/






















































































































































































































































































































































































































































Текст
Укяадка плетей и уборка инвентарных рельсов рельсоукладчиком
100 м
Выгрузка рельсовых плетей из спецсостава
ТЕХНОЛОГИЧЕСКАЯ ЦЕПОЧКА МАШИН ПРИ КОМПЛЕКСНОМ ПРОИЗВОДСТВЕ КАПИТАЛЬНОГО РЕМОНТА ПУТИ
МАШИНЫ
И МЕХАНИЗМЫ
ДЛЯ ПУТЕВОГО
ХОЗЯЙСТВА
ИЗДАНИЕ ТРЕТЬЕ, ПЕРЕРАБОТАННОЕ
И ДОПОЛНЕННОЕ'
Под редакцией
канд. техн, наук
С. А. СОЛОМОНОВА
Утверждено
Главным управлением учебными заведениями МПС
в качестве учебника для техникумов
железнодорожного транспорта
МОСКВА "ТРАНСПОРТ" 1984
УДК 625 1 08 (075)+625-144 5/7(075)
Машины и механизмы для путевого хозяйства: Учебник для техникумов
ж.-д трансп / С. А. Соломонов, В. П. Хабаров, Л. Я. Малицкий, Н. М, Нуж-
дин; Под ред. С. А Соломонова. — 3-е изд., перераб. и доп. М.: Транспорт,
1984 440 с
В книге описаны назначение, устройство, принципы действия и правила
эксплуатации основных машин и механизированного инструмента, применяемых
в путевом хозяйстве железных дорог (грузоподъемных, для ремонта земляного
полотна, балластировки, подъемки, укладки и выправки пути; для борьбы
со снежными заносами, транспортные средства, путеизмернтели и дефектоско-
пы), приведены основные расчеты, а также сведения по технике безопасности.
В третье издание включено описание новых машин
Учебник предназначен для техникумов железнодорожного транспорта и
может служить пособием для работников путевого хозяйства.
Ил. 369, табл 23
Рецензенты: преподаватель Тихорецкого техникума железнодорожно-
го транспорта А Н Лищенко. ведущий конструктор ЦКБ Путьмаш М. Б. Ко
ломейский
Зав. редакцией А. Е. Вичеревин
Редактор Т В Окунькова
Книгу написали:
канд. техн наук С. А. Соломонов — введение (совместно с В. П Хабаро- .
вым), разделы 1.1; 1.2; 1.3.1; 2; 4; 7.1-2; 12; 13; приложения; инженеры:
В. П. Хабаров — разделы 3; 6; 9; 10; II; Л. Я. Малицкий — разделы 5; 7
(кроме 7 12); 8 (кроме 8 1, 8.2, 83); Н. М Нуждин — разделы 1.3 (кро-
ме 1.3.1); 8.1; 8.2; 8.3.
3602020000-413
049(01)-84
83-84
© Издательство «Транспорт», 1978
© Издательство «Транспорт», 1984 с изменениями
ВВЕДЕНИЕ
В текущем пятилетии в соответствии с решениями XXVI съезда КПСС,
и последующих Пленумов ЦК КПСС на железнодорожном транспорте осу-
ществляется дальнейшее увеличение пропускной и провозной способности
на грузонапряженных направлениях, наращивание мощности станций н узлов.
Значительно возрастут в одиннадцатой пятилетке такие важные пока-
затели работы как грузооборот, пассажирооборот и производительность труда.
К 1985 г. протяженность путей с рельсами тяжелых типов достигнет 60 %, а
с железобетонными шпалами — 30—35 % развернутой длины главных путей..
В связи с этим предстоит большой объем трудоемких путевых работ. Их вы-
полнение в минимально короткие перерывы в движении поездов возможно
только при помощи высокопроизводительных машин, широко используемых в
настоящее время в путевом хозяйстве.
В создание путевого машиностроения внесли существенный вклад отечест-
венные инженеры и изобретатели. В числе первых путевых машин, созданных
еще на заре развития железнодорожного транспор та, плуг на конной тяге для
механизированной очистки пути от снега. В 1879 г. инж. С. С. Гендель скон-
струировал и применил снегоочиститель-таран. В это же время машинист
Беренс изготовил модель роторного снегоочистителя. В 1887 г. ннж-
И. Н. Ливчак создал вагон-путеизмеритель, а в 1910 г. инж. А. Н. Шуми-
лов— первую снегоуборочную машину с погрузкой снега на состав. В 1913 г.
инж. Н. Е. Долгов разработал путеизмерительную тележку и более совершен-
ный вагон-путеизмеритель.
Особое внимание механизации путевых работ стало уделяться в годы
Советской власти. В 30-е годы только что созданные путевые машинные стан-
ции стали получать высокопроизводительные путевые машины — путевые
струги и балластеры с лневмоуправлением, звеньевые путеукладчики. Тогда
же машинист Гавриченко разработал снегоуборочную машину. На новую сту-
пень поднялось путевое хозяйство после Великой Отечественной войны. Уже
в 1947 г. путевое хозяйство СССР получило электробалластеры ЭЛБ-1, земле-
уборочные машины системы Балашенко, автодрезины АГМу. Значительных
успехов достигла механизация путевых работ в 50-е годы, когда были созданы
путеукладочные краны УК-25/9 и УК 25/21, щебнеочистительная машина
ЩОМ-Д, балластные хопперы-дозаторы БХД, шпалоподбивочные машины
ШПМ-02, снегоуборочные машины СМ-2, электро- и гидроинструмент, средства
рельсовой дефектоскопии. В 60-е годы началось внедрение таких высокопро-
изводительных машин, как выправочно-подбивочно-отдел очная ВПО-ЗООО,
балластоочистительная ВМС, дрезина грузовая крановая ДГКУ, путеукладоч-
ный кран УК-25/9-18, путевая рельсосварочная машинаПРСМ-3, звеносбороч-
ные и звеноразборочные машины. В годы десятой пятилетки началось оснаще-
ние путевого хозяйства выправочно-подбивочно-рихтовочными машинами ВПР-
3
1200 н ВПРС-500 (для стрелок), рихтовочной Р-2000 и щебнеочистительной
1ЦОМ-4. Разработаны новые высокоэффективные путевые машины, в частности
автоматические путевые моторные гайковерты (ПМГ) для отвинчивания и за-
винчивания гаек путевых болтов, машина для смены стрелочных переводов,
универсальная балласто-распределительная машина (УБРМ-1), балластоуплот-
нительная машина (БУМ) и др.
Большой вклад в развитие путевых машин внесли коллективы Проектно-
технологическо-конструкторского бюро Главного управления пути МПС
(ПТКБ ЦП МПС), Всесоюзного научно-исследовательского института же-
лезнодорожного транспорта (ВНИИЖТ), Калужского, Кировского, Тихорец-
кого и других заводов, транспордных вузов, Проектно-конструкторского
бюро тяжелых путевых машин Министерства тяжелого и транспортного маши-
ностроения (ЦКБ Путьмаш), проектно-коиструкторскогобюро Главстроймеха-
инзации Министерства транспортного строительства (ПКБ Главстроймехани-
зации Минтрансстроя) и Всесоюзного научно-исследовательского института
транспортного строительства.
Главным направлением развития путевых машин в одиннадцатой пятилетке
н последующие годы является разработка системы машин, обеспечивающей
комплексную механизацию путевых работ. Для этого должны быть созданы
недостающие в ней машины и механизмы и повышена эффективность, надеж-
ность и производительность всех машин, входящих в систему.
При текущем содержании пути важнейшей задачей является машиниза-
ция текущего содержания, т. е. переход от механизации работ с использова-
нием машин н механизмов к выполнению работ только высокопроизводитель-
ными машинами.
1. ОБЩИЕ СВЕДЕНИЯ О ПУТЕВЫХ МАШИНАХ
1.1. ОСНОВНЫЕ ВИДЫ ПУТЕВЫХ РАБОТ
Для выполнения значительных объемов работ по содержанию и ремонту
железнодорожных путей созданы высокопроизводительные путевые машины и
механизмы. Рабочие процессы этих машин обусловлены работами, выполняе-
мыми при основных видах путевых работ, к которым относятся текущее со-
держание пути, подъемочнын, средний и капитальный ремонты, а также сплош-
ная смена рельсов.
Текущее содержание эксплуатируемого пути предусматривает контроль
за его состоянием, работы по предупреждению неисправностей, пути, выявление
появившихся неисправностей и их устранение, замену отдельных изношенных
элементов верхнего строения пути, продление сроков их службы.
Подъемочнын ремонт сводится к сплошной выправке пути, восстановлению
дренирующих и упругих свойств балластного слоя. При этом выполняют сле-
дующие основные работы: подъемку рельсо-шпальной решетки с добавлением
балласта и его уплотнением (подбивкой) под шпалами, очистку щебня в местах
наибольшего загрязнения, смену негодных шпал, одиночную смену рельсов
и скреплений, регулировку стыковых зазоров, рихтовку пути (т. е. постановку
его в проектное положение в плане), очистку водоотводных сооружений, ре-
монт переездов.
Средний ремонт заключается в очистке щебеночного балласта на глубину
не менее 20—25 см и замене загрязненного песчаного, гравийного и других
балластов. Одновременно выполняют смену н ремонт шпал, заменяют негодные
рельсы и скрепления, выправляют (рихтуют) путь в профиле и плане, ремонти-
руют земляное полотно, водоотводные сооружения и переезды.
Капитальный ремонт пути включает следующие основные работы: сплош-
ную смену рельсов, шпал, скреплений, стрелочных переводов; очистку щебе-
ночвого или обновление загрязненного асбестового (гравийного) балласта;
подъемку мостов малых пролетов в соответствии с новой отметкой головки
рельсов; ремонт переездов; оздоровление и ремонт водоотводных сооружений.
Уровень механизации этих работ характеризуется отношением объема
работ, выполняемых машинами, к общему объему работ определенного вида.
При капитальном ремонте пути он составляет 86 %, при среднем — 78 %,
при подъемочном — 70 %, при текущем содержании — 45 %.
1.2. КОМПЛЕКТЫ ПУТЕВЫХ МАШИН, ИХ КЛАССИФИКАЦИЯ
И ТРЕБОВАНИЯ, ПРЕДЪЯВЛЯЕМЫЕ К НИМ
Комплекты путевых машин. Текущее содержание пути и его ремонты —
сложные производственные процессы, для выполнения которых обычно со-
ставляют проекты производства работ.
На капитальный н средний ремонты пути Главным управлением пути МПС
(ЦП МПС) разработаны типовые технологические процессы для различных
5
условий и объемов работ, соответственно которым рекомендованы комплекты
машин и механизмов для их выполнения. В частности, для выполнения основ-
ных работ по капитальному ремонту пути предназначен комплект (цепочка)
машин (рис. 1,1), работающих поточным методом, когда машины идут одна
за другой, последовательно выполняя технологические операции. Комплект
включает путеразборочный 1 и путеукладочный 3 поезда, балластоочисти-
тельную машину 2, хоппер-дозаторные вертушки 4, 6, выправочно-подбнвочно-
отделочную машину 5.
Классификация путевых машин. В путевом хозяйстве нашли широкое
применение путевые, подъемно-транспортные, строительные машины и авто-
тракторный транспорт. Путевые машины классифицируют в зависимости от
назначения, способа выполнения работ, вида ходового оборудования, наличия
энергетической базы, способа передвижения и типа привода.
По назначению путевые машины и механизмы разделены на группы,
соответственно выполняемым видам работ: ремонт земляного полотна (путе-
вые струги, дренажные и землеуборочные машины), балластировка пути (бал-
ластеры, хопперы-дозаторы, путеподъемники, тракторные дозировщики), очист-
ка балластного слоя (щебнеочистительные машины), укладка пути (рельсоук-
ладчики, путеукладчики), сварка и шлифовка рельсов, работы на звеносбо-
рочных базах (звеносборочные, звеноразборочные машины), уплотнение балла-
ста и выправка пути (шпалоподбивочные, балластоуплотнительные, выправоч-
но-под би в очно-отд ел очные и путерихтовочные машины), контрольно-измери-
тельные (путеизмерительные и дефектоскопные вагоны и тележки), борьба
со снежными заносами (плуговые и роторные снегоочистители, снегоубороч-
ные машины), транспортные и погрузочно-разгрузочные средства для путе-
вых работ (саморазгружающиеся вагоны, дрезины, мотовозы, путеремонтные
летучки).
По способу выполнения работ различают машины тяжелого
типа, или несъемные (струги, балластировочные машины, путеукладочные,
щебнеочистительные, снегоуборочные и др.), и легкого типа, или съемные (пе-
редвижные электростанции, шпалоподбойки, рельсорезные и рельсосверлиль-
ные станки и другой электрический и гидравлический инструмент и т. д.). Ма-
шины тяжелого типа не могут быть сняты с пути для пропуска поездов и, сле-
довательно, требуют занятия перегона, а легкого типа снимаются с пути для
пропуска поезда и не требуют занятия перегона.
В зависимости от вида ходового оборудования исполь-
зуют машины на железнодорожном ходу (струги, путеукладчики, электро-
балластеры, шпалоподбивочные машины и т. п.) и на гусеничном ходу (трак-
торные путеукладчики, дозировщики). Большую часть машин выпускают на
железнодорожном ходу.
Наличие энергетической установки определяет авто-
номность и неавтономность путевых машин. Автономные имеют свою энергети-
Рис. 1.1. Схема комплекта машин для капитального ремонта пути
6
ческую базу, к которой подключают все двигатели. К таким путевым машинам
относятся: путеукладчики, дрезины, щебнеочистительная машина ЩОМ-ЗУ,
шпалоподбивочные машины. Энергия к рабочим органам неавтономных машин
(электроэнергия или энергия сжатого воздуха) поступает от локомотива (ро-
торные снегоочистители, щебнеочистительные машины, струги-снегоочи-
стители).
В зависимости от способа передвижения в рабочем состоянии
путевые машины разделяют на самоходные (снегоуборочные машины СМ-3,
СМ-4, выправочно-подбивочно-рнхтовочные ВПР-1200, ВПРС-500) и несамо-
ходные (электробалластеры, путевые струги, щебнеочистительные машины)
Перспективным является создание самоходных машин.
Типы приводов путевых машин: электрический, пневматический
и гидравлический. Есть также машины с двигателями внутреннего сгорания
и механической передачей.
Требования, предъявляемые к путевым машинам. К путевым машинам
предъявляются общие и специфические требования, К общим требованиям
относят: унификацию узлов и деталей; повышение прочности и надежности; сни-
жение стоимости, металле- и энергоемкости; универсальность машин; легкость
управления; простоту изготовления деталей, сборки узлов и машины; ремонто-
пригодность (возможность монтажа и ремонта узлов и агрегатов); обеспечение
безопасности труда при эксплуатации машины; создание благоприятных усло-
вий для работы машиниста, автоматизацию процессов управления.
Специфические требования обусловлены тем, что путевые машины работают
на железных дорогах. Они должны обладать хорошей маневренностью, быст-
ротой перевода рабочих органов из транспортного положения в рабочее и на-
оборот, плавностью хода, вписываться в габарит подвижного состава, не пре-
вышать допустимых нагрузок на ось, т. е. отвечать требованиям, предъявляе-
мым к железнодорожному подвижному составу.
1.3. ПРИВОДЫ МАШИН И МЕХАНИЗМОВ
ДЛЯ ПУТЕВОГО ХОЗЯЙСТВА
1.3.1. Назначение и классификация приводов
В приводе машин в качестве силового оборудования используют двигатели
внутреннего сгорания, электро-, гидро- и пневмодвигателн, гидро- и пневмо-
цилиндры. Ручной привод применяется крайне редко. В зависимости от вида
силового оборудования привод машины называют электрическим, гидравличес-
ким, пневматическим. Возможно также использование механического привода,
когда от одного двигателя внутреннего сгорания (ДВС) получают движение
все механизмы, связанные с ним трансмиссией. В качестве двигателей исполь-
зуют дизельные и карбюраторные. Достоинством этого типа привода является
постоянная готовность к работе, возможность регулирования скорости работы
механизма. Недостаток — исключен запуск ДВС под нагрузкой, что приводит к
необходимости установки фрикционных муфт, отключающих двигатель от
механизма при пуске, а также необходимость установки реверсивных устройств,
так как ДВС имеет постоянное направление вращения вала.
Широко применяется также дизель-электрический привод, в котором от-
дельные механизмы имеют свои индивидуальные электродвигатели, питаю-
щиеся от общей дизель-генераторной установки. Он отличается отсутствием
фрикционных муфт, простотой управления, но громоздок и имеет повышенную
массу.
7
В путевых прицепных машинах первых выпусков был использован пневма-
тический привод: сжатый воздух от компрессора локомотива поступал к сило-
вым пневмоцилиндрам н пневмодвигателям. Такой привод отличался простотой
конструкции и обслуживания, а также дешевизной, но имел недостатки. Прежде
всего машина не была автономна, она могла работать только при наличии локо-
мотива. Из-за небольшого давления воздуха в системе (0,5—0,6 МПа) для полу-
чения больших усилий требовались пневмоцилиндры больших диаметров.
Некоторые механизмы (гидродомкраты, рихтовщики, разгонщики) приво-
дятся в действие от ручного привода. При их использовании требованиями
техники безопасности ограничено среднее усилие рабочего на рукоять механиз-
ма. Так, при непрерывной работе оно не должно превышать 80—100 Н, при
периодичной работе с частыми перерывами — 150—160 Н, при кратковре-
менной (до 5 мин) — 200 Н, прн редкой — 400 Н.
В последнее время на путевых машинах широкое применение получает
гидравлический привод, или гидропривод. Этот вид привода весьма перспекти-
вен, он практически вытесняет пневмо- и электроприводы и поэтому целесооб-
разно рассмотреть его более подробно.
1.3.2. Основы гидропривода
Гидроприводом называется совокупность устройств, предназначенных для
приведения в движение механизмов и машин посредством рабочей жидкости под
давлением. Он включает один или несколько насосов, гидродвигатели, аппа-
ратуру управления и гидролинии.
Такой привод обеспечивает широкий диапазон регулирования скоростей,
плавность движения. Гидропривод характеризуют малые габариты, неболь-
шая масса, простая конструкция защиты узлов от перегрузок, легкость и
простота управления. Прн этом гарантирована передача больших усилий и
мощностей, малая ниерцня. К недостаткам гидропривода следует отнести по-
ниженную экономичность при малых нагрузках; ухудшение работы при низ-
, кнх температурах, что заставляет применять дорогостоящие морозоустойчивые
жидкости; значительные гндр©сопротивления прн наличии длинных трубопро-
водов; большую жесткость внешних характеристик; необходимость соблюдения
высокой точности прн изготовлении элементов привода, чтобы исключить
утечки рабочей жидкости через неплотности соединений. Кроме этого, необхо-
димо отметить, что в период, эксплуатации гидроприводов нередки нарушения
равномерного движения гидроагрегатов из-за проникновения воздуха в ра-
бочую жидкость.
Гидроприводы разделяются на объемные и гидродинамические.
В объемных в качестве выходного звена использованы гидроцилнндры
(например, в путеукладчиках, рельсосварочных и снегоуборочных машинах)
или гндромоторы и гидроцилнндры (выправочно-подбивочно-рихтовочные ма-
шины). Гидродинамические передачи применяются для передачи и изменения
величины крутящего момента в трансмиссиях дрезин, мотовозов, тепловозов.
Объемные гидроприводы по системе питания насосов бывают открытые,
закрытые и комбинированные. Чаще используются открытые гидроприводы
(рис. 1.2). В них насос Н засасывает из резервуара рабочую жидкость и
через фильтр Ф, распределитель Р подает ее в гидроцнлнидр или гидромотор М
(по схеме гидромотор).
Прн возникновении давлений, превышающих расчетные, срабатывает пре-
дохранительный клапан КП и жидкость сбрасывается в резервуар.
Прн закрытой системе (сплошные линии) насос Н1 и гидромотор М (рис.
1.3) включены в кольцевую магистральную линию, в которой жидкость может
8
циркулировать в любом направле-
нии, проходя фильтры Ф1 и Ф2. От-
работавшая в гидромоторе жидкость,
минуя бак, поступает в насос. Для
компенсации утечек служит подпи-
точный иасос Н2 с предохранитель-
ным клапаном КПЗ и фильтром ФЗ.
Так как оба полукольца могут быть и
всасывающей и напорной линией, то
в системе подпитки предусмотрены
два обратных клапана КО1 и К02.
Систему от больших давлений защи-
щают предохранительные клапаны
КП1 и КП2.
Открытая система проста, обеспе-
чивает хорошие условия для охлаж-
дения и отстоя жидкости. Но она
имеет большие габариты и в ней воз-
можна кавитация, что означает мест-
ное выделение из жидкости в зонах
пониженного давления паров и газов
(вскипание жидкости) с последующим
разрушением их при попадании в зо-
ну повышенного давления. Это раз-
рушение пузырьков сопровождается
Рис. 1.2. Схема гидропривода с открытой
системой циркуляции жидкости
Рис. 1.3. Схема гидропривода с закрытой и
комбинированной системами циркуляции
жидкости
местными гидравлическими микро-
ударами большой частоты и высокого уровня ударных давлений, что нару-
шает нормальный режим работы гидросистемы, а в отдельных случаях мо-
жет вызвать разрушение ее агрегатов.
У закрытой системы давление при всасывании больше атмосферного, что
исключает кавитацию и позволяет использовать более скоростные и, следова-
тельно, малогабаритные насосы. Исключено попадание воздуха в систему.
Но закрытая система более сложна, в ией хуже охлаждается жидкость. Часто
используется комбинация систем открытой и закрытой. В такой системе часть
отработавшей жидкости в гидродвигателе сливается в резервуар, а другая
часть вместе с жидкостью, подаваемой подпиточным насосом, поступает в
основной насос.
На рис. 1.3 пунктиром показано подключение к закрытой системе узла,
обеспечивающего слив в бак части отработавшей жидкости. Кольцевая систе-
ма замыкается двумя механически связанными обратными клапанами КОЗ,
КО4. Один из них всегда закрыт (на линии высокого давления), а другой от-
крыт (на линии низкого давления). К обоим обратным клапанам подключен
подпорный клапан КП4, которым поддерживают необходимое давление в
линии всасывания основного насоса.
1.3.3. Силовое гидравлическое оборудование
К силовому гидравлическому оборудованию относятся насосы, гидромо-
торы и гидроцилиндры.
Насосы преобразуют сообщаемую им первичным двигателем (дизелем,
электродвигателем и т. д.) механическую энергию в энергию потока рабочей
жидкости. Они подразделяются на поршневые, крыльчатые и роторные. У
поршневых насосов жидкость вытесняется из неподвижных рабочих камер
9
(гидроцилиидров) в результате прямолинейного возвратно-поступательного
движения поршней относительно этих камер. В крыльчатых этот процесс
происходит из неподвижных рабочих камер в результате возвратно-поворот-
ного движения вытеснителя относительно этих камер, а у роторных — из
перемещаемых рабочих камер в процессе вращательного или сложного дви-
жения вытеснителей относительно неподвижной части статора. К ним отно-
сятся шестеренные, пластинчатые, аксиально-поршневые и радиально-порш-
невые насосы. Первые два типа широко применяются на путевых машинах.
У гидромоторов рабочие камеры наполняются в процессе вращательного
нли сложного движения вытесняемых тел относительно статора.
Для гидроцилиндров характерно ограниченное возвратно-поступательное
движение ведомого звена (плунжера, поршня), в то время как в гидромоторах
ведомое звено (вал) совершает неограииченное вращательное движение.
Пластинчатые (лопастные) насосы и гидромоторы. Наиболее простыми
из существующих типов роторных насосов являются пластинчатые насосы, по-
тупившие в практике название лопастных или шиберных.
Основными элементами пластинчатого насоса (рис 1 4, а) являются ротор
/, пластины 2, перемещающиеся в пазах ротора под действием центробежных
сил или давления масла, и статор 3, по внутренней поверхности которого
скользят пластины. Ротор установлен в статоре с эксцентриситетом е. По
числу циклов за один оборот вала различают пластинчатые насосы и гидро-
моторы одно- и многократного (двух-, трех-, четырехкратного) действия. Из
рис. 1.4, б видно, что каждая пластина за один оборот ротора нагнетает жид-
кость 2 раза. Поскольку рабочее давление жидкости действует на диаметрально
противоположные стороны ротора (со стороны окон 1 и 2), подшипники ротора
практически разгружены от сил давления жидкости.
Современные пластинчатые насосы могут быть использованы и в качестве
гидромоторов, причем некоторые насосы применимы без изменений, а дру-
гие — при незначительном конструктивном изменении отдельных деталей.
Пластинчатые иасосы и гидромоторы просты по конструкции, малы по
габаритам, отличаются невысокой стоимостью, их применение в гидроприво-
дах с давлением 14—17 МПа очень широко.
На выправочно-подбивочно-рихтовочных машинах ВПР-1200 и ВПРС-500
применены двухпоточные насосы (рис. 1.4, в). В них на одном валу установ-
лены два ротора, имеющих по 10 лопаток.При вращении валамасло, поступаю-
щее в насос, всасывается через профилированные отверстия в камеры, и
10
жидкость, которая заполняет объем, лопатками вытесняется в напорную ма-
гистраль. Прижим лопаток к статору в зоне всасывания происходит в резуль-
тате действия центробежных сил и усилий пружин. Номинальное давление
насоса 17 МПа.
На машине ВПР-1200 для привода эксцентрикового вала подбивочного
блока применены гидромоторы, представляющие собой однолопастной двух-
поточный гидромотор, аналогичный по конструкции насосу, описанному выше,
ио состоящий из одной секции.
Шестеренные насосы и гидромоторы. Различают шестеренные насосы с
внешним и внутренним зацеплением. Первый тип распространен довольно
широко. Он состоит из пары сцепляющихся между собой цилиндрических
шестерен (рис. 1.4, г), помещенных в плотно обхватывающий их корпус, имею-
щий каналы в местах входа в зацепление и выхода из него. Максимальное
давление, развиваемое этими насосами, обычно равно 10 МПа.
Гидроцилнндры. Основными параметрами гидроцилиндров являются их
внутренний диаметр, диаметр штока, ход поршня и номинальное давление,
определяющее его эксплуатационную характеристику и конструкцию. У ци-
линдра одностороннего действия (рис. 1.5, а) усилие на выходном звене может
быть направлено только в одну сторону.
В противоположном направлении выходное звено перемещается, вытесняя
при этом жидкость из гидроцилиндра, только под влиянием возвратной
пружины. Гидроцилиндр состоит из корпуса / со штуцером для рабочей жид-
кости 3, штока 2, поршня 4 с уплотнительной манжетой 5 и возвратной пружи-
ны 6.
Гидроцилнндры двустороннего действия (рис. 1.5, б) имеют две рабочие
полости, поэтому усилие на выходном звене (штоке) и его перемещение могут
быть направлены в обе стороны в зависимости от того, в какую из полостей
нагнетается рабочая жидкость (противоположная полость при этом соединя-
ется со сливом). Гидроцилиндры двустороннего действия могут быть с односто-
ронним штоком (см. рис. 1.5, б) и двусторонним (рис. 1.5, в). Конструктивно
оии состоят из корпуса 7, штока 2 с поршнем 5 и уплотнением 6, штуцеров для
ввода рабочей жидкости 4 и уплотнений штоков 3. Полость цилиндра (см. рис.
1.5, б}, в которой расположен шток, называется штоковой, а противоположная—
поршневой. При нагнетании рабочей жидкости в поршневую полость усилие
иа выходном звене больше, чем при подаче жидкости под тем же давлением в
штоковую полость, причем отношение усилий пропорционально отношению
D2
D2—d2 ’
где D — внутренний диаметр гидроцилиндра (поршня);
d — наружный диаметр штока.
II
Для получения больших ходов применяют телескопические цилиндры, со-
стоящие из двух и более цилиндров (рис. 1.5, а, 5), размещенных в общем кор-
пусе.
1.3.4. Системы и аппаратура управления
Система управления гидравлического привода предназначена для измене-
ния направления движения и регулирования скорости выходных звеньев (што-
ков, валов, гидромоторов), а также для предохранения конструкции машины
от перегрузок. Регулирование скорости достигается изменением расхода жид-
кости, поступающей в гидромотор.
Основными элементами систем управления являются регулирующие уст-
ройства (клапаны различного типа, гидрораспределители, дроссели), а также
другие системы, прн помощи которых оператор управляет регулирующими
устройствами гидропривода.
Для управления работой гидропривода путевых машин используют уст-
ройства, посредством которых регулируют давление в линиях и агрегатах гид-
ропривода, направление движения потока рабочей жидкости, в том числе
распределение его между гидродвигателями, величину подачи (расхода) ра-
бочей жидкости к гидродвигателям.
Регулирующие устройства систем гидропривода. Устройства, регулирующие
давление, служат как для ограничения максимального создаваемого насосом
давления в системе, так и для поддержания в разных точках системы заданного
давления. К ним относятся напорные (предохранительные, переливные) и
редукционные клапаны.
К устройствам, регулирующим направление потока жидкости, относятся
обратные клапаны, гидравлические замки, золотниковые распределители.
К устройствам для регулирования подачи (расхода) жидкости относятся
следящие гидрораспределители (сервовентили) и дроссели.
Применяют также устройства для комбинированного регулирования, вы-
полняющие несколько функций.
Предохранительными клапанами называются напорные
гидроклапаны, предназначенные для предохранения объемного гидропривода
от давления, превышающего установленное, путем слива жидкости в моменты
увеличения этого давления. Напорные клапаны называются переливными, если
они предназначены для поддержания заданного давления путем непрерывного
слива рабочей жидкости во время работы.
Схема простейшего напорного клапана прямого давления приведена на
рис. 1.6, а. В корпусе 2 имеются два отверстия: сквозное (для подсоединения
клапана к гидролинии) н отверстие для подсоединения к сливной гидролинин.
Рис. 1.6. Схемы напорных клапанов
12
Рис. 1.7. Схемы редукционных клапанов
В корпусе размещены запорно-регули-
рующий элемент 1 (шарик), пружина 4,
опора 5 и регулировочный винт 3. При
повышении давления в гидролинии ша-
рик, преодолевая усилие пружины, от-
ходит от седла и пропускает часть жид-
кости иа слив, ограничивая подводимое
давление. Несмотря на простоту, такие
клапаны имеют ряд недостатков. Один
нз них — неустойчивая работа клапана
при малых расходах на слив. В этом
случае шарик, не имеющий специальных
направляющих, совершает колебания,
перпендикулярные оси гнезда, и раз-
вивает его. Поэтому такие напорные кла-
паны применяются в качестве предохра-
нительных в системе низкого давления,
так как в этом случае клапан работает
эпизодически.
В качестве переливных клапанов по
этой причине предпочитают использо-
вать плунжерные клапаны (рис. 1.6, б). В обоих случаях давление в напорной
магистрали устанавливается при помощи регулировочных винтов, обеспечиваю-
щих требуемое натяжение пружины. Часто применяются клапаны с индика-
торным стержнем (рис. 1.6, в).
Мощные напорные клапаны выполняют в виде клапанов непрямого дей-
ствия (рис. 1.6, г). В них, кроме основного клапана 7, выполненного заодно с
поршнем 6, имеется вспомогательный клапан, состоящий из запорно-регули-
рующего элемента /, пружины 2, регулировочного винта 3 и дросселя 8. Оба
клапана расположены в общем корпусе 4, причем вспомогательный управляет
основным.
При давлении в гидролинии, меньшем давления настройки клапана, за-
порно-регулирующий элемент 1 усилием пружины 2 закрывает окно вспомо-
гательного клапана, прн этом вокруг поршня 6 устанавливается одинаковое
давление. Пружина 5 разжимается и основной клапан 7 перекрывает рабочее
окно.
При возрастании давления в гидролинии выше значения, на которое
настроена пружина 2, запорно-регулирующий элемент 1 отжимается от седла
н жидкость потечет через вспомогательный клапан. В результате произойдет
падение давления на дросселе 8. Вследствие этого уменьшится давление в ра-
бочей полости поршня 6 и основной клапан откроет рабочее окно. В результате
упадет давление в напорной линии, затем в рабочей полости поршня 6, н ос-
новной клапан снова прикроет рабочее окно. Величина давления в напорной
гидролинни определяется величиной сжатия пружины 2, которое осуществля-
ется регулировочным винтом 3. В схемах напорные клапаны изображают,
как показано на рис. 1.6, б, е.
Редукционными клапанами называются гидроклапаны,
предназначенные для уменьшения давления в гидролинии, отводимой от основ-
ной линии, и для поддержания этого давления или перепада давления на по-
стоянном уровне. Их используют, когда от одного источника питаются несколь-
ко потребителей с разными давлениями.
Редукционный клапан прямого действия (рис. 1.7, а) состоит из золотника
/, корпуса 2, пружины 3 и регулировочного винта 4. Давление напора Рн,
подводимое к золотнику 1, не оказывает на него влияния, так как площади
13
буртов золотника равны. Следовательно, положение золотника 1 благодаря
пружине 3 будет определяться величиной разницы редуцируемого давления
^ред и давления слива Рсл. По мере увеличения этой разности золотник будет
прикрывать рабочее окно клапана, уменьшая подачу жидкости на выходе кла-
пана, что приведет к уменьшению разности перепада давления на клапане до
величины, на которую настроен клапан. Если же вследствие увеличения рас-
хода на выходе редукционного клапана давление Р^л уменьшится, то под
действием усилия пружины 3 золотник 1 приоткроет окно клапана и редуци-
руемое давление восстановится.
Схема редукционного клапана непрямого действия приведена на рис. 1.7, б.
Основной клапан 5 управляется при помощи вспомогательного, состоящего
из запорного элемента /, пружины 2, регулировочного винта 3 и постоянного
дросселя 6. Междроссельная камера, образованиая постоянным дросселем 6
и рабочим окном вспомогательного клапана, соединена гидролннией с рабочей
камерой основного клапана 5, в которой расположена пружина 4, открываю-
щая рабочее окно клапана 5 при давлениях иа выходе редукционного клапана
ниже заданных.
Если расход на выходе редукционного клапана уменьшится, то Ррсд
сначала увеличится. Это приведет к увеличению давления в междроссельной
камере вспомогательного клапана, открытию запорного элемента 1 и сливу
части масла. В результате давление в междроссельной камере вспомогательно-
го клапана уменьшится и клапан 5 под действием давления, превышающего
давление Ррел, переместится в сторону уменьшения проходного сечения (вверх).
Приток энергии, поступающей из напорной гидролинии в полость редуцируе-
мого давления, уменьшится н давление Рред достигнет значения, заданного
настройкой вспомогательного клапана. На схемах редукционный клапан изо-
бражается, как показано на рис. 1.7, в.
Обратные клапаны служат для пропускания рабочей жидкости
только в одном направлении. На рис. 1.8, а и б показаны обратные клапаны с
различными запорно-регулирующими элементами (с шариком и конусом).
При обратном движении жидкость прижимает запорно-регулирующий эле-
мент к седлу. Более высокой герметичностью характеризуются клапаны с
конусом, но они сложнее в изготовлении. В схемах обратные клапаны изо-
бражаются, как показано на рис. 1.8, в.
Гидравлические замки (гидрозамки) применяются для фик-
сирования поршня силового цилиндра в заданных положениях. Схема дву-
стороннего гидрозамка приведена на рис. 1.9, а. Гидролинии 2 и 3 подсоединя-
ются к соответствующим каналам гидрораспределителя, а / и 4 — к рабочим
полостям силового цилиндра. При подводе жидкости к каналу 2 открывается
левый обратный клапан, и жидкость проходит в силовой цилиндр. Одновре-
менно давлением жидкости поршень гидрозамка перемещается вправо и откры-
вает правый обратный клапан, обеспечивая проход жидкости, отводимой из
Рис. 1.8 Схемы обратных клапанов
Рис. 1.9, Схема двустороннего гидрозамка
14
Рис. 1.10. Схема четырехщелевых распределителей
канала 4 в канал 3 и далее к распределителю. При подаче жидкости в канал 3
замок срабатывает аналогично, но в обратном направлении. Если жидкость
не циркулирует, обратные клапаны запирают ее в силовом цилиидре, фикси-
руя тем самым поршень последнего. В схемах двусторонний гидрозамок изо-
бражается, как показано на рис. 1.9, б.
Золотниковые распределители предназначены для уп-
равления потоком рабочей жидкости между участками и агрегатами гидро-
системы. При помощи гидрораспределителей рабочая жидкость направляется
к соответствующему исполнительному гидромеханизму, а также осуществляет-
ся реверс механизмов.
Золотниковые гидрораспределители делятся на одно-, двух- и многощеле-
вые.
Наиболее широкое применение в основных гидравлических приводах наш-
ли четырехщелевые золотниковые распределители. Основными их достоинст-
вами являются симметрия сил, действующих на золотник; малые значения рас-
ходов утечек, высокий к.п.д., малое отклонение от исходного положения при
изменении температуры и давления питания; возможность простыми средствами
уменьшить или свести к нулю действие вредных сил, действующих на золотник.
Схемы четырехщелевых золотниковых распределителей приведены на
рис. 1.10. Они отличаются числом буртов, местом подсоединения гидролиний
напора и слива, направлением скорости движения гидронилиндров при одном
и том же направлении смещения золотников относительно нейтрали (рис. 1.10,
а—-г). Однако все они имеют четыре рабочие щели, на которых происходит дрос-
селирование потока рабочей жидкости. В тех случаях, когда конструктивные
особенности распределителя не имеют существенного значения, четырехщеле-
вые золотниковые распределители обозначаются условно (рис. 1.10, д). Три
квадрата являются полями трех характерных положений золотиика: нейтраль-
ное — средний квадрат и два крайних — крайние квадраты. Исполнительные,
сливиые и напорные гидролинии подводятся только с среднему квадрату.
Когда при условном изображении необходимо показать способ управления зо-
лотииком, к торцам полей условного обозначения добавляют соответствующие
знаки по ГОСТ 2.781—68 (рис. 1,10. е — з): от электромагнитов, с электро-
гидравлическим управлением и от рукоятки с фиксатором.
На машинах ВПР-1200, ВПРС-500, Р-2000, ВПО-ЗОООМ применен следя-
щий гидрораспреДелитель (сервовентиль). Его устройство приведено на рис.
1.11.
15
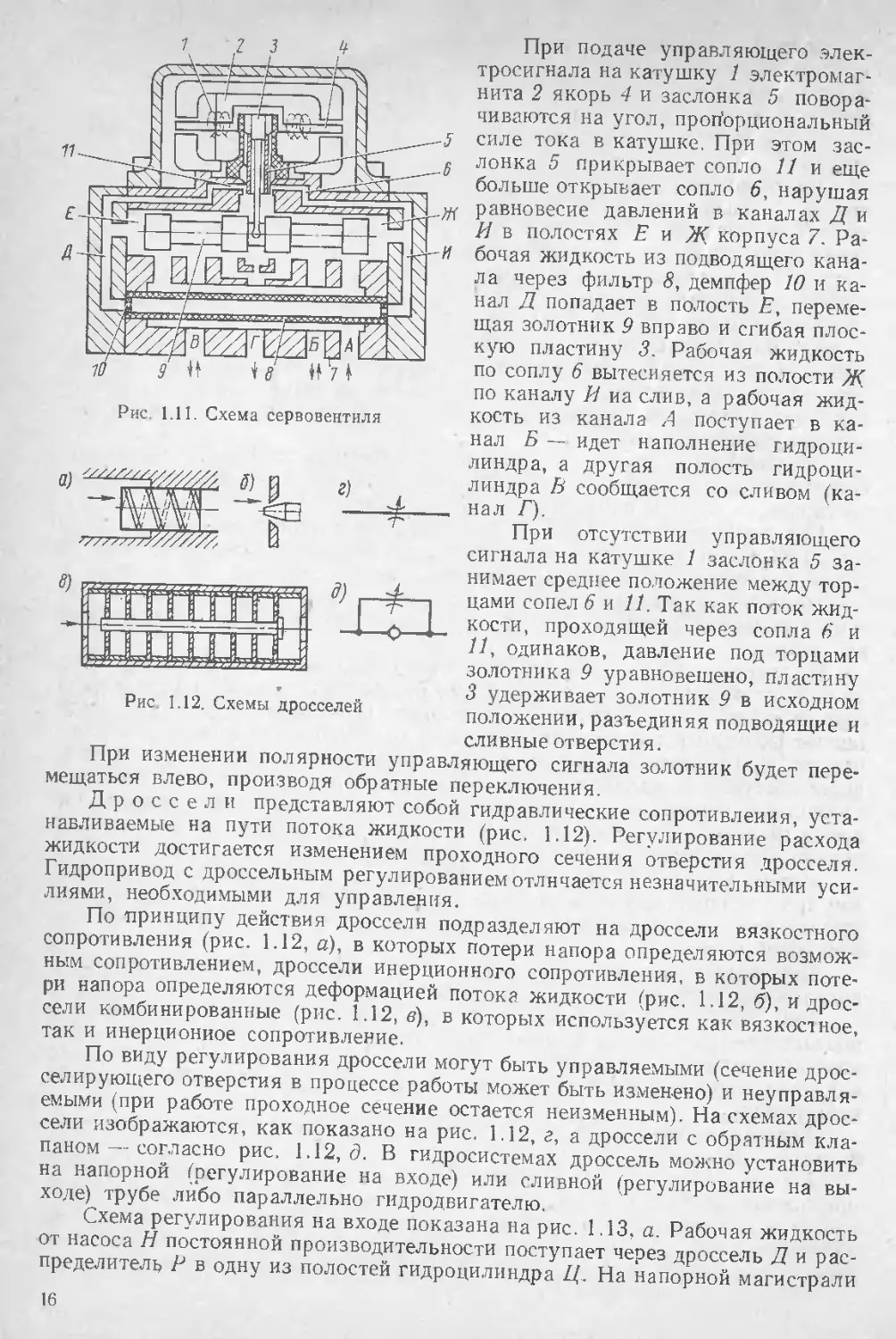
Рис. 1.11. Схема сервовентиля
Рис. 1.12. Схемы дросселей
При подаче управляющего элек-
тросигнала на катушку 1 электромаг-
нита 2 якорь 4 и заслонка 5 повора-
чиваются на угол, пропорциональный
силе тока в катушке. При этом зас-
лонка 5 прикрывает сопло 11 и еще
больше открывает сопло 6, нарушая
равновесие давлений в каналах Д и
И в полостях Е и Ж корпуса 7. Ра-
бочая жидкость из подводящего кана-
ла через фильтр 8, демпфер 10 и ка-
нал Д попадает в полость Е, переме-
щая золотник 9 вправо и сгибая плос-
кую пластину 3. Рабочая жидкость
по соплу 6 вытесняется из полости Ж
по каналу 11 иа слив, а рабочая жид-
кость из канала А поступает в ка-
нал Б —- идет наполнение гидроци-
линдра, а другая полость гидроци-
линдра В сообщается со сливом (ка-
нал Г).
При отсутствии управляющего
сигнала на катушке 1 заслонка 5 за-
нимает среднее положение между тор-
цами сопел 6 и 11. Так как поток жид-
кости, проходящей через сопла 6 и
11, одинаков, давление под торцами
золотника 9 уравновешено, пластину
3 удерживает золотник 9 в исходном
положении, разъединяя подводящие и
сливные отверстия.
При изменении полярности управляющего сигнала золотник будет пере-
мещаться влево, производя обратные переключения.
Дроссели представляют собой гидравлические сопротивления, уста-
навливаемые на пути потока жидкости (рис. 1.12). Регулирование расхода
жидкости достигается изменением проходного сечения отверстия дросселя.
Гидропривод с дроссельным регулированием отличается незначительными уси-
лиями, необходимыми для управления.
По принципу действия дроссели подразделяют на дроссели вязкостного
сопротивления (рис. 1.12, а), в которых потери напора определяются возмож-
ным сопротивлением, дроссели инерционного сопротивления, в которых поте-
ри напора определяются деформацией потока жидкости (рис. 1.12, б), и дрос-
сели комбинированные (рис. 1.12, в), в которых используется как вязкостное,
так и инерционное сопротивление.
По виду регулирования дроссели могут быть управляемыми (сечение дрос-
селирующего отверстия в процессе работы может быть изменено) и неуправля-
емыми (при работе проходное сечение остается неизменным). На схемах дрос-
сели изображаются, как показано на рис. 1.12, г, а дроссели с обратным кла-
паном— согласно рис. 1.12, д. В гидросистемах дроссель можно установить
на напорной (регулирование на входе) или сливной (регулирование на вы-
ходе) трубе либо параллельно гидродвигателю.
Схема регулирования на входе показана на рис. 1.13, а. Рабочая жидкость
от насоса Н постоянной производительности поступает через дроссель Д и рас-
пределитель Р в одну из полостей гидроцилиндра Ц. На напорной магистрали
16
до дросселя установлен предохрани-
тельный клапан КП, при помощи ко-
торого поддерживается постоянное
давление до дросселя.
Часть жидкости поступает через
дроссель в гцдроцилиндр.
Давление до дросселя всегда по-
стоянно и зависит только от настрой-
ки КП, а давление после дросселя
определяется усилием, приложенным
к штоку Ц, величина которого может
в процессе работы изменяться. С уве-
личением усилия на штоке повышает-
ся давление в гидроцилийдре, перепад
Рис. 1.13. Схемы установки дросселей в гид-
росистемах
давления на дросселе уменьшается, в результате чего снижается скорость
перемещения поршня. Приуменьшении усилия на штоке давление в гидро-
цилиддре понижается, перепад давления на дросселе увеличивается и ско-
рость поршня возрастает.
Следовательно, установка дросселя на напорной магистрали не обеспе-
чивает постоянной скорости при изменении нагрузки, приложенной к гидро-
двигателю, и данном проходном сечении дросселя.
При регулировании на выходе дроссель устанавливают на сливной трубе
(рис. 1.13, б). Эта схема менее экономична, так как в ней снижается усилие на
штоке гидроцилнндра ввиду преодоления противодавления. Но в связи с
двусторонним давлением на поршень схема с дросселем на выходе удобна при
знакопеременной нагрузке. В этом случае дроссель может быть использован
как тормоз.
В схеме рис. 1.13, в дроссель установлен параллельно гидронасосу. Если
он полностью закрыт, то вся жидкость, подаваемая насосом, нагнетается в
гидроцилиндр н с максимальной скоростью перемещает поршень, а если
полностью открыт, то жидкость поступает в бак. При этом поршень не переме-
щается. При частично открытом дросселе поток разделяется: одна часть жид-
кости поступает в гидроцилиндр, а другая через дроссель — в бак. Давление,
развиваемое насосом при такой схеме, зависит от сопротивления перемещению
штока гидроцилиндра. Следовательно, и в этом случае скорость перемещения
поршня определяется величиной внешней нагрузки.
Потери энергии на дросселирование по этой схеме значительно меньше,
чем при установке дросселя на входе и выходе, так как насос большую часть
времени работает при давлении, меньшем, чем то, иа которое настроен предохра-
нительный клапан.
Дроссельное регулирование наиболее эффективно, когда к одному насосу
подключают несколько силовых гидро цилиндров.
При объемном регулировании используют регулируемый иасос или гид-
родвигатель (регулируют производительность). У такого гидропривода жест-
кая характеристика (скорость мало зависит от нагрузки) н высокий к.п.д., так
как в нем отсутствуют потери на дросселирование, одиако он более сложен по
конструкции.
Вспомогательная аппаратура включает гидробаки, гидроаккумуляторы,
фильтры, охладители рабочей жидкости.
Гидробакн — это дополнительные емкости для рабочей жидкости,
предназначенные для компенсации разности объемов полостей гидроцилиндров,
пополнения наружных утечек и охлаждения рабочей жидкости Минимальная
вместимость бака должна составлять не менее 1,5 вместимости остальной сис-
темы, а максимальная — минутную производительность насосной установки.
17
Гидроаккумуляторы — это гидроемкости, предназначенные
дли накопления энергии рабочей жидкости, находящейся под давлением, с
целью ее последующего использования. На путевых машинах широкое при-
менение получили пневмогидроаккумуляторы с мембранными разделителями.
Гидроаккумулятор заряжается азотом, а снизу подсоединяется к напорной
магистрали гндролинни системы питания.
Фильтры предназначены для очистки рабочей жидкости от посто-
ронних примесей, состоящих из продуктов распада масла, износа деталей
гидроузлов и других частиц, попадающих в гидросистему извне. Онн разделя-
ются на фильтры грубой, нормальной, тонкой и особо тонкой очистки.
Фильтры устанавливают преимущественно на сливной магистрали. Уста-
новка фильтров на всасывающей линии хотя и предохраняет насос, но ухуд-
шает условия его питаиня.
Охладители предназначены для ннтенснвиого охлаждения рабочей
жидкости в системе гидропривода. Жидкость непрерывно нагревается в насосе
и при прохождении ее потока через гидроаппараты. В гидросистемах мощно-
стью, превышающей 10—15 кВт, охлаждение рабочей жидкости обычно осу-
ществляется с помощью специальных теплообменников, которые принято на-
зывать радиаторами. На путевых машинах для охлаждения рабочей жидкости
гидросистем применяют воздушные радиаторы и теплообменники.
18
2. ГРУЗОПОДЪЕМНЫЕ МАШИНЫ
е
2.1. КЛАССИФИКАЦИЯ И ОСНОВНЫЕ ХАРАКТЕРИСТИКИ МАШИН
При ремонте и содержании железнодорожного пути выполняется большой
объем погрузочно-разгрузочных работ. Так, на звеносборочных базах при сбор-
ке 1 км рельсо-шпальной решетки с рельсами Р75 и железобетонными шпалами
до четырех раз приходится перегружать различные материалы и конструкции
общей массой до 750 т, а при разборке 1 км звеньев с рельсами Р50 — до 650 т.
На дистанциях пути в течение года перегружают до 30 тыс. т грузов. Непо-
средственно при ремонте пути значительный объем составляют работы, свя-
занные с его подъемкой и выправкой, а также с погрузкой и выгрузкой от-
дельных элементов. Большие объемы погрузочно-разгрузочных работ вы-
полняют на шпалопропиточных заводах, в рельсосварочных поездах н шпало-
ремонтных мастерских.
По назначению грузоподъемные машины подразделяют на следующие
группы: домкраты — простейшие грузоподъемные устройства, позволяющие
перемещать грузы на небольшую высоту; лебедки (как самостоятельные меха-
низмы, так и составные части грузоподъемных машин), используемые для подъе-
ма, опускания и перемещения грузов; тали и тельферы, применяемые для подъе-
ма груза по вертикали с одновременным горизонтальным перемещением по мо-
норельсу; подъемники, обеспечивающие подъем груза на сравнительно неболь-
шую высоту; краны — грузоподъемные машины, обеспечивающие подъем н
перемещение груза в зоне действия крана на большую высоту, обслуживающие
площади различной конфигурации.
К основным параметрам грузоподъемных машин относятся грузоподъем-
ность, высота подъема, вылет груза, скорости подъема н перемещения.
Грузоподъемность — наибольшая масса поднимаемого груза, на которую
рассчитана данная машина. Определяют грузоподъемность по формуле
Q=Qrp+Qnp, (2 О
где Qrp — максимальная масса поднимаемого полезного груза;
Qnp — масса грузозахватного приспособления, подвешиваемого к крюку.
В системе СИ грузоподъемность выражается в тоннах или килограммах* 1.
ГОСТ 1575—81 установлен стандартный ряд грузоподъемности Q от 0,025 до
1000 т; 0,025: 0,05; 0,1; 0,125; 0,160; 0,2; 0,25; 0,32; 0,4; 0,5; 0,63; 0,8; 1,0; 1,25;
1,6; 2,0; 2,5; 3,2; 4,0; 5,0; 6,3; 8,0; 10,0; 12,5; 16,0; 20,0; 25; 32; 40 т н т. д. При
проектировании и строительстве новой машины ее грузоподъемность должна
соответствовать одному из чисел этого ряда. В путевом хозяйстве наиболее
часто используются машины грузоподъемностью до 20 т. Этим же ГОСТом ус-
тановлен основной ряд тяговых усилий в элементах грузоподъемных машин от
1 В учебнике все расчеты выполнены в соответствии с требованиями системы еди-
ниц физических величин SI. Использованы размерности величин: сила—ньютон (Н), ки-
лоньютон (кН); масса — килограмм (кг), тонна (т); давление, напряжение — паскаль
(Па) (Па Н/м2), мегапаскаль (МПа) (МПа = 106 Па). При необходимости перевода
величин в старую систему единиц можно пользоваться зависимостями: 1 кгс 10 Н;
1 тс 10 кН; 1 кгс/см2 = 0,1 МПа.
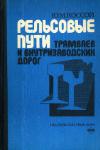
Операции Продолжительность операции,с
5 10 15 20 25 30 35 W У5 50 55 60 65
Строповка груза
Подъем крюка с грузом
Поворот крона с грузом
Передвижение крана с грузом L
Опускание груза
Отстропка груза 1 1.
Подъем крюка 1
Передвижение крана без груза
Поворот крона без груза
Опускание крюка Тц = 65с L
Всего
I
Рис. 2.1. Циклограмма работы грузоподъемной машины
0,25 до 10 000 кН в зависимости от силы тяжести — силы притяжения'тела к
земле, зависящей от ускорения свободного падения в данном пункте и изме-
ряемой в единицах силы (ньютон — Н, килоньютон — кН). Вес тела — это
сила, с которой тело под действием силы тяжести действует на опору. Принято
обозначать грузоподъемность (массу) Q, а силу веса G.
Грузоподъемные машины и механизмы относятся к устройствам перио-
дического (циклического) действия, время работы которых состоит из отдель-
ных циклов. Производительность таких машин, т/ч, определяют по формуле
tf=Qz, (2.2)
где Q — масса груза, поднимаемого за один цикл, т;
z —число рабочих циклов машины в течение 1 ч;
z = 3600 / Т,
3600 — число секунд в 1ч;
Т — продолжительность рабочего цикла, с, — промежуток времени между на-
чалами двух следующих один за другим подъемов груза;
Т= /1+ /2+ /3+ t4, (2.3)
где — время подъема и перемещения груза;
— время опускания и снятия груза;
?з — время возвращения механизма в исходное положение;
— время, затрачиваемое на подвешивание (строповку) груза.
Для повышения производительности грузоподъемных машин необходимо
максимально сокращать продолжительность выполнения отдельных операций,
а также совмещать их, например подъем груза с его перемещением и т. и.,
и, следовательно, сокращать время цикла Т. Для анализа цикла принято стро-
ить циклограмму (рис. 2.1), на которой отмечают все операции, продолжи-
тельность их выполнения и совмещение по времени. Контроль за изготовле-
нием и эксплуатацией гр узо подъемных машин осуществляется инспекцией по
техническому и горному надзору СССР (Госгортехнадзор). В соответствии с
правилами Госгортехнадзора установлены следующие режимы работы грузо-
подъемных механизмов с машинным приводом: легкий (Л), средний (С), тя-
желый (Т), весьма тяжелый (ВТ). Режимы работы механизмов подъема, вра-
щения, передвижения кранов зависят от следующих показателей:
а) коэффициента использования механизма по грузоподъемности
&гр ~ Qcp/Qhom>
где Qcp — среднее значение величины поднимаемого груза за смену, т;
Qhom — грузоподъемность механизма т;
20
б) коэффициентов годового kt, суточного kc и часового использования
механизма k4\
kr — число дней работы механизма в году/365;
kc = число часов работы механизма в сутки/24;
k4 = продолжительность работы в минутах за 1 ч/бО.
Для легкого режима kr = 0,25 4- 1,0 (нерегулярная работа). Для среднего:
kr = 0,75; kG = 0,33; k4 = 0,5. Для тяжелого: kv = 0,75-rl,0; kc = 0,66;
k4 — 1,0. Для весьма тяжелого kr =*= kG = k4 = 1,0;
в) относительной продолжительности включения ПВ механизма, %,
S tt
пв =—100,
где — продолжительность работы механизма в течение цикла, с;
Т — полное время цикла, с.
Для легкого режима ПВ — 15 %, для среднего — 25 %, для тяжелого
40 %;
г) числа включений механизма ЧВ в течение 1 ч. Этот показатель для ре-
жимов Л, С, Т и ВТ принимается соответственно 60, 120, 240 и 300;
д) температуры окружающей среды, принимаемой для всех режимов, кро-
ме ВТ, равной 25 ° С.
2.2. ЭЛЕМЕНТЫ МАШИН И МЕХАНИЗМОВ
2.2.1. Стальные канаты
Они применяются в качестве тяговых и подъемных элементов и в процессе
работы огибают блоки и навиваются на барабаны. Их используют также для
зачаливания штучных грузов к захватным устройствам.
Наибольшее применение нашлн стальные проволочные канаты (рис. 2.2)
одинарной, двойной и тройной свивки, обладающие большой гибкостью. Ка-
наты (тросы) одинарной свивки (рис. 2.2, а) представляют собой пряди, скру-
ченные из нескольких проволок, отличаются высокой жесткостью. При двой-
ной свивке (рис. 2.2, б, в) стальные проволоки свиты в пряди, а последние — в
канат. Канаты тройной свивки — кабели свиты из нескольких канатов двой-
ной свивки.
В грузоподъемных машинах преимущественно используются канаты двой-
ной свнвки — шестнпрядные с числом проволок в пряди 19 и 37. Пряди нави-
ваются вокруг сердечника, который большей частью бывает пеньковым, а может
Рис. 2.2. Схемы свивки канатов:
« — одинарная; б — двойная с точечным
касанием проволок в пряди; б —двойная
с линейным касанием проволок в пряди
21
быть также стальным нли асбестовым. Канаты с пеньковым сердечником более
гибкие и лучше удерживают смазку, которая поступает не только снаружи, но
и из самого сердечника, пропитанного смазкой. Канаты с асбестовым сер-
дечником предназначены для работы в условиях высоких температур. Канаты
со стальным сердечником применяются главным образом при многослойной
навнвке иа барабан. Прн этом нижние ветви не теряют формы под воздействием
нагрузки от верхних.
Свнвка канатов может быть параллельной (односторонней) или крестовой.
Прн односторонней (О) проволоки в прядях и пряди в канате свиты в одном
направлении, а прн крестовой свивке — в противоположных направлениях.
Канаты параллельной свивки более гибкие и долговечные, имеют ровную по-
верхность. Однако они легко раскручиваются под действием растягивающей
нагрузки и не пригодны в случаях, когда груз подвешивается на одной ветви.
Поэтому нх используют при движении груза в направляющих или с примене-
нием подвижных блоков, препятствующих раскручиванию каната.
Канаты крестовой свивки менее подвержены раскручиванию. Изготовля-
ются также нераскручивающиеся канаты, свиваемые из проволок и прядей, ко-
торым перед свнвкой придана форма, соответствующая нх положению в канате.
Это исключает возникновение в ннх внутренних напряжений в нагруженном
состоянии. Обрубленные концы таких канатов ие раскручиваются.
Канаты изготовляют с линейным касанием проволок в пряди типа ЛК
(см. рнс. 2.2, б) н с точечным касанием типа ТК (см. рнс. 2.2, а, б). Характер
контакта определяется взаимным расположением проволок в пряди.
По механическим свойствам проволока канатов бывает высшей (буква В),
первой (I) и второй (II) марок, нз светлой или оцинкованной проволоки. Она
может быть предназначена для разных условий работы: легких (ЛС), средних
(СС), жестких (ЖС). По направлению свивки канаты бывают правой (П) и
левой (Л) свивки; по способу свивкн — раскручивающиеся (Р) и нераскручн-
вающиеся (Н). Пример условного обозначения по ГОСТ 3068—74 каната диа-
метром 13 мм из проволоки марки В, оцинкованной для условий ЖС, пра-
вой крестовой свивки, нераскручнвающегося (Н) с временным сопротивле-
нием разрыву 160 МПа: канат 13-В-ЖС-Н—160 ГОСТ 3068—74. Конструкция
этого каната состоит из 6 прядей по 19 проволок в пряди н одного органичес-
кого сердечника — 1 о. с. Проволоки располагаются в прядн в три слоя:
центральном одна проволока, во втором бив третьем 12 проволок: 6X19(1 -|-
4- 6 ~г 12) ~г 1 о.с.
В процессе работы каната в грузоподъемной машине его проволоки испы-
тывают растяжение, сжатие, кручение, изгиб, смятие. Однако определяющим
фактором является максимальное натяжение каната. Поэтому в соответствии
с нормами Госгортехнадзора канат выбирают по расчетному разрывному уси-
лию Sp33, Н.
•^раз Я, (2 4)
где S — воспринимаемое канатом натяжение (нагрузка), Н;
п — коэффициент запаса прочности (для лебедок с ручным приводом п = 4,0; с
механическим приводом: легкий режим — 5; средний — 5,5; тяжелый — 6;
при подъеме людей п = 9).
Расчет каната выполняют в такой последовательности: 1) определяют уси-
лие в канате S; 2) по формуле (2.4) находят расчетное разрывное усилие S раз;
3) по полученному Spa3 по таблицам ГОСТа (см. приложение 1) подбирают ка-
нат.
Свободный конец каната прикрепляется к конструкциям машин при по-
мощи коушей и зажимов (рис. 2.3, а). Радиус дуги коуша должен быть не менее
четырех диаметров каната (4dK); число зажимов определяется по расчету,
но должно быть не менее трех (рну^Д 3, б), а расстояние между ними bdl{. Вмес-
Рис. 2.3. Схемы крепление канатов
Рис. 2.4. Схемы для определения усилий в
чалочном канате
то болтовых зажимов (рис. 2.3, в) иногда пряди расплетенного конца каната
вплетают б тело основной ветви с последующей оплеткой стальной проволокой.
Используют также втулки, в которых каиат закрепляют клином (рис. 2.3, г),
а также конические втулки (рис. 2.3, д'), когда конец каната, продетый через
отверстие втулки, расплетают на отдельные проволоки, пеньковый сердечник
вырезают, концы проволок отгибают в крючки и образовавшуюся кисть затя-
гивают внутрь втулки. Место выхода каната из втулки обвязывают проволокой,
внутреннюю часть втулки смачивают травленой соляной кислотой, затем
зал'ивают втулку третником, баббитом, свинцом или цинком.
Для чалки н строповки груза применяют чалочиые канаты, работающие
в довольно тяжелых условиях, поскольку при зачаливании они подвергаются
перегибам, а при взятии груза с места за счет инерции в них развиваются си-
лы, гораздо большие, чем масса поднимаемого груза. Более безопасными н
удобными в эксплуатации являются стропы, представляющие собой отрезки
канатов, концы которых снабжены крюками, серьгами и кольцами.
Коэффициент запаса прочности для чалочных стальных канатов, использу-
емых при обвязывании груза, п — 12, для чалочиых стальных канатов с крю-
ками, петлями, серьгами п — 6.
Находят применение также пеньковые, хлопчатобумажные и нейлоновые
канаты.
Для определения натяжения в ветвях палочного каната необходимо знать
вес подвешиваемого груза, число ветвей и угол наклона нх к вертикали.
Если вес подвешенного грузаG, кН, число ветвей т, а угол наклона нх к верти-
кали а° (рис. 2.4), то усилие 5, кН, возникающее в каждой ветви палочного
каната, можно определить по формуле
5 = Glm cos а. (2.5)
Уход за стальными канатами. Подъемные механизмы могут быть пущены
в эксплуатацию только при условии, что стальные канаты отвечают всем тре-
бованиям ГОСТа. В процессе работы они изнашиваются, проволоки обрыва-
ются н истираются, поэтому периодически (не реже одного раза в 7—10 дней)
канаты приходится осматривать и выбраковывать те, в которых число оборван-
ных проволок на шаге t свивки превышает пределы допускаемого износа,
установленного правилами Госгортехнад3 ь
23
Таблица 2.1
Нормы выбраковки канатов
Канаты с одним органическим сердечником Первоначальный коэф- фициент запаса проч- ности при установлен-
6X19=114 6X37=222 6X61=366
ном правилами
Число обрывов на шаге свивки отношении D : dx
12 22 36
— — До 6
6 11 18
14 26 38
— 6—7
7 13 19
16 30 40
— — Свыше 7
8 15 20
Примечание. В числителе приведены данные для крестового типа свивки, в знамена-
теле — для одностороннего, dx — диаметр каната; D — диаметр барабана.
Для определения шага t свивки (см, рис. 2.2, в) на поверхности пряди
каната в произвольном месте наносят метку /, от которой отсчитывают вдоль
оси каната столько прядей, сколько их имеется в сечении (например, 6 в шести-
прядном канате). На следующей пряди (в данном случае седьмой) наносят вто-
рую метку 2, Расстояние между метками 1 и 2 принимается за шаг свивки ка-
ната. У многопрядных канатов шаг свивки определяют по наружному слою
прядей. Стальные канаты заменяют новыми, если обрыв проволок на длине
одного шага свивки превышает число, указанное в табл, 2.1.
Канат, конструкция которого не указана в табл. 2.1, бракуется также
исходя из данных таблицы по данным для каната, ближайшего по числу пря-
дей и числу проволок в сечении. Например, для каната конструкции 8Х 19 =
—- 152 проволоки с одним органическим сердечником ближайшим является
канат конструкции 6 х 19 = 114, а поэтому его данные (число обрывов на
одном шаге свивки) умножают на коэффициент 96 : 72 = 1,33, где 96 и 72 —
число проволок в наружных слоях прядей соответствующих канатов, кото-
рые берут нз ГОСТа или подсчитывают на канате.
Если канат имеет поверхностный изиос или коррозию, число обрывов
проволок на шаге свивки, как признак выбраковки, должно быть уменьшено
в соответствии с приведенными данными:
Число обрывов проволоки на
Уменьшение диаметра шаге свивки, % от норм,
проволоки, % указанных в табл. 2.1
10 85
15 75
20 70
25 60
30 и более 50
При износе или коррозии, достигающих 40 % и более первоначального
диаметра проволок, канат должен быть выбракован.
2.2.2. Блоки, полиспасты, барабаны
Для изменения направления движения канатов применяют желобчатые
блоки (рис. 2.5), изготовляемые литыми из стали или серого чугуна. Диаметр
блока в соответствии с нормами Госгортехнадзора определяется по формуле
£>бл—е<^к» (2'6)
где е — коэффициент, зависящий от режима работы и типа механизма [2] (е — 16-4-30);
dK — диаметр каната, мм.
24
Рис. 2.5. Крановые блоки
Рис. 2.6. Схемы блоков
Для стреловых кранов прн ручном приводе е — 16, машинном приводе
при легком режиме работы е = 16, среднем е = 18, тяжелом е = 20; для грузо-
подъемных машин остальных типов и машинном приводе е соответственно рав-
но 16, 20, 25 и 30; для грузовых лебедок с ручным приводом е— 12, машинном —
20.
Блоки устанавливают на осях, на подшипниках качеиня (рис. 2.5, а) или
скольжения (рис. 2.5, в). Оси закрепляются стопорными планками при помощи
болтов (вид А).
Профиль ручья блока (рис. 2.5, б) делают трапецеидальным, расширяющим-
ся для возможного бокового огклонения каната. Глубина ручья Л = (1,6-Ь2)б?к,
радиус дна ручья г = (0,54-ь0,7)</к, раствор ручья I — (2-ь2,5)а?к, угол раст-
вора 2р = 60°. Для повышения долговечности применяют блоки, армирован-
ные алюминием, резиной, пластмассой, что рез-
ко (почти в 2 раза) повышает срок службы ка-
ната.
Внутренний диаметр ступицы блока dx ра-
вен наружному диаметру подшипника, а внеш-
ний диаметр dz принимают в пределах (1,5-ь
В зависимости от назначения блоки подраз-
деляют на неподвижные (рнс. 2.6, а) и подвиж-
ные (рис. 2.6, б, в). Последние в процессе работы
перемещаются в пространстве. Неподвижные
блоки применяют для изменения направления
движения. Такой блок вращается на оси, за-
крепленной в неподвижных направляющих. Ес-
ли пренебречь трением, то тяговое усилие S на
канате соответствует весу поднимаемого груза
25
G, т. e. S =G. В действительности же в связи с наличием сил трения тяговое
усилие S всегда больше G. Величину S можно определить
S = G/W. (2.7)
где т)бл — коэффициент полезного действия (к.п.д. — отношение полезной работы к
затраченной) блока, учитывающий потери в опорах блока и потери от жесткос-
ти каната.
При использовании стального каната и блока с подшипниками качения
Лбл = 0,98, а с подшипниками скольжения г]бл - 0,944-0,96. Вместо к.п.д.
блока пользуются также коэффициентом сопротивления k = 1 / Т]бл, число-
вое значение которого k — 1,024-1,06.
Подвижные блоки дают выигрыш в силе или в скорости. При использова-
нии блоков, дающих выигрыш в силе (см. рис. 2.6, б), один конец каната за-
креплен в неподвижной точке, а к другому, огибающему блок, приложено тя-
говое усилие. Вес груза, подвешиваемого к оси блока, распределяется на обе
ветви гибкого органа. Таким образом, теоретически S — G/2, т. е. достига-
ется выигрыш в силе в 2 раза. Трение в подшипниках и жесткость каната уве-
личивают силу S и в действительности
S - - б/2т]бЛ,
где Пбл — к.п.д. подвижного блока.
Путь А, проходимый силой, равен удвоенному пути h, проходимому гру-
зом, т. е. li = 2й. Таким образом, получая выигрыш в силе, имеем проигрыш
в пути.
Подвижные блоки, дающие выигрыш в скорости (см. рис. 2.6, в), чаще
всего используют в гидро- и пневмоприводах. Один конец каната, огибающего
блок, закреплен в неподвижной точке, к другому подвешен груз. При этом тя-
говое усилие Р на штоке, приложенное к оси блока,
Р = G.4- S,
где S — натяжение каната; G — вес поднимаемого груза, т. е. проигрываем в
силе примерно в 2 раза. Зато получаем выигрыш в скорости, так как скорость
подъема груза цгр в 2 раза выше скорости подъема блока ибл (Ир — 2убл).
При расчете блоков прежде всего определяют усилие в канате S. Втулку бло-
ков на подшипниках скольжения рассчитывают на удельное давление q:
S6 г 1
Г, л
10G Zc 4
где Sq — нагрузка на один блок, Н;
Zc — длина ступицы, м;
d0 — диаметр оси блока, м;
106 — переводной коэффициент для перевода паскалей (Па) в мегапаскали (МПа);
[<?] — допускаемое удельное давление (сталь по бронзе [<?] = 50 МПа, сталь по чугуну
[<?] = 20 МПа).
Ось блока рассчитывают на изгиб, определяя возникающие в ней напря-
жения, МПа,
/Ии
0,1 — 106
где Ми — максимальный изгибающий момент, действующий на ось, Н-м;
W — момент сопротивления поперечного сечения оси блока, м3;
[ои] — допускаемое напряжение изгиба, МПа (для Ст5 joj — 160 МПа);
Sg Zo
Ми = —у2- ; U7-0,ldg,
где Sg — сила, действующая на ось, Н;
Zo — длина оси, м (см. рис. 2.5).
26
Подставляя значения /Ии и Ц7И в формулу для определения о1Р находим
диаметр оси блока, м,
. у/
° V 4,105(ои]
Полиспастом (рис. 2.7) называется система подвижных и неподвижных
блоков, соединенных гибкой связью (канатом), применяемая для выигрыша в
силе или скорости. В грузоподъемных машинах полиспасты используются для
выигрыша в силе. При этом уменьшается натяженне каната, а поэтому его
диаметр может быть выбран меньшим, так же как и диаметры блоков и бара-
банов. В полиспастах для выигрыша в силе свободный конец гибкого органа
сбегает с неподвижного или подвижного блока. К свободному концу каната
прикладывается тяговое усилие. В машинах этот конец навивается на барабан
Основная характеристика полиспаста — кратность in, т. е. отношение числа
ветвей каната (а1р), на которое распределяется вес поднимаемого груза, к
числу ветвей (дс), идущих к барабану подъемного механизма,
1ц — Д0. (2 8)
При этом наблюдается такая закономерность: если тяговый канат сбегает
с неподвижного блока, то кратность соответствует числу блоков пбл, т. е.
in = Лбл, а если с подвижного, то 1И =•- лбп 4- 1. На рис. 2.7, а изображен
полиспаст, у которого груз висит на шести ветвях, а к барабану идет одна
ветвь, т. е. шестикратный полиспаст (/„ =- 6/1 = 6) Скорость движения тя-
говой ветви каната ок, м/с, определяется по формуле
--1п ^гр ,
где угр — скорость подъема груза, м/с.
Зависимость между пройденным путем тяговой ветви каната I и высотой
подъема груза Н выражается равенством I = Hin.
Натяженне на одну ветвь каната, кН, составляет
Лп
где G — вес поднимаемого груза, или грузоподъемность механизма;
т]п — к.п.д. полиспаста, значение которого зависит от числа блоков пол в полиспасте
и к.п.д. одного блока цел-
Если канат сходит с подвижного блока, то т) „ определяется по формуле
(2.9)
(2- Ю)
(211)
Нп— ,
41 (1 —Цб л)
барс
дан
Рис. 2 7. Схемы полиспастов
27
Таблица 2.2
Типы и кратность полиспастов крановых механизмов
Характер навивки каната да барабан Тип полиспаста Кратность полиспаста при грузоподъемности, т
ДО 1 2 -6‘ 5- 10 15—20 30 — 40
Непосредственная навивка Через направляющий блок Сдвоенный Одинарный 2 1 -2 2 2-3 2 3—4 2—3 4—6 3—4
Если канат сходит с неподвижного блока, то при определении к.п.д. по-
лиспаста rjn необходимо учитывать к.п.д. этого блока rj6a:
_ 0—'П^)‘Пбл
*п (I —'Пбл)
(2.12)
Прн небольшой кратности (i„^ 4) к.п.д. можно определить прибли-
женно как произведение к.п.д. всех блоков, получая заниженное значение к.п.д.
полиспаста. В этом случае rj п находится по формуле
Пп = »1блЛ, (2.13)
где ПбЛ — число блоков.
Если при подъеме груза применяется одновременно несколько полиспастов
(например, на путеукладочных кранах), то натджение каната определяется
по формуле
S=G/(an 1]п)> (2-14)
где ап — число полиспастов.
Полиспасты могут быть одинарными (см. рис. 2.7, а) и сдвоенными (рис.
2.7, б, в). Сдвоенные представляют собой два одинарных полиспаста, работаю-
щих параллельно. В них исключено скручивание канатов, идущих к крюковой
подвеске, которое наблюдается в одинарных полиспастах. Поэтому сдвоенные
полиспасты нашли широкое применение в механизмах подъема кранов. Верх-
ний блок 1 (см. рис. 2.7, в) называется уравнительным. Он служит для вырав-
нивания правой и левой ветвей каната в случае неравномерного вытягивания
их. Кратность сдвоенного полиспаста определяют также по формуле (2.8).
Следовательно, полиспаст, изображенный на рнс. 2.7, б, имеет in = 8/2 = 4,
т. е. это четырехкратный сдвоенный полиспаст, а у полиспаста, изображенного
на рис. 2.7, в, in — 4/2 — 2, т. е. это двукратный сдвоенный полиспаст.
Как у простого, так и у сдвоенного полиспаста канат может навиваться Не-
посредственно на барабан или через обводной блок. Тип и кратность полиспаста
(табл. 2.2) зависят от грузоподъемности и схемы навивки каната на барабан
(непосредственно илн через направляющий блок).
Натяжение канатов в одной ветви при сдвоенном полиспасте определяет-
ся аналогично одинарному (2.10), но считают, что на каждый полиспаст дей-
ствует половина нагрузки:
5 = О/2/ит)п, (2.15)
где /п — кратность полиспаста;
т]п — к. п.д. одинарного полиспаста.
После подстановки т]п [см. формулы (2.11) й (2.12)1 в (2.15) имеем:
С G 1—W .
б____1—W
2 G-ni11) w
(2.16)
28
Пример 1. Подобрать стальной проволочный канат для механизма подъема груза
массой Q = 10 т (весом G — 10 Q = 100 кН). Груз подвешен при помощи полиспаста.
Канат предназначен для крана с непосредственной намоткой с полиспаста на барабан.
Режим работы средний.
По табл. 2.2 выбираем сдвоенный полиспаст кратностью гп = 2 (см. рис. 2.7, s).
Принимаем блоки на подшипниках качения (»}бл = 0,98). По формуле (2.16) определяем
наибольшее натяженне на одну ветвь
9___1—Т)бЛ
каната Н,
100 000 1—0,98 _
= 25 250
2
По формуле (2.4) находим разрывное усилие для каната
5Раз = Sn = 25 250 • 5,5 = 138 875 Н,
где п — запас прочности (для среднего режима п = 5,5).
По ГОСТ 2688—80 (см. приложение 2, с. 431) выбираем канат грузовой (Г) типа ЛК-Р
с линейным касанием проволок. Диаметр каната dK — 16,5 мм. Разрывное усилие Spas —
= 139 000 Н (ближайшее к расчетному 138 875 Н). Маркировочная группа 1568 МПа, из
проволоки марки I, без покрытия, левой свивки (Л), раскручивающийся (Р). Условное
обозначение каната по ГОСТ 2688—80: канат 16.5-Г-1-Л-О-Р-1568 (160) ГОСТ 2688—80
(см. приложение 2, с. 431). Фактический запас прочности каната
Пф =
раз
<$
139 000
25 250
= 5,504 >nU,5.
Наименьший диаметр блока определяем по формуле (2.6)
Дбл — — 25 • 16,5 =412 мм,
где е ~ 25 для среднего режима различных грузоподъемных механизмов.
Принимаем 2>бл — 400 мм.
Барабаны, на которые в грузоподъемных механизмах навивают канаты,
обычно представляют собой цилиндры с винтовой нарезкой (рис. 2.8, а) или с
гладкой поверхностью (рис. 2.8, б). Первые используют для однослойной на-
вивки, вторые — для навивки в несколько слоев.
Конструкция крепления каната иа барабане предусматривает использо-
вание сил трения. В ряде конструкций конец каиата, пропущенный через от-
верстие в стейке барабана, закрепляют плаикой и прижимают винтами (рис.
2.8, б). Такое крепление называется планочным. Другой вид крепления — кли-
Рис. 2.8. Барабаны
29
новой — несколько сложнее — канат, изогнутый петлей, входит в конусное
отверстие в стенке барабана (рис. 2.8, г), внутрь петли вставляется клин.
Такое устройство дешевле первого.
Наиболее простым и дешевым является крепление посредством верхних
прижимных планок (рнс. 2 8, д). Однако при этом требуются три дополнитель-
ных витка каната на барабане. Для увеличения сцепления иа танках проре-
зают закругленные или треугольные канавки.
Винтовые канавки, нарезанные на поверхности барабана, увеличивают
поверхность соприкосновения и уменьшают напряжение смятия и износ ка-
ната, благодаря чему увеличивается его срок службы. Размеры канавок (см.
рнс. 2.8, а) выбирают по нормам в зависимости от диаметра каната dJt. Глубина
канавкн 0,3dK, радиус г = (0,6~-0,7)dK, шаг Z — dI; + (2—3) мм.
Диаметр барабана jD6, так же как и диаметр блока, выбирают по нормам
Госгортехнадзора по формуле (2.6). Однако надо учитывать, что при проходе
через блок канат претерпевает двойной изгиб (сначала изгибается, а потом
выпрямляется), а при набегании на барабан канат только изгибается, поэтому
для увеличения долговечности каната диаметр блока берут больше, чем диа-
метр барабана. Рабочая длина барабана должна быть такой, чтобы при иижнем
положении грузозахватного приспособления на барабане оставалось навитым
не менее 1,5—2 витков, не считая тех, которые находятся под зажимным уст-
ройством. Канатоемкость барабана £(;, м, вычисляют по формуле
Ьк=Я*п+(1,5-г 2) лОб, (2.17)
где Н — максимальная высота подъема груза, м;
— кратность полиспаста.
При сдвоенном полиспасте канатоемкость м,
I (2.17а)
Определение параметров барабана с нарезкой начинают с подсчета числа
рабочих витков Zp каната на одной половине барабана:
(2.18)
(2.19)
(2.20)
Р Л (Рб+^к)
Полное число витков каната на барабане составит
Z = Zp -J- zo,
где Zo — число разгружающих витков (Zo = 2-?3).
Длина части барабана с нарезкой £пар, мм, составит
^-нар =2/,
где t— шаг нарезки, мм [f == dK + (2—3)1.
При барабанах с винтовой нарезкой чаще используют сдвоенные полис-
пасты. В этом случае на барабан навивают две ветви каната, а нарезку делают
с одной стороны левую, а с другой — правую. Общая длина нарезкн на таком
барабане составляет
^нар~22/. (2.21)
Полная длина барабана, мм, при одинарном полиспасте
^б=^нарЧ" ^1 + ^2» (2.22)
при сдвоенном полиспасте
£б~Ьнар4-2/1-}-/2. (2.23)
Значения иеиарезанных частей /ь /2 (см. рис. 2.8, а) обычно принимают
/1 = 3/, /2 - (2-?3)<Л-.
30
При многослойной навивке (см. рис. 2.8, б) длина каната, навиваемого
на барабан (каиатоем кость барабана), определяется по формуле
LK — £>3 + ... 4- Dn) rcZ^ , (2.24)
где Dt, D2, Ds, .... On — диаметры окружностей, измеренные по центрам канатов соот-
ветственно для 1, 2, 3, n-го слоев навивки на барабан;
= с?к> £^2—O(5-|-3dK, Dst=jp$-\- 5dK,..., Dn — D б + (2п—1) t/K;
Z' — число рабочих витков в одном слое.
Преобразуя, получим
LK = «Zp(D6+dK«c). (2-25)
откуда число рабочих витков в одном слое
Z =---------—--------
р л (D6 + + )
где LK — длина каната, определяемая по формуле (2.17), м;
rfK — диаметр каната, м;
Dq — диаметр барабана, м;
пс — число слоев.
Барабаны, так же как и блоки, изготовляют литыми из серого чугуна или
из стали, а иногда сварными из листовой стали. Стенки барабана испытывают
сложное напряжение. Однако основное напряжение — сжатие.
Величина напряжения сжатия осж, МПа, определяется по формуле
$
асж = " /6-106 С[а1сж’ (2’26)
где [а]сЖ — допускаемое напряжение сжатия ([а]Сж = 70 4-90 МПа для чугунных и
Меж = 100 4-120 МПа для стальных барабанов);
S — максимальное натяжение каната, Н;
/ — шаг нарезки, м;
5 — минимальная толщина стенки, м;
Ю6 — для перевода Па в МПа.
Из формулы (2.26) находим толщину стенок барабана, м,
^7йСЖ-10. ' <2-27>
Для литых барабанов исходя из технологических условий изготовления 6
проверяется по формуле
6 > 0,020б + (6 -г 10) мм, * (2.28)
где Dq — диаметр барабана, мм.
Для чугунных литых барабанов толщина стенкн должна быть не менее
10 мм.
Пример 2. Определить параметры барабана для механизма, рассмотренного в при-
мере 1. Вес поднимаемого груза О ~ 100 кН, полиспаст, сдвоенный кратностью, гп = 2,
усилие в канате S = 25,25 кН = 25250 Н, выбранный канат имеет диаметр dK = 16,5 мм.
Высота подъема груза Н = 15 м.
Для среднего режима некрановых механизмов принимаем е = 25.
Определяем диаметр барабана по формуле (2.6)
Dq = е dK = 25 16,5 — 412,5 мм.
Принимаем Dg ~ 400 мм, литой чугунный с канавками. Определяем шаг нарезки
t ~ dK + (2-?3) мм = 16,5 + 3 ~ 19,5 мм.
Принимаем t — 20 мм — 0,02 м. Канатоемкость барабана вычисляем по формуле
L'K = 2Lk = 2 [/Дп+ (1,54-2) nD6]=2 [15-2 + 2-3,14-0,4] = 65,02 м.
31
Определяем число рабочих витков на одной половине барабана по (2.18)
р 2л (D6 + rfK) 2-3,14 (0,4 + 0,0165)
Принимая число разгружающих витков Zo = 3,14, получаем полное число на одной
половине барабана Z = Zp + Zo = 24,86 + 3,14 = 28 витков.
Выбираем крепление каната на барабане прижимными планками (см. рис. 2.8, д').
Длина нарезной части барабана определяется по (2.21) I
I-нар—2ZZ = 2-28-20 —1120 мм = 1,12'м.
Для подсчета полной длины барабана по формуле (2.23)
Lq :=i-nap + 2Z1-|-Z2
необходимо знать
Zi — 3Z — 3 • 20 = 60 мм; Z2 = 2 dK — 2 • 16,5 _ 33 мм.
Принимаем Z2 = 35 мм. Тогда
L6 = 1120 + 120 + 35 = 1275 мм = 1,275 м.
Находим толщину стенки барабана при [о]сж = 80 МПа — 80 • 10е Па
о S 25 250
-----------—------------—Q 0157 м=1,57 см.
t [Дсж-10е , 0,02-80-10г>
Принимаем б — 1,6 см = 16 мм.
Проверяем толщину стенок из технологических условий:
6 > 0,02 + (64-Ю) мм = 0,02 400 + (6 4- 10) = 14 4-18 мм.
Окончательно принимаем толщину стенки 6=18 мм.
2.2.3. Грузозахватные устройства
Для захвата груза предназначены грузозахватные приспособления раз-
личных конструкций: крюки, скобы, петли, клещи, специальные захваты,
ковшн, грейферы, электромагниты. Подъемный механизм, служащий для
подъема и переноса различных грузов, оборудуют одним из универсальных
грузозахватных приспособлений (крюк илн скоба) н вспомогательными при-
способлениями (стропы, клещи, траверсы, магнит и др.).
Для транспортирования определенных видов грузов, одинаковых по габа-
ритам, массе, физическим свойствам, подъемный механизм оснащают специ-
альным грузозахватным приспособлением. Например, у кранов для укладки
звеньев путевой решетки имеется траверса.
К конструкциям грузозахватных устройств предъявляют следующие тре-
бования: надежность в работе (безопасность людей, сохранность грузов), не-
большая масса самого устройства, малое участие рабочего в процессе захвата
и снятия груза, простота и низкая стоимость конструкции.
Из всех грузозахватных приспособлений наибольшее распространение
получили крюки. Их размеры и форма, а также требования, предъявляемые к
качеству изготовления, стандартизованы. По форме крюки подразделяют на
однорогие (рис. 2.9) и двурогие. Изготовляют крюки ковкой или штамповкой
из стали 20. Применение высокоуглеродистой стали и чугуна недопустимо нз-за
их хрупкости, что может явиться причиной внезапного излома. После ковки
крюки* подвергают отжигу для снятия внутренних напряжений. Для кранов
с большой грузоподъемностью применяют пластинчатые крюки, изготовленные
из отдельных пластин.
Крюк крепят к канату непосредственно (как правило, на ручных меха-
низмах) илн при помощи, крюковых обойм с подвеской груза на нескольких
ветвях. Обойма состоит из двух стальных пластин 4, в нижней части которых
32
установлена траверса 2. Че-
рез отверстие в последней
проходит хвостовик крюка /.
На него навинчена гайка 3,
которая всегда шплинтуется.
В средней части обоймы на
оси 5 с подшипниками 10,
закрытых крышками 6, разме-
щен блок 7, огибаемый грузо-
подъемным канатом. Для об-
легчения поворота крюка вок-
руг своей осн между гайкой 3
и траверсой 2 при грузоподъ-
емности более 3 т устанавли-
вают опорный подшипник 11.
Если кратность полиспаста
нечетная, то обойма в верх-
ней части имеет ось 9, к кото-
рой крепится конец каната 8.
Крюк проверяют на проч-
ность в двух местах: в опас-
ном сечении I — I изогнутой
части и в хвостовике. Сече-
ние I — 1 рассчитывают на
изгиб и растяжение, а хвосто-
вик— только на растяжение в
части, где выполнена нарезка.
Расчетная нагрузка 6,
кН, равна максимальному ве-
су поднимаемого груза (G —
= 10Q, где Q — грузоподъ-
емность, т).
Для захвата штучных грузов (ящики, бочки, рельсы и т. п.) применяют
клещи рычажной системы.
На рис. 2.10, а показаны клещевые захваты для транспортирования рель-
сов, а на рис. 12.10, б — для одиночных шпал.
Для подъема малогабаритных чугунных и стальных грузов (например,
рельсовые скрепления) служат подъемные электромагниты (рис. 2.11). Большей
частью они имеют цилиндрическую форму. Электромагнит состоит из стального
корпуса 3, внутри которого помещены катушки 4, защищенные снизу от по-
вреждения листом 5 из немагнитного материала (латунь нли высокомарганцо-
вистая сталь). Постоянный ток для катушек подается от источника по кабелю
1. Электромагнит, подвешенный к крюку подъемного механизма при помощи
цепей 2, опускают на стальной или чугунный груз. Затем включают постоянный
ток, груз притягивается магнитом и переносится грузоподъемным механизмом
к месту разгрузки. После этого ток отключают и груз освобождается.
При транспортировании рельсовых звеньев используют цепиые стропы
с захватами за подошву рельсов и траверсы различных конструкций, захва-
тывающие рельсы за подошву нли головку (рис. 2.12).
Один элекромагиит может поднять стальную болванку массой до 6 т, или
200 кг чугунных чушек, или 80 кг стальной стружкн. Таким образом, грузо-
подъемность электромагнитов при работе с кусковыми грузами резко снижается.
Другим недостатком электромагнитных подъемников является большой вес
самих магнитов, что уменьшает грузоподъемность механизмов.
2 Зак. 47
33
Рис. 2.10. Клещевые захваты
Грейферы служат для перегрузки сыпучих грузов. Конструктивно оии
выполняются одно- и двухканатными. Кроме того, бывают моторные и гидрав-
лические грейферы.
Наиболее распространены двухканатные грейферы (рис. 2.13, а), состоящие
из двух створок (челюстей) /, шарнирно соединенных тягами с головкой 6.
Внутренние грани ковша грейфера соединены траверсой 7. Канат 4, закреплен-
ный на головке 6, наматывается на барабан 3 и служит для подъема всего грей-
фера. Другой канат 5, называемый замыкающим, крепится к траверсе 7 и
наматывается на барабан 2. Для выигрыша в силе замыкающий канат вклю-
чается в систему полиспаста. При ослаблении замыкающего каната 5 челюсти
раскрываются, а грейфер удерживается канатом 4. Для захвата сыпучего
материала грейфер опускают на него. После этого замыкающий канат навива-
ется иа барабан и натягивается, что заставляет челюсти закрываться (рис.
2J3, б). Подъемный канат 4 в это время не натянут. После полного замыкания
челюстей начинается иамотка на барабан каната 4 и грейфер поднимается
(рис. 2.13, в). Для разгрузки грейфера (рис. 2.13, г) ослабляют замыкающий
канат.
У моторных грейферов челюсти закрываются приводом от электродвига-
теля. В последнее время все шире используются гидравлические грейферы, в
которых для закрытия челюстей предусмотрены гидроцилиндры.
Ко всем грузозахватным устройствам предъявляются серьезные требова-
ния. Параметры крюков, скоб и других устройств тестированы. Работать мож-
но только испытанными грузозахватными приспособлениями, имеющими со-
Рнс. 2.12. Подъемный электромагнит
34
Рис. 2.13. Двухканатный грейфер н схема его работы
г)
ответствующее клеймо или бирку, содержащие сведения о предшествующем
осмотре, и снабженными надписями о грузоподъемности.
Испытание и осмотр всех грузозахватных приспособлений в процессе экс-
плуатации производятся специально выделенным работником в сроки, уста-
новленные «Правилами устройства н безотказной эксплуатации грузоподъем-
ных кранов», но не реже следующих сроков: траверсы и коромысла — через
6 месяцев; клещи, другие захваты — через один месяц; стропы — через каж-
дые 10 дней. Кроме того, их обязаны ежедневно осматривать стропальщик нли
заиепщик совместно с крановщиком. При этом обязательно пользование лишь
исправными приспособлениями с непросроченными сроками испытаний, имею-
щими соответствующее клеймо илн бирку.
Грузоподъемность захватных приспособлений должна соответствовать
массе перерабатываемых грузов.
Перед подъемом груза необходимо убедиться, что захваты траверсы или
стропы прочно держат груз н не могут с него соскользнуть, что на грузе нет
людей, незакрепленного инструмента, деталей и пр. После этого по сигналу
стропальщика илн зацепщика крановшик поднимает груз. Снятие грузозахват-
ных приспособлений допускается лишь после опускания груза и надежной его
укладки.
2.2.4. Тормозные устройства
На грузоподъемных машинах устанавливают тормозные устройства для
остановки поднимаемого или опускаемого груза, удержания его на заданной
высоте, регулирования скорости опускания, прекращения поступательного
или вращательного движения. Все тормозные устройства можно разделить на
две группы: остановы и тормоза. Первые предназначены для остановки и
удержания поднятого груза на заданной высоте. По принципу действия они
подразделяются на храповые и фрикционные.
Храповые остановы состоят нз храпового колеса (храповика), размещае-
мого на приводном валу подъемного механизма, и собачки, качающейся на
неподвижной оси. Форма их подбирается так, чтобы собачка при подъеме груза
свободно скользила по храповому колесу, а при опускании упиралась в зуб
храповика, застопоривая механизм. Фрикционные остановы работают по
принципу использования сил трения между вращающимися и невращающимися
элементами.
2*
35
По своему назначению тормоза подразделяют на стопорные, спускные и
комбинированные. Стопорные служат для остановки и удержания груза на
весу в конце подъема или опускания, а спускные — для регулирования ско-
рости опускания груза. Комбинированные тормоза выполняют роль стопорных
и спускных и обеспечивают остановку в любой точке подъема (опускания),
поворота и передвижения, а также регулируют скорости.
Конструктивно тормоза подразделяют на колодочные, ленточные, диско-
вые; по принципу действия — иа управляемые и автоматические. В управляе-
мых замыкание и размыкание производятся нажатием на педаль или тормозной
рычаг. Автоматические тормоза действуют независимо от обслуживающего пер-
сонала и используются в механизмах подъема груза. Они замыкаются от дей-
ствия поднятого груза (грузоупорные тормоза) или при превышении скорости
движения груза (центробежные тормоза).
Управляемые тормоза бывают двух типов: нормально замкнутые (закры-
тые) и нормально разомкнутые (открытые). Первые постоянно затянуты усилием
пружины или весом специального груза. Размыкает их оператор вручную или
при помощи вспомогательных устройств — электромагнитов, гидравлических
и пневматических толкателей. Применяются закрытые тормоза преимущест-
венно в механизмах подъема с машинным приводом. Открытые тормоза замы-
каются оператором, когда необходимо остановить механизм. Устанавливают
их в механизмах передвижения и вращения кранов.
Работа любого тормоза, так же как и фрикционного останова, основана на
использовании силы трения, возникающей между вращающимся и прижимае-
мым к нему невращающимся элементами. Вращающимися элементами являются
тормозной шкив, конус или диски, укрепляемые на тормозном валу, а невра-
щающимнся — колодки, ленты, диски. Для увеличения силы трения тормозные
элементы облицовывают фрикционными материалами (асбестовая леита и др.).
Тормозные шкивы изготовляют из чугуна илн стали. Тормоза устанавливают
обычно на первом приводном валу машины, где действует наименьший кру-
тящий момент. Благодаря этому габариты тормоза могут быть меньшими.
Исходной величиной при расчете тормоза является максимальный кру-
тящий момент Л4Кр, который может возникнуть на приводном валу. По величине
Мкр находят расчетный момент тормоза Л'/т, Н ♦ м (кН • м):
= Мкр, (2.29)
где Ат — коэффициент запаса торможения, обеспечивающий надежность работы тормоза
(для легкого режима работы йт = 1,5; для среднего — 1,75; для тяжелого —
2,0; для весьма тяжелого — 2,5).
Колодочные тормоза. Торможение механизма колодочным тормозом про-
исходит в результате создания силы трения между тормозным шкивом, наса-
женным на вращающийся вал механизма, и тормозными колодками, соединен-
ными рычажной системой с неподвижной конструкцией. В зависимости от
количества колодок тормоза бывают одно- и двух колодочные.
Одно колодочные тормоза применяются только в механизмах
с ручным приводом. В гр узо подъемных машинах устанавливают преимущест-
венно двухколодочные тормоза, представляющие собой систему из двух одно-
колодочных.
Колодки могут быть соединены с тормозными рычагами жестко, составляя с
ним одно целое, или шарнирно. Больше распространено шарнирное соединение,
так как при жестком закреплении колодки изнашиваются неравномерно.
Замыкающая сила в колодочных тормозах создается весом специального гру-
за или усилием сжатия пружины, а поэтому тормоза могут быть соответственно
с грузовым или пружинным замыканием. В тормозах с пружинным замыка-
нием для размыкания пользуются короткоходовым магнитом или электро-
гидравлическим толкателем.
36
5
Рис. 2.14. Схема двухколодочного тормоза
с грузовым замыканием
Двухколодочиые тор-
моза с грузовым замы-
канием (рис. 2.14). Замыкание
такого тормоза осуществляется под
действием веса специального груза
Сгр. Для растормаживания катушку
электромагнита подключают к источ-
нику тока, в результате чего сердеч-
ник магнита с силой Рм втянется и
поднимет вверх рычаг 7 с грузом.
При этом тяга 4, поднимаясь вверх,
повернет треугольную косыику 3 вок-
руг точки О и через тягу 2 повернет
влево тормозной рычаг /. Вместе с
ним переместится левая колодка 9 до
упора в винт 10. После этого косынка 3 начнет поворачиваться вокруг точ-
ки Л и тормозной рычаг 6 вместе с правой колодкой будет отходить вправо
до упора в винт 5. Таким образом произойдет растормаживание. Треугольная
косынка поворачивается мгновенно, и колодки отходят практически одновре-
менно.
При замыкании тормоза все операции происходят в обратном порядке:
рычаг 7 опускается, увлекая за собой тягу 4, которая поворачивает косынку
3, прижимая колодки тормозных рычагов к шкнву 8.
Для остановки вращения вала тормоз должен создать тормозной момент,
величина которого больше величины крутящего момента на тормозном валу.
Значение тормозного момента /И?, Н-м, на любом валу привода можно найти
по формуле
/И' — Мб г]//, (2.30)
где /Иб «= Sj — крутящий момент на валу барабана, Н-м;
Si — окружное усилие на барабане (натяжение каната), Н;
Об — дийметр барабана, м;
г — передаточное число передачи от вала, иа котором установлен
тормоз, к валу барабана;
г| — к.п.д. передачи (поставлен в числитель, так как трение способствует
торможению).
Если тормоз установлен на первом валу передачи, что обычно и делается, то
тормозной момент М.? равен крутящему моменту двигателя Мкр, Н-м, ко-
торый можно найти по формуле
N д
Мкр = 9550---, (2.31)
Нд
где — мощность двигателя, кВт;
пя — частота вращения тормозного вала, равная частоте вращения двигателя, об/мин.
Для надежности торможения расчетный тормозной момент берут с за-
пасом
МТ = АТ MT~/гт 8\ —~ , (2.32)
где — коэффициент запаса, выбираемый в зависимости от режима работы [см. формулу
(2.29)].
Для достижения тормозного момента Мт должно быть создано расчетное
тормозное усилие PVACt Н, на поверхности тормозного шкива. Тогда тормоз-
ной момент Л4Т, Н-м,
Мт = Рра«-^-, (2.33)
37
где Z)T — диаметр тормозного шкива, м, который предварительно можно выбрать в зави-
симости от заданного тормозного момента, определяемого по формуле (2.32).
Предварительно От выбирают в зависимости от величины Л4Т.
Мт, Н м ... . 20 70—160 250—500 1000 2000
От, мм.......... 100 200 300 400 500
Усилие Ррас представляет собой силу треиня колодок о шкив. Каждая ко-
лодка прижимается к шкиву силой нормального давления N (N = = (V2)-
Прн этом на поверхности тормозного шкива двухколодочного тормоза возникает
сила трения FT:
F? = Ni u + N& = 2Ур,
где р — коэффициент трения колодки по шкиву (сталь по стали 0,15—0,18 без смазки,
0,1*7-0,12 прн малой смазке).
Для повышения эффективности тормозов увеличивают коэффициент тре-
ния между колодками и шкивом путем армирования колодок фрикционным
материалом, имеющим повышенный р (вальцованная и тормозная асбестовая
ленты, пластмасса). Значения р в этом случае значительно выше. Так, если
используется сталь и тормозная асбестовая лента — 0,35, вальцованная лен-
та— 0,42.
Таким образом,
Ppac = FT-2Wp, (2.34)
откуда можно найти силу N.
Для реализации силы N к концам тормозных рычагов 1 и 6 должна быть
приложена замыкающая сила S, которая определяется из уравнения момен-
тов относительно оси Ох:
Составляя уравнение моментов относительно точки О, можно найти уси-
лие Т, при котором на концы рычагов будут действовать силы S и, следова-
тельно, колодкн прижмутся к шкиву с силой (V:
а b а
T = S — ------, (2.35)
где о, Ъ, щ, — плечи рычагов (см. рис. 2.14).
Вес тормозного груза Grp находится из уравнения моментов всех сил от-
носительно шарнира закрепления рычага с грузом (точка О3):
Grp^T-y*. (2.36)
Нормальное состояние рассматриваемого тормоза закрытое (заторможен
ное). Растормаживают тормоз электромагнитом. Тяговое усилие магнита Рм
можно определить из условия равенства моментов
ОГР / = С, (2.37)
откуда
Рм = Огр~-— , (2.38)
п
где I и — плечи действия сил соответственно 0гр и Рм.
Электромагнит подбирают по величине растормаживающего усилия по
таблицам. Проверку размеров трущихся поверхностей тормозных колодок
производят на допускаемое удельное давление р (отношение силы нажатия
N к площади колодки FK, соприкасающейся со шкивом), и на допустимую
.38
удельную мощность трения [А ] = [pv] (произведение удельного давления
на скорость вращения поверхности шкива и):
_jy______________N
106 FK 10б л£>т Ва/360
А = pvke < [pv],
(2.39)
(2.40)
где N—сила нажатия колодки, Н;
£>т — диаметр шкива, м;
В — ширина колодки, м;
а — угол обхвата шкива колодкой (а = 60 4- 90°);
10е — перевод Паскалей (Па) в мегапаскали (МПа);
v — скорость на ободе шкива, м/с:
v — nDT n/QO;
п — частота вращения шкива, об/мин;
k(j — коэффициент безопасности, 1,1 —1,2;
[р] — допустимое давление, МПа, между шкивом н колодкой, зависящее от трущихся
материалов; при трении стали по стали [р] =0,24-0,4, стали по чугуну — 1 —
1,5, асбестовой ленты по стали —0,3—0,5, вальцованной ленты по стали
0,3—0,6.
Колодочные тормоза с пружинным замыканием.
Использование специального груза для замыкания тормоза ведет к увеличе-
нию времени срабатывания тормоза из-за значительной инерции замыкающего
груза, а также к повышению габаритов тормоза. В связи с этим широко при-
меняют тормоза с пружинным замыканием. Такой тормоз с короткоходовым
магнитом (рис. 2.15) состоит из тормозного шкива 9, двух тормозных колодок
8 и //, которые шарнирно крепятся на стойках 7 и 12. На стойке 12 закреплен
также электромагнит 13. На верхнем конце этой же стойки шарнирно укреп-
лен рычаг 14 с выступом 15. Рычаг 14 может притягиваться к магниту, повора-
чиваясь вокруг оси крепления 02. Обе стойки 7 и 12 соединены штоком /, на
котором имеются гайка 2, замыкающая пружина 3, вспомогательная пружина
5 и регулировочная гайка 6. На стойке 12 закреплена скоба 4. Тормоз нормаль-
но замкнутый. Замыкание производится пружиной <3, которая одним концом
упирается в скобу 4 и поворачивает стойку 12 вправо вокруг шарнира Ог, при-
жимая колодку 11 к шкиву. Другим концом пружина 3 давит на гайку 2,
перемещая шток влево, и, таким образом, поворачивает стойку 7 влево вокруг
оси О3, благодаря чему колодка 8
прижимается к шкиву.
Для размыкания тормоза вклю-
чается электромагнит 13, в результа-
те чего рычаг 14 притягивается к маг-
ниту. Выступ 15 нажимает на шток 1
и разводит концы стоек 7 и 12, в ре-
зультате колодки 8 yl 11 отходят от
шкива 9. Так как электромагнит рас-
положен только на левой стойке, он
создает эксцентричную нагрузку. Для
ограничения отхода левой колодки
предусмотрен упор 10 с регулировоч-
ным винтом. Отход правой стойки ре-
гулируется вспомогательной пружи-
ной 5 и гайкой 6.
На машинах используются длин-
Рнс. 2.15. Схема колодочного тормоза с
пружинным замыканием
но ходовые электромагниты постоян-
ного тока (типа КМП) и переменного
39
тока (KMT), короткоходовые постоянного тока (МП и ТКК), а также однофаз-
ные переменного тока (МО-Б).
Расчет тормоза начинают с определения расчетного тормозного момента
по формуле (2.32). Зная Л1Т, подбирают по таблицам тормоз. Из формулы (2.33)
определяют расчетное тормозное усилие Ррас, а силу нормального давления N
на одну колодку находят из условия торможения [см. формулу (2 34)]
2р.
или подставляя значение Ррас,
W = MT/£)Tp, (2.41)
где £>т — диаметр шкива, м;
р — коэффициент трения колодки о шкив.
Усилие Т, действующее вдоль штока 1, можно найти из уравнения момен-
тов всех сил, действующих на стойку, относительно оси поворота Tbt — Nb,
откуда
ь
P — (2.42)
где Ьг и b — плечи действия сил Т и N.
Усилие Т создается пружинами 3 и 5 и равно разности давлений Рг и Р2
соответственно основной и вспомогательной пружин:
Т^Рг-Р^. (2.43)
Реализуется это усилие электромагнитом при растормаживании.
Шкив и колодки проверяются на удельное давление [р] и мощность тре-
ния Гем. формулы (2.39) и (2.40)].
Колодочные тормоза с электрогидравлически-
ми толкателями. Особенность работы электромагнитов заключается в
том, что они быстро замыкают и размыкают тормоза, что необходимо в механиз-
мах подъема для быстрой и точной остановки груза на заданной высоте. Од-
нако для других механизмов, например механизмов передвижения, требуется
плавное торможение с возможностью регулирования тормозного момента. Этим
требованиям более отвечают колодочные тормоза с электрогидравлическими
толкателями (рис. 2.16, а). Для них характерны маиьшие габариты и масса,
чем с электромагнитами. Кроме того, тормоза с электрогидравлическими тол-
кателями потребляют меньше электроэнергии, благодаря чему они вытесняют
тормоза с электромагнитами.
Растормаживание в этих тормозах обеспечивается электрогидравлическим
толкателем. На корпусе 3 толкателя, заполненном маслом, размещен электро-
Рис. 2.16. Колодочный тормоз с гидротолкателем
40
Рис. 2.17. Схемы ленточных тормозов
двигатель 5, вал 4 которого телескопически соединен с горизонтальной крыль-
чаткой 1 центробежного насоса. Крыльчатка размещена внутри поршня 2, сое-
диненного тягами 6 с траверсой 7. Последняя крепится к треугольному рыча-
гу 8, шарнирно соединенному стойками 11, с тормозными колодками 9. Пружи-
на 10 постоянно отжимает рычаг 8 вииз, стремясь замкнуть тормоз.
Электродвигатели тормоза и привода механизма электрически соединены
между собой. Поэтому при включении последнего начинает работать двигатель
тормоза, приводя во вращение крыльчатку 1 центробежного насоса, перека-
чивающего цр каналам в поршне масло из его верхней полости в нижнюю. В
результате этого под поршнем создается избыточное давление (0,1 МПа), пор-
шень поднимается, перемещая вверх тяги 6, которые через траверсу 7 повора-
чивают вокруг шарнира О2 треугольный рычаг 8 (иа рис. 2 16, а штрихпунк-
тирное положение), преодолевая сопротивление пружины 10 и размыкая тор-
моз. При остановке электродвигателя 5 крыльчатка 1 перестает вращаться.
В результате создаваемое ею давление снижается до нуля и поршень под дей-
ствием пружины 10 и собственного веса начинает опускаться. При этом масло
перетекает в пространство над поршнем. Рычаг 8, поворачиваясь вниз, замы-
кает тормоз. Следовательно, замыкание тормоза осуществляется пружиной
10. Маркировка таких тормозов, например ТКТГ-200, обозначает: Т — тор-
моз; К — колодочный; Т — трехфазного тока (электродвигатель); Г — с элек-
трогидравлическим толкателем; 200 — диаметр тормозного шкива, мм. Под-
бирают тормоза с электрогидравлическим толкателем в зависимости от вели-
чины тормозного момента, вычисляемого по формуле (2.32) Гидротолкатели
бывают одно- и двухштоковые. Они развивают усилие 400—1600 Н.
Ленточные тормоза. Их применяют при больших тормозных моментах,
так как они легче и компактнее колодочных. Они состоят (рис. 2.17, а) из тор-
мозного шкива 1, охватывающей его ленты и рычага 6. В зависимости от на-
правления вращения шкива один конец ленты является набегающим 2, дру-
гой — сбегающим 4. При натяжении лента прижимается к шкиву, в результа-
41
те чего возникает сила треиия, останавливающая его вращение. Для повышения
коэффициента трения ленту облицовывают фрикционным материалом, напри-
мер асбестовой тормозной обкладкой 3. Ленточные тормоза бывают замкну-
тые и открытые. В замкнутых лента постоянно прижимается к шкиву, и тор-
моз находится в замкнутом состоянии. Натяжение тормоза осуществляется
грузом 7 или пружиной, растормаживание (подъем рычага 6 вверх) — вруч-
ную рычажной системой или электромагнитом. В открытых тормозах рычаг
6 поднят вверх, лента не прижимается к шкиву, который может свободно вра-
щаться. Для затормаживания необходимо нажать на рычаг и натянуть ленту.
Концы ленты прикреплены к шарнирам проушинами 8 и винтбвыми стяжками 5,
которые позволяют изменять зазор между шкивом и лентой при износе по-
следней.
Наибольшее распространение получили одноленточные тормоза. Они бы-
вают трех видов: простые, дифференциальные и сумми-
рующие. Наряду с этим выпускают и многоленточные тормоза. В простом
тормозе (рис. 2.17, б) один конец ленты набегающий, закреплен неподвижно,
другой сбегающий является подвижным. Его прикрепляют к тормозному
рычагу. Это — односторонний тормоз, так как вес груза G для затормажи-
вания соответствует только одному направлению вращения шкива. Такой тор-
моз используют в механизмах, не требующих двустороннего торможения,
например в механизмах подъема.
У дифференциального тормоза (рис. 2.17, в) оба конца ленты прикреплены
к рычагу по обе стороны от оси поворота. Момент, который должен быть создан
на рычаге при торможении, равен разности моментов, создаваемых силами
натяжения в набегающей 5наб и сбегающей Sc6 ветвях. Этот тормоз также
односторонний. Соотношение плеч рычагов в нем: а = 2,5-уЗ мм; b — 30-У50 мм.
Достоинство его — небольшое тормозное усилие G. Применяется чаще всего в
механизмах с ручным приводом.
В суммирующем тормозе (рис. 2.17, г) концы ленты прикреплены к тормоз-
ному рычагу с одной стороны от оси его поворота. Плечи d и а действия £ил
£наб и £сб относительно этой оси одинаковы. При перемене направления вра-
щения значение G не изменится. Следовательно, этот тормоз — двустороннего
действия. Используется он в механизмах, где необходимо двустороннее тор-
можение, например в механизмах поворота или передвижения.
Дисковые тормоза. Дисковые электромагнитные тормоза с пружинным
замыканием (рис. 2.18, а) состоят из неподвижных 1 и подвижных дисков 7,
вращающихся вместе с тормозным валом 6. Усилие У, необходимое для полу-
чения тормозного момента, создается пружиной 2. Размыкается тормоз тремя
электромагнитами 3, якоря 5 которых укреплены на крайнем тормозном диске
1. На противоположной стороне диска размещены фрикционные накладки 4.
Подвижные диски 7, выполненные из стали, не имеют фрикционных накладок.
Перспективными в грузоподъемных машинах являются дисково-колодоч-
ные тормоза, в которых тормозной диск 6 (рис. 2.18, б), установленный на
валу механизма, вращается между двумя тормозными рычагами 2 с колодками,
имеющими форму сегмента и расположенными одни против другого по обеим
сторонам диска. Колодки прижимаются к диску пружинами 5. Для размыка-
ния тормоза включается электромагнит 7, якорь которого, опускаясь, пово-
рачивает рычаг 3 и кулачок 4. Последний раздвигает тормозные рычаги 2,
отводя колодки от тормозного диска 6. Колодки соединены с цилиндрами 7,
движущимися в направляющих, укрепленных на раме 8 тормоза. Для устра-
нения перекосов цилиндров при повороте тормозных рычагов осуществлено
шарнирное соединение последних с цилиндрами. Такие тормоза меньше нагре-
ваются, так как у них больше теплоотдача.
42
Рис. 2.18. Дисковые тормоза
При эксплуатации тормозов необходимо следить за правильностью охвата
тормозного шкива колодками или лентой, зазор между шкивами и колодками
должен быть 0,25—0,5 мм для диаметра тормозного шкива £>т = 150—200 мм
и 0,25—1 мм — для £)т = 300 мм. Рабочие тормозные поверхности необходимо
содержать чистыми: на них не должно быть следов масла, грязи, не допуска-
ется также наличие выбоин. При образовании углублений и задиров свыше
0,5 мм шкивы необходимо обтачивать. Надежная и безаварийная работа
машины во многом зависит от состояния тормозных устройств.
2.2.5. Лебедки
Лебедки предназначены для подъема, опускания или перемещения грузов
и состоят из барабана, на который наматывается канат, зубчатой или червяч-
ной передачи, тормоза и привода. Лебедки бывают с ручным приводом (ста-
ционарные, напольные, настенные и переносные, применяемые при производ-
стве ремоитно-монтажиых работ) и машинным приводом, используемые как
самостоятельные механизмы и как составные части грузоподъемных машин —
механизмов подъема груза или стрелы, механизма передвижения тележки и др.
Лебедки с ручным приводом. Простейшей лебедкой такого типа явля-
ется ворот (рис. 2.19, а), в котором рукоятка и барабан укреплены на одном
валу. Подвешенный к канату груз натягивает его, в результате чего на
барабане создается грузовой момент Л!гр, Н*м,
Mrp = G£ = 10Q —,
(2 44)
где G — максимальный вес груза, Н;
Q — грузоподъемность, кг;
7? — радиус барабана, м (/? = Dq/2).
Грузовой момент уравновешивается моментом /Ир от усилия, прикладывае-
мого к рукоятке,
ЛГР = Pl, (2.45)
где Р — усилие рабочего, принимаемое при длительной работе до 150 Н, а при кратко-
временном (не более 5 мин) — 200 Н;
I — плечо рукоятки (обычно 0,25—0,35 м).
43
Рис. 2.19. Схемы лебедок с ручным
и машинным приводами
Так как
Мгр=Л1р т|, 7oGR—Plr\,
где ц — коэффициент полезного действия (q 0,95).
Отсюда можно найти максимальное значение веса G поднимаемого груза,
(2.46)
Р1
G =----Т|.
Р ’
Простой лебедкой можно поднимать небольшие грузы — массой 40—60 кг.
Для подъема более тяжелых грузов устанавливают редуктор и двигатель.
Основные параметры лебедки — тяговое усилие или грузоподъемность, каиа-
тоемкость (длина каната, наматываемого на барабан) и скорость наматывания
каната. Лебедки с ручным приводом выпускают грузоподъемностью 0,5—Ют
при канатоемкости 100—300 м.
Лебедки с машинным приводом (рис. 2.19, б). В качестве привода лебедок
большей частью используют электродвигатели, реже — двигатели внутренне-
го сгорания. Применяют в основном однобарабаниые лебедки с электрическим
приводом 1, барабаном 4, редуктором 3 и тормозом 2, смонтированными на общей
раме.
Для уменьшения натяжения в канате служит полиспаст 5.
В некоторых лебедках, например зубчато-фрикционных (рис. 2.19, в), ба-
рабан 5 соединен с двигателем 1 через систему открытых зубчатых 2 и фрик-
ционных 3 передач. Крутящий момент в них передается на барабан при трении
рабочих поверхностей фрикционных полумуфт. Для подъема груза необходимо
включить фрикционную муфту 3, а для опускания — ленточный тормоз 4.
Барабан 5 свободно установлен на оси 9 и может иметь незначительные
осевые перемещения. Для включения барабана рукояткой 8 поворачивают
гайку 7 по нарезной части оси. Гайка упирается в торец барабана и прибли-
жает его к конусу фрикциона 3; при возникновении сил трения на поверхностях
фрикциона барабан приходит во вращение. На весу груз удерживается тор-
мозом 4 при отключенном фрикционе. Длительное удержание груза обеспе-
чивается храповым остановом 6.
При установившемся режиме мощность двигателя лебедки кВт, опре-
деляется по формуле
Gyrp
= ,
1000л
где G — максимальный вес поднимаемого груза, включая вес грузозахватного устройства
Н (G = 10Q. Q — грузоподъемность, кг);
(2.47)
44
игр — скорость подъема груза, м/с;
т| — общий к.п.д. лебедки с полиспастом (р = 'Пт'Па'Пз*-т1г)г т е- учитывающий к.п д.
всех элементов лебедки — барабана T)i, зубчатых передач т]2, полиспаста т]3
и Др-).
Определив по формуле (2.47) мощность, по каталогу подбирают электро-
двигатель с соответствующей частотой вращения в 1 мин (лд) и находят пере-
даточное число передачи
/=лдМб,
где Пб — частота вращения барабана, об/мин;
п$ — 60ук/л£>6;
£>б — диаметр барабана, м;
ук — скорость движения каната, м/с, зависящая от кратности полиспаста Zn;
»к=^гр г'п;
игр — скорость движения груза, м/с.
Если кратность полиспаста 1П — 1, то скорость каната равна скорости
груза: 1»к = i»rp; при iu = 2, i»K =- 2сгр; при iп ~ 3, vK =- 3urp и т. д.
Величина статического момента /И0Тйб, Н-м, приложенного к барабану
от веса груза G, определяется по формуле
.. о D*
(2.48)
где S — тяговое усилие в канате, навиваемом иа барабан, Н.
Если используется полиспаст, то
S ~G/iц т]п>
где ia— кратность полиспаста, определяемая по формуле (2.8);
f|n — к.п.д. полиспаста, определяемый по формулам (2.11), (2.12), (2.13).
Приводя момент /Ист,б к валу двигателя, получим Л4СТ, Н • м,
,, Мст.б „ Dq
мст = ----= S —--------,
г11пер 2г 'Лпер
где i — передаточное число передачи лебедки от двигателя к барабану;
Ливр — к.п.д. передачи.
Пример 3. Определить параметры основных элементов лебедки (см. рис. 2.19, б)
Грузоподъемность лебедки Ют (вес груза G = 100 кН == 100 000 Н), высота подъе-
ма груза Н — 8 м, скорость подъема груза угр — 0,3 м/с; режим работы средний, ПВ ==
= 15 %.
1. Учитывая грузоподъемность, по табл 2.2 выбираем одинарный полиспаст с крат-
ностью ia — 4; блоки иа подшипниках качения (т|бл — 0,98) Тогда натяжение в ветви
каната, наматываемой на барабан, составит
G 100000
5=------- =---------= 27 115Н,
«п Оп 4-0,984
где т|п — к.п.д. полиспаста (т|п — = 0,984 = 0,922).
2. Для выбора по ГОСТу каната определяем величину разрывного усилия Spa8
(см. формулу (2.4)], учитывая, что коэффициент запаса прочности для механизмов с ма-
шинным приводом и средним режимом работы п = 5,5.
5раз = Sn = 27 115 . 5,5 =- 149 132 Н *= 149,132 кН
По ГОСТ 2688—80 (см. приложение 2, с 431) ближайшее значение Span для гру-
зового каната типа ЛК-Р (канат линейного касания ЛК с одинаковым диаметром проволок
в пряди) равно 167 000 Н (диаметр каната == 19,5 мм; число прядей в канате 6,
число проволок в пряди 19; масса 1 м смазанного каната 1,405 кг, маркировочная грчппа
1372 МПа проволока марки 1, без покрытия, левой (Л) односторонней (О) свивки, рас-
кручивающейся) Условное обозначение; канат 19.5-Г-1 Л-О-Р-1372 (140) ГОСТ 2688—80
3. Определяем параметры рабочих блоков и барабана Диаметры блоков и барабана
выбирают в зависимости от дваметра каната по формуле (2.6). Принимаем при среднем
45
режиме работы для грузовых лебедок е = 20:
Г>б = edK = 20 • 19,5 = 390,0 мм.
Окончательно принимаем Dq = 400 мм = 0,40 м.
4. Находим каиатоемкость барабана [см. формулу (2.17)]
Тк = Яхп + (1,5+2) = 8 • 4 + 2 - 3,14 • 0,40 = 34,512 м.
Определяем общее число витков каната на барабане
Дк 34,512
р л (£>б~Нк) 3,14 (0,40+0,0195)
Принимаем Z = 28. Учитывая небольшое число витков, можно осуществить навивку
в одни слой и выбрать барабан с винтовыми канавками. Тогда длину части барабана с
нарезкой определим по формуле (2.20):
Тнар = Zt — 28 • 22 = 616 мм = 0,616 м,
принимаем Тнар = 620 мм, где I—шаг нарезки, мм
[7 = dK + (2+3) мм = 19,5 + 2,5 = 22 мм = 0,022 м].
5. Определяем толщину стенок 6 барабана по формуле (2.28) при условии, что бара-
бан отлит из чугуна СЧ 15-32:
6 = 0,02Пб + (6+10) = 0,02 • 400 + 10 = 18 мм = 1,8 см.
6. Проверяем барабан на прочность по формуле (2.26):
S 27 115,0
°сж= —с----= 7-------77-------= 68,47 МПа + [<г]сж,
/6-10° 106-0,022-0,018
Гсг]С7« = 80,0 МПа (допускаемое напряжение сжатия). Принятая толщина 6 удовлетво-
ряет условиям прочности.
7. Подсчитываем частоту вращения барабана
60-1,2
------------------------------------— = 57,32 об/мин,
3,14-0,40
t>K-6o
«6 =--------
лРб
а скорость каната, навиваемого на барабан,
ук=ог in=0,3-4 = 1,2 м/с.
8. Определяем статическую мощность двигателя при подъеме номинального груза по
формуле (2.47):
„ Gyrp 100000-0,3
У = -----= -------------= 35,7 кВт,
1000т) 1000-0,84
где 1) = 0,84 — предварительно принятое значение к.п.д. механизма (1) = т|п'Пр'Пб; т1п =
= 0,922, найденное ранее к.п.д. полиспаста; тщ=0,97, к.п.д. барабана; т]р —
к.п.д. редуктора).
9, Подбираем поГОСТу (см. приложение 4, с. 432) электродвигатель типа MTF 412-6,
N = 40 кВт, частота вращения пд = 960 об/мин, с изоляцией класса Ft 4-го габарита,
исполнение 412, шестиполюсиого (6), умеренного климатического исполнения (У), 3-й
категории по ГОСТ 185—70. Условное обозначение MTF 412-6УЗ ГОСТ 185—70.
10. Для выбора редуктора определяем общее передаточное число механизма
ip—пд/пб=960/57,32= 16,74.
Из приложения 6 выбираем редуктор Ц2У-160— 111У2 (ГОСТ 20758—75), /р = 18,0.
11. По формуле (2.29) определяем тормозной момент:
где Ат — коэффициент запаса торможения, принимаемый по правилам Госгортехнадзора
(для среднего режима работы Ат = 1,75);
А4кр — статический крутящий момент при торможении:
.. GD6T] 100000-0,40-0,84
’ =-----------------= 262,5 Н - м;
ьр 2in /р 2-4-18
Mv = 1,75-262,5=459,37 Н-м.
46
По каталогу (см, приложение 5, с. 432) выбираем колодочный тормоз типа ТКГ-300
с тормозным моментом Л4Т = 800Н-М (80 кгс-м) (ТКТ-300-У-25М/220 ОСТ 24.290.08—
77).
12. Далее проводим прочностной проверочный расчет отдельных элементов меха-
низма: обоймы, крюка, редуктора и т. д.
2.3. СТРЕЛОВЫЕ И КОЗЛОВЫЕ КРАНЫ
2.3.1. Назначение, классификация и устройство
стреловых кранов
Стреловые краны предназначены для подъема и перемещения в ограничен-
ном пространстве груза, подвешиваемого к стреле, укрепленной на поворот-
ной части машины. Классифицируют их по назначению, возможности передви-
жения, типу приводов. По назначению краны подразделяют на портальные,
строительные, башенные, общего назначения и специальные (путеукладочные,
для установки пролетных строений мостов н др.).
Краны бывают стационарные и передвижные. Последние могут быть на
железнодорожном, гусеничном или пневмо колеси ом ходу В зависимости от
типа силовой установки краны бывают с двигателем внутреннего сгорания,
днзель-электрические, паровые.
По количеству приводов краны подразделяют на одномоторные, у которых
все механизмы работают от одного двигателя, и многомоторные, где каждый
механизм имеет индивидуальный двигатель, причем он может быть электри-
ческим или гидравлическим. Все краны имеют индексы, состоящие из бук-
венной и цифровой частей. Буквенная часть обозначает группу крана или
особенность его конструкции, а цифровая — грузоподъемность.
Для стреловых кранов, выпускаемых Минстройдормашем, введена индек-
сация (рис. 2.20), состоящая из двух букв КС (кран самоходный) и четырех
цифр. Первая цифра характеризует размерную группу (грузоподъемность в
соответствии с типоразмерными рядами); вторая — тип ходового устройства.
1 — гусеничное, 2 — гусеничное уширенное, 3 — пневмоколесное, 4 — на
Рис. 2.20. Индексация стреловых кранов
47
Рис. 2 21. Стреловой передвижной кран на железнодорожном ходу:
а — схема крана: б — график изменения параметров
спецшасси, 5 — автомобильное, 6 — тракторное, 7 — иа прицепе; третья
цифра определяет исполнение стрелового оборудования, а четвертая — поряд-
ковый номер модели. Затем снова следуют буквы, которыми обозначены очеред-
ная модернизация (А, Б, В) и климатическое исполнение (северное — ХЛ>
тропическое — Т, тропическое влажное — ТВ).
Например, КС 3361 А — кран самоходный, третьей размерной группы
(грузоподъемность Ют), пневмо колесный, с канатной подвеской, первый но-
мер модели, имевший первую модернизацию.
Независимо от типа конструктивная схема всех передвижных стреловых
кранов общего назначения принципиально одинакова. У каждого из них две
платформы, в том числе одна поворотная. Неповоротная платформа 8 (рис.
2.21, а) опирается на ходовую часть (на рисунке — железнодорожную), на
которой установлен механизм передвижения крана. На поворотной платформе
2 размещены противовес /, кабина 4, стрела 7 и механизмы: подъема груза 6,
подъема стрелы 5 и поворота самой платформы. Привод механизмов осуществля-
ется двигателем 3 через систему передач. У стационарных кранов стрелу и по-
воротную платформу монтируют на колоиие. Такие краны имеют только меха-
низмы подъема и поворота.
Механизм подъема на некоторых кранах установлен иа тележке, которая
может перемещаться вдоль стрелы, для чего предусмотрен еще механизм пере-
движения тележки.
Основными параметрами стреловых кранов являются грузоподъемность
Q, т или кг, высота подъема груза Н — расстояние между верхним и нижним
положениями крюка, вылет стрелы L — расстояние от оси поворота крана
до центра тяжести груза. Грузоподъемность крана обратно пропорциональ-
на вылету стрелы: чем больше вылет, тем меньше грузоподъемность, и наоборот.
Зависимость грузоподъемности, а также высоты подъема крюка от вылета
стрелы часто представляют в виде графика (рис. 2.21, б).
Сплошной линий / показана кривая грузоподъемности, а пунктирной 2—
кривая высоты подъема крюка. Такие графики позволяют по известному зна-
чению вылета стрелы L легко установить соответствующие ему значения Q и Н.
Например, при вылете стрелы крана 6 м из точки L — 6 надо восстано-
вить перпендикуляр до пересечения с кривой 1 для определения величины гру-
зоподъемности Q = 2 т и с кривой 2 —для определения высоты подъема крюка
Н -= 5,6 м Превышение грузоподъемности, соответствующей данному вылету
стрелы, может привести к потере устойчивости крана. Для увеличения по-
следней используют выносные опоры-аутригеры.
48
2.3.2. Стреловые краны на железнодорожном ходу
В путевом хозяйстве железнодорожные краны применяют на звеносбороч-
ных базах для разгрузки с подвижного состава элементов верхнего строения
пути (шпалы, скрепления, рельсы и т. п.), для раскладки материалов при
сборке новых звеньев, для погрузки элементов стрелочных переводов на по-
движной состав. Такие краны можно использовать при сборке стрелочных
переводов и укладке их в путь. На дистанциях пути н ПМС этими кранами,
оборудованными грейферами, также грузят и разгружают сыпучие материалы.
Грузоподъемность железнодорожных кранов (табл. 2.3), наиболее часто ис-
та блица 2.3
Технические характеристики кранов на железнодорожном ходу
Тип крана Длина стрелы, м Грузоподъ- емность, г Вылет стрелы, м Скорости Наиболь- шая высота подъема крюка, м Масса, т
подъема груза, м/с поворота, об/мин
КДЭ-163 20/15 16/3,2 18,5 26.8/8,9 2,0 19,0 53,5
КДЭ-161 20/15 16/4,2 14/5 26/8.8 2,0 19,0 53,1
КДЭ-151 20/15 15/20 15/5 26,5/17,6 2,60 19,0 54,5
КДВ-15П 18/14 15/13 18/4,5 30/15,4 2.90 18.0 50,0
МК-16 18/14 16/14 18/4,0 30,8/15,4 2,9 17,8 54,5
КДЭ-251 20/15 25/4,9 18/5,0 17,6/5,3 1,0 18,2 66,0
КДЭ-253 20/15 25/4,7 18/4,8 17,8/5,3 1,5 — 67,18
Примечание. В числителе приведены наибольшие, в знаменателе — наименьшие зна-
чения соответствующих параметров
пользуемых в путевом хозяйстве, колеблется в пределах 6—16 т при мини-
мальном вылете. Они бывают двух-, четырех- и шестиосные. Число осей за-
висит от грузоподъемности и веса крана. Нагрузка на каждую из них не должна
превышать допустимой, определяемой прочностью железнодорожного пути
Краны грузоподъемностью до Ют — двухосные, При работе они опираются
только на колеса. Краны грузоподъемностью 16—25 т — четырехосные (на
двух двухосных тележках), до 50 т — шестиосные (на двух трехосных тележ-
ках). При подъеме груза их устанавливают на выносные опоры (аутригеры),
что повышает устойчивость н при одинаковом вылете стрелы увеличивает грузо-
подъемность. В кранах небольшой грузоподъемности, работающих без вы-
носных опор, при подъеме груза необходимо выключить рессоры, так как при
вращении поворотной части крана изменяется изгиб рессор и возникают коле-
бания. С этой целью между рессорой и нижней полкой неповоротной рамы
вставляют чугунные бруски или устанавливают гидравлические толкатели.
На стреловых железнодорожных кранах установлены двигатели внутрен-
него сгорания или дизель-генераторные установки.
Для перевозки на дальние расстояния кран на железнодорожном ходу
включают в состав поезда. В связи с этим его ходовая часть должна отвечать
Правилам технической эксплуатации железных дорог СССР При передвиже-
нии крана в составе поезда привод к ведущим осям отключают, чтобы обеспе-
чить свободное вращение осей. Краны оборудуют сцепными (автосцепка) и
тормозными приборами.
49
2.3.3. Многомоторные стреловые краны
на железнодорожном ходу
В путевом хозяйстве нашли широкое применение многомоторные дизель-
электрические краны КДЭ-161, КДЭ-163, КДЭ-251, КДЭ-253. В каждой паре
этих кранов второй являемся модификацией первого (см. табл. 2.3). Все 4 типа
конструктивно унифицированы.
Основные технические характеристики кранов на железнодорожном ходу
приведены в табл. 2 3.
Рассмотрим кран КДЭ-161 (163). Такой кран (рис. 2.22) состоит из пово-
ротной платформы /, на которой размещено все оборудование: дизель 16 с
баком 2 для масла, радиатором 15 и аккумуляторной батареей 14\ генератор /7;
механизм поворота 19 с электродвигателем 18, механизм подъема стрелы 20
с двигателем 21\ механизм подъема груза, состоящий из барабанов 25, редук-
тора 24, колодочных тормозов 23 и электродвигателей 22. На поворотной плат-
форме также закреплена стрела 7 с крюком 8, грузовым и стреловым полиспаста-
ми и установлены пульт управления краном 6, сиденье 26, мотор-ганератор-
ная группа 3 электромагнита, панели управления 4 и контактная панель 5.
Поворотная рама опирается на ходовую раму 11, которая смонтирована на
двух тележках 13 Перемещается кран двумя механизмами передвижения,
каждый из которых состоит из электродвигателя 9 и осевого редуктора 10, пе-
редающего вращение ведущей колесной паре 12.
