/










































































































































































































Автор: Хромой Б.П.
Теги: электротехника радиотехнические измерения радиотехника радиосвязь
Год: 1986



Текст
МЕТРОЛОГИЯ,
СТАНДАРТИЗАЦИЯ
И ИЗМЕРЕНИЯ
В ТЕХНИКЕ
СВЯЗИ
Учебное пособие
для высших
учебных
заведений
МЕТРОЛОГИЯ,
СТАНДАРТИЗАЦИЯ
И ИЗМЕРЕНИЯ
В ТЕХНИКЕ
СВЯЗИ
Под редакцией Б. П. ХРОМОГО
Допущено
Министерством высшего и среднего
специального Образования СССР
в качестве учебного пособия
для студентов вузов,
^ обучающихся по специальностям:
«Автоматическая электросвязь»,
«Радиосвязь и радиовещание»,
«Многоканальная электросвязь»
i
^ Москва
12)«Радио и связь»
^ 1986
*.
ББК 32.842
М54
УДК'[389.1:621.37/.39] (075)
Б. П. ХРОМОЙ, А. В. КАНДИНОВ, А. Л. СЕНЯВСКИИ, А. А. КОТОВИЧ,
A. С. ВЛАДИМИРОВ, Д. Ф. ТАРТАКОВСКИИ, А. Б. СЕЛИБЕР,
B. И. СОКОЛОВ, Р. В. ЯРАЛОШВИЛИ, Ю. В. АКСЕНТОВ,
Ф. В. КУШ НИР, В. Л. ЛЕНЦМАН
Метрология, стандартизация и измерения в технике
М54 связи: Учеб. пособие для вузов/ Б. П. Хромой, А. В.
Киндинов/А. Л. Сенявский и др.; Под ред. Б. П. Хромого.—
М.: Радио и связь, 1986. — 424 с: ил.
Приведены метрологические характеристики методов измерения в
радиотехнике и связи, методики измерений (в том числе н цифровых) и обработки
результатов с использованием современной элементной базы. В отлнчие от
ранее выпущенных учебников рассматриваются общие теоретические вопросы,
позволяющие освоить конкретные измерительные приборы. Введенный раздел
«Стандартизация» увязан с потребностями измерений.
Для студентов вузов, обучающихся специальностям «Автоматическая
электросвязь?, «Радиосвязь» и радиовещание», «Многоканальная
электросвязь» .
2402020000-143
М —TTTTrr—Z 96-86 ББК 32.842
046(01)-86
Рецензенты,: Кафедра «Линии связи и измерения в технике связи»
Куйбышевского электротехнического института связи;
доктор техн. иаук, профессор И: Ф. Ш и ш к и и
Редакция литературы по радиотехнике
m
Издательство «Радио и связь>, 1986
*
*
/ ПРЕДИСЛОВИЕ
В области радиотехники и связи за последние два десятилетия
произошли существенные изменения. Развитие кабельных,
радиорелейных и спутниковых систем связи привело к необходимости
производства аппаратуры, отвечающей исключительно высоким
техническим требованиям. Внедрение цветного телевидения
вызвало резкий скачок в качестве изготовления не только
профессиональной, но и бытовой аппаратуры. Такие устройства, как
передающие камеры, видеомагнитофоны, видеопроигрыватели,
выполняются на пределе современных технических возможностей..
К точности изготовления, стабильности характеристик и
параметров ряда изделий современной техники связи предъявляются
такие же высокие требования, которые ранее были характерны для
механики и оптики.
