем использовать так называемый обоб-
обобщенный принцип сжатых отображений [51], согласно которому
уравнение р — Рр = 0 имеет единственное решение р из Lp [G + Г),
р > 2, принадлежащее сфере Lp (р) < г.
В частности, если В (z, 0, 0) = 0, то единственным решением
уравнения р — Рр = 0, принадлежащим сфере Lp (p) < г, являет-
является р = 0.
Таким образом, если функции B(z, 0, 0) и B0{z) в достаточ-
достаточной мере малы по норме LP(G + T), p>2, то задача Дирихле
для квазилинейного уравнения (9.3) с краевым условием (9.9)
§ 9. ПРИМЕНЕНИЯ СИНГУЛЯРНЫХ ИНТЕГРАЛЬНЫХ УРАВНЕНИЙ 271
всегда допускает решение. Это решение выражается по формуле
(9.10) и, следовательно, принадлежит классу Dz,p{G + T). Следо-
Следовательно, решение задачи имеет непрерывные производные 1-го
порядка, принадлежащие классу Ca(G + T), где а=(р — 2)/р.
Пусть |Л|<д<1, |Z?|s?M0, причем постоянные q и Мо не
зависят от х, у, и, их, щ. Тогда решение задачи D удовлетворяет
условиям (априорные оценки)
D2,P (и, G) < М', Cl (и, G)<M', а = ?=1Х (9.35)
где число р > 2 зависит только от q, a M' зависит только от q
а Л/о*).
2. Рассмотрим теперь случай линейного уравнения
L (м) = <шта + 2Ъиху + сиуу + dux + euv + fu = h, (9.36)
причем предполагается, что выполнены следующие условия:
1) а, Ъ, с — измеримые ограниченные функции переменных
х л у в круге х2 + уг < 1;
2) ас - Ь2 > Ао > 0 при хг + уг «? 1;
3) d, e, i/, h e LP(G + Г), р>2. При этих условиях без огра-
ограничения общности можно считать, что
а + с = 2 (bG).
В этом случае оператор Р имеет вид
Рр = ~ Re [(а — с + 2ib) П2р + (d + ге) Пхр] — -j /Пор + -^ h
(9.37)
и, следовательно, он линеен. Учитывая, что в рассматриваемом
случае
А = 4" (я — с+ 2ib),
В — — Id 4- ' ) 4-—(d—') —f— — h
находим
~ (9.37а)
причем g не зависит от выбора постоянной Л/, которая фигуриро-
фигурировала выше в наших рассмотрениях. Кроме того, в данном случае
Мi = 0 и неравенство (9.27) принимает вид
?Р[Р (pi - Р») ] < [?Л, + 2KLV (Bo) ]LP (Pi - р2),
*) Другими методами, главным образом с помощью так называемых
априорных оценок, задача Дирихле для квазилинейных уравнений изуча-
изучалась многими авторами (см., например, [54], [42]).
272 ГЛ- 4- КРАЕВЫЕ ЗАДАЧИ
причем это неравенство выполняется для любых элементов р? н
р2 из Lp (G + Г). Фиксируя теперь некоторое р > 2 так, чтобы
выполнялось неравенство
дА,<1, 0</?-2<е, (9.376)
и подчиняя функцию Во условию
a = qAP + 2KLp(B0)<l, (9.38)
получаем
Z)
Таким образом, при этих условиях оператор Р подчиняется прин-
принципу сжатых отображений и, следовательно, уравнение р — Рр =
= 0 имеет единственное решение из LP(G + T), p>0. Это озна-
означает, что задача Дирихле для линейного уравнения (9.36) с
однородным краевым условием и = 0 (на Г) допускает всегда
единственное решение, если выполнено условие (9.38). В част-
частности, если h = 0, то задача имеет лишь тривиальное решение
и = 0. Если d = e = / = 0, то условие (9.38), очевидно, выполне-
выполнено и, следовательно, уравнение
L0(u) = alia + 2buxy + сиУу = h
всегда имеет единственное решение, удовлетворяющее краевому
условию и = 0 (на Г). В частности, при h = 0 эта задача имеет
лишь тривиальное решение и = 0.
В случае линейного уравнения задачу можно привести к урав-
уравнению типа Фредгольма, регуляризируя соответствующее сингу-
сингулярное интегральное уравнение. Как видно из (9.37), оператор
Рр имеет вид
Рр = Рр + | h = Р2р + Рхр + ±h,
где
2Ь
В силу (9.37а) и (9.15)
LP(P2p)<qAPLp(p).
Поэтому в силу неравенства (9.376) оператора / — Р2 имеет об-
обратный (/ — Р2)~'. Применяя этот оператор к обеим частям
уравнения
р_Рр^р_Р2р_Р1р = ^/г, (9.39)
получаем
р- (/- P^PiP ^^{I-P^h. (9.40)
§ 9. ПРИМЕНЕНИЯ СИНГУЛЯРНЫХ ИНТЕГРАЛЬНЫХ УРАВНЕНИЯ 273
Так как оператор (/ —Р2)~' — линейный, a Pt— вполне непре-
непрерывный, то оператор (/— ?2)~iI'i является линейным, вполне
непрерывным в LP{G-\-T). Поэтому к уравнению (9.40), которое
эквивалентно сингулярному интегральному уравнению (9.39),
можно применить теоремы Фредгольма.
Таким путем мы приходим к следующим результатам:
I. Задача Дирихле для линейного уравнения L{u) = h с одно-
однородным краевым условием и = 0 {на Г) {задача D) имеет реше-
решение для любой функции h из класса LP{G+T), p>2, тогда и
о
только тогда, когда соответствующая однородная задача D не
имеет нетривиального решения. В этом случае для всякого h e
<= LP{G + Г), р > 2, задача допускает единственное решение клас-
класса Dp 2(бг + Г), р > 2, которое принадлежит также классу
Ci{G + Y), a = (p-2)/p.
Таким образом, для разрешимости задачи D достаточно до-
доказать теорему единственности, т. е. обнаружить, что соответ-
соответствующая однородная задача D не имеет решения.
II. Если однородная задача D имеет решение, то число ее ли-
линейно незивисимых решений равно числу линейно независимых
решений однородного уравнения р — (/ — P2)~'Pip = 0, причем
если р,, ..., р„ — полная система решений этого уравнения, то
функции
щ {х, у) = Пор,- =(]&> (z, ?) Pj (?) dl dr\ (/=1,..., п)
"g
о
составляют полную систему решений однородной задачи D.
III. Если однородная задача D имеет решение, то неоднород-
неоднородная задача D разрешима тогда и только тогда, когда выполнены
условия
К {I ~ Р2Г1 hdxdy^\$h(l- P^)-1 и dxdy=0 (9.41)
G
(/ = 1, ..., П),
где Xi — полная система решений союзного однородного интег-
интегрального уравнения
Х-РГи-Р2Т1Х = 0, (9.42)
где Рх и Р2 —сопряженные с Pi и Р2 операторы {их можно
первоначально рассматривать в L2, а затем расширить на Lp).
Если введем в рассмотрение новую функцию
I> = (/_Pj)-13Cl (9.43)
то % = (/ — Pj) v и уравнение (9.42) примет вид
v-P*v = 0, Р* = Р* + Рь (9.44)
18 И. Н. Векуа
274 гл- 4- КРАЕВЫЕ ЗАДАЧИ
которое можно еще записать в виде
v — (/ - Р*) Р*р = 0. (9.44а)
Таким образом, необходимое и достаточное условие (9.41)
разрешимости задачи D имеет вид
j J" h (z) v (z) dx dy = 0, (9.45)
G
где v — произвольное решение однородного сингулярного интег-
интегрального уравнения (9.44), союзного с (9.39). Это уравнение
эквивалентно уравнению Фредгольма (9.44а), поэтому оно имеет
конечное число линейно независимых решений.
3. Сделаем теперь относительно коэффициентов уравнения
следующие дополнительные допущения: 1) а, Ъ, с е ?J P(G-|-Г),
р>2; 2) d, esfl, P(G + T), р > 2. Докажем, что при этих усло-
условиях решение уравнения (9.44) является решением сопряжен-
о
ной однородной задачи D':
L* (v) == (av)xx + 2 (bv)xy + (cv)Vy — (dv)x — (ev)y + fv = 0,
v = 0 (на Г). (9.46)
Так как
то
Таккак по условию А ^ D2,P{G), Ao^ DiiP(G) и /е LP(G), p > 2,
то Р* является линейным оператором, действующим из D2 p в
А;, р. В таком случае решение v уравнения v— P*v = O также
принадлежит A ,P(G + F), p>2. Преобразовывая двойные ин-
интегралы с помощью формулы Грина, получаем
j А
G
1 Г /l /^ 5go (S. z) „s JZ , 1 i •
^l^. (9.46a)
§ 9. ПРИМЕНЕНИЯ СИНГУЛЯРНЫХ ИНТЕГРАЛЬНЫХ УРАВНЕНИЯ ?75
Нетрудно доказать, что
Поэтому, применяя еще раз формулу Грина к двойному интегра-
интегралу в правой части равенства (9.46а) и учитывая, что g0 = О на
Г, получим:
)(?> z)d—zrdldy\- (9-47)
Так как —^— = ^ —^ на Г, ге G, где v? — внешняя нор-
нормаль к Г в точке ?> то формула (9.47) может быть записана
еще так:
. (9.48)
г ь t G "ъ
Аналогично получим равенство
Я л° (z) ^Ну ® ^ dT>=- Я ^(s> z) ? ^ ^- (9-49)
G G
В силу (9.48) и (9.49) уравнение (9.44) можно записать в виде
(9-50)
Применяя теперь к обеим частям этого равенства операцию Д
и учитывая, что -^ g0 (z, ?,) = g (z, Q — функция Грина для круга,
получил! уравнение (9.46). Кроме того, устремляя в уравнении
(9.50) точку z к границе Г области G, получаем
i>(z) = ReU(z)z2b(z) (на Г).
Так как 1.41 < 1, то это равенство возможно лишь при i> = 0
на Г. Таким образом, установлено, что если v — решение урав-
уравнения (9.44), то оно является решением сопряженной однород-
однородной задачи D'. Обратное предложение также имеет место.
18*
276 ГЛ- 4- КРАЕВЫЕ ЗАДАЧИ
Рассмотрим неоднородную краевую сопряженную задачу D':
Lt (и) = /г* (в G), v = 0 (на Г). (9.51)
Ее решение, которое мы будем искать также в классе D2 р, р > 2,
очевидно, удовлетворяет интегральному уравнению
Л*(ЕI>(С) ,
1 г г
^ J J °
G
Преобразовывая первый из этих двойных интегралов с исполь-
использованием формулы Грина и с учетом краевого условия, получим
следующее интегральное уравнение, эквивалентное задаче:
v (z) — P*v = -г- \ g0 (z, Q h% (Q dl dr\. (9.52)
Отсюда видно, что однородная задача D' эквивалентна однород-
однородному уравнению v — P*v = 0.
В общем случае, когда А — измеримая ограниченная функция,
а 40е LP(G + Г), р > 2, решение уравнения (9.52), вообще го-
говоря, не принадлежит D2, P и, следовательно, нельзя его рассмат-
рассматривать как обобщенное решение задачи D' в обычном смысле.
В этом случае сопряженный дифференциальный оператор требует
специального определения.
4. Изложенный в этом параграфе метод применим и к ряду
других краевых задач. Например, рассмотрим для линейного
уравнения (9.36) вторую основную краевую задачу или, как ее
в дальнейшем будем именовать, задачу N:
L(u) = h (bG), j? = 0 (на Г) (9.53)
(v — внешняя нормаль к Г).
Эта задача была изучена В. С. Виноградовым [15а], результаты
которго мы приведем в этом пункте.
Область G по-прежнему будем считать кругом Ы < 1. Осталь-
Остальные предположения относительно коэффициентов и свободного
члена уравнения оставляем неизменными.
Решение задачи естественно искать в классе D2, P(G + F),
р > 2. Тогда его можно представить в виде
c, (9.54)
§ 9. ПРИМЕНЕНИЯ СИНГУЛЯРНЫХ ИНТЕГРАЛЬНЫХ УРАВНЕНИЙ 277
где с — некоторая постоянная, р = Аи, a g — функция Неймапа
для единичного круга:
Отметим следующие свойства этой функции:
1) 9 (z, :) = f (?, 2); 2) Щ^ = 0 (на Г, t, е G);
3)Д?=-4-; 4) J
G
Если peZ/P(G + r), р > 2, то м имеет непрерывные по Гельдеру
производные, которые вычисляются по формуле
д.2и = П1Р = j J ^|
G
причем, очевидно,
Существуют также обобщенные вторые производные, которые вы-
выражаются по формулам
причем последний интеграл следует понимать в смысле главного
значения по Коши; Шр — линейный оператор в LP(G + T), p>2
(гл. 1, § 9).
Следовательно,
L,(Пгр, G) < APLP(p, G), ЛР = LP(П2).
Совершенно так же, как это было сделано выше в отношении
оператора П2, устанавливается, что
Поэтому в силу непрерывности Ар относительно р для всякого
положительного числа q < 1 можно указать такое е > 0, что
выполняется неравенство
qhP < 1, если 2 < р «? 2 + е.
278 Гл- 4- КРАЕВЫЕ ЗАДАЧИ
Внося теперь приведенные выше выражения для искомой функ-
функции и и ее производных 1-го и 2-го порядка в уравнение L(u) = h,
получим следующее сингулярное интегральное уравнение, пол-
полностью эквивалентное поставленной задаче:
p(z)_Pp = _-l cf+±-h,. (9.55)
где
Рр = _ Re [А (г) П2р + Ао (г) ulP] - ±. f (г) Пор - ± J J p Q d| di\.
G
Этот оператор лпнеен и действует из Lp (G + T) в Lp (G + Г),
р > 2. Он имеет вид
Pp = Pzp + Pip,
где _^
P2p = -ReU(z)fi,p],
PlP = - Re [Ao (z) fflP] _ i- / (Z) ПоР _ i- J J p (Q d| d4.
G
В силу неравенства qAP < 1 оператор / — P2 имеет обратный
.(/-Ра)-1 в ?,, р>2.
Применяя его к обеим частям уравнения (9.55), мы прихо-
приходим к уравнению типа Фредгольма
р (z) - (/ - Р2)~х PlP = \ (I - Р.,) (А - с/).
Следовательно, к уравнению (9.55) мы можем применить аль-
альтернативы Фредгольма. Условие разрешимости этого уравнения
имеет вид 1 j (с/ — h) v dx dy = 0, где v — произвольное решение
союзного однородного уравнения
v - р*у = о. (9.56);
Это уравнение также эквивалентно однородному уравнению Фред-
Фредгольма. Поэтому оно имеет конечное число п линейно незави-
независимых решений. Если п = 0, то задача N имеет решение для лю-
любой правой части h. Кроме того, в этом случае однородная задача
N допускает одно (линейно независимое) решение. Это следует
из того, что задача N приводится к уравнению р—Рр = —т-с/,
которое имеет решение для любого значения постоянной с. В слу-
случае п > 0 рассмотрим постоянные /;- = J J fvjdx dy (/ = 1, ..., n),
G
где Vj — линейно независимые решения уравнения (9.56). Оче-
Очевидно, могут представиться два случая:
§ 9. ПРИМЕНЕНИЯ СИНГУЛЯРНЫХ ИНТЕГРАЛЬНЫХ УРАВНЕНИЙ 279
1) fi — 0 для всех значений / = 1, ..., п,
2) fj Ф О хотя бы для одного значения /.
В первом случае задача N разрешима только при выполнении
условий
hj = J J hvjdx dy = О (/ = 1,. .. ., га),
G
о
причем однородная задача N имеет п + 1 решений. Во втором
случае задача N имеет решение лишь при выполнении следую-
следующих условий:
c=Ji (А^О), }ц-^Ь = О (/ = 2, ...,»).
'1 >Х
Таким образом, в последнем случае на правую часть уравнения
накладывается га — 1 интегральных условий. Поэтому, если п = 1
и выполнено условие Д Ф 0, то задача N всегда разрешима и
притом имеет единственное решениг».
5. В этом пункте мы несколько дополним результаты преды-
предыдущего пункта, вводя в рассмотрение сопряженную задачу.
Сделаем теперь дополнительно следующие предположения:
1) а, Ъ, c^D2iP{G+Y); 2) d, e^DitP(G + T), p>2.
Тогда можно доказать, что решение интегрального уравнения
(9.55) принадлежит классу D2iP(G + T), p>2. Кроме того, имея
в виду, что
преобразованием двойных интегралов с применением формулы
Грина получим
P*v = - Re j J [[(Av)a - {Aov)% + i- / (?) i;] g(z, l) + ^v) dl йл -
G
(z,Qds, (9.57)
где
Следует заметить, что формулы (9.57) и (9.58) имеют место не
только для круга, но и для любой области, если функция g(z, ?)
280 ГЛ- 4- КРАЕВЫЕ ЗАДАЧИ
удовлетворяет условиям
?М = -|1п12-?1+?о» 5^ = 0 (на Г),
причем go — непрерывно дифференцируемая функция в G + Г.
В силу (9.57) уравнение (9.56) можно записать так:
v(z) + Re j
G
Лрименяя к этому уравнению операции А и у-, получим
L.,v = ^fv dl йц (в G), % - 4Q = 0 (на Г). (9.59)
Б силу (9.58) последнее краевое условие имеет вид
а* ^ + Р* -^ + Т*17 = ° (на г).
где _ _
о» = 1 - Re [4 (Q ?'2], Р* = ^ [2M(Q ?'*],
T:js = Re[- ^Г2 + 2i gs72 + 2iAlt
Таким образом, решение интегрального уравнения (9.56) пред-
представляет собой решение определенной краевой задачи (9.59),
которую естественно назвать задачей, сопряженной с задачей N.
Очевидно, а* ф 0 на Г, так как \А (?) I < 1.
6. Изложенный выше метод можно применить также к изу-
изучению краевой задачи Римана — Гильберта для эллиптической
системы уравнений, не приведенной к каноническому виду. Эта
задача была также изучена В. С. Виноградовым [15 б], результа-
результаты которого мы излагаем ниже *).
Как мы видели в гл. 3 (§ 17), эту систему можно записать
в комплексной форме так:
d-w — ?х (z) dzw — q2 (z) dzw + Aw + Bw = F, (9.60)
где qi и qz — измеримые фукции, удовлетворяющие неравенству
lgi(z)l + lgs(z)Kg.<l, (9.61)
а функции А, В и F принадлежат классу LP(G + Г).
*) Несколько видоизменяя постановку задачи, В. С. Виноградов рас-
распространил эти результаты на случай квазилинейной эллиптической си-
системы уравнений [15 в, г].
§ 9. ПРИМЕНЕНИЯ СИНГУЛЯРНЫХ ИНТЕГРАЛЬНЫХ УРАВНЕНИЙ 281
Задачу будем рассматривать для круговой области G: Ы < 1,
а краевое условие возьмем в канонической форме
Re[z-u;(z)] = i (наГ:Ы=1), (9.62)
где п — целое число. Общее краевое условие
для произвольной односвязной области G класса Cji, 0 < ц < 1,
приводится к виду (9.62) с помощью неособенного преобразова-
преобразования вида (9.2) и некоторой подстановки вида
w{z)e%[z\
которые сохраняют вид уравнения, не нарушая условия (9.61).
Кроме того, не ограничивая общности результатов, мы мо-
можем считать ч = 0.
Итак, нами будет рассматриваться следующая краевая задача.
Задача А. Требуется отыскать в круге G: |zl < 1 решение
уравнения (9.60), удовлетворяющее краевому условию
Re[z-"w(z)] = 0 (на Г). (9.63)
Решение задачи мы будем искать в классе непрерывных в G + Г
функций, принадлежащих Dit P (G + Г), р > 2.
Рассмотрим сперва случай неотрицательного индекса: п 3* 0.
Как это следует из формулы G.5) (см. еще [14з]), в этом слу-
случае искомое решение задачи можно представить в виде
w(z) = Pnf+Oo(z), (9.64)
где
Фо (z) = ianzn + 2«j (zft - 2sn-ft) + ih (*k + *2n-%
k=0
причем Ко, Ро, • • •, osn-i, Pn-i, к» — произвольные вещественные
постоянные. Для любой функции / из класса LP(G + T), p>2,
Р,/еСа(С + Г), а = - , и правая часть (9.64) удовлетворя-
удовлетворяет краевому условию (9.63), каковы бы ни были вещественные
постоянные ak, $k. Кроме того, w имеет обобщенные производные
по г и г, которые вычисляются по формулам
Bи + 1 -
(9.65)
282 гл- 4- КРАЕВЫЕ ЗАДАЧИ
Согласно теореме Зигмунда — Кальдерона Snf — линейный опе-
оператор, действующий из Lp в LP, р > 1. Внося в уравнение (9.60)
выражение (9.64) и учитывая равенства (9.65), получим для /
следующее интегральное уравнение:
f-Sf = FB, (9.66)
где
S] = ?,?„/ + q,Snf - АРп - BPnf,
F0 = F + д1Ф'о(z) U7 Щ Щ
Оператор Snj можно представить в виде
5n/
где
причем
Tf- I C?f&)dldi\ T, 1 CCJTtidldy
Я J J L, Z 1 J J 1 — z?
G G
Поэтому уравнение (9.66) мы можем записать еще в виде
f-Sf-Pnf = Fo, (9.67)
где
Sf = QiSJ + q2jnf, _ (9.68)
PJ = Bn+ l)z2nq1
Выкладки, совершенно аналогичные тем, которые позволили нам
доказать выше неравенство (9.20), дают возможность установить,
что
(Snf, ?/)<(/, /), /eL2(G + T),
причем и здесь знак равенства достигается. Это означает, что
L2(Sn) = \\Sn\\L2 = l.
Обозначая через ЛР норму Sn в Lv: ЛР = LP(Sn), в силу (9.61),
(9.68) будем иметь
LP(S)^q0AP, р>1.
Так как А2 = 1, то найдется такое р > 2, что
?0Лр < 1.
При некотором фиксированном р оператор I — S имеет обратный
(I — 5) в Lp. Следовательно, уравнение (9.67), которое экви-
эквивалентно исходной краевой задаче А, приводится к эквивалент-
эквивалентному интегральному уравнению Фредгольма
/-A-5)-'Р./-A-5)-%.
§ 9. ПРИМЕНЕНИЯ СИНГУЛЯРНЫХ ИНТЕГРАЛЬНЫХ УРАВНЕНИЙ 283
Это означает, что к уравнению (9.66) можно применять теоремы
Фредгольма. Докажем, что однородное уравнение
не имеет решения. Если / — решение этого уравнения, то функ-
функция w = Pnj является решением однородной задачи А° и, кроме
того, удовлетворяет условиям
\ w (г) z-h-idz = О, к = 0, 1, . . ., 2п. (9.69)
г
Следовательно, нам остается доказать, что решение однородной
задачи А°, удовлетворяющее дополнительно условиям (9.69),
тождественно равно нулю.
Согласно теореме 3.31 функцию w(z) = Pnf, как решение од-
однородного уравнения
d-w — qxdzw — qzdzw + Aw + Bw = 0, (9.69a)
можно представить в форме
w{z)=*<J>[W(z)]e»M, (9.70)
где W (г)—некоторый гомеоморфизм плоскости z на плоскость
W, Ф — голоморфная функция в области W{G) и ф(г)—функ-
ф(г)—функция класса DiiP(E), p>2, причем она голоморфна вне G и об-
обращается в нуль на бесконечности. В силу краевого условия
(9.63) имеем:
Re{z-"O{H/(z)]eIf<z)}=0 (на Г).
Делая замену переменных t, = W(z), получаем для функции
Ф( краевое условие вида
= 0 (на IV), (9.71)
где ГС = ЩГ)
Нетрудно видеть, что indA0(?) — 0 относительно кривой Г?. В си-
силу теоремы 4.7 решение Ф(?) краевой задачи Римана — Гиль-
Гильберта (9.70) не может иметь более чем In нулей в замкнутой
области G + Г. Следовательно, согласно (9.70) и функция w(z)
не будет иметь более 2га нулей в G + Г. Но в силу краевого ус-
условия (9.63) z~nw(z) принимает на Г чисто мнимые значения.
Пусть ио(х, у)—гармоническая функция в G, удовлетворяющая
условию
uu=*iz-nw{z) (на Г). (9.72)
284 Гл- 4- КРАЕВЫЕ ЗАДАЧИ
В силу условий (9.69) и0 удовлетворяет равенствам
J uoeih*dft = О (Л = 0,1,..., га),
о
Отсюда следует, что ио(х, у) имеет вид
и„(а\ */)
Где ф0 — голоморфная в G функция. Это означает, что через на-
начало координат проходит не менее 2п + 2 линии уровня иа = 0.
Если Ко тождественно не равно нулю, то эти линии уровня пе-
пересекаются с окружностью Г в 2п + 2 различных точках. Но в
силу (9.72) из этого следует, что w(z) имеет не менее чем
2п + 2 нулей на Г, мы пришли к противоречию, которое доказы-
доказывает, что w = 0.
Таким образом, установлено, что уравнение (9.66) имеет ре-
решение для любой правой части из Lp. Так как правая часть
уравнения (9.66) содержит линейно 2п + 1 произвольных вещест-
вещественных постоянных, то и его решение содержит линейно эти
постоянные.
Таким образом, доказано, что неоднородная задача А всегда
разрешима, а соответствующая однородная задача А° имеет
2п + 1 линейно независимых решений.
Переходим к рассмотрению случая отрицательного индекса.
В этом случае, как следует из уравнения G.32), искомое реше-
решение задачи А можно представить в виде
где к — — п>0, а /—искомая функция класса LP(G + Г), р > 2,
которая должна удовлетворять следующим равенствам:
°'М ^ -"И J^ + К2'1) dl*i = 0 0=1,...,*).
G
(9.74)
Всего здесь имеется 2к — 1 вещественных равенств. Рассматри-
Рассматривая подпространство элементов пространства LP(G + Т), удов-
удовлетворяющих условиям (9.74), обозначим его через LPi2h~i(G + Г).
Для любого элемента / подпространства LPi 2ft-i(G + F) функция
(9.73) удовлетворяет однородному краевому условию (9.63).
Внося выражение (9.73) в дифференциальное уравнение (9.60),
получим для / следующее интегральное уравнение:
F, (9.75)
§ 9. ПРИМЕНЕНИЯ СИНГУЛЯРНЫХ ИНТЕГРАЛЬНЫХ УРАВНЕНИЙ 285
где
Рассматривая сингулярный интегральный оператор
можно доказать, что его норма в L2 равна 1, т. е.
Lt(St) = l. (9.76)
Рассматривая теперь Sof = qxShj-\-q2Shj как оператор в
Lp (G + Г), р > 2, получим
В силу (9.76) найдется такое р>2, что
q0Lp{S*h)<:l, ?0<1.
В силу этого оператор I — So обратим в Lr(G + Г). Применяя
к обеим частям уравнения (9.75) обратный оператор (I — SoI,
получим эквивалентное уравнение с вполне непрерывным опе-
оператором. Отсюда следует, что к уравнению (9.75) применимы
теоремы Фредгольма. Пусть / удовлетворяет уравнению / — S*j =
= 0. Представим / в виде f = fo + h, где /osLVi2h-i(G), fk =
= cozh~l + Cizk~2 + ... (со = Co). Полином fh однозначно определяет-
определяется из равенств aj(f — fh) = Q (/=1, ..., к). Если представим
w—-Phf как решение уравнения (9.69а) в виде (9.70) и учтем,
что -Pft/o удовлетворяет условию (9.63), то получим
Re{zft(D [W{z)\ е*ч><2>} = Re fh на Г,
где fk— полипом (к— 1)-й степени от z. Далее, рассуждая так
же, как выше (с. 284), мы докажем, что /^==0, Ф = 0 и, сле-
следовательно, w = 0. Это доказывает разрешимость уравнения
(9.75) для любой правой части из класса LP(G + Г), р>2. Таким
образом, решение уравнения (9.75) можно представить в виде
/ = (I — S*)~lF. Это решение мы должны подчинить еще условиям
(9.74). В результате мы получим следующие 2к — 1 интегральных
условий разрешимости неоднородной задачи А:
G
i + Л) dxdy = 0 (/" = 1 2Л— 1), (9.77)
где Fi и F2 — вещественная и мнимая части функции F, a %j
и %з — вполне определенные линейно независимые функции.
286 ГЛ- 4- КРАЕВЫЕ ЗАДАЧИ
Таким образом, при п < 0 однородная задача А° не имеет не-
нетривиального решения, а неоднородная задача А разрешима лишь
при выполнении равенств (9.77).
§ 10. Замечания о некоторых работах, относящихся
к задаче А. Постановки более общих проблем
1. Как уже отмечалось выше, задача А впервые была изучена
Гильбертом [26а] для системы уравнений Коши — Римана. Она
представляет собой частный случай более общей задачи, постав-
поставленной еще Риманом в его знаменитой диссертации ([76], с. 78—
80). Задачу Римана можно сформулировать так: отыскать ана-
аналитическую в области G функцию w(z) = u + iv, удовлетворяю-
удовлетворяющую в каждой граничной точке соотношению вида
F(u, v) = 0 (на Г).
Однако Риман высказал только общие соображения относи-
относительно разрешимости этой задачи и метода ее решения. Впервые
Д. Гильберт исследовал случай линейного краевого условия ви-
вида аи+ $v = 4 (на Г), посвятив ему две работы (см. [26а], гл. 10).
В работе [266] задача приводится к сингулярному интегральному
уравнению, при исследовании которого были допущены некоторые
неточности, приведшие к неверным формулировкам. Другой ме-
метод решения задачи для односвязной области был предложен
Гильбертом позже в работе [26а] (с. 82—83). Случай многосвяз-
многосвязной области рассмотрен впервые Д. А. Квеселавой [39а]. Им уста-
установлен ряд важных признаков разрешимости задачи, в частности
разобран случай п = 0.
Случай разрывных коэффициентов исследован Н. И. Мусхе-
лишвилп [60а]. Более общие краевые задачи рассматривались в
работах Ф. Д. Гахова [23], И. Н. Векуа [146, ж], Д. И. Шермана
[94*], Н. П. Векуа [14*а], Б. В. Хведелидзе [91] и др.
Следует отметить, что появление работы Гильберта [266], не-
несмотря на отмеченные дефекты, имело важное историческое зна-
значение. Она наряду с работой А. Пуанкаре [73], посвященной за-
задаче теории приливов, в значительной мере стимулировала раз-
развитие исследований по теории сингулярных интегральных урав-
уравнений и краевых задач для аналитических функций.
Впервые Гильберт рассмотрел также краевую задачу для си-
системы уравнений эллиптического типа [26а] (гл. 17)
их — vy + au + bv — f, uy + vx + cu + dv = g, A0.1)
и = ч (на Г). A0.2)
Он исследовал эту задачу при помощи интегральных уравнений
типа Фредгольма. Однако в его рассуждения вкрались неточно-
неточности, которые привели к ряду неверных формулировок ('[26а],
§ 10. ЗАМЕЧАНИЯ О РАБОТАХ, ОТНОСЯЩИХСЯ К ЗАДАЧЕ А 287
с. 219, теорема 43). Эти неточности отмечены в работе Гель-
вига [24].
Общей краевой задаче для системы уравнений A0.1), назван-
названной нами выше задачей А, посвящены работы Гурвпца [29], Усма-
нова [89а, б], Гаака и Гельвига [21], Гаака [20], Гельвига [24а, в],
И. и И. Ниче [62], Йог. Ниче [63а, б, в], Иоах. Ниче [64а],
Ф. Д. Гахова и Э. Г. Хасабова [23*а], [23а]. В более общем виде
эта задача изучена в работе автора [14а]. Основные результаты
последней работы, дополненные рядом новых результатов автора,
а также Б. В. Боярского (см. добавление к гл. 4) и В. С. Вино-
Виноградова [15а, б], изложены в настоящей главе. Приближенный
метод решения задачи А разработан в работе Л. С. Клабуковой
[40*]. Краевым задачам для эллиптической системы уравнений
общего вида посвящены также работы Л. Берса и Л. Ниренберга
[7а, б].
Б. В. Боярским изучены краевые задачи для системы урав-
уравнений A0.1) с граничными условиями вида ([На, а'])
Re L (t) w (t) + J b0 (t, tj w (fx) dt} = у @ A0.3)
и
Re[aa(t)dtw+bt(t)w] = 4(t) lao(*)l = 1. A0.4)
Вводя в рассмотрение сопряженные к ним однородные задачи,
он установил необходимые и достаточные условия разрешимости
задач A0.3) и A0.4), а также получил важное соотношение
Z-Z' = 2ra-3(m-l), A0.4а)
где I и Г — числа решений взаимно сопряженных однородных
задач, п — индекс функции ao(t) и т+1 — порядок связности
области.
В последнее время И. И. Данилюк предложил новый способ
исследования задачи A0.4) [11 г, д, е]. Отметим некоторые его
результаты. Беря исходное уравнение в виде д-w + Bw = 0 и
вводя в рассмотрение комплексный вектор F с компонентами
w = u+ iv, wz и w, задачу A0.4) можем привести к эквивалент-
эквивалентной задаче вида
d-F + AlF + В±? = 0 (в G), Re [gx (t) F] = у (на Г), (.)
где AiBi и gi — матрицы, которые выражаются в явном виде при
помощи коэффициентов исходной задачи. К задаче (*) можно
применить методы, развитые в этой главе для решения зада-
задачи А. Здесь в качестве сопряженной задачи выступает задача
d-F' — A[F' —1i'j?' = 0 (в G),
Re [g'r1 (t)F'] = 0 (на Г)
288 ГЛ- 4- КРАЕВЫЕ ЗАДАЧИ
и в соответствующей форме получаются необходимые и доста-
достаточные условия разрешимости задачи A0.4). В частности, дается
новое доказательство формулы A0.4а). Важно еще выяснить,
в каких случаях можно найти отдельно значения I и V. Для этой
цели вводится в рассмотрение краевая задача, содержащая ве-
вещественный параметр: B = hB0, b = Xb0. Ограничившись рассмот-
рассмотрением случая односвязной области, эту задачу можно привести
к интегральному уравнению Фредгольма вида F — TXF = Ф, сле-
следуя пути, указанному выше в § 7 (пп. 2, 3). Доказывается, что
оператор Т% может иметь лишь дискретный спектр Л. Отметим
один важный результат, вытекающий из этих рассмотрений. Если
п Ss 0 и К Ф А, то I = In + 3 и V = 0. Если же п < 0 и I Ф Л, то
/ < 2, причем фактически можно реализовать все случаи I =
= 0, 1, 2.
2. Как увидим в гл. 5 (§ 8), к краевой задаче A0.4) приво-
приводятся многие геометрические задачи.
Укажем теперь на некоторые другие краевые задачи, изуче-
изучение которых представляет интерес, в особенности с точки зрения
геометрических приложений.
I. Пусть Г — простая замкнутая кривая класса CJ,. Пусть
v(t) — комплексная функция точки t контура Г, которая реали-
реализует гомеоморфное отображение этого контура на себя. Пусть в
области G, ограниченной кривой Г, требуется отыскать решения
uh и ц72 уравнений
d-zWj + Ар; + В§п} = 0 (/=1,2), A0.5)
удовлетворяющие граничным условиям вида
[с*! @ w (t) + а2 (t) wt (t) + а3 (t) dtw1 (t) + a4 (t) dp>]t=v(t) =
= a5 (z) w2 (z) + a6 (z) w2 (z) + a, (z) dzw2 + a8 (z) d-zw2, A0.6)
где <Xj(t)—заданные функции точки кривой Г. Коэффициенты
уравнений A0.5) принадлежат классу LP(G + T), p>2. Эта за-
задача представляет собой обобщение известной задачи Карлемана
для аналитических функций [386]. К такой обобщенной постанов-
постановке задачи Карлемана приводит, например, геометрическая задача
о склеивании поверхностей положительной кривизны (см.
гл.5, § 8).
В связи с этим представляет интерес установление признаков
наличия или отсутствия нетривиальных решений у задачи A0.6).
Заметим, что в геометрических задачах можно считать х (t) = t.
II. Пусть G+ и G~ — внутренняя и внешняя области ограни-
ограниченной кривой Г. Требуется отыскать решение в G+ и G~ урав-
уравнения
01 A,Be=LPA(E), p>2, A0.7)
ОБ ОСОБЫХ СЛУЧАЯХ ЗАДАЧИ РИМАНА — ГИЛЬБЕРТА 289
удовлетворяющее краевому условию вида
[a, (t) w+(t) + a2 (t) w+ (t) + a3 (t) (dtw)+ + a4 (t) (d-tw)+]t!=v(z) =
= a (z) w~ (z) + a (z) w~ (z) A0 8)
где v(?) — по-прежнему гомеоморфизм контура Г на себя, а,- —
заданные функции точки fef. Постановка этой задачи, так же
как и предыдущей задачи, обобщается на случай многосвязной
области. К задаче вида A0.7) — A0.8) можно привести указан-
указанную нами выше геометрическую задачу.
III. Представляет интерес также исследовать задачу A0.4)
в том случае, когда функция ao(t) обращается в нуль на некото-
некоторой части границы области. Существуют простые геометрические
задачи, которые приводят к этому случаю (гл. 5, § 8).
Добавление к главе 4
ОБ ОСОБЫХ СЛУЧАЯХ ЗАДАЧИ РИМАНА — ГИЛЬБЕРТА
Б. Боярский
о
Особыми случаями задачи Римана — Гильберта (задачи А)
ReUO}=0 (на Г), <Be«0(G), A)
мы называем случаи, когда индекс п задачи удовлетворяет не-
неравенству
В дальнейшем, продолжая рассуждения §§ 7—10 гл. 4, мы при-
приведем ряд результатов, относящихся к особым случаям задачи
Римана — Гильберта. Эти результаты выясняют качественную
о
картину соотношений разрешимости задачи А в указанных
случаях.
В соответствии с результатами § 4 мы ограничимся случаем,
когда область G ограничена контуром Г, являющимся совокуп-
совокупностью окружностей Го, rf..., Тт, причем Го — единичная окруж-
окружность и все Г,-, j ^ 1, находятся внутри Го. Пусть точка z = 0
принадлежит области G. Задачу A) приведем к каноническому
виду C.14), причем будем считать Qn(z) = (z — a)-n. Через %{а),
a^G, будем обозначать класс функций Ф(г), аналитических в G
и непрерывных всюду в G + Г, за исключением точки z = а, где
функции O(z) могут допускать полюс порядка не выше п. При
а = 0 положим $«@) = $,,. Тогда легко видеть, что задача A)
эквивалентна следующей задаче.
19 И. Н. Векуа
290 ГЛ. 4. КРАЕВЫЕ ЗАДАЧИ
Задача А„. Найти функцию ФB)е<р„(а) по граничному
условию
Re[e-*ia(f)cD@] = 0, B)
где a(t) — кусочно постоянная вещественная функция на Г:
а(?) = а3- = const на Т}, / = 1, . •., пг; а0 = 0. Если задана функ-
функция K(t) на Г и фиксирована точка а внутри G, то функция a(t)
или последовательность а,- (/ = 1, ..., пг) определяется по фор-
формулам E.68) и E.69) однозначно. Если последовательность а,-
заменить последовательностью ctj такой, что щ = щ (mod 1) для
всех /, то, очевидно, задача А„ не изменится. Поэтому естествен-
естественно последовательность чисел a, (j = 1, ..., пг) считать точкой с
действительного m-мерного тора Тт. Тогда при каждом фикси-
фиксированном п тор Тт представляет собой многообразие всех задач
о
А„. С другой стороны, каждая задача А вида A) имеет согласно
формулам E.68) и E.69) вполне определенного представителя
о
среди задач А„, полностью эквивалентного данной задаче А. Ка-
Качественная сторона соотношений разрешимости задач А и А„
совершенно одинакова. Мы перейдем сейчас к разбору этой по-
последней задачи.
1. Предварительно приведем две простые леммы о решениях
задачи А„. Эти леммы сформулированы несколько более общо,
чем это необходимо в дальнейшем.
Лемма 1. Всякая функция Ф(г), мероморфная в G, непре-
непрерывная на Г и удовлетворяющая граничному условию B), ана-
аналитически продолжима через Г.
Доказательство. Это следует непосредственно из прин-
принципа симметрии, ибо, по нашему предположению, G — круговая
область, а условие B) означает, что на плоскости переменной Ф
граничные значения функций Ф(г) на Г3- лежат на прямой
Пе{е-л1аЩ =0.
Лемма 1 остается в силе, если допустить наличие на Г конеч-
конечного числа точек, при приближении к которым изнутри G функ-
функция Ф(г) стремится к °°. Для доказательства достаточно рас-
рассмотреть функцию Ф4 = 1/Ф в окрестности этих точек. В силу
леммы 1 названные точки являются полюсами конечного порядка
функций Ф(г).
Пусть мероморфная функция Ф(г), удовлетворяющая гранич-
граничному условию B), принимает в G + T некоторое значение h.
В силу леммы 1 каждая /i-точка функции Ф(г) в G + T обладает
определенной конечной кратностью. Обозначим через Na(h)
сумму кратностей всех /i-точек функции Ф(г), расположенных
внутри G. Через NtjQi) 0 = 0, 1, ..., m) обозначим сумму
m
ностей /i-точек функции Ф(г) на Г3-. Пусть NT(h) = 2 Np.Q
i=o '
ОБ ОСОБЫХ СЛУЧАЯХ ЗАДАЧИ РИМ AHA — ГИЛЬБЕРТА 291
Лемма 2. Для всех конечных h-точек функции Ф(г), удов-
удовлетворяющей граничному условию B), не равной тождественно
постоянной и непрерывной на Г, имеет место формула
2Na{h) + NT(h) = 2Na{«>), C)
где Na(°°)—сумма кратностей всех полюсов функции Ф(г)
внутри G. Все числа Nrj (h) четны.
Доказательство. Рассмотрим функцию qp(z) = Ф(г) — h.
В силу леммы 1 эта функция имеет лишь конечное число нулей
в G + Г. Пусть Zi, ..., zp — совокупность ее нулей внутри G,
a Zj, z2; ...,zr — совокупность нулей на Г. Пусть t,u ..., ?s —
полюсы Ф(г) внутри G. Выберем е>0 настолы;о малым, чтобы
гругн Кг с центрами в полюсах функции cp(z) или ее нулях на
Г не пересекались. Удаляя из области G сумму этих кругов, по-
получим некоторую область Ge, ограниченную контуром Ге, причем
при достаточно малом s все точки zt, ..., zv лежат внутри Ge,
а точки ?i, ts и z{, ...,zr— вне Ge. Согласно принципу ар-
аргумента имеем
NG (h) = ± lim АгЕ arg Ф (г) = 2 N <&) т
где N(E,h)—кратность полюса t,k и N {z'h) — кратность нуля zk.
Первая сумма не вызывает сомнений. Поэтому рассмотрим
лишь вторую. Она представляет собой сумму приращения
arg ф вдоль несколько деформированных граничных кри-
кривых Yj\ при движении вдоль кривой Г,-, приближаясь
па расстояние е к какому-нибудь нулю z'h, следует перейти на
дугу окружности радиуса е с центром в zft. Но в силу граничного
условия B) на участках Г k г граничной линии Г^, между двумя
соседними нулями zk и zj, argcp(z) не получает никакого при-
приращения, ибо там <f(z) = — h + ip(z)emai, p(z) действительна и
не обращается в нуль, т. е. значения cp(z) покрывают конечный
отрезок некоторой прямой, причем значения ф (z) на концах Г/ г
равны. Поэтому, если эта прямая не проходит через начало коор-
координат, то А , , arg ф = 0. Если же рассматриваемая прямая про-
ходит через начало, то в силу условия, что ф (z) Ф О на Tj ,
значения ф (z) на Г/ г расположены лишь на одной полуоси рас-
рассматриваемой прямой. Поэтому также в этом случае А , ,аг?ф=
= 0.
19*
292 ГЛ. 4. КРАЕВЫЕ ЗАДАЧИ
Итак, argcp получает отличное от нуля приращение лишь при
движении по дугам окружностей радиуса е с центрами в точках
Zft. Но при е -»- 0 рассматриваемые дуги переходят в полуокруж-
полуокружности, и тогда в силу леммы 1 можем написать формулу D) и
тем самым формулу C). Одновременно мы видим также, что
-rj-iVr. (&) — целое, т.е. Nv^h) — четное число при любом / и h.
Лемма 2 полностью доказана.
Лемма 2 является уточнением формулы D.17) в применении
к задаче А„. Доказательства обеих формул также по существу
совпадают.
Следует отметить, что лемма 2 не переносится на общий слу-
чай граничной задачи А, ибо ft-точки при переходе к канониче-
каноническому виду задачи не инвариантны, если h Ф 0.
Из леммы 2 немедленно следует новое доказательство нераз-
неразрешимости задачи E.2) (§ 5, п. 1), если не удовлетворяются
условия а, = 0 (mod 1).
В самом деле, тогда 7VG(°°) = 0 и, в силу C), NG(h) = Nv{h) =
= 0, т. е. функция Ф(г) = const = с. В силу граничного условия
B) с Ф 0 лишь при условии щ = 0 (modi), / = 1, ..., т.
Для полного изучения задачи А„ в классе SPi нам понадобится
следующая лемма.
Лемма 3. Пусть Ez — область плоскости переменного z, огра-
ограниченная радиальными разрезами Ih (k = 0, I, ..., m) конечной
длины, расположенными соответственно вдоль прямых lh:
Re(e~"iaA:z) = O; ao = o. Если функция Ф = Ф(г) отображает Ег
конформно и однолистно на область Еф плоскости переменного
Ф, ограниченную разрезами In, расположенными вдоль тех же
лучей lk соответственно, причем ф(оо) = оо5 то Ф(г) = cz + ic, где
с и с — действительные постоянные. сФО лишь при условии
ак = 0 (mod 1) для всех к = 1, 2, ..., пг.
Доказательство. В условиях леммы функция Ф(г) имеет
простой полюс в точке z = °°, причем Пт (Ф (z),'z) = у =^= 0. Отме-
Z->oo
тим, что главная суть леммы состоит в том, что мы не делаем ни-
никаких предположений ни относительно расположения нуля функ-
функций Ф(г), ни относительно числа у.
Рассмотрим сначала тот случай, когда Ф@) = 0. Нетрудно
убедиться, что функция ф(г) = Ф(г)/г ограничена всюду. Это
очевидно, если точка z = 0 не лежит ни на одном из разрезов Д.
Если z = 0 лежит внутри отрезка /&„, 0 < к0 < т, то ограничен-
ограниченность cp(z) обеспечивается леммой 1. В случае же, когда точка
z = 0 есть конец одного из отрезков /„, пусть это будет отрезок /„,
мы не можем применять лемму 1. Расположим /0 вдоль положи-
положительной действительной полуоси и отобразим при помощи функ-
функции ? = /(z) внешность отрезка /0 на внутренность некоторой
гладкой кривой, например окружности К, так, чтобы точка z = 0
ОБ ОСОБЫХ СЛУЧАЯХ ЗАДАЧИ РИМАНА — ГИЛЬБЕРТА
293
оставалась неподвижной, /@) = 0. Очевидно, /(z) имеет вид
/(z) = /i(?), I = 1/z, в окрестности точки z = О, где Ml) — анали-
аналитическая функция переменного |, /i@) = 0, /i(?)/? ограничена
при | -»- 0. Функция Ф4A;) = Ф(г) удовлетворяет граничному ус-
условию вида B) на К-\-К', где ./?' — совокупность образов отрез-
отрезков Lh, кФО, при отображении ? = /(z). Кроме того, Ф4(?) равна
нулю при ? = 0 и имеет полюс 1-го порядка при ? = °°. Одновре-
Одновременно с Ф(г) она не исчезает ни в одной точке ?^0, принадле-
принадлежащей области, ограниченной кривыми К + К', ни на самих этих
кривых. Так как кривая К — окружность, то мы можем приме-
приме,
нить лемму 2. По формуле C) получим, что
в точности 2-го порядка в точке ? = 0, т. е.
имеет нуль
ФB)
Ф, @ f (z)
h Щ
*2
2
<
Ф1
s
/j A)
т. е. Ф(г)/г ограничено.
Таким образом, ограниченность cp(z) доказана. Но в силу
условия леммы Imqp(z) = 0 на /Й, к = 0, ..., т, откуда следует,
что ф(г) может быть только действительной постоянной.
Пусть Ф@) = 1е-Я1'е?=0.
Опять вводим функцию ф(г) = (Ф(г) — Ф@))/г и, так же как
и выше, убеждаемся, что ф(г) ограничена всюду на Ez, включая
точки z = °°. Кроме того, она удовлетворяет граничному условию
Im ф (z) = — Im0-^ = 4^ на /
\z\ = t,
где
pft = — Im e
.оо (к = 0,1,...,т),
;«й-в) = _sin2n(ak — 9).
E)
F)
G)
Если z = 0 (т. e. t = 0) принадлежит какому-нибудь из интерва-
интервалов [^r^fej5 определяющих отрезки Ik, то по условиям леммы соот-
соответствующее ph = 0. Поэтому в крайних неравенствах F) мы на-
написали знак строгого неравенства. Функция <p(z) = u+?i> есть
ограниченное и однозначное решение неоднородной задачи Ди-
Дирихле E) для области Ez. Покажем, что такое решение сущест-
существует лишь для рй = 0, /с = 0, 1, ..., т. В этом случае оно являет-
является действительной постоянной.
Рассмотрим случай, когда все ps Ф 0. Тогда, если среди них
есть как отрицательные, так и положительные, то мы сразу по-
получаем противоречие. В самом деле, если ф(г) не постоянная,
то каждый граничный континуум области q>(Ez) (y{Ez)—образ
области Ег) лежит в силу E) над отрезком оси v, v = ph/t,
0<ith<it<ith, т. е. целиком над отрицательной или положитель-
положительной мнимой полуосью, причем имеются налицо континуумы обоих
видов. Но такая область, очевидно, не может быть ограниченной.
294 ГЛ. 4. КРАЕВЫЕ ЗАДАЧИ
Итак, все рк — одного знака. Пусть pft>0, к = 0, 1, ..., т.
ds
В силу E) -г- = i^® на положительной стороне it и
^j = — > U на отрицательной стороне 1^ (положительном мы
назвали ту сторону, которая ири движении по Д в сторону возра-
возрастающих t остается слева).
-^ du dv n T+ du n j—
Отсюда — = — -j-s > 0 на Ih и — < 0 на Ih , т. е. при движе-
движении в положительном направлении вдоль каждой из кривых, огра-
ограничивающих область ф (Ег), мы должны двигаться всегда таким
образом, чтобы внутренности этих кривых оставались справа.
Но это невозможно, если <$(EZ)— ограниченная область, ибо
тогда хотя бы на одном контуре мы должны двигаться в проти-
противоположном направлении.
Аналогично можно рассмотреть случай, когда некоторые из
чисел ph равны нулю. Таким образом, предположение, что cp(z)
не есть постоянная, приводит к противоречию. Поэтому <p(z) =
= с = const, откуда получаем, что рч = О для к = 0, 1, ..., m и
что с — действительно. Этот результат совмевтим с G) лишь при
ah = 0, к = 1, 2, ..., т, причем тогда также 9 = 0. В противном
случае должно быть Ф @) = 0.
Таким образом, лемма 3 доказана полностью.
Из лемм 2 и 3 получается следующая
Теорема 1. При п = 1 любое решение Ф(г) задачи Ai в
классе $i, удовлетворяющее условию Ф(°°) = 0, осуществляет кон-
конформное отображение области G на плоскость переменного Ф с
разрезами вдоль прямых Re [е~яг<ХйФ] =0 (к = 0, . . ., т).
Если Ф1 и Ф2 — два таких решения, то Ф2 = сФ1 + Фо, где с —
действительная постоянная, а Фо — решение задачи Ао в классе %.
Доказательство. В силу условия Ф@) = » в равенства
C) имеем 2NG(h)-\-NT(h) = 2 для любого конечного значения h,
принимаемого функцией Ф(г) в G + Г. Отсюда, если Nv{h) = 0,
то NG(h)=l, т. е. если Ф(г) не принимает значения h на грани-
границе Г, то Ф(г) принимает его внутри в точности один раз. Если
же значение h принимается функцией Ф(г) во внутренней точке
области, то NG(h)=l и Л^г(^) = 0, т. е. оно не принадлежит гра-
граничным значениям функции Ф(г) на Г. Так как в силу гранич-
граничного условия B) и непрерывности Ф(г) на Г граничные значе-
значения Ф(г) принадлежат ограниченным отрезкам /, расположенным
вдоль прямых lh, Ф = ipke2ni<Xh, Pu —действительная функция точ-
точки (еГ6, то Ф(г) отображает конформно и однолистно область G
на плоскость с разрезами Ih. Таким образом, первая часть теоре-
теоремы доказана. Следует отметить, что области, о которых говорится
в теореме, могут не совпадать с обычно используемыми канони-
каноническими областями с разрезами, так как не исключается, что
ОБ ОСОБЫХ СЛУЧАЯХ ЗАДАЧИ РИМАНА — ГИЛЬБЕРТА 295
один из разрезов 1к проходит через начало координат. Очевидно,
два разреза 1к не могут проходить через начало. В самом деле,
гогда на двух контурах Ik и Ih> функция Ф(г) принимала бы
значение 0. В этом случае было бы iVrs@)I>0 н Nrh, @) > 0,
и так как N'Th @) и ЛгГа,@) четны, то NVk @) > 2 и NTk, @) > 2,
что противоречит формуле C).
Остается доказать второе утверждение теоремы.
Пусть CDi(z) и Ф2(г) — два линейно независимых решения
рассматриваемой задачи. Тогда, в силу только что доказанного,
сложная функция Ф2(ФГХ) =/(Ф1) осуществляла бы конформное
отображение области с разрезами вдоль прямых Lh на область
с разрезами вдоль тех же прямых. В силу леммы 3 /(Ф1) = сФ4 4-
+ ic, где с и с — действительные постоянные. Если с = 0, то
Ф2(г) = cOi(z), что противоречит предположению. Если же с^=0,
то в силу леммы 3 ak = 0 (modi), к = 1, ..., т. Тогда постоян-
постоянная ic есть решение задачи в классе Ч$о, и мы получаем O2(z) =
= сФ{(г)+ ic, что и требовалось.
2. Для дальнейшего необходимо сформулировать задачу, со-
сопряженную задаче А„. Для наших целей удобно принять следу-
следующее определение.
Задача Аи. Найти функцию ty(z) е Э?п/, п' = т — п—1, по
граничному условию
Re[z"-1zVia<z)T|)(z)] = 0 (на Г). (8)
Переход от задачи Ап к задаче, сопряженной в смысле определе-
нин § 2 гл. 4, осуществляется простой подстановкой вида 'ф = —.
Z
В частности, 1п и 1п — числа линейно независимых решений за-
задач Ап и Аи — соответственно связаны соотношением D.24)
In—l'n = 2n — m + l. (9)
При п < т — 1 числа ln — L{ot.) и 1п (а) зависят как от ге, так и
от точки а ^ Тт, определяющей задачу А„. Ниже перечислим
некоторые свойства чисел V и 1п в зависимости от п,
Первое из этих неравенств следует из того, что $n+i => фп, причем
при переходе от $„ к $п+1 появляются лишь две линейно неза-
независимые (относительно $„) функции l/z"+1 и i/zn+l. Наоборот,
при переходе от п к ге + 1 в задаче Ап имеем $„_„_!=> *рт_„_2.
Этим доказывается второе из неравенств A0).
Ниже воспользуемся следующей оценкой для 1п при п^т— 1:
max@, 2rc-m + l)<Zn<m. (И)
296 ГЛ. 4. КРАЕВЫЕ ЗАДАЧИ
Первая часть оценки следует из (9), пбо1п^0. Согласно перво-
первому неравенству A0), /и< lm-i = 4-i + 2 (пг — 1) — пг + 1 =
= Zm_!+ пг— 1^.т, ибо /т_х есть число линейно независимых
решений граничной задачи с граничным условием вида (8) в
классе $0. Но эта задача эквивалентна задаче А в классе $ и
согласно следствию из леммы 2 она имеет не больше одного
решения.
Таким образом, оценка A1) доказана.
Теорема 2. Если ln = 2n — m+ l для некоторого п<тп, то
1п, = In' — пг + 1 для всех п > п.
Доказательство. Если /„ = 2ге— т.+ 1, то согласно (9)
l'n = 0, но тогда в силу A0а) l'n, = 0, откуда 1п, = 2п — тп -\- 1.
Теорема 3. Для любого п^тп — 1 имеет место оценка
1п<п+1. A2)
Эта оценка — точная.
Доказательство. Прежде всего заметим, что, учитывая
(9), легко убедиться, что оценка A2) эквивалентна следующей
оценке: ln + In^m + 1. Нам удобнее доказывать это последнее
неравенство. Пусть Ф17 . . ., Ф?п и т^, . . ., ifn —полные системы
решений однородных задач соответственно А„ и Ап.
Рассмотрим произведения ф;й = Ф,г(:Л, / < /„, k^.ln. В силу
граничных условий B), (8) и определения классов $„ и Ч$П'
эти произведения будут решениями граничной задачи
Re {izm-'z>j7t} = 0 A3)
в классе 4$m-i, ибо п + п' = пг — 1. Пусть Г — число линейно неза-
независимых решений задачи A3) в классе spm-t. Так как прираще-
приращение аргумента функции zm~V вдоль Г равно нулю, то подста-
подстановкой вида E.68) можно, очевидно, привести эту задачу к экви-
эквивалентной задаче Ап-1 в классе 9Jm-i. Согласно A1) будет l^m.
Для доказательства теоремы достаточно еще показать, что
среди произведений <рЛ по крайней мере In + In — 1 линейно не-
независимых. Тогда In + In — i^l^m, что, как мы уже отмечали,
эквивалентно A2). Чтобы подсчитать число линейно независи-
независимых функций среди произведений <р;й, без ограничения общности
можно предположить, что в ряду Фх, ...,Ф(П функции расстав-
расставлены в порядке возрастания порядка полюсов в точке z = 0, при-
причем если Ф3- и Ф^+1 имеют равные порядки полюсов, например щ,
то мы считаем, что в окрестности z = 0 Ф^ (z) = — + . ..,
z ;
Ф^-+1 (z) = ——f- . .. В таком же порядке расставляем функ-
z z
ции ч|>1,..., г|зрп- Тогда легко видеть, что произведения Фц, Ф2ц • •.
ОБ ОСОБЫХ СЛУЧАЯХ ЗАДАЧИ РИМ*АНА — ГИЛЬБЕРТА 297
•••' СР;П и Ф;п,' Ф;, „'•••' Ф ' линейно независимы. Но их
в точности In + l'n — U откуда 1п + I'n^e + 1, что и требовалось
доказать.
Примеры, показывающие точность оценки A2), будут при-
приведены ниже (см. также § 5, п. 8 гл. 4).
3. В силу A1) для п<0жп>т — 1 имеем
,2n-m + l). A4)
Через Rn будем обозначать множество тех точек a = {ait ..., ат}
тора Тт, для которых имеет место формула A4). Пусть CRn —
дополнение Rn до Тт. Тогда теорему 4.10 можно в терминах мно-
множеств Rn высказать следующим образом: в неособых случаях
задачи Римана — Гильберта (п<0, п> m — \) CRn есть пустое
множество. Наоборот, как мы сейчас увидим, в особых случаях
CRn никогда не пусто. Это означает, что при 0 ^ п ^ пг — 1 для,
о
любой области существует задача А (или А„), число линейно
независимых решений которой не вычисляется по формуле A4)
(оно больше).
Сформулируем свойства множеств Rn, немедленно следующие
из фактов, приведенных в пп. 1 и 2:
1) CR0^CR1s ... c=CRnc=CRr-, для «<[¦?
2)
г
Cboiictbo 1) совпадает с первой частью неравенства (Ю)г
свойство 2) следует из теоремы 2.
Таким образом, самыми массивными являются множества
Щ CRr
Ы
4. Лемма 3, следствие из леммы 2 и теорема 1 позволяют
полностью описать структуру множеств CR0 и С7?4. Именно:
а) CR0 состоит из одной точки а — @, ..., 0) = 0.
б) CRi есть непрерывный образ области G, плюс точка а = 0,
т. е. Ci?i, вообще говоря, есть некоторое многообразие размер-
размерности ^2 на торе Тт. Утверждение а) очевидно.
Согласно теореме 1 точка а тогда и только тогда принадлежит
CRi — CR0, если область G можно отобразить конформно, с со1-
блюдением условия Ф@) = °°, на область (может быть неканони-
неканоническую) с разрезами вдоль прямых Re (е~глгакФ) = 0 (к —
= 0,1, ...,т), причем ао = 0. Но в силу известных теорем при
любом aeG, а?= 0, существует отображение области G на об-
область с разрезами, удовлетворяющее условиям: 1) Ф@) = °°г
2) Ф (а) = 0, 3) контур Го переходит в отрезок действжгельной
298 ГЛ. 4. КРАЕВЫЕ ЗАДАЧИ
оси (т. е. ао = О). Таким образом, для любой точки а?=0 и при-
принадлежащей области G существует некоторое а ^ CRi, причем,
очевидно, все а е CRU таким образом, исчерпываются.
Аналогично, если п > 1, то из леммы 2 заключаем, что любое
решение задачи А„, имеющее полюс в точке z = 0 в точности по-
порядка п, осуществляет конформное отображение области G на
риманову поверхность, м-кратно накрывающую область плоско-
плоскости Ф с радиальными разрезами 1к конечной длины, расположен-
расположенными на прямых Re (е~Лга'ьФ) = О (к = 0, ..., т) соответственно.
Край этой поверхности проектируется на разрезы 1к. Описанного
типа поверхность будем называть поверхностью класса f ni ее =
= (а0, а1; ..., ат). Из сказанного выше следует, что необходимое
и достаточное условие разрешимости задачи А,г можно сформу-
сформулировать следующим образом:
Теорема 4. Задача А„ тогда и только тогда допускает ре-
решение, обладающее в точке z = 0 полюсом порядка п, если об-
область G допускает конформное отображение, переводящее точку
z = 0 в точку z = о°, на некоторую поверхность класса Fn.
Такое отображение, вообще говоря, полностью определяется
заданием /г-точек области G, проекция которых есть нуль. По-
Поэтому геометрически совершенно очевидно, что CRn при п < то/2
есть некоторое множество точек тора Тт размерности не выше
2п. В связи с этим отметим, что при п ^ т/2 мы получаем всегда,
согласно оценке (И), L > 1, причем обязательно существует ре-
решение, обладающее полюсом порядка Кге'^н в точке z = 0.
Таким образом, правая часть неравенства A1) имеет следующую
интерпретацию в теории конформных отображений.
Пусть lh (k = 0, 1, ..., т) — любое наперед заданное множе-
множество прямых, проходящих через начало координат, и п — задап-
иое число, п ^ у. Между прямыми lh могут быть и совпадаю-
совпадающие. Тогда любую т + 1-связную область G можно отобразить
на некоторую риманову поверхность F, м'-кратно, 0 < п ^ п, по-
покрывающую некоторую плоскую неограниченную область. Край
поверхности F проектируется в некоторые отрезки конечной
длины 1к, к = 0, 1, ..., т, лежащие на прямых 1к соответственно.
Более точное утверждение можно, очевидно, сформулировать,
если п Зг т. В частности, при т — 2 получаем отсюда известную
теорему о том, что любую трехсвязную область можно отоб-
отобразить конформно и однолистно на область с разрезами вдоль
трех наперед заданных прямых, проходящих через начало ко-
координат.
Структура множеств Rn и йп- (n' = m—п—1) одинакова.
Именно эти множества связаны преобразованием следующего
вида:
а' = а — а0, кей,, а'ей„», A5)
ОБ ОСОБЫХ СЛУЧАЯХ ЗАДАЧИ РИМАНА — ГИЛЬБЕРТА 2991
где а0 — некоторая точка тора, зависящая от области G. Доста-
Достаточно рассмотреть случай п > т/2. Согласно (9) для подсчета
числа 1п достаточно подсчитать число 1п. Напишем задачу Апг
эквивалентную задаче А„. Согласно формулам § 3 гл. 4, для
т
функции ty* (z) = е->9М Д (z — zh) -ф (z), где t|? (z) — решение зада-
чи An, в классе 3?„* имеем граничное условие
Re {е*я1(вА+в)^ (Z)} = 0, A6)
ад определяются формулой E.72). Поэтому, если п^т/2 и точ-
точка a°^Rn, то 1п — 2п — пг+1, т. е. In = 0. Но полученная задача
A6) полностью эквивалентна рассматриваемой задаче An. Поэто-
Поэтому для нее 1п = 0, но по определению это означает, что точка
а — а0 е Rn>-
Итак, мы показали, что если точка а е Д„, то точка а', полу-
полученная из а при помощи формулы A5), принадлежит Rn'- Так
же показываем обратное утверждение. Тем самым A5) доказано.
В силу формулы A5) утверждения а) и б) пункта 4 перено-
переносятся на множества СНт~г и CRm-z.
5. Перейдем сейчас к доказательству важного свойства мно-
множеств CRn, сформулированного в теореме 5. Предварительно,
следуя рассуждениям § 5, необходимое и достаточное условие
разрешимости задачи Ап преобразуем к более удобному виду.
При этом будем решать задачу А„ в классе $*(«).
Через t|)j(z; a, a) = <Uj(z), / = 1, ..., р, будем обозначать пол-
полную систему линейно независимых решений задачи
Пе{ггел1а^} = 0 (на ГА) A7)
в классе со0.
