/




























































































































Автор: Фотиев М.М.
Теги: технология обработки без снятия стружки в целом: процессы, инструмент, оборудование и приспособления электротехника электрооборудование электроснабжение металлургия
ISBN: 5-229-01142—4
Год: 1995




Текст
М.М. Фотиев
ЭЛЕКТРО-
ОБОРУДОВАНИЕ
ПРОКАТНЫХ
И ТРУБНЫХ
ЦЕХОВ
Рекомендовано Комитетом Российской Федерации
по металлургии в качестве учебника
для средних специальных учебных заведений
по специальности "Обработка металлов давлением'
со специализациями по трубному и
прокатному производствам
10г
МОСКВА ’МЕТАЛЛУРГИЯ* 1995
Рецензенты: инж. Г.И.Бабушкин, преподаватель Челябинского метал-
лургического техникума Л.М.Федорова.
УДК 621.771:621.313.13
М. М. Ф о т и е в. Электрооборудование прокатных и трубных цехов: Учебник
для техникумов. — М.: Металлургия, 1995. — 256 с.
Изложены основы электропривода, рассмотрены схемы электрооборудования
прокатных и трубных цехов, основные правила его эксплуатации, схемы
электроснабжения прокатных цехов, способы рационального использования и
экономии электроэнергии.
Основное внимание уделено современным схемам электропривода прокатных и
трубных станов, выполненных с использованием тиристорных преобразователей,
многоконтурных систем подчиненного регулирования, микропроцессорной
техники.
Предназначена в качестве учебника для учащихся техникумов черной
металлургии, обучающихся по специальности 1108 "Обработка металла давле-
нием". Может быть полезна квалифицированным рабочим н ИТР предприятий
черной металлургии, а также студентам вузов соответствующих специальностей.
Ил. 102. Табл. 5. Библиогр. список: 9 назв.
Федеральная целевая программа книгоиздания России.
УЧЕБНИК
ФОТИЕВ Михаил Михайлович
ЭЛЕКТРООБОРУДОВАНИЕ ПРОКАТНЫХ
И ТРУБНЫХ ЦЕХОВ
Редактор издательства Савенков А.В.
Художественный редактор Девин СК.
Технический редактор Снераиская Н.А., Жарова Г.Б.
Корректоры Морозова Т.В., Колганова В.С.
Лицензия ЛР М 010157 от 04.01.92
Подписано в печать 31.08.95 Формат бумаги 60X88 1/16
Бумага офсетная N* 2 Печать офсетная
Усл.печл. 15,68 Уч.-изд.л. 15,93 Усл. кр.-отт 14,59
Тираж 1000 экз. С-027 Заказ 4337 Изд. 1Ф 1805
Набрано в издательстве "Металлургия" оператором Е.В.Смирн6вой
Ордена Трудового Красного Знамени издательство "Металлургия"
119857 Москва, ГСП, Г-34, 2-й Обыденский пер., 14
Московская типография N*9 при Государственном комитете по
информации и печати Российской Федерации
109033, Москва, Волочаевская ул., д. 40
Ф Ф без объявления
УЗ
(0 Фотиев М.М.,
ISBN 5-229-01142—4 издательство "Металлургия", 1995
2
СОДЕРЖАНИЕ
Предисловие..................................................... 5
Введение ....................................................... 6
Глава 1. Основы электропривода.................................. 8
1.1. Общие сведения............................................ g
1.2. Динамика электропривода. Основное уравнение движения. Приве-
дение моментов и сил ........................................... 14
1.3. Механические характеристики электродвигателей и производст-
венных механизмов. Двигательный и тормозной режимы .... 19
1.4. Электромеханические свойства двигателей постоянного тока 24
1.5. Электромеханические свойства двигателей переменного тока 33
1.6. Пуск электродвигателей ................................... 42
1.7. Регулирование скорости электропривода. Общие сведения . . 44
1.8. Регулирование скорости электроприводов постоянного тока
Электропривод по системе Г-Д.............................. 48
1;9. Тиристорный электропривод постоянного тока ............... 53
1.10. Регулирование скорости асинхронных двигателей ............ 67
1.11. Переходные процессы в электроприводе ..................... 77
1.12. Нагрузочные диаграммы. Нагрев электродвигателей. Номинальные
режимы работы электропривода.................................... 87
1.13. Выбор мощности и типа электродвигателя ................... 92
Глава 2. Аппаратура управления, защиты.
Электрооборудование кранов...................................... 100
2.1. Релейно-контакторная аппаратура .......................... 100
2.2. Принципы начертания релейно-контакторных электрических схем 109
2.3. Схемы управления с использованием логических элементов . . 112
2.4. Унифицированная блочная система регуляторов. Датчики регули-
руемых параметров............................................... 116
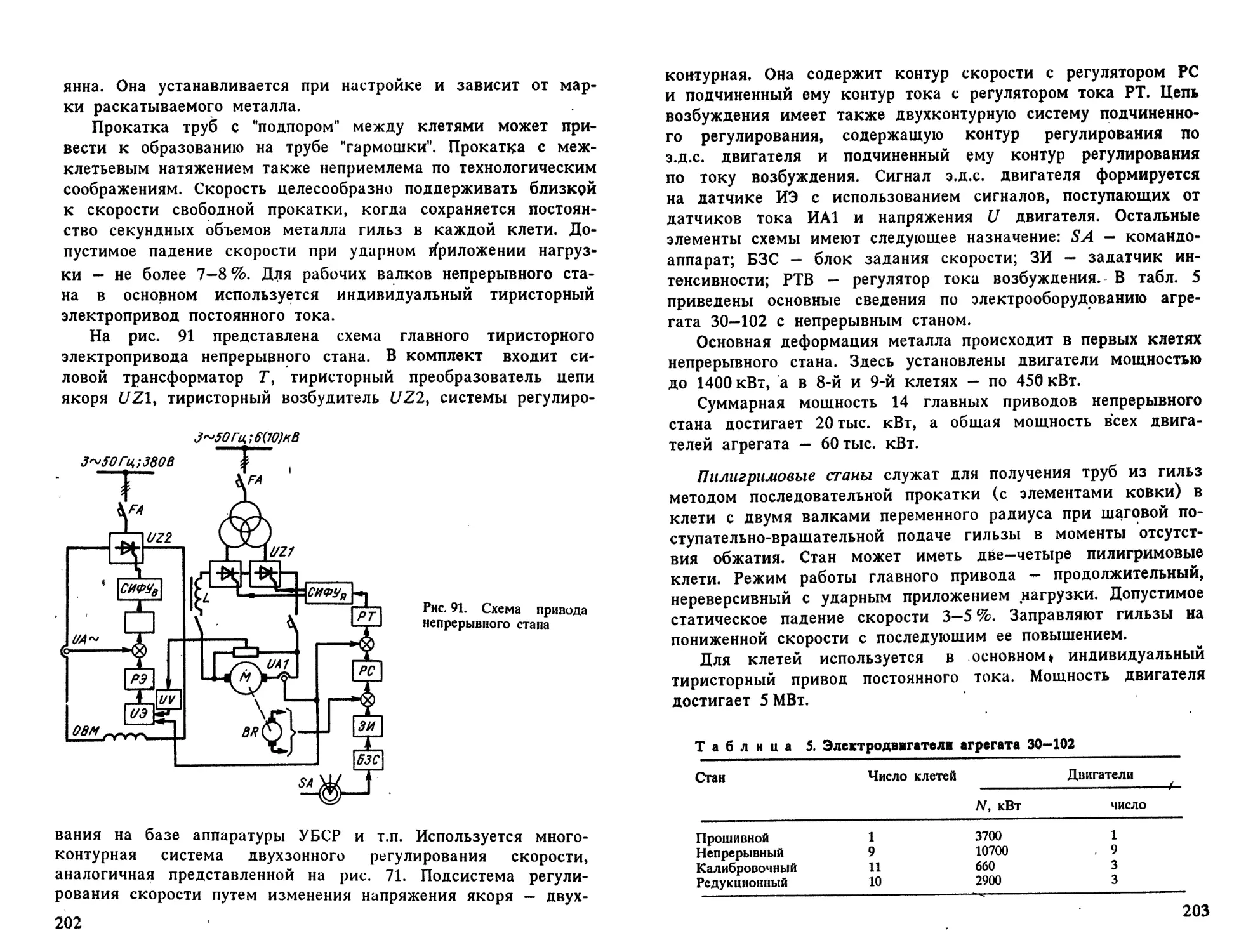
2.5. Автоматизация электропривода. Многоконтурные системы подчи-
ненного регулирования .......................................... 122
2.6. Электропривод металлургических кранов.................... 125
Глава 3. Электропривод прокатных и трубных станов ... 127
3.1. Общие сведения ........................................... 137
3.2. Условия эксплуатации Приводов прокатных станов. Классификация
приводов ....................................................... 142
3.3. Подчиненная система управления с двухзонным регулированием
скорости; оптимизация переходных процессов в приводе прокат-
ных станов ............................................... 146
3.4. Схема управления тиристорным электроприводом прокатного ста-
на. Выравнивание нагрузки двигателей ........................... 152
3.5. Автоматизация прокатного производства. Использование цифро-
вой микропроцессорной техники .................................. 159
3.6. Электродвигатели прокатных станов. Тиристорные преобразовате-
ли ............................................................. 171
3.7. Электропривод реверсивных станов горячей прокатки ....... 175
3.8. Электропривод чистовых клетей непрерывных станов горячей про-
катки .......................................................... 179
3.9. Электропривод непрерывных заготовочных станов............ 185
3.10. Электропривод непрерывных сортовых станов................ 188
3.11. Электропривод стэчов холодной прокатки .................. 191
3
3.12. Электропривод трубопрокатных агрегатов ...................... 196
3.13. Электропривод непрерывных, пилигримовых станов .............. 201
3.14. Электропривод калибровочных и редукционных станов............ 204
3.15. Электропривод трубосварочных станов.......................... 207
3.16 Электропривод черновых клетей и окалиноломателей станов
непрерывной прокатки ......................................... . 212
3.17. Электропривод вспомогательных механизмов прокатных и трубных
станов. Общие сведения ............................................ 214
3.18. Электропривод наматывающих устройств......................... 215
3.19. Электропривод рольгангов, кантователей, ножниц, нажимных уст-
ройств ............................................................ 221
3.20. Электропривод технологических машин трубных агрегатов ... 223
3.21. Расчет мощности электродвигателя прокатного стана ........... 225
Глава 4. Электроснабжение и эксплуатация
электрооборудовании прокатных цехов................................ 230
4.1. Общие сведения .............................................. 230
4.2. Схемы электроснабжения металлургического завода и прокатного
цеха .............................................................. 233
4.3. Расход и оплата электроэнергии ........................... 237
4.4. Компенсация реактивной мощности и экономия электроэнергии 240
4.5. Эксплуатация электрооборудования прокатных в трубных цехов 246
4.6. Электробезопасность ......................................... 252
Рекомендательный библиографический список . ................. 256
4
ПРЕДИСЛОВИЕ
Бурный технический прогресс в области полупроводнико-
вой, микропроцессорной техники, УВМ привел в последние
годы к большим переменам в электроприводе прокатных и
трубных станов.
В качестве основного и перспективного в прокатных и
трубных цехах укоренился тиристорный электропривод с мно-
гоконтурной системой подчиненного управления.
Все шире используется система автоматического управле-
ния на базе микропроцессорной техники и УВМ.
Все эти факты учтены при написании учебника, который
содержит четыре главы.
В первой главе изложены основы электропривода, причем
особое внимание уделено современным способам регулирова-
ния скорости с использованием тиристорных преобразовате-
лей, а также переходным процессам, играющим существенную
роль в приводе прокатных станов.
Во второй главе рассмотрены устройство и принцип дей-
ствия аппаратуры управления. Большое внимание уделено
бесконтактной аппаратуре на логических элементах.
Третья глава посвящена электроприводу прокатных и
трубных цехов. Особое внимание уделено рассмотрению схем
тиристорного электропривода с подчиненной системой двух-
зонного регулирования скорости. В п. 6 главы, написанным
канд. техн, наук, доцентом В.А.Зеньковским, рассмотрено
использование цифровой и микропроцессорной техники.
В четвертой главе изложены вопросы рационального ис-
пользования, экономии электроэнергии, эксплуатации элект-
рооборудования. Все основные разделы книги снабжены при-
мерами, контрольными вопросами, необходимыми при само-
стоятельной работе.
Все замечания и пожелания по содержанию книги будут
приняты с благодарностью. Их следует направлять в адрес
издательства ’’Металлургия”: 119034 Москва Г-34, 2-ой Обы-
денский пер., д. 14.
5
Введение
Электрофикация, т.е. внедрение электроэнергии в произ-
водство, является одной из главных основ технического
прогресса и экономического развития общества, основной
комплексной механизации и автоматизации производственных
процессов.
Решающим фактором технического прогресса, влияющим на
эффективность общественного производства и производитель-
ность, является электровооруженность труда, т.е. отноше-
ние колиЗеётва потребляемой электроэнергии предприятием
за год к среднесписочной численности промышленно-
производственного персонала.
Более 60 % вырабатываемой в стране электроэнергии по-
требляется электроприводом, в том числе - приводом про-
катных станов.
Как известно, прокаткой заканчивается металлургический
цикл производства металла. Через прокатные станы проходит
> 75 % всего производимого в стране металла, который пе-
рерабатывается в толстый и тонкий лист, балки, рельсы,
трубы, проволоку, разные виды фасонного проката и т.п.
Современный прокатный стан является мощным, глубоко
электрифицированным агрегатом. Количество электродвигате-
лей на одном стане достигает 4000, что не является преде-
лом; установленная мощность электрических машин достигает
100 МВт при единичной мощности двигателя & 16 МВт.
Современное прокатное и трубопрокатное производство
характеризуется увеличением электровооруженности труда,
улучшением технических и эксплуатационных характеристик
автоматизированного электропривода, широким внедрением
тиристорных преобразователей, бесконтактной аппаратуры,
микропроцессоров, УВМ, АСУ ТП.
В условиях металлургического производства, где элект-
рооборудование является составной частью технологических
агрегатов, а эффективность технологического процесса,
производительность и качество продукции прямо зависят от
степени совершенства электрооборудования и надежности его
работы, важной задачей всего учебного процесса является
приобретение прочных знаний в этой области. Специалист-
технолог или механик должен хорошо разбираться в электро-
6
оборудовании: самостоятельно читать научно-техническую
информацию, связанную с электрооборудованием, и электри-
ческие схемы, давать критическую оценку разным вариантам
электрооборудования и выбирать оптимальный для данных ус-
ловий вариант; уметь вести технологический процесс с уче-
том наиболее эффективного и экономического расходования
электроэнергии; знать основные направления дальнейшего
развития электрооборудования прокатных цехов и способст-
вовать внедрению на своем участке новых, наиболее эффек-
тивных его вариантов.
Бурный рост энергетики выдвигает ряд проблем, связан-
ных с охраной окружающей среды и здоровья населения, что
требует проведения комплекса мероприятий.
7
Глава 1. ОСНОВЫ ЭЛЕКТРОПРИВОДА
1.1. Общие сведения
Электроприводом называется электромеханическая систе-
ма, состоящая из электродвигательного, преобразовательно-
го, передаточного и управляющего устройств, предназначен-
ная для приведения в движение исполнительных органов ра-
бочей машины и управления этим движением. В отдельных
случаях в этой системе могут отсутствовать преобразова-
тельное и передаточное устройства.
Электроприводы классифицируются по ряду признаков.
Различают главный электропривод, обеспечивающий основную
операцию технологического процесса (например, привод вал-
ка прокатного стана, привод механизма поворота конвертера
и т.п.) и вспомогательный (например, привод нажимного
устройства, кантователя, заслонки печи и т.п.).
По возможному направлению движения электродвигателя
привод может быть реверсивный и нереверсивный (с одним
направлением вращения).
По соотношению числа электродвигателей и исполнитель-
ных органов рабочих машин различают электроприводы:
групповой, индивидуальный и многодвигательный.
Групповой электропривод обеспечивает Движение от одно-
го двигателя нескольких исполнительных органов одной ра-
бочей машины с помощью механических связей. Кинематичес-
кая схема его сложна и громоздка, вследствие чего приме-
няется он редко. В качестве примера можно указать лишь
применяемый иногда групповой привод валков прокатного
стана через шестеренную клеть и универсальные шпиндели.
Индивидуальный электропривод обеспечивает движение од-
ного исполнительного органа рабочей машины от собственно-
го двигателя; он отличается более высокими энергетически-
ми показателями, более простой кинематической схемой ме-
ханизма, позволяет оптимизировать режим работы машины,
повысить ее производительность, более полно автоматизиро-
вать технологический процесс. Индивидуальный электропри-
вод широко используется на прокатных станах, МНЛЗ, метал-
лургических кранах и других механизмах.
Многодвигательным взаимосвязанным называют такой
8
электропривод, в котором несколько электродвигателей ра-
ботают совместно на один исполнительный орган или вал.
Многодвигательный электропривод применяют на мощных про-
катных станах, конвейерах, кранах, конвертерах. Такой
привод позволяет осуществить равномерное распределение
статических и динамических нагрузок, возникающих при ра-
боте механизмов.
По роду тока различают электроприводы переменного и
постоянного тока.
По виду преобразовательного устройства - тиристорный,
транзисторный, вентильный и др.
По степени управляемости различают приводы регулируе-
мый и нерегулируемый, обеспечивающий лишь одну скорость
исполнительного органа машины.
Наиболее совершенным видом регулируемого электроприво-
да является автоматический электропривод — с автоматичес-
ким регулированием скорости, выполняемый в виде стабили-
зированного, програмноуправляюшего, следящего электропри-
вода. Наиболее перспективным является адаптивный электро-
привод, автоматически избирающий и регулирующий параметры
(координаты) системы в зависимости от изменяющихся усло-
вий работы, без участия оператора.
В создании и развитии электропривода большую роль
сыграли отечественные ученые и инженеры. Первый электро-
двигатель был построен в 1838 г. петербургским академиком
Б.С.Якоби. Создание в 1889г. инженером М.О.Доливо-
Добровольским трехфазного асинхронного двигателя ознаме-
новало новый этап в развитии электропривода и открыло до-
рогу к его широкому применению в промышленности. Большой
вклад в развитие электропривода внесли советские ученые:
С.А.Ринкович, А.Т.Голован, М.Г.Чиликин, Н.А.Дружинин и
многие другие.
Электропривод определяет уровень силовой электровоору-
женности труда и является основным средством автоматиза-
ции рабочих машин, агрегатов, установок. Ко всем электро-
приводам, независимо от назначения предъявляются ряд об-
щих требований, в частности: надежность и минимальная по-
требность в уходе, экономичность, соответствие основных
характеристик электропривода условиям работы производст-
венного механизма и электрической сети, безопасность и
т.п. От степени совершенства электропривода, правильности
9
ыбора его элементов, схемы и эксплуатации во многом за-
висят производительность, качество продукции, эффектив-
ность работы машины, агрегата, цеха, предприятия.
Функциональные схемы электроприводов представлены на
рис. 1. В большинстве случаев привод получает электро-
энергию от трехфазной сети переменного тока частотой
50 Гц напряжением от 380 до 10000 В. Основным элементом
Рис. 1. Функциональные
схемы электроприводов с
разомкнутой (а) и с
замкнутой (tf) системами
управления
электропривода является электродвигатель Л/, преобразующий
электрическую энергию в механическую. Передаточное уст-
ройство ПУ предназначено для передачи механической энер-
гии от электродвигателя к рабочему органу машины РО и со-
гласования вида и скорости их движения (рабочий орган,
например, валок прокатного стана, крюк крана и т.п. не
входит в систему электропривода). Элементами привода яв-
ляются: УУ — управляющее устройство, SA ~ аппарат ввода
задания (командоаппарат), с помощью которого оператор за-
дает скорость привода (например, скорость прокатки).
Системы управления электроприводом можно разделить на
разомкнутые и замкнутые. На рис. 1, а представлена прос-
тейшая схема электропривода с разомкнутой системой управ-
ления. Воздействуя посредством задающего устройства SA на
аппаратуру управления УУ, оператор осуществляет пуск, ос-
тановку привода, устанавливает задание на скорость или
другой параметр электропривода. Достоинство разомкнутой
системы управления — простота схемы, которая собирается
10
из простейших, обычно релейно-контакторных элементов. Не-
достаток ее — невысокое качество регулирования. Разомкну-
тые, т.е. без обратных связей, системы электроприводов
используются для механизмов, не требующих точного регули-
рования параметров или их стабилизации: некоторых вспомо-
гательных механизмов прокатных станов, электрических кра-
нов, механизмов поточно-транспортной системы, воздуходу-
вок, компрессоров и т.п.
Для привода основных механизмов станов, когда требует-
ся широкое регулирование скорости, момента и т.п. при вы-
сокой точности регулирования, используются замкнутые сис-
темы электропривода с обратными связями по скорости, току
двигателя, его э.д.с. и т.п. В таких системах сигнал об-
ратной связи Яос, пропорциональный регулируемой величине
(например, скорости, току и т.п.) передается с выхода
системы, посредством датчика тока, скорости и т.п. (на-
пример, тахногенератора) и канала связи на ее вход, где
он суммируется (с учетом знака) с задающим сигналом И3, с
другими сигналами обратных связей, образуя результирующий
сигнал Иу.
В состав такой системы электропривода входят преобра-
зователь HZ, УВМ, регуляторы Pl, Р2 рис. 1, 5. В качестве
преобразователя в большинстве случаев используются тирис-
торные агрегаты постоянного и переменного токов. Преобра-
зователь HZ и электродвигатель М составляют так называе-
мую силовую часть электропривода, которая характеризуется
большой силой тока в цепи.
Система работает по принципу отклонения. Характерным
признаком таких систем является подача на узел сравнения
(измеритель рассогласования) AW сигнала обратной связи
И0.с, пропорционального регулируемой (выходной) величине,
где он сравнивается с задающим сигналом И3, а также с
другими сигналами обратных связей. Сравнивающее устройст-
во AW вычисляет некоторую функцию этих сигналов — сигнал
ошибки
Иу = И3 ± Яо.с (1)
и выдает его на вход регулятора Р. В схеме на рис. 1, б
используются две обратные связи: по скорости — сигнал
Иос “ от Датчика скорости ВР и току двигателя — Иот — от
И
датчика тока ИА. Различают положительные, отрицательные,
жесткие и гибкие обратные связи. Обратная связь считается
положительной, если сигнал /70С имеет одинаковый знак с
основным (задающим) сигналом И3, увеличивая общий резуль-
тирующий сигнал управления Иу = И3 +
Положительные обратные связи используются сравнительно
’ .дко. Объясняется это тем, что при увеличении выходного
параметра, например выходного напряжения преобразователя
#вых, сигнал обратной связи возрастает до Иос=
= Ко.с#вых, гле Ко.с “ коэффициент обратной связи. Ре-
зультирующий сигнал регулирования также возрастает:
Иу = И3 + КосИаых.
Выходное напряжение также будет возрастать: Ивых = ЯУК,
где К — коэффициент усиления системы управления.
Таким образом, при положительной обратной связи систе-
ма будет неустойчивой.
Сигнал отрицательной обратной связи, встречный задаю-
щему сигналу, уменьшает результирующий сигнал управления:
Иу = И3 - Иос.
Так для схемы на рис. 1, б
#У1 = - ^о.с или ИУ2 = Ирх - #от.
Отрицательная обратная связь широко применяется в ав-
томатизированном электроприводе, поскольку с ее помощью
легко стабилизировать основные параметры - скорость, ток,
момент. Например, при случайном увеличении скорости дви-
гателя сигнал (-Иох) возрастет, результирующий сигнал Иу
уменьшится и скорость двигателя снизится до установленной
величины. Таким образом, отрицательная обратная связь
стабилизирует скорость двигателя, силу тока и другие па-
раметры.
Обратная связь называется жесткой в том случае,
когда она действует как в установившихся, так и в пере-
ходных режимах, и гибкой, когда она действует только
в переходных режимах, т.е. при изменении скорости, тока,
напряжения и т.п.
В одной системе электропривода могут действовать нес-
колько обратных связей.
Простейшие, разомкнутые системы электропривода хотя и
являются более дешевыми и не требуют высококвалифициро-
ванного обслуживания, тем не менее не могут быть исполь-
зованы в приводах главных механизмов прокатных и трубных
станов. Здесь используются замкнутые, более сложные сис-
темы, обеспечивающие высокую точность регулирования пара-
метров и соответственно — более высокую производитель-
ность и качество продукции.
Дальнейшее совершенствование электроприводов металлур-
гических машин и агрегатов происходит в следующих основ-
ных направлениях:
повышение надежности электропривода;
расширение области применения per тируемых электропри-
водов;
повышение технико-экономических показателей традицион-
но используемых электрических машин: динамических, энер-
гетических, масс ^габаритных, регулировочных показателей,
надежности (снижение потребности в уходе) и т.д.;
создание принципиально новых типов электродвигателей,
наиболее полно удовлетворяющих современным требованиям;
расширение диапазона номинальных мощностей;
использование комплектных электроприводов, полностью
укомплектованных и смонтированных на заводе-изготовителе;
более полная автоматизация электроприводов с иа -^зе-
ванием микропроцессорной техники, УВМ.
Контрольные вопросы
1. Что такое электроппивод?
2. Наличие каких элементов системы электропривода является обязательным, а
каких — необязательным?
3. В чем разница индивидуального и группового электроприводов?
4. Что такое замкнутая система управления электроприводом и р чен ее преи-
мущество перед разомкнутой системой?
5. Какие виды обратных связей используются в электроприводе и каково их
назначение?
6. Каковы основные направления дальнейшего развития электропривода?
13
1.2. Динамика электропривода.
Основное уравнение движения.
Приведение моментов и сил
Рабочий орган производственного механизма (валок про-
катного стана; подъемный механизм и т.п.) потребляет ме-
ханическую энергию, источником которой является электро-
двигатель. Рабочий орган характеризуется моментом нагруз-
ки М при вращательном движении и усилием F при поступа-
тельном. Моменты нагрузки и усилия совместно с силами
трения в механических передачах создают статическую на-
грузку (момент Мс или силу Гс). Как известно, механичес-
кая мощность кВт и момент Н • м на валу механизма связаны
соотношением
= Мс(ам/1000, (2)
где
= 2пп/60 = л/9,55; (3)
ым — угловая скорость вала механизма, рад/с; п — частота
вращения (внесистемная единица), об/мин.
Для тела, вращающегося с угловой скоростью w, запас
кинетической энергии определится из выражения
А = J^/2, (4)
где J = тр2 — момент инерции, кг • м2; т - масса тела,
кг; р - радиус инерции, м.
Момент инерции определяется также формулой
J = GD2/4, (5)
где GD2, — маховой момент, приводимый в каталогах на
электродвигатели, Н • м2; G - сила тяжести, Н; D — диа-
метр, м.
Направление вращения электропривода, при котором вра-
щающий момент, развиваемый двигателем, совпадает с на-
правлением скорости, считают положительным. Соответствен-
но, момент статического сопротивления Л/с может быть либо
14
отрицательным, либо положительным в зависимости от того,
совпадает он с направлением скорости или нет.
Режим работы электропривода может быть уста-
новившимся, когда угловая скорость неизменна
(du/dt - 0) или переходным (динамическим), когда
происходит изменение скорости - разгон, либо юрможение
(du/dt > 0).
В установившемся режиме вращающий момент электродвига-
теля М преодолевает момент статического сопротивления Л/с
и движение описывается простейшим равенством
М = Мс.
В переходном режиме в системе действует (наряду со
статическим Мс) также динамический момент, определяемый
запасом кинетической энергии движущихся частей:
Мд = Jdu/dt. (6)
Таким образом, при переходном процессе
уравнение движения электропри-
вода имеет вид
Л/ = Мс + Мдин = Мс + Jdu/dt (7)
или
М = Мс + J 1%55/dnldt. (7а)
С учетом возможных знаков моментов уравнение движения
можно записать
±М = Мс ± Jdu/dt. (8)
При М > Мс, du/dt > 0 - движение привода будет уско-
ренным (переходный режим); при М < Мс, du/dt < 0 движение
будет замедленным (переходный режим); при М = Мс,
du/dt = Q движение будет равномерным (установившийся ре-
жим).
Приведение моментов и сил к одной оси вращения. При
наличии редуктора система привода будет иметь несколько
элементов, движущихся с разными скоростями. Анализ такой
15
системы достаточно сложен. Для упрощения расчетов движе-
ние сложной системы целесообразно рассматривать на одном
приведенном звене. В качестве такого звена
обычно принимают вал двигателя, к которому приводят все
действующие в системе моменты, силы и моменты инерции
(рис. 2).
Приведение статического момента основано на условии,
что передаваемая мощность без учета потерь на любом валу
Рис. 2. Кинематическая
схема привода
механизма остается неизменной. На основании равенства
мощностей можно записать
^c.mwm/?Iii Мс<ад, (9)
где Л/см — момент сопротивления производственного меха-
низма; Л/с — тот же момент, приведенный к скорости вала
двигателя ид; ом — угловая скорость вала механизма; т|и -
к.п.д. передачи.
Отсюда приведенный момент
Ч = Л/см(ам/(й)д7|„) - Л/см/(/9и), (10)
где i - - передаточное число.
Выражение (10) справедливо для двигательного режима,
когда потери в передачах покрываются за счет мощности
двигателя. В режиме торможения, когда энергия передается
от вала рабочего механизма к двигателю, величина 7)п пере-
ходит из знаменателя в числитель. При этом уравнение (10)
примет вид
Л'с •-= Л/с мЧ||/'- (11)
При наличии между двигателем и механизмом нескольких
передач с передаточными числами z2,..., in и соответ-
16
ствуюшими к.п.д. 7)П1,> т)1|2,о- fhui уравнение > (!0) запи-
шется в виде
Л/^ = [Л/с>м/(/\ ’ i2 ’ ••• ’ * ^112 х
X ... /Чпл). (<12t)
Приведение сил сопротивления производится аналогично.
Если обозначйм скорость поступательного движения v, м/с,
а силу сопротивления производственного механизма FcM, Н,
то
^С.М^/^П = ^с^д'
Отсюда приведенный к угловой скорости вала двигателя
статический момент
= ^с.м^/^дПп)» (13)
где Fc.M^fn8i 8 ~ 9,81 м/с2 — ускорение силы тяжеСти;
/и — масса, кг.
Прцведение моментов инерции проводится, исходя Из ус-
ловия,, что запас кинетической энергии в реальной и приве-
денной системах сохраняется неизменным. Для вращающихся
частей системы (см. рис. 2, а) запас кинетической энергии
определяется выражением
А = Jw2/2 = Jaw2/2 + ZjOf/2 + ... + /мо2/2, .. (.14)
* 1
где J — приведенный к валу двигателя момент инерции сис-
темы, кг • м2; /д, о)д — момент инерции и угловая скорость
ротора двигателя вместе с ведущей шестерней; /р Wj • — то
же для промежуточного вала с шестернями; /м, — то же
для производственного механизма.
Разделив уравнение (14) на сэ2/2, получим
/ — (с^/сЭд)2 + Jм (й)м/й)д)2 = /а +
+ У! + /м 01 ’ (15)
где fj = Юд/оу,. ^=«ь>дй)м — передаточные отношения.
17
Приведенный к скорости вала двигателя момент инерции
поступательно движущегося элемента Ju определяется также
из условия равенства запаса кинетической энергии до и
после приведения
/псад/2 = mv2/2,
откуда
/п = (v/сОл)2» (16)
где т — масса поступательно движущегося тела, кг.
Полный момент инерции системы, приведенной к валу дви-
гателя, равен сумме приведенных моментов вращающихся, и
поступательно движущихся элементов
/х = J + Jn - Ла + (A/*i) + Um/О’ь ' ^) +
<+ т (т’/й)д)2. (17)
Пример 1. Применительно к схеме рис. 2 определить при-
веденные значения Мс, J в двигательном режиме. Моменты
инерции двигателя = 1500 кг • м2; промежуточного вала
с шестернями = 500 кг • м2; производственного механиз-
ма JM = 1000 кг • м2; передаточные числа редуктора
h = 4, i2 = 2; к.п.д. т)1И = 0,97; т)112 = 0,98; = 0,95;
угловая скорость двигателя ад = 16рад/с; скорость подъе-
ма v = 0,2 м/с; масса груза /71 = 50- 103кг.
Приведенный статический момент (13)
Мс => ^/((ЗДтЛпгЧм) - '«g’'/(wJij111ijll24M) =
= 50 • 103 • 9,81 • 0,2/(0,97 • 0,98 • 0,95 • 16) =
= 6789 Н • м.
Приведенный момент инерции согласно (17),
Ле = Л + + т = 1500 +
+ 500/16 + 1000/(16 • 4) + 50 • 103 (0,2/16)2 = 1554 кг • м2.
* »
18
Контрольные вопросы ।
1, Что такое,, переходный процесс в каких случаях он ,имеет ме^то?,
2. Как изменяется уравнение движения электропривода при переходе от ста-
тического режима* работы к переходному и обратно?
3. С какой целью осуществляют приведение моментов? (
4. Какие условия необходимо соблюдать в случае приведения статических мо-
ментов и моментов инерции?
5. В каком режиме работы привода к.п.д. переходит в числитель формулы при-
ведения статических моментов?
6. Что такое приведенный момент инерции?
7. В случае приведения к валу двигателя момент инерции механизма, как пра-
вило, уменьшается или увеличивается? В каком случае он мог бы увели-
' ' чиваться?
1. 3. Механические характеристики электродвигателей
и производственных механизмов.
Двигательный и тормозной режимы
Механической характеристикой электродвигателя называ-
ется зависимость угловой скорости ы (или частоты вращения
л) от разливаемого им электромагнитного момента Л/
(рис. 3).
Механические характеристики электродвигателей могут
быть естественными ’ или искусственными. Естественнееs меха-
нические характеристики соответствуют1 номинальным пара-
метрам питающей сети (напряжению U, частоте /), отсутст-
вию в электрических цепях двигателя дополнительных эле-
ментов (ребстатов, конденсаторов и т.п.) и основной схеме
Рис. 3. Механические
характерис I пкн двш ию-
лей:
1 — синхронною, 2 —
асинхронною. 3 и 4 —
двигателей ностяпно! о
юка с независимым и
параллельным возбужде-
нием: 5 - экскава юрная
механическая харакю-
рнечика
М
включения двигателя. Характеристики, не отвечающие этим
условиям, называются искусственными (реостатные характе-
ристики, характеристики при разных напряжениях, частотах
и т.п.).
19
Механические, характеристики всех < электродвигателей,
кроме. синхронного, имеют тот’ или иной наклон (рис* 3),
характеризующийся коэффициентом жесткости i
₽ = dM/du.
Характеристика синхронного двигателя Г считается абсо-
лютно жесткой (3 = °°)', характеристика ‘ двигателя постоян-
ного тока с независимым возбуждением 3 и асинхронного
Двигателя 2 (в рабочей части) - жёсткой и характеристика
двигателя постоянного тока с последовательным возбуждени-
ем 4 — мягкой.
Требуемая степень жесткости и форма механической ха-
рактеристики определяются характером работы производст-
венного механизма. Например, для привода транспортных ме-
ханизмов (сталевозов, слитковозов и т.п.) необходим при-
вод, обладающий мягкой механической характеристикой. Та-
кой привод обеспечивает плавное движение и преодоление
препятствий без рывков.
Но привод валков большинства прокатных стайов должен
иметь жесткую механическую характеристику, обеспечивающую
постоянство скорости (й соответственно - толщины листа, а
также его натяжения) при колебаниях нагрузки, связанных,
например, с изменениями температуры, твердости металла й
т.п.
В системах автоматизированного электропривода с по-
мощью обратных связей могут быть получены механические
характеристики самых разных требуемых форм, независимо от
формы естественной механической характеристики двигателя.
В частности в прокатных станах широко используются элек!-
ропрйводы, обеспечивающие так называемую ’’экскаваторную"
(упорную) механическую характеристику (рис. 3, б). Осо-
бенностью экскаваторной характеристики является ее боль-
шая жесткость в области номинальных нагрузок ’(£—/). При
моменте нагрузки, превышающем допустимое значение МДОц,
скорость привода резко падает до нуля (участок /ш), одна-
ко момент на валу двигателя при этом не снижаемся. Такая
характеристика обеспечивает не только высокую производи-
тельность агрегата при нагрузках в допустимый пределах,
но и защиту двигателя и механизма от аварии При возможных
перегрузках.
20
Механической характерист'икой- произведетвенйдго меха-
низма ' называется зависимость между ’приведейн&Ми к''валу
двигателя скоростью и1 статическим моментом сопротивления
механизма w = f (Мс).
На рис. 4 представлены типовые механические характе-
ристики i некоторых производственных механизмов. Зде^Л —
характеристика подъемных устройств кранов и других меха-
низмов с активным статическим моментом. При изменении на-
правления скорости активный момент Мс не изменяет направ-
ления действия; он не зависит от скорости. Таким образом,
при одном направлении движения (подъем груза) активный
момент противодействует движению, а при Другом (спуск
груза) способствует ему, увеличивая скорость сруска гру-
за. ,
Характеристикой 2 обладают механизмы, сопротивление
движению которых обусловлено силами трения, резания или
пластической деформацией (прокатка, резание металлов,
штамповка, намотка и т.п.). Момент нагрузки этого вида
всегда направлен навстречу движению, поэтому он называет-
ся реактивным.
Характеристикой 3 обладают вентиляторы, насосы и дру-
гие .механизмы, реактивный момент которых пропорционален
квадфату скорости. ,
Механические характеристики электродвигателя и произ-
водственного механизма должны подбираться с таким расче-
том, чтобы обеспечивать устойчивую работу системы в уста-
новившихся режимах, которые характеризуются равенством
моментов ц скоростей двигателя и производственного меха-
низма (М = МС; . c^ = wc). В статически устойчивой системе
при, случайи<> возникшем изменении скорости последняя авто-
матически возвратится к исходному (установившемуся) зна-
чению.
. Совмещая в одном квадрате механические характеристики
двигателя и производственного механизма, можно оценить,
настолько устойчивой будет работа привода. В качестве
примера на рис. 5 совмещены механические , характеристики
асинхронного двигателя 1 и производственного механизма с
Мс = const (2). В точке а работа привода будет устойчи-
вой», При случайном увеличении скорости вращающий момент
двигателя снизится, а при снижении скорости, наоборот —
21
увеличится относительно момента i статйческокоч j сопротивле-
ния Л/с. В любом из этих случаев система' возвратится <‘В^
точку я, т.е. будет устойчива. В то(чке б работа привода
будет неустойчивой. Действительно, случайное -снижение
скорости приведет к снижению вращающего момента двигателя»
относительно момента статической нагрузки Л/е, вследствие
чего, двигатель остановится под нагрузкой (точка в)/ Слу-
чайное увеличение скорости приведет к переходу привода на
работу в точку а.
Устойчивая работа электропривода обеспечивается тфи
выполнении условий, /3 > (Зс; где (3, |3С - жесткость механи-
ческой характеристики соответственно двигателя и произ-
водственного механизма.
Моменты и силы, действующие в системе электропривода,
могут быть движущими, если они действуют в направлении
движения или тормозящими, если они действуют встречно
движению системы. Для моментов двигателя положительное
направление действия совпадает с положительным неправле-
нием движения; для момментов производственного механизма
22
положительными считаются моменты (силы) сопротивления/
направленные встречно движению.
Как известно, электрические машины обратимы, т.е. они
могут раоотать как в двигательном, так и в генераторном
режимах.
Двигательный режим электрической машины характеризует-
ся тем, что знаки, момента и угловой скорости совпадают;
электрическая мощность положительна, она потребляется из
сети и преобразуется в механическую мощность
±Р = (+M)(±w). (18)
Генераторный режим, являющийся режимом электрического
торможения, характеризуется тем, что знаки угловой ско-
рости и момента противоположны; электрическая! мощность
отрицательна; ойа вырабатывается электрической машиной за
счет запаса кинетической энергии движущихся частей; запас
кинетической энергии уменьшается — происходит замедление,
т.е. электрическое торможение.
В системе координат и—М (рис. 6) квадраты I и III со-
ответствуют двигательному режиму электрической машины,
поскольку мощность здесь положительная. Квадраты II и IV
соответствуют генераторному режиму, поскольку мощность
здесь‘будет отрицательной.
Электрическое торможение по сравнению с механическим
торможением имеет ряд весьма важных преимуществ: плав-
ность, отсутствие изнашивающихся механических устройств
(колодок, шкивов и др.), возможность регулирования тор-
мозного усилия, удобство автоматизации процесса торможе-
ния и др.
Все способы электрического торможения делятся на три
вида: рекуперативное торможение с отдачей энергии в сеть,
динамическое торможение и торможение противовключением.
Рекуперативное торможение является наиболее экономичным,
поскольку энергия торможения передается в электрическую
сеть. Два других способа торможения осуществляются рас-
сеянием энергии торможения в реостатах.
Контрольные вопросы
1. В чей состоит различие механических характеристик привода и производст-
венного механизма?
23
2. Какая форма механической характеристики будет оптимальной для привода
рабочего валка' прокатного стана; для, привода сталевоза? .
3. Что такое экскаваторная механическая характеристика; на каких механизмах1
целесообразно ее применение? - *
4. Почему в точке б (рис. 5) система считается неустойчивой?
5. Прй каком условии работа привода будет устойчивой в данной точке механи-
ческой характеристики?
6. Почему в квадранте П (рис., 6) режим работы привода считается генератор-
йым (тормозным), а в квадранте III — двигательным?
7. В чем преимущества электрического торможения привода перед механическим?
8. Какие виды электрического торможения используются в электроприводе?
1.4.. Электромеханические свойства двигателей
постоянного тока
Электродвигатели с независимым и параллельным возбуж-
дением. Электромеханические свойства двигателей с незави-
симым и параллельным возбуждением практически одинаковы,
что, позволяет рассмотреть эти двигатели совместно. Схемы
их приведены на рис. 7.
Двигатели с независимым возбуждением, рис.’ 7, а, явля-
ются основными в приводе постоянного ^ока прокатных ста-
нов. .На рис. 7, а ОВМ - обмотка возбуждения; Яр, Яр_ав~
Рис. 7. Схемы электродвигателей постоянного тока с не-
зависимым (а) и параллельным (й) возбуждением,
добавочные резисторы соответственно в цепи якоря и обмот-
ки возбуждения; Дя — сопротивления цепи якоря двигателя;
U —» приложенное к цепи якоря напряжение; Е — э.д.с. яко-
ря; I — ток якоря.
24
Как известно приложенное к двигателю t напряжение U
уравновешивается э.д.с., индуцированной в обмотке якоря,
и падением напряжения в цепи якоря, т.е.
U = Е + / (Яя + Лр); (19)
Е = АголФ, (20)
где Ф — магнитный поток возбуждения двигателя; к-
= рЛ7(2тгя) - конструктивный коэффициент; р — число пар
полюсов; W - число активных проводников обмотки якоря.
Подставив в уравнение (19) значение Е из формулы (20),
получим уравнение электромеханической (скоростной) харак-
теристики двигателя:
w = [[/ — I (Яя + Яр)]/(АгФ). (21)
Вращающий момент двигателя определяется из выражения
М = кФ1, (22)
Подставив в уравнение (21) значение тока якоря I из
формулы (22), получим уравнение механической, характерис-
тики двигателя
w = и/(кФ) - М (Яя + Яр)/(Аг2Ф2). (23)
Уравнение' (23) имее! в правой части два слагаемых.
Первое слагаемое не зависит от момента, развиваемого дви-
гателем, и представляет собой угловую скорость идеального
холостого хода (точка о>0)
Ц> = и/(кФ) или = ипи„/(и„ - /„«„). (24)
Второе слагаемое уравнения (23) определяет наклон ме-
ханической характеристики к оси абсцисс.
Механические характеристики двигателя постоянного тока
с независимый возбуждением представлены на рис. 8. Здесь
о)0 — угловая скорость идеального холостого хода; Мс —
статический момент; и4 ин номинальные значения момента
и угловой скорости. Верхняя характеристика, соотвётствую-
25
щая Яр ₽.О, называется естественной; она имеет минималь-
ный наклон. По мере увеличения сопротивления реостата Я^
в цепи якоря наклон механических (искусственных) характе-
ристик увеличивается, скорость уменьшается. Угловая ско-
рость при заданной величине сопротивления реостата Яр и
заданном статическом моменте Мс определится из выражений
wR = W, [I - Z (Ля + Яр)/гл.]. .. (25)
Ток якоря определится из (19):
I = (U - E)/(R„ + Я,.).
(26)
Пересечение механической характеристики двигателя с
осью абсцисс соответствует режиму так называемого корот-
Рис. 8. Механические характерис-
тики электродвигателя с независи-
мым возбуждением
двигателя с независимым возбуждением
во всех режимах
кого замыкания (w = 0; Мк 3). Двигатель, подключенный к
источнику, неподвижен; Е = 0; ток может достигнуть боль-
шой величины, если его не ограничить:
Лз = С//(Яя + Яр).
(27)
Для построения механической характеристики двигателя
необходимо знать номинальное сопротивление якоря. Оно мо-
жет быть ориентировочно определено из выражения
- 0,5 (1 - р„) [/„//,„
(28)
где Т7И, Ч/„, /н — номинальные значения соответственно
к.п.д.,. напряжения и тока двигателя.
26
НбМйййльйёе "значение к.п.д. двигателя может бытй вы-
числено По формуле "• ‘ :
7]„ w ЮООРн/ОУ.Л), " - >.' (29)
где г~, номинальная мощность двигателя, кВт.
Поскольку механические характеристики двигателей с па-
раллёльным и независимым возбуждением прямолинейны, то
для их построения достаточно иметь две точки. В качестве
первой точки принимают точку при А/ = 0, а второй слу-
жат точки а, Ь, с, d, е на естественной или реостатной
характеристиках, соответствующих номинальному моменту Мн
и угловой скорости wH, wnp (см. рис. 8).
Тормозные режимы. Для двигательного режима работы
электрической машины характерно одинаковое направление
скорости и момента и противоположное направление э.д.с. и
тока, а для генераторного (тормозного) режима — наоборот:
направления э.д.с. и тока совпадают, а направления ско-
рости и момента противоположны.
Для двигателей с независимым возбуждением возможны все
три Известных режима торможения: рекуперативное торможе-
ние с отдачей энергии в сеть, динамическое торможение и
торможейие противовключением.
На рис. 9 представлены механические характеристики
двигателя с независимым возбуждением во всех режимах как
двигательных, так и тормозных.
Рекуперативное торможение с отдачей энергии в сеть
возможно при w>w0. Э.д.с. двигателя становится больше
подводимого напряжения E>U. Под действием э.д.с. ток
меняет направление на обратное
/ = (Е - С7)/(Яя + Яр).
Электрическая энергия, вырабатываемая машиной, отдается в
сеть, Соответственно меняет знак и момент, который теперь
становится тормозным Мт и уравнение (23) примет вид
w = U/(кФ) + Мт (Дя + ЯР)/(А:2Ф2). (30)
Механические характеристики этого режима начинаются в
точке идеального холостого хода а)0 и являются продолжени-
27
ем соответствующих характеристик двигательного режима в
квадрантах II и IV (на рис. 9 линии с двумя засечками).
Рекуперативное торможение широко применяется в приводе
прокатных станов и других механизмов, оборудованных при-
водом постоянного тока, вследствие экономичности и плав-
ности торможения.
При динамическом торможении якорь двигателя отключает-
ся от сети и замыкается на специальный реостат Ядт (рис.
10), когда обмотка возбуждения подключена к источнику пи-
тания или к сети. Поскольку при динамическом торможении
Рис. 10. Схема динами-
ческого торможения дви-
гателя с независимым
возбуждением
Рис. И. Схема и' механические характеристики элскгро.ципию-
ля с последовательным возбуждением
подводимое к двигателю напряжение U = 0, ток двигателя
определяется его противо-э.д.с.: I = -E/{R* + Ядт). Меха-
ническая энергия, запасенная в движущихся элементах меха-
низма и якоря, преобразуется в электрическую, которая в
свою очередь превращается в тепловую энергию в реостате
Ядт. Механические характеристики этого режима проходят
через начало координат (на рис. 9 линии с тремя засечка-
ми). С уменьшением скорости ток и соответственно тормоз-
ной момент стремятся к нулю, вследствие чего для полной
остановки иногда требуется применение механического тор-
моза. Такой режим торможения достаточно широко использу-
ется благодаря плавности, возможности точного дозирования
тормдзного момента.
28
Торможение противовключением осуществляется двумя спо-
собами: > :
1) введением в цепь якоря реостата с большим сопротив-
лением. При этом вращающий момент двигателя снижается и
становится меньше статического момента сопротивления Мс.
Двигатель останавливается (точка Л), а затем под действи-
ем момента Мс начинает вращаться в противоположном на-
правлении, развивая тормозной момент. В точке В наступает
установившийся режим. Ток в якоре совпадает по направле-
нию с напряжением и э.д.с. и определяется их суммарным
действием: I = (U + E)/(R* + Ярп). Для ограничения тока в
цепь якоря вводится реостат (так называемая ступень про-
тивовключения Ярп). Механические характеристики для этого
способа торможения являются продолжением соответствующих
характеристик двигательного режима (линии с четырьмя за-
сечками);
2) торможение переключением полярности обмотки якоря
на ходу. Двигатель, работающий до переключения обмотки в
точке 7, После переключения перейдет на соответствующую
характеристику - в точку 2. По линии 2-3 происходит тор-
можение (линия с пятью засечками). В точке 3 двигатель
останавливается и его следует отключить, чтобы избежать
перехода в двигательный режим и вращения в обратном на-
правлении. Торможение противовключением уступает первым
двум способам с точки зрения плавности, а первому спосо-
бу - и с точки зрения экономичности.
Электродвигатели с последовательным и смешанным воз-
буждением. В двигателе с последовательным возбуждением,
схема которого представлена на рис. И, а, ток якоря яв-
ляется одновременно и током возбуждения. Вследствие этого
поток возбуждения двигателя зависит от тока якоря, т.е.
от нагрузки на валу. С увеличением момента нагрузки угло-
вая скорость двигателя согласно (23) значительно снижает-
ся, так как при этом возрастает поток возбуждения.
Вследствие весьма мягкой механической характеристики
двигатели с последовательным возбуждением находят широкое
применение в электрифицированном транспорте, в приводе
наклона миксеров, конвертеров и других механизмов.
Механические характеристики двигателя еще больше смяг-
чаются при введении реостата в цепь якоря (см. рис. 11,
29
б). При нагрузках на 15—20 % менее номинальной скорость
вследствие снижения магнитного потока недопустимо возрас-
тает, а при холостом ходе скорость может достигнуть вели-
чины, при которой произойдет авария (разнос двигателя).
Поэтому двигатель с последовательным возбуждением нельзя
пускать вхолостую. *
Тормозные режимы. Для двигателя с последовательным
возбуждением возможны лишь два режима электрического тор-
можения: динамическое и противовключением. Режим рекупе-
ративного торможения у двигателей данного вида отсутству-
ет. Это объясняется тем, что. у них э.д.с. не может быть
выше напряжения сети, так как скорость идеального холос-
того хода не имеет конечной величины.
Динамическое торможение может быть осуществлена двумя
способами: с самовозбуждением (рис. 12, а) и с независи-
мым возбуждением (рис. 12, б). При торможении с самовоз-
буждением необходимо обеспечить сохранение направления
тока возбуждения таким же, как при нормальной работе дви-
гателя. Без этого машина размагнитится и никакого Тормоз-
ного эффекта не получится. Механические характеристики
Рис. 12. Схемы включения электродвигателя последоватслыю1 о
возбуждения при динамическом торможении
рассмотренного режима динамического торможения показаны
на рис. 11, б (линии с четырьмя засечками). Характеристи-
ки эти нелинейны вследствие непостоянства магнитного по-
тока. В области, отмеченной пунктирными линиями, торможе-
ние практически отсутствует. Рассмотренный режим исполь-
зуется редко, в основном как аварийный при исчезновении
напряжения сети. г
Механические характеристики динамического торможения с
последовательным возбуждением аналогичны соответствующим
30
характеристикам двигателя независимого возбуждения (см.
рис. 11, б, линии с двумя засечками). Такой способ тормо-
жения нашел широкое применение.
Торможение противовключением осуществляется, как и у
двигателей параллельного возбуждения, двумя способами:
включением в цепь якоря реостата с большим сопротивлением
(см. рис. 11, б, линии с тремя засечками) и изменением
полярности обмотки якоря (7-2-5).
Электродвигатель со смешанным возбуждением имеет две
обмотки возбуждения: последовательную О.В.Л/пос и парал-
лельную О.В.Л/паР (рис. 13, а), которые совместно создают
Рис. 13. Механические характеристики
смешанного возбуждения
и схема злск гро. пип a i с ы
поток возбуждения машины. Механическая характеристика
имеет промежуточную форму между характеристиками двигате-
лей с последовательным и параллельным возбуждением, при-
ближаясь К той или иной в зависимости от соотношения ам-
первитков этих обмоток. Механические характеристики смяг-
чаются при увеличении сопротивления в цепи якоря (см.
рис. 13, б). Благодаря потоку параллельной обмотки воз-
буждения опасность разноса на холостом ходу у этих элект-
родвигателей отсутствует. Скорость идеального холостого
хода у двигателя со смешанным возбуждением имеет конечное
значение.
Двигатели со смешанным возбуждением допускают все три
способа электрического торможения: рекуперативное с отда-
чей энергии в сеть, динамическое и торможение противо-
включением. При переводе двигателя в режим динамического
или рекуперативного торможения параллельную обмотку воз-
буждения оставляют как правило, включенной в сеть, а по-
следовательную обмотку отключают или шунтируют. Механи-
31
ческие характеристики в этих режимах прямолинейны и напо-
минают соответствующие характеристики двигателя парал-
лельного возбуждения (рис. 13, б).
Режим торможения противовключением осуществляется, Как
и у двигателей с последовательным и параллельным возбуж-
дением.
На заводах черной металлургии широко используются
электродвигатели постоянного тока серии Д на напряжение
220 и 440 В, мощностью от 2,5 До 180 кВт. Возбуждение
двигателей последовательное, смешанное и параллельное,
номинальная частота вращения от 400 до 1500 об/мин. Тех-
нические данные электродвигателей серии Д:
Тнп двигателя Д-12 Д-21 Д-22 Д-41
Мощность, кВт, при ПВ = 100 % . . 2,5 4,5 8,0 16,0
Частота вращения, об/мин .... 1100 900 1200 650
Тип двигателя Д-805 Д-814 , Д-816 Д-818
Мощность, кВт, при ПВ = 100 % . . 32,0 ПО 150 180
Частота вращения, об/мин .... 400 460 450 410
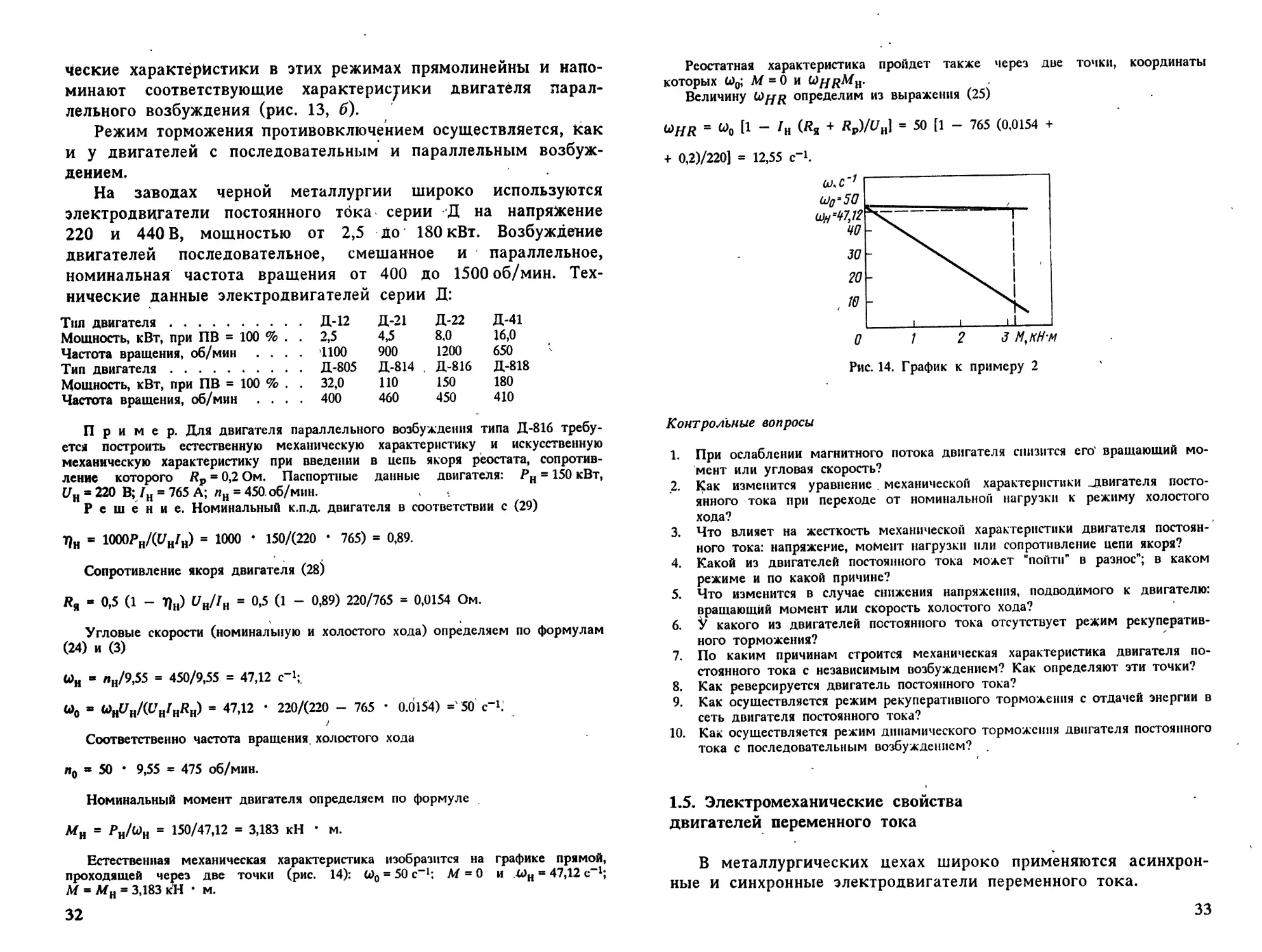
Пример. Для двигателя параллельного возбуждения типа Д-816 требу-
ется построить естественную механическую характеристику и искусственную
механическую характеристику при введении в цепь якоря реостата, сопротив-
ление которого Rp = 0,2 Ом. Паспортные данные двигателя: Рн = 150 кВт,
Un = 220 В; ZH = 765 А; лн = 450 об/мин.
