/

























































































































































Текст
С. А. Спектор
ЭЛЕКТРИЧЕСКИЕ
ИЗМЕРЕНИЯ
ФИЗИЧЕСКИХ
ВЕЛИЧИН
МЕТОДЫ
ИЗМЕРЕНИЙ
Допущено Министерством высшего
и среднего специального образования СССР
в качестве учебного пособия для студентов
вузов, обучающихся по специальности
«Информационно-измерительная техника»
Ленинград
ЭНЕРГОАТОМИЗДАТ
Ленинградское отделение
1987
ЁБК 31.221
С 71
УДК 621.317.39(075.8)
Рецензенты: кафедра информационно-измерительной техники ЛЭТИ имени
В. И. Ульянова (Ленина) (зав. кафедрой Е. А. Чернявский); А. М. Мелик-
Шахназаров и В. В. Савин
Спектор С. А.
С 71 Электрические измерения физических величин: Методы из-
мерений: Учеб, пособие для вузов. Л.: Энергоатомиздат. Ле-
нингр. отд-ние, 1987.—320 с.: ил.
Рассмотрены методы измерений и физические основы построения средств элек-
трических измерений физических величин, а также вопросы общей теории измере-
ний, метрологического обеспечения и коррекции погрешностей измерений. Приводятся
характеристики современных средств измерений.
Для студентов вузов по курсу «Методы измерений физических величин». Мо-
жет быть полезно инженерно-техническим и научным работникам.
С 2302010000—117 132_86 ББК 31.221
051(01)—87
УЧЕБНОЕ ПОСОБИЕ
Самуил Абрамович Спектор
ЭЛЕКТРИЧЕСКИЕ
ИЗМЕРЕНИЯ
ФИЗИЧЕСКИХ
ВЕЛИЧИН
МЕТОДЫ
ИЗМЕРЕНИЙ
Редактор Л. М. ПАРХОМЕНКО
Художественный редактор Д. Р. СТЕВАНОВИЧ
Технический редактор Н. А. МИНЕЕВА
Корректор Н. Б. ЧУХУТИНА
ИБ № 1907
Сдано в набор 17.02.87. Подписано в печать 23.04.87. М-23566. Формат 60X90'/»
Бумага типографская № 2. Гарнитура литературная. Печать высокая. Усл. печ.
л. 20. Усл. кр.-отт. 20. Уч.-изд. л. 23,49. Тираж 26 000 экз. Заказ № 444. Цена 1 р. 20 к.
Энергоатомиздат, Ленинградское отделение.
191065, Ленинград. Марсово поле, 1.
Ленинградская типография № 4 ордена Трудового Красного Знамени Ленинградского
объединения «Техническая книга» им. Евгении Соколовой Союзполиграфпрома при
Государственном комитете СССР по делам издательств, полиграфии и книжной тор-
говли. 191126, Ленинград. Социалистическая ул.. 14.
(С) Энергоатомиздат, 1987
ПРЕДИСЛОВИЕ
Измерение физических величин является основой научных эк-
спериментов, комплексных испытаний и массовых измерений во
всех сферах человеческой деятельности. Велика роль измерений
для повышения качества продукции и обеспечения ее государ-
ственной приемки. Современная практика требует измерений мно-
жества физических величин, подавляющее большинство которых
в процессе измерений преобразуется в электрические величины
и измеряется методами и средствами электрических измерений.
Предлагаемая книга является учебным пособием по курсам
«Методы измерений физических величин» специализации «Про-
цессы измерений» и «Измерение неэлектрических величин», чи-
таемым в высших учебных заведениях для специальности 0642
«Информационно-измерительная техника».
В первой главе рассматриваются общие вопросы теории из-
мерений физических величин: основные определения, классифика-
ция физических величин, методов и погрешностей измерений,
планирование и организация измерительного эксперимента,
методы коррекции систематических погрешностей, квантовые ме-
тоды измерений. В остальных двенадцати главах изложены ме-
тоды измерений наиболее часто измеряемых физических величин:
силы тока и напряжения, мощности, угла фазового сдвига, маг-
нитных величин, линейных и угловых размеров, механических
усилий, параметров движения объектов, жидких и газообразных
сред, температуры, концентрации веществ. При этом большая
часть книги посвящена методам измерений неэлектрических ве-
личин. Что же касается измерений электрических величин, то
в книге главным образом рассматриваются только методы изме-
рений этих величин в крайних диапазонах их значений, при на-
личии помех или методы, обеспечивающие повышение точности
измерений.
Изложение материала построено по принципу последователь-
ного рассмотрения общих методов измерений для отдельных
групп физических величин. При этом сделана попытка найти об-
щие признаки у ряда методов, кажущихся на первый взгляд
различными, и систематизировать эти методы в небольшие
группы. Такой подход позволяет легче ориентироваться в сущест-
вующих многочисленных методах измерений, выбрать необходи-
1*
3
мый метод и соответствующие средства измерений для решения
данной задачи. Большое внимание в книге уделено рассмотре-
нию квантовых методов, основанных на применении стабильных
физических явлений, обусловленных корпускулярно-волновой при-
родой вещества и электромагнитного излучения. Эти методы уже
нашли применение при создании естественных эталонов единиц
физических величин и являются перспективными для построения
высокоточных образцовых и рабочих средств измерений.
Подбор излагаемого материала базируется на многолетнем
опыте чтения лекций в Ленинградском ордена Ленина политехни-
ческом институте имени М. И. Калинина с учетом концепции
о перспективности методов измерений, основанных на примене-
нии внутриатомных и внутриядерных явлений, естественных
шкал, электрооптических способов преобразования измеритель-
ной информации, а также на работах автора и его сотрудников
по использованию ядерного магнитного резонанса для измерения
физических величин.
В написании некоторых разделов книги приняли участие док-
тора технических наук В. С. Гутников (гл. 2) и А. Е. Синельни-
ков (гл. 10), кандидаты технических наук Е. С. Левшина (§ 9-4),
Л. М. Петров (гл. 7) и Ю. С. Сидорин (гл. 5).
Автор считает своим долгом отметить, что излагаемый мате-
риал в значительной мере учитывает результаты обсуждений и
дискуссий, проводимых на кафедре информационно-измеритель-
ной техники, а также обязан своим созданием лекторам, ранее
работавшим над этим курсом: А. М. Туричину и Д. И. Зорину.
Автор признателен председателю научно-методического совета
МВ и ССО СССР по специальности «Информационно-измеритель-
ная техника», заслуженному деятелю науки и техники РСФСР,
доктору технических наук, профессору Е. Г. Шрамкову, а также
докторам технических наук, профессорам П. В. Новицкому и
П. П. Орнатскому за ценные предложения и замечания, которые
были учтены при подготовке рукописи к печати.
Замечания и пожелания по книге просьба направлять по ад-
ресу: 191065, Ленинград, Марсово поле, 1, Ленинградское отде-
ление Энергоатомиздата.
Автор
Глава первая
ОБЩИЕ ВОПРОСЫ
ЭЛЕКТРИЧЕСКИХ ИЗМЕРЕНИЙ ФИЗИЧЕСКИХ ВЕЛИЧИН
1-1. Основные понятия и определения
Физическая величина в соответствии с ГОСТ 16263—
70 — это свойство, общее в качественном отношении для многих
физических объектов, но в количественном отношении индивиду-
альное для каждого объекта. Основной задачей измерений явля-
ется получение информации о значении физической величины
в виде некоторого числа принятых для нее единиц. Единица фи-
зической величины — это физическая величина, которой по опре-
делению присвоено численное значение, равное 1. Истинное зна-
чение физической величины — значение физической величины, ко-
торое идеальным образом отражало бы в качественном и количе-
ственном отношении соответствующие свойства объекта. Результат
измерения дает только оценку истинного значения физической
величины с некоторой погрешностью.
Физические величины классифицируются по ряду признаков, и
соответственно различают несколько классификаций физических
величин. По отношению к сигналам измерительной информации
физические величины разделяются на активные и пассивные.
Активными называются величины, которые без использования
вспомогательных источников энергии могут быть преобразованы
в сигнал измерительной информации, т. е. сигнал, функционально
связанный с измеряемой физической величиной. Такими величи-
нами являются сила электрического тока и электрическое на-
пряжение, температура, сила и др.
Для измерения пассивных величин (электрическое сопротив-
ление, индуктивность, масса и др.) необходимо использовать
вспомогательный источник энергии, при помощи которого созда-
ется сигнал измерительной информации. При этом измеряемые
пассивные величины преобразуют в активные величины, которые
собственно и измеряются.
Хотя существуют очень точные меры пассивных величин (ем-
кость, активное сопротивление и др.), непосредственное сравне-
ние измеряемой пассивной величины с единицей этой величины
невозможно. Для измерения параметров электрической цепи че-
рез цепь пропускают электрический ток и измеряют падение на-
пряжения и ток, функционально связанные с измеряемым пара-
метром цепи. При измерении массы тела фактически производят
сравнение пропорциональной ей силы, действующей на тело
в гравитационном поле Земли, с известной силой.
5
По признаку аддитивности физические величины разделяются
на аддитивные (экстенсивные) и неаддитивные (интенсивные)
величины.
Аддитивные величины обычно являются физическими или энер-
гетическими свойствами объекта, к ним применимы операции сум-
мирования и вычитания. Такие величины (длина, масса, сила,
время, сила тока, ЭДС, скорость и др.) можно измерять по частям,
а также точно воспроизводить с помощью многозначной меры,
основанной на суммировании размеров отдельных мер. Так, токи
суммируются, если несколько проводников соединить в узел;
сопротивления — при последовательном, а проводимости — при
параллельном соединении объектов (резисторы, трубопроводы
и др.); масса объекта равна сумме масс составляющих его частей.
Неаддитивные величины, например удельная электрическая
проводимость, магнитная восприимчивость, плотность, вязкость,
непосредственно не измеряются, а преобразуются в непосред-
ственно измеряемые величины или измеряются путем косвенных
измерений. Воспроизведение неаддитивных величин встречает оп-
ределенные трудности, обусловленные сложностью создания высо-
коточных эталонов и мер таких величин. Физические величины,
характеризующие свойства веществ и материалов, лучше всего
воспроизводятся с помощью стандартных образцов.
По условной зависимости от других величин физические ве-
личины делятся на основные, условно независимые физические
величины и производные, условно зависимые физические вели-
чины. Соответственно делятся единицы физических величин.
В Международной системе (СИ) семь основных единиц физиче-
ских величин: массы — килограмм (кг); длины — метр (м); вре-
мени— секунда (с); силы тока —ампер (А); термодинамической
температуры—кельвин (К); силы света — кандела (кн); количе-
ства вещества — моль, две дополнительные единицы — радиан и
стерадиан и свыше ста производных единиц. Включенные в СИ
единицы физических величии не охватывают всего многообразия
объектов, явлений и процессов. В развивающихся и во вновь
возникающих областях науки и техники появляется необходи-
мость в определении новых физических величин и их единиц.
Примерами таких областей могут служить атомная и ядерная
физика, лазерная техника и др.
Отношение физической величины к одноименной физической
величине называется относительной величиной, а логарифм та-
кого отношения — логарифмической величиной. К таким величи-
нам относятся коэффициент усиления или затухания, добротность
колебательного контура, коэффициент полезного действия и др.
К относительным величинам можно также отнести геометрические
и фазовые углы. Относительные величины выражают в процентах
(%), 1% = Ю-2, в промилле (°/оо), 1%о=Ю-3, в миллионных до-
лях (млн.-1, ppm), lppm=10-6, в миллиардных долях (млрд.-1,
ppb), 1ррЬ = 10-9 и др. Единицами логарифмических величин яв-
ляются бел (Б), децибел (дБ), октава (окт), декада (дек) и др.
6
Единицы физических величин, допущенные к применению в СССР,
установлены ГОСТ 8.417—81 «Единицы физических величин».
Физические величины разделяются па постоянные величины и
величины, изменяющиеся во времени. Большинство физических ве-
личин изменяется во времени. Измерение действительно постоян-
ных физических величин является редкой задачей измерительной
техники. Такие измерения имеют место при уточнении значений
фундаментальных физических констант, таких, как скорость света
в вакууме, заряд и масса покоя электрона, гиромагнитное отноше-
ние атомных ядер, постоянная Ридберга, постоянная Авогадро и др.
В большинстве случаев необходимость в измерениях возникает
именно вследствие изменения физических величин во времени. Од-
нако если скорость изменения измеряемой величины не влияет на
точность измерения, то такую величину относят к постоянным вели-
чинам. Деление физических величин на постоянные и изменяю-
щиеся во времени является условным, поскольку динамическая
составляющая погрешности измерения, возникающая при измере-
нии изменяющихся величин, зависит от соотношения между ско-
ростью изменения измеряемой величины и динамическими харак-
теристиками используемых средств измерений.
Метод измерений согласно ГОСТ 16263—70 — это совокуп-
ность приемов использования принципов и средств измерений.
Там же принцип измерения определяется как совокупность фи-
зических явлений, на которых основаны измерения. Как видно,
методу измерений приписывается весьма емкое понятие. Осно-
вываясь на приведенном определении, методы измерений класси-
фицируют по разным признакам: по способу (алгоритму) срав-
нения измеряемой величины с единицей, по физическим явлениям
или закономерностям, положенным в основу измерения, по ви-
дам измерительных преобразований, по способу взаимодействия
средства измерений с объектом, по способам воспроизведения
величин заданного размера, по видам применяемых средств из-
мерений, по информативному параметру сигнала измерительной
информации, по используемым свойствам объекта исследования.
При таком широком подходе к понятию метода измерений
средство измерений рассматривается как воплощение одного или
нескольких методов измерений, знание которых способствует пра-
вильной организации и проведению процесса измерения.
1-2. Планирование и организация измерений
Измерение физических величин является основой на-
учного эксперимента и массовых измерений во всех отраслях на-
родного хозяйства. Изучаемые процессы и объекты многогранны;
обычно требуется измерять ряд физических величин, характери-
зующих данный объект или технологический процесс. Как любое
экспериментальное исследование, измерение включает в себя сле-
дующие стадии:
формулировку цели;
7
Ьыбор моделей объектов или класса моделей;
составление программы эксперимента, методическую и матери-
альную подготовку эксперимента;
проведение эксперимента и обработку первичных данных в ре-
альном масштабе времени;
обработку данных и оценку погрешности измерения;
анализ полученных данных, формулировку результата исследо-
вания и оценку исследования.
Типовыми задачами измерения физических величин являются:
оценка значений скалярной величины (геометрические размеры,
частота, масса, концентрация и др.);
оценка значений векторных величин (магнитная индукция, сила,
скорость и др.);
воспроизведение реализации процесса в координатах «физиче-
ская величина — время»;
воспроизведение характеристик процессов или объектов в соот-
ветствующих координатах (вольт-амперные характеристики, кри-
вые намагничивания и гистерезисные кривые, переходные и ампли-
тудно-частотные характеристики и др.).
Специфика измерительного эксперимента требует полного учета
всей совокупности факторов, влияющих на точность получаемых
экспериментальных данных, что обусловливает особенности орга-
низации и планирования измерений.
В общем случае измерение физических величин представляет
собой многоступенчатый процесс, состоящий как из самой про-
цедуры измерений, включающей типовые измерительные операции
(измерительное преобразование, сравнение величин, воспроизведе-
ние величин заданного размера и др.), так и ряда подготовитель-
ных и заключительных процедур, которые необходимо выполнить
до и после выполнения самих измерений. Процесс измерения
можно разделить на три основных этапа:
подготовка и планирование измерений;
выполнение измерений;
обработка и анализ полученных данных.
До начала измерительного эксперимента, на первом этапе,
необходимо решить ряд вопросов, касающихся подготовки, пла-
нирования и организации измерений. Основными из них явля-
ются:
цель и задача измерений;
наличие априорной информации об объекте исследования и
измеряемых величинах (функциональные связи между измеряе-
мыми величинами, результаты предварительных измерений, пред-
полагаемые диапазоны и др.);
модели объектов и измеряемые физические величины;
измеряемые параметры модели, которые должны быть аде-
кватны определяемым физическим величинам;
зависимости между определяемой величиной и непосред-
ственно измеряемыми величинами;
условия измерений н влияющие величины';
8
допустимые погрешности измерений. Если используются кос-
венные измерения, то необходимо определить допустимую по-
грешность измерения каждой из непосредственно измеряемых
величин;
необходимые методы измерений отдельных величин;
требуемые средства измерений, их метрологические характери-
стики и способы автоматизации измерений;
планирование измерений, включая математические методы
планирования измерений;
методы коррекции погрешностей измерений;
требуемая форма представления результатов измерений;
необходимые алгоритмы и средства обработки эксперименталь-
ных данных, оценки погрешностей измерений и их достовер-
ности;
требуемые и имеющиеся ресурсы, т. е. необходимые затраты
для выполнения поставленной задачи;
экономическая эффективность измерений.
Исследуемый объект и цель измерения обычно задаются. Но
даже и в этом случае необходимо проверить корректность поста-
новки задачи и заранее проанализировать, как будут использо-
ваны результаты измерений физических величин для оценки ис-
следуемого объекта, эффективности его функционирования или уп-
равления, для принятия решений по результатам исследования.
На основании такого анализа уточняются цели и задачи измери-
тельного эксперимента. Важным этапом подготовки к измерениям
является определение подлежащих измерению физических вели-
чин и характера их изменения. С учетом свойств объекта иссле-
дования и поставленной цели конкретизируются физические ве-
личины применительно к данному объекту. Определяются пре-
делы их изменений, частотный спектр, взаимные связи и др. Все
это устанавливается на основе априорных данных и, если требу-
ется, предварительных измерений.
При установлении требований к допускаемым погрешностям
измерений необходимо исходить из цели измерений. При массо-
вых измерениях требования к точности измерений устанавлива-
ются из экономических соображений, т. е. минимизации потерь
из-за неточности измерений. Требования к точности измерений
должны быть обоснованы и их нельзя завышать, так как чем
выше задаваемая точность измерений, тем больше ресурсов и
времени требуется для выполнения эксперимента. Чем выше
точность и чувствительность приборов, тем они сложнее, менее на-
дежны и требуют более квалифицированного обслуживания.
При измерениях используют различные виды математических
и физических моделей. В качестве таких моделей применяются
приближенные и точные математические модели, в частности
в виде дифференциального уравнения или передаточной функ-
ции (динамическая модель объекта), скалярная величина, вектор-
ная величина (двухмерный и многомерный вектор), тензор (мо-
дель поля механических напряжений), периодический сигнал, слу-
9
чайный сигнал, совокупность сигналов (спектр, взаимный спектр),
геометрическое тело, двухмерное поле, звено с сосредоточенными
параметрами, цепь с распределенными параметрами, четырехпо-
люсник и др. В ходе выполнения измерений может возникнуть
необходимость в переопределении или уточнении модели.
Существует ряд типовых методик выполнения измерений, раз-
работанных и аттестованных применительно к конкретным объ-
ектам исследования. Кроме того, имеется ряд государственных
стандартов, определяющих методики выполнения измерений.
1-3. Методы уменьшения погрешностей измерений
Анализ причин появления погрешностей измерений, вы-
бор способов их обнаружения и уменьшения являются одними из
основных этапов процесса измерений. Погрешности измерений
принято делить на систематические и случайные. В процессе из-
мерений систематические и случайные погрешности проявляются
совместно и образуют нестационарный случайный процесс. Деле-
ние погрешностей на систематические и случайные относительное
и является удобным приемом для их анализа и разработки ме-
тодов уменьшения их влияния на результат измерения.
Теория погрешностей главным образом посвящена анализу
случайных погрешностей и методам оценки погрешностей резуль-
татов измерений на основе теории вероятности и математической
статистики. Систематические погрешности при этом считаются
скорректированными благодаря введению поправок и использова-
нию других методов, а неисключенные остатки таких погрешно-
стей рассматриваются как реализации случайной величины и,так
же как случайные погрешности, оцениваются вероятностными ха-
рактеристиками.
Здесь рассматриваются способы обнаружения и исключения
систематических погрешностей, поскольку они зависят от выбора
метода измерений и его осуществления.
Систематические погрешности определяют качество измерений,
называемое правильностью измерений. Чем меньше систематиче-
ские погрешности, тем правильнее измерение, т. е. правильнее
выбраны модели объектов при измерениях, методы и средства
измерений, измерительные процедуры, алгоритмы вычислитель-
ных операций и т. д.
Правильность измерений в значительной степени зависит от
квалификации экспериментатора, поскольку систематические по-
грешности можно выявить и принять меры для их уменьшения
в процессе подготовки и в ходе выполнения эксперимента.
Большинство систематических погрешностей может быть вы-
явлено и оценено путем теоретического анализа свойств объекта
исследования, условий измерений, особенностей метода, характе-
ристик применяемых средств измерений, априорной информации
и др.
Сходимость измерений — качество измерений, отражающее
10
близость друг к другу результатов измерений, выполненных в оди-
наковых условиях. Сходимость тем лучше, чем меньше случай-
ные погрешности.
Случайные погрешности, в отличие от систематических, нельзя
заранее выявить и устранить до и в процессе измерения. Их
влияние на результат измерения можно уменьшить путем прове-
дения измерений с многократными наблюдениями и последующей
обработки результатов таких измерений. При планировании из-
мерений в зависимости от цели измерений, требуемой точности,
используемых методов и средств измерений и других причин мо-
гут быть предусмотрены многократные наблюдения. Но в большин-
стве случаев измерения физических величин, за исключением мет-
рологических работ, проводятся однократные измерения и особое
внимание следует уделять методам уменьшения систематических
погрешностей.
По характеру изменения систематические погрешности де-
лятся на постоянные и переменные. Последние, в свою очередь,
подразделяются на периодические и прогрессирующие. К посто-
янным погрешностям относятся, например, погрешности, связан-
ные с неточной градуировкой шкалы прибора, отклонением раз-
мера меры от номинального значения, неточным выбором моде-
лей объектов.
Периодической называется погрешность, изменяющаяся по пе-
риодическому закону, например погрешность отсчета при опре-
делении времени по башенным часам, если смотреть на стрелку
снизу, температурная погрешность от изменения температуры
в течение суток и т. п. Прогрессирующими называются погреш-
ности, монотонно изменяющиеся (увеличивающиеся или умень-
шающиеся) в общем случае по сложному, обычно неизвестному
закону. Прогрессирующие погрешности во многих случаях обус-
ловлены старением элементов средства измерения и могут быть
скорректированы при его периодической поверке.
По причине возникновения погрешности измерений физических
величин разделяются на три основные группы: методические, ин-
струментальные и погрешности взаимодействия.
Методические погрешности обусловлены неадекватностью при-
нимаемых моделей реальным объектам, несовершенством методов
измерений, упрощением зависимостей, положенных в основу изме-
рений, неопределенностью (диффузностью) объекта измерения.
Несоответствие модели реальному объекту может быть оце-
нено на основе предварительных измерений и анализа объекта
измерений. Например, при измерении геометрических размеров
круглых изделий (валы, трубы и др.) в качестве модели объекта
обычно применяется цилиндр, диаметр и образующая которого яв-
ляются параметрами модели, выбираемыми в качестве измеряемых
величин. Диаметр цилиндра должен быть инвариантен к сечению
и угловой координате, а все образующие должны иметь одинако-
вую длину. Однако вследствие неточности изготовления объекта
может оказаться, что разности результатов измерений соответ-
II
ственно диаметра и образующей в различных местах объекта
больше ожидаемой погрешности измерения. Это говорит о том,
что принятая модель не соответствует реальному объекту и должна
быть уточнена. Другой пример: при определении характеристик
цилиндрических мер магнитной индукции (соленоиды, катушки
Гельмгольца), входящих в эталон магнитной индукции, кроме диа-
метра витков и длины обмотки (образующей) определяются ко-
нусность и эллипсность обмотки. При исследовании периодических
процессов часто в качестве модели объекта используется синусо-
идальный процесс, но это допустимо только в том случае, если
значениями параметров высших гармоник можно пренебречь. Ана-
логичные трудности встречаются при очень точных измерениях
длины объекта из-за микронеровностей его концевых граней или
при измерениях ряда, казалось бы, постоянных величин вследствие
нестабильности (флюктуации) значений этих величин во времени.
И нет рументальные погрешности обусловлены прежде всего осо-
бенностями используемых в средствах измерений принципов и ме-
тодов измерений, а также схемным, конструктивным и технологи-
ческим несовершенством средств измерений. К инструментальным
погрешностям относится погрешность средств измерений в рабо-
чих условиях, включающая в себя основную, дополнительные (от
влияющих величин и неинформативных параметров входного сиг-
нала) и динамическую погрешности. Инструментальные погрешно-
сти данного средства измерений определяются при его испытании
и указываются в технической документации (паспорт, свидетель-
ство о поверке и др.).
Погрешности взаимодействия обусловлены взаимным влиянием
средства измерений, объекта исследования и экспериментатора.
Погрешности от взаимного влияния средства и объекта измерений
обычно принято относить к методическим погрешностям, а погреш-
ности, связанные с действиями экспериментатора, называются лич-
ными погрешностями. Однако такая классификация недостаточно
полно отражает суть рассматриваемых погрешностей.
Так, характерным примером методической погрешности счита-
ется погрешность за счет собственного потребления мощности ам-
перметром и вольтметром при их использовании для определения
сопротивления путем измерения тока через испытуемый резистор
и падения напряжения на нем. Однако возникающие при этом по-
грешности главным образом определяются не методом измерений,
а несовершенством используемых средств измерений, которые
вследствие конечных значений их входных сопротивлений потреб-
ляют мощность. Если бы для измерения падения напряжения на
резисторе применить вольтметр с бесконечно большим сопротив-
лением или амперметр с бесконечно малым сопротивлением, то
погрешности не было бы. Казалось, правильнее было бы относить
такие погрешности к инструментальным погрешностям. Однако
рассматриваемые погрешности зависят не только от параметров
используемых средств измерений, но также и от параметров объ-
екта исследования или, точнее, от их соотношения. Поэтому такие
12
погрешности следует относить к погрешностям взаимодействия.
Например, при измерении тока в нагрузке с сопротивлением Дн
посредством амперметра с сопротивлением Да имеет место по-
грешность
У=-ДА/(Д1 + ^н + Дд),
где Д,— внутреннее сопротивление источника тока.
Параметры, обусловливающие погрешности взаимодействия,
входят в состав метрологических характеристик и различны для
разных средств измерений. Такими параметрами могут быть по-
требляемая мощность, входное сопротивление, сопротивление изо-
ляции, теплоемкость, контактное давление, развиваемое усилие,
масса датчика и т. п. Зная эти параметры, можно дать оценку
погрешности взаимодействия и скорректировать полученные ре-
зультаты измерений.
Погрешность взаимодействия практически отсутствует при ис-
пользовании бесконтактных методов и средств измерений, при
которых влияние средства измерений на объект исследования и
измеряемую величину сведено до минимума или вообще его нет.
Эта погрешность также отсутствует, если применяемое средство
измерений постоянно подключено к объекту, т. е. является его не-
отъемлемой частью.
Принято считать, что совершенствование отсчетных устройств
и особенно использование приборов с цифровыми отсчетными уст-
ройствами исключают погрешность отсчитывания. Однако увели-
чение объема получаемой измерительной информации и рост пси-
хофизиологической нагрузки могут привести к возникновению
существенной составляющей погрешности взаимодействия, обуслов-
ленной действиями экспериментатора, в том числе ошибками от-
счета показаний приборов. При измерении малых напряжений и
токов возможны погрешности от термо-ЭДС, возникающих при
прикосновении или приближении экспериментатора к зажимам,
проводам или другим элементам входной цепи прибора, а также
вследствие наводок, передаваемых через его тело. При таких экс-
периментах не рекомендуется пользоваться одеждой из синтетиче-
ских материалов, так как возникающие на таких материалах
электрические заряды могут быть причиной появления помех.
Способы обнаружения и устранения систематических погреш-
ностей измерений весьма разнообразны и часто зависят от вида
измеряемой физической величины, используемых методов и средств
измерений. Собственно, выбор того или иного метода измерений
должен производиться с целью получения результата измерения
с допустимой погрешностью. Способы устранения ряда методиче-
ских погрешностей и погрешностей взаимодействия рассматрива-
ются в соответствующих главах применительно к конкретным ме-
тодам измерений различных физических величин. Здесь приводятся
наиболее распространенные общие методы.
Выявление и устранение причин возникновения погрешностей —
наиболее распространенный способ уменьшения всех видов си-
13
схематических погрешностей. Примерами такого способа явля-
ются: термостатирование отдельных узлов или прибора в целом,
а также проведение измерений в термостатированных помещениях
для исключения температурной погрешности, применение экранов,
фильтров и специальных цепей (например, эквипотенциальных це-
пей) для устранения погрешностей от влияния электромагнитных
полей, наводок и токов утечек, применение стабилизированных ис-
точников питания, амортизация приборов, удаление средств изме-
рений и объектов исследования от источников влияющих воздей-
ствий, исключение из измерительной цепи материалов, создающих
большую термо-ЭДС в паре с медью, например никеля, который
в паре с медью создает термо-ЭДС 19 мкВ/K. При аттестации вы-
сокоточных мер магнитной индукции производят компенсацию маг-
нитного поля Земли трехкомпонентной системой катушек с током.
Погрешность от термо-ЭДС можно исключить путем включения
в цепь термопары, ЭДС которой компенсирует паразитную термо-
ЭДС.
Для уменьшения прогрессирующей погрешности от старения
элементов средств измерений (резисторы, растяжки, постоянные
магниты и др.) параметры таких элементов стабилизируют путем
искусственного и естественного старения.
Систематические погрешности можно также уменьшить раци-
ональным расположением средств измерений по отношению друг
к другу, к источнику влияющих воздействий и к объекту иссле-
дования. Например, магнитоэлектрические приборы должны быть
удалены друг от друга, оси катушек индуктивности должны быть
расположены под углом 90°, выводы термопары должны распо-
лагаться по изотермическим линиям объекта (см. также § 3-4,
12-3 и др.).
Многие систематические погрешности, являющиеся не изме-
няющимися во времени функциями влияющих величин или обус-
ловленные стабильными физическими эффектами, могут быть тео-
ретически рассчитаны и устранены введением поправок или ис-
пользованием специальных корректирующих цепей. Например,
погрешность от экранирующего поля электронной оболочки ато-
мов при измерении методом ядерного магнитного резонанса учи-
тывается путем поправки, определяемой расчетным путем. Рас-
четным путем можно также определить ряд погрешностей взаи-
модействия, например погрешность от собственного потребления
мощности средством измерений.
Другим радикальным способом устранения систематических
погрешностей является поверка средств измерений в рабочих
условиях с целью определения поправок к результатам измере-
ния. Это дает возможность учесть все систематические погреш-
ности без выяснения причин их возникновения. Степень коррек-
ции систематических погрешностей в этом случае, естественно,
зависит от метрологических характеристик используемых образ-
цовых приборов и случайных погрешностей поверяемых приборов.
Фактически поверка средств измерений перед их использованием
14
и введение поправок адекватны применению средств измерений
более высоких классов точности при условии, что случайные
погрешности средств измерений малы по сравнению с системати-
ческими, а сами систематические погрешности медленно изменя-
ются во времени.
Метод инвертирования широко используется для устранения
ряда постоянных и медленно изменяющихся систематических по-
грешностей. Этот метод и ряд его разновидностей известны также
под названиями метода исключения погрешности по знаку,
метода коммутационного инвертирования, метода структурной мо-
дуляции, метода двукратных измерений, метода инвертирования
функции преобразования и др. Все эти методы основаны на
выделении алгебраической суммы четного числа сигналов измери-
тельной информации, которые вследствие инвертирования отлича-
ются направлением информативного сигнала, опорного сигнала
или знаком погрешности.
Близок к методу инвертирования метод модуляции-демодуля-
ции, при котором, по существу, производятся периодическое ин-
вертирование входного сигнала и подавление помехи, имеющей
однонаправленное действие.
Распространенным вариантом метода инвертирования является
метод исключения погрешности по знаку, который часто применя-
ется для исключения известных по природе погрешностей, источ-
ники которых имеют направленное действие, например погрешно-
стей от влияния постоянных магнитных полей, термо-ЭДС и др.
При использовании этого метода два измерения выполняются так,
чтобы постоянная систематическая погрешность входила в ре-
зультаты измерений с разными знаками. Этого можно достигнуть
изменением знака погрешности при неизменном значении измеряе-
мой величины или инвертированием входного сигнала при сохра-
нении знака и значения систематической погрешности. Первый
способ используется в том случае, если можно изменить знак или
направление систематической погрешности. Например, для исклю-
чения влияния внешнего магнитного поля на показания прибора
или на параметры меры изменяют знак погрешности путем пово-
рота прибора на 180°. Этот же способ используется в астазирован-
ных средствах измерений, содержащих два идентичных преобразо-
вателя, оси направленности которых расположены под углом 180°.
Однако полностью устранить рассматриваемую погрешность
можно только в том случае, если внешнее поле однородно и век-
тор магнитной индукции направлен коллинеарно с осью направ-
ленности прибора (преобразователя). Неисключенные системати-
ческие погрешности от неточного выполнения этих условий в ряде
случаев можно теоретически оценить.
Способ инвертирования входного сигнала широко используется
для коррекции аддитивных погрешностей, не зависящих от направ-
ления измеряемой величины, например погрешности нуля в при-
борах с нулем посредине шкалы, погрешностей от термо-ЭДС,
внешнего магнитного поля и других, а также некоторых мульти-
15
пликативных погрешностей средств измерений, например погреш-
ности линейности, обусловленной значениями четных производных
функции преобразования [9]. Для исключения погрешности от
термо-ЭДС в высокоточных компенсаторах и цифровых вольтмет-
рах постоянного тока производится повторное измерение при од-
новременном изменении полярности измеряемого напряжения и
рабочего тока. Поскольку термо-ЭДС не зависит от полярности
тока, то результаты двух измерений будут
= Ux 4" Ет. эдс', -^Х2 =- Пх-[-£т. эдс>
откуда
^х = (^1 + ад2.
Методы инвертирования сейчас широко используются для
уменьшения погрешностей современных средств измерений. Этому
способствует развитие измерительных преобразователей с диффе-
ренциальными входами, а также быстродействующих коммутато-
ров и сумматоров в микроэлектронном исполнении. Методы ин-
вертирования можно осуществлять непрерывно, если использовать
два измерительных преобразователя с одинаковыми функциями
преобразования, но с разными по знаку входными сигналами, или
дифференциальный преобразователь.
Метод замещения (метод разновременного сравнения) явля-
ется наиболее универсальным методом, который дает возмож-
ность устранить большинство систематических погрешностей. Из-
мерения осуществляются в два приема. Сначала по отсчетному
устройству прибора делают отсчет измеряемой величины, а за-
тем, сохраняя все условия эксперимента неизменными, вместо
измеряемой величины на вход прибора подают известную вели-
чину, значение которой с помощью регулируемой меры (калибра-
тора) устанавливают таким образом, чтобы показание прибора
было таким же, как при включении измеряемой величины. За
результат измерения принимается значение известной величины,
определяемое по входному коду меры. Погрешность измерения
при этом будет образовываться из погрешности меры и умножен-
ной на }2 случайной погрешности прибора. Метод замещения ши-
роко используется для повышения точности измерения ряда ве-
личин, например для определения массы с помощью не очень точ-
ных весов и набора гирь, для точного измерения сопротивлений,
индуктивности, емкости и других величин, для которых сущест-
вуют точные регулируемые меры. Метод обеспечивает в ряде слу-
чаев существенное повышение точности поскольку точность мер
(калибраторов) обычно выше точности других средств изме-
рений.
Разновидностью метода замещения является метод разновре-
менного компарирования, который используется при измерениях
таких величин, которые нельзя с высокой точностью воспроизво-
дить при помощи регулируемых мер или других технических
средств. Обычно это величины, изменяющиеся с высокой частотой
или по сложному закону. В качестве известных регулируемых ве-
16
личин при этом используются величины такого же рода, как изме-
ряемые, но отличающиеся от них спектральным составом (обычно
постоянные во времени и в пространстве) и создающие такой же,
как и измеряемая величина, сигнал на выходе компарирующего
преобразователя (см. § 6-4).
Другой разновидностью метода замещения является метод об-
разцовых сигналов, заключающийся в том, что на вход средства
измерений периодически вместо измеряемой величины подаются
образцовые сигналы такого же рода, что и измеряемая величина.
Разность между реальной градуировочной характеристикой и но-
минальной градуировочной характеристикой используется для кор-
рекции чувствительности или для автоматического введения по-
правки в результат измерения. При этом, как и в методе замеще-
ния, устраняются все систематические погрешности, но только
в тех точках диапазона измерений, которые соответствуют образцо-
вым сигналам. Метод широко используется в современных точных
цифровых приборах и в информационно-измерительных системах.
Характерным примером метода образцовых сигналов является пе-
риодическая подстройка рабочего тока в компенсаторах и цифро-
вых вольтметрах постоянного тока при помощи нормального эле-
мента.
К методу образцовых сигналов примыкает тестовый метод. При
использовании этого метода значение измеряемой величины опреде-
ляется по результатам нескольких наблюдений, при которых в од-
ном случае входным сигналом средства измерений является сама из-
меряемая величина X, а в других — так называемые тесты, явля-
ющиеся функциями измеряемой величины, например Xj = X+AX;
Хъ=аХ\ Xz=(X+AX)/b, где АХ — известное приращение вели-
чины, создаваемое мерой; а и b — постоянные коэффициенты.
Тестовые методы можно использовать для коррекции систе-
матических погрешностей при измерении различных физических
величин. Эффективность этих методов зависит от погрешности
воспроизведения величины АХ и наличия случайных погрешно-
стей [8].
Метод вспомогательных измерений используется для исключе-
ния погрешностей от влияющих величин и неинформативных па-
раметров входного сигнала. Для реализации этого метода одно-
временно с измеряемой величиной X при помощи вспомогатель-
ных измерительных устройств производится измерение каждой из
влияющих величин и вычисление при помощи вычислительного
устройства, а также формул и алгоритмов влияния поправок А»
к результатам измерения. Широкому использованию метода вспо-
могательных измерений способствует быстрое развитие средств
измерений со встроенными микропроцессорами. В качестве объ-
ектов вспомогательных измерений являются не только влияющие
величины, но и неинформативные параметры входного сигнала.
Пример лазерного интерферометра с использованием метода
вспомогательных измерений рассмотрен в § 8-4. Метод вспомо-
гательных измерений является самостоятельной эффективной раз-
I 17
новидностью или составной частью многих структурных методов
автоматической коррекции погрешностей средств измерений [9].
Метод симметричных наблюдений заключается в проведении
многократных наблюдений через равные промежутки времени и
усреднении результатов наблюдений, симметрично расположен-
ных относительно среднего наблюдения. Обычно этот метод при-
меняется для исключения прогрессирующих погрешностей, изме-
няющихся по линейному закону. Так, при измерении сопротив-
ления резистора путем сравнения напряжения на измеряемом и
образцовом резисторах, включенных последовательно и питаемых
от общего аккумулятора, может возникнуть погрешность вслед-
ствие разряда источника питания. Для исключения этой погреш-
ности проводят три измерения падения напряжения: первое —
на образцовом резисторе Ro-
— IRo,
а затем через равные промежутки времени — на измеряемом ре-
зисторе:
U,=(I-WR,
и снова н,а образцовом резисторе:
[7О2 = (/—Л/2) 7?0.
Если ток изменяется во времени по линейному закону, то
АД = 2АЛ; I—Mj = (Uol + UO2)/(2RO)
и
р __ р X __
t\x-Г\О
иО1 + {^02
Метод симметричных наблюдений можно также использовать
для устранения других видов погрешностей, например системати-
ческих погрешностей от влияющих величин, изменяющихся по
периодическому закону. В этом случае симметричные (периоди-
ческие) наблюдения проводят через половину периода, когда по-
грешность имеет разные знаки, но одинаковые значения. Таким
образом можно, например, исключить погрешность от наличия чет-
ных гармоник при измерении амплитудного значения напряжения
при искаженной форме кривой.
Некоторые из рассмотренных выше методов уменьшения систе-
матических погрешностей используются при построении средств
измерений. Так, в приборах применяются устройства для автома-
тической коррекции нуля и чувствительности, цепи коррекции тем-
пературных и частотных погрешностей, а также более сложные
устройства автоматической коррекции погрешностей, реализуемые
на основе рассмотренных методов или их комбинаций. Все рас-
смотренные методы направлены на выявление и уменьшение по-
грешностей измерений. Эта цель главным образом достигается за
счет усложнения эксперимента, применения более сложных и до-
рогостоящих средств измерений. При ручной коррекции падает
производительность труда экспериментатора,
18
1-4. Методы квантовой метрологии
Наиболее эффективным способом повышения точности
измерений является использование таких методов и средств из-
мерений, которые свободны от многих видов погрешностей изме-
рений и которые не требуют применения сложных методов кор-
рекции. В этом отношении наиболее перспективными являются
методы квантовой метрологии, основанные на квантовых эффек-
тах, имеющих место на атомном и ядерном уровнях, а также бес-
контактные спектрометрические (волновые) методы (особенно
оптические), базирующиеся на естественных шкалах длин волн
электромагнитного излучения.
Методы квантовой метрологии основаны на использовании ста-
бильных физических явлений и фундаментальных взаимодействий,
обусловленных корпускулярно-волновой природой вещества и элек-
тромагнитного излучения. Большинство квантовых методов бази-
руется на взаимодействии электромагнитного излучения с атом-
ными частицами (атомы, электроны, протоны, атомные ядра и др.),
находящимися в макроскопических количествах вещества. При
этом используют главным образом макроскопические квантовые
эффекты, т. е. такие эффекты и явления микромира, которые
можно обнаружить на макроуровне. К ним относятся:
эффект Зеемана, заключающийся в расщеплении энергетиче-
ских уровней атомных частиц на магнитные подуровни, создавае-
мые магнитным полем, и основанные на этом эффекте квантовые
магниторезонансные явления (см. § 6-2);
эффекты Джозефсона и квантования магнитного потока, обус-
ловленные макроскопическими квантовыми состояниями свободных
электронов (куперовскнх пар) в сверхпроводниках;
квантовый эффект Холла, заключающийся в квантовании хол-
ловской проводимости (отношение тока через образец к напря-
жению Холла), имеющий место в сильных магнитных полях;
эффект Мессбауэра — ядерный гамма-резонанс, основанный на
резонансном поглощении у-квантов без отдачи энергии (см.
§ 11-3), и др.
Исходным для описания многих используемых физических яв-
лений является известное квантовомеханическое соотношение Е—
= hf, в котором постоянная Планка h как бы перебрасывает мост
между микро- и макромиром. При этом энергия Е является мик-
роскопической характеристикой квантовых переходов между энер-
гетическими уровнями микрочастиц, а частота f (или длина
волны X) излучения — макроскопической величиной, доступной
измерению.
Квантовые методы и соответствующие средства измерений от-
личаются высокими метрологическими характеристиками и уни-
кальными свойствами, которые обусловлены стабильностью
физических явлений, лежащих в их основе. Функции преобразова-
ния квантовых измерительных преобразователей и приборов ба-
зируются на фундаментальных законах микромира и квантово-
19
механических соотношениях. Поэтому во многих случаях в каче-
стве коэффициентов преобразования таких средств измерений вы-
ступают фундаментальные физические константы, обычно извест-
ные с высокой точностью, или коэффициенты, поддающиеся
точному теоретическому расчету. Это кроме высокой точности преоб-
разования обеспечивает переход к абсолютным измерениям и по-
вышение метрологической надежности средств измерений, по-
скольку такие средства измерений не нуждаются в градуировке
и периодической поверке.
Использование физических явлений, происходящих на атом-
ном или ядерном уровнях, т. е. в недрах атома, позволяет созда-
вать высокочувствительные средства измерений с порогом чув-
ствительности, равным кванту энергии одной или небольшого
ансамбля атомных частиц. По этой же причине метрологические ха-
рактеристики квантовых приборов мало или вообще не зависят от
изменений внешних факторов. При этом чем более глубинные яв-
ления используются, тем меньше эта зависимость (см. § 6-2).
Квантовые преобразователи обычно не искажают состояния объ-
екта исследования. В качестве информативного параметра выход-
ного сигнала квантовых средств измерений во многих случаях
выступает частота, являющаяся наиболее точно измеряемой физи-
ческой величиной, которую легко, без искажений можно переда-
вать на большие расстояния. Это позволяет сделать общедоступ-
ной высокую точность измерения не только в метрологической
практике, но и при технических измерениях.
Квантовые методы уже нашли применение в метрологии для
создания естественных эталонов единиц ряда физических величин.
На их основе уже созданы эталоны единиц длины, времени и ча-
стоты (см. § 8-5), электрического напряжения [1J, магнитной ин-
дукции (см. § 6-5), вторичный эталон температуры (см. § 12-6).
Проводятся исследования по созданию естественных эталонов еди-
ниц массы на основе уточнения значения числа Авогадро, элек-
трического сопротивления на основе квантового эффекта Холла,
силы тока на основе ядерного магнитного резонанса и др.
Совершенствование квантовых методов и их сочетание с совре-
менной элементной базой позволяют на их основе создавать не
только высокоточные эталоны единиц физических величин, но
также образцовые и рабочие средства измерений с уникальными
характеристиками, которые не могут быть получены на основе
применения классических методов. Уже созданы усилители и ана-
лого-цифровые преобразователи с порогом чувствительности
10-14 В, тесламетры и градиентометры с порогами чувствительно-
сти соответственно 10-15 Тл-Гц’1/2 и 10 13 Тл-м~'. Гц-1/2на основе
эффекта Джозефсона, точные килоамперметры (см. § 3-4), бескон-
тактные расходомеры и концеитратомеры на основе ядерного
магнитного резонанса (см. § 11-3 и 13-4), измерители сверхмалых
линейных и угловых размеров с порогами чувствительности со-
ответственно 10~12 м и 0,001" на основе рентгеновской интерфе-
рометрии (см. § 8-4), лазерные интерферометры, обеспечивающие
20
измерение в производственных условиях линейных размеров с по-
грешностью 2-107 (см. § 8-4), концентратомеры и измерители
сверхмалых скоростей на основе эффекта Мессбауэра (см. § 11-3)
и др.
Многие квантовые методы, в частности основанные на явлениях
магнитного резонанса, ядерного квадрупольного резонанса, эф-
фекте Мессбауэра, относятся к категории резонансных, поскольку
в их основе лежит резонансное взаимодействие электромагнит-
ного излучения с системой атомных частиц. Их применение поз-
воляет создавать высокоточные средства измерений, обладающие
высокой чувствительностью, свойственной резонансным методам.
Глава вторая
МЕТОДЫ ИЗМЕРЕНИЙ МАЛЫХ НАПРЯЖЕНИИ,
ТОКОВ И ЗАРЯДОВ
2-1. Измеряемые величины и методы измерений
Задача измерения малых электрических сигналов явля-
ется типичной задачей, возникающей при работе с различными
датчиками физических величин — термоэлектрическими, тнезомет-
рическими, пьезоэлектрическими, ионизационными, при исследо-
вании биопотенциалов, при испытаниях изоляционных материалов
и т. п. К малым значениям напряжения, тока и количества элек-
тричества обычно относят значения, находящиеся в пределах:
напряжения — от 10-10 до 10 5 В, токи — от 10-18 до 10-5 А, коли-
чество электричества — от 10-12 до 10-5 Кл. Нижние границы ука-
занных диапазонов соответствуют реально достижимым порогам
чувствительности измерительной аппаратуры.
Чаще всего измерению подлежат медленно изменяющиеся ве-
личины, верхняя граница частотного диапазона которых лежит
ниже 1 Гц. Однако в практике встречаются также задачи, свя-
занные с необходимостью измерения малых переменных величин,
изменяющихся с частотой, лежащей в диапазоне от нескольких
герц до нескольких сотен килогерц.
Краткая классификационная таблица методов измерений ма-
лых электрических сигналов приведена на рис. 2.1. Большая
часть этих методов основывается на предварительном усилении
измеряемых сигналов. При этом находят применение электроме-
ханические (фотогальванометрические) и электронные усилители,
использующие принцип прямого усиления и с преобразованием
спектра (с модуляцией-демодуляцией сигнала). Возможно также
непосредственное измерение малых сигналов с помощью магни-
тоэлектрических или электростатических гальванометров. Кроме
того, для измерения сверхмалых токов и напряжений использу-
ются методы, не упомянутые в классификации (рис. 2-1) и осно-
ванные на эффекте Джозефсона [1].
21
Основные трудности, которые приходится преодолевать при
измерении малых сигналов, связаны с мешающим влиянием внут-
ренних шумов средств измерений и помех, наводимых различ-
ными внешними источниками. Интенсивность шумов и помех на
выходе измерительного канала снижается при уменьшении ча
стотной полосы. Поэтому для усиления малых сигналов исполь
зуются, как правило, узкополосные усилители. Преобразование
Рис. 2-1
спектра сигнала также преследует цель уменьшить влияние шу-
мов.
Как известно, снижение погрешности усилителей достигается
с помощью введения отрицательной обратной связи. При боль-
шом коэффициенте усиления замкнутого контура, состоящего из
усилителя и цепи обратной связи, точность коэффициента усиле-
ния практически полностью определяется точностью обратной
связи. С помощью соответствующих обратных связей обеспечивают
также требуемые значения входных и выходных сопротивлений
усилителя. Для того чтобы измерительное устройство как можно
меньше влияло на объект измерения, необходимо, чтобы при из-
мерении напряжения усилитель имел высокое входное сопротив-
ление, а при измерении тока и заряда — низкое. Низкое вы-
22
ходное сопротивление усилителя обычно требуется для обес-
печения благоприятных условий работы последующего преобра-
зователя.
Структурные схемы усилителей, применяемых для усиления напряжения,
показаны на рис. 2-2. В этих усилителях используется последовательная
(рис. 2-2, а) или параллельная (рис. 2-2, б) отрицательная обратная связь по
напряжению. Операционные усилители (ОУ), входящие в устройства, показан-
ные на рис. 2-2, могут быть различными, например полупроводниковыми или
фотогальванометрическими. У них должно быть возможно более высокое вход-
ное сопротивление, большое усиление по напряжению, малый уровень шумов.
При усилении низкочастотных сигналов, начиная от нулевой частоты, операцион-
ный усилитель должен иметь также малые входные токи и малое напряже-
ние смещения.
При работе иа линейном участке амплитудной характеристики выходное
напряжение ОУ приближенно можно определить из равенства ивых — К(е+—е_),
где К — коэффициент усиления ОУ, а е+ и е_ — напряжения на его неинверти-
рующем и инвертирующем входах. Для усилителей, построенных по схемам
Рис. 2-2
рис. 2-2, а и б, нетрудно получить соотношения, определяющие соответственно
их коэффициенты усиления:
UBX \ Ri I 1+1/(/С₽) Двх 14-1/(КР) { °
б определяется
при измерении
где P=/?i/(/?t+T?2).
Входное сопротивление усилителей по схемам рис. 2-2, а и
соответственно формулами:
Двх « Гвх (КР+1) и Явх ~ + R^HK + 1).
где гЕх — входное сопротивление ОУ.
Как видим, последовательная обратная связь (рис. 2-2, о)
напряжения предпочтительнее, так как она при может обеспечить более
высокое значение входного сопротивления, чем параллельная (рис 2-2,6).
Схемы усилителей с токовым входным сигналом показаны на рис. 2-3.
Для усилителя по схеме рис. 2 3, а
К
(2-2)
ДвЫх--/вх7?к+—^х-
р ________1
ЕХ Кф-1 1+(Д/гвх)/(К+1)
Если и К»/?/гвх, то Двых«— IR; RB*~RIK. Сглаживающий конден-
сатор С (рис. 2 3) вводят в усилитель тока для уменьшения полосы пропуска-
ния, чтобы уменьшить чувствительность усилителя к шумам и помехам.
Для увеличения коэффициента усиления усилителя по схеме рис. 2-3, а сле-
дует увеличивать сопротивленце R.
23
На рис 2-3,6 показана схема усилителя с токовым входом, в котором вы-
сокий коэффициент усиления достигаетси без применения высокоомных резисто-
ров, за счет использования Т-образного трехполюсника в цепи обратной связи.
Для этого усилителя
Ri Ч~ R2 Ч~ RiRz/Rs
-- 1вХ
U вых =
1 + (RzlRJ + I Ri + «2 + 11гвх 1/К
\ Rs / J
В данном случае увеличение коэффициента
увеличения отношения R2/R3.
усиления достигается за счет
На рис. 2-4 приведены схемы преобразователей заряда в на-
пряжение или, как их обычно называют, усилителей заряда (ин-
тегрирующих усилителей тока). Если конденсатор С был исходно
разряжен, то при поступлении на вход усилителя по схеме
рис. 2-4, а электрического заряда дЪх на его выходе получим на-
пряжение (7Вых=^?вх/С (предполагаем, что К3>1). Переключа-
тель S, установленный параллельно конденсатору С, предназна-
чен для периодического разряда этого конденсатора перед оче-
редным измерением.
Усилитель заряда по схеме рис. 2-4, б позволяет получить
большой коэффициент усиления без чрезвычайного уменьшения
емкости С. Для этого усилителя при нулевых начальных условиях
вых = ?вх(1+ад2)/С.
24
Усилители заряда находят применение и для измерения малых
токов. Действительно, измеряя приращение выходного напряже-
ния Д67вых такого усилителя за известное время t, можно опреде-
лить ток Ах, поступающий на вход усилителя. Для усилителей
(рис. 2-4, а и б) приращения выходного напряжения определя-
ются соответственно соотношениями:
Д^ВЬ,Х = - /вх//С И Л£Дых = - /вх/ (1 + RMIC. (2-3)
В частности, для усиления по схеме рис. 2-4, а при времени
интегрирования t, равном 10 с, и емкости С=100 пФ получим
—ДДвых/Л1х= Ю11 Ом. Таким образом, усилитель по схеме рис. 2-4, а
Рис. 2-5
эквивалентен усилителю тока по схеме рис. 2-3, а с резистором
в обратной связи, имеющим сопротивление /?=10“ Ом. В отноше-
нии габаритных размеров и температурной стабильности исполь-
зование конденсатора малой емкости в обратной связи ОУ может
оказаться предпочтительнее использования высокоомного резис-
тора.
Последовательно с интегрирующим усилителем входного тока
может быть включен дифференцирующий усилитель. Это дает
возможность непосредственно получать выходное напряжение, про-
порциональное входному току. Подобный усилитель тока показан
на рис. 2-5, а. Для него
г/ВЫх=/Вх-^-/?.
Cl
Аналогичной формулой определяется также коэффициент пре-
образования усилителя тока, схема которого показана на
рис. 2-5, б. В этом усилителе пропорциональная зависимость ме-
жду входным током и выходным напряжением достигается за
счет включения дополнительного интегратора в цепь обратной
связи.
25
2-2. Предельно достижимый порог чувствительности
усилителей прямого усиления
В настоящее время нетрудно построить усилитель
с весьма высоким (порядка 106 и выше) коэффициентом усиления.
Однако не коэффициент усиления, а внутренние шумы усилителя
и источника сигнала определяют предельно достижимый порог
чувствительности при измерении малых сигналов.
Собственные шумы электронных усилителей по виду их зави-
симости от частоты можно в первом приближении разделить
на две составляющие—белый шум, спектральная плотность мощ-
ности So которого не за-
висит от частоты, и флик-
кер-шум, или розовый
шум, спектральная плот-
ность мощности которого
изменяется обратно про-
порционально частоте.
Соответственно суммар-
ная спектральная плот-
ность шума усилителя
может быть описана со-
отношением
Рис. 2-6
5г1 = 50(1 + Ш (2-4)
где f0 — частота сопряжения, на которой белый и розовый шумы
имеют одинаковую спектральную плотность. Типичная зависимость
спектральной плотности шума усилителя от частоты пока-
зана на рис. 2-6. Кривая S21 на этом рисунке характеризует при-
веденный ко входу усилителя шум для случая, когда сопротивле-
ние Ri источника сигнала равно нулю, а кривая S22 —для слу-
чая, когда Ri отлично от нуля.
Увеличение приведенного ко входу шума при росте сопротив-
ления источника сигнала Ri происходит по двум причинам. Во-
первых, к ЭДС шума усилителя добавляется напряжение шума,
обусловленное прохождением через источник сигнала с сопротив-
лением Ri флюктуаций входного тока усилителя. Во-вторых, до-
бавляется внутренний шум источника сигнала. В соответствии
с формулой Найквиста любому электрическому активному сопро-
тивлению Ri вне зависимости от его физической природы присущ
белый шум, спектральная плотность которого равна
SR = 4kTRt. (2-5)
Подставляя в выражение (2-5) значения постоянной Больц-
мана k= 1,38-10~23 Дж/К и абсолютной температуры Т=300 К,
получаем, например, для Ri=l кОм значение спектральной плот-
ности 5Д, равное 16,6-10 18 В2/Гц.
26
Дисперсия шумового сигнала на выходе усилителя может быть
найдена интегрированием спектральной плотности шума по всему
частотному диапазону:
(2-6)
о
где | G ([) | — амплитудно-частотная характеристика (АЧХ) уси-
лителя.
Рассмотрим простейший случай, когда усилитель по своим ди-
намическим свойствам эквивалентен фильтру нижних частот пер-
вого порядка с постоянной времени т, так что его приведенная
АЧХ описывается соотношением
Gtf) 2 = 1
G(0) (2л/т)2+1
(2-7)
Тогда входной белый шум со спектральной плотностью 5б вызы-
вает приведенное ко входу шумовое напряжение, среднее квадра-
тическое значение которого равно
(2-8)
В частности, внутренний шум источника сигнала со спектраль-
ной плотностью, определяемой формулой (2-5), будет причиной
возникновения шумового напряжения, равного
= (2-9)
Таким образом, соотношение (2-9) определяет порог чувстви-
тельности, который мог бы быть достигнут с помощью идеаль-
ного, нешумящего, усилителя. Если, например, внутреннее сопро-
тивление источника сигнала равно 1 кОм и постоянная времени
усилителя т=1 с, то при температуре 7’=300 К приведенное ко
входу шумовое напряжение Um будет примерно равно 2-10-9 В.
Интересно, что если инерционность усилителя определяется
преимущественно емкостью его входной цепи, так что т=/?1СБХ,
то тогда из выражения (2-9) получим
Um. K = -\lkTlCw
Как видим, в этом случае рассматриваемая составляющая
шума не зависит от выходного сопротивления источника сиг-
нала Ri.
При использовании реального усилителя к шумовому напря-
жению источника сигнала, определяемому формулой (2-9), до-
бавляется шумовое напряжение самого усилителя. Особен-
ностью шума усилителя является то, что при уменьшении частоты
спектральная плотность шума неограниченно возрастает. Рассмот-
рим поэтому вначале более простой случай применения усилителя
переменного напряжения, для которого нижняя граница fH полосы
27
пропускания отлична от нуля. Будем считать, что приведенная
АЧХ усилителя равна единице в пределах полосы пропускания,
ограниченной частотами и fB, и равна нулю за пределами этой
полосы. Тогда приведенное ко входу шумовое напряжение усили-
теля может быть определено простым соотношением, полученным
исходя из выражений (2-4) и (2-6):
Уш у = [So (/в-/и) + Sofoln (М*. (2-10)
Таким образом, для уменьшения порога чувствительности уси-
лителя переменного напряжения следует уменьшать ширину его
полосы пропускания и по возможности располагать ее выше ча-
стоты f0, разграничивающей области действия фликкер-шума и
белого шума.
Для усилителей, у которых частотная полоса начинается с fH =
= 0, т. е. для так называемых усилителей постоянного тока, как
следует из выражения (2-10), дисперсия шумового сигнала не-
ограниченно велика. Казалось бы, этот факт полностью исклю-
чает применение усилителей постоянного тока. Однако такие
усилители существуют и, более того, используются достаточно ши-
роко в измерительной технике. Дело в том, что у любого усили-
теля, называемого нами усилителем постоянного тока, полоса про-
пускания ограничена снизу временем наблюдения /н. Любые флюк-
туации сигнала, период которых существенно превышает время /н,
проявляются как постоянные смещения на входе усилителя. Вре-
менем наблюдения можно, в частности, считать время, прошедшее
после очередной коррекции нуля усилителя.
Дисперсия шума на выходе усилителя постоянного тока будет
тем больше, чем больше время, прошедшее после коррекции нуля.
Для определения этой дисперсии можно воспользоваться форму-
лой (2-6), если в нее вместо частотной характеристики G (f) под-
ставить текущую частотную характеристику (ТЧХ) Gt(f). ТЧХ
линейной системы представляет собой преобразование Фурье ее
импульсной характеристики g (/), ограниченной временем 1И:
Gt(f)^g(t)ri2nftdt.
о I
При t=oo ТЧХ переходит в обычную частотную характерис-
тику.
Если усилитель постоянного тока с периодической коррекцией
погрешности нуля по своим динамическим свойствам эквивалентен
фильтру нижних частот первого порядка, то его ТЧХ по модулю
будет
10/(01 =
2 | sin (л//к)|
у/1 + 4n2f2T2
(2-П)
где т — постоянная времени усилителя; tK — период коррекции.
28
Подставляя выражения (2-4) и (2-11) в (2-6), для типичного слу-
чая получаем
^ш-у ~ +25°f° +с )] ( (2-12)
здесь С=0,577 — постоянная Эйлера.
Первое и второе слагаемые в правой части (2-12) представ-
ляют собой приведенные ко входу усилителя дисперсии флюктуа-
ций, обусловленные соответственно белым и розовым шумами уси-
лителя. Сравнивая выражения (2-12) и (2-8), приходим к выводу,
что коррекция нуля приводит к удвоению дисперсии, вызванной
белым шумом. Физически это нетрудно объяснить. Действительно,
в момент проведения коррекции нуля на входе усилителя дейст-
вует некоторое шумовое напряжение, которое и компенсируется
с помощью корректирующего устройства. По истечении времени
/ьОт, когда текущее значение флюктуации белого шума практи-
чески не будет коррелировано с компенсированным при коррек-
ции значением, шумовой выходной сигнал усилителя будет со-
держать две некоррелированные составляющие, одна из которых
определяется приведенным ко входу белым шумом, а вторая —
сигналом корректирующего устройства. Что касается фликкер-
шума, то вследствие большого содержания в нем низкочастотных
составляющих корреляция между скорректированным и текущим
значениями этого шума оказывается значительной даже по исте-
чении достаточно большого времени tK^>x. Это и позволяет с по-
мощью коррекции ограничить дисперсию флюктуаций, обусловлен-
ных этой составляющей шума.
Из выражения (2-12) следует, что для усилителей постоянного
тока, для которых 1/т^/о, в первом приближении можно прене-
бречь дисперсией, вызванной белым шумом, и учитывать лишь
фликкер-шум усилителя. Частота сопряжения двух составляющих
шума fo для электронных усилителей обычно лежит в диапазоне
10 Гц— 10 кГц. Соответственно пренебрежение белым шумом
справедливо для усилителей, имеющих т^Ю-1... 10~4 с. Если
к тому же учесть, что для подобных усилителей период коррекции
/к, как правило, много больше постоянной времени т, то в резуль-
тате получим
у « V2Sjoln(UT). (2-13)
Произведение Sofo для электронных усилителей обычно нахо-
дится в диапазоне 10~16—10-12 В2. Соответственно при т=0,1 с
получим иш. у~0,02... 2 мкВ по истечении времени /к=1 с после
коррекции нуля и t7m.y~0,05... 5 мкВ через месяц после ее про-
ведения.
При определении полного шумового сигнала усилителя сле-
дует учитывать статистическую независимость шума источника
сигнала и внутреннего шума усилителя:
Пш. ВХ и 4- иш. у.
29
При практическом анализе шумовых свойств усилителей малых сигналов
необходимо учитывать все возможные источники шумов. Для примера рассмот-
рим шумы усилителя с последовательной обратной связью, выполненного по
схеме рис. 2-2, а. Эквивалентная схема этого усилителя показана на рис. 2-7.
На этом рисунке ЭДС смещения есм операционного усилителя и его входные
токн «+ и i- для наглядности показаны в виде отдельных источников, вынесен-
ных за пределы условного обозначения операционного усилителя. С этой же
целью напряжения шумов резисторов, входящих в усилитель, условно показаны
на рис. 2-7 также в виде отдельных источников. Если считать коэффициент уси-
ления операционного усилителя равным бесконечности, то для выходного на-
пряжения усилителя, построенного по схеме рис. 2 7, нетрудно получить соот-
ношение
U ВЫХ = (1/вх + есм + i+Ri + (^2^1 + 1) + 1/ш2 — URz
Рис. 2-7
Напряжение смещения есы усилителя и его входные токи i+ и i_ можно
рассматривать состоящими из постоянных составляющих, создающих системати-
ческую погрешность, и шумовых составляющих еш, Лп+, im-, вызывающих по-
явление случайных погрешностей.
Учитывая статистическую независимость отдельных составляющих шума,
действующий на входе шумовой сигнал можно определить соотношением, в ко-
тором черта сверху означает усреднение по времени:
«Ш. вх = + («ш+^i)2 + +"«L И + [«miMVW +
+ + Я2)]2- (2-И)
Как уже упоминалось, шумы активных сопротивлений £/ш-и, Umt, Umi ха-
рактеризуются равномерной спектральной плотностью, определяемой формулой
Найквиста (2-5), а шумы ЭДС смещения еСм и входных токов усилителя i+ и
I- имеют составляющие белого и розового шумов, так что их соответствующие
спектральные плотности Se в вольтах квадратных на герц и Sj в амперах
квадратных на герц можно описать формулами, аналогичными (2-4):
— Soc (1 + foe/f)> S/ = So/ (1 + foi/f).
Предполагая, что интенсивность шумов токов i+ и i_ одинакова и что дина-
мические свойства измерительного канала определяются фильтром нижних ча-
стот (ФНЧ) первого порядка, приведенный по входу выходной шумовой сигнал
усилителя можно найти из выражения (2-14) с учетом (2-12):
«Ш2 = 2S0 Л , 1п (7к/т) + 2 So , [J?2 + (Ri || я2)2ро , 1£. (ут) +
+ 2 («7т) я2)], (2-15)
где RiWR^RiRzKRi+Rz)', tK и т — время, прошедшее после последней коррек-
ции нуля, и постоянная времени фильтра нижних частот.
30
Первые два слагаемых в правой части соотношения (2-15) обусловлены
собственным шумом операционного усилителя, а третье — шумом активных со-
противлений.
Таким же образом можно найти приведенную ко входу дисперсию шума
усилителя тока, построенного по схеме рис. 2-3, а:
‘шх = 2 So Jo е In (<к/т)/(Л(1| Я)2 + 2 So ,f01 In (<к/т) + 2 kTl[x
Как правило, дисперсия собственного шума операционного усилителя пре-
вышает дисперсию теплового шума входящих в измерительный усилитель рези-
сторов. При этом, как указывалось, в усилителях постоянного тока дисперсия
фликкер-шума обычно существенно больше дисперсии белого шума. Поэтому
для уменьшения порога чувствительности усилителей слабых сигналов целесооб-
разно применять операционные усилители с малым фликкер-шумом и по воз-
можности чаще проводить коррекцию нулевого уровня.
Однако более действенным методом борьбы с фликкер-шумом является
применение усилителей с преобразованием спектра, которые рассматриваются
в следующем параграфе.
2-3. Предельно достижимый порог чувствительности
усилителей с преобразованием спектра
Усилитель с преобразованием спектра, называемый
также усилителем с модуляцией-демодуляцией (усилитель МДМ),
содержит в своем составе модулятор М, усилитель модулирован-
ного сигнала У1, демодулятор ДМ и выходной усилитель У2
(рис. 2-8, а). В подобных усилителях, как правило, используется
амплитудная модуляция гармонического или прямоугольного' не-
сущего колебания.
Сущность процессов, происходящих в усилителе МДМ, пояс-
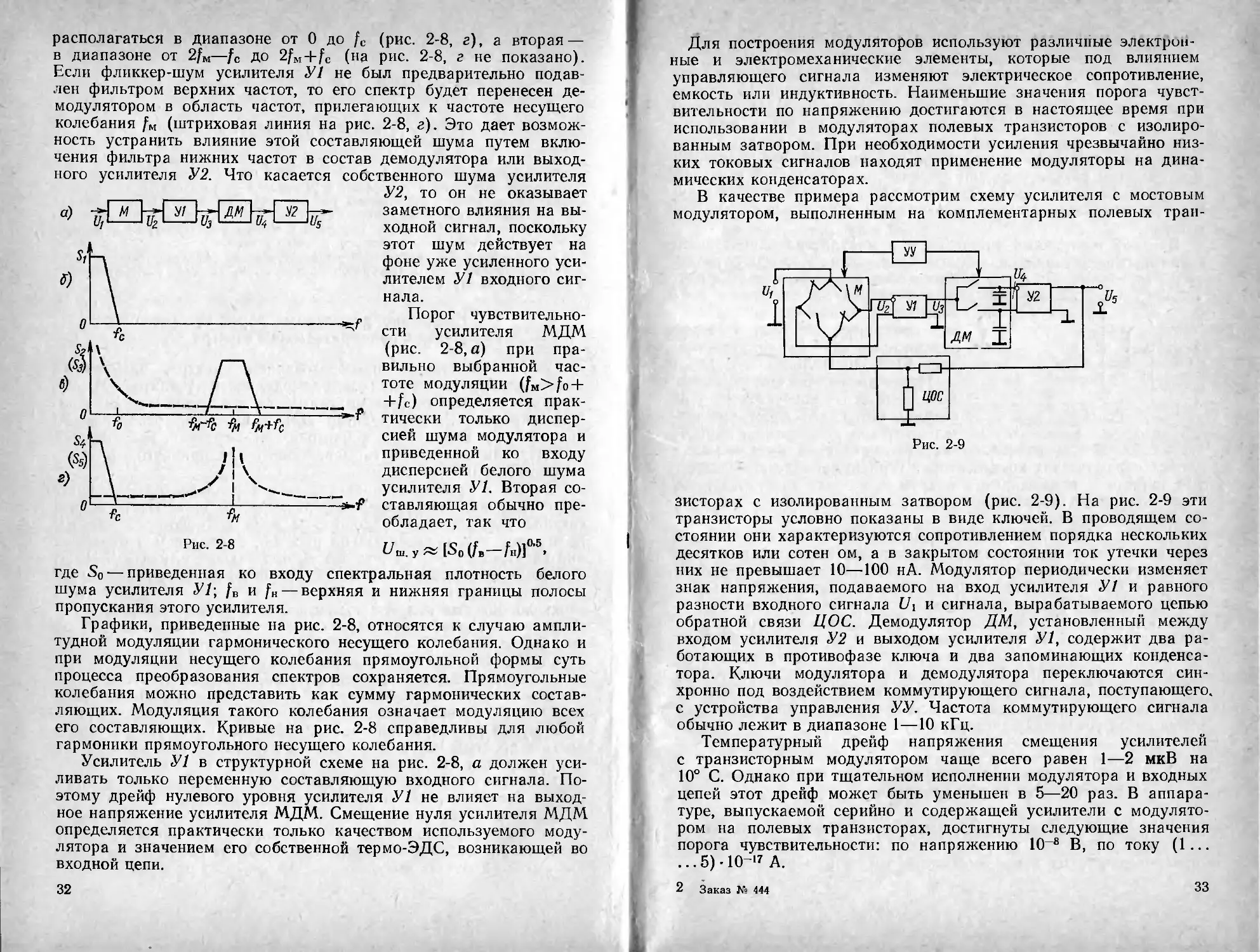
няют графики, приведенные на рис. 2-8, б, в, г. Пусть спектр
сигнала располагается в полосе от нуля до некоторой частоты
fc и имеет вид, показанный на рис. 2-8, б (индексы у обозначе-
ний спектров S]—S5 на рис. 2-8, б, в, г такие же, как у соответ-
ствующих напряжений на рис. 2-8, а). После амплитудной модуля-
ции, как известно, спектр сигнала преобразуется в нижнюю и
верхнюю боковые полосы, прилегающие к частоте исходного мо-
делируемого колебания fM (рис. 2-8, в). Штриховой линией на
рис. 2-8, в показана кривая спектральной плотности шумов уси-
лителя У/. Как видим, с помощью модуляции возможно перемес-
тить спектр сигнала в ту частотную область, где действие флик-
кер-шума практически незаметно. Для этого необходимо, чтобы
разность fM—fc превосходила частоту сопряжения белого и розо-
вого шумов fo- Устранения влияния фликкер шума теперь можно
достичь простым методом — включая фильтр верхних частот в со-
став усилителя У1.
Демодулятор в принципе функционирует так же, как и моду-
лятор. Соответственно и преобразование спектра сигнала в де-
модуляторе будет осуществляться так же, как и в модуляторе.
В частности, при подаче на вход демодулятора сигнала, спектр
которого располагается в частотной полосе от /м—fc до fM+fc, на
его выходе получим две боковые полосы, одна из которых будет
31
располагаться в диапазоне от 0 до fc (рис. 2-8, г), а вторая —
в диапазоне от 2fM—fc до 2fM+fc (на рис. 2-8, г не показано).
Если фликкер-шум усилителя У1 не был предварительно подав-
лен фильтром верхних частот, то его спектр будет перенесен де-
модулятором в область частот, прилегающих к частоте несущего
колебания fM (штриховая линия на рис. 2-8, а). Это дает возмож-
ность устранить влияние этой составляющей шума путем вклю-
чения фильтра нижних частот в состав демодулятора или выход-
ного усилителя У2. Что касается
U/ --- Ц? --- l/j --- Uf ----<us
собственного шума усилителя
У2, то он не оказывает
заметного влияния на вы-
ходной сигнал, поскольку
Рис. 2-8
этот шум действует на
фоне уже усиленного уси-
лителем У1 входного сиг-
нала.
Порог чувствительно-
сти усилителя МДМ
(рис. 2-8, а) при пра-
вильно выбранной час-
тоте модуляции (fM>fo +
+fc) определяется прак-
тически только диспер-
сией шума модулятора и
приведенной ко входу
дисперсией белого шума
усилителя У1. Вторая со-
ставляющая обычно пре-
обладает, так что
Иш. y~[S0(fB — Al)] ’
где So — приведенная ко входу спектральная плотность белого
шума усилителя У1; f„ и fH — верхняя и нижняя границы полосы
пропускания этого усилителя.
Графики, приведенные на рис. 2-8, относятся к случаю ампли-
тудной модуляции гармонического несущего колебания. Однако и
при модуляции несущего колебания прямоугольной формы суть
процесса преобразования спектров сохраняется. Прямоугольные
колебания можно представить как сумму гармонических состав-
ляющих. Модуляция такого колебания означает модуляцию всех
его составляющих. Кривые на рис. 2-8 справедливы для любой
гармоники прямоугольного несущего колебания.
Усилитель У1 в структурной схеме на рис. 2-8, а должен уси-
ливать только переменную составляющую входного сигнала. По-
этому дрейф нулевого уровня усилителя У1 не влияет на выход-
ное напряжение усилителя МДМ. Смещение нуля усилителя МДМ
определяется практически только качеством используемого моду-
лятора и значением его собственной термо-ЭДС, возникающей во
входной цепи.
32
Для построения модуляторов используют различные электрон-
ные и электромеханические элементы, которые под влиянием
управляющего сигнала изменяют электрическое сопротивление,
емкость или индуктивность. Наименьшие значения порога чувст-
вительности по напряжению достигаются в настоящее время при
использовании в модуляторах полевых транзисторов с изолиро-
ванным затвором. При необходимости усиления чрезвычайно низ-
ких токовых сигналов находят применение модуляторы на дина-
мических конденсаторах.
В качестве примера рассмотрим схему усилителя с мостовым
модулятором, выполненным на комплементарных полевых тран-
Рис. 2-9
зисторах с изолированным затвором (рис. 2-9). На рис. 2-9 эти
транзисторы условно показаны в виде ключей. В проводящем со-
стоянии они характеризуются сопротивлением порядка нескольких
десятков или сотен ом, а в закрытом состоянии ток утечки через
них не превышает 10—100 нА. Модулятор периодически изменяет
знак напряжения, подаваемого на вход усилителя У1 и равного
разности входного сигнала и сигнала, вырабатываемого цепью
обратной связи ЦОС. Демодулятор ДМ, установленный между
входом усилителя У2 и выходом усилителя У1, содержит два ра-
ботающих в противофазе ключа и два запоминающих конденса-
тора. Ключи модулятора и демодулятора переключаются син-
хронно под воздействием коммутирующего сигнала, поступающего,
с устройства управления УУ. Частота коммутирующего сигнала
обычно лежит в диапазоне 1—10 кГц.
Температурный дрейф напряжения смещения усилителей
с транзисторным модулятором чаще всего равен 1—2 мкВ на
10° С. Однако при тщательном исполнении модулятора и входных
цепей этот дрейф может быть уменьшен в 5—20 раз. В аппара-
туре, выпускаемой серийно и содержащей усилители с модулято-
ром на полевых транзисторах, достигнуты следующие значения
порога чувствительности: по напряжению 10-8 В, по току (1...
...5)-10-17 А.
2 Заказ № 444
Схема модулятора на динамическом конденсаторе показана на
рис. 2-10. Емкость динамического конденсатора Сд изменяется
путем перемещения одной из его обкладок под воздействием элек-
тромагнитного или электростатического поля. Входное сопротив-
ление усилителя, присоединяемого к модулятору через раздели-
тельный конденсатор Ср, делают существенно более высоким
в сравнении с балластным сопротивлением /?с„ а период управ-
ляющего напряжения —существенно меньшим постоянной времени
/?бСд. В этом случае выходное напряжение модулятора в первом
приближении равно произведению входного напряжения модуля-
тора на относительное изменение емкости динамического конден-
сатора.
Входной постоянный ток подобного модулятора определяется
сопротивлением изоляции входной цепи, динамического и разде-
лительного конденсаторов. У луч-
ших образцов динамических кон-
денсаторов сопротивление изоля-
ции превышает 1016 Ом, а порог
чувствительности по току состав-
ляет 10~18—10~16 А.
Несмотря на то что пластины
динамического конденсатора не
соприкасаются, его порог чувстви-
тельности по напряжению опреде-
их потенциалов. В высококачест-
О-
и,
1
иг
Ср
Vz
Рис. 2-10
контактной разностью
динамических конденсаторах используют пластины, покры-
ляется
венных
тые золотом и помещенные в вакуум или среду инертного газа.
При этом дрейф напряжения смещения составляет 10—100 мкВ
за несколько часов.
Усилители типа МДМ используют для измерения сигналов ин-
франизких частот (до нескольких единиц или десятков герц). Если
же требуется измерять сигналы в более широкой полосе частот,
то применяют усилители с параллельными каналами, в которых
различные частотные составляющие сигнала усиливаются отдель-
ными каналами, а выравнивание коэффициентов усиления по ка-
налам достигается за счет общей глубокой отрицательной обрат-
ной связи. Низкочастотный канал в таких усилителях выполняют
обычно по схеме МДМ. Порог чувствительности усилителей с па-
раллельными каналами, естественно, хуже, чем у усилителей
МДМ, поскольку расширение полосы пропускания неизбежно вле-
чет за собой увеличение дисперсии шума.
2-4. Предельно достижимый порог чувствительности
электромеханических приборов
Электромеханические высокочувствительные приборы —
магнитоэлектрические и электростатические — являются традици-
онными средствами измерений малых токов и напряжений.
34
Магнитоэлектрический баллистический гальванометр в дина-
мическом режиме работы можно использовать для измерения
количества электричества в импульсе тока, если длительность
импульса не менее чем на порядок меньше периода собственных
колебаний подвижной части гальванометра. Для обнаружения и
измерения малых переменных токов используется резонансный
гальванометр, у которого частота собственных колебаний по-
движной части устанавливается равной частоте измеряемого тока.
Уравнение движения рамки магнитоэлектрического гальванометра имеет
вид
J 4- —- + Wa = Vi, (2-16)
dt2 г dt
где J — момент инерции рамки; г —суммарное сопротивление обмотки рамки и
внешней цепи гальванометра; W — удельный противодействующий момент; V —•
потокосцепление; i— ток, проходящий через обмотку рамкн. Из (2-16) следует,
что в установившемся режиме угол отклонения рамки а будет равен
а = iV/W. (2-17)
Таким образом, для увеличения чувствительности гальванометра следует
уменьшать удельный противодействующий момент W и увеличивать потоко-
сцепление Чг. Однако в данном случае, как и при использовании усилителей,
достижимый порог чувствительности определяется шумами.
В соответствии с законами статистической механики средняя энергия шумо-
вого движения, приходящаяся на одну степень свободы системы, равна kTI2.
Напомним, что k — постоянная Больцмана; Т — абсолютная температура. При-
меняя указанное соотношение к гальванометру, который имеет одну степень
свободы — поворот подвижной части, получим
с^1Г/2 = Л772, (2-18)
где а2ш—дисперсия угла поворота рамки, вызванная шумовыми явлениями.
Объединяя равенства (2-17) и (2-18), приходим к формуле
= 'aaiWlV = ^JkTW IV, (2-19)
где iin — среднее квадратическое значение эквивалентного шумового тока.
Обычно используют гальванометр в режиме, близком к критическому ре-
жиму успокоения, когда примерно равен единице коэффициент успокоения
Р = nV2l(rtnW), (2-20)
где tn — 2л у J/117 — период собственных колебаний рамки.
Преобразуем выражение (2-19) с учетом (2-20):
= Т/(гкр^о) * (2-21)
где Гкр — сопротивление цепи гальванометра, соответствующее критическому
режиму. Эквивалентное шумовое напряжение соответственно будет равно
х — кр ~ 7'гкр/^о * (2-22)
Критическое сопротивление выпускаемых промышленностью гальванометров
лежит в диапазоне 20 Ом—200 кОм. Период собственных колебаний /о обычно
составляет 1—5 с. Ориентируясь на средние значения /о=2 с, Т=298 К, полу-
чим im«2-10-1®,. .2-10-11 А; г/ш~4-10-,0...4-10-« В.
2* 35
Сделать возможным отсчет весьма малых углов поворота
рамки гальванометра при измерении малых сигналов можно двумя
путями. Во-первых, можно увеличивать длину луча от зеркальца,
закрепленного на рамке гальванометра, до отсчетного устройства.
Это обеспечивается многократным отражением луча от зеркал, ус-
тановленных внутри корпуса гальванометра, или вынесением
шкалы гальванометра за пределы его корпуса. Во-вторых, можно
применить фотоэлектрический преобразователь небольшого пере-
мещения светового луча во вторичный электрический сигнал. В ка-
честве такого преобразователя обычно используют дифференци-
альный фоторезистор, фотодиод, фототранзистор или вакуумный
фотоэлемент. Таким образом, входной сигнал гальванометра пре-
образуется в более мощный электрический сигнал, получаемый
с фотоэлектрического преобразователя. Подобное устройство на-
зывают фотогальванеметрическим усилителем (ФГУ).
ФГУ применяются гораздо чаще простых магнитоэлектрических
гальванометров, что обусловлено их большей компактностью и
механической надежностью. Стабилизация коэффициента усиле-
ния ФГУ достигается, как и в электронных усилителях, путем
введения глубокой отрицательной обратной связи.
Достоинством приборов с ФГУ является нормированная
основная погрешность, которая в зависимости от предела измере-
ний составляет 1—4%. Кроме этого, приборы с ФГУ можно ис-
пользовать для создания автоматических средств измерений. Сле-
дует отметить, что повышение коэффициента усиления ФГУ прак-
тически не уменьшает их порога чувствительности в сравнении
с магнитоэлектрическими гальванометрами. Как было показано,
порог чувствительности в конечном счете определяется шумо-
выми явлениями.
Выпускаемые промышленностью приборы на основе ФГУ имеют
порог чувствительности, достаточно близкий к предельным зна-
чениям. Так, например, шумовое напряжение нановольтамперметра
Ф118 составляет менее 1 нВ, а шумовой ток нановольтамперметра
Ф128/2 не превышает 5 пА. Известны уникальные нановольтампер-
метры (НФК-1) и пикоамперметры (ПФК-1) с ФГУ, обладающие
еще меньшим порогом чувствительности. Минимальная цена деле-
ния у этих приборов составляет соответственно 4-10—10 В и
1 • 10~12 А. Основная погрешность не более ±4 %.
Электростатические высокочувствительные приборы, называе-
мые электрометрами, в зависимости от принципа действия разде-
ляются на два вида — квадрантные и струнные [5]. В обоих слу-
чаях отклонение подвижной части происходит под действием элек-
трического поля, обусловленного разностью потенциалов между
электродами. В квадрантном электрометре измеряемое напряже-
ние преобразуется в угол поворота подвижного электрода, укреп-
ленного на подвесе вблизи четырех неподвижных электродов —
квадрантов. В струнном электрометре изменение измеряемого на-
пряжения приводит к перемещению струны, расположенной ме-
жду двумя неподвижными электродами.
36
Чувствительность электрометров по напряжению относительно
невелика — порядка 0,1—1 мВ на деление. Что же касается чув-
ствительности ко входному токовому сигналу, то она весьма вы-
сока и определяется только сопротивлением изоляции. Однако по-
рог чувствительности в этом случае, как и раньше, определяется
шумовыми явлениями.
2-5. Борьба с помехами
при измерении слабых сигналов
Выше мы рассмотрели предельные возможности изме-
рения малых сигналов, обусловленные внутренними шумами при-
меняемых средств измерений. Наряду с этими шумами в измери-
тельной цепи, как правило, присут-
ствуют также мешающие сигналы,
проникшие извне — через электро-
статическое или электромагнитное
поле либо через изоляционные эле-
менты. Эти мешающие сигналы, на-
зываемые помехами, в большин-
стве случаев имеют более высокий
уровень, чем шумы, и именно они
часто определяют практический
порог чувствительности измери-
тельных устройств.
По характеру проявления помехи делят на две большие группы.
Первая группа — синфазные помехи, называемые также продоль-
ными или помехами общего вида. Эти помехи действуют между
землей и входными зажимами средства измерений. Вторая груп-
па— это дифференциальные помехи, называемые также попереч-
ными или помехами нормального вида. Эти помехи действуют ме-
жду входными зажимами измерительного устройства. Именно по-
перечные помехи приводят к возникновению погрешностей,
поскольку они проявляются так же, как и измеряемый сигнал.
Продольные же помехи опасны только потому, что они могут
преобразовываться в поперечные.
При проектировании и эксплуатации средств измерений необ-
ходимо принимать меры, предотвращающие появление помех и
уменьшающие влияние помех, уже проникших в измерительную
цепь. Традиционным методом борьбы с помехами является экра-
нирование. Проводящие экраны, соединенные с общим проводом,
защищают измерительную цепь от действия помех, вызванных
электростатическими и высокочастотными электромагнитными по-
лями. Ферромагнитные экраны защищают от влияния постоянных
и низкочастотных магнитных полей. Для уменьшения помех, про-
никающих в измерительную цепь через паразитные гальваниче-
ские связи, следует повышать качество изоляции и применять так
называемые охранные проводники, отводящие на корпус или в дру-
гую безопасную точку цепи паразитные токи утечки. Для примера
37
на рис. 2-11 приведена схема усилителя напряжения, в котором
проводник, соединяющий источник измеряемого напряжения с не-
инвертирующим входом операционного усилителя, окружен на
печатной плате охранными проводниками ОП. Охранные провод-
ники электрически соединены с низкоомным делителем обратной
связи Rl, R2, поэтому токи утечки, попадающие на эти провод-
ники, не влияют на выходное напряжение. С другой стороны, ко-
нечное сопротивление между входным и охранными проводниками
не вызывает нежелательных токов, поскольку они имеют практи-
чески один и тот же электрический потенциал (используется
принцип эквипотенциальной защиты).
Для средств измерений постоянного тока значимым влияющим:
фактором являются паразитные термо-ЭДС во входной цепи. Эти
ЭДС возникают из-за наличия в цепи разнородных материалов,
в частности из-за наличия соединений медного провода с оловян-
ным припоем (для примера укажем, что термо-ЭДС меди с при-
поем ПОС-40 составляет около 2,8 мкВ на 1 °C). Для защиты от
термо-ЭДС стремятся уменьшить температурный градиент внутри
той части корпуса, где находятся входные цепи средства измере-
ний. С этой целью применяют теплозащитные и тепловыравниваю-
щие экраны. Перепад температуры по вертикали обычно больше,
чем по горизонтали, поэтому целесообразно контакты разнород-
ных материалов помещать на одном уровне и в непосредственной
близости друг от друга.
Представление о значении паразитной термо-ЭДС дает следую-
щий пример. В фотогальванометрическом усилителе Ф117, имею-
щем довольно совершенные тепловые экраны, эта ЭДС состав-
ляет 150—250 нВ и обусловлена наличием в измерительной цепи
контактов бронзовых растяжек с медными токопроводами и мед-
ной обмоткой рамки измерительного механизма. Для уменьшения
термо-ЭДС в более совершенном фотогальванометрическом усили-
теле Ф117/1 монтаж соединений частично выполнен бронзовой
лентой, из которой сделаны и растяжки прибора. На рис. 2-12, а
показана схема соединений этого прибора. На том же уровне, что
и рамка, выполненная из медного провода, в соединительном про-
воднике сделана медная вставка. В результате контакты меди
(М) и бронзы (Б) находятся по вертикали на одном уровне. Это
позволило уменьшить термо-ЭДС во входной цепи до 40—60 нВ.
Еще больше снижена термо-ЭДС во входной цепи фотогальва-
нометрического усилителя Ф127. Здесь весь монтаж выполнен
бронзовой лентой, а выводы медной рамки сделаны с одной ее
стороны (рис. 2-12, б). В результате уровень термо-ЭДС не пре-
восходит 10—20 нВ.
Электромеханические измерительные приборы чувствительны
к механическим помехам — вибрациям, тряскам, ударам. Поэтому
их устанавливают на массивных фундаментах или на полках, ук-
репленных на капитальных стенах зданий. Вибрации могут влиять
и на электронные приборы. При перемещении в магнитном поле
Земли входного контура прибора в нем наводится ЭДС, для
38
уменьшения которой следует уменьшать площадь контура. С этой
целью в качестве входных проводов целесообразно использовать
витые пары.
Рассмотрим кратко методы снижения влияния продольных по-
мех. В простейшем случае прибор имеет несимметричный вход и
его низкопотенциальный входной зажим соединен с корпусом при-
бора (рис. 2-13, а). Источник сигнала (7ВХ соединяется с входом
прибора двухпроводной линией, сопротивления проводов которой
равны Г| и г2. Источник сигнала и измерительный прибор через
сопротивления Z] и Z2 связаны с землей. Эти сопротивления обус-
Рис. 2-12
ловлены емкостными и гальваническими утечками на землю или
сопротивлением заземления, если таковое имеется. Между точ-
ками земли о и б (рис. 2-13, а) имеются сопротивление Z3 и на-
пряжение 17п, вызванное наличием блуждающих токов, токов за-
земления силовых установок и т. п. Напряжение представляет
собой продольную помеху. За счет этой помехи на входе прибора
/?вх будет создаваться напряжение поперечной помехи, которое
при условии и, r2<^Rsx будет равно
IJ ~ II 2
п. вх ~ п , „ ’
r2 + -Zi, 2, з
где Z1,2,3=Z1+Z2+Z3. Комплексные сопротивления Zb Z2, Z3
практически не поддаются контролю и могут оказаться сравни-
мыми с сопротивлением низкопотенциального провода г2. По-
этому здесь продольная помеха в значительной мере преобразу-
ется в поперечную Дп. вх.