Пусть Ф(г) — решение задачи А„ в $п(а). Тогда, представляя
CD(z) в виде
Л+ф1(г)ф« + ф"
получаем для Oi неоднородную задачу
Re 1е-'йв*Ф1] = — Re {е-я1а*Ф„] = у. A8)
Необходимым и достаточным условием разрешимости задачи A8»)
в классе $о являются равенства
f v (t) щ (t) e-**«<'> dt = 0,
300 ГЛ- 4- КРАЕВЫЕ ЗАДАЧИ
что можно переписать в виде
0 = 22 f Re [Фо @ e-nia{t)] w} (t) e-nia(t) dt =
т. e.
Re 2J V>j- ' («) = °- / = 1, 2, ..., p, A9)
(s-l
гДе Vs = (^L"и' ибо u>j @ еягаУ = — гг;-(*) e "^Г. Условия A9)
представляют необходимые и достаточные условия разрешимости
задачи A8) при фиксированных fs, s = l, ..., п, т. е. они выра-
выражают условия существования решения задачи A8) в ф„(а), если
ладана главная часть разложения искомого решения в окрест-
окрестности полюса. Нас же интересует другой вопрос: сколькими спо-
способами можно подобрать вектор {yj, s = 1, . . ., п, чтобы задача
была разрешима. Иными словами: сколько линейно независимых
решений (над полем действительных чисел) имеет система ли-
линейных уравнений A9).
Из A9) для действительных и мнимых частей величин
7s = T5 + iYs получим систему действительных уравнений с мат-
матрицей, эквивалентной следующей матрице:
7X (fl) ... «,("-« (a), ^ (a) ... li-i"-» (a)
p (a) . .. u4" x) (a), u'p (a) ... ШрП х) (a)
или ®n = (An, AnJ, где А„ — матрица bi>jS)(a)), / = 1, ..., p, s =
= 0, ..., re —1. Матрицы А„ являются на самом деле функциями
точки аеСи точки a = (ai, ..., am)e Гт, причем Д„ = An (a; a) —
голоморфная функция точки a^G, непрерывная в G + Г и ана-
аналитическая в действительной области переменных а17 а2, ..., ат.
Первое утверждение не нуждается в пояснениях. Второе же
следует из того, что, как легко видеть, функции шДг, а, а) явля-
являются решениями некоторого интегрального уравнения с коэф-
коэффициентами, аналитически зависящими от переменных at, ..., ат
(и также от всех остальных переменных). В случае at = a2 = . ..
ди.
... = От = 0 функции Wj(z) связаны формулами -^ = Wj с гармо-
гармоническими мерами щ (см. § 5).. Отметим в этой связи одно инте-
OB ОСОБЫХ СЛУЧАЯХ ЗАДАЧИ РИМАНА — ГИЛЬБЕРТА 301
ресное свойство некоторых миноров матрицы Дп. Для п ^ т — 1
рассмотрим мпнор Ап = {и>/}, s = 0, 1, ..., га —1, / = 1, 2, ..., р.
Такой минор всегда существует, ибо, как легко видеть, р = т — 1
или р = т. Он является, как нетрудно проверить, используя гра-
граничное условие A7) и простейшие свойства детерминантов, ре-
решением следующей задачи Римана — Гильберта:
Re {gln} = 0 на Г, g= pViV, p = Г2"'"* па Г,,,
JV = ra(ra-l)/2. B0)
В силу леммы 2 отсюда получается, например, следующее соот-
соотношение для чисел NG(An) и NT(An), т. е. чисел нулей детерми-
детерминанта Ап внутри G п на Г соответственно:
Отметим, что при наших предположениях относительно кон-
контура Г функции Wj(z) аналитически продолжаются через Г;
поэтому необходимое при проверке B0) п — 1-кратное дифферен-
дифференцирование соотношения A7) вдоль Г вполне законно.
Пусть г — ранг матрицы ®„ и а Ф 0. Тогда число линейно не-
независимых решений системы A9), а тем самым и число линейно
независимых решений задачи А„ в классе %п[а) равно 1п = 2п — г.
Пусть n<m/2. Тогда г^р. Очевидно, при а = 0 множество Rn
совпадает с множеством тех точек а тора Тт, для которых ранг
г = 2п. Через ф„(я; at, ..., ап) = фге(я; а) обозначим сумму квад-
квадратов модулей всех миноров ранга 2/г матрицы ®,гф„(а; а) —
аналитическая в действительной области функция точки as Tm.
Множество CRn есть, очевидно, множество уровня нуль функций
Фп@; а). Мы покажем, что ни при каком a^G ф„(а; а) не ис-
исчезает тождественно на Тт. Для этого достаточно, очевидно, ука-
зать хоть одну задачу Ап (или А) при п < -^ допускающую лишь
тривиальные решения, т. е. для которой /„ = 0. Тогда, приводя
в случае необходимости найденную задачу к каноническому виду,
мы получим такую точку а^Тт, для которой (р„(а; а)>0. Но
в силу теоремы гл. 4, § 5, п. 10 такая задача обязательно най-
найдется среди множества задач Re [(z — 6) "/B)] = 0, /<=§(о, при
переменном Ъ е G. Каждое же множество J), с /i^т/2 связано
с некоторым Rn', п ==т— 1 — га < т/2, по формулам A5). Итак,
мы доказали следующую теорему.
Теорема 5. CRn есть множество нулей некоторой аналити-
аналитической в действительной области функции точки a, s Tm, не исче-
исчезающей тождественно на Тт.
Из теоремы 5 следует целый ряд утверждений о множествах
Rn и CRn. CRn, вообще говоря, состоят из некоторого числа точек
и аналитических многообразий, быть может, пересекающихся,
размерности <пг; Rn открыто и всюду плотно на Тт.
302 ГЛ- 4- КРАЕВЫЕ ЗАДАЧИ
Подытожим в общих чертах полученные результаты. В не-
неособом случае соотношения разрешимости задачи А или А„ числа
1п и 1п полностью определялись числами т и п, выражающими
лишь топологические условия задачи. Ни конфигурация области
G, ни специальные свойства коэффициента в граничном условии,
ни даже в более общем случае свойства класса обобщенных ана-
аналитических функций, в которых рассматривается задача А, не
оказывали никакого влияния на числа 1п и 1п- В наших терминах
эта ситуация выражается тем фактом, что тогда множества CRn
всегда пустые. В особом случае задачи Ао это уже не так. Тогда,
как мы уже отмечали, для любой области множества CRn не-
непусты. Числа 1п и 1п могут меняться в известных пределах в
зависимости от свойств области G и граничного условия. Прове-
Проведенный выше анализ и, в частности, теорема 5 показывают,
однако, что это влияние области и граничного условия при
фиксированных п и т проявляется лишь в исключительных слу-
случаях. В подавляющем же большинстве задач, можно сказать в
«типичных» задачах, когда а ^ /?П1 числа 1п и in определяются
в особых случаях задачи по тем же формулам, что и в неособых.
Отклонения от формулы A4) встречаются очень редко, «лишь на
многообразиях меньшей размерности» в множестве всех задач,
каким является для нас тор Тт. Геометрически эти отклонения
охарактеризованы в теореме 4. Эти качественные рассуждения
переносятся в известном смысле на общий случай задачи А.
И тогда можем сказать, что в громадном большинстве задач,
в «типичных» случаях, формула A4) сохраняет свою силу.
И другие свойства множеств Rn и задачи А можно перенести
на общий случай задачи А. Прежде всего результат теоремы 3
о
справедлив для всех задач А. Укажем сейчас, как переносится
на общий случай свойство открытости множеств Rn. Для просто-
простоты примем, что lAj=l на Г. Две задачи А назовем достаточно
близкими, если определяющие их функции X и X' удовлетворяют
неравенству \Х — Х'\ =?1 е на Г при достаточно малом е > 0.
о
Теорема 6. Задача А и все достаточно близкие к ней за-
задачи имеют одинаковое число решений тогда и только тогда,
когда справедлива формула A4).
Доказательство следует из непрерывности перехода от X и X'
к точкам а и а' (формулы E.69)) и из открытости мно-
множества Rn.
6. В некоторых случаях, правда очень редких, можно по-
построить решения задачи А„ в явном виде. С этой целью отобразим
область G на каноническую область А плоскости переменного ?
с радиальными разрезами Ik, причем так, чтобы точка z = 0
OB ОСОБЫХ СЛУЧАЯХ ЗАДАЧИ РИМАИА — ГИЛЬБЕРТА 303
перешла в бесконечно удаленную точку и чтобы разрез /о,
отвечающий кривой Го, лежал на действительной осн. Пусть
и = ре , 0< p/i< p< pft, к = 0, 1, ..., т,— уравнение разреза
1к; согласно предположению do = O.
о
После перехода к переменной t, задача А получит следую-
следующую формулировку: Найти в области Д голоморфную функцию
Ф(?) с полюсом порядка ^п в точке ? = °°, удовлетворяющую
граничному условию
Ке{<Гя^Ф(д} = 0на Ih. B1)
При этом предполагается, что граничное условие выполняется
для граничных значений Ф+ и Ф~ функций Ф на отрезке Ik. Так
сформулированная задача в некоторых случаях обладает непре-
непрерывными решениями, для которых Ф~ = Ф+ на /k, k = 0, 1, ..., т.
Такие решения, очевидно, являются полиномами степени ^/г.
Поэтому их очень легко найти. Нетрудно проверить, что для того,
чтобы граничная задача B1) допускала полиномиальное решение
вида 2 Ргб г?г> необходимо и достаточно выполнение равенств
Г=О
2ok= 1/2 (modi). B2)
Если ак = 0, к — 0, 1, ..., т, то, очевидно, B2) удовлетворяются
при dk = 0, 0г = 1/4 и решениями являются полиномы i, it,, it,2,...
..., it,". Таких решений га+1. Поэтому в силу теоремы 3 эти
полиномы исчерпывают все линейно независимые решения за-
задачи. Очевидно, решения этого вида совпадают с решениями § 5,
п. 8. Одновременно мы проверили точность оценки A2). Таким
образом, при dk — 0, т. е. для областей, допускающих конформное
отображение на каноническую область с радиальными разрезами
вдоль действительной оси, имеем /„ = п + 1 при любом п < т. Из
теоремы 1, очевидно, следует, что равенство 1п=:п+ 1 при любом
и < т возможно лишь для областей описанного вида. Даже бо-
более точно: если h = 2, то область G допускает отображение на
область с разрезами вдоль мнимой оси, все ак = 0 и 1п = п + 1
при любом п< т. Таким образом, при п = 1 крайний случай
оценки A2) реализуется лишь для специальных областей. Тем
не менее, при других значениях п оценка A2) может реализо-
реализоваться в любой области. Например, при п = т— 1 оценка A2)
реализуется в любой области для задачи Re(z'/) = 0 на Г (см.
§ 5 гл. 4). Если часть разрезов 1К располагается вдоль действи-
действительной оси, часть — вдоль мнимой оси, то при a = 0 последова-
последовательностью полиномиальных решений является последователь-
последовательность i, it?, ..., it?*, 2r < п. Вообще говоря, легко построить при-
примеры областей и задач, для которых число полиномиальных ре-
решений равно наперед заданному числу s, 0 ^ s ^ п + 1.
Часть II
НЕКОТОРЫЕ ПРИМЕНЕНИЯ К ЗАДАЧАМ
ТЕОРИИ ПОВЕРХНОСТЕЙ
И БЕЗМОМЕНТНОЙ ТЕОРИИ ОБОЛОЧЕК
В этой части книги будут даны некоторые применения пре-
предыдущих результатов к определенному кругу задач геометрии и
механики, которые встречаются при изучении бесконечно малых
изгибаний поверхностей (гл. 5) и безмоментной теории равно-
равновесия оболочек (гл. 6). Эти разделы геометрии и механики тесно
связаны между собой, прежде всего благодаря тому, что они
имеют дело с одними и теми же уравнениями с частными произ-
производными. Это позволяет давать геометрическим фактам механи-
механическую интерпретацию и обратно. Но совместное изучение гео-
геометрических и механических проблем является целесообразным
не только по этим причинам. Помимо указанных чисто матема-
математических аналогов, между ними имеются еще другие, более глу-
глубокие внутренние связи, которые обнаруживаются в дальнейшем
при анализе состояний деформаций и напряженного равновесия
оболочек. В случае поверхностей положительной кривизны эти
проблемы приводятся к различным задачам для эллиптических
уравнений.
Таким образом, открываются пути для применений получен-
полученных в предыдущих главах результатов к изучению широкого
круга задач теории поверхностей и теории упругости. Эти мето-
методы позволяют преодолеть значительные аналитические трудности,
которые встречаются при изучении многих классических проб-
проблем, и добиться в ряде направлений существенного продвижения
вперед.
Глава 5
ОСНОВЫ ОБЩЕЙ ТЕОРИИ
БЕСКОНЕЧНО МАЛЫХ ИЗГИБАНИЙ ПОВЕРХНОСТЕЙ
Главной целью этой главы является изучение некоторого круга
вопросов бесконечно малых изгибаний поверхностей положитель-
положительной кривизны. Однако, прежде чем приступить к рассмотрению
этих задач, мы нашли целесообразным осветить некоторые основ-
основные вопросы общей теории бесконечно малых изгибаний, имея
в виду главным образом интересы читателя, который, может
быть, не будучи специалистом в этой области, заинтересуется
затронутыми здесь вопросами*). В связи с этим мы даем вывод
основных дифференциальных уравнений и изучаем некоторые
общие свойства поверхностей при бесконечно малых изгибаниях.
Выводятся, например, выражения для вариаций различных ве-
величин, связанных с поверхностью. Так как нами будут рас-
рассматриваться и кусочно регулярные поверхности, то выводятся
также условия сопряжения на линиях склеивания смежных ре-
регулярных частей. Рассматривая вопросы жесткости, мы даем
прежде всего ряд новых доказательств классической теоремы
о жесткости овалоидов, привлекая для этого, в частности, резуль-
результаты гл. 3. Эти приемы позволяют в ряде случаев значительно,
ослабить требования о гладкости как в отношении поверхности,
так и в отношении поля смещений. Кроме того, дается обобщение
этой теоремы на случай кусочно регулярных выпуклых замкну-
замкнутых поверхностей. Далее, применяя главным образом результаты
гл. 4, мы изучаем условия жесткости выпуклых поверхностей с
краями. Устанавливается ряд признаков жесткости таких поверх-
поверхностей и в связи с этим значительное внимание уделяется гео-
геометрическим и механическим способам реализации жестких свя-
связей. Доказывается, что в ряде случаев жесткость поверхности
*) По вопросам бесконечно малых изгибаний поверхностей написано
значительное число работ. Многие главы посвящены этой проблеме в из-
вестных сочинениях Г. Дарбу [31] и Л. Бианки [8]. Весьма полное из-
изложение основных проблем этой области и освещение состояния их изу-
ченности можно найти в работах С. Э. Кон-Фоссена [41а] A936) и
Н. В. Ефимова [33а] A948). Работа Н. В. Ефимова выпущена в 1957 г.
отдельным изданием в немецком переводе [336] и снабжена рядом допол-
нений, написанных Е. Рембсом и К. П. Гротемейером. В этих дополнениях
содержится довольно полный обзор результатов последних лет A948—1957) *
ОП TI ТТ ТЭ
306 ГЛ- 5- ОБЩАЯ ТЕОРИЯ БЕСКОНЕЧНО МАЛЫХ ИЗГИБАНИЯ
можно обеспечить путем склеивания с некоторыми другими по-
поверхностями, а также наложением на нее втулочных связей. Вво-
Вводится понятие оптимальной жесткости и изучаются условия реа-
реализации оптимальных жестких связей. Рассмотрены также не-
некоторые классы жестких и нежестких невыпуклых кусочно
регулярных поверхностей. В связи с этим формулируются неко-
некоторые новые краевые задачи обобщенных аналитических
функций.
Отметим, что в эту главу включен ряд еще не опубликован-
опубликованных результатов автора, а также Б. В. Боярского, Сунь Хэ-шеня
и др. Многие из этих результатов были доложены в разное вре-
время A955—1957) на семинаре по геометрии в целом при Москов-
Московском университете, руководимом совместно Н. В. Ефимовым и
автором.
Наконец, отметим, что в этой книге вовсе не затрагиваются
вопросы изгибаний поверхностей (в малом пли в целом), кото-
которые, как известно, приводят к нелинейным задачам*). Однако
нужно сказать, что применяемые здесь методы могут быть ис-
использованы также для решения многих нелинейных задач об-
общей проблемы изгибаний [24г], [646, в]. За последние годы в
этом направлении был получен ряд новых результатов А. В. По-
гореловым [68в].
§ 1. Уравнение бесконечно малых изгибаний в векторной форме
Пусть S — кусочно регулярная поверхность класса Ст, пред-
представленная в векторной форме уравнением
г = г(х', х2).
Рассмотрим теперь семейство поверхностей Se, задаваемых
уравнениями вида
где s — произвольный числовой параметр, a U(a:1, хг) — некото-
некоторая непрерывно дифференцируемая вектор-функция точки по-
поверхности.
Поверхности Ss называются бесконечно малыми изгибаниями
поверхности S, если разность квадратов их линейных элементов
есть величина порядка е2, т. е.
dsi — ds2 = O(e2). A.1)
Так как
ds2 = drdr, dsl = drdr + 2гdrd\J + &2d\Jd\]^
*) С основными проблемами изгибаний поверхностей можно познако-
познакомиться в цитированной выше работы Н. В. Ефимова [33а, б], а также в мо-
монографиях А. Д. Александрова [2а, б] и А. В. Погорелова [68а, б].
§ 1. УРАВНЕНИЕ БЕСКОНЕЧНО МАЛЫХ ИЗГИБАНИЙ 307
то для равенства A.1) необходимо и достаточно, чтобы
O. A.2)
Это уравнение называется уравнением бесконечно малых из-
изгибаний поверхности S, а вектор U, удовлетворяющий этому
уравнению,— вектором смещений при бесконечно малых изгиба-
изгибаниях. Такое векторное поле на S будем называть коротко полем
смещений.
В силу A.1) имеем:
[ (^jj A.3)
dst-ds = O(e*)>0. A.3a)
Таким образом, имеет место следующая
Теорема 5.1. В результате бесконечно малого изгибания
поверхности всякий ее линейный элемент получает неотрицатель-
неотрицательное приращение 2-го порядка малости.
Иными словами, бесконечно малые изгибания поверхности
не сопровождаются сжатиями (даже 2-го порядка малости).
В дальнейшем мы все время будем рассматривать только не-
непрерывные деформации поверхности, т. е. считать, что вектор
смещения U является непрерывной функцией точки поверхности.
Кроме того, мы будем предполагать, что этот вектор имеет все
те производные, которые придется нам использовать ниже. Обыч-
Обычно ниже будут встречаться производные 1-го и 2-го порядка,
а иногда и производные 3-го порядка вектора U. В результате
деформации поверхности порядок ее регулярности, вообще го-
говоря, может понизиться. К этому вопросу мы еще вернемся
позже (§ 10, п. 3) и более точно выясним, каков будет порядок
регулярности деформированной поверхности в зависимости от
порядка регулярности исходной поверхности.
Непосредственной проверкой убеждаемся, что уравнение A.2)
всегда допускает решения вида
U = QXr+C, A.4)
где П п С — произвольные постоянные векторы. Так как фор-
формула A.4) изображает вектор смещения при жестком (беско-
(бесконечно малом) перемещении тела, то эти смещения не вызывают
внутренней деформации поверхности. Поэтому векторное поле
вида A.4) мы будем называть в дальнейшем тривиальными из-
изгибаниями или тривиальным полем смещений.
Основная задача теории бесконечно малых изгибаний поверх-
поверхностей состоит в отыскании нетривиальных полей смещений,
удовлетворяющих уравнению A.2). Если поверхность подчинена
тем или иным связям, то при интегрировании уравнения A.2)
необходимо учесть также эти связи, т. е. нужно отыскивать не-
20*
308 гл- 5- ОБЩАЯ ТЕОРИЯ БЕСКОНЕЧНО МАЛЫХ ИЗГИБАНИЙ
тривиальные поля смещений, которые совместимы с наличными
связями.
Если уравнение A.2) с учетом наличных связей допускает
лишь тривиальное решение вида A.4), то поверхность называ-
называется жесткой. Так как общее тривиальное изгибание представ-
представляет собой линейную комбинацию шести линейно независимых
векторов, то жесткая поверхность, рассмотренная как твердое
тело, может иметь некоторое число А: степеней свободы, причем
0 s? k s? 6. Если к = 0, то будем говорить, что поверхность явля-
является кинематически жесткой. Если 0 < k s? 6, то будем говорить,
что поверхность является геометрически жесткой.
Еще Либманом (см. [33а]), а позже более простым путем
Бляшке [10] была установлена жесткость замкнутых регулярных
поверхностей положительной кривизны, так называемых овалои-
дов. В настоящее время проблема жесткости решена еще для це-
целого ряда других классов поверхностей. В этой главе будут рас-
рассмотрены еще некоторые новые классы жестких поверхностей с
краями. Кроме того, будет уточнена сама постановка задачи о
жесткости путем введения понятия корректной, или оптималь-
оптимальной, и некорректной жесткости.
§ 2. Уравнение бесконечно малых изгибаний
относительно декартовой системы координат. Первое
доказательство жесткости овалоидов
1. Обозначая через х, у, z и |, ц, ? декартовы координаты
векторов г и U соответственно, уравнение A.2) можем записать
в виде
dxdl + dydr\ + dzdZ, = O. B.1)
Допустим, что поверхность однозначно проектируется на плос-
плоскость Оху. Тогда ее уравнение имеет вид
z = f(x,y). B.2)
В таком случае равенство B.1) примет вид
E* + z*%x) dx2 + (|„ + л* + zxt,v + zv%x) dx dy + (цу + zy%v) dif = 0.
Отсюда следует, что
I* + Zx%x = 0, цу + zyly = 0,
iv + il. + z^ + z.&^O. B.3)
Дифференцируя эти уравнения по два раза — первое по у, вто-
второе по х, а третье по х и у, а затем складывая первое и второе
и из суммы вычитая третье, получим
zj^yy - 2zxy%Xy + zyy\m = 0. B.4)
§ 2. УРАВНЕНИЕ ОТНОСИТЕЛЬНО ДЕКАРТОВОЙ СИСТЕМЫ 309
Таким образом, для «вертикальной» компоненты % вектора сме-
смещения U мы получили уравнение с частными производными 2-го
порядка B.4). Имея в виду формулу, выражающую гауссову
кривизну поверхности
B>5)
мы убедимся, что уравнение B.4) является уравнением эллипти-
эллиптического, гиперболического или параболического типа в зависимо-
зависимости от того, главная кривизна К>0, <0 или =0 соответственно.
Если найдено решение %{х, у) уравнения B.4), то другие
компоненты |(ж, у) и х\{х, у) вектора смещения U находятся
путем квадратур из системы B.3). В частности, эта система до-
допускает следующие тривиальные решения:
- QiZ, l = C3 + Qaj-&2X, B.5a)
где Сi и Qj — произвольные вещественные пстоянные.
2. Вводя обозначения
u = t+z?, v = r\ + zyZ, B.6)
систему уравнений B.3) можно переписать в виде
и* — zxx?, = 0, vy — Zyyt, = 0, иу + vx- 2zxy% = 0.
Исключая из этой системы 5, получаем
zxx(uy +vx) — 2zxyux = 0, zyy(uy +vx) — 2zXyVy = 0. B.7)
Вводя в рассмотрение комплексную переменную a = x+iy и
функцию
w = и + iv = I + щ + 2z- С, z- = -| (zx + izy), B.8)
мы можем записать систему B.7) в виде
Здесь
Поэтому
z—
аа
z -
аа.
— 1- ,;. ,:,";• B-10>
Пусть рассматриваемая поверхность принадлежит классу С2 и
имеет всюду положительную гауссову кривизну К. В таком слу-
случае существует такая положительная постоянная Ко < 1, для ко-
ГЛ. 5. ОБЩАЯ ТЕОРИЯ БЕСКОНЕЧНО МАЛЫХ ИЗГИБАНИЙ
торой всюду на рассматриваемой поверхности выполняются не-
неравенства
K(l+zf. + 4J>Ko, 1(^ + ^J^.1.. B.Ц)
Тогда в силу B.11) п B.10) на всей поверхности имеет место
неравенство
H55/zcu|'<1-KS<l- B-12)
Таким образом, для поверхности класса С2, имеющей всюду
положительную кривизну, уравнение B.9) принадлежит классу
эллиптических уравнений 1-го порядка, уже рассмотренному в
§ 17 гл. 3. Поэтому мы можем применять к уравнению B.9) до-
доказанные там теоремы. Отметим, что эти теоремы можно приме-
применить также к несколько более общему случаю, а именно, к клас-
классу поверхностей, удовлетворяющих условиям: 1) zn, zxy и z,jy —
ограниченные измеримые функции и 2) главная кривизна К 5=
^ К > 0 почти везде, где К — некоторая положительная постоян-
постоянная. Будем обозначать класс поверхностей, удовлетворяющих
этим условиям, через D2, =». Для любой такой поверхности усло-
условие B.12) выполняется почти везде, и, следовательно, доказан-
доказанные в § 17 гл. 3 теоремы можно использовать при рассмотрении
уравнения B.9) для поверхностей класса D2t«,. Эти замечания
будут нами существенно использованы ниже при доказательстве
классической теоремы о жесткости овалоидов. Этот способ доказа-
доказательства позволит значительно ослабить требования относительно
характера гладкости как поля смещений, так и самой по-
поверхности.
3. Обозначим теперь рассматриваемую поверхность через S%t
а декартовы кординаты радиуса-вектора г* и вектора смещения
U* через х%, у%, z* и \%, ц%, ?„. соответственно. Подвергнем теперь
эти переменные следующим (проективным) преобразованиям:
x = xjz#, y = yjz^, г=1/г*, B.13)
I = IJz*, ц = r\Jz*, I = — (x*lt + уъЧ* + z*l*)lz*. B.14)
Тогда при помощи простых выкладок убедимся, что из условия
dr*d\J% = dx^dl* + dy^dr]* + dz^dt,* = 0 следует равенство
dzd? = O, B.15)
где г и U — векторы с координатами х, у, z и |, ц, ? соответ-
соответственно.
Таким образом, в результате проективного преобразования
вида B.13) поверхность S% переходит в новую поверхность S,
причем преобразование B.14) ставит в соответствие всякому
полю смещений ?#, r\%, Z,* на S% определенное поле смещений
1, г], ? на S и наоборот, причем, как нетрудно убедиться, триви-
§ 2. УРАВНЕНИЕ ОТНОСИТЕЛЬНО ДЕКАРТОВОЙ СИСТЕМЫ 311
альное поле смещений переходит в тривальное же поле ([33а],
§25).
Пусть S% — овалоид. Если начало декартовой системы коорди-
координат поместим на S* и координатную плоскость о^х^у* располо-
расположим на касательной к S% плоскости, то в результате преобразо-
преобразования B.13) овалопд перейдет в бесконечную выпуклую поверх-
поверхность S, которая однозначно проектируется на плоскость оху.
Следовательно, ее уравнение можем записать в виде B.2).
Пользуясь обозначениями Монжа, будем иметь следующие
формулы преобразования:
p = pjA, q = qjA, A = х*р# + y*q* — z*, B.16)
1 = ^з [Х1я1г* — 2x*i* (x*p* — ч) ч + (x*p* — Z*Y
Из этих формул следует равенство
B.18)
Величина |А| равна расстоянию от начала координат до точки
пересечения оси o%z% с касательной плоскостью к овалоиду S%.
Поэтому А Ф 0 всюд>7, за исключением начала координат, где
А = 0. Но в окрестности начала координат имеет место равенство
Д s z# = 4 (т1х\ + 2*^,,^ + tlyl) + о (xl + yl). B.19)
Для определенности предположим, что начало координат совпа-
совпадает с омбилической точкой поверхности. Тогда равенство B.19)
принимает вид
А ^ z* = -? а^ + о (| а» |2), а* = ж„ + iy*. B.20)
Таким образом, в окрестности начала координат
^^1. B.21)
Это означает, что если овалоид S^ имеет всюду положительную
главную кривизну К*, то в результате преобразования B.13)
она переходит в поверхность, которая имеет также всюду поло-
положительную главную кривизну, включая бесконечно удаленную
точку. Из формул B.17), учитывая B.21), легко заключим, что
г, s, t ограничены. Поэтому условие B.12) будет выполняться и
для поверхности S, полученной из овалоида S* в результате пре-
преобразования B.13). Этим обстоятельством мы воспользуемся в
следующем пункте.
312 ГЛ. 5. ОБЩАЯ ТЕОРИЯ БЕСКОНЕЧНО МАЛЫХ ИЗГИБАНИЙ
4. В этом пункте, используя предыдущие результаты, а также
некоторые свойства решений уравнения эллиптического типа
B.9), доказанные в гл. 3, мы дадим доказательство жесткости
овалоидов.
Накладывая на поле смещений тривиальное поле A.4), кото-
которое не влияет на деформированное состояние овалоида (в первом
приближении), а также учитывая равенства B.3), мы можем
добиться того, чтобы компоненты поля смещений овалоида удов-
удовлетворяли следующим условиям в начале координат:
^ = 0, \)% — 0, ?„. = 0,
^ё* ^5* "Ч* ^Ч* ^»* ^»* f\ /о nn\
Мы считаем, что !*, т)*, С* непрерывны и принадлежат классу
Di, p, p > 2, на всем овалоиде. В отношении овалоида мы будем
предполагать, что он принадлежит классу D2, «, (с. 310).
При этих условиях, учитывая равенства B.22) и B.3), имеем
в окрестности точки а% = 0 (а# = х% + iy%)
g t т] =0A а |2), ?, =О(\ а Г2). B.23)
В силу B.9) и B.14), а также учитывая, что окрестность точки
а* = 0 переходит в окрестность точки а = °° (а = х+ iy) и
а* = ОI:—г) (вблизи а = оо), B.24)
получаем
1,у\ = ОA), ^=о[|-|-г) (вблизи а = оо). B.25)
Кроме того, из B.16) в силу B.20) следует
2„ = 0(|а|) (вблизи а = °°). B.26)
При этих условиях функция
w{a) = % + ii) + 2zal B.27)
непрерывна и ограничена на всей плоскости, а также принадле-
принадлежит классу Di, p на всякой ограниченной части плоскости а и
удовлетворяет уравнению B.9).
Записав уравнения B.9) в виде
w--qwa = 0, g = |!^(l+^) B.28)
и учитывая неравенство |gr| < q0 < 1, можем написать:
где W—основной гомеоморфизм уравнения B.28), который су-
существует в силу теоремы 2.15, а Ф — целая функция. Но она
§ 2. УРАВНЕНИЕ ОТНОСИТЕЛЬНО ДЕКАРТОВОЙ СИСТЕМЫ 313
ограничена и, следовательно, равна постоянной. Таким образом,
w = const. Используя теперь формулы B.3), легко заключим,
что | = const, г| = const и ? s 0. Наконец, если учтем еще усло-
условия B.22), то получим | = ц s 0. Таким образом, жесткость ова-
лоида доказана.
Приведенное в этом пункте доказательство было получено
автором и публикуется здесь впервые.
5. Используя теперь уравнение 2-го порядка B.4), мы изло-
изложим здесь доказательство важного свойства максимума и мини-
минимума для вектора смещения, которое затем применим к доказа-
доказательству жесткости кусочно регулярных выпуклых поверхностей.
Это доказательство было получено Б. В. Боярским и Н. В. Ефи-
Ефимовым [12*].
Теорема 5.2. Пусть S — кусочно регулярная выпуклая по-
поверхность положительной кривизны, однозначно проектирующая-
проектирующаяся на некоторую плоскость Е. Пусть п — нормаль к плоскости Е.
Тогда при любом нетривиальном бесконечно малом изгибании
поверхности S величина Е; = U • п, где U — поле смещений, дости-
достигает минимального и максимального значений на границе поверх-
поверхности S.
Доказательство. Мы приведем доказательство для слу-
случая, когда поверхность S не имеет вершин, т. е. когда ее ребра
не пересекаются. В этом доказательстве достаточно предполагать
двукратную дифференцируемость каждого куска поверхности S,
ибо эти предположения достаточны для вывода уравнения B.4)
[12*]. Принимая Е в качестве плоскости ху декартовой системы
координат, получим для ?j уравнение B.4). Из него немедленно
следует, что максимум (минимум) ?j не может достигаться во
внутренних точках отдельных кусков St, из которых склеена по-
поверхность. В самом деле, там уравнение B.4) принадлежит эл-
эллиптическому типу и его решение ?, обладает непрерывными про-
производными. Поэтому в этом случае утверждение теоремы следует
из известного принципа максимума (минимума) для таких урав-
уравнений.
Предположим сейчас, что 5 достигает максимума в точке Р
некоторого ребра L, вдоль которого склеены два регулярных кус-
куска S+ и S~ поверхности S. В дальнейшем проекции поверхностей
S+ и S~ и ребра L на Е будем обозначать теми же буквами, снаб-
снабжая их штрихом '. Для определенности предположим, что поверх-
поверхность S обращена выпуклостью к плоскости Е. Тогда имеем
ztx>0, ZyV>0 на S'+, Zxx>0, z^>0 на S'~
и
z+ = z~ на L'. (•)"
Для удобства начало координат поместим в точку Р', ось х на-
направим вдоль V и ось у — внутрь S'~. Пусть x = x(s), y = y{s)
уравнения L' в окрестности Р'. Тогда в точке Р' будем иметь
314 ГЛ. 5. ОБЩАЯ ТЕОРИЯ БЕСКОНЕЧНО МАЛЫХ ИЗГИБАНИЙ
х — 1, у — О, х = 0, у = к0 > 0, к0 — кривизна V в Р'. Дифферен-
Дифференцируя (*) вдоль L', получим в Р':
zt — h = — ^. zix — z7x = Mt0* B.29)
причем в силу выпуклости, как легко видеть, имеем
К>0.
Так как Р' — точка максимума, лежащая на границе областей
S'+ и S'~, то в силу известного результата (см., например, [66а])
нормальная производная функции ? в точке Р' отлична от ну-
нуля, т. е.
ty <0 и ?+ > 0 в точке Р'. B.29а)
Из равенства г\+ = г\~ на L', дифференцируя его два раза вдоль
L', получпдг в точке Р'\
Ч$х - Ч7* + К (ti+ - V) = 0. B.30)
Дифференцируя третье из уравнений B.3) по х, первое — по у и
вычитая одно из другого, получим:
Цхх + 4?* + & = 0 B.31)
на S+/ и такое же уравнение на S~'. Подставляя B.31) в B.30)
и учитывая второе уравнение B.3), находим
Дифференцируя равенство t,+ —1,~ два раза по s вдоль L',
получим:
Й"* + ?ОСУ+ = U + койу = ?Г5 = ц, B.33)
причем, так как % имеет в точке Р' максимум, то
ц < 0. B.34)
Из B.32) и B.33), учитывая B.29), получим
Zxxbxx == 2xxbxxi
откуда в силу B.29)
KZx^z-x&t-Zv')- B.35)
Но это невозможно. В самом деле, из B.35) и B.29а) следует,
что Йе>0. т. е. тогда \i = t?x + ^0^+>0 в точке Р', что про-
противоречит B.34). При выводе B.35) один раз приходится сокра-
сокращать на к0. Поэтому мы должны предположить ка > 0. Но при
ко = О противоречие получается легко уже из формулы B.32).
Таким образом, теорема доказана.
§ 3. СИСТЕМА УРАВНЕНИЙ ДЛЯ КОМПОНЕНТОВ ПОЛЯ СМЕЩЕНИЙ 315
Теорема 5.2 может быть использована для доказательства
жесткости поверхностей. Например, из нее получается
Теорема 5.3. Поверхность S, удовлетворяющая условиям
теоремы 5.2, не допускает нетривиального изгибания скольжения
относительно плоскости Е.
Изгибаниями скольжения поверхности S относительно плос-
плоскости Е называются такие бесконечно малые изгибания, при ко-
которых точки края поверхности S не получают смещений, ортого-
ортогональных Е (§ 8, п. 11). В частности, если край L поверхности S
лежит в плоскости Е или в плоскостях, параллельных Е, то при
изгибаниях скольжения L должна деформироваться параллель-
параллельно Е, т. е. ? = 0 вдоль L. Следовательно, в силу теоремы 5.2 ? =
= 0 всюду, что доказывает теорему 5.3.
Необходимо отметить, что для справедливости теорем 5.2 и
5.3 существенно требование однозначной проектируемости по-
поверхности S на плоскость Е. Без него, как показывают примеры
изгибаний скольжения сферических сегментов, больших полу-
полусферы (§ 11, п. 8), теорема 5.3 неверна.
Теорема 5.2 для класса регулярных поверхностей применя-
применялась А. В. Погореловым [68а] для доказательства жесткости регу-
регулярных овалоидов. Используя в этом доказательстве приведенное
выше расширение теоремы на случай кусочно гладких поверхно-
поверхностей, мы получим доказательство жесткости кусочно регулярных
овалоидов (см. также § 9, п. 3).
§ 3. Система уравнений для компонентов поля смещений
относительно произвольной системы координат на поверхности.
Некоторые признаки жесткости
Уравнение бесконечно малых изгибаний приводится к системе
уравнений 1-го порядка B.3) или к уравнению 2-го порядка B.4)
только в том случае, когда поверхность однозначно проектируется
на плоскость. Для достаточно малого куска поверхности это все-
всегда имеет место, но глобально это справедливо лишь для весьма
частного класса поверхностей. Поэтому уравнение B.4) и систе-
систему B.7) можно применять всегда, если изучается то или иное
локальное свойство бесконечно малых изгибаний. При изучении
же глобальных свойств этими уравнениями, вообще говоря, нель-
нельзя пользоваться. Имея в виду это обстоятельство, мы сейчас вы-
выведем систему уравнений бесконечно малых изгибаний относи-
относительно произвольной координатной системы на поверхности.
1. Пусть поверхность отнесена к некоторой системе коорди-
координат х1, х2. Тогда векторы
га = ^ (а = 1,2) C,1)
316 ГЛ. 5. ОБЩАЯ ТЕОРИЯ БЕСКОНЕЧНО МАЛЫХ ИЗГИБАНИЙ
составляют базис координатной системы х1, х2. Удобно ввести в
рассмотрение также сопряженный базис *)
га = Ле (а = 1,2), C.2)
где
all = a21/a; а12 = а21 = —ad а; а22 — ац/а, C.3)
причем
ара = а«р = г«гр, а = а1га22 — а\г > 0. C.4)
Квадрат линейного элемента — первая основная квадратичная
форма поверхности ¦— имеет вид
ds2 = аац dxa dx^ (aap = аРа). C.5)
Нетрудно видеть, что
А** = бе. гЧ = б|. C.6)
Величины аар и ааР — ковариантные и контравариантные со-
составляющие метрического тензора поверхности. В дальнейшем
с помощью этих тензоров будем производить операции поднятия
и опускания индексов: например, если С. ¦ • и Са- ¦ — два тен-
тензора, то они связаны соотношениями
^ PV = п ^Pv' ^«Pv = aaxC_^ •
Пусть п — орт нормали поверхности. Очевидно,
п=ЩЬ.^ а = апа22-а212>0, C.7)
причем правило для векторного произведения будем выбирать
такое, чтобы тройка векторов ru r2, n составляла правую систему
вращения в каждой точке поверхности. Такую же ориентацию
имеет тогда и триэдр г1, г2, п.
Если на поверхности S задано некоторое векторное поле
U (ж1, х2), то мы можем в каждой точке написать разложение
и = ИаГа + ИоП ИЛИ U = Uata + ЩП, C.8)
где
ua = Vta, иа = Ига = а^щ, uo = Vn. C.9)
Величины иа и иа составляют контравариантные и ковариантные
компоненты касательного вектора смещения, а и0 — нормальное
перемещение. По формулам
(по а не суммировать) C.10)
—г-
Уаа
*) Мы пользуемся известным правилом суммирования Эйнштейна, при-
причем глухие греческие индексы (а, 0, f, ...) будут принимать значения 1,
2, а латинские— 1, 2, 3.
§ 3. СИСТЕМА УРАВНЕНИЙ ДЛЯ КОМПОНЕНТОВ ПОЛЯ СМЕЩЕНИЙ
мы можем вычислить физические компоненты касательного век-
вектора смещения, т. е. проекции вектора U на координатные базис-
базисные векторы га.
Дифференцируя обе части равенства C.8) относительно х(',
получим:
Выпишем теперь деривационные формулы Гаусса
C.12)
а также формулы для производных нормали:
п« = ^ = - Ьа^ = - bl4, C.13)
где
Г«р = ЛвР = aXvrvr«P = aXvraPiV, C.14)
&ap = — ПаГр = ПГар, Ь% = a?HaX = — П«ГР C.15)
Величины Гац х и Гар называются символами Христофеля 1-го
и 1-го рода; Ьа» — коэффициенты второй основной квадратичной
формы поверхности.
Подставляя C.12) и C.13) в C.11), получим
^ = (Vai/ - biu0) гр + (Vau0 + Ъац*) и, C.16)
где va — символ ковариантного дифференцирования. Напомним,
что если ф — скаляр, то
Va<P=S (a ==1'2)- (ЗЛ7)
Если же tip и uB — ковариантные и контравариантные векторы, то
Вообще же для тензора произвольного ранга
Г7 п • V- • р... тчЛ *V-' t "pV «Л.. i^ /О A Q\
На основании этих формул, пользуясь равенствами
318 ГЛ- 5- ОБЩАЯ ТЕОРИЯ БЕСКОНЕЧНО МАЛЫХ ИЗГИБАНИЙ
легко покажем, что
^^ = 0, Vaa^ = 0 (a, p, й, = 1, 2). C.21)
В силу этих равенств формулы C.16) можем записать еще в виде
dJL п. C.22)
(Уацр
Подставляя C.22) в уравнение drdU = O и учитывая, что
d\] = dxa, dr = r,>,dx$, nra = 0, C.23)
dxa '
получим
4" (V«"p -f Vpua) - Ьорц0 = 0 (я, Р = 1, 2). C.24)
Эту систему уравнений, которая, очевидно, является коорди-
координатной записью уравнения A.2), мы будем называть кинемати-
кинематической системой уравнений или системой уравнений поля сме-
смещений бесконечно малых изгибаний поверхности.
Эта система содержит три уравнения с тремя неизвестными
функциями щ, и2, и0 от двух переменных х1, хг. Однако функция
и0 легко исключается из этой системы.
В самом деле, записав систему C.24) в виде
А / г-7 Р I V~P \ т|3 А
а затем сокращая левую часть по индексам а, [}, т. е. полагая
a = [} и суммируя, получим:
При выводе этого равенства мы учли известные формулы
= Ъа, Г^р=—= !^- (а =1,2), C.26)
где Н — средняя кривизна поверхности. Внося C.25) в C.24),
мы получим систему из двух уравнений с двумя неизвестными
функциями «1, щ:
b«P^Bx-H(VeBp + v|1Be) = 0 (а, Р = 1, 2). C.27)
Как показывает формула A.4), система C.24) допускает
шесть линейно независимых тривиальных решений
иа = е^гга, щ = е&гп (к = 1, 2, 3, a = 1, 2),: /д 28)
ма = е^_2га, Mq == ^fe—2^ (л = 4, 5, о, к = 1, 2.)f
где ef, e2, е3 — орты некоторой декартовой системы координат в
пространстве.
§ 3. СИСТЕМА УРАВНЕНИЙ ДЛЯ КОМПОНЕНТОВ ПОЛЯ СМЕЩЕНИЙ 319
2. В ряде случаев целесообразно пользоваться системой коор-
координат в линиях кривизны. Тогда
a.2 = bi2 = 0 C.29)
и, следовательно, первая и вторая основные квадратичные формы
поверхностей принимают вид
I ^ dsz = А2 й%г + В2 di\\
II^ksds2 = A2kld'g2 + B2k,di\z, C-30)
где мы ввели обозначения
1 = х\ ц=х\ А2 = аи, В2 = а22, C.31)
bii = A*fci, Ь22 = В2&2, C.32)
причем ki и к2 — главные кривизны поверхности. Кроме того,
имеем
а" = 1/А\ а22 = 1/В2, а'2 = а21 = 0, а = А2В2, C.33)
1 дА ri ri 1 ЗА г1 В <?В
i _ 1 дА ri _ri _ 1 ЗА г1 _ В <?В
"-Л"а1'' ll2"lal~X^T' 22 А1" Ж'
_ А М г2 _ -р2 _ 1 дВ
2 _ А М г2 _ -р2 1 дВ Г2 1 ЗВ
Выпишем также уравнения Кодацци и Гаусса (вывод их см. ни-
ниже, § 7, п. 3):
-^2В)==^-|, ?(*хА) = *,§?, C.35)
^ 1 Г 3 / 1 дВ \ , 3 / 1 <?А \ 1 /ч от
к = - яв[ж l^^J + ^г I-b-stJ J- C-36)
В этой системе координат система уравнений C.24) принимает
следующий вид:
А "й| 1"А"/ + АВ дг) В Л1"о ~ U'
Если введем в рассмотрение так называемые физические компо-
компоненты вектора смещения
и = щ/А, v = иг/В, C.38)
которые представляют собой проекции вектора U на главные на-
направления поверхности в рассматриваемой точке, то, учитывая
уравнения Кодацци, систему уравнений C.37), после исключения
320 ГЛ- 5- ОБЩАЯ ТЕОРИЯ БЕСКОНЕЧНО МАЛЫХ ИЗГИБАНИЙ
из нее и0, можем записать так:
_ Ф А. (Л_Л + ^ ± lJL\ = о C.39)
А д\ \кВ) + В дц [k^AJ U' ;
А д\ \ktB) ^ В дц
А. д i и \ d
~В~ дц \ X I + X 'д% \~~В.
1 ди v дА 1 ди и дВ ,г, ,л.
Последнюю формулу мы можем записать еще в виде
_ 1 (дВи дАи\ ,о 7,,
0 2НАВ \ д?, дг\ I' '
3. Пусть поверхность имеет нулевую главную кривизну: К = 0.
Предположим сперва, что одна из главных кривизн отлична от
нуля, например к\ = 0, к2 Ф 0. Тогда, согласно уравнениям Кодац-
ци и Гаусса, имеем
А = «(!), ft2B = Tf(il), C.42)
где а и "f — функции \ и г\ соответственно.
Пусть -^-==0, т. е. В — функция только переменной tj: B =
= Р(т]). Тогда из системы уравнений C.39) и C.40) сразу по-
получаем, что компоненты вектора смещения имеют вид
C.43)
C.44)
0 YOl)
где ф(г)) и яЬ(г|) — произвольные функции переменной ti. Если же
дВ , Л
~ffC =? "> т0
C.45)
В случае цилиндрической поверхности можно положить А = В =
= 1 и, следовательно, получить формулы
и0 = — [— ф" (т)) | + i|/ (т))]. C.48)
Заметим, что линии ц = const — образующие цилиндра, а линии
? = const — направляхщие линии, ортогональные образующим.
§ 3. СИСТЕМА УРАВНЕНИЙ ДЛЯ КОМПОНЕНТОВ ПОЛЯ СМЕЩЕНИЯ 321
Пусть L — некоторая дуга, принадлежащая поверхности ну-
нулевой главной кривизны (ki = 0, к2=?=0), причем она нигде не
касается асимптотических направлений поверхности. Пусть Sl
обозначает полосу поверхности, образованную (асимптотически-
(асимптотическими) линиями т] = const, пересекающимися с кривой L по крайней
мере в одной точке. В частности, может случиться, что SL покры-
покрывает всю поверхность S.
Пусть на поверхность S наложены связи, которые не допуска-
допускают растяжения вдоль линии L. Тогда из A.3) следует, что
~ = 0 (на L), т. е. U = С (на L), C.49)
где С — постоянный вектор. Таким образом, вектор U = U — С
является вектором смещения, принимающим на дуге L значение
нуль:
U = 0 (на L), т. е. и = v — и0 = 0 (на L).
Тогда согласно формулам C.44) или C.46) получим, что и = v =
= и9 = 0 всюду в SL, т. е. вектор смещения U = С в SL.
Таким образом, доказана следующая
Теорема 5.4. Если на поверхность нулевой гауссовой кри-
кривизны (к{ = 0, кг ?= 0) наложены связи, обеспечивающие нерастя-
нерастяжимость некоторой ее дуги L, то при этих условиях полоса SL
является (геометрически) жесткой.
Заметим, что связи указанного выше вида можно реализовать
путем жесткого склеивания поверхности с некоторой нерастяжи-
нерастяжимой, но абсолютно гибкой нитью. Под жестким склеиванием нити
с поверхностью мы подразумеваем такое соединение точек нити
с точками поверхности, при котором в процессе деформации соот-
соответствующие точки получают одинаковые смещения. Другие слу-
случаи жесткости поверхностей нулевой кривизны изучены в рабо-
работах Э. Г. Позняка [69а, б, в].
Особо следует рассмотреть случай бесконечно малого изгиба-
изгибания куска плоскости (к1 = кг = О). В этом случае из уравнения
dt d\J = 0 следует, что
сШ = пйФ, т.е. и = пФ + ОХг+С, C.50)
где п — нормаль к плоскости, Ф — произвольная функция точ-
точки плоскости, Q и С — постоянные векторы. Ввиду полной про-
произвольности функции Ф изучение бесконечно малых изгибаний
плоскости — задача совершенно неопределенная. Несмотря на
это, нецелесообразно полностью исключить этот случай из рас-
рассмотрения. По многим соображениям имеет смысл рассматривать
бесконечно малые изгибания плоскости, ограничившись лишь
тривиальными изгибаниями (жесткие пластинки) :
U=QXr + C. C.51)
21 И. Н. Векуа
322 Гл- 5 ОБЩАЯ ТЕОРИЯ БЕСКОНЕЧНО МАЛЫХ ИЗГИБАНИЙ
Поэтому в дальнейшем, говоря о бесконечно малых изгибаниях
плоских кусков поверхности (например, многогранников), будем
иметь в виду смещения вида C.51).
4. Если главная кривизна поверхности всюду отрицательна,
то удобно пользоваться системой координат в асимптотических
линиях. В этой системе координат
Ьц = Й22 = 0, 612 = V-aK C.52)
и система уравнений C.24) принимает вид
5 = О, °-?- TU. = 0 C.53)
Пусть L — дуга, лежащая на поверхности отрицательной кри-
кривизны, примем она нигде не касается асимптотического направ-
направления поверхности S. Пусть Sl п Sl — части поверхности S,
образованные асимптотическими линиями, пересекающимися с
кривой L. Пусть SL — общая часть (пересечение) Sl и Sl: Sl =
= S'LS"L. Предположим, что на поверхность наложены связи,
которые исключают растяжения вдоль линии L. Тогда, как выше
(с. 321), вектор смещения U будет принимать вдоль L постоян-
постоянное значение С. Следовательно, компоненты вектора U = U — С
будут обращаться в нуль на дуге L. Так как, кроме того, каса-
касательные компоненты ut и и2 вектора V удовлетворяют системе
уравнений C.53), то согласно единственности решения задачи
Коши имеем »4 = и2 = 0 в Sl. Это означает, что SL является
жесткой.
Таким образом, доказана следующая
Теорема 5.5. При наличии связей, исключающих растя-
растяжения вдоль некоторой дуги L поверхности отрицательной кри-
кривизны S, часть SL этой поверхности является (геометрически)
жесткой.
Как уже отмечалось выше, такие связи можно осуществить
путем склеивания поверхности с нерастяжимой абсолютно гиб-
гибкой нитью.
5. Если главная кривизна К всюду положительна, то удобно
пользоваться сопряженно изометрической системой координат.
Как мы видели в гл. 2, § 6, тогда
Ьн = Ь22 = Л = УвК] 612 = 0 C.55)
и систему уравнений C.24), после исключения из нее и0 можно
§ 3. СИСТЕМА УРАВНЕНИЙ ДЛЯ КОМПОНЕНТОВ ПОЛЯ СМЕЩЕНИЙ 323
записать в форме
ди, flu , 1 >
—1 + ^Д — 2Гумк = О,
Гди, дч , ,
C-57)
Вводя в рассмотрение комплексную функцию смещений
систему уравнений C.50) мы можем: записать в виде
д-w + Au- + Bw = 0, C.59)
где
A = -L (Г2\ - TJ, - 2Г?,) + -i- (rfi - Г?2 - 2ГЬ),
. . C.60)
5 = 4-(Г^2 - Г}, + 2Г?2) - -L. (Г^ - TL + 2Г113).
Таким образом, мы видим, что комплексная функция сме-
смещений в случае поверхности положительной кривизны является
обобщенной аналитической функцией
В,
Напомним, что (см. гл. 2, § 6, п. 6)
А = — д- In У a /Iy,
/! , II \ кх C.01)
Для нормальной компоненты щ вектора смещения имеем:
«о = тгтт- Re д а?™ • C-Г>2)
Эту формулу легко можем получить из C.57), если воспользу-
воспользуемся равенствами F.63) и F.54) гл. 2.
Беря в качестве U тривиальное изгибание C.51), легко убе-
убедимся, что уравнение C.59) допускает следующие линейно не-
независимые тривиальные решения:
Х-, Y-, Z-, XY-z-YX-, YZ--ZY-, ZX-z-XZ-z, C.63)
где X, F, Z — декартовы координаты точки поверхности.
21*
324 гл- 5- ОБЩАЯ ТЕОРИЯ БЕСКОНЕЧНО МАЛЫХ ИЗГИБАНИЙ
Выведем теперь форд1улу, позволяющую выразить вектор сме-
смещения через комплексную функцию смещения w. Имеем:
U = иага + цоп = -|- w (г1 - гг2) + y йг1 + гг2) + иоп. C.64)
Если учесть, что
l l2, C.64а)
то в силу формулы C.62) равенство C.64) можно записать
в виде
U = - -±= (wnz + wn-) + -±_ Re ( VKw), n. C.65)
Эту формулу можно записать еще в виде
U = Re ! - 2К~Т U (z) n2 + —^ дг ( /a K^u) n) C.66)
I К]/в v ' )'
где
U = "JfL. C.66a)
/а Т/К
Если учеть C.61), то, 1\ак легко видеть, функция t/ удовлетво-
удовлетворяет уравнению
д-U + BU = 0. C.67)
При S = 0, очевидно, f/ — аналитическая функция от z. В сле-
следующем параграфе мы убедимся, что этот случай реализуется
для выпуклых поверхностей 2-го порядка (и только для них).
Теорема 5.6. Пусть на поверхность S положительной кри-
кривизны наложены связи, исключающие растяжения вдоль неко-
некоторой ее (внутренней или граничной) дуги L. В таком случае
поверхность S является жесткой.
Доказательство. В самом деле, как мы уже видели выше
(с. 321), вдоль L вектор смещения U принимает постоянное зна-
значение С. Следовательно, вектор смещения U = U — С принимает
вдоль L значения, равные нулю. Тогда соответствующая комп-
комплексная функция смещений U равна нулю на L. Так как эта
функция удовлетворяет уравнению C.67), то согласно теореме
единственности 3.5 w = 0 всюду. Это и доказывает (геометриче-
(геометрическую) жесткость поверхности S.
Еще раз отметим, что такого рода связи реализуются путем
склеивания поверхности со сколь угодно малой нерастяжимой
абсолютно гибкой нитью.
С помощью уравнения C.67) можно дать еще одно доказа-
доказательство жесткости овалоида.
§ 3. СИСТЕМА УРАВНЕНИЙ ДЛЯ КОМПОНЕНТОВ ПОЛЯ СМЕЩЕНИЙ 325
Пусть овалоид принадлежит классу Dsp, р>2. Тогда, как
было установлено в гл. 2 (§6, п. 9), B*=LPt2\E), р>2. Кроме
того, вблизи точки z = °°
/а = 0(И-*), r-x = O(\z\-*). C.68)
Пусть поле смещений U принадлежит классу DiT, p > 2.
В таком случае в силу C.68) функция U непрерывна и удов-
удовлетворяет уравнению C.67) всюду на плоскости. Кроме того,
в силу C.58), C.66а) и C.68) вблизи точки z = °°
?/ = О(Ы2). C.69)
Отсюда на основании теоремы 3.12 следует, что U—обобщен-
U—обобщенный полином 2-й степени. Но всякий такой полином есть ли-
линейная комбинация с вещественными коэффициентами шести ли-
линейно независимых обобщенных полиномов, которые, очевидно,
соответствуют шести линейно независимым тривиальным реше-
решениям C.63). Это означает, что все непрерывные на плоскости
решения уравнения C.67), удовлетворяющие на бесконечности
условию C.69), исчерпываются решениями, которым соответ-
соответствуют тривиальные поля смещений. Это доказывает жесткость
овалоида.
Из формулы C.65) видно, что касательное поле смещений
выражается по формуле
Us = - —L= (иль + wn-) = -|" (г1 - ir2) w + 4 (г1 + гг2) w.
Отсюда имеем (см. гл. 2, § 6, п. 4):
U\ = -L [(а11 — а22 - 2m12) w2 + (а11 — а22 + 2мг12) w2 +
+ 2 (а» + а22) н^] = ±[2 (ап + а22) | w |2 -
— (йп — а22 — 2г'а12) ш2 — (а1г — й22 + 2г'а12) w2] =--
= -^ (н - /Ё cos 2 (-J - в)) = А,'| к'о |2, C.69а)
где
ks = Н — /Ё cos 2 (-|- — в), 9 = arg w (г),
Следовательно, А, — нормальная кривизна поверхности в неко-
некотором направлении, которое зависит от рассматриваемого по-
поля смещений. Функция ш„ представляет собой некоторую обоб-
обобщенную аналитическую функцию. Поэтому в силу принципа
32G ГЛ- 5- ОБЩАЯ ТЕОРИЯ БКСКОНКЧНО МАЛЫХ 11.ЧХЧ1БАННЙ
максимума (гл. 3, § 4, п. 8)
|o()Ke|e(|,
L
где М„ — положительная постоянная, которая зависит исключи-
исключительно от рассматриваемой поверхности. В силу этого из C.69а)
получаем
| Vs № I
U, (Л/)|< //.-, (М) Мо max
NL
NsL
Так как к, ^ /г, ^ А'2, то, обозначая максимум и минимум /.',
и fr2 через кг и /г^ соответствснпо, получим
Us (М) | < М' max | U, (N) |, ЛГ = ]/А-;//с! Л/о. C.696)
Таким образом, для касательного поля смещений на поверхно-
поверхности положительной кривизны имеет место принцип максимума
к указанной здесь форме. Следует иметь в виду, что положи-
положительная постоянная М', фигурирующая в неравенстве C.696),
зависит только от поверхности, но не зависит от поля смещений.
6. Укажем теперь еще один простой прием вывода уравнения
C.59). Как мы видели в п. 5 § 6 гл. 2, радиус-вектор г удов-
удовлетворяет уравнению (разумеется, при К > 0)
Умножая обе части этого равенства скалярно на 2U, получим:
BUr2-)- - 2U-2r- + A BUr-) + 3Bl)rz) = 0. C.71)
Но U удовлетворяет уравнению dvd\J=Q, которое равносильно
двум следующим равенствам:
U2-r- = 0, Urr; + Ujr, = 0.
Поэтому, учитывая обозначение (З.о8), из C.71) получим урав-
уравнение C.59).
§ 4. Об одном свойстве поверхностей 2-го порядка
Вводя в рассмотрение новую комплексную функцию сме-
смещений
U ^wjYa /К, D.1)
уравнение C.59) можно записать еще так:
д-и + BU = 0. D.2)
Если
Я-0, D.3)
g 1. ОБ ОДНОМ СВОЙСТВ!-: ПОВЕРХНОСТЕЙ 2-ГО ПОРЯДКА 327
то мы получаем уравнение Коши — Римана
: Щ- = 0, D.4)
Oz
т. е. U — аналитическая функция от z. Следовательно, для по-
поверхностей, удовлетворяющих условию D.3), задача приводится
к уравнению Коши — Римана и комплексная функция смещений
имеет вид
и- (z) = У а /К Ф (z), D:5)
где Ф(г)— аналитическая функция от z.
Условие D.3), как это сразу следует из формулы C.61),
выполняется для сферических поверхностей, причем в этом слу-
случае, если учтем, что (в случае единичной сферы)
ап = а.,2 = У~а — — - ,, а3., ¦—О, К = const, D.6)
(i + zz)-
формула D.5) примет вид
нф) = A + гг)-гФ(г). D.7)
Теперь, естественно, возникает вопрос, для каких еще поверх-
поверхностей имеет место равенство D.3). На этот вопрос отвечает
следующая
Теорема 5.7. Условие D.3) выполняется для всех поверх-
поверхностей 2-го порядка положительной кривизны и только для них.
Доказательство. Если 5 = 0, то уравнение C.70) мы
можем записать в виде
Отсюда следует, что
Х- = Уа /К / (z), Y- = У а УК <р (z), Z- = /а УЩ (z), D.8)
где X, Y, Z — декартовы координаты точки поверхности, а /,
Ф, г|) — произвольные аналитические функции от z. Из этих функ-
функций хотя бы одна не обращается тождественно в нуль. В про-
противном случае мы имели бы X = const, Y = const, Z = const.
Пусть, например, /(z)=^0. Тогда путем замены переменной
Z.J. = I -^рг, / (z0) =^0 (z0 — фиксированная точка)
мы можем добиться, чтобы / = 1 в окрестности точки z0.
328 гл- 5- ОБЩАЯ ТЕОРИЯ БЕСКОНЕЧНО МАЛЫХ ИЗГИБАНИЙ
В самом деле, с одной стороны,
х- = х- ?* = х- =L.
2 z* dz l* f{z)
С другой стороны (используя формулу F.77) гл. 2),
Таким образом, из этих двух равенств следует, что
Х^ = Va., /К, т. е. /,= 1.
Опуская в дальнейшем знак *, получаем
Ху = 0, т. е. Х = Х(х), У а /К = -L X' (х).
Таким образом, X есть функция только от х. Поэтому последние
два равенства D.8) мы можем записать теперь в виде
(у _ х (х) Ф (*)); = 0, (Z - X (х) хр (z))- = 0.
Эти равенства означают, что
где ф4 и я|)! — аналитические функции от z. Так как Y ж Z —
вещественные функции, то Хгг + и4 = 0, Xv + vt = 0, где и, м4,
у, Vi — мнимые части функций ф, ф1, tji и г|1, соответственно.
Но эти равенства означают, что Хи и Xv — гармонические функ-
функции переменных х и у. Из условий гармоничности и и v сразу
следует, что это возможно лишь тогда, когда
и = a cos hX (x — |) соа к (у — ц),
v ~ Р cos h>w (j; — g) cos Я (г/ — п').
9
a sin ИЯ (л; — |) cos Я (у —
о
ух = т- Р sin ЬЯ (ж — |) cos Я (у — г]'),
л
где а, ?5, Я, |, т] и tj' — любые вещественные постоянные. Гар-
Гармонические функции, сопряженные с и, v, щ и vu определяются
равенствами
щ — — a sin ЬЯ (х — |) sin Я (у — т)) + 7,
v* = — Р sin ЬЯ, (х — g) sin Я (у — т)') + у'9
§ 4. ОБ ОДНОМ СВОЙСТВЕ ПОВЕРХНОСТЕН 2-ГО ПОРЯДКА 329
ult = у- cos liX (х — |) sin Л. ((/ — 1]) + •>?!,
«in
ru = #- cos hA, (.г — 1) sin Я, (у — п') + 7ь
где 7, f'» Ти Ti—действительные,постоянные.
Таким образом, уравнение тех поверхностей, для которых
5 = 0, можно записать в виде
Х = Х(х), У = А» г/* + н^, Z = X (х) i\ + l\,. D.9)
Легко убедиться, что в этих уравнениях без ущерба для общно-
общности можтто положить | = 1] = 0, "\\ = 7i — 0- Тогда уравнения
D.9) можно записать еще так:
Х = Х(х), у -уХ^--^^,
у ,'V_ 2p sin Xy cos кц' — cos %y sin %ц' ^' .'
' ~ a cos ЬЯл-
Исключая из этих уравнений переменные х п у, получим
($ + ? w + i2?')Х2 + S + +
2™*}n'ZY
Таким образом, доказано, что класс поверхностей, для кото-
которых S = 0, содержит лишь алгебраические поверхности 1-го по-
порядка. Варьируя входящие в уравнение D.11) постоянные а, р,
f, "[', X и г)', можно получить любую поверхность 2-го порядка
положительной гауссовой кривизны: эллипсоиды (в частности,
сферы), двуполостные гиперболоиды и параболоиды*).
Отметим, что эти поверхности обладают тем свойством, что
сеть лилий кривизны представляет собой сопряженно изометри-
изометрическую сеть линий.
Докажем это. Как видно из F.66) гл. 2, равенство ,S = 0 оз-
означает, что
где / — аналитическая функция от z. Для случая сферической
*) Следует отметить, что н раньше было известно, что поверхности
2-го порядка при К > 0 приводят к системе Коши — Римана (см,, напри-
например, [18]). Выше установлено и обратное предложение, которое, насколько
известно автору, раньше никем не было доказано.
330 ГЛ- 5- ОБЩАЯ ТЕОРИЯ БЕСКОНЕЧНО МАЛЫХ ИЗГИБАНИЙ
поверхности Е ^ 0 и теорема тривиальна. Поэтому будем счп-
<ать, что Е > 0 к окрестности некоторой точки z0. Тогда /(z)^
Ф 0 и, беря в качестве новой независимой переменной
-~r. f(zn)=?Q, D.13)
мы убедимся, что
-Щ= е1** = 1, т. е. i|v -^ 0. D.14)
К у а*
Поэтому в силу F.30) гл. 2 для этой системы координат
а*2 = 0. D.15)
Это означает, что координатные линии выбранной сопряженно
изометрической системы координат являются линиями кривизны
поверхности. Кроме того, для этой системы координат в силу
D.14) и D.15) первая и вторая основные квадратичные формы
имеют вид
du-), II = I/ -rr (dx2 + dii'-). D.16)
Следует заметить, что эти формулы имеют место лишь в
окрестности каждой неомбилической точки, так как преобразо-
преобразование переменных по формуле D.13) законно лишь в окрестно-
окрестности точки, где f(z)?=O. В омбилической же точке /(zo)=O и
преобразование D.13) не имеет смысла.