Схема запасовки грузового полиспаста кранов КДЭ-161 и КДЭ-163 со
стрелой 15 м представлена на рис. 2.23, а; со стрелой 20 м — и а рис. 2.23, 6.
Обойма 4 грузового крюка подвешена к оси подвижных блоков 3. Два конца
грузовых канатов огибают неподвижные блоки 2 и наматываются на грузовые
50
Рис. 2.23. Схемы запасовки канатов крана КДЭ-163
барабаны 1 и 5. В первом случае кратность полиспаста равна i = агр / аб —
= 6/2 = 3, во втором i = 4/2 = 2 (где агр — число ветвей каната, на
которых висит груз; — число ветвей, наматываемых на барабан).
При запасовке канатов для работы с грейфером 4 (рис. 2.23, в) подъемный
канат, закрепленный одним концом на грейфере, огибает один из неподвижных
блоков 2 стрелы и наматывается на барабан 5. Другой канат, служащий для
открытия и закрытия челюстей грейфера, огибает блоки полиспаста 3 грейфера
и через блоки 2 наматывается на барабан 1. Для запасовки канатов стрелоподъ-
емного полиспаста (рнс. 2.23, г) к стреле, на конце которой смонтирована не-
подвижная ось 4 с блоками полиспаста, крепится подвижная обойма 3 с бло-
ками стрелоподъемного полиспаста. Канат через блоки неподвижной обоймы
2 наматывается на барабан 1 стрелоподъемного механизма.
На новых разрабатываемых кранах КЖДЭ-16 и КЖДЭ-25 (кран железно-
дорожный дизель-электрический, Q = 16 и 25 т) улучшена конструкция стре-
лы, обеспечивается гидравлический вынос дополнительных опор (аутригеров),
установлены две скорости рабочего передвижения кранов, улучшены условия
работы операторов (обзорность, кондиционирование воздуха).
2.3.4. Механизмы стреловых многомоторных кранов
Рис. 2 24. Кинематическая схема
механизма подъема груза
Механизм подъема груза. Он представляет собой лебедку с полиспастом
Привод лебедки электрический (механический или гидравлический). Крат-
ность полиспаста механизма подъема груза выбирается по тем же рекоменда-
циям, что и для лебедок, т. е. для кранов грузоподъемностью 5 т используют
одинарный полиспаст с кратностью /п = 2; при Q = 54-10 т сдвоенный поли-
спаст с i п = 2; при Q= 15-4-30 т сдвоенный полиспаст с i л = 3. На кранах с
многомоторным приводом установлена электрическая лебедка, состоящая из
электродвигателя, муфты, тормоза, редуктора
и барабана, на который навивается грузовой
канат.
Повышению производительности кранов
большой грузоподъемности способствует обо-
рудование подъемной лебедки двумя электро-
двигателями: одним мощным, но с небольшой
скоростью — для подъема тяжеловесных гру-
зов; другим — небольшой мощности, но быст-
роходным для подъема и опускания крюка
без груза или с легким грузом.
На кранах, например, типа КДЭ-161 или
КДЭ-163, оборудованных грейферами, уста-
51
новлены два барабана (для подъема и замыкания грейфера), вращающиеся
как совместно, так и независимо один от другого. Барабаны приводятся
в движение от двух двигателей. Кинематическая схема механизма подъ-
ема груза представлена на рис. 2.24. Валы двигателей 2 муфтами 3 сое-
динены со сдвоенным редуктором 4. На выходных валах последнего установле-
ны барабаны /. Эта схема использована в кранах на железнодорожном ходу
КДЭ-161, КДЭ-163. Механизм подъема (рис. 2.25) этого крана, представляющий
собой две совмещенные лебедки, состоит из двух барабанов 16 и двух электро-
двигателей 2, которые муфтами 4 с упругими вкладышами 3 соединены с ре-
дукторами. При этом одна из полумуфт, насаженная на вал редуктора, одно-
временно является тормозным шкивом. Каждый двигатель может быть затор-
можен своим колодочным тормозом 9 с электрогидравлическим толкателем.
Лебедка смонтирована на раме 19. Внутри редуктор разъединен вертикальной
стенкой 15, которая является опорой валов зубчатых колес. Валы установлены
на подшипниках 5, 6, 7, 8, 13, 14 и смазываются маслом из общей ванны при
52
разбрызгивании работающими зубчатыми коле-
сами. Для предотвращения вытекания масла из
редуктора и попадания пыли применяются за-
кладные крышки 10 и манжеты 12, 18.
При работе лебедки вращение от электро-
двигателя 2 через муфту 4 передается на вход-
ной вал I редуктора и через зубчатую пару на
промежуточный вал II, а далее через зубчатую
пару на выходной вал III редуктора и при по-
мощи зубчатой муфты 17 на барабан 16. Бара-
баны 16 имеют канавки для каната. Ось барабана
Рис 2.26. Кинематическая схе-
ма стрелоподъемной лебедки
через подшипник 1 опирается с одной стороны на
стойку 20, укрепленную на раме, а с другой---на выходной вал III редуктора,
который имеет внутреннюю расточку под подшипник. Соединение выходного
вала редуктора с барабаном осуществляется зубчатой муфтой 17. Внутри рамы
под барабанами установлены прижимные ролики на пружинах, которые обеспе-
чивают равномерную укладку каната на барабан. На каждом барабане уста-
новлен ограничитель сматывания каната, состоящий- из рычага-водила 11
и конечного выключателя. При навивке канат приближается к краю барабана,
при этом поворачивается рычаг И, в результате чего срабатывает конечный
выключатель и электродвигатель останавливается. Оба электродвигателя
могут включаться вместе или порознь: при совместном включении осуществля-
ется подъем или спуск, при раздельном — замыкание или открытие грейфера.
Расчет механизма подъема груза выполняют аналогично расчету лебедок с
машинным приводом (см. п. 2.2.5).
Механизм изменения вылета стрелы. Для захвата грузов, находящихся на
различных расстояниях от оси крана, подъема их на различную высоту и
укладки на различные расстояния, предусмотрено изменение вылета стрелы
крана путем ее наклона в вертикальной плоскости. Возможно также переме-
щение вдоль стрелы тележки, как это сделано в башенных и путеукладочных
кранах. На железнодорожных и автомобильных стреловых кранах, используе-
мых в путевом хозяйстве, изменение вылета стрелы достигается подъемом или
опусканием ее при помощи стрелоподъемной лебедки с полиспастом. Крутящий
момент в такой лебедке (рис. 2.26) передается от электродвигателя 5 через муф-
ту с тормозом 4, червячный редуктор 3 и зубчатую пару 2 на барабан 1. При
навивке каната на барабан стрела поворачивается вокруг оси ее крепления на
поворотной платформе. Конструкция механизма подъема стрелы дизель-элек-
трического крана КДЭ-163 приведена на рис. 2.27. Барабан 2 вращается на оси
в подшипниках. Привод барабана осуществляется электродвигателем 23 через
червячный редуктор 10 и зубчатую пару 20, 3. На валу двигателя закреплена
пальцевая муфта 11 с тормозным шкивом 12. Для торможения служит колодоч-
ный тормоз 22 с электрогидравлическим толкателем. Червяк 9 редуктора смон-
тирован на упорных и радиальных 7, 8, 14 подшипниках. Червячное колесо
19 установлено на выходном валу, который опирается на подшипники 17, 18.
На шлицах этого же вала закреплена шестерня 20, находящаяся в зацеплении
с зубчатым колесом 3, прикрепленным к торцу барабана, установленного на
подшипниках 4. Подшипники червяка смазываются через масленки, а подшип-
ники вала червячного колеса — из общей масляной ванны, где уровень масла
контролируется маслоуказателем 5. Для предотвращения попадания пыли и
вытекания масла используются крышки 15, а также манжеты 13, 16, 21. От-
крытая зубчатая пара смазывается графитной смазкой. Регулировка осевого
люфта в подшипниках вала червячного колеса осуществляется регулировочным
винтом, а упорного подшипника червяка—регулировочной гайкой 6. Стрело-
подъемная лебедка смонтирована на раме 1, размещенной на поворотной плат-
форме крана. На барабан лебедки наматывается канат стрелоподъемного по-
лиспаста, верхняя подвижная обойма которого закреплена на стреле.
Расчет механизма подъема стрелы (рис. 2.28) сводится к определению уси-
лия, необходимого для подъема стрелы н расчету стрелоподъемной, лебедки.
Для составления расчетной схемы указывают силы, действующие на стрелу
н их плечи относительно точки О, поворота стрелы. На стрелу действуют сле-
дующие силы: вес груза G, вес стрелы Gf, усилие в грузовом полиспасте S; усилие
Р в тяге, посредством которой крепится стрелоподъемный полиспаст к стреле;
равнодействующая от давления ветра Нъ и реакции и в оси крепления О
стрелы. Чем больше вылет стрелы Ьг, т. е. расстояние от центра крюка до оси
ее поворота, тем больше усилие Р, значение которого определяется из уравне-
Рис. 2.27. Механизм подъема стрелы крана КДЭ-163
54
ния моментов всех сил отно-
сительно точки 0:
p_GLi +G1 l^H^h-Sa.
с
(2.49)
где Llt llt /г, a, c—плечи действия
соответственно сил G, G1;
S, P.
Если кратность стрело-
подъемного полиспаста /п, а
к. п д. полиспаста ц п, то на-
тяжение каната Sc> Н, при
навивке его на барабан стре-
лоподъемной лебедки, вычис-
ляемое по формуле (2.10),
равно
Рис. 2.28 Расчетная схема механизма подъема стре-
лы
Скорость набегания каната на барабан vK, м/с, можно подсчитать по фор-
муле
= ^б ^'п/С (2.50)
где /б — путь, проходимый верхними подвижными блоками полиспаста при изменении
вылета от наибольшего до наименьшего значений, м;
1б—1б —/б;
1б, !б — длина полиспаста, м, соответственно до и после подъема стрелы;
t — время изменения вылета, с.
Мощность двигателя лебедки подъема стрелы N, кВт, при установившемся
движении (статическая мощность) определяют по формуле
$с
(2.51)
,V =
1000ц
где т] — к.п.д. передачи лебедки.
Подсчитав по формуле (2.51) мощность N, подбирают по каталогу электро-
двигатель.
Пример 4. Рассчитать и выбрать параметры основных элементов механизма подъема
стрелы крана (см. рис. 2,28) Исходные данные: грузоподъемность Q = 4900 кг (G =
- 49 000 Н = 49 кН) при вылете стрелы Lr = 12,78 м и плечах действия сил; = 6,2 м;
k~ 3,43 м; а ~ 0,9 м; с — 2,29 м. Механизм подъема груза имеет трехкратный сдвоен-
ный полиспаст (tn = 3). Вес стрелы Gj ~ 15 000 Н — 15 кН. Режим работы средний.
Стрелоподъемный механизм состоит из электродвигателя, червячного редуктора, откры-
той передачи и барабана, на который навивается конец каната полиспаста стрелодъемно-
го механизма.
Определяем все силы, действующие на стрелу прн ее подъеме. По формуле (2.10)
находим тяговое усилие S, кН, в ветви грузового полиспаста:
5 =—2__ =49 000 =17353 88Н=17 35 кН
/п Г)п 3-0,98*
гдеЦп а цел = 0,98 —к.п.д. блока.
Ветровая нагрузка Яв, действующая на стрелу, определится так; Яв — pF = 250 X
X 1,6 = 400Н, где F = 1,6 м2 — подветренная площадь стрелы; р = 250 Н/м2 — рас-
четное давление ветра.
55
По формуле (2+9) находим общее усилие, приложенное к стрелоподъемному по-
лиспасту с учетом двухбарабанной грузоподъемной лебедки
? GLx ^G^ Zi +//B h-2Sa
с
49 ООО-12,78 +15 000-6,2+400-3,43—2-17 353-0,9
2,29
= 328 264,29H=328,26 кН.
Приняв в качестве стрелоподъемного шестикратный полиспаст, определяем натяже-
, нне Sc каната, навиваемого на барабан стрелоподъемной лебедки;
Р 328 264 29
Sc=—-----= ——-+—-=58 702,48Н=58,7 кН.
/пт)п 6-0,932
К.п.д. полиспаста т]п найдем по формуле (2.12)
0—'ПбЙ'Пбл _ (1-0,98е) 0,98 л лоп
Пт, —— _ ~ ’ — 0,932.
‘n(!~W 6(1-0,98)
Находим расчетное разрывное усилие каната, используя формулу (2.4), при п —
= 5,5
5Раз = Scn = 58 702,48 - 5,5 - 322 863,64 Н = 322,86 кН.
Из приложения 3 ГОСТ 3070—74 для каната типа ТК6 X 19 5раз = 33 300 кгс
(Spaa = 333 000 Н), = 25,5 мм выбираем канат 25.5-1-Л-О-Н-180 (ГОСТ 3070—74).
Определяем диаметр барабана по формуле (2.6); для среднего режима работы крана
а — 18;
Dq — е dK — 18 • 25,5 — 459 мм.
Принимаем Pg = 0,5 м.
Определяем длину каната, навиваемого на барабан. По схеме в масштабе путь Ze,
проходимый блоками прн изменении вылета стрелы от наибольшего до наименьшего значе-
ния, составляет 1$~ 1,74 м. Отсюда определяется длина каната, навиваемого на барабан
ZK=Ze /п = 1,74-6=10,44 м.
Задаваясь временем качания стрелы (время перемещения из нижнего в верхнее
крайнее положение) i = 38 с, находим скорость набегания каната на барабан
yK = ZK/Z= 10,44/38=0,274 м/с.
Находим скорость вращения барабана
60ок 60-0,274 „
=—— — —---------—-----= 10,47 об/мин.
лОб 3,14-0,5
Мощность двигателя, прн установившемся режиме
SCOK 58 702,48-0,274 Л
v = _J^_k ---->--- = 22,559 кВт.
1000т] 1000-0,713
К.п.д. передачи лебедки
т] = т]б у), ^ = 0,97-0,75-0,98=0,713,
где Т|б — 0,97; = 0,75; Т|3 = 0,98 — к.п.д. соответственно барабана, червячного ре-
дуктора, зубчатой пары.
По каталогу (см. приложение 4) выбираем электродвигатель MTF-411, Уд = 22 кВт,
Пд— 965 об/мин, габарита 3, с изоляцией класса F, исполнения 411, шести полюсного,
умеренного климатического исполнения (У), 3-й категории MTF 411-6УЗ (ГОСТ 185—70).
Передаточное число механизма изменения вылета стрелы
хр = пд/пб = 965/10,47 = 92,17.
Зиая передаточное число Zp, подбирают редуктор и проектируют остальные эле-
менты передачи
58
Механизм поворота крана. Qh
служит для приведения во вращение
поворотной части крана вместе со
стрелой и поднятым грузом. Он со-
стоит нз привода и опорно-поворот-
ного устройства, выполняемого в ви-
де поворотной платформы со специ-
альным опорным устройством нли в
виде колонны. В стреловых кранах на
автомобильном и железнодорожном
ходу поворотная платформа посред-
ством катков, роликов или шариков
опирается на обойму, установленную
на неповоротной части крана. Опорно-
поворотное устройство служит для пе.
редачи давления от поворотной плат,
формы на раму ходовой части, Оно
также воспринимает опрокидываю-
щий момент, действующий на пово-
ротную платформу при внецентрен-
ном приложении нагрузок на стрелу
Рис 2.29 Схемы опорно-поворотных
устройств
и другие элементы крана. Возможно
различное конструктивное выполнение опорно-поворотного устройства. В од-
ном из них (рис. 2.29, а) на поворотной платформе 2 крепятся опорные кат-
ки 3, опирающиеся на круг катания 4, смонтированный на неповоротной
платформе. Поворотная платформа центрируется относительно неповоротной
цапфой /, воспринимающей опрокидывающий момент, возникающий в про-
цессе работы крана. В устройстве другого типа (рис. 2.29, б), кроме перечислен-
ных деталей, предусмотрены обратные катки 5, катящиеся по нижней опорной
поверхности поворотного круга 4, закрепленного на неподвижной платформе 6.
Этими катками воспринимается опрокидывающий момент. В некоторых кон-
струкциях этого типа круг катания выполнен в виде желоба (изогнутый швел-
лер), в который вставлены опорные ролики Нижние грани желоба воспри-
нимают вертикальную нагрузку, направленную вниз, верхние — вертикальные
усилия, направленные вверх, возникающие от опрокидывающего момента.
Шариковое (или роликовое) устройство (рис. 2.29, в) состоит из наружного
кольца 3, закрепленного на поворотной платформе, и внутреннего 2—на не-
поворотной. Между кольцами расположены один или два ряда опорных ша-
риков 1 или роликов.
Опорно-поворотным устройством стационарных и специальных консольных
кранов, устанавливаемых на щебнеочистительных машинах, дрезинах, служит
колонна. Такие краны выполняют в двух вариан-
тах: настенные с вращающейся колонной и свобод-
но стоящие с неподвижной колонной. В путевом
хозяйстве используют настенные краны небольшой
грузоподъемности. Вращающаяся колонна 2 (рис.
2 30) установлена на двух опорах А и В. На ко-
лонне смонтирована рама крана, состоящая из тя-
ги 3 и подкоса 6\ иа раме размещен механизм подъ-
ема груза 7 с подвижным 5 и неподвижным 4 блока-
ми. Поворот крана осуществляется приводом 1.
Привод механизма поворота любого крана
обычно состоит из червячной или конической, а
Рис 2.30. Схема крана на
колонне
также цилиндрической зубчатых передач Для по-
ворота многомоторного дизель-электр и чес кого кра-
57
на (КДЭ-163, КДЭ-161) (рис. 2.31, а) используется электродвигатель 7, на
валу которого насажен тормозной шкив 2, соединенный с цепной полу-
муфтой 3, вторая полумуфта 4 — на входном валу редуктора. Обе они
соединены цепью. Торможение осуществляется колодочным тормозом 10
с электрогидравлическим толкателем. Входной вал 5 редуктора 6 смон-
тирован на подшипниках 8. На конце вала имеется коническая шестерня 7,
находящаяся в зацеплении с зубчатым колесом 14, смонтированным на вер-
тикальном валу, который опирается на роликовые конические и шарико-
вые 13, 16, 19 подшипники. Шестерня 15 находится в зацеплении с зубчатым
колесом 21, посаженным на шлицах на промежуточный вертикальный вал 22,
вращающийся в конических подшипниках 24. На валу 22 посажена также ше-
стерня 23, зацепляемая с зубчатым колесом 12, установленным на шлицах
на вертикальном валу 25. Этот вал опирается на шариковые и роликовые
подшипники. На конце вала 25 иа шлицах установлена шестерня 26, находя-
щаяся в зацеплении с зубчатым венцом роликового В или шарикового С опор-
но-пов оротного устройства 11. Весь механизм поворота смонтирован на раме
9, размещенной на поворотной платформе крана. Опорно-поворотное устрой-
Рис. 2.31. Механизм поворота многомоторного крапа.
а—конструкция; б — кинематическая схема
58
Рис. 2.32. Опорно-поворотное устройство крана
ство закреплено на неподвижной раме. При включении двигателя вращается
вал 25 и закрепленная на нем шестерня 26 обегает по зубчатому венцу, увле-
кая за собой поворотную платформу. Спуск масла из редуктора осуществля-
ется через патрубки и сливную пробку. Для регулировки осевого люфта ко-
нических подшипников валов служат регулировочный винт 20 и регулировоч-
ная гайка 18. Зацепление конических шестерен регулируется с помощью регу-
лировочной гайки и прокладок 17. Колодочный тормоз 10 механизма поворота
постоянно замкнут. Он растормаживается в момент включения электродви-
гателя, а также при нажатии на педаль растормаживания механизма поворота.
Электродвигатель 1 механизма поворота рассчитан для работы с максималь-
ным грузом против ветра на уклоне.
Кинематическая схема механизма поворота приведена на рис. 2.31, б,
где 1 — двигатель; 2 — тормоз; 3 — редуктор; 4 — шестерня; 5 — зубчатый
веиец опорно-поворотного устройства.
Опорно-поворотное устройство крана типа КДЭ-163 (рис. 2.32) состоит из
ряда массивных колец 1, 2, 4, имеющих канавки, в которых закладываются
шарики 3. Между верхними 1 и нижним 4 кольцами помещены прокладки 6
из текстолита или пластмассы. Шарики зажаты между кольцами, благодаря
чему устройство не только является опорой для качения верхней поворотной
части 5 крана, но и воспринимает момент от ее опрокидывания. Уплотняющую
роль играют прокладки 7. Концентрично опорному кольцу на нижней непово-
ротной раме 8 установлено кольцо 2 с зубчатым венцом. Вместо шариков мо-
гут быть использованы также ролики, способные воспринимать большие усилия.
Расчет мощности привода механизма поворота начинают с определения
моментов сил, возникающих при вращении крана от трення в опорах, сопротив-
ления ветра и т.д.
Эти силы создают относительно оси вращения статический момент со-
противления Л1ст, Н-м, преодолеваемый вращающим моментом привода.
59
Он складывается из моментов от сил трения Мтр, ветровой нагрузки Л4В и
горизонтальных составляющих веса при наклоне крана
MCT=Mjp + МВ + М*. (2.52)
Момент сопротивления от сил трения при повороте, Н*м, составит
МТр = /?, (2.53)
где /? — радиус круга катания, м;
1Утр — сопротивление повороту от сил трения, Ы или кН:
№Tp==(G-{-Gn) (й, (2.54)
Q — вес поднимаемого груза, Н или кН;
Gn — вес поворотной платформы со всем оборудованием (стрела, механизм подъема
груза, противовес, кабина и т. п.), Н или кН;
<0 — коэффициент сопротивления движению катков, роликов или шариков.
Если поворотная платформа опирается на катки или ролики, закреплен-
ные на цапфах, то о) можно найти из уравнения
/ И1-г2/ \
где р — коэффициент трения в цапфах; для подшипников скольжения р — 0,08-т-0,1
для подшипников качения р. — 0,01-т-0,02;
D, dj — диаметры соответственно роликов и цапфы, см;
f — коэффициент треиия качения, см (/ ~ 0,03—0,1);
k — коэффициент, vmmiBaionmft перекос, проскальзывание и т. п. (обычно k = 1,3—-
4- 1,5).
Если поворотная платформа опирается на ролики или шарики, не имею-
щие цапф, коэффициент сопротивления определяют по формуле
и-—й,
<^ш/2
где — диаметр шариков, см.
Момент сопротивления повороту от ветровой нагрузки 7ИВ определяют по
формуле
t Мв— pF г L-{~pF.СТр &—pFц 1ц~р (F г —/’п ^п)> (2.55)
где р — давление ветра, Н/м2 (в прибрежных районах больших рек и морей
р = 400, для прочих мест р — 250 Н/м2);
Fr, FCTp, Fn — подветренные площади соответственно груза, стрелы- и поворотной
платформы крана вместе с оборудованием, ма;
L, /п — расстояние от оси поворота до центров тяжести соответственно груза,
стрелы и поворотной платформы, м (рис. 2.33).
Рис. 2.33. Расчетная схема механизма по-
ворота
Момент Мн, Н«м, от горизон-
тальных составляющих веса при на-
клоне крана:
—L-f-Gn /ц)—(Gr L H-Gn /п) sin <p,
Г г
где Gr, Gn — горизонтальная составляю-
щая веса груза и платформы;
Gr — G? sirup;
Gr — вес груза. Н,
<Р — угол наклона крана;
L — вылет крана, м.
60
(2.56)
По величине статического момента Л4СТ можно подсчитать мощность элек-
тродвигателя механизма поворота Nn, кВт, при этом вес GT, Н, поднимаемого
груза принимается максимальным (Gr = 10Q):
д 9550т] ’
где пк — заданная частота вращения крана, об/мин;
Г] — к.п.д. передачи механизма поворота;
Q — грузоподъемность, кг.
По вычисленному значению мощности Мд выбирают по каталогу электро-
двигатель, а по передаточному числу механизма поворота подбирают редуктор
и рассчитывают элементы передачи механизма.
Пример 5. Рассчитать и подобрать параметры основных элементов механизма поворота
крана, расчетная схема которого приведена на рис. 2.33. Поворот осуществляется при
вылете стрелы L =14 м; вес поднимаемого груза Gr = 49 кН (49 000 Н), sec поворотной
части крана без стрелы Gn = 222 кН (222 000 Н), вес стрелы GCTp = 15 кН (15 000 Н),
вес поворотной части со стрелой Gn = Gn + GCTP = 237 000 Н — 237 кН. Опорно-по-
воротное устройство шариковое; диаметр круга катания D — 2,1 м (Z? = 1,05 м); диаметр
шарика — 0,05 м, частота вращения пк — 2 об/мин, угол наклона пути ср = 4,5 °.
Определяем момент сопротивления повороту крана, создаваемый силами трения, по
формуле (2.53), принимая / = 0,001 м; k — 1,3:
MTp = (Gr + Gn) 2 -~kR-
Мтр = (49 000+237 000) 2 1,3-1,05= 15615 Н-м.
0,05
Для определения момента сопротивления, создаваемого ветром Мв принимаем р —
= 250 Н/м2; Fr = 9,0 м2; FCTp = 1,6 м3; Fa = 12 м2; Ь= 8 м; Zn = 0,7 м; L = 14 м.
Тогда момент по формуле (2.55) составит:
Мв = 250 (9 • 14 + 1,6 • 8 — 12 • 0,7) == 32 600 Н-м.
Момент от горизонтальных составляющих веса, Н-м
M^=(G^ T+G^ /п) sin <р = (49 000-14+237 000-0,7) 0,078 = 66 448.
Находим общий статический момент сопротивления повороту крана
Мст = Мтр + Мв + М“ = 15615+32600+66 448=114 663 Н-м.
Определяем мощность электродвигателя по формуле (2.56), предварительно прини-
мая, что к.п.д. механизма г] = 0,88:
„ 114 663-2 „
=------------= 27,28 кВт.
д 9550-0,88
По каталогу (см. приложение 4, с. 432) подбираем двигатель МТР-411-6У2 (ГОСТ
185—70) мощностью 27 кВт при ПВ = 25 %, пд= 955 об/мин. Передаточное число пе-
редачи
ip = «д/пк = 955/2 = 477,5.
Зная передаточное число, выбирают редуктор и проектируют остальные элементы
передачи.
Механизм передвижения крана. Краны и а железнодорожном ходу пере-
двигаются в процессе работы на небольшие расстояния посредством собствен-
ного механизма передвижения. У кранов КДЭ-163 с многомоторным приводом
установлены два механизма передвижения на каждой тележке. На сварной
раме 20 (рис. 2.34, а) смонтированы механизмы: электродвигатель 16, коло-
дочный тормоз 15 с электрогидравлическим толкателем, трехступенчатый ре-
дуктор 21 и осевой подшипник 18. Механизм подвешен к раме ходовой плат-
формы при помощи двух шарнирных тяг 13, а также цепи. Осевой подшипник
61
Рис. 2.34. Механизм передвижения многомоторного краиа иа железнодорожном ходу:
а — конструкция; б — кинематическая схема
18 состоит из основания и крышки. Во внутреннюю расточку подшипника
устанавливаются закладные полукрышки с резиновыми уплотнениями, разъем-
ная наружная обойма и роликоподшипник. Для возможности монтажа под-
шипника на оси колесной пары соединительные кольца роликовой обоймы раз-
резаются на две половины. От вала электродвигателя 16 через муфту вращение
передается на входной вал И редуктора, зубчатой парой 9 иа второй вал ре-
дуктора, а зубчатой парой 4 на третий вал, на котором находится на шлицах
скользящая шестерня 5, вращающая разъемное зубчатое колесо 1 и, следова-
тельно, колесную пару 19. Валы редуктора опираются на подшипники 10, 14,
8, 17, 6. Колесная пара 19 ходовой тележки является выходным валом редук-
тора. На шейке оси на шпонке 2 посажено разъемное зубчатое колесо 1, которое
является ведомым колесом третьей ступени редуктора и одновременно фикси-
рует его от осевого перемещения по оси колесной пары посредством центри-
рующего буртика. Шейка оси колесной пары является как бы внутренней обой-
62
мой разъемного роликоподшипника 3 редуктора. Скользящая шестерня 5 при
помощи вилки 22, вала 23 с рукояткой 12, выведенной за пределы корпуса ре-
дуктора, может перемещаться вдоль по валу на шлицах и выходить из зацепле-
ния с разъемным колесом выходного вала редуктора. Таким образом осуществ-
ляется перевод механизма из рабочего положения в транспортное и обратно.
Во время введения малой шестерни в зацепление тормоз механизма должен
быть расторможен, тогда валы редуктора смогут проворачиваться за квадрат-
ный хвостовик входного вала 11. Редуктор из транспортного положения в
рабочее можно переключать только при выключенном электродвигателе. Кони-
ческие подшипники второго и третьего валов редуктора регулируют посредст-
вом регулировочного винта 7. Смазка шестерен редуктора, а также подшип-
ников (кроме витых роликоподшипников 3) осуществляется разбрызгиванием
масла шестерней 24, сидящей на оси 25, закрепленной в корпусе реДуктора и
приводимой во вращение одним из зубчатых колес 9 первой ступени редуктора.
Разъемные роликоподшипники 3 и осевой подшипник 18 смазывают пресс-
масленкой. Весь механизм собран на раме 20
Кинематическая схема этого механизма приведена на рис. 2.34, б, где
1 — колесная пара; 2 — осевой редуктор; 3 — тормоз; 4 — электродвига-
тель. При движении крана по рельсам возникают сопротивления: трения, от
уклона пути, от ветровой нагрузки, от инерционных сил, от криволинейности
участка пути (расчет механизма см. п. 6.3.1).
2.3.5. Одномоторные стреловые краны
на железнодорожном ходу
Кроме многомоторных кранов с электроприводами для всех механизмов, в
путевом хозяйстве используют одномоторные, все механизмы которых имеют
привод от одного двигателя внутреннего сгорания. В путевом хозяйстве широ-
кое применение нашел кран КДВ-15, наибольшая грузоподъемность которого
15 т. Этот кран является модернизацией парового крана ПК-15 ЦУМЗ, в ко-
тором паровая установка заменена карбюраторным двигателем ЗИЛ-164 (мощ-
ность 73,54 кВт, частота вращения коленчатого вала 2800 об/мин). Кран имеет
пневматическое управление. На нем предусмотрены ограничители грузоподъем-
ности, автоматически выключающие двигатель при перегрузке свыше 10 %.
Он может быть оборудован стрелой длиной 14 или 18 м, крюковой обоймой
или грейфером 1,5 м3. Для удлинения стрелы имеется вставка длиной 4 м. Стре-
ла снабжена указателем вылета и грузоподъемности. Для повышения устой-
чивости кран оборудован дополнительными винтовыми опорами (аутригерами)
выдвижного типа. Благодаря этому грузоподъемность крана существенно по-
вышается. Так, например, при подъеме крюка на 13,75 м грузоподъемность
крана с выносными опорами 15,0 т, а без них — 9,7 т, при высоте подъема
6,0 м с выносными опорами грузоподъемность 3,5 т, а без них — 2,25 т.
Кинематическая схема крана приведена на рис. 2.35, а. От двигателя 40
вращение передается через редуктор 39, цепную передачу 38 на звездочку 37,
установленную на валу /, далее через зубчатую пару 3—4 на грузовую ле-
бедку, имеющую два барабана/, 8, свободно сидящие на валу: первый служит
для подъема груза на крюке (при работе с грейфером для замыкающего кана-
та), второй — для подъема каната грейфера. Барабаны приводятся во вра-
щение (связаны с валом) ленточными фрикционными муфтами 5. Одна из них
установлена на зубчатом колесе 4, вторая — на диске 9, закрепленном на
валу II. Включением тон или другой муфты сообщается вращение грузовому
или грейферному барабану. Одновременное включение этих муфт приводит во
вращение оба барабана одновременно, что необходимо при работе крана с
грейфером.
63
Рядом с муфтами расположены ленточные тормоза 6 открытого типа, дей-
ствующие на ободы барабанов. С главным валом I через промежуточное зуб-
чатое колесо 2, сидящее на оси III, и зубчатое колесо 19 соединен горизонталь-
ный вал IV, передающий движение на механизмы подъема стрелы и поворота
крана. На валу IV свободно сидят два конических колеса 20, находящихся в
зацеплении с зубчатым колесом 22 вала V, образуя тем самым реверсивную
передачу. На вертикальном валу V сидит червяк 27, верхней его опорой слу-
жит подпятник 25. Прн включении кулачковой муфты 21 левого илн правого
конического колеса 20 вращается (в ту или другую сторону) вал V. Червяк
27 находится в зацеплении с червячным колесом 26, соединенным с барабаном
Рис. 2.35. Схемы одномоторного крана-
а — кинематическая; б — Полиспастов
(,»4
28, сидящим навалу VI. На барабан наматывается канат полиспаста стрелы, из-
меняя ее вылет. Кроме того, механизм подъема стрелы имеет тормозной шкив
23 и тормоз 24, которым можно подтормаживать барабан при спуске стрелы.
Зубчатыми колесами 29, 30 вращение передается на второй горизонтальный
вал VII, иа котором расположен реверс из конических колес 31, 33. Реверс
включается дисковыми фрикционными муфтами 32 с колодочными тормозами 34.
Зубчатое колесо 33 сидит на вертикальном валу VIII механизма поворота, на
втором конце которого закреплено колесо 35, находящееся в зацеплении с
зубчатым венцом 36, имеющим внутреннее зацепление. При вращении вала
VIII колесо 35 обегает зубчатый венец, в результате происходит поворот верх-
ней части крана.
Механизм передвижения крана приводится в действие от вала I через ко-
ническую реверсивную передачу, состоящую из зубчаты колес 11 и 13. Ко-
леса 11 соединяются с валом дисковыми муфтами 10. Колодочный тормоз 12,
действующий на корпус каждой муфты, служит для торможения при остановке
крана. От реверсивной передачи'получает вращение вертикальный вал IX н
далее через коническую пару 14—15 на вал X с подшипниками 18, а через зуб-
чатые колеса 16—17 на колесные пары XI. Зубчатое колесо 16 может пере-
мещаться вдоль вала с колесами 17. В результате привод передвижения отклю-
чается н кран можно перемещать в составе поезда.
Схемы полиспастов крана КДВ-15 изображены на рис. 2.35, б\
I — при длине стрелы 14 м для грузов массой до Ют; i п = 3;
II — при стреле длиной 14 м для грузов до 15 т; i п — 4;
III — для стрел любой длины (стрелоподъемного сдвоенного полиспаста);
in ~ 2.
2.3.6. Расчет устойчивости стреловых кранов
При расчете стреловых кранов прежде всего стремятся обеспечить устой-
чивость, при которой исключена возможность нх опрокидывания в процессе
эксплуатации. Кран рассчитывают на устойчивость в рабочем состоянии при
поднятом грузе, т. е. на грузовую устойчивость, и без груза, т. е. на собствен-
ную устойчивость. Запас устойчивости крана характеризуется коэффициентом
К, учитывающим все силы, действующие на кран (за исключением влияния
захватов за рельс). При этом рассматривают самый неблагоприятный вариант
нагрузки крана. Для большинства передвижных кранов, в том числе и желез-
нодорожных, таким является случай, когда стрела крана расположена попе-
рек пути. Это объясняется тем, что ширина колеи меньше базы. Расчет на
устойчивость нормализован правилами Госгортехнадзора.
Грузовую устойчивость рассчитывают при положении крана с грузом Q при
максимальном вылете стрелы L, установленной поперек пути (рис. 2.36, а).
Уклон местности и ветровую нагрузку принимают способствующими
опрокидыванию крана в сторону груза. Расчет ведут при торможении спускаю-
щегося груза и повороте крана. За коэффициент грузовой устойчивости /^при-
нимают отношение суммы всех моментов от сил, действующих на кран, к опро-
кидывающему моменту от веса груза [2], причем Ki должен быть не менее
1,15, т. е.
Мк-Мтг-Мв-Мц> 1, (2>57)
мг
где Мк — момент, создаваемый весом крана относительно ребра опрокиды-
вания и противодействующий всем опрокидывающим моментам;
Л4ТГ, Л4В, Мд — опрокидывающие моменты соответственно от сил инерции при тор-
можении груза, ветровой нагрузки, центробежной силы груза при
вращении;
Л1Г — опрокидывающий момент, создаваемый весом поднимаемого груза.
3 Зак. 47 65
Рис, 2.36. Расчетные схемы устойчивости крара:
<2“-грузовой, б — собственной
Нормами Госгортехнадзора предусмотрена также проверка грузовой стати-
ческой устойчивости, т. е. без учета динамических сил при торможении спуска-
емого груза и повороте крана, а также без ветровой нагрузки. В этом случае
1,4, т. е.
Мк бк [(с-р&) cos а—й0 sin а]
г-------->'• ’ ( )
где GK — вес (сила тяжести) крана без груза, Н;
с — расстояние от центра тяжести крана до его оси вращения, м;
b — расстояние от оси вращения до ребра опрокидывания, м;
а — угол крена крана (угол наклона местности), град;
h0 — расстояние от уровня головки рельса до центра тяжести крана, м.
Собственная устойчивость рассматривается, когда кран стоит без груза с
максимально поднятой стрелой (вылет минимальный) и имеет крен в сторону
противовеса. При этом на него оказывает воздействие ветровая нагрузка в сто-
рону опрокидывания (рис. 2.36, б).
Коэффициент собственной устойчивости равен отношению суммы моментов
всех сил относительно линии опрокидывания, кроме ветровой нагрузки, к мо-
менту относительно линии опрокидывания от ветровой нагрузки:
Ок [(&—с) cos а—h0 sin а]
-----------------------> 1 |6’
где — сила давления ветра, действующая параллельно плоскости, на которой уста-
новлен кран, Н;
h{ — расстояние от линии действия силы до ребра опрокидывания, м.
Для обеспечения устойчивости кранов при повышенных расчетных на-
грузках используют специальные устройства — дополнительные опоры. У ав-
томобильных и гусеничных кранов это откидные опоры (аутригеры), у железно-
дорожных — рельсовые клещи.
2.3.7. Приборы и устройства для безопасной работы кранов
Для безопасной работы, кроме тормозов, реле, предохранителей, краны
снабжаются специальными приборами и устройствами: указателями, ограничи-
телями. К указателям относятся таблички, предупредительные надписи, ука-
затели вылетов стрелы. Наиболее простой и распространенный указатель выле-
тов — указатель отвесного типа. Тяжелая качающаяся стрелка, шарнирно за-
66
крепленная на стреле, под действием собственного веса всегда располагается
вертикально и своим концом на шкале показывает величину вылета и допусти-
мую величину груза на данном вылете. По правилам Госгортехнадзора каждый
самоходный стреловой кран снабжается ограничителем грузоподъемности (ог-
раничитель грузового момента), органичителем высоты подъема и ограничите-
лями верхнего и нижнего положения стрелы. Ограничители грузоподъемности
бывают торсионного, гидропружинного, рычажного и других типов. На кра-
нах типа КДЭ применен торсионный ограничитель (рис. 2.37, а), в котором ис-
пользовано явление упругой деформации на скручивание стального стержня.
Он установлен в верхней части портала крана. Конец стрелоподъемного каната
4соединен с рычагом 3, качающимся на оси портала. К рычагу 3 щарнирно при-
креплена тяга 2, нижний конец которой резьбой (для регулировки) прикреплен
к рычагу 5, сидящему на шлицах на торсионном валу 1. Один его конец за-
креплен, а другой опирается на шарикоподшипники. На свободном конце вала
имеется рычаг 6 с упорным регулировочным винтом 7. При весе поднима емого
груза на данном вылете, более чем на 10% превышающем расчетный, устанав-
ливается такой угол скручивания вала 1, при котором винт 7 нажимает на мик-
ровыключатель 8, отключающий двигатель механизма подъема. После срабаты-
вания микропереключателя механизм подъема груза можно включить только
на спуск, а механизм подъема стрелы — на ее подъем и уменьшение вылета.
Краны типа КДЭ имеют двойную характеристику, поэтому на рычаге 6 уста-
новлено два винта 7 и два переключателя; одна система работает с выносными
опорами, другая — без них. Переключение осуществляется автоматически
при установке и убирании выносных опор.
Система ограничения высоты подъема груза (рис. 2.37, б) срабатывает, когда
обойма крюка верхней частью коснется и приподнимет грузик 11, подвешенный
на канатике 9, огибающем блок 7, укрепленный на оси 6 головки стрелы. При
подъеме грузика 11 натяжение канатика 9 ослабевает, и шток 4 под действием
пружины 2, сжатой в стакане 3, надавив на микропереключатель 1, откдючит
Рис. 2.37. Схемы:
а — ограничителя грузоподъемности
торсионного типа; б — ограничителя
высоты подъема груза; в — сигнализа
тора угла наклона
3*
67
ме ханизм подъема. Скоба 10, обхватывая грузовой канат 8, ограничивает от'
ход грузика от каната. Грузовой блок 5 установлен на верхнем конце стрелы.
Сигнализатор угла наклона (рис. 2.37, в) состоит из корпуса 1, заполнен-
ного маслом, по днищу 3 которого перекатывается шарик 2, занимающий поло-
жение соответственно углу наклона рабочей площади от 0 до 3°. При большем
угле наклона шарик касается шайбы 4, являющейся элементом электроцепи опо-
вещения. При замыкании последней включаются лампа и звуковой сигнал.
2.4. КОЗЛОВЫЕ КРАНЫ
В путевом хозяйстве козловые краны применяются на открытых площад-
ках звеносборочных баз, погрузочных площадках дистанций пути, шпалопро-
питочных заводах для погрузки, выгрузки и транспортирования в пределах
площадки различных материалов и прежде всего материалов верхнего строения
пути — рельсов, скреплений, шпал. Они широко применяются при сборке рель-
со-шпальной решетки. Основное достоинство этих кранов — простота изготов-
ления и эксплуатации.
Независимо от конструкции козловой кран (рис. 2.38) состоит из моста
в виде фермы 1 (балка, труба), опирающейся через опоры 2 с тележками 3 на
подкрановые пути. На мосту козлового крана установлена н может перемещать-
ся по нему крановая тележка 4 или тельфер, оснащенные грузоподъемным ме-
ханизмом, к которому подвешивается груз 5.
Мост (ферма) козлового крана может иметь одну или две консоли, но может
быть и без них. В связи с этим краны разделяются на консольные и бескон-
сольные. Кабина управления краном размещается на опорах или ферме, что
обеспечивает крановщику хороший обзор.
К основным параметрам козлового крана относятся: грузоподъемность Q,
пролет Г, т. е. расстояние по горизонтали между осями подкрановых путей; дли-
на консоли LK — расстояние между осью рельса подкранового пути и центром
зева крюка грузоподъемного механизма, находящегося в крайнем положении;
максимальная высота подъема крюка Н. Скорость подъема груза козловыми
кранами находится в пределах 8—16 м/мин, а скорость передвижения кра-
на— 20—100 м/мнн.
Козловые краны пролетом 32 м и выше называют перегрузочными мостами.
Они предназначены для обслуживания больших площадей, например открытых
складов сыпучих грузов. Козловой кран обслуживает площадь, ограниченную
пролетом моста, консолями и длиной подкранового пути. Пролет козлового кра-
на может перекрывать два и более железнодорожных пути.
Рис. 2.38. Схема козлового крана
68
28000
Рис. 2 39. Двухконсольный козловой кран КДКК-Ю
ГОСТ 7352—81 на козловые краны распространяется на краны грузоподъ-
емностью 3,3—32 т с пролетом 10—32 м и предусматривает выпуск кранов типа
ККТ с тельфером (электроталью) в качестве механизма подъема и, КК с грузо-
вой тележкой. Таким образом, грузоподъемным механизмом козловых кранов
являются грузовая тележка (при Q > 5 т) или тельфер (Q 5 т). Примеры ус-
ловных обозначений кранов: 1) ККТП-5-16-8-0,125-0,32-0,8 (ГОСТ 7352—81)—
козловой кран с управлением с пола (П), с талью грузоподъемностью 5 т, проле-
том 16 м с высотой подъема крюка 8,0 м, скоростью подъема крюка 0,125 м/с,
скоростью передвижения тали 0,32 м/с, скоростью передвижения крана 0,8 м/с;
2) КК-2-20/5-32-10-0,2/0,5-0,8-1,0 (ГОСТ 7352 — 81) — козловой кран (ис-
полнение 2), с тележкой грузоподъемностью главного подъема 20 т и вспомога-
тельного 5 т, пролетом 32 м, высотой подъема 10 м, скоростью подъема
главного крюка 0,2 м/с, вспомогательного 0,5 м/с, скорость тележкн 0,8 м/с,
скорость крана 1,0 м/с.
Краны, спроектированные ранее, имеют другие обозначения. Так, на тран-
спорте используют двухконсольные 5-тонные краны КД-05 и КД-09, двухкон-
сольные 10-тонные краны КДКК-Ю, ККС-10 (самомонтирующиеся). В путевом
хозяйстве широко применяются 5- н 10-тонные краны.
Козловой кран КДКК-Ю (рис 2.39) состоит из фермы 2, опирающейся на
опоры 8 типа козловых. По ферме перемещается крановая тележка 1 с грузо-
подъемным механизмом. Ферма имеет две консоли 6. Опоры 8 смонтированы на
ходовых тележках 9, перемещающихся по рельсам подкрановых путей посред-
ством механизма передвижения. Двигатели крановой тележки питаются током
по кабелю 3 от троллеев 5. Для ремонта тележки служит балка 4 с талью Опо-
ры имеют распорные балки 10, а также кабину управления 7. На специальной
площадке смонтирована пускорегулирующая аппаратура 11.
Для погрузки н выгрузки рельсов, шпал н рельсовых звеньев применяется
кран КПБ-10 (кран путевых баз), который состоит из двух 10-тонных кранов
КДКК-Ю, соединенных жесткими штанрами и управляемых из одной кабины
Крановая тележка имеет механизмы подъема груза н передвижения тележ-
кн. У крана КДКК-Ю (рнс. 2.40) механизм подъема груза представляет
собой грузовую лебедку. Он включает двигатель 14, муфту 13, тормоз 4, редук-
тор 12, грузовой барабан 3, полиспаст 1 с рычагом ограничителя подъема груза 5,
обойму с крюком 6. Механизм передвижения тележки состоит из электродвига-
теля 8, редуктора 10, муфты 9, колес 2 и тормоза 7. Для подачн электроэнергии
к электроприводу тележка имеет кабель, наматываемый на специальный бара-
бан 11. На кинематической схеме механизма подъема груза (рис. 2.41, а) обо-
69
Рис. 2.40. Грузовая тележка КДКК-Ю
значенья: двигатель /, муфты 2,3, 6, тормоз 4, редуктор 5, барабан 7, полис-
паст 9, крюк 10 ц дополнительный кабельный барабан 8, который вращается
синхронно с грузовым. Кабель 11 питает электропривод или магнит сменных
приспособлений, навешиваемых на крюк 10 крана. На схеме механизма передви-
жения грузовой тележки (рис. 2.41, б) обозначены: 1 — двигатель, 2 — тормоз,
3 — опорные колеса, 4—редуктор. По рельсам подкранового пути кран переме-
щается с помощью привода ходовых приводных тележек. У КДКК-Ю все четы-
ре опорные тележки приводные. Каждая из них (рис. 2.41, в) имеет электро-
двигатель 1, тормоз 2 типа ТКТГ-200, редуктор 3 и опорные катки 4.
Козловой кран грузоподъемностью 5 т типа КД-09 показан на рис. 2.42.
Он состоит из фермы 1, по нижнему поясу которой по двутавровой балке 5
перемещается электроталь (тельфер) 3 с рельсовым звеном 6. Ферма опирается
на опоры 2. Питание электродвигателей током осуществляется по троллеям 4,
расположенным на стояках вдоль пути передвижения крана. На звеносбороч-
ных базах краном обрабатываются пакеты рельсовых звеньев 7 и склады мате-
риалов 8.
70
16500
Рис. 2.42. Козловой кран с тельфером
Электротали. Это компактные подвесные электрические лебедки с электро-
двигателем. Их применяют не только как элементы козловых кранов, но и как
самостоятельные грузоподъемные механизмы в цехах и мастерских, на складах
и базах. Грузоподъемность электроталей по ГОСТ 22584—77 от 0,25 до 5 т.
Основные узлы электротали — корпус, электродвигатель, грузовой барабан,
редуктор и тормоз. Корпус подвешивается к самоходной тележке. Электродви-
гатель может быть встроен в барабан нли прикреплен на фланцах сбоку тали.
Тали со встроенным двигателем меньше по длине и весу, но у них хуже отводит-
ся тепло от двигателя. Корпус электротали подвешивают к балке или тележке.
Электротали, подвешенные к самоходной тележке с электрическим приводом,
называются тельферами. Скорость их передвижения 20—40 м/мин. У электро-
тали ТЭ-500 (таль электрическая, грузоподъемность 5 т) со встроенным двигате-
лем электродвигатель 5 (рис. 2.43, а) размещен внутри барабана 6. Вал дви-
гателя соединен шлицевой муфтой с валом двухступенчатого редуктора 1.
Зубчатая пара 21—18 передает вращение на промежуточный вал, установлен-
ный на подшипниках 16, откуда зубчатая пара 17—2—на втулку, соединенную
зубчатой муфтой 14 с барабаном 6. Для предохранения электродвигателя
от попадания масла из редуктора служит манжетное уплотнение 15.
В корпусе редуктора, закрытого крышкой 22, размещены два тормоза: электро-
магнитный колодочный 23, тормозной шкив которого посажен на первичном
валу редуктора, и грузоупорный дисковый 20 на промежуточном валу. Хра-
повое колесо 19 этого тормоза стопорится собачкой. Грузоупорный тормоз дей-
ствует от веса груза и удерживает его на заданной высоте. Для опускания груза
электродвигатель вращают в сторону, обратную подъему. Канат 13 крепится на
барабане болтами. К сварному корпусу 3 тали прикреплен шкаф 7 с электро-
аппаратурой управления талью, в котором размещены пускатели 10 и кольце-
вой токопровод 9 с проводами 8 для питания электродвигателя 5. Таль подвеши-
вается к тележке на фланцах 4. Управление талью осуществляется из кабины
козлового крана или при самостоятельном использовании тали кнопками 12
через кабель 11.
На рис. 2.43, б представлена кинематическая схема механизма подъема
груза электротали, где от двигателя 5 через зубчатые пары 2—7 и 4—3 враще-
ние передается на барабан 6. Механизм имеет колодочный тормоз 1 и упорный 8
Механизм передвижения талн грузоподъемностью 3 т и менее состоит из
приводной и холостой тележек, а тали грузоподъемностью 5 т — из двух прн-
71
Рис 2.43. Тельфер ТЭ-500 со встроенным двигателем-
а ~ конструкция; б — кинематическая схема
водных тележек. У тех и других тележки соединены между собой траверсой,
на которой подвешен механизм подъема. Каждая приводная тележка имеет по
два ведущих и два холостых колеса. Первые приводятся в движение электро-
двигателем через два боковых редуктора. Приводная тележка изображена на
рис. 2.44, а. От электродвигателя 10 зубчатыми колесами 9, 8, 7, 6 и 5, 11, 1
вращение передается на колеса 2 и 4, опирающиеся на полки двутавра 3. При
установке тележек необходимо следить, чтобы суммарный зазор между реборда-
ми ходовых колес и полкой не превышал 4 6 мм. На рис. 2.44, б представлена
кинематическая схема этой тележки. В козловом кране грузоподъемностью 5 т
(С.м рис. 2.42) тельфер 3 перемещается по нижней полке двутавровой балки 5,
72
Рис. 2.44. Приводная тележка тельфера:
а — устройство; б — кинематическая схема
прикрепленной болтами к нижнему поясу фермы 1 краиа. Это позволяет легко
заменять балку в случае износа. Управление механизмами передвижения конт-
роллерное. Питание крановых электродвигателей током может осуществляться
по гибкому кабелю, наматываемому при передвижении крана на катушку илн
по троллеям, расположенным иа стойках вдоль пути передвижения крана.
Для кранов КД-05 н КД-09 грузоподъемностью 5 т, используемых в путе-
вом хозяйстве, взамен ранее применявшихся тельферов ТЭ-5-911 разработаны
73
грузовые тележки, перемещающиеся по двутавровой балке крана на двух четы-
рехкатковых тележках. Благодаря этому скорость подъема груза повышена до
0,233 м/с, а передвижения тележкн — до 0,66 м/с. Механизм передвижения
крана установле на двух приводных опорных тележках. Каждая из них
(рис. 2.45, а) нмее лектродвигатель 3, тормоз 2, редуктор 1 и опорные катки 4.
Козловые краны могут быть самомонтнрующнеся илн монтируемыми при
помощи других передвижных кранов илн специальных дополнительных мачт и
лебедок. Ферма самомонтнрующихся кранов шарнирно соединена с опорами, что
позволяет разводить последние в стороны прн опускании фермы на землю (де-
монтаже) н сводить опоры при подъеме фермы вверх, т. е. прн установке крана
в рабочее положение (монтаже). Стягивание опор н подъем крана осуществляют-
ся при помощи полиспаста и механизма, объединенного с механизмом передви-
жения крана. Для этого имеется канатный барабан 6, который включается ку-
лачковой муфтой 5. При соединении последней со ступицами катка 4 механизм
передвижения работает как механизм для самоподъема крана путем стягивания
полиспаста 7, одни блоки которого находятся на опорной приводной тележке А
крана, а другие 9 — на непрнводной опорной тележке Б. Прн монтаже кранов
предварительно устанавливают ферму на землю, а ходовые тележки — на под-
крановые пути. Затем опоры соединяют шарнирно с ходовыми тележками и фер-
мой (рис. 2.45, б, положение /). После этого прн помощи кулачковой муф-
ты 5 включают барабан 6 и полиспастом 7 стягивают опоры, поднимая тем
самым ферму (положение //). Опоры соединяют штангами нлн швеллерами.
Для монтажа 10-тонных кранов КДКК-10, К КС-10 используют вспомога-
тельные лебедки. Каждый самомонтнрующнйся козловой кран имеет специаль-
ный механизм для поддержания одинакового угла поворота опор прн подъеме
крана, т. е. предупреждения его перекоса. У 10-тонных кранов опоры соединены
рычажным блокировочным механизмом, состоящим из двух рычагов (рис. 2.46),
соединяющих концы опор по принципу параллелограммного устройства. При
повороте одной нз опор другая, связанная с ней рычагами, должна повернуть-
ся на такой же угол.
Рис. 2.46. Рычажное уравнительное устройство для самомонтажа крана КДКК-10
74
Привод козловых кранов электрический, поэтому для включения и регули-
рования электродвигателей используются специальные аппараты-контроллеры,
имеющие один илн два ряда кулачковых элементов, состоящих из подвижных н
неподвижных контактов. При перемещении подвижных изменяется сопротив-
ление электроцепи, ток и скорость вращения двигателей. Для приводов, рас-
считанных на тяжелые режимы, используют магнитные контроллеры, а управ-
ление осуществляют командоконтроллерами. Такне устройства предусмотрены
на КДКК-10. В зависимости от положения рукоятки командоконтроллера
включаются определенные контакторы, обеспечивающие соответствующий ре-
жим работы привода.
Ниже приведены технические характеристики некоторых козловых кранов.
Параметры КДКК-Ю ККУ КК-5-16 КК-12,5-25
Грузоподъемность, т . . . . 10 10 5,0 12,5
Длина пролета, м 16 20 16 25
Вылет консолей, м Наибольшая высота подъема 4,2 8 и 9 4,2 6,3
крюка, м Скорость, м/с: 8,65 10 7,4 9
крана 1.5 0,5 0,83 0,15
груза при подъеме . . . 0,168 0,233 0,133 0,2
тележки 0,635 0,666 0,5 0,6
Масса, т 36,2 39,2 15,5 3,3
2.5. МАШИНЫ НЕПРЕРЫВНОГО ТРАНСПОРТА
2.5.1. Назначение и область применения
Для массового перемещения насыпных, мелкокусочных н штучных грузов
предназначены машины непрерывного действия, транспортирующие материал
в горизонтальном, наклонном и вертикальном направлениях. Для них характе-
рен небольшой коэффициент перемещаемой тары, определяемый отношением
веса движущихся частей к весу перемещаемого груза, к = 0,3—0,5, тогда как
у автотранспорта к — 0,94-1,5. Коэффициент сопротивления движению также
невысок — 0,03—0,1, у автотранспорта — 0,05—0,15. В путевом хозяйстве
применяют ленточные, скребковые, пластинчатые, роликовые и цепные кон-
вейеры н ковшовые элеваторы, используемые как самостоятельные машины
нлн как рабочие органы других машин.
При проектировании н эксплуатации машин непрерывного действия, ра-
ботающих с насыпными материалами, необходимо учитывать физнко-механн-
ческне свойства последних, такие, как гранулометрический состав, т. е. состав
по крупности; объемная (насыпная) плотность; угол естественного откоса
в покое ръ т. е. угол между образующей конуса насыпанного свободно (без
падения с высоты) материала и горизонтальной плоскостью; угол естествен-
ного откоса в движении р2, он же, но прн отсыпке с высоты не менее 1 м.
2.5.2. Ленточные конвейеры
Ленточный конвейер (рис. 2.47, а) состоит из замкнутой (бесконечной) лен-
ты /, огибающей два барабана, приводной 2 н натяжной 4. Верхняя ветвь ленты,
перемещающая материал, называется рабочей, нижняя — холостой. Обе ветвн
поддерживаются роликовыми опорами 3 н 5, расставленными под рабочей
ветвью чаще, чем под холостой. Лента здесь является несущим и тяговым
органом.
75
Рис. 2.47 Схемы:
а. 6. в. г — ленточных конвейеров; д, е — раз-
грузочного устройства
Транспортируемый материал по-
ступает на ленту из воронки илн
питателя. Ленточные конвейеры при-
меняют на путевой землеуборочной
машине (см. п. 4.2), на снегоубороч-
ной машине СМ-2 (см. п. 13.3), на щеб-
неочистнтельных машинах ЩОМ-ДО
и ЩОМ-ЗУ (см. пп. 7.3 и 7.4), а так-
же как самостоятельные устройства.
Скорость ленты ил зависит от ее ши-
рины и типа перемещаемого мате-
риала. Обычно г»л — 14-3 м/с. Ленточ-
ные конвейеры могут быть горизон-
тальными (см. рнс. 2.47, а), накло^ы-
ми (рнс. 2.47, б) и комбинированными
(рис. 2.47, в, г). Прн перемещении ма-
териалов вверх угол подъема не дол-
2
жен превышать ^р2 (где р2 — угол естественного откоса материала в движении)
во избежание осыпания материала. Для повышения угла подъема используются
ребристые ленты нлн к обычным лентам крепят уголки нлн пластины. Разгруз-
ка ленты производится через концевой барабан или в промежуточной точке
прн помощи плужкового сбрасывателя — щита 6, устанавливаемого под углом
к ленте для сбрасывания на одну сторону (рис. 2.47, д) или на обе стороны
(рис. 2.47, е).
Лента конвейера должна отличаться прочностью, гибкостью, не истираться
и как можно меньше вытягиваться. Этим требованиям отвечают прорезиненная
ткань, капрон, сталь. Тканевые и прорезиненные ленты состоят нз несколь-
ких слоев (прокладок) нз хлопчатобумажной ткани (бельтинга), связанных
между собой слоями резины н покрытых со всех сторон резиновой обкладкой.
Вместо резины используют пластмассы. В резинотканевых лентах тканн для
каркаса изготовляют нз капроновых (типы Т Л К-100, Т Л К-200), анндных (типы
ТА-100, TA-300, ТА-400), вискозных (тнп ТВ-80) н комбинированных лавсано-
хлопчатобумажных (типы БКНЛ-65, БКНЛ-100, Б КИЛ-150) волокон (цифры
характеризуют разрывную прочность, Н, ткани шириной 1 мм). Ленты выпуска-
ются шириной В = 400, 500, 650, 800, 1000, 1200, 1400 мм, число прокладок
г'л ДО 8.
Ленты по ГОСТ 20—76 выпускаются типов 1, 2, 3, 4 н следующих видов
общего назначения: морозостойкие, пищевые н негорючие для угольных шахт,
теплостойкие. i
Условные обозначения ленты: тип I, общего назначения, ширина 1400 мм, с че-
тырьмя прокладками из ткаии ТК-300, с рабочей обкладкой толщиной 6 мм и нерабо-
чей — 2 мм, из резины класса А 1-1400-4-ТК-3,00-6-2-А (ГОСТ 20—76).
Вес ленты дл, Н/м, определяют по формуле
= ПВ (^л+бх + М, (2.59)
где 6 — толщина одной прокладки, мм;
— толщины верхней и нижней резиновых обкладок, мм;
хл — число прокладок;
В — ширина ленты, м.
Необходимое число прокладок iл в ленте определяется из расчета на растя-
жение:
, &Smax
2 л — ~
Вопч
(2.60)
76
где k — коэффициент запаса прочности при растяжении (k = 9—11);
В — ширина ленты, м;
<упч — предел прочности иа разрыв прокладки шириной 1 см (стпЧ=500<-1150 Н/см—
для бельтинга и опч = 3000 Н/см — для капрона);
•$тах — максимальное усилие натяжения ленты, равное усилию натяжения набе-
гающей ветви 5Н иа приводном барабане, Н:
(2.61)
где е — основание натурального логарифма (е = 2,71);
и. — коэффициент трения материала ленты о барабан (р = 0,3);
а — угол обхвата приводного барабана лентой, рад (обычно 180° С 3,14 рад);
Р — тяговое усилие в ленте, Н;
Р=?мН+(?м + ^о)^Р(о;
qM — нагрузка от материала, Н/м;
И — высота подъема материала, м (для наклонных участков И — Lsina);
L — длина наклонного участка, м;
а — угол наклона;
q0 — нагрузка от ленты, Н/м;
L”p — длина горизонтальной проекции конвейера, м;
w — коэффициент удельного сопротивления движению (<о 0,05)
Для очистки ленты от налипающего материала предусмотрены специаль-
ные приспособления — неподвижные скребки, прижимаемые к ленте, вращаю-
щиеся щетки, дисковые или специальные ролики, а также вибрационные
очистители.
Барабаны бывают приводные, концевые н натяжные. Диаметр барабана
Dq, мм, определяют по формуле
= ^б,
где Ао — коэффициент (для приводных барабанов Аб — 125-7-150; для концевых и натяж-
ных Аб — 100-7-125);
<л — число прокладок ленты.
Найденный диаметр округляют до ближайшего стандартного: 250, 320, 400»
500, 630, 800, 1000, 1250 и 1600 мм. Длину барабана /б принимают на 100—
200 мм больше ширины ленты;
/0 = В + (ЮО -г 200).
Для транспортирования сырых и налипающих материалов в таких путевых
машинах, как снегоуборочные, землеуборочные и щебнеочистительные, исполь-
зуют ленточные конвейеры с цепным тяговым органом. Их устройство принци-
пиально не отличается от устройства рассмотренных конвейеров, но к торцам
ленты у них крепятся двз тяговые цепи, а вместо барабанов смонтированы валы
со звездочками. Валы могут быть приводными, натяжными и отклоняющими
Звездочки валов находятся в зацеплении с тяговыми цепями. От вращения при-
водного вала со звездочками приходят в движение цепи вместе с прикрепленной
к ним лентой. Таким образом, несущиморганом в этих конвейерах является лен-
та, на которой размещается материал, а тяговым — цепи. Опорами у них слу-
жат ролики для ленты и звездочки для цепей. Приводной вал со звездочками
получает вращение от электродвигателя. В качестве привода используют кли-
новые или плоские ремнн, редукторы шестеренчатые (рис. 2.48, а), червячные
(рис. 2.48, б) н с цепной передачей (рис. 2.48, в). Натяжное устройство предназ-
начено для компенсации вытягивания цепей и ленты в процессе работы конвей-
ера, оно регулирует их длину и натяженне. Величина хода такого натяжного
устройства для конвейера с прорезиненной лентой длиной до 30 м равна 3%
длины конвейера. Натяжные устройства устанавливают обычно в месте креп-
ления натяжных барабанов для ленточных и натяжных валов для ленточио-
77
Рис. 2.48. Схемы приводов конвейеров
Рис. 2.49. Устройства для натяжения лен-
ты
цепных конвейеров. Онн бывают винтовые (ручные) при длине конвейеров до
50 м (рнс. 2.49). Ось 3 натяжного вала со звездочкой 1 смонтирована на подвиж-
ных опорах 2, которые могут перемещаться в направляющих 4. Винт 6, пройдя
через гайку 5, соединяется с опорой 2. Прн вращении винта опоры 2 перемеща-
ются вместе с валом (нли барабаном) и тем самым натягивается лента.
Роликовые опоры 3 и 5 (см. рнс, 2.47) нлн звездочки устанавливают для
уменьшения провисания ленты или цепей по всей длине конвейера на холостой
и рабочей ветвях.
На рис. 2.50 представлена схема наклонного ленточного конвейера путе-
вой уборочной машины системы Балашенко. Он состоит из ленты 12, которая
по краям прикреплена к тяговым цепям 4. Цепи, а следовательно, н лента
приводятся в движение электродвигателем 8 через редуктор 1, цепную передачу
2 и ведущий вал 3. Лента огибает ведомый вал 6 с натяжным устройством. Верх-
няя ветвь ленты В называется несущей, нижняя С — холостой. Обе онн имеют
поддерживающие звездочки 9 для цепей, а в середине ленты с тыльной ее сторо-
ны установлены поддерживающие роликн 13. Для предотвращения скатывания
материала на ленте закреплены уголкн И. Для увеличения объема транспорти-
руемого материала н, следовательно, производительности конвейера по бокам
его установлены борта 10. При работе путеуборочной машины материал (снег
нлн мусор) подается на конвейер вращающимся щеточным ротором 5. Конвейер
и ротор установлены на раме 7 машины.
Натяжение S ленты с тяговымн цепями складывается из сопротивления
движению ленты (силы трення) н предварительного натяжения U70, выпол-
6 5
Рис, 2.50. Схема наклонного конвейера с цепным тяговым органом
78
няемого с целью недопущения провисания цепей с лентой. Тогда для горизон-
тального конвейера без бортов имеем
(9м"г<7о)
S=U7T+r0 = (GM 4 G0)co4-----------•, (2.62)
где GM — вес материала на ленте, Н; GM — 10FLK у;
F — площадь поперечного сечения материала на ленте, м2;
LK — длина конвейера, м;
у — плотность материала, кг/м3;
Go—-суммарный вес ленты и цепи:
Go = Ол 4- Gy — qn Lji 4- ?ц^-ц>
q}l, Qu — вес ленты и цепи, Н/м;
Ьл, Lu —• общая длина ленты и тяговых цепей;
со — удельное сопротивление движению ленты и цепей (при частичном заедании ро-
ликов и звездочек принимают со = 0,14-0,15);
qM — вес материала, Н/м;
qo — вес ленты с тяговыми цепями, Н/м;
f—допускаемая величина провисания ленты, м [f — 0,01—0,05; f = (0,0254-
4- 0,03)Z„|;
I — шаг роликоопор ленты, м.
Для наклонного конвейера силы GM, (7Л, можно разложить на состав-
ляющие (см. рнс. 2.50): тангенциальные (параллельные плоскости ленты):
G^ =GM sin a; G^ = Ga sin a; G^ — Gu sin а (2.63)
н нормальные (перпендикулярные) плоскости ленты:
G1^ =GM cos a; =6лсо8а; G^f=G4 cos a, (2.64)
где a — угол наклона конвейера к горизонту.
Принимая вес набегающей н сбегающей частей ленты н цепи одинаковыми,
получим, что касательные составляющие (/л, Оц набегающей части будут равны
сбегающей, т. е. они уравновешиваются. Тогда натяжение S для наклонного
конвейера выразится так:
S=-G* -4(Gjy -г + G*) co4-n=GM sin a [ (GM + G.a4-Gu) co cos a4-F0. (2.65)
При наличии в конвейере бортов добавляется сила трения материала о бор-
та U76, Н, которую приближенно можно определить по формуле
й2
П=Ю —- LkTH!, (2.66)
tg Р
где h — высота слоя материала на ленте (высота бортов), м;
£к — длина конвейера, м;
Р — угол наклона бортов к горизонту, град;
у — объемная плотность материала, кг/м3;
рК у — масса материала, опирающегося на борты;
щ — коэффициент трения материала о борта (щ = 0,34-0,4—грунта по металлу;
щ — 0,054-0,08 — снега по металлу).
Тогда общее натяжение S для такого конвейера
S = GM sin a4-(GM4-Gn4-Gu) со cos (2.67)
Для конвейера, имеющего горизонтальный и наклонный участки,
S = GXM +г;4-Г04-^б = (с?м + ^) со 4-?ML“ sin (2.68)
где — сопротивление движению ленты на горизонтальном и наклонном участках
ленты;
79
— тангенциальная составляющая веса материала на наклонном участке, Н;
L£P — длина горизонтальной проекции всего конвейера, м:
^к₽ ~ cos а;
— длины соответственно горизонтального и наклонного участков, м.
Найденное S — статическое усилие в цепи. Кроме того, действует динами
ческое усилие
5д- 3m/max = 3/max((<7M-{-flo) £к] -у,
где /1пах — ускорение движущихся масс ходовой части и груза, возникающее из-за не-
равномерности движения цепи на звездочке
v-
!тах=2п‘ ~гч t '
г — число зубьев на ведущей звездочке;
t — шаг цепи, м;
т — масса движущихся частей, кг.
Тогда общее усилие, Н, So6 = S + 5Д. Зная 50б, определяют расчетное
разрывное усилие Враз, Н, и по нему по таблицам ГОСТа подбирают цепи:
^раз — 50б ^з. (2.69)
где А3 — коэффициент запаса (А3 = Зт10).
Производительность ленточного конвейера зависит от площади попереч-
ного сечения материала на ленте, м2, н скорости ленты, м/с,
n^=Fvn, м3/с, или П — 3600 Л>л, м3/ч.
(2.70)
С учетом объемной массы у материала, кг м3, производительность оп-
ределяется по формулам:
77 = 3600FvnУ- кг/ч, или /7 = 3,6^мт/ч, (2.71)
где q'u — масса материала, т/м.
Площадь поперечного сечення материала на ленте зависит от поперечного
сечения ленты под нагрузкой (плоское, желобчатое), наличия бортов н физиче-
ских свойств материала (угол естественного откоса, влажность н крупность
частиц). Прн определении площади F поперечное сеченне разбивают на плоские
элементарные фигуры-треугольннкн, прямоугольники и т. п., подсчитывают нх
площади и суммируют. Так, для плоской ленты без бортов (рис. 2.51, а) прини-
мают, что материал лежит слоем, имеющим сеченне равнобедренного треуголь-
ника нлн в виде равнобедренной трапеции с углами прн основании р3, равны-
ми половине угла р2 естественного откоса материала в движения, т. е. р3 =
= 0,5 рг. Если В — ширина плоской ленты, то основание треугольника Во при
ннмают Во = (0,84-0,9) В. Для конвейера с бортами (рис, 2.51, б) площадь по-
перечного сечення материала F определяется как сумма площадей тре^
угольника Fx н трапеции В2, т, е. (F — Fr + F2) с углом наклона боко-
вых стенок В. Учитывая, что обычно
Рис. 2.51. Схемы расположения материала
на ленте:
а — без бортов; б —с бортами
В, = 0,7 В\ р = 60=; Во = (0,84-0,9) В,
для конвейера с бортами при трапе-
цеидальном расположении материала
F = (0,25 В2 — 0,16)(tg 0 + tg р3) н
производительность конвейера
/7 = 3,6 Гуил = 3,6 (0,25Вг —
— 0,16) (tg p-l-tg ps) yvn. (2.72)
80
Рис. 2.52. Расчетная схема конвейера
т/ч;
Мощность N, кВт, на приводном
барабане нли приводном валу нак-
лонного ленточного конвейера затра-
чивается на подъем материала, его
горизонтальное перемещение, трение
о борта и на холостой ход ленты с це-
пями:
ПН (а
N =--------I- ------- +
360 ' 360
W6 +2</о Дк₽
+ --------------, (2.73)
1000 1
где П — производительность конвейера,
И — высота подъема материала, м;
ид — скорость движения ленты, м/с;
<в — коэффициент сопротивления движению ленты (для роликов с подшипниками
качения <в = 0,03-1-0,055);
L£p — горизонтальная проекция конвейера, м.
Мощность двигателя, кВт, конвейера с учетом к.п.д. передачи т)
Нд^Н/-ц. (2.74)
Пример 6. Выбрать параметры среднего ленточного конвейера путевой землеубо-
рочной машины системы Балашенко (см. п. 4.2) для транспортирования грунта или снега.
Производительность конвейера П — 600 т/ч. Схема конвейера даиа иа рис, 2,52. Он со-
стоит из горизонтального (длиной ~ 2,7 м) и наклонного (L” — 3,08 м) участков;
угол подъема а = 24°, Плотность перемещаемого грунта у « 1500 кг/м3. Так как требу-
ется перемещать сырой материал прн значительной весовой производительности и, сле-
довательно, значительном тяговом усилии, принимаем, что тяговым элементом конвейера
служат две цепи, а несущим — лента, роликовые опоры и звездочки—на подшипниках
качения. Конвейер имеет наклонные борта (высотой /1—0,2 м) для предохранения мате-
риала от просыпания и транспортирования на ленте толстого слоя материала, имеющего
малую плотность (снега). Принимая скорость леиты vn == 1,15 м/с, из формулы произво-
дительности находим ширину ленты, м,‘
iZ 1 г . 77______________
V 0,25 [ 3,6(tg^4-tg Ра) тул
600
3,6 (tg60°+tg 15°) 1500-1,15 + °’16р°-913-
По ГОСТу выбираем прорезиненную леиту шириной jS— 1000 мм типа 2Р, у которой
толщина прокладки о— 1,5 мм, толщина верхней резиновой обкладки 61=6,3 мм, иижней
<52 = 2 мм. Предварительно принимаем число прокладок в лейте /л = 5. Тогда погонный
вес ленты (по формуле 2.59) qn ~ 11,0 • 1,0 (1,5 • 5 + 6,3 4- 2) = 173,80 Н/м. Погонный
/7-10 600-10 ,„
вес материала qM = 6 - — -yg—у £* 1450 Н/м. Предварительно принимаем по-
гонный вес двух цепей по аналогии с конвейерами подобных конструкций, например на
снегоуборочных машинах, =- 60 2 — 120 Н/м. Тогда q0 — + <7ц — 173,8 4- 120 =
= 293,8 Н/м. Общая погонная нагрузка ?= ?м+ ?о ~ 1450 4- 293,8 = 1743,8 Н/м.
Длина горизонтальной проекции L"p — + L” cosa ~ “Ь 3,08 cos 24° = 5,513 м.
Общая длина конвейера LK = 4* ~ 2,7 Н" 3,08 5,78 м. Найдем по формуле
(2.67) общее натяжение в цепях и ленте, принимая, что допускаемая величина провиса-
ния f — 0,01 м, шаг роликоопор 1П = 0,01/0,025 = 0,4 м,
rV ч по (<7м4-?оНп
$ = <7м sin а+(?м +?о) -г------------------ +
°f
-10-—- LK ущ-1450-3,08 sin 24°4-(1450+293,8) 5,513-0,1 +
tg Р
(1450 + 293,8) 0,42 0 22 „
' -------~ ~ 4 10 7g60° 5>78-1500'0-3-6866’12-
8-0,01
81
Так как конвейер имеет две тяговых цепи, то усилие S, Н, на каждую из них
= 6836,73 • 0,5 = 3418,36. Ч
Динамическое усилие
ил 1 152
5д=3-2л2 —— (?м+?0)LK = 3-2-3,14а , 1А (14504-293,8) 5,78=3504,67 Н,
Юг2 t 152 • 0,1 10
где — скорость ленты, м/с;
z — предварительно принятое число зубьев звездочки (г = 15);
t — шаг цепи, м;
LK — общая длина конвейера, м.
Общее натяжение определяем по формуле Sog = S + Sa — 6866,12 + 3504,67 —
— 10 370,88. По формуле (2.69) находим разрывное усилие Spa3, Н, при k3 = 8 Spa3 =
=SO6 k3 = 10 370,88 8 = 82 967,0 Н. Из таблицы (см. приложение 7) выбираем цепь
М-80-2-80-2 (ГОСТ 588—74); Spa3 = 80 000 Н; шаг t = 80 мм; ?ц = 48 Н/м.
Находим диаметр начальной окружности Do звездочки для цепи с шагом t = 80 мм.
180° 180°
D0—t/sin------—80/sjn —-— = 384,8 мм,
’ г 15
где z — принятое число зубьев звездочки (z = 15).
Скорость вращения приводного вала конвейера
60г? 60-1,15
пв = — = ----------—-— = 57,106 об /мин.
в л£0 3,14-0,3847
Необходимую мощность находим по формуле (2.73):
ПН
N== 360 +
+ 10------
(tg 60°) 1000
Л7^рсо
360
+б г>л+2д0£^р йюл 800-1,23 , 600-5,78-0,1
= 360 + 360
~ 2-293,8-5,513-0,1-1,15
5,78-1500-0,3 - 1,15 + --------1----------------=7,12 кВт.
1 ААА
1000
1000
Определяем мощность электродвигателя кВт, зиая к.п.д. передачи:
' Т| = 'Пч'Пцп = 0,85 0,9 = 0,765,
где Т1ч и т)цп — к.п.д. соответственно червячной и цепной передач;
= М/т] = 7,12/0,68 = 9,3 кВт.
По каталогу подбираем двигатель типа 4А мощностью 9,5 кВт с числом обо-
ротов Пдв = 730 об/мин. Определив передаточное число привода I = пдв/п = 730/57,106=
= 12,78, подбираем редуктор.
2.5.3. Пластинчатые и скребковые конвейеры
Пластинчатые конвейеры (рис. 2.53) применяют для перемещения куско-
вых и тяжелых грузов, а также острокромочных материалов. На путевых ма-
шинах такие конвейеры применяются в полувагонах снегоуборочных поездов
(см. п. 13.3). Тяговым органом пластинчатых конвейеров служат две бесконеч-
ные цепи 3, которые устанавливают на ведущей 2 н ведомой 4 звездочках. К це-
Рис. 2.53. Пластинчатый конвейер полувагона снегоуборочного поезда
82
пям крепятся настилы 1 (металличе-
ские пластины). Для улучшения сцеп-
ления перемещаемо материала с
конвейером и предотвращения его
проскальзывания используют волни-
стые пластины. Величина тягового
усилия ограничивается прочностью
тягового органа-цепей; в таких кон-
вейерах используют обычно длинно-
звенные втулочно-роликовые цепи.
Скорость движения тягового органа,
а следовательно, и груза у этих кон-
вейеров меньше, чем у ленточных, и
равна 0,05—0,5 м/с.. Пластинчатые
конвейеры могут быть горизонтальные
н наклонные. Угол а наклона к гори-
зонту составляет при плоских пласти-
нах до 15°, при волнистых — до 30°.
Производительность и мощность пла-
стинчатого конвейера подсчитывается
по формуле (2.70), а затрачиваемая
мощность — по формуле (2.73), так-
же как и для ленточных конвейеров.
При этом коэффициент сопротивления
перемещению <о = 0,114-0,15.
Скребковые конвейеры, предна-
Рис. 2.54. Схема скребкового конвейера сне-
гоуборочной машины СМ-2
значенные для перемещения насып-
ных материалов (рис. 2.54), состоят из двигателя /, редуктора 2, привод-
ного вала 3, натяжного устройства 4, тяговой цепи 5 и скребков 6.
В путевом хозяйстве скребковые конвейеры применяют в качестве узлов
некоторых машин: снегоуборочных, щебнеочнстительных. Так, на снегоубороч-
ной машине СМ-3 (см. п. 13.3) применяется скребковый конвейер, перемещаю-
щий снег по верхней ветви. При работе машины снег, забираемый с пути и по-
даваемый на конвейер, попадает между скребками 6 и транспортируется вверх.
В разгрузочных устройствах снегоуборочной машины СМ-4 использован
скребковый конвейер, перемещающий материал скребками нижней ветви (см.
рис. 13.30, а). В щебнеочистительной машине ЩОМ-Зу (см. п. 7.4) скреб-
ковый конвейер вырезает щебень из-под путевой решетки и подает его в щеб-
неочнстнтельное устройство.
Скорость скребкового конвейера принимают в пределах vn = 0,5-4-1 м/с.
Производительность 77, т/ч, конвейера
П = 3,6 Дидуфср,
где F — площадь поперечного сечения желоба, м3;
у — насыпная плотность материала, т/м3;
ф — коэффициент заполнения желоба (для сыпучих ф = 0,5—0,6);
<р — коэффициент, учитывающий угол а наклона конвейера (при а = 0 ср = 1; при
а ~ атах ?= 304-40° ср — 0,5).
Потребляемая мощность на приводном валу определяется по (2.73).
2.5.4. Ковшовые элеваторы
Ковшовые элеваторы предназначены для перемещения сыпучих нли кус-
ковых материалов в вертикальном илн близком к нему направлении. В путе-
вом хозяйстве элеваторы используют в путевых уборочных машинах Балашен-
ко и на щебеночных заводах.
83
Рис. 2.55. Схема среднего элеватора путе-
вой уборочной машины
Конструкция ковшового элева-
тора путевой уборочной машины
(рнс. 2.55) состоит нз бесконечного
тягового органа — двух цепей 7, на
которых с равным интервалом (шагом
t) закреплены ковши 8, ведущей 4, ве-
домых 9 и отклоняющих 6 звездочек.
Вал звездочек 9 имеет винтовые на-
тяжные устройства. Привод осущест-
вляется от двигателя 1 через чер-
вячный редуктор 2, цепную пере-
дачу 3.
Различают элеваторы быстроход-
ные и тихоходные. Онн отличаются
скоростями передвижения тягового
органа и креплением ковшей к тяго-
вому органу: с зазорами нли вплот-
ную без зазоров. Первые нз них назы-
ваются элеваторами с расставленны-
ми ковшами, вторые — с сомкнутыми.
Прн движении ковшовой цепи матери-
ал зачерпывается ковшами и подни-
мается вверх. Пройдя верхнюю звез-
дочку, ковши разгружаются на кон-
вейер 5 под действием силы тяжести
(гравитационная разрузка) или под
действием центробежной силы.
Для расчета производительности ковшовых элеваторов 77, т/ч, можно вос-
пользоваться общей формулой для транспортирующих машин непрерывного
действия
П — 3,6 q vyt
где Vy — скорость движения тягового органа, м/с;
q — погонная нагрузка, определяемая по формуле
’—7-’
V — вместимость ковшей, м3;
t — шаг ковшей, м;
— коэффициент наполнения ковшей, зависящий от материала (для гравия и мел-
кого щебня Аи — 0,7; для щебня крупного kK — 0,5);
V — насыпная плотность материала, кг/м8.
2,6. ОСНОВЫ ЭКСПЛУАТАЦИИ И ОБСЛУЖИВАНИЯ
ГРУЗОПОДЪЕМНЫХ МАШИН
Изготовление н эксплуатация грузоподъемных машин обусловливаются
«Правилами устройства и безопасной эксплуатации грузоподъемных кранов»,
контроль за выполнением которых возлагается на органы Госгортехнадзора.
Грузоподъемные машины изготовляют только предприятия, имеющие разреше-
ние Госгортехнадзора.
Регистрация. Краны всех типов должны быть зарегистрированы в соответ-
ствующем органе Госгортехнадзора, после чего может быть выдано разрешение
на эксплуатацию.
Не подлежат регистрации краны с ручным управлением, а также мостовые,
передвижные и поворотные консольные краны грузоподъемностью до 10 т,
84
управляемые с пола прн помощи кнопочного аппарата, подвешенного на кране,
н со стационарно установленного пульта.
Машины, не зарегистрированные в органах Госгортехнадзора, а также стро-
пы, траверсы, клещи должны быть зарегистрированы на предприятии н снаб-
жены индивидуальными номерами.
Техническое освидетельствование. До пуска в работу вновь установленные
грузоподъемные машины должны пройти техническое освидетельствование: ча-
стичное— не реже одного раза в 12 месяцев, полное—не реже одного раза в 3 го-
да, за исключением редко используемых машин, для которых установлен срок
5 лет. Прн этом, кроме осмотра, машину подвергают статическому н динамичес-
кому испытаниям. Должны быть осмотрены и проверены в работе механизмы и
электрооборудование, приборы безопасности, тормоза, аппаратура управления,
сигнализация; проверено состояние металлоконструкций, сварных соединений,
крюка, канатов, блоков, осей н деталей нх крепления, состояние защитного
заземления (в кранах с электрическим приводом), подкранового пути.
При частичном техническом освидетельствовании статические и динами-
ческие испытания не производят.
Статические испытания машины производят для про-
верки ее прочности н грузовой устойчивости (для стреловых крахов). Нагрузки
при статическом испытании на 25% превышают грузоподъемность машины.
В стреловых кранах это испытание проводят для всех показателей грузовой
характеристики при наибольшем н наименьшем вылетах стрелы. При испыта-
нии груз поднимают на высоту 200—300 мм, выдерживают в течение 10 мин, пос-
ле опускания груза в конструкции исправного крана не должно быть оста-
точных деформаций.
Динамическое испытание грузоподъемная машина прохо-
дит под наибольшим рабочим грузом, масса которого на 10% превышает гру-
зоподъемность машины. Это испытание позволяет проверить действие механиз-
мов н тормозов. При динамическом испытании не менее двух раз выполняют все
движения машины с грузом на крюке. Результаты освидетельствования и ис-
пытания записывают в паспорт грузоподъемной машины. Прн удовлетвори-
тельных результатах в паспорт вносят запись о разрешении на работу грузо-
подъемной машины и указывают дату следующего освидетельствования. Пос-
ле каждого монтажа, капитального ремонта, смеиы механизма подъема нлн крю-
ка необходимо внеочередное освидетельствование грузоподъемной машины.
После освидетельствования на вновь зарегистрированные, установленные
на новом месте, а также реконструированные краны, подлежащие регистрации
в органах Госгортехнадзора, разрешение на его работу дают инспектор Госгор-
технадзора н лицо, ответственное на предприятии за работой грузоподъемных
машин (лицо надзора), которое назначается приказом по предприятию нз числа
инженерно-технических работников. Техническое освидетельствование машин,
не подлежащих регистрации в органах Госгортехнадзора, производит лицо
надзора, которое н дает разрешение на эксплуатацию этих машин.
Кроме технического освидетельствования, в процессе эксплуатации выпол-
няется периодический осмотр крана лицом, назначенным приказом по предпри-
ятию, совместное крановщиком. Результаты заносятся в журнал периодическо-
го осмотра. Паспорт крана и журнал находятся у ответственного за исправное
состояние крана.
Допуск к управлению машинами. К управлению н обслуживанию машин
допускаются лица не моложе 18 лет, прошедшие медицинское освидетельст-
вование, закончившие н выдержавшие аттестацию, знающие правила управле-
ния н обслуживания машин, а также правила техники безопасности. После
приведения машины в состояние готовности ее проверяет механик с опробова-
нием на холостом ходу. Работать на машинах следует в строгом соответствии с
85
указаниями, изложенными в заводской инструкции по эксплуатации. Контроль
за правильной эксплуатацией машин приводится инспекциями Госгортехнад-
зора. Инспекция имеет право делать предписания администрации об устране-
нии обнаруженных нарушении, а также останавливать эксплуатацию машин,
техническое состояние которых угрожает жнзнн и здоровью людей.
По окончании работы машинист должен очистить машину, проверить
состояние и, если необходимо, провести крепежные работы и устранить обна-
руженные дефекты. Прн невозможности устранения неисправности на месте ма-
шинист сообщает об этом механику н вносит соответствующую запись в смен-
ный журнал.
Приемка и сдача машины. Различают следующие виды приемки машин: но-
вых машин, машин из ремонта, машин от другой организации н межсменная
приемка. Каждая машина, вновь прибывшая в организацию, подвергается тех-
ническому освидетельствованию и осмотру Межсменная приемка и сдача ма-
шин необходима для повышения ответственности обслуживающего персонала
за техническое состояние машины. Сдаваемая машина должна быть исправной,
очищенной и смазанной. Межсменный осмотр производится в течение 20—45 мин
за счет времени обеих смен с соответствующей записью сменщиков в журна-
ле. Сдачу машин в ремонт оформляют актом с приложением описи технического
состояния. Машины, сдаваемые в ремонт, должны быть полностью укомплекто-
ваны, очищены и вымыты. Детали, подвергающиеся коррозии, должны быть ок-
рашены или смазаны маслом, окна, проемы и люки обшиты досками, а крышки
и двери опломбированы.
Новые и капитально отремонтированные машины перед вводом в эксплуа-
тацию проходят испытания н обкатку. Обкатка машин проводится в течение
10—100 ч с целью добиться приработки трущихся поверхностей сопряженных
деталей. В процессе обкатки машины работают 10% времени вхолостую, каж-
дые последующие 30% времени обкатки нагрузка постепенно увеличивается
от 25 до 100% номинальной.
Работа на машинах. Работать на машинах можно начинать только после
приемки смены н ознакомления с записями в журнале. При обнаружении не-
исправностей к работе приступать нельзя до полного нх устранения. Эксплуа-
тировать машину следует в соответствии с инструкцией завода-изготовителя с
соблюдением всех норм и правил, предусмотренных Госгортехнадзором. По
окончании работы машинист должен очистить машину от грязн н провести ее
осмотр, в процессе которого установить состояние ее узлов и деталей, подтянуть
ослабленные соединения, заменить негодные и установить новые крепежные де-
тали взамен утерянных, проверить состояние канатов, ремней и цепей, а также
отрегулировать основные механизмы и системы управления. Летом следует осо-
бенно тщательно следить за состоянием масляных, топливных и воздушных
фильтров, так как прн запыленном воздухе фильтры загрязняются быстрее.
Воздушные фильтры необходимо очищать при всех видах технического обслу-
живания, а прн работе машины в особо пыльных условиях — даже ежедневно.
Перевод машины на осенне-зимний режим эксплуатации производится по плану
прн установившейся температуре окружающего воздуха ниже 5е С. При подго-
товке к зимней эксплуатации кабины утепляют войлоком, на двигатель внут-
реннего сгорания надевают чехлы, воду в радиаторе заменяют антифризом, дви-
гатель заправляют зимними сортами масел. Машины смазывают смазками сра-
зу после остановки работы, когда механизмы еще разогреты. Перед началом ра-
боты машину заправляют топливом, маслом н опробовают на холостом ходу во
избежание примерзания деталей, особенно фрикционных н тормозных лент.
Смазка машин. В процессе работы машины все подвижные соединения из-за
имеющегося трения начинают изнашиваться, увеличиваются зазоры в соедине-
ниях и ухудшается качество работы машины. Износ делится на две основные
86
группы: естественный нли нормальный износ и аварийный износ. Естественный
износ происходит при нормальных условиях эксплуатации и соблюдении всех
правил ухода за машиной. Он может быть механическим, коррозионным, тепло-
вым и абразивным. Аварийный износ выводит из строя машину преждевремен-
но. Он является причиной применения недоброкачественных материалов, не-
правильного монтажа, нарушения режимов смазки и правил эксплуатации.
Для борьбы с износом проводят правильную и своевременную смазку. Смаз-
ка уменьшает потери мощности на тренне, снижает изнашивание деталей, пре-
дохраняет от коррозии и амортизирует ударные нагрузки. Смазки бывают жид-
кие и консистентные. Они должны обладать хорошей вязкостью и маслянисто-
стью, низкой температурой застывания и химической стойкостью. Смазку под-
бирают по давлению, скорости скольжения и температуре. Со временем смазка
загрязняется, а часть ее пропадает. Загрязненную смазку собирают и очищают
(регенерируют) в специальных установках для повторного использования. Прн
работе машин необходимо стремиться к тому, чтобы подшипники трення сколь-
жения работали в зоне жидкостного трення. В целях предохранения от попада-
ния абразивных частиц в зону трения для подшипников применяют консистент-
ные смазки, жировые и синтетические солидолы, заполняющие все зазоры.
Открытые зубчатые передачи смазывают графитной мазью. Перед нанесе-
нием ее шестерни очищают от грязи и старой смазки. Для смазки закрытых пере-
дач применяют нигролы. Закрытые цепные передачи летом обрабатывают мас-
лом АК-15, а зимой — А К-10. Открытые цепные передачи после‘очистки сма-
зывают разогретой графитовой мазью. Для стальных канатов используют разо-
гретую канатную мазь. Места н сроки смазки, а также выбор сорта последней
указывают в специальных картах и схемах.
Эксплуатация машин связана с передвижением и перевозкой их с одного-
объекта на другой.
Таблица смазки узлов крана КДЭ-163
Места смазки Сорт масла Периодичность
Редукторы грузовой и стре- Масло АКЗп-10 или инду- Заменять через 1000 ч ра-
ловой лебедок; механизмы по- ворота и передвижения стриальное 50 боты, но не реже одного раза в 6 месяцев
Буксы ходовых тележек с Консистентная смазка Смазывать через 6 меся-
роликовыми подшипниками 1-13 цев работы крана
Подшипники грузовых бара- банов, блоков порталов, тра- версы, головки стрелы, крюка, вала механизма поворота и т. д. Пресс-солидол «С» Шприцевать через 200 ч работы или 2 раза в месяц
Открытая зубчатая пара ме- ханизмов поворота и стрело- вой лебедки Графитная смазка Смазывать через 200 ч, но не реже двух раз в ме- сяц
Канаты Смазка канатная марки 39* Смазывать 2 раза в ме- сяц
Электрогидравлический тол- Летом — трансформатор- Заменять один раз в 6-
катель ное масло, зимой — АМГ-10 месяцев
Подшипники червячного ре- дуктора Пресс-солидол «С» Шприцевать через 500 ч работы или один раз в ме- сяц
Роликовый подшипник меха- низма передвижения Пресс-солидол «С» Сменить смазку через 200 ч работы или один раз в год
Пятник ходовой рамы Пресс-солидол «С» Смазывать один раз в год
87
На малые расстояния (до 5—10 км) гусеничные машины перемещают на
буксире нлн собственным ходом. Пневмо колесные машины доставляют своим
ходом на расстояние 15—20 км, а на буксире — на 100—150 км.
Хранение машин. Машины, работа которых прерывается на срок более од-
ного месяца, проходят консервацию и ставятся на хранение. В связи с этим вы-
полняют: чистку н мойку; освобождение емкостей от воды, топлива и масла;
Основные неисправности элементов крана КДЭ-163
Детали Признаки неисправности Примечание
Крюк Трещины и надрывы на поверхно- Подлежит выбраковке
Барабаны и блоки сти и у хвостовика, износ зева свы- ше 10% высоты, деформации тела крюка в опасных сечениях и ниток резьбы Осмотр при помощи лупы с 10—20-кратным увеличением, еже- годная дефектоскопия Уменьшение стенки барабана свы- Подлежит замене
Зубчатые колеса ше 15—20%, а стенки блока свыше 10%. Износ поверхности желоба бо- лее 25% диаметра каната, трещины и частичный излом реборды Трещины усталости одного из Подлежит замене. Для
Червячные пары зубьев, на ступице, ободе- Выкраши- вание свыше 30% рабочей поверхно- сти при глубине более 10% толщины зуба Ослабление посадки венца на ступице Осевое смещение червяка свыше быстроходных колес (свыше 8 м/с) заменяют пару зубчатых колес Подлежит замене
Валы н оси 0,1 мм при повороте последнего на 2—3 оборота Замеряют индикато- ром Кривизна более: 0,15 мм на 1 м Выправляются или за-
Канат длины (или 0,3 мм по всей длине) при 500 об/мин; 0,25 мм на 1 м дли- ны (0,5 мм по всей длине) при п<500 об/мин. Замер выполняют индикатором Трещина глубиной 0,05 мм, оста- точные деформации скручивания (разбитые шпоночные гнезда) Обрыв или износ проволок (см. меняются новыми Выбраковывают Выправляют Выбраковывают
Тормоза: а) шкивы табл. 2.1) Износ свыше 30%, риски, канавки свыше 1 мм, трещины, ослабление посадок на валах, биение Трещины, износ фрикционного ма- »
б) обкладки »
в) пружины териала до 2 мм толщины Трещины, обломанные витки, оста- »
г) оси, рычаги точные деформации Изиос более 5%, овальность свыше »
Подшипники качения 0,5 мм, трещины Трещины, повреждение сепаратора, Выбраковывают. За-
Ходовое оборудование Двигатель внутренне- го сгорания, электрообо- рудование увеличение радиального зазора, вы- крашивание или выработки на телах качения Проверяется в соответствии с «Правилами технической эксплуата- ции железных дорог» В соответствии с руководствами по эксплуатации этих агрегатов мена отдельных элемен- тов из других подшип- ников ие допускается
88
установку на подкладки или подставки с разгрузкой рессор, канатов, гидравли-
ческого и пневматического управления; перевод рычагов в нейтральное поло-
жение, консервацию двигателя; проверку комплектности запчастей и инстру-
мента с упаковкой их в ящики; заправку всех точек смазкой; восстановление ок-
раски днутри и снаружи; защиту шин пневмоколесных машин от атмосферных
воздействий; опломбирование кабины.
При длительной консервации машин необходимо: дополнительно слить мас-
ло из картеров и редукторов, промыть жидкой смазкой и заправить свежим мас-
лом, снять цепи и канаты и после очистки установить на место, промыть гидро-
систему и заполнить ее свежим маслом, заклеить стекла бумагой, покрышки
присыпать тальком и шнны вновь накачать. Перед консервацией машина дол-
жна пройти техническое обслуживание или ремонт, чтобы после консервации
ее можно было сразу использовать на полную мощность. Состояние машин,
находящихся на длительном хранении, проверяют через каждые 2—3 месяца.
Техническое обслуживание строится по планово-предупредительной си-
стеме, т. е. через определенное число часов работы в обязательном порядке не-
зависимо от технического состояния машина подвергается осмотру, регулиров-
ке с устранением неисправностей. Для крана КДЭ-163 устанавливаются сле-
дующие виды технического обслуживания: а) ежесменные (ЕО) — производит-
ся ежесменно; б) техническое обслуживание № 1 (ТО-1) (через 100 ч работы);
в) техническое обслуживание № 2 (ТО-2) (через 600 ч работы); г) техническое
обслуживание № 3 (ТО-3) (через 2500—3000 ч работы). При ЕО проводится
внешний осмотр механизмов и узлов, проверяется уровень масла, наличие топ-
лива, осматривается состояние канатов, металлоконструкций, измерительных
приборов, освещения, сигнализации. Проверяется надежность тормозов, ра-
бота крана на холостом режиме. Все замеченные неисправности устраняются.
При ТО-1 выполняются все работы ЕО, а также проверяется крепление дизель-
генератора, электроаппаратов, редукторов, двигателей, тормозов, опорно-пово-
ротного устройства; состояние металлоконструкций, электроаппаратов. Про-
водится смазка механизмов, уход за дизелем, аккумуляторной батареей. При
ТО-2, кроме работ по ТО-1, машину осматривают через смотровые люки. Зубча-
тые зацепления должны работать всей поверхностью (минимальное пятно кон-
такта 40% по высоте и 50% по длине). Проверяют центровку соединительных
муфт, величину осевого зазора у конических подшипников, регулировку тор-
мозов с заменой тормозных накладок, состояние металлоконструкций, сварных
швов, роликов, блоков, канатов. При ТО-3, кроме работ по ТО-2, проводится
ревизия подшипников и уплотнений, пру ин, прижимных роликов, состояние
тормозных муфт, стоек портала, регулировочных винтов, ограничителей грузо-
подъемности, выключателя рессор. При всех видах ухода производится обслу-
живание элементов электрооборудования и дизеля в соответствии с инструк-
циями. Основные неисправности крана КДЭ-163 даны в таблице.
2.7. ОСНОВНЫЕ ТРЕБОВАНИЯ ПО ТЕХНИКЕ БЕЗОПАСНОСТИ
ПРИ ОБСЛУЖИВАНИИ ГРУЗОПОДЪЕМНЫХ МАШИН
Общие требования техники безопасности включают проверку технической
готовности машины, ее пуск, осмотр после окончания работы и устранение не-
исправностей. Рабочее место машиниста должно быть удобным и обеспечивать
хороший обзор фронта работы, оборудовано ограждениями, защитными и пре-
дохранительными устройствами и приспособлениями.
Повышение степени безопасности достигается применением предохрани-
тельных устройств: ограничителей высоты подъема груза, грузоподъемности,
грузового момента, передвижения, указателей наклона самоходного крана.
89
Перед допуском к работе машинисты и их помощники под расписку получают
инструкцию, содержащую также требования техники безопасности. Ежегодно у
лиц, обслуживающих машины, проверяют знания в объеме призводственной
инструкции. Результаты проверки знаний оформляют и заносят в журнал ат-
тестации и проверки знаний. Перед началом работы необходимо подать пре-
дупредительный звуковой сигнал. Нельзя начинать работу при недостаточном
освещении.
Работа должна быть прекращена при спадании канатов с барабанов и бло-
ков., при повреждении предохранительных устройств, при вынужденной оста-
новке машины. По окончании работы все горючие и смазочные материалы необ-
ходимо сдать на склад. Рубильник перед главным кабелем питания машины с
электроприводом должен быть выключен и закрыт на замок. При аварии или
несчастном случае необходима остановка машины до прихода представителя
администрации. Несоблюдение правил техники безопасности может привести
к производственным травмам.
Современные машины и оборудование оснащаются средствами защиты ра-
бочих от вибрации, сотрясений, производственного шума, пыли.
Для предупреждения поражения электрическим током в сети освещения или
управления при возможности применяют электрический ток напряжением до
36 В; изолируют и ограждают электрооборудование и проводы, находящиеся
прд напряжением; устанавливают защитную аппаратуру, отключающую элек-
трооборудование при опасных нагрузках в электрической цепи; заземляют
электрооборудование.
На гр узо подъемных машинах масса поднимаемых грузов ни в коем случае
не должна превышать номинальной грузоподъемности кранов или подъемных
механизмов и применяемых во время работы вспомогательных приспособлений.
По имеющимся на кране указателям необходимо точно учитывать грузоподъем-
ность крана в зависимости от положения (наклона) его стрелы. Передвижные
стрелковые краны (железнодорожные и автомобильные) при подъеме грузов,
близких по весу к предельно допускаемой для крана нагрузке, следует уста-
навливать на выносные опоры независимо от предполагаемого направления
стрелы при работе. Все движения кранов и подъемных механизмов, а также тор-
можение их во время работы должны производиться плавно, без рывков и с над-
лежащей осторожностью.
Находиться или проходить под поднятым грузом запрещается; отступле-
ния от этого правила, если они являются неизбежными по производственным
условиям, должны быть согласованы с инспекцией Госгортехнадзора. Воспре-
щается поднимать и перемещать грузы с находящимися на них людьми.
Все передвижные краны с моторными приводами должны быть снабжены
механическими или электрическими сигнальными приборами; при неисправно-
сти или отсутствии сигнального прибора работа на кране не допускается. Под-
таскивание грузов, где бы они ни находились, краном при косом натяжении тро-
сов запрещается; не разрешается также отрывать краном груз, находящийся
на земле в примерзшем состоянии или углубленный в землю. По окончании ра-
боты или в перерывах груз нельзя оставлять в подвешенном состоянии. При
работе на путях с уклоном кран должен быть установлен на тормозе; при дли-
тельной работе на одном месте кран, кроме того, укрепляется захватами за
рельсы. Если сработал ограничитель грузоподъемности, нужно опустить груз
на землю или уменьшить вылет стрелы.
Груз с земли необходимо поднимать только грузовой лебедкой, а не подъ-
емом стрелы.
Запрещается находиться в машинном отделении при работе крана.
90
3. МЕХАНИЗИРОВАННЫЙ ПУТЕВОЙ ИНСТРУМЕНТ
Для механизации путевых работ применяют как путевой механизирован-
ный инструмент, так и машины. Механизированный инструмент классифици-
руют по назначению и применению, виду используемой энергии, характеру воз-
действия на обрабатываемый материал и виду движения рабочего органа отно-
сительно корпуса.
По назначению и применению путевой инструмент и машины подразделяют
на следующие виды: для работы с рельсами (рельсорезные, рельсосверлильные,
рельсошлифовальные), со скреплениямц (шуруповерты, гаечные ключи, мо-
торные гайковерты, машины для закрепления и смазки клеммных и заклад-
ных болтов, костылезабивщики, костылевыдергиватели), со шпалами (станки
и машины для одиночной смены шпал), для работы на подъемке, выправке
и рихтовке пути (домкраты, рихтовщики, разгоночные приборы, электрошпало-
подбойки). По виду используемой энергии инструмент подразделяют на элек-
трический, гидравлический, пневматический н с двигателем внутреннего сго-
рания (ДВС). По характеру воздействия рабочего органа на обрабатываемый
материал инструмент и машины могут быть вращательного, режущего, виб-
рационного, ударного и комбинированного воздействия.
3.1. ЭЛЕКТРИФИЦИРОВАННЫЙ ПУТЕВОЙ ИНСТРУМЕНТ •
И ИНСТРУМЕНТ С ПРИВОДОМ
ОТ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ
Весь электрифицированный путевой инструмент, как правило, имеет трех-
фазный асинхронный электродвигатель с короткозамкнутым ротором напряже-
нием 220 В и частотой 50 Гц. В последние годы начаты работы по постепенному
переводу инструментов на повышенную частоту до 200 Гц, что способствует сни-
жению их веса, повышению производительности и улучшению условий работы
обслуживающего персонала. Отдельные инструменты в качестве привода име-
ют ДВС, при этом не требуются электростанции.
3.1.1. Рельсорезные станки
Рельсорезные станки предназначены для резки рельсов всех типов. Разли-
чают два вида станков: рельсорезные станки РМ-3, используемые для резки не-
закаленных рельсов, и станки РМК. с абразивным диском для резки рельсов,
в том числе и объемнозакаленных.
Рельсорезный станок РМ-3 (рис. 3.1) состоит из рамы, на которой установ-
лен мотор-редуктор с кривошипно-шатунным механизмом, пильной рамкой 5,
ножовочным полотном 3, бачком 2 для охлаждающей жидкости и устройством
для крепления станка к рельсу. При перемещении станка используются двух-
91
Рис. 3.1. Схема рельсорезного станка РМ-3
ребордчатый ролик 14 и ручки 12. Мотор-редуктор имеет электродвигатель 5,
посредством вала и втулки 10, присоединенной к червяку 11 редуктора. На
ведомый вал редуктора неподвижно насажен кривошип 13. К нему шарнирно
прикреплен шатун 9, связанный с пильной рамкой 5. Благодаря кривошипно-
шатунному механизму пильная рамка с ножовочным полотном, натягиваемым
винтовым устройством, перемещается поступательно вдоль направляющей, ук-
репленной на поводке 7. Последний свободно опирается на вал червячного коле-
са. Станок крепится на рельсе скобой 1 с винтовым приспособлением. Для удер-
жания рабочего органа в верхнем (нерабочем) положении предусмотрен фикса-
тор 6.При включении двигателя пильный механизм плавно опускается на рельс и
начинает резку. Для охлаждения полотна открывают краник бачка. Когда про-
пил выполнен, устанавливают нажимные грузы 4, которые снимают перед окон-
чанием резки рельса. Желание отказаться от применения грузов привело к соз-
данию станка РМ5Г, у которого вместо грузов предусмотрена гидросистема.
Рельсорезный станок РМК (рис. 3.2, а) состоит из направляющей рамы I,
режущей головки II и кассеты для переноски абразивных дисков III. Направ-
ляющая рама / включает в себя винтовое зажимное устройство /, посредством
которого станок крепится к рельсу, основание 2, перекидывающий рычаг 6,
Рис. 3.2. Схема рельсорезного станка РМК
92
качающийся рычаг н Т-образный элемент, на котором крепится режущая го-
ловка II. Для переноски инструмента предусмотрена рукоятка. Режущая го-
ловка// состоит из корпуса 9, бензодвигателя 10 типа «Урал-2», рукояток 11
с бензобаком и абразивного диска 3, расположенного внутри кожуха 7. Диск
укреплен на валу посредством двух фланцев 4, стягиваемых гайкой 5. Поло-
жение кожуха при резании стопорится фиксатором 12. Положение режущей
головки // на Т-образном элементе определяется зажимом 8.
Абразивный диск 7 (рис. 3.2, б) приводится во вращение от бензодвигате-
ля 1 через центробежную фрикционную муфту 2, ведущий вал 5, коническую
пару передач 5 и ведомый вал 6. Все валы установлены в корпусе 4 на подшип-
никах качения. Ручка газа 8 служит для управления режимом работы двигате-
ля. При резании рельса усилие прикладывается к рукояткам 9. Для резания
рельса станок укрепляют на рельс, заводят бензодвигатель, вытягивают за-
порный стержень, давая режущей головке необходимую степень свободы, за-
тем приводят во вращение абразивный диск и подводят его к рельсу. Сначала
прорезают головку, шейку и большую часть подошвы рельса. По окончании ре-
зания рельса с одной стороны заводят качающийся рычаг с режущей головкой
на рычаг 6 (см. рис. 3.2, а), освобождают зажим 8 и поворачивают режущую го-
ловку вокруг оси Т-образного элемента в плоскости, параллельной поверхности
земли, на 180°. Затем завертывают зажим 8 до упора. После освобождения фик-
сатора перекидывают рычаг 6 на противоположную сторону в крайнее нижнее
положение. Резание рельса продолжают с обратной стороны до окончания ре-
за всего рельса. Размеры абразивных дисков 300 X 3 X 32 мм, окружная скорость
не более 80 м/с.
3.1.2. Рельсосверлильные станки
Рельсосверлильные станки предназначены для сверления отверстий в шей-
ках рельсов. Станок 1024В используют только прн работе с незакаленными
рельсами, а станок РСМ-1 — с любыми рельсами.
Рельсосверлильный станок 1024В (рис. 3.3) состоит из рамы 12 с упорами
10,11 н эксцентриковым рельсовым зажимом 9, двух направляющих штанг 13,
мотор-редуктора и бачка 7 для охлаждающей жидкости. К источнику электро-
энергии станок подключается посредством четырехжильного кабеля с вилкой
3 на конце. Мотор-редуктор состоит из электродвигателя 4 и соосного ци-
линдрического редуктора 5, свободно опирающихся на направляющие штанги,
регулируемые по высоте в зависимости от типа рельсов. Подача сверла со шпин-
делем 6 н мотор-редуктором осуществляется винтовым приспособлением / с
трещоточным ключом. Мотор-редуктор присоединен к рельсу посредством ско-
бы 2. Бачок 7 укрепляется на рельсе пружинными зажимами 8. Прн включении
двигателя вращение через редуктор передается сверлу.
Рис. 3.3. Схема рельсосверлильного станка 1024В
93
Рельсосверлильный станок РСМ-1 (рис. 3.4) состоит из рамы 4, подаю-
щего механизма с зажимным винтом 9, двух штанг 10, опирающихся на стойки
11, неподвижного упора 5; подвижного упора 3, надетого свободно на зажим 1
и вставленного в планку 2 рамы; мотор-редуктора 8 с переключателем и бачка
6 для охлаждающей жидкости. Станок передним концом рамы крепится за по-
дошву рельса путем поворота рукоятки зажима. В зависимости от ширины по-
дошвы рельса зажим устанавливается в одно из отверстий планки 2 рамы. На-
правляющие штанги, по которым перемещается в процессе работы станка мо-
тор-редуктор, переставляют в необходимое по высоте положение. Рычагом 7
обеспечивается подача сверла с требуемой скоростью: рабочей или уско-
ренной.
Мотор-редуктор (рис. 3.5) состоит из электродвигателя 15, Цилиндри-
ческого редуктора 1 с механизмом вращения и рабочей подачей и устройства
для ускорения подвода сверла к рельсу и отвода .его в исходное положение.
Механизм вращения включает цилиндрическую пару передач 14, 16, про-
межуточный вал 7, шестерни 8, 4 и направляющую втулку 2, передающую вра-
щение шпинделю 3. К механизму рабочей подачи относятся шестерни 14, 16,
муфта максимального момента 13, шестерни 12 и 17 и гайка-шестерня 19, рас-
положенная на резьбовой части вала шпинделя.
Механизм ускоренного подвода и отвода сверла включает муфту 10, ше-
стерню 11, гайку-шестерню 19, тормозную втулку 20, валик 6 с рукояткой 9 и
вильчатым рычагом 5. Работа мотор-редуктора осуществляется следующим об-
разом. При включении электродвигателя вращение двумя парами передач пере-
дается шпинделю со сверлом. Прн этом поступательного движения не происхо-
дит. Для подвода сверла к рельсу необходимо перевести рукоятку управления
9 вперед по ходу сверла, невращающаяся тормозная втулка 20 при этом пере-
мещается назад и конические поверхности втулки и гайки-шестерни 19 со-
прикасаются. Вращение гайки-шестерни 19 прекращается, и вал шпинделя со
сверлом, вывертываясь из гайки-шестерии, ускоренно перемещается вперед.
При упоре сверла в шейку рельса перемещение шпинделя прекращается,
но так как вращение продолжается, то заторможенная гайка-шестерня пере-
мещается назад, сжимает пружину 18 и торцовыми кулачками входит в зацеп-
ление с кулачками шестерни 17. Гайка-шестерня 19 начинает вращаться сов-
местно с шестерней /7 со скоростью, меньшей скорости вращения вала-шпииде-
Рис. 3.4. Рельсосверлильный станок РСМ-1
94
ля. Происходят рабочая подача и сверление отверстия. В этот момент рукоят-
ку 9 необходимо отпустить, и она станет в нейтральное положение. После окон-
чания сверления отверстия, когда осевая нагрузка на сверло отсутствует,
пружина 18 отжимает гайку-шестерню с валом шпинделя вперед до упора в то-
рец втулки 2, при этом гайка-шестерня отходит от шестерни 17 и подача вала
шпинделя прекращается.
Для отвода сверла необходимо нажать на рукоятку управления 9 назад.
При этом вильчатый рычаг 5 перемещает муфту 10 назад до соприкосновения
конических поверхностей муфты и шестерни 11. Последняя начинает вращаться
со скоростью вала 7 и передает крутящий момент гайке-шестерне 19, которая
вращается со скоростью, в 2 раза большей скорости вала-шпинделя. В резуль-
тате этого шпиндель ускоренно возвращается в исходное положение. При свер-
лении отверстия затупленным сверлом, когда осевая нагрузка превосходит
допустимую, срабатывает предохранительная муфта. Это сопровождается
характерными щелчками внутри редуктора.
При сверлении сырых рельсов сверлом из быстрорежущей стали необходи-
мо применять охлаждающую жидкость, а при сверлении закаленных рельсов
сверлом с твердосплавной пластинкой охлаждение не допускается.
Ниже приведены технические характеристики рельсорезных и рельсо-
сверлильных станков:
Параметры РМ-З РМК 1024В РСМ-1
Мощность двигателя, кВт . Частота вращения ведомого 1 3,7 0,75 1,7
вала, об/мин Продолжительность реза- 44 5100 93 150
ния (сверления) рельса Р65, мин 17 3—7 2—3 2,5
Масса, кг 78 31 38 65
95
3.1.3. Рельсошлифовальные станки
Для шлифовки рельсов разработаны станок МРШ-3, рельсошлифовалка
на тележке РТ-3 и рельсошлифовальный станок 1649.
Рельсошлифовальный станок МРШ-3 (рис. 3.6), предназначенный для за-
чистки наплавленных концов рельсов, крестовин и остряков стрелочных пере-
водов и других работ, состоит из электродвигателя 3, выключателя 2, устройства
для крепления шлифовального круга, кожуха 5 и ручек.
Шлифовальный круг 10 посредством двух нажимных шайб 7 с картонными
прокладками 9 и корончатой гайкой 8 укрепляется на выходном конце вала 4
электродвигателя. Включение и выключение электродвигателя осуществляет-
ся выключателем 2 барабанного типа при повороте ручки. В рабочем положе-
нии станок поддерживается за ручку выключателя и ручку, прикрепленную
к кожуху. Спереди круг закрыт крышкой 6. Подвод тока осуществляется че-
рез кабель и вилку 1.
Работая шлифовальным кругом, рекомендуется делать скользящие движе-
ния вперед и назад по обрабатываемому месту, пока оно не будет отшлифовано
в соответствии с предъявляемыми требованиями. Чрезмерное нажатие на круг
или резкое подведение его к обрабатываемой поверхности вызывает поврежде-
ние наждачного круга.
Рельсошлифовалка на тележке РТ-3 (рис. 3.7) предназначена для снятия
бокового наката на рельсах и стрелочных переводах при их текущем содержа-
нии. Рельсошлифовалка на тележке состоит из рамы 15, двух поддерживающих
8 и двух подвижных 14 роликов и шлифовального круга 12, защищенного ко-
жухом 9, с приводом от электродвигателя 3 посредством клиноременной пере-
дачи 10, закрытой кожухом 4. Поддерживающие ролики укреплены на рамке
7, вставляемой в основную раму и закрепляемой ручкой 6. Подвижные ролики
служат для подъема и опускания шлифовального круга при помощи винтового
механизма, приводимого в действие ручкой 16. Для предупреждения замыка-
ния рамой тележки рельсовых цепей на участках с автоблокировкой во все
ролики запрессованы капроновые втулки.
Поперечное перемещение шлифовального круга по направляющим штан-
гам 11 рамы осуществляется двуплечим рычагом 5, присоединенным к ползуну
13, а изменение угла наклона круга относительно вертикальной плоскости —
винтовым механизмом с маховичком 1 ца конце. Включение электродвигателя
осуществляется пакетным выключателем 2. Во время работы круг необходимо
подводить к рельсу плавно, без ударов.
Рис. 3.6. Схема рельсошлифовального станка МРШ-3
96
Рис. 3.7. Схема рельсошлифовалки на тележке РТ-3
Рельсошлифовальный станок 1649 (рнс. 3 8) предназначен для шлифовки
крестовин в пути без перерыва движения поездов и шлифовки наплавленных
коццов рельсов. Станком обрабатываются сборные крестовины с литым сердеч-
ником и цельнолитые типов Р50, Р65 марок 1/9, 1/11,1/18. Станок состоит из
копирного устройства н самого станка. В копирном устройстве предусмотрены
три пары линеек 1 для различных марок крестовин и комплект клещевых
захватов 2. Каждая линейка с одной стороны имеет поверхность, выполненную
в виде продольного профиля сердечника, а с другой—в виде продольного про-
филя усовиков. Клещевые захваты служат для установки копирного устройства
на сборные крестовины 17 с литым сердечником и цельнолитые крестовины 16.
Винтовыми зажимами 18 захваты попарно крепятся по обе стороны крестовины.
В пазы захватов и устанавливаются линейки /, закрепляемые винтами 19. Ра-
ма 14 станка четырьмя роликами 15 опирается на линейки. На раме крепится
механизм 21 установки уклонов. При помощи пружинного фиксатора 22 опор-
ная площадка механизма устанавливается в горизонтальное положение или
с уклоном в нужную сторону. Шлифовальная головка состоит из основания 9,
электродвигателя 10, клнноременной передачи 8, шлифовального круга 7 с ог-
раждением и механизма поворота 13. Последний позволяет устанавливать три
положения шлифовальной головки при обработке соответствующих частей кре-
стовины. Шлифовальная головка через механизм ограничения врезания 6 опи-
рается на площадку механизма установки уклонов. Установка круга на нужный
уровень производится вращением рукоятки 5 в ту илн иную сторону. Наклон
шлифовального круга при снятии боковых накатов рельсов обеспечивается
эксцентриками 20, опирающимися на поперечную планку 21 механизма уста-
новки уклонов. Рукоятки 3 с установленным на одной из них переключателем 4
регулируются по высоте и могут складываться прн транспортировке станка. На
раме шлифовальной головки установлен перекаточный ролик 11, который при
шлифовке крепится фиксатором в верхнем положении. Переноска, установка
нлн снятие станка с копирного устройства производится двумя людьми.
Для переноски станка предусмотрены ручки 12
Ниже приведены технические характеристики рельсошлифовальных стан-
ков:
Параметры МРШ-З РТ-3 1649
Мощность двигателя, кВт . . 0,4 1,7 1,7-2,2
Размеры шлифовального кру- га, мм 200X25X32 250X32X32 250X32X32
Окружная скорость круга, м/с 29 17 37
Масса, кг 11,5 70 135
4 Зак. 47.
97
Рис. 3.8. Рельсошлифовальный станок 1649
3.1.4. Шуруповерт ЩВ-2М
Шуруповерт ШВ-2М (рис. 3.9) предназначен для завертывания и отверты-
вания путевых шурупов, гаек клеммных и закладных болтов и сверления от-
верстий в шпалах. Шуруповерт состоит из трехколесной разборной тележки /,
параллелограммной подвески, имеющей две тяги 5, пружину 4 и колонку <?, на-
детую на стойку 2 рамы тележки, и мотор-редуктора 6 со сменным наконечни-
ком 11. Рама тележки опирается на головку рельсов со стороны мотор-редук-
тора двумя двухребор дчатыми роликами, а с противоположной—одним глад-
ким роликом с изоляционными втулками и имеет откидной предохранительный
ролик 10, позволяющий поворачивать мотор-редуктор на 180° и обеспечиваю-
щий безопасность работы. В рабочем положении мотор-редуктор поддерживает-
ся за две ручки 8, правая одновременно служит и для управления переключате-
лем 7, обеспечивающим включение и реверсирование электродвигателя. Ско-
рости мотор-редуктора переключаются рычагом 9.
Мотор-редуктор (рис. 3.10, а) состоит из электродвигателя, планетарного
и основного цилиндрических редукторов. Применение планетарного редуктора
позволило уменьшить габариты и вес основного редуктора и одновременно уве-
личить величину крутящего момента, развиваемого инструментом. Солнечная
шестерня а планетарного редуктора 9 выполнена заодно с валом 10 электро-
двигателя. Находящиеся с ней в зацеплении два сателлита б свободно насаже-
ны на осях вала-водила основного редуктора. Зубчатый венец в планетарного
редуктора неподвижно соединен с корпусом электродвигателя. Вал-водило 3
так же, как и два других вала 16 и 18, укреплены в разъемном корпусе редук-
тора 12 на шарикоподшипниках.
На валу 3 на бронзовых втулках насажены две цилиндрические шестерни
6 и 2 различного диаметра, а между ними на шлицах укреплена двусторонняя
кулачковая муфта 4. В зависимости от зацепления кулачковой муфты с верх-
Рис. 3.9. Шуруповерт ШВ-2М
4*
99
ней или нижней шестернями шпиндель инструмента получает большую или
меньшую скорость вращения. В положении, показанном на рисунке, большая
скорость вала 18 обеспечивается пружиной 7, устанавливающей скалку 8,
вильчатый рычаг 5 и муфту 4 в крайнее верхнее положение. Для уменьшения
скорости скалка 8 должна быть опущена в нижнее положение, что достигается
прижатием рычага переключателя 9 (см. рис. 3.9) к рукоятке инструмента. От
вала 3 (см. рис. 3.10, а) приводится в действие эксцентрик 1 плунжерного насо-
са. Последний по внутреннему каналу вала подает масло на верхние колена
редуктора., которые не находятся в масляной ванне.
На промежуточном валу неподвижно укреплены три зубчатых колеса:
верхнее 20 и нижнее 17 находятся в зацеплении с соответствующими шестерня-
ми вала-водила, а среднее 19 через зубчатое колесо 15 и муфту предельного мо-
мента передает вращение валу 16. На консольной части промежуточного вала
закрепляется наконечник со сверлом.
Зубчатое колесо /5, служащее нижней частью муфты предельного момента,
посажено на валу 16 свободно, тогда как верхняя половина муфты — диск 14—
на шлицах. Обе части муфты связаны между собой шариками, размещенными
радиально в луиках колеса и диска. Диск 14 прижимается к колесу 15 пружи-
ной 13, затягиваемой винтом 11 через чеку и шайбу. Регулировочный винт
защищен предохранительным колпаком. По образующей верхней полумуфты
выфрезерованы гнезда для роликов, заклинивающих полумуфту при обратном
вращении вала. Благодаря этому при отвинчивании гаек или шурупов муфта
предельного момента автоматически блокируется и шуруповерт ра,звивафг мак-
симальный крутящий момент электродвигателя.
100
При включении двигателя крутящий момент от солнечной шестерни плане-
тарного редуктора передается сателлитам, а так как они обкатываются по не-
подвижному венцу, то получает вращение вал-водило, вращающийся в 4 раза
медленнее вала двигателя. В зависимости от требуемого при производстве работ
крутящего момента кулачковая муфта ставится в верхнее или нижиее поло-
жение. Тогда вращение от вала-водила передается соответствующими цилиндри-
ческими шестернями промежуточному и ведомому валам, а следовательно, и
рабочим органам. Кинематическая схема мотор-редуктора приведена на
рис. 3.10, б.
3.1.5. Электрогаечные ключи
Различают два вида ключей: ЭК-IM и ПГК.
Электро гаечный ключ ЭК-1М (рис, ЗЛО предназначен для отвертывания и
завертывания гаек стыковых болтов и состоит из мотор-редуктора с преобразо-
вателем и двухколесной тележки / ддя перекатывания инструмента по рельсу.
К корпусу мотор-редуктора прикреплены две соединенные между собой руко-
ятки.? с амортизатором для удержания ключа при работе, уменьшения воздей-
ствия вибрации на руки рабочего и ручка 7 для удержания ключа при транспор-
тировке. Электродвигатель 5 включают переключателем 4. К источнику пита-
ния инструмент подключают посредством кабельной вилки 6. Мотор-редуктор,
соединенный с рамой тележки универсальным шарниром 2, имеет электродвига-
тель 5 с коническим редуктором 8. Для преобразования непрерывного враще-
ния конического колеса в ударно-импульсное вращение головки ключа пре-
дусмотрен преобразователь, состоящий из кулака 9, выполненного заодно с ко-
лесом, молотка 10, надетого на кулак, и головки ключа И. Молоток и кулак
соединены между собой двумя шариками 13, вставленными в профильные пазы
обеих деталей. Пружина 12 соединяет торцовые выступы молотка и головки
ключа между собой. В начале завертывания гайки, когда сопротивление мало,
кулак через шарики непрерывно вращает молоток, головку ключа и гайку.
Завинчивание гайки осуществляется с постоянным крутящим моментом. При
возрастании сопротивления дальнейшее завинчивание гайки происходит в ре-
зультате ударно-импульсного действия. При этом шарики, перекатываясь по
профильным вырезам, заставляют молоток двигаться поступательно в сторону
зубчатого колеса. В результате пружина сжимается, а выступы молотка и голов-
ки ключа расцепляются. В следую-
щий момент пружина перемещает мо-
лоток в сторону головки ключа. Мо-
лоток, вращаясь, своими выступами
наносит боковой удар по выступам го-
ловки ключа, поворачивая ее вместе с
гайкой на некоторый угол. За один
оборот кулака головка ключа полу-
чает два удара. Далее цикл повто-
ряется. Завинчивание гайки должно
быть прекращено, как только пру-
жинная шайба окажется выпрямлен-
ной.1 Процесс отвинчивания гайки на-
чинается с ударно-импульсного дей-
ствия ключа и по мере уменьшения
сопротивления гайка переходит во
вращательный режим.
Путевой гаечный ключ ПГК (рис.
3.12) предназначен для завертывания
Рис. 3.11. Схема электрогаечного ключа
ЭК-1М
101
Рис. 3.12. Путевой гаечный ключ ПГК
и отвертывания гаек клеммных бол-
тов и состоит из электроключа 1, па-
раллелограммной подвески 5 и тележ-
ки 6. В рабочем положении инстру-
мент удерживается за две рукоятки^,
прикрепленные к корпусу электро-
ключа посредством комплекта резино-
вых амортизаторов 2. В нерабочем по-
ложении ключ с рамой скрепляется
фиксатором 7. Включение и ревер-
сирование электродвигателя осущест-
вляется переключателем 3.
ПГК имеет три основных узла
(рис. 3.13): электродвигатель /, ци-
линдрический планетарный редуктор
II и преобразователь III вращатель-
ного движения в ударно-импульсное.
На валу 15 ротора электродвигателя
неподвижно укреплена солнечная ше-
стерня 13 планетарного редуктора.
В зацепление с нею входят два са-
теллита 12, свободно посаженные на
осях водила 7. Неподвижный зубча-
тый венец 11 укреплен при помощи фланца между корпусом 3 преобразо-
вателя и переходным корпусом 14. Преобразователь предназначен для преобра-
зования непрерывного крутящего момента в ударно-импульсный и состоит из
ударника 4, пружины 6, двух шариков 5, втулок 8 и 10 и шариков 9, выполняю-
щих роль упорного подшипника. Кулачки ударника находятся в зацеплении с
кулачками хвостовика 2, несущего на себе головку 1 ключа. Крутящий момент
электродвигателя передается через редуктор, водило, ударник, хвостовик на
головку ключа. Вначале завертывания гайки хвостовик преобразователя вра-
щается непрерывно. Когда момент сопротивления завертываемой гайки начи-
нает превышать установленный крутящий момент, удариик смещается вдоль
оси, сжимая рабочую пружину ударного механизма. Кулачки ударника выхо-
дят из зацепления с кулачками хвостовика, при этом ударник продолжает вра-
щаться и, одновременно двигаясь возвратно-поступательно, ударяет по кулач-
кам хвостовика, затягивая резьбовое соединение.
В настоящее время наряду с ПГК изготовляется гайковерт инерционный
электрический КИГЭ, у которого рама с подвеской и рукоятки остались такими
же, как и у ПГК, а конструкция гайковерта несколько изменена.
Рис. 3.13. Гаечный ключ в разрезе
102
3.1.6. Костылезабивщик ЭПК-3
Рис. 3.14. Схема костылеза-
бивщика ЭПК-3
Электропневматический костылезабивщик ЭПК-3
(рис. 3.14), применяемый для забивки костылей в
шпалы, состоит из электродвигателя 7, коническо-
го редуктора 2, кривошипио-шатунного механизма
4—5, подвижного цилиндра 6 со свободно двигаю-
щимися в нем поршием-бойком 8, узла амортиза-
тора // с забойииком 13 и выключателя. Враще-
ние, передаваемое электродвигателем через пони-
жающий редуктор, преобразуется кривошипно-ша-
тунным механизмом в возвратно-поступательное
движение цилиндра внутри неподвижного ствола
16. При ходе вверх между подвижными цилиндром
и поршнем-бойком 8 возникает разрежение, увле-
кающее боек вслед за цилиндром. При движении
цилиндра вниз происходит его встречное движение
с бойком. Воздух в цилиндре сжимается и застав-
ляет боек сначала остановиться, а затем ускоренно
двигаться вниз. Боек наносит удар по хвостовику
10 забойника 13, поставленного на костыль. Для
направления стержня забойника служит направ-
ляющая 14. Компенсационная воздушная система
выполнена в виде кольцевой выточки 7 и отверстия
9 цилиндра и каналов 15 в поршне-бойке. Пополне-
ние воздуха происходит каждый раз при совмеще-
нии верхнего пояса бойка с отверстиями ци-
линдра. Если усилие работающего не прикладывается к рукояткам 3, то про-
исходит холостой ход. Давление как над бойком, так и под ним атмосферное,
боек неподвижен, возвратно-поступательные движения совершает только ци-
линдр внутри ствола. Для перехода на рабочий режим должно быть приложено
усилие к ручкам инструмента, пружина 12 при этом сжимается.
Ниже приведены характеристики инструментов:
Параметры ШВ-2М ЭК-1М пгк КИГЭ .ЭПК-3
Мощность электродвига- теля, кВт 1,7 0,4 0,6 0,12 0,6
Частота вращения, об/мин: шпинделя 45,250 660 960 — —
сверла 980 — — — —•
Число ударов, мин . . . •— 1320 1920 1100
Продолжительность завер- тывания, с: гаек 4 6 5 5 X
шурупов 5; 11 — — — —
Продолжительность забив- ки костыля, с —. 3-5
Крутящий момент, Н м 120—450 -—. 200—400 200 —
Масса, кг . 63 27,5 27 20 24
3.1.7. Костылевыдергиватель КВД-1
Электрогидравлически й костылевыдергиватель КВ Д-1 (рис. 3.15) предназ-
начен для выдергивания костылей из шпал и состоит из электродвигателя с вы-
ключателем, гидравлической системы, механизма захвата костыля и механиз-
ма управления. Конец кабеля заканчивается вилкой 32. Один конец заземляю-
103
Рис. 3.15. Костылевыдергиватель КВД-1
щей жилы присоединяется к корпусу кабельной вилки, другой винтом 21 —-
к корпусу выключателя.
Вал ротора электродвигателя 19 оканчивается эксцентриком 18 с шарико-
подшипником. При вращении вала электродвигателя плунжер 16 масляного на-
соса приводится в возвратно-поступательное движение. Перемещаясь под дей-
ствием пружины 17 в сторону эксцентрика, плунжер засасывает масло из мас-
ляного резервуара 20 через отверстие в гильзе 14. Затем, перемещаясь под
действием эксцентрика в обратную сторону, плунжер нагнетает масло через
шариковый клапан 11 в гидравлический цилиндр 9, прикрепленный к кор-
пусу 15 ’
Режим холостого хода обеспечивается тем, что толкатель 22 под действием
рукоятки 23 и пружины 24 постоянно отжимает шарик 25 от гнезда, и перепуск-
ное отверстие остается открытым. Происходит перекачка масла по замкнутому
104
циклу, не создающая давления в полостях гидравлического цилиндра: меха-
низм работает на холостом ходу. Для работы поднимают рукоятку 23 вверх.
При этом шарик 25 под действием пружины 26 перекрывает перепускное от-
верстие. Перекачка масла в бак прекращается и в работу вступают последова-
тельно вначале большой цилиндр 9, создавая большое усилие в момент наддер-
гивания костыля, а затем малый цилиндр 8, и выдергивание костыля продол-
жается с меньшим усилием, но при большей скорости.
Передача усилия от гидравлического цилиндра 9 к выдергиваемому косты-
лю происходит через две регулируемые тяги 3, ввернутые одним концом
в клещевой захват, а другим — в муфту 6, которая соединена с гидравличе-
ским цилиндром посредством резьбы.
Поршень 5 присоединен к опоре 33, являющейся одновременно направляю-
щей для клещевого захвата.
При выдергивании костыля корпус КВД-1 с электродвигателем переме-
щается вверх, тогда как поршень 5 и опора 33 остаются неподвижными.