Для снижения влияния продольных помех можно выполнять
вход прибора симметричным, чтобы сопротивления между каж-
дым из входных зажимов и корпусом были большими. Нетрудно
39
уйидеть, что ё этом случае входная цепь прибора приобретает
вид четырехплечевого моста. Продольная помеха оказывается
приложенной к диагонали этого моста, а напряжение, образую-
щееся на другой диагонали, представляет собой поперечную по-
меху. Добиваясь близости к равновесию состояния моста (путем
симметрирования соединительной линии и выхода источника сиг-
нала), удается значительно снизить коэффициент, с которым про-
дольная помеха преобразуется в поперечную.
В наибольшей степени влияние продольной помехи ослабля-
ется в средствах измерений, в которых входная часть гальвани-
чески отделена от остальной измерительной цепи и использовано
защитное экранирование ее (рис. 2-13, б). Соединение источника
сигнала с измерительным прибором осуществляется при этом
трехпроводной линией. Третий провод (г3 на рис. 2-13, б), обычно
выполняемый в виде цилиндрического экрана, охватывающего два
других провода, соединяет низкопотенциальный вывод источника
сигнала с внутренним экранирующим кожухом. Этот кожух экра-
40
пирует входную часть прибора. Он изолирован от корпуса прибора
и от низкопотенциального входного зажима (сопротивления изо-
ляции Z4 и Zs). Поперечная помеха в данном случае может быть
приближенно определена с помощью соотношения
II Г1 Г» Г2
Ы п. ВХ ~ П —------——-------------
Z1, 2, з4*24 Z5 + r2
(2-23)
Таким образом, если обеспечить высокие сопротивления изо-
ляции Z4 и Z5, то поперечная помеха будет составлять ничтожно
малую часть продольной помехи.
Наличие гальванического разделения заметно усложняет схему
прибора. Обмен сигналами между гальванически изолированной
входной частью прибора и остальной измерительной цепью обычно
осуществляется с помощью трансформаторной или оптронной цепи
связи. Для питания гальванически изолированного узла исполь-
зуются отдельные обмотки силового трансформатора с соответ-
ствующими выпрямителями и стабилизаторами.
Довольно часто гальваническое разделение применяется без
защитного экранирования. В этом случае третий провод соедини-
тельной линии (г3 на рис. 2-12, б) может быть исключен и низ-
копотенциальный входной зажим непосредственно соединен с эк-
ранирующим кожухом, если таковой имеется. Это упрощает при-
бор, но вместе с тем снижается ослабление продольной помехи.
Значение поперечной помехи для такого варианта прибора может
быть найдено по формуле (2-23) при подстановке в нее Z5=0.
Как уже указывалось, входные провода (fi и г2 на рис. 2-13)
рекомендуется скручивать для защиты от электромагнитных по-
лей и экранировать, чтобы избежать влияния электростатических
полей. Электростатический экран на рис. 2-13 не показан. Он
обычно электрически соединяется с корпусом прибора. Отметим,
что в случае применения схемы рис. 2-13, б это будет второй
экран, охватывающий соединительные провода {г\ и г2) и первый
экран (гз), но не соединенный электрически с ним.
Значительную долю помех, проявляющихся при измерении сиг-
налов низкого уровня, составляют сетевые помехи. Эти помехи
содержат основную гармонику (для промышленной сети ее час-
тота равна 50 Гц) и кратные высшие гармоники, в основном не-
четные— третью, пятую и т. д. Если прибор по своим динамиче-
ским свойствам эквивалентен фильтру нижних частот, то чем
меньше его полоса пропускания, тем в меньшей степени влияет
сетевая помеха на результат измерения. В частности, для фильтра
нижних частот первого порядка коэффициент передачи сетевой
помехи определятся соотношением
Кп= 1/Л/(2<т)2 + 1.
где fc — частота сети; т — постоянная времени фильтра. Если, на-
пример, т=2 с, то помеха с частотой 50 Гц будет проходить на
выходе с коэффициентом 1,6-10~3, т. е., иначе говоря, она будет
Ослабляться примерно в 630 раз (56 дБ).
41
Следует иметь в виду, что при измерении слабых сигналов се-
тевая помеха, как правило, многократно превышает полезный сиг-
нал. Вследствие этого любая нелинейность характеристики преоб-
разования прибора приводит к появлению заметной постоянной
составляющей сигнала, обусловленной эффектом «выпрямления»
сигнала помехи. В частность, входной электронный усилитель, пе-
регруженный сетевой помехой, начинает работать за пределами
линейного участка характеристики преобразования, что, естест-
венно, вызывает появление значительных погрешностей. Поэтому
на входе усилителя обычно устанавливают пассивный фильтр
нижннх частот или фильтр-пробку на частоту 50 Гц.
В интегрирующих приборах для ослабления сетевой помехи
устанавливают время интегрирования равным или кратным пе-
риоду сетевого напряжения. Действительно, амплитудно-частот-
ная характеристика такого прибора определяется соотношением
[ Q (fj [ = 1 s*n я^и ' ,
где /и—время интегрирования. При fta=k, где k=\, 2, 3, ...,
функция синуса равна нулю, что и означает нечувствительность
средства измерений к помехе такой частоты. Если время интегри-
рования выбрано исходя из номинальной частоты сетевого напря-
жения, то при реальных отклонениях этой частоты в пределах
1—2% от номинальной коэффициент ослабления поперечной
помехи будет лежать в диапазоне 100—50 (40—34 дБ). Сущест-
венное увеличение коэффициента ослабления — до 1000 (60 дБ) и
более достигается при введении в прибор специального блока,
обеспечивающего непрерывную подстройку времени интегрирова-
ния под действительную частоту сетевого напряжения.
Дальнейшее увеличение коэффициента ослабления поперечной
сетевой помехи может быть получено при переходе к весовому
интегрированию, суть которого заключается в изменении масш-
таба (веса) входного сигнала в процессе интегрирования. Широ-
кое применение для интегрирующих вольтметров нашли, в част-
ности, биномиальные весовые функции, состоящие из ступеней,
амплитуды которых соотносятся между собой как коэффициенты
бинома Ньютона. Например, весовая функция второго порядка
состоит из трех ступеней с весами 1; 2; 1, а весовая функция
третьего порядка содержит четыре ступени, веса которых соот-
носятся как 1; 3; 3; 1. Длительность каждой ступени биномиаль-
ной весовой функции составляет половину номинального периода
сетевого напряжения, т. е. 10 мс при частоте сети 50 Гц. Ампли-
тудно-частотная характеристика прибора, реализующего биноми-
альную весовую функцию, определяется формулой
|С(/)1=^Ц^-[СО8(л//1)]П.
где п — порядок весовой функции; Л—длительность одной сту-
пени этой функции. При постоянной длительности периода инте-
42
грирования, равной (п+1) /ь и нестабильности частоты сети, со-
ставляющей 1—2 %, коэффициент ослабления основной гармоники
сетевой помехи для биномиальных весовых функций второго и
третьего порядка составит соответственно (6,4—1,6) -103 (76—
64 дБ) и (40,9—5,2) • 104 (112—94 дБ).
Совместное применение эффективных методов ослабления про-
дольных и поперечных помех позволяет получить у современных
интегрирующих цифровых вольтметров порог чувствительности
порядка 10~7 В.
Глава третья
МЕТОДЫ ИЗМЕРЕНИЙ
ВЫСОКИХ НАПРЯЖЕНИЙ И БОЛЬШИХ ТОКОВ
3-1. Общие положения, методы измерений
Современная практика и научные исследования требуют
измерений высоких и сверхвысоких напряжений — до 10 МВ и
больших токов — до 1—2 МА. Напряжения и токи при этом могут
быть постоянными, переменными (обычно с частотой 50—60 Гц)
и импульсными с длительностью импульсов от долей микросе-
кунды до нескольких десятков миллисекунд (грозовые и комму-
тационные импульсы). Измерение больших постоянных токов —
до 200—500 кА широко используется в устройствах электролиза
алюминия. Большие переменные токи — до 150—200 кА имеют
место в мощных дуговых электропечах. Вступили в строй линии
электропередачи с напряжением 1,2—1,5 МВ, проектируются ли-
нии передачи и энергетические устройства па более высокие на-
пряжения. В высоковольтных испытательных установках напряже-
ния достигают нескольких мегавольт. Токи в термоядерных уста-
новках достигают сотен килоампер.
В ряде случаев необходимо проводить измерения при сверх-
низких и высоких температурах, например в криотурбогенерато-
рах или криомодулях высокоскоростных транспортных средств на
магнитной подушке, при исследовании плазменных и термоядер-
ных источников энергий.
Экономические соображения и требования оптимизации режи-
мов работы энергетических объектов выдвигают задачу повышения
точности измерений больших токов и высоких напряжений, ко-
торая сейчас характеризуется погрешностями 0,5—2,5 % и более.
Для повышения качества электроэнергии необходимо снизить по-
грешности рабочих средств измерений до 0,2—0,5%, а образцо-
вых—до 0,02—0,1 %. Выполнение этих требований затруднено
из-за громоздкости токопроводов для больших токов, создаваемых
ими сильных электромагнитных помех и необходимости изоляции
средств измерений от высоковольтных цепей.
43
Основные методы измерений больших токов и высоких на-
пряжений в зависимости от алгоритмов преобразований разделя-
ются на методы масштабного преобразования, электромеханиче-
ские, электромагнитные, электрофизические и электрооптические.
3-2. Измерение токов и напряжений
методом масштабного преобразования
К этому методу относится измерение токов и напряже-
ний с использованием масштабных преобразователей — мер сопро-
тивления (шунты, измерительные резисторы), добавочных резисто-
ров, активных и емкостных делителей напряжения.
К методу масштабного преобразования можно также отнести
измерения с использованием индуктивных делителей напряжения,
измерительных трансформаторов тока и напряжения, рассмотрен-
ных в работе [5]. Однако поскольку характеристики таких средств
измерений главным образом определяются происходящими в них
электромагнитными процессами, то измерения с их помощью от-
несены к электромагнитным методам.
Измерение больших токов. Измерение больших токов основано
на измерении падения напряжения на мере сопротивления при
прохождении через нее измеряемого тока. В качестве мер со-
противления для измерения больших постоянных токов (БПТ)
применяются низкоомные четырехзажимные резисторы из манга-
нина, выполняемые в виде измерительных резисторов или шунтов.
Включение такой меры в цепь измеряемого тока производится
с помощью токовых зажимов, а падение напряжения снимается
с потенциальных зажимов. Основными характеристиками такой
меры являются номинальный ток Ц ном, номинальное выходное
напряжение £/2ном и сопротивление меры, представляющее собой
взаимное сопротивление четырехполюсника и определяемое как
^?M=t72//i при выходном токе /2=0. Если падение напряжения
между потенциальными зажимами определяется методом урав-
новешивания, то измеряемый ток находится из выражения /( =
= адм.
Наибольшая допустимая мощность измерительных резисторов
с номинальными сопротивлениями 10-4 и 10-5 Ом обычно не пре-
вышает 100 Вт. Действительное значение сопротивления меры
может быть из-мерено с погрешностью 0,002—0,005%. Но вслед-
ствие температурной и временной нестабильности погрешность
измерения больших постоянных токов с помощью таких мер па
порядок выше даже при введении поправок, учитывающих за-
висимость сопротивления меры от температуры. Для измерения
БПТ применяются взаимозаменяемые калиброванные шунты, но-
минальное падение напряжения на которых нормируется. Обычно
падение напряжения па калиброванных шунтах составляет 60
или 75 мВ. Для работы с самопишущими приборами в некото-
рых случаях выпускают шунты с номинальным падением напря-
жения 100, 150 или 300 мВ. Основными причинами изменения во
44
времени электрического сопротивления мер для измерения БПТ
являются нестабильность электрическою сопротивления манга-
нина, изменение переходного сопротивления в месте спая рези-
стивного элемента и наконечников, а также наличие термо-ЭДС.
Изменение сопротивления манганина, вызываемое механическими
напряжениями, при неправильном монтаже может быть в не-
сколько раз больше изменения сопротивления от температуры.
Из-за трудности создания и поверки мер сопротивления на
БПТ в некоторых случаях вместо одной меры на полный изме-
ряемый ток применяют комбинированную меру сопротивления,
состоящую из нескольких параллельно включенных мер сопро-
тивления.
425
Рис. 3-1
Метод параллельного соединения шунтов показан на рис. 3-1.
Потенциальные зажимы шунтов Rj соединяются в две общие
точки при помощи уравнительных резисторов rj и г/. Суммар-
ный ток / измеряется путем определения разности потенциалов
между объединенными зажимами.
Согласно обозначениям на рис. 3-1 можно составить следую-
щую систему уравнений:
IiRi + hri + ЙГ 1 =
/г^2 4“ Й^2 Ч" Й^2 = >
InRn “Б Й1БЛ "Б •
Разделив все члены на R} и суммируя систему п уравнений,
получим
t !, + £ WR/ + £ ifr/R^U £ 1/Z?z.
/=i /=i /=1 /=1
45
»
Уравнительные резисторы выполняются таким образом, чтобы
соблюдались условия:
Г1//?1 = г2/^2= • • - =rk/Rk— • • = г„//?п =*= с;
Г1/₽1=гг/^2= • - =r'kIRk= • • • = r’nIRn = c -
п
Поскольку У, Ij — I’ то
/=1
п п п
7 + сУч + с'£ 1/7?,.
/=1 /=1 /=1
Если падение напряжения на параллельно включенных шун-
тах измеряется методом уравновешивания, то на основании пер-
вого закона Кирхгофа члены, в которые входит сумма токов,
п
равны нулю, и измеряемый ток I — U У -\/Rj.
/=1
Достоинством комбинированной меры является возможность
поверки составляющих ее отдельных шунтов при номинальных
для них токах. Практика применения метода параллельных шун-
тов показала, что погрешность измерения БПТ может достигать
0,4—0,5 % вследствие нарушения соотношения между сопротив-
лениями уравнительных резисторов и шунтов, обусловленного
нагревом последних и относительно большими разностями потен-
циалов между одноименными потенциальными зажимами.
С помощью шунтов можно также измерять большие перемен- 42!
ные и импульсные токи. Последние имеют место, например, при
исследовании переходных процессов в сильноточных электротех-
нических устройствах, молнии, при изучении физики плазмы и др.
На рис. 3-2, а показана схема измерения быстроизменяющихся
токов с помощью шунта. Падение напряжения на шунте uw(t)
подается к осциллографу по коаксиальному кабелю с включен-
ным на его конце согласующим сопротивлением Zc. Если сопро-
тивление шунта является чисто активным для данного диапазона
частот, то Um(t) =Ri (7).
Однако обычно кроме активного сопротивления шунта R не-
обходимо учитывать его реактивное сопротивление. Эквивалент-
ная схема шунта представлена на рис. 3-2, б. Его активное со-
противление обычно невелико (7? = 10 5... 10-2 Ом), поэтому на
точность измерения переменных токов с частотой до нескольких
десятков мегагерц и импульсных токов основное влияние оказы-
вает индуктивность шунта, а его емкостью можно пренебречь.
Для уменьшения индуктивности шунты выполняются бифилярной
(рис. 3-2, в) или коаксиальной (рис. 3-2, гид) конструкции. На
рис. 3-2, г показано устройство коаксиального шунта с водяным
охлаждением. Ток от вывода 1 проходит через гибкий токопро-
вод 6, резистивный элемент 2, выполненный в виде цилиндра из
манганина, затем через наружный медный цилиндр 3, соединен-
46
Н2о
Рис. 3-2
с другим выводом 7. Примене-
гибкого токопровода умень-
возможность возникновения
ный
ние
шает
механических напряжений в рези-
стивном элементе.
Коаксиальные шунты имеют ма-
лую индуктивность, поскольку по-
тенциальный провод 4, соединен-
ный с коаксиальным разъемом 5,
расположен в пространстве, где от-
сутствует магнитное поле измеряе-
мого тока. При измерении токов
частотой до 5 кГц погрешность не более ±0,01%. При измерении
импульсных и высокочастотных токов погрешность главным об-
разом определяется влиянием поверхностного эффекта.
47
Падение напряжения на трубчатом коаксиальном шунте из
немагнитного материала для случая измерения импульсного тока
/0 с бесконечной крутизной можно определить из выражения [16]
и (О = IqR 11 + 2 S (— l)f ехР I -n2ptl([iodza)]
1 f=i
где о и d — соответственно электропроводимость и толщина стенки
резистивного элемента шунта.
Наибольшую полосу пропускания имеют
шунты, у которых резистивный элемент выпол-
нен в виде тонкой шайбы 2 (рис. 3-2, с?), к ко-
торой ток подводится при помощи токопро-
водов 1, а падение напряжения снимается
через разъем 3 и коаксиальные потенциальные
выводы 4, волновое сопротивление которых
равно сопротивлению соединительного ка-
беля. Такой шунт обеспечивает измерение
с малыми погрешностями импульсных токов
прямоугольной формы и переменных токов
частотой 1 ГГц.
Нагрев шунта, работающего в импульс-
ном режиме, главным образом определяется
энергией импульса и теплоемкостью резистив-
ного элемента и мало зависит от конструкции
и условий охлаждения шунта. Температуру
перегрева резистивного элемента можно опре-
делить по формуле
0 = ( f Ri2dt J/(mc),
\/ /
где R, т и с — соответственно сопротивление,
масса и удельная теплоемкость резистивного
элемента шунта.
Измерение высоких постоянных и перемен-
ных напряжений. Измерение этих величин про-
изводится с использованием масштабных
Рис. 3-3 преобразователей в виде добавочных рези-
сторов и делителей напряжения.
Добавочный резистор с известным значением сопротивления
включается последовательно с измерительным прибором. Этот
метод достаточно прост и широко применяется для расширения
пределов измерений вольтметров до Нескольких киловольт. При
более высоких напряжениях обычно параллельно измерительному
прибору и части добавочного резистора включается разрядник,
защищающий прибор от перенапряжений.
Для выравнивания распределения потенциала на резисторе
при переходных процессах и снижения его постоянной времени
между отдельными секциями добавочного резистора включают
конденсаторы (рис. 3-3). Для напряжения до 100 кВ добавочный
48
резистор можно выполнить в виде цепочки последовательно вклю-
ченных резисторов, помещенных в заполненный маслом гибкий
полиэтиленовый шланг, имеющий на концах экраны для защиты
от короны. Для электростатических источников высокого напря-
жения способ измерения с помощью добавочного резистора не-
пригоден из-за сильного влияния измерительного устройства на
источник.
Делители напряжения применяются для точных измерений высоких постоян-
ных, а также импульсных и переменных напряжений. При измерении высоких
постоянных напряжений главным образом используются резистивные делители
напряжения — масштабные преобразователи, оба плеча которых выполнены из
резисторов Коэффициент деления такого делителя на постоянном токе равен
k = (Rj + R2)/R2,
где Ri — сопротивление высоковольтного плеча с учетом сопротивления источ-
ника измеряемого напряжения; Rz — сопротивление низковольтного плеча с уче-
том сопротивления измерительного прибора, причем Ri^>R2.
В делителях напряжения в отличие от шунтов основной реактивной состав-
ляющей комплексного сопротивления резисторов является емкостная составляю-
щая, так как индуктивная составляющая вследствие бифилярной намотки про-
волочных резисторов и особенности их конструкции пренебрежимо мала по
сравнению с большим активным сопротивлением.
Коэффициент деления делителя изменяется в зависимости от входного со-
противления прибора, включенного параллельно резистору Rz. В тех случаях,
когда требуется соединение резистора Rz с осциллографом несогласованным ка-
белем, входная цепь осциллографа представляется в виде параллельно соеди-
ненных резистора и конденсатора. При высоких частотах активным сопротив-
лением кабеля можно пренебречь и коэффициент деления определяется как
{71 Ri R2/(l Ч- jf^RzCz)
R2/(l
где Сг — суммарная емкость низковольтного плеча. Обычно входная емкость
осциллографа составляет 10—50 пФ, а емкость кабеля 20—50 пФ/м.
Погрешность делителей вызывается нагревом проводов или иных элемен-
тов, из которых изготовлены резисторы, токами утечки, влиянием коронных раз-
рядов и обычно составляет 1—2 %. Однако, если принять соответствующие меры
для коррекции погрешностей, можно создать более точные делители с погрешно-
стями порядка 0,1—0,01 % Для измерения напряжений до 300 кВ. Наилучшие
результаты получаются, если делитель окружить вторым экранирующим дели-
телем, включенным параллельно первому, что обеспечивает равномерное рас-
пределение напряжения по элементам делителя. Наибольшее распространение
получили делители из микропроволочных и металлопленочных резисторов.
Резистивные делители на сравнительно невысокие напряжения имеют не-
большие размеры, поэтому можно не учитывать их распределенные емкости
относительно земли, что недопустимо для делителей на высокие напряжения,
линейные размеры которых значительны. Эквивалентная схема такого делителя
без учета индуктивностей его отдельных элементов представлена на рис. 3-4.
Собственные емкости С'а относительно земли ухудшают частотные характери-
стики резистивного делителя. Зарядный ток этих емкостей вызывает зависимое
от частоты неравномерное распределение напряжения вдоль делителя. Для
ослабления влияния этих емкостей параллельно к резисторам высоковольтного
плеча делителя подсоединяется цепочка конденсаторов. Ступень высокого
49
напряжения делителя представляет собой п последовательно соединенных рези-
сторов:
R\ = Rx!n,
где /?1 — сопротивление высоковольтного плеча делителя. Каждый элемент дели-
теля R\ шунтирован емкостью С'а=пСп, где Сп—продольная емкость высоко-
вольтного плеча.
Из рис. 3-4 видно, что здесь имеет место параллельное включение двух де-
лителей — резистивного и емкостного. Такой делитель называется резистивно-
емкостным. Для правильной записи осцил-
лографируемого напряжения следует воз-
можно точнее обеспечивать равенство ко-
эффициентов деления составляющих дели-
телей:
< Я1 + ^ЭКВ )/^ЭКВ (Сп + Сэкв) Сп,
где/?1=и/?1 ;Сц=б?п/н; /?акв и Савв — со-
ответственно сопротивление и емкость низ-
ковольтного плеча делителя с учетом пара-
метров измерительного прибора (осцилло-
графа) и соединительного кабеля. В тех
случаях, когда конденсаторы Сп' имеют
значительную емкость, их индуктивностью
нельзя пренебречь. Кроме того, вследствие
большой входной емкости резистивно-ем-
костный делитель может оказывать значи-
тельное влияние на источник напряжения.
на
3-3. Измерение высоких
напряжений
электромеханическими
приборами
Для измерения высоких
напряжений (до нескольких сот
киловольт) в цепях постоянного и
переменного тока применяются
приборы прямого преобразования,
киловольтметры с электростатиче-
ским измерительным механизмом, выходной величиной которого
является сила или перемещение подвижного элемента, и генера-
торные (роторные) киловольтметры, представляющие собой раз-
новидность динамического конденсатора, их выходной величиной
является ток или напряжение '[5].
Особенно широко используются электростатические вольт-
метры, характеризующиеся широким частотным диапазоном
(f=0...10 МГц), малой потребляемой мощностью и большим
входным сопротивлением RBX. При измерениях на постоянном
токе /?вх определяется сопротивлением изоляции между электро-
дами (Явх = 1010... 1013 Ом) , а на переменном токе — входной ем-
костью С [ZBX= 1ДоС)]. Обычно входная емкость высоковольтных
электростатических киловольтметров не более 5—50 пФ, поэтому
даже на частоте 1 МГц их входное сопротивление не менее 2—
50
20 кОм. Потребляемая при измерениях на переменном токе ре-
активная мощность U2uC учитывается обычно только на очень
высоких частотах. Серийно выпускаемые электростатические ки-
ловольтметры для измерений в заземленных цепях высокого на-
пряжения имеют верхний предел измерений не более 600 кВ.
Основная погрешность этих приборов не менее 1—1,5%.
Поскольку электростатический измерительный механизм прин-
ципиально может обеспечить более высокую точность измерений,
то в ряде стран были созданы электростатические киловольт-
метры с улучшенными метрологическими характеристиками. Из-
вестны электростатические киловольтметры
с пределом измерений 300—400 кВ и ос-
новой погрешностью 0,01%. Для уменьше-
ния погрешностей в таких приборах ис-
пользуется метод уравновешивающего пре-
образования для измерения усилия между
электродами, измерительный механизм
тщательно экранируется, электродное про-
странство заполняется газом под давле-
Рис. 3-6
Рнс. 3-5
нием, например элегазом SF4, что увеличивает пробивное напря-
жение и позволяет уменьшить габариты киловольтметра.
Для увеличения предела измерений предложен киловольтметр,
электроды которого выполнены в виде двух шаров большого диа-
метра (рис. 3-5). Такие киловольтметры могут работать при
напряжениях 1—2 МВ. Их погрешность в основном зависит от
точности расчета емкости между шарами и точности измерения
силы, которая при напряжении 1 МВ может достигать несколь-
ких десятков ньютонов. При зафиксированном положении по-
движного шара данное устройство может быть использовано как
обычный шаровой разрядник для измерения напряжения в мо-
мент пробоя воздушного промежутка (см. § 3-6).
Электростатические киловольтметры обычно используются для
измерений в цепях с одним заземленным проводом. При этом
электрод с измерительным механизмом заземляется, что соответ-
ствует условиям градуировки. Часто необходимо измерять высо-
кие напряжения в незаземленпых цепях, где оба провода, между
51
которыми производятся измерения, находятся под напряжением
относительно земли. Такие измерения осуществляются при сим
метрировании фидерных систем и линий электропередачи высо
кого напряжения, в электротермии и др.
Напряжения в незаземленных цепях можно измерять с по-
мощью обычного электростатического киловольтметра путем по-
следовательного измерения напряжения каждого провода отно-
сительно земли (рис. 3-6, а) или путем одновременного измере-
ния указанных напряжений при помощи двух киловольтметров
(рис. 3-6, б) с последующим суммированием результатов изме-
рений. Естественно, погрешности измерений при этом значительно
больше, чем при измерениях в заземленных цепях. Метод одно-
временного измерения двумя киловольтметрами является более
точным, поскольку отсутствуют погрешности, обусловленные коле-
баниями напряжения в цепи за время измерений и статистиче-
ской взаимосвязью показаний. На переменном токе метод двух
измерений практически можно использовать только в симметрич-
ных незаземленных цепях или в незаземленных цепях, в которых
напряжения проводов относительно земли находятся между собой
в фазе или в противофазе.
Измерение напряжений в незаземленных цепях возможно
также с помощью трехэлектродного электростатического кило-
вольтметра, содержащего два симметричных неподвижных элек-
трода и измерительный механизм с подвижным электродом
между ними. При таком способе измерений происходит суммиро-
вание вращающих моментов. Погрешность этого способа из-
мерений обусловлена главным образом нелинейностью зависимо-
сти вращающего момента от измеряемого напряжения, наруше-
нием симметрии напряжений проводов и наличием отклонения
разности фаз между ними от 0 или 180°. Из-за возникающих по
этим причинам значительных погрешностей область возможного
применения трехэлектродного киловольтметра ограничена практи-
чески симметричными цепями.
3-4. Электромагнитные методы
К электромагнитным методам измерений электрических
величин — токов и напряжений относится широкий класс мето-
дов, основанных на использовании электромагнитных процессов,
обусловленных неразрывной связью между электрическими и маг-
нитными явлениями. Теоретической основой их являются уравне-
ния Максвелла, записываемые в рационализированной форме
применительно к неподвижным средам в виде
, „ . , 6D . с ЙВ
rot Н = л---—; rot Е =----------—;
dt dt
divD = p; divB = 0.
52
Поскольку векторы В и Н, как D и Е, введены независимо,
к уравнениям добавляются связи:
B = |ii[H]; D = e[E]; J=y[E],
где р, е — соответственно магнитная и диэлектрическая проницае-
мость среды; у — ее удельная проводимость. В общем случае это
тензорные величины, отражающие анизотропные и нелинейные
свойства среды; квадратные скобки указывают на возможность
гистерезиса.
На использовании электромагнитных явлений основаны наибо-
лее распространенные средства измерений больших токов и высо-
ких напряжений, а именно: измерительные трансформаторы тока
и напряжения, индуктивные делители [5], магнитные компараторы,
а также методы ядерного магнитного резонанса, гальваномагнит-
ный и компарирования. Указанные средства и методы измерений
используются как для технических измерений, так и для метро-
логического обеспечения измерений больших токов и высоких на-
пряжений. Большинство электромагнитных методов относится
к бесконтактным методам, поскольку при их использовании связь
между объектом и средством измерений осуществляется через
электромагнитное (или магнитное) поле и нет необходимости
в гальванической связи между ними.
Измерение токов на основе гальваномагнитных эффектов. Та-
кое измерение главным образом осуществляется с помощью пре-
образователей Холла (ПХ), выпускаемых серийно с хорошими
метрологическими характеристиками [5]. Эти методы основаны на
применении ПХ для измерения параметров магнитного поля, соз-
даваемого измеряемым током, и использовании зависимости
между током и магнитным полем, которая определяется законом
полного тока
f Hdl = /.
Если контур интегрирования не проходит через намагничиваю-
щуюся среду, то можно пользоваться уравнением
f Bdl = р0/.
Практически измерение токов с помощью ПХ сводится к оп-
ределению магнитной индукции в конечном числе или даже в од-
ной точке магнитного поля, создаваемого измеряемым током.
Известны приборы с немагнитным интегрирующим контуром,
состоящим из ряда ПХ, окружающих шину с током, и с ферро-
магнитным магнитопроводом, в воздушных зазорах которого рас-
полагаются ПХ. Последние разделяются на приборы прямого
преобразования, в которых ПХ применяются для измерения маг-
нитной индукции, и приборы уравновешивающего преобразования,
представляющие собой магнитные компараторы тока с ПХ в ка-
честве преобразователей неравновесия.
53
В приборах с немагнитным интегрирующим контуром ПХ рав
номерно расположены по окружности вокруг шиуы с измеряемым
током. Для этого случая справедливо приближенное уравнение
(B1coscc14-B2cosa2+ • • • + Bncosan) А/ = р0/,
где Bi — магнитная индукция в месте расположения i-ro ПХ;
щ — угол между вектором магнитной индукции и осью направ-
ленности i-ro ПХ; А/ — расстояние между соседними ПХ.
Если все ПХ имеют одинаковую чувствительность SB, то
сумма их выходных напряжений пропорциональна измеряемому
току:
ft7x = p0SB//AZ.
z=i
Суммирование выходных сигналов п ПХ позволяет уменьшить
температурный дрейф суммарного остаточного напряжения,
а также увеличить в -у/n раз отношение полезного сигнала к шуму
при действии случайных некоррелированных помех.
Замена идеального контура интегрирования конечным числом
ПХ обусловливает составляющие погрешности измерений тока от
влияния внешних магнитных полей и несимметричного распреде-
ления тока относительно контура, образуемого ПХ. Погрешность
от влияния неоднородного магнитного поля обратного провода
можно определить по формуле [11]
п 1сб С г \п COS ntp — (г/с)п ,
/ V а J 1 (г/а)2п — 2 (г/о)" cos пер
где п — число ПХ; I — измеряемый ток; /ое — ток в обратном
проводе; г—радиус окружности, на которой расположен ПХ;
а — расстояние между прямым и обратным проводами (а>г);
Ф — угол между линией, соединяющей оси прямого и обратного
проводов, и плоскостью ближайшего ПХ.
Погрешность от несимметричного распределения тока отно-
сительно контура с ПХ может достигать больших значений при
малом числе ПХ. Так, при использовании шести ПХ эта погреш-
ность равна 1% при смещении провода с током от центра кон-
тура на половину его радиуса.
Для повышения чувствительности и уменьшения нижнего пре-
дела измерений применяются ПХ с ферромагнитными подлож-
ками (рис. 3-7). Вокруг цилиндрической шины 1 равномерно рас-
положены десять ПХ 2, которые наклеены на ферритовые пла-
стины 3. Для компенсации переменных ЭДС, индуцируемых
в контурах холловских электродов, применяется корректирующая
катушка 4, установленная в корпусе 5. Необходимое значение
компенсирующей ЭДС определяется путем поворота катушки при
отключенном питании ПХ.
54
Приборы с немагнитным интегрирующим контуром характери-
зуются простой конструкцией и малой массой. Их можно выпол-
нить в виде измерительных клещей для измерения токов без раз-
рыва токопровода, в том числе в высоковольтных цепях. Для
уменьшения указанных выше погрешностей необходимо исполь-
зовать большое число ПХ. Особенно эффективны такие приборы
для измерения и осциллографирования высокочастотных и им-
пульсных токов, поскольку ПХ практически безынерционны.
Использование ферромагнитного интегрирующего контура поз-
воляет повысить чувствительность и уменьшить погрешности от
влияния внешних магнитных полей и несимметричного распреде-
Рис. 3-7
ления измеряемого тока. Обычно магнитопровод имеет астатиче-
скую конструкцию с четным числом воздушных зазоров, в кото-
рые помещаются ПХ (рнс. 3-8).
Если магнитопровод состоит из п ферромагнитных участков и
имеет т зазоров, то, исходя из закона полного тока, можно со-
ставить приближенное уравнение
п т
Дре i + 22 Н— I >
<=1 k=l к
где HVoi и H(,k —соответственно среднее значение напряженно-
сти магнитного поля в i-м ферромагнитном участке и />-м зазоре;
^Fe< и l6k —соответственно длина i-ro ферромагнитного участка
и k-vo зазора.
Умножив все члены на щ, получим для случая, когда зазоры
одинаковы = Z6),
Л2
22
к=\
( ^HFeilpei
__iBo I ] ___ ‘ =1_______
1 A i
55
При измерении магнитной индукции в воздушных зазорах ПХ
с одинаковой чувствительностью SB имеем
k=l
/ п
(i-X
\ 1=1
^Fe dpe J
Из последнего выражения следует, что суммарное напряжение
п
ПХ пропорционально измеряемому току, если 2Z HFef/Fei//1.
i=l
При использовании кремнистой холоднокатаной электротехниче-
л
ской стали отношение X Нре^реМ не превышает 0,001, если
/>15 кА.
Погрешность преобразования тока в магнитную индукцию в ос-
новном определяется гистерезисом и нелинейностью основной кри-
вой намагничивания магнитопровода. Погрешности от гистерезиса
можно определить из выражения
п
i=I
где Нс — коэрцитивная сила. Погрешность линейности можно оп-
ределить по приближенной формуле
п
/ 1 mla
i=l
где kt = BilBC1 — отношение магнитной индукции в t-м ферромаг-
нитном участке к магнитной индукции в воздушном зазоре; т1б—
общая длина воздушных зазоров; р,ц и ц.г— соответственно ми-
нимальная и максимальная относительная магнитная проницае-
мость ферромагнитного материала в рабочем диапазоне измере-
ний. Основная погрешность приборов с магнитопроводом для из-
мерения больших постоянных токов (до 150 кА) составляет 0,2—
0,5 %. Их основным недостатком является большая масса магнито-
провода, сечение которого выбирается из условия, чтобы при мак-
симальном значении измеряемого тока ни один из участков маг-
нитной цепи не насыщался.
Измерение токов методом ядерного магнитного резонанса
(ЯМР). Измерение токов методом ЯМР основано на измерении ча-
стоты прецессии атомных ядер в магнитном поле, создаваемом
измеряемым током. Как известно, метод ЯМР (см. § 6-2) явля-
ется наиболее точным методом измерения магнитной индукции
однородных постоянных магнитных полей, обеспечивающим изме-
рения с погрешностью 0,001 % и менее. Для того чтобы сохранить
56
высокую точность метода ЯМР при его использовании для изме-
рения постоянных токов, необходимо преобразовать измеряемый
ток в индукцию однородного магнитного поля с помощью устрой-
ства, параметры которого поддаются точному теоретическому рас-
чету или могут быть точно определены экспериментально. На
рис. 3-9, а показана схема цифрового килоамперметра, основан-
ного на использовании метода ЯМР. Преобразователь измеряе-
мого тока в пропорциональную ему индукцию однородного магнит-
ного поля представляет собой цилиндрическую шину 1 с эксцен-
трически расположенным воздушным каналом 2, в центральной
Рис 3 9
части которого установлен датчик ЯМР 4, включенный на вход
автоматического измерительного устройства ЯМР 3 с цифровым
отсчетом.
Магнитное поле в воздушном канале при равномерном распре-
делении тока по сечению шины является однородным и может
быть теоретически точно рассчитано. Поскольку в таком преобра-
зователе отсутствуют ферромагнитные материалы, магнитная ин-
дукция в канале линейно зависит от измеряемого тока. Коэффи-
циент преобразования можно просто определить, если принять,
что магнитная проницаемость материала преобразователя равна
магнитной проницаемости воздуха, а вектор плотности тока имеет
единственную составляющую, параллельную оси преобразователя.
Если шина выполнена из материала с магнитной проницаемостью
ро, то магнитное поле в воздушном канале можно, пользуясь прин-
ципом суперпозиции, рассматривать как поле, создаваемое двумя
токами: током с плотностью J, протекающим через все сечение
шины, и током с плотностью —J, протекающим только через сече-
ние воздушного канала.
5Z
Магнитную индукцию поля, создаваемого током с плотностью
J, в некоторой точке М (рис. 3-9, б) можно определить, исходя из
уравнения
f Bxdl = ролГ1 J,
откуда
Вг = р0 [JrJ/2,
где п — радиус-вектор, проведенный из центра сечения шины
в точку М.
Рис. 3-10
Аналогично магнитная индукция поля, создаваемого током
с плотностью —J, равна
В2 = Ро [ — Jr2]/2,
где г2 — радиус-вектор, проведенный из центра сечения воздуш-
ного канала в точку М.
Суммарный вектор магнитной индукции в точке М равен
В — Bi -р В2 р0 [J (гг—г2)]/2= р0 [Jb], (3-1)
или
В = 2p0W/[n (D2—d2)], (3-2)
где b -— вектор, соединяющий центры сечений шин и воздушного
канала; D — диаметр шины; d — диаметр воздушного канала; I —
измеряемый ток. Из выражения (3-1) следует, что вектор магнит-
ной индукции имеет единственную составляющую по оси х, оди-
наковую для всех точек воздушного канала, т. е. магнитное поле
58
в воздушном канале является однородным, благодаря чему маг-
нитную индукцию можно измерить методом ЯМР, при использо-
вании которого магнитная индукция определяется по частоте пре-
цессии ядер (см. § 6-2):
В — 2п/7у,
(3-3)
где у — гиромагнитное отношение используемых атомных ядер. Из
уравнений (3-2) и (3-3) получаем выражение, связывающее изме-
ряемый ток и частоту прецессии ядер:
/-n2(£>2-d2)f/(poW) = K/. (3-4)
Из этого выражения следует,
что постоянная килоамперметра,
основанного на использовании
метода ЯМР, может быть точно
рассчитана по геометрическим
размерам сечения преобразова-
теля и значениям фундаменталь-
ных физических констант ц0 и у.
На рис. 3-10 показан внешний
вид преобразователя для изме-
рения токов от 5 до 35 кА. При
использовании этого преобразо-
вателя и резонанса протонов
в воде (упр = 2,67513 • 108 с-1 • Тл-1)
Рис. 3-11
постоянная К=0,01 А/Гц. На
рис. 3-11, а, б показано соответственно схематическое устройство
и сечение двухшинного преобразователя, который можно исполь-
зовать для измерения токов от 0,5 кА и выше, поскольку он
обладает более высокой чувствительностью, чем одношинный
преобразователь. Постоянная килоамперметра с двухшинным
преобразователем определяется по формуле
(3-5)
Погрешности измерений токов методом ЯМР в основном опре-
деляются погрешностью преобразования тока в магнитную индук-
цию, поскольку погрешность измерения магнитной индукции мето-
дом ЯМР можно снизить до 10 5—10~6 (см. § 6-2). Основными
составляющими погрешности преобразования тока в магнитную
индукцию являются: погрешность от неточного определения гео-
метрических размеров преобразователя, входящих в выражение
для коэффициента преобразования К; погрешность от неравномер-
ного распределения тока по сечению преобразователя; погреш-
ность, обусловленная различием в магнитной проницаемости мате-
риала преобразователя и воздуха; температурная погрешность и
погрешность от влияния внешних магнитных полей.
59
Погрешности измерений геометрических размеров (D, dub) на среднем
участке длины преобразователя, где расположен датчик ЯМР (см. рис. 3-9),
не коррелированы п распределены по нормальному закону, поэтому погрешность
коэффициента преобразования КЛ=В!1 можно определить по формуле
VA6 , / 2D2
b D2 — d2
2d2
D2 — d2
где Kb lb, KDjd н Kd)d — соответственно погрешности измерений b, D и d. При
измерении размеров D, d и b при помощи лазерного интерферометра (см.
§ 8-4) погрешность не превышает 10-6—10-5. Неравномерное распределение
тока возможно из-за наличия градиента
температур по сечению преобразователя и
неравномерного распределения тока на его
концах. Первая причина вызывает погреш-
ность, которую можно оценить по формуле
A J2D2 (1 — 4b2/D2)-10-14,
где А — коэффициент, равный 0,5 для пре-
образователя из медн н 2 — из алюминия;
1 — плотность тока. Прн соответствующем
выборе соотношений размеров преобразо-
Рпс. 3-12 •
вателя, в частности, если его длина /^ЗП, погрешность от неравномерного
распределения тока не превышает 10~5. Погрешность из-за различия магнитных
проницаемостей материала преобразователя и воздуха не превышает (1.. .2) • 10-5,
если преобразователь выполнен из медн или алюминия. Эта погрешность систе-
матическая и может быть учтена путем коррекции значения коэффициента пре-
образования. Температурную погрешность, обусловленную изменением размеров
преобразователя при нагреве его измеряемым током или изменением темпера-
туры окружающей среды, можно определить по формуле
Те= -аеде>
где Д0— отклонение температуры преобразователя от нормальной; ае—тем-
пературный коэффициент линейного расширения материала преобразователя.
Прн изготовлении преобразователя из меди уе=—17-1О-6Д0, из алюминия
уе =—24 • 1О-еД0.
Температурная погрешность может быть скорректирована путем измерения
температуры преобразователя. Погрешность от влияния магнитного поля тока
в обратной шине и других внешних магнитных полей можно уменьшить путем
рационального расположения преобразователя и его экранирования. Преобразо-
ватель необходимо располагать таким образом, чтобы вектор магнитной индук-
ции внешнего поля Ввн в воздушном канале был направлен ортогонально к век-
60
тору магнитной индукции В1 поля, создаваемого измеряемым током (рис.
3-12,а). Погрешность от магнитного поля тока в обратной шине, расположен-
ной на расстоянии а от преобразователя, можно определить по приближенной
формуле
Ti = (VBi + Bbh - « (6/п)2/2.
Уменьшить влияние других внешних магнитных полей (магнитное поле
Земли, поля ферромагнитных тел, поля участков контура, влияние которых не
исключается указанным выше способом) можно путем экранирования преобра-
зователя. Чтобы экран не искажал магнитное поле в воздушном канале, кон-
тур экрана должен совпадать с линиями напряженности поля, создаваемого
током в пространстве, окружающем преобразователь. Для этого ось цилиндри-
ческого экрана должна совпадать с плоскостью, проходящей через оси преоб-
разователя и воздушного канала, и быть смещена относительно оси преобразо-
вателя на расстояние хсм (рис. 3-12,6):
»1м=2!^1п2г+Д,
2 гэ — Ь
где n=d2ID'i-, г3 — средний радиус экрана.
Существенного снижения влияния внешних магнитных полей
можно достигнуть при использовании астатического преобразова-
теля ток—индукция, который имеет два воздушных канала, про-
сверленных с разных торцов до середины длины преобразователя
симметрично относительно его оси (рис. 3-12,в). В каналах рас-
положены датчики ЯМР 1, включенные в соответствующие авто-
матические устройства ЯМР 2, сигналы с которых подаются на
сумматор частоты 3. Частота на выходе последнего определяется
выражением
f — fi I- fi, — Тпр (I Bi -|- BBHI +1B2 -p BBHI)/(2л),
где Bi и B2 — векторы магнитной индукции полей, создаваемых
в воздушных каналах измеряемым током; Ввн — вектор магнитной
индукции внешнего магнитного поля.
Поскольку векторы Bt и В2 направлены встречно, то на
значение f будет влиять только составляющая вектора магнит-
ной индукции внешнего магнитного поля, направленная под пря-
мым углом к векторам Bt и В2. Обусловленную этой составляющей
погрешность измерения тока при любом направлении внешнего
магнитного поля и |В!| = |В2| = В можно найти по формуле
Тг = (VB2 + (BBHcosa)2 — В)/В,
где а — угол между вектором магнитной индукции внешнего поля
и плоскостью, проходящей через оси воздушных каналов.
Метод ЯМР при использовании высокоточных преобразовате-
лей ток—магнитная индукция можно использовать для точного
воспроизведения единицы силы тока через гиромагнитное отноше-
ние протона или других атомных ядер.
Датчики и измерительные устройства ЯМР подробно рассмот-
рены в § 6-2. Создание автоматических устройств ЯМР позволяет
использовать метод ЯМР не только для метрологических целей,
61
но и для измерения токов в производственных условиях, приме-
няя разъемные ферромагнитные преобразователи ток — индукция,
аналогичные тем, которые используются совместно с преобразо-
вателями Холла (см. рис. 3-8). Метод ЯМР можно также приме-
нять для измерения токов в цепях высокого напряжения. В этом
случае преобразователь ток — индукция и измерительное устрой-
ство ЯМР находятся под тем же потенциалом, что и провод
с измеряемым током, а измерительная информация в виде ча-
стотного сигнала передается по каналу высокочастотной связи.
Метод компарирования. Этот метод относится к методам кос-
венного сравнения, при которых непосредственно сравниваются
две однородные величины: одна из них пропорциональна измеряе-
Рис. 3-13
мой величине, а другая—
известная или легко оп-
ределяемая с высокой
точностью величина. Этот
метод широко применя-
ется для точных измере-
ний переменного тока,
напряжения и мощности
на повышенных частотах
путем их косвенного
сравнения с соответству-
ющими величинами по-
стоянного тока. При этом
используются компари-
рующие термоэлектриче-
ские преобразователи, выходная величина (термо-ЭДС) которых
в определенном диапазоне не зависит от спектра входной вели-
чины. Метод компарирования применяется для точных измерений
больших постоянных и переменных токов, поскольку в этом слу-
чае измерение большого тока заменяется измерением в К раз
меньшего тока, который может быть измерен с высокой точностью.
К — коэффициент преобразования, который обычно воспроизво-
дится с точностью, превосходящей точность воспроизведения еди-
ницы силы тока.
На рис. 3-13 показана схема резистивного компаратора тока, основанного
на сравнении падений напряжений, создаваемых измеряемым большим током
1Х и током /2 на двух точных резисторах. Резисторы R1 н R2 являются компа-
рируюшими преобразователями, погрешность определения отношения сопротив-
лений которых в основном определяет точность измерения тока 1Х. Поскольку
ток Ii—IxRiIRi при 7?1<ёС7?2 значительно меньше тока 1Х, он может быть изме-
рен с высокой точностью, например, с помощью образцового резистора RK и
цифрового вольтметра V. Точность компарирования токов указанным способом
ограничена трудностью изготовления высокоточных и стабильных резисторов
(мер сопротивления) для больших постоянных и особенно переменных токов.
Для точного измерения больших постоянных и переменных то-
ков применяется метод компарирования, основанный на уравно-
вешивании МДС, создаваемой большим измеряемым током, МДС,
создаваемой меньшим по значению током, протекающим по вит-
62
кам многовитковой уравновешивающей обмотки. Для уравнове-
шивания МДС необходимо, чтобы замкнутый ферромагнитный маг-
нитопровод, охватывающий шины с измеряемым током, имел кри-
вую намагничивания, близкую к идеальной безгистерезисной
кривой, а намагничивание магнитопровода измеряемым и уравно-
вешивающим токами было однородным по его периметру. При
этом должно быть исключено влияние внешних магнитных полей
и токов утечки. При выполнении условий полного уравновешива-
ния МДС llWi = lKwK или miK=WilwK, где Ц и 1К — соответственно
измеряемый и уравновешивающий токи; wt и щк— числа витков
соответствующих обмоток.
При компарировании путем уравновешивания МДС в качестве
компарирующих преобразователей используются обмотки, коэф-
фициенты преобразования которых соответственно равны Ki =
= Fl/Il = wl и Д2=^2/Л=®2. Поскольку отношение w2/Wi является
постоянной прибора, не зависящей от влияющих величин, то точ-
ность измерения отношения токов при выполнении указанных выше
условий полного уравновешивания МДС может быть очень высо-
кой. При использовании высокочувствительных преобразователей
неравновесия погрешность измерения отношения токов не превы-
шает 10~6—10“7. Магнитный компаратор тока обычно состоит из
ферромагнитного магнитопровода, выполненного из магнитомяг-
кого материала с высокой магнитной проницаемостью, с двумя об-
мотками, одной из которых (первичной) является токопровод
с измеряемым током, и преобразователя неравновесия МДС.
В магнитных компараторах с замкнутым магнитопроводом для
выявления состояния равновесия МДС используются чувствитель-
ные магнитомодуляционные преобразователи, обмотки которых
размещены равномерно на двух стержнях магнитопровода. В ка-
честве нечетногармонических преобразователей неравновесия ис-
пользуются магнитные усилители с положительной обратной
связью, а в качестве четногармонических — ферроиндукционные
(феррозондовые) преобразователи. Существуют магнитные ком-
параторы с разомкнутым магнитопроводом, в которых в качестве
преобразователей неравновесия применяются преобразователи
Холла.
Погрешности магнитных компараторов в основном обусловлены
влиянием внешних магнитных полей и неоднородностью намагни-
чивания магнитопроводов магнитным полем измеряемого тока, что
является следствием несимметричного распределения МДС от из-
меряемого тока по периметру магнитопровода, особенно при нали-
чии в нем воздушных разоров. Эффективный способ для повыше-
ния точности компараторов — применение замкнутых магнито-
проводов, которые совместно с равномерно распределенными об-
мотками преобразователя неравновесия помещаются в магнитный
экран.
На рис. 3-14, а показана схема компаратора постоянного тока с нечетно-
гармоническим магннтомодуляционным преобразователем неравновесия. Компа-
ратор состоит из двух кольцевых ферромагнитных магнитопроводов 1 из пер-
63
Маллоя с обмотками 2, которые питаются переменным током. Магнитопроводы
с обмотками помещены в экран 3, выполненный в виде полого ферромагнитного
торонда, на который намотана уравновешивающая обмотка 4, через которую
пропускается ток 1К, который, с одной стороны, уравновешивает МДС от из-
меряемого тока /1, а с другой — предотвращает насыщение экрана магнитным
полем измеряемого тока. Экран при этом выполняет две задачи: обеспечивает
равномерное распределение МДС в магнитопроводах 1 н защищает преоб-
разователь неравновесия от влияния внешних магнитных полей.
Обмотки 2 совместно с магнитопроводами 1 образуют магнитный усилитель
с внутренней положительной обратной связью (самонасыщающийся магнитный
усилитель), который выполняет роль преобразователя неравновесия. В каче-
стве управляющего сигнала этого усилителя используется разность МДС, созда-
ваемых измеряемым Ц и уравно-
вешивающим /к токами. Для по-
лучения уравновешивающего тока
с малыми пульсациями питание
обмотки 4 осуществляется от
трехфазного магнитного усилите-
ля мощности 5, на управляющую,
обмотку которого поступает сиг-
нал от преобразователя неравно-
весия. Трехфазный магнитный
усилитель также выполнен с
внутренней положительной обрат-
ной связью, что позволяет повы-
сить коэффициент усиления пря-
мой цепи компаратора и умень-
шить его инерционность, обусловленную большой постоянной времени обмотки
с числом витков wK. Практически уменьшение инерционности магнитного компа-
ратора производится путем уменьшения числа витков обмотки к>к, поскольку
требуемое усиление по мощности достигается за счет введения положительной
обратной связи.
На рис. 3-14,6 показаны осциллограммы первичного н уравновешивающего
токов магнитного компаратора с пределом измерений 120 кА [11]. Прн измене-
нии первичного тока со скоростью 3 кА/мс уравновешивающий ток повторяет
его форму без искажений. Погрешность таких компараторов в основном зави-
сит от крутизны характеристики преобразователя неравновесия и при измере-
нии токов в диапазоне 50—110% номинального тока не превышает 0,1 %.
Магнитные компараторы для измерения сверхбольших постоян-
ных токов (150—200 кА) изготовляются с разъемным магнитопро-
водом, что позволяет производить их монтаж без разрыва токо-
провода. Такие компараторы главным образом используются для
измерений в производственных условиях. По сравнению с измери-
тельными трансформаторами постоянного тока они обеспечивают
большую точность измерения и потребляют меньшую мощность,
которая в основном определяется значениями компенсирующего
тока и активного сопротивления уравновешивающей обмотки.
64
В качестве образцовых средств измерений больших постоянных
токов обычно применяются компараторы тока с полностью экра-
нированными замкнутыми магнитопроводами. Известны такие по-
луавтоматические компараторы тока с пределом измерений
20 кА, обеспечивающие измерение токов с погрешностью 0,001 %
[111-
Другой перспективной разновидностью магнитных компарато-
ров тока являются компараторы, в которых в качестве преобразо-
вателей неравновесия применяются гальваномагнитные преобразо-
ватели, главным образом преобразователи Холла. Такие компа-
раторы выполняются с разъемным магнитопроводом, в котором
имеются воздушные зазоры для размещения преобразователей
Холла. Кроме того, разъемная конструкция магнитопровода позво-
ляет осуществлять монтаж компараторов без разрыва цепи изме-
ряемого тока. Для уменьшения влияния внешних магнитных полей
и несимметричного расположения токопровода в окне магнитопро-
вода уравновешивающая обмотка выполняется из секций, число
которых равно числу воздушных зазоров. Каждая секция разме-
щается на симметрично расположенных частях магнитопровода
(рис. 3-15) и питается от отдельного усилителя, на вход которого
подается напряжение от преобразователя Холла, установленного
в зазоре соответствующего магнитопровода.
При влиянии внешнего магнитного поля или перераспределе-
нии токов между шинами токопровода уравновешивающие токи
в отдельных секциях w2 изменяются, но их сумма /г, измеряемая
цифровым прибором, остается неизменной, так как уравновешива-
ние МДС на отдельных участках позволяет более точно осущест-
влять суммирование МДС по контуру магнитопровода. Если сек-
3 Заказ 444
65
Ции имеют одинаковые числа витков, то уравнение преобразования
компаратора с воздушными зазорами можно представить в виде
] ___________________________
1 + 1б/(№гК) +
где /в — длина воздушных зазоров; /Fe— средняя длина силовых
линий магнитного потока в магнитопроводах; — коэффи-
циент преобразования прямой цепи; р — относительная магнитная
проницаемость материала магнитопровода.
Современные тонкопленочные преобразователи Холла позво-
ляют применять магнитопроводы с очень малыми воздушными за-
зорами, что повышает чувствитель-
ность и уменьшает погрешность
компараторов. При соответствую-
щем выборе параметров усилителей
и ферромагнитного преобразовате-
ля l6/(p0w2K) <1 и Де/(цош2А)<1,
поэтому МОЖНО принять Ii = I2W2.
Известны магнитные компараторы
с гальваномагнитными преобразо-
вателями, обеспечивающие измере-
ние токов до 200 кА с основной по-
грешностью 0,2 %. Такие компара-
торы выпускаются с пределами
измерений 20, 40, 60, 100 и 200 кА.
Метод компарирования, являю-
щийся наиболее точным методом
измерения энергетических величин
(ток, напряжение, мощность) пере-
менного тока, используется также для обеспечения единства изме-
рений больших переменных токов в широком диапазоне значений
силы тока и его частоты. Токи частотой 50 Гц необходимо изме-
рять в пределах до 50—100 кА, а частотой 400 Гц — до 8 кА.
Магнитный компаратор переменного тока обычно содержит
замкнутый магнитопровод из материала с высокой магнитной про-
ницаемостью (пермаллоя) и три обмотки: первичную wt, уравно-
вешивающую w2 и обмотку w3 преобразователя неравновесия. Для
точного уравновешивания МДС, создаваемых измеряемым Д и
уравновешивающим /2 токами, последний изменяется как по ам-
плитуде, так и по фазе. Выполнение условия Дге»1=/2ге’2 достига-
ется с помощью высокочувствительного преобразователя неравно-
весия, который реагирует только на разность МДС, обусловлен-
ных первичным (измеряемым) и уравновешивающим токами.
Погрешности компараторов переменного тока обусловлены вли-
янием на преобразователь неравновесия внешних электромагнит-
ных полей и полей рассеяния обмоток и w2, которые вызывают
неравномерное намагничивание магнитопровода, а также токами
утечки, которые попадают в обмотку w3 через распределенные ем-
66
кости обмоток. С повышением частоты измеряемого тока погреш-
ность от токов утечки становится преобладающей. Коррекцию
погрешностей магнитных компараторов осуществляют, используя
замкнутый магнитный экран 2 (рис. 3 16), охватывающий магни-
топровод 1 и обмотку w3, и электростатические экраны 3 и 4 для
защиты преобразователя неравновесия от электромагнитных по-
мех и токов утечек. Улучшение метрологических характеристик
магнитных компараторов достигается также путем секционирова-
ния обмоток и юъ, секции которых выполняются параллельно.
По такой схеме выполнен компаратор на номинальные токи 4, 5,
6, 8 и 10 кА, погрешность коэффициента преобразования которого
равна 0,005%, а угловая — 0,3'. При использовании экранирова-
ния и более сложных схем коррекции погрешности магнитных ком-
параторов тока могут быть снижены до 0,0005—0,001 %.
3-5. Электрофизические методы
Электрофизические методы основаны на использовании
стабильных физических эффектов и явлений, имеющих место при
взаимодействии электромагнитных полей с частицами вещества
(молекулы, ионы, электроны, атомные ядра). Такие методы обеспе-
чивают высокоточные абсолютные измерения токов и напряжений,
результаты которых не зависят от внешних факторов, если взаи-
модействия происходят на атомном или ядерном уровнях. Непо-
средственно измеряемой величиной при использовании электрофи-
зических методов обычно является время, частота или длина, вос-
произведение и измерение которых выполняются с наибольшей
точностью. Кроме того, связь между определяемыми физическими
величинами и непосредственно измеряемыми величинами простран-
ства и времени при использовании большинства электрофизических
методов устанавливается физическими закономерностями, в кото-
рых в качестве коэффициентов связи используются фундаменталь-
ные физические константы.
Газоразрядный метод. Газоразрядный метод измерений макси-
мальных значений постоянных, переменных и импульсных напря-
жений основан на возникновении самостоятельного газового
разряда (пробоя) в электрическом поле. При соблюдении нормиро-
ванных внешних условий и заданных размеров и формы электро-
дов существует стабильная зависимость между напряжением, при
котором происходит разряд, и расстоянием между электродами.
Для воздуха при атмосферном давлении напряженность электри-
ческого поля, при которой наступает самостоятельный разряд, со-
ставляет 30 кВ/см.
Наиболее распространенными измерительными устройствами,
основанными на рассматриваемом методе, являются шаровые раз-
рядники со сферическими электродами (рис. 3-17), для которых
составлены таблицы разрядных напряжений в зависимости от диа-
метров шаров и расстояний между ними с учетом атмосферных
3* 67
условий. Измеряемая разрядником амплитуда импульсных напря-
жений зависит от полярности импульсов, что учитывается в таб-
лицах (ГОСТ 17512—82). Для ограничения тока при пробое раз-
рядника используется ограничительный резистор с сопротивлением
/?=1О4...1О6 Ом, значение которого зависит от емкости разряд-
ника. Сопротивление и емкость разрядника образуют делитель
напряжения с зависимым от частоты коэффициентом деления. Во
всех случаях необходимо, чтобы 1/(шС), т. е. коэффициент де-
ления отличался от
единицы в пределах заданной погрешности из-
мерения. Емкость шарового разрядника можно
рассчитать по формуле
C = //[36-109(fc—1)],
где I — расстояние между электродами, м; k —
поправочный множитель, зависящий от отно-
шения I к радиусу шара.
Для учета отличия внешних условий от
нормальных изменяемое напряжение опреде-
ляется по формуле
Ux = 0,00289pt/T/(273 +1),
где UT — табличное значение измеряемого на-
пряжения (при нормальных условиях); р —
давление воздуха, Па; / — температура, °C.
Рассмотренный метод обеспечивает изме-
рение высоких постоянных, переменных и им-
пульсных напряжений с погрешностью 2—
измерения кроме климатических условий вли-
Рис. 3-17
10% • На точность
яют наличие ионизирующих излучений, запыленность окружаю-
щей среды, наличие внешних полей и объектов, находящихся под
потенциалом Земли. Менее чувствительны к внешнему окруже-
нию разрядники с электродами в виде перекрещивающихся ци-
линдров.
Измерение высоких и сверхвысоких напряжений с помощью
шаровых разрядников является одним из старейших и не очень
точных, но, тем не менее, наиболее распространенным методом из-
мерений в лабораторных условиях, что объясняется его относи-
тельной простотой и практически неограниченным верхним преде-
лом измерений.
Метод ускорения заряженных частиц. Этот метод основан па
измерении кинетической энергии частиц, ускоряемых измеряемым
напряжением. Устройства, основанные на этом методе, обычно со-
стоят из ускорителя заряженных частиц и анализатора энергии
с измерительным устройством. Если электрон ускоряется напря-
жением Ux, то он приобретает кинетическую энергию
тоиЧ2 — eU х,
где т0 — масса покоя электрона; v— его скорость; е — заряд элект-
рона.
68
Значение измеряемого напряжения определяется из выражения
V Х=тйх?!(2ё).
Таким образом, для определения напряжения необходимо из-
мерить энергию или скорость заряженных частиц. Для этого при-
меняются различные способы и приборы: времяпролетный, тормоз-
ного излучения, дифракция электронов на кристаллической ре-
шетке, а также магнитные и электростатические анализаторы и др.
В качестве ускоряемых частиц лучше всего использовать элект-
роны, так как электронные пучки можно получить с узким энерге-
тическим спектром. Вместо скорости электрона можно измерять
длину волны электрона, которая связана с его скоростью выра-
жением
Х = h/(mov),
где h — постоянная Планка.
Длину волны электрона с высокой точностью можно опреде-
лить по дифракции электронов на кристаллической решетке:
1 = ed sin а,
где d — расстояние между плоскостями кристаллической решетки
в определенном направлении; а — угол между плоскостью решетки
и направлением движения электронов.
Рассматриваемый метод позволяет измерять высокие напряже-
ния с погрешностью 0,1 %. Скорость электронов можно определять
времяпролетным методом, который, в частности, используется в ди-
намических масс-спектрометрах (см. § 13-6).
Метод резонансных ядерных реакций. Метод основан на опре-
делении измеряемого напряжения по энергии протонов или дейт-
ронов, вызывающих ядерные реакции.
Если легкие атомные ядра облучать ускоренными измеряемым
напряжением частицами (протоны, дейтроны), то при определен-
ной энергии этих частиц будет происходить ядерная реакция, мак-
симум эффективного сечения которой имеет резонансный характер.
Так, например, если тонкую литиевую пластинку бомбардиро-
вать ускоренными протонами, то при энергии протонов (441,1 ±
±0,5) кэВ возникнет ядерная реакция
iLi + lH^tBe + y.
В результате из лития образуется возбужденный бериллий, пе-
реходящий после у-излучения в основное состояние. Энергия про-
гонов, при которой происходит их резонансный захват, фиксиру-
ется по максимуму интенсивности у-излучения. В диапазоне энер-
гий от 100 кэВ до нескольких мегаэлектрон-вольт значительное
число резонансных максимумов с узкими резонансными сигналами
можно наблюдать при бомбардировке мишени из фтора l9F. Имея
шкалу энергий, при которых наступают ядерные реакции, можно
рассчитать ускоряющее (измеряемое) высокое напряжение. Шкалу
69
энергий, при которых имеют место максимумы у-излучений, опре-
деляют по отклонению частиц в магнитном поле, индукция кото-
рого определяется методом ядерного магнитного резонанса (см.
§ 6-2).
Существуют другие способы точного определения высоких на-
пряжений по моменту возникновения ядерных реакций. Напри-
мер, напряжение 1022 кВ можно точно определить по энергии воз-
никновения электронно-позитронных пар, которая точно теоре-
тически рассчитывается.
3-6. Электрооптические методы
Быстрое развитие линий электропередачи и электрофи-
зических устройств высокого и сверхвысокого напряжения
(1200 кВ и выше) обусловило появление новых методов измере-
ний, не требующих создания дорогостоящих и громоздких изоля-
ционных устройств на полное рабочее напряжение. Перспектив-
ными являются электрооптические методы, основанные на преоб-
разовании измеряемых электрических величин в параметр
оптического излучения и применении оптических каналов связи для
передачи измерительной информации из зоны высокого напряже-
ния на низковольтную часть измерительного устройства. Преиму-
ществами этих методов являются высокое быстродействие, защи-
щенность от электромагнитных помех, а также надежная естествен-
ная электрическая изоляция между высоковольтной и вторичной
измерительными цепями вследствие их полной электрической раз-
вязки.
Электрооптические методы разделяются на методы с внутрен-
ней модуляцией, при которых сигнал измерительной информации
непосредственно воздействует на источник оптического излучения,
изменяя параметры его излучения, и методы с внешней модуля-
цией, основанные на воздействии измеряемой величины непосред-
ственно на оптическое излучение от внешнего стабильного источ-
ника.
При измерении методами с внутренней модуляцией (рис. 3-18)
источник оптического излучения 2 (например, светодиод) и пер-
вичный преобразователь 1 (шунт, измерительный трансформатор
и др.) находятся под высоким напряжением, а приемник оптиче-
ского излучения 4 и вторичное измерительное устройство 5 имеют
потенциал Земли. В качестве оптического канала связи 3 между
источником и приемником излучения применяются высоковольтные
волоконные жесткие или гибкие световоды, которые обеспечи-
вают надежную изоляцию измерительных устройств от высоко-
вольтной цепи.
Методы с внешней модуляцией основаны на использовании
электрооптических и магнитооптических эффектов, главным обра-
зом электрооптических эффектов Керра и Поккельса — для изме-
рения напряженности электрического поля и напряжения, а также
магнитооптического эффекта Фарадея — для измерения токов.
70
Время релаксации, свойственное электро- и магнитооптическим
эффектам, составляет менее 10 10 с, поэтому на основе этих эф-
фектов можно создать быстродействующие средства измерений
постоянных, переменных и импульсных токов и напряжений,
а также современные быстродействующие устройства защиты.
Эффект Фарадея заключается во вращении плоскости поляри-
зации линейно поляризованного света в оптически активных ве-
ществах под действием магнитного поля. Угол поворота плоско-
сти поляризации света
е=свв/, (з-б)
где Св — постоянная Верде; I — длина пути света в веществе; В —
магнитная индукция.
Измеряя угол поворота плоскости поляризации света, можно
определить индукцию магнитного поля или силу тока, если пре-
образователь поместить в магнитном поле измеряемого тока.
Уравнение (3-6) справедливо для составляющей индукции В/,
направленной вдоль пути света. Знак угла 0 зависит от направ-
ления вектора магнитной индукции, но не зависит от направления
света, что позволяет увеличить угол 0, если свет многократно про-
пускать через ячейку Фарадея. Как и в других методах, основан-
ных на измерении магнитной индукции поля, создаваемого изме-
ряемым током, при использовании эффекта Фарадея основными
составляющими погрешности измерения тока являются погреш-
ность преобразования измеряемого тока в магнитную индукцию
и погрешность измерения магнитной индукции.
71
При использовании эффекта Фарадея измерение магнитной ин-
дукции сводится к измерению угла поворота плоскости поляриза-
ции света, которое обычно осуществляется методами прямого или
уравновешивающего преобразования.
При применении метода прямого преобразования свет от ла-
зера 1 направляется к преобразователю Фарадея 3 (рис. 3-19).
При этом поляризатор 2 и анализатор 4 могут быть расположены
непосредственно у магнитооптического образца, что позволяет ис-
пользовать оптические каналы связи 5 в виде обычных волоконных
световодов.
Выходным сигналом устройств, построенных на основе метода
прямого преобразования, является фототок г'ф=5ф/2 или выходное
напряжение.
где /?н — сопротивление нагрузки фотоприемннка; £ф — чувстви-
тельность фотоприемника 6; J2 — интенсивность светового потока
на входе фотоприемника, которая в соответствии с законом Ма-
люса равна
Jg = J1 COS2 (ф Ц О),
здесь /1 — интенсивность света на входе анализатора; ф— угол
между поляризатором и анализатором; 0 — угол поворота плоско-
сти поляризации. При ф=45°
Ивых == iRu (1 ± sin20)
или при малых углах 0
Мвых =-^~ (1 + 20) £ф«717?н.
При углах 0 = 7° погрешность линейности составляет 1%.
Па рис. 3-20 показаны различные виды магнитооптических пре-
образователей Фарадея. Самый простой преобразователь состоит
из магнитооптического элемента 2, расположенного у провода 1
с измеряемым током (рис. 3-20, а). Уменьшения влияния внешних
магнитных полей и увеличения чувствительности средств измере-
ний, основанных на использовании эффекта Фарадея, к току S7 =
=0/Ix = CBlKi можно достигнуть путем увеличения коэффициента
преобразования — применяя соленоид (рис. 3-20,6) или
ферромагнитный магнитопровод 3 с магнитооптическим элементом
2, охватывающим провод / с измеряемым током (рис. 3-20,в).
Однако использование таких преобразователей связано с ухудше-
нием динамических характеристик прибора и появлением фазовых
погрешностей, а у прибора с магнитопроводом — погрешностей ги-
стерезиса и линейности. Более рациональный путь повышения чув-
ствительности — увеличение длины пути прохождения светового
луча в магнитооптическом элементе за счет многократного отраже-
72
ния (рис. 3-20,г) или использование многовиткового магнитоопти-
ческого преобразователя из гибкого волоконного световода
(рис. 3-20, д). Этот преобразователь, так же как преобразователь,
показанный на рис. 3-20, е, одновременно является своеобразным
интегрирующим контуром, что позволяет установить однозначную
зависимость между током и углом поворота плоскости поляриза-
ции света и исключить влияние внешних магнитных полей и нерав-
номерного распределения тока внутри контура:
6 — Св $ Bril — СвРоЛг
Рнс. 3-20
В качестве рабочего вещества для магнитооптических преобра-
зователей применяются стекла, содержащие оксид свинца (флинты,
кроны) и плавленый кварц. Особенно большую постоянную Верде
имеют пленки из феррита-граната, удельное фарадеевское враще-
ние плоскости поляризации света в которых на два-три порядка
больше, чем в стеклах.
Измерение напряжения с использованием электрооптических
эффектов Керра и Поккельса основано на возникновении двухлу-
чепреломления поляризованного света, распространяющегося
в электрическом поле, создаваемом измеряемым напряжением.
Возникновение квадратичного эффекта Керра поясняется на
рис. 3-21, а. Поляризованный луч света, образуемый с помощью
источника света / и поляризатора 2, проходит через электрическое
поле, создаваемое конденсатором 3, к электродам которого прило-
жено измеряемое напряжение Ux. При этом луч света направлен
73 .
перпендикулярно вектору напряженности этого поля. После ана-
лизатора 4 свет попадает в фотоприемник 5, где он преобразуется
в электрический сигнал, измеряемый прибором 6.
Интенсивность света на выходе преобразователя Керра опре-
деляется выражением
JK = Jo sin2 (лСк/к(7х/<12).
где /к — эффективная длина преобразователя Керра; d — расстоя-
ние между его электродами; Ск — коэффициент Керра; Jo — интен-
сивность света на входе преобразователя.
Эффект Керра возникает во многих изотропных веществах, но
наиболее часто используется нитробензол, который имеет наиболь-
ший коэффициент Керра по сравнению с другими веществами
(вода, бензол, эпоксидные компаунды и др.).
Линейный электрооптический эффект Поккельса наблюдается
в пьезоэлектрических кристаллах, находящихся в электрическом
74
поле. В зависимости от направления вектора напряженности элек-
трического поля возникает продольный или поперечный эффект
Поккельса. Продольный эффект сильнее всего проявляется в кри-
сталлах дигидрофосфата аммония NH4H2PO4 или гидрофосфата
калия КН2РО4, где электрическое поле создается при помощи
кольцевых электродов 7, к которым приложено измеряемое на-
пряжение Ux (рис. 3-21,6). Поперечный эффект сильно проявля-
ется в кристаллах ниобата лития ЫЫЬОз, которые используются
в электрооптических модуляторах света.
Интенсивность света на выходе преобразователя Поккельса
можно определить из выражения
Jn — Jo sin2 (лг63По/пДД) = Jo sin2 (n,re3ti%Uxlk'),
где r63 — электрооптический коэффициент кристалла; п0 — его по-
казатель преломления при отсутствии электрического поля; X —
длина волны излучения лазера; Ех—напряженность электриче-
ского поля; /п—эффективная длина преобразователя Поккельса.
Статические характеристики преобразователей Керра и Пок-
кельса показаны соответственно на рис. 3-21, в и г.
Глава четвертая
МЕТОДЫ ИЗМЕРЕНИЙ МОЩНОСТИ И ЭНЕРГИИ
4-1. Мощность, энергия и методы их измерений
Мощность и энергия являются основными характеристи-
ками большинства физических объектов, процессов и явлений. По-
этому определение мощности и энергии представляет собой весьма
распространенный вид измерений. Повышение точности измерений
этих величин приобретает особое значение в связи с огромным
ростом потребления энергии, поиском новых источников энергии и
повсеместным внедрением мер по экономии энергетических ре-
сурсов. Мощность, так же как и энергия, существует во многих
формах: электрической, тепловой, механической, мощности излуче-
ния и др. Наиболее распространенными являются измерения элек-
трической мощности и энергии. Измерение других видов мощности
и энергии обычно также осуществляется электрическими методами.
Современная практика требует измерения электрической мощно-
сти в широких пределах — от 10-2<> Вт до многих миллиардов ватт.
Так, мощность сигнала, воспринимаемого радиолокационной стан-
цией, составляет 10-16 Вт и менее, а мощность современных элект-
ростанций превышает 1010 Вт. Энергия, доходящая до Земли от
далеких галактик за 1 с, составляет IO-40 Дж, а энергия, выраба-
тываемая электростанциями за один год. равна 1020 Дж.
75
Как и другие энергетические электрические величины, мощность
и энергию необходимо измерять в широком диапазоне частот — от
нуля (постоянный ток) до 109 Гц и более.
Мощность в электрической цепи постоянного тока можно пред-
ставить одним из выражений:
P = UI; P = FR-, P = U1 2/R\ Р = kq,
где I — ток в цепи; U — падение напряжения на нагрузке с сопро-
тивлением R', q — количество теплоты, выделяемой в нагрузке
в единицу времени.
Активная мощность в однофазной электрической цепи перемен-
ного тока определяется как среднее значение мощности за пе-
риод Т:
. I J -г
Р—-----J pdt =---J uidt,
То т i
где и, i и р — соответственно мгновенные напряжение, ток и мощ-
ность.
В случае когда ток и напряжение являются синусоидальными
функциями времени, активная мощность рассчитывается по выра-
жению
P = U/’cos ф.
Множитель cos ф называется коэффициентом мощности, а S =
= UI — полной мощностью, определяющей активную мощность при
чисто активной нагрузке, т. е. при cos ф = 1.
При расчете различных электротехнических устройств и для
оценки их эффективности используется понятие реактивной мощ-
ности, которая для синусоидального процесса определяется выра-
жением
Q = UI эшф.
В общем случае переменного периодического процесса с произ-
вольной формой кривых тока и напряжения активная мощность
находится как сумма мощностей гармонических составляющих:
k=<x> k=oo
Р = £ р*= £ UkIkCOsq>k.
fe=l ft=l
Коэффициент мощности определяется как отношение активной
мощности к полной мощности:
KP = PIS.
Если в цепи имеет место импульсный режим (процесс), то его
можно характеризовать импульсной мощностью, определяемой как
среднее значение мощности за время одного импульса т:
1 т
РИ =—J uidt.
т о
76
Обычно эта мощность определяется путем измерения средней
мощности за период повторения импульсов:
Р= —f uidt = — Ря.
То Т
Для многофазной цепи выражения для активной и реактивной
мощности имеют вид
п п
Р = 2 ^ф</ф/С05фь Q= У, t/ф j/ф i sin<Pb
1=1 1=1
где (7ф и /ф — действующие фазные напряжения и токи; <pi — угол
фазового сдвига между соответствующими фазными напряже-
ниями и токами; п — число фаз.
Выражения для электрической энергии, являющейся интегра-
лом от мощности по времени, получают путем интегрирования при-
веденных выше выражений для мощности. Поэтому счетчик элек-
трической энергии обычно представляет собой измерительный
преобразователь мощности и интегратор, в качестве которого ис-
пользуются механический или электрический счетчики.
Приведенные выражения для активной и реактивной мощности
показывают, что при всех методах определения мощности, за ис-
ключением калориметрического (теплового), при котором опреде-
ляется количество теплоты (температура), необходимо выполнять
операции перемножения и последующее усреднение мгновенной
мощности за период или за время длительности импульсов, а для
многофазной цепи — еще и суммирование. Функцию произведения
можно также реализовать путем моделирования различных мате-
матических зависимостей, из которых преимущественно использу-
ются две:
UuUf = [(Uu+ Uif-(UU~U№- (4-1)
= [Ul + U2i- (Uu- Ut)2]/2, (4-2)
где Uu и Ui — напряжения, пропорциональные соответственно па-
дению напряжения на нагрузке и силе тока в ней.
Для выполнения операций суммирования (вычитания) и возве-
дения в квадрат применяются сумматоры и квадраторы. Поэтому
в средствах измерений мощности наряду с различного рода пере-
множающими устройствами используются сумматоры и квадра-
торы. При этом погрешности измерений мощности главным обра-
зом зависят от метрологических характеристик устройств, выпол-
няющих указанные операции.
Методы измерений мощности (энергии) в зависимости от вида
используемых измерительных преобразователей разделяются на
электромеханический, электрический, электротепловой (калори-
метрический) и метод компарирования.
Электромеханический метод основан на использовании элек-
тромеханических перемножающих устройств в виде электродина-
мического, ферродинамического, электростатического и пндукцион-
77
ного измерительных механизмов, угол отклонения подвижной ча
сти которых является функцией измеряемой мощности.
Электрические методы основаны на использовании аналоговых
и цифровых электронных перемножающих устройств, выходной
электрический сигнал которых является функцией измеряемой
мощности.
Электротепловой (калориметрический) метод, являющийся ме-
тодом прямого преобразования электрической мощности в тепло-
вую, используется для измерения мощности и энергии в цепях вы-
сокой и сверхвысокой частот, а также мощности (энергии) лазер-
ного излучения.
Метод компарирования в основном применяется для точного
измерения мощности в электрических цепях высокой частоты,
а также для метрологического обеспечения измерения мощности
в цепях переменного тока.
4-2. Метод на основе
электромеханических перемножителей
Для измерения мощности в цепях постоянного тока и
переменного тока частотой 50—1000 Гц преимущественно исполь-
зуются электродинамические и ферродинамические ваттметры. Эти
приборы, особенно электродинамические ваттметры, применяются
также для измерения в звуковом диапазоне частот — до 10—
15 кГц. В этом случае они выполняются для измерений при фикси-
рованных частотах или в узком диапазоне частот, составляющем
небольшую часть от номинальной частоты.
При измерениях на постоянном токе и переменном токе часто-
той до 200—400 Гц погрешность электродинамических ваттметров
составляет 0,1% и более, а ферродинамических 0,2% и выше. При
этом погрешность перехода от постоянного тока к переменному ча-
стотой не более 200 Гц у первых равна 0,01—0,1%, а у вторых —
0,1—0,5%.
Погрешности электродинамических ваттметров обусловлены
временной и температурной нестабильностью характеристик рас-
тяжек и добавочного резистора, несинфазностью напряжения и
тока в подвижной катушке, а также тока и потока — в неподвиж-
ной, влиянием паразитных связей между обмотками, реактивными
составляющими сопротивления обмоток, влиянием внешних маг-
нитных полей и др. Частотная и угловая погрешности обуслов-
лены собственными емкостями, индуктивностями и взаимной ин-
дуктивностью катушек, вихревыми токами, реактивными сопротив-
лениями добавочных резисторов и шунтов. У ферродинамических
ваттметров, кроме того, имеются погрешности от гистерезиса и
вихревых токов в ферромагнитных частях измерительного меха-
низма [2].
Коррекция температурной и частотной погрешностей, астатиро-
вание и экранирование позволяют снизить погрешности и создать
ваттметры класса 0,2 для работы при частотах до 10 кГц. В США
78
электродинамический ваттметр используется в качестве эталона
для воспроизведения единицы электрической мощности в диапа-
зоне частот 40—500 Гц с неисключенной систематической погреш-
ностью 0 = 0,005 Не-
применение ваттметров с усилителями во входных цепях поз-
воляет расширить пределы измерений мощности в сторону малых
значений напряжений и токов, увеличить сопротивление парал-
лельной цепи и уменьшить сопротивление последовательной цепи.
Известны электродинамические ваттметры класса 0,02—0,1 с уси-
лителями для диапазона частот 5—104 Гц. Промышленность вы-
пускает широкую номенклатуру ваттметров для измерений мощно-
сти в цепях постоянного тока, в однофазной и многофазных цепях
классов точности 0,1—2,5. Ваттметры выпускаются как лабора-
торные, так и щитовые. Существует
также широкая номенклатура самопишу-
щих ваттметров. Для регистрации мощ- jlz
ности в цепях звуковой частоты примени- /
ются осциллографические ваттметры— S'
вставки к электромеханическим гальва- "/
нометрам. /
Измерение мощности в цепях с малым
cos<p. Электродинамические и феррединамнческие Рис. 4-1
ваттметры обычно градуируются при cos<p=l.
При измерении активной мощности в цепях с ма-
лым cos <р возможны большие погрешности вследствие недостаточной чувстви-
тельности таких ваттметров н наличия у них угловой погрешности, которая
возрастает по мере уменьшения cos <р.
Уравнение преобразования электродинамического ваттметра можно пред-
ставить в виде
С
СС = — /2^12^08 (/2» Ф1г)> (4-3)
где С—в общем случае функция угла отклонения a, Iz = U]Zz— ток в подвиж-
ной обмотке; W — удельный противодействующий момент пружинок; Ф12 —
поток, создаваемый током /t и сцепляющийся с током 1г.
С учетом сдвига фаз между током /г и напряжением U, а также между
током Д и потоком Ф12 (рис. 4-1) уравнение (4-3) можно написать в виде
« = ву + 6,)=-^- H/tCOS^—fi).
Погрешность измерения мощности, обусловленная сдвигом фаз б=бц—6/,
будет
Р'— Р cos (го — б) — COS ф с . к ,
уе =--------=------—----------— = cos о Ц- tg ф sin о — 1.
Р COS ф
Угловая погрешность проявляется в том, что при изменении cos Ф и
неизменной мощности показания ваттметра изменяются. Во всех известных
ваттметрах и преобразователях мощности эта погрешность возрастает с умень-
шением cos ф Обычно угол б мал, и поэтому cos6--l и sin 6«б, а следова-
тельно, уе=в612ф Если б выражать в минутах, то уе ~0,0296tg ф в процентах.
79
При <р=л/2 погрешность ус ->оо, поэтому вместо относительной погрешности
лучше использовать выражение для приведенной погрешности
' __ cos (<р — 6) — cos <р cos <р + 6 sin <р
---- cos ЧРном
cos <РнОМ
При малых cos <р погрешность измерения мощности может достигать боль-
ших значений, поэтому в этих случаях необходимо использовать малокосинус-
иые ваттметры, которые градуируются при cos<pHOM=0,l или 0,2. В таких ватт-
метрах для получения полного угла отклонения подвижной части при малых
cos <рНом увеличена чувствительность за счет уменьшения противодействующего
момента W. Кроме того, приняты специальные меры для коррекции паразитных
фазовых сдвигов бц и бг в параллельной и последовательной цепях ваттметров,
которые не должны превышать единиц минут. Значение cos<pHoM в малокоси-
нусных ваттметрах указывается на шкале прибора.
Электростатические ваттметры основаны на использовании в качестве пере-
множающего преобразователя электростатического электрометра, содержащего
четыре попарно соединенных неподвижных электрода 1 и 3 и находящийся
между ними подвижный электрод 2 (рис. 4-2, а). При измерении мощности на
одну пару электродов полагается напряжение {71 = б/;=/нРш, другая пара со-
единяется с заземленным экраном ({73=0), а на подвижный электрод 2 пода-
ется напряжение Uz=Uu + Ui. При такой схеме включения и при условии, что
дС12/да=—дСз21да=дС/да, вращающий момент определяется из выражения
М = — [(t/3 - Utf - (tA - i/2)2]
2 да
или
м = Rm (Рн-0,5Рш) —,
да
где Рш — мощность, потребляемая шунтом; С12 н С32 — емкости между соот-
ветствующими неподвижными и подвижными электродами.
Погрешность за счет собственного потребления шунта может быть скоррек-
тирована путем проведения дополнительного измерения, при котором опреде-
ляется только мощность, рассеиваемая в шунте, или методами структурной кор-
SO
рекции, например использованием во входных цепях ваттметра специальных де-
лителей, шунтов или усилителей.
На рис. 4-2, б показана схема электростатического микроваттметра, у кото-
рого указанная коррекция осуществляется применением усилителя А2 в цепи
Ut с коэффициентом усиления, в два раза большим, чем у усилителя А1 в цепи
Uи- При таком соотношении коэффициентов усиления усилителей в цепях U, и
Uи показания прибора пропорциональны активной мощности. Применение вход-
ных усилителей в цепях Uu и U, совместно с безреактивными шунтами и дели-
телями позволяет создавать микроваттметры с нижним пределом измерений
2-10—7 Вт для измерения мощности в частотном диапазоне 20 Гц — 20 кГц при
cos<p=0,l с погрешностью 2,5 %- Известны электростатические ваттметры, ко-
торыми можно измерять мощность в более широком частотном диапазоне с по-
грешностью 0,1—0,2 % Такой высокой точности измерения мощности при по-
вышенных частотах можно достигнуть, если в ваттметре использованы безре-
активные шуиты (тш< (1.. .2) • 10-8 с), приняты меры для снижения контактной
разности потенциалов между электродами (до 10—20 мкВ) и уменьшения тем-
пературных изменений противодействующего момента растяжек. При измерении
мощности в высокочастотных цепях определяющей может оказаться резонанс-
ная погрешность, обусловленная индуктивностью подводящих проводов и рас-
тяжек и емкостью электрометра.
Электростатические ваттметры целесообразно применять для измерений
мощности переменного тока при частотах более 1 кГц вплоть до нескольких
мегагерц и при малых cos <р. При таких условиях электростатические ваттметры
обеспечивают более высокую точность, чем электродинамические. Электростати-
ческие ваттметры классов 0,1—0,2 используются главным образом в качестве
образцовых приборов для поверки других типов ваттметров на повышенных
частотах.
4-3. Методы на основе электронных перемножителей
К электронным перемножителям относится широкий
класс электронных и полупроводниковых устройств, которые опе-
рацию перемножения осуществляют на основе использования эф-
фекта Холла [5], функционального преобразования входных сиг-
налов в соответствии с уравнениями (4-1) и (4-2), модуляции
входных сигналов и ряда других методов [2].
Модуляционный метод измерений мощности. Этот метод осно-
ван на реализации функции произведения входных сигналов Uu
и Ut путем использования этих сигналов для двойной модуляции
импульсного сигнала. При этот аналоговые сигналы Uu и Ui ли-
нейно преобразуются в частоту, период, амплитуду, длительность
или скважность импульсного сигнала с последующим его интегри-
рованием. Наиболее часто используются комбинации широтно-им-
пульсной (ШИМ) и амплитудной модуляции (ШИМ — AM), ши-
ротно-импульсной и частотной модуляции (ШИМ—ЧМ), частот-
ной и амплитудной модуляции (ЧМ—AM).
На рис. 4-3, а, в показаны структурные схемы ваттметров, ос-
нованных на методах ШИМ—AM и ШИМ—ЧМ, а рис. 4-3, б пояс-
няет принцип ШИМ и АИМ. При использовании ШИМ—AM в ши-
ротном модуляторе ШМ (рис. 4-3, а, б) входным сигналом «,• мо-
дулируется длительность (ширина) t импульсов, поступающих от
генератора Г с частотой f0=l/T0. С выхода ШМ импульсы дли-
тельностью ti=kut подаются в амплитудный модулятор AM, где
они модулируются по амплитуде сигналом uu(t). При Т0-+0
81
площадь каждого импульса на выходе AM пропорциональна мгно-
венной мощности:
S (/) = uuti — kuuu{.
Напряжение на выходе интегратора И пропорционально сред-
ней мощности. При использовании модуляции ШИМ—ЧМ (рис.
4-3, в) один из входных сигналов, например ии, подается на пре-
образователь напряжение — частота ПНЧ. Импульсы с ПНЧ по-
Рис. 4-3
ступают на интегратор И через ключ К, который открывается на
время, равное длительности импульса с ШМ, управляемого другим
сигналом (и,). Число импульсов в каждом пакете на входе интег-
ратора И пропорционально мгновенной мощности:
Nu = futi = k1uukiui.
Применение цифровых интеграторов позволяет легко создавать
ваттметры с цифровым отсчетом.
Всем модуляционным методам присуща методическая погреш-
ность, обусловленная конечным значением длительности цикла мо-
дуляции, что ограничивает верхний предел частотного диапазона.
При 70=5 мкс и частоте входных сигналов 10 кГц погрешность
ваттметра на основе ШИМ—AM составляет 0,1%. Перспектив-
ность модуляционных методов измерений мощности возрастает по
мере развития быстродействующих микроэлектронных модулято-
ров и других преобразователей.
82
В Японии модуляционный метод используется в эталоне еди-
ницы электрической мощности, который воспроизводит единицу
мощности в диапазоне частот 40—10 000 Гц с неисключенной си-
стематической погрешностью 0 = 0,01 ... 0,2% •
Измерение мощности методом статистических испытаний (ме-
тод Монте-Карло). Этот метод основан на воспроизведении функ-
ции произведения согласно теореме теории вероятностей: вероят-
ность совмещения двух независимых случайных событий Е\ и Е%
равна произведению вероятностей осуществления каждого
из них:
Р[Е1ПЕг} = Р(Е11Р{£2).