Существенную роль в''деле улучшения качества продукции
играет Государственная система стандартизации, являющаяся
своеобразным фильтром, позволяющим отбирать наиболее
эффективную технику, технологические процессы,- правила и нормы.
Выполнение требований стандартов в области производства, научных
исследований, конструкторских разработок возможно лишь при
наличии метрологического обеспечения. Согласно ГОСТ 1.25—76
метрологическое обеспечение — установление и применение
научных и организационных основ, технических средств, правил и
норм, необходимых для достижения единства и требуемой
точности измерений. Таким образом имеется тесная связь между
качеством продукции, стандартизацией и метрологией.
Совершенствование техники и, в частности, техники связи
невозможно без опережающего развития метрологии, поскольку
разработка аппаратуры с улучшенными техническими
характеристиками, освоение новых частотных диапазонов требуют более
•точной аппаратуры. Отрасль связи в этом отношении занимает
особое положение. Помимо широкой номенклатуры измерительной
аппаратуры общего применения (вольтметров, осциллографов
я т. п.) здесь используют большое число узкоспециализированных
приборов. Иначе говоря, инженер-связист на практике сталки-
3
вается не только с необходимостью решать измерительные задачи.
на базе типовых измерительных приборов, но и с разработкой
новых приборов, их метрологической аттестацией,
стандартизацией методов измерений.
Последние годы ознаменовались усилением внимания к
стандартизации и метрологии со стороны директивных
правительственных органов. 4 апреля 1983 г. принято постановление
Совета Министров СССР № 273 «Об обеспечении единства
измерений в стране», в котором указывается, «что результаты
измерений с использованием технических средств выражаются в
СССР в единицах физических величин, определяемых
Государственным комитетом СССР по стандартам, и используются при
условии оценки их погрешности с необходимой точностью.
Единство измерений обеспечивается государственной метрологической
службой, возглавляемой Государственным комитетом СССР по
стандартам, и метрологическими службами министерств и
ведомств. Порядок выполнения работ по обеспечению единства
измерений устанавливается Государственным комитетом СССР по
стандартам». .
Работы по обеспечению единства измерений, проводимые на
предприятиях, в организациях и учреждениях, относятся к
основным видам работ.
Постановлением Совета Министров СССР № 936 от 28
сентября 1983 г. введено в действие «Положение о государственном
надзоре за стандартами и средствами измерений в СССР».
«Главными задачами государственного надзора за стандартами и
средствами измерений в СССР являются обеспечение
министерствами, ведомствами, предприятиями, организациями и
учреждениями своевременного внедрения и строгого" соблюдения стандартов
и метрологических правил, единства лзмерений в стране, а
также анализ научно-технического уровня стандартов и средств
измерений и содействие при их разработке наиболее эффективному
использованию достижений науки и техники с целью повышения
эффективности общественного производства, ускорения научно-
технического прогресса, роста производительности труда,
повышения технического уровня и качества ^продукции.»
Вузы страны должны улучшить подготовку студентов в об-
~~ ласти метрологии и стандартизации. Об этом говорится в инст-
. руктивном письме № 8 Министерства высшего и среднего
специального образования СССР от 13 февраля 1984 г. Главная
задача заключается в обеспечении непрерывной подготовки
студентов, в области стандартизации и метрологии за счет изучения
вопросов стандартизации и метрологии на многоэтапной основе.
Данная книга является результатом попытки авторов
(преподавателей МЭИС и ЛЭИС) создать, пособие по курсу
«Метрология, стандартизация и измерения" в технике связи» для
студентов вузов связи, трех специальностей: 0702, 0703 и 0708. От
ранее изданных учебников и учебных пособий для вузов связи
она отличается более подробным изложением вопросов метроло-
4
гии, которые выделены в специальный раздел. Кроме того,
усилено «внимание к вопросам-определения погрешностей и методам
их. минимизации в разделах, посвященных конкретным
аппаратурным решениям. В разделе «Электрорадиоизмерения»
сгруппированы общие задачи электро- и радиотехнических измерений,
которые решаются на основе использования широко
распространенных методов и приборов общего применения. Это создает
удобства для использования книги студентами других специальностей,
например 0701.