Герметизация гидравлической системы костылевыдергивателя достигается
посредством манжет 7 и 10, сальника 4 и прокладок 12 и 13.
Верхнее крайнее положение механизма, соответствующее полному выдер-
гиванию костыля, ограничивается тем, что при своем движении гайка, нахо-
дящаяся на нижнем конце тяги 27, упирается в шайбу трубки 30, рукоятка 23
от усилия тяги открывает перепускной клапан, и масло получает возможность
перетекать в масляный резервуар.
Для захвата костыля губки 1 клещей надо поставить на головку костыля,
затем резко нажать иа ручки костылевыдергивателя — сожмутся пружины 2 и
28, а палец 31 переместится по профильным пазам половинок клещей и губки
разойдутся. Для захвата костыля клещами необходимо прекратить нажатие
на ручки. Под действием пружин 2 и 28 палец переместится вверх по пазам кле-
щей, губки клещей сойдутся и захватят костыль за головку.
Выбрасывание костыля совмещается с приведением механизма в нижнее
положение. При этом конец костыля упирается в шпалу или подкладку, а го-
ловка костыля выбрасывается наклонной плоскостью клещей из зева. При пере-
носе инструмента подвижная часть удерживается защелкой 29.
Техническая характеристика КВД-1
Мощность электродвигателя, кВт.......................................0,4
Время, затрачиваемое на выдергивание костыля из шпалы, с . 5
Масса инструмента, кг................................................24
3,1.8. Шпалоподбойка ЭШП-9М
Для уплотнения балласта под шпала-
ми применяются электрошпалоподбойки
ЭЩП-6, ЭШП-7 и ЭШП-9М. Шпалопод-
бойка ЭШП-9М (рис. 3.16) состоит из элек-
тродвигателя 4 с вибратором 3, рамки 6 с
резинометаллическими амортизаторами 10,
амортизированной рукоятки 8 и подбой-
ника 1. Для переноски предусмотрена ру-
коятка 9. Между ремнем 5, прикрепленным
к двигателю, и рамкой установлены рези-
иометаллические амортизаторы. Для сни-
жения вибрации, передаваемой на руки ра-
ботающего, между рукояткой и рамкой
Рис. 3.16. Шпалоподбойка ЭШП-9М
105
дополнительно установлен амортизатор 7. Подбойни к к корпусу электродвига-
теля крепится при помощи двух стремянок 2 с гайками на концах, что обеспе-
чивает жесткость и надежность узла. При вращении вала ротора на дебаланс
действует центробежная сила, в результате корпус с подбойником получает ко-
лебательное движение, которое передается балласту. При работе шпалопод-
бойки наконечник, вибрируя, создает текучесть балласта и этим уплотняет
его под шпалой. Высота рукоятки может быть установлена в зависимости от
роста работающего путем регулирования телескопического устройства рамки.
Техническая характеристика ЭШП-9М
Мощность электродвигателя, кВт................................0,37
Возмущающая сила дебаланса, Н................................. 2350 (
Масса (без кабеля и вилки), кг...............................(19±5) %
3.2. ГИДРАВЛИЧЕСКИЙ ПУТЕВОЙ ИНСТРУМЕНТ
ЙТНГЧ
Гидравлический путевой инструмент позволяет развивать большие усилия
при относительно малом весе и отличается высоким к.п.д. К гидравлическим
инструментам относятся домкраты, рихтовочные и разгоночные приборы.
3.2.1. Гидравлические домкраты
Путевые гидравлические домкраты предназначены для подъемки рельсо-
шпальной решетки и стрелочных переводов при текущем содержании пути
(высота подъемки до 100 мм) и при капитальном ремонте (высота подъемки до
200 мм). Наибольшее применение получили домкраты типов ДГ-09 и ДГП-8.
Гидродомкрат ДГ-09 (рис. 3.17) состоит из опорной плиты 16 с панелью 13,
резервуара для масла 8 с сапуном 3, гидроцилиидра 21, ввинченного в панель с
отверстием 4, поршня 2 с лапой 20, поршневого насоса 9 со всасывающим 10 и
нагнетательны” 11 клапанами, предохранительного клапана 14 и спускного
клапана 15. Для большей жесткости опорная плита имеет рифленую поверх-
ность с ребрами жесткости 19. Для работы домкрат устанавливают под рельс с
таким расчетом, чтобы лапа находилась под подошвой рельса, спускной клапан
закрывают, поворачивая стержень с резьбой по ходу часовой стрелки, и, при-
кладывая возвратно-поступательные движения к стержню 6 через рычаг 5 и
тягу 7, приводят насос в работу. Последний нагнетает масло под поршень и тем
Рис. 3.17. Схема гидродомкрата ДГ 09
106
самым поднимает лапу и рель-
со-шпальную решетку. Для
снятия домкрата достаточно
повернуть стержень спускно-
го клапана 15 против хода ча-
совой стрелки. Уплотнения 1
и 17 обеспечивают герметич-
ность поршня. Домкрат пере-
носят за ручку 12. Кольцо 18
ограничивает ход поршня.
Гидродомкрат ДГП-8
(рис. 3.18) принципиально от-
личается от домкратов всех
других видов. Основанием
домкрата служит опорная
плита 17 с вваренным в нее
неподвижным поршнем 16 ци-
линдра 14. Внизу цилиндр за-
канчивается резьбой, на ко-
торую навернута грузовая
гайка 15.
Для максимального приб-
лижения точки приложения
нагрузки к оси цилиндра и
сведения к минимуму изгиба-
ющего момента по длине пор-
шня со стороны рельса сде-
лан паз, по которому переме-
щается верхний 2 и нижиий 1
сегменты грузовой гайки. К
верхней части цилиндра при-
варена клапанная коробка 3
Рис. 3.18. Схема гидродомкрата ДГП-8
с каналами и гнездами под
клапаны насоса. Уплотнение
поршня в цилиндре выпол-
нено в виде двух уплотнительных колец с манжетой из маслостойкой резины
Домкрат имеет двухплунжериый насос, размещенный внутри резервуара 4
для масла и прикрепленный болтами к клапанной коробке. У этого насоса вдвое
меньшее число качаний ручки в 1 мин, чем у домкрата ДГ-09. В вертикальные
резьбовые отверстия коробки ввернуты корпуса 5 плунжерных пар. На верх-
ние концы плунжеров 6 навернуты тарелкн 8, упирающиеся в ролики 9 коро-
мысла 12 привода насоса. Для всасывания масла плунжеры поднимаются нз
резервуара пружинами 7. Опускание их производится двуплечим коромыслом,
закрепленным шпоикой иа валу 13. На выходном конце вала установлена руко-
ятка 11 со вставленным в нее стержнем 10. Опорами вала служат бобышки ре-
зервуара для масла. Клапанная коробка снабжена двумя всасывающими 21,
двумя нагнетательными 20 и предохранительным 19 шариковым пружинным
клапанами. Для спуска давления в цилиндре предусмотрен спускной вентиль
18 с запорной иглой на конце.
При движении плунжера вверх масло из резервуара поступает в рабочую
камеру всасывающего клапана; при обратном движении всасывающий клапан
закрывается, а нагнетательный открывается и порция масла поступает в подъ-
емный цилиндр домкрата, который вместе с грузовой гайкой и грузом подни-
мается вверх. Для сброса давления масла и приведения домкрата в исходное
107
положение достаточно повернуть на 1—1,5 оборота спускной вентиль. При
этом запорная игла освободит канал и масло перетечет из цилиндра в резервуар,
снабженный сапуном. Переносят домкрат за две ручки. При работе домкра-
том ДГП-8 поршень остается неподвижным, а цилиндр перемещается вместе
с грузовой гайкой, баком и насосом.
Ниже приведены технические характеристики гидродомкратов:
Параметры ДГ-09 ДГП-8
Грузоподъемность, т 6 8
Наибольшая высота подъема лапы, мм . . . 200 200
Усилие на рукоятке насоса, Н 240 250
Давление рабочей жидкости, МПа .... 35 24
Рабочая жидкость Масло веретенное
Масса, кг . , 17 19,5
.1 нг. 0 <
П 1 1 нои
3.2.2. Гидравлические рихтовочные приборы ' М i J'
. .qw V
Одной из весьма трудоемких работ в путевом хозяйстве является рихтовка
пути. При ее выполнении применяют два варианта расстановки приборов на
пути. По варианту I необходимо иметь три рихтовщика, два из них располагают
на одном рельсе, один — на другом. По варианту II требуется пять рихтовоч-
ных приборов, из иих два расставляют по одному рельсу и три—по другому.
Последний вариант применяется при рихтовке пути с тяжелыми элементами
верхнего строения пути. Используются гидравлические рихтовочные приборы
систем Матвеенко, ГР-12, ГР-12Б и РГУ-1. Принцип их действия аналогичен
принципу действия гидравлических домкратов, но усилие, прилагаемое к рель-
су, направлено не вертикально, как в домкратах, а наклонно.
Рихтовочный прибор системы Матвеенко (рис. 3.19) представляет собой
гидравлический домкрат ДГП-8, дополненный приспособлением для рихтовки,
благодаря чему он может быть использован как рихтовщик и как домкрат.
На цилиндре 2 прибора болтом 3 укреплен башмак 4 с кронштейном для за-
водки под головку рельса. Для предотвращения скольжения башмака по ци-
линдру на последнем установлен вкладыш 7, упирающийся в грузовую гайку 8
Рис 3 19. Рихтовочный прибор си-
стемы Матвеенко
домкрата и закрепляемый болтом 6. Для
рихтовки прибор за ручку 5 устанавливают
под углом 45° к горизонту, опорную плиту
9 короткой стороной погружают в балласт.
При этом кронштейн башмака упирается в
головку рельса. Качанием рукоятки 1 при-
водится в действие плунжерный насос.
Работа прибора ие отличается от рабо-
ты домкрата ДГП-8. Под давлением масла
рельсо-шпальная решетка вывешивается и
одновременно рихтуется.
Рихтовщик гидравлический ГР-12
(ГР-12Б). Рихтовщики ГР-12 и ГР-12Б
принципиально отличаются тем, что для
их установки на рабочем месте требуется
минимальное время (ие надо рыть луики).
В процессе рихтовки используются наи-
большие значения коэффициента сопротив-
ления прибора с балластом, при этом затра-
чиваются мйнимальные физические усилия
работающих Оба прибора имеют новое са-
108
моустанавливающееся опор-
ное устройство.
Рихтовщики ГР-12 и
ГР-12Б (рис. 3.20) состоят из
гидравлического толкателя и
опорного устройства. Толка-
тель представляет собой двух-
плунжерный ручной насос 5,
расположенный в корпусе 4,
цилиндр 3 со штоком 2 и воз-
вратной пружиной /.
Подвижным элементом
толкателя является цилиндр с
установленной на нем насос-
ной группой и трехступенча-
тым рельсовым захватом 6,
упирающимся во время рабо-
ты в подошву рельса. Опор-
ное устройство состоит ИЗ
задней 13 и средней под-
вижной 7 опор и сошника 9,
шарнирно соединенных и опирающихся на балласт. Гидравлический толкатель
при помощи шарнира, 14 прикреплен к задней опоре, а подвижная часть его шар-
ниром И крепится к двухшарнирной стойке 8, присоединенной к сошнику. Для
увеличения устойчивости прибора при работе на рыхлом щебне на среднюю
опору надевается съемная подкладка 10. Для предотвращения обратного про-
гиба опорного устройства при переносе и установке рихтовщика в шарнирах
промежуточной опоры установлены ограничители 12.
При работе двухшарнирную стойку подводят под подошву рельса до упора
одной из ступенек захвата. После этого шток толкателя выдвигается, при этом
увеличивается расстояние между шарнирами 11 и 14. Двухшарнирная стойка
передним концом с сошником заглубляется в балластную призму, одновремен-
но вывешивая путевую решетку. При дальнейшем выдвижении штока и повыше-
нии сопротивления балласта сдвигу гибкое опорное устройство практически
останавливается, а вывешенная колея смещается в сторону рихтовки. При этом
рельсо-шпальная решетка как бы перекатывается на двухшарнирных стойках
приборов. По мере возрастания сопротивления решетки сдвигу увеличивается
глубина опускания двухшариирной стойки и сошника в балласт. Благодаря
самоустанавливающемуся опорному устройству рихтовщик при работе автома-
тически реализует в процессе сдвижки максимальные значения коэффициента
сопротивления, это дает возможность рихтовать путь с наименьшей вывеской
рельсо-шпальиой решетки.
Рихтовщики ГР-12 и ГР-12Б исключают необходимость рыхлеиия балласта
у торцов шпал, а также в большинстве случаев отрытие его в шпальных ящи-
ках. $ результате каждый цикл рихтовки совершается в 1,5—2 раза быстрее
При этом прибором развивается усилие, в 1,5—2 раза большее, чем другими
типами ручных рихтовщиков. Благодаря этому производительность труда при
работе с приборами типов ГР-12 и ГР-12Бв2—3 раза выше, чем при рих-
товке пути'другими приборами.
Рихтовщик гидравлический передвижной РГУ-1 является усовершенство-
ванным гидравлическим прибором с приводом от двигателя. Он имеет четыре
рабочих органа-домкрата с одним общим приводом. Применение моторных рих-
товщиков РГУ-1 способствует резкому повышению производитель ости труда
(2,5 км в смену вместо 0,5—0,8 км). Благодаря одновременному приложению
109
Рис. 3.21 Рихтовщик гидравлический РГУ-1
I f<i ' Т Д11 Ш8 '
усилий при рихтовке на все четыре рабочих органа значительно облегчается
сдвижка путевой решетки с железобетонными шпалами и рельсами тяжелых
типов.
Рихтовщик РГУ-1 (рис. 3.21, а) состоит из рамы /, опирающейся на рельсы
двумя роликами 7, двигателя внутреннего сгорания 3 типа «Дружба», редук-
тора 11, шестеренчатого насоса 12, бензобака 8, масляного бака 9, четырех гид-
равлических домкратов 6 и маслоподводящих рукавов 2 высокого давления.
Для сбрасывания давления в системе при перестановке домкратов предусмот-
рен рычаг 5. При воздействии последнего на иглу 4 отжимается шариковый
клапан, расположенный в корпусе 10. Все четыре рабочих органа-домкрата
имеют одинаковую конструкцию.
Домкрат (рис. 3.21, б) имеет опорную плиту 6, иатяжиой винт 5, цилиндр 4,
возвратную пружину 3, штуцер 2 подводящего шланга и крышку цилиндра 1
с захватом головки рельса. Для рихтовки цилиндры устанавливают под рельсы
и запускают двигатель на больших оборотах. После создания во всех цилиндрах
необходимого давления производится рихтовка пути, затем обороты двигателя
уменьшаются, давление в системе снижается. Рихтовщик передвигается по рель-
су к следующему месту, и цикл повторяется. Работу выполняют 4 или 5 чел.
Один из иих (моторист) управляет рихтовщиком, удерживая его на рельсовой
нити, а остальные устанавливают и снимают домкраты.
Ниже приведены технические характеристики гидравлических рихтовоч-
ных приборов:
Параметры Система Матвеенко ГР-12Б ГР 12 РГУ-1 (один домкрат)
Распорное усилие, Н . . ♦ 80 000 60 000 60 000 50 000
Ход поршня, мм .... 200 100 100 120
Рабочее давление, МПа 24 25 25 12
Усилие на рукоятке прибо- ра, Н 250 140 140
Масса, кг 21,5 15,5 16 20
3.2.3. Гидравлические разгоночные приборы
Они предназначены для продольной сдвижки рельсов или рельсовых плетей
для восстановления нормальных зазоров между рельсами, нарушенных в ре-
зультате угона пути подвижным составом Работа без разрыва рельсовой колеи
называется регулировкой зазоров, ас разрывом — разгонкой зазоров. Регули-
ровкой зазоров руководит бригадир пути, а их разгоикой — дорожный мастер.
Применяются гидравлические разгоночные приборы РН-01А и РН-02.
110
Разгоночный прибор РН-01А (рис. 3.22) состоит нз двух корпусов 6 и 13,
соединенных между собой двумя гидроцнлиндрами 15 и возвратными пружина- '
мн 12. Каждый корпус для захвата за головки рельсов имеет по два клина 14
с наконечниками с внутренней стороны. Клиньями управляют двуплечими ры-
чагами 4, закрепленными в корпусе на оси 3. Разведение рычагов соответствует
заклиниванию корпусов с рельсами. Сближение рычагов 4 соответствует уста-
новке прибора в транспортной положение, при этом оба корпуса приподнима-
ются и опираются на ролики 1. На корпусе 6 установлен масляный бак 10 с
расположенными в нем четырьмя плунжерными насосами. Насосы приводятся
в действие попарно при помощи рычагов 8 и коромысел 9. Если в одном насосе
происходит всасывание масла из бака, то в другом — нагнетание порции масла
в цилиндр. Работой иасосов управляют 2 чел., каждый из которых нагнетает
масло в один из цилиндров. Оба цилиндра ввинчиваются в корпус 6, а их плун-
жеры неподвижно соединяются с корпусом 13. Перепускной вентиль 7 служит
для сбрасывания давления в цилиндрах по окончании работы. Масло в цилинд-
ры подается по каналам 11. Для разгонки (регулировки) зазоров прибор уста-
навливают так, чтобы стык рельсов приходился посередине между обоими кор-
пусами. Обе ручки ставят в рабочее положение, а спускной вентиль завинчива-
ют до отказа. Затем качанием обоих рычагов приводят в действие насосы; от
давления масла поршни получают поступательное движение, а зажатые клинь-
ями рельсы раздвигаются. Для приведения прибора в исходное положение
спускной вентиль отворачивают на один оборот, давление в цилиндрах резко
падает, пружины возвращают масло в резервуар, при этом корпуса возвраща-
ются в исходное положение. Одновременно с этим поворотом ручек к его сере-
дине прибор посредством балок 2 приподнимается относительно оси 5 и иа ро-
ликах передвигается к следующему стыку. Этим прибором можно перемещать
одновременно четыре 25-метровых рельса без ослабления стыковых болтов,
а при ослабленных костылях — до 150 м.
Разгонный прибор РН-02 представляет собой упрощенный вариант при-
бора РН-01 А. Только у него один двухплунжерный насос и ролики предусмот-
рены лишь для одного корпуса. В остальном приборы конструктивно схожи
Рис. 3.22. Схема гидравлического разгоночного прибора РН-01А
111
Их используют только для регулировки зазоров и перемещения одного 25-
метрового рельса.
Ниже приведены технические характеристики разгоночных приборов
Параметры РН-01А РН-02
Распорное усилие, кН.................................. 250 120
Диаметр распорного цилиндра, мм........................ 65 42
Число цилиндров, шт.................................... 2 2
Рабочее давление, МПа.................................. 40 45
Усилие на рукоятке, Н................................. 180 220
Максимальная величина раздвижки, мм:
без перехвата........................................ 150 100
с перехватом . 300 -*
Рабочая жидкость..................................Масло веретенное
Масса, кг.............................................. 78 37
3.3. ПОДКЛЮЧЕНИЕ ЭЛЕКТРОИНСТРУМЕНТОВ
К ИСТОЧНИКАМ ПИТАНИЯ
Питание электррииструментов током может осуществляться как от пере-
движных электростанций, так и от внешних источников в виде низковольтной
электрической сети напряжением 220 и 380 В или высоковольтной — напряже-
нием 10 и 27 кВ. На рис. 3.23 приведена схема переносной кабельной сети с пи-
танием от передвижной электростанции 1. Такая сеть состоит из магистраль-
ного кабеля 2 марки КРИТ сечением 3x10+1x6 мм2 и длиной 100—150 м,
распределительных коробок 3, кабелей 4 сечением 3 X 2,5+1 X 1,5 мм2, подводя-
щих ток к инструментам, и соедини-
тельных муфт, укрепленных на кон-
цах этих кабелей. Если число ин-
струментов больше, чем может быть
подключено к одной распределитель-
ной коробке, пользуются дополни-
тельным кабелем 5. Распределитель-
ная коробка имеет шесть розеток, из
которых две торцовые служат для под-
ключения магистрального кабеля, а
четыре боковые — для подводящих.
На рис. 3.24 приведены схемы
подключения электроинструментов к
низковольтным сетям и высоковольт-
ным линиям. Непосредственное под-
ключение электроинструмента к сети
трехфазного тока напряжением 220 В
изображено на рис. 3.24, а. Электро-
двигатели 6 инструментов соедини-
тельным кабелем 5 подключаются к бо-
Рис. 3.23. Схема переносной кабельной сети
Рис. 3.24. Схемы подключения электроинст-
рументов
112
ковым розеткам распределительной коробки 4, последняя посредством магис-
трального кабеля 3 присоединена к заземленной токоотборной точке 2, полу-
чающей питание силовой сети 1.
Возможно подключение к трехфазной сети 1 напряжением 380 В через по-
нижающий трансформатор 4 (рис. 3.24, б). В этом случае последний магист-
ральным кабелем 3 соединяется с токоотборной точкой 2, также заземленной.
Нулевая жила силовой сети подведена к корпусу токоразборной точки.
В тех случаях, когда требуется подключить электроинструмент к однофаз-
ной сети 1 220 В или к трехфазной сети напряжением 380 В (рис. 3.24, в) к токо-
отборной точке 2 присоединяют преобразователь фаз 3. Схемы питания электро-
инструментов от ЛЭП 10 кВ и 27 кВ приведены на рис. 3.24, г, д, е. По вариан-
ту, показанному на рис. 3.24, г, питание токоразборных точек осуществляется
через низковольтную сеть 3 напряжением 220 В, энергия в которую поступает
от 1 (ЛЭП 10 кВ) при помощи понижающих подстанций 2. По другому вариан-
ту (см. рис. 3.24, д) питание инструментов осуществляется через переносные
понижающие трансформаторы 2, которые иа период работы подключаются к ли-
нии электропередачи 1 напряжением 27 кВ.
В случае, приведенном на рис. 3.24, е, можно использовать два преобразо-
вательных агрегата: однофазный понижающий трансформатор 1 и преобразова-
тель цикла фаз 2. Для подключения электроинструмента собирается электри-
ческая цепь: инструмент—силовая линия. Затем вилку магистрального кабеля
подключают к электростанции или к токоразборной точке. После проверки пра-
вильности сборки включают рубильник или пакетный выключатель и последо-
вательно — выключатели инструментов. Если электроинструмент не имеет вы-
ключателей, его подключают к распределительным коробкам после включения
рубильника.
3.4. ОСНОВЫ ЭКСПЛУАТАЦИИ И ОБСЛУЖИВАНИЯ
ПУТЕВОГО МЕХАНИЗИРОВАННОГО ЭЛЕКТРОИНСТРУМЕНТА
3.4.1. Подготовка к работе и обслуживание электроинструментов
При подготовке всех электрических инструментов к работе необходимо
проверить соответствие напряжения сети технической характеристике данного
инструмента, уровень масла в редукторе, надежность всех соединений и зазем-
ления инструмента, подтянуть крепежные детали.
После этого инструмент подключают к сети и опробуют вхолостую. При
искрении, постороннем шуме и других неисправностях он должен быть от-
ключен от сети, а неполадки устранены. В процессе работы не допускается
перегрев электродвигателя или других частей инструмента. Если они нагрева-
ются настолько, что к ним нельзя прикоснуться рукой, то инструменты оста-
навливают и дают им возможность остыть. При эксплуатации инструментов
важно применение необходимых сортов смазки и соблюдение : пернодичиости
смазки. Уровень масла в редукторах должен находиться в соответствующих
пределах; один раз в 3—6 месяцев (в зависимости от вида инструмента) обяза-
тельны разборка, осмотр и чистка двигателя и редуктора.
Важными условиями правильной эксплуатации являются своевременная
замена изношенных деталей, недопущение замасливания и увлажнения обмот-
ки статора, резких перегибов кабеля, повреждений резиновой оболочки и по-
падания на нее масла, керосина, бензина. При эксплуатации различных инстру-
ментов необходимо придерживаться соответствующих правил.
Рельсорезный станок. В процессе резания следят за непрерывной подачей
охлаждающей жидкости к месту резания.
пз
Рельсосверлильный станок. До начала заглубления сверла открывают
кран и подводят к месту сверления охлаждающую жидкость; во время выхода
сверла из отверстия необходимо уменьшить подачу, что позволит избежать его
заедания и возможных поломок.
Электрошпалоподбойки. Следует избегать резких толчков корпуса вибра-
тора, натяжения, скручивания и дергания кабеля, что может привести к его
обрыву.
Шуруповерт. При перемещениях шуруповертов рекомендуется сохранять
вертикальное положение мотор-редуктора, стараясь исключить попадание
смазки на обмотку; необходимо периодически осматривать контакты переклю-
чателя, очищать их от пыли и нагара.
В электроключах требуется регулярно осматривать состояние кулачков.
В костылезабивщиках для смазкн кривошипно-шатунного механизма не-
обходимо заполнять компрессорным маслом масленку; через 100 ч работы тре?
буется снимать и промывать в керосине ствол, поршень, боек, направляющую
втулку, рабочий орган; удалять заусенцы, наклеп на хвостовике стержня, бой-
ке, стволе и втулке, а детали смазывать компрессорным маслом.
Костылевыдергиватель. Для залива масляного резервуара костылевыдер-
гивателя рекомендуется применять только профильтрованное масло, чтобы
не нарушить работу плунжерной пары, шариковых клапанов и уплотнений;
выключатель необходимо периодически вскрывать и очищать от пыли.
Основные неисправности электроинструментов и способы их устранения
Неисправность Возможные причины Способы устранения
При включении электро- двигатель не работает 1. Нет напряжения в сети Проверить контрольной лампой и устранить неис- правность
2. Сняты или сгорели предо- хранители Поставить новые предо- хранители
При включении вилки го- рит предохранитель 3. Нет контакта в вилке или выключателе 1. Короткое замыкание в вы- ключателе или кабеле Осмотреть и исправить вилку или выключатель Осмотреть кабель и ис- править выключатель
2. Короткое замыкание в об- мотке статора Отправить в ремонт
При подключении к сети электродвигатель гудит, а вал не вращается или вра- щается, медленна 1. Нет контакта на одной из фаз в переключателе или вил- ке 2. Неисправен предохрани- тель Исправить переключа- тель или вилку Исправить или заменить предохранитель
При прикосновении .к ме- таллическим частям бьет током Электродвигатель сильно перегревается Произошло замыкание токо- ведущих частей на корпус 1. Перегрузка электродвига- теля Найти и устранить неис- правность Выяснить причину Пере- грузки и устранить
2. Увлажнена обмотка Просушить обмотку
Греются гнезда шарико- подшипников 3. Произошло междувитко- вое замыкание в обмотке 1. Недостаточная смазка Отправить в ремонт Пополнить смазку
2. Перекос или зажим под- шипников Устранить перекос или зажим
114
3.4,2. Подготовка к работе и обслуживание
гидравлических приборов
При подготовке гидродомкратов к работе необходимо проверить количест-
во масла в баке и в случае надобности долить его (в домкратах ДГП-8 масло
должно быть залито до верха резервуара, а в домкратах ДГ-09 — до оси вала
привода иасоса). Работу домкрата опробовают без нагрузки, закрыв спускной
вентиль. При подтекании масла подтягивают ослабленные крепления. Во вре-
мя работы домкратов необходимо следить за исправностью крепления рукоят-
ки привода иасосов; заблаговременно снимать нх с пути при подходе поездов
к месту работ, а при перерывах в работе ставить домкраты вертикально. Чтобы
домкраты работали безотказно, необходимо обеспечить тщательный и своевре-
менный уход за подъемным механизмом и насосом. В домкраты следует зали-
вать веретенное масло № 3 только чистое и профильтрованное через ситец.
Нужно следить, чтобы в домкрат не попадала пыль.
Все работы по ремонту приборов рекомендуется выполнять в закрытых по-
мещениях.
При работе с несколькими рихтовочными приборами гидронасосы всех
рихтовщиков следует приводить в действие одновременно, а после сдвижки пу-
ти разгружать сначала рихтовщики, установленные на задней рельсовой нити.
Для пропуска поезда рихтовщики заблаговременно должны быть сняты
с пути и уложены на обочину нли междупутье.
Приступать к работе разгоночными приборами разрешается только после
того, как ослаблены стыковые болты и противоугоны; при загрязнении насечкн
клиньев их необходимо выиуть и прочистить. При приближении поезда прибор
должен быть снят с рельсов. Для обеспечения нормальной и бесперебойной ра-
боты гидравлических разгоночных приборов необходимо ежедневно после ра-
боты очищать прибор от грязи и масла, а открытые неокрашенные поверхно-
сти смазывать слоем веретенного масла; через каждые 500 ч работы заменять
масло с тщательной промывкой керосином бака, насоса и фильтров.
Основные неисправности гидравлических приборов
и способы их устранения
Неисправность Возможные причины Способы устранения
Насос не подает мае- 1. В приборе недостаточно Вывернуть пробку или са-
ла в цилиндр масла 2. Неплотное прилегание ша- риков клапанов к своим гнез- пун и долить масло Проверить клапаны насоса, при засорении очистить, в слу-
дам из-за износа иди засоре- чае износа гнезд отправить в
ния гнезд ремонт
Полная или частичная 1. Износ манжет поршня Заменить манжеты
потеря усилия в., цилинд- 2. Снижение упругости пру- Отрегулировать или заме-
рах прибора жины предохранительного клапана нить пружину
Масло вытекает из ци- линдра Износ или порыв манжет поршня Заменить манжеты
Зажимные клинья про- 1. Загрязнение насечки кли- Очистить насечку клина от
скальзывают по головке ньев грязи и масла
рельса., 2. Выкрашивание насечки клиньев; обильный слой мазу- та на головке рельса; большие заусенцы на головке рельсов Заменить негодные клинья; очистить рельсы от мазута в местах установки прибора; удалить заусенцы на рельсах в местах постановки прибора
115
3,4.3. Основные требования по технике безопасности
прн работе с путевым механизированным инструментом
При эксплуатации механизированного путевого инструмента следует стро-
го соблюдать требования, предусмотренные инструкциями и правилами тех-
ники безопасности. Так, к работе с электрифицированным инструментом допу-
скаются лишь лица, знающие его устройство, знакомые с Правилами техниче-
ской эксплуатации устройств электрооборудования и Правилами техники безо-
пасности прн работе с ним. Работа с электрифицированными механизмами
производится, под постоянным контролем моториста и руководителя путевых
работ. Электроинструмент надо хранить в закрытых помещениях; выдавать для
работы неисправный инструмент запрещается. Корпус электрического инстру-
мента через четвертую жилу кабеля должен быть обязательно заземлен через
корпус электростанции. Для повышения безопасности рекомендуется при-
менять электроинструмент с двойной изоляцией, когда корпус электроинстру-
мента выполняется пластмассовым или же статор отделяется от корпуса слоем
изоляции, а в редуктор вводится шестерня из изоляционного материала. Кро-
ме того, целесообразно использование защитно-отключающего устройства, ко-
торое может обеспечивать контроль состояния изоляции фаз, контроль непре-
рывности заземления, а также отключение инструмента при снижении сопро-
тивления изоляции ниже допускаемых пределов.
При переноске запрещается держать инструмент за его рабочие части.
Очистка ножовочного полотна рельсорезного станка и сверла рельсосверлиль
ного станка допускается только при полной остановке двигателя. Работать иа
шлифовальных станках без защитных кожухов й защитных очков не разре-
шается. При обнаружении в шлифовальном круге хотя бы небольшой трещины
его надо заменить.
Нельзя включать электроинструмент до тех пор, пока рабочий не возьмет
его в руки и не приготовится к работе. Если рабочий почувствует хотя бы сла-
бое воздействие тока, он должен отключить инструмент и заявить об этом руко-
водителю работ. Не разрешается работать электрифицированным инструментом
без диэлектрических перчаток. При перемещении электроинструмента на но-
вый участок работы его отключают от источника тока. Во время работы реко-
мендуется следить за состоянием изоляции кабеля, не допуская перекручива-
ния последнего. Не следует оставлять инструмент, присоединенный к сети без
надзора.
Запрещается применять гидравлические приборы с неисправными возврат-
ными пружинами, а также с пружинами, ненадежно закрепленными.
то?.
116
4. МАШИНЫ ДЛЯ РЕМОНТА ЗЕМЛЯНОГО ПОЛОТНА
Земляное полотно является основанием железнодорожного пути. Его проч-
ность и стабильность влияют на состояние всего пути и, следовательно, ца до-
пускаемые скорости движения, нагрузки и безопасность движения. Под дей-
£ТД1|ем, нагрузок от поездов, атмосферных осадков, грунтовых вод возможна
потеря прочности земляного по,лотца и возникновение деформаций (оседание,
выпирание, пучины, провалы, оползни, размывы). Для предотвращения таких
деформаций, а также их ликвидации проводят работы по ремонту земляного
полртца с использованием как общестроительных машин (экскаваторы, буль-
дозеры, скреперы), так и специализированных машии для ремонта земляного
полотна (путевые струги, путевые уборочные машины, дренажные машины).
4.1. ПУТЕВЫЕ СТРУГИ
4.1.1. Назначение и устройство путевых стругов
Путевые струги предназначены для очистки старых и нарезки новых кюве-
тов, планировки и оправки откосов выемок, оправки бровок и откосов иасыпей,
профилирования балластной призмы, срезки загрязненного балласта или грун-
та с соседнего пути при снятой путевой решетке, а также для срезки и плани-
ровки грунта при строительстве вторых путей. Зимой они используются в
местах выгрузки снеговых составов и очистки станций от снега, а также кюве-
тов для пропуска весенних вод. На железных дорогах СССР эксплуатируются
путевые струги нескольких типов: струг-снегоочиститель СС-1, мощный отваль-
ный плуг МОП и ранее выпускавшийся путевой струг ПС-2а. Независимо от ти-
па путевой струг (рис. 4.1) — машина иа железнодорожном ходу, перемещае-
мая локомотивом, которая срезает, планирует и перемещает грунт. По бокам
струга к раме 1 шарнирно прикреплены крылья 2 и 4. Для выполнения работы
устанавливают под углом к оси пути и закрепляют распорками 5 одно из двух
крыльев или оба одновременно. В транспортном положении крылья устанавли-
вают параллельно ферме (крыло 2).
В торцовых частях струга размещены
снегоочистительные устройства 3, от-
брасывающие балласт или сиег с пути.
Наибольшее распространеиие име-
ет струг-снегоочиститель СС-1 (рис.
4.2), которым, помимо работ, выпол-
няемых всеми путевыми стругами,
можно расчищать пути от снега на
перегоне прн высоте заноса до 2 м.
Рабочими органами его являются два
боковых крыла и два снегоочисти-
Рис. 4.1. Схема путевого струга
117
Qo
шшш
Рис. 4.2. Струг-снегоочиститель СС-1
тельных устройства. Наибольший вылет каждого крыла от оси пути 7,5 м. Все
оборудование струга размещено на сварной раме /, опирающейся на две те-
лежки: переднюю (трехосную) и заднюю (двухосную). В средней части струга
установлена портальная рама 10, на вертикальных стойках ее смонтированы
два боковых крыла 5. В рабочее положение каждое крыло переводится своим
пневмоцилиндром 8, который может поворачиваться вокруг вертикальной оси.
В вертикальной плоскости крыло наклоняется телескопической тягой 7, кото-
рая шарнирно крепится на укосине 9. Снегоочистительные устройства 12 смон-
тированы по торцам струга, где расположены также автосцепки. В передней
части рамы находится будка управления И, в задней — хозяйственная буд-
ка 2. В раскрытом состоянии крылья удерживаются тремя телескопическими
распорками 3 и 4.
Телескопическая распорка (рис. 4.3) выполнена из двух
труб 8 н 9, входящих одна в другую. Конец одной трубы, прикреплен к крылу,
а конец другой — к раме машины универсальными шарнирами 7 н 10. При по-
вороте крыла длина распорок изменяется автоматически в зависимости от угла
раскрытия крыла. Для фиксации длины распорок и, следовательно, положе-
ния крыла служит пневматический стопор в виде пневмоцилиндра, укреплен-
ного на наружной трубе 9. Поршень 3 пружиной 4 всегда отжимается в нижнее
положение. На конце штока поршня закреплен сухарь 2 с зубьями, находящи-
мися в зацеплении с зубчатой рейкой 6, приваренной к внутренней трубе 8.
Для направления движения этой трубы и предотвращения ее поворота преду-
смотрен направляющий ролик 5. Стопор в нормальном положении обычно за-
стопорен, а при открытии крыла он расстопоривается, для чего по трубке 1 по-
дается сжатый воздух под поршень 3, который, поднимаясь, сжимает пружину и
освобождает рейку. Благодаря этому при повороте крыла трубы могут раз-
двигаться и изменять длину телескопической распорки.
Боковое крыло (рис. 4.4) состоит из основной части 6 сварной или
литой конструкции, на которой смонтированы выдвижная кюветная часть 7,
откосное крыло 1, балластный подкрылок 4. Нижняя режущая грань крыла
снабжена подрезным ножом 5.
Откосное крыло, предназначенное для профилирования откосов выемки,
крепится к основной части при помощи сектора 9 и вертикальной оси 11. Сек-
тор может перемещаться по криволинейному направляющему пазу 8, поворачи-
ваясь вокруг шарнира 10. Для изменения угла наклона откосного крыла к го-
ризонту служит пневмоцилиндр 3, шток которого тягой 2 шарнирно соединен
с откосным крылом. При выдвижении штока крыло вместе с сектором поворачи-
вается вокруг шарнира 10, устанавливается в требуемое положение и фик-
сируется пневмостопором 17. Для перемещения грунта откосное крыло можно
Рис. 4.3. Телескопическая распорка крыла CC-f
119
располагать параллельно оси пути, повернув его вокруг вертикальной оси 11.
В этом положении откосное крыло удерживается телескопической тягой 6 (см.
рис. 4.2), один конец которой закреплен на колонне портальной рамы, а дру-
гой — в проушинах откосного крыла. Балластный подкрылок 4 (см. рис. 4.4)
служит для планировки откосов балластной призмы. Его можно поворачивать
вокруг оси и устанавливать горизонтально под углом, соответствующим укло-
ну откоса балластной призмы.
Кюветная часть 7 по наклонным направляющим 12, укрепленным на зад-
ней стороне основного крыла, перемещается механизмом, состоящим из пнев-
модвигателя 14, редуктора 15 и винтового устройства 13. Последнее зубчатое
колесо редуктора закреплено на гайке. В гайку ввернут винт 16. При вращении
гайки винт поднимает или опускает кюветную часть. Прн подъеме в верхнее
(транспортное) положение кюветная часть заходит за основную. В это же поло-
жение она переводится при планировочных работах. При этом откосное крыло
устанавливается горизонтально.
Каждое боковое крыло / подвешено к портальной раме (рис. 4.5) на укосине
6, вертикальная часть которой выполнена в виде трубы 5, надетой на колонну
7. К верхней части укосины 6 крепится наклонная телескопическая тяга 4.
Шток 2 тяги соединен с крылом. К кронштейну 3 нижней обоймы трубы на го-
ризонтальной оси крепится крыло, поворачивающееся в вертикальной плоско-
сти и изменяющее величину угла наклона. Поворот осуществляется телескопи-
ческой тягой 4. Кронштейн 8 верхней обоймы укосины 6 соединен со штоком
подъемного пневмоцилиндра 9, закрепленного внутри фермы струга.
Каждое крыло имеет свой подъемный пневмоцилиндр. При выдвижении
штока этого цилиндра укосины вместе с крылом поднимаются вверх, скользя
по колонне 7. В поднятом положении крыло стопорится штырями.
120
Телескопическая тяга
(рис. 4.6) служит для изме-
нения наклона крыла, со-
стоит из рамы 2, в которой за-
креплен пневмоцилиндр /.
Шток цилиндра универсаль-
ным шарниром 3 соединен с
подвижной трубой5. На верх-
ней части последней приваре-
на зубчатая рейка 7. Труба 5
перемещается в неподвижной
трубе 6, на которой смонти-
рован пневмостопор такой же
конструкции, как и на теле-
скопической распорке. Сто-
пор состоит из пневмоцилин-
Рис. 4.5. Схема подвески бокового крыла к порталь-
ной раме струга
дра 8 с зубчатым сектором 9
на штоке. Воздух в пневмопцлиндр подается по трубопроводу 4. Для пред-
отвращения перекоса внутренней трубы служит двухребордчатый направ-
ляющий ролик 10, закрепленный на неподвижной трубе и катящийся по
рейке. Подвижная труба шарниром 11 соединена с крылом. При выдвижении
поршня пневмоцилиндра крыло наклоняется вниз, поворачиваясь вокруг го-
ризонтальной оси закрепления его на нижней обойме. Таким образом, боковые
крылья могут быть подняты, опущены и наклонены. На верхней обойме укосины
имеется также кронштейн для крепления телескопической тяги 6 (см. рис. 4.2) и
установки откосного крыла параллельно оси пути. В транспортном положении
кюветная часть вдвигается за основную, откосное крыло занимает верхнее поло-
жение и все крыло посредством подъемного пневмоцилиндра и наклонной тяги
поднимается в крайнее верхнее положение.
Снегоочистительные устройства установлены по обо-
им торцам фермы струга. Они позволяют использовать струг для расчистки
снежных заносов при движении по перегону в обоих направлениях без разворо-
та. При расчистке выемок и станционных путей, кроме снегоочистительных
устройств, используют боковые крылья.
Снегоочистительное устройство (рис. 4.7, а) состоит из двух передних верти-
кальных щитов 5 и 7 и двух снегоочистительных боковых крыльев 4. Первые
шарнирно закреплены на раме машины, вторые — на щитах. Крылья открыва-
ются и закрываются пневмоцилиндрами 2, размещенными на кронштейнах 3
передних щитов. В раскрытом положении передние щиты удерживаются жест-
кими распорками 1. Открывают и закрывают щиты, поворачивая их вокруг
шарнира 6. Кинематическая схема снегоочистительного устройства дана на
Рис. 4.6. Телескопическая тяга СС-1
121
рис. 4 7, б. Каждое крыло 4 имеет подвижной подкрылок 12, который с помо-
щью рычагов 10 и тяг 9, 13 автоматически поднимается по направляющим 11
в транспортное положение при закрытии и опускается в рабочее при открытии
крыла пневмоцилиндрами 2 на кронштейнах 3 В нижней части передних щитов,
установленных на оси 6, есть подвижные щитки /6, которые в рабочем положе-
нии опускаются на 50 мм ниже уровня головки рельса, в транспортном поло-
жении поднимаются пневмоцилиндрами 8 и рычажной системой /7; фиксируются
щитки пневмопилнндрами 18. Для прохода снегоочистительного устройства
кривых участков пути при опускании щитков в них имеются вырезы для рель-
сов. Эти вырезы в щигках перекрываются секторами 15, автоматически повора-
чивающимися вниз или вверх под действием рычажных механизмов 14, соеди-
ненных с подвижными щитками 16. Передние щиты удерживаются распорка-
ми 1.
Снегоочистительное устройство можно устанавливать в виде двухгранного
угла для очистки однопутных линий (рис. 4.8, а), отвальной плоскости — для
очистки двухпутных линий с отбросом снега вправо (рис. 4.8, б) или влево
(рис. 4.8, в), а также в виде скрепера (рис. 4.8, а) для перемещения снега вдоль
пути и выноса его за пределы выемки.
Управление рабочими органами струга-снегоочистителя пневматическое
(рис. 4.9). Сжатый воздух от локомотива по трубопроводу через кольцевой
кран /С/С, обратный клапан ОК, редукционный клапан РК, воздухоочиститель
122
Рис. 4.8. Схемы работы снегоочистительного устройства
О подается в воздушные резервуары (ресиверы Рг — Р7), откуда через краны
Л'х поступает к постам управления (левым П} и правым /72) боковыми крыльями
и /73 снегоочистительного устройства. Отсюда крацами управления Л’2 сжатый
воздух направляется к пневмоцилиндрам и пневмодвигателям, На каждом бо-
ковом крыле установлены пневмоцилиндры трех стопоров ПС телескопических
распорок, стопоров наклонной тяги и рткосного крыла, пневмоцилиндры Z/5,
Z/(i, Д4, Ц7 соответственно наклона откосного крыла, наклона, подъема и от-
крытия бокового крыла, а также пневмодвигатель Д кюветной части. Каждое
снегоочистительное устройство имеет по два пневмоцилиндра подъема щитов
Ц-ь Цг> открытия крыльев Ц3, а также пневмостопоры ПС), ПС2 подвижных
щитков. В пневмосистему включены манометры М для контроля за давлением
воздуха, краны Л3 для спуска конденсата, воздушные сигналы-тифоны
Стругом-снегоочистителем СС-1 выполняют работы по очистке и нарезке
кюветов на железных дорогах II и III категорий, где ось кювета удалена от
осн пути соответственно на 4,1 и 3,6 м. Для работы на железных дорогах I кате-
гории, где это расстояние составляет 4,6 м, потребовалась модернизация маши-
ны. В связи с этим СС-1М имеет вылет крыла 7,755 м (вместо 7,5 м) и производит
горизонтальную планировку на уровне 1,2 м (вместо 1,0 м). что позволяет
выполнять необходимый объем работы за меньшее число проходов. Увеличена
также база машины с 14 до 16,5 м. благодаря чему возросла ее устойчивость
(снизилась вероя гность схода с рельсов), повысилась скорость очистки снега
до 80 км ч Кюветная часть СС-1М представляет металлическую плиту трапеце-
идальной формы, сваренную из листов. Съемные ножи кюветной части выпол-
нены в трех вариантах для дорог I,II, III категорий, что соответствует удале-
нию оси кювета от оси пути на расстояния, равные 4,6; 4,1; 3,6 м.
Мощный отвальный плуг МОП имеет боковые крылья такие же, как у стру-
га-снегоочистителя СС-1, а носовая его часть упрощена и состоит из двух перед-
них щитов, расположенных под углом 60°, и двух боковых.
Ниже приведены технические характеристики путевых стругов-
Параметры СС-1 CC-IM МОП
Рабочая скорость, км/ч:
на земляных работах . До 15 До 15 До 10
при очистке снега на перегонах . . . До 40 До 80 »
Наибольший вылет крыла от оси пути, м 7,5 7,755 7,5
Угол открытия крыла, град 30—45 30—45 30—45
Толщина очищаемого слоя, м . . . . 2,0 2,0 1.0
Ширина очищаемого слоя, м .... 5,2 5,2 зд
Величина опускания ножей ниже уров-
ня головки рельсов, мм 50 50 100
Масса струга, т 92 •—• 63
Одним из недостатков путевых стругов является невозможность их исполь-
зования для нарезкн кюветов на электрифицированных участках, где опоры
контактной сети мешают движению струга с открытым крылом; другим —иска-
123
жение проектного профиля кювета при изменении угла открытия крыла в кри-
волинейных участках пути, что обусловлено изменением расстояния от оси пу-
ти до оси кювета.
Для устранения первого недостатка была сделана попытка модернизиро-
вать СС-1, оснастив его двумя роторными головками с кожухами, имеющими
очертание профиля кювета. При вращении роторов грунт вырезается и отбра-
сывается за пределы выемки.
Рис 4 9 Пневматическая схема струга-снегоочистителя
124
4.1.2. Тяговый расчет путевых стругов
Для того чтобы по заданным параметрам путевого струга и технологичес-
кого процесса определить необходимое тяговое усилие и подобрать локомотив
или, наоборот, по параметрам тяговой единицы выявить возможные техноло-
гические режимы работы машины, выполняют тяговый расчет. При работе
струга возникает ряд сопротивлений (рис. 4.10, а), которые должны преодоле-
ваться локомотивом. Общее сопротивление, кН, может быть выражено как
№ = 4^+ W2+ W3+ W<+ Ws + W«, (4.1)
где — проекция на ось пути сопротивления грунта резанию; •
№2, ^з — проекции на ось пути сопротивлений перемещению грунта соответственно
перед крылом и вдоль него;
Wi — сопротивление перемещению струга как подвижной единицы;
№5, — сопротивления перемещению струга соответственно в кривых и от уклона
п ути. ’
Сопротивление грунта резанию Wi, кН, определяют из выражения
(4.2)
где^ — удельное сопротивление резанию, кН/м2 (для грунтов категории I = 504-
4-60 кН/м2; для категории II k{ = 70—90 кН/м2; для категории Ш ~ 104-
4- 12 кН/м2);
h — толщина срезаемой стружки (рис. 4.10, 6), м;
I — длина стружки, т. е. длина режущей кромки крыла, м.
Сопротивление Wi направлено перпендикулярно плоскости крыла, про-
ектируя W\ на ось пути, получим составляющую сопротивления резанню,
преодолеваемую локомотивом,
1Г1 — sin « = hl sin a, (4.3)
где a — угол открытия крыла, град.
Сопротивление перемещению вырезанного и находящегося перед крылом
грунта находят по формуле
где — коэффициент трения грунта по
грунту (Д ~ 0,64-0,9);
Q — вес перемещаемого вала грунта,
кН;
у — средняя плотность грунта, кг/м3;
V — объем вала грунта, находящегося
перед крылом (треугольной приз-
мы), м2;
Я — высота вала грунта (см. рис.
4.10, б), м;
<р — угол естественного откоса (<р
~ 40°).
Проектируя 1^2 на ось пути, най-
дем Wz-
№ I
-----Vfisin a- (4-5)
2 tg ф
Сопротивление перемещению грун-
та вдоль крыла или сопротивление
трения крыла о грунт W3’
(4.6)
125
где N — нормальная сила, действующая на крыло от грунта, N = W 2;
/2 — коэффициент трения грунта по стали (0,34-0,6).
Проектируя W3 на ось пути, получим IF3, кН:
№ !
W3 = —--- yfi f2 cos а. (4.7)
2 tg ф
Сопротивление струга
как подвижной единицы Н:
65 - v
\W.~Q -------------
12-j--0,55G ’
(4.8)
км/ч.
где G — вес струга, кН;
v — скорость движения,
Сопротивление в кривых F5 и от уклона пути Н:
F5--^-G; (4.9)
. I. I • I
где Я — радиус кривой, м;
ty — величина уклона пути, °/00.
Подставляя в формулу (4.1) все эти усилия, получим полную величину W
сопротивления, направленную вдоль оси струга.
При работе струга Т W, где Т — тяговое усилие локомотива, кН. Для
надежной работы необходимо учитывать динамический фактор. Поэтому
Т = (^+^ + ^3+^ + ^ + ^),
(4.Ю)
где р— коэффициент запаса (р. 1,2).
Если известно тяговое усилие локомотива Т, то при расчете определяют
максимальную толщину стружки Л и число проходов.
Из формулы (4.10) находим
Ш ^-(^4^з + ^ + ^+^)М .. ...
Ц/ — * " - , 1 1 * /
р
Но так как
hl sin а,
* 1
то
г_(Д72 + Г9+У74 + Г5 + Г6)р
h =--•------ . -- ------— (4.12)
I sin a
При расчете крыльев на прочность максимальное усилие, перпендикуляр'
ное крылу, определяют из условия полного использования силы тяги локомоти-
ва на уклоне (IFe с минусом) прямого участка пути (/? — оо и, следовательно,
W5 — 0). Величина нормальной силы, действующей на крыло, составит
1Г + 1Г =1Г-(Гз + Г4 -Fe) р]-------. (4.13)
12 р, sin a
Прн определении №’3 принимается, что высота вала грунта соответствует
высоте крыла.
4.2. ПУТЕВАЯ ЗЕМЛЕУБОРОЧНАЯ МАШИНА
4.2.1. Назначение и устройство землеуборочиой машины
Путевая землеуборочная машина системы Балашенко предназначена для
очистки станционных путей от грязи и мусора, скола льда и уборки снега, от-
валки от пути за пределы габарита приближения строений грунта, шлака, за-
грязненного балласта, уборки с откосов выемок и косогоров сплывов грунта,
126
Рис. 4.11. Путевая землеуборочная машина
а также для углубления муждупутья. На машине (рис. 4.11) установлены рель-
совые щетки 15, дисковые рыхлители 14, собирающее устройство 12, средний
11 и боковые 10 элеваторы, средний ленточный конвейер 9, щеточный питатель
8, наклонный ленточный конвейер 7, боковые тросовые щетки 6, скалывающее
устройство 5. Рама 16 опирается на две двухосные тележки. В кабине 1 разме-
щена электростанция мощностью 200 кВт, от которой питаются электродвигате-
ли рабочих органов машины. Кабина 2 предназначена для отдыха обслуживаю-
щего персонала. 1
Подача воздуха в пневматические цилиндры рабочих органов машины осу-
ществляется из резервуара, наполняемого компрессором локомотива перед вы-
ходом машины на работу. Для управления пневматическими цилиндрами пре-
дусмотрены типовые трехходовые краны. Для управления рабочими органами
предусмотрены два поста. С поста 13, расположенного на нижней площадке,
осуществляется управление дисковыми рыхлителями 14, крыльями собираю-
щего устройства 12, боковыми 10 и средними 11 элеваторами. С поста 3, разме-
щенного на верхней площадке, управляют средним 9 и наклонным 7 ленточными
конвейерами, щеточным питателем 8, боковыми тросовыми щетками 6, скалы-
вающим устройством 5 и муфтой включения ленточных конвейеров полува-
гонов 4.
4.2.2. Рабочие органы машины
Рельсовые щетки (рис. 4.12) предназначены для очистки рельсов, в част-
ности, перед осмотром их на дефектность. Щетки 8 закреплены на вертикаль-
ных валах. Они представляют собой цилиндры, на наружной поверхности
которых в несколько рядов по высоте расположены стальные тросы. Наружные
концы тросов при работе контактируют у поверхностью рельсов, сметая с них
загрязнители (грязь, мазут, шлак). Щетки закрыты кожухами 7, чтобы грязь
не разбрасывалась. Вертикальные валы щеток установлены на подшипниках
в корпусах 9, на боковых площадках которых закреплены электродвигатели 4
(N 4,5 кВт, п — 950 об/мин), соединенные цепной передачей 5 с валами щеток.
Последние попарно шарнирно подвешены на горизонтальной оси 3. Буксы пос-
ледней установлены в челюстях рамы 2 на регулировочных подвесках, измене-
нием длины которых регулируется положение щеток относительно рельсорых
нитей по высоте. Опускание щеток и подъем осуществляются пневматическими
цилиндрами 1 путем поворота щеток по стрелке А относительно оси 3. Для
предохранения щеток от поломок при проходе рельсовых стыков предусмотрен
нх отвод при помощи лыж 6, закрепленных на кожухах 7. В транспортном поло-
жении щетки вписаны в габарит 1-Т подвижного состава и закреплены пневма-
тическими стопорами.
Дисковые рыхлители (рис. 4.13) установлены впереди элеваторов и пред-
назначены для рыхления в междупутьях слежавшегося грязного балласта,
127
Рис. 4.12. Рельсовые щетки
Рис. 4.13. Дисковые рыхлители
грунта, снега, что облегчает их захват ковшами боковых элеваторов. Они смон-
тированы на раме 7, которая жестко закреплена на раме машины (см рнс. 4.11).
На раме 7 (см. рис. 4.13) рыхлителей шарнирно установлены балки 3. На ннх
в подшипниках 1 закреплены валы с дисками 2, которыми осуществляется рых-
ление слежавшихся материалов. Диски могут быть заглублены максимально на
350 мм ниже головки рельса. Ограничителем служит цепь 4. Ширина захвата
с каждой стороны рыхлителя 1200 мм от головки рельса. В тех случаях, когда
для рыхления оказывается недостаточно собственного веса, дополнительно
включают пневмоцилнндры 6, предназначенные для приведения рыхлителя в ра-
бочее и транспортное положения. В транспортном положении рыхлитель закре-
пляется защелкой 5, а при транспортировке иа дальние расстояния — допол-
нительно болтами.
Собирающее устройство предназначено для перемещения убираемого ма-
териала с междупутий к середине пути, где его захватывает средний элеватор
Юно смонтировано на раме 11 (рис. 4 14, а). По обе стороны рамы на верти-
Рис. 4 14. Собирающее устрой-
ство
128
кальных валах 10 шарнирно закреплены боковые крылья 9, оснащенные смен-
ными подрезными ножами 7, подкрылки 4. Крылья (рис. 4 14, б) приводятся
в рабочее и транспортное положения независимо одно от другого посредством
пневматических цилиндров 1 и 2.
Цилиндр / ^предназначен для опускания и подьема крыла с подкрылком,
а цилиндр 2 — для раскрытия крыла, т е. поворота его вокруг вертикального
вала 10 Поворот крыла осуществляется посредством реечного привода, состо-
ящего из реечного колеса 13, закрепленного на валу 10, и рейки 12, связанной со
штоком поршня цилиндра 2 Ширина захвата крыла 9 до 3 м от оси пути, макси-
мальный угол раскрытия 45е Крыло в раскрытом положении удерживается
цепью 6.
Собирающее устройство используют также для отвалки от рельсового пути
за пределы габарита приближения строения убираемого материала. В тран-
спортном положении крылья крепят стяжками 8 к упору 5 на раме машины,
а подкрылки — пневматическим стопором 3.
Средний элеватор (рнс. 4.15) предназначен для погрузки иа средний лен-
точный конвейер материалов, перемещенных на середину пути крыльями соби-
рающего ушройства. Ковши 3 элеватора вместимостью 160 л каждый закрепле-
ны на двух втулочно-роликовых цепях 2, посаженных на направляющие блоки
8. Три верхние пары блоков 8 установлены на раме машины, а иижияя пара —
на нижней части подъемной рамы 1. Верхняя часть рамы / шарнирно с возмож-
ностью поворота в вертикальной плоскости подвешена на раме машины. При
наезде на препятствие рама / с ковшами, поворачиваясь вокруг шарнира (точка
/), поднимает нижний конец вверх, н ковши свободно, без поломок проходят
над препятствием Натяжное устройство 7 позволяет регулировать натяжение
цепей 2 н величину заглублеиия ковшей. Элеватор работает на двух режимах
первый — с забором до 130 мм ниже уровня головок рельсов, второй — при
совместной работе со щеточным питателем на 100 мм выше уровня головок рель-
сов; привод элеватора —от электродвигателя 5 (N — 20 кВт, п — 1460 об/мин),
через червячный редуктор 4 и цепную передачу 6 В рабочее и транспортное
положение элеватор приво-
дится совместно с собираю-
щим устройством посредством
пневматических цилиндров /
(см. рнс. 4.14, а).
Боковые элеваторы (рис.
4.16) предназначены для убор-
ки с междупутий предвари-
тельно разрыхленного диско-
выми рыхлителями 14 (см.
рис. 4.11) загрязненного ма-
териала. Они шарнирно за-
креплены иа раме машины,
благодаря чему возможен по-
ворот нх на 90°. Каждый бо-
ковой элеватор (см. рис. 4.16)
состоит нз рамы 8, цепи с ков-
шами 10, привода ковшовой
цепи, ленточного конвейера-
питателя 7. Рама 8 подвеше-
на шарнирно на раме маши-
ны 18 на двух кронштейнах:
нижнем 13 и верхнем 3.
Рис. 4.15. Средний элеватор
5 Зак 47
129
Ковши 10 (вместимостью ио 40 л) закреплены на двух втулочно-роликовых
цепях. Привод ковшовой цепи осуществляется от электродвигателя 1 (N
10 кВт) через червячный 2 и конический редукторы. Привод конвейера-пита-
теля 7 осуществляется от конического редуктора цепной передачей, состоящей
из звездочек 5 и цепи 6. Элеватор закрыт кожухом 4.
Конический редуктор размещен внутри кронштейна 3, являющегося одно-
временно его корпусом. Конвейер-питатель 7 является промежуточным зве-
ном между боковым элеватором и средним ленточным конвейером 17. Грунт из
ковшей боковых элеваторов в месте их опрокидывания попадает на ленту кон-
вейера-питателя и последним подается на ленту среднего конвейера. Ковшовая
Рис. 4.16. Боковые элеваторы
130
Рис. 4.17. Кинематическая схема бокового элеватора
цепь в нижней части элеватора огибает два направляющих блока, установлен-
ных на подъемной раме 16, которая верхним концом шарнирно подвешена на
раме 8 элеватора. Благодаря такой подвеске предотвращается поломка нижней
части ковшовой цепи при встрече препятствий в забираемом ковшами материа-
ле. В нижней части подъемной рамы 16 установлен подкрылок 11, способствую-
щий лучшему заполнению ковшей. Для опускания в рабочее положение и подъ-
ема в транспортное подъемной рамы 16 предусмотрен пневматический цилиндр
19, шток которого шарнирно связан с рамой 16. Поворот элеватора в горизон-
тальной плоскости на 90° при приведении его в рабочее и транспортное положе-
ния осуществляется пневматическим цилиндром 15, шток которого связан с ры-
чагом 14 нижнего кронштейна 13. В рабочем положении элеватор закрепляет-
ся штангой 9, один конец которой шарнирно связан с рамой 8 элеватора, а дру-
гой, размещенный в направляющих на раме машины, фиксируется пневмати-
ческим стопором. Заглубление ковшей элеватора ограничивается цепью 12.
В транспортном положении элеваторы закрепляются винтовыми стяжками 20.
Из кинематической схемы (рис. 4.17) видно, что от электродвигателя 1 вра-
щение передается на червячиый редуктор 2, который имеет два вала: горизон-
тальный, соединенный с двигателем 1, и вертикальный с коническим зубчатым
редуктором 3, имеющим также два выходных вала. Один соединен с приводным
валом 4 ковшовой цепи 6 элеватора 5, на другом, параллельном оси машины,
сидит звездочка 9, через которую цепной передачей 8 вращается ленточный
конвейер-питатель 7.
Средний ленточный конвейер (рис. 4.18) предназначен для передачи на
наклонный конвейер 4 материала, убираемого с пути средним и боковыми эле-
ваторами. Конвейер расположен в середине машины и состоит из горизонталь-
ного и наклонного участков. Его прорезиненная лента 9 прикреплена скобами
к двум втулочно-роликовым цепям. Для предотвращения скатывания транспор-
тируемого материала с наклонной части конвейера на ленте поперек ее за-
креплены уголки.
Для предупреждения провисания втулочно-роликовых цепей они поддер-
живаются роликами 8. Для ограничения прогибов ленты под воздействием тран-
спортируемого материала рабочая ветвь леиты по всей длине средней части
опирается на поддерживающие ролики 6. По бокам рамы конвейера установ-
лены борта 7, образующие лоток, приемную вороику 10 и разгрузочный патру-
бок 5. Конвейер приводится в действие электродвигателем 3(N ~ 10 кВт, п =
— 1460 об/мин) через червячный редуктор 2 и цепную передачу 1.
5*
131
Щеточный питатель (рис. 4.19) предназначен для очистки мусора и снега со
станционных путей и стрелочных переводов. Это горизонтально расположен-
ный цилиндр, на поверхности которого по всей длине равномерно закреплены
гибкие элементы — стальные тросы 11, образующие щеточный барабан-пита-
тель, размещенный в струенаправляющем кожухе 12. Привод от электродви-
гателя 6 (N = 28 кВт, п — 1460 об/мин) осуществляется посредством двух
цепных передач 7 и 8 с отклоняющей звездочкой 10.
Прн работе щеточный барабан диаметром D вращается и подает сметаемый
мусор и снег по струенаправляющему кожуху 12 (по стрелке К} на наклонный
конвейер, нижний коней 9 которого шарнирно соединен с кожухом 12. По обеим
сторонам кожуха установлены подкрылки 13. Это увеличивает ширину захвата
питателя до 2,7 м, благодаря чему путь обметается на всю длину шпалы. В ра-
бочее и транспортное положения питатель приводится двумя пневматическими
цилиндрами 4 через рычажную передачу 1 и две тяги 5. Величина опускания
щеточного питателя регулируется винтовым устройством 2 с сектором 3. В тран-
спортном положении питатель фиксируется стопором с закладками.
Наклонный ленточный конвейер 7 (см. рнс. 4.11) предназначен для пере-
дачи поступающего иа него материала со среднего ленточного конвейера в под-
вижной состав. Его конструкция (см. рис. 2.50) (несущий орган-леита, система
поддерживающих н опорных роликов) аналогична конструкции среднего лен-
точного конвейера (см. рис. 4.18). В рабочее и транспортное положения ои
приводится одновременно со щеточным питателем.
Боковые щетки (рис. 4.20) предназначены для сметания с концов шпал и
бровок балластной призмы остающихся после работы боковых элеваторов за-
сорителей или снега с подачей нх на середину рельсовой колеи для погрузки
щеточным питателем на наклонный ленточный конвейер, а последним — на под-
вижной состав. Они установлены по обеим сторонам машины после скалываю-
щего устройства. Горизонтально расположенные тросовые барабаны 9 щеток
Рис. 4.19. Щеточный питатель
132
консольно подвешены на раме машины иа полых телескопических стойках 7,
что обеспечивает возможность поворота щеток в горизонтальной плоскости на
45' при приведении их в рабочее и транспортное положения. Привод каждого
тросового барабана осуществлен от электродвигателя / (Д' — 10 кВт, п 1460
об'мин) через червячный редуктор 2. В ступице червячного колеса редуктора
2, имеющей шлицы, размещен верхний конец вертикальною вала 3, установ-
ленного внутри полой стойки 7 Ban 3 парой конических зубчатых колес ниж-
него редуктора 8 связан с горизонтальным валом тросового барабана 9. Опуска-
ние последнего в рабочее положение и подъем в транспортное осуществляются
пневмоцилиидром 4, шток которого через рычажную передачу 5 и муфту 6
связан со стойкой 7 подвески тросового барабана на раме машины. Для пово-
рота тросового барабана в горизонтальной плоскости предназначен пневмоци-
линдр 11, шток которого связан с рычагом поворота 12 барабана, жестко
связанного с полой телескопической стойкой 7. С внешней стороны тросовый
барабан огражден щитком 10, не допускающим разбрасывания грязи.
Льдоскалывающее устройство (рис. 4.21) предназначено для скалывания
льда и уплотненного снега. Оно размещено впереди машины и выполнено из
трех наклонных под углом 45° подвижных щитов: среднего 3 с шириной захва-
та 2,45 м и двух боковых 4 и 10, которые увеличивают ширину захвата до 3,4 м.
Такое расположение щитов перемещает сколотый материал на середину пути
(по стрелке Д’) для погрузки его в подвижной состав. Снизу щиты оснащены
зубьями 1 Средний щит 3 смонтирован на четырех направляющих 13, закреп-
ленных на кронштейне 2. 1
Боковые щиты 4 и 10 установлены на раме машины в подшипниках 9. По-
ворот щитов в рабочее и транспортное положения осуществляется пневматичес-
кими цилиндрами 11. Средний щит двумя тягами 8 связан с горизонтальными
плечами угловых рычагов 7. вертикальные плечи которых соединены со штока-
ми двух пиевмоцилиндров 6, опускающих щит в рабочее положение и подни-
мающих в транспортное. Для опускания и подъема боковых щитов предназна-
чены пневмоцилиндры 5, а для раскрытия и закрытия — пневмоцнлиидры 11.
Ширина захвата щитов регулируется цепями 12. Заглубление зубьев скалы-
вающего устройства (до 70 мм ниже верха головок рельсов) регулируется огра-
ничителями, смонтированными на щитах.
133
Рис. 4.21 Льдоскалывающее устройство
Техническая характеристика землеуборочиой машины
Производительность, м3/ч:
по среднему элеватору 600
» боковым элеваторам 450
» конвейерам .... 650
Скорости, км/ч:
рабочая..................3—5
транспортная . . . . до 50
Габарит....................1-Т
Масса машины, т . . . . 74,2
Потребное тяговое усилие,
кН......................100—160
Силовая установка . . .
Электростанция мощностью 200 кВт
Обслуживающий персонал,
чел...................... 3
На сети дорог, кроме описанной машины, находятся в эксплуатации убо-
рочные машины ранних выпусков, оборудованные аналогичными механизмами,
но на них отсутствуют рельсовые щетки, щеточный питатель и боковые щетки.
Кроме того, эксплуатируются машины, у которых скалывающее устройство
выполнено в виде одного среднего щита с удлиненными боковыми сторонами.
131
4.3. МАШИНЫ ДЛЯ УСТРОЙСТВА ДРЕНАЖЕЙ
4.3.1. Машина для сооружения продольных дренажей
За один проход машина выполняет весь комплекс работ по сооружению
продольного дренажа глубиной от 1,6 до 3,1 м, считая от бровки земляного по-
лотна или от поверхности земли, и шириной 520 мм. Диу траншеи для самопро-
мывания дренажной трубы придается уклон не меиее2°/00. Продольная ось дре-
нажа располагается в плайе на расстоянии не менее 3,5 м от оси пути.
Машина (рис. 4.22) сконструирована на базе экскаватора ЭТЦ-202. Она
имеет тяговую лебедку /, установленную на раме 2, дизель 3 (96 кВт), кабину
управления 4, ковшовый бар 7 с механизмом заглубления 12 и бункерами-кре-
пями 8,9, 10, //, поперечный 6 и продольный 13 ленточные конвейеры. Привод
самоходного шасси 5 и ковшовой цепи бара 7 осуществлен от дизеля 3 через про-
межуточный вал и шестеренчатый редуктор. Приводы остальных рабочих орга-
нов и устройств машины гидравлические. К ним относятся механизм заглубле-
ния 12 ковшового бара 7 с бункерами-крепями 8, 9, 10, 11, привод поперечного
6 и продольного 13 ленточных конвейеров, управление фрикционами и тормоз-
ным барабаном гусеничного шасси 5, а также тяговой лебедки 1
Ковшовый бар 7 имеет верхний приводной вал с двумя звездочками и от-
клоняющие колеса с натяжным устройством ковшовой цепи, а также инжний
вал с отклоняющими колесами. Ковшовая цепь состоит из двух параллельных
ветвей тяговой цепи с шагом 190 мм, соединенных между собой ковшами. По-
перечный ленточный конвейер 6 служит для приема грунта, разрабатываемого
ковшами, и передачи его на продольный конвейер 13, а последним обратно
в траишею, если грунт дренирующий, или на откос выемки и частично в верх-
нюю часть траншеи, если грунт недренирующий.
Продольный конвейер 13 можно устанавливать с любой стороны машины
так, чтобы всегда он был со стороны откоса выемки. Бункеры-крепи из листовой
стали с угольниками жесткости закреплены сзади бара и служат для укладки в
траншею дренирующих материалов и дренажной трубы, а также для предохра-
нения сгеиок траншей от возможного обрушения. Из бункера-крепи 8 на дно
траншей по всей протяженности дренажной трубы насыпается дренирующая
подсыпка 14 (ширину слоя 150—200 мм регулируют передвижной заслонкой,
установленной иа задней стейке бункера). Ее же используют для планировки
поверхности слоя. Из криволинейного бункера-крепи 9 укладывают дренажную
трубу 15, керамзитобетонные трубофильтры или гончарные трубы 125x200 мм.
Монтаж трубы ведется непрерывно из секций длиной 500 м, соединенных гоф-
рированными пластмассовыми муфтами. Дренажную трубу засыпают из бун-
10000
Рис. 4 22. Машина для сооружения продольных дренажей
135
кер а-крепи 10 дренирующей обсыпкой 16. Толщина слоя (100 250 мм) регули-
руется передвижной заслонкой на задней стенке буикера-крепи 10. Иа бункера-
крепн 11 укладывают дренирующий заполнитель /7, толщина слоя которого
при сообщающихся водоносных горизонтах составляет 200 —400 мм. При ие-
сообщающихся водоносных горизонтах верх дренирующей части заполнителя
располагается на 200— 300мм выше верхнего водоносного горизон га. Оставшую-
ся часть 18 траншеи заполняют местным грунтом Машина в процессе работы
перемещается по кювегу, который предварительно загружается дренирующим
материалом (мелкий щебень, гравий) и планируется бульдозером.
Тяговая лебедка / является вспомогательным устройством для передви-
жения машины, когда по условиям работы силы тяги гусеничного шасси ока-
зывается недостаточно. Канат лебедки через уравнительный блок заякоривает-
ся по оси дренажа на расстоянии 100 м впереди машины При подходе машины
к якорю его снова переставляют вперед.
Положение сооружаемого дренажа в плане и продольном профиле и рытье
траншеи с необходимым уклоном дна задаются тросом-копиром, устанавливае-
мым по проектным данным вдоль фронта работ. С тросом-коп и ром контактируют
датчики автоматического устройства, управляющего гидроприводом шасси 5
(фрнкцноны н тормозной барабан) и гидроприводом механизма заглубления 12
ковшового бара.
4.3.2. Машина для сооружения поперечных дренажей (МСПД)
Машина предназначена для сооружения поперечных дренажей для оздо-
ровления «больных» мест в насыпях (балластные корыта, грязевые мешки и
т. п.). Она бурит горизонтальные и наклонные скважины и устанавливает в
них элементы поперечного трубчатого дренажа (рис 4.23), состоящего из перфо-
рированной трубы (фильтра) 5, керамзитобетонных трубофильтров 4, соеди-
ненных пластмассовыми муфтами 3. Секция асбоцементной трубы 2 распола-
гается в бетонном оголовке L
Бурение производится шнеком 1 (рнс. 4.24), вращаемым двигателем 4 (от
мотороллера «Тула-200», 17,7 кВт) через редуктор 10. Шнек состоит нз секций
длиной 1 м, наращиваемых по мере бурения скважины. Наибольшая длина
скважины 20 м. Двигатель и редуктор вместе со шнеком перемещаются при вра-
щении вручную штурвала 5, вал которого коническими зубчатыми колесами
связан с валом реечных колес, находящихся в зацеплении с зубчатыми рейками,
нарезанными на нижней части трубчатых направляющих 2. На выходном валу
редуктора 10 жестко установлена коническая втулка, в которую входит закреп-
ляемый клином хвостовик бурового инструмента диаметром 150 мм, состояще-
го из буровой головки н шнека /, транспортирующего из скважины разработан-
ный грунт.
Вспомогательная лебедка//предназначенадля самозатаскивания машины
на откос насыпн и для самомонтажа ее из транспортного положения в рабочее
и обратно. Машина оборудована колесами 7 и 14 для перемещения по откосу
Я-Я Б-Б 8-8
Рис. 4.23. Схема поперечного трубчатого дренажа
136
Рис. 4 24. Машина для сооружения поперечных дренажей
насыпи и вдоль фронта работ. Стойки 6 снабжены шаровыми шарнирами, вхо-
дящими в башмаки 9. Для подъема машины на откос насыпи конец троса с
лебедки 11 через блоки 5 подается вверх к забиваемому в откос якорю После
его закрепления запускают двигатель 4, трос наматывается на барабан и затас-
кивает машину на откос. Колеса 14 снимаются и опорные башмаки 1,3 устанав-
ливают на откосе и закрепляют. Стойки 6 в траиспортном положении располо-
жены горизонтально вдоль направляющих 2. Прн приведении машины на от-
косе в рабочее положение их устанавливают вертикально. При этом опориые
башмаки 9 также закрепляют. С помощью лебедки 11 поднимают заднюю часть
машины, поворачивая ее раму вокруг оси башмаков 12, н устанавливают в тре-
буемое рабочее положение. Для устойчивости на откосе служат подкосы 8
4.4. ОСНОВЫ ЭКСПЛУАТАЦИИ И ОБСЛУЖИВАНИЯ МАШИН
ДЛЯ РЕМОНТА ЗЕМЛЯНОГО ПОЛОТНА
В обязанности обслуживающих машины бригад входят подготовка к ра-
боте н соблюдение всех требований, определенных Правилами технической
эксплуатации железных дорог, Инструкцией по обеспечению безопасности дви-
жения поездов прн производстве путевых работ, Инструкцией по движению по-
ездов и маневровой работе, Правилами по технике безопасности и производст-
венной санитарии при производстве работ в путевом хозяйстве и др. Машинист
Машины является ответственным за выполнение бригадой всех требований ука-
занных инструкций и правил
Перед началом работы путевого струга на участке проводят подготовитель-
ные мероприятия: убирают с пути н переносят на расстояние не менее 10 м от
его оси путевые знаки, заменяют временными настнлы переездов, убирают рель-
сы, шпалы и другие предметы из кюветов, с обочин н откосов насыпей. До вы-
езда струга на перегон машинист и его помощник осматривают машину, техни-
ческое состояние узлов, опробывают их действие, смазывают трущиеся части,
устраняют неисправности. Особое внимание при подготовке струга к работе
уделяют проверке пневматической системы управления рабочими органами.
Прн обнаружении в магистрали, кранах управления и цилиндрах мест, где
утечка воздуха достигает 0,05 МПа в течение 5 мни, в кратчайший срок исправ-
ляют неисправность. При этом в пневматических цилиндрах подтягивают илн
заменяют уплотнения. Перед выездом на перегои рабочие органы опробовают
на холостом ходу.
137
К месту работы на перегоне струг перемещается со скоростью до 65 км ч.
При этом рабочие органы находятся в транспортном положении. Приступая
к работам, руководитель должен иметь профиль земляного полотна на участке
с обозначением глубин и уклонов кюветов и расстояний от оси кюветов до оси
пути Заранее должны быть намечены места, куда предстоит отваливать или
вывозить грунт. При нарезке или очистке кюветов первый проход делается
пробным со скоростью 5 км/ч с выключенным стопором механизма наклона
крыла. Если при этом проходе не обнаружены препятствия, то при последую-
щих проходах скорость может быть повышена до 10—15 км ч. При возвраще-
нии к месту начала работ (холостой ход), если нет препятствий, струг движется
с поднятым, но не закрытым крылом. При последнем проходе машины, когда
выполняется окончательная зачистка кюветов, скорость составляет 3 км/й.
Кюветы нарезают с уклоном i не менее 0,002. При уклоне пути I Д> 0,002 ук-
лон кювета соответствует уклону пути. При i 0,002 и длине участка свыше
300 м рекомендуется, чтобы кювет имел уклоны в обе стороны от середины вы-
емки Нарезка и очистка кюветов на горизонтальном участке (i 0,002) ве-
дется ступенями. Вначале при первом проходе снимается слой по всей длине
кювета; во второй проход срезку начинают на 20—30 м от начала первого, а
в следующий еще на 20—50 м от начала второго и т. д. Последним проходом
сглаживают кювет по всей длине при выключенном стопоре наклона крыла.
При очистке перегонов от снега струг-снегоочиститель движется со ско-
ростью до 40 км/ч. На станциях пользуются снегоочистительным устройством й
боковыми крыльями, которые устанавливают в положение для планировочных
работ. Снег очищают,на 50 мм ниже уровня головки рельса одновременно с двух
путей и переваливают на второе междупутье. Второй уже очищенный путь
струг проходит с раскрытым крылом, отбрасывая снег со второго междупутья,
и с третьего пути — на третье междупутье. Так процесс повторяется, пока
снег не будет сброшен за пределы станции.
Путевую уборочную машину обслуживают машинист и два его помощни-
ка Перед выходом уборочного состава на работу бригада осматривает ее, про-
веряя рабочие органы и механизмы машины, ходовые части, упряжные прибо-
ры и тормозную систему. Осматривают и в случае необходимости смазывают
ведущие и натяжные валы, их подшипники, конвейеры, элеваторы, редукторы,
пневматические цилиндры и т. п. Редукторы рабочих органов, подшипники ве-
дущих и натяжных валов регулярно смазывают: штоки пневматических цилинд-
ров—консистентной смазкой, цепи элеваторов и транспортеров — нигролом или
карданной смазкой. Одновременно проверяют заземление корпусов генератора
электростанции, электродвигателей и электроаппаратуры, надежность изоляции
и защиты от возможности прикасания ко всем токоведущим частям. Цепи эле-
ваторов и ленты конвейеров машины и полувагонов в случае необходимости на-
тягивают до устранения их провисания. Машина транспортируется отдельным
локомотивом, расположенным в голове уборочного состава. Последний форми-
руют, как правило, из путевой землеуборочной машины и специальных полу-
вагонов, оборудованных продольными ленточными конвейерами. Специаль-
ные полувагоны включают в уборочный состав после осмотра и устранения
выявленных недостатков. При отсутствии полувагонов убираемый материал
отбрасывают в отвал за пределы габарита приближения строения.
Прн встрече с препятствиями механики машины приводят рабочие органы
в состояние, обеспечивающее беспрепятственный проход машины; в случае не-
обходимости дают сигнал машинисту локомотива об остановке поезда. Если ма-
шина находится в сцепе с подвижным составом, с пульта управления на верх-
ней площадке одновременно с рабочими органами включают пластинчатые кон-
вейеры полувагонов этого состава. Второй помощник машиниста обслуживает
электростанцию, находясь у щита управления в будке, где она размещена.
138
Сигнал машинисту локомотива о начале движения уборочного поезда дает
его механик, а сигнал об остановке обязан дать каждый член бригады, если он
обнаружил неисправность, которая .может вызвать поломку машины или угро-
жает безопасности движения поезда. Для обеспечения надежной связи бригады
машины с бригадой локомотива уборочного поезда, помимо звуковой сигнали-
зации, установлена световая. Для транспортировки рабочие органы машин при-
водят в транспортное положение и после проверки вписывания в габарит под-
вижного состава закрепляют на раме стопорными устройствами.
Техническое обслуживание путевого струга и путевой уборочной машины
предусматривает ежесменное обслуживание (ЕО), проводимое бригадой перед
началом работы; техническое обслуживание № 1 (ТО-1), выполняемое через
50 км рабочих проходов струга и через каждые 10 смен работы путевой убороч-
ной машины; техническое ©обслуживание № 2 (ТО-2), проводимое через 100 км
рабочих проходов струга и через один месяц работы путевой уборочной машины.
Ежесменное обслуживание (ЕО) включает внешний осмотр, очистку дета-
лей, крепежные работы, смазку трущихся направляющих поверхностей.
ТО-1 предусматривает все операции ЕО, а также смазку механизмов сог-
ласно карте смазки, замену негодных болтовых соединений, регулировку и на-
ладку отдельных узлов и механизмов.
ТО-2 сводится к выполнению всех операций по ТО-I, а также устранению
дефектов в пневмосистеме, электрооборудовании; замене неисправных уплотне-
ний, прокладок, болтовых соединений; притирке неисправных кранов управле-
ния и т. п. Обслуживание электростанции и проверка ее работы должны вы-
полняться в соответствии с требованиями приложенной к ней инструкции заво-
да-изготовителя.
Сведения о смазке путевых стругов, основные неисправности машин для
ремонта земляного полотна и способы их устранения приведены ниже.
Таблица смазки струга-снегоочистителя
Места смазки Тип масла Периодичность смазки
1 2 3
Направляющие подъемных щитов и крыльев Солидол 1 раз в неделю
снегоочистительного устройства; колонны и на- правляющие колонн боковых крыльев
Пневмоцилиндры, пневмостопоры Смазка 4а 1 раз в 6 месяцев
Пятники и шейки осей тележек Масло осевое Перед выездом на работу
Рабочая поверхность крыльев То же При длительных стоянках
Валы, петли и оси рычагов передних щитов, бо- 1 раз в неделю
ковых крыльев; валики петель откосного крыла; штанги телескопической распорки; шарнирные со- единения
Пневмодвигатель кюветной части Масло инду- стриальное То же
Редуктор кюветной части То же 1 раз в месяц
Подшипники вал-гайки кюветной части Солидол I раз в сутки
Винты стяжек крыла и ручного тормоза Масло осевое 1 раз в неделю
При сооружении продольного дренажа работы разделяются на подготови-
тельные, основные и заключй'Гелъньтё1, ‘
К подготовительным ра^бтамютносятся доставка машины на место произ-
водства работ и установка ее в рабочее положение; завоз и распределение по
139
Неисправности машин для ремонта земляного полотна
и способы их устранения
Неисправность
Возможные причины
Способы устранения
Утечка воздуха в сети
воздухопровода
Утечка воздуха в ци-
линдрах
Ослабление болтовых
креплений
Не поднимаются кры
лья
Не опускаются крылья
Не открываются боко-
вые элеваторы путевой
уборочной машины
Дисковые рыхлители
при подъеме не подхо-
дят к раме машины
Скалывающее устрой-
ство путевой уборочной
машины полностью не
опускается
При включении боко-
вой элеватор не работа-
ет
Конвейер-питатель не
успевает передать мате-
риал на средний транс-
портер
1 Неплотности в местах
резьбовых соединений возду-
хопровода
2 Ослабли хомутики резино-
вых рукавов
3 Пропуск в кранах управ-
ления
4 Трещины в трубах возду
хопровода
1 Ослабла набивка сальни-
ков в цилиндрах
2 Неисправны прокладки
под крышками цилиндров
1. Ослабли затяжки гаек, от-
сутствуют шплинты и шдйбы
2 Срыв или удлинение резь-
бы болтов
1 Низкое давление сжатогр
воздуха в магистрали
2 Утечки сжатого воздуха в
магистрали
3 . Неисправны манжеты ци-
линдра
4 Заедание шарнирного ва-
ла среднего элеватора
1. Перекос в направляющих
2 Заедание пальца пневмо-
стопора
1. Заедание ползуна в на-
правляющей
2 Утечка воздуха через про-
кладки цилиндровых крышек
1. Изгиб штока поршня ци-
линдра
2. Низкое давление сжатого
воздуха из-за утечек через
сальниковый уплотнитель
1. Изгиб штока цилиндра
2. Изгиб рычагов передачи
3. Держит стопорный диск
на валу поворота
4. Перекос в направляющих
1. Перегорели плавкие встав-
ки
2 Сорвана муфта соедине-
ния между редуктором и ко-
робкой передач
Ослабло натяженне ленты и
снизилась скорость ее движе-
ния
При ослаблении резьбы труб
намотать на нее пеньки и об-
мазать суриком, после чего со-
единить трубы
Плотнее затянуть хомутики,
закрепляющие резиновые ру-
кава
Притереть пробку крана и
подтянуть гайку ее крепления
Заварить трещины труб ав-
тогеном или заменить трубы
Подтянуть крышки грунд-
букс цилиндров или заменить
в них уплотняющую набивку
Заменить прокладки и плот-
нее притянуть крышки ци-
линдров
Поставить шайбы, подтянуть
гайки болтов и поставить
шплинты
Сменить болты с сорванной,
изношенной или вытянувшейся
резьбой *
Поднять давление воздуха в
магистрали до 0,6 МПа
Устранить утечки воздуха
Заменить манжеты цилиндра
Устранить заедание вала и
смазать его подшипники
Устранить перекос и смазать
направляющие
Выправить палец стопора
Устранить заедание ползуна
и смазать направляющие
Сменить прокладки под
крышками
Выпрямить шток поршня
Подтянуть грундбуксу или
заменить сальниковую набивку
Выправить шток цилиндра
Выправить рычаги передачи
Выправить положение сто-
порного диска на валу поворо-
та
Устранить перекос и смазать
направляющие
Заменить плавкие вставки
Исправить муфту и соеди-
нить редуктор с коробкой пе-
редач
Подтянуть натяжение ленты
конвейера
140
Окончание
Неисправность Возможные причины Способы устранения
Лента среднего кон- вейера не вращается 1. Цепи ослабли и переска- кивают через зубья звездочек 2. Проворачиваются на валу ведущие звездочки Отрегулировать натяжение цепей Заменить шпонки ведущих звездочек
фронту работ дренирующих материалов, труб и т. п.; установка по проектным
данным троса-копира.
Основные работы включают сооружение дренажа с периодической провер-
кой нивелированием правильности укладки дренажной трубы, устройство в не-
обходимых случаях смотровых колодцев и перестановку в процессе работы ма-
шины троса-копира.
Заключительные работы предусматривают очистку и приведение машины в
транспортное положение; отправку машины на базу или новое место работы;
уборку с откоса выемки вынутого из траншей грунта и восстановление проект-
ных очертаний и размеров земляного полотна.
На небольшие расстояния машина транспортируется своим ходом, а на
большие — на железнодорожной платформе. Машину обслуживает бригада из
10—12 чел. в составе: руководитель работ, сигналист, два механика, работаю-
щих на машине, бульдозерист и пять—семь рабочих, выполняющих вспомога-
тельные операции. Эта же бригада осуществляет планово-предупредительные
ремонты.
5. МАШИНЫ ДЛЯ БАЛЛАСТИРОВКИ И ПОДЪЕМКИ ПУТИ
При всех видах ремонта железнодорожного пути, а также при строитель-
стве новых линий иа 1 км укладывают от 300 до 1800 м:! балласта. Для механи-
зации этих работ на железнодорожном транспорте применяют хопперы-доза-
торы и электробалластеры, что сокращает число рабочих, занятых на выполне-
нии расчетного годового объема работ соответственно на 70 и 150 чел
5.1, ХОППЕРЫ-ДОЗАТОРЫ
5.1.1. Назначение и общее устройство
Хопперы-дозаторы предназначены для перевозки, механизированной раз-
грузки слоем заданной толщины — дозой (отсюда дозировка) и разравнивания
всех видов балласта на рельсо-шпальной решетке. Из хопперов-дозаторов фор-
мируют специальные составы (обычно 20 вагонов) с одним турным вагоном для
размещения и следования в нем обслуживающей брит ады На железных дорогах
применяют хопперы-дозаторы ЦНИИ-ДВЗ и ЦНЙИ-ДВЗМ
Хоппер-дозатор (рис. 5 I) представляет собой специальный полувагон,
оборудованный разгрузочно-дозировочными устройствами. Он состоит из ра-
мы, опирающейся на две двухосные тележки, кузова /, торцовые стенки которого
наклонены под углом 45' к горизонту, пневмооборудования (цилиндры 2, воз-
душный резервуар 4, рабочая воздушная магистраль 6), пульта управления 5,
стопор а-фиксатор а 3 и дозатора 7 Для отвалки от рельсов выгруженного бал-
ласта предусмотрены плужки 8
В кузов 7 (рис. 5.2) загружается балласт Внизу кузова имеется бункер 3
с разгрузочными люками, которые снабжены наружными 5 и внутренними 6
крышками Под бункером размещен дозатор 2, устанавливаемый механизмом
его подъема и опускания на заданную высоту от уровня верха головок рельсов
Рис. 5.1. Хоппер-дозатор ЦНИИ-ДВЗ
142
Рис. 5.2 Транспортное и рабочие положения разгрузочно-дозировочных механизмов
Дозатор представляет собой бездонную коробку, в которую из кузова через
открытые люки бункера выгружается балласт. Высота выгружаемого слоя бал-
ласта (дозировка) определяется величиной установки низа дозатора по отноше-
нию к головкам рельсов. Для дозировки использован принцип подпора. Если
на стоянке открыть крышки люков бункера по одной из схем, указанных на
рис. 5.2, то балласт из кузова через люки будет высыпаться в дозатор, а из
него на путевую решетку до тех пор, пока на ней не образуется слой такой высо-
ты, который закупорит разгрузочные окна в дозаторе, т. е. создастся подпор
Дальнейшая выгрузка прекратится. При движении хоппер-дозатор наезжает
на участки, где просвет между путевой решеткой и низом дозатора не заполнен
балластом. Здесь балласт высыпается из дозатора и непрерывно заполняет про-
свет до образования подпора. Выгрузка балласта из хопперов-дозаторов про-
изводится только на ходу.
В транспортное положение (рис. 5.2, а) механизмы хопперов-дозаторов
ЦНИИ-ДВЗ приводятся для следования с грузом и порожняком в составе по-
ездов. Хопперы-дозаторы производят следующие виды разгрузки балласта:
на всю ширину пути (рис. 5.2, б). В этом положении дозатор 2 опущен и а
заданную отметку, установленную иа стопоре-фиксаторе, и упоры 1 не препят-
ствуют открыванию крышек. Наружные крышки 5 открыты н упираются в бо-
ковые рамы 4, образуя замкнутую воронку .благодаря которой балласт не рас-
сыпается. Двускатные продольные балки средней рамы дозатора 2 защищают
рельсы от засыпки их балластом. Внутренние крышки бункера открыты;
на стороны пути (на концы шпал) (рис. 5.2, в). Для этого выполняют те же
операции, что и при выгрузке на всю ширину пути, но внутренние крышки 6
закрыты;
143
на середину пути (рис. 5.2, г). Для этого выполняют те же операции, что и
при выгрузке на всю ширину пути, но наружные крышки 5 закрыты;
на обочину пути (рис. 5.2, 6). Дозатор опускают иа заданную отметку толь-
ко со стороны обочины. Со стороны междупутья дозатор остается закреплен-
ным в транспортном положении стопором-фиксатором и транспортными запо-
рами. Упоры 1 препятствуют открыванию наружной крышки со стороны меж-
дупутья; открывают наружную крышку 5 со стороны обочины;
на междупутье (рис. 5.2, е). Для этого приводятся в действие разгрузоч-
но-дозировочные механизмы со стороны междупутья.
Хоппер-дозатор ЦНИИ-ДВЗМ отличается от хоппера-дозатора ЦНИИ-
ДВЗ улучшенной конструкцией ходовых частей вагона, тормозов и схемой
пневмооборудования.
5.1.2. Основные устройства хопперов-дозаторов ЦНИИ-ДВЗ
*
Разгрузочно-дозировочные механизмы хопперов-дозаторов состоят из ме-
ханизмов наружных и внутренних крышек и механизма подъема, опускания и
регулирования высоты установки дозатора.
Механизм наружных крЫшек (рис. 5.3) служит для их открывания и за-
крывания. В транспортном положении поршень пнлиндра 1 поднят вверх. Прн
подъеме в верхнее положение рычагов 2 поворачивается вал 3, а рычаги 12
опускаются в нижнее положение. Благодаря этому распорные рычаги 11 по-
ворачивают угловые распорные рычаги 10 вокруг их осей 9 и рычагами 4 за-
крывают наружные крышки 5. В этом положении крышки удерживаются упо-
рами 6 поднятого дозатора 8 и распорными рычагами 4, которые перешли через
«мертвую» точку. Этот переход регулируется таким образом, чтобы в транспорт-
ном положении крышек струна, натянутая через центры осей шарниров рычага
4, была ниже центра оси вращения рычага 10 на 6—10 мм. Для упоров 6 в бун-
кере 7 имеются окиа. Разгрузочно-дозировочные механизмы хоппера-дозатора
позволяют открывать каждую наружную крышку отдельно.
Механизм внутренних крышек (рис. 5.4) служит для открывания и закры-
вания виутреиних крышек люков бункера.
В транспортном положении поршень цилиндра 4 поднят вверх, рычаг 5,
поворачивая вал 6, находится в верхнем положении, а рычаги 7 — в нижнем.
Благодаря этому рычаг 7 через подвеску 9 устанавливает рычаги 10, соединен-
Рис 5.3. Механизм наружных крышек
144
Рис. 5 4 Механизм внутренних крышек
ные шарниром 6, в распор В этом положении внутренние крышки 3 люков бун-
кера закрыты и удерживаются упорами 12 поднятого дозатора 13 и распорными,
рычагами 10, которые перешли через «мертвую точку». Этот переход регулиру-
ется таким образом, чтобы в транспортном положении крышек струна, натяну-
тая между центрами шарниров 11, была выше центра шарнира 8 на 6— 10 мм
Для упоров 12 в бункере 2 имеются окна. Для открывания наружных 1 и внут-
ренних 3 крышек воздух впускают в верхние полости их цилиндров.
Механизм подъема, опускания и регулирования дозатора (рис. 5.5) слу-
жит для подъема и закрепления дозатора в транспортном положении, а также
для установки и фиксирования в заданном рабочем положении—при дозировке
балласта. Таких механизмов два Каждый из них предназначен для управле-
ния левой или правой сторонами дозатора. Для опускания последнего вначале
устанавливают гайку стопора-фиксатора 5, вращая маховичком 4 ее винт до
заданной отметки по шкале 3. Отметки шкалы соответствуют высоте низа доза-
тора по отношению к уровню головок рельсов. Вместе с гайкой стопора-фнкса-
тора могут опускаться опирающийся на нее конец рычаг 8, который другим
концом соединен с рамой тягой 7, и подвеска 13, паз которой перемещается по
пальцу приводного рычага 12. Под действием сжатого воздуха шток цилиндра
6, воздействуя на рычаг 12, поворачивает вал 1 и рычаги 9, к которым на подвес-
ках 2 присоединен дозатор 10 с боковой, рамой 11. Дозатор опускается до тех
145
Рис 5 6. Принципиальная схема пневмообо-
рудования хоппера дозатора
пор, пока палеи рычага 12 упрется в
нижнюю часть паза подвески 13.
В этом положении иижняя кромка
дозатора будет находиться над уров-
нем головок рельсов на отметке шка-
лы 3.
Хопперы-дозаторы ЦНИИ-ДВЗ
оборудованы двумя пневматическими
системами: рабочей—для приведе-
ния в действие и управления разгру-
зочно-дозировочными механизмами и
тормозной — для приведения в дей-
ствие автоматических тормозов ва-
гона. Принципиальная схема рабо-
чего пневматического оборудования
приведена на рис. 5.6 Сжатый воздух от локомотива поступает по рабо-
чей магистрали 10 через обратный клапан 9 и кран 8 в рабочий резер-
вуар 6. из резервуара через клапан максимального давления 11 по воздухо-
проводной сети 12 хоппера-дозатора, через краны управления 13, 14, 15, 16
и резиновые шланги 5 к рабочим цилиндрам / наружных крышек, 2— внутрен-
них и 3, 4 — дозатора. Спуск конденсата из рабочего резервуара осуществля-
ется краном 7. Ниже приведена техническая характеристика хопперов-доза-
торов ЦНИИ-ДВЗ.
Параметры
Виды перевозимого балласта
Грузоподъемность, т..................
Число одновременно выгружаемых ваго-
нов, шт. , . ................
Рабочая скорость движения при раз-
грузке, км/ч......................
Максимальное давление воздуха в ра-
бочем резервуаре, МПа ....
Минимальное давление воздуха в рабо-
чем резервуаре, МПа
ЦНИИ-ДВЗ ЦНИИ двзм
Все виды 60 балласта 60
1-2 1—2
3—5 3—5
0,6 0,8
0,4 0.4
5.1.3. Основы обслуживания хопперов-дозаторов
Составы хопперов-дозаторов обслуживают две бригады, в каждой из них
по два человека: машинист и его помощник. При выгрузке участвуют обе
бригады, при транспортировании — одна.
При эксплуатации, хопперов-дозаторов проводят следующие виды техничес-
ких обслуживании:
техническое обслуживание № I (ТО-1) выполняют на стоянках в пути сле-
дования. Оно заключается в осмотрах разгрузочно-дозировочных механизмов,
проверке надежности закрепления нх в транспортном положении и устранении
выявленных недостатков;
техническое обслуживание № 2 (ТО-2) выполняют после каждой разгрузки
хопперов-дозаторов: очищают механизмы от грязи и щебня в рычажных пере-
дачах, проверяют крепления и устраняют неисправности, выявленные при про-,
верке и в процессе выгрузки балласта;
техническое обслуживание № 3 (ТО-3) производят один раз в месяц. В него
входят все работы, входящие в ТО-2. Кроме того, используя локомотив или
другой источник сжатого воздуха, проверяют плотность воздухопроводов рабо-
чей магистрали, кранов управления и обратных клапанов воздушных резервуа-
146
ров; работу механизмов при давлении воздуха в резервуаре 0,4 МПа; правиль-
ность регулировки механизмов; одновременно производят смазку и крепление
узлов.
Во время погрузки и выгрузки балласта люди не должны находиться внутри
кузова. Нельзя пролезать в открытые люки кузова, регулировать механизмы,
а также находиться в зоне движения разгрузочно-дозировочных механизмов
.при наличии сжатого воздуха в системе. Для пропуска поездов по соседнему
пути работу хопперов-дозаторов прекращают, и бригада машинистов сходит
на обочину.
5.2. ЭЛЕКТРОБАЛЛ АСТЕРЫ
Электробалласзеры предназначены для дозировки балласта и подъемки пу-
ти £ отличие от хоппсров-дозаюров электробалластерами дозируют неравно-
мерно выгруженный балласт (например, из полувагонов) с перераспределе-
нием его в продольном и поперечном направлениях по отношению к пути и раз-
равниванием па рельсо-шпальной решеткеслоем заданной толщины.
Цосьемку пути элек(робалластеры производят на ходу, непрерывно у дер-
живая в поднятом положении рельсо-шкальную решетку на заданной высоте.
При ням ранее задозированный балласт просыпается в шпальные ящики и
разравнивается После опускания на него рельсо-шпальная решетка оказыва-
ется поднятой на заданную высоту, определяемую высотой подъемки и толщи-
ной слоя дозировки Кроме этих основных работ, электробалластерами про-
изводят сдвижку путевой решетки (перемещениее ее в плане), рыхление песча-
ного балласта пол рельсо-шпальной решеткой, срезку и планировку обочин зем-
ляного полотна, грубую оправку откосов балластной призмы, подъемку стре-
лочных переводов и мостовых пролетных строений массой до 15 г.
Электробалластеры служат базой для создания других путевых машин, на-
пример щебнеочистительных и рихтовочных.
Наибольшее распространение получили электробалластеры ЭЛБ-I и
Э,ЛБ-3М. Для транспортного строительства начат выпуск электробалластеров
ЭЛБ-ЗТС.
5.2.1. Электробалластер ЭЛБ-1
ЭЧБ-i (рис 5 7) предназначен для подъемки пути с рельсами не тяжелее
Р65 и деревянными шпалами Он состоит из двух ферм 2 (ферма № /) и 21 (фер-
ма № 2), соединенных между собой междуферменным шарниром 19. На фермах
расположены все рабочие органы машины — электромагнитный подъемник 18
с механизмами 5 подъема и опускания магнитов, 7 — перекоса, 4 — сдвига пу-
ти, 6 подъема балластерных рам, 10 — подъема дозатора 16 и 8 — поворота
его крыла, рельсовые 15 и шпальные 17 щетки Хвостовая часть фермы № 2 у
тележки 22 для устойчивости загружена чугунными отливками. Ферму № 2
(ферма № /), где расположен электромагнитный подъемник, называют фермой
рабочего пролета. Ферма 21 (ферма № 2) является направляющей, так как, опи-
раясь на две тележки 20 и 22, она направляет при движении ферму 2, опираю-
щуюся только на одну тележку 14 и на консоль фермы № 2.
Питание всех электродвигателей механизмов электробалластера обеспечи-
вает электростанция 12 переменного тока, установленная в машинном отделе-
нии 13. Там же размещен машинный преобразователь 11 для питания постоян-
ным током электромагнитного подъемника 18. Всеми механизмами управляют
с пульта 9 управления дозатором и центрального пульта<3.
Электробалластер оборудован автоматическими н ручными тормозами, зву-
ковыми сигналами, электроосвещением помещений и рабочих органов. При сле-
147
00
Рис. 57 Электробалластер ЭЛБ-1
шарнир подьж
Тележка №2 i/ устройство
т ин \ / .Ферт Ne1
Ферна N 2 \ / ^ » .. ио<
т . „ \ Тележка №1
Тележка \ \
№J \ поО
Рис. 5 9. Мелд\фирменное соединение:
а- \ инфицированный межлуферменный шарнир, и ~- междуферменные связи
Рис. 5.8 Схема вписывания электробаллас-
тера в кривые
довании машины бригада разметается в будке 1. В ней же хранятся инстру-
менты и инвентарь.
Междуферменный шарнир электробалластера предназначен для обеспече-
ния вписывания его в кривые участки пути, безопасного следования по перело-
мам профиля и участкам с изменением возвышения одной рельсовой нити по от-
ношению к другой.
Геометрическая схема соединения ферм электробалластера (рис. 5.8) обес-
печивает его вписывание в кривые участки пути с сохранением положения
электромагнитного подъемника по оси пути.
В настоящее время электробалластеры оборудованы усиленными между-
ферменными шарнирами (рис. 5.9, а), у которых кронштейны сварены из двух
листов, а диаметр шаровой части оси увеличен до 220 мм.
Ферма № / опирается через свой кронштейн, полусферы / и 4 на шаровую
часть оси 2 , которая через пяты 3 и кроиштейн передает эту нагрузку на фер-
му № 2. Оси, полусферы и пяты унифицированы с аналогичными деталями элек-
i робал ластера ЭЛ Б-Зм и щебнеочистительных машин ЩОМ-Д и 1ЦОМ-4. Межф-
ирменные связи (рис. 5 9, и) служат для восприятия усилий, возникающих
при перемещении ферм относительно друг друга вокруг шарнира, а также для
возвращения фермы № / в установленное среднее положение относительно фер-
мы № 2. Они состоят из тяг /, пружин 3 и pei улировочных муфт 2.
Электромагнитный подъемник (рис. 5.10) — главный рабочий оргаи элект-
робалластера Он предназначен для подъема, сдвига и перекоса рельсо-шпаль-
ной решетки и удержания ее в поднятом положении во время движения маши-
Рис. 5.10. Электромагнитный подъемник
149
ны. Для захвата рельсов он снабжен четырьмя электромагнитами, по два на
каждую рельсовую нить. Грузоподъемность каждого электромагнита 75 кН.
Электромагниты 1 подвешены к траверсе 5 посредством серьги 4 и валика 3.
Такая подвеска дает возможность каждому электромагниту поворачиваться в
вертикальной и горизонтальной плоскостях вокруг горизонтальной и верти-
кальной осей валика и серьги. Траверса 5 также шарнирно подвешена к попе-
речной балке 8 при помощи валика 6 и вилки 7. Шарнирная подвеска магнитов
и траверсы позволяет электромагнитам самоустанавливаться по изогнутым
поверхностям поднятых рельсовых нитей и вписываться в кривые участки пути.
Электромагнит состоит .из стального литого корпуса-ярма, на сердечника
которого установлено пять катушек. К сердечникам ярма привинчены полюсные
решетки. При подъемке пути электромагниты, удерживая поднятые рельсовые
нити, катятся по ним на роликах 2 (по два на каждый электромагнит). Ролик
магнита (рнс 5 11) предохраняет полюсные решетки от износа и облегчает
передвижение электробалластера. Зазор между полюсными решетками и голов-
кой рельса должен быть не более 1 мм. При большем зазоре грузоподъемность
магнита снижается. Величина зазора регулируется роликом 4, для чего его
ось / опирается на корпус магнита через эксцентриковые втулки 5 (эксцентри-
ситет составляет 3 мм), закрепленные на оси при помощи шпонок 10. При по-
вороте оси / ролика вправо он опускается, увеличивая зазор, а влево поднима-
ется, уменьшая его. На шкале 8, прикрепленной к корпусу магнита, указаны
величины зазоров, соответствующие различным положениям ролика. Дробные
доли миллиметра (с точностью до 1Z3 мм) получают постановкой фиксирующего
болта 2 в одно из отверстий 9, засверленных н нарезанных в корпусе полумаг-
нита. Величина зазора читается против выступа, на шайбе 3, вращающейся сов-
местно с осью / ролика благодаря шпонке 10. Ролик опирается на ось 1 через
конические роликоподшипники 7, расстояние между которыми фиксируется
дистанционной трубкой 6.
Рабочие операции электромагнитного подъемника—подъемку, сдвиг и
перекос пути — выполняют соответственно механизмы подъема, сдвига и пере-
коса пути.
Механизм подъема пути состоит из электродвигателя 24 (см. рис. 5.10),
соединенного полужесткой муфтой с червячным редуктором 23. Червячная
шестерня редуктора является одновременно гайкой винта 21, который шар-
нирно при помощи вилки и валика 22соединен с траверсой 19 подъемного меха-
низма. Траверса перемещается в направляющих кронштейнах 20. К ее концам
прикреплены две параллелограммныетяги 18, к которым подвешена поперечная
балка 8 с траверсами 5 н электромагнитами 1 Траверса 19, параллелограммные
тяги 18 и участок балки 8 между точками прикрепления тяг образуют шарнир-
ный четырехугольник, постоянно сохраняющий параллельность своих сторон.
Положение шарнирного четырехугольника определяют рычаг 17, траверсы 19,
ползун 16 механизма перекоса пути и каретка 12 механизма сдвига пути.
Рис. 5.11. Ролик магнита
150
По схемам (рис. 5.12, а, б) можно проследить работу механизма подъема.
Оси рычага / и ползуна 2 совмещены с вертикальной осью машины. Траверса
4, жестко закрепленная перпендикулярно оси рыча! а /, находится в горизон-
тальном положении, одновременно, в шарнирном четырехугольнике тяги 3
отвесны, а балка'/? горизонтальна. При включении электродвигатель 6 приводит
во вращение червяк и червячную шестерню редуктора 7. Червячная шестерня
поднимает или опускает (в зависимости от направления вращения электродви-
гателя) винт 5, который в свою очередь поднимает или опускает траверсу, тяги
и балку с электромагнитами и рельсо-шпалыюй решеткой. При подъеме путе-
вой решетки ползун 2 перемещается в пазу рычага 1 Полный ход механизма
подъема равен 400 мм. Это обеспечивает опускание магнитов на 50 мм ниже уров-
ня стоянки тележек (см. рис. 5.7), захват путевой решетки, имеющей местную
проса тку до 50 мм, и подъем магнитов с путевой решеткой на 350 мм выше этого
уровня. Контроль за величиной подъемки пути ведут по шкале указателя
подьема пути, находящегося в кабине центрального пульта управления.
Во всех механизмах электробалластера применены специальные червячные
редукторы (рис. 5.13). Конструкция их однотипна. Отличаются они лишь свои-
ми параметрами в зависимости от передаваемой мощности и передаточного чис-
ла. Редуктор состоит из стального корпуса 3, в котором расположен червячный
вал 4, опирающийся на два подшипника 5. Гнезда в корпусе для установки под-
ши пн и кор закрыты крышками 6. Крышки снабжены уплотнительными войлоч-
ными кольцами 7. Один конец червячного вала заканчивается квадратным хво-
стовиком для прокручивания редуктора вручную. Ручной привод применяют
для приведения рабочих органов в транспортное положение, если нет электро-
энергии или вышел из строя электродвигатель. На другом конце червячного ва-
ла на шпонке закреплена одна половина соединительной цепной муфты 2.
Другая ее половина 1 закреплена на валу электродвигателя. Червячный вал
4 зацепляется с червячным колесом 12, ступица которого имеет трапецеидаль-
ную резьбу. В него заводится винт 8.
В редукторах механизмов сдвига и перекоса пути в ступице червячного
колеса резьбы нет, цилиндрический конец винта закреплен в нем гайкой и шпон-
кой, поэтому винт продольного перемещения не имеет.
Ступица червячного колеса расположена в радиальных подшипниках
10 и упорных 18. Корпус редуктора с одной стороны имеет фланец для закреп-
151
ления его на опорной площадке фермы С другой стороны к редуктору прикреп-
лена болтами крышка 13 с одним радиальным шарикоподшипником. Между
упорными и радиальными подшипниками установлены распорные кольца 17;
они и крышка 15 обеспечивают регулировку нормального зацепления червяч-
ного колеса и червяка, а также передачу осевых нагрузок на корпус редуктора
Между крышками 13 и 15 находятся регулировочные прокладки 14. В крышке и
фланце корпуса установлены уплотнительные кольца 7 и 16, предохраняющие
подшипники от загрязнения и предотвращающие утечку масла из корпуса.
Уплотнение со стороны фланца регулируется нажимной втулкой .9, имеющей
резьбу. Для наполнения редуктора свежей смазкой и спуска отработавшей смаз-
ки служат отверстия в корпусе, закрываемые пробками 11.
Механизм сдвига пути электробалластера предназначен для непрерывного
или выборочного перемещения рельсо-шпальной решетки в плане одновремен-
но с ее подъемкой, а также для регулировки электромагнитного подъемника
при вписывании его в переходные кривые и для установки магнитов на головки
рельсов при зарядке электробалластера. Усилие сдвига на путевую решетку
передают реборды роликов электромагнитов. Благодаря их шарнирной подвеске
оба ролика передают одинаковое горизонтальное усилие.
Механизм сдвига пути состоит из электродвигателя 10 (см. рис. 5.10),
редуктора 11 и каретки 12, которая может перемещаться по балкам 9, увлекая
за собой параллелограммиые тяги 18. При смещении тяг 18 сдвигается также
поперечная балка 8 с электромагнитами и путевой решеткой, при этом онн со-
храняют параллельность траверсе 19 подъемного механизма, так как она удер-
живается рычагом 17. На рис. 5.12, в механизм сдвига показан в положении,
когда путь сдвинут на максимальную величину, равную 150 мм.
Механизм перекоса пути предназначен для обеспечения заданного взаимно-
го положения рельсовых нитей по уровню при подъемке на прямых и кривых
участках пути.
Механизм перекоса состоит из электродвигателя 13 (см. рис 5.10), типо-
вого червячного редуктора 14, винта 15 и ползуна 16, находящегося в верти-
кальных пазах рычага 17 траверсы подъемного механизма. После включения
электродвигателя начинает вращаться винт 15 и по нему перемещается ползун
16, увлекая за собой рычаг 17. Последний поворачивает на необходимый угол
вокруг валика 22 траверсу 19, а вместе с ней поперечную балку 8 с электро-
магнитами и путевой решеткой, создавая заданное возвышение одной рельсовой
152
нити над другой. На рис. 5.12 , г механизм перекоса показан в положении, когда
левая рельсовая нить поднята выше правой на 160 мм. Это возвышение соответ-
ствует углу наклона плоскости пути к горизонту, тангенс которого равен Vlo.
Электробалластер оборудован устройством для выключения рессор ходо-
вых тележек, исключающее влияние на качество подъемки пути раскачивания
фермы № 1 на рессорах.
Балластерные рамы предназначены для закрепления на них стальных прут-
ков диаметром 12—16 мм, называемых струнками, служащих для планировки
и рыхления балласта под поднятой рельс о-шпальной решеткой, а также для
выдавливания песчаного балласта в шпальиые ящики при неподнятой решетке
для опускания пути.
Балластериая рама (рис. 5.14) имеет подвижную раму 10, которая при по-
мощи механизма подъема и опускания может перемещаться по направляющим
5, закрепленным на ферме 9. Струнки 14 закреплены в нижней балке подвиж-
ной рамы штырями 1. Механизм подъема и опускания балластерной рамы со-
стоит из электродвигателя 3, соединенного муфтами 5 и промежуточным валом
4 с типовым червячным редуктором 6. Ступина червячного колеса редуктора 6
является гайкой, в которую входит винт 7. В месте соединения винта 7 с под-
вижной рамой установлена пружина 12, служащая ограничителем максималь-
ной силы нажатия механизма опускания на подвижную раму 10, а также амор-
тизатором при наезде на небольшие препятствия. При достижении усилия на
раму, равного 16 кН, пружина 12сжимается примерно на 25 мм и рычажком на-
давливает на концевой выключатель 2, контакты которого размыкаются и вы-
ключают привод механизма опускания рамы. Концевой выключатель 11 огра-
ничивает подъем балластерной рамы вверх. При работе рамы опускают таким
образом, чтобы струнки 14 находились ниже подошвы наиболее толстых шпал
примерно на 100 мм. Струнки закрепляют поворотом штырей 1 в винтовых ру-
чьях стаканов 13. Для контроля за положением балластерных рам на централь-
ном пульте управления имеются механические указатели с канатным приводом,,
аналогичные указателям механизма подъема
Рис. 5.14. Балластерные рамы
153
Дозатор предназначен для дозировки балласта, грубой оправки балласт-
ной призмы, срезки обочин земляного полотна, а также для перераспределе-
ния балласта в продольном и поперечном направлениях по отношению к оси
пути, срезки лишнего балласта и других работ. Электробалластер ЭЛБ-1 обо-
рудован двумя дозаторами двустороннего действия, поодному на фермах № 1 и
№2. Дозатор (рис. 5.15) состоит из щита 14, двух крыльев 12, корневыми частями
шарнирно соединенных со щитом, и подкрылков 10. Для управления дозатором
имеются механизмы наклона крыла 8, подъема и опускания щита дозатора 4,
поворота крыла 5 с редуктором 3, а также аппаратура управления электродви-
гателями и контроля положения дозатора. Щит дозатора представляет собой
коробку, сваренную из листовой стали толщиной 6—8 мм, снабженную внутри
ребрами жесткости и направляющими для перемещения щнта по двум опор-
ным стойкам 15, которые прикреплены к ферме машины. Он соединен валом
6 и карданным шарниром 7 с винтами типовых редукторов механизмов подъема
и опускания дозатора.
Крыло дозатора состоит из корня крыла 13, собственно крыла 12., сектор-
ного ножа //, подкрылка 10 и параллелограммной тяги 9. Наклон крыла осу-
ществляет механизм наклона 8. Для наклона крыла винт перемещают вверх.
При этом часть крыла, связанная с винтом, также поднимается, поворачивая
крыло вокруг шарнира 2 и создавая нужный наклон крыла. При любых накло-
нах крыла в вертикальной плоскости подкрылок 10 остается параллельным
своему первоначальному положению. Это достигается благодаря тому, что точ-
ки крепления подкрылка — шарнир 1 и шарнир параллелограммной тяги 9 на
подкрылке — образуют с шарниром 2 и вторым шарниром тяги 9 на корне кры-
ла параллелограмм. Одна сторона параллелограмма, связанная с корнем кры-
ла, сохраняет постоянное направление, поэтому другая сторона, связанная с
подкрылком, всегда ей параллельна. Нижняя грань подкрылка в исходном по-
ложении горизонтальна, поэтому и при любом наклоне крыла она горизонталь-
на.
Рис. 5.15 Дозатор
154
Рис 5.16. Дозатор в транспортном положении
Крыло поворачивают механизмом 1 (рис. 5.16) поворота, винт которого
соединяется шарнирно с рейкой 3, сцепленной с шестерней 4. Последняя по-
сажена на вал поворота крыла и связана с ним скользящей шпонкой. В зави-
симости от направления вращения электродвигателя винт перемещается влево
или вправо. Перемещение винта и связанной с ним рейки 3 вызывает поворот
шестерни 4, а следовательно, и вала механизма поворота Поворот вала пере-
дается на крыло карданным валом 5 и валом петлевого шарнира 6, с которым
крыло связано срезными штифтами и сегментными упорами Такое соединение
крыла с валом петлевого шарнира предохраняет самотормозящинся механизм
поворота крыла от поломок при обрыве стяжек крыла или в других случаях
перегрузки Дозатором управляют с поста 2 Дозатор поднимают н опускают
два механизма 4 (см. рис. 5.15). При этом щит дозатора перемещается по опор-
ным стойкам 15. Ход щитов дозаторов: фермы № I выше головки рельса 300 мм.
ниже головки рельса 100 мм, фермы №2 выше головки рельса 250 мм, ниже го-
ловки рельса 100 мм.
Рельсовые щетки предназначены для очистки головок рельсов от балласта,
которым онн засыпаются при дозировке, чтобы обеспечить безопасный проход
ходовых тележек электробалластера. На ЭЛБ-1 (см рис 5.7) установлены че-
тыре пары рельсовых щеток (по две пары на каждый дозатор) Они расположены
на машине таким образом, что при работе любым дозатором в любую сторону
можно очищать головки рельсов перед тележкой, которая цервой проходит по
задозированному участку Рабочим органом рельсовой щетки является плужок.
Поднимают и опускают рельсовую щетку вручную винтовым механизмом.
В опущенном положении рельсовую щетку постоянно прижимает к головке
рельса пружина, которая одновременно смягчает у тары ib- та неровностей пути
155
Шпальные щетки предназначены для сметания балласта, оставшегося на
верхних постелях шпал во время подъемки пути. На электробалластере уста-
новлены две шпальные щетки, по одной с каждой стороны электромагнитного
подъемника. Поднимают и опускают шпальные щетки вручную при помощи вин-
тового механизма.
5.2.2. Электробалластер ЭЛБ-3М
Эта машина предназначена для выполнения балластаровочных работ на
пути с тяжелым типом верхнего строения (рельсы Р65, Р75 н железобетонные
шпалы). По сравнению с ЭЛБ-1 в конструкцию электробалластера ЭЛБ-3№
(рис. 5.17) внесены изменения' увеличено расстояние между тележками 7 и 15
с 28 до 30,2 м, грузоподъемность электромагнитного подъемника доведена до
440 кН (вместо 300 кН); ход механизма подъема теперь составляет 450 мм, что
на 50 мм больше; усилена конструкция дозатора, улучшена его маневренность
благодаря увеличению скорости его подъема и опускания, а также установке
механизма для прикрытия крыла во время дозировки; рельсовые и шпальные
щетки снабжены электроприводом; в связи с увеличением нагрузки на тележку
15 вместо двухосной применена четырехосная тележка; для улучшения усло-
вий работы бригады машины увеличена кабина центрального поста 3 и установи
лен пост 2 управления дозатором 16.
Электробалластер ЭЛБ-3М состоит также из двух шарнирно сочлененных
ферм 9 (ферма «А® /) и 17 (ферма №2), на которых смонтированы все рабочие ор-
ганы. Ферма № 2 опирается на двухосную тележку 18 и четырехосную тележку
/5, а ферма № 1 — на двухосную тележку 7 и междуферменный шарнир 14.
На ферме № 1 расположены кронштейн междуферменного шарнира 14,
электромагнитный подъемник 13, балластерные рамы 12, механизмы сдвига пу-
ти 11 и подъема пути 4 У электромагнитного подъемника имеются рельсовые
захваты 10, предназначенные для страховочного удержания поднятой путевой
решетки при зарядке струнок н подъемке мостов. Перед тележкой № 1 установ-
лены шпальные н рельсовые щетки 8 В хозяйственной будке 6 размещается
бригада во время транспортирования машины и хранится инструмент для об-
служивания механизмов электробалластера и ухода за ними На центральном
посту управления 3 находятся приборы и аппараты для управления электро-
магнитным подъемником и балластерны.ми рамами
На ферме Л5 2 расположены кронштейн междуферменного шарнира 14,
дозатор двустороннего действия 16, машинное отделение 1 и пост 2 управления
дозатором. Вдоль обеих ферм установлены перила 5.
Электромагнитный подъемник снабжен механизмами подъема и сдвига
пути.
Механизм подъема пути (рис. 5 18) состоит из нижней рамы, сваренной из
трех балок; продольной 3 и двух поперечных 2. К концам поперечных балок
шарнирно прикреплены электромагниты 1 В середине продольной балки шар-
нирно закреплена скоба 4 на поперечной оси Благодаря этому нижняя рама с
Рис. 5 17 Э к ктроба мастер Э.ЛБ-.Р1
156
электромагнитами может свободно изменять свое
положение в вертикальной плоскости и самоус-
танавлнваться соответственно изгибу рельсов
поднятой путевой решетки. Скоба 4 имеет про-
ушины, которыми нижняя рама с электромагни-
тами шарнирно присоединена к вертикальным
тягам 5. Верхние концы тяг 5 шарнирно связа-
ны с вилками 6, внутри которых установлены
пружины? и помещены головки подъемных вин-
тов 8. Редукторы механизма подъема по кон-
струкции принципиально не отличаются от ти-
повых редукторов механизмов электробалласте-
ра ЭЛ Б- 1 . Ступица червячного колеса 11 также
играет роль гайкн подъемного винта 8. Червяк
10 цепной муфтой соединен с двигателем 5,
При одновременном пуске обоих электродвигате-
лей червячные колеса, вращаясь в ту или дру-
гую сторону в зависимости от направления вра-
щения электродвигателей, перемещают вверх
или вниз оба винта, которые поднимают или
опускают нижнюю раму с электромагнитами
и путевой решеткой. При пуске одного из элек-
Рис. 5.18 Схема механизма!
подъема пути
тродвцгателей поступательное движение получает один нз винтов и одна
тяга. Благодаря этому скоба, нижняя рама с электромагнитами и путевой
решеткой поворачиваются вокруг шарнира, соединяющего скобу с непод-
вижной тягой, и занимают наклонное положение относительно горизонталь-
ной плоскости. При этом путевая решетка устанавливается так, что одна
рельсовая нить оказывается выше другой. Таким образом, подъемное устрой-
ство балластера ЭЛБ-3М может не только поднимать и опускать путь, но и соз-
давать перекос без дополнительного механизма перекоса, как это предусмотрено
на электро балластере ЭЛБ-1. Пружины 7 ограничивают усилие нажатия элект-
ромагнитов на рельсы при их опускании и автоматически выключают электро-
двигатели при достижении усилия 50 кН. Ход механизма подъема выше верха
головок рельсов на 400 мм, ниже на 50 мм. Таким образом, полный ход 450 мМ
Разность хода тяг 5 относительно друг друга ±50 мм, что соответствует пере-
косу путевой решетки (разности уровней одной рельсовой нити по отношению к
другой) ± 150 мм. Механизмом управляют с центрального поста. Выключение
электродвигателей в крайних положениях автоматическое концевыми выключа-
телями. Подъем и перекос пути контролируют сельсинами-датчиками и сель-
синами-приемниками. Последние установлены в кабине центрального поста
Механизм сдвига пути (рис. 5.19) предназначен для непрерывного или выбо-
рочного перемещения пути в плане, регулировки электромагнитного подъемни-
ка при вписывании его в кривые и для установки магнитов на головки рельсо-
вых нитей при зарядке электробалластера. Ои состоит из электродвигателя 2,
который цепной муфтой соединен с червяком 1 редуктора. Этот червяк соединен
с червяком другого редуктора промежуточным валом 8 В ступицы червячных
колес 6 ввинчены винты 7, которые шарнирно связаны с балкой 4, являющейся
осью для нажимного ролика 3 Балка перемещается в направляющих 5, обес-
печивающих центрирование винтов 7 относительно ступиц червячных колес 6,
чем предотвращается изгиб винтов. При пуске электродвигателя 2 начинают
вращаться червяки и червячные колеса 6, перемещая винты 7 влево или вправо
в зависимости от направления вращения электродвигателя Винты в свою оче-
редь перемещают балку 4, которая роликом 3 нажимает на одну из вертикаль-
ных подвесок 9 электромагнитов, сдвигая их вместе с путевой решеткой в нуж-
157
ную сторону. Максималь-
ный сдвиг путевой решет-
ки неподнятого пути 250 мм
в каждую сторону от сред-
него положения электро-
магнитного подъемника.
Выключают электродвига-
тель в крайних левом и
правом положениях меха-
низма сдвига конечные вы-
ключатели. Величину сдви-
га пути контролирует сель-
синовый указатель на цент-
ральном посту. Сельсин-
датчик установлен на на-
правляющих 5. На злею
тробалластере ЭЛБ-3М име-
ются также устройства для
выключения рессор тел ёж
ки № 1.
Рис. 5.19 Схема механизма сдвига пути
Балластерные рамы (рис. 5.20) предназначены для закрепления на них
струнок, служащих для разравнивания балласта под поднятой рельсо-шпаль-
ной решеткой. Они имеют две вертикальные рамы 10 и четыре балки 8, связан-
ные между собой шарнирно. Балки 8 соединены с кронштейном 9, приваренным
к стенке фермы № /, образуя параллелограммную подвеску рам 10. При такой
подвеске рамы во время подъема или опускания сохраняют параллельность бо-
ковой стенке фермы №1. Три струнки И закреплены в рамах 10 стержнями 12.
Нижняя и боковые кромки рам 10 сменные; они изготовлены из износостойкой
лщгой марганцовистой стали. Поднимают и опускают каждую вертикальную ра-
му независимо одну от другой. При подъеме и опускании балластерных рам
электродвигатель 2 и редуктор 1, установленные на рамке 4, могут поворачи-
Рис. 5 20. Балластерные рамы
158
ваться на цапфах 5 в кронштейне 3. Винты 6 соединены с рамами амортиза-
торами 7.
Положение балластерных рам контролируют указателями, находящимися
в кабине центрального поста управления. Там же расположены кнопки управ-
ления магнитными пускателями электродвигателей механизмов подъема и опус-
кания балластерных рам. Для транспортирования рамы поднимают в верхнее
крайнее положение и закрепляют ручными стопорами.
Дозатор двустороннего действия установлен на ферме № 2. Устройство его,
за исключением механизма прикрытия крыла под нагрузкой и механизма на-
клона крыла, принципиально не отличается от устройства дозаторов на элект-
робалластере ЭЛБ-1. Механизм прикрытия крыла обеспечивает приведение
крыла в габарит во время дозировки при пропуске поездов по соседнему пути
Электродвигатель 1 механизма прикрытия крыла (рис. 5.21) соединен с
червяком 2 редуктора. Ступица червячного колеса 7 служит гайкой для винта
8, связанного с ползуном 4, к которому прикреплена цепная растяжка 6. По-
следняя вторым концом прикреплена к крылу 5 При перемещении ползуна по
направляющей 3 посредством растяжки крыло прикрывается на нужный угол.
Механизм поворота крыла не препятствует его прикрытию, так как его червяк и
винт несамотормозящие. Электродвигатель механизма прикрытия крыла в край-
них положениях крыла отключается концевыми выключателями.
Наклонная тяга предназначена для придания крылу наклона, соответству-
ющего профилю откоса балластной призмы, для регулировки количества за-
хватываемого балласта при дозировке, а также для обхода препятствий крылом
при работе электробалластера.
Электродвигатель 1 механизма наклонной тяги (рис. 5.22) соединен с червя-
ком 2 редуктора механизма наклона крыла. Ступица червячного колеса 3 слу-
жит гайкой для винта 4. Шайба 5 винта 4 удерживается в стакане 8 крышкой 6,
которая прижимает шайбу к пружине 7, размещенной на направляющей труб-
ке 9. Стакан установлен на подвижной рамке 11, ннжний конец которой шар-
нирно закреплен на подкрылке дозатора. Подвижная рамка входит в непод-
вижную рамку 10 и перемещается в ней по направляющим. Верхний конец не-
подвижной рамкн шарнирно закреплен на втулке механизма подъема дозатора.
При пуске электродвигателя 1 нажатием кнопки на пульте управления до-
затором винт 4 в зависимости от направления вращения двигателя ввинчивает-
ся в ступицу колеса илн вывинчивается нз нее, соответственно поднимая или
опуская подвижную рамку 11 вместе с крылом дозатора. Если при опускании
Рис. 5.2!. Схема механизма прикрытия
крыла
Рис. 5.22. Схема наклонной тяги
159
крыло встретит препятствие при невыключенном электродвигателе, то подвиж-
ная рамка И вместе с крылом остановится. Винт с шайбой начнет сжимать пру-
жину 7. Когда сжимающее усилие достигнет 16 кН, концевой выключатель ра-
зомкнет цепь катушки магнитного пускателя, и электродвигатель выключится.
Таким образом ограничено максимальное усилие нажатия на крыло. Пружина
служит также амортизатором при наезде крылом во время дозировки на пре-
пятствие, скрытое в балласте.
Ниже приведены технические характеристики электробалластеров.
Параметры
Подъемная сила электромагнитного подъемника, кН
Вписывание в кривые
Общий ход механизма подъема пути, мм . . .
Мощность электродвигателя подъема, кВт
Ход механизма сдвига пути, мм . . .
Чощность электродвигателя сдвига, кВт
Ход механизма перекоса пути, мм...................
Мощность электродвигателя механизма перекоса,
кВт . ...............................
Ход винта балластерной рамы, мм ..................
Мощность электродвигателя подъема балластерной
рамы, кВт ............................
Число дозаторов шт................................
Полный ход щита дозатора, мм......................
Мощность электродвигателя, кВт: . . . .
подъема дозатора ..............
поворота крыла дозатора ......................
наклона крыла дозатора . . . . .
прикрытии крыла дозатора...................
Мощность генератора мотор-генераторной группы,
кВт.....................................
Масса электробалластера, . т
Габарит ..........................................
ЭЛ Б-1 ЭЛБ-Зм
300 440
Автоматическое
400 450
4,2 7X2
±150 ±250
1,6 4,5
±160 ±160
1,6 —.
1100 920
1.6X2 2,8X2
2 1
400 400
1.6X2 1,7X2
1.6 1,7
2,75 4,5
— 7,0
16,2 16.5
84 110
1-Т 1-Т
5.2.3. Основы эксплуатации и обслуживания электробалластеров
На магистральных железных дорогах электробалластеры используют при
капитальном ремонте пути в комплекте с путеукладчиками на двух-трех участ-
ках или в комплекте с путеукладчиками на одном участке и одновременно иа
других участках для выполнения среднего или подъемочного ремонтов, а также
при среднем и подъемочном ремонтах пути в пределах дороги.
Электробалластер работает на пути, временно закрытом для движения по-
ездов, во время технологического «окна». Максимальная выработка электро-
балластеров достигается при работе по скользящему графику на нескольких
участках ремонта пути и при условии, что к каждому выезду электробалластера
участок работ подготовлен, материалы выгружены, обеспечена безотказная ра-
бота механизмов машины и взаимно увязаны действия бригад электробалласте-
ра и локомотива. Электробалластер обслуживает бригада из трех человек: ма-
шинист, его помощник и моторист электростанции.
Перед подъемкой на участке работ отрезают длинные концы шпал для про-
хода балластерных рам, прикрепляют к рельсам ослабшие шпалы, которые мо-
гут при подъемке пути оборваться, убирают или обозначают препятствия для
прохода рабочих органов машины, отсоединяют заземлители контактных опор
на электрифицированных участках В начале участка дозировки опускают рель-
совые щетки, щит дозатора, открывают крылья и устанавливают растяжки
Подкрылок поворачивают в положение, параллельное оси пути В зависимости
•от величины подъемки щит дозатора устанавливают на соответствующую от-
160
метку по указанию руководителя работ. Во время дозировки машинист управ-
ляет крылом дозатора со стороны междупутья, а помощник машиниста — со
стороны обочины. Скорость движения электробалластера при дозировке до
15 км/ч. На протяжении начальных 25—50 м путь поднимают от нуля до
отметки, заданной руководителем работ.
При работе в комплекте с путеукладчиками струнками обычно не поль-
зуются. Во всех других случаях одновременно с подъемкой пути струнками пла-
нируют балласт под шпалами. Во время подъемки электробалластер перемеща-
ется со скоростью до 10 км/ч. В конце поднимаемого участка его скорость снижа-
ют до 3—5 км/ч, стрункн поочередно выключают, начиная с последней по ходу
электробалластера, и путевую решетку на протяжении 25—50 м плавно
опускают, обеспечивая конечный отвод. При подъемке пути машинист следит за
тем, чтобы шпалы не угонялись шпальными щетками и струйками. При угоне
шпал приподнимают шпальные щетки так, чтобы они слегка касались шпал,
и заглубляют балластерные рамы.
При сдвижке пути сначала поднимают путевую решетку иа 8—10 см. Пос-
ле подъемки перемещают электробалластер со скоростью 5—10 км/ч. Одновре-
менно с началом движения электробалластера включают механизм сдвига и
плавно увеличивают значение сдвига от нуля до заданной величины. В конце
участка сдвига устраивают его отвод. Максимальный сдвиг пути за одии про-
ход допускается до 250 мм.