Решение. Номинальный к.п.д. двигателя в соответствии с (29)
7|н = 1000PH/(CZHZH) = 1000 • 150/(220 • 765) = 0,89.
Сопротивление якоря двигателя (28)
Кя « 0,5 (1 - Т?н) <7H/ZH = 0,5 (1 - 0,89) 220/765 = 0,0154 Ом.
Угловые скорости (номинальную и холостого хода) определяем по формулам
(24) и (3)
«н в пн/9,55 = 450/9,55 = 47,12 с"1;_
w0 " = 47>12 * 220/(220 - 765 • 0.0154) = 50 с”*.
У
Соответственно частота вращения, холостого хода
п0 « 50 • 9,55 - 475 об/мин.
Номинальный момент двигателя определяем по формуле
Мн = рн/^н = 150/47,12 = 3,183 кН • м.
Естественная механическая характеристика изобразится на графике прямой,
проходящей через две точки (рис. 14): 6)0 = 50 с-1: М = 0 и Д)н = 47,12 с-1;
М = Ми = 3,183 кН • м.
32
Реостатная характеристика пройдет также через две точки, координаты
которых 0О; М = 0 и С^НЛ^Н-
Величину tofjR определим из выражения (25)
(OtfR = <*>0 [1 - 1№ («я + R₽)/UH1 = 50 [1 - 765 (0,0154 +
Рис. 14. График к примеру 2
Контрольные вопросы
1. При ослаблении магнитного потока двигателя снизится его' вращающий мо-
мент или угловая скорость?
2. Как изменится уравнение . механической характеристики двигателя посто-
янного тока при переходе от номинальной нагрузки к режиму холостого
хода?
3. Что влияет на жесткость механической характеристики двигателя постоян-
ного тока: напряжение, момент нагрузки пли сопротивление цепи якоря?
4. Какой из двигателей постоянного тока может “пойти" в разнос"; в каком
режиме и по какой причине?
5. Что изменится в случае снижения напряжения, подводимого к двигателю:
вращающий момент или скорость холостого хода?
6. У какого из двигателей постоянного тока отсутствует режим рекуператив-
ного торможения?
7. По каким причинам строится механическая характеристика двигателя по-
стоянного тока с независимым возбуждением? Как определяют эти точки?
8. Как реверсируется двигатель постоянного тока?
9. Как осуществляется режим рекуперативного торможения с отдачей энергии в
сеть двигателя постоянного тока?
10. Как осуществляется режим динамического торможения двигателя постоянного
тока с последовательным возбуждением?
1.5. Электромеханические свойства
двигателей переменного тока
В металлургических цехах широко применяются асинхрон-
ные и синхронные электродвигатели переменного тока.
33
Асинхронные электрод визите ли
Они наиболее распространены в металлургических цехах
вследствие простоты устройства, невысокой стоимости, от-
сутствии преобразователя, простоты ухода и т.п. Асинхрон-
ные двигатели широко используются в приводе металлурги-
ческих кранов, рольгангов, некоторых прокатных станов,
большинства вспомогательных механизмов, в особенности та-
ких, где не требуется точного регулирования скорости.
Особенностью асинхронного двигателя является скольже-
ние, т.е. отставание ротора от магнитного поля статора,
вращающегося с синхронной угловой скоростью. Номинальное
скольжение асинхронного Электродвигателя, %,
$н = ЮО (соо — wH)/О0 (31)
. составляет 2—7 %; ббльшие значения характерны для дви-
гателей специального исполнения.
Синхронная угловая скорость (холостого хода), с”1:
w0 = 2-Kflp, (32)
где f — частота сети, Гц; р — число пар полюсов.
Частота вращения холостого хода
nQ-6tif/p об/мин. (33)
На рис. 15 представлены схемы асинхронных электродви-
гателей с короткозамкнутым (а) и с фазным (б) ротором.
Механические характеристики асинхронного двигателя с фаз-
ным ротором представлены На рис. 15, в. Характерны на ме-
ханической характеристике точки: идеального холостого хо-
да (w0, М = 0, 5 = 0); соответствующая номинальному мо-
менту (Мн, шн, <ун); критического момента (Мкр, sKP); со-
ответствующая пусковому моменту (Мп; j = 1, и = 0).
Кривые М - f (s) имеют максимумы (рис. 15, в). В точ-
ках максимума крутящий момент и скольжение двигателя до-
стигают критических значений Л/кр, $кр:
Л/кр - АЛ/н
34
(34)
sKP * sH X + v X2 — 1
(35)
где X = M^p/Mn — кратность максимального момента (у дви-
гателей с фазным ротором X = 1,84-2,5; с короткозамкну-
тым . — X -1,54-1,95; у специальных электродвигателей с
двойной клеткой и глубоким пазом X = 24-3,5.
Электромагнитный вращающий момент асинхронного двига-
теля, как и любой электрической машины, пропорционален
магнитному потоку Ф и активной составляющей вторичного
тока ротора Z2; М = кФ12 cos <р2, где к - конструктивный
коэффициент, cosy>2 - коэффициент мощности цепи ротора.
Величина критического момента асинхронного двигателя
определяет максимальную кратковременную нагрузку на валу,
которую он может преодолеть:
Мы = 3^/2ьакл, ’ (36)
где 1/\ — напряжение сети.
3-50 Гц
Рис. 15. Схемы и механические Рис. Механические характеристики
характеристики асинхронных асинхронного электродвигателя с фаз-
эяск-|родвигатс.тсП ным ротором во всех режимах
35
Как видно из формулы .(36), величина критического мо-
мента пропорциональна квадрату напряжения сети. В сетях
заводов напряжение может колебаться, например, при пуске
мощных двигателей, при ударных нагрузках, характерных для
прокатных станов и т.ц. Чтобы учесть возможность пониже-
ния напряжения в сети, наибольшая допустимая перегрузка
принимается равной Л = 0,85Мкр/Мн.
Упрощенное выражение механической характеристики
асинхронного электродвигателя имеет вид
М = 2MK/{(s/sK) + , GD
Вычислив Мк, и задавшись разными значениями s (от О
до > 1), можно построить механическую характеристику
асинхронного двигателя M = f(s).
Величина активного сопротивления реостата Rp в цепи
ротора не влияет на величину критического момента Мк, но
значительно влияет на величину 5КР, т.е. увеличивает на-
клон искусственных механических характеристик (см.
рис. 15, в), вызывая снижение скорости двигателя.
Критическое скольжение на искусственной характеристике
^кр = ^кр (-^рот + -^р)/Крот* I (38)
/
где $кр — критическое скольжение на естественной характе-
ристике; Rp - сопротивление реостата в цепи ротора.
Активное сопротивление фазы ротора
-RpOT = Z2H] > (39)
где Е2н, /2н — номинальные значения соответственно э.д.с.
и тока ротора.
Тормозные режимы. Для асинхронного электродвигателя
возможны три известных режима торможения.
Режим рекуперативного тормо-
жения с отдачей энергии в сеть — при угловой скорости
выше синхронной (0 > w0). В режиме рекуперативного Тормо-
жения электрическая машина работает генератором, превра-
щая кинетическую энергию движущейся машины в электричес-
кую и отдавая ее в сеть. Механические характеристики это-
36
го режима — продолжение характеристики двигательного ре-
жима располагаются в квадранте II (рис. 16, линии с двумя
засечками).
Режим торможения противовклю-
чением аналогичен соответствующему режиму двигателя
постоянного тока параллельного возбуждения. Он может быть
достигнут двумя способами:
. 1) увеличением сопротивления реостата в цепи ротора. В
точке А (см. рис. 16) момент двигателя меньше момента
статического сопротивления, в результате чего груз увле-
кает за собой ротор в направлении, обратном направлению
вращающегося магнитного поля статора. В точке Б наступает
установившийся режим торможения;
2) реверсом, т.е. переключением двух фаз статора на
ходу. Поле статора при этом изменит; направление вращения,
а ротор по инерции будет вращаться в прежнем направлении.
Момент станет тормозным, что вызовет быструю остановку
двигателя. Для ограничения броска тока при переходе в ре-
жим противовключения. в цепь фазного ротора двигателя вво-
дится ступень противовключения.
Линия 1—2—3 (см. рис. 16) показывает переход из двига-
тельного режима в режим противовключения реверсированием
и остановку двигателя.
Режим динамического торможе-
ния. Для перевода в него статор вращающегося электро-
двигателя отключается от сети переменного тока и в две
фазы статора подается постоянный ток от специального вы-
прямителя. Обмотка статора, обтекаемая постоянным током,
создает неподвижное магнитное поле, в котором по инерции
вращается ротор. В обмотке ротора наводится э.д.с, под
действием которой протекает ток и создается магнитное по-
ле. Поле ротора, взаимодействуя с магнитным полем стато-
ра, создает на валу двигателя тормозной момент. Кинети-
ческая энергия, запасенная во вращающихся частях машины,
преобразуется в электрическую и выделяется в виде тепла в
обмотке ротора и в реостате, включенном в цепь ротора.
Механические характеристики в режиме динамического тормо-
жения показаны на рис. 16 (линиями с тремя засечками).
В черной металлургии широко применяются крановые
асинхронные электродвигатели переменного тока серии MTF
37
(с фазным ротором, F - класс нагревостойкости изоляции) и
MTKF (с короткозамкнутым ротором). Металлургические
электродвигатели серий МТН и МТКН соответственно с фаз-
ным и короткозамкнутым ротором; Н - класс нагревостойкос-
ти изоляции, предназначены для приводов металлургического
производства, работающих при повышенных температурах ок:
ружающей среды. Электродвигатели серий MTKF и МТКН имеют
повышенное скольжение и рассчитаны на непосредственный
пуск от полного напряжения сети. Двигатели всех перечис-
ленных серий характеризуются повышенной перегрузочной
способностью, большими пусковыми моментами при сравни-
тельно небольших пусковых токах, а также малым временем
разгона. Номинальное . напряжение двигателей 380/220 и
500 В, частота 59 Гц; число тгар полюсов 3,4 и 5,
Поскольку электродвигатели рассчитаны на работу в сре-
де с повышенной влажностью и запыленностью (в агломераци-
онных, доменных, сталеплавильных, прокатных, литейных и
других цехах), то основным исполнением электродвигателей
является закрытое и с внешним обдувом. В табл. 1 приведе-
ны технические данные отдельных двигателей серий.
Таблица!
Технические данные асинхронных электродвигателей
кран оно-металлургической серии
Тип двигателя NI1B-4O %’ кВт л, об/мин cos <р 7? "max’ Н ‘ "
МТ 011-6 1,4 885 0,65 0,61 39
МТ 412-6 30 970 0,71 0,85 930
МТ 311-8 7,5 695 0,68 0,70 260
МТК 011-6 1,4 875 0,66 0,61 40
МТК 412-6 30 935 0,78 0,83 980
МТК 311-8 7,5 690 0,71 -0,73 310
МТК 412-8 22 700 0,69 0,8 980
МТН111-6 3 845 0,67 0,65 80
МТН412-6 30 965 0,71 0,84 920
МТН311-8 7,5 , 690 0,74 0,71 ‘ 250
МТН512-8 37 705 0,74 0,85 1350
МТН611-10 45 570 0,72 0,84 2300
МТН713-10 160 586 0.68 0,91 7400
МТКН111-6 3 930 0,63 0,68 92
МТКН412-6 .30 935 0.78. 0,83 980
МТКН311-8 7,5 690 0.71 0,74 320
МТКН512-8 37 695 0.78 0.83 1460
38
Синхронные электродвигатели
Особенностью синхронного электродвигателя является то,
что скорость его постоянна и не зависит от нагрузки. Она
определяется числом пар полюсов магнитной системы р и
частотой тока сети / и равна скорости магнитногр поля
статора:
wc * 2itf/p \/с (40)
или
пс » &)f/p об/мин.
По этой причине ч синхронные двигатели применяют для
привода машин, не требующих регулирования скорости (насо-
сы, вентиляторы, аглоэксгаустеры, компрессоры, черновые
клети прокатных станов, привод преобразовательных агрега-
тов и др.). Из всех известных электродвигателей синхрон-
ные являются самыми мощными. Их мощность достигает десят-
ков тысяч киловатт.
Вращающий момент синхронного двигателя определяется из
выражения
М = 3E[//(WoXc)(cOS 0), (41)
где - угол сдвига фаз напряжения сети и э.д.с. двигателя;
U — напряжение сети; Е — э.д.с., наводимая в обмотке ста-
тора полем ротрра; Хс — синхронное реактивное сопротивле-
ние двигателя.
Это уравнение представляет собой угловую характеристи-
ку синхронного двигателя. Момент двигателя возрастает по
синусоидальному закону при изменении угла 0 от 0 до 90°.
При sin 0«1 (0 = 90°) вращающий мойент двигателя дости-
гает максимальной величины (М ).
max
Следовательно, уравнение (41) может быть записано
М = М sin 0. (42)
max
39
При 0 > 90° работа двигателя будет неустойчивой, так
как при дальнейшем увеличении нагрузки вращающий момент
двигателя буМет убывать.
Номинальному моменту двигателя ЛГН обычно соответствует
угол 0Н = 20*30° (sin 0 = 0,35*0,5). Перегрузочная спо-
собность синхронного двигателя
Л = М /Мп = 1/(0,35 - 0,5) = 3*2.
max
В специальных случаях применяют синхронные двигатели с
перегрузочной способностью, достигающей 3,5—4.
Механическая характеристика синхронного двигателя —
прямая, параллельная оси абсцисс.
Синхронные электродвигатели имеют на роторе коротко-
замкнутую пусковую обмотку типа беличьей клетки. Эта, об-
мотка позволяет осуществлять наряду с пуском еще и тормо-
жение, в частности динамическое.
Достоинством синхронных электродвигателей является вы-
сокий к.п.д. (т) = 0,98), что выше к.п.д. асинхронных дви-
гателей той же мощности, скорости и габаритов.
Номинальный коэффициент мощности синхронных двигателей
составляет cos <р = 0,9*0,8 при опережающем токе. В этом
режиме синхронные двигатели генерируют в сеть реактивную
мощность, благодаря чему обеспечивается повышение общеза-
водского cos (р, повышение устойчивости электрических се-
тей и т.п. Большой воздушный зазор между статором и рото-
ром допускает сравнительно большой износ подшипников, что
повышает надежность работы, упрощает уход.
Как видно из уравнения (41), вращающий момент двигате-
ля пропорционален первой степени напряжения, что делает
его менее чувствительным к колебаниям напряжения сети по
сравнению с асинхронным двигателем.
Несмотря на известную сложность конструкции и потреб-
ность в источнике постоянного тока, синхронные двигатели
находят все более широкое применение для привода устано-
вок средней и большой мощности.
В настоящее время широко внедряется система регулируе-
мого возбуждения синхронных электродвигателей на тиристо-
рах, которая позволяет поддерживать заданную величину ко-
эффициента мощности двигателя и оптимизировать режим его
работы.
40
У современных синхронных электродвигателей использует-
ся бесщеточная Система подачи тока в обмотку возбуждения
на вращающемся роторе.
Разрабатываемые способы регулирования частоты вращения
синхронных электродвигателей, например, путем регулирова-
ния частоты питающего тока, откроют им путь к широкому
применению в самых разных установках.
Пример. Рассчитать и построить естественную механическую характе-
ристику для асинхронного электродвигателя с фазным ротором типа МТН713-10
(рис. 17). Паспортные данные двигателя: Рн = 160 кВт: ин = 586 об/мин;
М = 7400 Н • м (см, табл. 1).
IT13X
Решение. Определяем в соответствии с формулой (2) угловые скорости-
номинальную WH и холостого хода О0: = лн/9,55 = 586/9,55 = 61,35 с-1;
Wo = 600/9,55 = 62,8 с"1, где 600 мин-1 — частота вращения холостого хода
(синхронная).
Номинальное скольжение согласно формуле (30) составит
5Н = <wo ~ whVwo = (62,8 - 61,35) 100 %/62,8 = 2.3 %.
Номинальный момент двигателя согласно формуле (2)
Мн = 1000PH/wH = 1000 • 160/61,36 = 2607 Н • м.
Кратность максимального момента
А = ^тах/А<н = 7400/2607 = 2,838.
Рис. 17. Схема пуска асинхронного электродвигателя (</) и
графики (d) к примерам 3, 4
41
Критическое скольжение по формуле (35)
5К 4 |х + А2 - 1 F 0,023 (2,838 + V 2,838* - ] I =
*= 0,1263 (или 12,63 %).
Для построения естественной механической характеристики используем
уравнение (37).
Задавшись произвольными значениями i от 0 до 1, рассчитаем естественную
механическую характеристику. По результатам расчета строим график (см.
рис. 17, tfy
s . . . М, кН ' м . . , , 0,001 0,1171 0,01 * 1,104 0,02 2,285 0,04 4,26 0,05 5,063
S . . . 0,08 0,01 0,126 0,15
Af, кН ’ м . . . . 6,688 7,202 7,4 7,292
S . . . 0,2 0,3 0,4 0,5 0,6
М, кН • М . . . ♦ 6,683 5,29 4,25 3,5157 2,9845
S . . . 0,7 ‘ 0,8 0,9 1
М, кН • М • , . . 2,5873 2,28 2,0377 1,8407
1.6. Пуск электродвигателей
/
Для ограничения бросков тока и связанных с этим явле-
нием перегревом двигателя, искрением щеток, толчков, пе-
регрузок механизма и 1.д. пуск электродвигателей, особен-
но средней и большой мощности, часто осуществляется через
специальные пусковые устройства. Простейшим из этих уст-
ройств является пусковой реостат, секции которого набраны
из стали, чугуна, нихрома, фехраля или других сплавов с
повышенным удельным активным сопротивлением.
По мере разбега двигателя реостат выводится ступенями
путем замыкания соответствующих контактов.
На рис. 17 представлены схема (а) и график (б) пуска
асинхронного двигателя в четыре ступени. Наибольший пус-
ковой момент М[ наблюдается в начале пуска. По мере раз-
гона вращающий момент двигателя снижается до величины мо-
мента переключения ЛГпер (точки к, Л, f, d, Ъ пусковой ди-
аграммы). В моменты, соответствующие указанным точкам ди-
аграммы, замыкаются ускоряющие контакты КМ1-КМ4\ которые
при этом шунтируют секции пускового реостата.
Для расчета пусковых реостатов используются разные ме-
тоды, в частности аналитический. Однако наиболее прост
графический метод. Цель расчета — определение величин
42
сопротивлений каждой пусковой ступени и всего реостата.
По результатам выбирают пусковой реостат из стандартных
элементов (ящиков).
Графический метод расчета основан на соотношении, вы-
текающем из формулы (37), и линейной зависимости S=
~f(M) в рабочей части механической характеристики. Вы-
полняется расчет следующим образом. Вначале строят есте-
ственную механическую характеристику двигателя; затем за-
даются моментами при пуске: наибольшим А/) = 0,85Л/к и мог
ментом переключения Мпер, величина которого зависит от
числа ступеней реостата, но должна быть всегда больше Мс.
Из точек М[ и Afnep проводят две вертикальные линии до пе-
ресечения с естественной механической характеристикой
(точки а, б). Через эти две точки, проводят прямую до пе-
ресечения с горизонталью 5 = 0 (точка 0. Из точки t про-
водят луч Н и из полученной точки к проводят горизонталь
kq. Аналогично из точки t проводят лучи tg, te, tc, ta, a
из точек А, /, d - горизонтали he, fc, da. Последняя го-
ризонталь должна попасть, в точку а. В противном Случае
все графическое построение следует произвести вновь, из-
менив в нужном направлении величину момента Мпер.
Сопротивления ступеней пускового реостата определяются
из выражений:
= Rpo^/pa\ R2 = R^eq/pa-,
R$ = R^ce/pa-, R4 =- R^Q^ac/pa. (43)
Величина Ярот определяется из уравнения (39).
Общее сопротивление пускового реостата,
Яп = 7?! + R2 + R3 + R4 = R^ai/pa.
Пример. Рассчитать сопротивление ступеней пускового реостата для
асинхронного электродвигателя с фазным ротором типа МТН713-10, данные
которого приведены в табл. 2 и в примере 3. Пуск двигателя осуществляется в
четыре ступени.
Решение. Механическая характеристика двигателя построена на
рис. 17. Наибольший - момент при пуске Mj = °-8^max = °*8 * 7400 = 5920 Н X
Хм.
Момент переключения ЛГпер = = 1,3 • 2607 = 3389 Н • м. Из точек Mj
и Afnep проводим вертикали до пересечения с естественной характеристикой
43
J
(точки л, б). Через точки а и б проводим прямую до пересечения с горизон-
талью 5 = 0 (точка 0- Из точки t проводим лучи ti, tg, te, tc, ta.
Для расчета сопротивлений ступеней пускового реостата определяем из
уравнения (39) сопротивление фазы ротора, приняв по каталогу номинальную
силу тока ротора /2Н = 244 А; номинальную э.д.с. ротора Е2Н - 498 В:
«рот = £2Н « 408 • 0,023/(1,73 • 244) = 0,02225 Ом.
Сопротивления ступеней
= ЯрОчф/ра = 0,156 Ом; R2 = RP(yTeq/pa - 0,0786 Ом;
Я3 = RPQJce/pa =* 0,0376 Ом; К4 « RPOTac/pa = 0,0179 Ом.
Общее сопротивление реостата
Яп = /?х + /?2 + Я3 + Я4 = °»29 Ом-
Контрольные вопросы
1. Какие достоинства асинхронных двигателей являются причиной их широкого
применения в промышленности?
2. Каково приблизительное значение номинального скольжения - асинхронного
двигателя?
3. Каково примерно соотношение критического и номинального моментов
асинхронного двигателя?
4. Критическое скольжение асинхронного двигателя увеличивается с увеличе-
нием числа пар полюсов, частоты или сопротивления цепи ротора?
5. Скорость идеального холостого хода асинхронного двигателя можно изме-
нить путем изменения частоты, напряжения сети или сопротивления в цепи
рдтора?
6. Наклон механических характеристик асинхронного двигателя можно изменить
путем изменения числа пар полюсов, частоты или сопротивления цепи ро-
тора?
7. Каковы способы электрического торможения асинхронного двигателя?
8. Как осуществляется динамическое торможение асинхронного двигателя?
9. Как строится механическая характеристика асинхронного двигателя?
10. Каким образом осуществляется реверс асинхронного двигателя?
11. Какими существенными достоинствами обладает синхронный электродвига-
тель?
1.7; Регулирование скорости электропривода.
Общие сведения
S'
В современном электроприводе регулируются скорость,
ускорение, момент, ток двигателя, положение того или ино-
го элемента. Наиболее широко используется регулирование
скорости — целенаправленное, принудительное ее изменение
в соответствии с требованиями технологии. Регулируют ско-
44
рость электропривода воздействием на параметры электри-
ческой цепи двигателя или на параметры источников питания
и в редких случаях - операциями с передаточными устройст-
вами.
Многие технологические процессы" в металлургических це-
хах требуют регулирования скорости. Например, для каждого
профиля и сорта прокатываемого металла имеются свои наи-
более выгодные скорости, определяющие высокую производи-
тельность стана и качество проката. Весьма точного регу-
лирования скорости требуют механизмы МНЛЗ, поворота кон-
вертеров, миксеров и т.п.
Область применения регулируемого электропривода в ме-
таллургии непрерывно расширяется по мере разработки необ-
ходимого для этой цели электрооборудования (преобразова-
телей, бесконтактных аппаратов управления, новых типов
электродвигателей и т.п.). Регулируемый электропривод
обеспечивает наиболее полную автоматизацию технологичес-
ких процессов, облегчает труд оператора, позволяет упрос-
тить конструкции рабочих механизмов за счет ликвидации
громоздких механических передач, обеспечивает повышение
качества проката и т.п.
Каждый метод регулирования, скорости можно охарактери-
зовать совокупностью показателей, основные из которых
рассмотрены ниже.
Диапазон регулирования определяется отношением скорос-
тей:
при номинальном значении момента статической нагрузки и
записывается в виде отношения (например, 2:1, 100:1 и
т.п.).
Плавность регулирования оценивается коэффициентом
плавности, представляющим собой отношение угловых скорос-
тей на двух соседних искусственных механических характе-
ристиках (ступенях регулирования)
^пл = &il
где W/, — значения угловых скоростей двигателя на
/-той и (/ — 1)-ой ступенях регулирования. Таким образом,
45
плавкость характеризуется числом дискретных значений ско-
рости в заданном диапазоне регулирования. Чем больше это
число (число искусственных механических характеристик в
заданном диапазоне регулирования), тем выше плавность.
Стабильность (точность) регулирования определяется
способностью электропривода поддерживать соответствие
действительной скорости заданному ее значению При возмож-
ных колебаниях статического момента нагрузки. Точность
регулирования оценивают по относительному отклонению ско-
рости от заданного ее значения ю3:
5 = Дю /ю3,
max
где Дю — наибольшее отклонение скорости от заданного
max
значения, обусловленному изменению нагрузки.
Стабильность скорости определяется жесткостью механи-
ческой характеристики. При снижении модуля жесткости бу-
дет уменьшаться и стабильность. Для оценки погрешности
регулирования используется так называемый статизм механи-
ческой характеристики
j = Дюном/юор,
где Д0Ном ~ изменение скорости двигателя, вызванное изме-
нением нагрузки от нуля до номинальной; ю0Р — угловая
скорость холостого хода на заданной регулировочной харак-
теристике.
Экономичность — один из важнейших показателей опреде-
ляет в основном выбор способа регулирования скорости.
Экономичность регулирования будет тем выше, чем меньше
стоимость дополнительного оборудования, используемого с
целВю регулирования скорости и чем меньше эксплуатацион-
ные расходы. Главной составляющей эксплуатационных расхо-
дов является стоимость потерь электроэнергии при регули-
ровании.
При автоматическом регулировании важное значение имеют
динамические показатели регулирования: быстродействие,
колебательность, перерегулирование, оцениваемые по харак-
теру переходного процесса при скачкообразном возмущении.
Для* обеспечения высоких показателей регулирования
46
(диапазона плавности* стабильности и т.п») необходимо
сложное и относительно дорогое электрооборудование, тогда
как при невысоких требованиях применима более простая и
сравнительно недорогая аппаратура. Показатели регулирова-
ния скорости задаются технологами и от значений этих по-
казателей будет зависеть вид применяемого электропривода,
его сложность и т.п.
При выборе способа регулирования необходимо решить
вопросы о нагрузке, допустимой при длительной работе на
регулировочных характеристиках и о необходимой мощности
электродвигателя. Каждому способу регулирования скорости
соответствуют наиболее благоприятные условия изменения
нагрузки в процессе регулирования. Желательно применять
такой способ регулирования, при котором двигатель был бы
полностью загружен при всех скоростях. Допустимая дли-
тельная нагрузка двигателя ограничивается его нагревом,
зависящим от тока нагрузки и от условий охлаждения. Если
двигатель имеет независимую вентиляцию, в качестве крите-
рия допустимой нагрузки при любой скорости можно принять
номинальное значение тока ZH. Таким образом, условием
полного использования двигателя при работе на разных ре-
гулировочных характеристиках является постоянство величи-
ны нагрузочного тока Z, который равен при этом номиналь-
ному значению ZH.
Обеспечить указанное выше условие в процессе регулиро-
вания скорости можно, поддерживая постоянными либо мо-
мент, либо мощность двигателя. В первом случае регулиро-
вание называется при постоянном моменте, - а во втором —
при постоянной мощности. Допустимая мощность в первом
случае (при ЛГ = const) будет изменяться по линейному за-
кону Рдоп = ЛГы, поскольку она пропорциональна угловой
скорости. Во втором случае (Р = const) допустимый момент
двигателя обратно пропорционален угловой скорости
Млоп - Р/ы.
Для одних механизмов, например кранов, подъемных лебе-
док, некоторых прокатных станов и т.п., оптимальным явля-
ется регулирование при постоянном моменте, а для других
(моталки прокатного стана, привод станов горячей прокатки
на последних пропусках и т.п.) — при постоянной мощности.
47
Контрольные вопросы
1. Что такое регулирование скорости электропривода и какими способами оно
осуществляется?
2. Какие механизмы металлургического цеха требуют регулирования скорости и
какова цель регулирования? 1
3. Что такое диапазон регулирования скорости?
4. Что такое плавное регулирование скорости9
5. У какого из двигателей стабильность скорости выше: у двигателя с неза-
висимым или с последовательным возбуждением?
6. Какими показателями характеризуется экономичность регулирования скорос-
ти?
1.8. Регулирование скорости электроприводов
постоянного тока. Электропривод по системе Г-Д
Как следует из формулы (21) регулировать скорость дви-
гателя постоянного тока можно путем изменения сопротивле-
ния реостата включенного в цепь якоря (резисторное
регулирование); изменением потока возбуждения Ф, а также
изменением напряжения U, подводимого к двигателю (см.
рис. 7).
На рис. 18 представлены механические характеристики
двигателя постоянного тока с независимым возбуждением при
разных способах регулирования скорости.
Рис. 18. Механические характеристики двигателя постоянного чока с независи-
мым возбуждением при разных способах регулирования скорости
Резисторное регулирование скорости (параметрический
способ регулирования) несмотря на простоту применяемого
для целей регулирования оборудования и его малую стои-
мость, имеет ряд весьма важных недостатков., Регулирование
скорости в двигательном режиме осуществляется только вниз
от основной скорости (рис. 18, а; рис. 11, 13). Модуль
жесткости механических характеристик уменьшается при сни-
48
жении угловой скорости, что снижает точность регулирова-
ния; диапазон регулирования скорости ограничен, особенно
при малых нагрузках; плавность регулирования невелика.
Резисторный способ регулирования крайне неэкономичен.
Мощность, потребляемая приводом из сети, неизменна
Рс = UI = const, тогда как механическая мощность =
снижается с уменьшением скорости (М = const), а потери
мощности возрастают пропорционально снижению ДРЭЛ = Ао>А/.
К.п.д. привода при этом способе снижается пропорционально
снижению скорости t/ = w/u0. В силу этих причин резистор-
ное регулирование в приводе постоянного тока металлурги-
ческих цехов не используется. Исключение составляют лишь
электроприводы рельсового электрического транспорта (ста-
левозов, слитковозов и т.п.), где используются электро-
двигатели постоянного тока последовательного возбуждения
с регулированием скорости с помощью реостата в цепи яко-
ря.
Регулирование скорости изменением потока возбуждения
осуществляется, согласно (21), только вверх от основной
скорости, поскольку ток в обмотке возбуждения не может
быть выше номинального; он может лишь снижаться относи-
тельно номинального значения, поскольку магнитная система
насыщена.
Механические характеристики этого способа регулирова-
ния приведены на рис. 18, б. Уменьшение магнитного потока
приводит к увеличению скорости идеального холостого хода
w01 > w0. Модуль жесткости механических характеристик при
этом снижается, что ограничивает диапазон регулирования
скорости.
Способ достаточно экономичен, поскольку не требует
больших капитальных затрат, а потери мощности здесь не
велики, так как мощность обмотки возбуждения составляет
всего (5—10) % от номинальной мощности двигателя.
Поскольку при ослаблении поля двигателя его момент бу-
дет снижаться, допустимый момент нагрузки должен быть ог-
раничен Мдоп = *Фи7ном, гДе
Фи = Фном^ном/^и ~
поток возбуждения на искусственной характеристике. Тогда
Мдоп^м в ^ном^ном = Люм = const, т.е. регулирование осу-
49
пХествляется при постоянной мощности, равной номинальной
мощности Рном.
В металлургической промышленности регулирование ско-
рости изменением потока возбуждения как отдельный способ
не применяется. Однако он достаточно широко используется
как способ расширения диапазона регулирования скорости в
сложных системах регулируемого электропривода постоянного
тока, о чем будет сказано ниже.
Система преобразования — двигатель. Как показал приве-
денный анализ, ни один из рассмотренных способов регули-
рования скорости двигателя постоянного тока не дает пол-
ного решения проблемы. Третий способ регулирования ско-
рости, основанный на изменении подводимого к якорю напря-
жения U (21). Изменение напряжения осуществляется с по-
мощью индивидуального регулирования преобразователя пос-
тоянного тока, который устанавливается рядом с двигате-
лем. В системе преобразователь-двигатель все управление
приводом (пуск, торможение, реверс, регулирование скорос-
ти и т.п.) осуществляется воздействием на выходные пара-
метры указанного выше индивидуального преобразователя.
Применяя обратные связи, задатчики, регуляторы, ЭВМ и
т.п., можно получать механические характеристики практи-
чески любой формы, автоматически ограничивать ток нагруз-
ки, момент; стабилизировать или изменять скорость по за-
данным законам или программе и т.п.
В качестве индивидуальных источников питания использу-
ются электромашинные генераторы (система Г-Д) и главным
образом тиристорные преобразователи (система ТП-Д).
Основным выходным параметром преобразователя является
его э.д.с. Епр. С изменением ЕПР регулируется лишь ско-
рость идеального холостого хода от основной w0CH, соот-
ветствующей номинальному значению ЕПРН, до wop, соответ-
ствующей пониженному значению Епрр (рис. 18, в)
WOP ~ ^Пр.р/(^ном)>
(44)
где к - конструктивный коэффициент двигателя; Фном - но-
минальный поток возбуждения двигателя.
Уравнения электромеханической и механической характе-
ристик в системе преобразователь-двигатель имеют вид:
50
w = ЕПР/(*Ф) - /Яя2/(АгФ), (45)
о = ЕПР/(*Ф) - Л/Яя2/(Л2Ф2), (46)
где R& — суммарное сопротивление цепи якоря двигателя.
Жесткость механических характеристик привода по систе-
ме преобразователь-двигатель практически постоянна. Меха-
нические характеристики представляют собой семейство па-
раллельных прямых (рис. 18, в). Диапазон, плавность, точ-
ность регулирования здесь несравненно выше, чем в случае
резисторного регулирования скорости.
Система преобразователь-двигатель применяется для при-
вода механизмов, требующих глубокого и плавного регулиро-
вания скорости (привод главных и вспомогательных механиз-
мов прокатных станов, привод механизма поворота конверте-
ров, привод перемещения электроприводов дуговых электро-
печей и др.). Достоинством такой системы является широкий
диапазон регулирования скорости, плавность, возможность
оптимизации форм механических характеристик привода, ши-
рокие возможности с точки зрения автоматизации и т.п.
Система характеризуется существенной сложностью, высокой
стоимостью, поэтому использование ее требует технико-
экономического обоснования.
Электропривод по системе Г-Д применяется для механиз-
мов, требующих глубокого и плавного регулирования скорос-
ти. Схема привода по системе Г-Д представлена на рис. 19,
а. Приводной двигатель MI преобразовательного агрегата
(синхронный или асинхронный короткозамкнутый) работает с
постоянной скоростью, приводя в движение якорь генератора
G. От G получает питание двигатель Л/, который приводит в
движение рабочий орган P.O. От тиристорного возбудителя
UZ1 получает питание обмотка возбуждения генератора ОВГ;
от преобразователя UZ2 — обмотка возбуждения двигателя
ОВМ. Регулирование скорости рабочего двигателя М осуще-
ствляется изменением напряжения генератора, которое в
свою очередь изменяется с помощью возбудителей в цепи об-
мотки возбуждения ОВГ. Мощность обмотки возбуждения гене-
ратора сравнительно не велика, поэтому потери на регули-
рование оказываются малы, а само регулирование получается
плавным. Уравнение механической характеристики двигателя
в системе Г—Д имеет вид
51
и = Ег/(кФ) - М (Rr + Яа)/(к2Ф2),
где Ег, Rr — соответственно э.д.с. и сопротивление цепи
якоря генератора.
Механические характеристики двигателя — параллельные
прямые (см. рис. 19, б), угол наклона которых определяет-
ся сопротивлениями якорей двигателя и генератора. Этот
угол будет несколько больше, чем при питании двигателя от
сети из-за сопротивления Rr.
Реверсирование двигателя М осуществляется изменением
полярности обмотки возбуждения генератора ОВГ с помощью
возбудителя UZ1 (см. рис. 19,. а). При перемене полярности
обмотки ОВГ изменяется полярность напряжения» подводимого
к якорю двигателя, и последний реверсируется. Однако в
целом привод по системе Г-Д заменяется более совершенными
52
системами вследствие таких его недостатков, как высокие
первоначальные затраты, большая суммарная установленная
мощность электрических машин, составляющая > 300 % мощ-
ности рабочего двигателя, пониженный к.п.д. всей установ-
ки из-за большого количества электрических машин. Кроме
того, вращающиеся машины требуют тщательного ухода, ре-
монта и в определенной степени снижают надежность приво-
да.
Наибольшее применение в приводе прокатных станов нахо-
дит тиристорный привод постоянного тока по системе ТП-Д.
Контрольные вопросы
1. Какой из способов регулирования скорости двигателя постоянного тока
обеспечивает наиболее высокие значения диапазона, плавности, стабиль-
ности регулирования?
2. каковы недостатки резисторного способа регулирования скорости, а также
регулирования изменением потока двигателя?
3. Как регулируется скорость, пускается и реверсируется двигатель в системе
преобразователь-двигатель?
4. Как изменяется механическая характеристика привода при изменении
напряжения преобразователя?.
5. Когда жесткость естественной механической характеристики будет выше: у
двигателя, питаемого от сети, или в системе преобразователь-двигатель?
6. Как регулируется скорость и реверсируется двигатель в системе Г—Д?
7. Каковы недостатки привода по системе Г-Д?
1.9. Тиристорный электропривод постоянного тока
Тиристорный электропривод постоянного тока является
основным видом привода прокатных станов и другие метал-
лургических машин и агрегатов-конвертеров, миксеров,
электродов (дуговых электропечей и т.п.), требующих глу-
бокого и плавного регулирования скорости.
Тиристоры — это наиболее мощные полупроводниковые при-
боры, Используемые в силовых схемах автоматизированного
электропривода. Они рассчитаны на ток до нескольких кило-
ампер при допустимом обратном напряжении в несколько ки-
ловольт. С помощью тиристора, включенного в цепь перемен-
ного тока, можно не только выпрямлять ток, но и регулиро-
вать его величину. Тиристор - это полупроводниковый ключ,
имеющий лишь два состояния: открытое (включенное), при
котором сопротивление в прямом направлении равно практи-
чески нулю, и закрытое (сопротивление считается равным
бесконечности).
53
Управляют тиристором, т.е. включают его с помощью уп-
равляющего электрода УЭ (рис. 20, а), на который каждый
полупериод напряжения сети Uc подается отпирающий импульс
10Тп из СИФУ - системы импульсно-фазового управления. От-
пирающие импульсы имеют небольшую мощность (~0,1 А;
Рис. 20. Принцип регулирования напряжения с помощью гнрисюра
5 В), крутой передний фронт. Отпирание очередного тирис-
тора (в точке естественной коммутации а (рис. 20, 6} или
позднее (рис. 20, в, г) осуществляется подачей на его уп-
равляющий электрод импульса /от|] (рис. 20, ид).
Запереть тиристор с помощью управляющего электрода не-
возможно, следовательно тиристор в отличие, например, от
транзистора, является прибором полууправляемым. Этой осо-
бенностью тиристора можно объяснить известную сложность
схем управления тиристорных преобразователей.
С помощью СИФУ можно изменять фазу (момент) подачи от-
пирающего импульса /отп относительно точки естественной
коммутации вентиля а, т.е. можно изменять угол регулиро-
вания (угол задержки начала отпирания) а, рис. 20, в, г.
При этом изменяется среднее значение выпрямленного напря-
жения соответствующее заштрихованной площади, рис.
54
20, в, г. Чем больше угол регулирования тем меньше вы-
ходное напряжение преобразователя
U= 'f'L U2m/nsin(jt/in)-cos а = Udo cos а, (47)
где т — число фаз выпрямления, равное частоте пульсаций
за период напряжения сети; U2 — действующее значение ли-
нейного напряжения питающей сети; Udo — выпрямленное на-
пряжение преобразователя (максимальное) при полностью от-
крытых тиристорах, т.е. при а = 0. Таким образом, изменяя
с помощью СИФУ угол регулирования а, можно плавно и в ши-
роких пределах изменять величину выпрямленного напряжения
Udat рис. 21 и соответственно — угловую скорость электро-
двигателя, подключенного к выпрямителю. <
Уравнение электромеханической характеристики двигателя
в системе ТП—Д имеет вид:
w = (udo cos а ~ /Л)яЕ/(/сФ),
(48)
где Яя£ - суммарное сопротивление цепи якоря, куда входят
сопротивления обмоток трансформатора, двигателя, сглажи-
ваемого реактора и др.
Рис. 21. Зависимость выходного
напряжения тиристорного преоб-
разователя от угла регулирова-
ния
Рис. 22. Механические характеристики
тиристорного привода постоянного тока
Угловая скорость идеального холостого хода двигателя
“о = uda/(k9) (49)
изменяется в зависимости от выходного напряжения преобра-
зователя U da-
55
Уравнение механической характеристики электропривода
системы ТП-Д имеет вид:
w = (Udo (cos а)/(кФ) - М R&/к2Ф2{. (50)
Изменяя угол регулирования а, можно получить семейство
механических характеристик, расположенных параллельно
(рис. 22, I квадрант). Наклон этих характеристик опреде-
ляется суммарным сопротивлением цепи якоря R^. Поскольку
это сопротивление больше внутреннего сопротивления двига-
теля, то наклон механических характеристик привода по
системе ТП—Д больше, чем в обычном приводе постоянного
тока и несколько больше, чем в системе Г-Д. Однако благо-
даря используемым в тиристорных приводах отрицательным
обратным связям, может быть обеспечена практически любая
жесткость механических характеристик.
Следует однако иметь в виду, что в действительности
угловая скорость идеального холостого хода двигателя не
соответствует величине, определяемой из (49). Это обус-
ловлено наличием зоны прерывистых токов, для которой
w > о>0 (штриховые линии на рис. 22). Появление этой зоны
вызвано тем, что в контуре преобразователя действует
э.д.с. Ед якоря двигателя, направленная встречно напряже-
нию Udoc преобразователя. В отдельные моменты, особенно
при малом токе нагрузки мгновенные значения э.д.с. двига-
теля становятся больше напряжения преобразователя Udoc и
ток в цепи якоря становится прерывистым. Однако использо-
вание отрицательных обратных связей в схеме управления
тиристорным преобразователем позволяет свести зону преры-
вистых токов к такому минимуму, при котором на работу
привода она практически влиять не будет. В целом механи-
ческие характеристики тиристорного электропривода посто-
янного тока имеют удовлетворительную форму, а само регу-
лирование отличается широким диапазоном, плавностью, ста-
бильностью и т.п.
Тиристорный преобразователь постоянного тока можно
считать состоящим из двух основных частей: силового блока
тиристоров ТБ и системы управления и зашиты СУЗ, куда
входит система импульсно-фазового управления (СИФУ) ти-
ристорами.
56
Выбор силовой схемы тиристорного преобразователя опре-
деляется его мощностью и назначением. В тиристорных
электроприводах прокатных станов применяют схемы выпрям-
ления трех-, шести-, 12-фазные, а в особо мощных приводах
также 18-ти и даже 24-фазные схемы. Наибольшее применение
в тиристорном электроприводе получили мостовые схемы на-
пряжения (рис. 23), достоинством которых является хорошее
использование мощности трансформатора, сравнительно невы-
сокое обратное напряжение на вентилях, отсутствие потока
однонаправленного намагничивания, шестифазное выпрямле-
ние, обеспечивающее относительно небольшие пульсации вы-
прямленного тока, возможность питания от сети трехфазного
тока без трансформатора и т.п. Однако мостовая схема име-
ет вдвое большее число тиристоров и блоков управления к
ним. Тем не менее достоинства этой схемы обусловливает ее
преимущественное применение в автоматизированном электро-
приводе. На рис. 23: FA — автомат, выполняющий функцию
57
защиты; FU — быстродействующие плавкие предохранители,
защищающие каждый тиристор от недопустимых перегрузов и
коротких замыканий; R, С — элементы защиты тиристоров от
пробоя при перенапряжениях; L — реактор, сглаживающий
пульсации выпрямленного напряжения.
Тиристорный электропривод может быть выполнен неревер-
сивным, однако в большинстве случаев используется ревер-
сивный тиристорный привод, поскольку реверсирование при-
вода требуется не только по условиям технологического
процесса, но и при ремонтах, наладке, ревизии стана, при
рекуперативном торможении и т.п.
Как известно, для реверсирования двигателя постоянного
тока необходимо изменить направление тока либо в обмотке
якоря, либо в обмотке возбуждения. В первом случае нужно
установить двухкомплектный (реверсивный) преобразователь
в цепи якоря (рис. 24, я), во втором — в цепи обмотки
возбуждения (рис. 24, б). Принципиально для целей ревер-
сирования могут быть использованы контакторы, однако для
мощных высокопроизводительных агрегатов это неприемлемо.
Система (рис. 24, б) имеет меньшие габариты и стоимость,
однако она более инерционна по сравнению со схемой на
рис. 24, а вследствие значительной индуктивности обмотки
возбуждения ОВМ. По этой причине в приводе прокатных ста-
нов в основном используется система, изображенная на рис.
24, а, обеспечивающая более высокую производительность
стана благодаря малой длительности переходных процессов в
цепи возбуждения. Таким образом, в состав реверсивного
преобразователя входят два объединенных электрически
комплекта (блока) тиристорных преобразователей (рис. 24,
а). Один комплект вентилей ТБ1 используется при работе
привода в направлении "Вперед", а второй ТБ2 — при работе
в направлении "Назад".
Существуют два основных способа включения групп тирис-
торов: встречно-параллельное и перекрестное. Наибольшее
применение нашла встречно-параллельная схема (рис. 25),
достоинствами которой является использование простейшего
трансформатора сравнительно малой типовой мощности; воз-
можность питания от трехфазной сети без трансформатора и
унификации конструкций реверсивного и нереверсивного пре-
образователей. Недостаток ее — возможность возникновения
58
3~50Гц
3^50 Ги,
3^50 Гц
Т
UZ1
Рис. 24. Схемы силовой
реверсивных тиристорных
роприводов
части
злект-
овм
ОВМ
а
L2
встреч-
вклю-
L7
Рис. 25. Схема
но- параллельного
чения групп тиристоров
реверсивного преобразо-
вателя
ОВМ
тяжелых аварийных режимов при самопроизвольном отпирании
или пробое одного из вентилей.
При работе двигателя в генераторном режиме, например
при спуске груза, реверсивный тиристорный преобразователь
можно перевести в инверторный режим, когда постоянный ток
электрической машины преобразуется преобразователем в пе-
ременный ток и энергия последнего отдается в сеть. В ин-
верторном режиме тиристоры отпираются при угле опережения
₽ = п — а. Семейство механических характеристик привода в
инверторном режиме расположено в квадранте II (см. рис.
59
22). Мгновенные значения э.д.с. групп вентилей не уравно-
вешивают одна другую и между группами действует перемен-
ное напряжение, вызывающее протекание уравнительных токов
между группами. Для их ограничения в силовую цепь ревер-
сивных преобразователей включают уравнительные реакторы.
В схеме на рис. 25 таких реакторов четыре: £р Ь2,
Ь2.
В схемах реверсивного тиристорного электропривода при-
меняют два основных способа управления преобразователями:
совместное и раздельное.
При совместном управлении один преобразователь, работа-
ет в выпрямительном режиме, а другой подготовлен к инвер-
торному.
Раздельное управление заключается в том, что управляю-
щие импульсы подаются только ria ту группу вентилей, кото-
рая в данный момент должна вступить в работу. На нерабо-
тающей группе импульсы сняты (заблокированы). Снйтие
(блокирование) управляющих импульсов производится логи-
ческим переключающим устройством, которое определяет мо-
мент равенства нулю тока преобразователя, блокирует им-
пульсы ранее работающей группы и Лосле некоторой паузы
(10—15 мкс), необходимой для компенсации зоны нечувстви-
тельности датчика нулевого тока, разрешает Подачу импуль-
сов на вентили другой группы. При раздельном управлении
уменьшается вероятность опрокидывания инвертора, повыша-
ется к.п.д. привода вследствие исключения: уравнительных
токов.
Комплектные тиристорные электроприводы. В последние
годы шире используются комплектные тиристорные электро-
приводы, обеспечивающие регулирование в широком диапазоне
различных координат. г
В состав КТП входят электродвигатель постоянного тока
с тахогенератором, тиристорный преобразователь для пита-
ния цепи якоря с необходимой аппаратурой управления заши-
ты, сигнализации, контроля, тиристорный преобразователь
для питания обмотки возбуждения; силовой трансформатор
или анодный реактор; коммутационная и защитная аппаратура
в цепях переменного и постоянного тока; сглаживающрр* ре-
актор; система управления электродвигателем (якорем и об-
моткой возбуждения); контрольно-испытательные стенды и
т.п.
60
Поставка комплектных тиристорных электроприводов, сос-
тоящих из всех основных (заранее согласованных с заказчи-
ком) составных элементов - узлов, устройств электроприво-
да, позволяет снизить трудоемкость разработок и изготов-
ления электроприводов, повысить их заводскую готовность,
снизить затраты на электромонтажные работы, сократить
время на наладку приводов.
Комплектные тиристорные электроприводы подразделяются
по числу двигателей - на однодвигательные, двухдвигатель-
ные, многодвигательные (последние могут быть нереверсив-
ными и реверсивными, с изменением направления тока воз-
буждения или изменением полярности напряжения на якоре);
на однозонные, двухзонные; по основному регулируемому па-
раметру — с регулированием скорости, ЭДС, напряжению, по-
ложению, натяжению, мощности и других параметров (в спе-
циальных приводах); с линейным контактором и без него; с
динамическим торможением и без него; по напряжению питаю-
щей сети - 0,38; 6 или 10 кВ.
В табл. 2 приведены основные параметры комплектных ти-
ристорных преобразователей, используемых в металлургии.
Диапазон регулирования скорости не менее 50:1; для
электроприводов с регулированием ЭДС — не менее 20:1.
Время реверса тока для реверсивных электроприводов с
раздельным управдением не более 30 мес.
Таблица 2. Основные параметры комплектных тиристорных
нреобраэ овате лей
Изготовитель Серия Мощность, Напряжение Основные регулируемые координаты
мВт < В
ПО ХЭМЗ КТУ 12 220, 440, 600, 750 Скорость, ЭДС, положе- ние, мощность, натяже- ние, специальные системы
ПО ХЭМЗ ЭКТ 2,0 220, 440, 600, 750, 930 ' Скорость, ЭДС, мощность, специальные системы
ПО "Преобразо- ватель" ; г КТЭ 1,0 220, 440, 600 Скорость, ЭДС, мощность, положение, натяжение
ПО "Преобразо- ватель" ТПП 13 440, 600, 825, 1050 То же
ПО "Уралэлектро- тяжмаш" ТЕ, ТЕР 0,825 ТВ, ТВР 13 440, 600, 825, 1050 440, 600, 825, 1050
61
Срок службы электропривода 15—20 лет; выработка на от-
каз в течение двухлетней гарантийной работы 4000—6500 ч.
В силовых цепях преобразователей используются тиристо-
ры на номинальные токи 160, 320, 800, 1000 А.
Основная схема преобразования в КТУ — трехфазная мос-
товая.
В мощных электроприводах используется параллельное
включение двух тиристорных преобразователей, напряжения
питания которых сдвинуты один относительно другого на
30°.
Увеличение номинального тока преобразователя достига-
ется параллельным включением тиристоров в плечах. В этом
случае последовательно с тиристорами включаются индуктив-
ные делители тока, способствующие равномерному распреде-
лению тока между параллельно включенными вентилями и ог-
раничению скорости нарастания тока в вентилях при включе-
нии.
Защита электроприводов осуществляется по многим (до 15
и более) параметрам: от выхода из строя тиристора при
внешних и внутренних коротких замыканиях, открывания ти-
ристоров в неработающей группе; опрокидывания инвертора,
от перенапряжений на тиристорах, от аварийной перегрузки
на тиристорах, от исчезновения напряжения собственных
нужд и т.п.
При всех видах защит обеспечивается определенная се-
лективность, не допускающая перегорания предохранителя
(авария может быть предотвращена срабатыванием автомати-
ческого выключателя или сеточной защитой). «
Система импульсно-фазового
управления тиристорным преобразователем выполня-
ет следующие основные функции: вырабатывает синхронизиро-
ванную с напряжением сети систему импульсов тока заданной
формы; осуществляет сдвиг управляющих (отпирающих) им-
пульсов относительно фазы напряжения сети; в ряде случаев
она также выполняет функцию зашиты тиристоров и т.п.
Фиксация момента подачи управляющего импульса осуще-
ствляется обычно путем сравнения двух напряжений с ис-
пользованием так называемого "вертикального” принципа.
При вертикальном управлении момент подачи отпирающего им-
пульса определяется равенством постоянного управляющего
напряжения Uy (рис. 26, а) и опорного напряжения Uon,
62
имеющего Чаще всего пилообразную форму. В момент равенст-
ва напряжений Uy и Uon в схеме возникает либо один, либо
пачка импульсов с крутым передним фронтом /отп, которые
затем подаются на управляющие электроды тиристоров.
На рис. 26, б представлена в упрощенном виде схема уп-
равления тиристором. Напряжение, подаваемое на базу тран-
зистора Кт, равно алгебраической сумме управляющего на-
Рис. 26. Принцип "вертикального" управления тиристором
пряжения Uy и выходного напряжения генератора пилообраз-
ного напряжения (Г.П.Н.). При положительном напряжении на
базе транзистор заперт.
В момент, соответствующий точке а (см. рис. 26, а),
когда результирующее напряжение на базе станет равным ну-
лю, транзистор откроется, и в первичной обмотке wl импуль-
сного трансформатора. Т.И возникнет напряжение. Импульс
напряжения через вторичную обмотку трансформатора будет
подвешен к управляющему электроду тиристора VS и послед-
ний откроется. Для формирования крутого переднего фронта
импульса используется дополнительная обмотка обратной
связи трансформатора (на схеме не показана). Резистор Ry
и диод служат для защиты управляющего р—/z-перехода ти-
ристора от действия недопустимого тока или напряжения об-
ратной полярности. Изменяя управляющее напряжение С7У,
оператор изменяет момент отпирания тиристора, т.е. изме-
няет угол регулирования а от 0 до п (рис. 26, а). При
этом в соответствии с [47] изменяется выходное напряжение
преобразователя, а следовательно и скорость подключенного
к нему электродвигателя.
63
Управление электродвигателем: пуск, регулирование ско-
рости, торможение и т.п. осуществляется командоконтролле-
ром SA (ручным или педальным) с поста управления (рис.
27). Управляющий сигнал Uy переменного тока на выходе ко-
мандоаппарата необходимо преобразовать в сигнал постоян-
ного тока, полярность которого определялась бы фазой уп-
равляющего сигнала С/у, которая в свою очередь определяет-
ся положением ручки командоаппарата. С этой целью исполь-
3-50 Гц
зуется фазочувствительное выпрямительное устройство
(ФВУ).