§ 5. Поле вращений. Характеристическое уравнение
бесконечно малых изгибаний
1. Из уравнения A.2) следует, что
dV = YXch\ E.1)
где V — некоторая вектор-функция. Это равенство показывает,
что в результате бесконечно малого изгибания поверхности все
исходящие из точки (х\ хг) ее линейные элементы испытывают
вращение с угловой скоростью V(x', x2). Иными словами, при
бесконечно малом изгибании поверхности каждая элементарная
площадка перемещается как жесткое тело.
Вектор V называется вектором вращения, а соответствующее
векторное поле па поверхности — полем вращений.
' Теперь покажем, что поле вращений однозначно определя-
определяется через поле смещений.
§ 5. ПОЛЕ ВРАЩЕНИИ. ХАРАКТЕРИСТИЧЕСКОЕ УРАВНЕНИЕ 331
Представляя V в виде
\ = v^n + vnt E.2)
получаем
cW = vxi\ X rrxdxa + vn X r*dxa. E.3)
Нетрудно доказать, что
Га X Гц = Capll, 11 X Га = СгхрГР, EЛ )
где _
Си = С22 = 0, с,2 = —с21 = Уя, E.5)
Сар — кососимметрический ковариантный тензор второго ранга.
В силу E.3) п E.2) равенство E.1) примет вид
Отсюда имеем:
У Cad = УГ1Щ — bafUo, E.6)
vKcKr, = VaWo + ftaxU\ E.7)
На E.0), учитывая E.5), вновь получим равенства C.24).
Кроме того, имеем
v ---.
2 у а
t
2 У ~а
(a-
<>:iX
= 1,
2),
E
E
.8)
9)
где сщ> = (i^a^Cx-i — кососимметрнческнй контравариантныИ тен-
тензор второго ранга, причем
Си = са = Oj сп .,., __ C2i _ 1 / /- C">-C(ik = 6«_ E.10)
Таким образом, компоненты вектора вращения V однозначно
определяются посредством компонент вектора смещений U. Нао-
Наоборот, семи задано заранее поле вращений, то соответствующее
ему ноле смещений U определится из равенства E.1) посред-
посредством квадратур с точностью до переноса.
Очевидно, U будет тривиальным полем смещений тогда и
только тогда, когда V — постоянное векторное поле.
2. Пусть L — некоторая кривая, лежащая па поверхности S.
Пусть s, m, b — натуральный триэдр, связанный с кривой L: s —
орт касательной, m — орт главной нормали и b — орт бинорма-
бинормали, причем ориентация этого триэдра такая же, как координат-
координатного триэдра г,, г2, п. Поэтому
sXm = b, mXb = s, bXs = m. E.11.)
Кроме того, мы считаем, что m направлен всегда в сторону
вогнутости кривой.
332 гл- 5- ОБЩАЯ ТЕОРИЯ БЕСКОНЕЧНО МАЛЫХ ИЗГИБАНИЙ'
Разложив вектор смещения U по ортам натурального триэд-
триэдра s, m, b, получим
U = mss + «„до + м&Ь. E.12)
Дифференцируя обе части этого равенства по дуге s кривой L
и пользуясь формулами Серре — Френе
— = km, -r = — hs + xb, -г- = — у.т, E.13)
ds ds ' ds v
где к — кривизна, а у, — кручение кривой L, находим
^ = (S ~kUm) s + [^ir + kUs - ть)т +' 1? + XUm)ъ- E-14''
С другой стороны, согласно E.1) и E.11),
^- = V X s = (vss + vmm + vbb) X s = vbm — vmb, E.15)
где vs, vm, vb — проекции вектора вращения на орты натураль-
натурального триэдра.
Сравнивая E,14) с E.15), получаем
du \ du,
1?-кит = 0, т. e. um^-L—?, E.16)
m , , / 1
Таким образом, мы получили формулы, выражающие проекции
vb и vm вектора вращения через проекции и3 и иь вектора сме-
смещения на орты натурального триэдра, связанного с кривой L.
Если L — прямая линия, то к = 0 и из E.16) следует, что
и3 = const (вдоль L). E.18)
Таким образом, имеет место следующая
Теорема 5.8. Если поверхность содержит прямую, то со-
составляющая поля смещения вдоль этой прямой есть величина
постоянная.
Поэтому при бесконечно малом изгибании линейчатой по-
поверхности проекция вектора смещения на образующую есть
функция, зависящая только от соответствующей точки направ-
направляющей линий, т. е.
в. = /(«). E-19)
где f(s)—функция длины дуги s направляющей кривой линей-
линейчатой поверхности.
Так как (см. ниже, § 7, п. 5)
ит — Mo cos 0 — w; sin 8 (l = nXs), E.20)
§ 5. ПОЛЕ ВРАЩЕНИЙ. ХАРАКТЕРИСТИЧЕСКОЕ УРАВНЕНИЕ 333
где в — угол между нормалью поверхности и главной нормалью
кривой L, то в силу формулы E.16)
u» = Xjf + tgQui- ^ = "со*е- C.21)
Если L — геодезическая кривая, то tg6 = 0 и из E.21) сле-
следует, что
dus
ksu0 — — (вдоль L). E.22)
((А
Если же i — асготтотическая кривая поверхности, то к3 = 0 и
^ 4- ки, = 0, т. е. щ = — -1- d~, к ф 0. E.23)
9. Из E.1) имеем:
дх1 дт1
Дифференцируя первое из этих у]1авнений относительно х2,
второе — относительно х\ а затем вычитая из первого второе,
получим:
5 ж дх
Так как в силу формулы C.16)
Цг = (Vai;1 - &&) г». + (Vai; + fea,^) n, E.25)
<?.rx
то равенство E.24), если учтем формулы E.4), примет вид
\Уаиа - b*v) n -(V«y + iwv*) ra = 0,
т. е.
Vav* - 2Ну = 0 BГ1 = 62), E.26)
V«v + Ъа^ = 0 (а = 1, 2). E.27)
Следовательно, равенство E.25) принимает вид
Величины Т& составляют смешанный тензор второго ранга. Как
показывают формулы E.8), E.9), тензор Та однозначно опре-
определяется через вектор U.
Допустим теперь, что главная кривизна поверхности отлична
от нуля:
334 гл- 5 ОБЩАЯ ТЕОРИЯ БЕСКОНЕЧНО МАЛЫХ ИЗГИБАНИЙ
Тогда, решая систему E.27) относительно у1 и v2, получим:
„*=-<?#¦% (а =1,2), E.28)
где
Если выражения E.28) внесем в E.26), то получим урав-
уравнение
Ve(da%i;)+2H» = 0. E.30)
Это уравнение впервые было выведено Вейнгартеном. Оно
называется характеристическим уравнением поля вращений при
бесконечно малых изгибаниях поверхности, а решения его —
характеристическими функциями.
Уравнение E.30) допускает три линейно независимых три-
тривиальных решения
А = е,п, ц = е2п, v = е3п, E.31)
представляющих собой направляющие косинусы нормали по-
поверхности.
Кслп v — некоторое решение уравнения E.30), то
Y = -<f*^ra + vn E.32)
представляет собой вектор вращения, соответствующий некото-
некоторому бесконечно малому изгибанию поверхности.
Как будет показано в следующей главе (§ 4), к уравнению
E.30) приводит также изучение задачи безмоменгного напря-
напряженного состояния равновесия оболочек.
4. Пусть поверхность отнесена к координатной системе в ли-
линиях кривизны. Тогда
d11 = -i-г, d- = -i-т, dvl = d21 = 0, E.33)
и уравнение E.30) и формула E.32) примут вид
dv
Если главная кривизна поверхности имеет переменный знак, то
характеристическое уравнение смешанного типа. Оно эллипти-
эллиптического типа в тех частях поверхности, где К > 0, и гипербо-
гиперболического типа там, где К < 0.
На поверхности отрицательной кривизны мы можем рассмот-
рассмотреть координатную систему в асимптотических линиях. Тогда
§ 5. ПОЛЕ ВРАЩЕНИЯ. ХАРАКТЕРИСТИЧЕСКОЕ УРАВНЕНИЕ 335
характеристическое уравнение E.30) и формула E.32) прини-
принимают вид
{Цк$) 1(ЫЩ=°- E-36)
Здесь мы учли, что
dn = d22 = о, rfia = jti _= /J_T. E.38)
Вводя в рассмотрение новую функцию
со = (- К)му, E.39)
получим уравнение
+ Мо - 0, E.40)
дх cly
где
М = Н У^аК - (- КI'4 -^— Г(— К)~1/',. E.41)
v / ах ду 1У ' J v
Иа поверхности положительной кривизны можно ввести в
рассмотрение сопряженно изометрическую систему координат.
Тогда
du = d22 = 1 ? diL> = d2i = 0 E,42)
УаК
и у]>авнение E.30) п формула E.32) принимают вид
*/Л . э ( \ д»\л . „,,. = 0) E_43;
1
Если введел! в расслготрение новую функцию
«а = K-1/4i7, E.45)
то для нее получим уравнение
„9 „ »
СТО) G 0) , ., г. /г /Г'\
—- Ч + Мю -= 0, E.4Ь)
где
М = 2УаК Н - К|/4{'(К-1/1)« + (К-1/4)га}. E.47)
Функцию у в силу формул E.8) можно выразить при помо-
помощи комплексной функции смещений w = ul + ш2 следующим
образом:
E.48)
336 гл- 3- ОБЩАЯ ТЕОРИЯ БЕСКОНЕЧНО МАЛЫХ ИЗГИБАНИЙ
Уравнение E.46) имеет три тривиальных решения:
ю, = К-1/4е<п (* = 1, 2, 3), E.49)
где et, e2, е3 — орты декартовой системы координат в простран-
пространстве. Этим решениям соответствуют тривиальные поля смеще-
смещений. Линейными комбинациями этих решений исчерпываются
все тривиальные решения уравнения E.46). В случае овалоида
все ограниченные па всей плоскости решения будут линейны-
линейными комбинациями функций E.49). Это следует из жесткости
овалоида; в противном случае овалоид был бы нежестким. От-
Отметим, что вблизи бесконечности функция М удовлетворяет ус-
условию
). E.50)
§ 6. Поля изгибаний. Статическое поле
1. Согласно формуле E.25а) мы имеем
_ = ? _ = 0
дх1 дг} Ох2 дх1 дхг дх1 '
ИЛИ
СаЭГЬ.сс + еаР^|г, = 0. F.1)
Используя деривационные формулы C.12), последнее равенство
можно записать в виде
т. е.
Вводим в рассмотрение новый контравариантный тензор
Гар = ca>Tl т. е. Tl = сыГхг\ F.3)
Согласно F.3), E.5) и E.26)
Т\ + Т\= Va (Г12 — Г21) = 0, т. е. Тп = Г21. F.4)
Следовательно, ТаГ' — симметрический контравариантный тензор
второго ранга. Если учтем равенства E.5), и E.10), то согласно
формуле C.19) получим
V,cap = 0, V,CaB = 0. F.5)
§ 6. ПОЛЯ ИЗГИБАНИЙ. СТАТИЧЕСКОЕ ПОЛЕ 337
В силу этого уравнения F.3) запишутся так:
Vaf«n = O @ = 1,2), Ь«,Г»|1 = О {Ть* = 1*а). F.6)
Таким образом, если на поверхности задано некоторое поле вра-
вращений V, то по формулам
определяется симметричный контравариантнып тензор второго
ранга Га|\ удовлетворяющий системе уравнений F.6). Этот тен-
тензор, как увидим ниже, полностью характеризует деформацию
поверхности при ее бесконечно малом изгибании. Поэтому мы
будем его называть контравариантным тензором изгибаний или
просто полем изгибаний.
В следующей главе мы увидим, что системе уравнений F.6)
удовлетворяют коптравариантные компоненты тензора усилия
безмоментного напряженного состояния равновесия оболочки,
причем всякому решению этой системы соответствует некоторое,
вполне определенное безмоментное напряженное состояние рав-
равновесия. Поэтому всякое тензорное поле Tafi, удовлетворяющее
системе уравнений F.6), мы будем называть еще статическим
полем.
Теперь естественно возникает вопрос о том, можно ли любое
статическое поле представить в виде F.7). Иными словами, воз-
возможно ли заданное статическое поле интерпретировать всегда
как некоторое (контравариантное) поле изгибаний?
Ниже мы увидим, что для односвязной поверхности это всег-
всегда возможно, а в случае многосвязной поверхности такое толко-
толкование приводит, вообще говоря, к многозначным полям
смещений.
2. Если введем теперь в рассмотрение ковариаптный тензор
(ковариантное поле изгибаний)
т. е. ГаР = caV%, F.8)
то для него в силу F.3) и F.5) получим систему уравнений
Ниже мы выясним геометрический смысл этого тензорного поля
(§7, п. 4).
Из формул F.1), F.3) и F.8) легко следует, что между по-
полем вращений и полем изгибаний имеется соотношение
dV = c^ta,r,dxa = T**racudx\ F.10)
Таким образом, если задано поле вращений, то соответствую-
соответствующее поле изгибаний мы можем найти с помощью операции диф-
22 и. Н. Векуа
338 ГЛ. 5. ОБЩАЯ ТЕОРИЯ БЕСКОНЕЧНО МАЛЫХ ИЗГИБАНИЙ
фереицирования. Если же задано поле изгибаний, то соответству-
соответствующее ноле вращений, а затем и поле смещений можно найти
посредством квадратур.
J fyCTi. s и 1 — два взаимно перпендикулярных касательных
орта, причем они ориентированы так. что
lXs = n. sXn = I, nXl = s. F.11)
Очевидно, два из них— следствие третьего.
Подставляя в эти соотношения выражения
s-M-^-r,, 1 =/„г" = Z'r, F.12)
я учитывая формулы E.4), получим следующие формулы:
So. — Cf,rj,l , S — С If,. la — Ca!,S , I —¦ С S$. (O.lo)
Согласно этим формулам равенство F.10) мы можем записать
еще так:
~ = Ta*v«k,. F.14)
Если V есть некоторое поле вращении, то, очевидно, выпол-
выполняются следующие равенства:
frfV = O, frXdV = O, F.15)
L L
где L — любая кусочно гладкая простая замкнутая кривая, ле-
лежащая на поверхности. Первое из этих равенств очевидно,
а нторое следует из формулы
rXdV = d(rXV)+c/U. F.16)
Таким образом, для того чтобы статическое поле, т. е. решение
системы уравнений F.6) представляло собой также поле изги-
изгибаний необходимо, чтобы выполнялись равенства
pds = 0, (' г X Тарга1ф = 0, F.17)
L L
где L — любая кусочно гладкая замкнутая кривая, принадлежа-
принадлежащая поверхности.
Докажем, что эти условия достаточны. В самом деле, из
формул F.14) и F.16) видно, что
V(M) = f Ta\alf>ds + Vo, F.18)
U (M) = V X г + f г x dY + Uo, F.19)
где Л/о —; фиксированная точка, а М — переменная точка поверх-
поверхности; Uo и Vo — постоянные векторы, причем интегралы берут-
g 6. ПОЛЯ НЗГНБАНПП. СТАТИЧЕСКОЕ ПОЛЕ 3391
ся по любой спрямляемой кривой, лежащей на поверхности S и
соединяющей точки Мо и М. В силу равенств F.17) эти инте-
интегралы не зависят от пути интегрирования. Из последних формул
видно, что статическому полю Та1>, удовлетворяющему системе
уравнений F.6), соответствуют однозначные поля смещений и
вращений тогда и только тогда, когда выполняются равенства
F.17). В таком случае всякое статическое поле можно истол-
истолковать как некоторое бесконечно малое изгибание поверхности.
Докажем, что условие F.17) всегда выполняется в случае одно-
связной поверхности. Для этой цели докажем одно интегральное
тождество.
Пусть U — некоторое поле смещений, а Та<1—некоторое ста-
статическое поле, т. е. Та(' удовлетворяет системе уравнений F.В).
Тогда имеет место тождество
f UT(t)ds = J T^ujpd.s = О, F.20>
L L
где L — граница поверхности S. а Т(,, — вектор, равный
Т@ = Рагр. F.21)
•Этот вектор мы назовем вектором усилий (см. гл. 6, § 1). Мы
предполагаем, что L состоит из конечного числа кусочно гладких
простых замкнутых контуров Lo, Ь1ч ..., Lm. Кроме того, считаем,
что поля U и ГаР непрерывны в S + L.
Применяя формулу Грина, а также используя уравнения
C.24) и F.6), получим
f UT0)ds^ f Ta\,lach = J J V, (Г%) dS =
L L S
' s
f-"a + ^аЩ) dS = ~\l Ta%fiU0dS = 0.
Здесь мы воспользовались также симметричностью тензора TafS.
Интегральное тождество F.20) выражает свойство взаимной со-
сопряженности систем уравнений C.27) и F.6).
В частности, если U и V — два произвольных поля смещений
и вращений на S. то имеем тождество
f U d\ = 0. F.22)
L
Нужно помнить, что здесь U и V, вообще говоря, не связаны
соотношением d\J = V X dr. Докажем, что если выполнено по-
последнее условие, то имеет место равенство F.22) для любой
22*
340 гл' 5- ОБЩАЯ ТЕОРИЯ БЕСКОНЕЧНО МАЛЫХ НЗГИБАНИЙ
замкнутой кусочно гладкой простой кривой, принадлежащей
поверхности.
В самом деле, если сШ = V X dr, a L — замкнутая кривая на
S, то
j U dV = — С V d\J = f V (V X с/г) = 0.
L L L
Таким образом, если векторные поля TJ и V непрерывны на
S -г L и связаны между собой равенством dU = V X dr. то имеют
место равенства
UdV = 0 (/ = 0,1,...,»»). F.23)
Надо заметить, что в силу формулы F.22) одно из этих ра-
равенств есть следствие остальных.
Если поверхность односвязна, то, беря в F.20) в качестве
U тривиальные изгибания C.51), получим равенства F.17). Та-
Таким образом, равенства F.17) всегда выполняются в случае
односвязной поверхности для любого статического поля. Следо-
Следовательно, в этом случае формулы F.18) и F.19) каждому ста-
статическому полю сопоставляют (с точностью до тривиального
изгибания) однозначные поля смещений и вращений. Иными
словами, в случае односвязной поверхности любое статическое
поле Г"" мы можем интерпретировать как поле изгибаний. В слу-
случае многосвязной поверхности это уже не так, ибо условия F.17)
не будут выполняться для любого статического поля (гл. 6, § 3.
п. 4). Заметим, что равенства F.17), пользуясь обозначением
F.21), можем записать так:
[ Т@ ds = 0. \ v X T(l)ds = 0 0 =1,2 т). F.24)
Ч Ч
В следующей главе мы выяснил: механический смысл форму-
формулы F.20), а также равенств F.24). Кроме того, мы выясним
механический смысл вектора Т^,.
3. С помощью формул F.3), F.1), E.8), E.9) нетрудно най-
найти, что поле изгибаний, соответствующее некоторому полю сме-
смещений, можно выразить по следующим формулам:
(a, E = 1. 2). F.25)
где
"•= Ш VMa V
или, так как
§ 6. ПОЛЯ ИЗГИБАНИЙ. СТАТИЧЕСКОЕ ПОЛЕ 341
то в силу E.28)
) - c^v, F.27)
где v — характеристическая функция.
Из равенства Г12 = Г21 следует, что
v=-^a(^%u0). F.28)
Таким образом, характеристическая функция получается в ре-
результате двукратного дифференцирования нормальной компонен-
компоненты вектора смещения.
Заметим, что по формулам F.25) или F.27) выражается
любое однозначное поле изгибаний (т. е. решение системы урав-
уравнений F.6)) односвязной поверхности. В случае же многосвяз-
многосвязной поверхности эти формулы не могут дать все (однозначные)
решения системы уравнений F.6), если оставаться в классе
однозначных полей смещений и вращений. К этому вопросу мы
еще вернемся ниже (п. 8).
4. Если поверхность отнесена к системе координат в линиях
кривизны, то, вводя в рассмотрение величины
Ni = AiTlt, N2 = B2T2\ H = Hl = -H2 = ABT12, F.29)
системе уравнений F.6) можно придать вид
dBiV, дкНл ял яп
-sr + V + ^-f лт* = 0' FЖ))
^ ^ ?^=0. F.31)
k.N, + k2N2 = 0.
Вводя новые обозначения
р = _ ^1 езА g = //, = _ Я5. F.32)
систему уравнений F.30) можем записать еще так:
1 д /;2г>2 "\ 1 дХ'а „
F.33)
кг\'В йч v В2А д%
Ниже, в § 7, п. 7, мы выясним геометрический смысл величин
р и q. Заметим, что системы уравнений C.39) и F.33) взаимно
сопряжены.
5. Пусть главная кривизна К < 0. Тогда, рассматривая на по-
поверхности систему координат в асимптотических линиях, легко
342 ГЛ 5- ОБЩАЯ ТЕОРИЯ БЕСКОНЕЧНО МАЛЫХ ИЗГИБАНИЙ
убедимся, что
Г2 = Г' = 0. F.3'i)
Введем обозначения
и' = ПТп, v' = пТ1г; F.35)
тогда система уравнений F.6) примет вид
^ + r,v + IV = о, ^ + r2v + i>' = o. (Об)
6. Рассмотрим теперь случаи поверхности положительной
кривизны. Относя поверхность к сопряженно]) изометрической
системе координат и учитывая симметричность тензора Та®, си-
систему уравнений F.6) можно записать в виде
Т" = -Тг\ F.37)
*? + *? + BГ3\ + Ц2 - Г^) Г" + (Ж], + Г*2) Л* = О,
U 12 (Г)-38)
^ - ^ + BГ12 + Г]2 - rfx) 2'" - C11, + ГЬ) ^12 = 0.
Вводя в рассмотрение комплексную функцию напряжений
w' = T/7(TH-iTiZ), F.39)
систему уравнений F.38) мы може.м записать в комплексной
форме:
VOL — Aw'— Bw' = 0, F.40)
где А и В — функции, заданные равенствами C.60) или C.61).
Таким образом, комплексная функция напряжений w' явля-
является обобщенной аналитической функцией, удовлетворяющей
уравнению, сопряженному уравнению C.59) для комплексной
функции перемещений.
Как мы видели в гл. 3, § 9, п. 1, условия сопряженности
уравнений C.59) и F/i0) выражаются равенством
z\ --= 0, F.41)
где w и м/ — произвольные, непрерывные в области G решения
этих уравнений соответственно, а Г' — любая кусочно гладкая
замкнутая простая кривая, принадлежащая области G. Если w и
w' непрерывны в G+Г, где Г — граница области G, состоящая
из конечного числа кусочно гладких простых кривых, то в ка-
качестве Г' в равенстве F.41) можно взять также Г.
Комплексную функцию напряжений w', которая однозначно
определяет статическое поле Trxf', мы будем называть комплекс-
§ 6. ПОЛЯ ИЗГИБАНИЙ. СТАТИЧЕСКОЕ ПОЛЕ 343
ной функцией изгибаний, если тензор Г*р удовлетворяет усло-
условиям F.17). Эти условия в комплексной записи принимают вид
Im \ w'r-dz = 0, lm f ir'r X т-dz = 0 (/ = 1, 2, ..., m), @.42)
где Го, Г\, ..., Г,„ — граничные контуры области G, на которую
гомеоморфно отображается поверхность S. Кривые Го, ..., Г„,
являются гомеоморфнымн образами граничных кривых La, Lu ...
..., Lm соответственно.
Если поверхность односвязна (то = 0), то условия F.42) вы-
выполняются всегда в силу F.20). Следовательно, в этом случае
комплексную функцию напряжении можно всегда интерпретиро-
интерпретировать как комплексную функцию изгибании. В случае же мно-
многосвязной поверхности это не всегда возможно. Существуют
комплексные функции напряжений, которые условиям F.42) не
удовлетворяют (гл. 6, § 3, п. 4).
Условимся в дальнейшем комплексную функцию изгибании
обозначать через w'. Это есть решение уравнения F.40), удов-
удовлетворяющее условиям F.42), т. е.
wr=*u(ri-iT"). @.43)
Пользуясь формулами F.37) и F.39), мы можем формулу
F.14) для производной вектора вращения записать еще в виде
d\ ., т I —, dz \ dz dx . dy ,о , ,х
= 2 Im[w —- г- , -г-=-^—^1~г- F.44)
ds
Здесь, разуд1еется, w' является комплексной функцией изгибаний.
Если же и/ — комплексная функция напряжений, то в силу
F.21) и F.43) имеем формулу
('|-г-), @.45)
выражающую вектор усилия безмоментного напряжения, которое
уже нельзя, вообще говоря, интерпретировать как некоторое поле
изгибаний (см. еще гл. 6, § 3, п. 4).
Пользуясь формулами F.39) и F.25), мы можем теперь вы-
выразить комплексную функцию изгибаний w' через комплексную
функцию перемещений. Формулы F.39) н F.27а) дают:
-i- F1 - Ъ\ - 2ib\) v, F.46)
где V4 и V2 — операции ковариантного дифференцирования, v —
нормальная компонента вектора вращения, т. е. решение харак-
характеристического уравнения F.30), а у™ — контравариантные компо-
компоненты вектора вращения, равные (в сопряженно изометрической
344 гл- 5 ОБЩАЯ ТЕОРИЯ БЕСКОНЕЧНО МАЛЫХ ИЗГИБАНИЙ
системе координат)
Г1 = =- , Г- = -=г —. (Ь.4/)
УаК дх У«К "У
В силу (формул F.72), F.63), F.24) и F.26) гл. 2 и E.48)
имеем
w' = I /Ei-!*w - 2jK* (dzw0 - Д/70|, (°--48)
где
_i _з _i _з
S 4 5f4-Im5-2i. F.49)
/
Таким образом, формула F.48) выражает решения дифферен-
дифференциального уравнения F.40) через решения сопряженного с ним
уравнения C.59) пли же через решения характеристического
уравнения E.30). Иными словами, комплексную функцию изги-
изгибаний мы можем получить, применяя к комплексной функции
смещений определенную линейную дифференциальную операцию
3-го порядка нли же в результате применения к характеристи-
характеристической функции определенной дифференциальной операции 2-го
порядка.
Нужно заметить, что формула F.48) дает общее представле-
представление всех однозначных решений уравнения F.40) в случае од-
носвязной области. В случае же многосвязной области это не
так. Если формулу F.48) мы будем применять к однозначным
решениям уравнения C.59), то она не исчерпает всего класса
однозначных решений сопряженного уравнения F.40). Однако
и в случае многосвязной поверхности формула F.48) дает весь
класс комплексных функций изгибаний. Следовательно, класс
однозначных решений уравнений F.40), которые не выражаются
в виде F.48), не может соответствовать классу однозначных по-
полей смещений. Этот класс однозначных решений уравнения F.40)
соответствует некоторому классу многозначных решений уравне-
уравнения C.59), т. е. некоторому классу многозначных полей сме-
смещений.
§ 7. Вариации различных геометрических величин
при бесконечно малых изгибаниях поверхности. Некоторые
признаки жесткости
1. Бесконечно малые изгибания поверхности составляют тот
случай общей деформации поверхности, при котором коэффи-
коэффициенты первой квадратичной формы не получают вариаций 1-го
порядка (точное определение понятия вариации будет дано
ниже). Поэтому все величины, которые выражаются через коэф-
коэффициенты первой основной квадратичной формы и их производ-
производные (как, например, главная кривизна, символы Христофеля л
§ 7. ВАРИАЦИИ РАЗЛИЧНЫХ ГЕОМЕТРИЧЕСКИХ ВЕЛИЧИН 345
др.), также не будут получать вариаций. Но коэффициенты вто-
второй основной квадратичной формы будут испытывать, вообще
говоря, ненулевые вариации, так как в противном случае дефор-
деформация представляла бы собой движение, т. е. тривиальное из-
изгибание.
Таким образом, геометрические величины, которые выража-
выражаются через коэффициенты второй основной квадратичной формы,
получают при бесконечно малых изгибаниях поверхности опре-
определенные приращения, которые, вообще говоря, нелинейно вы-
выражаются через вектор смещения U. Если вектор смещения
имеет вид gU, где е — некоторый малый параметр, то прираще-
приращение А^ некоторой величины s?, характеризующей то или иное
свойство поверхности, будет иметь вид
Коэффициенты этого разложения bs&, б2^, ... будем называть
первой, второй и т. д. вариациями величины s?, причем, очевид-
очевидно, Ss4 является однородной и аддитивной функцией от U.
Так как мы рассматриваем бесконечно малые деформации
поверхности, то с достаточным приближением можно считать
В дальнейшем мы будем рассматривать исключительно пер-
первые вариации величин, характеризующих те или иные свойства
поверхности, при бесконечно малых изгибаниях последней. По-
Поэтому будем называть их просто вариациями соответствующих
величин, опуская слова «первые» и «при бесконечно малых из-
изгибаниях поверхности».
2. Как видно из равенств A.1) и A.2), вариация первой
основной квадратичной формы
I^ds*^aaf,dxadx* G.1)
равна нулю:
б/ = 0, т. е. ба«Р = 0, (а,? = 1,2). G.2)
Поэтому имеем также:
Ьа = 0, а = а11а22 —¦ а\2, G.3)
8а°Ф = 0 (а, р = 1," 2), G.4)
бгар = О, 6с«9 = 0 (а, 0=1, 2), G.5)
6Га!и = 0, 8ltp = 0 («,РД=1, 2). G.6)
Последние равенства непосредственно вытекают из формул
g +
dxp dx
если учтем равенства G.2) и G.4).
Заметим, что вариация тензорного поля, заданного на поверх-
поверхности, также является тензорным полем того же самого ранга,
346 ГЛ- 5 ОБЩАЯ ТЕОРИЯ БЕСКОНЕЧНО МАЛЫХ ИЗГИБАНИЙ
причем соотношения, связывающие между собой различного типа
компоненты тензора (ковариантные, контравариантные и сме-
смешанные), сохраняются и для их вариаций. Например, если /а и
/'' — ковариантпьте и контравариантные компоненты вектора,
принадлежащего поверхности, то fa = aaf,f. Отсюда, учитывая
равенства G.2). получим 6/а = aaf,bf, что и доказывает наше
утверждение. Аналогично доказывается это утверждение для
тензора любого ранга.
3. Если воспользуемся деривационными формулами Гаусса
C.12), а также формулами C.13), то получим
$ {^гг К^)>(S^
Меняя в этом равенстве местами jj и и. а затем вычитая одно
равенство из другого, получим следующие равенства:
fl*ap rjl*a.u
Ох»
Снстел1а уравнений G.8), по существу, эквивалентна одному
уравнению
аК ^ blx0ti Ь12 = —^ —^ 1 ц! 22 у + 1 12* 21,V ('-I")
которое носит название уравнения Гаусса. Система G.9) назы-
называется системой уравнений Кодацци.
Заметим, что относительно координатной системы в линиях
кривизны система уравнений Кодацци и уравнение Гаусса за-
записываются в виде C.35) и C.30) соответственно.
Таким образом, главная кривизна К поверхности выражается
через коэффициенты первой основной квадратичной формы и их
производные 1-го и 2-го порядка. Поэтому в силу равенств G.3)
н G.6) имеем
fiTv^O. G.11)
Отсюда в силу формул G.3) и G.10) следует, что вариации
коэффициентов второй основной квадратичной формы удовлетво-
удовлетворяют следующему алгебраическому соотношению:
Ь„6ЬИ + Ь2г6Ьп - 2Ь126Ь1г = 0. G.12)
Система уравнений Кодацци содержит лишь два независимых
уравнения, которым удовлетворяют три коэффициента (bn, bn =
= Ь2и Ъг1) второй основной квадратичной формы:
II = b^dx^dx*. G.13)
g 7. ВАРИАЦИИ РАЗЛИЧНЫХ ГЕОМЕТРИЧЕСКИХ ВЕЛИЧИН 347
Из G.9), учитывая равенства G.6), мы получим, что вариации
коэффициентов формы II удовлетворяют следующей системе
дифференциальных уравнений:
Ох' Ох
ш дьь, ,
Г.2„б&и — Г1386^, = 0.
—Г 1г + Г.2„б&и Г
Ох дх~
Эту систему можно записать короче еще так:
^6&„ - ^,66.2 = 0, V.fift., - V26fc,, = 0. G.15)
4. Вариации коэффициентов формы II нетрудно выразить че-
через компоненты поля пзгибашгп.
Рассматривая два взаимно перпендикулярных касательных
к поверхности орта
1 = -jr, S = —- G.16)
и имея в виду равенства
lXs = n, dU = VXdr. G.17)
получаем
6n = 61 X s + 1 X 6s = V X n.
При выводе последнего равенства мы воспользовались фор-
формулой для раскрытия двойного векторного произведения:
АХ(ВХС) = (АС)В-(АВ)С. G.19)
Далее, из равенств
bat = nran = — nar» G.20)
находим
66«p = бпга„ + nUaP = (V X n) raP + n (V X г«) „ =
= Vnra|! + nVraP + nVpra = nVpra. G.21)
Здесь мы учли, что вариацией радиуса-вектора г является вектор
смещения U.
Но согласно F.1) и F.3)
Vp = Tfa = сарТа\. G.22)
Поэтому, учитывая равенства raXfp = сарП и имея в виду форму-
формулы F.8), получаем
faB. G.23)
348 гл- 5- ОБЩАЯ ТЕОРИЯ БЕСКОНЕЧНО МАЛЫХ ИЗГИБАНИЙ
Таким образом, компоненты ковариантного тензора fap, рассмот-
рассмотренного нами выше (§ 6, п. 2), представляют собой вариации ко-
коэффициентов второй основной квадратичной формы при беско-
бесконечно малом изгибании поверхности.
Подставляя выражения G.23) в G.12) и G.15), получим
систему уравнений
Va7^ = 0 (.3 = 1, 2), baJa* = Q, G.24)
которая была найдена нами выше (§ 6, п. 1) иным путем.
Пусть поверхность S имеет всюду положительную гауссову
кривизну. Тогда, относя S к сопряженно изометрической сети
линий, имеем
66ll=-6&22, 6&12 = б&21- G.25)
Пользуясь формулами G.23) и F.43), получим формулу
№' FЬ22-МбЬ12), G.26)
выражающую вариации коэффицинтов второй основной квадра-
квадратичной формы через комплексную функцию изгибаний. Нужно
заметить, что здесь и/ — комплексная функция изгибаний, кото-
которая удовлетворяет уравнению F.40) и условиям F.42) .^В слу-
случае односвязноп области условия F.42) отсутствуют и и;'= м>'.
а. Рассматривая на поверхности некоторую гладкую кривую L
и дифференцируя радиус-вектор поверхности по дуге этой кри-
кривой, получим орт касательной
G.27)
Дифференцируя это равенство еще раз по s и используя дери-
деривационные формулы Гаусса C.12), получим так называемый
вектор главной нормали кривой L:
—Y = km = [ —^- + Гар -j- — ) Г}. + bafj -j- -у- • п, G.28)
где m — орт главной нормали, а А: — кривизна кривой L. Нужно
иметь в виду, что вектор —*~ н, следовательно, его орт m направ-
ds
лены в сторону вогнутости криво11 L. Кривизна А: кривой L, оче-
очевидно, величина неотрицательная, А: ^ 0. Если А; = 0 на некото-
некоторой дуге кривой L, то эта дуга является отрезком прямой. Точки,
где к > 0, мы будем называть обыкновенными точками кривой L.
В окрестности обыкновенной точки кривая расположена по одну
сторону ее справляющей плоскости.
Как известно, заданием величин кривизны к и кручения х
кривая L определяется однозначно с точностью до движения.
§ 7. ВАРИАЦИИ РАЗЛИЧНЫХ ГЕОМЕТРИЧЕСКИХ ВЕЛИЧИН
349
Нужно иметь в виду, что к и у, являются функциями точки
кривой и не зависят от выбора направления на кривой L. Это
сразу следует из формул
к = m
da
= m
ds1'
dm
Gb
Достаточно учесть, что при изменении направления на кривой
направления sub меняются на противоположные, a m остается
без изменения (он всегда на-
направлен в сторону вогнутости
кривой).
Рассмотрим теперь в каждой
точке кривой L еще триэдр
s, п, I, имеющий такую же ори-
ориентацию, как и триэдр s, m, b,
причем 1 — тангенциальная нор- /
маль кривой L. Обозначим че- /
рез 9 угол между главной нор-
нормалью кривой L и нормалью
поверхности, причем будем счи-
считать, что —л =S 9 =S я. Угол 9
принимает положительное зна-
значение, если в результате пово-
поворота триэдра s, m, b вокруг s
на угол 9 против движения часовой стрелки мы получим триэдр
s, п, 1 (рис. 1). В противном случае 9 отрицателен.
Как легко видеть, имеют место формулы
m = ncos9 — Isin9, b = nsin9 +Icos9, G.30)
n = racos 9 + b sin 9, 1 = — msinB + bcos9. G.31)
Из равенств G.30) в силу G.18) получил! [14к]:
Рис. 1
8m = VXm- 68Ь,
6Ь = V X Ь + 66т.
G.32)
G.33)
Дифференцируя равенства G.31) и учитывая E.13), легко
получим следующие равенства:
ds , , dn , , d\
-з— = км — оЛ, —г- — — k~s + тЛ, —г- = o\s — т.п.
где
A-s = к cos 9, crs = к sin 9, ts = у. +
ds '
G.35)
Эти велиичны носят следующие названия: ks — нормальная кри-
кривизна поверхности в направлении s, os — геодезическая кривизна
кривой L и %s — геодезическое кручение кривой L.
350 ГЛ 5- ОБЩАЯ ТЕОРИЯ БЕСКОНЕЧНО МАЛЫХ ИЗГИБАНИЙ
Если умножим обе части равенства G.28) сперва скалярно,
а затем векторно на п, то, имея в виду формулы
mn = cos0, mXn = sin9-s, пХгх = с^гт, G.36)
найдем
А-, =з A-cos 8 = Ьар-^--^ = —, G.37)
jc'-v G-38)
Как видно, A,\. зависит исключительно от направления каса-
касательной кривой L, но вовсе не зависит от других свойств ее.
Умножая последнее равенство скалярно на s и 1 и учитывая
формулы F.13), получим:
as = к sin 9 =
'd'x1' , Г). dxad
+ Г
17 ) c^ = {г + Г«Р5Г 17
Кривая, для которой о\ = 0, называется геодезической кривой
поверхности. Таким образом, координаты геодезической кривой
удовлетворяют уравнениям
Ч ) п р
11 х ! рЛ, Ц*<* ц^ „__ Q /Т, Л <)\ /П /Л\
Р^сли на поверхности лежит прямая (/с = 0), то она, очевидно,
является геодезической линией. Если же А: Ф 0, то вдоль геоде-
геодезической линии sin В = 0. Это значит, что главная нормаль и нор-
Малъ поверхности вдоль геодезической линии (и только тогда)
коллинеарны.
6. Теорема 5.9. При бесконечно малом изгибании поверх-
поверхности геодезические линии переходят в геодезические линии де-
деформированной поверхности.
Это сразу вытекает из уравнений G.40), если учесть равен-
равенства G.6).
На основании G.6) из G.39) заключаем, что вариация геоде-
геодезической кривизны кривой равна нулю:
6os = 6A; sin 9 + k cos В 66 = 0. G.41)
Это равенство можно получить еще следующим образом. Исполь-
Используя формулы G.34), получим
с <,/ dl) , dl , del
ОСТ = О S -r- = OS ~i h S —r- =
s I ds J ds ds
§ 7. ВАРИАЦИИ РАЗЛИЧНЫХ ГЕОМЕТРИЧЕСКИХ ВЕЛИЧИИ 351
Из G.37) следует, что вариация нормальной кривизны равна
6ks = 8& cos 9 - к sin 9 69 = 6bafisas\ G.42)
На основании формул G.41) и G.42) имеем
1) 6fc = 6fcscos9, 2) А: 69 = -bks sin 9. G.43)
Если L—асимптотическая линия поверхности, причем к Ф 0, то
cos 9 — 0 вдоль нее и из G.43) вытекает
Теорема 5.10. При бесконечно малом изгибании поверхно-
поверхности вариация кривизны асимптотической кривой равна нулю.
Подставляя в G.42) выражения G.23) и учитывая формулы
F.13), получим
gks = т°-ца1^ G.44)
Эту формулу можно получить еще так:
hks = 6 n — = 8n — + n — = V X n T + n — V X s =
s \ ds } ds (Is ч ' dn 'is v '
Здесь мы воспользовались формулами G.18), E.4) и F.13).
Учитывая формулы C.13), находим
Отсюда видно, что т„ зависит исключительно от направления ка-
касательной KpiiBoii L и вовсе не зависит от других свойств ее. По-
Поэтому т», как п к,, является величиной, характеризующей неко-
некоторое свойство поверхности. Отметим следующие равенства, ко-
которые сразу следуют из G.45):
т., = т<_*,, 1, = — х,. G.46)
Из G.45) следует, что ts=0 для главных направлений по-
поверхности (этим условием определяются главные направления по-
поверхности). Следовательно, т8 = 0 вдоль лишш кривизны поверх-
поверхности. В частности, в омбилических точках {к, = к2Ф0) т, = 0
для любого направления. Поэтому на сферической поверхности
(п только на ней) т8=0 всюду.
Из G.45), учитывая формулы F.13), следует, что
бтв = -6WV = ТаЧ^. G.47)
В силу G.43) из G.35) имеем [14к]
^^О G.48)
352 Гл- 5- ОБЩАЯ ТЕОРИЯ БЕСКОНЕЧНО МАЛЫХ ИЗГИБАНИЙ
Эту формулу можно вывести еще так:
dm \ „, dm .
/ж- t \ dm tO dm , I rfV . , \
= (V X b)_ + 8em— + b(— X m] +
ds I ds ds
dm ca
ds ds \ ds
Как видно и формулы F.14), вектор —т— лежит на касатель-
касательной плоскости поверхности. Поэтому его можно записать в виде
dV _ L JX_\ . , / d\ '
IT ~[ ds J ~т~ {
Но в силу F.14), G.44) и G.47) имеем
Следовательно,
S —
-5- = 8A.I + 6tss. G.49)
В частности, если рассматривается поверхность положительной
кривизны, то с помощью формул F.44), F.13) и G.49) мы мо-
можем вариации кривизны и кручения выразить посредством комп-
комплексной функции изгибаний, а именно
г „„ 1
6г. -/a Be [S'(*)?¦!¦].
Пусть U и V — два произвольных поля смещении и вращений
на поверхности, непрерывные на S + L. Тогда в силу формул
F.22) и G.49) получим тождество
I {щ8к3 + ms6t3) ds = 0, G.51)
где ui и us — проекции вектора смещения U на касательную и
тангенциальную нормаль к L, а 8к, и 6т. — вариации нормальной
кривизны и геодезического кручения поверхности, соответствую-
соответствующие полю вращений V. Если учтем формулы G.48), G.43) и
G.30), то легко покажем, что равенство G.51) эквивалентно
следующему:
\ (иь8к + us8x) ds = 0. G.52)
§ 7. ВАРИАЦИИ РАЗЛИЧНЫХ ГЕОМЕТРИЧЕСКИХ ВЕЛИЧИН 353
Если U и V соответствуют некоторому бесконечно малому
изгибанию поверхности, т. е. если d\J = V X dr, то имеем
] (ufiks + usSts) ds= О или J (ub8k + us8x) ds = 0 G.53)
Ч Ч
(/ = 0, 1, ..., та).
Заметим, что одно из этих равенств есть следствие остальных т
равенств.
7. В этом пункте мы покажем, что поле изгибаний поверхно-
поверхности можно полностью охарактеризовать с помощью двух скаляр-
скалярных функций, которые имеют вполне определенный геометриче-
геометрический смысл.
Если Si и s2 •— главные направления поверхности в некоторой
точке, то имеем
s2 ^ = 0, st — = 0 (вг X s2 = n). G.54)
Обозначая через % угол наклона орта s к s4, получаем
s = Si cos % + s2 sin %, I = st sin % — s2 cos %. G.55)'
В силу G.54) и G.55)
. / dn
= (Sl sm X ~ S2cos X) A7
dn ,_ _. ч / dn , dn
COo
dn
HI A7 ^
= sx -j— sm x cos x — s2 -7— sin x cos x.
dsi ds2
Так как в силу G.54)
dn . rfn , ,- rm
где fe, и кг — главные кривизны поверхности, то имеем новое вы-
выражение для геодезического кручения
,i 1 ч • *¦„ — к,
х& = («2 — »i) sm X cos х ==
Таким образом, как уже отмечалось выше, в омбилической
точке (kt — к2?=0) геодезическое кручение равно нулю для лю-
любого направления. В неомбилической же точке (А;4 Ф кг) при
X = л/4, Зл/4 оно принимает свои экстремальные значения, рав-
равные ±т0 соответственно, где
•!, = (&.-ft,)/2. G-58)
Считая ki =3= k2, находим
т„ = VI, G.59)
где Е = Н2 — К — эйлерова разность.
23 и. Н. Векуа
354 ГЛ- 5- ОБЩАЯ ТЕОРИЯ БЕСКОНЕЧНО МАЛЫХ НЗП1БЛШ1П
Таким образом, УЕ есть максимальное геодезическое кручения
в данной точке. Минимальное геодезическое кручение равно — УЕ.
Из равенства G.57) следует, что
хъ хь
Sxs = 22 г sin 2X + (ka - k,) cos 2^8%, G.60)
где б/ — вариация угла наклона главных направлений. Полагая
в этом равенстве % = U, -g-, получим:
д = бт2 = -бт1 = (й1-А;2)бх,- G.61)
где 6ti и бт2 — вариации геодезических кручений поверхности
вдоль главных направлений s4 и s2 (следует иметь в виду, что
до деформации поверхности xt = т2 = 0).
Величину q в дальнейшем будем называть геодезическим
кручением или просто кручением поверхности при ее бесконечно
малом изгибании. Очевидно, q — скалярная функция точки по-
поверхности.
Так как
6К = б (ktk2) = kfik* + А*6А, = 0, G.62)
26Н = б (Л, + k2) = 6/ft + 8k2, G.63)
то имеем
8кх = й;^, 6А:2 = -kzp, G.64)
где
26Н 6Н /, — 7, \ /п пг\
Р= к -к =-=П? (кт->к2)- G-65)
Очевидно, р является скаляром. В силу G.59) и G.65) имеем
также
Д% 5 УЕ G66)
Р- н — н ,
т. е. Ир равно вариации максимального геодезического кручения
в данной точке.
Из G.65) и G.66) получаем
6H = -Х^. бт0 = У Ер. G.67)
Если поверхность отнесена к системе координат в линиях
кривизны, то
I = АЧ12 + B4rf, II - A2Mf + B2Mif. G.68J
Если в качестве s возьмем касательную к линии кривизны у\ ==
= const, то
§ 7. ВАРИАЦИИ РАЗЛИЧНЫХ ГЕОМЕТРИЧЕСКИХ ВЕЛИЧИН 355
Поэтому в силу формул G.42) и G.47)
6&i = 6Ьн/А2, 6кг = 6&2-./В2,
&г1 = _бт2 = -^-, G.69)
или, учитывая равенство G.64) и G.61),
ббц = bnp = A2kip,
8b22 = -b22p = -B*kzp, G.70)
Относительно произвольно!! системы координат эти формулы
имеют вид [14л]*)
&ар = (НЬар - КааР) р + -i- (солЬр + ср^а) ?• G.71)
2
В самом деле, для системы координат в линиях кривизны эти
равенства совпадают с равенствами G.70). Поэтому они справед-
справедливы и в любой другой системе координат на поверхности, так
как обе части этих равенств являются компонентами ковариант-
ного тензора второго ранга.
Таким образом, пара скалярных функций р и q, геометриче-
геометрический смысл которых определяется при помощи равенств G.65),
G.66) и G.61), полностью характеризует поле изгибаний по-
поверхности.
8. В случае поверхности положительной кривизны удобно рас-
рассматривать комплексную скалярную функцию изгибаний
+ ig. G.72)
которая в силу формул G.71), G.26), а также F.26) гл. 2 свя-
связана с комплексной функцией изгибаний равенством
G.73)
Эта скалярная функция удовлетворяет следующему дифферен-
дифференциальному уравнению:
d-zw*-A^-B^ = 0, G.74)
где
или
= _ д-г In (Уа /Ке**), В* = Ве~**, G.75)
G.75а)
*) Правые части равенств G.71) составляют симметрический тензор,
аполярный в отношении тензора 6ар- Соотношения между аполярными сим-
симметрическими тензорами были установлены Н. В. Ефимовым ([ЗЗв]; см.
еще [37], гл. XIX § 86, п. 4). Равенство cttXcBi:6ap66j,T = 0 выражает свой-
свойство аполярности тензоров 6ац и б6ар.
23*
356 ГЛ- 5- ОБЩАЯ ТЕОРИЯ БЕСКОНЕЧНО МАЛЫХ ИЗГИБАНИЙ
где
G.756)
Используя это уравнение, мы можем дать теперь еще одно (по
счету уже четвертое) доказательство жестокости овалоида.
Пусть овалоид принадлежит классу D3i Р, р > 2. Если поле
изгибаний принадлежит классу Dit Р, р > 2, то, очевидно,
и/ш е Dlp (Е), jd>2, и, следовательно, и>'„^Са(Е), а = (р — 2)/р.
Кроме того, в силу C.68) вблизи точки z = °°
Поэтому согласно обобщенной теореме Лиувилля 3.11 w» s= О,
что, очевидно, означает жесткость овалоида.
Пользуясь теперь результами предыдущей главы, мы можем
получить еще некоторые условия жесткости выпуклых регуляр-
регулярных поверхностей с краями.
Теорема 5.11. Пусть поверхность S положительной кри-
кривизны класса Dh+3: p {р>2, А: 5= 0) окаймлена m +1 гладкими
кривыми Lo, Llt ..., Lm класса Ср,, 0 < ц < 1. Пусть выполнены
условия: 1) на L расположено лишь конечное число омбиличе-
омбилических точек поверхности, 2) вариация средней кривизны равна
нулю вдоль L, т. е.
6Н = 0 (на I), G.76)
и 3) на L имеется хотя бы одна точка Мо, где главные направ-
направления сохраняются при бесконечно малом изгибании, т. е.
g(Mo) = O, MoeL. {1.11)
При этих условиях поверхность является жесткой.
Доказательство. Как видно из формул G.64) п G.61),
функции р и q ограничены всюду на поверхности. Поэтому из
формулы G.65) вытекает, что 6Н = 0 в омбилической точке по-
поверхности, т. е. омбилическая точка остается омбилической при
бесконечно малом изгибании поверхности. Более того, из G.65)
мы имеем, что в окрестности омбилической точки
Aj). G.78)
Так как р непрерывна на S, то из G.65), G.76) и G.77) выте-
вытекает краевое условие
i? = 0 (на L), q(M0) = 0, MosL. G.79)
Отсюда в силу теоремы 4.6 имеем
Р-0, д-0,
что и требовалось доказать.
§ 7. ВАРИАЦИИ РАЗЛИЧНЫХ ГЕОМЕТРИЧЕСКИХ ВЕЛИЧИН 357
Заметим, что эта теорема не имеет места в случае сфериче-
сферической поверхности. Тогда 6Н = 0 всюду и из условия G.76) не
вытекает условие р = 0 на L.
Отметим также, что односвязная поверхность не будет жест-
жесткой, если не требовать условия G.77). Но в случае многосвяз-
многосвязной поверхности (т 5= 1) это условие может оказаться излишним.
Как правило, многосвязная поверхность положительной кривизны
является жесткой лишь при наличии двух первых условий
теоремы.
Заметим еще, что доказанная теорема о жесткости будет
справедлива, если в ней поменяем ролями р и q. А именно, вме-
вместо условий 2) и 3) потребуем следующие условия: 2) вдоль гра-
границы поверхности сохраняются главные направления, т. е.
q = 0 (на L),
и 3) в фиксированной граничной точке М„, отличной от омбили-
омбилической, 6Н = 0.
Иными словами, имеет место
Теорема 5.12. Если при малой деформации поверхности
главные направления вдоль границы поверхности сохраняются
и, кроме того, в некоторой неомбилической точке границы равна
нулю вариация средней кривизны, то поверхность является
жесткой.
9. Вычисляя нормальную кривизну повернхости в касательном
направлении s, в силу G.55) получаем
7 dn , . I dn dn . \
К = — s -^ = - (sx cos % + s2 sin x) {-^ cos x + -%- sin %j =
dn , dn
где % — угол наклона направления s относительно главного на-
направления Si. Отсюда в силу G.56) имеем
ks = kt cos2 % + k2 sin2 %. G.80)
Эта формула называется формулой Эйлера.
Из G.80), пользуясь формулами G.61) и G.64), получим
= (ki cos2 % — kz sin2 i)p — si
или, считая ki ^ k2,
G.81)
( x)p
Заменяя в этой формуле s на 1, имеем
8kt = (УЁ - Н cos 2%)p + sin 2%q. G.82)
358
ГЛ. 5. ОБЩАЯ ТЕОРИЯ БЕСКОНЕЧНО МАЛЫХ ИЗГИБАНИЙ
Складывая равенства G.81) и G.82), получим
-j- Fks + 6А;,) =
= 6H.
G.83)
Таким образом, полусумма вариации нормальных кривизн по-
поверхности, соответствующих двум взаимно перпендикулярным
касательным направлениям, равна вариации средней кривизны и,
следовательно, является скалярной функцией точки.
Из формулы G.60) в силу G.61) и G.64) имеем
6т„ = —Н sin 2%р — cos 2х?. G.84)
Пользуясь формулой G.49), в силу G.81) и G.84) получим
-|Х. = gs* + k*pt*, G.85)
где (см. также стр. 588)
s* = —sin 2x1 — cos 2xs =
= —Si cos x + s2 sin x, G.86)
/
/
r
\x
CDS%S2
— H sin 2xs sa — k2 sin %st —
- k± cos xs2, G.87)
причем
A:* = Vk\ cos2 % + kl sin2 %. G.88)
Орты s* и t* принадлежат взаим-
взаимно сопряженным направлениям,
причем s* есть зеркальное изобра-
изображение орта s относительно глав-
главного напралления s2 и, кроме того, s* и t* имеют такую же
ориентацию, как s? и s2 (рис. 2).
Напомним, что два касательных к поверхности направления
s и t, которые составляют с главным направлением Si углы 9 и О1
соответственно, являются взаимно сопряженными, если выполне-
выполнено равенство tns = 0, т. е.
/Ci cos 0 cos в1 + k2 sin 0 sin ¦& = 0.
Рис. 2
§ 8. Условия сопряжения на линиях склеивания.
Некоторые признаки жесткости поверхностей с краями.
Втулочные связи. Идеальное защемление
1. Рассматривая бесконечно малые изгибания кусочно регу-
регулярной поверхности, следует учесть, что каждая кривая склеива-
склеивания, участвуя одновременно в деформациях двух смежных регу-
регулярных частей поверхности, оказывает определенное влияние на
характер этих деформаций. Как показывают полученные в пре-
§ 8. УСЛОВИЯ СОПРЯЖЕНИЯ НА ЛИНИЯХ СКЛЕИВАНИЯ 359
дыдущнх параграфах уравнения, природа бесконечно малых изги-
изгибаний в значительной степени определяется природой самой
поверхности. Достаточно указать на то, что поверхности положи-
положительной кривизны приводят к уравнениям эллиптического типа,
а поверхности отрицательной кривизны — к уравнениям гипербо-
гиперболического типа. Поэтому бесконечно малые изгибания, допускае-
допускаемые одной поверхностью, могут быть несовместимы с бесконечно
малыми изгибаниями другой поверхности. На кусочно гладкой
поверхности деформация одной регулярной части воспринимается
смежной ее частью посредством линии склеивания, которая,
участвуя в двух различных деформациях, сама при этом дефор-
деформируется вполне определенным образом. Это обстоятельство при-
приводит к вполне определенным соотношениям на линии склеива-
склеивания между величинами, характеризующими бесконечно малые
изгибания смежных регулярных частей поверхности. Поэтому
смежные регулярные поверхности, вообще говоря, не могут под-
подвергаться произвольным бесконечно малым изгибаниям. Их де-
деформации должны быть согласованы между собой тем условием,
что деформация кривой склеивания при бесконечно малом изги-
изгибании одной поверхности должна быть идентична деформации ее
при бесконечно малом изгибании другой, смежной поверхности.
Таким образом, кривые склеивания выполняют роль связей,
определенным образом стесняющих деформацию кусочно регу-
регулярной поверхности. Ниже мы увидим, что при помощи склеи-
склеивания можно реализовать определенные связи, которые делают
поверхности жесткими.
Соотношения, которые должны выполняться на линиях склеи-
склеивания, мы будем пазывать условиями сопряжения. Ниже мы да-
дадим вывод этих условий как в геометрической, так и кинемати-
кинематической форме.
2. Пусть L — линия склеивания двух регулярных поверх-
поверхностей S+ и S~. Рассмотрим вдоль L наряду с натуральным три-
триэдром s, m, b еще два триэдра s, n+, 1+ и s, n~, 1~, связанные с
поверхностями S+ и S~. Мы будем предполагать, что эти триэдры
ориентированы одинаково с натуральным триэдром s, m. b
(рис. 3).
Рассматривая бесконечно малые изгибания кусочно регуляр-
регулярной поверхности S = S+ + S~, в силу непрерывности деформации
получаем
U+ = U- (на I), (8.1)
где U+ и U~ — векторы изгибаний поверхностей S+ и S~ соот-
соответственно. Дифференцируя равенство (8.1) по дуге кривой L
и учитывая, что <Ш = V X dr, имеем
V+Xs = V-Xs, т. е. V+-V- = -us, (8.2)
360 ГЛ- 5- ОБЩАЯ ТЕОРИЯ БЕСКОНЕЧНО МАЛЫХ ИЗГИБАНИЙ
где ц — некоторая функция точки кривой L. Дифференцируя ра-
равенство (8.2) еще раз по дуге s, получим
dV+ dV~ , d\i
= -А:цт- —s,
ds
ds ds
или, в силу формулы G.49),
8kfl+ -j- St^s — 8kJ~l~ — 6tJ"s = — кцт ^~8> (8-3)
где kf, ks , rf, %s — нормальные кривизны и геодезические кру-
кручения поверхностей S+ и S~ вдоль кривой L соответственно. Это
Рис. 3
векторное равенство равносильно следующим трем скалярным:
8А;.^~ cos 6+ — 8&7 cos 6~ = 0,
6A:S+ sin 9+ — 8к7 sin 9" = кр,
(8.4)
Второе из этих равенств в силу G.43) дает
sin9
т. е.
sin0~ c7—
т—SA:S
где
(8.5)
(8.6)
Как нетрудно видеть, -ft равно углу, дополняющему до я угол
между поверхностями S+ и S~, т. е. углу, заключенному между
их нормалями п+ и n~: cos в- = п+п~ (рис. 3).
§ 8. УСЛОВИЯ СОПРЯЖЕНИЯ НА ЛИНИЯХ СКЛЕИВАНИЯ 361
Таким образом, на линии склеивания вектор вращения испы-
испытывает скачок, равный
V+-V- = -6ds, (8.7)
где 66" — вариация угла склеивания.
Пользуясь равенствами (8.4), имеем
и- = <
или, в силу G.43),
J»L±eArss_iiE±efc+ (8.8)
(8.9)
ktk7
Равенство (8.6) можно получить еще следующим образом.
В силу G.33)
бт = у+ X т - S0+b, бт = V" X т - 68"Ь.
Отсюда
(V+-V-)Xm-6@+-e-)b = O,
или
б @- - 0+) = 60- = bm (V+ - V") = -Mbms = ц,
что и требовалось доказать.
Из (8.4) в силу (8.6) имеем
8kf cos 9+ — 6/cJ" cos 9~" = О,
А (8Л0)
= 0.
Эти равенства будем называть условиями сопряжения вдоль ли-
линии склеивания. Они были получены в работе автора [14 л].
Формулы (8.10) могут быть выведены еще следующим обра-
образом. Так как кривая L принадлежит обеим поверхностям S+ и S~,
а деформация является неразрывной, то в силу G.43) и G.48)
можем написать
bk = bkf cos9+ = Ьк7 cos 6~
(8.10а)
Отсюда сразу следуют равенства (8.10), если учтем, что 66- =
= б9--б9+.
3. Изучая поля изгибаний кусочно регулярной поверхности,
необходимо, таким образом, учитывать не только краевые усло-
условия на границе поверхности, но также условия сопряжения на
линиях склеивания. Это обстоятельство значительно усложняет
задачу. В этом пункте мы покажем, что даже в простейших слу-
случаях здесь мы имеем дело с математическими задачами, которые
еще мало изучены.
362 гл 5 ОБЩАЯ ТЕОРИЯ БЕСКОНЕЧНО МАЛЫХ ИЗГИБАНИЙ
Пусть S+ и S~ — куски овалоидов, которые склеены между
собой и в совокупности составляют замкнутую, но, вообще го-
говоря, не выпуклую поверхность. Выбираем теперь на S+ и S~
сопряженно изометрические сети линий, которые отображают
гомеоморфно эти поверхности на области G+ и G~ плоскости z,
имеющие общую границу Г, которая является простой замкнутой
гладкой кривой; G~ — бесконечная область. Такие сети, очевидно,
всегда существуют. При этом контур склеивания L дважды ото-
отобразится гомеоморфно на кривую Г, причем каждой точке М
контура L будут соответствовать на Г, вообще говоря, две раз-
различные точки t и v{t), где v(f)—функция, реализующая гомео-
морфное отображение кривой Г на себя.
Если заранее не фиксировать области G+ и G~, то можно
ввести на всей замкнутой кусочно гладкой поверхности единую
сопряженно изометрическую систему координат, при помощи ко-
которой поверхность S+ + S~ гомеоморфно отображается на всю
плоскость z.
Нужно иметь в виду, что на обеих поверхностях сопряженно
изометрические координаты вводятся таким образом, чтобы урав-
уравнения для комплексных функций смещений и изгибаний имели
вид
д-w +Aw + Bw = 0 (в G+ + G~), (8.11a)
д-у - Aw' — Ш' = 0 (в G+ + G~) (8.116)
соответственно.
В рассматриваемом случае условие сопряжения (8.10) пли
эквивалентное ему условие (8.7) можно записать в комплексной
форме, пользуясь комплексной функцией изгибаний w', которая
удовлетворяет уравнению (8.116). Вводя в рассмотрение функцию
U'(z) = Yа /К w' (z), (8.11в)
уравнение (8.116) приводим к виду
п = 0. (8.12)
В силу (8.Ив) формулу F.44) можем записать теперь в виде
dV
ds
'<*> И-
Дифференцируя обе части равенства (8.7) по дуге кривой L,
получим:
ds ds
§ 8. УСЛОВИЯ СОПРЯЖЕНИЯ НА ЛИНИЯХ СКЛЕИВАНИЯ 363
С помощью формулы (8.12а) это условие можно записать так:
2 Im r =
= —&тбО —^s, геГ, (8.13)
где ? и z — точки кривой Г, которые связаны между собой соот-
соотношением t = v(z). Вообще, в дальнейшем величины, снабжен-
снабженные знаками «+» и «—», будут рассматриваться на Г в точках
t = v(z) иг соответственно. Кроме того, следует иметь в виду,
что правая часть равенства (8.13) берется в точке z. Далее, U'+
и U'~ — решения уравнения (8.12) в G+ и G~, причем они не-
непрерывны в G+ + Г и G~ + Г соответственно. Кроме того, на
бесконечности должно выполняться условие (см. § 7, п. 8)
-i). (8.14)
Умножая обе части равенства (8.13) скалярно на комплексный
вектор (<9*п)+ и учитывая, что
1) 3(П<?;г = — ~ УаК, 2) dtndtT = 0, (8.15)
получим на Г равенство следующего вида:
[/'+ [v (z)] = №~ (z) + $2U'~ (z) + P35l9> + P4^7' (8-16)
где Pj — заданные функции точки кривой Г, которые выражаются
по следующим формулам:
a- V'iF
v(z),
2т+(агГ) ,
У К+ У а~УМ
о 2ikds
Рз = 4а
/К+
Т^(г), = v(z).
VVL+dt
Если теперь обратимся к формулам (8.8) и G.50), то для
получим следующее выражение:
J С/'" ()| ( Г) (8.166)
^_,Re(/?J С/'" (z)| (на Г).
vi- ^ ' J
364 ГЛ- 5' ОБЩАЯ ТЕОРИЯ БЕСКОНЕЧНО МАЛЫХ ИЗГИБАНИИ
Внося его в правую часть равенства (8.16), мы приходим к соот-
соотношению вида на Г:
U'+ [v (z)] = fiu'~ (z) + в!U'~ (z) + RgRe 1(%X dU'~ {z) }, (8.17)
где
sin ft
dz \2
Ы
sin ft /?i\2
^s+ IK-
^-f^-)!, (8.18)
sin ft
Таким образом, проблема жесткости замкнуто11 поверхности,
склеенной из двух кусков овалоидов, приводит к задаче отыскания
функции U' (z), которая в G+ и G~ удовлетворяет уравнению
(8.12), непрерывна в G+ + T и G~ + Г, причем на кривой Г вы-
выполняется соотношение (8.17), а на бесконечности — условие
(8.14). Эту задачу будем называть в дальнейшем задачей Н.