Техническое обслуживание состоит из ежесменных и периодических уходов
за механизмами машины для обеспечения нормальной работы деталей и их со-
пряжений, а также для своевременного выявления н устранения возникающих
дефектов.
Для электробалластеров установлены следующие виды и сроки техничес-
кого обслуживания: ежесменное техническое обслуживание (ЕО) перед работой
и после ее окончания, техническое обслуживание № 1 (ТО-1) через 20 км об-
щей выработки машииы и техническое обслуживание № 2 (ТО-2) через 40 км об-
щей выработки машины. Техническое обслуживание выполняет бригада элект-
робалластера под руководством мастера по эксплуатации. О каждом проведен-
ном техническом обслуживании, кроме ЕО, делают запись в паспорте машины.
Прн ЕО проверяют наличие топлива и масла в баках и картерах, охлажда-
ющей жидкости в системе охлаждения, напряжение аккумуляторных батарей,
показания контрольно-измерительных приборов, состояние крепежных уст-
ройств и наиболее ответственных сварных швов. Осматривают электрообору-
дование, изоляцию и защиту проводов, кнопки управления и коицевые выклю-
чатели. Производят пробный запуск и проверяют работу электростанции. В ТО-1
входят все работы, предусмотренные ЕО, и, кроме того, очистка от пыли и грязи
силового и электрического оборудования и всех механизмов машины; выполне-
ние технического ухода за электростанцией (по паспорту машины), осмотр и
очистка коллекторов и щеток генераторов, контактов электрических аппара-
тов, смазка механизмов. В ТО-2 входят все работы, предусмотренные для ТО-1,
а также замена смазкн в редукторах (по карте смазки), замена изношенных эле-
ментов электроаппаратуры, проверка изоляции электрооборудования, регули-
ровка рабочих органов машины.
Проверку основных рабочих органов электробалластера производят ма-
шинист й его помощник. Для проверки выбирают вполне исправный участок
пути протяженностью не менее 60 м, на котором не должно быть просадок и пере-
ломов продольного профиля (допускается как площадка, так и однородный ук-
лон), перекосов, уширений и сужений, отклонений по направлению в плане,
плохо подбитых шпал и недобитых костылей. Особенно важно, чтобы путь был
без отклонений по шаблону и уровню и была обеспечена хорошая подбивка
шпал и добивка костылей на тех шпалах, над которыми будут находиться те-
6 Зак. 47
161
Таблица смазки основных механизмов ЭЛБ-1
Наименование механизма Наименование смазочных материалов, № стандарта 1 Число то- чек смазки Периодичность проверки и замены смазки
Редукторы механизмов подъ- ема, сдвига и перекоса пути Смазка трансмиссионная ЦИАТИМ-208, ГОСТ 16422—79 3 1 раз в месяц
Винт редуктора механизма подъема пути Солидол УСо-2, ГОСТ 4366— 74 1 1 раз в неделю
Шарниры подвески электро- магнитов Солидол УСо-2, ГОСТ 4366— 74 4 То же
Подшипники электродвига- Смазка 1-13, ОСТ 380! 2 1 раз в полгода
теля механизма подъема пути
Направляющие балластерной рамы Солидол УС0-2, ГОСТ 4366— 74 4 1 раз в неделю
Зубья рейки и шестерни ме- ханизма поворота крыла Солидол УСо-2, ГОСТ 4366— 74 2 То же
Редукторы механизмов подъ- ема дозатора, поворота и на- Смазка трансмиссионная ЦИАТИМ-208, ГОСТ 16422—79 6
клона крыла
/Чеханизм выключения рес- сор Солидол УСо-2, ГОСТ 4366— 74 2
Подшипники мотор-генерато- Смазка 1-13, ОСТ 3801 4 1 раз в месяц
ра Буксы ходовых тележек Масло осевое, ГОСТ 610—72 12 Перед выездом на работу
Встречающиеся неисправности ЭЛБ-1
Неисправность
Возможные причины
Способы устранения
При подъеме путевой
решетки электромаг-
нитный подъемник сбра-
сывает ее
При нормальном на-
пряжении электромаг-
нитный подъемник сбра-
сывает путь
При движении элект-
ромагниты сбрасывают
поднятую путевую ре-
шетку
При включении меха-
низма поворота крыла
дозатора крыло не по-
ворачивается
1 Низкое напряжение пита-
ния электромагнитов
2. Катушки электромагнитов
имеют витковое замыкание
1. Неправильно соединены
между собой катушки. Не-
сколько катушек включены на
встречную полярность
2. Неправильно соединены
между собой магниты
3 Большие зазоры между
полюсными решетками магни-
тов и поверхностью рельсов
Между полюсными решетка-
ми и поверхностью рельсов
увеличился зазор вследствие
попадания посторонних пред-
метов или налипания на роли-
ки грязи
Срезаны штифты, которыми
соединены крыло с валом пет-
левого шарнира
Отрегулировать напряже-
ние генератора постоянного
тока до 230 В
Разъединить катушки элект-
ромагнитного подъемника, оп-
ределить неисправную катуш-
ку, отремонтировать или заме-
нить ее
Проверить полярность и
включить катушки с правиль-
ным чередованием полюсов
Проверить полярность ка-
тушек и соединить магниты с
правильным чередованием по-
люсов
Отрегулировать зазоры по
концам каждого магнита. Они
должны быть не более 1 мм
Остановить электробалла-
стер, опустить путь, обесточить
магниты, поднять их, удалить
посторонние предметы и очи-
стить ролики
Заменить штифты. Запасные
штифты должны входить в
комплект запасных частей и
инструмента
162
лежки электробалластера и электромагнитный подъемник. При регулировке
подъемного устройства проверяют посадку магнитов на рельсы и величину воз-
душного зазора между поверхностью рельсов и полюсами магнитов. По конце-
вым полюсам зазор должен быть 0,5—1 мм. Повторными подъемами и опуска-
ниями с резкими переходами от опускания к подъему устанавливают надежность
захвата пути магнитами. Среднее положение механизма сдвига пути проверяют,
замеряя расстояние между отвесом, приложенным к середине поперечной бал-
ки подвеса полумагнитов, и головками рельсов. В среднем положении при ра-
венстве замеренных расстояний стрелка указателя механизма сдвига стоит на
нуле. Для регулировки дозатора машинист и помощник машиниста, став по обе
стороны пути, натягивают шнур так, чтобы он одновременно прикасался к обе-
им головкам рельсов. Затем опускают дозатор с раскрытыми крыльями в поло-
жение, при котором нож на щите касается шнура всей своей рабочей кромкой.
При этом указатель должен показывать на линейке нуль. В крайних положе-
ниях всех механизмов концевые выключатели должны отключать электродви-
гатели их привода.
5.2.4. Определение мощностей электродвигателей
механизмов подъема и сдвига путевой решетки
электробалластера ЭЛБ-1
Мощность, кВт, электродвигателя привода механизма подъема пути определяется
формуле
по
Qn vn
1000т]ч г]в
где Qn — усилие, развиваемое винтом механизма подъема, Н;
vn — скорость подъема путевой решетки, м/с (оп = 0,0033 м/с);
т]ч, Лв— к.п.д. соответственно червячного редмктороа и винтовой пары (т]ч== 0,45-j-
~ 0,50; т]в = 0,454-0,48);
Qn = £ + G3, (5.2)
где Р — усилие, необходимое для подъема путевой решетки, Н;
G3 — вес траверс, поперечной балки, параллелограммных тяг и электромагнитов, Н
(G3 = 33 000 Н);
4 ________
P^4,4VEIx2 , (5.3)
Е — модуль упругости рельсовой стали (£ = 21 • 106 Н/см2);
I х — момент инерции двух рельсов относительно горизонтальной оси, см4. /Чомент
инерции для одного рельса Р50 1Х = 2011 см4, для Р65 / = 3540 см4, для
Р75 /Xi = 4489 см4;
h — высота подъема путевой решетки, см;
q — погонное сопротивление подъему путевой решетки, Н/см-:
?пр + ?б; (5 4)
<7пр — погонный вес 1 см путевой решетки, Н/см.
Для путевой решетки с деревянными шпалами и с рельсами Р50 = 28 Н/см,
с рельсами Р65 — 31,7 Н/см и с рельсами Р75— 33,7 Н/см2. Для путевой решетки
с железобетонными шпалами и с рельсами Р50 <упр = 61,3 Н/см, с рельсами Р65 —64 Н/см
и с рельсами Р75 — 66 Н/см;
— сопротивление балласта в начальный момент подъема; без дозировки 25—27,5
Н/см; при задозированном пути 88—97 Н/см.
/Чощность, кВт, электродвигателя привода механизма сдвига пути определяется
по формуле
Ю00т)ч т)в т)ш
где QB — усилие, развиваемое винтом механизма сдвига, Н;
ав — скорость движения винта, м/с (рв = 0,0057 м/с);
Т|ч — к.п.д. червячного редуктора;
6*
163
— к.п.д. винтовой пары;
т|ш — к.п.д. шарниров подвески магнитов (т|ш = 0,9). В соответствии со схемой ме-
ханизма сдвига (см. рис. 5.12, в);
а
Qb = Qc-^" i (5.6)
где Qc — усилие сдвига путевой решетки, Н. без учета сопротивления балласта
Qc = 192 --------у- (5.7)
I3
а — расстояние от траверсы до низа магнитов, см (а = 293,5 см);
b — расстояние от траверсы до оси винта механизма сдвига, см
(Ь — 145 см);
Е — модуль упругости рельсовой стали, Н/см2;
1у — момент инерции двух рельсов относительно вертикальной оси, см4. Момент
инерции для одного рельса Р50 Iyi = 375 см4, для Р65 / = 564 см4, для Р75
Iи = 665 см4;
K-м — коэффициент жесткости путевой решетки, учитывающий влияние шпал и
скреплений.
Для деревянных шпал со скреплениями КБ и рельсов Р50 = 3,9,
со скреплениями Д и рельсов Р65 /<ж = 4,5; для скреплений К-2 и рельсов Р75
Кж ~ 5,0; для железобетонных шпал со скреплениями К-4 и рельсов Р50
Кж — 6,4;
I — расстояние между шкворнями ходовых тележек 14 и 20 (см. рис. 5.7), см;
у — максимальная величина сдвига путевой решетки, см.
Пример 1 Определить мощность электродвигателя механизма подъема пути ЭЛБ-1
для подъема путевой решетки из рельсов Р65 и деревянных шпал на высоту h = 35 см.
По формуле (5.4) определяем погонное сопротивление q, Н/см,
q = ?пр + ?б = 31,7 + 97 = 128,7.
Усилие подъема Р, Н, определяемое по формуле (5.3), составит:
4 _________ 4___________________________
Р^4,4|/’ EIXthq3 = 4,4 Г2| 106-2-3540-35 (128.7)3 - 254 0 00.
Зная Р по формуле (5.2), подсчитываем усилие Qn, Я, которое необходимо развить
винтом механизма подъема,
Qn == Р + Сэ = 254 000 + 33 000 = 287 000 Н.
Отсюда мощность Л/п, кВт составит
Qn »п 287 000-0,0033 960
Nn — ------------= ----------------= ------= 4,0.
ЮООПчЛв 1000 -0,5-0,48 240
Соответственно выбираем электродвигатель серии 4а типа 4АС112МВ6 мощностью
4,2 кВт, частота вращения 910 об/мин.
Пример 2. Определить мощность электродвигателя механизма сдвига пути ЭЛБ-1
для сдвига путевой решетки из рельсов Р65 и деревянных шпал, со скреплениями марки
Д на величину у = 15 см.
По формуле (5.7) определяем усилие сдвига Qc, Н, без учета сопротивления балласта
192PZ Кж 192-2! • 10s-564-2-4,5
Qc = ---------У = --- 15=14000.
Р у 28003
Затем по формуле (5.6) определяем усилие Qo, Н, которое необходимо развить винтом
механизма сдвига, (см. рис. 5.12, в),
а 293 5
Qb-Qc --14 000 —+- = 28 300.
о 145
Зная QB, по формуле (5.5) находим мощность Л/с, кВт, электродвигателя механизма
сдвига пути
жг QB vb 28300-0,0057 2,83-57
xV с ~~ = Q 7 5.
!ОООТ]Ч Пв 1000-0,5-0,48-0,9 216
164
6. МАШИНЫ ДЛЯ СБОРКИ, РАЗБОРКИ, УКЛАДКИ
РЕЛЬСО-ШПАЛЬНОЙ РЕШЕТКИ И СВАРКИ РЕЛЬСОВ
В ПУТИ
В нашей стране ежегодно строится около 1 000 км новых железных дорог и
вторых путей. Кроме того, осуществляется капитальный ремонт и реконструк-
ция более 12 тыс. км эксплуатируемых линий. При этом применяют два мето-
да укладкн рельсо-шпальиой решетки: звеньевой, когда в путь укладывают за-
ранее собранные звенья (блоки), длина которых равна стандартной длине рель-
сов (25 и 12,5 м), и раздельный способ, когда на перегон привозят рельсы, шпа-
лы, скрепления, из которых иа месте будущего пути собирают рельсо-шпаль-
ную решетку. Применяемые в настоящее время путеукладочные средства сдер-
живают работу технологической цепочки, поэтому ведутся работы по созданию
машины такой производительности, которая позволила бы в ближайшей перс-
пективе увеличить объем укладки в «окно» в 2,5—3 раза. Звеньевой способ по-
ка еще остается более производительным и эффективным. Звенья собирают и
разбирают на звеносборочных базах ПМС. Собранные звенья грузят на платфор-
мы путеукладочного поезда н вывозят на перегон, где одним краном позвенно
снимают старую путевую решетку, а другим укладывают новую. Таким обра-
зом, весь процесс, начиная от сборки новых и кончая разборкой старогодных
звеньев, полностью механизирован.
6.1. МАШИНЫ ДЛЯ СБОРКИ РЕЛЬСО-ШПАЛЬНОЙ РЕШЕТКИ
Рельсо-шпальную решетку собирают на путях-стендах производственных
баз н в закрытых цехах. Для сборки звеньев с деревянными шпалами костыль-
ным скреплением .используют поточные звеносборочные линии ЗЛХ-800
и ППЗЛ-650 (ППЗЛ-500), а также звеиосборочный комбайн ХабИИЖТа.
Сборку путевой решетки с железобетонными шпалами осуществляют на звено-
сборочных линиях ТЛС, ЗЛХ-500, ЗЛЖ-650, ПЗЛ-850, «Смолянка» и др.
6.1.1. Полуавтоматическая поточная линия ЗЛХ-800
Линия длиной 110 м смонтирована на двух путях (рнс. 6.1), На пути I
расположены устройства н станки, образующие конвейер для подготовки дере-
вянных шпал к сборке: подвижной склад шпал /, приемный конвейер 2, шпало-
питатель 3, шаговый конвейер 4,
сверлильный станок 5 и накопи-
тель 6. На пути II размещены
агрегаты и механизмы сбороч-
ного конвейера: рельсовый роль-
ганг 8 с двумя механизмами по-
дачи 10 рельсов и двумя упора-
ми 9, бункера для скреплений И
и 12, питатели 13, сборочный
агрегат 14, приемная рама 15,
Рис, 6.1. Схема технологической линии ЗЛХ-800
165
тележки 16 для приема и перемещения звена и перегружатель 17. Связь
между обоими конвейерами обеспечивает шпальный поперечный конвейер 7.
Шпалопитателем, сверлильным и сборочным станками управляют операторы.
По пути III подвозят материалы верхнего строения пути (ВСП), идущие на
сборку и забирают готовые звенья.
Площадку обслуживают два козловых крана 18, перемещающиеся вдоль
подкрановых путей IV. Один из козловых кранов оборудован магнитной пли-
той При помощи краиов укладывают шпалы в штабеля, на подвижной склад и
приемный конвейер, заполняют бункер подкладками и костылями, устанавли-
вают рельсы на рольганг и снимают с перегружателя собранные звенья. Под-
вижной склад 1 и конвейер 2 периодически продвигают штабель шпал к шпало-
питателю, откуда их по шаговому конвейеру по одной подают к сверлильному
станку.
Шпалы, подготовленные к сборке, выталкиваются в накопитель и кон-
вейером 7 направляются к сборочному станку. Рельсы, поданные на ролики
рольганга, вводятся в сборочный станок механизмом подачи 10, азатем отодви-
гаются назад до предварительно настроенных упоров 9. Таким образом, концы
рельсов могут быть установлены с необходимым забегом.
По подвижному диищу бункера И подаются подкладки, направляемые к
питателям 13, последние направляют их к сборочному агрегату. Ориентацию
подкладок обеспечивает монтер пути. Одновременно два монтера пути берут из
лотка бункера 12 костыли и вставляют их в отверстия подкладок. До полной го-
товности звено автоматически доводится в сборочном агрегате 14, включающем-
ся после введения в него концов рельсов, заполнения питателя 13 подкладками,
укомплектованными костылями и заполнения накопителя 6 просверленными
шпалами.
Из накопителя поперечным конвейером 7 шпала за торец заводится
под рельсы, затем две первые подкладки с костылями и шпала с питателем 13
передвигаются вдоль рельсов и устанавливаются в заранее намеченном месте
по оси пришивки. В накопитель и питатель ставится следующая пара подкла-
док и очередная шпала.
Шпала центрируется относительно продольной и поперечной осей так, что-
бы просверленные в ней отверстия находились напротив костылей. В этой по-
зиции гидропресс агрегата начинает двигаться вверх, поднимает шпалу и на-
прессовывает ее на костыли, которые своими головками упираются в пуансоны-
После наживления шпалы на костыли питатели 13 возвращаются в исходное
положение и готовятся к подаче следующей пары подкладок и шпалы, а пресс
продолжает двигаться вверх. Затем пресс опускается вниз, а эпюрный механизм
агрегата, захватив рельсы за головку, передвигает звено на шаг заданной
эпюры
К моменту опускания пресса все элементы верхнего строения, предназ-
наченные для следующего звена, а также механизмы агрегата и конвейеры на-
ходятся в исходном положении Процесс повторяется до тех пор, пока не будут
пришиты к рельсам все шпалы Звено, продвигаясь на шаг эпюры, постепенно
надвигается головками рельсов на ролики в приемной раме 15, а затем под соб-
ственным весом опускается на тележки 16. Последние откатывают звено к пере-
гружателю и возвращаются к сборочному агрегату. Краны снимают звено
с перегружателя и укладывают его в пакет.
Годовая экономия от применения одной машины составляет 11 тыс. руб.
Производительность линии 100 м/ч, приводы рабочих органов электрический
и гидравлический, рабочие давления в гидросистеме 4 и 11 МПа, суммарная
мощность двигателей 75 кВт, время перестройки линии с рельсов Р50 иа Р65
или наоборот 1 ч, обслуживающий персонал И чел.
166
6.1.2. Полуавтоматическая поточная
звеиосборочная линия ППЗЛ-650 (ППЗЛ-500)
Линия предназначена для сборки звеньев длиной до 25 м с деревянными
шпалами и рельсами до Р65 включительно при костыльном скреплении, а с рель-
сами Р50 и при шурупно-клеммном скреплении. Линия ППЗЛ-650 (рис. 6.2) сос-
тоит из шпалопитателя /, сверлильного станка 2, стенда с цепным конвейером 5,
сборочного станка 4 и трех приемных тележек 5. Для размещения ППЗЛ-650,
не считая подкрановых путей IV для козловых кранов, надо иметь еще три пу-
ти. На пути I размещена сама линия, на пути II устанавливают путеукладоч-
ный поезд, путь III используют для подачи материалов, идущих на сборку
Расположение обслуживающего персонала показано кружками. Операции по
сборке звена разделяются на автоматизированные, механизированные и ручные.
К первым относятся: подача шпал к сверлильному станку, сверление и антисеп-
тирование отверстий, выдача шпал на конвейер стенда и подача их к сборочно-
му станку, задавливание костылей нлн завинчивание шурупов, навинчивание
гаек на клеммные болты и выдвижение звена из сборочного станка.
К механизированным операциям относятся: загрузка шпал в шпалопита-
тель, укладка рельсов на стенд н транспортирование скреплений к рабочим мес-
там, съем готового звена и его погрузка на состав, оборудованный роликовым
конвейером, возвращение приемных тележек к сборочному станку. Вручную вы-
полняют: ориентацию шпал с выдачей их на наклонный конвейер шпалопитате-
ля, раскладку подкладок на шпалах, наживление костылей илн шурупов и ус-
тановку клемм, закрепление собираемого звена на приемных тележках.
Шпалопнтатель (рис. 6.3) предназначен для приема пакетов шпал и их по-
штучной выдачи к сверлильному станку. Он состоит из рамы 2, горизонталь-
ного 3 и наклонного 5 конвейеров и рольганга 6. Для транспортировки шпало-
питателя по рельсам предусмотрены колесные пары 1 и 9, изображенные на
рисунке в поднятом положении. Приводная станция 7состоит из электродвига-
теля 10, двух цилиндрических редукторов и цепной передачи. Для отбраковки
длинных шпал служат ограничители 4. Цепи наклонного конвейера имеют за-
хваты для удержания н продвижения шпал. По рольгангу 6 шпалы скатываются
к сверлильному станку, в конце рольганга они задерживаются упором и пода-
ются на секцию стенда сверлильного станка поочередно двумя звездочками 8.
Вместимость шпалопитателя до 150 шпал.
Сверлильный станок (рис. 6.4) предназначен для сверления отверстий в
шпалах под костыли или шурупы и их антисептирования. Станок имеет стани-
ну в виде портала, состоящего из колонн /, 13 и балок 4 и 18. На станине смон-
тированы сверлильные головкн 6 и 9, механизмы центрирования и подъема
шпал 17, подвижной 2 и неподвижный 12 упоры, гидроцилиндры 7 опускания
и подъема сверлильных головок, установка 8 для подачи антисептика, пульт
управления 11, электродвигатель 15 с гидронасосом 16 и аппаратура гидросис-
темы станка с масляным баком 14. С нижней стороны к порталу прикреплены
упоры 3 и 10, которые поддерживают шпалу при сверлении в ней отверстий.
Для сверления отверстий
в шпале при различной шири-
не колеи сверлильные голов-
ки имеют регулировочные
винты 5. При их перемеще-
нии в горизонтальной плос-
кости сверлильная головка
поворачивает стрелку указа-
теля, которая и показывает
Рис. 6.2. Схема технологической линии ППЗЛ-650
на шкале величину сдвижки.
167
Рис. 6.3. Схема шпалопитателя
На левой колонне установлен подвижной упор 2, который пружиной прижи-
мает шпалу к неподвижному упору, в результате чего правые торцы шпал уста-
навливаются по шнуровой нитке. Упоры можно менять местами и тогда шну-
ровой будет левая нитка. Привод каждой сверлильной головки имеет элек-
тродвигатель, редуктор и пять карданных валов со шпинделями на конце. Для
антисептирования отверстий служит установка 8, состоящая из бака, насоса и
предохранительного клапана. Для поддержания постоянной температуры ан-
тисептика предусмотрен электронагреватель. Антисептик впрыскивается в от-
верстие при подъеме сверлильной головки, когда установленный на ней упор
поворачивает толкатель, закрепленный на станине.
Стенд (рис. 6.5,а) предназначен для непрерывной подачи рельсов и шпал
со скреплениями на сборочиый стаиок. На нем выполняют следующие операции:
укладку рельсов на опоры, соединение стыкователями рельсов зашиваемого
звеиа с рельсами последующего звена, подачу шпал от сверлильного стайка к
сборочному, укладку подкладок на шпалы, а при шурупно-клеммном скрепле-
нии и карточек на подкладки, наживление костылей или шурупов и установку
клемм. Стенд состоит из соединенных между собой секции 1 сверлильного стан-
ка, трех промежуточных секций 2, 3 и 4 и секции сборочного станка 5. Каждая
секция имеет две колесные пары для транспортировки по рельсам и цепной
конвейер. Все секции между собой соединены и имеют общую приводную стан-
цию, установленную на секции сборочного станка. Последняя состоит из элект-
родвигателя, двух цилиндрических редукторов и цепиой передачи. Шпалы из
шпалопитателя поступают на секцию стенда сверлильного стайка. Здесь на них
раскладывают подкладки и наживляют обшивочные костыли или шурупы. Оче-
редная шпала с рольганга сбрасывается на толкающую раму А сверлильного
станка, которая, перемещаясь гндроцилиндром, подает шпалу на сверлиль-
ный станок, а шпалу с просверленными отверстиями — на пластинчатый кон-
вейер стенда. При движении толкающей рамы к шпалопитателю ее упор ударя-
ет по звездочкам 8 (см. рис. 6.3) рольганга н очередная шпала скатывается с
него на раму. Промежуточные секции колесными парами Б (см. рис. 6.5, а)
опираются на рельсы. Средняя секция имеет боковые роликн, прн помощи ко-
торых рельсы заданной шири-
ны колеи направляются в сбо-
рочный станок и четыре зах-
вата Д для прикрепления ра-
мы к головкам рельсов пути
Над колесными парами на
раме секции предусмотрены
стойки В с направляющи-
ми Г. Последние служат мес-
том временного складирования
для рельсов, с каждой сто-
роны которого можно поло-
жить по четыре-пять рель-
сов. На секции стенда сбо-
Рис 6.4. Сверлильный станок
168
Рис. 6.5. Схемы:
й>— стенд; б — сборочный станок; в —приемная тележка
ровного станка 5 шпалы, поступившие с конвейера стенда, устанавливают по
шнуровой нитке. Здесь наживляют основные костыли или устанавливают клем-
мы. После этого шпалы подают на сборочный станок. В ППЗЛ-650 подачу
шпал осуществляет цепной конвейер, а в ППЗЛ-500 — толкающая рама с гид-
роприводом. На секции стенда сборочного станка установлена тяговая лебедка
Е для откатки собранного звена к участку доводки звеньев и возвращения те-
лежек в исходное положение. Для выполнения этих операций на барабан чер-
вячной реверсивной электролебедки надет канат, вторая петля которого огиба-
ет уравнительный блок в конце линии. Каждая тележка имеет зажимное уст-
ройство для указанного каната. Тяговая лебедка включается с пульта управ-
ления сборочного станка.
Сборочиый станок (рис. 6.5, б) предназначен для сборки звена путем после-
довательного прикрепления шпал к подошвам рельсов по заданной эпюре.
Станок оснащен прессовыми или шуруповертными головками На станке про-
изводится перемещение звена, прием шпалы с подкладками, ее центрирование
и прижатие подкладками к подошвам рельсов собираемого звена, задавливание
костылей (завинчивание шурупов) и гаек клеммных болтов. Станок имеет
станину, состоящую из основания 1, колонн 6 и 13 и балки 7. На станине смон-
тированы механизмы центрирования 5, подъемные столы 3, механизмы задавли-
вания костылей, механизм передвижения звена 12, шкаф управления 2, роли-
ковые клещи 11, ограничители 4, аппаратура гидросистемы станка с приводами
15 гидронасосов, масляным баком 14. При сборке звеньев с шурупно-клеммным
скреплением вместо залавливающих головок устанавливают две шуруповерт-
ные головки. На балке 7 рамы смонтированы два механизма задавливания кос-
тылей, которые состоят из рамы, укрепленной на станине, гидроцилиндра 9 и
прессовой головки 8 с пуансонами 10. Головка крепится к штоку поршня гид-
роцилиндра и надета на четыре направляющие стойки. При подаче масла в верх-
нюю полость обоих гидроцилиндров 9 происходит одновременное задавливание
всех костылей. Подъемные столы 3 снизу поддерживают шпалу. Механизм пере-
движения звена обеспечивает передвижку рельсов собираемого звена на вели-
чину эпюры шпал
Приемные тележки (рис. 6.5, в) грузоподъемностью по 6 т каждая предназ-
начены для поддержания звена, выходящего из сборочного станка и его откат-
ки к месту доукомплектования. Тележка состоит из двух колесных пар 8, ра-
мы 6, стяжки 1, рычагов 3 и рукоятки 4 с основанием 5. На неподвижные оси
колесных пар посажены по два колеса. Рама тележки сварная, трубчатая. Стяж-
ка 1 служит для перемещения подвижных концов рычагов, подводимых снизу
под шпалы, и представляет собой винт с правой и левой резьбой по концам.
Винт заканчивается квадратами, на которые надеваются рукоятки 4. По резь-
бе винта перемещаются правая и левая цапфы, на осях которых установлены
ролики 7 и стойки 2, верхние концы которых шарнирно связаны с рычагами
3 рамы Прн сборке звена шпалу вращением рукояток 4 рычагами 3 прижимают
к подошве рельса и в таком положении закрепляют костылями или шурупами.
6.1.3. Технологическая линия стендовая (ТЛС)
Линия (рис 6.6) предназначена для сборки звеньев с рельсами Р50 и Р65
и железобетонными шпалами. Площадка, на которой она расположена, имеет
ходовой путь IV для подачи на сборку материалов и уборку собранных звень-
ев. На пути 111 складируют готовые звенья. Собственно сборка звеньев ведется
на пути-стенде /, по обе стороны которого уложены рельсы объемлющего пути
1/ (ширина колеи 3680 мм). Площадка обслуживается двумя козловыми крана-
ми 3 грузоподъемностью по Ют, перемещающимися по подкрановым путям V.
170
Рис. 6.6. Схема технологической стендовой линии (ТЛС)
Под одной из консолей кранов расположены штабеля шпал, бункера для ком-
плектов клеммных и закладных болтов и бункер для подкладок. Рельсы шта-
белируют по обе стороны объемлющего пути. По последнему движутся три само-
ходные тележки: тележка 2 для раскладки прокладок и подкладок, тележка
5 для раскладки сборок закладных болтов и тележка 4 для раскладки клеммных
сборок, накладок и стыковых болтов. Гайки клеммных и закладных болтов
завинчивают гайковертами ГБЗ-1, расположенным^ на тележках 6 и 7, перед-
вигающимися по рельсам собираемого звена. Все тележки имеют электропри-
вод, получающий питание оттокоотборных точек /, расположенных вдоль фрон-
та работ между штабелями материалов н объемлющим путем с шагом в 20 м.
Сборка звеньев ведется поточным методом. Козловыми кранами на путь-
шаблон устанавливают пакеты железобетонных шпал, которые затем расклады-
вают по эпюре. Бункера самоходных тележек загружают соответствующими ма-
териалами с использованием электромагнитов. Двигаясь по объемлющему пути,
рабочие с самоходных тележек последовательно раскладывают на шпалы про-
кладки, подкладки, закладные и клеммные болты с гайками и шайбами. Козло-
выми кранами вдоль фронта работ на подкладки укладывают рельсы. Одна
бригада рабочих устанавливает закладные болты, а другая — клеммные. На
рельсы собираемого звена краном устанавливают тележки с гайковертами, ко-
торые и завершают сборку звеньев. Из самоходной тележки 4 на один конец каж-
дого звена укладывают накладки и стыковые болты с гайками и шайбами. Соб-
ранные таким образом звенья штабелируют на пути III. Площадка имеет дли-
ну 500 м, ширину 20 м. Преимущества такой линии в возможности транспорти-
ровать и раскладывать скрепления на шпалы с самоходных тележек; закреп-
лять клеммные и закладные болты гайковертами, смонтированными на самоход-
ных тележках, а также повышать производительность линии при увеличении
числа работающих и установке дополнительных гайковертов.
Для завертывания гаек клеммных и закладных болтов при сборке звеньев
путевой решетки с железобетонными шпалами на базах ПМС используют гай-
коверт ГБЗ-1 (рис. 6.7). Он состоит из двух самоходных тележек: для гаек клем-
мных и закладных болтов. Каждая тележка состоит из рамы /, двух колесных
пар, механизма 11 передвижения, компрессорной установки 12 с воздухосбор-
ником 10, блока 13 шуруповертов ШВ-2 и устройств для центрирования шурупо-
вертов относительно клеммных н закладных болтов. Электрооборудование
гайковерта размещено в шкафу 5.
На траверсе 15 смонтирован блок гайковертов, состоящий из четырех шуру-
повертов ШВ-2 с ключами под закладные или клеммные болты. Шуруповерты
при помощи специального крепления могут изменять угол наклона шпинделя,
а также расстояние между ними для настройки на клеммные или закладные
171
Рис. 6.7. Гайковерт ГБЗ-1
болты. По концам траверсы крепятся телескопические направляющие для цен-
трирования блока гайковертов при его опускании.
Блок гайковертов может свободно перемещаться в горизонтальной плоско-
сти в любую сторону на расстояние до 80 мм под действием центрирующего уст-
ройства 9 и устанавливающих пружин 14. Он опускается под собственным весом
при выпуске воздуха из нижиих полостей пневмоцилиндров 6 подъема блока.
При завертывании гаек шпалы прижимаются к рельсам подвешенными на
раме тележки двумя пневмоцилиндрами 2 одностороннего действия, имеющими
на концах штоков тарельчатые упоры 3. Для удобства машиниста на гайковерте
предусмотрено сиденье 7 и тент 4. Тележки гайковерта могут работать в авто-
матическом и ручном режимах.
Перед началом работы обе тележки гайковерта устанавливают в начале со-
бираемого звена и при помощи кабелей подключают к электросети. Каждая
тележка управляется одним машинистом. При ее движении ролик конечного вы-
ключателя 8 набегает на поверхность шпалы, отключает привод передвижения
тележки, и она затормаживается тормозом ТКТ-100. Одновременно конечный
выключатель включает программное реле времени, которое управляет всем цик-
лом завертывания гаек клеммных или закладных болтов, подъемом и опуска-
нием траверсы с шуруповертами, поджатием шпалы, а также передвижением те-
лежки к очередной шпале. При передвижении ролик конечного выключателя,
пройдя шпалу, отключает своими контактами реле времени и цепь управления
возвращается в исходное положение. При ручном управлении машинист при
помощи переносного пульта дистанционно управляет всеми операциями.
Техническая характеристика гайковерта ГБЗ-1
Производительность, м/смену.................................. 800—900
Продолжительность цикла обработки шпалы, с..................10—13
Общая установленная мощность, кВт............................... 10,2
Масса одной тележки, кг 980
6.1.4. Прочие типы звеиосборочных линий
Звеносборочиую линию ЗЛХ-500 монтируют на двух параллельных путях,
располагая на них конвейеры предварительной и основной сборки звена. На
первом пути шпалы укомплектовывают прокладками, подкладками и заклад-
ными болтами. Конвейер предварительной сборки состоит из комплекта опор-
ных балок с роликами, на которые укладываются рельсовые плети со шпалами,
бункеров для скрепления, шпального конвейера и механизма передвижения
плетей. На втором пути производят окончательную сборку звена. Он снабжен
эстакадой с механизмами подачи рельсов, роликовым конвейером для поддер-
жания эпюрных реек, эпюрной кареткой для подачи звена на шаг эпюры, по-
перечным шпальным конвейером, центратором рельсов, бункером клеммных
сборок, сборочным станком и тележкой для отвозки собранного звена, а также
тяговой лебедкой для перемещения тележки. Линию обслуживают два козловых
10-тонных крана и два тельфера. Линия ЗЛХ-500 имеет небольшую длину. Дру-
гим ее преимуществом является то, что закрепление клеммных и закладных бол-
тов производится в полуавтоматическом режиме. Вместе с тем линия характе-
ризуется низкой производительностью, занимает два пути и сложна в изготов-
лении и эксплуатации.
Звеносборочиая линия ПЗЛ-850 располагается на одном пути. Звено мон-
тируется на пяти позициях по элементам. Вначале из штабеля на стенд козло-
вым краном, оборудованным траверсой, подаются шпалы. Длина траверсы рас-
считана на всю эпюру шпал одного звена. Затем производится раскладка про-
кладок и подкладок, установка закладных болтов. Звено перемещается на по-
зицию, где краном укладывают рельсы и устанавливают клеммные сборки. На
следующей позиции завинчивают гайки закладных и клеммных болтов. Гото-
173
вое звено поступает на позицию доводки. Таким образом, технология неслож-
ная, производительность линии достаточно высокая, перемещение звена вдоль
линии автоматизировано. Однако многие процессы немеханизированы (прикреп-
ление шпал к траверсе, завинчивание гаек, закладных и клеммных болтов).
Звеносборочиая линия «Смолянка» от других линий отличается тем, что
сборка решетки осуществляется на движущемся конвейере. Основные узлы ли-
нии расположены в двух зданиях Над линией сборки размещены бункера, за-
гружаемые элементами скреплений при помощи козловых кранов Шпалы на
тележки конвейера раскладывают козловым краном, оборудованным травер-
сой. В первом здании производится раскладка прокладок, подкладок и уста-
новка закладных болтов; во втором устанавливают клеммные болты и шурупо-
вертами завертывают гайки закладных и клеммных болтов. Между зданиями
3-тоннын козловой кран раскладывает рельсы.
Конвейер состоит из технологического пути, пути возврата тележек, спе-
циального стрелочного перевода, 15 грузовых тележек, механизма передвиже-
ния и двух самоходных тележек: одна служит для подачи грузовых тележек со
шпалами в конвейер, другая — для возвращения порожних грузовых тележек
к началу конвейера. Механизм передвижения приводит конвейер в движение.
Управление самоходной тележкой, конвейером и стрелочным переводом осу-
ществляется из диспетчерской. Звеносборочная линия «Смолянка» характери-
зуется высокой производительностью. Собирают ее нз распространенных комп-
лектующих узлов. Однако наряду с этими преимуществами имеется существен-
ный недостаток: сложные условия работы обслуживающего персонала, что
обусловлено большой длиной линии, наличием двух путей со стрелочным пере-
водом, стесненными условиями при непрерывно движущемся конвейере.
Ниже приведены технические характеристики звеносборочных линий:
Показатель Типы звеносборочных линяй для шпал
деревянных ж елезо бетон н ы х
ППЗЛ-650 ЗПХ-800 «Смолянка» ЗЛЖ-650 ЗЛХ-500 ПЗЛ-850 | тле
Производитель- ность в смену, м 650 800 1100 650 500 850 600
Тип рельсов Р50; Р65; Р75 Р50; Р65; Р75 Р50; Р65; Р75 Р50, Р65 Р50; Р65 Р50, Р65; Р75 Р50; Р65; Р75
Длина рельсов, м до 30 до 30 12,5; 25 12,5; 25 12,5; 25 jl2.5; 25 12,5; 25
Тип скреплений костыльное клеммно-болтовое
Привод рабочих органов электрогндравли- ческий электри- ческий электрогидравли- чески й электро- пневма- тический электро- ги др а - вли чес- кий
Установочная мощность линии, кВт 60 75 70 50 50 55 50
Способ и шаг пе- ремещения звень- ев при сборке цикл на шпалу непре- рывный цикл на шпалу цикл на звено цикл на шпалу
174
Продолжение
Показатель Типы звеносборочных линий для шпал
деревянных железобетонных
ППЗЛ-650 ЗПХ-800 «Смолянка» злж 650 ЗЛХ-500 ПЗЛ-850 тле
Способ подачи шпад на линию козловым краном пакет специаль- ная тра- верса пакет специаль- ная тра- верса пакет
Способ раскладки скреплений вручную
Обслуживающий персонал, чел. 16 12 36 20 16 28 26
Удельный расход мощности на 100 м решетки, кВт 9,2 9,4 6,2 7,7 10 6,4 8,3
Удельные затраты труда (без кра- новщиков и комп- лектовщиков клеммных и за- кладных болтов), чел/100 м 2,4 1,5 3,3 3.4 3,2 3,4 4,3
Продолжитель- ность цикла сбор- ки одного звена длиной 25 м, мин 19 15 11 19 24 14 20
Ориентировочная площадь для раз- мещения линии, м2 8X120 12Х ЮО 10х 150 5Х 120 12Х 100 J2X 120 6X600 (в 1 ярус)
6.2. МЕХАНИЗАЦИЯ РАЗБОРКИ РЕЛЬСО-ШПАЛЬНОЙ РЕШЕТКИ
Разборка рельсо-шпальной решетки — один из трудоемких процессов в
путевом хозяйстве. Только при капитальном ремонте пути ежегодно приходит-
ся разбирать более 7000 км. Для разборки звеньев с деревянными шпалами
и костыльным скреплением чаще всего используют звеноразборочную линию
ЗРС-700, а также звеноразборочную машину ХабИИЖТа. Разрабатываются
соответствующие линии и для звеньев с железобетонными шпалами. В результа-
те предполагается довести уровень механизации процессов разборки рельсо-
шпальной решетки до 90%.
Звеноразборочный стенд ЗРС-700 обеспечивает разборку звеньев путевой
решетки на элементы, укладку подкладок с костылями в бункера транспортной
тележки, выдачу под отгрузку рельсов с разобранных звеньев, сортировку ста-
рогодных шпал на годные и негодные и комплектование их в пакеты. Стенд
(рис. 6,8) располагается на одном из железнодорожных путей звеносборочной
базы и включает тяговые лебедки 1 и 7, установленные в начале и конце стенда,
транспортную тележку 2, агрегат расшивки 3, перегружатель 4, шпальную те-
лежку 5 и сортировщик шпал 6.
175
Рис. 6.8 Схема звеноразборочного стенда 3 PC-700
Тяговыми лебедками осуществляется перемещение транспорт-
ной и шпальной тележек вдоль фронта работ. Транспортная тележка движется
от крайнего левого положения до перегружателя, а шпальная — от перегружа-
теля до сортировщика шпал. Для этого предусмотрена система канатов и откло-
няющих блоков, прикрепленных внутри колеи рабочего пути. Обе лебедки име-
ют одинаковую конструкцию.
Кинематическая схема их представлена на рис. 6.9. Лебедка состоит из
электродвигателя 8, клиноременной передачи 9, редуктора 10, двух колодочного
тормоза /, соединительной муфты 2, вала барабанов 7, укрепленного в подшип-
никовых опорах 6, барабана 3 большего диаметра, барабана 5 меньшего диамет-
ра и кулачковой муфты 4. Разный диаметр барабанов обеспечивает меньший ра-
бочий и больший холостой ход тележек. Управление лебедками дистанционное.
Транспортная тележка (см. рис. 6.8) служит для перемеще-
ния звена, уложенного на нее краном, к агрегату расшивки. Рама тележки опи-
рается на пять пар колес, перемещающихся по рельсовому пути. На ней укреп-
лены съемные бункера для скреплений, освобождающихся при расшивке звеиа.
К трем поперечным балкам рамы тележки прикреплены три пары стоек, под-
держивающих разбираемое звено. Конструкция стоек позволяет регулировать
положение звена по отношению к рабочему пути. Средняя пара стоек выполне-
на подвижной, что позволяет устанавливать их под подошву рельса без сдвиж-
ки шпал. Грузоподъемность тележки 25 т.
Агрегат расшивки (рис. 6.10) служит для разборки рельсо-
шпальной решетки на элементы. Все узлы смонтированы на П-образной раме
10, опирающейся на опорную балку 11, на последней расположены рельсы, по
которым перемещается транспортная тележка 12 со звеном, и цилиндры 1 ме-
ханизма поджатия шпал. По бокам рамы находятся упоры 2, ограничивающие
ход шпал. Механизм отжатия шпалы включает прежде всего неподвижный гид-
роцилиндр 7, к нижнему концу штока которого крепится головка, отжимающая
шпалу в средней части, а к верхнему — концы цепей, огибающих две звездочки,
Рис 6.9 Схема тяговой лебед-
ки
Рис. 6.10. Схема агрегата расшивки
176
размещенные на верху рамы. Другие концы цепей прикреплены к боковым от-
жимным рычагам 3, шарнирно закрепленным на портале. В верхнее положение
они устанавливаются пружинами, а в нижнее — при поступлении масла в верх-
нюю полость гидроцилиндра 7. Таким образом, нажатие на шпалу происходит
одновременно в трех точках.
На верхней поперечной балке рамы смонтирован механизм захвата под-
кладок 4, две пары роликовых клещей 8для поддержания звена за головки рель-
сов и упор 6 привода конечного выключателя. Механизм захвата подкладок
представляет собой две пары двуплечих клещеобразных рычагов, приводимых
в движение горизонтально расположенными гидроцилиндрами двустороннего
действия. Привод всех механизмов агрегатов гидравлический, включающий в
себя насосную установку с приводом от электродвигателя 5, фильтрующую ап-
паратуру, контрольно-гидравлическую и регулирующую гидравлическую ап-
паратуру и систему трубопроводов. Агрегат расшивки имеет автоматическую
систему управления, обеспечивающую последовательное выполнение следую-
щих операций: перемещение транспортной тележки на шаг эпюры, поджатие
шпалы к подошве рельса, захват подкладок, отжатие шпалы и холостой ход ра-
бочих органов. Контрольно-управляющая электрогидроаппаратура гаранти-
рует последовательное включение в работу рабочих органов агрегата и циклич-
ность их работы. Звено подается до нажатия шпалой на упор конечного вы-
ключателя, последний связан сэлектрогидравлическим золотником управления,
в результате чего поступает команда на последовательное срабатывание меха-
низмов поджатия шпалы, захвата подкладок, отрыв шпалы и переезд тележки
со звеном на шаг эпюры. На агрегате предусмотрена ручная система управления
с пульта управления 9. Усилие отрыва шпалы до 12 т, рабочее давление в сис-
теме 5 МПа, скорость подачи звена 0,4 м/с.
Перегружатель предназначен для перегрузки элементов расшито-
го звена с транспортной тележки на шпальную. Он выполнен в виде двух про-
дольных балок, соединенных через рычажную систему с шестью гидравличес-
кими домкратами, установленными на поперечных балках. Крепление рычагов
к балкам перегружателя приведено на рис. 6.11, а. Двуплечий рычаг 7 шарнирно
укреплен на опоре 5. Один его конец посредством стойки 1 и подкладки 2 кре-
пится к рельсу 3. К Другому концу рычага прикреплена цепь 4, ограничиваю-
щая величину хода поднимаемых балок перегружателя. К средней части рыча-
га присоединен шток поршня цилиндра 6. До захода транспортной тележки в
перегружатель его балки находятся в нижнем положении. После захода тележ-
ки с расшитым звеном внутрь перегружателя подается масло в нижние полости
всех шести цилиндров и балки, приподнимаясь, снимают путевую решетку с
тележки. По возвращении последней в исходное положение внутрь перегружате-
ля завозится шпальная тележка, н звено цилиндрами опускается на ее раму.
Питание цилиндров рабочей жидкостью осуществляется от гидросистемы агре-
гата расшивки. Грузоподъемность перегружателя 10 т, управление ручное.
Шпальная тележка 5 (см. рис. 6.8) предназначена для переме-
щения шпал и рельсов разобранного звена от перегружателя к сортировщику
Рис 6.11. Схемы:
а крепления рычагов к балкам перегружателя; б сортировщика шпил
177
шпал. После снятия рельсов краном шпалы подаются на сортировку. Конструк-
ция шпальной тележки отличается от конструкции транспортной тележки лишь
тем, что на ней нет стоек. Шпальной тележкой управляют дистанционно с пуль-
та управления сортировщика шпал.
Сортировщик шпал (рис. 6.11, б) служит для сортировки шпал
на годные и негодные и накопление их в пакеты для последующей отгрузки.
Он состоит из двух бункеров, каждый из которых имеет П-образное основание
1 и 7, внутри которого проходит шпальная тележка, бункеров 2 и 6 с одной под-
вижной стенкой 3 и наклонного цепного конвейера 4 с захватами для шпал.
Сортировщик устанавливают на рабочий путь стенда. Первым по ходу шпаль-
ной тележки от перегружателя располагают бункер с более коротким цепным
конвейером, захват которого проходит над шпалами шпальной тележки. Этот
бункер оборудован двумя наклонным рычагами 5, свободно поворачивающими-
ся на нижней оси наклонного конвейера. Конвейер второго бункера располо-
жен ниже уровня рамы шпальной тележки. При работе сортировщика шпалы
по одной захватываются упорами на цепях конвейера и перемещаются вверх по
нему. Шпалы, годные к употреблению в пути, по направляющим сбрасываются
в бункер справа, а негодные—обратным движением цепей конвейера по наклон-
ным рычагам 5 передаются на укороченный конвейер и накапливаются в бун-
кере слева. Подвижные стенки бункеров обеспечивают правильную укладку
шпал. Приводом стенок бункера управляет оператор с пульта сортировщика
шпал. Укладка звеньев на транспортную тележку, штабелирование рельсов и
шпал осуществляются кранами, обслуживающими стенд. Привод агрегатов
электрический от сети переменного тока и гидравлический.
Техническая характеристика стенда ЗРС-700
Производительность, м/ч................................................100
Мощность электродвигателей, кВт.......................................26
Время настройки, ч.....................................................0,5
Масса стенда, т......................................................17,76
Обслуживающий персонал, чел. ...........................................8
6.3. МАШИНЫ ДЛЯ УКЛАДКИ РЕЛЬСО-ШПАЛЬНОЙ РЕШЕТКИ
Укладку рельсо-шпальной решетки при звеньевом способе ведут звеньевы-
ми путеукладчиками. Путеукладчик включает укладочный кран, 2—5 мотор-
ных платформ и состав из четырехосных платформ, оборудованных роликовым
конвейером, портальными арками и устройствами для закрепления пакетов
звеньев. При большом фронте работ одна из платформ может быть оборудована
электролебедкой для перетяжки пакетов звеньев вдоль состава на расстояние
до 200 м. Собранные на базе звенья укладывают в пакеты на платформы соста-
ва. Они опираются на ролики лыжами или рельсами перевернутого нижнего
звена. В последнем случае звено оборудуют наконечниками. Пакеты с 25-мет-
ровыми рельсами размещают на двух четырехосных платформах, а 12,5-метро-
вые — на одной. При капитальном ремонте пути старую путевую решетку при-
ходится заменять новой. В этом случае необходимо иметь не один поезд, а два.
Первым позвенно снимают старогодную путевую решетку, поэтому поезд назы-
вают путеразборочным, второй же позвенно укладывает новую путевую решет-
ку, его называют путеукладочным.
В голове путеразборочного поезда (рис. 6,12, а) находится локомотив /,
затем следуют четырехосные платформы 2 с роликовым конвейером. В средней
части расположена одна или две моторные платформы 3, а в хвосте поезда —
кран 4. Последний позвенно разбирает рельсо-шпальную решетку и грузит
звенья на свою платформу. По мере комплектации пакетов звеньев их перетя-
178
Направление движения
Рис. 6.12. Схемы поездов:
а — путеразборочного; б — путеукладочного
гивают по составу на передние платформы состава. На освобожденных от путе-
вой решетки участках ремонтируемого пути планируют или очищают загрязнен-
ный балласт, после чего в работу вступает путеукладочный поезд (рис. 6.12, б),
состоящий из укладочного крана 4 и четырехосных платформ 2 с моторной плат-
формой (МПД) 3 посередине. В хвосте поезда ставится локомотив 1. Число мо-
торных платформ зависит от длины фронта работ и колеблется от 1 до 3. В про-
цессе работы кран с прицепленными к нему несколькими платформами со звень-
ями ведет укладку. По мере необходимости новую партию пакетов звеньев в го-
лову укладок доставляют ведомой моторной платформой с хвостовой части пита-
ющего состава, перемещаемой локомотивом. Укладочным краном укладывают
звенья новой путевой решетки и временно их стыкуют. По мере укладки звень-
ев одного пакета после перетяжки укладываются звенья следующего пакета и
т. д. Число платформ, прицепляемых к МПД или УК, зависит от профиля пути.
К МПД при уклоне до 5°/00 можно прицепить до девяти платформ, а к УК — до
пяти; при уклоне от 5 до 10%0 — соответственно 5 и 3 платформы, а при уклоне
более 10°/оо — 3 и 1 платформу, груженные пакетами. После окончания работ
оба состава возвращаются на звеносборочную базу, где разгружают старые и
грузят новые звенья рельсо-шпальной решетки. Укладочные краны используют
также для механизированной смены стрелочных переводов. Последние грузят
на платформы блоками, а брусья стрелочных переводов закрепляют инвентар-
ными зажимами.
6.3.1. Моторная платформа дизельная (МПД)
Платформа предназначена для передвижения пакетов новых звеньев по со-
ставу к укладочному крану в путеукладочном поезде и для передвижения паке-
тов звеньев от крана на порожние платформы в путеразборочном поезде. Явля-
ясь тяговой единицей, МПД передвигает часть состава рабочего поезда на участ-
ке работ и выполняет маневровые работы на звеносборочной базе. Она состоит
из рамы 1 (рис. 6.13) с роликовым конвейером 2, двух ходовых тележек 7, двух
лебедок 17 для передвижения пакетов рельсовых звеньев, пневматического обо-
рудования, двух дизель-генераторных установок, двух постов управления 4
со съемным сиденьем 3 и электрооборудования. В средней части рамы располо-
жено девять отсеков для размещения основного оборудования. Сверху оии за-
крыты крышками 11 (на рисунке в правой части машины крышки сняты). В цен-
тральном отсеке размещены водяные и масляные радиаторы 12. По обе стороны
от ннх находятся двигатели 15 дизель-генераторных установок. Далее, симмет-
рично с правой и левой сторон платформы расположены генераторы 16, контак-
торы 18 и воздушные резервуары 20 пневматической системы. Для доступа к
дизель-генераторным установкам, помимо верхних крышек, предусмотрены бо-
ковые люки 6. Моторная платформа оборудована типовыми ударно-упряжны-
ми приборами 10, автомобильными фарами 9 и приборами световой и звуковой
179
Рис. 6.13. Схема моторной платформы
сигнализации. По всей длине платформы на настиле рамы установлены два ря-
да двухребордчатых роликов, образующих роликовый конвейер 2. По краям
платформ ролики установлены чаще, чем посередине, что облегчает переход па-
кета с одной платформы на другую. Вне отсеков на раме расположены аккуму-
ляторные батареи 13, баки 21 для топлива, баки 14 для масла, лебедки 17 для
передвижения пакетов звеньев и компрессор 22. По концам платформы установ-
лены четыре песочницы 5 и 8. Нагрузка от рамы платформы на ходовые тележки
передается через поперечные шкворневые балки с пятниками 19. Питание по-
стоянным током электродвигателей ходовых тележек, лебедок и кранового обо-
рудования осуществляется силовой установкой, состоящей из дизеля У1Д6
и генератора П-111П, соединенных втулочно-пальциевой муфтой.
Ходовая тележка (рис. 6.14) двухосная, приводная, одинарного рессорного
подвешивания с продольными балансирами. Тележка состоит из рамы /,
двух ведущих колесных пар 2, рессорного подвешивания 7, трансмиссии 3 и
пневмотормозного оборудования, включающего тормозной цилиндр 10, два
колодочных тормоза 8 с рычажной передачей и ручной привод 9. На раме тележ-
ки приварены кронштейны для крепления тяговых двигателей и реактивной под-
вески осевого редуктора. На верхних поясах боковин рамы установлены два
скользуна 4 для уменьшения поперечного раскачивания платформы в кривых,
а на вертикальных листах боковин — буксовые челюсти 6 и кронштейны для
установки деталей рессорного подвешивания. Для соединения рамы платформы
с рамой тележки предусмотрен подпятник 5.
Осевой редуктор (рис. 6.15) двухступенчатый с цилиндрически-
ми косозубыми шестернями. Корпус 1 редуктора выполнен из двух половин с
горизонтальной плоскостью разъема. Первичный вал-шестерня 2, получаю-
щий привод от тягового двигателя, установлен на подшипниках 3. Промежуточ-
ный вал 4 установлен иа одном шарикоподшипнике 13 и роликоподшипнике 7.
Зубчатое колесо 12 посажено свободно на двух шарикоподшипниках. На удли-
ненной ступице колеса 12 нарезаны зубья, служащие одной из половин зубча-
той муфты. Вторая половина муфты 5 и шестерня 6 посажены на шлицах вала 4.
Вдоль зубьев обеих половин муфты 8 может перемещаться подвижная часть
с внутренними зубьями. Оиа может занимать два положения: рабочее и транс-
портное. При рабочем положении муфты вращение двигателя через вал-шестер-
ню 2, колесо 12 и шестерню 6 передается на зубчатое колесо 9, жестко поса-
женное на оси 10 колесной пары тележки, вызывая передвижение последней.
При транспортном положении муфты 8 при вращении колесной пары локомоти-
вом через передачу 9, 6 в движение приводится промежуточный вал 4, что пре-
180
дохраияет тяговый двигатель и первую пару передач от ненужного износа. Муф-
та 8 переключается рычагом 14, связанным с вилкой 16, закрепленной на вали-
ке 17 с шариковым фиксатором 15. Для обеспечения безопасности при включе-
нии и выключении осевого редуктора рукоятка переключения муфты выведе-
на в сторону за пределы ходовой тележки. Самопроизвольное включение муф-
ты исключено благодаря наличию фиксаторов валика и рукоятки. Выключение
привода колесной пары тележки исключает интенсивный износ его узлов и дета-
лей при транспортировке платформы локомотивом на большие расстояния.
Корпус 1 редуктора установлен на оси колесной пары на двухроликовых под-
шипниках 11 и проушиной подвешен к кронштейну шкворневой балки рамы
тележки.
Тормоз колодочный (рис. 6.16) предназначен для торможения
моторной платформы во время ее движения и при стоянке. Ои обеспечивает
двустороннее нажатие тормозных колодок 2 на обе колесные пары. Принцип
работы такого прямодействующего тормоза состоит в следующем. При необхо-
димости торможения сжатый воздух подается в левую полость тормозного ци-
линдра 12 (правая его полость сообщается с атмосферой), поршень, шток и ры-
Рис. 6.14. Ходовая тележка МПД
181
Рис. 6.16. Тормоз колодочный
182
чаг 11, перемещаясь вправо, поворачивают горизон-
тальные двуплечие рычаги 10 относительно своих
опор так, что продольные тяги 9 перемещаются вле-
во. Приходит в движение рычажная передача с тягами
3 и 7 и рычагами 1, 4, 6, 8, что заставляет все тор-
мозные колодки прижаться к колесам. Тормозной ци-
линдр выполнен одностороннего действия, в правой
его полости расположена пружина, которая при тор-
можении сжимается, а при отпуске тормозов возвра-
щает рычажную передачу и поршень в исходное поло- рис- tq7mЧН°Г°
жение. В отпущенном состоянии колодки отходят от тормоза
колес на 4—6 мм. Регулировка тормоза осуществ-
ляется изменением длины тяг 3 и 7 и уменьшением расстояния между концами
рычагов 4 и 6, для чего тяга 5 имеет несколько отверстий под валики рычагов.
Для упрощения понимания работы рычажной передачи ее привод условно по-
вернут на 90°.
Каждая ходовая тележка оборудуется ручным тормозом (рис. 6.17),
служащим для торможения платформы при неработающей пневмосистеме. При-
вод такого тормоза осуществляется посредством штурвала /, усилие от которого
через винт 2, гайку 3 и тягу 4 передается двуплечему рычагу 5. Так как послед-
ний шарнирно прикреплен к штоку поршня цилиндра, то приходит в движение
рассмотренная выше рычажная передача с двуплечим рычагом 6, и тормозные
колодки подходят к колесным парам.
Пневмотормозное оборудование предназначено для приведения в действие
тормозов, подачи песка на рельсы, для увеличения сцепления колес с рельсами
и подачи звукового сигнала. До недавнего времени как МПД, так и УК снаб-
жались только прямодействующим тормозом, обладавшим существенными недо-
статками. Первый — в рабочем положении эти машины могли тормозить толь-
ко самих себя, а прицепленные к ним платформы оставались незаторможенными.
Второй — при транспортировке МПД и УК в составе грузовых поездов они не
являлись тормозными единицами. Из-за первого недостатка по условиям тор-
можения приходится ограничивать число прицепляемых платформ, гружен-
ных пакетами рельсовых звеньев. В результате во время «окна» кран вынужден
простаивать в ожидании перетяжки пакетов с остальных платформ. Второй не-
достаток снижает безопасность следования грузовых поездов с МПД или УК-
В усовершенствованных тормозных системах МПД и УК, внедренных на серий-
но выпускаемых машинах, эти недостатки устранены. На обоих нижних постах
управления установлены краны машиниста, для управления торможением тя-
говой единицы и прицепленных к ней платформ. В крайних отсеках платформы
размещены главные резервуары питательной магистрали, что обеспечивает тор-
можение тяговой единицы и 10 прицепленных к ней платформ. В торцовых час-
тях платформы установлены краны экстренного торможения, что дает возмож-
ность немедленно затормозить состав обслуживающему персоналу, находяще-
муся в зоне стыковки звеньев.
Кроме этого, платформы оборудованы воздухораспределителем для под-
ключения тормозной системы тяговой единицы к воздушной магистрали грузо-
вого поезда.
В укладочном кране на тележке расположен не один тормозной цилиндр,
а два, что обеспечивает надежное нажатие тормозных колодок на обеих осях;
этим облегчилась и регулировка рычажной передачи в результате износа тор-
мозных колодок.
Новая пневматическая тормозная система, представленная на схеме пнев-
матического оборудования (рис. 6.18), состоит из: питательной магистрали (оиа
изображена жирной линией), служащей для подачи сжатого воздуха в тормоз-
183
Рис. 6.18. Схема пневматического оборудования МПД
ную магистраль и состоящей из песочницы, тифона и крана вспомогательного
тормоза; тормозной магистрали для торможения тяговой единицы с прицеп-
ленными к ней тормозными платформами (она изображена тонкой сплошной ли-
нией); магистрали тормозных, цилиндров для торможения тяговой единицы кра-
ном вспомогательного тормоза — прямодействующий тормоз (она изображена
пунктирной линией) и вспомогательной магистрали, обеспечивающей работу
песочниц, тифона и крана машиниста (она изображена штрихпунктирной ли-
нией). На рис. 6.18 применены обозначения: PC — резервуары; КМ — ком-
прессор; ВД — воздухоочиститель; КО — обратный клапан, КП — предохра-
нительный клапан; КК — концевой кран; Р — воздухораспределитель; МН —
манометр; Ц — цилиндр; КДТ — кран; КД — клапан максимального давле-
ния; КПР — переключательный клапан; ВВП — электропневматический кла-
пан песочниц; ФРП — форсунка песочницы; К — клапан тифона; ТК — тор-
мозной кран; ККМ — разобщительный кран; РД — регулятор давления; РВ—
рукав; ТФ — тифон.
Питательная магистраль включает компрессор 9 с приво-
дом от электродвигателя, воздухоочиститель 8, обратный клапан 7, предохра-
нительный клапан б, отрегулированный на давление (0,85±0,02) МПа, глав-
ные резервуары 1 и регулятор давления 19. Последний используется для авто-
матического управления работой обоих компрессоров. Когда давление в глав-
ных резервуарах доходит до (0,8±0,02) МПа, устройство срабатывает и вы-
ключает электродвигатели компрессоров. При понижении давления до (0,65±
±0,02) МПа оба электродвигателя автоматически включаются и повышают дав-
ление в питательной магистрали до 0,8 МПа. Для удаления конденсата воз-
духоочиститель и главные резервуары снабжены водоспускными кранами.
Тормозная магистраль объединяет концевые краны 22, воз-
духораспределитель 28, запасные резервуары 21, краны экстренного торможе-
184
ния 4 и двухстрелочный манометр 13. Воздухораспределитель присоединяется
к тормозной магистрали через кран 27.
Магистраль тормозных цилиндров объединяет тор-
мозные цилиндры 20, установленные на ходовых тележках, клапан максималь-
ного давления 25; переключательные клапаны 18 и 26, краны вспомогательного
тормоза 16 и манометры 24. Каждый тормозной цилиндр соединен с воздушной
магистралью резиновым рукавом, а для отключения цилиндра при его осмотре
имеются разобщительные краны.
На вспомогательной магистрали расположены элект-
ро пневматический клапан песочниц 2, форсунки <3 песочниц, клапан 11 макси-
мального давления, клапан сигнала 10, тифон 5, тормозной кран 12, уравни-
тельный резервуар 15, разобщительные краны 17 и манометры 13 и 14. Ручка
тормозного крана (крана машиниста) имеет шесть положений: полный отпуск и
зарядка тормозов, поездное, перекрыта без питания тормозной магистрали,
перекрыта с питанием тормозной магистрали, служебное и экстренное тормо-
жения.
Кран машиниста регулируется на давление 0,53—0,55 МПа при поездном
положении ручки. Для отключения крана машиниста от питательной магист-
рали при его неисправности служит кран 17. Комбинированный кран предназ-
начен для отключения крана машиниста от тормозной магистрали и экстрен-
ного торможения при неисправности крана машиниста. При управлении тор-
мозами при одиночном следовании МПД или УК применяется кран вспомога-
тельного тормоза 16. Он имеет три положения рукоятки: отпуск тормоза, при
котором происходит сообщение тормозного цилиндра с атмосферой; перекры-
та, когда тормозной цилиндр разобщен с питательной магистралью и атмос-
ферой; торможение, при котором тормозной цилиндр сообщен с питательной ма-
гистралью через переключательный клапан 18 и регулятор давления 19. Двух-
стрелочный манометр показывает давление воздуха в питательной (красная
стрелка) и тормозной (черная стрелка) магистралях. Однострелочные манометры
14 и 24 показывают давление соответственно в тормозных цилиндрах 20 и урав-
нительных резервуарах 15. Воздухораспределитель 28 служит для автомати-
ческого распределения сжатого воздуха между приборами тормозной системы
в зависимости от изменения давления в тормозной магистрали. При зарядке
тормозов он обеспечивает наполнение воздухом до зарядного давления 0,53—
0,55 МПа запасного резервуара 21, сообщая при этом тормозные цилиндры
с атмосферой. При снижении давления в тормозной магистрали воздухораспре-
делитель сообщает запасной резервуар с тормозными цилиндрами и происхо-
дит процесс торможения.
По питательной магистрали воздух поступает от компрессора в главные
резервуары, а затем к крану машиниста и крану вспомогательного тормоза. По
тормозной магистрали воздух поступает от крана машиниста к концевым кра-
нам 22, оборудованным рукавами 23, которые служат для сообщения или разоб-
щения магистрали прицепных платформ к воздухораспределителю и запасному
резервуару и кранам экстренного торможения; последние служат для останов-
ки поезда в случае угрозы схода его с рельсов. В тормозные цилиндры воздух
поступает от крана вспомогательного тормоза через клапаны 18 и 26, а от воз-
духораспределителя—через клапан 26. По вспомогательной магистрали воздух
поступает к клапану сигнала 10 воздушных тифонов 5 и к клапану 11 через
электропневматические клапаны 2 к форсункам 3 песочниц и к цилиндру дис-
танционного управления лебедки для передвижения пакетов (на схеме не пока-
зан).
Действие автоматического тормоза при втором положении ручки крана
происходит следующим образом. Сжатый воздух через комбинированный кран
поступает в тормозную магистраль и далее через воздухораспределитель за-
185
схема лебедки
Рис 6.19. Кинематическая
для передвих<ения пакетов
полняет запасной резервуар. При
этом тормозной цилиндр через воз-
духораспределитель сообщен с атмо-
сферой и тормоз находится в оттор-
моженном состоянии. При зарядке
давление воздуха в питательной ма-
гистрали составляет 0,65—0,8 МПа,
в тормозной магистрали — 0,53 —
0,55 МПа. Для торможения ручку
крана машиниста необходимо из вто-
рого положения перевести в одно из
тормозных положений, при этом дав-
ление воздуха в тормозной
страли снижается
ного резервуара
пределитель и
клапан поступает
линдры, которые через систему рыча-
гов осуществляют торможение маши-
ны. Полное служебное торможение
происходит при шестом положении ручки крана машиниста. Давление воздуха
в тормозных цилиндрах при этом должно быть 0,38—0,4 МПа. Для ускорения
маги-
и воздух из запас -
через воздухорас-
переключательный
в тормозные ци-
отпуска тормоза ручку переводят кратковременно в первое поездное положение
и после достижения в тормозной магистрали давления 0,53—0,55 МПа переводят
ее во второе поездное положение. Действие прямодействующего тормоза проис-
ходит следующим образом. При постановке ручки крана в тормозное положение
воздух из питательной магистрали через разобщительный кран, переключатель-
ный клапан 18, клапан максимального давления 25 и переключательный клапан
26 поступает в тормозные цилиндры. Переключательный клапан отключает при
этом воздухораспределитель от тормозных цилиндров. Отпуск тормозов про-
изводится рукояткой в положение «Отпуск».
Лебедка для передвижения пакетов (рис. 6.19) обеспечивает перемещение
пакетов рельсовых звеньев вдоль составов путеразборочного и путеукладочного
поездов. На платформе по диагонали размещены две лебедки, каждая из кото-
рых рассчитана на перетяжку не более трех пакетов звеньев с тяговым усилием
30 кН. При включении электродвигателя 3 вращение через цепную муфту 4
передается червячному редуктору 5, открытой цилиндрической передаче 6 и
барабану 2, свободно посаженному на оси 1. При этом кулачковая муфта 7 долж-
на быть включена вправо. Это может быть достигнуто за счет поворота ручки
включения 8 вправо или при дистанционном управлении муфтой подачей сжа-
того воздуха в левую полость пневмоцилиндра 9. Для разматывания каната с
барабана кулачковая муфта должна быть разомкнута.
Управление МПД. Для управления моторной платформой в средней ее
части по обеим сторонам оборудованы
Ю 11 ю
Рис. 6.20. Пост управления МПД
два дублированных поста управления.
Кабина управления на машинах пер-
вого выпуска навесная. На машинах
последующих выпусков она заменена
съемным вращающимся сиденьем.
В транспортном положении сиденье
снимают, а его кронштейны надежно
закрепляют.
Все рукоятки приборов управле-
ния и контрольно-измерительные при-
боры (рис. 6.20) размещены енммет-
186
рично относительно оси рамы платформы: слева — для агрегатов, расположен-
ных с левой стороны пульта, а справа — для агрегатов, находящихся справа.
В средней части пульта управления находится щиток 4 приборов управления.
На нем смонтированы два одинаковых комплекта приборов и кнопок соответст-
венно для левой и правой сторон платформы.
Над щитком расположены рукоятки 5 открывания и закрывания жалюзи
радиаторов. Справа и слева от щитка приборов на раме платформы находятся
штурвалы 3 управления регулятором возбуждения генератора, рычаги 2
включения автоматических выключателей, рычаги 1 включения кулачковой
муфты лебедки для перетяжки пакетов. Под щитком приборов размещены три
универсальных переключателя 6 для управления тяговыми двигателями ходо-
вых тележек, кнопки стартеров 7, рукоятки управления 8 топливоподачей ди-
зелей, рычаг 9 управления краном машиниста, штурвалы 10 и 11 управления
контроллерами лебедок для перетяжки пакетов и стояночным тормозом.
Техническая характеристика МПД
Грузоподъемность платформы, кг.........................32 000 или 45 000
Максимальная сила тяги, кН.................................. до 100
Максимальная конструктивная скорость от собственных
силовых установок, км/ч.................................... до 40
Максимальная скорость в составе поезда, км/ч ... 80
Число ведущих колесных пар.................. . 4
Давление в тормозной системе, МПа ...... 0,6
Тип двигателя ........................................ У1Д6
Номинальная мощность двигателя при 1500 об/мин, кВт 121,4
Мощность генератора ПН-750 или П-111П, кВт . . 100
Тяговое усилие лебедки для перетяжки пакетов, кН 30
Канатоемкость барабана, м . .................... НО
Запас топлива в четырех баках, л ' 940
Расход топлива, кг/ч 50—54
Пример. Расчет механизма передвижения МПД. Вес МПД G - 3,9 • 105 Н; масса
платформы Gx — 2 105 Н; вес пакета G2 ~ 6 • I03 Н; число платформ пг — 8, число
пакетов п2 — 4; число осей МПД т1 — 4; число приводных осей МПД т2 — 4; скорость
движения v — 2,78 м/с; диаметр колес Дк—0,95м; диаметр цапфы — 0,135 м; коэффи-
циент трения качения ц = 0,03 см; коэффициент трения в цапфах / = 0,015; коэффициент
трения реборд^р = 1,2; радиус кривой R — 1200 м; уклон t.1=20/oo; давление ветра Рв =
= 250 Па; подветренная площадь поезда F — 70 м2; коэффициент сцепления колес с
рельсами ф — 0,12.
При движении поезда возникают сопротивления, Н; трения от уклона пути V/2,
от ветровой нагрузки и от криволинейности участка пути УД;
/(/ц т 2ц
Дк
0,015-13,5 + 2.0,03
+ 6 • Ю5 • 4) ——----------------1,2 = 13 650;
rx = (Gi nx + G+G2 п2)
Лр = (2-105-8 I 3,9-Ю*+
95
УД = (61Щ + G + G2n2) = (200 8 + 390 + 600 4) 2 — 8780;
Г3- PUF-- 250- 70 =17500;
700 700
= (Gx hx + G+G2 ц2) = -^- (200-8+390+ 600-4)-2560.
Общая величина сопротивления, Н, при установившемся движении поезда
W = У?! + +2 + = 13 650 + 8780 + 17 500 + 2560 - 42 490.
Для движения поезда необходимо обеспечить надежное сцепление с рельсами. Бок-
сование происходит, если сопротивление передвижению превышает силу сцепления колес
с рельсами.
187
Определяем величину этой силы, Н,
Fсц = бсц ф>
тх 4
где Ссц - G— = 3,9 - 105 = 3,9 • 106.
Тогда Fcn — 3,9 • 105 • 0,12 = 46 800, отсюда видно, что Рсц > W. Боксования нет.
Подсчитываем мощность, кВт, на приведение поезда в движение:
Wv 42 490-2,78
= 147,
1000Т1-------1000-0,8
где г| = 0,8 — предварительно принятое значение к.п.д. механизма. МПД имеет четыре
тяговых двигателя, следовательно, мощность одного тягового двигателя составит A/j =•
= 147/4 = 36,9 кВт. По каталогу подбираем двигатель ДК-309 при ПВ 15 %: пд —
— 1060 об/мин. Определяем частоту вращения ходовых колес, об/мин,
60а 60-2,78
лк—-------— —------------—55,6.
h лДк 3,14-0,95
Передаточное число осевого редуктора ia — п9/лк 1060/55,6 = 19. Далее расчет
ведут по курсу «Детали машин».
6.3.2. Укладочные краны УК-25/9-18
Укладочные краны служат для снятия с пути старогодных рельсовых зве-
ньев и укладки новых звеньев. Различают следующие типы укладочных кра-
нов: УК-25,9-18 грузоподъемностью 18 т и У К-25 21 грузоподъемностью 21 т
для работы с 25-метровыми звеньями и шпалами любых типов; УК-25/9 грузо-
подъемностью 9 т для работы с 25-метровыми рельсовыми звеньями и деревян-
ными шпалами и 12,5-метровыми звеньями с железобетонными шпалами. Се-
рийно выпускается кран УК-25.9-18, широко распространены также краны
УК-25/9
Укладочный кран (рис.6.21) является самоходной единицей и состоит из
моторной платформы 18, на которой на четырех телескопических стойках 15
укреплена ферма 2 с расположенным на ней грузоподъемным оборудованием.
Для установки фермы в рабочее или транспортное положение предусмотрена
гидросистема. По своей конструкции и устройству кран, за исключением уз-
лов грузоподъемного оборудования, практически не отличаются от крана
УК-259.
Моторная платформа крана имеет две силовые дизель-генераторные уста-
новки, смонтированные в средних отсеках рамы, их мощность расходуется на
передвижение крана и прицепной нагрузки, на привод кранового оборудова-
ния, лебедки для перетяжки пакетов, компрессоров, гидронасосов и на осве-
щение. При движении крана самоходом питание тяговых двигателей ходовых
тележек может осуществляться от одной дизель-генератор ной установки или
Рис. 6.21. Схема укладочного крана УК-25/9-18
188
от двух; при этом каждая ходовая тележка получает электроэнергию от бли-
жайшего к пей генератора. При работе крана одна силовая установка исполь-
зуется для питания грузоподъемного оборудования, а другая — для передви-
жения крана с питающим составом. Рама платформы заимствована от УК-25/9,
но усилена в ряде мест Вдоль настила рамы размещены ролики 16 роликового
конвейера.
Ходовые тележки 17 крана трехосные, две крайние колесные пары веду-
щие, а средняя поддерживающая. Буксы тележек роликовые, подпятник и
скользуны вагонного типа. Каждая ходовая тележка имеет два тяговых двига-
теля. При трогании с места и при движении на малых скоростях они включают-
ся последовательно, а при разгоне и на больших скоростях — параллельно.
Тележка оборудована колодочным тормозом. Рычажная система колодочного
тормоза выполнена раздельно па каждую ведущую колесную пару с двусторон-
ним нажатием колодок на колесо. На каждой тележке установлено по два тор-
мозных цилиндра, воздух к которым подводится от воздушной магистрали гиб-
кими шлангами, а также имеется ручной привод к рычажной передаче тормо-
за, аналогичный установленному на МПД. Тормозное оборудование крана
такое же, как на МПД. Управление передвижением крана осуществляется с
правого или левого нижних пультов 12, расположенных сбоку платформы в ее
средней части.
Крановое оборудование состоит из четырех портальных стоек 15 с вы-
движными каретками 14 и фермы 2, на которой расположено грузоподъемное
оборудование, состоящее из грузовой 7 и тяговой 10 лебедок, тросо-блочной
системы 4—19, двух крановых тележек 1, ограничителей подъема 13, канатных
поддержек 6, откидных балок 3, грузоподъемной траверсы 5 и кранового элек-
трооборудования. Фронт работ при необходимости освещается прожекторами.
Краны, работающие на электрифицированных участках, оборудуются изоли-
рованными от фермы лыжами-отбойниками. Ферма крана при рабочем поло-
жении передвигается вперед или назад по роликам консолей 9 и поднимается,
а при транспортировке устанавливается в среднее симметричное относитель-
но оси платформы положение. Подъем и опускание фермы осуществляются
12 гидроцилиндрами, вмонтированными в каретки портальных стоек. Пульт
управления 8 крановым оборудованием расположен в средней части фермы
крана. Управление грузовой и тяговой лебедками осуществляется с помощью
контроллеров. Безопасность работы обслуживающего персонала обеспечива-
ется за счет бокового ограждения 11.
Стойка (рис. 6.22, а) представляет собой балку коробчатой формы,
состоящую из двух вертикальных направляющих 9 и 12 и горизонтальной
плиты 1. Стойки болтами 4 неподвижно прикреплены к бобышкам 3 рамы
платформы 2. С внутренней стороны направляющих есть ряд отверстий (вид
Д) для крепления башмаков 6. В рабочем положении каретка поддерживается
двумя башмаками, каждый из которых сбоку имеет два шипа, вставляемых в
отверстие стойки. Башмак болтами крепится к стойке и каретке 8. С наружной
стороны вдоль каждой направляющей расположена лестница 7. используемая
при закреплении или снятии башмаков. Горизонтальная плита 1 служит ос-
нованием для крепления к ней нижних концов штоков 5 цилиндров 13 гидро-
системы. Сами цилиндры валиками И шарнирно укреплены внутри каретки.
С внутренней стороны стойки на пальцы 10 надевается консоль с двумя роли-
ками для перетяжки фермы.
Каретка (рис. 6.22, б) состоит из четырех швеллеров 1, сваренных
с двумя стальными листами 2, образуя пустотелую коробку. Внутри последней
расположены цилиндры 3. С наружной стороны к каждой каретке приварена
рейка 7 с храповыми зубьями. В рабочем положении каретка удерживается
собачкой, шарнирно закрепленной в одной из направляющих стойки. Для
189
Рис. 6.22. Схемы
а—стойка крана: б каретка крана
опускания фермы собачка выводится из зацепления с зубьями рейки. Каретки
внутри стойки направляется приливами 4, приваренными с обей к сторон ниж-
ней части каретки. Каретка соединяется с фермой балансиром 5, укреплен-
ным на оси 6. На концах опорных балок фермы имеются опорные башмаки,
соединяющиеся в замок с балансирами кареток. При этом башмак опорной бал-
ки охватывает выступ балансира каретки. От продольных перемещений фер-
ма удерживается болтами, ввернутыми в опорную балку и заходящими в паз ба-
лансира. Доступ к пробкам 8 для выпуска воздуха из гидравлических цилин-
дров обеспечивается через три отверстия с лицевой стороны каретки.
Г и;д равлическая система. Для подъема фермы крана в
верхнее рабочее и опускание ее в иижнее транспортное положения предназ-
качена гидросистема, состоящая из двух
одинаковых комплектов оборудования соот-
ветственно для правой и левой сторон ма-
шины. В комплект гидросистемы (рис. 6.23)
входят насос 1, масляный бак 11, золотни-
ковый распределитель 8, разгрузочно-предо-
хранительный клапан 12, манометр 7, до-
затор (делитель потока) 9, шесть гидравли-
ческих цилиндров 10 и маслопроводы 2.
Все части гидросистемы, кроме цилиндров,
расположены под рамой платформы. Порш-
невой насос 1 посредством муфг втулочно-
пальциевой 3, зубчатой 4 и цепной пере-
дачи 5 соединен с электродвигателем 6 ле-
бедки для передвижения пакетов. Включе-
Рис. 623. Схема гидравлической си-
стемы
190
иие и выключение насоса осуществляются зубчатой муфтой посредством ры-
чага, что обеспечивает раздельную работу гидросистемы и лебедки. Для пре-
дупреждения повышения давления в системе свыше 8,5 МПа предусмотрен
разгрузочно-предохранительный клапан, через который масло сливается в
бак, минуя золотниковый распределитель.
На рнс. 6.23 применены обозначения: Б— бак; И— насос; МН —мано-
метр; Н—цилиндр; ДП — дозатор; Л77 — разгрузочно-предохранительный
клапан.
Золотниковый распределитель (рис. 6.24) служит для распределения по-
тока масла по одному из трех направлений: от насоса в бак, от насоса в ци-
линдры и из цилиндров в бак. Для уменьшения количества маслопроводов рас-
пределитель укреплен непосредственно иа баке и сообщается с последним ка-
налами. В корпус 7 распределителя ввернуты штуцеры 3 и 6 для подвода
масла от насоса и подачи его в цилиндры. Внутрь-корпуса запрессована гиль-
за 2 с кольцевыми выточками, образующими полости А, Б, В и Г. Выточки А
и Г постоянно сообщаются с баком, выточка Б — со штуцером 6, а, следова-
тельно, с цилиндрами, выточка В — со штуцером 3 и тем самым с насосом.
К внутренней поверхности гильзы 2 притерт трехсекционный золотник 4.
Сверху гильза закрыта глухой крышкой 5, а снизу — крышкой 7 с уплотне-
нием. На иижнюю часть золотника навинчена вилка 9. В нейтральное поло-
жение золотник устанавливается автоматически под действием пружины и ша-
рикового фиксатора 11. Для предохранения золотника от пыли есть защитный
кожух 8.
Золотник устанавливается в требуемое положение рукояткой управле-
ния 10. При нейтральном (среднем) положении (рис. 6.24, а) масло, поступаю-
щее из насоса, перетекает из полости В в полость Г, т. е возвращается в бак.
Для подъема фермы рукоятку управления надо приподнять. В этом случае зо-
лотник перекрывает выточки А и Г (рис. 6.24, б), а выточки В и Б оказывают-
ся сообщенными между собой, и масло, подаваемое насосом, поступает в ци-
линдры, Для опускания фермы рукоятка управления переводится в нижнее
положение, золотник перекрывает выточку В (рис. 6.24, в), а выточки А и Б
Рис. 6.24. Золотниковый распределитель
191
оказываются сообщенными между собой. Масло выдавливается из цилиндров
весом фермы и через выточку А возвращается в масляный бак. При подъеме или
опускании фермы рукоятку управления необходимо удерживать до полного
окончания работы, в противном случае она под действием пружины устанавли-
вается в нейтральное положение, н работа прекращается
Для управления правой и левой сторонами укладочного краиа предназ-
начены раздельные гидросистемы, поэтому работа по подъему и опусканию фер-
мы должна вестись одновременно двумя золотниковыми распределителями, уп-
равляемыми машинистом и его помощником. Для равномерного распределения
масла, поступающего в цилиндры гидросистемы, предназначен дозатор, пред-
ставляющий собой шестеренный насос. В его корпусе расположены три одина-
ковые цилиндрические шестерни, находящиеся между собой в зацеплении и
свободно посаженные на осях. Корпус имеет три штуцера: к одному из них под-
водится масло от золотникового распределителя, а два других подают его к
цилиндрам двух противоположных стоек крана. При нагнетании масла в ци-
линдры шестерни дозатора, вращаясь с одинаковой скоростью, подают впади-
нами зубьев одинаковые порции масла в цилиндры правой и левой сторон кра-
на, осуществляя этим подъем фермы без перекосов. При вытеснении масла из
цилиндров при опускании фермы происходит вращение шестерен дозатора в
обратную сторону. Дозаторы укреплены на шкворневых балках платформы;
для их обслуживания в настиле платформы предусмотрены люки.
Конструкция цилиндров и схема их работы приведены на рис. 6 25. Вну-
три каждой каретки днищем вверх расположены три гидроцилиндра Ци-
линдр 1 состоит из трубы и стального корпуса, сваренных между собой. Кор-
пус разъемный, соединенный болтами 5. Цилиндр посредством валика 4 и на-
детой на него сферической втулки соединен с кареткой. Для удаления воздуха
из гидросистемы в цилиндре есть пробка 3 Цилиндры являются подвижными
частями, тогда как поршни —
неподвижными. Своим основа-
нием поршни 2 укреплены к
продольной балке стойки. Каж-
дый поршень состоит из диска,
большой и малой труб и отлив-
ки со сферическим днищем Ма-
лая труба служит маслопрово-
дом, а большая — направляю-
щей для цилиндра Уплотнение
цилиндра выполнено в виде че-
тырех резиновых манжет 6, удер-
живаемых нажимным кольцом
7, ввинченным в цилиндр. Дни-
ще поршня при креплено к плите
12, приваренной к балке стойки,
и удерживается двумя планками
11. Сферическая форма днища
поршня и втулки цилиндра до-
пускает их некоторый перекос
при подъеме фермы. К штуцеру 13
подводится маслопровод от насо-
са. В днище поршня имеется ряд
вертикальных и горизонтальных
каналов, в одном из которых ус-
тановлен клапан 14, прижима-
емый к седлу пружиной 8, а в
Рис, 6 25. Схема работы цилиндров
другом — регулировочная игла Р, прикры-
ваемая колпачком 10. При подъеме фермы
в рабочее положение масло от насоса по-
ступает через дозатор к штуцеру 13. Под
давлением масла клапан 14 отжимается от
седла, и по малой трубе масло попадает в
цилиндр. Увеличение количества масла в
цилиндрах вызывает их подъем вместе с
каретками. Опускается ферма под дейст-
вием своего веса при нижнем положении
золотника распределителя. В ЭТОМ случае Рис. 6.26. Кинематическая схема гру-
путь масла по каналахМ иной, чем при зовой лебедки
подъеме фермы. Давлением масла и дружи- '
ны клапан 14 прижимается к седлу, закрывая выход масла к дозатору. При
этом масло проходит по нижнему горизонтальному каналу, частично перекры-
ваемому иглой, по вертикальному каналу подходит к штуцеру 13 и через доза-
тор и распределитель поступает в бак. Регулировочная игла 9 обеспечивает ре-
гулирование скорости опускания фермы; она позволяет добиться равномерно-
го опускания цилиндров левой и правой сторон краиа.
Крановое оборудование состоит из грузовой и тяговой лебедок, двух гру-
зовых тележек, тросо-блочного оборудования, ограничителей подъема, огра-
ничителей хода грузовых тележек, канатных поддержек и грузозахватных
траверс.
Грузовая лебедка предназначена для подъема и опускания зве-
на рельсо-шпальной решетки. Она смонтирована на плите и укреплена бол-
тами к ферме крана. Лебедка (рис. 6.26) состоит из электродвигателя 1 типа
Д-806 мощностью 32 кВт с частотой вращения 900 об/мин, зубчатой муфты 2,
трехступенчатого цилиндрического редуктора 3 с передаточным числом i =
— 16,3, на выходном валу которого укреплены два барабана 4 и 5 с канавка-
ми. Ведущий вал редуктора имеет тормозной шкив 6 двухколодочного электро-
магнитного тормоза с грузовым замыканием. Благодаря небольшой разнице
диаметров барабанов стыкуемый конец звена опускается быстрее, что облег-
чает его укладку.
В зависимости от того, работает ли кран с 25-метровым звеном с деревян-
ными или железобетонными шпалами, применяют соответственно двух- или
четырехкратный полиспаст. В первом случае скорость подъема груза состав-
ляет 0,416 м/с, а во втором — 0,208 м/с, что соответствует технической произ-
водительности крана 1000 или 750 м/ч На рис. 6.27 изображена схема запа-
се в ки грузовых канатов при четырехкратном полиспасте. Одни концы грузо-
вых канатов 2 и 4 закреплены на барабанах 3 и 6, затем они последовательно
огибают отклоняющие блоки 1 на конце фермы крана, неподвижные блоки 5,
установленные на грузовой тележке, подвижные блоки 8 грузозахватной тра-
версы 9, концевые блоки 17 иа другом конце фермы и вторыми своими концами
крепятся к балкам 16, присоединенным к ограничителям грузоподъемности 15.
При наматывании грузовых канатов на барабаны происходит подъем звена,
а при сматывании — опускание.
Тяговая лебедка (см. рис. 6 28) служит для передвижения гру-
зовых тележек вдоль фермы крана из одного крайнего положения в другое,
что позволяет выносить звено с платформы с укладкой его в путь или собирать
старогодные звенья с укладкой их на платформу крана
Тяговая лебедка, как н грузовая, смонтирована на собственной раме, при-
крепленной болтами в средней части фермы крана Обе лебедки расположены
таким образом, что пульт управления ими расположен между ними. Лебедка-
ми управляет кранооператор с верхнего поста управления..
7 Зак 47
193
Рис. 6.27. Схема запасовкп грузовых и тяговых кранов УК-25/9-18
Схема запасовки тяговых канатов приведена на рис. 6.27. Кинематически
тяговая лебедка состоит нз тех же узлов, что и грузовая, т. е. электродвигателя
4 типа Д-41 мощностью 24 кВт при частоте вращения 970 об/мин, зубчатой
муфты 3, трехступенчатого цилиндрического редуктора 2 с передаточным чис-
лом i — 25,2, двухколодочного нормально замкнутого грузового тормоза 1
с электромагнитным выключением и двух барабанов 5 н 6 с канавками. В от-
личие от грузовой лебедки оба барабана имеют одинаковый диаметр, равный
700 мм. Однако конструкция обоих барабанов различная: барабан 5 выполнен
цельнолитым и крепится на ведомом валу лебедки на шпонке; барабан 6 сбор-
ный. В качестве ступицы барабана использовано храповое колесо 8, закреплен-
ное на том же валу шпонкой. В теле диска барабана 6с внутренней стороны сде-
ланы шесть пазов под собачки 7 храпового устройства. Последние пружинами
постоянно прижаты к зубьям храпового колеса. С обеих сторон храповой ме-
ханизм ограничен двумя дисками 9, соединенными болтами с барабаном 6.
Рис. 6.28 Тяговая лебедка
194
Рис. 6.29. Грузовая тележка
Наличие храпового устройства внутри барабана необходимо для натяжения
тягового каната при его удлинении.
Перемещение грузовых тележек вдоль фермы осуществляется тяговой ле-
бедкой с барабанами 12 и 13 (см. рис. 6.27) посредством трех тяговых канатов
10, //и 14, два из которых огибают концевые блоки 7 и 18 фермы. Концы кана-
тов 11 и 14 закрепляются на барабанах с различных сторон, поэтому при вра-
щении вала барабанов один конец каната свивается с барабана, а другой нави-
вается.
Грузовая тележка (рис. 6.29) несет неподвижные блоки гру-
зового полиспаста, поддерживающего траверсу со звеном. Рама тележки со-
стоит из двух сварных боковин 1, соединенных болтами с распорными втулка-
ми. В средней части тележки на осях 5 на подшипниках попарно посажены бло-
ки 6. По концам рамы с обеих ее сторон на осях 3 укреплены балансиры 2
с безребордными опорными катками 4, которыми тележка передвигается по
нижним полкам главной балки фермы. Для лучшего направления тележки
вдоль балки с обеих сторон боковин укреплены кронштейны 8, в которых на
осях укреплены безребордные ролики 9. Для разведения балок канатных под-
держек в стороны для прохода через них в нижней части боковин тележки при-
варены направляющие лыжи 7, а для воздействия на конечные выключатели
ограничителей хода тележки верхние части боковин снабжены планками, су-
жающимися по концам. Тяговые канаты коушами 10 крепятся на втулках
крайних болтов, скрепляющих боковины.
Траверса (рис. 6.30) для крана служит грузозахватным устройст-
вом. Она представляет собой коробчатую балку 2, по концам которой шарнир-
но укреплены две поперечные полуавтоматические траверсы 1 и 5 с клещевы-
ми захватами, а для подвешивания к ферме крана—подвижные блоки 3 гру-
зового полиспаста, свободно посаженные на осях 4. Траверсы обеспечивают
полуавтоматический захват головок рельсов типов Р50, Р65 и Р75. Конструк-
цию и работу траверс можно проследить по рис. 6.30, б, в. Внутри коробча-
той балки 1 расположены две пары челюстей 2 для захвата головок рельсов
Рис. 6.30. Траверса УК-25/9-18
7* 195
звена, два стопора 8 с коленчатыми рычагами 9 и противовесами 10, рукоятка
15 для ручного освобождения стопоров, рукоятка 14 с тягой 12 для выключе-
ния замковых рычагов 6, стержни 5, соединенные с челюстями и толкателем 3,
опирающиеся на головки рельсов. Для управления двумя стопорами от одной
рукоятки предусмотрена рычажная передача, имеющая три кан'атика И и
двуплечий рычаг 13. За счет пружины 7 замковые рычаги 6 постоянно прижаты
к большему или меньшему диаметру стержней 5. При опускании траверс на
звено за счет веса грузозахватного устройства челюсти траверс разводятся в
разные стороны, рукоятка 15 запирается в крайнее правое положение, при этом
оба стопора 8 устанавливаются в выключенное положение. При поднятии тра-
верс грузовыми канатами челюсти надежно захватывают головки рельсов зве-
на. Для раскрытия челюстей и снятия траверс со звеиа его опускают до со-
прикосновения с балластом или звеном, рукоятки 14 перемещают вправо, а
затем отпускают, рукоятку 15 перемещают влево. Тогда за счет противовесов
10 стопоры 8 выдвигаются в наружные стороны и удерживают челюсти от за-
крывания при последующем поднятии траверс.
Ограничители подъема (рис. 6.31) предохраняют ферму
крана и грузоподъемное оборудование от перегрузок. На кране установлено
два ограничителя подъема, неподвижно укрепленных на ферме над стойками
крана. Основой прибора служат два цилиндра 6, расположенных по вертика-
ли. В них вставлены пружины 7, один конец которых неподвижен, а другой
соприкасается с упорной шайбой 5. Пружина сжимается на расчетное усилие
фланцем 2 и тремя болтами 1. К упорной шайбе с помощью гайки 3 и полусферы
4 присоединена тяга 8, выходящая за пределы цилиндра. К двум таким тягам
валиками 9 и 10 крепятся серьги И с прикрепленным к ним при помощи паль-
ца 12 и коуша 13 концом грузового каната Когда кран поднимает звено с
железобетонными шпалами, нагрузка от каната равномерно распределяется
на оба цилиндра. Если кран работает с деревянными шпалами, то верхний ва-
лик 9 снимают и тогда усилие каната приходится только на нижний цилиндр.
В нижних цилиндрах обоих ограничителей подъема выфрезерованы пазы,
через которые в упорную шайбу завинчивается палец 16. На палец надета рей-
ка 20, находящаяся в зацеплении с шестерней 15, укрепленной на валу 14 в
корпусе привода конечного выключателя. На выходной конец вала насажен ры-
чаг 17, касающийся ролика 18 конечного выключателя 19. Ограничители подъе-
ма регулируют таким образом, чтобы при подъеме груза каждой тележкой,
равной 11 700 кг, происходил разрыв электроцепи в конечном выключателе и
электродвигатель грузовой лебедки выключался. Если кран работает на гру-
зоподъемность до 9 т, пружины цилиндров регулируют на грузоподъемность
Рис. 6.31. Ограничитесь подъема
196
каждой тележки в 5500 кг. После окончательной регулировки ограничителя
подъема передние крышки корпусов и рычаги пломбируют. Производить
подъем груза с отключенным или неправильно отрегулированным ограничи-
телем подъема запрещается.
Канатные поддержки (рис. 6.32) предназначены для умень-
шения провисания канатов. Они равномерно расположены вдоль всей фермы.
Каждая из шести пар поддержек представляет собой изогнутые в нижней ча-
сти рычаги /, шарнирно прикрепленные своей верхней частью осями 7 к кор-
пусу 8. Последний болтами прикреплен к главной балке 4 фермы. В корпус
свободно вставлен направляющий стакан 9, соединенный с рычагом при помощи
валика 6. Рычаг в месте соединения с корпусом имеет форму рамки. Для воз-
можности соединения стакана с рычагом в корпусе под валик выфрезерованы
пазы. Снаружи корпус заканчивается резьбой, иа которую навинчен колпак
5. Пружина 10, расположенная между стаканом и колпаком, прижимает оба
рычага друг к другу. Изогнутая часть рычагов несет на себе подушки 2 нз
алюминиевого сплава. Они и поддерживают канаты. Подушки обоих рычагов
соединяются в замок, что исключает заклинивание канатов между ними.
При подходе крановой тележки к канатной поддержке направляющие лыжи
тележки, воздействуя на ролики 3, разводят рычаги поддержки в противо-
положные стороны, пропуская тележку, после чего пружины возвращают их
в исходное положение. На рисунке тонкой линией изображены рычаги, раздви-
нутые в стороны, а контуром — исходное положение рычагов.
Ограничители хода грузовой тележки, Они уста-
новлены по обоим концам фермы и предназначены для отключения электро-
двигателя тяговой лебедки при подходе тележки к крайнему положению. Лы-
жа рамы тележкн при подходе к ограничителю нажимает на концевой упор,
заходящий внутрь балки фермы и, выдвигая его, воздействует на рычаг конеч-
ного выключателя. Последний размыкает цепь контактора, тем самым разры-
вая цепь электродвигателя тяговой лебедки. Движение тележек в обратном на-
правлении осуществляется реверсированием двигателя лебедки.
Крепление фермы и ее перетяжка. В транспортном
положении ферма установлена симметрично относительно средней оси фермы
и опирается на четыре откидные балки. В рабочем положении она опирается
на каретки стоек в четырех точках, при этом две передние опоры на ферме яв-
ляются балками средней части, которые жестко приварены к ферме, а две
другие задние опоры являются откидными балками. Наличие на ферме восьми
откидных балок и четырех опор позволяет выдвигать ферму в одну или другую
сторону и устанавливать ее в среднее положение. На концах откидных балок
197
имеются опорные башмаки, которые при соединении с балансирами кареток
закрепляются от вертикальных перемещений в замок. Закрепление фермы от
продольных перемещений на каретках осуществляется специальными болта-
ми Устройство для передвижения фермы состоит из четырех консольных ба-
лок, постоянно установленных на каретках стоек. На каждой консольной бал-
ке имеется балансир с двумя ребордчатыми роликами, на которые опирается
ферма крана при ее перекатывании. Передвижение фермы производится толь-
ко прн опущенном положении фермы.
Взаимное положение различных узлов при перетяжке фермы / показано
на рис. 6 33 Для перетяжки крановые тележки 3 и 5 устанавливаются в такое
положение, при котором дополнительный канат 6 мог бы быть закреплен за
одну из консольных балок 2 или 7, затем вывинчивают стопорные болты от-
кидных балок и включают в работу тяговую лебедку 4. При этом ферма начи-
нает поступательно перемещаться в нужную сторону до тех пор, пока соот-
ветствующие опорные башмаки не дойдут до балансиров кареток крана. В этом
положении ферму необходимо снова закрепить болтами.
Управление краном осуществляется с двух постов: нижнего и верхнего.
Нижний пост управления аналогичен посту управления .моторной платформы.
Дополнительно здесь установлен рычаг управления золотниковым распреде-
лителем гидравлической системы. Верхние посты расположены по обеим сто-
ронам средней части фермы. Управление грузовой и тяговой лебедками контрол-
лерное, при помощи двух рычагов с цепными передачами. Сигнал при работе
подается нажатием кнопки. Напротив сиденья кранооператора на ферме рас-
положен щиток приборов, на котором размещены выключатель осветительных
ламп пульта управления, кнопка «Пуск», амперметр, вольтметр, рубильник,
выключатели освещения фронта работ и предохранители.
Ниже приведены технические характеристики укладочных кранов:
Параметры У К-25/9 УК-25/9-18
Производительность, м/ч 1000 750 1000
Длина звена, м 25,0 25,0
Грузоподъемность крана, т Мощность двигателя силовой установки при 9 18
1500 об/мин, кВт 110,4 121,4
Мощность генератора, кВт Скорость, м/с. 100 100
подъема груза 0,3 0,208—0,416
передвижения крановой тележки 1,5 1,5
Давление в гидросистеме, МПа .... 8,5 9,5
Число подъемных цилиндров, шт. . . 12 12
Высота подъема, мм Скорость передвижения крала, км/ч- 1540 1540
рабочая . ... . . 5 5
транспортная .... ... 70 80
Масса крапа, т 78 Ю2
Обслуживающий персонал, чел 3 2
Порядок расчета мощности двигателей крановых механизмов укладочного
крана можно проследить на следующих примерах:
198
Пример 1. Провести расчет грузовой лебедки УК-25 9-18. Вес звена G~ 1,8 X
X 105 Н; скорость подъема v — 0,2 м/с; число полиспастов два; кратность полиспаста
in -- 4; режим работы тяжелый (л = 6).
Усилие в одной ветви каната, Н,
Разрывное усилие в канате, Н,
Sp = Sn = 22 500 6 = 135 • 103.
По ГОСТ 3070—74 данному усилию соответствует канат
17,5- 1-Л-К-Н-150.
Диаметр грузового барабана, мм
Дб — edK — 20 17,5 = 350 мм.
Частота вращения вала барабанов, об/мин,
60+п 60-0,2-4
«б —---------------------— 44.
лДб 3,14-0,35
Мощность двигателя, кВт,
„ 1,8-105.0,2
N =----------= —---------— —39,2,
100011 1000-0,9
где т) — к.п.д. лебедки, принимаем 0,9.
Подбираем по каталогу электродвигатель Д-806 при ПВ 15%, частота вращения
пп 900 об мин. Общее передаточное число редуктора i — — 900/44 — 20.
Дальнейший расчет ведется по курсу «Детали машин».
Пример 2. Провести расчет тяговой лебедки УК-25/9-18. Вес звена G = 1,8 106 Н;
траверсы — 2,3 • 104 Н; тележек G2 ~ 7,4 • 103 Н; скорость передвижения звена v —
— 1,5 м/с; диаметр колес тележек Д = 15 см; диаметр цапф колеей = 4 с.м; коэффициент
трения качения р = 0.06 см; коэффициент трения скольжения f = 0,01; коэффициент
трения реборд — 1,5; угол наклона пути а — 0°42'.
За расчетное положение принимаем случай выноса краном верхнего звена пакета.
-Определяем сопротивление перемещения тележек с. грузом, Н,
/ d \
2(G- G, + G2) 1р + / —
W i — ~~ “г (Gj G2) tg a —
2(1,8-105-!-2,3-104 + 7,4-103) / n 4 \ e
= —'---------i ------------------ 0,06 + 0,01 — 1,5+
la \ 2 )
+ (l,8-1054-2,3-104) 0,012 = 5790.
Определяем сопротивление трения грузового каната, Н,
G4Gt/tt , . l,8-10s+2,3-10-‘ , 1П . .
-----------------------------(ft"-’ — l)-—:-------------1— - (KOI10-1- l)=4560,
fn-----------------------------------4
где k — коэффициент трения в блоке (k = 1,014-1,02);
п — число вращающихся блоков при движении тележек. Находим сопротивление
натяжения каната, Н,
<71
где qt — вес 1 м каната;
/к— длина-провисающего каната, м,
/к = 4,7;
3 8ft
h = ~) + = —!— 4,7-—0,047 м.
50 ' 100 / ь 100
Для каната dK = 13 мм, qx — 5,9 Н/м, тогда
5 9-4,72
:— = 34,5 Н.
3 8-0,047
199
3,14-0,7
11140-1,5 п
-----------=. 19 2 кВт.
1000-0,85
Определяем сопротивление трения концов звена о пакет, Н,
где <?2 — вес 1 м звена (q2 ~ 7200 Н/м);
/г — расстояние от места захвата звена до его конца (1г — 7,0 м);
— коэффициент трения бетона по стали = 0,015).
Тогда
W4 = 7200 • 7 • 0,015 = 756 Н.
Общая величина сопротивления при установившемся движении, Н,
W = + W2 + W3 + W4 = 5790 + 4560 + 34,5 + 756 = 11 140.
Подбираем тяговый канат
Sp = Wn = 11 140 6 = 66 840 Н = 66,84 кН
по ГОСТ 3070—74, этому усилию соответствует канат 13-1-Л-К-Н-130.
Диаметр барабанов
Да — edK — 20 • 13 — 260 мм;
принимаем Да ~ 700 мм.
Частота вращения барабанов
60о 60-1,5
«б =-----------------...........
л Да
Мощность двигателя составит
Wv
N--------
10001]
По каталогу подбираем электродвигатель Д-41 при ПВ 25 %, частота вращения
п9 — 970 об/мин.
Передаточное число редуктора i — njna = 970/40 — 25. Далее расчет ведут по
курсу «Детали машин».
6.3.3. Подвижной состав для перевозки пакетов
Пакеты рельсовых звеньев перевозят на железнодорожных платформах,
снабженных роликовым конвейером н съемным оборудованием При погрузке
25-метр о вых звеньев с деревянными шпалами нижнее звено пакета укладывают
на четыре лыжи, устанавливаемые на ролики конвейера, или нижнее звено
переворачивают шпалами вверх, а рельсами иа—ролики На концы рельсов
в этих случаях по направлению перетяжки пакета устанавливают'наконечники-
направители Остальные звенья в пакете грузят шпалами вниз.
Число звеньев с деревянными шпалами в одном пакете зависит от того,
электрифицирован данный участок или иет. На неэлектрнфицированном уча-
стке при рельсах типов Р50, Р65, Р75 оно не должно быть более семи. На элек-
трифицированном участке в пакете не допускается более шести звеньев с рель-
сами Р50 и пяти звеньев с рельсами Р65 и Р75
Число звеньев с железобетонными шпалами в одном пакете независимо от
тина участка допускается при рельсах Р50 ие более пяти, при рельсах Р65
и Р75 — ие более четырех Звенья длиной 25 м с железобетонными шпалами
переворачивать нельзя Для закрепления пакетов рельсовых звеньев на плат-
формах предназначены съемные и несъемные устройства. В первом случае оба
торца пакета (рис 6 34, вид А—А) закрепляют стяжками 1 и 2 На пакетах,
погруженных на лыжи 7, торцовые стяжки / и 2 крепят к подошвам рельсов
иижнего звена за хватами И и 12, а иа пакетах с перевернутым нижним звеном —
к подошвам рельсов второго снизу звена За головку рельса верхнего зве-
на пакета стяжки закрепляют крюкамн 9 и 10 с гайками для натяжения стя-
жек Кроме того, пакет закрепляю-! промежуточными стяжками 5 иа одной из
платформ сцепа Нижний конец каждой промежуточной стяжки (вид - Б)
200
Пакет звеньев длиной. 25 м
Рис 6.34. Съемное устройство для закрепления пакетов рельсовых звеньев
закрепляют за скобу платформы, а верхний — за головку рельса при помощи
крюка 9. Торцовые 1 и 2 и промежуточные 5 стяжки удерживают звенья па-
кета от боковых смешений. От продольных перемещений пакет предохраняют
тиски 8, установленные на платформе на средних опорах роликового конвейе-
ра. Тисками пакет закрепляют на тон же платформе, где устанавливают про-
межуточные стяжки 5. При отсутствии тисков допускается закреплять каждый
пакет по обоим ею концам шпальными выкладками 3. Последние состоят из
одной шпалы, уложенной поперек, и двух шпал, уложенных вдоль платфор-
мы. Для одновременной перетяжки двух-трех пакетов звеньев их соединяют
межпакетными соединительными звеньями 6. Для предотвращения падения
шпал при движении между двумя платформами устанавливают две предохра-
нительные скобы 4. Пакет рельсовых звеньев длиной 12,5 м на одной платформе
закрепляют также, но устанавливают только две торцовые стяжки / (вид В).
В комплект съемного и несъемного оборудования входят стьгкователн рельсо-
вых звеньев.
На концах рельсов каждого укладываемого звена устанавливают два вре-
менных стыкователя.Лыжа стыкователя направляет рельс укладываемого зве-
на и обеспечивает безопасный проход рабочего состава через стык. После ук-
ладки новых рельсовых звеньев и прохода путеукладочного поезда стыковате-
тели заменяют накладками.
Унифицированное несъемное оборудование (рнс. 6.35) состоит нз двух
порталов 3 и 7, укрепленных на раме платформы 5 хомутами 4, ограничитель-
Рис. 6 35. Унифицированное несъемное оборудование
201
ных цепей 2, съемных упоров 1 и лестниц 6 для поднятия на платформу. Пор-
талы не дают рельсовым звеньям перемещаться в поперечном направлении,
упоры удерживают пакет от продольного перемещения, а ограничительные
цепи являются страхующим элементом в случае, если упор не удержит па-
кет. Порталы 3 и 7 представляют собой замкнутую сварную раму, состоящую
из двух стоек, верхней арки и нижней рамы с укрепленными на ней основа-
ниями для крепления рельсов и упоров. Ограничительные цепи 2 поддерживают
шпалы верхнего звена от смещения вперед при торможении, а также предот-
вращают падение концевых шпал в случае их отрыва от рельсов при пере-
возке Верхний конец цепи 2 через амортизатор 3, состоящий из резиновых
пластин, крепится к арке портала, а нижний забрасывается за пакет, натяги-
вается и закрепляется в нижней части стойки арки.Съемный упор / служит для
удержания рельсового пакета в звеньях от продольных перемещений при голи-
ках и торможении поезда. Упор состоит из двух кронштейнов, на осях которых
закреплен корпус. Внутри его расположены резиновые пластины и шток.
Корпус может находиться в верхнем рабочем положении, когда поддерживает-
ся складывающимся рычагом Р, или в нижнем (нерабочем).
При перетяжке пакетов звеньев рычаг складывают, корпус под действием
своего веса опускается и пакет свободно проходит над упором. Для поднятия
корпуса в рабочее положение достаточно ломиком поддеть рычаг. При этом
перемещение пакета исключается Для 25- и 12,5-метровых звеньев упоры раз-
мещают на платформе на различном расстоянии. Унифицированным оборудо-
ванием может быть перевезено семь 25-метровых звеньев с деревянными шпа-
лами и рельсами Р43 и Р50; шесть 25-метровых звеньев с деревянными шпа-
лами и рельсами Р65 или пять звеньев длиной 12,5 м с железобетонными шпа-
лами и рельсами Р50 и Р65. Скорость следования состава, груженного паке-
тами звеньев, по прямым участкам пути н кривым радиусом /? 600 м и бо-
лее до 80 км/ч
6.4. МЕХАНИЗАЦИЯ УКЛАДКИ И РЕМОНТА БЕССТЫКОВОГО ПУТИ
6.4.1. Механизация укладки рельсовых плетей
бесстыкового пути
Прн укладке бесстыкового пути в СССР используют рельсовые плети дли-
ной 800 и 400 м, между которыми укладывают три-четыре уравнительных
рельса.
Укладку бесстыкового пути ведут в две стадии: сначала укладывают сты-
ковой путь с инвентарными рельсами, после его обкатки и стабилизации внутрь
колеи выгружают рельсовые плети.
При закрытом перегоне в «окно» снимают инвентарные рельсы и на их
мес'ю надвигают ранее выгруженные плети. Последние сваривают из стандарт-
ных рельсов на рельсоварочных предприятиях и транспортируют к месту
укладки на специальном составе из 79 двухосных плач форм, на которые одно-
временно грузят 12 плетей, размещая каждую из них на ребордчатых роли-
ках, прикрепленных к полу платформы. Передняя платформа имеет устройст-
во для закрепления плетей, а задняя — кабину для обслуживающего персона-
ла, поднятую нал платформой, чтобы не препятствовать погрузке и выгрузке
рельсов. При выгрузке на перегоне (рис. 6.36) концы рельсовых плетей /
при помощи канатов заякореваютза существующий путь, при движении со-
става стягивают с него и по наклонным желобам в полу последней платфор-
мы 3 и тележки 2 плавно опускают внутрь колеи.
Лежащие в пути инвентарные рельсы заменяют путеукладчиками в «ок-
но» с использованием навесного приспособления к крану или с помощью сала-
202
Рис I) 3b Выгр\ jha рельсовых iйен и
Рис 6 37. Смена инвентарных рельсов рельсовыми плетями
2ПЗ
Рис. 6.38 Салазки для укладки плетей
зок, буксируемых моторной плат-
формой или краном. В первом
случае плети 6 захватываются
двумя роликовыми клещами 4,
соединенными поперечиной 5 и
подвешенными на тягах 3 к фер-
ме / укладочного крана (рис.
6.37). Для сохранения постоян-
ного расстояния между ролико-
выми клещами н краном служит
канат, прикрепляемый одним
концом к раме клещей, а дру-
гим— к автосцепке крана. Кра-
новые тележки н грузозахват-
ные траверсы при этом свобод-
ны и ими можно забирать инвен-
тарные рельсы 2 и грузить их на
платформу крана. При движе-
нии укладочного крана задним
ходом для погрузки очередной
пары инвентарных рельсов тяго-
вый канат увлекает за собой ро-
ликовые клещи, благодаря чему
плети, раздвигаясь на ширину
колен и опускаясь, укладываются на подкладки пути, а затем закрепляются.
Во втором случае приспособление выполнено в виде салазок (рнс. 6.38).
Они состоят из двух уголков 5, к которым приварены кускн старогодных рель-
сов 4. Последние служат основанием для двух пар ребордчагых роликов /,
одна нз которых сдвигает подлежащие замене инвентарные рельсы внутрь
колеи, а другая надвигает плети на подкладки. Перед роликами смонтировано
специальное устройство — скалыватель 6 -для снятия прокладок, пристав-
ших к подошве рельса Треиие салазок о подкладки уменьшается благода-
ря смазке, поступающей нз двух бачков 7. Салазки снабжены также дополни-
тельными роликами: натяжными 2, предохранительными 3 и обводными 8
При помощи стального каната приспособление передвигается по подкладкам
со скоростью 1—2 км ч Салазки перевозят на перегон ня платформе прикры-
тия укладочного крана Этим же краном их снимают и заряжают. Укладочный
кран, передвигаясь по только что уложенным плетям, убирает инвентарные
рельсы.
Для сокращения числа предоставляемых «окон», повышения производи-
тельности и эффективности работы необходимо иметь техническое средство,
способное разбирать и укладывать бесстыковый путь не в два этапа, как опи-
сано выше и как это делается, а в одни, т. е. в одно «окно». Над этим работают
проектные организации.
6.4.2. Машина ШПМ-02/МГ
Самоходная машина ШПМ-02/МГ (рис. 6.39) непрерывного действия (пу-
тевой моторный гайковерт на базе ШПМ-02) предназначена для закрепления
и смазки клеммных и закладных болтов пути с рельсами Р50, Р65 и Р75 и со
скреплениями К-2, Д-2, ЖБ и КБ.
Рама 19 машины опирается на две колесные пары: переднюю 14 (ведущую)
и заднюю 20 (поддерживающую). На заднем конце рамы установлен дизель 1
типа У2Д6, приводящий в движение как саму машину в транспортном режиме,
204
так и основные рабочие органы — грехшпиндельные гайковерты //. устано-
вленные на блоке 6 В средней части рамы размещены гидродвигатель /7,
червячный редуктор 16 с, цилиндрической парой передач, центральный и угло-
вые редукторы 18, коробка передач, а также компрессор пнев.мосистемы.
В передней части машины расположены правый и левый блоки-гайковерты,
приводимые в действие от угловых редукторов 18, карданных 15 и трансмис-
сионных 7 валов. Блоки снабжены четырьмя гайковертами, каждый из которых
приводятся во вращение от своего маховика через карданный вал 8. Установ-
ка блоков-гайковертов в нужное положение обеспечивается копирами 13,
снабженными горизонтальным роликом 12, контактирующим с рельсом.
Подъем и опускание блоков осуществляются пневмоцилиндрамн 5, установ-
ленными на каркасе рамы машины. В головной части расположено два ком-
плекта щеток 9, приводимых в движение от гидродвигателя 10. Они очищают
скрепления от загрязнителей.
Гидрооборудование машины состоит из двух автономных гнидросистем
объединенных общим баком: одна предназначена для обеспечеия рабочего,
хода машины с заданной скоростью, другая — для привода щеток и нх уста-
новки в рабочее или транспортное положение. К правому угловому редуктору
прифланцован редуктор 3 привода гидронасоса. Управляют машиной из каби-
ны 4. Оборудование защищено от воздействия атмосферных осадков крышей 2
На дальние расстояния машину транспортируют на железнодорожной плат-
форме.В случае неисправности ее прицепляют тягой к локомотиву и убирают
с перегона.
Экипажная часть машины включает раму, кузов, колесные пары, гидрав-
лический тормоз с ножным и дистанционным управлением и ручной тормоз.
Кинематическая схема машины представлена на рис. 6.40. Силовой при-
вод машины осуществляет передачу крутящего момента от двигателя 1 к
ведущей колесной паре 13, компрессору 4, маховикам гайковертов первого 23
и второго 22 рядов, гидронасосам 14, а также от гидродвигателя 10 к ведущей
колесной паре 13. При транспортном режиме последняя получает вращение
по следующей кинематической цепи: двигатель 1 — карданный вал 2 — две
Рис. 6 39. Машина ШПМ-02 МГ
205
пары цилиндрических передач центрального редуктора 3 — муфта сцепле-
ния 7 — трехскоростиая коробка передач 8 — реверс 9 — открытая цилин-
дрическая пара 12. При этом шестерня Д, установленная на ведущем валу ре-
верса, в зависимости от направления движения машины должна быть введена
в зацепление с одной из двух шестерен Г нли Е реверса. При рабочем режиме
шестерня Д устанавливается в нейтральное положение, а кулачковая муфта
В вводится в зацепление с ведущей шестерней открытой пары передачи 12.
Тогда вращение от гидродвигателя 10 через червячный редуктор 11 и откры-
тую пару передач 12 передается той же колесной паре 13.
Компрессор 4 пневмосистемы получает вращение от ведущего вала цент-
рального редуктора 3 через коническую пару передач (муфта А включается),
поперечные валы, три конические шестерни левого углового редуктора 6 и
клиноременную передачу 5.
Маховики гайковертов первого 23 и второго 22 рядов приводятся во вра-
щение от правого 16 и левого 6 угловых редукторов при включенных зубчатых
муфтах Б. Тогда крутящий момент через карданные валы 17 передается транс-
миссионному валу 18, состоящему из двух частей, соединяемых посредством
подвижной втулочно-пальциевой муфты Ж На первой части вала 18 непод-
вижно укреплен один шкив 19, а на второй — два спаренных шкива клино-
ременной передачи. Посредством клиновых ремней 20 вращение получают ве-
домые шкивы со встроенными в них фрикционными неметаллическими роли-
ками 21. Последние пружинами 25 снизу прижимаются к торцовой части ма-
ховиков 22 и 23 рядов, приводя их при этом во вращение. /Маховики 23 пер-
вого ряда взаимодействуют с одним из двух фрикционных роликов (один на
завинчивание, другой на отвинчивание гайки); маховнкн 22 второго ряда —
только с одним фрикционным роликом, что соответствует завинчиванию путе-
вой гайки. Каждый фрикционный ролик укреплен иа конце подвижного ры-
чага 24 (см. вид Л). С обеих сторон вала 18 параллельно ему расположены два
кулачковых вала 26 и 27 с укрепленными на них тремя парами кулачков 28
с различными профилями. Кулачковые валы обеспечивают контакт в нужный
Рис. 6.40. Кинематическая схема машины ШПМ-02/МГ
205
Рис. 6.41 Схема гайковерта
момент между тем или иным фрикционным ро-
ликом и корпусом соответствующего махови-
ка. Каждый из восьми маховиков насажен на
вертикальный вал 29, присоединенный к трех-
шпиндельному гайковерту; последний и обес-
печивает отвинчивание гаек, с.мазку скреп-
лений и завинчивание гаек. Каждый кулач-
ковый вал имеет переключатель четырех ре-
жимов работы: «Смазка», «Завинчивание»,
«Нейтраль» и «Дотяжка». Режим «Смазка»
обеспечивает отвинчивание гаек первым ря-
дом гайковертов, смазку скреплений и завин-
чивание гаек вторым рядом гайковертов. При
режиме «Завинчивание» происходит частичное
завинчивание гаек первым рядом гайковер-
тов, смазка скреплений и окончательное за-
винчивание гаек вторым рядом гайковертов
после укладки плетей бесстыкового пути Для
режима «Нейтраль» характерно отсутствие
вращения маховиков первого и второго ря-
дов. При режиме «Дотяжка» отсутствует вра-
щение маховиков первого ряда и осущест-
вляется смазка и завинчивание гаек вторым рядом гайковертов. Гидронасо-
сы 14 приводятся во вращение от редуктора 15, прифланцованного к пра-
вому угловому редуктору 1,6.
Блоки гайковертов являются основными рабочими органами машины.
Для каждой рельсовой нити предназначен один блок гайковертов. Опускание
или подъем блоков в рабочее или транспортное положения осуществляется
лпевмоцилиндрами 5 (см. рис. 6.39). В рабочем положении каждый опущенный
блок копиром 13 с роликами 12 опирается на рельс. Положение рамы блока
гайковертов относительно ролика регулируется в зависимости от типа рель-
сов, болтов и числа витков шайб. Каждый блок гайковертов снабжен четырь-
мя трехшпиндельными гайковертами для отвинчивания, смазки и завин-
чивания гаек клеммных и закладных болтов Передние по ходу движения
машины части блоков относятся к первому ряду гайковертов, а задние ко
второму. /Маховики первого и второго рядов вращаются в противоположных
направлениях так, что первый ряд гайковертов отвинчивает гайки скрепле-
ний очередной шпалы, а второй завинчивает те же гайки. Как видно из
рис. 6.41, маховик 2 вращаемый фрикционным роликом 3, передает крутящий
момент через вертикальный 1 и карданный 4 валы центральному валу-шестер-
не 12 трехлучевого редуктора 6. На рисунке условно изображены только
два из трех лучей, расположенных под углом 120° один к другому. Тремя про-
межуточными шестернями 11 вращение от центрального вала передается трем
шестерням 7, насаженным на шпиндели 8 с патронами 9 на концах. Нижняя
часть патрона снабжена внутренним шестигранником, размеры которого соот-
ветствуют размерам путевой гайки. Соосно с каждым шпинделем (на продолже-
нии последнего) расположен вильчатый искатель 10, соприкасающийся при
движении машины с элементом скрепления. Трехшпиндельный гайковерт при
помощи водила 13 связан с направляющей штангой 14 и пневмоцилиндром 15
подъема гайковертов.
Подача смазки па скрепления осуществляется от системы смазки через
шланговое соединение к водилу, далее через отверстия в стойке 5 и трубки в
шпинделе. Смазка подается только на обрабатываемое скрепление, а на осталь-
ные два шпинделя гайковерта она не поступает, так как каналы этих шпииде-
207
лей перекрыты. На рис. 6.42 приведено пять позиций работы двух блоков гай-
ковертов 1 одной нити пути при переезде машины от одной шпалы к другой.
На позиции / изображен захват искателями (ловителями) гаек болтов. При
непрерывном движении машины корпуса блоков поворачиваются в направле-
ниях, указанных стрелками При опускании блока гайковертов (позиция /7)
начинается отвертывание (завертывание) гаек. Этот процесс продолжается в
позиции 111. Одновременно смазывается резьба болтов. Позиция IV соответ-
ствует окончанию отвертывания (завертывания) гаек и подъему блока гайко-
верта. В позиции V корпуса блоков под действием пружин, прижимающих их
к упорной планке-копиру 2, вновь занимают исходное положение, при этом
второй искатель каждого блока ориентирован для улавливания гайки 6 оче-
редной шпалы 5. Далее цикл работы блока повторяется. Опускание и подъем
блоков происходят автоматически при срабатывании конечных выключате-
лей. Скорость движения машины, частота вращения шпинделей, моменты подъе-
Рис. 6 43. Схема щеток машины ШПМ-02/МГ
208
ма и опускания блоков, время нахождения шпинделя на обрабатываемой гай-
ке конструктивно увязаны между собой. Цифрами 3 и 4 обозначены поворотный
кронштейн и рама машины.
Щетки для очистки скреплений расположены в головной части машины
и предназначены для очистки гаек от загрязнителей перед их отвинчиванием.
На поперечной балке 3 (рис. 6.43) шарнирио укреплены держатели 2 с консоль-
но укрепленными жесткими проволоками 1. Держатели соединены между со-
бой и с кривошипно-шатунными механизмами 6 при помощи тяг 4 и 5. Каждая
из четырех щеток расположена между рядами клеммных и закладных болтов.
При работе щетки правая и левая стороны совершают встречные колебания в
поперечном направлении относительно рельсовой нити, что обеспечивает
очистку гаек, достаточную для надежного иадеваиия на них патронов шпин-
делей гайковертов. Привод щеток (см. рис. 6.39) осуществляется от одного
гидродвигателя 10 и двух кривошипио-шатуниых механизмов. Приведение
рамы щеток в рабочее и транспортное положения производится гидроцилин-
дром 10 (см. рис. 6.43). Поперечная балка, на которой смонтированы щетки,
трубчатыми направляющими 7 перемещается в опорах 9 несущей рамы 11, при-
крепленной к передним стойкам боковин рамы машины. В транспортном поло-
жении одна из направляющих запирается штырем 8.
Техническая характеристика машины ШПМ-02/МГ
Производительность, м/ч.................................... 700—850
Скорость в транспортном режиме, км/ч........................... 36
Масса, т ................................ 17
Время приведения машины в транспортное положение, мин . . 5—7
Обслуживающий персонал, чел. ................................. 2
6.4.3. Путевая рельсосварочная самоходная машина (ПРСМ-3)
Машина предназначена для сварки стыков рельсов контактным способом.
Сваривать можно рельсы, по которым передвигается машина, а также распо-
ложенные сбоку от пути на расстоянии до 600 мм от него. Машина обеспечи-
вает выезд самоходом к месту сварочных работ и передвижение в процессе свар-
ки от стыка к стыку с прицепным составом массой до 40 т.
Основанием машины ПРСМ-3 (рис. 6.44) служит рама 1 типовой четырехос-
ной платформы с тележками 2, заимствованными от МПД. На раме расположе-
ны узлы и агрегаты: две сварочные машины 5, металлоконструкция качающих-
ся рам 3 с электроталями 4, кузов 6, шкафы с электрооборудованием 7, насосные
станции 8 к сварочным машинам, лебедкн 17 для подтаскивания рельсов, ox-
Рнс 6.44 Путевая рельсосварочная самоходная машина ПРСМ.-3
i-
209
лаждающий агрегат 9, топливный бак 10, компрессорная установка 16, пуско-
регулирующие сопротивления 11, дизель-генераторная установка 12, аккуму-
ляторная батарея 13 и кабина управления 14 с пультом управления 15. Име-
ется также пиевмотормозное, грузовое и гидрооборудование.
Управление машниой при следовании по перегону осуществляется из ка-
бины машиниста, а при передвижении от стыка к стыку в процессе сварки —
с выносного пульта.
Питание электроэнергией тяговых двигателей, сварочного н вспомога-
тельного оборудования производится от силовой установки, состоящей нз ди-
зеля 1Д12В мощностью 300 л. с. (220 кВт) и генератора переменного тока мощ-
ностью 200 кВт. Электроэнергия от дизель-генератора передается через вы-
прямительную установку на тяговые электродвигатели постоянного тока.
Крутящий момент от электродвигателей к приводным колесным парам переда-
ется посредством карданного соединения и осевого редуктора.
Тормоза на машине колодочные, аналогичные МПД. Управление тормоза-
ми самой машины осуществляется прямодействующим тормозом, а тормозами
прицепного состава — краном машиниста, При сварочных работах торможение
машины автоматическое, а для отпуска тормоза требуется нажатие кнопки иа
выносном пульте Ручной тормоз предназначен для затормаживания машины на
стоянке и приводится в действие раздельно на каждой ходовой тележке штур-
валами Для питания сжатым воздухом пневматической системы предусмотре-
на мотор-компрессорная установка. Машина оборудована скоростемером, све-
товой и звуковой сигнализацией, а кабина машиниста — отоплением, венти-
ляцией и стеклоочистителями. Сварку можио производить как одним, так и
двумя сварочными агрегатами (головками). Для подъема и опускания послед-
них предусмотрены электротали. Рельсы, подлежащие сварке, подтягивают
лебедками, установленными под рамой с двух сторон машины и имеющими ка-
наты длиной 35 м с рельсовыми захватами иа концах.
При движении машиной управляет машинист и его помощник. Для под-
готовки рельсов к сварке и выполнения этой операции должна быть специаль-
ная бригада.
Не доезжая 5—10 м до стыка, подлежащего сварке, машину останавли-
вают и переключают управление из кабины машиниста на выносной пульт,
после чего машину подводят к стыкам рельсов, подлежащих сварке на расстоя-
ние 1,5—2 м. Подготовленные к сварке рельсы тяговыми лебедками подтяги-
вают до соприкосновения их торцов. С пульта управления правым сварочным
агрегатом включается насосная станция, питающая гидросистему качающих-
ся рам, и нажатием кнопки на выносном пульте металлоконструкций качаю-
щиеся рамы ставятся в рабочее положение. Сварочные агрегаты машины по-
средством талей устанавливают на стыки свариваемых рельсов. После этого
включают гидравлическое устройство, зажимающее рельсы губками, и маши-
на включается на режим сварки. Управление этим процессом автоматическое
при помощи гидроследящей системы. По окончании сварки устройство зажа-
тия рельсов отключается, губки разжимаются, сварочные агрегаты смещаются
в сторону и производится зачистка шва. Затем машина переезжает к следующе-
му стыку, и цикл повторяется.
Сварочное оборудование включает два агрегата со сварочными головка-
ми типа К-355, два шкафа электрооборудования и две насосные станции.
Каждый сварочный агрегат состоит из двух корпусов, соединенных между со-
бой механизмами перемещения и осадки, зажимных губок с цилиндрами за-
жатия рельсов, гидроследящей системы, сварочных трансформаторов, гидро-
разводкн, разводки водяного охлаждения и пульта управления. Сварка рель-
сов осуществляется методом непрерывного оплавления при помощи гидросле-
дящей системы по заранее установленной программе с автоматическим регули-
210
рованием напряжения. Зажатие рельсов происходит двумя парами клещевид-
ных зажимных щек, которые в процессе сварки могут сближаться или разво-
диться. Левая пара щек вместе с центральной гильзой имеет возможность пе-
ремещаться в осевом направлении. Кроме центральной оси, левая и правая
пары щек соединены между собой направляющими штоками. Левые щекн смон-
тированы со штоками неподвижно. Взаимное перемещение левой и правой пар
щек происходит через эти штоки от гидроцилиндров, расположенных на кор-
пусе каждой правой щеки. При подаче масла в левые полости этих цилиндров
происходит сближение левой и правой пар щек, а при подаче масла в правые
полости — их разведение. Изменение скорости сближения и разведения щек,
а также осадка осуществляются гидроследящей системой.
Металлоконструкции качающихся рам. Для перемещения сварочных агре-
гатов к свариваемым стыкам рельсов в передней части машины установлена
металлоконструкция с навешенными на нее электроталямч.
Металлоконструкции (рис. 6.45) состоят из двух пар качающихся рам:
передней 2 и задней 3, соединенных стрелами 7; двух гидроцилиндров 4 про-
дольного качания, четырех гидроцилиндров 8 поперечного качания и съемной
поперечной балки. Качающиеся рамы шарнирно соединены с рамой машины и
со стрелами. Стрелы предназначены для перемещения по ним электроталей
/7 с подвешенными к ним сварочным головкам 12. На стрелах и на поперечной
балке установлены упоры, ограничивающие ход электроталей и откидные упо-
ры с цепочками для запирания их в транспортном положении. На стрелах
также установлены амортизаторы для предохранения их от раскачивания при
передвижении машины. При работе только одного сварочного агрегата на
стрелы навешивается съемная поперечная балка, на которую устанавливается
одна из талей, другая при этом с машины снимается. Каждая нз качающихся
рам состоит из ригеля 7 и двух ног 5, соединенных шарнирами 9. Ригели вы-
полнены из труб и соединены с йогами при помощи кронштейнов 6. Внутри
каждого из них расположены два гидроцилиндра поперечного качаиия 8. Кор-
пуса цилиндров шарнирно соединены с трубой, а штоки — с ногами. Ноги
качающихся рам выполнены сварными. В нижней и верхней частях ног вваре-
ны проушины для соединения ног с рамой машины, ригелем и штоком гидро-
цилиндра поперечного качания. К ногам задней качающейся рамы приваре-
ны кронштейны для крепления гидроцилиндров продольного качания. Благо-
даря наличию шаровых подшипников 10 ноги имеют возможность поворачи-
ваться как вдоль, так и поперек машины. Стрелы металлоконструкции соеди-
нены с ригелями посредством шаровых опор.
Наличие шаровых опор позволяет при помощи гидроцилиндров продоль-
ного и поперечного качаний устанавливать металлоконструкцию в различные
положения. При транспортном положении стрелы расположены симметрично
оси машины и выдвинуты в крайнее заднее положение. Рабочие положения ме-
таллоконструкции :
Рис. 6 45. Металлоконструкция качающихся рам
2 11
среднее: стрелы выдвинуты вперед параллельно продольной оси машины
н расположены над рельсами пути, по которому перемещается машина;
левое или правое: металлоконструкция из среднего положения смещена
влево или вправо параллельно продольной оси машины, выходит за боковой
габарит в сторону смещения;
перекрестное левое нли правое: металлоконструкция расположена под
углом к продольной оси машины и выходит за боковой габарит с обеих сторон
машины;
рабочее положение: металлоконструкция расположена под углом к про-
дольной осн машины с поперечным смещением только одной передней качаю-
щейся рамы влево или вправо; металлоконструкция выходит за боковой габа-
рит только с одной стороны машины.