Работая над книгой, авторы не шли по пути максимального
«уплотнения» материала с целью изложения возможно большего
числа вопросов. В этом случае книга неизбежно, приблизилась
бы по своему характеру к справочнику по измерительной
технике. Излагая материал, "авторы большее внимание уделяли
вопросам, освоение которых традиционно вызывает наибольшие
трудности у студентов И которые важны для понимания других
разделов. В частности, значительное место отведено технике ос-
циллографических измерений не только вследствие того, что в
настоящее время электронный осциллограф самый распростра- .
ненный и сложный для освоения прибор, но и потому, что на
тех же принципах основана работа анализатора спектра,
измерителей амплитудно-частотных и фазочастотных характеристик
и других приборов.
Предисловие, главы 1, 7, § 8.6, 9.5, 11.4, 13.7 написаны докт.
техн. наук, проф. Б. П. Хромым; гл. 4, § 5.1, 5.2, 11.1 —11.3 —'
канд. техн. наук А. Л. Сенявским; § 9.1, 9.2 — канд. техн. наук
А. С. Владимировым; § 9.4, 12.2 — канд. техн. наук А. А. Котови-
чем; § 5.4, 12.1 — канд. техн. наук Ф. В. Кушниром; гл. 10,
§ 13.1^13.6, 13.8—канд. техн. наук В. И. Соколовым; гл. 2, 3,
§ 5.3 — канд. техн. наук А. Б. Селибером; часть IV — докт. техн.
наук Д. Ф. Тартаковским; гл. 6 — канд. техн. наук В. Л. Ленц-
маном; § .12.3—канд. техн. наук Ю: В. Аксентовым; § 11.5 —
канд. техн. наук Р. В. Яралошвили; § 9.6 — канд. техн. наук
А. В. Кандиновым; § 9.3-—А. В. Кандиновым, А. С.
Владимировым; § 8.1—8.5^ В. Л. Ленцманом, Ф. В. Кушниром, Р. В.
Яралошвили; (приложения — канд. техн. наук А. Л. Сенявским.
Замечания и предложения по содержанию книги следует
направлять по адресу: 101000, Москва, Почтамт, а/я 693,
издательство «Радио и связь».
Часть I. ОБЩИЕ СВЕДЕНИЯ О МЕТРОЛОГИИ
Глава 1. ПРЕДМЕТ И ЗАДАЧИ МЕТРОЛОГИИ
1.1. ОСНОВНЫЕ ТЕРМИНЫ,
ПРИМЕНЯЕМЫЕ В МЕТРОЛОГИИ
Термин метрология произошел от греческих слов: i^expov — мера
и АоуоЕ; — учение, слово. В современном понимании это наука
об измерениях, методах и средствах обеспечения их единства
и способах достижения требуемой точности. К основным
направлениям метрологии относятся: общая теория измерений; единицы
физических величин и их системы; методы и средства измерений;
методы определения точности измерений; основы обеспечения
единства измерений'и единообразия средств измерений; эталоны и
образцовые средства измерений; методы передачи размеров
единиц от эталонов и образцовых средств измерений рабочим
средствам измерений. Часть из них имеют научный характер-. Другая
часть, посвященная комплексам ^взаимосвязанных и
взаимообусловленных общих правил, требованиям и нормам, нуждающиеся
в регламентации и контроле со стороны государства и
направленным на обеспечение единства измерений и единообразия средств
измерений, относится к законодательной метрологии.
Законодательный характер метрологии обусловливает- стандартизацию ее
терминов и определений.
Термины и определения основных понятий метрологии
установлены ГОСТ. Определение отдельных терминов будут даваться
по мере необходимости, однако ряд следующих часто
применяемых терминов необходимо усвоить на первых этапах изучения
метрологии.