Тиристорный привод используется как правило в автома-
тизированных агрегатах, где регулируются разные техноло-
гические параметры: скорость, положение тех или иных ор-
ганов, сила тока привода и т.п. Поэтому в систему управ-
ления приводом вводятся разные регуляторы скорости PC,
тока РТ и т.п.). Сигналы отрицательных обратных связей
соответственно по скорости и току поступают на входы ре-
гуляторов от датчика скорости BR и тока UA. Питание аппа-
ратуры управления осуществляется от специальных блоков
БП.
Рассмотренная здесь система широко используется в
электроприводе прокатных станов, моталок, конвертеров.
64
МНЛЗ и других механизмов металлургических цехов. Системы
управления максимально унифицированы; они состоят из се-
рийных блоков, набранных в f разных сочетаниях в соответст-
вии с требуемым алгоритмом управления.
Следует отметить, что наряду с известными достоинства-
ми тиристорные НреобразоваТели имеют существенный недо-
статок, который заключается в крайне низких энергетичес-
ких показателях, в частности - в низком коэффициенте мощ-
ности. Тиристорный выпрямитель искажает синусоиду, преоб-
разуя синусоидальный ток в ток периодический несинусои-
дальный. Как известно, несинусоидальный периодический ток
состоит из постоянной составляющей и суммы токов основной
и высших гармоник. Таким образом, тиристорные преобразо-
ватели при работе генерируют в сеть переменного тока мощ-
ные потоки высших гармонических, которые вызывают радио-
помехи и другие неблагоприятные последствия. Появление в
питающей электросети потоков реактивной мощности объясня-
ется искажением кривой первичного тока, вследствие фазо-
вого управления, процесса коммутации и т.п. При фазовом
управлении ток сети /с искусственно задерживается на вре-
мя, примерно соответствующее углу регулирования а (рис.
28). Вследствие этого ток . отстает по фазе от напряжения
сети [7С, что приводит к снижению коэффициента мощности со
Рис. 28. Сдвиг фаз тока и., на-
пряжения при фазовом управле-
нии тиристорным преобразовате-
лем
всеми неблагоприятными последствиями. Коэффициент мощнос-
ти тиристорного преобразователя может быть определён из
выражения
* = и cos <pt = UdaJU , (51)-
“О
где v - Ijl — коэффициент искажения тока, потребляемого
из сети; cos^ — косинус угла сдвига <pt, напряжения Uc и
тока первой гармонической составляющей Ц потребляемого
преобразователем из сети; U, /U J — относительное сниже-
на do
65
ние (глубина регулирования) напряжения преобразователя
при фазовом регулировании.
Если пренебречь сравнительно небольшим углом коммута-
ции у, то становится очевидной сильная зависимость коэф-
фициента мощности от угла регулирования а, т.е. от глуби-
ны регулирования выпрямленного напряжения. Таким образом,
регулирование скорости тиристорного электропривода дости-
гается ценой соответствующего снижения коэффициента мощ-
ности, что является существенным недостатком данной сис-
темы электропривода. Ввиду низкого коэффициента мощности
в сетях переменного тока прокатных, цехов циркулируют по-
токи реактивной мощности. Это вызывает большие колебания
напряжения в сети, потери мощности, падения и колебания
напряжения и т.п. Принимаются меры по повышению коэффици-
ента мощности тиристорных преобразователей и минимизации
уровней высших гармонических в электрических сетях про-
катных цехов,
Другим серьезным недостатком электропривода постоянно-
го тока, в том числе и тиристорного, является наличие у
электродвигателя коллектора, который требует постоянного
ухода, недостаточно надежен. Эти недостатки требуют поис-
ка и разработки новых, более совершенных систем электро-
привода,
Контрольные вопросы
1. Что такое угол регулирования тиристора, каким образом он регулируется и
как влияет его величина па выходные парамо ры преобразователя?
2, - Какую функцию выполняет управляющий элем род тиристора? Можно ли с его
помощью запереть тиристор?
3, От каких параметров зависит величина выходного напряжения тиристорного
преобразователя?
4. Какой вид имеют механические харам сриаикп двигателя в системе ТП-Д?
Каков диапазон, плавность регулирования?
5, С какой целью увеличивают число фаз выпрямления тиристорных преобразо-
вателей?
’6, Как защищают тиристоры в схемах преобразовав слей?
7. Каким образом реверсируется электродвигатель в системе ТП—Д?
8. В каких случаях тиристорный преобразователь работает в инверторном
режиме?
9. В чем заключаются достоинства комплектных тиристорных электроприводов?
10. Каковы функции системы импульсно-фазового управления тиристорным пре-
образователем (СИФУ)?
11, Какие основные элементы входят в систему управления привода по системе
ТП-Д?
12. Чем объясняется низкий коэффициент мощности тиристорного электропривода
и наличие токов высших гармоник в сетях переменного тока?
66
1Д0, Регулирование скорости асинхронных двигателей
В соответствии с формулами (31) и (37) скорость асин-
хронного электродвигателя можно регулировать введением в
цепь ротора реостата (резисторное регулирование), из-
менением числа пар полюсов р и изменением частоты питаю-
щего тока /Р В некоторых случаях используется регулиро-
вание изменением подводимого напряжения, импульсное регу-
лирование, регулирование с использованием электрических и
гидравлических муфт.
Недостатки при резисторном регулировании асинхронных
двигателей те же, которые были отмечены для двигателей
постоянного тока. Однако вследствие простоты этот метод
регулирования находит применение в приводе металлургичес-
ких кранов. Схема и механические характеристики этого
способа регулирования скорости приведены на рис. 15,
Регулирование изменением числа полюсов ведется по-
степенно. Отечественной промышленностью выпускаются
двух-, , трех- и четырехскоростные асинхронные электродви-
гатели на частоты вращения (синхронные) 750/1,500,
5ОО/1ОО0, 1500/3000, 750/1000/1500, 500/750/1000/
/1500 об/мин.
Изменение числа пар полюсов осуществляется переключе-
нием обмотки статора. Каждая фаза обмотки выполняется Из
двух одинаковых катущек, которые могут соединяться после-
довательно или параллельно. Катушки» включенные последо-
вательно, образуют две пары полюсов 2р, а те лее катушки,
включенные параллельно, - одну пару (р). Чаще всего для
получения меньшей скорости обмотку статора включают тре-
угольником с последовательным соединением катушек, а для
получения вдвое большей скорости - звездой с параллельным
соединением катушек (двойной звездой), Регулирование в
этом случае осуществляется при постоянной мощности. Регу-
лирование при постоянном моменте осуществляется, переклю-
чением обмотки статора со звезды на двойную звезду.
Двухскоростные двигатели имеют на статоре одну обмот-
ку, допускающую переключения указанными выше способами.
Трехскоростные и четырехскоростные двигатели имеют две
обмотки статора, рассчитанные на разные числа пар полю-
сов; у четырехскоростного двигателя каждая из обмоток
67
обеспечивает получение двух скоростей рассмотренным выше
способом.
Ротор двигателя выполняется короткозамкнутым, посколь-
ку короткозамкнутая обмотка автоматически приобретает то
же число ‘полюсов, что и обмотка статора, не требуя в от-
личие от фазной обмотки переключений.
На рис. 29, а представлены механические характеристики
двухскоростного асинхронного электродвигателя. Регулиро-
вание осуществляется при постоянном моменте, поэтому с
Рис. 29. Механические характеристики асинхронного двигатель
при регулировании скорости переключением числа пар полюсов ,
(я) и изменением Частоты питающего напряжения (б)
переходом на более низкую ступень скорости номинальная
мощность двигателя снижается пропорционально скорости.
Характеристики данного метода регулирования отличаются
жесткостью, а само регулирование - экономичностью. Серь-
езным недостатком этого способа регулирования, сильно ог-
раничивающим области его применения, является ступенча-
тость. Этот метод регулирования применяется в приводах
методических печей, элеваторов, некоторых волочильных
ч станов, барабанных смесителей сушильных барабанов и т.п.
Наиболее перспективен метод регулирования скорости из-
менением частоты. На рис. 29, б приведены механические
характеристики асинхронного электродвигателя, регулируе-
мого изменением частоты (во всех режимах). Как видно из
рис. 29, б характеристики обладают большей жесткостью, а
68
само регулирование - плавностью и широким диапазоном.
Двумя засечками отмечены характеристики в режиме рекупе-
ративного торможения с отдачей энергии в сеть, тремя — в
режиме торможения противовключением и четырьмя - в режиме
динамического торможения. Жесткость механических характе-
ристик и высокие значения критического момента двигателя
обеспечиваются в том случае, когда двигатель работает при
постоянном магнитном потоке. Постоянство же магнитного
дотока обеспечивается, когда регулирование осуществляется
при неизменном соотношении питающего напряжения и часто-
ты:
Ujfi - const.
Таким образом, необходимо одновременно регулировать
частоту и величину питающего напряжения.
Достоинством рассматриваемого метода регулирования
скорости наряду с плавностью и большим диапазоном регули-
рования является также возможность использования в регу-
лируемых приводах простого и надежного асинхронного
электродвигателя с короткозамкнутым ротором. Однако, не-
смотря на большие достоинства, частотное регулирование
скорости асинхронных двигателей до последнего времени не
находило широкого применения. Причина заключалась в от-
сутствии надежного и удобного в эксплуатации преобразова-
теля частоты. Положение изменилось в связи с разработкой
надежных, бесшумных, высокоэкономичных статических преоб-
разователей частоты на тиристорах, обладающих относитель-
но малыми габаритами и массой.
Тиристорные преобразователи частоты (ТИЧ) можно разде-
лить на два основных класса: с непосредственной связью и
с промежуточным звеном постоянного тока. Преимущества
преобразователей с непосредственной связью и естественной
коммутацией тока в вентилях: возможность обеспечения лю-
бого заданного соотношения между напряжением и частотой
на выходе, а также получения заданных напряжений при час-
тотах, близких к нулю; достаточно высокая перегрузочная
способность; возможность двухстороннего обмена мощности
между питающей сетью и нагрузкой без дополнительного ус-
ложнения схемы, что позволяет обеспечить работу двигателя
в режиме рекуперативного торможения и т.д. Преобразова-
69
тель обеспечивает диапазон регулирования скорости до
60:1. К недостаткам его следует отнести ограничение * верх-
него предела частот напряжения, который обычно не превы-
шает 40-45% частоты питающей сети.
На рис. 30, а приведена схема тиристорного преобразо-
вателя с непосредственной связью. Каждая из трех фаз
электродвигателя М получает питание от тиристорной мосто-
вой трехф&я№Й схемы. Группу из трех вентилей, имеющих
общий катод, называют выпрямительной, а группу с общим
анОдом - иНйер^орной.
На рис.'30,' б показаны кривые выходного напряжения при
условии, ^то угол регулирования вентилей а - 0. В течение
одного поЛупёриода выходного напряжения (0—п) пропускают
ток выпрямительные группы, а в течение другого полуперио-
да инверторный. Каждая полуволна выходного напряжения
состоит из отрезков кривых трехфазного напряжения питаю-
щей сети. Фазовая коммутация вентилей в одной группе,
т.е. их закрывание, осуществляется под действием напряже-
ния питающей сёти. Для Ограничения уравнительных токов и
улучшения формы выходного напряжения используются уравни-
3-50 Гц
Рис. 31. Структурная схема тирис-
торного преобразователя частоты с
промежуточным звеном постоянного
тока
Рис. 30. Схема тйрпсТорНоГо преобразова:
Теля с непосредственной связью
70
тельные реакторы L* Регулирование напряжения на , выходе
преобразователя достигается изменением угла- регулирования
вентилей а.
Преобразователи с промежуточным звеном постоянного то*
ка проще, чем преобразователи с непосредственной .связью»
проще й схема управления ими» Они позволяют плавно и в
широких пределах регулировать выхбдную частоту независимо
от частоты сети; выходное напряжение их сравнительно мало
искажено» Недостатком их является двойное преобразование
энергии, невозможность без усложнения схемы возвращения
энергии в сеть» Последнее обстоятельство затрудняет, в
частности, рекуперативное торможение двигателя! Таким об-
разом, выбор того или иного типа преобразователе частоты
зависит от режима работы механизма. <
Структурная схема инвертора с промежуточным звеном по-
стоянного тока представлена на рис» 31» Преобразователь
состоит из управляемого выпрямителя (ВУ), трехфазного ин-
вертора (И) и схемы управления, которая содержит блок уп-
равления выпрямителем (БУВ) и блок управления инвертором
(БУИ).
Переменное напряжение трехфазного тока выпрямляется и
подается на инвертор» Трехфазная схема управления инвер-
тором вырабатывает отпирающие импульсы опредёленной час-
тоты, сдвинутые по фазе на 120°» Эти импульсы поочередно
со сдвигом в 120° отпирают тиристоры инвертора, и на вы-
ходе появляется напряжение трехфазного Переменного тока,
форма которого в большей или меньшей степени приближается
к синусоиде» Частота выходного напряжения зависит от час-
тоты подачи отпирающих импульсов на тиристоры инвертора.
Частота может регулироваться как вверх, так и вниз от
частоты питающей сети. Раздельное регулирование выходного
напряжения и частоты позволяет легко получать требуемые
их соотношения, что обеспечивает высокую плавность и ши-
рокий диапазон регулирования скорости электродвигателя.
На рис. 32, а представлена принципиальная схема сило-
вой части ТПЧ с промежуточным звеном постоянного тока»
Тиристоры входят в состав управляемого выпрямителя UZ1,
на выходе которого включен сглаживающий фильтр £ф.
Инвертор UZ2 состоит из шести тиристоров VSl^S6t шес-
ти последовательно включенных с ними вентилей VD7*~
71
шести вентилей VD1—VD6, включенных тю трехфазной’ мостовой
скеме, и шести колебательных контуров L-C.
Преобразование постоянного напряжения в трехфазное пе-
ременное осуществляется коммутацией тиристоров VS1—VS6,
работающих в определенной последовательности. Время от-
крытого состояния каждого Тиристора соответствует
Рис. 32. Схема (а) и форма выходного напряжения (б) ТИЧ с звеним iiociokii-
ного тока < > * * .
120 эл.град. В каждый момент одновременно открыты два ти-
ристора. Запиранйе тиристоров осуществляется с помощью
коммутирующих контуров L—C за счет накопленной В них
энергии. Ток разряда контура L—С направлен встречно пря-
мому току, проходящему через открытый тиристор, и послед-
ний этим током запирается. Вентили VD7—VD12 служат для
отделения коммутирующих конденсаторов от нагрузки. Через
вентили VD1—VD6 реактивная энергия двигателя возвращается
конденсатору Со, чем поддерживается баланс мощности в ре-
активных элементах нагрузки.
Создана единая серия преобразователей частоты на осно-
ве автономных инвенторов мощностью > 10 мВт, частотой
2—130 Гц. Разрабатываются регулируемые электроприводы пе-
ременного тока мощностью до 10-12 МВт в тихоходном испол-
72
нении и до 30—40 МВт в быстроходном исполнении для приво-
да регулируемых компрессоров, врздуходувок, прокатных
станов.
Асинхронный вентильный каскад. Такие механизмы, как
дробилки, мельницы, вентиляторы, насосы, компрессоры,
конвейеры и т.п., в настоящее время работают без регули-
рования производительности. Этим главным образом объясня-
ется их низкий к.п.д. Наиболее экономично регулирование
производительности изменением скорости электродвигателя.
К тому же такой способ ч регулирования наилучшчм образом
поддается автоматизации. Наиболее перспективным для этих
установок является асинхронный вентильный каскад.
Сущность регулирования скорости в„каскадных схемах со-
стоит в том/ что в цепь ротора асинхронного электродвига-
теля вводится от постороннего источника добавочная э.д.с.
(£доб)> частота которой равна частоте ротора. Известно,
что вращающий момент двигателя
М = сФ12 cos (р2.
Ток ротора в данйбм случае
Л ~ (^2 ~~ En.Q§)/%,2у
где Е2, Z2 — соответственно э.д.с. и сопротивление цепи
ротора.
Таким образом, при . введении в цепь ротора Едоб,
встречно направленной по отношению к Е2, ток ротора и
вращающий момент двигателя уменьшаются. Под действием мо-
мента нагрузки скорость двигателя также уменьшается. При
этом увеличиваются скольжение, частота и напряжение рото-
ра. Процесс этот длится до тех пор, пока момент двигателя
не уравновесится статическим моментом нагрузки и не уста-
новится новая скорость двигателя. Когда добавочная э.д.с.
совпадает по фазе с э.д.с. ротора Е2, скорость, двигателя
возрастает.
В качестве источника дополнительной э.д.с. используют
тиристоры.
На рис. 33 показана принципиальная схема асинхронного
вентильного каскада. Управляемый выпрямитель UZ2 преобра-
'73
зует переменную э.д.с, ротора в постоянное напряжение.
Вентильный преобразователь VZ1, состоящий из управляемых
вентилей и трансформатора Т, является источником добавоч-
ной э.д.с. Вентили UZ1 работают в режиме зависимого ин-
вертора, преобразуя выпрямленный вентилями UZ2 ток ротора
в переменной с частотой сети.
Если напряжение выпрямителя UZ2 равно напряжению пре-
образователя UZ1, то ток в ней ротора и момент, развивае-
мый двигателем, будут равны нулю. При уменьшении выпрям-
Рис. 33. Схема (а) и механические характеристики (б) асинх-
ронного вентильного каскада
ленного напряжения UZ2 ток в цепи ротора возрастает, мо-
мент двигателя увеличивается и при заданном моменте на-
грузки скорость будет повышаться и достигает максимальной
величины при напряжении UZ2, равном нулю.
Напряжение преобразователя UZ1> так же как и выпрями-
тели UZ2, регулируется изменением угла отпирания. Угол
74
отпирания изменяется фазосдвигающим устройством, которое
управляется автоматическим регулятором» Таким образом,
момент двигателя можно изменять от 0 до М > а скорость
в двигательном режиме - от 0 до 95 % максимальной.
Механические характеристики вентильного асинхронного
каскада представлены на рис. 33, б. Как видно из рис. 33,
скорость двигателя регулируется изменением угла опереже-
ния зажигания Вентильного преобразователя UZ1 (см. рис.
33, а)» В начальный момент пуска (см. рис. 33, б) угол
р О, выпрямленный ток равен нулю и скольжение
S = 100 %. По мере увеличения угла р скорость растет.
К достоинствам асинхронного вентильного каскада отно-
сятся: определяющаяся бесступенчатым плавным регулирова-
нием высокая управляемость, высокая жесткость механичес-
ких характеристик, малая инерционность, отсутствие кон-
тактов в силовой цепи и Др. Вентильные каскады характери-
зуются наиболее высоким кл.д. из всех систем регулируе-
мого .Привода. Вследствие тою, что в каскадных системах
преобразуется только часть энергии, потребляемой приводом
(энергия скольжения).
Регулирование скорости асинхронного привода изменением
питаюгйгго напряжения осуществляется включением по вс гре л
но-параллельной схеме двух тйристоров в каждую фазу ста-
тора ЧрИС> 34, а). Изменяя угол регулирования тиристора
Рис. 34. Схема (д) и
механические характе-
ристики при регулирова-
нии скорости изменением
напряжения
а, МоЯсно плавно регулировать величину подводимого к ста-
тору напряжения. Поскольку вращающий момент асинхронного
двигателя согласно (35) пропорционален квадрату напряже-
ния фазы статора при неизменных прочих параметрах, то при
снижении напряжения уменьшается критический момент двига-
теля и увеличивается наклон механических характеристик
(рис. 34, 5). Практически данный метод регулирования на-
ходит некоторое применение лишь для двигателей с фазным
ротором, в замкнутых системах управления с тиристорным
регулятором напряжения.
Импульсный способ регулирования скорости заключается в
периодическом (импульсном) изменении параметра цепи АД
или питающей сети. Обычно изменяют подводимое к двигателю
напряжение или сопротивление реостата в цепи ротора или
статора. Величина средней скорости определяется соотноше-
нием между продолжительностью открытого Го и закрытого t3
состояния тиристорного ключа И5. Скважность г =
- ^3/(гз + Q = G/T’, где Т = Г3 + to - период цикла.
На рис. 35 представлены схемы импульсного регулирова-
ния асинхронного двигателя. Тиристорные ключи VS шунтиру-
ют резисторы, включенные в цепь ротора (а) и статора (б).
Рис. 35. Схемы (а, б) и механические характеристики (в) импульсного регули-
рования скорости асинхронного двигателя
При скважности у = 1 (ключ VS1 все время замкнут) дви-
гатель работает на естественной характеристике (рис. 35,
в), скорость wycT. При у = 0 (ключ разомкнут) - двигатель
работает на нижней искусственной характеристике. При про-
межуточном значении скважности 0 < у < 1 скорость будет
изменяться в пределах от wycT до wyCTP при моменте на-
грузки Ме. Для обеспечения жесткости механических харак-
теристик используются схемы импульсного регулирования с
обратными связями.
76
Контрольные вопросы
1. Каковы основные спосрбы регулирования скорости асинхронных двигателей?
2. Какой вид имеют механические характеристики асинхронного двигателя при
регулировании скорости изменением частоты и числа пар полюсов?
3. Какие основные функциональные элементы содержат тиристорный преобразо-
ватель частоты со звеном постоянного тока?
4. Как регулируется скорость двигателя в системе асинхронного вентильного
каскада?
5. В чем сушность импульсного способа регулирования скорости?
6. Какой из способов регулирования скорости нашел наибольшее применение в
приводе прокатных станов и по каким причинам?
1.11. Переходные процессы в электроприводе
Переходным считается процесс изменения во времена сос-
тояния динамической системы с момента приложения воздей-
ствия до начала установившегося процесса. Типичными для
электропривода являются электромеханический переходный
процесс, обусловленный изменением скорости: пуск, тормо-
жение, реверс, регулирование скорости, а также электро-
магнитный переходный процесс, обусловленный изменением
тока в обмотках. Характерный чертой переходных процессов
является возникновение динамических составляющих момента,
тока и т.п., что связано с большой дополнительной нагруз-
кой двигателя, ^его нагревом. Слишком быстрое протекание
переходных процессов может привести к недопустимым пере-
грузкам, толчкам, ударам, а слишком медленное - к сниже-
нию производительности.
У двигателей большинства механизмов металлургических
цехов (реверсивных прокатных станов, литейных кранов, за-
валочных машин, механизмов перемещения электродов дуговых
печей и др.) основную часть рабочего времени составляют
переходные (динамические) режимы, исследование и изучение
которых имеет большое практическое значение. Анализ пере-
ходных процессов позволяет: установить характер изменения
скорости привода, момента, тока; определить длительность
переходных процессов, потери в двигателе, его нагрев и
т.п. Лишь при учете характера протекания переходных про-
цессов можно разработать систему электропривода, обеспе-
чивающую максимальную производительность, экономичность,
безаварийную работу, долговечность.
В установившемся режиме движущий момент электродвига-
теля М преодолевает статический момент сопротивления Afc,
77
а в переходном режиме (при ускорении) еше и возникающий
при этом динамический момент (см. уравнение [7]). Закон
изменения момента при переходном процессе сравнительно
просто определяется для двигателей, обладающих линейной
механической характеристикой (рис. 36), где Мк - мо-
Рис. 36. Линейная механи-
ческая характеристика
менты соответственно статический и короткого замыкания;
wy ~ установившееся значение угловой скорости, соответ-
ствующее статическому моменту Мс.
Для анализа переходных процессов используется основное
уравнение движения [7].
Уравнение электромеханического равновесия системы:
U = киФ 4- /Я, (52)
где R - полное сопротивление’ цепи Якоря;
М = кФ! = Jdu/dt + Мс. (53)
Объединив выше приведенные уравнения и преобразив их,
получим:
=и + +
к2ф2 к2Ф2
или
w0 = и + Тм ~~ + (54)
где и^и/(кф) — угловая скорость холостого хода; 4wc-
= МсК/(к2Ф2) - перепад угловой скорости при нагрузке,
равной Мс (см. рис. 36).
78
TM « /Я/(^Ф2) ’ 7w0/A/K (55)
— электромеханическая постоянная времени, с.
Электромеханической постоянной времени называется вре-
мя, в течение которого привод с приведенным моментом
инерции / разгоняется вхолостую из неподвижного состояния
(инач»0) до угловой скорости идеального холостого хода
w0 при неизменном вращающем моменте Мк,
Как видно из (55) постоянная времени растет с увеличе-
нием сопротивления цепи якоря R и уменьшается с увеличе-
нием Мк. Она не зависит от нагрузки.
С увеличением растет время переходных процессов и,
как следствие, снижается производительность, а также эко-
номичность работы машины, что вызывает необходимость ее
снижения. Электромеханическая постоянная времени асинх-
ронного двигателя
Твд ж 55 7Uq/AZ|0 (56)
где jh, Мн - номинальные значения соответственно скольже-
ния и момента двигателя,
Решив уравнение (54) относительно угловой скорости w
или вращающего момента двигателя М, после необходимых
преобразований получим уравнения переходного процесса
привода:
0 « ис + (^ -г wc) exp (-//Тм), (57)
М « MQ + (М, + Мс) exp (-Г/Тм), (58)
где Mc, - статический момент и соответствующая ему ус-
тановившаяся угловая скорость; Л/п ы, момент двигателя
и угловая скорость в начале переходного процесса; t -
время от начала переходного процесса, с.
При пуске двигателя из неподвижного состояния (w1 = 0)
уравнения (57), (58) примут вид
W * wc [1 - exp С-Г/Тм)], . , (57 а)
М Л/с [1 - exp (-r/TM)J, (58 а)
79
Как видно из (57)—(58 а) разгон электропривода осуще-
ствляется по экспоненте. Теоретическое время разгона рав-
но бесконечности. Однако в практических расчетах считают,
что процесс разгона заканчивается при скорости ® 0,97w?.
Этой скорости привод достигает за время t = (3*5)ТМ7 На
рис. 37 представлены, графики изменения угловой скорости
Рис. 37. Графики переходных процессов
а (/) и момента M(t) при пуске из неподвижного состояния
в одну ступень.
Постоянная времени Тм может быть определена графичес-
ки, как отрезок, отсекаемый на линии о)0 касательной, про-
веденной из начальной точки кривой w(0 (рис. 37, а).
Длительность переходных про-
цессов. Поскольку периоды разгона и торможения
электропривода обычно снижают эффективность работы меха-
низма, их, как правило, стремятся сокращать. Особенно
важно такое сокращение для приводов механизмов, работаю-
щих с частыми пусками, остановками, реверсами (привод
прокатных станов, кранов и т.п.).
Продолжительность переходных процессов привода опреде-
ляется интегрированием уравнения движения электропривода
7. Разделив переменные, получим для периода разгона
dt = JduKM - Мс). (59)
Отсюда время разгона от до и2
о>2
(60)
80
Для решения этого уравнения необходимо знать зависи-
мости моментов двигателя и механизма от угловой скорости.
В простейшем случае, приняв J = const, получим
'i-2 = J (w2 - - Mc). (61)
Посредством несложных преобразований уравнения (57)
получим выражение для определения времени разгона при из-
менении статического момента от до М2:
А-г = гм 10 [(ЛА - мс)/(мг,- мс)]
или
*1-2 = Тм In [(wc - «^/(Wc - w2)].
При разбеге из неподвижного состояния, т.е. при =
= 0, время разгона определится из выражения
А-г = Тм In [wc/(wc - w2)J. (63)
Уравнения (62) и' (63) можно использовать, например,
для определения времени разгона двигателя на любой ступе-
ни пускового реостата, считая, что М2 = Л/пер; МС = Л/Н.
Поскольку Мх и М2 на всех ступенях одинаковы (изменя-
ется только Тм), то полное время пуска можно выразить
следующим образом:
t = (T’mi + ТМ2 + ... + Тме) 1п[(Л/, - МС)/(М2 - Мс)]. (64)
Как видно из формул (55), (60) и др., величина Тм, а
также длительность переходных процессов зависят от J -
момента инерции привода. Для повышения быстродействия
привода и увеличения в результате этого производительнос-
ти иногда вместо одного мощного электродвигателя устанав-
ливают два двигателя половинной мощности (с меньшим диа-
метром ротора). Используются также двигатели с удлиненным
81
ротором уменьшенного диаметра, с пониженным моментом
инерции. В приводе прокатных станов с этой целью исполь-
зуются двухъякорные и трехъякорные двигатели постоянного
тока, имеющие относительно небольшой диаметр якорей.
Особенности переходных процессов при ударном приложе-
нии нагрузки. Для привода прокатных станов характерным
является ударное приложение нагрузки в момент захвата ме-
талла валками клетй. Считаем, что до приложения нагрузки
двигатель работал с угловой скоростью шнач (рис. 38, а).
При скачкообразном увеличении момента от Мнач до Мс угло-
вая скорость снижается, вызывая вследствие уменьшения
Рис. 38. Графики переходных процессов при ударном при
ложении нагрузки
э.д.с. двигателя рост его тока и момента. На рис. 38, а
Дис — статический перепад скорости; Ди — максимальный
max
перепад, называемый динамическим падением скорости. Пере-
ходный процесс при ударном приложении нагрузки может быть
либо колебательным (рис. 38, б), либо апериодическим
(рис. 38, в). Колебания момента, тока и угловой скорости
в этом случае объясняются наличием индуктивности цепи
якоря двигателя £я. Ток двигателя и соответственно его
момент не могут из-за наличия индуктивности возрастать
82
мгновенно. Они отстают от угловой скорости w по фазе (см.
рис. 38, б).
На характер переходного процесса будут влиять одновре-
менно электромеханическая Тм (55) и электромагнитная Тэ
постоянные времени.
Электромагнитная постоянная времени
Тэ = LjR* с, (65)
где £я, Ля — соответственно индуктивность и активное qo-
противление цепи якоря.
Уравнение цепи якоря
U = iR + £я di/dt +е = iR + Дя di/dt + £ыФ, (66)
М = Мс + Jdu/dt. (67)
Разделив обе части равенства (67) на &Ф, получим выраже-
ние
I ~ 1С + [У/(АгФ)] dw/dt. (68)
Совместное решение уравнений (66) и (68) дает дифференци-
альное уравнение скорости двигателя
d^/dt1 + Т;1 du/dt + (w - wycT)/(7\ - Тм) = 0, (69)
где wycT — установившееся значение угловой скорости при
моменте нагрузки Мс (см. рис. 38). Решение линейного диф-
ференциального уравнения второго порядка (69), а следова-
тельно и характер переходного процесса зависят от соотно-
шения постоянных времени Тм и Т.г При Тм < 4ТЭ корни
уравнения (69) будут комплексными числами; изменения уг-
ловой скорости и тока приобретают характер затухающих ко-
лебаний, причем амплитуда колебаний возрастает с увеличе-
нием отношения Тэ/Тм. При изменении Тэ/Тм от 0 до 10 от-
носительный динамический перепад скорости ^wmax/^wc воз-
растает от 1 до 3,4. При Тм > 4ТЭ переходный процесс бу-
дет апериодическим (см. < рис. 38, в).
При введении в цепь якоря пускового реостата величина
83
Т3 значительно уменьшается и на переходный процесс влия-
ния не оказывает; колебательность процесса пропадает. Для
электроприводов прокатных станов динамический перепад
скорости Awmax должен быть ограничен во избежание резкого
изменения натяжения ленты, больших перегрузок, снижения
качества проката. После нескольких (обычно двух-трех) ко-
лебаний Момент и угловая скорость достигают установивших-
ся значений Л/с, ыУСТ (см. рис. 38, а). Считают, что пере-
ходный процесс заканчивается, когда амплитуда колебаний
Ды снизится до 5 % от Дис.
Электромагнитные переходные
процессы в системе Г — Д. Как отмечалось,
управление рабочим электродвигателем в системе Г—Д осуще-
ствляется путем воздействия на обмотку возбуждения гене-
ратора. Обмотки возбуждения* электрических машин обладают
электромагнитной инерцией. Поэтому при включении ток 1В в
обмотке нарастает не скачком, а плавно, по экспоненциаль-
ному закону:
'в = 4.Н [1 - ехР (-Г/Тэ)1. (70)
где 7ВН — ток возбуждения номинальный; T^ = LjRB —
электромагнитная постоянная времени, с; LB, Яв — соответ-
ственно индуктивность, Гн, и активное сопротивление, Ом,
обмотки возбуждения.
Кривые IB = f (t) представлены на рис. 39. В мощных
электроприводах системы Г-Д время нарастания тока Возбуж-
Рис. 39. Графики нарастания тока воз-
буждения без форсировки (7) и с фор-
сировкой (2)
дения до номинальной величины достигает нескольких се-
кунд. Для убыстрения (форсировки) переходных процессов на
время переходного процесса обмотку возбуждения генератора
84
включают на повышенное напряжение С/в п > С/вл1. Благодаря
этому ток возбуждения /в нарастает быстрее и время нарас-
тания тока возбуждения до номинальной величины ZBH со-
кращается от t до Г'. В момент t' приложенное к обмотке
напряжение снижают до номинальной величины С/вн. Отноше-
ние UBM/UBAi называется коэффициентом форсировки, кото-
рый составляет обычно 1,5*5-4.
Потери энергии при переходных
процессах и способы их уменьше-
ния. Энергия, потребляемая электродвигателем из сети в
период пуска, расходуется главным образом на преодоление
момента статического сопротивления, на создание запаса
кинетической энергии в движущихся частях электропривода и
на покрытие тепловых потерь в двигателе и в пусковых ре-
остатах.
Потери энергии при переходных процессах, увеличивая
общий расход электроэнергии, снижают экономичность работы
привода. Кроме того, они вызывают перегрев двигателя, что
влечет за собой снижение допустимой нагрузки (номинальной
мощности), увеличение массы, габаритов и стоимости.
При пуске вхолостую из неподвижного состояния до угло-
вой скорости ы0 потери энергии в цепи ротора двигателя
Mir = -М/2, (71)
т.е. , они равны запасу кинетической энергии, приобретенной
вращающимися частями двигателя. Величина этих потерь не
зависит от формы механической характеристики, числа пус-
ковых ступеней, величины сопротивления пускового реостата
и времени пуска.
Потери энергии и цепи статора при пуске определяются
из уравнения
ДЛП1 = (Л>*/2) RjR'» (72)
где Rx — активное сопротивление статора; R'2 — приведенное
активное сопротивление цепи ротора, включая реостат.
Из (72) следует, что при введении в цепь ротора пуско-
вого реостата уменьшаются потери, вызывающие нагрев об-
мотки статора. При сохранении неизменной общей величины
потерь перераспределяется тепло, выделяемое в обмотках и
85
в пусковом реостате. Доля потерь в реостате возрастает, а
нагрев обмоток уменьшается.
В короткозамкнутых двигателях все тепловые потери вы-
деляются в обмотках, в связи с чем эти двигатели по усло-
виям нагрева, особенно при частых пусках, находятся в бо-
лее тяжелых условиях по сравнению с двигателями постояно-
го то;са или с асинхронными двигателями с фазовым ротором.
Из (66) следует, что потери энергии при переходных
процессах могут быть снижены уменьшением момента энергии
привода, а также ступенчатым изменением напряжения, под-
водимого к двигателю постоянного тока в процессе пуска
(например в случае тиристорного привода).
Пример. Для асинхронного электродвигателя типа МТП713-10, Данные
которого приведены в табл. 2 и в примерах 2 и 3, а Маховой момент GD2 =
- 600 Н • м2; приведенный момент инерции механизма JM = 5 кг ♦ м2, угловая
скорость идеального холостого хода Wo = 50 град/с, требуется рассчитать
время пуска в четыре ступени (см. рис. 17. пример 3), если Л/с = 0,5Л/н, на-
чальная угловая скорость = 0.
Решение. Приведенный момент энергии двигателя определяем из урав-
нения (5):
/д = GD2/4 = 60/4 - 15 кг • м2.
По формуле (62) определяем электромеханические постоянные времени для
всех ступеней. Определение видно из рис. 17. Суммарный приведенный мо-
мент инерции:
J = /д + JM = 15 + 5 = 20 кг • м2;
ТМ1\= /W05h/^h s 20 * 50 * 0,32/2607 * 0,123 с:
tmz = /wo5h7Mh = 20 • 50 * 0,155/2607 « 0,0595 с:
ГМз = 20 • 50 • 0,08/2607 = 0,0308 с;
ТМ4 = 20 • 50 • 0,04/2607 = 0,0154 с;
Тме = 20 • 50 • 0,02/2607 - 0,0077 с.
Время разгона двигателя на всех ступенях определим из (64) с учетом
того, что Мх = 5920 Н • м; М2 = 3380 Н • м; Мс = 0.5 • 2607 = 1300 II • м;
» = (ГМ1 + ТМ2 + Гмз + ТМ4 + Тме) In ((М, - МС))/(М2 - Мс)\ =
« (0,123 + 0,0595 + 0,0308 + 0,0154 + 0,0077) In [(5920 -
- 1300)/(3380 - 1300)] = 0,185 с.
86
Контрольные вопросы
1. Чем объясняются перегрузки при переходных процессах?
2. Что такое электромеханическая постоянная времени? От чего зависит ее
величина?
3. Зависит ли Тм привода от нагрузки?
4. Различаются ли уравнения переходного процесса при разгоне привода от
начальной скорости Wc и из неподвижного состояния?
5. Как графически определить постоянную времени Тм?
6. Зависит ли Длительность переходного процесса от момента инерции?
7. Как можно наиболее рационально снизить длительность переходного про-
цесса? Какие специальнее двигатели изготовляются с этой целью? .
8. Что такое статическое и динамическое падение скорости?
9. В силу каких причин переходный процесс может быть колебательным?
10. От чего зависит электромагнитная постоянная времени?
11. Изменится ли колебательность переходного процесса при введении в цепь
якоря реостата?
12. Когда переходный процесс считают законченным?
13. Каким образом и с какой целью осуществляют форсировку переходных про-
цессов в цепи возбуждения?
14. Зависят ли общие потери при пуске от сопротивления реостата в цепи
якоря?
15. Какую роль играет пусковой реостат с /очки зрения потерь и нагрева
двигателя?
16. Как можно снизить потери энергии при пуске двигателя?
1.12. Нагрузочные диаграммы. Нагрев электродвигателей.
Номинальные режимы работы электропривода
Большое значение имеет правильный выбор мощности
электродвигателей. Для выбора мощности двигателя задается
график изменения скорости производственного механизма
(рис. 40, а) — тахограмма ы = /(/) и нагрузочная диаг-
рамма производственного механизма, представляющая собой
зависимость приведенного к валу двигателя статического
момента Мс или мощности Рс от времени. Однако при пере-
ходных режимах, когда скорость привода изменяется, на-
грузка на валу двигателя будет отличаться от статической
на величину ее динамической составляющей. Динамическая
составляющая нагрузки [см. формулу (5)] зависит от момен-
та инерции движущихся частей системы, в том числе и от
момента инерции двигателя, который пока не известен. В
связи с этим в тех случаях, когда динамические режимы
привода играют заметную роль, задача решается в два эта-
па: 1) предварительный выбор двигателя; 2). проверка дви-
гателя по перегрузочной способности и по нагреву.
87
Предварительный выбор мощности и угловой скорости дви-
гателя проводится на основании нагрузочных диаграмм рабо-
чей мащины или механизма, а затем, с учетом момента инер-
ции предварительно выбранного двигателя, строят нагрузоч-
ные диаграммы привода.
Нагрузочная диаграмма двигателя (привода) представляет
собой зависимость вращающего момента, тока или мощности
Рис. 4Q. Нагрузочные
диаграммы механизма и
привода
Рис. 41. Графики нагрева и охлажде-
ния двигателя
двигателя от времени М, Р, I = f (f). Она учитывает как
статические, так и динамические нагрузки, преодолеваемые
электроприводам в течение цикла работы. На основании на-
грузочной диаграммы привода двигатель проверяется по до-
пустимому нагреву и перегрузке и в случае неудовлетвори-
тельных результатов проверки выбирается Другой двигатель
большей мощности. На рис. 40 представлены нагрузочные ди-
аграммы производственного механизма (d), электропривода
(г), а также диаграмма динамических моментов (в\
88
При пуске двигателя М = Мс + Л/д (рис. 40, г) участок
ab. При установившемся движении М = Мс, поэтому нагрузоч-
ные диаграммы двигателя и механизма совпадают (участок
cd). При электрическом торможении (участок ef) М-
= МС — МЛ — вращающий момент двигателя меньше момента
статического.
Нагрев и охлаждение двигателей. Процесс электромехани-
ческого преобразования энергии всегда сопровождается по-
терей части ее в самой машине. Преобразуясь в тепловую
энергию, эти потери вызывают нагрев электрической машины
или даже ее перегрев, что недопустимо. Уже при сравни-
тельно небольшом превышении допустимой температуры проис-
ходит интенсивное старение изоляции и вследствие этого
резкое сокращение срока эксплуатации машины. Ограничение
по нагреву двигателей определяется теплостойкостью из
изоляции. В электромашиностроении используются изоляцион-
ные материалы нескольких классов, каждый из которых имеет
определённую допустимую температуру нагрева:
Класс изоляции . .........А В F Н
Допустимая температура, °C . . . 105 130 155 180
Наиболее распространенной для двигателей краново-
металлургических серий является изоляция классов F и Н. t
Для удобства при анализе используют не температуру двига-
теля, °C, а превышение температуры двигателя Гдв над
стандартной температурой окружающей среды foc (перегрев)
~ ^дв ^о.с* (73)
Стандартная температура окружающей среды принимается рав-
ной 40 °C. Двигатель условно считают однородным телом,
обладающим теплоемкостью С, Дж/град. Коэффициент теплоот-
дачи Л, Дж/(с • Град) определяется конструкцией машины и
способом вентиляции. Процесс нагревания двигателя описы-
вается; линейным; неоднородным дифференциальным уравнением
первого порядка. ^Решение этого уравнения имеет вид
т (тнвц “*Густ) ехр (“//Уц)' +' Ту р-р, (74)
т.е. т при нагреве и охлаждении изменяется по экспоненци-
альному закону. Здесь тнач, туст - соответственно началь-
89
ное и конечное (установившееся) значение перегрева;
Тп = С/ А — тепловая постоянная времени, представляющая
собой время, в течение которого двигатель нагрелся бы до
туст при отсутствии теплоотдачи в окружающую среду. Вели-
чина Тн зависит от коэффициента теплоотдачи Л, который
определяется конструкцией двигателя и способом его венти-
ляции. На рис. 41 показаны кривые нагрева двигателя.
Здесь Тн — постоянная времени нагрева вращающегося (рабо-
тающего) двигателя, Тс — постоянная времени охлаждения
неподвижного (отключенного) двигателя. Температура нагре-
ва двигателя зависит также от температуры окружающей сре-
ды. При температуре окружающей атмосферы 40 °C нагрузка
двигателя должна быть уменьшена. Помимо температуры окру-
жающей среды на процесс нагрева двигателя большое влияние
оказывает интенсивность теплоотдачи его поверхности, ко-
торая зависит х от скорости потока охлаждающего воздуха и
способа охлаждения. Поэтому у двигателя с самовентиляцией
при снижении скорости теплоотдача ухудшается, что- требует
снижения нагрузки. Например, при длительной работе такого
двигателя со скоростью, равной 60 % от номинальной, мощ-
ность должна быть снижена вдвое. Чем выше класс изоляции
двигателя и чем интенсивнее его охлаждение, тёй большую
нагрузку (мощность) он сможет развить при заданных масс-
габаритных показателях.
Номинальные режимы работы электроприводов. Возможные
режимы работы электроприводов отличаются огромным много-
образием по длительности, характеру изменения нагрузки,
ее величине, условиям охлаждения и т.п. Характер нагрева-
ния двигателя позволяет выделить характерные режимы рабо-
ты электроприводов. На основании анализа реальных режимов
выделены специальные номинальные режимы, на которые рас-
считаны серийные двигатели. Действующим стандартом пре-
дусматриваются восемь номинальных режимов, которые в со-
ответствии с международной классификацией имеют условные
обозначения 51—58. Ниже приводится краткая характеристика
этих номинальных режимов.
Продолжительный номинальный
(51) — режим работы электрической машины - при неизменной
нагрузке, продолжающейся до тех пор, пока превышения тем-
пературы всех частей электрической машины достигнут уста-
новившихся значений (рис. 42, а). Длительность рабочего
90
периода fp>3Tlt; длительность паузы роли не играет. В
длительном режиме работают двигатели некоторых механизмов
прокатных станов, насосов, воздуходувок, компрессоров,
конвейеров и т.п.
Кратковременный номинальный
(S2) - режим, при котором период неизменной номинальной
нагрузки чередуется с периодом отключения машины; при
этом периоды нагрузки не настолько длительны, чтобы пре-
вышения температуры машины могли достигнуть установивших-
ся значений а периоды остановки настолько
длительны (гр > ЗГ0), что все части ее охлаждаются до
температуры окружающей среды, рис. 42, б. Для кратковре-
менного режима работы рекомендуется tp — продолжитель-
ность рабочего периода 15, 30, 60, 90 мин. В кратковре-
менном режиме работают электродвигатели подъема и поворо-
та свода печи, приводов заслонки, задвижек, механизма на-
клона печей и т*п.
Повторно-кратковременный но-
минальный режим (53) — режим, при котором
кратковременные периоды неизменной номинальной нагрузки
(рабочие периоды) чередуются с периодами отключения маши-
ны (паузами), причем как рабочие периоды, так и паузы не
настолько длительны, чтобы превышения температуры частей
машины могли достигнуть установившихся значений. При по-
вторно-кратковременном режиме продолжительность цикла не
превышает 10 мин. Этот режим характеризуется относитель-
ной продолжительностью включения, %,
ПВ = 100(„/(tp + (0) = lOOZp/Тц,
(75)
91
или е = tp/T^ = ПВ/100,
(75 а)
где Гр, Го, Тц - соответственно длительности работы, пау-
зы и цикла. Нормируемые значения продолжительности вклю-
чения составляют 15; 25; 40 и 60 % или соответственно
е = 0,15; 0,25; 0,4; 0,6. Повторно-кратковременный режим
характеризуется условиями tp«ЗТН; Го«ЗТ0, т.е. за
время одного цикла перегрев не достигает туст, а за время
паузы не становится равным нулю. При многократном йовто-
рении циклов процесс нагрева устанавливается, т.е. темпе-
ратура перегрева в начале и в конце одинаковая и ее коле-
бания происходят около среднего значения тср (рис. 42,
г). В повторно-кратковременном режиме работают электро-
приводы механизмов прокатных станов, кранов, подъемников,
некоторых вспомогательных механизмов прокатных цехов и
т.п.
Номинальные режимы 51, 52, 53 являются в настоящее
время основными, используемыми в отечественном электрома-
шиностроении. Укажем режимы 54*58:
54 - повторно-кратковременный
номинальный с частыми пусками (пусковые потери
существенно влияют на превышение температуры машины);
55 — п о в т о р н о - к р а т к о в р е м е й н ы й
номинальный с частыми пусками и электрическим
торможением;
56 — перемежающийся номинальный
(после периода работы двигатель не отключается, а продол-
жает работать вхолостую);
57 — перемежающийся номинальный
с частыми реверсами;
58 — перемежающийся номинальный
с двумя или более скоростями.
1.13. Выбор мощности и типа электродвигателя
Выбор двигателя — главного элемента электропривода -
наиболее ответственная задача при проектировании электро-
оборудования металлургических агрегатов и установок.
Основным требованием к электродвигателю является на-
дежность работы при минимуме капитальных затрат и эксп-
92
луатационных расходов. Это требование может быть удовлет-
ворено лишь при выборе двигателя соответствующей мощнос-
ти. Применение двигателей завышенной мощности влечет не-
оправданное увеличение капитальных вложений, снижение
к.п.д., а для асинхронных двигателей — снижение коэффици-
ента мощности. Применение двигателей недостаточной мощ-
ности может привести к нарушению нормальной работы меха-
низма, снижению производительности машин, сокращению сро-
ка службы двигателя и даже возникновению аварийной ситуа-
ции.
Электрические и механические параметры электродвигате-
лей (номинальная мощность и напряжение, частота вращения,
относительная продолжительность рабочего периода, пуско-
вой и максимальный моменты, пределы регулирования скорос-
ти и т.п.) должны соответствовать параметрам приводимых
ими механизмов во всех режимах работы в данной установке.
. При выборе электродвигателя учитываются многие его
свойства, особенности, параметры: род токов, номинальное
напряжение, номинальная мощность, частота вращения, спо-
соб защиты от воздействия окружающей среды, регулировоч-
ные свойства, особенности пуска и торможения, вид механи-
ческих характеристик при данной системе электропривода,
конструктивные особенности и f.n. Необходимые параметры,
свойства, конструктивные особенности выбираются на осно-
вании требований технологии, условий работы в данном це-
хе, параметров питающей сети. Как уже отмечалось, при вы-
боре рода тока, типа электродвигателя следует стремиться
прежде всего использовать асинхронные электродвигатели с
короткозамкнутым ротором, как наиболее надежные, простые
по устройству, экономичные, требующие минимального холос-
того хода, а также асинхронные двигатели. Использование
электропривода постоянного тока допустимо лишь в том слу-
чае, когда указанные электродвигатели не удовлетворяют
требованиям технологии по условиям регулирования скорос-
ти, плавности пуска и торможения, а также требованию ми-
нимума приведенных затрат. Это же относится и к асинхрон-
ным электродвигателям с кольцами.
Выбор по каталогу мощности двигателя сопряжен с опре-
делением расчетных мощности, момента двигателя, темпера-
тура изоляции которого при работе в заданном режиме будет
близка к допустимой, но не превысит ее.
93
При переменном характере нагрузки электропривода вто-
рым критерием выбора мощности двигателя (кроме нагрева)
является обеспечение преодоления возможных кратковремен-
ных перегрузок пикового характера. С этой целью выбранный
по условиям нагрева двигатель должен быть проверен по пе-
регрузочной способности.
В большинстве случаев мощность электродвигателя выби-
рают по допустимому нагреву, определяемому классом изоля-
ции, и затем проверяют на перегрузочную способность и по
условиям пуска. При проверке на перегрузочную способность
должны выполняться условия:
асинхронных двигателей -
м ; (76 а)
н max
двигателей постоянного тока —
для
ХМН >
для
где Л/н, ZH — номинальные значения соответственно момента
и тока двигателя; М , I — максимальные значения
п max н max
момента и тока из графика нагрузки; X, X/ — соответствен-
но допустимые коэффициенты перегрузки по моменту и току;
для двигателя постоянного тока X/ = 2*3.
Для обеспечения надежного пуска необходимо, чтобы
минимальный момент двигателя Л/ при пуске превышал
n min
момент статического сопротивления: М . = (1,1*1,15)Л/С.
n min
У большинства механизмов металлургических цехов (про-
катных станов, кранов и т.п.) основную долю приведенного
момента инерции привода составляет момент самого электро-
двигателя. Поэтому предварительно выбирают мощность дви-
гателя на основании нагрузочной диаграммы производствен-
ного механизма без учета динамического момента. Двигатель
выбирается по каталогу ориентировочно по средней мощности
с некоторым (порядка 20%) запасом. С учетом данных этого
конкретного двигателя строится нагрузочная диаграмма и
проверяется его тепловая нагрузка одним из рассмотренных
ниже методов.
94
Электрические параметры электродвигателей: род тока,
напряжение, частота^ вращения, пределы регулирования час-
тоты вращения и т.п. должны соответствовать параметрам
приводимых ими механизмов и питающей сети.
Выбор мощности при длительном режиме. При неизменной
или маломеняющейся длительной нагрузке мощность двигателя
выбирают непосредственно по каталогу, в соответствии с
мощностью из нагрузочной диаграммы. Проверки двигателя по
нагреву или перегрузке здесь не требуется. При тяжелых
условиях пуска двигатель проверяют на достаточность пус-
кового момента. Если в каталоге двигателя такой мощности
нет, то выбирают ближайший двигатель большей мощности,
соблюдая условие Ри £ Рс. В случае продолжительной работы
с переменной нагрузкой мощность двигателя рассчитывают
методом средних потерь или методом эквивалентных величин
(эквивалентного тока, момента, мощности). Как отмечалось,
выбор мощности двигателя производится в несколько этапов.
Предварительно выбирают мощность двигателя по нагрузочной
диаграмме производственного механизма без учета динами-
ческих моментов. Мощность двигателя принимается на
15—20% больше средней мощности нагрузочного графика:
р = (i.is+i.aXPiG + p2t2 + ... + pntn)/tu,
где 1, 2,..., п - участки нагрузочного графика. Далее
строится нагрузочная диаграмма и по ней определяются эк-
вивалентные ток, момент, мощность.
Для привода механизмов, не требующих регулирования
частоты вращения, независимо от их мощности рекомендуется
применять электродвигатели синхронные или асинхронные с
короткозамкнутым ротором. Для привода механизмов, имеющих
тяжелые условия пуска либо требующих регулирования ско-
рости, следует применять электродвигатели с наиболее
простыми и экономичными методами пуска или регулирования
скорости, возможными в данной установке.
Электродвигатели постоянного тока допускается приме-
нять только в тех случаях, когда электродвигатели пере-
менного тока не обеспечивают требуемых характеристик ме-
ханизма либо неэкономичны.
Метод эквивалентного ' тока основан
на том, что фактический изменяющийся ток двигателя заме-
95
няется в расчетах эквивалентным, неизменным по величине
током /э, который вызывает такой же нагрев двигателя, как
и фактический ток за такой же период. При ступенчатом
графике нагрузки эквивалентный ток определяется из выра-
жения
/ ^14 + ^2*2 + ••• + ^п1п ' / Е
j / --------------------------- = / -«----------- , (77)
’ j, + i2 + ... + t„ J n
S rK
i
где IK и tK - ток и время данного участка (ступени) гра-
фика (см. например, рис. 42, в).
Полученный по формуле (77) эквивалентный ток /э срав-
нивается с номинальным током 1п предварительно выбранного
двигателя. В случае удачного предварительного выбора дви-
гателя должно выполняться условие /и > 13. По эквивален-
тному току можно найти эквивалентную мощность (кВт) дви-
гателя:
для трехфазных двигателей переменного тока
Рэ = 0,001 У 3 UHI3 (cos (р) т/д, (78 а)
для двигателей постоянного тока
Рэ = 0,00Шн/э17д. (78 б)
При выборе мощности двигателя по каталогу необходи-
мо выполнить условие Рн > Рэ.
Поскольку при Ф = const между моментом и током двига-
теля постоянного тока существует прямая зависимость, то
Для двигателей, работающих с постоянным магнитным пото-
ком, метод эквивалентного тока может быть заменен методом
эквивалентного момента. Преимуществом этого метода явля-
ется то, что при выборе мощности двигателя чаще задается
график момента или мощности, чем график тока. Величина
эквивалентного момента определяется из формулы, аналогич-
ной (77)
96
/п
S М*<к
-1---
п
S t к
(79)
Для двигателей с жесткой механической характеристикой,
пренебрегая изменением скорости, можно пользоваться рас-
четным или экспериментальным графиком мощности. Эквивале-
нтную мощность двигателя можно определить по формуле,
аналогичной формуле эквивалентного момента:
1 + ?212 + ••• + ?п{ п
'i + t2 + '3 +••• + bt
Двигатель должен быть проверен
ке в соответствии с (76).
(80)
по допустимой перегруз-
Выбор мощности при повторно-
кратковременном режиме. В целях улуч-
шения технико-экономических показателей электропривода
для повторно-кратковременного режима работы выпускают
специальную серию двигателей, снабженных, кроме общих
данных, указанием, для какой продолжительности включения
они предназначены. При многоступенчатом графике нагрузки,
изображенном на рис. 42, в, вначале определяют эквивале-
нтный момент за рабочий период:
M\tx + М^2 +
'1 + '2 + 'з
(81)
При остановке, а также в период пуска или торможения
двигателя условия его охлаждения значительно ухудшаются.
Это учитывается введением коэффициента ухудшения охлажде-
ния /3 в формулу (80). Для паузы принимают р ~ 0,5, а при
пуске и торможении р ~ 0,75. Например, если принять, что
fx, G» G, *о “ соответственно время пуска, работы на
номинальной скорости, торможения и паузы двигателя, то
формула эквивалентного момента примет вид:
97
/ Afftl + ^2*2 + '*3^3
= 0,75* i + t2 + 0,7^ з + O,5ro ’ (82^
Время паузы Го в (79) и (80) не включают, поскольку
оно учитывается величиной ПВ в формуле (75).
Если подсчитанная по формуле (75) фактическая ПВФ от-
личается от стандартной, то необходимо пересчитать экви-
валентную мощность Рэ ”а стандартное значение ПВ. При пе-
ресчете исходят из того, что величина Рэ при переходе от
одного значения ПВ к другому должна остаться неизменной.
Пересчет мощности двигателя может быть проведен на осно-
вании равенства
Р|ПВФ = Р£ПВ, (83)
где Рн * Р3 ПВФ/ПВ - (84)
номинальная мощность выбранного двигателя при данном
стандартном значении ПВ.
Приведенным соотношением пользуются, если фактическая
продолжительность включения ПВФ находится в пределах от
15 до 60 %. При ПВФ < 10 % режим работы считается кратко-
временным; если ПВФ > 60 %, то режим работы считается
длительным.
Двигатель, выбранный по условиям нагрева при повторно-
кратковременном режиме работы, необходимо также проверить
по условиям перегрузки и пуска в соответствии с (76).