Грузовое оборудование состоит из двух электроталей грузоподъемностью
3 т и двух тяговых лебедок. Таль ЭТС-3 состоит нз механизма подъема, ходовой
тележки и электрооборудования. Ходовая тележка катками установлена на
нижние полки стрел. Крюковая обойма подвешена на пластинчатой цепи.
Управление талью осуществляется от подвесной кнопочной станции.
Тяговые лебедки (рнс. 6.46) предназначены для подтягивания сваривае-
мых рельсов к месту сварки стыка и размещены под настилом рамы в передней
части машины, работают они независимо одна от другой. Тяговое усилие лебед-
ки 15 кН (1500 кгс), скорость перемещения каната 0,33 м с. Привод лебедки осу-
ществляется от электродвигателя 1 через предохранительную фрикционную
муфту 2 и карданный вал 3. Канат 13 от барабана 9 к подтягиваемым рельсам
проходит по ролику 14 и блоку 15, которые отклоняют канаты в сторону от
сварочных агрегатов, что позволяет производить подтягивание рельсов, не
убирая сварочные агрегаты. На концах канатов имеются рельсовые захваты
16 При включении рукояткой 5 кулачковой муфты 6 вращение от электро-
двигателя через червячный редуктор 4 и открытую пару передач 7, 8 передается
к барабану 9. Последний свободно установлен на оси 12 и оборудован пружин-
ным канатоукладчиком 10. Канат разматывается вручную, прн этом кулачко-
вая муфта выключается. Благодаря наличию на барабане фрикционного тормо-
за 11 предупреждается запутывание каната при размотке.
Гидрооборудование машины обеспечивает вывод металлоконструкции в
транспортное илн рабочее положение, синхронное смещение качающихся рам
вправо илн влево, а также с перекосом (передней вправо, задней влево или на-
оборот). Система гидрооборудовання ПРСМ-3 включает гндрооборудование
самой машниы и контактных сварочных головок.
Гидрооборудоваиие ПРСМ-3 (рнс. 6.47) включает насосные станции 1 и 2,
дозатор (делитель потока ДП) 3, реверсивные золотниковые гидрораспредели-
тели 4 и 4' (РЗ), цилиндры (Ц) поперечного качания 5 н 6, цилиндры продоль-
Рис. 6.46 Тяговая лебедка
212
Рис, 6.47. Принципиальная гидравлическая схема ПРСМ-3
кого качания 7, гидрооборудоваиие сварочных агрегатов 8 и масляные радиа-
торы 9.
Насосная станция (рис. 6.48) предназначена для питания
гидросистем сварочных машин и состоит из масляного бака 1 (Б) и шестеренча-
того насоса (Н) 10 с приводом от электродвигателя. В систему нагнетания по-
следовательно включены обратный клапан 9 (КО), фильтр 8 (Ф) и предохрани-
тельный клапан 6 (КП) с переливным золотником. К клапану последовательно
подключены электрозолотник 5 и шариковый клапан 4 (К)- В системе слива ус-
тановлен фильтр 3 (ДП). При работе насосной станции жидкость нагревается,
для ее охлаждения в баке предусмотрен змеевик 2, по которому пропускается
колодиая вода. При включении электродвигателя насос через обратный кла-
пан, фильтр и предохранительный клапан нагнетает масло по рукавам высокого
давления в рабочие полости машины. Насосная станция имеет два предохрани-
тельных клапана в системе высокого и низкого давления. Предварительное за-
жатие рельсов и их оплавление ведутся при низком давлении, а перед осадкой
система автоматически электрозолотником переключается иа высокое давление.
Дозатор (делитель потока) 3 (см. рис. 6.47) предназначен для равномерного
распределения масла, поступающего к гидроцилиндрам. Конструкция и работа
его аналогичны дозатору (делителю потока) укладочного крана.
213
Золотниковый гидрораспределитель 4
служит для управления потоком масла,
поступающего к гидроцилиндрам продоль-
ного и поперечного качания рам. Золотни-
ки четырехлинейные: один канал для под-
вода масла, два для его отвода к гидро ци-
линдрам и один для слива масла в бак. По
числу фиксированных положений все золот-
ники трехпозиционные и двухступенчатые,
т. е. плунжер основного золотинка переме-
щается под действием потока масла, кото-
рым управляет вспомогательный золотник.
Плунжер последнего перемещается электро-
магнитным приводом.
Цилиндры 7 предназначены для приве-
дения рам в рабочее или транспортное по-
ложение. Посредством шаровых шарниров
цилиндры присоединены к качающимся ра-
мам и к кронштейнам рамы машины. В от-
личие от обычных цилиндров двусторонне-
го действия внутри каждого цилиндра
Рис. 6.48. Гидрооборудование насос- встроен шариковый автоматический замок,
ной станции Цилиндры 5 и 6 предназначены для
поперечного перемещения передней и зад-
ней качающихся рам при работе машины. Все четыре цилиндра двусторон-
него действия. Шток каждого из них присоединен к рычагу рамы, а проушины —
к ригелям.
При работе насосной станции масло поступает в гидросистему сварочно-
го агрегата и к гидропанели с золотниковыми распределителями, управляю-
щими гидроцилиндрами поперечного и продольного качания рам. При ней-
тральном положении распределителей давление в системе устанавливается пре-
дохранительным клапаном, включенным в нагнетательную магистраль насос-
ной станции и отрегулированным на давление 6 МПа. При включении золот-
никовых гидрораспределителей 4 рабочая жидкость поступает в цилиндры 5
и 6 поперечного качания рам. При включении золотниковых гидрораспреде-
лителей 4' — в цилиндры 7. Масло, вытесняемое из нерабочих полостей ци-
линдров, проходит через каналы распределителей, сливной канал гидропане-
ли и сливается в бак.
Гидрооборудование контактных сварочных головок приведено на
рис. 6 49. Левая 3 и правая 2 щеки сварочных агрегатов сближаются или раз-
водятся гидроцилиндрами осадки /, а зажатие и разжатие рельсов осущест-
вляются гидро цилиндрам и зажатия 4. Этим процессом управляют при помощи
крана управления 8, установленного на сварочном агрегате. При нижием поло-
жении рукоятки масло поступает в верхние полости гидроцилиндров зажатия
и происходит зажатие рельсов. Если рукоятка крана установлена в верхнем
положении, масло поступает в иижиие полости гидроцилиндров и происходит
разжатие рельсов. При нейтральном положении рукоятки крана доступ масла
в обе полости гидроцилиндров прекращается.
Подача масла в гидроцилиндры осадки осуществляется следующим обра-
зом. При вращении вала ротора электродвигателя 5 по часовой стрелке враще-
ние через червяк передается червячному колесу редуктора 6, виит 7 получает
поступательное движение влево, туда же перемещается и золотник 10, сжи-
мая пружину 9. Открывается доступ масла в левую полость гидроцилиндров
1, и щеки сварочных агрегатов сближаются. Правая полость тех же гидроци-
214
Рис. 6.49. Гидрооборудование контактных сварочных головок
линдров при этом сообщается со сливной магистралью. Если перемещение што-
ка золотника прекратится, его корпус, двигаясь влево, перекроет доступ масла
в левую полость гидроцнлиндров н слив масла в правой полости, а значит, и
перемещение щек прекратится. При включении электродвигателя 5 в обрат-
ную сторону винт 7 идет вправо. Под действием пружины шток золотника стре-
мится переместиться вправо, но этому препятствует гайка, которая упирается
в винт электромагнита осадки. Следовательно, при перемещении винта элек-
тромагнита осадки вправо и шток золотника будет также перемещаться вправо
стой же скоростью. При этом кромки штока золотника открывают доступ масла
в правую полость гидроцилиндров, а левые соединяются со сливом. Происхо-
дит разведение щек. В редукторе гидроследящей системы имеется концевой
выключатель, который выключает цепь электродвигателя при полном разведе-
нии щек машины. Редуктор снабжен также предохранительной муфтой, ко-
торая срабатывает при заклинивании штока золотника или винта. Регулиро-
вание скорости сближения и разведения щек машины производится измене-
нием частоты вращения электродвигателя.
Техническая характеристика ПРСМ-3
Число свариваемых стыков машиной, шт/ч......................... 10
Продолжительность сварки стыка рельса Р65, мин . . . 2—3
Мощность, потребляемая сварочной машиной, кВт .... 150
» дизеля ]Д 12В-300 при 1500 об/мин, кВт .... 220,8
» тягового двигателя при 1250 об/мин, кВт ... 43
Максимальная сила тяги, кН.................................... 100
Скорость передвижения, км/ч;
в рабочем положении ......... 3—5
» транспортном положении .... .... до 70
Масса, т............................................. 66
6.4.4. Машина для смены стрелочных переводов
Машина предназначена для смены одиночных стрелочных переводов ти-
пов Р65, Р50 и Р43 марок 1/9 и 1/11, расчлененных на три блока. Она произво-
дит погрузку собранных на производственной базе блоков, их транспортирова-
ние к месту работ, смену старогодиого стрелочного перевода, транспортирова-
ние снятых блоков и выгрузку их на базе. Машина (рис. 6.50) состоит из двух
четырехосных платформ 1 грузоподъемностью по 60 т, оборудованных фер-
мами 2, образующими подкрановый путь для грузовой каретки 9,треугольными
фермами 16, служащими стенками для опирания на них блоков перевода,
вспомогательных механизмов 13 для поперечного смещения н обводного блока
215
to
СЪ
Блоки нового
Рис 6.50 Машина для смены стрелочных переводов в рабочем состоянии
12 для* продольного передвижения пролетной фермы 5. При помощи этих
механизмов ферму приводят в рабочее и транспортное положения. Для приве-
дения в рабочее положение платформы расцепляют, локомотивом отодвигают
одну из них до тех пор, пока конец пролетной фермы совпадет с шарнирными
соединениями фермы на другой платформе. Затем механизмами 13 пролетнук>
ферму сдвигают и соединяют с фермой платформы. При этом образуется еди-
ный подкрановый путь для передвижения грузовой каретки с одной платфор-
мы на другую. На треугольных фермах размещены противовесы для уравнове-
шивания односторонних нагрузок на платформы от каретки и блоков стрелоч-
ного перевода. Для приведения машины в транспортное положение каретку
закрепляют на левой платформе, пролетную ферму разъединяют в местах шар-
нирного соединения ее с фермой на правой платформе, затем механизмами 13
сдвигают пролетную ферму вовнутрь (на левой платформе этот сдвиг возможен
благодаря шарнирной вставке 3) и передвигают ее на правую платформу с при-
менением локомотива. По платформе пролетная ферма передвигается на кат-
ковых тележках 14. После сцепки платформ подготавливают машину для транс-
портирования.
Грузовая каретка 9 снабжена механизмами: для подъема и опускания
стрел и сменяемых блоков (соответственно 7 и 10), для выдвижения штаиг 6
(11), для привода механизма передвижения 8. Для отклонения штаиг 6 преду-
смотрен отдельный механизм
Грузовая каретка перемещается по балке 22 (рнс. 6.51, а) нижнего под-
краиового пути ферм на колесах 23 механизма ее передвижения, удерживается
обоймами с катками 25 за верхнюю балку 24 и упирается в балку 22 катками
21. Питание электроэнергией механизмов каретки осуществляется от своей
электростанции или от постороннего источника (напрнмер, генератора дрези-
ны ДГКУ) по кабелю 4 (см. рис. 6.50), Управление механизмами каретки про-
изводят из кабины 15 машиииста машины. Для перевозки блоки стрелочного
перевода размещают на платформах в пределах габаритов погрузки. Первым
грузят блок стрелки 17. Нумерация начата с позиции 17. Позиции 1—16 соот-
ветствуют приведенным на рис. 6.50. Блок //устанавливают на опорную пло-
щадку и прислоняют к треугольной ферме 16. Затем грузят блоки переводных
путей 18 и крестовины 20. Последний устанавливают в карман 19 рамы плат-
Рис. 6.51. Размещение блоков стрелочного перевода:
а — в транспортном положении, б — при укладке; в —- во временном положении при работе
217
Рис. 6.52, Перемещение блоков перевода вдоль машины
формы. Блоки, каретку и пролетную ферму закрепляют транспортными креп-
лениями. После прибытия к месту работ машину приводят в рабочее положе-
ние и устанавливают ее и ад сменяемым блоком.
Вдоль машины блоки перемещают в вертикальном положении (рис. 6.52),
удерживая грузоподъемными механизмами каретки. Для укладки блоки пере-
водят в горизонтальное положение, поворачивая их вокруг захватов штанг.
Первым заменяют блок 20 (см. рис. 6 51) с крестовиной. Стар о годный блок
поднимают и переводят в вертикальное положение грузоподъемными механиз-
мами каретки, перемещают его вместе с кареткой на незагруженную платформу
и устанавливают, опирая на треугольную ферму. В этом положении брусья
выходят за пределы габарита погрузки (рис. 6.51, в). Блок нового стрелочного
перевода укладывают на место старого (рис, 6.51, б) при помощи полиспаста
10 и штанг 6. После укладки машину передвигают по уложенному блоку и
заменяют блоки 77 и 18. Для приведения блоков старого перевода в габарит
нх перевозят иа освободившуюся платформу и устанавливают в порядке, при-
веденном на рис. 6.51, а. При необходимости первым укладывать блок стрел-
ки блоки нового стрелочного перевода предварительно размещают на правой
платформе в порядке, приведенном на рис, 6.51, в.
Техническая характеристика машины для смены стрелочных переводов
Марки сменяемых стрелочных переводов................ 1/11 и 1/9
Время смены одного перевода, мин.................... 100-120
Вес поднимаемого груза двумя грузоподъемными механиз-
мами каретки, кН......................................... 120
Скорость, м/с:
передвижения каретки.................................. 0,6
подъема груза . . 0,1
Время приведения машины в рабочее и транспортное по-
ложения, мин............................................. 15
Масса машины с блоками, т.................................. 140
Источник питания .................................. электростанция
мощностью 50 кВт
Обслуживающий персонал, чел................................. 2
218
6.5. ОСНОВЫ ЭКСПЛУАТАЦИИ И ОБСЛУЖИВАНИЯ МАШИН
ДЛЯ СБОРКИ, РАЗБОРКИ, УКЛАДКИ
РЕЛЬСО-ШПАЛЬНОЙ РЕШЕТКИ И СВАРКИ РЕЛЬСОВ В ПУТИ
6.5.1. Подготовка к работе и обслуживание
Перед запуском звеносборочной и звеноразборочной линий в работу не-
обходимо проверить уровень масла в масляных баках гидросистем, в корпу-
сах сверлильных головок, агрегате расшивки, редукторах лебедок, транспорте-
ров и др и при необходимости долить свежее масло; проверить надежность
уплотнений гидросистем и устранить обнаруженные течи, исправность и це-
лостность защитного заземления, а также исправность электрооборудования
После этого должны быть запущены в работу поочередно все агрегаты линий,
чтобы убедиться в нормальной работе электродвигателей, гидронасосов, пре-
дохранительных клапанов. На звеносборочион линии требуется проверка уров-
ня антисептика в баке и добавка его при необходимости, а затем пробное ис-
пытание всего антисептирующего устройства.
При подготовке к работе путеукладчиков двигатели заправляют топливом,
маслом, водой, наполняют песочницы, проверяют общее состояние машины.
Песок для заправки песочниц должен быть хорошо просушен и просеян.
При подготовке к работе проверяется состояние колесных пар, букс рес-
сор, крепление тормозных цилиндров, состояние рукавов, колодок, тяговых
двигателей, крепление компрессоров, натяжение ремней клиноременной пере-
дачи привода компрессоров, состояние всех канатов, чистота электрических
приборов
Перед троганием моторной платформы или крана с места проверяют дей-
ствие тормозов, затем включают автоматы генераторов После прогрева дви-
гателя и подачи звукового сигнала поезд трогают с места. Для ускорения на-
растания напряжения иа клеммах генератора в период разгона нажимают кноп-
ку «Подпитка». Во время укладки звеньев краном включение этой кнопки обя-
зательно. При укладке пути передвижение краиа осуществляется от одного
генератора с последовательным соединением четырех тяговых двигателей. Для
увеличения скорости поезда до 20 км ч н более двигатели переключают на па-
раллельное соединение, В дальнейшем устанавливают скорость движения в
зависимости от веса поезда и профиля пути
Для звеносборочных и звеиоразборочных машин предусмотрены ежесмен-
ное техническое обслуживание, техническое обслуживание ТО-1 (через 35 ч
работы), техническое обслуживание ТО-2 (через 140 ч работы) и сезонное тех-
ническое обслуживание.
При ежесменном обслуживании проверяют наличие масла в баках и воды
в радиаторах (при необходимости их доливают, спускают отстой из топливных
баков и фильтра), иатяжеиие ремней привода вентилятора и компрессора, на-
пряжение аккумуляторных батарей (оно должно быть не ниже 24 В), осматри-
вают коллекторы и щетки генераторов и электродвигателей, контакты контакто-
ров, универсальных переключателей и батарей, ослабшие контакты подтяги-
ваю'!, а подгоревшие зачищают; проверяют исправность действия тормозов,
электрических и электропневматических сигналов, а также на слух работу каж-
дого двигателя; следят за показаниями контрольно-измерительных приборов
(давление масла - около 0,8 МПа, вольтметр должен показывать зарядку ак
кумуляторов, температура воды и масла постепенно повышаться) ТО-1 и
ТО-2 включают все операции ежемесячного обслуживания и ря [ дополнитель-
ных более сложных работ
Основными мероприятиями, обеспечивающими нормальную эксплуатацию
ПРОМ 3. являются осмочры н периодические ремонты Ежедневно перед на
214
чалом работы машина должна проходить технический осмотр (ТО), предусма-
тривающий обслуживание дизель-генератора, сварочных головок, компрессора,
талей, пневмотормозного и гидрооборудования. Одни раз в 8—10 дней работы
машины производится профилактический осмотр (ПО). Кроме того, преду-
смотрены малый периодический ремонт (МПР) — один раз в 1—1,5 месяца н
большой периодический ремонт (БПР) — один раз в 9—12 месяцев.
6.5.2. Смазка машин
Исправное состояние машин в большой степени зависит от регулярной
смазки трущихся поверхностей. Масленки, отверстия и каналы для смазки не-
обходимо периодически осматривать и очищать. Перед смазкой следует тща-
тельно удалять грязь с пресс-масленок и смазываемых поверхностей, а после
смазки насухо вытирать все смазочные приборы (масленки, пробки и т. п.). Смаз-
ку шприцем необходимо подавать до тех пор, пока свежая смазка не покажется
из мест стыков деталей смазываемого узла. Корпуса роликовых и шариковых
подшипников необходимо заполнять не более чем на 2/3 емкости. При замене
консистентной смазкн в подшипниковых узлах их необходимо разобрать, очи-
стить от старой смазки; при замене смазки в редукторах старая смазка должна
быть слита, а редуктор промыт бензином. Периодичность и места смазки от-
дельных узлов, а также сорта смазки указываются в каргах смазки. В качест-
ве примера ниже приведена карта смазки МПД:
Карта смазки МПД
Место смазки Способ смазки Рекомендуемая смазка Периодичность смазки
Осевой редуктор Через крышку ре- дуктора Трансмиссион- ное автотрактор- ное Через 200 ч работы
Тяговые двигатели В корпус подшип- ника Консистентная 1-13 Через 1000 ч рабо- ты
Роликовая букса То же То же 1 раз в 6 месяцев
Наличники буксы Поливом Смазочный ма- 1 раз в неделю
Рессорные валики, ось балансира Через колпачко- вые масленки зут То же 1 раз в месяц
Подпятник тележки Поливом » То же
Шарикоподшипник В корпус подшип- Консистентная Через 100 ч, но не
генератора пика 1-13 реже, чем через 6 ме- сяцев
Компрессор Через капельную масленку Компрессорное масло М Непрерывно в мас- ленку через 3 ч
Роликовый транс- портер В корпус подшип- ника Консистентная 1-13 1 раз в год
Редуктор лебедки для перетяжки паке- тов Наливом Трансмиссион- ное автотрактор- ное Через 200 ч работы
Шарикоподшипники электродвигателя и роликоподшипники червяка В корпус подшип- ника Консистентная 1-13 1 раз в сезон
/Малая шестерня зубчатой передачи Наружная Солидол Через 100 ч работы
Кула чкова я м у фта На шлицы Трансмиссион- ное автотрактор- ное То же
220
Возможные неисправности укладочных кранов и способы их устранения
Неисправность Возможные причины Способы устранения
Нагреваются подшипни- 1. Недостаток смазки Добавить смазку
ки генератора Генератор искрит под 2. Загрязнены подшипники 3. Повреждены или изноше- ны подшипники Щетки не притерты Промыть и заполнить но- вой смазкой Заменить подшипники Притереть щетки
щетками Угольные щетки слишком Заменить щетки
Появление дыма из тяго- твердые или мягкие Неправильно установлены щеткодержатели Воспламенение изоляции илн Установить правильно щеткодержатели Проверить сопротивле-
вого электродвигателя межкатушечных соединений ние изоляции. В случае по-
Прекращение подъема Недостаточное количество вреждения изоляции отпра- вить двигатель в ремонт Залить бак веретенным
фермы крана при включе- масла в баке маслом
нии гидронасоса Скопление воздуха в гидро- Отвернуть пробки каре-
Электродвигатель грузе- системе Гидросистема пропускает масло Неисправности тяговых или ток и при работе насоса удалить воздух из цилинд- ров Установить место пропу- ска и устранить утечку мас- ла Выявленные неисправно-
вой или тяговой лебедки грузовых лебедок и редукторов сти устранить
работает с перегрузкой Нагрев тормозных шкивов, Отрегулировать тормоза
Конечные выключатели не сильно затянуты тормоза Замыкание в витках катуш- ки электромагнита Неисправный привод конеч- Заменить катушку тормо- за Установить и устранить
срабатывают, крановая те- ного выключателя, электро- неисправность привода
лежка идет до упора Ограничитель подъема цепь не размыкается Не отрегулирована пружина Отрегулировать пружину
груза срабатывает с недо- ограничителя подъема ограничителя подъема груза
грузом крана Ограничитель подъема Сильно затянута пружина „ / То же
груза не срабатывает на установленную грузоподъ- емность Компрессор не работает ограничителя подъема груза Неисправность цепи управ- Неисправность устранить
ления Неисправность в электродви- Установить причины не-
гателе исправности электродвига- теля, при невозможности заменить другим
6.5.3. Основные требования по технике безопасности
при обслуживании машин для сборки, разборки-
укладки рельсо-шпальной решетки и сварки рельсов в пути
При эксплуатации машин для сборки н разборки рельсо-шпальной решет-
ки запрещается: опираться на движущиеся шпалы собранного или разбирае-
мого звена или движущиеся части механизмов, включать станки и конвейеры
во время укладки рельсов на стенд н постановки для снятия стыкователей; за-
гружать в шпалопитатель более расчетного числа шпал; засорять рабочие места
посторонними предметами и скреплениями; загромождать доступ к аварийным
221
выключателям; осматривать машины, пользуясь для освещения факелом; на-
ходиться вблизи линии посторонним лицам.
При аварии или поломке механизмов необходимо немедленно остановить
всю линию. Работающие иа базе рабочие должны следить за приближением ва-
гонов, дрезин, кранов и других подвижных единиц, помня, что осторожность и
внимательность — главные меры, обеспечивающие безопасность производства
работ. При маневрах на путях звеносборочной базы машинистам тяговых еди-
ниц необходимо проявлять особую осторожность, поскольку на этих путях
постоянно находятся люди, а на междупутьях складируют элементы верхнего
строения пути. Заливать масло следует только, используя воронку, при этом
запрещается курить и пользоваться близко открытым огнем. Запрещается ра-
ботать при повышении давления в гидросистеме выше допустимого, при неис-
правности предохранительных клапанов, при иагреве масла выше 60 °C, при
неисправности манометра, при снижении уровня масла в баке ниже допусти-
мого. Нельзя эксплуатировать незаземленную звеносборочную или звенораз-
борочную линию. Запрещается открывать находящиеся под напряжением
электрические шкафы управления и распределительные коробки. Не разре-
шается ремонтировать электрооборудование при подключенной электросети.
Все грузоподъемные механизмы и приспособления допускаются к работе толь-
ко в исправном состоянии. Особенно внимательно следует проверять исправ-
ность тормозных устройств и канатов. Кантовать рельсы разрешается только
ломами или лапами.
Погруженные на платформу пакеты звеньев должны быть надежно за-
креплены от продольного и поперечного сдвигов. При работе с применением
укладочных кранов следует соблюдать следующие правила техники безопасно-
сти. Все работы по передвижению крана, подъему звена, перетяжке пакетов
производят по команде начальника укладочного (разборочного) поезда с пред-
варительной подачей звукового сигнала. Запрещается: выполнять работы впе-
реди разборочного поезда и сзади укладочного поезда на расстоянии ближе
25 м, находиться на поднятом звене, переходить и находиться под поднятым
звеном, а также на расстоянии ближе 1 м сбоку от звена. При расположении
последнего на высоте более 2 м от земли нельзя быть на расстоянии ближе 4 м
сбоку от звена при поднятии его для перевертывания, а также находиться перед
погруженными пакетами рельсовых звеньев при транспортировке и работе.
Все рабочие, обслуживающие путеукладочные поезда, при перетяжке па-
кетов должны отойти отиатяиутых канатов немеиее чем на 10 м. Для предотвра-
щения сходов кранов с рельсов обязательно следует ставить тормозные баш-
маки на третьей шпале от конца уложенного звена. При обнаружении неисправ-
ностей в тормозах лебедок, в экипажной части, концевых выключателях,
грузозахватных приспособлениях, сигналах путеукладочные машины к рабо-
те не допускаются. Сопровождение путеукладчиков в составе хозяйственных
поездов от базы до места работ разрешается только машинисту крана.
При эксплуатации ПРСМ-3 необходимо соблюдение следующих правил:
не должно быть течи топлива и масла из баков и в соединениях трубопроводов;
во время стоянки и прн запуске дизеля машина должна находиться в затор-
моженном состоянии, в процессе сварочных работ и при перемещениях кача-
ющихся рам не допускается нахождение персонала в пределах металлоконструк-
ций, при следовании но перегону нельзя развивать скорость более 65 км/ч, а
при передвижении с подвешенными на галях сварочными головками — более
5 км/ч; при подтягивании рельсов не разрешается находиться ближе 5 м от
натянутого каната; при передвижении машины от стыка к стыку не допускает-
ся нахождение людей перед машиной, во время сварки не следует находиться
в зоне брызг, необходимо пользоваться защитными очками; нельзя работать
на машине при грозе
222
7. МАШИНЫ ДЛЯ ОЧИСТКИ БАЛЛАСТА
В процессе эксплуатации железнодорожного пути происходит загрязне-
ние балласта в результате истирания его частиц, наноса на путь загрязнителей,
а также осыпания сыпучих грузов, перевозимых в подвижном составе. Вслед-
ствие этого балласт теряет свои дренирующие и упругие свойства. Несущую спо-
собность щебеночного и гравийного балласта периодически восстанавливают,
для чего специальными щебнеочистительными машинами производят на ходу
забор н очистку загрязненного балласта, лежащего в пути, удаление загрязни-
телей и укладку чистого балласта снова в путь. В отечественных машинах для
очистки щебня применен центробежный способ, предложенный А М. Драгав-
цевым. Щебнеочистительиые машины по способу производства работ подразде-
ляют на работающие с подъемом путевой решетки (ЩОЛ4-4, ЩОА4-Д, ЩОМ-Д0
без подъема путевой решетки (ЩОМ-Зу) и при снятой путевой решетке (ВМС).
Их применение позволяет высвободить до 200 рабочих на расчетный годовой
объем работ.
7.1. ЩЕБНЕОЧИСТИТЕЛЬНАЯ МАШИНА ЩОМ-4
7.1.1. Назначение и общее устройство машины
Машина предназначена для очистки щебеночного и гравийного балласта
на всю ширину балластной призмы одного пути иа глубину до 40 см. Она мо-
жет быть использована для вырезки балласта, а также, каки электробалластер,
для подъемки и сдвижкн пути, подъемки мостов малых пролетов весом до
200 кН. Базой машины (рис. 7.1) служит электробалластер ЭЛБ-3. Для разме-
щения щебиеочистительного оборудования внесены необходимые изменения в
конструкцию ферм 1 (ферма № 2) и 18 (ферма № /). Электромеханический при-
вод электромагнитного подъемника 4 заменен гидроприводом, упразднен доза-
тор, улучшена конструкция рельсовых 19, шпальных 16 и рельсо-шпальных 7
щеток. Щебнеочистительное устройство состоит из подъемной рамы 5 с приво-
дом сетчатой ленты 12, несущей рамы 14, подгребающих крыльев 15, роторно-
го устройства 21, устройств 9 для отбора части очищенного щебня и 17 для про-
бивки щебия в шпальных ящиках, планировщиков 10, подрезного ножа 13,
бункера 11. Управление машиной осуществляется из будки 6 и кабины вынос-
ного поста 8. Для погрузочных и выгрузочных работ предусмотрен кран 3
Электрооборудование переменного тока питается от электростанции У-36,
установленной в машинном отделении 2. Электроснабжение постоянным током
для привода щебнеочистительиой ленты и перемещение машины в рабочем и
транспортном состояниях осуществляются специально переоборудованным
двухсекционным тепловозом ТЭЗ. Гидрооборудование машины состоит из на-
сосных станций 20, исполнительных гндроцилиндров, аппаратуры управления,
регулирующих н предохранительных клапанов и измерительных приборов
Электромагнитный подъемник предназначен, как и на электробалласте-
рах, для подъема и удержания в поднятом состоянии путевой решетки, а также
223
для сдвига и перекоса пути. Он имеет гидравлический привод. Гидроцилиндры 1
подъема н опускания путевой решетки (рис. 7.2, а) сферическими опорами 2
установлены на опоры цилиндров, приваренные к ферме № 1. Для фиксирова-
ния путевой решетки в поднятом положении цилиндры снабжены гидрозам-
ками. Штоки 3 цилиндров посредством шарниров 4 соединены с вертикальными
тягами 5, которые, перемещаясь цилиндрами, поднимают или опускают попе-
речную балку 8 с электромагнитами 9 и путевой решеткой 10. Сдвиг путевой
решетки осуществляется двумя гндроцилиндрами 7 (рис. 7.2, б), шарнирно
соединенными балкой 11 (сечение А—Л), на которой размещен ролик 6. Шго-
ки цилиндров неподвижно прикреплены к ферме. При перемещении цилиндров
они увлекают соединяющую их балку 11 и ролик 6. Последний сдвигает
тяги 5 вместе с электромагнитами и поднятой ими путевой решеткой. При вклю-
чении в работу одного из цилиндров 1 (рис. 7 2, в) перемещается одна из тяг 5,
которая наклоняет поперечную балку 8 с электромагнитами н путевой решет-
кой, создавая заданное возвышение одной рельсовой нити по отношению другой.
Щебнеочистительное устройство (рис. 7.3) является главным рабочим орга-
ном машины, выполняющим очистку и вырезку балласта. При движении ма-
шины балластный слой срезается подрезным ножом 1. При этом балласт по-
ступает на движущуюся со скоростью до 14 м/с бесконечную сетчатую леиту,
которая приводится в движение звездочками 7. В начальный момент скорость
балласта в поперечном направлении равна нулю.
Разность между скоростями ленты и балласта, движущегося равномерно-
ускоренно, создает условие для частичной очистки балласта от засорителей на
горизонтальном участке трассы ленты. Завершается очистка на криволинейном
участке, образуемом роликовой батареей 3, где под действием центробежной
силы засорители выбрасываются через ячейки ленты 2 за пределы пути. Очи-
щенный щебень, отклоняясь после звездочек 4, направляется в бункер 5, а
затем при помощи заслонок 6 и 8 распределяется по ширине балластной приз-
мы. Для отбора части очищенного щебня предусмотрено устройство 10, кото-
рое при необходимости заводится в вырез в наклонном листе бункера, закрытый
откидным листом 9 (положение показано иа рисунке пунктиром). Ссыпающий-
ся с наклонного листа бункера очищенный щебень разравнивают отвалом 11
планировщика.
Подъемная рама 1 (рис. 7.4) предназначена для подъема и опускания не-
сущей рамы 5 со щебнеочистительным обор удов ан и ем, ведущего вала со звездоч-
ками 15 привода ленты 6 и передачи на ферму № 1 нагрузок, действующих на
несущую раму при работе машины. Подъем и опускание подъемной рамы осу-
ществляется гидроцилиндрами 13. При этом она своими скользунами 3 сколь-
Вид А
Рис. 7 3 Схема работы щебнеочистительного устройства
8 Зак. 47
225
зит по Направляющим 2, закрепленным на стенках фермы 14. В транспортном
положении подъемная рама опирается на ферму через домкраты 16.
Несущая рама 5 служит основанием для крепления подрезного ножа 8,
крыльев 15 (см. рис. 7.1), роликовой батареи 7 (см. рис. 7.4), звездочек 9,
регулирующего устройства 10 и лебедок 11 для подведения подрезного ножа
под путевую решетку. Она состоит из двух вертикальных рам, соединенных
шарнирно с подъемной рамой рычагами 4. В транспортное и рабочее положе-
ния несущая рама приводится гидроцилиндрами 12 развала несущей рамы.
Гидроцилиндры оснащены гидрозамками для фиксирования положения рамы
при прекращении подачи жидкости в полости цилиндра. Для перекоса ножа
в продольном направлении смещают передние скользуны по ходу машины от-
носительно задних, а в поперечном направлении — скользуны одной стороны
по отношению к другой.
Привод ленты (рис. 7.5) состоит из двух электродвигателей 5, соединенных
зубчатыми муфтами 7 с входными валами шестеренчатого редуктора 8 (i = 5,15).
Электродвигатели и редуктор установлены на раме 6, закрепленной на спе-
циальных кронштейнах фермы машины, и закрыты защитным кожухом 4.
А-А (см.рис 7. 1)
Рис. 7.4 Подъемная и несущая рамы щебнеочистительного устройства
22о
Рис. 7.5. Привод ленты
Выходной вал редуктора соединен карданным валом 9 (по типу тепловоза
ТГМЗ) с ведущим валом 11, на котором посажены звездочки, приводящие в дви-
жение сетчатую ленту. Ведущий вал опирается на сферические роликоподшип-
ники, расположенные в корпусах 10. Последние при помощи двух подвесок 1
соединены с подъемной рамой 2. Для удержания ведущего вала с сетчатой лен-
той при обесточенных электродвигателях установлен колодочный тормоз 3
типа ТКГ-200.
Редуктор привода ленты (рнс. 7.6) предназначен для передачи крутяще-
го момента от электродвигателей привода к ведущему валу. Корпус редуктора
состоит из двух частей: верхней 9 и нижней 10, соединенных по плоскости
разъема болтами. В подшипниковых гнездах корпуса размещены входные ва-
Рис. 7.6. Редуктор привода ленты
8*
227
лы-шестерни 1 и 6 и выходной вал 3, на котором посажено зубчатое колесо 2.
На входном валу 6, закреплен тормозной шкив 4 гидравлического тормоза 8.
На корпусе предусмотрены рым-болт 5 и крюк 7 для подъема редуктора, от-
верстие 11 для заливки свежего масла н пробки 12 для спуска отработанного
масла.
Плетеная лента (рис. 7.7) состоит нз двух двухрядных втулочно-роли-
ковых цепей 1 с шагом 50,8 мм. Расстояние между осями внутренних цепей
1247 мм. Между цепями расположена плетеная сетка, состоящая нз спиралей
4 из проволоки диаметром 6—8 мм, вплетенных одна в другую и соединенных
между собой нижним рядом прутков 5 диаметром 12 мм. Прутки соединены
скользунами 6. Для увеличения сцепления движущейся леиты со щебнем и
защиты ее от износа лента снабжена верхними прутками 9. Для соединения
цепей с плетеной сеткой ее нижние прутки входят в отверстия скоб 2, приварен-
ных к внутренним цепям, а верхние — в отверстия пластин 3. Длина ленты
12801,6 мм. Она состоит из трех частей, которые в рабочем положении соеди-
нены в бесконечную леиту. Для приведения машины в транспортное положение
ленту разъединяют. Одна часть (90 звеньев) остается в иоже, а остальные две
части — на звездочках и роликах щебнеочистительного устройства. Их за-
крепляют тормозом и транспортными креплениями. Для разъединения ленты
прдусмотрены соединительные прутки 8, фиксируемые шплинтами 7.
Подрезной нож (рис. 7.8) сварной конструкции состоит из листа-основа-
ния 2, к которому приварены уголки /, служащие направляющими для цепей
ленты. К передней части листа-основания приварена режущая кромка 7 с
зубьями 5. Для увеличения износостойкости на концы зубьев и переднюю грань
режущей кромки наплавлены твердые сплавы. Применяются, как опытные,
ножи с режущей кромкой без зубьев. Передняя и задняя части ножа перекрыты
дугами 4. Сзади нож закрыт листом 3.
Для подведения иожа под поднятую путевую решетку канаты лебедок за-
цепляют за его проушины 10. На машине ЩОМ-4 применены лебедки от машины
ЩОМ-Д (см. описание рис. 7.27). После подведения ножа на конические бобыш-
ки 8 стоек несущей рамы направляют гнезда 11 подрезного ножа и притягивают
его цепями 9 канатов лебедок к стойкам несущей рамы. В этом положении нож
удерживают при работе машины. К скобам ножа прикрепляют при помощи крю-
ков 6 прутки-струнки, которые поддерживают оторвавшиеся шпалы и предот-
вращают попадание их под отвалы планировщика. В случаях когда ЩОМ-4 ис-
пользуют в качестве электробалластера для подъемки пути, балластерные
рамы со струнками также, как нож, прикрепляют к коническим выступам несу-
щей рамы.
А
Рис 7.7. Плетеная лента
228
Рис. 7.8 Подрезной нож
Бункер 5 (см. рис. 7.3) предназначен для направления и равномерного
распределения очищенного щебня на пути, а также для направления части
его на конвейер устройства для отбора щебня.
Бункер —это металлический трехстенный ящик 1 (рис. 7.9), укреплен-
ный на ферме № 1 в зоне расположения несущей рамы и щебнеочистительиой
ленты. Боковая стенка бункера облицована резиновым листом, способствую-
щим уменьшению шума, возникающего от ударов летящего с большой скоростью
щебня. Для регулировки распределения очищенного щебня по ширине пути и
отделения части его на конвейер устройства для отбора щебня в бункере пре-
дусмотрены два шибера 2, представляющие собой рамы, передняя часть кото-
рых с двух сторон обшита листами. Шиберы при помощи гидроцилиндров 4
перемещаются по направляющим роликам 3 и 5, расположенным вне бункера.
В наклонном днище бункера (в нижней части) предусмотрен вырез для разме-
щения приемной части 6 конвейера устройства для отбора части очищенного
щебня. При работе без отбора конвейер выводится из выреза бункера и устанав-
ливается в транспортное положение, а откидной лист 7 перекрывает вырез и
запирается, образуя сплошной наклонный лист днища бункера
Планировщик (рис. 7.10) предназначен для планирования под поднятой
путевой решеткой щебня, ссыпающегося с наклонного листа бункера. Он со-
229
Рис. 7.10 Планировщик
230
'стоит из опорных рам 6 и 8, к которым шарнирно при помощи рычагов 1 и •/
прикреплены несущие рамы 2 и 9. На нх цапфах посажены отвалы планиров-
щика— передний 10 и задний 11. При приведении отвалов в рабочее
и транспортное положения возможен их поворот вокруг цапф на 360°. Заглуб-
ление и развал несущих рам осуществляется гидроцилнндрами 5, перекос
опорных рам — гидроцилиндрами 7, а заглубление заднего планировщика по
отношению к переднему — гидро цилиндрами 3. Соединенные между собой под
путевой решеткой отвалы образуют в плане угол. Положение планировщика в
рабочем положении под путевой решеткой приведено на рис. 7.10. Транспорт-
ное положение показано пунктирной линией (см. рис. 7.10)
Устройство для отбора части очищенного щебня (рис. 7.11) предназначе-
но для предупреждения переподъемки пути, т. е. постановки его после очист-
ки балласта на отметку более высокую, чем до начала очистки. Переподъемка
происходит вследствие того, что весь очищенный щебень, в том числе и находив-
шийся до очистки в шпальных ящиках, укладывается под подошвы шпал Др у -
гая причина—разрыхление щебня в процессе очистки. Поэтому часть очищен-
ного щебня приходится направлять за пределы путевой решетки или на путевую
решетку после ее -опускания на балластную призму перед задней ходовой те-
лежкой машины, где он заполняет шпальные ящики. Устройство состоит из
конвейера 1 и бункера-распределителя 5 с двумя лотками 6. При помощи
гидроцилиндра 3 конвейер, перемещаясь по опорам 7, вводится или выводится
из выреза наклонного листа бункера 11 машины. Транспортирующая лента 2,
так же как и щебнеочистительная, состоит из втулочно-роликовых цепей и пле-
теной ленты. Привод 4 конвейера включает электродвигатель и цепную пере-
дачу. Бункер-распределитель сварной конструкции подвешен к ферме 1
(см. рис. 7.1). Нижние части его наклонных лотков (см. рис. 7.11) могут пово-
рачиваться гидроцилиндрами 13. При помощи заслонок, управляемых гидро-
цилиндрами 8, часть очищенного щебня направляется на конвейер, а затем кон-
вейером к бункеру-распределителю, откуда он ссыпается либо на опущенную
путевую решетку для заполнения шпальных ящиков (в этом случае поворотные
части лотков поднимают, а шибер 14 полностью или частично открыт), либо ук-
ладывается вдоль пути за концами шпал (в этом случае наклонные лоткн
должны находиться в опущенном, а шибер в закрытом положениях). При не-
обходимости можно весь щебень из бункера-распределителя ссыпать на одну
сторону пути (влево или вправо). Для этого одну из заслонок 12 устанавливают
в ннжнее (опущенное) положение, перекрывая выходной канал одной стороны.
Поступающий с транспортера щебень скользит по наклонной плоскости, обра-
зованной заслонкой и ссыпается через открытый выходной канал второй сто-
роны. Щебень, ссыпающийся из бункера 11, планируется отвалами 9 и 10.
Роторное устройство (рис. 7.12) предназначено для вырезкн щебеночного
балласта за концами шпал со стороны обочины н междупутья и создания двух
траншей для уменьшения сопротивления резанию щебеночного балласта под-
резным ножом при работе щебнеочистительной машины. Принцип действия ро-
торного устройства аналогичен действию роторных многоковшовых экскава-
торов. Устройство состоит из двух многоковшовых роторов 3. каждый из ко-
торых установлен на специальной раме 2. Кронштейн последней шарнирно со-
единен с опорой 10, укрепленной на конце горизонтально расположенной штан-
ги. Последняя сидит в направляющей 12, прикрепленной к нижним поясам
фермы № 1 (см. рис. 7.1) и может перемещаться в ней Благодаря этому каждый
ротор может подниматься или опускаться гидроцилиндром 1 (см рис 7 12) в
вертикальной плоскости при повороте вокруг горизонтальной оси штанги и
перемещаться гидроцилиндром 11 перпендикулярно оси машины при перемеще-
нии опоры ротора вместе со штангой в ее направляющей Гидроцилиндры подъе-
ма и опускания роторов шарнирно закреплены на опорах, приваренных к фер-
23
Рис. 7.11 Устройство для отбора
ме, а цилиндры перемещения роторов в поперечном направлении закреплены на
корпусе направляющей для штанг В транспортном положении роторы крепят к
верхним поясам фермы стяжками и крюками 18. Каждый ротор опирается на
катки двух поддерживающих валов 8 и направляется катками направляющих
валов 7 Днище и боковые стенки ковшей снабжены зубьями из износостойкой
стали, а задняя стенка 14 выполнена из стальных прутков На обоих дисках
ротора приклепаны секциями зубчатые рейки /7, с которыми зацепляются две
выходные шестерни коническо-цилиндрического редуктора 6 привода ротора
Электродвигатель 5 привода и редуктор 6, соединенные цепной муфтой 4, ус-
тановлены на раме ротора на своей опоре Для предупреждения поломок при-
вода и деталей ротора при наездах на препятствия предусмотрена электриче-
ская и механическая защита. Последняя осуществляется срезным штифтом в
цепной муфте На передней части рамы ротора перед ковшами установлен на-
клонный желобчатый лоток 9, который как бы удлиняет забой и улучшает
наполнение ковшей В зависимости от глубины резания высота установки лот-
ка регулируется таким образом, чтобы нижняя его кромка была выше уровня
балласта на 50 60 мм Вырезанный щебень направляется на путевую решет-
ку лотком 13. При установке направляющего листа 15 для выброса вырезан-
ного щебня на обочину лоток устанавливается в положение 16
Устройство для пробивки щебня (рис 7 13) предназначено для выталки-
вания на балластную призму щебня, оставшегося в шпальных ящиках после
подъемки путевой решетки, для очистки его вместе со всей массой балласта.
Устройство состоит из рамы 2, один конец которой при помощи шарового под-
шипника соединен с пальцем 1 кронштейна, приваренного к междуферменному
шарниру, а другой закреплен на пальцах пружинных подвесок 6, соединенных
со штоками двух гидроцилиндров 5 по одному с каждой стороны машины На
горизонтальной оси, расположенной на этом подвижном конце рамы, по всей
ширине путевой решетки посажены свободно вращающиеся пробивочные ор-
ганы 7 (два с наружной стороны рельсов и два внутри между ними) Пробивоч-
ный орган представляет собой ступицу, на которой равномерно по окружности
размещены шесть спиц 9 со специальными пятками на концах. При движении
машины пробивочные органы спицами зацепляют шпалы поднятой путевой
решетки и, попадая при этом в шпальные ящики, выталкивают застрявший в
232
части очищенного щебня
них щебень вниз под путевую решетку. Подъем и опускание подвижного кон-
ца рамы осуществляется двумя гидр о цилиндрам и 5 двустороннего действия.
Фиксация устройства по высоте в заданном рабочем или транспортном положе-
ниях осуществляется при помощи двух стяжек 10, соединенных шарнирно с
подвижным концом рамы и двух штырей 4, вставляемых в отверстия коробок 3,
приваренных к стенкам фермы по одной с каждой стороны машины. Направ-
ляющие 8 ограничивают движение устройства в поперечном направлении.
Для центрирования устройства по оси фермы предусмотрены пружинные бу-
фера 11, соединенные с рамой устройства тягами 12.
Кран предназначен для погрузки подрезного ножа с находящейся в нем
частью щебнеочистительной ленты и снятия его на обочину перед началом ра-
боты по очистке щебня. Кран установлен на ферме №2 (см. рис. 7.1), Он со-
стоит из неподвижно закрепленной на ферме колонны 7 (рис. 7.14), стакаиа4
с консольной стрелой 2, посаженного на колонну на двух радиальных и одном
опорном подшипниках, механизма подъема 8 и механизма поворота 5 стрелы 2.
Механизм подъема состоит из электродвигателя, цилиндрического редуктора,
барабана,лебедки, электромагнитного колодочного тормоза,обводных блоков,
и грузовой обоймы с цепным стропом для строповки подрезного ножа 1. Для
предохранения механизма подъема от перегрузок установлен ограничитель 3
грузоподъемности. Механизм поворота состоит из электродвигателя, цилин-
дрическо-червячного редуктора и колодочного тормоза. Выходная шестерня
редуктора зацепляется с зубчатым колесом, посаженным на нижнюю часть ста-
кана. При повороте зубчатого колеса вместе с ним поворачивается и стакан со
стрелой Кран неполноповоротнын. Угол поворота ограничивается выключа-
телями 6-
Рельсо-шпальные щетки (рис. 7.15) предназначены для сметания балласта
со шпал и рельсов, ссыпающегося с бункера-распределителя и устанавливают-
ся перед задней ходовой тележкой Они состоят из подвижной рамы 1, которая
при помощи траверсы 5 соединена со штоком цилиндра'<? подъема и опускания
рамы с щетками: шпальными 7 и 9 и рельсовыми 10. Подвижная рама при ее
подъеме и опускании направляется своими скользунами 6 в направляющих 2.
В рабочем положении щетки опираются на рельсы роликами 8, а в транспорт-
ном — крепятся штырями к транспортным проушинам 4. Шпальные щетки 16
233
Рис 7.12. Роторное устройство
Л-Л
Рис. 7.13 стронет во для пробивки щебня в шпальных ящиках
(см. рис. 7.1) принципиально не отличаются от рассмотренных, а рельсовые
19 представляют собой два металлических уголка, прижимаемых при работе
к поверхностям катания рельсов.
Гидрооборудование машины предназначено для подъема, опускания и
передвижения всех рабочих органов при их приведении в рабочее и транспорт-
ное положения, а также выполнения рабочих операций по подъемке и сдвижке
пути электромагнитным подъемником. Гидрооборудование состоит из трех
насосных станций, регулирующей, измерительной и распределительной гид-
роаппаратуры и исполнительных гидроцилиндров. На ферме № 1 расположе-
ны две одинаковые насосные станции, соединенные между собой гидрозолот-
ником, в зависимости от положения которого возможна их раздельная работа
каждой на свою систему или совместная — на обе системы гидроприводов фер-
мы № 1. Насосная станция, расположенная на ферме № 2, состоит из двух на-
сосов БГ12-24, один из которых соединен с электродвигателем переменного то-
Рис. 7.14. Кран
235
Рис. 7 15. Шпально-рельсовые щетки
ка, а другой — с электродвигателем постоянного тока^ Последний, питаясь от
тепловоза, является аварийным и предназначен для обеспечения приведения
рабочих органов в транспортное положение в случае выхода из строя электро-
снабжения переменного тока от своей электростанции.
Принципиальная схема гидрооборудовайия фермы № 2 приведена на
рис. 7.16. Гидронасосы 12 и 16 с электродвигателями М, всасывая масло из ба-
ка 13, нагнетают его через обратные клапаны И и 17 в напорную магистраль,
давление в которой ограничивается предохранительным клапаном 9 и контро-
лируется манометром 18. Подъем и опускание роторов производятся двумя ци-
линдрами 4, по одному на каждый ротор, работой которых управляют при по-
мощи золотников 22 с электромагнитными катушками ЭМЬ ЭМ7, ЭМ5, ЭМ6.
На цилиндрах установлены двусторонние гидравлические замки 5 для фикси-
рования роторов в любом положении по высоте и предохранительные клапаны
3 и 6 для выпуска масла из верхних полостей цилиндров в бак при превышении
допустимого давления в них (в случаях наезда на препятствие или превышения
подпора). Роторы передвигаются цилиндрами 20, которыми управляют посред-
ством золотников 21 с электромагнитами ЭМЗ, ЭМ4, ЭМЗ. ЭМ9. При нейтраль-
ном положении золотника обе полости закрыты. Подъем и опускание рельсо-
вых щеток производятся цилиндром 1, который управляется золотником 23
с электромагнитами ЭМ 10, ЭМ 11 и дросселем 24. Положение щеток по высоте
фиксируется управляемым обратным клапаном 2. Масло сливается в бак через
два каскада фильтров 14 и 15. Давление на сливе контролируется по маномет-
ру 19. Разгрузочный клапан 10 при невключенных золотниках гидроцилиндров
соединяет напорную магистраль с баком и разгружает ее. При включении лю-
бой катушки золотника разгрузочный клапан разъединяет напорную маги-
страль с баком, подготавливая систему к функционированию. В аварийных
236
Рис. 7 16 Схема гидрооборудования
случаях подключение насосных станций фермы № 2 к насосным станциям фер-
мы № / производится вентилями 7 и 8. Схемы гидрооборудования для управле-
ния рабочими органами фермы 7 (см, рис. 7.1) аналогичны рассмотренным
схемам гидрооборудования фермы № 2. Дополнительно для синхронизации
работы цилиндров на механизмах устройств для пробивки щебня в шпальных
ящиках, сдвига пути, подъема и опускания подъемной рамы применяются де-
лители потока.
7.1.2. Определение мощности привода сетчатой ленты
Мощность М, кВт, необходимая для привода сетчатой ленты щебнеочисти-
тельного устройства, может быть определена двумя методами: по суммарной со-
ставляющей мощности, потребной для выполнения отдельных операций, и с
учетом натяжения в ленте (определяемого методом обхода по контуру) и ско-
рости ленты. Рассмотрим первый метод как более простой. Исходной является
формула
N = Л^+ N2-r N3+ (7.1)
где Лй — мощность, расходуемая на преодоление сил трения при движении ленты в ноже,
кВт;
jVo — мощность, расходуемая на сообщение кинетической энергии щебню и загрязни-
телям, при условии, что их скорость достигает скорости ленты, кВт;
,¥3 —- мощность, расходуемая на подъем чистого щебня на высоту и загрязнителей
на высоту #2> кВт; для ОЩМ-Д — 1,6 м, Н2 — 0,6 м;
237
Л/4 —мощность, расходуемая на дви-
жение ленты, как загруженного
конвейера, кВт;
Fip г’л
1000
Рис 7 17 Расчетная схема щебнеочисти-
тельного устройства
Ffp —сила трения, возникающая меж
ду ножом и движущейся лентой
со щебнем, Н;
y.-j —скорость ленты, равная!Он-14 м/с.
Сила трения определяется по
формуле
ДТр _ (6щ l у() Lv) ft[> (7.3)
где бщ — вес щебня па горизонтальном участке ленты, Н;
(/о — вес 1 м ленты (qf, 1150 Н/м);
/л — коэффициент трения ленты о нож (с учетом сильной загрязненности и закли-
нивания /д о,7-:-1,0);
Lr — горизонтальная длина ленты, м;
Ощ ~ lOSBy - ЮЛЬ,- By; (7.4)
5 — площадь продольного сечения вала щебня, находящегося на ленте, м;
В — ширина ленты, м,
Л — средняя толщина слоя щебня на ленте, Л принимается равной толщине одной
щебенки (0,025—0,075 м).
При равномерно ускоренном движении щебия на ленте под действием по-
стоянной силы трения площадь 5 (рис. 7.17) на участке ленты длиной Lr -
- 3,4 м, как показали опыты, ограничивается сверху кривой ОА. Для упро-
щения расчета среднее значение площади 5, м2, может быть приближенно оп-
ределено по формуле
77 об 7-г
5-----------
ЗбООг-л В'
где /7об — объемная производительность, м3 ч (для ЩОМ-4 ПОб 3000 м8/ч);
В — ширина ленты, м (В — 1 м):
у — объемная плотность щебня, кг/м3, у -• 1800 кг/м3.
Далее определим
77 об
Л? 2------------у (7.5)
2-3600-1000 * к ’
где Лоб — объемная производительность, м3/ч.
Следующая составляющая суммарной мощности
,, 77чист //чист4 77заг НЯЯ(
АЛ.— ----------------------, (7.6)
3600-1000 V
где ЛЧ11С1 — весовая производительность по чистому щебню, Н/ч:
//чист — /7 вес Ф) ’>
Ф1 — коэффициент, учитывающий долю чистого щебня в общем объеме (Ф1 = 0,6*т-
0,7);
//чист — высота подъема чистого щебня (//чист = 1,6 м);
Лвес — весовая производительноть, Н/с:
п - 10Лоб V .
Вес“ 3600
77заг — вес загрязнителей, удаляемых в 1 с, Н/с:
77заг — Ф1 /7пес; (/7заг-=/7од у-0,4 Н/с);
7/заг — средняя высота подъема загрязнителей — 0,6 м).
238
Мощность V4, кВт, расходуемая на движение ленты как горизонтального
конвейера, может быть определена по формуле (2.73)
10/7<>б еру । 2д0 Ь,ч ыуя
3600-1000 + 1000
(7.7)
где /70б — производительность, м3/ч;
Lut — путь транспортирования щебня (£щ — Lr 4- Няаг + ЯЧцст);
о) — коэффициент сопротивления движению ленты (с учетом загрязнения и закли-
нивания (о — 0,14-0,2);
90 — вес 1 м ленты, Н м;
Ln — полная длина ленты, м.
Зная общую мощность N, находим мощность одного электродвигателя при-
вода ленты, кВт,
где 7] — к.п.д. передачи;
п — число электродвигателей,
/гс — коэффициент синхронности работы двигателей (кс ~ 0.954-0,9).
Подобрав по таблицам ГОСТа электродвигатель, находят общую установ-
ленную мощность привода Л/]ф и определяют усилие в сетчатой ленте Р, Н,
Лнр 1000
Р-. ------------- »].
ул
(7.9)
Учитывая, что сетчатая лента имеет две цепи, усилие на одну цепь Р{
Р.2ф, (7.10)
где ф — коэффициент неравномерности работы цепей, ф — (0,85—0,9).
Разрывное усилие
^раз Р ।,
где ni — коэффициент запаса;/г3^8 4-10. Зная гц, по ГОСТу подбирают цени.
Пример. Определить мощность и усилие в сетчатой ленте ЩОМ’ производительность
Поб = 3000 м3/ч, скорость лепты = 14 м с; объемная плотность у 1800 кг/м3, высо-
та подъема чистого щебня //,шсг — 1,6м; загрязненного H3ar = 0,6 м; вес I м ленты
д(1 — 1 150 Н/м, ширина ленты В — 1,0 м; горизонтальная и общая длины ленты соответ-
ственно Lv ~ 3,4 м, £л ~ 12,8 м; толщина слоя щебня на ленте h — 0.075 м (75 мм)
равна диаметру щебенки. Мощность кВт, необходимая для преодоления сил трения,
находим по формулам (7.2—7.4):
Гтр °л (|0й£г Ву-J- Lr) 1Л 1>л
?/, ==--------------------------------- _
1000 1000
(10-0,075-3,4-1 • 1800-Ь 1150-3,4) 0,9-14 _ „
юоо _ G
Мощность, кВт, необходимая для сообщения щебню кинетической энергии (см. фор
мулу (7.5)],
/7об У'4 3000-1800-142
=------------—-- --------------- 147.
“ 3600-2 1000 3600-21000
Мощность, кВт, необходимая для подъема щебня [см. формулу (7.6)],
У /7диет ^чист-Н^заг 7У3аг 10 (Прб YTi ^чнстЧ-^рб у-0,4/73а1.)
3 “ 3600-1000 = 3600•1ооо
10 (3000-1800-0.6-1,64-3000-1800-0,4-0,6)
3600-1000
239
Мощность, кВт, необходимая для работы сетчатого устройства как конвейера д/4,
10/7o(j у (Z-г~i ^эаг~г^чист) У
#4 =
2д0 £л ощл
3600.1000 1000
10-3000-1800 (3,4+ 0,4+1,6) 0.1 2-1150-12,8-0,1 -14 4Л п „
---------------------------------1-------------------=49,316.
3600-1000
1000
Общая мощность, кВт,
/V = /Vi + М2 + Ns + = 107,1 + 147 + 18 + 49,316 = 321,416
Принимая к.п.д. передачи ц = 0,95, находим мощность двигателей, кВт.
„ к 321,416 „
~ ц 0,95 338,332 ’
В качестве привода с учетом компановки щебнеочистительного устройства принимаем
два электродвигателя. Учитывая коэффициентом кс = 0,95-^-0,9 возможную несинхрон-
ное™ работы двигателей, находим мощность одного электродвигателя Л^л, кВт,
W 338,332
Л'эп“ пкс “ 20,95 178да-
Выбираем два электродвигателя мощностью по 180 кВт. Следовательно, общая мощ-
ность привода /VnD = 2ЛСл = 360 кВт. Усилие в сетчатой ленте, кН, находим по формуле
(7-9)
Л+р-1000
р=-----------
Ул
Учитывая, что сетчатая
360-1000
п=---------- 0,95 = 24 428/7 = 24,42 кН.
' 14
лента имеет две цепи, усилие на одну цепь, Н, Рх
Р/2ф = 24 428/2 0,9 = 13 571.
Разрывное усилие в цепи, Н, при коэффициенте запаса п3 — 10
Spaa — Р1 135 /10.
Зная 5Раэ, выбирают по ГОСТу цепь.
Мощность /V, необходимую для привода механизма поворота крана
(рис. 7.18) машины ЩОМ-4, стоящей на кривой, определяют для упрощения
расчета, без учета сил инерции:
м Мст пк _____ (Мтр /VfB-j-/VfH) нк
9550ц 9550ц
где Мст — суммарный статический момент сил сопротивления повороту крана, Н • м;
Л4тр — момент сил трения в подшипниках колонны крана, Н • м;
ЛТВ — момент сил от ветровой нагрузки, Н - м;
Мк — момент сил, возникающих от наклона крана при работе на кривых участках
пути, Н - м;
лк — частота вращения стрелы крана, об/мин;
ц — к.п.д редуктора механизма поворота крана.
Кран смонтирован на колонне, поэтому силы трения возникают в верх-
нем, нижнем и опорном подшипниках. Соответственно этому в верхнем (сфери-
ческом) подшипнике возникнет момент трения Л4®р, в нижнем (роликовом)
Н-м; в опорном подшипнике A(°J, Н-м. Тогда момент сил трения составит
Любой из этих моментов сил трения выражается формулой
АЛ* _ pi r.
где FzTp — сила трения в i-м элементе:
Ftp = Ri НК
240
Ri — нормально действующая сила;
|.i,: — коэффициент трения;
г, — радиус действия силы F* :
гг.-=0,5 dt
d{ — диаметр элемента.
Каждый из моментов трения определится по формулам:
М*р-0,5/?в dR к; (7.12)
.М«р-0,5/?н^ргК; (7,13)
М™^0.5Яопф)пИ1К, (7-14)
где RB, Rl{ и Ron — суммарные реакции соответственно в верхнем, нижнем и опорном
подшипниках, Н;
dR, dn и d(m— диаметры по кругу катания соответственно верхнего, нижнего и
опорного подшипников, м;
к — коэффициент, учитывающий неточность монтажа и зазоры;
[.ц и ц2 — коэффициенты трения.
Определяем реакции в верхнем, нижнем и опорном подшипниках колон-
ны, возникающих от сил, действующих в плоскости стрелы. Как известно из
курса «Сопротивление материалов», реакции в подшипниках в рассматривае-
мом случае находятся'из уравнений суммы моментов всех действующих сил
относительно одной из опорных точек:
241
где GK — вес поворотной части крана, Н;
х — координата центра тяжести поворотной части крана, ,м;
G — вес поднимаемого груза, Н;
L — вылет груза, м;
b — расстояние между подшипниками.
Определим реакцию в верхнем подшипнике от сил, действующих перпен-
дикулярно плоскости стрелы,
(G1 +^вг) (Я —a)+G* (у -а)Ц Рвк (yt — а)
РВ2 = , (7.16)
где G1' — горизонтальная составляющая от веса груза, перпендикулярная оси колонны,
возникающая на кривых участках пути, Н:
Gr = G sin ф; (7.17)
ф — угол наклона крана;
Р вг — сила давления ветра на груз, Н:
/%г — Р вг 7в1 (7.18)
/'в г — подветренная площадь груза, м2;
«Ун — удельное давление ветра, Н/м3;
Н — расстояние от рамы машины до оси установки блоков, м;
а — расстояние от рамы машины до оси нижнего подшипника колонны, м;
G^ — горизонтальная составляющая от веса поворотной части крана, Н:
G^ GK sin ср; (7.19)
у — координата центра тяжести поворотной части крана, м;
Рвк — сила давления ветра на подветренную площадь крана, Н:
= ^вк 7н’> (7.20)
Ух — координата центра давления ветра на кран, м.
Определим реакцию в нижнем подшипнике от сил, действующих перпенди-
кулярно плоскости стрелы, Н, из суммы проекций на горизонтальную ось
всех сил :
^Л-^в2- & -^г- Ск ” (7.2|)
Суммарные реакции в верхнем и нижнем подшипниках, Н, определяются
по формулам;
(7.22)
(7.23)
Реакция в опорном подшипнике, Н,
Rott — G~r G^-rS^, (7.24)
где SK — усилие в канате лебедки, Н:
SK — G 4i]JJ().~iirc. (7.25)
Определение момента от ветровой нагрузки /Ив, Н-м,
М В — Р ВК РВГ 7-> (7.26)
где — координата центра давления ветра на кран, м.
Определение момента от сил, возникающих от наклона крана прн работе
на кривых Л)л, Н-м,
Mn-Gr L-\ G^x. (7 27)
Пример, Рассчитать мощность электродвигателя механизма поворота крана грузо-
подъемностью 4 т (вес груза 40 кН). Все приводимые ниже размеры, веса и другие исход-
ные данные, необходимые для расчета, приняты по данным проекта ЩОМ-4, разработан-
ного ПТ КБ ЦП МПС,
242
Определяем суммарные реакции в верхнем и нижнем подшипниках колонны.
По формуле (7.15) находим реакции и Рв , Н, от сил, действующих в плоскости
стр елы,
GKx~\~GL |3 000-1,34-| 40 000-3,85 17 420 + 154 000
РВ1 - = ----“--------- ------------+-----------------+7---------- 109 884.
* Hl b 1,56 1,56
Для определения реакции RK в верхнем подшипнике от сил, действующих перпен-
дикулярно плоскости стрелы, находим:
горизонтальную составляющую груза, Н [см. формулу (7.17)],
Gr = G simp = 40 000 0,08 = 3200;
силу давления ветра на груз. Н [см формулу (7.18)1,
Р1(Г = /?НГ <?в-1 .25-250 = 312,5;
горизонтальную составляющую от веса поворотной части крана, Н [см. формулу (7.19)]
G’K — GK sin ф= 13 000-0,08 -1040;
силу давления ветра па подветренную площадь Гвк крана, Н [см. формулу (7.20)],
Рвк — Рнк <7 в = 2,18 • 250 545;
координаты у- 1,56 м; ул — 1,38 .м; размеры И = 1,84 м; а =0,11 м.
По формулам (7.16) и (7.21) определяем реакции, Н:
(G’ +РВГ) (II—a) +GB (у —а)-Рви (г/! — а)
(320Q —312,5) (1,84 —0,11)+ 1040 (1 ,56 — 0,11) |-545 (1,38- 0,11)
1,56
... 6100-^510 + 8^ _
1,56
Рв„ — Gr — РГ!Г — GrK —Рвк -5300 — 3200 — 312,5— 1040 — 518- 230.
Суммарные реакции в верхнем Рв и нижнем Рн подшипниках, Н, находим соответ-
ственно по формулам (7.22) и (7.23):
R(! _ У + - У 1098842 — 5400^ ^- 110000,
Pir_|//P^,+ ^+^ V Ю9884Ч-2302 110000.
Определяем реакции Р()П в опорном подшипнике, Н. По формуле (7.24) находим
Рои G |-GK tSk = 40 000-1 13 0004-12 300-65 300.
Усилие в канате лебедки SK, Н, определяем по формуле (7.25)
SK- G'4n„0>inc_ 40 000+ -0,815 12300.
Моменты трения в верхнем, нижнем и опорном подшипниках, Н - м, подсчитываем
соответственно по формулам (7.12), (7.13) и (7.14):
М®р -0,5Рв dB щ к-0,5-110 000-0,1-0,015-1,5-124;
М“р-0,5р„ р., к —0,5-НО 000-0,29-0,02-1,5^ 478;
М°р — 0,5РОИ +ш р.] к =0,5-65 300-0,1 5-0,015 1,5 — 110.
Суммарный момент трения Мтр, Н м, составит
М1.р..-=М®р + М;,р-| A4°J=-124 1-478 |-110-712.
Цемент А4В от ветровой нагрузки, Н-м, определяем по формуле (7.26)
Мв Рвк х,1 ]• Рвг Р —545-1,21 +312,5-3,85.-1860.
243
Момент Мн от сил, возникающих от наклона крана при работе на кривых, Н • м,
определяем по формуле (7 27)
Gr l-~\-GrK х —3200 3.85+1040-1,34 = 13 700.
Мощность N, кВт, электродвигателя привода механизма поворота крана определя-
ем по формуле (7.11)
(Мтр + Мв + Mf[) пк (712+i8604-13 700) 0,89
9550?! = 9550-0,585 =2’6-
Выбираем электродвигатель серии 4а с повышенным скольжением типа 4AC100L6
мощностью 2,6 кВт; частота вращения п — 920 об/мин.
7.2. ЩЕБНЕОЧИСТИТЕЛЬНАЯ МАШИНА ЩОМ-Д
ЩОМ-Д является первой щебнеочистительной машиной, на которой при-
менен центробежный способ очистки балласта Она так же, как ЩОМ-4, пред-
назначена для очистки щебеночного или гравийного балласта по всей ширине
балластной призмы одного пути, но на глубину до 250 мм. Кроме того, ее мож-
но использовать для вырезки песчаного балласта.
Базой машины является электробалластер ЭЛБ-1. На машине сохранены
все его рабочие органы (за исключением дозатора на фермер /), поэтому маши-
на ЩОМ-Д (рис. 7.19) может применяться так же, как электробалластер. На фер-
ме 8 размещены узлы щебнеочистительного устройства 6, управление которы-
ми осуществляют из будки 10 и выносного поста 7, на ферме 2 — кран 4, уп-
равляемый с поста 5. Фермы 2 и 8 усилены увеличена высота стенок в сечениях
фермы, где расположено щебнеочистительное устройство; наварены дополни-
тельные полосы на нижний и верхний пояса; связи из уголков заменены листо-
выми диафрагмами Тележки 1 и 9 оставлены от электробалластера, а тележка 3
заменена четырехосной Передвижение машины в рабочем и транспортном со-
стояниях осуществляется специально переоборудованным тепловозом ТЭЗ,
который является также источником электроэнергии для питания постоянным
током двигателей привода щебнеочистительной ленты. Двигатели остальных
механизмов питаются переменным током от электростанции, установленной на
машине.
Щебнеочистительное устройство (рис. 7 20) состоит из подъемной рамы 3
с приводом 4, ленты, несущей рамы 2 с подгребающими крыльями /, планиров-
щика 5, бункера 6, подрезного ножа и сетчатой ленты 7. По принципиальной
схеме, приведенной на рис. 7.21, можно проследить за работой щебнеочисти-
тельного устройства машины ЩОМ-Д Аналогично работе устройства на щеб-
неочистительной машине ЩОМ-4 загрязненный щебень при ее движении под-
резается подрезным ножом 1 и подается на движущуюся (по направлению
стрелки) со скоростью до 12 м/с сетчатую ленту 2. Увлекаемый лентой щебень
очищается от загрязнителей вначале на горизонтальном участке, а затем под
действием центробежной силы — на криволинейном участке трассы ленты,
образованном роликовой батареей 3 Очищенный щебень после звездочки 4
регулирующего устройства направляется в бункер 6, где он распределяется по
ширине балластной призмы заслонками 7 и 8 Лента приводится в движение
двумя звездочками 5 ведущих валов и направляется снова к ножу отклоняю-
щими звездочками 9. Качество очистки щебня н дальность выброса загрязни-
телей зависят от скорости движения сетчатой ленты.
Подъемная рама (рис 7.22) предназначена для установки на ней привода
леиты и навески несущей рамы с подрезным ножом. Она состоит из горизон-
тальной сварной площадки, снизу которой укреплены четыре башмака 9 с
пазами, в которые входят разъемные обоймы 10 со сферическими гнездами для
244
ьо
Рис. 7.21. Схема работы щебнеочистительного устройства
Рис. 7.20. Щебнеочистнтельное устройство
•сфер 8 стержней, соединенных со скользунами 6 рамы. Скользуны перемещают-
ся в направляющих 7и представляют собой литые балки с двумя проушинами
11 для соединения с параллелограммной подвеской несущих рам. Подъем и
опускание рамы производятся четырьмя домкратами /. На горизонтальной
площадке размещены электродвигатели 5, редукторы 4, валы 3 привода ленты
и бачок 2 для смазки ее цепей. Домкраты грузоподъемностью по 12 т каждый
представляют собой червячные редукторы с электроприводом, в которых
подъемные винты перемещаются червячными колесами, являющимися их гай-
ками Подъемные винты своими шаровыми опорами опираются на ферму маши-
ны Червяки редукторов имеют хвостовики с квадратами для ручного привода
домкратов в случае выхода из строя электростанции машины. Правый и ле-
вый редукторы каждого конца рамы соединены через гибкие муфты с одним
электродвигателем. Управление электродвигателями домкратов может быть
общим и раздельным Последнее позволяет производить продольный наклон
подъемной рамы, а следовательно, и подрезного ножа для установки необхо-
димого угла резания.
Приводной вал 5 (рис 7.23) щебнеочистительной ленты опирается на два
сферических ротиковых подшипника 9, которые расположены в корпусах сталь-
ных литых кронштейнов /. На валу на шпонках посажены ведущие звездочки 6,
состоящие из ступиц и сменных зубчатых венцов. Корпуса подшипников за-
крыты крышками 3 и 10. Регулировка подшипников осуществляется за счет
прокчадок 4 и дистанционных втулок 7, а уплотнение выходных отверстий —
сальниками 8. Подшипники смазывают через отверстия, закрытые пробка-
ми 11. Для удержания ленты после ее разъединения предусмотрено прижимное
устройство 2.
Редуктор привода ленты (рис. 7.24) состоит из литого стального корпу-
са /, к которому болтами прикреплена стальная крышка 2, снабженная лю-
ком 4, через который периодически осматривают зубья шестерен, и рым-бол-
том 3, служащим для переноса редуктора. Низ корпуса снабжен фланцем с от-
верстиями для закрепления редуктора на подъемной раме. В корпусе располо-
жены входной 11 и выходной 15 валы, опирающиеся на шарикоподшипники 13,
прикрытые глухими крышками 14 и крышками 9 с отверстиями для пропуска
консольных частей валов. Крышки 9 имеют уплотнительные манжеты 10, кото-
рые предохраняют редуктор от загрязнения и предупреждают утечку смазки,
На валах закреплены косозубые цилиндрические шестерни. Шестерня 12
выполнена как единое целое с валом; зубчатое колесо 8 имеет сменный венец
и закреплено на валу шпонкой. На консольной части вала 11 шпонкой за-
Рис 7 22. Подъемная рама щебнеочистнтельного устройства
246
Рис. 7.23. Приводной вал
крепляется втулка зубчатой муфты, соединяющей его с валом электродвигате-
ля мощностью 180 кВт. На консольной части вала 15 закрепляется втулка
зубчатой муфты, соединяющей его с приводным валом цепей ленты. Для конт-
роля уровня масла в корпусе предусмотрен указатель 6, а для спуска масла —
пробка 7. Масло в корпус редуктора заливают через крышку люка 4, в проб-
ке 5 которого предусмотрено отверстие для сообщения внутренней полости ре-
дуктора с атмосферой.
Несущая рама (рис. 7.25) является основанием для установки подрезного
ножа, батареи 2 со звездочками, регулирующего устройства9, направляющих
Рис. 7.24. Редуктор привода ленты
247
Рис. 7.25. Несущая рама
звездочек 14 и лебедок 7 для затаскивания и подъема ножа При работе машины
она воспринимает усилие подпора балласта и тяги тепловоза. Она состоит из
левой и правой рам 8, шарнирно соединенных при помощи рычагов 6 со сколь-
зунами 5 подъемной рамы. В нижние части стоек рамы вварены конические
бобышки 15, которые в рабочем положении входят в конические гнезда ножа
и в таком положении удерживают его лебедками 7 во время работы машины.
На передних стойках установлены крылья 1 с подкрылками для увеличения ши-
рины захвата загрязненного щебня и распорный домкрат 15. Для подъема и
опускания каждой стороны несущей рамы предназначены два гидравлических
цилиндра двустороннего действия. Фиксация каждой стороны рамы осущест-
вляется двумя реечными стопорами 11. Каждый стопор состоитиз рейки, соеди-
ненной шарнирно с рычагом 6 и подпружиненного зубчатого стопора 4, соеди-
ненного с фермой машины. Под воздействием пружины зубья стопора входят
в зубья рейки и удерживают в таком положении несущую раму. Для возмож-
ности ее подъема или опускания расцепляют стопор с рейкой при помощи вспо-
могательного гидравлического цилиндра. В транспортном положении несущая
рама дополнительно удерживается винтовыми стяжками. В верхней части ба-
тареи установлен щиток 3 для направления выбрасываемых отходов. Цепная
растяжка 12 предназначена для усиления крепления рамы к ферме машины.
Ролик 13 служит для направления каната лебедки 7 при затаскивании ножа
под поднятую путевую решетку при зарядке щебнеочистительного устройства
и вытаскивания ножа — прн разрядке.
Регулирующее устройство (рис. 7.26), размещенное над роликовой бата-
реей, предназначено для изменения угла наклона участка трассы ленты с це-
лью регулирования распределения очищенного щебня по ширине бункера,
а регулирующее устройство, расположенное на противоположной стороне
фермы машины,—для натяжения ленты.
Регулирующее устройство состоит из двух звездочек 12, установленных
на оси 13 на подшипниках качения, расположенных в их ступицах. Консоль-
ные части оси 13 опираются на ползуны 2, расположенные в направляющих 1.
Верхние концы ползунов серьгами 3 шарнирно присоединены к рычагам 4,
которые посажены на оси 5, закрепленные на несущей раме. Наружные концы
рычагов 4 шарнирно соединены с вилками вертикально расположенных
Рис. 7.26. Регулирующее устройство
249
винтов 7, гайками которых служат червячные колеса редукторов 8. Вилки
винтов 7 помещены в направляющие 6. Редукторы 8, направляющие 6 вилок
н электродвигатель 11 привода закреплены на несущей раме. Электродвига-
тель 11 расположен между редукторами, имеет два конца вала н посредством
муфт 9 и промежуточных валов 10 соединен с червяками редукторов8 При ра-
боте электродвигателя в ту или другую сторону сообщается поступательное
движение винтам. Винты 7 поворачивают рычаги 4, которые через серьги 3
поднимают или опускают ползуны 2 вместе со звездочками 12. Движением
звездочек изменяют угол наклона ленты или натяжение ее цепей.
Лебедка (рис. 7.27) предназначена для затаскивания подрезного ножа
под путевую решетку, подъема его для соединения со стойками несущей рамы
и удержания на конических бобышках стоек рам- при работе шебнеочиститель-
ного устройства. После окончания работы лебедками вытаскивают нож из-под
путевой решетки для погрузки на ферму машины. Лебедка состоит из корпуса
5 с крышкой 4. К фланцу 9 корпуса болтами крепится электродвигатель 8
мощностью 2,8 кВт. В корпусе расположен червячный вал 10, опирающийся
одним концом на два конических роликоподшипника 11, закрываемые крыш-
кой 12, а другим — на вал электродвигателя. Червячный вал шпонкой соеди-
нен с валом электродвигателя. Отверстие в корпусе для пропуска конца чер-
вячного вала закрыто крышкой 7 с уплотнительным кольцом.Червяк находит-
ся в зацеплении с бандажированным червячным колесом 3, закрепленным на
валу 2 шпонкой. Вал опирается на два скользящих подшипника /, один из
которых запрессован в приливе корпуса, а другой — в приливе крышки На
консольной части вала червячного колеса шлицами закреплен барабан 6 для
стального каната лебедки. Один конец каната закреплен на барабане, к друго-
му подвешен крюк Л?. При вращении барабана канат навивается на него или
свивается с него, при этом поднимается или опускается крюк Лебедки болтами
крепятся к верхним торцам несущей рамы. На машине предусмотрено четыре
лебедки, по две на каждой вертикальной раме.
Подрезной нож и щебнеочистительная лента, так же как и на машине
ЩОМ-4, предназначены для вырезки и очистки загрязненного щебня. По своему
Рис. 7.27. Лебедка
250
Рис. 7 28 Планировщик
принципиальному устройству они отличаются лишь тем, что вместо двухряд-
ных втулочно-роликовых цепей для привода ленты применены однорядные.
Бункер также принципиально аналогичен бункеру ЩОМ-4. В отличие
от последнего для привода заслонок бункера ЩОМ-Д применен электромеха-
нический привод с червячным редуктором.
Планировщик (рис. 7.28) предназначен для планировки очищенного щеб-
ня под поднятой путевой решеткой. Он расположен за щебнеочнстительным
устройством и состоит из двух левых 7 и двух правых 6 отвалов, а также двух
левых 1 и двух правых 5 выдвижных колонн и двух кронштейнов 4. Отвалы
выполнены сварными и в сечении имеют плугообразную форму. На заднем кон-
це каждого отвала предусмотрены проушины, в которые входят цапфы ниж-
них концов колонн. Отвал закрепляется на колонне штифтом, который не пре-
пятствует повороту его вокруг цапфы, но предупреждает падение его при подъе-
ме колонн.
Для работы планировщика его отвалы заводят под поднятую путевую
решетку путем поворота вручную вокруг цапф до соприкосновения передних
концов отвалов. В рабочем положении отвалы располагаются под углом к про-
дольной оси пути. Колонны отвалов трубчатого сечения размещены в нижних
2 и верхних 3 разъемных корпусах кронштейнов 4 фермы. Опускание колонн
при приведении отвалов в рабочее положение и подъем их в транспортное по-
ложение осуществляются электродвигателями через червячные редукторы.
Червяк 8 редуктора находится в постоянном зацеплении с венцом 10, который
251
вращается вокруг колонны без смещения вдоль нее. Внутренняя поверхность
червячного венца имеет трапецеидальную нарезку, которая находится в за-
цеплении с закрепленными в пазах колонны тремя рейками 9, расположенными
одна относительно другой под углом 120°. Для предупреждения поворота ко-
лонны рейки входят в пазы неподвижных корпусов колонн. Червячные венцы
редукторов, вращаясь в соответствующую сторону, перемещают рейки вместе
с отвалами, закрепленными на нижних концах колонн,
Для подъема и опускания несущей рамы, а также управления стопорами
предназначена гидравлическая система. Она состоит из двух насосных устано-
вок, четырехсекционного золотникового гидрораспределителя, трубопроводов,
предохранительных н обратных клапанов. Одна насосная установка является
аварийной и включается в работу при отказе основной. Две секции гидрорас-
пределителя управляют цилиндрами несущей рамы по одной секции на каж-
дую сторону и две секции стопорами — также по одной на каждую сторону.
7.3. ЩЕБНЕОЧИСТИТЕЛЬНАЯ МАШИНА ЩОМ-Д0
Машина предназначена для очистки щебеночного и гравийного балласта
на глубину до 40 см, для вырезки балласта, а также для подъемки и сдвижки
пути. Рабочие органы машины позволяют выполнять эти операции на пути с
любым типом верхнего строения. В отличие от щебнеочистительных машин
ЩОМ-4 и ЩОМ-Д машина ЩОМ-Д0 может грузить засорители в землеубороч-
ный состав или отсыпать их в отвал за пределы пути, очищать щебень у высо-
ких платформ и понижать путь на подходах к искусственным сооружениям.
Машину можно использовать при капитальном, среднем и подъемочном ре-
монтах пути. Машина ЩОМ-Д0 (рис. 7.29, а) состоит из однопролетной фермы
7, опирающейся на две четырехосные тележки, на которой установлены щебне-
очистительное устройство 5 с подрезным ножом 4, механизмы 2 и 8 для подъе-
ма рельсо-шпальной решетки, плаиировщик 6, конвейер-питатель 3, главный
14 и поворотный 15 конвейеры для транспортировки засорителей, конвейер 9
для отбора части очищенного щебня с бункером 10, шпальные щетки 7 и 11.
Принципиальная схема работы щебнеочистительного устройства приведена иа
рис. 7.29, б. При движении машины загрязненный щебень, также срезаемый
подрезным ножом, поступает на движущуюся сетчатую ленту 32, где он очища-
ется и после отклоняющих роликов поступает на конвейер-питатель 3, а затем
ссыпается на путевую решетку или частично отбирается конвейером 9 и на-
правляется в бункер 10 для засыпки шпальных ящиков. Щебнеочистительное
устройство машины ЩОМ-Д0 снабжено второй лентой 33 для сбора и транс-
портирования загрязнителей, прошедших через ячейки ленты 32. Увлекаясь
лентой 33, загрязнители после отклоняющих роликов отражаются отбойным
щитом и поступают на главный коивейер 14. Затем поворотным конвейером 15
нх грузят в подвижной состав или ссыпают в отвал.
Лейта для транспортирования загрязнителей состоит из шарнирно со-
единенных между собой стальных пластин, которые прикреплены к втулочно-
роликовым цепям с шагом 50,8 мм. Сетчатая лента по конструкции аналогич-
на лентам, используемым на машинах ЩОМ-4 и ЩОМ-Д. Для привода сетча-
той ленты установлены два электродвигателя 28 постоянного тока мощностью
по 180 кВт, которые вращают вал 30 со звездочками через редукторы 27. Лен-
та 33 приводится в движение электродвигателем 25 мощностью 180 кВт через
редуктор 24 и вал 22. Скорость л еиты 9,35 м/с. Щеб и ео чисти тельное устройство
имеет четыре горизонтальных телескопических гидроцилиндра 20, корпуса
которых закреплены на ферме, а выдвижные части соединены с двумя правыми
и двумя левыми вертикальными телескопическими гидроцилиидрами 21
252
Рис. 7 29. Щебнеочистительная машина Ш.ОМ-Д*
5-b
К нижним выдвижным частям гидроцилиндров 21 справа и слева от фермы при-
креплены несущие рамы 23, на которых установлены роликовые батареи 36,
натяжные звездочки 39 и 41, гидроцилнндры 31 и 40 натяжения лент, гидро-
цилиндры 29 заправки ножа, крылья 34 несущих рам, цилиндры 35 их раскры-
тия и подрезной нож 4 Заглубление ножа определяется по указателю 26.
Для перевода щебнеочистительного устройства из транспортного положе-
жения в рабочее горизонтальные телескопические гидроцилиндры раздвигают
вправо и влево, а вертикальные выдвижные части гидроцилиндров 21 вместе
с несущими рамами опускают вниз.
Вертикальные гидроцилиндры вместе с несущими рамами могут смещать-
ся влево и вправо от фермы четырьмя гидроцилиндрами 38. Благодаря этому
можно очищать щебень машиной ЩОМ-Д0 в местах, где имеются препятствия
(например, у высоких и низких пассажирских платформ). При очистке щебня,
когда работают с одной сетчатой лентой, используется такой же подрезной нож,
как на машинах ЩОМ-4 и ЩОМ-Д. При работе с двумя лентами применяют
подрезной нож, имеющий направляющие для сетчатой и пластинчатой лент.
Конвейеры 9, 14 и 15 имеют резиновые ленты, а конвейер-питатель 3 — сет-
чатую (по типу щебнеочистительной).Для регулирования количества чистого
щебня, отбираемого конвейером 9, последний подвешен на цепях и может пе-
ремеЕцаться вдоль машины двумя гидроцилиндрами. Конвейер 15 поворачи-
вается вокруг опорно-поворотного устройства гидромотором и наклоняется
гидроцилиндрами. Приводом всех конвейеров служат мотор-барабаны.
Для подъема путевой решетки на машине ЩОМ-Д0 установлены два меха-
низма подъема. Это вызвано необходимостью размещения щебнеочистител fa-
но го устройства и стремлением уменьшить напряжения в рельсах поднимаемой
путевой решетки. Каждый механизм состоит из двух шарнирно подвешенных
к ферме вертикальных телескопических гидро цилиндров 16, выдвижные части
которых соединены со штоком горизонтального гидроцилиндра 17 сдвига пу-
тевой решетки, расположенного перпендикулярно оси пути. На его корпусе
установлена рама 19, на концах которой шарнирно закреплены балки. На цап-
фах этих балок посажены балансиры с двумя электромагнитами. Каждый из
них состоит нз двух секций, по три катушки в секции. Для передачи усилия
сдвига на головку рельса предусмотрены ролики 18. Для разравнивания очи-
щенного щебня машина оборудована шнековым планировщиком 6, состоящим
из трех пар горизонтальных шнеков с правой н левой навивками. Заглубле-
ние планировщика осуществляется гидроцилиндром 37. Для выгрузки и по-
грузки подрезного ножа н планировщиков на ферме установлен консольный
кран 13 грузоподъемностью 40 кН. Гидросистема состоит из насосных станций,
предохранительных н обратных клапанов, гидрораспределителей, панелей,
трубопроводов и манометров. В кабине 12 установлена электростанция пере-
менного тока мощностью 500 кВт для питания всех электродвигателей пере-
менного тока, а также освещения и сигнализации машины. Электродвигатели
привода сетчатой и пластинчатой лент питаются постоянным током от специ-
ально переоборудованного тепловоза ТЭЗ. Этим же тепловозом транспорти-
руют машину и перемещают ее при работе.
7.4. ЩЕБНЕОЧИСТИТЕЛЬНАЯ МАШИНА ЩОМ-ЗУ
Машина ЩОМ-ЗУ предназначена для очистки щебеночного или гравий-
ного балласта под стрелочными переводами и по всей ширине и глубине бал-
ластной призмы одного пути, в том числе у высоких и низких платформ и дру-
гих препятствий. Она может быть также использована для вырезки балласта.
Принципиальное отличие машины ЩОМ-ЗУ от машин ЩОМ-4, ЩОМ-Д и
254
Рис. 7.30. Щебнеочистительная машина ЩОМ-ЗУ
ЩОМ-Д0 состоит в том, что она самоходная, производит очистку и вырезку
балласта без подъема путевой решетки.
Машина ЩОМ-ЗУ (рис. 7.30) состоит из сварной рамы 10, опирающейся
на две самоходные тележки; двух выгребных устройств 9\ щебнеочиститель-
ного устройства 8, расположенного внутри рамы; бункера-распределителя 7
чистого щебня; наклонного 1 и поворотного 2 ленточных конвейеров; дозатора 5
с подкрылками для разработки траншеи у концов шпал или брусьев при заряд-
ке выгребного устройства; подштопывающего устройства 6\ будки 4 с электро-
станцией мощностью 400 кВт и центральным пультом управления; мотор-ге-
нераторов 5; двух кабин 11 для управления машиной в рабочем состоянии.
Принципиальная схема работы щебнеочистительного устройства машины
приведена на рис. 7.31. Загрязненный щебень вырезается скребковой цепью
выгребного устройства 5 и через окно 8 в вертикальной стенке рамы машины
подается на сетчатую ленту 4щебнеочистительного устройства. Загрязненный
щебень, увлекаемый движущейся со скоростью до 12 м/с лентой, очищается
на ленте, как на ранее рассмотренных машинах. Чистый щебень, отрываясь от
ленты после отклоняющих роликов 9, направляется в бункер-распределитель 3
Прн этом загрязнители выбрасываются через ячейки ленты на наклонный кон-
вейер 6, а затем подаются им на поворотный конвейер 7 для погрузки на под-
вижной состав или отсыпки в отвал на расстояние до 7 м от осн пути. Чистый
щебень из бункера через пустые шпальные ящики попадает на песчаную по-
душку балластной призмы, где подштопывающими устройствами 2 проталки-
вается в подрельсовую зону.
Дозатор 1 предназначен для разравнивания очищенного щебня на путевой
решетке и сметания его с верхней постели шпал и рельсов. При необходимости
им можно дозировать балласт. Привод ленты осуществляется электродвигате-
лем постоянного тока мощностью 100 кВт через редуктор и приводной вал со
Рис. 7.31. Схема работы щебнеочистительного устройства
255
Рис. 7.32. Выгребное устройство
звездочками 10, Для натяжения ленты предназначен натяжной вал со звездоч-
ками 11. Конструкция сетчатой ленты отличается от рассмотренных щебне-
очистительных лент лишь расстоянием между осями втулочно-роликовых цепей,
которое равно 768 мм. Гидрооборудование машины состоит нз трех насосных
станций, установленных по одной иа каждом крыле выгребного устройства
и на раме машины и исполнительных гидроцилиндров для приведения рабо-
чих органов в рабочее и транспортное положения Для питания постоянным
током машины при ее работе по очистке щебня установлены два мотор-генера-
тора, по одному для питания каждой ходовой тележки, и один мотор-генера-
тор мощностью 100 кВт для питания привода сетчатой ленты. Последний пи-
тает тяговые двигатели при транспортировании машины самоходом.
На машине применены оригинальные выгребные устройства, которые мож-
но опускать у концов шпал нли брусьев, заводить горизонтальной частью на-
правляющих корпусов с частью выгребной цепи под путевую рещетку и про-
изводить ими вырезку загрязненного щебня с подачей его на сетчатую лен-
ту. По окончании работы выгребные устройства приводят в транспортное по-
ложение.
Выгребное устройство (рис. 7.32, а) состоит из двухшарнирной выгребной
цепи 1 с лопатками, привод которой осуществляется через редуктор 3 от элек-
тродвигателя переменного тока 4 мощностью 100 кВт; корпуса 2, направляю-
щие которого образуют трассу, по которой движется выгребная цепь; колонны
вокруг которой может поворачиваться корпус 2 при помощи цилиндра 11 и
рычага 10; колонны 7, вдоль которой посредством цилиндра со штоком 8 может
перемещаться крыло 6 с выгребным оборудованием, одновременно поворачиваясь
вокруг нее при помощи цилиндров 13 и рычагов 12. Для обеспечения работы
гидроцилиндров крыла установлена насосная станция 9. Для зарядки выгреб-
ного устройства опускают крыло, располагая выгребное устройство вдоль оси
пути (вид Л), запускают привод цепи и с работающим выгребным устройством
поворачивают корпус вокруг его колонны в сторону оси пути. При этом поворо-
те выгребное устройство врезается в балластную призму и занимает рабочее
положение (рис. 7.32, б). Машина снабжена двумя типами направляющих
корпусов выгребного устройства: с укороченными горизонтальными частями —
для работы иа пути одновременно двумя устройствами и с удлиненными —
256
для работы одним устройством под стрелочными переводами и в местах препят-
ствий. При очистке щебня под стрелочными переводами вначале работает одно
устройство (с одной стороны), а затем другое.
Бункер предназначен для регулирования распределения щебня иа правую
и левую рельсовые нити. В нем предусмотрена заслонка для деления потока
чистого щебня, поступающего после отклоняющих звездочек леиты. Для регу-
лирования количества щебия, поступающего на концы шпал и в середину ко-
леи, его левый и правый патрубки снабжены секторными затворами.
7.5. БАЛЛАСТООЧИСТИТЕЛЬНАЯ МАШИНА БМС
Балластоочистительная машина БМС (рис. 7.33) предназначена для очи-
стки щебеночного и гравийного балласта на всю ширину и глубину до 25 см
балластной призмы одного железнодорожного пути. Работа по очистке балла-
ста выполняется при снятой путевой решетке в промежутке между работой пу-
теразборочиого и путеукладочного краиов. Машиной можно также осущест-
влять вырезку песчаного балласта с удалением его за пределы балластной
призмы. Машина полуприцепная В рабочем положении оиа перемещается
двумя сцепленными тракторами 1 типа Т-100 или Т-130. Коробки передач трак-
торов снабжены ходоуменьшителями для увеличения силы тяги и обеспечения
малых (ползучих) скоростей. Необходимое тяговое усилие по сцеплению
(160 кН) для перемещения машины во время работы достигается увеличением
сцепного веса тракторов К переднему дополняется груз 2 массой 12 т, а иа
задний опирается машина. Для перемещения по рельсам на грунтозацепах гу-
сениц тракторов предусмотрены специальные вырезы, а на гусеницах —до-
полнительные опорные катки. Машина состоит из рамы 4, упряжного устройст-
ва 5, щебнеочистительного устройства 6, дизельной установки 7, катков 9,
гидрооборудоваиия с рычагами управления 8, планировщика И и крыльев 13.
Передняя часть рамы через упряжное устройство опирается на трактор,
а задняя — на катки, имеющие реборды для перемещения по рельсам. Упряж-
ное устройство передает тяговое усилие тракторов машине и обеспечивает ра-
боту машины на прямых и кривых участках пути. Оно состоит нз двух рам,
одна из которых (рама 3) при отцепке машины остается на тракторе, а другая
(рама 12) — на машине Поворот катков осуществляется посредством гидрав-
лического цилиндра 19
Принципиальная схема работы щебнеочистительного устройства машины
БМС приведена на рис. 7.34. Загрязненный щебень, подрезанный иожом /
при движении машины, поступает на горизонтальный участок ленты 2, движу-
щейся со скоростью до 12 м/с. Увлекаемый лентой щебень очищается так же,
как на рассмотренных устройствах машин ЩОМ-4, ЩОМ-Д и ЩОМ-3У. За-
грязнители выбрасываются через ячейки сетчатой леиты в полевую сторону
за пределы пути, а очищенный щебеиь, отклоняясь после роликовой батареи 3,
направляется в бункер 7, где щитом-заслонкой 6 распределяется по ширине
балластной призмы Регулировать распределение очищенного щебия можир
Рис. 7.33. Балластоочистительная машина БМС
9 Зак 47
257
Рис. 7 34 Схема работы щебнеочистительного устройства БМС
также изменением его угла полета посредством натяжных звездочек 4. Привод
ленты осуществляется приводным валом со звездочками 5.
Устройство рабочих органов машины приведено на рис. 7.35. Захватные
крылья 22 совместно с ножом 21 обеспечивают захват и вырезку загрязнен-
ного балласта со всей ширины балластной призмы одного пути. На машине
установлены два крыла, каждое из которых состоит из корня крыла, собствен-
но крыла и съемных ножен. Положение крыла относительно рамы машины
фиксируется цепными растяжками 23, изменением длины которых регулиру-
ется ширина захвата загрязненного балласта. Крылья заглубляют одновре-
менно с заглублением рамы и подрезного ножа. Последний представляет собой
сварную конструкцию, состоящую из горизонтального листа, двух уголков для
направления цепей ленты и режущей кромки. Нож является элементом рамы
и крепится к ней болтами на конусные бобышки стоек. Конструкция сетчатой
Рис. 7.35 Рабочие органы балластоочистительной машины
258
ленты 12 аналогична рассмотренным лентам и отличается от них лишь шири-
ной (800 мм). Она приводится в движение ведущим валом 8, который цепной
муфтой 18 соединен с реверс-редуктором. Ведущий вал закрыт кожухом 7.
Трассу ленты образуют звездочки ведущего вала, роликовые батареи 3 и 14,
ролики натяжных устройств 5 и горизонтальный лист ножа.
Для направления вылетающих загрязнителей над одной из роликовых
батарей (на рисунке правой) устанавливают кожух 13. При этом на другую на-
девают защитный кожух 1. В зависимости от требуемого направления выброса
загрязнителей кожуха переставляют. Сброс очищенного щебня с ленты про-
исходит в зоне между верхними роликами батареи и роликами натяжного уст-
ройства. С щебнеочистительной ленты часть щебня, отраженная регулировоч-
ным щитом 10, попадает на наклонный лист 11, ссыпается по нему на балласт-
ную призму, а остальная часть щебня пролетает в щель между регулировоч-
ным щитом и наклонным листом и, отраженная щитком 2, также ссыпается по
наклонному листу на балластную призму.
Перемещение регулировочного щита производится гидроцилиндром 20.
В рабочее положение кожух 13 поднимают ручной лебедкой 9 и так он удержи-
вается цепью. Защитный кожух фиксируется в закрытом положении устройст-
вом 4. Наклонный лист 11 опирается своей нижней частью на упоры 17, распо-
ложенные на подрезном ноже, а верхней частью— скобами 6 на защелки, рас-
положенные на раме машины.
Планировщик 19 представляет собой двусторонний плуговой отвал, под-
вешенный к раме машины на трех гидроцилиндрах: одном переднем и двух
задних. Положение планировщика по уровню поддерживается автоматиче-
ски маятниковым датчиком.
На рисунке роликовые батареи изображены в рабочем положении. Для
приведения в транспортное положение их поворачивают вовнутрь рамы ма-
шины вокруг шарниров 16 при помощи гидроцилиндров 15.
Силовая установка (рис. 7.36) машины состоит из дизеля 4 марки 2Д12Б
мощностью 220,6 кВт, соединенного с реверс-редуктором 2 упругой муфтой 3,
цепной муфты 1, систем охлаждения, топлива и смазки, а также воздухоочи-
стителей и глушителей. Дизель и реверс-редуктор установлены на моторной
раме 5, закрепленной на кронштейнах 6 рамы машины.
Реверс-редуктор (рис. 7.37) предназначен для переключения скоростей
движения щебнеочистительной ленты и реверсирования ее для выброса загряз-
нителей. Он состоит из корпуса 2, крышки 3, четырех валов: входного 8, про-
межуточного 7, выходного 6 и привода 1 гидронасоса, рычага 4 и фиксатора 5
Рис. 7.36. Силовая установка
9*
259
переключения зубчатых муфт. Кинематическая схема привода ленты и гидро-
насоса приведена на рис. 7.38.
Выброс загрязнителей осуществляется при движении леиты с двумя ско-
ростями: 8,5 м/с (при сухом балласте) и 12,0 м/с (при влажном и загрязненном
балласте). Наличие двух скоростей способствует продлению срока службы
леиты. Для обеспечения выброса загрязнителей на правую сторону при ско-
рости движения ленты, равной 12,0 м/с, привод ленты осуществляется по сле-
дующей кинематической цепи: дизель 4, муфта сцепления 3 дизеля — упругая
муфта 5, входной вал реверс-редуктор а, шестерня z — 23 и зубчатое колесо
z — 44, цепная муфта 2, приводной вал 1. Зубчатой муфтой на выходном валу
включают в этом случае зубчатое колесо z = 44. Для обеспечения выброса за-
грязнителей также на правую сторону, но при скорости ленты 8,5 м/с, зубчатой
муфтой на выходном валу реверс-редуктор а включают зубчатое колесо z -- 47.
В этом случае в указанной кинематической цепи вместо зубчатой пары z = 23
и z — 44 включается зубчатая пара z = 20 и z = 47. Для выброса загрязни-
телей на левую сторону включают зубчатую муфту на промежуточном валу.
В этом случае в кинематической цепи от дизеля к приводному валу 1 работают
шестерня z = 21, шестерни промежуточного вала и зубчатое колесо z — 42.
При этом зубчатая муфта иа выходном валу занимает нейтральное положение.
В постояниом зацеплении с шестерней z = 21 находится шестерня г — 17 при-
вода вала, к которому прифланцован шестеренчатый гидронасос 6 марки
НШ-32У. Все шестерни реверс-редуктор а косозубые.
Гидрооборудоваиие предназначено для приведения механизмов и узлов
машины в рабочее и транспортное положения, а также для регулировки их по-
ложения в процессе работы. В гидросистему машины входят бак, два насоса
(шестеренчатый и ручной), два обратных клапана, разгрузочно-предохрани-
тельный клапан, фильтр, гидропанели с золотниками, гидрозамки и девять
гидравлических цилиндров: распорный гидроцилиндр упряжного устройства,
два гидроцилнндра роликовых батарей, гидроцилиндр регулировочного щита,
три гидронилиндра планировщика, гидроцилиндр опорных катков и гидро-
цилиидр поворота катков.
Все элементы гидросистемы соединены металлическими трубопроводами и
рукавами высокого давления. Давление рабочей жидкости контролируется
манометром.
260
Ниже приведены технические характеристики щебнеочистительных машин:
Параметры ЩОМ-4 ЩОМ-Д ЩОМ-ДО шом-зу ВМС
Производительность, ма/ч . 3000 2000 3000 150—400 1000
^Максимальная ширина очи- стки балласта, м ... 5 5 5 4 5
Максимальная глубина очи- стки балласта, м ... 0,4 0,25 0,4 0,35 0,15—0,25
Состав обслуживающей бригады, чел б 5 б 4 4
Способ производства работ с подъемом путевой без подъ- при снятой
Способ очистки щебня . . Максимальная скорость сет- чатой ленты, м/с . . . решетки ема путевой решетки центробежный, сетчатой лентой 14 12 14 12 путевой решетке 12
Удаление загрязнителей за пределы пути за пределы пути или за пределы
Способ передвижения . . Скорость передвижения, км/ч; рабочая тепловозами ТЭ-3 до 3,0 до 3.0 в подвижной состав самоходом до 3,0 до 0,3 пути двумя тракторами 0,7—2,25
транспортная .... 60 50 80 50 до 10,2
Силовая установка1 тип У-36 У-12 АЭС-500 ДГУ-400 (трактора- ми) дизель
мощность, кВт .... 200 100 500 400 2Д12Б 220,6
Привод щебяеочиститель- ного устройства .... Мощность привода, кВт электрический 400 360 400 100 механиче- ский 220,6
Масса машины, т . . . . 160 148 147 80 12
7.6. ОСНОВЫ ЭКСПЛУАТАЦИИ И ОБСЛУЖИВАНИЯ МАШИН
ДЛЯ ОЧИСТКИ БАЛЛАСТА
Щебнеочистительные машины работают на пути, закрытом для движения
поездов, в специально предоставляемые «окна» для выполнения ремонтио-пу-
тевых работ комплексом путевых машин. Объем ремонта и срок его выполнения
строго регламентированы, после чего путь должен быть открыт для движения
поездов с установленными скоростями. Это выдвигает особые требования к со-
держанию машии в исправном состоянии и обеспечению их безотказной ра-
боты.
До начала работы щебнеочистительных машии ЩОМ-4, ЩОМ-Д и ЩОМ-Д0
необходимо проверить высоту обочины пути на участке работ и при необ-
ходимости срезать ее для обеспечения свободного выброса загрязнителей. Для
подготовки места, где предстоит заряжать нож, требуется вырезать балласт в
четырех шпальных ящиках ниже нижней постели шпал и подложить под путь до-
полнительные шпалы для пропуска тепловоза с машиной. Кроме того, выреза-
ется балласт с междупутья и откоса призмы (ниже подошвы шпал) надлине 2м
вдоль пути с каждой стороны для размещения крыльев несущей рамы, а также
балласт из шпальных ящиков (до подошвы шпал) на длиие 8 м перед местом за-
рядки ножа, чтобы зарядить отвалы планировщика и предупредить возможную
переподъемку путевой решетки при попадании щебня из шпальных ящиков под
нижние постели шпал поднятой путевой решетки. Одновременно необходимо
заменить негодные шпалы и укрепить те, которые могут оторваться при под нем-
ке пути; отрегулировать стыковые зазоры, подтянуть стыковые болты и попра-
вить положение шпал по эпюре. Опилить деревянные шпалы, если их длина
261
превышает 2,75 м. Вырезать балласт из шпальных ящиков у места разрядки
ножа на протяженности 10 м. Проверить возможность работы машины около
различных препятствий (фундаменты, колодцы, бетонные глыбы), разобрать
переезды.
На электрифицированных участках должно быть снято напряжение
с контактной сети.
Для обеспечения бесперебойной работы машины на перегоне при подго-
товке ее на базе необходимо снабдить электростанцию топливом и охлаждаю-
щей жидкостью, а гидросистему—маслом, провести пробный запуск элек-
тростанции для проверки ее работы, проверить работу всех рабочих органов.
Кроме того, должны быть смазаны все узлы (в соответствии с картой смазки),
рабочие органы приведены в транспортное положение и закреплены. Выезд
машниы на перегон без устранения всех неисправностей не допускается.
По прибытии машины к месту работы приводят в рабочее положение щеб-
неочистительное устройство. Для этого на месте зарядки ножа убирают под-
веденные под путь шпалы, краном поднимают нож и опускают его на путь так,
чтобы он опустился у места зарядки перпендикулярно оси пути. После этого
опускают электромагнитный подъемник и балластерные рамы и поднимают пу-
тевую решетку на высоту 450 мм (при Р50) и не выше 350 мм при Р65 и Р75.
В этом положении путевую решетку фиксируют рельсовыми захватами, предо-
храняющими ее от случайного падения в случае обесточивания магнитов. При
зарядке планировщика его отвалы располагают вдоль машины, опускают пооче-
редно задние, а затем передние иоги планировщика с их отвалами, заводя по-
следние под путевую решетку, до соприкосновения передних концов отвалов.
Для зарядки машины ЩОМ-4 необходимо выполнить ряд дополнительных
операций. Ее рекомендуется установить так, чтобы роторное устройство совме-
стилось с траншеей для зарядки иожа, затем роторное устройство переводят из
транспортного положения в рабочее, для чего его освобождают от транспорт-
ных запоров и прн помощи гидроцилиндров раздвигают роторы в горизонталь-
ной плоскости, затем их опускают при помощи гидроцилиндров подъема и
опускания на величину, соответствующую заглублению подрезного ножа щеб-
иеочистительного устройства. Далее устанавливают в рабочее положение по-
воротные части наклонных лотков.
Вслед за этим переводят из транспортного положения в рабочее устройст-
во для пробивки щебня в шпальных ящиках, для чего предварительно из од-
ного шпального ящика, совпадающего с его горизонтальной осью, удаляют за-
стрявший балласт; опускают шпальные щетки до соприкосновения их с верх-
ней поверхностью шпал; боковые щетки, развернув в горизонтальной плоско-
сти, устанавливают в рабочее положение и закрепляют; подтягивают тепло-
возом машину с работающим роторным устройством вперед и выгружают кра-
ном нож у места, где предстоит зарядка машины. Затем устанавливают в ис-
ходное положение стрелу крана и закрепляют ее. После чего тепловозом пере-
двигают машину вперед (роторное устройство должно работать) до совмещения
осей несущей рамы и подрезного иожа; освобождают несущую раму от предо-
хранительных стяжек и приводят в рабочее положение ее крылья с подкрыл-
ками. устанавливают на место нижние отклоняющие блоки канатов лебедок
зарядки иожа (если они были сняты при выезде на перегон), заводят нож под.
поднятую путевую решетку и устанавливают его в такое положение, чтобы
в его гнезда могли войти штыри нижних концов стоек несущей рамы. Затем
приводят в рабочее положение несущую раму и вертикальные подвижные ра-
мы. поднимают лебедками нож, чтобы конические бобышки стоек несущей ра-
мы вошли в гнезда иожа и лебедками подтягивают нож к стойкам до полного
натяжения канатов лебедок, соединяют между собой части ленты при помощи
соединительных пальцев и натягивают ее; устанавливают ограничительный
262
кожух на роликовую батарею и защитный кожух ленты со стороны между-
путья; заглубляют отвалы планировщика на требуемую величину так, чтобы
задние его отвалы располагались ниже передних примерно на 3 см. После уста-
новки подъемной рамы на заданную величину заглубления натягивают рас-
тяжки,
Время зарядки машины не должно превышать 20—25 мин, поэтому реко-
мендуется одновременное выполнение ряда операций. По окончании работы по
очистке щебня машину'- приводят в транспортное положение. Для этого все
перечисленные выше операции по его зарядке выполняют в обратной последо-
вательности и надежно закрепляют рабочие органы к ферме машины предусмо-
тренными для этой цели стопорными устройствами (стяжки, крюкн, штыри).
При приведении в транспортное положение часть ленты (92 звена) остается на
ноже, для чего ее разъединяют в двух местах. Время разрядки очистительно-
го устройства с приведением машины в транспортное положение не должно пре-
вышать 15—20 мин, поэтому рекомендуется совмещать операции.
Системой плаиово-предупредительного ремонта путевых машин предусмо-
трено выполнение следующих видов ремонта и технического обслуживания
щебнеочистительных машин ЩОМ-4, ЩО1М-Д и ЩОМ-Д0: текущий ремонт —
после очистки балласта на протяженности 60 км пути, средний ремонт — после
’240 км, капитальный ремонт — после 480 км, техническое обслуживание № 1
(ТО-1) — после 15 км и техническое обслуживание № 2 (ТО-2) — после 30 км.
В ТО-1 входят все операции ежесменного обслуживания, а также очистка
от пыли и грязи всего силового, электрического и грузоподъемного оборудо-
вания, техническое обслуживание дизеля электростанции, осмотр подрезного
ножа и замена при необходимости износившейся сетчатой ленты, проверка ге-
нератора электростанции, электродвигателей и приборов электрооборудова-
ния, смазка узлов и механизмов машины согласно таблице смазки.
ТО-2 включает все операции по техническому обслуживанию № 1, а так-
же регулировку всех узлов машины; их смазку согласно таблице смазкн, про-
верку гидравлической системы машины; замену износившихся щеток в генера-
торах переменного и постоянного тока, контактов контакторов и магнитных
пускателей; уход за дизелем согласно инструкции завода-изготовителя по его
эксплуатации.
Перед началом работы машины БМС разводят захватные крылья до требуе-
мой величины захвата; устанавливают в рабочее положение и закрепляют
роликовые батареи с кожухами. Устанавливают и закрепляют щиток (правый
нли левый) в зависимости от направления выброса потока загрязнителей,
поднимают и закрепляют щиты бункера для направления потока очищенного
балласта на путь; опускают в рабочее положение планировщик, запускают ди-
зель и проверяют работу устройства в холостом режиме. Затем сцепляют оба
трактора, включают их ходоуменыпители и приступают к очистке балласта
Техническое обслуживание балластоочистительной машины БМС подраз-
деляют на ежесменное, которое должно выполняться регулярно перед началом
работы, во время перерывов и после окончания работы машины и периодиче-
ское
Прн ежесменном техническом обслуживании необходимо проверить на-
личие масла в масляных, а топлива в топливных баках, жидкости в системе
охлаждения, смазки в рев ер се-редукторе и ходоуменьшителях; напряжение
аккумуляторной батареи, работу механизма выключения сцепления; работу
дизеля 2Д12Б в соответствии с Руководством по его эксплуатации; работу
тракторов Т-100МЗГП6 или Т-130 в соответствии с Руководством по их экс-
плуатации
Периодическое техническое обслуживание подразделяется иа техниче-
ское обслуживание № I (ТО-1), которое производится после выполнения ра-
2С>3
бот машиной по очистке щебня в объеме 12,5 км пути, но не реже одного раза
в месяц, техническое обслуживание № 2 (ТО-2), которое производится после
очистки щебня в объеме 25 км пути, но не реже одного раза в два месяца и
ежегодный контрольно-технический осмотр.
При ТО-1 необходимо: выполнить все операции, входящие в ежесменное
техническое обслуживание, выполнить работы по ТО-1 за дизелем 2Д12Б
и тракторами Т-100МЗГП6 или Т-130 в соответствии с руководствами по нх
эксплуатации, проверить состояние золотников, произвести смазку узлов в
соответствии с таблицей и схемой смазки, проверить работу гидрооборудова-
иия при помощи переносного пульта управления.
При ТО-2 необходимо, выполнить все операции, входящие в ТО-1, при
проведении каждого второго ТО-2 рекомендуется произвести все работы, вхо-
дящие в ТО-2 двигателей 2Д12Б и тракторов Т-100МЗГП6 или Т-130 в соот-
ветствии с Руководством по их эксплуатации.
Техническое обслуживание должно выполняться бригадой балластоочи-
стительиой машины под руководством машиниста машины.
Таблица смазки основных механизмов щебнеочистительной машины ЩОМ-4
Наименование механизма Рекомендуемый смазочный материал. № стандарта Число то- чек смазки Периодичность проверки и замены смазки
1, Подъемная рама и привод ленты Направляющие механизмы Солидол УС0-2, ГОСТ 4366-— 12 1 раз в неделю
подъема Подшипники вала ведущего 76 Солидол УСо-2, ГОСТ 4366— 2 Ежедневно
привода ленты Редуктор привода ленты 76 Смазка трансмиссионная 1 1 раз в месяц
2. Рама несущая Подшипники звездочек и ро- ЦИАТИМ-208 ГОСТ 16422—79 Смазка 1-13 ОСТ 3801 16 Ежедневно
ликов роликовой батареи Подшипники звездочек па- То же 8 I раз в неделю
правляющих Редуктор регулирующе-на- Смазка трансмиссионная 4 1 раз в месяц
тяжного устройства 3. Экипажная часть Междуферменное соединение ЦИАТИМ-208 ГОСТ 16422—79 Солидол УС0-2, ГОСТ 4366— 1 1 раз в неделю
Подпятники и пятники ходо- 76 Масло осевое «3» ГОСТ 5 Ежедневно
вых тележек 610—72 до работы
4. Устройство для отбора щебня Подшипники звездочек и Смазка 1-13 ОСТ 3801 24 1 раз в месяц
опорных роликов рамы Цепи конвейера Смазка трансмиссионная По 1 раз в неделю
Направляющие натяжного ЦИАТИМ-208 ГОСТ 16422 -79 Солидол УСо-2 ГОСТ 4366— всей длине 2 1 раз в месяц
устройства конвейерной ленты |-6
264
Встречающиеся неисправности ЩОМ-4
Наименование неисправности Возможные причины 1 Способы устранения
При работе машины цепи Щебнеочистительная лен- Натянуть ленту при помощи
ленты перескакивают через та вытянулась, натянута не- натяжного механизма Если
зубья ведущих звездочек достаточно хода механизма для натяже- ния ленты не хватает, ее нуж- но укоротить на два звена
На внутренней поверхно- Износ днища от трения Заплавить электросваркой
сти днища подрезного ножа опирающихся на него сколь- образовавшиеся бороздки и за
образовались глубокие бо- зупов, движущейся ленты с чистить неровность наплавлен-
роздки загрязненным щебнем ного металла
Несущая рама после раз- В шарниры стоек и рыча- Очистить сочленения несу-
рядки щебнеочистительно- го устройства складывается не полностью гов набился щебень щен рамы и ее элементы
Стук в корпусах звездо- чек и роликов Поврежден подшипник Заменить поврежденный подшипник
Течь масла по штоку гид- 1. Риски и задиры на по- Поверхность штока отшли-
роцилиндра верхности штока 2 Износ или v поврежде- ние уплотнительных манжет фовать. При глубоких рисках и больших задирах заменить шток Заменить негодные манжеты
Рельсо-шпальные щетки 1 Изношены щетки Заменить изношенные щетки
плохо сметают щебень 2 Ослаблено крепление пучков щеток Подтянуть крепление
7.7. ОСНОВНЫЕ ТРЕБОВАНИЯ ПО ТЕХНИКЕ БЕЗОПАСНОСТИ
ПРИ ОБСЛУЖИВАНИИ ЩЕБНЕОЧИСТИТЕЛЬНЫХ МАШИН
Щебнеочистительные машины работают в условиях движения поездов,
на участках, где выполняется комплекс путевых работ с участием бригад пу-
тевых рабочих Для безопасной и производительной работы в этих условиях
особенно необходимо знание и строгое соблюдение основных правил по технике
безопасности.
Все лица, входящие в состав бригады, обслуживающей щебнео чиститель
ную машину, должны иметь удостоверения иа право управления машиной
или ее составными частями и о сдаче испытаний по технике безопасности с при-
своением квалификационной группы по электр©безопасности.
Ответственность за соблюдение правил по технике безопасности при ра-
боте машины несет ее машинист.
При работе на электрифицированных участках постоянного или перемен-
ного тока напряжение с контактной сети должно быть снято и а весь период ра-
боты машины, а контактная сеть на месте работы заземлена.
Во время приведения несущей рамы машины из транспортного в рабо-
чее положение (при зарядке) и из рабочего в транспортное (при разрядке)
пропуск поездов по соседнему пути не допускается На период пропуска по-
ездов по соседнему пути работа машины должна быть прекращена.
Перед выполнением операций по зарядке и разрядке щебнеочистительиой
машины, а также перед пуском рабочих органов машинист должен предупреж-
дать об этом руководителя работ н находящихся поблизости рабочих звуковым
сигналом.
При подъеме или опускании ножа поворотным краном запрещается при-
ближаться к нему на расстояние менее 2 м.
265
При переводе рабочих органов машины из транспортного положения в ра-
бочее и обратно нельзя находиться у стоек несущей рамы и роторного устройст-
ва.
Во время работы машины нельзя стоять илн ходить по обочине и между-
путью вблизи щебнеочистительного устройства, а также приближаться к нему
спереди или сзади на расстояние до 5 м. Во время зарядки илн разрядки щебне-
очистительного устройства рельсы поднятой путевой решетки необходимо под-
держивать предохранительными захватами.
Все предохранительные щитки, кожуха, сетки, цепи и т. п, всегда должны
быть установлены на своих местах.
Все цепи захватных устройств и растяжки следует периодически осма-
тривать и при обнаружении дефектов в звеньях (трещины, надрывы) заменять
их новыми.
Все работы по обслуживанию машины и уходу за ней необходимо произ-
водить только исправным и пригодным для производства той нли иной опера-
ции инструментом.
При работе машины ВМС запрещается приближаться к ней на расстояние
5 м, находиться между передним и задним тракторами, а также на раме упряж-
ного устройства и подножках тракторов. Не допускаются маневры машины на
балластной призме, въезд или съезд ее прн пропуске поездов по соседнему пути.
По окончании работ машина ВМС может быть оставлена на перегоне, но
ее выступающие части должны находиться на расстоянии не менее 2,5 м от
наружного рельса. Осмотр и техническое обслуживание машины ВМС следует
производить на производственной базе ПМС в депо путевых машин. При необ-
ходимости выполнения этих работ на перегоне обслуживающий персонал не
должен приближаться к действующему пути (крайнему рельсу) на 2 м, а на
участках со скоростным движением поездов (более 120 км/ч) - на 4 м.
При осмотре, техническом обслуживании машины и регулировке ее узлов
базовый трактор должен быть отцеплен, машина опущена на подрезной нож.
266
8. МАШИНЫ для ВЫПРАВКИ, рихтовки ПУТИ
И ОТДЕЛКИ БАЛЛАСТНОЙ ПРИЗМЫ
При всех видах ремонтов и текущем содержании пути производится вы-
правка его продольного и поперечного профилен (нивелировка пути), выправ-
ка пути в плане (рихтовка), а также уплотнение балласта под шпалами (под-
бивка шпал). Выправка поперечного профиля предусматривает устранение пе-
рекосов (выправка по уровню). Для механизации этих работ применяют выпра-
вочно-подбивочные и путерихтовочные машины, которые разделяются на две
группы: цикличного действия, выполняющие одну или несколько операций за
цикл с остановками у каждой шпалы, и непрерывного действия, выполняющие
без остановок одновременно одну илн несколько операций.
Последние отличаются более высокой производительностью. На железных
дорогах СССР применяются машины обеих групп. К первой группе относятся
выправочно-подбивочно-рихтовочная машина ВПР-1200 и выправочно-подби-
вочно-рихтовочная машина для пути и стрелочных переводов ВПPC-500. Вто-
рая группа представлена рихтовочной машиной Р-2000, вынравочно-подбивоч-
но-отдел очным и машинами ВПО-ЗООО, ВПО-ЗОООМ, электробалластерами с рих-
товочными устройствами и путерихтовочной машиной системы Балашенко.
8.1. ВЫПРАВОЧНО-ПОДБИВОЧНО-РИХТОВОЧНАЯ МАШИНА ВПР-1200
Машина ВПР-1200 (производительностью до 1200 шпал-Ф) предназначена
для выправки пути в продольном профиле, по уровню и в плане, уплотнения
балласта под шпалами и у торцов шпал при строительстве, всех видах ремонта
и текущем содержании железнодорожного пути с рельсами до Р65 включи-
тельно с деревянными и железобетонными шпалами на всех видах балласта
Машина / (рис. 8.1) представляет собой самоходную железнодорожную
единицу, к которой присоединена платформа II. Рама 6 опирается на две двух-
осные тележки 1, 13\ из них передняя 13 приводная. Все оси машины н плат-
формы оборудованы тормозами. В двух кабинах 2, 14 оборудованы рабочие
места машиниста и операторов, управляющих машиной. В передней кабине 14
расположены контрольно-измерительные приборы и устройство для записи
состояния пути. Из кабины 2 осуществляется управление дизелем и рабочим
Рис. 8.1. Схема выправочно-подбивочно-рихтовочной машины ВПР-1200
2R7
циклом машины. Для связи между исполнителями в кабинах оборудована си-
стема громкоговорящей связи. Торможение машины и подача сигнала о ее при-
ближении могут быть осуществлены из любой кабины.
На раме машины установлены рабочие органы: подбивочиые блоки 3, уп-
лотнители балласта у торцов шпал 4 и подъемно-рихтовочное устройство 5.
В средней части машины размещены реверс-раздаточная 7 и раздаточная //
коробки, связанные с дизелем ЯМЗ-238 и колесными парами карданными ва-
лами 8, 12, компрессоры пиевмоснстемы, генератор и др. Силовая установка
9 и приводные агрегаты закрыты капотом 10 со съемными боковыми щитами
На машине и платформе размещены тележки А, Б, В, Г, Д, Е контрольно-
измерительной системы, подъем и опускание которых производятся при помо-
щи пневмоцилиндров. Между штангами нивелировочной системы, расположен-
ными в передней и задней кабинах, натянуты нивелировочные тросы, проходя-
щие параллельно рельсовым нитям.
При движении в транспортном режиме машиной управляет машинист,
находящийся в задней кабине. При этом наблюдение за тем, свободен лн путь,
а также сигналами ведется из кабины оператора Команды передаются маши-
нисту по переговорному устройству.
В рабочем режиме управление машиной может быть ручное, полуавтома-
тическое и автоматическое. При ручном управлении команды на переезд ма-
шины от шпалы к шпале, опускание подбивочного блока и сжатие подбоек
подаются машинистом, находящимся иа месте оператора в кабине водителя.
При полуавтоматическом управлении команды на переезд машины и опу-
скание подбивочиых блоков подаются машинистом, а на сжатие подбоек —ав-
томатически, после заглубления блока.
При автоматическом управлении весь цикл совершается автоматически,
время подбивки устанавливается при помощи реле времени.
Выправка пути производится одновременно с подбивкой по одному из
трех методов: сглаживанием, по фиксированным точкам, по лазерному лучу
Основными частями машины ВПР-1200 являются экипажная часть, ра-
бочие органы, контрольно-измерительная, гидравлическая и пневматическая
системы, а также электрооборудование.
8.1.1. Экипажная часть
Экипажная часть служит для размещения рабочих органов н систем, обес-
печивающих их работу, и состоит из силовой передачи (трансмиссии), ходовой
части, силовой установки н кабин.
Силовая передача (трансмиссия) (рис. 8.2) служит для передачи крутяще-
го момента от двигателя приводным колесным парам машины. К основным уз-
лам трансмиссии относятся - муфта сцепления 1 с коробкой перемены передач 2,
реверс-раздаточная 3 и раздаточная 6 коробки, осевые редукторы 7 и 8, гид-
ромотор рабочего движения 5, редуктор отбора мощности 4, карданные ва-
лы 1 —VII. Муфта сцепления служит для кратковременного разъединения дви-
гателя с коробкой перемены передач и плавного их соединения, что необходимо
при трогании машины с места, при переключении передач и включении отбора
мощности на гидронасосы н вспомогательные механизмы.
Коробка перемены передач предназначена для изменения тягового усилия
на ведущих колесах машины и получения холостого хода.
Осевые редукторы колесных пар служат для повышения крутящего мо-
мента, подводимого от раздаточной коробки н передачи его на осн колесных пар
Карданная передача передает крутящий момент к узлам трансмиссии под
изменяющимися углами. Передача крутящего момента к колесным парам осу-
268
Рис. 8 2 Схема кинематическая силовой передачи
ществляется двумя путями в зависимости от режима работы. При работе в
транспортном режиме муфта А выведена из зацепления с полумуфтой блока
шестерен 3.1—3.2, а зубчатое колесо 3.11 — из зацепления с зубчатым коле-
сом 3.12.
В раздаточной коробке включается высшая передача (муфта С вводится
в зацепление с полумуфтой зубчатого колеса 6.10).
Крутящий момент от двигателя через муфту сцепления 1 и коробку пере-
дач 2 передается на карданный вал / и далее на входной вал реверс-раздаточ-
ной коробки 3.4. С входного вала крутящий момент через зубчатое колесо
3.3 передается на блок шестерен 3 1—3.2, свободно вращающийся на валу от-
бора мощности. Зубчатое колесо 3.1 находится в зацеплении одновременно с
зубчатым колесом 3.7 выходного вала 3.5 и зубчатым колесом 3.10 промежуточ-
ного вала 3.9. Вместе с промежуточным валом вращается закрепленное на
нем зубчатое колесо 3 8 и находящееся в постоянном зацеплении с ним зуб-
чатое колесо выходного вала 3.6, которое вращается в направлении, противо-
положном вращению колеса 3.7 При движении передним ходом муфта В вво-
дится в зацепление с полумуфтой колеса 3 7, соединяя его с выходным валом
3.5 и передавая на него крутящий момент.
При движении задним ходом муфта В вводится в зацепление с полумуф-
той колеса 3.6 и крутящий момент на вал 3.5 передается от промежуточного
вала через зубчатые колеса 3.6 и 3.8, вращая его в противоположную сторону.
С выходного вала 3.5 крутящий момент передается карданным валом 111 па
первичный вал 6.1 раздаточной коробки 6.
С первичного вала через зубчатое колесо 6 2 крутящий момент передает-
ся на зубчатое колесо 6.10 и через муфту С— на вторичный вал 6.7. С него
крутящий момент передается на сателлиты дифференциала 6.12, которые рас-
пределяют его поровну между зубчатыми колесами 6.3 и 6,13, свободно сидя-
щими на вторичном валу. Цилиндрические венцы этих колес находятся в по-
стоянном зацеплении с зубчатыми колесами 6.5 и 6.11, установленными на
выходных валах 6.6 н 6.14. От вала 6 14 крутящий момент карданным валом VI
передается па ведущий вал осевого редуктора 7, а от вала 6 6 карданным ва-
лом V — на вал промежуточной опоры и далее карданным валом VII — на
ведущим вал осевого редуктора 8.
Машина трогается с места на первой передаче в коробке передач, пере-
ключение на последующие передачи производится по мере разгона машины
В особо тяжелых условиях рекомендуется трогание машины с места произво-
дить на низшей передаче раздаточной коробки-
При работе в рабочем режиме муфта А вводится в зацепление с полумуф-
той блока шестерен 3.1—3.2, соединяя его с валом отбора мощности, муфта ре-
верса В ставится в нейтральное положение, зубчатое колесо 3 11 вводится в за-
цепление с зубчатым колесом 3.12, в раздаточной коробке включается низшая
передача (муфта С вводится в зацепление с полумуфтой зубчатою колеса 6.9),
в коробке перемены передач включается четвертая (прямая) передача.
Крутящий момент от двигателя через муфту сцепления и коробку переме-
ны передач передается на карданный вал 1 и далее на входной вал реверс-раз-
даточной коробки 3.4.
С входного вала крутящий момент через зубчатое колесо 3.3 передается на
блок шестерен 3.1—3.2 и через муфту А — на вал отбора мощности VII1. От
вала отбора мощности карданным валом II крутящий момент передается на ре-
дуктор отбора мощности для привода гидравлических насосов и генератора.
Зубчатые колеса 3.6 и 3.7 выходного вала 3.5 и промежуточный вал 3.9 с зуб-
чатыми колесами 3.8 н 3.10 вращаются вхолостую
Гндромотор М, обеспечивающий движение машины в рабочем режиме, пи-
тается от гидронасоса 4.2.
270
Крутящий момент подводится от гидромотора карданным валом IV к
зубчатому колесу 3.12 и через зубчатое колесо 3.11 передается на выходной вал
3.5 и далее карданным валом 111 на раздаточную коробку и приводные колес-
ные пары машины.
Реверс-раздаточная коробка предназначена для пе-
редачи крутящего момента, поступающего от коробки перемены передач, обес-
печения двух режимов работы машины (рабочего и транспортного) и реверси-
рования машины в транспортном режиме. Конструктивно коробка состоит из
корпуса и крышки, соединенных ио вертикальной плоскости разъема. В рас-
точках корпуса и крышки установлены валы, которые собираются совместно
с шестернями.
Раздаточная коробка использована от автомобиля КрАЗ-257
и представляет собой дифференциальный редуктор, равномерно распределяю-
щий крутящий момент от реверс-раздаточной коробки между двумя валами, для
передачи его через осевые редукторы на колесные пары машины.
Раздаточная коробка (рис. 8.3) состоит из коробки переключения режимов
н межосевого дифференциала, собранных в отдельных корпусах и объединен-
ных общим валом.
Коробка переключения режимов служит для изменения передаточного
числа между реверс-раздаточной коробкой и дифференциалом и состоит из пе-
реднего корпуса 13, первичного вала 1 с набором шестерен 2,3,4, вторичного
вала 15, шестерйи низшей передачи 14, шестерни высшей передачи 11 и муфты
переключения передач 12 с синхронизатором. Переключение режимов в нашем
случае происходит только при остановленной машине, поэтому узел синхрони-
зации муфты переключения не используется.
Межосевой дифференциал служит для разделения поровну крутящего
момента между приводными колесными нарами. Он состоит из корпуса 10,
муфты дифференциала 6, ведущих колес 5 и 7, выходных валов 17 и 18 с шестер-
нями 16, 19 и блокировочной муфты 9 с вилкой управления 8. На машине муф-
та дифференциала 6 используется только для жесткой связи вторичного вала
15 с колесами 5 и 7. Это достигается постоянным включением блокировочной
муфты 9, обеспечивающей включение этой связи.
В работе раздаточной коробки различают два режима: рабочий и транс-
портный. Рабочий режим характерен тем, что в коробке включена понижающая
передача и мощность передается периодически при передвижении машины от
Ряс. КЗ. Раздаточная коробка
271
шпалы к шпале. Прн транспортном режиме в коробке включена повышающая
передача и крутящий момент передается непрерывно при движении машины.
Крутящий момент от первичного вала 1 через шестерни 2. 14 (при рабочем
режиме; и 4, 11 (при транспортном режиме), муфту переключения передач 12
передается на вторичный вал 15 и далее через муфту дифференциала 6, соеди-
ненную с ведущими колесами 5, 7 на шестерни 16, 19 выходных валов 17, 18 для.
приводов осевых редукторов колесных пар.
Вторичный вал через муфту дифференциала и карданные валы постоянно
соединен с приводными колесными парами и всегда вращается при движении
машины. При вращении вторичного вала вращаются валы привода колесных
пар и установленные на них шестерни разбрызгивают находящееся в корпусе
масло. Образовавшийся масляный туман смазывает находящиеся в заднем
корпусе зубчатые передачи и подшипники.
Смазка зубчатых передач и подшипников, установленных в переднем кор-
пусе, осуществляется также масляным туманом, создаваемым вращением ше-
стерен вторичного вала. Масляный туман, осаждающийся в желобе на боковой
стенке корпуса, создает приток масла в полость крышки переднего подшип-
ника, откуда оно поступает к подшипникам скольжения шестерен вторичного
вала. Ввиду того что нормальная смазка осуществляется только при вращении
шестерен вторичного вала, при транспортировке машины другим транспорт-
ным средством в коробке переключения режимов должна быть включена выс-
шая передача. Прн установке переключения передач в нейтральное положение
шестерни вторичного вала не вращаются, в корпусе нет масляного тумана и
смазка не подводится к подшипникам шестерен вторичного вала, что может
привести к их задирам.