При использовании этого метода измерение мощности произво-
дится путем проведения многократных актов сравнения мгновен-
ных значений входных сигналов uu(t) и с мгновенными зна-
чениями двух независимых случайных напряжений и1сл(1) и
ы2сл(0> равновероятно распределенными во времени и на интер-
валах:
—171 U1C3 (t) sj и — U2^. и2сл (0 f7S’-
Операция перемножения сводится к логическому умножению
бинарных операций сравнения, а интегрирование и усреднение —
к подсчетам в реверсивном счетчике логических произведений
с учетом полярности входных сигналов в момент сравнения.
При одновременном сравнении uu(t) с u\Zn(t) и ui(t) с u2cn(t)
через отрезки времени А/—>-0 в течение интервала времени Т ма-
тематическое ожидание частоты совмещения событий Et и Е%
можно представить в виде выражения
1 1
4UiU2 Т
М =
т
| ии (t) и{ (0 dl,
о
которое показывает, что значение М пропорционально активной
мощности.
Практически интегрирование заменяется суммированием конеч-
ного числа слагаемых. Для иллюстрации на рис. 4-4, а показана
структурная схема ваттметра, основанного на методе статистиче-
ских испытаний. Генераторы случайных чисел ГСЧ1 и ГСЧ2 с так-
товой частотой F, задаваемой генератором тактовых импульсов
ГТИ, генерируют случайные независимые числа с равномерным за-
коном распределения плотности вероятности, которые с помощью
цифро-аналоговых преобразователей ЦАП1 и ЦАП2 преобразу-
ются в двухполярные случайные напряжения UiCJ1(t) и и2сЛ(1)
(рис. 4-4, б). Эти напряжения в каждом такте с помощью срав-
нивающих устройств СУ1 и СУ2 сравниваются с мгновенными зна-
чениями входных сигналов uu(t) и Ui(t).
Логическое устройство ЛУ, учитывая в каждом такте резуль-
таты сравнения и полярность случайных напряжений, подает на
83
суммирующий вход реверсивного
вместном выполнении условий:
Пи (^ft) >^1сл (^й) 2>0
и
П-l Wk) ^2СЛ (^й) 6
счетчика PC импульс при со-
(4-4)
(4-5)
или
Пи (^л)<С^Кл (^>)<^6
и
Ui (tk)<Uzел (4)<о,
т. е. когда мгновенная мощность по-
ложительна (llu(tk)Ui(tk)>0) .
Если совместно выполняются ус-
ловия (4-4) и (4-7) или (4-5) и (4-6),
т. е. когда мгновенная мощность от-
(4-6)
(4-7)
рицательна, логическое устройство ЛУ подает импульс на вход
вычитания (—) счетчика PC. При всех других сочетаниях резуль-
татов сравнения содержание счетчика PC не изменяется. Следо-
вательно, число импульсов tn, зафиксированных в счетчике PC за
интервал времени То, пропорционально активной мощности. При
соответствующем выборе числа сравнений (тактовых импульсов)
и значений напряжений U\ и U2 можно по цифровому отсчетному
устройству ЦСУ непосредственно отсчитывать измеряемую мощ-
ность.
Рассматриваемый метод позволяет при минимальном числе пре-
образований непосредственно преобразовать мощность в цифровой
код. Достоинством метода является возможность измерения мощ-
ности в широком диапазоне частот с относительно малой погреш-
ностью. Погрешность в основном определяется быстродействием
сравнивающих устройств и может быть определена по приближен-
ной формуле
Т/ = 3(Д)2,
где f — частота тока в исследуемой цепи; т— время срабатывания
сравнивающего устройства.
84
Для звукового диапазона частот могут быть созданы цифровые
ваттметры с погрешностью 0,05%. Метод применим для измерения
мощности при малых cos ср, поскольку широкополосность таких
ваттметров обеспечивает малые фазовые погрешности. При часто-
тах до 1—2 МГц погрешность измерения мощности не превышает
0,2—0,5 % при времени срабатывания сравнивающего устройства
не более 20 нс.
4-4. Калориметрический (тепловой) метод
измерений мощности и энергии
Калориметрический метод широко применяется для из-
мерения мощности на высоких и сверхвысоких частотах, например
для измерения потерь в ферромагнитных материалах, а также для
определения энергетиче-
ских параметров лазерного
излучения. Метод основан
на преобразовании элек-
тромагнитной энергии
в тепловую и определении
изменений какого-либо па-
раметра нагреваемого тела
(температура, удлинение,
электрическое сопротивле-
ние, количество вещества,
изменившего агрегатное со-
стояние, и др.).Калоримет-
рический метод — это един-
ственный метод, при котором измеряемая мощность (энергия)
поглощения непосредственно преобразуется в выходной сигнал
или сравнивается с известной мощностью постоянного тока.
В зависимости от вида калориметрической среды (теплоноси-
теля) калориметры разделяются на жидкостные, газовые и твер-
дотельные. В качестве жидких теплоносителей применяются ми-
неральное масло, дистиллированная вода, нитробензол, кремний-
органические жидкости и др.
Калориметрический метод можно использовать для измерения
энергии, пропорциональной количеству теплоты, выделившейся за
определенный интервал времени (калориметрические интегра-
торы), а также для измерения мощности.
Калориметрические ваттметры обычно работают в диатермиче-
ском режиме, при котором мощность определяется по изменению
температуры калориметрической среды (рис. 4-5). Мощность Рх,
потребляемая нагрузкой Рх, определяется по разности температур
жидкости (теплоносителя) 1 на выходе и входе калориметра, ко-
торая измеряется с помощью термобатареи 2 и милливольтметра
при постоянном расходе жидкости: PX=CG(@2— ©(), где С —
удельная объемная теплоемкость жидкости, Дж/(м3-К); G—
85
объемный расход жидкости, м3/с; ©i и 02 — температура жидко-
сти соответственно на входе и выходе калориметра.
Калориметрический ваттметр обычно градуируют путем пропу-
скания известного постоянного тока /0 через резистор с извест-
ным сопротивлением /?д-, помещенный в калориметр.
Калориметрическому методу присущи погрешности от измене-
ния температуры окружающей среды (или температуры теплоно-
сителя на входе калориметра), а также от нестабильности тепло-
вых свойств и скорости теплоносителя. Защита от утечки теплоты
осуществляется путем термостатирования или автоматического
поддержания температуры стенок калориметра, равной темпера-
туре калориметрической среды. Для повышения точности калори-
метрических ваттметров применяются также тестовые методы (см.
§ 1-3), при которых в качестве тестов используются искусственно
создаваемые тепловые потери и известная мощность постоянного
тока или тока низкой частоты. Нижний предел измерений калори-
метрических ваттметров обычно составляет 1 мВт. В диапазоне
частот 50—1 МГц погрешность измерения лежит в пределах 0,1—
2%. Дифференциальный метод, при котором используются два
идентичных калориметра, в одном из которых выделяется изме-
ряемая мощность, а в другом помещена эквивалентная нагрузка,
питаемая известным постоянным током, позволяет измерять высо-
кочастотную мощность с абсолютной погрешностью 1 мкВт.
Для измерения мощности и энергии лазерного излучения в ши-
роком диапазоне их изменения применяются калориметрические
приборы с твердотельными тепловыми преобразователями, кото-
рые выполняются в виде пластин или чаще полостей — полого
конуса, сферы с отверстием и др. Для измерения тепловой мощно-
сти (энергии), поглощаемой калориметрическим преобразовате-
лем, используются термоэлектрический, терморезистивный или
пироэлектрический эффекты. Последний заключается в электри-
зации полярных диэлектриков при изменении температуры [5].
Преимуществами пирометрических калориметров перед термо-
электрическими или терморезистивными (болометрическими) яв-
ляются более высокая чувствительность и быстродействие. На
рис. 4-6 показана структурная схема пироэлектрического измери-
86
теля мощности непрерывного лазерного излучения, основанного
на методе уравновешивающего преобразования. Пироэлектриче-
ский преобразователь 1 выполняет функции первичного и обрат-
ного преобразователей. Лазерное излучение W модулируется об-
тюратором 10, поглощается золотой зачерненной пластиной 2 и
через тонкую пленку 3 нагревает в течение одного полупериода
пироэлектрическую пластину 4 из ЫТаОз. В течение последую-
щего полупериода через пластину 2 как через нагреватель пропу-
скается ток /, пропорциональный первой гармонике выходного
напряжения пироэлектрического преобразователя. Цепь прямого
преобразования прибора состоит из усилителя 5, фазочувствитель-
ного детектора 6 и ключа 7. Работа последних синхронизируется
тактовыми импульсами, создаваемыми при вращении обтюратора
между источником света 9 и светоприемником 8 с частотой
12,5 Гц. Такое значение частоты выбрано из условия эквивалент-
ности теплового эффекта от излучения лазера и нагревателя. По-
рог чувствительности таких приборов составляет 10-8 Вт/Гц1/2,
погрешность ± (2—10) %-
Глава пятая
МЕТОДЫ ИЗМЕРЕНИЙ УГЛА ФАЗОВОГО СДВИГА
5-1. Основные определения
Фаза наряду с частотой и амплитудой является основ-
ным параметром колебательного процесса. Фаза — аргумент гармо-
нической функции x=Xmcos(o/+ip), где X— соответственно
амплитуда и круговая частота гармонического колебания;
(ш/+<р)— фаза колебания. Фаза колебания состоит из двух со-
ставляющих— переменной ы1 и постоянной <р. Чаще всего необ-
ходимо измерять не собственно фазу, а угол фазового сдвига
(УФС) между двумя колебательными процессами xt и х2 одной и
той же частоты: Xi=Xml cos(<о£4-<pi); X2 = Xm2cos(<T>/+(p2)- В этом
случае УФС равен разности постоянных составляющих фаз двух
колебаний cp=<pi — <р2 и не зависит от начала отсчета времени.
Сигналы с кратными частотами характеризуются приведенным
значением УФС. В зависимости от того, к какой частоте приве-
дены колебания, УФС определяется по одной из двух формул:
С01 <о2
<р = <Р1---- <р2; <Р = — фа 4---
«2 <01
При искаженной форме сигналов под <р понимается УФС между
их первыми гармониками. Если колебательные процессы имеют
сложную форму, например периодические процессы импульсного
характера, то обычно говорят не о УФС, а о сдвиге во времени,
который определяется интервалом времени между моментами,
87
когда колебания проходят через определенный уровень (напри-
мер, через нуль).
Обычно УФС выражается в радианах или градусах, а сдвиг
во времени — в секундах. В дальнейшем рассматривается наибо-
лее часто встречающийся в практике случай измерения УФС двух
колебаний одинаковой частоты в диапазоне 0—360°.
Существуют различные виды классификации методов измере-
ний УФС. Наиболее часто эти методы разделяются на методы пря-
мого и уравновешивающего преобразования; целесообразна
также классификация по способам получения первичной инфор-
мации о УФС. По этому признаку методы измерений УФС разде-
ляются на методы с использованием информации о переходе сиг-
налов через определенный уровень и методы с более полным ис-
пользованием входной информации. Методы первой группы
применяются при высоком отношении сигнала к шуму. Приборы,
основанные на этих методах, определяют УФС по моментам пере-
хода исследуемых напряжений через нуль или через определенный
уровень, например Хт/2. При наличии значительных помех или
при сложной форме входного сигнала предпочтительны методы
второй группы, на которых основаны корреляционные фазометры
и фазометры с ортогональной обработкой сигнала, рассмотренные
в § 5 4.
5-2. Измерение угла фазового сдвига
методами прямого преобразования
Рассмотрим следующие методы прямого преобразова-
ния: осциллографические; методы с преобразованием УФС в ток
или напряжение; методы с преобразованием УФС в число им-
пульсов.
Осциллографические методы измерений УФС. Непосредственно
УФС можно измерить при помощи светолучевых и электронных
осциллографов с использованием методов линейной, синусоидаль-
ной и круговой развертки.
При использовании способа линейной развертки исследуемые
сигналы подаются либо на входы двух вибраторов (в случае при-
менения светового осциллографа), либо на два входа двухлуче-
вого осциллографа или однолучевого осциллографа с электрон-
ным коммутатором на входе вертикальной развертки. Горизон-
тальная линейная развертка создается механическим путем
в случае использования светолучевого осциллографа или за счет
подачи линейного напряжения на горизонтальные пластины при
применении электронного осциллографа. Получающиеся изобра-
жения двух колебательных процессов (рис. 5-1, а) используются
для определения УФС (в градусах):
<р = — 360,
1 b
где а — отрезок между точками перехода кривых через нуль; b —
88
бтрёзок, пропорциональный периоду колебаний. Погрешность из-
мерения УФС указанным методом зависит в основном от погреш
ности измерения отрезков на экране осциллографа, от нелиней-
ности развертки, неточности определения оси симметрии сравни-
ваемых кривых и от изменения условий синхронизации. Абсо-
лютная погрешность этого метода 1—5° и более.
Другая разновидность осциллографического метода — это ис-
пользование фигур Лиссажу, при котором применяется способ си-
нусоидальной развертки (рис. 5-1,6). Перед измерением добива-
ются симметрии вертикального и горизонтального каналов осцил-
лографа. Затем один из сигналов подается на вход усилителя
вертикальной развертки, а второй — на вход усилителя горизон-
тальной развертки. При одинаковых частотах входных сигналов
89
на экране осциллографа будет наблюдаться эллипс, угол наклона
которого зависит от УФС:
<р = arcsin — =’2arctg —,
с D
где с, D — проекции эллипса на оси координат; d, е — отрезки
между точками пересечения эллипса с осями координат. Знак
УФС определяется по направлению вращения луча осциллографа:
при положительных значениях ср луч вращается по часовой
стрелке, а при отрицательных — против. Для определения знака
УФС яркость модулируют напряжением, сдвинутым при помощи
фазовращателя на 90° относительно напряжения горизонтальной
развертки; при положительном <р более яркой является верхняя
половина осциллограммы (рис. 5-1, в), при отрицательном <р —
нижняя.
Погрешность измерения УФС при помощи фигур Лиссажу со-
ставляет 2—3% при углах, близких к 0 и 180°, и возрастает до
10—15% при <р=90°.
Более высокую точность измерения обеспечивает способ кру-
говой развертки, при котором сигнал ду преобразуется в два оди-
наковых по значению, но сдвинутых на л/2 сигнала, используемых
для получения круговой развертки. Другой сигнал х2 через фор-
мирователь Ф подается на модулирующий яркость электрод Z
в виде однополярного импульса длительностью в полпериода
(рис. 5-1,г). При фазовой симметрии и одинаковом коэффици-
енте усиления каналов X и У на экране осциллографа наблюда-
ется полуокружность, угол поворота которой зависит от сдвига
фаз между xt и х2. При измерении ключ S вначале переводится
в положение 2, и на экране отмечают начальное положение диа-
метра полуокружности. Затем ключ S переводится в положение 1,
на экране отмечают новое положение диаметра и измеряют угол
между двумя диаметрами. Достоинством метода является отсчет
УФС с указанием знака сдвига.
Метод измерения УФС с преобразованием в ток или на-
пряжение. Преобразование УФС в ток иллюстрируется на
примере ключевых схем фазочувствительных выпрямителей —
ФЧВ (рис. 5-2,а). Один из сигналов xt подается на вход 1—1,
вторым сигналом х2, который обычно называется опорным (ком-
мутирующим, управляющим), изменяется с помощью ключа S
проводимость измерительной цепи от Go до 0 (рис. 5-2,6). Зави-
симость выходного сигнала от времени показана на рис. 5-2, в.
При применении сглаживающего фильтра постоянная составляю-
щая выходного сигнала /0 будет равна
/0 = CXlmG0 cos <р, (5-1)
где С — коэффициент; Х1т — амплитуда сигнала хь Как видно из
выражения (5-1), значение 7 о пропорционально амплитуде вход-
ного сигнала xlt косинусу УФС и не зависит от амплитуды опор-
ного сигнала. Поэтому в качестве опорного используют менее ста-
90
бильный по амплитуде входной сигнал с предварительным усиле-
нием и ограничением. Амплитуду входного сигнала Xim необхо-
димо поддерживать постоянной. Чувствительность ФЧВ
S = = — CG0X]m sin <р
О(р
зависит от УФС, максимальна при ф = 90° и стремится к нулю
при ф=0 или 180°, поэтому такой ФЧВ применяют в диапазоне
30°<ф<150°.
Основными источниками погрешностей фазометров с ключе-
выми ФЧВ являются изменение параметров цепи под воздейст-
Рис. 5-2
вием дестабилизирующих факторов, непостоянство амплитуды
входного сигнала, погрешность отсчетного устройства, погреш-
ность градуировки и ухода нуля.
Измерения УФС с преобразованием входной величины в напряжение (ток).
Эти измерения часто реализуются на основе суммо-разиостного метода. Так как
модули векторной суммы Хс и разности Хр двух колебаний xi=Ximcos(<of+<pi)
и x2=X2mcos(iof-t-<p2) определяются выражениями:
Хс = VXlm + XL + 2XlmX2m cos <p ;
Xp = VX?m + X*m - 2X,mX2m cos <p .
TO при X\in—Xzm~Xm
Xc — 2Xm cos <p/2 и Xp= 2Xm sin<p/2, (5-2)
t. e. Xc и Xv являются функциями УФС. Для выполнения арифметических опе-
раций наиболее часто используют усилители с отрицательной обратной связью,
обеспечивающие точное суммирование и развязку источников исследуемых сиг-
налов.
Погрешность измерения складывается из погрешности преобразования и по-
грешности выходного прибора. Погрешность преобразования зависит от точности
выполнения условия (5-2) и значения УФС.
91
Чувствительность фазометра прн суммировании (5С) и вычитании (5Р)
дХс у . <р __ дХр _____у <р
ос =--------— — Лт sin-------- On-----------------— Л/п cos--
. 2 ’ р а<₽ 2
зависит от <р: значение Sc максимально при <р=180°; Sp максимально при <р=0
и <р=360°. Обычно фазометры, основанные на этом методе, имеют переключатель
для перехода от суммирования к вычитанию; погрешность измерения состав-
ляет 1—2 %. В качестве входных сигналов фазометров чаще всего использу-
ются напряжения. Поэтому в последующем изложении примем Xi(0=Wi(0’>
*2 (0 =u2(t).
Метод измерения УФС с преобразованием в ток или напряжение может
быть реализован при использовании дополнительного преобразователя УФС
в интервал времени. Входные сигналы подаются на формирователи Ф1 и Ф2
(рис. 5-3, а); при переходе синусоидальных сигналов через нуль формируются
импульсы ui' и и2 (рис. 5-3, б), которые поступают на R-, S-входы триггера
с открытым коллектором. Таким образом, УФС входных сигналов преобразуется
формирователями Ф1 и Ф2 в интервал времени между импульсами. При воздей-
ствии входных импульсов на выходе триггера появляется сигнал /тр
(рис 5-3, б) и через миллиамперметр, установленный на выходе триггера, течет
ток i, среднее значение которого равно
I — 1 _ I
•ср—‘т —‘т
ф
360
где 1т — амплитуда тока на выходе триггера; Т — период сигнала. Следова-
тельно,
<р= 360.
1т
Так как /m=const, то измеряемое значение /ср пропорционально <р. По-
грешности измерений составляют ±(1—2) % и в основном определяются по-
грешностью определения /ср и нестабильностью тока 1т.
Методы измерений с преобразованием УФС в код. Эти методы
основаны на преобразовании УФС в интервал времени и в запол-
нении полученного интервала времени импульсами известной ча-
стоты. Фазометры, построенные на данном методе, содержат пре-
образователь УФС в интервал времени (ПФВ), времяимпульсный
преобразователь и автоматическое устройство пересчета числа им-
пульсов в значение УФС,
92
-ПФВ можно подразделить на триггерные и преобразователи
с перекрытием. Оба типа преобразователей могут быть выполнены
как по однополупериодной, так и по двухполупериодной схеме.
В однополупериодном триггерном устройстве (рис. 5-4, а) ис-
следуемые напряжения ut и н2 подаются на входы формировате-
лей Ф1 и Ф2, которые при переходе напряжения из отрицатель-
Рис. 5-4
ного в положительное формируют импульсы и/ и и2', поступаю-
щие на вход триггера Т. На выходе триггера получается импульс,
длительность которого пропорциональна УФС:
’ 45 360
где Т — период входного сигнала. Недостатком однополупериод-
ных триггерных преобразователей является зависимость показа-
ния прибора от наличия постоянной составляющей входного сиг-
нала, наличия четных гармоник и т. д.
93
Двухполупериодный триггерный преобразователь (рис. 5-4, б)
содержит формирователи, которые вырабатывают импульсы при
переходе входных напряжений через нуль, и два триггера. На
выходах триггеров получаются два импульса длительностью
и которые в дальнейшем суммируются. Значение <ф =
=-^-(^ф1-Т^фг) пропорционально УФС и не зависит от постоянной
составляющей во входных сигналах, так как при ее наличии дли-
тельность одного сигнала увеличивается, а другого — уменьша-
ется. Двухполупериодное преобразование позволяет также умень-
шить погрешность от четных гармоник. Как и в предыдущем
случае, отсчет однозначен в диапазоне 0—360°. Недостатком триг-
герных устройств является наличие «мертвых» зон вблизи 0 и 360°
из-за конечной разрешающей способности триггера.
В преобразователях с перекрытием (рис. 5-4, в) формирова-
тели Ф1 и Ф2 преобразуют синусоидальный сигнал в прямоуголь-
ные импульсы, которые затем поступают на схему совпадения СС.
Причем на вход 1 схемы совпадения поступает прямой сигнал
с выхода Ф1, а на вход 2— инверсный сигнал с выхода Ф2. Дли-
тельность выходного напряжения пропорциональна УФС, опреде-
ляемому промежутком времени /ф. Аналогично двухполупериод -
ным триггерным преобразователям в преобразователях с пере-
крытием для уменьшения погрешности измерения применяются
двухполупериодные цепи. По сравнению с триггерными преобразо-
вателями устройства с перекрытием обеспечивают более высокую
точность измерения при работе в «мертвой» зоне.
Простейший фазометр с преобразованием УФС в код за один
период исследуемого напряжения (рис. 5-5, а) состоит из преоб-
разователя ПФВ, схемы совпадения СС, генератора квантующих
импульсов Г и счетчика Сч. УФС между напряжениями щ и н2
преобразуется в сигнал н3 длительностью /ф, который поступает
на схему СС. На выходе схемы совпадения получаем импульсы,
число N которых пропорционально /ф, т. е. УФС:
т
где То — период квантующих импульсов. Так как С = <р----, то
360
N = <р
т_____1_
То 360
(5-3)
При номинальном значении УФС фНОм=360о число импульсов
Аном, подсчитанное счетчиком, определится выражением
Л^ном = TIT о-
Показания счетчика пропорциональны УФС только при посто-
янных значениях Т и То, которые необходимо заранее определить;
поэтому такой тип фазометра малоудобен. Основными составляю-
щими погрешности фазометра являются инструментальная по-
грешность и погрешность квантования. Инструментальная по-
94
грешность определяется нестабильностью времени срабатывания
триггера преобразователя ПФВ, различными уровнями срабаты-
вания схем формирователей и др. Погрешность квантования обу-
словлена тем, что интервал времени можно измерять с погреш-
ностью не более одного периода квантующих импульсов. При
срном = 360° максимальная погрешность от квантования будет
равна
60 = —!—360 = 360-^--
Whom Т
Рис. 5-5
95
Если погрешность от квантования распределена по закону
Симпсона, то среднее квадратическое отклонение погрешности бу-
дет составлять
°о = ^о/д/б •
Нижняя рабочая частота фазометра не ограничена. Макси-
мальная частота исследуемого процесса, ограниченная погрешно-
стью квантования, определяется по формуле
t ___ 1____Sofo
Tm(n ~ 360 ’
При /о=1ОО МГц и бо=О,О5° значение fmax=14 кГц. Фазометры
данного типа обладают наиболее высоким быстродействием.
Автоматический пересчет значения УФС в градусы при высо-
ком быстродействии может быть выполнен за счет умножения ча-
стоты одного из входных сигналов на 3,6- 10” (рис. 5-5,6) умно-
жающим устройством Ум. В схеме совпадения происходит кван-
тование интервала времени tv импульсами, частота которых
равна fo=3,6 • 10'77’. При этом, так как Т/То—3,6 10", то отсчет
получается в градусах.
Разновидностью вышеприведенного устройства является фазометр, струк-
турная схема которого представлена на рис. 5-5, в. Входные сигналы подаются
на преобразователь ПФВ, преобразуются в интервал времени t<p, который в уст-
ройстве СС заполняется высокочастотными квантующими импульсами от гене-
ратора Г. Отсчет значения УФС со счетчика Сч снимается в градусах при
частоте генератора, в 3,6-10" раз большей частоты сигнала иг. Постоянство со-
отношения Т/То поддерживается за счет системы автоматической подстройки ча-
сТоты АПЧ. На один вход системы АПЧ подается частота входного сигнала иг,
на второй вход — частота генератора Г, деленная делителем частоты Д иа
3,6 • 10". Напряжение разбаланса с устройства АПЧ воздействует на генератор
и подстраивает его частоту к частоте сигнала умноженной на 3,6 10". Не-
достатком этих устройств является увеличение времени измерения, связанное
с переходными процессами в умножителе или системе АПЧ. Частотный диапа-
зон фазометра определяется частотным диапазоном умножителя частоты или
генератора.
Снизить рассмотренные ранее две погрешности и расширить частотный диа-
пазон измерений можно при использовании метода усреднения, т. е. при усред-
нении результатов измерений за промежуток времени, достаточно большой по
сравнению с периодом исследуемых колебаний (рис. 5-5, г). Устройство ПФВ
преобразует УФС напряжений щ и иг в интервал времени 6р. Напряжения гене-
ратора ut и преобразователя ПФВ и3 поступают на схему совпадения СС1, где
происходит квантование промежутка времени /<р импульсами квантующего ге-
нератора; причем не требуется, чтобы частота генератора зависела от частоты
входного сигнала. Полученные пачки импульсов и5 подаются на один вход
схемы совпадения СС2, на второй вход которой поступают импульсы и3, сфор-
мированные путем деления частоты генератора, определяющие время цикла из-
мерения Тц:
Тц = ^дел То,
где kReл коэффициент деления делителя частоты; Го—период квантующих
импульсов генератора Г. Общее число подсчитанных импульсов Уц за интервал
времени Гц будет равно
N^-nN, (5-4)
96
где п=Тп!Т — число групп импульсов; N— число квантующих импульсов, укла-
дываемых в промежутке /<р. Тогда в соответствии с формулой (5-4)
^ц = *дел-у-^-
Подставив значение N из формулы (5-3) в последнее выражение, получим
Т 360 360
Следовательно, при йДел=3,6 10" отсчет получается в градусах и показания
не зависят от частоты квантующего генератора, а при большом числе групп
импульсов п — и от частоты исследуемых напряжений.
Расширение диапазона измерений в область низких частот осуществляется
за счет увеличения времени измерения Тд. В области верхних частот диапазон
фазометров «среднего значения» ограничен погрешностью квантования интер-
вала времени lip и инструментальной погрешностью прибора. При равных по-
грешностях квантования фазометров, осуществляющих преобразование УФС
в код за один период исследуемых напряжений, и фазометров «среднего» зна-
чения последние имеют в Vя раз более высокую верхнюю граничную частоту.
Обычно фазометры этой группы используются в диапазоне частот от единиц
герц до нескольких мегагерц при относительной погрешности измерения 0,1—
0,2%.
5-3. Измерение угла фазового сдвига
методом уравновешивающего преобразования
При использовании этого метода измеряемый УФС срав-
нивается с УФС, создаваемым с помощью градуированного фазо-
вращателя. В зависимости от вида уравновешивания методы под-
разделяются на нулевые и разностные. При нулевом методе
измеряемый УФС отсчитывается по шкале градуированного фазо-
вращателя при показании указателя равновесия, равном нулю.
При разностном методе измеряемый УФС определяется как сумма
показаний градуированного фазовращателя и указателя равно-
весия.
Структурная схема прибора уравновешивающего преобразова-
ния с ручным управлением представлены на рис. 5-6, а. Для уст-
ранения паразитных искажений фазы двух каналов ключ S сна-
чала ставят в положение 1 и при нулевом показании градуирован-
ного фазовращателя ГФ вспомогательным фазовращателем ВФ
добиваются нулевого показания указателя равновесия УР. Затем
ключ S переводят в положение 2 и с помощью фазовращателя ГФ
также добиваются нулевого показания указателя равновесия; при
этом отсчет снимается по шкале фазовращателя ГФ.
Рассмотрим структурную схему фазометра с автоматическим
уравновешиванием (рис. 5-6,6). Один из входных сигналов пода-
ется прямо на указатель УР, а второй — через ряд последова-
тельно включенных фазовращателей Ф1—Фп, которые создают
соответственно фазовые сдвиги 18072°, 180721, ..., 18072п. При
наличии УФС между входными сигналами указатель УР включает
ключ К и импульсы с тактового генератора Г поступают на триг-
герный распределитель ТР, который поразрядно через ключи
4 Заказ № 444
97
KI—Kn накоротко замыкает определенную группу фазовращате-
лей до получения нулевого сигнала на выходе указателя УР. УФС
фиксируется фазовращателями, распределителем ТР и отсчетным
устройством ОУ. Метод уравновешивания используется в фазо-
метрах Ф2-4, Ф2-6, Ф2-9 и др. Например, фазометр типа Ф2-4
обеспечивает измерение УФС в диапазоне ±240° с погрешностью
0,7° при частоте сигналов 20 Гц — 60 кГц. Путем промежуточ-
ного преобразования частоты можно расширить частотный диа-
пазон прибора до 10 МГц, при
этом погрешность увеличивается до
2—3°.
Основными устройствами в при-
борах, построенных на методе урав-
новешивающего преобразования,яв-
ляются фазовращатели. В фазомет-
а)
рах применяются параметрические,
Рис. 5-6
круговые фазовращатели и фазовращатели в виде линии за-
держки. Параметрические фазовращатели обычно создают УФС
в пределах 0—180° с погрешностью менее 1,5%. Погрешность фа-
зовращателя зависит от точности изготовления и стабильности его
элементов, рабочей частоты и сопротивления нагрузки.
Круговые фазовращатели подразделяются на резистивные, ин-
дуктивные и емкостные. Эти фазовращатели позволяют создавать
УФС, равный 0—360° и обеспечивают работу в широком диапа-
зоне частот. Резистивные фазовращатели применяются в основном
в диапазоне инфранизких, низких и звуковых частот и имеют по-
грешность 0,2°. Недостатками резистивных фазовращателей явля-
ются непостоянство их выходного напряжения и нелинейная зави-
симость между углом поворота движка и УФС. Индуктивные
фазовращатели применяются при частотах от сотен герц до еди-
ниц мегагерц. Их погрешность в основном определяется неортого-
нальностью обмоток и наличием емкостных связей и составляет
0,1-1%.
98
При более высоких частотах (десятки и сотни мегагерц) ис-
пользуются емкостные фазовращатели. Погрешность этих фазо-
вращателей определяется неравенством амплитуд входных напря-
жений и неточностью выполнения конструкции. Воспроизведение
УФС в диапазоне 0—180° возможно также при применении линий
задержки, выполненных на RC- и LC-элементах. Достоинством
/?С-цепи является простота выполнения, недостатками — зависи-
мость выходного сигнала от частоты и ограниченное значение
УФС. LC-цепи обеспечивают получение УФС с дискретностью
0,001° в диапазоне частот 100 Гц— 10 кГц. Плавные и дискретные
фазовращатели находят широкое применение в фазометрах урав-
новешивающего преобразования, калибраторах фазы и эталонах
единицы УФС.
5-4. Корреляционный и ортогональный
методы измерений УФС
В рассмотренных ранее методах о УФС судят только по
двум точкам, не используя остальную информацию, заложенную
во входных сигналах. Наличие высших гармоник в сигналах и
шумов во входной цепи приводит к изменению момента перехода
через нуль первых гармоник сигналов. Следовательно, изменяется
значение и появляются значительные погрешности.
Корреляционный метод. Косинус УФС между входными сигна-
лами W| = Um\ sin со/ и и2= Um2 sin + ф), представленный через
взаимокорреляционную функцию Ki,2(t) сигналов щ и и2 и их
дисперсии Di и О2, имеет вид
COS ф = К1,2 .
При использовании статистических оценок К\, 2(т), D\ и D2:
К1.2 (т) = —-’— Ё иии2{-,
1 — П 1=1
Di =---------— Г ыц-; А =---------------— Ё w2i
п — 1 1=1 п — 1 1=1
косинус УФС определяется выражением
п
у,
(5-5)
4'
99
Структурная схема фазометра, реализующего указанный алго-
ритм, представлена на рис. 5-7, а. Входные сигналы щ и н2 пода-
ются на блок выделения периода БВП, который формирует им-
пульс длительностью, равной периоду входных сигналов, и раз-
бивает этот интервал на п равных отрезков времени. В течение
каждого отрезка времени аналого-цифровые преобразователи
АЦП1 и АЦП2 синхронно преобразуют напряжения щ и н2, ко-
торые затем подаются на арифметическое устройство АУ, где про-
Рис. 5-7
водятся операции согласно формуле (5-5). Синхронизация работы
всех устройств обеспечивается устройством управления УУ. Зави-
симость погрешности фазометра от шумов и наличия высших гар-
моник в сигнале приведена на рисЛ 5-7, б, в. Как видно из ри-
сунка, погрешность фазометра возрастает с увеличением шума и
гармоник; погрешность носит систематический характер, макси-
мальна при <р = 0, 180° и минимальна при 90°. Достоинством фазо-
метра является уменьшение погрешности приблизительно в шесть
раз по сравнению с фазометрами, которые работают только по
переходам сигналов через нуль. Недостатки корреляционного ме-
тода— ограниченный частотный диапазон (от инфранизких ча-
стот до единиц килогерц), сложность реализации функции (5-5),
косинусоидальный характер шкалы.
100
Ортогональный метод. Минимум средней квадратической по-
грешности измерения УФС при наличии шумов обеспечивает орто-
гональный метод, основанный на использовании выражения
'и
( и (t) sin attdt
Ф = arctg —------------, (5-6)
f и (t) cos со/d/
о
где tH — время наблюдения сигнала; u(t)—входной сигнал.
Структурная схема устройства, реализующего данный метод,
приведена на рис. 5-8. Входной сигнал подается на умножители
Ум, в одном из которых он перемножается с напряжением генера-
тора опорного напряжения ГОН, а в другом — с напряжением
этого же генератора, сдвинутым на 90°. Полученные напряжения
интегрируются и в виде напряжений А и В подаются на устрой-
ство В/A, на выходе которого появляется сигнал, пропорциональ-
ный tgcp. Этот сигнал устройством arctg ср преобразуется в УФС.
Процесс измерения сводится к определению УФС между входным
сигналом и напряжением генератора ГОН. Для определения УФС
между двумя исследуемыми сигналами необходимо определить
УФС между напряжением генератора ГОН и первым и вторым
сигналами, а затем найти их разность. Устройства, обеспечиваю-
щие аналоговое интегрирование [см. (формулу (5-6)] с последую-
щей цифровой обработкой, позволяют получить верхнюю гра-
ничную частоту измерения порядка сотен мегагерц. Устройства,
реализующие алгоритмы (5-6) только при помощи дискретной тех-
ники, имеют верхнюю частоту в несколько килогерц из-за ограни-
ченного быстродействия АЦП.
5-5. Методы измерений угла фазового сдвига
с переносом спектра и повышение точности измерения
При измерении УФС в широком диапазоне частот по-
является частотная погрешность, связанная с зависимыми от ча-
стоты фазовыми сдвигами в измерительном устройстве. Для
101
уменьшения этой погрешности и расширения частотного диапа-
зона используется метод переноса частот, обеспечивающий изме-
рение УФС на фиксированной частоте (рис. 5-9). Входные сиг-
налы щ и «2, между которыми измеряется УФС, подаются на
входы смесителей См1 и См2, на вторые входы подается напря-
жение гетеродина Г1 с перестраиваемой частотой. Частота гете-
родина Г1 w + сой подстраивается под частоты входных сигналов
регулирующим устройством РУ так, чтобы на выходе смесителей
было максимальное значение напряжения с частотой сой. Сигналы
со смесителей подаются на усилители промежуточной частоты
Рис. 5-9
УПЧ1 и УПЧ2, настроенные на частоту (щ. Выходные напряже-
ния усилителей равны
«1 = и ml sin (wkt + ф + Лф1);
«2 = и'т2 sin (akt + Аф2),
где Дф[ и Дфг — УФС, вносимые усилителями УПЧ1 и УПЧ2.
Дальнейшее уменьшение частоты обеспечивается за счет введе-
ния дополнительных смесителей См3, См4 и генератора Го фикси-
рованной частоты (t>o- На смеситель См3 подается напряжение н/
и напряжение генератора Го-, сигнал разностной частоты coft— соо
выделяется усилителем УПЧЗ:
и\ = U"m\ sin <оо) t + ф + Дф1+ Дфз1>
где Дфз — УФС, вносимый усилителем УПЧЗ. Сигналы и2 и щ"
подаются на смеситель См4 и далее на усилитель УПЧ4, выде-
ляющий сигнал и2" с частотой соо:
«2 = U’m2 sin (соо/ + Д ф4 + Д ф4—ф—Д фх—Дфз),
где Дф4 — УФС, вносимый усилителем УПЧ4.
102 |
На вход измерительного устройства ИУ подаются сигналы от
усилителя УПЧ4 и генератора Го относительно низкой частоты со0,
между которыми и производится измерение УФС.
Если Д<р1 = Л(р2 и Дф3=Дср4, то измеренный УФС равен иско-
мому УФС. Таким образом, измерение УФС в широком диапазоне
частот сведено к измерению на фиксированной частоте. Условие
Дф1 = Дф2 легко выполняется, так как усилители УПЧ1 и УПЧ2
настроены на одинаковые частоты <зд, условие Дфз = Д<р4 выполнить
трудно, так как УПЧЗ и УПЧ4 настроены на разные частоты. Для
уменьшения погрешности измерения, вносимой этими усилите-
лями, применяется трехкратное преобразование сигнала.
Для уменьшения погрешности аналогового измерительного
устройства ИУ, которая составляет обычно 1—2°, можно приме-
нить метод фазовой трансформации, заключающийся в увеличе-
нии УФС в п раз путем умножения частоты сигналов в такое же
число раз. Такая последовательность обработки сигналов позво-
ляет получить и широкий диапазон, и высокую точность измерений.
Для этого в оба измерительных канала (обозначены штрихо-
выми линиями на рис. 5-9) устанавливаются умножители ча-
стоты УмЧ1, УмЧ2 и фильтры Ф1 и Ф2, выделяющие п-е гармо-
ники частоты ы0. Точный отсчет производится по фазоизмеритель-
ному устройству ФИУ. При Д<р1 = Д<рг и Дф3=Д<р4 значение УФС,
измеренное устройством ФИУ, будет равно
ф = пер ± Дфл + k-360,
где п — коэффициент трансформации фазы; Дср„ — погрешность
устройства ФИУ- k — коэффициент, учитывающий неоднознач-
ность отсчета.
Так как значение п известно, то измеряемый УФС будет равен
_2_ = (р ;| . . । АзбО.
п п п
Как видно из этой формулы, погрешность измерения при ис-
пользовании метода умножения частоты уменьшается в п раз.
Для устранения многозначности отсчета используется устройство
ИУ, позволяющее грубо определить значение измеряемого УФС.
Применение в фазометрах встроенных микропроцессорных
устройств, обладающих достаточными объемами памяти и боль-
шими вычислительными возможностями, позволяет уменьшить по-
грешность измерения УФС от изменения амплитуды и частоты
входных сигналов, температуры, напряжения питания, неидентич-
ности каналов, а также производить математические операции
(например, для реализации ортогонального метода). Приборы но-
вого поколения являются, по существу, комбинированными при-
борами, измеряющими фазу, частоту, период, амплитуду и отно-
шение амплитуд входных сигналов. Например, автоматизация
фазометрической установки за счет применения ЭВМ позволила
103
сократить время ее самоаттёстйции в пять-шесть раз при сниже-
нии погрешности в три раза (до 0,002—0,003°). Разработаны фазо-
метры, которые имеют основную погрешность измерения
УФС±(0,2—0,3)° при частотах 1 Гц-—10 МГц и динамическом
диапазоне входных сигналов 60 дБ. Микропроцессорные средства
находят все более широкое применение в серийных приборах, на-
пример в фазометрах с времяимпульсным преобразованием типа
Ф2-28, Ф2-34, ФК2-35, ФК2-36, предназначенных для работы
в диапазоне частот 0,01 Гц— 10 МГц.
Глава шестая
МЕТОДЫ ИЗМЕРЕНИЙ ПАРАМЕТРОВ МАГНИТНЫХ ПОЛЕЙ
6-1. Общие вопросы измерения параметров
магнитных полей
Под параметрами магнитного поля принято понимать
скалярные, векторные и тензорные величины, характеризующие
магнитное поле и инвариантные относительно системы коорди-
нат. К ним относятся магнитный поток, вектор магнитной индук-
ции, вектор напряженности магнитного поля, градиент вектора
магнитной индукции grad B(VB) (тензор), градиент модуля маг-
нитной индукции grad |B|(vB) (вектор) и др. Обычно непосред-
ственно измеряемыми параметрами магнитного поля являются
скалярные величины: магнитный поток, модуль вектора магнит-
ной индукции | В| или его составляющие В„ производные этих
величин, функционально связанные с указанными векторными и
тензорными величинами и дающие возможность определить топо-
графию и степень неоднородности магнитного поля, а также ха-
рактер его изменения во времени.
Измерения параметров магнитного поля являются основой всех
магнитных измерений, поскольку на них базируются все осталь-
ные виды магнитных измерений, такие, как измерения магнитных
параметров и характеристик материалов, веществ и изделий, маг-
нитные измерения в научных исследованиях и др. Примерами
важных научных и народнохозяйственных проблем, решаемых
с помощью магнитных измерений, являются: исследование строе-
ния вещества и микрочастиц, теория магнетизма и физики твер-
дого тела, изучение ближнего и дальнего космоса, разработка тер-
моядерных источников энергии, ускорительной техники, магнито-
гидродинамических и криогенных генераторов, высокоскоростного
наземного транспорта на магнитной подушке, поиск полезных ис-
копаемых, создание ферромагнитных материалов и веществ с на-
перед заданными свойствами, воздушная и морская навигация,
методы диагностики в технике и медицине и др.
Современная практика, включая уникальные научные иссле-
дования, требует измерения параметров постоянных магнитных
104
полей с индукцией от 10 16 Тл (магнитный вакуум) до 30 Тл, пе-
ременных— от 10 15 Тл до нескольких тесла в диапазоне частот
от долей герц до десятков мегагерц, импульсных — с индукцией от
10 15 Тл до сотен тесла при длительности импульсов от единиц
наносекунд до нескольких секунд. Магнитный поток необходимо
измерять от тысячных долей кванта магнитного потока (Фо=
= 2,07- 10~15 Вб) до десятков вебер. В ряде случаев измерения
необходимо производить при сверхнизких или сверхвысоких тем-
пературах, в космическом пространстве, при низких и высоких
давлениях и в других экстремальных условиях.
Разнообразны требования к точности измерения магнитных ве-
личин. При определении значений физических констант, в метро-
логической практике и в спектроскопии ядерного магнитного ре-
зонанса необходимо стабилизировать и измерять магнитную
индукцию с погрешностью 10~8—10-6. При исследовании устройств
ускорительной техники и различных систем с постоянными магни-
тами погрешности не должны превышать 10 е—10 3. Погрешности
измерений магнитного потока находятся в пределах 10-5—10-1.
Повышаются требования и к точности измерения дифференциаль-
ных параметров магнитного поля, определение которых необхо-
димо при исследовании топографии полей различных электрофи-
зических устройств, в навигации, а также при решении обратной
задачи магнитометрии — обнаружения и описания источников маг-
нитного поля и залежей полезных ископаемых.
Большинство методов измерений параметров магнитного поля
базируется на двух основных проявлениях магнитного поля: сило-
вом (энергетическом) взаимодействии магнитного поля с макро-
или микроскопическими токами и электромагнитной индукции.
В табл. 6-1 дана классификация основных методов измерений
параметров постоянного (----------) и переменного (~~~~)
магнитных полей, примерные диапазоны измерений магнитной ин-
дукции, погрешности ее измерений и частотные диапазоны пере-
менного поля. В настоящее время наиболее широко применяются
магниторезонансные, гальваномагнитные и индукционные методы
и соответствующие средства измерений. При использовании эф-
фекта Холла точность и диапазон измерений магнитной индукции
в основном определяются метрологическими характеристиками
преобразователя Холла [5], поскольку измерение ЭДС Холла, ко-
торая обычно находится в пределах 105—1 В, можно осуществить
с высокой точностью. Применение серийно выпускаемых преобра-
зователей Холла (Х602), цифровых милливольтметров и микро-
процессорных устройств для коррекции погрешностей обеспечи-
вает создание одно- и многоканальных тесла метров для измере-
ний магнитной индукции постоянного и переменного поля в пре-
делах 10~2—10 Тл с погрешностью 0,2—0,5 % в рабочем диапа-
зоне температур 4—400 К-
Магнитооптическнй метод, основанный нй эффекте Фарадея,
применяется Для измерения параметров магнитных пленок,
а также для измерения параметров сильных магнитных полей.
105
106
Распространенной разновидностью индукционного метода яв-
ляется магнитомодуляционный метод, рассмотренный в работах
[5, 12]. Этот метод, основанный на применении феррозондовых
преобразователей, характеризующихся высокой чувствительно-
стью и малыми размерами, широко используется для измерения
параметров слабых постоянных и низкочастотных магнитных по-
лей в диапазоне 10 9—10 4 Тл.
6-2. Квантовые магниторезонансные методы
измерений параметров магнитных полей
Квантовые магниторезонансные методы основаны на яв-
лении магнитного резонанса, заключающегося в резонансном по-
глощении и излучении энергии высокой частоты атомными части-
цами в результате магнитных дипольных переходов между энерге-
тическими подуровнями, создаваемыми постоянным магнитным
полем. Магнитные (зеемановские) подуровни могут создаваться
как внешними магнитными полями, так и магнитными моментами
микрочастиц. Например, взаимодействие магнитных моментов
электронной оболочки и ядра атома вызывает расщепление энер-
гетических уровней атома и соответствующих спектральных ли-
ний, называемое сверхтонкой структурой энергетического спектра
атома. Переходы между уровнями сверхтонкой структуры исполь-
зуются, в частности, для создания квантовых стандартов частоты,
лазеров и высокочувствительных тесламетров с оптической накач-
кой (см. § 6-3).
Магнитный резонанс может наблюдаться в макроскопическом
количестве вещества, атомные частицы которого имеют механиче-
ский (спин) и магнитный моменты. С позиций классической ме-
ханики такие частицы прецессируют в постоянном магнитном
поле аналогично прецессии гироскопа в гравитационном поле.
Термин «резонанс» здесь означает, что при наблюдении данного
явления производится настройка на собственную частоту кванто-
вой системы, равную частоте прецессии магнитных частиц в по-
стоянном магнитном поле, определяемой уравнением Лармора
ы=уВ, где у— гиромагнитное отношение, равное отношению маг-
нитного момента частицы к ее механическому моменту количества
движения.
В зависимости от вида резонирующих частиц существует не-
сколько разновидностей магнитного резонанса: ядерный, элек-
тронный парамагнитный, ферромагнитный, антиферромагнитный
и др. Ядерный резонанс обусловлен ядерными диполями, другие —
электронными диполями. Электронный парамагнитный резонанс
можно наблюдать в веществах, атомы или молекулы которых
имеют неспаренные электроны. Ферро- и антиферромагнитные ре-
зонансы имеют место в веществах, в которых электронные диполи
связаны обменными силами в доменные структуры.
Метод ядерного магнитного резонанса (ЯМР). Это наиболее
точный метод измерений магнитной индукции постоянных и
107
медленно изменяющихся магнитных полей, поскольку гиромагнит-
ное отношение атомного ядра (например, ядра водорода — про-
гона), определяющее функциональную связь между магнитной
индукцией и частотой, является фундаментальной физической
константой.
Измерительный преобразователь ЯМР обычно состоит из од-
ной или двух обмоток и рабочего вещества, содержащего атом-
ные ядра, обладающие магнитным моментом. Рабочее вещество
может находиться внутри цилиндрической, прямоугольной или
тороидальной обмотки (рис. 6-1,а), или, наоборот, обмотка может
быть помещена внутри рабочего вещества (рис. 6-1,6 и в). В по-
следнем случае увеличивается коэф-
фициент заполнения преобразователя,
пропорциональный объему рабочего
вещества, находящегося в высокоча-
стотном поле, создаваемом обмоткой.
Для защиты от внешних помех пре-
образователь ЯМР обычно помеща-
ется в экран. В преобразователях
o’)
Рис. 6-1
ЯМР наиболее часто используется жидкое диамагнитное веще-
ство, содержащее атомные ядра с отличным от нуля магнитным
моментом. Последний равен нулю только у атомных ядер, состоя-
щих из четного числа протонов и четного числа нейтронов. В по-
стоянном магнитном поле атомные ядра, обладающие магнитным
моментом, занимают определенные энергетические уровни, число
которых равно 2/4-1.
Энергия взаимодействия ядра и внешнего магнитного поля
с индукцией Во определяется выражением
Ет=—т^^1,
где т — магнитное квантовое число; р, — магнитный момент
ядра; I — спиновое квантовое число, которое может принимать
значения, только кратные 1/2; например, ядро водорода — протон
имеет спин 1=\12. Согласно правилам отбора возможны переходы
между уровнями, для которых Дт=±1, т. е. разрешены пере-
ходы между уровнями, разность энергии которых равна учВЦ.
Такие переходы сопровождаются поглощением (излучением) кван-
108
тов, энергия которых равна разности энергии уровней пе-
рехода:
Отсюда следует, что магнитные дипольные переходы имеют резо-
нансный характер и происходят при частоте излучения, которая
совпадает с классической частотой прецессии атомного ядра во
внешнем магнитном поле:
<о= 2лр75/(/й)=яуВ,
где у — гиромагнитное отношение атомных ядер.
Явление ЯМР можно экспериментально обнаружить по допол-
нительным потерям энергии в катушке индуктивности колебатель-
ного контура, создающего высокочастотное поле (метод ядерного
резонансного поглощения), или по ЭДС, наводимой в приемной
катушке прецессирующими ядрами (метод ядерной индукции).
Измеряя частоту высокочастотных колебаний, при которых имеет
место ЯМР, и зная значение у, известное для многих типов ядер
с погрешностью (3...20) * Ю7, можно с высокой точностью опре-
делить индукцию постоянного магнитного поля или другие физиче-
ские величины, преобразуемые в магнитную индукцию. Таким об-
разом, система атомных ядер, обладающих магнитными момен-
тами, представляет собой идеальный частотный преобразователь,
поскольку изменение частоты прецессии ядер точно и практически
мгновенно следует за изменением магнитной индукции. Резонанс-
ная частота при свободной прецессии (ядерной, атомной) уста-
навливается за доли периода частоты прецессии <в=уВ.
В однородном магнитном поле ядра прецессируют с одинако-
вой частотой, но с произвольными фазами. Вследствие этого век-
тор ядерной намагниченности J, представляющий собой суммар-
ный ядерный магнитный момент единицы объема вещества, имеет
только продольную компоненту Jz, совпадающую по направлению
с вектором магнитной индукции постоянного магнитного поля Во.
Для получения выходного сигнала, несущего информацию о ча-
стоте прецессии о = уВ, необходимо сфазировать прецессию ядер
с тем, чтобы возникла поперечная компонента ядерной намагни-
ченности, прецессию которой можно преобразовать в электриче-
ский сигнал. Этого можно достичь воздействием на образец до-
полнительным поляризующим магнитным полем или высокоча-
стотным полем резонансной частоты, направленными перпендику-
лярно к вектору В.
В зависимости от способа синхронизации прецессии ядер из-
мерительные устройства ЯМР разделяются на три группы: устрой-
ства свободной ядерной прецессии, работающие в режиме сво-
бодных колебаний; спиновые генераторы, в которых осуществля-
ется режим самовозбуждения, и устройства ЯМР с вынужденной
прецессией ядерной намагниченности.
Для системы ядер, слабо взаимодействующих между собой и
решеткой (например, в жидких веществах), изменение состав-
109
ляющих ядерной намагниченности хорошо описывается уравне-
ниями Блоха:
dJx/dt = у (JyBz—JzBy) —JXIT 2;
dJ y/dt — у (JZBX—JXBZ)—JJT2,
dJzldt^y(JxBy~-JyBx)—-(Jz—J0)/T1,
(6-1)
(6-2)
(6-3)
где J0=xH0—статическая ядерная намагниченность; 7’i—время
продольной или спин-решеточной релаксации; Т2 — время попе-
речной или спин-спиновой релаксации.
Рис. 6-2
Макроскопически Т\ определяется как постоянная времени ус-
тановления продольной (в направлении внешнего поля) компо-
ненты ядерной намагниченности (/z), а Т2 — постоянная времени
затухания поперечных компонент (Jx и Jy).
В зависимости от способа получения сигнала измерительной
информации метод ЯМР разделяется на метод свободной ядерной
прецессии, метод ядерной индукции и метод ядерного резонанс-
ного поглощения.
Метод свободной ядерной прецессии применяется для измере-
ния магнитной индукции слабых магнитных полей (например,
магнитного поля Земли). Структурная схема тесламетра на ос-
нове этого метода изображена на рис. 6-2, а. Преобразователь
ЯМР представляет собой ампулу с водой 1, помещенную в ка-
тушку 2, ось которой направлена перпендикулярно вектору из-
меряемой магнитной индукции Во. Для синхронизации ядер водо-
рода — протонов и создания поперечной компоненты ядерной на-
магниченности на образец сначала, в течение времени
(2... 3) 7\, воздействуют вспомогательным сильным поляризую-
щим магнитным полем, индукция которого BD^>B0 (переключатель
в положении /). В результате этого в направлении оси катушки
создается начальная ядерная намагниченность /п=хНп, где и —
макроскопическая ядерная восприимчивость; НП=ВП/ц0— напря-
женность поляризующего магнитного поля.
ПО
Если поляризующее поле быстро выключить (переключатель
в положении II), то вектор ядерной намагниченности Jn начнет
прецессировать вокруг направления вектора Во с частотой <о=
=уВ0, с постепенно уменьшающимися амплитудой и углом пре-
цессии 0 (рис. 6-2, б). При этом в катушке будет наводиться ЭДС
ядерной прецессии, которая усиливается усилителем 3, а ее ча-
стота измеряется цифровым частотомером 4. Амплитуда этой
ЭДС убывает по экспоненте с постоянной времени Т2*, которую
можно вычислить по формуле
1/71=1/Т2+1/Т2ДВ+1/т,
где Т2—естественное время спин-спиновой релаксации, обуслов-
ленное взаимодействием ядер друг с другом; Т2ДВ = л/(уЛАп) —
составляющая времени релаксации, связанная с неоднородностью
магнитного поля в объеме образца ДВ0; т — составляющая, учи-
тывающая обратную реакцию катушки на спиновую систему.
Для протонов в дистиллированной воде T2~Tt^3fi с; Т2дв
в магнитном поле Земли такого же порядка. Значение т можно
оценить по формуле т=2/(ц0/0фт]у), где Q — добротность, а т] =
= 0,5. ..1—коэффициент заполнения катушки веществом. Пара-
метры преобразователя необходимо выбрать таким образом,
чтобы тЭ>Т2*. В противном случае происходит быстрое затухание
индуцируемой ЭДС.
Решение уравнений (6-1) — (6-3) для этого случая имеет вид
Jx = Jn exp ( — t/T*) cos <oZ;
J = exp ( — fIT*') sin <oZ;
Jz — Jo [1 — exp ( — tIT,)].
ЭДС, индуцируемая в катушке, определяется по формуле [12]
е = ti)JnKBV exp ( — Z/T’*) sin coZ,
где V—объем образца; Кв — постоянная катушки по магнитной индукции. На-
чальная амплитуда сигнала, возбуждаемого свободной ядерной прецессией,
равна
£ m — coJrKbV = уВо^НпК bV. (6-4)
Если катушка представляет собой длинный соленоид, в котором находится
рабочее вещество (вода), то
&т с = лр0уВ0х/пгЛ?2/Г, (6-5)
где I — длина соленоида; R— его радиус, w — число витков, /п— ток, создаю-
щий поляризующее поле.
Для тороидальной катушки
1 R
8mt =---- роУВох/п^2 In -- , (6-6)
2л Bi
где h — высота тороида; Ri и Rz— соответственно его внутренний и наружный
радиусы.
111
В земном магнитном поле (Во«51О~5 Тл; /=ы/(2л) «2100 Гц) индуцируе-
мый сигнал обычно составляет единицы микровольт, поэтому для его усиления
используются узкополосные усилители, а преобразователь и измерительная цепь
должны быть защищены от внешних помех. Наиболее помехоустойчивыми явля-
ются тороидальные и астатированные преобразователи. Для увеличения попе-
речной составляющей ядерной намагниченности можно также использовать ди-
намическую поляризацию ядер на основе эффекта Оверхаузера [12]. В этом
случае применяют вещество, содержащее частицы, имеющие как ядерный, так
и электронный магнитные моменты. Сигнал свободной ядерной прецессии можно
также получить при импульсном воздействии на систему спинов высокочастот-
ным полем резонансной частоты, направленным под углом л/2 к вектору маг-
нитной индукции Во.
На основе метода свободной ядерной прецессии создан и се-
рийно выпускается ряд аэро- и переносных тесламетров для из-
мерений параметров слабых магнитных полей (магнитного поля
Земли, космического пространства и др.), а также устройства для
каротажа нефтяных скважин (см. § 13-5). Такие тесламетры вы-
пускаются как автономные приборы, а также входят в состав
аэрогеофизических и каротажных комплексов. Наиболее широко
применяются протонные тесламетры с циклической синхронной
поляризацией. Среднее квадратическое значение случайной по-
грешности у таких тесламетров 0,1—0,3 нТл, а систематической
0,1—2,5 нТл при частоте наблюдений 1 Гц. При увеличении ча-
стоты наблюдений до 5—7 Гц погрешности возрастают примерно
на порядок. Протонные тесламетры с динамической поляризацией
имеют систематическую погрешность 0,1 нТл и порог чувствитель-
ности 0,01 нТл при частоте наблюдений 1 Гц и 0,1 нТл при 5—
7 Гц. Выпускаются протонные микропроцессорные тесламетры
с программным управлением и обработкой результатов измерения.
Диапазон измерений таких микротесламетров обычно составляет
20—80 мкТл.
Метод ядерной индукции, основанный на непрерывном инду-
цировании ЭДС прецессирующими ядрами, используется в спино-
вых генераторах, а также в спектрометрах ЯМР, применяемых
для исследования структуры вещества и измерения его состава и
концентрации.
Спиновый генератор представляет собой автоколебательную
систему, у которой положительная обратная связь обеспечивается
за счет индуцированного излучения, создаваемого спиновой систе-
мой. Такую систему корпускулярных резонаторов можно пред-
ставить эквивалентным колебательным контуром, собственная
частота которого определяется индукцией магнитного поля соя=
=уВ, а добротность Qn = T2*^n/2.
Простейшим типом спинового генератора является усилитель,
охваченный положительной обратной связью через систему ядер,
обладающих магнитными моментами (рис. 6-3, а). Образец веще-
ства с двумя скрещенными катушками располагается таким об-
разом, чтобы оси катушек находились в плоскости, перпендику-
лярной вектору магнитной индукции. При включении усилителя
через возбуждающую катушку проходит шумовой ток, в спектре
которого имеется составляющая с частотой соя = уВ- Создаваемое
112
этим током высокочастотное поле резонансной частоты фазирует
прецессирующие ядерные магнитные моменты, что приводит к по-
явлению поперечной компоненты ядерной намагниченности, кото-
рая наводит в приемной катушке ЭДС с частотой прецессии. При
достаточном коэффициенте усиления усилителя и соответствую-
щем фазовом сдвиге возникают незатухающие колебания. Частота
спинового генератора из-за эффекта затягивания несколько отли-
чается от частоты прецессии ядер. Если Qk/Qh<C1, то частота
генератора определяется выражением
®Г = ®Я Ч" (®К-<йя) Qk/Qbi
где QK и <вк — соответственно добротность и
собственная частота приемного контура.
Трудности создания спиновых генераторов
связаны с весьма слабой обратной связью че-
рез ядерные спины, что требует применения
усилителя с большим коэффициентом усиле-
ния (7<>105) и сложных способов устранения
паразитных связей. Так, например, для уст-
Рис. 6-3
ранения трансформаторной связи между приемной и возбуждаю-
щей катушками они должны быть расположены строго под пря-
мым углом.
Известны различные варианты спиновых генераторов, отли-
чающиеся способами создания прецессии вектора ядерной намаг-
ниченности и исключения паразитных связей, возникающих по-
мимо системы ядерных спинов. Для уменьшения паразитных свя-
зей применяются генераторы с двумя приемными катушками,
в одной из которых рабочее вещество отсутствует (рис. 6-3, б),
или используется разделение процессов возбуждения и генериро-
вания колебаний во времени, в пространстве или по частоте. На
рис. 6-3, в показана схема спинового генератора с перемещаю-
щимся рабочим веществом (текучей жидкостью), в котором воз-
буждение и генерирование колебаний пространственно разделены.
Эффективным является введение в замкнутую цепь элемента оп-
тической связи, что используется в спиновых генераторах с опти-
ческой накачкой, рассмотренных ниже.
113
Разработаны генераторы на боковой полосе, применяемые для
стабилизации резонансных условий в спектрометрах ЯМР. Для
измерения параметров слабых магнитных полей главным образом
используются спиновые генераторы с оптической накачкой,
а также генераторы с динамической поляризацией на основе эф-
фекта Оверхаузера.
Спиновые генераторы характеризуются большим быстродейст-
вием и высокой точностью преобразования. Известен спиновый ге-
нератор ЯМР, который поддерживает резонансные условия
Рис. 6-4
в спектрометре ЯМР с погрешностью
5 • 10_9. Однако узкий частотный диа-
пазон и сложность устройства спино-
вых генераторов препятствуют их при-
менению для создания измерительных
устройств ЯМР с широким диапазо-
ном измерений.
Метод ядерного резонансного по-
глощения основан на явлении погло-
щения высокочастотной энергии яд-
рами в результате магнитных диполь-
ных переходов между уровнями,
создаваемыми исследуемым магнит-
ным полем.
В тесламетрах, основанных на этом методе, синхронизация
прецессии ядер осуществляется высокочастотным полем, создавае-
мым генератором, частота которого устанавливается равной ча-
стоте прецессии ядер. Информацией, свидетельствующей о наступ-
лении резонанса, является уменьшение уровня высокочастотных
колебаний в контуре генератора.
В таких тесламетрах применяется преобразователь ЯМР с од-
ной обмоткой (рис. 6-4), которая используется в качестве индук-
тивности LC-генератора (рис. 6-4,а). Рабочее вещество помещено
в катушку L, которая вместе с конденсатором С образует колеба-
тельный контур генератора высокой частоты ГВЧ. При резонансе,
когда частота генератора совпадает с частотой прецессии ядер,
добротность колебательного контура уменьшается вследствие по-
глощения энергии атомными ядрами, что приводит к уменьшению
напряжения на контуре. Для периодического прохождения через
резонанс индукция магнитного поля моделируется слабым пере-
114
менным полем Вм, создаваемым при помощи катушек М, питаю-
щихся от генератора низкой частоты ГНЧ. Напряжение высокой
частоты, модулированное сигналом ядерного резонансного погло-
щения (рис. 6-4,6), подается на усилитель высокой частоты УВЧ,
а затем на демодулятор, выделяющий сигнал ЯМР, который че-
рез усилитель низкой частоты УНЧ поступает на указатель резо-
нанса (осциллограф или фазочувствительный выпрямитель). Так
как за период модуляции условия резонанса повторяются дважды,
то на экране видны два сигнала, симметричное расположение ко-
торых относительно центра развертки свидетельствует о наступ-
лении резонанса при нулевом значении модулирующего поля. При
этом частота генератора пропорциональна измеряемой магнитной
индукции. Вместо магнитного поля можно модулировать частоту
высокочастотных колебаний вблизи ее резонансного значения.
Выражение для сигнала на выходе преобразователя ЯМР поглощения
можно получить решением уравнений (6-1)—(6-3) [12]. Максимальное значение
сигнала имеет место при fr=fnp=?Bo/(2jt) и амплитуде высокочастотного
магнитного поля В1т = 2/'у
(6-7)
Разработаны тесламетры ЯМР, в которых процесс настройки
генератора высокой частоты на частоту прецессии ядер автомати-
зирован [11]. Наиболее перспективным является применение ком-
бинированных систем, сочетающих принципы регулирования по
возмущению и отклонению. В таких системах основную задачу
управления выполняет связь по возмущению (входной величине),
а следящая система используется только для обработки остаточ-
ного отклонения. Введение прямой связи по входной величине уве-
личивает помехозащищенность и быстродействие и уменьшает
статическую погрешность автоматических устройств.
На рис. 6-5 изображена структурная схема автоматического
тесламетра ЯМР типа Ш1-100, в котором для создания управ-
ляющего сигнала по входной величине (магнитной индукции) ис-
пользуется преобразователь Холла (ПХ), который совместно
с преобразователем ЯМР помещен в измеряемое магнитное поле.
Напряжение с ПХ поступает на устройство выбора предела из-
мерения УВП, которое подключает определенный реактивный эле-
мент в контур генератора высокой частоты ГВЧ, т. е. осущест-
вляет выбор нужного диапазона. Более точная настройка частоты
генератора в пределах каждого диапазона также производится
сигналом с преобразователя Холла, который по цепи: ПХ, УВП,
устройство расширения пределов УРП, корректирующее звено
К31, сумматор См2, функциональный преобразователь ФП—по-
дается на управляемые элементы контура генератора ГВЧ. Пре-
образователь ФП линеаризует зависимость напряжения от ча-
стоты. Звено К31 корректирует передаточную функцию системы
управления. Для точной настройки в резонанс в схему тесламетра
введен генератор точного поиска Г7П. В момент выполнения
115
резонансных условий и появления сигнала ЯМР напряжение гене-
ратора ГТП фиксируется избирательным ключом И К. Оставшееся
рассогласование частот генератора и прецессии ядер отрабаты-
вается следящей системой автоматической подстройки частоты
(АПЧ), состоящей из преобразователя разности частот в длитель-
ность импульса kf/ht, временного дискриминатора ВЦ, корректи-
рующего звена К32, преобразователя ФП и генератора ГВЧ. При
постоянном входном воздействии следящая система является ста-
тической с улучшенными точностными характеристиками. В ди-
намическом режиме при изменяющейся магнитной индукции
прежде всего срабатывает малоинерционная следящая система
с ПХ, оставляя на долю АПЧ отработку сравнительно малых рас-
согласований.
Автоматический тесламетр Ш1-100 обеспечивает измерение
магнитной индукции с одним датчиком ЯМР в диапазоне 0,05—
0,5 Тл с погрешностью не более 0,005% при скорости изменения
магнитной индукции до 25 мТл/с. В режиме поиска с последую-
щим слежением время измерения не превышает 3 с при частоте
модуляции 50 Гц.
На рассмотренном методе автоматического поиска сигнала
ЯМР с помощью преобразователя Холла основан серийно выпу-
скаемый тесламетр ЯМР типа Ш1-9.
Метод ЯМР поглощения используется для измерений магнит-
ной индукции от 0,01 Тл и выше. Нижний предел измерения огра-
ничен снижением ядерной намагниченности по мере уменьшения
магнитной индукции. Верхний предел практически не ограничен.
Для измерений в диапазоне 0,01—1 Тл лучше всего использовать
резонанс протонов (ядер водорода) в водных растворах парамаг-
нитных солей (при температуре 0—80°С), в тяжелом дизельном
масле (при температуре до 150° С) или в битумах (при темпера-
116
туре до 250° С). Парамагнитные ионы вводятся в воду для умень-
шения продольного времени релаксации Т\ протонов в воде, что
необходимо для получения максимального сигнала ЯМР поглоще-
ния. Но поскольку с увеличением концентрации парамагнитных
растворов уменьшается также время релаксации Т2, то необхо-
димо выбрать оптимальную концентрацию раствора. Для работы
в лабораторных условиях наиболее целесообразно применять
0,16 М водный раствор соли NiSO4-7H2O, так как магнитная вос-
приимчивость этого раствора близка к нулю. Это дает возмож-
ность исключить погрешность от намагничивания образца. Кроме
Рис. 6-6
того, как видно из рис. 6-6, где показаны зависимости сигналов
ЯМР от концентрации различных парамагнитных ионов в водных
растворах, при указанной концентрации амплитуда сигнала ЯМР
имеет максимальное значение [11].
В более сильных магнитных полях (при В>1 Тл) часто ис-
пользуют резонанс ядер лития (7Li) и дейтерия (2П),что позволяет
снизить верхний предел частотного диапазона генератора, так как
'уо<уы<ур. Резонанс ядер лития наблюдается в водном растворе
LiC103 и L1CI, насыщенном по обеим солям. Резонанс дейтерия
наблюдается в тяжелой воде. Коэффициенты преобразования тес-
ламетра ЯМР при использовании резонанса протонов, лития и
дейтерия соответственно равны:
Кр = ур/(2л) = 42,57619 МГц/Тл;
Кы = Ть/(2л) = 16,54646 МГц/Тл;
KD = yD/(2n) = 6,328914 МГц/Тл.
В одном и том же магнитном поле сигнал ЯМР от ядер ли-
тия примерно в четыре, а от дейтерия в сто раз меньше сигнала
117
протонного резонанса, поэтому увеличивать верхний предел изме-
рения целесообразно за счет повышения частоты генератора. Для
расширения диапазона измерений тесламетра с одним преобразо-
вателем ЯМР в последнем используется рабочее вещество с не-
сколькими видами ядер, например водорода и лития.
Метод ЯМР можно применять для измерения магнитной ин-
дукции в широком диапазоне рабочих температур. Для измерения
магнитной индукции при сверхнизких температурах (от 1 К) при-
меняется ЯМР в тонкодисперсных образцах цезия 133Cs, алюминия
27А1, легированных галоидах или протонный резонанс в некоторых
компаундах, например в эпоксидной смоле. В этих веществах
в отличие от большинства твердых веществ наблюдаются отно-
сительно узкие сигналы ЯМР. Ширина сигнала от ядер 133Cs со-
ставляет 0,1 мТл, от 27А1 — 1 мТл. При использовании металлов
в качестве рабочего вещества необходимо учитывать поправку на
сдвиг Найта — сдвиг частоты ЯМР по сравнению с ее значением
в диамагнитной среде, обусловленный поляризацией электронов
проводимости внешним магнитным полем, вследствие чего они
создают вблизи ядер металла дополнительное поле. Сдвиг Найта
зависит от температуры.
Коэффициенты преобразования тесламетра ЯМР при использо-
вании резонанса ядер цезия и алюминия с учетом поправки на
сдвиг Найта соответственно равны:
KCs = Tcs/(2n) = 5,672375 МГц/Тл;
Kai = Та1/(2л) =11,1117 МГц/Тл.
В диапазоне температур 170—300 К можно использовать про-
тонный резонанс в этиловом спирте, а в диапазоне 230—300 К —
в каучуке.
Метод электронного парамагнитного резонанса (ЭПР). Метод основан на
использовании резонансных переходов между энергетическими уровнями, опре-
деляемыми магнитным моментом электронной оболочки. ЭПР можно наблюдать
в веществах, частицы (атомы, ионы и т. п.) которых имеют неспаренные элек-
троны, благодаря чему электронная оболочка обладает магнитным моментом.
К таким веществам относятся элементы переходных групп, свободные радикалы,
растворы щелочных металлов и др. Электронный парамагнетизм существует
в металлах и полупроводниках из-за наличия в них свободных электронов.
Для составляющих электронной намагниченности полностью применимы
уравнения Блоха, решение которых позволяет определить ширину, форму и
интенсивность сигнала ЭПР.
Методика измерений и измерительные устройства ЭПР аналогичны исполь-
зуемым в методе ЯМР поглощения. Отличие заключается в том, что в одном
и том же магнитном поле частота ЭПР примерно на два-три порядка больше,
чем частота ЯМР, поскольку гиромагнитное отношение электрона в 660 раз
больше гиромагнитного отношения протона (уР/у8= 1,51927-10~3).
Для оценки сигнала ЭПР можно пользоваться формулой, аналогичной
(6-7):
Sm = wBxKBvVr2/7’i/(2p0). (S-8)
где со, и, Т\ и Т2— соответственно частота ЭПР, статическая атомная восприим-
чивость, продольное и поперечное времена релаксации рабочего вещества, кото-
рые лежат в пределах Ti«Ti=10_*. ..Ю-8 с.
118
Сигнал ЭПР на несколько порядков больше сигнала ЯМР, что позволяет
применять преобразователи ЭПР очень малого объема (0,1—1 мм3). Благодаря
этому метод ЭПР применяется для измерений магнитной индукции при значи-
тельной неоднородности магнитного поля в том диапазоне (1-10-4—5-Ю-3 Тл),
в котором трудно использовать метод ЯМР. Кроме того, метод ЭПР вследствие
его высокой чувствительности используется для анализа веществ и измерения
концентрации парамагнитных ионов (см. § 13-5).-
Погрешность измерения магнитной индукции методом ЭПР составляет 0,01—
0,1 %. Относительно большие значения погрешности (по сравнению с методом
ЯМР) обусловлены значительной шириной сигнала ЭПР (0,1.. .0,2) • 10~4 Тл и
погрешностью определения уэ. Значения уэ зависят от ряда факторов (темпера-
тура, давление, внд рабочего вещества и др.) и устанавливаются путем сравне-
ния частот ЭПР и протонного резонанса в одном и том же магнитном поле.
В качестве рабочего вещества для преобразователей тесламетров ЭПР
лучше всего использовать органические радикалы а, а-дефиннл-Р-пикрилгидра-
зил (ДФПГ) и N-пикрип-рг-амниокарбазин, синтезированные из нециклических
растворителей. Гиромагнитное отношение электрона и ширина линий ЭПР в та-
ких веществах обладают высокой стабильностью во времени. Рабочий диапазон
температур преобразователей от —100 до 80 °C Постоянная тесламетра ЭПР
при использовании в качестве рабочего вещества ДФПГ равна Сэ=2л/уэ=
=3,5685-10“10 Тл/Гц (В—Ся{). Погрешность определения этой постоянной не
более 0,01 %,
Из-за малых значений времени релаксации электронной спиновой системы
метод ЭПР можно использовать для измерения параметров магнитных полей
в диапазоне 10~4—10-2 Тл при частоте исследуемого магнитного поля до 105 Гц
и наличии относительно большого градиента магнитной индукции (10~3 Тл/м).
Диапазон измерений и верхняя частота ограничены тем, что в слабых полях
резонансная частота и ширина сигнала ЭПР становятся сравнимыми соответ-
ственно с частотой магнитного поля и измеряемым значением магнитной индук-
ции, а в сильных полях время прохождения резонансной области становится
сравнимым с временем релаксации, что приводит к искажению формы сигнала
и сдвигу резонансной частоты.
Магниторезонансные методы с оптической накачкой атомов.
Эти методы основаны на одновременном использовании двух кван-
товых переходов, частота одного из которых находится в оптиче-
ском, а другого — в радиочастотном диапазонах. При этом опти-
ческое излучение (накачка) используется для создания инверсной
поляризации магнитных моментов атомов в разреженных газах,
а магнитный резонанс осуществляется радиочастотным полем, сти-
мулирующим переходы между зеемановскими подуровнями, созда-
ваемыми магнитным полем. В качестве рабочего вещества в таких
тесламетрах используются пары щелочных металлов (I33Cs, 87Rb,
23Na, 39К), атомы которых имеют один валентный электрон, или
метастабильный гелий (ортогелий 4Не), атомы которого имеют два
электрона с одинаково направленными спинами. Атомы указан-
ных элементов обладают магнитным моментом. При помещении
их в постоянное магнитное поле можно выделить три или более
энергетических уровня, переходы между которыми лежат в опти-
ческом и радиочастотном диапазонах (рис. 6-7, а). Кроме созда-
ваемых внешним магнитным полем энергетических уровней основ-
ного состояния 1 и 2, энергетический интервал между которыми
измеряется для определения магнитной индукции, имеется уро-
вень возбужденного состояния 3, отделенный от уровней основ-
ного состояния оптическим переходом. Уровень 3 является проме-
жуточным для осуществления оптической накачки на переходе
119
1—3. Облучение атомов циркулярно поляризованным светом, из-
лучающим кванты энергии равные разности энергии уровней
3 и 1 (Ез—Ei), вызывает переход атомов с уровня 1 на уровень 3,
сопровождающийся поглощением света. С уровня 3 атомы спон-
танно за очень короткий промежуток времени (т= 10 8 с) перехо-
дят на уровни 1 и 2 основного состояния. Переход же с уровня 2
на уровень 1 происходит только под воздей-
ствием релаксационного процесса (теплового
движения), постоянная времени которого на
несколько порядков больше времени перехода
с уровня 3 на уровни 1 и 2.
В результате такого механизма переходов
после установления динамического равнове-
сия большинство атомов переходит (перека-
чивается) с уровня 1 через уровень 3 на уровень 2, вследствие
чего происходит поляризация атомов (ядер). Поглощение света
при этом прекращается, оптическая прозрачность газа стано-
вится максимальной, что определяется при помощи фотодетек-
тора. Если на атомы дополнительно действовать резонансным
высокочастотным полем, частота которого соответствует энер-
гии перехода между зеемановскими уровнями 2 и 1 (fi2h = E2—Е{),
то произойдет переход атомов с уровня 2 на уровень 1, процесс
оптической накачки возобновится, газ снова начнет поглощать
свет, что определяется по уменьшению сигнала на фотодетек-
торе. Измеряя частоту высокочастотного поля, при которой
120
уменьшается прозрачность газа, можно определить индукцию
внешнего магнитного поля, пользуясь формулой fa = KaB, где
коэффициент преобразования определяется видом используе-
мых атомов. Значения коэффициента Кл для 87Rb, I33Cs, 4Не и 8Не
соответственно равны 4,67 -109; 3,5-109; 2,8023522 • 1010 и
3,8-1010 Гц/Тл. Атомные преобразователи отличаются высокой
чувствительностью вследствие того, что каждый переход атома,
обусловленный радиочастотным резонансом, регистрируется по
поглощению оптического фотона, имеющего энергию, в 109—1010
раз большую, чем энергия радиочастотного кванта.
Преобразователи с оптической накачкой разделяются на три группы: пре-
образователи А1г-типа, AR-типа и преобразователи со сверхтонкой структурой.
Первые два типа основаны на использовании резонансных переходов между
зеемановскими подуровнями, а третий — на использовании резонансных перехо-
дов между сверхтонкими подуровнями, обусловленными взаимодействием элек-
тронной оболочки с магнитным моментом ядра. На рис. 6-7, б изображена
структурная схема рубидиевого тесламетра, который состоит из источника света
в виде газоразрядной лампы накачки 1, оптической системы 2, атомного пре-
образователя 3, высокочастотная обмотка которого подключена к генератору
высокой частоты 4, фотодетектора 5, усилителя 6, указателя резонанса Z
и источника модуляции 8. Лампа накачки 1 и атомный преобразователь 3 за-
полнены парами 87Rb. Оптическая система, состоящая из линзы, фильтра,
поляроида и четвертьволновой пластинки, обеспечивает получение односто-
ронне циркулярно поляризованного света, длина волны которого соответст-
вует разности энергий основного и возбужденного состояния атома 87Rb.
В AR-тесламетрах направление светового излучения параллельно вектору маг-
нитной индукции измеряемого поля. По принципу действия Afz-тесламетры отно-
сятся к приборам с вынужденной прецессией спиновой системы.
В тесламетрах Afx-типа вектор магнитной индукции постоянного поля дол-
жен быть расположен к направлению света накачки под углом 45° (рис. 6-7, е).
В этом случае интенсивность х-составляющей светового потока модулируется
с частотой, соответствующей переходу между зеемановскими подуровнями. Уси-
ленный сигнал модуляции подается на высокочастотную обмотку преобразова-
теля с такой фазой и амплитудой, чтобы поддерживать в замкнутой системе
непрерывные колебания, частота которых определяется значением индукции по-
стоянного магнитного поля. Таким образом, тесламетр А1х-типа является спино-
вым генератором, в котором используется неэлектрическое звено (оптическое)
в замкнутой цепи. Благодаря этому исключается паразитная обратная связь
между входом и выходом генератора. Рабочий диапазон тесламетра составляет
10~3—10-13 Тл, нижний предел ограничен порогом чувствительности, который,
в свою очередь, определяется параметрами среды и системой накачки. Верхний
предел теоретически ие ограничен, но при В>10 3 Тл лучше использовать
тесламетры ЯМР, отличающиеся меньшими габаритами и более простой кон-
струкцией.
Абсолютная погрешность тесламетров А1г-типа составляет 1010 Тл и обус-
ловливается главным образом неопределенностью формы резонансной кривой и
влиянием интенсивности и спектрального состава света иакачки, а также по-
грешностью коэффициента Ла. Тесламетры Afx-типа имеют на порядок большую
систематическую погрешность. Случайные погрешности тесламетров можно опре-
делить из выражения
6 « AfC/A,
где С — постоянная тесламетра; Af —ширина сигнала; А — отношение сигнал-
шум.
Тесламетры Мх- и AR-типов также различаются по динамическим характе-
ристикам вследствие отличия свойств продольного и поперечного светового из-
лучения. В Afx-тесламетрах (спиновых генераторах) информативный параметр
выходного сигнала (частота) непосредственно связан с энергией через разность
121
фаз квантовых состояний спиновой системы. Поэтому их быстродействие не за-
висит от времени релаксации, а определяется только постоянной времени цепи
обратной связи. В ЛС-тесламетрах непосредственно наблюдаемым сигналом яв-
ляется изменение светового потока, связанное с разностью населенностей уров-
ней, зависящей от времени релаксации. Это ограничивает верхнюю границу ча-
стотного диапазона Л1г-тесламетров частотами 5—10 Гц, что на несколько по-
рядков меньше, чем у Afx-тесламетров.
Наиболее высокие метрологические характеристики имеют тесламетры с оп-
тической накачкой, в которых используются квантовые переходы между под-
уровнями сверхтонкой структуры атомов щелочных металлов, создаваемыми за
счет взаимодействия электронных и ядерных магнитных моментов. Частота та-
ких переходов не зависит от влияния параметров света накачки и других фак-
торов, вызывающих систематические погрешности в рассмотренных выше тесла-
метрах. Погрешности таких тесламетров могут быть снижены до уровня
Ю~12 тл. Недостатком тесламетров с оптической накачкой является относи-
тельно большой объем чувствительного элемента (1—3 дм3).
6-3. Индукционные методы измерений
параметров магнитных полей
Индукционный метод, основанный на явлении электро-
магнитной индукции, широко используется для измерения пара-
метров магнитного поля, а также лежит в основе большинства
средств измерений магнитных параметров материалов. В соответ-
ствии с законом электромагнитной индукции ЭДС, индуктируемая
в контуре, определяется формулой
е = — w dQ)/di, (6-9)
где w — число витков контура; Ф — магнитный поток сквозь по-
верхность, ограниченную контуром.
Как видно из выражения (6-9), естественной входной величи-
ной средств измерений, основанных на индукционном методе,
является скорость изменения магнитного потока, пронизывающего
индукционный измерительный преобразователь, который обычно
выполняется в виде многовитковой катушки (измерительной ка-
тушки) или ферромагнитного сердечника с одной или несколькими
обмотками. Основные виды индукционных преобразователей рас-
смотрены в работе [5]. Для определения значения магнитного по-
тока выходной сигнал преобразователя необходимо интегрировать.
Поэтому приборы, основанные на индукционном методе, обычно
содержат интегратор тока или ЭДС, метрологические характери-
стики которого оказывают решающее влияние на точность изме-
рения потока.
Индукционный метод можно использовать для измерения па-
раметров как переменных, так и постоянных магнитных полей, по-
скольку магнитный поток, пронизывающий контур индукционного
преобразователя, может изменяться как из-за изменения самого
измеряемого потока, так и вследствие изменения во времени па-
раметров преобразователя. Такими параметрами являются угол а
между нормалью к плоскости витков и вектором магнитной индук-
ции, площадь контура S, относительная магнитная проницае-
мость сердечника ц, коэффициент размагничивания сердечника N.
122
Для однородного магнитного поля уравнение (6-9) можно пе-
реписать в виде
+ (6-10)
где y=Spcosa/[l + ?V((i—1)] — обобщенный параметр преобразо-
вателя.
Достоинствами средств измерений, основанных на индукцион-
ном методе, являются линейность функции преобразования в ши-
роком диапазоне измерений, высокая стабильность характеристик,
малая температурная погрешность, применимость для измерения
параметров как постоянных, так и переменных магнитных полей
в широком диапазоне частот, малые габариты преобразователя.
Кроме того, индукционный метод является единственным методом,
который дает возможность непосредственно измерять не только
магнитный поток в свободном пространстве, но также и поток,
проходящий внутри сплошных объектов, что широко используется
для измерения магнитных параметров различных устройств и ма-
териалов.
Наряду с тем, что индукционный метод позволяет непосред-
ственно измерять магнитный поток, он также используется для
определения магнитной индукции, напряженности магнитного поля
и МДС [5, 12]. Точность определения этих величин существенно за-
висит от степени неоднородности магнитного поля. В частности,
результат определения магнитной индукции представляет собой
некоторое усредненное значение плотности магнитного потока
в объеме, занимаемом измерительным преобразователем.
Для измерения параметров постоянного магнитного поля при-
меняется индукционно-импульсный метод прямого преобразова-
ния, основанный на измерении импульса ЭДС или тока, возникаю-
щего при изменении потока AY, сцепляющегося с обмоткой пре-
образователя, который выполняется в виде стационарной или
поворотной измерительной катушки:
t,
AY = г^АФ = \edt.
t,
В качестве интегрирующего прибора применяется веберметр.
Для повышения точности измерений, например при аттестации
мер магнитного потока и магнитной индукции, при исследовании
стабильности и температурных характеристик магнитных систем
с постоянными магнитами, применяются дифференциальный и ну-
левой индукционно-импульсные методы, основанные на сравнении
импульсов тока или ЭДС, один из которых обусловлен измеряе-
мым магнитным потоком, а другой — известным потоком, созда-
ваемым мерой.
При измерении параметров переменного магнитного поля ис-
пользуются неподвижные индукционные преобразователи с посто-
123
янными параметрами (F=const). ЭДС, индуцируемая в обмотке
такого преобразователя, определяется выражением
— wYdBldt.
При а=0 и синусоидальной форме кривой магнитной индукции
(В = Втsincof)
е = waYBm cos cof.
Если используется преобразователь без ферромагнитного сер-
дечника,
е = waSВm cos at.
Поскольку индуцируемая ЭДС пропорциональна частоте пере-
менного магнитного поля а», то для получения выходного напря-
жения, пропорционального измеряемому параметру магнитного
поля, необходимо в измерительной цепи иметь функциональный
преобразователь, коэффициент преобразования которого обратно
пропорционален частоте. В качестве такого преобразователя це-
лесообразно использовать операционный интегрирующий усили-
тель, работающий в режиме активного апериодического звена.
Если пренебречь емкостью и индуктивностью преобразователя,
а также магнитным полем, создаваемым проходящим по катушке
током, то напряжение, снимаемое с такого усилителя в определен-
ном диапазоне частот, не будет зависеть от частоты.
Для создания средств измерений с широким частотным диапа-
зоном прежде всего необходимо иметь широкополосные преобра-
зователи, обладающие высокой собственной резонансной частотой,
т. е. малой индуктивностью и емкостью, что достигается рацио-
нальной конструкцией, в частности применением секционирован-
ных обмоток, каждая из которых располагается на своем сер-
дечнике. Другими способами увеличения частотного диапазона
являются уменьшение емкости соединительной линии путем рас-
положения входного усилителя вблизи преобразователя, использо-
вание входных каскадов с эквивалентнойг отрицательной емкостью,
применение измерительных цепей уравновешивающего преобразо-
вателя с частотно-зависимой обратной связью.
Наиболее эффективный способ расширения частотного диапа-
зона — применение многосекционного преобразователя, секции ко-
торого подключаются к отдельным функциональным преобразова-
телям, выходные сигналы которых сортируются по частотным под-
диапазонам. Это дает возможность не только увеличить полный
частотный диапазон прибора, но также повысить его чувствитель-
ность, поскольку с уменьшением полосы пропускания на от-
дельных частотных поддиапазонах происходит снижение уровня
шума.
124
6-4. Измерение параметров магнитных полей
методами уравновешивания и компарирования
В ряде случаев, когда непосредственно измерить пара-
метры магнитного поля с требуемой точностью методом прямого
преобразования не представляется возможным, используются ме-
тоды прямого или косвенного сравнения. К ним относятся методы
уравновешивания и компарирования.
Метод уравновешивания. Этот метод является в данном случае
методом прямого сравнения и заключается в компенсации иссле-
дуемого магнитного поля магнитным полем, параметры которого
известны нли могут быть точно установлены. Он имеет ограничен-
ное применение, так как связан с искажением исследуемого поля,
поскольку в месте расположения магнитоизмерительного преобра-
зователя неравновесия исследуемое поле компенсируется по-
лем, создаваемым током в обмотках обратного преобразова-
теля. Этот метод в основном применяется при измерении пара-
метров слабых магнитных полей (В<0,01 Тл), так как для
создания более сильных полей необходимы обратные преобразо-
ватели большого объема, потребляющие значительную мощ-
ность. В качестве преобразователей неравновесия обычно ис-
пользуются индукционные, магнитомодуляционные (феррозондо-
вые), гальваномагнитные или сверхпроводниковые (джозефсонов-
ские) преобразователи [1, 12].
Метод обычно применяется для точного измерения параметров
слабых магнитных полей в диапазоне 10-п—10-4 Тл, в частности
для измерений компонент вектора магнитной индукции геомагнит-
ного поля и магнитного поля в космическом пространстве. Для
компенсации измеряемого поля используются трехкомпонентные
катушки, в рабочем объеме которых помещается один трехкомпо-
нентный или три однокомпонентных феррозонда, используемые
как преобразователи неравновесия. Значения компонент вектора
магнитной индукции выдаются в цифровой форме на основе изме-
рения токов в компенсационных катушках и известных постоянных
этих катушек. Погрешность измерения в диапазоне 10~8—10-4 Тл
составляет 0,01—0,005%, а в диапазоне 10~и—10~7 Тл равна
0,01 % при коррекции погрешностей нуля и долгопериодных флюк-
туаций способом компенсации погрешности по знаку, т. е. разво-
ротом феррозондовых преобразователей на 180°.
Используется метод уравновешивания для измерения намагни-
ченности дна-, пара-, ферро- и антиферромагнитных веществ. Из-
мерения осуществляются путем уравновешивания магнитного мо-
мента образца магнитным моментом катушки с током, по значе-
нию которого определяется измеряемый момент. Образец с ком-
пенсационной катушкой помещается в сильное магнитное поле.
При использовании в качестве преобразователя неравновесия виб-
рирующего индукционного преобразователя [5] порог чувствитель-
ности по восприимчивости не превышает 2- 10 8 в магнитном поле
с индукцией 1 Тл. При использовании сверхпроводящего преобра-
125
зователя неравновесия на основе эффекта Джозефсона порог чув-
ствительности может быть снижен до 1 • 10~10 [1].