Пример. Рассчитать мощность и выбрать тип асинхронного двигателя с
фазным ротором металлургической серии. График изменения приведенного к валу
двигателя момента (нагрузочная диаграмма) представлен на рис. 42, в. Номи-
нальная частота вращения л„ = 700 об/мин; напряжение сети 380 В; »
« 1600 Н’м; М2 • 1200 Н*м; М3 = 1000 Н*м; =t2 =t3 = 100 с; tQ = 240 с.
Р е ш е н и е. По нагрузочной диаграмме и формуле (81) определяем экви-
валентный момент
м _ / 1600* • юр +_120Q2_« 1,00 + 10002 * .100 _ pg0 „ .
МЭ “ / 100 + 100 + 100 L’™ Н м-
По формуле (75) в соответствии с графиком (см. рис. 42, в) определяем
фактическую продолжительность включения:
ПВа = ----10-0.+-1QQ + .1,0Q- . |qq % = 55 %
1ШФ юо + 100 + 100 + 240 -
98
Эквивалентная мощность двигателя
Рэ = M3WH ’ Ю-з = 1290 • 73,3 • 10-3 = 94 5 кВт,
где номинальная угловая скорость
WH = «н/^55 = 700/9,55 s 73,3 град/с.
По формуле (84) определяем мощность двигателя при ближайшей стандартной
продолжительности включения 60%:
Рн = 94,5 V 55 / 60 = 90,4 кВт.
По каталогу выбираем двигатель типа МТН712—10 мощностью 100 кВт, ПВ =
= 60 %. Проверка двигателей на перегрузочную способность по формуле (76)
показала, что двигатель для графика (см. рис. 42, в) подходит, поскольку
максимальный момент по графику Мтах = Л/х = 1600 Н • м значительно меньше
максимального момента, развиваемого двигателя (Л/к = 4500 Н • м).
Контрольные вопросы
1. Чем отличаются нагрузочные диаграммы механизма и электропривода?
2. В каком случае нагрузочные диаграммы привода и механизма совпадают?
3. Какую температуру допускает изоляция класса F и класса //?
4. Что дает повышение класса изоляции?
5. Что такое тепловая постоянная времени, от чего зависит ее величина?
6. Каково принятое значение температуры окружающей среды?
7. Что дает улучшение условий охлаждения двигателя?
8. Какие три номинальных режима работы электропривода являются наиболее
распространенными?
9. При каком режиме температура достигает установившееся значение за один
цикл работы?
10. Какой номинальный режим соответствует 15-мин циклу?
И. Какие номинальные режимы соответствуют ПВ-10, 55 и 80 %?
12. Каковы стандартные значения ПВ?
13. При каком (25 или 60 %) значении ПВ двигатель может развить большую
номинальную мощность?
14. Каковы неблагоприятные последствия завышения мощности и занижения мощ-
ности двигателя?
15. Что ограничивает номинальную мощность двигателя?
16. Каким образом проверяется двигатель на перегрузочную способность?
17. В чем сущность выбора двигателя методом эквивалентного тока и момента?
18. Как определяется номинальная мощность двигателя, соответствующая стан-
дартному значению ПВ?
19. Какой двигатель следует стремиться использовать в первую очередь: по-
стоянного тока, синхронный или асинхронный?
99
Глава 2. АППАРАТУРА УПРАВЛЕНИЯ, ЗАЩИТЫ.
ЭЛЕКТРООБОРУДОВАНИЕ КРАНОВ
2.1. Релейно-контакторная аппаратура
В современных автоматизированных электроустановках ме-
таллургических цехов электрическая аппаратура выполняет
самые разные функции, связанные с управлением, контролем,
защитой и т.д. В частности, в электроприводах с помощью
аппаратуры выполняются такие функции, как пуск, торможе-
ние, реверсирование, регулирование скорости, автоматичес-
кая защита; контроль, автоматическое управление и т.п.
Электрическая аппаратура может быть классифицирована:
по роду тока, напряжению, принципу действия — электромаг-
нитная, электронная, полупроводниковая и т.д.; по конст-
руктивному выполнению и в отношении защиты от окружающей
среды; по назначению — аппаратура управления, защиты,
‘сигнализации, контроля и т.п.; по способу управления —
ручного управления, дистанционного, автоматического, те-
лемеханического управления; кроме того, аппаратуру управ-
ления подразделяют на релейно-контакторную и бесконтак-
тную.
В электрической аппаратуре предъявляется целый ряд
требований, основными из которых являются: надежность,
большой срок службы; малые габариты и масса, простота
ухода и ремонта. Аппаратура должна обеспечивать требуемую
точность, быстродействие, обладать необходимой чувстви-
тельностью.
Контакт (деталь) является основным элементом ре-
лейно-контакторной аппаратуры. Материалы для изготовления
контактов: медь, бронза, латунь, а в особо ответственных
случаях - серебро. Все большее применение находят контак-
ты из металлокерамики, обладающие повышенной надежностью,
долговечностью, износостойкостью.
При размыкании контактов под действием э.д.с., самоин-
дукции возникает электрическая дуга, вызывающая их подго-
рание. Для защиты контактов и сокращения времени действия
дуги применяют различные дугогасительные приспособления и
устройства. Контакты часто размещают в асбоцементной ка-
мере, которая охлаждает дугу и препятствует ее распрост-
ранению на соседние элементы. В стенках асбоцементной ка-
100
меры иногда укрепляют металлическую
решетку, состоящую из ряда изолированных одна от
другой луженых стальных пластин. При размыкании контактов
возникшая дуга индуктирует в пластинах вихревые токи. Со-
зданный этими токами магнитный поток смешает дугу в сто-
рону пластин, затягивает внутрь решетки, где дуга рассе-
кается на мелкие части, быстро охлаждается и гаснет. Для
гашения дуги широко применяют также дугогаси-
тельные катушки, которые включают последова-
тельно в цепь силового контакта. При размыкании контакта
дуга подвергается воздействию магнитного поля катушки.
Возникшая при этом сила взаимодействия растягивает дугу
на расходящиеся "рога" контактов. Широко используется
также гашение дуги в минеральном масле, струей сжатого
воздуха, с использованием элегаза, вакуума и т.п.
Аппаратура ручного (непосредственного) управления ха-
рактеризуется тем, что переключение контактов осуществля-
ется путем непосредственного воздействия на контактную
систему с помощью рукоятки или рычага. К этой группе от-
носятся простейшие аппараты: рубильники, пакетные выклю-
чатели, универсальные переключатели, командо-контрольные
(командоаппараты), путевые переключатели, пусковые кнопки
и т.д.
Контакты конечного выключате-
л я переключаются с помощью специального рычага движущи-
мися элементами механизма в крайних (предельных) их поло-
жениях.
Путевые переключатели располагаются
по пути следования механизма; контакты его переключаются
движущимися механизмами.
Командоконтроллер служит для ручного
дистанционного управления механизмом, например, механиз-
мами кранов, прокатных станов и т.п. Наиболее широко при-
меняются кулачковые командоконтроллеры. Поворотом ручки
командоконтроллера оператор переключает его контакты с
помощью кулачков, насаженных на валик.
На рис. 43 изображена схема (развертка) командоконт-
роллера, где I—IV — его контакты. Вертикальные штриховые
линии обозначают фиксированные положения рукоятки коман-
доконтроллера. Зачерненные окружности на этих линиях по-
казывают, что контакт непосредственно над зачерненной
101
точкой в данном положении ручки командоконтроллера замк-
нут. Например, рассматриваемый командоконтроллер имеет 5
положений: нулевое и по два рабочих положения (7, 2) в
каждую сторону ("вперед", "назад"). Как видно из схемы, в
нулевом положении рукоятки включены катушка КМ1 и лампоч-
Рис. 43. Схема (развертка) командо
контроллера
Рис. 44. Схема контак-
тора
ка ££. Катушка КМ2 включается при установке ручки в пер-
вое и второе положения (вперед и назад); катушка КМЗ
включается во втором положении ручки (вперед).
Контактор является основным элементом релейно-
контакторной аппаратуры. Его контакты переключаются с по-
мощью специального электромагнита. Контроллер состоит из
электромагнитной системы, главных силовых контактов, иск-
рогасительного устройства и маломощных блокировочных кон-
тактов (рис. 44, а). Главные контакты служат для коммута-
ции силовых цепей, а блок-контакты для коммутации цепей
управления. При нажатии кнопки "пуск" катушка контактора
2 возбуждается и сердечник 5 электромагнитной системы
притягивает подвижной якорь 3. При этом замкнутся главные
контакты 7, 4 и маломощные блок-контакты 6. В данной схе-
ме блок-контакт 6 шунтирует кнопку "пуск". При нажатии
102
апки "стоп" разрывается цепь катушки 2, и якорь 3 под
действием собственной массы и пружины 8 отпадает. При
этом размыкаются контакты 7, 4 силовой цепи и блок-
контакт 6; блок-контакт 7 замыкается.
На рис. 44, б приведены условные обозначения основных
элементов контактора: катушки (2); замыкающих контактов
(7, 6) и размыкающих контактов (7). Замыкающие и размы-
кающие контакты различаются тем, что первые при отключен-
ной катушке контроллера разомкнуты, а вторые - замкнуты.
Контакторы классифицируют по роду тока катушки — пере-
менного и постоянного и по числу полюсов (одно-, двух-,
трехполюсные и т.д.). Контактер с катушкой постоянного
тока более надежен, долговечен; он допускает большую час-
тоту включения, что объясняется меньшим пусковым броском
тока, отсутствием гудения и дребезжания.
Реле - элемент автоматизированного устройства, . осу-
ществляющий скачкообразное включение или выключение
электрических цепей под действием входных сигналов (им-
пульсов). По назначению они делятся на реле управления,
защиты, контроля, сигнализации, блокировочные и др. По
выполняемым функциям их делят на реле тока, напряжения,
промежуточные, скорости, времени, частоты, температуры и
др. По принципу действия различают реле электромагнитные,
тепловые, двигательные, электронные и т.п. Реле характе-
ризуются разными номинальными параметрами: током, напря-
жением, частотой, а также параметром срабатывания (устав-
кой) — величиной тока, напряжения, температуры, скорости
или другой физической величины, при которой реле переклю-
чается. Реле могут быть контактными и бескон!актными.
Электромагнитные реле получили наиболее широкое рас-
пространение вследствие простоты конструкции, небольших
размеров и малой стоимости. Они разделяются на реле пос-
тоянного и переменного тока. Принцип действия электромаг-
нитного реле основан на притяжении стального якоря 3
(рис. 45, а) к сердечнику 2; по обмотке катушки 7 реле
пропускается управляющий ток 1У> в результате замыкаются
контакты 4 в цепи управления.
Характеристикой реле является зависимость выходной ве-
личины Y от входной X (рис. 45, б). Коэффициент возврата
К3 = Хй (Хср), где ЛГСР, Хц — значения входной величины,
103
соответствующие срабатыванию (включению) реле и его от-
пусканию (отключению).
Магнитоконтактное реле на гер-
конах. Широкое применение в схемах управления элект-
роприводами и электротермическими установками металлурги-
ческих цехов находят современные электромагнитные реле с
магнитоуправляемыми контактами. Таки£ реле не требуют
обслуживания, а срок службы их лежит в пределах периода
морального износа технологического оборудования. Количе-
цепи
У
Рис. 45. Схема (а) и
характеристика (б) реле
ство контактов, управляемых обмоткой реле, достигает 18 и
более. Ток управления, протекающий через обмотку реле,
обычно не превышает 10 А.
На рис. 46 показано схематически устройство простейше-
го варианта геркона. Неподвижный контакт 1 и подвижный 2
размещены внутри герметизированной стеклянной капсулы 3,
заполненной инертным газом. Капсула охвачена магнитопро-
водом 4. При включении катушки 5 возникает магнитный по-
ток, замыкающийся по магнитопроводу 4 и подвижному кон-
такту 2, изготовленному из сплава железа с никелем. В ре-
зультате конец подвижного контакта переместится и замк-
нется с контактом 1. При отключении катушки пружинящий
контакт 2 возвращается в исходное положение и размыкает
цепь.
Реле времени предназначены для создания необ-
ходимой задержки в передаче воздействия от одного устрой-
ства (элемента) к другому. Время от момента подачи им-
пульсов на вход реле до момента переключения его контак-
тов называется выдержкой времени реле.
Выдержка времени может осуществляться как при замыкании,
W4
так и при размыкании контактов реле. В схемах автоматики
используют реле времени электромагнитные, маятниковые,
двигательные, электронные, тепловые и др.
На рис. 47 показано устройство электромагнитного реле
времени. Размыкание контактов 8 реле происходит не сразу
после выключения катушки 7, а с выдержкой времени, кото-
рая достигается благодаря замедлению отпадания якоря* Для
замедления отпускания якоря применяют медные втулки 3 или
короткозамкнутые витки, надеваемые на железный сердечник.
Рис. 47. Схема (я), графики магнитных потоков (б) реле времени электромаг-
нитного типа (в — элементы реле)
При отключении катушки действовавший в сердечнике магнит-
ный поток Фи совпадает по кривой 7 (рис. 47, б). Этот из-
меняющийся поток наводит э.д.с. в короткозамкнутом витке,
и в нем появляется ток, который создает дополнительный
магнитный поток (кривая 3), препятствующий (по правилу
Ленца) исчезновению основного магнитного потока. Резуль-
тирующий магнитный поток в сердечнике (кривая 2) будет
спадать более медленно. Отпадание якоря 6 (после отключе-
ния) происходит при снижении магнитного потока катушки 7
до величины Фотп, при которой электромагнитная сила при-
тяжения станет меньше отрывающего усилия пружины 4. Как
видно из рис. 47, б, выдержка времени реле при наличии
короткозамкнутого витка увеличивается и достигает величи-
ны Гв.
105
Для грубого регулирования выдержки времени между яко-
рем и сердечником крепят тонкую немагнитную прокладку, с
помощью которой изменяется индуктивность магнитной цепи
реле, а следовательно и выдержка времени. При наличии
прокладки номинальный магнитный поток снижается и выдерж-
ка времени уменьшается. Более тонкое регулирование вы-
держки осуществляется винтом 5. При уменьшении натяжения
пружины увеличивается выдержка, так как уменьшается вели-
чина Фогя. Электромагнитные реле обеспечивают получение
/•'5'с выдержки.
В тех случаях, когда требуется получение большой вы-
держки (порядка нескольких минут и более), применяют дви-
гательные реле времени, представляющие' собой кулачковое
устройство, воздействующее на контактные группы и приво-
димое во вращение через редуктор микродвигателем постоян-
ного или. переменного тока.
На рис. 47:, в представлены условные обозначения основ-
ных элементов. реле времени. Здесь КТ — катушка; КТ' — за-
мыкающий контакт с. выдержкой при его размыкании; КТ"
замыкаюший контакт с выдержкой при его замыкании; КТ"' —
размыкающий контакт с выдержкой при замыкании.
Аппаратура защиты. Чтобы исключить возможность аварии,
приемник (например, двигатель) необходимо автоматически
отключить от сети при коротких замыканиях, недопустимо
больших перегрузках, при значительном уменьшении питающе-
го напряжения и других аналогичных ситуациях. Для защиты
используют плавкие предохранители, тепловые, термические,
максимальные (токовые) реле, а также специальные автома-
ты. В электроустановках с тиристорными преобразователями
используются специальные схемы-блоки токоограйичения,
снимающие отпирающие импульсы с тиристоров при перегруз-
ках.
Плавкие * предохранители являются про-
стейшими аппаратами защиты электроустановок от коротких
замыканий. Основным элементом предохранителя является
вставка из легкоплавкого металла. При коротком замыкании
вставка расплавляется и предохранитель отключает установ-
ку от сети. Недостатком плавких предохранителей является
трудоемкость их эксплуатации, связанная с необходимостью-
^мены После каждого сраб?' ^ния.
106
Тепловые и термические реле пред-
назначены для защиты электродвигателей от недопустимого
перегрева при длительных перегрузках. Основным элементом
теплового реле, изображенного на рис. 48, а, является би-
металлическая пластина 2, сваренная из двух металлов с
разными коэффициентами линейного расширения. При нагреве
пластинка изгибается и воздействует на отключающее уст-
ройство. Чем больше ток двигателя, проходящий через на-
гревательный элемент 2, тем больше нагревается биметалли-
Рис.48. Схема теплового ре-
* ле (а) и временная , зависи-
мость тока (б)
ческая пластинка. При перегрузке пластина изгибается
вниз, воздействуя на рычаг 4. Рычаг под действием Пружины
,5 разомкнет контакт 6, который Прерывает цепь управления
защищаемой электроустановки* После устранения причины пе-
регрева биметаллическая пластинка остывает, и нажатием
кнопки 3 реле можно привести в исходное положение. Время
срабатывания теплового реле зависит от ^величины тока
(рис. 48, б). Вследствие тепловой инерции реле не реаги-
рует На кратковременные скачки тока, например при пуске
двигателя.
Более надежно защищают двигатель термические реле,
встроенные непосредственно в электродвигатель. Эти реле
реагируют на температуру перегрева двигателя. В качестве
чувствительного элемента в таких реле наряду с биметалли-
ческими пластинками используют полупроводники-термисторы
и т.п. На рис. 48 показаны условные обозначения нагрева-
тельного элемента 1 и койтакта теплового реле (FR). х
107
Максимальные (токовые) реле служат
для защиты двигателей в случае коротких замыканий и Пере-
грузок. Катушку максимального реле выполняют из толстой
проволоки с небольшим числом витков и включают в цепь
двигателя последовательно или через трансформатор тока.
При коротком замыкании катушка притягивает якорь и размы-
кает контакт, включенный в цепь катушки контактора двига-
теля. Уставку реле регулируют изменением натяжения специ-
альной пружины. Ток срабатывания реле принимают на
30—50% больше пиков пусковых токов. Токовые реле приме-
няют также Для автоматизации процессов пуска и торможения
двигателей.
Автоматические выключатели (ав-
томаты) служат для защиты электроустановок при коротких
замыканиях и перегрузках, а также для сравнительно редких
оперативных включений и отключений этих установок. В
трехфазных сетях используются трехполюсные автоматы, а в
сетях постоянного тока двух- и однополюсные. Включается
автомат вручную, либо автоматически, с помощью тепловых и
максимальных реле прямого действия, включенных последова-
тельно в защищаемую цепь. Реле прямого действия характе-
ризуется тем, что подвижная часть реле, например якорь,
при срабатывании воздействует непосредственно на меха-
низм свободного расцепления, и под действием пружины кон-
такты автомата размыкаются. Для эффективного гашения дуги
контакты автомата обычно помешают в дугогасительную каме-
ру. Защита действует мгновенно или с выдержкой времени.
Номинальный ток автоматических выключений выбирается по
длительному расчетному току линии. Ток срабатывания (от-
сечки) электромагнитного расцепителя Zcp определяется из
соотношения 1СР = 1,25/КР, где 1КР - максимальный кратко-
временный ток линии, который при ответвлении к одиночному
электродвигателю равен его пусковому току. Коэффициент
1,25 учитывает неточность в определении максимального
кратковременного тока линии и разброс характеристик рас-
цеплений. Автоматические выключатели серии А3700 рассчи-
таны на напряжение до 440 В постоянного тока и до 660 В
переменного и номинальную силу тока 160, 250, 400 и
630 А. Серийно изготовляются также автоматические выклю-
чатели типов АЕ2000, АК-63 и т.п.
108
2.2. Принципы начертания релейно-контакторных
электрических схем
По основному назначению все электрические схемы делят-
ся на структурные, функциональные, принципиальные, схемы
соединений, схемы подключения, общие схемы расположения,
комбинированные и совмещенные схемы. Наиболее применяются
принципиальные схемы, на которых изображают все электри-
ческие элементы или устройства (катушки, контакты, кон-
денсаторы, резисторы и т.п.), электрические связи между
ними (разъемы, зажимы и т.д.). Все элементы на схеме изо-
бражают в виде условных графических обозначений, установ-
ленных в стандартах ЕСКД. Основные правила выполнения
схем: они выполняются без соблюдения масштабов, располо-
жение элементов схемы определяется лишь удобством чтения
схемы; схемы изображают в отключенном положении, когда
катушки не обтекаются током, а кнопки, пружины и т.д. от-
пущены; силовые цепи на схеме вычерчивают жирными линия-
ми, а цепи управления - более тонкими; элементы и устрой-
ства изображают на схемах совмещенным или разнесенным
способом; в первом случае составные части элементов или
устройств изображают на схеме в непосредственной близости
одна к другой; во втором — в разных местах схемы; схемы
выполняют в многолинейном или однолинейном изображения.
Каждому устройству, элементу, функциональным частям на
схемах присваивается буквенно-цифровое позиционное обоз-
начение, составленное из буквенного обозначения и поряд-
кового номера, проставленного после буквенного обозначе-
ния одинаковой с ним высоты. Ниже приведены рекомендуемые
одно- и двухбуквенные обозначения в соответствии с ГОСТ
2.710-81. Первая буква означает род элемента, вторая -
его функциональное назначение. A-устройства (усилитель);
В — преобразователи неэлектрических величин в электричес-
кие (датчики); ВК, BR, BV — датчики соответственно тепло-
вой, частоты вращения (тахогенератор) скорости; BE, ВС —
сельсины — соответственно приемник и датчик; BL — фото-
элемент; С — конденсаторы; D — интегральные схемы; DA —
аналоговые микросхемы; DD — цифровые микросхемы, логичес-
кие элементы; Е — элементы разные; ЕК — нагревательный
элемент; EI — лампа осветительная; - F — разрядники, предо-
хранители, защитные устройства; FA - дискретный элемент
109
защиты по току мгновенного действия; FU — плавкий предо-
хранитель; FV — дискретный элемент защиты по напряжению;
разрядник; G — генераторы, источник питания; Н — устрой-
ства индикаторные, сигнальные; НА, HL — приборы соответ-
ственно звуковой и световой сигнализации; К — реле, кон-
такторы, пускатели: КА, КН, КК, КТ, KV - реле соответст-
венно токовое, указательное, электротепловое, времени,
напряжения; КМ — контактор, магнитный пускатель; L — ка-
тушка индуктивности, дроссели; М — двигатель; Р — приборы
измерительные; РА — амперметр; Q — выключатели и разъеди-
нители в силовых цепях; QF — автоматический выключатель;
QS — разъединитель; R — резисторы; 5 - устройства комму-
тационные для слаботочных цепей: SA - выключатель или пе-
реключатель; SB, SQ — выключатель соответственно кнопоч-
ный, путевой; Т — трансформаторы; ТА, TV — трансформаторы
соответственно . тока и напряжения; U — преобразователи
электрических величин в неэлектрические; UZ — преобразо-
ватель частоты, выпрямитель, инвертор; V - приборы полу-
проводниковые; VD — диод; VT - транзистор; VS - тиристор;
У - устройства механические с электрическим приводом;
УЛ- электромагнит; В, YC - тормоз и муфта с электромаг-
нитным приводом.
На рис. 49, а показана простейшая схема управления
пуском асинхронного двигателя М с короткозамкнутым рото-
ром. Для пуска включают рубильник QS и нажимают на кнопку
SBL Контактор КИ1 при этом включается и своими главными
Рис. 49. Схемы пуска нереверсивного (а) и реверсивного (б) асинхронных ко-
роткозамкнутых электродвигателей
110
контактами КМ1 подключает статор двигателя к сети. Замы-
кающий блок-контакт контактора КМ1 блокирует кнопку SB1,
которую благодаря этому можно отпустить. Отключение
электродвигателя от сети осуществляется нажатием кнопки
SB2, после чего схема приходит в исходное положение. За-
щита двигателя осуществляется двумя тепловыми реле FK1,
FK2, плавкими предохранителями FU1. При значительной пе-
регрузке тепловое реле срабатывает, размыкает свой кон-
такт FK1 или FK2 в цепи контактора К и этим отключает
двигатель М от сети. Схема управления защищена плавкими
предохранителями FU2.
На рис. 49, б показана схема управления асинхронным
электродвигателем с короткозамкнутым ротором с реверсив-
ным магнитным пускателем. Для подачи командных сигналов
имеются три кнопки: SB1, SB2 и SB3. При нажатии кнопки
SB1 включается контактор КМ1, который своими контактами
КМ1 подключит статор двигателя к сети. Одновременно он
своим замыкающим блок-контактом шунтирует кнопку SB1, а
размыкающим блок-контактом разрывает цепь катушки контак-
тора КМ29 чтобы исключить возможность короткого замыкания
при одновременном нажатии обеих кнопок. При нажатии кноп-
ки SB2 включается контактор КМ2. Две фазы статора при
этом меняются местами, и двигатель изменит направление
вращения. При нажатии кнопки SB3 схема управления обесто-
чится и двигатель будет отключен.
Пуск асинхронных электродвигателей средней и большой
мощности осуществляется в большинстве случаев с помощью
реостата, включенного в цепь ротора (рис. 50) в автомати-
t2 t3 t
3~5ОГц
Рис. 50. Диаграмма (я) и схема (d) пуска асинхронного электродвпга юля
111
зированном режиме. Автоматизация операций пуска и тормо-
жения привода значительно облегчает процесс управления,
устраняет возможные ошибки оператора, ведет к повышению
производительности машин, особенно при частых включениях
привода. Пуск двигателей постоянного тока и асинхронных
электродвигателей с фазным ротором обычно осуществляется
в соответствии с заданной пусковой диаграммой. Закорачи-
вание ступеней реостата осуществляется либо при достиже-
нии определенной скорости, либо при определенной силе то-
ка, частоте или через заданное время. В соответствии с
этим управление пуском может осуществляться в функции
скорости, тока, частоты, времени, пути, пройденного произ-
водственным механизмом и др.
На риг. 50, а изображена пусковая диаграмма двигателя
с тремя ступенями пускового реостата, из которой видно,
что первая ступень пускового реостата закорачивается че-
рез время вторая - через t2 и т.д. Ток двигателя при
пуске изменяется в пределах от Ц до Z2; вращающий
момент - от М до Мпее.
При управлении в функции времени выдержка осуществля-
ется С использованием реле времени. Схема автоматического
пуска асинхронного электродвигателя с использованием реле
времени электромагнитного типа показана на рис. 50, б.
Нажатием кнопки SB1 подается питание на катушку контакто-
ра KMlt который, включившись, своими главными контактами
подключает электродвигатель Л/ к сети при полностью вве-
денном в цепь ротора реостата Рр. Размыкающий блок-
контакт КМ1 отключает реле времени КТ1 и последнее с вы-
держкой времени включает первый ускоряющий контактор КМ2.
Последний, включившись, шунтирует первую ступень пусково-
го реостата. Аналогично шунтируются вторая и третья сту-
пень пускового реостата, после чего двигатель выходит на
естественную характеристику и пуск на этом заканчивается.
2.3. Схемы управления с использованием
логических элементов
В последние годы широко применяются схемы управления
приводами, выполненные на логических бесконтактных эле-
ментах. Выходной сигнал логического элемента формируется
112
в соответствии с входными сигналами в зависимости о.Т вы-
полняемой логической функции. На рис. 51 приведены услов-
ные обозначения наиболее распространенных логических эле-
ментов и их релейные эквиваленты. Здесь Xlt X2f Y — вход-
ные и выходной сигналы — логические высказывания.
Рис. 51. Логическиее элементы
Конъюнкций - функция "И" - логическое умноже-
ние. Высказывание Y истинно (равно 1), если истинны все
входящие в него высказывания, т.е. Х2 = 1, Х2 = 1. Если
хотя бы одно из высказываний ложно, например = то
ложно (равно нулю) все высказывание (У =0).
Дизъюнкция — функция "ИЛИ" - логическое сло-
жение. Высказывание истинно в том случае, когда истинно
хотя бы одно из высказываний Хх, Х2. Таким образом* сиг-
нал на выходе У = 1 получается при наличии сигнала хотя
бы на одном из его входов.
Отрицание - функция "НЕ" - инверсия, обознача-
ется У = X, т.е. сигнал на выходе инвертора У = 1 будет в
том случае, когда входной сигнал отсутствует, X = 0.
Элемент И-НЕ является комбинацией двух логических эле-
ментов. Сигнал на выходе исчезнет (У = 0) лишь при нали-
чии сигналов на обоих входах. Во всех остальных случаях
на выходе будет сигнал "1".
ИЗ
Элемент ИЛИ-HE характеризуется тем, что сигнал на вы-
ходе появится лишь при отсутствии сигналов на обоих вхо-
дах. При подаче сигнала на любой вход сигнал на выходе
исчезнет — ”0".
Элемент "память" имеет два входа: при подаче на первый
вход появляется сигнал на выходе и остается там после
снятия сигнала с этого входа. Для снятия сигнала с выхода
необходимо подать сигнал на второй вход.
На рис. 52, а представлена схема, обеспечивающая функ-
цию "Память", выполненная на триггере Т. При. нажатии на
кнопку SB1 на вход триггера Т подается сигнал "Г, поэто-
му на его выходе возникнет сигнал "1", сохраняющийся и
Рис. 52. Схемы элемента "Память"
послее отпускания кнопки SB1. При нажатии на кнопку SB2
на второй вход триггера подается сигнал "1", который
обеспечивает переключение триггера и появление на его
входе "0", остающегося также и после отпускания кнопки
SB2. Новое нажатие на кнопку SB2 вновь вызовет переключе-
ние триггера и появление на его выходе сигнала "1" и т.д.
Функция "Память" может быть выполнена также на элемен-
тах ИЛИ—НЕ, рис. 52, б: при нажатии SB1 *на вход первого
логического элемента ИЛИ—НЕ будет подан сигнал "1". На
выходе второго элемента ИЛИ—НЕ при этом будет сигнал "Г,
который по цепочке обратной связи будет подан на вход
первого элемента ИЛИ—НЕ. На выходе будет удерживаться
сигнал "1" и после отпускания SB1; схема "запомнила" сиг-
нал, поступающий от SB1, Сброс памяти осуществляется на-
жатием SB1, когда на вход второго элемента будет подан
сигнал "1".
Мощность выходных цепей серийных логических элементов
не превышает 3-5 Вт. Поэтому для управления Исполнитель-
ными устройствами-контакторами, электромагнитами, микро-
114
машинами, ключами и др. часто используются промежуточные
усилители, входящие в номенклатуру серии логических уст-
ройств. На рис. 53 изображена схема пуска двигателя на
логических элементах. В исходном состоянии схемы, когда
SB1 разомкнута, на обоих входах элемента 1 (ИЛИ—НЕ) сиг-
нал отсутствует ("О"), поэтому на первом входе элемента 2
ИЛИ—НЕ будет сигнал "1", а на его выходе — "О". На входе
усилителя А напряжение отсутствует и контактор КМ отклю-
чен. При замыкании SB1 на первом входе первого элемента
ИЛИ—НЕ будет сигнал "1", на входе усилителя А появится
напряжение, и контактор КМ включится. Одновременно с выхо-
да 2 (ИЛИ—НЕ) будет подан сигнал на второй вход элемента
Рис. 53. Схемы пуска с использованием логических эле-
ментов
1 (ИЛИ—НЕ). Этот сигнал заменит сигнал от SBI, которая
теперь может быть отпущена. Схема "запомнила*' команду
"Пуск". Сброс памяти произойдет при замыкании SB2, когда
на второй вход элемента 2 ИЛИ-HE будет подан сигнал "1".
На рис. 54 представлена схема пуска в функции времени
асинхронного двигателя с фазным ротором, е использованием
логических элементов. Пуск осуществляется в три ступени.
В схеме предусмотрена ячейка ПАМЯТЬ на триггере Т. При
нажатии на кнопку SB1 на выходе триггера Т появится сиг-
нал "1" и с помощью усилителя А включится линейный кон-
тактор КМ1. Двигатель заработает. Сигнал на выходе триг-
гера Т сохранится и после отпускания кнопки SB2. Схема
"запомнила" пусковую команду.
Сигнал с выхода, триггера Т подается одновременно, че-
рез цепочку R—C1 (элемент времени ЭВ1) и усилитель А1 —
на контактор КМ2. Нарастание сигнала и соответственно
включение контактора КМ2 осуществляется с задержкой во
времени, длительность которой определяется параметрами
цепочки R—C1.
115
Далее также с задержками по времени (элементы R—C2,
R—C3) будут включены ускоряющие контакторы КМЗ, КМ4 и
пуск будет закончен.
Отключение двигателя осуществляется либо кнопкой SB2,
либо размыкающими контактами максимального реле FA. При
размыкании хотя бы одной из входимых цепей элемента И-НЕ
на его выходе появится сигнал "1", поступающий на второй
вход триггера Т. Триггер перебрасывается и сигнал на его
останавливается. Схемы,
приведенные на рис. 53,
54, содержат наряду с бес-
контактными логическими,
также. контактные элементы,
что является их существен-
ным недостатком. Более со-
вершенны схемы, полностью
выполненные на бесконтакт-
ных элементах. Вместо кон-
такторов там используются
тиристорные и транзистор-
ные ключи — силовые выход-
ные элементы.
Рис.54 Схема пуска асинхрон-
ного двигателя с использовани-
ем логических элементов
2.4. Унифицированная блочная система регуляторов.
Датчики регулируемых параметров
Основная тенденция развития электропривода металлурги-
ческих агрегатов — все более полная его автоматизация на
базе широкого применения бесконтактной аппаратуры управ-
ления. Достоинства бесконтактной аппаратуры по сравнению
с релейно-контакторной: высокая допустимая частота вклю-
чений, долговечность, быстродействие, надежность, сравни-
116
тельно малая чувствительность к влиянию окружающей среды,
отсутс!вйе потребности в регулировке и уходе в процессе
эксплуатации; широкие возможности в отношении глубины ав-
томатизации технологических процессов и т.п.
Широкое применение в металлургическом производстве
нашла унифицированная блочная система регуляторов УБСР.
Она представляет собой совокупность типовых элементов и
блоков-регуляторов, усилителей, фазочувствительных выпря-
мителей, командных задающих устройств датчиков напряже-
ния, тока, э.д.с., скорости, задатчиков интенсивности,
блоков нелинейности, бесконтактных ключей, функциональных
преобразователей, блоков питания, вычислительных уст-
ройств и т.п. Особенности аппаратуры УБСР: взаимозаменяе-
мость однотипных элементов; согласованность входных и вы-
ходных параметров различных элементов; построение всех
элементов на основе небольшого числа модулей. Система
УБСР имеет несколько ветвей: аналоговую, выполненную на
обычных элементах электроники УБСР-А, на интегральных
микросхемах УБСР—АИ; цифровую дискретную — на обычных
элементах УБСР—Д и на интегральных микросхемах УБСР-ДИ.
Система УБСР-Д выполнена на логических элементах серии
"Логика—Т". Система УБСР-ДИ выполнена на интегральных
элементах и схемах, способных самостоятельно выполнять
сложные логические и арифметические операции. Схемные и
конструктивные решения системы УБСР-ДИ позволяют приме-
нять ее совместно с аналоговой ветвью УБСР-АИ и УВМ.
Основным элементом системы, с помощью которого выпол-
няются схемы разных регуляторов, является операционный
усилитель постоянного тока УПТ-3 с высоким коэффициентом
усиления (> 1000).
В системе УБСР—А используется также усилитель мощности
УПТ—5, предназначенный для работы с внешними исполнитель-
ными устройствами. Для примера на рис. 55 показаны схемы
Рис. 55. Схемы операци-
онных усилителей
117
П Й ПИ-регуляторов, собранных на базе операционного уси-
лителя ОУ. Сигнал на выходе П-регулятора (рис. 55, а)
пропорционален входному, т.е. {7иых = kUDK.
Передаточная функция регулятора
Wp (Р) = Poc/Pj = к.
Сигнал на выходе ПИ-регулятора (рис. 55, б) пропорциона-
лен входному сигналу и интегралу от входного сигнала,
т.е.
^BbJX в ^вх + У ^вх^>
1 о
где То = Rq,cC — постоянная времени обратной связи, с.
Использование бесконтактной аппаратуры блочного типа
позволяет существенно повысить надежность, упростить мон-
таж, наладку, ремонт и эксплуатацию электрооборудования,
повысить качественные показатели регулирования. В бескон-
тактных -системах автоматического управления функции реле
выполняют логические элементы, а функцию контакторов —
бесконтактные переключающие (выходные) устройства. В ка-
честве командно-аппаратов используются бесконтактные ап-
параты, в основном сельсинного типа, типа вращающегося
трансформатора и т.п. Для контроля разных физических ве-
личин используются разнообразные датчики: скорости, тока,
э.д.с., положения и т.п.
Датчики положения служат для контроля положения машины
или ее отдельных элементов в пространстве и для ограниче-
ния их движения. В электроприводе металлургических машин
и агрегатов широко используются путевые датчики, конечные
выключатели. В качестве путевых, конечных выключателей
используются в основном контактные аппараты механическо-
го, нажимного, рычажного, вращающегося действия. Недос-
татки контактных аппаратов известны. Все более широко
применяются переключатели, срабатывающие без механическо-
го воздействия. На рис. 56 представлена схема путевого
датчика на базе геркона, управляемого полем постоянного
магнита. В немагнитном корпусе 1 расположены геркон 2 и
воздействующий на его контакты постоянный магнит 3. При
вхождении в щель ферромагнитной полосы 4 магнитный поток
118
постоянного магнита шунтируется, контакты геркона пере-
ключаются, переходя в исходное положение.
В бесконтактных системах управления в качестве датчи-
ков положения и . задающих (командных) устройств широко ис-
пользуются сельсинные командоаппараты в рычажном, махо-
вичном и педальном исполнениях. На рис. 57, а представле-
на схема сельсинного командоаппарата. Однофазная статор-
ная обмотка возбуждения сельсина ОВ получает питание от
сети переменного тока частотой 50 Гц. Она создает пульси-
Рис. 56. Схема бескон- Ufoix
тактного датчика поло-
жения на герконе
Рис. 57. Схема сельсинного
командоаппарата q jq qq &град
рующий магнитный поток, который индуцирует в каждой фазе
трехфазной обмотки ротора э.д.с. Выходным напряжением
сельсина является разность напряжений первой и третьей
фаз ротора (обмотка 2 не используется).
^вых - ~ * 3 ^max s^n ₽»
где 3 — угод сдвига фаз обмоток ротора и статора; U —
max
максимальное значение выходного напряжения, при совпадении
119
оси данной обмотки (1 или1Э) с осью обмотки ОВ (рис. 57,
б). Изменяя угол поворота ротора сельсина, можно изменять
величину управляющего сигнала, подаваемого в схему управ-
ления электроприводом, и тем самым управлять его работой
{включать, отключать, изменять скорость и т.п.). Рукоятка
бесконтактного командоаппарата имеет ряд положений, фик-
сируемых с помощью фрикциона. Выходное напряжение сельси-
на 0*10 В, выходной ток — 0,4 А. Выходное напряжение
сельсина через трансформатор Т подается в фазочувстви-
тельное выпрямительное устройство ФВУ и далее, после его
преобразования — в схему управления. При использовании
сельсина в качестве датчика положения на его ротор воз-
действует перемещающийся механизм. На рис. 57, б пред-
ставлена прямолинейная зависимость выходного напряжения
сельсина от угла поворота ротора; на рис. 57, в — его ус-
ловное обозначение.
Датчики скорости широко используются в приводе прокат-
ных станов с целью непрерывного контроля угловой скорости
двигателей, валиков, барабанов и т.п. Наиболее широко с
этой*' целью используются тахогенераторы постоянного и пе-
ременного тока.
Тахогенераторы постоянного
т о к а представляют собой микромашинный генератор, с не-
зйййсймым возбуждением, рис. 58, а, либо с постоянным
йагни!бм1 на индукторе. Выходное напряжение тахогенератора
может быть определено из выражения
С7ВЫХ ~ Ег ~ IR ~
где Ег — э.д.с. тахогенератора; Ц R — соответственно ток
и сопротивление цепи якоря.
Выходное напряжение тахогенератора пропорционально его
угловой скорости.
Тахогенераторы переменного
тока не имеют контактов, что является их преимущест-
вом. Различают асинхронные и синхронные тахогенераторы.
Асинхронный тахогенератор (рис. 58, б) представляет
собой двухфазную асинхронную микромашину, ротор 2 которой
выполнен в виде тонкостенного алюминиевого цилиндра. Об-
мотка возбужения 1 включена в сеть; она создает пульси-
рующее , магнитное поле, в котором вращается ротор. В рото-
120
ре индуцируется э.д.с. е2, пропорциональная угловой ско-
рости и. На статоре расположена измерительная обмотка 3,
являющаяся выходной. К ней через выпрямитель UZ подключа-
ется схема управления. Э.д.с., индуктируемая полем ротора
в измерительной обмотке 3, пропорциональна угловой ско-
рости еиз = со) sin , где с - постоянный коэффициент.
Рис. 58. Схемы тахогенераторов постоянного тока («) н асинх-
ронного {6}
Задатчик интенсивности. В схеме управления тиристорным
электроприводом (см. рис. 27) командоаппарат А вырабаты-
вает ступенчатый сигнал управления, что вызывает соответ-
ствующее ступенчатое увеличение скорости привода. Скачко-
образное изменение скорости привода приводит к большим
динамическим перегрузкам. Для ограничения перегрузок,
формирования динамического тока ступенчатый сигнал управ-
ления Uy (рис. 59, а) необходимо преобразовать в сигнал,
изменяющийся линейно (рис. 59, б). Эту функцию выполняет
задатчик интенсивности, темп нарастания выходного сигнала
Рис. 59. Схема задачи интенсивности
121
которого не зависит от уровня входного сигнала, но может
регулироваться по желанию оператора. Схема задатчика ин-
тенсивности представлена на рис. 59, в. Схема выполнена
на транзисторе VT, включенном по схеме с общей базой. В
данной схеме ток коллектора не зависит от входного напря-
жения 17вх. Процессы заряда и разряда конденсатора С при
изменении L7BX протекают с постоянным током через конден-
сатор. Следовательно, напряжение на конденсаторе, т.е.
выходное напряжение £7ВЬ1Х задатчика интенсивности, изменя-
ется во времени по линейному закону.
2.5. Автоматизация электропривода.
Многоконтурные системы подчиненного регулирования
В электроприводах металлургических цехов находят при-
менение самые различные системы управления - от простей-
ших разомкнутых до самонастраивающихся кибернетических.
В электроприводах прокатных и трубных цехов широкое
применение находит многоконтурная система подчиненного
регулирования на базе аппаратуры УБСР-А, УБСР-АИ и др.
При использовании такого рода систем регулирование осуще-
ствляется по нескольким параметрам (например, по скорос-
ти, ускорению, току или э.д.с.. двигателя, по положению
механизма, в частности механизма натяжения полосы и
т.п.).
Сигналы датчиков контролируемых (регулируемых)' парамет-
ров вводятся на входы соответствующих, включенных каскад-
но, регуляторов. Количество регуляторов соответствует ко-
личеству регулируемых параметров, а количеству регулируе-
мых параметров соответствует число контуров регулирова-
ния.
Один из регулируемых параметров, например скорость,
является основным, а остальные - подчиненными. На
рис. 60, а представлена обобщенная структурная схема мно-
гоконтурной системы подчиненного регулирования системы с
п контурами (в данном случае - с тремя). Каждый контур
системы может быть представлен в виде двух структурных
звеньев: регулятора Р и объекта регулирования ОР данного
контура. На входе каждого регулятора, например РПУ срав-
ниваются сигналы задания и действительного значения
122
регулируемой величины Хт а выходной сигнал регулятора
является сигналом-заданием ХзадР2 последующего (подчинен-
ного) регулятора Р2 другой регулируемой величины.
Выходная величина Yn всей системы является основной,
определяющей конечную цель регулирования. Кх, К2, Кп —
коэффициенты обратных связей контуров регулирования.
Способ подчиненного регулирования позволяет сравни-
тельно просто включать в систему управления любое число
регулируемых параметров, осуществлять изменение парамет-
ров по оптимальным законам, вводить ограничения парамет-
ров сверху и снизу, вводить в законы регулирования произ-
водные и т.д.
На рис. 60, б приведена схема простейшей системы под-
чиненного регулирования привода постоянного тока по сис-
теме ТА-Д. Двигатель М получает питание от тиристорного
преобразователя UZ. Скорость двигателя контролируется та-
хогенератором BR, а ток якоря - датчиком тока UA. Задаю-
щий сигнал Хзал поступает от бесконтактного командоконт-
роллера SA и суммируется с сигналом обратной связи по
скорости Хос. Результирующий сигнал Хпх подается на вход
регулятора скорости PC. Кроме основного контура регулиро-
123
вания скорости, в системе имеется подчиненный ему контур
регулирования тока якоря. Сигнал Xqyy соответствующей то-
ку якоря, по цепи отрицательной обратной связи АГОТ .пода-
ется к входу регулятора РСУ образуя результирующий сиг-
нал, подаваемый на вход регулятора тока. Таким образом,
выходной сигнал регулятора скорости PC является задающим
сигналом для регулятора тока РТ. На выходе РТ формируется
сигнал управления тиристорным преобразователем.
Основными направлениями дальнейшего развития металлур-
гического электропривода следует считать:
а) повышение надежности и долговечности электрообору-
дования (должны быть практически исключены простои метал-
лургических агрегатов по причине неисправности электро-
оборудования);
б) увеличение установленной мощности двигателей, что в
конечном счете определяет рост электровооруженности тру-
да; повышение экономичности работы привода;
в) уменьшение габаритов и массы электрооборудования, в
особенности преобразователей и электрической аппаратуры;
г) поставку в комплектных крупноблочных контейнерах
полностью смонтированного, налаженного и испытанного на
заводе автоматизированного электропривода для металлурги-
ческих агрегатов;
д) широкое применение регулируемых электроприводов на
базе тиристорных преобразователей;
е) более широкое применение специального электрообору-
дования в металлургическом конструктивном исполнении со
специальными техническими и эксплуатационными характерис-
тиками (безредукторных приводов, криогенных электродвига-
телей, закрытых синхронных электродвигателей с бесщеточ-
ным тиристорным возбуждением и т.д.);
ж) комплексную автоматизацию металлургических агрега-
тов с использованием надежно работающих управляющих вы-
числительных машин и унифицированной блочной бесконтак-
тной аппаратурой управления, микропроцессоров.
Контрольные вопросы
1. В чем достоинства бесконтактной аппаратуры?
2. Что означают штриховые линии и зачерненные точки на схеме командоаппа-
рата?
3. В чем достоинства контактора постоянного тока?
124
4. Чем отличается электромагнитное реле от контактора?
5. Как регулируется выдержка времени реле электромагнитного типа?
6. Каким буквами обозначаются контакторы, реле времени, тахогенераторы,
максимальное реле?
7. В чем различие замыкающего и размыкающего контактов?
8. Каковы релейно-контакторная и логическая схемы пуска асинхронного дви-
гателя с фазным ротором в функции времени в две или три ступени?
9. Что является выходным напряжением сельсина и от чего оно зависит?
10. Какие функции выполняет задатчик интенсивности?
11. Чему равно число регуляторов многоконтурпой системы подчиненного регу-
лирования и как эти регуляторы включены относительно друг друга?
12. Какова простейшая схема подчиненного регулирования привода постоянного
тока по системе ТА—Д?
2.6. Электропривод металлургических кранов
Мостовые электрические краны находят широкое примене-
ние в цехах металлургических заводов. В прокатных и труб-
ных цехах используются колодцевые (клещевые) краны для
обслуживания нагревательных печей колодцевого типа и по-
дачи нагретых слитков для транспортировки их к прокатному
стану. Колодцевые краны выполняют следующие движения: за-
хват слитка клещами, вращение клещей, подъем клещей, пе-
редвижение тележки вдоль моста, передвижение моста вдоль
пролета, подъем вспомогательного крюка. Для посадки заго-
товок и, блюмов в нагревательные печи используются поса-
дочные краны. Для перемещения слитков, заготовок, труб
исподьзуются магнитные краны. Краны, оборудованные крю-
ком, используется для транспортировки металла и т.п.
Для металлургических кранов характерны весьма тяжелые
условия эксплуатации, которые характеризуются повышенной
температурой среды, высокой концентрацией пыли (в том
числе — токоподводящей), наличием в атмосфере слабых кис-
лот и щелочей, сильными механическими воздействиями (виб-
рацией, ударами), частыми пусками под нагрузкой, большими
перегрузками и т.п. В отличие от большинства электропри-
водов производственных механизмов крановый электропривод,
как правило, не имеет наперед заданного производственного
цикла. Поэтому крановое электрооборудование должно удов-
летворять следующим условиям эксплуатации: изменение на-
грузки в широких пределах значений, большой диапазон ре-
гулирования скорости, большая частота включений, частое
чередование периодов работы и пауз, значительные внешние
125
механические воздействия, значительные перегрузки, частые
торможения и т.п.
Производительность современных металлургических цехов,
особенно конвертерных, мартеновских, прокатных и т.д. в
значительной степени зависит от производительности и на-
дежности работы кранов. Аварийная остановка механизма
крана может привести к застыванию металла в ковше. Поэто-
му приводы механизмов металлургических литейных кранов
относятся к первой категории потребителей; мощность каж-
дого из двух двигателей механизма главного подъема выби-
рается такой, чтобы один двигатель был в состоянии под-
нять ковш с металлом.
Все многообразие режимов эксплуатации кранового элект-
рооборудования сведено к пяти типовым режимам: Л - лег-
кий; С - средний; Т - тяжелый; ВТ - весьма тяжелый; ОТ —
особо тяжелый. Ниже приведены характеристики этих режи- мов:
Режим . . Л С Т ВТ ОТ
^гр . . 0,25-0,75 0,75 0,75-1,0 1,0 1,0
*г . . — 0,5 ЪО 1,0 1,0
Режим . . Л С т ВТ от
«с . . — 0,33 0,66 1,0 ' 1,0
ПВ, % . . 15—25 25-40 40 60 100
Среднее число включений в час 60 60-120 120-140 300-600 600
z, °C, окружающей среды , . . 25 25 40 45 , —
Здесь коэффициент использования крана по грузоподъем-
ности А?Гр = 2Ф/2н (2Ф и Qu - среднее значение массы под-
нимаемого груза и грузоподъемность крана); коэффициент
годового использования крана Кг= т/365 (т — число дней
работы крана в году); коэффициент суточного использования
крана (п — число часов работы крана в сутки).
На металлургических кранах используется главным обра-
зом система привода с магнитным контроллером, где основ-
ным типом электродвигателя является асинхронный с фазным
ротором.
Электродвигатель управляется посредством релейно-
контакторной аппаратуры, а регулирование скорости — изме-
нением сопротивления реостата в цепи ротора. Такие систе-
мы электропривода кранов выпускаются комплектно. Комплек-
тные электроприводы включают в себя системы с силовыми
126
кулачковыми и магнитными контроллерами, с цепями управле-
ния на постоянном и переменном токе.
На кранах используются электродвигатели специальной
крановометаллургической серии, рассчитанные на напряжение
220 В (обмотка статора соединяется в треугольник) и на
380 В (обмотка соединяется в звезду). С изоляцией класса
F (МТГ) или класса Н (МТН)..
Применение асинхронных короткозамкнутых электродвига-
телей ограничено маломощными кранами вспомогательного
назначения, поскольку такие двигатели создают чрезмерные
ускорения при пуске, большие пусковые токи, перегреваются
пусковыми токами. Привод постоянного тока с питанием от
заводской сети используется только на некоторых клещевых
посадочных кранах.
Металлургические краны разных конструктивных исполне-
ний оборудованы унифицированными панелями управления,
защиты, а также другими типовыми элементами электрообору-
дования. Такая унификация существенно упрощает эксплуата-
цию кранового электрооборудования и ремонт.
Защита крановых электроприводов. По назначению, специ-
фике работы и конструктивным особенностям мостовые элект-
рические краны относятся к категории оборудования повы-
шенно опасного, что объясняется самим процессом его рабо-
ты на площадках и в цехах, где одновременно находятся лю-
ди и дорогостоящее оборудование.
Крановые электроприводы имеют следующие основные типы
защитных устройств: максимальную защиту, нулевую защиту
для отключения электропривода при перерыве подачи пита-
ния. Разновидностью нулевой защиты является нулевая бло-
кировка, исключающая самозапусК; двигателя при восстанов-
лении питания, если орган управления находится в рабочем
положении; конечную защиту для предотвращения перемещения
движущихся элементов конструкции в опасную зону. Включе-
ние, т.е. подача питания может осуществляться после отпи-
рания включающего устройства с помощью индивидуального
ключа-марки; ключ не может быть вынут без выполнения опе-
раций отключения. Такая блокировка гарантирует приведение
крана в действие только лицом, имеющим право на управле-
ние краном.
Аппараты, входящие в схему защиты, могут быть встроены
в общую для всего крана защитную панель.
127
Защитные панели предназначены для максимальной и нуле-
вой защиты двигателей и применяются совместно с кулачко-
выми и магнитными контроллерами. Панель расположена в ме-
таллическом шкафу, в котором на изоляционной асбоцемен-
тной плите смонтированы трехполюсный рубильник с наружной
рукояткой и линейный контактор. Панель также снабжена
максимальным реле, действующими на линейный контактор,
предохранителями цепей управления, переключателем опробо-
вания, пусковой кнопкой й ключом-маркой.
Для кранов, получающих питание от цепи постоянного то-
ка, используется защитная панель типа ППЗБ, а для кранов,
получающих питание от сети переменного тока, защитные па-
нели типов ПЗКБ и ПЗКВ.
На рис. 61 представлена схема защитной панели крана,
работающего на переменном токе и управляемого кулачковым
командоконтроллером. Электродвигатели механизмов подъема,
тележки, моста получают питание от трехфазной сети через
разъединитель QS и контактор КМ1. При включении контакто-
ра КМ1 напряжение подается к командоконтроллерам электро-
двигателей, но включить их можно только соответствующим
командоконтроллером.
/Г дбигателю
подъема
\QS FU1
К дбигателю
теленка
Л дбигателю
моста
FA2 FA3
Рис. 61. Схема защитной панели крана
128
В комплект электрооборудования защитной панели входят
следующие аппараты: рубильник QS, линейный контактор КМ1,
реле максимального тока FA1-F АЗ, реле FAO, пусковая кноп-
ка SB1, предохранители FU.
В схему защитной панели вошли некоторые элементы
электрооборудования, конструктивно не входящие в ее сос-
тав. К ним относятся: нулевые контакты силовых контролле-
ров, контакты SQ3+SQ7 конечных выключателей механизмов
подъема, тележки и моста; аварийный выключатель SQ1, кон-
такт блокировки люка SQ2.
При включении рубильника QS напряжение от главных
троллеев подводится к главным контактам линейного контак-
тора КМ1 и через предохранители — к схеме управления за-
щитной панели. Если аварийный выключатель замкнут, люк,
ведущий из кабины на мост, закрыт, а контроллеры находят-
ся в нулевых положениях, то, нажимая кнопку SB1 можно
включить линейный контактор КМ1. Тогда через главные кон-
такты КМ1 и катушки реле максимального тока две фазы сети
подводятся к контроллерам, а третья фаза через катушку
реле ГАО подводится ко всем трем двигателям, минуя конт-
роллеры.
После включения контактора КМ1 можно при помощи конт-
роллеров осуществлять управление двигателями. Как видно
из схемы, нулевые контакты контроллеров заблокированы це-
почкой, состоящей из контактов конечных Выключателей.
Вследствие этого в процессе управления двигателем, когда
размыкаются нулевые контакты контроллеров, контактор КМ1
остается включенным.
Контактор КМ1 и, следовательно, все двигатели отключа-
ются при значительном снижении напряжения сети или его
полном исчезновении, при срабатывании максимальных реле,
при размыкании контактов конечных выключателей в крайних
положениях механизмов, . в случае отключения аварийного
выключателя или открывания люка, при перегорании плавких
предохранителей цепи управления. Повторное включение ли-
нейного контактора может быть проведено лишь при установ-
ке контроллеров в нулевое положение, чем обеспечивается
нулевая, защита.
Управляют двигателями металлургических кранов в основ-
ном посредством магнитных контроллеров.
129
Магнитные контроллеры серии ТА, ТСА, К, КС предназна-
чены для управления крановыми асинхронными двигателями с
фазным ротором серии MTF, МТН. Контроллеры типов К, КС
применяются в крановых электропроводах, металлургического
производства, работающих в режимах Л, С, Т, ВТ, ОТ; конт-
роллеры типов ТА, ТСА - в электроприводах кранов общего
назначения, работающих в режимах Л и С.
Контроллеры серий ТСА, КС используются в электроприво-
дах механизмов подъема, а также механизмов грейфера;
контроллеры серий ТА и К - в основном в электроприводах
механизмов горизонтального передвижения (передвижение
моста крана и тележки). Контроллеры ДК, ДКС, ДТА предназ-
начены для управления двумя двигателями одновременно
(дуплексные, двухдвигательнь^ приводы). Взамен контролле-
ров серий КС и ТСА внедряются контроллеры серий ТСД,
КСДБ, в которых использован принцип динамического тормо-
жения с самовозбуждением и использованы тиристорные ком-
мутаторы в силовой цепи.
Для управления двигателями постоянного тока последова-
тельного возбуждения, работающими в режимах Л, С, Т, ВТ,
ОТ, используются магнитные контроллеры серий П, ПС; конт-
роллеры серий П-в электроприводах механизмов горизон-
тального передвижения и серии ПС - в электроприводах ме-
ханизмов подъема.