Ходовая часть служит для восприятия нагрузок от массы машины. Она
включает в себя раму с ударно-тяговыми приборами, тележки бегунковую и тя-
говую, тормозную систему.
Тележка бегунковая (рис. 8 4) состоит из следующих основ-
ных частей: рамы 2, двух колесных пар 7, элементов подвешивания / и 3,
четырех гидроцилиндров блокировки амортизаторов второго яруса 6, четырех
опорных цилиндров блокировки амортизаторов первого яруса 4, пяти гидрав-
лических демпферов 5 и 9, колодочного тормоза. Связь тележки с машиной осу-
ществляется посредством шкворня 8, который установлен на шкворневой бал-
ке рамы тележки Рессорное подвешивание выполнено по двухъярусной схеме
на резинометаллических амортизаторах. Амортизаторы первого яруса 3
установлены между буксой и рамой тележки. Они передают на буксы колесных
пар нагрузку от веса подрессорной части тележек и машины; уравнивают на-
грузку между колесными парами и смягчают толчки при движении машины.
Во время рабочего процесса для достижения большей точности работы машины
необходимо исключать упругую связь между машиной и железнодорожным
путем. Для этой цели на тележке установлены четыре гидроцилиндра блоки-
ровки амортизаторов второго яруса 6 и четыре опорных цилиндра блоки-
ровки амортизаторов первого яруса 4 В обоих ярусах подвешивания парал-
лельно амортизаторам установлены гидравлические демпферы 5 и 9 Вторая
ступень подвешивания 1 представляет собой два резинометаллических аморти-
затора, посредством которых происходит опирание машины на тележку.
Тележка тяговая конструктивно выполнена аналогично бегуи-
ковой, только на ней нет гидравлических цилиндров блокировки второго яру-
са и на осях колесных пар установлены осевые редукторы.
Тормозная система служит для гашения скорости машины,
остановки и удержания ее на месте.
На машине установлен колодочный тормоз с пневматическим приводом,
действующий на все оси машины и платформы, и тормоз с ручным механиче-
272
А-А
Рис. 8,4. Тележка бсгунковая
ским приводом, действующий только на две оси бегунковой тележки. По прин-
ципу действия на машине применены три вида пневматических прямодейст-
вующих приводов тормоза: автоматический, неавтоматический и электропнев-
матическнй.
Прямодействующий автоматический тормоз предназначен для торможения
машины при следовании своим ходом или при перевозке ее локомотивом.
Управление тормозом при следовании своим ходом осуществляется кранами,
установленными в кабинах водителя и оператора. При следовании с локомоти-
вом тормозом управляет машинист локомотива.
273
Прямодействующий неавтоматический тормоз предназначен для тормо-
жения машины при следовании своим ходом и управляется педалью, уставов
ленной в кабине машиниста.
Прямодействующий электропневмэтический тормоз предназначен для
торможения машины при передвижении от шпалы к шпале в рабочем режиме.
Управление тормозом осуществляется от системы управления движением ма-
шины в рабочем режиме. Система включается при помощи кранов в кабинах
водителя и оператора.
Тормоз с ручным механическим приводом предназначен для затормажи-
вания машины прн стоянке на уклоне и приводится в действие от штурвала, ус-
тановленного в кабине водителя.
Тормозная система (рис. 8.5) включает приборы и оборудование, которые
по своему назначению делятся на четыре группы:
1) приборы для питания сети системы сжатым воздухом: компрессоры,
регуляторы давления, главный и дополнительные резервуары, воздухоочи-
стители, перепускные, обратные и предохранительные клапаны, клапаны хо-
лостого хода;
2) приборы для управления тормозами: краны машиниста, электропнев-
матическне вентили, манометры;
3) приборы торможения: тормозные цилиндры, воздухораспределители,
реле давления, клапаны максимального давления, клапан переключательный;
4) воздухопровод с арматурой (перепускные и обратные клапаны, стоп-
краны, выпускной клапан, концевые и разобщительные краны, тормозная и на-
порная магистрали)
Все элементы тормозной системы машины унифицированы с элементами
тормозных систем выпускаемых в стране путевых машин и локомотивов.
Наполнение системы сжатым воздухом осуществляется следующим обра-
зом. Воздух через фильтры поступает в компрессоры 23 и 24, откуда через
змеевики охлаждения 44, влагосборники 21 и 22, обратные клапаны 13, 46,
64 нагнетается в главные 14 н 45 и дополнительные резервуары 17, 26, 62.
Одновременно воздух от воздухофильтра дизеля поступает к компрессору 19
и далее через клапан холостого хода 47 — к главным и дополнительным ре-
зервуарам. Запасные резервуары 25 и 65 заполняются прн включении кранов
машиниста 5 и 30. Предохранительные клапаны 18 и 20 срабатывают при до-
стижении в системе давления 0,7 МПа.
Управление прямодействующим автоматическим тормозом осуществляет-
ся одним из двух кранов машиниста 5 и 30, установленных в кабинах машины.
Прн работе автоматического тормоза разобщительные краны 36 и 53 должны
быть закрыты. В зависимости от того, нз какой кабины ведется управление
тормозами, второй кран машиниста отключается разобщительными кранами
6, 7, 31, 32.
При торможении снижение давления в магистральной части воздухорас-
пределителей 27 и 67 приводит к их срабатыванию. Сжатый воздух из запасно-
го резервуара 25 через воздухораспределитель 27, трубопровод 34 через пере-
ключательные клапаны 43 и 48 поступает в тормозные цилиндры машины 41
и 51. Из запасного резервуара 65 через воздухораспределитель 67 переключа-
тельные клапаны 56 и 57 сжатый воздух поступает в тормозные цилиндры плат-
формы 54 и 59. При неисправности воздухораспределителей их можно отклю-
чить от тормозной магистрали посредством разобщительных кранов 28 и 66
Давление в тормозных цилиндрах и тормозной магистрали контролируется по
манометрам 4 и 29.
Управление прямодействующим неавтоматическим тормозом осуществля-
ется педальным двухконтурным тормозным краном 15, установленным в каби-
не водителя, Сжатый воздух с главного резервуара 45 через трубопроводы,
274
Рис. 8 5. Схема тормозной системы
Рис. 8 6. Тормоз задней тележки
клапан максимального давления 16 посту-
пает к тормозному крану 15. Из него при
нажатии педали воздух поступает через
трубопровод 12, переключательные клапа-
ны 40 и 50, реле давления 42 и 49 и пере-
ключательные клапаны 43 и 48 в тормоз-
ные цилиндры машины 41 и 51.
Одновременно по трубопроводам 2, 9
через переключательный клапан 60, реле
давления 55 и 58 и переключательные кла-
паны 56 и 57 сжатый воздух поступает
в тормозные цилиндры 54 и 59 тормозной
платформы. Величина конечного (предель-
ного) давления в тормозных цилиндрах
устанавливается при помощи клапанов
максимального давления 16 и 63 и контролируется по манометрам 8 и 33.
Прямодействующий электропневматический тормоз предназначен для
торможения машины в рабочем режиме. Для перехода с поездного режима на
рабочий необходимо открыть разобщительные краны 36 и 53. Сжатый воздух
из дополнительных резервуаров 17 и 26 через разобщительные краны 36 и 53,
фильтры воздухопровода 10 и 37, клапаны максимального давления 11 и 38,
открытые электропневмовентили 39 и 52, на которых принят электрический
сигнал, переключательные клапаны 40 и 50, реле давления 42 и 49 и переклю-
чательные клапаны 43 и 48 поступает в тормозные цилиндры 41 и 51.
Одновременно по трубопроводу / через клапан максимального давления
63, электропневмовентиль 61, клапан 60, реле давления 55 и 58, клапаны 56,
57 сжатый воздух поступает в тормозные цилиндры платформы. Отпуск тормо-
за производится электропневмовентилями 39, 52, 61, которые при отключении
электрического сигнала от рабочей педали перекрывают питательные маги-
страли и сообщают управляющие полости реле давления с атмосферой. Через
электропиевмовентиль 35 сжатый воздух поступает для подачи смазки на осе-
вые редукторы в рабочем режиме машины.
Колодочный тормоз предназначен для передачи усилия от тормозного
цилиндра через тормозные колодки на колеса машины. Он действует на все
четыре оси. Нажатие колодок одностороннее.
Рычажная передача задней тележки, схема которой представлена на
рис. 8.6, передает усилие от тормозного цилиндра 16 через рычаг 15, тяги 14,
10 на рычаги 9, 7. Через рычаги усилие передается на правый и левый тормоз-
ные мосты 12, 8, прижимающие колодки 13 к колесам.
При отпуске тормоза, т. е при падении давления в тормозном цилиндре,
под действием обратного хода штока цилиндра и сжимающего действия воз-
вратных пружин 11 система возвращается в первоначальное положение.
Тележка оборудована ручным тормозом, привод которого включает ру-
коятку 5, редукторы 6, 4, винт 3, рычаг 2, цепь 1. Рычажная передача передней
тележки аналогична задней, но в ней нет привода ручного тормоза. При от-
соединении машины от платформы краны3 (см. рнс. 8.5) перекрываются.
8.1.2. Рабочие органы
Для выполнения механических операций служат рабочие органы, включа-
ющие подбивечные блоки, подъемно-рихтовочное устройство и уплотнители
балласта у торцов шпал. Все рабочие органы работают одновременно.
Подбивочные блоки служат для уплотнения (подбивки) балласта под шпа-
лами. На машине установлены два подбивочных блока с асинхронным обжа-
276
тием балласта, обеспечивающие одновременную подбивку двух шпал под каж-
дой рельсовой нитью с подачей балласта подбойками из шпального ящика под
нижнюю постель шпалы в зоне расположения рельсов и его обжатие. Бла-
годаря асинхронному сжиму подбоек, при котором путь, пройденный подбой-
ками при сжиме, обратно пропорционален плотности балласта перед подбой-
ками, достигается более равномерное уплотнение балласта под шпалами.
Подбивочный блок (рис. 8.7) имеет две лары рычагов с подбойками 1, 2,
11, 13, охватывающих две шпалы с двух сторон. Рычаги шарнирно соединены
с корпусом блока, а верхние плечи рычагов — шатунами 3, 5, 10, 12 с шейка-
ми кривошипов эксцентрикового вала 6. Шатуны выполнены в виде гидроцилин-
дров двустороннего действия. Шатуны 3, 12 (основные) рычагов внутренних
подбоек соединены непосредственно с шейками кривошипов, а шатуны 5, 10
(прицепные) наружных подбоек шарнирно соединены с головками щатунов
внутренних подбоек.
При вращении эксцентрикового вала 6 от гидродвнгателя 8 головки шату-
нов, соединенные с шейками кривошипов, совершают вращательное движение,
а головки, соединенные с верхними плечами рычагов, — колебательные. Ры-
чаги, поворачиваясь вокруг шарниров на корпусе, передают колебания с ча-
стотой 35 Гц на подбойки. При внедрении подбоек в балласт поршни гидроци-
линдров-шатунов заперты давлением масла и передают на подбойки только ко-
лебательные движения. После заглубления подбоек на необходимую глубину
в поршневые полости цилиндров внешних подбоек и штоковые полости цилин-
дров внутренних подбоек подается масло, что вызывает их перемещение в ци-
линдрах и на рычаги одновременно с колебательными движениями передается
поступательное, благодаря чему они поворачиваются относительно средних
шарниров и сближают концы подбоек, охватывающих шпалу. Для разведения
подбоек масло подается в полости цилиндров, вызывая движение штоков в
противоположных направлениях.
Основными частями подбивочного блока являются станина, эксцентри-
ковый вал 6, маховик 9, шатуны 3, 5, 10, 12, рычаги /, 2, 11, 13 с подбойками,
соединительная муфта гидромотора 7, система смазки.
Эксцентриковый вал 6 служит для преобразования вращательного дви-
жения в колебательное, передаваемое подбойкам. Он имеет две коренные шей-
ки 4 для установки подшипников, которыми он опирается на стенки корпуса,
и по три шатунные шейки с каждой стороны, образующие кривошипы, преоб-
разующие вращательное движе-
ние эксцентрикового вала в ко-
лебательное шатуна. Кривоши-
пы образованы смещением осей
шатунных шеек в противопо-
ложные стороны на 2,5 мм отно-
сительно оси коренных шеек.
На концах вала с обеих сторон
установлены маховики 9, явля-
ющиеся аккумуляторами меха-
нической энергии и предназна-
ченные для регулирования рав-
номерности вращения эксцент-
рикового вала при изменении на-
грузки в период рабочего цикла.
Колебательные движения от
Кривошипов эксцентрикового
вала передаются на рычаги 6,
13 (рис. 8.8) при помощи основ-
—Движение поршня при сжатии подбоек
- —Движение поршня при разведении подбоек
Рис. 8.7. Схема работы подбивочного блока
277
Рис. 8 8 Блок подбивочный
них шатунов, а на рычаги 4, 12 внеш-
них подбоек прицепными шатунами.
Подбойки /, 3 служат для подачи бал-
ласта под нижние постели шпал и его
уплотнения. Нижние части подбоек —
лопатки 14 — наплавлены твердым
сплавом для повышения их износо-
устойчивости. Эксцентриковый вал
приводится во вращение гидродви-
гателем 8 (см. рис. 8.7) при помощи
упругой втулочно-пальцевой муфты 7.
Ограничение раздвижки подбоек
подбивочного блока осуществляется
ограничителями раздвижки 7 (см
рис. 8.8), приводимыми в действие
пневмоцилиндрами 8.
В подбивочных блоках имеется
большое количество трущихся пар, ра-
ботающих в различных режимах, смазка которых осуществляется различными
способами. К коренным подшипникам эксцентрикового вала и нижним шарни-
рам рычагов масло поступает самотеком из специального бачка, а шатунные
подшипники эксцентрикового вала и верхние шарниры рычагов смазываются
консистентной смазкой через пресс-масленки. Для. смазки направляющих,
по которым поднимается и опускается подбивочный блок, применены фитиль-
ные масленки.
При выполнении операций рабочего цикла подбивочные блоки поднимают-
ся и опускаются по вертикальным направляющим 2 подвижной рамы 9 при
помощи гидроцилиндра 10. Для ориентации над рельсами подбивочные блоки
могут перемещаться гидроцилиндром совместно с подвижной рамой по направ-
ляющим 5, 11. В транспортном положении подбивочный блок стопорится в
крайнем верхнем положении при помощи фиксатора. О положении фиксатора
(открытое или закрытое) подается световой сигнал в кабину машиниста по-
средством конечного выключателя.
Подъемно-рихтовочное устройство машины предназначено для выправ-
ки и рихтовки пути. При помощи его выполняют подъемку пути и сдвижку без
опоры иа балласт роликовыми захватами за головку рельсов. Передача усилий
при рихтовке пути производится одновременно на оба рельса. Управление
автоматическое от контрольно-измерительных систем. Возможна ручная
корректировка.
Подъемно-рихтовочное устройство (рис. 8.9) расположено в средней части
машины перед подбивочными блоками и состоит из балки захвата 5, балансира
3, клещевидных захватов 2, рихтовочных роликов И, направляющей колон-
ный, гидравлических цилиндров подъема 6 и сдвига (рихтовки) пути 13. Кле-
щевидные захваты и рихтовочные ролики смонтированы на балансире 3, ко-
торый посредством подвески 4 связан с балкой захвата 5. Связь подвески с бал-
кой захвата позволяет балансиру поворачиваться относительно вертикальной
оси, что необходимо при работе в кривых участках пути. Балка захвата пере-
мещается по направляющей колонне 8, закрепленной на раме 7, обеспечивая
вертикальное перемещение подъемно-рихтовочного устройства.
Во время движения машины подъемно-рихтовочное устройство находится
в транспортном положении: закреплено стопором 9, приводимым в действие
пневмоцилиндром 10. Для выполнения рабочих операций устройство опуска-
ется на путь.
278
Подъем и перемещение рельсовых звеньев осуществляются цилиндрами
подъема 6 при помощи клещевидных захватов 2. Открытие и закрытие захватов-
осуществляется гидроцилиндрами 12. Ролики 1 захвата, катясь под головкой
рельса, обеспечивают подъем и удержание пути на заданном уровне во время
всего рабочего процесса.
Рихтовка пути осуществляется при помощи рихтовочных роликов 11 и
гидравлических цилиндров сдвига 13. В рабочем положении подъемно-рих-
товочного устройства рихтовочные ролики 11 катятся по поверхности рельса.
Усилие сдвига передается на рельс ребордами роликов.
Уплотнитель балласта у торцов шпал (рис. 8.10) служит для уплотнения
плеч балластной призмы одновременно с подбивкой балласта под шпалами и
выправкой пути, что обеспечивает заполнение балластом возникающих при рих-
товке пустот у торцов шпал. Благодаря этому повышается устойчивость пути.
Уплотнитель балласта состоит из уплотнительной плиты 7 с вибратором,
которые подвеской соединены с рамой подбивочного блока. Уплотнительная
плита 7 передает возбуждаемые вибратором колебания на балласт.
Вибратор состоит из вала 13 с дебалансами 14, который приводится во
вращение от гидродвигателя 18 через муфту 16. Вал установлен в подшипниках
15 и закрыт кожухом 17 и 12, на котором установлен фиксатор 9, служащий для
крепления плиты в транспортном положении. Уплотнительная плита соеди-
нена с рамой подбивочного блока при помощи подвески, включающей рычаги
8, 11, балансиры и упругие элементы подвески. Рычагами 8 осуществляется
подъем и опускание уплотнительных плит. На нем предусмотрены упоры для
взаимодействия с конечными выключателями, управляющими подъемом и опу-
сканием уплотнителей.
Уплотнительная плита соединена с рычагами через упругие элементы и
балансиры 6. Упругий элемент подвески состоит из муфты 1, двух кронштейнов-
3 и резиновых вкладышей 5.
Муфта 1 представляет собой отрезок трубы прямоугольного сечения, к ней
приварены два уголка для крепления к плите. В трубу муфты с двух сторон
вставлены квадратные цапфы 2 кронштейнов 3. В зазоры между поверхностями
Рис. 8.9. Подъемно-рихтовочное устройство ВПР-1200
279
Рис. 8.10. Уплотнитель балласта
а — вид с торца; 6- вид сбоку
цапфы и трубы муфты запрессованы вкладыши 5 из резины круглого сечения
Фланцы кронштейнов крепятся к боковым стенкам скобы 4. На площадке по-
следней установлен балансир 6, состоящий из двух скоб и серьги, соединенных
между собой через резиновые вкладыши. Конструкция балансира аналогична
устройству упругого элемента подвески.
В рабочем положении машины фиксатор освобожден и плиты опущены в
промежуточное положение, в котором удерживаются гидроцилиндрами 10.
Вибраторы приводятся во вращение гидродвигателем 18. Упругие элементы
и балансиры препятствуют передаче машине вибрации от уплотнительных плит
и дают возможность им самоустанавливаться при их прижатии к балласту.
При заглублении подбоек подбивочного блока в балласт плиты опускаются на
поверхность балластной призмы и прижимаются усилиями гидроцилиндров.
Статическое усилие прижатия плит и динамические усилия, создаваемые виб-
ратором, производят уплотнение балласта. После окончания цикла подбивки
плиты поднимаются и при переезде машины удерживаются гидроцилиндрами
в поднятом положении.
8.1.3. Контрольно-измерительная система
Она предназначена для измерения отклонения пути в продольном профи-
ле, по уровню и в плане с подачей сигналов механизмам, управляющим вы-
правкой пути и контролирующих его состояние.
По выполняемым функциям контрольно-измерительная система делится
на три независимые системы: нивелировочную и рихтовочную измерительные
системы и контрольную систему состояния пути до и после производства вы-
правочных работ.
Нивелировочная измерительная система (рис. 8.11) предназначена для
управления выправкой пути в продольном профиле и по уровню. На машине
применена тросовая трехточечная нивелировочная система с корректиров-
кой передней точки. Она включает нивелировочные тросы 2, нивелировочное
280
устройство 3, контрольное устройство /, переднюю тележку 6, рычаг 5, измери-
тельное устройство 10, пропорциональные датчики высоты 12 и 13, нивелиро-
вочный маятник 15, контрольный маятник 11, механизмы 14 и 16 подъема пе-
редних концов тросов, генератор лазера 7, лазерную тележку 8 и фотоприем-
ник 4.
При работе системы сигнал на подъемку пути подается датчиком в зависи-
мости от величины отклонения пути в месте выправки от измерительной базы,
положение которой определяется двумя точками; задней А, находящейся на
выправленном участке пути, и передней £, находящейся перед машиной
Базой измерительной системы являются два нивелировочных троса 2,
натянутых над каждым рельсом. Передиие концы тросов закреплены на
штангах нивелировочного устройства 3, опирающихся через рычаг 5 на рельсы
перед машиной, а задние концы—на штангах контрольного устройства 1,
опирающихся на рельсы выправленного участка в точке А.
Отклоняясь в зависимости от положения выправляемого пути, нивелиро-
вочные тросы тянут защемляющие их поводки датчиков 13 и 12. Линейное
перемещение поводка и соответственно тросика датчика пропорционально
углу поворота шкива и соответственно сидящего с ним на одной оси потенцио-
метра. Возникающий потенциал дает сигнал, который через усилитель подается
на сервозолотники гидрораслределителей, управляющих работой гидроцилин-
дров подъемно-рихтовочного устройства 9
Рычаг 5 предназначен для уменьшения перемещений в точке В по отно-
шению к перемещениям в точке Е посредством плеч.
Выправка пути в продольном профиле производится относительно одно-
го рельса, принятого за базовый (исходный, ведущий). При работе на прямых
участках пути выбор базового рельса делается произвольно, а при pa6oie в
кривых участках за базовый принимается внутренний рельс. Передняя точка
троса, находящегося над другим рельсом, выводится на уровень передней точ-
ки троса, находящегося над ведущим рельсом но команде oi маятника 15
нивелировочного устройства Положение пути ио уровню в зоне выправки
контролируется при помощи маятника 11, установленного на измерительном
устройстве 10.
В зависимости от способа базирования передней точки измерительной ба-
зы различают три метода работы нивелировочной системы: сглаживания, фик-
сированных точек и работу ио лазерному лучу.
Рис. 8 11. Схема нивелировочной измерительной системы
281
При работе по методу сглаживания передняя точка нивелировочного тро-
са находится на невыправленном участке пути и при движении машины копи-
рует его неровности. Поэтому в установку измерительной базы вводится заве-
домая погрешность, определяемая положением передней точки нивелировоч-
ного троса Вследствие этого в месте выправки пути ставится не на проектную
отметку, а с некоторым отклонением, которое зависит от положения пути в ме-
сте нивелировки и от соо тношения элементов измерительной системы. Таким
образом, после прохода машины отклонения пути от проектного положения
уменьшаются на величину, определяемую геометрическим коэффициентом
сглаживания системы, который показывает, во сколько раз отклонение пути от
заданного положения в зоне выправки меньше того же отклонения в зоне пе-
редней измерительной точки. Геометрический коэффициент сглаживания си-
стемы определяется по формуле
Км Л'Г.
где f — погрешность в положении пути после выправки;
Г — отклонение в положении пути до выправки в месте замера (передняя точка).
Численное значение коэффициента сглаживания изменяется в зависи-
мости от состояния пути в зоне нивелировки и при принятых размерах систе-
мы колеблется от 4 до 14.
Для устранения влияния на точность выправки пути его начального со-
стояния необходимо вносить поправку в положение передней точки закрепления
троса Это делаю г при помощи механизмов 14 и 16 подъема передних концов
тросов. Способ выправки, при котором положение передней точки гроса кор-
ректируется в зависимости от фактического положения пути, называется пре-
цизионным и дает возможность устанавливать путь на проектную отметку.
При работе по методу фиксированных точек путь предварительно нивелп-
р\юц нанося на шпалы численные значения величин, на которые необходимо
поднимать переднюю точку троса. Команду па подъем передней точки троса
подает механик из кабины оператора после остановки машины. Переднюю точ-
ку троса устанавливаю! на нужную величину Дальнейшая работа системы про-
исходит так же, как и по методу сглаживания. Этот метод пригоден для вы-
правки прямых участков пути, а также круговых и переходных кривых.
При работе на длинных прямых участках пути корректировка передней
точки можеч производиться при помощи лазерного луча, создаваемого генера-
тором 7, смонтированным на лазерной тележке 8, которая устанавливается
впереди машины на расстояние до 600 м в зависимости от метеорологических
условий и настраивается так, что луч попадает на фотоприемник 4 нивелиро-
вочного устройства. При этом подается сигнал на механизмы 14 или 16, уста-
навливающие переднюю точку троса на нужную высоту. Далее- контрольная
система работаем так же, как и при методе сглаживания. При движении маши-
ны нивелировочная тележка 6 копирует профиль пути, а фотоприемник подает
команды на перемещение передней точки измерительно!о троса, удерживая его
на требуемой высоте относительного лазерного луча. Таким образом, перед-
няя точка базового измерительного троса удерживается лазерным лучом на
проектной отметке, что дает возможность устанавливать путь точно на проект-
ное положение.
Лазерный луч в поперечном сечении имеет крестообразную форму. Его
горизонтальная составляющая используется для управления подъемкой, а
вертикальная — для управления рихтовкой.
Рихтовочная измерительная система (рис 8.12) предназначена для управ-
ления выправкой пути в плане. На машине применена однохордовая четырех-
точечная система, позволяющая осуществлять рихтовку прямых и кривых уча-
стков пути. Она включает трос рихтовочный 4 (хорду), переднюю тележку 10,
282
Рис 8.12 Схема рихтовочной измерительной системы
контрольную тележку 3, следящее устройство 9 с механизмом перестановки
хорды, заднюю тележку 1, датчики 5 и 7 стрелы прогиба, измерительную те-
лежку 8, контрольно-измерительную тележку 6, генератор // лазера и лазер-
ную тележку 12.
Принцип действия системы при рихтовке кривых основан на сравнении
двух смежных стрел прогиба и Я2, возникающих при работе машины по
рихтовке кривых участков пути. Измерительной базой в системе служит трос
4, размещенный вдоль продольной оси машины между передней 10 и контроль-
ной 3 тележками контрольно-измерительной системы (точки А и D)
Передний конец троса 4 может перемещаться поперек оси пути 2 при по-
мощи следящего устройства 9 и механизма перестановки хорды. Натяжение
гроса осуществляется пневмоцилиндром, установленным на задней тележке 1
Положение измерительной базы определяется точками А и D Точка А
находится на выправленном участке пути, точка D — на невыправленно.м
(перед машиной).
Известно, что для хорд с малым центральным углом высота стрелы про-
гиба, делящая хорду на отрезки, будет равна с достаточной точностью произ-
ведению отрезков, поделенному на диаметр:
AC.CD AB-BD Н. AC-CD
. Н.,~=-------; ; —- .
2R “ 2/? Н. AB-BD
Следовательно, соотношение стрел прогиба /—величина постоянная, не
зависящая от радиуса кривой, определяемая лишь соотношением расстоянии
между точками измерения. Для машины ВПР-1200 соотношение стрел проги-
ба равно 1,364. Стрелы прогиба Нх и Н2 измеряют потенциометрическими дат-
чиками 5 и 7. При отклонении пути от круговой кривой датчики фиксируют рас-
согласование от величины 1,364 и выдается команда на выправку пути до тех
нор, пока соотношение стрел прогиба не будет восстановлено
В зависимости от способа базирования передней точки рихтовочной хор-
ды системой можно производить рихтовку по трем методам, методу сглажива-
ния, по фиксированным точкам и по лазерному лучу. При работе по методу
сглаживания передняя точка рихтовочной хорды находится на невыправлен-
ном пути. Любому отклонению точки Су от оси будет соответствовать изменение
стрелы прогиба Нх. Возникающее при этом изменение соотношения стрел про-
гиба фиксируется датчиком 7 стрелы прогиба. В связи с тем что в положение из-
мерительной базы в точке С передней точкой вносится погрешность, положение
нуги после рихтовки будет отличаться от проектного на величину, определяе-
мую геометрическим коэффициентом сглаживания системы
283
Л'р - f!F,
где F — погрешность в положении пути в передней точке;
f — величина, на которую уменьшается погрешность в точке Сг,
При принятой разбивке хорды коэффициент сглаживания будет равен 7,
т. е. существующая ошибка в положении пути уменьшается в 7 раз.
При рихтовке по методу фиксированных точек, так же как и при нивели-
ровке, перед началом работы машины производится разметка пути, и при
подъезде к определенной шпале механик в кабине оператора смещает передний
конец хорды на необходимую величину в сторону проектного положения пути
Далее работа системы происходит в соответствии с принципами рихтовки
кривых или прямых участков. Метод фиксированных точек применяют и при
рихтовке переходных кривых с использованием специальных таблиц переста-
новки переднего конца хорды. Этим методом достигается абсолютная точность
рихтовки.
Для рихтовки длинных прямых участков пути применяется генератор //
лазера, установленный натележке 12 перед машиной. Вертикальная составляю-
щая луча, попадая на фотоприемник следящего устройства .9, вызывает выда-
чу им сигнала на сдвиг переднего конца хорды до тех пор, пока луч не попадет
в середину фотоприемника.
Дальше работа системы происходит в соответствии с принципом, рихтов-
ки прямых. Нивелировочную и рихтовочную измерительные системы называют
пропорциональными, потому что скорость подъема и рихтовки находится в
прямой зависимости от высоты подъема и величины сдвига и уменьшается с
приближением пути к проектному положению.
Этот эффект увеличивает производительность машины и точность выправ-
ки пути и достигается за счет применения в гидросистеме машины следящих
золотников, управляющих выправочными устройствами.
Контрольная система (рис. 8.13) предназначена для контроля состояния
пути до и после производства выправочных работ посредством записи и а лен-
ту самописца его параметров.
Она включает трос-хорду контрольную 9, тележку контрольно-измери-
тельную 8, тележку заднюю 1, тележку контрольную 2, датчик 10 стрелы про-
гиба, шаговое колесо 7, гибкий вал 4, датчик пути 6, маятник контрольный 3,
двухканальный электронный самописец 5 и механизм перестановки хорды //.
Контрольная система позволяет регистрировать два параметра: положе-
ние пути в плане и положение пути в поперечном профиле (по уровню) Поло-
жение пути в плане регулируется тросом-хордой контрольной 9, натянутой
между контрольно-измерительной 8 и задней 1 тележками.
Колебания стрелы прогиба в середине хорды преобразуются посредством
датчика 10 стрелы прогиба в электрические сигналы, поступающие на вход од-
ного из каналов самописца. Положение пути в поперечном профиле регистри-
284
рует маятник 3, сигналы от которого поступают на вход второго канала само-
писца.
Контрольная система позволяет производить точечную запись парамет-
ров пути (в момент выправки пути при неподвижной машине) и непрерывную
запись в рабочем режиме или при контрольных поездках При всех видах за-
писи синхронизация движения ленты самописца с перемещением машины осу-
ществляемся системой, состоящей из шагового колеса 7, гибкого вала 4 и дат-
чика пути 6. Во время работы двигатель лентопротяжного механизма электри-
чески связан с датчиком пути 6, который вращается от шагового колеса 7 че-
рез гибкий вал 4 Управляющий импульс датчика пути 6, вызывающий пере-
мещение ленты самописца, всегда соответствует пути, пройденному машиной
8.1.4. Пневматическая рабочая система
(Система служит для выполнения вспомогательных операций при работе
машины, для перевода подбивочных блоков, подъемно-рихтовочного механиз-
ма и контрольно-измерительной системы нз транспортного положения в рабо-
чее и наоборот, для подачи звуковых сигналов и управления обдувом прибо-
ров, расположенных на раме машины при ее работе.
Пневматическая рабочая система (рис 8.14) питается сжатым воздухом от
тормозной системы, давление в системе 0,7 МПа В нее входят пневмоаппара-
тура подготовки воздуха, контрольно-регулирующая аппаратура, пневморас-
пределительная аппаратура и пневмоцилиндры управления исполнительными
органами.
К пневмоаппаратуре подготовки воздуха относятся два разобщительных
крана 6 и 42, предназначенных для подачи воздуха из тормозной пневматиче-
53 52
2
13
11
На обдув
приборов
10
37
\Панель,
'45
От
44 43 42 \mop-
Ut поз-
най сис-
темы
Рис. 8.14. Схема пневматической рабочей системы машины
) тор поз-
най систе-
5 4
3
.36 38
285
ской магистрали; фи л ьтр-вл агоотдел ител ь 43 для отделения твердых частиц,
воды и компрессорного масла, находящегося в сжатом воздухе; масло рас пре-
делитель 44 для внесения в сжатый воздух распыленного масла с целью смаз-
ки трущихся поверхностей пневматических устройств.
Контрольно-регулирующая аппаратура включает регулятор давления 34
и два контрольных манометра 40 и 41. Регулятор давления предназначен для
автоматического поддержания давления сжатого воздуха в пневмоцилиндрах
на уровне 0,5 МПа. Манометром 41 осуществляется контроль давления в рабо-
чей системе, а манометром 40—в пневмоцилиндрах натяжения нивелиро-
вочных тросов. Пневмораслределительная аппаратура в основном расположе-
на на панели управления пневмооборудованием в кабине машиниста, откуда
и осуществляется управление вспомогательными операциями при работе
машины.
Для управления передней тележкой в кабине оператора предусмотрены
клапаны 10, 11. Для опускания тележки ее несколько приподнимают, подав
воздух через клапан 10 в пневмоцилиндры 3, 14, а клапаном 11, подав воздух
в цилиндры 5, 13, отводят стопоры. Затем переключением клапана 10 сообща-
ют полости цилиндров 3, 14 с атмосферой, и тележка под собственным весом
опускается.
Подъем и опускание подъемно-рихтовочного устройства и подбивочпых
блоков осуществляются гидроцилиндрами, а стопорение их в транспортном
положении — пневмоцилиндрами. Для опускания подъемно-рихтовочного уст-
ройства его сначала несколько поднимают гидроцилиндрами, клапаном 32 по-
дают воздух в пневмоцилиндры 7, 12 для расстопорения, а затем гидро цилин-
драми опускают в рабочее положение, установив регулятор клапана 32 в ис-
ходное положение. При подъеме подъемно-рихтовочного устройства его сто-
порение происходит самостоятельно. При опускании подбивочного агрегата
его несколько приподнимают гидроцилиндрами, подают воздух клапаном 30
в цилиндры 22, 23, которые производят расстонорение. Для стопорения в
транспортном положении рукоятку клапана 30 надо повернуть в положение
«Запирание».
Опускаиие и прижим к рельсам в рабочем положении измерительной те-
лежки, находящейся рядом с подъемно-рихтовочным устройством, осущест-
вляются при помощи двух пневмоцилиндров 4, 15, управляемых клапаном 35.
Одновременно происходит натяжение контрольного троса (хорды), находя-
щегося на тележке под кабиной водителя, пневмонилиндром 51, который уп-
равляется тем же клапаном.
Подъем тележки из рабочено положения в транспортное осуществляется
теми же цилиндрами и тем же клапаном.
При работе подбивочного блока появляется необходимость ограничивать
раздвижение подбоек. Для этого предназначены специальные ограничители,
которые вводят между гидроцилиндром и проушиной штока цилиндра, связан-
ного с подбойкой. Каждый ограничитель перемещается своей группой пневмо-
цилиндров 17—20 и 24—27. Четыре цилиндра, управляемые клапаном 39,
ограничивают раскрытие задних подбоек; другие четыре цилиндра, управляе-
мые клапаном 38, — раскрытие передних подбоек.
Перед кабиной водителя находится измерительное устройство. Его вклю-
чение, опускание, прижатие к рельсам в рабочем положении, а также подъем в
транспортное положение осуществляются пневмоцилиндрами 16, 28. Управля-
ет цилиндрами клапан 36. Одновременно с переводом измерительного устройст-
ва в рабочее положение происходит натягивание нивелировочных тросов дву-
мя пневмоцилиндрами 48 и 53 и клапаном 33. Натяжение троса снимается при
установке клапана 36 в нейтральное положение.
286
Подъем из рабочего положения
в нейтральное контрольно-измери-
тельной тележки, находящейся под
кабиной водителя, осуществляется
двумя пневмоцилиндрами 47 и 52, уп-
равляемыми клапаном 37. Для опус-
кания тележки в рабочее положение
включением этого клапана воздух по-
дают в пневмоцилиндры 47 и 52 на
подъем. При отведении механическо-
го стопора полости цилиндров соеди-
няются с атмосферой и тележка под
собственным весом опускается. В тран-
спортном положении тележка должна
быть механически застопорена. Перед
началом работы передняя и измери-
тельная тележки, измерительное уст-
ройство и две тележки прицепной
платформы должны быть прижаты к
одному из рельсов. Это осущест-
Рис. 8,15. Схема пневматической рабочс-ii
системы прицепной платформы
вляется через клапан 31 пневмоцилиндрами 50, 8, 9, 21 и пневмоцилинд-
рами 1, 5 (рис. 8.15).
Два звуковых сигнала 2 и 45 (см. рис. 8.14) установлены на крыше кабин
водителя и оператора и управляются соответственно клапанами 1 и 46. Кла-
пан 49 на панели управления служит для управления обдувом сжатым возду-
хом приборов, установленных впереди кабины водителя. Передняя контроль-
ная тележка опускается и прижимается к рельсам двумя пневмоцилиндрами 4,
6 (см. рис. 8.15), которые управляются клапаном 7, расположенным рядом с
тележкой. Подъем в транспортное положение осуществляется теми же цилин-
драми и клапаном.
Задняя тележка, установленная в задней части платформы, аналогично
передней контрольной тележке опускается в рабочее положение с последую-
щим прижимом к рельсам двумя пневмоцилиндрами 2, 9, которые управляются
клапаном 8, расположенным рядом с тележкой. Подъем задней тележки ана-
логичен подъему контрольной тележки. Натяжение измерительной хорды осу-
ществляется пневмоцилиндром 3, который управляется клапаном 29 (см
рис. 8.14), установленным на панели управления.
8.1.5. Гидравлическая система
Система служит для приведения в действие рабочих органов, обеспечения
выполнения вспомогательных операций рабочего цикла и включает систему
питания, гидрооборудование подъемно-рихтовочного устройства, подбивоч-
ных блоков, разгрузки тележек и кабины, передвижения машины и уплотни-
теля балласта у торцов шпал.
Система питания (рис. 8.16) обеспечивает питание всех гидроцилиндров,
рабочих органов, гидромоторов и включает три сдвоенных лопастных насоса Н1,
Н2, НЗ, фильтры Ф1, Ф2, ФЗ, разобщительные краны К1—Кб, обратные кла-
паны KOI и К02, предохранительные клапаны КП 1—КП7.
Сдвоенный лопастной насос Н2 питает все гидравлические цилиндры и
гидромотор передвижения машины М5. После насоса установлен обратный кла-
пан КО!, который обеспечивает работу системы от секции насоса 230 л/мин
в случае выхода из строя секции насоса 80 л/мин. Масло через обратный кла-
287
Рис 8.16 Схема гидравлической системы
пан К02 поступает в напорную магистраль. Давление в гидросистеме поддер-
живается при помощи автомата разгрузки, состоящего из клапана КПЗ, об-
ратного клапана КО2, гидроаккумулятора АКК Автомат разгрузки включа-
ется краном КЗ, При открытом кране КЗ напорный трубопровод соединен со
сливом, и все масло, подаваемое насосом, сливается в бак. При закрытом вен-
тиле слнв масла прекращается и управление автоматом разгрузки осуществля-
ется давлением масла гидросистемы. До давления 12 МПа масло поступает в
магистраль и заряжает гидр о аккумулятор АКК При достижении давления
12 МПа автомат разгрузки переключается и насос И2 подает рабочую жид-
кость в бак при давлении 0,7 МПа, что снижает загрузку силовой установки.
В гидросистеме при этом удерживается давление 12 МПа. При работе
гидроаккумулятор разряжается, давление в гидросистеме падает до 11 МПа
и автомат разгрузки соединяет насос Н2 с напорной магистралью и гидроак-
кумулятор снова заряжается.
Большая секция сдвоенного лопастного иасоса НЗ питает гидромотор под-
бивочного блока М4, а малая — внутренние цилиндры подбивочных блоков
Ц30—Ц37.
Большая секция сдвоенного лопастного насоса Н1 питает гидромотор вто-
рого подбивочного блока М3, а малая через делитель потока ДП питает гидро-
моторы Ml и М2 уплотнителей балласта у торцов шпал.
Для предохранения напорных магистралей насосов от возможного повы-
шения давления установлены предохранительные клапаны КП1, КП2, КП4~
КП6, которые блокируются разобщительными кранами К1—К5. Край Кб
служит для разгрузки системы. Контроль давления осуществляется по мано-
метру М посредством многопозиционного переключателя П в точках а—е
системы.
Гидрооборудование подъемно-рихтовочного устройства (для нивелиров-
ки) обеспечивает подъем пути на величину, пропорциональную величине элек-
трического сигнала, поступающего от системы управления нивелировкой и со-
стоит из двух сервовентилей Р12, Р15, двух четырехщелевых электромагнит-
ных вентилей Р13, Р14, двух гидроцилиидров для подъема пути Ц18, Ц19.
Система питается от насоса Н2. В связи с высоким требованием к чистоте
масла, необходимой для нормальной работы сервовентилен, устанавливаются
фильтры высокого давления Ф6, Ф7, имеющие указатели загрязненности.
Подъем путевой решетки осуществляется только после опускания блока,
что обеспечивается конечным выключателем. После подъема пути на необхо-
димую величину управляющий электрический сигнал становится равным нулю
и сервовентиль выключается, распределительный золотник сервовентиля упру-
гой заслонкой возвращается в среднее положение и масло от насоса не посту-
пает к четырехщелевому электромагнитному вентилю. Полости цилиндров Ц18,
Ц19, находящиеся под давлением, со сливом не сообщаются. Благодаря этому
при отклонении от нормы цилиндрами сразу можно поднять путевую решетку на
нужную величину. Для ускорения срабатывания системы целесообразно остав-
лять электромагнитный вентиль во включенном положении. Полость цилин-
дра сообщается со сливом только после того, как подбивочный агрегат поднима-
ется вверх. Это обеспечивается конечным выключателем. Опускаются цилиндры
под весом конструкции.
Золотник управления клещевыми захватами питается от напорной маги-
страли. Гидрораспределитель Р16 управляет цилиндрами Ц38—Ц41. При по-
даче сигнала на электромагнит распределителя Р16 поршневые полости ци-
линдров соединяются с напорной магистралью, поршии перемещаются, штоки
выдвигаются, рабочая жидкость из штоковых полостей вытесняется в напорную
магистраль — клещи закрываются. При обесточенном электромагните распре-
делителя Р16 поршневые полости цилиндров соединяются со сливом, и, по-
Ю Зак- 47^
289
скольку штоковые полости постоянно соединены снапориой магистралью, порш-
ни втягиваются и клещи открываются.
Гидрооборудование подъемно-рихтовочного устройства (для рихтовки)
обеспечивает смещение пути иа величину, пропорциональную величине элек-
трического сигнала, поступающего от системы управления рихтовки и состоит
из одного сервовеитиля РЮ, одного четырехщелевого электромагнитного вен-
тиля РП, двух гидроцилиндров Ц16, Ц17 и двух разобщительных кранов К7
и К8. Система питается от насоса Н2.
Рихтовка пути осуществляется только после опускания подбивочиого
блока, что обеспечивается конечными выключателями. После смещения пути,
когда управляющий электрический сигнал становится равным нулю и серво-
веитиль выключается, золотник сервовентиля упругой заслонкой перемещается
в среднее (нейтральное) положение и масло от насоса не поступает к четырех-
щелевому электромагнитному вентилю. В системе рихтовки установлены разоб-
щительные краны К7 и К8, необходимые только для точной установки подъем-
но-рихтовочного устройства на рельсовый путь в начале работы.
Гидрооборудование подбивочных блоков состоит из гидроцилиндров Ц5,
Ц20—ЦЗО, двух гидромоторов М3 и М4, двух всасывающих клапанов КЕИ,
КЕЮ, двух гидроаккумуляторов АК2, А КЗ, двух дросселей с обратными кла-
панами ДРЮ, ДР И, двух редукционных клапанов KPI, КР2, двух демпфи-
рующих клапанов КДЦ КД2, двух распределителей Р2, Р6, двух распреде-
лителей Р8, Р9, двух распределителей PJ, Р7, распределителя Р5 и гидрозам-
ка ГЗ. Гидроцилиндры системы питаются от насосов И2 и НЗ.
К цилиндрам ЦЗО—Ц37 подбивочиого блока от иасоса НЗ подводится со
стороны штока поршня давление 12 МПа. Величина давления обеспечивается
клапаном КП7. Масло в эти полости подводится через золотники Р2, Р6,Р8,
Р9 Давление 12 МПа в цилиндрах ЦЗО—Ц37 обеспечивает необходимое усилие
для уплотнения балласта со стороны внутренних подбоек. Для нормальной
работы этих цилиндров с противоположной стороны на поршень подводится
противодавление 3,5МПа, которое обеспечивается клапаном предохранитель-
ным КП6, установленным после сдвоенного насоса НЗ. Это давление подобрано
опытным путем. При меньшем противодавлении гильзы цилиндров ЦЗО—Ц37
начинают вибрировать, а при большем усилие подбивки оказывается недоста-
точным. Необходимое усилие на внешних подбойках обеспечивается цилиндра-
ми Ц22—Ц29. Со стороны штоков подводится давление 12 МПа через обратные
дроссели ДРЮ-—ДР11, а с противоположной стороны —- давление 11 МПа.
Это давление обеспечиватся редукционными клапанами КР1 и КР2,п его
величина подобрана опытным путем.
В случае если расстояние между двумя соседними шпалами очень мало
(двойные шпалы) и внутренними подбойками работать нельзя, включаются рас-
пределители Р8 и Р9 и полости цилиндров ЦЗО—Ц37 сообщаются со сливом.
При этом подбойки не сходятся. Аккумуляторы АЦ2 и А КЗ служат для попол-
нения расхода в системе при разведении подбоек.
Для регулирования скорости подъема цилиндров Ц20, Ц21 установлены
демпфирующие клапаны КД1 и КД2. При их включении масло в полости ци-
линдров поступает только через регулируемые дроссели ДРЮ, ДРЮ. Это ис-
ключает резкие удары в конце подъема подбивочных агрегатов.
При работе машины в кривой включается распределитель Р5 и цилиндр
Ц5 смешает подбивочные блоки иа нужную величину. Для плавного перемеще-
ния подбивочных блоков перед цилиндром Ц5 установлены дроссели ДРЗ
и ДР4. Гидрозамок ГЗ фиксирует положение гидроцилиндра при включенном
распределителе Р5.
Гидромоторы М3 и М4 подбивочных блоков питаются от больших секций
сдвоенных насосов Н1 и НЗ. При работе гидромоторов с максимальной скоро-
290
стью в момент сброса оборотов дизеля гидромоторы продолжают работать
на тех же оборотах (в связи с большой массой маховиков подбивочного блока),
а производительность насосов, питающих моторы, резко падает. Это может
вызвать кавитацию в гидромоторе и его поломку. Для предупреждения это-
го в системе питания гидромоторов подбивочиых блоков установлены всасываю-
щие клапаны КВ1 и КВ2, которые при разряжении иа входе в гидромотор
обеспечивают всасывание масла в гндромоторы из бака. Для качественной очи-
стки масла иа сливе от распределителей Р1—Р7 установлен фильтр Ф5.
Гидрооборудование разгрузки тележек и кабины состоит из 10 гидроци-
лиидров Ц6—Ц15. Питается система от насоса Н2. Перед началом работы не-
обходимо установить жесткую связь между колесами тележек и кабиной для
того, чтобы уменьшить ошибку при нивелировании и рихтовке. Давление пода-
ется в гидроцилиндры Ц6—Ц15, отключающие рессоры и амортизаторы ма-
шины.
Гидрооборудование передвижения машины состоит из гидромотора М5,
распределителя Р17 и дросселя с обратным клапаном ДР9. Передвижение ма-
шины при работе осуществляется включением распределителя Р17 Приводит
в движение машину гидромотор М5. Скорость его вращения можно регулиро-
вать дросселем с обратным клапаном ДР9.
Гидрооборудование уплотнителя балласта у торцов шпал состоит из
двух гидромоторов Ml и М2, четырех гидро цилиндров Ц1—Ц4, двух дрос-
селей с обратным клапаном ДР1 и ДР2, делителя потока ДП, двух распредели-
телей РЗ и Р4, обратного клапана КОЗ, клапана термостатического КТ, ра-
диатора масляного РМ и фильтра Ф4.
Система питается от насоса Н1. Для подвода равных потоков масла к гид-
родвигателям установлен делитель потока ДП. Гидродвигатели вращают экс-
центриковые валы, которые передают колебания на уплотнители. В момент на-
чала движения машины гидроцилиндры Ц1—Ц4 поднимают уплотнители, а в
момент остановки опускают их. Управляются эти цилиндры распределителями
РЗ и Р4.
Из гидромоторов Ml и М2 масло через обратный клапан КОЗ и фильтр
Ф4 сливается в бак. Как только масло в системе нагревается до 43 °C, откры-
вается клапан термостатический КТ и часть масла поступает в радиатор масля-
ный РМ и охлаждается, а затем через фильтр Ф4 слйвается в бак.
8.2. ВЫПРАВОЧНО-ПОДБИВОЧНО-РИХТОВОЧНАЯ МАШИНА
ДЛЯ СТРЕЛОК И ПУТИ ВПРС-500
Универсальная машина ВПРС-500 предназначена для выправки пути в
продольном профиле, по уровню и в плане, уплотнения балласта под шпалами
и у торцов шпал при строительстве, всех видах ремонта и текущем содержании
магистральных и станционных путей, стрелочных переводов, с рельсами Р65
включительно, с деревянными и железобетонными шпалами на всех видах бал-
ласта.
Она состоит из тех же основных частей, что и машина ВПР-1200, но имеет
конструктивные отличия в расположении и устройстве некоторых узлов, что
объясняется предназначением для работы на стрелочных переводах.
Машина I (рис. 8.17) постоянно соединена с платформой II. Рама машины
10 опирается на две двухосные тележки 2, 14, одна из которых 14 приводная.
На ведомой тележке 2 с обеих сторон расположены уплотнители балласта 3.
По концам машины находятся две кабины 1, 15 закрытого типа, в которых раз-
мещены рабочие места машиниста и операторов. Расположение оборудования
в них такое же, как и на машине ВПР-1200. Рабочим циклом машины на стре-
Ю
291
лочных переводах управляют из боковых дополнительных кабин б открытого^
типа, установленных иа раме машины над каждой рельсовой нитью между под-
бивочиыми блоками 4 и подъемно-рихтовочными устройствами 7. В них распо-
ложены рабочие места операторов и оборудование для индивидуального управ-
ления рабочими циклами подбивочных блоков. Для уменьшения вибрации вну-
три кабин все они установлены на специальных резинометаллических аморти-
заторах. Кабины связаны между собой системой громкоговорящей связи. Ре-
верс-раздаточная 8 и раздаточная 12 коробки, дизель ЯМЗ-238, карданные соеди-
нения 9, 11, 13, тележки А, Б, С, Д, Е, контрольно-измерительная система,
нивелировочные, рихтовочный и контрольный тросы размещены так же, как
в машине ВПР-1200. У каждого подбивочного блока снизу расположены ку-
лачковые захваты 5 для подъема пути на стрелочных переводах. В отличие от
машины ВПР-1200 машина ВПРС-500 может работать только в ручном и полу-
автоматическом режимах.
Подбивочные блоки, подъемно-рихтовочный агрегат и уплотнители бал-
ласта у торцов шпал конструктивно отличаются от тех же рабочих органов ма-
шины ВПР-1200. Кроме того, предусмотрены кулачковые захваты и подъемные
клещи для работы машины на стрелочных переводах. Управление работой
машины может осуществляться как из кабины водителя, так и из боковых рабо-
чих кабин. В последнем случае управление в кабине водителя блокируется.
Подбивочные блоки машины предназначены для уплотнения балласта под
шпалами. На машине установлено два подбивочных блока (левого и правого ис-
полнений), выполненных симметрично относительно продольной оси машины.
Принцип их работы такой же, как подбивочных блоков машины ВПР-1200.
Подбивочный блок (рис. 8.18) состоит из станины 6, в расточках которой
на подшипниках установлен эксцентриковый вал с эксцентриситетом 2,5 мм.
На эксцентриковых шейках вала размещены шатуиы 8, выполненные в виде
гидроцилиндров двойного действия. На штоках гидроцилиндров установлены
откидные упоры 7, ограничивающие величину раскрытия подбоек. Поворот
упоров осуществляется пневмоцилиндрами 5. Гидроцилиндры сжима передают
вибрацию и усилие обжатия иа подбойки 12 посредством рычагов 9, 11. По-
следние выполнены шарнирными, с возможностью поворота от 15° в сторону
рельса до 85° от него. Это и позволяет уплотнять балласт в зоне стрелочных
переводов. Поворот нижних рычагов 11 осуществляется гидроцилиндрами 10.
Гидромотор 4 приводит во вращение эксцентриковый вал с двумя маховиками 2
на концах, обеспечивающих устойчивую работу блока в процессе подбивки.
Колебание системы шатуи—рычаг—подбойка происходит с частотой 35 Гц.
Каждый подбивочный блок с рамой может перемещаться вдоль штаиги 13 при
помощи гидроцилиндра 14. От возможного поворота раму удерживают ролики 1,
опирающиеся на траверсу рамы машины. К раме подбивочного блока крепит-
ся гидроцилиндр 3 подъема-опускания блока, шток которого шарнирно соеди-
нен со станиной. Для ограничения нижней точки опускания подбивочного
блока при заглублении в балласт на нижней балке рамы предусмотрены резь-
бовые упоры. i
Подъемно-рихтовочное устройство (рис. 8.19) служит для выправки и
рихтовки пути, выполняет подъемку и сдвижку пути в базе машины без опоры
на балласт. Управление устройством автоматическое от контрольно-измери-
тельной системы с возможностью ручной корректировки. Устройство состоит *
из тележки 3, рельсовых захватов 4~ с роликами 8, гидроцилиндра подъемки
пути 1, рихтовочного гидроцилиндра 10, тяг 6. Тележка 3 служит для установ-
ки рельсовых захватов и передачи на рельсы усилий от гидроцилиндров 1
и 10, производящих соответственно подъемку и сдвижку пути через ролики 8
рельсовых захватов 4 и рихтовочные ролики 5. Рельсовые захваты 4 фикси-
руют тележку на рельсах и воспринимают вертикальные усилия, возникающие
293
при выправке пути и стрелочных переводов. Открытие и закрытие захватов
осуществляются гидроцилиндрами 2. Во время движения машины подъемно-
рихтовочное устройство находится в транспортном положении. При этом оно
крепится транспортным запором на кронштейнах 7 и 9. Для выполнения рабо-
чих операций устройство опускается на путь и прижимается к нему гидроци-
линдрами подъемки пути. В процессе всего рабочего цикла ролики 8 захватов,
катаясь под головки рельсов, обеспечивают фиксацию тележки в заданном по-
ложении. Рихтовка пути осуществляется рихтовочными роликами 5 при помо-
щи гидравлического цилиндра сдвига 10. Ролики, катясь по поверхности
рельса своими ребордами, передают усилия сдвига на рельс. Подъемно-рихто-
вочное устройство подвижно соединено с рамой машины при помощи гидроци-
линдров 1, 10 и тяг 6, удерживающих тележку от продольных перемещений.
Уплотнители балласта служат для уплотнения балласта у торцов шпал, что
обеспечивает заделку пустот, образующихся между ними и балластом при рих-
товке пути и способствует увеличению боковой устойчивости пути после его
рихтовки. Уплотнитель балласта (рис. 8.20) — это дебалансный вибратор,
приводимый в действие гидромотором 8. Он состоит из уплотнительной плиты 5,
с вибратором, которая подвеской соединена с рамой машины, запора 1 и рыча-
га 3, удерживающих плиту в транспортном положении. Уплотнительная плита
5 служит основанием для сборки вибратора и передает возбуждаемые им коле-
бания иа балласт. Возбуждающий колебания дебаланс 6 приводится во враще-
ние от гидромотора 8 через эластичную муфту 7. Подвеска состоит из рычага
4, балансирных 9 и рессорных 10 элементов. Рычаг 4 служит для подъема и
опускания плиты и передачи на нее при работе статического усилия прижатия,
создаваемого гидроцилиндром 2. Балансирные 9 и рессорные 10 элементы пре-
пятствуют передаче вибрации от уплотнительных плит на машину и дают воз-
можность им самоустаиавливаться при их прижатии к балласту.
Уплотнение балласта происходит в результате воздействия статического
усилия прижатия плиты и динамического, создаваемого вибратором.
При переезде машины уплотнительные плиты подняты на уровень, опре-
деляемый конечным выключателем, срабатывающим от кулачка, расположен-
ного на оси поворота уплотнителя.
Подъемные клещи (рис. 8.21) предназначены для подъемки стрелочных пе-
реводов. Они установлены под каждым подбивочным блоком и включают бал-
ку свариой конструкции, подъемный гидроцилиндр, наружный и внутренний
захваты, гидроцилиндры захватов с рычагами и механизм перемещения.
Подъемная балка 1 одним своим концом шарнирно связана с рамой подби-
вочного блока. К другому ее концу крепится шток гидроцилиндра подъема 6,
корпус которого также шарнирно связан с передвижной рамой подбивочного
блока. Захват за подошву рельса осуществляется наружным захватом 3, вы-
полненным в форме крюка. Он устанавливается иа четырехгранной штанге и
может регулироваться по высоте в зависимости от типа рельсов. На этой же
294
Рис. 8.21. Подъемные клещи
штаиге расположен рычаг, связанный со штоком цилиндра захвата 5. При
включении цилиндра в работу штаига поворачивается и наружный захват под-
водится под подошву рельса. Внутренний захват 4 цилиндрической формы уста-
новлен на рычаге, связанном с подъемной балкой. Поворот внутреннего захвата
осуществляется гидроцилиндром 7. На рычаге установлен и конечный выклю-
чатель, подающий сигнал о раскрытии клещей. Поскольку подъемные клещи
смонтированы в зоне подбивочиого блока, то при максимальном раскрытии под-
боек (при подбивке сдвоенных шпал) во избежание столкновения подбойки с
наружным захватом ои может быть отодвинут в сторону внутреннего захвата.
Для этого предусмотрен механизм продольного перемещения, состоящий из
пневмоцилиидра 2, шток которого связан с четырехгранной штангой шарнир-
ной тягой. В транспортном положении подъемные клещи запираются штифто-
вым фиксатором.
8.3. РИХТОВОЧНАЯ МАШИНА Р-2000
Машина Р-2000 (производительностью до 2000 шпал/ч) предназначена для
выправки пути в плане (рихтовки) и уплотнения балласта у торцов шпал при
строительстве, всех видах ремонта и текущем содержании железнодорожного
пути с рельсами Р65 включительно, с деревянными и железобетонными шпала-
ми на всех видах балласта.
Она состоит из собственно машины и прицепной платформы. Машина име-
ет рабочие органы, энергетическую установку, системы и механизмы, обеспе-
чивающие выполнение технологических операций и движение в рабочем и транс-
портном режимах. Прицепная платформа служит для увеличения измеритель-
ной базы рихтовочной контрольно-измерительной системы и может исполь-
зоваться для перевозки в ней инструмента и оборудования, применяемых для
производства работ. Машина 7 (рис. 8.22) постоянно соединена с платформой
II. Их расцепляют только при погрузке на подвижной состав для транспорти-
ровки и при ремонте.
Машина состоит из следующих основных частей:
экипажной части, которая служит основанием для размещения рабочих
органов и систем, обеспечивающих их работу и состоящей из силовой установ-
ки, силовой передачи (трансмиссии), ходовой части и кабины;
295
10185
Рис. 8.22. Схема рихтовочной машины Р-2000
рабочих органов для выполнения технологических операций и включающих
рихтовочное устройство и уплотнители балласта у торцов шпал;
контрольно-измерительной системы для измерения отклонений в положе-
нии пути и подачи команд на рихтовочный блок, выполняющего рихтовку пути,
и контроля положения пути после рихтовки. Она состоит из комплекса тележек
контрольно-измерительной системы, системы управления рихтовкой, контроль-
ной системы и лазерного устройства;
гидравлической системы для приведения в действие рабочих органов и
обеспечения вспомогательных операций рабочего цикла;
пневмосистемы для выполнения вспомогательных операций при работе
машины и перевода тележек контрольно-измерительной системы в рабочее и
транспортное положения;
электрооборудования для управления рабочими процессами освещения,
сигнализации и связи.
Машина 7 представляет собой самоходную железнодорожную единицу.
Ее основу составляет экипажная часть. Рама машины 5 опирается на две двух-
осные тележки 1, 11, одна из которых И приводная. Все оси машины и плат-
формы оборудованы тормозами. В задней части рамы расположена кабина 2Г
в которой оборудованы рабочие места машиниста и оператора, управляющих
машиной при ее движении в транспортном режиме и при рихтовке пути.
На раме около кабины установлены уплотнители балласта у торцов шпал 3
н рихтовочное устройство 4. В средней части машины размещены реверс-раз-
даточная 6 и раздаточная 9 коробки, связанные с дизелем и колесными парами
карданными валами 7 и 10, компрессоры пиевмосистемы, генератор и др. Сило-
вая установка и приводные органы закрыты капотом 8 и съемными боковыми
щитами. На машине и платформе размещены тележки А, Б, В, Г, Д контроль-
но-измерительной системы.
Между задней А и передней Д тележками машины натянут рихтовочный
трос измерительной системы, а между тележками А и В — трос контрольной
хорды (на рисунке не показаны).
При движении в транспортном режиме машиной управляет машинист,
находящийся в кабине на рабочем месте, где сосредоточены органы управле-
ния двигателем, силовой передачей, тормозами и приборы, контролирующие
их работу.
На рабочем месте оператора размещены органы управления передвиже-
нием машины в рабочем режиме, рабочими органами, контрольно-измеритель-
ной системой и приборы, контролирующие их работу.
Рихтовка пути производится по одному из методов: сглаживанием, фикси-
рованным точкам, по лазерному лучу или оптическим визированием. Рихтовка
пути методом фиксированных точек и оптическим визированием проводится
циклически. Управление процессом полуавтоматическое. Рихтовка пути ме-
тодом сглаживания и по лазерному лучу может производиться как циклически,
296
так и непрерывно. В последнем случае управление рихтовкой автомати-
ческое.
Рихтовка методом сглаживания, по фиксированным точкам и по лазерному
лучу производится так же, как и машиной ВПР-1200.
При рихтовке оптическим визированием, так же как и по лазерному лучу,
обеспечивается наиболее высокая точность выправки. Этот метод применяется
на прямых участках пути большой протяженности. В этом случае базой для
рихтовки пути служит визирная линия, проведенная наблюдателем от оптиче-
ского прибора ПРПМ, установленного впереди машины, до визирного щитка,
находящегося на передней тележке. Специальная отметка на визирном щитке
должна совпадать с перекрестием оптического прибора. За этим следит наблю-
датель через специальное устройство. В случае необходимости внесения по-
правок это достигается изменением положения передней точки измерительной
системы прн помощи радиопередатчика.
Контроль рихтовки пути осуществляется контрольным устройством, за-
писывающим положение пути в плане на ленту самописца, установленного в ка-
бине. Натурное положение пути может быть записано дои после выправки.
Уплотнитель балласта и рихтовочное устройство выполнены, как иа маши-
не ВПРС-500. Остальные составные части машины аналогичны соответствую-
щим частям машин ВПР-1200 и ВПРС-500 или несколько упрощены в связи
с тем, что машина Р-2000 предназначена для выполнения меньшего числа тех-
нологических операций.
Ниже приведены технические характеристики выправочно-подбивочно-
рихтовочных машин:
Показатели ВПР-1200 ВПРС-500
Производительность. шпал/ч 900—1200 500
стрелочный перевод, ч — 1
Точность выправки пути, мм: по уровню ±2 ±2
» рихтовке ±2 ±2
Точность срабатывания контрольно-измерительной системы, мм ±0,5 ±0,5
Мощность двигателя при 2100 об/мин, кВт 176,5 176,5
Число подбоек в подбивочном блоке, шт. 16 8
Число одновременно подбиваемых шпал, шт. 2 1
Максимальное заглубление подбоек от головки рель- сами 475 475
Частота колебания подбоек, Гц 35 35
Максимальное усилие, кН при подъемке пути 250 250
» рихтовке » 140 140
Высота подъема пути при рельсах Р65, мм 100 100
Величина сдвижки при рельсах Р65, мм ... 100 100
Рабочее давление в системе привода, МПа- уплотнителя балласта 8,0 8,0
эксцентрикового вала 17,0 17,0
рабочих органов 14,0 14,0
Приведение машины из транспортного положения в рабочее, мин 10 10
Приведение машины из рабочего положения в транс- портное, мин 7 10
Скорость движения в транспортном режиме, км/ч . 80 80
Масса машины с прицепной платформой, т . 51,4 51,2
Обслуживающий персонал, чел. ... . . 3 3
297
8.4 ПУТЕРИХТОВОЧНЫЕ МАШИНЫ НЕПРЕРЫВНОГО ДЕЙСТВИЯ
(НЕСАМОХОДНЫЕ)
Путерихтовочные машины непрерывного действия впервые были созданы
в Советском Союзе и по производительности в 2—3 раза превосходят лучшие
зарубежные образцы. На железных дорогах СССР для непрерывной рихтовки
пути применяют рихтовочные устройства системы МИИТа, устанавливаемые
на электробалластерах ЭЛБ-1 и ЭЛБ-3 и специализированные рихтовочные
машины системы Балашенко. Устройствами для непрерывной рихтовки пути
оборудуют также машины ВПО-ЗООО. Системы измерений натурного состояния
пути в плане и отработки команд на сдвиг позволяют рихтовать путь этими
машинами по программе в полуавтоматическом режиме и по способу «сглажи-
вания» (без предварительного замера состояния пути) в автоматическом.
Для рихтовки по программе используют трехточечную систему измерений.
На протяженности участка рихтовки непрерывно определяют значения стрел
изгиба в точке С (рис. 8.23), измеряя их от хорды АД. Таким образом, в работе
участвуют три точки А, С и Д. График зависимости стрел изгиба при правиль-
ном положении пути (рис. 8.24) состоит из участков: А, Д — прямые (стрела
изгиба равна нулю), Б, Г — переходные кривые (стрела изгиба возрастает
по прямой зависимости) и В — круговая кривая (стрела изгиба равна f). Гра-
фик зависимости натурных стрел изгиба при расстроенной кривой выражает-
ся линией Р (рис. 8.25). Для построения программного графика используют
два метода: приближенный и расчетный.
При приближенном методе программную линию А, Б, В, Г, Д проводят
визуально, соблюдая при этом условие, чтобы сумма площадей верхних участ-
ков (2АН) приближенно равнялась сумме площадей нижних участков (S/'h).
При расчетном методе программную линию строят на основе алгебраиче-
ского суммирования графика натурных стрел с графиком расчетных сдвигов.
Для рихтовки по методу «сглаживания» используют четырехточечную си-
стему, непрерывно измеряя стрелы изгиба /2 (см. рис. 8.23) в точке В и Д в
точке С от хорды AD. Таким образом, в работе участвуют четыре точки Д, В,
С, D. Для круговой кривой отношение стрел к Д не зависит от радиуса и яв-
ляется величиной постоянной для данного распределения мест измерений. Ис-
пользуя эту зависимость в процессе рихтовки, непрерывно сравнивают значе-
ния этих стрел, принимая стрелу /2 за программную, так как она находится на
отрихтованиом участке. Путь в точке С сдвигают до тех пор, пока стрела Д
достигнет такой величины, при которой она будет находиться в заданном отно-
шении к стреле Д. В частном случае, когда 1г ~ 13, то Д = Д. При работе по
методу «сглаживания» путь рихтуют за один заезд без предварительной записи
натурного состояния пути. При рихтовке пути по программе необходимо два
заезда: во время первого производят запись натурного состояния, во время
второго — рихтовку по программе, составленной по расчетному или прибли-
женному методам.
6 5
Рис. 8.23. Схема принципиальная
рихтовочной системы
Рис. 8,24. График правильной кривой
298
Рис. 8.25. Схема построения приближенной программы рихтовки
Стрелы изгиба рельсовой нити замеряют измерительными тележками.
Установленные на них сельсины-датчики 2 и 4 дистанционно передают значе-
ния измеренных стрел к сельсинам-приемникам 1 и 8 стола управления, где
они перемещают соответственно каретки 6 и 7. Если измеряемая стрела не со-
ответствует программной, контакты 5 замыкаются и дается команда на меха-
низм 3 для сдвига пути в ту или иную сторону. Операция производится до тех
пор, пока величина стрелы достигнет заданного значения, при котором кон-
такты разомкнутся и сдвиг пути прекратится.
8.4.1. Путерихтовочное устройство
на электробалластере ЭЛБ-1
Путерихтовочное устройство значительно расширяет технологические
возможности электробалластера и в дополнение к его прежним функциям поз-
воляет рихтовать путь при всех видах ремонта, а также при его текущем содер-
жании.
Электробалластер оборудован системой измерений, которая может быть
использована как в качестве трехточечной —для рихтовки по программе, так
и в качестве четырехточечной — для рихтовки по методу сглаживания. Для
повышения качества рихтовки прямых участков пути по методу «сглаживания»
используют хорду длиной 48 м; для рихтовки кривых и коротких прямых —
длиной 24 м. Применение электробалластера на этих видах работ создает услов-
ную экономию 24 чел. на годовой объем работ.
Путерихтовочное устройство на электробалластере ЭЛБ-1 (рис. 8.26)
принципиально не отличается от аналогичного устройства на ЭЛБ-3. Ойо сос-
тоит из рабочего и контрольного стрелографов, механизмов 12 сдвига пути и
магнитов и механизма 10 прижатия пути, рыхлителей 16 и уплотнителей 6
балласта, пневматической системы с компрессором 3 для питания сжатым воз-
духом цилиндров подъема и опускания рабочих органов и цилиндров натяж-
ного устройства 2, 13 и 17 механизмов иатяжения хорд рабочего и контрольного
стрелографов, электрооборудования и гидрооборудования. Для улучшения
условий управления предусмотрен выносной пост 9.
Рабочий и контрольный стрелографы являются основными органами рих-
товочного устройства, при помощи которых управляют процессом рихтовки и
осуществляют контроль за состоянием пути после прохода машины.
Рабочий стрелограф расположен под фермами электробалластера и тур-
ным вагоном. Он состоит из пяти тележек 5, 8, 11, 14, 18, двух механизмов 13
и 17 для натяжения канатов, используемых в качестве хорд, масштабного кат-
ка 15 и лентопротяжного механизма со столом управления, расположеииого
в центральной будке управления. Тележки 5,14 и 18 являются концевыми при
работе соответственно с хордами длиной 24 и 48 м. Они предназначены для удер-
299
Рис. 8.26. Четырехточечное рихтовочное устройство системы
жания каната вдоль пути (с образованием хорды установленной длины) и по-
перек пути на постоянном расстоянии от рабочей грани рельсовой нити, стрелы
изгиба которой измеряются. Передние концевые тележкн 14 и 18 снабжены
блоками для направления каната к механизмам натяжения, а задняя 5 — крю-
ком для закрепления каната.
Концевая тележка (рис. 8.27) состоит из корпуса 8, в котором размещены
две полуоси 6, имеющие возможность перемещаться на роликах 7. На полуосях
установлены колеса 4. В нерабочем состоянии полуоси с колесами прижимают-
ся к корпусу пружинами 5. Для удержания тележки на постоянном расстоя-
нии, например, от левой рельсовой нити подают сжатый воздух в правый ци-
линдр 1, жестко соединенный с корпусом тележки, который штоком 2 передает
усилие прижатия через кронштейн 3 и колесо 4 на правую рельсовую нить, от-
жимая тележку к левой нити и упруго удерживая ее от этой нити на постоян-
ном расстоянии. Для прижатия к правой нити приводят в действие левый ци-
линдр.
Измерительные тележки 8 и 11 (см. рис. 8.26) предназначены для непрерыв-
ного измерения стрел изгиба рельсовой нити. По конструкции корпуса и ходо-
вых частей они аналогичны концевым тележкам. Для измерения стрел изгиба
на корпусе тележки закреплен сельсин-датчик 9 (рис. 8.28). На шкивок, сидя-
А-А
Рис. 8.27. Концевая тележка рабочего стрелографа
300
щий на его валу, запасована нить 6, соединенная со стойками 5 кареткн 11.
Последняя может перемещаться на роликах, расположенных в обоймах 10.
К каретке прикреплена вилка 7, в прорези которой проходит канат 8 хорды.
При изменении величины стрелы изгиба рельсовой нити, к которой прижата
тележка, канат 8 перемещает вилку 7 и каретку //состойками5. Последние
при помощи нити 6 поворачивают вал сельсина на угол, соответствующий ли-
нейному перемещению вилки. Сельсин-датчик 9 электрически связан с сельси-
ном-приемником стола управления. Сельсин-приемник, поворачиваясь на тот
же угол, что и сельсин-датчик 9, перемещает на столе управления связанную с
ним каретку с карандашом, которая записывает значение измеренной стрелы
на бумажную ленту стола управления или сравнивает ее с программой. Каждая
тележка соединяется с фермами электробалластера тягами /. Поднимают и опу-
скают тележку пневматическим цилиндром, шток 3 которого связан с тягой
тележки. В транспортном положении она закрепляется крюком 4 и рамкой 2.
Масштабный каток (рис. 8,29) предназначен для привода лентопротяжно-
го механизма стола управления. Передача вращения на тяговый барабаи ленто-
протяжного механизма осуществляется сельсином-датчиком, соединенным по-
средством редуктора с катком 4> и сельсином-приемником, соединенным также
через редуктор с барабаном. Общее передаточное отношение 1 : 500. При про-
ходе машиной 1 км пути лентопротяжный механизм протягивает 2 м бумажной
ленты. Каток соединен шарнирно с фермой машины рычагом 2. В транспортном
Рис. 8.28. Измерительная тележка рабочего стрелографа
301
Рис. 8.29. Масштабный каток
положении ои фиксируется в направ-
ляющих плаиках 3. Поднимается и
опускается каток пневматическим ци-
линдром /.
Стол управления с лентопротяж-
ным механизмом (рис. 8.30) предназ-
начен для записи графика натурных
стрел, ианесения на бумажную ленту
стола программ рихтовки и для уп-
равления рихтовкой пути по прог-
рамме или по «сглаживанию». Запись
графиков осуществляется в продоль-
ном масштабе 1 : 500 и в попереч-
ном 1:1.
Механизм состоит из корпуса /,
лентопротяжного барабана 8, приво-
димого во вращение через шестерен-
чатую передачу сельсином-приемни-
ком 10 от сельсина-датчика масштаб-
ного катка, сельсинов-приемников 7 и
11, стола управления 6, кассеты для
бумаги 3 и направляющего бара-
бана 4.
Сельсины-приемники 7 и 11, связанные электрически с сельсинами-дат-
чиками измерительных тележек рабочего стрелографа, перемещают самопи-
шущие каретки 2 и 5 и, таким образом, передают на стол управления значения
измеренных стрел Для сравнения измеренных стрел с программными (при рих-
товке по методу «сглаживания») каретка 2 снабжена двумя контактами, а карет-
ка 5 — одним. Эти контакты образуют электрический переключатель гидро-
золотника цилиндров рихтовки. При равенстве стрел контакты находятся в
разомкнутом состоянии, при неравенстве замыкается один из контактов и ме-
ханизмом рихтовки путь сдвигается до тех пор, пока измеренная стрела ста-
нет равной программной. Для прижатия бумаги к столу предусмотрен валик 9
с резиновыми кольцами. Предусмотрен поворот барабана 8 вручную для вне-
сения корректив во время работы и при настройке машины. Это достигается
выведением нз зацепления шестерни, сидящей на валу барабана.
Контрольный стрелограф предназначен для записи состояния пути до и
после рихтовки. Он состоит из двух концевых тележек 1 (см. рис. 8.26) и 7
(тележки № 8 и № 6), измерительной 4 (тележка № 7), натяжного устройства 2
и лентопротяжного механизма с приводом от масштабного катка рабочего
стрелографа.
Механизм сдвига пути (рис. 8.31) предназначен для передачи усилий гид-
роцилиндров 4 рихтовочным роликам 6, при помощи которых производят сдвиг
пути по команде со стола управления рабочего стрелографа. Гидроцилиндры со-
единены шарнирно с поперечной балкой 5 и ползуном рычага 3. Усилие цилин-
дров передается через ползун иа рычаг 3, который, поворачиваясь вокруг шар-
нира упорной балки 2, приваренной к ферме машины, нижиим концом сдвига-
ет балку 7, на которой закреплены рихтовочные ролики 6 и коробки 1, приварен-
ные к электромагнитам 8.
Механизм сдвига магнитов (рис. 8.32) предназначен для зарядки электро-
магнитного подъемника и обеспечения его работы в условиях, когда затруднено
использование машины в качестве электробалластера нз-за наличия щебня
внутри колеи. Механизм состоит из гидроцилиидра 4, укрепленного на крон-
штейнах 3 с наружной стороны фермы, каретки 2, охватывающей параллелог-
302
раммные тяги /, на которых подвешены электромагниты. При рихтовке пути
обе полости цилиндра соединяются «на слив», что обеспечивает свободное
перемещение параллелограммиых тяг с магнитами (совместно с рельсо-
шпальной решеткой) под действием механизма сдвига пути.
Механизм прижатия пути (рис. 8.33) предназначен для удержания пути
после сдвига в процессе рихтовки от возможных упругих перемещений его
по направлению, противоположному сдвигу. Он состоит из гидроцилиндров 8,
которые через кронштейны 7 (жестко соединенные с колонками /) и поводки
6 (шарнирно соединенные с колонками) передают усилие прижатия пути,
равное 100—120 кН, на тележку 5 и от нее на путь. Колонки перемещаются
в вертикальных направляющих 4 на роликах 3. В транспортном положении те-
лежка удерживается стопорами 2. Благодаря шарнирному соединению повод-
ков 6 с колонками возможно поперечное смещение тележки с оси машины при
работе на кривых участках пути.
Рыхлители (рис. 8.34) предназначены для уборки балласта от концов шпал
в целях уменьшения сопротивления путевой решетки ее сдвигу при рихтовке
пути. Они состоят из отвалов 4, закрепленных на рычагах 3, опускание и подъем
которых осуществляются пневматическими цилиндрами 2. К отвалу 4 прива-
рены косынка 5 с отверстиями для крепления рыхлителя в транспортном поло-
Рис. 8.30. Стол управления с лентопротяжным механизмом
303
Рис. 8.31. Механизм сдвига пути
женин к стопорной планке 1, Передняя кромка отвала скошена под углом 45°
к горизонту для облегчения его прохода в опущенном состоянии через посто-
ронние предметы и длинные шпалы. После сдвига пути разрыхленный балласт
у концов шпал уплотняется уплотнителями вибрационного типа нли катками.
Для приведения в действие механизмов сдвига пути, электромагнитов,
прижатия пути предназначено гидрооборудование рихтовочного устройства.
Гидрооборудование механизма сдвига пути (рис. 8.35) состоит из гидро-
насоса 2, который из бака / подает масло под давлением, устанавливаемым
предохранительным клапаном 22, к распределителю 5 с электрогидравличе-
ским управлением и затем в зависимости от положения электрического переклю-
чателя на столе управления, а следовательно, н распределителя 5—к одной
из полостей гидроцилиндров 6 и 7 Давление в системе контролируется мано-
метром 3. Два гидроаккумулятора 4 н 8 предназначены для аккумулирования
запаса масла под давлением и сглаживания падения его давления в момент
включения цилиндров. Напорный золотник 24 служит для поддержания на
сливе нз цилиндров давления, необходимого для обеспечения нормальной ра-
боты распределителя. Слив объединен с другими системами. Масло сливается
в бак через фильтр 18. Параллельно последнему установлен обратный кла-
пан 21, обеспечивающий слив прн засорении фильтра.
Гидрооборудование механизма сдвига электромагнитов состоит нз насоса
16, который из общего бака 1 подает масло под давлением, устанавливаемым
предохранительным клапаном 20, к ручным распределителям 13 и 14, при по-
304
Рис 8.32. Механизм сдвига магнитов
мощи которых управляют работой гидроцилиндра 12. Во время рихтовки пути
последний должен находиться в «плавающем» положении, т. е. обе его полости
соединены со сливом. Это достигается установкой распределителя 14 в нейтраль-
ное положение, а распределителя 13 — в одно из крайних. Для работы меха-
низмом сдвига магнитов распределитель 13 устанавливают в нейтральное по-
ложение. Цилиндром в этом случае управляет распределитель 14. Давление
в системе контролируется манометром 15.
Гидрооборудование механизма прижатия пути питается маслом под дав*
лением также от насоса 16. Гидроцилнндрами 10 и 11 прижатия пути управляют
при помощи ручного золотника 9. Давление в рабочих полостях цилиндров
ограничивается предохранительным клапаном 23. Давление на сливе всей си-
стемы контролируется по манометру 19. Для возможности отсоединения обо-
рудования от бака установлен вентиль 17.
Рис. 8.33. Механизм прижатия
пути
Рис. 8.34. Рыхлитель
305
Рис. 8.35 Схема гидрооборудования рихто-
вочного устройства
Рихтовочное устройство работает
в режимах замера состояния пути,
рихтовки пути и холостого хода.
При работе в режиме замера со-
стояния пути машину перемещают
фермой № 1 (см. рис. 8.26) вперед.
В работе участвуют рабочий и конт-
рольный стр ел о графы. Остальные ра-
бочие органы рихтовочного устройст-
ва находятся в транспортном положе-
нии. Рабочим стрелографом можно
измерять стрелы изгиба на прямых
участках пути от хорд длиной 24 и
48 м, а и а кривых — только от хор-
ды длиной 24 м. Тележка 4 остает-
ся в транспортном положении.
При работе в режиме рихтовки
пути машину перемещают так же
фермой № 1 вперед. В работе участ-
вуют все рабочие оргаиы рихтовоч-
ного устройства соответственно их
назначению.
В режиме холостого хода маши-
ну перемещают в любую сторону в
зависимости от необходимости. В этом
режиме допускается переезд машины
со скоростью 15—20 км/ч в пределах одного перегона с опущенными на рель-
сы стрелографами. Цилиндры тележек должны быть отключены от пневматиче-
ской системы, все остальные рабочие органы закреплены в транспортном по-
ложении .
8.4.2. Путерихтовочная машина системы Балашенко
Машина является специализированной рихтовочной машиной, предназна-
ченной для непрерывной рихтовки прямых и кривых участков пути и состоит
из фермы 8 (рис. 8.36), опирающейся на две ходовые тележки 3 и 15, рихтовоч-
Рис. 8.36. Путерихтовочная машина системы Балашенко
306
Рис. 8.37. Схема распорного устрой-
ства ходовой тележки № 2
кого рычага 5 с электромагнитами и меха-
низмом вывешивания 6 рельсо-шпальной
решетки, рабочего 7 и контрольного 1 стре-
лографов, плугов 14 с дисками, уплотня-
ющих катков 2, столов оператора 10 и конт-
рольного //, лентопротяжные механизмы
которых приводятся в действие от масштаб-
ного катка 13 механической передачей 12,
гидрооборудования, пневмооборудования 9,
электрооборудования, а также бытового
оборудования для бригады, обслуживаю-
щей машину. Для ориентирования графи-
ка стрел изгиба предусмотрен отметчик 4.
На ферме смонтирован кузов машины, внут-
ри которого размещены энергетическое и
контрольно-измерительное оборудование, а
также бытовые помещения.
Ходовая тележка 15 (№ 1) — типовая,
вагонная ЦНИИ-ХЗ-0.
Ходовая тележка 3 (№2) — специ-
альной конструкции, предназначена для
размещения концевой тележки рабочего
стрелографа и механизмов 1 (рис. 8.37) —
распора тележки и 2 — распора колес. Эти
механизмы предназначены для исключения
влияния на рихтовку пути зазоров между
гребнем бандажа и рабочей гранью головки
рельса, а также в подшипниках и буксах
колесных пар.
Рихтовочный рычаг (рис. 8.38) являет-
ся силовым органом машины и предназна-
чен для исполнения команд по сдвижке
пути в заданное положение. Он состоит
из рамы 13, закрепленной задним кон-
цом при помощи двухшарнирного хому-
та 12 на вертикальной оси ходовой тележки № 2. Передний конец рамы
опирается катками 3 на балку 7 механизма вывешивания. Последняя может
перемещаться в вертикальной плоскости между направляющими стойками 5,
приваренными к низу фермы машины. Подъем балки вверх ограничивается ско-
бами 4. На кронштейны 2 рихтовочного рычага подвешены электромагниты 1.
Сдвижка рихтовочного рычага с магнитами и рельсо-шпальной решеткой в го-
ризонтальной плоскости, т. е. рихтовка пути осуществляется гидроцилии-
драми 19 и 20, которые своими корпусами шариирно соединены с упором
6 поперечной балки 7, а штоками — с кронштейнами 8 и 17 рамы рычага. Уси-
лие сдвижки, создаваемое гидроцилиидрами, передается на рельсы через
рихтовочные ролики 21. Для удержания рельсо-шпальной решетки от выбросов
при рихтовке бесстыкового пути предусмотрены обжимные ролики 9 и 15,
установленные на кронштейнах 11 и 14. Ролики приводятся в действие гидро-
цилиндрами 10 и 16. Для защиты электромагнитов от механических повреж-
дений балластом и другими предметами, находящимися на пути, на раме рыча-
га предусмотрено отвальное устройство 18.
Электромагниты 1 рихтовочной машины предназначены для вывешивания
путевой решетки и отличаются от электромагнитов электробалластеров н ма-
шины ВПО-ЗООО конструкцией остова, полюсных решеток и опорных роликов.
307
5800
Механизм вывешивания рельсо-шпальной решетки предназначен для сни-
жения ее сцепления с балластной призмой, а следовательно, усилий, необхо-
димых для ее сдвнжки при рихтовке. Рельсо-шпальную решетку при рихтовке
не поднимают, а лишь, вывешивая уменьшают ее сцепление с балластной
призмой. Таким образом исключается попадание частичек балласта под ниж-
нюю постель шпал, а следовательно, искажение профиля пути и его положения
по уровню. Достигается это ограничением величины давления жидкости в
гидроцилиндрах механизма, в результате чего они развивают усилие, равное
0,8—0,9 силы, необходимой для отрыва рельсо-шпальной решетки от балласт-
ной призмы.
Механизм вывешивания рельсо-шпальной решетки (рис. 8,39) состоит из
двух гидравлических цилиндров /, которые корпусами соединяются шарнир-
но с балками 14 фермы, а штоками — через винтовую тягу 9 с опорной балкой
12. На последнюю опирается рихтовочный рычаг катками 6. Подъем катков
ограничивается кронштейнами 4. Опорная балка удерживается от смещений:
вдоль оси машины направляющими 10, приваренными к нижиим балкам 2 фер-
мы, поперек оси — упорами 5 и от вертикальных — выступами 11 и засовами
13. В транспортном положении опорная балка с рихтовочным рычагом закреп-
ляются гайками 3 с штурвалами и с помощью рукоятки 7 канатика 8 — за-
совами 13.
Плуги 14 (см. рис. 8.36) с дисками при рихтовке пути отваливают балласт
от концов шпал также для снижения усилия при рихтовке пути. После сдвиж-
308
Рис. 8.39. Механизм вывешивания
ки пути уплотняющими катками 2 уплотняют балласт у концов шпал для за-
крепления пути от упругих деформаций.
Рабочий и контрольный стрелографы являются главными управляющими
органами машины при рихтовке и контроле за состоянием пути после прохо-
да машины. Рабочий стрелограф (рис. 8.40) состоит нз пяти тележек: №1,2,
3, 4 и 5 [точки 7\—Ть (см. рис. 8.36)]; пневмоцилиндров 1 их подъема и опус-
кания; стального каната 2, являющегося хордой стрелографа, и механизма 3
ее натяжения. Тележки № 1 и 5 являются концевыми при работе стрелографа
с хордой длиной 27 м. На тележке № 1 установлен блок для направления кана-
та к механизму натяжения, а на тележке №5 — блок для её прижатия к рель-
сам. Тележка № 2 служит концевой при работе стрелографа с хордой длиной
15 м. Тележки № 3 и 4 играют роль следящих и предназначены для измерения
и дистанционной передачи к столу оператора значений стрел изгиба при рабо-
те стрелографа с хордами длиной 15 и 27 м. В соответствии с полученными дан-
ными на столе оператора'формируется команда механизму рихтовки пути. Те-
лежки стрелографа и механизм натяжения хорды путерихтовочной машины
Балашенко имеют некоторые конструктивные особенности по сравнению с со-
ответствующими узлами путерихтовочного устройства на электробалластере.
Контрольный стрелограф предназначен для измерения до и после рихтов-
ки натурных стрел изгиба хордой длиной 10 м и дистанционной передачи зна-
Рис. 8.40. Схема рабочего стрелографа
309
чений этих стрел на контрольный стол машины, где они записываются в виде
непрерывного графика. Контрольный стрелограф (рис. 8.41) состоит из кон-
цевых тележек № 4 и 7 и измерительной — №6 [точки Г4, Т6 иТ7 (см. рис. 8.36)].
Тележка № 4 входит также в состав рабочего стрелографа. Рама 10 шарнирно
соединена с кронштейном 7 фермы машины. При помощи лебедки 2 и каната 3
ее опускают в рабочее и поднимают в транспортное положения. В поднятом по-
ложении рама закрепляется пневматическим стопором 5 и закладкой 6. Для
вывода рамы из транспортного положения предусмотрены пружинные буфера
4. Тележка № 6 при помощи водила с шарниром 9 соединена с ходовой тележ-
кой № 2. Натяжение каната-хорды 8 осуществляется пневматическим цилинд-
ром 11 через блок 1.
Стол оператора предназначен для записи на бумажную ленту натурных
стрел участка пути с использованием хорд длиной 27 и 15 м и управления про-
цессом рихтовки. Запись в продольном направлении ведется в масштабе
1 : 500, в поперечном — 1:1. Стол оператора состоит из станины, тягового
барабана, листа, по которому перемещается бумажная леита, устройств для
направлений ленты и редуктора для обеспечения ее движения в заданном мас-
штабе. Записывающее устройство (рис. 8.42) стола оператора состоит из
сельсинов-приемников 1 и 11, струнок 12, 13, 18 и 19, закрепленных иа листе
3, по которым может перемещаться датчик 17 с контактной системой 16. На
датчике предусмотрены зажимы 14 и 15 для прикрепления его к нитям 5,
запасованным на блочки 10 сельсинов, и гнездо 4 для записывающего каран-
даша. Для натяжения нитей предназначена пружина 8, винт с гайкой 9 и бло-
чок 7, установленные иа кронштейне 6.
Для записи натурного положения кривой датчик устанавливается на
струнках 18 и 19, а при рихтовке по способу программного задания — на стру-
нках 12 и 13. В последнем случае датчик закрепляют зажимом 14 иа нитке сель-
сина-приемника 11, а зажимом 15 — на нитке сельсина-приемника 1. При об-
воде карандашом графика стрел программы датчик удерживается на значениях
программных стрел. В местах, где натурные стрелы не равны программным,
контактная система дает команду, срабатывает гидравлический золотник и
путь двигается до тех пор, пока стрелы не станут равными программным. В
Рис. 8.41. Схема контрольного стрелографа
310
Рис. 8.42. Записывающее устройство
этот момент контакты размыкаются и сдвиг пути прекращается. При рихтовке
прямых и круговых участков пути, когда зависимость стрел изображается
прямой линией, датчик закрепляется к нити сельсина-приемника 11 стопором
2. Рихтовка производится в автоматическом режиме.
Для рихтовки пути по способу «сглаживания» датчик устанавливается на
струнках 18 и 19, его контактная система разворачивается в сторону струнок
12 и 13, после чего датчик закрепляется на нитях зажимами 14 и 15. Прн рих-
товке по способу «сглаживания» в зависимости от длины хорды для уравнива-
ния значений измеряемых стрел изгиба на сельсин 11 устанавливают блочки
соответствующих диаметров.
Стол контрольный предназначен для записи натурных стрел, измеренных
контрольным стрелографом, до и после рихтовки. Масштаб записи продольный
1 : 1000, поперечный — 1 : 1. По конструкции контрольный стол в основном
аналогичен столу оператора, за исключением того, что он имеет одно записы-
вающее устройство.
Масштабный каток предназначен для привода лентопротяжных механиз-
мов столов оператора и контрольного (рис. 8.43). Привод последних механи-
ческий. В этом состоит принципиальное отличие масштабного катка от катка
рихтовочного устройства на электробалластере. Передача вращения к тяговому
барабану 3 стола оператора от масштабного катка 11 осуществляется посредст-
вом цепной передачи 10 (i — 1/5), конического редуктора 9 (i = 1), карданно-
го вала 8, конического редуктора 6 (i = 1) с кулачковой муфтой 7 (для отклю-
чения привода), вала 5, червячного редуктора 4 (I = 1/100). В свою очередь
барабан 3 приводит тяговый барабан 1 контрольного стола при помощи цепной
передачи 2 (г = 1).
Гидрооборудование машины (рис. 8.44) предназначено для приведения в
действие механизмов рихтовки, распора ходовой тележки № 2, прижатия об-
жимных роликов на рихтовочном рычаге и вывешивания путевой решетки.
Гидронасосы 15 и 16 через обратные клапаны 19 подают масло под давлением,
устанавливаемым регулировкой предохранительного клапана 10, к электро-
311
Рис. 8.43. Схема привода столов оператора
и контрольного
золотнику 9, который по сигналу от
контактной системы стола оператора
направляет масло в одни из цилинд-
ров 7 рихтовки пути. Одновременно
через обратный 22 и редукционный
11 клапаны масло (со сниженным в
нем давлением) поступает в гидроак-
кумулятор 20 и к гидрозолотникам 3,
которые распределяют его между ци-
линдрами 1 распора рамы тележки и
2 распора ходовых колес. К цилинд-
рам 6 привода обжимных роликов
масло поступает через ручной зо-
лотник 26. Гидронасос 17 через об-
ратный клапан 18 подает масло под
давлением, ограниченным предохра-
нительным клапаном 5, к ручному
золотнику 27 и к цилиндрам выве-
шивания 8. Давление в системах из-
меряют манометрами 4, 23, 25. Для предохранения манометра 23 от пульси-
рующего давления при рихтовке предусмотрен вентиль 24. Из цилиндров масло
сливается в бак 13 через фильтры 12. Для отключения масляного бака установ-
лен вентиль 14. В случае выхода из строя насоса 17 для подъема рихтовочного
рычага в транспортное положение вентилем 21 гидронасосы 15 и 16 подключают
к цилиндрам 8.
Путерихтовочную машину системы Балашенко применяют для рихтовки
пути по программе и по способу «сглаживания».
При рихтовке пути по приближенной программе (рис. 8.45, а) графическим
путем составляют приближенную программу, используя хорду рабочего стре-
лографа длиной 27 м. В работе участвуют тележки № 1, 4, 5, 6, 7. Величины
натурных стрел измеряют тележкой № 4 рабочего стрелографа и тележкой № 6
контрольногострелографа. При соста влеиии программы расчетным путем рих-
товку производят с использованием хорды (рис. 8.45, б) рабочего стрелографа
длиной 15 м. В работе участвуют тележки № 2, 3, 4, 6, 7. Величины натурных
стрел измеряют тележками № 3 и 6.
Рис. 8.44. Схема гидрооборудования путерихтовочной машины
312
При рихтовке пути по способу’ сглаживания работы выполняют автомати-
чески за одни заезд без использования предварительно составленной програм-
мы. Программной стрелой является стрела /, находящаяся и а отри хтов ан ном
участке пути. Рихтовку осуществляют по схеме, приведенной на рис. 8.45, в
при радиусе кривой R = 1804-300 м; при R = 3004-600 м — по схеме на
рис. 8.45, г; при R > 600 м — по схеме на рис. 8.45, д.
Состояние отрихтованного пути записывается на контрольном столе ПО'
данным тележки № 6.
Ниже приведены технические характеристики рихтовочных машин непре-
рывного действия:
Параметры Рихтовочное устройство на ЭЛБ-1 и ЭЛБ-3 Путерихтовоч ная машина Валашенко
Скорость машины, км/ч:
при записи состояния пути . . . . 15—20 20—25
при рихтовке:
по способу «сглаживания» . . . . 4—5 6-8
по программе . . . . 1,5—2 6—8
транспортная .... . . . . 50 80
Максимальная величина сдвига пути за один
проход, мм . . . . 300 260
Минимальный радиус рихтовки, м 150 180
Усилие сдвига, кН . . . . . . . . 100 200
» прижатия, кН . . . . 120 —
Привод механизма рихтовки .............
» подъема и опускания рабочих органов
Обслуживающая бригада, чел.............
гидравлический
пневматический
5 4
313
8.4.3. Основы эксплуатации и обслуживания рихтовочных машин
Рихтовочные машины непрерывного действия применяются при всех видах
ремонта железнодорожного пути. Для лучшего их использования целесообраз-
но организовывать работу по скользящему графику в пределах одиого-двух
отделений дороги. Поскольку машины работают в «окна» в графике движения
поездов, они должны быть заблаговременно подготовлены к выездам на пере-
гон. Транспортирование машин производят отдельными локомотивами в пре-
делах участка работ или в хвостовой части поезда. Руководителем работ при
рихтовке стыкового пути должен быть дорожный мастер, а бесстыкового —
старший дорожный мастер.
Для машин установлены следующие виды технического обслуживания:
ТО-1 — через 30 км рихтовки пути и ТО-2 — через 60 к.м. При их выполнении
важно обращать особое внимание на обеспечение регулировки давлений: в
системе рихтовки пути в пределах 9—10 МПа; распора 6—6,5 МПа, в пневма-
тической сети 0,55 МПа. Усилие на перемещение датчика измерительного уст-
ройства должно быть 1000—1200 мН. Зазоры в вилках кареток на измеритель-
ных тележках должны составлять 0,2 мм, а суммарный зазор в контактных
пластинах датчтика — 0,5—0,7 мм. Периодичность смазки узлов, а также ос-
новные неисправности приведены ниже.
Ответственным лицом за соблюдение правил техники безопасности брига-
дой, обслуживающей путерихтовочную машину, является начальник машины.
Кроме правил по технике безопасности и производственной санитарии для ра-
ботников путевого хозяйства, бригаде необходимо знать и выполнять требова-
ния по эксплуатации рихтовочных машин. Последним, в частности, запреща-
ется находиться на рабочих органах при движении машины, опускать раму
контрольного стрелографа путерихтовочной машины Балашенко при ослаб-
ленном канате лебедки и находиться в зоне ее опускания, сходить с машины в
сторону междупутья на двухпутных участках пути. Перед опусканием рабо-
чих органов машины следует убедиться в отсутствии вблизи нее людей и дать
звуковой сигнал.
Таблица смазки основных механизмов рихтовочного устройства на ЭЛБ-1
Место смазки Рекомендуемая смазка, Xs стандарта Число точек смазки Периодичность смазки
Механизм сдвига пути: подшипники рихтующих ЦИАТИМ-201 ГОСТ 6267— 2 Ежедневно
роликов валики шарнирных соеди- нений, скользуны, серьги Механизм прижатия пути: подшипники ходовых ко- лес внутренняя поверхность 74 То же » Тормозная XT (4Е) ТУ ЦТ 7 4 2 1 раз в месяц 1 раз в полгода То же
цилиндров и манжеты Тележки концевые и следя- щие. подшипники шариковые 4 04.58 ЦИАТИМ-201 ГОСТ 6267— 2 1 раз в полгода
ходовых колес канаты 74 Канатная 399 ГОСТ 5570—69 По То же
Катки масштабные: подшипники штоки и серьги пневмоци- линдров ЦИАТИМ-201 ГОСТ 6267— 74 То же всей длине 2 2 » 1 раз в 3 месяца
314
Часто встречающиеся или возможные неисправности
рихтовочного устройства на ЭЛБ-1
Неисправность Возможные причины Способы устранения
Некачественная рихтовка пути 1. Недостаточное натяжение каната хорды рабочего стрело- графа 2. Большой зазор между вилкой каретки и канатом хор- ды Натянуть канат хорды Заменить вилку
Механизм сдвига смеща- 1. Неисправен гидрораспре- Проверить и отремонти-
ет путь только в одну сто- делитель ровать гидрораспределитель
рону 2. Неисправны контакты ре- ле управления гидрораспреде- лителем 3. Обрыв провода в катушке гидрораспределителя Очистить контакты или заменить реле Восстановить целост- ность провода
Резкий сдвиг пути в сто- 1. Обрыв каната хорды Заменить канат
рону 2. Выход каната хорды из вилки каретки следящей те- лежки Заправить канат
Тележки стрелографа 1. Недостаточное давление Проверить и отрегулиро-
медленно поднимаются воздуха в системе 2. Порвана манжета ппевмо- цилиндра вать давление Заменить манжету
Шум и вибрация в гид- равлической системе 1. Наличие воздуха в систе- ме 2 Недостаточное крепление трубопроводов Спустить воздух Закрепить трубопроводы
Повышенный нагрев мае- Насос не разгружается при Проверить работу разгру-
ла в гидросистеме обесточенных катушках гидро- распределителей зочного клапана
8.5. ВЫПРАВОЧНО-ПОДБИВОЧНО-ОТДЕЛОЧНАЯ МАШИНА ВПО-ЗООО
8.5.1. Назначение и принцип действия
Машина непрерывного действия ВПО-ЗООО предназначена для механизиро-
ванного выполнения одновременно, т. е. за один проход, комплекса путевых
работ: чистовой дозировки выгруженного на путь балласта, выправочной
подъемки пути с постановкой его в требуемое положение в продольном и попе-
речном (по уровню) профилях и в плане (рихтовка), уплотнения балластной
призмы и отделки отремонтированного пути.
Машина применяется для капитального, среднего и подъемочного ремон-
тов пути и его текущего содержания независимо от типа рельсов и их скреп-
лений, шпал и рода балласта. Она обеспечивает производительность до
3000 м/ч, поэтому для соблюдения установленных допусков при выправке по-
ложения рельсового пути, помимо ручного (кнопочного), предусмотрено авто-
матическое управление рабочими органами.
Машина (рис. 8.46) состоит из фермы /, на которой в последовательности,
обеспечивающей выполнение всего комплекса работ, размещены дозатор 12,
рельсовые щетки 11, механизм подъема', сдвига и перекоса пути 9, основные
вибрационные уплотнительные плиты 10 (правая и левая), планировщики от-
косов 8, вибрационные уплотнители откосов 5 (правый и левый) и механизм
для обметания с поверхности пути излишков балласта 4 Ферма 1 опирается
315
Рис. 8.46. Общий вид машины ВПО-ЗООО
Рис. 8.47. Схема размещения на ферме рабочих органов машины
на две ходовые тележки, из которых передняя 13 двухосная, а задняя 6 трех-
осная. Последняя оборудована механизмом выключения рессор 7.
В передней кабине 2 размещены дизельное и дозаторное отделения. В ди-
зельном отделении установлены электростанция, генератор для питания элект-
ромагнитов, генератор для зарядки аккумуляторных батарей и часть электро-
оборудования; в дозаторном — пульты управления дозатором, рельсовыми
щетками и измерительными роликами, а также щиток приборов для контроля
за работой дизель-генератора.
В задней кабине 3 размещены пульты управления остальными рабочими
органами и хозяйственное отделение.
На рис. 8.47 приведена схема размещения на ферме рабочих органов маши-
ны. Позиции те же, что на рис. 8.46.
Машина оборудована автосцепкой, пневматическим и ручным тормозами,
звуковой н световой сигнализацией, переговорным устройством, регулятором
возбуждения для управления движением из передней кабины тепловоза, ис-
пользуемого в качестве тяговой единицы. Для сокращения затрат времени иа
приведение машины в рабочее и транспортное положения с сохранением не-
обходимого при работе режима механизмы подъема дозатора, наклона и пово-
рота его крыльев, рихтующих роликов, подъема и сдвига основных уплотни-
тельных плит и подъема планировщика откосов оборудованы двухскоростными
электродвигателями, которые включаются в работу на повышенных скоростях
при зарядке и разрядке рабочих органов машины.
Для безопасной работы обслуживающего персонала на электрифициро-
ванных участках пути над палубой машины оборудован навес.
8.5.2. Дозатор
Дозатор предназначен для дозировки балласта, выгруженного на путь
перед машиной, а также для оправки балластной призмы и нарезки в между-
путье траншеи, облегчающей проход по нему вибрационных уплотнительных
плит. При выгрузке балласта на путь из хопперов-дозаторов, как правило, нет
необходимости в дополнительной дозировке. Дозатор ВПО-ЗООО выполнен по
типу дозатора электробалластера ЭЛБ-1, изменена лишь конструкция поворот-
ного устройства крыльев, а основная часть крыла снабжена съемным плужком,
необходимым для нарезки траншеи в междупутье.
Механизм поворота крыла дозатора (рис. 8.48) предназначен для раскры-
тия и закрытия крыла при приведении дозатора в рабочее и транспортное по-
ложения и для регулирования угла раскрытия крыла при работе машины. Он
выполнен в виде телескопической распорки, которая одним концом шарнирно
соединена с кронштейном, закрепленным на нерабочей стороне крыла, а дру-
гим — с кронштейном, связанным с фермой машины. Шарнирное соединение
телескопической распорки с крылом и фермой машины обеспечивает ее поворот
Рис. 8.48. Механизм поворота крыла дозатора
317
в горизонтальной и вертикальной плоскостях (при раскрытии и заглублении
крыла).
На задней корневой части распорки установлен червячный редуктор 1,
на корпусе которого закреплен электродвигатель 2. Вал последнего соединен
муфтой с валом редуктора 7, который связан с корневой частью распорки.
Внутри распорки расположен ходовой винт 3, задний конец которого закреп-
лен в ступице червячного колеса редуктора /. На передней части телескопичес-
кой распорки закреплена гайка 6, соединенная с ходовым винтом 3. При вра-
щении последнего происходит навиичиваиие или свинчивание с него гайки 6,
чем достигается изменение длины телескопической распорки, т. е. раскрытие
или закрытие крыла дозатора. Предельная величина раскрытия крыла огра-
ничена конечными выключателями 4, на которые воздействует гайка 6 при
ее наезде на ролики педали 5.
8.5.3. Рельсовые щетки
Для очистки головок рельсов от попавшего на них балласта предназначе-
ны рельсовые щетки (рис.8.49). Они выполнены по типу рельсовых щеток
электробалластера ЭЛБ-3 с изменением некоторых узлов. Расположенные над
рельсовыми нитями металлические плужки 10, имеющие в плане форму равно-
бедренных треугольников, сметают с головок рельсов основную массу балласта.
Внутри плужков 10 установлены тросовые щетки 11, окончательно обметаю-
щие поверхности головок рельсов и ролики 9, реборды которых, контактируя
с головками рельсов, фиксируют щетки относительно последних. Щетки сво-
бодно перемещаются в горизонтальной плоскости поперек пути, для чего они
связаны между собой балкой 5, которая опирается на размещенные внутри нее
ролики 6, закрепленные на нижней части рамы 13 Рельсовые щетки оборудо-
ваны автоматическим устройством, обеспечивающим постоянную силу иажатия
Рис. 8.49. Схема работы рельсовых щеток
их на головки рельсов, Щетки подве-
шены на ферме машины с возможно-
стью их перемещения в вертикальной
плоскости, для чего по обеим сторо-
нам рамы 13 установлены ролнки 4,
находящиеся внутри вертикальных
балок 3, закрепленных на нижних по-
ясах фермы машины. Ролики 4, пере-
катываясь по направляющим балкам
3, изменяют положение щеток в вер-
тикальной плоскости относительно
фермы машины. На поперечной бал-
ке, закрепленной на иижних поясах
фермы, установлен электродвигатель
1 с типовым червячным редуктором
2, винт которого шарнирно связан с
поперечной балкой 14. Последняя
спиральными пружинами 8 связана
с нижией поперечной балкой рамы 5.
На балке установлены микропере-
ключатели 7 и рычаг 12. При изме-
нении положения рельсовых нитей
по высоте или их взаимного поло-
жения по уровню щетки балкой 5
давят на ролики 6, вызывая сжатие
или растяжение пружин 8. При этом
318
соответственно вверх или вниз перемещается балка 14. Рычаг 12, поворачива-
ясь иа некоторый угол, включает правый или левый микропереключатель, тем
самым замыкая электрическую цепь питания электродвигателя, вал которого
связан с валом червячного редуктора 2, и получает вращение по часовой стрел-
ке или против нее в зависимости от того, который из микропереключателей
замкнут. Соответственно редуктор 2 винтом поднимает или опускает щетки до
тех пор, пока произойдет размыкание микропереключателей. В транспортном
положении рельсовые щетки фиксируются от самопроизвольного опускания и
горизонтального смещения валиками, вставленными в ушки на направляющих
балках 3 и раме 13.
8.5.4. Механизм подъема, сдвига и перекоса пути
Механизм предназначен для выправки рельсового пути в продольном про-
филе, по уровню и в плане и состоит из двух электромагнитов, механизма
подъема электромагнитов и механизма сдвига пути.
Электромагниты аналогичны электромагнитам электробалластера ЭЛБ-2,
ЭЛБ-3. Они установлены по одному на рельсовую нить и служат для захвата
головок рельсовых нитей при подъеме и сдвиге ремонтируемого пути.
Механизм подъема электромагнитов (рис. 8.50, а) предназначен для из-
менения положения электромагнитов 13 по высоте при выправке положения
рельсового пути в продольном и поперечном профилях, а также приведения
электромагнитов в рабочее и транспортное положение. Для каждого электро-
магнита имеется свой механизм подъема, благодаря чему обеспечивается одно-
временная и независимая выправка положения рельсового пути в продольном
и поперечном профилях.
Механизм подъема электромагнитов состоит из балки 11, которая шар-
нирно соединена внизу с поперечной балкой 12, а вверху — с подъемным
винтом 6. Для исключения передачи изгибающих усилий на винт 6 по концам
валика, связывающего винт с подвеской И, установлены ролики 7. Они разме-
щены внутри балок рамы н при работе механизма подъема перекатываются по
их полкам. Винт 6 проходит внутри имеющей винтовую нарезку ступицы ко-
леса червячного редуктора 3. На торце винта 6 закреплена стрелка 2, показы-
вающая по шкале величину подъема или опускания электромагнита. Опуска-
ние последнего в рабочее и подъем в транспортное положения ограничено ко-
нечными выключателями. В необходимых случаях возможен ручной подъем
механизма вращением за хвостовик 1 вала червяка редуктора.
319
Реверс-ре цуктор механизма подъема электромагнита. Для автоматического
управления выправкой положения рельсового пути в продольном профиле и
по уровню при непрерывном движении машины в кинематическую цепь при-
вода между валом электродвигателя 4 и валом червячного редуктора 3 включен
реверс-редуктор 5. Благодаря этому обеспечивается непрерывная работа элект-
родвигателя, т. е. исключаются частые повторно-кратковремениые включения
и выключения, вызывающие перегрузку и перегрев электродвигателя.
На ведущем валу 4 реверс-редуктора (рис. 8.51), соединенном цепной муф-
той 5 с приводным электродвигателем, установлена шестерня 3, которая по-
стоянно находится в зацеплении с шестернями 12, сидящими на шарикопод-
шипниках 13 ведомого вала 11. На шлицах этого вала посажены электромаг-
нитные муфты 8, внешние диски 7, якоря 6 которых размещены внутри по-
водков 10, жестко связанных с шестернями 12. При обесточенном положении
электромагнитных муфт внешние диски 7, связанные наружными выступами с
поводками 10, свободно проскальзывают относительно внутренних дисков муф-
ты, сидящих на шлицах вала //, не вызывая его вращения. При подаче напря-
жения на обмотку правой или левой муфты 8 внешние диски прочно притяги-
ваются к внутренним, образуя фрикционную связь, и приводят во вращение
ведомый вал 11. Через муфту 9 получает вращение червячный вал редуктора,
производя подъем или опускание электромагнита с рельсовой нитью. Реверс-
редуктор оборудован электрическим тормозом, Им служит электромагнитная
муфта, 2, закрепленная на корпусе реверс-редуктора. Внутренние диски муф-
ты сидят на шлицах втулки 1, закрепленной на валу 11.
При подаче напряжения питания на обмотку муфты 2 ее наружные диски
притягиваются к внутренним, производя торможение вала. При прекращении
подачи тока в обмотку муфты происходит освобождение вала 11. Управление
тормозом осуществляется от тех же реле управления выправкой положения
пути в продольном и поперечном профилях, но с противоположным значением
команд — при подаче команды на включение одной из муфт 8 одновременно
Рис. 8.51. Реверс-редуктор
320
Рис. 8.52. Схема рихтующих роликов
подается команда на выключение тор-
мозной муфты 2, а при подаче коман-
ды на выключение муфты 8 подается
команда на включение муфты 2.
Механизм сдвига пути (рис.
8.50, б) предназначен для выправки
положения рельсового пути в плане
(рихтовка). Он является общим для
правого и левого электромагнитов
механизмов подъема и сдвига пути
и состоит из двухосной каретки 10,
на осях которой посажены ходовые
ролики 9, перемещающиеся внутри
горизонтальных балок направляю-
щей рамки. На этих же осях уста-
новлены катки 8, упирающиеся при сдвиге пути в вертикальные балки 11 под-
вески электромагнитов. Каретка 10 шарнирно связана с горизонтально распо-
ложенным тяговым винтом 17, который проходит внутри имеющей винтовую
нарезку ступицы колеса червячного редуктора 16, установленного неподвиж-
но, как и все остальные узлы привода, на продольной балке направляющей
рамы.
Механизм оборудован реверс-редуктором 14, аналогичным по конструк-
ции реверс-редуктору механизма подъема. Привод осуществляется электродви-
гателем 15.
Рихтующие ролики механизма подъема и сдвига пути предназначены для
повышения точности выправки положения рельсового пути в плане. Они осна-
щены следящей системой, которая при изменении ширины колеи автоматичес-
ки, в процессе работы машины, увеличивает или уменьшает расстояние между
роликами, тем самым сохраняя неизменным положение рихтующих роликов
относительно рельсовых нитей пути.
Такое устройство рихтующих роликов исключает возможность попе-
речных проскальзываний электромагнитов относительно головок рельсов.
Крайние допустимые положения роликов по ширине ограничены конечными
выключателями.
Рихтующие ролики (рис. 8.52) перемещаются от реверс-редуктор а 8, по-
лучающего привод от электродвигателя 10 через шестерни 9. Реверс-редуктор
отличается от типового отсутствием тормозной электромагнитной муфты. Одна
электромагнитная муфта управляет уширением рихтующих роликов, а дру-
гая—сужением.
Реверс-редуктор 8 концами выходного вала и муфтами 7 связан с ходо-
выми винтами 6, гайки которых цапфами 5 соединены с вилками на верхних
плечах рычагов 4. Последние подвешены с возможностью поворота на осях и
вилками на нижних плечах соединены с валиками, закрепленными в сухарях
3 и через оси 2 с рихтующими роликами 1. При перемещении гайки по ходо-
вому винту 6 ее цапфы 5, упираясь в вилку на верхнем плече, поворачивают
на оси рычаг 4, который, упираясь вилкой нижнего плеча в валик, смещает
сухарь 3 с установленным на нем рихтующим роликом 1.
8.5.5. Основные вибрационные уплотнительные плиты
Симметрично относительно продольной оси машины расположены основные
вибрационные уплотнительные плиты, предназначенные для уплотнения бал-
ластной призмы железнодорожного пути при непрерывном ее виброобжатии со
11 Зак. 47
321
Рис. 8.53. Основная уплотнительная
плита
стороны торцов шпал. Каждый виброуплотнитель состоит из основной вибра-
ционной уплотнительной плиты и механизмов ее подъема и сдвига в горизон-
тальной плоскости.
Уплотнительная плита (рис. 8.53, а) представляет собой пустотелый кор-
пус, состоящий из двух прямоугольников разной высоты. Меньший обращен в
сторону оси пути и является уплотняющей частью плиты. Больший является
корпусом 5 для дебалансного вибратора. Внутри корпуса 5 (рис. 8.53, б) на
вертикальных валах размещены шестерни 4 и дебалансы 3, генерирующие вы-
нуждающую силу направленного действия. Привод вибратора осуществляет-
ся электродвигателем 1 через карданный вал 2. Вибратор при шести дебалан-
сах создает вынуждающую силу 200 кН. В положениях I н III дебалансов
(рис. 8.54) вынуждающая сила вибратора равна сумме вынуждающих сил от-
дельных дебалансов н действует перпендикулярно продольной оси пути, при-
чем в положении I в сторону пути, а в положении III — от него. В положениях
II и IV дебалансов вынуждающая сила вибратора равна нулю, так как вынуж-
дающие силы отдельных дебалансов взаимно уравновешены. Такой вибратор
называется вибратором направленного
Рис 8.54 Схема работы вибратора направ-
ленного действия
действия.
В рабочем положении клиновая
часть уплотнительной плиты заглубле-
на на 60—100 мм ниже постели шпал
ремонтируемого пути, при этом перед-
ние клинья заходят под шпалы на 150
—175 мм.При уплотнении виброплиты
совершают два вида движений: коле-
бательное в горизонтальной плоско-
сти и поступательное вдоль пути.
Уплотнительные клинья подают бал-
ласт в подшпальное пространство и
в процессе вибрационного и обжим-
ного воздействия на него уплотняют
зону а (рис. 8.55) в подшпальиом про-
странстве и зону б между шпальными
ящиками. Зона г остается неуллот-
ненной, а зону в уплотняют уплотни-
телями откосов. Продольной балкой
10 (рис. 8.56) уплотнительная вибро-
322
Рис. 8.55. Схема уплотнения балластной призмы машиной ВПО-ЗООО
плита 11 закреплена в челюстях подъемно-поворотных кронштейнов 7
н 14, которые могут поворачиваться в горизонтальной плоскости и пере-
мещаться в вертикальной на полых цилиндрических направляющих 15.
Для снижения вибрационного воздействия, передаваемого от уплотнитель-
ной плиты 11 на продольную балку 10, а от нее и на машину в целом, под-
веска плиты на продольных балках выполнена упругой через амортизирую-
щую систему.
Механизм подъема предназначен для приведения уплотнительной плиты в
рабочее и транспортное положения и регулирования по высоте при изменении
величины подъемки пути и при работе машины в кривых. При опускании виб-
роплит в рабочее и подъеме в транспортное положения ои работает на повы-
шенной скорости, а в процессе работы машины — на пониженной. Это дости-
гается благодаря установке на машине двухскоростного электродвигателя 3.
Механизм подъема состоит из двух червячных редукторов 1 и 5, которые через
муфты и валы 2 и 4 соединены с электродвигателем 3. При вращении винтов 16
гайки 6 и 17, свинчиваясь или навинчиваясь, перемещают подъемно-поворот-
ные кронштейны 7 и 14 с подвешенной к ним на продольной балке 10 вибро-
плитой 11. Крайние положения виброплит ограничены концевыми выключате-
лями.
Механизм сдвига основных уплотнительных плит выполнен в виде теле-
скопической тяги, ходовой винт 13 которой связан с направляющей 15. Вра-
щением гайки 12, соединенной через редуктор 9 телескопической тяги с двух-
скоростным электродвигателем 8, осуществляется перемещение поворотио-
подъемных кронштейнов, а с ними и
самой виброплиты.
Конструктивно привод механизма
сдвига состоит из двухскоростного элек-
тродвигателя 9 (рис. 8.57), установлен-
ного на кронштейне 10 верхнего поя-
са фермы, и шестеренчатого редукто-
ра 13. Редуктор одной стороной закреп-
лен на фланце обоймы 11 телескопиче-
ской тяги, а другой опирается через
бронзовую втулку 14 на полый вал 1.
Входная вал-шестерня 6 муфтой 7, име-
ющей кожух 8, соединена с валом элек-
тродвигателя 9. В ал-шестерня 6 и ше-
стерня 2, вал-шестерня 3 и шестерня 12
находятся в постоянном зацеплении.
Шестерни 2 и 12 посажены на шпоиках
на соответствующих валах и передают
крутящий момент от электродвигателя 9
полому валу 1, внутри которого рас-
11* 323
Рис. 8.56. Схема кинематическая основ-
ного виброуплотнителя машины
Рис. 8.57. Привод механизма сдвига плит
положен ходовой винт 15. Телескопическую тягу фиксируют в нужном поло-
жении тормозной электромагнитной муфтой 4, установленной в корпусе 5
на хвостовдке промежуточного вала-шестерни 3.
8.5.6. Планировщики откосов
Они предназначены для подбора с обочины земляного полотна балласта,
обрушенного основными уплотнительными плитами и обратной укладки его
на откос, придания последнему проектного очертания, а также для засыпкн в
междупутья траншеи, образовавшейся при проходе уплотнительной плиты.
Планировщик откосов состоит нз крыльев, механизмов их наклона и подъе-
ма, а также телескопических распорок раскрытия крыльев.
Крыло планировщика откосов (рис. 8.58) состоит из корня 3, планировоч-
ного крыла 5, секторного ножа 6, подкрылка 7, закрылка 8 и распорной тяги 4.
Планировочное крыло аналогично крылу дозатора, ио имеет вырез для плани-
Рис. 8 58. Схема крыла планировщика от
КОСОВ
ровкн откоса балластной призмы.
Механизм наклона крыла плани-
ровщика откосов 2 предназначен для
регулирования величины заглубления
н положения крыла в процессе работы
машины. Он установлен на корне кры-
ла и по коиструкцин аналогичен ме-
ханизму наклона крыла дозатора эле-
ктробалластера ЭЛБ-1. Крайние по-
ложения крыла ограничены конечны-
ми выключателями.
Механизм подъема крыла плани-
ровщика 1 предназначен для опуска-
324
ния и подъема крыла при приведении его в рабочее и транспортное
положения, а также при изменении режима его работы. Он состоит из типо-
вого червячного редуктора, соединенного с электродвигателем привода.
Втулка 9 закреплена свободно иа ходовом винте редуктора и от пово-
рота защищена направляющими, скользящими по продольному пазу ко-
лонны. Подъем и опускание крыла осуществляются вращением ходового вин-
та редуктора через втулку 9, которая контрится при фиксированном п о-
ложении крыла планировщика.
Механизм поворота крыла планировщика откосов предназначен для изме-
нения угла его открытия при переходе на другой режим работы машины и для
приведения крыла в рабочее и транспортное положения. Телескопическая рас-
порка крыла планировщика аналогична телескопической распорке крыла до-
затора (см. рис. 8.48).
8.5.7. Вибрационные уплотнители откосов
Они предназначены для уплотнения балласта на откосах призмы (см-
рис. 8.55, зона в) и состоят из двух (правой и левой) вибрационных уплотни-
тельных плит 1 (рис. 8.59), подвешенных к рамам 2 на плоских листовых рес-
сорах. Каждая рама крепится с возможностью поворота в вертикальной плос-
кости при помощи параллелограммных подвесок 3 на ферме машины. Для сни-
жения уровня вибрации от уплотнительных плит в узлах соединения паралле.
лограммных подвесок 3 с рамой 2 и фермой машины установлены амортиза-
ционные втулки.
Плита уплотнителя откосов имеет уплотнительную поверхность, угол
наклона которой равен углу откоса балластной призмы. Конструкция вибра-
тора уплотнителя откосов аналогична конструкции вибратора основной уплот-
нительной плиты (см. рис. 8.53), но имеет только четыре дебаланса, создающих
вынужденную силу в 100 кН, действующую в горизонтальной плоскости попе-
рек оси. В рабочем положении плиты уплотнителя откосов располагаются по
сторонам пути и уплотнительными поверхностями контактируют с откосами
балластной призмы, производя их вибрационное обжатие. Внутрь корпуса 5
(см, рис. 8.53, б) заливается масло до
уровня верхней кромки зубчатых ко-
лес.
Механизм подъема уплотнитель-
ных плит 6 (см. рис. 8.59) состоит из
червячного редуктора, вал которого
связан с валом приводного электро-
двигателя. Во втулке червячного ко-
леса неподвижно установлен конец
ходового винта 5, а его гайка 4 шар-
нирно закреплена цапфами на парал-
лелограммных подвесках. Свинчива-
нием и навинчиванием гайки 4 осуще-
ствляются опускание и подъем уплот-
нительной плиты.
Механизм изменения величины
плеча откоса балластной призмы
(рис. 8.60) состоит из двух червяч-
ных редукторов 3 и 9 и двух направ-
ляющих скалок 11 с корпусами 8.
Валы редукторов муфтами 6 связа-
ны с валом электродвигателя. В сту-
Рис. 8.59. Вибрационные уплотнители отко
сов
325
ВидЛ
Рис. 8.60. Механизм изменения величины плеча откоса балластной призмы
лицах червячных колес редукторов закреплены хвостовики винтов с гайка-
ми 7. Изменение величины плеча откоса балластной призмы от 0 до 45 см
осуществляется регулированием длины нижних тяг 10 параллелограммной
подвески рамы 2, на которой при помощи листовых рессор подвешена
уплотнительная плита.
Червячные редукторы 3 и 9 с электродвигателем 5 установлены на свар-
ном кронштейне 4, жестко связывающим верхние концы нижних тяг 10 па-
раллелограммной подвески, а гайки 7 неподвижно закреплены на концах ниж-
них тяг 10. Верхние и нижние концы тяг жестко связаны между собой балками
и кронштейнами. При свинчивании гаек 7 с винтов редукторов 3 и 9 нижние
тяги 10 удлиняются. При этом рама 2 с уплотнительной плитой отклоняется
вправо, тем самым увеличивается при фиксированном положении механизма
подъема 1 плечо уплотняемого откоса. При навинчивании гаек 7 укорачива-
ются нижние тяги. Изменение размера плеча откоса влияет на его крутизну.
8.5.8. Механизм для обметания излишков балласта с пути
Механизм предназначен для перемещения излишков балласта из шпаль-
ных ящиков на откос призмы илн в междупутье и состоит из расположенного
поперек пути щеточного барабана н ленточного конвейера, размещенных в
одном кожухе. Барабан сметает с поверхности пути излишки балласта и пода-
ет нх по кожуху на ленточный конвейер, который выносит излишки балласта
иа междупутье. Работа щеточного барабана, конвейера, подъем и опускание
механизма в транспортное и рабочее положения осуществляются электродви-
гателями.
8.5.9. Устройства для контроля положения пути
Обеспечение нормальной работы устройств автоматического и полуавтома-
тического управления выправкой положения рельсовых нитей пути машиной
ВПО-ЗООО по уровню, в продольном профиле и в плане возможно только при
непрерывном поступлении информации о фактическом положении рельсовых
-326
Рис. 8.61 Схема размещения рихтовочного устройства на машине ВПО-ЗООО
нитей пути в рабочей зоне. Информация о взаимном положении рельсовых ни-
тей по уровню обеспечивается измерительным устройством, включающим из-
мерительные ролики, трособлочную передачу и суммирующий механизм. На
основании сравнения с заданным взаимным положением рельсовых нитей по-
даются команды на подъем и опускание подъемного электромагнита, управ-
ляемого этим устройством. Машина оборудована и механизмом сдвига пути, ко-
торый может быстро менять направление сдвижки. Однако оно используется
для рихтовки не в полной мере. Это объясняется отсутствием устройства для
непрерывного измерения фактического положения колен в плане при работе и
подачи команды механизму сдвига для устранения отклонений.
На опытных машинах ВПО-ЗООО внедрена система МИИТа, которая спо-
собна выполнять эти функции. Ее механизм состоит из четырех двухколесных
тележек 1, 4, 5, 6 (рис. 8.61), троса-хорды 3, цилиндра натяжения хорды 2 и
пульта управления 9. Тележки 1 и 6 удерживают концы хорды на расстоянии
760 мм от правой рельсовой нити. Тележкн 4 и 5 измерительные. На каждой
из них имеется сельсин-датчик (СДХ и СД2), ротор которого через гибкий тро-
сик и поводок при изменении положения хорды поворачивается на угол, про-
порциональный величине изменения стрелы изгиба. Работает устройство сле-
дующим образом. При движении машины сельсинами парами СДг—СП1 и
СД2—СП2 непрерывно измеряются величины стрел прогиба h и Н. Первые
показывают фактическое положение пути в плане н фиксируются на пульте
управления 9 ползуном 8 через тросик 7 и ролнк 10. Вторые стрелы характе-
ризуют правильное положение пути в плане и фиксируются на пульте ползу-
ном 13 через ролик / /и тросик 12. Если путь находится в проектном положении,
измеряемые стрелы равны между собой (h = Я). В этом случае ползуны 8 и
13 находятся один против другого, контакт ползуна 8 расположен между кон-
тактами ползуна 13, электромагнитная муфта механизма сдвига обесточена, и
он неподвижен. При въезде машины на участок пути, где есть его смещение,
равенство стрел прогиба нарушается. Ползун 8 перемещается относительно
ползуна 13, и их контакты замыкаются. Это приводит к срабатыванию элект-
ромагнитной муфты, и механизм сдвига смещает путь так, чтобы соблюдалось
равенство h = Н. Данное устройство автоматизирует управление механизмом
сдвига и обеспечивает высококачественную рихтовку.
327
8.6. Выправочио-подбивочно-отделочиая машина ВПО-ЗОООМ
Назначение выправочно-подбнвочно-отд елочной машины ВПО-ЗОООМ
(рис. 8.62) то же, что и машины ВПО-ЗООО.
На ферме машины 14 смонтированы рабочие органы в последовательности,
обеспечивающей выполнение всего комплекса работ: дозатор 2, рельсовые
щетки 5, подъемно-рнхтовочное устройство 7, виброударные уплотнительные
плиты 6, планировщик откосов балластной призмы 9, горизонтальные щетки
10, уплотнители откосов 12, вертикальные щетки 13. Ферма опирается на те-
лежки 1, 11. На машине расположены тележки А, Б, В, Г контрольно-изме-
рительной системы и насосные станции 3, 4, 8.
В конструкцию машины внесен ряд изменений, благодаря чему повыси-
лись маневренность, качество выполняемых работ, стали надежнее н долговеч-
нее рабочие органы. Транспортная скорость увеличена до 80 км/ч. Масса ма-
шины распределена одинаково иа переднюю и заднюю тележки — по 200 кН
на ось. Некоторые механизмы и рабочие органы оборудованы гидропривода-
ми, что обусловило их конструктивные изменения.
Машина оборудована контрольно-измерительной системой, унифициро-
ванной по принципу работы с машиной ВПР-1200, работающей по методу сгла-
живания и фиксированных точек.
Дозатор, выполнен по типу дозатора электробалластера ЭЛБ-1, но с не-
которыми конструктивными изменениями. Механизмы подъема дозатора, по-
ворота и наклона крыла оборудованы гидроприводами. Для пропуска хорды
контрольно-измерительной системы в нижней части щита предусмотрен вырез.
Рельсовые щетки (рис. 8.63) предназначены для очистки головок рельсов
от балласта с целью создания условий для беспрепятственного прохода электро-
магнитных подъемников и рихтующих роликов. Они включают кронштейн 5,
приваренный к ферме машины, два пневмоцилиндра 6, служащие для подъема
(опускания), а также прижима щеток к головкам рельсов, две тяги 7, воспри-
нимающие продольные нагрузки, возникающие при трении щеток о рельсы,
сварную раму 2, на которой размещены тросовые щетки с плужками 1.
Шарнирные соединения между основными частями рельсовых щеток обес-
печивают их автоматическую самоустановку при движении машины по прямым
н кривым участкам железнодорожного пути. Фиксируются щетки относитель-
но головок рельсов ползунами 4, которые приварены к плужкам. В транспорт-
ном положении рельсовые щетки крепятся фиксатором 3. Кран управления
подъемом н опусканием рельсовых щеток расположен с правой стороны маши-
ны.
Подъемио-рихтовочиое устройство (рис. 8.64) предназначено для подъем-
ки, сдвнжки и перекоса пути и включает четыре электромагнита 5, два рих-
тующих ролика 2, установленных в двух балансирах 3, поперечную балку 4,
два гидроцилиндра 8 подъема путевой решетки, гидроцнлиндр сдвига 7, гид-
роцнлиндр раздвижки рихтующих роликов 6, две тяги 1, воспринимающие
продольные силы, возникающие при работе электромагнитов, систему трубо-
проводов гидросистемы н систему трубопроводов пневмосистемы, по которой
подводится воздух для сдува мелкого щебня перед роликами передних электро-
магнитов. Электромагниты трехкатушечные, по конструкции аналогичны элект-
ромагнитам, установленным на 1ЦОМ-Д0. Устройство обеспечивает подъем
путевой решетки, ее перекос до 150 мм и сдвиг до 200 мм. Усилие подъемки пу-
ти составляет 200 кН, а сдвижкн — до 165 кН. Для обеспечения подъемного
усилия электромагнитов в рабочем положении воздушный зазор между голов-
кой рельса н полюсными накладками должен быть в пределах 0,2—0,5 мм. В
транспортном положении устройство крепится к балкам виброплит винтовыми
стяжками.
328
329
Рис. 8.62. Общий вид машины ВПО-ЗОООМ
вид А
Рис. 8.64. Подъемно-рихтовочное устройство
Виброударные уплотнительные плиты. По конструкции подвески к про-
дольной балке, приводу вибратора и кронштейнам виброудариые уплотнитель-
ные плиты ВПО-ЗОООМ аналогичны плитам, примененным на ЩОМ-Д°. Меха-
низм подъема виброплиты состоит из двух вертикальных цилиндров, смонти-
рованных внутри колонны. Каждая телескопическая распорка разведения пли-
ты состоит из гидроцилнндра, один конец которого надет на колонну, а другой
прикреплен к продольной балке. Управление подъемом и сдвигом виброплит
при зарядке и разрядке ручное кнопочное, а при работе в кривых по сдвигу
в горизонтальной плоскости — автоматическое. Это обеспечивает сельсин-
повторитель, связанный с механизмом сдвига подъемно-рихтовочиого устрой-
ства .