Физическая величина — свойство, .общее в качественном
отношении многим физическим объектам, но в количественном
отношении индивидуальное для каждого объекта.
Измерение — нахождение значения физической величины
опытным путем с помощью специальных технических средстве Под
измерением понимается процесс экспериментального сравнения
данной физической величины с однородной физической величиной,
значение которой принято за единицу.
Единица физической величины — физическая величина, которой
по определению присвоено числовое значение, равное 1. Единицы
физических величин представляют собой вспомогательный аппа-
6
/
рат, применяемый при изучении объектов природы.
Принципиально можно использовать бесконечное множество единиц физических
величин. Но практика выдвигает требование единства измерений,
которое можно обеспечить при любой системе единиц. Однако
для сопоставления результатов измерений без пересчетов (при
переходе от одной системы единиц к другой) необходимо, чтобы
результаты измерений выражались в узаконенных единицах.
Единство измерений — состояние измерений, при котором их
результаты выражены в узаконенных единицах и погрешности
измерений известны с заданной вероятностью. Как ясно из
определения, это понятие включает в себя не только выполнение
условия единства используемых единиц физических величин, но и
знание погрешности измерения.
Для проведения измерений требуются специальные технические
средства. Под средствами измерений понимают технические
средства, использумые при измерениях и имеющие нормированные
метрологические свойства. По техническому назначению средства
измерений подразделяются на меры, измерительные приборы,
измерительные преобразователи, вспомогательные средства
измерений, измерительные установки и измерительные системы.
Мера — средство измерений, предназначенное для
воспроизведения физической величины заданного размера. Например, квар- »
цевый генератор может являться мерой частоты электрических
колебаний. Мера, воспроизводящая ряд одноименных величин
различного размера, называется многозначной. Конденсатор
постоянной емкости может выполнять роль однозначной меры, а
конденсатор переменной емкости — многозначной. Часто используется
набор мер — специально подобранный комплект мер>, применяемых
не'только отдельно, но и в различных сочетаниях для
воспроизведения ряда одноименных величин различного размера.
Измерительный прибор — средство измерений, предназначенное
для выработки сигнала измерительной информации в форме,
доступной для непосредственного восприятия наблюдателем.
Измерительные приборы классифицируются по различным признакам.
Например, измерительные приборы можно построить на основе
аналоговой схемотехники или цифровой. Соответственно их делят
на аналоговые и цифровые. Ряд приборов, выпускаемых
промышленностью, допускают только отсчитывание показаний. Эти
приборы называются показывающими. Измерительные приборы, в
которых лредусмотрена регистрация показаний, носят название
регистрирующих.
Измерительный преобразователь — средство измерений,
предназначенное для выработки сигнала измерительной информации в
форме, удобной для передачи, дальнейшего преобразования,
обработки и хранения, но не поддающейся непосредственному
восприятию наблюдателем. Первичным называют преобразователь,
являющийся первым в измерительной цепи, к нему непосредственно
подводится измеряемая величина. Передающий измерительный
преобразователь предназначен для дистанционной передачи -сиг-
7
нала измерительной информации, масштабный — для измерения,
величины в заданное число раз.
Вспомогательное средство измерений — средство измерения
величин, влияющих на метрологические свойства другого средства
измерения при его применении. Эти средства применяют для
контроля за поддержанием значений влияющих величин в заданных
пределах.
Измерительная установка — совокупность функционально
объединенных средств измерений (мер, измерительных, приборов,
измерительных преобразователей) и , вспомогательных устройств,
предназначенная для выработки сигналов измерительной
информации в форме, удобной для непосредственного восприятия
наблюдателем, и расположенная в одном месте.
Измерительная система — совокупность средств измерений
(мер, измерительных приборов, измерительных преобразователей)
и вспомогательных устройств, соединенных между собой
каналами связи, предназначенная для выработки сигналов измерительной
информации в форме, удобной для автоматической обработки,
передачи и использования в автоматических системах управления.-
1.2. КЛАССИФИКАЦИЯ ИЗМЕРЕНИИ
Принято различать несколько видов измерений. Их
классификация осуществляется на основе характера зависимости
измеряемой величины от времени, условий, определяющих точность
результата' измерений, и способов выражения этих результатов.