Нужно заметить, что эта задача приводится к аналогичной задаче
для аналитических функций, если поверхности S+ и S~ — сегмен-
сегменты выпуклых алгебраических поверхностей 2-го порядка, ибо
тогда В^О (§ 4). Поэтому представляет интерес изучить зада-
задачу Н сперва в классе аналитических функций. Рассмотрение
этого случая, помимо непосредственно геометрического интереса,
заслуживает внимания и с точки зрения изучения общей задачи.
Если воспользоваться формулой D.3) гл. 3, § 4, то исследование
общего случая можно привести к указанному частному виду. Это
обстоятельство вполне соответствует геометрической природе
задачи.
Как уже отмечалось, вообще говоря, можно ограничиться рас-
рассмотрением случая, когда v(t) = t. Он реализуется, если на по-
поверхности S+ + S~ (вообще невыпуклой) ввести единую сопря-
сопряженно изометрическую сеть линий, которые сами будут перехо-
переходить через линию склеивания непрерывно, но их касательные и
координатный угол будут испытывать скачки.
Как нетрудно видеть, задача Н представляет собой частный
вид задачи, сформулированной нами в § 10 гл. 4 (задачи A0.7) —
A0.8)). Если задача Н не допускает других решений, кроме
тривиального U' = 0, то это будет означать, что замкнутая по-
поверхность S+ + S~ является жесткой. При наличии же нетриви-
нетривиального решения у задачи Н эта поверхность является нежесткой.
Привлекая методы сингулярных интегральных уравнений,
можно доказать, что задача Н может иметь лишь конечное число
линейно независимых решений. Это означает, что замкнутая по-
§ S. УСЛОВИЯ СОПРЯЖЕНИЯ НА ЛИНИЯХ СКЛЕИВАНИЯ 365
еерхностъ, склеенная из двух кусков овалоидов, допускает лишь
конечное многообразие бесконечно малых изгибаний.
Из этого следует, что всякую поверхность указанного вида
можно превратить в жесткую поверхность, накладывая на нее
некоторое (конечное) число добавочных связей точечного типа
(гл. 4. § 6). Но можно указать классы такого рода поверхностей,
которые являются жесткими без добавочных условий. К ним при-
принадлежат все выпуклые кусочно регулярные поверхности, а так-
также целый ряд классов невыпуклых поверхностей (см. §§ 9, И).
Вообще, по-видимому, среди указанного вида поверхностей слу-
случаи нежесткости встречаются гораздо реже, нежели случаи жест-
жесткости. Иными словами, такие поверхности, как правило, являют-
являются жесткими. Но такое утверждение носит слишком общий
характер и не имеет достаточно конкретного математического
содержания. Поэтому представляют интерес дальнейшие поиски
более конкретных геометрических и аналитических признаков
жесткости кусочно регулярных поверхностей положительной кри-
кривизны. Ниже, в §§ 9 и 11, будут указаны некоторые признаки
такого рода.
Рассмотрим теперь особо случай, когда линия склеивания яв-
является линией соприкасания поверхностей 5+ и S~. В этом слу-
случае sin О-езО и, как показывают формулы (8.18), условие (8.17)
примет вид
'-(z), геГ, (8.19)
Исследование вопроса разрешимости этой задачи можно привести
к рассмотрению аналогичной задачи в классе аналитических
функций. В самом деле, искомое решение можно представить в
виде (см. § 4 гл. 3)
C/'-B) = O+(z)ea+W, если z e= G+,
f/'-B) = O-(z)e»-W, если zeG~, (8-20)
где Ф+ и Ф~ — голоморфные функции в G+ и G~ соответственно,
а и+ и ю~ — функции класса Са(Е), а = (р — 2)/р, р>2. Кроме
того, Ф+ непрерывна в G+ -Ь Г, а Ф~ непрерывна в G~ + Г л удов-
удовлетворяет на бесконечности условию
ф-(г) = О(|г|-4). (8.21)
Внося выражения (8.20) в (8.19), получим
<D+[v(z)] = ai(z)<l>-(z) + a,(z)<F(z), z^T, (8.22)
где ^
аг = р^-Ю-в+М*», сс2 = рав«-(*)-»+м*». (8.23)
Задача (8.22) при v(z) = z изучалась в работе Н. П. Векуа
[14*6] для системы аналитических функций. Из его результатов
следует, что задача может иметь лишь конечное число линейно
366 ГЛ- 5- ОБЩАЯ ТЕОРИЯ БЕСКОНЕЧНО МАЛЫХ ИЗГИБАНИЙ
независимых решений, имеющих конечный порядок на бесконеч-
бесконечности. (В нашем случае этот порядок к = — 4). Тот случай зада-
задачи (8.22), когда а2^0, но v(z)^z, изучен Д. А. Квеселавой
[396]. Как видно из (8.23) и (8.16а), этот случай реализуется,
если
(Й+(|)" v(*). (8.23a)
В силу (8.15) это имеет место в случае соприкасания 2-го поряд-
порядка. Нетрудно видеть, что условие (8.23а) инвариантно относи-
относительно выбора координатной системы на поверхности. В этом
случае исследование задачи можно довести до конца.
В самом деле, тогда равенство (8.22) примет вид
O+[v(z)] = al(z)O-(z). (8.24)
Кроме того, с помощью формул (8.23) и (8.16а) можно обнару-
обнаружить, что <Xi (z) нигде в нуль не обращается на Г и индекс х = 0.
Это реализуется в двух случаях: 1) если S++ S~ является ова-
лоидом и 2) когда S+ + S~ обращены вогнутостью в одну сторону.
По теореме Д. А. Квеселавы все решения задачи (8.24),
имеющие на бесконечности полосы конечного порядка, выража-
выражаются по формулам вида
Ф+(*) = Х(*)Ф(*) геС+,
где P(z)—полином от z, Ф,, и Ф2 — голоморфные функции в G+
и G~ соответственно, которые однозначно определяются по за-
заданному полиному P(z), причем Ф2(°°) = 0, а также Ф! = Ф2 = 0
при P(z) = O. Наконец, %(z)—так называемое 1ганоническое ре-
решение задачи, которое нигде на плоскости не обращается в нуль,
исключая бесконечно удаленную точку, вблизи которой имеет ме-
место разложение вида
Так как в нашем случае х = 0, то в силу (8.25) для решения
задачи, удовлетворяющего на бесконечности условию (8.21),
очевидно, P(z)^O. Следовательно, ф+ = Ф~ = 0, что и требова-
требовалось доказать.
В случае простого соприкасания условие (8.23а) не выполня-
выполняется. Но тогда o&i и а2 удовлетворяют неравенству
1а4|>1а2| (на Г).
Однако, как это следует из недавних результатов Б. В. Боярско-
Боярского, и в этом случае задача (8.19) не имеет решения.
§ S. УСЛОВИЯ СОПРЯЖЕНИЯ НА ЛИНИЯХ СКЛЕИВАНИЯ 367
Таким образом, замкнутая поверхность, склеенная из двух
кусков различных овалоидов, является жесткой, если линия
склеивания есть линия соприкасания.
В заключение этого пункта сделаем следующие два за-
замечания.
Замечание 1. Рассмотренную выше задачу можно привести
также к задаче вида A0.5) — (Ю.6), поставленной нами в § 10
гл. 4. Для этого достаточно поверхности S+ и S~ отобразить с
помощью соответствующим образом выбранных сопряженно изо-
изометрических координат на одну и ту же область G, ограничен-
ограниченную простой замкнутой кривой Г.
В § 11 (п. 11) будет изучена таким путем задача о жесткости
певыпуклон поверхности, скленной из двух сферических
сегментов.
3 а меча н и е 2. Изложенный в этом пункте прием можно
применить также к проблеме жесткости замкнутых поверхностей,
склеенных из конечного числа кусков овалоидов 50, Si, ..., Sm.
Для определенности предположим, что So — m-связная поверх-
поверхность, т. е. So— овалоид с отверстиями Lt, ..., Lm, с которыми
склеены односвязные выпуклые поверхности Sh ..., Sm соответ-
соответственно. Путем соответствующим образом выбранных сопряженно
изометрических координат мы можем поверхность So гомеоморф-
гомеоморфно отобразить на область Go, ограниченную простыми замкнуты-
замкнутыми кривыми Г4, Г2, ..., Гт, причем кривые Г2, ..., Гт располо-
расположены внутри Гь После этого, выбирая соответствующим образом
сопряженно изометрические сети линий на Su ..., Sm, мы можем
эти поверхности гомеоморфно отобразить на бесконечную область
Gu ограниченную кривой 1\, и на области G2, ..., Gm, ограничен-
ограниченные Г2, ..., Гт соответственно. В таком случае каждая линия
склеивания Ц, которую мы считаем в достаточной мере гладкой,
отобразится гомеоморфно двумя различными способами на кри-
кривую Г3-, причем каждой точке М кривой Lt будут соответствовать
на Tj две точки z и i = v,(z), где v3(z) — функция, реализующая
гомеоморфное отображение Г3 на себя. Написав теперь условия
сопряжения (8.7) в комплексной форме, мы получим краевые
условия вида
U] [vj (*)] = foU'o (z) + &Щг) + рз*,-Re [(f-J^^], (8.26)
/=1,2, ..., и»),
где ру — вполне определенные функции точки контура Г =
= Г4 + ... + Гт, которые выражаются по формулам вида (8.18),
Uj удовлетворяет уравнению (8.12) в области G3- и непрерывна
в Gj + Tj (j = 0, 1, ..., m), причем V\ на бесконечности подчине-
подчинена условию (8.14). Задачу (8.26) нетрудно свести к эквивалент-
эквивалентному сингулярному интегральному уравнению нормального типа.
368 ГЛ- 5- ОБЩАЯ ТЕОРИЯ БЕСКОНЕЧНО МАЛЫХ ИЗГИБАНИЙ
Это позволит доказать, что она может иметь лишь конечное число
линейно независимых решений.
Таким образом, кусочно регулярные поверхности (невыпук-
(невыпуклые), склеенные указанным выше образом, могут иметь лишь
конечное многообразие в отношении бесконечно малых изгиба-
изгибаний (см. стр. 482). Поэтому такие поверхности всегда можно
превратить в жесткие путем наложения на них конечного числа
точечных связей, например, жестко закрепляя некоторое количе-
количество их точек.
Если все линии склеивания являются линиями соприкасания,
то краевое условие (8.26) упрощается и принимает вид
Uj [Vj (z)] = рии0 (z) + hjUv (z), zeTj (8.27)
(/ = 1, .-., m).
Исследование вопроса разрешимости этой задачи также можно
привести к случаю аналитических функций. Если можно обна-
обнаружить, что задача (8.27) не имеет ненулевых решений, удовлет-
удовлетворяющих условию (8.14), то это будет означать жесткость замк-
замкнутой поверхности, склеенной указанным выше образом по ли-
линиям соприкасания из конечного числа выпуклых поверхностей.
Если будем рассматривать замкнутые поверхности, склеенные
произвольным образом из конечного числа кусков выпуклых ре-
регулярных поверхностей, то проблема их жесткости приведет нас
к еще более сложным краевым задачам для обобщенных анали-
аналитических функций. Поэтому дальнейшие поиски в направлении
изучения такого рода задач имеют значительный интерес.
4. В следующих пунктах настоящего параграфа мы рассмот-
рассмотрим случаи, когда в результате склеивания поверхностей полу-
получаются связи, обеспечивающие жесткость по крайней мере одной
из склеиваемых поверхностей.
Будем говорить, что поверхности S+ и S~ жестко склеены
вдоль L, если при бесконечно малых изгибаниях поверхности
вариация угла склеивания равна нулю, т. е.
60 = 88--6в+ = 0 (вдоль!,). (8.28)
Предположим, что в каждой точке кривой L либо к
либо kj =5^= 0. Например, если одна из поверхностей S+ и S~ имеет
положительную главную кривизну, то указанное условие всегда
выполнено. При выполнении этого условия кривую L будем на-
называть нормальной кривой склеивания. Если в некоторой точке
кривой выполняется условие ks = kj = 0, то эту точку назовем
особой точкой линии склеивания L. Если кривая L состоит пол-
полностью из особых точек, то будем ее называть особой линией
.склеивания. В каждой особой точке линия касается асимптоти-
асимптотических направлений поверхностей S+ и S~*
§ 8. УСЛОВИЯ СОПРЯЖЕНИЯ НА ЛИНИЯХ СКЛЕИВАНИЯ 369*
В дальнейшем, пока не будет специально оговорено противо-
противоположное, будем считать, что кривая L является нормальной
линией склеивания.
Так как согласно (8.8)
к+ЬЪ = — sin Ш7, К&Ь = — sin Mkt, (8.29>
то соотношение (8.28) имеет место при выполнении одного из
следующих условий:
1) sin ft = О (вдоль!/),
2) kt ф 0, б/С = 0 или к~ ф О, bkf = 0.
Наоборот, если sin $Ф0, то из условия (8.28) в силу (8.29) и
(8.10) всегда следуют условия
8kt = 0, 8кТ = 0, бт+"= бтГ (вдоль L), (8.29а)
т. е. в силу G.49)
dV+ = dV-^8x.sds (вдоль L). (8.296)
Если поверхности S+ и S~ соприкасаются вдоль кривой L, то
п+ = +п~ (на L) и, следовательно, sin 0 = 0, т. е. 60 = 0 вдоль L.
Таким образом, имеет место
Теорема 5.13. Линия соприкасания поверхностей является
линией жесткого склеивания, т. е. при любых бесконечно малых
изгибаниях этих поверхностей линии соприкасания сохраняются.
Иными словами, соприкасание (вдоль кривой) поверхностей
при бесконечно малых изгибаниях не нарушается. Это объясня-
объясняется тем, что S+ и S~ имеют общую полосу с основанием L и
поэтому при бесконечно малых изгибаниях вращение ее элемен-
элементарной площадки можно рассматривать как общее для S+ и S~.
Так как в рассматриваемом случае (при соприкасании поверх-
поверхностей) cos 8+ = ±cos 9", то на линиях соприкасания двух по-
поверхностей, не являющихся асимптотическими линиями их или
огибающими таковых, выполняются условия
Ьк+ = ± 6&Г, 6т+ = 6тГ (на L). (8.30)
5. Допустим, что кривая L для поверхности S~ является
асимптотической линией или огибающей таковых, а на поверх-
поверхности S+ она нигде не касается асимптотических направлений.
В таком случае
cos 8" = 0, cos 8+ ^0 (на L). (8.31)
Второе условие всегда выполняется, если S+ — поверхность поло-
положительной кривизны. При этих условиях первое из равенств
(8.10а) дает
8к = 6к+ cos8+ = 0, или 8&+ = 0 (на L). (8.32)
Чтобы обеспечить выполнение этого условия, достаточно в ка-
качестве S~ взять любую асимптотическую полосу с основанием L,
24 И. Н. Векуа
370
ГЛ. 5. ОБЩАЯ ТЕОРИЯ БЕСКОНЕЧНО МАЛЫХ ИЗГИБАНИЙ
т. е. проходящую через L полосу, нормаль которой совпадает с
бинормалью L в каждой точке этой кривой (черт. 4).
В дальпейшем будем говорить, что поверхность окаймлена
асимптотическими полосами, если каждая ее граничная кривая
склеена с соответствующей асимптотической полосой, основанием
которой служит эта кривая.
Таким образом, при бесконечно малых изгибаниях поверхно-
поверхности, окаймленной асимптотическими полосами, вариация кривиз-
кривизны граничного контура равна нулю (81с = 0). Если, кроме того,
граничный контур нигде не касается асимптотических направле-
направлений поверхности, то вдоль него вариация нормальной кривизны
равна нулю (8ks = 0).
Заметим, что условия последней части этого предложения
всегда реализуются для овалоидов, так как на них вовсе не име-
имеется (действительных) асимптотических направлений.
Пусть S — овалоид, на котором имеется конечное число от-
отверстий и щелей, контуры которых обозначим через Lo, 1ц, ...
..., Lm. Пусть эти контуры склеены с поверхностями So, Si, , Sm
-соответственно, причем склеивание S с каждой из поверхностей
m
S
"if
m \
(L)
AS)
Рис. 4
Sk произведено жестко (80 = 0) в тех частях Lk, которые не ка-
капаются асимптотических направлений поверхности Sk. Достаточ-
Достаточно для этого, чтобы линии склеивания Lo, ..., Lm были линиями
соприкосновения (теорема 5.13). В частности, поверхности Sh
могут быть весьма узкими полосками (рис. 4). Если sind?=0,
то при жестком склеивании выполняется краевое условие
fi& = 0 или fi&. = 0.
§ 8. УСЛОВИЯ СОПРЯЖЕНИЯ НА ЛИНИЯХ СКЛЕИВАНИЯ 371
В этом случае овалоид с отверстиями будем называть овалоидом
с отороченными краями. В частности, если отверстия овалоида —
плоские кривые и они склеены с асимптотическими (плоскими)
полосками, то имеем так называемый уселенный овалоид. Как
известно [33а], усеченный овалоид является жестким. Имеет ме-
место также
Теорема 5.14. Пусть регулярный овалоид S с отверстиями
La, Lt, ..., Lm жестко склеен с кусочно регулярными поверхно-
поверхностями So, Si, ..., Sm по контурам отверстий Lo, Lu ..., Lm соответ-
соответственно, причем эти поверхности нигде не соприкасаются с S
вдоль Lo, ..., Lm, т. е. sin^^O всюду на L. В таком случае при
бесконечно малых изгибаниях поверхности S.^. = S + So + . .. + Sm
овалоид S остается жестким.
Доказательство. Так как мы предполагаем, что вдоль,
линий склеивания нигде не происходит соприкасания, то выпол-
выполняется краевое условие (8.32), которое в силу формулы G.50)
можем записать в виде
6ks == - Va Re \w' (z) (j?f] = 0 (на L), (8.33)
где w' — комплексная функция изгибаний, которая удовлетворяет
уравнению
©' (го) = д-w' — Aw'—Bw' = 0 (в G). (8.33а>
Кроме того, по своему геометрическому смыслу она, очевидно,
непрерывна в G + T и еще удовлетворяет условиям F.42), ко-
которые обеспечивают однозначность соответствующих полей сме-
смещений и вращений.
Индекс задачи (8.33) вычисляется легко (§ 3 гл. 4). Он равен
n = 2(m-l), (8.34)
где m -f-1 есть число, равное порядку связности поверхности.
Для определенности мы предположим, что контуры отверстий
овалоида — гладкие, простые, замкнутые линии Жордана, при-
принадлежащие классу Cj,, 0<ц<1. Кроме того, мы считаем, что
овалоид принадлежит классу Dk+S, р, р > 2, к > 0. В таком случае
коэффициенты уравнения (8.33а) принадлежат классу Dkt P, p >
> 2, а граница Г области G принадлежит классу С],, (см. гл. 2,
§ 6, п. 9). Поэтому мы можем к задаче (8.33) применить резуль-
результаты предыдущей главы.
Рассмотрим здесь случай овалоида с одним отверстием. Тогда
т = 0 и в силу (8.34) п = —2. Отсюда в силу теоремы 4.5 сле-
следует, что го' = 0. Это доказывает нашу теорему в случае m = Q.
Случай многосвязной области (m^i) мы рассмотрим ниже
(§ 10, п. 9).
24*
372 ГЛ- 5- ОБЩАЯ ТЕОРИЯ БЕСКОНЕЧНО МАЛЫХ ИЗГИБАНИЙ
6. Представим теперь, что две выпуклые односвязные поверх-
поверхности S' и S" с краями V и L" склеены с третьей поверхностью
So, граничные полосы So и So которой являются асимптоти-
асимптотическими полосами с основаниями L' п L" соответственно. В та-
таком случае, согласно теореме 5.14, выпуклые поверхности S' и
S" являются жесткими, a So, вообще говоря, по является
жесткой.
Таким образом, составная поверхность S^ = S' + S" + Sn .мо-
.может подвергаться бесконечно малым изгибаниям лишь за счет So.
Словом, наличие So в составе S% ослабляет жесткость и делает
S% способной воспринимать некоторые изгибные деформацгга.
Оболочки такой конструкции могут иметь практические приме-
применения. Выпуклые ее части S' и S" могут работать на безмомент-
ную нагрузку, а моментные нагрузки будут реализоваться в виде
изгибных деформаций ослабляющего пояса So.
7. Асимптотические полосы, имеющие основанием кривую L,
лежат на линейчатых поверхностях вида
r = p(s) + [a(s)s + p(s)m]f, a2 + ?2 = l, (8.35)
где s — длина дуги кривой L, р = р (s) — уравнение кривой L, а.
и р — заданные непрерывно дифференцируемые функции длины
дуги s, t — параметр. Поэтому условие (8.32) можно обеспечить,
склеивая контуры овалоида с линейчатыми поверхностями вп-
да (8.35).
Заметим, что при Р = 0, сс = 1 мы будем иметь линейчатую
поверхность, образованную касательными кривой L, т. е. развер-
развертывающуюся поверхность с ребром возврата L. При а = 0, [1 = 1
имеем линейчатую поверхность, образованную главными норма-
нормалями кривой L. Согласно (8.8) и (8.10) на L выполняются сле-
следующие условия:
bkf = 0, бт+ = бтГ. (8.30)
Если S+ есть овалоид с отверстием L, то, как мы видели вы-
выше, он является жестким, ибо вдоль его отверстия 8ks = 0. Это
означает, что и бт8 = 0. Следовательно, в силу второго равенства
(8.36) имеем:
бтГ = 0. (8.37)
Таким образом, склеивание овалоида с линейчатой поверхностью
вида (8.35) по контуру его отверстия обеспечивает не только
жесткость овалоида, но еще накладывает определенные связи на
линейчатую поверхность, эквивалентные условию (8.37).
8. Рассмотрим еще овалоиды, склеенные с цилиндрическими
поверхностями (рис. 5).
§ 8. УСЛОВИЯ СОПРЯЖЕНИЯ НА ЛИНИЯХ СКЛЕИВАНИЯ
373
Мы можем на цилиндре выбрать систему координат так, что-
чтобы первая основная квадратическая форма имела вид d%z + dtf —
= ds2, причем линии т] = const представляют собой образующие
цилиндра. Следовательно,
/с4 = 0, к% = кг(т\)ФЪ. (8.38)
Рассмотрим случаи, когда контур L полностью окружает ци-
цилиндр. Тогда уравнение кривой L на цилиндре имеет вид | =
= о)(г|), где о) — однозначная непрерывно дифференцируемая пе-
периодическая функция от ц. Принимая во внимание формулы
G.81) и G.84), находим
6/cs = — k2p-'sln2%- — q~ sin 2%~,
к
6тГ = — -f- PZ sin 2X~ - QZ cos 2X~,
где %~ — угол между касательной к L
и образующей цилиндра ц = const.
Исключая из этих равенств р~, по-
получим (считаем sin yj~ Ф 0):
t7 = — q~ sin %-.
В силу (8.10) это равенство можем
переписать так:
cos в
— sin х-
— sin i
ds
(8.39)
Рис. 5
Так как bt = 0, то из второго уравнения F.33) следует, что
•д~ = ф(т]), т. е. вдоль каждой образующей цилиндра q~ сохра-
сохраняет постоянное значение. Поэтому, если q~ задано вдоль неко-
некоторой кривой L', расположенной на цилиндре S~ и его окружаю-
окружающей, то правая часть равенства (8.39) также задана вдоль L.
Если мы теперь выразим 8Q по формуле (8.166), а затем 67cJ и
бт8 по формулам G.50), то для соответствующей комплексной
функции изгибания w'', которая удовлетворяет уравнению (8.33а),
мы получим краевое условие вида
Re
[а ?
(8.40)
где а, Ь, f — заданные функции точки контура L, явные выра-
выражения которых, очевидно, нетрудно выписать. Если L является
линией соприкасания, то а = 0 и мы имеем краевые условия вида
R[6/] /
374 ГЛ- 5- ОБЩАЯ ТЕОРИЯ БЕСКОНЕЧНО МАЛЫХ ИЗГИБАНИЙ
9. Условия сопряжения на линиях склеивания можно зада-
задавать также в кинематической форме, т. е. в компонентах вектора
смещения и вектора вращения. Если разложим вектор смещения
U по ортам касательной, главной нормали и бинормали кривой
L, то из условия непрерывности вектора U следует:
ut = UT, Um = Um, Щ = Щ. (8.41)
Но в силу формулы E.16)
ds
= кит
и второе из равенств (8.41) следует из первого. Следовательно,
на линиях склеивания должны выполняться следующие два
условия:
us = us , Ub — Ub , (8.42)
которые мы будем называть кинематическими условиями сопря-
сопряжения.
Пусть L — линия соприкасания поверхностей S+ и S~. Если
они составляют в совокупности гладкую поверхность, то, очевид-
очевидно, выполняются условия
+ — + — /1 + 1 — __ 1 \ /О / О\
Если же S+ и S~ соприкасаются вдоль L, не составляя в сово-
совокупности гладкой поверхности, то имеем
..+ ..— ?,+ in— /l+ i 1— l\ /Q A/.\
Us = Us , U\ = zjZ Ul \l = ^z * ^= */• \O.QQy
Если рассматривается замкнутая поверхность, склеенная из
конечного числа выпуклых регулярных поверхностей, то условие
неразрывности поля смещений U+ = U~ на линиях склеивания
приводит к задачам такого же типа, которые мы рассмотрели
выше, в п. 3. Мы не будем приводить здесь точную формулиров-
формулировку этих задач. Их нетрудно получить, если воспользоваться фор-
формулами C.65) и C.65а).
10. Пусть S~ — линейчатая поверхность, уравнение которой
имеет вид
t, (8.45)
где p = p(s) — уравнение направляющей кривой L, h(s)—неко-
h(s)—некоторый заданный орт образующей поверхности, являющийся функ-
функцией длины дуги s кривой L, t — параметр, равный расстоянию,
взятому с надлежащим знаком, от рассматриваемой точки по-
поверхности до точки пересечения соответствующей образующей
с направляющей кривой L. Представив орт X в виде
b(s) = a(s)s + p(s)l+ + T(*)n+, (8.46)
§ 8. УСЛОВИЯ СОПРЯЖЕНИЯ НА ЛИНИЯХ СКЛЕИВАНИЯ 375
где а = A,s, E = М+, у — Хп+, пз условия непрерывности вектора
смещения получим
ut = out + $ul+ + уи? = их. (8.47)
Но, как мы видели выше (теорема 5.8), и% есть функция, зави-
зависящая лишь от длины дуги s кривой L, т. е. и? сохраняет по-
постоянное значение вдоль каждой образующей линейчатой поверх-
поверхности S~. Пусть L* — некоторая новая ортогональная направля-
направляющая линия поверхности S~. Пусть поверхность S~ соприкасает-
соприкасается по кривой L% с жесткой стенкой S, ортогональной S~. Тогда,
очевидно, Я является нормалью 2 и
u? = (QXT)k + Ck, (8.48)
где Q и С — постоянные векторы. В таком случае на контуре L
в силу (8.47) и (8.48) имеем условие
и? = out + §щ+ + уи+ = f (s) (/ = Qr^ + О,). (8.49)
Это есть краевое условие кинематического типа.
Если S+ — поверхность положительной кривизны, то рассмат-
рассматривая на ней сопряженно изометрическую сеть линий, в силу
C.65) краевое условие (8.49) можем записать в виде
(8.50)
Re [(Я* -Л2) w (z) + ^ ( /К w)zj = /,
где К1, %г, к0 = y — компоненты орта %: X = каг? + Яоп+, a w —
комплексная функция смещений, удовлетворяющая уравнению
д-Tjo + Aw + Bw = 0.
Если y = 0, то
ut = out + fiu? = /• (8.51)
В этом случае линейчатая поверхность S~ соприкасается вдоль
L с поверхностью S+, составляя вместе с ней кусочно гладкую
поверхность.
Для поверхности положительной кривизны краевое условие
(8.51) запишется в следующей форме:
Re[(^-u2)w;(z)] = /. (8.52)
Таким образом, мы пришли к краевой задаче, изученной в
предыдущей главе. Используя полученные там результаты, мы
можем установить ряд критериев жесткости овалоидов с отвер-
отверстиями, склеенных с линейчатыми поверхностями (см. ниже, § 10).
11. Краевые условия вида (8.49) можно получить также, за-
стааляя край поверхности скользить по некоторой другой поверх-
поверхности. Это условие можно реализовать, например, вставляя в
отверстия втулки, стенки которых плотно прилегают к контуру
376 ГЛ- 5- ОБЩАЯ ТЕОРИЯ БЕСКОНЕЧНО МАЛЫХ ИЗГИБАНИЙ
отверстий. Чтобы получить эти условия естественным путем на
основе рассмотрения реально осуществимых механических и гео-
геометрических связей, полезно поверхность представлять себе как
тонкую упругую оболочку, оказывающую значительное сопротив-
сопротивление деформациям растяжений и сдвигов, но вместе с тем, при
сравнительно небольших внешних воздействиях, допускающую
бесконечно малые изгибания. Назовем условно такую поверх-
поверхность гибкой оболочкой.
Рассмотрим гибкую оболочкую S, окаймленную конечным чис-
числом кусочно гладких простых кривых Жордана, совокупность
которых обозначим через L. Мы будем считать поверхность S дву-
двусторонней, причем одну из ее сторон примем в качестве положи-
положительной стороны и соответственно ориентируем направление нор-
нормали п к поверхности. В качестве положительного направления
на L примем то направление, которое оставляет положительную
сторону поверхности слева. Среди граничных кривых, составляю-
составляющих L, могут встретиться как замкнутые, так и разомкнутые
кривые. Первые из них будем называть отверстиями, а вторые —
щелями. На щели будем различать два берега — «левый» и «пра-
«правый», которые будем отмечать знаками «+» и «—» соответствен-
соответственно. Пусть Lu ..., Lq — щели, а Ья+1, ..., Lm — отверстия. Тогда
границей S будет
L = L+ + LI + ... + L* + L~ -j- Lq+1 + ... + Lm.
Пусть в отверстия и щели вставлены некоторые упругие или
жесткие тела, которые назовем втулками. Совокупность ограни-
ограничивающих их поверхностей обозначим через 2. Предположим,
что поверхности 2 находятся в постоянном контакте с поверх-
поверхностью S по контуру L, причем в процессе деформаций S и 2
этот контакт не нарушается. Иными словами, мы считаем, что
втулки настолько плотно заполняют отверстия и щели, что в
процессе бесконечно малых деформаций между контуром L и X
не возникают зазоры. Это означает, что смещения точек S и 21
по направлению нормали к 2 одинаковы вдоль всей линии кон-
контакта, т. е.
vU = vU, или mv = mv (на L), (8.53)
где U и U — векторы смещения точек S и 2 соответственно, a v —
орт нормали к 2 (рис. 6).
Заметим, что равенство (8.53) выражает то условие, что кон-
контуры отверстий и щелей поверхности S находятся в непрерывном
контакте с поверхностями 2, причем эти контуры могут переме-
перемещаться вдоль поверхностей 2, скользя по ним. Поэтому поверх-
поверхности 2 будем называть поверхностями скольжения, а связи,
устанавливаемые таким путем на контурах отверстий и щелей
поверхности S,— кинематическими связями скольжения или вту-
втулочными связями.
§ 8. УСЛОВИЯ СОПРЯЖЕНИЯ НА ЛИНИЯХ СКЛЕИВАНИЯ
377
Если нормальное перемещение uv точки поверхности контакта
^ задано вдоль контуров отверстий и щелей, то условие (8.53)
запишется в виде
= / (на L), (8.54)
иУ = vo»o
где v0 = nv, vt = vl, причем 1 — орт тангенциальной нормали кон-
контура L, a n — орт нормали поверх-
поверхности S.
Например, условие вида (8.54)
получаем в том случае, когда
втулки представляют собой абсо-
абсолютно твердые тела. Если их
поверхности к тому же абсолют-
абсолютно гладкие, то (8.54) является
единственным условием, которое
можно получить на основе вту-
втулочной связи, так как в этом
случае возможны любые каса-
касательные к 2 бесконечно малые
перемещения, которые, очевидно,
не нарушают условий контакта
(8.54).
Если нормальное перемещение щ, используя формулу E.21),
записать в виде
\ du.
^Q (8.55)
Рис. 6
то равенство (8.54) примет вид
17" + a°Ul
ft./,
где
«о = ks (vi + v0 tg Э) = к cos F - 60), cose0 =
(8.56)
(8.57)
Таким образом, мы получим иным путем снова краевое условие
вида (8.49).
Если поверхности S ортогональны к S, то v0 = vn = 0, vt =
= vl = 1, и условие (8.56) принимает вид
щ = uja = /.
(8.58)
12. Краевое условие вида (8.56) можно получить также пу-
путем защемления края поверхности.
Пусть узкая граничная полоса поверхности S плотно защем-
защемлена между жесткими стенками довольно глубокой щели, при-
причем стенки щели и поверхности полосы мы считаем идеально
гладкими (например, между ними имеется тонкий слой смазки).
Кроме того, между дном щели и контуром L поверхности S име-
378
ГЛ. 5. ОБЩАЯ ТЕОРИЯ БЕСКОНЕЧНО МАЛЫХ ИЗГИБАНИЙ
ются довольно просторные зазоры (рис. 7). В таком случае точ-
точки контура L имеют две степени свободы; в процессе деформации
они могут свободно перемещаться вдоль стенок щели. Поэтому
вдоль контура L выполняется одно условие:
nU = nU,
(8.59)
где U и U — векторы смещения точек поверхности S и стенок
щели. Считая нормальное переме-
перемещение стенок щели известной
функцией точки контура L, усло-
условие (8.59) мы можем записать
еще так:
1 1
J.I
ill L
-^ + auL = / (на
ds
a = fcsinG,
(8.60)
Рис. 7
где о — геодезическая кривизна
контура L.
Описанную выше связь, которой соответствует краевое усло-
условие (8.60), мы будем называть идеальным защемлением гранич-
граничной полосы поверхности (оболочки) S.
§ 9. Некоторые классы жестких замкнутых
кусочно регулярных поверхностей
В этом параграфе мы докажем жесткость некоторого доволь-
довольно широкого класса кусочно регулярных замкнутых поверхно-
поверхностей неотрицательной кривизны. К этому классу принадлежат
выпуклые кусочно регулярные замкнутые поверхности, а также
некоторое семейство невыпуклых замкнутых поверхностей. Для
этой цели мы используем полученные в предыдущем параграфе
условия сопряжения на линиях склеивания и одно важное ин-
интегральное тождество Бляшке [10]. Предварительно дадим вывод
этого тождества.
1. Пусть V и V — два поля вращений на регулярной поверх-
поверхности, окаймленной конечным числом кусочно гладких кривых
Lo, Lu ..., Lm, совокупность которых будем обозначать по-преж-
по-прежнему через L. Ту сторону поверхности S, куда направлена нор-
нормаль, будем считать положительной стороной поверхности. Поло-
Положительным направлением на L примем то, которое оставляет по-
положительную сторону поверхности слева.
Предположим, что поля вращений непрерывны в S + L и при-
принадлежат классу D2, p, р>2. Кроме того, мы будем считать, что
поверхность S принадлежит классу С2.
§ 9. КЛАССЫ ЖЕСТКИХ ЗАМКНУТЫХ ПОВЕРХНОСТЕЙ 379
Применяя формулу Грина, напишем следующую формулу:
frVdV = ffC«P(rVVp)a^, ( )« = ^. (9.1)
1 V дх
Но
с«Р (rVVp)e = c«P (rVV«p) + c«P (rV«Vp) + c«P (r«VVp) =
При выводе этого равенства мы учли формулы F.1) и E.4),
а также следующие равенства:
с^ (rVVap) = rV (V12 - V21)/ Va = 0,
c«PrpVVa = - ca4%Vrpx = rapcaPnV = 0,
1'де ГаЭ и Та?' — контравариантные поля изгибаний, соответствую-
соответствующие векторам V и V. Следовательно, имеем тождество
f rV dV = j j CaffixfT^f^ja dS, (9.2)
L
справедливое для любых двух произвольных полей вращения
V и V. Если V = V, то имеем формулу Бляшке
rV d\ = 2 j
L S
или, в силу формул G.23),
j rVdV = 2 J j -J- Fbiie622 - %2Sbi2) m d5. (9.4)
L S
j J
L S
Учитывая равенства G.70), имеем еще
j rV dY = - 2 j j (Kp2 + g2) rn AS. (9.5)
2. Применим сперва формулу (9.5) к доказательству жестко-
жесткости овалоида [10].
Допустим, что овалоид подвергается бесконечно малому изги-
изгибанию, при котором вектор вращения V удовлетворяет указан-
указанным выше условиям. Пусть L — простая замкнутая кусочно глад-
гладкая линия, принадлежащая овалоиду и делящая его на две ча-
части Si и Sz. Применяя к каждой из них формулу (9.5), а затем
складывая почленно полученные равенства, получим
0. (9.6)
380 ГЛ- 5- ОБЩАЯ ТЕОРИЯ БЕСКОНЕЧНО МАЛЫХ ИЗГИБАНИЙ
Здесь мы учли, что сумма криволинейных интегралов по L рав-
равна нулю в силу непрерывности вектора V и его производных на
Va. Поместив начало координат внутри овалоидов, будем иметь
(считаем, что нормаль п внешняя)
гп>0 (на S). (9.7)
Кроме того, главная кривизна К = TiJ<,2 5= 0 всюду, причем мы
будем предполагать, что К может обращаться в нуль лишь па
множестве меры нуль. При этих условиях из (9.6) следует, что
Кр2 + qz = 0, т. е. р = q = 0. (Последние равенства доказывают-
доказываются с помощью рассуждений, которые мы приведем ниже на
с. 381). Это доказывает жесткость регулярных овалоидов.
3. Как уже отмечалось выше, этот метод доказательства мо-
может быть применен также к более общему классу кусочно регу-
регулярных замкнутых выпуклых поверхностей неотрицательной
кривизны. Однако предыдущее рассуждение без существенных
дополнений не переносится на более общий случай. Применяя
формулу (9.5) к регулярным частям поверхности, а затем скла-
складывая полученные равенства, мы придем к равенству, в правой
части которого будет фигурировать в точности двойной интеграл
(9.5), а в левой части — сумма криволинейных интегралов, взя-
взятых по линиям склеивания. Как и прежде, жесткость поверхно-
поверхности получится немедленно, если будет доказано, что эта сумма
равна нулю. Но это сразу не очевидно. Затруднение создает то,
что мы не можем а priori считать поле вращения непрерывным
на всей поверхности. Как видно из формулы (8.7), оно может
иметь разрывы 1-го рода на линиях склеивания. Несмотря на
это, мы ниже обнаружим, что с помощью формулы (8.7) указан-
указанное затруднение может быть преодолено. Таким путем ниже мы
докажем жесткость весьма широкого класса выпуклых кусочно
регулярных поверхностей. Доказательство, которое будет изложе-
изложено в настоящем пункте, было дано в совместной работе Б. В. Бо-
Боярского и автора [12].
Пусть S — замкнутая выпуклая поверхность, склеенная из
конечного числа поверхностей неотрицательной кривизны. Под-
Подразделим эти поверхности на три группы. В группу I входят те
из них, для которых ki = k2 = 0, т. е. плоские фигуры. В группу
II входят поверхности нулевой кривизны, для которых одна из
главных кривизн положительна почти всюду. Наконец, в группу
III входят поверхности, для которых гауссова кривизна К 5= 0,
причем знак равенства, возможно, имеет место на множестве
(плоской) меры нуль.
Как мы уже видели выше (§ 3, п. 3), бесконечно малые из-
изгибания плоских кусков поверхности S — задача неопределенная.
Однако мы все же не будем исключать из нашего рассмотрения
поверхностей группы I, допуская для них лишь тривиальные
§ 9. КЛАССЫ ЖЕСТКИХ ЗАМКНУТЫХ ПОВЕРХНОСТЕЙ 381
изгибания
U = Й X г + С, V = Й, (9.8)
где fi и С — постоянные векторы на каждой поверхности груп-
группы I. Поэтому на всякой поверхности группы I, очевидно,
p^q^O (всюду). (9.9)
Относительно поверхностей группы II мы примем следующее
дополнительное предположение. Каждая асимптотическая линия
поверхности группы II пересекается по крайней мере один раз с
границей поверхности группы I или III. Линии склеивания по-
поверхностей, составляющих S, будем предполагать кусочно глад-
гладкими. Совокупность этих линий разобьем на следующие две
группы: 1) группа а включает простые замкнутые или незамк-
незамкнутые линии склеивания, 2) группа р включает те лишш склеи-
склеивания, на которых лежит конечное число точек, из которых ис-
исходят три или более линий склеивания. Эти точки назовем
условно вершинами. Группа E может состоять из нескольких
связных множеств $lt ..., f>n, n> 1, причем C,j}ft = 0, если i Ф к.
Кривые каждой группы ?Sj состоят из конечного числа ребер,
причем каждое ребро содержит лишь две вершины в качестве
начала и конца. Здесь не исключаются случаи, когда ребро —
замкнутая кривая, т. е. начало и конец ребра совпадают: ребро
представляет собой петлю. На каждом ребре, а также на каждой
кривой группы а, которые можно назвать изолированными реб-
ребрами, мы будем различать два берега — левый и правый, кото-
которые будем снабжать знаками «+» и «—» соответственно, при-
причем направление обхода кривой L, оставляющее левый берег ее
слева, будем считать положительным. Обозначая через L сово-
совокупность линий склеивания, будем обозначать через L+ и Lr
совокупность их левых и правых берегов.
Применяя к каждому гладкому куску поверхности формулу
Бляшке (9.5), а затем суммируя эти равенства по всем кускам,
получим:
/ = -2 f f(Kp2 + g2)rndS= f rV+ dY+ - t\~ dV~. (9.10)
Здесь V+ и V~ обозначают предельные значения вектора V «сле-
«слева» и «справа» от L. Будем предполагать по-прежнему, что на-
начало координат помещено внутри S. Тогда гп > 0 и, следова-
следовательно,
/<0. (9.11)
Мы должны доказать, что здесь знак неравенства исключается,
т. е. / = 0. Тогда отсюда будет следовать, что Кр2 + дг = 0, т. е.
Кр = 0, 9 = 0- Если К > 0, то р Е= q = 0. Это означает, что по-
поверхности группы III являются жесткими. Рассматривая поверх-
382 ГЛ- 5- ОБЩАЯ ТЕОРИЯ БЕСКОНЕЧНО МАЛЫХ ИЗГИБАНИЙ
ность группы II и считая для определенности кг = О, к2 Ф 0, из
F.33) получаем, что к^В2р не зависит от |, т. е.
Ф(п), q = 0. (9-12)
Докажем, что ф(т))=0. Граница Ь% рассматриваемой поверхно-
поверхности S* группы II, очевидно, представляется в виде L^ = L' +
+ L", где L' — совокупность тех граничных дуг, которые явля-
являются также граничными дугами смежных поверхностей групп I
и III соответственно, причем ни одна дуга, входящая в L', не
содержит дугу асимптотической линии r| = const и нигде ее не
касается. В L" входят те граничные дуги поверхности S%, кото-
которые являются дугами линий r| = const. Обозначим через «S^i и
^*т, смежные с S* поверхности групп I и III. Так как р =
= q = 0 на S^j и 5„ш, то из (8.10) следует, что 8ks — 0 на L'
(мы предполагаем, что cos Эф =^=0 вдоль L'). Так как согласно
(9.12) q = 0 на S*, то из G.81) следует, что р = 0 на Z/, ибо
bks = — ks sin2 %p = 0 на L', а к2 sin2 % Ф 0 на L'. Но по условию
все линии г| = const, принадлежащие ?*, пересекаются с L'.
Поэтому в силу (9.12) ф(г|)^0. Таким образом, установлено,
что если / = 0, то
р = д = 0 (на 5). (9.13)
Это доказывает жесткость каждой составной регулярной части
поверхности S. Из (9.13) следует, что на всякой регулярной ча-
части S вектор V принимает постоянное значение Q. Для жестко-
жесткости всей поверхности в целом нужно еще установить, что Q при-
принимает одно и то же постоянное значение везде на S. Но это
следует из равенства (8.7), так как в силу (9.13) и (8.8) 60* =
= 0 на всех линиях склеивания.
Итак, нам остается обнаружить, что в (9.11) знак неравенст-
неравенства исключается. Для этого достаточно установить, что
1 1>0. (9.14)
Равенство (9.10) мы можем записать еще так:
/= j" r(V+ — \~)d\+ + f rV~d(V+- V"). (9.15)
L+ L+
Интегрируя по частям, получаем
= f dr\~ (V+ - V") - f V" (V+ - V~) dr + \r(\+-y-)d\-.
L+ L+ L+
В силу формулы (8.7) второй интеграл правой части этого ра-
равенства обращается в нуль, а первый интеграл равен прираще-
§ 9. КЛАССЫ ЖЕСТКИХ ЗАМКНУТЫХ ПОВЕРХНОСТЕЙ 383
лпю rV~V+ при однократном обходе всех ребер в положительном
направлении:
б= f drV-(V+-V~)^ f drV-V+ = {rV-V+)L+. (9.16)
?+ ?+
Таким образом, равенство (9.15) приобретает вид
/ = б+ J r(V+-V-)dV++ f r(V+-V")dV-,
?+ L+
пли, учитывая формулы
V+ — V" = - 6fts, dV* = bkf 1± + 6t±s,
1+ х s = n+, 1- X s = n-,
получаем
/ = б + j 6ft Ffcs+rn+ + ЬкТпГ) ds =
L
K8AV
-^- sin ft (ЛГгп+ + A-,+rn~) rf*. (9.18)
K
Так как rn+ > 0, rnr > 0, sin ft > 0, A1^ < 0 (рис. 8), то
k~\2
- U sin ft (fe7ni+ + /cs+rn~) ds > 0. (9.19)
{ \ *• /
Нам еще остается обнаружить, что
6^0. (9.20)
Простоты ради ограничимся рассмотрением случая, когда по-
поверхность S содержит лишь ребра группы а. Доказательство не-
неравенства (9.20) для общего случая дано в цитированной выше
работе [12].
Очевидно, б = б4 + ... + б„, где б,- обозначает приращение
rV~V+ на ребре Lf. Если А{ и В{ — начало и конец ребра А, то,
очевидно,
Так как мы считаем, что вектор V непрерывен на каждой регу-
регулярной части поверхности S, то, очевидно, б( = 0 для всякого
ребра группы а. В самом деле, в случае замкнутости ребра это
очевидно, так как А{ = Bt. В случае же разомкнутого ребра
V24 = VJij, Ув{ = Vj?. и, следовательно, опять б< = 0. Следова-
384
ГЛ. 5. ОБЩАЯ ТЕОРИЯ БЕСКОНЕЧНО МАЛЫХ ИЗГИБАНИЙ
Рис. 8
тельно, 6 = 0. Поэтому в силу (9.19) из (9.18) имеем /З^О. Со-
Сопоставляя это с (9.11), получим 1 = 0.
Таким образом, установлена следующая
Теорема 5.15. Выпуклая кусочно гладкая поверхность не-
неотрицательной кривизны является жесткой, если линии склеива-
склеивания представляют собой
кусочно гладкие простые
замкнутые или незамкну-
незамкнутые кривые.
Как мы указывали вы-
выше, теорема сохраняется
и при наличии вершин и
конических точек [12].
4. Нетрудно заметить,
что в предыдущем пункте,
по существу, доказана бо-
более общая теорема. В са-
самом деле, предыдущие
рассуждения сохраняют
полную силу, если 1) усло-
условие выпуклости заменить
требованием звездности рассматриваемой поверхности относитель-
относительно некоторой внутренней точки О, что, очевидно, обеспечивает
выполнение неравенств rn+ 3* 0, rn~ 3s 0 вдоль S, и 2) потребовать,
чтобы на линиях склеивания выполнялось неравенство
kirnT + kjrn+ < 0 (на L). (9.21)
Таким образом, имеет место следующая [ИЗ]
Теорема 5.16. Пусть в отверстия кусочно регулярного ова-
лоида S вставлены некоторые овалоиды So, St, ..., Sm, склеенные
с S вдоль контуров отверстий Lo, ..., Lm. Предположим, что по-
поверхности So, ..., Sm не пересекаются. Далее, предположим, что
внутри поверхности S%= S + So + .. ,+Sm существует точка О
(начало координат), из которой видна вся внутренняя сторона
поверхности S*. Наконец, предположим еще, что на Lo, ..., Lm
удовлетворяются условия (9.21). При этих условиях поверхность
S^ является жесткой.
Нетрудно указать примеры невыпуклых замкнутых поверх-
поверхностей, удовлетворяющих условиям последней теоремы. Рассмот-
Рассмотрим так называемый усеченный овалоид, который получится,
если отсечем от регулярного овалоида конечное число шапочек
с плоскими контурами Lo, Lu ..., Lm и заклеим последние куска-
кусками плоскостей — крышками. Вдавливая эти крышки слегка
внутрь, очевидно, можем получить бесконечное семейство невы-
невыпуклых поверхностей, удовлетворяющих условиям теоремы.
Отметим, что условия последней теоремы достаточны для
обеспечения жесткости невыпуклых поверхностей неотрицатель-
§ 9. КЛАССЫ ЖЕСТКИХ ЗАМКНУТЫХ ПОВЕРХНОСТЕЙ 385
ной кривизны, но вовсе не необходимы. Как было показано в
§ 8 (п. 3), невыпуклая поверхность S, склеенная из двух кусков
овалоидов S+ и S~, соприкасающихся вдоль линии склеивания,
является жесткой. Однако такая поверхность, как легко видеть,
не является звездной относительно некоторой внутренней точки
и, следовательно, не удовлетворяет условиям теоремы. Что эти
условия действительно не являются необходимыми, показывает
также случай поверхностей вращения (§ 11). По-видимому,
замкнутая п невыпуклая поверхность S*, полученная в резуль-
результате склеивания куска овалоида S с кусками овалоидов So, ...
..., Sm, вложенных в 5 и пересекающих его лишь по одному реб-
ребру, но не пересекающихся между собой, всегда жесткая.
5. В противоположность только что рассмотренному способу
склеивания, склеивание, например, двух поверхностей S ж So
положительной кривизны в замкнутую поверхность S% таким
образом, что So не заходит внутрь 5 (или S не заходит внутрь
?). уже, вообще говоря, может привести к нежесткой поверхно-
поверхности. Примеры такого склеивания сферических сегментов и более
общих поверхностей вращения приведены в § 11 настоящей
главы.
В этой связи мы приведем теорему о бесконечно малых изги-
изгибаниях составных поверхностей, обладающих плоскостью сим-
симметрии *).
Пусть плоскость Е отсекает от некоторого овалоида S, вооб-
вообще говоря, кусочно регулярного, односвязную часть S*. Через S~
обозначим зеркальное отражение S+ относительно плоскости Е.
Склеим S+ и S~ в замкнутую поверхность S, вообще говоря, не-
невыпуклую. Плоскость Е является плоскостью симметрии для S.
Теорема 5.17. Поверхность S допускает такие и только та-
такие нетривиальные бесконечно малые изгибания, которые одно-
одновременно являются изгибаниями скольжения для S* (S~) no
плоскости Е.
Доказательство. Рассмотрим сначала случай, когда
S+ — регулярная поверхность. Плоскость Оху декартовой систе-
системы координат расположим на плоскости Е. Если U+ =
===(^+) Ц+1 t+)—поле смещений бесконечно малого изгибания
скольжения S+ по плоскости Е, то, очевидно, в силу системы
уравнений B.3), полагая в симметрических относительно Е точ-
точках поверхности S~JJ~^(%~, r\~, ?~) = (?+, r\+, — Z,+), мы полу-
получим некоторое поле U = U+ на S+ и U = U~ на S~, непрерывное
на всей поверхности S и тривиальное лишь тогда, когда U+ три-
тривиально на S+. Пусть, наоборот, U = U+ на S+ и U = U~ на
S~ — некоторое непрерывное поле смещений на S. Тогда поле
Р' — зеркальное отражение точки Р относительно Ь, будет, оче-
*) Эта теорема доказана впервые Б. В. Боярсюш.
25 И. Н. Векуа
386 гл- 5- ОБЩАЯ ТЕОРИЯ БЕСКОНЕЧНО МАЛЫХ ИЗГИБАНИЙ
видно, полем бесконечно малого изгибания скольжения па S+.
Таким образом, любое поле смещений поверхности S порождает
некоторое поле скольжения U4 на S+. Покажем, что при наших
предположениях поле Ui тривиально только тогда, когда триви-
тривиально поле U на S. Поле U2 = U — -к- Ux имеет компоненты
(О, О, X,) на L. По теореме об усеченных овалоидах*) поле U2
есть поле бесконечно малого движения**). Поэтому U = -у Uj +
+ U2 тривиально тогда и только тогда, когда тривиально поле U4.
Кроме того, мы доказали, что ? совпадает с компонентом три-
тривиального поля на L, что и требовалось доказать.
Если воспользоваться обобщением теоремы об усечепных <ва-
лоидах на случай кусочно гладких овалоидов, то приведенное
выше доказательство позволяет установить справедливость тео-
теоремы 5.17 для кусочно гладких S+ и S~.
Требуемое обобщение теоремы об усеченных овалоидах полу-
получается немедленно, если соединить метод доказательства
Н. В. Ефимова (см. [33а]) с методом доказательства теоре-
теоремы 5.15.
Отметим, что условие выпуклости S+ существенно. Из двух
сферических сегментов можно построить поверхность вращения
S+, даже однозначно проектирующуюся на плоскость Е, но но
являющуюся частью выпуклой поверхности, такую, что поиерх-
ность S, склеенная из S+ и ее зеркального отражения S~ отно-
относительно плоскости Е, является нежесткой. Соответствующий
пример может быть рассчитан по методу § 10.
Теорема также перестает быть справедливой, если S+ обла-
обладает отрицательной кривизной в некоторых своих частях. Это оз-
означает, что поле Ut может оказаться тривиальным, хотя U л
нетривиально.
§ 10. Некоторые классы жестких выпуклых
поверхностей с краями
1. В предыдущих параграфах мы рассмотрели некоторые
классы жестких замкнутых поверхностей, а также указали на
целый ряд признаков жесткости поверхностей с краями.
В настоящем параграфе будут указаны еще новые признаки
жесткости. Будут рассмотрены также некоторые виды нежестких
*) Замечапие, что в этом месте можпо сослаться на теорему об усе-
усеченных овалоидах, принадлежит Н. В. Ефимову. Первоначальное доказа-
доказательство Б. В. Боярского являлось в дальнейшем своей части фактическим
доказательством (методом, отличным от метода Н. В. Ефимова) нужного
здесь случая теоремы об усеченных овалоидах.
**) Это следует также из теоремы 5.14 или из теоремы 5.19 (с. 398).
Достаточно заметить, что ?/г» = 0 на L.
g 10. КЛАССЫ ЖЕСТКИХ ВЫПУКЛЫХ ПОВЕРХНОСТЕЙ С КРАЯМИ 387
связей, совместимых с бесконечно малыми изгибаниями и одно-
однозначно определяющих (нетривиальное) поле смещений.
Поверхности с краями (незамкнутые поверхности) являются
всегда нежесткими, т. е. допускают нетривиальные бесконечно
малые изгибания, если они вовсе не стеснены связями. В самом
деле, если речь идет о поверхности положительной кривизны с
краями, то вопрос о жесткости сводится к установлению того,
что существует хотя бы_одна непрерывная и ограниченная на S
комплексная функция УК/? + iq, которая, как мы видели в § 7,
п. 7, однозначно определяет поле изгибаний поверхности. Но эта
функция удовлетворяет уравнению вида д-w + Aw + Bw =
= 0 (А, В е Lp, p>2) в области G, на которую поверхность го-
меоморфно отображается с помощью сопряженно изометриче-
изометрической системы координат. В случае овалоида с краями эта область
не покрывает всей плоскости и ее граница содержит континуу-
континуумы. Поэтому указанное уравнение всегда допускает непрерывные
ограниченные ненулевые решения. Но всякому такому решению
соответствует нетривиальное поле изгибаний поверхности. Это
означает, что поверхности положительной кривизны с краями
могут быть жесткими лишь при наличии некоторых внешних
связей, которые в дальнейшем будем называть жесткими связя-
связями. Конечно, не всякие связи обеспечивают жесткость поверхно-
поверхности. Всякая связь, очевидно, ограничивает возможные формы
бесконечно малых изгибаний, но не всегда их полностью исклю-
исключает. Особый интерес представляют те нежесткие связи, которые
допускают лишь конечное многообразие бесконечно малых изги-
изгибаний. Это означает, что существует конечное число линейно не-
независимых полей смещений UA), ..., и((!), которые совместимы с
наличными связями, причем любое ноле смещений, совместимое
с этими связями, выражается в виде
U = ClUA) + . .. + c,tU<ft>, A0.1)
где с4, .... ck — произвольные вещественные постоянные.
Если при этом все поля UU) — тривиальные, то поверхность
является геометрически жесткой. В этом случае, очевидно, число
k «S 6. Если же среди полей U(i) имеются и нетривиальные, то
тогда поверхность будет нежесткой. Это всегда так, если число
к > 6. Если поверхность допускает конечное многообразие не-
нетривиальных полей смещений, то будем говорить, что наличные
связи являются почти жесткими. Такого вида нежесткость по-
поверхности еще можно охарактеризовать тем, что связи допуска-
допускают конечное многообразие полей изгибаний. Иными словами, су-
существует конечное число линейно независимых комплексных
функций изгибаний w'{i>, ..., w'w, причем любая другая функ-
функция изгибаний, совместимая с наличными связями, выражается
25*
388 ГЛ. 5. ОБЩАЯ ТЕОРИЯ БЕСКОНЕЧНО МАЛЫХ ИЗГИБАНИЙ
в виде линейной комбинации вида
wr = Ciww + ... + ctw'w. A0.2)
Число I можно назвать в таком случае степенью свободы налич-
наличных почти жестких связей.
Ниже мы рассмотрим целый ряд примеров такого рода свя-
связей. Путем наложения на поверхность некоторого числа новых
связей точечного типа (гл. 4, § 6) почти жесткие связи всегда
можно сделать жесткими связями.
Рассматривая жесткие связи, нужно учитывать, что такие
связи могут обладать различной степенью жесткости. Если при
наличии жестких связей еще наложим на поверхность новые
связи, то, очевидно, опять получим жесткие связи. Например,
если с поверхностью положительной кривизны склеим нерастя-
нерастяжимую, абсолютно гибкую нить, то, как было показано в п. 5
§ 3, будем иметь жесткую поверхность. Если с той же поверх-
поверхностью мы склеим еще другую иерастяжимую нить или нало-
наложим некоторые другие связи, то, очевидно, жесткость поверхно-
поверхности не нарушится, а, наоборот, она усилится. Но следует иметь
в виду, что усиление жесткости с практической точки зрения не
всегда приемлемо. Например, если поверхность представляет со-
собой гибкую тонкую оболочку и на нее наложены жесткие связи,
то любая деформация такой оболочки будет вызывать растяже-
растяжения и сдвиги, ибо бесконечно малые изгибания исключены на-
наличными связями. Это повлечет за собой появление растягиваю-
растягивающих или сжимающих, а также скалывающих сил, которые могут
вызвать, при известной концентрации напряжений, значительное
ослабление и даже разрушение связей или образование трещин
и складок. Таким образом, наличие жестких связей в известных
случаях может вредно отразиться на работе конструкции, в осо-
особенности, если связи мало эластичны и плохо податливы или же
оболочка слабо сопротивляется деформациям растяжения и сдви-
сдвигов. Поэтому, накладывая на оболочку (поверхность) те или
иные жесткие связи, надо учитывать указанные обстоятельства
и делать это с осмотрительностью.
В связи с этим мы вводим понятия корректной, или опти-
оптимальной, и некорректной, или сверхоптималъной, жесткостей.
Некорректными жесткими связями мы называем такие связи,
которые допускают некоторые ослабления, оставаясь все же же-
жесткими. Например, такого рода жесткие связи устанавливаются
при склеивании поверхности положительной кривизны с нерастя-
нерастяжимой нитью. Если укоротим длину этой нити, мы не нарушим
жесткости поверхности, хотя явно ослабим связи. Понятие кор-
корректной, или оптимальной, жесткости мы введем на основе рас-
рассмотрения линейных связей вида R(\J) — f, где R — некоторый
однородный и аддитивный оператор, сопоставляющий любому
полю смещений U некоторую функцию, заданную на некотором
§ 10. КЛАССЫ ЖЕСТКИХ ВЫПУКЛЫХ ПОВЕРХНОСТЕЙ С КРАЯМИ 389
множестве точек поверхности и принадлежащую определенному
семейству функций. Такой вид имеют многие связи, устанавли-
устанавливаемые посредством склеивания или втулочными заполнениями
отверстий (§ 8). Допустим, что каждой заданной функции /
условие R(U)= j позволяет однозначно сопоставить вполне оп-
определенное поле изгибаний, причем последнее в некотором, впол-
вполне определенном смысле непрерывно зависит от /. Очевидно,
в таком случае при / = 0 поле изгибаний сводится к нулевому
полю. При этих условиях связи вида R(U) = f будем называть
корректными связями, причем соответствующие жесткие связи
R(U)=^0 будем называть корректно жесткими, или оптимально
жесткими, связями.
Можно еще сказать, что корректные жесткие связи не до-
допускают дальнейших ослаблений, оставаясь жесткими связями,
но если они подвергаются некоторым, для рассматриваемой за-
задачи вполне естественным, ослаблениям, то в результате полу-
получаются связи, всегда совместимые с некоторым полем смещений
бесконечно малых изгибаний поверхности.
Вообще осуществление на практике оптимальных жестких
связен связано с известными трудностями. Дело в том, что бе-
бесконечно малые изгибания поверхности, являясь весьма частным
случаем общей деформации поверхности, реализуются лишь при
наличии специального вида геометрических и кинематических
связей, осуществление и поддерживание которых требуют спе-
специальных геометрических условий и механических приспособле-
приспособлений. В ряде случаев, как это увидим ниже, такие связи могут
быть осуществлены путем скеливания поверхностей, а также при
помощи втулочных связей. В следующих пунктах мы изучим
более подробно свойства некоторых классов связей, которые при-
приводят к краевой задаче А, изученной в предыдущей главе.
2. Пусть в каждой точке границы L поверхности 5 задано
касательное к S направление t, составляющее угол ср с направ-
направлением тангенциальной нормали 1, причем <р является перемен-
переменной величиной — функцией точки контура L. Допустим, что
вдоль L в каждой точке заданы проекции вектора смещения U
на направление t, т. е.
ut = щ cos ф + Mssin(p = / (на L), (-Ю-З)
где / — некоторая заданная функция точки контура L. В даль-
дальнейшем заданные на L функции будем считать непрерывными
в смысле Гельдера. Так как вектор U можно представить с по-
помощью комплексной функции смещения w, удовлетворяющей
уравнению C.59), по формуле C.65), то
Mtsa Re [«;(*)!], fg = *i+tt», f = d-§, A0.4)
390 ГЛ. 5. ОБЩАЯ ТЕОРИЯ БЕСКОНЕЧНО МАЛЫХ ИЗГИБАНИЙ
где ta — контравариантные компоненты вектора t. Условия вида
j( 10.3) можно реализовать, как мы уже видели в § 8, путем
склеивания поверхностей или при помощи втулочной связи.
В силу A0.4) условие A0.3) запишется в виде
Re
[«?(*)§] = / (на Г). A0.5)
Таким образом, мы пришли к задаче, которую в дальнейшем
будем именовать задачей А(. Дадим формулировку этой задачи.
Задача А,. Требуется отыскать решение w(z) уравнения
д-w + A(z)w + B(z)w = 0 (в G), A0.6)
непрерывное в G + Г и удовлетворяющее краевому условию
A0.5).
Назовем эту задачу основной кинематической краевой зада-
задачей. Она принадлежит к кругу задач, изученных в гл. 4.
3. Прежде чем применять к этой задаче результаты гл. 4,
выясним некоторые свойства функций А и В, а также контура
Г, в зависимости от степени гладкости поверхности S и ее гра-
границы L.
Мы будем предполагать, что 5 + L есть часть некоторой по-
поверхности So положительной кривизны класса Dh+3iP, р > 2, k ^
5s 0, причем граничные кривые Lo, Lu ..., Lm, совокупность ко-
которых составляет полную границу L поверхности, принадлежат
некоторому классу С^'+1 (О^к'^к, 0<^^1). При этих
предположениях, как мы это видели в гл. 2 (§ 6, п. 8), а и
\\> ^Dh+i:P(G0), где Go — область на плоскости z = х + iy, па ко-
которую гомеоморфно отображается поверхность So с помощью не-
некоторого гомеоморфизма
* = *(!, П), У**У&, П) (Ю.7)
второй основной квадратичной формы
U^A'k.dl' + B'hd^. A0.8)
Так как по условию А2, В2, ки k2^Dh+l:P, то гомеоморфизм
A0.7) принадлежит классу Dh+ZtP. Если теперь обратимся к
формулам C.61), то легко убедимся, что коэффициенты урав-
уравнения A0.6)
A(z), B(z)^DKP(G0) (k>0, p>2). A0.9)
Поэтому согласно теореме 3.2 всякое непрерывное решение урав-
уравнения A0.6) принадлежит внутри области Go классу Dh+1Jt
(Go — гомеоморфный образ поверхности So). На основании фор-
формулы C.65) легко убедимся, что соответствующее поле сме-
смещений U принадлежит классу DKP(G0), причем касательная
§ 10. КЛАССЫ ЖЕСТКИХ ВЫПУКЛЫХ ПОВЕРХНОСТЕЙ С КРАЯМИ 391
составляющая этого поля
U. = - -4= (wn, + wn-), A0.10)
очевидно, принадлежит классу Dh+ip(G0).