Недостатком метода уравновешивания является невозможность
его применения для измерения параметров магнитного поля в уз-
ких зазорах магнитных систем, поскольку при помещении обрат-
ного преобразователя вблизи ферромагнитных наконечников меня-
ется его коэффициент преобразования.
Метод компарирования, или метод косвенного сравнения. Ме-
тод основан на сравнении каких-либо проявлений магнитного поля
или эффектов (ЭДС Холла, ЭДС индукции, эффект Фарадея, маг-
ниторезистивный эффект и др.), пропорциональных измеряемой
магнитной величине и образцовой величине, создаваемой мерой.
Такие измерения необходимо проводить, например, при определе-
нии параметров полей с большой неоднородностью, в широком ди-
апазоне температур, при необходимости точного определения па-
раметров средних и сильных переменных магнитных полей, для ко-
торых отсутствуют точные меры.
Как и для электрических величин, компараторы для измерения
магнитных величин разделяются на компараторы одновременного
и разновременного сравнения. В первых применяют два идентич-
ных по принципу действия и параметрам компарирующих преоб-
разователя (КП), один из которых помещают в исследуемое маг-
нитное поле, а другой — в магнитное поле, создаваемое многознач-
ной мерой. При использовании разновременного компарирования
один и тот же преобразователь помещается поочередно в иссле-
дуемое и образцовое поля. На рис. 6-8 показаны примеры электро-
механических компараторов одновременного сравнения для изме-
126
рения параметров неоднородных полей магнитных систем с посто-
янными магнитами. В качестве многозначной меры магнитной
индукции в компараторах используется электромагнит ЭМ, маг-
нитная индукция в зазоре которого измеряется при помощи авто-
матического тесламетра ЯМР. Необходимое значение магнитной
индукции в зазоре меры устанавливается сигналом от преобразо-
вателя неравновесия ПН, который подается на управляемый ис-
точник тока У ИТ.
В компараторе, изображенном на рис. 6-8, а, сравниваются вращающие мо-
менты магнитоэлектрических механизмов, рамка одного нз которых помещена
в исследуемое поле WiSi, а рамка другого — в однородное магнитное поле меры
Из равенства вращающих моментов Ч'зс/о=Ч'2/о можно определить полный
поток Ч'х, сцепляющийся с рамкой он, а при известных параметрах рамок
можно найти магнитный поток, проходящий через площадь рамки ш, (предпо-
лагается, что все витки этой рамки имеют одинаковую площадь):
ФЛ = ш252В2/^1,
где Вг — магнитная индукция в зазоре меры, измеряемая тесламетром ЯМР.
В компараторе, схема которого показана на рис. 6-8,6, используются виброин-
дукциоиные компарирующие преобразователи a-типа КП1 и КП2. Для создания
угловых колебаний измерительных катушек служит электромагнитный вибра-
тор ЭМВ, питаемый от источника переменного тока.
Метод компарирования широко используется в метрологиче-
ской практике для аттестации мер магнитной индукции и различ-
ных типов магнитометров, например вибрационных магнитомет-
ров, применяемых для определения характеристик слабоферро-
магнитных материалов. Метод компарирования также находит
применение для измерения магнитной восприимчивости диа-, пара-
и слабоферромагнитных материалов путем сравнения магнитных
моментов образцов этих материалов с магнитным моментом меры
в виде катушки с током. В качестве компараторов используются
астатические магнитомеханические тесламетры [12].
Успешно используется метод компарирования при создании
магнитоизмерительных систем (МПС) и комплексов, применяемых
для измерения параметров неоднородных магнитных полей,
а также для исследования температурных характеристик и ста-
бильности параметров сложных магнитных систем. При использо-
вании метода разновременного косвенного сравнения в качестве
КП лучше всего применять преобразователи Холла, которые отли-
чаются малыми габаритами, широким рабочим диапазоном темпе-
ратур, высокой чувствительностью и относительно хорошей крат-
ковременной стабильностью параметров [5]. В качестве меры
магнитной индукции для воспроизведения магнитного поля с ин-
дукцией выше 0,01 Тл наиболее пригодным является электромаг-
нит броневого типа, индукция в рабочем зазоре которого контро-
лируется автоматическим тесламетром ЯМР.
В зависимости от задачи исследования КП может быть одно-,
двух- или трехкомпонентным, а также перемещаться по опреде-
ленной программе по одной или нескольким координатам.
127
Применяемая в МИС микро-ЭВМ используется не только как
вычислитель, но и для управления работой составляющих МИС,
например координатного устройства.
На рнс. 6-9 показана структурная схема МИС для исследова-
ния топографии магнитного поля, температурных характеристик и
стабильности фокусирующих систем с осесимметричным магнит-
ным полем. В качестве КП используется преобразователь Холла
(ПХ), который перемещается шаговым двигателем ШД, управляе-
мым ЭВМ. Информация о значении индукции в отдельных точках
рабочего объема исследуемой системы, соответствующих каждому
Рис. 6-9
шагу ПХ, в виде напряжения с ПХ через усилитель У подается на
входы преобразователей АЦП1 и АЦП2, код с которых поступает
в ЭВМ. Преобразователь АЦП1 — быстродействующий, но с ма-
лым числом разрядов, а АЦП2 — более точный, но с меньшим
быстродействием. Для увеличения быстродействия МИС преду-
смотрены три скорости перемещения ПХ. Между контролируе-
мыми участками скорость определяется тактовой частотой шаго-
вого двигателя ШД, а внутри контролируемых участков — быстро-
действием используемых средств измерений. В зависимости от
программы исследования в оперативное запоминающее устройство
ЭВМ подаются определенные данные, например экстремальные
значения индукции, значения индукции в определенных точках поля
и др. Одновременно в запоминающее устройство подаются данные
о пространственных координатах ПХ и его температуре, которые
поступают от соответствующих датчиков — датчика координат ДК
и датчика температуры ДТ. Последний укреплен у ПХ. По окон-
чании зондирования исследуемой системы ПХ перемещается в ра-
бочий зазор меры магнитной индукции ММИ, где расположен дат-
128
чик тесламетра ЯМР (ЛЯМР). После этого поочередно код из за-
поминающего устройства через преобразователь ЦАГ1 подается на
управляемый источник тока УИТ, питающий обмотку меры ММИ.
При этом с помощью ЭВМ сравнивается выходное напряжение ПХ
с напряжением, зафиксированным в запоминающем устройстве
при нахождении ПХ в заданной точке исследуемой магнитной си-
стемы.
Точная настройка магнитной индукции в зазоре меры ММИ
производится генератором линейно изменяющегося тока ГЛИТ,
который управляется от ЭВМ. Ток генератора ГЛИТ, питающего
дополнительную обмотку меры ММИ, фиксируется при равенстве
указанных напряжений, и включается тесламетр ЯМР, показания
которого подаются в ЭВМ пли прямо записываются регистрирую-
щим устройством РУ. При этом в ЭВМ подаются также резуль-
таты измерения температуры ПХ при его нахождении в мере
ММИ, которые используются для коррекции температурных по-
грешностей ПХ.
При определении температурных характеристик магнитных си-
стем с постоянными магнитами исследуемая система, мера ММИ
с датчиком ЯМР помещаются в термокриостат. В зависимости от
применяемых ПХ и датчиков ЯМР рабочий диапазон МИС состав-
ляет 4,2—500 К-
Погрешность измерения магнитной индукции с помощью МИС
в зависимости от неоднородности исследуемого поля составляет
0,01—0,2 %- Результаты измерений параметров магнитного поля
выводятся на дисплей, графопостроитель и цифропечать.
В связи с трудностью создания меры магнитной индукции пе-
ременного магнитного поля при использовании метода компариро-
вания для измерения в качестве образцовых мер применяются
меры магнитной индукции постоянного поля, а в качестве КП —
магниторезистор или два каскадно включенных преобразователя
Холла [12].
Такие КП имеют близкие к квадратичным функции преобра-
зования, что позволяет сравнивать действующее значение магнит-
ной индукции переменного поля с индукцией постоянного
поля.
При использовании гальваномагнитных КП можно произво-
дить компарирование магнитной индукции переменных и постоян-
ных полей только в относительно узком диапазоне (0,05—0,1 Тл),
ограниченном снизу малой чувствительностью КП, а сверху —уве-
личением составляющей погрешности, обусловленной отклонением
реальной функции преобразования КП от квадратичной, которое
превышает 1%. Увеличить диапазон измерений можно, если в ка-
честве КП применить индукционный преобразователь, который по-
очередно помещается в переменное и постоянное магнитные поля;
при этом в постоянном поле он приводится во вращательное или
колебательное движение с частотой, равной частоте переменного
поля. Этот метод целесообразно применять, когда форма кривой
измеряемой магнитной индукции близка к синусоидальной.
5 Заказ № 444 129
Точные измерения индукции переменных магнитных полей
в широком частотном диапазоне можно осуществить с помощью
магнитооптических компараторов одновременного сравнения, ос-
нованных на эффекте Фарадея (см. § 3 6). При частоте перемен-
ного магнитного поля от единиц герц до десятков килогерц по-
грешность измерения магнитной индукции не превышает 0,2—
0,3%.
6-5. Метрологические основы измерений
магнитных величин
Система метрологического обеспечения магнитных изме-
рений в СССР базируется на государственных первичных этало-
нах единиц магнитной индукции, магнитного потока, магнитного
момента и соответствующих государственных поверочных схемах
и нормативных документах по поверке образцовых и рабочих
средств измерений, включая стандартные образцы (СО) магнит-
ных материалов с известными магнитными характеристиками, ко-
торые выполняют роль мер магнитных величин.
Государственный первичный эталон единицы магнитной индук-
ции воспроизводит теслу через основные единицы СИ — метр и
ампер с помощью катушки с током, постоянная которой опреде-
лена расчетным путем по измеренным геометрическим размерам
обмотки.
Эталон обеспечивает воспроизведение единицы магнитной ин-
дукции в диапазоне 5- Ю-5—5- 10 4 Тл со средним квадратическим
отклонением (СКО) результата измерений не более 1 • 10-6 при
десяти независимых наблюдениях. Неисключенная систематиче-
ская погрешность (НСП) не превышает 2,5-10-6. Размер единицы
передается рабочим средствам измерений в диапазоне 5-10-12—
5-Ю-2 Тл в соответствии с ГОСТ 8.095—81 при помощи вторич-
ных эталонов и образцовых средств измерений трех разрядов, ко-
торые основаны на методах квантовой магнитометрии — ядерном
и атомном магнитном резонансе (см. § 6-2). Для средних постоян-
ных магнитных полей разработаны государственный специальный
эталон и общесоюзная поверочная схема для диапазона 5-10-2—
2 Тл (ГОСТ 8.144—75) со СКО 3- 106, НСП 1- 10 5. Эталон пред-
ставляет собой электромагнит со стабилизатором поля на основе
протонного резонанса и эталонный тесламетр ЯМР.
Метрологической основой измерений сильных постоянных по-
лей является государственный специальный эталон единицы маг-
нитной индукции, состоящий из сверхпроводящей меры эталона,
воспроизводящей поле с индукцией 1—10 Тл при температурах 4,2
и 300 К, и эталонного тесламетра ЯМР с диапазоном измерений
0,5—10 Тл. Эталон воспроизводит единицу магнитной индукции
со СКО S= 1-Ю-6 при НСП е=7-10-6 (ГОСТ 8.188—85). Кроме
того, для метрологического обеспечения средств измерений силь-
ных магнитных полей применяются образцовые тесламетры ЯМР
первого разряда с диапазоном измерений 1—10 Тл и погреш-
ностью 1-Ю-4, образцовые тесламетры с преобразователями
130
Холла с диапазоном измерений 0,5—10 Тл и погрешностью 0,1—
0,2 % при температурах 2; 4,2; 77 и 293 К.
Согласование размера единицы магнитной индукции, воспроиз-
водимой государственными эталонами в слабых, средних и силь-
ных постоянных магнитных полях, осуществляется через гиромаг-
нитное отношение протона, являющееся коэффициентом преобра-
зования эталонных тесламетров ЯМР во всех трех эталонах.
Значение гиромагнитного отношения протона, установленное на
основании согласования значений физических констант и опубли-
кованное в Бюллетене Международного комитета данных науки
и технологии (KODATA) в 1986 г., № 63, равно ур-=2,67515255X
Х108 с-1-Тл-1 с погрешностью 3-10—7, что следует считать за
мировой уровень воспроизведения единицы магнитной индукции
постоянного поля.
Единство измерений магнитной индукции переменного магнит-
ного поля обеспечивается с помощью государственного специаль-
ного эталона и государственной поверочной схемы для диапазона
1 • 10-13—1 Тл при частотах 0,1—20 000 Гц (ГОСТ 8.093—80). Эта-
лон воспроизводит размер единицы магнитной индукции в диапа-
зоне 1 • 10-6—2,5- 10—4 Тл при частотах 1—10000 Гц со СКО
1 • 10~4—5- 10~4 и НСП не более 3- 10—4. Постоянная катушки оп-
ределяется расчетным путем, на основе измерения размеров обмо-
ток. Частотные поправки постоянной определены на основании тео-
ретических и экспериментальных исследований. Размер единицы,
воспроизводимой специальным эталоном, согласован с размером
единицы, воспроизводимой первичным эталоном на постоянном
токе. Передача размера единицы магнитной индукции образцовым
и рабочим средствам измерений осуществляется методом компа-
рирования с использованием квантовых и индукционных компари-
рующих преобразователей.
Метрологическое обеспечение измерений магнитного потока ос-
новывается на государственном первичном эталоне магнитного по-
тока, государственной поверочной схеме средств измерений маг-
нитного потока и двух рабочих эталонах. Один из рабочих этало-
нов является многозначной мерой магнитного потока (делителем
магнитного потока), а другой—автоматизированной установкой
с высокоточным веберметром (класс 0,03).
Государственный первичный эталон единицы магнитного потока представ-
ляет собой комплекс, состоящий из меры магнитного потока в виде расчетной
катушки магнитного потока на кварцевом каркасе, катушки для компенсации
магнитного поля Земли и других внешних магнитных полей, компаратора на
основе индукционного метода для передачи размера единицы вторичным эта-
лонам (эталон сравнения, эталон-копия, рабочие эталоны) методом сличения.
Катушка магнитного потока — это катушка с двумя обмотками, предназначен-
ная для воспроизведения определенного значения магнитного потока, сцепляю-
щегося со вторичной обмоткой, когда по первичной протекает электрический
ток известного значения. Значение постоянной эталонной катушки Кф=Чг//=
( =0,0100165 Вб/А. Эталон воспроизводит единицу потока со СКО 5=1 Ю-5 и
НСП 6=1,7-10-’ (ГОСТ 8.030—83).
Номинальные значения постоянных вторичных эталонов 0,01 Вб/А, а по-
стоянная по потоку катушки — делителя магнитного потока лежит в диапазоне
Б* 131
НО-2—ЫО-* Вб/А. Катушка-делнтель осуществляет масштабное преобразо-
вание магнитного потока в соответствии с числом витков ее обмоток. От дели-
теля магнитного потока размер единицы потока методом компарирования пере-
дается мерам магнитного потока — катушкам взаимной индуктивности первого
разряда (класс 0,05—0,2) и рабочим средствам измерений — веберметрам и из-
мерительным катушкам.
Кроме того, в поверочную схему включены средства измерений магнитного
потока, применяющиеся для испытаний магнитомягких и слабоферромагнитных
материалов в статическом и квазистатическом режимах намагничивания, а также
образцовые меры первого разряда, представляющие собой источники импульса
ЭДС, проградуированные в веберах. Такие меры используются для поверки ве-
берметров, которые имеют ограничения по минимальной длительности входного
импульса и которые трудно поверить с помощью катушек магнитного потока
Передача размера единицы потока от государственного первичного эталона
магнитоизмерительным установкам и комплексам для определения характери-
стик магнитных материалов осуществляется посредством стандартных образцов
(СО) магнитных материалов, которые являются групповыми средствами изме-
рений, хранящими и воспроизводящими значения функциональной зависимости
в материале. Такие СО магнитомягких материалов аттестуются по ра-
бочему эталону потока и используются в качестве образцовых средств измере-
ний первого разряда с относительной погрешностью 0,1—0,5 %.
Для воспроизведения и передачи размера единицы магнитного потока в им-
пульсном режиме исходными образцовыми средствами измерений являются
меры импульса электрического напряжения на основе ДС-формирователей им-
пульсов с заданными параметрами. Такие импульсы, являющиеся электрическим
эквивалентом магнитного потока (1 Вб=1 В-с), можно воспроизводить и пере-
давать с более высокой точностью, чем импульс потока. Погрешность исходных
образцовых мер импульса напряжения для диапазона 10-3—10~9 В-с состав-
ляет соответственно 0,2—2 %.
В качестве образцовых средств измерений используются нано- и микрове-
берметры, а также СО из прецизионных магиитомягких сплавов, аттестованные
по приращению магнитного потока. Погрешность таких средств измерений для
диапазона 10~3—10~9 Вб составляет 1—6%.
Глава седьмая
МЕТОДЫ ИЗМЕРЕНИЙ МАГНИТНЫХ ПАРАМЕТРОВ
И ХАРАКТЕРИСТИК МАТЕРИАЛОВ
7-1. Магнитные параметры материалов
Магнитное поле в вакууме, создаваемое некоторой си-
стемой проводников с током или совокупностью постоянных маг-
нитов, характеризуется векторами магнитной индукции В и напря-
женности магнитного поля Н, связанными через магнитную посто-
янную цо=4л' Ю-7 Гн/м: »
В0 = р0Н. (7-1)
В помещенном в это поле физическом теле возникает намагни-
ченность J, пропорциональная напряженности магнитного поля:
J=x-H, где х — безразмерный коэффициент пропорциональности,
называемый магнитной восприимчивостью. Таким образом, полная
магнитная индукция в материале составляет B=p.oH + p,oJ> где
132
первый и второй члены правой части представляют собой соответ-
ственно составляющие внешнего и внутреннего поля. По аналогии
с выражением (7-1) можно записать для поля в материале
В = раН, (7-2)
где ца — абсолютная магнитная проницаемость материала. От-
сюда ц0/ро=И-«- Обозначив относительную магнитную прони-
цаемость |х=|10/цо> получим следующее выражение для магнитной
восприимчивости: x=|i—1.
Численное значение, знак магнитной восприимчивости и ее за-
висимость от напряженности магнитного поля, температуры и дру-
гих факторов определяют магнитные свойства того или иного
магнетика. В настоящее время выделяют пять основных видов
магнитного упорядочения в материалах: диамагнетизм, парамагне-
тизм, ферромагнетизм, антиферромагнетизм и ферримагнетизм. По
последним данным, к ним добавляют девять других типов, таких,
как метамагнетизм, «зародышевый» ферромагнетизм и др.
Диамагнетизм характеризуется малыми отрицательными зна-
чениями магнитной восприимчивости. Он присущ всем без исклю-
чения веществам, но может быть выделен лишь при достаточно
малом уровне «шумов», представляющих сбой «фон» более силь-
ных магнитных эффектов. Диамагнетизм имеет место в так назы-
ваемых диамагнетиках — материалах, для которых характерна
полная компенсация магнитных моментов атомов и молекул.
Парамагнетизм возникает за счет ориентации не полностью
скомпенсированных атомных магнитных моментов по направле-
нию внешнего магнитного поля и характеризуется малыми поло-
жительными значениями магнитной восприимчивости.
Ферромагнетизм заключается в существовании в веществе об-
ластей— доменов, в пределах которых материал намагничен до со-
стояния насыщения. Магнитная восприимчивость ферромагнетиков
достигает значений 105—106 и существенно зависит от темпера-
туры и напряженности магнитного поля.
Антиферромагнетизм является следствием антипараллельной
ориентации равных по значению магнитных моментов соседних
атомов или ионов при отсутствии внешнего магнитного поля.
Таким образом, результирующий магнитный момент равен нулю.
Под воздействием внешнего магнитного поля элементарные маг-
нитные моменты стремятся установиться вдоль его силовых линий.
Антиферромагнетики характеризуются малыми положительными
значениями магнитной восприимчивости, зависящими от темпе-
ратуры.
Ферримагнетизм представляет собой нескомпенсированный ан-
тиферромагнетизм. Магнитная восприимчивость ферримагнетиков
может составлять единицы — десятки тысяч.
Существуют предельные температуры — точка Кюри для фер-
ромагнетиков и точка Нееля для антиферромагнетиков, выше ко-
торых указанные вещества становятся парамагнетиками. В табл.
133
Таблица 7-1
Ферромагнетик Точка Кюри, К Антиферромагнетик Точка Нееля» К
Со 1393 Fe2O3 950
Fe 1043 МпО 122
Fe—Si (3%) 973 МпО2 84
Ni 631 6Н2О 0,084
Gd 289 CrK(SO4)2- 12Н2О 0,004
7-1 приведены значения температур этих точек для некоторых ма-
териалов.
Здесь рассматриваются главным образом методы и средства
измерений экспериментальной зависимости (7-2) и ее основных па-
раметров при различном характере изменения во времени магнит-
ной индукции или напряженности магнитного поля. В зависимости
от скорости изменения во времени указанных магнитных величин
имеет место статический или динамический режим намагничива-
ния; измеряемые магнитные параметры относят к статическим или
динамическим. Границей, разделяющей эти два вида параметров,
является такое значение скорости (или частоты) циклического
перемагничивания, дальнейшее снижение которой уже не приво-
дит к заметному изменению результатов измерений, например
когда это изменение находится в пределах погрешности измере-
ний. Значение граничной частоты намагничивания может сильно
варьироваться в зависимости от испытуемого магнитного мате-
риала и свойств образца. Например, для монолитных образцов
высокопроницаемых материалов с высокой электропроводимостью
типа пермаллоев оно не превышает единиц и десятых долей герца.
Магнитные параметры низкопроницаемых ферритов, имеющих ма-
лую электропроводимость, определенные на звуковых частотах,
могут совпадать со статическими.
Статическими называются характеристики, определяемые в по-
стоянных полях, а динамическими — в переменных полях. Совре-
менная магнитоизмерительная аппаратура часто имеет частотный
диапазон, простирающийся практически от нуля (постоянное поле)
до частот в десятки килогерц и выше при реализации одного и
того же метода измерений. С учетом этого ниже по возможности
объединено рассмотрение методов и средств измерений статиче-
ских и динамических магнитных параметров, и правильнее гово-
рить об измерении магнитных параметров и характеристик мате-
риалов в статическом и динамическом режимах намагничивания.
При монотонном увеличении напряженности магнитного поля
в предварительно размагниченном образце получают основную
кривую намагничивания 1 (рис. 7-1). При достаточно больших зна-
чениях напряженности кривая 1 асимптотически приближается
к прямой 2: B = Bs + \i0H, где Bs — индукция насыщения. При этом
по основной кривой могут быть определены абсолютная и диффе-
134
ренциальная магнитные проницаемости как функции напряжен
ности: \ia = BIH и \kd = dBldH соответственно.
Циклическое изменение напряженности между значениями Ну
и Н~ приводит к тому, что кривая 2 принимает вид так называе-
мой петли магнитного гистерезиса 3. Начиная с некоторого значе-
ния //max, несмотря на дальнейший рост напряженности, петля ги-
стерезиса остается неизменной (за исключением продолжающих
расти узких «носиков»). Такая петля называется предельной.
Петли, для которых | //+ | = | Н~ |, называются симметричными;
если же (Н+ | и | Н~ | < Нтах, то такие петли называются част-
ными. Все частные петли, как симметричные, так и несимметрич-
ные, лежат внутри предельной петли.
Напряженность и индукция в точках пересечения петли гисте-
резиса с осями абсцисс и ординат называются соответственно ко-
эрцитивной силой Нс и остаточной индукцией Вг. Аналогичные
точки на частных петлях носят условно те же названия и обозна-
чаются соответственно Нс' и Вг'.
Магнитотвердые материалы с высокими значениями остаточной
индукции и коэрцитивной силы, которые применяются в качестве
постоянных магнитов, лучше всего характеризуются участком петли
гистерезиса, расположенным во втором квадранте по осям В и Н
и называемым кривой размагничивания. Для таких материалов
представляет особый интерес зависимость объемной плотности
энергии в материале BHI2 от магнитной индукции (рис. 7-2).
Перемагничивание магнитных материалов в переменных маг-
нитных полях возбуждает вихревые токи, магнитное поле которых
направлено встречно внешнему полю. В результате напряжен-
ность магнитного поля в материале падает с удалением вглубь от
поверхности. С этим явлением борются, используя магнитопро-
воды, набранные из электрически изолированных пластин или
135
навитые из изолированной с поверхности ленты, тем более тонких,
чем выше частота намагничивания Результаты измерений дина-
мических магнитных параметров зависят от свойств материала,
технологии изготовления образца для испытаний, а также от ха-
рактера изменения напряженности магнитного поля во времени
при испытаниях. Получение однозначных результатов, возможно
лишь при заданной форме кривых напряженности или же индук-
ции и частоте изменения последних.
Важнейшей динамической характеристикой можно считать се-
мейство динамических магнитных петель — совокупность зависимо-
стей мгновенных значений индукции от мгновенных же значений
напряженности, определенных при некоторых, последовательно
возрастающих амплитудах этих
магнитных величин. Эти зависи-
мости в отличие от полученных при
испытаниях на постоянном токе на-
зываются динамическими магнит-
ными петлями, поскольку помимо
гистерезисных явлений они опреде-
ляются формой кривой и частотой
изменения напряженности, электро-
проводностью материала и т. д. За-
висимость амплитуды магнитной
индукции от амплитуды напряжен-
ности носит название основной ди-
намической кривой намагничивания
С ростом частоты форма динамических петель приближается
к эллиптической, и петля может быть представлена в виде гар-
монически изменяющихся во времени напряженности и индукции:
и B = Bmsin(<Df—6), где б — угол фазового сдвига
между этими синусоидами. Переходя к комплексной форме пред-
ставления, можно ввести понятие комплексной магнитной прони-
цаемости
ц = В/Н = [ie ,с ——/р2.
Здесь pi = Bmcos6/Hm и n2=Bms>inf)/Hm—соответственно действи-
тельная (консервативная, упругая) и мнимая (консумптивная, вяз-
кая) составляющие комплексной магнитной проницаемости. Идея
такого представления динамической петли продуктивна даже при
существенном отличии формы последней от эллипса. Она реали-
зуется путем определения зависимостей между первыми гармони-
ками индукции и напряженности Bim=f Как и в испытаниях
на постоянном токе, для динамических кривых намагничивания
могут быть определены амплитудная и дифференциальная магнит-
ные проницаемости.
Одной из важнейших характеристик материала в переменных
полях является мощность рассеяния в единице массы образца
в функции амплитуды индукции p = f(Bm), называемая удельными
магнитными потерями.
136
Разновидностью динамического намагничивания является на-
магничивание импульсными магнитными полями. При этом изме-
нение магнитного состояния материала происходит по частным
или предельным динамическим магнитным петлям. Кроме соответ-
ствующих динамических петель, при импульсном намагничивании
объектами измерений являются зависимость удельных магнитных
потерь от приращения магнитной индукции р=/(ДВ), зависимость
импульсной магнитной проницаемости на частной динамической
петле от приращения напряженности импульсного магнитного
поля, зависимость величины, обратной времени перемагничивания
г, от амплитуды напряженности импульсного поля l/r=f(Нтах),
а также зависимость производной индукции от амплитуды напря-
женности импульсного поля, напряженность поля старта, коэффи-
циент переключения и т. п.
Магнитные материалы широко используются в электрических
машинах, приборах и устройствах В одних случаях от них тре-
буется способность легко намагничиваться до высоких значений
индукции при минимальной напряженности и, если они работают
в переменных магнитных полях, иметь минимальные потерн на
перемагничивание. В других случаях они должны сохранять вы-
сокую остаточную намагниченность для создания, при отсутствии
внешних источников энергии, магнитных потоков в поляризован-
ных магнитных цепях. Первому требованию отвечают магнито-
мягкие материалы, второму — магнитотвердые. Магнитомягкие
материалы характеризуются значительными магнитной проницае-
мостью, индукцией насыщения, малой коэрцитивной силой и, сле-
довательно, узкой петлей магнитного гистерезиса. Магнитотвердые
материалы, напротив, имеют большую коэрцитивную силу, высо-
кие значения объемной плотности энергии, малую магнитную про-
ницаемость.
К магнитомягким материалам относятся технически чистое же-
лезо, электротехнические стали — сплавы железа с 0,5—5% крем-
ния, пермаллой — сплав железа с никелем с добавками других ме-
таллов, магнитомягкие ферриты — системы оксидов железа, цинка,
никеля, марганца и некоторых других металлов, магнитодиэлек-
трики — мелкодисперсные порошки высокопроницаемых материа-
лов на основе карбонильного железа и альсифера в неферромаг-
нитной связке.
Типичными представителями магнитотвердых материалов яв-
ляются стали с высоким содержанием углерода, алнико —
сплавы железа с алюминием, никелем, кобальтом, магнитотвер-
дые ферриты, викаллой — сплав железа с ванадием, соединения
на основе редкоземельных элементов — самария, празеодима
и др.
Кроме указанных важнейших групп магнитных материалов, все
большее распространение в технике находят магнитные мате-
риалы с цилиндрическими магнитными доменами, магнитострик-
ционные, тонкопленочные, аморфные магнитные материалы, маг-
нитные жидкости.
137
Следует отметить широкое использование на практике так на-
зываемых слабомагнитных материалов, имеющих магнитную вос-
приимчивость в пределах примерно 10~10— 10. Они используются
при создании немагнитных узлов приборов, машин и механизмов.
Подобными свойствами обладают хромоникелевые стали и неко-
торые другие сплавы.
7-2. Магнитные цепи и их элементы
Сущность измерений магнитных параметров материалов
сводится к определению их магнитного состояния при воздействии
магнитного поля. Воздействие на магнитные материалы происхо-
дит в магнитной цепи — совокупности тел и участков окружаю-
щего пространства, по которым проходит магнитный поток. Маг-
нитная цепь содержит источники магнитного поля — постоянные
магниты или обмотки с протекающим по ним намагничивающим
током и участки цепи, по которым протекает магнитный поток.
Магнитные цепи разделяются на замкнутые и разомкнутые, поля-
ризованные и нейтральные, расчетные и нерасчетные.
В замкнутых магнитных цепях (ЗМЦ) магнитный поток про-
ходит практически полностью в телах, чья магнитная восприимчи-
вость существенно больше единицы. Разомкнутые магнитные цепи
(РМЦ) имеют существенные включения немагнитных сред, напри-
мер воздушные зазоры. В поляризованных и неполяризованных
магнитных цепях источниками магнитодвижущей силы являются
соответственно постоянные магниты или обмотки с током. Магнит-
ные цепи, напряженность на участках которых может быть опре-
делена путем расчета по геометрическим размерам намагничиваю-
щих обмоток и по протекающему по ним току, можно назвать
расчетными. Основные виды магнитных цепей, применяемых на
практике, с указанием их достоинств и недостатков приведены
в табл. 7-2.
Основной частью магнитной цепи является образец испытуемого материала.
Наибольшая однородность намагничивания при наименьших потоках рассеяния
может быть получена в кольцевых образцах. Они могут быть сплошными, на-
бираться из штампованных колец или навиваться из ленты. При испытаниях на
переменном токе кольца или соседние витки ленты должны быть изолированы
диэлектриком. Для повышения однородности намагничивания отношение ра-
диальной толщины образца к его среднему радиусу должно быть по возмож-
ности минимальным. В отношении технологии изготовления и нанесения обмо-
ток кольцевые образцы, пожалуй, самые неудобные. Наряду с кольцевыми ши-
роко используются образцы в виде пакетов нарезанных полос, образующих
замкнутую магнитную цепь (аппарат Эпштейна), образцы с плоскопараллель-
ными гранями для испытаний в пермеаметрах, электромагнитах и т. п.
Наилучшая форма образца для испытаний в РМЦ — эллип-
соид вращения, намагничивающийся равномерно в однородном
внешнем магнитном поле. Такой образец обладает еще одним важ-
ным качеством — возможностью аналитического расчета его коэф-
фициента размагничивания. Дело в том, что при намагничивании
незамкнутого образца внешним магнитным полем с напряжен-
ий
Таблица 7-2
Наименование Тип цепи Достоинства Недостатки
Замкнутая Поляризо- ванная Расчетная
Тор, кольцо + — + Однородность намагничивания Минимальные потоки рассеяния Т рудность изготовления Трудоем- кость нанесе- ния обмотки
То же с о/ намагничива щовитковым нием + — + Простота нане- сения обмотки Однородность намагничивания Малое зна- чение изме- ряемого сиг- нала
Аппарат Эпштейна + — + Отсутствие^не- обходимости на- несения обмоток Простота уста- новки образца Простая форма образца Влияние за- зоров в месте стыка на точ- ность измере- ния
* 1
Пермеаметр + — + Простая форма образца Отсутствие об- мотки на образце Ограниче- ние намагни- чивания: а) из-за на- сыщения сер-
( г -и
дечника;
Ж^т б) из-за ос- таточной на- магниченности сердечника
139
Продолжение табл. 7-2
Наименование Тип цепи Достоинства Недостатки
Замкнутая Поляризо- ванная Расчетная
Электромагнит + и Отсутствие об- мотки на образце Простота уста- новки образца Достижение больших напря- женностей Ограниче- ние намагни- чивания: а) из-за на- сыщения сер- дечника; б) из-за оста- точной намаг- ниченности сердечника Ограничен- ный частот- ный диапазон
1 ]
Соленоид ff«Q —- — 4- Простота уста- новки образца Сравнительно неплохой доступ Достижение весьма больших напряженностей Ограничен- ный частот- ный диапазон
Катушки Гельмгольца ©в — — + Простота уста- новки образца Хороший до- ступ Однородность поля Сравнитель- но небольшая напряжен- ность магнит- ного поля
Постоянный магнит (для испытаний слабо- магнитных материалов) — + Отсутствие ис- точников питания Простота уста- новки образца Сравнительно сильные поля Большие масса и габа- риты Невозмож- ность регули- рования маг- нитного поля
140
Таблица 7-3
Определяе- мый магнитный параметр Измеряемая велрчина Уравнение связи Используемые методы и средства измерений
Вп, Hi, J Магнитная ин- дукция в воздухе В о (Bon, BqT) о С? cqo 3 II II II С н oq Индукционные, галь- ваномагнитные и кван- товые методы и средства измерений (см. гл. 6)
В Ф ЭДС е2 Ф 1 В — — 1 То же
S w2S
н, мдс р Намагничиваю- щий ток Электрическая активная мощ- ность Р МДС rl = — ^ср ^ср р = Р/т Амперметр, катушка взаимной индуктивно- сти с интегрирующим пр еобр азователем Методы и средства измерений мощности (см. гл. 4)
р Тепловой поток Q/t Р = Q/(tm) Калориметрический метод (см. § 4-4)
J Сила, дейст- вующая на обра- зец, F J = kF Методы измерений силы
р, X, tg6 Параметр экви- валентной элек- трической цепи: ^экв> ^экв» f» АД АВ Мостовые, резонанс- ные и квантовые ме- тоды. Мосты, частотоме- ры, измерители доброт- ности, градиентометры
ностью Не напряженность внутри образца Н уменьшается на ве-
личину, пропорциональную намагниченности: Н=Не—NJ, где N—
коэффициент размагничивания, зависящий от формы испытуемого
образца. Очевидная трудность изготовления образцов такой слож-
ной формы, как эллипсоид вращения, приводит к замене их цилин-
дрическими или призматическими. Поскольку в этом случае одно-
родность намагничивания в РМЦ нарушается, точный расчет ко-
эффициента размагничивания становится невозможен, Вместо него
пользуются приближенными формулами, в которые непременно
входит отношение длины образца к его поперечному размеру.
С увеличением этого отношения значение коэффициента размагни-
чивания уменьшается. По этой причине везде, где это возможно,
используют длинные и тонкие образцы.
Рассмотрим, каким образом различные магнитные величины, характеризую-
щие магнитное состояние образца магнитного материала, могут быть измерены
непосредственно или определены косвенно по результатам измерений других фи-
зических величин. В табл. 7-3 приведены основные определяемые магнитные
параметры, измеряемые величины и уравнения связи между ними, а также
используемые методы и средства измерений. Непосредственно измеряются сле-
дующие физические величины:
141
вектор магнитной индукции Во или его составляющие, например нормаль-
ная Воп или тангенциальная Ви к поверхности образца, в окружающем про-
странстве;
ЭДС е2, индуцируемая в обмотке с числом витков W2, охватывающей попе-
речное сечение образца площадью S;
намагничивающий ток ц в намагничивающей обмотке с числом витков сю>;
электрическая активная мощность Р, переходящая в тепловой поток в объ-
еме образца массой т в процессе его перемагничивания;
тепловой поток Q/t, проходящий через поверхность образца в окружающую
среду;
сила F, действующая на образец, помещенный в магнитное поле;
параметры эквивалентной схемы образца — эквивалентные индуктивность и
сопротивление Дак в, Rbkb, резонансная частота f и ее изменение Л/ в различных
режимах намагничивания, добротность Q эквивалентной индуктивности илн ко-
лебательного контура с сердечником из испытуемого материала.
Действительно, нормальная составляющая индукции и тангенциальная со-
ставляющая напряженности не изменяются на границе раздела магнитного
материала и окружающего пространства. Измерение соответствующей составля-
ющей индукции в непосредственной близости от поверхности образца дает воз-
можность определить индукцию и напряженность внутри образца. Измеряя век-
тор индукции в различных точках пространства, окружающего намагниченный
образец, можно определить намагниченность образца, магнитную восприимчи-
вость его материала. Для измерения индукции главным образом используются
индукционный и гальваномагнитный методы. При измерении параметров тонких
пленок широко применяются магнитооптические методы. Прн индукционном ме-
тоде в качестве интегрирующих приборов используются при измерениях на по-
стоянном токе баллистический гальванометр, вытесняющий его веберметр и
электронные интеграторы. При повышенных частотах применяются вольтметры
средневыпрямленных значений, феррометры (фазочувствительные преобразова-
тели) и компенсаторы переменного тока. В настоящее время широкое распро-
странение находят пассивные и активные (с операционными усилителями) инте-
грирующие цепи.
Намагничивающий ток может быть измерен амперметром, а также путем
интегрирования выходной ЭДС катушки взаимной индуктивности, включенной
своей первичной обмоткой в намагничивающую цепь.
Электрическая активная мощность, переходящая в тепловой поток в испы-
туемом образце, пропорциональна удельным магнитным потерям и измеряется
ваттметром. В отдельных случаях могут быть использованы компенсационные и
мостовые цепи.
Тепловой поток, проходящий через поверхность образца в окружающую
среду и измеряемый с помощью калориметра (см. § 4-4), также пропорциона-
лен удельным магнитным потерям.
По силовому воздействию на намагниченный образец со стороны внешнего
магнитного поля могут быть определены намагниченность и магнитная воспри-
имчивость материала образца.
Наконец, измеряя посредством мостов, частотомеров, измерителей добротно-
сти параметры эквивалентной электрической цепи, можно определить комплекс-
ную магнитную проницаемость, магнитную восприимчивость, тангенс угла маг-
нитных потерь.
Одним из существенных элементов магнитной цепи является
устройство для создания необходимого режима намагничивания.
Дело в том, что получение однозначных результатов измерений
магнитных параметров возможно при заданном режиме изменения
во времени напряженности или индукции, что эквивалентно под-
держанию соответствующей формы кривой намагничивающего
тока или индуцированной ЭДС. Рассмотрим типичные устройства,
используемые для этой цели. На рис. 7-3 приведена схема источ-
ника намагничивающего тока на основе мощного операционного
142
усилителя ОУ. Обеспечив условие RdRs^Rz/Ri, получают пропор-
циональность тока в намагничивающей обмотке образца О за-
дающему напряжению и соответствующей формы: t’i =—u/R3.
Аналогично можно создать необходимый режим изменения во
времени магнитной индукции. Простейшим решением вопроса
было бы подключение генератора напряжения с требуемой фор-
мой выходного сигнала и с малым внутренним сопротивлением
к намагничивающей обмотке. К сожалению, из-за конечного внут-
реннего сопротивления г последней индуцированная ЭДС будет
отличаться от приложенного напряжения на тем большее значе-
ние, чем больше ток намагничивания. Во избежание этого исполь-
Рис. 7-4
зуют устройство по схеме, показанной на рис. 7 4, в котором соот-
ветствующим выбором сопротивлений в цепях обратной связи
RJR3=R(^+R2/Ri)/(R + r) — 1 получают пропорциональность ЭДС
и входного напряжения. Поскольку ЭДС является производной
функцией индукции, то для получения, скажем, синусоидальной
или пилообразной кривой индукции требуется соответственно си-
нусоидальная или прямоугольная форма входного напряжения и.
7-3. Измерение параметров магнитных материалов
Прежде чем перейти к рассмотрению методов и средств
измерений параметров и характеристик магнитных материалов,
следует отметить исключительную роль семейства магнитных
петель, поскольку эта характеристика содержит исчерпывающую
информацию о большинстве параметров. Таким образом, опреде-
ление того или иного параметра возможно двумя путями: либо
измерением специализированным средством измерений, либо соот-
ветствующей обработкой информации, содержащейся в предвари-
тельно определенном семействе магнитных петель. Во втором слу-
чае явным преимуществом является необходимость иметь всего
одну магнитоизмерительную установку для определения любого
143
параметра испытуемого материала. Проведение соответствующих
вычислений по заданным программам посредством современных
средств микроэлектроники, в частности с помощью микропроцес-
соров, не представляет затруднений и требует минимальных за-
трат. По этой причине второй путь, более подробно рассмотренный
в § 7-5, посвященном автоматизации при измерении магнитных па-
раметров, становится предпочтительнее.
Рассмотрим последовательно методы непосредственного изме-
рения магнитных параметров и характеристик.
Измерение координат магнитных петель заключается в изме-
рении мгновенных значений магнитной индукции и напряженно-
сти в образце. Поскольку индукция в толще материала может
быть определена лишь интегрированием индуцируемой ЭДС, то
важно правильно выбрать интегрирующие преобразователи при
проведении измерений. При этом необходимо учитывать, что на
инфразвуковых частотах намагничивания значение интегрируемой
ЭДС чрезвычайно мало, поэтому возникает проблема повышения
чувствительности. С повышением частоты намагничивания необхо-
димо увеличивать полосу пропускания каналов измерений магнит-
ной индукции и напряженности для сведения к минимуму частот-
ных и фазовых погрешностей. Кроме того, на повышенных часто-
тах трудно реализовать регистрацию результатов измерений.
Существуют две группы методов определения магнитных пе-
тель. Для первой характерна синхронность процессов перемагни-
чивания и измерения магнитной индукции и напряженности в не-
прерывном или дискретном множестве точек, т. е. измерение и ре-
гистрация петли производятся за один цикл перемагничивания или
повторяются в каждом последующем цикле с целью поддержания
непрерывного отображения петли на регистрирующем устройстве
или на экране осциллографа. Прочие методы характеризуются от-
сутствием зависимости между периодом намагничивания и време-
нем определения петли. Последнее обычно многократно превы-
шает указанный период. Первую группу методов измерений коор-
динат магнитных петель можно назвать синхронными методами,
вторую — методами с преобразованием спектра.
Синхронные методы. К синхронным методам измерений коор-
динат магнитных петель можно отнести индукционно-импульсный,
квазистатический и осциллографический методы.
Индукционно-импульсный метод основан на интегрировании
импульсов ЭДС баллистическим гальванометром (в последнее
время гальванометры практически вытеснены веберметрами). Им-
пульсы ЭДС возникают при скачкообразном изменении магнитной
индукции вследствие скачкообразных приращений напряженности
в дискретном числе точек. Этот метод устарел вследствие трудно-
сти его автоматизации.
Квазистатический метод, называемый индукционно-непрерыв-
ным, получается из предыдущего при замене гальванометра или
веберметра электронной интегрирующей цепью и при переходе от
скачкообразного изменения напряженности к непрерывному. Ре-
144
зультаты измерений регистрируются в аналоговом виде — в виде
изображения петли на графопостроителе (двухкоординатном са-
мописце) или в цифровом виде, например напечатанными на циф-
ропечатающем устройстве (ЦПУ) совокупностями пар цифровых
координат петли, полученных путем измерения медленно меняю-
щихся на выходе интегратора и на резисторе в намагничивающей
цепи напряжений, пропорциональных магнитной индукции и на-
пряженности соответственно. Измерение напряжений может быть
осуществлено АЦП с небольшим быстродействием, в качестве ко-
торого можно использовать цифровой вольтметр постоянного
тока.
Методы с преобразованием спектра. К ним относятся фазочув-
ствительный (феррометрический) и стробоскопический методы, ос-
нованные на переносе спектров высокочастотных периодических
сигналов в каналах измерения магнитной индукции и напряжен-
ности. Иногда одновременно с переносом спектра в область низ-
ких частот вплоть до нуля (постоянный ток) производится опера-
ция интегрирования. Выигрыш, получаемый при этом, — использо-
вание более дешевых и точных низкочастотных средств измерений
и регистрации, проигрыш — увеличение времени измерений.
Фазочувствительный (феррометрический) метод основан на
применении феррометра — прибора с фазочувствительным преоб-
разователем, предназначенного для измерения мгновенных значе-
ний интеграла от периодического входного сигнала (см. табл. 7-4,
п. 4). Сущность работы феррометра состоит в усреднении вход-
ного сигнала за часть его периода. Например, усредняя ЭДС е2 от
момента —Т/2 ее периода Т=\Ц в течение половины этого пе-
риода, получим
-ф JTI2(Ф„-Ф„.те) = (в„-в„_те),
где S — площадь поперечного сечения образца.
Для симметричной магнитной петли имеем Btl =—В^-ти
и, следовательно, e2CV = 4fw2Btl, т. е. ЭДС пропорциональна
мгновенному значению индукции в момент tt. Медленно изменяя
значение t\ от 0 до 7 путем изменения фазы управляющего напря-
жения типа «меандр», получаемого от источника намагничиваю-
щего тока, можно измерить мгновенные значения индукции в лю-
бой точке периода.
Простейший феррометр состоит из быстродействующего ключа
и интегрирующей ДС-цепи, к которой ключ в течение половины пе-
риода намагничивания подключает входной сигнал. На вход фер-
рометра поступают сигналы с частотой намагничивания, а на вы-
ход— напряжение постоянного тока, пригодное, например, для
регистрации на графопостроителе. Важным преимуществом рас-
смотренного преобразователя является осуществление вместе с пе-
реносом спектра операции интегрирования.
145
Следует отметить, что феррометр представляет собой одну из
разновидностей устройств, которые в литературе носят названия
синхронного детектора, управляемого выпрямителя, векторметра.
Стробоскопический метод, используемый во многих областях
измерительной техники для исследования высокочастотных перио-
дических процессов посредством низкочастотных каналов, успешно
применяется и для магнитных измерений.
Сущность стробоскопического метода состоит в измерении вре-
менного масштаба измеряемых сигналов в каналах магнитной ин-
дукции и напряженности в сторону замедления, с тем чтобы про-
изводить измерение и регистрацию координат петли на инфразву-
ковых частотах, в то время как частота намагничивания может
превышать десятки и сотни килогерц (см. табл. 7-4, п. 5). Здесь
используется свойство так называемого стробоскопического преоб-
разователя, периодические входной и выходной сигналы которого
связаны следующим образом: цВых=Нвх(со//^+<ро), где значения
коэффициента преобразования масштаба времени 1 (в пре-
деле &->оо). Фактически стробоскопический преобразователь пред-
ставляет собой широко распространенное устройство, более из-
вестное под названием устройства выборки-хранения, аналогового
запоминающего устройства или динамического запоминающего
устройства, стробируемое определенным образом. В процессе его
работы выходное напряжение принимает значение входного в мо-
мент действия короткого стробимпульса и «хранится» далее по-
стоянным независимо от изменения входного напряжения до по-
ступления следующего стробимпульса.
Представим теперь, что стробпмпульсы поступают один раз
за период намагничивания в один и тот же момент его. По-види-
мому, на выходе стробоскопического преобразователя окажется
постоянное напряжение, равное значению входного сигнала в этот
момент его периода (такая ситуация и соответствует /г->оо). При
сдвиге момента поступления стробимпульса в каждом следующем
периоде на малую его часть, например на 1/&-ю часть периода, по-
лучим на выходе стробоскопического преобразователя сигнал,
«растянутый» во времени в k раз, но воспроизводящий форму
входного сигнала с погрешностью, не превышающей дискретность
по времени и уменьшающейся обратно пропорционально увеличе-
нию k (рис. 7-5). Погрешности современных схем выборки-хране-
ния в интегральном исполнении не более 1 %, а частота входных
сигналов превышает мегагерцы. При необходимости проведения
операции интегрирования перед стробоскопическим преобразова-
телем или после него помещают интегратор. В первом случае ин-
тегратор должен быть широкополосным, во втором — иметь малый
дрейф нуля.
Стробоскопический метод и метод с использованием ферро-
метра имеют много общего: необходимость в управляющем напря-
жении, медленно сдвигаемом по фазе, высокая входная частота и
низкая выходная, наличие на входе ключевых схем, а на выходе —
инерционных звеньев.
146
Функциональные схемы средств измерений координат магнит-
ных петель, основанных на рассмотренных методах, приведены
в табл. 7-4, где также даны выражения для сигналов измеритель-
ной информации в пронумерованных точках измерительной цепи.
Измерение координат основной кривой намагничивания произ-
водится различными методами в зависимости от ее вида. Опреде-
ление этой кривой при монотонном возрастании магнитной индук-
ции от нуля до насыщения в предварительно размагниченном
образце производится по аналогии с измерением координат магнит-
ных петель индукционно-импульсным или квазистатическим мето-
дом (схемы 1 и 2 в табл. 7-4). Индукционно-импульсным методом
можно также определить так называемую коммутационную кри-
вую намагничивания, когда измеряются приращения индукции при
реверсировании напряженности для дискретных значений послед-
ней, монотонно возрастающих от нуля до максимума. Указанные
приращения индукции измеряются веберметром, а в магнитной
цепи, имеющей зазоры, — с помощью преобразователей Холла.
С увеличением частоты коммутации переходят к динамиче-
скому намагничиванию. Измерять амплитуду индукции становится
возможным посредством вольтметров средневыпрямленных значе-
ний, поскольку
I I
еср = — {\е (01 dt = 4fw2SB,
где f=\[T — частота намагничивания.
Еще один способ измерения амплитуды магнитной индукции
состоит в применении интегрирующей цепи и вольтметра ампли-
тудных значений. Последний может быть использован и для изме-
147
Таблица 7-4
Номер
схемы
Наименование методов
Номер
точки
Выражение для сигналов
в пронумерованных точках
2
Синхронные методы
Индукционно-импульсный
1
2
3
4
5
6
7
8
е2 (0 =г wt SdB (t)/dt
•i (О = *cp# (0/®i
“fi (0 = — fa (0 dt =
т
= w2SB (t)/i
UH (0 = ‘1 (0 R =
= RlcpH (0/Wi
Uв (ti) =
j' e.W«-
1 tt—T2
— 4w2 SfB (0)
eM (0 = M =
dt
M/cp dH(t)
Wi dt
U11
t
u(t)—-e2 — =
k
dt
1 r t
UB (0 = —- fa dt =
т k
WaS B t
т k
UH (0 = Rii — =
k
_ RlcpH (t/k)
Здесь:
«1 (0 — намагничива-
ющий ток
«а (0 — индуцирован-
ная ЭДС
®2 — числа витков
обмоток образца
148
Продолжение табл. 7-4
Номер схемы Наименование методов Номер точки
4 Методы с преобразованием спектра Фазочувствительный
Выражение для сигналов
в пронумерованных точках
ем (/) — выходная
ЭДС катушки взаимной
индуктивности
В (/), Н (/) — мгно-
венные значения магнит-
ной индукции и напря-
женности
/ср, S — длина сред-
ней магнитной линии и
площадь поперечного се-
чения образца
f, Т — частота и пе-
риод намагничивания
k — коэффициент пре-
образования масштаба
времени
Условные обозначения:
— испытуемый образец
— катушка взаимной
индуктивности
— баллистический галь-
ванометр, вебер метр
— интегрирующая цепь
— осциллограф
— графопостроитель
(двухкоординатный
самописец)
— феррометр (вектор-
метр, - фаз0ЧУвстви"
тельный преобразо-
ватель)
— стробоскопический
преобразователь
(схема выборки-хра-
нения)
рения амплитуды напряженности. Рассмотренные методы измере-
ний основной кривой намагничивания иллюстрируются табл. 7-5.
Методы измерений магнитной проницаемости. Абсолютную, ам-
плитудную, дифференциальную, максимальную, начальную прони-
цаемость определяют косвенно по результатам измерения коорди-
нат основной кривой намагничивания. Другим способом является
непосредственное измерение соответствующей проницаемости сред-
ством измерений координат основной кривой намагничивания,
149
Таблица 7-5
Номер
схемы
Функциональная схема
Номер
точки
Выражения для сигналов
в пронумерованных точках
Условные обозначения:
e2(t) = waS^-Q
dt
1 т
ив ~ — f I е2 (/) | dt =
1 о
— 4fwaSBm
»i (О = kpH (O/^i
ем (0 = М =
dt
Mlcp dH(t)
Wi dt
1 т
Чц =— \ \ем (t) | dt =
т о
— 4М1^Н ttJwi
ии (О = Rh (О
И(() = Рт^Д =
dt
_ Ril ср dH (?)
Wi dt
1 T
uH = — [ |«(0|Л =
1 b
= itRflcpHm/Wi
UH = IcpRHm/e^i
1 t
— \e2(t)dt =
т о
= w2B (/)/t
uB w2SBmlt
vcp
Vm
— преобразователь (вольт-
метр) средневыпрямлен-
ных значений
— преобразователь (вольт-
метр) амплитудных зна-
чений
— двухкоординатный
самописец
См. также условные
обозначения табл. 7-4
150
снабженным каким-либо делительным устройством. Например, при
медленном изменении магнитной индукции и напряженности можно
использовать вольтметр В7-34 в режиме деления двух входных по-
стоянных напряжений. При измерении дифференциальной магнит-
ной проницаемости в процессе перемагничивания по магнитной
петле требуется более широкополосное делительное устройство,
например на основе серийных интегральных микросхем, частотный
диапазон которых превышает несколько мегагерц, погрешность
1-2%.
Измерение удельных магнитных потерь производится калори-
метрами, ваттметрами, мостами и компенсаторами переменного
тока. Калориметрический метод основан на измерении теплоты,
рассеиваемой образцом в окружающую среду в установившемся
Рис. 7-6
тепловом режиме (см. § 4-4). Достоинствами метода являются от-
сутствие зависимости результатов измерения от частоты намагни-
чивания, сравнительно высокая точность. Однако трудоемкость
процесса измерения, громоздкость калориметров, трудность авто-
матизации ограничивают применение калориметрического метода.
Наиболее широко используется ваттметровый метод измере-
ний мощности потерь [18]. Удельные магнитные потери определя-
ются выражением
p=-^—-(HdB, (7-3)
тТ
где V, т — объем и масса образца; Т — период перемагничивания.
Поскольку H(t) = ii(t)wl/lCp, a dBldt=—e2(t)l(w^S), то
w2mt о
Другими словами, для измерения удельных магнитных потерь
необходимо последовательную цепь ваттметра включить в цепь на-
магничивающего тока ii(t), а его параллельную цепь подключить
к измерительной обмотке W2, в которой индуцируется ЭДС 62(f)
(рис. 7-6).
Измерение удельных магнитных потерь большей частью произ-
водится в одном из граничных режимов намагничивания, т. е.
когда один из сигналов на входе ваттметра синусоидален, а вто-
151
рой представляет собой сумму гармонических составляющих.
Вследствие ортогональности тригонометрических полиномов в этом
случае последнее выражение примет вид
р~ —д------/iC2cos<p,
т
где Л и Е% — действующие значения первой гармоники намагничи-
вающего тока и ЭДС индукции; <р — угол фазового сдвига между
ними. Следовательно, в граничных режимах можно определять
удельные магнитные потери по первым гармоникам частоты на-
магничивания посредством частотно-избирательных цепей — мос-
тов и компенсаторов переменного тока.
С повышением качества магнитных материалов удельные по-
тери имеют постоянную тенденцию снижения, что приводит
к уменьшению costp. Это обстоятельство ужесточает требования
к ваттметрам в отношении чувствительности, широкополосности
и допускаемым фазовым сдвигам. Необходимо отметить, что со-
здание точных (с погрешностью в десятые доли процента) ватт-
метров на звуковой и сверхзвуковой частотный диапазон прн
cos<p<0,l является достаточно сложной задачей.
Измерение магнитных параметров по первым гармоникам час-
тоты намагничивания заключается в измерении амплитуд и фаз
первых гармоник магнитной индукции и напряженности в об-
разце. Действительно, в граничных режимах намагничивания,
если характеристики испытуемых образцов не выходят за пре-
делы линейной области, процесс намагничивания описывается
указанными параметрами. Даже при выходе характеристик за
пределы линейности можно ограничиться гармоническим прибли-
жением процесса намагничивания, особенно при повышенных ча-
стотах. Указанные обстоятельства привели к широкому распро-
странению на практике мостовых и компенсационных средств из-
мерений магнитных параметров.
Мостовой метод измерений заключается в том, что намагни-
чивающая обмотка образца включается в одно из плеч моста
переменного тока. В одну из диагоналей моста включают источ-
ник намагничивающего тока, в другую — избирательный указа-
тель равновесия, настроенный на первую гармонику частоты на-
магничивания. Мост уравновешивают путем изменения парамет-
ров по меньшей мере двух переменных элементов, включенных
в остальные плечи моста. После уравновешивания по уравнению
равновесия моста рассчитывают параметры эквивалентной схемы
испытуемого образца с намагничивающей обмоткой. Параметры
этой схемы в виде последовательно соединенных индуктивности
Lx и активного сопротивления гх следующим образом связаны
с магнитными параметрами материала для кольцевого образца со
средним диаметром d и площадью поперечного сечения S:
Hi = dLx-107/(4Sa;a):
Ik = Hi tg’S = Р1Гп/(с1)£Л) = (rx — r0) d lO7/(4Stefto),
152
где |ii и Ц2 — упругая и вязкая составляющие комплексной маг-
нитной проницаемости; w — число витков намагничивающей об-
мотки; и — круговая частота намагничивающего тока; гп — со-
противление потерь образца, равное разности измеренного сопро-
тивления гх и сопротивления обмотки го на данной частоте; tg 6 —
тангенс угла магнитных потерь.
Измеряя Lx и гх при различных значениях напряженности маг-
нитного поля, частоты и температуры окружающей среды, можно
определить коэффициенты потерь, температурные коэффициенты
магнитной проницаемости и тангенса угла потерь. Удельные маг-
нитные потери могут быть рассчитаны по формуле р = Л2(гж—го)/т,
где /| — действующее значение первой гармоники намагничиваю-
щего тока.
На рис. 7-7 приведена схема моста, применяемого в широком
диапазоне частот. Условия равновесия моста Ьх=Сг\Г2 и Гх^цг^г
достигаются изменением емкости и сопротивления регулируемых
конденсатора и резистора, включенных параллельно в плечо мо-
ста, противоположное плечу с исследуемым образцом. Измеряе-
мые величины определяются из условий равновесия. В зависимо-
сти от частоты и значений измеряемых величин погрешность из-
мерения параметров эквивалентной схемы образца составляет
0,2—10 %,.
В последнее время расширяется применение цифровых мостов
с автоматическим уравновешиванием, что позволяет значительно
повысить производительность труда прн проведении измерений.
Частотный диапазон мостовых средств измерений лежит в пре-
делах 50 Гц—100 МГц. Диапазон значений измеряемых парамет-
ров эквивалентной схемы образца составляет: для индуктивно-
сти— от 10~° Гн до единиц генри, для сопротивления — от сотых
долей ома до единиц килоом. Погрешности измерений индуктив-
ностей и сопротивлений равны соответственно 1—10% и 0,2—1%.
Большие значения погрешностей соответствуют случаю измерения
малых индуктивностей и сопротивлений. Это объясняется нали-
чием собственных индуктивностей и емкостей в элементах моста,
конечным переходным сопротивлением переключателей в магази-
нах сопротивлений. Элементам мостовых схем присущи собствен-
ные потери. По этой причине минимальные значения tg 6, подда-
ющиеся измерению, составляют примерно 5- 10 s—5 • 10“4.
Наиболее точные измерения магнитных параметров материала
по первым гармоникам можно выполнить на основе измерения ам-
плитуд и фаз первых гармоник сигналов на обмотках испытуе-
мого образца посредством компенсаторов переменного тока. Ком-
пенсационные средства измерений используются для определе-
ния по первым гармоникам основной кривой динамического
намагничивания, удельных магнитных потерь и комплексной маг-
нитной проницаемости в граничных режимах намагничивания
в звуковом диапазоне частот.
Измерение магнитных параметров при импульсном намагни-
чивании имеет некоторые особенности. Намагничивающий ток
153
представляет собой в этом случае последовательность коротких
импульсов с крутыми фронтами. Следствием этого является тре-
бование большой широкополосности как первичных преобразова-
телей магнитных величин, так и измерительных каналов. Это при-
водит к замкнутой, большей частью кольцевой, форме образцов,
что обеспечивает предельное снижение рассеяния магнитного по-
тока, а следовательно, уменьшение собственных индуктивностей
намагничивающей и измерительной цепей. Широко распространено
одновитковое намагничивание. Измерение координат петель на-
магничивания осуществляется обычно осциллографическим и стро-
боскопическим методами измерений, как самыми широкополос-
ными. Удельные магнитные потери ввиду недостаточной полосы
пропускания ваттметров в основном измеряются калориметриче-
ским методом. Рассмотренные методы используются также в ав-
томатических средствах допускового контроля магнитных изде-
лий в процессе их производства.
7-4. Измерение параметров слабомагнитных материалов
Слабомагнитные материалы характеризуются сравнительно малыми
значениями магнитной восприимчивости: н= 10-1с... 10, практическим отсут-
ствием ее зависимости от напряженности, а также пренебрежимо малыми гисте-
резисными явлениями. Отсюда следует, что магнитная восприимчивость явля-
ется важнейшим магнитным параметром рассматриваемых материалов, к кото-
рым относятся диа- и парамагнетики, материалы, частично содержащие ферро-
и ферримагнетики.
В зависимости от используемого для измерения магнитной восприимчиво-
сти физического явления методы измерений ее разделяются на силометрический,
магнитометрический, индукционный и параметрический.
Силометрический метод. Метод основан на силовом взаимодействии намаг-
ниченного тела, помещенного в магнитное поле, с этим же полем, причем по-
следнее должно иметь градиент индукции в пределах объема испытуемого об-
разца. При таком условии на образец слабомагнитного материала с положи-
тельной магнитной восприимчивостью будет действовать сила, пропорциональ-
ная значению восприимчивости, влекущая образец в область поля с большим
значением индукции. В случае отрицательной магнитной восприимчивости на-
правление силы изменится на противоположное. Силометрический метод имеет
две основные модификации — метод Фарадея и метод Гуи. Метод Фарадея, про-
иллюстрированный на рис. 7-8, состоит в измерении с помощью чувствительных
весов силы, действующей на небольшой образец, помещенный в неоднородное
магнитное поле. Это поле создается постоянным магнитом или электромагни-
154
том с формой полюсных наконечников, обеспечивающей в некоторой области
постоянную производную составляющей вектора индукции, параллельной изме-
ряемой силе. Сила, действующая на образец, выражается формулой
Ff=x-^- V
Но
dBz
dz
где V — объем образца; г — индекс, показывающий, что имеются в виду со-
ставляющие векторов силы и индукции вдоль одной и той же оси z.
Метод Гу и (рис. 7-9) отличается от предыдущего метода тем, что образец
в виде длинного цилиндра или призмы с поперечными размерами, много мень-
шими длины, помещен одним концом в однородное поле с индукцией В, созда-
ваемое магнитом или электромагнитом, а другим концом — в магнитное поле
Земли Во. Выражение для силы, приложенной к образцу, в этом случае имеет
вид
F^xS^-B?)/^),
где S — площадь поперечного сечения образца. В эгом случае как точность, так
и чувствительность выше, чем в предыдущем методе, поскольку индукция одно-
родного поля измеряется точнее, чем пара-
метры неоднородного поля, а большие
размеры образца позволяют при одной и
той же чувствительности весов измерять
меньшие значения магнитной восприимчи-
вости. Процесс измерения восприимчивости
может быть автоматизирован, если ис-
пользовать для измерения силы чувстви-
тельный динамометр с электромеханиче-
ским обратным преобразователем (см.
§ 9-4).
Магнитометрический метод. Метод ос-
нован на том, что помещенный в магнит-
ное поле с индукцией Во образец из слабомагнитного материала, будучи намаг-
ниченным этим полем, создает в некоторой точке пространства индукцию
B=knBoV, где k — коэффициент пропорциональности, зависящий от формы об-
разца, его ориентации по отношению к указанной точке н расстояния между
ними. При простой форме образца (шар, эллипсоид вращения) этот коэффициент
поддается расчету. В противном случае градуируют прибор по стандартному
образцу с известной восприимчивостью и с размерами, идентичными размерам
испытуемого образца. В качестве измерителей магнитной индукции используются
астатические тесламетры, которые не реагируют на магнитное поле удаленных
источников, например на сравнительно однородное магнитное поле Земли. Сле-
дует иметь в виду, что измеряемое значение магнитной индукции В меньше Во
на пять-восемь порядков, поэтому очень важно снижать влияние намагничиваю-
щего образец магнитного поля на тесламетр. Наиболее эффективной мерой яв-
ляется создание намагничивающего поля системой с минимальным рассеянием
магнитного потока. Это возможно, например, при помещении испытуемого об-
разца внутрь тороидальной обмотки с намагничивающим током.
Весьма перспективным в отношении увеличения чувствительности и умень-
шения нижнего предела измеряемых значений магнитной восприимчивости яв-
ляется применение квантовых градиентометров на основе эффекта Джозефсона
[1]. Исследуемый образец помещается в одну из двух идентичных катушек дат-
чика градиентометра, что вызывает появление градиента магнитной индукции
между точками расположения этих катушек. Поскольку сверхпроводящие гра-
диентометры имеют порог чувствительности 1 • 10-17 Тл • м-1 • Гц-*, то они яв-
ляются наиболее чувствительными приборами для измерения магнитной воспри-
имчивости.
Индукционный метод. Метод основан на измерении магнитного потока в ис-
пытуемом образце посредством измерения индуцированной ЭДС в измеритель-
ной обмотке, охватывающей образец (см. § 6-3). Рассмотрим некоторые моди-
фикации индукционных средств измерений. В простейшем случае (рис. 7-10)
155
образец помещается в одну из последовательно соединенных идентичных намаг-
ничивающих катушек с числами витков н и>2. Измерительные катушки w3 и
Wt соединены встречно. Изменяя переключателем S направление намагничиваю-
щего тока, измеряют соответствующее изменение магнитного потока, например,
с помощью веберметра. При измерениях на переменном токе вместо веберметра
применяются усилитель переменного тока и вольтметр средних значений. Ис-
пользуя узкополосный усилитель, можно получить весьма большое усиление и,
как следствие, более высокую чувствительность, чем при измерениях на по-
стоянном токе.
Параметрический метод. Метод основан на изменении параметров колеба-
тельного контура автогенератора при помещении в катушку индуктивности,
включенную в контур, исследуемого образца из слабомагнитного материала.
Происходящее при этом изменение частоты колебаний автогенератора линейно
связано с магнитной восприимчивостью нз-за малых значений последней. При
значительных размерах образцов их не помещают внутрь катушки, а прибли-
жают последнюю к плоской поверхности образца.
7-5. Автоматизация измерений
магнитных параметров материалов
Отличительными чертами рассматриваемой области из-
мерений являются многообразие магнитных параметров, режимов
намагничивания и необходимость производить обработку получен-
ных при измерениях данных, поскольку большинство параметров
определяется путем косвенных измерений. При малом уровне ав-
томатизации требуются большая затрата времени на испытания
магнитных материалов, а также высокая квалификация экспери-
ментатора. В свете современных успехов в области вычислитель-
ной техники и микроэлектроники автоматические измерения маг-
нитных параметров материалов могут быть выполнены существу-
ющим стандартным набором технических решений на основе ти-
повых аппаратных структур. Периодический в большинстве
случаев процесс перемагничивания говорит о сравнительно огра-
ниченном количестве измерительной информации, проходящей по
измерительным каналам. Это позволяет производить аналого-циф-
ровое преобразование измеряемых величин с произвольно уста-
навливаемой скоростью, не зависящей от частоты перемагничи-
вания. Здесь реализуется общая идея стробоскопического метода
измерений.
Автоматизированные универсальные средства измерений мо-
гут работать следующим образом. Выходные сигналы первичных
преобразователей магнитных величин поступают на устройства
выборки-хранения с временем выборки до долей микросекунды,
т. е. с полосой пропускания до единиц мегагерц и более. В те-
чение времени хранения от десятков микросекунд до единиц мил-
лисекунд происходит аналого-цифровое преобразование выходных
сигналов посредством точных аналого-цифровых преобразовате-
лей (АЦП) сравнительно низкого быстродействия. Полученные
таким образом цифровые данные поступают в вычислительное
устройство — микропроцессор или однокристальную ЭВМ для
накопления и обработки. Предварительно эти данные (при недо-
статочном быстродействии микропроцессора) могут быть накоп-
лены в быстродействующей буферной памяти. Затем происходит
156
необходимая обработка цифровых данных для получения жела-
емого параметра или характеристики. Выходной сигнал первич-
ного преобразователя может быть пропорционален измеряемой
магнитной величине или ее производной и даже может быть свя-
зан с ней какой-либо другой известной функцией. Это несуще-
ственно, так как необходимое выделение магнитной величины
путем, например, интегрирования или другой операции осуществля-
ется легко не аппаратным, а программным путем без потери точ-
ности в цифровом виде. После окончания процедуры вычислений
результаты выдаются в желаемом виде на любом стандартном
периферийном устройстве: графопостроителе, дисплее, цифропе-
чатающем устройстве, перфораторе и т. п. В случае включения
автоматизированного средства измерений в обратную связь уп-
равления технологическим процессом производства магнитного
материала, результаты измерений должны соответствующим об-
разом оперативно корректировать этот процесс с целью достиже-
ния наилучших качественных показателей.
Рассмотрим в качестве примера автоматическое устройство
для измерения координат семейства магнитных петель и опреде-
ления по ним всех производных характеристик — основных кри-
вых намагничивания, различных видов магнитной проницаемости,
удельных потерь, характеристик по первым гармоникам и т. п.
в диапазоне частот от нуля (постоянный ток) до десятков кило-
герц.
Прежде всего остановимся на некоторых существенных вопро-
сах методики проведения измерений, формы представления ре-
зультатов измерений и алгоритмах обработки этих результатов.
Выше было указано влияние на магнитные петли режима на-
магничивания, т. е. режима изменения во времени магнитной'
индукции и напряженности, который важно знать в качестве до-
полнительной информации, как правило, не содержащейся в ре-
зультатах измерений координат петель. Есть, однако, способ за-
дания петли, позволяющий получать эту информацию. Достаточно
обеспечить параметрическое задание петли, когда в зависимости
от времени или какого-либо другого параметра задаются кривые
индукции и напряженности. В случае цифрового представления
петли в виде совокупности ее пар координат указанные зависимо-
сти представляют в моменты времени, которые делят период на-
магничивания на равные части.
Обработка результатов измерений координат магнитных пе-
тель возможна лишь при их представлении в виде аналитической
аппроксимации. Аппроксимация в параметрическом виде имеет
очевидные удобства, связанные с однозначностью кривых магнит-
ной индукции и напряженности, в то время как сама петля в де-
картовых координатах всегда неоднозначна, а в полярных может
быть неоднозначна. Искомое аналитическое приближение дол-
жно удовлетворять следующим требованиям. Во-первых, оно дол-
жно быть «сглаживающим», поскольку результаты измерений со-
держат погрешности средств измерений. Во-вторых, оно должно
157
быть достаточно простым и удобным для вычислений. Наконец,
в-третьих, это приближение должно быть наглядным и по возмож-
ности иметь физический смысл. Наибольшее распространение
в такого рода задачах нашло приближение на основе метода наи-
меньших квадратов, когда аппроксимирующая функция выбрана
так, чтобы минимизировать сумму квадратов отклонения от ее
экспериментальных точек. В рамках метода наименьших квад-
ратов аппроксимация ортогональными многочленами или тригоно-
метрическими полиномами имеет то преимущество, что улучше-
ние аппроксимации путем добавления последующих членов не
изменяет ранее вычисленных коэффициентов при предыдущих
Рис. 7-11
членах. Выбор должен быть сделан
в пользу тригонометрических поли-
номов, поскольку они удовлетво-
ряют поставленным выше требова-
ниям, а физический смысл аппрок-
симации при их использовании
заключается в том, что коэффици-
енты полиномов суть амплитуды
гармонических составляющих спек-
тров магнитной индукции и напря-
женности.
В соответствии с теоремой Ко-
тельникова минимально необходи-
мое число пар координат на одну
петлю должно вдвое превышать
максимальный номер гармоники в разложении в ряд Фурье
кривых магнитной индукции и напряженности, амплитуда кото-
рых еще соизмерима с погрешностью измерения. Обычно число
таких гармоник не превышает 15—30, и, следовательно, число п
необходимых пар координат на каждую петлю не более 30—60.
Функциональная схема рассматриваемого устройства приве-
дена на рис. 7-11. Оно работает следующим образом. По цифро-
вым сигналам управления с выхода микропроцессора МП цифро-
аналоговый преобразователь ЦАП формирует аналоговый сигнал
заданной формы и частоты, подаваемый на вход источника на-
магничивающего тока ИНТ, аналогичного изображенным на рис.
7-3 и 7-4, поддерживающего заданный режим намагничивания
образца О. Выходные сигналы первичных преобразователей ПП
магнитных параметров: ЭДС индукции, холловской ЭДС, на-
магничивающего тока и т. п. поступают на вход устройства вы-
борки-хранения УВХ, стробируемые микропроцессором. В моменты
появления стробимпульсов устройства выборки-хранения запо-
минают в аналоговом виде входной сигнал на время, достаточное
для преобразования его аналого-цифровыми преобразователями
АЦП в цифровую форму. Эти цифровые сигналы запоминаются
в буферной памяти процессора. После получения таким обра-
зом п пар результатов в каналах измерения индукции и напря-
женности происходит дискретное увеличение амплитуды намагни-
158
чивающего сигнала и определение следующей совокупности п
пар результатов. Число определяемых петель в первом приближе-
нии равно п; следовательно, память процессора должна хранить
примерно 2п2 результатов измерений. При погрешности в десятые
доли процента достаточно восьми двоичных разрядов аналого-
цифрового преобразователя, так называемого байта, т. е. ем-
кость памяти должна быть около 8 килобайт. Последнее состав-
ляет в настоящее время всего 10—20% объема памяти одного
корпуса серийной интегральной микросхемы.
Далее происходит обработка результатов измерений микро-
процессором. Во-первых, в зависимости от вида первичного пре-
образователя, массы и геометрических размеров образца, пара-
метров намагничивающей обмотки и т. п. вычисляются магнитная
индукция и напряженность в виде совокупностей п пар координат
на каждую петлю. Во-вторых, по известным формулам преобразо-
вания Фурье каждая петля представляется параметрически за-
данными тригонометрическими полиномами с числом членов по
и/2:
л/2
Bi (0 = X Втк (sin/г®/+ фвЛ);
к~' (7-4)
п 2
Дг (0 = Е Hmk (sin kat+ cpHk),
k=i
где Втк, Hmk и фвл, q>Hk — соответственно амплитуды и начальные
фазы гармоник магнитной индукции и напряженности; « — круго-
вая частота намагничивания; i — порядковый номер петли семей-
ства.
На этой стадии, если необходимо, семейство магнитных пе-
тель может быть зарегистрировано в цифровом виде или визуали-
зировано в аналоговом виде на одном из стандартных термина-
лов Т: устройстве цифропечати, регистраторе на магнитном диске,
графопостроителе, дисплее.
В-третьих, производится определение (путем вычисления) маг-
нитных параметров, информация о которых содержится в семей-
стве магнитных петель.
Основная кривая намагничивания может быть определена пу-
тем нахождения максимальных значений индукции и напряжен-
ности в выражениях (7-4) для каждой петли. Информация об ос-
новной кривой по первым гармоникам частоты намагничивания
непосредственно содержится в полиномах (7-4) в виде амплитуд
первых гармоник индукции Вт1 и напряженности Hmi-
Различные виды магнитной проницаемости определяются диф-
ференцированием, делением друг на друга координат магнитных
петель или основной кривой намагничивания. Удельные магнит-
ные потери могут быть вычислены по формуле (7-3).
Более того, закладывая в процессор соответствующие про-
граммы, можно получить самые разнообразные магнитные харак-
теристики, например зависимость третьей или пятой гармоники
159
индукции от амплитуды напряженности. Магнитные измерения,
традиционно считающиеся сравнительно сложными, являются под-
ходящей областью для широкого внедрения автоматизированных
средств измерений на основе современной электроники и вычис-
лительной техники.
Глава осьмая
МЕТОДЫ ИЗМЕРЕНИЙ ЛИНЕЙНЫХ И УГЛОВЫХ РАЗМЕРОВ
8-1. Характеристики измеряемых величин,
классификация методов измерений
Измерения линейных и угловых размеров весьма рас-
пространены, широко применяются в машиностроении, геодезии,
в военном деле, космонавтике, астрономии и т. д. Например,
в машиностроении они составляют 80%, от всех производимых из-
мерений. Широкое распространение измерений линейных и угло-
вых размеров обусловлено также тем, что наиболее используемые
методы измерений ряда физических величин, таких, как механи-
ческое напряжение, сила, момент, давление, параметры движения,
основаны на промежуточном преобразовании этих величин в уг-
ловое или линейное перемещение и измерении этих перемещений.
Кроме того, выходной величиной всех аналоговых измерительных
приборов является угловое и линейное перемещение указателя
показывающего или регистрирующего устройства и погрешность
определения этого перемещения — одна из составляющих основ-
ной погрешности прибора.
Современная практика требует измерения линейных размеров
в очень широком диапазоне (10-15—1023 м). Угловые размеры
чаще всего ограничены полной окружностью, и требуемый диа-
пазон их измерений составляет 0,0001"—360° (или 2л радиан).
Нижний предел измерений линейных размеров 10~15 м соответ-
ствует размерам микрочастиц (радиусы атомных ядер лежат
в пределах 10-18—6-Ю-15 м) и длинам волн рентгеновского и
гамма-излучений.
Относительная нестабильность длины волны лучших лазеров
не менее 10-11, а возможная для измерения доля интерференци-
онной полосы составляет 10-9, что в видимой области спектра
(Х=3-10~7 м) соответствует нижнему теоретическому пределу
измерения длины 3 • 10_27 м. Однако из-за тепловых флюктуаций,
дробового эффекта, квантовых пределов малых перемещений и
других помех нижний предел измеряемых длин в настоящее время
составляет 10*12 м, а угловых размеров — 0,0001". Верхний пре-
дел измерения длины определяется размерами галактик, которые
предположительно составляют 20—200 млрд, световых лет
(2-Ю26—2-Ю27 м).
Наиболее часто встречающиеся задачи измерений линейных и
угловых размеров можно разделить на следующие группы:
160
воспроизведение и измерение сверхмалых длин и перемещении
(менее 1О~10 м), которые необходимо выполнять при создании
эталонных мер единицы длины с относительной погрешностью
менее 10-6, при измерении толщин мономолекулярных пленок,
при создании средств измерений очень малых сил (10-12 Н и ме-
нее), при которых надо регистрировать смещения порядка 10~18 м,
при детектировании гравитационных волн, исследовании струк-
туры вещества и микрочастиц, определении межатомных расстоя-
ний в совершенных монокристаллах, при точном определении
числа Авогадро и других экспериментальных исследова-
ниях;
измерение линейных размеров в диапазоне от 0,01 мкм до не-
скольких десятков метров и угловых размеров от 0,1" до 360°,
которые имеют место в машиностроении и приборостроении. Наи-
более часто встречающиеся задачи этой группы — измерение
параметров шероховатости, являющейся модификацией длины; из-
мерение отклонения размера детали от заданного значения; изме-
Г - рение диаметров отверстий, параметров зубчатых передач, тол-
щины деталей и изделий, в том числе при одностороннем доступе,
например измерение толщины различных антикоррозийных по-
крытий. В связи с развитием микроэлектронной элементной базы
возникают сложные задачи измерения толщины покрытий и мик-
ропленок из полупроводниковых, изоляционных и проводящих
материалов, а также толщины многослойных изделий и структур
в диапазоне 2-10“9—10-5 м;
измерение размеров от тысячных долей до сотен метров при
определении уровней жидких и сыпучих веществ в различных
резервуарах и скважинах, уровня горючего в баках различных
транспортных средств, разности уровней верхнего и нижнего бье-
фов плотины, в строительстве, в геодезии и т. д.;
определение координат объектов и расстояний между объек-
тами, в том числе и космическими, которые лежат в пределах от
долей микрометра до многих миллиардов километров и более.
Измерение линейных и угловых размеров обычно связано
с определением координат границ раздела отдельных объектов,
веществ, сред и фаз, отличающихся по каким-либо параметрам.
Поэтому многие методы и средства измерений размеров основаны
на использовании различных свойств сред или объектов, образую-
щих границы измеряемого размера.
Основные электрические методы и соответствующие средства
измерений линейных и угловых размеров в зависимости от нали-
чия или отсутствия механического контакта между объектом и
средством измерений разделяются на контактные и неконтактные.
В зависимости от принципа измерительного преобразования ме-
тоды делятся на электромеханические, электрофизические и спект-
рометрические (волновые).
Электромеханические методы в зависимости от используемого
вида первичного преобразователя разделяются на резистивные,
индуктивные, емкостные, оптоэлектронные, обкатывания и т. д.
6 Заказ № 444
161
Электрофизические методы в зависимости от используемого
физического свойства вещества или явления делятся на электро-
кондуктометрические, теплокондуктометрические, магнитные, ем-
костные, электромагнитные, многопараметрические и т. д.
Спектрометрические (волновые) методы и соответствующие
средства измерений, с одной стороны, классифицируются в зави-
симости от длины волны используемого излучения на звуковые,
ультразвуковые, радиоволновые, СВЧ, оптические (лазерные),
рентгеновские, радиоактивные. С другой стороны, в зависимости
от используемого явления или комбинаций явлений спектромет-
рические методы разделяются на локационные, интерферометри-
ческие, рефрактометрические, голографические, доплеровские и др.
При наименовании метода или соответствующего средства
измерений обычно указываются два или несколько признаков, на-
пример рентгеновский интерферометр, лазерный рефрактометр
и т. д. По назначению рассматриваемые средства измерений раз-
деляются на микрометры, миниметры, толщиномеры, профило-
метры, уровнемеры, глубиномеры, путемеры, угломеры, гонио-
метры и т. д.
8-2. Электромеханические методы
Электромеханические методы, или так называемые ме-
тоды осязающего щупа, основаны на преобразовании измеряемого
параметра в перемещение чувствительного элемента преобразова-
теля, который прямо или в определенном масштабе воспроизводит
измеряемый размер. В качестве измерительных преобразователей
используются контактные, реостатные, емкостные, индуктивные,
тензорезистивные, пьезоэлектрические, оптоэлектронные, электро-
химические и другие типы преобразователей, естественной вход-
ной величиной которых является перемещение. В последнее время
для получения высокой точности и цифрового выхода широкое
применение нашли кодовые линейки, диски, растровые, муаровые,
нониусные и другие типы пространственных преобразователей
аналог — код. Электромеханические методы широко используются
для измерения размеров в машиностроении (контактные профило-
метры, микрометры и др.), для измерения уровней (поплавковые
и буйковые уровнемеры). Для измерения расстояния, пройденного
транспортным средством, широко применяется метод обкатыва-
ния.
Для измерения малых размеров, в частности параметров шеро-
ховатости, в машиностроении широко используются контактные
микрометры, миниметры, профилометры, в которых пространст-
венные координаты сначала преобразуются в линейное перемеще-
ние щупа-иглы, а затем в электрический сигнал при помощи ин-
дуктивных, емкостных и других типов преобразователей.
На рис. 8-1 показана схема цифрового измерителя малых раз-
меров на основе емкостного преобразователя, который является
частотно-зависимым элементом кварцевого генератора. Емкостный
162
датчик состоит из неподвижного золотого электрода 3, напылен-
ного на полированный стеклянный брусок 6, и подвижного элект-
рода 2, жестко связанного с иглой-щупом 1. Датчик при помощи
короткого коаксиального кабеля 4 соединен с кварцевым генера-
тором 5, частота которого является информативным параметром.
Кварцевый генератор возбуждается на частоте последователь-
ного резонанса, что обеспечивает высокую временную и темпера-
турную стабильность его частоты. Входная и выходная емкости
активного четырехполюсника, каким является кварцевый генера-
тор, также мало влияют на частоту генератора, которая меняется
только от изменения емкости измерительного преобразователя
при перемещении подвижного электрода. Частота кварцевого
генератора /кв=К(х) после преобразования при помощи смесителя
7, опорного генератора 8, измерителя периода 9, линеаризатора
(микропроцессора) 10 поступает на цифровое' отсчетное устрой-
ство 11, которое выдает результат измерения в микрометрах. По-
рог чувствительности микрометра равен 0,01 мкм, пределы изме-
рений 0,1—1 мм.
При использовании таких приборов для измерения параметров
шероховатости имеют место погрешности из-за нелинейных ис-
кажений, обусловленных способом преобразования реального про-
филя шероховатой поверхности в линейное перемещение щупа.
При этом могут возникать погрешности из-за отрывов щупа в не-
которых точках профиля поверхности и вследствие деформации
(упругой и пластичной) исследуемой поверхности под действием
усилия со стороны иглы-щупа. Эти погрешности определяются
усилием, создаваемым щупом. Это усилие в общем случае непо-
стоянно и может меняться в зависимости от инерционности преоб-
разователя, радиуса щупа, свойств материала и профиля иссле-
дуемого объекта. В этом отношении преимущество имеет виброкон-
тактный метод, основанный на преобразовании в электрический
6* 163
сигнал колебаний вибрирующего щупа, амплитуда которых
автоматически регулируется и устанавливается равной измеряе-
мому размеру. Виброконтактный метод позволяет производить из-
мерения при незначительных усилиях щупа, который только пе-
риодически соприкасается с исследуемым объектом. Благодаря
этому можно использовать тонкие щупы, что дает возможность
измерять размеры легкодеформируемых изделий, а также объек-
тов сложной конфигурации.
Для измерения относительно больших линейных (до 1м) и уг-
ловых (до 360°) перемещений различных станков и механизмов
применяются индуктивные и трансформаторные (взаимоиндуктив-
ные) преобразователи с распределенными параметрами.
Высокая точность измерений обеспечивается при использова-
нии индуктосинов — многополюсных безжелезных трансформатор-
ных преобразователей с печатными обмотками [5]. Индуктосины
применяются для измерения как линейных, так и угловых пере-
мещений. Линейные индуктосины выполняются как развертки
круговых индуктосинов. Выходным сигналом индуктосина явля-
ется индуцируемая во вторичной обмотке ЭДС, амплитуда или
фаза которой зависят от измеряемого перемещения. Для точного
измерения угла поворота наиболее широко используется фазовый
метод. Поворот ротора кругового индуктосина на угол а = 2л1р
(р — число пар полюсов) вызывает изменение фазы выходной
ЭДС на 360°. Таким образом, угловой индуктосин преобразует
пространственный угол в угол фазового сдвига электрического
сигнала, который в р раз больше измеряемого пространственного
угла. При измерении линейных и угловых перемещений, превыша-
ющих размер одного полюсного деления, необходимо дополни-
тельно применять устройства отсчета полюсных делений.
Цифровые средства измерений с использованием индуктосинов
обеспечивают измерение линейных размеров до 1 м с погрешно-
стью 1—2 мкм и измерение угловых размеров с погрешностью,
не превышающей нескольких угловых секунд.
На основе индуктивных и емкостных преобразователей промышленность
выпускает широкий класс аналоговых и цифровых микрометров, профиломет-
ров и информационно-измерительных систем (ИИС) для измерения размеров и
координат различных изделий. Так, измерительная система, включающая в себя
два индуктивных датчика, записывающее устройство, транскриптор, ЭВМ, имеет
диапазоны измерений от +9,99 до —9,99 мкм и от +99,99 до —99,99 мкм.
В первом диапазоне измерений абсолютная погрешность 0,2 мкм, порог чувстви-
тельности 0,01 мкм.
Метод осязающего щупа широко используется в поплавковых и буйковых
уровнемерах для измерения уровня жидкости в различных резервуарах и топ-
ливных баках. Первичный измерительный преобразователь в виде поплавка 1
(рис. 8-2), перемещающегося совместно с границей раздела жидкость — газ,
преобразует изменение уровня жидкости в силу, которая вызывает перемещение
стальной перфорированной ленты 2, сцепляющейся с зубчатым мерным шки-
вом 3. Мерный шкив связан с пятиразрядным механическим счетчиком 4, обе-
спечивающим отсчет уровня в миллиметрах. Угол поворота мерного шкива
преобразуется также в электрический сигнал с помощью преобразователя 5,
в качестве которого часто используется резистивный преобразователь или пре-
образователь угол — код и виде кодового диска.
164
На точность измерения уровня при помощи поплавковых уровнемеров
'(УДУ-5, УМПВ-1А, УМПВ-1, УМПВ-2) влияют изменения температуры и плот-
ности жидкости, изменение длины гибкой механической связи от непостоянства
усилий, погрешность вторичного преобразователя и др. Основная погрешность
таких уровнемеров составляет 0,01—0,1%.
Наличие кинематических узлов и нарушение герметичности резервуаров
уменьшают надежность и ухудшают эксплуатационные характеристики поплав-
ковых уровнемеров. Тем не менее, эти уровнемеры вследствие их простоты и
относительно высокой точности нашли широкое применение, особенно для из-
мерений уровня топлива в баках транспортных средств, а также в различных
резервуарах. Наиболее точные уровнемеры выполняются с преобразователями
аналог — код и цифровыми отсчетными устройствами. Такие уровнемеры исполь-
зуются не только в качестве рабочих, но и образцовых средств измерений
уровня.
Буйковые уровнемеры (УБ-Э, УБ-П) основаны на измерении усилия, разви-
ваемого буйком (тело с отрицательной плавучестью), выполненным в виде длин-
ного сплошного цилиндра, погружаемого в жидкость, уровень которой измеря-
ется. Обычно усилие уравновешивается пружиной или измеряется методом
уравновешивания силы, основанным на использовании обратного электромехани-
ческого или пневматического преобразователя. Буйковые уровнемеры выпускаются
для работы при температуре среды до +400° С и давлении 6—10 МПа. Диапа-
зоны измерений от 0—0,04 м до 0—16 м, основная погрешность 1% и 1,5%.
Унифицированный выходной сигнал у электрических уровнемеров (УБ-Э) со-
ставляет 0—5 мА или 0—20 мА, у пневматических (УБ-П) 0,02—0,1 МПа.