По характеру зависимости измеряемой величины от времени
измерения делятся на статические и динамические. Статические
измерения соответствуют случаю, когда измеряемая величина
остается постоянной, динамические—когда измеряемая величина
изменяется.
По способам получения результатов различают прямые,
косвенные, совокупные и совместные измерения.
Прямыми называют измерения, при которых искомое значение
величины находят непосредственно из опытных данных. При этом
измеряемую величину сравнивают с мерой измерительными
приборами, градуированными в требуемых единицах. В качестве
примера можно привести измерение напряжения вольтметром.
При косвенных измерениях — искомое значение'величины
находят на основании известной зависимости между этой величиной
и величинами, подвергаемыми прямым измерениям. Косвенные
измерения широко распространены в тех случаях, когда искомую
величину невозможно или сложно измерить непосредственно или
когда прямое измерение дает менее точный результат. Например,
затухание, вносимое четырехполюсником, обычно вычисляют па
измеренным значениям входного и выходного напряжений.
При совокупных измерениях одновременно измеряют несколько.
одноименных величин и искомые значения величин находят, ре-
8
шая систему уравнений, получаемых, при прямых измерениях
различных сочетаний этих величин. - . |.
Совместные измерения — производимые одновременно
измерения двух или нескольких одноименных величин для нахождения
зависимости между ними.
По способу выражения результатов измерений принято
различать абсолютные и относительные измерения.
Абсолютное измерение основано на прямых измерениях одной
или нескольких основных величин и (или).,, использовании
значений физических констант. Примером абсолютного измерения
является измерение силы тока в амперах.
Относительным называют измерение отношения величины к
одноименной величине, играющей роль единицы, или изменения
величины по отношению к одноименной величине, принимаемой
за исходную. Примером относительного измерения является
измерение коэффициента отражения в линии.
Измерения классифицируются также по используемому методу
•измерения—совокупности приемов использования принципов и
средств измерений. Различают следующие методы измерений.
Метод непосредственной оценку, в. котором значение величины
определяют непосредственно по отсчетному устройству
измерительного прибора прямого действия.
Метод сравнения с мерой, в котором измеряемую величину
сравнивают с величиной, воспроизводимой мерой. Этот метод
Имеет следующие модификации:
. противопоставления, когда измеряемая величина и величина,
воспроизводимая мерой, одновременно воздействуют на прибор
сравнения, с помощью которого устанавливается соотношение
между этими величинами;
дифференциальный, когда на измерительный прибор
воздействует разность измеряемой величины и известной-величины,
воспроизводимой мерой;
нулевой, когда результирующий эффект воздействия величин
на прибор сравнения доводят до нуля;
замещения,'когда измеряемую величину замещают известной
величиной, воспроизводимой мерой;'
совпадений, когда разность между измеряемой величиной и
величиной, воспроизводимой мерой, измеряют, используя совпадение
отметок шкал или периодических сигналов.
1.3. ОСНОВНЫЕ ХАРАКТЕРИСТИКИ
ИЗМЕРЕНИИ
Основными характеристиками измерений являются: принцип
измерений, метод измерений, погрешность, точность, правильность и
достоверность измерений!
Принцип измерений — физическое явление или совокупность
физических явлений, положенных в основу измерений. Например,
9
измерение мощности с использованием термоэлектрического
эффекта.
Погрешность измерений — отклонение результата измерения от
истинного значения измеряемой величины.
Истинное значение физической величины идеальным образом
отражало бы в качественном и количественном отношениях
соответствующие свойства объекта, но оно остается неизвестным,
поэтому с помощью измерений находят так называемое
действительное4^ значение, настолько приближающееся к истинному, что для
данной цели может быть использовано вместо него.