Все схемы контроллеров обеспечивают автоматический
пуск (в функции времени), реверсирование, торможение и
ступенчатое регулирование скорости (реостатное). Диапазон
регулирования скорости 3:1—4:1.
Главная цель контроллеров переменного тока выполняется
на напряжение 220 и 380 В; цепь управления - на постоян-
ном токе напряжением 220 В, или переменном напряжении,
равном напряжению главной цепи (контроллеры ТА, ТСА).
Типовая схема магнитного контроллера типа К, предназ-
наченного для управления механизмами передвижения, приве-
дена на рис. 62. Напряжение к обмотке статора подводится
через контакты рубильника QS1, линейного контактора КМ1 и
контакты контакторов КМ2 и КМЗ, задающих направление дви-
жения. Последовательно в эту цепь включены катушки реле
максимального тока FA, а параллельно обмотке статора че-
рез контакты контакторов КМ7, КМ8 подключается трехфазный
130
электромагнит механического тормоза УЛ/.. В роторную цепь
двигателя включены пять • ступеней пускорегулировочного ре-
остата, четыре из которых могут быть замкнуты контактами
контакторов КМЗ и КМ4, а пятая - невыключенная добавочная
ступень.
Цепи защиты и блокировок выполнены на переменном токе
с помощью реле kU\ здесь можно видеть нулевую блокировку
(нулевой контакт командоконтроллера SA, шунтированный
Рис. 62. Схема магнит-
ного контроллера типа К
контактом kV), конечную защиту (контакты конечных выклю-
чателей SQ1, SQ2, шунтированные контактами контакторов
соответственно КМ2, КМЗ и контактом КМ8), максимальную
зашиту (контакт FA). Панель предназначена для кранов с
тяжелым режимом работы, поэтому схема управления выполне-
на на постоянном токе. Использование контакторов постоян-
131
ного тока при этом обеспечивает более высокую надежность
и долговечность работы электрооборудования. Питание цепей
управления осуществляется от источника постоянного тока
через предохранители FU1 и FU2 для контроля исправности
которых в цепь реле введены замыкающие контакты КМ8 и
КТ2.
Ступенчатое реостатное регулирование скорости и момен-
та электропривода осуществляется с помощью контактов
К2-К6 командоконтроллера SA, причем контакты К2 и КЗ слу-
жат для задания направления движения, а остальные имеют
симметричную диаграмму замыкания и используются для вклю-
чения и отключения ступеней пускорегулировочного реостата
с помощью контакторов КМ9-КМ12.
Схемой предусматривается автоматическое управление
процессами реостатного пуска электропривода и его тормо-
жения противовключением. При этом приняты меры для обес-
печения удовлетворительной плавности протекания , переход-
ных процессов и ограничения динамических нагрузок передач
при выборе зазоров. В нулевом положении командоконтролле-
ра предусмотрен свободный выбег электропривода без нало-
жения механического тормоза. Рассмотрим эти важные осо-
бенности схемы.
При быстрой перестановке командоконтроллера из положе-
ния 0 в положение 4 "Вперед" включаются контакторы КМ2 и
КМ1 и к статорной обмотке двигателя подводится напряжение
сети. Вспомогательный замыкающий контакт контактора КМ1
подключает через резистор R5 катушку реле противовключе-
ния kU к питающему схему управления напряжению Uy. К точ-
кам а и б резистора R5 подключен диодный мост К7—К4, пи-
тающийся от напряжения роторной цепи. Благодаря этому
между точками а и б создается пропорциональное ЭДС ротора
Е2 падение напряжения С/аб, направленное, встречно к Uy.
При этом напряжение С7к, прикладываемое к цепи катушки k,U
~ Uy ~ ~ ^У ~ ^211014’
где ^2НОМ - э.д.с. ротора при 5 = 1 и UY = С/1Н; S -
скольжение.
Коэффициент к устанавливается таким, что при пуске
(*^мач= 1) напряжение UK достаточно для включения реле
132
kU. Включаясь, реле kU замыкающим контактом через контакт
командоконтроллера К4 подает напряжение на катушку кон-
тактора КМ9, который своими главными контактами выводит
первую ступень реостата в цепи ротора, а вспомогательными
включает контакторы КМ8 и КМ7 электромагнита тормоза и
отключает катушку реле КТ1. Реле времени КТ1 отсчитывает
выдержку времени, в течение которой электропривод ускоря-
ется под действием момента, определяемого характеристикой
2 на рис. 62, б. По истечении выдержки времени реле КТ1
его контакт в цепи катушки КМ10 замыкается. Контактор
КМ10 включается, выводит вторую ступень роторного реоста-
та, становится на самопитание, включает реле КТ2 и размы-
кает цепь катушки реле КТЗ.
В течение выдержки времени реле КТЗ электропривод ус-
коряется, затем включается контактор КМ11, выводит третью
ступень реостата и размыкает цепь катушки реле КТ1. Реле
КТ1 вновь отсчитывает выдержку времени, в течение которой
происходит пуск с промежуточной пусковой характеристикой
4 А. Далее включением контактора КМ 12 электропривод выво-
дится на основную характеристику 4. В роторной цепи при
этом остается невыключаемая ступень реостата, обеспечи-
вающая требуемые условия ограничения тока и момента при
данйом числе контакторов ускорения.
Включающийся в начале пуска электромагнит тормоза YM
При дальнейшей работе остается постоянно включенным, так
как контактор КМ8 становится на самовоспитание. Поэтому
при установке командоконтроллера в нулевое положение ме-
ханический тормоз не накладывается и снижение скорости
Происходит в режиме выбега под действием тормозного мо-
мента нагрузки. Отказ от использования механйческого тор-
моза для оперативного торможения устраняет рывки, обус-
ловленные его наложением, и повышает плавность торможе-
ния. При этом тормоз накладывается только при срабатыва-
нии предусмотренных защит или при нажатии аварийной кноп-
ки SB1.
Как отмечалось, в прокатных и трубных цехах использу-
ются клещевые посадочные краны. Режим работы посадочных
кранов весьма тяжелый: число включений в час достигает
800; ПВ = 40*50 % при температуре окружающей среды до
60—70 °C: Коэффициент использования кранов по грузо-
подъемности достигает 0,9; коэффициенты суточного и годо-
133
вого использования близки к единице. Все это требует при-
менения электрооборудования постоянного тока. На рис. 63
представлена схема крановой панели серии П.
Магнитный контроллер серии П применяется для управле-
ния двигателями постоянного тока последовательного воз-
буждения механизмов перемещения и тележек. В цепи якоря
‘З^НОГи,
гиг
Г[
1г~1Т~п
КМЗ\ НМ2\КМ2\ КМ7\ КМ7У
YM
KM12
KM11
Назад ^ вперед
43210 1234 SQ1 SQ2 . HV
ri!!ИЧ!t!» Lr LHl
pTtTjTli |
J । ।
KV
9SZ
11 /г/w
НМ11
YM1
all
«*()
KT1
KY
HM11
КМЗ
KM10
KM9
KY
кмг
R4
КМП
KM10
KM10
KM9
К М3
YD2
YD4
VD1
r£h
YD3
e*
Назад SA вперед
KM1 4321 0 1234
KM9 [ 111 I 11 11
I ! HI\ kmi~
Рис. 63. Схема управления крановым двигателем iiociomhiioi о юка
КМ8\
[Н
134
двигателя предусмотрены четыре ступени реостата, предназ-
наченные для пуска и регулирования скорости. Реверсирова-
ние двигателя осуществляется переключением контакторов
ИМ1, КМ2. В нулевом положении командоконтроллера включено
реле кУ, которое своим контактом включает цепи управле-
ния. В первом положении "Вперед" замыкаются контакты КК1,
ККЗ командоконтроллера и включаются контакторы КМ, KML
Двигатель М и катушка тормозного электромагнита включают-
ся в сеть. При переводе рукоятки командоконтроллера в
крайнее (четвертое) положение двигатель будет разгоняться
автоматически в функции времени с помощью реле? времени
КТ1—КТЗ. Вначале включается контактор КМ6 • и Шунтирует
предварительную ступень реостата в цепи якоря двигателя.
Одновременно контакт КМ 6 шунтирует (отключает) ^реле вре-
мени КТ1, и последнее с заданной выдержкой времени вклю-
чает первый ускоряющий контактор КМЗ и т.п.
Для торможения противовключением рукоятку переводят в
любое Положение "Назад". При этом в цепь якоря вводится
весь реостат. Контакты КМ6, КМЗ-КМ5 не получают питания,
поскольку реле К2 не включено. Когда скорость двигателя
станет близка к нулю, реле К2 включится и замкнет цепь
питания ускоряющих контакторов. В схеме используются за-
щитные аппараты» реле максимального тока Г А; конечные вы-
ключатели SQ1, SQ2>
Стремление повысить производительность кранового обо-
рудования путем увеличения скорости, мощности электропри-
вода, Диапазона регулирования, улучшения динамических ха-
рактеристик потребовало использования тиристорных элект-
роприводов постоянного и переменного токов.
В крановом оборудовании используются тиристорный
электропривод постоянного тока - тиристорный преобразова-
тель - двигатель (ТП-Д) и две системы тиристорного приво-
да переменного тока: тиристорный преобразователь часто-
ты - двигатель (ТПЧ-Д) и тиристорный регулятор напряже-
ния - двигатель (ТРН-Д).
Тиристорный привод постоянно-
го тока (система Т П - Д) для кранов имеет три
исполнения. Первое с реверсивным выпрямителем и цепи яко-
ря. Система наиболее универсальна, но имеет наибольшие
габариты и массу преобразователя. Она используется в ин-
тервале мощностей 100-300 кВт.
135
Второе — с нереверсивным выпрямителем, где для ревер-
сирования двигателя используются контакторы в главней це-
пи. Система имеет минимальные массогабаритные показатели,
Ьднако контактное переключающее устройство не позволяет
получить мощность > 100 кВт.
Третье — с нереверсивным выпрямителем в главной цепи и
реверсом в цепи обмотки возбуждения система используется
в основном для мощных электроприводов (> 300 кВт) с малой
частотой включения (например, привод крупных разливочных
кранов с двигателем мощностью до 1 МВт). Для механизма
подъема используются тиристорные электроприводы постоян-
ного’ тока ' мощностью до 630 кВт. Диапазон регулирования
скорости электроприводов с обратной связью по напряжению
составляет 10:1 и 12:1, а с учетом возможного ослабления
поля двигателя - до 25:1. При использовании обратной свя-
зи по скорости и многоконтурных структур управления
электроприводом можно получить диапазон регулирования
скорости до 25:1, а с учетом ослабления поля - до 50:1,
т е. скорость подъема — спуска груза до 200 м/с..
На рис. 64 представлена схема кранового электропривода
постоянного тока, выполненная по системе ТП—Д. Привод —
реверсивный с двумя преобразователями UZ1, UZ2 в цепи
якоря двигателя М и одним нереверсивным преобразователем
UZ3 в цепи обмотки возбуждения двигателя ОВМ. Управление
приводом от командоаппарата SA. В схеме используется об-
ратная связь по скорости И по току.
Система тиристор н ы й преобра-
зователь частоты — двигатель
(ТПЧ — Д). Использование этой системы в крановых элект-
роприводах позволяет применять надежный, короткозамкнутый
асинхронный электродвигатель при широком диапазоне регу-
лирования скорости.
Наибольшее применение нашли тиристорные преобразовате-
ли частоты с непосредственной связью, как более простые
по схеме. Однако регулирование частоты здесь осуществля-
ется в диапазоне 5—20 Гц, что позволяет регулировать ско-
рость в диапазоне не выше 4:1.
Для расширения диапазона регулирования используются
двухскоростные асинхронные двигатели, обмотки которых
имеют смешанное питание от сети 50 Гц и от преобразовате-
ля частоты. Применение преобразователя частоты в системе
136
с полюснопереключаемыми двигателями, позволяет значитель-
но увеличить плавность, диапазон регулирования (до 60:1).
На рис. 65 представлена схема комбинированного элект-
ропривода с двухскоростным двигателем. Для расширения
диапазона регулирования скорости в схеме выполняется по-
очередное подключение преобразователя частоты ТПЧ к тихо-
Рис. 65. Схема комбинированного ти
ристррного электропривода крапа
Рис. 64. Схема электропривода крапа
по системе ТП— Д
ходной и быстроходной обмоткам. Реверс двигателя осуще-
ствляется изменением порядка коммутаций тиристоров ТПЧ;
последний одновременно выполняет функции бестокового ком-
мутатора.
Глава 3. ЭЛЕКТРОПРИВОД ПРОКАТНЫХ
И ТРУБНЫХ СТАНОВ
3.1. Общие сведения
Прокаткой завершается технологическая обработка метал-
ла в металлургии. Более 75—85 % стали, выплавляемой в ме-
таллургических цехах, идет на прокатные стали.
137
Основным назначением йсяко|$Г прокатного стана является
получение заготовок или готовых изделий пластической де-
формацией металла между вращающимися валками. Все обору-
дование прокатного стана можно условно разделить на ос-
новное и вспомогательное. Основное оборудование стана
служит непосредственно для деформации металла; к нему от-
носятся клети с прокатными валками, электродвигатели ра-
бочих валков, редукторы и шестеренные клети. Все осталь-
ное оборудование, необходимое для осуществления техноло-
гического процесса прокатки, считается вспомогательным;
сюда относятся нажимные устройства, рольганги, Шлепперы,
кантователи, ножницы, пилы, моталки и др.
В связи с чрезвычайно широкой номенклатурой продукции
прокатного производства (слябы, блюмы, сортовой прокат,
проволока, трубы, рельсы, балки, толстый и тонкий лист,
специальные профили и т.п.) прокатные станы отличаются
большим разнообразием конструкций и режимов * работы. Про-
катные станы можно классифицировать по самым различным
признакам: по назначению, числу и расположению рабочих
валков, числу и расположению рабочих клетей, режиму рабди-
ты.
По назначению прокатные станы делятся на обжимныф
(блюминги, слябинги), заготовочные, рельсо-балочные, сор-
товые, проволочные, листовые, трубные, специальные (коле-
сопрокатные, бандажные, трубосварочные и пр.). По количе-
ству и расположению рабочих клетей они делятся на одно-
клетевые, многоклетевые линейные, последовательные, зиг-
загообразные, шахматные. Различают станы горячей и холод-
ной прокатки; периодические, непрерывные, полунепрерыв-
ные.
Прокатные станы можно классифицировать независимо от
конкретного назначения по типу применяемого электроприво-
да, который может быть реверсивным и нереверсивным, регу-
лируемым и нерегулируемым, постоянного тока и переменного
тока, индивидуальным и групповым.
Рассмотрим кратко основные величины, используемое в
теории прокатки и в расчетах. Обозначив через /0, Ьо, Ло,
50, ciQ соответственно длину, ширину, высоту (толщину),
площадь поперечного сечения и диаметр заготовки до про-
пуска, а Через /„ d^ те же величины после
пропуска, определим основные параметры процесса прокатки.
138
Абсолютное обжатие:
по высоте
3 = Л, - /11, (85)
abc
заготовки круглого сечения
а - s« - (86)
abc
Относительное обжатие соответственно:
5 я (/i0 —
5 = (So - SJ/SO - WJ - d>)/d> (87)
или, в процентах
3 я (Ло - hj • 100 %/А0,
3 = (V Si) •' 100 %/S0. 1 (88)
Вытяжка (коэффициент вытяжки)
X = /у/о
или, в процентах
X = юо/Д.
Для заготовок круглого сечения X «= SQ/Si =
-d^/d] или, в Процентах, X = (/j* 100/c/f.
Величины обжатия и вытяжки за один пропуск называются
частичными (единичными), а за всю прокатку {к
пропусков) - полными. Полный коэффициент вытяжки равен
произведению частичных коэффициентов вытяжки.
Величина частичного коэффициента вытяжки зависит от
химического состава металла, его размеров, температуры и
т.п.; она составляет 1,06-1,6 (чаше всего 1,15-1,3).
Как правило, металл из валков выходит со скоростью vM,
большей окружной скорости валков vB. Такое явление назы~
139
вают опережением. Величина опережения /3 = (vM — рв)/рв,
она при прокатке тонких листов достигает 10—15 %.
Считают, что объем металла И = 5/ при прокатке остает-
ся неизменным (условие постоянства секундного объема),
т.е.
Ко = И.
(89)
Процесс прокатки начинается с захвата металла валками.
Однако надежный захват возможен не при всех условиях, по-
скольку при этом кроме втягивающей, возникает еще оттал-
кивающая сила. Рассмотрим
этот вопрос более подробно.
Дуга АВ окружности рабочего
валка, по которой он соприка-
сается с прокатываемым метал-
лом (рис. 66), называется ду-
гой захвата, а центральный
угол а, опирающийся на эту ду-
гу — углом захвата.
Рис. 66. Графики сил, дейст-
вующих в валках
В момент захвата валки действуют на металл с силой Р,
под действием которой возникает сила трения Т,' перпенди-
кулярная к Р и направленная по касательной к; окружности
валков. Горизонтальная составляющая сила трения
Tv = Т cos а будет втягивать металл, а горизонтальная
составляющая силы давления валков Рх -Р sin ос — выталки-
вать его из валков. Очевидно, что металл может быть за-’
хвачен валками лишь когда
Т cos а > Р sin а.
(90)
Учитывая, что сила трения
Т = Р]\
где f ~ коэффициент трения, с учетом (90) получим условие
захвата металла:
<Р > tg ос. (91)
140
С увеличением угла захвата а горизонтальная составляю-
щая силы давления Рх (выталкивающая сила) будет расти
(см. рис. 68), а втягивающая сила Tv, наоборот, уменьша-
ется. Таким образом, чем меньше угол а, тем лучше условия
захвата металла валками. Согласно (91), захват металла
залками произойдет лишь в том случае, когда коэффициент
трения будет больше тангенса угла захвата.
При горячей прокатке
f = m (1,05 - 0,0005r) = 0,25-0,6,
где t — температура металла, °C; m — коэффициент при го-
рячей прокатке на стальных валках (/п = 1, на чугунных за-
каленных m = 0,8).
Допустимая по условиям захвата металла валками величи-
на обжатия в станах горячей прокатки при гладких валках
определится из выражения
Забс = Ь (1 - eqs а) ~ 0.1D, (92)
где D — диаметр валка.
Установлено, что коэффициент трения уменьшается с уве-
личением скорости валков. Для улучшения условий захвата
металла скорость валкрв в момент подачи в них металла
обычно .снижают. (
Как отмечалось, в процессе , прокатки к металлу через
валки прикладывается внешняя сила Р, преодолевающая внут-
реннее сопротивление деформации. При этом полное давление
металла на валки определится из выражения
Р = Рср5, (94)
где Гср — среднее удельное давление металла на валки, ко-
торое зависит от химического состава металла, его темпе-
ратуры, величины обжатия, скорости прокатки; S -bL— по-
верхность соприкосновения металла с одним валком (здесь
b _ средняя ширина металла, L — длина дуги захвата, кото-
рую считают равной хорде).
Считая L=v/?3a6c (R - радиус рабочего валка) с уче-
том (94), получим
Р = Лг* ЯЗабс • (95)
141
Чем меньше диаметр валка, тем меньше дуга захвата.
Уравнение (94) показывает, что при одном и том же обжатии
полное давление металла на валки растет с увеличением
диаметра валков. Поэтому целесообразно применять валки с
минимально возможным по условиям захвата диаметром.
Энергия Л, потребляемая главным приводом из сети, рас-
ходуется на преодоление сил трения металла о поверхность
валков и дополнительных сил трения при прокатке (Лтр),
работу холостого хода (Лхх) и на преодоление сил инерции
при изменении скорости электропривода (Лдин), т.е.
Л = ЛцР + Лтр + Лхх + Лдцц. (96)
Соответственно момент, необходимый для привода рабочих
валков прокатного стана:
Л/ ~ Л/11Р + МТр + Л/хх + Мдцц.
Динамический момент учитывается в реверсивных и регу-
лируемых электроприводах.
3.2. Условия эксплуатации приводов прокатных станов.
Классификация приводов
Современный прокатный стан - высокопроизводительный
автоматизированный комплекс, оборудованный сложной систе-
мой электропривода основных и вспомогательных механизмов.
В состав электропривода прокатного стана входят электри-
ческие машины постоянного и переменного тока,' преобразо-
вательные агрегаты, комплект аппаратуры управления, регу-
лирования и защиты, контрольно-измерительная аппаратура и
др.
Несмотря на большие различия прокатных станов по наз-
начению, конструкции, режимам работы и т.п., условия ра-
боты приводов и требования, предъявляемые к ним, во мно-
гом совпадают.
Электропривод прокатного стана должен обеспечивать по-
лучение проката требуемого качества, т.е. обеспечить со-
ответственно установленным требованиям геометрических
размеров, формы, физико-механических свойств, состояния
поверхности и т.п.
142
Работа большинства электроприводов станов характеризу-
ется тяжелыми условиями окружающей среды: температурой,
запыленностью, влажностью, а в ряде случаев — ее агрес-
сивностью.
Нагрузка привода носит обычно ударный характер. В мо-
мент захвата металла валками резко возрастает динамичес-
кий ток, момент, наблюдается существенное падение скорос-
ти.
Разгон привода осуществляется, как правило, с металлом
в валках, что связано с большими дополнительными пере-
грузками. Скорость приводов регулируется в довольно широ-
ких пределах - рт ползучей, заправочной (скорости захвата
металла) до максимальной. Для многих приводов основную
или значительную часть рабочего времени составляют пере-
ходные процессы — разгон, торможение, в том числе — ава-
рийное.
Этим обусловливается ряд серьезных требований к приво-
ду прокатных и трубных станов в части диапазона, плавнос-
ти, точности регулирования, характера и длительности про-
текания переходных процессов, исключающих рывки, удары,
недопустимые падения скорости и т.п.
Особая важность для народного хозяйства - обеспечение
высокой производительности стана, качества готовой про-
дукции выдвигает в качестве одного из основных требований
высокой надежности, безотказности работы электропривода.
Учитывая большие мощности приводов и напряжений харак-
тер их работы,’ важным является требование экономичности
работы привода, малые потери энергии при регулировании.
Классификация. электроприводов прокатных станов
Для прокатных и трубных станов нашли применение две
системы привода рабочих валков - групповой и индивидуаль-
ный, При групповом приводе (рис. 67, а) один двигатель /
обеспечивает вращение обоих (верхнего и нижнего) рабочих
валков 4 через шестеренную клеть 2 й универсальные шпин-
дели 3. При индивидуальном приводе (рис. 67, б) каждый
рабочий валок 4 получает вращение от своего двигателя I
через универсальные шпиндели (3).
Индивидуальный электропривод валков имеет следующие
преимущества перед групповым:
1) большая возможная мощность электропривода;
143
2) меньший суммарный приведенный момент инерции приво-
да, благодаря чему обеспечиваются более высокие динами-
ческие свойства;
3) обеспечивается высокая точность регулирования неза-
висимо от степени износа того или иного валка;
Рис. 67. Кинематические схемы группового (п) и индивидуальною (о) приколов
валков
4) не требуется точной подгонки валков по диаметру,
резко сокращается парк валков;
5) отсутствуют громоздкая шестеренная клеть и связан-
ные с ней потери энергии, ремонты, обслуживание, в част-
ности — смазка и т.п.
В большинстве случаев современные прокатные станы обо-
рудуются индивидуальным приводом валков, хотя в некоторых
случаях используется групповой привод, как более простой
по устройству и требующий меньших затрат.
144
Детальное рассмотрение электроприводов всех типов про-
катных станов ввиду их многочисленности практически не-
возможно. Целесообразно разделить все станы на группы в
соответствии с режимом работы электропривода, его типом,
структурной схемой управления и т.п. Это даст возможность
рассмотреть вместо многочисленных конкретных схем, зачас-
тую весьма схожих, сравнительно небольшое число обобщен-
ных схем электропривода, характерных для данной группы
станов.
В соответствии с режимом работы и предъявляемыми тре-
бованиями все главные приводы прокатных станов можно раз-
делить на следующие группы.
т. Привод реверсивных клетей горячей прокатки. (Ревер-
сивные станы).
II. Привод нереверсивных чистовых клетей горячей про-
катки. (Непрерывные станы).
III. Привод нереверсивных черновых клетей непрерывных
станов. •
IV. Привод реверсивных клетей станов холодной прокат-
ки.
V. Привод нереверсивных клетей станов холодной прокат-
ки.
VI. Привод трубосварочных станов.
На главных и вспомогательных механизмах прокатных ста-
нов наряду с приводом постоянного тока используется при-
вод переменного тока. Однако многочисленным и серьезным
требованиям, предъявляемым к электроприводу механизмов
прокатных станов, в наибольшей степени удовлетворяет при-
вод постоянного тока по системе тиристорный преобразова-
тель — двигатель (ТП—Д).
Характерная особенность такого привода независимо от
назначения стана - использование многоконтурных подчинен-
ных систем управления; двухзонного регулирования скорос-
ти; элементов, оптимизирующих переходные процессы; цифро-
аналоговых систем управления, УВМ, микропроцессоров.
В подавляющем числе приводов схема управления содержит
две двухконтурные системы регулирования, осуществляющие
двухзонное регулирование скорости посредством взаимосвя-
занного регулирования напряжения якоря и потока возбужде-
ния двигателя. В такой схеме контур регулирования скорос-
145
ти содержит регулятор скорости и подчиненный ему регуля-
тор тока якоря. Такой контур управляет потоком возбужде-
ния двигателя в зависимости от его э.д.с. Этот контур со-
держит регулятор э.д.с. и подчиненный ему регулятор тока
возбуждения двигателя. Остановимся на этих вопросах под-
робнее.
3.3. Подчиненная система управления
с двухзонным регулированием скорости;
оптимизация переходных процессов
в приводе прокатных станов
Наиболее благоприятным в энергетическом отношении яв-
ляется режим работы тиристорного электропривода при мини-
мальных углах регулирования а. В этом случае потребляемая
реактивная мощность и потоки высших гармоник будут мини-
мальными [см. (51)]. Существенна уменьшить угол регулиро-
вания и соответственно улучшить энергетические показатели
тиристорного электропривода можно, двухзонный регулирова-
нием скорости.
В процессе обжатия с каждым пропуском момент прокатки
снижается, а длина полосы увеличивается. Это дает возмож-
ность увеличить скорость прокатки на последних пропусках
и обеспечить благодаря этому более высокую производитель-
ность стана.
Повышение скорости выше основной на последних пропус-
ках обеспечивается ослаблением поля двигателя, путем сни-
жения тока обмотки возбуждения.
Степень ослабления поля двигателя обычно не превышает
0,5 от номинального значения; скорость^ двигателя регули-
руется при этом в диапазоне (2*2,5):1.
На рис. 68 приведены механические характеристики ти-
ристорного привода постоянного тока при двухзонном регу-
лировании скорости, а на рис. 69 - графики изменения в I
и II зонах напряжения якоря двигателя L7, магнитного пото-
ка Ф, тока якоря 1 момента М и мощности двигателя Л
Ток двигателя 7, определяющий его нагрев, в обеих зо-
нах равен номинальному, чем обеспечивается наиболее пол-
ное использование двигателя.
Зона I соответствует обычному регулированию скорости
путем изменения напряжения, подводимого к якорю при неиз-
146
менном магнитном потоке двигателя, равном его номинально-
му значению Фн, магнитный поток Ф, ток якоря 1 и соответ-
стенно момент М двигателя остаются во всем диапазоне пос-
тоянными; регулирование в I зоне осуществляется при пос-
тоянном моменте Л/= /<Ф/= const.
При подходе к зоне II ц, напряжение U становится
максимальным (номинальным), и дальнейшее повышение ско-
Рис. 68. Механические характеристики
тиристорного электропривода при двух-
зонном регулировании скорости
Рис. 69. Графики U, Ф, /, М, Р-
= f (со) при двухзопном регулировании
рости (выше основной <aocll) достигается ослаблением потока
двигателя Ф < Фп при номинальном напряжении на якоре.
'> Вследствие снижения магнитного потока должен быть сни-
жен и момент двигателя, который в зоне II составит
М = A/uwu/(a; Ф = Фцц/са,
(98)
где Л/, Ф, — соответственно момент, поток и угловая ско-
рость двигателя в зоне II. Скорость в зоне II регулирует-
ся при постоянной мощности.
Двухзонное регулирование скорости тиристорного привода
постоянного тока сочетается с многоконтурной системой
подчиненного управления. Достоинствами многоконтурной
системы подчиненного управления выполненной на базе аппа-
ратуры УБСР, являются простота построения схем управления
с любым числом регулируемых параметров, при использовании
ограниченной номенклатуры аппаратуры; компактность аппа-
ратуры, ее надежность, возможность агрегатного принципа
147
построения схем; удобство монтажа; ремонта; легкая реали-
зация оптимальных законов управления, обеспечение хороше-
го качества переходных процессов и т.п.
Система электропривода в этом случае включает тирис-
торный преобразователь UZ] цепи якоря двигателя Л/, обмот-
ку возбуждения двигателя ОВМ, тиристорный возбудитель UZ2
и схему управления (рис. 70).
Схема управления состоит из двух взаимосвязанных сис-
тем регулирования: напряжения якоря и тока возбуждения
/в. Каждая из этих систем выполнена двухконтурной, подчи-
ненной.
Система регулирования напряжения якоря содержит регу-
лятор скорости PC, подчиненный регулятор тока РТ, а также
датчики скорости BR, тока якоря UA1, задатчик скорости
SA, систему импульсно-фазового управления тиристорами
СУФУ1.
Как видно из схемы на рис. 70, выходной сигнал регуля-
тора скорости PC является задающим сигналом для регулято-
ра тока РТ.
В системах подчиненного регулирования управление полем
двигателя осуществляется обычно в функции э.д.с., величи-
на которой в процессе регулирования остается постоянной.
Система ‘ регулирования тока возбуждения 7В содержит регу-
лятор э.д.с. РЭ, подчиненный регулятор тока возбуждения
РТВ, а также датчики э.д.с. U3, тока возбуждения UA2,
СИФУП.
148
Таким образом осуществляется взаимосвязанное регулиро-
вание скорости двигателя и его магнитного потока, причем
исходят из того, что целесообразно одновременно изменять
напряжение на якоре и поток возбуждения, так как это сни-
зило бы допустимый момент двигателя и модуль жесткости
механических характеристик привода. С помощью РЭ происхо-
дит разделение режимов управления напряжением и полем
двигателя.
Скорость во второй зоне регулируется потоком возбужде-
ния двигателей в зависимости от напряжения на якоре. По
достижении номинального напряжения на якоре происходит
магнитный поток ослабляется и двигатель разгоняется во
второй зоне.
Скорость двигателя в зоне 11 регулируется при условии
поддержания постоянства его э.д.с. Е = кыФ = const. Кон-
тур регулирования э.д.с. стремится поддержать э.д.с. дви-
гателя постоянной, равной номинальной за счет изменения
потока возбуждения.
Сигнал, пропорциональный э.д.с. Е двигателя, получает-
ся на датчике э.д.с. UE (см. рис. 70), вычитанием из час-
ти якорного напряжения U величины InR, пропорциональной
падению напряжения на якоре двигателя
Е U - /яЯ. (99)
Сигнал, пропорциональный Е, вычитается из сигнала за-
данного значения э.д.с. Е3 и разность этих сигналов
ДЕ = Е3 — Е поступает на вход РЭ - регулятора э.д.с.
Величина выходного сигнала регулятора РЭ ограничивает-
ся нелинейным элементом и поступает на вход РТВ — регуля-
тора тока возбуждения. При увеличении напряжения на якоре
и скорости двигателя его э.д.с. достигает Е3 и з^тем пре-
вышает его. Выходной сигнал регулятора РЭ начинает сни-
жаться, что вызовет снижение тока возбуждения и потока
двигателя Ф, увеличение его скорости и стабилизацию зна-
чения э.д.с. двигателя.
Процесс ослабления потока возбуждения двигателя будет
продолжаться до тех пор, пока еГо скорость не сравняется
с заданным значением, при котором э.д.с. двигателя будет
равна ее заданному значению.
Таким образом, до тех пор, пока идет процесс ускорения
до основной скорости (w < wocll, I зона) э.д.с. двигателя
149
Е < Ее, регулятор РТВ поддерживает номинальное значение
тока возбуждения /вп. Выходной сигнал регулятора э.д.с.
РЭ в этом случае ограничивается на уровне, соответствую-
щем заданной номинальной величине тока возбуждения. По-
этому при работе двигателя со скоростью ниже основной вы-
ходное напряжение регулятора э.д.с. РЭ и, следовательно,
ток возбуждения двигателя не зависит от скорости. ,
Увеличение скорости выше основной (w > woclI, II зона,
рис. 68) приводит к увеличению э.д.с. Е> Е3 и начинается
Процесс . ослабления поля, в котором регулятор э.д.с. РЭ,
выйдя из ограничения и воздействуя на РТВ, стремится под-
держивать э.д.с. двигателя равной номинальному значению
за счет снижения магнитного потока.
Оптимизация переходных процессов в электроприводе про-
катных станов. Приводы прокатных станов, в основном боль-
шую часть времени работают в переходных режимах. В зави-
симости от динамических свойств системы привода, парамет-
ров, характера нагрузки, вида управляющего воздействия и
т.п. переходные процессы будут отличаться такими показа-
телями, как динамическое Дад и статическое Дас падения
скорости, длительность переходного процесса, его колеба-
тельность, перерегулирование и т.п. В зависимости от ха-
рактёра переходного процесса будут динамические перегруз-
ки, ч потери, нагрев двигателей и т.п. Принято считать пе-
реходный процесс закончившимся, когда регулируемая вели-
чина не отличается более чем на ±5 % от ее установившего-
ся значения. Однако для некоторых приводов прокатных ста-
нов эти требования значительно жестче. Например, для при-
вода непрерывных клетей широкополосного стана горячей
прокатки скорость при увеличении нагрузки должна восста-
навливаться с точностью до 0,2 % за 0,1*0,3 с. Поэтому
весьма важно выбрать такой характер переходного процесса,
который обеспечил бы максимальное быстродействие, минимум
динамических нагрузок и потерь энергии, а также оптималь-
ные значения всех других показателей, характеризующих ус-
ловия протекания процесса. Такой характер переходного
процесса будет считаться оптимальным.
Формирование оптимальных переходных процессов с пока-,
зателями, максимально удовлетворяющими требованиям техно-
логического процесса, является одной из важнейших задач
при разработке системы электропривода прокатных станов.
150
Критерием оптимизации переходных процессов могут быть:
минимум потерь энергии, максимум быстродействия и произ-
водительности стана, минимум колебательности переходного
процесса, минимум динамических нагрузок, ограничение ус-
корений по перегрузочной способности двигателя и т.п. Как
известно, для приводов прокатных станов, в особенности
непрерывных, большое значение имеет характер переходных
процессов при ударном приложении нагрузки. Ударное прило-
жение нагрузки при выходе металла в клеть вызывает сниже-
ние скорости и одновременно - увеличение тока двигателя.
При этом в зависимости от параметров системы и их соотно-
шения переходный процесс будет носить колебательный или
апериодический характер.
На рис. 71 представлены графики переходных процессов.
График 1 не имеет перерегулирования (апериодический про-
цесс). Такой переходный процесс удовлетворителен для при-
Рис. 71. Графики пере-
ходных процессов при
ударной нагрузке
водов, не требующих быстродействия в процессе регулирова-
ния, например привода рольгангов, где допускается значи-
тельная длительность переходного процесса /ПП1 (см.
рис. 71).
Стремление повысить быстродействие привода как замкну-
той системы, содержащей инерционные элементы с возможнос-
тью обмена накопления энергиями, приводит к колебательно-
му характеру переходного процесса (см. график 3 на рис.
71). Здесь длительность переходного процесса снизилась до
1ППЗ, однако процесс носит колебательный характер с зна-
чительным динамическим перепадом скорости Дад.
151
Для приводов, требующих высокого быстродействия, опти-
мальным является переходный процесс вида 2 (см. рис. 71).
Поскольку наибольшее перерегулирование здесь «5 %, этот
переходный процесс можно считать законченным за минималь-
ное время /пп2 без чрезмерных колебаний.
Требуемый характер ' переходного процесса может быть
сформирован введением корректирующих устройств в виде
гибких обратных связей, т.е. обратных связей, действующих
только в переходных процессах. В качестве корректирующих
элементов в гибких обратных связях используются пассивные
Я—С-цепочки, стабилизирующие трансформаторы, а также ак-
тивные элементы - операционные усилители. Корректирующие
устройства своим входом подключаются к источнику сигнала
обратной связи (7ВХ (рис. 72), а с выхода снимается сигнал
Рис. 72. Схемы включения корректирующих элементов
гибкой обратной связи 1/вых, который может быть поДан, на-
пример, на вход регулятора тока РТ. В схеме на рис. 72, а
корректирующим элементом является цепочка Я—С, а в схеме
на рис. 72, б - трансформатор Т.
3.4. Схема управления тиристорным электроприводом
прокатного стана. Выравнивание нагрузки двигателей
• Требования к электроприводу прокатных станов обуслов-
ливают схемы управления. В частности, она должна обеспе-
чить: оптимальное по быстродействию регулирование скорос-
ти привода по условию полного использования мощности и
перегрузочной способности двигателей; автоматический
плавный пуск привода, его замедление с максимально допус-
тимыми ускорениями; рабочее и аварийное торможение приво-
да; автоматическое управление работой привода и всего
стана; точное (часто > 0,5 %) согласование скоростей
152
взаимосвязанных приводов механизмов; формирование требуе-
мых статических и динамических характеристик привода;
разгон с постоянным ускорением, с постоянным динамическим
током и со снижением величины динамического тока по мере
ослабления поля; обеспечение устойчивой ’’ползучей” ско-
рости.
При стопорении электропривода под действием статичес-
кого момента время стояния двигателя под током ограничи-
вается до 5*10 с.
При индивидуальном приводе требуется регулирование
скоростей верхнего и нижнего валков до захвата металла и
выравнивание нагрузки двигателей при прокатке.
При перегрузках (например, прокатка более холодного
слитка, увеличение обжатия и др.) система управления
должна автоматически ограничивать ускорение и соответст-
венно динамический ток якоря; обеспечение так называемого
лыжеобразования; возможность толчковой работы в прямом и
обратном направлениях прокатки; защита привода и его эле-
ментов от аварийных режимов; сигнализация о неисправнос-
тях, перегрузках и т.п., надежность схемы, безотказность,
удобство монтажа, ремонта и 1.д.
В электроприводе прокатных, трубопрокатных станов,
вспомогательных механизмов встречаются разные структуры
систем регулирования.
1. Регулятор скорости с подчиненным регулятором тока
якоря (однофазное регулирование),
2. Регулятор скорости с подчиненным регулятором тока
якоря и зависимым управлением потоком возбуждения двига-
теля (двухфазное регулирование).
3. Регулятор положения с подчиненными регуляторами
скорости и тока. '
4. Регуляторы структур 7 и 2 с выравниванием нагрузок,
с воздействием на поле двигателя.
5. Регулятор мощности (для намоточных устройств).
6. Регулятор тока, уставка которого регулируется в со-
ответствии с заданным натяжением и т.п.
Несмотря на большое разнообразие прокатных, трубных
станов, вспомогательных механизмов, схемы тиристорного
электропривода их имеют много общего. Это дает возмож-
ность рассмотреть обобщенную схему электропривода прокат-
ного и трубного стана и выявить назначение ее основных
153
элементов. Благодаря этому можно избежать многих повторе-
ний при рассмотрении конкретных схем разных механизмов.
На рис. 73 представлена обобщенная схема тиристорного
электропривода механизма стана. Схема управления соответ-
ствует второму типу.
Рис. 73. Схема тиристорного электропривода постоянного тока механизма стана
с двухзонным подчиненным регулированием скорости
В силовую часть схемы входят следующие .элементы: авто-
мат FA, трансформатор Г, реверсивный тиристорный преобра-
зователь цепи якоря двигателя UZ1, рабочий двигатель по-
стоянного тока Л/, с обмоткой возбуждения двигателя ОВМ>
получающей питание от тиристорного нереверсивного преоб-
разователя возбуждения UZ2.
. Система управления приводом многоконтурная, подчинен-
ная, с двухзонным регулированием скорости состоит из двух
систем, осуществляющих взаимосвязанное регулирование на-
пряжения якоря и тока возбуждения двигателя.
Система регулирования напряжения якоря имеет два кон-
тура: внешний контур регулирования скорости и подчиненный
внутренний контур регулирования тока якоря. В контур ре-
гулирования тока якоря входят: датчик тока UA1, регулятор
154
тока якоря РТ, система импульсно-фазового управления
СИФУ1.
В контур регулирования скорости входят: тахогенератор
BR, регулятор скорости PC, блок ограничения тока БОТ и
т.п.
Схема управления током возбуждения также двухконтур-
ная. Она содержит контур регулирования тока возбуждения и
контур регулирования э.д.с. двигателя. Внешний контур ре-
гулирования э.д.с. содержит датчик э.д.с. UE, регулятор
э.д.с. РЭ, нелинейный элемент НЭ и т.п. Внутренний (под-
чиненный) контур регулирования тока возбуждения содержит
датчик тока UA2, регулятор тока возбуждения РТВ, СУФУП.
Схема содержит блок питания аппаратуры управления БП.
Управление напряжением на якоре и полем двигателя че-
редуются. Управление полем двигателя осуществляется в за-
висимости от величины напряжения на якоре. Так, при уско-
рении двигателя ослабление потока до*лжно начинаться толь-
ко при напряжении на якоре, близком к номинальному, а при
замедленном напряжении на якоре цолжно снижаться только
при полном потоке двигателя. Управление электроприводом,
т.е. задание скорости и направления вращения производит
оператор с помощью блока задания скорости ЦЗС. Темп раз-
гона определяется задатчиком интенсивности ЗИ, который
ступенчатый сигнал, поступающий от БЗС через фазовыпрями-
тельное устройство ФВУ, преобразует в линейно изменяющий-
ся сигнал задания скорости двигателя. Задатчик интенсив-
ности позволяет, кроме того, изменять темп разгона и тор-
можения в зависимости от величины потока возбуждения.
Для получения более качественного переходного процесса
(исключения перерегулирования и т.п.) между задатчиком
интенсивности ЗИ и регулятором скорости PC включен фильтр
(инерционное звено).
Сигнал задания скорости U.ic на входе регулятора ско-
рости PC сравнивается с сигналом обратной связи U0Ci про-
порциональным фактической скорости двигателя, который по-
лучен от тахогенератора BR. Выходной сигнал регулятора
скорости служит заданием регулятора тока РТ. На входе ре-
гулятора тока сигнал регулятора скорости Upc сравнивается
с сигналом UQT) пропорциональным фактическому значению
тока якоря UAL Выходной сигнал регулятора тока подается
на вход системы импульсно-фазового управления СИФУ1
155
реверсивного тиристорного преобразователя UZI, осу-
ществляя требуемое регулирование напряжения на якоре
двигателя.
Контур тока возбуждения состоит из системы управления
тиристорным возбудителем UZ2 - СИФУП, регулятора тока
возбуждения РТВ, датчика тока возбуждения UA2. В контур
регулирования э.д.с. входят датчик э.д.с. UE, регулятор
э.д.с. РЭ и т.п.
Отсечка по току. Блок ограничения тока (БОТ) осущест-
вляет так называемую отсечку по току, обеспечивающую рез-
кое снижение скорости двигателя при неизменном моменте на
валу. Отсечка по току используется для защиты двигателя
при перегрузках в статическом и динамическом режимах, в
случае работы привода на упор и для осуществления необхо-
димых динамических режимов.
Отсечка осуществляется введением в цепь обратной связи
по току опорного напряжения UО1 и вентиля (рис. 74, а)
Рис. 74. Схема привода с отсечкой по току без («) и се ciabii iniih
ном (б) и его электромеханическая характеристика (в)
или стабилитрона VD (рис. 74, 6). Эти элементы обеспечи-
вают действие обратной связи пи току только в случае пре-
вышения сигналом обратной связи Ux величины опорного на-
пряжения (UT>U01). При нагрузках, меньших допустимой,
действие указанной связи задерживается. Применение стаби-
литрона исключает необходимость использования источника
опорного напряжения. Электромеханическая характеристика
привода, работающего с отсечкой (рис. 72, в) имеет два
156
участка: участок стабилизации скорости - а и участок
стабилизации момента а — /к, где /О1С — ток отсечки (до-
пустимый ток нагрузки). Ток отсечки регулируется измене-
нием опорного напряжения. Поскольку перегрузочная способ-
ность двигателя при ослаблении поля снижается, необходимо
менять уставку БОТ, что осуществляется с помощью блока
уставки тока БИУТ.
Выравнивание нагрузок. При индивидуальном приводе вал-
ков необходимо обеспечить равномерную загрузку и согласо-
вание скоростей двигателей. Перераспределение нагрузок
объясняется тем, что валок с большей линейной скоростью
стремится двигать металл быстрее и тем самым разгружать
двигатель другого валка. При этом выходящий конец прока-
тываемой заготовки стремится изогнуться в сторону валка,
вращающегося с меньшей скоростью. Вращающий момент между
двигателями в этом случае распределяется неравномерно.
Выравнивание нагрузки между двигателями и окружных
скоростей валков стана осуществляется с помощью специаль-
ных уравнительных схем. По принципу работы уравнительные
схемы индивидуального привода валков можно разбить на две
группы:
1. Схемы, в которых характеристики двигателей регули-
руются изменением магнитных потоков двигателей (выравни-
вание мощностей, развиваемых двигателями).
2. Схемы, в которых характеристики двигателей регули-
руются изменением напряжения, подводимого к якорю двига-
телей (выравнивание моментов двигателей).
Технологически более рационально регулирование, обес-
печивающее равенство мощностей прокатки. Однако при рабо-
те до основной скорости, когда магнитная система двигате-
ля насыщена, воздействие на возбуждение двигателя неэф-
фективно, и практически регулирование возможно только пу-
тем изменения напряжения якоря. К тому же последний вари-
ант Характеризуется быстродействием. Выравнивание нагру-
зок двигателей должно осуществляться как в двигательном,
так и тормозных режимах.
На рис. 75 представлена схема выравнивания нагрузки.
Двигатели верхнего (Л/7) и нижнего (Л/2) валков получают
питание от индивидуальных преобразователей. Сигналы с
Датчиков тока двигателей подаются на сравнивающее устрой-
ство СУ. Сигнал рассогласования через регулятор выравни-
157
вания токов (РТВ) подается на входы двух самостоятельных
систем управления со своими задающими сигналами и
U3C2, Каждая система - двухконтурная с регулятором тока
(РТ) и регулятором скорости PC. На сравнивающие элементы
этих систем СУ1 и СУ2 подаются сигналы обратной связи по
скорости (Кс) от тахогенераторов BR7, BR2. Сигналы обрат-
Рис. 75. Функциональная схема выравнивания нагрузки
двигателей валков
ной связи по току нагрузки (узел Кг) подаются на входы
регуляторов тока (РТ). В случае перегрузки, например
двигателя Ml верхнего валка, сигнал, пропорциональный раз-
ности токов, увеличивает напряжение преобразователя UZ2,
а следовательно скорость и ток двигателя М2, Последний
принимает на себя дополнительную часть нагрузки, разгру-
жая частично двигатель Ml.
Контрольные вопросы
1. В чем состоит особенность работы привода прока ниих станов и какие тре-
бования предъявляются к приводу?
2. В чем состоят достоинства индивидуальною привода валков нереЛ группо-
вым?
3. Какие элемешь! содержит 1ирис1орный привод носюяпного пока с многокон-
турным подчиненным, двухзонпым peiy.iifpoiKtiiiicM скорости?
4 Как изменяются момент, мощное! ь. юк пинакля при двухзонном регули-
' рсванпи?
158
5. При каких условиях допускается снижение мании ною потока двигателя в
случае двухзонного регулирования?
6. Как зависит момент, магнитный ноток от скороеiи во второй зоне регули-
рования?
7. Как разделяются режимы регулирования напряжения и поля двигателя?
8. Как работает контур регулирования э.д.с. в зонах I и II?
9. Каким образом получается сигнал, пропорциональный э.Д.с. двигателя?
10. В каком случае характер протекания переходного процесса может считаться
оптимальным?
11. С какой целью используются корректирующие элементы и что они собой
представляют?
12. Какие основные требования предъявляются к схеме управления прокатным
станом?
13. Какие структурные системы регулирования применяются в приводе прокатных
станов?
14. С какой целью и каким образом осуществляется отсечка по току?
15. В чем заключается принцип выравнивания нагрузок двигателей валков?
3.5. Автоматизация прокатного производства.
Использование цифровой микропроцессорной техники
Автоматизация прокатных станов дает возможность увели-
чить производительность, улучшить качество проката, полу-
чить новые его виды, улучшить условия труда, исключить
человека из непосредственного управления технологическим
процессом, что способствует повышению технического и
культурного уровня обслуживающего персонала.
Характерной чертой технического прогресса в прокатном
производстве является все более широкое внедрение автома-
тизированных систем управления технологическими процесса-
ми (АСУ ТП), обеспечивающих решение как технологических,
так и планово-организационных задач.
В состав АСУ стана входят локальные (аналоговые и циф-
ровые) системы регулирования отдельных параметров и уп-
равляющие вычислительные машины УВМ. Вся система АСУ ТП
относится к числу иерархических многоярусных систем, со-
держащих несколько уровней:
1. (Нижний) уровень образуют локальные системы, осуще-
ствляющИ1е автоматическое регулирование отдельных парамет-
ров технологического процесса — скорости, тока двигателя,
его э.д.с., натяжения полосы, ее температуры, положения
металла и рабочих механизмов, а также характера протека-
ния переходных процессов, темпа разгона и т.п. Здесь ши-
роко используются микро-ЭВМ.
159
2. (Средний) уровень структуры обеспечивает управление
технологическими процессами по оптимальным жестким про-
граммам, выбираемым операторами. Он содержит одну или
несколько УВМ, управляющих исполнительными механизмами и
локальными системами регулирования технологических пара-
метров. Оптимальная программа прокатки рассчитывается для
каждой отдельной заготовки с учетом ее параметров — ис-
ходных и конечных размеров, сорта металла, температуры и
т.п. Оптимальную программу прокатки часто выбирают по ус-
ловию максимальной производительности.
В частности, основными функциями устройств среднего
уровня АСУ ТП широкополосных станов является: планирова-
ние прокатки слябов; слежение за слябами по всей линии
стана; управление темпом »прокатки; управление загрузкой
слябов в нагревательные печи и выдачей из них; управление
режимами обжатия в реверсивных клетях черновой группы;
управление тепловым режимом нагревательных печей; регули-
рование скорости и ширины полосы в непрерывной черновой
группе клетей; управление ножницами перед чистовой груп-
пой клетей; прямое цифровое регулирование технологических
параметров полос в чистовой группе клетей (толщины, про-
филя, формы, натяжения, ширины и температуры полосы); уп-
равление душируюшей установкой; управление режимами рабо-
ты моталок; транспортировка и маркировка рулонов; пере-
стройка скоростного режима и всех механизмов стана и т.п.
3. (Верхний) уровень оптимизирует управление второго
уровня, уже без участия оператора, осуществляя управление
работой всего цеха. Устройства верхнего уровня АСУ ТП, в
частности, оптимизируют режимы работы стана для обеспече-
ния максимальной производительности и высокого качества
проката, собирают и обрабатывают технологическую информа-
цию для адаптации алгоритмов регулирования и начальной
настройки, инженерную и производственную информацию, учи-
тывают объем и качество выпускаемой продукции; формируют
сопроводительную документацию; контролируют и диагности-
руют неисправности средств автоматики и вычислительной
техники, работу оборудования стана, прогнозируют, контро-
лируют и фиксируют возникающие аварийные ситуации и т.п.
В связи с освоением выпуска интегральных микросхем с
большой степенью интеграции (БИС — большая интегральная
схема; СБИС — сверхбольшая интегральная схема) появилась
160
возможность построения эффективных цифровых систем регу-
лирования. В частности, наряду с системой приборов УБСР
аналоговой ветви были созданы и освоены промышленностью
приборы цифровой ветви. Наиболее высокие показатели
электропривода получаются, когда цифровая измерительная
часть сочетается с аналоговой, выполненной по принципу
подчиненного регулирования параметров. При этом образуют-
ся так называемые цифро-аналоговые системы электроприво-
да, отличающиеся высокими динамическими показателями, вы-
сокой точностью регулирования (до 0,001 %). В таких сис-
темах, как правило, аналоговый регулятор включается во
внутренний контур регулирования (обычно в контур тока), а
цифровой — во внешний контур скорости, ЭДС, положения и
т.п. Кроме повышения точности работы агрегатов цифро-
аналоговые системы обеспечивают возможность сопряжения с
разными программно-задаюшими устройствами.
На рис. 76 представлена функциональная схема электро-
привода с подчиненной системой регулирования на цифро-
аналоговых элементах. В ней используются цифровые датчики
Рис. 76. Функциональная схема подчиненного многоконтурного регулирования,
выполненная на цифро-аналоговых элементах
физических величин, которые вместе с другими цифровыми
устройствами управления (задатчиками, сумматорами, счет-
чиками и т.п.) образуют измерительную часть электроприво-
да.
Аналоговая часть электропривода (см. рис. 76) выполне-
на по структуре подчиненного регулирования с тремя конту-
рами регулирования: по положению исполнительного органа
(РП), по скорости (PC) и току (РТ). Внешний контур регу-
161
лирования положения (РП) выполнен цифровым, а внутренние
контуры регулирования тока (РТ) и скорости (PC) — анало-
говыми. Таким образом, аналоговая часть содержит регуля-
тор тока РТ, на который поступают сигналы задания по току
17зд — от регулятора скорости PC и обратной связи по току
17от — от датчика тока UA. Выходной сигнал регулятора то-*
ка Uy является сигналом управления тиристорного преобра-
зователя UZ, питающего якорь двигателя М. Регулятор ско-
рости PC получает сигнал UQC от датчика скорости BR и
сигнал задания 17зс — от датчика интенсивности ЗИ. Вход-
ным сигналом ЗИ является выходной сигнал 1/зс аналогового
регулятора положения РП.
В состав цифровой измерительной части электропривода
входят датчики входного BIA и выходного BL2 сигналов по-
ложения, арифметическое суммирующее устройство АрСУ, пре-
образователь кода в напряжение ДА (преобразователь код-
аналог). Задачей цифровой измерительной части является
формирование сигнала рассогласования L/д. Работа ее проис-
ходит следующим образом. Требуемое перемещение исполни-
тельного органа задается задатчком BL1 в виде числа W3n
в двоичном коде. Этот сигнал подается на вход сумматора
АрСУ вместе с числовым сигналом Nn (также в параллельном
двоичном коде), соответствующим действительному положению
исполнительного органа. Сумматор АрСУ обеспечивает сумми-
рование этих двух цифровых сигналов и выделение сигнала
рассогласования 7VA в цифровом представлении. Далее цифро-
вой сигнал NA преобразуется (ДА) в аналоговый сигнал 1/Д
(напряжение постоянного тока), который поступает на вход
регулятора положения РП. Схемы такого рода выполняются на
унифицированных аналоговых (УБСР-АИ) и цифровых (УБСР-ДИ)
регуляторах.
По мере развития и совершенствования технологии увели-
чивается число параметров и факторов, которые необходимо
контролировать и обрабатывать с целью оптимизации проте-
кания технологических процессов. При этом непрерывно ус-
ложняются требования к системам автоматизации электропри-
вода.
Традиционный состав технических средств электроприво-
да — электродвигатель, преобразователь, аппаратура управ-
ления и регулирования отдельных параметров уже не может
162
удовлетворять требованиям, предъявляемым к современным
сложным системам управления с гибкой структурой.
Все возрастающая способность регулируемых автоматичес-
ких электроприводов, содержащих аналоговые и цифровые
устройства, устройства связи и преобразования формы ин-
формации, возрастающая сложность законов управления и ма-
тематического описания системы, необходимость выполнения
многих функций, в частности, тех, которые раньше выполня-
лись обслуживающим персоналом, требуют новых средств для
реализации этих систем. Такими средствами явились управ-
ляющие вычислительные машины УВМ.
На . рис. 77 представлена двухконтурная цифровая система
регулирования скорости привода на основе УВМ. Импульсы
управления вентильным преобразователем UZ формируются не-
посредственно УВМ. На рис. 77 приняты следующие обозначе-
ние. 77. Система цифрового регулирования ско-
рости привода с использованием УВМ
ния: 1 — УВМ; 2, 3 — регуляторы соответственно скорости и
тока; 4 — устройство синхронизации импульсов с сетью; 5 —
СИФУ; 6 — формирователь импульсов; 7 — усилитель импуль-
сов; 8 — счетчик импульсов; 9 — фильтр; 10 — преобразова-
тель сигнала; М — электродвигатель постоянного тока;
ОВМ — обмотка возбуждения двигателя; Т - трансформатор;
S, 10 — датчики соответственно скорости и тока. Как видно
из рис. 77, ряд элементов системы управления, в том числе
регуляторы, не являются самостоятельными физическими уст-
ройствами, а входят в состав УВМ.