Другим примером приборной реализации метода осязающего щупа является
уровнемер (рис. 8-3) с резистивным преобразователем, состоящим из линейного
резистора 1 с равномерно распределенным сопротивлением. Резистор помещен
в защитный кожух 2, выполненный в виде гибкого гофрированного шланга
с внутренним электропроводящим покрытием. За счет давления шланг сжима-
ется и накоротко замыкает все участки резистора, находящиеся ниже измеряе-
мого уровня жидкости или сыпучего материала. Сопротивление незамкнутой ча-
сти резистора зависит от уровня вещества в резервуаре. На указанном принципе
удобно создавать уровнемеры с цифровым отсчетом.
К измерениям методом осязающего щупа можно также отнести измерения
толщины прн одностороннем доступе (например, толщины антикоррозийных по-
крытий) путем вытравливания с помощью электролиза цилиндрического отвер-
стия, длина которого равна измеряемой толщине покрытия. Такой своеобразный
электрохимический преобразователь (щуп) определяет границу раздела покры-
тие — основа по изменению электродного потенциала, а измеряемая толщина
165
1
покрытия hx вычисляется интегрированием тока за время т электролиза уча-
стка измеряемой толщины [5]:
т
hx = k | idt,
о
где k — коэффициент, м/Кл.
На рис. 8-4 показана схема дифференциального гидростатического уровне-
мера для измерения разности уровней в различных сооружениях, например для
контроля осадки фундаментов больших турбогенераторов. В точках А и Б,
между которыми определяется разность уровней, устанавливаются два иден-
тичных датчика /, образующих систему сообщающихся сосудов, соединенных
гибкими шлангами 2 и 3. Измеряемая разность уровней Д/г определяется как
разность расстояний, проходимых зондами 4 от их верхнего положения до об-
щего для обоих датчиков условного уровня, в качестве которого используется
уровень жидкости в сообщающихся сосудах. Уровень жидкости в датчиках 1
определяется путем зондирования поверхности жидкости измерительными зон-
дами 4, которые перемещаются при помощи шаговых двигателей 5, питаю-
щихся от импульсного генератора 6. Уровнемер работает циклически. По команде
запуска от блока управления 7 шаговые двигатели начинают синхронно переме-
щать зонды от верхнего крайнего положения. При соприкосновении одного из
зондов с поверхностью жидкости соответствующий двигатель отключается, и
на цифровой измеритель интервалов времени 8 подается старт-импульс. Счет-
чик измерителя начинает отсчет импульсов генератора образцовой частоты, ко-
торый происходит до тех пор, пока зонд второго датчика не войдет в контакт
с жидкостью и не возникнет стоп-импульс. Число импульсов, поступивших
в счетчик за этот интервал времени, пропорционально измеряемой разности
уровней Д/z. Диапазон измерений уровнемера зависит от длины микрометриче-
ских винтов и может быть расширен до нескольких метров путем использова-
ния инваровых удлинительных стержней.
Погрешность измерения разности уровней рассмотренным способом в лабо-
раторных условиях составляет 0,01 мм, а при натурных измерениях — 0,04 мм.
Коррекция температурной погрешности осуществляется введением поправок, по-
лученных методом вспомогательных измерений температуры, Рассмотренным
166
способом может быть определена разность уровней расположенных на значи-
тельных расстояниях друг от друга объектов, между которыми нет прямой
видимости.
Для измерения расстояния, пройденного транспортным средством по суше
или воде, а также для определения размеров листовых изделий при непрерыв-
ном технологическом процессе их производства широко используется метод об-
катывания. Он заключается в подсчете числа оборотов мерного колеса нли ро-
лика, сцепляющегося с полотном дороги или с обрабатываемым объектом. При
определении расстояния, пройденного морским транспортным средством, вместо
мерного колеса используется турбинка лага, сцепляющаяся с водой. Путь,
пройденный движущимся объектом, определяется интегрированием скорости за
время движения. При этом круговая шкала в виде мерного колеса преобразу-
ется в линейную методом обкатывания. Методу обкатывания присущи мульти-
пликативные погрешности, обусловленные износом или деформацией мерного
колеса, а также его проскальзыванием.
На рис. 8-5 показан пример использования метода обкатывания для изме-
рения диаметра детали 1 в процессе ее обработки на токарном станке. К обра-
батываемой детали прижимается
калиброванный ролик 2, частота
вращения которого Л относится
к частоте вращения шпинделя fz
как Dx/d, где Dx — измеряемый
диаметр; d — диаметр ролика, т. е.
Dx=dfjf2.
Используя точные преобразо-
ватели угол — код, можно с вы-
сокой точностью определить изме-
ряемый диаметр. Число импульсов
с выхода преобразователя угол —
код 3 подсчитывается прибором 4
за интервал времени, равный пе-
риоду оборота обрабатываемой детали, который определяется при помощи опто-
электронного или контактного устройства. В качестве измерительного устройства
можно также применять цифровой частотомер 4 в режиме измерения отноше-
ния частот. Погрешность измерения диаметра зависит от точности используемых
преобразователей угол — код и разрядности счетчиков. Кроме того, необходимо
учитывать возможные мультипликативные погрешности от деформации ролика
или его проскальзывания. Известно применение метода обкатывания для изме-
рения деталей диаметром до 10 м с погрешностью квантования 0,001 мм.
Для бесконтактного измерения размеров, в частности уровня,
используется метод следящего уравновешивания на основе при-
менения емкостного (рис. 8-6, а) или радиоактивного (рис. 8-6,6)
преобразователей.
Электромеханический уровнемер, схема которого показана на
рис. 8-6, а, применяется для измерения уровня электропроводящих
жидкостей. Дифференциальный емкостный преобразователь не-
равновесия 1 состоит из конденсатора с постоянной емкостью Со,
помещенного в герметичный корпус, и конденсатора Сх, емкость
которого зависит от расстояния между общей пластиной 2 и уров-
нем электропроводящей жидкости, которая используется в каче-
стве другого электрода конденсатора Сх. Преобразователь нерав-
новесия перемещается при помощи двигателя 3 таким образом,
что он непрерывно отслеживает уровень жидкости в резервуаре.
На аналогичном принципе следящего уравновешивания осно-
ван уровнемер с радиоактивным преобразователем неравновесия,
состоящим из источника 1 и приемника 2 радиоактивного излуче-
167
ния (рис. 8-6,6), которые синхронно перемещаются в соответст-
вии с изменением уровня. Результаты измерений с измеритель-
ного блока 3 обычно передаются на выходной прибор 4 при по-
мощи сельсинов-датчиков. Уровнемеры с радиоактивным преоб-
разователем неравновесия применяются для измерений уровней
до 20 м агрессивных и взрывоопасных сред. Основная погреш-
ность таких приборов ± (2—10) мм при скорости слежения за
уровнем 100—3000 м/мин («Удар-5», УР-8, УР-8М, комплекс
«Кура» и др.).
Уровнемер с емкостным преобразователем неравновесия часто
относят к емкостным уровнемерам, хотя он, как и уровнемер с ра-
Рис. 8-6
дноактивным преобразователем неравновесия, является электро-
механическим, основанным на методе осязающего щупа. По су-
ществу, в таких приборах измерительные преобразователи нерав-
новесия могут быть иными, но сам метод измерения основан на
преобразовании измеряемого размера в перемещение чувствитель-
ного элемента, что характерно для всех приборов, реализующих
метод осязающего щупа.
8-3. Электрофизические методы
Электрофизические методы измерений основаны на ис-
пользовании отличия физических свойств веществ, находящихся
на разных сторонах границ, определяющих измеряемый размер.
Для измерения линейных и угловых размеров используются ме-
тоды и приборы, основанные на различии тепловых, электриче-
ских, магнитных, механических (плотность, вязкость) и других
свойств веществ или их сочетаний.
Электромагнитные методы. Эти методы основаны на сочета-
нии электрических и магнитных свойств. Наиболее распростра-
ненными из них являются вихретоковый и резонансный методы.
168
Вихретоковый метод, широко применяемый для измерения тол-
щины тонких листовых изделий и покрытий, основан на зависи-
мости глубины проникновения электромагнитных колебаний в ма-
териал от его магнитной проницаемости р, удельной электропро-
водимости у и частоты колебаний f:
z0.05=V1AJlHvf)»
где Zo.os — глубина, на которой колебания затухают на 95%.
Вихретоковый толщиномер обычно состоит из индуктивного
вихретокового преобразователя и измерительной цепи для опре-
деления активного и реактивного сопротивлений датчика [5}.
Резонансный метод измерений линейных размеров основан на
зависимости частоты собственных колебаний объемного электро-
магнитного резонатора (эндовибратора) от размеров его полости
и от диэлектрической и магнитной проницаемости заполняющего
его диэлектрика. Этот метод главным образом используется для
измерения уровня (объема) диэлектрических веществ в металли-
ческих резервуарах.
Радиоактивный метод. Метод основан на различии в способно-
сти веществ поглощать, ослаблять или отражать радиоактивное
излучение, широко используется для измерения линейных разме-
ров, особенно толщины различных изделий, зазоров, а также
уровней. В отличие от большинства электрофизических методов,
радиоактивный метод позволяет осуществлять бесконтактные из-
мерения, что обусловило его широкое применение для измерения
размеров изделий при непрерывных технологических процессах
или при отсутствии прямого доступа к границам измеряемого раз-
мера. Приборы, основанные на этом методе, обычно содержат
источник и приемник радиоактивного излучения, последний из ко-
торых преобразует интенсивность прошедшего или отраженного
излучения в электрический сигнал.
Тепловой (термокондуктометрический) метод. Этот метод из-
мерения размеров основан на отличие тепловых свойств веществ,
образующих границы измеряемого размера. Метод главным об-
разом применяется для измерения уровня жидких веществ,
а также для обнаружения и определения дислокации различных
объектов по их тепловому излучению (см. § 12-8). Принцип дей-
ствия тепловых уровнемеров основан на различии коэффициентов
теплоотдачи от твердого тела к жидкости, газу или к пару. На
рис. 8-7 схематично показано устройство тепловых уровнемеров.
Обычно тепловой уровнемер (рис. 8-7, а) содержит проволоч-
ный терморезистор 1 из материала с большим температурным
коэффициентом электрического сопротивления (платина, медь,
нержавеющая сталь), длина которого соответствует максимальной
высоте измеряемого уровня. Терморезистор выполняется в виде
тонкой проволоки, натянутой по оси трубки 2 с отверстиями 3,
обеспечивающими хорошее омывание терморезистора и демпфи-
рование колебаний измеряемого уровня. Для уменьшения
169
погрешностей от изменения температуры и теплопроводности жид-
кости применяется терморезистор Rk, находящийся у дна резер-
вуара и постоянно погруженный в жидкость. Постоянная времени
такого уровнемера определяется теплоемкостью терморезистора,
скоростью отрыва жидкости от проволоки и интенсивностью ее
испарения, которая зависит от температуры проволоки над уров-
нем жидкости. Обычно в уровнемерах с терморезистивными пре-
образователями используются мостовые измерительные цепи. По-
грешности таких уровнемеров 0,5—1,5 %. Применяя измеритель-
ные цепи с обратной связью, можно уменьшить абсолютную
Рис. 8-7
погрешность измерения уровня до 5—10 мм, поддерживая постоян-
ным сопротивление терморезистора путем изменения проходящего
через него тока.
На рис. 8-7, б показано устройство теплового уровнемера с дис-
кретным выводом информации, состоящего из спирального нагре-
вателя, помещенного в винтовую канавку 1 на поверхности трубы 2
из материала с высокой теплопроводностью. По всей длине трубы
имеются радиальные каналы 3, в которые помещены термопары 4.
Горячие спаи термопар выходят на поверхность трубы между вит-
ками нагревателя, а холодные концы выводятся из контролируе-
мого объема через вертикальное отверстие трубы 5. Принцип дей-
ствия уровнемера основан на различии коэффициентов теплоот-
дачи от твердого тела к газу и жидкости. Поскольку теплоотдача
от трубы к жидкости больше, чем к газу, температура части
трубы, находящейся в газе, всегда больше, чем в жидкости, даже
если температуры газа и жидкости равны. Вследствие этого в ме-
сте перехода трубы из жидкости в газ имеет место скачок темпе-
ратуры, определяемый при помощи дискретной шкалы тер-
мопар, по которой фиксируется положение измеряемого уро-
вня.
I7Q
Рассматриваемый уровнемер можно использовать для измере-
ния уровня кипящих жидкостей, в которых пуз-ырьки газа или
пара неопределенной формы распределены по всему объему и
отсутствует четкая граница между жидкостью и газом. Этот ме-
тод также пригоден для измерения уровня при высоких темпера-
турах, давлениях или повышенной радиации, т. е. при таких усло-
виях, когда применение электромеханических или других методов
не обеспечивает необходимой точности измерения или вообще не-
возможно.
Электрокондуктометрический метод. Этот метод измерения
линейных размеров основан на использовании различия между
удельной электропроводимостью сред, находящихся на разных
сторонах границ, определяющих измеряемый размер. Метод ис-
пользуется для измерения уровней электропроводящих жидких
веществ, углов поворота различных объектов, а также для опре-
деления толщины электропроводящих объектов при односторон-
нем доступе к ним (стенка корпуса корабля, металлические по-
крытия на неэлектропроводящих основаниях и др ).
При измерении уровня в резервуар помещается резистор из
проволоки с высоким удельным сопротивлением, длина которого
соответствует измеряемому изменению уровня. Конструктивно
электрокондуктометрический уровнемер аналогичен тепловому,
показанному на рис. 8-7, а. По мере снижения уровня уменьшается
шунтирующее действие электропроводящей жидкости и соответ-
ственно возрастает сопротивление резистора. Этим же методом
измеряется угол поворота или угол отклонения от вертикального
направления с применением дифференциальных электролитиче-
ских резистивных преобразователей [5].
Измерение толщины электрокондуктометрическпм методом
осуществляется путем определения падения напряжения между
двумя точками на поверхности исследуемого объекта при прохож-
дении через него известного стабильного тока. Электрокондукто-
метрический метод вследствие невысокой точности имеет ограни-
ченное применение, главным образом для измерения толщины
элекропроводящих покрытий.
Емкостный метод. Метод основан на отличии диэлектрической
проницаемости сред, находящихся на разных сторонах границ, оп-
ределяющих измеряемый размер, широко используется для изме-
рения уровней жидких и сыпучих веществ, границы раздела жид-
кость — жидкость, а также для измерения толщины диэлектриче-
ских пленок и листовых материалов в процессе их непрерывного
производства. Основные типы емкостных датчиков и применяемые
измерительные цепи рассмотрены в работе [5].
Магнитный метод. Метод применяется главным образом для
измерения толщины ферромагнитных объектов, немагнитных по-
крытий на ферромагнитном основании при одностороннем дос-
тупе к измеряемому размеру. Метод также широко используется
в дефектоскопии для обнаружения и локализации дефектов (тре-
щины, раковины и др.). На рис. 8-8, а изображена структурная
171
схема магнитного толщиномера статического уравновешивания,
а на рис. 8-8,6 — схематическое устройство датчика толщиномера
с цилиндрическим магнитопроводом, который из-за отсутствия
краевого эффекта дает возможность измерять толщину на краях
изделия. Датчик содержит симметричный магнитопровод 1 с двумя
воздушными зазорами 2 и 4, в которых размещены преобразова-
тели Холла ПХ1 и ПХ2. Магнитное поле в воздушных зазорах
создается с помощью постоянного магнита NS или стабильным
постоянным током 10, протекающим по обмотке 3 (a'i). При от-
сутствии исследуемого объекта 6 вследствие симметрии магнито-
провода значения магнитной индукции В, и В2 в воздушных зазо-
рах 2 и 4 равны и ток /ур в уравновешивающей обмотке 5 (w2),
пропорциональный измеряемой толщине hx, равен нулю. При шун-
тировании рабочего зазора магнитопровода ферромагнитным объ-
ектом 6 магнитная индукция В\ увеличивается, а В2 уменьшается,
в результате чего в уравновешивающей обмотке возникает ток /ур,
создающий магнитодвижущую силу F—Iypw2, которая восстанав-
ливает равенство значений Б, и В2 с погрешностью неравновесия,
не превышающей 0,1% при использовании современных преобра-
зователей Холла [5] и малошумящих усилителей ОУ1, ОУ2, ОУЗ.
Применение метода уравновешивающего преобразования обеспе-
чивает уменьшение погрешности линейности и зависимость пока-
заний от магнитной проницаемости материала исследуемого объ-
екта.
8-4. Спектрометрические (волновые) методы
Наиболее точными методами измерений линейных и уг-
ловых размеров являются спектрометрические методы, основан-
ные на измерении параметров различных излучений в широком
диапазоне длин волн (звуковые, ультразвуковые, радиоволновые,
172
оптические, радиоизотопные) при их взаимодействии с исследуе-
мым объектом. Высокая точность измерений, характерная для
спектрометрических методов, обусловлена тем, что в этих методах
имеет место сравнение измеряемого размера с линейными и кру-
говыми естественными шкалами, к которым, например, относятся
линейные пространственные шкалы акустических и электромаг-
нитных волн, шкалы на основе межатомных расстояний в совер-
шенных монокристаллах, временные естественные шкалы на ос-
нове атомных генераторов и др.
Высокая точность спектрометрических методов обусловлена
также тем, что при их использовании воспроизводятся выходные
сигналы, информативными параметрами которых являются время,
частота, число длин волн, число интерференционных полос или
разность фаз, т. е. такие величины, которые могут быть опреде-
лены с высокой точностью.
Особенно широкое применение получили методы, использую-
щие радиоволновой и оптический диапазоны длин волн, что свя-
зано с успехами в развитии радиоэлектронных устройств и стаби-
лизированных по частоте лазерных источников оптического излу-
чения, которые обеспечивают интенсивное когерентное излучение,
характеризующееся высокой монохроматичностью и направленно-
стью. Так, ширина спектра излучения газовых лазеров составляет
АХ= ЮЛ.,Ю~9 нм, что на 7—12 порядков меньше ширины спек-
тра излучения лампы накаливания, у которой ДХ=103 нм. Рас-
ходимость газовых лазеров составляет несколько угловых ми-
нут, а при использовании специальных коллимирующих устройств
достигается расходимость в несколько угловых секунд.
Спектрометрические методы используются для точных измере-
ний линейных и угловых размеров практически во всех требуе-
мых диапазонах измерений. Так, линейные размеры с помощью
этих методов можно измерять, начиная с размеров атомных ре-
шеток (Ю-12 м) и кончая расстояниями, которые необходимо оп-
ределять при исследовании дальнего космоса.
Ниже рассмотрены некоторые наиболее распространенные
спектрометрические методы, к которым относятся локационный,
интерферометрический и голографический.
Локационный метод. Для измерения расстояний в различных
средах широко применяется локационный метод, основанный на
измерении времени прохождения измеряемого расстояния излу-
чением, скорость которого известна и остается неизменной в про-
цессе измерений. Практически для реализации локационного ме-
тода можно использовать все виды излучения, включая радиоак-
тивное, но особенно развиты методы и средства радио-, оптической
и акустической локации. При использовании звуковых и ультра-
звуковых волн локационный метод часто называют эхо-звуковым,
а при использовании радиоактивного излучения — времяпролет-
ным методом.
Обычно измеритель и приемник находятся на одной границе
измеряемого размера, а на другой границе устанавливается
173
специальный отражатель или в качестве последнего используется
граница объекта, до которого определяется расстояние.
Радио- и оптический локационные методы применяются в ос-
новном для измерений больших расстояний — от десятков и со-
тен метров до многих миллионов километров.
Акустическая локация используется в твердых, жидких и газо-
образных средах для измерения размеров и расстояний от единиц
миллиметров до нескольких километров, т. е. в том диапазоне,
в котором применение радио- и оптической локации затруднено
из-за необходимости измерять очень малые временные интервалы
Рис. 8-9
(10~9—10~п с), что связано с большой скоростью распространения
электромагнитных волн, или вследствие быстрого затухания
электромагнитных колебаний в жидких и твердых средах.
Скорость распространения звуковых и ультразвуковых колеба-
ний в воздухе около 333 м/с, в морской воде 1500 м/с, в металлах
3000—10 000 м/с, т. е. на 4—6 порядков меньше скорости распро-
странения электромагнитных колебаний. Это позволяет исполь-
зовать акустическую локацию для измерения небольших расстоя-
ний.
Существуют два основных способа реализации локационного
метода: импульсный и модуляционный (фазовый). В первом спо-
собе используется излучение в виде коротких импульсов, а во
втором — непрерывное модулированное излучение, фаза которого
содержит информацию об измеряемом расстоянии. На рис. 8-9
показаны упрощенные структурные схемы оптических локацион-
ных светодальномеров, основанных на использовании импульс-
ного (рис. 8-9, а) и модулированного (рис. 8-9,6) излучений.
В импульсных локаторах излучение в виде короткого импульса
от источника излучения — лазера 1 направляется к объекту 2,
174
расстояние до которого определяется. Отраженный от объекта
импульс воспринимается чувствительным приемником — оптоэлек-
тронным преобразователем 3. Интервал времени, в течение кото-
рого импульс проходит двойное измеряемое расстояние, определя-
ется при помощи измерителя интервалов времени 4. При извест-
ной скорости распространения излучения v измеряемое расстояние
1Х вычисляется вычислительным устройством 5 в соответствии
с формулой lx=tv/2 и непосредственно отсчитывается по отсчет-
ному устройству 6.
Скорость распространения электромагнитного излучения, в том
числе и оптического, в воздушной среде определяется по формуле
и=с]п, где с=299792458 м/с (точно)—скорость света в вакууме;
п — групповой показатель преломления среды, который зависит
от ее температуры, давления и влажности.
В современных высокочастотных светодальномерах одновре-
менно с измерением расстояния производятся вспомогательные из-
мерения метеорологических параметров среды (температура Т,
давление р, влажность W7) в нескольких точках вдоль измеряемой
трассы, результаты которых вводятся в микропроцессор 5 для
уточнения значения скорости света в данной среде в момент
измерения расстояния. Этот способ весьма трудоемкий и приме-
няется только при очень точных метрологических измерениях рас-
стояния до нескольких километров, например в установках для
воспроизведения единицы длины в области 50—1000 м.
Другой способ уточнения скорости света в данной среде —
это использование двухволнового дисперсионного метода, при ко-
тором показатель преломления п определяется путем измерения
расстояния при двух различных длинах волн с применением
двухчастотного лазера. Этот способ используется в светодально-
мерах—рефрактометрах, обеспечивающих точное измерение
больших расстояний (до 60 км и более).
В фазовых (модуляционных) локационных дальномерах
(рис. 8-9, б), отличающихся от импульсных более высокой точно-
стью, используется непрерывное излучение лазера 1, модулиро-
ванное по интенсивности синусоидальным сигналом с частотой
/м от генератора 5. При этом в качестве информативного пара-
метра для определения времени прохождения излучением двой-
ного измеряемого расстояния 1Х используется угол фазового
сдвига между напряжением на выходе приемника излучения 3 и
модулирующим напряжением, измеряемый фазометром 4. Изме-
рение угла фазового сдвига осуществляется на частоте модуля-
ции:
<рг = 2nW + Аф = ют/2—amt! = 2л/м (t2 -^) = 2л/мт,
где <0тЛ и От/г — фаза колебаний соответственно в моменты вре-
мени /1 и ti\ N — полное число фазовых циклов; Дф —угол фазо-
вого сдвига в пределах неполного фазового цикла.
175
Измеряемое расстояние определяется по формуле
/, = ±_T = _£._£L_==_£_fjv+_Av_>| = _L_(jv+_A£_Y
2 2 2л/м 2/и к 2л 7 2nfu к 2л )
Таким образом, при использовании фазовых локационных даль-
номеров для измерений расстояний, которые больше половины
длины волны модулирующего сигнала, необходимо определять
полное число фазовых циклов и угол фазового сдвига в пределах
неполного (последнего) фазового цикла. Обычно частота модуля-
ции лежит в диапазоне 10—100 МГц.
Модуляция светового излучения осуществляется при помощи
безынерционных модуляторов на основе электрооптических эф-
фектов Керра и Поккельса (см. § 3-6), на основе дифракции
света при прохождении им ультразвукового поля, фазово-импульс-
ной модуляции излучения и др.
При помощи оптической локации и лазеров расстояние от
Земли до отражателей, установленных на Луне, было определено
с абсолютной погрешностью 2—6 см или с относительной погреш-
ностью (0,5.. .1,7) • 10-10.
Методы акустической локации применяются для определения пространствен-
ного положения объектов (например, исполнительных устройств роботов), опре-
деления уровней в резервуарах, для гидролокации глубин морей и океанов, при
поиске рыб, для измерения толщины объектов при одностороннем доступе
к ним, для локализации трещин и других дефектов в различных изделиях,
а также в медицинской диагностике. При акустической локации используется
преимущественно излучение ультразвукового диапазона частот. В воздушной
среде используются колебания с частотой 20—200 кГц. Колебания в мегагерце-
вом диапазоне частот (0,5—10 МГц) быстро затухают в воздушной среде, по-
этому они используются в других средах. Акустическим колебаниям частотой
20 кГц соответствует длина волны в воздухе 1,7 см. Малая длина волны уль-
тразвуковых колебаний позволяет обеспечить хорошую направленность излуче-
ния и локализацию энергии колебаний при небольших размерах излучателей.
Кроме того, акустические методы экономичны и легко реализуются.
Недостатком акустической локации является сильная зависимость скорости
распространения акустических волн от вида и свойств среды распространения,
ее температуры, давления и других параметров. Так, температурный коэффи-
циент скорости распространения звука в воздухе сч=1,83- 10~3 К-1, что на три
порядка больше соответствующего коэффициента для скорости света в воздухе.
Содержание газов, особенно СО2, также сильно влияет на скорость звука. При
увеличении концентрации СО2 в воздухе на 0,03% скорость звука уменьшается
на 0,2 м/с. В жидких и твердых средах скорость распространения акустических
колебаний изменяется в очень широких пределах (1000—10 000 м/с) в зависи-
мости от вида и свойств среды. Поэтому при использовании акустической лока-
ции необходимо применять методы коррекции скоростной погрешности.
Метод импульсной акустической локации широко применяется для измере-
ния размеров при одностороннем доступе к исследуемому объекту, а также
в дефектоскопии. Измеряемый размер 1Х определяется по времени т прохожде-
ния ультразвукового импульса от одной границы измеряемого размера до дру-
гой и обратно, т. е. /х=от/2. Для исключения зависимости результата измерений
от скорости распространения ультразвуковых колебаний используется способ
одновременного возбуждения в исследуемом объекте различных типов воли
(продольные, сдвиговые, поверхностные), отношение времен прохождения кото-
рых не зависит от свойств объекта. Особенно целесообразно одновременно ис-
пользовать продольные н поверхностные волны, обладающие одинаковой ско-
ростью распространения,
176
На рис. 8-10 показана структурная схема двухволнового толщиномера для
измерения толщин объектов при одностороннем доступе к ним. Генератор 2,
частота которого обычно лежит в пределах 2—5 МГц, питает пьезопреобразо-
ватель /, который является излучателем импульсов продольных и поверхност-
ных волн и одновременно служит приемником ультразвуковых импульсов, отра-
женных от нижней границы измеряемого размера /х. Для приема импульсов
поверхностных волн используется пьезопреобразователь 5, расположенный на
фиксированном расстоянии /о от правого края пьезопреобразователя 1. В каче-
стве измерительного устройства применяется цифровой измеритель отношения
временных интервалов 6, на первый вход которого подается импульс от генера-
тора 2, соответствующий моменту посылки ультразвукового излучения в иссле-
дуемый объект, на второй вход через усилитель 3 поступает эхо-импульс, от-
раженный от нижней границы измеряемого размера, а на третий вход через
усилитель 4 — импульс, соответствующий приходу поверхностной волны к при-
Рис. 8-11
Рис. 8-10
еминку 5. При условии равенства скоростей распространения продольной (щ)
и поверхностной (ог) волн показание прибора 6, работающего в режиме изме-
рения отношения интервалов времени, пропорционально измеряемому раз-
меру Д:
N = = 2lxfl0 = klx.
Такие толщиномеры обеспечивают измерения толщин в диапазоне 1 мм —
1 м с погрешностью 2—4% от измеряемой толщины.
Акустический локационный метод применяется также для измерения пере-
мещений объектов по трем взаимно перпендикулярным направлениям, например
для определения трех составляющих вибросмещення. Метод основан на измере-
нии расстояния, проходимого ультразвуковыми волнами от пьезоэлектрического
излучателя ультразвука со сферической диаграммой направленности, установ-
ленного на перемещающемся объекте, до неподвижных приемников, размещен-
ных на трех ортогональных осях координат.
Основная приведенная погрешность измерения такой системы составляет
2 %• Для коррекции погрешности от непостоянства скорости звука на каждой
оси устанавливаются друг против друга два приемника излучений.
Локационный метод с использованием радиоактивного излучения (время-
пролетный метод) основан на измерении времени пролета гамма-кваитов от ис-
точника излучения до границы измеряемого размера и обратно. В отличие от
оптического или ультразвукового излучения скорость распространения гамма-
квантов не зависит от параметров окружающей среды. На рис. 8-11 показана
схема локационного уровнемера с использованием радиоактивного излучения.
177
В качестве точечного источника применяется каскадно-излучающий источник;
например 137Cs с p-y-распадом или 60Со с р-у-у-распадом. Источник 1 помеща-
ется в блок 2 с коллимирующими коническими отверстиями, через которые
гамма-кванты вылетают одновременно по двум направлениям: прямо к детек-
тору 3 и к границе измеряемого расстояния hx, откуда отраженное излучение
попадает во второй детектор 4. Импульсы с детекторов через формирователи 5
поступают на измерительное устройство 6, определяющее временной интервал
между моментом вылета гамма-кванта из источника, который фиксируется пер-
вым детектором 3, и моментом прилета обратиоотраженного гамма-кванта ко
второму детектору 4. Рассматриваемый метод применим для точного измере-
ния относительно больших расстояний м), поскольку погрешность изме-
рения малых интервалов времени для у-у-совпадений составляет ± (1.. .3) • 10-3 с,
что соответствует абсолютной погрешности измерения расстояния ±(15. ..45) мм.
Локационный метод на основе радиоактивного излучения можно, применять
для бесконтактных измерений расстояний в герметичных объектах при высоких
температурах и давлениях, а также в запыленных и агрессивных средах, на-
пример для измерения уровня шихты в доменных печах.
Интерферометрический метод. Этот метод измерения линейных
и угловых размеров и перемещений основан на сравнении из-
меряемой величины с пространственной естественной шкалой
электромагнитных или акустических волн с использованием ин-
терференциальных эффектов, обусловленных волновой природой
излучения. Существуют различные модификации интерферометри-
ческого метода и многочисленные типы интерферометров. Наибо-
лее широко развиты методы оптической интерферометрии, точ-
ность и области применения которых существенно увеличины
в результате применения лазерных источников излучения. Лазер-
ное излучение характеризуется высокой пространственной и вре-
менной когерентностью, вследствие чего оно является идеальным
источником света для получения ярких и четких интерференцион-
ных картин, что позволяет осуществлять автоматический счет
интерференционных полос. Метод лазерной интерферометрии ос-
нован на сравнении измеряемого размера с длиной волны излуче-
ния от стабилизированного по частоте лазера [4]. Лазерные
интерферометры сейчас успешно используются не только в лабо-
раторной практике для проведения метрологических работ, но и
для точных измерений в производственных условиях, особенно
в машиностроении, где они применяются в координатно-измери-
тельных машинах, а также для измерения различных размеров
в гибких автоматизированных производствах. Интерферометриче-
ский метод с использованием лазерного излучения применяется
для измерения размеров от долей микрометра до десятков метров.
Процедура измерений заключается в определении числа длин
волн (или долей длин волн), укладывающихся на измеряемом
размере.
В последнее время интенсивно развивается метод голографи-
ческой интерферометрии, успешно применяемый для измерений
деформаций и параметров вибраций. Для измерения очень ма-
лых линейных (10—10—10~4 м) и угловых (10-3—100") размеров
применяется метод рентгеновской интерферометрии, основанный
на использовании естественной периодичности атомных плоско-
стей в совершенных монокристаллах.
178
В большинстве лазерных интерферометров используется клас-
сическая схема двухлучевого интерферометра Майкельсона
(рис. 8-12). Излучение от лазера 1 разделяется светоделителем 2
на два луча, один из которых через фильтр 4 направляется на не-
подвижный отражатель 3, а другой — на такой же отражатель 5,
связанный с объектом, перемещение которого измеряется. Свето-
вые лучи, отразившись от отражателей, снова попадают в свето-
делитель, где объединяются и интерферируют. Лучи, пришед-
шие с обоих отражателей с разностью хода в целое число длин
волн (т. е. в одной фазе), дают максимум освещенности, а лучи
с разностью хода в нечетное число полуволн (т. е. в противо-
фазе) — минимум, в результате чего образуются так называемые
интерференционные полосы. При перемещении объекта с отража-
телем 5 меняется разность хода интерферирующих лучей, что
приводит к перемещению полос. Смещение подвижного отража-
теля на половину длины волны излучения лазера, т. е. на 0,5Х,
соответствует одному периоду изменения светового потока. Число
прошедших полос фиксируется фотоприемниками 7 и 9 и счетчи-
ком 8.
Измеряемая длина определяется выражением
lx = (N + Дф) М(2пв) = (N + Дф) V2,
где (Л^-|-Д<р)—порядок интерференции, т. е. целая (N) и дробная
(Дф) части числа полос, прошедших перед окном фотоприемника;
Хо — длина волны излучения лазера в вакууме; пв — показатель
преломления воздуха; 7— длина волны излучения лазера в воз-
духе.
Таким образом, процедура измерения требует обязательного
прохождения подвижным отражателем измеряемого размера.
Для определения направления движения и исключения погреш-
ности от вибрации применяются два фотоприемника 7 и 9, сиг-
налы которых сдвинуты по фазе на л/2. Это дает возможность
с помощью реверсивного счетчика суммировать импульсы, выз-
ванные движением интерференционных полос в одном заданном
179
направлении, и вычитать импульсы при случайных смещениях
(например, при вибрациях) в другом направлении. Для получения
фазового сдвига на л/2 перед фотоприемниками установлены по-
ляризационные фильтры 6 и 10, с помощью которых системы по-
лос, перемещающихся перед окнами фотоприемников, смещаются
относительно друг друга на 'Д ширины полосы.
Для определения числа полос N, прошедших перед окном
фотоприемника, обычно регистрируют число периодов изменения
фазы сигналов на 2л в ряде фиксированных точек, относительно
которых также определяют значение дробной части порядка ин-
терференции. Простейшими интерполяторами дробных частей,
применяемыми в промышленных интерферометрах, являются уст-
ройства, регистрирующие приращение фазы сигнала на л или ж/2.
В последнем случае измеряемая длина определяется с дискрет-
ностью Z/8 по формуле lx=N'K/8, где N'— целое число.
Для повышения точности измерения дробной части, увеличе-
ния помехоустойчивости и расширения области применения ла-
зерных интерферометров применяется перенос спектра сигнала
в сторону высоких частот и измерения проводятся с использова-
нием бегущей интерференционной картины. Кроме того, это по-
зволяет работать в условиях, когда от подвижного отражателя
в интерферометр возвращается всего несколько процентов излу-
чения лазера.
Для переноса спектра сигнала применяются акусто- и электро-
оптические модуляторы, вращающиеся поляризационные пла-
стинки и двухчастотные лазеры.
На рис. 8-13 показана схема интерферометра с двухчастотным
гелий-неоновым лазером 1, который генерирует оптическое излу-
чение с частотами ач и со2 с противоположной круговой поляри-
зацией. С помощью светоделителя 2 и оптических фильтров 4 луч
с частотой со; поступает на неподвижный отражатель <3 (в рефе-
рентное плечо), а с частотой со2— на подвижный отражатель 5
(в измерительное плечо). В зависимости от направления движе-
180
кия отражателя 5 частота отраженного от него луча становится
равной <1)2±<о(/), где <о(/)—доплеровский сдвиг частоты (см.
§ 11-3). После рекомбинации этого луча с референтным лучом от
отражателя 3 на фотоприемник 7 поступает излучение с частотой
<1)2 —<1) (/)-(Ор
Для выделения сигнала с частотой <о (/), несущего информа-
цию об измеряемой величине, используется опорный сигнал с час-
тотой «г—соц представляющий собой преобразованную часть из-
лучения лазера, которая с помощью пластины 12 направляется
Рис. 8-14
в фотоприемник И. Результат вычитания измерительного и опор-
ного сигналов, поступающих с фотоприемников 7, 9 и 11 на вы-
числительное устройство 8, пропорционален измеряемой величине:
2 о
Современные лазерные интерферометры представляют собой
многоцелевую измерительную систему, позволяющую в условиях
промышленного производства с высокой точностью измерять
длину, плоскостность, линейные и угловые перемещения, скорость
перемещения объектов и др. Обычно такая система состоит из
лазера, набора стандартных оптико-электронных модулей и фото-
электронного блока обработки информации.
На рис. 8-14 показана схема лазерного интерферометра LA3002
(ЧССР), который имеет четыре сменных блока для измерения
181
показателя преломления прозрачных сред (а), для бесконтактных
измерений линейных (б) и угловых (в) перемещений и для ли-
нейных измерений (г).
Для уточнения показателя преломления воздуха пв и учета
температурных изменений размеров интерферометра и объекта
используется блок автоматической коррекции, куда поступают ре-
зультаты измерений температуры Тв и давления воздуха рв,
а также температуры отдельных узлов (7\, Tk).
Для измерения угловых перемещений объектов применяется
дифференциальный интерферометр (рис. 8-14, в) состоящий из
светоделителя и двойного уголкового отражателя, связанного
с объектом.
Угол поворота определяется по формуле
<р = NM(2b),
где b — расстояние между центрами зеркал уголкового отража-
теля. Метод обеспечивает измерения малых угловых перемещений
с погрешностью 0,2—2".
Контроль плоскостности поверхностей основан на анализе ин-
терференционной картины, получаемой в результате интерферен-
ции опорного луча, отраженного от образцового плоского зеркала,
и луча, отраженного от исследуемой поверхности объекта. При на-
личии неплоскостности поверхности наблюдается искривление ин-
терференционных полос, параметры которых используются для
определения значения отклонения от неплоскостности:
Д/г = ХДт/(2т cos а),
где X — длина волны излучения лазера; а—-угол падения луча
на контролируемую поверхность; Дт— параметр, характеризую-
щий искривление интерференционной полосы; m — ширина полосы.
Такой бесконтактный способ обеспечивает измерение парамет-
ров неплоскостности поверхности с погрешностью в десятые доли
длин волн при среднем отклонении профиля не более чем
0,32 мкм.
Измерение скорости перемещения объекта лазерным интер-
ферометром осуществляется путем определения расстояния, про-
ходимого объектом (подвижным отражателем) за известный ин-
тервал времени. Значение начального расстояния запоминается и
вычитается из нового значения расстояния через заданный интер-
вал времени. Результаты измерений выдаются дискретно с часто-
той десять измерений в секунду.
Метод рентгеновской интерферометрии основан на применении
естественной периодичности атомных плоскостей в совершенных
монокристаллах кремния или германия, которые используются
в качестве дифракционной решетки с делениями в виде плоско-
стей, на которых дифрагирует рентгеновское излучение. Расстоя-
ние между атомными плоскостями ц0, являющееся характерным
параметром кристаллической решетки, в этом методе используется
182
как мера малой длины. Определение межплоскостного расстоя-
ния а0 в абсолютных единицах длины (метрах) производится при
помощи оптического интерферометра для измерения малых длин,
например интерферометра Фабри—Перо, который для этого со-
вмещается с рентгеновским интерферометром.
На рис. 8-15 показана упрощенная схема оптико-рентгенов-
ского интерферометра, представляющего собой сочетание трех-
кристального рентгеновского и оптического интерферометров.
Рентгеновский интерферометр состоит из источника рентгенов-
ского излучения /, трех параллельных пластин 2, 3 и 6, изготов-
ленных из одного совершенного монокристалла кремня, и детек-
Рис. 8-15
тора рентгеновского излучения 7. Пластина 6 (анализатор) может
перемещаться относительно пластин 2 и 3 при помощи устройства
линейного перемещения 8. Оптический интерферометр состоит из
источника оптического излучения (лазера) 5, эталона Фабри—
Перо 4 и приемника оптического излучения 9.
Рентгеновское излучение от источника 1 в результате диф-
ракции на атомных плоскостях пластин 2 и 3 образует два
когерентных луча, которые падают на пластину 6 и создают
новые дифрагированные лучи. В результате интерференции эти
лучи образуют интерференционную картину с дифракционными
максимумами, являющуюся отображением атомных плоскостей
в кристалле. Интерференционная картина фокусируется на
детектор рентгеновского излучения 7 или на фотопластинку.
Для правильной фокусировки и обеспечения заданной разности
хода двух когерентных рентгеновских лучей необходимо с вы-
сокой точностью изготовить и установить пластины интерферо-
метра. Если пластина 6 анализатора повернута на небольшой
угол ф по отношению к неподвижным пластинам 2 и 3, то на
153
интерференционной картине появятся муаровые полосы с шагом
(периодом) =«о/<р. При перемещении анализатора относи-
тельно неподвижных пластин 2 и 3 в направлении, перпендику-
лярном атомным плоскостям, на шаг решетки а0 муаровые по-
лосы переместятся в поперечном направлении на шаг D. Вслед-
ствие того что перемещение муаровых полос в увеличенном
масштабе воспроизводит перемещение пластины 6 анализатора,
для определения малых перемещений анализатора может быть
использован простой детектор рентгеновского излучения. Опре-
деляя число муаровых полос п, прошедших через детектор при
перемещении анализатора на расстояние 1=па0, и измеряя это
расстояние (перемещение пластины 6) при помощи оптического
интерферометра, можно определить межатомное расстояние
в единицах длины (метрах) с относительной погрешностью
1 • 10“7—1 • 10-8 и в дальнейшем использовать это расстояние
как меру малой длины.
Таким образом, определив один раз число атомных плоско-
стей, приходящихся на единицу длины кристалла рентгенов-
ского интерферометра, можно использовать такой интерферо-
метр в качестве вторичного эталона для измерения малых длин
в диапазоне 10-10—10-4 м с абсолютной погрешностью ±2Х
X 10“12 м. Кроме того, такой интерферометр можно также
применять для точного измерения малых углов в диапазоне
0,001—0,1". Сочетание оптической и рентгеновской интерферо-
метрии успешно используется для повышения точности опреде-
ления постоянной Зигбана (переводной множитель от рентгенов-
ских КХ-единиц к ангстремам (10-10 м), для определения
длины волны рентгеновского излучения, что позволяет создать
единую шкалу длины волн в оптическом, рентгеновском и
гамма-диапазонах излучения.
Рентгеновская интерферометрия позволяет с высокой точно-
стью определять искажение структуры кристаллов, поскольку
картина муара в большом масштабе отображает нарушение
идеальности структуры. Так, при относительных изменениях
межплоскостного расстояния Да/а=1-10-8 и повороте атомных
плоскостей на угол 0,001" период полос муара составляет 2 см.
Применение рентгеновской интерферометрии для измерения
межплоскостного расстояния в совершенных монокристаллах
с погрешностью 1 • 10~8 позволяет повысить точность определе-
ния постоянной Авогадро, что имеет значение для уточнения
ряда физических констант и для создания естественного эталона
массы, основанного на атомной единице массы.
Голографический метод. Этот метод применяется для реше-
ния ряда задач в науке, технике, биологии и изобразительном
искусстве, его можно использовать для измерения геометриче-
ских размеров, деформаций, параметров шероховатостей, вибро-
перемещений и т. д. Голография —это метод получения объем-
ного изображения объектов путем одновременной регистрации
амплитуды и фазы рассеянной исследуемым объектом волны
184
электромагнитного излучения. Наиболее развита оптическая голо-
графия с использованием когерентного лазерного излучения. В ос-
нове голографии лежат явления дифракции и интерференции волн.
Достоинствами голографического метода являются высокая чув-
ствительность и возможность его применения для измерения пара-
метров различных объектов в статике и динамике.
Если от лазера 1 (рис. 8-16) через светоделитель 2 на регист-
рирующую среду (фотопластинку) 3 направить опорную волну
Ai и рассеянную волну от исследуемого объекта 4 — так называе-
мую предметную волну Л2, то в результате сложения этих двух
когерентных волн получится интерференционная картина, в кото-
рой распределение интенсивности света описывается выражением
7s — G4i +-^г)2 — + +
+ а1а2[е/№2-'р1) + е/№‘-ср2)],
где Ai, А% — соответственно комп-
лексные амплитуды колебаний
опорной и предметной волн;
щ, а2 и фь Ф2 — соответственно
амплитуды и фазы опорной и
предметной волн.
Следы пересечения интерфе-
ренционной картины с плоско-
стью фотоэмульсии после прояв-
ления образуют голограмму, ко-
торая представляет собой слож-
ную дифракционную решетку. Е
опорной волной Ai, то получится
Рис. 8-16
:ли голограмму снова осветить
новая волна с комплексной ам-
плитудой колебаний
Az = (п? + al + а>а2 [е'‘+ е> .
Члены, содержащие амплитуду и фазу предметной волны, опи-
сывают волну, которая образует трехмерное изображение объекта.
Для получения трехмерного изображения объекта необходимо,
чтобы толщина фотоэмульсии была больше длины волны излуче-
ния (t/слоя — Ю... 15 мкм).
Голографический метод дает возможность определить геоме-
трические параметры трехмерных объектов по восстановленному
изображению на голограмме, являющейся пространственной опти-
ческой моделью исследуемого объекта. В частности, используя
метод голографической интерферометрии, можно осуществить
бесконтактное измерение параметров рельефа различных объектов.
Сущность таких измерений заключается в получении путем интер-
ференции на голограмме контурных линий равного уровня, об-
разующих естественную шкалу размеров (уровней), цена деления
которой определяется длиной волны источника излучения. Суще-
ствует несколько способов таких измерений. Наиболее точным
u 185
является двухчастотный метод, при котором на оЛну фотопла-
стинку снимаются две голограммы одного и того же объекта при
двух различных длинах волн Xi и Х2 с использованием двухчастот-
ного или перестраиваемого по частоте лазера. В результате интер
ференции двух световых волн в процессе восстановления голо-
граммы получается топографическая картина исследуемого объ-
екта с линиями равного уровня, что позволяет бесконтактным
способом определять размеры трехмерных объектов сложной кон-
фигурации.
Расстояние между соседними секущими плоскостями равного
уровня зависит только от длин волн источника излучения:
Дй=-----______
2 (Z.! —Хг)
Соответствующим выбором типа лазера и длин волн можно
менять цену деления шкалы уровней от микронов до миллиметров.
Шаг квантования по уровню можно уменьшить, если ввести гра-
дацию яркостей между линиями, соединяющими середины интер-
ференционных полос. Применение импульсных лазеров дает воз-
можность получить голограммы движущихся и быстродеформируе-
мых объектов, например биологических. Скорость объекта не
должна быть более чем Щпах = 0,1Х/т, где т — длительность им-
пульса.
Существующие в настоящее время импульсные лазеры и элек-
трооптические затворы позволяют получать голограммы объектов,
движущихся со скоростью до 7—10 м/с. Методом голографической
интерферометрии можно измерять очень малые перемещения объ-
ектов, например очень малые деформации различных микрообъ-
ектов. В результате интерференции между волновыми фронтами,
создаваемыми двумя почти идентичными изображениями объекта
(до и после деформации), восстановленное изображение имеет
зеброподобный вид. Этим способом можно проследить рост расте-
ний за минуту.
Метод голографической интерферометрии с временным усред-
нением используется для определения виброперемещений поверх-
ностей. При этом вся поверхность голограммы оказывается по-
крытой темными и светлыми линиями —линиями равной ампли-
туды колебаний. По этим линиям можно определить амплитуды
смещений каждой точки поверхности в процессе ее колебаний.
8-5. Метрологическое обеспечение
линейных и угловых измерений
В СССР метрологическое обеспечение этой области из-
мерений базируется на трех государственных первичных этало-
нах— эталонах единиц длины, плоского и сферического углов и
ряде государственных специальных и вторичных эталонов, а также
на соответствующих образцовых средствах измерений и общесоюз-
186
ных поверочных схемах в области измерений линейных и угловых
размеров.
Передача размера единицы длины от первичного эталона
метра рабочим средством измерений осуществляется с помощью
32 вторичных эталонов и 450 тыс. образцовых средств измерений
1—5 разрядов.
Хотя длина является одной из наиболее точно измеряемых
величин (третьей после времени и частоты), требования к точно-
сти измерения линейных и угловых размеров непрерывно воз-
растают.
В октябре 1983 г. XVIII Генеральная конференция мер и весов
приняла решение о новом определении единицы длины — метра:
метр — это длина пути, проходимого в вакууме светом за
1/299792458 долю секунды. Старое определение метра (1960 г.),
основанное на переходе между уровнями 2рю и 5ds атома крип-
тона-86, отменяется. Государственный первичный эталон для вос-
произведения единицы длины — метра по определению 1960 г.
(ГОСТ 8.020-75) состоит из криптоновой лампы, спектроинтер-
ферометра и интерференционного компаратора для передачи раз-
мера единицы штриховым и концевым мерам. Этот эталон воспро-
изводит единицу длины — метр со средним квадратическим откло-
нением (СКО) результата измерений So = 5-10’9. Более высокая
точность измерения может быть обеспечена на основе применения
излучения лазера, которое воспроизводится с большей стабильно-
стью и удобнее для использования, чем излучение криптоновой
лампы. Наилучшими метрологическими характеристиками об-
ладают гелий-неоновые лазеры, стабилизированные по насыще-
нию в метане (7,=3,39 мкм), для которых получена внутренняя
нестабильность 1 • 10~13.
В связи с новым определением метра, в системе СИ появилась
наряду с магнитной постоянной цо=4л-1О-7 Гн/м вторая кон-
станта— скорость света в вакууме, установленная путем соглаше-
ния: с=299792458 м/с (точно). Поскольку единица длины опре-
деляется как l—tc, то погрешность воспроизведения метра зависит
только от погрешности воспроизведения интервала времени, рав-
ного 1/299792458 доли секунды. Практически единица длины будет
определяться спектрометрическими (интерференционными) мето-
дами путем подсчета числа длин волн N, излучаемых стабилизи-
рованным лазером, с частотой / (периодом Т), укладывающихся
на определенной длине: l=Nh=NcT=Nc/f.
В настоящее время создается единый эталон единиц времени —
частоты — длины, который будет включать в себя государствен-
ный первичный эталон единиц времени и частоты с радиооптиче-
ским мостом (цепь синтеза лазерных частот) с метановым лазе-
ром и государственный первичный эталон единицы длины
с устройством для определения длин волн лазеров в инфракрас-
ной и видимой областях спектра. Ожидается, что погрешность
воспроизведения метра новым эталоном будет лежать в пределах
10-и_ Ю-13.
187
Спектрометрические методы также используются для обеспе-
чения единства почти всех видов линейных и угловых измере-
ний.
Так, государственный специальный эталон единицы длины
в области измерений параметров шероховатости Rmax и Rz (ГОСТ
8.296—78) состоит из эталонной меры шероховатости, газового
лазера и эталонной микроинтерференционной установки, воспроиз-
водящей в длинах световых волн ординаты дискретных точек вы-
ступов и впадин профиля поверхности. Rmax — расстояние между
линией выступов и линией впадин, a Rz — среднее значение пяти
неровностей в пределах базовой длины. Погрешности результа-
тов измерений параметров Rmax и Rz составляют So=0,005 мкм и
0о=0,005 мкм в диапазоне 0,1—1 мкм и соответственно 50=
= 0,05 мкм и 0о = О,О5 мкм в диапазоне 1—1000 мкм, где 0о — не-
исключенная систематическая погрешность (НСП). В качестве
образцовых средств измерений I разряда применяются профило-
графы, микроинтерферометры и микровысотомеры, которые ат-
тестуются по рабочему эталону методом прямых измерений.
Другим примером является государственный специальный
эталон единицы длины в области измерений отклонения от прямо-
линейности и плоскостности (ГОСТ 8.420—81), который в диапа-
зоне 0—50 мкм воспроизводит отклонения от прямолинейности и
плоскостности с 5о = 0,1Д мкм и 0o=O,lL мкм, где L=0...5 ;м.
Для хранения и воспроизведения единицы длины в области
измерений больших длин (0,05—1 км) используются интерферо-
метрические установки с двухчастотными гелий-неоновыми лазе-
рами. Измеряемая длина определяется по формуле
Ь = Хд(ДГ4-Д)/2,
где 7V— число целых периодов интерференционной картины, укла-
дывающихся между приемопередающей и отражающей частями
интерферометра; Д — дробная часть периода; Хд=с/(Д/п)—дей-
ствующее значение длины волны периодической интерференцион-
ной картины; Д/ — разность частот колебаний лазера (Д/ =
=480,3125 МГц); п — показатель преломления атмосферы, опре-
деляемый по результатам измерений температуры, давления и
влажности вдоль трассы луча интерферометра. Воспроизведение
единицы длины в диапазоне 0,05—1 км осуществляется с погреш-
ностями So= ±0,15 мм и 0о= ±0,15 мм.
' Государственный первичный эталон единицы плоского угла
состоит из набора многогранных призм и автоматизированной из-
мерительной системы «Радиан», которая выполняет ряд процедур
наведения на изображение марок двух автоколлиматоров и из-
мерения разности смещений этих марок, пропорциональной углу
между гранями многогранной призмы. Эталон воспроизводит
углы в диапазоне 0—360° с погрешностями 50=0,01" и 0о=0,02".
При значении измеряемого угла 10" абсолютная погрешность
Д^ ±0,008".
188
Глава девятая
МЕТОДЫ ИЗМЕРЕНИЙ МЕХАНИЧЕСКИХ НАПРЯЖЕНИЙ,
СИЛ, МОМЕНТОВ И ДАВЛЕНИЙ
9-1. Измеряемые величины.
Классификация методов измерений
Механические усилия, действующие на различные объ-
екты, разделяются на сосредоточенные и распределенные. Раз-
личают сосредоточенные линейно направленные усилия — силы и
вращательные усилия — крутящие моменты. Распределенные уси-
лия подразделяются на внешние — давления и внутренние — меха-
нические напряжения, возникающие в теле исследуемого объекта.
Измерение механических усилий необходимо во всех отраслях на-
родного хозяйства, являясь неотъемлемой частью многих научных
исследований, технологических процессов, медицинской диагно-
стики и др.
Диапазоны измеряемых усилий весьма широки: внутренние
напряжения в материалах 0—2000 МПа, силы 0—109 Н, моменты
0—108 Н-м, давления 0—1010 Па. Измерения усилий требуется
производить в различных средах, в условиях действия разнообраз-
ных влияющих величин, в широком диапазоне температур — от
—270 до 1200° С, в широком частотном спектре, который для
механических напряжений и сил простирается от 0 до 100 кГц,
а для давлений ультразвуковых волн в гидро- и аэроакустике —
до 107 Гц.
Методы измерений различных видов механических усилий
имеют много общего. По виду непосредственно измеряемой вели-
чины их можно разделить на четыре группы, основанные на из-
мерении:
деформаций исследуемого объекта или упругого элемента, воз-
никающих под действием определяемого усилия;
параметров или свойств преобразователей, изменяющихся под
действием определяемых усилий (электрическое или магнитное
сопротивление, частота собственных колебаний и др.);
непосредственно свойств исследуемых объектов или сред, за-
висящих от действующих на них усилий (например, скорость рас-
пространения звука, теплопроводность газа, показатель преломле-
ния света в жидкости, температура, магнитная и электрическая
проводимость, двойное лучепреломление и т. д.);
усилия, уравновешивающего измеряемое.
Первая группа методов наиболее широко используется для
определения механических напряжений путем измерения дефор-
мации поверхности исследуемого объекта, а также в приборах для
измерения сил, крутящих моментов и давлений.
Вторая группа применяется для построения средств измерений,
основанных на использовании пьезоэлектрических, магнитоупру-
189
гих и манганиновых преобразователей, естественной входной ве-
личиной которых является измеряемое усилие.
Прямой пьезоэффект, заключающийся в электризации кристал-
лических тел под действием механических напряжений, широко
используется для измерения сил и давлений. Поскольку преоб-
разование механического напряжения в электрический заряд осу-
ществляется с малой погрешностью (10-1—Ю-4%), а собственная
частота пьезоэлектрических датчиков достаточно высока (20—
200 кГц), то на их основе выпускаются весьма точные средства
измерений для определения быстропеременных сил и давлений.
Применение современных усилителей с высоким входным сопро-
тивлением (/?вх=1013 Ом), усилителей «заряда» (см. гл. 2) по-
зволяет использовать пьезоэлектрический эффект для измерений
не только динамических, но и квазистатических усилий.
Высокими метрологическими характеристиками обладают при-
боры с пьезорезонансными датчиками, основанными на изменении
частоты резонатора под действием механического усилия. Такие
датчики позволяют создавать манометры с погрешностью 0,01—
0,02%, с верхним пределом измерения 70 МПа и порогом чувст-
вительности 7 Па, а также динамометры для измерения сил в диа-
пазоне 3- 10-3—15 Н с погрешностью 0,02%.
Магнитоупругий эффект, заключающийся в зависимости маг-
нитной проницаемости ферромагнитных тел ц от существующих
в них механических напряжений о, используется для измерения
больших сил, вращающих моментов и давлений. Магнитоупругие
датчики можно применять для измерения усилий как в статиче-
ском, так и в динамическом режимах при частотах до нескольких
килогерц. Они отличаются высокой надежностью, но малой точно-
стью (погрешность 1—5%). Нижний предел измерения определя-
ется магнитоупругой чувствительностью материала датчика, кото-
рая для различных материалов лежит в пределах
5М = 100 = 0,6 . . . 2,5%/МПа.
о
Верхний предел измерения манометров и динамометров ограни-
чивается допустимым значением механического напряжения
в материале магнитоупругого преобразователя, которое не должно
превышать 10—20% от предела упругости данного материала.
В противном случае сильно возрастают погрешности линейности и
гистерезиса.
Измерение давлений с помощью манганиновых преобразовате-
лей основано на свойстве манганина изменять свое сопротивление
под действием всестороннего сжатия. Барический коэффициент
д р/р
манганина Кр =--------= 2,7 10-11 Па-1, поэтому такие преобра-
зователи применяются для измерения высоких и сверхвысоких дав-
лений (108—1010 Па), в частности высоких импульсных давлений.
На зависимости свойств или параметров исследуемых объек-
тов от действующих усилий основаны ультразвуковой, термоупру-
190
гий (см. § 9-2), магнитоупругий и фотоупругий методы измерений
механических напряжений, тепловой и ионизационный метод из-
мерении механических напряжений, тепловой и ионизационный
методы измерений вакуума, интерферометрический метод измере-
ния давлений и др.
Методы уравновешивания используются при построении наи-
более точных средств измерений сил, вращающих моментов и дав-
лений.
9-2. Методы измерений деформаций
и механических напряжений
Измерение деформаций и механических напряжений
широко применяется при исследовании физических свойств мате-
риалов и прочностных испытаниях различных деталей, машин,
строительных конструкций и сооружений, а также земной коры и
горных пород. Измерение деформаций используют при техниче-
ской диагностике, а также при измерении механических величин
(силы, моменты, давления), которые преобразуются в деформа-
цию упругого элемента. В большинстве методов измерений меха-
нических напряжений датчиком воспринимается абсолютное или
относительное значение деформации, поскольку естественной вход-
ной величиной применяемых при этом преобразователей является
перемещение. Непосредственно измерять механические напряже-
ния можно термоупругим, магнитоупругим, ультразвуковым и
фотоупругим методами.
Переход от измеренных деформаций к механическим напряжениям можно
осуществить при известных функциональных зависимостях между деформацией
и напряжением. При однородном объемнонапряженном состоянии изотропного
материала в пределах упругих деформаций можно по измеренным значениям
главных деформаций ei, е2 и е3 определить главные напряжения Сч, щ и Оз,
пользуясь уравнениями связи:
si = [щ — н (о2 + 03)]/£;
в2 = [о2 — и (о3 + 01)]/^;
83 = [03 — И (01 + 02)V^>
где р — коэффициент Пуассона; Е — модуль Юнга. В случае плосконапряжен-
ного состояния (Оз=0) уравнения связи имеют вид
01 = Е (ех + ре2)/(1 — р.2); о2 = Е (ех + pej/(1 — р2).
При исследовании линейно-напряженного состояния связь между напряже-
нием с и относительной деформацией ei в пределах упругости определяется вы-
ражением
о = Ее/.
За пределом упругости переход от деформаций к напряжениям вызывает
трудности, если заранее не известна функциональная зависимость между напря-
жениями л деформациями. Напряжения во внутренних слоях исследуемого объ-
екта можно определить по измеренным деформациям на его наружной поверх-
ности, если известен закон распределения деформаций по толщине объекта.
В прозрачных образцах или в моделях из прозрачных диэлектриков внутрен-
191
неё Напряжение можно определить поляризационно-оптическим методом, осно-
ванным на фотоупругом эффекте [5].
Деформации необходимо измерять в весьма широких пре-
делах—от сотых долей микрометра до метров, относительные
деформации — в диапазоне 0—100% и более. Малые деформации
имеют место в металлах и твердых пластмассах, большие дефор-
мации необходимо измерять при испытании образцов с большим
удлинением (эластичные пластмассы, резина и др.).
При определении прочностных характеристик материалов на-
пряжение менее 5—10 МПа обычно не измеряется. Измерения
очень малых механических напряжений и деформаций требуется
производить при различных физических и биологических исследо-
ваниях, в частности при исследовании структуры кристаллов, био-
логических мембран и других микрообъектов.
Обычно при измерении деформации ее сначала преобразуют
в перемещение концов чувствительного элемента тензометра, рас-
стояние между которыми называется базой. При этом использу-
ются два способа крепления первичного преобразователя к объ-
екту испытания.
В первом случае первичный преобразователь непосредственно
укрепляется на испытуемом объекте (например, тензопреобразо-
ватель приклеивается к испытуемой детали). Такой способ из-
мерения, широко применяемый при комплексных испытаниях
сложных объектов с использованием тензорезисторов, отличается
невысокой точностью (погрешность 2—-10%) вследствие большого
разброса параметров тензорезисторов и невозможности градуиро-
вать прибор (канал) с данным тензорезистором, который при
таких измерениях является элементом разового использования.
Во втором случае датчик тензометра, включающий в себя
первичный преобразователь (тензорезнстивный, индуктивный,
электрооптический и др.), прикрепляется к исследуемому объекту
при помощи специальных устройств, выполняемых в виде опорных
призм, ножевых, щуповых, пружинных, магнитных и других типов
захватов. Для измерений при высоких температурах (до 1100° С)
применяются захваты с кварцевыми наконечниками. Такие тензо-
метры обычно используются совместно с испытательными маши-
нами для прочностных испытаний деталей, образцов материалов
и отдельных элементов сложных конструкций. Перемещение за-
хватов, вызванное деформацией испытуемого образца, измеряется
при помощи различных методов и средств измерений, рассмотрен-
ных в гл. 8, но наиболее широкое применение получили тензорези-
стивные, индуктивные и электрооптические тензометры. Тензо-
метры, используемые совместно с испытательными машинами,
обеспечивают измерения с относительно малыми погрешностями
(0,2—1,5 %), поскольку их можно градуировать совместно с дат-
чиком при помощи образцовых средств измерений длины.
На рис. 9-1 показано устройство тензорезистивного датчика
тензометра, у которого упругий элемент 2 в форме скобы крепится
192
к испытуемому образцу 7 при помощи ножевых зажимов 4. Гензо-
резисторы 3 наклеены на среднюю часть скобы, которая изгиба-
ется при деформации (удлинении) испытуемого образца. Путем
изменения формы упругого элемента и типа захватов создаются
тензометры различных назначений, например для измерений угла
закручивания образца или размеров трещин. Достоинствами таких
тензометров являются относительно малая основная погрешность
(0,2—0,5%) при погрешности линейности и гистерезиса 0,05—
0,2% и высокая собственная частота датчика (10 кГц).
В индуктивных тензометрах (рис. 9-2) перемещение ножевой
опоры 2 при деформации испытуемого образца 1 передается
Рис. 9-2
Рис. 9-1
сердечнику 3 индуктивного датчика 4, который при помощи струб-
цины 5 укрепляется на образце. Погрешности индуктивных тензо-
метров лежат в пределах 0,5—1,5 %. Отсутствие упругого элемента
позволяет создавать индуктивные тензометры для работы в широ-
ком диапазоне температур.
При испытании образцов материалов тензометры с тензорези-
сторами применяются в основном для измерения деформации
до 50% от базы при значениях базы 2,5—100 мм. Индуктивные
тензометры выпускаются с базами 1—200 мм и используются для
измерения как малых, так и больших деформаций — до 30% и
более от базы.
Электрооптические тензометры обычно применяются для из-
мерения больших деформаций — до 100%. Преимуществом таких
тензометров является отсутствие механического контакта между
испытуемым образцом и датчиком перемещений, что позволяет
проводить испытания образцов в закрытых камерах, при различ-
ных температурах и в разных средах. Использование лазерных
интерферометров (см. § 8-4) для измерения деформаций дает воз-
можность существенно повысить точность результатов измерений
при прочностных испытаниях.
7 Заказ № 444
193
Для измерения деформаций и механических напряжений при
натурных испытаниях различных машин, конструкций транспорт-
ных средств и других изделий наиболее широко используется
метод, основанный на применении дискретных металлических и
полупроводниковых тензорезисторов. Особенностью испытаний
сложных изделий является наличие большого числа точек тензо-
метрирования, поэтому для этих целей используются многоканаль-
ные тензостанции и ИИС для прочностных испытаний. Проволоч-
ные, фольговые и пленочные металлические тензорезисторы при-
меняются для измерений относительных статических деформаций
0,005—1,5—2%, полупроводниковые — до 0,1—0,2%, свободные
проволочные тензорезисторы, которые закреплены только по кон-
цам базы, а также эластичные электрохимические тензорезисторы
[5] могут быть использованы для измерения деформаций соответ-
ственно до 5—10% и 30—50%- В динамическом режиме макси-
мально допустимые значения деформаций для проволочных и
полупроводниковых тензорезисторов должны быть на порядок
меньше, так как при таком режиме уменьшается надежность
тензорезисторов.
Основные технические характеристики металлических, полу-
проводниковых и интегральных полупроводниковых тензорезисто-
ров, а также основные измерительные цепи для тензорезисторов
рассмотрены в работе [5].
Термоупругий метод измерения механических напряжений.
Рассматриваемый метод основан на термоупругом эффекте, за-
ключающемся в изменении температуры упругого тела при его
деформации. В соответствии с положениями термодинамики де-
формация упругого тела вызывает перераспределение его темпе-
ратурного поля. При этом изменение поверхностной температуры
упругого тела линейно зависит от суммы главных механических
напряжений, что дает возможность измерять непосредственно
механические напряжения, а не деформации. В этом состоит боль-
шое преимущество метода, поскольку большинство других мето-
дов основано на измерении деформаций, по которым обычно опре-
деляются механические напряжения. Метод применим только для
измерения переменных механических напряжений, так как из-
менение температуры за счет термоупругого эффекта относительно
мало и может быть определено только выделением переменной
составляющей теплового излучения на фоне общего температур-
ного поля исследуемого объекта. Относительное изменение темпе-
ратур не зависит от частоты механических напряжений, а опре-
деляется только свойствами материала и значениями механиче-
ских напряжений:
Д77Т = Ктуст2,
где Л'ту — коэффициент термоупругости, равный, например,
0,86- 10 11 Па-1 для алюминия и 28- 10 11 Па-1 для стали.
Упругие материалы с положительными коэффициентами линей-
ного расширения (например, металлы) имеют отрицательный
194
коэффициент термоупругости. При соблюдении адиабатических ус-
ловий нагружения поверхностная температура тел из таких ма-
териалов уменьшается при росте механических напряжений.
Определение механических напряжений термоупругим методом
осуществляется путем измерения параметров температурного поля
исследуемого объекта с помощью чувствительных инфракрасных
пирометров (тепловизоров), наиболее совершенные из которых
имеют порог чувствительности 0,005—0,01 °C (см. § 12-8). Трудно-
сти измерения меньших изменений температуры обусловливают
нижний предел измеряемых механических напряжений термо-
упругим методом, который в зависимости от материала исследуе-
мого объекта составляет от долей мегапаскаля до нескольких
мегапаскаль.
Термоупругий метод не применим для измерения статических
напряжений. Другим недостатком термоупругого метода является
невозможность получения информации о компонентах и направле-
нии исследуемых деформаций, поскольку изменение температуры
пропорционально сумме главных деформаций и не зависит от их
направления.
Основанная на термоупругом методе измерительная система
содержит двухзеркальное сканирующее устройство, обеспечиваю-
щее развертку изображения исследуемой поверхности, светодели-
тель и детектор. Регистрируемое инфракрасное излучение с вы-
хода светоделителя подается в канал визуализации и регистра-
ции изображения на экране 16-цветового дисплея, который
позволяет наблюдать поле двуосного напряженного состояния по-
верхности исследуемого объекта. Угловые смещения сканирующей
системы могут изменяться от 0,1°Х0,1° до 25°Х25°, а расстояние
от приемника излучения до объекта исследования — от 0,5 до Юм.
Это позволяет измерять распределение сложных механических на-
пряжений на поверхности как малых, так и протяженных объектов
с локализацией отдельных участков, напряженное состояние кото-
рых определяется с увеличенной разрешающей способностью.
Частотный диапазон измеряемых переменных напряжений про-
стирается от 0,5 Гц до 5 кГц. Метод отличается достаточно высокой
чувствительностью. Например, минимальное определяемое меха-
ническое напряжение в деталях из алюминия (о=2 МПа) со-
ответствует относительной деформации е/ = 5-10 6 (5 мкм/м).
При исследовании объектов с малой излучательной способно-
стью их поверхность окрашивается в черный цвет.
Термоупругий метод является перспективным бесконтактным
методом измерения механических напряжений, широкое использо-
вание которого тесно связано с быстрым развитием тепловидения.
Метод рентгеновской тензометрии. Этот метод применяется для
исследования напряженного состояния и структур объектов из
поликристаллических материалов. Он основан на измерении меж-
плоскостных расстояний с использованием явления дифракции
рентгеновских лучей на плоскостях решеток поликристаллических
материалов. При облучении решетки поликристаллического
7* 195
образца монохроматическими рентгеновскими лучами атомы вы-
нуждаются к колебаниям в режиме рентгеновского излучения и
действуют как корпускулярные генераторы колебаний, излучение
которых интерферирует в зависимости от внутренних геометриче-
ских условий, которые определяются уравнением Брегга
l = 2tfAwsin6ftW,
где X — длина волны рентгеновского излучения; d — расстояние
между плоскостями атомных решеток; 6 — угол дифракции; hkl—
индексы Миллера для плоскостей решеток.
Если в поликристаллическом образце отсутствуют внутренние
напряжения, то расстояния между соответствующими плоскостями
решеток одинаковы и не зависят от положения этих плоскостей
в образце. На рис. 9-3, а показано распределение нескольких пло-
скостей решеток с равными индексами в свободном от механиче-
ских напряжений образце, а на рис. 9-3, б—при наличии на-
пряжения растяжения ох вдоль одной из осей. Упругие деформа-
ции, обусловленные внешними или внутренними напряжениями,
приводят к изменению расстояния между плоскостями решеток.
Распределение внутренних напряжений в деформированном кри-
сталле может быть найдено по экспериментально измеренным
значениям относительного изменения периода решетки в данном
кристаллографическом направлении (Ad/d)ftw и микроскопической
кривизне атомных плоскостей.
196
Реализация метода рентгеновской тензометрии поясняется на
рис. 9-3, в. Рентгеновское излучение от источника / направляется
на установленный в центре лимба 3 исследуемый образец 2, от
которого излучение после интерферирования отражается на сцин-
тиляционный счетчик 4. Поворачивая образец и счетчик вокруг
оси, перпендикулярной плоскости диска, определяют углы дифрак-
ции 0. По измеренным значениям углов, соответствующих дифрак-
ционным максимумам, и по известной длине волны излучения
определяются расстояния между плоскостями решетки, которые
дают информацию о структуре, асимметрии и деформации кри-
сталлической решетки. При помощи такого измерительного уст-
ройства можно исследовать дифракционные линии с углами ди-
фракции от 25 до 82° при углах ф между поверхностью образца и
плоскостью решетки от —65 до +65°.
Процесс измерения на основе рентгеновской интерференции
поддается автоматизации. Для определения упругих деформаций
и напряжений в различных деталях разработаны типовые про-
граммы для обработки полученной информации на ЭВМ.
Метод рентгеновской тензометрии позволяет как бы визуали-
зировать искажения кристаллической структуры и по виду кар-
тины муара определить тип искажения. Метод позволяет измерять
статические и динамические напряжения, а также градиенты на-
пряжений на очень малых участках, линейные размеры которых
в мелкокристаллических материалах не превышают десятки
микрометров. При этом можно измерить деформацию в любом
направлении, образующем с нормалью к поверхности объекта
25 углы от 0 до 65°. Это позволяет найти микроструктуру распреде-
ления деформаций и напряжений в тонком слое, что особенно
важно при исследовании объектов с поверхностным упрочнением,
в которых механические напряжения дислоцированы в тонком по-
верхностном слое толщиной в десятки или сотни микрометров.
9-3. Методы измерений сил и крутящих моментов
Сила — векторная величина, характеризующая механи-
ческое воздействие на материальное тело со стороны других тел
или полей. Сила полностью определяется, если известны ее значе-
ния, направление и точка приложения.
Существуют различные виды сил: гравитационные, электро-
магнитные, реактивные, ядерные, слабого взаимодействия, сила
инерции, сила трения и др. Силы необходимо измерять в широком
диапазоне — от 10-12 Н (Ван-дер-Ваальсовы силы) до 109 Н
(силы удара, тяги и т. п.). С малыми силами имеют дело при на-
учных исследованиях, при испытании точных датчиков силы в си-
стемах управления и др. Силы от 1 Н до 1 МН характерны для
испытательной техники и при определении усилий в транспортных
средствах, прокатных станах и др. В некоторых отраслях машино-
строения, сталепрокатной и аэрокосмической технике необходимо
измерять силы до 50—100 МН. Погрешности измерений силы и
197
моментов при технических измерениях составляют 1—2% и более.
При проведении ряда исследований допустимые погрешности не
должны превышать 0,1—0,2%. К измерению силы сводится из-
мерение таких физических величин, как давление (см. § 9-4),
ускорение (см. § 10-3), масса и др., погрешность измерения кото-
рых во многих случаях не должна превышать 0,001 %.
Наиболее характерным проявлением силы является ее способ-
ность сообщать телу ускорение и деформировать взаимодействую-
щие тела.
Связь между силой F, ускорением а и массой т определяется
вторым законом Ньютона
F = ma, (9-1)
Рис. 9-4
421
а связь между силой и деформацией — законом Гука, который
в простейшем случае может быть представлен в форме: F=cl, где
с и 1 — соответственно жесткость деформируемого тела и вектор
деформации в точке приложения силы.
Зависимость (9-1) редко используется для измерения силы; на-
оборот, путем измерения силы определяется ускорение твердого
тела (см. § 10-4).
Подавляющее большинство силоизмерительных устройств ос-
новано на методе преобразования измеряемой силы в механиче-
ские напряжения в теле упругого элемента и его деформацию,
которые преобразуются в электрический сигнал с помощью тензо-
резистивных, емкостных, индуктивных, пьезоэлектрических, маг-
нитоупругих, виброчастотных или других типов преобразователей.
В таких средствах измерений основным конструктивным элемен-
том, оказывающим решающее влияние на точность измерения
силы, является упругий элемент.
Хорошими метрологическими характеристиками обладают ча-
стотные приборы с вибростержневыми датчиками. На рис. 9-4 по-
казаны различные конструкции вибростержневых датчиков
НИКИМПа, применяемых в силоизмерительных устройствах и
весах. Частотно-зависимым элементом в таких датчиках является
резонатор в виде тонкой пластинки 2, изготовляемой заодно
198
С упругим элементом 3 из одного куска металла (сталь марбк
35ХГСА, 20X13, сплав 44НХТЮ). Режим автоколебаний осущест-
вляется с помощью возбудителя 1 и приемника колебаний 4, со-
единенных с выходом и входом усилителя 7 (рис. 9-4, а). Особен-
ностями датчиков являются низкий уровень механических на-
пряжений в резонаторе и в упругом элементе (100—150 МПа),
полная или частичная компенсация погрешностей от несовершен-
ства упругих свойств материала преобразователя, хорошая по-
мехоустойчивость вследствие высокого уровня выходного сигнала,
достигающего нескольких вольт. Девиация частоты обычно состав-
ляет 15—30% от начальной частоты f0, а нелинейность характе-
ристики 3—4%.
Для исключения погрешности от изгибающих усилий и
крутящих моментов используются шаровой силовводящий эле-
мент 5 и плоская мембрана 6 (рис. 9-4, а). Применение сфериче-
ского силовводящего элемента также локализует точку приложе-
ния силы и повышает воспроизводимость результатов измерений.
Упругая система такого вида применяется в динамометрах для
измерения сжимающих усилии до 1 МН с погрешностью ±0,1%.
В многокомпонентных динамометрах находит применение упру-
гий элемент в виде параллелограмма (рис. 9-4,6), что позволяет
уменьшить погрешность от неизмеряемых компонентов. В цифро-
вых весах используются датчики с упругой системой в виде угло-
вого рычага с опорой на двух упругих шарнирах (рис. 9-4, в).
Такие датчики, используемые в серийных торговых весах на на-
грузки 50—500 Н (5—50 кг), имеют класс точности 0,04.
На основе пьезоэффекта удобно создавать многокомпонентные динамометры
для одновременного измерения усилий, действующих на объект вдоль трех
взаимно перпендикулярных осей (рис. 9-5). Трехкомпонентный пьезокварцевый
преобразователь (рис. 9-5, а) содержит два пьезоэлемента Х-среза 1, обеспе-
чивающих измерение усилий вдоль оси, и две пары пьезоэлементов Y-среза 2
и 3 для измерения горизонтальных усилий вдоль осей X и Y. На рис. 9-5, б
показана схема соединения датчика, содержащего четыре трехкомпоиентных
пьезокварцевых преобразователя. Такой датчик позволяет определить три ком-
понента вектора суммарной силы
F = VF2x + f2y + 4,
где
f х = FX1 + Fx2 + F x3 + /'%4;
F y = FY1 + F y2 + Fy3 + f y4;
Fz = FZ1 + Fz2 + FZs + FZv
и три компонента моментов сил, создаваемых относительно центра датчика:
М х = b (FZi + Fz2 — Fz3 — FZi);
MY = a (— FZ1 + Fz2 + Fz3 — Fz^-,
Mz = b( — FX1 — Fx2 + Fx3 + Fx4) + a (FY1 — Fy2 — Fy3 + fy4).
Динамический диапазон таких датчиков (отношение верхнего предела изме-
рения к порогу чувствительности) достигает 108. Некоторые пьезокварцевые
199
динамометры могут работать в диапазоне температур от —270 до +400 °C.
В диапазоне от —200 до +250 °C температурный коэффициент чувствительно-
сти составляет 10 К’.
Для измерения крутящих моментов наиболее широко исполь-
зуются методы, основанные на преобразовании измеряемого мо-
мента в деформацию упругого элемента, выполняемого в виде
сплошных, полых или плоских валов (торсионов), спиральных
пружин, подвесов и растяжек [5]. Преобразование деформации
(механического напряжения) упругого элемента в электрический
сигнал осуществляется при помощи тензорезистивных, нндук-
тивных, магнитоупругих и других измерительных преобразова-
телей.
На рис. 9-6, а показана схема бесконтактного моментомера
(торсиометра) для измерения крутящего момента на вращаю-
щемся валу, основанного на определении механических напряже-
ний в материале вала при помощи тензорезисторов. Особенно-
стью прибора является наличие мостовой измерительной цепи
с преобразователем напряжение — частота (ПНЧ) 3. Питание
цепи и ПНЧ и съем сигнала с них осуществляются через вра-
щающийся трансформатор 5. На валу 1 расположены тензомет-
рический мост 2 из четырех тензорезисторов Дт, преобразователь
напряжение — частота 3, цепь управления 4, вторичная обмотка
с числом витков w2 вращающегося трансформатора 5, диод V и
ключ S1. Первичная обмотка вращающегося трансформатора Wi
питается от генератора синусоидального напряжения 6 с часто-
той 5—10 кГц. В течение полупериода выходного напряжения
преобразователя 3, когда ключ разомкнут, напряжение вторичной
200
обмотки трансформатора выпрямляется диодом V, стабилизиру-
ется и питает измерительную цепь. Напряжение разбаланса с диа-
гонали тензометрического моста Д£7М (рис. 9-6, б) подается на
вход интегратора на операционном усилителе А1, выходное на-
пряжение которого Ua сравнивается компаратором А2 с опорным
напряжением UK, пропорциональным напряжению питания моста
Uo. При неизменном значении А(7М напряжение на выходе инте-
гратора линейно растет до тех пор, пока не станет равным опор-
ному напряжению UK. При срабатывании компаратора изменя-
ется полярность напряжений Uo, AUK, UK, начинается новый цикл
интегрирования и т. д. Таким образом, на выходе компаратора
имеет место напряжение прямоугольной формы, частота кото-
рого линейно зависит от относительного разбаланса моста. Для
тензометрического моста с четырьмя рабочими плечами AUJU0 =
201
= Д/?т//?т = е, и частота напряжения на выходе компаратора оп-
ределяется выражением
f = E(R2 + R3)/(4R1C1Ra).
Сигнал с выхода ПНЧ в виде частотно-модулированного пе-
ременного напряжения управляет ключом S1, который с частотой
f накоротко замыкает вторичную обмотку трансформатора а>2,
вызывая модуляцию напряжения на первичной обмотке Wj. Это
напряжение после амплитудного демодулятора 7 подается на
аналоговый или цифровой частотомер 8, а также через частот-
ный демодулятор 9 поступает на вход регистрирующего при-
бора 10. При несущей частоте 5 кГц чувствительность прибора
к относительному изменению сопротивления тензорезисторов со-
ставляет S=Af/e = 5000 Гц/%.
Для периодической коррекции погрешности тензорезистор-
ного моста используется метод образцовых сигналов. Парал-
лельно одному из тензорезисторов с помощью геркона S2
(рис. 9-2, б) подключается резистор Ro с известным сопротивле-
нием, что приводит к определенному изменению частоты выход-
ного сигнала. Управление герконом 52 осуществляется бескон-
тактным способом путем приближения к нему внешнего постоян-
ного магнита.
Измерение силы методом уравновешивания. Метод основан на
уравновешивании измеряемой силы силой, создаваемой обрат-
ным электромеханическим преобразователем, чаще всего магни-
тоэлектрическим, а также силой реакции, возникающей в дина-
мической системе. К таким силам относятся центростремительная
сила, сила инерции при колебательном движении, гироскопиче-
ский момент. Измерение силы методом уравновешивания с ис-
пользованием магнитоэлектрических обратных преобразователей
рассмотрено в § 9-4 (см. рис. 9-13) и § 10 3.
Перспективным способом создания высокоточных средств из-
мерений больших сил (от 105 Н и более) является применение
электродинамических обратных преобразователей силы со сверх-
проводящими обмотками, которые позволяют воспроизводить
силы до 107—108 Н с погрешностью 0,02—0,05%.
Гироскопический метод измерения сил основан на измерении
угловой скорости прецессии рамки гироскопа, возникающей под
воздействием гироскопического момента, уравновешивающего из-
меряемый момент или момент, создаваемый измеряемой силой.
Этот метод уже нашел применение в весоизмерительной технике.
На рис. 9-7 показано устройство динамометра, основанного на
уравновешивании измеряемой силы центробежной силой. В си-
ловоспринимающих цилиндрах 1 и 5, соединенных сильфо-
ном 4, имеются конические выборки, в которых размещены инер-
ционные клиновидные массы 3, насаженные на ось двигателя 6
и способные перемещаться по направляющим 2. При воздействии
измеряемой силы Fx происходит сближение инерционных масс,
которое регистрируется датчиком перемещения 7. Сигнал дат-
20?
чика управляет двигателем, который раскручивает инерционные
массы до тех пор, пока центробежная сила Ец не уравновесит
силу Fx с учетом угла клина. Для устранения сил трения приме-
няются аэродинамический, гидродинамический или гидростати-
ческий подвесы. В установившемся режиме динамические явле-
ния не влияют на статическую силу уравновешивания. Измеряе-
мая сила определяется из уравнения
Fx = -у Рц ctg ф—(тк -Ь тг) g cos ip,
Рис. 9-7
где ф — угол клиньев; 41 — угол между вектором ускорения сво-
бодного падения g и осью чувствительности прибора; тк — масса
клиньев; тц — масса верхнего цилиндра. Сила реакции одно-
значно определяется геометрией системы, массами клиньев и ча-
стотой их вращения. Таким образом, при неизменных параметрах
измерительного устройства измеряемая сила Fx определяется по
частоте вращения двигателя.
9-4. Методы измерений давления
Давление определяется как скалярная величина, ха-
рактеризующая состояние сплошной среды, и оценивается как
отношение силы, действующей перпендикулярно поверхности,
к площади этой поверхности. Единицей давления в системе
СИ является паскаль, 1 Па=1 Н/м2; однако еще встречаются
203
и другие единицы, например 1 ат=9,80665- 104 Па, 1 мм рт. ст.=
= 133,322 Па. Звуковое давление принято оценивать не в абсо-
лютных, а в логарифмических единицах — децибелах. Уровень
звукового давления в децибелах определяется по формуле 7V=
= 2Olg(p/po), где р0=2- Ю“5 Па.
Наиболее часто необходимо производить измерения давления
жидкостей и газов в различных технических установках, измере-
ния атмосферного давления на разных высотах, измерения зву-
ковых давлений, создаваемых акустическими волнами, измере-
ния малых абсолютных давлений. В народном хозяйстве эксплу-
атируется более 400 млн. средств измерений давления, а их еже-
годный выпуск превышает 35 млн. шт.
Рис. 9-8
При измерении давлений можно выделить три вида измере-
ний: а) измерение давления в некотором объеме или среде; б) из-
мерение разности между давлением в некотором объеме и атмо-
сферным давлением, которое в данном случае принимается как
бы за начальное; в) измерение разности давлений в двух объ-
ектах. В первом случае говорят об измерении абсолютного дав-
ления, во втором — об измерении избыточного давления или про-
сто давления; при этом, если давление меньше атмосферного, его
называют вакуумом или разрежением. В третьем случае — об из-
мерении разностного давления. Измерение давления в области
низких абсолютных давлений является специальной задачей и
носит название измерения вакуума, которое часто выполняется
путем определения абсолютной концентрации газов с помощью
тепловых, ионизационных и радиоизотопных вакуумметров (см.
гл. 13).
В большинстве случаев датчики давления соединяются с объ-
ектами измерения при помощи соединительных трубок. Такие ли-
нии коммуникации давления, заполненные воздухом или жидко-
стью, не вносят погрешностей при измерении статических давле-
ний, но сильно влияют на результаты измерений меняющихся
давлений, обладая существенной инерционностью, присущей
204
пневматическим и гидравлическим звеньям. Линии коммуника-
ции могут быть использованы в качестве пневматических или
гидравлических фильтров, позволяющих разделить отдельные
составляющие давления. В качестве примера на рис. 9-8, а пока-
зано присоединение датчиков к объекту, давление в котором из-
меняется так, как показано на рис. 9-8, б. В этом случае ампли-
туда выходного сигнала датчика / будет пропорциональна дав-
лению рт, амплитуда выходного сигнала датчика 2, включенного
через длинную трубку, являющуюся пневматическим фильтром,
будет пропорциональна давлению ро, а амплитуда выходного
сигнала датчика 3, в одну камеру которого поступает давление
Po+Pimsin ы t, а в другую, включенную через фильтр,— давление
ро, будет пропорциональна давлению pim.
Рис. 9-9
Метод преобразования разности давлений в деформацию уп-
ругого элемента положен в основу манометров, устройство кото-
рых показано на рис. 9-9. На рис. 9-9, а изображен манометр,
состоящий из двух камер, разделенных мембраной 2 и соединен-
ных с объектами, в которых измеряется давление, трубками 3 и
4. При равных давлениях (Р\=Р2) в камерах мембрана нахо-
дится в нейтральном положении, при изменении одного из дав-
лений мембрана прогибается и изменяется емкость С преобразо-
вателя между мембраной 2 и неподвижным изолированным элек-
тродом /. Изменение емкости АС пропорционально измеряемой
разности давлений р\—р2. Для измерения прогиба мембраны мо-
гут быть использованы преобразователи перемещения: емкост-
ные, индуктивные, фотоэлектрические и др. Для измерения на-
пряжений в мембране при ее деформации применяются тензоре-
зисторы. При измерении избыточного давления в одну из камер
подается измеряемое давление pi = px, во второй камере устанав-
ливается давление, равное атмосферному: р2—рат', чаще всего
эта камера просто соединяется с окружающей средой. При изме-
рении абсолютного давления вторая камера вакуумируется и гер-
метизируется. Таким образом, мембрана, кроме функции упру-
гого элемента, выполняет еще функцию элемента, разделяющего
две среды. В большей части датчиков разделительный и упругий
элементы объединены, однако это не обязательно. Выпускаются,
205
например, манометры (рис. 9-9, б), у которых разделительным
элементом является мембрана 3, а упругим элементом — балкаР,
один конец которой укреплен в корпусе, а второй связан с цент-
ром мембраны. На балку для измерения ее деформации помеща-
ются тензорезисторы 1.
В ряде случаев в
датчиках давления мо-
жет быть использован
преобразователь, вход-
ной величиной кото-
рого является механи-
ческое напряжение или
давление. В этом слу-
чае используется мяг-
кая, так называемая
вялая мембрана, кото-
рая выполняет функ-
цию только раздели-
тельного элемента. На
рис. 9-9, в в качестве
примера показан прин-
цип действия датчика
рис g.io давления с защищен-
ным мембраной 2 пье-
зоэлектрическим преобразователем /, выходной сигнал которого
пропорционален давлению или механическому напряжению в на-
правлении оси X.
Большая часть выпускаемых промышленностью датчиков дав-
ления основана на методе преобразования разности давлений
в деформацию или механические напряжения упругого элемента.
Метрологические характеристики этих датчиков определяются
206
в первую очередь используемыми в них упругими элементами.
Обычно составляющую погрешности измерения давления от не-
идеальности упругих элементов трудно уменьшить до значений,
меньших 0,1—0,5%. Исключение составляют датчики с упругими
элементами из кристаллических материалов — кварца, кремния
и сапфира, которые получают сейчас все более широкое распро-
странение. Хорошими точностными характеристиками обладают
датчики давления типа «Сапфир-22», предназначенные для изме-
рения избыточного давления, разности давлений и абсолютного
давления. Чувствительным элементом датчика является пластина
из монокристаллического сапфира с кремниевыми тензорезисто-
рами, прочно соединенная с металлической мембраной. Дат-
чики выпускаются на различные пределы измерений в диапазоне
0,25—100 МПа с основными погрешностями 1,0; 0,5 и 0,25% и
нормированным выходным сигналом 5 и 20 мА.