Граница Г области G, которая состоит из кривых Го, ..., Гт,
являющихся гомеоморфньши образами Lo, ..., Lm, принадлежит
классу С1^+1. Относительно угла ср, определяющего касательное
направление t на поверхности вдоль L, будем предполагать, что
он принадлежит некоторому классу С% (L), (к" X), 0 < v < 1).
В таком случае функция
M*)^g, - A0.il)
очевидно, непрерывна в смысле Гельдера вдоль Г и нигде ле
обращается в нуль на Г. Поэтому к задаче А( можно применять
результаты гл. 4. Так как мы считаем, что правая часть / крае-
краевого условия A0.5) непрерывна по Гельдеру, то решение зада-
задачи А( принадлежит классу Dk+itP(G), p>2, внутри G и непре-
непрерывно в смысле Гельдера в G + Г (теоремы 3.2 и 4.1).
4. Рассмотрим сопряженную с At однородную краевую зада-
чу Af Она состоит в следующем:
Задача Af. Требуется отыскать решение сопряженного
уравнения
д-w' — A(z)w' —В(z) w' = 0 (в G), A0.12)
непрерывное в G + Г и удовлетворяющее краевому условию
Re Гц?' (г) gg] = Re [и/ (z) Xs (z) Xt (z)] = 0. A0.13)
Необходимое и достаточное условие разрешимости задачи А(
состоит в выполнении следующих равенств (см. гл. 4, § 2):
п] = 0 0=1, •••,l't), A0.14)
где Wj — полная система линейно независимых решений сопря-
женнои однородной задачи Af, а /< — число решении этой задачи.
Обращаясь к формуле F.45), находим
ГГ(„ я Тт = - Va Re [w' (z) | §\, A0.15)
где t' — касательное к S направление в граничной точке, пер-
перпендикулярное к t, причем t X t' = п. При выводе этой формулы
392 гл- 5- ОБЩАЯ ТЕОРИЯ БЕСКОНЕЧНО МАЛЫХ ИЗГИБАНИЙ
мы воспользовались соотношениями
*« = с«э«'р, ta = ca%. A0.16)
Учитывая теперь условие A0.13), получим
Tm = ±w'(z)h^r, A0.17)
где w' — решение задачи А<.
При выводе этого равенства мы воспользовались соотноше-
соотношением
dz dz dz dz 2/ ,.„ ,q\
{шло)
доказанным нами в § 6 гл. 2 (формула F.47)).
В силу A0.17) равенство A0.14) примет вид
'fT%dz = O 0 = 1, ...,/;). A0.19)
о ,
Как увидим в следующей главе, задача Aj допускает статиче-
статическое толкование, так как w' представляет собой комплексную
функцию напряжений. Но в случае односвязной области эту
функцию, как мы видели выше, в § 6, п. 6, можно всегда тол-
толковать как комплексную функцию изгибаний, которая связана
с полем вращений по формуле F.44). Из этой формулы следу-
следует, что
t' g = _ 8/cs sin Ф + 8ts cos ф = /a Re \w' (z) fg g]. A0.20)
Таким образом, в случае односвязной области краевое усло-
условие A0.13) можно записать еще в виде
—8ks sin ф + 6ts cos <p = 0. A0.21)
В случае многосвязной области последнее условие эквивалентно
условию A0.13) только тогда, когда функция w' подчинена еще
дополнительным условиям F.42). Только тогда функция w' бу-
будет представлять собой комплексную функцию изгибаний. Крае-
Краевое условие 8ks = 0 (на L), которое мы рассмотрели выше,
в § 8, п. 5, является частным случаем условия A0.21). В этом
случае ф = -к, т. е. t совпадает с s.
5. Индекс краевой задачи Af равен приращению arg -^ прд
однократном обходе точкой z границы Г области G в положи-
положительном направлении (§3 гл. 4). Это число мы обозначим
через nt.
§ 10. КЛАССЫ ЖЕСТКИХ ВЫПУКЛЫХ ПОВЕРХНОСТЕЙ С КРАЯМИ 393
Назовем теперь два касательных к S направления t и t* на-
направлениями одного и того же класса (например, направления-
направлениями класса t), если щ = щ*. Пусть <р* — угол между t n t*.
Если этот угол в каждой точке L по своему абсолютному зна-
значению не превышает я, |ф*1<я, то ясно, что t и t* будут
одного и того же класса. Если t принадлежит классу 1 (напри-
(например, совпадает с 1 или s), то, очевидно,
п, = п, = ;г8 = 1 - те. A0.22)
Если угол ф*, кроме того, непрерывен в смысле Гельдера,
Ф* sCv(r), и его норма в метрике CV(T) удовлетворяет усло-
условию С\,(ф*, Г)<8, где 8 — достаточно малое положительное чис-
число, то будем говорить, что направление t* является нормальным
возмущением направления t.
Рассмотрим теперь задачу А** с краевым условием
Re I w* (z) Щ = /*, A0.23)
где w* есть непрерывное в G + Г решение уравнения
0-w* + A* (z) u;* + В* (z) w* = 0, A0.24)
причем ^4* и 5*— функции класса ?з,(С? + Г), /? > 2, принад-
принадлежащие вместе с А и 5 некоторому компактному в Lj^G + F)
семейству функций и удовлетворяющие условиям
LP{A-A*, G)<e, LP(B-B*, G)<e, p>2, A0.25)
а правая часть краевого условия A0.23) удовлетворяет условию
Cv(/-/*, Г)<е, 0<vs?l. A0.26)
Таким образом, мы переходим от задачи А( к другой задаче
А(* путем варьирования коэффициентов уравнения и краевой
задачи, а также правой части краевого условия. Назовем крае-
краевую задачу At* нормальным возмущением задачи А*.
Докажем, что если задача А( квазикорректна, то всякая за-
задача At* при достаточно малых значениях е также квазикор-
квазикорректна.
В самом деле, квазикорректность задачи At означает, что
lt = 2n — т+1>0я l\ = 0 (гл. 4, § 6, п. 4). Тогда согласно
теореме 6 Б. В. Боярского (Добавление к гл. 4) /<* = 2п — т +
+ 1 и, следовательно, /(* = 0, что и требовалось доказать.
При п>т— 1 задача At всегда квазикорректна, а при
п < т — 1 она, вообще говоря, некорректна. Поэтому при п >
> т — 1 задачу At будем называть нормально квазикорректной
задачей.
Нужно сказать, что изучение вопроса о нормальной коррект-
корректности задачи А( имеет важный геометрический интерес. Вы-
394 гл- 5- ОБЩАЯ ТЕОРИЯ БЕСКОНЕЧНО МАЛЫХ ИЗГИБАНИЙ
яспение этого вопроса позволяет, например, судить о том, в ка-
какой степени устойчивы свойства связей вида A0.3). Например,
если они совместимы с бесконечно малыми изгибаниями поверх-
поверхности, то интересно знать, сохраняют ля они это свойство при
малых возмущениях параметров, определяющих связи. Практи-
Практически связи всегда реализуются с некоторым приближением и
поэтому важно знать, в какой мере влияют погрешности, мо-
могущие иметь место при устройстве связей, на характер дефор-
деформации поверхности (см. еще гл. 6, § 5, п. 12).
6. Переходим теперь к исследованию вопроса разрешимости
задачи А(. Обозначим через lt и Ц числа решений однородных
о о ,
задач At и А*. В силу теоремы 4.8 эти числа связаны между
собой соотношением
lt — l't = 2п + 1 — т, где п = щ. A0.27)
Рассмотрим сперва случай, когда п < 0. Тогда в силу теоре-
теоремы 4,5 lt = 0 и, следовательно,
l't = —2n + m—l. A0.28)
Таким образом, при наличии связей вида ut = 0 поверхность
является жесткой, если nt < 0. Но жесткие связи этого вида
не являются корректными. При нормальных возмущениях они
переходят в связи вида щ* = /*, которые не всегда совместимы
с бесконечно малыми изгибаниями поверхности. Сопряженная
однородная задача А*'» имеет l't = — 2га + тп — 1 решений w* (t)
(/ = 1, ..., — 2п + пг— 1), и, следовательно, должны выполняться
равенства
h
= 0 (/ = 1, ..., - 2/г + тп - 1), A0.29)
которые, очевидно, имеют место для произвольной непрерывной
функции /*. Это означает, что при nt<0 жесткие связи ut = 0
не корректны. Однако следует заметить, что в отношении нор-
нормальных возмущений вида щ* = 0 свойство жесткости связей
ut = 0 сохраняется.
Заметим, что рассмотренный выше случай реализуется для
овалоидов с тремя и большим числом отверстий (яг>1), если
направление t принадлежит классу 1 или s. Тогда nt = 1 — m < 0
и однородные связи вида
и( = 0 (на L) A0.30)
являются жесткими.
Пусть п>пг— 1. Тогда согласно теореме 4.10 однородная
о
задача А( имеет ровно lt = In + 1 — m линейно независимых ре-
решений, а неоднородная задача At всегда разрешима.
§ 10. КЛАССЫ ЖЕСТКИХ ВЫПУКЛЫХ ПОВЕРХНОСТЕЙ С КРАЯМИ 395
Следовательно, поле смещений, удовлетворяющее условиям
задачи А,, имеет вид
2n+l-m
и = ио+ 2
где Uo ¦— некоторое поле смещений, совместимое с условием не-
неоднородной задачи At, Ut, ..., U2?l+i_m — линейно независимые
поля смещений, удовлетворяющие однородному краевому усло-
условию щ = 0 на L, a dh — произвольные вещественные постоянные.
Таким образом, задача At в рассматриваемом случае (п>т — 1)
квазикорректна. Пользуясь результатами п. 3 § 6 гл. 4, мы мо-
можем добавлением новых точечных условий сделать задачу кор-
корректной.
Зафиксируем совершенно произвольно к внутренних и к' гра-
граничных точек поверхности, обозначая их соответственно через
М-у, ..., Mh и Мъ ...,Mkr. Числа к ж к' подчинены следую-
следующим условиям:
1) 2ft + к' = 2п +1 - т, 2) к'> т, A0.32)
причем на каждой из т произвольно взятых граничных кривых
(число их равно то+1) зафиксировано нечетное число точек.
В § 6 гл. 4 такое множество фиксированных точек мы назвали
нормально распределенным (к, к') множеством.
Зададим теперь дополнительно в точках М3 и Mj касатель-
касательную составляющую вектора смещения U, т. е. наложим на по-
поверхность дополнительно такие связи, которые фиксируют в
этих точках касательные компоненты вектора смещения. Учи-
Учитывая, что компоненты вектора U в направлении t в точках Mj
должны быть заданы согласно краевому условию задачи, ука-
указанные выше добавочные условия можно записать в виде
Ь3 (/ = 1, ..., ft),
где и и v — касательные компоненты вектора смещения, a ah bs
и Cj — некоторые заданные вещественные постоянные.
Рассматривая теперь краевую задачу А, с учетом дополни-
дополнительных точечных условий A0.33), мы получим корректную за-
задачу. Она всегда допускает решение, и притом единственное,
причем решение зависит непрерывно от данных задачи. Эти
утверждения легко вытекают из результатов § 6 гл. 4. Таким
образом, при п>тп— 1 задача А» с учетом добавочных условий
A0.33) является нормально корректной.
Остается теперь рассмотреть еще случаи, когда
0<п <пг- 1, тп> 1. A0.34)
396 ГЛ. 5. ОБЩАЯ ТЕОРИЯ БЕСКОНЕЧНО МАЛЫХ ИЗГИБАНИЙ
Как видно, эти случаи возможны лишь для многосвязных по-
поверхностей, т. е. для овалоидов с двумя или большим числом
отверстий.
При п = 0 могут представиться два случая: 1) /г = 0 или
2) I, = 1. В соответствии с этим, в силу A0.27), 1) lt = m — 1
или 2) k = т. Отсюда видно, что при т > 1 задача А( не кор-
корректна в обоих случаях. В первом случае (U = 0) связи вида
1-Ц = 0 являются жесткими, но они не корректно жесткие. В са-
мо5[ деле, для разрешимости нормально возмущенной краевой
задачи ut* = f* должны выполняться равенства вида A0.29),
число которых не меньше, чем те—1 (те>1). Аналогично убе-
убедимся, что во втором случае (It = 1) задача At не квазикоррект-
на. При т = 1 (овалоид с двумя отверстиями) в первом случае
(I, = 0) задача А< всегда допускает решение, и притом един-
единственное. В этом случае она корректна в отношении нормальных
возмущений связей. Это следует из теоремы 6 (см. добавление
к гл. 4).
При 7?г=1 и /( = 1 задача At, очевидно, не корректна.
Если при га = 0 задача At имеет ненулевое решение (lt = i),
то соответствующий вектор смещений U обладает тем свойством,
что его касательное поле смещений нигде не обращается в нуль
как внутри, так и на границе поверхности. Это сразу следует из
формулы A0.10), если учесть, что w^O в G + Г, как решение
о
однородной задачи Аг с нулевым индексом (теорема 4.6).
7. Следует заметить, что среди ненулевых решений однород-
о
иой задачи At, число которых при п > т — 1 равно In + 1 — т,
некоторые могут оказаться тривиальными полями смещений.
Так как таких полей имеется не более шести, то справедлива
Теорема 5.18. Если 2га — т> 5, то задача At имеет по
крайней мере 2п — тп — 5 нетривиальных решений, которым со-
соответствуют нетривиальные поля смещений, и, следовательно,
в этом случае поверхность не является (геометрически) жесткой.
Если оке 2п — m =C 5, то может оказаться, что все поля сме-
смещений или часть из них, совместимые с краевым, условием
и, = 0, являются тривиальными. В первом слг/чае поверхность
(геометрически) жесткая.
Таким образом, неравенство
2га > те+ 5 A0.35)
является достаточным признаком нежесткости поверхности, а не-
неравенство
2га<т + 5 A0.36)
представляет собой необходимое (но, вообще говоря, недостаточ-
недостаточное) условие геометрической жесткости.
§ 10. КЛАССЫ ЖЕСТКИХ ВЫПУКЛЫХ ПОВЕРХНОСТЕЙ С КРАЯМИ 397
В частности, при т — 0 (односвязная) поверхность заведомо
не является геометрически жесткой, если п > 2. Если же 0 <
^ п ^ 2, то при наличии только связей вида щ = 0 поверхность
не будет кинематически жесткой, ибо задача А( допускает 2п + 1
решений. Однако не исключена возможность наличия геометри-
геометрической жесткости, так как в этом случае выполнено необходимое
для этого условие In + 1 < 6.
8. Рассмотрим теперь особо тот случай задачи At, когда на-
направление t принадлежит классу касательной s или, что то же
самое, тангенциальной нормали 1 контура L поверхности. В этом
случае согласно A0.22) п = nt = 1 — пг. Остановимся для опре-
определенности на рассмотрении краевого условия щ = /, которое,
как мы видели в § 8 (п. 11), может быть реализовано с по-
помощью втулочных связей. Вставляя в отверстия овалоида же-
жесткие втулки, поверхности которых ортогональны овалоиду и
плотно прилегают к контурам отверстии его, получим вдоль каж-
каждого граничного контура условие вида
щ = Ъ(ыЦ) (/ = 0, 1, ..., т), A0.37)
/,- = mjr + ICj (; = 0, 1, ..., m). A0.38)
Здесь Qj и Cj — постоянные векторы.
Эти условия выражают, во-первых, наличие непрерывного
контакта поверхностей втулок с контурами отверстий и, во-вто-
во-вторых, то, что поверхности втулок могут перемещаться лишь как
твердые тела. Если поверхности втулок ддеальпо гладкие, то
контуры отверстий овалоида свободно могут передвигаться
(скользить) по этим поверхностям. При этих условиях связи
вида A0.37) будем называть ортогональными идеальными вту-
втулочными связями или еще ортогональными связями скольжения.
Так как в дальнейшем будем рассматривать лишь втулоч-
втулочные связи указанного вида, то слова «ортогональные» и «иде-
«идеальные» будем обычно опускать.
Кроме связей, обусловленных наличием контакта между по-
поверхностями втулок и контуров отверстий овалоида, которые мы
условимся называть внутренними связями, могут еще существо-
существовать внешние связи между втулками, накладывающие опреде-
определенные ограничения па их взаимную конфигурацию. Эти внеш-
внешние связи могут быть выражены в виде некоторого числа ра-
равенств или неравенств, содержащих компоненты векторов ffj
и С]. Такие соотношения будем называть условиями внешних
связей. Естественно допустить, что эти связи не препятствуют
движению всей системы втулок и овалоида в целом. Иными сло-
словами, условия внешних связей допускают замены векторов Qj
ж Cj на Qj — Q и Cj — С, где Q и С — произвольные постоян-
постоянные векторы. Это означает, что одну из втулок можем считать
398 ГЛ. 5 ОБЩАЯ ТЕОРИЯ БЕСКОНЕЧНО МАЛЫХ ИЗГИБАНИЯ
неподвижной. Поэтому в дальнейшем все время будем считать,
¦что
Дв = 0, С„ = 0. A0.39)
Допустим, что условия внешних связей позволяют выразить ос-
остальные 6т постоянных — компонентов векторов fi;- и С,- (/ =
= 1, ..., т) через к независимых параметров «i, ..., ah. В та-
таком случае будем говорить, что втулочная связь имеет к сте-
степеней свободы. При к — 0 мы будем называть связь жестко
скрепленной втулочной связью. В этом случае совокупность вту-
втулок составляет одну неизменяемую систему тел. При к = %пг мы
имеем вполне свободную втулочную связь. В этом случае внеш-
внешние связи между втулками вовсе отсутствуют и правая часть
краевого условия задачи имеет вид A0.38), где flj и С,- — вполне
произвольные постоянные векторы.
В качестве независимых параметров аи ¦ •., «й мы можем
взять к компонентов векторов Я\ и С3. Тогда остальные Ьпг — к
компонентов этих векторов будут вполне определенными функ-
функциями уже фиксированных к компонентов. В том случае, когда
flj и Cj являются линейными однородными функциями парамет-
параметров «1, ..., «а, втулочную связь будем называть линейной.
В случае жестко скрепленной втулочной связи, учитывая еще
допущение A0.39), получим однородное краевое условие
м; = 0 (на L). A0.40)
Индекс этой задачи равен п = 1 — пг. В случае одпосвязной по-
поверхности т = 0и индекс /г=1. Согласно теореме 4.11 задача
имеет три линейно независимых решения. Сопряженной одно-
однородной задачей является задача с краевым условием (см.
A0.21); в нашем случае ср = 0)
6ts = 0 (на L), A0.41)
индекс которой равен п = —2. Следовательно, сформулированная
задача не имеет решения. Вообще краевая задача A0.21) не
допускает непрерывного решения в случае односвязной области,
если направление t принадлежит классу I.
Возвращаясь опять к задаче A0.40), рассмотрим случай
пг = 1. Тогда индекс п = 0 и могут представиться два случая:
1) задача не имеет решения или 2) она допускает одно линейно
независимое решение. Наконец, при m > 1 индекс отрицателен
и задача не имеет ненулевых решений. Таким образом, имеет
место следующая
Теорема 5.19. При наличии жестко скрепленной втулочной
связи овалоид с одним отверстием допускает три линейно не-
независимых поля смещений Ufl), UB), UC), овалоид с двумя от-
отверстиями является либо жестким, либо же допускает одно не-
§ 10. КЛАССЫ ЖЕСТКИХ ВЫПУКЛЫХ ПОВЕРХНОСТЕЙ С КРАЯМИ 399
нулевое поле смещений и, наконец, овалоид с тремя и большим
числом отверстий всегда является жестким.
Если окажется, что U(i), Ut2), U<3) — тривиальные поля сме-
смещений, т. с.
U(« = О«> X г + С(Л (/=1, 2, 3), A0.42)
то овалоид с одним отверстием при наличии связи щ =0 яв-
является геометрически жестким. Поэтому представляется интерес-
интересным указать случаи, когда это имеет место.
Пусть контур отверстия — плоская кривая, а тангенциальная
нормаль к ней перпендикулярна (в каждой точке) к плоскости
этой кривой, как, например, в случае полусферы. Расположив
координатную плоскость оху на плоскости отверстия, легко убе-
убедимся, что тривиальные поля смещений
e,, UB)=e2, UW-e,Xr A0.43)
удовлетворяют краевому условию щ = 0.
Может случиться также, что из трех полей UA), UB), Ul3)
лишь одно или два являются нетривиальными. В случае дву-
связной поверхности (wi=l) можно указать также пример, ког-
когда втулочные связи совместимы с тривиальными плоскими (кру-
(круговыми) отверстиями: наличие втулочных связей допускает
вращение вокруг оси. В качестве втулок в этом случае можно
взять конусы с вершиной в центре сферы.
Независимо от того, выполняется условие A0.42) или нет,
мы можем обеспечить жесткость овалоида с одним отверстием
при наличии связен щ = 0 добавлением к ним точечных условий
вида
в(ДГ1) = О, v(M\) = O, и3(Л/1) = О, A0.44)
пли
us (M[) = 0, us (М2) = 0, м5 (М3) = 0, A0.45)
где Mi — внутренняя, а М'ъ М2, M's — граничные точки овалои-
да, которые можно фиксировать совершенно произвольно. Важ-
Важно подчеркнуть, что при этих условиях овалоид с одним отвер-
отверстием является оптимально жестким, а при т > 1 жесткость
становится не корректной.
В случае, когда втулочные связи имеют к степеней свободы,
0 < к < 6т, надо исследовать задачу Ах с краевым условием ви-
вида A0.37), где fij и С,- являются заданными вектор-функциями
параметров <Xi, ..., а^..
о f
Пусть т > 1. Тогда сопряженная однородная задача А8 в
силу A0.28) имеет ls — 3m — 3 решений. Поэтому необходимое
400 ГЛ- 5- ОБЩАЯ ТЕОРИЯ БЕСКОНЕЧНО МАЛЫХ ИЗГИБАНИЙ
и достаточное условие разрешимости задачи А, имеет вид
2 J fjTffl) ds = O (p = 1, ..., 3m - 3), A0.-46)
где
одесь Wp — решения однородной задачи А;, т. е. решения урав-
дения A0.12), удовлетворяющие краевому условию
В силу формул A0.38) равенства A0.46) примут вид
m
J O,Mjp + С^р = 0 (р = 1, ..., Зяг - 3), A0.49)
где
1 Г '
? J
M-jp г- 1 Wp (z) г X г- dz.
Ti
Механический смысл этих выражений мы выясним в следующей
главе.
Таким образом, выполнение системы равенств A0.49) явля-
является необходимым и достаточным условием существования ре-
решения задачи А, с краевым условием A0.37). Иными словами,
овалоид с тремя и большим числом отверстий допускает беско-
бесконечно малое изгибание при паличии втулочных связей с к сте-
степенями свободы тогда и только тогда, когда параметры «i, ..., ah,
определяющие положение втулок, совместимое с внешними
связями, удовлетворяет системе уравнений A0.49).
Эта система уравнений может быть как линейной, так и не-
нелинейной относительно параметров аи .. ., ат. Предположим, что
имеем линейные втулочные связи. Это означает, что векторы
S2j и Cj —• линейные однородные функции параметров «i, ..., ah.
Пусть р — ранг матрицы системы A0.49).
Если р = к, то, очевидно, система A0.49) допускает лишь
нулевое решение ft,- = Cj = 0 (/ = 1 ..., т) и, следовательно,
в этом случае поверхность является жесткой. Если же р < к,
то система A0.49) имеет к — р решений, которые можем выра-
выразить в виде
а,- = Сц$1 +,.. + сй_ррл_р (/ = 1, ..., к), A0.51)
§ 10. КЛАССЫ ЖЕСТКИХ ВЫПУКЛЫХ ПОВЕРХНОСТЕЙ С КРАЯМИ 401
где Сх — вполне определенные постоянные, а ${, ..., р\_р — не-
независимые параметры, которые назовем допустимыми координа-
координатами системы втулок. Каждой системе значений этих координат
соответствует вполне определенная конфигурация втулок, и вся-
всякой такой конфигурации (и только ей) соответствует определен-
определенное (и единственное) ненулевое поле смещений, совместимое
с наличными связями. Если обозначить через UA), ..., U<ft~p) по-
поля смещений, отвечающие допустимым координатам A, 0, ..., 0),
@, 1, ..., 0), ..., @, 0, ..., 1) соответственно, то общее ре-
решение задачи Aj при наличии внешних втулочных связей имеет
U = pjjw + ... + fo-pU'*-»'. A0.52)
Нетрудно видеть, что UA), ..., \]{к~р) — линейно независимые
векторы. Если присоединим теперь к заданным условиям еще
к — р подходящим образом выбранных добавочных условий (на-
(например точечных), то можем добиться, чтобы задача А( имела
единственное решение. В частности, эти условия (добавочные)
можно выбрать так, чтобы поверхность стала корректно жесткой.
Отметим теперь особо некоторые результаты, которые легко
получаются из вышеизложенного.
1) При наличии внешних втулочных связей с к степенями
свободы овалоид с тремя и большим числом отверстий заведомо
не является жестким, если к > Ъпг — 3. Существует при этом
к — р > к — Зпг + 3 различных конфигураций втулок, которым
соответствуют определенные линейно независимые поля смеще-
смещений U(i), ..., и(к~!Л, причем поля смещений, соответствующие
другим допустимым конфигурациям системы втулок, задаются
по формуле A0.52), где J3i, ..., f}ft_p— допустимые координаты
системы втулок.
2) При наличии внешних втулочных связей с к степенями
свободы поверхность может быть жесткой только при выпол-
выполнении необходимого условия к < Зтп — 3(то > 1).
Это условие, однако, может оказаться недостаточным. Важно
было бы указать соответствующий пример.
Рассмотрим, наконец, случай двусвязной поверхности (т —
= 1). Тогда п = 0 и однородная задача либо не имеет решения,
либо имеет одно решение. В первом случае поверхность всегда
допускает ненулевое поле смещений, совместимое с произволь-
произвольной втулочной связью щ = /. Во втором же случае такое поле
смещений существует лишь при выполнении одного равенства
вида
QiMll + CiFH = 0. A0.53)
Наконец, заметим, что если бы имели место равенства
Fjt = 0, Mjt = 0 (/ = 1, ..., т; i = l, ..., Зте-3), A0.54)
то условие A0.49), очевидно, выполнялось бы всегда. Но ра-
26 и. Н. Векуа
402 ГЛ- 5- ОБЩАЯ ТЕОРИЯ БЕСКОНЕЧНО МАЛЫХ ИЗГИБАНИЙ
венства A0.54) означают, что статическое поле, удовлетворяю-
удовлетворяющее краевому условию A0.48), представляет собой поле изги-
изгибаний, которое удовлетворяет краевому условию A0.41). В сле-
следующем пункте мы докажем, что геометрическая задача с крае-
краевым условием A0.41) не имеет нетривиального решения. Иными
словами, овалоид с краями при наличии связей вида A0.41)
является жестким. Отсюда следует, что выполнение всех ра-
равенств A0.54) одновременно невозможно. Это означает, что крае-
краевое условие A0.37) при любых значениях постоянных векторов
fij и Cj несовместимо с бесконечно малым изгибанием.
9. Изучим теперь геометрическое краевое условие вида
A0.21), которое, как мы видели выше, можно записать в виде
A0.13), где w'(z)—решение уравнения A0.12), подчиненное
дополнительно условиям F.42). Последние условия обеспечива-
обеспечивают существование одпозпачных полей смещений и вращений,
которые можно получить с помощью квадратур из формулы
В случае односвязной поверхности условия F.42) всегда вы-
выполняются и поэтому задача сводится к отысканию решения
уравнения A0.12), непрерывного в G+Г и удовлетворяющего
условию A0.13). В том случае, когда направление t принадлежит
классу 1, индекс задачи п = —2 и, как ужо отмечали выше, за-
задача A0.21) не имеет ненулевого решения.
Изучим теперь случаи т > 1, причем будем по-прежнему
предполагать, что t принадлежит классу 1. Если не будем учи-
учитывать условия F.42), обеспечивающие, как уже было сказано,
однозначность полей смещений и вращений, то получим крае-
вую задачу А/, сопряженную с кинематической задачей At. Зги
задача допускает определенное статическое толкование, но об
этом речь будет идти специально в следующей главе. Так как
индекс задачи Аг равен п = 1 — т, то в силу формулы A0.27)
число линейно независимых решений задачи At равно V = Ът —
— 3(го>1). Если обозначить через и>ъ ...,Wi- полную систе-
му решений задачи At, то общее решение ее имеет вид
w' = exwx + ... + cvw\, (V = 3т — 3). A0.56)
Чтобы получить решение однородной краевой задачи A0.21),
необходимо и достаточно, чтобы w' удовлетворяло равенствам
F.42), которые можно записать в виде
Зги—3 р Зт—3 -
U=& = 0, 2 с, 1*5 ^ & - 0 A0.57)
(к - 1, ..., т).
§ 10. КЛАССЫ ЖЕСТКИХ ВЫПУКЛЫХ ПОВЕРХНОСТЕЙ С КРАЯМИ
При выводе этих равенств мы учли, что для решений задачи
о f
At формула F.45) принимает вид
T{l) = j-w'(z)Щt (шЬ). A0.58)
Таким образом, мы имеем однородную систему из 6т уравне-
уравнений для определения Зт — 3 вещественных постоянных си ...
..., Сзи-з- Если эта система уравнений не имеет ненулевых ре-
решений, то тогда (и только тогда) овалопд с т + 1 отверстиями,
подчиненный связям, выражающимся краевым условием
—6/е„sinф + 6tscosф = 0 (на L), A0.21)
является жестким. Здесь, как уже отмечалось выше, предпола-
предполагается, что угол ф непрерывен по Гельдеру и не превосходит
по абсолютному значению п, 0 «? |ф] < я. Это означает, что на-
направление t принадлежит классу 1.
В дальнейшем для краткости эту геометрическую задачу бу-
будем обозначать через Bf.
Учитывая формулу A0.58), равенства A0.57) можно запи-
записать в следующей форме:
Зтп—3 „ зт—3 _
2 Ъ \ T%t ds = 0, 2 ci \ rHV X t ds = 0 A0.59)
i=i Lh i=i Lk
(k = 1, ..., те),
где
\% ' ()
Г w = ± wk (z) =?==* (k = l, ...,3m- 3). A0.60)
> Я4(г)
Мы рассмотрим тот случай, когда краевое условие A0.21) име-
имеет вид
6Л. = 0 (на L). A0.61)
Как мы выяснили из § 8, п. 5 это краевое условие соответ-
соответствует овалоиду с отороченными краями. В этом случае ф = у
и, следовательно, t = s, t' = —1. Тогда условия A0.59) прини-
принимают вид
т—3 . зт—з „
2 ct j Г$) dr = 0, ^ Cj j Г$)Г X А = 0 A0.62)
(к = 1, ... т).
Рассмотрим теперь случай овалоида с двумя отверстиями.
Тогда т = 1 и индекс задачи » = 0. Согласно теореме 4.6 в этом
о f
случае однородная задача At либо не имеет ненулевого реше-
26*
404 ГЛ- 5- ОБЩАЯ ТЕОРИЯ БЕСКОНЕЧНО МАЛЫХ ИЗГИБАНИЙ
пия, либо имеет одно линейно независимое решение. В первом
случае геометрическая задача с краевым условием A0.61), оче-
очевидно, не имеет ненулевого решения, т. е. при выполнении
этого условия овалоид с двумя отороченными отверстиями яв-
является жестким. Допустим теперь, что задача А* имеет одно
нетривиальное решение, т. е. существует комплексная функция
напряжении и/, которая удовлетворяет краевому условию
Г(,о== — /a Re [и/ (z) (j|J] = 0 (на L). A0.63)
Но, как мы неоднократно отмечали выше, геометрическому ус-
условию A0.61) отвечают лишь те решения задачи A0.63), ко-
которые удовлетворяют дополнительно условиям
1) Jrwdr = O, 2) J T(ls)t X dr = 0, A0.64)
причем в силу A0.60)
T(ls) = ±w'(z)e~2i% A0.65)
где #s— угол наклона касательной к Г в точке z. Но ненулевое
о ,
решение w' задачи А*, если таковое существует, в силу теоре-
теоремы 4.6 нигде не обращается в нуль в G + Г. Следовательно,
T(ts) Ф 0 всюду на L (следует помнить, что мы пока рассматри-
рассматриваем случай т = 1 и индекс задачи равен 0).
Поместим теперь начало координат внутри овалоида и рас-
рассмотрим конус, описываемый радиусом-вектором г(М), когда точ-
точка М опишет контур Lu Пусть е — орт некоторой оси, проходя-
проходящей через вершину конуса (начало координат) и расположенный
внутри отверстия 1ц. Умножая скалярно второе равенство
A0.64) на е, получим
\ Т(п) rse ds = 0- A0.66)
Но теперь мы обнаружим, что это невозможно. В самом деле
вектор г X s направлен по нормали конуса и, следовательно, со-
составляет с ортом е либо все время острый угол, либо все время
тупой угол. Это означает, что знак смешанного произведения
rse не меняется вдоль Lt. Так как T(U) нигде не обращается в
нуль на L, то и знак подынтегрального выражения в равенстве
A0.66) не меняется вдоль Ln. Следовательно, равенство A0.66)
невозможно. Это доказывает, что условия A0.64) одновременно
не могут быть выполнены, если Т{щ Ф 0 всюду на L. Это оз-
означает, что однородная геометрическая задача A0.61) в случав
двусвязной поверхности не допускает нетривиального решения.
§ 11. БЕСКОНЕЧНО МАЛЫЕ ИЗГИБАНИЯ ПОВЕРХН. ВРАЩЕНИЯ 405
Отсюда следует, что овалоид с двумя отороченными отверстия-
отверстиями является жестким.
Рассмотрим теперь случай овалоида с тремя отверстиями
(те = 2). Тогда индекс задачи п = 2 и однородная задача Aj
имеет три линейно независимых решения. Докажем, что в этом
случае всякое решение задачи А;, по крайней мере на одном
из граничных контуров, отлично всюду от нуля. Согласно фор-
формуле D.17) гл. 4 число граничных нулей решения w'(z) задачи
Аг не больше, чем 4, ибо п = 2. Согласно теореме 4.7 на каж-
каждом граничном контуре лежит четное число нулей w'(z). Так
как граничных контуров в рассматриваемом случае три, то от-
отсюда следует, что по крайней мере один контур всегда свободен
от нулей w'(z). Следовательно, в силу A0.65) на этом контуре
соответствующее касательное усилие T(U) ?= 0 всюду. Теперь,
так же каж и выше, докажем, что второе равенство A0.64) не
может выполняться на соответствующем контуре. Это и дока-
доказывает, что задача A0.61) в случае трехсвязной поверхности
не допускает решения.
Отсюда следует, что овалоид с тремя отороченньиш отвер-
отверстиями является жестким.
Приведенные выше рассуждения непосредственно нельзя ис-
использовать для общего случая те > 2. Однако и в этом случае
можно доказать, что овалоид с отороченными краями является
жестким. В случае усеченного овалоида, т. е. в том случае, ког-
когда отверстия являются плоскими кривыми, это иным путем до-
доказано Н. В. Ефимовым [33а].
§ 11. Бесконечно малые изгибания поверхностей вращения
В этом параграфе мы особо рассматриваем некоторые вопро-
вопросы жесткости поверхностей вращения. Сравнительная простота
уравнений в этом случае позволит изучить более полно вопросы
жесткости не только для поверхностей вращения положитель-
положительной кривизны, но и для некоторого класса поверхностей сме-
смешанного типа. Глобальное приведение к канонической форме
уравнений бесконечно малых изгибаний легко осуществимо в
случае поверхностей вращения. В результате мы получим в ка-
канонической форме, вообще говоря, уравнения смешанного типа,
причем на основе геометрических соображений естественным
путем устанавливаются характер особенностей коэффициентов и
условия сопряжения на линиях вырождения типа уравнений.
1. Пусть имеется поверхность вращения, заданная уравне-
уравнениями
A1.1)
406
ГЛ- 5- ОБЩАЯ ТЕОРИЯ БЕСКОНЕЧНО МАЛЫХ ИЗГИБАНПЙ
где ф(р)—однозначная непрерывная функция, имеющая кусоч-
кусочно непрерывные производные порядка т > 3 в интервале 0 =^
< р < а, причем а может равняться +°°.
Таким образом, мы рассматриваем поверхность, которая по-
получается вращением вокруг оси oz плоской кривой, пересека-
пересекающейся с каждой прямой, параллельной оси oz, не более чем в
одной точке. Первая и вторая основные квадратичные формы
поверхности выразятся по формулам
Поэтому
Пусть
V 1 +
ф'ф"
У1-Y ф'"
Рф" + ф'
Р(н-Ф'2
причем ро выбираем так, чтобы интеграл сходился. Вообще,
считаем, что <р' н ф" могут обращаться в нуль только в изо-
изолированных точках и что интеграл сходится для любого р, 0 <
< р < а. При этих условиях 'п(р), очевидно, монотонно возра-
возрастает от г)о = г)(О) до У]а = У](а), при этом г)„ и г\а могут обра-
обратиться в — °° и +°о соответственно.
Относительно новых переменных g и ц имеем
I = ds2 s A2 dl2 + В2 drf,
где
е (т]) = sign К ft) =
= р, В =
1, если K(ti)>0,
0, если К (tj) = 0,
.—1, если К(т))<0,
Iф
(H.C>
A1.7}
(И8>
VI к |' г
и I — длина отрезка нормали поверхности.
На линиях (параллелях), где К = 0, коэффициент В* терпит
разрыв.
На основании формул C.34)" получим
г1 г1 г2 _ п г1 _ * dA 1 dp
г2 _ Ai^ Г2 _1йВ 1 ;
1 п ~~ в2 ^n ' 22 ~ В йг] *
§11. БЕСКОНЕЧНО МАЛЫЕ ИЗГИБАНИЯ ПОВЕРХН. ВРАЩЕНИИ 407
Здесь под р следует понимать функцию от г\, заданную равен-
равенством A1.5). В точках, где К = 0, Г^ и Г|2 терпят разрывы, а
Г?! обращается в нуль.
Мы можем теперь основные уравнения бесконечно малых из-
изгибаний поверхностей вращения записать в следующем виде.
Система уравнений для поля смещений C.39)
и C.40):
?|_8A1)^. + ^ = 0, *f + g. + cu = O, A1.10)
где
&==й2 5тГ' c = driln72' A1.12)
A1.13)
причем M(i) и м{2) — физические компоненты вектора смещения
по меридиану и параллели.
Система уравнений для поля изгибаний F.33):
lf-^T + ci;=0' 8(т1)-а?+Ж + 6" =0' A1Л4)
где
й' = -е(т1)Ар, г;' = -АВ2Г2 = -В?. A1.15)
Характеристическое уравнение E.34):
0 + е(т1)^ + М(т1)ш = О, A1.16)
где
ю = !К1-]/Ч v = \n, A1.16а)
М = —-i^, Я=,|КГ1/4A + Ф'Т1/2 = |КГ1/4соз0, A1.17)
причем б — угол между нормалью поверхности и осью враще-
вращения — л/2 < 6 < л/2.
Уравнение A1.16) имеет три тривиальных решения:
X, ц = Яф'cos #, v = u<p'sin#, A1.18)
которые пропорциональны направляющим косинусам нормали
поверхности.
2. При интегрировании систем уравнений A1.10) и A1.14)
следует учитывать условия сопряжения на параллелях, где К =
= 0. Они вытекают из непрерывности деформация (в окрестно-
окрестности линии вырождения поверхность считаем гладкой).
408 Гл- 5- ОБЩАЯ ТЕОРИЯ БЕСКОНЕЧНО МАЛЫХ ИЗГИБАНИЙ
Пусть К = 0 на параллели г) = г)'. Имея в виду геометриче-
геометрический смысл величин u(i) и и{2), а также р и q (см. § 7, п. 1)г
мы должны считать их на этой линии непрерывными. Тогда
из A1.13) и A1.15) получим следующие условия сопряжения:
w|,,/_0 = м („/+„ = 0, у|П'-0 = у|п'+о, A1.19)
п' |ч,_0 = - й'|пЧ0, (v/B\,-o = (ЭД..'+о. A1 -20)
Если К(т]')=0, К'(т1')?=0, то нетрудно показать, что вбли-
вблизи точки т\ функция М имеет особенность вида
где М^ (ц) — непрерывная функция, причем
М* (V) = - 7/36. A1.22)
Таким образом, задача отыскания поля смещений или поля
изгибаний поверхности вращения совершенно естественным пу-
путем приводит к задаче о глобальном изучении свойств решений
уравнений смешанного типа как для систем уравнений с частны-
частными производными 1-го порядка A1.10) и A1.14), так и для
уравнения 2-го порядка A1.16). Тип этих уравнений зависит от
знака К(т]). При К(г))>0 они относятся к уравнениям эллип-
эллиптического типа, а при К<0 и К = 0 — к уравнениям гипербо-
гиперболического и параболического типа соответственно. На линиях
вырождения (К(т)) = 0) должны быть учтены условия A1.19)
и A1.20) для систем A1.10) и A1.14) соответственно, а для
характеристического уравнения 2-го порядка A1.16), учитывая
непрерывность поля вращения, получим условия вида
+ _ - (du_
v ~v ' Up
или
. A1.23)
Кроме того, если поверхность кусочно гладкая и незамкнутая,
то следует еще учесть условия сопряжения на линиях склеи-
склеивания, а также краевые условия, выражающие наличные связи.
В частности, если М(г))=0, то получим простейшее модель-
модельное уравнение смешанного типа 2-го порядка
—2 + е (г))—г" = 0. A1.Z4)
На важность глобального изучения свойств решений этого
уравнения впервые обратил внимание М. А. Лаврентьев [47а].
§ 11. БЕСКОНЕЧНО МАЛЫЕ ИЗГИБАНИЯ ПОВЕРХ!!. ВРАЩЕНИЯ 409
Основные свойства его решений и ряд краевых задач для него
изучил в своих работах А. В. Бицадзе [9]. Из его результатов
можно получить ряд условий жесткости для поверхностей вра-
вращения смешанного типа.
Нетрудно проверить, что равенству М(т])=0 удовлетворяют,
например, следующие поверхности вращения:
Фх (р) = т + « [р YWTW Тр2 ig"(p + YWTW)l
Фз (Р) = Т + а [р VV — Р2 — Р2 lg (р + VV — Р2)], A1.25)
Фз (Р) = 7 + « [р /Р2 - р2 + Р2 arcsin-jl],
где а, р, у — действительные постоянные.
Нетрудно указать также геометрические задачи, которые при-
приводятся к проблеме Трикоми [85а, в].
Важные признаки разрешимости краевых задач для уравне-
уравнения 2-го порядка с линией вырождения впервые указал
М. В. Келдыш [406]. Применяя эти результаты, также можно
указать целый ряд условий жесткости поверхностей вращения,
окаймленных линиями иараболичностн (К = 0). Дальнейшие
обобщения, с одной стороны, и конкретизацию применительно к
уравнениям более частного вида, с другой стороны, эти резуль-
результаты нашли в работах [16а], [43], [566], [666], [83] *).
Представляет значительный интерес провести дальнейшее
изучение смешанных задач, а также краевых задач с линией
вырождения для уравнения 2-го порядка A1.16) или для си-
систем уравнений A1.10) и A1.14), учитывая конкретные осо-
особенности коэффициентов этих уравнений. В частности, было бы
интересно изучить свойства решений уравнения A1.16), когда
коэффициент М(т]) имеет вид A1.21)**).
*) Изучению вырождающихся эллиптических уравнений второго по-
порядка посвящена монография О. А. Олепник п Е. В. Радкевича «Уравне-
«Уравнения второго порядка с неотрицательной характеристической формой» (Ма-
(Математический анализ, 1969 / Итоги науки.— ВИНИТИ, 1971.—252 с). Там
же имеется подробная библиография.— Примеч. ред.
**) Как известно, до сих пор для уравпений смешанного типа пли с
линиями вырождения проблемы ставились главным образом в связи с за-
задачами газовой динамики. Выло бы весьма важно связать более тесно эту
проблематику еще с задачами бесконечно малых изгибаний поверхностей,
а также беамоментной теории оболочек (см. гл. 6, § 5). Во многих случаях
сравнительная простота и наглядность этих геометрических и механиче-
механических задач может подсказать ряд свойств искомых решений, равно как и
некоторые новые подходы к их изучению. Обычно приводимые примеры
из области газовой динамики, имеющие сами по себе важный практиче-
практический интерес и оказавшие большое влияние на развитие этой важной об-
области теории уравнений в частных производных, не обладают, однако, столь
наглядным характером. Формулировки этих проблем, как мы видели выше,
получаются из простых геометрических соображений как для систем урав-
уравнений 1-го порядка A1.10), A1.14), так и для уравнения 2-го порядка
A1.16).
410 ГЛ- 5- ОБЩАЯ ТЕОРИЯ БЕСКОНЕЧНО МАЛЫХ ИЗГИБАНИЙ
3. В случае поверхности вращения, ограниченной паралле-
параллелями т] = const, представляет интерес отыскание периодических
относительно | (с периодом 2л) решений уравнения A1.16).
Это приводит к рассмотрению обыкновенных дифференциальных
уравнений вида
=0 A1.26)
(и = 0, 1, ..., e(r|) = signK(Ti)).
Отсутствие у этих уравпений ограниченных решений (кроме три-
тривиальных) будет признаком жесткости поверхности. В частно-
частности представляет интерес изучепие тех случаев, когда функции
М(г)) имеют особенности вида A1.21).
4. В последующих пунктах мы выведем некоторые признаки
жесткости различных семейств поверхностей вращения. Излагае-
Излагаемые ниже результаты принадлежат Ш. С. Мецховришвили [52],
Б. В. Боярскому [Из] и Сун Хэ-шэну [81], причем многие из
этих результатов в полном виде излагаются впервые.
Функцию <р(р) мы считали выше однозначной. Это равно-
равносильно тому, что соответствующая поверхность пересекается с
каждой прямой, параллельной оси вращения, самое большее в
одной точке. Но это ограничение желательно устранить, ибо оно
не выполняется, например, для замкнутых поверхностей вра-
вращения.
В таких более общих случаях мы можем представить себе
поверхность как совокупность открытых поверхностей вращения
рассмотренного выше вида, которые склеены вдоль ограничива-
ограничивающих их параллелей. Написав для каждой из них соответствую-
соответствующие уравнения бесконечно малых изгибаний, мы должны при-
присоединить к ним еще условия сопряжения, выражающие непре-
непрерывность деформации вдоль линий склеивания. Таким образом,
задача сведется к интегрированию совокупности систем уравне-
уравнений с частными производными вида A1.10), A1.14) или урав-
уравнений 2-го порядка вида A1.16), с учетом указанных выше
условий сопряжения, а также тех граничных условий, которые
выражают наличные внешние связи.
Однако для целого ряда поверхностей вращения можно вве-
ввести в рассмотрение такие системы координат, которые позволя-
позволяют написать уравнения бесконечно малых изгибаний для всей
поверхности в целом, не разбивая ее по участкам D1а, б]. Так
обстоит дело, например, в отношении овалоидов вращения и то-
тора. Рассмотрим сперва случай тора.
5. Уравнение тора мы можем записать в следующей форме:
у = Z(l + ecos<p)sin'0>, r==asinq>,
§ И. БЕСКОНЕЧНО МАЛЫЕ ИЗГИБАНИЯ ПОВЕРХН. ВРАЩЕНИЯ 411
где а — радиус окружности, вращением которой получен тор,
I — расстояние от оси вращения до центра окружности, в = -^
эксцентриситет тора, ф — внутренняя широта тора, % — долгота
меридиана тора, причем для полного тора 0<ф<2я, (Х#<2я.
В таком случае первая и вторая основные квадратичные фор-
формы поверхности тора будут иметь вид
I = ds2 = а2йф2 + Р A + е cos ф) W,
II = а йф2 + I cos ф A + е cos ф) d&z.
Следовательно, А = a, В = Z(l + e cos ф), е < 1, и согласно C.34)
Гц = О, Г^ = О, Т12 = О, Г22 = О,
•рз езшф pi sin ф A -f- e cos <p)
1" 1+8 COS ф' '^ 8
Так как
k —-L — -L fr = J- = C0S(P
то системы уравнений C.39) и F.30) для тора примут вид
ди 1 dv , л
dv ч '
Ж ~ cos ф ~di + 2 sin
причем
?м д, е cos ф . г
"о — Зф. 7V1 1 + е cos ф а>
Характеристическое уравнение имеет вид
4-\A + еcosФ) d-f\ + -L_?!i' + A + 28cosф)Ь = 0.
дф [ч ' ^' бф] cos ф Q$2 ' ч Y/
Докажем теперь, что поверхность {полного) тора является
жесткой в отношении бесконечно малых изгибаний. Для этого
необходимо и достаточно, чтобы система уравнений A1.28) не
обладала непрерывным на всем торе решением, обеспечивающим
однозначность поля смещений.
Из геометрических соображений следует, что непрерывные
на всем торе решения системы A1.28) должны быть периоди-
периодическими функциями от ф и # с периодами, равными 2я. Но
412 ГЛ. 5, ОБЩАЯ ТЕОРИЯ БЕСКОНЕЧНО МАЛЫХ ИЗГИБАНИЙ
можно доказать, что все такие решения системы A1.28) имеют
вид
где с — произвольная постоянная [52].
Условие F.24) в нашем случае примет вид
|"Т(О<&= [ЗД = О, A1.29)
г = 1A + е созф) (et cos Ф + ег sin #) + e3e sin ф,
причем е1? е2, е3 —- орты декартовой системы координат (е3 — орт
оси вращения). Если в качестве линии интегрирования взять
окружность Ф = О, то условие A1.29) примет вид
2П
e.
cos ср dcp
+ e cos cp)a
sin ср с?ср
A+8 COS Cp)
= 0.
о
Но это условие не выполняется, так как
2Л
J cos ф A + е cos ф)~2 йф Ф 0 при в Ф 0.
о
Это доказывает, что поверхность полного тора не допускает
бесконечно малых изгибаний. Приведенное здесь доказательство
дано в работе [52а]. Указаны также условия жесткости для раз-
различных кусков тора и рассмотрены задачи безмоментного равно-
равновесия тора [52а. б, в].
6. В этом пункте мы рассмотрим некоторые случаи втулочных
связей на поверхностях вращения. Мы будем пользоваться спе-
специальной системой координат, в которой ось вращения поверх-
поверхности совпадает с осью ог. Точки поверхности будем отмечать
парой (z, #), где ¦§ — угол вращения. Тогда радиус-вектор г =
= r(z, Ф) рассматриваемой поверхности S можем представить в
виде
где p (z) — меридиан поверхности, k — единичный вектор оси
вращения, е (Ь) — единичный вектор, перпендикулярный к kr
который с изменением # описывает окружность с осью к и дли-
длиной дуги #. Пусть g(^) = kXe('O). Вектор смещения U разла-
разлагается по триэдру е, g, k:
>к. A1.30)
Тогда основное уравнение dU dv = 0, как легко видеть, равно-
равносильно следующей системе уравнений в частных производных
§ 11. БЕСКОНЕЧНО МАЛЫЕ ИЗГИБАНИЯ ПОВЕРХН. ВРАЩЕНИЯ 413
1-го порядка для составляющих и, v, w [41a]:
p'(z)uz + zi>z = O,
i»# + a = 0, A1.31)
р(z) v2 + p' (z) (u« — v)+w<> = 0.
Исключая u(z, ¦&•) и w(z, ¦&) из этой системы, получим
-р" (z)vM + P(z)vzz-p" (z)v = 0, A1.31a)
причем при z-^Zts или z-*-z0 уравнения A1.31) и A1.31а) мо-
могут но иметь линий особенностей.
Исключая и из системы A1.30) и вводя новые неизвестные
а ц ^ по формулам
получим для них систему уравнений вида
а2 = р$о, а* = -др, A1.33)
. = O, A1.34)
где
Р = -р"р, ? = Р2. A1.35)
Пусть Li и Z-i — две параллели поверхности S, z = z^ и z — zx
соответственно, 20<Cz1<;21<;z0, ограничивающие полосу S{ по-
поверхности S. Предположим, что вдоль L4 и />i поверхность S{
подчинена втулочным связям, определенным некоторой поверх-
поверхностью S (см. § 8, п. 11). Мы не будем предполагать, что по-
поверхность 2 является поверхностью вращения, но считаем, что
нормаль v к S вдоль L — LL + L1 лежит в плоскости векторов
к, е, т. е. v = vlk + v2e, где vl и v2 — некоторые функции точки
кривой L. Согласно § 8, п. 11, если S неподвижно, то условие
втулочной связи имеет вид Uv = 0 на L, или
wv, + ot2 = 0, A1.36)
что, в переменных аир, приводит к условию
^ = 0, где vj. = ^-, v2 = p'v1 — v2. A1.37)
Предположим сейчас, что рассматриваемая поверхность Si есть
кусочно регулярная, выпуклая поверхность. Пусть z{, i = 2,
..., п — 1, zx <C Z\ <C Zi+x <C • • • < zn = Z\ — последовательность то-
точек излома меридиана р = р (z). Пусть L, — параллель z = z3- и
I} — интервал (г{_(, zf). Тогда внутри /j p" (z)< 0, т. е.
рЗ*0, g>0 A1.38)
р'+B()>р'-(г0, A1.39)
414 ГЛ- 5' ОБЩАЯ ТЕОРИЯ БЕСКОНЕЧНО МАЛЫХ ИЗГИБАНИЙ
где знак «+» и «—» обозначает левостороннюю п правостороннюю
производные соответственно.
Пусть U — некоторое поле смещении, непрерывное на St п
класса С2 в каждой полосе между параллелями Д_4 п L,-, удов-
удовлетворяющее, кроме того, втулочным связям A1.37) ыа L.
Умножая уравнепие A1.34) па р, получим
Интегрируя это равенство по прямоугольнику /?,-: z,_t < z < z,,
О =^ й =^ 2л, получим
/г = J J (рР2» + gPl) d* cm = f f [(огр)» - (ceflp)sl dO rfz =
"Щ
где в обоих интегралах интегрирование ведется в направлении,
доложительном относительно i?,-. Суммируя эти равенства по i и
обозначая пределы величин а и {J на i^,- справа и слева знаками
«—» и «+» соответственно, получим
О < / = у Ji = \ a dp + V f (a~dp~ - a+^P+) — f a dp,
t=2 Li i=2
A1.40)
причем во всех интегралах A1.40) интегрирование ведется в том
же направлении, что и на Ьи т. е. в направлении убывания ве-
величины ~&.
В силу непрерывности деформации, учитывая A1.33), имеем
_ ггт на L{,
что дает:
f cc~dp~ - cc+dp+ < О, »' = 2, ..., n — 1. A1.41)
U
Из граничного условия A1.37) получаем
a dp = — ) ц.а2 d# и — ] а dp = \ fxa2 d"&,
¦V, V.
где ц = тс= = —т-7—^—Г • Допустив теперь, что
и ц,>0 на Li, A1.42)
§ 11. БЕСКОНЕЧНО МАЛЫЕ ИЗГИБАНИЯ ПОВЕРХН. ВРАЩЕНИЯ 415
получим
j a dp < 0 и — j а dp < 0.
Отсюда в силу A1.41) следует 7=^0. Но, с другой стороны, в си-
силу A1.40) /^0. Поэтому / = 0, откуда {}<> = §г = 0, что, как не-
нетрудно убедиться, возможно только для тривиальных бесконечно
малых изгибаний.
Если контур L1 отсутствует, т. е. если сегмент Si односвязен
и лишь на Li задана втулочная связь, удовлетворяющая усло-
условиям A1.36) и A1.42), то, используя гладкость функции а в р
в окрестности вершины поверхности, легко убедиться, что также
РЛ = $г егэ 0.
Таким образом, доказана
Теорема 5.20. Сегмент Si выпуклой, кусочно регулярной
поверхности вращения, ограниченный одной или двумя парал-
параллелями, не допускает нетривиаль-
нетривиальных бесконечно малых изгиба- *
ний, если на него наложены
втулочные связи, порожденные
поверхностью 2, удовлетворяющей
условиям A1.42).
Если п — внутренняя нормаль
к поверхности S, а ф есть угол
между v и п, то, как легко ви-
видеть, используя тот факт, что
ctg 8 = р' (г), где 0 — угол между
п и к, условие A1.42) выполня-
ется, если
ф >¦ -j при Vj > 0
Рис. 9
или ф < -9 при vx <С 0.
На рис. 9 заштрихована соот-
соответствующая область изменения
для образующих 1 поверхности 2,
ортогональных вектору нормали v. Если все образующие гранич-
граничной полоски поверхности 2 вдоль края L располагаются в ука-
указанной области, то рассматриваемая втулочная связь заведомо-
является жесткой. В противном случае, как будет доказано ни-
ниже, втулочная связь может оказаться нежесткой. Однако это
имеет место, вообще говоря, лишь в исключительных случаях.
7. Если Vi и v2 постоянны вдоль Lu т. е. когда граничная
полоска поверхности 2, проходящая через контур L, совпадает с
полоской конуса вращения, с осью вращения oz, доказанное
выше предложение допускает значительное усиление (причем
доказательство его также упрощается). Именно тогда можно
более точно описать те конусы 21г 2Х (очевидно, в рассматривае-
416
ГЛ. 5. ОБЩАЯ ТЕОРИЯ БЕСКОНЕЧНО МАЛЫХ ИЗГИБАНИЙ
мом случае можно каждую из поверхностей 2! считать просто
конусом вращения), которые приводят к нежестким связям.
В этом случае оба конуса, проходящие через Li и Lx, полностью
определяются углами 04 и 6Х соответственно, какие их образую-
образующие составляют с осью oz (рис. 10). Тогда, очевидно,
-=ctg01HaL1n — =
па
A1.43)
Теорема 5.21. Для любого 0t существует последователь-
последовательность 01,ft, ctgO^j-*—р' (zj при к -*¦ °о, такая, что связи,
Рис. 10
определяемые конусами 2t и 2^ @^ = Gli?.) соответственно,—
нежесткие. Если при фиксированном конусе Si конус 2/ не сов-
совпадает ни с одним из конусов, определяемых по формуле A1.48)
@1 = 01,ft), то втулочные связи, определяемые парой конусов
(Sj, Sx), — жесткие.
Доказательство. Разложим функцию v(z, #) в ряд
Фурье по # [416]
Коэффициенты tyk этого разложения в силу A1.31) удовлетво-
удовлетворяют уравнениям
; = 0 (& = 0,±1, ...). A1.44)
Условие втулочных связей A1.36) дает при каждом к следую-
следующие граничные условия для функции i|\(z):
р' (&2 —
ctg0 = 0 при z = z1 A1.45)
= O при z = z[. A1.46)
§ Н. БЕСКОНЕЧНО МАЛЫЕ ИЗГИБАНИЯ ПОВЕРХН. ВРАЩЕНИЯ 417
Если уравнение A1.44) при А>2 не допускает непрерывных ре-
решений в интервале (zx, z^), удовлетворяющих граничным усло-
условиям A1.45) и A1.46), то это, очевидно, означает жесткость
рассматриваемых втулочных связей.
Если контур Li отсутствует, т. е. если рассматриваемая часть
поверхности вращения содержит вершину, то граничное условие
A1.45) на L{ следует заменить условием ограниченности реше-
решения уравнения A1.44) при z-+z0. В силу условий q(zo)=O,
p'(zo) =+°° это, очевидно, приводит к соотношениям
^^'^ A1.47)
Интегрируя уравнение A1.44) в интервале {zu г^), получим:
что, учитывая A1.45), приводит к условию
А\ Wi) (р' (%) + ctgQ'hh) - (р' (zy) + ctgBj) = J %p"dz. A1.48)
При этом, без ограничения общности, в силу однородности урав-
уравнения A1.44) и граничных условий A1.45) мы приняли, что
**(*,)= 1.
Таким образом, если угол Qlth удовлетворяет условию A1.48),
то рассматриваемые втулочные связи — нежесткие, ибо если
взять в качестве i|?ft(z) решение уравнения A1.44) с начальными
данными
t (z) I t'(:) P/(zi)
t(:)
то это решение в силу A1.48) также удовлетворяет второму
граничному условию A1.46) и не будет исчезать тождественно.
С другой стороны, так как функция ctgG в интервале @, п)
принимает все действительные значения, то равенство A1.48)
при каждом фиксированном 94 определяет некоторую последова-
последовательность углов 9i,fe, т.е. конусов 2Й, к = 1,2, ...t которые
вместе с конусом Et реализуют нежесткие втулочные связи.
Если Z-i отсутствует [81], то равенства A1.48) рассматри-
рассматриваем как условия, определяющие последовательность углов 01|ft,
при которых втулочные связи, реализуемые конусом 2, не
27 и. н. Векуа
418 ГЛ. 5. ОБЩАЯ ТЕОРИЯ БЕСКОНЕЧНО МАЛЫХ ИЗГИБАНИЙ
являются жесткими. В силу A1.48) эти условия принимают вид
/
20
р' (Zl) + ctg 6lift = - j ^fe (z) p" (z) dz. A1,49)
Остается еще показать последнее утверждение теоремы. Для
простоты ограничимся лишь случаем, когда Ьг отсутствует. Из
нашего условия tyh(zi)=l, условий A1.47) и уравнении A1.44)
легко следует, что i])a(z) монотонна и 0<i|)ft(z)<l в интервале
(zi> zo). Далее, учитывая A1.47), из A1.44) получаем для tyk
интегральное уравнение
(z) = к^^ %{^{$) ds du. A i 50)
Но легко видеть, что в силу монотонности ^k(z) предположи
ifw(z)>a>0 для некоторо!! последовательности к}-+°° в кеко-
тором интервале zx<Cz<C.z<z<izu немедленно приводит к про-
противоречию с уравнением A1.50). Поэтому внутри интервала
(z1,z'0)^k(z)~y0 равномерно. Но тогда согласно A1.49) p'(/t)-f
+ ctg 0!, k -*¦ 0, что и требовалось доказать.
В частности, мы показали также, что p'(z1) + ctg0iiS>O. Но
из A1.49) можно также получить для р'(zi) + ctgQik оцэнку
сверху [81]. В самом деле, из уравнения A1.44) легко заключаем,
что fe ^ 7 Для всех z1<C2<;zo. Подставляя эту
оценку в A1.49), получаем
Ctg Blth < - \ ^^ р" (Z) dz=
z V
A1.51)
Как нетрудно видеть, это последнее неравенство допускает сле-
следующую простую интерпретацию. Через 20 и Е4 обозначим ко-
конусы, образующие которых перпендикулярны в точке А к кри-
кривой p — p{z) и прямой О А соответственно (рис. И). Тогдг об-
образующие всех конусов Eft, которые реализуют нежесткие вту-
втулочные связи, заключены между образующими конусов 20 ж 2,
(см. рис. 11)..
8. В некоторых случаях, когда уравнения A1.44) могут быть
явно проинтегрированы, формулы A1.48) позволяют найти точ-
точные значения углов Qh, при которых соответствующие втулочные
связи нежестки.
§11. БЕСКОНЕЧНО МАЛЫЕ ИЗГИБАНИЯ ПОВЕРХН. ВРАЩЕНИЯ 419
Ниже мы приведем примеры расчетов углов 0А. Сначала рас-
рассмотрим случай бесконечно малых изгибаний сферического сег-
сегмента. При этом будем действовать по методу, отличному от
метода предыдущего пункта. Мы используем метод теорий функ-
функций комплексного переменного, в общем случае изложенный в
предыдущих параграфах.
Пусть (g, ц)—сопряженно изометрическая система коорди-
координат на сфере. Как известно, такая система возникает, если сферу
Рис. 11
проектировать с южного полюса на плоскость экватора. Положим
? = | + и]. § и г] связаны с географическими координатами на
сфере формулой
A1.52)
ь» 2 e '
где "& — широта, ф — долгота.
Пусть (х, у, z)—система декартовых координат в простран-
пространстве. Уравнение сферы S радиуса г с центром в точке (о, о, q),
отнесенной к изометрически сопряженной системе координат,
имеет вид
A1.53)
4-К 1 + К г 1 +
Запишем еще выражения для коэффициентов аар первой квадра-
квадратичной .формы и ее дискриминанта а:
йл\ йоо
22
A + К)'
A1.54)
На основании формул C.65а) получаем тогда следующее выра-
выражение для вектора смещения:
'[-2Ф(?I
п? + (Ф' (Q -
Ф (S)) п],
A1.55)
27*
420
ГЛ. 5. ОБЩАЯ ТЕОРИЯ БЕСКОНЕЧНО МАЛЫХ ИЗГИБАНИЙ
где п — единичный вектор внутренней нормали, Ф(?)— голоморф-
голоморфная функция от ?, которая в силу C.656) и A1.54) связана с
комплексной функцией смещений по формуле
-Ш2- (Н-56)
Условие Ф = 0 достаточно, но, вообще говоря, не необходимо
для того, чтобы бесконечно малое изгибание, соответствующее
функции Ф(?), было тривиальным, т. е. чтобы поле вектора сме-
смещения U совпадало с полем бесконечно малого движения.
Отметим еще следующие выражения для векторов гг и п:
A + а2)' A +
— n =
' A + ш
-Q 1-й
A1-58)
1 + К 1 + К 1 + КУ
При перемещении центра сферы S по оси z выражения для п;
и 11 остаются неизменными.
Используя полученные формулы, рассмотрим скольжение сфе-
сферического сегмента по двум соосным круговым конусам (рис. 12).