Системы управления с использо-
ванием микропроцессорной техни-
163
к и. Применение мощных вычислительных машин в АСУТП эко-
номически эффективно лишь на крупных производственных
объектах, так как такие машины дороги, сложны, требуют
специального обслуживания. Для управления отдельными
объектами с малым числом электроприводов целесообразно
использовать микропроцессоры (МП). На базе МП сформиро-
вался новый класс машин - микро-ЭВМ, выполненных на нес-
кольких платах, состоящих из МП, памяти, устройств связи
с объектом (УСО) и периферийных устройств.
Микро-ЭВМ, УСО, пульт управления, периферийные устрой-
ства и другие элементы образуют управляющий вычислитель-
ный комплекс УВК (рис. 78), ориентированный на решение
задач управлений, контроля, защиты, диагностики и т.п.
Рис. 78. Функциональная схема управляю-
щего вычислительного комплекса ?
Устройство связи с объектом УСО позволяет соединить мик-
ро-ЭВМ с управляемым объектом через посредство датчиков
Д1-ДМ, исполнительных устройств ИУ1-ИУЛГ, которые могут
представлять собой систему локальных регуляторов с обрат-
ными связями.
УСО осуществляет также преобразование аналоговых,
дискретных и импульсных сигналов в цифровую форму и об-
ратно.
Основным компонентом микро-ЭВМ является МП, выполняю-
щий самые разные функции, связанные с обработкой данных,
164 * ‘
вычислением и управлением объектом. В тиристорных приво-
дах прокатных станов, ножниц и других агрегатов все шире
используются микропроцессорные устройства управления.
Микропроцессорная техника используется в электроприво-
де станов для прямого цифрового управления, т.е. органи-
зации сигналов управления с помощью микро-ЭВМ, с выдачей
управляющих импульсов на тиристоры (через усилители).
Многофункциональные микропроцессорные устройства выполня-
ют одновременно функции регуляторов и СИФУ. Управляющее
микропроцессорное устройство решает задачи сбора и пере-
дачи информации, формирования и выдачи управляющих воз-
действий на объект управления по правилам^ предписываемым
алгоритмом. При управлении приводом оно выполняет функции
регуляторов координат привода: регуляторов положения,
скорости, тока с одновременным выполнением функций СИФУ,
контроля и диагностики состояния электропривода. МП уп-
равляет преобразователем в якорной цепи электродвигателя
и преобразователем в цепи его обмотки возбуждения. Одно-
временно осуществляет ’’сеточную” защиту при аварийных ре-
жимах в цепи преобразователя, контроль включения тиристо-
ров, состояния предохранителей и блокировок в цепях
электропривода, контроль технологических параметров при-
водимого механизма. Осуществляет обмен информацией с дру-
гими устройствами управления, исполнение команд устройств
более высокого уровня иерархии АСУТП.
МП имеют специальные диагностические программы поиска
неисправностей, обеспечивающие локализацию поврежденных
цепей. Микропроцессор — функционально законченное полу-
проводниковое устройство, состоящее из одной (однокрис-
тальный МП) или нескольких (многокристальный МП) интег-
ральных микросхем с большой степенью интеграции (БИС),
включающее в себя все средства, необходимые для обработки
информации и управления, и рассчитанное на совместную ра-
боту с устройствами памяти и ввода—вывода информации. Ос-
новная выпускаемая в России микропроцессорная БИС серии
К580 - это микросхема КР580ИК80, которая представляет со-
бой однокристальный 'МП. На примере этой микросхемы рас-
смотрим архитектуру МП.
Основными архитектурными элементами любого МП являются
устройство управления (УУ), арифметическо-логическое уст-
ройство (АЛУ), регисторы специального и общего назначе-
165
ния, интерфейсные средства (рис. 79). Устройство управле-
ния декодирует команды, записанные в программе и генери-
рует сигналы, необходимые для того, чтобы МП мог выпол-
нять необходимые функции. Работа УУ сводится к циклически
выполняемой последовательности операций: извлечение ко-
манд программы из внешней по отношению к МП памяти и ис-
полнение этих команд. Для синхронизации работы всех эле-
ментов МП используются последовательности тактовых им-
Рис. 79. Функциональная схема микропроцессора
пульсов, создаваемые специальным генератором тактовых им-
пульсов (ГТИ). Архитектурно ГТИ объединен с УУ. Макси-
мальная тактовая частота рассматриваемого МП составляет
2 МГц, длительность одного такта 0,5 мкс, а продолжитель-
ность выполнения команды (в зависимости от типа команды)
4—20 тактов.
Арифметическо-логическое устройство (АЛУ) выполняет
предписанные устройством управления арифметические и ло-
гические операции над данными, поступающими из внешней
(по отношению к МП) памяти или из устройств ввода-вывода
информации.
В микропроцессорных системах АЛУ и УУ соединены в одну
большую интегральную схему (БИС), которая называется
центральным процессором и выполняет все функции обработки
данных и управления.
К регистрам специального назначения следует отнести
аккумулятор, регистр команд с декодирующим устройством,
программный счетчик, регистр кода состояния.
Аккумулятор — дополнение к АЛУ, хранящее информацию
(некоторое число), поступающую в АЛУ для обработки. Одно-
временно АЛУ может выполнять операции только над двумя
166
числами, поэтому второе число извлекается соответствующей
командой из памяти. Результат выполнения операции остает-
ся в аккумуляторе.
Назначение регистра команд — сохранять команду, со-
гласно которой МП действует в данный момент. Команда,
хранимая в регистре команд, называется. текущей командой.
Функции программного счетчика состоят в формировании
адреса, по которому можно найти в памяти следующую коман-
ду. Обычно программный счетчик имеет специальное инкре-
ментное устройство, служащее для прибавления единицы к
текущему адресу, т.е. получают следующий адрес. По этому
адресу в памяти содержатся либо команда, либо данные.
Регистр кода состояния процессора служит для запомина-
ния результата выполнения последней команды программы.
Например, сформировался ли в результате выполнения опера-
ции сигнал переноса единицы в старший разряд, получился
ли результат отрицательным, равным нулю или положитель-
ным.
К регистрам общего назначения (РОН) относятся 6 реги-
стров, каждый из которых имеет свое собственное символь-
ное наименование: В, С, D, Е, Н, L. В основном РОН ис-
пользуются для сверхоперативного запоминания текущей ин-
формации, с которой работает МП.
На рис. 79 представлена принципиальная схема МП, в
состав которого входят АЛУ, аккумулятор (АК), регистр ко-
манд с декодирующим устройством (РК, ДУ), программный
счетчик (ПС), регистр кода состояния (РКС), регистры, об-
щего назначения (РОН), устройство управления (УУ), гене-
ратор тактовых импульсов (ГТИ), шина данных (ШД), адрес-
ная шина (ША), шина управления (ШУ). На рис. 79 также по-
казаны внешние по отношению к МП запоминающие устройства:
оперативное запоминающее устройство (ОЗУ) и постоянное
запоминающее устройство (ПЗУ). В ОЗУ хранится текущая ин-
формация: программа, числовые данные. Содержимое ОЗУ мо-
жет быть ’’стерто" и на его место записана новая информа-
ция. Таким образом, ОЗУ можно использовать в режиме чте-
ния и записи информации. Информация, хранимая в ПЗУ, не
может быть стерта, а может быть только считываема. В ПЗУ
обычно "зашивается" набор команд микро-ЭВМ, некоторые
подпрограммы, то есть та информация, без которой машина
работать не сможет.
167
Вся информация в МП представляется в двоичной системе
счисления, которая, в отличие от десятичной системы счис-
ления, которой пользуемся мы, оперирует не с 10 цифрами
(0, 1, 2, 3, 4, 5, 6, 7, 8, 9), а с двумя: 0, 1. Все
арифметические операции (сложение, вычитание, умножение,
деление) с помощью1 специальных приемов (взятие дополне-
ния, сдвиг) сводятся в МП (и в любой другой ЦВМ) к опера-
ции сложения. Сложение чисел в двоичной системе счисления
производится поразрядно и на основании правил двоичной
арифметики. Один двоичный разряд (0 или 1) называется
бит. Чтобы с помощью 0 и 1 закодировать буквы алфавита,
десятичные цифры, знаки арифметических действий, знаки
препинания и другие символы, требуется, как минимум, 8
бит. Принято 8 бит называть байт. Таким образом, напри-
мер, в слове ТОК три байта. В байтах измеряется объем па-
мяти. Часто применяют единицу килобайт (Кбайт, Кб или К),
который равен 1024 байта (210). Количество информации,
которое может быть записано в память или считано с нее за
одно обращение (за один цикл), называется машинным сло-
вом, длина которого может быть соответственно 4, 8 или 16
бит.
Основным языком программирования МП является язык мне-
мокодов — АССЕМБЛЕР. Программа, записанная на ассемблере,
переводится на язык нулей и единиц (машинные коды) —
единственный язык, который понимает МП (и любая другая
ЦВМ) — с помощью ассемблера-транслятора.
Под интерфейсом МП понимается система адресных, инфор-
мационных и управляющих шин, предназначенных для связи
перечисленных устройств. В МП различают внешний интер-
фейс, обеспечивающий сопряжение МП, памяти и периферийных
устройств и внутренний интерфейс — для связи между блока-
ми МП, периферийным называется устройство, осуществляющее
преобразования и ввод — вывод информации о регулируемых
координатах электропривода, состоянии защитной и коммута-
ционной аппаратуры, технологических параметрах процесса и
т.п.
Схема сопряжения периферийных устройств с микро-ЭВМ
называется интерфейсом ввода—вывода.
Информация со всех периферийных устройств вводится в
микро-ЭВМ в ,каждый момент естественного открытия венти-
лей. В эти же моменты выдается Информация о требуемом уг-
168
ле регулирования. Все узлы микро-ЭВМ (см. рис. 79) связа-
ны двухнаправленной шиной данных ШД, представляющей мно-
гопроводную магистраль. Однонаправленная шина адреса (ША)
предназначена для передачи двоичных кодов адресов. Шина
управления (ШУ) предназначена для передачи управляющих
сигналов.
На рис. 80 представлена функциональная схема реверсив-
ного тиристорного электропривода постоянного тока с мик-
ропроцессорным управлением. Здесь ПЗУ, ОЗУ — соответст-
3~50Гц
Рис. 80. Схема электропривода с микропроцессорным управлением
венно постоянное и оперативное запоминающие устройства;
П — преобразователи сигналов обратной связи; М - электро-
двигатель; ТРП - тиристорный реверсивный преобразователь;
L/Л, BR — датчики соответственно тока и скорости.
На рис. 81 представлена функциональная схема микропро-
цессорной системы управления. Напряжения шунтов Ш2, ШЗ в
цепи якоря двигателя М и возбуждения ОВМ преобразуется в
частоту следования импульсов преобразователями ПИЧ. Даль-
нейшая обработка сигналов выполняется в ячейке ЯС. Для
синхронизации процессов измерении и вычислений система
снабжена датчиком синхронизации. Для отсчета угла регули-
рования очередного тиристора используется ячейка ЯУТ,
имеющая в своем составе программируемые таймеры и буфер-
169
ные регистры. Периферийная ячейка ВД осуществляет выдачу
дискретных сигналов для управления блокировками и цифро-
вого сигнала в последовательном коде в ЭВМ верхнего уров-
ня или в систему управления другими агрегатами.
Клавишный регистр КР служит для ввода восьмеричных
цифр от 0 до 7 и определения программы работы процессора.
Остальные элементы схемы, рис. 81, имеют следующее назна-
чение: ВВ — устройства ввода сигналов защитных и коммута-
3^50 Гц
PQ...P4
j"Пульт 1
А2
игг
Напряжение
питания ТЭП
К ЭВМ верхнего
уровня
ИТ
ШЗ
ЯУТ
ОЗУ
-J
ПИЧц
I________
Задание
спорости
| пйч\ [ пич |Г/тл7ч
Рис. 81. Функциональная схема микропроцессорного управления
08М
ДС
ционных аппаратов; ИТ - индикационное табло; ПС — процес-
сорная секция; ППЗУ - перепрограммированное ПЗУ; ЯС —
ячейка счетчика импульсов; ЯУТ - ячейка управления тирис-
торами. С помощью МП решаются как типовые, так и специ-
альные задачи управления электроприводом. По мере совер-
шенствования микропроцессорных систем эти задачи будут
усложняться и круг их расширяться. Предусмотрен наладоч-
ный режим работы МП. В этом режиме осуществляется коррек-
тировка программ регулирования и проверка устройства на
функционирование с указанием на индикаторе пультового
терминала результатов проверки. Принципиальным достоинст-
вом управления с помощью микро-ЭВМ является его гибкость,
возможность оперативного изменения алгоритмов и программ
управления. Это позволяет программно изменять характерис-
тики привода и выполняемые им функции без изменения эле-
170
ментной и схемной основы системы управления. Задача авто-
матизации в этом случае сводится лишь к составлению новых
программ и внесению некоторых изменений в устройство свя-
зи с объектом (УСО), без разработки новых элементов схем
и организации их производства.
В микропроцессорных системах управления нет отдельно
выделенных регуляторов СИФУ, в виде физических объектов;
функции регуляторов и СИФУ программно выполняет микро-
ЭВМ. Физические переменные представляются в цифровом ко-
де. Достоинством такого управления является использование
в системе управления большого числа параметров, в том
числе — параметров, недоступных для непосредственного из-
мерения.
3.6. Электродвигатели прокатных станов.
Тиристорные преобразователи
Для привода рабочих валков клетей большинства станов
используются двигатели постоянного тока, получающие пита-
ние от преобразователей, в основном тиристорных. Ведутся
работы по внедрению на главных приводах прокатных станов
регулируемого электропривода переменного тока: частотно-
регулируемого; привода с обращенными синхронными двигате-
лями и привода с вентильными двигателями. В некоторых
случаях, например, в приводе черновых клетей непрерывных
станов горячей прокатки, используются синхронные электро-
двигатели; в приводе окалиноломателей таких станов ис-
пользуются асинхронные электродвигатели.
В приводах мощностью до 200 кВт используются в основ-
ном серийные двигатели постоянного тока, * серии Д. Для
приводов большей мощности разрабатываются специальные
прокатные двигатели, являющиеся базовыми для своего типо-
размера.
Для приводов валков мощных прокатных станов применяют
электродвигатели постоянного тока типа МП, П, ПС, ПП, ПБК
и др. Серийно изготовляются двигатели серии П2 (ИП2).
Важнейшим направлением развития прокатных станов явля-
ется увеличение мощности главного привода, что обеспечи-
вает повышение величин ускорения и замедления, величин
обжатий в пропусках, уменьшение времени прокатки, увели-
чение массы слитка и как следствие — повышение производи-
171
тельности. По этой причине в электроприводах таких станов
используются электродвигатели так называемой предельной
мощности. Предельная мощность двигателей постоянного тока
ограничивается допустимым напряжением между соседними
коллекторными пластинами (10—20 В), нагревом якоря, мак-
симально допустимой окружной скоростью якоря (70 м/с) и
т.п.
Одной из основных характеристик двигателя прокатного
стана является его технический показатель
а = PuMjJ. (100)
Чем выше этот показатель, тем большая производитель-
ность стана может быть обеспечена при данной мощности
двигателя. Важность технического показателя при оценке
уровня электрической машины объясняется тем, что простое
увеличение номинальной мощности и момента двигателей да-
леко не всегда может дать должный эффект, если не учесть
их динамические показатели.
Мощные прокатные электродвигатели постоянного тока
конструируются так, чтобы обеспечить наилучшие динамичес-
кие характеристики прй заданной номинальной мощности. В
частности, широко применяются прокатные двигатели посто-
янного тока с многоходовой обмоткой. Применение многохо-
довых обмоток позволяет уменьшить диаметр якоря и соот-
ветственно момент инерции двигателя данной мощности; по-
высить окружную скорость якоря, повысить к.п.д., расши-
рить диапазон регулирования скорости путем изменения на-
пряжения и т.п.
Чем больше радиус якоря, тем выше предельная мощность
по межламельному напряжению, по коммутации и реактивной
э.д.с. Однако, увеличение радиуса якоря приводит к увели-
чению момента инерции в значительно большей степени, чем
увеличение вращающего момента двигателя. Это привело к
необходимости изготовления двухъякорных и даже трехъякор-
ных двигателей.
Двухъякорное исполнение двигателей, а также применение
многоходовых обмоток якорей позволяет уменьшить габариты
машины при заданной мощности и частоте вращения.
В ряде случаев, например, в приводе непрерывных листо-
прокатных станов с целью снижения динамического падения
скорости иногда используют специальные двигатели с низким
172
ударным падением скорости (с повышенным моментом инер-
ции).
Эксплуатационные характеристики двигателей. Для оценки
показателей электродвигателей используются эксплуатацион-
ные характеристики, представляющие собой зависимость мо-
мента М, мощности Р,
тока якоря Z, напря-
жения якоря двига-
теля U и его пото-
ка Ф от скорости
(рис. 82).
Рис. 82. Эксплуатацион-
ные характеристики дви-
гателя прокатного стана
U
<Р
I
м
Мпш
I/nax
2шн ш
\I3OHQ
о)н Изона
природе прокатных станов с целью по-
-------------------Ни энергетических показателей
используется двухзд^ное регулирование скорости.
------------------- --------> основной достигается
Как отмечалась, в
вышения производительности
Широко
Увеличение скорости двигателя выше
снижением его магнитного потока. Однако снижение <магнит-
ного потока двигателя неизбежно ведет к снижению его вра-
щающего момента и перегрузочной способности, что необхо-
димо учитывать в целях обеспечения надежной и эффективной
работы электропривода.
Для двигателей реверсивных прокатных станов различают
номинальные, максимальные рабочие и максимальные выклю-
чаемые значения момента (соответственно М, М , Мвыкл),
тока, мощности (см. рис. 82).
Номинальные эксплуатационные характеристики строят для
длительного режима работы, исходя из условия, что ток
якоря, определяющий нагрев двигателя во всем диапазоне
скоростей, не должен превышать номинального значения
I = ZH. Такие характеристики представлены на рис. 82 в
нижней его части.
173
Для более полного использования прокатного двигателя и
повышения производительности преодоление возникающих при
работе динамических нагрузок (например, при разгоне при-
вода с металлом в валках) осуществляется с учетом пере-
грузочной способности двигателя, которая зависит от ско-
рости. Максимально допустимые значения тока I и момен-
та М Двигателя при регулировании скорости от нуля до
номинальной остаются постоянными М = ЛЛГ.., где Л — ле-
тах
регрузочная способность двигателя при
О увеличением скорости двигателя растет его э.д.с.
вследствие чего ухудшаются условия коммутации, что требу-
ет снижения момента.
Максимальные рабочие эксплуатационные характеристики
(изображенны в верхней части рис. 82), строят, исходя из
условия, что предельно допустимый ток для каждого
значения угловой скорости должен обеспечивать надежную и
безыскровую коммутацию двигателя.
Предельно допустимый момент снижается при увеличении
скорости Л/тах = Л/11Хпц1/с<), где Хн - допустимая перегрузка
двигателя при wH.
Под максимальными выключающими значениями момента
Мвыкл» мощности, тока понимают те их значения, при кото-
рых двигатель должен отключаться от источника питания.
Обычно эти величины на 15-20% выше их максимальных рабо-
чих значений при угловой скорости (и > ц,).
Дальнейшее развитие электродвигателей прокатных станов
осуществляется в следующих направлениях: повышение еди-
ничной мощности реверсивных прокатных электродвигателей
постоянного тока; повышение динамических показателей дви-
гателей; улучшение конструкции магнитопровода с использо-
ванием магнитомягких и магнитотвердых сталей и сплавов;
развитие принципов новой электромагнитной геометрии на
основе сложных обмоток позволяет уменьшить диаметр якоря
и соответственно момент инерции двигателя данной мощнос-
ти; намечено повысить окружную скорость якоря и к.п.д.,
расширить диапазон регулирования скорости путем изменения
напряжения и т.п. Значительный эффект дает применение в
двигателях компенсационной обмотки, обеспечивающей высо-
174
кие динамические показатели; использование в мощных про-
катных двигателях явления сверхпроводимости. Сверхпрово-
дящая обмотка возбуждения позволяет значительно повысить
рабочую индукцию, исключить магнитопривод, внести корен-
ные изменения в конструкцию двигателя - уменьшить массу,
размеры машины, момент инерции якоря, благодаря чему
улучшаются ее динамические и эксплуатационные характерис-
тики.
3.7. Электропривод реверсивных станов горячей прокатки
В эту группу входят обжимные станы (блюминги, слябин-
ги), клети заготовочных станов горячей прокатки, универ-
сальные клети крупносортных, листовых реверсивных станов
горячей прокатки, реверсивные чистовые клети толстолисто-
вых станов горячей прокатки и т.п.
В реверсивной клети стана прокатка идет в обоих на-
правлениях за несколько пропусков. После каждого пропуска
двигатель реверсируется.
Если блюминг имеет одну клеть с горизонтальными валка-
ми, то слябинг имеет две клети — горизонтальную и верти-
кальную, в которых происходит одновременная прокатка.
В комплекс реверсивного стана горячей прокатки, кроме
рабочих клетей, входит целый ряд других механизмов: роль-
ганги, ножницы, слитковозы, кантователи и др.
Перед каждым пропуском реверсивный стан разгоняется
вхолостую. При определенной скорости, которую называют
скоростью захвата, в валки поступает прокатываемый ме-
талл. Скорость захвата сравнительно невелика' и составляет
15—30% от максимальной скорости в данном пропуске ю ♦
Сравнительно небольшая скорость при захвате металла вал-
ками объясняется условиями надежного, безударного захва-
та. После захвата стан снова разгоняется с металлом в
валках. Перед концом прокатки скорость снижается с таким
расчетом, чтобы слиток не был выброшен на большое рас-
стояние от клети. Второй пропуск происходит в обратном
направлении, после реверса. После второго пропуска слиток
обычно кантуется и вновь рольгангом направляется к рабо-
чим валкам для следующего пропуска. Общее количество про-
пусков от 9 до 40.
175
В последующем пропуске слиток выбрасывается с макси-
мальной скоростью, поскольку в этом случае металл не
возвращается обратно в клеть.
В первых пропусках длина слитка невелика и скорость не
успевает достигнуть номинального значения юи. График ско-
рости в первых пропусках - треугольный (рис. 83, штрихо-
вые линии). С увеличением номера пропуска длина слитка
увеличивается, а сечение уменьшается. Для повышения * про-
изводительности стана скорость. рабочих валков с увеличе-
нием номера пропуска увеличивается и, наконец, достигает
номинального значения (о>н). После этого график скорости
может стать трапецеидальным. Однако часто в последних
пропусках, когда заготовка достигает значительной длины,
увеличивают скорость выше номинальной, ослабляя поле дви-
гателя. В этом случае темп ус-
корения и замедления необходи-
мо снизить, и график скорости
принимает вид выпуклой ломаной
кривой.
Рис. 83. Графики угловой
скорости валков реверсивно-
го стана
Режим работы электроприводов реверсивных клетей станов
горячей прокатки весьма напряженный. Частота включений
достигает 1500—2000 в час; толчки тока при захвате метал-
ла достигают 250—300 % от номинального; разгон осуществ-
ляется с металлом в валках; в конце каждого прохода имеет
место интенсивное торможение и т.п.
Требуемый по технологии диапазон регулирования скорос-
ти (от ползучей до максимальной) составляет (10-s-25):l.
Требования, касающиеся точности регулирования скорости,
невысоки и составляют 1-2 %.'
Ввиду частых включений важным требованием к приводу
является минимизация длительности переходных процессов —
пуска, торможения, реверса, а также потерь энергии при
переходных процессах. Привод должен обладать большой пе-
регрузочной способностью. Индивидуальный электропривод
176
станов должен регулировать соотношение скоростей верхнего
и нижнего валков до- захвата металла и выравнивания на-
грузки двигателей при прокатке.
Из всего многообразия электроприводов указанным требо-
ваниям удовлетворяет, в основном, индивидуальный электро-
привод постоянного тока, выполненный по системе: ревер-
сивный тиристорный преобразователь-двигатель с системой
подчиненного управления на базе УБСР, с двухзонным регу-
лированием скорости. Схема тиристорного электропривода
реверсивной клети стана горячей прокатки представлена на
рис. 84. Здесь FA1, FA2 - автоматы; Tl, Т2 — трансформа-
торы силовые; ТА — трансформатор тока; L7Z1, L/Z2 — ревер-
сивный тиристорный преобразователь цепи якоря двигателя
Ml; UZ3 — преобразователь цепи обмотки возбуждения; UE,
SE, РЭ - соответственно датчик, задатчик и регулятор
э.д.с.; РТ, РТВ - регуляторы соответственно тока якоря и
тока возбуждения; PC - регулятор скорости; UA1, UA2 -
датчики тока; В - тахогенератор; БЗС - блок задания ско-
рости; ФВУ — фазовыпрямительное устройство; ЗИ - задатчик
интенсивности; Ф — фильтр; РВН — регулятор выравнивания
нагрузки. Система управления приводом — многоконтурндя,
подчиненная, с двухзонным регулированием скорости. Она во
многом аналогична представленной на рис. 71. Особенностью
схемы рис. 84 является наличие регулятора выравнивания
нагрузок РВН, который является обшим для систем регулиро-
вания напряжения якоря и тока возбуждения двигателя. Сиг-
нал с датчика тока якоря ИА1 поступает на элемент сравне-
ния ЭС, на выходе которого сигнал А7 равен разности токов
двигателей Ml и М2 A/ = 7j-/2. При равномерной загрузке
двигателей Ml и М2 сигнал А7 = 0 и выходной сигнал РВН
также равен нулю. При перегрузке, например, двигателя М2
на выходе РВН появится сигнал. При этом выходные сигналы
РВН будут уменьшать задание на скорость двигателя М2 и
увеличивать задание на скорость двигателя Ml на входе ре-
гулятора скорости PC. Соответственно уменьшается напряже-
ние тиристорного преобразователя C/Z2, скорость и ток дви-
гателя М2. В то же время напряжение другого преобразова-
теля L7Z1, скорость и ток двигателя/ Ml увеличатся. В при-
воде используются реверсивные прокатные электродвигатели
специального металлургического исполнения с повышенной
177
механической и электрической прочностью (усиленные под-
шипники и крепление обмоток якоря, теплостойкая изоляция
и т.п.). Погрузочная способность составляет 2,5*3; стани-
ны двигателей выполняются разъемными для удобства монтажа
и ремонта. Мощность главного привода горизонтальных вал-
ков достигает 12-13 МВт, поэтому современные мощные об-
жимные станы имеют только индивидуальный привод валков.
Рис. 84. Схема главного электропривода реверсивного стана горячей прокатки
Напряжение двигателей 750-1000 В, частота вращения
50—65 об/мин и максимальная, при ослабленном поле, до
120 об/мин.
Для электроприводов выпускаются тиристорные агрегаты в
реверсивном исполнении мощностью до 16 МВт, на номиналь-
ные напряжения 600, 825, 1050 В.
178
3.8. Электропривод чистовых кле!ей непрерывных
станов горячей прокатки
К этой группе относятся главные приводы чистовых кле-
тей непрерывных широкополосных листовых станов, загото-
вочных, сортовых станов горячей прокатки, а также непре-
рывных калибровочных и редукционных станов трубопрокатных
агрегатов. Режим работы приводов клетей этой группы — не-
реверсивный, с ударным приложением нагрузки в момент за-
хвата металла валками, с редким регулированием скорости.
Диапазон регулирования скорости не превышает (10*20):1.
Предусматривается возможность подрегулирования скорос-
ти двиггтеля каждой из клетей. Хотя привод клетей данного
типа считается нереверсивным, однако с целью торможения
имеется тиристорная группа "назад",, рассчитанная на
30-50 % мощности электродвигателя.
Электропривод широкополосных станов горячей прокатки.
Современное развитие прокатного производства характеризу-
ется систематическим увеличением доли листа в общем про-
изводстве проката.
На современных широкополосных станах горячей прокатки
получают листы и полосы шириной от 500 до 2300 мм, толщи-
ной 0,8—20 мм из < 45-т слябов; скорость прокатки до
30 м/с, Производительность одного стана достигает 6 млн.т
в год. Условно эти станы делят на тонколистовые, прокаты-
вающие лист толщиной до 4 мм, и толстолистовые (4—20 мм).
По характеру технологического процесса и расположению ра-
бочих клетей станы этого типа делятся на непрерывные и
полунепрерывные.
В состав непрерывной чистовой группы входят: семь—во-
семь четырехвалковых клетей, чистовой окалиноломатель,
летучие ножницы с механизированной уборкой обрезй, уста-
новка гидросбива окалины, установка автоматической пере-
валки валков и другое оборудование.
Температура раската перед чистовой группой
1000—1050 °C, перепад температуры по длине раската
<10 °C. Температура полос в конце прокатки (на выходе .из
чистовой группы клетей) может находиться в пределах
730—950 °C, в зависимости от толщины и марки стали; точ-
ность поддержания заданной температуры ±5-5-10 °C.
179
Технологический процесс непрерывной группы клетей ха-
рактеризуется одновременным нахождением металла в нес-
кольких клетях. Поэтому при непрерывной прокатке обяза-
тельным является выполнение условия - постоянства секунд-
ного объема металла по клетям, которое может быть записа-
но в следующем виде
51V1 = S2V2 = - = snvn = const, (101)
где 52,..., Sn, , v2,..., v„ - соответственно сече-
ние и линейная скорость металла перед, входом в клеть.
Невыполнение условия (101) может привести к возникно-
вению усилий растяжения металла между клетями — прокатка
f с натяжением; усилий сжатия - прокатка с образованием
петли (с подпором). Петлю легко образуют заготовки малого
сечения. При этом на металл не воздействуют усилия сжа-
тия. При заготовках большого сечения петля не образуется
и тогда возникают усилия сжатия, характерные для прокатки
с подпором. Усилия растяжения или сжатия не должны превы-
шать установленных значений во избежание аварийных ситуа-
ций.
Свободная прокатка является границей между прокаткой с
натяжением и петлей; она является неустойчивой и не может
длительно поддерживаться. Поэтому в зависимости от техно-
логии прокатку чаще ведут с натяжением или с петлей (сжа-
тием металла).
В связи с жесткими требованиями к синхронизации элект-
роприводов нескольких клетей, связанных прокатываемым ме-
таллом, к электроприводам предъявляется требование мини-
мального статического (до 0,2 %) и динамического (2-3 %)
перепада скорости за 0,1—0,3 с.
Характер изменения скорости двигателей двух смежных
клетей -при ударном приложении нагрузки представлены на
рис. 85, где — угловая скорость холостого хода;
(*)у - установившееся значение угловой скорости; Дсад -
ударное (динамическое); Awc — статическое падение скорос-
ти. В момент fj металл входит в клеть I и скорость двига-
теля снижается. В момент 12 металл входит в клеть II. При
этом, как видно из графика, w2 > и, и возникает [согласно
(101)] растяжение металла. В периоды Г3-Г4 и t5-r6 будет
иметь место прокатка с петлей (с подпором).
180
Чередование режимов прокатки с растяжением и сжатием
приводит к разнотолшинности прокатываемого металла, а в
случае больших рассогласований скоростей — к его разрыву.
Учитывая все эти обстоятельства, часто в приводе не-
прерывных станов используют специальные двигатели с низ-
I клеть П клеть
Рис. 85. График переходных процессов । j । t
в п смежных клетях непрерывного стана L--1--JJ
ким ударным падением скорости (с повышенным моментом
инерции) в сочетании с быстродействующими схемами управ-
ления.
' Стремление устранить продольную разнотолшинность поло-
сы, а также сократить время прокатки полос обусловило
прокатку в чистовой группе клетей с ускорением до 1м/с2.
Это позволило довести скорость прокатки до 20 м/с. При
этом ускорение чистовой группы клетей выбирается, как
правило, постоянной, из расчета поддержания требуемой
температуры конца проката.
Работа чистовой группы клетей с ускорением обусловила
специфические требования к ее электроприводу, в том чис-
ле — необходимость изменения в широком диапазоне скорос-
ти; согласованное ускорение всех двигателей чистовой
группы при сохранении требуемых межклетьевых натяжений
полосы; согласование ускорения чистовой группы, рольган-
гов и моталки с прокатываемой полосой; индивидуальное
торможение каждого привода чистовой группы по выходе по-
лосы из данной клети. Кроме того, должна быть обеспечена
возможность изменения соотношения скоростей валков клетей
для обеспечения заданного изменения натяжения в устано-
вившихся и переходных режимах, возможность аварийного ре-
верса каждой клети и всего стана и т.п.
В электроприводах чистовых клетей непрерывных широко-
полосных станов используют обычно групповой привод, когда
один двигатель приводит во вращение два рабочих валка. В
этом случае используется блочное питание, когда обмотка
181
якоря каждого приводного двигателя подключается к индиви-
дуальному преобразователю.
С повышением мощности главного привода листовых широ-
кополосных станов потребовалась установка двухъякорных
двигателей или двух двигателей, питаемых по восьмеричной
схем© (рис. 86).
У современных листовых станов непрерывной горячей про-
катки с целью уменьшения отклонений толщины полосы, вы-
званных ее охлаждением, прокатка ведется с непрерывным
увеличением скорости. Здесь используется реверсивный при-
вад в связи с необходимостью быстрого снижения скорости
до. скорости захвата. Мощность тормозных секций тиристор-'
ного преобразователя составляет 30—50 % от мощности рабо-
чих секций. Современные схемы управления главных приво-
дов чистовой группы станов строятся по принципу подчинен-
ного регулирования, с зависимой системой управления воз-
буждением двигателя, на базе унифицированной блочной сис-
темы регуляторов (УБСР—АИ). Функциональная схема главного
Привода чистовой группы широкополосного стана представле-
на на рис. 86. Рабочие валки приводятся во вращение
182
двухъякорным двигателем постоянного тока Ml, М2, питающим-
ся от двух комплектов тиристорного реверсивного преобра-
зователя L7Z1, UZ2, включенных по восьмеричной схеме. Для
улучшения энергетических показателей в процессе глубокого
регулирования скорости первичные обмотки трансформаторов
Tl, Т2 включены по схемам треугольника и звезды с автома-.
тическим переключением отпаек.
Для питания обмоток возбуждения ОВМ1, ОВМ2, соединен-
ных последовательно, используется тиристорный преобразо-
ватель UZ3. Система управления приводом — многоконтурная,
подчиненная, с двухзонным регулированием скорости; она во
многом аналогична представленной на рис. 73. Схема управ-
ления содержит три взаимосвязанных компонента:, регулиро-
вания напряжения в якорной цепи двигателя, регулирования
тока возбуждения и задания скорости. Первые две из этих
схем — двухконтурные. Контур скорости содержит тахогене-
ратор BR, регулятор скорости PC и т.п. Подчиненный ему
контур тока якоря содержит датчик тока UA1, блок ограни-
чения тока БОТ; регулятор тока РТ, СИФУ; БИУТ - блок из-
мерения уставки тока. Система управления током возбужде-
ния также двухконтурная (контур тока возбуждения и контур
э.д.с.). Контур э.д.с. содержит датчик напряжения UV\
датчик э.д.с. L/E, регулятор э.д.с. РЭ. В контур регулиро-
вания тока возбуждения входят датчик тока возбуждения
UA2, РТВ, БОТВ, СИФУВ.
На входе регулятора РЭ сравниваются два сигнала: сиг-
нал заданного значения противо-э.д.с. Е1ЮМ и сигнал Е,
пропорциональный действительному значению противо-э.д.с.,
поступающий от датчика UE. Выходной сигнал РЭ является
заданием для регулятора тока возбуждения РТВ. На входе
РТВ он сравнивается с сигналом, пропорциональным действи-
тельному значению тока возбуждения от датчика тока UA2.
Схема задания скорости также содержит ряд элементов.
БУЗ — блок установил задания; МДУ — множительно-
делительное устройство, осуществляющее согласование ско-
ростей клетей. Оно выполняет операцию умножения двух на-
пряжений: суммы двух эталонных напряжений С/зап и Up и ин-
дивидуального для каждой клети сигнала БУЗ. Выходные на-
пряжение МДУ в определенном масштабе представляет задан-
ное значение скорости каждой из клетей. Сумматор СК —
183
суммирует сигналы, поступающие от шин заправочной скорос-
ти ШЭС, шин совместного ускорения ШСУ и от петледержате-
лей.
Задание на уровень скорости и грубая регулировка осу-
ществляется с помощью БУЗ, шин СЗС и ШСУ. БУЗ осуществля-
ет "грубую" настройку скорости клети от сельсина грубой
настройки СГН; для тонкой настройки в пределах ±10 % ис-
пользуется сельсин тонкой настройки СТН.
После захвата металла задатчик интенсивности ЗИ выклю-
чается из цепи управления с помощью размыкающего контакта
РЗИ, что обеспечивает возможность быстрого изменения ско-
рости при перемещении рукоятки тонкой настройки СТН. Для
снижения рывка в начальный момент разгона двигателя на
входе задатчика интенсивности включено инерционное звено
ИЗ.
Скорость прокатки чистовой группы клетей определяют
два независимых эталонных напряжения - (7зан от шин запра-
вочной скорости ШЗС и t/р от шин совместного ускорения
ШСУ. ир подается с задатчика интенсивности разгона ЗИР на
сумматор СК после входа металла во все клети, через ключ
индивидуального торможения КИТ и его сигнал линейно воз-
растает от нуля до заранее заданного значения, определяю-
щего рабочую скорость прокатки.
Напряжение 1/зап снимается с блока установки задания
заправочной скорости БУЗЗС. Темп ускорения чистовой груп-
пы зависит от выходного сигнала блока установки темпа ус-
корения БУЗТУ. Рабочая скорость прокатки задается блокам
рабочей скорости БУЗРС. Ограничение ЗИР зависит от раз-
ности между напряжением задания рабочей и заправочной
скоростей, азел ограничения ускорения УОУ ограничивает
темп ускорения вплоть до полного его прекращения при пе-
регрузке любого двигателя чистовой группы.
На входе из стана толщина полосы не сохраняется неиз-
менной в процессе прокатки и зависит от многих факторов.
На толщину готового листа влияют скорость прокатки, от-
клонения в режиме технологической смазки, разнотолщин-
ность и разная твердость по длине подката, температура
рабочих и опорных валков, эксцентричность опорных валков,
натяжение полосы и т.д.
Допускаемая величина среднеквадратичного отклонения
толщины полосы на выходе стана составляет 0,02 мм, ширины
184
Таблица Техническая характеристика двигателей стана 2400
№ клети Тип двигателя Рп, МВт W, об/мин ^двнг Привод
1 СДСЗ—19—59—16У4 7,5 375 1 Групповой
2,3 МП6300—32У4 6,3 32/63 2 Индивидуальный
4,5 МПС3000-63У4 8,0 63/90 2
6 М6300-32У4 6,3 32/63 2
7 МП8000-63У4 8,0 63/90 2
8 2МП20000—1000У4 2X10 100/200 1 Групповой без-
9 2МП20000-160У4 2X10 160/300 1 редукторный
10, И ЗМП18900—250У4 3X6,3 250/560 1
12 ЗМП12000-400У4 3X4,0 400/850 1
полосы 2,5 мм, поперечной разнотолшинности 0,01 мм. Теле-
скопичность горячекатаных рулонов должна быть не более
5—10 мм. Указанные жесткие допуски обеспечиваются благо-
даря использованию регуляторов толщины, работающих от
УВМ.
Широкополосный стан горячей прокатки является мощным
потребителем электроэнергии. Суммарная установленная мощ-
ность электроустановок современного 1-клетевого стана до-
стигает 600 МВт; общее количество электродвигателей ’ —
свыше 2000.
В табл. 3 приведены в качестве примера технические
данные двигателей главных приводов широкополосного стана
2400.
3.9. Электропривод непрерывных заготовочных станов
На непрерывных заготовочных станах прокатывают заго-
товки для сортовых, трубных, проволочных станов. Исходным
материалом для заготовочных станов служат блюмы сечением
300x300, 370x370 мм и т.д. Конечное сечение заготовки от
50x50 до 200x200 мм.
Непрерывные заготовочные станы состоят из одной, двух
или трех непрерывных групп клетей, расположенных последо-
вательно. Крупные заготовки прокатываются только в первой
группе, а мелкие - во всех группах.
Общая мощность двигателей превышает 65 МВт, при сум-
марной мощности главных приводов до 30 МВт.
Заготовочные станы выпускают ограниченный ассортимент
готовой продукции и не требуют изменения в широком диапа-
185
зоне скоростей валков рабочих клетей. Конечное сечение
заготовки не является окончательным, имеет простую форму
(квадрат, прямоугольник и т.п.). Поэтому высоких требова-
ний к точности регулирования скорости, диапазону регули-
рования скорости не предъявляется. Здесь возможно приме-
нение группового привода, при котором рабочие валки не-
скольких клетей приводятся от одного двигателя. В качест-
ве приводных могут использоваться двигатели переменного
тока (синхронные, асинхронные). При групповом приводе
вопросы, связанные с ударным падением скорости, отпадают.
Однако в современных заготовочных станах еще использу-
ется индивидуальный тиристорный привод постоянного тока,
позволяющий регулировать соотношение скоростей рабочих
клетей в определенных пределах. В ряде случаев применяет-
ся блочное питание двигателей групп клетей. Так, например,
заготовочный непрерывный стан 850 годовой производитель-
ностью 3,35 млн.т состоит из друх групп клетей по шесть в
каждой. В первой группе клетей заготовки прокатываются
свободно. Сечение заготовок достаточно велико и скорос-
тной режим в процессе прокатки может не меняться. Поэтому
в приводе первой группы клетей . возможно использование
сравнительно простой и дешевой схемы питания якорей дви-
гателей от общих шин постоянного тока (рис. 87). Шины по-
стоянного тока, питающие цепи якорей двигателей/ секцио-
нированы и подключены к общим тиристорным преобразовате-
лям L/ZHL/Z3 через автоматы FA и сглаживающий реактор L.
Структура управления приводом - нереверсивный преобразо-
ватель цепи якоря с одноконтурной системой регулирования
скорости.
Уровень скорости клетей задается командоаппаратом SA.
Для стабилизации напряжения и соответственно скорости
двигателей используется обратная связь по напряжению с
помощью датчика напряжения UV. На входе регулятора напря-
жения PH суммируются сигналы £/х||, UH соответственно за-
данного и фактического значений напряжения. Суммарный
сигнал подается на PH и далее - на СИФУ.
К каждой секции общих шин подключено по два двигателя
Ml, М2. В экстренных случаях возможно динамическое тормо-
жение двигателей. В этом случае контактором КМ1 якорь
двигателя отключается от шин постоянного тока и контакто-
186
ром КМ2 замыкается на резистор динамического торможения
Я1.
Как отмечалось, в схеме используется двухзонное регу-
лирование скорости: изменением напряжения якоря и ослаб-
лением поля двигателя. Ослабление поля двигателя осуще-
Рис. 87. Схема привода заготовочного стана
ствляется резистором R2. Реверс двигателей осуществляется
переключением контакторов КМЗ КМ4 в Цепи обмотки возбуж-
дения двигателя.
Для привода клетей второй группы применяется привод
постоянного тока по системе ТП—Д. В системе используется
двухзонное регулирование скорости с независимым регулиро-
ванием тока возбуждения. Реверс осуществляется полем дви-
гателя.
Привод клетей — групповой, через шестеренную клеть и
редуктор. Используются двигатели постоянного тока
МП-1800-20006, 1325 кВт; 200/300 об/мин, 750 В;
МП-2500-200, 1800 кВт, 200/400 об/мин, 750 В и др.
187
ЗЛО. Электропривод непрерывных сортовых станов
Сортовые станы предназначены для прокатки разнообраз-
ных стальных профилей как простых, так и фасонных (поло-
сы, уголка, квадрата, шестигранника, проволоки (катанки)
и т.п.), всего более 600 профилей и свыше 5000 профиле-
размеров.
По расположению клетей сортовые станы делятся на ли-
нейные, последовательные, зигзагообразные или шахматные,
непрерывные, полунепрерывные и т.п. Наиболее совершенными
являются непрерывные станы. Широко распространены непре-
рывные мелкосортные станы, имеющие черновую и чистовую
группы клетей.
. Режим работы привода стана — нереверсивный, продолжи-
тельный, с ударным приложением нагрузки.
Работа сортового непрерывного стана характеризуется
рядом особенностей, которые объясняются разнообразием
прокатываемых сортаментов. Технологические режимы прокат-
ки разных сортаментов могут значительно разрушиться, по-
этому электроприводы должны обеспечивать возможность из-
менения скорости в широких пределах. Диапазон регулирова-
ния скорости листовых клетей составляет 10:1.
Стан ускоряется до рабочей, скорости вхолостую. Металл
подается в валки на полной рабочей скорости, которая в
зависимости от назначения стана и его мощности составляет
15—20 м/с, а проволочных — 60 м/с.
Для получения качественного (по размерам) профиля сор-
тового металла прокатку следует вести без натяжения или
подпора. Все клети стана должны обеспечивать один и тот
же ритм прокатки, задаваемый клетью с наибольшим циклом
прокатки.
В соответствии с этим привод клетей стана должен обес-
печивать строгое (с точностью 0,1—0,2 %) соотношение
между скоростями клетей для разных программ прокатки; ма-
лое динамическое падение скорости (< 2 %) и малое время
регулирования (~ 0,1 с); незначительное натяжение или.
сжатие полосы при входе металла в валки; возможность об-
разования петли металла между клетями и поддержание ее
величины в заданных пределах; возможность получения меха-
нических характеристик разной жесткости для каждой клети
стана, обеспечивающих саморегулирование режима прокатки в
188
чистовых группах клетей; возможность осуществления авто-
матического независимого регулирования скорости двигате-
лей каждой клети.
В соответствии с перечисленными выше достаточно жест-
кими требованиями для клетей непрерывных сортовых станов
используется индивидуальный нереверсивный тиристорный
привод постоянного тока с двухзонным регулированием ско-
рости, с многоконтурной системой подчиненного регулирова-
ния параметров.
На рис. 88 представлена схема электропривода сортового
непрерывного стана 350, предназначенного для прокатки
профилей круглого, квадратного, шестигранного сечений,
Рис. 88. Схема привода сортового непрерывного стана
уголка. Схема управления построена так, что оператор име-
ет возможность осуществлять с пульта управления как инди-
видуальное подрегулирование скорости двигателя каждой
клети, так и общее регулирование скорости группы клетей.^
При изменении скорости прокатки в одной из чистовых кле-
тей одновременно меняется скорость всех предыдущих чисто-
вых и черновых клетей. Такое регулирование, изменяя лишь
общую скорость прокатки, не изменяет соотношения скорос-
тей отдельных клетей.
Схема осуществляет двухзонное взаимосвязанное регули-
рование скорости путем изменения напряжения якоря и пото-
ка возбуждения двигателя. Преобразователь UZ1 цепи якоря
двигателя нереверсивный, а преобразователь UZ2 обмотки
189
возбуждения ОВМ реверсивный. С его помощью осуществляется
торможение, а также аварийное реверсирование двигателя. В
известной мере схема аналогична той, что представлена на
рис. 73.
В данной схеме используются адаптивные регуляторы РТ и
скорости PC с переменной передаточной функцией, изменяю-
щейся в соответствии с требованием объекта регулирования.
Задача адаптивного регулятора тока состоит в том, чтобы
автоматически создавать одинаковые динамические характе-
ристики во всем диапазоне рабочего тока. Он должен иметь
в зоне непрерывного тока и прерывистого тока разные ха-
рактеристики и переключаемый коэффициент контурного уси-
ления. С этой целью регулятор тока разбит на две части:
перед И-регулятором (APT) включен переключаемый ПД—11-
регулятор тока (РТ).
Регулятор скорости состоит из ПИ-регулятора (PC) и
адаптивного П-регулятора с изменяющимся коэффициентом пе-
редачи (АРС). Задание скорости главных приводов поступает
с УВМ (в цифро-импульсной форме) на цифро-аналоговый пре-
образователь и далее (в аналоговой форме) поступает на
вход регулятора скорости. При неисправности в цифровом
задающем устройстве задание может подаваться с централь-
ной или вспомогательной площадки управления.
Система управления потоком возбуждения содержит регу-
лятор э.д.с. РЭ, регулятор тока возбуждения РТВ, датчики
э.д.с. (U3), тока UA2.
Логическое переключающее устройство переключает систе-
му привода на реверс и аварийное торможение. Оно управля-
ется сигналами с командного устройства.
Электропривод калибрующего блока. Калибрующий блок
обеспечивает повышенную точность размеров сортового про-
ката, выпускаемого с чистовой линии стана, за счет доба-
вочного малого его обжатия. При этом обеспечивается сни-
жение затрат на последующую обработку резанием, уменьша-
ются отходы в стружку дорогостоящего металла.
Калибрующий блок содержит две двухвалковые клети — го-
ризонтальную и вертикальную. Режим работы привода дли-
тельный, нереверсивный. Привод клетей индивидуальный, от
двигателей постоянного тока. В качестве индивидуального
источника питания используются комплектные реверсивные
тиристорные преобразователи.
190
К электроприводу калибровочного блока, кроме общих,
предъявляются дополнительные требования: плавный пуск,
разгон до максимальной скорости, реверсирование и оста-
новка каждой клети, тонкая поднастройка скоростей каждой
из клетей калибрующего блока при совместной работе с чис-
товой линией с целью удобства настройки блока при перехо-
де на разные сортаменты, возможность поднастройки жест-
кости статических характеристик приводов.
Силовая схема содержит две тиристорные группы, вклю-
ченные по встречно-параллельной схеме. Управляется тирис-
торный преобразователь системой импульсно-фазового управ-
ления СИФУ. Регулирование скорости двигателей клетей ка-
либрующего блока осуществляется изменением подводимого к
нему напряжения преобразователя с контролем по току якоря
и скорости.
Каждый приводной двигатель питается от собственного
тиристорного преобразователя со своей системой управле-
ния. Системы управления электроприводом горизонтальной и
вертикальной, клетей идентичны и обьединены на входе общим
задатчиком интенсивности.
Система автоматического регулирования построена по
принципу подчиненного регулирования параметров на базе
аппаратуры УБСР. Она состоит из двух последовательно
включенных регуляторов: тока и скорости. Задание рабочей
скорости привода клети поступает от тахогенератора чисто-
вой линии стана через датчик напряжения.
3.11. Электропривод станов холодной прокатки
Как известно, прокатка тонких металлических лент тол-
щиной < 1 мм возможна лишь в холодном состоянии. Объясня-
ется это тем, что тонкая лента в горячем состоянии имеет
малую прочность, а окалина, образующаяся при нагреве, со-
измерима по толщине с лентой. Холодная прокатка обеспечи-
вает благоприятную текстуру электротехнической и других
видов сталей.
Технологический процесс производства холоднокатаного
листа включает обычно следующие операции: очистку поверх-
ности исходной полосы от окалины и ржавчины; холодную
прокатку; термическую обработку листа с целью улучшения
его физико-механических свойств; дополнительную холодную
191
прокатку после термообработки с небольшим обжатием (дрес-
сировку), обеспечивающую поверхностную прочность металла
на глубине в несколько десятков микрометров; окончатель-
ную отделку — правку, резку на карты, обрезку кромок, по-
крытие другими металлами, В частности лужение и т.п.
Станы холодной прокатки подразделяют на непрерывные
(многоклетьевые) и реверсивные (одноклетьевые).
Реверсивные станы предназначены для прокатки со ско-_
ростыо до 15 м/с небольших партий тонких листов. Толщина
прокатываемой ленты - от 0,2 мм до 1-2 мкм, при этом
обеспечивается высокая степень точности ленты по толщине.
Диаметр рабочего валка выбирают из соотношения Ор =
= (1000*2000) Л, где h - толщина полосы.
Таким образом, для прокатки тонких лент используются
валки малого диаметра при большой длине, что снижает их
жесткость. Для повышения -жесткости ч^сто используются
опорные валки; количество которых достигает 18, причем в
некоторых станах привод осуществляется через опорные вал-
ки.
Рабочие валки реверсивных станов горячей прокатки име-
ют тиристорный привод постоянного тока. Схема управле-
ния - подчиненная, с двухзонным регулированием скорости.
Диапазон регулирования скорости (30*50):!; точность под-
держания скорости в установившемся режиме 1 %.
Клети непрерывных станов выполняются обычно четырех-
валковыми, в них прокатываются полосы толщиной
0,35*0,2 мм; скорость прокатки 20-45 м/с. Общее число
клетей стана три—шесть.
Увеличение числа клетей дает возможность прокатывать
более тонкую полосу при одной и той же начальной толщине,
использовать более толстый прокат; повышать точность и
качество поверхности готового проката за счет уменьшения
обжатия в одной клети. Это обеспечивает повышение произ-
водительности и качества готовой продукции.
Непрерывные станы холодной прокатки являются высоко-
производительными агрегатами с годовым выпуском продукции
до 2 млн.т.
Холодная прокатка должна выполняться с натяжением по-
лосы между клетями. Отсутствие натяжения может привести к
аварии, снижению качества металла и т.п. Поэтому кроме
рабочих клетей, где происходит основная операция — обжа-
192
тие металла, стан снабжен моталками, разматывателями.
Кроме того, стан оборудован летучими ножницами, сварочной
машиной и передвижным петледержатеЛем (аккумулятором по-
лосы), с помощью которого создается запас полосы, выби-
раемый в процессе прокатки, по мере надобности, что поз-
воляет по ходу прокатки проводить рез концов полос и их
сварку.
Технологический режим прокатки на реверсивных и непре-
рывных станах холодной прокатки подразделяется на следую-
щие основные этапы: заправка полосы с разматывателя в ра-
бочую клеть (клети) и моталку; установление заданного на-
тяжения металла, одновременный разгон двигателя клети,
разматывателя и моталки, прокатка на установившейся ско-
рости, торможение двигателей и т.п.
Режим работы привода - нереверсивный, но для осуще-
ствления рекуперативного торможения его выполняют реверс
сивным. Мощность вентильной группы "назад" составляет
около 50 % мощности рабочей вентильной группы.
В соответствии с технологическими условиями к электро-
приводу рабочих клетей непрерывных станов предъявляются
следующие требования: точное согласование скоростей про-
катки между клетями и намоточными устройствами с точ-
ностью порядка 1 %; обеспечение требуемых величин натяже-
ния полосы во всех режимах работы стана с точностью
3-5 %; создание натяжения покоя; плавное и в широких пре-
делах — от 10:1 до 25:1 для реверсивных и от 50:1 до
100:1 — для непрерывных станов регулирование скорости;
возможность раздельного и совместного регулирования ско-
рости привода клетей, моталок, разматывателей; обеспече-
ние разгона с заданным темпом ускорения; замедление с
ограниченным темпом, не препятствующим действию регулято-
ров натяжения и толщины; возможность толчкового режима
работы.
Привод непрерывных станов ’должен также обеспечивать
возможность окончания ускорения или замедления по желанию
оператора (режим "так держать"); аварийную остановку ста-
на с предельным для каждой клети темпом замедления; воз-
можность изменения жесткости механических характеристик
двигателей в зоне низких скоростей и при захвате полосы;
автоматическое . замедление стана при подходе сварных швов,
193
при окончании прокатки; аварийное торможение при обрыве
полосы.
Перечисленным выше жестким требованиям в настоящее
время удовлетворяет привод постоянного тока по системе
ТП-Д.
В приводе станов холодной прокатки находит применение
как групповой привод через шестеренную клеть, так и инди-
видуальный привод валков.
Для быстроходных непрерывных станов характерна большая
потребляемая мощность главных приводов, в связи с чем од-
нодвигательный привод оказывается невыполненным, посколь-
ку . потребляемая мощность двигателя становится выше пре-
дельной. По этой причине на высокопроизводительных непре-
рывных станах используют многоякорные двигатели с индиви-
дуальным приводом каждого рабочего валка. ‘Такой привод
позволяет одновременно снизить приведенный момент инерции
и повысить его быстродействие.
Ниже приведены основные технические данные электродви-
гателей (с частотой вращения 270/810 об/мин) непрерывного
стана холодной прокатки (система ТП—Д с использованием
редукторов):
Клети..............
Число якорей . . .
Рн» кВт............
1-5 М*
4 3
8200 3195
Моталка.
На рис. 89 представлена функциональная схема управле-
ния двигателем клети непрерывного стана холодной прокат-
ки. Привод клети - индивидуальный, каждый рабочий валок
приводится от двух двигателей - Ml и М2, работающих на
один вал. Якорные цепи двигателей соединены последова-
тельно по восьмеричной схеме и питаются от реверсивных
тиристорных преобразователей (7Z1, UZ2. Обмотки возбужде-
ния двигателей ОВМ1, ОВМ2 соединены последовательно и пи-
таются от нереверсивного тиристорного преобразователя
UZ3. Система управления электроприводом — подчиненная, с
двухзонным зависимым регулированием скоростей (по напря-
жению якоря и току возбуждения двигателя).