Рх
Рнс. 9-11
Более высокую точность имеют датчики давления с пьезо-
кварцевыми резонаторами, в которых механические напря-
жения в кристаллическом упругом элементе преобразуются
в частотный выходной сигнал. Высокую точность имеет также
частотный манометр с упругим элементом в виде металли-
ческого вибрирующего цилиндра (рис.9-10,а). На тонкостен-
ный цилиндр 1, выполненный из проводящего материала,
воздействует разность давлений, одно из которых (рх) пода-
ется во внутреннюю полость цилиндра, а другое (ро) дей-
ствует снаружи. Под действием разности давлений изменя-
ется собственная частота колебаний цилиндрической обо-
лочки; при рх>ро собственная частота нзгибных колебаний
стенок цилиндра возрастает. Тонкостенный цилиндр применяется в качестве
резонатора автогенератора, в котором используются магнитоэлектрическая си-
стема возбуждения колебаний и емкостная система съема. Цилиндр служит
проводником тока в магнитоэлектрической системе возбуждения 2 и колеблю-
щимся электродом в емкостной системе съема колебаний 3.
В резонаторе поддерживаются незатухающие колебания, в процессе кото-
рых его поперечное сечение принимает форму эллипса, вытянутого попеременно
то по одной, то по другой из двух взаимно перпендикулярных осей. На
рис. 9-10,6 показаны направление магнитных силовых линий магнитов 2, на-
правление тока в цилиндре 1, направление магнитоэлектрических сил, действую-
щих на стенки цилиндра, деформация цилиндра под действием этих сил и изме-
нение зазоров между цилиндром и электродами 3, 5 и 4, 6. К попарно соеди-
ненным электродам 3, 5 и 4, 6 подключей источник постоянного напряжения Uo.
При колебаниях стенок цилиндра и изменении емкостей между цилиндрической
поверхностью и парами электродов 3, 5 н 4, 6 между точками а и b
(рис. 9-10, а) появляется переменное напряжение, частота которого равна ча-
стоте колебаний цилиндра. Это напряжение поступает на вход усилителя, уси-
ливается и подается на цилиндрический резонатор в фазе, обеспечивающей вы-
полнение условий самовозбуждения. Выходная частота прибора является
функцией перепада давлений рх—ро. При максимальном напряжении в стенках
цилиндрического резонатора <т= (100.. .50) • 10е Па девиация частоты резона-
тора под действием измеряемого давления достигает Afx=0,25f. Габариты ци-
линдра, выполненного из стали 45НХТ, зависят от номинального давления рвом.
В частности, при рНОм = 5-105Па используется цилиндр радиусом 7,5 мм, длиной
45 мм, с толщиной стенок 0,26 мм и начальной частотой колебаний fo—4,8 кГц.
Ток возбуждения через цилиндр составляет около 100 мА при индукции в за-
зоре 0,05—0,1 Тл. Основная приведенная погрешность датчика равна 0,01%.
Зависимость параметра преобразователя, погружаемого в среду, от гидро-
статического давления, использована в манометре, принцип действия которого
показан на рис. 9-11. В этом манометре применяется манганиновый резистор 1,
207
сопротивление которого при больших давлениях (104—105 МПа) изменяется
пропорционально объемному, т. е. гидростатическому, сжатию. Для обеспече-
ния гидростатического сжатия преобразователь погружен в масло. Кроме ман-
ганиновых резисторов для этих целей используются полупроводниковые рези-
сторы, резисторы из специальных сплавов с золотом, а также пьезоэлектриче-
ские преобразователи из титаната бария и других материалов, для которых
пьезомодуль йгидро не равен нулю (для пьезокварца йгидро=0). Пьезоэлектри-
ческие преобразователи обладают высоким быстродействием и применяются
для измерения больших импульсных давлений.
Зависимость свойств среды от давления в среде широко применяется при
измерении вакуума (см. § 13-3 и 13-4), а также для измерения переменных
давлений интерферометрическим методом. Этот метод измерения переменных
давлений основан на зависимости показателя преломления света от плотности
среды, которая, в свою очередь, зависит от давления. При изменении давления
до 10 МПа показатель преломления пропорционален давлению среды. Измеряя
с помощью интерферометра показатель преломления, можно определить давле-
Рис. 9-12
иие в исследуемой среде. С высокой точностью такие измерения выполняются
с помощью лазерного интерферометра, например рассмотренного в § 8-4 (см.
рис. 8-14).
Метод уравновешивания сил или давлений иллюстрируется
рис. 9-12 и 9-13. На рис. 9-12, а изображен широко известный
U-образный жидкостный манометр, в котором осуществляется
уравновешивание согласно уравнению
Рх—Po = Pgl,
где р — плотность жидкости; g— ускорение свободного падения.
На рис. 9-12, б показан принцип действия грузопоршневого ма-
нометра. Поршень 1 помещен в цилиндр 2, соединяемый трубкой
3 с камерой, в которой измеряется давление. Снизу на поршень
действует сила
Fx = Spx,
где S — площадь поршня. Сверху на платформу устанавливается
груз массой т, и на поршень действует сила F=mg. При равен-
стве сил поршень находится в равновесном положении, и по зна-
чению массы т определяется измеряемое давление рх как рх =
= — т. Вес самого поршня, если он не скомпенсирован, опре-
деляет нижнюю границу диапазона измеряемых давлений,
208
На рис. 9-13 показан принцип действия манометра, в котором
уравновешивающая сила создается магнитоэлектрическим обрат-
ным преобразователем. К рычагу 2, установленному на опоре 3,
прикреплен сильфон 4, в который подается измеряемое давле-
ние. Под действием этого давления правая половина первона-
чально уравновешенного рычага смещается вверх и перемеща-
ется пластина 6 емкостного преобразователя. На вход усилителя
поступает сигнал, который усиливается, выпрямляется, и ток по-
дается в последовательно соединенные обмотки 5 и 1 обратного
магнитоэлектрического преобразователя. На обмотки 1 и 5, ук-
репленные на рычаге и находящиеся в магнитном поле, дейст-
Рис. 9-13
вуют силы Fi = Pi/ и F5=Ps/ так, чтобы рычаг находился в рав-
новесии. Условие равновесия рычага
PxScli— Р1//1+ Ps/^s>
откуда
где Pi и р5 — коэффициенты обратного преобразования; 5С — пло-
щадь сильфона и /1, /4, /5 — плечи рычага.
Выходной величиной прибора является напряжение на рези-
сторе Rn, равное
//вых
„Л'*.-,
\ РЛ + Р5<5 )
Погрешность измерения давления методом уравновешивания
сил определяется нестабильностью площади 5 и погрешностью
измерения уравновешивающей силы (для U-образного мано-
метра— нестабильностью р и g, для грузопоршневого мано-
метра— нестабильностью g, а для манометра с магнитоэлектри-
ческим преобразователем — нестабильностью (Pi + ₽s) и (/1 +
209
+ обе эти составляющие являются мультипликативными).
Кроме того, может быть весьма большая аддитивная составляю-
щая погрешности, вызванная порогом чувствительности устрой-
ства, устанавливающего равенство сил. Для манометра, показан-
ного на рис. 9-12, а, это будут силы натяжения жидкости, для
манометра на рис. 9-12, б — сила трения между поршнем и ци-
линдром, для манометра на рис. 9-13 — трение в опоре 3.
При измерении импульсных давлений применяются в основном
методы, основанные на зависимости физических свойств среды
от давления, или методы, при которых гидростатическое давление
передается некоторому телу и затем используется зависимость фи-
зических свойств этого тела от давления. Достоинством первой
группы методов является то, что картина поля давлений сохраня-
ется неизменной. Прн использовании датчика, вносимого в среду,
можно выделить при измерении следующие этапы преобразований:
а) преобразование поля давлений в среде в поле давлений на по-
верхности датчика; б) преобразование поля давлений на поверх-
ности в поле напряжений внутри датчика; в) преобразование поля
напряжений в деформацию датчика; г) преобразование деформа-
ций в электрический сигнал и измерение электрического сигнала.
Характерные погрешности при измерении импульсных давлений
возникают на первом, третьем и четвертом этапах преобразования.
Погрешности первого этапа связаны с искажением поля давлений.
Особенностью импульсных давлений является высокая частота
и, следовательно, относительно малая длина волны. Поэтому
размеры вносимых в среду датчиков оказываются сравнимыми
с длинами волн и могут вызвать существенное искажение поля
давлений из-за дифракции. Для того чтобы искажение поля было
минимальным, размеры датчика должны быть меньше длины
волны. Скорость звука в воде составляет о~1500 м/с, длина волны
при частоте 100 кГц равна Х=0,015 м, и, таким образом, размеры
датчика не должны превышать 15X15X15 мм3.
Погрешности третьего этапа преобразования определяются
инерционностью преобразования, т. е. собственной частотой дат-
чика, которая должна быть значительно выше частоты измеряе-
мых давлений. Погрешности четвертого этапа связаны с помехами,
вызываемыми действием источника импульсного давления, кото-
рым может быть взрыв, электрический разряд в жидкости и т. д.
Волна давления при этом сопровождается взрывной волной, вы-
зывающей вибрации фундаментов и оборудования и появление
механической и электрической помех.'
При измерении импульсных давлений наибольшее распростра-
нение получили резистивные датчики и пьезоэлектрические дат-
чики, чувствительные к гидростатическому давлению. Пьезоэлек-
трические датчики, выполненные из турмалина, ниобата лития,
пьезокерамики (для этих материалов c?nwpo#=0), изготовляются
в виде дисков, вставляемых в металлические обтекатели, или
в виде шариков. Для шарообразного датчика не важна ориента-
ция относительно фронта волны. Шарообразный датчик представ-
21Q
ляет собой платиновый шарик, на который нанесена и обработана
спеканием керамика из титаната бария; наружная поверхность
металлизирована. Датчик диаметром 0,2 мм имеет полосу частот
до 10 МГц.
При исследовании импульсных давлений возникает также за-
дача измерения гидродинамических нагрузок на преграду. Для
этих целей используются волноводные датчики. На рис. 9-14, а по-
казан принцип действия волноводного датчика, состоящего из ме-
таллических стержней-волноводов / и 3 и пьезокерамического эле-
мента 2. Деформационная волна, вызванная импульсом давления,
распространяется по стержню /,
достигает границы пьезоэле-
мента, частично отражается от
нее, частично проходит и вызы-
вает деформацию пьезокерамики
и появление электрического сиг-
Рис. 9-14
нала. Далее деформационная волна проходит в волновод 3, кото-
рый должен быть достаточно длинным, чтобы на выходной сигнал
не наложилась помеха, вызванная деформационной волной, отра-
женной от торца волновода 3. Преимуществом волноводных дат-
чиков является задержка выходного сигнала на время пробега
по волноводу 1 и, следовательно, возможность разделения во вре-
мени помехи, вызванной источником импульсного давления, и вы-
ходного сигнала.
На рис. 9-14, б, в показаны волноводные датчики, установлен-
ные на преграде. Датчики не меняют форму поверхности преграды,
хорошо экранированы от электрических и магнитных полей, защи-
щены от воздействия температуры и влияния среды, в которой
измеряется давление. Волноводы позволяют также увеличить пре-
дел измерения датчика, ограничиваемый прочностью пьезоэле-
мента. На рис. 9-14, в изображен датчик с рупорным волноводом,
в этом датчике давление на пьезоэлемент р2 меньше измеряемого
pi в соответствии с условием piDi2 = p2D22, где D, и О2— диаметры
волновода.
211
9-5. Метрологическое обеспечение измерений
механических усилий
Метрологическое обеспечение тензометрии Разнообразие объектов
исследования и условий, при которых проводятся тензометрические измерения,
наличие ряда трудноконтролируемых факторов, например качества наклейки
тензорезисторов, а главное, невозможность градуировки и поверки измеритель-
ного канала с градуированным тензорезнстором затрудняют метрологическое
обеспечение тензометрических измерений при натурных испытаниях. Эта задача
сейчас решается путем раздельного определения метрологических характеристик
тензорезистивных преобразователей и измерительного канала, а также созда-
нием и аттестацией методик выполнения тензометрических измерений.
Тензорезисторы выборочно испытываются с помощью образцовых устано-
вок для воспроизведения и измерения деформаций в требуемом диапазоне из-
менения влияющих величин. Аттестация партии тензорезисторов состоит в том,
что полученные значения метрологических характеристик испытанных образцов
тензорезисторов приписываются всей изготовленной партии. Разброс парамет-
ров тензорезисторов вокруг средних для данной партии значений и нестабиль-
ность этих параметров во времени являются основными причинами относи-
тельно больших погрешностей тензометрических измерений.
Определение метрологических характеристик средств измерений для работы
с тензорезисторамп в виде переносных аналоговых и цифровых тензостанций,
а также ИИС для тензометрических исследований осуществляется путем ис-
пользования образцовых резисторов и магазинов резисторов, а также различ-
ных имитаторов выходных сигналов четверть-, полумостовых и мостовых тензо-
метрических цепей. Некоторые типы имитаторов (ТКМ-75 и ИСТ) прошли го-
сударственные испытания и выпускаются серийно.
Методики выполнения тензометрических измерений обычно создаются и ат-
тестуются применительно к определенным объектам и условиям исследования.
При тензометрировании натурных конструкций особое значение приобретает ме-
тодика простого и надежного крепления тензорезисторов.
Метрологическое обеспечение средств измерений силы. Оно основывается на
государственном первичном эталоне и государственной поверочной схеме для
средств измерений силы (ГОСТ 8.065—85).
Государственный первичный эталон единицы силы включает в себя че-
тыре установки, соответственно воспроизводящие единицу силы в диапазонах
10—2-102 Н; 102—5-103 Н; 2-103—105 Н и 2-Ю1—10е Н со средним квадрати-
ческим отклонением результата измерений So=5-lO-6 при неисключенной систе-
матической погрешности 0о=ЫО-5. Эталон основан на методе непосредствен-
ного нагружения, прн котором сила воспроизводится и определяется путем со-
вокупного измерения массы образцовых грузов т и местного ускорения сво-
бодного падения g в соответствии с уравнением F—mg.
Для воспроизведения и измерения больших енл — от 1 до 50 МН повероч-
ная схема предусматривает метод сравнения с показаниями группы образцо-
вых динамометров, установленных параллельно. Размер единицы силы от госу-
дарственного первичного эталона передается силоизмерительному комплексу
с верхним пределом измерения 30 МН с погрешностью 0,2%, а до 50 МН—•
с погрешностью 0,5%. В качестве силозадающего устройства используется гид-
равлический пресс.
Для решения проблемы метрологического обеспечения измерений перемен-
ных сил разработаны системы, использующие электромагнитные взаимодействия.
Использование взаимодействия сверхпроводящих соленоидов позволяет созда-
вать установки для воспроизведения сил в статическом и динамическом режи-
мах. Воспроизводить переменные силы можно также с помощью маятниковой
центрифуги.
Метрологическое обеспечение средств измерений давлений. Наиболее точ-
ными приборами для воспроизведений и измерений давлений являются грузо-
поршиевые манометры с неуплотнениым вращающимся (для уменьшения тре-
ния) поршнем, которые используются в большинстве эталонов для воспроиз-
ведения единицы постоянного и переменного давления. Для средств измерений
212
постоянного давления имеется пять государственных поверочных схем и пять
государственных эталонов для следующих диапазонов измерений:
малых абсолютных давлений 10 3—103 Па (ГОСТ 8.107—81);
средних абсолютных давлений 2,7-102—4-105 Па (ГОСТ 8.223—76);
средних избыточных давлений от —105 до 2,5-10s Па (ГОСТ 8.017 79;
поверочную схему возглавляет первичный эталон давления);
высоких избыточных давлений до 4- 10э Па (ГОСТ 8.094—73);
малых разностей давлений 0,1—4-104 Па (ГОСТ 8.187—76).
Государственный первичный эталон, состоящий из пяти грузопоршневых
манометров, воспроизводит единицу давления в диапазоне 6-105—6- 10е Па со
средним квадратическим отклонением результата измерений So=0,0006 % при
неисключенпой систематической погрешности 0о=О,ОО4 %. Из аналогичных при-
боров состоит эталон-копия и рабочие эталоны, которые воспроизводят единицу
давления в диапазоне 0,4-105—6-10’ Па при So=O,OO2 %. Государственный спе-
циальный эталон абсолютного давления, состоящий из двух грузопоршневых
манометров, воспроизводит единицу абсолютного давления в диапазоне 2,7-102—
1,3-10® Г1а при So=O,3 Па и 0о=2 Па. Государственный специальный эталон
для высоких давлений состоит из трех грузопоршневых манометров, образцовых
мер массы, компаратора и установки для создания и поддержания гидростати-
ческого давления. Эталон воспроизводит единицу давления в диапазоне
1 - 10s—2,5- 10s Па с погрешностями So=0,004% и 0о=0,02%.
Единство измерений малых абсолютных давлений в диапазоне 10-3—•
103 Па обеспечивается государственным специальным эталоном, состоящим из
четырех компрессионных манометров, мембранно-емкостного манометра, уста-
новки с калиброванными объемами и манометра среднего абсолютного давле-
ния. Эталон воспроизводит единицу давления с погрешностями So=l.. .2% при
0о=О,5%. Для этого же диапазона разработан вторичный эталон единицы дав-
ления, основным звеном которого являются мембранно-емкостные манометры
с электростатическим уравновешиванием [17]. Такие манометры являются пер-
спективными для повышения точности измерения давления в области среднего
вакуума. Метрологическое обеспечение средств измерений переменного давления
осуществляется по ГОСТ 8.433—81 в диапазоне амплитуд 102—10е Па, частот
5-10-2—104 Гц и длительностей 10-5—10 с. Для более низких амплитуд пере-
менного давления созданы три эталона, воспроизводящие единицу звукового
давления.
Глава десятая
МЕТОДЫ ИЗМЕРЕНИЙ ПАРАМЕТРОВ
ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА
10-1. Измеряемые величины.
Взаимосвязь параметров движения
Движение твердого тела характеризуется движением его
центра масс, оно полностью определяется тремя поступательными
перемещениями центра масс и тремя углами поворота вокруг
центра масс. Под параметрами движения твердого тела будем по-
нимать линейные и угловые перемещения центра масс и все их
производные во времени (перемещение, скорость, ускорение, рез-
кость и т. д.).
Параметры движения — векторные величины. Поэтому их из-
мерение осуществляется одним из двух путей:
213
определяются модули Соответствующих векторов и углы, ха-
рактеризующие положение этих векторов в выбранной системе
отсчета;
определяются составляющие векторов по осям выбранной си-
стемы отсчета.
Взаимосвязь параметров движения можно разделить на про-
странственную и временную. Под пространственной понимается
взаимосвязь линейных и угловых параметров движения, измеряе-
мых определенным образом расположенными и ориентированными
на объекте средствами измерений. Приведем простейший пример.
Пусть необходимо измерить угловое ускорение ротационной
платформы 1, вращающейся с переменной угловой скоростью со(/)
(рис. 10-1). Измерение можно выполнить
с помощью углового акселерометра 3, из-
мерительная ось которого совпадает с осью
вращения О.
С другой стороны, угловое ускоре-
ние е может быть косвенно измерено
линейным акселерометром 2, измеритель-
ная ось ИО которого перпендикулярна
радиусу /?. В этом случае e = a/R, где
а — ускорение, измеренное линейным аксе-
лерометром.
Подобную взаимосвязь параметров движения следует учиты-
вать прн установке средств измерений на объекте. Поскольку кон-
структивно обычно не удается расположить все средства измере-
ний близко к центру масс объекта, то при оценке результатов
измерений необходимо учитывать влияние дополнительных попе-
речных составляющих линейных параметров движения на сред-
ства измерений угловых параметров и появление дополнительных
составляющих, вызванных угловыми движениями объекта, в вы-
ходном сигнале средств измерений линейных параметров движе-
ния. В случае необходимости вводятся поправки. Эта же вза-
имосвязь может быть использована и для повышения точности
измерений.
Временная взаимосвязь параметров движения — это интегро-
дифференциальная связь между ними. Принципиально возможны
два способа определения параметра движения. При первом спо-
собе его измеряют непосредственно, при втором — определяют пу-
тем дифференцирования или интегрирования другого, измеренного
параметра движения. Например, с помощью интерферометра из-
меряют перемещение движущейся платформы, затем путем двой-
ного дифференцирования находят ее ускорение. Операции интегри-
рования или дифференцирования выполняются непосредственно
в самом приборе или с помощью вычислительного устройства.
Выбор характеристики измеряемой величины зависит от за-
дачи измерения. Так, например, при исследовании полигармони-
ческих вибраций наибольший интерес для расчетов на прочность.
и надежность представляют среднее квадратическое и максималь-
214
ное значения; прн исследовании медленных и непериодически из-
меняющихся движений важны мгновенные и интегральные (за
заданный интервал времени) значения; при исследовании удар-
ных процессов — амплитудное значение, длительность ударного
процесса, его фронт и др.
Методы измерений параметров движения могут быть разделены
на две группы:
абсолютные (инерциальные) методы, в основе которых лежит
справедливый для классической механики принцип инерции; пара-
метры движения при этом измеряются в инерциальном простран-
стве. (Инерциальное пространство — это пространство, в котором
справедливы законы Ньютона; оно не вращается относительно
«неподвижных звезд», настолько удаленных от Земли, что их поло-
жение для решения тех или иных технических задач можно счи-
тать фиксированным.);
относительные методы, при которых параметры движения од-
ной системы координат измеряют относительно другой.
При измерении параметров движения исходя из конкретной за-
дачи измерения должна быть выбрана система отсчета. Так, при
определении параметров движения элементов корабля относи-
тельно корабля, рассматриваемого как твердое тело (например,
параметров выбрации корпуса двигателя), система отсчета свя-
зана с кораблем.
При решении навигационных задач обычно используются:
а) инерциальная система координат, связанная с солнечной си-
стемой; б) инерциальная система координат с началом от-
счета в центре Земли, не вращающаяся относительно инерци-
ального пространства; в) системы координат, связанные с Зем-
лей, например известная географическая система с началом
отсчета в центре Земли.
При измерении параметров движения погрешность измерения
в общем случае зависит не только от погрешности средств изме-
рений, но и от погрешностей построения систем отсчета, а также
от точности установки измерительных осей приборов по осям си-
стемы отсчета. Так, при определении положения корабля по ме-
тоду инерциальной навигации «уход» систем координат от их ис-
тинных положений со скоростью 1... 7ч приводит к погрешности
определения скорости, равной 1,85 км/ч.
10-2. Способы построения систем отсчета
Относительные способы. При построении системы отсчета
необходимо иметь опорную систему координат, по отношению
к которой определяется положение других систем координат, в ко-
торых измеряются параметры движения.
Для реализации опорной системы координат используют, на-
пример:
астрономические методы, когда с помощью астрономических
инструментов определяется местоположение движущегося объекта
215
по отношению к неподвижным звездам и по результатам последо-
вательных измерений находятся его параметры движения;
локационные методы, например широко применяемый радиоло-
кационный метод, в котором используются, в частности, в каче-
стве места расположения источников излучения искусственные
спутники Земли (см. § 8-4).
Во многих случаях опорная система координат реализуется не-
посредственно в процессе выполнения измерительного экспери-
мента. Например, при измерении с помощью емкостных преобра-
зователей биения вала двигателя относительно корпуса устанав-
ливаемые на корпусе элементы емкостных преобразователей
непосредственно задают направления, по которым измеряются
параметры движения вала.
Инерциальные способы [3, 17]. Эти способы характеризуются
автономностью, высокой точностью, что и определило их широкое
применение. На Земле чаще всего выбирают систему отсчета, одна
из осей которой совпадает с вертикалью места, а две другие ле-
жат в горизонтальной плоскости.
При решении навигационных задач основным элементом, реали-
зующим систему отсчета, в большинстве случаев является гиро-
скоп. В основу его действия положено свойство вращающихся тел
сохранять неизменным при отсутствии внешних моментов заданное
направление вектора момента количества движения (кинетического
момента) в инерциальном пространстве, что позволяет использо-
вать это направление в качестве опорного. Вторым важным свой-
ством гироскопа является возможность, прикладывая к его ротору
момент внешних сил М, осуществлять прецессию вектора кинети-
ческого момента Н с угловой скоростью со, при этом
М = юхН, (10-1)
и вектор Н, прецессируя относительно инерциального простран-
ства, стремится совместиться с вектором внешнего момента.
Трехстепенные гироскопы. Чтобы гироскоп, предназначенный
для сохранения в инерциальном пространстве заданного направле-
ния, не изменял его, конструкцией гироскопа предусмотрены две
степени свободы его ротора. Простейшая кинематическая схема та-
кого гироскопа приведена на рис. 10-2.
Ротор / установлен во взаимно ортогональных кольцах 2 и 3
карданова подвеса, обеспечивающих две требуемые степени сво-
боды. Расположенные по осям подвеса колец преобразователи
угла и момента (на рисунке не показаны) позволяют: а) опреде-
лить ориентацию оси вращения ротора относительно колец, а сле-
довательно, положение объекта, на котором установлен гироскоп,
относительно направления в инерциальном пространстве, по кото-
рому направлена ось вращения ротора; б) при необходимости за-
ставить прецессировать с требуемой угловой скоростью ось вра-
щения ротора, задавая моменты, определяемые выражением
(Ю-1).
Созданы конструкции гироскопов, в которых удалось отказаться
216
or кардановых колец и использовать газовый, электростатический
и магнитный подвесы.
Двухстепенные гироскопы. Наряду с трехстепенными при реа-
лизации систем отсчета широко используется разновидность двух-
степенного гироскопа — интегрирующий гироскоп. Схема подобного
прибора приведена на рис. 10-3.
Гироскоп имеет только одно кольцо подвеса — рамку /. Успо-
коитель 2 создает вокруг оси Ох момент, пропорциональный <р'.
При вращении с угловой скоростью со вокруг оси z связанного
с объектом корпуса прибора кинетический момент уравновешива-
ется демпфирующим, при этом
kq>' = <яН,
откуда
(10-2)
где k — коэффициент, определяемый типом и конструкцией успо-
коителя.
Из выражения (10-2) видно, что угол <р поворота рамки вокруг
оси Ох пропорционален интегралу от угловой скорости объекта,
т. е. его углу поворота в инерциальном пространстве. Выходной
сигнал интегрирующего гироскопа, пропорциональный углу ф, ис-
пользуется либо для стабилизации объекта в инерциальном про-
странстве, либо вводится в вычислительное устройство.
Системы отсчета, связанные с движущимися телами. При ре-
шении многих задач полезно располагать системами отсчета, свя-
занными с конкретными небесными телами или объектами, напри-
мер с Землей. Поскольку гироскоп без приложения к нему внеш-
них моментов сохраняет неизменным положение соответствующей
оси в инерциальном пространстве, решить поставленную задачу
можно, если по выбранным осям системы отсчета создать мо-
менты, заставляющие прецессировать ось ротора гироскопа до
совмещения с осью системы отсчета. При движении вблизи Земли
217
Для этой цели в большинстве приборов используются маятниковые
устройства, создающие момент, пропорциональный при малых
углах углу отклонения маятника от вертикали места. Этот момент
заставляет ось ротора гироскопа прецессировать до ее совпадения
с вертикалью. Таким образом, при выборе географической системы
координат в качестве системы отсчета ось ротора гироскопа всегда
будет направлена по вертикали места. Однако при применении
обычных маятниковых устройств зачастую возникают существен-
ные погрешности определения вертикали, вызванные ускорением
точки подвеса расположенного на движущемся объекте маятника.
Необходимость исключения этих погрешностей привела к созда-
нию невозмущаемого физического маятника, упрощенная схема
которого приведена на рис.
10-4.
Расположенная на объекте,
движущемся по дуге большого
круга вдоль поверхности
Земли, платформа 1 обладает
свободой поворота вокруг оси
уу. На платформе установлен
линейный акселерометр 2, из-
мерительная ось ИО которого
перпендикулярна оси уу. Вы-
ходной сигнал акселерометра
дважды интегрируется интег-
раторами 3 и 4 и через мас-
штабный преобразователь 5
поступает на устройство 6 по-
ворота платформы на угол а.
Тогда
а = k^kgkt a dt, (10-3)
где ki, k2, ka, kt — коэффициенты преобразования элементов 3, 4,
5, 6- а — ускорение платформы.
При ускоренном движении платформы вдоль поверхности Земли
вертикаль, соединяющая центр масс чувствительного элемента ак-
селерометра с центром Земли, поворачивается на угол ср вокруг
центра Земли с угловым ускорением
е = ф" = а/7?з, . (10-4)
где R3 — радиус Земли.
Если угол поворота платформы а равен <р, то платформа, рас-
положенная первоначально перпендикулярно вертикали, при дви-
жении объекта всегда будет сохранять это положение, т. е. яв-
ляться невозмущаемым маятником.
Из условия а~<р получаем
kjk^fzJzja. = a/R3 (10-5)
или
A ^tz^k^z^ 1 IRs.
218
Выбором коэффициентов klt ..k,> добиваются выполнения ус-
ловия (10-5). При этом период колебаний рассмотренного физи-
ческого маятника равен периоду математического маятника дли-
ной R3:
7’ = 2лд/7?з/^«84,3 мин.
Изложенные принципы положены в основу действия инерци-
альной системы — одной из наиболее точных навигационных си-
стем.
10-3. Методы и средства измерений параметров
движения в выбранной системе отсчета
Относительные методы. В этом случае измеряются пара-
метры движения движущегося тела относительно другого движу-
щегося или неподвижного тела. При этом широко применяются
рассмотренные в восьмой
главе методы и средства
измерений линейных и уг-
ловых перемещений, в том
числе электромеханические
методы, основанные на ис-
пользовании емкостных,
индуктивных, индукцион-
ных и других преобразова-
телей, и различные спек-
трометрические и оптиче-
ские методы.
В качестве примера
рассмотрим применение
Рис. 10-5
интерферометра при измерении ускорения свободного падения g.
Схема установки приведена на рис. 10-5.
Пробное тело 2, выполненное в виде уголкового отражателя,
свободно падает в вакуумированной трубе 1. Пройденный телом
путь измеряется двухлучевым интерферометром Майкельсона.
В качестве источника излучения используется лазер 3. Интерфе-
ренционная картина преобразуется фотоэлектронным умножителем
4 в последовательность импульсов, подсчет которых осуществля-
ется счетчиками 5 и 6, управляемыми генератором частоты 7.
Включение счетчиков — одновременное, выключение—через задан-
ные генератором 7 отрезки времени ti и /2- Высокая точность опре-
деления ускорения с помощью созданной установки (погрешность
менее 2*10-8) достигается за счет применения стабилизированного
лазера, а также благодаря учету и исключению погрешностей, при-
чинами которых являются вертикальный градиент ускорения сво-
бодного падения, вариации ускорения, вызванные притяжением
Луны и Солнца, возмущающие воздействия: сейсмоколебания
фундамента, влияние магнитных и электростатических полей
и др.
219
Упрощенное выражение для определения ускорения
2
/г — ti
________
ti tl
(10-6)
где li и l2 — измеренные интерферометром отрезки пути, пройден-
ные в процессе падения пробного тела; ti и t2 — время прохожде-
ния телом этих отрезков.
Для измерения параметров движения используются также ме-
тоды, основанные на применении эффектов Доплера, Мессбауэра
и др. (см. гл. 11).
Инерциальные методы измерений параметров линейного дви-
жения. В основе применения этих методов лежит фундаменталь-
ное свойство тел — свойство инерции. С по-
мощью инерциальных средств измерений
измеряют линейное ускорение твердого тела
и другие связанные с ускорением парамет-
ры линейного движения. Однако в силу
эквивалентности инерционной и гравитаци-
онной масс выходной сигнал подобных
средств измерений пропорционален не инер-
ционному ускорению, а так называемому
кажущемуся ускорению, представляющему
собой геометрическую разность инерцион-
ного и гравитационного ускорения а = аи—
—ag. Поэтому в результаты выполненных
измерений в общем случае необходимо вносить поправки на состав-
ляющие гравитационного ускорения по направлению измеритель-
ной оси акселерометра либо строить такие системы отсчета, в ко-
торых этими составляющими можно пренебречь. Например, в ряде
инерциальных систем, используемых для навигации вблизи Земли,
когда притяжением Солнца и планет можно пренебречь, автома-
тически поддерживается горизонтальное положение платформы
с установленными на ней акселерометрами. В этом случае уско-
рение свободного падения всегда перпендикулярно направлению
измерительных осей акселерометров, лежащих в плоскости плат-
формы, и во многих случаях его влиянием можно пренебречь.
В основе всех методов измерений параметров линейного дви-
жения твердого тела ле$кит измерение силы инерции Fn, пропор-
циональной массе т и ускорению а тела:
Fn = та.
Для измерения линейного ускорения выбирают некоторую пробную
массу т, определенным образом связывают ее с движущимся телом, а затем
измеряют ее силу инерции. Для измерения переменных ускорений с частотами
от единиц герц до десятков килогерц наибольшее применение нашли пьезоэлек-
трические преобразователи [5]. Для измерения постоянных и низкочастотных
ускорений используются приборы инерционного действия.
Простейшая схема прибора инерционного действия, в котором применен
метод прямого преобразования, приведена на рис. 10-6. Чувствительный эле-
мент 4 прибора — твердое тело массой т с помощью упругого элемента — пру-
220
жины 2 с жесткостью с подвешен в корпусе / прибора, укрепленного на дви-
жущемся теле. Успокоение чувствительного элемента производится успокоите-
лем 3, перемещение х чувствительного элемента относительно корпуса опреде-
ляется по шкале 5.
В установившемся положении та=—сх и
где а — составляющая ускорения по направлению измерительной оси Ох.
Перемещение х обычно преобразуется в электрический сигнал.
В общем случае движение чувствительного элемента описывается извест-
ным дифференциальным уравнением
тх" 4- Рх' сх = — та
или в приведенном виде
х’ 4- 2₽со0х' 4- «qX = — а, (10-7)
где <в0 = д/с/т — частота собственных колебаний; ₽=Р/(2ти0)—степень ус-
покоения; Р — коэффициент успокоения.
Из уравнения (10-7), представленного в операторном виде
(р2 4-2р«0р 4- cojj)х = —а, (10-8)
можно определить чувствительность прибора к ускорению а, скорости v и пере-
мещению у объекта, на котором прибор установлен:
S (р)а = =------------!-------; (10-9)
а р24-2₽й>0р 4-©5
S (р)0 = — = - pS (р)а; (10-10)
V
s (р)у =—=—p2S (р)а. (10-11)
У
Подставляя в выражение (10-9) p=ja>, находим амплитудно частотную и
фазочастотную характеристики прибора:
<Ра («) = — arctg
2₽ —
«о
или
Sna (п) = ' —
Vo — nT + W
I \ г ЗРч
<Рпа (п) = — arctg Г1 ,
1 —
где т)=и/шо — отношение частоты вынуждающей силы к частоте собственных
колебаний; So=So (0) = 1/coq2.
(10-12)
221
Аналогичным образом находим
snv (п) = (п); <Рпи (п) = «г™ (п) — л/2; (1 о 13)
$пу 01) = 01)’ <Рпу 01) ~ Фла 01) (10-14)
Представленные выражениями (10-12)—(10-14) зависимости для разных
значений р приведены на рис. 10-7—10-12.
Используя выражения (10-12)—(10-14), можно определить значения пара-,
метров прибора, показанного на рис. 10-6, оптимальных в отношении измере-
ния того или иного параметра движения. Из рис. 10-7 видно, что погрешности
Рис. 10-7
Рис. 10-9
Рнс. 10-8
измерений ускорений минимальны при 7]С1 (Х„а(т|)«1), т. е. когда частота
вынуждающей силы значительно меньше частоты собственных колебаний. По-
этому, чтобы расширить частотный диапазон измерений прибора, работающего
в режиме акселерометра, необходимо снижать т] путем увеличения частоты соб-
ственных колебаний прибора. Последнее может быть достигнуто уменьшением
массы чувствительного элемента (ЧЭ) или увеличением жесткости пружины.
Однако уменьшение массы снижает инерционную силу, а следовательно, и чув-
ствительность прибора и, кроме того, ограничено конструктивно. Увеличение
жесткости пружины также ведет к понижению чувствительности из-за уменьше-
ния перемещения ЧЭ. Поэтому для измерения перемещения ЧЭ применяют вы-
сокочувствительные преобразователи: емкостный, индуктивный, фотоэлектри-
ческий.
Погрешность измерения переменных ускорений зависит от степени успокое-
ния Р; обычно оптимальным является значение ₽=0,6.. .0,7.
Работа прибора в режиме измерения перемещения требует иного выбора
параметров. Из рис. 10-11 видно, что погрешности минимальны при ?]Э>1.
В этом случае, в отличие от предыдущего, необходимо увеличить массу ЧЭ и
222
Рис. 10-13
снизигь жесткость пружины. Поэтому в сейсмометрах масса ЧЭ достигает
иногда нескольких килограммов, и выбором соответствующей конструкции под-
веса ЧЭ добиваются малых значений жесткости.
Аналогичный рассмотренному выше подход применяют и при выборе пара-
метров прибора для измерения скорости.
В рассмотренных выше средствах измерений сила инерции пре-
образуется в линейное перемещение ЧЭ. Широкое применение на-
шли также маятниковые средства измерений параметров линей-
ного движения, в которых сила инерции преобразуется в угловое
перемещение ЧЭ. В общем случае будем называть маятником лю-
бое устройство, ЧЭ которого имеет свободу поворота и некоторую
массу разбаланса относительно оси подвеса. На рис. 10-13 приве-
дена схема подобного маятника.
На рисунке ЧЭ представлен в виде математи-
ческого маятника с приведенными массой т и
плечом г, обладающего свободой поворота отно-
сительно оси подвеса уу. Противодействующий
момент создается пружиной /, успокоение осу-
ществляется успокоителем (на рисунке не пока-
зан), угол поворота а определяется по шкале 2.
Движение ЧЭ описывается известным уравне-
нием
Ja" -ф Раа' 4- саа = —mra cos а, (10-15)
где J — момент инерции ЧЭ; Ра — коэффициент
успокоения; са—жесткость пружины; а — со-
ставляющая ускорения по направлению измери-
тельной оси прибора.
При малых а, если для обеспечения требуемой
принять cosa=l, выражение (10-15) может быть представлено
в виде
ТОЧНОСТИ можно
(10-16)
а.
а" 4- 2^аа>Оаа' wOaa = - а,
где степень успокоения pa — Pa!(2JwOa), частота собственных коле-
баний Moa = VCa/^ •
В установившемся режиме
тг
а— —-------
Аналогия выражений (10-7) и (10-16) позволяет использовать
для оценки погрешностей измерений формулы (10-12) — (10-14)
при замене линейного перемещения х на угловое а, степени успо-
коения прн линейном движении р на степень успокоения ра при
угловом и т. п.
Уравнение (10-15) является нелинейным. Поэтому при измене-
нии ускорения по полигармоническому закону (например, при ра-
боте прибора на вибрирующем основании) в решении уравнения
появляется постоянная составляющая — «увод» маятника. С увели-
223
ченйем частоты собственных колебаний прибора значение увода
уменьшается.
Однако, несмотря на указанную погрешность, маятниковые
средства измерений находят широкое применение. Это в значи-
тельной степени обусловливается их конструктивными преимуще-
ствами: возможностью применения прецизионных подшипников
качения, удобством взвешивания чувствительного элемента в вяз-
кой жидкости с целью снижения момента трения по оси подвеса
и др.
Повышение точности и существенное улучшение динамических
характеристик средств измерений связаны с применением прибо-
ров уравновешивающего преобразования.
Рис. 10-14
преобразователем 3 сила Fnp=Blio с
инерции Fn=ma (В и /—индукция в
нитоэлектрического преобразователя).
Из равенства сил следует
. _ т П — 'тР™* п
1о. с — а» ивых ~
bl bl
На рис. 10-14 приведена схе-
ма акселерометра с линейно пе-
ремещающимся ЧЭ. Принципы
действия такого акселерометра и
рассмотренного в девятой главе
манометра с силовым уравнове-
шиванием аналогичны. Перемеще-
ние чувствительного элемента 2
под действием силы инерции та
с помощью емкостного преобра-
зователя /, усилителя 5 и фазо-
чувствительного выпрямителя 4
преобразуется в ток io. с. Созда-
ваемая магнитоэлектрическим
противоположна по направлению силе
зазоре и длина провода катушки маг-
(10-17)
Выражения (10-17)
вид
б^вЫХ
являются идеализированными, полное выражение имеет
а,
Bl + cRl(knky)
(10-18)
где с — жесткость токоподводов; R — сопротивление цепи катушки магнитоэлек-
трического преобразователя; йу и — коэффициенты преобразования элементов
5 и 1.
Выражение (10-18) иллюстрирует известное свойство приборов уравновеши-
вающего преобразования: требование высокой точности предъявляется лишь
к элементу, создающему уравновешивающую величину. Действительно, при до-
статочно больших значениях йу
Bl > cRl{knky)
и для оценки точности прибора может быть использовано выражение (10-17),
показывающее, что высокие требования предъявляются лишь к обратному маг-
нитоэлектрическому преобразователю. Существенным источником погрешности
подобных приборов являются силы, совпадающие по направлению с F„, в пер-
вую очередь силы трения. Для уменьшения трения применяют аэростатические,
магнитные, электростатические подвесы, осуществляют взвешивание ЧЭ в вяз-
кой жидкости и др.
Упрощенное выражение для круговой частоты собственных колебаний при-
бора имеет вид
®о « VBlknky/(mR) .
224
Увеличением коэффициента усиления /г у Можно добиться повышения ча-
стоты собственных колебаний и расширения частотного диапазона измерений.
При этом снижается значение перемещения ЧЭ.
mR
х « —-----а,
Blknky
что ведет также и к повышению точности преобразователя 3.
Сочетание достоинств маятниковых приборов и приборов урав-
новешивающего преобразования позволило создать две группы
наиболее точных средств измерений. К первой группе относятся
маятниковые акселерометры уравновешивающего преобразования,
принципиальная схема которых
аналогична схеме акселерометра
с линейным перемещением чувстви-
тельного элемента, приведенной на
рис. 10-14.
В состав второй группы входят
гироскопические маятниковые ак-
селерометры, обычно называемые
гироинтеграторами линейных уско-
рений (рис. 10-15). Центр масс О}
гиромотора 1 смещен по оси его
вращения на расстояние I от оси х
его рамки 2, подвешенной в наруж-
ной рамке 3. Относительно оси на-
ружной рамки ув прибор сбаланси-
рован, и центр масс гиромотора при
перпендикулярности осей z и ув
расположен на оси ун- При ускоре-
нии, направленном по оси уа, момент относительно оси х, рав-
ный Мх=т1а (т — масса гнромотора), уравновешивается гиро-
скопическим моментом Мг=На'. Угол поворота а рамки 3 изме-
ряется преобразователем 4. При этом угловая скорость а' будет
пропорциональна измеряемому ускорению, а угол поворота на-
ружной рамки относительно оси уЕ — измеряемой скорости:
а = ~^г1~ Г adt.
Н о
Гироакселерометры являются одними из наиболее точных
средств измерений ускорения, однако конструктивно они сложнее
маятниковых акселерометров. Кроме того, существенно затруднено
определение их метрологических характеристик при ускорениях
выше g. Здесь основными точными методами задания ускорений
являются ротационные методы (см. § 10-4), применение которых
в этом случае не представляется возможным из-за значительных
методических погрешностей прибора при его работе на вращаю-
щемся основании.
В акселерометрах уравновешивающего преобразования в на-
стоящее время широко применяют импульсный ток в цепи обрат-
8 Заказ № 444 225
ной связи. Структурная схема такого акселерометра приведена
на рис. 10-16.
Электрический сигнал с преобразователя перемещения ПП чув-
ствительного элемента через усилитель У поступает па модуля-
тор Л4, в качестве которого применяют модуляторы частотно-им-
пульсного (ЧИМ), широтно-импульсного (ШИМ) или релейно-им-
пульсного (РИМ) типов. Модулирующее устройство управляет
работой электронного ключа ЭК, пропускающего на обмотки пре-
образователя силы или момента ПС импульсы от стабилизатора
тока СТ.
Для измерения параметров движения также широко применя-
ются методы, основанные на использовании пьезоэлектрических,
струпных и электрокинетических преобразователей [5].
Рис. 10-16 Рис. 10-17
Схема дифференциального струнного акселерометра приведена
на рис. 10-17. Чувствительный элемент (массой т) установлен
в упругих подвесах 3 и растянут двумя струнами 1 и 2. Струны
предварительно натянуты силой Fo.
Частота собственных колебаний каждой из струн определя-
ется формулой
f= Hr V"T ’ <10-,9>
где Fo — сила натяжения струны; I — ее длина; р — масса на еди-
ницу длины струны.
Частоты идентичных струн при действии силы инерции та
чувствительного элемента в соответствии с выражением (10-19)
равны
f — 1 л / 1'п + та^
1 21 у р
и f2 = у] , (10-20)
и разностная частота
226
fTlCl уу « Л £
Если -------<SC I. то Л/«-----------а.
Условие (Ю-21) показывает, что для получения высокой линей-
ности статической градуировочной характеристики акселерометра
предварительный натяг струн Fo должен значительно превосхо-
дить силы инерции, что, в свою очередь, приведет к увеличению
жесткости в направлении измерительной силы и к уменьшению
чувствительности акселерометра. Поэтому обычно прибор строят
по другой схеме, используя полученное из уравнений (Ю-20) выра-
жение
= =------------а, (Ю-22)
4Pp(A+f2) ' ’
из которого следует, что если автоматически поддерживать посто-
янство суммы частот /у+/2. то их разность будет пропорциональна
измеряемому ускорению. Для поддержания колебаний струн ис-
пользуют не показанную на рис. Ю-17 систему, состоящую из пре-
образователя параметров колебаний струны в электрический сиг-
нал, усилителя и возбудителя колебаний.
Достоинствами струнных преобразователей является их высо-
кая точность и возможность достаточно просто путем счета им-
пульсов, сформированных из разностной частоты Af, выполнить
интегрирование измеряемого ускорения.
Методы измерений параметров углового движения. Эти методы
принципиально ничем не отличаются от методов измерений пара-
метров линейного движения при условии замены силы инерции
чувствительного элемента средства измерения на момент сил инер-
ции. При идеально сбалансированных чувствительных элементах
подобные приборы не чувствительны к линейным инерционным
и гравитационным ускорениям.
Как и при линейном движении, в этом случае применяют две
группы средств измерений. В приборах первой группы момент сил
инерции преобразуется в угловое перемещение, а затем в электри-
ческий сигнал; в приборах второй группы осуществляется прямое
преобразование момента сил инерции в электрический сигнал.
Среди средств измерений первой группы наиболее распростра-
нены приборы с твердым чувствительным элементом, сбалансиро-
ванным относительно оси его поворота, и гироскопические приборы.
Схема прибора для измерения угловых параметров движения
аналогична приведенной на рис. 10-6 и может быть получена из
показанной на рис. Ю-13 схемы маятникового прибора путем ис-
ключения массы дисбаланса т.
Дифференциальное уравнение движения чувствительного эле-
мента имеет вид
а + 20асоОаа’ +(oqCC = —е, (10-23)
где е — угловое ускорение объекта, на котором располагается
прибор.
8*
227
В установившемся режиме
1
а=---------е.
®0а
Аналогично предыдущему полная идентичность выражений
(10-7) и (10-23) позволяет использовать формулы (10-12) —
(10-14) для оценок амплитудно-частотных и фазочастотных харак-
теристик средств измерений угловых параметров движения.
Естественно, что и все приведенные выше выводы и рекомен-
дации по выбору параметров справедливы и для случая измере-
ния угловых параметров движения.
Среди гироскопических приборов широко используются гирота-
хометры и интегрирующие гироскопы. В гиротахометрах гироско-
пический момент, возникающий при вращении основания прибора,
уравновешивается моментом, создаваемым упругим элементом.
Если изображенный на рис. 10-3 двухстепенной гироскоп снабдить
пружиной, создающей момент относительно оси х, то в устано-
вившемся положении
'Н
<х==---(О,
са
где са — угловая жесткость пружины.
В наиболее точных приборах этого типа используется принцип
уравновешивающего преобразования.
Интегрирующие гироскопы предназначены для измерения угла
поворота объекта в инерциальном пространстве, главным образом
для введения соответствующих сигналов в системы управления.
Среди второй группы средств измерений угловой скорости наи-
более важным и перспективным для практического применения яв-
ляется кольцевой лазер. В основе его действия — использование
эффектов, возникающих при вращении плоского многозеркального
резонатора, в контуре которого возбуждаются две бегущие на-
встречу друг другу электромагнитные волны.
Пусть твердое тело Р, по периметру произвольного замкнутого
контура которого распространяются встречные волны 1 и 2, вра-
щается с угловой скоростью Q вокруг оси, проходящей через точку
О перпендикулярно плоскости чертежа (рис. 10-18). Время про-
хождения участка dL между точками А и В для волны 1, распро-
страняющейся по направлению движения тела, кажется меньшим,
чем для встречной волны 2. За время прохождения волны 1 между
точками В и А точка А из-за движения тела сместится в новое
положение А', и пройденный волной путь будет равен
dLr« dL-\- rd(f,
где dq> = Q ; c — скорость света. ,
228
Так как dL = rda, то
dLt -= rda r2Q
с
Для волны 2 аналогично находим
dL2 = rda —
с
Кажущаяся разность хода волн
dl = dl^—dLz = 2Л2 — -
с
1
и 2 на участке АВ
(10-24)
Рис. 10-18
контуру, получим
Интегрируя выражение (10-24) по
/ = $ r^da — 4Q —.
где S — площадь контура.
Временное запаздывание встречных волн
М лгх s
т =— = 4Q —
с с2
может быть выражено и через угол фазового сдвига между ними:
Аф = сот = 4Й —ю-.
с2
где (о — частота волн при неподвижном резонаторе.
Рассмотренные эффекты при движении без потерь встречных
волн в резонаторе, вращающемся в инерциальном пространстве,
аналогичны изменению его частот настройки.
Разность этих частот
Асо = -82LLq( (Ю-25)
ХА
где Z,=2nc/(o — длина волны при неподвижном резонаторе.
229
Угловая скорость резонатора может быть определена путем
измерения т, Дф, а также интенсивностей встречных волн. Наи-
более чувствительными и точными являются приборы с частот-
ным выходом. На рис. 10-19 приведена схема подобного при-
бора— кольцевого газового лазера. Зеркала А, В и С образуют
кольцевой резонатор, в который введена активная среда 3 (обычно
смесь гелия и неона), необходимая для генерации незатухающих
волн 1 и 2. Этот прибор позволяет измерять угловую скорость
твердого тела в инерциальном пространстве, поэтому его часто на-
зывают лазерным гироскопом.
Кольцевые лазеры используются также, например, в эталон-
ных установках ротационного типа в качестве точных быстродей-
ствующих средств измерений угла в динамическом режиме.
Выражение (10-25) может быть записано в виде
А 8nS da
IL dt
Тогда, сформировав из сигнала разностной частоты последователь-
ность импульсов и сосчитав их, получим
n = JAwdf — —се.
10-4. Эталоны в области измерений параметров
движения и методы передачи размера единиц
рабочим средствам измерений
Существующие первичные и специальные эталоны в об-
ласти измерений параметров движения разделяются на две основ-
ные группы: эталоны единиц, характеризующих линейное движе-
ние центра масс твердого тела (перемещение, скорость, ускорение),
и эталоны единиц, характеризующих угловое движение вокруг
центра масс твердого тела (угловая скорость и угловое ускоре-
ние).
Государственный первичный эталон единицы постоянного ли-
нейного ускорения твердого тела в диапазоне 0,001—200 м/с2
(ГОСТ 8.179—76) включает в себя две установки. Эталонная уста-
новка типа ЭУГТ-1, обеспечивающая воспроизведение единицы
постоянного ускорения в диапазоне 0,001—10 м/с2, основана на
принципе эквивалентности инерционной и гравитационной масс.
Принцип ее действия иллюстрируется рис. 10-20. Поверяемый ак-
селерометр устанавливается па платформу, обладающую свободой
поворота вокруг оси, проходящей через точку О перпендикулярно
плоскости чертежа. В исходном положении А верхняя плоскость
платформы и измерительная ось акселерометра горизонтальны.
При повороте платформы на заданный угол а по измерительной
оси акселерометра будет направлена составляющая ускорения сво-
230
Годного паденйй ag, равная по модулю, согласно принципу эквива-
лентности, инерционному ускорению:
а= — ag=—gsina. (10-26)
Зная значение g и измеряя угол а, по выражению (10-26) нахо-
дят значение воспроизводимого ускорения.
Эталонная установка ЭУП-1 воспроизводит единицу ускорения
в зависимости от его значения со средним квадратическим откло-
нением (СКО) результата измерения So, не превышающим
1 • 10~2—1 • 10 5, при неисключенной систематической погрешности
(НСП) 0о, не превышающей 4-10~2—3-10~5.
Эталонная установка типа «Ротор» обеспечивает воспроизведе-
ние с помощью ротационной платформы единицы постоянного ус-
корения в диапазоне 5—200 м/с2. Платформа А (рис. 10-21) вра-
щается вокруг вертикальной оси OOi с постоянной угловой ско-
ростью Q. Верхняя плоскость платформы и измерительная ось
установленного на платформе акселерометра горизонтальны, при
этом измерительная ось акселерометра пересекает ось ООЬ Если
расстояние от оси OOi до центра масс чувствительного элемента
акселерометра равно R, то приложенное к центру масс центро-
стремительное ускорение
а= — Q2/?.
Требуемые значения воспроизводимого ускорения достигаются
путем задания различных постоянных значений й. Эталонная уста-
новка «Ротор» воспроизводит постоянное ускорение с СКО So, не
превышающим 2-Ю-5, при НСП 6о, не превышающей 8-10"5.
Гармонические параметры линейного движения воспроизво-
дятся с помощью двух специальных эталонов. В диапазоне 5—
100 м/с2 при частотах 0,5—30 Гц ускорение создается с помощью
двух ротационных платформ с параллельными вертикальными
231
осями вращения (двойная центрифуга) (рис. 10-22). Ротор 1 н рас-
положенный на нем стол 2 вращаются с постоянными угловыми
скоростями Q и со. Если на стол установить акселерометр так,
чтобы центр масс его чувствительного элемента находился на оси
вращения стола, то направленное по измерительной оси центро-
стремительное ускорение будет равно
а — —i)2R cos и/.
Рис. 10-23
Этот эталон воспроизводит ускорения Q2/?, амплитуда которых
не зависит от частоты, с CKO S0^l 10_3 и НСП 0о^2-1О-3.
Государственный специ-
альный эталон единиц длины,
скорости и ускорения при ко-
лебательном движении твер-
дого тела (ГОСТ 8.138—84)
основан на применении \ли-
нейно виброперемещающейся
платформы. Параметры виб-
рации воспроизводятся тремя
эталонными установками:
ЭУВ-1 на основе электродина-
мического вибратора (в ди-
апазоне частот 20—103 Гц),
ЭУВ-2, использующей набор
резонансных вибровозбудите-
лей (2,8-103—104 Гц), и
ЭУВ-3 на основе электромаг-
нитного возбудителя (0,3—
от предыдущего эталона, амплитуды ско-
зависят от частоты, что не позволяет
Рис. 10-22
30 Гц). В отличие
рости и ускорения
достичь их больших значений в диапазоне низких и инфра-
низких частот; однако в этом случае диапазон частот со су-
щественно шире. Диапазон воспроизводимых амплитуд ускорения
Л=хош2, где х0 — амплитуда виброперемещения, в зависимости от
и находится в пределах 1-10-3—1-Ю3 м/с2, при этом S0^5-10-4...
2,5- IO 3 и 0(<1 • 10-3.. .2,5-10~3.
Параметры ударного ускорения воспроизводятся с помощью
государственного специального эталона единицы ускорения при
ударном движении (ГОСТ 8.137—85), в состав которого входят
две установки. В установке 93101Э ударная волна возбуждается
индуктором в механическом волноводе, на торце которого уста-
навливается поверяемый акселерометр.
В установке 93103Э (рис. 10-23) поверяемый акселерометр 1
устанавливается на массе 2, связанной упругими связями с мас-
сой 3 и неподвижным основанием. К массе 3, также упруго свя-
занной с неподвижным основанием, приложена сила тяжести
массы 4. При быстром снятии этой силы, например перерезанием
связующего элемента, масса 2 движется с ударным ускорением,
232
параметры которого являются функциями предварительно опреде-
ленных масс и жесткостей показанной на рис. 10-23 системы.
В зависимости от длительности фронта эталон воспроизводит
ударное ускорение в диапазоне 1-Ю3—1 -106 м/с2 с CKO So^2,5...
3-Ю-2
Параметры углового движения воспроизводятся двумя этало-
нами.
В государственном первичном эталоне единицы постоянного
углового ускорения в диапазоне 1—100 рад/с (ГОСТ 8.289—78)
с помощью винтовой пары ускорение свободно падающей
платформы преобразуется в ее угловое ускорение, дискрет-
ные значения которого задаются с помощью устанавливаемых на
платформе инерционных дисков. При этом S0<3-10-4; 0<5-1О-5.
В государственном специальном эталоне единицы угловой ско-
рости в диапазоне 5-10~8—2,5-10"4 рад/с (ГОСТ 8.288—78) ис-
пользуется метод сравнения воспроизводимой скорости с состав-
ляющей угловой скорости вращения Земли. В эталоне So с
<2-10-9 рад/с; 0О<2> 10~9 рад/с.
Передача размера единиц от описанных выше эталонов рабо-
чим средствам измерений регламентируется государственными по-
верочными схемами. В качестве средства передачи чаще всего
применяются акселерометры (низкочастотные, вибрационные,
ударные). Как образцовый низкочастотный акселерометр исполь-
зуется маятниковый компенсационный акселерометр с вертикаль-
ной осью подвеса чувствительного элемента, как образцовые ви-
брационные и ударные акселерометры — пьезоэлектрические аксе-
лерометры. Образцовые акселерометры поверяют непосредственно
на эталоне, а затем с их помощью градуируют образцовые уста-
новки низших разрядов, на которых поверяются рабочие средства
измерений.
Глава одиннадцатая
МЕТОДЫ ИЗМЕРЕНИЙ ПАРАМЕТРОВ
ДВИЖЕНИЯ ЖИДКИХ И ГАЗООБРАЗНЫХ ВЕЩЕСТВ
11-1. Характеристики измеряемых величин,
классификация методов измерений
Измерения параметров движения жидких и газообраз-
ных веществ широко применяются в нефтегазодобывающих и
транспортирующих системах (магистральных трубопроводах), при
контроле нефтеперерабатывающих, химических, теплотехнических
и других технологических процессов, в газоводоснабжении, пище-
вой промышленности и во многих других областях народного хо-
зяйства. Основными параметрами движения потоков жидких, га-
зообразных веществ и плазмы являются расход, определяемый
233
как количество вещества, протекающее через сечение трубопро-
вода (канала) в единицу времени, и полный расход, т. е. общее
количество протекающего вещества. В ряде случаев необходимо
определять скорость потока.
Единицы расхода могут быть объемными — метр кубический
в час, в секунду, литр в секунду и т. д. и массовыми — килограмм
в секунду, в час и т. д. Измерения расхода веществ составляют
около 20% всех проводимых измерений, а число эксплуатируемых
расходомеров и счетчиков — несколько миллионов штук. Погреш-
ность измерения расхода в производственных условиях в настоя-
щее время составляет 1—2% и более. В ряде отраслей требуется
измерять расход с погрешностью 0,2—0,5%. Измерение расхода
необходимо производить в очень широких пределах. Диапазоны
измерений расхода жидкостей разделяются на три поддиапазона:
малые расходы — от 0 до 15-10~4 м3/с, средние расходы — от
15-10-4 до 0,5 м3/с и большие расходы — от 0,5 м3/с и выше.
Приборы для измерения расхода называются расходомерами,
для измерения количества вещества — счетчиками, а для измере-
ния скорости потоков — анемометрами.
Здесь главным образом рассматриваются методы и средства
измерений расхода и скорости жидких и газообразных веществ.
Измерение количества вещества электрическими методами произ-
водится путем интегрирования расхода за определенный интервал
времени.
Обычно измеряются средние значения расхода и скорости, но
в некоторых случаях требуется измерять мгновенные значения
этих величин. Кроме того, иногда надо определить скорость в за-
данных точках потока или среднюю по всему сечению. Такие из-
мерения необходимы для исследования эпюры скоростей и харак-
тера движения различных потоков.
Существующие электрические методы и средства измерений
расхода можно разделить на бесконтактные и контактные. К пер-
вым относятся методы и средства измерений, в которых отсут-
ствуют какие-либо нагружения потока, а также не используются
подвижные или вращающиеся элементы, помещенные внутрь по-
тока.
Расход относится к величинам, которые пока не поддаются не-
посредственному измерению с помощью электрических методов.
Большинство методов измерений расхода основано на измерении
каких-либо параметров потока вещества (развиваемое усилие, пе-
репад давлений, скорость потока, частота завихрений и др.), кото-
рые несут информацию о расходе. Наиболее распространенные
электрические методы измерения расхода можно разделить на
гидродинамические (силовые), основанные на силовом взаимодей-
ствии потока и помещенного в него тела, и скоростные (кинема-
тические), основанные на измерении скорости потока, которая
прямо пропорциональна объемному расходу. Гидродинамические
(силовые) методы в основном являются контактными методами
со свойственными им погрешностями за учет «энергетического»
234
взаимодействия объекта (потока) и средства измерения. Значи-
тельное число скоростных методов относится к неконтактным ме-
тодам, для которых характерно малое или незначительное взаимо-
действие средства измерения и потока.
11-2. Гидродинамические методы измерений расхода
Гидродинамические методы основаны на использовании
явлений, возникающих при силовом взаимодействии потока жидко-
сти или газа с помещенным в него телом. К таким явлениям от-
носятся возникновение тормозящих или ускоряющих сил, мест-
ный перепад давления, образование вихрей, гидродинамических
колебаний и др.
Гидродинамические методы можно разделить на статические,
при которых поток взаимодействует с неподвижным телом, и ди-
намические, когда используется подвижное тело, которое совер-
шает поступательное, вращательное или колебательное движение.
К статическим методам относятся метод переменного перепада дав-
лений, вихревой метод, генераторный и др., к динамическим —
метод постоянного перепада давлений, тахометрический, вибраци-
онный и др.
Статические методы. Метод переменного перепада давлений
основан на использовании сужающего устройства (диафрагма,
сопло, труба Вентури и т. п.), создающего перепад давления, из-
меряемый дифференциальным манометром прямого или уравно-
вешивающего преобразования.
Объемный Qy и массовый Qm расходы выражаются соответ-
ственно формулами:
Qv = aS '\/2\plp ; Qm = aS ^2Лрр ,
где S — площадь отверстия сужающего устройства; а — его коэф-
фициент расхода; Др —перепад давлений; р — плотность вещества.
Для получения линейной зависимости между показаниями расхо-
домера и измеряемым расходом перепад давлений удобно изме-
рять при помощи дифференциального манометра с ферродинами-
ческим обратным преобразователем, уравновешивающая сила ко-
торого пропорциональна квадрату тока в его обмотках [5]. Более
точными являются расходомеры, в которых разность давлений Др,
создаваемая сужающим устройством, уравновешивается давлением,
создаваемым компрессором (рис. 11-1). Поскольку давление, раз-
виваемое компрессором К, пропорционально квадрату частоты
вращения его ротора, то частота вращения двигателя Д, измеряе-
мая тахометром Т, пропорциональна расходу, а общее число обо-
ротов ротора, определяемое счетчиком Сч, указывает на количе-
ство вещества, прошедшего через трубопровод.
Метод переменного перепада давлений является одним из наи-
более распространенных методов измерения расхода жидких и
газообразных веществ, находящихся при давлениях до 100 МПа
и температурах до нескольких сотен градусов. Метод позволяет
235
независимо градуировать сужающие устройства и дифференци-
альные манометры. Недостатком метода являются относительно
большие погрешности (1—2%), обусловленные демпфирующим
действием сужающего устройства, нелинейной зависимостью между
расходом и перепадом давлений, неравномерным распределением
давления, износом сужающего. устройства, изменением плотности
вещества и др. Последняя причина особенно существенна при из-
мерении расхода газа или параД
Весьма перспективны гидродинамические частотные методы
измерений расхода, основанные на возникновении вихрей и гидро-
динамических колебаний в потоке жидкого или газообразного ве-
щества.
В вихревых расходомерах используется гидродинамическое яв-
ление— образование вихрей при обтекании жидкостью препят-
ствия. Если в поток помещено препятствие (плохообтекаемое тело),
отдельные слои жидкости отрываются от тела и свертываются
в вихри (рис. 11-2), образуя зоны низкого давления за препят-
ствием. Частота следования вихрей прямо пропорциональна скоро-
сти потока. Если в качестве препятствия используется поперечно
расположенный цилиндр (рис. 11-2,а), то зависимость между ча-
стотой образования вихрей и скоростью потока имеет вид
f = kv/d,
где k — коэффициент, который в относительно широком диапазоне
его значений не зависит от числа Рейнольдса; d— диаметр ци-
линдра.
236
При образовании вихря у одной стороны плохообтекаемого
тела скорость потока увеличивается, а давление падает, а у про-
тивоположной стороны скорость падает, а давление возрастает.
Это создает перепад давлений, который меняет свой знак при соз-
дании вихря у противоположной стороны тела. При этом перерас-
пределение давлений и скоростей вокруг тела происходит с часто-
той образования вихрей, которая пропорциональна расходу. Для
определения частоты образований вихрей можно использовать дат-
чик давления или нагреваемый током терморезистор (рис. 11-2,6),
частота изменения сопротивления которого является инфор-
мативным параметром, пропорциональным измеряемому рас-
ходу.
Рис. 11-3
Другая разновидность частотного гидродинамического метода
основана на явлении возникновения гидродинамических колеба-
ний, вызываемых «прилипанием» жидкости или газа к стенке тру-
бопровода. При проходе потока через специальный корпус 1 рас-
ходомера (рис. 11-3) происходит притягивание струи 2 к одной из
стенок (эффект Коанда), вследствие чего возникает потокв канале
обратной связи 3, вызывающий переброс струи к противополож-
ной стенке, откуда под влиянием потока, возникающего во втором
канале обратной связи 4, струя перебрасывается в начальное по-
ложение и т. д. Частота автоколебаний струи, пропорциональная
скорости (объемному расходу), так же как и в вихревых расхо-
домерах, определяется по частоте изменения сопротивления на-
греваемого током терморезистора 5, который размещается в одном
из каналов обратной связи.
Для определения частоты образования вихрей используются
также ультразвуковые преобразователи. Под воздействием вихрей
происходит модуляция ультразвуковых колебаний, частота которых
равна частоте вихрей.
Гидродинамические частотные расходомеры отличаются высо-
кими метрологическими характеристиками. Так, например, вихре-
237
вне расходомеры обеспечивают измерения расхода жидких и газо-
образных сред, находящихся при давлении до 10 МПа и темпера-
турах от —40 до +230° С, с погрешностью 0,25%.
Динамические методы. Метод постоянного перепада давлений наиболее про-
сто реализуется в ротаметре — расходомере, состоящем из конической трубки и
поплавка, перемещающегося вверх под действием потока (рис. 11-4). По мере
подъема поплавка кольцевой зазор между ним и внутренней поверхностью
трубки увеличивается до тех пор, пока подъемная сила, действующая на попла-
вок, не уравновесит его вес:
Уп£ГРп УпДРс + е,^пРс1,2/2,
где 1+ — объем поплавка; рп и рс — соответственно плотность поплавка и
среды; v — скорость потока на поверхности поплавка; S,. — максимальная пло-
щадь сечения поплавка; с —
коэффициент сопротивления,
зависящий от геометрических
размеров измерительного уст-
ройства и числа Рейнольдса.
Поплавок обычно имеет
спиральную нарезку, благо
даря которой он вращается
в потоке жидкости, что умень-
шает трение и центрирует по-
плавок по оси конической
трубы. Ротаметр представляет
собой нелинейное апериодиче-
ское звено, постоянная вре-
мени которого обычно состав-
ляет 1—1,5 с. В статическом
режиме высота подъема по-
плавка линейно зависит от
измеряемого расхода. Переме-
щение поплавка может быть
преобразовано в пропорци-
ональный электрический сиг-
нал при помощи дифференци-
альных, емкостных, оптоэлек-
тронных, радиоизотопных или других преобразователей. Ротаметры отлича-
ются простотой конструкции и не вызывают существенных потерь давления
в трубопроводе. Погрешность таких приборов обычно не превышает 1—1,65 %
и в основном определяется точностью градуировки и влиянием изменения
свойств вещества — плотности, вязкости и др.
Другой разновидностью динамического метода является тахометрический
метод, основанный на преобразовании расхода жидкости или газа в скорость
вращательного или возвратно-поступательного движения различных тел (тур-
бинка, поршень, шарик и т. п.). Наиболее широко этот метод используется
в турбинных расходомерах, которые отличаются хорошими метрологическими
характеристиками. У различных типов турбинных расходомеров основная по-
грешность составляет 0,2—1,5%, постоянная времени 1—50 мс. Тахометрический
метод применяется для измерения объемных расходов в- диапазоне 5-10~9—
10 м3/с. Обычно турбинный расходомер состоит из турбинки (крыльчатки), уста-
новленной в поток, и индукционного или индуктивного, ионизационного, опто-
электронного преобразователя частоты вращения турбинки в электрический сиг-
нал. Основные составляющие погрешности таких расходомеров главным образом
определяются нестабильностью трения в подшипниках и изменением вязкости
среды.
При измерении малых расходов возникает погрешность за счет тормозного
момента, который имеет место в случае использования электромагнитных (ин-
дукционных, индуктивных) преобразователей скорости. Тормозной момент
можно исключить, применяя радиоактивные, фотоэлектрические или емкостные
238
преобразователи. Для уменьшения погрешности от трения используют пластмас-
совые (фторопластовые) лопасти и подшипники, способы гидравлической ком-
пенсации осевого усилия или бесподшипниковые опоры ротора.
На рис. 11-5 показано устройство расходомера для измерения малых рас-
ходов газа, в котором вал ротора с лопастями 1 опирается на вращающийся
вместе с ним поплавок 5, плавающий на поверхности жидкости (воды) в со-
суде 6, находящемся внутри вертикального отрезка трубопровода. Восходящий
поток газа вызывает вращение ротора вместе с поплавком. Вертикальное поло-
жение ротора стабилизируется грузом 7 и постоянным магнитом 8, находя-
щимся снизу сосуда с жидкостью. Частота вращения ротора измеряется опто
электронным устройством по частоте импульсов, возникающих в фотодиоде 2
при периодическом перекрытии светового сигнала от источника 4. При малом
расходе частотомер 3 работает в режиме измерения периода.
Частота вращения ротора линейно зависит от скорости газа в диапазоне
0,25—10 л/с. Момент, создаваемый трением между жидкостью и поплавком,
в 100 раз меньше момента, создаваемого вязким трением между газом и по-
верхностью лопастей ротора.
Для измерения расхода вязких жидкостей в широком диапазоне темпера-
тур-— от —40 до +500° С и высоких давлений — до 50 МПа применяются
поршневые или турбопоршпевые расходомеры.
Для определения вектора скорости течения жидких и газообразных сред,
например морских течений, ветра и т. д., используются двух- или трехкомпо-
нентные турбинные анемометры, содержащие две или три турбинки, оси кото-
рых образуют прямоугольную систему координат. Для определения направле-
ния составляющих вектора скорости применяются реверсивные преобразователи
числа оборотов турбинки в цифровой код. В качестве такого преобразователя,
например, используют постоянный магнит, установленный в роторе турбинки, и
два геркона, импульсы с которых образуют код, определяющий направление и
значение частоты вращения ротора.
Вибрационный метод основан на зависимости параметров (ча-
стота и амплитуда колебаний, коэффициент успокоения) механи-
ческого трубчатого резонатора от массового расхода проходящего
через резонатор потока. Трубчатый резонатор, круглого или пря-
моугольного сечения, обычно работает в режиме свободных коле-
баний или в режиме автоколебаний. Для создания расходомеров
непрерывного действия последний режим предпочтительнее. Наи-
более эффективно применять вибрационный метод для измерения
расхода многофазных потоков.
На рис. 11-6 представлена структурная схема вибрационного
массового расходомера, работающего в автоколебательном ре-
жиме. Электромеханическая автоколебательная система состоит
из механического резонатора с распределенными параметрами
в виде консольно укрепленной трубки 2, через которую протекает
исследуемый поток, электромагнитных приемника 5 и возбуди-
теля 6 колебаний, охваченных положительной обратной связью че-
рез усилитель 4, управляемый усилитель 10 и усилитель мощно-
сти 8 Амплитуда колебаний автогенератора задается опорным
напряжением Uo и поддерживается постоянной при помощи цепи
отрицательной обратной связи путем изменения коэффициента
усиления управляемого усилителя 10 сигналом от компаратора 7.
При заполнении резонатора исследуемой средой изменяются его
параметры, что вызывает изменение амплитуды и частоты коле-
баний автогенератора. С увеличением массового расхода увеличи-
вается момент сил за счет кориолисова ускорения, что приводит
239
к возрастанию успокоения и уменьшению амплитуды колебаний
резонатора. Изменение плотности потока главным образом влияет
на изменение собственной частоты резонатора (a = '^c/(Jp+ Jc) .
где с — жесткость резонатора, /р и Jc — моменты инерции резона-
тора и заполняющей его среды.
При уменьшении амплитуды колебаний, обусловленном увели-
чением массового расхода, сигнал от компаратора 7 через инте-
гратор 9 подается на управляемый усилитель 10, в результате
чего возрастает ток в обмотке возбудителя и восстанавливается
заданная амплитуда колебаний. Одновременно сигнал от инте-
гратора подается на преобразователь напряжение — частота 1, ча-
стота выходного сигнала которого fm является информативным
параметром массового расхода. Частота колебаний автогенера-
тора fp содержит информацию о средней плотности среды, про-
ходящей через резонатор.
Вибрационный массовый расходомер можно использовать для
измерения расхода двухфазных двухкомпонентных сред, напри-
мер нефть — газ или воздух — вода, поскольку при известной
плотности жидкой и газовой фаз и известном давлении среды
получаемая измерительная информация о расходе Qc и средней
плотности смеси в потоке достаточна для определения расхода
каждого компонента смеси (<2Ж и Qr), что осуществляется при
помощи микропроцессорного устройства 3. Погрешность вибра-
ционных массовых расходомеров составляет ±2,5% при измере-
нии расхода однородной жидкости и ±4% при измерении газо-
жидкостной смеси.
11-3. Кинематические (скоростные) методы
измерений параметров движения
К этой группе относится широкий класс методов, осно-
ванных на измерении собственно вектора скорости и его состав-
ляющих. Это — методы меток потока, ультразвуковой, индукцион-
ный, тепловой, корреляционный, интерферометрический и др.,
а также методы, основанные на использовании эффектов Доп-
лера и Мессбауэра. Переход от измеряемой скорости к расходу
легко осуществляется, если известна площадь сечения потока.
Метод меток потока. Этот метод основан на измерении ско-
рости искусственно создаваемых или естественных образований
(меток), отличающихся каким-то свойством от остального веще-
ства. При использовании этого метода измерение расхода жидко-
стей или газов сводится к измерению средней скорости меток при
прохождении ими участка трубопровода известной длины (базы).
Метки могут быть тепловые, химические, ионные, радиоактив-
ные, электропроводящие, магнитные, оптические и другие. Они от-
личаются по соответствующим свойствам от общего потока, но по
остальным свойствам они должны быть идентичными ему.
Так, например, для измерения расхода природного газа ис-
пользуются метки в виде радиоактивного изотопа «аргон-41»,
который химически инертен и плотность которого близка к плот-
ности природного газа. Для других газов часто используются ион-
ные метки, создаваемые путем периодической ионизации участ-
ков потока радиоактивным излучением или искровым разрядом.
В жидкостях наиболее часто применяются магнитные, радиоак-
тивные или оптические метки. Метод меток используется также
для измерения скорости перемещения конвейеров и других твер-
дых тел, например ферромагнитных лент, на которые наносятся
магнитные метки в виде намагниченных участков их поверх-
ности.
На методе меток основаны также корреляционные расходо-
меры, в которых используется корреляционный метод измерения
скорости естественных или искусственно создаваемых меток (слу-
чайное распределение температур, электропроводности, намагни-
ченности, прозрачности и др.).
Основная составляющая погрешности метода меток — несоот-
ветствие между скоростью меток и средней скоростью потока.
Метки различной природы в зависимости от их формы и свойств
подвержены действию различных тормозящих и ускоряющих сил.
При малых скоростях потока источником погрешности может
быть броуновское движение частиц. Эта погрешность отсутствует
в том случае, если в качестве меток используются молекулярные
или атомные частицы исследуемого вещества, например намагни-
ченные ядра атомов, которые абсолютно пассивны к гидродинами-
ческим воздействиям. Общим для всех меточных расходомеров
является увеличение объема метки в результате распределения
частиц жидкости или газа по скоростям v, осредненным по длине
241
базы /0, вследствие чего искажаются фронты меток — они рас-
плываются и теряют четкость.
На рис. 11-7 показана структурная схема времяимпульсного
ЯМР-расходомера, в котором использован метод магнитных ме-
ток, создаваемых на основе метода ЯМР (см. § 6-2). Расходомер
состоит из поляризатора I, источника меток II, анализатора III
и измерительного устройства IV. Жидкость, атомные ядра кото-
рой обладают магнитным моментом, сначала поступает в сильное
поляризующее постоянное магнитное поле 2V1—Si, где в резуль-
тате ядерной намагниченности происходит поляризация ядер.
Рис. 11-7
Для того чтобы ядерная намагниченность достигла максималь-
ного значения Лпах=иоДп, объем трубопровода 1, находящегося
в поляризующем магнитном поле 2Vi—Sb должен быть
Vn2>3Qy maxT j,
где ио — ядерная восприимчивость; Нп — напряженность поляри-
зующего магнитного поля; Qvmax — максимальное значение из-
меряемого расхода; Т\ — время спин-решеточной релаксации. Уча-
сток трубопровода с катушкой 3 образует датчик ЯМР, подклю-
ченный к устройству обнаружения сигналов ЯМР 4. Если катушку
2 подключить ключом 6 к высокочастотному генератору 5, ча-
стота которого равна частоте прецессии ядер в магнитном поле
У2—S2 (см. § 6-2):
/2 = ТВ2/(2л),
то в небольшом объеме жидкости, проходящей через участок тру-
бопровода с катушкой 2, произойдет изменение ядерной намаг-
ниченности (образование метки) и при подходе этой жидкости
к катушке датчика ЯМР изменится интенсивность или даже знак
242
сигнала ЯМР. При периодическом подключении генератора 5
к катушке 2 в потоке будут создаваться участки жидкости с де-
поляризованными ядрами (метки), которые, проходя через дат-
чик ЯМР, будут вызывать периодическое изменение (или инвер-
сию) сигнала ЯМР. Измерив прибором 7 интервал времени At
между моментом включения генератора 5 и последующим мо-
ментом t2 резкого изменения сигнала ЯМР, можно определить
скорость жидкости v = lolAt и соответственно объемный расход
Qv = Son = SololAt = V0/At,
где So — площадь сечения трубопровода; 10 — расстояние между
центрами катушек 2 и 3.
Во времяимпульсных ЯМР-расходомерах метки создаются че-
рез равные промежутки времени, a At определяется между мо-
ментом создания метки и моментом, когда сигнал ЯМР достигает
порогового значения, задаваемого амплитудным дискриминатором.
В частотных ЯМР-расходомерах расход жидкости определяют
по частоте следования меток, которые с помощью цепи обратной
связи создаются в моменты достижения сигналом ЯМР порогового
значения. При этом расход определяется по формуле
Qv = 2Vof0,
где р — поправочный множитель, зависящий от режима течения
жидкости и настройки анализатора; f — частота следования меток.
В другой разновидности частотных ЯМР-расходомеров (фазо-
><; вых) частота следования меток (включения ключа 6) устанавли-
вается автоматически из условия получения заданного угла фа-
зового сдвига А<р между сигналом метки и сигналом ЯМР. При
А<р=л/2 расход определяется по формуле
Qv = Wp.
Основной составляющей погрешности меточных ЯМР-расходо-
меров является погрешность определения времени прохождения
меткой базы 10. Погрешность определения момента ti образова-
ния метки незначительна, поскольку ЯМР-метки образуются прак-
тически мгновенно, а разбросом времени срабатывания электрон-
ного ключа можно пренебречь. Погрешность определения момента
t2 зависит от многих причин, основными из которых являются раз-
мытость фронтов метки, шумовые флюктуации сигналов ЯМР, ре-
лаксационные изменения ядерной намагниченности и др.
ЯМР-расходомеры целесообразно применять для бесконтакт-
ных измерений расхода и скорости движения агрессивных или
диэлектрических жидкостей, крови в биологических объектах,
а также других жидких веществ, содержащих атомы, ядра кото-
рых обладают магнитным моментом (Н, F, Li, Cl, Р и др.). Су-
ществующие ЯМР-расходомеры обеспечивают измерения расхода
в диапазоне 8*10-7—10~2 м3/с с погрешностью 0,2—2%.
Ультразвуковые методы. Эти методы основаны на изменении
скорости ультразвуковых колебаний в подвижной среде, которая
243
равна геометрической сумме скорости среды и скорости звука
в данной неподвижной среде, которая известна. Если ультразву-
ковые колебания распространяются в неподвижной среде со ско-
ростью с, то в той же среде, движущейся со скоростью о, они бу-
дут распространяться в направлении движения потока со ско-
ростью c+ocosa, а против потока — со скоростью с—о cos а, где
а — угол между направлениями потока и ультразвукового излуче-
ния. Время прохождения ультразвукового импульса от излуча-
теля до приемника, расположенных друг от друга на расстоянии
L, называемом базой, в направлении потока равно
tr —----—-----» fl---------— cos a'),
с + о cos а с \ с )
а против потока
Существует несколько разновидностей ультразвукового ме-
тода измерения расхода: времяимпульсный, частотно-импульсный,
доплеровский, фазовый и метод на основе измерения интенсив-
ности сноса ультразвуковых колебаний движущимся потоком.
Ультразвуковые методы в основном применяются для измерений
расходов жидких сред. Для уменьшения нестабильности скорости
звука от изменения температуры, плотности, давления и других
факторов используются двухканальные расходомеры, включенные
по дифференциальной схеме.
Времяимпульсный метод основан на измерении разности времени прохож-
дения ультразвуковых импульсов по движению потока и против него
Д< = t2 — h — 2Lvcp cos a/c2 = 8mQ ctga/(n£>c2),
где m — коэффициент, учитывающий отличие средней скорости потока оСр от
осреднениой по длине луча скорости потока v; D — диаметр трубопровода.
Работа ультразвукового расходомера, основанного на частотно-импульсном
методе, аналогична работе рассмотренного выше частотного ЯМР-расходомера
Каждый излучатель посылает импульс ультразвуковых колебаний в момент при-
хода предыдущего импульса на соответствующий приемник. Разность частот
двух работающих таким образом автогенераторов пропорциональна измеряе-
мому расходу:
Af = f2 — f-L = 2vcp cos a/L — SmQ ctg a/(nD3),
Преимуществом частотно-импульсных расходомеров является независимость
результатов измерений от скорости распространения ультразвука, если оба ка-
нала имеют одинаковые базы: Li=L2=L.
В фазовых расходомерах используется непрерывное излучение модулирован-
ных ультразвуковых колебаний, направленных по движению потока и против
него, и измеряется разность фаз принятых приемником колебаний. Статическая
характеристика таких расходомеров имеет вид
Аф - <ом/2 — <ом/1 = 16rafMQ ctga/(Dc2),
где (м — частота модуляции ультразвуковых колебаний.
244
На рис. 11 -8 показана структурная схема фазового ультразвукового расхо-
домера. Ультразвуковые колебания, создаваемые генератором /, модулируются
с помощью модулятора 2 и генератора модуляции 11. Модулированные колеба-
ния поступают на возбудители 3 двухканального датчика, установленного иа
трубопроводе 4. Сигналы с приемников ультразвуковых колебаний 10 через уси-
лители 5 и 9, демодуляторы 6 и 8 подаются иа фазометр 7, показания которого
пропорциональны расходу.
На основе фазового метода созданы приборы для измерения скорости мор-
ских течений, а также расходомеры для измерения расхода природного газа
в широком диапазоне (Qmax/Qmin=4) с погрешностью 0,4%.
Всем ультразвуковым методам измерений расхода присуща методическая
погрешность, обусловленная отличием измеряемой этими методами скорости
движения среды, осредпениой по пути от излучателя до приемника ультразву-
Рис. 11-8
ковых колебаний, от скорости движения среды, осреднеиной по площади сече-
ния трубопровода. Эта погрешность зависит от структуры потока, которая оп-
ределяется рядом факторов, например шероховатостью трубопровода, физико-
химическими свойствами перемещающейся среды и др. Рассматриваемая погреш-
ность может быть уменьшена соответствующим выбором соотношения размеров
ультразвукового канала и трубопровода с учетом его шероховатости.
Термоанемометрический метод. Этот метод является распро-
страненной разновидностью теплового метода, основанного на
сносе тепла движущимся потоком. При помещении в движущуюся
жидкую или газовую среду нагреваемого током терморезистора
снос тепла потоком является основным фактором, влияющим на
теплоотдачу терморезистора. Уравнение теплового баланса тер-
морезистора имеет вид
/2/? = gS(0n-0c),
где £ — коэффициент теплоотдачи, зависящий от скорости движе-
ния среды; Оп и 0С — соответственно температура терморезистора
(преобразователя) и среды; S — площадь поверхности терморе-
зистора. В случае если терморезистор имеет форму цилиндра и
расположен поперек потока так, что угол между осью цилиндра
245
й вектором скорости потока равен 90°, коэффициенты теплоотдачи
для газов и жидкости соответственно определяются по формулам:
— Re"Pro-4,
d
где v, X и v — соответственно скорость, теплопроводность, кинема-
тическая вязкость среды; d — диаметр терморезистора; с и п —
Рис. 11-9
коэффициенты, зависящие от числа Рейнольдса Re=ut//v; Рг —
=т/« — число Прандтля, зависящее от кинетической вязкости и
температуропроводности среды а. В качестве преобразователей
термоанемометров используются проволочные терморезисторы из
платины и вольфрама диаметром 5—20 мкм (рис. 11-9, а), фибро-
пленочные терморезисторы (рис. 11-9, б) из кварцевой нити, по-
крытой пленкой из никеля, и пленочные из никеля. Для измере-
ния компонент вектора скорости применяются двухкомпонентные
(рис. 11-9, в) и трехкомпонентные датчики термоанемометров
(рис. 11-9, г). В табл. 11-1 приведены характеристики датчиков
термоанемометров датской фирмы ДИСА (DISA).
Преобразователи термоанемометров обычно включаются в мо-
стовую измерительную цепь. При этом терморезистор может ра-
ботать в режиме заданного тока и в режиме заданной темпера-
туры. Последний режим более предпочтителен, особенно при из-
менении высокочастотных составляющих скорости потоков.
246
На рис. 11-10 показана схема термоанемометра, в котором тер-
морезистор 7? одновременно выполняет функции прямого и обрат-
ного преобразователей. При нулевой скорости потока через
терморезистор проходит некоторый начальный ток, который нагре-
вает его до номинальной температуры, при которой мост нахо-
дится в равновесии. При движении потока происходит охлаждение
терморезистора и изменение его сопротивления, вызывающее на-
рушение равновесия моста, и на выходе усилителя У появляется
добавочный ток, часть которого проходит через терморезистор,
выделяя тепло, которое компенсирует потери тепла, уносимого
движущимся потоком. При этом температура и сопротивление
терморезистора восстанавли-
ваются почти до их номиналь-
ных значений. Измеряемая
скорость определяется по зна-
чению тока, питающего мост.
Применение уравновешиваю-
щего преобразования позво-
ляет существенно уменьшить
постоянную времени термо-
анемометра. Поскольку в об-
ратной цепи термоанемометра
преобразование тока в теп-
лоту происходит практически
мгновенно, то такие термоане-
мометры можно использовать
для измерения высокочастот-
ных составляющих скорости пс
Основными составляющими погрешности термоанемометров
являются погрешности от изменения температуры среды и ее
теплофизических параметров. Для уменьшения температурной
погрешности применяются различные методы коррекции, в част-
Таблица 11-1
Тип чувствительного элемента Материал Диапазон скоростей, м/с Верхняя граничная частота, кГц Среда
Проволочный Покрытый платиной вольфрам 0,2—500 0,01—5 400 Воздух Дистиллирован- ная вода
Фибропленочный Никель 0,2—350 0,01—10 175 30 Воздух Вода
Пленочный 0,1—500 0,01—25 450 30 Воздух Вода
247
ности в датчике вблизи основного термопреобразователя разме-
щается аналогичный по чувствительности терморезистор, не омы-
ваемый потоком. Термоанемометры измеряют локальную скорость
в месте установки терморезистора. Для измерения расхода необ-
ходимо знать зависимость между измеряемой локальной и сред-
ней скоростями потока. Обычно стараются устанавливать датчик
в таком месте, где локальная скорость примерно равна средней
скорости. Известны термоанемометры для бесконтактного изме-
рения расхода, в которых в качестве терморезистора применяется
изолированный участок трубопровода.
Индукционный метод. Этот метод измерения расхода основан
на возникновении ЭДС в электропроводящей жидкости при дви-
жении ее в поперечном магнитном поле. При движении жидко-
сти в цилиндрической трубе диаметром D в постоянном магнит-
ном поле индуцируемая ЭДС равна
е=BDv — 4BQv/(nD),
где В — магнитная индукция; v — скорость жидкого потока. В пе-
ременном магнитном поле индуцируется переменная ЭДС
е — BmDv sin о/ = 4BmQv sin wtlfnD).
Обычно индукционный (электромагнитный) расходомер
(рис. 11-11, а) содержит источник постоянного (рис. 11-11, б)
или переменного магнитного поля 1 с помещенным в него немаг-
нитным участком трубопровода 2, в который вмонтированы элек-
троды 3 для снятия индуцируемой ЭДС и средство измерения
этой ЭДС. Индукционный метод широко используется для изме-
рения расхода различных веществ с удельной электропроводи-
мостью от 10-5 См/м и выше. При меньших проводимостях среды
248
Начинает сказываться Погрешность от токов смещения. Основ-
ными составляющими погрешности индукционного метода измере-
ния расхода являются:
погрешность от напряжения поляризации при измерении рас-
хода электролитов. Эта составляющая уменьшается при исполь-
зовании переменных магнитных полей с частотой 10—1000 Гц [5];
погрешность от ЭДС, наводимой в приемном контуре пере-
менным магнитным полем за счет трансформаторной связи. Она
может быть снижена путем создания противо-ЭДС, индуцируемой
в специальной индукционной катушке (рис. 11-11, а);
погрешности от паразитных наводок, обусловленных емкост-
ными связями между системой возбуждения переменного маг-
нитного поля и приемным контуром. Уменьшение этой погреш-
ности возможно за счет применения экранирования;
погрешность вследствие искажения эпюры распределения ско-
ростей в цилиндрическом канале индукционного преобразователя.