Параллельные края сегмента S будем обозначать через L, и
Lz. Пусть 0! и 02 — их широты в географических координатах.
Представим себе, что в отвер-
отверстия, ограниченные Li и L2,
вставлены два круговых конуса
2i и 22, оси которых покрыва-
покрываются с осью z. Расположение
S4 и Б2 полностью определяется
заданием углов аи^, которые
будем считать ориентированны-
ориентированными против часовой стрелки, так
что на рис. 12 угол а считается
отрицательным. Очевидно. 0i —
-л=?=а<0, и 02 - л =?= р < 02.
Знаки равенства отвечают то-
тоб
р
му случаю, когда один или оба
конуса Si и 22 вырождаются в
цилиндры с образующими, па-
параллельными оси z. При а =
= Р = 0 получаем ортогональ-
ортогональные связи, к которым примени-
Рис. 12
ма теорема 5.19. Если а = 0Х ^-; Р = 02 g-, то конусы
вырождаются в плоскости и мы имеем случай скольжения по
параллельным плоскостям.
Пусть vt и v2 — единичные векторы нормали к St и Б2 в точ-
точках контуров Li и Ь2 соответственно. Тогда условие втулочных
§ 11. БЕСКОНЕЧНО МАЛЫЕ ИЗГИБАНИЯ ПОВЕРХН. ВРАЩЕНИЯ 421
связей запишется в виде (мы считаем конусы жесткими _п не-
неподвижными)
1М = 0на?„ Uv2 = 0 на L2, A1.59);
где U — вектор смещения; он выражается по формуле A1.55).
Пусть nj и п2 — внутренние нормали к S на краях Li и L2 соот-
соответственно. Из чертежа ясно, что
пм = sin а на Lu
¦о г A1.60)
n2v2 = sin p на Ь2.
Так же нетрудно убедиться в справедливости следующих выра-
выражений для составляющих векторов Vi и v2:
(И.61)
2р2 ' 2f2 '
где
X, ==-008(9.-a), v1 = sin@1-a),
X2 = -cosF2-p), v2 = sm(92-p). { " '
Отсюда и из A1.57) получаем для скалярного произведения
—ncv< выражение
- "tVl" ТпгТЖ'(Xl A -р!) -2vlPl) -W$y (ищ
A-1, 2).
Учитывая выражение A1.55) для компонентов вектора сме-
смещения в силу A1.50), A1.63), условие A1.59) запишем в виде
Re(Ofr< + <?') = 0 на L, (т. е. |?| = р;, i = l, 2), A1.64J
где
[( )] [( )]
и Ф = ФE)—голоморфная функция в кольце р4< 1^1 <р2, опре-
определяющая бесконечно малое изгибание сегмента S. Итак, опре-
определение всех бесконечно малых изгибаний сегмента S, подчи-
подчиненного описанным втулочным связям, сводится к отысканию
всех голоморфных в кольце pi<ISl<p2 функций Ф = Ф(?) по
граничному условию A1.64).
Подстановкой Ф = 5^ преобразуем условие A1.64) к виду
^O при l?l=pi, A1.66)
422 ГЛ- 5- ОБЩАЯ ТЕОРИЯ БЕСКОНЕЧНО МАЛЫХ ИЗГИБАНИЙ
~ 2 2р.
где Yi = 1 + TiPiJ учитывая соотношения sinOj = — cos 9» =
1 + Р?
i-P?
= т, находим
1 + Р?
Для определения 4я E) мы имеем граничную задачу вида A1.66).
Разлагая Чг(^) в ряд Лорана в кольце pt < |?| <р2
2 а&\ A1.68)
&=—оо
нетрудно убедиться, что она допускает ненулевое решение тогда
и только тогда, когда
+ mj** [Ь)А A1.69)
при некотором целом /с. Число /с = 0 всегда удовлетворяет усло-
условию A1.69); это дает одно решение задачи, если хоть одно из
чисел .^i или ^2 отлично от нуля. Если они оба равны нулю, то
отсюда получаем два линейно независимых решения. Очевидно,
в обоих случаях эти решения уничтожаются количеством степе-
степеней свободы, которыми при описанных связях обладает сегмент S.
Сегмент S допускает нетривиальные бесконечно малые изгибания
лишь тогда, когда A1.69) выполняется при некотором к>1.
Рассмотрим более подробно случай, когда конус 24 отсутст-
отсутствует. Тогда можем принять 0i = pi = 0, и наша задача сводится
к нахождению всех голоморфных функций в круге 1?1<Р = Р2
по граничному условию
Re [Off + Ф'] = О, Ч = Т2-' A1.70)
Функция
Фь{Ъ) = аа + а& + а& A1.71)
есть решение A1.70), если только коэффициенты а0, аг, а2 удов-
удовлетворяют системе уравнений
(ТР2 + 1)(а1 + а1) = 0, fao + a2B + Tp2) = O. A1.72)
При ¦ур2 + 1^0 мы получаем таким образом три линейно неза-
независимых решения задачи A1.70). Остальные решения этой за-
задачи можем искать в виде Ф = ?ЧГ, 1шЧг@) = 0; тогда A1.70)
примет вид
Re(T'Y + ST') = 0 на l?l=p, 7 = 1 + ТР2- A1.73)
Это совпадает с условием A1.66). Поэтому A1.73) обладает не-
ненулевым решением лишь при f = ~к для некоторого целого по-
§ 11. БЕСКОНЕЧНО МАЛЫЕ ИЗГИБАНИЯ ПОВЕРХН. ВРАЩЕНИЯ 423
яожительного к. Все решения задачи A1.70) получаются по
формуле
Ф()Ф(Е) + *Е*+1, A1.74)
где ак — произвольное комплексное число, отличное от нуля лишь
при соблюдении условия "f = —к, т. е.
sin (9 —
sinjj
= к A1,75)
для некоторого целого к. Очевидно, должно быть к>\. Трп ре-
решения вида A1.71) дают три тривиальных поля смещений, со-
соответствующих трем степеням свободы сегмента как жесткого
тела при данных связях. При фиксированном значении Э сущест-
существует последовательность углов таких, что при {} = $k сегмент S
допускает два линейно независимых нетривиальных бесконечно
малых изгибания. Всегда pft > 0 и $h -*• 0 при к-*-°°. При [3 < 0
задача имеет столько же решений, что и при чисто ортогональ-
ортогональных связях, когда ^ = 0, т. е. три тривиальных изгибания, соот-
соответствующих трем аналитическим функциям: Ф = it,, ?2 — l,
Такие же факты обнаруживаются при подробном исследова-
исследовании условия A1.69). Здесь может быть повторено все то, что
говорилось при обсуждении условия A1.75); в частности, если
Yi и 7г — одинакового знака, то A1.69) не может выполняться
ни при каком к ^ 1.
9. Рассмотрим эллипсоид вращения S с контуром L, меридиан
которого имеет вид p(z) = c]'R2~(z — R)z, Q<z<zu где с>0,
R > 0 — произвольные константы. Имеет место следующая
Теорема 5.22. Если образующие конуса, осуществляющего
втулочную связь на отверстии z = zt поверхности S, составляют
с осью z угол
A1.76)
^ (г) (й !)
Замена переменной
R
то поверхность S не является жесткой. Во всех остальных слу-
случаях поверхность S жесткая.
Доказательство. Для нашей поверхности уравнение
A1.44) можно переписать в следующем виде:
«!= 0. A1.77)
A1.78)
приводит A1.77) к виду
%t + 2th щ'к + % — ?2% = 0. A1.79)
424 ГЛ- 5- 0БЩАЯ ТЕОРИЯ БЕСКОНЕЧНО МАЛЫХ ИЗГИБАНИЙ
Пусть <ph(t) = cht •%; тогда A1.79) приводится к виду
щ-к*щ = 0. A1.80)
Линейно независимые решения этого уравнения можно записать
в виде
„?> = *", ^ = е~М. A1.81)
Поэтому два линейно независимых решения уравнения A1.79)
имеют выражения
Так как t ->- +°° при z -»- 0, то среди этих двух решений только
tyh является нужным нам решением.
Решение уравнения A1.31) можно записать в виде
cos АО + fcftsinM)-~ e~M, A1.83)
Так как i|V (z) должны удовлетворять краевому условию вида
A1.45), то
{с [к + th * - A - A2) th q + J?- ctge} e-« - 0 на L,
т. e.
v ; (u>2) A1.84)
Теорема доказана.
Заметим, что из A1.84) непосредственно следует, что при
Zi = R -\—-?, к = 2, 3, поверхность 5 допускает скольжение по
плоскости z — zt. В случае сферы (с = 1) этот факт был доказан
впервые Е. Рембсом [75].
Аналогично можно доказать следующую теорему.
Теорема 5.23. Рассмотрим поверхность вращения S, мери-
меридиан которой имеет вид p(z) = Cza, O^z^z,, где 0<а<1,
О 0 — произвольная константа.
Если образующие конуса составляют с осью z угол Qk:
A1.85)
§ И. БЕСКОНЕЧНО МАЛЫЕ ИЗГИБАНИЯ ПОВЕРХН. ВРАЩЕНИЯ 425
то поверхность S не является жесткой. Во всех остальных слу-
случаях S жесткая.
Результаты этого пункта принадлежат Сунь Хэ-шэну [81а].
10. В § 8, п. 2, мы видели, что в некоторых случаях склеи-
склеивание двух поверхностей положительной кривизны в одну замк-
замкнутую поверхность путем вложения одной из них в другую при-
приводит к жестким невыпуклым поверхностям. Ниже используя
уравнения A1.44), этот вопрос будет
изучен более полно для поверх-
ностей вращения [Из].
Теорема 5.24. Пусть Si и S2 —
две соосные выпуклые, кусочно
гладкие поверхности вращения, скле-
склеенные вдоль общей параллели L
в одну замкнутую поверхность S,
для которой L является ребром.
Пусть S2 расположена внутри Su
так что вся поверхность S лежит
по одну сторону плоскости парал-
параллели L. Тогда поверхность 2 — жест- рИс. 13
кая (рис. 13).
Доказательство. Мы ограничимся случаем, когда St и
S2 — гладкие поверхности (класса С2). Пусть p> = p.(z),
zt<z<z0, Pi(zo) = p2(zo), pI<0, i = l, 2
— параллели поверхностей St и S2 соответственно. Согласно на-
нашим предположениям имеем
Zi<z2 и p2(z)s? pi (z) для zz<z<z0.
Пусть U{ — поле смещений на St, удовлетворяющее условиям
U, = U2 на L. A1.86)
Разлагая поля Ut по формуле A1.30) и используя условие
A1.86), легко получим из системы A1.31) для составляющих
rpk, г, кроме уравнений
%,гРг + № - 1) *MPi = 0. f = 1, 2, & = 1, 2, 3, ... A1.87)
еще следующие условия сопряжения при z = z0:
,i (z0) =
= Pa («o) ifo.« (%) к + p2 (z0) tft.2 (z0), Я = № - 1. A1.88)
Наша задача установить, что системы A1.87) при условиях
сопряжения A1.88) для &>1 не допускают отличных от нуля
решений.
426 гл- 5- ОБЩАЯ ТЕОРИЯ БЕСКОНЕЧНО МАЛЫХ ИЗГИБАНИЙ
В дальнейшем фиксируем к и положим rlpki < = i|>{, i = 1, 2.
Пусть ij>i (z0) = "фгС^о) ^ 0. Ввиду однородности уравнений
A1.87) и условий A1.88) можем принять tpi (z0) == ^2(z0) = 1. Из
ограниченности ifi(z) в точке z = Zt получаем
№) = 0, ~—»-0 при z + z, и t'(Zl) = 0. A1.89)
"г
Далее, используя известный факт, что в силу условий f>i ^ 0
решения уравнений A1.87) не допускают ни положительного
максимума, ни отрицательного минимума, легко устанавливаем,
что i|>t>0 и фг>0 для Z2.<z<za, причем обе функции обра-
обращены выпуклостью вниз и строго возрастают: %(z)>0. Далее,
легко видеть, что фУр, также возрастают, т. е.
>0. A1.90)
В самом деле, (tyiPi — %Pi)' = — &2Pi%>0, т. е. функция
j — it>iPi=Pi I -jr I возрастает* но при z = z{ она равна нулю,
поэтому при z > zt она всюду положительна.
Умножая первое из уравнений A1,87) на i^/pi, второе — на
Tfi/pa и вычитая одно из другого, получим
Интегрируя это равенство в интервале z%< z< z0 и учитывая
условия A1.89) на конце z = z2, после интегрирования по частям
получим
= х I (т1 Is I (pip« - p*Pi) &=-я- f
• \ "l / ^
Z 2
где . ¦..¦¦•.-
7=^гк)[(р'ы ~ р"Bо)) х"р Bо) (^(Zo) ~ ^Bо)I>-AL93)
а через ф обозначено все подынтегральное выражение в интег-
интеграле A1.92). Преобразуем ор следующим образом:
§ 11. БЕСКОНЕЧНО МАЛЫЕ ИЗГИБАНИЯ ЛОВЕРХН. ВРАЩЕНИЯ 427
Первый член полученного выражения отрицателен. Интегралы
же каждого из остальных также отрицательны.
В самом деле,
p2
Pi
ибо — > 0, о|з2 > 0 и первая скобка также положительна.
"г pi
Таким образом, мы установили, что / < 0, если только не исче-
исчезают тождественно все члены в выражении ср. В силу же гра-
граничных условий A1.88) / = 0. Поэтому все три члена в выраже-
выражении A1.94) исчезают тождественно, отку- , t
да уже нетрудно получить, что при к > 1
% = 0, что противоречит нашему пред-
предположению.
Таким образом, теорема доказана. Слу-
Случай кусочно гладких поверхностей рас-
рассматривается аналогично. i « .«2
Отметим, что несколько более слож- \ IX
ным рассуждением можно показать, что
если три соосных поверхности вращения
Рис. 14
Рис. 15
склеить так, как указано на рис. 14, то полученная замкнутая
поверхность S будет жесткой.
Если поверхность 2 склеена из St и Sz таким образом, что
St и Sz располагаются по разные стороны плоскости ребра L, то
уже может получиться нежесткая поверхность. Если S2 есть зер-
зеркальное отражение & в плоскости Е ребра L, то 2 будет не-
нежесткой тогда и только тогда, когда Sl допускает изгибания
скольжения по Е (см. теорему 5.17).
Приведем сейчас три примера склеивания двух поверхностей
в замкнутую невыпуклую поверхность. В этих примерах можно
точно охарактеризовать случаи, когда получается жесткая и когда
нежесткая поверхность. Первый и третий из этих примеров ука-
указаны Б. В. Боярским. Второй принадлежит Сунь Хэ-шэну.
11. Склеивание двух сферических сегментов. Этот пример мы
рассчитаем по методу п. 8.
428 ГЛ- 5- ОБЩАЯ ТЕОРИЯ БЕСКОНЕЧНО МАЛЫХ ИЗГИБАНИЙ
Пусть г4 и г2 — радиусы сегментов St и S2 соответственно.
Уравнения & и S2 примем в виде
/ 3 -\ (и-95')
где |?|^p, Я = —-, p4 = tg-тр (рис. 15). Выбирая уравнение Si
в виде A1.95'), мы достигли того, что при параметрическом пред-
представлении Si и Sz параметр Z, меняется в круге |?l < р, причем
в обоих случаях точке границы ?, 1^1 =р этого круга отвечает
одна и та же точка общего края сегментов Si и S2.
Из формул A1.55) для векторов смещения XJi и XJ2 поверх-
поверхностей St и Si, используя условие сопряжения U1=3Ug при 1^1 =
== р. после некоторых преобразований получим равенства
(И.95)
где i^i и wz — соответствующие голоморфные функции в круге
I ? I < р. Итак, задача определения всех бесконечно малых изги-
изгибаний поверхности Б, в том числе также и тривиальных, сводит-
сводится к отысканию тех пар (wu w2) голоморфных функций в круге
l?i<p, которые удовлетворяют граничным условиям A1.95).
После введения новых неизвестных
/ -Л ^ _|_ А Г 1 >f4 ""^
Угг X2 4- Р2 УГ2'
первые два уравнения A1.95) эквивалентны условию
Ке{??Ф}=0 на l?l ==р,
откуда находим:
ф = а0 + CZ, + \-,
где а0 — произвольная комплексная, а С — вещественная посто-
постоянная. Подставляя и?1 = г#2 + Ф в третье уравнение A1.95),
§ 11. БЕСКОНЕЧНО МАЛЫЕ ИЗГИБАНИЯ ПОВЕРХ. ВРАЩЕНИЯ 429
получим для определения й>2 неоднородное условие
Re (lw2 + Щ1 щ) = - ^ Re (ф; + ф' Ц?-). A1.96)
Так как функция
V
_J.?2
где
B) (* + Р2)*¦
„ -
является решением неоднородной задачи A1.96), а функция
— решением однородной задачи A1.96) при произвольных по-
постоянных Ьо и С2, Сг — вещественная, то для функции %(?)> где
й>2 = v + v + %%{'Q), из A1.96) получаем граничное условие вида
Y&C'(C)] = O, ImX@) = 0, T = ТТ^. (И.97)
Р
В п. 8 мы видели, что задача A1.97) имеет отличные от нуля
решения зиE) = аь?,\ «л — произвольная постоянная лишь тогда,
когда у = г-, к — целое число, к 5* 0. В этом случае задача
A1.97) имеет в точности два линейно независимых решения.
Все пары (u>i, w2), которые являются решениями задачи A1.95),
получаются по формулам
в которых член 3U(?) присутствует лишь тогда, когда
к = р„ или
где А; — целое положительное число. Если A1.99) не имеет места,
то формулы A1.98) дают шесть линейно независимых полей
смещения, которые, очевидно, должны совпадать с шестипара-
метрическим семейством бесконечно малых движений поверх-
поверхности 2.
При каждом фиксированном р2 2 нежестка лишь для некото-
1 k + i
рои счетной последовательности значении рц р1к = — fc_-.,
1 1
в частности, всегда Plfe>—; если Pi^—, то поверхность 2
¦ "i Рг
430
ГЛ. 5. ОБЩАЯ ТЕОРИЯ БЕСКОНЕЧНО МАЛЫХ ИЗГИБАНИЙ
выпукла. При к^оо имеем Plfe-*T' T- е' нежестК11е поверх-
поверхности встречаются лишь в невыпуклом случае; при фиксирован-
фиксированном р2 они имеются всего лишь в счетном количестве и накопля-
накопляются при приближении к сфере lpt — —дна рис. 15 tg —= р, А.
12. Рассмотрим замкнутую поверхность вращения, составлен-
составленную из двух сферических сегментов Su 52 и цилиндра Т, мери-
меридианы которых выражаются формулами (рис. 16)
P2 (*) =
р =
соответственно. Поверхности Si и Т склеиваются по кругу L с
Рис. 16
центром z = z0 (на оси z) и радиусом pi(zQ) — p, T и 52 склеива-
склеиваются по кругу Ьг с центром (на оси z) z = —z0 и радиусом
Рг(-20) = р.
Обозначаем через XJ4, U2, U3 векторы смещений поверхностей
Si, S2 и Т соответственно.
В силу непрерывности вектора смещений U для поверхности
21 = Si + Т + S2 на линиях склеивания Lt и Ь% должны выполнять-
выполняться следующие условия:
т. е.
XJ1=U3 на Li, U3 = U2 на L2,
(z0, ®) = u3(z0, 0), yt(z0, fr) =
Wi(Zo, •&)=K73(ZO, €¦),
A1.100)
Пользуясь формулой A1.83), решения уравнения A1.31) для
Щ (-z0, €¦) = и2 (-z0, 0), y3 (-z0, 0) = у2 (-z0,
(—z0, ¦01) = w2(—z0, ¦©).
§11. БЕСКОНЕЧНО МАЛЫЕ ИЗГИБАНИЯ ПОВЕРХ. ВРАЩЕНИЯ 431
поверхностей Sit S2 можно записать в виде
1
A1.101)
Щ (*, G) = У (c<ft} cos fed + с[2) sin Ad) 1/ 1 — "^-J e *
ЛИИ ч If \ *l /
0 ' \ 2 V
а решения уравнения A1.31) для цилиндра Т
Щ (г, Щ = 2 [ («ft1)z + Pi1') cos Ad + (a^z + pL2)) sin Ad]. A1.102)
о
Из A1.100), A1.101), A1.102), учитывая A1.30), получим
VO)_ i ft(i) /. _ л о\ l\
//ь \а -ftth-l(--i)
1 ~ (У е =
h-H -^
j e \ l = К*?-fefa(ft« (« = 1, 2),
A1.104)
7ТТ2 fttb-1^
1-| jl « «A zo + Pft (г=1,^/г
A1.105)
A1.106)
В силу равенств A1.103) — A1.106) следует
Теорема 5.25. Для нашей поверхности
существуют нетривиальные изгибания лишь тогда, когда выпол-
выполняется одно из следующих условий:
2 [khx -
,
432 ГЛ- 5- ОБЩАЯ ТЕОРИЯ БЕСКОНЕЧНО МАЛЫХ ИЗГИБАНИЙ
. = к0, или
3) «,-0, ^ = Х (*==2,3,...).
^2
Доказательство. 1) Почти очевидно, так как пз A1.104),
A1.106) получим «^==0, i = l, 2, к>2; подставляя в A1.103)
и A1.105), мы не сможем однозначно определить остальные кон-
константы, т. е. йи\ с^ , Рй вообще не равняются нулю.
2) Из A1.103) —A1.105) следует, что
Л-а^Р — r{i)e
1
2
f ( 1 + . i \ A1.107)
Из A1.104) —A1.106) выводим, что
„_i( '^2
?2
(^ ^j-). A1.108)
Из A1.107) и A1.108) получаем:
1 )] о
Л? —A?/ i 1 \ <«
Поэтому, если z0 = —^—Lfe _ д +й_д , то avft' остаются
произвольными, и, следовательно, остальные константы тоже не
определены.
Так как z0 > 0, то
Из этого нетрудно получить ограничения на значения к,
3) Если z0 = 0, то из A1.103), A1.105) получим:
A1.109)
§ И. БЕСКОНЕЧНО МАЛЫЕ ИЗГИБАНИЯ ПОВЕРХН. ВРАЩЕНИЯ 433-
Из A1.104), A1.106) получим
fy) 1Ч A1.110)
Из A1.109), A1.100) находим
К
к-jf —
R2
т. е.
Rl + R2~ k V — ">"> •••/¦
В этих случаях все константы остаются произвольными.
В частном случае, когда Rt^R2^ I, z2 = zi, нетривиальные-
изгибания существуют лишь тогда, когда выполняется одно и*
следующих условий:
1') fe = Zl-z0 = ^, к = 2,3,...;
1-й2
Заметим, что величины z0, при которых существуют нетриви-
нетривиальные изгибания, имеют верхнюю грань. Например, для случая,
когда Rl=R2 — I, z2 = zu верхней гранью является
1-h2
z = ¦
т. е. при h Ф -г-, z0 > z поверхность S всегда является жесткой..
13. Пусть r = r(z), Z!<z<0,— меридиан выпуклой поверх-
поверхности S, г(О) = го>О.
Рассмотрим семейство выпуклых поверхностей вращения SK
с меридианом ря (z) = р f-т-), Я > 0, где p(z) — некоторая функция,.
удовлетворяющая условиям р @) = г0, р (z) > 0, р" ^0и 0 < z < z0>.
р (z0) = 0.
Пусть 5Cft(z) — решение уравнения Xfcr+(^2—1)'""Хь==0 в
интервале z4 < z < 0 и фЛ(г) — решение уравнения %р + (к2— 1)Х
X p"tyh = 0 в интервале 0 < z < z0, регулярные при z = zt в
z = z0 соответственно и удовлетворяющие условию "Ф*(О) = хл(О) =
= 1. Тогда нетрудно проверить, что поверхность S* — результат
28 и. Н. Векуа
434 ГЛ- 5- ОБЩАЯ ТЕОРИЯ БЕСКОНЕЧНО МАЛЫХ ИЗГИБАНИЙ
склеивания S и S>. — нежесткая тогда и только тогда, когда
fe (A3 - 1) г' @) + roz; @) "
При к ->- оо имеем Afe —»- , .^. В частности, если это отношение
отрицательно, то среди поверхностей 2*. существует лишь не бо-
более чем конечное число нежестких поверхностей. Еслп , ,,.. > 0,
то тогда нежестких поверхностей счетное количество. Нежесткие
поверхности накапливаются при Б*, стремящейся к гладкой по-
поверхности (т. е. г' @) = pL(O)).
Во всех трех примерах в случае склеивания в невыпуклую
поверхность, как правило, склеенная поверхность получается
жесткой. Нежесткость есть сравнительно редкий случай.
Глава 6
ВОПРОСЫ БЕЗМОМЕНТНОЙ ТЕОРИИ ОБОЛОЧЕК
В этой главе мы рассмотрим вопросы безмоментной теории
оболочек и выясним ее связи с теорией обобщенных апалитиче-
скпх функций и проблемой о бесконечно малых изгибаниях по-
поверхностей. Будет доказано, что всякое бесконечно малое изги-
изгибание поверхности можно истолковать как некоторое состояние
безмоментного напряженного равновесия оболочки. Поэтому мно-
многие формулы и соотношения, установленные в предыдущей главе,
допускают чисто механическую интерпретацию. Например, ин-
интегральные равенства F.17) и F.20) гл. 5, а также краевые
задачи для поля изгибаний допускают вполне определенное ста-
статическое толкование (§ 5, п. 11). Кроме того, ниже будет пока-
показано (§ 3, п. 2), что бесконечно малые изгибания срединной по-
поверхности упругой оболочки можно рассматривать как деформи-
деформированное состояние, соответствующее чисто моментному напря-
напряженному состоянию равновесия.
В первых двух параграфах этой главы будут выведены основ-
основные уравнения общей теории оболочек. Дальнейшие параграфы
будут целиком посвящены вопросам безмоментной теории. По-
Полученные в этом направлении основные результаты изложены в
§ 5, где, в частности, воспроизведены некоторые результаты, со-
содержащиеся в § 9 работы автора [14а]. Здесь главное внимание
уделено формулировке условий, обеспечивающих в оболочке реа-
реализацию состояния безмоментного напряженного равновесия. Рас-
Рассмотрены выпуклые оболочки, которые могут иметь любое число
отверстий. Установлен ряд характерных свойств таких оболочек
в зависимости от числа отверстий.
Отметим некоторые результаты [14а] (§9). Доказано, что в
выпуклой оболочке при наличии одного отверстия и в отсутствие
поверхностных нагрузок не всегда реализуется безмоментное на-
напряженное состояние равновесия, если распределение нормальных
усилий вдоль отверстий задано по произвольному закону (разу-
(разумеется, касательные усилия заранее не задаются). При этом в
такой оболочке не может существовать ненулевое поле усилий,
если нормальные усилия равны нулю на границе. Для выпуклой
оболочки с двумя отверстиями существуют случаи, когда при
любом способе распределения нормальных усилий по контуру
28*
436 ГЛ- 6- ВОПРОСЫ БЕЗМОМЕНТНОЙ ТЕОРИИ ОБОЛОЧЕК
реализуется безмоментное напряженное состояние. Также можно
указать случаи, когда последнее не имеет места. Наконец, для
выпуклых оболочек с числом отверстий, большим двух, реализу-
реализуется безмоментное состояние напряженного равновесия при лю-
любом способе распределения нормальных усилий вдоль контуров,
причем в оболочке с т (т>1) отверстиями существует ровно
Зт — 3 линейно независимых (ненулевых) безмоментных напря-
напряженных состояний при отсутствии нормальных усилий па
контуре.
Эти результаты остаются в силе, если вместо нормальных
усилий на контуре задавать в каждой точке усилие в некотором
косом направлении, угол наклона которого относительно танген-
тангенциальной нормали по абсолютной величине нигде не превышает
л (этот угол от точки к точке может изменяться непрерывно).
В том же § 5 изучены вопросы устойчивости безмоментного со-
состояния в некотором смысле в практическом плане. Известно, что
если рассматривать задачу в чисто математической постановке,
то состояния безмоментного напряженного равновесия выпуклой
оболочки с краями не являются устойчивыми. Однако нарушение
математических условий реализации безмоментного состояния
еще не означает, что соответствующее моментное состояние су-
существенно будет отличаться от безмоментного. Во многих случаях
такие состояния можно практически считать безмоментными, ибо
чисто моментные компоненты соответствующих полей напряже-
напряжений незначительны и в практических задачах их можно не при-
принимать во внимание. На этом факте, по существу, и основаны
все практические применения безмоментной теории. Но вместе с
тем, очевидно, не при любых нарушениях математических усло-
условий безмоментности возможно пренебречь моментным компонен-
компонентом поля напряжений. В связи с этим в § 5 сделана попытка
установить некоторые общие принципы, позволяющие оценивать
границы практической применимости безмоментной теории*).
*) Вопросам безмоментной теории оболочек посвящена обширная ли-
литература. Прежде всего, сошлемся на классическое сочинение А. Лява
[50], где, в частности, рассмотрены и вопросы безмоментной теории и, бес-
бесконечно малых изгибаний поверхностей. Общие и специальные задачи
безмоментной теории оболочек, а также ее связи с бесконечно малыми
изгибаниями поверхностей изучены в работах В. 3. Власова [181, А. Л. Голь-
Гольденвейзера [27], В. В. Новожилова [65], Ю. Н. Работнова [74], В. В. Соко-
Соколовского [80] (достаточно полная библиография вплоть до 1947 г. имеет-
имеется в [28]). В этих работах решены главным образом задачи, имеющие
практический интерес и относящиеся к оболочкам частного вида. Выбор
формы оболочки и вида краевых условий большей частью определяется
возможностями применяемого метода. Наряду с этим давно было замече-
замечено, что в ряде случаев эти задачи сводятся к системе уравнений Коши —
Римана [80], [18а, б], но из этого было извлечено сравнительно мало поль-
пользы, если не считать решения некоторых задач для случая замкнутой сфе-
сферической оболочки [18а], [27а]. Общие методы теории функций комплекс-
комплексной переменной, развитые главным образом в работах Н. И. Мусхелишви-
§ 1. УСИЛИЯ И МОМЕНТЫ СИЛ НАПРЯЖЕНИЙ
437
При изложении основ общей теории оболочек мы будем поль-
пользоваться тензорным методом. Изучая задачи безмоментной тео-
теории оболочек положительной кривизны, мы будем применять
комплексные функции напряжений и смещений, а также свойства
обобщенных аналитических функций.
§ 1. Усилия и моменты сил напряжений
1. Оболочкой называется упругое тело, ограниченное двумя
поверхностями S+ и S~, расположенными по разные стороны от
поверхности S на равном расстоянии h > 0. Будем считать, что
5+ находится в сторону положительной нормали п к S. Поверх-
Поверхности S+ и S~ будем условно называть «верхней» и «нижней»
поверхностями оболочки, a S — срединной поверхностью. Поло-
Положительное число 2h называется толщиной оболочки. Толщину
мы будем считать малой по сравнению с прочими размерами те-
тела. Если срединная поверхность S не замкнута, то оболочка будет
ограничена еще боковыми по-
поверхностями, совокупность ко-
которых мы обозначим через 2.
Будем предполагать, что по-
поверхности S и 2 взаимно орто-
тональны. Пусть L — совокуп-
ность их линий пересечения, ко-
которая, очевидно, является гра-
границей срединной поверхности
S. Она называется также гра-
границей или краем оболочки. Рис- 17
Если Q — точки оболочки, то в качестве ее координат мы мо-
можем взять*) тройку чисел ж1, ж2, z, где х\ х2— координаты осно-
основания нормали к S, опущенной из точки Q, a z — длина этой
нормали, взятая с соответствующим знаком; z>0, если точка Q
расположена от S в сторону положительной нормали, и z < 0 в
противном случае, причем, очевидно, —h^z^h (рис. 17).
Об 1 г 1 2
р,
Обозначим через v = i(x1, хг)
A 2)
и п =
х2) соответственно
й
)
радиус-вектор точки (ж1, х2) поверхности S и орт нормали к ней
ли [60а, б], начали проникать в теорию оболочек сравнительно недавно.
В работах автора эти методы были применены к основным задачам общей
(моментной) теории пологих оболочек, в том числе сферических и цилинд-
цилиндрических [146] (см. также [65*а, б, в], [78*а, б]). А. Л. Гольденвейзером
изучены некоторые задачи безмоментного напряженного равновесия сфери-
сферических оболочек с краями [27а]. Общий метод изучения основных задач
безмоментной теории выпуклых оболочек был разработан автором. В работе
[14а] были решены в общем виде основные краевые задачи для выпуклых
оболочек произвольной формы и с любым числом отверстий; некоторые
полученные там результаты были уже упомянуты выше, во введении
(см. еще [4]).
*) При этом, вообще говоря, нужно предполагать, что оболочка явля-
является достаточно тонкой.
438 Гл- 6- ВОПРОСЫ БЕЗМОМЕИТНОЙ ТЕОРИИ ОБОЛОЧЕК
в точке (ж1, ж2). Тогда радиус-вектор точки Q(xl, x", z) выража-
выражается равенством (рис. 17)
R = r(z\ x2) + zn(x\ x2). A.1)
Отсюда сразу получим, что базисными векторами простран-
пространственной системы координат ж1, ж2, z являются
R«-j!=r«-«&?rp (a = 1,2), R3^^| = n (^ = z).ii.2)
ОХ (/Я*
Вычисляя теперь квадрат расстояния между двумя бесконеч-
бесконечно близкими точками Q(xl, х2, z) и Q' (хг + dx1, xz + dx2, z — dz)
оболочки, получим
dsz = dR dR. = R;R* dxl dxh = gih dxl dx'\ f 1.3 )
где
afi pe + Z26a^P (a, p = 1, 2).
gw = ffsi = #23 = &» = 0, g33 = 1. '! '4)
Очевидно, ga, fi — ковариантный тензор второго ранга для лю-
любого фиксированного значения z. Так как средняя кривизна Н
и главная кривизна К поверхности S выражаются по формулам
то легко найдем
= /a A _ 2Нг + Кга) = /a (I — М A — А:2г). A.6)
Из A.6) видно, что отношение g/a не зависит от выбора си-
системы координат ж1, а;2 на поверхности S.
Рассмотрим контравариантный тензор второго ранга:
И _ ^22 12 __ „21 _ ?l3 „22 _ ?ll
S S ' S ^ g ' ^ ? ' a 7>
„13 _ „31 __ „23 _ „32 _ A „33 __ I }
а также сопряженные базисные координатные векторы
# = Л (i = l, 2, 3). A.8)
Нетрудно доказать, что
RJRfe = 6i, R{Rft = gih, A.9)
2. Рассмотрим на 5 две соседние точки М (ж1, ж2) и Ж'(ж'Ч-
, соединенные бесконечно малой дугой ММ'. Пусть
§ 1. УСИЛИЯ И МОМЕНТЫ СИЛ НАПРЯЖЕНИЙ
439
s — орт касательной к дуге ММ' в точке М, а 1 — орт тангенци-
тангенциальной нормали дуги ММ', причем 1 = s X п. Обозначим через S1
площадку нормального сечения оболочки, перпендикулярную
к I и заключенную между соседними нормалями к S в точках М
и М'. Пусть РA){х\ х~, z)—сила напряжения, приложенная к
площадке ~ в точке с координатами xl, x2, z. Тогда к элементу
Рис. 18
Рис. 19
площадки Z', заключенному между линиями z = const, z + dz =
= const и обозначаемому в дальнейшем через d2z, будет прило-
приложена сила напряжения, равная (рис. 18) Р<г) (ж1, ж2, z) dSz.
Обозначая через T^ds главный вектор этих сил, очевидно,
получаем
h v ^
T({)ds = j Р@ (ж1, a;2, z) d2z, ds = |MM'|. A.11)
—л
Вектор Т(!) называется усилием, приложенным к поперечной
площадке 2г с нормалью 1 (рис. 19). Как видно, усилие рассчи-
рассчитано на единицу длины.
Обозначая теперь через M0)ds главный момент сил P(i)dSz
относительно точки М(х1, х2) срединной поверхности S, очевидно,
будем иметь (рис. 19)
h h
-h -ft
Вектор М(!) является моментом сил напряжений, приложенных
к поперечной площадке с нормалью 1. Вектор М(г) рассчитан
также на единицу длины.
Совокупность усилия Т(!) и момента M(i) статически эквива-
эквивалентна системе, сил напряжений, приложенных к поперечной
площадке 2!. Обычно допускают, что в тонкой упругой оболочке
ГЛ. 6. ВОПРОСЫ БЕЗМОМЕНТНОЙ ТЕОРИИ ОБОЛОЧЕК
картина напряженного состояния существенно не изменится, если
непрерывно распределенную систему сил напряжений в каждой
поперечной площадке 2' заменить статически эквивалентной си-
системой сил напряжений. Поэтому при изучении деформации
упругвй оболочки ограничиваются отысканием полей усилпй ТA)
и моментов М(г>. Во многих случаях таким путем получается
практически приемлемое приближение. Поле сил напряжений
можно вычислять по формулам
Р@(х\ х\z) = ± Т(о (х\ х*) + JJ М@ (х\ х*)Хп(х\ х\ A.13)
Первое слагаемое правой части этого равенства мы будем назы-
называть безмоментным компонентом поля напряжений оболочки,
а второе слагаемое — моментным компонентом того же поля. ¦;-
3. В дальнейшем, когда направление 1 совпадает с направле-
направлением сопряженного базисного вектора га, вместо Р((), Т(() и М@
будем писать соответственно Р(О), Т(а) и М(а).
Пусть йЪг и d2| — прямоугольники, построенные на векторах
ndz, Rzdx2 и ndz, R4 dx1 соответственно. Их площади, очевидно,
выражаются по формулам
dS2 = j R21 dx2 dz — Y ?22 dx2 dz = A/ — d$2dz,
/tff. A.14)
— dsxdz,
an
где dsi = Уйи (fa1, ds2 = Уа22 da;2 — элементы дуг координатных ли-
линий хг = const и х1 = const соответственно, причем предполагает-
предполагается для простоты, что dx1 > 0, dx2 > 0, dz > 0.
На основании этих формул из A.11) получим
h h
Уа~1г ТA) = f Р0) /?~ dz, /o7iT2 = \ РB)/i^ dz. A.15)
-h -h
Так как
то, вводя обозначения
•I == "в А;!)) * == '" -М2)> A.17)
находим
Т»-jVjAf & (а-1,2).
—л *
§ 2. СИСТЕМА УРАВНЕНИЙ РАВНОВЕСИЯ ОБОЛОЧКИ 441
Аналогично получим
л п
Ма = j nxP"z YlT dz s nX J P"z ^"-f-dz' (L2°)
-л -л
где
М1 = Уо"МA„ М2 = Уа22М<2). A.21)
4. Так как в силу формулы A.6) g/a не зависит от выбора
системы координат на поверхности, то, как увидим ниже
(стр. 443), при переходе от одной системы координат ж1, ж2, z к
некоторой другой системе ж1, хг, z векторы Т" и М" преобразу-
преобразуются по формулам
fa = Tp^! Ма = М^. A.22)
Докажем теперь, что усилия и моменты, приложенные к по-
поперечной площадке 2' с нормалью 1, вычисляются по формулам
Т(г) = Та4, М(«, = МЧ» (la = ha). A.23)
Выберем новую координатную систему ж1, ж2, z так, чтобы
поперечная площадка 2' с нормалью 1 лежала на координатной
поверхности хг = const. Тогда, очевидно,
, 1 дх . л п\
т.е. la=—r==—^ (а = 1,2).
Согласно формулам A.17) и A.22)
Аналогично получим и вторую формулу A.23).
§ 2. Основная система уравнений равновесия оболочки
1. Рассмотрим теперь бесконечно малую призму Щ, построен-
построенную, на векторах П^ж1, Н2йж2 и R3dz с общей вершиной в точке
Q (ж1, ж2, z), причем для определенности допустим, что dxl > О,
д,хг > 0, dz > 0 (рис. 20).
Пусть dS" — грань призмы, вдоль которой ж™ = const, dl} —
грань, проходящая через концы векторов Rtdx1 и R2Ac2, причем 1
442
ГЛ. 6. ВОПРОСЫ БЕЗМ0МЕНТИ0Й ТЕОРИИ ОБОЛОЧЕК
обозначает орт внешней к этой грани нормали. Так как соглас-
согласно A.10) _
R3dz X Ridx1 = }gWdxldz,
B.1)
B.2)
X n3dz = 1gR4x2dz,
R3dz X (Ridx1 - R2dx*) =
TO
I dS = fgR'dx'dz + 1gR2dxfdz
или, в силу формулы A.14), находим
Таким образом,
где
VI
Za = lRa = Za — z6a^, Za = lra.
B-3)
B.4)
B.5)
К призме $р приложены поверхностные силы P(i)cS, —Р(.;й2',
—PB)dE2, — P(n)dS3, fP(n) + 9-^p- dzj dE3 и массовая сила
-PB)dE2
Рис. 20
F dx, причем di? — площадь основания призмы, a dx — объем
призмы. Приравнивая сумму этих сил нулю, получим:
ят>
-Fdx.
§ 2. СИСТЕМА УРАВНЕНИЙ РАВНОВЕСИЯ ОБОЛОЧКИ 443
Если разделим обе части этого равенства на йЕг и учтем, что
1) dx = dzd23 и 2) ^,-уО,
когда призма сжимается в точку, то в силу B.4) и A.18) полу-
получим равенство
P(i) = VF1 ад; + V1F Р(й*2 ^ р%. B.6)
Так как Р0) не зависит от выбора системы координат, то для
любых двух систем координат х\ хг, z и х\ хг, z имеем
Р@ = Ра4 = ?%. B.7)
Учитывая, что la = h—-„, получим
дха
Так как 1 — любое направление, касательное к 5, то имеем ра-
равенство
pfs = pa?^ (В =1,2). B.8)
дха
Таким образом, векторы Р" преобразуются при переходе от
одной координатной системы х1, х2, z к любой другой системе
х1, хг, z по закону преобразования дифференциалов dxa, т. е. по
контравариантному закону. Поэтому векторы Р* мы будем назы-
называть контравариантными векторами сил напряжения. Если эти
векторы будут найдены, то по формулам B.7) мы легко найдем
физические силы напряжений.
Из формул A.19), A.20) и B.8) сразу следуют равенства
A.22), которыми мы воспользовались выше при выводе фор-
формул A.23).
2. Разлагая векторы Р1 по базисным векторам Ri, R2, R3,
подучим:
Р>- = р*^ (* = 1, 2, 3; Р3 = Р3, R3 = n), B.9)
где pik = P'RA — контравариантный тензор второго ранга. Этот
тензор симметричен: pih = рм.
В самом деле, это легко доказывается в случае декартовой
системы, а свойство симметричности тензора инвариантно в от-
отношении выбора системы координат.
В силу A.2) из B.9) имеем
f а + Pi3n. B.10)
444 гл- 6' вопросы безмомкнтной теории оболочек
Подставляя эти выражения в A.19) и A.20), будем иметь
Та = Та|Ч + Тап, Ма = Ма% (а = 1, 2), B.11)
где
h
J J
-h -ft
h
J OP - zp^bl) y/~JL dz, Г = J p«P V^-^-dz, BЛ2)
h ft
z ]/-f- dz, B.13)
j
-ft
причем c«? = Coafl^'-
Контравариантные тензоры второго ранга Taf>, МаЬ будем
называть контравариантными тензорами усилий и моментов сил
напряжений, а контравариантный вектор Та — контравариант-
ным вектором перерезывающей силы.
Усилие и момент, действующие на площадку с нормалью I,
в силу A.23), B.11) можно еще представить в виде
Т(|) = N,1 + HlS + Ttn, B.14)
М(„ = G,I +lf,e, B.15)
причем Nt и Hi называются нормальным и касательным усилия-
усилиями, Ti — перерезывающей силой, ?, и Mt — крутящим и. изгиба-
изгибающим моментами.
Нетрудно видеть, что эти величины выражаются следующими
формулами:
Tt = Tala, B.16)
Gl = Ma4Jt = S«%st, Mt = Ma%S(, = Sa%k. B.17)
3. Основную систему уравнений равновесия сплошной среды
можно записать относительно произвольно выбранной системы
координат в следующей векторной форме:
р.о B.18)
где F — массовая сила. Справедливость этого равенства относи-
относительно декартовой системы координат очевидна. Но в силу
свойства B.8) векторов Р* (надо иметь в виду, что Р3 = Р3 = Р<>)
нетрудно установить, что левая часть равенства B.18) вовсе не
зависит от выбора координатной системы. Следовательно, равен-
равенство B.18) имеет место относительно произвольной криволиней-
криволинейной координатной системы в пространстве.
§ 2. СИСТЕМА УРАВНЕНИЙ РАВНОВЕСИЯ ОБОЛОЧКИ 445
Умножая обе части равенства B.18) на 1/ ^- dzvi затем ин-
интегрируя по z, получим:
У а дха\ J га, I Г a z=-h J * а
* —h J —h
и, в силу формулы A.19), имеем
i t?±p + x (x\a?) = 0, B.19)
где
X = A - 2Hft + К/г2) Р+ - A + 2Ш + К/г2) Р^ +
h
+ j A - 2Hz + Kz2) F (ж1, x\ z) dz; B.20)
—h
здесь Р^" и PJ обозначают силы, приложенные к поверхпо-
стям 5+ и S",
Отсюда видно, что для тонких пли пологих оболочек с доста-
достаточным приближением можно положить
h
X = Р3+ - Р3- + j F {x\ x\ z) dz. B.21)
-h
Таким образом, X представляет собой главный вектор поверх-
поверхностных и объемных сил, рассчитанных на единицу площади.
Вектор X мы можем считать известной функцией точки
(х1, х2) поверхности S, ибо он выражается через поверхностные-
силы Рз", Р<Г и массовую силу F, которые мы считаем заданны-
заданными. В частности, X = 0, если эти силы отсутствуют.
_Умножая обе части уравнения B.18) векторно на вектор
, получим
или
nX-P'z V7) - n«XPaz/i + ±
=0. B.22)
Принимая во внимание равенства
^ K3, RAxPft = 0, B.23)
446 гл' 6- ВОПРОСЫ БЕЗМОМВНТНОЙ ТЕОРИИ ОБОЛОЧЕК
находим
= /J(raXPa-RftXP'J) = Va ]/Zr«XPe.
В силу этого равенство B.22) можем переписать так:
Интегрируя обе части этого равенства по z и учитывая формулы
A.19) и A.20), получим
1 ?VI*L + Г.ХТ» + Y - 0, B.24)
у а вх
где
Y = h(l — 2Hh + Kh2) nxH + h(i + 2Uh + №)
h
+ j A — 2Hz + Kz2)nXFzdz. B.25)
—h
Для тонких или пологих оболочек с достаточным приближением
можно считать, что
h
Y = fenXРз" + ftnXРГ + j nXFz dz. B.26)
-h
Таким образом, Y представляет собой главный момент поверх-
поверхностных и объемных сил, рассчитанный на единицу площади.
Очевидно, Y — заданная вектор-функция от х\ аг.
Уравнения B.19) и B.24) составляют основную систему
уравнений равновесия оболочек. Используя принцип Даламбера,
можно также вывести систему уравнений колебаний оболочки.
Но ее мы здесь не будем выписывать, так как в дальнейшем
нам не придется ею пользоваться.
4. В уравнениях B.19) и B.24) фигурируют векторы X и Y,
являющиеся функциями точки срединной поверхности. Как мы
уже отмечали выше, первый из них представляет собой главный
вектор, а второй — главный момент объемных и поверхностных
сил, приложенных в оболочке. Таким образом, в теории оболочек
вместо заданного распределения системы внешних объемных и
поверхностных сил рассматривается статически эквивалентная
ей совокупность сил X и моментов Y, рассчитанных на единицу
площади и распределенных на срединной поверхности. При этом,
очевидно, предполагается, что такое перераспределение внешней
§ 2. СИСТЕМА УРАВНЕНИЙ РАВНОВЕСИЯ ОБОЛОЧКИ 447
нагрузки не вносит существенного искажения в истинную карти-
картину напряженного состояния оболочки, т. е. считается, что это
искажение не выходит за пределы практически допустимой по-
погрешности. Однако трудно указать такой критерий, который по-
позволяет установить, когда именно такое приближение практиче-
практически приемлемо. В пользу такого допущения обычно приводят
соображения, основанные главным образом на непосредственной
интуиции, а также ссылаются на благоприятные результаты
практического опыта применения теории оболочек. На самом
деле можно считать установленным, что эти предположения
близки к действительности для достаточно широкого класса тон-
тонких упругих оболочек, если внешние нагрузки распределены в
какой-то мере непрерывно как по толщине оболочки, так и по
се поверхностям.
Если в отдельных частях оболочки происходит сильная кон-
концентрация внешних нагрузок (например в отдельпых точках
приложены сосредоточенные силы), то в окрестности этих мест
расчет оболочек по уравнениям B.19) и B.24) может дать ре-
результаты, которые в значительной степени расходятся с реаль-
реальной картиной состояния напряженного равновесия.
Совокупность сил, приложенных к боковым поверхностям,
также заменяют в теории оболочек совокупностью вектора уси-
усилия Т(!) и момента М^,, где 1 •— тангенциальная нормаль к гра-
границе оболочки.
Если векторы X и Y тождественно обращаются в нуль, т. е.
если внешние объемные и поверхностные силы по совокупности
статически эквивалентны нулю в каждом элементарном объеме'
оболочки, то будем говорить, что оболочка является свободной.
В свободной оболочке напряженное состояние равновесия под-
поддерживается исключительно усилиями Т^ и моментами М(!),
приложенными к контуру оболочки.
Система уравнений B.19) и B.24) в случае свободной обо-
оболочки принимает вид
= о, i ^ + raXf = 0. B.27)
у а дх
f = о,
у а дх у а
Эти же уравнения мы имеем и в том случае, когда на оболочке
действуют сосредоточенные внешние силы. Но в окрестности
действия сосредоточенных сил нельзя считать усилия Т(ц и мо-
моменты М(г), вообще говоря, ограниченными. Кроме того, в этих
случаях, по крайней мере в районе сильной концентрации внеш-
внешних нагрузок, картину напряженного состояния оболочки, вооб*
ще говоря, нельзя восстановить с достаточной точностью, зная
лишь усилия и моменты.
В теории оболочек, как правило, моментами внешних сил Y
пренебрегают, т. е. полагают их равными нулю. В дальнейшем
448 гл- 6- вопросы безмоментной теории оболочек
и мы будем все время считать
Y = 0. B.28)
В пользу такого предположения можно привести следующие со-
соображения. Во-первых, в большинстве случаев силы, приложен-
приложенные к «верхней» и «нижней» поверхностям оболочки, направле-
направлены перпендикулярно (или почти перпендикулярно) к этой по-
поверхности (например гидростатическое давление). Следовательно,
при этих условиях моменты сил Pjj" и PjT равны нулю. Что же
касается объемной силы F, то она, в особенности в случае тон-
тонкой оболочки, незначительно изменяется по толщине оболочки.
Поэтому интеграл, фигурирующий в равенстве B.26), можно
принять равным нулю. Таким образом, основную систему урав-
уравнений B.19) и B.24) мы будем рассматривать в виде
1 O^f + X = 0, B.29)
[/а дх
* О^+ГвХТ" = 0. B.30)
[/а дх
В дальнейшем вектор X, который представляет собой глав-
главный вектор поверхностных и объемных сил, приложенных к обо-
оболочке, будем называть поверхностной нагрузкой. Таким образом,
силы, действующие на боковые поверхности оболочки и статиче-
статически эквивалентные усилию Т(г, и моменту М((), мы не будем
причислять к внешним поверхностным силам. Усилия и момен-
моменты, действующие на боковые поверхности оболочки, мы будем
называть контурными силами (Т(!) — контурное усилие, или кон-
контурная нагрузка, Mlt) — контурный момент или контурная пара
сил).
5. Пользуясь формулами B.11), систему векторных уравне-
уравнений B.29) и B.30) мы можем записать в следующей координат-
координатной форме:
у«Гар _ ТаЪ% + Хр = 0 ф = 1, 2), B.31)
Vara + Ь^Г* + Z = 0, B.32)
VaMap - Тас? = 0 (Р = 1, 2), B.33)
MaPbaP + caPTa5 = 0. B.34)
При выводе этих уравнений мы воспользовались деривационны-
деривационными формулами Гаусса
г«р = Г?ргх + b^n (а, р = 1, 2),- B.35)
а также равенствами
J*. в Па = _ ЬарГР s _ bivp (a = 1, 2). B.36)
§ 2. СИСТЕМА УРАВНЕНИЙ РАВНОВЕСИЯ ОБОЛОЧКИ 449
Таким образом, система векторных уравнений B.29) и B.30)
эквивалентна системе из шести уравнений B.31) — B.34), кото-
которая содержит всего десять неизвестных величин: четыре компонен-
компонента касательного вектора усилия Г11, Г12, Г21, Г22, два компонента
перерезывающей силы 7", Т2 и, наконец, четыре компонента век-
вектора момента: М1\ М12, ПР\ М2\
Мы будем считать, что объемные и поверхностные силы зада-
заданы. Это означает, что будут заданы векторное поле X на средин-
срединной поверхности оболочки и усилия Т(;, и момент М(!) вдоль
границы оболочки. Иными словами, будут заданы свободные чле-
члены уравнений B.31), B.32), а также вдоль края оболочки нор-
нормальное и касательное усилия, перерезывающие силы и крутя-
крутящий и изгибающий моменты, т. е. всего будут заданы пять крае-
краевых условий. Таким образом, мы будем иметь систему из шести
уравнений с десятью неизвестными функциями, подчиненными
пяти краевым условиям. Эти условия, вообще говоря, недостаточ-
недостаточны для однозначного определения искомых величин. Вследствие
этого задача о равновесии оболочки в общем случае является
статически неопределимой, т. е. уравнения B.29) и B.30) с уче-
учетом даже всех пяти естественных граничных условий недостаточ-
недостаточны для определения всех искомых величин, характеризующих
напряженное состояние оболочки. Чтобы придать этой задаче
математически определенную форму, необходимо привлечь неко-
некоторые дополнительные предположения о характере распределе-
распределения напряжений в оболочке, устанавливающие между искомыми
величинами некоторое количество новых соотношений, которые
вместе с исходными уравнениями B.29) и B.30) позволяют со-
составить полную систему уравнений. Речь идет о такой системе
уравнений, которая при учете определенных граничных условий,
а также некоторых других условий, вытекающих из физического
и геометрического содержания задачи, позволяет найти все ис-
искомые величины. При выводе дополнительных соотношений сле-
следует исходить из каких-нибудь физических и геометрических до-
допущений, учитывающих определенные свойства реально встре-
встречающихся оболочек. Одним из обычных путей для этого является
установление, с помощью определенных гипотез, соотношений
между компонентами усилий и моментов, с одной стороны,
и компонентами тензора деформации, с другой стороны. Напри-
Например, в случае упругих оболочек это достигается с помощью ли-
линейного закона Гука и некоторых добавочных гипотез геометри-
геометрического и статического характера (например, так называемой
гипотезы Кирхгофа — Лява).
Однако на этом пути существует много серьезных трудно-
трудностей, которые все еще не преодолены. Одна из таких трудностей
состоит в том, что не существует единообразия в вопросе выбора
упомянутых гипотез. Различные гипотезы, лежащие в основе
вывода вышеупомянутых соотношений, приводят к различным
29 и. Н. Векуа
450 ГЛ' 6' ВОПРОСЫ БЕЗМ0МЕНТН0Й ТЕОРИИ ОБОЛОЧЕК
по структуре дифференциальным уравнениям и краевым услоки-
ям. В уравнениях наряду с главными членами часто фигурируют
и второстепенные слагаемые, наличие которых не влияет сущест-
существенно на точность расчета, но сильно усложняет задачу и значи-
значительно снижает практическую эффективность полученных урав-
уравнений. Сложность вопроса состоит в том, что трудно предложить
способы, позволяющие отделять в уравнениях второстепенные
слагаемые от главных, чтобы устранить их. Поэтому до сих пор
наблюдается большой разнобой в вопросе выбора гипотез, лежа-
лежащих в основе составления уравнений теории оболочек.
В результате этого в настоящее время в теории оболочек
имеются разные системы уравнений и соотношений и очень ча-
часто трудно судить, какие преимущества или недостатки имеют
одни перед другим. Из-за этого не исключены случаи, когда
близкие по своему физическому содержанию задачи приводятся
к существенно различным уравнениям. Все это лишает матема-
математическую теорию оболочек той внутренней законченности и цель-
цельности, которые присущи многим другим разделам классической
механики. Построение общей теории оболочек нельзя считать
законченным до тех пор, пока не будет найдена обоснованная
общая схема составления уравнений теории оболочек. Но реше-
решение этой задачи в такой общей постановке сопряжено с трудпо
преодолимыми препятствиями.
Дело в том, что в технических конструкциях оболочкам при-
приходится выполнять самые различные функции. В различных
конструкциях оболочки подвергаются различным воздействиям
от внешних нагрузок, и потому нельзя все возможные случаи
подогнать под одну общую схему, которая приводила бы как в
физическом, так и в математическом отношениях к удовлетвори-
удовлетворительным результатам. Под действием внешних нагрузок в одних
случаях в напряженном состоянии оболочки могут превалировать
усилия, а моменты можно вовсе не учитывать, в других же слу-
случаях, наоборот, напряженное состояние может оказаться чисто
моментным, а усилиями можно пренебречь. Чаще всего, конечно,
встречаются случаи, когда ни моментами, ни усилиями пренебре-
пренебрегать нельзя, но между ними должны существовать определенные
соотношения, которые и следует найти, чтобы составить полную
систему уравнений теории оболочек. Кроме того, если оболочка
находится под действием переменных внешних нагрузок, то с те-
течением времени характер напряженного состояния ее может
сильно меняться. В некоторых случаях оболочку можно рассмат-
рассматривать как упругое тело и пользоваться линейным законом Гу-
ка. Но во многих случаях необходимо применять нелинейные
соотношения и учитывать также возможность перехода за преде-
пределы упругости и появление пластических зон.
Все это говорит о том, что трудно все случаи охватить одной
схемой, если, конечно, ставить перед собой цель построения об-
§ 3. БЕЗМОМЕНТНОЕ НАПРЯЖЕННОЕ РАВНОВЕСИЕ ОБОЛОЧЕК 451
щей внутренне стройной математической теории, которая вместе
с тем, была бы достаточно эффективна для практических прило-
приложений. Поэтому, не оставляя поисков в направлении дальнейше-
дальнейшего усовершенствования общих принципов теории оболочек, необ-
необходимо наряду с этим рассматривать различные типичные клас-
классы оболочек и строить для них соответствующие математические
теории. К таким случаям относятся, например, плоская задача
[606], а также призматические оболочки [14 с].
Одним из таких типичных случаев напряженного равновесия
оболочек является состояние безмоментного напряженного рав-
равновесия. В этом случае получается система уравнении, которая
при некоторых граничных условиях допускает однозначное ре-
решение. Иными словами, безмоментное напряженное состояние
равновесия является статически определимой задачей.
В следующем параграфе мы дадим вывод основных уравне-
уравнений безмоментной теории оболочек и рассмотрим некоторые дру-
другие относящиеся сюда вопросы.
§ 3. Система уравнений безмоментного напряженного
равновесия оболочек. Геометрическая интерпретация
1. Пусть оболочка находится в состоянии безмоментного на-
напряженного равновесия. Это означает, что выполняются следую-
следующие условия:
Л/« = 0 (а =1,2), т.е. Ж0 = 0 (а, р = 1, 2). C.1)
При этих условиях система уравнений B.31) —B.34) примет вид
VaTaf! + X» = 0 @ = 1,2), Ъа9Г* + Z = 0, C.2)
Та» = Т*а (а, [5 = 1, 2), (З.ЗУ
Г« = 0 (а = 1,2). C.4)
Таким образом, при безмоментном напряженном состоянии рав-
равновесия в каждой поперечной площадке 2' обращаются в нуль
как момент М(П, так и перерезывающая сила пТ(() = Ть Следова-
Следовательно, вектор усилия на каждой площадке Ъ1 выражается по
формуле
ТA) = ТХ ^ ТаЧат,, C.5)
или
т(„ = m + Ht», (з.б)
где
Nt-T^kh, Ht = TaHM C.7)
Ni и Hi — нормальное и касательное усилия. Из формул C.7)
легко заключаем, что
N(l) = #,_,„ Я, = #<_„. C.7а)
29*
452 ГЛ- 6- ВОПРОСЫ БЕЗМОМЕНТНОЙ ТЕОРИИ ОБОЛОЧЕК
Кроме того, учитывая симметричность тензора ТаГ', имеем
#, = -И.. C.8)'
Таким образом, к взаимно перпендикулярным площадкам
приложены равные по абсолютному значению и противополож-
противоположные по знаку касательные усилия.
Симметричное тензорное поле ТаР, которое удовлетворяет си-
системе уравнений C.2), будем называть неоднородным статиче-
статическим полем, если компоненты поверхностных сил Ха и Z одно-
одновременно не обращаются тождественно в нуль. Это поле будем
называть однородным статическим полем*), если Ха = Z s= 0.
Однородное статическое поле удовлетворяет системе уравнений
?аГ* = 0 (Р = 1, 2), &аРГа|! = 0 (Ta[i = Га). C.9)
Всякое неоднородное статическое поле, соответствующее за-
заданному полю внешних поверхностных сил X = Xava + Zn, оче-
очевидно, есть сумма некоторого фиксированного неоднородного по-
поля Та& и однородного статического поля Tafi. Неоднородное поле
ТаР можно подчинить некоторым дополнительным условиям. Ино-
Иногда эти условия могут оказаться такими, что они определяют
поле Taii однозначно.
2. В предыдущей главе мы видели, что системе уравнений
C.9) удовлетворяет тензор Тае% который выражается через век-
вектор вращения V по формулам
T*?J = саХ — гр (а, Р = 1, 2). C.10)
ОХ
Таким образом, каждому полю вращений сопоставляется
вполне определенное однородное статическое поле безмоментного
напряжения. Это позволяет геометрические свойства бесконечно
малых изгибаний поверхности интерпретировать как определен-
определенные механические свойства, характеризующие состояние безмо-
безмоментного напряженного равновесия оболочки.
Однако это не следует понимать в том смысле, что деформи-
деформированное состояние, которое возникает в оболочке в результате
бесконечно малого изгибания ее срединной поверхности, инду-
индуцирует безмоментное напряженное состояние равновесия оболоч-
оболочки. Напротив, по крайней мере для упругих оболочек такое де-
деформированное состояние соответствует чисто моментному на-
напряженному состоянию [50] (гл. XXIII). Например, в тонкой
*) Чтобы избегнуть недоразумения, отметим, что мы различаем по-
понятия однородного и постоянного (скалярного, векторного п тензорного)
полей на поверхности. Под постоянным полем мы подразумеваем такое
поле, элементы которого принимают во всех точках поверхности одно и
то же значение. Это замечание мы сочли нужным сделать потому, что иног-
иногда в векторном анализе такое поле принято называть однородным.
§ 3. БЕЗМОМЕНТНОЕ НАПРЯЖЕННОЕ РАВНОВЕСИЕ ОБОЛОЧЕК 453
упругой оболочке компоненты усилий и моментов относительно
системы координат в линиях кривизны выражаются по фор-
формулам [50]
? \ tj гг Eh
C.11)
I2\ (K2 + °"Xl)'
За-оУ '"" 2 3A-а2) C12)
где ? — модуль Юнга, о — коэффициент Пуассона материала
оболочки, h — половина толщины оболочки, еи е2, ы — удлине-
удлинения и сдвиги, а ул, ул и т — вариации главных кривизн п круче-
кручения срединной поверхности. При бесконечно малых изгибаниях
срединной поверхности 84 = е2 = со = 0 и, следовательно, А\ —
= N2 — Hi — —Нг = 0, т. е. касательные компоненты усилия рав-
равны нулю.
Таким образом, напряженное состояние упругой оболочки,
индуцированное бесконечно малым изгибанием срединной по-
поверхности, не может быть безмоментным. Скорее всего, в первом
приближении оно является чисто моментным.
В дальнейшем такое напряженное состояние равновесия обо-
оболочки условимся называть чисто изгибным напряженным со-
состоянием.
Формулы C.10) равносильны следующему векторному ра-
равенству:
¦?=r°"W C.13)
Эта формула позволяет сопоставлять также каждому однородно-
однородному статическому полю Taii определенное поле смещений и вра-
вращений. Эти поля выражаются по формулам F.18) и F.19) гл. 5
и, следовательно, находятся с помощью квадратур. В случае од-
носвязнои поверхности мы получим таким путем однозначные
поля смещений ц вращений с точностью до тривиальных из-
изгибаний.
Это означает, что в случае односвязной поверхности всякое
однородное статическое поле можно интерпретировать как поле
изгибаний, и наоборот, полагая
Тар = fa» (K) р = 1) 2). C.14)
Что же касается многосвязной поверхности, то в этом случае,
вообще говоря, заданному однородному статическому полю 7"
будут соответствовать многозначные поля смещений и враще-
вращений. Как мы уже выяснили в предыдущей главе, для однознач-
454 гл- 6- вопросы безмомкнтной теории оболочек
ности полей смещений и вращений необходимо и достаточно вы-
выполнение следующих равенств:
j T(l)ds = 0, J Т(„ X tds = 0 (/ = 1, . .., т), C.15)
Ч Ч
где
ТA) = r*ljt. C.16)
Ниже мы выясним механический смысл этих условий, а также
выявим природу многозначности полей смещений и вращений,
соответствующих произвольно заданному статическому полю.