Точность измерения — качество измерений, отражающее
близость их результатов к истинному значению измеряемой величины.
Правильность измерений—качество измерений, отражающее
близость к нулю систематических погрешностей результатов (т. е.
таких погрешностей, которые остаются постоянными или
закономерно изменяются при повторных измерениях одной и той же
величины). Правильность измерений зависит от того, насколько
были верны средства измерений, используемые при эксперименте.
Достоверность измерения — степень доверия к результатам
измерений. Измерения, для которых известны вероятностные
характеристики отклонения результатов от истинного значения,
относятся к категории достоверных. Наличие погрешности
ограничивает достоверность измерений, т. е. вносит ограничение в число
достоверных значащих цифр числового значения измеряемой
величины и определяет точность измерений.
Сходимость измерений — качество измерений, отражающее
близость друг к другу результатов измерений, выполняемых в
одинаковых условиях.
Воспроизводимость измерений — качество измерений,
отражающее близость друг к другу результатов измерений, выполняемых
в различных условиях (в различное время, в различных местах).
1.4. ФИЗИЧЕСКИЕ ВЕЛИЧИНЫ И ЕДИНИЦЫ
Согласно ГОСТ 16263—70 «Государственная система
обеспечения единства измерений. Метрология. Термины и определения» под
физической величиной понимается «свойство, общее в
качественном отношении многим физическим объектам (физическим
системам, их состояниям и происходящих в них процессам), но в
количественном отношении индивидуальное для каждого объекта».
Индивидуальность в количественном отношении следует понимать в
том смысле, что свойство может быть для одного объекта в
определенное число раз больше или меньше, чем для другого.
Развитие науки и техники, рост научно-технических и
экономических связей привели к необходимости установления
единообразия единиц измерений в международном масштабе. Требовалась
единая система единиц физических величин, практически удобная
и охватывающая различные области измерений. Международный
комитет по мерам и весам выделил из своего состава комиссию
10
по разработке единой Международной системы единиц. Этой
комиссией был разработан ироект Международной системы единиц,
который был утвержден XI Генеральной конференцией по мерам
й весам. Принятая система была названа Международной
системой единиц, сокращенно СИ (SI — начальные ч буквы
французского наименования Systeme International).
В СССР действует ГОСТ 8.417—81 «Единицы физических
величин». Наиболее употребительные в электрорадиоизмерениях
единицы приведены в табл. 1.1. •
Таблица 1.1
Величина
Наименование
3.
Энергия, работа, количество
теплоты
Мощность, поток энергии
Количество электричества
(электрический заряд)
Электрическое- напряжение,
электрический потенциал, разность
электрических потенциалов,
электродвижущая сила
Электрическая емкость.
Электрическое сопротивление
Электрическая проводимость
Индуктивность, взаимная
индуктивность
Плотность магнитного потока,
магнитная индукция
Поток магнитной индукции,
магнитный поток
Частота
Сила электрического тока
Размерность
L2MT-2
L2MT-3
TI
L2MT-3I-»
L-2M-*T4I2
L2MT-3I-2
L-2M-lT3p
'
L2MT-2I-2
мт-ч-1
L2MT-2I-'
T-*
I
Единица
Наименование
джоуль
ватт
кулои
вольт
фарад
ом
симеис
генри
тесла
вебер
герц
ампер
Обозиачеиие
Международное
J
W
С
V
F
Q
S
Н
Т
Wb
Hz
А
Русское
Дж
Вт
Кл
В
Ф
Ом
См
Гн
Тл
Вб
Гц
А
При разработке системы СИ специалисты исходили из.того, чтобы охватить
системой все области наукн и техники; принять удобные для практики
размеры основных единиц, уже получившие распространение; выбрать в качестве
основных единицы таких величин, воспроизведение -которых возможно е
наибольшей точностью. В системе СИ в качестве основных единиц приняты: метр —
единица длины, килограмм — единица массы, кельвин — единица температуры,
кандеда— единица силы света, ампер — единица силы тока, секунда — единица
времени, моль — количество вещества. Остальные единицы являются
производными.