Она может быть снижена использованием неоднородного магнит-
ного поля специальной конфигурации или применением преобра-
зователя прямоугольного сечения с пластинчатыми электродами,
у которых эта погрешность отсутствует.
При использовании в качестве источников магнитного поля си-
стем с постоянными магнитами возможны погрешности вследст-
вие временной и температурной нестабильности характеристик
магнитных систем. Эти погрешности особенно существенны у рас-
ходомеров для жидких металлов, у которых температура элемен-
тов магнитной системы достигает 100—200° С. Причиной значи-
тельных погрешностей также могут быть термо-ЭДС, возникаю-
щие вследствие неправильного выбора материала электродов и
других элементов приемного контура, а также наличия гради-
ента температур между электродами. Термо-ЭДС уменьшаются
при расположении электродов в горизонтальной плоскости на
вертикальном участке трубопровода (см. § 3-2).
Для измерения расхода сред с температурой более 500—700° С
используются индукционные расходомеры, в которых отсутствуют
магнитные системы, а переменное магнитное поле создается то-
ком, проходящим через жидкость вдоль оси трубопровода. При
движении электропроводящей жидкости в создаваемом током пе-
ременном магнитном поле между осью потока и его цилиндри-
ческой поверхностью возникает разность потенциалов, которая
снимается с помощью двух электродов. Один из этих электродов
приварен к трубе, а контактирующий конец другого расположен
по оси трубопровода. На индукционном методе основан ряд дру-
гих типов расходомеров, в том числе и безэлектродных, которые
пригодны для измерения расхода сред при высоких темпера-
турах.
Доплеровские методы измерений параметров движения. Для
измерения скоростей подвижных объектов, жидких, газообразных
и сыпучих сред, а также для измерения параметров вибраций
широкое применение находят методы, основанные на использова-
249
нйи эффекта Доплера. Эти методы используются Для Измерения
скоростей в широком диапазоне — от 0,001 мкм/с до скоростей,
близких к скорости света.
Эффект Доплера, заключающийся в изменении частоты излу-
чения при движении его источника или приемника, нашел ши-
рокое применение в акустике, радиофизике, оптике, а также для
ряда прикладных целей, особенно для измерения параметров дви-
жения. Относительное изменение частоты излучения пропорцио-
нально отношению измеряемой скорости к скорости распростра-
нения колебаний.
Если на движущийся объект направлено излучение с частотой
fo, то частота отраженного сигнала отличается от fo в соответст-
вии с уравнением Доплера на величину
где v — скорость объекта (положительная для удаляющегося объ-
екта); с — скорость распространения излучения. Если с=с0 (со —
скорость света), то при п<104 м/с влияние членов высшего по-
рядка меньше, чем 3-10Д и обычно пользуются приближенной
формулой
Д/д = —2/оп/с=—
или
и= — Д/дС/(2/0) = —/дХ/2,
где Х=с//о — длина волны излучаемого сигнала.
Для измерения скорости на основе эффекта Доплера приме-
няются излучения в широком спектре частот — от ультразвуковых
колебаний до у-излучения. Достоинствами метода являются бес-
контактность, высокая чувствительность и точность, возможность
сканирования и измерения локальных скоростей отдельных час-
тиц, размеры которых ограничены дифракционным пределом. Все
это обеспечивает возможность не только измерять скорости, но
также определять топографию поля скоростей сложных потоков
или получать пространственные виброграммы. Для измерения ско-
рости жидких и газообразных сред необходимо наличие в этих
средах инородных частиц (твердые частицы или пузырьки), от-
ражающих направленное на них излучение.
Эффект Доплера широко используется для измерений в ра-
диочастотном диапазоне, для которого созданы монохроматиче-
ские источники излучения и разработаны методы точных измере-
ний малых изменений частоты. При работе в трехсантиметровом
диапазоне длин волн и регистрации разности частот 1 Гц можно
измерять скорости от 0,03 см/с.
Развитие лазеров и методов точного измерения разности ча-
стот световых волн обеспечило широкое использование эффекта
Доплера для измерения скорости различных объектов по сдвигу
частоты в рассеянном ими излучении лазера. Обнаружение малой
250
разности частот двух световых волн позволяет определять пере-
мещение объекта, движущегося со скоростью 0,1—1 мкм/с. Та-
кие скорости имеют частицы при броуновском движении, жид-
кость при естественной конвекции, вызванной разностью темпера-
тур 0,01 К. С такими малыми скоростями происходит рост расте-
ний, движение ледников, осадка зданий и др.
Средства измерений, основанные на эффекте Доплера, обычно
содержат источник излучения, модулятор, фокусирующие системы,
приемник излучения, средства обработки сигнала и регистрирую-
щие устройства. Разностная частота, пропорциональная скорости
объекта, измеряется разными методами: непосредственным изме-
рением частоты сигнала биений, измерением частоты сигнала бие-
ний при рассеянном излучении, измерением сдвига частоты сиг-
Рис. 11-12
нала при помощи оптического дискриминатора с использованием
гетеродинного способа приема информации.
На рис. 11-12 представлена схема доплеровского лазерного ане-
мометра для измерения скорости двухфазных потоков газ — твер-
дые частицы.
Излучение лазера 1 с длиной волн Х=632,8 нм с помощью све-
тоделителя и зеркала разделяется на два когерентных зондирую-
щих световых луча 2 и 3 равной интенсивности, которые с по-
мощью линзы 4 фокусируются в некотором элементарном объеме
исследуемого потока 5. На вход фотоприемника (фотоэлектрон-
ного умножителя) 6 поступают пространственно совмещенные све-
товые волны, образованные в результате рассеивания частицами
зондирующих лучей (первого и второго).
Доплеровский сдвиг частоты выходного сигнала определяется
как
Д/д =— —sin 0/2,
где v — местная скорость потока; 0 — угол пересечения зондирую-
щих лучей в потоке
С фотодетектора 6 сигнал через следящий частотный фильтр
с частотным детектором 7 подается на интегрирующий цифровой
вольтметр 8 и электронный вольтметр 9, первый из которых изме-
ряет среднюю скорость частиц, а второй — среднее квадратиче-
ское значение пульсаций скорости частиц. Выходной сигнал можно
также наблюдать на экране светолучевого осциллографа 10.
251
Промышленная система ЛДИС-781-ИВК обеспечивает бескон-
тактное измерение скоростей воздушных потоков в диапазоне 1—
2000 м/с. Диапазон измеряемых частот до 200 МГц, погрешность
измерения средней частоты 0,1%. Имеются устройства автомати-
ческого поиска и захвата сигнала, развитая система селекции, си-
стемное и прикладное математическое обеспечение. Рассматри-
ваемый метод может использоваться для определения параметров
вибраций и скорости твердых тел, например скорости проката.
При скорости до 60 м/с погрешность измерения не более 0,1—
0,2%.
Метод ядерного гамма-резонанса (ЯГР) является одной из
разновидностей доплеровского метода с использованием радиоак-
Рис. 11-13
тивного излучения.
Метод ЯГР основан на явлении резо-
нансного ядерного поглощения гамма-кван-
тов в кристалле без отдачи энергии, полу-
чившем название эффекта Мессбауэра. Это
весьма чувствительный метод измерения па-
раметров механических колебаний (вибра-
ций) с практически неограниченным сверху
диапазоном частот. Структурная схема ус-
тановки для измерения параметров вибра-
ций методом ЯГР представлена на
рис. 11-13. На вибрирующем объекте 1 ук-
реплен источник излучения гамма-квантов
2, например изотоп ”9Sn. Приемником излучения является резо-
нансный сцинтиллятор, который состоит из поглотителя 3 в виде
тонкой (0,02 мм) пластинки из диоксида олова (1I9SnO2) с естест-
венным изотопным составом и детектора, содержащего кристалл
Nal(Tl) 4 на входе и фотоэлектронный умножитель 5. С детектора
сигнал в виде электрических импульсов через усилитель 6 посту-
пает на блок обработки и регистрации 7.
При неподвижном источнике гамма-излучений происходит ре-
зонансное поглощение гамма-квантов в поглотителе без отдачи
энергии (эффект Мессбауэра) и до детектора гамма-кванты не
доходят. При движении источника гамма-излучения совместно
с вибрирующим объектом относительно неподвижного поглотителя
вследствие эффекта Доплера изменяются частота f и энергия hf
выпускаемых гамма-квантов возбужденного ядра. При этом с уве-
личением скорости источника возрастает интенсивность пучка
гамма-квантов, прошедших через поглотитель. Резонансное погло-
щение гамма-квантов в поглотителе происходит только в том слу-
чае, если энергия возбуждения, передаваемая ядрам поглотителя,
отличается от резонансной не более чем на ширину возбужденного
уровня. Поэтому при больших скоростях источника разница ме-
жду энергией возбуждения гамма-квантов и шириной возбужден-
ного уровня становится настолько существенной, что поглощение
вообще прекращается. Вследствие этого метод ЯГР может ис-
пользоваться только для измерения малых скоростей и вибропе-
252
Рис. 11-14
не зависит от
оптически непро-
сред между пе-
ремещений, амплитудные значения которых соответственно лежат
в диапазонах 0,05—500 мм/с и 10 8—10 6 м при частоте вибра-
ций 1 Гц—100 кГц. Погрешность измерения не превышает 1—3%
в середине диапазона измерений и 1С% на его краях.
Достоинством ЯГР-виброметров является малая частотная по-
грешность чувствительности, что при соответствующем выборе
пары источник — приемник излучения дает возможность произво-
дить градуировку на низких частотах. Другие преимущества ме-
тода ЯГР — малая масса источника излучения, которая состав-
ляет доли миллиграмма, широкий диапазон рабочих температур
(20—600 °C) и давлений (104—1010 Па), а также возможность
измерений вибрации объек-
тов в закрытых корпусах,
поскольку поглощение гам-
ма-квантов
наличия
зрачных
точником и приемником из-
лучения.
В качестве источника
гамма-квантов можно ис-
пользовать изотопы 119Sn,
57Fe, 67Zn, 107Ag. Поглоти-
тель должен содержать те
же изотопы тех же эле-
ментов, которые использу-
ются в излучателе.
Метод ЯГР широко применяется для исследования структур
и динамических свойств вещества в конденсированной фазе, в ча-
стности для исследования динамики белков и других биополи-
меров.
Эффект Мессбауэра используется также для измерений малых
скоростей и расходов жидких веществ. При этом способе измере-
ния в жидкость, протекающую по трубопроводу, вводят нерадио-
активную добавку (поглотитель — олово, железо), образующую
своеобразные метки, скорость перемещения которых вместе с по-
током определяется с помощью эффекта Мессбауэра. Источник
гамма-излучения 1 (рис. 11-14), содержащий мессбауэровский изо-
топ, расположен на одной стороне трубопровода, а на другой
стороне установлены два детектора гамма-излучения 2. Сигналы
с детекторов через измерительные устройства 3 подаются на ре-
версивный счетчик 4, показания которого дают возможность оп-
ределить значение и направление скорости жидкости. Диапазон
измеряемых скоростей жидкости определяется шириной линий ре-
зонансного поглощения гамма-лучей на половине высоты линии.
Для расширения диапазона измеряемых скоростей источник
гамма-квантов можно двигать с известной скоростью вдоль на-
правления течения потока.
253
Глава двенадцатая
МЕТОДЫ ИЗМЕРЕНИЙ ТЕМПЕРАТУРЫ
12-1. Характеристики измеряемой величины,
классификация методов измерений
Температура наряду с давлением и объемом представ-
ляет собой одну из трех основных величин, характеризующих тер-
модинамическое состояние вещества, и непосредственно связана
с его внутренней энергией. Практически нет ни одной области
деятельности человека, где бы не требовалось измерять и регу-
лировать температуру, поэтому она является одной из наиболее
часто измеряемых физических величин. Температура — это стати-
стическое понятие, которое применимо к системам, состоящим из
большого числа частиц, находящихся в тепловом равновесии.
Энергия частиц, усредненная по их числу, и определяет темпера-
туру системы (объекта).
Температура (temperature)—латинское слово, обозначающее
«Смесь». При взаимодействии двух равновесных систем, имеющих
разные температуры, происходит переход энергии от системы
с большим энергосодержанием в систему с меньшим энергосодер-
жанием, пока обе системы не примут новое состояние равновесия.
Общим для всех видов частиц первоначально разделенных систем
является температура.
Диапазон измеряемых температур весьма широк. Путем рас-
творения гелия 3Не в обычном жидком гелии 4Не достигнута тем-
пература 0,001 К. Методами магнитного охлаждения получена
температура 0,000016 К. Верхний предел существующих темпера-
тур практически не ограничен. Как предполагают, в начале разви-
тия Вселенной существовала сверхгорячая плазма с температурой
4- 1031 К. Сейчас практически необходимо измерять температуры
порядка 108 К и более, которые имеют место в горячей плазме и
при термоядерных реакциях.
Диапазон существующих температур можно разделить на ряд
характерных поддиапазонов: сверхнизкие температуры (0—4,2 К),
низкие (4,2—273 К), средние (273—1300 К), высокие (1300—
5000 К) и сверхвысокие (от 5000 К и выше). Сверхнизкие и
низкие температуры необходимо измерять при проведении раз-
личных физических экспериментов, и особенно при исследовании
сверхпроводимости и ее техническом применении, в криогенной
технике и др. За верхний предел сверхнизких температур условно
принята температура, при которой проводники переходят в сверх-
проводящее состояние. Наиболее часто измеряемые температуры
лежат в области низких, средних и высоких температур. Такие
измерения имеют место в различных отраслях народного хозяй-
ства, при научных исследованиях, в медицине и др.
Потребность в измерении сверхвысоких температур непре-
рывно возрастает, особенно в связи с развитием плазменных мето-
дов обработки материалов, ракетной и космической техники,
а также исследований управляемых термоядерных реакций. Диа-
254
пазом сверхвысоких температур начинается примерно с 4000—
5000 К, т. е. с температур, при которых все вещества при нор-
мальном давлении переходят в газообразное состояние. Темпе-
ратуры, находящиеся в начале диапазона сверхвысоких темпера-
тур (4000—20 000 К), имеют место при слаботочных электрических
дуговых разрядах, в газоразрядных лампах, в ракетных двига-
телях, на поверхности Солнца (примерно 6000 К), на тепловом
щите космических аппаратов, в плазмотронах для обработки ма-
териалов (5000—20 000 К) и т. д.
Температуры порядка 5-Ю4—10е К имеют место в стационар-
ных электрических дугах и сверхзвуковых потоках плазмы, при
кратковременных электрических разрядах в фокусе плазмы. При
ядерных реакциях, внутри Солнца и звезд температуры достигают
108 К- Еще более высокие температуры наблюдаются при неуп-
равляемых термоядерных реакциях (водородная бомба).
Необходимо отметить, что температура принадлежит к фи-
зическим величинам, точность измерения которых еще невелика.
При проведении научных исследований, в частности при опреде-
лении фундаментальных физических констант, необходимо изме-
рять температуру с погрешностью Ю 2—10-4%. В промышленно-
сти также имеется необходимость в повышении точности измере-
ния температуры. Сейчас промышленные приборы обеспечивают
измерение температуры с погрешностью 0,5—1% и более. Повы-
шение точности измерения температуры, например, при разливке
стали на 0,1% дает возможность улучшить на 5—10% качествен-
ные показатели стали.
При выращивании монокристаллов, изготовлении интеграль-
ных микросхем и получении чистых металлов необходимо поддер-
живать температуру с погрешностью 0,01—0,1%. Снижение по-
грешности измерения температуры в диапазоне 1500—1800° С до
3—5 К позволяет повысить мощность атомных электрических
станций на 3—5%. Современная практика кроме повышения точ-
ности выдвигает и другие требования к термометрии: измерение
переменных температур в широком диапазоне частот, измерение
температуры многофазных потоков, при высоких давлениях, в аг-
рессивных средах, в сильно магнитных полях, измерение парамет-
ров температурного поля протяженных объектов и т. д.
Широкий диапазон подлежащих измерению температур, раз-
нообразие условий и объектов исследования обусловили много-
численность методов и средств измерений температуры.
В термометрии принято классифицировать методы и средства
измерений на контактные и неконтактные. Такая классификация
основана на наличии или отсутствии непосредственного контакта
(касания) термочувствительного элемента с объектом измерения.
Более полно раскрывает особенности отдельных методов клас-
сификация по механизму передачи энергии от объекта исследова-
ния к термопреобразователю, в соответствии с которой методы и
средства измерений температуры можно разделить на термомет-
рические, пирометрические и спектрометрические.
255
Термометрические методы, как правило, являются контакт-
ными методами, при которых энергообмен между объектом ис-
следования и термопреобразователем осуществляется главным об-
разом путем теплопроводности (при измерении температуры твер-
дых тел) и конвекции. Теплообмен посредством излучения при
этом играет малую роль, а в ряде случаев является мешающим
фактором, обусловливающим появление дополнительной погреш-
ности. Термометрические методы основаны на температурной за-
висимости свойств различных веществ, используемых в качестве
термометрического тела (термопреобразователя), которое нахо-
дится в непосредственном контакте с объектом исследования и
температура которого принимается равной измеряемой темпера-
туре.
По используемым термометрическим свойствам вещества или
физическим явлениям термометрические методы разделяются на
терморезистивные, термоэлектрические, термомагнитные, термо-
шумовые, термочастотные и др. Некоторые из этих методов в за-
висимости от используемых типов преобразователей имеют ряд
разновидностей, например термочастотный метод — на основе ме-
ханических, акустических, ядерных и других резонаторов.
Неконтактные методы измерений температуры основаны на
энергообмене путем излучения между объектом исследования и
измерительным преобразователем. Все тела излучают в окружаю-
щее пространство электромагнитные волны различных длин. В за-
висимости от вида излучения и определяемых его параметров не-
контактные методы можно разделить на пирометрические, приме-
няемые в основном для измерения температур от низких до 4000—
6000 К по тепловому излучению исследуемых объектов, и спек-
трометрические, используемые для измерения сверхвысоких тем-
ператур, главным образом температуры плазмы. При температу-
рах до 4000—6000 К имеет место одна из разновидностей элек-
тромагнитного излучения — тепловое излучение, обусловленное
тепловым движением в твердых, жидких или газообразных веще-
ствах или в плазме. В этой области температур происходит из-
лучение в широком спектре длин волн, характерное для серого
излучателя, у которого излучательная способность мало зависит
от длины волны.
При более высоких температурах излучение обусловлено про-
цессами диссоциации и ионизации. При этом вещества находятся
в виде плазмы, состоящей из различных частиц, которым приписы-
вается своя температура (молекулярная температура, электронная
температура, температура возбуждения и др.). Спектр излучения
плазмы состоит в основном из отдельных линий, и только неболь-
шая часть его составляет непрерывный спектр, так что прямая
пирометрия неприменима для измерения температуры плазмы. Для
этой цели используют различные спектрометрические методы, ос-
нованные на измерении параметров отдельных спектральных ли-
ний или других величин, зависящих от спектральных свойств из-
лучения исследуемого объекта.
256
11-1. Метрологические основы измерения температурь).
Температурные шкалы
Единство измерений температуры базируется на тем-
пературных шкалах, эталонах единицы температуры и поверочных
схемах для передачи значения единицы температуры от эталонов
к образцовым и рабочим средствам измерений.
Основой всех температурных измерений является термодина-
мическая температурная шкала (ТТШ), не связанная с каким-
либо частным термометрическим свойством вещества. Эта шкала,
основанная на втором законе термодинамики, была в 1852 г. раз-
работана Кельвином. Если в обратимом цикле Карно рабочее
тело при температуре 1\ поглощает теплоту Qb а при температуре
Tz отдает теплоту Qz, то отношение термодинамических темпера-
тур Т\1Т2 равно отношению количеств теплоты, т. е. T\ITz=Q\IQz-
Это отношение согласно положениям термодинамики не зависит
от свойств рабочего тела и от его температуры. Таким образом,
по заданной температуре Т2 температура 7\ определяется как 7\ =
~TzQ\/Qz-
Единицей термодинамической температуры (символ Т) явля-
ется кельвин (К), который определяется как 1/273,16 часть тер-
модинамической температуры тройной точки воды. Такое опреде-
ление единицы температуры требует практически осуществления
только одной реперной точки. Необходимая вторая точка — теоре-
тическая— абсолютный нуль. Температуру можно также выра-
жать в градусах Цельсия (°C). Температурой Цельсия (символ t
или 0) называется разность между температурой Кельвина Т
и температурой 70 = 273,15 К (точка таяния льда), т. е. t=T—
—273,15.
По определению размер градуса Цельсия (°C) равен размеру
кельвина. Разность температур АТ=Д7 так же как и темпера-
тура, может быть выражена в кельвинах или градусах Цельсия.
ТТШ является теоретической шкалой, которую практически
невозможно точно реализовать в соответствии с уравнением Т\ =
= TzQ\IQ2, поскольку трудно точно измерить значения и Q2,
соответствующие температурам Т\ и Т2.
Шкалой, практически воспроизводящей ТТШ, является Ме-
ждународная практическая температурная шкала 1968 г.
(МПТШ-68), принятая на основе международных соглашений.
Связь между теоретической ТТШ и практической МПТШ-68 осу-
ществляется при помощи газовых термометров, для которых при
идеальном газе справедливо уравнение
PV = RT.
Из реальных газов меньше всего отклоняются от идеального
газа водород, гелий и азот.
Измеряя давление с помощью очень точных манометров и
вводя поправки на отклонения данного реального газа от иде-
ального газа, определяют при помощи газовых термометров зна-
чения температуры ряда материально воспроизводимых равновес-
9 Заказ № 444 2 57
Таблица 12-1
Состояние фазового равновесия Принятое значение международной практи- ческой температуры
т<*. к /«. °C
Равновесие между твердой, жидкой и парообразной фа- зами равновесного водорода (тройная точка равновесного водорода) Равновесие между жидкой и парообразной фазами рав- новесного водорода при давлении 33 330,6 Па (25/76 нор- мальной атмосферы) 13,81 —259,34
17,042 —256,108
Равновесие между жидкой и парообразной фазами рав- новесного водорода (точка кипения равновесного водо- рода) Равновесие между жидкой и парообразной фазами нео- на (точка кипения неона) 20,28 —252,87
27,102 —246,048
Равновесие между твердой, жидкой и парообразной фазами кислорода (тройная точка кислорода) 54,361 —218,789
Равновесие между твердой, жидкой и парообразной фа- зами аргона (тройная точка аргона) 83,798 —189,352
Равновесие между жидкой и парообразной фазами кис- лорода (точка росы кислорода) 90,188 —182,962
Равновесие между жидкой, твердой и парообразной фа- зами воды (тройная точка воды) 273,16 0,01
Равновесие между жидкой и парообразной фазами воды (точка кипения воды) 373,15 100
Равновесие между твердой и жидкой фазами олова (точка затвердевания олова) 505,1181 231,9681
Равновесие между твердой и жидкой фазами цинка (точка затвердевания цинка) 692,73 419,58
Равновесие между твердой и жидкой фазами серебра (точка затвердевания серебра) 1235,08 961,63
Равновесие между твердой и жидкой фазами золота (точка затвердевания золота) 1337,58 1064,43
них состояний вещества (реперных точек). Таким образом, ис-
ходным эталоном единицы температуры является комплекс га-
зовых термометров, изготовленных в разных странах.
Шкала МПТШ-68 построена по полученным газометрическим
методом значениям температуры реперных точек (табл. 12-1) пу-
тем их интерполяции и экстраполяции выше точки плавления зо-
лота. Эта шкала по мере совершенствования методов и средств
измерений температуры и уточнения значений температуры репер-
ных точек приближается к ТТШ. Интерполяция температур ре-
перных точек производится по формулам, устанавливающим связь
между показаниями эталонных приборов, аттестованных по ре-
перным точкам, и международной практической температурой.
В качестве интерполяционных приборов в области низких темпе-
ратур применяются платиновые термометры сопротивления и тер-
мопары, а в области высоких температур — температурные лампы
и пирометры излучения.
258
Для реализации МПТШ-68 метрологическими институтами СССР разрабо-
таны практические температурные шкалы, первичные и специальные эталоны
единицы температуры и поверочные схемы, перекрывающие диапазон темпера-
туры 1,5—105 К.
Точность воспроизведения единицы термодинамической температуры — кель-
вина различна для различных интервалов температур. Наибольшая точность
воспроизведения достигается в тройной точке воды и наименьшая — в диапазоне
сверхвысоких температур.
Эталонным прибором для диапазона температур 13,81—903,89 К (точка за-
твердевания сурьмы) является платиновый термометр из чистой, хорошо со-
старенной платиновой проволоки. Зависимость между сопротивлением термо-
метра и температурой определяется при помощи стандартной функции и двух
уравнений в виде полиномов.
В диапазоне температур 903,89—1337,58 К применяется эталонный термо-
электрический термометр с электродами из платинородия (10% родия) и пла-
тины, для которого зависимость между ЭДС и температурой выражается урав-
нением второй степени. Для диапазона температур 4,2—13,81 К создан эталон
единицы температуры иа основе температурной шкалы германиевого термометра
сопротивления (ГОСТ 8.084—79), а для диапазона температур 1,5—4,2 К — эта-
лон единицы температуры в виде газового термометра на основе *Не
(ГОСТ 8.078—79).
Кроме газовых термометров, в области сверхнизких температур использу-
ются манометрические термометры, основанные на хорошо изученной зависимо-
сти давления паров жидкости от температуры. Для воспроизведения темпера-
турной шкалы в области сверхнизких температур применяется также термомаг-
нитный метод, который обеспечивает возможность измерения температуры до
0,002 К.
В области температур выше точки затвердевания золота (1337,58 К) шкала
МПТШ-68 воспроизводится с помощью пирометрических методов в соответствии
с законом излучения Плаика с использованием температуры затвердевания зо-
лота Tee (Au) в качестве реперной температуры и значения второй постоянной
излучения С2=0,0143879 м-К:
Ьр. Т«8] _ ехр (С2/(1Г88)] - 1
b[k, T’e8 (Au)] exp [C2l(kT№ (Au))] - 1
где 6[Х, Тев] и 6[Х, Tee (Au)] — спектральные плотности энергетической яркости
излучения абсолютно черного тела (АЧТ) для длины волны X при температурах
Гее и Tee (Au).
Метрологическое обеспечение средств измерений температуры, основанных
на пирометрических методах, осуществляется с помощью системы государствен-
ных эталонов, охватывающих диапазон температур 600—2800 К в интервале
длин волн 0,3—4,5 мкм. Эталоны и соответствующие поверочные схемы обеспе-
чивают единство измерения в диапазоне 273,15—6300 К. Государственный пер-
вичный эталон единицы температуры, воспроизводящий шкалу в области высо-
ких температур, содержит модель АЧТ при температуре затвердевания золота
(1337,58 К), значение которой передается эталонам-копиям в виде температур-
ных ламп. Для воспроизведения температурной шкалы выше допустимой темпе-
ратуры накала ламп используется пирометрическое редуцирование (ослабление)
за счет применения поглощающих стекол.
Градуировка первичных эталонных пирометров производится на основании
известного отношения энергетических яркостей излучения при различных тем-
пературах Т к энергетической яркости при температуре затвердевания золота
Т’сДАи). Градуировка осуществляется путем сравнения яркости эталонной тем-
пературной лампы, соответствующей яркости черного тела с температурой Т,,
с яркостью черного тела с температурой, равной температуре затвердевания
золота. Для ослабления яркости эталонной температурной лампы используется
секторный диск с известным коэффициентом пропускания т, расположенный
между температурной лампой и пирометром.
Значение температуры Ts определяется из выражения
1 ITS = 1 IT (Au) — Мп т (Ь)/С2.
9* 259
Погрешность определения температуры затвердевания золота равна 0,1—
0,5 К, что обусловливает составляющую погрешности градуировки 0,5 К при тем-
пературе 1273 К и 1,1 К при 2273 К.
Для области температур 5000—15 000 К созданы государственный специаль-
ный эталон единицы температуры по излучению плазмы в инфракрасной области
спектра в диапазоне температур 10 000—15 000 К н общесоюзная поверочная
схема для температуры плазмы в диапазоне 5000—15 000 К. Единица темпера-
туры — кельвин воспроизводится в этом диапазоне с помощью стабилизирован-
ного аргонового плазменного излучателя, температура которого определяется
спектрометрическими методами (см. § 12-9). Для обеспечения единства измере-
ния температуры в диапазоне 6000—100 000 К создан государственный специаль-
ный эталон единицы температуры, основанный на излучении в микроволновой
области спектра.
Температурная шкала пирометра микроволнового излучения строится на
основе уравнения
Р (Т)/Р (Ан) = ПТ (Ан)
или
Т = Т (Au) Р (Т)/Р (Ан),
где Р(Т) н Р(Аи)—спектральная плотность энергии излучения абсолютно чер-
ного тела в диапазоне микроволнового радиоизлучения соответственно при тем-
пературе Т и температуре затвердевания золота Т(Лп).
12-3. Особенности контактных методов
измерений температуры
Контактные методы и средства измерений применяются
для измерения температур в диапазоне от значений, близких
к абсолютному нулю, до 1500 °C. В отдельных случаях, исполь-
зуя термопреобразователи из тугоплавких материалов или квази-
контактный метод измерения, при котором термопреобразователь
на короткое время помещается в измеряемую среду, можно по-
высить верхний предел измерений до 2500—3000 °C.
Из контактных методов измерений наиболее широкое примене-
ние получили термоэлектрический и терморезистивный методы.
Другие контактные термометрические методы (см. § 12-4—12-6)
главным образом используются при научных исследованиях или
для воспроизведения температурной шкалы. Термоэлектрические
и терморезистивные термометры широко применяются для изме-
рения температуры в производственных условиях, при научных
исследованиях, а также в метрологической практике для воспроиз-
ведения МПТШ в диапазоне 4,2—1337,58 К. Достоинства этих ме-
тодов и соответствующих средств измерений заключаются в их
простоте, надежности, низкой стоимости и возможности получе-
ния высокой точности измерений. Кроме того, используя контакт-
ные методы, можно легко создать многоканальные измеритель-
ные системы для непрерывного измерения параметров темпера-
турного поля сложных объектов, в том числе при высоких
давлениях и в труднодоступных местах. Основные характери-
стики промышленных терморезисторов и термопар, а также изме-
рительные цепи термометров сопротивления и термоэлектрических
термометров рассмотрены в работе [5].
Для расширения области применения терморезистивного н термоэлектриче-
ского методов разработаны преобразователи, которые дают возможность увели-
260
чнть диапазон измерений этих методов как в область сверхнизких, так и в об-
ласть высоких температур. Для точных измерений температур от 10 до 2000 К
наиболее широко используются платиновые термометры сопротивления (ТС), ко-
торые характеризуются широким диапазоном измерений, высокой точностью,
стабильностью характеристик во времени и наличием стандартных градуировоч-
ных таблиц вплоть до 13,8 К.
Базовым термопреобразователем для измерения низких температур явля-
ется преобразователь ТСП-4054, погрешность которого не более ±0,02 К при
градуировке в четырех точках. Недостаток платиновых ТС — резкое уменьшение
чувствительности в области сверхнизких температур.
Разработаны терморезисторы на основе платины и сплава платины с ре
нием с легирующими добавками кобальта и железа. Терморезистор на основе
сплава платины с кобальтом позволяет измерять температуру в диапазоне 2—
300 К с погрешностью 0,01—0,5 К. Для измерений сверхнизких температур и при
действии сильных магнитных полей можно
использовать ТС из сплава константана >
с манганином, имеющий температурный lojA1
коэффициент 1,5- 10 3 К-1, ТС из золота
с 0,4 % марганца н платины с 3 % мар-
ганца. Электрическое сопротивление таких
ТС мало зависит от магнитного поля.
В диапазоне температур 1,5—300 К
широко применяются полупроводниковые
ТС из германия с легирующими приме-
сями. Эти ТС отличаются высокой чувст-
вительностью при низких температурах и
малой зависимостью сопротивления от маг-
нитного поля. В диапазоне температур
1—100 К используются полупроводниковые
ТС и диоды из арсенида галлия.
Для измерения температуры ниже 1 К наиболее пригодны угольные и гра-
фитовые ТС. Угольные ТС могут работать в сильных магнитных полях. Прн
этом во избежание самонагрева ТС подаваемая в терморезистор мощность не
должна превышать 10-14 Вт. Поэтому необходимо применять высокочувстви-
тельные измерительные цепи.
Новой приборной реализацией терморезнстнвного метода является ионный
термометр, основанный на зависимости сопротивления ионных кристаллов от
температуры. Вид такой зависимости представлен на рис. 12-1. Диапазон изме-
ряемых температур находится между температурами 7\ и Тг, соответствующими
границам восходящего участка с точкой плавления а. Ионный термометр раз-
работан в ЧССР и используется для измерения температур от 200 до 700 °C
в ядерных реакторах.
Термоэлектрические термометры (ТТ) обеспечивают высокую точность изме-
рения, особенно прн использовании благородных металлов, способных работать
прн высоких температурах — до 2500 °C, а также без дополнительных источни-
ков питания. Непрерывно ведутся работы по созданию новых комбинаций мате-
риалов для изготовления термоэлектрических преобразователей.
Серийно выпускаемые термопреобразователи платинородий (30%)—платн-
нородий (6%) дают возможность измерять температуру до 1600 °C и кратковре-
менно до 1800 °C, а преобразователи вольфраморений (5 %)—вольфраморений
(20%)—до 2200°C и кратковременно до 2500°C. Наибольший верхний предел
измерения имеют термоэлектрические термометры с термопарами на основе кар-
бидов металлов (титан, ниобий, цирконий) и углеродистых или графитовых во-
локон. Термопары графит — карбид титана и графит — цирконат бора
(С—ZrB2) могут работать до температур 2500—3000 °C.
При использовании термоэлектрического и терморезистивного
методов задача измерения температуры сводится к точному из-
мерению соответственно ЭДС в диапазоне 0,1—200 мВ или сопро-
тивлений от долей ома до десятков и сотен ом. Эти задачи ус-
261
пешно решаются применением современных средств измерений
указанных величин. Использование серийно выпускаемых измери-
тельных усилителей и автоматических регистрирующих мостов и
компенсаторов с улучшенными характеристиками цифровых мил-
ливольтметров, преобразователей сопротивления в цифровой код
а также микропроцессорных устройств для коррекции погрешно-
стей термопреобразователей обеспечивает создание средств изме-
рений температуры с весьма низкими инструментальными по-
грешностями (0,1—0,5%). Так, известны цифровые термоэлек-
трические термометры с разрешающей способностью 0,1 К, имею-
щие основную погрешность ± 1 % в диапазоне 4—2000 К и
±0,2 % в диапазоне 73—2000 К.
При воспроизведении МПТШ применяются образцовые термо-
метры, обеспечивающие измерение температуры между реперными
точками с погрешностью ±0,001 %. Однако даже при ис-
пользовании точных приборов погрешности измерений темпера-
туры могут достигать больших значений из-за наличия методи-
ческих погрешностей, обусловленных самой сутью и принципиаль-
ными особенностями контактных методов измерений температуры.
Главное заключается в том, что все контактные методы основаны
на преобразовании в сигнал измерительной информации какого-
либо термометрического свойства термопреобразователя, а не
объекта исследования. Поэтому все средства измерений, основан-
ные на этих методах, принципиально измеряют температуру тер-
мопреобразователя (вернее, его чувствительного элемента), ко-
торая в общем случае не равна температуре объекта.
Кроме того, при контактных методах измерений температуры
существенное значение имеет погрешность, обусловленная взаи-
модействием объекта и средства измерения, особенно если послед-
нее используется только для периодических измерений и не яв-
ляется штатным прибором данного объекта. При помещении
термопреобразователя в исследуемую среду или у поверхности
объекта заведомо нарушается их температурное поле как за счет
собственного потребления (или отдачи) тепловой энергии термо-
преобразователем, так и за счет теплообмена между объектом и
окружающей средой через термопреобразователь.
Особенности контактных методов обусловливают также ряд
других погрешностей, часть которых является общей для всех
контактных методов, а другие свойственны отдельным методам.
Так, терморезистивному методу свойственны методические
погрешности, обусловленные нагревом термопреобразователя про-
ходящим через него током, влиянием сопротивления линии, неста-
бильностью сопротивления преобразователя и т. д., а термоэлек-
трическому— погрешности от нестабильности температуры сво-
бодных концов термопары, влияния постоянных магнитных полей
и других факторов.
Общими для всех контактных методов являются погрешности,
обусловленные недостаточным тепловым контактом между пре-
образователем и объектом исследования, теплообменным излуче-
262
нием между термопреобразователем и окружающими его телами,
температура которых отличается от измеряемой, паразитным теп-
лообменом между объектом и окружающей средой за счет тепло-
проводности термопреобразователя, дополнительным нагревом
термопреобразователя при торможении высокоскоростного потока
газа, собственным потреблением (или отдачей) тепловой энергии
термопреобразователем при помещении его в среду измерения
и др.
При измерении температуры контактными методами в первую
очередь должна быть обеспечена хорошая теплопередача от объ-
екта к термопреобразователю, что особенно важно при измерении
температуры поверхности твердых тел, а также газов и пара при
малых давлениях и скоростях течения.
При измерении температуры твердых тел рабочий спай тер-
мопары лучше всего приклеивать или приваривать к поверхности
объекта. Если термопреобразователь прижимается к поверхности,
то теплопередачу можно улучшить при помощи металлической
пластинки, укрепленной на рабочей части термопреобразователя
(рис. 12-2, а). Материал пластинки должен иметь такой же коэф-
фициент излучения, что и материал объекта исследования, чтобы
излучение в окружающую среду было таким же, как при отсут-
ствии термопреобразователя. Для измерения температуры выпук-
лых поверхностей применяются ленточные термопреобразователи
(рис. 12-2, б), у которых термопара выполняется из двух тонких
лент 1 и 2, которые при прижатии к объекту принимают форму
его выпуклой поверхности.
При измерении температуры движущихся сред для улучшения
теплообмена термопреобразователь должен хорошо обтекаться
исследуемой средой, поэтому он обычно располагается там, где
скорость течения наибольшая. При малых скоростях газовых по-
токов для увеличения теплообмена используются отсасывающие
термопреобразователи, скорость газа у которых искусственно уве-
личивается при помощи насоса (эжектора). При большой ско-
рости газовых потоков (п>50 м/с) возможен дополнительный на-
грев термопреобразователя за счет частичного торможения по-
тока. Если поток газа полностью затормозить без теплообмена
263
ё окружающей средой, то температура газа Повысится на А/ —
= о2/(2Ср), где v — скорость газа; СР — удельная теплоемкость
газа при постоянном давлении. В реальных условиях вследствие
неполного торможения потока газа и других причин погрешность
обычно меньше значения, определяемого этим уравнением. Для
уменьшения этой погрешности применяются обтекаемые термо-
преобразователи, в которых скорость газа у термочувствитель-
ного элемента уменьшается за счет применения цилиндрических
или шарообразных наконечников с отверстиями (рис. 12-2, в).
Погрешность за счет собственного потребления тепловой энер-
гии термопреобразователем имеет место, если термопреобразова-
тель вносится в исследуемую среду только на время измерения,
и ее нет при стационарной установке преобразователя. Эта по-
грешность особенно проявляется при измерении температуры ма-
лых объектов. Ее значе-
ние пропорционально от-
ношению теплоемкостей
термопреобразователя и
объекта исследования и
разности их начальных
температур. Эту погреш-
ность можно уменьшить,
если температуру термо-
к
следования.
Рис- 12-3 Погрешность от пара-
зитного теплообмена ме-
жду объектом исследования и окружающей средой через термо-
преобразователь зависит от конструкции и свойств термопреобра-
зователя, способа его монтажа и от характеристик объекта
исследования. Эта погрешность может достигать больших зна-
чений при измерении температуры поверхностей твердых тел,
а также газов и пара при малых давлениях и скоростях течения.
Так, например, при измерении температуры поверхности из хо-
рошо теплопроводящего материала при помощи термопары эта
погрешность составляет 3 % при диаметре термоэлектродной про-
волоки 1 мм и 1 % при диаметре 0,1 мм, если припаянные к по-
верхности в точке измерения термоэлектродные проволоки вы-
ведены перпендикулярно поверхности (рис. 12-3,а). Погрешность
может быть еще больше, если термопара прижимается концом
к объекту, особенно если поверхность шероховатая или из плохо
теплопроводящего материала. Рассматриваемая погрешность мо-
жет быть снижена, если термоэлектроды укрепить вдоль изо-
термы (рис. 12-3, б). Еще лучшие результаты можно получить,
если термопару уложить в паз (рис. 12-3, в) или рабочий конец
термопары зачеканить цилиндрическим штифтом в неглубокое
отверстие в объекте (рис. 12-3,г).
264
Как недостаток контактных методов можно отметить относи-
тельно большие динамические погрешности, обусловленные значи-
тельной тепловой инерционностью термопреобразователей, посто-
янные времени которых составляют 10—60 с и более. Другими
недостатками являются ограниченный сверху предел измерения
(1500—2500°С), трудности при измерении температуры подвиж-
ных объектов, а также нарушение теплового и технического со-
стояния исследуемой поверхности. От этих недостатков свободны
пирометрические и спектрометрические методы измерений темпе-
ратуры.
12-4. Термомагнитный метод
Метод основан на зависимости магнитной восприимчивости пара-
магнитных веществ или ядерной магнитной восприимчивости от температуры.
В соответствии с законом Кюри — Вейса магнитная восприимчивость обратно
пропорциональна абсолютной температуре:
х = С/(Т + а + 6/7),
где С — коэффициент, пропорциональный константе Кюри, индуктивности изме-
рительной катушки и фактору заполнения катушкн образцом; а —поправка,
зависящая от формы образца, плотности и взаимодействия ионов; 6 — поправка,
учитывающая штарковское расщепление и диполь-дипольное взаимодействие.
Прн использовании термомагнитного метода измеряемой величиной явля-
ется магнитная восприимчивость парамагнитных солей или ядерная магнитная
восприимчивость металлов, например меди или платины. Измерение магнитной
восприимчивости парамагнитных солей обычно производится путем измерения
индуктивности или взаимной индуктивности катушки с сердечником из термо-
метрического вещества. Преимуществами метода являются отсутствие система-
тических погрешностей, свойственных газовым н акустическим методам, высокая
чувствительность, которая растет с понижением температуры (при 2 мК порог
чувствительности составляет 1-10-4 мК), высокая воспроизводимость по срав-
нению с другими методами измерений термодинамической температуры.
Термомагнитный метод в основном применяется при измерении температур
10 3—4 К. В качестве термометрического вещества используются монокристаллы
нитрата церия-магния (в диапазоне температур 0,1—4 К), сульфат аммония-
марганца (1,8—4 К), нитрат церия-лантана-магния для температур ниже 2 мК.
В НПО «ВНИИМ имени Д. И. Менделеева» использован метод магнитной тер-
мометрии для исследования отклонений шкалы МПТШ-68 от термодинамиче-
ской шкалы в диапазоне от температуры тройной точки водорода 13,81 К до
30 К. В качестве термометрического вещества применен поликристаллическнй
образец марганцево-аммониевого сульфата Mn(NH4)2(SO4)2-6H2O, для кото-
рого а=6 мК, а 6—0.
Для того чтобы погрешность измерения температуры не превышала 1 мК
при измерении температуры 20 К, необходимо производить относительные из-
мерения восприимчивости с погрешностью 5 10-6. Для этой цели используется
специальный мост для измерения взаимной индуктивности. Известно создание
магнитной температурной шкалы для диапазона температур 1—83 К.
Для измерений температуры в диапазоне 0,001—0,3 К в качестве термомет-
рического вещества используются металлы (медь, платина), для которых мето-
дом ЯМР (см. § 6-2) определяется зависимость ядерной магнитной восприимчи-
вости хя от абсолютной температуры Т:
(I + l)/(3kT), (12-1)
где N — число ядер в единице объема; g— фактор магнитного расщепления
(^•-фактор); ря — ядерный магнетон; I — спин ядра; k — постоянная Больц-
мана.
Значения хя определяются по сигналу ЯМР, амплитуда которого линейно
зависит от ядерной магнитной восприимчивости и, следовательно, от 1/7, по-
26g
скольку все величины в выражении (12-1), кроме хя и Т, являются физиче-
скими константами.
На рис. 12-4 показана зависимость сигнала ЯМР при резонансе ядер пла-
тины от обратного значения температуры 1/F в интервале температур 0,55—
275 мК. Погрешность линейности полученной зависимости не более 1%. Гра-
дуировка ЯМР-термометра в точках 1—6 проводилась по показаниям германие-
вого термометра, который, в свою очередь, был отградуирован до 30 мК по
кривой плавления 3Не, а в точке 7 — по термомагнитному термометру на основе
цериево-магниевого нитрата. Датчик ЯМР-термометра (рис. 12-5) выполнен
в виде жгута 1 длиной 14 мм, массой 0,14 г из 950 платиновых проволочек диа-
метром 25 мкм в кварцевой изоляции, находящегося в катушке с индуктивно-
стью 0,65 Гн нз 1500 витков медной проволоки.
Катушка 2 с образцом из платиновых проволочек представляет собой дат-
чик ЯМР, включаемый в контур LC-генератора. Измерительная цепь ЯМР-тер-
мометра аналогична измерительной цепи
ЯМР-тесламетра (см. § 6-2).
Зависимость, представленная на рис.
12-4, была определена в постоянном маг-
нитном поле с индукцией В = 0,0260 Тл, что
соответствует частоте ЯМР 250 кГц Ми-
нимальная, измеренная этим методом тем-
пература 0,55 мК была определена с по-
грешностью 5%.
Существенное повышение чувствитель-
ности термомагнитных термометров для из-
мерения сверхнизких температур достиг-
нуто путем использования для измерения
магнитной восприимчивости магнитометров
и градиентометров со сверхпроводящим
квантовым интерференционным датчиком
(СКВИДом), основанным
на эффекте Джозефсона [1].
Высокая чувствительность
СКВИДов расширяет воз-
можности термомагнитного
метода, поскольку при их
использовании можно силь-
но уменьшить размеры,
а следовательно, и тепло-
емкость термочувствитель-
ного элемента, что осо-
Рис. 12-4
бенно важно прн измере-
Рис. 12-5 нин низких температур.
Применение СКВИДов
для измерения ядерной магнитной восприимчивости металлов, например меди,
расширяет предел измеряемых температур в сторону низких температур до 2—
10 мК при пороге чувствительности 1 • 10~‘ мК
12-5. Термошумовой метод
Термошумовой метод измерения температуры базируется на урав-
нении Найквиста, которое устанавливает связь между напряжением тепловых
шумов, возникающим на любом резисторе, и его термодинамической темпера-
турой:
^ = 4£Г/?Д/,
где «ш2 — среднее квадратическое значение шумового напряжения; k — по-
стоянная Больцмана, равная 1,38-10~23 Дж/К; R — сопротивление резистора;
Af — полоса частот, в которой производятся измерения,
266
Сравнение Найквиста справедливо для резисторов из различных материа-
лов и не зависит от свойств этих материалов. Если обеспечить постоянство R
и Д/, то на основании уравнения Найквиста можно получить
= ^Оыш/ишО’
где 7'о = 373,16К — термодинамическая температура тройной точки воды и2шо—
среднее квадратическое значение шумового напряжения прн То. Условие R=
=const удовлетворяется прн изготовлении резистора нз материала с темпера-
турным коэффициентом электрического сопротивления, близким к нулю.
Таким образом, термошумовой метод позволяет определить размер еди-
ницы термодинамической температуры — кельвина в соответствии с ее опреде-
лением как независимой единицы, что обеспечивает независимую реализацию
термодинамической температурной шкалы н дает возможность уточнить МПТШ.
Рис. 12-6
Термошумовой метод можно использовать для измерения температур в диа-
пазоне от 0,001 до 2000—2500 К. В качестве измерительных преобразователей
применяются безреактивные резисторы из платины, манганина, константана, ни-
хрома, вольфрама, графита, непроволочные резисторы, а также емкостные н
индуктивные неконтактные преобразователи, представляющие собой резонанс-
ный колебательный контур. Источником теплового шума в двух последних
преобразователях служит сопротивление среды, температура которой измеря-
ется, например ионизированного газа или пламени. Это дает возможность изби-
рательно определять температуру отдельных участков газа, отличающихся по
удельной электропроводимости.
Трудности использования термошумового метода заключаются в низком
уровне полезного сигнала, который составляет доли или единицы микровольт.
Основными факторами, ограничивающими точность термошумового метода, яв-
ляются зависимость сопротивления резистора от температуры, собственные шумы
измерительного канала, особенно входных усилителей, помехи в линии связи,
изменение коэффициента усиления входного усилителя Существуют различные
пути реализации термошумового метода, отличающиеся главным образом спо-
собами коррекции погрешностей от указанных мешающих факторов. Термошу-
мовые термометры строятся как приборы прямого преобразования или как при-
боры сравнения. Наибольшее распространение получили термошумовые термо-
метры, основанные на сравненнн средних квадратических значений напряжений
шумов двух резисторов, один из которых находится при известной температуре
То, а другой — при измеряемой температуре Тх.
На рнс. 12-6 представлена структурная схема! термошумового термометра
прямого преобразования с коррекцией влияния шумов измерительного канала и
температурного коэффициента сопротивления (ТКС) измерительного преобразо-
вателя. Измерение производится в два такта. Сначала, когда ключи находятся
в положении /, шумовое напряжение с резистора /( /?ш) через усилитель 2, усн-
267
I
Литель-фильтр 3, квадратор 4 поступает в устройство 5, которое запоминает
усиленное и возведенное в квадрат суммарное напряжение тепловых шумов ре-
зистора /?ш и измерительного канала иш%. В положении ключей //напряжение
собственных шумов канала при его закороченном входе иш к запоминается
устройством 6 и вычитается из суммарного напряжения устройством 7 Разность
напряжений 1/ш. p = Um% — иш,к поступает на масштабный усилитель 8, учиты-
вающий изменение сопротивления резистора / от температуры. С усилителя 8
напряжение поступает на детектор 9 и регистрирующий прибор 10. Такой тер-
мошумовой термометр обеспечивает измерение температуры в широком диапа-
зоне с погрешностью ±1% по значению термошумового напряжения без пред-
варительной градуировки.
Применение сверхпроводящего термошумового датчика на основе эффекта
Джозефсона [1] позволяет распространить термошумовой метод на измерение
сверхнизких температур. Схема сверхпроводящего термошумового термометра
представлена на рис. 12-7.
Сверхпроводящее кольцо 1 с резистивным участком 2 и переходом Джозеф-
сона 3, индуктивно связанное с LC-контуром, находится при измеряемой сверх-
низкой температуре и совместно с контуром образует датчик температуры. Тер-
мочувствительным элементом является резистивный участок 2 с сопротивле-
нием /?=10-5 Ом, который служит источником напряжения тепловых шумов,
значение которого определяется в соответствии с формулой Найквиста. По-
скольку напряжение шумов может принимать нулевое значение, то через рези-
стор R пропускается ток смещения /= 10 ~6 А, который создает начальное на-
пряжение смещения
i/i = //?« ю-« В.
Таким образом, к переходу Джозефсона приложено напряжение U=Ut+
+ 1УШ, которое в соответствии с нестационарным эффектом Джозефсона [1] вы-
зывает через переход переменный ток, частота которого определяется нз выра-
жения
hf = 2eU,
где е — заряд электрона; h — постоянная Планка. Отсюда
f = (//? +1/щ)/Ф0,
где Ф0=/г/(2е) =2,07-10-15 Вб — квант магнитного потока. Член IRI<t>0 опреде-
ляет среднее значение частоты, которое при указанных значениях R и / при-
мерно равно 5 кГц. Если сопротивление /? мало по сравнению с сопротивле-
нием источника тока смещения и сопротивлением перехода, то напряжение
теплового шума будет определяющим для флюктуаций частоты тока через
переход, которая несет информацию о температуре резистора R.
Таким образом, переход Джозефсона в данном применении используется
как преобразователь напряжение — частота, преобразующий напряжение тепло-
268
вых шумов в переменный ток с частотой Этот ток Модулирует высоко-
частотное напряжение на £С-контуре, настроенном иа частоту питающего его
генератора высокой частоты (ГВЧ) 4. Обычно несущая частота ГВЧ равна не-
скольким десяткам мегагерц Напряжение с LC-контура подается через усили-
тель высокой частоты 5 на детектор 6, который выделяет сигнал переменного
тока, флюктуация частоты которого пропорциональна измеряемой температуре.
С помощью цифрового частотомера 7 и микро-ЭВМ 8 путем многократных
измерении определяется дисперсия частоты сигнала а2, пропорциональная изме-
ряемой температуре. Дисперсия вычисляется из выражения
o2=(f-4p)2 = 2^/?/(T<I^),
где т — время счета частотомера
Для исключения погрешности от температурных изменений сопротивления
резистивного участка его сопротивление Д определяется в процессе измерения
температуры путем измерения тока смещения и средней частоты fCp.
Таким образом, этот метод позволяет определять термодинамическую тем-
пературу, пользуясь выражением
Гх = О2т/Фв/(2£/Ср),
которое связывает абсолютную температуру с достаточно точно измеряемыми
величинами (/, fcp, т, о2) через фундаментальные физические постоянные
(k и Фо).
Минимальная температура, измеряемая рассматриваемым методом, ограни-
чена шумами самого перехода, которые эквивалентны температуре 10~6 К.
Практически с помощью эффекта Джозефсона можно измерять абсолютную
температуру в диапазоне 10 мК—10 К с погрешностью 1% при усреднении ре-
зультатов измерений в течение нескольких минут.
12-6. Термочастотные методы
Измерение температуры термочастотными методами
основано на использовании зависимости от температуры частоты
собственных колебаний различного рода резонаторов, скорости
распространения звуковых и ультразвуковых колебаний и пара-
метров частотно-зависимых RC- или 7?£-цепей с терморезистором.
Наиболее развиты резонансные термочастотные методы, осно-
ванные на применении резонаторных датчиков, которые пред-
ставляют собой автогенераторы или генераторы с вынужденными
колебаниями, частота которых настраивается в резонанс с часто-
той собственных колебаний резонатора, изменяющейся с темпе-
ратурой.
Для измерения температуры применяются механические
(твердотельные), газовые и ядерные резонаторы. Характеристика
преобразования температуры в частоту у таких резонаторов не-
линейна. Уравнение преобразования термометров с резонатор-
ными преобразователями на рабочем участке характеристики мо-
жно представить в виде полинома
f = f011 + «(Т - То) + ₽ (Т - Т0)2+у (Т - Т0)3],
где коэффициенты а, р и у выбираются в зависимости от вида и
характеристик резонаторов. При использовании кварцевых резо-
наторов погрешность линейности весьма незначительна. В ос-
тальных случаях для линеаризации характеристики прибора не-
обходимы дополнительные устройства с функциональными пре-
269
образователями. Развитие микропроцессорной техники позволяет
создавать точные частотные термометры с погрешностью линей-
ности не более 10-5.
Термометры с механическими резонаторами. В них применя-
ются струнные, камертонные, язычковые, консольные, дисковые и
другие виды твердотельных резонаторов. В качестве темпера-
турно-зависимого управляемого параметра в таких резонаторах
используются жесткость, момент инерции резонатора или тем-
пературные напряжения в резонаторе. Из твердотельных резона-
торов для измерения температуры до 500—700 К наибольшее
распространение получили пьезокварцевые резонаторы, отличаю-
щиеся высокой линейностью характеристики f=F(T).
Для измерения более высоких температур применяются резо-
наторы из тугоплавких материалов, выполненные в виде цилин-
7
Рис. 12-8
дра, консоли или камертона. На рис. 12-8 показана структурная
схема устройства датчика цифрового термометра с механиче-
ским резонатором, работающим в режиме вынужденных колеба-
ний. Термометр предназначен для измерения температуры в ядер-
ных реакторах. Резонатор 1, имеющий форму камертона, выпол-
нен как одно целое со стержнем 2, являющимся акустической
линией для передачи сигналов запроса и ответа. Функции воз-
будителя и приемника колебаний совмещает обратимая магнито-
электрическая система 3, состоящая из постоянного магнита W—S
и обмотки w, подключенной к измерительному устройству 4. По-
следнее содержит перестраиваемый генератор импульсов в виде
свободного мультивибратора, период колебаний которого сравни-
вается с периодом свободных колебаний резонатора, выделяемых
из эхо-декремента ответного сигнала. Разность периодов приво-
дится к нулю системой автоматической подстройки частоты ге-
нератора, которая измеряется цифровым частотомером 5 и несет
информацию о температуре в месте расположения резонатора.
Камертонный резонатор изготовляется с акустической линией из
жаропрочных материалов — молибдена, вольфрама, иридия или
сапфира. Для хорошего теплового контакта с газом-теплоноси-
телем датчик выполняется без защитного кожуха.
Частота колебаний свободносвязанного стержня зависит от
скорости звуковых колебаний в материале с, длины I и ширины
зубцов камертона Ь:
1 = сЫР.
270
Для зонда из сапфира диаметром 3 мм и длиной 254 мм резо-
нансная частота равна 150 кГц. Градуировка термометра произ-
водится в пламени, температура которого измеряется термопа-
рой. До температур 1900 °C нестабильность градуировочной ха-
рактеристики не более ±2 °C.
В пьезокварцевых термометрах в качестве термочувствитель-
ных датчиков используются кварцевые резонаторы Y-среза,
АС-среза или LC-среза, имеющие относительно большой коэффи-
циент термочувствительности — порядка 10-4 К-1. Датчик пред-
ставляет собой кварцевый диск или линзу, помещенные в герме-
тичный корпус. Обычно кварцевый термометр состоит из двух
автогенераторов, в одном из которых используется термочувст-
вительный кварц, являющийся датчиком температуры, а в дру-
гом — пьезокварц АТ-среза с малым коэффициентом термочув-
ствительности (Ю-6—10-7 К’1). Разность частот этих генерато-
ров,’ измеряемая цифровым частотомером, пропорциональна
измеряемой температуре. Генераторы обычно работают на ча-
стоте в десятки мегагерц. Рабочий диапазон температур кварце-
вых термометров составляет от —196 до +500 °C. При более
высоких температурах возникают микротрещины, понижающие
стабильность характеристик термометра. Чувствительность зави-
сит от конструкции резонатора, типа среза и в известных кварце-
вых термометрах находится в пределах 20—2850 Гц/К. Погреш-
ность линейности равна 0,02 °C в диапазоне температур от 0 до
+ 100°C и 0,15°С — в диапазоне от —40 до +250°С. Теоретиче-
ский порог чувствительности составляет 1-10-7 К, практически
достигнут порог 10~6—10-4 К при добротности кварца Q = 5-106.
Недостатком кварцевых термометров является большое время
установления показаний (десятки секунд) за счет плохой тепло-
проводности между защитным корпусом датчика и чувствитель-
ным элементом. Для измерения температуры в спокойной воз-
душной среде с погрешностью 0,01 °C необходимо время до
30 мин. Увеличение быстродействия кварцевых термометров до-
стигается уменьшением габаритов датчика, заполнением корпуса
датчика гелием, а также созданием непосредственного теплового
контакта выводов кварцевого элемента с исследуемой средой.
Измерения температуры методом ядерного квадрупольного
резонанса (ЯКР). Эти измерения основаны на зависимости от
температуры частоты прецессии атомных ядер, обладающих
электрическим квадрупольным моментом. Этот момент обуслов-
лен отклонением распределения заряда ядра от сферической сим-
метрии и имеет место у ядер, спин которых />1. Взаимодействие
квадрупольных моментов ядер с электрическим полем кристал-
лической решетки вызывает прецессию ядер с частотой
f я к р ~ (2^) >
где е — заряд электрона; Q— квадрупольный момент ядра; qzz—
составляющие тензора градиента электрического поля; h — по-
стоянная Планка.
271
Градиент электрического поля решетки зависит от темпера-
туры, что обусловливает температурную зависимость частоты
ЯКР и позволяет применить ЯКР для измерения темпера-
туры.
В большинстве веществ с понижением температуры частота
ЯКР возрастает. Частота ЯКР в различных веществах находится
в пределах 20 кГц— 1000 МГц. Для измерения температур в ди-
апазоне 10 — 600 К в качестве термометрического вещества наи-
более подходящим является соль КСЮз, в которой опреде-
ляется частота ЯКР ядер 35С1. При температурах до 870 К ис-
пользуется ЯКР ядер 63Си в Си2О или ядер Re в соли NaReO4.
Рис. 12-9
Все термометры, в которых используется ЯКР одних и тех же
ядер в образцах данного химического состава, имеют одинаковую
и стабильную зависимость частоты ЯКР от температуры. Благо-
даря этому ЯКР-термометры не нуждаются в градуировке, если
эта зависимость однажды определена по реперным точкам тем-
пературной шкалы. Недостатком ЯКР-термометров является не-
линейность зависимости f—F(T), вследствие чего чувствитель-
ность df/dT является функцией температуры. На рис. 12-9, а по-
казаны зависимости/якр=К(Т) для ядер 35С1 в КСЮз, для ядер
63Си в СиО2 и для ядер Re в NaReO4, а на рис. 12-9, б — зависи-1
мость df$Kp/dTx=F(Tx) для ядер 35С1 в КС1О3 и погрешность из-
мерения температуры Д7\ При температуре 290 К чувствитель-
ность достигает 5,8 кГц/К-
На рис. 12-10 представлена структурная схема цифрового
автоматического ЯКР-термометра, состоящего из датчика темпе-
ратуры 1, LC-генератора высокой частоты (ГВЧ) 2 с цепью авто-
матического поиска и настройки на частоту ЯКР, микропроцес-
сора 3 для линеаризации зависимости/яКР = /(Та:) и получения ре-
зультата измерения температуры непосредственно по цифровому
отсчетному устройству 4. Датчик ЯКР состоит из герметичного
272
корпуса, в который помещен образец термометрического веще-
ства (КСЮз) с катушкой L, которая является индуктивностью
ГВЧ, работающего в режиме вынужденных колебаний.
Для расчета температуры по частоте ЯКР ^якр используется
формула
Тх— S Pt (^якр —/оякрУ>
«=о
гДе foякр = 28,213324 МГц—частота ЯКР ядер 35С1 при ТЖ=293К;
п=6 при работе в диапазоне температур Тх = 87,7... 178,7 К и п=7
при Тх= 178,7... 297 К; Ri — коэффициенты, рассчитываемые ме-
тодом наименьших квадратов. Термометр обеспечивает измерение
температур в диапазоне 77—374 К с абсолютной погрешностью
Рис. 12-10
0,001 К- Чувствительность прибора при Г=300 К составляет
5 кГц/K. На частоту ЯКР влияет изменение давления. При 300 К
изменение давления на 105 Па эквивалентно уменьшению темпе-
ратуры на 6 мК- Магнитное поле вызывает уширение резонанс-
ного сигнала, поэтому датчик необходимо экранировать.
Стабильность и универсальность градуировочных характери-
стик ЯКР-термометров в сочетании с частотным выходом позво-
ляют использовать такие приборы для дистанционных измерений
температуры в метрологии и океанографии. Метод ЯКР приме-
няется также для создания вторичных эталонов температуры,
в частности для воспроизведения практической температурной
шкалы.
12-7. Пирометрические методы
Пирометрические методы измерений температуры ох-
ватывают широкий диапазон температур — от 173 до 6000 К,
включающий в себя низкие, средние и высокие температуры. Эти
методы основаны на определении параметров теплового излуче-
ния объекта без нарушения его температурного поля. Тепловое
излучение представляет собой электромагнитное излучение, воз-
буждаемое тепловым движением атомов и молекул в твердых,
жидких и газообразных веществах. При температурах выше
4000 К излучение вызывается процессами диссоциации и иони-
зации.
273
Теория пирометрических методов измерений температуры ос-
нована на законах, устанавливающих связь между излучением
абсолютно черного тела (АЧТ) и его температурой. Абсолютно
черным телом называется тело, поглощающее все падающее на
него излучение и соответственно способное при данной темпера-
туре излучать максимальную энергию. Хорошим приближением
к АЧТ является закрытая со всех сторон полость с малым отвер-
стием, площадь которого пренебрежимо мала по сравнению с об-
щей поверхностью полости.
Закон Планка устанавливает связь между абсолютной темпе-
ратурой и спектральным распределением потока излучения (све-
тимости) АЧТ:
м[т = G Vs (еС2/<ХТ) — 1)"’, (12-2)
где М\,т —спектральная плотность потока излучения АЧТ, т. е.
энергия, излучаемая в единицу времени единицей площади по-
верхности излучателя, приходящаяся на единицу диапазона длин
волн; С1 = 2лс2й=3,741832- 10~16 Вт*м2; C2=c/i/ft = 0,01438786 мХ
ХК— соответственно первая и вторая постоянные излучения; с —
скорость света; h — постоянная Планка; k — постоянная Больц-
мана.
При малых значениях XT можно вместо выражения (12-2)
пользоваться законом Вина
Зависимость MxT=F(X, Т) изображена на рис. 12-11.
Полная энергия, излучаемая с единицы поверхности АЧТ
в единицу времени, определяется законом Стефана—Больцмана
М°т = оТ\
где 0=5,67032* 10-8 Вт/(м2*К4)— постоянная Стефана—Больц-
мана.
Как видно из рис. 12-11, с увеличением температуры макси-
мумы кривых = F(X, Т) сдвигаются в ультрафиолетовую об-
ласть спектра, т. е. в сторону более коротких волн. Сдвиг макси-
мума излучения подчиняется закону смещения Вина, установлен-
ному в виде двух зависимостей:
Лтах = Л/7; М^^ЬгТ5,
где Л =28978*10-7 м* К; fei = 12816-10~9 Вт/(м3*К5).
Разработка чувствительных приемников инфракрасного (ПК)
излучения [5] позволяет применять пирометрические методы для
измерения не только высоких, но и низких температур. Приборы
для измерения температур объектов по их тепловому электро-
магнитному излучению называются пирометрами.
В зависимости от естественной входной величины пирометры
разделяются на пирометры полного излучения (радиационные
пирометры), воспринимающие полную (интегральную) энергию
274
Излучения, пирометры частичного излучения (яркостные пиро-
метры), основанные на зависимости от температуры энергетиче-
ской яркости излучения в ограниченном диапазоне длин волн, и
пирометры спектрального отношения (цветовые пирометры),
в которых используется зависимость от температуры отношения
спектральных плотностей энергетических яркостей на двух или
нескольких длинах волн.
Пирометры прямого преобразования обычно состоят из опти-
ческой системы, приемника излучения, измерительной цепи с вто-
N3
2600К
(2327'С
20-00 К
(2127°С)
2200К
(1327°$
2000'0
(1727°$
1800К
(1527°С)
1600К
(1327°С)
1W0K
(1127'С)
0 0,5 1,0 1,5 2,0 2,5 3,0 35
----i---5---ii-1----]----L---1—
Длина Волны Л, мкм
Рис. 12-11
ричным прибором, а в ряде случаев с микропроцессорным вычис-
лительным устройством. В пирометрах уравновешивающего пре-
образования, кроме того, имеется образцовый источник излуче-
ния. В зависимости от вида оптической системы, с помощью ко-
торой излучение передается на приемник излучения, пирометры
разделяются на рефракторные с собирающей линзой, рефлек-
торные с собирающим зеркалом, световодные и комбинирован-
ные.
Пирометры полного излучения, или радиационные пирометры.
Эти пирометры основаны на зависимости от температуры инте-
гральной мощности излучения АЧТ во всем диапазоне длин волн,
определяемой законом Стефана—Больцмана:
М°т = <зТ*.
275
Для реального тела эта зависимость определяется вираже
нием
Мт еоТ4,
где 0,04<1—коэффициент теплового излучения (коэффици-
ент излучательной способности), зависящий от материала излу-
чателя и от состояния и температуры его поверхности. Например,
для стальных изделий в зависимости от появления на них ока-
лины значение е может изменяться от 0,1 до 0,9. Пирометр, гра-
дуированный по излучению АЧТ, при измерении на реальном
объекте покажет так называемую радиационную температуру Тр,
значение которой всегда меньше действительной температуры
объекта Т. Радиационной температурой объекта называется та-
кая температура АЧТ, при которой его полная мощность излуче-
Рис. 12-12
ния (плотность излучения во всем диапазоне длин волн — от Xi =
= 0 до Я,2=°о) равна полной мощности излучения рассматривае-
мого объекта при температуре Т.
Связь между Тр и Т определяется из равенства о7’р4=еоТ4,
откуда
Т = ТР]/Ш.
Пирометры полного излучения применяются для измерения
в диапазоне температур от —50 до +3500 °C. Наиболее целесо-
образно использовать такие пирометры для измерения темпера-
туры объектов, излучательные свойства которых мало отлича-
ются от свойств АЧТ. Этому условию удовлетворяют большин-
ство закрытых печей и топок с малым отверстием, кожа
человека, стекло, резина и др.
На рис. 12-12 приведены принципиальные схемы рефрактор-
ного и рефлекторного пирометров полного излучения с термо-
электрическим приемником излучения, выполняемым обычно
в виде термобатареи. В рефракторном пирометре (рис. 12-12, а)
излучение от объекта 1 через линзу 2 и диафрагму 3 фокусиру-
ется на горячие спаи термобатареи 4. Визирование телескопа пи-
рометра на объект измерения осуществляется наблюдателем 5
через оптическую систему, состоящую из диафрагмы 6, окуляра 7
и дымчатого светофильтра 8. Резистор 9 из никеля, который
276
имеет хороший тепловой контакт с корпусом пирометра, приме-
няется для коррекции температурной погрешности.
В двухзеркальном рефлекторном пирометре (рис. 12-12, б)
излучение объекта 1, пройдя через кварцевое окно 2, отражается
от зеркала 6 и частично от обратного зеркала 3, попадает через
отверстие в диафрагме 4 на термоприемник 5 и затем на окуляр
7. Узел 8 с обратным зеркалом и термоприемником может для
фокусировки объекта перемещаться вдоль оси телескопа. При-
емники излучения в пирометрах полного излучения должны иметь
спектральную характеристику, близкую к характеристике АЧТ.
Для повышения точности пирометров полного излучения
в корпусе телескопа устанавливается образцовый источник излу-
чения в виде АЧТ, температура которого поддерживается посто-
янной. При помощи дифференциальной измерительной цепи срав-
ниваются мощности излучения измеряемого объекта и АЧТ, потоки
излучения которых с помощью вращающегося или колеблюще-
гося зеркала попеременно подаются на приемник.
Разработаны различные оптические устройства, расширяю-
щие области применения пирометров. Например, изготовляются
пирометры с волоконной оптикой для измерения температуры
в диапазоне 400 — 3000 °C. Используются световоды длиной до
10 м. Такие пирометры обеспечивают измерение температур объ-
ектов диаметром от 1 мм, а также температур в герметичных
объемах. Такой канал передачи не чувствителен к помехам и из-
менениям параметров промежуточной среды.
Пирометры частичного излучения. Основаны на использова-
нии зависимости от температуры мощности излучения в ограни-
ченном диапазоне длин волн. Рабочий диапазон измерений таких
пирометров от -—100 до +6000 °C. Основная погрешность изме-
рения для различных типов пирометров лежит в пределах 0,25—
2,5%, быстродействие 0,001—-2,5 с.
Разновидностью пирометра частичного излучения является
монохроматический яркостный пирометр, основанный на сравне-
нии энергетической яркости объекта исследования с энергетиче-
ской яркостью образцового излучателя в узком участке спектра
излучения. В качестве образцовых излучателей обычно исполь-
зуются лампы накаливания с плоской вольфрамовой нитью, ко-
торые при температуре нити ниже 1500 °C имеют стабильную
зависимость яркости от тока накала нити.
Вследствие неполноты излучения реальных тел яркостные пи-
рометры измеряют не действительную температуру тела Т, а так
называемую яркостную температуру Тя. Соотношение между дей-
ствительной и яркостной температурами, как следует из законов
излучения, определяется выражением
1____1 X
т ~ тя + с2
где е% — коэффициент теплового излучения для длины волны Z.
Большинство яркостных пирометров, работающих в видимой об-
277
ласти спектра, снабжаются красным светофильтром, обеспечива-
ющим эффективную длину волны, равную (0,656+0,008) мкм.
В зависимости от материала излучателя и состояния его по-
верхности значения коэффициента теплового излучения ко-
леблются в широких пределах: 0<е>.<1. Так, при Х=0,65 мкм
для полированной меди он равен 0,03, для серебра 0,04 — 0,07,
для вольфрама 0,6, для окисленного железа 0,6 — 0,9, для сили-
катных огнеупоров 0,9 и т. д.
Рис. 12-13
S)
Сравнение энергетических яркостей объекта исследования и
образцового излучателя может осуществляться автоматически
или визуально человеком, глаза которого очень чувствительны
к слабым интенсивностям света. Широкое применение для изме-
рения температур в диапазоне 300—6000 °C получили визуаль-
ные пирометры с исчезающей нитью.
В таком пирометре (рис. 12-13, а) изо-
бражение объекта / путем перемеще-
ния объектива 2 совмещается с пло-
скостью нити 3 лампы накаливания 4.
Наблюдая изображения объекта и
нити через светофильтр 5 и окуляр 6,
наблюдатель меняет ток накала нити
Рис. 12-14 лампы до тех пор, пока середина на-
каленной нити не исчезнет на фоне
изображения объекта (рис. 12-13, б). Это свидетельствует о ра-
венстве энергетических яркостей излучающего объекта и нити
в области спектра, определяемого характеристикой пропускания
красного фильтра т(/.) и спектральной характеристикой чувстви-
тельности глаза наблюдателя v(X), максимум которой для нор-
мальных глаз соответствует длине волны %=0,555 мкм (рис.
12-14).
Зависимость между током лампы и яркостной температурой
определяется путем градуировки термометра по температуре
АЧТ. Шкала такого пирометра имеет резко нелинейную харак-
теристику, поскольку яркость нити примерно пропорциональна
пятой степени тока накала нити. Равномерную шкалу можно по-
лучить, если ток накала нити и, следовательно, ее температуру
поддерживать постоянными, а выравнивание яркости нити и
278
объекта осуществлять перемещением нейтрального поглотителя
с переменной плотностью (оптического клина) 7 (см. рис. 12-13,а),
устанавливаемого между объективом и температурной лампой.
Яркостная температура в этом случае определяется по шкале от-
счетного устройства, регистрирующего положение клина.
Для увеличения верхнего предела измерения пирометров при-
меняются нейтральные поглотители с известным коэффициентом
пропускания т(7), который определяется из выражения
— 1пт(Х) = С2/[Х(1/72— 1/T0J,
где Л — длина волны; С2 — вторая постоянная излучения; Т\—
температура АЧТ, измеренная пирометром без поглотителя; Т2 —
температура АЧТ, измеренная при наличии поглотителя.
Рис. 12-15
Сравнение яркостей производится с погрешностью примерно
1 %, но обусловленная этим погрешность измерения температуры
не превышает 0,1 % вследствие того, что яркость тела увеличива-
ется значительно быстрее, чем его температура.
На рис. 12-15 показана схема пирометра с автоматическим
уравновешиванием, в котором яркость объекта 1 сравнивается
с яркостью электрометрической лампы 2 при помощи фотоэлект-
рического преобразователя 5. Излучения от объекта и лампы
с помощью модулятора 4 через красный светофильтр 3 попере-
менно подаются на преобразователь 5. Сигнал переменного тока
через усилитель 6 и фазочувствительный выпрямитель 7 регули-
рует ток в электрометрической лампе. Шкала прибора 8 градуи-
руется в единицах температуры.
Пирометры спектрального отношения, или цветовые пиро-
метры. Они показывают так называемую цветовую температуру
тела Тц — условную температуру, при которой АЧТ имеет такое
же относительное спектральное распределение энергетической яр-
кости, что и исследуемое реальное тело с действительной темпе-
ратурой Т.
Показания пирометра спектрального отношения соответствуют
действительной температуре, если объект является абсолютно
279
черным или серым телом, т, е. таким телом, у которого излуча-
тельная способность для всех длин волн одинакова.
Если е зависит от длины волны, то связь между действитель-
ной и цветовой температурой определяется выражением
1/7’ = 1/Тц+ХЖХ2 In (еК1/елЭ/[С2 (Ла—Ml, (12-3)
где е?4 и Е>.2 — коэффициенты излучательной способности тела со-
ответственно на длинах волн М и Х2.
Из выражения (12-3) следует, что пирометры спектрального
отношения, в отличие от пирометров полного или частичного из-
лучения, показывают действительную температуру серых тел и их
показания не зависят от излучательной способности тела до тех
пор, пока ^ = 8^.
Для многих тел е>. не остается постоянным с изменением
длины волны. У металлов е?. уменьшается с ростом длины волны,
у неметаллических тел в ряде случаев еж, наоборот, увеличивается.
Поскольку при Х2>Х1 величина 8X2=ge?b то измеренная
цветовая температура, как следует из выражения (12-3), может
быть больше, меньше действительной температуры или равна ей.
Из этого же выражения следует, что цветовая температура Тц
тела тем ближе к действительной температуре, чем больше раз-
ность Х2 — Хь
В целом погрешности пирометров спектрального отношения
меньше, чем у пирометров полного или частичного излучения.
Их показания принципиально не зависят от расстояния до объ-
екта исследования, а также от поглощения излучения в промежу-
точной среде между объектом и пирометром, если е?1 = 8?2.
В большинстве серийно выпускаемых пирометров модуляция
излучения осуществляется при помощи механических модулято-
ров, приводимых в движение синхронными микродвигателями.
В качестве приемников излучения применяются термобатареи
(в пирометрах полного излучения), фотодиоды, фоторезисторы
или пироэлектрические приемники. В некоторых приборах при-
емники излучения термостатированы. Большинство пирометров
имеют стандартный выходной сигнал постоянного тока 0—5 мА
или 4—20 мА и постоянного напряжения 0—100 мВ или 0—10 В.
12-8. Тепловидение и термография
Пирометрические методы находят все более широкое применение
для получения видимого изображения и регистрации температурного поля по-
верхности различных объектов. Приборы для наблюдения и исследования объ-
ектов по их тепловому излучению называются тепловизорами, термографами или
тепловизорными микроскопами.
Первые приборы, разработанные для ночного видения, основанные на при-
менении электронно-оптических методов усиления и визуализации фотоэлектро-
нов, имели спектральный диапазон чувствительности до 1,3 мкм и позволяли
наблюдать распределение температур только выше 400 °C.
Телевизионные приемные трубки — видиконы с фоторезнстивным слоем из
пленки оксида свинца или сульфида оксида свинца чувствительны к излучению
280
Рис. 12-16
и устройства развертки и синхронизации 5
До 2 мкм. Чувствительные телекамеры, снабженные такими видиконами, Дают
возможность определить температурное поле при температурах выше 250 °C.
Создание чувствительных приемников инфракрасного излучения, спектраль-
ная чувствительность которых простирается далеко в инфракрасную область
спектра, открыло широкие возможности для развития термографии и тепловиде-
ния объектов с более низкими температурами. Применение в качестве приемни-
ков излучения пироэлектрических элементов [5] дает возможность получать ви-
димое изображение температурного поля объектов с температурой от —20 до
+2000 °C.
Телевизионные приемники инфракрасного излучения, в которых видикон
выполнен со сканируемой поверхностью из пироэлектрического кристалла три-
глицилсульфата, позволяют создавать чувствительные пироэлектрические тепло-
визоры, известные под названием пиротронов, пироконов или видиконов пиро-
электрических, которые обеспечивают прием инфракрасного излучения вплоть до
40 мкм.
В серийно выпускаемых тепловизорах и термографах пока в основном при-
меняются дискретные приемники инфракрасного излучения и оптико-механиче-
ские системы развертки изо-
бражения при помощи вра-
щающихся или колеблющихся
зеркал или призм. Структур-
ная схема тепловизора пока-
зана на рис. 12-16. Приемно-
оптическая система 2, управ-
ляемая сканирующей системой
3, производит обзор объекта
и разлагает его изображение
в ряд точек, излучение от ко-
торых воспринимается прием-
ником излучения /, выходной
сигнал которого подается на
усилитель 4. Сигналы с усили'
создают на экране электронно-лучевой трубки 6 видимое черно-белое или цвет-
ное изображение температурного поля поверхности исследуемого объекта. Обзор
происходит в пределах поля зрения, определяемого углами а и р, за время т,
называемое временем кадра. В качестве приемников излучения сейчас преиму-
щественно применяются фоторезисторы из антимонида индия, охлаждаемые
жидким азотом до —196 °C. Такие приемники имеют постоянную времени 1 мкс,
что позволяет в зависимости от требуемого геометрического разрешения полу-
чать кадры с частотой 0,5—60 Гц. Низкая частота кадров пока ограничивает
применение тепловизоров при исследовании динамики тепловых процессов и на-
блюдении быстродвижущихся объектов. Можно увеличить геометрическое раз-
решение и частоту кадров применением нескольких приемников, соединенных
в строку или детекторную матрицу.
Важной характеристикой тепловизоров является их порог чувствительно-
сти — минимально определяемая разность температур ATmin на поверхности
АЧТ (е=1) с температурой 25 °C, при которой отношение сигнала к собствен-
ным шумам тепловизора должно быть равно 1. У серийно выпускаемых тепло-
визоров ATmin=0,l.. .0,3 °C.
Для исследования температурных полей малых объектов разработаны теп-
ловизорные микроскопы и микрорадиометры, применяемые, например, для ис-
следования температурного поля микросхем с целью обнаружения скрытых де-
фектов. В таких приборах используется микроскопная оптика с увеличением от
3 до 125 Известны микрорадиометры, имеющие пространственное разрешение
10 мкм и температурное разрешение АГ=0,06°С в диапазоне температур от
—30 до +850 °C.
Тепловидение и термография начинают широко применяться при геологиче-
ских и климатологических исследованиях земной поверхности, в медицинской
практике для диагностики, в строительстве для проверки теплоизоляции зданий,
для обнаружения мест перегрева в электрических цепях и у различного рода
энергетического оборудования, для измерения механических напряжений и
281
деформации методом термоупругости (см § 9 2) Для температурного зойййро-
вания атмосферы применяются спутниковые радиометры, а для поисков залежей
полезных ископаемых—спсктрорадпометры. Такие приборы обычно градуиру-
ются непосредственно в единицах температуры пли в единицах энергетической
яркости. Градуировка обычно осуществляется при помощи моделей АЧТ раз-
личных конфигураций.
12-9. Спектрометрические методы
Спектрометрические методы применяются для измере-
ний сверхвысоких температур — выше 4000 К, при которых все
вещества находятся в состоянии плазмы. Поэтому спектрометри-
ческие методы тесно связаны с физикой и диагностикой плазмы.
Спектрометрические методы можно разделить на пассивные
и активные. Пассивные методы основаны на определении раз-
личных параметров спектра излучения плазмы, при котором про-
цесс измерения не влияет на измеряемую величину.
При использовании активных методов плазма облучается
внешним электромагнитным излучением и ее температура опре-
деляется по поглощению, рассеянию или скорости распростране-
ния внешнего излучения в исследуемой среде. Влиянием внешнего
излучения не всегда можно пренебречь.
Плазма, состоящая в основном из молекул, атомов, ионов и
свободных электронов, характеризуется рядом температур: моле-
кулярной, атомной, ионной, электронной, температурой возбуж-
дения и др. Первые три температуры тесно связаны и характери-
зуют температуру газа.
Излучение плазмы состоит преимущественно из линий, и лишь
очень малую часть составляет непрерывный спектр; поэтому пря-
мая пирометрия для измерения температуры плазмы неприме-
нима. Решить, является ли измеренная температура газовой или
электронной, можно только, если известен механизм излучения
на данной длине волны X и каким частицам — тяжелым или лег-
ким — принадлежит излучение.
Пассивные методы. Наиболее распространенный пассивный
метод определения температуры плазмы основан на измерении
интенсивности молекулярных, атомных или ионных спектральных
линий, для которых известны теоретические зависимости между
интенсивностью спектральных линий и температурой.
Измеряемая в результате опыта абсолютная интенсивность
спектральных линий атомов и ионов IL связана с температурой
возбужденного состояния или электронной температурой Те со-
отношением
Il = Alnrgrmhfle-Errnl(kT^nZr\ (12-4)
где пг — число кратно ионизированных частиц в единице объема;
/ — протяженность гомогенного газового слоя; grm — статистиче-
ский вес; Erm — энергия возбужденного квантового состояния пг;
Zm — сумма состояний (суммирование производится по всем
i-состояниям r-кратно ионизированной частицы); f — частота ли-
ний (f = X/c).
282
Плотность частиц, излучающих одну определенную спектраль-
ную линию прц заданном давлении, зависит только от темпера
туры плазмы. Эту зависимость можно определять, пользуясь вы
ражением (12-4). Для каждой длины волны зависимость интен-
сивности от температуры имеет максимум, что дает возможность
применять рассматриваемый метод для градуировки спектро-
метров, используя плазму с известными параметрами, например
водородную или аргоновую.
Температуру плазмы можно также определять по ширине или
профилю спектральных линий, если известны эффекты, приводя-
щие к уширению. Часто используется эффект уширения линий
вследствие действия микрополей положительных ионов. В част-
ности, у водорода расщепление возрастает линейно с увеличе-
нием напряженности поля. Напряженность поля растет с увели-
чением плотности ионов и электронов, которая сильно зависит
от температуры.
Путем добавки следов водорода к исследуемой плазме можно
по спектральным линиям водорода определить электронную тем-
пературу общей плазмы. При температуре выше 105 К уширение
линий возникает главным образом вследствие эффекта Доплера.
Температура пропорциональна квадрату половины доплеровской
ширины линии.
В области длин волн 124 — 300 нм в качестве образцового
источника излучения широко используется водородная плазма,
для которой теоретически рассчитаны таблицы интенсивности из-
лучения в диапазонах температур 15000 — 30000 К и давлений
81,06—121,59 кПа. Относительная погрешность расчетов при
Х= 124... 148 нм составляет 1 — 5%, а при Х= 148...300 нм она
равна 1—2%.
Для получения температурного поля плазмы разработаны
ИПС. В одной из них излучение плазменного источника проходит
через систему зеркал, которая позволяет сканировать источник
по горизонтали и вертикали, развертывая изображение плазмен-
ного источника по входной щели монохроматора с детектором,
с выхода которого сигналы поступают в оперативную память
мини-ЭВМ. Данные, накопленные в мини-ЭВМ, сравниваются
с данными долговременной памяти, содержащей абсолютные ко-
эффициенты излучения как функцию температуры. Данные о рас-
пределении температуры, полученные в результате такого срав-
нения, выводятся на графопостроитель.
Активные методы. К активным спектрометрическим методам
измерений температуры плазмы относится метод прямого изме-
рения плотности тяжелых частиц, основанный на поглощении
плазмой рентгеновских, а- и р-излучений.
Поглощение таких излучений подчиняется закону
J^Joe-aWd,
где /0 и J — интенсивности излучения до и после прохождения
поглощающего слоя толщиной d; а — коэффициент поглощения,
983
зависящий только от плотности частиц п. По измеренному значе-
нию плотности частиц и известным зависимостям T=F(n) опре-
деляется температура плазмы.
Температуру в холодной (несветящейся) зоне плазмы можно
найти путем измерения показателя преломления, который связан
с плотностью частиц через температурно-зависимый коэффи-
циент.
Показатель преломления определяется интерферометром, те-
невым или голографическим методами.
Метод рассеянного излучения с использованием лазера в ка-
честве источника излучения позволяет проводить динамические
Рис. 12-17
измерения температуры в ионосфере, в плазменных установках,
в стационарных и пульсирующих электрических дугах и установ-
ках типа «токамак». При этом методе плоская электромагнитная
волна проходит сквозь плазму и рассеивается на свободных элек-
тронах и ионах. Так как эффективное сечение рассеяния мало,
то необходима высокая интенсивность лазерного излучения, но
мощность лазера должна быть ограничена (Р<10”'0 Вт), чтобы
не происходил нагрев плазмы.
Ультразвуковой метод измерения температуры основан на за-
висимости скорости распространения ультразвуковых колебаний
от температуры среды. Метод обладает высокой чувствительно-
стью и успешно применяется для измерения температуры в от-
крытых и закрытых потоках плазмы с температурой 4000 —
10 000 К. Время задержки акустического импульса при прохож-
дении расстояния / от излучателя 2 к приемнику 5 (рис. 12-17),
между которыми находится исследуемая плазма 3, измеряется
при помощи старт-стопной измерительной цепи 7. В качестве из-
лучателя и приемника используются охлаждаемые водой пьезо-
электрические преобразователи из титаната бария, заканчиваю-
щиеся кварцевыми стержнями (волноводами) 4, которые сопри-
касаются с плазмой. Ультразвуковые колебания возбуждаются
импульсным генератором 1 и принимаются детектором 6. Полу-
284
чаемая информация обрабатывается при помощи микро-ЭВМ 8
и подается на регистрирующее устройство 9.
Скорость звука в плазме определяется из выражения
l/v= 1/о'—Дт/Z,
где Ат=т0—т— разность времени прохождения сигналом рас-
стояния I в воздухе и плазме; v'— скорость звука в воздухе при
комнатной температуре То, определяемая по формуле
V’ = 331,5 + 0,0677’о-
Для определения температуры плазмы по скорости T=kv2 не-
обходимо знать химический состав, степень диссоциации и иони-
зации плазмы, от которых зависит коэффициент k. Для воздуш-
ной плазмы погрешность алгоритма определения температуры по
измеренной скорости составляет доли процента. Разработаны
ИИС для определения температурного поля в плазме, которые
снабжены координатно-перемещающим устройством для уста-
новки зонда с приемным и передающим волноводами в задан-
ную точку плазменного потока и мини-ЭВМ для управления ИИС
и обработки получаемой информации. Быстродействие таких
ИИС ограничено временем реверберации сигнала в электроаку-
стическом тракте и составляет 1000—1500 изм/с. ИИС дает
возможность определить среднюю температуру и ее дисперсию
в любой точке плазменного потока с погрешностью 5—10%.
Верхний предел измерения температур ограничен жаропроч-
ностью волноводов и при кратковременном квазиконтактном ре-
жиме достигает (10... 15)-103 К.
Глава тринадцатая
МЕТОДЫ ИЗМЕРЕНИЙ КОНЦЕНТРАЦИИ ВЕЩЕСТВА
13-1. Общие вопросы аналитических измерений
Аналитические измерения, задачей которых является
определение состава и концентрации веществ, широко применя-
ются для контроля технологических процессов, в химических,
биологических, геологических, космических исследованиях,
в сельском хозяйстве, медицине, криминалистике и в ряде других
областей. Объектами рассматриваемых измерений практически
являются все существующие вещества и химические элементы,
которые могут находиться в различных агрегатных состояниях.
О масштабности аналитических измерений говорит тот факт, что
только в химической промышленности необходимо производить
анализ более 75 тысяч различных веществ и материалов. Особое
значение аналитические измерения имеют для охраны труда 'и
решения проблемы охраны среды обитания. Диапазон измеряе-
мых концентраций чрезвычайно широк. Так, для измерения влаж-
285
ности и концентрации ряда чистых веществ в производственных
условиях требуются приборы с верхним пределом измерения
100%. При изготовлении полупроводниковых материалов, воло-
конных световодов и чистых металлов необходимо определять
примеси, концентрация которых составляет 10~6—10 8 %. Разви-
тие новых отраслей науки и техники, технология производства
новых материалов и веществ с наперед заданными свойствами
выдвигают все возрастающие требования к аналитическим изме-
рениям. Например, при исследовании материалов для ядерной
энергетики необходимо определять примеси, концентрация кото-
рых не превышает 10' 10%.