3. В § 6 предыдущей главы мы доказали интегральное
тождество
j UT(Ods = j UaTa%ds = 0, C.17)
L L
где L — граница поверхности <S, U — произвольное поле смеще-
смещений на S, а Т<(> = ТаЧах9, причем Та* — любое решение системы
уравнений C.9), т. е. Taii— произвольное однородное статическое
поле безмоментного напряжения свободной оболочки, срединной
поверхностью которой служит поверхность S. Предполагается,
что U и Т0 непрерывны b5 + L,
Формула C.17) обобщается и на случай неоднородного ста-
статического поля. Если U — по-прежнему некоторое поле смещений
на S, a Та® — некоторое неоднородное статическое поле, т. е.
решение неоднородной системы уравнений C.2), то
UX = щХ* + u0Z = - щУаТа& + u0Z =
4" ^(Vaup + Vpwa) + u0Z =
= - V« ОрГр) + rt#0 + u0Z=- Va (щТ**). C.18)
Здесь мы воспользовались системой уравнений для поля сме-
смещений
4" (\аЩ + Vpwa) - Ъари0 = 0 (a, p = 1, 2), C.19)
а также симметричностью тензора Taf. Кроме того, мы пользо-
пользовались обозначениями
X = Xata + Zn, U = иага + щп. C.20)
Интегрируя равенство C.18) по поверхности S и применяя
формулу Грина, получим искомую формулу:
j j UX dS + f UT(,,& = 0. C.21)
§ 3. БЕЗМОМЕНТНОЕ НАПРЯЖЕННОЕ РАВНОВЕСИЕ ОБОЛОЧЕК 455
В частности, если в качестве U мы возьмем произвольное три-
тривиальное поле
U = QXr + C, C.22)
то тождество C.21) будет равносильно следующим равенствам:
rr S , L C.23)
J J rXXdS+ \ rXT(,)rfj = 01
S L
которые, как известно, составляют необходимое и достаточное
условие равновесия поверхности S как жесткого тела. Во всем
дальнейшем, задавая некоторое распределение поверхностных
сил X и контурных усилий T(j), мы все время будем подразу-
подразумевать, что это распределение удовлетворяет условиям равнове-
равновесия жесткого тела C.23).
В случае свободной оболочки X s= 0 и, следовательно, будем
иметь формулу C.17).
Так как \JXdS и UT(!)ds суть элементарные работы поверх-
поверхностной силы X ds и контурной силы Т(;) ds на перемещении U,
то формула C.21) выражает следующий факт:
Сумма элементарных работ внешних поверхностных и кон-
контурных сил, приложенных к оболочке, находящейся в состоянии
безмоментного напряженного равновесия, на перемещениях, соот-
соответствующих любому бесконечно малому изгибанию срединной
поверхности, равна нулю.
Другими словами, бесконечно малые изгибания срединной
поверхности оболочки являются возможными {виртуальными)
перемещениями в отношении любой системы внешних и контур-
контурных сил, поддерживающих в оболочке безмоментное напряженное
состояние равновесия.
Таким образом, внешние поверхностные силы и контурные
усилия, действующие на оболочку и поддерживающие в ней со-
состояние ненулевого безмоментного напряженного равновесия,
должны быть ортогональны любому полю смещений. Иными сло-
словами, статические условия, которые создают в оболочке безмо-
безмоментное напряженное состояние равновесия, должны быть сов-
совместимы с любыми связями, допускающими бесконечно малые
изгибания, и наоборот. Поэтому статические условия, которые
поддерживают в оболочке состояние безмоментного напряженно-
напряженного равновесия, всегда можно дополнить связями (в частности,
жесткими), совместимыми с некоторым (в частности, тривиаль-
тривиальным) бесконечно малым изгибанием срединной поверхности обо-
оболочки. Необходимо при этом, чтобы эти связи (в том числе
жесткие) были совместимы с любым статическим полем.
Кроме того, напряженное состояние равновесия оболочки, ко-
которое складывается из безмоментного и из чисто изгибного на-
456 Гл- 6- ВОПРОСЫ БЕЗМОМЕНТНОЙ ТЕОРИИ ОБОЛОЧЕК
пряженных состояний, мы будем называть в дальнейшем кратко
состоянием (Т, М). Такое состояние, очевидно, является проме-
промежуточным между общим моментным напряженным состояпием и
чисто безмоментным напряженным состоянием равновесия.
В дальнейшем для краткости будем называть безмоментное на-
напряженное состояние равновесия состоянием (Т), а чисто изгнб-
ное напряженное состояние равновесия — состоянием (М). Со-
Состояние (Т. М) есть сумма состояний (Т) и (М).
В предыдущей главе мы указали ряд геометрических и кине-
кинематических условий, определяющих состояние (М). В следую-
следующем параграфе рассмотрим условия типа (Т). При напряжен-
напряженном состоянии (Т, М) деформация срединной поверхности скла-
складывается из двух деформаций — из бесконечно малого изгибания,
соответствующего состоянию (М), и из деформации растяжений
(сжатий) п сдвигов, соответствующей состоянию (Т). Первую
деформацию мы определяем непосредственно, решая систему
уравнений бесконечно малых изгибаний при учете условии ти-
типа (М), а вторую деформацию, вообще говоря, определить в яв-
явной форме можно, лишь используя ту или иную гипотезу о связи
между деформациями и напряжениями. В этом случае непосред-
непосредственно определяется статическое состояние (Т); что же каса-
касается деформации, то ее можно найтя, например, в случае упру-
упругой тонкой оболочки, пользуясь приближенными формулами
C.11). Формулы C.12) позволяют определить компоненты мо-
момента состояния (М).
Равенства C.15) выражают, что коитуриьте силы, приложен-
приложенные к любой замкнутой граничной кривой свободной оболочки,
статически эквивалентны нулю (главный вектор и главный мо-
момент этих сил равны нулю). Из этих равенств следует, что это
условие выполняется тогда для любой замкнутой кривой, при-
принадлежащей срединной поверхности оболочки.
Таким образом, однородному статическому полю соответству-
соответствуют по формуле C.13) однозначные поля смещений и вращений
(с точностью до тривиального изгибания) тогда и только тогда.
когда контурные силы, приложенные каждому граничному кон-
контуру, по совокупности статически эквивалентны пулю. Для од-
носвязной поверхности это условие всегда выполняется в силу
равенства C.17). Поэтому в данном случае, как уже отмечалось
выше, любое однородное статическое поле можно интерпретиро-
интерпретировать как поле изгибаний срединной поверхности.
4. Если поверхность многосвязна и условия C.15) не выпол-
выполняются, то найденные по формулам F.18) и F.19) гл. 5 поля
смещений и вращений U и V будут многозначными функциями
точки поверхности. Мы теперь выясним природу этой многознач-
многозначности (см. еще [33а], § 26).
Пусть при данной координации поверхность гомеоморфпо ото-
отображается на некоторую многосвязную область G плоскости z =
§ 3. БЕЗМОМЕИТНОЕ НАПРЯЖЕННОЕ РАВНОВЕСИЕ ОБОЛОЧЕК 457
= х1 + ixz. Пусть дополнение G до полной плоскости состоит из
т + 1 континуумов Go, Gu ..., Gm, причем Go либо вовсе отсут-
отсутствует, либо же содержит бесконечно удаленную то.ку, a G{. ...
..., Gm — ограниченные множества. Пусть
fyB) = iarg(z-z,-), C.24)
где z} — некоторая фиксированная точка континуума G, A =
= 1, ..., т). Очевидно, #j(z)—многозначная функция, получаю-
получающая приращение, равное 1, когда точка z один раз обойдет
вокруг континуума G$ против движения часовой стрелки. Тогда
из F.18) п F.19) гл. 5 сразу следует, что векторы V и U име-
имеют вид
V (М) = S \,Ъ, (М) + V* (M), C.25)
.7=1
S (Vi X г + V)) 0, (М) + U* (М), C.26)
где Us и V-fc — однозначные вектор-функции точки М поверх-
поверхности S, a Vj n Vj — постоянные векторы, равные
У} - f Т@ ds, V- = f г X Т(о cfe. C.27)
Нетрудно теперь доказать, что многозначным полям смеще-
смещений и вращений U и V вида C.25) и C.26), где Vj и V
G = 1, ..., т) — произвольно заданные постоянные векторы, всег-
всегда соответствует согласно формулам C.10) вполне определенное
однородное статическое поле безмоментного напряженного со-
состояния оболочки.
Формулам C.25) и C.26) молено дать следующую геометри-
геометрическую интерпретацию. Пусть на поверхности S проведены раз-
разрезы вдоль простых гладких дуг Ьи .. ., Lm, причем так, что
в результате получается односвязная поверхность S' = S —
— \L1 -J- ... + Lm). Этой поверхности на плоскости z = х1 + ix2
будет соответствовать односвязная область G' = G— (Г{ + ...
... + Т'т), где Г^- — образы дуг L'5 (J = 1, .. ., т).
Пусть Lj+ и Lf — левый и правый берега разрезов L$
(.7 = 1, ..., т). Тогда в силу C.25) и C.26) имеем:
= V,- (>=1, ...,т), C.28)
ч
U | ч - U | ,- = V, X г + V; (; = 1, .,., т). C.29)
ч ч
Эти формулы показывают, что каждый берег любого разреза Lj
перемещается относительно другого как жесткое тело, причем
458 гл- 6- вопросы безмоментной теории оболочек
эти перемещения однозначно определяются по заданному одно-
однородному статическому полю Та^.
Таким образом, и в случае многосвязной поверхности всяко-
всякому безмоментному напряженному состоянию оболочки сопостав-
сопоставляется вполне определенное бесконечно малое изгибание ее сре-
срединной поверхности, если последняя будет превращена в одно-
связную поверхность произвольно выбранными разрезами Ly, ...
..., Lm, при этом берега каждого разреза сдвигаются относитель-
относительно друг друга как жесткие тела. Эти сдвиги вполне однозначно
определяются по заданному статическому полю.
Отсюда следует, что отсутствие удовлетворяющего наличным
связям на поверхности и условиям C.15) нетривиального реше-
решения системы уравнений C.9) является необходимым и достаточ-
достаточным признаком жесткости многосвязной поверхности.
Иными словами, если отсутствует ненулевое однородное ста-
статическое поле Tafl, которое удовлетворяет геометрическим связям
и условиям C.15), обеспечивающим однозначность полей смеще-
смещений и вращений, то поверхность будет жесткой. Причем это ус-
условие является как необходимым, так и достаточным условием
для (геометрической) жесткости.
§ 4. Новый вывод характеристического уравнения
В этом параграфе мы укажем другой способ вывода харак-
характеристического уравнения E.30), полученного в предыдущей
главе на основе чисто геометрических соображений.
Пусть пара векторов Т* и Т* является некоторым частным
решением уравнения C.2). Тогда общее его решение будет
иметь вид
Тк = Т2 + Т? (а = 1, 2), D.1)
гдеТ"— любое решение однородного уравнения
Этому уравнению, очевидно, удовлетворяют векторы вида
То=с ^ («= 1,2), D.3)
где W = W(a;i, хг) — произвольная дифференцируемая вектор-
функция точки поверхности. Имеем
§ 5. УСЛОВИЯ РЕАЛИЗАЦИИ СОСТОЯНИЯ (Г). КРАЕВЫЕ ЗАДАЧИ 459
Но ^ = - lfvrv + bin. Поэтому
Т? = ^ 2? + c<X"r"v^ - <^**, - Ляи/ _ Л^о, D.4)
где ws = WrB, «70 = Wn. Так как Tf = T§a, то
va«7a-2Hw0-0. D.5J
Далее,
т. е.
-J + 6арЫ;Р = 0 (о = 1, 2). D.6)
Пусть К?=0. Тогда из D.6)
Подставляя D.7) в D.5), мы получим характеристическое
уравнение
V (i1a^V ?/? ¦\-t-9H7/) О (?Я\
Если «70 — характеристическая функция, то вектор W выразится
по формуле
а для вектора Tq согласно D.3) имеем
Т? = - cap (Vp^7V7M;0 + Ь^о) г„ (а = 1, 2). D.10)
Таким образом, мы получили иным путем формулы, равно-
равносильные формулам F.27), выведенным в предыдущем па-
параграфе.
§ 5. Условия реализации состояния (Г). Краевые задачи
1. Реализация безмоментного напряженного состояния равно-
равновесия оболочки, названного нами выше состоянием (Т) и являю-
являющегося весьма частным случаем общего напряженного состояния,
возможна лишь при некоторых специальных распределениях
внешних нагрузок. Перечислим, прежде всего, следующий комп-
комплекс необходимых условий реализации состояния (Т).
4C0 гл- 6- ВОПРОСЫ БЕЗМОМЕНТЫОЙ ТЕОРИИ ОБОЛОЧЕК
Во-первых, совокупность поверхностных и объемных сил ста-
статически эквивалентна некоторому полю сил X, распределенных
по срединной поверхности оболочки. Моменты же этих сил тож-
тождественно равны нулю.
Во-вторых, приложенные к боковым площадкам оболочки си-
силы статически эквивалентны усилиям вида T = iVH-#s, т. е. мо-
моменты и перерезывающие силы вдоль границы оболочки равны
нулю.
В-третьих, поверхностные силы X и контурные усилия Т
должны удовлетворять тождеству C.21), в котором фигурирует
произвольное поле смещений U бесконечно малого изгибания
срединной поверхности. Если U — тривиальное поле смещений,
то условие C.21) обращается в обычное условие C.23) равнове-
равновесия системы твердого тела, которое, очевидно, всегда должно быть
выполнено.
Но перечисленные выше условия еще не обеспечивают реа-
реализацию состояния (Т). Вообще, установление общих законов
распределения внешних нагрузок, обеспечивающих осуществле-
осуществление таких состояний,— задача трудная, и едва ли она разрешима
только математическими средствами. Вопрос осложняется еще
тем, что это состояние имеет неустойчивый характер. При чисто
математическом рассмотрении это следует из условия C.21), ко-
которое при произвольном задании полей X и Т, вообще говоря,
не выполняется. Поэтому, оставляя в стороне задачу о физиче-
физических условиях реализации состояния (Т), ниже будем главным
образом заниматься чисто математическим вопросом об отыска-
отыскании условий, обеспечивающих существование и единственность
статического поля усилий 7*аР, удовлетворяющего системе урав-
уравнений C.2) и C.3). Как мы видели выше, для этого необходимо
выполнение равенства C.21). Ниже мы докажем также доста-
достаточность этого условия. Это, конечно, еще не означает, что при
этих условиях напряженное состояние в оболочке на самом деле
будет строго безмоментным. Но, как показывают многочислен-
многочисленные примеры, взятые из инженерной практики, при указанных
условиях многие реальные оболочки практически безмоментны.
Дело в том, что реальные оболочки почти всегда обладают зна-
значительной жесткостью в отношении деформаций изгиба и, следо-
следовательно, наличие небольшого моментного компонента суще-
существенно не может нарушить в таких случаях безмоментный ха-
характер поля напряжений. (Это обстоятельство, очевидно, имеет
место и во многих таких случаях, когда условия C.21) явно
нарушаются (см. ниже, п. 8 и след.).) Известно, что выпуклые
оболочки обладают обычно значительно большей жесткостью в
отношении изгиба, чем оболочка отрицательной кривизны. В си-
силу этого выпуклые оболочки имеют больше применений в тех-
технике, как более устойчивые в отношении нарушений условий
реализации безмоментного состояния. В дальнейшем под состоя-
§ 5. УСЛОВИЯ РЕАЛИЗАЦИИ СОСТОЯНИЯ (Т). КРАЕВЫЕ ЗАДАЧИ 461
нием (Т) будем подразумевать наличие такого распределения
поверхностных сил X и контурных усилий Т, которое обеспечи-
обеспечивает существование статического поля Та1>, удовлетворяющего
системе уравнений C.2).
В дальнейшем мы будем изучать условия реализации состоя-
состояния (Т) только для оболочек положительной кривизны.
В этом случае проблема приводится к системе уравнений эл-
эллиптического типа и мы можем использовать результаты преды-
предыдущих глав. Но прежде чем перейдем к изучению этого специаль-
специального случая, считаем нужным сделать еще некоторые
предварительные замечания общего характера.
Мы уже говорили выше о неустойчивом характере состоя-
состояния (Г). Но природа этой неустойчивости в значительной мере
зависит от типа оболочек. Она проявляется различным образом
в отношении оболочек эллиптического и гиперболического типа.
В этом легко убедиться, если учесть, что тип дифференциальных
уравнений интересующей нас проблемы определяется типом соот-
соответствующей поверхности. Проблема приводится, как уже отме-
отмечалось выше, к эллиптическим уравнениям в случае оболочек
положительной кривизны и к гиперболическим или параболиче-
параболическим уравнениям соответственно для оболочек отрицательной или
нулевой кривизны. Но характер зависимости решений этих урав-
уравнений от данных, однозначно их (решения) определяющих, не
одинаков. Чтобы в этом убедиться, достаточно проанализировать
этот вопрос на примерах задачи Дирихле для уравнения эллип-
эллиптического типа (например, для уравнения Лапласа) и задачи
Коши для уравнения гиперболического типа (например, для
уравнения колебания струны).
При малых непрерывных изменениях граничных дапных ре-
решение задачи Дирихле мало изменяется во всей области (имеют-
(имеются в виду случаи регулярных областей, для которых задача Ди-
Дирихле корректна). Иначе говоря, решение задачи Дирихле не-
непрерывно зависит от граничных данных. Более того, если
коэффициенты и свободный член эллиптического уравнения не-
непрерывны и допускают некоторое число непрерывных производ-
производных, то и производные решения задачи Дирихле непрерывны и
непрерывно зависят от граничных данных внутри области. Если
учесть, что производные решения задачи Дирихле часто имеют
вполне определенный физический смысл (например, градиент
решения можно трактовать как силовое поле или поле скоростей
установившегося течения идеальной жидкости), то указанное об-
обстоятельство означает, что соответствующая физическая задача
действительно устойчива (во всяком случае внутри области, т. е.
во всей области, исключая лишь узкую граничную полосу; вооб-
вообще говоря, градиент решения может сильно возрастать по вели-
величине при приближении границы). Вообще, аналитическая при-
природа решения эллиптического уравнения внутри области опредег-
462
ГЛ. 6. ВОПРОСЫ БЕЗМОМЕНТНОЙ ТЕОРИИ ОБОЛОЧЕК
ляется исключительно аналитической природой коэффициентов,
а особенности границы и граничных данных локализуются около
границы и внутрь области не распространяются*).
Что же касается гиперболического уравнения, то для него
задача Дирихле, вообще, плохо изучена из-за ее сильной неус-
неустойчивости. Но и природа устойчивости решения задачи Копш
значительно отличается от природы устойчивости решения зада-
задали Дирихле. Это хорошо видно на примере уравнения колебания
струны
*!?_*!_« = о, E.1)
которое встречается и в теории оболочек, а также, как мы уже
видели в предыдущей главе (§ 11), и в задачах теории беско-
бесконечно малых изгибаний поверхностей отрицательной кривизны.
Из формулы Даламбера
и (х, у) = -j [ф (х, у) + ф (х - у)] + у J t|> (?) dg, E.2)
х-у
дающей решение задачи Коши с начальными условиями
и Iv-o = Ф («). •|^|г,=0 = 1М;г)-00<;Г<00' E-3)
следует, что при достаточно малых непрерывных изменениях на-
начальных данных решение мало изменяется (если х и у изменя-
изменяются в некоторой ограниченной области), но относительно про-
производных решения этого утверждать нельзя. Это зависит от ха-
характера дифференциальных свойств начальных данных.
Таким образом, природа зависимости решения задачи Коши
от начальных данных носит более капризный характер и соблю-
соблюсти устойчивость решения в физических задачах значительно
труднее в этом случае, нежели в задачах, которые приводят
к уравнениям эллиптического типа. Желая обеспечить устойчи-
устойчивость физической задачи в гиперболическом случае, мы должны
добиться, чтобы возмущения начальных данных принадлежали
к более узкому классу дифференцируемых функций. Но очень
трудно в практических задачах обеспечить выполнение этого ус-
условия, так как возмущения очень часто происходят от трудно
контролируемых случайных причин.
На основании свойств уравнений эллиптического и гипербо-
гиперболического типа можно сделать теперь ряд заключений о харак-
тере распределения напряжений внутри оболочек соответствую-
*) См., например, Л. Хермандер «Линейные дифференциальные опера-
операторы с частными производными» (М.: Мир, 1965), С. Агмон, А. Дуглис,
Л. Ниренберг «Оценки решений эллиптических уравнений вблизи грани-
границы» (М.: ИЛ, 1962).— Примеч. ре».
§ 5. УСЛОВИЯ РЕАЛИЗАЦИИ СОСТОЯНИЯ (Г). КРАЕВЫЕ ЗАДАЧИ 463
щих типов. Для определенности будем иметь в виду оболочки,
нагруженные только контурными усилиями Т0). В эллиптической
оболочке напряжение от любых внешних нагрузок воспринима-
воспринимается всеми ее частями, причем если внешняя нагрузка распре-
распределена более или менее равномерно (т. е. исключаются лишь
сосредоточенные силы), то внутри оболочки обычно не возникают
большие концентрации усилий. Поэтому при случайных малых
приращениях внешних нагрузок маловероятно, чтобы дополни-
дополнительные напряжения вызывали опасные концентрации усилий.
Другое дело в случае гиперболической оболочки. Тогда возмуще-
возмущения в распределении контурных нагрузок распространяются
внутрь оболочки по зонам и может оказаться, что соответствую-
соответствующие напряжения воспринимаются не всеми частями оболочки,
а локализуются по некоторым участкам, которые могут быть
расположены и вдали от приложения контурных сил.
Поэтому в случае гиперболической оболочки больше вероят-
вероятности возникновения опасных концентраций усилий, которые
могут иметь вредные последствия (появление трещин и складок,
разрушение связей и др.)- В силу указанных причин гипербо-
гиперболические оболочки имеют сравнительно мало применений в прак-
практике. Оболочки параболического типа занимают промежуточное
положение между оболочками эллиптического и гиперболического
типа. Они более устойчивы, чем оболочки гиперболического типа,
а также их расчет проще, чем расчет оболочек эллиптического
типа. Поэтому параболические оболочки имеют более широкое
применение в технических сооружениях (перекрытия всякого
рода и др.).
Скажем еще несколько слов об оболочках смешанного типа.
Имеются в виду оболочки с кривизной переменного знака. На-
Наличие в составе такой оболочки участков положительной кри-
кривизны при известных условиях может обеспечить всей оболочке
практически достаточную устойчивость. Такая оболочка может
сохранить устойчивость в целом в некоторых случаях даже тог-
тогда, когда в результате больших концентраций усилий в зонах
гиперболичности будет превзойден предел упругости и материал
перейдет в пластическое состояние. Расчет таких оболочек при-
приводит к дифференциальным уравнениям смешанного типа. Тео-
Теория такого рода уравнений за последние годы разрабатывается
весьма интенсивно и в этом направлении достигнуто уже много
интересных результатов [9], которые можно использовать и в за-
задачах теории оболочек (см. также гл. 5, § 11).
2. Рассматривая на срединной поверхности оболочки положи-
положительной кривизны некоторую сопряженно изометрическую систе-
систему координат и вводя в рассмотрение комплексную функцию
напряжений по формуле
V ^ E.4)
464 ГЛ- 6- ВОПРОСЫ БЕЗМОМЕИТИОЙ ТЕОРИИ ОБОЛОЧЕК
систему уравнений C.2) можем записать в комплексной фор-
форме так:
д-у — Aw' — Bw' = F, E.5)
где
У77^ 2? = -(arch^y*-be"* E.6)
(\V~tX*). E.7)
Пусть F е= 0, т. е.
" 4/1A).. *'=4v?(ii- ^
Тогда будет выполняться однородное уравнение
d-wr — Aw' — Bw' = 0, E.9)
которое мы уже имели в гл. 5 (§6, п. 6). Условие E.8) озна-
чает, что поле поверхностных сил X имеет потенциал V = ^.
Потенциальное поле относительно произвольной системы коорди-
координат можно записать в виде
X = i Kdafi —а гр + KFn, Z = KV. E.10)
Это сразу следует из формул E.8), если учесть, что относитель-
относительно сопряженно изометрической системы координат (гл. 5,
§ 5, п. 4)
i 12 = d2i = 0. E.11)
aK
Мы теперь укажем еще один путь вывода уравнения E.5),
который позволяет получить его непосредственно из уравнения
безмоментпого состояния, записанного в векторной форме
+Х = 0, г„ХТ° = 0. E.12)
Это уравнение можно записать еще так:
д- [ Va (T* - iT-)] + dz [ VaiT1 + гТ2)] + Va X = 0. E.13)
Так как
Г = Г% = (Tal + iTai) rz + (Tai - iT*2) г-,
то в силу симметричности тензора ТаР
Т1 — гТ2 = (Г11 + Г22) rz + (Ти — 7122 — 2J7112) г-,
§ 5. УСЛОВИЯ РЕАЛИЗАЦИИ СОСТОЯНИЯ (Г). КРАЕВЫЕ ЗАДАЧИ 465
Если возьмем теперь сопряженно изометрическую систему коор-
координат, то из равенства E.13) получим равенство
Т11 + т" EЛ4>
Имея в виду уже введенное выше обозначение E.4), получим
1 / ±^. E.15)
Подставляя это в E.13) и учитывая равенства (см. гл. 2, § 6,
п. 5)
ГГг + АЪ + Вг* = 0. EЛ6>
^ (
легко получим уравнение E.5).
Умножая обе части равенства E.15) па —-г и учитывая,
что
» -^-т— -г = l\ + U2i la = lra, E.18)
находим
Отсюда легко получим формулу
--2W^ \z=d- E'20)
При выводе этой формулы мы воспользовались равенством
Из формул E.19) и E.20) получаются равенства
E.22)
E-23>
Пусть ф — угол наклона орта 1 к главному направлению «j. Тогда
имеем
Nt = у(N1 + Na) + l~2 " cos2ф + H1 sin2ф, E.24>
г~ 2 8^2ф + Ясо8 2ф (Я1 = -Я2), E.25)
30 и. Н. Векуа
ГЛ. 6. ВОПРОСЫ БЕЗМОМЕНТНОЙ ТЕОРИИ ОБОЛОЧЕК
где Ni и iV2 — нормальные, а Я4 = — Ег — касательные усилия на
площадках главных нормальных сечений. Из формул E.24) и
E.25) вытекают следующие равенства:
E.26)
Vi + N2, E.27)
— «« t у j i + • z)- (O.Zo)
Равенство E.26) означает, что сумма нормальных усилий, при-
приложенных к взаимно перпендикулярным площадкам нормальных
сечений, не зависит от ориентации этих площадок, и, следова-
следовательно, представляет собой скалярную функцию точки срединной
поверхности. (Это утверждение, равно как и формулы E.26) —
E.28), справедливо для оболочек любого типа.)
Из равенства E.28) следует, что 1Т(/)| достигает своих экстре-
экстремальных значений на тех площадках, где касательные усилия
равны нулю. (Считаем, что iV1 + JV2'5t 0.) Как видно из E.25),
это имеет место на двух взаимно перпендикулярных площадках
2' и S" с нормалями 1' и 1", направления которых определяются
углами ф, ф + -у, где ф есть решение уравнения
tg 2ф = N _17у. . E.29)
Назовем эти направления главными осями поля усилий ТA),
а кривые, лежащие на срединной поверхности и касающиеся
в каждой точке одной из главных осей, главными линиями поля
усилий. Обозначим нормальные усилия на площадках 2' и 2"
через N' и N". Они называются главными усилиями поля Т(!).
Так как
T(i,) = N'V, T>) = NT, E.30)
то в силу формул E.22) и E.23) имеем
s"[if)\ <5-31)
k'N' + k"N" +Z = 0, E.32)
где к' и к" — нормальные кривизны поверхности в направле-
направлении главных осей Г и 1". Из E.31), учитывая формулу
А^/ЖЦР, E.33)
получим неравенство
—т= , E.34)
§ 5. УСЛОВИЯ РЕАЛИЗАЦИИ СОСТОЯНИЯ (Г). КРАЕВЫЕ ЗАДАЧИ 467
Это означает, что для каждого ограниченного поля усилий ТAу
соответствующая комплексная функция напряжений и/ огра-
ограничена.
Введем еще в рассмотрение комплексную скалярную функ-
функцию напряжений
. _ К (N' + N") - ZH (N"-N')t' 3
которая связана с комплексной функцией напряжений и/ соот-
соотношением (см. гл. 5, § 7, п. 8)
w' = e^V,, т. е. w* = e*V. E.36)
В формуле E.35) %' обозначает геодезическое кручение поверх-
поверхности в направлении главной оси усилий Г. Если учесть ра-
равенства
=Ni + N2f kiN1 + kI?ft + Z = 0,
k'N' + k"N" +Z = 0, ( '
то легко убедимся, что в омбилической точке (Е = 0) функция
w» ограничена.
Если поле X = 0, то, учитывая формулы E.37), будем иметь
(см. также п. 4 § 6 и п. 8 § 7 гл. 5):
w, = Щ- + Ш, ^ /К р + iq, E.38)
т. е.
Р=Т = -Т> Ч = Н^-Н2. E.39)
Эти равенства позволяют дать механическое толкование величин
р и q, которые мы ввели в рассмотрение в гл. 5, где был вы-
выяснен их геометрический смысл. В частности, в силу формулы
G.65) гл. 5 имеем
~ (N1 + N2) = |- (N' + N") = 6H, E.40)
т. е. для оболочки, свободной от поверхностных сил, полусумму
главных усилий можно интерпретировать как вариацию средней
кривизны при соответствующем бесконечно малом изгибании
поверхности.
3. Переходим теперь к задаче отыскания условий, обеспечи-
обеспечивающих существование и единственность поля усилий Т(,,, оп-
определяемого уравнением E.5) и формулой E.19) [14о, п]. Иног-
Иногда, как мы уже условились об этом выше, такое поле будем
называть еще состоянием (Т). Назовем также совокупность по-
полей распределенных на S поверхностных сил X и заданных на
L контурных усилий Т полем (X, Т), или внешней нагрузкой
(X, Т). Это поле определяется заданием пяти функций: трех
30*
4G8 гл- 6- вопросы безмоментной теории оболочек
функций точки поверхности, определяющих компоненты поля X,
и двух функций точки контура L, определяющих компоненты
поля Т. Мы уже доказали выше необходимость выполнения ус-
условия C.21), в котором фигурирует произвольное поле смеще-
смещений U. Это поле представляется в виде (гл. 5, § 3, п. 5)
E.41)
[ yah. K]/
где w — комплексная функция смещений, которая является ре-
решением однородного уравнения
д-w + Aw + Bw = 0, w = 2Ur-, E.42)
д
сопряженного с уравнением E.5). Внося выражение E.41) в
формулу C.21) и затем преобразовывая двойной интеграл с
применением формулы Грина, легко получим следующее тож-
тождество, равносильное равенству C.21):
Re | f f wF dx dy — ~ \ ww' dz\ = 0. E.43)
Здесь w' и w — произвольные решения уравнений E.6) и E.42)
соответственно, причем здесь и в дальнейшем мы их считаем
непрерывными в G + Г. Это тождество можно получить также
непосредственно из рассмотрения уравнений E.5) и E.42). Ни-
Ниже мы докажем также достаточность тождества E.43) и, сле-
следовательно, C.21) для существования поля усилий Т(г), соот-
соответствующего заданному полю (X, Т). Ограничимся простоты
ради рассмотрением односвязной области.
Пусть заданное поле (X, Т) удовлетворяет условию C.21),
где U — любое поле смещений. Тогда функция F{z), заданная
в G по формуле E.7), и функция w'=fi+ifz, вычисленная
по формуле E.20) на границе Г, удовлетворяет тождеству E.43)
для любого непрерывного в G решения w уравнения E.42). Мы
будем предполагать, что заданное поле (X, Т) таково, что вы-
выполняются условия:
1) F(z)^Lp(G + T), р>2, и 2) Д, /2еС,(Г), 0 < v < 1.
Первое условие означает, что
Z^DliP(S + L), XaeLv(S+L), p>2. E.44)
Следовательно, Z e Ca (S + L), а = .
Построим теперь решение w' уравнения E.5) по граничному
условию
Re[ffi'(z)I = /i (на Г; ©'е= C(G +Г)). E.45)
Такое решение существует согласно теореме 4.11. Так как ин-
индекс задачи равен нулю, то общее ее решение имеет вид (в силу
§ 5. УСЛОВИЯ РЕАЛИЗАЦИИ СОСТОЯНИЯ (Г). КРАЕВЫЕ ЗАДАЧИ 469
теоремы 4.12) w' = w0 + c1w1 (cd — произвольная вещественная
постоянная), где w0-—частное решение задачи, a w[ — нетриви-
нетривиальное решение однородной задачи. Так как w'x = i%t на Г (%4 —
вещественная функция), то
w' = /1 + if2 + гсф (на Г).
Поэтому разность граничных значений заданной функции w' =
= /1 + ifi и найденной функции w' равна
w'-w'^i (h -ft- Сф) (на Г). E.46)
Так как w' и w' удовлетворяют тождеству E.43), то для их
разности имеем равенство
J (U - h - c1%1) Re [и; (z) |] ds = 0, E.47)
г
где w — произвольное решение уравнения E.42). Подчиним те-
теперь w краевому условию
dz\ ~
Так как индекс 3Toii задачи равен — 1, то для ее разрешимости,
согласно теореме 4.12, необходимо и достаточно, чтобы постоян-
постоянная Ci имела вид
) %l ds
Г
При этих условиях из E.47) получаем, что f2 = /г — Ci%i (на Г).
Следовательно,
ТПГ == / -4- 7/ -1" 7/> Л/ / -4- 77* = 7/7 (тХЛ Т*\
Таким образом, доказано, что если поле (X, Т) удовлетво-
удовлетворяет условию C.21), а функция w' на границе задана по фор-
формуле E.20), то ее можно продолжить по непрерывности внутрь
области G так, чтобы она удовлетворяла уравнению E.5), при-
причем это продолжение, очевидно, единственно. Это означает, что
по заданному полю (X, Т), удовлетворяющему условию C.21),
однозначно определяется поле усилий Т0). Это поле дается фор-
формулой E.19). Назовем поле (X, Т), удовлетворяющее условию
C.21), безмоментным полем внешней нагрузки.
4. В силу первой формулы E.7), уравнения E.6) и E.42)
можем записать в виде
d-U' — Bjz) V = F', E.48)
d-U + B(z)U = 0, E.49)
470 гл- 6- ВОПРОСЫ БЕЗМОМЕНТНОЙ ТЕОРИИ ОБОЛОЧЕК
i
U' = У а /К w' (г) = аК* (Г11 - iT12) + TZV Ю
E.52)
Формулу E.43), очевидно, можно записать в виде
Re I \ I UF' dxdy — -7r- \ UU' dz\ = 0. E.53)
All •/ */ I > \/
Уравнениями E.48) и E.49) целесообразно пользоваться при
рассмотрении бесконечной области. Дело в том, что функция
A (z) = — d-z In у а "КК. в случае неограниченной области не при-
принадлежит классу Lpi(E), p > 2, и поэтому в таких случаях
нельзя применять непосредственно к уравнениям E.5) и E.42)
некоторые теоремы, доказанные в гл. 3. Например, для них не
сохраняется обобщенная теорема Лиувилля в обычной форму-
формулировке. Это видно на примере сферической поверхности, когда
5=0, А=-^-=. E.54)
1 -\- ZZ
Легко видеть, что А не принадлежит классу Lp2(E), p>2.
Уравнение д-w + Aw — 0 в этом случае допускает шесть ли-
линейно независимых решений:
zh izk (к = 0, 1, 2), E.55)
которые непрерывны и ограничены на всей плоскости, а также
обращаются в нуль на бесконечности. Таким образом, в данном
случае для уравнения д-w + Aw = 0 теорема Лиувилля не со-
сохраняется. Решениям E.55) соответствуют тривиальные изгиба-
изгибания сферической поверхности.
5. Фактическая проверка выполнения условия C.21) в об-
общем случае затрудняется тем, что в нем содержится произволь-
произвольное поле смещений U. Однако в ряде частных случаев это все
же удается сделать. Например, в случае замкнутой выпуклой
оболочки равенство C.21) обращается в обычные условия рав-
равновесия статики твердого тела.
В самом деле, так как в данном случае контур L отсутству-
отсутствует, то равенство C.21) принимает вид
И
UX US = 0. E.56)
s~
§ 5. УСЛОВИЯ РЕАЛИЗАЦИИ СОСТОЯНИЯ (Г). КРАЕВЫЕ ЗАДАЧИ 471
Но поле смещений в этом случае сводится к тривиальному полю
в сплу жесткости выпуклой замкнутой поверхности. Поэтому
равенство E.56) равносильно равенствам
XXdS = O, E.57)
выражающим условия равновесия статики твердого тела. Так
как, естественно, мы предполагаем, что поле X этим условиям
удовлетворяет, то приходим к результату:
При любом распределении поверхностных сил X замкнутая
выпуклая оболочка допускает поле усилий T(ij.
Условия E.57) равносильны равенствам
Re f f т-F dx dy = O, Re [ j r X r-F dx dy = 0. E.58)
E "E
Следовательно, при наличии потенциального поля поверхностных
сил эти условия всегда выполняются, ибо тогда F = 0.
Мы теперь предложим способ фактического расчета замкну-
замкнутой выпуклой оболочки по безмоментной теории. Эта задача
приводится в общем случае к интегральному уравнению Фред-
гольма решение которого можно строить с помощью процесса
последовательных приближений. В частности, для выпуклых по-
поверхностей 2-го порядка задача решается в явной форме с по-
помощью квадратур.
Для обоснования этого метода необходимо предварительно
иметь оценки поведения искомого решения и некоторых других
функций вблизи бесконечности.
В главе 2 (§ 8, п. 8) мы выяснили, что
г1; г2 или rz, т- = O(\z\~2) (вблизи z = оо). E.59)
Отсюда следует, что
E.60)
ггг5 = 1к1 + а22) = ±У|-Н==О(|гГ*).
В силу этого
а«», Va = O(\z\-^) (вблизи z = oo). E.61)
Вообще, если Р — некоторое непрерывно дифференцируемое по-
поле на овалоиде S (скалярное, векторное, тензорное), то
Ри pl = o{\zГ2) (вблизи z = оо). E.62)
В силу E.59) и E.61) из E.34), E.50), E.51) будем иметь:
lz|-2), E.63)
|-4), U(z)=O(\z\*). E.64)
472 ГЛ- 6- ВОПРОСЫ БЕЗМОМЕНТНОЙ ТЕОРИИ ОБОЛОЧЕК
Из формулы E.6) в силу E.62) следует, что
B(z) = O(\z}-2) (вблизи г = оо). E.65)
Отсюда видно, что
B^LPiZ(E), E.66)
причем р — любое число >2. Поэтому к уравнениям E.481 и
E.49) можно примепять результаты гл. 3 и 4.
В силу E.59), E.61) имеем
ааР = О(Ы4), г* = Лв = 0(и|2). E.67)
Поэтому
Xa^Xra = O{\z\2) (вблизи z = °°). E.83)
В силу E.62), E.61) и E.68) из E.7) и E.52) найдем
F(z)= 0(|z|-2), F'(z)=O(\z\-6). E.69)
Задача определения поля усилий Т(() по заданному на замк-
замкнутой выпуклой поверхности полю X сводится к доказательству
существования решения U' уравнения E.48) на бесконечной
плоскости Е, удовлетворяющего вблизи z = °° первому условию
E.64). Эта задача приводится к интегральному уравнению
oW, C.70)
Е Е
где Ф(г)—целая функция от z. Так как вблизи z — °°
U' = O(\z\-1), B = O{\z\-2) и F' = O{\z\~6),
то левая часть этого уравнения обращается в нуль на беско-
бесконечности (это следует сразу из теоремы 1.23). Отсюда вытекает,
что Ф(°°) = 0. Следовательно, Ф(г)=О и задача приводится к
интегральному уравнению
Так как Z? = O(|z|~2) вблизи z = » и правая часть уравнения
E.71) обращается в нуль на бесконечности как UI (это сле-
следует из теоремы 1.23), то мы можем рассматривать это урав-
уравнение в любом LP(E), р>1. Так как однородное уравнение н&
имеет нетривиального решения в любом классе LP(E), p > 1,
то неоднородное уравнение E.71) всегда имеет решение, и при-
притом единственное (гл. 3, § 5).
В случае замкнутой выпуклой поверхности 2-го порядка В =
= 0 (гл. 5, § 4) и, следовательно, искомое решение определя-
определяется формулой
Ш^ EJ2>
§ 5. УСЛОВИЯ РЕАЛИЗАЦИИ СОСТОЯНИЯ (Г). КРАЕВЫЕ ЗАДАЧИ 473
Следует заметить, что в общем случае, когда В Ф 0, к урав-
уравнению E.71) можно применить процесс последовательных при-
приближений, причем каждое приближение сводится к вычислению
интеграла вида E.72). Как мы указывали в гл. 1 (§ 4, п. 4),
в ряде случаев вычисление интеграла вида E.72) можно вы-
выполнить до конца в квадратурах.
6. Решение уравнения E.71) можно представить в следующем
виде (гл. 3, § 13, п. 3):
V (z) = 1 j J (Qx (?, z) F' (?) + Щ Tffi) dl dr\, E.72a)
E
где Qt(z, ?) и Q2(z, ?)—основные ядра уравнения E.49) (гл. 3,
§ 8, п. 2). В силу E.7) и E.52)
F' (z) = 4- Va K3/4 dz f#) - 4- аК1/4 (X* - iX*). E.726)
Применяя формулы Грина и учитывая E.69) и формулы (8.16)
и (8.17) гл. 3, легко докажем равенства
г г- 2"
j jol(?,z)yaK^
Е Е E.72в)
Интеграл в правой части первого равенства следует понимать
в смысле главного значения по Коши.
Внося E.726) в правую часть равенства E.72а) и учитывая
{5.72в), приходим к следующей формуле:
Sb E.72г)
где X — заданное поле поверхностных сил, a U(z, ?)— комплекс-
комплексная вектор-функция вида
Ж
+ 5J (Й1 (Е> z) д,п + 0^7) Sgn). E.72т)
Так как (гл. 3, § 8, п. 2)
QI(?,z) = X1(t,*)+tX,tt,z)l
474 гл- 6- ВОПРОСЫ БЕЗМОМЕНТНОЙ ТЕОРИИ ОБОЛОЧЕК
где Xi и Х2 — элементарные решения уравнения^ w + B(t)w =
= 0 с полюсом в точке z, то
U(?, z)=U1(M, iV)+iU2(M, N), E.72e)
где
It, (M, N) = 4 Re {2 [К (М)Г1/4Х; (?, г) д^п (М) -
- KJ)(yL^ dt [К, (?, z) /^Ж) (К (ВД! (/ = 1, 2). E.72ж)
Таким образом, формулы E.72ж) дают на замкнутой поверх-
поверхности S поля смещений Ui(M, N) и U2(M, N) относительно пере-
переменной точки М, имеющие полярные особенности в точке N
(? и z являются сопряженно изометрическими комплексными
координатами точек М ж N соответственно).
В силу E.50) и E.19) мы можем написать
Т(!)(N) = Re Г * —U' (z) ^т-] + ZR(l)(N), E.72з)
где
Л Г Л J_ П
E.72и)
Как это видно из формулы E.72з), вектор Ri(M) не зависит
от выбора координатной системы и от поля усилий. Он зависит
лишь от направления 1 и формы поверхности. Простые выклад-
выкладки показывают, что
к«) = "ж"лГ Хп'
т. е. этот вектор перпендикулярен к вектору Родрига ns и при-
принадлежит сопряженному относительно s направлению s*, при-
причем его направление и длина определяются из равенств R(z> =-
= — ^(^Л + TsS), R(o = —^4к—• Внося в правую часть ра-
равенства E.72з) выражение E.72г) и учитывая E.72е), получим
Т(о (ДО = Та (N) Р(а0 (Л0 + ZR@ (N), E.73)
где
Та (N) = J J Ua (М, Л0 X (М) й^м (а = 1, 2), E.73а)
s
E.736)
§ 5. УСЛОВИЯ РЕАЛИЗАЦИИ СОСТОЯНИЯ (Г). КРАЕВЫЕ ЗАДАЧИ 475
причем
Ux (M, N) = 1 -JttAM. N)cosrp(N)-n2 (M,
У a (N) Т/К (N)
E.73в)
U2(M,N)= {ttx(Jlf,JVKi
Ka(iV)i/K(iV)
Векторы P^z) и Pfj) зависят только от точки поверхности и ка-
касательного к ней направления 1. Поэтому векторные поля
UaCf, N) (а = 1, 2) также инвариантны относительно выбора
системы координат, причем для всякой фиксированной точки N
они являются полями смещений на замкнутой выпуклой поверх-
поверхности. Назовем эти поля основными полями (с полюсом в точ-
точке N) замкнутой выпуклой поверхности. Пользуясь формулой
(гл. 2, § 6, п. 6)
можем написать:
ns = nzz' + ib? = - Н (r,z' + г-z') +
+ /I(e-**rjz' + еЩ*') - -Hs
т. е.
. E.73г)
где ns — вектор Родрига, соответствующий касательному направ-
направлению s, перпендикулярному к 1 A X s = п). Легко найдем те-
теперь также следующую формулу (см. гл. 5, § 7, п. 9)
где s# — касательное направление, сопряженное с s.
Вводя в рассмотрение комплексное диодное произведение
(диадное поле)
QU) (M, N) = Ua (M, N) Pf,, (N), E.74)
формулу E.73) можем записать в виде
И E-74а)
s
Здесь под знаком интеграла фигурирует комплексный вектор
Q@ (И, N) X (М) = [U« (M, N) X (М)] Pf,, (iV). E.746)
476 ГЛ- 6- ВОПРОСЫ БЕЗМОМЕНТНОЙ ТЕОРИИ ОБОЛОЧЕК
Следует заметить, что диады Q(t) (M, N) являются инвариантами
относительно выбора системы координат на поверхности. Бу-
Будем называть Qlt)(M, N) диадным ядром замкнутой выпуклой
оболочки.
Формула E.74а) с помощью диадного ядра выражает поле
усилий T(i) состояния (Т), соответствующее любому заданному
распределению поверхности сил X. Разумеется, поле спл X удов-
удовлетворяет условиям E.57).
Заметим, что если поле X имеет потенциал, т. е. X выража-
выражается по формуле вида E.10), то
И
s
9.A) (М, N) X (М) dSM = 0. E.74в)
Следовательно, при потенциальной внешней нагрузке поле уси-
усилии замкнутой выпуклой оболочки задается по формуле
T(l)(N) = ZR(l)(N). E.74г)
7. Формулы E.72г) и E.74а) обобщаются и на случай вы-
выпуклой оболочки с отверстиями. Мы будем считать, что такая
оболочка представляет собой часть некоторой замкнутой регу-
регулярной оболочки, диадное ядро и основные поля смещений ко-
которого будем обозначать по-прежнему через Q{i)(M, N) и
\Ха{М, N) соответственно.
Используя формулу C.21) и учитывая особенности, имею-
имеющиеся у векторов 11а (М, N) в точке N, легко получим следую-
следующую формулу:
Т(„ (N) = J J Q(o (М, N) X (М) dSM + f QU) (M, N) T(n (M) dSM,
S L
E.75)
где 1 — некоторое касательное направление во внутренней точке
N, а V — тангенциальная нормаль к L в точке интегрирования М.
Следует заметить, что если N лежит вне S + L, то правая
часть формулы E.75) будет равна нулю, а если N е L, то пра-
л
вая часть будет равна — Т(г) (N), причем надо иметь в виду, что
в последнем случае I — некоторое заданное касательное направ-
направление в точке N, а не тангенциальная нормаль к L.
Если поле сил X имеет потенциал, то в силу E.10) и E.41)
имеем
UX = Re [u0Z
§ 5. УСЛОВИЯ РЕАЛИЗАЦИИ СОСТОЯНИЯ (Г). КРАЕВЫЕ ЗАДАЧИ 477
Применяя формулу Грина, получим
Иих dS=Re ЯI (ww) dxdy=~Re {-5ГI w wd'z]~
Таким образом, при наличии потенциального поля X формула
C.21) принимает вид
f U(T —ZR(i))<fc = 0. E.76)
Эта формула равносильна равенству
Ro j-i- [ ww' dz\ = 0, E.76а)
где w' имеет вид E.20), a w — произвольное решение уравне-
уравнения E.42).
Таким образом, при наличии потенциального поля, поверх-
постных сил на выпуклой оболочке с отверстиями реализуется
состояние (Т) тогда и только тогда, когда вектор Т — ZR(I, орто-
ортогонален вдоль границы оболочки любому полю смещений U сре-
срединной поверхности.
В частности, это условие всегда выполняется, если
T = ZR{1) (на L). E.766)
Из формулы E.76) теперь нетрудно получить следующее-
важное равенство:
Т@ (N) = f Q@ (M, N) [Т (И) - Z (M) Rao (M)] dsM +
E.77)
выражающее поле усилий Т(() состояния (Т) при наличии па
выпуклой поверхности потенциальной нагрузки
Разумеется, предполагается, что при этом выполнено равенства
E.76). В формуле E.77) под знаком иптеграла V обозначает
тангенциальную нормаль к L в точке М.
В случае незамкнутой выпуклой оболочки или, как будем
еще говорить, оболочки с краями или отверстиями, установле-
установление выполнения условий C.21) и E.76) затрудняется тем, что
поле U в таком случае не сводится к тривиальному полю сме-
478 гл- 6- вопросы безмоментной теории оболочек
щений. Однако в ряде частных случаев все же можно убедиться,
выполняются эти условия или нет.
Рассмотрим, например, случай наличия потенциального поля
внешних нагрузок и предположим, что контурные усилия рав-
равны нулю: Т = 0 (на L). В таком случае равенство E.76) при-
принимает вид
z.
Это равенство в силу формул E.51) и E.72и) принимает вид
^Ке[тИ^)ф-0 («'=?). E.79)
Рассмотрим краевую задачу
d-w + Aw + Bw = Q (в G),
Re[iwz'] = f (на Г). E.80)
Если эта краевая задача при любой правой части допускает
решение, то условие E.79), очевидно, не будет выполняться.
Но индекс этой задачи п — 1 — т. Следовательно, в случае одно-
связной области (т — 0) ге = 1 и задача всегда имеет решение
в силу теоремы 4.11.
Таким образом, при наличии потенциальной нагрузки на вы-
выпуклой оболочке с одним отверстием не может реализоваться со-
состояние (Т), если Z?^0uT = 0HaL.
Следует отметить, что при указанных условиях, за редкими
исключениями, и на выпуклой оболочке с многими отверстиями
не может реализоваться состояние (Т).
8. Необходимое и достаточное условие реализации состоя-
состояния (Т) можно сформулировать еще иначе. Для этой цели об-
обратимся к формуле E.20). Как видно из этой формулы, совме-
совместимое с состоянием (Т) поле (X, Т) удовлетворяет следующе-
следующему условию: правая часть равенства E.20), которая содержит
контурные усилия Т и нормальную составляющую Z поверхно-
поверхностных сил, представляет собой граничное значение некоторого
непрерывного в G + Г решения w' уравнения E.3). Нетрудно
показать, что выполнение этого условия не только необходимо,
но также достаточно для реализации состояния (Т).
Если мы теперь на поле X наложим некоторое потенциальное
о
поле X с потенциалом Vo = ZJK, то правая часть уравнения
E.5) не изменится, а формула E.20) примет вв(щ
% ^±b E.81)
2"l/K 2
о
Таким образом, для нового поля (X + X, Т) уравнение для функ-
функции w' остается прежним, а изменяется только краевое условие.
§ 5. УСЛОВИЯ РЕАЛИЗАЦИИ СОСТОЯНИЯ (Г). КРАЕВЫЕ ЗАДАЧИ 479*
Новое краевое условие содержит вместо Z сумму Z + Zt, причем
еще раз подчеркиваем, что функция Zo в правую часть диффе-
дифференциального уравнения не входит.
В связи с этим естественно возникает следующая задача,
которую в дальнейшем назовем задачей Е.
Задача Е. Пусть задано некоторое поле (X, Т). Отыскать
потенциальное поле X так, чтобы для поля (Х + Х, Т) реализо-
реализовалось состояние (Т).
Эта задача, очевидно, сводится к отысканию функции Zo точ-
точки поверхности по условию: правая часть равенства E.81) на
границе Г области G должна представлять собой граничное зна-
значение некоторого непрерывного в G + T решения w' уравнения
E.5). Правая часть этого уравнения имеет вид E.7) и, следова-
следовательно, зависит только от поля X, но не зависит от искомого
потенциального поля X.
Нетрудно убедиться, что эта задача в матемахическом отно-
отношении является не вполне определенной. Дело в том, что если
о
задача допускает хотя бы одно решение X, то она имеет и беско-
нечно много решений. В самом деле, вместе с полем (Х + Х, Т)
условиям задачи удовлетворяет любое поле вида (Х + Х + Х, Т),
где X — любое потенциальное поле, потенциал которого обраща-
обращается в нуль всюду на границе оболочки.
Мы теперь займемся изучением задачи Е, оставляя пока в
стороне вопрос об условиях, обеспечивающих единственность ее
решения. К этому вопросу мы вернемся в следующем пункте.
Из формулы E.81) следует, что функция w', соответствую-
о
щая полю (X + X, Т), является решением краевой задачи
d-w' - Aw' — Bw' = F (в G), E.82)
Re[ui/z'2] = / (на Г),
где
|[^l ^^ (на Г). E.83)
ds v ' v >
Следовательно, функция / однозначно определяется с помощью-
заданного поля контурных усилий Т.
Таким образом, правые части F и / полученной задачи, кото-
которая представляет собой частный вид обобщенной краевой задачи
Римана — Гильберта, зависят исключительно от заданного ноля
(X, Т). Если эта задача, которую мы назовем задачей Е*, не
имеет решения, то поставленная задача Е, очевидно, также не
имеет решения. Если же задача Е* имеет решение (хотя бы од-
одно) , то задача Е будет иметь решения, притом бесконечное
множество.
480 ГЛ- 6- ВОПРОСЫ ЕЕЗМОМЕПТИОЙ ТЕОРИИ ОБОЛОЧЕК
В самом деле, приравнивая на границе Г области G правую
часть равенства E.81) граничным значениям решения w' задачи
Е#, мы найдем граничные значения функции Zo:
Zo = ^4— Tnz - 2V?z> w' - Z (на L). E.84)
iz' у a z'
Продолжая теперь эту функцию из контура L внутрь поверхно-
поверхности произвольным образом (достаточно потребовать только, что-
чтобы соответствующее потенциальное поле было ограниченным),
мы получим потенциальное поле X, которое обладает тем свойст-
о
вом, что поле (X + X, Т) допускает поле усилий, которое вычис-
вычисляется согласно E.19) по формуле
Т@ = 2Rc [-L W (*) -§-';] + (Z + Zo) R(o. E.85)
Как видно, это поле представляется в виде суммы
Т@ = Т('г) + Т(°г), E.86)
где
Т('„ = 2Re [4- W (z)-f-rj + ZHW, E.87)
Т(о = Z0R(/). E.88)
Таким образом, первое поле усилий ^f), как видно из E.87),
определяется исключительно заданным полем (X, Т), а второе
поле усилий ТB) принимает заданные значения только на гра-
границе оболочки. Внутри же оболочки в качестве поля Т\ц мы
можем взять любое иоле вида E.88), где Zo — любая функция
класса Di>v, p > 2 (следовательно, она принадлежит классу
С(р~2)/р), которая принимает заданные значения E.84) на гра-
границе оболочки. Для того чтобы существовало хотя бы одно та-
такое продолжение функции Zo, достаточно предположить, что вы-
выполняются следующие условия: 1) граница оболочки L состоит
из кусочно гладких контуров класса Cjl,v .....v^ 2) компоненты
вектора усилия принадлежат классу CV(F) и 3) Z e DitP(S + L),
р>2 (см., например, [44а], [61а]).
Таким образом, потенциал Zo существует при весьма широ-
широких предположениях относительно данных задачи.
Переходим теперь к рассмотрению вопроса разрешимости за-
задачи Е*, которая есть частный случай общей краевой задачи А,
изученной в гл. 4. Индекс этой задачи равен
тг = 2(пг-1). E.89)
Рассмотрим сперва случай односвязной области (оболочка с
одним отверстием). Тогда тп = 0 и п = —2. Следовательно,
§ 5. УСЛОВИЯ РЕАЛИЗАЦИИ СОСТОЯНИЯ (Г). КРАЕВЫЕ ЗАДАЧИ 481
в силу теоремы 4.5 однородная задача
d-w' — Aw' — Bw' = 0 (в G), Re [iw'z'2] = 0 (на Г) E.90)
не имеет решения, а неоднородная задача разрешима лишь при
выполнении следующих трех условий:
\\Ja)T(l)ds + j fu°)XdS' = O (/=1,2,3), E.91)
L "" S
где U0) — поля смещений, соответствующие линейно независи-
независимым решениям сопряженной однородной задачи
д-w + Aw + Bw = 0 (в G), Re [iwz'\ = 0 (на Г). E.92)
Надо теперь рассмотреть две возможности: 1) все U0) — триви-
тривиальные поля смещений и 2) хотя бы одно из них — нетривиаль-
нетривиальное поле смещений. В первом случае равенства E.91) сводятся
к условиям равновесия статики твердого тела и, следовательно,
их выполнение является естественным требованием, которому мы
всегда должны подчинять поле (X, Т). В этом случае задача Е*
всегда допускает решение и, следовательно, задача Е также всег-
всегда имеет решение. Во втором же случае задача Е* не всегда
допускает решение и, следовательно, задача Е также не допуска-
допускает решения для любого заданного поля (X, Т).
В случае двусвязной области (выпуклая оболочка с двумя
отверстиями) та = 1 и л = 0. В силу теоремы 4.6 в этом случае
однородная краевая задача Е* либо не имеет ненулевого реше-
решения A = 0), либо допускает одно линейное независимое решение
A=1). В первом случае решение неоднородной задачи Е* всег-
всегда существует и определяется однозначно. Следовательно, имеет
решение и задача Е при любом заданном поле (X, Т). Во втором
же случае A = 1) неоднородная задача Е* будет иметь решение
лишь при выполнении условия
f f VX'ds + f UT(l) ds = 0, E.93)
где U — ноле смещений, соответствующее решению сопряжен-
сопряженной однородной задачи E.92), которая в рассмотренном случае
имеет одно ненулевое решение. Может случиться, что поле U —
тривиальное. Тогда условие E.93), очевидно, выполняется, как
одно из условий равновесия статики твердого тела. Если же по-
поле U — нетривиальное, то на заданное поле (X, Т) мы должны
наложить дополнительное требование E.93). Это означает, что
задача Е не допускает решения в этом случае при любом задан-
заданном поле (X, Т).
Переходим к рассмотрению случая произвольной многосвяз-
многосвязной области (т>1). Тогда индекс задачи Е*, равный п =
= 2(т— 1), больше т— 1, и в силу теоремы 4.10 неоднородная
31 И. Н. Векуа
482 гл- 6- вопросы безмоментной теории оболочек
задача всегда разрешима. Следовательно, в этом случае задача Е
допускает решение при любом способе задания поля (X, Т).
Таким образом, мы пришли к следующим результатам:
Для выпуклой оболочки с числом отверстий, большим двух,
задача Е допускает решение для любого заданного ноля (X, Т).
Для выпуклой оболочки с одним или двумя отверстиями задача
Е, вообще говоря, не допускает решения для любого заданного
поля (X, Т). Однако для некоторых форм оболочек и отверстий,
а такоке в зависимости от конфигураций последних задача Е мо-
может допускать решение при любом способе задания поля (X, Т).
Вообще, случаи неразрешимости задачи Е встречаются гораз-
гораздо реже, чем случаи разрешимости.
Предложенный в этом пункте метод изменения нагрузки
о
(X, Т) с помощью добавления потенциального поля X можно
назвать методом потенциального нагруокения, я X —¦ регулирую-
регулирующей потенциальной нагрузкой.
9. Сделаем теперь несколько замечаний об условиях единст-
единственности решения задачи Е. Таких условий, очевидно, можно
указать много. Но вместе с тем нужно иметь в виду, что особен-
особенно сильно регламентировать способы выбора регулирующего по-
о
тенциального поля X нецелесообразно. К решению этого вопроса
следует подходить с точки зрения практической целесообразно-
целесообразности. При решении конкретной задачи каждый раз надо выбирать
практически наиболее простые и доступные приемы построения
о
поля X и, что особенно важно, следует учесть возможности ре-
о
ального нагружения оболочки дополнительно силами X. Наряду
с этим надо обеспечить выполнение условий устойчивости обо-
оболочки. Необходимо, чтобы суммарная нагрузка всегда оставалась
значительно ниже критической, при которой происходит потеря
устойчивости оболочки.
Мы теперь укажем все же два общих способа построения
поля X. Одним из них является отыскание по заданному гранич-
граничному значению потенциала Vo такого потенциального поля X,
для которого реализуется минимум интеграла
XW, E.94>
где р — некоторая положительная весовая функция.
В силу формулы E.10) имеем:
J = ^ pbdS = jj§ (kP*V2 + -L PK*haSiVcFVpF ) dS, E.95)
s s
где
& M E.96)
§ 5. УСЛОВИЯ РЕАЛИЗАЦИИ СОСТОЯНИЯ (Г). КРАЕВЫЕ ЗАДАЧИ 483
В системе координат в линиях кривизны
hu = -4-, ^22 = ^ А" = Л« = О. E.97)
Дифференциальное уравнение Эйлера, соответствующее постав-
поставленной проблеме, имеет вид
Это есть уравнение эллиптического типа (в случае поверхности
положительной кривизны). Поэтому для него, учитывая, что
р > 0, задача Дирихле всегда допускает решение, и притом
единственное. Граничные значения искомого потенциала V = -=Д,
которые вычисляются по формуле E.84), в случае многосвязной
области имеют вид (например, при т > 1)
V=V0 + с, V, + ... + c3m_3F3m_3, - E.99)
где F3, Vi, ..., F3m-3 — вполне определенные линейно независи-
независимые функции, которые зависят только от заданного поля (X, Т),
a Ci, ..., Сзт-а — произвольные вещественные постоянные.
К формуле E.99) мы придем, если учтем, что однородная крае-
краевая задача Е* допускает Зт — 3 линейно независимых решений.
Но произвольные постоянные ск, очевидно, однозначно определя-
определяются из рассматриваемой вариационной задачи. Таким образом,
однозначность решения задачи Е в этом случае всегда обес-
обеспечена.
Предложенный выше способ, позволяющий однозначно опре-
определять потенциальное поле X, имеет то преимущество, что при
этом гарантируется в определенном смысле минимальность доба-
добавочной потенциальной нагрузки, обеспечивающей безмоментность
видоизмененного поля (Х + Х, Т). Зная это поле, мы можем су-
судить о степени и характере отклонения заданного поля внешних
нагрузок (X, Т) от совокупности полей безмоментных нагрузок.
В качестве характеристики этого отклонения можно принять
число, равное минимуму интеграла E.94) (например, при весе
р — 1), которое, очевидно, однозначно определяется посредством
заданного поля (X, Т). Если это число окажется достаточно ма-
малым по сравнению с значением того же интеграла для заданной
нагрузки X, то это можно рассматривать как критерий практиче-
практической применимости безмоментной теории к расчету оболочки при
заданном распределении нагрузки (X, Т).
К сожалению, практическая эффективность описанного выше
способа ограничивается тем, что, во-первых, надо определять
граничные значения искомого потенциала Fo с помощью реше-
решения граничной задачи E.82) и, во-вторых, требуется решить
-31*
-484 ГЛ' 6- ВОПРОСЫ БЕЗМОМЕНТНОЙ ТЕОРИИ ОБОЛОЧЕК
краевую задачу Дирихле для довольно сложного уравнения
E.98). Однако следует сказать, что в ряде важных для практики
случаев эти задачи решать нетрудно, особенно последнюю, при-
применяя к соответствующей вариационной задаче, например, пря-
прямые методы. Если срединная поверхность оболочки является вы-
выпуклой поверхностью 2-го порядка, то задача E.82) приводится
к задаче Римана — Гильберта для аналитических функций, ко-
которую в ряде случаев можно решить эффективно [60а].
В практических задачах продолжение функции Zo можно вы-
выполнить следующим образом. Фиксируем некоторую узкую гра-
граничную полосу S' оболочки и продолжаем функцию Z, по
непрерывности из границы внутрь поверхности так, чтобы Zo = О
вне граничнох! полосы S'. При достаточной гладкости границы
оболочки и граничных значений функций Zo такое продолжение
всегда возможно, причем внутри оболочки можно обеспечить
сколь угодно высокую степень гладкости функции Zo [44а]. [54].
В таком случае вся добавочная нагрузка будет приложена вбли-
вблизи краев оболочки, что повлечет за собой, вообще говоря, значи-
значительное искажение картины распределения напряжений вблизи
границы, но зато вдали от краев расхождение обычно не выхо-
выходит за пределы допустимой погрешности. Надо сказать, что это
положение подтверждается примерами инженерной практики.
Расчеты большинства инженерных конструкций производятся по
безмоментной теории, причем в необходимых случаях в резуль-
результаты вносятся поправки на так называемый краевой эффект j 50].
В нашем случае этому соответствует поле усилий Т"г) = Z0R(n,
приложенное к узкой пограничной полоске. (В связи с этим во-
вопросом см. также [74].)