Планировщик откосов балластной призмы. Конструктивно он схож с пла-
нировщиком откосов машины ВПО-ЗООО, но подъем, наклон и поворот крыльев
осуществляются гидроцилиидрами.
Горизонтальные щетки (рис. 8.65) предназначены для сметания щебня со
шпал внутрь колеи и состоят из следующих основных узлов: подвижиой рамы
3, кожуха щетки 5, шнекового конвейера 2, привода щетки и конвейера 4, от-
вала 1, направляющих роликов 6.
Щетка состоит из двух секций 7, размещенных по краям. Зона в середине
пути свободна для пропуска троса измерительной системы рихтовки пути. В
каждую секцию входят 12 тросовых блоков, закрепленных на щеточных бара-
банах. Барабаны и ведомая звездочка цепной передачи установлены на гори-
зонтальном валу. Параллельно щетке на валу размещен шнековый конвейер,
состоящий из двух секций с разным направлением шнеков. Он транспортирует
щебень от середины к краям. На этом же валу установлены ведущая звездочка
цепной передачи и червячное колесо приводного червячного редуктора. К ко-
жуху щетки под шнеками прикреплены лотки для транспортировки щебня.
Привод щетки и шнекового конвейера осуществляется от электродвига-
теля, установленного на ее кожухе. Вал электродвигателя через цепную муфту
330
А-А
Рис. 8 65- Горизонтальные щетки
соединен с червяком на валу шнекового конвейера. В средней части пути ще-
бень со шпал удаляется отвалом, который представляет собой удлиненный плу-
жок с роликовой батареей, размещенной по его оси Длина роликовой батареи
такова, что отвал всегда опирается не менее чем на две шпалы. Отвал связан
с кожухом щетки четырьмя серьгами и двумя пружинами. Такая подвеска
обеспечивает постоянный прижим роликовой батареи к шпалам.
Ролики 6 служат ограничителями положения щеток по высоте относитель-
но рельсов В горизонтальной плоскости они определяют положение колеи и
являются направляющими.
Щетки поднимаются и опускаются двумя гидроцилиндрами, установлен-
ными на подвижной раме. Последняя вместе с закрепленными на ней агрегата-
ми может перемещаться поперек пути, т.е. работать в «плавающем» режиме.
Для зарядки горизонтальной щетки в кривых служит ручная винтовая пере-
дача, которую в «плавающем» режиме выключают.
Уплотнители откосов (рис. 8.66) выполнены плавающего типа. Угол на-
клона их рабочих поверхностей устанавливают соответственно заложению от-
косов балластной призмы. Уплотнительная плита 1 состоит нз корпуса н двух
вибраторов 2. Она шарнирно соединена через подвеску 3, верхнюю 5 и нижнюю
4 тяги с фермой машины Гидроцилиндр сдвига 6 и гндроцилиндр подъема 7
через поперечные балки тяг также связывают уплотнитель с фермой машины.
Такая система подъема и сдвига уплотнителя обеспечивает его работу при ши-
рине плеч балластной призмы в пределах 50—450 мм. На всех гидроцилиндрах
установлены гидрозамки 8 для фиксации промежуточных положений и обес-
печения безопасной работы. Подвеска 3 служит для гашения колебаний, пере-
даваемых от вибратора. В качестве амортизатора используется пружина сжа-
тия. Уплотнителями откосов управляют с пультов раздельно.
Вертикальные щетки (рис. 8.67) предназначены для удаления щебня с кон-
цов шпал. Привод щеток 1 осуществляется от электродвигателя 4 через ци-
линдрический редуктор 3. Щетки имеют два фиксированных положения: на-
клонное при работе с железобетонными шпалами и вертикальное — с дере-
вянными Щетки вместе с направляющими роликами 2 установлены на попе-
речной балке, которая четырьмя тягами 5 и двумя гидроцилиндрами 6 связана
Рис. 8.66. Уплотнитель откосов
332
с фермой машины. В транспортном
положении поперечная балка фик-
сируется транспортным запором.
Управление щетками раздельное с
пультов управления.
Гидравлическая система маши-
ны (рис. 8.68) служит для приве-
дения в действие рабочих органов
и обеспечения выполнения вспомо-
гательных операций при работе ма-
шины. Она обеспечивает подъем,
опускание, наклон и поворот кры-
льев щита дозатора; подъем, опус-
кание н поворот крыльев плани-
ровщика; подъем и опускание вер-
тикальных и горизонтальных ще-
ток; подъем, опускание и сдвиг уп-
лотнителей откосов и подъемно-
рихтовочного устройства, а также
раздвижку рихтующих роликов.
Система питания включает три
пластинчатых насоса Hl, Н2,
НЗ общей производительностью
210 л/мин и обеспечивает переме-
щение всех гндроцнлиндров рабо-
чих органов. Насос Н1 питает все
плнт. В эту систему включена аварийная насосная станция с насосом Н4
производительностью 8 л/мин. Насос Н2 питает цилиндры планировщика,
уплотнителя откосов, горизонтальных и вертикальных щеток, а насос НЗ —
гидроцилнндры подъемно-рнхтовочного устройства и рихтующих роликов
При открытии кранов К4—К7 все насосы работают на общую систему, которая
предохраняется от возможного превышения давления предохранительными
клапанами КП1—КП4.
Все цепи питания гидроцилиндров работают по одной схеме, за исключе-
нием цепей питания подъемно-рихтовочного устройства (ПРУ). Рассмотрим цепь
питания цилиндра подъема щита дозатора. Масло от насоса Н1 и обратного
клапана КО1 поступает в напорную магистраль н к электрогидравлическому
распределителю Р1. Прн подаче команды на подъем электрогид равл и чески й
золотник перемещается и пропускает масло на основной золотник, который,
перемещаясь, соединяет рабочую магистраль с силовым цилиндром Ц1 через
гидрозамок Г1, а другую полость цилиндра — со сливом. В обесточенном по-
ложении электромагнита распределителя гндрозамок занимает среднее поло-
жение и клапаны гидрозамка запирают масло в гндроцилнндре, тем самым фик-
сируя его. Питание гидроцилнндров ПРУ осуществляется от насоса НЗ. В
связи с высокой требовательностью к чистоте масла, поступающего на серво-
вентили, установлены фильтры высокого давления Ф1 и Ф2, а краны Кб и К7
перекрываются, отсоединяя насосную станцию с насосом НЗ от общей системы.
Перемещение золотника распределителя Р2 (сервовентиля) зависит от величи-
ны управляющего сигнала на его катушку. Распределитель Р2 включается н
масло через распределительный золотник РЗ поступает в цилиндр Ц2. Когда
управляющий сигнал становится равным нулю, распределитель Р2 выключа-
ется и масло от насоса НЗ не поступает в распределительный золотник РЗ. По-
лости цилиндра Ц2 в это время не соединяются со сливом, поэтому ПРУ ос-
тается в исходном положении, ожидая следующей команды.
333
Рис. 8.68. Схема гидравлической системы
Ниже приведены технические характеристики выправочио-подбивочно-
отделочных машин:
Параметры
ВПО-ЗООО
ВПО-ЗОООМ
Производительность при уплотнении и выправ-
ке, км/ч.................................. до 3
Мощность электростанции при 1500 об/мин,
кВт....................................... 200
Мощность двигателя при 1500 об/мин, кВт . 220
Ход механизма подъема выше уровня головок
рельсов, мм............................... 600
Максимальная величина подъемки пути, мм . 150
Величина сдвига пути (на уровне головок
рельсов), мм................................. ±200
Максимальное усилие, кН, при:
подъемке пути................................. 200
сдвижке »................................. 14,3
Точность выправки пути, мм:
ио уровню.................................
при рихтовке . ....................
Привод рабочих органов ................... электрический
Рабочее давление в гидросистеме, МПа
Мощности электродвигателей виброплит, кВт 2X55
Вынуждающая сила, кН
виброплиты...................................... 200
уплотнителя откосов ........................ 100
Транспортная скорость, км/ч............... до 80
Масса машины, т.............................. 106,5
Обслуживающий персонал, чел...................... 8
до 3
200
220
600
150
±200
200
16,5
±2
±2
электрогид-
равлический
10
2X55
200
60
до 80
94
6
8.7. ОСНОВЫ ЭКСПЛУАТАЦИИ И ОБСЛУЖИВАНИЯ МАШИН
ДЛЯ ВЫПРАВКИ И РИХТОВКИ ПУТИ
8.7.1. Основы эксплуатации и обслуживания
машин ВПР-1200, ВПРС-500, Р-2000
Поддержание машин в состоянии высокой готовности к работе обеспечи-
вается комплексом мероприятий, включающих соблюдение правил эксплуата-
ции, технического обслуживания и планово-предупредительных ремонтов.
При подготовке машин к работе производят внешний осмотр машины;
проверяют исправное состояние ходовых частей, крепление и блокировку под-
бивочных блоков, подъемно-рихтовочного устройства, уплотнителей балласта,
тележек контрольно-измерительной системы, крепление агрегатов силовой
установки и трансмиссии, уровень масла в реверс-раздаточной, раздаточной
коробках н коробке передач, осевых редукторах, компрессорах, в резервуа-
рах для смазки подбивочиых блоков. При необходимости добавляют до нормы
рекомендуемое масло. Смазывают все агрегаты и устройства в соответствии с
картами смазкн соответствующих машин; проверяют наличие топлива в баке,
охлаждающей жидкости н масла в системе двигателя н при необходимости
производят дозаправку. При температуре воздуха ниже -4-5 °C охлаждающую
жидкость предварительно подогревают. Убедившись в нормальном состоянии
электрооборудования, запускают двигатель. После создания давления в глав-
ных резервуарах проверяют действие тормозов, выясняют, иет ли утечки топ-
лива, масла и охлаждающей жидкости во всех соединениях трубопроводов.
335
затем проверяют .на слух работу двигателя и контролируют работу системы
сигнализация и освещения.
Для трогания машины с места машинист подает сигнал, указывающий на-
правление движения, ставит переключатель режимов в положение «транспорт-
ный» и переключатель реверса в положение направления движения. Прн этом
должна загореться контрольная лампочка, указывающая о включении муфты
реверса. Затем отпускают стояночный тормоз и, выжав педаль сцепления, ма-
шинист включает I скорость, медленно опускает педаль сцепления и дает газ.
Для увеличения скорости движения переключают рукоятку управления ко-
робкой передач.
8.7.2. Техническое обслуживание
машин ВПР-1200, ВПРС-500 и Р-2000
Содержание машин в технически исправном состоянни может быть обес-
печено прн условии хорошо организованного и регулярно проводимого тех-
нического обслуживания. По периодичности выполнения и перечню работ тех-
нические обслуживания подразделяются на следующие виды: ежедневное тех-
ническое обслуживание (ЕО) производится ежедневно независимо от наработ-
ки; техническое обслуживание № 1 (ТО-1) — через 10 смен, нлн 15—16 км
подбитого пути, но не более чем через 50 ч работы дизеля; техническое обслу-
живание № 2 (ТО-2) — через 40 смен, илн 60—64 км подбитого пути, но не
более чем через 200 ч работы дизеля; сезонное техническое обслуживание
(СО)—перед началом сезона работ и после его окончания.
В ЕО входят работы, выполняемые при подготовке машины к работе (см.
п. 8.7.1), а также контроль за машиной н ее обслуживание и контролъно-осмот-
ровые работы.
Прн движении к месту работы и при работе машины по выправке и под-
бивке пути необходимо следить за давлением воздуха, масла, исправностью
сигнальных приборов, посторонними шумами, следить за частотой вращения
коленчатого вала дизеля и при отклонении от нормы срочно принимать меры
к обнаружению причин и устранять неисправности Непрерывно (в рабочем
режиме) машина может работать 3 ч. После этого ее необходимо остановить
для осмотра и обслуживания. В перерывах во время работы рекомендуется
проверить и при необходимости подтянуть шарнирные соединения рычагов и
шатунов подбивочных блоков, крепление цилиндров подъема рабочих орга-
нов, нагрев подшипниковых узлов подбивочных блоков и наличие масла в си-
стеме смазки; смазать шатуиные подшипники эксцентрикового вала и верх-
ние подшипники шатунов, крепления узлов и агрегатов машины.
Прн ТО-1, ТО-2, СО выполняются все работы ежедневного обслуживания
и ряд дополнительных более сложных работ.
При ТО-1 проверяют работу системы управления подачей топлива сило-
вой установки, исправность работы муфты сцепления, переключение передач,
состояние тормозных колодок, штоков гидроцилиндров, прнжимиых механиз-
мов измерительной системы, работу самописца. Кроме того, очищают масля-
ные фильтры, проверяют давление в гидроаккумуляторах, а также состояние
аккумуляторных батарей.
При ТО-2 выполняют работу в объеме ТО-1 и, кроме того, снимают с ма-
шины для проверки и ремонта краны машиниста, обратные краны, краны мак-
симального давления, электропневматические вентили; заменяют неисправные
приборы, проверяют герметичность пневмосистемы, амплитуду на концах под-
боек, устраняют люфты, меняют изношенные уплотнения, проверяют чистоту
масла, работу натяжных устройств, электродвигателей, датчиков
336
8.7.3. Основы эксплуатации и обслуживания
машины В ПО-ЗООО
При подготовке к работе начальник машины проверяет готовность участ-
ка пути, в частности, знакомится со сведениями о ширине междупутья, уста-
навливает вылет крыльев дозатора и планировщика откосов. Одновременно
на всем участке отсоединяют от рельсо-шпальной решетки перемычки изоли-
рующих стыков, убирают ящики с приборами автоблокировки, их соединитель-
ные кабели и заземляющие провода опор контактной сети, удаляют за пределы
досягаемости рабочими органами машины запасы материалов верхнего строе-
ния и прочие предметы.
Перед средним и подъемочным ремонтами, выполняемыми без смены пу-
тевой решетки, заменяют негодные и закрепляют ослабевшие шпалы; удаляют
мощение, настил и балласт на переездах.
Для предупреждения угона пути на каждой шпале по обеим рельсовым
нитям устанавливают инвентарные противоугоны.
До закрытия перегона для обеспечения правильной установки и в даль-
нейшем работы машины подготавливают место для ее зарядки. Предпочтитель-
но, чтобы это был прямой участок длиной около 30 м. Отступления в плане,
продольном профиле и по уровню не могут превышать 2—3 мм.
После закрытия перегона для зарядки уплотнительных плит примерно
посередине этого участка отрывают по сторонам пути траншею длиной 4,5—
5 м, шириной 0,8—I м с заходом в средней части под торцы шпал на 0,2 м. Глу-
бина траншеи 0,2—0,25 м ниже подошвы шпал.
Пропускать машину через сортировочные горки и толкать прн маневрах
не разрешается.
При зарядке ВПО-ЗООО машинист н его помощник находятся внизу н вы-
полняют по указаниям начальника машины вспомогательные операции: вы-
ключают рессоры задней ходовой тележкн, проверяют установку электромаг-
нитов на рельсах и наличие в них тока, установку плужка и ножа на дозаторе,
стопорение отдельных механизмов в рабочем положении и т. п.
В процессе работы машины они идут по обе стороны от нее и наблюдают
за работой рабочих органов и качеством ремонта пути.
Подъемку пути на величину, большую 8 см, рекомендуется выполнять за
два прохода машины: первый проход с подъемкой до 8 см в период основных
работ в «окно», а второй с окончательной постановкой пути на проектные от-
метки, когда ведутся отделочные работы под прикрытием очередного «окна».
При транспортировке машины все ее рабочие органы находятся в транс-
портном положении (вписываются в габарит подвижного состава 1-Т), которое
фиксируется конечными выключателями механизмов подъема, сдвига и рас-
крытия всех рабочих органов. Рабочие органы закрепляют на ферме машины
стопорными устройствами (винтовые стяжкн, штыри и т. п.).
При транспортировке машины на ней находится дежурный машинист, ко-
торый следит за состоянием всех рабочих органов, нх транспортных крепле-
ний и машины в целом. Обнаруженные неисправности устраняют. Если на ма-
шине нет навесов, то работа на палубе по устранению неисправностей разре-
шается только иа неэлектрифицированных участках пути.
Готовность машины к транспортировке проверяет комиссия отделения
дороги. После этого составляют акт о ее исправности.
Для машины ВПО-ЗООО предусмотрены техническое обслуживание еже-
сменное, текущий, средний и капитальный ремонты соответственно после вы-
полнения ремонта 60, 240 и 480 км пути. Техническое обслуживание выполня-
ет бригада перед каждым выходом машины на работу. Для содержания маши-
ны в исправном готовом к работе состоянии все ее механизмы, особенно их по-
337
движные сочленения, очищают от пыли, грязи и смазывают. После этого про-
веряют исправность рабочих органов и автоматических устройств, электро-
станции, ходовых частей, сцепных приборов, тормозного оборудования, рес-
сорного подвешивания и стопорных устройств, систем управления рабочими
органами, звуковой и световой сигнализации.
Текущий ремонт проводят в мастерской ПМС с участием бригады, обслу-
живающей машину. Этот вид ТО предусматривает профилактические и регу-
лировочные работы с ремонтом н заменой изношенных и дефектных деталей,
настройку автоматов управления, замену смазки.
Средний ремонт выполняют в депо с участием бригады. При этом проводят
текущий ремонт и, кроме этого, проверяют все ответственные узлы машины с
разборкой и снятием их с машины, с заменой изношенных и дефектных дета-
лей и комплектующего оборудования. Одновременно заменяют смазку во всех
механизмах, регулируют узлы основных н вспомогательных механизмов, ав-
томатические устройства и др.
При капитальном ремонте, выполняемом иа ремонтном заводе, разбирают
все механизмы и автоматы, очищая и промывая их от грязи, коррозии и масла;
заменяют и ремонтируют дефектные детали, узлы и комплектующее оборудо-
вание. После сборки механизмов осуществляется их регулировка и настройка.
Затем машину обкатывают н испытывают под рабочей нагрузкой. Завер-
шающей операцией является окраска машины, нанесение всех надписей и тра-
фаретов.
Электростанцию ремонтируют в соответствии с документацией на нее,
прилагаемой к машине. 1
При работе машины необходимо систематически проверять по контроль-
ным пробкам и масломерам наличие н чистоту масла в ее механизмах и автома-
тах.
Во всех редукторах и реверс-редукторах через 50 ч работы проверяют
уровень масла в картерах, а через 120 ч масло заменяют, предварительно про-
мыв картер керосином.
Во всех силовых редукторах без электромагнитных муфт применяют мас-
ло трансмиссионное ТСп16 (ГОСТ 23652—79), а в реверс-редукторах и редукто-
рах сельсинов-датчнков — масло индустриальное-12 (ГОСТ 20799—75).
Карданные соединения смазывают через каждые 50 ч работы нигролом.
Направляющие и колонны через каждые 10 ч работы смазывают консистент-
ной смазкой УС-2 (ГОСТ 1033—73), предварительно удалив с них грязь, ста-
рую смазку и промыв их керосином.
Ходовые тележки, подпятники смазывают маслом осевым (ГОСТ 610—72),
а буксовые подшипники и челюсти — в соответствии с нормами по уходу за
буксовыми подшипниками грузовых вагонов.
8.7.4. Возможные неисправности машины и их устранение
Машины ВПР-1200, ВПРС-500 и Р-2000
Неисправность Возможные причины Способы устранения
Сцепление пробуксо- вывает 1. Отсутствует свободный ход муфты выключения сцеп- ления 2. Износ фрикционных на- кладок ведомого диска Отрегулировать свободный ход муфты выключения сцеп- ления Заменить фрикционные на- кладки или ведомые диски в сборе и провести полную регу- лировку сцепления
338
Окончание
Неисправность
Возможные причины
Способы устранения
Неполное выключение
сцепления
Повышенный шум при
работе коробки передач
Невключение или ту-
гое включение передач
Самовключение пере-
дач
Повышенный нагрев
реверс-раздаточной ко-
робки
Подбивочные блоки не
поднимаются в транс-
портное положение
3 Сожжены или пропитаны
маслом фрикционные накладки
ведомого диска
1. Механизм выключения
сцепления не обеспечивает
полного хода муфты выключе-
ния
2. Коробление нажимного
диска
3. Большой зазор между
упорным кольцом оттяжных
рычагов и нажимным подшип-
ником
Перекос осей первичного и
вторичного валов из-за ослаб-
ления затяжки болтов крепле-
ния картера сцепления к кар-
теру маховика и болтов креп-
ления задней опоры коробки
передач
1. Износ конусных колец
синхронизаторов
2. Поломка обоймы синхро-
низатора
Износ или скол зубчатых
муфт кареток синхронизато-
ров и шестерен
Недостаточное количество
масла
1. Отказал в работе двига-
тель
2. Отказали гидроцилиндры
подъема блоков
Заменить фрикционные на-
кладки или ведомые диски в
сборе и провести полную регу-
лировку сцепления
Проверить регулировку и
установку педали пневмоуси-
лителей механизма выключе-
ния
Заменить нажимной диск
Отрегулировать свободный
ход муфты выключения сцеп-
ления
Проверить затяжку и при
необходимости подтянуть бол-
ты крепления картера сцепле-
ния к картеру маховика и бол-
ты крепления задней опоры ко-
робки передач
Заменить неисправные синх-
ронизаторы
Заменить неисправный синх-
ронизатор
Заменить неисправные дета-
ли
Долить масло рекоменду-
емой марки
Отвернуть шланги, по кото-
рым подходит масло к гидро-
цилиндрам и поднять блоки
домкратами
Машина ВПО-ЗООО
Неисправность Возможные причины Способы устранения
Заедание телескопической распорки дозатора Нарушено торцовое за- крепление ходового винта Восстановить крепление
Заедание ходовой гайки при- Резьба ходового винта Очистить, исправить, про-
вода подъема или наклона повреждена или забита гря- мыть и вновь смазать ходо-
крыла-планировщика ЗЬЮ вой винт
Стук в подшипниках вибра- тора или электродвигателя привода вибратора Повреждение подшипни- ка Заменить подшипник
Поломка рессор подвески плит Трещины в коренных ли- стах Заменить коренные листы
Остановка транспортера механизма обметания пути Заедание ленты Очистить поверхность ленты от заклинивших ее кусков щебня
Не работает привод подъ- ема измерительного ролика Резьба ходовой гайки сорвана Гайку заменить новой
Измерительный ролик не Загрязнение подшипни- Подшипники очистить,
вращается ков ролика промыть керосином и сма- зать
339
8.8. ОБЩИЕ ТРЕБОВАНИЯ ПО ТЕХНИКЕ БЕЗОПАСНОСТИ
ПРИ ОБСЛУЖИВАНИИ МАШИН ДЛЯ ВЫПРАВКИ, ПОДБИВКИ ПУТИ,
УПЛОТНЕНИЯ И ОТДЕЛКИ БАЛЛАСТНОЙ ПРИЗМЫ
При обслуживании машин необходимо соблюдение следующих правил;
нельзя допускать течей топлива и масла из баков и в соединениях трубопро-
водов; во время стоянки и при запуске двигателя машина должна находиться
в заторможенном состоянии; перед запуском двигателя все рабочие органы и
измерительные тележки следует застопорить, при этом людям нельзя нахо-
диться под машиной; не допускается производить осмотр, крепление, регули-
ровку н ремонт двигателя, компрессоров и других агрегатов с вращающимися
или движущимися частями при их работе; запрещается хранение и перевозка
на машинах легковоспламеняющихся веществ и применение их для протирки
машин.
При эксплуатации машин запрещается пользоваться открытым огнем на
машине и рядом с ней; сходить и садиться на ходу машины, устранять неис-
правности пневматических и гидравлических устройств, находящихся под
давлением; подниматься на крышу машины на электрифицированном участке;
ремонтировать и устранять неисправности рабочих органов, находящихся в
поднятом и незастопоренном состоянии.
Выполнение путевых работ впереди и сзади машины разрешается на рас-
стоянии не ближе 50 м (для ВПО-ЗООО). Не допускается работа машин в тем-
ное время суток прн отсутствии необходимого освещения, во время сильного
тумана или при грозе. Машинисту, помощнику, операторам и мастерам пути
запрещено находиться в междупутье рядом с машиной.
Перед началом работ на вторых путях бригада, обслуживающая машину
ВПО-ЗООО, должна узнать у руководителя работ наибольший вылет крыльев
дозатора и планировщика. При зарядке и разрядке последних соседние пути
следует ограждать сигналами остановки. Для проверки заземляющих устройств
машины ВПО-ЗООО необходимо измерять в них сопротивления не реже четырех
раз в год. Изоляцию электрооборудования рекомендуется осматривать не реже
одного раза в неделю и проверять мегаомметром не реже одного раза в месяц.
Запрещается приступать к работе при наличии неисправностей в машине.
340
9. ГИДРАВЛИЧЕСКАЯ ПЕРЕДАЧА
9.1. ОБЩИЕ СВЕДЕНИЯ
Силовая передача, предназначенная для передачи мощности от двигателя
тяговой единицы к колесным парам, должна обеспечивать максимальную вели-
чину силы тяги в момент трогания с места, плавное изменение силы тяги от
нуля до максимума при переднем и заднем ходах, полное использование мощ-
ности двигателя на всем диапазоне скоростей движения локомотива. Сущест-
вует три вида передач: механическая, электрическая и гидравлическая.
В механической передаче крутящий момент от ведущего вала передается
к колесным парам посредством валов, зубчатых колес и фрикционной муфты
чисто механическим путем. Такая передача установлена на автодрезине АГМу.
Электрическая передача включает генератор, приводимый в действие ди-
зелем, и тяговые электродвигатели, соединенные с движущимися колесными
парами. Механическая энергия двигателя преобразуется в генераторе в элек-
трическую, а затем электродвигателями вновь в механическую на колесных
парах. К машинам с электрической передачей относятся путеукладчики
В гидравлической передаче крутящий момент от ведущего вала передается
на колесные пары без жестких связей в результате взаимодействия лопастных
систем с рабочей жидкостью.
В последние годы на автодрезинах применяют гидравлические передачи;
они допускают перегрузки и пригодны для передачи больших мощностей; обес-
печивают автоматическое бесступенчатое изменение тягового усилия и работу
двигателя в наиболее выгодных условиях; бесшумны в работе и экономичны.
Однако оии имеют переменный к. п. д. по режиму работы, требуют дополни-
тельных устройств для охлаждения рабочей жидкости. Гидропередачи пред-
ставляют собой комплекс гидравлических аппаратов в сочетании с одно- или
многоступенчатыми передачами. По принципиальному устройству гидроаппа-
ратуры оии подразделяются на гидромуфты и гидротрансформаторы.
Гидравлическая муфта — простейший вид гидропередачи, обеспечивает
передачу энергии с ведущего вала на ведомый без изменения величины крутя-
щего момента. Гидромуфта (рис. 9.1, а) состоит из насосного колеса Д связан-
ного с валом I двигателя, и турбинного колеса 2, укрепленного неподвижно на
валу II, который соединен с ходовой частью. Оба колеса в гидромуфте имеют
лопастную систему. При вращении двигателем насосного колеса масло, нахо-
дящееся в полости между лопатками, увлекается им и под действием центро-
бежной силы перемещается от центра по каналам между лопатками и
выходит из него с запасом кинетической энергии. Попадая на лопатки тур-
биииого колеса, жидкость заставляет его вращаться в ту же сторону, что и на-
сосное колесо. Таким образом, в гидромуфте имеются только два рабочих эле-
мента, связанных жидкостью, а так как согласно законам механики всякому
действию соответствует равное ему противодействие, то в гидромуфте всегда
имеется равенство моментов на насосном Мн и турбинном Мт колесах. Такая
передача не может быть использована для увеличения крутящего момента на
ведомом валу.
341
Рис 9.1 Схемы гидропередач:
а — гидромуфта б — гидротрансформатор; в —
комплексный гидротрансформатор
Как видно из графика (на рисун-
ке справа), значения к. п. д. и вели-
чины моментов М зависят от переда-
точного отношения i — nT/nH; значе-
ния к. п. д. гидромуфты изменяются
по закону прямой линии.
Максимальное значение дости-
гается при наибольшем передаточном
отношении и составляет 0,97—0,98, а
минимальное — при неподвижном по-
ложении насосного и турбинного ко-
лес. Значения крутящих моментов
при увеличении передаточного отно-
шения постепенно уменьшаются.
Гидротрансформатор. Вторым ти-
пом гидропередач является гидрав-
лический трансформатор, передаю-
щий энергию с ведущего вала на ве-
домый с преобразованием величины
крутящего момента в зависимости от
числа оборотов ведомого вала.
Гидротрансформатор (рис. 9.1, б)
состоит из трех колес с лопатками:
насосного колеса 3, вращаемого дви-
гателем от вала /, турбинного колеса
2, связанного валом II с ходовой ча-
стью машины, и колеса 1, закреплен-
ного неподвижно и при работе не вра-
щающегося (реактор). Внутри все ко-
леса образуют замкнутую рабочую
полость, в которой масло последова-
тельно поступает от насосного коле-
са к турбинному, затем в реактор, да-
лее цикл повторяется. При этом на
турбинном колесе создается вращающий момент, в 3—5 раз превышающий
момент на насосном колесе. Процесс в гидротрансформаторе происходит
автоматически, т. е. при невращающемся или медленно вращающемся турбин-
ном колесе (трогание с места) усилие воздействия масла на лопатки турбинно-
го колеса максимальное, транспортная единица развивает максимальную си-
лу тяги.
По мере увеличения скорости вращения турбинного колеса (разгон транс-
портной единицы) усилие воздействия масла на его лопатки уменьшается, ло-
патки как бы убегают от потока жидкости и поэтому крутящий момент на тур-
бинном колесе снижается Если после этого число оборотов турбинного колеса
снова уменьшится (транспортная единица замедлит скорость), то сила удара
масла о лопатки этого колеса снова увеличится, и т. д Из графика (на рисунке
справа) видно, что значения крутящего момента на насосном колесе Мп оста-
ются постоянными, тогда как значения крутящих моментов турбинного колеса
Л4Т постепенно уменьшаются. Значения к. п. д. гидротрансформатора при
трогании с места и при увеличении скорости движения дрезины остаются не-
большими, а зиачеиия к. п. д достигают максимальной величины (0,85—0,87)
при средних значениях передаточного отношения.
Желание совместить ценные качества гидротрансформатора и гидромуфты
в одном агрегате привело к созданию комплексных гидротрансформаторов.
342
Комплексный гидротрансформатор (рис. 9.1, в) имеет насосное 3 и турбин-
ное 2 колеса и два направляющих подвижных аппарата 1 и 4, которые могут
вращаться в одну сторону с турбинным колесом или заклиниваться на ме-
ханизмах свободного хода 5 и 6 (автологах). Механизм свободного хода соеди-
няет направляющий аппарат с корпусом гидротрансформатора.
В начале работы такого гидротрансформатора момент в направляющем
аппарате действует в обратном направлении по сравнению с моментом на тур-
бинном колесе, поэтому оба направляющих аппарата неподвижны: комплекс-
ный гидротрансформатор работает как простой одноступенчатый гидротранс-
форматор, развивая при этом максимальную силу тяги. При передаточном от-
ношении, равном 0,65, изменяется момент на первом направляющем аппарате
/, и он начинает вращаться вместе с турбинным колесом. При достижении пе-
редаточного отношения, равного 0,85, освобождается второй направляющий
аппарат 4, и гидротрансформатор переходит на работу в режиме гидромуфты.
Характеристики гидромуфты и гидротрансформатора (см. рис. 9.1, а, б)
показывают, что области высоких значений к. п. д. (свыше 0,8) ограничены
небольшими интервалами передаточных отношений. В комплексном одноступен-
чатом гидротрансформаторе, где совмещены характеристики простого гидро-
трансформатора и гидромуфты, общий интервал выгодных передаточных от-
ношений значительно расширяется, что видно из графика, приведенного на
рис. 9.1,в. Следовательно, при большом интервале передаточных отношений
гидротрансформатора значения к. п. д. остаются все время высокими, т. е.
передача работает экономично.
9.2. УНИФИЦИРОВАННАЯ ГИДРОПЕРЕДАЧА
Конструкция и принцип действия комплексного трансформатора исполь-
зованы в уиифицироваииой гидропередаче мощностью 169 кВт, установленной
иа автодрезине ДГКу. Такая гидропередача состоит из трех частей: комплекс-
ного гидротрансформатора, коробки перемены передач (КПП) и системы пи-
тания, управления и смазки. Комплексный гидротрансформатор уже рассмот-
рен, поэтому ниже приводится описание остальных элементов унифицированной
гидропередачи.
Коробка перемены передач (рис. 9.2) двухскоростиая, реверсивная, двух-
режимная с принудительной смазкой подшипников, шестерен и фрикционных
дисков по принципу сухого картера. КПП состоит из корпуса /, в котором раз-
мещены механизм фрикционных муфт переключения передач, механизм ревер-
са, а также механизмы маневрового и поездного режимов.
Механизм фрикционных муфт переключения передач служит для разоб-
щения вала дизеля от колесных пар, что необходимо при переключении ревер-
сивного и режимного механизмов при работающем дизеле, а также при пере-
ключении ступеней скорости при движении машины. Ведущий вал 3 КПП по-
лучает вращение от гидротрансформатора посредством зубчатой муфты 4. На
среднюю часть вала напрессована ступица с двумя соединенными между собой
плунжерами 8 и 9, которые с диском ступицы образуют две рабочие камеры
масляных бустеров. В каждой камере бустера по окружности установлены 10
пружинных упоров, удерживающих их в среднем нейтральном положении.
Плунжеры по отношению к ступице имеют только поступательное перемещение,
т. е. в сторону фрикционных дисков I ступени скорости (влево) или в сторону
фрикционных дисков II ступени скорости (вправо).
На ведущем валу по обе стороны от ступицы на подшипниках качения ус-
тановлены две шестерни 2 и 11 различных диаметров с колоколами 5 и 10.
Внутренняя часть каждого колокола имеет шлицевую поверхность для ведо-
343
мых дисков 7. Каждый диск с обеих
сторон покрыт металлокерамиче-
ским сплавом для увеличения коэф-
фициента трения. Ступица с обеих
сторон также имеет шлицы для ве-
дущих дисков 6 без обкладок.
Работа фрикционных муфт про-
исходит за счет давления масла,
создаваемого насосом и подводимым
по каналу а в камеру бустера фрик-
ционной муфты I ступени скорости
или по каналу б в камеру бустера
фрикционной муфты II ступени
скорости. Фрикционные муфты име-
ют два положения: нейтральное и
рабочее. При нейтральном положе-
нии обе камеры бустеров свободны
от масла, а плунжеры возвратными
пружинами удерживаются в сред-
нем положении. При включении I
ступени скорости полость камеры
бустера соответствующей муфты за-
полняется маслом от насоса с дав-
лением до 1,2 МПа. Плунжер 8 пе-
ремещается влево, нажимая на дис-
ки 7 фрикционной муфты, в ре-
зультате чего начинает вращаться
колокол 5 ведущей 2 шестерни I
ступени скорости. Происходит тро-
гание машины с места и плавное на-
растание скорости. Включение муф-
Рис. 9.2. Коробка перемецы передач ты II ступени скорости происходит
в той же последовательности. При
этом камера бустера муфты I ступени скорости через золотниковую коробку
сообщается со сливом в масляный бак. Переключение I ступени скорости на
II ступень и обратно происходит автоматически на ходу транспортной еди-
ницы и контролируется соответствующими манометрами.
Механизм реверса КПП обеспечивает движение машины передним или
задним ходом и состоит из реверсивного 15 и промежуточного 17 валов, шесте-
рен 28—29—13—14—27—16, зубчатой двусторонней реверсивной муфты 12
и устройства для переключения муфты реверса. Реверсивный вал получает
вращение от ведущего вала посредством шестерен 14 и 28. Зубчатая муфта,
посаженная на шлицевой части вала, имеет три положения: среднее (нейтраль-
ное), два крайних, включенных на передний или задний ход. Реверсирование
осуществляется за счет того, что между валами 15 и 19 с правой и левой их сто-
рон находится различное количество шестерен. Кинематическая цепочка шес-
терен 13—16—27—26 обеспечивает движение машины вперед, а кинематичес-
кая цепочка шестерен 29—26 — назад.
Механизм поездного и маневрового режимов имеет два вала: промежуточ-
ный 19 и ведомый 23, причем на каждом из них насажено по две шестерни. Ше-
стерни 18 и 26 промежуточного вала укреплены на шпонках, а шестерни 20 и 25
ведомого посажены соответственно на шариковом и роликовом подшипниках.
На средней шлицевой части вала 23 располагается двусторонняя зубчатая
муфта 21 переключения режимов, снабженная так же, как и муфта реверса,
344
Рис. 9.3. Система питания, управления и смазки
устройством для переключения. Среднее положение муфты нейтральное, пра-
вое обеспечивает маневровый режим, а левое —поездной, На консольных час-
тях вала 23 на шлицах посажены фланцы 22 и 24 для передачи вращения кар-
данным валам осевых редукторов.
Для предохранения муфты реверса от преждевременного износа рекомен-
дуется включение в положения «Вперед» или «Назад» до запуска двигателя.
Перевод муфты реверса из положения «Вперед» в положение «Назад» и обратно
допускается при работающем двигателе только на стоянке машины. Пере-
ключение муфты режимов разрешается лишь при полностью остановленном
двигателе.
Система питания, управления и смазки (рис. 9.3) предназначена для не-
прерывного питания маслом круга циркуляции гидротрансформатора, вклю-
чения и автоматического переключения ступеней скорости КПП, а также для
подвода смазки к трущимся частям и подшипникам гидропередачи. Она вклю-
чает бак для масла 9, блок насосов 12 (Н) с питательной и откачивающей сек-
циями, два импульсных насоса И и 14, клапанную 3 (РК) и золотниковую 1
(РЗ) коробки, блок клапанов 15 плавного включения муфт ступеней скорости
КПП, теплообменник 18 и сеть маслопроводов. Для очистки масла от механи-
ческих примесей предусмотрены инерционные 6, магнитные 13 и сетчатые 12
и 7 (Ф) фильтры. Циркуляция масла по маслопроводам питания и смазки соз-
дается блоком насосов, а в системе управления — первичным и вторичным им-
пульсными насосами. Из бака 9 масло самотеком поступает в питательную сек-
цию блока насосов 12 и через инерционный фильтр 6 направляется в клапан-
ную коробку 3, из которой один поток масла поступает в гидротрансформатор,
а другой через сетчатый фильтр 2—в золотниковую коробку для питаиия по-
лостей плунжеров фрикционных муфт КПП. Из гидротрансформатора масло
идет в теплообменник 18 (АТ) для его охлаждения водой, циркулирующей в
системе охлаждения дизеля, а затем через клапанную коробку 3 сливается в
бак. Для предупреждения повышения давления в теплообменнике установлен
кран-манипулятор 16 (К) с перепускным клапаном. При давлении более
0,3 МПа часть масла, минуя теплообменник, через перепускной клапан посту-
пает в бак. От маслопровода слива масла в бак через дроссель 17 часть масла
отбирается на принудительную смазку трущихся частей редуктора, гидро-
трансформатора и КПП. Масло, вытекающее через неплотности из круга цир-
куляции гидротрансформатора и полостей фрикционных муфт, собирается в
нижней части корпуса, откуда через сетчатый фильтр с магнитным сердечни-
ком нижним блокам—насосом 12 подается в бак. Дистанционные манометры
5 (МН) и термометр 4 (Т) с датчиками в различных частях системы питания.,
управления и смазки контролируют температуру и давление масла. Краны 8
разобщают бак от маслопроводов при выключении гидропередачи в период
длительных стоянок машин. На маслопроводах установлены датчики 10 для
присоединения манометров при регулировке.
346
10. ТРАНСПОРТНЫЕ СРЕДСТВА
При ремонте и эксплуатации железнодорожного пути новые материалы
верхнего строения пути доставляют к месту их укладки, а старые убирают с
перегонов и станций на звеносборочные базы или на второстепенные направ-
ления. Перевозить приходится также электростанции, инструменты, механиз-
мы, горюче-смазочные материалы. Осуществляется большой объем маневровых
работ на путях дистанций пути и ПМС, а также доставка путевых бригад на
перегон. Для выполнения этих работ предназначены транспортные средства:
грузовые автодрезины АГМу, ДГКУ, служебные дрезины АС-1А, мотодрезины
СМ-4 и ТД-5М и путеремонтные летучки различных типов.
10.1. ГРУЗОВЫЕ АВТОДРЕЗИНЫ
10.1.1. Грузовая автодрезина АГМу
Автодрезину используют для погрузки, перевозки и выгрузки материалов
верхнего строения пути. Автодрезина (рис. 10.1) смонтирована на базе двухос-
ной специальной платформы. Рама 14 платформы с бортами 13 через рессорное
подвешивание 12 и роликовые буксы 7 опирается на две ведущие колесные па-
ры 8. Осевая формула дрезины 0-2-0, т. е. она снабжена только двумя ведущими
осями, бегунковых и поддерживающих осей на ней нет. Для разгрузки рессор
при погрузочных работах над ними расположены винтовые домкраты. На на-
стиле рамы установлены двигатель типа КАЗ-120 мощностью 70 кВт, кабина
10 и пульт управления. От двигателя через коробку передач, реверс 9, кар-
данные валы 11 и осевые редукторы приводятся во вращение обе колесные па-
ры 8. Сзади кабины расположен полноповоротный кран грузоподъемностью
1 т. На его неподвижной колонне 4 на подшипниках надета стрела 2 с грузовой
тележкой 1. Для подъема груза предназначена грузовая лебедка 5, приводимая
во вращение двигателем, а для изменения вылета стрелы — тяговая лебедка 3.
Поворот стрелы осуществляется канатом вручную. Кабина и кран располо-
жены так, что с боков платформы остается место для укладки рельсов. С обеих
сторон кабины есть площадки для складирования перевозимых автодрезиной
грузов. Автодрезина оборудована тормозной системой. При неработающем
двигателе торможение осуществляется ручным способом, а при движении —
пневмоприводом. В обоих случаях обеспечивается двустороннее торможение
обеих колесных пар посредством рычажной тормозной системы 6.
Кинематическая схема автодрезины приведена на рис. 10.2. Вращение
от коленчатого вала 1 двигателя через муфту сцепления 2 и коробку перемены
передач 3 передается соединительной муфте 4, ведущему валу реверса 5 и далее
на барабан 7 механизма подъема груза краиа или на обе ведущие колесные па-
ры. В первом случае от ведущего вала реверса вращение передается шестер-
не 8, вводимой в зацепление с венцом 6 барабана, во втором — от ведомого
347
348
Рис. 10.1. Автодрезина грузовая АГМл
Рис. 10 2. Кинематическая схема автодрезины
вала реверса — на карданные валы 9, конические осевые редукторы 10 и ко-
лесные пары.
Реверс (рис. 10.3) предназначен для изменения направления движения дре-
зины. Он имеет корпус /, опирающийся на раму дрезины с расположенными на
шарикоподшипниках тремя валами: ведущим 5, промежуточным 9 и ведо-
мым 2. f
Со стороны двигателя на валу 5 укреплена звездочка 3 цепной муфты, а
с противоположной на скользящей шпонке посажена шестерня 7. По средней
части вала движется двойная шестерня блока 4. На промежуточном валу не-
подвижно укреплены шестерни 8 и 10 у а на ведомом—зубчатое колесо 6. На
шлицах вала 2 закреплены также карданные вилки. Для изменения положения
Рис. 10.3. Реверс автодрезины
349
Рис. 10.4. Кран дрезины
блока шестерен 4 и 7 в корпусе реверса установлены два валика 12 с вилками
11. Валики устроены так, что не допускают включения одновременно обеих
шестерен. При работе одной из этих шестерен другая находится в нейтральном
положении, и прежде чем включить какую-либо из иих, надо обе шестерни по-
ставить в нейтральное положение, а затем осуществить включение. Двойная
шестерня 4 имеет три положения: первое нейтральное, при котором она не за-
цепляется ни с одной из шестерен реверса (дрезина не движется); второе, когда
шестерня введена в зацепление с колесом 6 ведомого вала (дрезнна перемеща-
ется вперед); третье, при котором левая шестерня 4 блока введена в зацепле-
ние с шестерней 8 промежуточного вала, который, получая вращение, передает
его через шестерню 10 колесу 6 ведомого вала (дрезииа движется назад). Ше-
стерня 7 служит для передачи вращения зубчатому венцу лебедки подъема
груза крана. Она имеет два положения: включенное (кран работает) и выклю-
ченное (кран не работает). '
Кран дрезины (рис. 10.4) состоит из колонны 1 коробчатого сечения, ук-
репленной на раме платформы 2 и поддерживаемой двумя подкосами 3, и стре-
лы 4, надетой на цилиндрическую часть колонны. Стрела выполнена из пово-
Рис. 10.5. Тяговая лебедка
350
ротной колонки, двух горизонтальных швеллеров и поддерживающих тяг 5.
По верхним полкам швеллеров перемещается грузовая тележка 6 Подъем гру-
за краном осуществляется лебедкой 10 и обоймой 7 с крюком, а изменение вы-
лета груза — тяговой лебедкой 9. Для направления грузового каната 8 на
среднюю часть каждой оси тележки 6 посажено по одному блоку. Длина хода
тележки 6 по швеллерам стрелы ограничена упорами. Вылет крана изменя-
ется от 1,2 до 4,5 м.
Тяговая лебедка (рис. 10.5) размещена у основания стрелы и
состоит нз тягового колеса 1, огибаемого бесконечной калиброванной цепью,
двух валов 2 и 3, соединенных между собой открытой цилиндрической переда-
чей 4, и барабана 5 с канавками. Оба конца тягового каната закреплены иа ра-
ме тележки; с одной стороны канат огибает натяжной блок 6, а с другой намо-
тай на барабан. При работе лебедки число витков каната иа барабане остается,
постоянным. Для передвижения тележки необходимо приложить усилие к
цепи тягового колеса 1.
Грузовая лебедка (рнс. 10.6) предназначена для поднятия и
опускания груза. Грузовой каиат 8 (см. рис. 10.4) одним концом крепится на
барабане лебедки 10, а другим — иа конце стрелы. При этом он огибает на-
правляющие блоки стрелы, тележку и блок обоймы 7.
Лебедка размещена внутри колонны. Ее корпус (см. рис. 10.6) прикреплен
болтами'к кронштейну платформы дрезины. Она состоит из барабана 2 с зуб-
чатым венцом 1, оси /5, неподвижно закрепленной на раме 7 лебедки, и тор-
моза автомобильного типа. Тормоз лебедки двухколодочный, грузовой, нор-
мально замкнутый с ручным управлением и состоит из двух колодок 4, установ-
ленных на эксцентриковых осях внутри барабана и стягиваемых пружиной 5.
Со стороны, противоположной осям, между колодками размещен кулак 3,
жестко связанный с рычагом 6. К другому концу этого рычага подвешен груз
10. Под действием веса груза кулак разжимает колодки, прижимая их к стен-
кам барабана, вследствие чего возникает сила трения, препятствующая про-
Рис. 10 6. Грузовая лебедка
351
извольному поворачиванию барабана. Этим поднимаемый дрезиной груз удер-
живается на заданной высоте. Для растормаживания тормоза водитель дре-
зины рычагом 12 через тяги 8 и 9 поднимает груз 10 и пружина 5 отводит
колодки 4 от барабана. Для подъема груза шестерня 14 рычагом 11 и тягой 15
вводится в зацепление с зубчатым венцом барабана, а тормоз растормаживает-
ся. Груз поднимают на малых оборотах двигателя и первой скорости. Для
опускания груза предельно допустимого веса включают заднюю скорость ко-
робки передач, а грузы небольшого веса опускают на режиме торможения.
Тормозная система {рнс. 10.7) предназначена для остановки поезда, сни-
жения скорости и удержания его на стоянке. Система состоит из тормозных
колодок и рычажной передачи и приводится в действие от двух независимых
приводов: пневматического и ручного. Прн пневматическом приводе первона-
чальное усилие создается тормозным цилиндром 7, а при ручном —усилием
водителя через штурвал /, винтовую передачу 2—3 и тягу 4 передается трех-
плечему рычагу 6, укрепленному на валу 5. Независимо от способа торможения
поступательное движение получает продольная тяга 8, передающая его иа всю
систему. Движение тяги влево соответствует торможению дрезниы, а вправо —
отпуску тормозов.
На рисунке показана последовательность затормаживания колес правой
колесной пары (оси всех колес условно повернуты на угол 90°). Точками 0г,
02, 03 и т. д. обозначены мгновенные центры поворота соответствующих ры-
чагов, а штрих пункта ром — изменение положения этих рычагов. Сжатый
воздух поступает в тормозной цилиндр 7 и, воздействуя на поршень, застав-
ляет рычаг 6 повернуться иа валу 5. Тяга 8 получает движение влево (по стрел-
ке Л), при этом двуплечий рычаг 9 поворачивается относительно точки в ту
же сторону. В результате серьга 10, двуплечий рычаг 11 и обе тяги 12 движут-
ся влево и поворачивают подвески 18 относительно точки 02. Колодки 18 обоих
колес правой колесной пары прижимаются к бандажам колес 16 и становятся
мгновенными центрами поворотов 03 подвесок 17. Присоединенные к иим тяги
13 подтягивают подвески 14 с тормозными колодками 15 к колесной паре, при
этом подвески 17 поворачиваются относительно опор Происходит затор-
маживание колес с обратной стороны колодками 15. В этот момент вся рычаж-
ная система правой колесной пары находится в состоянии покоя. Но так как
тяга 8 еще продолжает движение влево, то рычаг 9, поворачиваясь уже отно-
сительно точки 05, приводит в движение вправо тягу 19 (по стрелке Б). Таким
же образом происходит затормаживание левой колесной пары. Ход поршня
тормозного цилнидра определяет величины хода тяг, рычагов и тормозных ко-
лодок.
Для регулировки отхода тормозных колодок от колес тяги S и 19 рычажной
системы снабжены стяжными муфтами. При износе тормозных колодок в сред-
Рис. 10.7. Схема тормозной системы
нем сечении до толщины менее
25 мм их надо заменять. Нельзя
допускать движения затормо-
женной дрезииы «юзом», так как
при этом уменьшается эффект
торможения, а на колесах могут
образовываться скользуны, в ре-
зультате чего они выходят из
строя и портят рельсы. Наибо-
лее эффективное торможение до-
стигается при полном нажатии
тормозных колок в начале тор-
можения с постепенным умень-
шением его в конце. При отпус-
352
ке тормоза, под действием пружины тор-
мозного цилиндра, колодки отходят от
колес.
Воздухопровод (рис. 10.8) включает
в себя тормозное сигнальное устрой-
ство и пневматические стеклоочистите-
ли дрезииы. Компрессор 1 через фильтр-
водомаслоотделитель 2 подает сжатый
воздух по трубопроводу к двум воздуш-
ным резервуарам: сигнальному 11 и тор-
мозному 10. Давление воздуха в ма-
гистрали 0,35—0,4 МПа. Магистрали
резервуаров разделены обратным шари-
ковым клапаном а, установленным со
стороны тормозного воздушного резер- Рис 10 8. Схема воздухопровода
вуара внутри клапанной коробки 5.
Его назначение—не пропускать воздух
из тормозной магистрали в магистраль сигнала, откуда он может стравиться
при продолжительном пользовании сигналом. На общей магистрали в клапан-
ной коробке поставлен также предохранительный клапаи б для выпуска воз-
духа при повышении давления сверх установленного, т е 0,4 МПа. Воздушная
магистраль сигнала состоит из резервуара 11, трубопровода 3 клапана б и зву-
кового сигнала 4. Для подачи сигнала водитель дрезииы должен йогой нажать
на педаль в. Этим преодолевается сопротивление пружины предохранительного
клапана и сжатый воздух из резервуара 11 подается к звуковому сигналу.
К магистрали сигнала подключен также трубопровод стеклоочистителей 12. Тор-
мозная магистраль имеет следующую аппаратуру и оборудование: обратный
клапан а, резервуар 10, два манометра, один из которых 6 показывает давле-
ние в тормозной сети, а другой 8 в тормозном цилиндре 9, тормозной кран
7 и фильтр воздухопровода. На рис. 10.8 применены обозначения: КМ —
компрессор; ВД — фильтр-водомаслоотделитель; ТФ — звуковой сигнал;
РК — клапанная коробка; PC — резервуар; МН — манометр; ТК — тор-
мозной край; Ц — цилиндр.
Тормозной кран имеет три положения ручки; торможение, перекрыша и
отпуск. Он расположен в кабине управления дрезиной. При торможении руч-
ку крана необходимо повернуть вправо. В крайнем правом положении ручки
давление в тормозном цилиндре максимальное. При отпуске тормоза после
полного торможения давление в тормозном цилиндре понижается до атмосфер-
ного, при переводе ручкн влево происходит полный отпуск тормоза. Шток тор-
мозного цилиндра возвращается в исходное положение пружиной. При поло-
жении ручки в позиции «Перекрыша» давление воздуха в тормозном цилиндре
остается постоянным. Основным видом привода тормозной системы является
пневматический. При длительной стоянке заторможенной дрезины пользу-
ются ручным приводом, отпустив предварительно пневматический. Торможе-
ние во время движения осуществляется поворотом ручки тормозного крана, а
на стоянке — поворотом ручного штурвала.
В последнее время автодрезина АГМУ подверглась модернизации. Двига-
тель 3 (рис. 10.9), помимо привода колесных пар 5 (через реверс 2, карданные
валы и осевые редукторы 4), посредством клиноремеиион передачи приводит
в действие генератор 1 переменного тока, питающий током электродвигатели
крановых механизмов: подъема груза 9, изменения вылета стрелы 7 и поворо-
та 6. Как видно по кинематической схеме, механизм подъема груза представляет
собой электролебедку, состоящую из электродвигателя, муфты с тормозом,
двухступенчатого цилиндрического редуктора и барабана 10, на который иама-
12 Зак 4 7
353
Рис 10 9. Кинематическая схема модернизированной дрезины АГМу
тывается грузовой канат 11. Грузоподъемность крана с 1 т увеличена до 1,8 т.
Механизм изменения вылета стрелы состоит из электродвигателя, муфты с ко-
лодочным тормозом, червячного редуктора, открытой цепной передачи и ба-
рабана 8, огибаемого канатом 12. Оба конца последнего закреплены на раме
грузовой тележки 13.
Механизм поворота состоит из электродвигателя, муфты с колодочным тор-
мозом, червячного редуктора и открытой конической передачи. Зубчатое ко-
лесо выполнено неподвижным, а шестерня имеет возможность, обкатываясь
по нему, поворачивать стрелу крана.
Описанный выше край может работать с электромагнитной шайбой, по-
стоянный ток к которой поступает от выпрямителя из трех полупроводниковых
диодов.
10.1.2. Грузовая автодрезина ДГКУ (ДГКу-5)
Автодрезина предназначена для тех же работ, что и АГМУ. Кроме того,
дрезина этого типа может снабжать потребителей электроэнергией (до 50 кВт).
По конструкции она более совершенная: грузоподъемность крана увеличена
до 3,5 т; все механизмы крана имеют электромеханический привод; применена
гидропередача, наличие мотор-генератора позволяет использовать электро-
магниты. Надрезине применены автотормоза, благодаря чему повысилась бе-
зопасность работы персонала, улучшились условия работы. Имеются также ав-
тэцрззины ДГКу-5 с кранами грузоподъемностью 5 т. Базой автодрезины ДГКУ
служит специальная двухосная железнодорожная платформа. Рама 5 плат-
формы (рис. 10.10) через двойное рессорное подвешивание 6 и роликовые бук-
сы 7 опирается иа оси обоих колесных пар 8. Предусмотрены также выключа-
тели рессор.
На раме платформы под капотом 1 установлены силовая установка-ди-
зель У2Д6-250ТК, раздаточная коробка и генератор переменного тока.
В средней части платформы размещена гидропередача 12. Под рамой 5 располо-
жены карданные передачи 9, мотор-генераторная группа 13 и основные эле-
менты пневматической системы 10. Для торможения дрезины предусмотрены
пневматический прямодействующий и ручной тормоза. Кран машиниста с про-
летной трубой предназначен для управления автотормозами прицепляемых
354
Рис 10.10 Грузовая автодрезина ДГКУ
вагонов во всех случаях следования дрезины с составом Поперечные размеры
капота и кабины 2 меньше ширины рамы платформы, что позволяет исполь-
зовать боковые части последней для перевозки рельсов На свободной части
платформы размещают перевозимые на дрезине грузы. Каркас кабины служит
основанием для полноповоротного электрического краиа 3. На последнем смон-
тированы механизмы подъема груза, передвижения грузовой тележки н пово-
рота, электродвигатели которых питаются током от генератора переменного
трехфазиого тока. Кран, помимо крюковой обоймы, снабжен электромагнит-
ным подъемником. Для его питания служит мотор-генераторная группа 13.
В транспортном положении стрела располагается вдоль оси пути и удер-
живается на конце транспортными тягами 4. Для облегчения запуска дизеля
в холодное время года вода и масло подогреваются в котле 11. Дрезина обору-
дована звуковыми и световыми сигналами.
Кинематическая схема автодрезины ДГКУ (рис. 10.11) позволяет просле-
дить передачу крутящего момента от силовой установки (дизеля) к генератору,
гидропередаче, колесным парам и компрессору пневмосистемы. Дизель 1 мар-
ки У2Д6-250ТК посредством карданного вала 2 передает вращение генерато-
ру 32, а через эластичную муфту 5 и цилиндрический редуктор — гидротранс-
форматору 30 и компрессору 9. Для включения генератора в работу должна
быть включена зубчатая муфта 4, тогда крутящий момент посредством клино-
ременной ускоряющей передачи 3 передается генератору 32.
Компрессор 9 получает вращение от дизеля через зубчатую пару передач
11—6, карданный вал 7 и предохранительную муфту 8.
На комплексный гидротрансформатор 30 вращение передается шестерня-
ми 10—31 ускоряющей передачи цилиндрического редуктора.
Передача вращения от дизеля к колесным парам на различных режимах
при движении в ту или иную сторону обеспечивается следующими восьмью
кинематическими цепочками.
При движении вперед иа I ступени скорости при маневровом режиме муф-
ты 18 и 25 включаются вправо. Тогда крутящий момент от дизеля 1 через вал 2,
муфту 5, шестерни 10—31 передается гидротрансформатору 30, муфте 29, ше-
стерням 28—27—14—16—24—23—17—19 и далее через карданные валы 20 н
осевые редукторы?/ колесным парам. При движении вперед на II ступени ско-
рости при том же режиме муфты 18 н 25 остаются в том же положении. Враще-
ние от дизеля тем же путем передается зубчатой муфтой 29 и муфтой сцепления
12 шестерням 13—15—14—16—24—23—17—19 и далее колесным парам. При
12*
355
движении назад на I ступени скорости прн том же режиме муфта 25 включа-
ется влево, а муфта 18 остается в том же положении, крутящий момент от ди-
зеля / аналогично вышеописанному передается муфте 29, шестерням 28—27—
26—23—17—19 и далее к обоим колесным парам. При движении назад на 11 сту-
пени скорости при том же режиме муфты 18 и 25 остаются в прежнем
положении и крутящий момент от дизеля 1 аналогично передается муфте
29, шестерням 13—15—26—23—17—19 и далее к колесным парам. Для работы
в поездном режиме муфта 18 включается влево. Тогда при движении вперед
на I ступени скорости вращение от дизеля передается муфте 29, шестерням
28—27—14—16—24—23—22 и далее колесным парам. При движении вперед
на II ступени скорости вращение дизеля передается муфте 29, шестерням
13—15—14—16—24—23—22 и аналогичным путем обоим колесным парам
При движении назад иа I ступени скорости крутящий момент дизеля переда-
ется муфте 29, шестерням 28—27—26—23—22 и далее колесным парам. При
движении назад на П ступени скорости вращение от дизеля передается муфте
29, шестерням 13—15—26—23—22 и тем же путем иа обе колесные пары.
Пневматическая система автодрезины предназначена для управления тор-
мозами дрезины и вагонов, для подачи звуковых сигналов, привода в действие
песочниц, стеклоочистителей и автоматики управления гидропередачей. На
дрезине установлены неавтоматические и автоматические тормоза. Принцип
их действия рассмотрен в разделе 6.2 этого учебника. Все элементы пневмати-
ческой системы автодрезины (рис. 10.12) объединены трубопроводами трех ма-
гистралей: напорной магистрали 25 (выделена жирной линией), магистрали
прямодействующего тормоза 22 и магистрали автоматического тормоза 21. Ис-
точником получения сжатого воздуха в автоматической системе служит комп-
рессор 4 типа В В-0,7/8. Напорная магистраль объединяет регулятор давления
5, фильтр-отстойиик 6, обратный клапан 8, два главных резервуара 7, предох-
ранительный клапан 24, клапаны23 управления гидропередачей, клапан мак-
симального давления 11. Магистраль прямодействующего тормоза соединяет
Рис. 10 11. Кинематическая схема дрезины
356
напорную магистраль через
краиы 3 и 10 с манометром 9
и тормозным цилиндром 20.
Магистраль автоматического
тормоза объединяет кран ма-
шиниста 13, двухстрелочный
манометр 14, концевые краны
17 и соединительный рукав 18.
Она позволяет соединить на-
порную магистраль с магист-
ралью вагонов, прицепленных
к дрезине. Воздушный сигнал
2 включается в работу при
повороте крана 1. Управление
песочницами 19 осуществляет-
ся краном 12, подающим воз-
Рис. 10 12 Пневматическая система
дух в форсунки двух песочниц по ходу движения дрезины под передние ко-
леса. Стеклоочистители 15 включаются в работу поворотом ручки крана 16.
Давление сжатого воздуха в главных резервуарах поддерживается в пределах
0,6 МПа регулятором давления. Последний срабатывает при давлении 0,65 МПа
и сообщает напорную трубу с атмосферой, ком пресор в это время продолжает
работу, выпуская воздух в атмосферу, пока давление в главных резервуарах
не понизится до 0,57 МПа. При этом давлении регулятор разобщает напорную
трубу с атмосферой и снова переключает компрессор на нагнетание сжатого
воздуха в главный резервуар. Для регулирования давления сжатого воздуха
в системе прямодействующего тормоза служит клапан максимального дав-
ления, срабатывающий при 0,38 МПа. Давление сжатого воздуха в главном ре-
зервуаре и пролетной трубе регистрируется двухстрелочиым манометром 14,
а в тормозном цилиндре — отдельно манометром 9.
Грузоподъемный кран автодрезины (см. рис. 10.10, поз. <?) имеет электро-
механический привод всех механизмов. Максимальная грузоподъемность при
вылете 3 м составляет 3,5 т, а минимальная при вылете 3,8 м — 1,7 т. Край
состоит из поворотной платформы с установленной на ней стрелой, опорно-по-
воротного устройства и механизмов. Опорно-поворотиое устройство включает
опорный круг и шесть роликов, которыми платформа опирается на коническую
поверхность круга.
Механизм подъема груза состоит из электродвигателя 1
(рис. 10.13, а), муфты с тормозом 2, червячного редуктора 3, зубчатой
муфты 4, барабана 5 с канавками, грузового каната 6, направляющих блоков
7 и крюковой обоймы 11 Одни из блоков установлен иа стреле крана, а два
других — на грузовой тележке 9. Тормоз механизма двухколодочный, элек-
тромагнитный с пружинным замыканием. Высота подъема груза ограничива-
ется концевым выключателем, расположенным на тележке. Один конец гру-
зового каната закреплен на барабане лебедки, а другой — на конце стрелы.
Механизм передвижения грузовой тележки состоит из
электродвигателя 12, муфты с тормозом 13, червячного редуктора 14, зубчатой
муфты 15, вала 16, барабана с канавками 17, тягового каната 8, грузовой те-
лежки 9 и блока 10 с натяжным устройством. Тормоз того же типа, что и гру-
зовой лебедки. При вращении барабана в ту или иную сторону грузовая тележ-
ка получает поступательное движение по стреле. При этом число витков ка-
ната на барабане остается постоянным. Ход тележки ограничивается конце-
выми выключателями. (
Механизм поворота крана (рис. 10.13, б) состоит из элек-
тродвигателя 1, муфты с тормозом 2, червячного редуктора 3 с муфтой предел ь-
357
Рис. 10 13. Кинематическая схема механизмов крана ДГКу:
а — грузовой и тяговой лебодок, б — механизма поворота крана
ного момента, цилиндрической передачи 4 с наружным зацеплением и цилинд-
рической передачи 5 с внутренним зацеплением. Зубчатый венец неподвижно
укреплен на опорном круге, вокруг которого обкатываются ролики 6 опорио-
поворотного устройства. Тормоз механизма такой же. Муфта предельного
момента, встроенная в червячный редуктор, выполнена в виде одиокоиусной
фрикционной муфты с пружиной, затянутой на расчетное усилие. Благодаря
этой муфте уменьшаются динамические нагрузки на элементы привода во вре-
мя пуска и остановки механизма, что достигается в результате пробуксовки
ведомой части муфты по отношению к ведущей. Вращение от двигателя пере-
дается червячному редуктору и цилиндрическим передачам. При этом ведущая
шестерня второй передачи обкатывается по неподвижному зубчатому веицу,
обеспечивая поворот крана.
Автодрезина ДГКу-5 (рис. 10.14) по конструкции экипажной части, сило-
вой передачи, пневматической системы в основном аналогична автодрезине
ДГКУ и отличается от нее лишь грузоподъемным краном. Грузоподъемность
крана при вылете 3 м доведена до 5 т при той же массе дрезниы. Конструкция
крана включает в себя промежуточную опору, опорно-поворотное устройство,
основание крана, стрелу, механизмы поворота крана, передвижения грузовой
тележки, подъема груза и вспомогательные устройства. Промежуточная опо-
ра представляет собой обечайку с двумя фланцами. Нижний фланец крепится
к каркасу кабины, на верхний устанавливается основание многоопорного ро-
ликового опорио-поворотного устройства. Стрела крепится к основанию крана
болтами. На основании крана установлен механизм поворота, а на консольной
поворотной стреле — лебедки подъема груза и передвижения тележки. Меха-
низм поворота состоит из электродвигателя, червячного редуктора и втулочно-
пальцевой муфты, наружный обод которой является тормозным шкивом коло-
дочного тормоза. Механизм передвижения грузовой тележки состоит из чер-
вячного редуктора с приводом от электродвигателя, барабана, соединенного с
редуктором зубчатой муфтой, н двух ветвей тягового каната.
Механизм подъема груза автодрезины включает электрическую таль, гру-
зовую тележку, подвижной блок с грузовым крюком, грузовой канат и два
направляющих блока. Предусмотрен также ограничитель грузоподъемности,
размещенный иа конце стрелы.
Управление механизмами краиа осуществляется с расположенного в ка-
бине машиниста кнопочного поста иа гибком кабеле. На рисунке изображены:
1 — моторная группа; 2 — промежуточная опора; 3 — кран; 4 — транспорт-
ные распорки; 5 — грузовая платформа; 6 — ходовая часть; 7 -карданный
вал; 8 — коробка перемены передач; 9 — песочница.
358
Рис. 10 14. Грузовая автодрезина ДГК--'
359
Ниже приведены технические характеристики автодрезин:
Параметры АГМу ДГКу ДГКУ-5
Максимальная скорость, км/ч . . . Предельная масса состава, т: 65 85 100
при следовании по перегону . . 16 60 60
» маневрах на станции . . . 40 300 300
Грузоподъемность платформы, т . . 5 6 6
» крана, т . . . . 1-4-1.8 1,74-3,5 2,54-5,0
Вылет стрелы, м Скорость, м/с: . 1,24-4,5 3-5,8 3,04-5,8
подъема груза 0,16 0,17 0,13
передвижения тележки . . . . 0,04 0,21 0,20
Масса, кг 10 000 31 000 31 000
10.2. АВТОДРЕЗИНА ПАССАЖИРСКАЯ АС-1А
Она предназначена для служебных поездок работников путевого хозяйст-
ва и рассчитана на перевозку 24 чел. Автодрезина (рис. 10.15) представляет
собой двухосный самоходный вагон с задней ведущей колесной парой. На ра-
ме /£ дрезины размещен кузов 8, имеющий два отделения: одно с пультом
управления 2 для водителя, другое для перевозки пассажиров. В передней
части рамы установлен автомобильный двигатель / типа ГАЗ-51, от которого
крутящий момент передается к задней колесной паре 10 через муфту сцепления,
коробку перемены передач 5, промежуточный карданный вал 4, реверс 5, кар-
данный вал 9 и конический редуктор, смонтированный на оси колесной пары.
В кабине водителя установлены приборы управления.
Для обеспечения безопасности следования дрезииы задним ходом в конце
кузова предусмотрен пост наблюдения, оборудованный педалью сцепления,
краном пневматического тормоза и сигналом. Узлы трансмиссии, тормозная
система 7 и ходовые части унифицированы с автодрезиной АГМу. Отопитель-
ная установка 6 и подметельники 11 укреплены под рамой дрезины. Дрезина
имеет только один пост управления, что создает некоторые неудобства, так как
при езде задним ходом водителю трудно следить за дорогой, для чего ему не-
обходим помощник. ПТКБ ЦП разработало документацию по оборудованию
дрезины вторым постом управления. Такой дрезиной управляет только один
водитель.
На кинематической схеме автодрезины AC-1A (рис. 10.16) обозначены:
/— коленчатый вал; 2— муфта сцепления; 3— коробка перемены передач;
4,6 — карданные валы; 5 — реверс; 7 — ведущая колесная пара.
Рис. 10.15. Автодрезина пассажирская АС-1А
360
Рис. 10.16. Кинематическая схема автодрезины
Техническая характеристика автодрезины
Максимальная скорость движения, км/ч...........................80
Сцепная масса, кг........................................... 10 000
Диаметр колес, мм .......................................... 650
10.3. ТЯГОВЫЙ РАСЧЕТ ГРУЗОВОЙ АВТОДРЕЗИНЫ АГМу
Тяговые расчеты позволяют установить возможность движения поезда при заданных
расчетных данных. В качестве примера рассмотрим тяговый расчет автодрезины АГМУ,
движущейся с одной двухосной платформой по криволинейному участку радиусом R =
= 350 мс подъемом i = 5°/00, со скоростью и — 65 км/ч. Масса автодрезины = 10 т;
масса состава Q2 ~ 16 т. Двигатель автодрезины автомобильный типа ЗИЛ-120 номиналь-
ной мощностью Ад — 58,8 кВт; лд — 2500 об/мин; к.п.д передачи т)м = 0,85; переда-
точное число трансмиссии хт = 4,6, диаметр колес автодрезины D = 0,6 м. Требуется оп-
ределить полное сопротивление движению поезда, касательную силу тяги автодрезины и
силу тяги по сцеплению.
1. Основное удельное сопротивление движению автодрезины, Н/т,
= 10 (1,2 + 0,025о + 0,00016а2) = 10 (1,2 + 0,025 ♦ 65 + 0,00016 652) = 35.
2. Основное удельное сопротивление движению платформы, Н/т,
/ в+ОДо+О.ООгбо2 \
ву0 —10 0,7 4------------------],
\ <7о /
где q0 — масса, приходящаяся иа одну ось платформы:
Я о = <2г /посей = 16/2 = 8т,
тогда
" л/ „ 8+0.1- 65 + 0,0025-653
w0 =10 0,7+ -------------------------
\ О
=38 Н/т.
3. Дополнительное сопротивление от подъема, Н/т,
Wi = 10z = 10-5—50.
4. Дополнительное удельное сопротивление от кривой, Н/т,
wr = 7000//? = 7000/350 = 20.
381
5. Полное сопротивление движению поезда, Н,
W = Q1 (w'o +a»i+tt>r)4-Q2 (a»o'+«'i + a’r) = 10 (35+50+20)+10 (38+50+20) =2778.
6. Касательная сила тяги автодрезины, Н,
2Л1Д -qM гт 2.9550Л?дт]м гт 19 100-58,8-0,85-4,6
Рк= D = 0,6-2500 =3113.
7. Сила тяги по сцеплению, Н,
FK—1000фк Рсц,
где фч — коэффициент сцепления колес с рельсами;
Реи. — сцепной вес автодрезины:
РСц=. 100 кН;
фк = 0 ,25 Н----------=0,25 + -------------=0 255;
r ’ 100 + 20V ^100 + 20-65 ’ ’
FK = 1000 • 0,255 • 100 = 25 500 Н,
Для движения автодрезины необходимо соблюдение неравенств Рк > W и FK > Рк.
В данном случае 3113 > 2778 Н и 25 500 Н > 3113 Н. Неравенства соблюдаются, сле-
довательно, при заданных условиях автодрезина обеспечит движение платформы с уста-
новленной скоростью.
10.4. ПУТЕРЕМОНТНАЯ ЛЕТУЧКА ПРЛ-3
Путеремонтная летучка ПРЛ-3 предназначена для механизации погрузки,
разгрузки н транспортировки элементов верхнего строения пути в пределах
дистанции пути. В качестве локомотива используют дрезину ДГКу. ПРЛ-3
(рис. 10.17) состоит из трех двухосных тормозных платформ 12. Крайние плат-
формы имеют консольные поворотные краны 6 с подвижной 5, неподвижной 4
крановыми опорами, откидными щитами 7, неподвижными подрельсовыми опо-
рами 5, упорными тумбами 9, кабиной 10, противовесами 11, металлическими
бортами 13, домкратами 14, выключающими из работы рессоры при загрузке
летучки грузами.
Средняя платформа оборудована подвижной подрельсовой опорой 1, ме-
таллическими бортами 2, съемными щитами 3. Все платформы снабжены откид-
ными переходными фартуками 15. Для питания током электродвигателей при-
водов механизмов кранов от генератора ДКГу вдоль платформ в трубах про-
ложены кабели силовые н цепей управления. Краны расположены на крайних
платформах на расстоянии 1,5 м от осей автосцепок. Расстояние между осями
поворота обоих кранов составляет 13,4 м, что позволяет выполнять погрузоч-
но-разгрузочные операции с 25-метровымн рельсами без специальной травер-
сы. На раме стрелы крана смонтированы электрифицированные механизмы
подъема груза, передвижения грузовой тележкн и поворота крана.
Рис. 10.17. Путеремонтная летучка ПРЛ-3
3 62
Рис. 10.18. Опоры крана:
а — неподвижная; б — подвижная
Неподвижная опора крана (рнс. 10.18, а) служит основанием крана и пе-
редает вес поднимаемого груза на платформу. Опора состоит из рамы /, двух
левых 2 н двух правых 4 поперечных балок и двух затворов 3, удерживаемых
на осях 5. В проем средней верхней части опоры заводятся рельсы, погружа-
емые кранами иа летучку. Такое расположение рельсов обеспечивает безопас-
ную их перевозку по перегону. Во время транспортировки они опираются не
на рамы, а на подрельсовые опоры 8 (см. рнс. 10.17), а в средней части — на
подрельсовую опору 1. На верхней плоскости рамы (см. рис. 10.18, а) приварены
балки 2 н 4, снабженные на внутренних торцах проушинами. На осях 5, встав-
ленных в проушины, шарнирно закреплены затворы 3. Удаляя одну из осей,
можно вручную повернуть затвор на 180° вокруг оставшейся. При повернутых
затворах между балками 2 и 4 образуется проем, являющийся продолжением
проема рамы 1. Через этот проем опускают и поднимают рельсы при погрузке
иа платформу нли прн их выгрузке. В балкн и затворы вварены особой конфи-
гурации рельсы 11 и контррельсы 6. В пазах последних иа осях 8 размещен
ряд роликов 7, образующих цевочную рейку. В постоянном зацеплении с рей-
кой находится ведущая звездочка 10 механизма передвижения подвижной
опоры крана. Между рельсами и контррельсами расположены также опорные
катки 9 подвижной опоры крана. Подвижная опора крана (рнс. 10.18, б)
служит для передачи нагрузки от стрелы крана на неподвижную опору и для
поперечного перемещения крана на 0,7 м. Опора состоит из рамы 3, четырех
опорных катков 1, механизма передвижения опоры с ведущими звездочками
2, опорного круга 5, зубчатого венца 6 и щитков 4. В торцах инжней частя рамы
закреплены четыре цапфы с опорными катками /, размещающимися между
рельсами и контррельсами балок неподвиж-
ной рамы крана. В портале рамы 3 нахо-
дится механизм ее передвижения.
Механизм передвижения крана (рис.
10.19) состоит из электродвигателя 7, муф-
ты с тормозом 6, цилиндрического редук-
тора 5, цепной передачи 4, вала 3, двух
звездочек 2 и двух цевочных реек 1. Рей-
ки установлены на неподвижной опоре кра-
на, поэтому при включении электродвига-
теля вращение через указанные выше пере-
дачи передается двум звездочкам 2, кото-
рые, отталкиваясь от цевок рейки, застав-
ляют подвижную опору, а с ней и стрелу
крана перемещаться поперек платформы.
В каждом нз крайних положений подвиж-
Рис. 10 19. Кинематическая схема
механизма передвижения крана
ная опора стопорится двумя валиками.
363
В транспортном положении крана обе его опоры установлены симметрично и
удерживаются двумя цепными растяжками с натяжными устройствами по
концам.
Консольный кран состоит нз стрелы, опорно-поворотного устройства,
крюковой обоймы с двукратным полиспастом и механизмов подъема груза,
изменения вылета стрелы, передвижения и поворота. Указанные механизмы,
за исключением механизма передвижения крана, аналогичны соответствую-
щим механизмам ДГК?, а механизм подъема груза дополнен ограничителями
высоты подъема груза и грузоподъемности. Механизм изменения вылета стре-
лы в крайних положениях тележки имеет конечные выключатели, ограничи-
вающие ход тележки в пределах заданного вылета стрелы. В качестве локомо-
тива для ПРЛ-3 используют автодрезину ДГК?. Скорость движения летучки
с грузом по перегону в среднем составляет 35—-45 км/ч, поэтому для ее работы
необходимо предоставлять «окна», что неприемлемо для участков с интенсив-
ным движением поездов. Питание электродвигателей приводов механизмов от
генераторов ДГКУ возможно только на стоянке. Из-за этого механизмы ле-
тучки нельзя использовать для выполнения вспомогательных операций при
ее движении по перегону.
После модернизации ПРЛ-3 н установки на ней электростанции мощностью
50 кВт вместо одной нз кабин стало возможным использовать для ее передви-
жения любой тип локомотива достаточной мощности н работать на участках
с интенсивным движением поездов. Устранены затворы между балками не-
подвижной опоры крана, а образование проема между ними предусмотрено
путем сдвижкн вправо или влево балок, подвижно закрепленных на послед-
ней. Для перемещения балок предусмотрены пневмоцилнндры. Благодаря уве-
личению грузоподъемности крана н скорости передвижения грузовой тележки
существенно ускорилось выполнение погрузочно-разгрузочных работ. Для
питания электромагнитной плиты и погрузки рельсовых скреплений предус-
мотрена выпрямительная установка.
Техническая характеристика ПРЛ-3 после модернизации
Грузоподъемность крана, т...................... . . 2
Вылет стрелы, м............................................ 0,875—4,9
Скорость движения по перегону, км/ч .... 80
Максимальное количество перевозимых за один рейс элементов
пути, шт.:
25-метровых рельсов.......................................14—20
12,5-метровых рельсов 18—28
деревянных шпал............................................300
Обслуживающий персонал, чел..................................... 3
10.5. ОСНОВЫ ЭКСПЛУАТАЦИИ И ОБСЛУЖИВАНИЯ
ТРАНСПОРТНЫХ СРЕДСТВ
10.5.1. Подготовка к работе и обслуживание
транспортных средств
Технический уход за транспортными средствами сводится к периодическим
осмотрам и техническому обслуживанию. Осмотры подразделяют на ежеднев-
ный и годовой контрольно-технический. Ежедневый осмотр водитель выполняет
до выезда на перегон. Годовой проводит комиссия. Техническое обслуживание
подразделяется на ТО-1, выполняемое через 1250 км пробега (100 ч работы) и
ТО-2 — через 5000 км пробега (400 ч работы). Оба обслуживания проводит
бригада автодрезины. При ежедневном осмотре машину очищают от грязи,
проверяют уровень масла и воды в двигателе, исправность сигнализации,
кранового оборудования, плотность воздушных и гидравлических трубопро-
364
водов. Опробуют исправность двигателя, основных механизмов и тормоза. Ос-
матривают также рессорное подвешивание, сцепные приборы, поверхность
круга катания н гребни колес, карданные содеинения и оси колесных пар.
Прн годовом контрольно-техническом осмотре проверяют работу двигате-
ля и других агрегатов на всех режимах, состояние тормозной системы (с заме-
ром тормозного пути), сигнализации, грузоподъемного оборудования и грузо-
захватных приспособлений. Кроме этого, проверяют внешний вид автодрези-
ны, паспорт н сроки очередных освидетельствований колесных пар, сцепных
приборов, рессорного подвешивания, наличие и исправность инструмента, за-
пасных частей и инвентаря.
При ТО-1, кроме проверки состояния узлов, устранения выявленных
мелких неисправностей, устраняют неисправности, нарушающие нормальную
работу, зачищают контакты электрооборудования, промывают систему пита-
ния, фильтры, регулируют тормоза и крановые механизмы, пополняют смазку,
При ТО-2 выполняют все работы ТО-1 и, кроме того, регулируют газорас-
пределительный механизм двигателя, проверяют компрессию, промывают ба-
ки, удаляют иакнпь из системы охлаждения двигателя.
Правильная эксплуатация транспортных средств предполагает обяза-
тельное выполнение следующих операций. Перед началом работы обслужива-
ющий персонал обязан опробовать вхолостую все механизмы автодрезины.
При обнаружении неисправностей, угрожающих безопасной работе, водитель,
не приступая к работе, обязан их устранить или обратиться за помощью к мас-
теру по эксплуатации транспортных средств. Не допускается работа автодре-
зины ДГКУ при давлении масла в бустерах муфт включения КПП меиее 0,9 МПа.
При переходе с I ступени скорости иа II рекомендуется уменьшать обороты
дизеля. Для предохранения от поломок муфты реверса его переключение не-
обходимо делать только при остановленной машине; при кратковременных ос-
тановках реверс следует оставлять включенным. Не допускается боксование
колес. При трогании с места тяжелого состава необходимо пользоваться песоч-
ницами. При длительной стоянке автодрезин периодически рекомендуется пе-
редвигать машину иа несколько метров для предупреждения повреждения
букс в местах контакта роликов с кольцами. При остановке автодрезины для ра-
боты с краном на уклоне, большем 2о/оо, в кривых н прн плохом состоянии пути
рекомендуется пользоваться захватами. Перевод подвижной единицы с прямого
хода на обратный до полной ее остановки не допускается. Муфту генератора раз-
решается включать только при остановленном двигателе автодрезины. Передви-
жение автодрезины с грузом на краие разрешается со скоростью не более 5 км/ч.
При эксплуатации кранов автодрезин необходимо соблюдать правила, изло-
женные в разделе 2.6.
Смазка механизмов выполняется в соответствии с картой смазки.
Карта смазки автодрезин ДГКУ
Место смазки Способ смазки Рекомендуемая смазка Периодичность смазки
Дизель Буксовые направ- ляющие Осевой редуктор: шестерни подшипники Буксы роликовые Заправить в масля- ный бак Нанести тонкий слой Проверить наличие и добавить в картер Добавить тавот- прессом Заполнить 2/з поло- сти подшипника МС-20, МК-23, МС-14 (зимой) Осевое Автотракторное, трансмиссионное УС-1 1-ЛЗ Смена смазки че- рез 100 ч работы После 300—600 км пробега Через 5000 км про- бега Через 100 км про бега Дополняется при ревизиях букс
365
Продолжение
Место смазки Способ смазки Рекомендуемая смазка Периодичность смазки
Компрессор Проверить наличие и добавить Масло компрес- сорное Масло заменить че- рез 2 месяца
Червячные редук- Заполнить масля- Дизельное мае- Смена через 1000 ч
торы механизмов ную ванну по указа- телю уровня ло Д-11 работы
Подшипники редук- тора Заполнить % поло- сти подшипника Смазка конси- стентная 1-13 То же
Зубчатая муфта Заполнить полость зацепления на 100% УС-2 »
Подшипники вала •барабана лебедок Заполнить 21з поло- сти подшипника УС-2 »
Шарниры рычагов тормоза Через пресс-маслен- ки УС-2 Смена через 250 ч работы
Рабочая поверх- ность опорного круга Покрывать кистью УС-2 Смена через 50 ч работы
Канаты Наносить помазком Канатная мазь В зависимости от условий эксплуата- ции
Возможные неисправности автодрезины и способы их устранения
Неисправность Возможные причины Способы устранения
Пробоксовывают
•ски сцепления
Шумная работа шесте-
рен КПП
Произвольное выклю-
чение шестерен КПП
Машина не трогается
с места. Давление масла
на манометре I ступени
скорости составляет
0,9—1,1 МПа
При трогании машины
с места включается II
ступень скорости
Упало давление масла
в гидротрансформаторе
Импульсный насос не
нагнетает масло
Шум в коробке ревер-
са
1. Ослабли пружины
2. Замаслились фрикцион-
ные накладки
3. Изношены фрикционные
накладки
1 Изношены зубья
2 Изношены подшипники
валов
Ослабли пружины фиксато-
ров
Изношены диски муфты
I ступени скорости КПП
Нагрев карданных со-
членений
Заклинило золотник им-
пульсных насосов
Насос питания не дает рас-
четной производительности
Засорен фильтр нли загряз-
нилось масло
1. Нет или мало смазки
2. Сработаны зубья шестер-
ни переключения
3. Лопнули подшипники
4. В коробку попал посто-
ронний предмет
1. Увеличился угол наклона
Нагрев осевого редук-
тора
2 Отсутствие смазки
1. Нарушилась регулировка
подшипников
2. Отсутствует смазка
Заменить пружины
Промыть накладки
Заменить ведомые диски
Заменить шестерни
Заменить подшипники
Заменить пружины фиксато-
ров
Заменить негодные диски
или добавить один ведущий
диск со стороны плунжера
Отрегулировать золотник
Исправить насос
Фильтр очистить, масло за-
менить
Добавить смазку
Заменить шестерню
Заменить подшипники
Осмотреть коробку и уда-
лить предмет
Отрегулировать подвеску
осевого редуктора
Заполнить смазкой
Отрегулировать подшипники
Добавить смазку
.366
10.5.2. Основные требования по технике безопасности
при использовании транспортных средств
Перед выездом необходима проверка технического состояния автодрезин.
Эту операцию выполняют при выключенном двигателе и заторможенных ко-
лесах, за исключением случаев опробования тормозов, проверки работы дви-
гателя н приемки машин на ходу. Перед осмотром ходовых частей двигатель
должен быть остановлен, а автодрезина заторможена.
Не допускается скопление на машине концов, пропитанных горючими
веществами, илн грязи. Запрещается развивать скорость на маневровом илн
поездном режимах свыше величин, указанных в паспорте, и больше установ-
ленной скорости на данном участке.
Машинисту и его помощнику во время работы нельзя отлучаться даже на
короткое время, не предупредив об этом друг друга.
При перемещении автодрезины стрелу крана необходимо ставить вдоль
пути. Во время работы в кривых дрезина должна быть закреплена рельсовыми
захватами, а при установке иа уклоне, кроме того, тормозными башмаками.
Работа крана на неисправных путях и в местах, где не обеспечена устойчи-
вость дрезины, не разрешается. Вес прицепляемого состава не должен превы-
шать соответствующих норм. Не допускается пользование открытым огнем
для освещения узлов машины.
На каждой дрезине должно быть не менее двух огнетушителей. Подъемна
поворотную платформу ДГКУ на электрифицированных участках при отсутст-
вии ограждения категорически запрещается. Для перевозки людей на платфор-
ме дрезины должны быть ограждения. Запрещается развивать скорость дви-
жения дрезины ДГКУ более 100 км/ч. Не допускается нагрев масла гидротранс-
форматора свыше +105 °C. Прн пуске дизеля н его работе на стоянке дрезина
должна быть заторможена. При работе с кранами необходимо выполнять пра-
вила, изложенные в разделе 2.
367
И. ПУТЕИЗМЕРИТЕЛ И И СРЕДСТВА ДЕФЕКТОСКОПИИ
Железнодорожный путь должен обеспечивать безопасное движение поез-
дов с установленными скоростями, поэтому за его состоянием требуется по-
стоянный контроль, осуществляемый непосредственными осмотрами и провер-
ками с применением специализированных приборов, инструментов, тележек,
вагонов-путеизмернтелей н вагонов-дефектоскопов. Прн этом проверяют ши-
рину колен (шаблон), взаимное положение рельсовых нитей по высоте в по-
перечной плоскости (уровень), положение рельсовых нитей в плане (рихтовка),
местные просадки, перекосы (последовательное отклонение по уровню обеих
рельсовых нитей в разные стороны прн расстоянии между ними менее 24 м),
дефекты в рельсах (раковины, расслоения, трещины и т. п,). Периодичность
проверок пути устанавливается инструкциями МПС.
11.1. Устройство для измерения пути
Для проверки состояния пути применяются путеизмерительный инстру-
мент (путевые шаблоны рабочие и типа ЦУП), путеизмерительные тележки и
вагоны-путеизмерители.
Путевые шаблоны являются ручными переносными приборами точечно-
го действия, применяемыми для контроля ширины колеи и уровня рельсовых
нитей. Шаблоны типа ЦУП имеют пределы измерений по ширине 1510—1550 мм,
по уровню 0—160 мм. Точность измерений ±1 мм.
Для непрерывного измерения рельсовой колеи по шаблону и уровню с
записью этих данных на бумажную ленту используют путеизмерительные те-
лежки системы Матвеенко.
Путеизмерительная трехколесная тележка (рис. 11.1) состоит из трубча-
той рамы 3, опирающейся на ролики 1 н 9, и механизмов для непрерывного из-
мерения и записи на бумажную ленту ширины колеи и взаимного положения
рельсовых нитей по уровню. На тележке предусмотрен также уровень 2 для
точечного контроля рельсовой колеи. Ширина колеи измеряется роликами
/ и 9. Ролики 9 неподвижно закреплены иа раме, а ролик / может перемещать-
ся на штанге, размещенной внутри трубы рамы. Пружиной, надетой иа эту
штангу, ролики прижимаются к внутренним граням головок рельсов. На штан-
ге закреплены перья 4 и 6, записывающие на ленте регистрирующего прибора
«5 результаты измерений. Измерительной базой механизма уровня является
физический маятник 8, снабженный масляным демпфером 7 При изменении
взаимного положения рельсовых нитей по высоте рама тележки наклоняется
относительно сохраняющего вертикальное положение маятника 8, вызывая
этим поворот связанного с ннм пера 6 относительно осн подвеса на раме те-
лежки. Поворот пера 6 на угол, пропорциональный величине изменения вза-
имного положения рельсовых нитей по высоте (в миллиметрах) записывается
на ленте регистрирующего прибора в масштабе 1 : 2 Шаблон записывается
пером 4 в масштабе 1 1
№8
Рис. 11.1. Путеизмерительная трехколссная тележка
Регистрирующий прибор 5 состоит из катушек с бумажной лентой, реги-
стрирующих перьев 4 и 6, пера с ручным приводом для отметки на лейте кило-
метров и пикетов и перьев для нанесения на ленте нулевых линий и линий до-
пускаемых отклонений от установленных норм содержания пути по шаблону
и уровню. Лента регистрирующего прибора протягивается от переднего ро-
лика 9 через конический редуктор, карданный вал и два червячных редукто-
ра 10, обеспечивающих продольный масштаб 1 : 2000. При скорости передви-
жения ие свыше 5 кмч точность измерений и записи обоих механизмов тележки
±1 мм. Трехколесиая путеизмерительная тележка недостаточно устойчива в
кривых участках, в местах уширения и сужения рельсовой колеи. В связи с
этим она заменяется аналогичной по принципу действия, но более совершен-
ной тележкой ПТ-2.
Путеизмерительная четырехколесная тележка ПТ-2 (рис. 11.2) состоит
из трубчатой рамы 3, опирающейся на ходовые устройства 2 с четырьмя роли-
ками 5. Передний ролик на ходовом устройстве является приводом лентопро-
тяжного механизма. На раме размещены механизм записи 4 и маятник /, яв-
ляющийся базой для измерения положения рельсовых нитей по уровню. Коле-
са 2 (рис. 11.3) тележки соединены поперечинами /, жестко связанными со
штангами 3, которые направляются опорами в раме 18 и постоянно прижимают-
ся к внутренним граням рельсов пружинами 16. Механизм уровня оснащен
маятником 21, который передает отклонения пути по уровню на боек 15 Ка-
ретка 14 последнего шарнирно соединена с маятииком тягой 17. Боек 15 явля-
ется самописцем ударного действия и оснащен иглой, оставляющей точечные
отпечатки на бумажной ленте 27 через копировальную ленту 29. Он приводит-
ся в движение приводным колесом посредством кулачка 5 и рычажной переда-
чи. В механизме измерения ширины колеи предусмотрен клин 13, боковые гра-
ни которого скользят по направляющим, а середина шарниром 12 соединена с
входной рейкой // редуктора 9. Выходная рейка 8 редуктора 9 соединена с кд-
369
Рис. 11 2. Путеизмерительная четырехколесная тележка ПТ-2
реткой 6 бойка 7 и двойной шестерней 10. Наличие клина 13 обеспечивает одно-
временное перемещение попарно соединенных колес 2 при измерении ширины
пути, что смягчает действие поперечных ударов на точку подвески маятника
21. В результате этого уменьшается погрешность в записи уровня пути. Бу-
мажная лента 27 протягивается игольчатым валиком 28, вращающимся на оси
30 и снабженным обгонной муфтой 23. Скорость его вращения обусловливает-
Рис. 11 3. Кинематическая схема путеизмерительной тележки ПТ-2
370
ся соотношением диаметров приводного колеса и игольчатого валика, а также
передаточными числами конической передачи 37 и червячных редукторов 4
и 34, через которые получает движение игольчатый валик 28 Перематывание
и натяжение бумажной ленты 27 обеспечивается торможением сматывающей
катушки 26 и вращением наматывающей катушки 33 через ременную переда-
чу 24, которая может проскальзывать. Бумажная лента прижимается валиком
31 при помощи пружины и рычага 38 Сверху бумажной ленты 27 располага-
ется копировальная лента 29, наматывающая катушка 32 которой вращается
от игольчатого валика 28 шкивом 19 через ременную передачу 20 и коническую
передачу 22. Сматывающая катушка тормозится пружиной, что обеспечивает
натяжение копировальной ленты. Пишущий механизм, посредством которого
приводятся в действие бойки 7 и 15, а также боек 39 линий допусков с иглами
для нанесения нулевых линий и линий допусков, состоит из рамки 40 и толка-
теля 41, приводится в действие кулачком 5, вращение к которому передается
от приводного колеса через коническую передачу. В механизмах привода
игольчатого валика и наматывающей катушки 33 предусмотрены соединитель-
ные муфты 25, 35 и 36. Масштабы записи механизмов уровня пути 1 : 2, ширины
колеи 1 : 1 и длины пути 1 : 2000. Точность измерения ширины колеи и уровня
Чт1 мм. Перемещение тележки при работе ручное со скоростью до 5 км ч,
масса — 38,2 кг.
Вагон-путеизмеритель ЦНИИ-2 предназначен для контроля состояния
пути под динамическими нагрузками при скорости движения до 100 км/ч. Ме-
ханизмы путеизмерителя размещены в четырехосном вагоне (рис. 11 4, а).
В задней части находится аппаратное отделение (рис. 11.4,6), где установлены
регистрирующий стол, гироскопическая система механизма уровня и распреде-
лительные щиты гиросистемы и ее усилителя. Здесь же настелен второй пол
из съемных щитов. В промежутке между полами расположены суммирующие
аппараты механизмов: шаблона, просадок, рихтовки и уровня, привод лен-
топротяжного механизма,
тросовая система связей
измерительных элементов
механизмов с их суммиру-
ющими аппаратами, с пе-
рьями на регистрирующем
столе и вспомогательное
оборудование.
Высокая точность по-
казаний механизмов путе-
измерителя обеспечивается
независимо от скорости его
движения и состояния кон-
тролируемого пути
Это достигается бла-
годаря тому, что подвиж-
ные элементы механизмов
работают под однозначной
нагрузкой и постоянно на-
ходятся в растянутом сос-
тоянии. Это позволило при-
менить подвижные элемен-
ты с малыми массами, а сле-
довательно, и малыми си-
лами инерции. Кроме того,
подвижные элементы меха-
Рис. 11.4 Вагон-путсизмеритель системы ЦНИИ-2
а общий вид; б — аппаратное отделение
371
низмов находятся под натяжением пружин, т. е. исключены искажения их
показаний при наличии зазоров в шарнирных сочленениях.
В качестве измерительной базы механизма уровня применен обладающий
большой устойчивостью при высоких скоростях движения путеизмерителя ги-
роскопический горизонт, не реагирующий на центробежную силу, толчки и
колебания.
В передней части вагона предусмотрены бытовые помещения. Рядом с ап-
паратным отделением расположены мастерская и отделение для расшифровки
лент. В мастерской размещены распределительный щит и два электромашиниых
преобразователя постоянного тока аккумуляторных батарей напряжением
ПО В в переменный ток повышенной частоты (500 Гц) и напряжением 127 В
для питания двигателей гироскопической системы механизма уровня. Акку-
муляторные батареи укреплены на раме вагона между ходовыми тележками.
Задняя тележка вагона освобождена от тормозного оборудования. Одна из
ее колесных пар является измерительной базой механизма уровня и в этих
целях имеет цилиндрическую обточку бандажей.
Вагон-путеизмеритель перемещается отдельным локомотивом. При его
движении происходит непрерывное измерение и регистрация на бумажных
лентах состояния рельсового пути: по ширине колеи с пределами измерения
1514—1560 мм, по взаимному положению рельсовых нитей по высоте (уровень)
в пределах ±150 мм, по положению рельсовых нитей в плане (рихтовка) с
пределами измерения ±225 мм, по местным просадкам рельсовых нитей иа ба-
зе 2,7 м в пределах ±50 мм. По записи показаний механизмов путеизмерителя
после проверки устанавливают отступления в содержании рельсового пути от
норм и допусков, а также места расположения неисправностей (километр, пи-
кет). Основную ленту расшифровывают для балльной оценки состояния пути,
а дубликат передают начальнику дистанции пути для устранения неисправно-
стей. Измерительные системы вагона-путеизмерителя ЦНИИ-2 работают в ав-
томатическом режиме прямого измерения и выполнены с применением механи-
ческих рычажно-трособлочных передач Система прямого измерения состоит
из устройств, контактирующих с рельсами (датчики), суммирующего механиз-
ма, передающего и воспринимающего устройств.
Дальнейшее совершенствование путеизмерителей предполагает замену
механического способа измерений на электромеханический. При этом сохра-
нится контактный метод измерений, а передача данных на самописец будет
производиться электрическими элементами вместо трособлочной системы, ог-
раничивающей скорость движения путеизмерителя. Предстоит также создание
бесконтактного электронного путеизмерителя с автоматической расшифровкой
ленты на базе ЭВМ.
11.2, СРЕДСТВА ДЕФЕКТОСКОПИИ
Рельсовые дефектоскопы предназначены для обнаружения наружных и
скрытых дефектов в виде изломов, расслоений, трещин, появившихся в рель-
сах при изготовлении или эксплуатации. Для обнаружения дефектов исполь-
зуют методы магнитного рассеивания, вихревых токов и ультразвук.
Метод магнитного рассеивания основан на явлении перераспределения маг-
нитных силовых линий, вызванном дефектом. Применяют два вида намагничи-
вания: полюсное и циркулярное. Полюсное намагничивание (рис. 11.5, а) осу-
ществляется электромагнитом постоянного тока. Направленное вдоль рель-
сов магнитное поле при отсутствии дефектов будет однородно и в таком поле
через любое сечение рельса проходит одинаковое количество магнитных сило-
вых линий. Дефект понижает магнитную проводимость рельса, силовые линии
выходят за пределы рельса и образуют местное поле рассеивания. Электромаг-
372
Рис 11.5 Схемы:
а — полюсного намагничивания, б — циркулярного намагничивания
нит имеет ярмо 1 и намагничивающие катушки 2, соединенные с источником то-
ка. На участке между концами ярма рельс намагничивается продольно, чем
обеспечивается хорошее обнаружение поперечных дефектов.
Циркулярное намагничивание (рис. 11.5,6) осуществляется включением
контролируемого участка в цепь постоянного или переменного тока. При этом
внутри и вокруг рельса образуется магнитное поле с замкнутыми силовыми ли-
ниями, перпендикулярными продольным дефектам, что позволяет обнаружить
расслоения, трещины, волосовины и т. п. При намагничивании в постоянном
поле силовые линии магнитного потока распределяются по всему сечению рель-
са, а при переменном — лишь по поверхностному слою, поэтому постоянное
поле используется для обнаружения внутренних дефектов, а переменное —
для дефектов, выходящих иа поверхность рельса.
Метод вихревых токов основан на электромагнитной индукции, создавае-
мой переменным током. Индукционный дефектоскоп (рис. 11.6) состоит из
электромагнита с намагничивающей катушкой / и сердечника 2. Под полюсами
расположены искательные катушки 3, подключенные к измерительному прибо-
ру 4. Катушка 1 возбуждает в сердечнике 2 и окружающем пространстве пер-
вичное магнитное поле, направленное противоположно вторичиому, создавае-
мому в рельсах вихревыми токами. В результате взаимодействия полей элект-
ромагнита и вихревых токов устанавливается результирующее магнитное по-
ле. Вихревые токи, встречая дефект, создают магнитное поле, отличное от нор-
мального. Под левым полюсом электромагнита показаны нормальные пути
вихревых токов, а под правым — искаженные дефекты. В этом случае величина
вихревых токов и напряжение создаваемого ими поля под полюсами электро-
магнита различны. Для нахождения дефекта служат искательные катушки
3, одинаково расположенные относительно полюсов сердечника 2 и рельса.
При пронизывании равными потоками в них индуктируются электродвижущие
силы одной величины, а поскольку катушки включены так, что в их цепи элект-
родвижущие силы направлены навстречу, то их сумма при отсутствии дефекта
равна нулю. Выявленная измерительным прибором 4 разность электродвижу-
щих сил указывает на наличие дефекта. Электромагнит и катушки обычно
объединены в одно искательное уст-
ройство, являющееся узлом дефекто-
скопа. При продольном намагничи-
вании рельса переменным магнит-
ным полем над дефектами, располо-
женными перпендикулярно направле-
нию магнитного потока, возникают
дополнительные поля рассеивания, ко-
торые воздействуют на искательную
катушку совместно с полями от вих-
ревых токов. Поэтому при намагни-
чивании рельсов переменным магнит-
ным потоком на наличие дефектов
г-о-о. 1 2
Рис 11.6. Принципиальная схема иядх’кпп-
онного рельсового дефектоскопа
’"3
Рис. 11.7. Принципиальные схемы методов
ультразвуковой дефектоскопии рельсов:
а зеркально-теневой; б — эхо-метод
ды), отраженной от противоположной
указывает изменение поля вихревых
токов и возникновение дополнитель-
ных потоков рассеивания. Для выяв-
ления продольных дефектов основное
значение имеют вихревые токи, а для
выявления поперечных дефектов —по-
токи рассеивания и вихревые токи.
Ультразвуковой метод основан
на использовании свойства ультра-
звука практически полностью отра-
жаться от границы стали с воздухом
или водой. В ультразвуковой рель-
совой дефектоскопии применяют два
метода обнаружения дефектов: зер-
кально-теневой и эхо-метод. При пер-
вом признаком дефекта является
уменьшение интенсивности (амплиту-
поверхности изделия (например, по-
дошвы рельса), ультразвуковой волны, излучаемой искателем И (рис. 11.7, а)
и принимаемой искателем П. Противоположную поверхность, зеркально отра-
жающую ультразвук, называют донной, а отраженный от нее импульс — дон-
ным импульсом. При эхо-методе признаком обнаружения дефекта служит при-
ем искателем П эхо-импульса, отраженного от дефекта (рис . 11.7, б).
Магнитные рельсовые дефектоскопы по конструктивному исполнению под-
разделяются на тележки-дефектоскопы съемного типа и магнитные вагоны-
дефектоскопы. Последние предназначены для сплошной проверки рельсов,
лежащих в пути, и позволяют выявить достаточно развитые поперечные и про-
дольные трещины в головке рельса, а также дефекты, имеющие в изломе го-
ловки рельса вид «светлых» и «темных» пятен, расположенных на глубине
до 5 мм Принцип действия магнитного вагона-дефектоскопа основан на ис-
пользовании токовихревого метода обнаружения дефектов в рельсах . Обору-
дование вагона-дефектоскопа, состоящее из искательных устройств, регистри-
рующей аппаратуры, источников питания и подсобных устройств, размещено
в пассажирском вагоне К тележкам-дефектоскопам относят съемные двухни-
точные дефектоскопы МРД-52 и МРД-66, основанные на методе магнитного
рассеивания Для контроля рельсов наиболее широко применяют ультразву-
ковые дефектоскопы УЗД-НИИМ-6М и УРД-58М. Ультразвуковой рельсо-
вый дефектоскоп УЗД-НИИМ-6М применяют для выявления трещин и рас-
слоений в рельсах при одновременном контроле обеих рельсовых нитей.
Дефектоскоп подключают к аккумуляторной батарее. Его масса 80 кг.
Центрирующие механизмы с искателями расположены между колесами тележки
над каждой рельсовой нитью При работе по рельсам скользят два комбини-
рованных искателя, каждый из которых состоит из двух прямых и одной на-
клонной вставок, излучающих ультразвуковые импульсы в рельс. Для обес-
печения акустического контакта между искателем и рельсом под искатель по-
дается вода (при минусовых температурах — раствор технического спирта).
Рельс перед искателем предварительно очищают и смачивают. Контроль шейки
осуществляют зеркальио-теиевым методом. Головку рельса по всей длине кон-
тролируют эхо-методом с частотой посылок импульсов ультразвуковых ко-
лебаний 750—1100 Гц. Дефекты регистрирует оператор визуально по стре-
лочному индикатору и акустически по звуковым сигналам в головных теле-
фонах при скорости 3—4 км/ч. Перспективное совершенствование вагонов-де-
фектоскопов предусматривает механизацию подъема магнитов индукторной
тележки и запись дефектов на магнитную ленту.
374
12. МАШИНЫ ДЛЯ ЗЕМЛЯНЫХ РАБОТ
12.1. БУЛЬДОЗЕРЫ
12.1.1. Назначение, классификация и устройство
В путевом хозяйстве бульдозеры применяют при ремонте земляного по-
лотна, планировке площадок, нарезке террас на косогорах, засыпке траншей
и рвов, разравнивании грунта в отвалах, а также для расчистки дорог от снега
и планировке снежных отвалов. Бульдозерное оборудование включает рабо-
чий орган — отвал, толкающую раму, а также систему управления отвалом.
В процессе работы толкающая рама с укрепленным на ней отвалом опускается
посредством системы управления. При поступательном движении машины от-
вал заглубляется в грунт и, срезая с него стружку, формирует перед отвалом
призму волочения и перемещает ее. После транспортировки и разгрузки грун-
та бульдозер возвращается в исходное положение при заднем движении тягача
или с разворотом последнего в зависимости от дальности перемещения. Этим
завершается рабочий цикл.
Современные бульдозеры классифицируют по типу ходового оборудова-
ния, мощности, назначению, способу установки отвала, системе управления
рабочим органом. По типу ходового оборудования тягача различают гусенич-
ные и пневмоколесные бульдозеры По мощности разделяют на малогабаритные
(до 23 кВт), легкие (23—55 кВт), средние (55—110 кВт), тяжелые (110—220 кВт)
и сверхтяжелые (свыше 220 кВт). По способу установки отвала рабочего ор-
гана бульдозеры делят на машины с неповоротным и поворотным отвалами
(универсальные бульдозеры). По способу управления отвалом бульдозеры бы-
вают с канатно-блочным (тросовым) и гидравлическим управлением.
Каждой модели бульдозера присваивают буквенное обозначение ДЗ (ра-
нее обозначали Д), порядковый номер разработки и данные о модернизации
(буквенное обозначение по алфавиту). В зависимости от климатического ис-
полнения добавляют буквы ХЛ (старое обозначение С) — для работы в райо-
нах с холодным климатом, например ДЗ-117ХЛ.
Универсальные бульдозеры выпускают с канатно-блочным и гидравличес-
ким управлением. Бульдозерное оборудование, установленное на тракторе 5
(рис. 12.1, а), состоит из отвала 2, универсальной толкающей рамы 7
(рис 12.1, б), толкателей 3 и привода управления. Отвал бульдозера сварной,
имеет лобовой лист с криволинейной поверхностью, облегчающей набор и фор-
мирование призмы грунта. Нижняя кромка отвала оборудована съемными но-
жами 1 из стали специальной или обычной, но упрочненной наплавкой.
К нижней части отвала приварена шаровая пята для соединения со сферической
головкой универсальной рамы. По бокам отвала предусмотрены проушины
для соединения с толкателями. Толкающая рама сварная, коробчатого сечения.
Концы рамы шарниром 8 связаны с гусеничными тележками трактора. Шаро-
вая головка в центре толкающей рамы вместе с шаровой пятой образует универ-
сальный шарнир, позволяющий отвалу принимать различные положения. По-
ворот отвала в плане совершается вокруг шарнира 9 при помощи гидроцилин-
дров 6. Перекос отвала в поперечной плоскости достигается посредством гидро.
375
6)
Рис. 12 1 Универсальный бульдозер с гидравлическим управлением
цилиндров 4 Для наклона отвала одновременно включают оба гидроцилиндра-
Перекос отвала достигается перемещением одного гидроподкоса или обоих в
разных направлениях.
Для тросового управления отвалом к универсальной раме в ее центре при-
варивают проушину, к которой шарнирно крепится нижняя обойма блоков
полиспаста системы управления, а при гидравлическом управлении к раме
приваривают две проушины, которыми соединяют гидроцилиндры подъема
отвала.
Конструкция бульдозерного оборудования с неповоротным отвалом
(рис. 12.2) проще универсального. Толкающая рама бульдозера состоит из
двух продольных толкающих брусьев 2, которые передними концами шарнир-
но связаны с нижней частью отвала 6, а задними — с трактором 1. Требуемое
положение отвала в вертикальной плоскости фиксируется подкосами 4, задние
концы которых штырями крепятся к кронштейнам 3 брусьев. Наличие в этих
кронштейнах нескольких отверстий для штырей позволяет изменять в за-
данных пределах угол резания ножей отвала. Устойчивость всей системы в пла-
не обеспечивается раскосами, связывающими отвал с толкающими брусьями
в горизонтальной плоскости. Подъем и опускание отвала, как и в универсаль-
376
Рис 12.2 Бульдозер с неноворотным отвалом
ном бульдозере, осуществляют при помощи канатно-блочного управления или
гидроцилиндра 5.
Для расширения области применения и увеличения использования по вре-
мени бульдозеры с неповоротным отвалом снабжены сменным оборудованием
(рис. 12.3). Основными видами сменного оборудования являются уширители а,
открылки б, удлинители в, передние и задние рыхлительные зубья а, кирка
для взламывания асфальта д, ножи для разработки высокопрочных грунтов и
наледей е, кусторезная приставка ж, канавная надставка з, жесткий и гидро-
управляемый откосник и откосник-планировщик и, передние и задние лыжи
для точной планировки грунта к, отвальная приставка для работы от стенки
грузовые вилы м, грузоподъемный крюк с приводом от лебедки н.
Рис. 12.3. Сменное оборудование к бульдозеру
377
12.1.2. Системы управления бульдозерным оборудованием
Система обеспечивает заглубление и выглубление отвала и может быть
гидравлической и канатно-блочной (тросовой).
При гидравлической системе исполнительный механизм состоит из одного
или двух гидро цилиндров, которые штоками соединены с шарнирами на отва-
ле, а корпусом закреплены на раме базового трактора.
При тросовом управлении для подъема и опускания отвала служит по-
лиспаст, соединенный с лебедкой.
Гидравлическая система управления (рис. 12.4) бульдозерным оборудова-
нием обеспечивает заглублеиие-выглублеиие отвала, его наклбн, перекос и
поворот. Давление масла в гидросистеме 10,0—16,0 МПа. Система состоит из
одного или нескольких насосов шестеренного, лопастного или плунжерного
типа, распределителя с предохранительным клапаном, бака и исполнительных
элементов-гидроцилиндров. Масло, находящееся в баке 6 (рис. 12.4, а) засасы-
вается насосом 1 и под давлением подается в распределитель 4, а из него по
трубопроводам 3 в верхнюю или нижнюю полости гидроцилиндров 2 (пока-
зано стрелками). Это приводит к перемещению поршня, шток которого связан
с отвалом бульдозера. Одновременно масло, вытесняемое движущимся порш-
нем из другой полости, через распределитель сливается в бак.
Для предотвращения повреждений гидропривода при повышении давле-
ния масла сверх установленной нормы служит предохранительный клапан,
перепускающий масло из трубопроводов высокого давления в бак. Поступаю-
щее из гидросистемы в бак масло очищается от механических примесей в фильт-
ре 5. Шестеренный насос приводится в действие от коленчатого вала двигате-
ля через карданный вал, муфту 5 (рис. 12.4, б) и мультипликатор (шестерен-
ную передачу, увеличивающую число оборотов ведомого вала). Мультиплика-
тор содержит муфту включения 2 и шестерню 4, свободно вращающуюся
на двух подшипниках, напрессованных иа входном валу.
Рис. 12.4. Гидравлическая система управления.
а — схема, б — привод насосов
378
Рис. 12 5. Системы управления бульдозером;
а — гидравлическая; б — трособлочная; в — схема однобарабанной лебедки с одноступенчатым
редуктором; г— схема лебедки с двухступенчатым редуктором
С шестерней 4 в постоянном зацеплении находится одна или несколько (в
зависимости от числа насосов) малых шестерен 5. В каждой малой шестерне
имеется внутреннее шлицевое соединение, в котором монтируется хвостовик
шлицевого вала насосов. На ведущем валу с возможностью продольных пере-
мещений установлена кулачковая муфта, передающая вращение от вала к ве-
дущей шестерне. Включение и выключение муфты производят рычагом 6 пос-
редством валика /.
Управление гидросистемой осуществляется золотниковым четырехпози-
ционным распределителем 4 (см. рис. 12.4, а), определяющим четыре рабочих
положения отвала: «Подъем», «Опускание», «Заперто», «Плавающее».
Гидросистема (рис. 12.5, а) трактора, на котором навешено бульдозерное
оборудование, состоит из насоса 5, гидрораспределителя 4, масляного бака 6,
гидроцилиндров подъема и опускания 1 и поворота отвала 2, трубопроводов 3,
гидрозамков 10, фильтров 7, перепускных клапанов 9 и манометра 8.
При положении золотника «Подъем» нагнетательная полость распределите-
ля соединена с нижней полостью цилиндров, и жидкость от насоса поступает
в нижнюю полость, поднимая поршень с отвалом.
При положении золотника «Заперто» жидкость циркулирует по кругу:
бак—насос—распределитель—фильтр—бак. Обе полости гидроцилиидра запер-
ты золотником распределителя. В плавающем положении жидкость циркули-
рует по тому же кругу, но верхние и нижние полости цилиндров сообщаются
через распределитель и поршни свободно1 могут перемещаться под действием
внешних сил. Для фиксации положения поршней и отвала служит гидрозамок.
Тросово-блочная система управления бульдозером (рис. 12.5, б) вклю-
чает механическую однобарабанную лебедку с фрикционом и тормозом, по-
лиспаст 3 подъема отвала, направляющие блоки и тяговый трос. Лебедка смон-
тирована, как правило, на корпусе заднего моста трактора и приводится в дви-
жение от вала отбора мощности трактора через кулачковую муфту. Основными
элементами лебедки являются грузовой барабан 1 для навивки троса, редук-
тор 5, фрикциоииая муфта 4 и ленточный тормоз 2. Рычагом 6 включается муф-
та 4 и барабан 1.
379
Однобарабанная лебедка Д-269 (ДЗ-7) приводится в действие от вала от-
бора мощности трактора посредством, соединительного вала (рис. 12.5, в)
Ведущий вал, размещенный в литом корпусе лебедки, соединен с шестерней 1,
находящейся в постоянном зацеплении с ведомым зубчатым колесом 2, к сту-
пице которого болтами жестко прикреплен ведущий конус фрикциона 5. Для
увеличения сил трения на ведущем конусе наклепана асбобакелитовая на-
кладка. Колесо установлено на двух конических роликоподшипниках, закреп-
ленных внутренними кольцами на полой втулке 4. Втулка с зубчатым колесом
может поступательно передвигаться вдоль оси 8 барабана н удерживается от
вращения шпонкой Барабан 7 выполнен заодно с ведомым конусом фрикциона
и тормозным шкивом 6 и свободно вращается на неподвижной осн. Включают
фрикцион фасонной гайкой 3 с правой и левой внутренней резьбой: в-первую
ввернут конец втулки колеса, во вторую — конец оси барабана. При повороте
гайки втулка колеса получает осевое перемещение, включающее нли выклю-
чающее фрикцион.
Фиксация рабочего органа в рабочем или транспортном полджении обес-
печивается ленточным тормозом 9, выполненным из медноасбестовой ленты,
стягивающей тормозной диск барабана. Управление лебедкой осуществляется
посредством рычага в кабине и системы передаточных тяг. Системой управле-
ния предусмотрено включение тормоза или его выключение при включении
фрикционной муфты. В результате выполнения этих операций происходит
подъем и опускание отвала.
Существуют системы с управлением лебедкой от пневмопривода базового
трактора (см. рис. 12,5, б).
Однобарабаиная лебедка Д-499 (ДЗ-21) (рис. 12.5, г) имеет более надеж-
ную конструкцию. Одной из составных частей ее является двухступенчатый
редуктор с промежуточными шестернями 1 и 2. Тормозной фрикцион установ-
лен на промежуточном валу редуктора. Включение фрикционной муфты про-
изводится при перемещении ведомого диска, выполненного с конусной коль-
цевой проточкой по краю диска. На ведущем диске муфты прикреплены конус-
ные фрикционные накладки. Тормозной барабан выполнен заодно с барабаном
лебедки.
Основным недостатком тросового управления является невозможность
принудительного заглубления отвала с использованием массы базовой машины.
Ниже приведены технические характеристики бульдозеров:
С поворотным отвалом
Базовый трактор ДЗ-43 (Д-607) ДТ-75Б ДЗ-104 ДЗ-18 (Д-493А) Т4АП1 Т 100МГП ДЗ-17 (Д-492А) Т-100М ДЗ-25 (Д-522) Т-180 ДЗ-55 (Д-689) ТП-4
Тяговое усилие, кН 30 40 (60) 100 100 150 40 (60)
Отвал, мм длина .... 3500 3280 3940 3940 4430 3700
высота .... 800 1000 815 815 1200 830
Управление .... гидравлическое канатное гидравли-
Масса, т 9,1 10,03 13,9 14,0 17,85 ческое 10,45
Базовый трактор . . Тяговое усилие, кН . Отвал, мм: длина .... высота .... Управление . . . . Масса, т . . . . . С неповоротным отвалом Д-37 (Д-579) ДЗ-48 (Д-661) МТЗ-52 К-702 14 50(100) 2000 3200 200 1100 гидравлическое 36,0 14,5
380
12.2. ЭКСКАВАТОРЫ i
12.2.1. Назначение и классификация
Экскаваторы — самоходные землеройные машины, служащие для копа-
ния и перемещения грунта в отвал или транспортные средства. По принципу
действия различают одноковшовые экскаваторы цикличного действия и мно-
гоковшовые непрерывного. У одноковшовых экскаваторов рабочим органом
является ковш. Его рабочий процесс (цикл) включает копание (отделение ков-
шом грунта от массива), перемещение грунта к месту выгрузки и возвращение
ковша в исходное положение.
В путевом хозяйстве широкое распространение нашли одноковшовые
экскаваторы универсального типа. Основными видами сменного рабочего обо-
рудования таких машин являются прямая и обратная лопаты, кран, драглайн,
грейфер. При прямой лопате (рис. 12.6', а) в комплект входят стрела /, рукоять
2, ковш 3. Таким оборудованием обычно разрабатывается груит в забое, рас-
положенном выше уровня стоянки машин.
Обратная лопата (рис. 12.6, б) применяется для рытья траншей и котло-
ванов, расположенных ниже уровня стоянки машины. Комплект включает
стрелу /, рукоять 2, ковш 3 и переднюю стойку 4. Крановое оборудование
(рис. 12.6, в) используется для монтажных и погрузочных работ. Ойо имеет
удлиненную стрелу 1 и полиспаст 2. Оборудование драглайн (рис. 12.6, г)
включает удлиненную стрелу 1 и ковш совкового типа 2. Грейферное оборудо-
вание (рис. 12.6, б) используют при погрузке и выгрузке сыпучих, рытье глу-
боких котлованов, колодцев, траншей. Оно состоит из удлиненной стрелы 1
и грейфера 2 (см. рис. 2.13).
Одноковшовые экскаваторы классифицируют по типу оборудования, вмес-
тимости ковша, исполнению рабочего оборудования, роду силовой установки,
типу привода механизмов и системе управления.
В зависимости от вместимости ковша различают восемь размерных груцп
экскаваторов.
По исполнению рабочего оборудования экскаваторы делят на машины
с гибкой и жесткой подвесками. При гибкой подвеске рабочее оборудование
удерживается и приводится в действие посредством гибких связей — канатов.
При жесткой—для этой цели служат жесткие связи в виде гидроцилиндров.
Жесткая подвеска может быть выполнена шарнирно-рычажной (шарнирно-
сочлененной) или телескопической.
По роду силовой установки различают экскаваторы дизельные, электри-
ческие и с комбинированным приводом (например, дизель-электрические).
По типу привода механизмов существуют одно- и многомоторные экска-
ваторы.
По виду управления экскаваторы бывают с механическим, гидравлическим
и пневматическим управлением. Механическое управление отличается боль-
шим количеством тяг, рычагов и шарнирных соединений. Гидравлическое уп-
равление с использованием гидравлических исполнительных механизмов 'об-
легчает управление машиной и снижает утомляемость водителя. При пневма-
тическом управлении для включения всех рабочих механизмов используют
энергию сжатого воздуха, подаваемого от компрессора. Благодаря этому обес-
печивается плавное управление механизмами.
Система индексации одноковшовых экскаваторов (рис. 12,6, ё) предусмат-
ривает буквенное обозначение ЭО (Э— экскаватор, О — одноковшовый)
и четыре цифры, обозначающие размерную группу машины, тип ходового уст-
ройства, конструктивное исполнение рабочего оборудования и номер модели
данного типа. После четырех цифр ставится дополнительное буквенное обо-
381
Резерв
4
5
Телеско-
пическое
Очередная модернизация
1
ХЛ
£
а
б
7
1
Тр Пр
Климатическое
исполнение
S:
§
ъ
1
Порядковый № модели
/|z|j|4|5|5|7|8|g
4
СШ
5
А
2
п
2
ГУ
0,15- 0,4
0,25- 0,55
0,4 - 1,0
0,65 ~ 1,6
1,0 - 2,5
1,6 - 4,0
2,5- 6,5
S)___________
О канатной
подвеской.
Т ТВ
Кодовое устройство
8 | 9
Резерв
с жесткой
подвеской
2
Исполнение рабочего оборудования
2
2
2
2
2
5
7_
В
эо-
Если не было модернизации
Рис. 12.6 Сменное рабочее оборудование одноковшовых экскаваторов:
а — прямая лопата; б — обратная лопата, в — крановое оборудование; г — драглайн; д — грей
фер; е — индексация экскаваторов
значение модернизации машины (Л, Б, В, ...) н климатических условий, для
которых она исполнена: ХЛ — холодные, Т — тропические и ТВ — влаж-
ные тропические.
Все одноковшовые экскаваторы разделены на восемь размерных групп в
зависимости от минимальной вместимости ковша.
Следующая цифра соответствует типу ходового устройства: 1 — гусенич-
ное с минимальной поверхностью гусениц (Г); 2 —гусеничное с увеличенной
поверхностью гусениц (ГУ), 3 — пневмоколесное (Л); 4 — специальное шасси
автомобильного тип^ (СШ), 5 — шасси грузового автомобиля (Л); 6 — трак-
торное (Тр)-, 7—прицепное (Пр). Цифры 5 и 9 предусмотрены в качестве резерва.
Конструктивное исполнение рабочего оборудования выражается цифрами:
1 — с канатной подвеской; 2 — с жесткой подвеской; 3 — телескопическое;
382
4, 5 -— резерв. В качестве примера можно привести марку экскаватора’
ЭО-6112БХЛ, обозначение которой содержит следующую информацию1
ЭО — экскаватор универсальный одноковшовый, 6 — размерной группы 6
(вместимость ковша не менее 1,6 м3); 1—на гусеничном ходу с минимально
допустимой поверхностью гусениц; 1 — с канатной подвеской; 2 — второй
модели; Б — второй модернизации; ХЛ — в северном исполнении. В индекс
экскаваторов старых выпусков входит вместимость ковша и порядковые номе-
ра модели и модернизации. Например, Э-652Б — экскаватор с ковшом вмес-
тимостью 0,65 м3, модель 2, вторая модернизация.
12.2.2. Устройство экскаваторов с жесткой подвеской
рабочего оборудования
Такие экскаваторы имеют гидравлический привод, что обеспечивает плав-
ность и бесступенчатость изменения скоростей рабочих движений, повышает
долговечность машины, позволяет реализовать на рабочем органе большие уси-
лия резания, дает возможность применять ковши увеличенной вместимости,
облегчает смену рабочего оборудования, упрощает устройство экскаватора,
снижает массу машины и облегчает уход за ней. Все это ведет к повышению
производительности машины. Гидравлическая схема экскаваторов обеспечи-
вает передачу энергии к основным механизмам: рабочему оборудованию и ме-
ханизмам поворота и передвижения, дополнительным опорам, системе управ-
ления и т.п.
Во время работы экскаватора, оборудованного обратной лопатой, ковш
движется снизу вверх на себя. В начале работы его устанавливают в положе-
ние 1 (рис. 12.7, а). При этом гидроцилиндр поворота ковша находится в край-
нем положении, шток до упора втянут в цилиндр, положение гидроцилиидров
стрелы и рукояти таково, что позволяет режущей кромке ковша занять тре-
Рис. 12,7 Гидравлический экскаватор
а — работа обратной лопатой; б — гидросхема; в — гидрозолотник при подъеме стрелы, г — гид
розолотник при опускании стрелы
383
буемое исходное положение. Далее ковш при помощи гидроцилиндра рукояти
внедряется в грунт, а затем включается гидроцилиндр поворота ковша. При
этом продолжается внедрение ковша в результате движения цилиндра стрелы.
По достижении максимального сечения стружки движение штока рукояти
прекращается, а ковш продолжает поворачиваться до полного его заполнения
(положение II). Цилиндр поворота стрелы начинает работать после того, как
ковш заполнится иа 50%. После окончания поворота ковша и его выглубления
из забоя включается механизм поворота платформы. При этом подъем стрелы
и ковша продолжается. После поворота платформы для установки ковша над
местом разгрузки или транспортным средством ковш поворачивается для раз-
грузки, принимая в конце исходное положение III. Платформа возвращается
в исходное положение. Стрелу и рукоять также устанавливают в исходное по-
ложение, и цикл повторяется.
Значительным достоинством гидравлического привода является возмож-
ность независимо управлять работой отдельных узлов силового оборудования.
В гидросхеме (рис. 12.7, б) масло из бака 7, в котором помещен фильтр 2, по-
дается насосом 3 в трубопровод 4 и к распределительному устройству (золот-
нику) 5. При перемещении золотника вниз рукояткой 6 масло поступает через
отверстия Н и А (рис. 12.7, в) и трубопровод 7 (см. рис. 12.7, б) в нижние по-
лости гидроцилиндров 8. Штоки гидроцилиндров при этом перемещаются по
стрелке В, поднимая стрелу. Масло из верхних полостей 9 через трубопроводы
10 и отверстия в распределительном устройстве С и Б (см. рис. 12.7, в) и тру-
бопровод 11 (см. рнс. 12.7, б) сливается в бак 1. Для опускания стрелы ры-
чагом 6 перемещают золотник вверх (рис. 12.7, г). При этом масло через от-
верстия Н н С и трубопровод 10 (см, рис. 12.7, б) подается в верхние полости 9
цилиндров, а из нижних полостей этих цилиндров масло сливается в бак 1 че-
рез трубопровод 7, отверстия в золотниковом распределителе и трубопровод
11. В гидросистеме установлен предохранительный клапан 12. Если золотник
находится в нейтральном положении (см. рис. 12.6, б) и перекрывает доступ
масла в гидроцилиидры или если в системе нагнетания давление повышается
выше расчетного, то масло, подаваемое насосом, пропускается через этот кла-
пан обратно в бак 1.
Экскаваторы с жесткой подвеской рабочего оборудования различают двух
типов: шарнирно-рычажные и телескопические.
Экскаваторы шарнирно-рычажного типа выпускают с ковшами вмести-
мостью 0,15; 0,25; 0,5; 0,65 и 1,0 м3. Они делятся на полно- и неполноповорот-
ные. Полноповоротные состоят из поворотной платформы, на которой смонти-
рованы силовая установка и основные агрегаты гидропривода; механизм по-
ворота, рабочее оборудование; опорно-поворотный круг и кабина с пультом
управления. Опорно-поворотный круг передает нагрузки от поворотной плат-
формы иа ходовую раму экскаватора и допускает вращение поворотной плат-
формы и а 360°.
Неполноповоротный экскаватор (рис. 12.8, а) монтируют в качестве навес-
ного оборудования на колесных тракторах 1. Они включают рабочее оборудо-
вание 2 и поворотную колонку 3, смонтированную иа раме, прикрепленной к
раме трактора, и допускающую поворот рабочего оборудования на ограничен-
ный угол, к раме трактора крепится бульдозерное оборудование 5 и выносные
опоры 4, Сменное рабочее оборудование гидравлических экскаваторов включа-
ет обратную и прямую лопаты, погрузочное оборудование и грейфер.
Обратная лопата полноповоротного экскаватора (см. рис. 12.7, а) имеет
составную стрелу из основной 4 и удлиняющей 3 частей, рукоять 2 н ковш 1.
Поворот рукояти и ковша, опускание-подъем стрелы осуществляются гидро-
цилиндрами. Основная часть стрелы пятой крепится к проушинам поворотной
рамы 5. В процессе копания грунта толщину стружки регулируют подъемом и
опусканием стрелы, Прн обратном повороте ковша происходит его разгруз-
384
13 Зак. 47
385
ка, поэтому ковши обратной лопаты делают закрытого типа, без открыва-
ющегося днища.
Прямая лопата. Ее рабочее оборудование включает стрелу 3 (рис 12 8. б),
рукоять 2. ковш / и гидронилиндры 4 и 5 соответственно для нодье.ма стрелы и
поворота рукояти Возможно использование поворотного ковша с дополни )ель-
ным гидроцилиндром. Неповоротные ковши предназначены для наиболее тя-
желых условий эксплуатации машин В них предусмотрено поворотное днище
для разгрузки грунта с механизмом принудительно) о открывания н закрыва
ния. Днище при од ви тс я в движение штоком гидропривода через рычажную
систему.
Заглубление ковша при копании и регулировании толщины стружки осу-
ществляют гидроцилиндрами подъема-опускания стрел ы Для набора грунта
в ковш и подъема последнего из забоя приводят в действие гидроцилиндр по-
ворота рукояти.
Погрузочное оборудование предназначено для разрабожи легких грун-
тов, погрузки и разгрузки сыпучих при движении ковша от экскаватора. Вме-
стимость ковша погрузчика в 1,5—2 раза превышает вместимость ковша пря-
мой лопаты. Оборудование погрузчика включает ковш / (рис, 12 8, в). рукоять
2, стрелу 3 и гидронилиндры 4. В качестве стрелы может быть использована
основная часть стрелы обратной лопаты Ковш погрузчика не имее, поворот-
ного днища. Разгрузка материала осуществляется при повороте ковша отно-
сительно рукояти.
Грейфер предназначен для погрузки сыпучих материалов, копания 1л\-
боких колодцев и котлованов с вертикальными стенками Грейферное обору-
дование включает стрелу 5 (рис 12 8, г), рукоять 5, подвеску 2, гидроцилинд-
ры 6 и 4 соответственно открывания челюстей ковша и поворота рукояти, а
также гидроцилиндр подъема стрелы
Челюсти грейфера 1 приводятся в действие гидроцилиндрами и рычажной
системой в отличие от канатных грейферов (см рис 2 13).
Экскаваторы с телескопическим рабочим оборудованием (рис. 12.9) пред
назначены для планирования и отделки откосов насыпей и выемок, зачистки
дна котлованов, а также для выполнения обычных погрузочных работ. Пово-
ротный круг 6 и платформа 7 по конструкции не отличаются от аналогичных
узлов других экскаваторов.
Стрела состоит из хвостовой рамы 5, неподвижной секции-основания 3
и подвижной секции 2. К последней шарнирно, обеспечивая возможность по-
ворота, крепится ковш /. ^Механизм поворота позволяет изменять угол реза-
8if50
Рис. 12.9. Экскаватор с телескопическим рабочим оборудованием
386
ния ковша и устанавливать его в транспортное положение. Подвижная секция
снабжена роликами, которые перемещаются по направляющим элементам
внутри основания стрелы при воздействии механизма выдвижения (втягива-
ния). В результате этого изменяется длина стрелы при копаиии, что способ-
ствует повышению точности планировочных работ. Основание стрелы шарнир-
но с возможностью угловых перемещений установлено в поворотном круге 4
хвостовой рамы стрелы. Поворот стрелы относительно ее продольной оси ис-
пользуется при выполнении зачистных, отделочных и планировочных работ,
требующих изменения положения ковша в пространстве.