Регулирование ряда сложных технологических процессов по
косвенным параметрам (расход, температура, давление) уже
недостаточно эффективно — требуются быстродействующие и
точные средства измерений, которые в составе автоматизирован-
ных систем управления технологическими процессами обеспечи-
вали бы измерения параметров, непосредственно определяющих
состав и свойства вырабатываемых материалов.
Множеств анализируемых веществ и широкий диапазон из-
меряемых концентраций обусловили возникновение многочислен-
ных и чрезвычайно разнообразных методов, основанных на ис-
пользовании различных физико-химических явлений и свойств
вещества. Все более широко используются внутриатомные и вну-
триядерные эффекты, позволяющие создавать наиболее чувстви-
тельные и избирательные методы анализа.
Особенностью аналитических измерений является сильная за-
висимость результатов измерений от общего состава вещества,
его агрегатного состояния, внешних условий (давление, темпера-
тура, скорость перемещения и др.). Эти факторы особенно вли-
яют на точность методов, основанных на использовании инте-
гральных свойств вещества, таких, как электропроводность, тепло-
проводность, магнитная и диэлектрическая проницаемость. Все
это ограничивает возможности таких отдельно взятых методов
измерений, каждый из которых, за небольшим исключением, при-
годен для измерения концентрации одного компонента при извест-
ном и не особенно сложном составе анализируемой смеси.
Современная тенденция развития аналитического приборо-
строения — это более широкое применение селективных, комби-
нированных и многопараметрических методов, которые позволяют
создавать чувствительные и точные средства определения состава
и измерений концентраций многокомпонентных веществ. Селек-
тивные методы в отличие от интегральных позволяют переходить
от измерения свойств веществ в целом к определению характери-
стик отдельных компонентов. Среди них особенно перспективны
многие спектрометрические методы, основанные на использовании
«глубинных» внутриатомных и ядерных явлений, на которые
практически не влияют изменения внешних условий.
Для анализа многокомпонентных веществ широко применя-
ются комбинированные методы, такие, как масс-спектрометриче-
286
Скйе, хроматографические и их сочетание Илй многопарамеТрИ-
ческий метод, основанный на одновременном или последователь
ном измерении ряда параметров исследуемого вещества и сов-
местной математической обработке полученных результатов для
определения концентрации каждого компонента. Успешному ис-
пользованию этих методов способствует широкое применение
средств вычислительной техники как для автоматизации самого
процесса измерения, так и для обработки результатов измерений.
Встроенные микропроцессоры и микро-ЭВМ позволяют не только
повысить точность аналитических измерений, но и существенно
увеличить быстродействие комбинированных средств измерений,
которые применяются не только для научных исследований, но и
в автоматизированных системах управления технологическими
процессами.
Весьма сложной является задача метрологического обеспече-
ния аналитических измерений, особенно в связи с повышением
требований к точности таких измерений. Большое число объектов
исследования и разнообразие используемых методов и средств
измерений затрудняют унифицированный подход к метрологиче-
скому обеспечению этой области измерений. Для большинства
методов и средств аналитических измерений метрологическое
обеспечение осуществляется на основе использования стандарт-
ных образцов состава или поверочных смесей с заданными свой-
ствами и нормированных выходных сигналов, а для других—на
основе эталонов, образцовых средств измерений и соответствую-
щих поверочных схем.
В системе СИ в качестве основной единицы количества веще-
ства введена единица — моль, которая определяется как коли-
чество вещества системы, содержащей столько же структурных
элементов, сколько содержится атомов в углероде-12 массой
0,012 кг (СТ СЭВ 1052—78). Эта единица должна быть положена
в основу обеспечения единства измерений состава и концентра-
ции всех веществ и материалов в жидком, газообразном и твер-
дом состояниях, включая аэрозоли и гидрозоли. Однако в насто-
ящее время нет возможности точного воспроизведения моля в со-
ответствии с его определением. Поэтому основой обеспечения
единства аналитических измерений являются чистые вещества,
абсолютные методы их аттестации и создаваемые на их основе
меры концентрации — стандартные образцы состава (СО со-
става) в виде образцовых жидких, твердых и газовых смесей из-
вестного состава и их комбинаций.
Многие методы измерений концентрации веществ основаны на
сравнении свойства анализируемого объекта с мерой свойств
с последующим переходом к определению концентрации по изве-
стной зависимости состав — свойство. Поэтому аналитические
приборы могут иметь «шкалу свойств» и «шкалу концентраций».
Приборы со шкалой свойств градуируются и поверяются по СО
свойств или мерам физических величин, воспроизводящим соот-
ветствующие величины, например, с помощью магазинов сопро-
287
тивлений, емкостей и др. Приборы со шкалой концентраций гра-
дуируются и поверяются по СО состава, которые являются наи-
более эффективным средством обеспечения единства и требуемой
точности измерений. Так, например, средства измерений состава,
основанные на хроматографическом методе (см. § 13-6), обычно
градуируются по газовым смесям, представляющим собой упро-
щенную модель реально анализируемой газовой смеси. В неко-
торых случаях СО состава могут быть выполнены в виде бинар-
ных газовых смесей, состоящих из анализируемого газа и инерт-
ного газа-носителя.
Для поверки гигрометров—приборов для измерения влажно-
сти газов применяются генераторы влажного газа, которые обес-
печивают получение непрерывного потока парогазовой смеси
с известными значениями влажности, определяемой путем изме-
рения температуры и давления.
В качестве основных средств поверки влагомеров использу-
ются СО влажности или эквивалентные меры влажности, соот-
ветствующие требованиям ГОСТ 8.376—80, ГОСТ 8.326—78,
ГОСТ 8.382—80 и др.
Ниже рассмотрены некоторые, наиболее распространенные
электрические методы анализа веществ и соответствующие
средства измерений, которые в зависимости от используемых фи-
зико-химических явлений или их сочетания разделяются на элек-
трохимические, электрофизические, ионизационные, спектромет-
рические и комбинированные.
13-2. Электрохимические методы
Электрохимические методы анализа основаны на при-
менении электрохимических преобразователей, подробно рассмат-
риваемых в работе [5]. Эти методы широко применяются для ана-
лиза веществ в жидких средах, для измерения концентраций ряда
газов и влажности.
При измерениях электрохимическими методами используются
относительно простые средства измерений, выходным сигналом
которых является электрический ток или напряжение. При этом
в ряде случаев не требуется внешнего источника питания, по-
скольку сам электрохимический преобразователь является источ-
ником выходного электрического сигнала, используемого в каче-
стве сигнала измерительной информации. Эти методы особенно
пригодны для автоматического анализа веществ, для которых
другие методы не обеспечивают нужной чувствительности или
требуют более сложных и дорогостоящих средств измерений.
Наиболее распространенными электрохимическими методами
являются кондуктометрический, кулонометрический, потенциало-
метрический и ряд их разновидностей, например полярографиче-
ский, метод потенциометрического титрования и др.
Кондуктометрический метод измерений концентраций. Этот
метод основан на зависимости электропроводимости веществ от
288
приборы
Рис. 13-1
их состава и концентрации отдельных компонентов. Метод ши-
роко применяется для измерения концентрации солей, оснований
и кислот в жидких растворах и расплавах, для измерения соле-
ности воды, в том числе в Мировом океане, для измерения кон-
центрации газов по изменению электропроводимости раствора
при поглощении им пробы анализируемого газа, а также для из-
мерения влажности в твердых, газообразных и жидких средах.
Приборы, основанные на этом методе, называются кондуктомет-
рическими концентратомерами, соленомерами, кондуктометриче-
скими газоанализаторами и кондуктометрическими влагомерами.
В зависимости от используемых типов электрохимических ре-
зистивных преобразователей [5] кондуктометрические
разделяются на контактные и неконтактные (ем-
костные и индуктивные). Последние, в свою оче-
редь, делятся на низкочастотные и высокочастот-
ные. Емкостные высокочастотные кондуктомеры
целесообразно использовать для измерения слабых
концентраций электролитов, а индуктивные — для
сильных. Высокочастотные кондуктомеры можно
также применять для измерения концентраций
твердых частиц в жидкости, особенно в непрозрач-
ных и густоокрашенных жидких средах, которые
нельзя исследовать с помощью оптических мето-
дов.
Кондуктометрический метод получил широкое
применение как в лабораторной практике, так и
для технологических измерений. Недостатками ме-
тода являются его неселективность, двузначность и
зависимости электропроводимости от концентрации,
зависимость можно считать только у растворов солей, оснований
и кислот, концентрация которых не превышает 100 мг/л. Кондук-
тометрические приборы измеряют суммарную электропроводи-
мость, создаваемую ионами всех растворенных веществ. Поэтому
концентрацию одного вещества в растворе можно определить
только в том случае, когда концентрация неопределяемых компо-
нентов остается постоянной или если обусловленная ими электро-
проводимость очень мала. Для расчета электропроводимости мно-
гокомпонентных сред используется относительная электропроводи-
мость, которая представляет собой значение электропроводимости
любого вещества в долях электропроводимости раствора NaCl
такой же весовой концентрации.
Промышленные кондуктометрические концентратомеры обес-
печивают измерение электропроводимости в жидких средах с от-
носительной погрешностью ±(1— 5) % при температурах 0—
НО °C и давлениях до 10е Па. Присутствие в растворе раство-
ренных газов может привести к искажению результатов измере-
ний, поэтому такие приборы обычно снабжаются дегазаторами.
Для’исследования расплавов при высоких температурах при-
меняются датчики в виде муфельной печи 5 (рис. 13-1), в кото-
10 Заказ № 444 289
нелинейность
Линейной эту
рую опускается электродная система 1, выполненная в виде двух
проволочек диаметром 0,5 мм из сплава (60% Pt+40% Re).
Электроды укреплены в мулптовом стержне 4, проходящем че-
рез радиационные экраны 2 и медную крышку 3, охлаждаемую
водой. Датчик включается в мостовую цепь, питаемую перемен-
ным напряжением частотой 7 кГц. Кондуктомер обеспечивает из-
мерение электропроводимости расплавленных оксидов при тем-
пературах до 1700°C с относительной погрешностью ± (5—10) %.
Кондуктометрический метод находит также применение для
измерения концентрации различного рода частиц в веществах
сложного состава, в частности для оп-
ределения состава крови и других био-
логических жидкостей. Исследуемое
вещество помещают в электролит, на-
пример в раствор NaCl, и полученную
суспензию пропускают через импульс-
ный кондуктометрический датчик, со-
противление которого периодически
возрастает при прохождении каждой
частицы сквозь капиллярную перего-
родку [5]. Кондуктометрические цитро-
метры обеспечивают повышение про-
изводительности и точности биохими-
ческих анализов. Погрешность измере-
ния числа частиц в крови составляет
2,5%.
------о го о-----
Рис. 13-2
лизируемого газа. Так, для
ным раствором ВаСО3:
Кондуктометрический метод измерений
концентрации газов. Метод основан на изме-
рении электропроводимости раствора, с кото-
рым реагирует определяемый компонент ана-
анализа газа СО3 используется его реакция с вод
СО2 -р ВаСО3 4- Н2О Ва (НСО3)2.
Так как Ва(НСОз)г более растворим, чем ВаСОз, то электропроводимость
раствора увеличивается. На рис. 13-2 показана схема кондуктометрического га-
зоанализатора, который состоит из дифференциального электролитического пре-
образователя, помещенного для выравнивания температур плеч в масляный
термостат 1, и мостовой измерительной цепи. Электропроводимость раствора
между электродами 2 и 3 постоянная, а между 7 и 8 она изменяется в зави
симости от концентрации определяемого компонента газа, который поглощается
раствором в змеевике 4. Непрореагировавшая часть газа отделяется от жидко-
сти в газоотделителе 5 и удаляется вместе с раствором через выход 6. Кон-
дуктометрические газоанализаторы используются для измерения малых концен-
траций широкого класса газов (СО2, SO2, HzS, СОСЬ, NH3, H2 и др.) и вы-
пускаются с диапазонами измерений от 0—10-6 до 0—0,5% объемных. Газы СО
и СН4 перед анализом сначала сжигаются и переводятся в СО2.
Для измерения концентрации кислорода, растворенного в воде, использу-
ются кондуктометрические газоанализаторы, основанные на реакции металличе-
ского таллия со следами растворенного в воде кислорода. Сам таллий в воде
инертен, но в присутствии кислорода образует гидрооксид таллия, который уве-
личивает электропроводимость воды. Газоанализатор содержит два электроли-
тических преобразователя, через один из которых вода проходит до реакции
с таллием, а через другой — после. Основанный на этом принципе автоматиче-
290
ский анализатор кислорода обеспечивает измерения с основной приведенной по-
грешностью ±5% в диапазоне 0—0,1 мг/л. Постоянная времени таких газоана-
лизаторов 2—4 с.
Кондуктометрический метод измерений влажности. Этот метод широко при-
меняется для измерения влажности в капиллярно пористых твердых веществах
и газах. Определение влажности твердых веществ основано на измерении актив-
ного сопротивления преобразователя, между электродами которого размещается
испытуемое вещество. Электропроводимость капиллярно-пористых веществ с уве-
личением влажности резко возрастает за счет растворения в воде электролитов,
входящих в состав таких веществ.
Для измерения влажности древесины, кожи, фанеры и аналогичных по
твердости материалов используются игольчатые (зубчатые) электроды, вдавли-
ваемые на определенную глубину в испытуемый материал. Для твердых мате-
риалов (железобетонные панели и др.) применяются электроды из электропро-
водящей резины. Для сыпучих материалов (зерно, песок, угольная пыль и т. д.)
применяются преобразователи с принудительным уплотнением вещества.
Зависимость сопротивления между электродами Rx от влажности U7 может
быть представлена выражением
Rx = A/Wn,
где А и и — коэффициенты, зави-
сящие от исследуемого материала
и параметров преобразователей и
определяемые обычно экспери-
ментально.
Кондуктометрический метод
целесообразно применять для из-
мерения влажности твердых ве- рис 13 g
ществ в диапазоне 5—30 %.
Верхний предел ограничен паде-
нием чувствительности с ростом влажности, нижний — сложностью измерения
очень больших сопротивлений (1010—1014 Ом). На показания таких влагомеров
сильно влияют содержание электролитов в исследуемом веществе, его плотность
и структура, неравномерность распределения влаги по объему, поверхностное
сопротивление, поляризация, значения напряжения на электродах.
Для измерения влажности газов применяется сорбционно-кондуктометриче-
ский метод, основанный на изменении электропроводимости электролитов (вла-
гочувствительная соль или кислота) за счет поглощения влаги из окружающей
среды. Преобразователи обычно состоят из основания (стекло, полистирол
и др.), покрытого с обеих сторон влагочувствительиой пленкой, содержащей
LiCl. Электроды из благородных металлов (золото, палладий) изготовляются
напылением на влагочувствительиую пленку.
Кондуктометричские пленочные гигрометры применяются для измерения
влажности в широких пределах — от единиц до 100% относительно влажности
при температуре от —40 до +50 °C. На их показания влияет изменение
атмосферного давления и температуры. Рассматриваемые гигрометры, характе-
ризуются малой инерционностью, которая тем меньше, чем тоньше влагочувст-
вительная пленка. На рис. 13-3 показано устройство малоинерционного преоб-
разователя кондуктометрического гигрометра (т=1.. .3 с), состоящего из стек-
лянного основания 4, на которое печатным способом нанесены гребенчатые
электроды из хрома 3 с выводами 1. На электроды сверху нанесен влагочувст-
вительиый слой фтористого бария 2 толщиной 0,3 мкм.
Кондуктометрические гигрометры обычно представляют собой автоматиче-
ские мосты, в одно плечо которых включается преобразователь. Для уменьше-
ния погрешностей от поляризации питание мостов осуществляется переменным
током промышленной частоты. При более высоких частотах появляются погреш-
ности от влияния емкостных составляющих. Для повышения точности измере-
ний обычно используются цепи коррекции температурной погрешности.
Весьма перспективными являются сорбциоиио-коидуктометрические влаго-
меры и гигрометры, основанные на измерении электрического сопротивления по-
лупроводниковых пленок (оксиды цинка, алюминия) или кристаллических сор-
10*
291
бейтов (силикагель, алюмогель) при поглощении ими влаги. Такие влагомеры
с успехом используются для измерения влажности не только в газах, но и
в жидких средах, особенно в насыщенных (пентан, гексан) и ароматических
(толуол, бензол) углеводородах. Чувствительным элементом преобразователя
наиболее часто является пленка из оксида алюминия, нанесенная на электрод
из химически чистого алюминия. Другим электродом служит напыленный на
пленку газопроницаемый слой золота. Показания прибора не зависят от давле-
ния и расхода анализируемого газа в диапазоне линейных скоростей газа О —
10 м/с и давлений до 5-Ю5 Па. Существуют модификации сорбционно-кондук-
тометрических преобразователей для работы при давлениях до 3-107 Па. Пре-
образователь не допускает контакта со спиртами, фтористым водородом и ам-
миаком. Постоянная времени преобразователя в зависимости от толщины влаго-
чувствительного слоя лежит в пределах от нескольких секунд до нескольких
минут. Другим применением сорбционно-кондуктометрического метода является
измерение концентрации горячих газов, так как с повышением температуры
чувствительность таких влагомеров резко возрастает.
Кулонометрический метод.
Метол основан на измерении тока
или количества электричества при
электролизе исследуемого веще-
ства или вещества, реагирую-
щего с измеряемым компонен-
том. На этом методе основаны
приборы для измерения концент-
рации вещества в жидких и га-
зообразных средах, а также для
измерения влажности.
На рис. 13-4 представлена
схема кулонометрического гигро-
метра для измерения влажности
газов. Датчик гигрометра выпол-
нен в виде изоляционной трубки 1, внутри которой расположены
несоприкасающиеся платиновые электроды 2 и 3, выполненные
в виде геликоидальных спиралей, подключенные к источнику по-
стоянного тока 5.
Электроды образуют спиральный зазор, покрытый тонкой
пленкой фосфорного ангидрида, которая поглощает влагу из газа,
пропускаемого через датчик с постоянной скоростью. При этом
непрерывно происходят два процесса: образование фосфорной
кислоты и электролиз с регенерацией фосфорного ангидрида:
Р2Об4-Н2О->2НРО3;
2НРО3 -> Н2 + 0,5О2 + Р2О3-
Ток электролиза, измеряемый по падению напряжения на ре-
зисторе R с помощью автоматического компенсатора 4, пропор-
ционален абсолютной влажности газа:
т Fz
/= ——pq,
tn
где F— постоянная Фарадея; z— основность; т — молекулярная
масса воды; р—расход газа, м3/с; q — абсолютная влажность.
292
Существует ряд модификаций кулонометрических гигрометров
(«Байкал», «Лена», КИВГД, ДКГ и др.), которые позволяют из-
мерить влажность в диапазоне 2- 10 6—10 % объемных с основной
приведенной погрешностью ±(1,5—5) % при температуре анали-
зируемого газа от —10 до +60°C и давлении 104—6- 10® Па. Не-
достатком влагомеров с использованием оксида фосфора является
невозможность анализа газов, содержащих щелочные компо-
ненты и углеводороды.
Для измерения малых концентраций влажности (106% объ-
емных) применяется способ накопления влаги на чувствительном
элементе за определенный период времени с последующим изме-
рением количества элект-
ричества при электролизе
накопленной влаги. Та-
кой циклический режим
работы осуществлен в ги-
грометре «Кулон». Верх-
ний предел измерения
электрохимических газо-
анализаторов и влагоме-
ров может быть увеличен
(до 100 % объемных)
с помощью диффузион-
ного барьера, выполнен-
Рис. 13-5
ного из проницаемого
для газа или влаги мате-
риала или в виде кана-
лов в непроницаемом материале. Такой барьер играет роль «де-
лителя» газа или влаги, регулирующего поступление анализируе-
мого компонента в датчик. Показания таких гигрометров мало за-
висят от скорости анализируемого газа. Недостатком является не-
обходимость индивидуальной градуировки каждого прибора.
На рис. 13-5 показана схема кулонометрического газоанализатора для изме-
рения концентрации SO2 в газовых смесях. Анализируемый газ через фильтр 1
поступает в датчик 2, заполненный подкисленным водным раствором KI. Датчик
имеет две пары электродов: 5 и 6— электроды цепи электролиза KI и 3 и 4 —
измерительные электроды, один из которых (4) из платины, а другой (3)
представляет собой каломельный полуэлемент. Электроды 3 и 4 образуют галь-
ванический преобразователь, ЭДС которого зависит от концентрации в растворе
свободного иода, который образуется при электролизе KI. Действие газоанали-
затора основано на непрерывном титровании SO2 иодом, который выделяется
при электролизе в количестве, эквивалентном концентрации SO2. Уравнение ре-
акции титрования: SO2+l2+2H2O->H2SO4+2HI. При изменении концентрации
SO2 происходит изменение концентрации иода и потенциала платинового элек-
трода 4, что приводит к изменению тока электролиза, который измеряется реги-
стрирующим прибором 7. Газоанализатор работает как система автоматического
уравновешивания, поддерживающая скорость выделения иода и, следовательно,
ток электролиза пропорциональными количеству SO2, поступающему за единицу
времени в датчик. Пределы измерений таких газоанализаторов 0—0,1; 0—0,5%
объемных, основная погрешность ±5%.
На этом же принципе основаны газоанализаторы для измерения микрокон-
центраций SOa (пределы измерений 0—5-10~5% объемных) с погрешностью
293
±2%, а также для измерения концентраций сероводорода, хлора, озона и др.
Постоянная времени таких газоанализаторов около 1 мии.
Полярографы являются разновидностью кулонометрических анализаторов и
основаны на электролизе исследуемого вещества с помощью полярографических
преобразователей [5]. Полярографы являются единственными электрохимиче-
скими приборами, которые позволяют проводить качественный (по значению
потенциала поляризации) и количественный (по значению предельных токов элек-
тролиза) анализ многокомпонентных растворов без предварительного разделе-
ния компонентов. Полярографы широко применяются для качественного и коли-
чественного анализа неорганических и органических веществ, для решения ряда
аналитических задач при научных исследованиях, а также как концентратомеры
и газоанализаторы, особенно для измерения концентрации кислорода в газовых
смесях, а также в промышленных и сточных водах. Пределы измерений таких
кислородомеров для газообразных сред от 0,01—2 до 100 % объемных, основ-
ная погрешность ± (5—10) % от предела измерений. При измерении в жидких
средах и концентрациях 5—10 мг/л основная погрешность составляет ±(1—5) %.
Многоцелевые полярографы снабжаются автоматическими устройствами
для измерений поляризующего напряжения и тока электролиза, для компенса-
ции начального тока и падения напряжения на датчике и др. Особенно низким
порогом чувствительности (до 10-в моль/л) обладают полярографы, в которых
поляризующее постоянное напряжение модулируется переменным напряжением
синусоидальной, пилообразной, трапецеидальной или прямоугольной формы.
Современные полярографы позволяют регистрировать на экране осциллографа
производную потенциала от тока и другие зависимости. Некоторые поляро-
графы снабжаются двухкоординатными графопостроителями и микро-ЭВМ для
регистрации и обработки полярограмм.
Потенциалометрический метод. Метод, основанный на измерении электрод-
ных потенциалов гальванических преобразователей [5], нашел широкое приме-
нение для измерения активности водородных ионов в различных растворах и
пульпах с помощью pH-метров. Этот метод также используется для измерения
концентрации (активности) ионов натрия, калия, хлора, меди, цинка, двухва-
лентной серы и других элементов, для выполнения потенциометрических титро-
ваний, для анализа газов, измерения влажности.
При потенциометрическом титровании эквивалентная точка определяется по
изменению потенциала на электродах гальванического датчика, опущенного
в титруемый раствор, или титрование производится до получения определен-
ного значения pH. Такие титраторы применяются для автоматического опреде-
ления концентрации ряда элементов в растворах. Они отличаются высокой чув-
ствительностью и точностью. Например, при измерении концентрации двухва-
лентного железа в пределах 0—0,3 и 0—5 г/л погрешность не превышает ±1%.
Прибор рН-673.2 при применении соответствующих гальванических преобразова-
телей позволяет измерять pH, pNa, производить потенциометрическое титрование
и определять влажность. Прибор представляет собой милливольтметр с большим
входным сопротивлением (1012 Ом), обеспечивающий измерение окислительно-
восстановительных потенциалов до ± 1400 мВ.
Для измерения концентрации кислорода в газовых средах наряду с галь-
ваническими датчиками с жидкими электролитами, изменяющими свою ЭДС при
поглощении электролитом кислорода из анализируемого газа, находят примене-
ние кислородомеры с твердым электролитом. Действие таких приборов осно-
вано на измерении разности потенциалов, возникающих иа поверхностях мем-
браны из твердого керамического электролита, нагреваемого до температуры
850 °C. ЭДС такого гальванического датчика пропорциональна логарифму от-
носительной концентрации кислорода по обе стороны мембраны. С одной сто-
роны мембраны подается анализируемый газ, а с другой — обычный воздух.
Кислородомеры с чувствительным элементом из твердого электролита обладают
высокой чувствительностью, широким диапазоном измерений (0,1—20; 1—100 %
объемных).
13-3. Электрофизические методы
Электрофизические методы основаны на использовании
зависимостей физических свойств веществ от их состава и кон-
центрации отдельных компонентов или воздействий анализируе-
мых компонентов на измеряемый физический параметр чувстви-
тельного элемента. Для измерений концентраций веществ наибо-
лее широкое применение получили методы и приборы, основан-
ные на использовании тепловых, магнитных, диэлектрических
свойств веществ. Для анализа используются также такие пара-
метры веществ или чувствительных элементов датчиков, как
плотность, вязкость, упругость, масса, частота собственных коле-
баний и др. За небольшим исключением, при использовании элек-
трофизических методов химический состав анализируемых ве-
ществ остается неизменным.
Тепловой метод. Тепловой метод анализа основан на зависи-
мости тепловых свойств вещества, главным образом его тепло-
проводности, от его состава и концентрации отдельных компо-
нентов, а также на определении температурных коэффициентов
при различных физико-химических фазовых превращениях веще-
ства. Тепловые методы используются для анализа газов, измере-
ния вакуума, влажности газов, а также для анализа состава
жидких сред. Наиболее широкое применение получил метод ана-
лиза, основанный на различии теплопроводности компонентов,
входящих в анализируемую газовую смесь. Термокондуктометри-
ческие газоанализаторы, или катарометры, особенно пригодны для
анализа газов Н2, Не, СО2, SO2, С12, которые значительно отлича-
ются по теплопроводности от других газов, а также для измере-
ния вакуума, т. е. абсолютной концентрации газов безотноси-
тельно к их составу. В качестве чувствительных элементов в тер-
мокондуктометрических газоанализаторах и вакууметрах обычно
используются нагреваемые электрическим током платиновые или
полупроводниковые терморезисторы. Изменение концентрации из-
меряемого компонента газовой смеси, пропускаемой через камеру,
где помещен терморезистор, приводит к изменению теплоотдачи и
температуры терморезистора, что вызывает изменение его элект-
рического сопротивления. Измерительная цепь таких газоанали-
заторов обычно представляет собой автоматическую мостовую
или компенсационную цепь.
На рис. 13-6 показана электрическая схема термокондуктометрических газо-
анализаторов типа ТП. Для уменьшения погрешностей от изменения темпера-
туры и напряжения питания датчик газоанализатора содержит восемь терморе-
зисторов, четыре (R1—R4) нз них образуют измерительный мост, a R5—R8 —
сравнительный мост. Мосты конструктивно выполнены в одном металличе-
ском блоке и питаются от двух вторичных обмоток одного н того же трансфор-
матора. Терморезисторы, образующие плечи R2, R4, R6 и R8, запаяны в ам-
пулы с газовой смесью, соответствующей по концентрации началу шкалы при-
бора, a R5 и R7 — со смесью, соответствующей концу шкалы; R1 и R3 — плечи
моста, в которых терморезисторы омываются анализируемой газовой смесью.
Напряжение на выходной диагонали измерительного моста, пропорциональное
концентрации измеряемого газа, компенсируется напряжением на верхнем уча-
295
стке реохорда Rp, питаемого от выходной диагонали сравнительного моста.
Поскольку основные причины нестабильности напряжений на диагоналях мо-
стов (изменения напряжения питания и температуры окружающей среды)
влияют одинаково на оба моста, то применение такой измерительной цепи суще-
ственно уменьшает погрешности измерений. Газоанализаторы типа ТП приме-
няются для измерения концентраций СОг или Н2 в пределах 0—10; 0—20; 0—30;
20—60; 40—80; 80—100% объемных в многокомпонентных смесях газов, тепло-
проводность которых существенно отличается от теплопроводности Н2 или СО2.
Основная погрешность газоанализаторов ±2,5%, постоянная времени 60—120 с.
Теплопроводность газовых смесей подчиняется закону аддитивности, по-
этому термокондуктометрические газоанализаторы в основном пригодны для
анализа бинарных и псевдобинарпых смесей. Для повышения избирательности
метода и возможности его применения для анализа газов в многокомпонентных
смесях используются искусственные способы. Так, для анализа трехкомпонент-
ных газовых смесей используется различие температурных коэффициентов теп-
лопроводности отдельных компонентов. Применяя два измерительных моста, на-
ходящихся в средах с различ-
ными температурами, можно по-
лучить два напряжения, по ко-
торым можно одновременно
определить концентрации двух
компонентов трехкомпонеитной
смеси. Повысить избирательность
газоанализаторов можно еще
путем использования специальных
преобразователей, в которых су-
щественную роль в теплообмене
играет конвекция, а также при-
меняя метод сравнения тепло-
проводности анализируемой сме-
си с теплопроводностью газовой
смеси с определенными свойства-
ми. Последняя получается путем
физико-химических преобразова-
ний части анализируемого газа.
Этот способ, в частности, ис-
пользуется для исключения влия-
ния непостоянства концентраций
примесей (О2, N2, СО2) при опре-
делении концентраций Н2.
Для измерения концентрации
оксида углерода, водорода, ме-
тана, этилена, паров бензина и
других горючих веществ применя-
ются термохимические газоанализаторы, основанные на измерении с помощью
термопреобразователей повышения температуры за счет окисления (горения)
анализируемого вещества.
Для измерения концентрации компонентов в дисперсных средах (суспен-
зия, пульпа) применяется калориметрический метод, основанный на зависимо-
сти теплофизических параметров дисперсной среды от соотношения ее фаз.
Обычно измеряется температура среды до и после нагревателя при стабильной
скорости потока. По схемным и конструктивным решениям калориметрические
концентратомеры аналогичны тепловым расходомерам [18].
На тепловом методе основаны электрические гигрометры и психрометры
точки росы, применяемые для измерения влажности газов. Измерение влажности
газа по точке росы заключается в определении температуры поверхности воды,
при которой устанавливается динамическое равновесие между количеством
влаги, испаряющейся с поверхности, и осаждаемой обратно из газа. При прак-
тическом осуществлении метода измеряют температуру 0Р поверхности твердого
тела (металлического зеркала), которое охлаждают до тех пор, пока не по-
явится конденсат (pocai). С помощью терморегулятора поддерживают темпера-
296
конденсата не менялось,
производится с использо-
туру поверхности таким образом, чтобы количество
Известны гигрометры, в которых охлаждение зеркала
ванием эффекта Пельтье
По температурам точки росы 0Р и исследуемого газа © (0^0Р) можно
определить относительную влажность (в процентах)
<р= *^.100,
£(0)
где E(f)p) и £(0) —упругости насыщенного пара соответственно при темпера-
турах 0Р и 0.
Достоинствами гигрометров точки росы являются относительно высокая точ-
ность и возможность измерения влажности воздуха и различных газов при низ-
ких температурах (—160 °C) и высоких давлениях (2-107 Па), недостатками —
сложность конструкции и дополнительные погрешности от загрязнения зеркала
содержащимися в газах примесями (пыль, агрессивные газы и т. п.).
Психрометрические гигрометры основаны на измерении разности температур
двух термопреобразователей (терморезисторы, термопары): сухого (0С), нахо-
дящегося в исследуемой газовой среде, и мокрого (0М), который смачивается
водой и находится в термодинамическом равновесии с газовой средой. Чем
меньше влажность этой среды, тем сильнее испаряется влага с поверхности
мокрого термопреобразователя и тем ниже его температура 0М. Поэтому часто
применяется принудительная вентиляция с постоянной скоростью. Относитель-
ная влажность газа определяется по формулам:
<Р = Ры/Рс — Ар (Ре— <р = ЕЫ1ЕС — Ар (0С — 0„)/£,
где рс и рм — давление насыщенного водяного пара соответственно при темпе-
ратурах 0с и 0М; Р — атмосферное давление; А — психрометрический коэффи-
циент, зависящий от ряда факторов, в том числе от скорости газа, и опреде-
ляемый обычно экспериментально для каждого типа психрометра. Психрометри-
ческие гигрометры в основном используются для измерения влажности газовых
сред при температурах 0—100 °C. Измерительная цепь таких гигрометров
обычно представляет собой автоматический мост или компенсатор.
Разновидностью теплового метода анализа является термохимический ме-
тод, применяемый для определения суммарной концентрации примесей в орга-
нических веществах или для определения чистоты таких веществ. Метод осно-
ван иа зависимости температуры кристаллизации вещества от суммарного со-
держания примесей и позволяет определять содержание примесей в диапазоне
0,5—1% с погрешностью 20%.
Магнитный метод. Этот метод получил широкое применение
для измерения концентрации кислорода в газовых средах, по-
скольку из всех газов кислород обладает наибольшей магнитной
восприимчивостью. Магнитные методы применяются также для
поисков полезных ископаемых, определения магнитных включений
в немагнитных материалах, в дефектоскопии и магнитном струк-
турном анализе.
На рис. 13-7, а, б показаны конструкция датчика и схема из-
мерительной цепи термомагнитного кислородомера. Датчик пред-
ставляет собой кольцевую камеру с горизонтальной трубкой, на
которую намотана нагревающая платиновая обмотка, разделен-
ная на две секции rt и Га- У левого конца горизонтальной
трубки расположены полюсные наконечники магнита NS, поэтому
парамагнитный газ всасывается с левой стороны в горизонталь-
ную трубку и в ней подогревается. Так как при нагревании газа
его магнитная восприимчивость падает, то холодный газ, втяги-
ваясь в магнитное поле, будет выталкивать нагретый газ. В ре-
зультате в горизонтальной трубке газ движется слева направо со
297
скоростью, пропорциональной концентрации кислорода в испытуе-
мой газовой смеси.
Нагревательные секции обмотки одновременно служат термо-
анемометрами (см. § 11-3). Левая секция zy охлаждается холод-
ной смесью, поступающей из камеры. В правую половину гори-
зонтальной трубки газовая смесь поступает уже нагретой, благо-
даря чему охлаждение правой секции обмотки г2 значительно
меньше, чем левой. Обе секции обмотки включены в два соседних
плеча моста.
Для уменьшения погрешностей от влияния неизмеряемых ком-
понентов, изменения температуры и напряжения питания в маг-
нитных кислородомерах используются компенсационно-мостовые
Рис. 13-7
измерительные цепи (аналогичные цепи, показанной на рис. 13-6),
состоящие из измерительного и сравнительного мостов. Через
чувствительные элементы измерительного моста пропускается
анализируемая газовая смесь, а через элементы сравнительного
моста — газовая смесь известной концентрации (например, воз-
дух). Высокая точность измерения при больших концентрациях
кислорода достигается в результате совместного применения теп-
лового и термомагнитного методов измерений. Основанные на
этом принципе газоанализаторы обеспечивают измерения кон-
центрации кислорода в диапазоне 98—100 % объемных с абсо-
лютной погрешностью 0,1 %.
Разновидностью магнитного метода является магнитовибра-
ционный метод, основанный на взаимодействии парамагнитного
газа с переменным магнитным полем. При наличии в исследуе-
мом газе парамагнитного компонента (кислород, оксид азота,
хлор) в измерительной камере возбуждаются механические ко-
лебания, амплитуда которых пропорциональна концентрации
определяемого магнитного компонента. В качестве приемника ко-
лебаний используется конденсаторный микрофон, сигнал с кото-
рого через усилитель подается на вторичный прибор.
298
Магнитные кислородомеры применяются для измерения кон-
центраций кислорода в широком диапазоне — от 0 до 100%
объемных в различных газовых смесях с основной погрешностью
0,1—5%. Постоянная времени таких газоанализаторов 10—90 с.
Емкостный или диэлкометрический метод. Этот метод основан на зависи-
мости диэлектрических свойств веществ от их состава и концентрации отдель-
ных компонентов. Измерение концентрации при использовании этого метода
часто сводится к определению емкости конденсатора, между обкладками кото-
рого помещается исследуемое вещество, выполняющее роль диэлектрика.
Метод широко применяется для измерения влажности в твердых, жидких и га-
зообразных средах, так как вода имеет резко отличную от других веществ ди-
электрическую проницаемость (ен2О = 81)> а также для измерения концентра-
ций полярных жидкостей, таких, как ацетон, спирт, глицерин, вода и др.
(е=3. ..81), в неполярных (е=СЗ) и наоборот. В качестве измерительных цепей
в емкостных влагомерах применяются чувствительные мостовые и резонансные
измерительные цепи. Высокими метрологическими свойствами отличаются емко-
стные влагомеры на основе трансформаторных мостов с тесно связанными ин
дуктивными плечами.
Для измерения влажности газов часто используются емкостные гигрометры,
основанные на измерении диэлектрических свойств пленки сорбента, погло-
щающей влагу, а также гигрометры, например типа «Аргон», основанные на
сравнении диэлектрической проницаемости сухого образцового газа и влажного
анализируемого газа, подаваемых периодически в один и тот же емкостный
датчик.
Высокая чувствительность средств измерений емкости способствует тому,
что емкостный метод находит также применение для измерения концентрации
газов, несмотря на то, что диэлектрическая проницаемость различных газов от-
личается по значению всего лишь на 0,1—1%.
Емкостные датчики используются в хроматографии в качестве детекторов
(см. § 13-6). Их достоинствами являются малая инерционность и линейность
характеристики в широком диапазоне изменений. Высокой чувствительностью и
хорошими динамическими характеристиками обладают пьезосорбционные гигро-
метры и газоанализаторы, основанные на измерении собственной частоты квар-
цевого резонатора, покрытого тонким слоем (1—2 мкм) сорбирующего веще-
ства. Обычно резонатор выполняется из пластинки кварца АТ-среза, собствен-
ная частота которого мало зависит от температуры. При поглощении влаги
изменяются масса и собственная частота кварцевого резонатора [5]. Такие гигро-
метры обеспечивают измерение влажности газов в диапазоне 0—100% с по
грешностью 1,5—2 %.
13-4. Ионизационные методы
Ионизационные методы основаны на ионизации анализи
руемого вещества и измерении ионного тока, пропорционального
концентрации определяемого компонента. Они широко применя-
ются в вакуумметрах, ионизационных газоанализаторах, в масс-
спектрометрах, а также для измерения аэрозолей, влажности га-
зов и др. Существуют разнообразные способы ионизации анали-
зируемого вещества. Наибольшее применение для целей анализа
получили: а) ионизация газов электронами, возникающими
вследствие автоэлектронной эмиссии (преобразователи с холод-
ным катодом) и термоэлектронной эмиссии (преобразователи
с горячим катодом); б) электроразрядный способ ионизации, ос-
нованный на зависимости характеристик электрического разряда
в газах от их состава; в) ионизация за счет облучения анализи-
руемого вещества радиоактивным и рентгеновским излучением;
299
г) термическая ионизация молекул в пламени водорода; д) ио-
низация с помощью лазерного излучения.
Наряду с указанными методами ионизации для анализа на-
ходят также применение и ряд других способов, таких, как окис-
лительно-ионизационный, способ поверхностной ионизации, эмис-
сия положительных ионов, захват электронов, фотоионизационный
и др.
Ионизация атомов и молекул электронами, возникающими
вследствие авто- и термоэлектронной эмиссии, широко приме-
няется в вакуумметрах и масс-спектрометрических анализато-
рах. Датчик такого ионизационного вакуумметра обычно пред-
ставляет собой вакуумный триод с патрубком для присоедине-
нения объекта, где измеряется вакуум. При постоянных значениях
анодного напряжения и тока накала значение ионного тока,
проходящего через сетку, зависит от абсолютной концентрации
газа в межэлектродном пространстве. Диапазон измерений та-
ких вакуумметров составляет 3 • 10-5—0,2 Па. При больших
давлениях может перегореть катод. Чувствительность датчика
75 мкА/Па. На 1—2 порядка больше чувствительность и верх-
ний предел измерений у вакуумметров с магнитоэлектроразряд-
ным датчиком, в котором под действием магнитного поля увели-
чивается длина пробега электронов и соответственно ионный
ток. Недостатком таких вакуумметров является зависимость
показаний от рода газа и внешних магнитных полей.
Ионизационный метод с использованием радиоактивного излу-
чения применяется в вакуумметрах, газоанализаторах и детекто-
рах хроматографов (см. § 13-6). Для ионизации газа обычно
используются а (ядра атомов гелия)- и 0 (электроны, позитроны)-
излучения, обладающие большой ионизирующей способностью.
Наиболее распространенными разновидностями этого метода
являются методы непосредственной ионизации атомов и мо-
лекул анализируемого газа радиоактивным излучением и иониза-
ция с помощью метастабильных атомов. Первый способ иониза-
ции, в частности, применяется в радиоактивных ионизационных
вакуумметрах, состоящих из ионизационной камеры и измери-
тельной цепи, входной усилитель которой монтируется в одном
корпусе с преобразователем и обычно представляет собой электро-
метрический усилитель. Источник a-излучения и коллектор ионов
расположены внутри камеры, которая при помощи патрубка сое-
диняется с объектом, где измеряется вакуум. Такие вакуумметры
характеризуются хорошей воспроизводимостью результатов изме-
рений (разброс не более 1—2%) и практически линейной зависи-
мостью между ионным током и давлением газа (а следовательно,
и абсолютной концентрацией газа) в широком диапазоне — от
0,1 до 2-104 Па.
На рис. 13-8 показана схема дифференциального ионизацион-
ного анализатора газов, состоящего из двух идентичных иониза-
ционных камер 1 и 2, через одну из которых пропускается чистый
газ-носитель (гелий или водород), а через другую — газ-носитель
зоо
с анализируемым компонентом газа. Камеры имеют общий кол-
лектор ионов 4 и идентичные источники р-излучения 3, выполнен-
ные в виде таблеток из ^Sr, 85Кг или, 147Рги. Разностный ток
ионизационных камер создает падение напряжения на высокоом-
ном резисторе R, которое усиливается электрометрическим уси-
лителем 6 и регистрируется самопишущим прибором 5. Такие
анализаторы имеют практически линейную характеристику в ши-
роком диапазоне, малую инерционность, высокую чувствитель-
ность и способны работать при температурах до 300 °C.
Метод ионизации метастабильными атомами, который можно
назвать методом двойной ионизации, применяется в аргоновых и
Рис. 13-8
Рис. 13-9
гелиевых анализаторах для измерения концентрации широкого
класса веществ. Метод заключается в том, что в электрическом
поле с помощью p-излучения происходит ионизация атомов газа-
носителя аргона, вследствие чего в ионизационной камере созда-
ется большая концентрация метастабильных атомов аргона с энер-
гией 11,8 эВ, которые, в свою очередь, ионизируют молекулы
анализируемого компонента. Для анализа веществ, имеющих бо-
лее высокий потенциал ионизации, в качестве газа-носителя при-
меняется гелий, энергия метастабильного состояния атомов ко-
торого равна 19,8 эВ.
Хорошими метрологическими характеристиками обладает
триодный аргоновый датчик (рис. 13-9), у которого, кроме анода
1, катода 2 и источника р-излучения 3, имеется коллекторный
электрод 4, сигнал с которого подается на электрометрический
усилитель. Порог чувствительности такого датчика 2 -10 14 г/с,
постоянная времени 1—5 с, нелинейность характеристики 1,2 %.
Ионизационно-пламенный метод (рис. 13-10) основан на иони-
зации молекул исследуемого вещества в водородном пламени.
Чистый водород, сгорая в воздухе, почти не образует ионов, по-
этому водородное пламя имеет очень большое сопротивление
(1012—1014 Ом). Если вместе с водородом в преобразователь по-
ступает исследуемый горючий газ, то в результате термической
301
диссоциации и окисления
происходит ионизация моле-
кул газа и сопротивление
между электродами 1 и 2
преобразователя резко па-
дает. Вследствие этого уве-
личиваются ток и падение
напряжения на резисторе R,
Рис. 13-10 которое через усилитель
подается на самопишущий
прибор. Метод позволяет обнаруживать микроконцентрации ор-
ганических соединений, поступающих в преобразователь со ско-
ростью 10-12—10 14 г/с. Чувствительность анализаторов составляет
104—Ю5 В-с/мг, постоянная времени 1 мс. Линейный рабочий диа-
пазон 106—107, рабочая температура до 400 °C.
13-5. Спектрометрические (волновые) методы
Спектрометрические методы основаны на избирательной
способности различных веществ поглощать, изучать, отражать,
рассеивать или преломлять различного рода излучения. Эта
группа методов включает в себя многочисленные методы, в кото-
рых используется широкий спектр длин волн — от звукового диа-
пазона (103 Гц) до рентгеновских и гамма-излучений (1018 Гц).
Электроакустический метод. Метод основан на различии в за-
тухании или скорости распространения ультразвуковых колеба-
ний в различных жидкостях и газах, применяется для анализа
бинарных газовых и жидких смесей, а также для измерения
влажности.
Приборы, в которых используется этот метод, обычно состоят
из акустического или ультразвукового излучателя и приемника —
преобразователя звуковых колебаний в электрические сигналы.
Исследуемая смесь пропускается между излучателем и приемни-
ком.
Радиоспектрометрические методы. К ним относятся методы
ядерного магнитного резонанса (ЯМР), электронного парамаг-
нитного резонанса (ЭПР), СВЧ и микроволновая спектроскопия.
В последнее время эти методы получили широкое распростране-
ние для исследования свойств ядер, молекул, кристаллов и для
других физико-химических исследований. Присущие этим мето-
дам высокие метрологические характеристики обусловливают
перспективность их применения для анализа вещества.
Метод ядерного магнитного резонанса основан на использова-
нии магнитных свойств атомных ядер, большинство из которых
обладает магнитным моментом. Взаимодействие магнитных мо-
ментов ядер с внешними магнитными моментами других частиц
(ионы, атомы, электроды и др.) дает возможность определять
структуру сложных соединений, а также проводить качественный
302
и количественный анализ различных веществ. Для аналитиче-
ских измерений применяются методы ЯМР-поглощения, метод
ядерной индукции (см. §6-2), а также импульсные методы, при
которых информация о структуре вещества получается как от-
клик спиновой системы на импульсное воздействие на образец
высокочастотным полем резонансной частоты («спиновое эхо»).
Образец исследуемого вещества помещается в катушку дат-
чика, находящегося в однородном магнитном поле. Измеряя ча-
стоту высокочастотного поля, при котором имеет место сигнал
ЯМР при известном значении магнитной индукции, можно про-
водить качественный анализ многокомпонентных веществ, по-
скольку гиромагнитные отношения ядер различных элементов
(у=о/В) отличаются достаточно сильно и известны с высокой
точностью. ЯМР-спектр можно также получить, изменяя магнит-
ную индукцию при постоянном зна-
чении частоты генератора. Количест-
венный анализ производится по интен-
сивности сигнала ЯМР, поскольку ам-
плитуда сигнала зависит от числа
ядер в исследуемом образце.
Особенно эффективен метод ЯМР
для исследования соединений слож-
ной структуры. Вследствие так назы-
ваемого химического сдвига между
Частота
Рис. 13-11
и того же элемента,
резонансными частотами ядер одного
входящих в химически неэквивалентные соединения, происходит
расщепление сигнала ЯМР и он приобретает мультиплетную
структуру. В качестве примера на рис. 13-11 показан сигнал
ядер фосфора-31 в смеси фосфатов. Измеряя интенсивность от-
дельных составляющих сигнала ЯМР от ядер компонентов слож-
ной смеси, можно определить концентрацию компонентов, содер-
жащих ядра одного вида. Так как обычно относительный сдвиг
по частоте между отдельными линиями такого резонансного сиг-
нала имеет порядок 10-5—10~7, то в этих случаях необходимо
использовать аппаратуру ЯМР с высокой разрешающей способ-
ностью (107—Ю8), что в основном определяется однородностью
постоянного магнитного поля.
Рассмотренным методом можно определять состав ряда не-
органических и органических веществ, содержащих водород, фтор,
фосфор и другие элементы, с погрешностью ±1%. Современные
спектрометры ЯМР позволяют производить аналитические и
структурные исследования жидких, газообразных и твердых ве-
ществ и другие физико-химические исследования в диапазоне
температур 4—800 К с разрешающей способностью до 5 • 109 гра-
даций.
Измерение влажности методом ЯМР основано на зависимости
сигнала протонного резонанса от числа ядер водорода в образце
вещества и на отличии времени релаксации протонов, входящих
в состав свободной воды, от времени релаксации протонов, входя-
303
щпх в состав исследуемого вещества. Применение метода ЯМР
особенно эффективно для измерения влажности веществ с боль-
шой электропроводимостью, таких, как пищевые продукты, почва
и др., так как другие методы, основанные на измерении электро-
проводимости, емкости и диэлектрических потерь, не обеспечи-
вают необходимой точности измерения влажности таких веществ.
Метод ЯМР обеспечивает измерение влажности в диапазоне 5—
80% с погрешностью 0,2—0,5%. При этом измерения проводятся
без разрушения и загрязнения исследуемого вещества. Возможно
также измерение влажности в потоке и использование сигнала
ЯМР для автоматического регулирования влажности. Недостат-
ком метода ЯМР является появление дополнительных погреш-
ностей при измерении влажности материалов с трудноконтроли-
руемым содержанием жиров или других водородосодержащих
веществ в жидкой фазе.
Разновидностью метода ЯМР в его аналитическом примене-
нии является метод ядерного магнитного каротажа, используемый
для получения информации о нефтеносности скважин путем обра-
ботки сигналов свободной ядерной прецессии в магнитном поле
Земли от ядер водорода, входящих в состав пластовой жидкости
(см. §6-2, рис. 6-2). В скважину опускается катушка в виде прямо-
угольной рамки так, чтобы ее длинная сторона была расположена
вдоль оси скважины. Первоначально катушка подключается к ис-
точнику постоянного тока, и в породе, окружающей скважину,
кратковременно (в течение 5—10 с) создается сильное поляризу-
ющее магнитное поле, направленное почти перпендикулярно маг-
нитному полю Земли. Под действием поляризующего поля ядра
водорода, входящего в состав пластовой жидкости, ориентиру-
ются вдоль этого поля в результате чего создается суммарный
момент намагниченности ядер /0, направленный почти перпенди-
кулярно магнитному полю Земли (см. § 6-2). После этого катушка
быстро отключается от источника постоянного токаи подключа-
ется ко входу резонансного усилителя. При этом в катушке ин-
дуцируется экспоненциально затухающая ЭДС с частотой fnp,
определяемой значением индукции В3 магнитного поля Земли
в месте каротажа. Наведенная в катушке ЭДС, усиленная усили-
телем, подается на находящееся на поверхности измерительное
устройство, при помощи которого измеряются начальная ампли-
туда индуцированной ЭДС и время релаксации Т2. По этим па-
раметрам можно определить характер пластовой жидкости и вы-
явить наличие нефти, а также определить продуктивность нефте-
носных пластов [21].
Метод электронного парамагнитного резонанса (ЭПР) явля-
ется одним из наиболее чувствительных методов для анализа
малых количеств парамагнитных веществ. Метод ЭПР широко
применяется для обнаружения и измерения концентрации ионов
переходных элементов, примесей в полупроводниках, свободных
радикалов, облученных кристаллов и других элементов и соеди-
нений, содержащих неспаренные электроны,
304
Метод ЭПР весьма сходен с методом ЯМР, но поскольку маг-
нитный момент электрона примерно в 1000 раз больше магнитных
моментов ядер, а спин электрона равен 1/2, то электронный ре-
зонанс обычно наблюдается в диапазоне сантиметровых и милли-
метровых длин волн (см. §6-2). Так как энергия, поглощаемая
электронами, на несколько порядков больше энергии, поглощае-
мой ядрами при ЯМР, то для получения сигналов ЭПР доста-
точно весьма малое количество исследуемого вещества — по-
рядка 10-12 г.
Анализаторы ЭПР, предназначенные для анализа свободных
радикалов, парамагнитных ионов и радиационных дефектов
в твердых и жидких средах, при комнатной температуре и темпе-
Рис. 13-12
ратуре жидкого гелия имеют порог чувствительности 10-11 моль/л.
Для непрерывного автоматического измерения концентрации па-
рамагнитного вещества в жидких средах разработаны анализа-
торы с порогом чувствительности 5-10-10 моль/л. Их основная
приведенная погрешность ± (2—5) %.
Сверхвысокочастотная (СВЧ) спектроскопия широко при-
меняется для измерения влажности в различных веществах. Из-
мерение влажности осуществляется по ослаблению уровня или
сдвигу фазы СВЧ-колебаний при их прохождении через исследуе-
мое вещество. Достоинствами метода являются неограничен-
ный верхний предел измерений (до W= 100%), высокая чувстви-
тельность в широком диапазоне измерений влажности, относи-
тельно малое влияние неравномерного распределения влаги и
электролитов, бесконтактный способ измерения, а также возмож-
ность получения информации об интегральной влажности объек-
тов большого объема. На результат измерения сильно влияют
толщина и плотность исследуемого материала, а также темпера-
тура, влияние которой особенно велико при использовании в ка-
честве информативного параметра изменения амплитуды СВЧ-
колебаний.
На рис. 13-12 показана структурная схема СВЧ -влагомера,
основанного на методе измерения фазового сдвига. Влагомер
состоит из генератора, приемника и детектора СВЧ-колебаний.
305
Генератор СВЧ 4 (отражательный клистрон, работающий в ре-
жиме автодина) с антенной 3 установлен на стойке, которая
может двигаться вдоль шкалы.
СВЧ-колебания излучаются антенной в пространство и, от-
ражаясь от вибратора 1, улавливаются ею же. Вибратор питается
от генератора Г и колеблется со звуковой частотой, что приводит
к модуляции СВЧ-колебаний, приходящих на антенну. На вы-
ходе автодина возникает сигнал низкой частоты, подаваемый
через усилитель У на фазочувствительный выпрямитель ФЧВ.
Сигнал на выходе автодина зависит от распределения СВЧ-ко-
лебаний между антенной и вибратором, т. е. от положения
антенны по отношению к вибратору. Образец с неизвестной влаж-
ностью 2 устанавливается между вибратором и антенной. Введе-
ние образца вызывает сдвиг фазы СВЧ-колебаний и изменение
уровня сигнала на выходе автодина. Перемещением стойки с авто-
дином можно добиться первоначального уровня сигнала, а по
шкале определить сдвиг фазы. Прибор необходимо градуировать
с помощью стандартных образцов для установления зависимости
между сдвигом фазы и влажностью. В современных. СВЧ-влаго-
мерах процесс измерения автоматизирован, имеются устройства
коррекции погрешностей от нестабильности температуры и плот-
ности исследуемого вещества. В диапазоне измерений 1—30 %
абсолютная погрешность составляет 0,3—0,5%. СВЧ-влагомеры
успешно используются для измерения влажности движущихся
материалов в непрерывных технологических процессах.
Метод микроволновой спектроскопии наиболее пригоден для
анализа газов и основан на взаимодействии электрического ди-
польного момента молекул с электрическим полем, создаваемым
генератором СВЧ, в результате чего происходит поглощение
энергии от генератора, что обнаруживается детектором. Поглоще-
ние имеет резонансный характер, поэтому по резонансной частоте
можно проводить качественный анализ, а по амплитуде сигнала
поглощения — количественный анализ. Наиболее перспектив-
ным диапазоном длин волн является 1—3 мм, в котором наблю-
дается резонансное поглощение энергии большинством веществ.
Электрооптические методы. Эти методы основаны на избира-
тельном поглощении, излучении или рассеянии компонентами
анализируемого вещества светового излучения в видимом инфра-
красном и ультрафиолетовом диапазонах длин волн. Успешному
развитию электрооптических методов способствует применение
лазерных источников излучения.
Метод инфракрасной спектроскопии (ИК). В этом методе ис-
пользуется избирательное поглощение различными веществами
излучения в инфракрасной области спектра. Для анализа газов
широкое распространение получила разновидность ИК-спектро-
скопии — оптико-акустический метод, основанный на избиратель-
ном поглощении различными газами модулированного низкой ча-
стотой инфракрасного излучения и преобразовании возникаю-
щих акустических колебаний в электрические сигналы. Высокая
306
Рис. 13-13
чувствительность и избирательность метода обусловлены тем,
что приемник излучения, прошедшего через анализируемую га-
зовую смесь, заполнен именно тем газом, концентрация которого
измеряется. Этот метод широко применяется для анализа боль-
шинства двухатомных газов и паров, которые имеют характерные
полосы поглощения в инфракрасной области спектра (Х=
0,74 мкм... 2 мм). Для анализа О2, N2, С12 и паров ртути исполь-
зуется избирательное поглощение этими веществами радиации
в ультрафиолетовой области спектра.
Лазерное излучение по сравнению с другими позволяет на
несколько порядков повысить чувствительность оптико-акустиче-
ских анализаторов, что дает воз-
можность применять их для иссле-
дования широкого класса веществ
с коэффициентами поглощения
10~10—105 см-1, находящимися
в различных агрегатных состояниях
в диапазоне температур 2—1000 К.
ИК-оптико-акустическая спек-
троскопия может быть также ус-
пешно использована для определе-
ния концентрации твердых и жид-
ких веществ на основе измерения
объемного коэффициента поглоще- [ д |
ния непрозрачных материалов. На
рис. 13-13 показана схема прибора
для измерения концентрации суль-
фатов, которые играют значитель-
ную роль в загрязнении водной и
воздушной среды. Прибор состоит из перенастраиваемого в диа-
пазоне 9—11,5 мкм лазера 1 на изотопах 12СО2 и 13СО2 мощно-
стью 10—500 мВт, анализатора спектра 2, прерывателя 3, рабо-
чей камеры 4 с микрофоном 5, камеры сравнения 6 со стандарт-
ным образцом 7 и микрофоном 8, двух фазочувствительных
детекторов 9, измерителя отношения 10 с дисплеем 11. Анализи-
руемый твердый или жидкий образец помещается в акустически
изолированную камеру 4, заполненную газом, и освещается пре-
рываемым с частотой 10—104 Гц излучением лазера. Возникаю-
щий оптико-акустический сигнал, детектируемый с помощью мик-
рофона, пропорционален амплитуде колебаний температуры на
поверхности образца 0, которая, в свою очередь, пропорцио-
нальна коэффициенту поглощения исследуемого вещества а (X):
J
2nfpC
а (X),
где / — интенсивность излучения на длине волны X; f — частота
прерывания излучения; р — плотность и С — удельная теплоем-
кость исследуемого вещества.
307
ность от 3-10 4 %. Используется
0,95 мкм.
Фотоколориметрический метод,
определяется по интенсивности
Рис. 13-14
понентом и активным веществом
При использовании электретных микрофонов и нерезонирую-
щих кювет погрешность воспроизводимости результатов измере-
ний при анализе твердых образцов составляет доли процента,
а жидких образцов — менее 2%. Порог чувствительности при ана-
лизе ионов SO1— в водном растворе составляет 1 —10 мг/л, что
соответствует содержанию сульфата в незагрязненной воде.
Метод ИК-спектроскопин используется для измерения влажно-
сти, особенно в жидких средах. Метод позволяет измерять влаж-
область длин волн А=0,83...
при котором концентрация
окраски анализируемого ве-
щества или индикатора, вза-
имодействующего с исследуе-
мым компонентом вещества.
Метод широко применяется
для измерения концентрации
жидких и газообразных ве-
ществ в окрашенных средах.
Существуют две разновидно-
сти метода: метод спектраль-
ного отражения, основанный
на изменении светового по-
тока, отраженного от поверх-
ности индикатора, в резуль-
тате селективной цветовой ре-
акции между измеряемым ком-
индикатора, и метод селектив-
ного поглощения, основанный на изменении оптической плотности
раствора, взаимодействующего с измеряемым компонентом. Отра-
женный от индикатора или прошедший через раствор световой по-
ток обычно измеряется при помощи дифференциального фотоэле-
ктрического детектора.
На рис. 13-14 показана схема фотоколориметрического газо-
анализатора, основанного на зависимости интенсивности окраски
индикаторной ленты 1 от концентрации измеряемого компонента.
В приборе использован метод сравнения светового потока лампы
накаливания 2, отраженного от индикаторной ленты, с прямым
световым потоком от той же лампы при помощи фотоэлементов
Ф1 и Ф2 и цепи автоматического уравновешивания. Порог чувст-
вительности газоанализатора 10 s % объемных, основная погреш-
ность ±10%. Продолжительность одного цикла измерения 2,5;
5 и 10 мин.
Ленточные газоанализаторы главным образом применяются
для измерения микроконцентраций широкого класса газов (С1г,
SO2, H2S, HN3, NO, NO2 и др.), так как такие приборы обладают
высокой чувствительностью, обусловленной возможностью накоп-
ления окрашенных веществ в течение некоторого времени (цикла
измерения). Выбирая различные индикаторные вещества, реаги-
308
рующие на определенный компонент газовой смеси, можно по-
лучить высокую избирательность.
В современных ленточных фотоколориметрах используются
тестовые ленты, на которые наносятся десятки различных ком-
понентов, что дает возможность одновременно определять концен-
трации большого числа компонентов анализируемого вещества.
Изменение окраски ленты определяется фотометром, и путем
сравнения со стандартными образцами получают информацию, по
которой с помощью встроенного микропроцессора рассчитыва-
ется концентрация исследуемых компонентов.
Хемилюминесцентный метод анализа, являющийся интенсивно
развивающейся разновидностью электрооптического метода, осно-
ван на измерении интенсивности оптического излучения, возни-
кающего в результате реакции анализируемого компонента с хе-
милюминесцентным веществом. В качестве последнего, например,
при определении концентрации оксидов азота используется озон:
NO -|- Оз —NO2 О2.
В результате такой реакции молекулы диоксида азота пере-
ходят в возбужденное состояние и излучают кванты света:
NO2^-NO24-/iv.
По интенсивности возникающего при этом светового излуче-
ния определяется концентрация оксидов азота в многокомпонент-
ных смесях. Метод отличается высокой чувствительностью и изби-
рательностью.
Существует ряд электрооптических приборов для определения
концентрации веществ, основанных на измерении прозрачности
вещества (нефелометры), коэффициента преломления света
(рефрактометры), угла вращения плоскости поляризации света
(поляриметры). Нефелометры применяются для определения
концентрации веществ в мутных средах (дымномеры, пылемеры,
мутномеры), а рефрактометры и поляриметры—-в прозрачных
средах, например для анализа растворов органических веществ.
Для повышения точности измерения обычно используются
двухлучевые фотометры с общим источником излучения,
световой поток которого попеременно пропускается через ис-
следуемый и образцовый растворы. При этом результатом
измерения является отношение коэффициентов пропускания,
поглощения, преломления и т. д. Такие приборы могут исполь-
зоваться при сортировке различных веществ. Структурная
схема двухлучевого фотометра показана на рис. 13-15.
От источника света 1 свет с помощью вибрирующего зеркала 2
и зеркал 3 и 4 попеременно пропускается через измеритель-
ную 5 и сравнительную 6 кюветы, а затем с помощью зеркал 7,
8 и 9 направляется в оптоэлектронный преобразователь 10, вы-
ходной сигнал которого поступает на измерительно-вычисли-
тельное устройство с цифровым отсчетом И.
309
Метод электронной спектроскопии. Метод основан на «вы-
рывании» связанных электронов с внешней валентной или
внутренних оболочек атомов и измерении энергии испускаемых
частиц, энергетический спектр которых несет информацию
о структуре и химическом составе вещества. В качестве источ-
ников ионизации используются либо фотоны (фотоионизация),
либо электроны. В зависимости от механизма ионизации и
вида испускаемых частиц электронная спектроскопия разделя-
ется на спектроскопию фотоэлектронов, рентгеновскую спектро-
скопию и Оже-спектроскопию.
Фотоионизация является
котором вся энергия фотона
При этом между энергией
одноступенчатым процессом, при
идет на вырывание фотоэлектрона,
фотона hf, энергией связи Ес вы-
рываемого электрона и изме-
ряемой энергией испущенного
фотоэлектрона Ек существует
простая зависимость
Рис. 13-15
hf=Ec+EB.
Рентгеновская и Оже-спек-
троскопия являются двухсту-
пенчатыми процессами с пере-
ходом электронов на внутрен-
ние оболочки, при которых ис-
пускается квант рентгеновского излучения или вторичный элек-
трон (электрон Оже). Для переходов с энергиями выше 10 кэВ
преобладает рентгеновское излучение, при меньших энергиях
имеют место Оже-процессы, что характерно для легких элементов,
у которых энергия перехода гораздо ниже 10 кэВ.
Электронная спектроскопия дает возможность определить
химические сдвиги, на основании которых можно проводить
анализ молекулярного и элементного состава и концентрации
различных веществ. Достаточно большие сдвиги (свыше 10 эВ)
обнаруживаются для всех элементов, что указывает на универ-
сальность этого метода. Применяемая аппаратура включает
в себя источник возбуждения, кювету для газообразных и твер-
дых образцов, спектрометр и анализатор спектров с ЭВМ.
Анализу обычно подвергается поверхностный слой образца
толщиной примерно 2-Ю-7 м (20 А). Достигнутое раз-
рушение составляет 0,2 эВ в газах и 0,5 эВ в твердых веще-
ствах.
Радиоактивные методы. Эти методы основаны на различии
в интенсивности излучения, поглощения или отражения рент-
геновского и радиоактивного излучений компонентами анализи-
руемого вещества. Определение состава и концентрации про-
изводится по спектрам собственного излучения вещества, по
поглощению радиоактивного излучения, по спектрам вторич-
ного излучения, возникающего при взаимодействии нейтронов,
р- и у-излучений с веществом. Радиоактивные методы широко
310
применяются для экспертного анализа многокомпонентных
сред (например, руд), для анализа бинарных жидкостей, для
определения концентрации тяжелых элементов в растворах,
а также для измерения влажности грунтов, торфа и строитель-
ных материалов, для измерения примесей в сверхчистых ве-
ществах. Для анализа оловосодержащих руд используется ме-
тод резонансного поглощения у-квантов на ядрах 119Sn, входя-
щих в состав SnO2. Метод основан на использовании эффекта
Мессбауэра (см. §11-3) и обеспечивает измерение концентра-
ции олова в диапазоне 0,01—40% с погрешностью 0,01—40%
в зависимости от измеряемой концентрации.
Для измерения влажности чаше всего используются метод
ослабления р- и у-излучений и нейтронный метод, основанный
на способности ядер водорода, входящих в молекулы воды, за-
медлять быстрые нейтроны, превращая их в тепловые. Для ис-
ключения влияния непостоянства плотности вещества произво-
дится одновременное детектирование двух потоков медленных
нейтронов с различными энергетическими спектрами. Приме-
нение микропроцессора для обработки получаемой информации
и периодическая поверка влагомера с помощью калибраторов,
имитирующих влажность в нескольких точках диапазона, обе-
спечивают измерение влажности с погрешностью 0,5%.
Радиоактивационный метод анализа является наиболее
чувствительным методом измерений концентрации веществ.
Этот метод основан на активации исследуемого вещества с по-
мощью интенсивных потоков нейтронов, у-квантов или заряжен-
ных частиц с последующим измерением вторичных радио-
активных излучений, испускаемых ядрами определяемых
компонентов вещества.
Метод позволяет определить в многокомпонентных веществах
большой ряд химических элементов, концентрация которых не
превышает 10-5—10-10%.
Существуют разновидности радиоактивационного метода,
которые отличаются типом первичного излучения и особен-
ностями возникающих ядерных реакций, например нейтронно-
радиационные методы, нейтронно-нейтронные методы, у-ре-
зонансный метод и др. Радиоактивационный метод по
процедуре измерения похож на рассмотренный выше метод элек-
тронной спектроскопии. Но в отличие от последнего, основан-
ного на взаимодействии внешнего излучения (фотонного и
электронного) с электронной оболочкой атомов, в радиоактива-
ционном методе используется взаимодействие внешнего из-
лучения (нейтроны, у-кванты, заряженные частицы) с атом-
ными ядрами, т. е. радиоактивационный метод основан на ис-
пользовании внутриядерных явлений, на которые не влияют
внешние факторы. Поэтому он наряду с высокой чувствитель-
ностью может при использовании соответствующих средств
измерений обеспечить высокую точность определения концент-
рации.
311
13-6. Комбинированные методы
Из многочисленных комбинированных методов для ана-
лиза многокомпонентных веществ наиболее широкое применение
получили масс-спектрометрический и хроматографический ме-
тоды, а также их сочетания с другими методами.
Масс-спектрометрический метод. Метод основан на иониза-
ции анализируемого вещества и разделении ионов на отдельные
пучки по компонентам, отличающимся отношением массы иона
к его заряду. Ионизация атомов и молекул газа или пара про-
изводится в источнике ионов путем их бомбардировки ускорен-
Рис. 13-16
ными электронами. Твердые вещества ионизируются термоион-
ной эмиссией, при которой анализируемое вещество наносится
на нагреваемую электрическим током вольфрамовую ленту или
оно предварительно испаряется в специальном тигле. Сущест-
вуют также лазерные методы ионизации веществ.
В зависимости от способа разделения ионов масс-спектро-
метры делятся на магнитные с разделением ионов в магнитном
поле, времяпролетные с разделением ионов по времени их про-
лета от источника до коллектора ионов и радиочастотные с раз-
делением ионов под воздействием высокочастотных электриче-
ских полей. На рис. 13-16 показана схема масс-спектрометра
с разделением ионов в однородном магнитном поле. Анализи-
руемое вещество в виде газа или пара направляется в источник
ионов 2, укрепленный в конце вакуумной камеры 4. Под дейст-
вием электронов, испускаемых катодом 1, происходит образо-
вание ионов, которые при помощи фокусирующей системы 3 на-
правляются в магнитное поле электромагнита, один из полюс-
ных наконечников которого (5) изображен на рисунке. Ионы
разных компонентов, обладающие одинаковым положительным
зарядом е, но разной массой /П/, под действием магнитного
312
поля разделяются на отдельные пучки, описывающие траекто-
рии с различными радиусами:
Путем изменения магнитной индукции В или ускоряющего
напряжения U отдельные пучки ионов с одинаковой массой по-
очередно направляются к коллектору ионного тока 6. Напряжение
коллектора через усилитель 7 подается на регистрирующий при-
бор 8. По оси абсцисс получается шкала масс, а площади
отдельных пиков пропорциональны концентрации соответству-
ющих ионообразующих компонентов в анализируемом веществе.
Во времяпролетном масс-спектрометре ионы, выходящие из
ионизационной камеры, под действием ускоряющего напря-
жения приобретают разностную скорость vi=^‘2eUlmi, завися-
щую от массы ионов. Вследствие этого по мере пролета
расстояния до коллектора ионы разделяются на отдельные
пучки, создающие импульсы тока, соответствующие отдель-
ным компонентам анализируемого вещества.
Основными параметрами масс-спектрометров являются диа-
пазон массовых чисел, который лежит в пределах 1—600 м. е.
(массовых единиц), разрешающая способность (выражаемая
числом различных градаций в рабочем диапазоне массовых чи-
сел) и порог чувствительности. Для анализа компонентов, очень
мало отличающихся по массе (СО—N2; D2—Не4; Н2—D), при-
меняются масс-спектрометры с разрешающей способностью до
1500 градаций. Порог чувствительности масс-спектрометров ле-
жит в пределах 0,1—0,0001%. Минимально необходимое со-
держание компонента при анализе твердого вещества равно
10-13 г (при 100%-ной ионизации и применении электронных
умножителей для измерения ионного тока). Погрешности раз-
личных масс-спектрометрических анализаторов составляют от
±1 до ±10%. Существуют масс-спектрометры с пространст-
венно-временным разделением ионных пучков, у которых раз-
решающая способность равна 10 000 градаций (на уровне полу-
высоты пиков), а порог чувствительности 10 6—10-4%.
Для локального химического и изотопного анализа твердых
тел используется метод масс-спектральной микроскопии, осно-
ванный на возбуждении ионной эмиссии с исследуемой поверх-
ности бомбардировкой ионным пучком и использовании эмис-
сионной микроскопии в сочетании с масс-спектральным анали-
зом изображений. Метод обеспечивает оптическое разрешение
1 мкм при масс-спектральном разрешении 300 градаций.
Наибольшее распространение в настоящее время получили
динамические масс-спектрометры, в которых используется ло-
вушечный механизм разделения заряженных частиц по удель-
ным зарядам (е/ш) в поперечном гиперболическом высокоча-
стотном поле.
313
Хроматографический метод. Для анализа сложных смесей
широко используется хроматографической метод, основанный на
предварительном разделении исследуемого вещества на состав-
ные компоненты с последующим определением концентрации
анализируемых элементов с помощью рассмотренных выше ме-
тодов анализа. В зависимости от используемого способа раз-
деления компонентов различаются методы ионообменной, ге-
лийпроникающей и адсорбционной хроматографии.
Наиболее развит адсорбционный хроматографический ме-
тод на основе использования явления сорбции. При этом методе
определенное количество исследуемой смеси перемещается
инертным газом-носителем (водород, азот, гелий, аргон, неон,
диоксид углерода, воздух и пр.) через длинную трубку (хрома-
тографическую колонку) /, заполненную неподвижным сорби-
рующим веществом (рис. 13-17). Вследствие селективного за-
медления, осуществляемого неподвижным сорбентом, мало-
поглощающие компоненты (В, D) уходят вперед, а хорошо
растворимые (Л, С) отстают. В результате происходит разделе-
ние смеси на составные компоненты, которые движутся через
колонку отдельными зонами и по очереди выносятся газом-но-
сителем к детекторам 2, основанным на использовании тепло-
вого, ионизационного, электрохимических, пламенно-ионизаци-
онного, спектрохимических, масс-спектрометрического и других
методов. Сигналы с выходов детекторов передаются в измери-
тельно-вычислительную систему 3 для обработки результатов
хроматографического анализа. Результаты измерений регистри-
руются самопишущим прибором 4, а также могут выводиться
для дальнейшей обработки.
Кривая (хроматограмма) 5 состоит из отдельных пиков,
каждый из которых соответствует определенному компоненту.
Компоненты идентифицируются по времени выхода из колонки,
а их объемная концентрация определяется как отношение пло-
щади соответствующих пиков к площади всей хроматограммы.
Существует ряд разновидностей хроматографического метода
анализа. Газоадсорбционный метод применяется для анализа
смесей, содержащих низкокипящие газы (Н2, СО, СН4). В ка-
честве сорбента используется твердая пористая шихта (огне-
упорный кирпич).
314
В газожидкостном методе используется сорбент в виде не-
летучих жидкостей, нанесенных на твердые пористые вещества.
Метод применяется для анализа сложных смесей, содержащих
компоненты с близкими температурами кипения.
При хроматермографическом методе анализ производится при
разных температурах колонки, что увеличивает избирательность
и чувствительность метода. Капиллярный метод, основанный на
разделении смеси в длинном (20—300 м) капилляре, внутрен-
ние стенки которого смочены малолетучей жидкостью, позво-
ляет производить быстрый анализ при малых концентрациях
газа. С помощью газовых хроматографов можно анализировать
вещества с температурой кипения 173—800 К, жидкостные
хроматографы главным образом применяются для анализа ве-
ществ, разрушающихся при повышенных температурах, напри-
мер биологических и физиологических растворов, лекарственных
препаратов и др.
В современных хроматографах имеются автоматические
устройства для подготовки проб, набор детекторов, основанных
на различных методах измерений, встроенные микропроцессоры
с набором программ для обработки данных, а также набор
стандартных образцов для калибровки хроматограмм. Хрома-
тографический метод позволяет измерять концентрации различ-
ных сложных смесей, содержащих до сотни компонет веществ,
с относительной погрешностью 5—10%. При использовании
хроматографов высших классов точности с соответствующими
стандартными образцами и методиками измерения погрешность
составляет 0,5—2%. Хроматографический метод и его сочетания
с масс-спектрометрическим, спектрометрическим, ионизацион-
ным и другими методами лежат в основе ряда комбинирован-
ных методов измерений, которые являются наиболее перспектив-
ными для повышения точности аналитических измерений.
СПИСОК ЛИТЕРАТУРЫ
1. Бароне А., Патерно Дж. Эффект Джозефсона: Пер с англ М.: Мир, 1984.
2. Безикович А. Я., Шапиро Е. 3. Измерение электрической мощности. Л.:
Энергия, 1980.
3. Ишлинский А. Ю. Ориентация, гироскопы и инерциальная навигация. М.:
Наука, 1976.
4. Коронкевич В. П., Ханов В. А. Лазерные интерферометры и их приме-
нение. Новосибирск: Наука, 1984.
5. Левшина Е. С., Новицкий П. В. Электрические измерения физических
величин: Измерительные преобразователи. Л.: Энергоатомиздат. 1983.
6. Линевег Ф. Измерение температуры в технике. М.: Металлургия, 1980.
7. Испытание магнитных материалов и снстем/В. Г. Сергеев, А. Я. Шихин,
Е. Г. Комаров, А. Д. Покровский; Под общ. ред. А. Я. Шихина. М.: Энерго-
атомиздат, 1984.
8. Новицкий П. В., Зограф И. А. Оценка погрешностей результатов измере-
ний. Л.: Энергоатомиздат, 1985.
9. Орнатский П. П. Теоретические основы информационно-измерительной
техники. Киев: Вшца школа, 1983.
10. Орнатский П. П. Автоматические измерения и приборы. Киев: Вища
школа, 1980.
11. Спектор С. А. Измерение больших постоянных токов. Л.: Энергия, 1978.
12. Средства измерения параметров магнитного поля/ Ю. Ф. Афанасьев,
Н. В. Студеицов, В. Н. Хорьев и др. Л.: Энергия, 1979.
13. Температурные измеренпя/О. А. Геращенко, А. Н. Гордов, В. И. Лах
и др. Киев: Наукова думка, 1984.
14. Цапенко М. П. Измерительные информационные системы. М.: Энерго-
атомиздат, 1985.
15. Цифровые методы измерения сдвига фазы/А. С. Глинченко, С. С. Куз-
нецкий, А. М. Фиштейн, М. К- Чмых. Новосибирск. Наука, 1979.
16. Шваб А. Измерения на высоком напряжении. М.: Энергоатомиздат, 1983.
17. Электрические измерения неэлектрических величин/ А. М. Туричнн,
П В. Новицкий, Е. С. Левшина и др.; Под ред. П. Н. Новицкого. Л.: Энергия,
1975.
18. Электрические измерения/К. П. Дьяченко, Д. И. Зорин, П. В. Новицкий
и др.: Под ред. Е. Г. Шрамкова. М.: Высшая школа, 1972.
19. Электрические измерения/Л. Ч. Байда, Н. С. Добротворский, Е, М. Ду-
шин и др.; Под ред. А. Ф. Фремке и Е. М. Душина. Л : Энергия, 1980.
20. Электрические измерения/В. Н. Малиновский, Р. М. Демидова-Панфе-
рова, Ю. Н. Евланов и др.; Под ред. В. Н. Малиновского. М.: Энергоатомиздат,
1985.
21. Ядериые магнитные методы исследования скважин/С. М. Аксельрод,
В. И. Даиевич, В. М. Запорожец и др. М.: Недра, 1976.
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Абсолютно черное тело 274
Автоматизация измерений 9, 115,
156, 287
Акселерометр 214, 225, 226
Вакуумметр 300
Ваттметр 78, 80
Влагомер 289, 304
Газоанализатор 290, 293, 295
Гигрометр 296, 297
Гироскоп 216, 217, 228
Государственный первичный эталон
130, 131, 187, 212, 230, 233
— специальный эталон 232 233, 260
Давление 204, 205, 207
Динамометр 49, 199
Единица физической величины 5, 6
Интерферометр 179, 181, 183
Лазер 173, 228
Локатор 174, 175
Локация 176, 177
Магнитные компараторы 66
Магнитоизмерительная система 127
Манометр 207, 208
Методы измерений:
абсолютный 215
акустической локации 176
вихретоковый 169
времяимпульсный 242, 244
времяпролетный 173, 177
гидродинамический частотный 234,
235, 236
гироскопический 202
голографический 162, 178, 184
Гуи 155
динамический 238, 239
дифракционный 173
диэлкометрический 299
доплеровский 162, 249
индукционный 105, 122, 248
индукционно-импульсный 123
инерциальный 215, 216, 220
интерферометрический 162, 178
инфракрасной спектрометрии 306
ионизационный 300
ионизационно-пламенный 301
квантовый магниторезонансный
107
квантовой метрологии 19
кинематический 234, 241
кондуктометрический 288
контактный 161, 225, 234
компарирования 126, 127
корреляционный 99
кулонометрический 292
лазерной интерферометрии 178
локационный 162, 173
магнитный 162, 171, 297
магнитовибрационный 298
магнитомеханический 106
магнитомодуляционный 107
магнитооптический 105
магниторезонансный 107
магнитоупругий 190, 191
масс-спектрометрический 312
меток потока 241
микроволновой спектроскопии 306
многопараметрический 162
Монте-Карло 83
неконтактный 161, 225, 234
обкатывания 161
оптической накачки 119
оптико-акустической спектроско-
пии 307
ортогональный 101
осциллографический 88, 148
осязающего щупа 162
относительный 215, 219
переменного перепада давлений
235
пирометрический 273
потенциалометрический 294
радиоактивный 162, 169, 310
радиоактивационный 311
радиоволновой 162
радиоспектрометрический 302
разновременного компарирования
16
резонансных ядерных реакций 69
рентгеновский 162
рентгеновской интерферометрии
178
сверхвысокочастотной спектроско-
пии 305
свободной ядерной прецессии 110
сорбционно - кондуктометрический
291
спектрометрический 161, 172, 282,
302
спектрометрический активный 282
спектрометрический пассивный 282
стробоскопический 146, 149
тахометрический 238
термоанемометрический 245
термокондуктометрический 169
термомагнитный 265
термометрический 256
термоупругий 194
термохимический 297
термочастотиый 269
термошумовой 266
термоэлектрический 260
ультразвуковой 162, 243
уравновешивания 125, 126, 202
ускорения заряженных частиц 68
317
фазочувствительный 145, 149
фотокалориметрический 308
хемилюминесцентный 309
хроматографический 314
частотно-импульсный 244
электрокондуктометрический 162
электромагнитный 162
электромеханический 161, 162
электронного парамагнитного ре-
зонанса 106, 118, 304
электрооптический 306
электрофизический 161, 295
электрохимический 288
ядерного гамма-резонанса 252
ядерного квадрупольного резо-
нанса 271
ядерного магнитного резонанса
302
ядерного резонансного поглоще-
ния 114
ядерной индукции 112
Методы коррекции погрешностей 14,
15, 16, 17, 18
Метрологическое обеспечение 130,
131, 186, 212, 213, 257, 287
Пирометр 274, 279
Планирование измерений 7
Психрометры 296
Погрешности:
взаимодействия 12
измерений 10
инструментальные 12
методические 11
отсчитывания 13
переменные 11
периодические 11
постоянные 11
прогрессирующие 11
систематические 10
случайные 10
Помехи:
дифференциальные 37
механические 38
нормального вида 37
общего вида 37
поперечные 37
продольные 37
сетевые 41
синфазные 37
Порог чувствительности 26
Расходомер 234, 236, 238, 240, 243,
244
РН-метры 294
Сигнал измерительной информа-
ции 5
Спиновый генератор 112
Тензометры 196
Температурные шкалы 257
Тепловизор 281
Термоанемометр 297
Термометр 264, 266, 268, 271
Физическая величина 5, 6
Эффекты:
Гаусса 106
Джозефсона 19, 268
Доплера 250
Зеемана 19
квантовый Холла 19
Керра 176
Коанда 237
Мессбауэра 19, 220
Поккельса 176
ОГЛАВЛЕНИЕ
Предисловие . : ...................................... ..... -. 3
Глава первая. ОБЩИЕ ВОПРОСЫ ЭЛЕКТРИЧЕСКИХ ИЗМЕРЕНИИ
ФИЗИЧЕСКИХ ВЕЛИЧИН ; ................................. 5
1-1. Основные понятия и определения........................
1-2. Планирование и организация измерений................... 7
1-3. Методы уменьшения погрешностей измерений...............10
1-4. Методы квантовой метрологии............................19
Глава вторая. МЕТОДЫ ИЗМЕРЕНИИ МАЛЫХ НАПРЯЖЕНИИ, ТОКОВ
И ЗАРЯДОВ . 21
2-1. Измеряемые величины и методы измерений..................—
2-2. Предельно достижимый порог чувствительности усилителей пря-
мого усиления........................................: . : 26
318
2-3. Предельно достижимый порог чувствительности усилителей с пре
образованием спектра ..................................... ... 31
2 4. Предельно достижимый порог чувствительности электромеханиче
ских приборов . . .................... . . . . . 34
2-5. Борьба с помехами при измерении слабых сигналов 37
Глава третья. МЕТОДЫ ИЗМЕРЕНИЙ ВЫСОКИХ НАПРЯЖЕНИЙ И
БОЛЬШИХ ТОКОВ.........................................................43
3 1. Общие положения, методы измерений........................... —
3-2. Измерение токов и напряжений методом масштабного преобразо-
вания .......................................................... 44
3-3. Измерение высоких напряжений электромеханическими приборами 50
3-4. Электромагнитные методы ........................ . . 52
3-5. Электрофизические методы................... .67
3-6. Электрооптические методы................... 70
Глава четвертая. МЕТОДЫ ИЗМЕРЕНИЙ МОЩНОСТИ И ЭНЕРГИИ 75
4-1. Мощность, энергия и методы их измерений ..... —
4-2. Метод на основе электромеханических перемножителей 78
4-3. Методы на основе электронных перемножителей.................81
4-4. Калориметрический (тепловой) метод измерений мощности и
энергии..........................................................85
Глава пятая. МЕТОДЫ ИЗМЕРЕНИЙ УГЛА ФАЗОВОГО СДВИГА ... 87
5-1. Основные определения.........................................—
5-2. Измерение угла фазового сдвига методами прямого преобразования 88
5-3. Измерение угла фазового сдвига методом уравновешивающего
преобразования.................................................. 97
5-4. Корреляционный и ортогональный методы измерений УФС . . 99
5-5. Методы измерений угла фазового сдвига с переносом спектра и
повышение точности измерения.............................. - - 101
Глава шестая. МЕТОДЫ ИЗМЕРЕНИЙ ПАРАМЕТРОВ МАГНИТНЫХ
ПОЛЕЙ ..........................................Ю4
6-1. Общие вопросы измерения параметров магнитных полей ... —
6-2. Квантовые магниторезонансные методы измерений параметров
магнитных полей............................................, Ю7
6-3. Индукционные методы измерений параметров магнитных полей . 122
6-4. Измерение параметров магнитных полей методами уравновеши-
вания и компарирования...................................... • '25
6-5. Метрологические основы измерений магнитных величин 130
Глава седьмая. МЕТОДЫ ИЗМЕРЕНИЙ МАГНИТНЫХ ПАРАМЕТРОВ
И ХАРАКТЕРИСТИК МАТЕРИАЛОВ.......................................132
7-1. Магнитные параметры материалов..............................—
7-2. Магнитные цепи и их элементы........................ .... 138
7-3. Измерение параметров магнитных материалов . 143
7-4. Измерение параметров слабомагнитных материалов 154
7 5. Автоматизация измерений магнитных параметров материалов . 156
Глава восьмая. МЕТОДЫ ИЗМЕРЕНИЙ ЛИНЕЙНЫХ И УГЛОВЫХ
РАЗМЕРОВ . . . 160
8-1. Характеристики измеряемых величин, классификация методов
измерений . : : :...................................... —
8-2. Электромеханические методы................................162
319
8-3 Электрофизические методы ... . 168
8 4. Спектрометрические (волновые) методы.....................172
8 5. Метрологическое обеспечение линейных и угловых измерений 186
Глава девятая. МЕТОДЫ ИЗМЕРЕНИЙ МЕХАНИЧЕСКИХ НАПРЯЖЕ-
НИЙ, СИЛ, МОМЕНТОВ И ДАВЛЕНИЙ.......................................189
9-1. Измеряемые величины. Классификация методов измерений . —
9-2. Методы измерений деформаций и механических напряжений . 191
9-3. Методы измерений сил и крутящих моментов ... . 197
9-4. Методы измерений давления . ...................... 203
9-5. Метрологическое обеспечение измерении механических усилий 212
Глава десятая. МЕТОДЫ ИЗМЕРЕНИЙ ПАРАМЕТРОВ ДВИЖЕНИЯ
ТВЕРДОГО ТЕЛА . . .......................................213
10-1. Измеряемые величины. Взаимосвязь параметров движения . . —
10-2. Способы построения систем отсчета . . . ... 215
10-3. Методы и средства измерений параметров движения в выбран-
ной системе отсчета....................................: : 219
10-4. Эталоны в области измерений параметров движения и методы
передачи размера единиц рабочим средствам измерений ......... 230
Глава одиннадцатая. МЕТОДЫ ИЗМЕРЕНИЙ ПАРАМЕТРОВ ДВИ-
ЖЕНИЯ ЖИДКИХ И ГАЗООБРАЗНЫХ ВЕЩЕСТВ.................................233
11-1. Характеристики измеряемых величин, классификация методов
измерений......................................... . . . : —
11-2. Гидродинамические методы измерений расхода..............235
11-3. Кинематические (скоростные) методы измерений параметров
движения..................................................... 241
Глава двенадцатая. МЕТОДЫ ИЗМЕРЕНИЙ ТЕМПЕРАТУРЫ .... 254
12-1. Характеристики измеряемой величины, классификация методов
измерений.......................................................—
12-2. Метрологические основы измерения температуры. Температур-
ные шкалы.................................................. . 257
12-3. Особенности контактных методов измерений температуры . . 260
12-4. Термомагнитный метод . ......... : 265
12-5. Термошумовой метод............ ... ... 266
12-6. Термочастотные методы .... ... . . . 269
12-7. Пирометрические методы . . . . 273
12-8. Тепловидение и термография . .............280
12-9. Спектрометрические методы . . . ..............282
Глава тринадцатая. МЕТОДЫ ИЗМЕРЕНИЙ КОНЦЕНТРАЦИИ ВЕ-
ЩЕСТВА . . ..............................................285
13-1. Общие вопросы аналитических измерений . . . —
13-2. Электрохимические методы ... . . 288
13-3. Электрофизические методы . . . . 295
13-4. Ионизационные методы............................ . . 299
13-5. Спектрометрические (волновые) методы . . . . 302
13-6. Комбинированные методы ...........312
Список литературы .......... .............. 316
Предметный указатель ................................ ; 317