10. Сущность метода регулирующих нагружений состоит
в том, что он позволяет внести в заданное распределение внеш-
внешних нагрузок такое изменение, которое приводит к новому рас-
распределению, совместимому с состоянием (Т). В п. 7 мы убеди-
убедились, что этого можно добиться почти всегда путем добавочного
потенциального нагружения. Но, очевидно, это не единственный
способ решения указанной задачи. В этом и в следующих пунк-
пунктах мы укажем другие способы, которые позволяют достичь xoit
же цели несколько иными путями.
Если обратимся к формуле B.20), то увидим, что поле X
зависит не только от статических величин, каковыми являются
объемные и поверхностные силы, но также от величин, характе-
характеризующих геометрические и механические (физические) свойст-
свойства оболочки, как средняя и главная кривизны Н и К срединной
поверхности, а также толщина и плотность материала оболочки,
которые, очевидно, содержатся в интегральном члене правой ча-
части равенства B.20). Изменяя соответствующим образом эти
характеристики, в ряде случаев мы можем добиться, чтобы внеш-
внешняя нагрузка (X, Т) была безмоментной. Для этого может пона-
§ 5. УСЛОВИЯ РЕАЛИЗАЦИИ СОСТОЯНИЯ (Т). КРАЕВЫЕ ЗАДАЧИ 485
добиться некоторое видоизменение форм внешней и нижней по-
поверхностей, а иногда также срединной поверхности, равно как и
рассмотрение оболочек переменной плотности. Но эти обстоя-
обстоятельства не могут служить серьезным препятствием для приме-
применения указанного метода, так как развитая выше теория пол-
полностью прилагается как к оболочкам переменной плотности, так
и к оболочкам переменной толщины. Безмоментная теория тем и
выгодно отличается от общей моментной теории оболочек, что
она базируется на точных уравнениях равновесия сплошной сре-
среды, причем при выводе этих уравнений не приходится пользо-
пользоваться никакими гипотезами, кроме основных законов статики
твердого тела и гипотезы о сплошности материала оболочки. По-
Поэтому указанная теория может быть применена к любой сплош-
сплошной оболочке независимо от того, составлена она из однородного
или неоднородного материала.
Нетрудно также видоизменить уравнения безмоментной тео-
теории таким образом, чтобы они охватывали и случаи оболочек
переменной толщины. Пусть z — h+(x, у) и z = h~(x, у)— урав-
уравнения верхней и нижней поверхностей оболочки. Предположим,
что эти поверхности по форме незначительно отличаются от сре-
срединной поверхности. Иными словами, будем считать, что произ-
производные 1-го порядка функций h+ и h~ относительно переменных
х и у настолько малы по величине, что их квадратами и более
высокими степенями можно пренебречь. При этих условиях, по-
повторяя способ вывода уравнения B.19) (§ 2, п. 3) применитель-
применительно к оболочке, ограниченной поверхностями z — h+ (х, у) и z =
= h~(x, у), получим уравнение, которое от прежнего отличается
лишь тем, что в нем свободный член будет иметь вид
л-
где Р+ и Р~ — силы, приложенные к верхней и нижней поверх-
поверхностям оболочки соответственно, F — массовая сила, 1 / -^- и
— являются значениями 1 — 2Hz + Kz2 при z = h+ и z =
= h~ соответственно. Если оболочка является в достаточной мере
тонкой, то можем положить
h+
Fdz. E.100а)
л—
Наконец, если в качестве массовой силы к оболочке приложена
лишь сила тяжести, то
E.1006)
486 гл- 6- ВОПРОСЫ БЕЗМОМЕНТНОЙ ТЕОРИИ ОБОЛОЧЕК
где "/ — вес оболочки на единицу площади, р — плотность мате-
материала оболочки, g — ускорение силы тяжести.
Величины у, р и h+ — h~ иногда целесообразно не задавать
заранее, а отыскивать их, считая искомыми функциями и подчи-
подчиняя внешнюю нагрузку (X, Т) условию безмоментности. Этим
путем иногда достигается не только удовлетворение условий без-
безмоментности, но при некотором специальном законе распределе-
распределения поверхностных сил Р+ и Р~ обеспечивается также реализа-
реализация определенного специального вида распределения поля уси-
усилий внутри оболочки [84].
Рассмотрим теперь следующую задачу.
Задача F. Пусть (X, Т)—некоторое заданное поле внеш-
внешних нагрузок. Пусть е — некоторое поле направлений на S, при-
причем \е\ = 1. Это поле, вообще говоря, не является постоянным.
*
Требуется отыскать такое скалярное поле Z на S, что поле
* * *
внешних нагрузок (X, Т), где X = X + Ze, удовлетворяет
условию безмоментности
f j" XU dS + f TU ds = 0, E.101)
~8 L
где U — любое поле смещений на S.
Для решения этой задачи мы построим полную систему (от-
(относительно S) полей смещений U4 (i = 0, 1, ...), которые под-
подчинены следующим условиям:
U*eU*edS = Ьг] (Vu = eU*). E.101a)
Такую систему можно построить следующим образом. Согласно
формулам E.41) и E.51) поле смещений можно выразить по
формуле
\ -I ( _ I \\
U = Re — 2К iUnz+ -^.аДУаК4г7у , E.102)
где U — любое (непрерывное в G + Г) решение уравнения
д-U + BU = 0. E.102а)
Построим теперь некоторую полную относительно области G
систему решений Z7»(t = 1, 2, ...) уравнения E.102а). Как стро-
строить такую систему, было указано в гл. 3 (§ 15). Подставляя 11г
в формулу E.102), мы получим определенную полную бесконеч-
бесконечную систему полей смещений U{ (i — 1, 2, ...). В таком случае
условие E.101), очевидно; эквивалентно следующей бесконечной
системе равенств:
f fxUtd5+ f TUids = 0 (? = 1,2,...). E.1026)
§ 5. УСЛОВИЯ РЕАЛИЗАЦИИ СОСТОЯНИЯ (Г). КРАЕВЫЕ ЗАДАЧИ 487
Подставляя сюда X = X + Ze, получим:
uie = bl (i='.l, 2, ...;#!, = eU4), E.102в)
где
bi = — j j XV idS — \ TUids (? = 1,2,...). ,E.102r)
s l.
Очевидно, числа b{ заданы, ибо по условию нагрузка (X, Т) за-
задана наперед. Таким образом, отыскание скалярного поля Z мы
привели к специальной проблеме теории моментов E.102в). Что-
Чтобы найти решение этой проблемы, целесообразно подчинить вы-
выбор полной системы полей Vt некоторым специальным условиям.
Не исключена возможность, что существуют линейно нёзави-
„ тт* тт*
симые поля смещении Uo, ..., U^, которые ортогональны полю е:
еи; = 0 (; = 1,2,..., к). E.102Д)
например, если е — постоянное поле, то равенствам E.102д)
удовлетворяют три линейно независимых тривиальных поля из-
изгибаний. Можно показать, что в общем случае число к решений
задачи E.102д) не превышает трех. В частности, может случить-
случиться, что к — 0. Выбираем теперь полную систему полей U{ так,
чтобы первые к полей Ui, .. ., U^ были линейно независимые
решения задачи E.102д), разумеется, если таковые существуют.
Остальные поля Vh+1, Uft+a, .. . мы можем подчинить условиям
E.101а). Этого всегда можем добиться, если применим к функ-
функциям eUj = у.(] = к + 1, к + 2)^ процесс ортогонализации Шмид-
Шмидта (эти функции линейно независимы; в противном случае по-
последовательность полей Vj (/ = 1,2,...) содержала бы линей-
линейно зависимые элементы). При этих условиях система равенств
E.102в), очевидно, эквивалентна следующей системе:
j j XV*dS + f TV*ds = 0 (; = 1, ..., ft), E.102e)
L
' Z<p]dS = b* (/ = ft> 1, ft + 2, ...), E.102ж)
где
b* = -§§ X\J*dS - f T(,,U*ds. E.102з)
S L
Формальное решение системы равенств E.102ж), очевидно, вы-
выражается рядом
2
b*<p} + Z, E.102и)
488 гл- 6- вопросы безмоментной теории оболочек
где Z — произвольная функция точки поверхности, ортогональ-
ортогональная системе функций ф^-: (Z, ф^) = 0 (/ = 1, 2, ...). Надо еще по-
показать, что этот ряд сходится (достаточно установить сходимость
в некотором ZI|P, р > 2). Мы будем предполагать это, пе оста-
останавливаясь на исследовании условий сходимости.
Таким образом, мы пришли к следующему результату:
Задача F разрешима тогда и только тогда, когда заданная
нагрузка (X, Т) удовлетворяет условиям E.102е). При этих ус-
условиях задача имеет решения, которые выражаются по форму-
формуле E.102и).
В частности, если поле направлений е таково, что задача
E.102д) не имеет решения, т. е. не существует поля смещения,
ортогонального полю направлений е, то в этом случае задача F
всегда разрешима (интересно указать примеры реализации этого
случая).
Применим теперь полученные выше результаты к случаю,
когда поле е есть поле вертикальных направлений, а искомое
скалярное поле Z равно весу оболочки f ~{h+ + h~)pg. В этом
случае к = 3, причем равенство E.102е) составляет часть усло-
условия равновесия абсолютно твердого тела.
Таким образом, мы пришли к следующему результату:
Если на поверхности S задано поле нагрузок (X, Т), удов-
удовлетворяющее условиям E.102е), где к = 3, a Ui, U2, U3 — ли-
линейно независимые тривиальные поля смещений, ортогональные
вертикальному полю направлений, то оболочка является безмо-
безмоментной, если ее вес определяется по формуле
у == (h+ + ът) pg = 2 ?>*ср. + Z E.102к)
i=4 J
где функция Z, ортогональная системе фл-, должна быть подобра-
подобрана так, чтобы у > 0. Если обеспечение выполнения условия f > 0
окажется невозможным, то это означает, что нельзя добиться
безмоментности оболочки путем изменения веса.
Заметим, что аналогичная задача об обеспечении безмомент-
постп оболочки путем соответствующего выбора ее веса рассмат-
рассматривалась ранее другими авторами для разных частных слу-
случаев [84].
11. В предыдущих пунктах мы указали способы решения ин-
интересующей нас задачи путем внесения определенного изменения
в поле поверхностных сил X, считая распределение контурных
усилий Т по какому-то произвольному закону полностью задан-
заданным. В этом пункте мы рассмотрим случаи, когда задачу можно
решать за счет частичного задания распределения контурных
усилий Т на границе оболочки. Считая поле X заданным по про-
§ 5. УСЛОВИЯ РЕАЛИЗАЦИИ СОСТОЯНИЯ (Т). КРАЕВЫЕ ЗАДАЧИ 489
изволыюму закону, мы будем задавать в каждой точке контура
лишь один компонент усилия Т, а другой отыскивать по усло-
условию, что поле (X, Т) создает некоторое состояние (Т).
Пусть t — некоторое касательное направление в граничной
точке поверхности (Itl = 1), составляющее с тангенциальной
нормалью I угол ф. Обозначая проекцию усилия Т на t через
Т(«), рассмотрим краевое условие
Тт еэ N, cos ф + Hi sin ф = / (на I), E.103)
где / — некоторая заданная функция точки контура L, причем
мы будем во всем дальнейшем предполагать, что 1) ср<= CW{L),
2) f^Cv(L), 0 < v ^ 1, а контур L состоит из конечного числа
гладких контуров класса С\. Пользуясь формулой E.19), усло-
условие E.103) мы можем записать еще так:
Re «;'O0-^7p \ = g (на i), E.104)
где
E.105)
причем здесь f — перпендикулярное к t касательное к S направ-
направление: t X t' = п. Вывод равенства E.104) не представляет тру-
труда, если учесть, что
(сс = 1, 2), E.106)
dz dz\ Z~)/a ,-, Г dz dz j /r ,mN
_ _J _ _X_ Re ^,_J. (o.I07)
Таким образом, краевое условие E.103) приводит к обобщенной
задаче Римана—Гильберта вида E.104). Такого рода задачи
мы уже рассмотрели в предыдущей главе в связи с некоторыми
геометрическими задачами (гл. 5, § 10). Поэтому на подробно-
подробностях доказательства здесь не будем останавливаться. Мы вос-
воспроизведем лишь некоторые полученные ранее результаты с не-
необходимыми дополнениями.
Мы будем считать, что направление t принадлежит классу 1
(гл. 5, § 10, п. 5). В таком случае индекс задачи E.104) равен
»-2(л»—1). E.108)
Поэтому в случае выпуклой оболочки с одним отверстием (т =
= 0) п — —2 и в силу теоремы 4.12 однородная задача не имеет
решения, а неоднородная задача разрешима лишь при выполне-
выполнении трех условий вида
J fu(tj)ds + J J U(j)X dS = 0 (/ = 1, 2, 3), E.109)
490 ГЛ. 6. ВОПРОСЫ БЕЗМОМЕНТНОЙ ТЕОРИИ ОБОЛОЧЕК
где г4;) —проекция поля U(i) на t, причем поля U(i) (/ = 1, 2, 3)
являются решениями сопряженной однородной кинематической
задачи
ut'=0 (на ?). E.110)
Здесь может представиться два случая: 1) все поля Uw яв-
являются тривиальными и 2) по крайней мере одно из них нетри-
нетривиальное. В первом случае равенства E.109) являются условия-
условиями равновесия статики твердого тела. Следовательно, в этом
случае краевая задача всегда имеет решение. Во втором же слу-
случае задача, очевидно, не всегда разрешима. Для выпуклой обо-
оболочки с двумя отверстиями (го = 1) д = 0 и в силу теоремы 4.6
могут представиться два случая: 1) либо неоднородная задача
E.104) всегда разрешима, а соответствующая однородная задача
не имеет нетривиального решения и 2) либо однородная задача
имеет одно решение, а неоднородная задача разрешима лишь
при выполнении условия
[futds+ f fuXdS = O, E.111)
L S
где U — решение (нетривиальное) задачи E.110). Здесь особо
следует отметить тот случай, когда поле U — тривиальное.
В этом случае равенство E.111) совпадает с одним из условий
равновесия статики твердого тела и, следовательно, задача всег-
всегда имеет решение.
Наконец, в случае го > 1 индекс задачи п = 2(т — 1) больше
т— 1 и в силу теоремы 4.10 неоднородная задача E.104) всегда
имеет решение, а соответствующая однородная задача допускает
ровно Зго — 3 линейно независимых решений. Следовательно, по-
поле усилий имеет вид
Зт—3
T(i) = Т°A) + 2 chTk(l). E.112)
Произвольные постоянные ch можно определить при помощи до-
добавочных условий точечного типа, задавая усилия Т^ на к внут-
внутренних точках Mi, ..., Mh и на к' граничных точках М 1а ...
...,Mk>. При этом должны быть выполнены условия: 1) 2к +¦
+ к' = 2га + 1 — m n 2) на m произвольно выбранных граничных
контурах должно лежать (на каждом из них) нечетное число
фиксированных точекMj. В остальном эти точки можно выбрать
совершенно произвольно. На внутренних точках Mj мы можем
произвольно фиксировать оба компонента вектора усилия Г(;)?
а на граничных точках Mj мы можем фиксировать произвольно
лишь компонент ^(гс), так как другой компонент У(н')по условию
задан заранее.
§ 5. УСЛОВИЯ РЕАЛИЗАЦИИ СОСТОЯНИЯ (Т). КРАЕВЫЕ ЗАДАЧИ 491
Отметим, что при указанных добавочных условиях краевая
задача E.104) корректна, если т > 1, т. е. в случае выпуклых
оболочек с числом отверстий, большим двух. Для оболочек с од-
одним и двумя отверстиями эта задача, вообще говоря, не кор-
корректна.
12. Естественно теперь поставить вопрос о том, в какой мере
краевые условия вида E.104) могут быть реализованы на прак-
практике. Укажем некоторые конкретные приемы реализации такого
рода условий. Обратимся для этой цели к рассмотренным в пре-
предыдущей главе втулочным связям.
Пусть в отверстия и щели оболочки вставлены твердые или
упругие тела (втулки), ограниченные коническими поверхностя-
поверхностями, которые плотно прилегают к стенкам оболочки. Обозначим
по-прежнему поверхности этих тел через S. Если поверхности
3 — абсолютно гладкие, то силы реакции, очевидно, будут на-
направлены по нормали к 2. Следовательно, вдоль границы поверх-
поверхности S будет выполняться условие
H,^Ta%s^ = 0 (на L). E.113)
В случае достаточно тонкой оболочки можно считать, что эти
силы реакции постоянны вдоль каждой образующей поверхно-
поверхности Б. Тогда, очевидно, моменты сил реакции, а также касатель-
касательные усилия и перерезывающие силы будут равны нулю.
Другой пример реализации краевого условия E.113) полу-
получим, если будем подвергать боковые поверхности оболочки гид-
гидростатическому или гидродинамическому давлению. Если предпо-
предположить боковые поверхности абсолютно гладкими и жидкость
идеальной, то давление будет направлено перпендикулярно к бо-
боковой поверхности и, следовательно, касательные усилия будут
равны нулю, т. е. реализуется краевое условие E.113). Нужно
заметить, что в этой задаче величина давления не предполагает-
предполагается известной. Давление определяется в результате решения кра-
краевой задачи E.113), которая при наличии поверхностной нагруз-
нагрузки приводится к обобщенной задаче Римана — Гильберта следу-
следующего вида:
д-ш' — Aw' — Bw' = F (b'G),
Re [to'(z)-g-§-] = 0 (на Г). E.114)
Если к оболочке приложено потенциальное поле поверхностных
сил, то имеем однородную задачу
д-р' — Aw' — Bw' = 0_ (в G),
;'(s)-?.-gJ=O (на Г). E.115)
492 гл- 6- вопросы безмоментной теории оболочек
В случае односвязной оболочки из результата предыдущего
пункта следут, что эта однородная задача имеет лишь тривиаль-
тривиальное решение и поле усилий определяется по формуле E.75).
Нетрудно теперь пояснить также механизм осуществления
на краю оболочки условия вида
JV, в ТаЧа1, = /. E.116)
Представим себе, что в одно из отверстий оболочки вставле-
вставлена полая втулка конической формы, на внутренней поверхности
которой действуют нормальные силы, постоянные вдоль каждой
образующей. Тогда соответствующие этим силам моменты и пере-
перерезывающие силы, очевидно, равны нулю. Следовательно, вдоль
средней линии внутренней поверхности конуса приложено уси-
усилие вида E.116). Будем теперь считать, что поверхность Б ше-
шероховатая. Тогда нормальное усилие Nh приложенное к внутрен-
внутренней поверхности конуса, полностью воспринимается боковой по-
поверхностью оболочки, а касательное усилие, равное нулю на
внутренней поверхности конуса, ввиду шероховатости внешней
его поверхности, вообще говоря, не равно касательному усилию
на боковой поверхности оболочки. Поэтому на границе оболочки
будет задано лишь одно условие вида E.116). Касательное уси-
усилие Hi, которое возникает ввиду шероховатости поверхности S,
определяется из условия, что в оболочке установится безмомент-
ное напряженное состояние равновесия, совместимое с усло-
условием E.116).
Рассмотрение краевого условия общего вида E.103), когда
вместо нормального или касательного усилия в каждой точке
контура задается усилие в некотором наклонном направлении
t, имеет значение также для выяснения вопросов устойчивости
решения краевых задач с условиями вида E.113) или E.116).
Дело в том, что вследствие неабсолютной гладкости поверхностей
контакта S или некоторых других причин практически очень
трудно в точности осуществить задание нормального или каса-
касательного усилий. На самом деле, практически всегда задается
усилие в некотором наклонном направлении. Поэтому важно
выяснить, как влияет на решение задачи с краевым условием
вида E.103) некоторая малая погрешность в задании угла накло-
наклона ф. Если обнаружится, что при малой вариации этого угла ре-
решение задачи испытывает такого же порядка вариацию, то это
означает, что задача устойчива в отношении вариации угла на-
наклона направления t.
Иными словами, изучение общей краевой задачи E.103)
позволяет выяснить характер корректности задач E.113) и.
E.116). Поэтому рассмотрение этой задачи имеет не только тео-
теоретический, но и прикладной интерес (см. гл. 5, § 10, п. 5).
13. В предыдущих пунктах мы указали разные условия, обес-
обеспечивающие применимость безмоментной теории к расчету вы-
§ 5. УСЛОВИЯ РЕАЛИЗАЦИИ СОСТОЯНИЯ (Т). КРАЕВЫЕ ЗАДАЧИ 493
пуклых оболочек, нагруженных силами вида (X, Т). Эти усло-
условия накладывают определенные ограничения на характер рас-
распределения внешних нагрузок. Для замкнутых выпуклых оболо-
оболочек эти ограничения сводятся к известным условиям равновесия
абсолютно твердого тела, и следовательно, являются вполне есте-
естественными. В случае же оболочек с отверстиями эти условия
имеют более сложный вид. Они существенно суживают класс до-
допустимых нагрузок и, кроме того, практически трудно реализуе-
реализуемы. Несмотря на это, безмоментная теория широко используется
при расчете оболочек, встречающихся в технических конструк-
конструкциях, и ее выводы дают удовлетворительные практические ре-
результаты. В ряде случаев по безмоментной теории производятся
расчеты даже тогда, когда внешние нагрузки заведомо не под-
подчиняются условиям безмоментности. Это указывает на то, что не-
некоторые отступления от точного соблюдения условий безмомент-
безмоментности практически допустимы. В связи с этим естественно воз-
возникает вопрос об отыскании условий, позволяющих определять
границы практической применимости безмоментной теории обо-
оболочек.
Очевидно, если некоторая нагрузка (X, Т) является безмо-
безмоментной, т. е. удовлетворяет условию
j f XU dS + f TU ds = 0, E.117)
S JL
где U — произвольное поле смещений, то все (в известном смыс-
смысле) близкие к ней нагрузки практически можно считать также
безмоментными. Теперь вопрос состоит в том, чтобы дать более
четкую математическую формулировку определения понятия бли-
близости двух нагрузок (X, Т) и (Хо, То). На первый взгляд мо-
может показаться наиболее естественным определять близость двух
полей внешних нагрузок точечно, т. е. считать две нагрузки е-
близкими, если в каждой точке М поверхности S и ее границы L
выполняются неравенства
|Х(ЛО-Х.(ЛГ)|<в (на 5),
|Т(Ж)-Т°(М)!<8 (на i).
На самом же деле, как нетрудно убедиться, такое понятие бли-
близости не отвечает по существу физической природе явления и,
кроме того, слишком сильно суживает рамки практических при-
применений безмоментной теории. В этом отношении более целесо-
целесообразно вводить понятие s-близости с помощью интегральной
метрики
-(X0Te)||sKf|X-Xe|»ds+ f|T-T«|»iep<B.
I
494 гл- 6- ВОПРОСЫ БЕЗМОМЕНТНОЙ ТЕОРИИ ОБОЛОЧЕК
В связи с этим мы введем в рассмотрение следующее гильберто-
гильбертово пространство, которое можно назвать пространством внешних
нагрузок.
Пусть $ —множество пар (X, Т), удовлетворяющих следую-
следующим условиям:
1) X — векторное поле, заданное на поверхности S,
2) Т — векторное поле, заданное на L и удовлетворяющее
условию
пТ = 0 (вдсль L), E.118)
и
3) |(X,T)|=jJJx!(lS + JT2cfe|1/2<oo. E.119)
Неотрицательное число II (X, Т) II мы будем называть нормой эле-
элемента (X, Т).
Определив в $ операции умножения на вещественную по-
постоянную с, сложения и скалярного произведения по формулам:
с(Х, Т) = (сХ, сТ), E.120)
(X,, Т4) + (Х2, Т2) = (Х, + Х2, Т. + Т,), E.121)
(К К) = 11 XxX2 dS + f ТХТ2 ds (ft, = (Хь ТО), E.122)
S L
легко убедимся, что множество $? превратится в гильбертово про-
пространство.
Пусть U — некоторое поле смещений на поверхности S. Тогда
пара (U, U,), где Us — касательная составляющая поля U:
U. = U-(nU)n, E.123)
очевидно, является элементом $, причем множество таких эле-
элементов составляет подпространство пространства й1, которое в
дальнейшем будем обозначать через $0. Пусть $% — ортогопаль-
ное дополнение ^0 до полного пространства $. Условие ортого-
ортогональности $0 и $* выражается равенством E.117). Следователь-
Следовательно, все безмоментные внешние нагрузки (X, Т) являются эле-
элементами подпространства $#. Обозначим теперь через d(X, T)
расстояние элемента (X, Т) до пространства Я^. Это число, как
увидим ниже, определенным образом характеризует степень бли-
близости поля напряжений, соответствующего нагрузке (X, Т), к со-
совокупности безмоментных полей напряжений.
Как известно из функционального анализа, это число равно
длине проекции элемента (X, Т) на подпространство $0. Для
этого целесообразно ввести в $0 ортогональный базис.
Построив некоторую полную систему полей смещений Ч<
(i = 1, 2, ...) (см. п. 10) и рассматривая пары
en = (Un, U,,.), E.124)
§ 5. УСЛОВИЯ РЕАЛИЗАЦИИ СОСТОЯНИЯ (Т). КРАЕВЫЕ ЗАДАЧИ 495
получим полную в ®о последовательность. Мы будем считать
эту последовательность ортонормированной
(е„, в*,)зз f J VnTJmdS + f UnSUmSds = 6nm. E.125)
Как известно, этого всегда можно добиться путем применения
процесса ортогонализации. Нетрудно убедиться, что последова-
последовательность е„ представляет собой ортогональный базис в $V По-
Поэтому условие E.117) равносильно равенствам
d a (h, ei) = J J XVidS + J TUi ds = 0 ;E.126)
S L
(i = 0, 1, ...; A-(X, T)).
Таким образом, обращение в нуль всех коэффициентов Фурье
cf нагрузки (X, Т) относительно орт анормального базиса подпро-
подпространства &о является необходимым и достаточным условием
безмоментности этой нагрузки.
Однако необходимо сказать, что в такой формулировке усло-
условие мало пригодно для практического применения, так как очень
трудно убедиться, в какой мере выполняется на самом деле бес-
бесконечная система равенств E.126) в конкретных задачах. Это
затруднение возникает в особенности в тех случаях, когда на-
нагрузка (X, Т) задана графически или табличным способом. По-
Поэтому целесообразно попытаться поискать другую формулировку
указанного условия, более приспособленную для практических
применении.
Условие E.126) означает, что элемент /г = (Х, Т) простран-
пространства §! принадлежит подпространству ®*. На языке функцио-
функционального анализа это условие можно выразить в виде следую-
следующего равенства:
сЦХ,Т)Н|й-М = °, E.127)
где к*— ближайший к h элемент подпространства ®%, который
задается равенством
К=К-%с#и с« = (Л,е,). E.128)
Отсюда легко получим
/se?- E-129>
В силу этой формулы условие безмоментности E.127) приобре-
приобретает более определенный практический смысл. Оно, по существу,
означает, что нагрузку (X, Т) можно практически считать без-
моментной, если сумма квадратов ее коэффициентов Фурье d
ГЛ. 6. ВОПРОСЫ БЕЗМОМЕНТНОЙ ТЕОРИИ ОБОЛОЧЕК
относительно ортогонального базиса подпространства $0 окажет-
окажется е достаточной степени малой.
Нужно сказать, что это условие может быть пспользог.ано
практически при расчете многих конкретных оболочек. К числу
таких случаев относится довольно широкий класс оболочек, очер-
очерченных по выпуклым поверхностям 2-го порядка. Задача в этом
случае приводится к системе Коши — Римана и нетрудно по-
построить ортогональный базис е„ в явном виде.
В общем случае практическое определение числа d(X. T)
связапо с значительными математическими трудностями. Преж-
Прежде всего, трудность, очевидно, возникает при построении ортого-
ортогонального базиса е4 подпространства $0. Но в практических за-
задачах вовсе не требуется найти точное значение числа d(X. T).
Достаточно уметь лишь находить его приближения сверху, близ-
близкие к точному значению. Для этой цели можно воспользоваться
также следующим способом, не требующим фактического по-
построения ортогонального базиса.
Пусть заданная нагрузка /i = (X, Т) принадлежит сфере I:,f:
II (X, Т) II ^ М. Пусть $# —множество элементов подпространства
$*, принадлежащих Ъм. Рассмотрим теперь некоторую бесконеч-
бесконечную последовательность линейно независимых элементов h, =
= (Xj, Tj) (/ = 1, 2, ...) множества $* , которые удовлетворяют
условию: любой элемент множества $* можно приблизить с
точностью до 8 > 0 при помощи линейных комбинаций влда
cjti + ... 4- cnhn.
Определим теперь число dn из условия
dn = min
] ckhk
E.130)
Эта задача, очевидно, приводится к решению системы
п
It (hj, К) ch = (h, h}) (j = 1, . .., n).
Докажем теперь, что для любого фиксированного 8 > 0 сущест-
существует такое п, что выполняется условие
В самом деле, так как ближайший к h = (X, Т) элемент
h* подпространства Ш% принадлежит ®™, то найдется линейная
комбинация h' = c^ix + ... + c'nhn, удовлетворяющая условию
IIК — к || < е.
В таком случае для элемента hs = сА +... + cnhn, решающего
задачу E.130), имеем:
что и требовалось доказать.
§ 5. УСЛОВИЯ РЕАЛИЗАЦИИ СОСТОЯНИЯ (Г). КРАЕВЫЕ ЗАДАЧИ 497
Если, вообще, нам задана некоторая коночная или бесконеч-
бесконечная последовательность элементов (Xj, Т,) подпространства $?*г
то, очевидно, имеем
d(X, T)<eZ0(X, T) = min!l(X, T)-(XJf T,)ll.
Если заранее неизвестно относительно последовательности
(Xj, Т3), что она плотна в й, то, очевидно, мы уже не можем
судить о степени приближения d0 к d. Однако может случиться,
что число d0 окажется достаточно малым. В таком случае па-
грузку (X, Т) можно считать практически безмоментной.
В заключение заметим, что малость числа d(X, T) мы можем
обеспечить, приравнивая нулю некоторое количество п первых
коэффициентов Фурье нагрузки (X, Т):
с1 = ... = с„ = 0. E.131)
Теперь следует еще заметить, что в этих равенствах вовсе не
обязательно, чтобы поле смещений Uh удовлетворяло условиям:
E.125). Это замечание практически облегчает решение задачи,
так как оно освобождает нас от необходимости применения про-
процесса ортогонализации.
Выполнение условий E.131) можно обеспечить, например,
путем нагружения оболочки сосредоточенными силами в п зара-
заранее заданных точках поверхности. Можно указать ряд других
практических путей обеспечения выполнения равенств E.131)
[4]
32 и. Н. Векуа
СПИСОК ЛИТЕРАТУРЫ
1. Александрия Г. Н.
а) Об одной граничной задаче для обобщенных аналитических функ-
функций / Тр. Тбил. гос. ун-та.— 1955.— Т. 56.— С. 135—139.
2. А л е к с а н д р о в А. Д.
а) Внутренняя геометрия выпуклых поверхностей.— М., Гостехиздат,
1948.
б) Выпуклые многогранники.— М., Гостехиздат, 1959.
¦3. Альфорс Л. (Ah Но г s L.)
a) Conformanlity with respect to Riemannian metrics / Ann. Acad. Sci.
Fenn. Ser. A. 1.— 1955.— T. 206.— С 22.
4. Белендорф (Behlendorf E.)
a) Tiber Randwertprobleme bei Hauten und dunnen Schalen im Membran-
spannungszustand / Z. angew. Math, und Mech.—1955.— B. 35,
№ 9-10.- S. 348-349; № 11-12.- S. 399—413.
4*. Б е р г м а н С. Б. и Ш и ф ф е р М.
a) Kernel function and Elliptic differential Equations in Mathematical
Physics.— New York, 1953.
5. Берс Л. (Bers L.)
а) Theory of pseudo-analytic functions.—New York, 1953.
б) Partial differential equations and generalized analytic functions // Proc.
Nat. Ac. Sc, USA.— 1951— V. 37, № 1.— P. 42—47.
в) Formal powers and power series // Comm. a. Appl. Math.—1950.—
V. 9.—P. 693—711.
r) On a theorem of Mori and the definition of quasiconformality / Trans.
Amer. Math. Soc— 1957.— V. 84, № 1— P. 78—84.
6. Берс Л. и Э г м о н С. (Bers L. and A g m о n S.)
a) The expansion theorem for pseudo-analytic functions / Proc. Amcr.
Math. Soc— 1952. V. 3, № 5.— P. 757—764.
7. Берс Л. и Ниренберг (Bers L. und Nirenberg L.)
а) On a representation theorem for linear elliptic systems with disconti-
discontinuous coefficients and its applications // Convegno internaz. equazioni
lineari alle derivate parziali.— Roma, 1954—1955.— P. Ill—140.
б) On linear and non-linear elliptic boundary value problems in the pla-
plane / Convegno internaz. equazioni lineari alle derivate partiali.— Ro-
Roma, 1954—1955.—P. 141—167.
8. Бланки Л. (Bianchi L.)
a) Vorlesungen fiber Differentialgeometrie.— Lpz.; Brl., 1910.
СПИСОК ЛИТЕРАТУРЫ
499-
9. Б и ц а д з е А. В.
а) К проблеме уравнений смешанного типа // Тр. Мат. ин-та АН
СССР.— 1953.— Т. 41.
10. Бляшке В.
а) Дпфферошшалытая геометрия.— М.: Гостехиздат, 1955.
11. Боярски й Б. В.
а) Об одной краевой задаче для системы уравнений в частных произ-
производных первого порядка эллиптического типа // ДАН СССР.—
1955.— Т. 102, № 2,— С. 201—204.
а') Некоторые краевые задачи для уравнений эллиптического типа на-
плоскости: Дис./МГУ.—М., 1955.
и) Гомеоморфные решения систем Бельтрами / ДАН СССР.— 1955.—
Т. 102, № 4.— С. 661-664.
в) О решениях линейной эллиптической системы дифференциальных
уравнений на плоскости / ДАН СССР.—1955.— Т. 102, № 5.—
С. 871-874.
г) Обобщенные решения системы дифференциальных уравнений пер-
первого порядка эллиптического типа с разрывными коэффициентами /
Мат. сб.— 1957 —Т. 43, № 4.— С. 451-503.
д) Общие свойства решений эллиптических систем на плоскости // Тру-
Труды Всесоюзной конференции по теории функций в Москве, 1957 г.—
М., 1958.
с) Об особом случае задачи Римана — Гильберта / ДАН СССР.—
1958.—Т. 119, № 3 —С. 411—414.
;к) Об одной граничной задаче теории функций / ДАН СССР.— 1958.—
Т. 119, № 2 — С. 199—202.
з) О бесконечно малых изгибаниях составных поверхностей / УМН.—
1959.
ц) Общее представление решений эллиптической системы уравнений на-
плоскости // ДАН СССР.— 1958.— Т. 122, № 4.— С. 543—546.
к) Некоторые граничные задачи для системы уравнений эллиптическо-
эллиптического типа на плоскости // ДАН СССР.— 1958.—Т. 124, № 1.
л) Об устойчивости задачи Гильберта для голоморфного вектора / Со-
общ. АН ГССР.— 1958.— Т. 21, № 4.— С. 391—398.
12. Б о я р с к и й Б. В. и В е к у а И. Н.
а) Доказательство жесткости кусочно регулярных замкнутых выпуклых
поверхностей неотрицательной кривизны // ИАН СССР. Сер. мат.—
1958.—Т. 22, № 2.—С. 165—176.
12*.Боярский Б. В., Ефимов Н. В.
а) Принцип максимума для бесконечно малых изгибаний кусочно ре-
регулярных выпуклых поверхностей // УМН.— 1959.— Т, 14, № 6.—
С. 147—153.
13. Варшавский С. (Warschawski S.)
a) Uber das Randverhalten der Ableitung der Abbildungsfunktion bei
konformer Abbildung / Math. Ztscbr. 1932.— B. 35. № 3—4.— С 321—
456.
37»
500 список литературы
14. В е к у а И. Н.
а) Системы дифференциальных уравнений первого порядка эллиптиче-
эллиптического типа и граничные задачи с применением к теории оболочек //
Мат. сб.—1952.—Т. 31, Кг 2.—С. 217—314.
б) Новью методы решения эллиптических уравнений.— М.: Гостехт-
даг, 1948.
в) Задача приведения к каноническому виду дифферепцпальпых форм
эллиптического типа и обобщенная система Коши — Римана // ДАН
СССР.— 1955 — Т. 100, № 2.— С. 197—200.
г) Общее представление функций двух независимых переменных, допус-
допускающих производные в смысле С. Л. Соболева и проблема прими-
примитивных / ДАН СССР— 1953.— Т. 89, № 5.— С. 773—7756.
д) Об одном свойстве решений обобщенной системы уравнений Ко-
Коши — Римана И Сообщ. АН ГССР.— 1953.— Т. 14, № 8.— С. 449—
453.
«) О некоторых свойствах решений системы уравнений эллиптическо-
эллиптического типа / ДАН СССР.— 1954.— Т. 98, № 2.— С. 181—184.
ж) Об одной линейной грапичной задаче Римана / Тр. Тбил. мат. ип-
та.— 1942.-Т. 11,—С. 109-139.
з) Граничная задача с косой производной для уравнения эллиптическо-
эллиптического типа /I ДАН СССР.—1953.—Т. 90, № 6.—С. 1113—11166.
и) Об одном методе решения краевых задач уравнений в частных про-
производных а ДАН СССР.—1955.—Т. 101, № 4.—С. 593—596.
к) О некоторых условиях жесткости поверхностей положительной кри-
кривизны / Чехосл. мат. ж. 6 (81).—1956.—Т. 6.—С. 143—160.
л) Некоторые вопросы бесконечно малых изгибаний поверхностей //
ДАН СССР.—1957.—Т. 112, № 3.—С. 377—380.
м) Теория обобщенпых аналитических функций и некоторые ее при-
применения в геометрии и механике / Тр. 3-го Всесоюзн. мат. съезда.—
1957 — С. 42—64.
н) Некоторые вопросы теории обобщенных аналитических функций и
приложений в геометрии и механике Ц Bull. Math. Soc. Math. Pliys
R. P. R.— 1957.— V. 1, № 2.— P. 233—247.
о) Об условиях, обеспечивающих безмоментное напряженное состояпие
равновесия выпуклой оболочки // Сообщ. АН ГССР.— 1958.— Т. 20,
№ 5.— С. 525—532.
п) Об условиях безмоментиости выпуклых оболочек / Сообщ. АН
ГССР.— 1958.— Т. 6.— С. 649—652.
р) Uber die korrekte Stelhmg dor Riemann — Hilbertschen Aufgabe /
Ann. Acad. Sci. Fenn. Ser. A. 1, № 251/10.
с) Об одном методе расчета призматических оболочек / Тр. Тбил. мат.
ин-та.—1955.—Т. 21.—С. 191—295.
14*. В е к у а Н. П.
а) Системы сингулярных интегральных уравнений.— М.: Гостехиздат,
1950.
б) Об одной краевой задаче линейного сопряжения Ц Тр. Тбил. мат.
ин-та.— 1957.— Т. 24— С. 126—134.
СПИСОК ЛИТЕРАТУРЫ
501
в) Об одной системе сингулярных интегро-дифференциальных уравне-
уравнений / Тр. Тбил. мат. пн-та.— 1957.— Т. 24.— С. 136—147.
15. Виноградов В. С.
а) О задаче Неймана для уравнения эллиптического типа // ДАН
СССР.—1956.—Т. 109, № 1.— С. 13—16.
б) Об одпой краевой задаче для линейных эллиптических систем диф-
дифференциальных уравпений первого порядка па плоскости // ДАН
СССР.- 1958.- Т. 118, № 6.—С. 1059-1062.
в) Об ограниченности решений краевых задач для линейных эллипти-
эллиптических систем уравнений на плоскости Ц ДАН СССР.— 1958.— Т. 121,
Л"» 3 — С. 399—402.
г) Об одной задаче для квазилинейных систем уравнений на плоско-
плоскости // ДАН СССР.—1958.—Т. 121, № 4.—С. 579—582.
16. Виши к М. И.
а) Краевые задачи для эллиптических уравнений, вырождающихся на
границе / Мат. сб.— 1954.— Т. 35, № 3.— С. 513—568.
17. В и ш и к М. И. и Ладыженская О. А.
а) Краевые задачи для уравнений в частных производных и некоторых
классов операторных уравнений // УМН.— 1956.— Т. II, № 6.— С. 41—
97.
18. Власов В. 3.
а) Общая теория оболочек.— М.: Гостехиздат, 1949.
б) К теории безмоментных оболочек // ИАН СССР, ОТН.— 1955.— Т. 5.—
С. 55-84.
19. В о л к о в ы с к и й Л. И.
а) Квазикопформпые отображения.— Львов, 1955.
20. Г а а к В. (Н а а с k W.)
a) Allgemeine Randwertprobleme fur Differontialgleichungen vom ellip-
tischen Typus / Math. Nachr.—1952,— V. 1—30; Randwertprobleme
hohere Charakteristik fur em System von zwei elliptischen Differen-
tialgleiclmngen / Math. Nachr. V. 8. S. 123—132.
21. Гаак В. и Г ель виг Г. (Н а а с к W. und Hell wig G.)
a) Die Uberfuhrimg dos Rahdwertproblems fur Systeme elliptischer Diffe-
rentialgleichungen auf Fredholmsche Integralgleichungen. Math.
Nachr. 4.— 1950, 1951.— V. 1—8. S. 408—418.
22. Г а т т е н ь о К. и Островский A. (G a 11 e g n о С. et 0 s t r о w-
ski A.)
a) Representation conforme a la frontiere; domaines particuliers // Mem.
or Sc. Malh. Fasc. CX.— Paris, 1949.
23. Г ахов Ф. Д.
а) Краевые задачи.— М.: Физматгиз, 1958; 3-е изд.— М.: Наука, 1977.
23*. Гахов Ф. Д. и Хасабов Э. Г.
а) Краевая задача Гильберта для многосвязной области / Изв. вузов.
Мат.— 1958.— Т. 1.— С. 12—23.
24. Г е л ь в и г Г. (Н е 11 w i g G.)
a) Das Rahdwertproblem ernes Imearen elliptischen Systems // Math.
Ztschr.- 1952.- V. 56.— S. 388—408.
502 список литературы
б) Bemerkungen zu der Satzgruppo von Hilbert fiber Systeme elliptischer
Differentialgleichungen f/ Math. Ztschr.—1952.—V. 55.—S. 276—283.
в) Randwertproblome nichtlinearcn elliptischer Differentialgleidmngs-
systemen erster Ordnung mit Anwendimg auf die Verbiegung von ellip-
tisch gekrumtcr Flanclionstucken // Malh. Naehr.—1952.— V. 8.—
S. 13—30.
r) Uber die Verbiegbarkeit von Flachenstuckcn mit posiliver Gaubcher
Krummung / Arch. Math.— 1955.— V. (!.— S. 243—249.
25. Герген И. н Дрессель Ф. (G ergon J. und Dressel F.)
a) Mapping for elliptic equations / Trans. Amor. Math. Soc.—1351—
V. 77.— P. 151-178.
26. Г и л ь б е р т Д. (II i I b с г t D.)
а) Grundzuge einer allgcmeinen Thcorie der linearen Integralglciclum-
gen.— Leipzig — Berlin, 1924.
б) Uber eine Amvendung der Integralglciclmngen auf ein Probk-m der
Funktionentheorie / Verb., d. Intern. Mathematiker Kongr.— Heidel-
Heidelberg., 1904.
27. Гольденвейзер А. Л.
а) Теория упругих оболочек.— M.: Гостехиздат, 1953; 2-е изд.— М.: Нау-
Наука, 1976.
28. Гольденвейзер А. Л. и Лурье А. И.
а) О математической теории равновесия упругих оболочек / Прикл.
мат. и мех.—1948.—Т. П.—С. 565—592.
29. Гурвиц В. (Ilurwitz VV. А.)
a) Randwertaufgabcn dor Systemen von linearen partiellen Diffcivntial-
gleichungen erster Ordnung: Dissertation.— Gottingen, 1910.
30. Гурса E. T* 1
а) Курс математического анализа. Т. 3, ч. 2.— М.: ОНТП, 1934.
31. Дарбу Г. (Darboux G.)
a) Lecons sur la thcorie generale dcs surfaces. V. 3, 4.— Paris, 1914—1925-.
32. Д а н и л ю к И. И.
а) О некоторых вопросах теории эллиптических систем дифференциаль-
дифференциальных уравнений первого порядка на поверхностях / ДАН СССР.—
_ 1955.—Т. 105, № 1—С. 11-14.
б) Об интегральном представлении решении некоторых эллиптических:
систем первого порядка на поверхностях с приложением к теории
оболочек // ДАН СССР.— 1956.— Т. 109, № 1.— С. 17—20.
в) О задаче с косой производной для эллиптических систем 1-го по-
порядка / ДАН СССР.— 1958.— Т. 122, № 1 — С. 9—12.
г) Исследование одной задачи с косой производной при помощи систе-
системы уравнений Фредгольма / ДАН СССР.—1958.— Т. 122, № 2.—
С. 175-178.
д) Об отображениях, соответствующих решениям уравнений эллипти-
эллиптического типа / ДАН СССР.— 1958.— Т. 120, № 1.— С. 17—20..
е) Некоторые свойства решений эллиптических систем 1-го порядка а
краевые задачи: Дис./Мат. ин-т АН СССР, 1958.
СПИСОК ЛИТЕРАТУРЫ 503
ж) О задаче с косой производной для общей квазилипейной эллиптиче-
эллиптической систолы первого порядка // ДАН СССР.—1959.— Т. 127.—
С. 953—954.
з) О задаче с наклонной производной // Сиб. мат. журн.— 1962.— Т. 3,
№ 1.—С. 17—55.
33. Ефимов If. В.
а) Качественные вопросы теории деформаций поверхностей // УМН.—
1948.— Т. 3, № 2.- С. 47-158.
б) Flachen Verbiegung in grossen. Mit einem Nachtrag von E. Rembs und
K. P. Grotemeyer // Berlin: Akademie Verlag, 1957.
в) О тензорах взаимно сопряженных сетей // Тр. 2-го Всесоюзного мат.
съезда.— Т. 2.— 1936.— С. 80—83.
34 Жиро Г. (Giraud G.)
a) Equations a integrates principals // Ann. Sc. Ec. Norm. Sup.—1934.—
V. №51 —P. 251—372.
35. Зигмунд А.
а) Тригонометрические ряды.— M.: ГОНТИ, 1939.
36. 3 и г м у н д А. и К а л ь д е р о н А. (С а 1 d о г о n A. and Z у g-
mund A.)
а) On existence of certain integrates / Acta Math.—1952.— V. 88.—
P. 85—139.
б) On singular integrals / Amer. Journ. Math.— 1956.— V. 78.— P. 289—
309.
37. Каган В. Ф.
а) Основы теории поверхностей. Т. 2.— М.: Гостехиздат, 1947.
38. К а р л е м а н Т. (С а г 1 е m a n Т.)
а) Sur les systemes lineaires aux derivees partielles du premier ordre a
deux variables, С R.— Paris, 1933.—V. 197.—P. 471—474.
б) Sur la theorie des equations integrates et ses applications / Verhandl.
des Internat. Math. Kongr., Zurich. V. 1.— 1932.
39. К в е с е л а в а Д. А.
а) Задача Римана — Гильберта для многосвязной области // Сообщ.
АН ГрузССР.— 1945.— Т. 6, № 8.— С. 581—590.
С) Некоторые граничные задачи теории функций / Тр. Тбил. мат. ин-
та.— 1948.— Т. 16.— С. 39—80.
в) Решение одной граничной задачи теории функций // ДАН СССР.—
1946.— Т. 53, № 8.— С. 683—686.
40. Келдыш М. В.
а) Конформные отображения многосвязных областей на канонические
области Ц УМН.— 1939.— Т. 6.— С. 90—119.
б) О некоторых случаях вырождения уравнений эллиптического типа
на границе области // ДАН СССР.— 1951.— Т. 77, № 2.— С. 181—
183.
40*. Клабукова Л. С.
а) Приближенный метод решения задач Гильберта и Пуанкаре // Вы-
числ. мат.— 1958.— Т. &— С. 34—87.
504 список литературы
41. Кон-Фоссен С. Э.
а) Изгибаемость поверхностей в целом Ц УМН.— 1936.— Т. 1.— С. 33—
76.
б) Нежесткие замкнутые поверхности // УМН.—1954.—Т. 9. № 1.—
С. 63—81.
42. К о ш е л е в А. И.
а) Апр1горные оцспки в Lv и обобщенные решения эллиптических урав-
уравнений и спетом II УМН.— 1958.— Т. 3, № 4.— С. 29—88.
43. К р и в е н к о в 10. П.
а) О некотором представлении решений уравпепия Эйлера — Пуассо-
Пуассона—Дарбу II ДАН СССР.—1957 —Т. 116, Я» 3.—С. 351—354.
б) Представление решений уравнения Эйлера — Пуассона — Дарбу че-
через аналитические функции // ДАН СССР.—1957.—Т. 116. № 4.—
С. 545-548.
4}. Кудрявцев Л. Д.
а) О продолжении функций и о вложении классов функций / ДАН
СССР.— 1956.— Т. 107, № 4— С. 501—504.
б) О решении вариационным методом эллиптических уравнений, вы-
вырождающихся на границе области / ДАН СССР.—1958.— Т. 103,
№ 1.—С. 16—19.
45. Лаврентьев М. А.
а) Об одном классе непрерывных отображений / Мат. сб.— j 035.—¦
Т. 42.- С. 407-434.
б) Общая задача теории квазиконформных отображений плоских обла-
областей И Мат. сб.—1947.—Т. 21.—С. 285—320.
в) Основная теорема теории квазиконформных отображений плоских
областей / Изв. АН СССР. Сер. мат.— 1948.— Т. 12.— С. 513—554.
40. Л а в р е н т ь е в М. А. и Ш а б а т Б. В.
а) Геометрические свойства решений нелинейных систем уравнений с
частными производными // ДАН СССР.—1957.—Т. 112.—С. 8iO—
811.
б) Методы теории функций комплексного переменного.— М.: Физлатгпз,
1958; 2-е изд.— М.: Наука, 1965.
47. Л а в р е н т ь е в М. А. и Б и ц а д з е А. В.
а) К проблеме уравпений смешанного типа / ДАН СССР.— 1950.—
Т. 70, № 3.— С. 373—376.
48. Лихтенштейн Л. (Lichtenstein L.)
a) Zur Theorie der Konformen Abbildung. Konforme Abbildung nichtana-
lytischer singularitatenfreier Flanchenstucke auf eine Gebiete / Bull.
Acad. Sc. Cracovie.— 1916.— S. 192—217.
49. Л о п а т и н с к и й Ю. Б.
а) Об одном обобщении понятия аналитической функции / Укр. мат.
журн.— 1950.— Т. 2, № 2.— С. 56—73.
50. Ляв А.
а) Математическая теория упругости.— М.: ОНТИ, 1935.
51. Л юст ер ник Л. А. и Соболев В. И.
а) Элементы функционального анализа.—М.: Гостехиздат, 1951.
СПИСОК ЛИТЕРАТУРЫ 505
52. Мецховришвили Ш. С.
а) Некоторые вопросы безмоментного напряженного состояния торооб-
разной оболочки / Сообщ. АН ГССР.— 1955.— Т. 16, № 4.— С. 263—
267.
б) Задачи безмоментного напряженного состояния торообразной оболоч-
оболочки / Тр. Тбил. мат. ин-та.— 1957.— Т. 24.— С. 179—193.
в) О бесконечно малых изгибаниях торообразной оболочки // Сообщ. АН
ГССР.- 1957.- Т. 18, № 5.- С. 521-527.
53. Мин агав а Е. и Радо (Minagawa Т., Rado I.)
a) On the infinitesimal rigidity of surfaces of revolution / Math. Z.—
1953.— V. 59, № 2.— P. 151—163.
54. M ;: p а н д а К.
а) Уравнения с частными производивши эллиптического типа.— М.: ИЛ,
1957.
55. Михайлов Л. Г.
а) Краевая задача типа задачи Римана для систем дифференциальных
уравпешш первого порядка эллиптического типа и некоторые инте-
интегральные уравнения / Ученые записки. Тр. физ.-мат. ф-та Тадж. гос.
ун-та.— 1957.— Т. 10.— С. 32—79.
б) Краевая задача типа задачи Римана для систем дифференциальных
уравнений первого порядка эллиптического типа / ДАН СССР.—
1957.- Т. 112, № 1.-С. 13-15.
56. Мяхлнн С. Г.
а) Сингулярные интегральные уравнения // УМН.— 1948.— Т. 3, № 3.—
С. 29—112.
б) К теории многомерных сингулярных интегральных уравнений /
Вестн. ЛГУ,—1956.—Т. I—С. 3—24,
в) Вырождающиеся эллиптические уравнения // Вестн. ЛГУ.— 1954.—
Т. 8.— С. 19—48.
57. М о н т е л ь П.
а) Нормальные семейства аналитических функций.— М.: ОНТИ, 1936.
58. М о ц с и л Г. К. (М о i s i I G. С.)
a) Asupra invariantilor des systemelor lui Vecua. Note 1 et 3 Ц Communi-
carile academie Й. P. R.— 1955.—V. 5, № 1.— P. 7—11,13—19; Note 2 //
Bulletin Stiintific de stiinte matematice si Fizice 6.—1954.— V. 0.
Л» 3.— P. 595—601.
59. M о р р и К. (М о г г е у С. В.)
a) On the solutions of quasilinear elliptic partial differential equations /
Trans. Amer. Math. Soc— 1938.— V. 43.— P. 126—166.
60. M у с х е л п ш в и л и Н. И.
а) Сингулярные интегральные уравнения.— М.: ГОНТИ, 1946; 3-е изд.—
М.: Наука, 1968.
б) Некоторые основные задачи математической теории упругости.—
М.: Изд. АН СССР. 1954;— 2-е изд.— М.: Наука, 1968.
61. Никольский С. М.
а) О продолжении функций многих переменных с сохранением диффе-
дифференциальных свойств / Мат. сб.—1956.—Т. 40, № 2.—С. 243—258.
506 список литературы
б) Свойства некоторых классов функций многих переменных на диф-
дифференцируемых многообразиях // Мат. сб.—1953.— Т. 83, № 2.—
С. 261—326.
в) Компактность классов аналитических функций мпогих переменпых //
ИАН СССР. Сер. мат.— 1956.—Т. 20.—С. 611—622.
62. Н и ч е И. и Н и ч е И. (N i t s с h о J. und N i t s с h e J.)
а) Allgemeine Randwertprobleme fur Systeme elliplisrber Differ^ntial-
gleichungen. Zimickfnhrung auf eine von F. Noethcr nntersuchte Klas-
se singularer intogralgleichungen // Rend. Circolo. mat. Paletrtio.—
1953.— V. 2.— P. 40—45.
63. H и ч е Йог. (N i t s с h e Johannes)
a) Untersucliungon iiber dio linearen Randwertaufgaben linearer und
quasilinearer ellipliscbcr Diirerentialglcichungs syslcme. 1,2 / Math.
Nachr.— 1955.— V. 14.— S. 75—127, 157—182.
б) Uber die linearen Randwcrtprobleme eines quasilincaren ellpUschen
Differentialgleichungssystems / Math . Ztschr.— 1954.— V. 61.—
S. 336—347.
в) Eine charakteristischo Eigenschalt dor Losungen von Randwertproble-
men elliptischer Differentialgleiclmngssystome / Arch. Math.— 1955.—
V. 6, № 1.— S. 18—24.
64. Ниче Иоахим (Nitsche Joachim)
а) Das erste Randwerlproblem eines linearen elliplischen Differential-
Differentialgleichungssystems / Math. Nachr.—1952.—V. 7.—P. 31—33.
б) Ein mit Verbiegung der Halbkngel Verbundenes Randwertproblem.
Teil 1 / Arch. d. Math.— 1953.— V. 4— P. 331—330; Teil 2 // Arch. d.
Math.—1955.—V. 6.—P. 13—17; Teil 3 / Arch. d. Math.—1955.—
V. 6.— P. 45—150.
в) Beitrage zur Verbiegung zweifach zusammenhangen der FlancLenstu-
cke / Math. Ztschr.— 1955.— V. 62.— P. 388—399.
65. Новожилов В. В.
а) Теория тонких оболочек.— М.: Судпромгиз, 1951.
65*. Оболашвили Е. И.
а) Об одной краевой задаче параболической оболочки вращения // Тр.
Тбил. ун-та.- 1957.- Т. 64.- С. 182-187.
б) Об одной задаче безмоментного равновесия составной оболочки /
Сообщ. АН ГССР.— 1957.— Т. 19, № 6.— С. 649—652.
в) Об одной частной задаче колебания пологих сферических оболо-
оболочек И Тр. Тбил. ун-та.— 1954.— Т. 52.— С. 31—38.
66. О л е й н и к О. А.
а) О свойствах решений некоторых краевых задач для уравнений эл-
эллиптического типа / Мат. сб.— 1952.— Т. 30.— С. 695—702.
б) Об уравнениях эллиптического типа, вырождающихся на границе
области И ДАН СССР.— 1952 — С. 885—888.
в) О линейных уравнениях второго порядка с неотрицательной харак-
характеристической формой I/ Мат. сб.— 1966.— Т. 69, № 1.— С. 111—
140.
СПИСОК ЛИТЕРАТУРЫ 507
€7. Петровский И. Г.
а) О некоторых проблемах теории уравнений с частными производ-
производными / УМН.— 1946.— Т. 1, № 3, 4— С. 44—70.
68. П о г о р е л о в А. В.
а) Изгибание выпуклых поверхностей.— М.: Гостехиздат, 1951.
б) Однозначная определенность выпуклых поверхностей / Тр. мат.
ин-та АН СССР, 1949.
в) Некоторые вопросы геометрии в целом в рпмановом пространстве //
Харьков: Изд-во Харьк. ун-та, 1957.
69. П о з н я к Э. Г.
а) Бесконечно малые изгибания цилиндрического пояса / УМН.—
1947.—Т. 2; № 4.—С. 170—174.
б) Бескопечпо малые изгибапия желобов Ц Мат. сб.—1953.— Т. 32.—
С. 681—092.
в) Пример замкнутой с особой точкой поверхности, имеющей счетную
фундаментальную систему бесконечно малых изгибаний // УМН.—
1957.— Т. 12, № 3.—С. 363—367.
70. Положи й Г. Н.
а) О р-апалитических функциях комплексного переменного / ДАН
СССР.—1947.—Т. 58.—С. 1275—1278.
б) Теорема о сохранении области для некоторых эллиптических систем
дифференциальных уравнений // Мат. сб.— 1953.— Т. 32,— С. 485—
492.
в) К вопросу о (р, q)-аналитических функциях комплексного перемен-
переменного н нх применениях // Rev. Math. p. et app,—1957.— V. 2.—
P. 331-301.
Tl. П о sine iiro Ю. Д. (Pompe iu D.)
a) Sur une classe de fonctions dune variable comploxe // Rend. Circolo
mat.—Palermo, 1912.—V. 33.—P. 108—113; 1913.-V. 35.-P. 277—
281.
72. Привалов II. И.
а) Граничные свойства однозначных аналитических функций.— М.: Гос-
техиздат, 1950.
73. Пуанкаре А. (Poingare А.)
a) Legons de Mechanique celeste V. 3.— Paris, 1910.
74. P а б о т п о в IO. H.
а) Некоторые решения безмоментпой теории оболочок/Прикл. мат. и
мех.— 1946.- Т. 10, № 5, № 6.- С. 639-646.
75. Рембс Е. (Rembs E.)
a) Uber Gloitvor biegungen // Math. Ann.— 1935.— V. 3, № 4.— S. 587—595.
76. P и м а н Б.
а) Сочинения.— M.: Гостехпздат, 1948.
77. Рисе M. (Riesz M.)
a) Sur les maxima des formes billineares et sur les fonctional nelles li-
neaires / Acta Math.—1928.— V. 49.— P. 465—497.
78. Сакс С.
а) Теория интеграла.— М.: ИЛ, 1949.
508 список литературы
78*. Сигу а Ф. Д.
а) Некоторые краевые задачи сферических оболочек Ц Тр. Тбпл. маг.
ин-та.— 1954.— Т. 20 — С. 347—356.
б) Об одной граничной задаче тонкой сферической оболочки // Тр.
Тбил. мат. ин-та.— 1956.— Т. 22.— С. 265—275.
79. Соболев С. Л.
а) Некоторые применения функционального анализа в математической
физике.—Л.: Изд-во ЛГУ, 1950.
б) Об одной теореме функционального анализа // Мат. сб.— 1938.— Т. 4,
№ 3.—С. 471—497.
.80. Соколовский В. В.
а) Уравпения равновесия безмоментных оболочек // Прпкл. :гат. и
мех.- 1943.- Т. 7, № 1.— С. 57-64.
81. Сунь Хэ-шэн
а) Некоторые признаки жесткости для поверхностей вращения , ДАН
СССР.— 1957.— Т. 116, № 5.— С. 758—761.
б) О единственности решения вырождающихся уравнений п жесткости
поверхностей / ДАН СССР.— 1958.— Т. 122, № 5.— С. 770—773.
в) О жесткости незамкнутой поверхности неотрицательной кривизны
при втулочных связях II ДАН СССР.— 1958.— Т. 121, Л° 2.— С. 229—
232.
82. Теодореску Н. (Т h е о d о г е s с о N.)
а) Theses.— Paris, 1931.
б) La derivoo areolaire // Ann. Roumains Math. Cahier.— Bucarest, 1936.—
V. 3.
83. T e p с е н о в С. А.
а) Об одном уравнении эллиптического типа, вырождающемся на гра-
границе области // ДАН СССР.—1957.—Т. 115, № 4.—С. 670—673.
84. Т и м о ш е н к о СП.
а) Пластинки и оболочки.— М.: Гостехиздат, 1948.
85. Трико ми Ф. (Tricomi F.)
а) О линейных уравнениях смешанного типа.— М.: Гостехиздат. 1947.
б) Equazioni integrali conlenenti il valor principale di un integrate dop-
pio H Math. Ztschr.— 1928.— V. 27.— P. 87—133.
в) Equazioni a derivate parziali.— Roma, 1957.
86. Уинтнер A. (Wintner A.)
a) On the Holder restrictions in the theory of partial differential equa-
equations / Am. Journ; Math.—1950.—V. 72, № 4.—P. 731—738.
87. Уолш Дж. (Walsch J.)
a) Interpolation and approximation.—New York, 1933.—Рус. пер. 2-го
изд.: Интерполяция и аппроксимация рациональными функциями в
комплексной области.— М.: ИЛ, 1961.
89. Усманов Н. К.
а) Граничные задачи дифференциальных уравнений в частных произ-
производных первого порядка эллиптического типа Ц Тр. ин-та физ. и
мат. АН ЛатвССР.— 1950.— Т. I.— С. 41—100.
СПИСОК ЛИТЕРАТУРЫ 509
б) К граничным задачам функций, удовлетворяющих системе диффе-
дифференциальных уравнений в частных производных первого порядка эл-
эллиптического типа I/ Тр. ип-та физ. и мат. АН ЛатвССР.— 1950.—
Т. 2.— С. 59—100.
№">. Федоров В. С.
а) Особые значения везде непрерывных аналитических функций / Изв.
политехи, ин-та.— Иваново-Вознссспск, 1922,— Т. 6.— С. 43—56.
00. Федоров В. С.
• а) Краевые задачи для эллиптических уравнений / Изв. АН СССР.
Сер. мат.— 1947.— Т. П.— С. 345—369.
91. X в о д е л и д з о Б. В.
а) Линейные разрывные граничные задачи тсоршг функции, сингуляр-
сингулярные интегральные уравнения п некоторые их приложения // Тр.
Тбпл. мат. ин-та.— 1956.— Т. 23.— С. 3—158.
VI. Ч ж о н ь Шэн-шень (С h о г n S h i i n g — S h с n).
a) An elementary proof of the existence of isothermal parameters on a
surfaces Ц Proc. Amer. Soc— 1955.— V. C— P. 771—782.
93. Ш а б а т Б. В.
а) Об обобщенных решениях одной системы уравнений в частных про-
производных И Мат. сб.— 1945.— Т. 17.— С. 193—209.
б) Об отображениях, осуществляемых решениями системы Карломана /
УМН.— 1956.— Т. II, № 3.— С. 203—206.
в) О теореме в формуле Коши для квазиконформных отображений //
ДАН СССР.— 1949.— Т. 49, № 3.— С. 305—308.
94. Ш а п и р о 3. Я.
а) О существовании квазиконформных отображений / ДАН СССР.—
1941.— Т. 30 — С. 685—687.
94*. III с р м а н Д. И.
а) К общей задаче теории потенциала / Изв. АН СССР. Сор. мат.—
1946.— Т. 10, № 2.— С. 121—134.
95. Шилов Г. Е.
а) Векторно-гладкие функции / УМН.— 1951.— Т. 6, № 5.— С. 176—184.
96. Шиффер М.
а) Некоторые новые результаты в теории конформных отображений //
Р. Курант. Принцип Дирихле, копформпые отображения и мини-
минимальные поверхности.— М.: ИЛ, 1953.— Приложение.
97. Ш м и д т В.
а) Некоторые вопросы разрешимости обобщеппои задачи Римапа —
Гильберта: Дпс./МГУ.— М„ 1956.
б) Обобщенная задача Римана ¦— Гильберта в случае отрицательного ин-
индекса / ДАН СССР.- 1958.- Т. 119, № 5,- С. 893-896.
в) Einige Satze tiber die Riemann — Hilbertsche Randwertaufgabe /
Ztschr. d. Hochschulo f. Elektrotechnik.— Jlmenau, 1957.— V. 3, № 1.—
S. 9—12.