12.2.3. Устройство канатных экскаваторов
Стандартным оборудованием одноковшовых универсальных экскаваторов
служат прямая и обратная лопаты и драглайн. В путевом хозяйстве наиболее
часто применяют экскаваторы Э-652Б, Э-1252, ЭО-3311Б и ЭО-31 ИВ
В универсальных экскаваторах с гибкой подвеской стрела и рукоять с
ковшом подвешены на канатах, которыми и приводятся в действие при копа-
нии и разгрузке грунта. Подъем и опускание стрелы, поворот рукояти и реа-
лизация напорного усилия осуществляются посредством канатных полиспас-
тов. Благодаря канатной подвеске рабочего оборудования драглайном и грей-
фером можно вести работы на большой глубине при вылете 10—12 м. Такой
экскаватор (рис. 12.10, д) состоит нз ходовой части 1, рамы 14, поворотной плат-
формы 5, на которой размещены силовая установка 6 (дизельная или электри-
ческая), главная 3 и стреловая 4 лебедки, механизмы главной трансмиссии 7,
пульт управления 13. К поворотной платформе в передней части крепится смен-
ное рабочее оборудование (в данном случае прямая лопата). Поворотная плат-
форма смонтирована на ходовой раме 14 посредством опорно-поворотного уст-
ройства.
При электрической силовой установке предусмотрена подводка кабеля 2.
Оборудование прямой лопаты содержит стрелу 9, рукоять 10, ковш 11.
На верхнем конце стрелы укреплена ось для головных блоков каната подъема
ковша и блоков 8 полиспаста подъема стрелы. Нижний конец стрелы имеет
проушины, которыми она шарнирно соединена с проушинами поворотной
платформы. В средней части стрелы размещен напорный вал 15
(рис. 12.10, б), а на нем седловой подшипник 12 и обводные блоки при каиатиом
напоре или зубчатые шестерни 17, 19 со звездочкой 20 при зубчато-реечном
напоре. На этом же валу установлен блок 16 для каната открывания днища
ковша. Рукоять 10 ковша прямой лопаты изготавливают одно- или двухбалоч-
ной. Первая проходит внутри стрелы, вторая охватывает ее с двух сторон. Воз-
вратно-поступательное движение однобалочной рукояти обеспечивается боль-
шей частью канатным, а двухбалочной — зубчато-реечным механизмом 18.
Рукоять 10 вместе с ковшом 11 и седловым подшипником 12 могут поворачи-
ваться в вертикальной плоскости относительно оси напорного вала 15 и пере-
мещаться вдоль оси вперед (напор) и назад (возврат). Ковш И прямой лопаты
состоит из корпуса, откидного днища и сменных зубьев. Корпус имеет высту-
пающий вверх и вперед козырек с гнездами, в которые вставляют зубья с на-
конечниками, выполненными из высокомарганцовистой стали, хорошо проти-
востоящей абразивному изнашиванию. К задней стенке ковша приварены про-
ушины для соединения его с рукоятью, подвески днища ковша и крепления
блока подъема. Днище удерживается в закрытом положении пружинным за-
совом, выключаемым специальным механизмом. Захлопывание днища проис-
ходит при резком опускании ковша вниз в сторону машины.
В последние годы нашли широкое применение ковши без зубьев со сплош-
ной режущей кромкой полукруглой формы, выступающей вперед. У этих ков-
13*
387
шей сопротивление грунта при копании и их вес меньше, чем у ковшей с зубья-
ми, что позволяет на 20—30% увеличить нх вместимость и производительность
машины.
Основными операциями рабочего цикла одноковшового экскаватора явля-
ются опускание ковша на грунт, копание при движении ковша от экскаватора,
подъем стрелы с ковшом, поворот платформы, разгрузка ковша в отвал или
транспортные средства, обратный поворот платформы и установка рабочего
оборудования в первоначальное положение. В процессе копания ковш прямой
лопаты разрабатывает забой снизу вверх. При этом одновременно с натяжением
каната напорным механизмом выдвигается рукоять. Напорный механизм
позволяет регулировать толщину стружки для реализации полного исполь-
зования мощности двигателя экскаватора и быстрого заполнения ковша.
Оборудование обратной лопаты (рис. 12.11, а) состоит из ковша /, ру-
кояти 6, стрелы.? и вспомогательной стойки 4. Ковш жестко связан с рукоятью,
которая в виде неравноплечего рычага шарнирно укреплена на конце стрелы.
Другой конец стрелы также шарнирно соединен с поворотной платформой экс-
388
каватора. Консольная часть рукояти полиспастом 5 связана с вспомогатель-
ной стойкой 4, удерживаемой в требуемом положении стрел о подъемной лебед-
кой. Другой конец рукояти тяговым полиспастом 2 связан со стрелой. Стойка
предназначена для увеличения угла между подъемным полиспастом и стрелой,
благодаря чему уменьшается действующая на полиспаст нагрузка. Свободный
конец каната подъемного полиспаста крепится на барабане главной лебедки.
Основные части рабочего оборудования — ковш, стрела и рукоять — сходны
между собой, а у большинства машин с ковшами вместимостью до 0,35 м3 уни-
фицированы полностью.
Процесс работы экскаватора с обратной лопатой. Подтягивая подъемный
полиспаст 5 и отпуская тяговый 2, поворачивают рукоять, выиося ковш вперед
от экскаватора (положение III). Затем подъемным полиспастом опускают стре-
лу и ковш под действием веса рабочего оборудования врезается в грунт (по-
ложение /). Далее включают тяговый полиспаст 2 и растормаживают подъем-
ный 5, при этом ковш подтягивается к экскаватору и набирает грунт После
наполнения ковша стрела вместе с подтянутым ковшом поднимается подъемным
полиспастом при заторможенном тяговом, и поворотную платформу вместе с
рабочим оборудованием поворачивают к месту разгрузки. Разгружают ковш
через открытую часть (положение II).
Оборудование драглайн (рис. 2.11, б) включает стрелу 1, удерживаемую
полиспастом 6, и ковш 3, подвешенный к стреле на подъемном канате 2 и пере-
мещаемый в сторону экскаватора тяговым канатом 4. На передней части пово-
ротной платформы установлен механизм наводки 5, который не допускает за-
девания каната за платформу и стрелу и обеспечивает правильную навивку
каната на барабан. Стрела драглайна в процессе работы несет нагрузку только
от веса ковша с грунтом. Это дает возможность делать ее облегченной конструк-
ции и более длинной по сравнению со стрелами прямой и обратной лопат. Ра-
бочий цикл драглайна начинается с заброски ковша из верхнего положения.
Падая, ковш зубьями врезается в грунт. При подтягивании тягового каната
перемещающийся волоком ковш срезает* стружку грунта. После его наполне-
ния выбирают подъемный канат, не ослабляя тягового. При этом ковш отрыва-
ется от грунта и перемещается к голове стрелы, где он повисает на растянутых
канатах. С операцией подъема ковша может быть совмещен поворот на выгруз-
ку. Для разгрузки ковша тяговый канат ослабляют, при этом передняя часть
ковша опускается вниз и грунт высыпается.
Рис. 12.11. Схема работы экскаватора:
а — обратной лопаты; б — драглайна
13в Зак. 47
389
12.2.4. Основные механизмы канатных экскаваторов
На универсальных строительных экскаваторах наиболее распространен
привод трансмиссии от одного дизельного илн электрического двигателя через
главную фрикционную муфту, которая предназначена для отключения транс-
миссии экскаватора при запуске двигателя. К числу основных механизмов од-
ноковшовых экскаваторов относятся: главная и стрелоподъемная лебедки, на-
порный механизм, а также механизмы поворота платформы и передвижения
ходового оборудования.
От двигателя 1 (рис. 12.12) через дисковую фрикционную муфту 2 (назы-
ваемую главной муфтой), цепную передачу 3 вращение передается на вал 26,
а через шестерни 4,5,9 — на вал 8. Это — главная трансмиссия экскаватора.
Включение ленточиого фрикциона 21 соединяет свободно вращающийся бара-
бан 17 подъема ковша с валом 8. Барабан начинает вращаться, наматывает
трос и поднимает ковш к головным блокам стрелы. Ддя остановки и удержания
поднятого ковша фрикцион 21 выключают и включают ленточный тормоз 18,
затормаживающий барабан. Ковш опускается под собственным весом, скорость
опускания регулируется тормозом 18. При включении фрикциона 10 начинает
вращаться звездочка 16 и соединенная с ней цепями звездочка 12. В ре-
390
зультате вращается барабан напорного механизма 15, наматывается трос на-
порного каната 14 и сматывается канат 13. Это приводит к вращению оси сед-
лового подшипника напорного механизма 15 и рукоять начинает выдвигать-
ся, осуществляя напор. Кулачковой муфтой 23 можно соединить с валом 7
звездочку 24 или стрелоподъемный барабан 22. При включении фрикциона 6
(и выключении 10), а также муфты 23 и звездочки 24 вращение от вала 7 пере-
дается на звездочки 16, 12 и далее на каиаты 13 и 14 — рукоять с ковшом втя-
гивается. Для удержания рукояти ковша от выдвижения или втягивания ис-
пользуют ленточный тормоз 11. Для подъема стрелы муфту 23 соединяют с ба-
рабаном 22, включают фрикцион 6 и вращение от вала 7 передается на барабан
22. На последний наматывается канат, и стрела поднимается. При выключе-
нии фрикциона 6 барабан 22 удерживается от проворачивания ленточным тор-
мозом 20. Для опускания стрелы натяжение последнего ослабляют. Во избе-
жание падения стрелы при случайном расторможении применено противоугон-
ное устройство, состоящее из звездочки, соединенной с барабаном 22, цепи и
звездочки 19 и собственно противообгонйой муфты. При опускании стрелы
звездочка 19 вращается почасовой стрелке все с большей частотой, пока она не
станет равной частоте вращения вала 8. Тогда Срабатывает противообгонная
муфта, что предупреждает падение стрелы.’ При подъеме стрелы барабан 22
вращается против часовой стрелки и звездочка 19 свободно движется навстре-
чу валу 8 (муфта не включается). Для поворота платформы экскаватора вклю-
чают фрикционы 27 или 30, в результате соединяют конические шестерни 29
или 25 с валом 26 и вращение передается через зубчатое колесо 28 на вал 49 и
далее через зубчатые колеса 50, 47 (или 48), 46 и через муфту 32 на вал 31 и
шестерню 45, находящуюся в зацеплении с зубчатым венцом 36 поворотного
механизма. При вращении шестерня 45 обегает венец 36, и платформа повора-
чивается. Включение фрикциона 27 или 30 изменяет направление вращения
вала 49. Включение сдвоенной шестерни 50 с 48 приводит к уменьшению ско-
рости вращения, а с 47 — к увеличению. Фрикционы 27 и 30 сблокированы
так, что включать можно только один из них. Для передвижения экскаватора
включают муфту 34, в результате соединяют свободно вращающуюся шестер-
ню 35 с валом 33 и начинают действовать коническая передача 38, 43 и вал 42,
передающие вращение через муфты 39, звездочки 37 и 41 на ведущие колеса 40
гусениц. Для передвижения по кривой отключают муфтой 39 одну из гусениц.
Для предупреждения самопроизвольного движения экскаватора имеется сто-
пор 44. Муфты 32 и 34 сблокированы и можно включать только одну из них
(поворот или -передвижение). Для изменения скорости движения экскаватора
пользуются сдвоенной шестерней 5,0.
Главная лебедка, предназначенная для/'передачи усилий и движений на
ковш, имеет два барабана: подъемный й тяговый (напорный). Если эти бараба-
ны смонтированы на одном валу, лебедка называется одиовальной, если на
двух — двухвальной. Однрвдльные лебедки устанавливают, как правило, на
экскаваторах с ковшами вместимостью до 2,5 м3, а двухвальные — иа экска-
ваторах с ковшами большей вместимости.'Вал 1 (рис. 12.13) с посаженным на
шлицах зубчатым колером 2 начинают вращаться при включении главной муф-
ты привода экскаватора. Вместе с валом приходят в движение и ведущие части
фрикционных муфт 3. Два барабана 9 и 10 свободно посажены на валу на под-
шипниках. Их боковины, выполненные в виде тормозных шкивов, охватывае-
мых снаружи ленточными тормозами 8, одновременно являются ведомыми час-
тями фрикционных муфт 3. К барабану 10 приварены две зубчатые звездочки
5. При работе прямой лопаты сменную часть барабана 10 снимают и на звез-
дочки 5 надевают цепи привода напорного механизма. Для работы экскава-
тора, оборудованного прямой лопатой, к тормозному барабану 7 крепится пред-
назначенный для подъема ковша разъемный барабан 6 с винтовой канавкой для
13в*
391
Рис. 12.13. Главная одновальная лебедка экскаватора
правильной навивки каната. При работе экскаватора, оборудованного обрат-
ной лопатой или драглайном, барабан 6 служит для навивки тягового каната.
На левом тормозном барабане 4 в данном случае монтируется разъемный ба-
рабан 10, на который навивается подъемный канат. При работе экскаватора с
краиовым оборудованием устанавливают барабан 9, диаметр которого меньше,
чем диаметр барабана 6.
Опускание ковша происходит под действием собственного веса при выклю-
чении фрикционной муфты и отпущенном тормозе, который слегка приторма-
живается машинистом для ограничения скорости опускания.
Напорные механизмы принудительного типа по принципу действия под-
разделяют на независимые (рис. 12.14, а), зависимые (рис. 12.14, 6) и комби-
нированные (рис. 12.14, в), а по способу передачи движения на рукоять ковша—
иа зубчато-реечные (см. рис. 12.10) и канатные (см. рис. 12.14).
При независимом напорном механизме (см. рис. 12.14, а) свободный ко-
нец каиата 1 подъема, идущего с барабана А главной лебедки, закрепляется
иа стреле. Канат 3 напорного механизма, огибающий уравнительный блок 2
рукояти, двумя ветвями охватывает напорный барабан В снизу. Возвратный
канат 4 одним концом крепится к кронштейну рукояти, а другим охватыва-
ет напорный барабан сверху. Последний связан цепной передачей 5 со сдвоен-
Рис. 12.14. Схемы напорных механизмов экскаваторов
392
ной звездочкой Б, в зависимости от направления вращения которой выдви-
гается или втягивается рукоять с ковшом. Движения напора и подъема не за-
висят одно от другого, что позволяет четко управлять ковшом. Недостатком
этого типа напорного механизма являются отсутствие возможности изменения
скорости напора и большая величина напорного усилия, которое требуется
для преодоления не только отбора грунта, но и части подъемного усилия ру-
кояти. Одновременное включение подъемного и напорного механизмов могут
привести к перегрузке двигателя, поэтому напор приходится осуществлять пе-
риодически рывками, что отрицательно сказывается на работоспособности ме-
ханизмов.
При зависимом напорном механизме (см. рис. 12.14, б) конец подъемного
каната 1, идущего с барабана А главной лебедки, крепится не на стреле, а на
напорном барабане Г, при этом канат стремится повернуть его по часовой
стрелке. Вращение барабана Г, а с ним и барабана В вызывает натяжеиие ка-
натов 4, в результате чего рукоять выдвигается вперед; одновременно подъем-
ный канат сматывается с напорного барабана, замедляя тем самым скорость
подъема ковша. Возврат рукояти с ковшом происходит при наматывании на
барабан В каната 3 через блок 2, в этом случае подъемный канат, наматываясь
на барабан Г, увеличивает скорость подъема ковша. Таким образом, при за-
висимом напорном механизме усилия и скорости напора и подъема ковша вза-
имно связаны, причем наибольшая сила напора определяется только силой на-
тяжения подъемного каната и диаметром напорного барабана. Для получения
силы напора, необходимой для заглубления ковша в твердый грунт, а также
выдвижения рукояти с груженым ковшом при максимально поднятой стреле
требуется максимальный напор. Между тем для нормального копания усилие
напора должно быть значительно меньшим (в 1,5—2 раза). Его уменьшают тор-
мозом барабана Д, связанного канатом 5 с барабаном В, что приводит к нера-
циональному расходу энергии на преодоление сил трения и, кроме того, ша-
чительно усложняет управление экскаватором. Если барабан не будет вовремя
и с достаточной силой заторможен, то ковш под воздействием излишнего на-
порного усилия очень быстро заглубится в груит и тем самым вызовет пере-
грузку двигателя. В этом случае возврат ковша без выключения механизма
подъема (а это связано с потерей времени) невозможен, так как при возвратном
движении скорость подъема ковша и, следовательно, расход мощности увели-
чиваются. Из-за этого весьма существенного недостатка система зависи-
мого напора выходит из употребления, несмотря на ее конструктивную про-
стоту.
Комбинированный напорный механизм (см. рис. 12.14, в) объединяет до-
стоинства зависимого и независимого напора. Диаметр напорного барабана В
в этой схеме выбран с таким расчетом, что напорное усилие, создаваемое за-
висимой частью, не превышает усилия, требуемого при нормальном копании
При этом используются положительные качества зависимого напора —воз-
можность плавного изменения скорости. В случае работы в тяжелых грунтах
и при выносе ковша необходимое дополнительное напорное усилие обеспечи-
вается независимой частью.
Каждый из напорных механизмов может быть выполнен как с зубчато-ре-
ечиой, так и с канатной передачей движения на рукоять. В зубчато-реечном ме-
ханизме (см. рис 12.10, 6) напорный вал /5 вращается в подшипниках, кор-
пуса которых укреплены на балке стрелы. На валу жестко закреплены при
водная звездочка и две напорные шестерни, находящиеся в зацеплении с рей
ками Седловой подшипник выполнен в виде двух Г-образьтых кронштейнов,
каждый из которых охватывает одну из балок рхкоятп ковша, постоянно
хдерживая рейк\ в зацеплении с шестерней Кронштейны седлового подшип-
ника соединены с напорным валом по [шинниками и. следовательно. мо, \ т
ЛОЛ
вместе с рукоятью качаться относительно него в вертикальной плоскости
У канатного напорного механизма при однобалочной рукояти седловой под-
шипник имеет два направляющих проема на одной оси. В проемах седлового
подшипника находятся съемиые вкладыши, по которым скользит рукоять ков-
ша. Подшипник жестко связан с осью, которая может поворачиваться во втул-
ках, закрепленных в балках стрелы. На этой же оси на шариковых подшип-
никах установлены три направляющих блока: крайние два — для напорного
каната, а центральный — для возвратного.
12.2.5. Системы управления экскаваторами
На универсальных экскаваторах применяются рычажная, гидравличес-
кая и пневматическая системы управления. Рычажная система, используемая
иа экскаваторах с ковшами вместимостью до 0,35 м3, отличается простотой
устройства, плавностью включения и высокой чувствительностью. Машинист
включает муфты и тормоза через систему тяг и рычагов. Для уменьшения зна-
чительных усилий применяют сервофрикционы, использующие энергию дви-
гателя (рычажно-механическая система). Однако включение рычажной систе-
мы сопряжено с большими физическими нагрузками на машинистов. Поэтому
она вытесняется более современными системами — гидравлической и пневма-
тической.
Гидравлическая система управления может быть насосной и безиасосной.
При безиасосной системе усилие машиниста передается исполнительному ме-
ханизму жидкостью (маслом), заполняющей два гидроцилиндра (датчик и
исполнительный) и соединяющую их трубку. Эта система не дает существен-
ного уменьшения усилий на рычагах по сравнению с рычажной системой.
У насосной гидравлической системы много общего с системой управления буль-
дозером. Только в ней есть аккумулятор, поддерживающий постоянное давле-
ние масла в системе (независимо от колебаний его расхода). Кроме того, ис-
пользованы лопастные насосы, более производительные, чем шестеренные. Не-
достаток насосных гидросистем — резкое включение механизмов, поскольку
рабочая среда (масло) практически не сжимается.
Пневматическая система управления получила в последнее время наибо-
лее широкое распространение. Она отличается большой плавностью включе-
ния, сходна с гидравлической, но в ней нет обратных трубопроводов, поскольку
воздух выпускается в атмосферу. В ней предусмотрен компрессор для сжатия
воздуха, ресивер, играющий роль аккумулятора запаса сжатого воздуха, и
масловодоотд елитель.
Ниже приведены технические характеристики экскаваторов:
Параметры . ЭО-3311Г ЭО-304В ЭО-5015А ЭО-3322А Э-652Б ЭО-4321 ЭО-4121А Э-10011Е
Вместимость
ковша, м3 Мощность дви- о л о;Л *. -г 1Р > 0,65 0,65 1,0 1,0
гателя, кВт Iлубина копа- 37 37 55 55 55—60 59 95 89
ния, м . . Радиус копа- 4,0 5,0 4,5 4,2 4,7 5,5 5,8 8.2
ния, м . . Высота выгруз- 5 9 8,2 7,0 7,75 7,9 8,95 9,0 9,2
ки. м Ходовая часть 4,3 5.6 3,9 4,8 5,6 5,6 5,0 8,3
колесная гусеничная колесная гусенич- ная колесная гусеничная
X правление механическое гидравлическое механическое гидрав- лическое механи- ческое
Часса, т 12 4 12,4 12,25 14,8 21,2 19,2 21,6 35,0
394
12.2.6. Производительность бульдозеров и экскаваторов
Техническая производительность бульдозера при срезке грунта в плотном теле, м3/ч,
определяется по формуле
„ 3600Укп
77----------
1ц /Ср
где — время рабочего цикла, с;
— h “Ь + 4 Т 4-
Оно состоит из затрат времени: на перемещение грунта = L/vp, подъем отвала в
транспортное положение t2, переключение передач трактора и его пово-
роты в конце рабочего хода t3, обратный (холостой) ход 4 (4 — Uvx),
переключение передач и его повороты в конце обратного хода 4;
L — длина участка, t>p, vy — скорость рабочего и холостого хода, м/с;
/ср — коэффициент разрыхления грунта (/ср--1 1,14-1,4);
кп •— коэффициент потерь грунта при транспортировке на расстояние L;
1—0,005 I;
кк —• коэффициент наполнения призмы (кн 0,8™ 1,2);
И — объем грунта, м3. Принимая, что грунт располагается перед отвалом треугольной
призмой, имеем а№ (£» ' геометрические размеры Приа-
мы волочения).
Производительность /7, м3/ч, при планировочных работах
п 3600а (Z/sina—0,5)
т
где b — длина отвала, м;
а — угол установки отвала в плане, град;
0,5 — ширина перекрытия проходов, м;
т — число проходов по одному месту;
v — скорость движения, м/с.
Техническая производительность одноковшового экскаватора П, м3/ч,
д ЗбООдКн
/С р
где q — вместимость ковша, м3;
/Сц — коэффициент наполнения ковша (кя — 0,6—1,2);
«р — коэффициент разрыхления грунта (/ср — 1,14-1,3);
— время цикла, с; состоит из продолжительности: копания поворота на выгруз-
ку 41, выгрузки £в, поворота в забой /из:
4i ~ 4< “Ни + + ^цз •
Время цикла зависит от квалификации машиниста, рабочего оборудования, вмести-
мости ковша н т. д. Так, при работе в отвал с ковшом q “ 0,65 м3 прямой лопатой /ц
124-15 с, драглайном 14—21 с, при работе в транспорт — соответственно /ц 12,5™
4- 18 с н 254-26 с. Эксплуатационная производительность //./
• ~ Лк-ри
где /св — коэффициент использования машины по времени (/св = 0,8—0,85).
12.3. ОСНОВЫ ЭКСПЛУАТАЦИИ И ТЕХНИЧЕСКОГО ОБСЛУЖИВАНИЯ
ЗЕМЛЕРОЙНЫХ МАШИН
Техническое обслуживание машин подразделяется на ежесменное (ЕО),
выполняемое в период каждой рабочей смены, и периодическое (ТО), проводи-
мое после отработки машиной определенного количества часов. При ЕО уда-
ляют с механизмов пыль и грязь, смазывают машину, производят контрольный
осмотр перед пуском, проверяют исправность действия рабочих органов, хо-
довой части, тормозов, освещения, управления, а также подготавливают ма-
шину к передаче смены другой бригаде. При ТО предусмотрены мойка, очист-
ка, осмотр машины, контроль за техническим состоянием узлов, агрегатов,
395
Таблица смазки экскаватора ЭО-4121
Места смазки Тип смазки Периодичность в часах
Шарнирные соединения стрелы с поворотной Летом солидол «С». 30
платформой, гидроцилиндров и их штоков со стрелой и рукоятью, тяг с ковшом и рукоятью, рычагов зимой пресс-солидол «С»
Рабочие поверхности опорно-поворотного уст- ройства Смазка ЦИАТИМ-203 60
Редчкторы механизмов поворота, движения Масло для коробок пе- редач и рулевого управ- ления 1200
Зубчаты^ венец I рафцулая смазка \ СсА 240
приборов, гидравлической системы, сменного оборудования. При его выпол-
нении крепят детали, регулируют механизмы, узлы и агрегаты, смазывают и
заправляют емкости, опробуют отдельные узлы и рабочее оборудование, вы-
полняют мелкие ремонтные работы, а также замену масел, топлива и охлаж-
дающих жидкостей при переходе от осенне-зимнего сезона к весенне-летнему
и наоборот. Работы по периодическому техническому обслуживанию предусмот-
рены по графику в соответствии с инструкциями. ТО-1 одноковшовых экска-
ваторов проводится через 60 ч работы, ТО-2 —- через 240 ч, а сезонное — 2 ра-
за в год
Ремонты землеройных машин подразделяются на текущие и капитальные.
При текущем ремонте осуществляют частичную разборку машин, устраняют
неисправности в узлах и агрегатах, препятствующие нормальной эксплуатации
машины, заменяют отдельные узлы и детали новыми или отремонтированными.
Этот вид ремонта выполняют в ремонтных мастерских или непосредственно на
стройке. При капитальном ремонте делают полную разборку машины, восста-
навливают все начальные сопряжения, посадки и зазоры, заменяют изношен-
ные узлы и агрегаты новыми, используя метод агрегат!ю-узлового ремонта.
Капитальный ремонт машин выполняют иа специализированных ремойгно-
механических заводах
13. МАШИНЫ ДЛЯ ОЧИСТКИ ПУТЕЙ ОТ СНЕГА
Для обеспечения бесперебойного движения поездов зимой железнодорож-
ные пути необходимо очищать от снежных заносов. Для механизации этого
вида работ создай большой парк машин, которые по назначению подразделяют-
ся на снегоочистители и снегоуборочные. В свою очередь снегоочистители де-
лятся на пдужиые, роторные, таранные и машины с реактивным авиационным
двигателем. Наибольшее распространение получили плужные и роторные.
Кроме снегоочистителей и снегоуборочных машин, для очистки путей от снега
применяют и другие путевые машины — струги всех типов, путевую убороч-
ную машину системы Балашеико, снеготаялки, автодрезины, оборудованные
щеточными барабанами. На стрелках для удаления снега оборудуют пневма-
тические устройства для обдува, электрические и газовые обогреватели, ко-
торые растапливают и испаряют падающий снег.
13.1. ПЛУЖНЫЕ СНЕГООЧИСТИТЕЛИ
13.1.1. Назначение и классификация
Плужные снегоочистители предназначены прежде всего для очистки пу-
тей на перегонах, а также небольших станциях. Они очищают путь от снега,
отбрасывая его в сторону. Базой их служит специальный вагон, оборудован-
ный по торцам снегоочистительными устройствами, расположенными под углом
к оси пути вертикальными плоскостями, состоящими из щита и двух крыльев.
При работе снегоочиститель подталкивается сзади локомотивом, передний щит
и крылья вырезают снег, который, скользя по ннм, отбрасывается в сторону.
Плужные снегоочистители подразделяют иа одно- и двухпутные. Первыми мож-
но очищать лишь однопутные линии, отбрасывая снег в обе стороны от пути,
а вторыми—двух-и многопутные участки.
Для отбрасывания снега на достаточное расстояние от пути скорость дви-
жения машины должна быть не менее 25—30 км/ч. При меньшей скорости
вдоль пути образуются снежные валы, которые в последующую метель будут
способствовать быстрому заиосу рельсовой колеи. При очистке станционных
путей снег отбрасывается на междупутье. При этом скорость движения снего-
очистителя может быть порядка 10—15 км/ч. На железных дорогах нашей стра-
ны используют снегоочистители типов СДП, СДП-М (модернизированный),
ЦУМЗ. Наиболее широко распространены СДП и СДП-М,
13.1.2. Плужный снегоочиститель СДП-М
Машина предназначена для очистки путей от снежных заносов глубиной
до 1,5 м на двух- и многонутиых участках Рабочая скорость СДП-М до
19.44 м с (70 км ч) Этот снегоочиститель обладает большой устойчивостью и
пробивной способностью при высокой производительности Он представляет
ИЧ7
11900
1525 1555 1052
Рис. 13.1. Плужный снегоочиститель СДП-ЛА
собой четырехосный вагон с цельнометаллическим кузовом 3 (рис. 13.1), ко-
торый опирается на две двухосные тележки 4. По торцам его установлены
снегоочистительные устройства 2, каждое из которых состоит из лобового щи-
та 7 и двух крыльев: бокового 8 (правого по ходу движения) и углового 6 (ле-
вого по ходу движения). Расположенные в верхней части лобового щита и
крыльев защитные козырьки 1 предохраняют смотровые окна машины от снеж-
ной пыли. В рабочем положении крылья образуют с передним щитом единую
отвальную плоскость, расположенную под углом 50° к оси пути. Поворот в
транспортное положение (вдоль кузова вагона) угловых и боковых крыльев
осуществляется пневмоцилиндрами 9, 10 с рычажной системой. Машина сцеп-
ляется с локомотивом выдвижной автосцепкой 5, которая при переводе снего-
очистителя в рабочее положение убирается за передний щит. Сигнализация и
освещение снегоочистителя состоит из фар, звукового сигнала, прожектора и
внутривагоиных ламп. Постоянный ток напряжением 50 В подается от локомо-
тива штепсельным подключением.
Лобовой щит СДП-М состоит из двух частей: одна из них —вертикальный
неподвижный щит 1 (рис. 13.2) — закреплена на раме машины; другая выпол-
нена в виде поворотного щита 7 с подрезными ножами 9. Поворотный щит 7
шариирио прикреплен к рычагу 6 и приводится в рабочее и транспортное по-
ложения пневмоцилиндрами 3 при повороте вокруг горизонтальной оси 4,
установленной в кронштейнах, приваренных к раме. Штоки цилиндров 3 шар-
нирно связаны с рычагами 6, прикрепленными к задней стенке поворотного
щита. Для облегчения поворота щита 7 на рычагах установлены чугунные
грузы — противовесы 5. В транспортном положении щит устанавливается го-
ризонтально (на рис. 13.2 показано пунктиром) и закрепляется стяжкой 8.
В рабочем и транспортном положениях он расположен ниже выдвижной авто-
сцепки, благодаря чему при очистке пути локомотив может находиться впере-
ди снегоочистителя. Снизу щит имеет съемные подрезные ножи 9, которые в
рабочем положении опускаются на 50 мм ниже уровня головок рельсов. Над
рельсами вместо ножей установлены тросовые щетки 10. Положение лобового
щита контролируется указателем, расположенным в кабине, а также контроль-
ной электролампой. В средней части лобового щита имеется люк с крышкой,
предназначенный для выдвижения автосцепки. Над лобовым щитом иа раме
машины закреплен козырек 2 для направления потока снега, перемещающе-
гося по отвалу, и уменьшения забрасывания окон машины снегом.
Крылья снегоочистительных устройств служат для увеличения ширины
захвата снега. К раме машины шарнирно подвешены угловые (со стороны меж-
дупутья) и боковые (со стороны обочины пути) крылья с подъемными подкрыл-
ками, которые в открытом положении совместно с лобовым щитом образуют
Рис. 13.2. Лобовой щит СДП-М
399
отвал снегоочистителя (см. рис. 13.1). Крыло угловое (рис. 13.3) имеет подъем-
ный подкрылок 2 с подрезными ножами 1. Сверху установлен козырек 8. От-
крытие крыла выполняется пневмоцилиндром через рычажную передачу. При
открытии и закрытии крыльев подкрылки автоматически опускаются и под-
нимаются. Механизм их подъема состоит из горизонтальной тяги 6, двупле-
чего рычага 4, шарнирио закрепленного на крыле, и вертикальной тягн 3.
Один конец горизонтальной тяги 6 при помощи комбинированного шаринра 5,
обеспечивающего свободу в горизонтальной и вертикальной плоскостях, за-
креплен на раме машины, другой конец при помощи шарового шарнира 7
соединен с одним из плеч рычага 4. Вертикальная тяга <?, соединенная со вто-
рым плечом рычага 4, надета на палец, закрепленный в подкрылке и пропу-
щенный в прорезь крыла. Прн повороте крыла тяга 6 автоматически поворачи-
вает двуплечий рычаг 4, который перемещает в вертикальной плоскости тягу 3
вместе с подкрылком 2. При открытии подкрылок опускается, при закрытии
поднимается. На раме машины крыло подвешено шарнирно при помощи рыча-
гов 9.
Боковое крыло (рис. 13.4) имеет такую же конструкцию и те же элементы,
каки угловое. Верхние козырьки 8 крыльев выполнены шарнирно и прикреп-
лены к подъемным подкрылкам. При открытии крыла козырьки автоматически
поворачиваются вперед, при закрытии занимают вертикальное положение.
В транспортном положении оба крыла устанавливают вдоль фермы и запирают
специальными запорами. В рабочем положении крылья удерживаются пнев-
моцнлиндрами. Усилие, действующее по штоку цилиндра, выбрано так, что
прн большой высоте и плотности снега, превышающих расчетные, крылья
прикрываются, что увеличивает устойчивость снегоочистителя. Для смягче-
ния ударов крыльев о раму при закрывании на ней установлены амортизаторы,
в корпусе которых имеются резиновые шайбы Для снижения сопротивления
перемещения снега по отвалу во время работы снегоочистителя автосцепка со
стороны переднего щита вдвигается внутрь, а образовавшееся отверстие за-
крывается откидным щитком.
УГР
Рис. 13.3. Крыло угловое СДП-М
400
Вид A
Рис. 13.4. Боковое крыло СДП-М
У снегоочистителя СДП (немодернизироваиного) лобовой щит (рис. 13.5)
также состоит из неподвижной части /, приваренной к раме машины, и подвиж-
ной 4, которая при помощи пиевмоцилиндров 2 и противовесов 5 на цепях 6
может скользить по вертикальным направляющим 3 вверх и вниз, занимая
соответственно транспортное и рабочее положения. В связи с большим трени-
ем скорость перемещения небольшая, поэтому на перевод из одного положения
в другое затрачивается значительно больше времени, чем у СДП-М, где подъем-
ный щит поворачивается.
Рис. 13.5. Схема снегоочистительного устройства СДП
401
Управление всеми рабочими органами СДП-М (открытие крыльев, пово-
рот щита, выдвижение автосцепки) пневматическое. Сжатый воздух от локомо-
тива через междувагонные соединительные шланги МШ (рис. 13.6) поступает
в центральную магистраль сиегоочистителя и по трубопроводу через вентили
В, клапаны максимального давления КР, обратный КО, предохранительный
клапан КП — в воздушные резервуары ВР. Два клапана максимального дав-
ления установлены в кузове машины и предназначены для снижения давления
с 0,89—0,9 МПа у локомотива до 0,6—0,65 МПа, на которое рассчитано все
оборудование (цилиндры, резервуары и т. п.) снегоочистителя. Для увеличе-
ния пропускного сечения клапаны установлены параллельно и отрегулирова-
ны на давление (0,62+0,02) МПа. Предохранительный клапаи КП отрегули-
рован на (0,65+0,01) МПа. Обратный клапаи КО предназначен для предотвра-
щения выпуска воздуха из резервуаров при открытых концевых кранах. От
резервуаров ВР идут трубопроводы к коллекторам пультов управления. На
снегоочистителе предусмотрены два пульта управления: один для переднего
снегоочистительного устройства, другой для заднего. На всех пультах разме-
щеньг пневматические краны золотникового типа, которыми сжатый воздух
направляется в соответствующие пневмоцилиндры: выдвижения автосцепки
ПЦг, подъема щита 77Д2. открытия крыльев ПЦз и ПЦ^. На каждой стороне
сиегоочистителя установлены кондукторский стоп-кран СК, манометры /И и
звуковой сигнал-тифон С с клапаном управления КУ- Для удаления из запас-
ных цилиндров влаги осуществляется их продувка через краны Bt.
Снегоочиститель оборудован автоматическим тормозом, в схему которого-
входят воздухораспределитель ВР, тормозные цилиндры ПЦТ и стоп-краны СК.
Для очистки снегоочистителя после работы через специальный кран В, подается
402
сжатый воздух. Автотормоза питаются от специальной воздушной магистрали
с фильтром Ф, которая ие соединена с рабочей магистралью.
Рукоятки кранов управления рабочими органами нмеют три положения, соот-
ветствующие положению рабочих органов: рабочее, промежуточное и транс-
портное. Кроме звуковой, на снегоочистителях использована световая сигнали-
зация. У постов управления машины и на локомотиве установлены указатели
трех цветов: красный, желтый и зеленый. Опускание переднего щита ограни-
чено концевым выключателем и контролируется красной лампочкой.
Помимо плужных снегоочистителей СДП, еще применяют ранее выпускав-
шиеся машины конструкции ЦУМЗ в одно- и двухпутном исполнении. Базой
их служит двухосный вагой с деревянным кузовом, в торцах которого установ-
лены снегоочистительные устройства, состоящие так же, как и СДП, из перед-
него щита и двух боковых крыльев. Подвижная часть переднего щита подни-
мается в верхнее положение пневмоцилиндрами с рычажной системой. У одно-
путной машины передний щит в плане представляет двухгранный угол, при
движении которого снег отбрасывается в обе стороны от оси пути.
Ниже приведены технические характеристики плужных снегоочистите-
лей:
Параметры сдп-м (СДП) ЦУМЗ (двухпутный) ЦУМЗ (од- нопутный)
Рабочая скорость, км/ч до 70 до 40 до 40
Максимальная толщина очищаемого слоя, м Ширина очищаемой полосы, м: с крыльями 1,5 0,6 0,6
5,0 5,1 4,95
без крыльев 3,2 2,4 2,55
Опускание ножа ниже головки рельса, мм 50 50 50
Масса снегоочистителя, т 84 26,5 21,6
13.2. РОТОРНЫЕ СНЕГООЧИСТИТЕЛИ
13.2.1 . Назначение и классификация
Роторные снегоочистители предназначены для расчистки путей от глубо-
ких снежных заносов. Основным рабочим органом их является роторное уст-
ройство, которым снег срезают, захватывают и отбрасывают в сторону от пути
Применяют одно-, двух- и трехроторные снегоочистители. В последнее время
разработан ферезерно-роторный снегоочиститель. У однороторных устройств
(рис. 13.7, а) вращающийся ротор большого диаметра установлен на передней
торцовой стенке машины. Ось вращения ротора параллельна оси пути, т. е..
Рис. 13.7. Схемы роторных устройств
403
плоскость самого ротора перпендикулярна пути. По образующим ротора за-
креплены радиальные лопасти. В верхней части кожуха имеется выбросное
окно. При поступательном движении машины ротор врезается в снежиый мас-
сив, при этом вращающиеся лопасти срезают снег, который под действием
центробежной силы выбрасывается через выбросное окно.
Процесс расчистки пути от снега у двухроторного устройства (рис. 13.7, б)
разделен, ротор-питатель отделяет снег от массива и подает его в выбросной
ротор, который и отбрасывает снег. Ротор-питатель, расположенный горизон-
тально (его ось перпеидикулярнд оси пути), представляет собой барабан с ло-
пастями на образующих. При вращении лопасти срезают снег и подают его
под действием центробежной силы в выбросной ротор. Последний выполнен по
типу однороторного устройства. Его лопасти служат только для отброса сиега
через выбросное окно.
Снегоочистительное устройство с тремя роторами (рис. 13.7, в) оснащено
одним выбросным и двумя роторами-питателями, расположенными одни над
другим, что позволяет разрабатывать сдой снега значительно большей высо-
ты Питатели вращаются навстречу один другому, направляя струю снега в
пространство между ними. Для увеличения разрабатываемой в снегу траншеи
снегоочистительные устройства всех типов имеют боковые крылья и подрезные
ножи.
Одиороторным снегоочистителям при работе приходится преодолевать
большие лобовые сопротивления. В конструкции двух- и трехроторных снего-
очистителей пассивные лобовые поверхности исключены, благодаря чему су-
щественно уменьшились потребные мощности для резания снега и перемеще-
ния машины. Этим можно объяснить, что они полностью вытеснили одноро-
торные снегоочистители. В фрезерно-роторном снегоочистителе вместо лопаст-
ных барабанов-питателей использованы две пространственные фрезы со спи-
ральными режущими элементами, что позволяет разрабатывать сиег практи-
чески любой плотности, обеспечивая при этом высокую производительность.
13.2.2 . Трехроторный электроснегоочиститель ЭСО-3
Трехроторным электроснегоочистителем ЭСО-3 можно расчищать пути от
заносов снега высотой до 4,5 м при любой его плотности. В торцовой части ма-
шины (рис. 13.8) размещено трехроториое устройство, разрабатывающее пря-
моугольную траншею шириной, превышающей габарит подвижного сос-
тава. Рама 14 опирается на две тележки: переднюю 11 трехосную и заднюю 18
двухосную Между верхиим 5 и нижним 7 роторами-питателями расположен
рассекатель 6, направляющий снежную струю в выбросной ротор 10. Для
очистки пути от снега ниже уровня головки рельсов служит подрезной нож 8,
устанавливаемый в рабочее и траспортное положения пиевмоцилиндрами 9.
Выбросной ротор 10 отбрасывает снег влево или вправо от оси пути (в зависи-
мости от направления вращения) через левое или правое выбросное окно, за-
крываемое перекидной заслонкой, посредством штурвала 4 с зубчатым секто-
ром. Ротор приводится во вращение двумя электродвигателями 13 постоянно-
го тока мощностью 200 кВт с редуктором 12. В кузове 2 размещен привод ро-
тора 10, пульт управления 3, мотор-генераторная группа 16 и шкаф с электро-
оборудованием 17 Помещение 1 предназначено для отдыха бригады. Для ус-
тойчивости машины установлены противовесы 19. Под кузовом размещены
резервуары для воздуха 15 Верхний и нижний роторы-питатели (рнс. 13.9)
имеют одинаковую конструкцию. Это горизонтальный барабан 8, внутри
которого размещен электродвигатель 4 с грехступеичатым редуктором 10. Ось
барабана перпендикулярна оси пути По образующим барабана размещены
104
Рис. 13 8. Трехроторный электроснегоочиститель ЭСО-3
ООН
Рнс 13.9 Рабочие органы:
и — ротор питатель; б — кинема
гичсеьая ттема выбросного ро
тора
лопасти 6 изогнутой формы с ножами 3 для срезания и захвата снега Для
большей жесткости лопасти скреплены кольцевыми перегородками 5- Во флан-
цевых крышках электродвигателя закреплены полуоси 7, смонтированные в
розетиых подшипниках 1 на раме машины. От вала электродвигателя, на ко-
тором размещена шестерня 9, вращение передается на промежуточный вал //
и далее на второй вал. Шестерня последнего находится в зацеплении с зубча-
тым венцом 12 барабана Для подвода кабеля к электродвигателю одна из по
луосей сделана полой. Для осмотра коллектора, щеток электродвигателя и ре-
дуктора предусмотрены смотровые люки 2 в корпусе ротора, закрываемые крыш-
ками с резиновыми прокладками. Оба ротора-питателя размещены в кожухе,
но при этом их режущие лопасти выдвинуты вперед за пределы вертикальных
боковых подкрылков. Этим достигается резание снега без прессования и хоро-
шая проходимость снегоочистителя. Расположенный между питателями рассе-
катель (см рис. 13 8) предотвращает образование встречных потоков.
Подрезной нож 8 (см. рис. 13.8) сварной конструкции шарнирно подвешен
к раме машины под нижиим ротором-питателем. В рабочем положении он опус-
кается иа 50 мм ниже уровня головки рельса, в транспортном поднимается на
180 мм над рельсами и закрепляется болтами.
Выбросной ротор 10 может отбрасывать снег на 50 м от оси пути. Диаметр
ротора 2,79 м, скорость вращения 170 об мин- Ротор включает ступицу и зад-
нюю стенку из листовой стали с шестью радиальными лопатками, три из ко-
торых выполнены на полную ширину ротора, а три — лишь на %. Укороченные
лопатки предназначены для облегчения входа струи снега во вращающийся
ротор. Для большей жесткости все лопатки с передней стороны скреплены меж-
406
ду собой металлическим кольцом. Ступица ротора закреплена на продольном
приводном валу. Между роторами-питателями н выбросным ротором имеется
пространство шириной около 0,6 м и боковые двери для осмотра ротора. Ки-
нематическая схема привода выбросного ротора представлена на рис. 13.9, б.
Два одинаковых электродвигателя 1 через соосный редуктор 2 передают кру-
тящий момент на вал ротора 3.
Крылья снегоочистителя служат для увеличения ширины траншеи до 6 м
поверху и 5 м понизу при втором проходе машины Первый проход снегоочис-
тителя выполняется обычно при закрытых крыльях (при этом получается трап
шея шириной 3,4 м). При неглубоком снеге (слоем до 1,5 м) машина пробивает
траншею за один проход при открытых крыльях. Каждое крыло (рис 13.10)
с подкрылком подвешено шарнирно на двух петлях 8 к вертикальной стойке
машины Крылья сварные коробчатого сечения Их открытие и закрытие осу
ществляются реечными механизмами 12 с пневмоцилиндром 3 и тягой 4 В на
чальный момент раскрытия крыла плечо реечного механизма небольшое, вслед-
ствие этого момент, создаваемый им, недостаточен для поворота крыла Поэ-
тому на кожухе ротора установлены два толкающих пневмоцилиндра 2 (по
одному на каждое крыло) для предварительного открытия крыла. В рабочем
положении крылья удерживаются двумя распорками: верхней 6 и нижней 9.
Каждая распорка одним концом закреплена на крыле, а другим — на специ-
альной поползушке 10, смонтированной в направляющих 1 В процессе рабо-
ты поползушка находится в переднем положении, где фиксируется пневмати-
ческим стопором 11. При закрывании крыльев 5 пололзушки 10 вместе с рас-
порками 6 и 9 перемещаются в крайнее заднее положение. Подкрылки в транс-
Рис. 13.10. Боковые крылья
407
портном положении развернуты внутрь к оси машины и закреплены штырями.
Нижняя часть 7 крыльев, выполненная на петлях, поворачивается на 180° и
закрепляется на крыле, что обеспечивает их вписывание в габарит подвижного
состава в транспортном положении. В рабочем положении эта часть крыла от-
кидывается и удерживается башмаками.
Источниками энергии для питания электродвигателей снегоочистителя
служат генераторы тепловоза ТЭ2 или ТЭЗ. Мотор-геиераторная группа 16
(см. рис 13.8) состоит из электродвигателя МП14-11 3 и генератора ПН-1750
мощностью 200 кВт (1470 об мин). Она снабжает энергией восемь последователь-
но соединенных тяговых двигателей тепловоза. Такая электросхема обеспечи-
вает плавное рабочее движение снегоочистителя с малой скоростью. Электри-
ческий ток от генераторов тепловоза поступает к двигателю мотор-генератор-
ной установки, а ток, вырабатываемый генератором этой установки, — к тя-
говым электродвигателям тепловоза. Регулятором возбуждения генератора
изменяют напряжение и, следовательно, скорость движения тепловоза вместе
со снегоочистителем. Генератор первой секции тепловоза питает двигатели
роторов-питателей и мотор-генераторной группы, а генератор второй секции
двигатели выбросного ротора. Электрическая схема тепловоза изменена и при-
способлена для работы тепловоза как электростанции и обычного локомотива,
т. е. в «снеговом» и «поездном» режимах. При переходе на снеговой режим тя-
говые двигатели тепловоза необходимо отключить от сети его генераторов и
присоединить к сети мотор-генераторной группы. Практически электросхему
изменяют переключателями, установленными на стенках высоковольтных ка-
мер тепловоза. Электродвигатели снегоочистителя имеют независимое возбуж-
дение с питанием от специального возбудителя — генератора постоянного
тока мощностью 14,5 кВт, напряжением 116 В (1450 об/мин). Геиератор вра-
щается от вала мотор-генераторной группы посредством клнноременной пере-
дачи. В начальный период при запуске двигателя, пока мотор-генераторная
группа не наберет полных оборотов, обмотки возбуждения питаются от вспо-
могательного генератора тепловоза (напряжение 75 В). Для пуска двигателей
снегоочистителя напряжение поднимают от нуля до номинального значения.
Пульт управления со всеми приборами находится в передней части кузова. На
задней, торцовой, стенке снегоочистителя расположена станция управления,
где размещены контакторы, реле, сопротивления и т. п. Соединительные про-
вода от тепловоза к снегоочистителю проложены через проходные изоляторы
Пневматическая система предназначена для открытия н закрытия крыльев,
поднятия н опускания подрезного ножа, управления стопорами крыльев, а
также тормозом. Воздух от компрессора тепловоза через междувагонное сое-
динение поступает в четыре воздушных резервуара, откуда через двух- и трех-
ходовые воздушные краны подается в любой пневмоцилиндр. На снегоочисти-
теле установлены воздушный сигнал и стоп-кран.
Модернизация трехроторных снегоочистителей ЭСО-3 проведена ПТКБ
ЦП МПС с целью увеличения мощности электродвигателей роторов-питателей
и улучшения конструкции роторов. Для улучшения забора снега и опорож-
нения ячеек питателя усовершенствованы очертания его лопастей. В связи
с тем что снегоочиститель работает в основном с тепловозами ТЭЗ, устранена
мотор-генераторная группа, а возбудитель приводится в действие от вала при-
вода выбросного ротора. Изменены также габаритные и основные боковые
крылья с тем, чтобы для приведения их в рабочее и транспортное положения,
что выполняется вручную, не требовалось больших усилий. Более простой и
надежной стала конструкция механизма открытия крыльев.
Организация работы снегоочистителя заключается в следующем. На пе-
регоне за 10 м от снежного заноса снегоочиститель приводят в рабочее поло-
жение: снимают транспортные стопоры с ножа, опускают его, раскрывают под-
408
крылки и фиксируют их штырями. При небольшом заносе (до 1,5 м) работу вы-
полняют за один проход, после чего раскрывают крылья, снимают транспорт-
ные винтовые стяжки, расстопоривают распорки, открывают крылья. Убедив-
шись, что около рабочих органов нет людей, подают сигнал на тепловоз о вклю-
чении напряжения. При этом необходимо отключить все элементы управления
(кнопки, реостаты, тумблеры и т. п.). Постепенным повышением напряжения
разгоняют роторы. При небольшом удалении очередного заиоса допускается
перемещение к нему на «снеговом» режиме, когда максимальная скорость не
превышает 15 км/ч- Если расстояние между заносами составляет несколько
километров, то перемещение осуществляется иа поездном режиме: снимается
напряжение с генераторов тепловозов, останавливают рабочие органы снего-
очистителя и схему на тепловозе переключают на соответствующий режим. Во
время работы для связи пульта управления снегоочистителя с тепловозом,
кроме звуковой,пользуются световой трехцветной сигнализацией-
13.2.3 . Фрезерно-роторный снегоочиститель
Снегоочиститель предназначен для пробивки и разработки траншей при
больших снежных заносах высотой до 4,5 м и отбрасывания снега в сторону на
расстояние до 50 м от осн очищаемого пути. Наибольшая производительность
машины при средней плотности снега 0,5 гм3 составляет 13 500 м3/ч. Рабочая
скорость машины при максимальном заносе 0,8 км/ч. Снегоочиститель создай
на базе машины ЭСО-3. Вместо лопастных роторов-питателей (барабанов) ус-
тановлены фрезы-питатели 8 (рис. 13.11) со спиральными режущими элемен-
тами. Роторное снегоочистительное устройство состоит из двух фрез-питателей
8, расположенных один над другим в носовой части машины на подъемной ра-
ме, и выбросного ротора-метателя 5, установленного за фрезами. Последними
снег вырезается из забоя и подается к выбросному ротору, который отбрасыва-
ет его в сторону по направляющему кожуху. Траншею разрабатывают крылья-
ми 7 и вертикальными боковыми подкрылками 9. Для очистки рельсов служат
Рис. 13.11. Фрезерно-роторный снегоочиститель
14 Зак. 47
409
Рис. 13.12 Схемы.
а — привода фрез; б — кинематическая
плужки 3. Привод фрез н выбросного ротора осуществляется электродви-
гателями 1 и 2 постоянного тока. Электродвигатели получают питание от гене-
ратора электростанции одной из секций тепловоза ТЭЗ, перемещающего сне-
гоочиститель. Привод подъемной рамы пневматический от пиевмосистемы теп-
ловоза. Снегоочиститель оборудован автоматическим прямодействующим руч-
ным тормозом. Управление машиной осуществляется из кабины 4.
Схема привода фрез представлена на рис. 13.12, а. На каждом валу пита-
теля расположены по две фрезы 5 с правыми и левыми витками. Электродви-
гатели / с редуктором 2 привода фрез размещены внутри кузова. Привод
верхней фрезы осуществляется карданом 3, передающим вращение от цилинд-
рического редуктора коническому 4, сидящему на цапфах верхнего вала 6.
Верхний и инжний валы с фрезами установлены иа подъемной раме (кожухе).
В нижней передней ее части под нижними фрезами установлен подрезной нож
6 (см. рис- 13.11). На высоте нижних фрез по бокам иа шарнирах крепятся
вертикальные подкрылки. На задней стороне рамы установлены четыре попол-
зушки, при помощи которых она соединяется с направляющими, закреплен-
ными в носовой части ходовой рамы. Для перемещения подъемной рамы в вер-
тикальном направлении служит механизм подъема. Он состоит из двух пнев-
матических цилиндров, двух стопоров и двух опорных кронштейнов с аморти-
заторами В нижнем положении рамы подрезные ножи располагаются на 50 мм
ниже уровня головок рельсов, а в верхнем положении — на 420 мм выше этого
уровня. В отличие от машин ЭСО-3 у фрезерно-роторного между валом выброс-
ного ротора и центральным валом редуктора введена вставка, что дает возмож-
ность приблизить привод ротора к задней тележке н тем самым разгрузить пе-
реднюю. Благодаря этому стало возможным заменить переднюю трехосную
тележку на двухосную.
Кинематическая схема машины представлена на рис. 13.12, б От электро-
двигателей 15 через редуктор 14 и карданный вал 13 вращение передается иа
конический редуктор 6 вращения верхней фрезы 7 и далее на редуктор 9 вра-
щения нижней фрезы. От электродвигателей 1 через редуктор 2, вал-вставку 3
вращение передается на выбросной ротор 12, заслонка кожуха которого от-
крывается пиевмоцилнндром 4. Боковые крылья 10 и подкрылки 11 открыва-
ются пиевмоцилнндрами 5 через распорки 8.
410
13.3. СНЕГОУБОРЩИКИ
13.3.1. Назначение н классификация снегоуборщиков
Для уборки снега, находящегося на путях и в междупутьях на станциях,
транспортировки его за пределы станций и механизированной разгрузки, при-
меняют снегоуборщики. В соответствии с назначением снегоуборщики оснаща-
ют устройствами для очистки путей от снега, погрузки его на специальный по-
движной состав, транспортировки и оборудованием для разгрузки снега. Все
это может быть установлено в одном или нескольких специальных вагонах.
По этому признаку снегоуборщики подразделяют на снегоуборочные поезда и
одновагоиные снегоуборщики. На железных дорогах СССР эксплуатируются
снегоуборочные поезда системы ПТКБ ЦП МПС и системы Гавричеико, а также
самоходный снегоуборочный поезд СМ-3.
В снегоуборочный поезд входят головная подвижная единица — снего-
уборочная машина, один или несколько специальных промежуточных полу-
вагонов, где накапливается снег, и концевой полувагон, с устройством для
разгрузки снега. В качестве головной подвижной единицы служат снегоубо-
рочные машины типов СМ-2, СМ-3, системы ЦУМЗ и системы Гавриченко. Ра-
бота любой снегоуборочной машины основана на следующем принципе: снег
заборным органом захватывается с пути и подается иа конвейер, который
перемещает его в находящиеся за машиной полувагоны. Существуют два типа
заборных рабочих органов: ножевой (рнс. 13.13, а) н роторный (рис. 13.13, б)
Первый из них представляет собой жесткий нож 1 (см. рис. 13.13, а), ус-
тановленный впереди машины поперек пути. Нож служит продолжением кон-
вейера 2 В рабочем положении он опускается иа 50 мм ниже уровня головки
рельсов, для чего в нем предусмотрены вырезы При движении машины нож
срезает слой снега толщиной Н и подает его иа конвейер, где он располагает-
ся слоем Нх. Ножевой орган конструктивно прост. Он дает возможность вести
очистку путей на больших скоростях при малых затратах энергии. Однако
этим заборным органом нельзя очищать стрелочные переводы, переезды и пе-
ресечения. Кроме того, после прохода машины на пути остается слой снега
(толщиной h), а при уборке мокрого снега перед ножом может образоваться
смежный вал, который движется впереди, не поступая на конвейер. Роторный
заборный орган (см. рис. 13.13, б) выполнен в виде поперечного ротора-пита-
теля / (как у роторных снегоочистителей),
но с гибкими лопастями 3, набранными из
тросов. При вращении ротора срезаемый
лопастями снег подается на конвейер 2.
В рабочем положении ротор опущен н ло-
пасти срезают снег до верхней поверхно-
сти шпал. Благодаря гибким лопастям ма-
шина может очищать стрелочные перево-
ды, крестовины и переезды, сметая даже
небольшой (около 0,1 м) слой снега. Перед
роторным заборным органом не образуют-
ся снежные валы. Летом машину с таким
рабочим органом можно использовать для
очистки путей от мусора, угля, торфа,
шлака и т. п.
Ножевым заборным органом были
оснащены снегоуборочные машины систе-
мы ЦУМЗ и системы Гавриченко, кото-
рые теперь модернизируются и оснащают-
Рис. 13.13. Схемы заборных органов
снегоуборочных машин
14*
411
ся щеточным питателем. Все выпускаемые сейчас машины имеют щеточный
ротор-питатель. На снегоуборочной машине СМ'-2 установлены и нож и щеточ-
ный питатель.
С конвейера снегоуборочной машины снег поступает в промежуточные
полувагоны снегоуборочного состава системы ПТ КБ ЦП МПС, располагаемые
за машиной. Пол этих полувагонов представляет собой пластинчатый кон-
вейер .
Кроме снегоуборщиков, на крупных станциях с большой густотой движе-
ния, где затруднен вывоз снега, используют стационарные и передвижные
снеготаялки Первые представляют собой бетонные ямы, в которых загружае-
мый снег тает от тепла, выделяемого газом прн горении или паром. Передвиж-
ная снеготаялка представляет собой специальный двухосный вагон, впереди
которого размещены крылья и скребковый конвейер. Крылья забирают снег
с междупутья и подают его на путь, откуда он прн помощи скребкового кон-
вейера попадает в бассейн, куда поступает вода, подогретая паром паровоза,
перемещающего снеготаялку. Вода, образующаяся при таянии снега турбона-
сосом, подается в цистерны, прицепленные к паровозу. Производительность
снеготаялки 60 м3. ч.
Для очистки от снега стрелок применяют электрические и газовые обогре-
ватели, а также оборудование для обдувки стрелок сжатым воздухом.
13.3.2. Поезд снегоуборочный системы ПТКБ ЦП МПС
Поезд снегоуборочный системы ПТКБ ЦП МПС состоит из головной сне.
гоуборочнОй машины типа СМ-2, промежуточных и концевого полувагонов-
Вместимость состава нз двух промежуточных полувагонов 500 м3. Перемеща-
ется он локомотивом. Привод рабочих органов электрический. Управление
рабочими органами пневматическое. Источником электроэнергии служит
электростанция У-14 мощностью 200 кВт.
Сжатый воздух поступает из компрессора локомотива.
Снегоуборочная машина СМ-2 предназначена для очистки станционных
путей, стрелочных переводов и горловин от снега (при толщине слоя до 0,9 м),
а летом — от мусора и шлака с погрузкой их в полувагоны. На раме 12 маши-
ны (рис 13 14), опирающейся на две двухосные тележки 16 типа ЦНИИ-ХЗ-О,
смонтированы боковые крылья 1 с пневмоцилиндрами подъема 3 и открытия
2, щеточный ротор-питатель 19 с защитным козырьком 20 и пневмоцилиндром
его управления 21, подрезной нож 18. Снег, забираемый с пути питателем или
ножом, подается на ленточный конвейер 15, передняя часть которого подни-
мается пневмоцилнндром 17 Электропривод 6 конвейера размещен сзади
машины. Боковые щетки 23 с электроприводом 24 сметают снег с междупутий.
Льдоскалывающне устройства 10 и 13 с пневмоцилиндрами 11 и 14 управле-
ния ими расположены в средней части машины В машинном помещении 5 раз-
мещена силовая установка — дизель 7 и генератор 8 мощностью 200 кВт, а
также аккумуляторная батарея 9. Пульт управления 4 машиной находится в
кабине Привод ротора 19 осуществляется электродвигателями 22 через цеп-
ные передачи
Боковые крылья/ (рис. 13-15, а) собирают сиег с междупутий
и подают его к заборному органу — щеточному ротору или подрезному ножу.
Крылья шарнирно крепятся к раме Для перевода в рабочее положение они
открываются горизонтальными пневмоцил индрами 3 и опускаются вертикаль-
ными цилиндрами 4. Пневмоцилиндры к раме крепятся шарнирно посредством
цапф В раскрытом положении каждое крыло устанавливается под углом 35
к продольной оси Main ины и у герживается цепью 2 В нераскрытом положения
412
I
Рис. 13.15. Боковые крылья
а — рабочее положение крыльев, б — схе-
ма крыла со щеткой
показано штрихпунктиро.м) крылья расположены вдоль оси пути. Ширина
очищаемой при этом полосы 2,8 м. В транспортном положении крылья пово-
рачивают на угол 35° к оси пути, поднимают на 0,5 м и закрепляют болтами.
В различных положениях крылья фиксируют рычагами 5 и закладными сто-
порами 6.
На рис 13.14 показан модернизированный вариант снегоуборочной ма-
шины СМ-2 До модернизации у СМ-2 боковые щетки находились в середине
машины за льдоскалывателем. В результате при их работе машина делала два
прохода: при первом щетками снег подавался внутрь колеи с междупутий, а
при втором этот снег забирался ротором. После модернизации боковые щетки
перенесены на крылья (рис. 13.15, б), что позволяет за одни проход очищать
путь и междупутья. Щетка 7 барабанного типа крепится к задней нерабочей
плоскости левого и правого крыльев /. Вращение щетки осуществляется от
электродвигателя 8 через цепную передачу 9.
Щеточный рото р-п и т а т е л ь (рис. 13-16, а) забирает снег или
мусор с пути и подает его на ленточный конвейер Питатель выполнен в виде
барабана, по образующим которого размещены шесть тросовых лопастей 8,
закрепленных в обоймах болтами. Защитный козырек спереди барабана пре-
пятствует распылению снега Он состоит из верхней неподвижной 2 и нижней
подвижной 1 частей Подъем и опускание козырька осуществляются пиевмо-
цилиидром 15 с рычажной системой 7. Ротор-питатель смонтирован на подъем-
ной траверсе 16, имеющей П-образную форму. Траверса с питателем поднима-
ется и опускается по направляющим 12 двумя пневмоцилиндрами 6, штоки 4
которых шарнирно соединены с двуплечими рычагами, установленными на
валу 9 Вторые плечи этих рычагов шарнирно соединены тягами с траверсой.
Прн движении штоков двуплечие рычаги поворачиваются и ротор-питатель
поднимается и опускается Положение ротора по высоте фиксируется в зави-
симости от толщины слоя снега двумя пневмостопорами закрепленными иа
траверсе Направляющие, по которым движется траверса с цитате 1ем, имеют
рейки 10 При зацеплении зубьев гребенки стопора с зубьями рейки происхо-
дит фиксация В конструкции ротора предусмотрено реверсирование его вра-
414
щения. Обычно ротор работает в нижнем, опущенном, положении, вращаясь
так, что снег поднимается вверх и отбрасывается на конвейер. В верхнем,
поднятом, положении ротор включается, если снег плохо поступает по ножу и
его необходимо подталкивать, чтобы предупредить закупоривание простран-
ства между ротором и конвейером. В последнее время используется упрощен-
ная схема привода ротора-питателя. По этой схеме ротор-питатель крепится
иа валу, который на подшипниках установлен на траверсе. На концах вала
закреплены звездочки 13. На верхней горизонтальной балке траверсы установ-
лены два электродвигателя 14, валы которых при помощи звездочек 3 цепны-
ми передачами 11 соединены с валом ротора. У первых машин СМ-2 привод на-
ходился внутри ротора, что затрудняло его ремонт.
Подрезной нож (рис. 13.16, б), выполненный в виде сварного кли-
нообразного щита 8, шарнирно подвешен на цапфах вала / конвейера в носо-
вой части рамы 9 (за щеточным ротором-питателем). В рабочем положении он
опускается на 50 мм ниже уровня головки рельса и служит продолжением на-
клонной плоскости конвейера. В транспортное положение (показано штрих-
пунктиром) иож поворачивается пневмоцилиидром 3 и рычажной системой.
Шток 4 цилиндра шарнирно соединен с двуплечим рычагом 5, закрепленным на
горизонтальном валу 6. Второе плечо рычага соединено с тягой 7, шарнирно
закрепленной на щеке 10 ножа. При выдвижении штока нож поворачивается
и передний конец его поднимается иа 150 мм иад уровнем рельсов. В период
транспортировки нож стопорится болтом 2. По бокам ножа приварены щитки
Рис. 13 16. Рабо-
чие органы снего-
уборочной маши-
ны:
а — ротор питатель с
механизмом подъема:
б подрезной нож
415
//, предупреждающие ссыпание снега. Слой снега небольшой толщи-
ны машина разрабатывает с опущенным ротором л иожом. При расчистке зна-
чительных заносов ротор необходимо поднимать. При проходе стрелок нож
должен быть поднят.
Продольный конвейер (рис. 13.17) предназначен для транс-
портирования снега, подаваемого ротором-питателем или ножом Он состоит
из двух частей: передней, наклоненной под углом 30° к горизонту, и задней —
горизонтальной Конвейер с леитой 9 смонтирован иа раме 3. Ее носовая
часть 2 вместе с установленным подрезным ножом 7 и рычагами управления
им 8 в транспортном положении поднимается на 400 мм вверх при помощи пнев-
моцилнндра и рычажной системы 1. Подъем и опускание конвейера сблоки-
рованы с подъемом и опусканием ротора-питателя. Конвейер можно поднять
только в том случае, если поднят питатель, и, наоборот, опустить питатель
можно лишь при опущенном конвейере. Такая блокировка предотвращает по-
ломку элементов питателя и конвейера. Принцип работы блокирующего уст-
Рис. 13.18. Льдоскалывающее устройство
Ч'Ь
Рис. 13 19 Промежуточный полувагон
ройства основан на перекрытии доступа воздуха к кранам управления питате-
лем и конвейером посредством рычажной системы и клапана. Задний вал кон-
вейера приводится в действие от электродвигателя 6 мощностью 30 кВт через
редуктор 5 и цепную передачу 4. На приводном валу установлена натяжная
станция винтового типа.
Льдоскалывающее устройство (рис. 13.18) служит для
скалывания льда и уплотненного снега на глубине 80 мм ниже головки рельса
при ширине обрабатываемой полосы 4 м. Устройство состоит из трех частей:
среднего 1 и двух боковых 3 и 8 льдоскалывателей, каждый из которых пред-
ставляет собой двухрядную борону со стальными зубьями 2. Средний льдоска-
лыватель пневмоцилиндром 4 может поворачиваться на 90 вокруг горизон-
тальной оси для перевода в транспортное положение. Боковые льдоскалыва-
тели 3 и 8 поднимаются вверх пневмоцилиндрами 5, установленными в крон-
штейнах 7. Кроме того, в транспортном положении они закрываются, повора-
чиваясь пневмоцилиндрами 6 вокруг вертикальных осей. Поднятые и закры-
тые льдоскалыватели в транспортном положении находятся в габарите подвиж-
ного состава. В рабочем положении боковые льдоскалыватели устанавливают
под углом 70 к оси пути.
Система управления рабочими органами машиной СМ-2 пневматическая
с подачей воздуха от компрессора локомотива через междувагонные соедине-
ния. Машина оборудована автоматическим пневмотормозом, питающимся от
специальной воздушной тормозной магистрали, а также стоп-краном и звуко-
вым сигналом. В будке управления установлено три стола управления (см.
рис. 13.15, а): центральный и два боковых, на которых размещены краны уп-
равления воздушными цилиндрами. Кроме того, там же находится пульт уп-
равления электродвигателями машины и шкаф с. распределительной аппара-
турой.
Промежуточный полувагон (рис. 13.19) представляет собой четырехосный
полувагон 6 без торцовых стенок. В его кузове вместо пола на раме 3 установ-
лен наклонный пластинчатый конвейер 7, привод которого осуществляется от
электродвигателя через редуктор 4 и цепную передачу 2. Приподнятый конец
конвейера выступает за основную раму 3 вагона так, что под него заходит ниж-
ний конец конвейера следующего вагона. Это обеспечивает неразрывность пе-
ремещаемого слоя снега, поскольку конвейеры двух соседних вагонов пере-
крываются. В торцах вагона расположены щиты с фартуками /, предохраняю-
щие снег от просыпания при перемещении его из одного вагона в другой. Ва-
гой опирается на две двухосные тележки 5 и оснащен автотормозом 8.
Концевой полувагон (рис. 13.20) состоит из следующих основных узлов:
рамы /, конвейера-накопителя 5, рыхлителя 3, разгрузочного поворотного кон-
вейера 6, кузова 4 и кабины управления 2.
417
Убираемый с пути материал поступает с конвейера промежуточного полу-
вагона на конвейер-накопитель 5, при движении ленты которого происходит
заполнение емкости полувагона.
При выгрузке снег с конвейера-накопителя поступает на разгрузочный
поворотный конвейер 6, которым отбрасывается вправо или влево от оси пути.
Крупные комья снега перед попаданием на разгрузочный конвейер разбива-
ются рыхлителем. При разгрузке засорителей рыхлитель в работе ие участ-
вует, так как при этом материал, находящийся на конвейере-накопителе 5,
имеет небольшую толщину. Разгрузка производится на стоянке или на ходу
снегоуборочного поезда.
Рама полувагона опирается на две тележки.
К о и в е й е р-н а к о п и т е л ь (рис. 13.21) по конструкции аналогичен
накопителю промежуточного полувагона (см. рис. 2.53), но имеет меньшую
длину и больший угол наклона. Пластинчатая лента 5 (см. рис. 13.21) приво-
дится в движение через приводной вал 2 электродвигателем с редуктором 6
при помощи цепной передачи 4 с отклоняющими звездочками 3 и натяжным
устройством /.
Рыхлитель (рис. 13.22) предназначен для рыхления крупных глыб
снега, поступающих с конвейера-накопителя на разгрузочный конвейер при
Рис. 13.21. Конвейер-накопитель
418
23Ь0
Рис. 13.22. Рыхлитель:
а — вид сбоку, б — вид сверху
419
разгрузке снегоуборочного поезда. Он установлен над разгрузочным конвейе-
ром, представляет собой полый вал / с закрепленными на нем лопастями 2,
который приводится во вращение от электродвигателя 5 через редуктор 4 и
цепную передачу 3.
Разгрузочный поворотн ы й конвейер (рис. 13.23)
установлен в рабочем положении под углом 90 к продольной оси машины и
обеспечивает вьп рузку материала в любую сторону от оси пути на расстояние
10—12 м. Он имеет резинотканевую ленту с ведущими тяговыми цепями и со-
стоит из рамы 4, опорно-поворотного устройства 5, механизма поворота 6, лен-
ты 3 с цепями и бортами, электродвигателя 10, редуктора 11, ведущего 12 и
ведомого 1 валов, натяжного устройства 2 и фиксаторов 9. Опорно-поворотное
устройство роликовое применяется на автомобильных кранах. Лента конвей-
ера через угольники и пластины прикреплена к двум тяговым цепям, приво-
димым в движение звездочками, закрепленными на приводном валу, который
установлен в задней части конвейера, т. е. ведущая его ветвь нижняя. Привод
конвейера осуществляется от электродвигателя на ведущий вал через кони-
ческий редуктор, соединенный с электродвигателем и приводным валом прн
Рис 13-23. Поворотный конвейер
« — вил сбоку; б вид сверху
420
помощи цепных муфт. Для обеспечения натяжения тяговых цепей и ленты слу-
жит натяжное устройство 7. В отличие от других натяжных устройств в нем
у винта между упором и гайкой установлены пружины, обеспечивающие по-
стоянное натяжение. Для восприятия вертикальных нагрузок от материала
на ленте предусмотрены поддерживающие ролики. Поворот конвейера осуще-
ствляется пневмоцилиндром, воздействующим на рычаг, закрепленный на
звездочке, соединенной цепной передачей с другой звездочкой, сидящей на
вертикальном валу, связанным с рамой конвейера. Ведущая звездочка с ры-
чагом имеет 30 зубьев, а ведомая — 12. Вследствие этого при повороте ведущей
звездочки на 32' ведомая поворачивается на 180 , обеспечивая необходимый
поворот конвейера.
В транспортном положении конвейер устанавливается вдоль продольной
оси полувагона, для чего предусмотрены пневмофиксаторы, управление кото-
рыми осуществляется из кабины или с площадки управления концевого полу-
вагона. Для крепления при переездах на дальние расстояния служат винтовые
стяжки 8.
Из кинематической схемы концевого полувагона (рис. 13.24) видно, что при-
вод ленты конвейера-накопителя осуществляется от электродвигателя через
двухступенчатый редуктор 12, цепную передачу 13 на приводной вал 14. Рых-
литель 11 вращается от двигателя 9 через редуктор 10. Поворотный выбросной
конвейер имеет двигатель 1, редуктор 2, приводной вал 3, поддерживающие
ролики 4. Поворот выбросного конвейераоосуществляется пневмоцилиндром 8,
шток которого через рычаг связан со звездчской 7 и далее через цепную пере-
дачу со звездочкой 6. Опорно-поворотное утройство имеет ролики 5.
Рис. 13.24. Кинематическая схема
концевого полувагона
421
Организация работ по очистке путей снегоуборочным поездом системы
ПТКБ ЦП МПС. В голове состава размещается снегоуборочная машина СМ-2,
которая при поступательном движении крыльями перемещает снег с между-
путья на путь, забирает его щеточным ротором-питателем и подает на конвей-
ер. Последний грузит снег в промежуточный полувагон. Ввиду того, что ско-
рость ленты у промежуточного полувагона небольшая, толщина слоя снега на
ней достигает 1,95 м. Продвигаясь вдоль полувагонов, снег последовательно
заполняет все вагоны, после чего состав направляется на крайний путь к месту
разгрузки. После остановки состава выбросной конвейер, установленный пер-
пендикулярно оси пути, отбрасывает снег на расстояние 10—12 м от пути.
13.3.3. Самоходные снегоуборщики
Для уменьшения простоя машин из-за отсутствия локомотивов разрабо-
таны самоходные снегоуборщики СМ-3 и СМ-4.
Поезд снегоуборочный самоходный СМ-3 (рис 13 25) состоит из четырех
полувагонов и может компоноваться из двух единиц; головного и концевого
полувагонов (вместимость состава 160 м3); из трех единиц: головного, проме-
жуточного и концевого полувагонов (вместимость 285 м3); четырех единиц:
головного, двух промежуточных и концевого полувагонов (вместимость 410 м3).
Для работы по уборке мусора в летний период к составу снегоуборочного по-
езда прицепляется цистерна для воды.
В передней части головного полувагона установлены щеточный ротор-
питатель 6 и подрезной нож 5 (рис. 13.25, а), подающие забираемый с пути ма-
териал на скребковый загрузочный конвейер 4. Последний направляет его на
пластинчатый конвейер-накопитель 2, лента которого движется с малой ско-
Рис 13.23. Носи снегоуборочный самоходный СМ-3
422
Рис 13 26 Щеточный ротор-питатель
ростью. Боковые крылья 7 машины оборудованы щетками На машине преду
смотрено поливочное устройство для улучшения условий работы летом. Оно
состоит из насоса, запорного вентиля с электроприводом для управления из
кабины, разводящих трубопроводов и насадок для распыления воды. Подрез-
ной нож 5, установленный за щеточным питателем, является вторым заборным
органом и служит для уборки уплотненного снега значительной толщины при
большой поступательной скорости машины. Льдоскалывающее устройство 1
предназначено для сколки льда и рыхления уплотненного снега и состоит из
среднего и двух боковых льдоскалывателей, представляющих собой двухряд-
ную борону со стальными зубьями. Для очистки рельсов предназначены рель-
совые щетки 3.
Щеточный рото р-п н т а т е л ь (рис. 13.26) предназначен для за-
бора с пути и подачи снега на наклонный скребковый конвейер. Ротор-пита-
тель выполнен в виде пустотелого сварного барабана 2, на котором укреплено
шесть рядов тросовых щеток 1. Вал барабана 8 установлен в подшипниках 10
на траверсе 9. На верхней балке траверсы установлены два электродвигателя
3, валы которых цепными передачами 4 соединены с валом ротора-питателя,
на котором установлены звездочки И. Натяжение цепи осуществляется натяж-
ными звездочками. Щеточный барабан выполнен вместе с подвешенным впере-
ди защитным козырьком 6. Положение щеточного барабана и козырька отно-
сительно рельса регулируют механизмом подъема, состоящим из двух гидро-
цилиндров Козырек поворачивают гидравлическим цилиндром 5 через ры-
чажную передачу 7. Высоту установки козырька определяют в зависимости
423
от высоты убираемого снега. Верхняя часть козырька неповоротная, а нижняя
поворотная в виде сектора.
Загрузочный скребковый конвейе р-п и т а т е л ь
принимает от щеточного барабана снег и подает его на конвейер-накопитель,
расположенный в кузове машины. Он состоит из ленты со скребками
(см рис 2 54), прикрепленной к тяговым цепям; верхнего приводного вала
с натяжным устройством, нижнего ведомого вала, рамы с бортами и под-
держивающими роликами. Лента (рис. 13.27) выполнена из прорезиненного
трехслойного полотна с литыми резиновыми скребками. Отдельные полосы лен-
ты соединены между собой поперечными трубками соскребками. Эти же труб-
ки служат для соединения ленты конвейера с тяговыми цепями Опорой ленты
при ее движении по продольным направляющим балкам рамы конвейера
служат ролики. Лейта приводится во вращение цепной передачей от элект-
родвигателя через редуктор и втулочно-пальцевую муфту. Конвейер рас-
положен под углом 57 к горизонту.
Конвейер-накопитель 2 (см. рис. 13-25. а) служит для накопления снега
поступающего с питателя. Пластинчатая лента этого конвейера имеет скорость
0,00836 м с, что в 14 раз меньше скорости скребкового конвейера-питателя
(0,12 м с). В результате на пластинчатом конвейере накапливается слой боль-
шой толщины (до 1,85 м), и этот снег перемещается к промежуточному полу-
вагону Для полного использования вместимости машины на накопителе уста-
новлен автомат контроля загрузки, который включает и выключает электро-
двигатель привода конвейера-накопителя. Действие автомата основано на
принципе ограничения величины грузоподъемности, где датчиком усилия слу-
жит динамометр, который выдает электрический сигнал, пропорциональный
приложенному усилию от массы груза (снега). Автомат выполнен по типу кра-
нового ограничителя грузоподъемности ОГП-1 Крылья с боковыми щетками
такие же, как в модернизированной СМ-2 (см рис. 13-15. б), только цилинд-
Рис 13 2” Лента загрузочного скребкового конвейера-питателя
424
ры подъема и поворота их гидрав-
лические.
Рельсовые щетки (рнс.
13.28) служат для очистки рельсов от
снега и грязи. Щетки 5 приводятся в
действие от электродвигателя 1 через
двухступенчатый редуктор 2. Они
прижимаются к рельсу при помощи
пружинного устройства 3 и ролика 4
Управление всеми рабочими органами
на машине гидравлическое. Снег из
накопителя подается в промежуточ-
ный полувагон (см. рис. 13.25, б).
Последний концевой (разгрузочный)
полувагон (см. рис. 13.25, в) имеет три
конвейера. Накопитель 8 и скребко-
вый конвейер 6 подают снег или засо-
рители на поперечный конвейер 5, от-
куда снег поступает на поворотный
ленточный конвейер 7. Он размещен
Рис. 13 28. Рельсовые щетки
под рамой полувагона и при разгруз-
ке поворачивается на 90" и отбрасывает снег на обочииу. Дизель-электростан-
ция 3 имеет дизель (367,6 кВт), генератор постоянного (350 кВт) и переменного
(300 кВт) тока. Первый генератор питает тяговые двигатели тележки 2 от теп-
ловоза ТЭЗ, а второй — двигатели всех рабочих органов состава. На машине
установлен компрессор 4 для тормозной системы и обдувочных устройств и
водяной насос 1. На головной машине размещена радиостанция ЖР-ЗМ.
Одновагонный снегоуборщик СМ-4 предназначен прежде всего для очист-
ки от снега горловин станций и стрелочных улиц, а в летнее время — для
уборки засорителей с путей Кузов СМ-4 (вместимостью 100 м3) используется
для погрузки снега и загрязнителей. В передней части машины (рис 13 29)
имеется ротор-питатель 8, который прн работе машины вырезает снег или
засорители с пути и подает их на конвейер-питатель .5, откуда материал посту-
пает в кузов машины. Дном кузова является конвейер-накопитель 4, при по-
мощи которого кузов машины заполняется по всей длине. Для разгрузки ку-
зова предусмотрен выбросной ротор 10 и скребковый конвейер 3. На машине
смонтированы две будки управления: передняя 6 и задняя 1. Под задней буд-
кой расположена дизель-электростаиция 2 с двумя генераторами: постоянно-
го и переменного тока. Генератор постоянного тока (300 кВт) питает тяговые
электродвигатели трехосной приводной тележки //, генератор переменного
тока (200 кВт) — электродвигатели приводов рабочих органов машины
В носовой части машины расположены крылья с боковыми щетками 7, при помо-
щи которых снег или мусор с междупутий подается на путь и убирается пита-
Рис. 13.29 Одвовагоняый снегоуборщик СМ-4
425
Рис 13.30 Схемы выбросного устройства.-
телем за один проход машины.
Управление всеми рабочими ор-
ганами машины осуществляется
гидроцилиидрами. Для выдува-
ния снега со стрелок предусмот-
рены сопла .9. Источником сжа-
того воздуха служит компрес-
сорная установка 12. Щеточный
ротор-питатель, скребковый кон-
вейер-питатель, пластинчатый
конвейер-накопитель и крылья с
установленными на них щетками
конструктивно такие, как и иа
СМ-3.
а — скребковый конвейер; б — выбросной ротор СкребКОВЫЙ КОН-
вейер (рис. 13.30, а) предназ-
начен для дозирования снега, поступающего в выбросной ротор с конвейера-
накопителя. Он состоит из электродвигателя 3, редуктора 4, от которого вра-
щение посредством цепной передачи 2 передается на приводной вал 1. Цепь на-
тягивается устройством 5. Нижняя ветвь конвейера рабочая. При ее движении
серху вниз скребки 6 срезают снег, находящийся на ленте накопителя, и по-
дают его в загрузочную воронку выбросного ротора. Выбросной ротор (рис.
13.30, б) предназначен для разгрузки машины от снега и мусора Снег, посту-
пающий со скребкового конвейера в кожух вращающегося ротора /, выбра-
сывается из кожуха 2 вправо или влево от оси пути. Ротор вращается элек-
тродвигателями 3 через редуктор 4. Для уменьшения пылеобразования при
уборке мусора летом предусмотрено поливочное устройство, которое при рабо-
те питателя, боковых щеток и выбросного ротора создает вокруг этих рабочих
органов водяные завесы, препятствующие распространению пыли. Поливочное
устройство состоит из водяного насоса с электроприводом и системы трубо-
проводов и насадок, распыляющих воду.
Ниже приведены технические характеристики
машин:
снегоуборочных
Параметры
СМ ’ СМ-3 СМ-4 ЦУМЗ Г авриченко
Производительность т/ч . . 750 750 750 480 480
Максимальная толщина очищаемого слоя снега м 0,8 0,9 0,8 0.9 0,9
Ширина полосы, очища емой питателем м . . 2 145 2,6 2.6 — —
Ширина полосы, очищаемой крыльями, м . . . 5, 1 5, 1 5, 1 4,38 4.9
Ширина захвата льдоска- лывателя, м Заглубление льдоскалыва- теля, мм .... 3.66 4,0 — 2,6 —
80 80 — 70 —
Транспортная скорость, км/ч 70 70 70 50 50
Часовая сила тяги, кН . . — 150 150 — —
Вместимость полуваго- нов, м3. промежуточного . . . 80 125 48 48
концево’о , . 55 60,100 — 30 30
Мощность, кВт. двигателя . . . 220,6 367,6 220,6 58,8 58,8
генератора 200 300 200 — —
Масса машины, т 80 71,2 118 40 27
Масса полувагона, т промежуточного . . . 36,5 36,8 — 19,3 19,3
концевого 39 39 — 24.7 24 7
426
13.4. ОСНОВЫ ЭКСПЛУАТАЦИИ МАШИН ДЛЯ ОЧИСТКИ ПУТЕЙ
ОТ СНЕГА
Плуговые снегоочистители должны всегда находиться в исправном сос-
тоянии и быть готовыми для выезда на перегон. Перед каждым выездом меха-
ник проверяет все механизмы, а по прибытии локомотива — исправность его
воздушного насоса. После этого снегоочиститель прицепляют к локомотиву,
присоединяют трубопровод тормозной магистрали, проверяют исправность
воздушных магистралей и механизмов машины. Выезд снегоочистителя к мес-
ту работ даже с незначительными неисправностями недопустим. Все места
утечек сжатого воздуха должны быть устранены После опробования меха-
низмов устанавливают световую сигнализацию с локомотивом, проверяют пра-
вильность показаний световых сигналов и исправность действия световой сиг-
нализации от аккумуляторных батарей, установленных на снегоочистителе.
Последний следует с локомотивом к месту работы со скоростью, установленной
для грузовых поездов Руководитель работ и машинист машины наблюдают за
сигналами н указателями препятствий иа пути следования снегоочистителя.
Они всегда должны быть готовы принять необходимые меры, чтобы своевре-
менно поднять или опустить нож, закрыть или открыть крылья, подать сигнал
машинисту локомотива. Скорость движения снегоочистителей в рабочем сос-
тоянии устанавливает начальник дистанции пути в зависимости от толщины
слоя очищаемого снега и типа снегоочистителя. Ночью в условиях метели нли
тумана скорость движения сиегоочистителя уменьшается. При транспорти-
ровке в составе поезда снегоочиститель приводят в транспортное положение:
крылья закрывают, подрезной иож поднимают и закрепляют их в этих поло-
жениях дополнительными болтами На станционных путях рабочая скорость
10 км/ч.
Техническое обслуживание плуговых снегоочистителей подразделяется на
ежесменное и техническое обслуживание № 1 (ТО-1). Ежесменное обслужива-
ние выполняют перед началом и после окончания работы, а также во время
перерывов. Оно включает проверку технического состояния ходовых частей,
пневматической и механической систем механизмов, кранов управления, при-
боров освещения и сигнализации, смазку всех трущихся поверхностей и сое-
динений. Кромеэтого, регулируют рычажные передачи механизмов, проверяют
пневматическую систему, снимают и выправляют деформированные детали,
заменяют изношенные подрезные ножи и манжеты пневматических цилиндров,
смазывают трущиеся поверхности и соединения. ТО-1 проводят через каждый
месяц работы машины
Роторный снегоочиститель иа перегоне останавливают иа расстоянии не
менее 10 м от места начала работы и приводят в рабочее положение. В зависи-
мости от глубины заиоса и плотности снега путь очищают за один или два про-
хода снегоочистителя. Первый проход осуществляется с раскрытыми подкрыл-
ками при закрытых крыльях, второй — с открытыми крыльями До наступ-
ления снегопадов проверяют также состояние электрооборудования теплово-
за, закрепленного на зимний период за роторным снегоочистителем. После
сцепки тепловоза со снегоочистителем концы проводов, уложенные на крыше
первой секции тепловоза, присоединяют к соответствующим изоляторам, уста-
новленным на торцовой стенке кузова снегоочистителя, и тепловоз считается
подготовленным к работе Перед пуском роторного снегоочистителя осматри-
вают электродвигатели, генератор, крепление крыльев подрезного ножа,
положение рукояток реостатов и кранов пневматического управления
Снегоуборочные машины готовят к сезонным работам осенью Заранее
убирают со станционных путей посторонние предметы, которые могут привести
к поломке машины прн наезде на препятствия Над неубранными препятст-
427
Основные неисправности СМ-2
Неисправность Возможные причины Способы устранения
Не открываются или не
закрываются крылья
Не поднимаются или не
опускаются ротор-пита-
тель, подрезной нож, кры-
лья, льдоскалыватель, кон-
вейер
Перегрев подшипников
качения
Трещины усталости зуб-
чатых колес, выкрашивание
свыше 30% рабочей по-
верхности при глубине бо-
лее 10% толщины зуба
Ослабление посадок на
вал
Не заводится дизель, не-
исправности генератора,
электродвигателей и других
электроагрегатов
1. Перекос сальника цилинд-
ра
2. Недостаточно давление
воздуха
3. Запрессовка снега
4. Деформация элементов
крыла
1. Недостаточно давление
воздуха
2. Деформации, заедания,
люфты в механизмах управле-
ния рабочими органами
3. Не проведено расстопоре-
ние механизма
I. Неправильная центровка
сопрягаемых деталей
2. Недостаточное или плохое
качество смазки
3. Плохое качество подшип-
ника
Плохое качество изготовле-
ния, недостаточная смазка,
некачественный монтаж
Плохое качество шпонок
или плохая посадка
Выправить перекос
Накачать воздух в запас-
ные резервуары
Выгрести забившийся
снег
Выправить крылья
Накачать воздух в резер-
вуары
Разобрать соответству-
ющий механизм, выправить
деформации и устранить
неисправности
Снять стопор
Проверить центровку
Дополнить смазку или ее
заменить
Заменить
Подлежат замене (для
быстроходных колес v~
= 8 м/с). Заменяется па-
ра — шестерня и колесо
Заменить шпонку
Устраняются в соответст-
вии с инструкциями по экс-
плуатации этих агрегатов
Таблица смазки снегоочистителя СДП-М (СДП)
Наименование механизма Тип смазочных материалов Периодичность
Буксы ходовых тележек (на подшипниках качения) То же скольжения Шарниры рычажных си- стем Направляющие подъема подкрылков Пневмоцилиндры (в том числе тормозные) Смазка железнодорожная Масло осевое марки 3, в се- верных районах марка С Смазка укиверсальная УС (солидол жировой) То же Смазки ЖТКЗ-65 Добавляется при плано- вом текущем ремонте, пол- ная замена — при капиталь- ном Поддерживать уровень смазки постоянно При техническом обслу- живании То же I раз в год при консер- вации
428
виями ставят предупредительные знаки. При работе машинист внимательно
наблюдает за состоянием путей, при подходе к препятствиям своевременно
принимает меры для подъема ножа и крыльев или для остановки поезда, пре-
дохраняя их тем самым от повреждений илн поломок. Снегоуборочные машины
СМ-2, СМ-3, СМ-4 и модернизированная система ЦУМЗ убирают снег не только
со станционных путей, но и со стрелочных переводов горловин, так как они
оборудованы щеточными рабочими органами Наличие боковых щеток позво-
ляет убирать снег с междупутий.
Техническое обслуживание снегоуборочных машин включает ежесменное
обслуживание, проводимое перед началом и в конце каждой смены, техничес-
кое обслуживание № 1 (ТО-1), выполняемое через каждые 10 смен, н техничес-
кое обслуживание № 2 (ТО-2), проводимое через один месяц работы машины.
При подготовке машин к работе проверяют агрегаты, детали их крепления и
смазку. Смазывают ведущие и натяжные валы, их подшипники, цепи, муфты
включения, цилиндры, редукторы. Двигатели внутреннего сгорания подготав-
ливают к работе в соответствии с требованиями Инструкции завода-изготовн-
теля по уходу за двигателями н их содержанию. После этого машину испыты-
вают вхолостую и устраняют все обнаруженные неисправности.
Полувагоны включают в снегоуборочный поезд после исправления выяв-
ленных дефектов. Цепи конвейера натягивают, чтобы исключить их провиса-
ние. Устраняют неисправности приборов пневмоуправлення рабочими орга-
нами. Проверяют, нет ли утечки воздуха в воздушной магистрали и цилиндрах.
Если в течение 5 мин давление в сети падает более чем на 0,05 МПа, то выявля-
ют места утечки и ликвидируют их. Неисправности в цилиндрах устраняют
подтяжкой или заменой уплотнения.
Работой снегоуборочных машин руководит мастер, который согласовы-
вает их перемещение с диспетчером или начальником станции. Непосредствен-
но управляют машиной машинист и одни или два его помощника.
Снегоуборочная машина СМ-2 при глубоком снеге работает с закрытыми
крыльями. Снег с междупутий убирают боковыми щетками при последующих
проходках. При уборке глубокого снега нли подготовленных снежных валов
барабан-питатель поднимают в верхнее положение; снег в этом случае убира-
ют только подрезным ножом, подающим его на конвейер. Если снег сильно
уплотнен и имеются участки со льдом, то машина вначале проходит один раз
с поднятым б араб ан ом-питателем и конвейером и с опущенными льдоскалыва-
телями, которые разрыхляют плотный снег Стрелочные переводы очищают от
снега щеточным барабаном-питателем при поднятом подрезном ноже.
13.5 ОСНОВНЫЕ ТРЕБОВАНИЯ ПО ТЕХНИКЕ БЕЗОПАСНОСТИ
ПРИ ОБСЛУЖИВАНИИ МАШИН ДЛЯ ОЧИСТКИ ПУТЕЙ ОТ СНЕГА
После приведения машины из транспортного положения в рабочее меха-
ник включает рабочие органы машины только по сигналу руководителя работ,
находящегося около машины. Механик, получив сигнал на включение меха-
низма, подтверждает получение сигнала и включает механизмы. При раскры-
тии рабочих органов нельзя находиться в зоне их движеиня, а при работе пи-
тателя — впереди машины, так как он выбрасывает вперед крупные предметы
(шебень, кирпичи) Не разрешается осматривать питатель, боковые щетки,
транспортеры и выбросной транспортер или ротор во время их работы или на
холостом ходу; запрещается исправлять электроаппаратуру, находящуюся
под напряжением; во время разгрузки машины нельзя находиться в зоне вы-
броса снега или мусора; перед запуском механизмов помощник механика дол-
жен проверить, нет ли вблизи люден
424
Запрещается механику включать механизмы машины без сигнала помощ-
ника; при отправлении машины на разгрузку илн при возвращении ее к фрон-
ту работ помощник механика проверяет надежность закрепления всех меха-
низмов, их габарит и докладывает о готовности машины к движению дорож-
ному мастеру. Трогание машины с места осуществляют по сигналу руководи-
теля работ.
Нельзя во время работы машины находиться внутри полувагонов и вбли-
зи рабочих органов, а также производить какие-либо ремонты на ходу машины.
Запрещается прогревать паяльцой лампой или факелом двигатели и замерзшие
краны около запасного резервуара, наполненного сжатым воздухом, и в осо-
бенности на самом резервуаре, чтобы не допустить возможного взрыва. Во из-
бежание замерзания кранов и воздухопроводной сети необходимо перед пуском
воздуха в магистраль обязательно ее продуть.
Обслуживающий персонал электростанций и электросиловых установок
должен быть знаком с электрической схемой и правилами эксплуатации элек-
трооборудования Все металлические части двигателя и генератора должны
быть заземлены Все токоведущие части, находящиеся под напряжением, не-
обходимо защитить, чтобы исключить возможность прикосновения к ним. Ре-
монт, осмотр н проверку состояния электрооборудования машин необходимо
производить до начала работ илн после их окончания. Прн осмотре электро-
оборудования и устранении возникших в нем неисправностей рубильники не-
обходимо выключить, используемый инструмент должен иметь изолированные
ручки. Ремонт линии от главного рубильника до генератора и его осмотр до-
пускается только после полной остановки двигателя.
Механик снегоуборочной машины ведет и хранит журнал работы машины,
в который записывают данные о регулировке, ремонте, периодических осмот-
рах механизмов и узлов машины, а также результаты освидетельствования
электрооборудования, двигателей внутреннего сгорания н пневматического
оборудования машины
ПРИЛОЖЕНИЕ 1
СТАЛЬНЫЕ КАНАТЫ ТИПА ЛК-0 ПО ГОСТ 3077-80
КОНСТРУКЦИИ 6X19 (1 +9+9)4-1 о. с.
ierp к а , мм !НТИрО- ая масса 1 М сма- ого каната Маркировочная группа, МПа
1372 1470 1568 1666 1764 1862
я н Е( К Орис вочн; 1 оос занн Разрывное усилие каната. II. не менее
10.5 387 5 53 650 55 950 57 650 60 300
11,5 487,0 — 66 150 70 300 72 450 75 800
12.0 530.0 — — 72 000 76 500 78 850 82 350
13,0 597,3 — 81 100 86 150 88 700 92 800
14,0 719.0 — 97 750 103 500 106 500 111 000
15,0 852.5 — .— 115 500 122 500 126 500 132 000
16,5 996.5 118000 126 500 135 000 143 500 147 500 154 500
17,5 1155.0 136 500 146 500 156 000 166 000 171 500 178 500
19,5 1370.0 162 500 174 000 183 000 197 000 203 500 212 500
20,5 1550.0 184 000 197 000 210 500 223 500 230 500 241 500
22,0 1745.0 207 000 221 500 236 500 296 000 259 000 270 500
Примеры условных обозначений: канат диаметром 16,5 мм, грузового назначения,
проволоки марки 1, без покрытия, левой односторонней свивки, раскручивающийся,
маркировочной группы 1764 МПа.
Канат 16.5-Г-1-Л-О-Р-1764 ГОСТ 3077—80
Канат диаметром 29.0 м, грузолюдского назначения, марки В, оцинкованной по
группе Ж. правой крестовой свивки, нераскручивающийся, маркировочной группы
1568 МПа
Канат 29-ГЛ-В-Ж-Н-1568 ГОСТ 3077—80.
ПРИЛОЖЕНИЕ 2
СТАЛЬНЫЕ КАНАТЫ ДВОЙНОЙ СВИВКИ ТИПА ЛК Р
КОНСТРУКЦИИ 6X19 (1+6+6/6)+1 о. с. ГОСТ 2688—80
н Маркировочная группа, МПа
Си s !НТИРОВ масса 1 энного 1372 1470 1568 1666 1764 1862
Я» £ со 5 ® Лэ s s О ~ Q Ж Разрывное усилие каната в целом, Н, не менее
9.9 358,6 . 48 850 51 850 53 450 55 950
11.0 461.6 — — 62 850 66 750 68 800 72 000
12.0 527 0 — — 71 750 76 200 78 550 81 900
13,0 596.6 71 050 76 190 81 250 86 300 89 000 92 800
14.0 728.0 86 700 92 850 98 950 105 000 108 000 112 500
15,0 844,0 100 000 107 100 114 500 122 000 125 500 131 000
16.5 1025.0 121 500 130 000 139 000 147 500 152 000 159 000
18.0 1220.0 145 000 155 000 166 000 176 000 181 500 189 500
19,5 1405.0 167 000 179 500 225 000 203 000 209 000 218 500
21,0 1635,0 194 500 208 000 261 500 236 000 243 500 254 000
22,5 1850.0 220 000 235 500 296 000 267 000 275 000 287 500
Примеры условных обозначений: канат диаметром 12 мм, грузолюдского назна-
чения, из проволоки без покрытия, марки В, левой односторонней свивки, нераскручи-
ваюодийся маркировочной группы 1764 МПа.
Канат 12-ГЛ-В-Л-О-Н-1764 ГОСТ 2688—80.
Канат диаметром 32,0 мм, грузового назначения, марки 1, оцинкованной по группе
ОЖ, правой крестовой свивки, нераскручивающийся, маркировочной группы 1372 МПа
Канат 32-Г-1-ОЖ-Н-1372 ГОСТ 2688—80.
ПРИЛОЖЕНИЕ 3
КАНАТЫ ДВОЙНОЙ СВИВКИ ТИПА тк КОНСТРУКЦИИ
6X19 (1 + 6+12)4-1 о. с. ГОСТ 3070—74
Диаметр каната, мм Расчетная масса 1000 м, кг Маркировочная группа по временному сопротивлению разрыва, кгс/мм2
140 160 170 180 200
Расчетное разрывное усилие каната, кгс
13,0 565,5 6 860 7 845 8 330 8 560 9 340
14,5 715 8 670 9 900 10 500 10 800 11 800
16,0 882,5 10 700 12 200 13 000 13 400 14 600
17,5 1070 12 900 14 750 15 700 16 150 17 650
19,5 1275 15 450 17 650 18 750 19 350 21 100
21,0 1495 18 100 20 700 22 000 22 700 24 750
22,5 1735 21 000 24 000 25 500 26 300 28 700
24,0 1990 24 [00 27 550 29 250 30 200 32 900
25,5 2265 27 450 31 350 33 300 34 300 37 450
27,0 2555 30 950 35 400 37 600 38 750 42 250
Пример условного обозначения каната диаметром 13 мм, из светлой проволоки
марки 1, левой (Л) односторонней (О) свивки, нераскрупивающийся (Н), временное
сопротивление разрыву 180 кгс/мм2 канат 13-1-Л-О-Н-180 ГОСТ 3070—74.
ПРИЛОЖЕНИЕ 4
ЭЛЕКТРОДВИГАТЕЛИ ТРЕХФАЗНЫЕ АСИНХРОННЫЕ КРАНОВЫЕ
(ГОСТ 185—70), КЛАСС ИЗОЛЯЦИИ F, ЗАКРЫТЫЕ, ОБДУВАЕМЫЕ
Исполнение Продолжительность включения ПВ, %
15 25 40 60
кВт об/мин кВт об/мии кВт об/мин кВт об/мин
112-6 6,5 895 5,8 915 5,0 930 4 950
211-6 10,5 895 9.0 915 7,5 930 6 945
311-6 14,0 925 13,0 935 11,0 945 9 960
312-6 19,5 945 17,5 950 15,0 955 12 965
411-6 30,0 945 27,0 955 22,0 965 18 970
412-6 40,0 960 36,0 965 30,0 970 25 975
Пример условного обозначения двигателя серии МТ 3-го габарита, с изоляцией
класса F, исполнение 311, шестиполюсного 6, умеренного климатического исполнения
(У), 3-й категории MTF 311—6УЗ ГОСТ 185—70.
ПРИЛОЖЕНИЕ 5
ТОРМОЗА КОЛОДОЧНЫЕ ПО ОСТ 24.290.08—77
Параметр Тип тормоза
ТКГ-160 ТКГ-200 ТКГ-250 ткг-зоо ТКГ-400
Максимальный тормоз- ной момент, Н-см . . 1000 25 000 40 000 80 000 160 000
Пример условного обозначения тормоза колодочного с диаметром тормозного
шкива £> = 200 мм, климатического исполнения У с толкателем типа ТЭГ-25М, рабо-
тающего от сети 220 В:
тормоз ТКГ-200-У-25М/220 ОСТ 24.290.08—77.
432
ПРИЛОЖЕНИЕ 6
ЦИЛИНДРИЧЕСКИЕ РЕДУКТОРЫ
Одноступенчатые редукторы по ГОСТ 21426—75
Типоразмер редуктора Межосевое расстояние» мм Номинальные передаточные числа Номинальный Мкр на тихоходном валу, Нм
ЦУ-100 100 2,0; 2,5 250
ЦУ-160 160 3,15; 4,0 1000
ЦУ-200 200 5,0 2000
ЦУ-250 250 6,3 4000
Пример условного обозначения редуктора цилиндрического одноступенчатого с
межосевым расстоянием 200 мм. номинальным передаточным числом 5,0. вариант сбор-
ки (расположение валов) 111, климатического исполнения У и категории размещения 2
редуктор ЦУ-200-5-И 1У2 ГОСТ 21426—75.
Продолжение прилож. 6
ДВУХСТУПЕНЧАТЫЕ РЕДУКТОРЫ ПО ГОСТ 20758—75
Типоразмер Межосевое расстояние мм Ном ннальные передаточные Номинальный Л4кр на тихоходном валу. Н-м
Тихоходные нары Быстроходные нары
Ц2У-100 Ц2У-1 25 100 125 80 80 8. 10; 12,5 16 250
Ц2У-160 160 100 18; 20; 22,4 1000
Ц2У-200 Ц2У-250 200 250 125 160 28; 31,5 35,5; 40 2000 4000
Пример условного обозначения цилиндрического двухступенчатого редуктора
с межосевым расстоянием тихоходной пары 200 мм, передаточным числом 28, вари-
ант сборки 111, коническим выходом выходного вала (К), климатического исполнения
У. категории размещения 2. редуктор Ц2У-200 28 111 КУ2 ГОСТ 20758—75.
ПРИЛОЖЕНИЕ 7
ТЯГОВЫЕ ПЛАСТИНЧАТЫЕ ЦЕПИ ПО ГОСТ 588—81
(ТИП 1 — ВТУЛОЧНЫЕ, ТИП 2 — РОЛИКОВЫЕ,
ИСПОЛНЕНИЕ 1 — НЕРАЗБОРНЫЕ, ИСПОЛНЕНИЕ 2 — РАЗБОРНЫЕ)
Шаг цепи, мм
V° цени Разрушающая нагрузка, Н 63 80 100 125 160 200
Масса 1 м, кг
М-28 28 000 1,45 1,34 1,26 1,20 1,15
М-40 40 000 2,10 2,05 1,90 1,76 1 ,70 1,65
М-56 56 000 3,34 3.06 2,82 2.62 2,46 2,38
М-80 80 000 4,80 4,40 3,95 3,80 3,66
М-112 112 000 -—. 7,26 6,00 5,80 5,30 5,05
М-160 160 000 9,15 8,20 7,75 7,05
М-224 224 000 — — -— 12,70 11,40 10,70
М-315 315 000 — — — -—’ 15,90 15,60
Пример обозначения тяговой цепи М-112 с разрушающей нагрузкой 112 000 Н, тип 2, с
шагом 100 мм исполнения 2; цепь М-112-2-100-2 ГОСТ 588—74.
433
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
А
Автодрезина 34“ 354 360
—. карта смазки 365
. кинематическая схема 347. 355
—. основные неисправности 366
. техническая характеристика 360 361
— грузовая, тяговый расчет 361
Агрегат расшивки рельсо-шпальной решетки 176
Аккумулятор гидравлический IS
Аппаратура вспомогательная 17
— контрольно регулирующая 266
Б
Бак гидравлический 17
Барабан 29 77
—. длина полная 30
крепление наката 29
расчет параметров 30
Блок 24
— неподвижный 25
— подбивочный 276 292
— подвижный 25
— профиль ручья 25
— , расчет 26
— . установка 25
Бульдозер, классификация 375
— . расчет производительности 395
—, техническая характеристика 380
В
Вагон дефектоскоп 374
Вагон путсизмеритель 371
Вал приводной 131. 246. 420 424
Вибратор ВПР 1200 279
направленного действия 322
Воздухопровод 353
Выправка пути 281
Г
1 айковерт ГБЗ I 171
— —. техническая характеристика 173
Головка контактная сварочная 214
Грейфер 34 , 387
— моторный 34
Д
Дефектоскоп двух ниточный съемный 371
индукционный 373
— рельсовый 372
— магнитный 374
Дозатор 154. 328
Хомкрат 19
гидравлический 106
--. техническая характеристика 108
Допуск к управлению машиной 85
Дренаж продольный 139
— трубчатый поперечный 136
Дроссель, классификация 16
схема регулирования 16. 17
3
Замок гидравлический 14
Захват клещевой 33
И
Износ машины аварийный 87
--естественный 87
Инструмент путевой меха визированный. класси-
фикация 91
------. основные неисправности 114
—-----подготовка к работе 113
------. техника безопасности 116
Испытание машины динамическое 85
— — статическое 85
К
Кавитация 9
Канат стальной, выбраковка 24
• —, классификация 21
---. маркировка 22
- — чалочпый 23, 24
тяговый, схема запасонки 194
Канатоемкость барабана 30
Каретка грузовая 189. 217
Каток масштабный 301, 311
Клапан, классификация 12. 13
Ключ гаечный путевой 101
— 'электрогаечнып. техническая характеристика
103
- ЭК 1М 101
Колодка тормозная, проверка 38
—, регулировка 352
Конвейер накопитель 418. 424
Конвейер ленточный 75
--- горизонтальный 76
--- комбинированный 76
— наклонный 76, 78. 132
---средний 141
пластинчатый 82
— продольный 416
разгрузочный поворотный 420
- скребковый 83. 42b
Костылевыдергиватель КВД-1 ЮЗ
— . техническая характеристика 105
Костыле «абивщпк ЭПК-3 103
---, техническая характеристика 105
Коробка перемены передач 268. 343
-------, смазка 272, 346
раздаточная 271
— реверс раздаточная 271
Коэффициент запаса прочности каната стально-
го 23
использования механизма:
годовой 21
по грузоподъемности 20
суточный 21
часовой 21
грузовой устойчивости крана 65
— перемещаемой тары 75
полезного действия блока 26
----- полиспаста 28
- сглаживания системы контрольно измеритель-
ной 282. 284
— собственной устойчивости крана 66
сопротивления блока 26
— — движению 75
Кран гру юподъемпый 19. 357
дрезины 350
• — КД В 15. схема полиспастов 65
— КДЭ 163, таблица смазки 87
—. основные неисправности 88
козловой 66
— КДКК Ю. кинематическая схема 70
. основные параметры 68
- — самомО(<гирую:цийся 74
—. техническая характеристика 75
стреловой железнодорожный 49. 63
—------. кинематическая схема 64
. техническая характеристика 49
—. индексация 47
. классификация 47
— многомоторный дизель электрический 50
—, основные параметры 48
- тормозной 353
Кратность полиспаста 27. 28. 51
Крыло боковое 119, 400, 407, 412
— планировщика откоса За4
— устройства снегоочистительного 399
Крюк двурогий 32
однорогий 32
—, крепление к канату 32
Л
Лебедка I!) 43, 250
— главная 391
грузовая 193, 351
— расчет 199
передвижения пакетов 186
— с приводом машинным 44
—------расчет 44. 45
-------ручным 43
— — —, расчет 43, 44
— стрелоподъемная, кинематическая схема 53
тяговкя 136. 176. |93. 212, 351
— —. кинематическая схема 176
434
—, расчет 199
Лента конвейера 76
— . расчет 76, 79
— плетеная 228
Летучка путеремонтная 362
----. техническая характеристика 364
Линия визирная 297
звеносборочная 165. )Ь . 170, 173 17-1
—, техническая харакп ристина 174
— —. техническое обслуживание 219
— 5веноразборочная 175
— , техническое обслуживание 219
М
Магистраль bchomoi«тельная 185
— напорная 356
— питательная 184
— тормоза автоматического 357
------ прямодействующего 356
— тормозная 181
• — тормозных цилиндров 185
Машина балластоочиститсльная 257
нынравочко- иодбивочно отделочная ВПО-ЗООО
315
------ —, основные неисправности 339
— —. подготовка к работе 337
— —, техническая характеристика 335
выправочно нодбивочпо рихтовочная 267. 291
----. техническая характеристика 297
Мишина грузоподъемная, классификация 19
—, обкатка 86
----. основные параметры 19
—, приемка 86
—, регистрация 84
----, режим работы 20
----, смазка 86
----. техническое обслуживание 89
—для ремонта земляного полотна 117
—---------. основные неисправности 140
— смены стрелочных переводов 215
------ --- техническая характеристика 218
----сооружения дренажа поперечною 136
----- — продольного 135
— непрерывного действия 75
— путевая, классификация 6
— — рельсосварочная самоходная 20ч
-------, подготовка к работе 210
------ — —. техническая характеристика 215
— — уборочная 126
----. техническая характеристика 134
----—. техническое обслуживание 138
рихтовочная 295
— —. техническая характеристика 313
— —. техническое обслуживание 314
- ШПМ 02/МГ 204
— снегоуборочная. техническая характеристика
426
----, техническое обслуживание 429
— щебнеочистительная 223. 244. 252
----. зарядка 262
— —. основные неисправности 265
----. подготовка к работе 261
— —. таблица смазки 264
----. техническое обслуживание 263
Метод обнаружения дефектов.
вихревых токов 373
зеркально-теневой 374
магнитного рассеивания 372
ультразвуковой 374
эх о-метод 374
Мост перегрузочный 68
.Муфта 279
— гидравлическая 341
----. характеристика 343
•— сцепления 268
— фрикционная 343
----. ступени скорости 344
Механик вывешивания рсльсо-шпальной решет
ки 308
— наклона крыла планировщика откосов 324
—- передвижения крана 61
-------. кинематическая схема 62
— — МПД. расчет 187
----тележки грузовой 357
---- электротали 71
— поворота крана 57. 354, 357
-------. расчет мощности привода 59
----крыла планировщика откосов 325
---- дозатора 317
— подъема груза 51 52 69 353. 357. 358
-----. кинематическая схема 51
----крыла планировщика откосов 324
— — плиты уплотнительной 325
----стр<лы 53. 354
----, расчет 54. 55
----электромагнита ВПО 3000 319
— прижатия пути 303
разгрузочно-дозировочный 143
— сдвига пути 102 321
---- магнитов 302
Н
Насос 9--11
Намагничивание полюсное 372
— циркулярное 373
Натяжение каната максимальное 22
Нож подрезной 228. 250. 258 406. 415
О
Оборудование бульдон'рное 375
----. систе ма управления 378
— гидравлическое ПРСМ 3 212
----устройства подъемно рихтовочною 289 291
— — ПУтерихтовочного 304. 305
----ЩОМ 233 252 260
— тру юное ПРСМ 3 212
— драглайн 389
— крановое УК 25е'9 18 189 193 195
— пневмотормоз нос МПД 183
— noi ре 1ОЧНО1- 386
св; ровное ПРСМ 3 210
Ofраиичитель высоты подъема груза 67. i9o
г|п (оподъемности 67 358
— ио (бое к 286
eo.i.i грукжой тележки УК 197
Опоры крана неподвижная 363
подвижная 363
Остановы фрикционные 35
храповые 35
Охладитель рабочей жидкости 18
Л
Пакет рельсовых (вепьев. перевозка 200
Перегружатель 177
Передача гидравлическая 341
— карданпая 268
— механическая 341
— силовая 341 •
Питатель щеточный 132
Планировщик о. коса 324 . 330
— ЩОМ 229. 251. 254 259
Платформа моторная дизельная 179. 188
—----, карта смазки 220 1
----. техническая характеристика 187
. управление 186
Плети рельсовые, выгрузка 202
Плита уплотнительная 279 294, 322, 32г
Плуг 308
— мощный отвальный 123
Подъемник электромагнитный 19. 223
Поле магнитное результирующее 373
— рассеивания дополнительное 373
Полиспаст 27
— одинарный 28
— сдвоенный 28
уравнительный 28
Полувагон концевой 417
— промежуточный 417
Прибор гидравлический, основные ненсправ! о-
сти 115
----, подготовка к работе 115
----разгоночный [1|
---- техническая характеристика 112
— — рихтовочный 108
----, техническая характеристика 110
Привод ленты 226
— машины классификация 7. 8
Путеукладчик 178
—, подготовка к работе 219
Путь бесстыковой, укладка 202
Р
Рама щебнеочистительного устройства несущая
226. 217
435
----— подъемная 225. 244
Распорка крыла струга-снегоочистителя телеско-
пическая 119
Распределитель гидравлический следящий 15,
— золотниковый 15. 191, 379
Реверс 34.4. 349
Реверс редуктор 259. 320
Редуктор осевой 180. 268
привода ленты 22”. 246
Рельсошлифовалка 96
Ремонт пути капитальный 5
---, комплект машин 6
----подъемомный 5
----средний 5
Рихтовка пути 290
----. геометрические схемы 313
Рихтовщик гидравлический 108. 109
Ролик рихтующий 321
Ротор выбросной 406. 426
Ротор питатель Щеточный 414. 423
Рыхлитель 127. 303 4)8
Рычаг рихтовочный 307
С
Свивка каната параллельная 22
---- крестовая 22
Сдача машины 86
Сервовентиль 15
Сигнализатор угла наклона Ь8
Система измерений трехточечная 298
измерительная нивелировочная 280
— рихтовочная 280
Система контрольная состояния пути 284
Система контрольно-измерительная состояния
пути 280. 296
— —. метод работы 281 — 294. 296, 297
— рабочая пневматическая 285
— тормозная 183. 352
Снегоочиститель 397. 403. 409
— основные неисправности 428
—. техническая характеристика 403. 426
—. техническое обслуживание 427
Снеготаялка 412
Снегоуборщик, классификация 411
Сортировщик шпал 178
Станок рельсорсзный 91 92
—, техническая характеристика 95
— рельсосверлильный 93. 94
— техническая характеристика 93
—- рсльсошлифовальпый 96 97
—. техническая характеристика 97
Станция насосная 213
Стенд звсноразборочный 1*5
----. техническая характеристика 178
Стол контрольный 311
— оператора 310
— управления с лентопротяжным механизмом
302
Стрелограф контрольный 302. 309
— рабочий 299. 309
Строны цепные 33
Струг путевой 117. 137
----. техническая характеристика 123
- тяговый расчет 125. 126
Струг снегоочиститель 117
. таблица смазки 139
управление рабочими органами 122
Т
Таль 19
Текущее содержание пути 5
Тележка бегунковая 272
— измерительная 300
— крановая 69
концевая 300
- путеизмерительная трехколесная 368
----, четырехколесная 369
— тельфера приводная 72
— транспортная 176
тяговая 272
— ходовая 180 188. 307
— шпальная 177
Тельфер 19. 71
Торможение служебное полное 186
Тормоз, классификация 36
—. маркировка 41
расчет 36, 37. 40
~. эксплуатация 43
— дисковый 42
— колодочный 39. 42. 181, 272, 276
---с замыканием грузовым 37
--------пружинным 39. 40
-------- электрогидравлическим толкателем 40
— прямодействующий 273, 274
Траверса 33. 195
Трансформатор гидравлический 342
---комплексный 343
У
Указатель вылета стрелы 66
Укладочный кран 188
---. основные неисправности 221
---. техническая характеристика 198
---. управление 198
Уплотнитель балласта 279. 294. 297
— откоса 332
Уровень мсханишцин путевых работ 5
Устойчивость крана стрелового 65. 66
Устройство грузозахватное 32
---. испытание и осмотр 35
— дефектоскопа искательное 373
— для закрепления пакетов звеньев 200
отбора очищенного щебня 231
— льдоскалывающее 417
— подъемно-рихтовочное 278. 293. 297. 328
— рихтовочное, основные неисправности 315
— . таблица смазки 314
— снегоочистительное 121
— щебнеочнетительное 223. 225. 244, 252. 235 251
---. расчетная схема 238
Ф
Фильтр жидкости рабочей 18
X
Хоппер-дозатор 142
— . виды разгрузки балласта 143
— , техническая характеристика 14о
— . техническое обслуживание 146
- ЦНИИ ДВЗ 144. 145
Хранение машины 88
Ц.
Цилиндр гидравлический одностороннего денег
Вия 11
--двустороннего действия 11
Ч
Число витков каната полное 30
— включений механизма 21
Ш
Шаблон путевой 368
Шаг свивки 24
Шуруповерт 99
—. техническая характеристика 103
Щ
Щетки боковые машины землеуборочной 132
— вертикальные ВПО 3000 332
— горизонтальные ВПО 3000 330
— рельсовые 127. 233. 318, 328. 425
Щит лобовой 399
Э
Экскаватор 381 384. 386
— расчет производительности 395
— . система управления 394
— , таблица смазки 396
техническая характеристика 394
— одноковшовый, система индексации 381
---. рабочий цикл 338
Элеватор машины путевой уборочной 83. 129
Электробалласте.р. назначение 147
— . ос нов Huie неисправности 162
— . подготовка к работе 100
— . проверка рабочих органов 161
—. рабочие органы 149—159
—. техническая характеристика 160
, техническое обслуживание 161
Электромагнит подъемный 33
Электроталь 71
Элсктрошц.члополбойка 105
техническая характеристика 106
43G
ОГЛ АВ Л EH HE
Введение ................................................................. 3
1. Общие сведения о путевых машинах
1.1. Основные виды путевых работ.......................................... 5
1.2. Комплекты путевых машин, их классификация и требования, предъявляемые
к ним.................................................................... 5
1.3. Приводы машин и механизмов для путевого хозяйства .... .... 7
1.3.1. Назначение и классификация, приводов........................... 7
1.3.2. Основы гидропривода........................................... 8
1.3- 3- Силовое гидравлическое оборудование........................... 9
1-3.4. Системы и аппаратура управления................................ 12
2. Грузоподъемные машины
2.1. Классификация и основные характеристики машин...................... .19
2.2. Элементы машин и механизмов......................................... 21
2.2.1. Стальные канаты................................................21
2.2.2. Блоки, полиспасты, барабаны ...................................24
2.2.3. Грузозахватные устройства..................................... 32
2.2.4. Тормозные устройства...........................................35
2.2.5. Лебедки . . . .................................................43
2.3. Стреловые и козловые краны...........................................47
2.3.1. Назначение, классификация у устройство стреловых кранов . ... 47
2.3,2. Стреловые краны на железнодорожном ходу........................49
2.3.3. Многомоторные стреловые краны на железнодорожном ходу . ... 50
2.3.4. Механизмы стреловых многомоторных кранов.......................51
2.3.5. Одномоторные стреловые краны на железнодорожном ходу...........63
2.3.6. Расчет устойчивости стреловых кранов.......................... 65
2.3.7. Приборы и устройства для безопасной работы кранов..............66
2.4. Козловые краны.......................................................68
2.5. Машины непрерывного транспорта.......................................75
2.5.1. Назначение и область применения................................75
2.5.2. Ленточные конвейеры .....................................75
2.5.3. Пластинчатые и скребковые конвейеры........................... 82
2.5.4. Ковшовые элеваторы.............................................83
2.6. Основы эксплуатации и обслуживания грузоподъемных машин .............84
2.7. Основные требования по технике безопасности при обслуживании грузоподъем-
ных машин ............................................................89
3. Механизированный путевой инструмент
3.1. Электрифицированный путевой инструменти инструмент с приводом от двига-
телей внутреннего сгорания...............................................91
3.1.1. Рельсорезные станки............................................91
3.1.2. Рельсосверлильные станки.................................... • 93
3.1.3. Рельсошлифовальные станки......................................96
3.1.4. Шуруповерт ШВ-2М...............................................99
3.1.5. Электрогаечные ключи.......................................... Ю1
3.1.6. Костылезабивщик ЭПК-3..........................................ЮЗ
3.1.7. Костылевыдергиватель КВД-1 . ЮЗ
3.1.8. Шпалоподбойка ЭШП-9М......................................... 105
3.2. Гидравлический путевой инструмент....................................Ю6
3.2.1. Гидравлические домкраты...................................... Ю6
3.2.2. Гидравлические рихтовочные приборы . . .... 108
437
3.2.3. Гидравлические разгоночные приборы ...............................110
3.3. Подключение электроинструментов к источникам питания .................112
3.4. Основы эксплуатации и обслуживания путевого механизированного электро-
инструмента .............................................................. 113
3.4.1. Подготовка к работе и обслуживание электроинструментов..........113
3.4 2. Подготовка к работе и обслуживание гидравлических приборов .... 115
3.4.3. Основные требования по технике безопасности при работе с путевым
механизированным инструментом ......................................... 116
4. Машины для ремонта земляного полотна
4.1. Путевые струги........................................................117
4.1.1. Назначение и устройство путевых стругов.........................117
4.1.2. Тяговый расчет путевых стругов..................................125
4.2 Путевая землеуборочная машина.........................................126
4.2.1. Назначение и устройство землеуборочной .машины..................126
4.2.2. Рабочие органы машины ......................................... 127
4.3. Машины для устройства дренажей....................................... 135
4.3.1. Машина для сооружения продольных дренажей.......................135
4.3.2- Машина для сооружения поперечных дренажей (МСПД)................136
4.4. Основы эксплуатации и обслуживания машин для ремонта земляного полотна 137
5. Машины для балластировки и подъемки пути
5.1. Хопперы-дозаторы......................................................142
5.1.1. Назначение и общее устройство...................................142
5.1.2, Основные устройства хопперов-дозаторов ЦНИИ-ДВЗ . . . 144
5.1.3. Основы обслуживания хопперов-дозаторов . . ..............146
5.2. Электробалластеры . . .............................................147
5.2.1. Электробалластер ЭЛБ-1 . . . . ..............147
5.2.2. Электробалластер ЭЛБ-3М........................................ 156
5.2.3. Основы эксплуатации и обслуживания электробалластеров.......... 160
5.2.4. Определение мощностей электродвигателей механизмов подъема и
сдвига путевой решетки электробалластера ЭЛБ-1 .........................163
6. Машины для сборки, разборки, укладки
рельсо-шпальной решетки и сварки рельсов в пути
6.1. Машины для сборки рельсо-шпальной решетки.............................165
6.1.1. Полуавтоматическая поточная линия ЗЛХ-800 ......................165
6.1.2. Полуавтоматическая поточная звеносборочная линия ППЗЛ-650
(ППЗЛ-500)..............................................................167
6.1.3. Технологическая стендовая линия (ТЛС)...........................170
6.1.4. Прочие типы звеносборочных линий................................173
6.2. Механизация разборки рельсо-шпальной решетки..........................175
6.3. Машины для укладки рельсо-шпальной решетки ...........................178
6.3.1. Моторная платформа дизельная (МПД)..............................179
6.3.2. Укладочные краны УК-25/9-18.................................... 188
6.3.3. Подвижной состав для перевозки пакетов..........................200
6.4. Механизация укладки и ремонта бесстыкового пути ......................202
6.4.1. Механизация укладки рельсовых плетей бесстыкового пути..........202
6.4.2. Машина ШПМ-02/МГ................................................204
6.4.3. Путевая рельсосварочная самоходная машина (ПРСМ-3)............. 209
6.4.4. Машина для смены стрелочных переводов..............» .......215
6.5, Основы эксплуатации и обслуживания машин для сборки, разборки и укладки
рельсо-шпальной решетки и сварки рельсов в пути ...........................219
6-5.1. Подготовка к работе и обслуживание..............................219
6.5.2. Смазка машин....................................................220
6.5.3. Основные требования по технике безопасности при обслуживании машин
для сборки, разборки, укладки рельсо-шпальной решетки и сварки
рельсов в пути..........................................................221
7. Машины для очистки балласта
7.1. Щебнеочистительная машина ЩОМ-4.......................................223
7.1.1. Назначение и общее устройство машины.............................223
7.1.2. Определение мощности привода сетчатой ленты .....................237
7.2. Щебнеочистительная машина ЩОМ-Д.......................................244
7.3. Щебнеочистительная машина ЩОМ-Д° .....................................252
7.4. Щебнеочистительная машина ЩОМ-ЗУ......................................254
7.5. Балластоочистительная машина БМС................................... • 257
438
7.6 Основы эксплуатации и обслуживания машин для очистки балласта .... 261
7.7. Основные требования по технике безопасности при обслуживании щебне-
очистительных машин.................................................... 265
8. Машины для выправки, рихтовки пути
и отделки балластной призмы
8.1. Выправочно-подбивочно-рихтовочная машина ВПР-1200 ................. 267
8.1.1, Экипажная часть.............................................. 268
8.1.2. Рабочие органы............................................... 276
8.1.3. Контрольно-измерительная система . . .... 280
8.1.4. Пневматическая рабочая система .... . 285
8.1.5. Гидравлическая система..........................................287
8.2. Выправочно-подбивочно-рихтовочная машина для стрелок и пути ВПРС-500 291
8.3. Рихтовочная машина Р-2000 ......................................... 295
8.4. Путерихтовочные машины непрерывного действия (несамоходные) 298
8.4.1. Путерихтовочное устройство на электробалластере ЭЛБ 1 . 299
8.4.2, Путерихтовочная машина системы Балашенко .... Зоб
8.4.3 Основы эксплуатации и обслуживания рихтовочных машин 314
8.5. Выправочно-подбивочно-отделочная машина ВПО-ЗООО ... 315
8.5.1. Назначение и принцип действия . . . . 117
8.5.2. Дозатор.............................. ... . 317
8.5.3. Рельсовые щетки.......................... ... 318
8 5.4 Механизм подъема, сдвига и перекоса пути Я1)
8 5.5. Основные вибрационные уплотнительные плиты -21
8.5.6 Планировщики откосов................................ 324
8.5.7. Вибрационные уплотнители откосов 325
8.5.8. Механизм для обметания излишков балласта с пути о26
8.5.9. Устройства для контроля положения пути . . . • ... 325
8.6 Выправочно-подбивочно-отделочная машина ВПО-ЗОООМ.....................328
8.7 Основы эксплуатации и обслуживания машин для выправки и рихтовки п>ти 335
8.7.1 Основы эксплуатации и обслуживания машин ВПР 1200, ВПРС-500,
Р-2000 ............................................ ... . . . 335
8.7.2. Техническое обслуживание машин ВПР 1200. ВПРС-500 и Р 2000 . 336
8.7.3. Основы эксплуатации и обслуживания машины ВПО-ЗООО . 537
8.7.4. Возможные неисправности машины и их устранение................. 338
8.8 Общие требования по технике безопасности при обслуживании машин для вы-
правки. подбивки пути, уплотнения и отделки балластной призмы . . . 340
9. Гидравлическая передача
9.1 . Общие сведения....................................... . • 341
9.2 Унифицированная гидропередача............................ ... 343
10. Транспортные средства
10.1. Грузовые автодрезины................................................ 347
10.1.1. Грузовая автодрезина АГМУ . 347
10.1 2. Грузовая автодрезина ДГКУ (ДГКУ 5) ............354
10.2. Автодрезина пассажирская АС-1А ... 360
10.3, Тяговый расчет грузовой автодрезины АГМУ ... . . 361
10 4. Путеремонтная летучка ПР Л 3 . . . . • • 362
10-5 Основы эксплуатации и обслуживания транспортных средств .... .164
10.5. 1. Подготовка к работе и обслуживание транспортных средств.......364
10 5.2. Основные требования по технике безопасности при использовании
транспортных средств............................. . - .............. 367
11. Путеизмерителя и средства дефектоскопии
11.1 Устройства для измерения пути.............................. • • 368
И 2. Средства дефектоскопии........................... . . .... 372
12 Машины для земляных работ
12.1 Бульдозеры......................................................... 175
12-1.1 Назначение, классификация и устройство .........................375
12.1.2 . Системы управления бульдозерным оборудованием.......... 378
12.2. Экскаваторы . . . ................................................. 381
12 2.1. Назначение и классификация........................... . 381
12.2.2. Устройство экскаваторов с жесткой подвеской рабочего оборудования 383
12.2.3. Устройство канатных экскаваторов............................. 387
439
12.2 4. Основные механизмы канатных экскаваторов .... 390
12.2.5. Системы управления экскаваторами.............................. 394
12.2.6. Производительность бульдозеров и экскаваторов..................395
12.3. Основы эксплуатации и технического обслуживания землеройных машин 395
13. Машины для очистки путей от снега
13.1. Плужные снегоочистители . . ............ ..................397
1 3.1 I. Назначение и классификация . . 397
13 1.2. Плужный снегоочиститель СДП-М ............ 397
13 2 Роторные снегоочистители............................................. 403
13.2. L Назначение и классификация ................................... 403
13 2-2. Трехроторный электроснегоочиститель ЭСО-3 404
13.2.3. Фрезерно-роторный снегоочиститель............................. 409
13.3. Снегоуборщики........................................................411
13.3.1. Назначение и классификация снегоуборщиков . . . 411
13-3.2. Поезд снегоуборочный системы ПТКБ ЦП МПС.......................412
13.3.3. Самоходные снегоуборщики . ........................ 422
13.4. Основы эксплуатации машин для очистки путей от снега.................427
13.5. Основные требования по технике безопасности при обслуживании машин
для очистки путей от снега .............................................. 429
Приложения.................................................................431
1. Стальные канаты типа Л1\-0.................................... .... 431
2. Стальные канаты двойной свивки типа ЛК-Р................. ... 431
3- Канаты двойной свивки типа ТК..................•- ............432
4. Электродвигатели трехфазные асинхронные крановые...................432
5. Тормоза колодочные..................................................432
6. Цилиндрические редукторы. Двухступенчатые редукторы ................433
7. Тяговые пластинчатые цели...........................................433
Предметный указатель. ............................................... .... 434
СЕМЕН АНДРЕЕВИЧ СОЛОМОНОВ. ВЛАДИМИР ПЕТРОВИЧ К УВАРОВ
ЛЕВ ЯКОВЛЕВИЧ МАЛИЦКИМ. НИКОЛАИ МАТВЕЕВИЧ НУЖДИН
МАШИНЫ И МЕХАНИЗМЫ ДЛЯ ПУТЕВОГО ХОЗЯЙСТВА
Предметный указатель составил В Г Пешков
Переплет художника А Е. Смирнова
Форзац Е Н Волкова
Технические редакторы Г П. Федорова. Н И. Первова
Корректор В Л. Луценко
ИБ № 2463
Сдано в набор 26 01.84 Подписано в печать 02.11.84. Т-17869.
Формат 70X1007(5- Бум. офсетная № 2. Гарнитура литературная. Офсетная печать.
Усл. печ. л. 35.75. Усл. кр.-отт. 36.4. Уч.-изд. л. 38.46. Тираж 20 750 экз. Заказ 47.
Цена 1 р. 50 к. Изд. № 1-1 2/3 № 1612
Ордена «Знак Почета» издательство «ТРАНСПОРТ».
103064 Москва. Басманный туп. 6а
Московская типография № 4 Союзполиграфпрома
прн Государственном комитете-СССР
по делам издательств полиграфии и книжной торговли.
129041. Москва. Б Переяславская ул . 46
IIV > ^i.rtiiJiWWKWiWUH*»
Снегоубо очная
машина CM 3
Путеремонтная
летучка ПРЛ—3
Путевой моторный
гайковерт ПМГ
Балластоочистительная
машина БМС
..«гс^я^****»
w
_—>—7
’Л»-
1. J
Щебнеочистительная
машина ЩОМ Д
Передвижная"
рельсосварочная
машина ПРСМ
Выправочно подбивочно
отделочная машина
ВПО 3000