Система управления тиристорным преобразователем якор-
ной цепи UZlt UZ2 — двухконтурная, с подчиненным регули-
194
роваиием; она содержит контуры скорости и тока. Сигналы
обратной связи по току якоря и скорости поступают с дат-
чика тока UA\ и тахогенератора BR. Для изменения стати-
ческого перепада скорости каждой из клетей вводится уст-
ройство переменного компаундирования УПК, позволяющее
вводить отрицательную обратную связь по статическому мо-
менту Мс. Заправочная и рабочая скорости приводов всех
клетей стана задаются эталонным напряжением U3, формируе-
мым блоком задания скорости БЗС и поступающим на вход за-
датчика интенсивности ЗИ. В соответствии с выбранным ре-
жимом обжатия скорость клети корректируется блоком ВКС.
Рис. 89. Схема привода клети непрерывного стана, холодной прока тки
Управление двигателем клети при скорости выше основной
и выравнивание нагрузки двигателей верхнего и нижнего
валков производится с помощью двухконтурной системы уп-
равления возбуждением с подчиненным регулированием. Пер-
вый контур возбуждения состоит из датчика тока возбужде-
ния UA2, инерционного звена ИЗ, функционального преобра-
зователя ФП, регулятора потока РП. Второй контур содержит
195
ПИ-регулятор э.д.с. РЭ с ограничением выходной величины.
Уровень ограничения определяет номинальный поток возбуж-
дения. На вход РЭ сигнал поступает с датчика э.д.с. U3,
через модульное устройство МЭ. Для выравнивания нагрузки
двигателей верхнего и нижнего валков используется обрат-
ная связь по разности токов якорей /я1~/я2.
На вход регулятора деления нагрузок РДН поступают сиг-
налы, пропорциональные токам нижнего и верхнего двигате-
лей /Я1 и /я2. Сигнал с выхода РДН поступает на вход ре-
гулятора э.д.с. РЭ. При одинаковой нагрузке на двигатели
сигналы эти равны и противоположны по знаку и РДН не
влияет на скорости валков. Если /Я1 * /я2, вступает в
действие регулятор РДН, который воздействует на изменение
потоков двигателей. При перегрузке одного из двигателей
ослабляется поток недогруженного двигателя и нагрузка на
двигатели выравнивается.
Остальные элементы схемы на рис. 89 имеют следующее
функциональное назначение: БОТ - блок ограничения тока
якоря; ВД1 - блок коррекции коэффициента усиления регуля-
тора скорости PC при изменении поля двигателя.
3.12. Электропривод трубопрокатных агрегатов
Россия по выпуску стальных труб занимает первое место
в мире.’Предусматривается дальнейший значительный рост их
производства, учитывая непрерывно возрастающую потреб-
ность в трубах при строительстве газо- и нефтепроводов,
жилищно-коммунальном строительстве и т.п. Особое внимание
уделяется повышению качества изготовляемых труб.
Сортамент труб насчитывает свыше 25 тыс. типоразмеров.
Продукция трубных заводов страны составляет до двух тысяч
профилеразмеров труб из сталей и сплавов более 300 марок.
Горячей прокаткой получают бесшовные трубы с наружным
диаметром от 25 до 1800 мм, толщиной стенки от 2,0 до
75 мм,, длиной от 4 до 20 м и более.
Наибольшее распространение для производства горячека-
таных труб получили трубопрокатные агрегаты ТПА с авто-
матическим станом, с непрерывным станом, с пилигримовым
станом и с трехвалковым раскатным станом. .
196
Агрегат с автоматическим станом
На агрегатах с автоматическим станом прокатывают трубы
диаметром от 60 до 420 мм с толщиной стенки от 3 до 60 мм
и длиной до 15,5 м. Исходным материалом служит заготовка
круглого сечения диаметром до 350 мм.
Последовательность основных технологических операций
горячей прокатки труб на агрегате с автоматическим станом
такова.
Круглую нагретую заготовку подают к прошивному стану,
где она превращается в толстостенную гильзу, которую
вновь подогревают и передают к автоматическому стану. На
автоматическом стане гильзу за два-три прохода раскатыва-
ют до необходимого наружного диаметра и толщины стенки
готовой трубы.
С автоматического стана прокатанная труба поступает на
обкатной стан, где при небольших обжатиях несколько уст-
раняется разнотолщинность стенок трубы, разглаживается ее
внутренняя и наружная поверхности; трубе придается круг-
лая форма.
После обкатного стана трубу подают к калибровочному
стану, где ей придают окончательный точный размер по диа-
метру, а затем трубу подают на правильные машины для
правки по длине и т.д.
В табл. 4 приведены характеристики электродвигателей
главных приводов агрегата 400.
Общая мощность двигателей постоянного тока главных
приводов агрегата около 12 МВт. На приводах основных и
вспомогательных механизмов установлены еще 44 двигателя
постоянного тока суммарной мощностью 1184 кВт и 1521 дви-
Таблица 4. Характеристики электродвигателей
главных приводов агрегата 400
Стан Двигатели N. кВт п, об/мин
тин ЧИС К)
Прошивной МП-500-ПО 2 3680 110/220
Автоматический МП-2500-375 1 1840 375/550
МП-1200-400 1 885 .400/750
Обкатной МП-170-500 2 125 500/900
Горячего калибрования МП-170-500 7 125 500/900
Холодного калибрования МП-170-500 3 125 500/900 -
197
гатель переменного тока суммарной мощностью 4030 кВт. Ро-
лики рольгангов имеют индивидуальный привод (816 двигате-
лей мощностью 2012 кВт). Общая мощность всех двигателей
агрегата, около 20 МВт.
Прошивные станы входят практически во все трубопрокат-
ные агрегаты. Они предназначены для получения из круглой
заготовки полой гильзы и имеют в большинстве случаев
двухвалковую клеть с наклоненными по отношению к оси за-
готовки валками, .обеспечивающими одновременно вращатель-
ное и поступательное движение заготовки.
Режим работы главного привода стана - продолжительный,
нереверсивный при практически постоянном статическом мо-
менте и ударном приложении нагрузки. Разгон происходит с
металлом в валках; торможение используется с целью сокра-
щения времени остановки. Технология прошивки требует ре-
гулирования скорости прокатки в пределах 2:1. Регулирова-
ние скорости предусматривается также для настройки обору-
дования и при заправке заготовки в клеть с последующим
повышением скорости до номинальной. Точность поддержания
скорости в режиме холостого хода - 0,1 %; допустимое ста-
тическое падение скорости - до 1,2%; динамическое паде-
ние скорости при набросе нагрузки 8,5 %; длительность пе-
реходного процесса - до 1,5 с.
На многих промышленных станах используются однодвига-
тельные приводы с шестеренными клетями-редукторами. В но-
вых прошивных станах применяются индивидуальные безредук-
торные приводы валков с двигателем постоянного тока по
системе ТП-Д.
Для главных приводов прошивных станов используются
электродвигатели постоянного тока типа ПБК, ПГ мощностью
до 3680 кВт, при напряжении 750-825 В, числах оборотов от
71 до 370 об/мин.
На рис. 90 представлена схема главного электропривода
прошивного стана с индивидуальным приводом по системе
ТП-Д. Якори электродвигателей Ml, М2 получают питание от
тиристорных преобразователей (7Z1, UZ2. Каждый из преобра-
зователей содержит два последовательно соединенных шести-
полюсных мостовых выпрямителя, которые подключены к раз-
ном обмоткам трансформаторов 7Т и Т2. Этим обеспечивается
12-пульсное выпрямление, характеризуемое малыми пульса-
198
циями выпрямительного напряжения и малыми амплитудами
высших гармонических составляющих.
Индивидуальный привод валков двухвалковой клети требу-
ет синхронизации скоростей обоих двигателей и равномерно-
го распределения нагрузки между ними.
С целью создания быстродействующей системы синхрониза-
ции скоростей принята блочная система подключения двига-
З^ЗОГщЗВОВ 3~50Ги,\6(10)кВ
3~50Гц;6(10)кВ
Рис. 90. Схема электропривода прошивного стана
телей в системе ТП-Д. Обмотки возбуждения подключены к
тиристорным возбудителям L7Z3, C7Z4. Управление двигателя-
ми - общее, на базе аппаратуры УБСР.
Динамическое торможение осуществляется с помощью ре-
зисторов Ядт и контакторов КМ1, КМ2.
Задание скорости w3 - от сельсинного командоаппарата
5Л, с* помощью блока задания скорости БЗС, через ЗИ - за-
датчик интенсивности. Выходной сигнал общего регулятора
скорости PC поступает на входы индивидуальных регуляторов
тока РТ1, РТ2. Для выравнивания скорости двигателей на
вход регулятора тока РТ2 двигателя М2 поступает сигнал,
199
соответствующий разности угловых скоростей w2—устрой-
ства сравнения скоростей УСС.
Тиристорные возбудители UZ3, UZ4 управляются регулято-
рами э.д.с. РЭ1, РЭ2, образующими контуры, замкнутые по
э.д.с. каждого двигателя с подчиненными регуляторами тока
возбуждения РТВ1, РТВ2. Сигналы э.д.с. формируются в бло-
ках датчиков э.д.с. ДЭ1, ДЭ2, на которые поступают сигна-
лы от датчиков напряжения ДН1, ДН2 и датчиков тока якоря
ИА1, ИА2. Схема питания и управления обмотки ОВМ2 на рис.
89 не показана.
Автоматический стан используется для раскатки гильзы в
трубу методом продольной прокатки с использованием корот-
кой неподвижной оправки, установленной между валками в
калибре.
Наиболее распространены одноклетьевые станы с двумя
многоручьевыми валками.
Режим работы автоматического стана — продолжительный,
непрерывный с ударным приложением нагрузки. Скорость ре-
гулируют лишь при изменении сортамента прокатываемых
труб. Жестких требований к стабилизации скорости не
предъявляются. Реверс главного привода используется лишь
как аварийный; он осуществляется в цепи обмотки возбужде-
ния.
В большинстве автоматических станов используется при-
вод постоянного тока по системе ТП-Д. Реверс осуществля-
ется изменением направления тока в цепи обмотки возбужде-
ния. Мощность двигателя агрегатов 140, 250 и 400 состав-
ляет соответственно 880, 1320 и 1840 кВт; частота враще-
ния от 70 до 160 об/мин. Система управления двигателем —
двухконхурчая подчиненная с двухзонным регулированием
скорости, осуществляемым изменением как напряжения на
якоре двигателя, так и тока возбуждения. Схема аналогична
изображенной на рис. 73.
Обкатной стан входит в состав разных трубных агрега-
тов. Обработку на обкатном стане производят длй придания
трубам круглой формы, улучшения наружной и внутренней по-
верхности, уменьшения разнотолшинности стенок. Многие
эксплуатируемые станы являются двухвалковыми с групповым
главным приводом. Значительное применение находят более
совершенные трехвалковые клети с индивидуальным приводом
валков. Режим работы главного привода обкатного стана не-
200
прерывный с ударным приложением нагрузки. Реверсирование
используется лишь при настройке или в аварийных ситуаци-
ях - изменением полярности обмотки возбуждения.
Регулирование скорости весьма ограничено и осуществля-
ется изменением магнитного потока двигателя. Получение
труб высокого качества возможно лишь при обеспечении ра-
венства окружных скоростей валков. При индивидуальном
приводе это требует согласования скоростей двигателей.
Широко применяют в обкатных станах тиристорный электро-
привод постоянного тока с подчиненным регулированием па-
раметров. Система подчиненного регулирования параметров
электропривода состоит из двух взаимно согласованных под-
систем: 1 — регулирования э.д.с. "эквивалентного двигате-
ля”, которая управляет напряжением тиристорного преобра-
зователя и скоростью прокатки; 2 — регулирования скорос-
тей всех двигателей воздействием на магнитный поток каж-
дого из них, чем обеспечивается подрегулирование скорос-
тей отдельных двигателей с целью обеспечения равенства
окружных скоростей валков. Мощности применяемых электро-
двигателей постоянного тока от 180 до 2500 кВт. Нашла
применение система комплектного электропривода с питанием
всех электродвигателей валков от группового тиристорного
преобразователя.
3.13. Электропривод непрерывных, пилигримовых станов
Непрерывная прокатка труб на длинной оправке является
прогрессивным способом производства <; стальных бесшовных
труб длиной до 20,5 м. j
На трубопрокатных агрегатах с непрерывным станом про-
катывают трубы диаметром от 29 до 14$ мм из круглой гиль-
зы массой до 500 кг. Агрегат содержит прошивной, непре-
рывный, калибровочный или редукционной станы.
Непрерывный стан состоит из нескольких последовательно
расположенных двухвалковых клетей, установленных под уг-
лом 45° к плоскости пола таким образом, что обжатие трубы
происходит со всех сторон. Для привода валков разработаны
специальные электродвигатели, допускающие эксплуатацию
при установке их под углом 45° к горизонту. Режим работы
привода — продолжительный нереверсивный при наличии удар-
ных нагрузок при захвате гильз. Скорость прокатки посто-
201
янна. Она устанавливается при настройке и зависит от мар-
ки раскатываемого металла.
Прокатка труб с “подпором" между клетями может при-
вести к образованию на трубе "гармошки". Прокатка с меж-
клетьевым натяжением также неприемлема по технологическим
соображениям. Скорость целесообразно поддерживать близкой
к скорости свободной прокатки, когда сохраняется постоян-
ство секундных объемов металла гильз в каждой клети. До-
пустимое падение скорости при ударном приложении нагруз-
ки — не более 7-8%. Для рабочих валков непрерывного ста-
на в основном используется индивидуальный тиристорный
электропривод постоянного тока.
На рис. 91 представлена схема главного тиристорного
электропривода непрерывного стана. В комплект входит си-
ловой трансформатор Г, тиристорный преобразователь цепи
якоря C/Z1, тиристорный возбудитель C/Z2, системы регулиро-
вке. 91. Схема привода
непрерывного стана
вания на базе аппаратуры УБСР и т.п. Используется много-
контурная система двухзонного регулирования скорости,
аналогичная представленной на рис. 71. Подсистема регули-
рования скорости путем изменения напряжения якоря — двух-
202
контурная. Она содержит контур скорости с регулятором PC
и подчиненный ему контур тока с регулятором тока РТ. Цепь
возбуждения имеет также двухконтурную систему подчиненно-
го регулирования, содержащую контур регулирования по
э.д.с. двигателя и подчиненный ему контур регулирования
по току возбуждения. Сигнал э.д.с. двигателя формируется
на датчике ИЭ с использованием сигналов, поступающих от
датчиков тока ИА1 и напряжения U двигателя. Остальные
элементы схемы имеют следующее назначение: SA — командо-
аппарат; БЗС — блок задания скорости; ЗИ — задатчик ин-
тенсивности; РТВ — регулятор тока возбуждения. В табл. 5
приведены основные сведения по электрооборудованию агре-
гата 30—102 с непрерывным станом.
Основная деформация металла происходит в первых клетях
непрерывного стана. Здесь установлены двигатели мощностью
до 1400 кВт, а в 8-й и 9-й клетях - по 450 кВт.
Суммарная мощность 14 главных приводов непрерывного
стана достигает 20 тыс. кВт, а общая мощность всех двига-
телей агрегата — 60 тыс. кВт.
Пилигримовые станы служат для получения труб из гильз
методом последовательной прокатки (с элементами ковки) в
клети с двумя валками переменного радиуса при шаговой по-
ступательно-вращательной подаче гильзы в моменты отсутст-
вия обжатия. Стан может иметь две—четыре пилигримовые
клети. Режим работы главного привода — продолжительный,
нереверсивный с ударным приложением нагрузки. Допустимое
статическое падение скорости 3—5 %. Заправляют гильзы на
пониженной скорости с последующим ее повышением.
Для клетей используется в основном* индивидуальный
тиристорный привод постоянного тока. Мощность двигателя
достигает 5 МВт.
Таблица 5. Электродвигатели агрегата 30-102
Стан Число клетей Двигатели
N, кВт число
Прошивной 1 3700 1
Непрерывный 9 10700 . 9
Калибровочный 11 660 3
Редукционный 10 2900 3
203
Для уменьшения влияния пиковых нагрузок приводы иногда
оснащают маховиками. Система управления - двухконтурная,
подчиненная.
Управляют скоростью двигателя по напряжению якоря с
помощью регулятора скорости с подчиненным регулятором то-
ка, а регулируют по потоку возбуждения двигателя — с по-
мощью регулятора э.д.с. с подчиненным ему регулятором то-
ка возбуждения.
3.14. Электропривод калибровочных и редукционных станов
На калибровочных и редукционных станах формируются
окончательные размеры и форма труб - их диаметр, толщина
стенки й т.п. Эти станы являются завершающими в техноло-
гических линиях изготовления труб.
Калибровочные станы с небольшим числом клетей предназ-
начены в основном для придания сечению трубы формы пра-
вильной окружности (при небольшом обжатии), а много-
клетьевые станы служат для сложного процесса деформации
металла - редуцирования трубы, заключающегося не только в
уменьшении диаметра, но и в утончении стенки. Такого рода
станы сильно различаются по назначению, числу клетей,
мощности приводов и т.п. Режим работы главных приводов —
продолжительный, нереверсивный с повторяющимися пиками
нагрузки. Реверс используется лишь, в аварийных ситуациях,
после остановки привода. Для многоклетьевых станов при
остановке с металлом в валках целесообразно торможение,
предотвращающее переполнение калибров и повреждение вал-
ков. Допустимое статическое падение скорости не должно
превышать 1 %, время восстановления скорости — 0,1 с.
Калибруют трубы в 3-11 клетях, причем труба находится
одновременно' в нескольких клетях.
Редукционный стан имеет до 24 клетей, причем две по-
следние по ходу прокатки - чистовые, а остальные — черно-
вые.
Важным требованием к электроприводу редукционных и ка-
либровочных станов является синхронизация рабочих клетей.
Во избежание разрывов, образования петель требуется быст-
родействующая система стабилизации скорости.
Важным технологическим условием при редуцировании труб
На многоклетьевых станах является ограничение продольной
204
разнотолщинности. Для выполнения этого условия необходимо
обеспечить постоянство натяжения, т.е. сохранение соотно-
шения скоростей смежных клетей как в переходных, так и в
установившихся режимах. Редукционные станы имеют индиви-
дуальный, групповой или дифференциально-групповой привод
валков. Наиболее просты станы с групповым приводом. Одна-
ко в этом случае соотношение скоростей отдельных клетей,
а следовательно, и величина натяжения металла не поддаются
регулированию, так как жестко определяются трансмиссией.
Наилучшим для калибровочных и редукционных станов яв-
ляется индивидуальный привод валков, позволяющий к тому
же резко сократить парк валков, отпадает потребность в
валках разных диаметров. Использование привода постоянно-
го. тока по системе ТП—Д позволяет устанавливать разные
скорости прокатки в зависимости от сортамента труб, по
размерам и маркам стали, повысить производительность аг-
регатов.
Для многоклетьевых станов применяют тиристорный привод
постоянного тока с многоконтурными быстродействующими
системами двухзонного регулирования на базе аппаратуры
УБСР.
Реверсирование двигателя при настройке и торможении
обеспечивается использованием двухкомпонентного преобра-
зователя цепи возбуждения.
В редукционных станах применяется система подчиненного
регулирования напряжения группового тиристорного преобра-
зователя и индивидуального регулирования скорости каждого
двигателя воздействием на его поток возбуждения. Обратная
связь по магнитному потоку осуществляется с помощью дат-
чика, включенного на падение напряжения в цепи возбужде-
ния.
На рис. 92 представлена упрошенная блок-схема индиви-
дуального электропривода 24-клетьевого редукционного ста-
на. Клети 1—2, 23—24 работают попарно, от общих двигате-
лей. Таким образом, на стане установлено 22 двигателя.
Двигатели подключены по групповой схеме к реверсивному
тиристорному преобразователю UZ. Обмотки возбуждения дви-
гателей ОВМ подключены к тиристорным преобразователям
17Z1. Система регулирования скорости построена по принципу
двухзонного подчиненного регулирования и содержит две
подсистемы: регулирования напряжения группового тиристор-
205
ного агрегата UZ и индивидуального регулирования скорости
каждого двигателя воздействия на его поток возбуждения.
Система регулирования скорости обеспечивает во всем
диапазоне установленную зависимость между эталонной ско-
ростью уэ и скоростью перемещения трубы у,- в f-той клети:
V/ = уэ (1 - Л\) = уэ “
где Л - коэффициент общей вытяжки на стане (88); Л/ — ко-
эффициент, учитывающий долю /-той клети в создании общей
х вытяжки; для последней клети Л/ = 0. .
QBM1
------ К системам
I управления
I--^двигателями
Рис. 92. Блок-схема индивидуального привода- 24-клетевого редукционного
стана
Сигнал задания скорости, определяющий .скорость уэ, по-
ступает на регуляторы PC путем регулирования скорости
каждого двигателя и на регулятор вытяжки РВС, которым за-
дается величина коэффициента Л. Затем сигнал, преобразо-
ванный пропорционально Луэ, поступает на регуляторы ско-
рости кйети РСК соответствующих двигателей, с помощью ко-
торых оператор устанавливает величины коэффициентов Л/,
т.е, скорости отдельных двигателей.
Возможность с помощью РВС изменять соотношение скорос-
тей всех клетей значительно упрощает настройку стана и
его эксплуатацию.
206
Подсистема регулирования напряжения группового тирис-
торного преобразователя UZ ~ одноконтурная, с регулятором
напряжения PH цепи якоря. J-
На входе регуляторов скорости PC суммируются сигналы,
соответствующие v3, AAf-, v3, и в результате образуется
сигнал, пропорциональный заданной скорос!и для каждой
клети. Для оптимизации переходных процессов во всем диа-
пазоне регулирования потока после редуктора скорости ус-
тановлено корректирующее звено КЗ с коэффициентом усиле-
ния, изменяющимся в функции потока двигателя, что позво-
ляет компенсировать изменение динамических параметров
двигателя при изменении потока. Регулирование скорости
осуществляется от общего сельсинного командоаппарата SA.
Сигнал задания скорости с блока БЗС поступает через
задатчик интенсивности ЗИ и далее - на регулятор напряже-
ния PH, где сравнивается с сигналом обратной связи по на-
пряжению, поступающим от датчика напряжения UV, и далее
сигнал поступает на СИФУ группового тиристорного преобра-
зователя UZ. Сигнал задания тока поступает на вход регу-
лятора тока РТ со звена КЗ вместе с сигналом обратной
связи по току якоря, где ограничивается в соответствии с
перегрузочной способностью двигателя, которая уменьшается
пропорционально степени ослабления поля.
На вход регулятора тока РТ поступает также сигнал об-
ратной связи по магнитному потоку от датчика тока возбуж-
дения UАВ через корректирующее звено КЗВ, реализующее
функцию, соответствующую кривой намагничивания двигателя.
Схема допускает пуск при пониженном токе возбуждения.
Разгон стана до основной скорости происходит при одновре-
менном росте напряжения на якоре и' силы тока возбуждения
двигателей.
3.15. Электропривод трубосварочных станов
Более половины выпускаемых в России стальных труб сос-
тавляют сварные трубы и более 80 % из них — электросвар-
ные. Доля сварных труб в общем их объеме продолжает уве-
личиваться, что объясняется существенными преимуществами
трубосварочного производства перед прокатным. Сварные
трубы при хорошем качестве шва имеют меньшую-, толщину
207
стенки, чем аналогичные по диаметру бесшовные. Этим д(
тигается экономия металла; при изготовлении сварных тр
в большой степени применяются высокопроизводительные г
прерывные процессы, основные операции которых выполняют*
автоматически.
На трубосварочных агрегатах используется непрерывны
технологический процесс изготовления труб путем формовк
и сварки (дуговой, индукционной и т.п.). В ОСНОВНОМ И(
пользуются одно- и двухшовные, прямо- и спиральношовны
агрегаты. Исходным материалом для изготовлений прямошов
ных труб большого диаметра являются стальные листы, дл
сварных труб —рулонная полоса (штрипс). Часто передний ко
нец в стыкосварочной машине сочленяется с задним концо*
предыдущего рулона, обеспечивая непрерывный процесс свар
ки.
В состав непрерывного трубосварочного агрегата обычнс
входят разматыватель, Правильная машина, ножницы, стыко-
сварочная машина, петлеобразователь, печь, формовочно-
сварочный стан, редукционно-калибровочный стан, летучая
пила и т.п.
На формовочно-сварочном стане штрипс формуется и сва-
ривается в трубу.
Основными операциями процесса производства сварных
труб являются формовка и сварка. При изготовлении спи-
ральношовных труб и прямошовных труб малого диаметра эти
операции выполняются совместно на формовочно-сварных ста-
нах, где штрипс формуется и, сваривается в трубу. Прямо-
шовные формовочно-сварочные станы имеют от 6 до 12 кле-
тей. Режим работы приводов - продолжительный, нереверсив-
ный с повторно-кратковременным приложением нагрузок, »а в
ряде случаев, в частности на крупных формовочных станах,
имеют ярко выраженный ударный характер нагрузки. Изделие
находится одновременно в нескольких клетях, что требует
согласования скоростей при жесткой стабилизации заданной
скорости валков. Рассогласование скоростей двигателей мо-
жет вызвать недопустимую деформацию металла.
Наибольшее применение в формовочных станах находит ти-
ристорный привод постоянного тока с нереверсивными преоб-
разователями. Часто используется один общий тиристорный
преобразователь для питания якорей всех двигателей с ин-
208
дивидуальными преобразователями для питания обмоток воз-
буждения. Используется двухзонное регулирование скорости.
Для получения качественных швов необходима стабилиза-
ция скорости в зоне сварки с ошибкой 3 %.
Электротрубосварочный стан ЭТС-20-83 является одним из
самых современных высокопроизводительных станов, все тех-
нологические процессы в котором полностью автоматизирова-
ны. В системах автоматики наряду с аналоговыми регулято-
рами широко используется микропроцессорная техника. Стан
предназначен . для производства стальных редуцированных
труб с электрической высокочастотной сваркой швов. Диа-
метр трубы — от 25 до 83 мм; длина трубы — от 4 до 8 м;
толщина полосы от 1 до 4 мм; рабочая скорость сварки —
125м/мин; часовая производительность стана - 1200 труб.
Технологическая схема стана приведена на рис. 93. С
разматывателя 1 лента-штрицс поступает на правильную ма-
шину 2 и далее — на стыкосварочную машину 3, где сварива-
ние. 93. Технологическая схема электротрубосварочпого стана
ются конец предыдущего и начало последующего рулонов с
целью получения непрерывной ленты. Роликами тянущего уст-
ройства 4 лента подается в накопитель 5. Для компенсации
времени, необходимого для операций загрузки и стыковой
сварки, в накопителе образуется определенный запас ленты.
Из накопителя лента поступает в 5-образное натяжное - уст-
ройство 6 и далее — в формовочный стан 7, где она прохо-
дит шесть клетей, прежде чем окажется сформованной в
круглое сечение, которое может быть сварено. Далее труб-
ная заготовка подвергается высокочастотной сварке 8. За-
тем труба охлаждается 9 и направляется на редукционно-ка-
либровочный стан 10, где либо калибруется до окончатель-
ного размера, либо редуцируется по диаметру. Труба, выхо-
209
дящая из редукционно-калибровочного стана, проходит через
правильное устройство 11 и направляется на резку дисковой
фрезой или пилой 12.
Все трубы проходят неразрушающий контроль. При наличии
дефекта труба маркируется краской и направляется в прием-
ный карман для бракованных труб. Далее труба проходит
ультразвуковое устройство контроля толщины стенки и ла-
зерное устройство контроля диаметра.
Практически на всех перечисленных механизмах используй
ется тиристорный привод постоянного тока. Этим приводом
снабжены формовочный стан (мощность двигателя 186 кВт),
редукционно-калибровочный стан (30 кВт), правильная маши-
на (32 кВт), тянущие падающие ролики (32, 10 кВт), спи-
ральный накопитель ленты (30, 20 кВт), 5-образное натяж-
ное устройство (32 кВт), летучий отрезной станок (9 кВт),
печь с газовой защитной атмосферой (9 кВт).
Формовочная 6-клетьевая машина имеет групповой тирис-
торный привод с двигателем постоянного тока. Вал двигате-
ля с помощью соединительной муфты связан с понижающим ре-
дуктором. Движение на все клети формовочной машины рас-
210
пределяется с помощью шестеренной клети. Автоматическая
система управления главного привода формовочного стана
(рис. 94) обеспечивает: пуск привода и плавный разгон до
заданной скорости; регулирование скорости в широких пре-
делах; поддержание режима работы привода в соответствии
с требованиями технологического процесса; реверсирование
привода для отладки технологического процесса.
Система подчиненного управления приводом осуществляет
двухзонное регулирование скорости изменением напряжения
якоря и потока возбуждения двигателя. По своей структуре
она аналогична той, что представлена на ^рис. 73.
С целью повышения качества сварного шва шовсжимающие
усилия в клетях регулируются в зависимости от температуры
кромОк Ленты. С увеличением температуры усилия сжатия шва'
снижаются. Регулирование осуществляется с использованием
микропроцессора. С помощью микропроцессора скорость фор-
211
мовки и соответственно сварки регулируется в зависимости
от толщины стенки трубы.
Как отмечалось, в состав непрерывного элек^ротрубосва-
рочного агрегата входит редукционно-калибровочный стан.
Стан имеет' тиристорный привод постоянного тока (рис. 95)
с подчиненной системой двухзонного регулирования скорос-
ти. Схема аналогична той, что представлена на рис. 73.
3.16. Электропривод черновых клетей и
окалиноломателей станов непрерывной прокатки
К этой группе относятся черновые клетй среднесортовых,
мелкосортовых, листовых станов горячей прокатки, прошив-
ных, раскатных, пилигримовых станов трубопрокатных агре-
гатов, а также чистовых нереверсивных клетей крупносорто-
вых (рельсо-балочных) станов. Режим работы электроприво-
дов данной группы - нереверсивный, длительный,' с ударным
приложением нагрузки и редко регулируемой скоростью. В
'Связи с отсутствием необходимости, строго поддерживать за-
данное соотношение скоростей валков смежных клетей и ред-
ким регулированием скорости к электроприводу данной груп-
пы не предъявляют специальных требований в отношении точ-
ности регулирования скорости и ее восстановления при из-
менении нагрузки. В станах, где клети черновой группы не
связаны прокатываемым металлом и регулирования скорости
не требуется, для привода горизонтальных валков использу-
ются тихоходные синхронные электродвигатели мощностью от
5 до 10 МВт, 100 и 150 об/мин, 10 кВ. Работа синхронных
двигателей черновых клетей характеризуется ударным прило-
жением нагрузки, что вызывает колебания напряжения питаю-
щей сети- Для обеспечения устойчивой работы двигателя и
уменьшения колебаний напряжения сети используют синхрон-
ные двигатели с безынерционным регулированием возбужде-
ния. Автоматические регуляторы возбуждения (АРВ) синхрон-
ных двигателей черновых клетей обеспечивают постоянство
реактивной мощности, а также постоянство напряжения на
шинах подстанции при колебаниях тока. Все это очень важно
для прокатных станов, где работают мощные тиристорные
преобразователи, коэффициент мощности которых весьма ни-
зок.
212
Однако в ряде случаев здесь используется также привод
постоянного тока по системе ТП-Д. При использовании при-
вода постоянного тока применяется следующая структура уп-
равления: нереверсивный тиристорный привод с регулятором
скорости и подчиненным регулятором тока, с зависимой сис-
темой управления потоком возбуждения двигателя, либо с
постоянным магнитным потоком двигателя. ;
Для горизонтальных валков черновых окалиноло^ателей
используется также привод от синхронных электродвигателей
мощностью до 5 МВт, 100 об/мин, 10 кВ.
Чистовой окалиноломатель представляет собой двухвалко-
вую клеть, конструктивно во многом аналогичную черновому
окалиноломателю. Однако в связи с меньшими обжатиями чис-
товой окалиноломатель имеет меньшие габариты и соответст-
венно привод меньшей мощности. Для привода валков чисто-
вого окалиноломателя используют двигатели постоянного то-
ка мощностью До 520 кВт, 110/220 об/мин.
Рабочие валки вертикальных клетей окалиноломателей
приводятся через цилиндрические зубчатые передачи и шпин-
дели от асинхронных короткозамкнутых электродвигателей
мощностью до 2x630 кВт при 360 об/мин, 6 кВ. Применение в
этом случае синхронных машин нерациональное из-за слож-
ности выравнивания нагрузки двигателей правого и левого
валков.
Для вертикальных валков нереверсивной универсальной
клети используют привод постоянного тока ввиду необходи-
мости согласования скорости вертикальных валков со ско-
ростями горизонтальных валков при одновременной прокатке
в вертикальных и горизонтальных валках.
Привод реверсивных универсальных 'черновых клетей рабо-
тает в условиях частых пусков, ускорений, тормозных режи-
мов и, естественно, должен быть хорошо управляемым. По-
этому для привода горизонтальных и вертикальных валков
реверсивной универсальной клети используют двигатели по-
стоянного тока мощностью 6 МВт и 1—3 МВт соответствен-
но. Привод горизонтальных валков индивидуальный, что поз-
воляет повысить мощность и улучшить динамические качества
главного привода клети и, следовательно, ее производи-
тельность. v
213
3.17. Электропривод вспомогательных механизмов
прокатных и трубных станов. Общие сведения
К
Вспомогательные механизмы прокатных и трубных станов
выполняют самые разные функции, вследствие чего сильно
различаются по конструкции, кинематической схеме, типу
электропривода. Однако несмотря на разнообразие вспомо-
гательных механизмов, их можно унифицировать по типу и
структуре используемого электропривода.
Различают два основных класса вспомогательных механиз-
мов.
1. Обрабатывающие механизмы, работа которых связана с
изменением формы материала. Это — механизмы резки, прав-
ки, сматывания, гибки, обработки и отделки поверхности,
обвязки, упаковки и т.п. Сюда относятся ножницы, пилы,
правильные машины, моталки, разматыватели, нажимные уст-
ройства, агрегаты зачистки и т.п.
2. Транспортные механизмы, осуществляющие перемещение
металла, его подачу к валкам, транспортирование, измене-
ние положения, кантовку и т.п. Сюда относятся рольганги,
толкатели, слитковозы, поворотные столы, выталкиватели,
кантователи, извлекатели, шлепперы. '
Основное требование к приводу вспомогательных механиз-
• мов — надежность и обеспечение высокопроизводительной ра-
боты стана. Большинство вспомогательных механизмов (на-
жимные устройства, рабочие рольганги, манипуляторы, кан-
тователи, ножницы) требуют быстрого разгона и замедления
механизма, так как каждый из механизмов должен быстро вы-
полнить свою операцию, не снижая общего темпа работы ста-
на.
Приводы таких механизмов, как нажимные винты, ножницы,
манипуляторы, должны обеспечить стопорную (экскаваторную)
механическую характеристику с целью зашиты механизма и
двигателя от поломок при работе на упор.
Механизмы нажимных устройств, «летучих ножниц, кантова-
телей, манипуляторов и т.д. совершают строго определенные
перемещения рабочего органа. Здесь требуется точная фик-
сация исходного или конечного положений двигателя. К сис-
темам регулирования положения вспомогательных механизмов
прокатных и трубных станов предъявляется требование быст-
214
рой отработки заданного перемещения без перерегулирова-
ния, так как перерегулирование по перемещению может при-
вести к ударам в механических передачах при наличии люф-
тов.
В состав электроприводов нажимных устройств линеек ма-
нипуляторов и других механизмов, требующих позиционного
регулирования наряду с другими регуляторами, входит регу-
лятор положения.
3.18. Электропривод наматывающих устройств
Электропривод моталок служит для создания и поддержа-
ния постоянного натяжения, а также для намотки и смотки
прокатываемой ленты. Прокатка ленты без натяжения невоз-
можна, поскольку вследствие образования большой петли не
исключена деформация ленты, ее разрыв и т.п.
Для постоянства натяжения необходимо, чтобы линейная
скорость наматывания полосы оставалась равной скорости
выхода ее из валков, а угловая скорость приводного двига-
теля должна изменяться в соответствии с диаметром рулона.
При исчезновении натяжения необходима автоматическая ос-
тановка моталки и всего стана. Изменение скорости прокат-
ки, а также изменение диаметра рулона не должны влиять на
точность поддержания натяжения ленты. Для производства
разных технологических операций: заправки полосы, снятия
рулона и т.п. должна быть предусмотрена возможность толч-
кового режима работы моталки, а также возможность ста-
бильной работы моталки на малых скоростях.
С учетом этих технологических особенностей к электро-
приводу моталрк предъявляются жесткие требования,- основ-
ные из которых сформулированы ниже.
Система управления приводом моталок должна обеспечи-
вать два режима работы: регулирование скорости и натяже-
ния полосы, причем первый из этих режимов вспомогатель-
ный. Скорость привода намоточного устройства должна изме-
няться в зависимости от натяжейия ленты; должно быть
обеспечено: поддержание постоянства нйтяжения на всех
участках стана как в переходных, так и в установившихся
режимах, а также при остановке. Точность поддержания по-
стоянства натяжения составляет 3-12 %, а в статическом
режиме 1—4 % от номинального значения. Время отработки
215
ступенчатого задания натяжения < 0,2 с при перерегулиро-
вании < 10 %. Диапазон регулирования скорости от 10:1 до
30:1; плавное, в заданном темпе ускорение и замедление
при быстром протекании переходных процессов'; раздельное и
совместное (с приводом клетей) управление; возможность
электрического торможения и т.п.
На современных моталках используется привод постоянно-
го тока с питанием двигателей по блочной схеме — от инди-
видуальных тиристорных преобразователей. ,
Обычно натяжение ленты достигает 70 % предела текучес-
ти прокатываемого металла; соответственно мощность приво-
да намоточных устройств составляет 70—80 % мощности глав-
ного привода клети.
В моталках крупных станов используются мощные двух- и
трехъякорные двигатели; в ряде случаев используют трех-
двигательный привод, причем количество подключенных дви-
гателей изменяется в зависимости от натяжения. ленты. Еди-
ничная мощность электродвигателя > 3 МВт.
Как отмечалось, основное требование в электроприводу
моталок — стабилизация натяжения полосы при смотке и на-
мотке в рулон.
В системах регулирования привода моталок используется
прямой и косвенный методы контроля натяжения ленты. В
первом случае используются датчики натяжения, во втором
(косвенном) - датчики тока, ЭДС, напряжения. Из-за отсут-
ствия совершенных измерителей натяжения чаще всего ис-
пользуется косвенный метод — путем поддержания и регули-
рования электромагнитной мощности двигателя. Электромаг-
нитный момент двигателя, идущий на создание натяжения,
должен быть равен моменту натяжения, т.е.
М = кмФ1 = ГР/(21р),
где Т — натяжение полосы; D — диаметр рулона; ip -«> пере-
даточное число редуктора.
Следовательно, ток якоря 7, идущий на создание натяже-
ния, /
I - Т£>/(27Р^Ф).
216
Значение ЭДС двигателя должно меняться пропорционально
величине где vu — .скорость полосы. Таким образом,
система управления электроприводом намоточных устройств
должна включать в себя регулятор тока и регулятор э.д.с.,
обеспечивающий соотношение
Е х v^ZT1.
Как известно, мощность, расходуемая на создание натя-
жения полосы
Р = Fv,
где F — натяжение полосы, Н; г - линейная скорость намот-
ки, м/с.
При постоянных значениях F и v мощность также постоян-
на.
В то же время электромагнитная мощность двигателя
Р = Е1Я. , '
Таким образом, постоянство мощности,. а следовательно,
и натяжения полосы можно обеспечить, поддерживая постоян- .
ство произведения Е1Я = const.
В приводе моталок успешно применяется двухконтурная
астатическая система управления, где постоянство тока
якоря поддерживается изменением напряжения якоря, а пос-
тоянство. э.д.с. — изменением потока двигателя. В этом
случае по мере увеличения- радиуса рулона поток возбужде-
ния двигателя увеличивается до номинального значения, а
дальше ос^ется неизменным. Угловая скорость при этом
уменьшается, а линейная сохраняется неизменной.
На рис. 96 представлена функциональная схема электро-
привода моталки. Якорь двигателя М получает питание от
реверсивного тиристорного преобразователя C/Z1, а обмотка
возбуждения ОВМ —' от преобразователя UZ2.
В приводе используется многоконтурная система управле-
ния с двухзонным регулированием скорости. Регулирование
скорости изменением напряжения якоря двигателя осуществ-
ляется в функции тока (регулятор РТУ с коррекцией по ско-
рости рабочего валка (тахогенератор BR).
217
Регулирование скорости потоком возбуждения осуществля-
ется в функции э.д.с. и тока возбуждения. На вход регуля-
тора тока РТ поступают сигналы установки натяжения УН
(F3), сигнал обратной связи по току якоря от датчика
СЛ41, скорректированный множителем Ml, и сигнал узла огра-
ничения скорости двигателя моталки ОС.
Рис. 96. Функциональная схема электропривода моталки
Выходной сигнал РТ совместно с сигналом тахогенератора
клети BR (после множителя МН2) подается на СИФУ1 тирис-
торного преобразователя якорной цепи UZ1.
Контур регулирования ЭДС двигателя моталки включает
датчик ЭДС ИЭ, регулятор РЗ, датчик тока возбуждения UAB,
интегрозапомичающее устройство ИЗУ, нелинейный преобразо-
ватель сигналов НПС2. Сигнал с выхода РЭ поступает на
СИФУ2-преобразователя возбуждения UZ2. При пустом бараба-
не моталки, когда идет прокатка с постоянной скоростью,
напряжение на выходе ИЗУ равно нулю и на выходе нелиней-
ного элемента НПС2 сигнал минимальный, что соответствует
Минимальной величине тока возбуждения и максимальной ско-
рости двигателя барабана моталки.
218
По мере намотки рулона линейная скорость увеличивает-
ся, следовательно, увеличивается натяжение и нагрузка
двигателя моталки. Определенное снижение угловой скорости
двигателя приведет при этом к снижению Е—сигнала э.д.с.
Сигнал рассогласования t7p = Е - Uчерез усилитель А,
ИЗУ и НПС2 поступает на вход РЭ. При этом ток возбуждения
двигателя увеличивается, а скорость его снижается. Следо-
вательно, величина тока /я и электромагнитная мощность
Рэ = Е/я останутся неизменными, что обусловливает посто-
янство натяжения полосы.
ИЗУ обеспечивает на выходе сигнал, пропорциональный
диаметру рулона во всех режимах прокатки и в случае оста-
новки, стана ИЗУ "запоминает" свой выходной сигнал.
Регулятор ЭДС РЭ работает до тех пор, пока магнитный
поток двигателя не достигнет номинального значения, кото-
рый соответствует радиусу рулона Ео. Дальнейшее увеличе-
ние радиуса рулона не приведет к изменению Потока, так
как НПС2 перейдет в режим насыщения.
Намотка рулона радиусом > увеличивает натяжение и
соответственно — ток при неизменной скорости. Регулятор
э.д.с. при этом отключается и в работу вступает регулятор
тока. В процессе дальнейшей намотки величина тока увели-
чивается, э.д.с. двигателя снижается, а электромагнитная
мощность и натяжение остаются неизменными. При обрыве по-
лосы выходной сигнал ОС поступает на вход РТ, снижая на-
пряжение преобразователя UZ\ и скорость двигателя.
Привод разматывателя. Разматыватель предназначен для
удержания рулона и создания натяжения ленты при ее про-
катке в первом пропуске. В последующих пропусках разматы-
ватель не работает, а натяжение ленты создается моталка-
ми. ' ' .
Основным требованием, предъявляемым к электроприводу
разматывателя, является -необходимость автоматического ре-
гулирования натяжения ленты при прокатке. Здесь использу-
ется тиристорный привод постоянного тока с многоконтурной
системой двухзонного регулирования скорости. Для управле-
ния приводом разматывателя применена система с регулято-
ром мощности, с независимым управлением полем.
При работе с натяжением привод работает в генераторном
режиме. Регулирование скорости двигателя при изменении
219
скорости полосы обеспечивается путем изменения напряжения
питания якоря, а при изменении диаметра рулона — путем
регулирования Поля двигателя.
ЭлектропривОд перемоточного устройства. Перемоточное
устройство предназначено для перемотки прокатанной на
стане ленты барабана в рулон, а также для перемотки руло-
нов исходной ^енты на двухопорный барабан с целью даль-
нейшей прока/ки на стане. Электропривод перемоточного
устройства во многом аналогичен электроприводу разматыва-
теля.
Электропри^оды бумагомоталок. Бумагомоталка, установ-
ленная на разМатывателе стана, предназначена для смотки в
рулон бумаги, ^проложенной между витками исходной ленты.
Бумагомоталка/ на моталке перемоточного устройства пред-
назначена для ^размотки рулона бумаги с целью прокладки
между виткамй прокатанной на стане ленты, а также для
смотки в рулой бумаги, проложенной между витками исходной
ленты. Привод рулона бумаги осуществляется двумя привод-
ными роликами, на которые опирается наружная поверхность
рулона. Прилегание рулона бумаги к приводным роликам
обеспечиваете^ при помощи гидро- и пневмопривода. Основ-
ным требованием, предъявляемым к электроприводу бумагомо-
талки, является необходимость обеспечения автоматического
поддержания заданного натяжения бумаги при всех рабочих
режимах стана. Электропривод бумагомоталки должен обеспе-
чить синхройцую работу бумагомоталки с соответствующей
моталкой стана, постоянство натяжения бумаги при размотке
и намотке. Здесь используется индивидуальный электропри-
вод постоянного тока с питанием главных цепей от тирис-
торного преобразователя. В качестве приводного использу-
ется электродвигатель постоянного тока мощностью 0,3 кВт,
750 об/мин. Для питания якоря приводного двигателя бума-
гомоталки принят однофазный тиристорный преобразователь.
Поддержание заданного оператором натяжения бумаги осуще-
ствляется путем воздействия на напряжение якоря приводно-
го электродвигателя.
220
3.19.. Электропривод рольгангов,
кантователей, ножниц, нажимных
устройств
Электроприводы рабочих рольгангов, кантователей, мани-
пуляторов, слитковозов работают в повторно-
кратковременном реверсивном режиме с большой частотой
включений, достигающей 2000 в час при ПВ-59*70%. Большой
частотой включений обусловлены высокие требования к дина-
мике- электропривода. Время реверса не должно превышать
25—40 мс. Диапазон регулирования скорости (10-5-20): 1.
Рольганги работают в основном в повторно-
кратковременном режиме с динамическим торможением. Боль-
шинство таких механизмов имеют индивидуальный безредук-
торный привод роликов от асинхронных короткозамкнутых
электродвигателей. При необходимости регулирования ско-
рости используется привод по системе тиристорный пре-
образователь частоты — двигатель, а также тиристорный
реверсивный электропривод постоянного тока. Структура
электропривода в (этом случае такова: тиристорный ревер-
сивный преобразователь — двигатель постоянного тока с
регулятором скорости или э.д.с. и подчиненным регулятором
тока якоря.
Ножницы предназначены для резки горячего и холодного
металла. Дисковые ножницы для продольного
резания листового металла, снятия продольных, кромок ра-
ботают в продолжительном режиме с постоянной нагрузкой.
Летучие ножницы служат для поперечного реза-
ния движущегося листа или мелкосортного металла/ Посколь-
ку летучие ножницы предназначены для резания движущегося
металла, скорость привода ножниц должна быть синхронизи-
рована со скоростью перемещения полосы. Электропривод
ножниц для лучшего использования запаса кинетической
энергии вращающихся частей должен иметь достаточно мягкую
упорную механическую характеристику. ' '
На ножницах с относительно небольшим усилием резания
применяют маховичный привод, позволяющий снизить мощность
приводного асинхронного двигателя. Для привода ножниц
обжимных станов используется тиристорный реверсивный при-
вод постоянного тока, иногда — двухдвигательный. Суммар-
ная мощность двигателей в зависимости от назначения, типа
221
ножниц колеблется от сотен киловатт до 2 МВт. Система
управления приводом выполняется с регулятором скорости и
подчиненным регулятором тока. Задающим сигналом регулято-
ра скорости является напряжение тахогенератора, связанно-
го с последней клетью стана.
Нажимные устройства предназначены для
изменения раствора валков с целью получения требуемого
обжатия прокатываемой заготовки.
Электропривод нажимного устройства реверсивного стана
горячей прокатки и ряда других станов работает в повтор-
но-кратковременном режиме при частоте , включения
1000—2000 в час. На непрерывных листовых станах горячей и
холодной прокатки привод нажимного механизма работает в
режиме автоматического поддержания толщины полосы. На
непрерывных сортовых, заготовочных и проволочных станах
привод нажимного механизма работает в кратковременном ре-
жиме. Требуемая точность отработки положения нажимных
винтов чистовой клети толстолистового стана ±0,01 мм при
ходе 50-20 мм. Здесь широко используется привод постоян-
ного тока по системе ТП-Л. Так, в приводе нажимных
устройств блюмингов используются двигатели постоянного
тока мощностью до 640 кВт; 700/1000 об/мин. Для обеспече-
222
ния высокой надежности и быстродействия в приводе нажим-
ных устройств используется однозонное регулирование ско-
рости путем изменения напряжения на якоре при
Ф - Фном - const. В приводах таких механизмов используют-
ся позиционные системы управления, т.е. системы с регуля-
тором положения с подчиненными регуляторами скорости, то-
ка якоря. С целью обеспечения быстрой отработки заданного
перемещения используется нелинейный регулятор положения
РП (рис. 97). Система управления здесь трехконтурная.
Внутренний контур тока включает регулятор РТ и датчик ВА;
контур регулирования скорости включает регулятор PC и
тахогенератор BR*, внешний контур регулятор положения РП и
датчик положения BW. На вход системы подается задание для
отработки заданной величины перемещения. Источником сиг-
нала обратной связи по положению является датчик положе-
ния. BW, установленный на валу двигателя или механизма.
Наибольшее распространение здесь получила система под-
чиненного регулирования с цифровым контуром положения и
аналоговым контуром тока и скорости. 4
3.20. Электропривод технологических машин
трубных агрегатов
В состав трубных агрегатов входит ряд технологических
машин: устройства для раскроя листов, полос, штанг, слит-
ков, труб и т.п. (прессы, ножницы для холодной и горячей
резки—х гильотинные, дисковые, летучие и т.п.), пилы для
холодной и горячей резки, разрезные станки, разрывные ма-
шины, плазмотроны, аппараты газовой резки и т.п.
В большинстве случаев режущие средства встроены в по-
точные линии и работают как в продолжительном, так и в :
перемещающемся режимах.
Летучие пилы и ножницы служат для порезки на мерные
длины редуцированных труб. Кривошипно-эксцентриковые ле-
тучие ножницы приводятся от двух последовательно соеди-
ненных и работающих на общий вал двигателей, получающих
питание от реверсивного тиристорного преобразователя.
Система регулирования - двухконтурная с регулятором ско-
рости и подчиненным регулятором тока якоря. Вычислитель-
ное устройство содержит информацию о длине труб, положе-
нии ножниц и т.п. Управление операциями включения и тор-
223
можения, а также установки ножей в исходное положение
осуществляется с помощью логического устройства.
Кромкострогальные станки предназначены для подготовки
и сварки обоих продольных • торцов листов, используемых при
производстве труб большого диаметра. Обработка листа
происходит при его движении с помощью приводных двухвал-
ковых клетей. В некоторых станах валки клетей приводятся
в движение от асинхронных двигателей с регулированием
скорости изменением передаточного числа трансмиссии.
Однако на современных станах используется индивидуальный
привод постоянного тока. Режим работы главных приводов
станков— продолжительный нереверсивный с повторно-
кратковременной нагрузкой. Регулирование скорости осу-
ществляется лишь при настройке на заданный сортамент,
число клетей и соответственно двигателей - от 6 до 18.
Двигатель получает питание от нереверсивного тиристорного
преобразователя. Регулирование скорости осуществляется по
зависимой системе. Обмотки возбуждения двигателей парал-
лельно подключены к тиристорным возбудителям. Система
управления — с подчиненным регулированием скорости и
обратной связью по типу группы двигателей.
Электропривод правильных машин. Операция правки пред-
назначена для устранения дефектов, связанных с возможными
нарушениями формы, размеров, поперечного сечения труб и
исходного материала. Правка труб обычно осуществляется на
роликовых или валковых правильных машинах. Режим работы —
продолжительный нереверсивный с переменным графиком на-
грузки.
Точность поддержания скорости - несколько процентов. К
динамическим режимам особых требований не предъявляется.
Для привода роликов или валков используется электропривод
постоянного тока и переменного тока мощностью до 400 кВт,
учитывая, что здесь нет необходимости в точном поддержа-
нии скорости. Для привода могут использоваться многоско-
ростные асинхронные электродвигатели. Широко используется
также тиристорный привод постоянного тока. Используются
регуляторы скорости или э.д.с. с подчиненным регулятором
тока. Задание скорости — от сельсинного задающего устрой-
ства через задатчик интенсивности. Е^ли несколько приво-
дов образуют одну технологическую линию, то используют
общее задающее устройство.
224
Электрооборудование загрузочных и выгрузочных машин
кольцевых печей. Для загрузки и выгрузки используются
специальные самоходное рельсовые тележки с подвижным.
хоботом и клещами для захвата штанг. Привод механизма
передвижения тележек - постоянного тока, обычно двухдви-
гательный, тиристорный, обеспечивающий точную остановку
машины в положениях захвата и укладки заготовок. Режим
работы машин — перемещающийся, реверсивный. Возможно
также применение привода переменного тока, учитывая
напряженный режим работы машин.
3.21. Расчет мощности
электродвигателя прокатного стана
Все используемые на практике методы расчета мощности
двигателей прокатных станов являются поверочными. Целью
их является определение возможности предварительно выб-
ранного электродвигателя выполнить заданную программу
прокатки. Мощность двигателя выбирается на основании
опытных данных для конкретного стана с известными усло-
виями прокатки. Исходными данными для расчета служат сор-
тамент прокатываемой стали, расчетная производительность
стана и программа прокатки.
В программе прокатки указывается количество пропусков,
размеры заготовки до и после прокатки в каждом пропуске,
распределение обжатий по пропускам, марка, температура
прокатываемого металла. ' Л ' !
При наличии нескольких программ прокатки разного сор-
тамента металла мощность рассчитывается для наиболее тя-
желой программы. Вследствие разнообразия условий прокат-
ки, сортамента, программ прокатки и т.п. в формулы для
расчетов вводится большое количество, экспериментальных
коэффициентов. Во избежание возможных серьезных ошибок
выбор мощностей главных приводов прокатных станов произ-
водят одновременно несколькими методами и в заключение
сопоставляют все полученные результаты. Расчеты ведутся с
использованием ЭВМ.
Наибольшее применение на практике находят теоретичес-
кие методы расчета: метод А.И.Целикова, метод Стоуна и
др., а также метод расчета по экспериментальным кривым
удельного расхода электроэнергии.
225
Метод АМДеликова. Вначале определяется суммарный мо-
мент на шпинделе. На станах холодной прокатки металл про-
катывается обычно при переднем и заднем натяжении, поэто-
му следует учесть тот факт, что переднее натяжение как бы
помогает двигателю главного привода, а заднее, наоборот,
противодействует движущему моменту и требует увеличения
мощности двигателя.
Суммарный приведенный момент на шпинделе определяется
по выражению
~ ^пр + ~ -^нат>
(90)
где Мпр- момент прокатки, необходимый для преодоления
сил сопротивления деформации прокатываемого металла;
Мтр — момент трения в подшипниках опорных валков; Мнат —
момент натяжения, обусловленный разницей натяжений метал-
ла до и после клети; знак "плюс" соответствует заднему
натяжению, "минус"- переднему.
Методы выбора мощнности двигателя стана холодной про-
катки рассмотрим на конкретном примере.
Исходные данные: ширина прокатываемой полосы Ь =
= 940 мм; расчет мощности ведем по второму пропуску, для
которого толщина листа до пропуска /:0 = 1,4 мм, после
пропуска ^ = 0,83 мм.
Абсолютное обжатие за пропуск ’ <5абс = hx =
= 0,31 мм.
Относительное обжатие за пропуск • 1ОО%/Ло=
= 27,2%.
Скорость прокатки упр = 8,7м/с.
Предел текучести до пропуска о = 1072 Н/мм2; после
пропуска (Г - 1149 Н/мм2.
0'1
Натяжение ленты заднее Т1 = 273 кН.
Натяжение ленты переднее То = 343 кН.
Сечение полосы до прокатки 50 = bhQ = 1071 мм2; после
прокатки S = bhY = 780 мм2; радиус рабочего валка R =
= 300 мм.
При использовании метода А.И.Целикова расчет момента
прокатки производится по давлению металла на валки.
Давление металла на валки
226
Р = Pj>L,
(91)
где рср — среднее удельное давление, Н/мм2; L— длина ду-
ги захвата с учетом упругой деформации валков, мм.
Величина среднего удельного давления с учетом натяже-
ния полосы определяется из выражения
ео*о
(92)
е1^1 *0 + Aq + Л]
Определим (округленно) величины, входящие в (92): /:0~
= l,15<rso = 1233 Н/мм2; к{ = 1,15^ = 1322 Н/мм2; . <Г0 =
= Tq/Sq = 320 Н/мм2; а1 = Т1/51 = 350 Н/мм2; e0Ar0 = kQ -
- (Го = 912,7 Н/мм2; е^к^ = ^ - o', = 972,3 Н/мм2;
/и = 2mL0/(/i0 + /i1), (93)
где р — коэффициент трения металла о валки, зависящий от
материала валков, смазки, скорости ‘прокатки; определяется
он по диаграмме.
Для станов холодной прокатки при эмульсионной смазке
валков и скорости прокатки выше 5 м/с можно принять р =
« 0,06+0,046; в данном примере принимаем ц = 0,Й46.
Длина захвата металла без учета сплющивания валков
определяется из выражения L0-y/R§a6c =9,64 мм. Подста-
вив полученные величины в формулу (93), получим т - 0,45.
Далее по формуле (92) определим рср = 1,21 кН/мм2. Длина
дуги захвата с учетом упругой деформации валков (сплющи-
вания)
L = рсрЛ/9500 + Лзабс + (РоЯ/9500)2 =
= 14,23 мм.
227
Давление металла на валки согласно (91), составит
16,18 МН. Момент прокатки Мпр = рср - ЬЛ6абс • 10“6 =
= 105,7 кНм. Момент трения в подшипниках, кН • м,
Мтр = 2 • 10“2gTPp (Дцап или Доп), (94)
где Яцап — радиус цапфы опорного валка (в данном случае
Яцап = 590 мм); Доп - радиус опорных валков (в данном
случае Яоп = 750 мм); ртр = 0,003*0,005 - коэффициент
трения в подшипниках валков.
Подставив в (94) указанные величины, получим Мтр =
= 22,9 кНм.
Момент натяжения
Мнат = 1О'6(Го - TJR. (95)
Подставив в (95) имеющиеся значения, получим Мнат =
=; 21 кНм.
Момент на шпинделе Мшп = Л/пр + Мтр + Л/нат = 149,6 кН *
Хм.
Мощность двигателя
Рд = Мшп60гпр/(9751)2пР • 10--’) =
= 3250 кВт, (96)
где 1) = 0,92 — к.п.д. двигателя.
Расчет мощности по экспериментальным кривым удельного
расхода энергии. По данным рассмотренного выше' примера
произведем поверочный расчет мощности электродвигателя
методом экспериментальных кривых удельного расхода энер-
гии. Удельный расход энергии на прокатку 1 т металла за-
висит от формы конечного профиля (блюм, лист, рельс и
т.п.), начального и конечного сечений, температуры и хими-
ческого состава металла, а также от типа стана, его кон-
струкции, типа подшипников и т.п. Поэтому кривые удельно-
го расхода энергии снимаются для конкретного стана, для
заданного профиля прокатываемого металла и т.п. На
рис. 98 в качестве примера приведена кривая удельного
расхода энергии для стана холодной прокатки. Поскольку
для станов холодной прокатки отношение сечений листа при-
228
мерно равно отношению его толщин So/S} = /i0//tp то удель-
ный расход энергии здесь обычно приводится в функции тол-
щины листа w = f(h). Для обжимных станов кривая удельного
расхода энергии дается в функции вытяжки (удлинения)
w = /(Л).
Обычно кривыми удельного расхода энергии учитывается
работа, затрачиваемая t на деформацию (прокатку) металла и
на преодоление силы трения Ртр; потери энергии в привод-
ных двигателях кривыми удельного расхода* не учитываются.
Расход энергии определяется
отдельно для каждого пропуска.
Удельный расход энергии за
один пропуск равен разности
ординат wn = wK~wK_1 за дан-
ный (к-и) пропуск и предыду-
щий (£-1)-й пропуск (рис.98).
Рис. 98. График удель-
ного расхода электро-
энергии при прокатке
Расход энергии за пропуск
wn = (wK - (97)
где G — масса прокатываемой ленты, т.
Мощность, расходуемая за один пропуск металла, опреде-
ляется формулой
“ ^пр + ^тр = wn/(1000f), (98)
где t— время одного пропуска металла, с.
Определим теоретическую часовую производительность
стана:
Й4 = b/ivnp73600 • 10~6 =
= 940 • 1,14 • 8,7 • 7,8 • 3600 • 10“6 =
- 261,8 т/ч, (99)
где у = 7,8 т/м3 — плотность прокатываемого металла.
229
Удельный расход энергии за пропуск определяется По
кривой на рис. 98 и по формуле (97): и>п = 17,5 кВт • ч/т.
Мощность прокатки Рпр - ivnQ4 = 4581,15 кВт.
Полное натяжение Т - То — Т1 = 34,3 - 27,3 = 7,0 кН.
Мощность натяжения Рнат = Тупр = 0,0098 = 596 кВт.
Мощность прокатки с учетом натяжения Ли> = ^тр“
-Риат = 3985,15 кВт.
Мощность потерь в двигателе принимаем равной 8 % от
Рпр. Тогда суммарная мощность Р = Рпр - Рнат + Рпотерь с
учетом потерь составит Р = 4350,8 кВт. Сравнивая получен-
ные данные с расчетом по методу А.И.Це Дикова, можно отме-
тить достаточно близкое совпадение результатов.
1 -г ; ’
Контрольные вопросы
1. В каких механизмах прокатных станов используется синхронный и асинхрон-
. ный электропривод?
2. Каковы особенности работы привода черновых нереверсивных клетей?
3. Каков режим работы универсальных черновых клетей и какой привод там
используется?
4. Каким требованиям должен удовлетворять привод моталок?
5. Какие элементы содержит система управления электропривода намоточных
; устройств?
б. Какой параметр должен поддерживаться постоянным в приводе моталок?
7. Каков режим работы привода нажимного устройства и какой тип привода там
используется?
8. Какие требования предъявляются к приводу правильных машин?
9. Каков порядок выбора мощности прокатного двигателя?
10. В чем сущность расчета мощности прокатного двигателя по методу А.И.Це-
Ликова?
11. В чем сущность расчета мощности прокатного двигателя по эксперименталь-
ным кривым удельного расхода энергии?
Глава 4. ЭЛЕКТРОСНАБЖЕНИЕ И
ЭКСПЛУАТАЦИЯ ЭЛЕКТРООБОРУДОВАНИЯ
ПРОКАТНЫХ ЦЕХОВ
4Д. Общие сведения
Системой электроснабжения называется совокупность
электроустановок, предназначенных для обеспечения, потре-
бителей электроэнергией. В систему электроснабжения про-
мышленных предприятий входят линии электропередач, под-
230
станции, распределительные пункты, потребители электро-
энергии и т.п.
Электрическая подстанция — установка, предназначенная
для преобразования и распределения электроэнергии. В за-
висимости от назначения подстанции бывают узловые
110-500 кВ (УРП), главные 110-220 кВ (ГПП), глубоких
вводов 110-220 кВ (ПГВ), распределительные 6-10 кВ (РП) и
цеховые 6—10/0,38-0,66 кВ (ТП). , >
Трансформаторная подстанция имеет понижающие трансфор-
маторы, коммутационную аппаратуру - выключатели мощности,
разъединители; сборные шины, распределительные панели,
контрольно-измерительную аппаратуру и т.п. . (
К системе электроснабжения предъявляются ряд требова-
ний, основные из которых экономичность, надежность,
безопасность, обеспечение необходимого качества электро-
энергии, обеспечение необходимых резерва и защиты и т.п.
В отношении обеспечения надежности электроснабжения
электроприемники разделяются на три категории.
К I категории относятся электропрйемники, пе-
рерыв электроснабжения которых может повлечь за собой
опасность для жизни и здоровья людей, значительный ущерб
народному хозяйству, повреждение дорогостоящего основного
Оборудования, массовый брак продукции, расстройство слож-
ного технологического процесса, нарушение функционирова-
ния особо важных элементов коммунального хозяйства.
Из состава электроприемников I категории выделяется
особая группа электроприемников, бесперебойная работа
которых необходима для безаварийного останова производст-
ва с целью предотвращения угрозы жизни и здоровью людей,
взрывов, пожаров И Повреждения дорогостоящего оборудова-
ния.
Ко II категории относятся электроприемники,
перерыв электроснабжения которых приводит к массовому
недовыпуску продукции, массовым простоям рабочих, ме-
ханизмов, нарушению нормальной деятельности значительного
количества людей.
К III категории относятся все остальные
электроприемники, не подходящие под определение I и
II категорий.
Электрооборудование прокатных станов относится в боль-
шинстве fc числу потребителей II категории.
231
Особые группы приемников I категории трудно поддаются
точному определению, поэтому они не регламентируются, а
должны выявляться совместно с технологами для каждого
конкретного случая (аварийное освещение цехов, электро-
двигатели задвижек и запорной аппаратуры, электродвигате-
ли насосов водяного охлаждения печей, электродвигатели
воздуходувок и т.п.).
Требуемая надежность электроснабжения потребителей I и
И категорий обеспечивается резервированием, автоматичес-
ким вводом резерва при перерывах в подаче электроэнергии,
автоматическим повторным включением линий, автоматизацией
работы системы электроснабжения и т.п. Электроприемники
I категории получают электроэнергию не менее чем от двух
независимых, взаимно резервирующих источников питания и
перерыв их электроснабжения допускается лишь на время
автоматического восстановления питания (доли секунды).
Для электроснабжения особой группы электроприемников
I категории предусматривается дополнительное питание от
третьего независимого взаимно резервирующего • источника
питания, в качестве которого используются местные элект-
ростанции и агрегаты бесперебойного питания АБП. В ка-
честве последних могут использоваться автоматизированные
дизель-генёраторные станций (АДГ), установки гарантийного
питания (УГП) и т.п.
Электроприемники II категории рекомендуется обеспечи-
вать электроэнергией не менее чем от двух независимых,
взаймно резервирующих источников питания.
При наличии потребителей I и II категорий на подстан-
ции должно быть установлено не менее двух трансформато-
ров. Установка трех* и более трансформаторов должна быть
обоснована поскольку такая подстанция имеет недостатки
по части экономичности.
При двухтрансформаторных подстанциях мощность каждого
трансформатора выбирают с таким расчетом, чтобы при выхо-
де из строя одного трансформатора оставшийся в работе мог
нести всю нагрузку потребителей I и II категорий (с уче-
том допустимых нормальных и аварийных перегрузок). При
этом потребители III категории могут временно отключать-
ся.
Исходя из этого, номинальная мощность трансформаторов
двухтрансформаторной подстанции принимается равной 70 %
232
от общей расчетной нагрузки. Тогда при выходе из строя
одного из трансформаторов второй на время ликвидации
аварии оказывается загруженным не бол*ее чем на 140 %,
что допустимо в аварийных условиях (в течение 5 сут или
долее 6ч в сутки).
Показателями качества электроэнергии являются отклоне-
ние напряжения, колебания напряжения (разница его измене-
ния со скоростью > 1 % в секунду), несимметрия напряже-'
ния, несинусоидальность формы кривой напряжения и тока,
отклонения и колебания частоты и т.п.
Отклонение напряжения
V ~ ^ном
= и - С/ном или ДС7, % = ----------100 %, (100)
^ном
где U и L7H0M “ соответственно фактическое и номинальное
напряжение сети, В.
Допустимое отклонение номинального напряжения на за-
жимах приборов рабочего освещения -2,5+5 %; на зажимах
электродвигателей -5+10 %; на зажимах остальных приемни-
ков ±5%.
* На подстанциях завода применяются трансформаторы с ши-
роким диапазоном автоматического регулирования напряже-
ния.
Колебания напряжения при работе электроприемников
и - U .
61/ s —2^------—100%. (101)
^ном
Частота изменения колебаний напряжения
F = ш/Г,
где т— количество изменений напряжения со скоростью бо-
лее 1 % в секунду за время Т.
4.2. Схемы электроснабжения
металлургического завода и
прокатного цеха
Основной принцип построения современной схемы электро-
снабжения предприятий заключается в максимальном прибли-
233
жении источников напряжения > 1 кВ к потребителям. К мощ-
ным потребителям электроэнергии - электроплавильным} про-
катным цехам, кислородным станциям, а также к удельным
мощным потребителям подается напряжение ПО и 220 кВ по
радиальным линиям. В этом случае понижающие подстанции
устанавливают непосредственно в районе указанных цехов.
Таким образом осуществляется глубокий ввод,
когда напряжение > 1 кВ подается непосредственно потреби-
телю или к расположенной в непосредственной близости от
него трансформаторной подстанции глубокого ввода (ПГВ).
Этим обеспечивается децентрализация электроснабжения:
прием — электроэнергия принимается не одной, а нескольки-
ми подстанциями с первичным напряжением ПО, 220 и
330 кВ. При такой системе электроснабжения распредели-
тельные устройства вторичного напряжения (6-10 кВ) выпол-
няют функции распределительных пунктов (РП), и при этом
резко сокращаются распределительные сети, уменьшается
число ступеней трансформации, укорачиваются кабельные
трассы, дорогие кабельные туннели. Снижаются потери энер-
гии, затраты цветного металла, капиталовложения.
На рис. 99 представлена схема электроснабжения первой
ступени крупного металлургического завода с расчетной на-
грузкой 12MLMB • А, где широко используется принцип глу-
бокого ввода.,, >
Питание электроэнергией осуществляется от шин районной
понижающей подстанции РПП напряжением 330/110 кВ и от
двух ТЭЦ, работающих на доменном и коксовом газах. К ши-
нам 330 кВ районной подстанции подключены* четыре транс-
форматора мощностью по 250 МВ • А напряжением 330/110 кВ.
Генераторы ТЭЦ мощностью по 80 и 175 МВт включены по схе-
ме блок генератора—трансформатор 110 кВ на шины 110 кВ.
Между секциями шин 110 кВ предусмотрены реакторы Р, бла-
годаря чему при снижении напряжения на одной из секций на
остальных сохраняется нормальное напряжение и, следова-
тельно, секции, согласно ПУЭ, являются независимыми
источниками питания. Шины 110 кВ районной подстанции раз-
делены на независимые системы. Таким образом обеспечи-
вается высокая' степень надежности электроснабжения во
всех возможных ситуациях. Система шин 330 кВ районной
подстанции соединена с шинами 110 кВ ТЭЦ через согласую-
234
щие трансформаторы мощностью по 200 МВ • А напряжением
330/110 кВ.
Прием электроэнергии от источников (РПП и ТЭЦ) осу-
ществляется на четыре узловые распределительные подстан-
ции УРП 110 кВ, от которых энергия распределяется кабель-
ными линиями 110 кВ к трансформаторам подстанций глубоких
вводов ПГВ. Питание каждого УРП осуществляется по четырем
линиям ПО кВ: две линии от двух разных секций ТЭЦ и
две— от двух независимых систем Шин ПО кВ районной под-
станции. Каждая линия рассчитана на половину нагрузки УРП
с учетом взаимного резервирования. На УРП секции шин
работают раздельно: при посадке напряжения на одной из
четырех секций на остальных сохраняется нормальное напря-
жение.
Трансформаторы ПГВ устанавливаются открыто, возле
крупных цехов. Число трансформаторов на ПГВ принято в за-
висимости от характера питаемых от них нагрузок. На ПГВ
3, 5, 7, 8 предусмотрено по три трансформатора из сообра-
жений поддержания уровня напряжения, развития нагрузок и
235
надежного резервирования; от этих подстанций питаются
электроприемники особой группы. На ПГВ 10—13, питающих
прокатные цехи, установлено по четыре трансформатора, два
из которых питают спокойную нагрузку и два - ударную. На
ПГВ4 электровоздуходувной станции с очень крупной кон-
центрированной нагрузкой установлено пять трансформаторов
для питания по схеме блока линия — трансформатор пяти
двигателей электровоздуходувок мощностью по 60 МВт, т.е.
фактически каждый блок представляет собой как бы отдель-
ную ПГВ.
Распределение электроэнергии на второй ступени системы
электроснабжения осуществляется кабельными линиями 10 кВ
непосредственно от ПГВ или через цеховые распределитель-
ные пункты РП.
На рис. 100 представлена схема электроснабжения листо-
прокатного цеха, в котором установлен слябинг, широкопо-
лосовой стан горячей прокатки и стан холодной прокатки
(на схеме не показан).
На понижающей подстанций ТП установлены два трансфор-
матора 110/10,5 кВ по 60 МВ • А каждый. Подстанция цолу-
чает питание по двум линиям 110 кВ, по схеме блока ли-
236
ния—трансформатор. В основных цехах предусмотрены цеховые
подстанции с трансформаторами напряжением 10,5/4 кВ для
питания мелких потребителей и осветительных сетей. Мощные
синхронные электродвигатели Ml, М2 подключены к шинам
10,5 кВ распределительного устройства подстанции РУ.
Питание двигателей постоянного тока чистовой группы
клетей осуществляется от тиристорных преобразователей,
подключенных к шинам 10,5 кВ РУ.
4.3. Расход и оплата электроэнергии1
Для определения расхода электроэнергии используются
графики нагрузки предприятия Р, Q, S = f(t).
График нагрузки может быть суточным, месячным, годо-
вым.
На рис. 101 представлен суточный график нагрузки пред-
приятия.
Рис. 101. Суточный график на-
грузки предприятия
о Ч 8'' 16 20 Т,ч
Годовой расход активной электроэнергии может* быть
определен из выражения
^а.г ^Лм^г,
(102)
где KC3il — коэффициент сменности; Рсм - активная мощность
в наиболее загруженную смену; Т\ — годовой фонд рабочего
времени.
Годовой расход электроэнергии можно легко рассчитать
при наличии норм удельного расхода электроэнергии
И'а.г = И'а.уМ» <103)
где М — годовой выпуск продукции, т • м2 и т.п.
Удельные нормы расхода электроэнергии устанавливаются
вышестоящей организацией на каждый год, на основе факти-
дореформенных ценах. /
237
ческих данных предыдущего года, с учетом мероприятии,
подлежащих проведению в предстоящем году, по совершенст-
вованию организации производства, внедрению новой техни-
ки. На основании удельных норм предприятию устанавливают-
ся лимиты потребления электроэнергии.
Средний удельный расход электроэнергии по прокатному и
трубному производству, кВт • ч/т:
Блюминг .... 30
Слябинг .... 16
Листовой (горячей
прокатки) ... 60
Листовой (холод-
ной прокатки) 140
Трубы стальные
горячекатаные 130
Трубы стальные
холоднокатаные 1000
Проволока сталь-
ная .... SO
Оплата электроэнергии проводится: для населения и мел-
ких предприятий — по одноставочному тарифу — по показанию
счетчика активной энергии, для крупных предприятий, в том
числе металлургических - по двухставочному тарифу.
Двухставочный тариф состоит из основ-
ной и дополнительной ставок. За основную ставку прини-
мается годовая плата за каждый киловатт заявленной потре-
бителем активной мощности, участвующей в максимуме энер-
госистемы. В зависимости от района стоимость 1 кВт заяв-
ленной мощней составляет 30-48 руб.
Дополнительная ставка двухставочного тарифа предусмат-
ривает плату по тарифу по показанию счетчика активной
энергии. Стоимость 1 кВт • ч активной электроэнергии сос-
тавляет 0,25-5*2 коп ,в зависимости от района.
Годовая стоимость электроэнергии по двухставочному та-
рифу
Cr = (аР3 + Wa>r) (1 * Аг),
(104)
где Р3 — заявленная мощность, кВт; а — годовая плата за
1 кВт заявленной мощности, руб/кВт; b — стоимость
1 кВт • ч активной энергии, руб/кВт • ч; 1Уаг — потреблен-
ная за год (по счетчику) активная энергия, кВт • ч; к-
коэффициент надбавки или скидки в зависимости от степени
компенсации реактивной мощности.
При наличии норм удельного расхода энергии формула
(114) принимает вид
238
Сг » (оР3 + bwayM)(l+/c),
(105)
где ЛГ- годовой выпуск продукции, т; и>аУ - удельный рас-
ход электроэнергии, кВт • ч/т.
На крупных металлургических предприятиях годовое
электропотребление достигает 2000 ГВт • ч; средняя мощ-
ность 250 МВт. Суммарная мощность установленных двигате-
лей достигает 1 ГВт, а их количество может достигать
20 тыс. *
Заявленная мощность крупных металлур-
гических предприятий может достигать 300-40,0 МВт.
Электровооруженность труда,
т.е. годовое потребление электроэнергии, отнесенное на
одного трудящегося > достигает 120 МВт • ч/чел.
Согласно основной ставки потребитель оплачивает всю
планируемую нагрузку в часы максимума (утреннего и вечер-
него) энергосистемы, которая указывается в договоре на
отпуск электроэнергии и не зависит от фактически потреб-
ляемой мощности.
Учет утреннего и вечернего максимумов нагрузки объяс-
няется резким увеличением потребления электроэнергии и
стремлением разгрузить энергосистему в это время суток.
По истечении этого времени контроль величины потребляемой
мощности прекращается. Например, для сиСТЖыГ Мосэнерго
утренние часы максимума нагрузки приходится на 8-10 ч.
Вечерние часы максимума могут зависеть от времени года: в
январе это 17-21 ч; в июле 20-22 ч и т.д.
Энергосистема контролирует соблюдение предприятием-
потребителем заявленной мощности. В случае превышения
заявленной мощности, ограниченной договором или лимитом,
с потребителя взимается десятикратная стоимость каждого
киловатта мощности сверх оговоренной договором или лими-
том.
Пример. Стоимость 1 кВт
Пример. Стоимость 1 кВт заявленной мощности в системе Мосэнерго
Р3 = 36руб. в год. Первоначально в
« 50000 кВт. Следовательно, годовая
случае составила бы
договоре была заявлена мощность =
плата за заявленную мощность в этом
Р * а * 50000 • 36 « 1 800 000 руб. '
31
Предприятие сумело организовать
ческие нагрузки отключаются в часы
свою работу так, что основные электри-
максимума энергосистемы (ремонт, пере-
239
вносятся поправки. Если заявленная
= 30 000 кВт. то ежегодная экономия
валка валков и т.п.). Тогда в договор
мощность теперь составит, например > г
л2
составит
С = а - (Р - Р ) = 36(50 ООО — 30 000) = 720 тыс.руб..
31 32
что. в новых условиях деятельности предприятия весьма важно.
Предприятиям устанавливается лимит потребления электроэнергии. Вся элек-
троэнергия, потребленная сверх лимита, подлежит оплате в пятикратном разме-
ре тарифной ставки.
Пример. Для системы Мосэнерго тарифная ставка при двухставочном та-
рифе составляет 10 коп. за 10 кВт • ч. Предприятию был выделен на месяц ли-
мит электроэнергии в размере 10 ГВт * ч. Фактический расход (по счетчику)
составил, например, 12 ГВт • ч.
Сумма оплаты по дополнительной тарифной ставке составит в этом случае
С = 10 • 106 • 0,01 4- 2 ; 106 • 0,01 • 5 =
= 100 000 + 100 000 = 200000 руб.
Второе слагаемое — сумма штрафа за перерасход установленного лимита. Как
видно, сумма штрафа равна сумме, выплаченной за всю электроэнергию, потреб-
ленную в пределах выделенного лимита. Учитывая, что вся сумма штрафа за пе-
рерасход электроэнергии ложится на себестоимость, такой тариф заставляет
предприятие искать пути экономии и рационального использования электроэнер-
гии.' Лимит на электроэнергию рассчитывает обычно потребитель по нормам
удельного расхода электроэнергии на единицу продукции, причем нормы расхода
потребитель защищает. Таким образом, двухставочный тариф является выгодным
как для потребителей, так и для энергоснабжающей организации, он способст-
вует выравниванию среднесуточной нагрузки, что дает значительный народно-
хозяйственный эффект. Он открывает широкие перспективы для рационального
расходования и экономии электроэнергии на предприятиях.
4.4. Компенсация реактивной мощности
и экономия электроэнергии
Наличие в системе электроснабжения предприятий асин-
хронных двигателей, трансформаторов, тиристорных преобра-
зователей и других источников реактивной мощности приво-
дит к снижений ее энергетических показателей. В качестве
такого показателя использовался коэффициент мощности
cos <р ±= P/S = Р//>2 + Q2, (106)
где Р = LT/cos^) - активная мощность, кВт; S = UI — полная
мощность, кВт - A; Q = L/Zsin <р — реактивная мощность,
кВ • Ар; U, I— соответственно напряжение и сила тока в
сети; <р— угол сдвига фаз напряжения и тока сети.
240
В настоящее время с этой целью используется коэффи-
циент реактивной мощности
tg <р = Q/P = Wt/W„ (107)
где Wa, Wp — показания счетчиков (расход) соответственно
активной и реактивной энергии, кВт • ч и кВ • Ар • ч.
Увеличение доли реактивной мощности ведет к увеличению
полной мощности S = а/ Р2 + Q1 ; к увеличению силы тока I
в линии при заданной активной мощности Р
1 = s/U = P/(Ucos<p\ (108)
Поскольку линии, трансформаторы, выключатели и т.п. рас-
считываются на полную мощность, то увеличение S потребует
дополнительных расходов на увеличение мощности линии и
оборудования. Увеличение силы тока в линии приводит, кро-
ме того, к увеличению потерь напряжения ДС7 и мощности ДР
в линии, причем потери мощности растут во второй степени
Ш = /Ял; ДР = РЯЛ, (109)
где Ял — активное сопротивление линии.
Все это указывает на большое значение вопросов компен-
сации реактивной мощности в электросетях. Снизить потреб-
ление реактивной мощности можно в результате, во-первых,
полной загрузки двигателей и трансформаторов, замены
недогруженных двигателей двигателями меньшей мощности,
ограничения холостой работы трансформаторов и двигателей,
повышения качества ремонта двигателей и т.п. мероприятий,
а во-вторых, установки в сетях специальных источников
реактивной мощности. Так как такого рода источники гене-
рируют в сеть реактивную мощность, общая реактивная мощ-
ность снизится, а угол сдвига фаз уменьшится.
Мощность компенсирующих устройств определяется как
разность между реактивной мощностью нагрузки предприятия
и предельной реактивной мощностью, предоставляемой пред-
приятию энергосистемой по условиям режима ее работы
Qk = 6ф - 2э = Рз^е, <pt, - tg <Рэ>, (ио)
241
где = тангенс угла, соответствующий заяв-
ленной активной мощности предприятия Р3 (фактический);
tg^3 = 63/^3*” тангенс угла, соответствующий установлен-
ным предприятию условиям получения мощности и являющийся
оптимальным; 0Э - оптимальная реактивная нагрузка потре-
бителей в часы максимума активной нагрузки энергосисте-
мы, заданная энергоснабжающей организацией; (2Ф — факти-
ческая реактивная нагрузка потребителя, участвующая в
максимуме активной мощности энергосистемы.
В качестве источников реактивной мощности используются
статические конденсаторы и синхронные компенсаторы. Функ-
ции источников реактивной мощности вы.полняют также синх-
ронные электродвигатели, используемые в электроприводе
металлургических установок и агрегатов. Система автомати-
ческого регулирования возбуждения двигателей обеспечивает
максимальную или регулируемую по определенному закону
выдачу в сеть реактивной мощности. В сетях с резкопере-
менными нагрузками компенсирующие устройства должны обла-
дать большим быстродействием. С этой целью используются
синхронные компенсаторы и двигатели со специальной
быстродействующей тиристорной системой возбуждения.
Наибольшим быстродействием отличаются статические ком-
пенсирующие устройства, состоящие из плавно регулируемого
(с помощью тиристоров) индуктивного элемента и батареи
конденсаторов, выполняющей одновременно функцию фильтра
высших гармонических. Как отмечалось, компенсация реак-
тивной мощности обеспечивает снижение потерь энергии в
сетях энергосистемы и потребителей, улучшает качество
отпускаемой потребителем электроэнергии, позволяет эконо-
мично использовать электроустановки энергосистемы и линии
передач. По этим причинам энергоснабжающей организацией
стимулируется проведение потребителей работ по компенса-
ции реактивной мощности путем введения шкалы скидок и
надбавок к тарифу.
Этой шкалой предусмотрено, что энергоснабжающая орга-
низация определяет для каждого потребителя разрешенную к
использованию им реактивную мощность в часы максимума в
энергосистеме. Реактивная мощность определяется расчетом,
исходя из оптимального распределения реактивной мощности
в энергосистеме с учетом особенностей сетей потребителя.
Эта разрешенная реактивная мощность задается каждому
242
потребителю оптимальным коэффициентом реактивной мощности
tg Фэ ~ Сэ/^з, (П1)
где Р3 — заявленная потребителем активная мощность, кВт,
участвующая в максимуме нагрузки энергосистемы и зафикси-
рованная в договоре; <Ээ — оптимальная реактивная нагрузка
потребителя, заданная энергосистемой (как разрешенная к
использованию) на границе раздела сетей энергоснабжающей
организации и потребителя и зафиксированная в договоре на
пользование электроэнергией.
Заданный условный коэффициент одновременно определяет
каждому потребителю индивидуальную шкалу скидок и надба-
вок к тарифу на электроэнергию. При этом потребитель дол-
жен выполнять требования энергоснабжающей организации с
точки зрения именно поддержания оптимального коэффициен-
та. Уменьшение или увеличение коэффициента влечет умень-
шение скидок, а при значительных уменьшениях или увеличе-
ниях вводятся надбавки к стоимости электроэнергии, Или не
выплачиваются скидки.
Пример. Потребителю задан оптимальный коэффициент tg <р3 = 0,3. Если
фактическая величина tg фф®0,3, потребитель получит 5 % скидки. При изме-
нении величины коэффициента tg фф = 0,4 или tg фф = 0,1 потребитель полу-
чает скидку, но уже в размере 1 %. При tg <рф ~ 0,45 или tg фф=0,15 скидки
не выплачиваются. При tg <рф = 0,5; 0,55 и т.д. вводятся надбавки (штраф).
При расчетах за электроэнергию по двухставочному тарифу скидки и надбавки
исчисляются как с основной, так и с дополнительной платы за электроэнергию.
При этом, несмотря на то, что расчеты за электроэнергию проводятся ежеме-
сячно, надбавки и скидки рассчитываются на расход за квартал.
Пример. Предприятию задана оптимальная реактивная нагрузка Q3 =
= 2115 кВ • Ар при заявленной активной мощности Рэ = 7050 кВт, т.е. данному
предприятию был утвержден оптимальный коэффициент tg <р3 = Q3/P3 =2115/7050=
= 0,3; а = 9 руб/кВт (за квартал).
По окончании расчетного квартала на основании записей в журналах учета
поступления электроэнергии была зафиксирована реактивная нагрузка £ф =
« 2960 кВ ’ Ар. Фактическое значение коэффициента tg <рф = 2Ф/Р3 =2960/7050=
= 0,4198 округляем до tg фф = 0,42. Для определения скидки или надбавки
округляем величину tg уф до ближайшего значения шкалы. Допустим, что
tg <рф = 0,4 соответствует надбавка 1 %, а следующее значение шкалы
tg <рф = 0,45 соответствует надбавке 2 %. - Принимается надбавка к стоимости
электроэнергии, отпущенной за квартал, в размере 1 %.
В соответствии с этим стоимость электроэнергии, потребленной за указан-
ный квартал с учетом надбавки, составит
С = аР3 + b(W\ + W2 + ЙИ3) + каР3 + kbtwY + w2 + и;я).
243
Здесь а = 9 руб/кВт • ч; Ь = 10коп за 10 кВт • ч; W'p W2, — расход
электроэнергии в I, II, III месяцах квартала, равные соответственно,
кВт • ч, 4500 000, 4 600 000, 4650 000; к - коэффициент, равный 0,01, исхо-
дя из 1 % надбавки к тарифу.
Таким образом, стоимость электроэнергии составит С = 9 • 7050 + 0,01 х
X (4500000 + 4600000 + 4650000) + 0,01 • 9 • 7050 + 0,01 • 0,01 • (4500000+
+ 4600000 + 4650000) = 63450 + 137500 + 634,5 + 1375 = 200950 + 2009,5 =
= 202959,5 руб.
Сумма надбавки только за один квартал составила’ 2009,5 руб. В то же вре-
мя стоимость компенсирующей установки мощностью 200 кВ • Ар составляет
1800-2000 руб.
Экономия электроэнергии. Вопросы рационального, эконо-
мичного расходования электроэнергии приобретают все более
важное значение. Расширение электропотребления происходит
в условиях дефицита энергоресурсов в европейской части
страны. Прогнозы указывают на напряженный энергетический
баланс, повышение оптовых цен на топливо и электроэнергию
для нужд промышленности. В черной металлургии доля элект-
рической составляющей в себестоимости продукции равна
примерно 20 %, и значение рационального расходования
электроэнергии и ее экономии здесь особенно велико. Твор-
ческая мысль технологов и работников электрических служб,
всех производственников должна быть постепенно нацелена
на дальнейшее совершенствование технологических процессов
и организацию производства, на создание условий для наи-
более эффективного использования и экономии электроэнер-
гии в конкретных условиях производства.
В ряде технологических процессов выработку продукции
необходимого качества возможно обеспечить за счет измене-
ния технологии при полном или частичном сокращении неко-
торых энергоемких процессов. В ряде случаев это высвобож-
дает из электробаланса электроэнергию и мощность в значи-
тельных масштабах, многократно превышающих (не менее чем
в два—три раза) масштабы экономии электроэнергии за счет
мероприятий по рационализации собственно электрохозяйст-
ва. Ниже перечислены некоторые из наиболее важных меро-
приятий по экономии электроэнергии на предприятиях черной
металлургии.
Ведение технологических процессов по критерию минимума
расхода электроэнергии вместо критерия максимума выхода
годового продукта (естественно, речь идет об оптимальном
варианте); внедрение технических решений, требующих мень-
244
ших удельных расходов электроэнергии; увеличение номи-
нальной мощности применяемого оборудования и его полная
загрузка; устранение работы оборудования с пониженной
производительностью; устранение или сокращение холостого
хода двигателей, трансформаторов, электропечей и других
электроустановок; интенсификация производственного про-
цесса, его возможно более полная автоматизация; рацио-
нальная организация производства — исключение простоев,
перерывов в работе оборудования, рациональное распределе-
ние электрических режимов работы установок в течение
суток с учетом времени прохождения максимума нагрузки
энергосистемы. Замена устаревшего оборудования более со-
вершенным, замена электромашинных генераторов более
экономичными тиристорными и т.п.; своевременный ремонт,
смазка; уменьшение припусков заготовок, приводящих к уве-
личению объема последующей механической обработки; выпуск
экономичных профилей; использование точного проката,
штамповки, прессования из порошков; ликвидация утечек
сжатого воздуха, воды и т.п.; выбор оптимальной мощности
электрооборудования, рациональной схемы силовой части и
схемы управления; снижение потерь электроэнергии путем
применения рациональных способов пуска, регулирования,
улучшения динамики электропривода, потерь на переходные
процессы, сокращения времени пуска, разгона привода,
внедрение энергетических рациональных способов регулиро-
вания производительности, скорости привода, температуры и
т.п.; рациональная компоновка оборудования, предусматри-
вающая сокращение длины линий передач напряжением
< 1000 В; глубокий ввод; компенсация реактивной мощности;
рационализация освещения — внедрение новых прогрессивных
источников света, автоматическое включение и отключение
освещения, регулярная чистка светильников и оконных прое-
мов и т.п.
На каждом предприятии составляется план организацион-
но-технических мероприятий по, экономии электроэнергии. В
составлении плана самое активное участие принимают руко-
водители цехов, участков, мастера, технологи, механики,
экономисты, работники энергослужб. План организационно-
технических мероприятий должен включать мероприятия по
рациональному электропотреблению; внедрению более совер-
шенных технологических процессов и оборудования, требую-
245
щих меньших удельных энергозатрат; борьбе с потерями
электроэнергии во всех звеньях электропотребления пред-
приятия. Регулярно проводятся всесоюзные, республиканс-
кие, отраслевые конкурсы на лучшее предложение по эконо-
мии электроэнергии.
4.5. Эксплуатация электрооборудования
прокатных и трубных цехов
Техническое состояние электрооборудования существенно
влияет на технико-экономические показатели работы участ-
ка, цеха и всего предприятия в целом. Правильная эксплуа-
тация и своевременный качественный ремонт электрооборудо-
вания являются предпосылкой для надежной и безаварийной
работы электрооборудования, его сохранности, бесперебой-
ной работы предприятия.
Помимо обеспечения бесперебойности работы предприятия
и длительной сохранности электрооборудования решается
экономическая задача - максимальное снижение себестоимос-
ти продукции, для чего необходимо добиваться экономии
электроэнергии, снижения расхода материалов, сокращения
численности эксплуатационного" персонала без ущерба для
надежности электрооборудования и его сохранности. Монтаж
и эксплуатация электрооборудования цехов осуществляется в
строгом соответствии с правилами устройства электроуста-
новок (ПУЭ); строительными нормами и правилами (гл.
’’Электротехнические устройства"); правилами технической
эксплуатации электроустановок потребителей и правилами
техники безопасности при эксплуатации электроустановок
потребителей (ПТЭ и ПТБ) и т.д.; типовым положением тех-
нического обслуживания и ремонта (ТОиР).
За работоспособность электрооборудования, правильную
организацию его эксплуатации, своевременное проведение
ремонта в ’ цехе несут ответственность начальник цеха и
электрик цеха. Они разрабатывают, осуществляют и контро-
лируют комплекс мероприятий, которые должны обеспечить
безаварийную, бесперебойную, экономичную и безопасную
работу электрооборудования; внедрение нового, более
эффективного электрооборудования на агрегатах цеха; эко-
номию электроэнергии.
Для обеспечения нормальной работы прокатных и трубо-
246
прокатных станов во всех сменах предусматривается штат
дежурных электриков, а также ремонтно-наладочная группа.
Все электрооборудование цеха закрепляется за бригадами
или отдельными лицами, которые несут ответственность за
его эксплуатацию и техническое состояние.
Производственно-технологический персонал также участ-
вует в обслуживании электрооборудования закрепленных за
ним агрегатов. Для них начальник цеха совместно с главным
энергетиком определяет перечень работ и круг обязаннос-
тей, разрабатывает календарные графики технического
обслуживания оборудования.
Основным техническим документом являются эксплуата-
ционные инструкции для обслуживающего персонала. Эти
инструкции содержат сведения о правах и обязанностях пер-
сонала, указания по эксплуатации оборудования; меры
безопасности и противопожарные мероприятия. Эксплуата-
ционные инструкции периодически (не чаще раза в три года)
пересматриваются.
Система планово-предупредительных ремонтов (ППР)
является комплексом организационно-технических мероприя-
тий по уходу, надзору и ремонту электрооборудования,
направленных на обеспечение его безаварийной и экономич-
ной работы. В этот комплекс входят: техническое обслужи-
вание, текущие, средние и капитальные ремонты, производи-
мые периодически, в определенные сроки, определяемые гра-
фиками ППР; профилактические испытания, модернизация
электрооборудования.
Техническое обслуживание включает систематическое
наблюдение за работой электрооборудования; контроль за
выполнением специальных инструкций, разработанных на
основе технических указаний заводов-изготовителей; устра-
нение мелких неисправностей, контроль за нагревом элект-
рооборудования и состоянием изоляции; чистоту, регулиро-
вание, наладку в процессе работы оборудования; замену
неисправных блоков и элементов, проверку исправности
ограждений, заземляющих устройств.
При текущем ремонте выполняют те же опе-
рации, что I? при осмотрах, и, кроме того, осуществляют
замену отдельных изношенных деталей, смазку подшипников.
При * средних ремонтах оборудование разби-
рают полностью, производят чистку, замену изношенных час-
247
/
тей, испытание электрооборудования под повышенным напря-
жением.
Капитальный ремонт выполняют с полной
разборкой, заменой изношенных деталей, восстановлением
изоляции.
Периодичность планово-предупредительных ремонтов опре-
деляется ПТЭ и зависит от группы электрооборудования, его
мощности, режима работы, состояния оборудования, характе-
ра окружающей среды, местных условий эксплуатации. Они
выполняются в соответствии с утвержденным планом проведе-
ния ППР.
Наиболее совершенной формой организации ремонта
является его централизация, обеспечивающая повышение ка-
чества и снижение затрат на его выполнение. Такой ремонт
выполняется в специальных ремонтных цехах и на централи-
зованных электроремонтных предприятиях, таких как Тлав-
электроремонт”, "Энергочермет" и др.
Передовые металлургические предприятия благодаря пра-
вильной эксплуатации и своевременному ремонту электрообо-
рудования увеличивают межремонтный период в 1,5—2 раза по
сравнению с плановым. Ремонты электрооборудования выпол-
няются во время профилактических остановок основных меха-
низмов и агрегатов. Надежность работы электрооборудования
значительно повышается при внедрении межремонтного обслу-
живания, в основе которого лежит соответствующий график,
составляемый по каждому цеху, участку. График является
нормированным ежедневным заданием персоналу по проведению
плановых осмотров и поддержанию оборудования в работоспо-
собном состоянии в межремонтный период. В течение смены
дежурный электрик обязан осмотреть все электрооборудова-
ние с целью вскрытия возможных дефектов. Проверяется (В
обесточенном состоянии электрооборудования) состояние по-
верхности контактов, коллекторов, шеток; производится их
чистка; замеряется сопротивление изоляции. В рабочем сос-
тоянии электрооборудования проверяется температура под-
шипников, обмоток, вибрация, биение, искрение щеток.
Осмотры проводятся без разборки электрооборудования.
Осмотры обесточенного электрооборудования приурочивают к
плановым технологическим остановкам — перевалкам и т.п.
Результаты проведенных осмотров фиксируют в специальном
журнале. Мелкие дефекты устраняют в процессе осмотра (на-
248
пример, замена изношенной щетки, чистка подгоревших кон-
тактов). Более трудоемкие, сложные работы включаются в
график ППР. Кроме плановых осмотров, проводимых в соот-
ветствии с ’ утвержденным графиком, производятся внеочеред-
ные осмотры после устранения коротких замыканий.
Электрические машины. Наиболее характерными наисправ-
ностями электрических машин являются повреждения изоля-
ции — межвитковые замыкания, пробой на корпус, реже —
обрыв обмоток.
У машин постоянного тока наиболее частыми повреждения-
ми являются ухудшение контакта коллектора со щеткой,
обрывы в соединениях обмотки якоря с коллектором. Опасны-
ми для электрических машин являются их значительные пере-
грузки и связанный с этим перегрев обмоток и изоляции, а
также перегрев подшипников. Коллектор, щетки, контактные
кольца электрических машин должны быть чистыми, и уголь-
ная пыль сработавшихся щеток должна периодически удалять-
ся продувкой коллектора чистым сжатым воздухом давлением
< 0,2 МПа, протиркой чистой тряпкой, смоченной авиабензи-
ном.
Безыскровая коммутация обеспечивается правильной уста-
новкой щеток по нейтральной линии, щетка должна свободно
передвигаться в обойме щеткодержателя. Зазор между щеткой
и щеткодержателем должен составлять 0,2—0,3 мм. Давление
щеток на коллектор должно быть в пределах 150—250 г/см2.
Для шлифования коллектора применяют специальные шлифо-
вальные бруски или стеклянную бумагу №00. После шлифовки
коллектор продувают чистым сжатым воздухом и полируют.
Допустимое биение коллектора составляет 20—70 мкм, в
зависимости от частоты вращения и диаметра коллектора.
Необходимо систематически контролировать нагрузку
электродвигателя, не допуская опасных перегрузок.
Электродвигатели мощностью > 40 кВт имеют амперметр, на
шкале которого красной чертой отмечено 105 % номинальной
силы тока.
Необходимо периодически контролировать температуру
нагрева двигателя. Ориентировочно температуру нагрева
можно определить прикосновением к нагретой части машины;
ладонь выдерживает температуру до 60 °C.
Необходимо периодически контролировать сопротивление
изоляции электрических машин. Наименьшее допустимое
249
сопротивление изоляции jRIJ3, МОм может быть рассчитано по
формуле
*из = 1/ном(Ю00 + Люм/100)> , (112>
где С7НОМ, рном- номинальные значения напряжения, В, и
мощности, кВт.
Уход за подшипниками состоит в контроле за нагревом,
уровнем масла, за работой смазочных колец, за вибрацией,
которая усиливается при зазорах, превышающих предельные
значения, при плохой центровке и балансировке машины, не-
достаточно прочном креплении подшипников на фундаментной
плите. Допустимая амплитуда вибрации подшипников состав-
ляет 0,05 мм при синхронной частоте вращения
л0 = 300 об/мин и 0,16 мм при л0 = 750 об/мин.
Электродвигатель подлежит немедленному отклонению от
сети при отклонении указанных параметров от допустимых
значений, при появлении дыма, недопустимой вибрации, пе-
регреве, угрозе несчастного случая, поломке приводимого
механизма и» т.п.
Важное значение имеет вентиляция машин и машинного за-
ла. Во избежание попадания металлической пыли из цеха в
машинный зал в нем должно создаваться избыточное давле-
ние. Воздух охлаждается в специальных воздухоочистителях.
Находящиеся длительное время в резерве электродвигате-
ли должны быть в состоянии полной готовности к пуску, пе-
риодически осматриваться и подвергаться опробованию по
утвержденному графику.
Тиристорные преобразователи предназначены для установ-
ки в закрытых помещениях (в машинных залах). Нормальная
работа обеспечивается при строгом соблюдении температур-
ного режима. Нагрузке тиристоров и нормальной работе сис-
темы охлаждения должно быть уделено главное внимание, по-
скольку они не допускают перегрузки и перегрева.
Для тиристоров применяются следующие виды охлаждения:
естественное воздушное, принудительное воздушное, водя-
ное, масляное. При воздушном принудительном охлаждении
устанавливаются, как правило, два вентилятора — основной
и резервный, с автоматическим переключением в случае вы-
хода из строя основного. Средняя скорость охлаждающего
воздуха составляет 8-12 м/с.
250
От перегрузок, перенапряжений защита осуществляется с
помощью устанавливающихся последовательно с каждым тирис-
тором быстродействующих плавких предохранителей, макси-
мальных реле, автоматов, специальных схем управления. За-
щита тиристоров от перенапряжения осуществляется с по-
мощью цепочек Я—С, включенных параллельно с каждым тирис-
тором. Преобразователи оборудуются звуковой и световой
сигнализацией, сигнализирующей о перегрузках и неисправ-
ностях преобразователя. Тиристорные преобразователи под-
лежат периодическим (ежемесячным) осмотрам. В отключенном
состоянии преобразователя проверяют (на ощупь) равномер-
ность нагрева вентилей, плотность резьбового соединения
вентиля с радиатором, плотность прилегания вентиля к по-
верхности радиатора. Вентили; радиаторы, шкаф периодичес-
ки продувают чистым сжатым воздухом. Если тиристор вышел
из строя, его нужно заменить тиристором на соответствую-
щий ток соответствующего класса и группы. При замене вен-
тилей необходима проверка распределения тока и напряжения
по вентилям. Для проверки параметров тиристоров, снятия
прямой и обратной ветвей вольтамперной характеристики,
измерения времени выключения тиристоров используют спе-
циальные стенды.
Аппаратура управления и защиты. Контакты пускателей,
автоматов, контакторов, реле необходимо периодически (при
снятом напряжении) очищать от нагара личным напильником,
стеклянной бумагой. Применять наждачную бумагу запрещает-
ся. Необходимо содержать аппаратуру в чистоте, проводить
периодический осмотр. Наиболее часто встречающейся не-
исправностью схемы релейно-контакторного управления,
является разрыв цепи. Причиной этого в большинстве слу-
чаев является неисправность той или иной пары контактов.
Отыскание места повреждения цепи управления осуществляет-
ся при отключении силовой цепи. Место разрыва цепи легко
определить, включив на холостом ходу схему управления.
Следующий по схеме за местом разрыва аппарат (реле, кон-
тактор) не включается.
При срабатывании защиты нужно установить причину сра-
батывания. Максимальная и тепловая защита срабатывает
при перегрузке двигателя вследствие заклинивания меха-
низма, замыкания проводников, приваривания силовых кон-
251
тактов, застывания смазки и замерзания механизма в холод-
ное время года.
4.6. Электробезопасность
понимается система
мероприятий и средств,
от вредного и опасного
Под электробезопасностыо
организованных и технических
обеспечивающих защиту людей
воздействия электрического тока. Через тело человека,
случайно оказавшегося под напряжением, проходит
электрический, ток, который в зависимости от величины,
может вызвать ожоги, болезненные ощущения, сильные боли,
паралич отдельных органов человека и даже смерть.
Степень поражения электрическим током определяется его
величиной, длительностью прохождения, индивидуальными
свойствами человека. Действие электрического тока
ощущается уже при 1,5 мА; при 5—10 мА начинаются судороги
рук; при 20—25 мА - паралич рук; при 50-70 мА — паралич'
дыхания; при 90-110 мА - паралич сердца. Ток, проходящий
через тело человека, зависит от величины напряжения, под
которым он оказался, и от сопротивления тела человека, с
учетом сопротивления обуви, пола и т.п. Сопротивление
тела человека зависит от многих факторов и изменяется в
широких пределах. По этой причине трудно говорить о
какой-либо величине напряжения, безопасной с точки зрения
поражения человека током. В зависимости от характера
помещения, условий работы и т.п. за безопасное принимают
напряжение от 6 до 42 В. Таким образом, условия
электробезопасности зависят от целого ряда факторов:
величины напряжения, характера помещения и окружающей
среды и т.п. В частности, окружающая среда при наличии
влаги, агрессивна газов, абразивной пыли и т.п. может
разрушающе действовать на изооляцию и тем самым
усугублять опасность поражения электрическим током.
По состоянию окружающей среды в отношении опасности
поражения людей электрическим током производственные и
бытовые помещения делятся на три категории: без
повышенной опасности, с повышенной опасностью и особо
опасные.
Требования, предъявленные правилами безопасности к
электроустановкам, удовлетворяются проведением ряда
252
мероприятий техники безопасности. Все мероприятия такого
характера можно условно разделить на:
1. Технические, предусматривающие использование разных
средств защиты — заземления, зануления, резиновых
перчаток, обуви, ковриков, клещей, ограждений, защитного
отключения, предупредительной сигнализации, блокировки,
надписей, плакатов и т.п.
2. Организационно-технические, предусматривающие
строгое соблюдение технических мероприятий безопасности,
правила включения и отключения электроустановок; допуск к
работе только лиц, имеющих соответствующую группу.
Квалификационных групп пять; наиболее ответственная —
V группа. К работе на электротехнических установках
допускаются только лица, имеющие квалификацию не ниже
II группы. Неэлектротехнический персонал, работающий на
электрификационных механизмах, проходит производственный
инструктаж по электробезопасности. На ряде рабочих мест
персоналу необходимо присвоение квалификаций.
Для проведения ремонтных, монтажных и других работ на
действующих установках необходимо распоряжение,
оформленный допуск к работе, надзор за ней. До начала
работы проводятся необходимые выключения, проверяется
отсутствие напряжения, устанавливается временное
заземление, временное ограждение, устанавливаются
загородки, вывешиваются предупредительные плакаты.
Выключение электрооборудования может быть проведено
только по требованию лица, давшего заявку на отключение.
Переключения в электрических схемах распределительных
устройств допустимы лишь с ведома вышестоящего дежурного
персонала с записью в оперативном журнале.
Защитное заземление — электрическое соединение с
землей металлических нетоковедуших частей, которые при
отсутствии необходимой изоляции, например, ее пробе,
могут оказаться под напряжением.
При определенных обстоятельствах человек может
коснуться токоведущих частей, находящихся под
напряжением. Наиболее опасно двухфазное прикосновение. В
этом случае прикоснувшийся попадает под линейное
напряжение сети.
При сопротивлении тела человека 1 кОм, ил = 380 В ток
через тело человека 380/1000 = 0,38 А окажется
253
смертельным. Однако двухфазное прикосновение — весьма
редкий случай.
Значительно чаще имеет место однофазное прикосновение.
Так, в случае пробоя изоляция на корпус
электрооборудования, человек, прикоснувшийся к корпусу,
оказывается под напряжением. Однако характер воздействия
напряжения на человека зависит не только от его величины,
но и от режима нейтрали.
В трехфазной сети с изоляционной нейтралью в случае
однофазного прикосновения ток, проходящий через тело
человека, “вынужден” проходить через изоляцию двух других
проводов сети. Если эта изоляция выполнена без нарушений,
ее сопротивление весьма велико, и ток будет . неопасен.
Если же изоляция проводов неудовлетворительна, ток может
достигнуть значительной, опасной, величины.
В трехфазной сети с заземленной нейтралью в случае
пробоя. изоляции хотя бы одной фазы на корпус
прикоснувшийся к корпусу человек оказывается под фазным
напряжением (рис.102,а), и ток через тело человека при
Рис. 102. Схемы защитного заземления (а) и зануления (5)
С/д = 220/1000 = 0,22 А, что смертельно опасно, поэтому в
таких системах принимаются защитные меры.
В электроустановках с изолированной нейтральной точкой
трансформатора применяется защитное заземление
металлических частей, корпусов, оболочек, арматуры и
т.п., нормально не находящихся под напряжением. Основная
цель заземления — снизить напряжение прикосновения С7ПР,
т.е.\ то напряжение, под которое человек может попасть,
254 \
прикоснувшись к корпусу электроустановки, оказавшейся
соединенной с токоведущим проводом вследствие пробоя
изоляции Uw = 73Я3, где /3 — ток замыкания на землю,
Я3 — сопротивление заземляющего устройства. Наибольшее
напряжение прикосновения, т.е. напряжение на заземлителе
относительно точки нулевого потенциала, не должно
превышать нескольких десятков вольт. Для случая, в момент
прикосновения к корпусу электроустановки и замыкания на
корпус одной из фаз, ток через тело человека при наличии
заземления
^чел = ^Л1р/-^чел = А^з/^чс.т
Таким образом, чем меньше R3, тем меньше опасность
поражения током. Максимально допустимое сопротивление
заземляющих устройств электроустановок напряжения до
1000 В с изолированной нейтралью 4 Ом.
Следует отметить, что длительное существование
однофазного замыкания на землю в сети с изолированной
нейтралью опасно. В этом случае человек, случайно
коснувшийся одной из двух неповрежденных фаз, попадает
под линейное напряжение.
Поэтому в сетях с изолированной нейтралью необходим
непрерывный контроль состояния изоляции и автоматическое
отключение электроустановки в случая пробоя изоляции или
недопустимого снижения ее сопротивления.
В четырехпроводной системе с глухо заземленной
нейтральной точкой трансформатора и нулевым проводом
корпуса электроустановок присоединяют к нулевому проводу
(рис. 102, б}. Это так называемое зануление. Пробой
изоляции любой из фаз на корпус приводит, по существу, к
короткому замыканию, что вызывает мгновенное срабатывание
автоматической Защиты и отключение поврежденного участка
сети.
Контрольные вопросы
1. Какими показателями характеризуется качество электроэнергии?
2. В чем заключается сущность "глубокого ввода" напряжения и каким образом
он осуществляется?
3. Что такое двухставочный тариф на электроэнергию?
4. Что такое заявленная мощность?
255
5. Как определяется годовая стоимость электроэнергии (формула)?
6. Что такое "потребитель особой группы первой категории", каковы особен-
ности его электроснабжения?
7. Что такое независимый источник питания и сколько их должно быть у пот-
ребителей первой категории?
8. Каким образом стимулируется внедрение мероприятий по компенсации реак-
тивной мощности?
9. Какие мероприятия по экономии электроэнергии в прокатном цехе Вам из-
вестны?
10. Сколько трансформаторов устанавливается на цеховой подстанции и какова
мощность каждого из них? z
И. Что такое эксплуатационная инструкция, какие материалы она содержит?
12. Что такое система планово-предупредительных ремонтов и что она предус-
матривает?
13. Каковы преимущества централизованной формы ремонта?
14. Что содержит график межремонтного обслуживания?
15. Какие операции выполняются при осмотре электрооборудования?
16. Каковы основные мероприятия по уходу за коллектором машины постоянного
тока?
17. Каково должно быть сопротивление изоляции обмоток электрической машины?
18. Как защищается тиристор?
19. Каковы способы охлаждения тиристоров?
20. Какие параметры подлежат контролю при замене тиристора?
21. В чем заключается принцип защитного заземления и зануления?
Рекомендательный библиографический список
Автоматизированный электропривод. Под обшей редакцией Н.Ф.Ильинскаго,
М.Г.Юнъкова. — М.: Энергоатомиздат, 1986. — 448 с.
Атабеков В.Б. Ремонт электрооборудования промышленных предприятий. — М.:
Высшая школа, 1985. — 175 с.
Васин В.М. Электрический привод. — М.: Высшая школа, 1984. — 231 с.
Князевский БА., Трунковский Л.Е. Монтаж и эксплуатация промышленных
электроустановок. — М.: Высшая школа, 1984. — 175 с.
Москаленко В.В. Автоматизированный электропривод. — М.: Энергоатомиздат,
1986. - 416 с.
Правила и устройство электроустановок (ПУЭ). — М.: Энергоатомиздат, 1986. —
648 с.
Справочник по автоматизированному электроприводу. — М.: Энергоатомиздат,
1983. - 616 с.
Тиристорные электроприводы прокатных станов — М.: Металлургия, 1978. —
152 с.
Фотиев М.М. Электрооборудование предприятий черной металлургии. — М.: Ме-
таллургия, 1980. - 312 с.