Для выражения результатов измерений в узаконенных единицах размер
последних должен либо храниться или воспроизводиться на месте, либо
передаваться каким-то образом с места хранения или воспроизведения. В зависимости
от этого различают централизованное и децентрализованное воспроизведение
единиц физических величин. В первом случае оно осуществляется с помощью
« 11
специальных технических средств, называемых эталонами, а для передачи
размера единиц используются образцовые средства измерений. Во втором случае
единица производной физической величины (например, площади) воспроизводится иа
месте через единицы основных физических величии. Последние хранятся и
воспроизводятся только централизованно в соответствии с их определением.
Главной задачей современной метрологии является создание полной системы
взаимосвязанных естественных эталонов на основе использования
фундаментальных физических коистаит и высокостабильиых" квантовых явлений, важный шаг
в решении этой задачи сделай XVII Генеральной конференцией по мерам и
весам, принявшей в 1983 г. иовоё определение метра — как длины пути,
проходимого светом в вакууме за промежуток времени, равный ;1J299 792 458 с. При
таком подходе единица длины может воспроизводиться децентрализованно, t
помощью фундаментальной физической константы — скорости света — и единицы,
времени —'- секунды, определяемой через период эталонной частоты, передавае-
, мой по радио. Единица времени я частоты воспроизводятся сейчас с иаимеиь^
шей погрешностью.
1.5. ЭТАЛОНЫ И ОБРАЗЦОВЫЕ'СРЕДСТВА
ИЗМЕРЕНИЙ
Чтобы обеспечить единство измерений, необходима
тождественность единиц, в которых проградуированы все средства
измерений одной и той же физической величины. Для этого
применяют средства измерений, хранящие и воспроизводящие
установленные единицы физических величин и передающие их
соответствующим средствам измерений. Высшим звеном в метрологической
цепи передачи размеров единиц являются эталоны.
Эталон единицы — средство измерений (или комплекс средств
измерений), обеспечивающее воспроизведение и (или) хранение
единицы с целью передачи ее размера нижестоящим по поверочной
схеме средствам измерений, выполненное по особой спецификации
и- официально утвержденное в установленном порядке в качестве
эталона.
Эталон, обеспечивающий воспроизведение единицы с
наивысшей в стране (по сравнению с другими эталонами той же
единицы) точностью, называется первичным. Первичный эталон
основной единицы должен воспроизводить единицу в соответствии
с. ее определением.
Специальный эталон воспроизводит единицу в особых условиях.
- и заменяет при этих условиях первичный эталон.
Первичный или специальный эталон, официально
утвержденный в качестве исходного для страны, называется
государственным. Примером такого устройства может служить государствен,
ный первичный эталон единицы электродвижущей, силы (ГОСТ
8.027—75). Примером специального эталона является
государственный специальный эталон единицы напряжения переменного
тока в диапазоне частот от 100 до 1500 МГц (ГОСТ 8072—73 и
-8075—73). Государственные эталоны утверждаются
Государственным комитетом СССР по стандартам.
12
В метрологической практике широко используют вторичные
эталоны, значения которых устанавливаются по первичным эталонам.
Вторичные эталоны являются частью подчиненных средств
хранения единиц и передачи их размера. Они создаются^ утверждаются
й тех случаях, когда это необходимо для обеспечения наименьшего
износа государственного эталона.
Вторичные эталоны по своему назначению делятся на эталоны-
копии, эталоны сравнения, эталоны-свидетели и' рабочие эталоны.
Эталон-копия предназначен для передачи размеров единиц
рабочим эталонам. Эталон-копия не всегда является физической
копией государственного эталона.
Эталон-свидетель предназначен для проверки сохранности
государственного эталона и для замены его в случае порчи или
утраты.
Эталон сравнения применяют для сличения эталонов, которые
по тем или иным причинам не могут быть непосредственно
сличаемы друг с другом. Примером его является так называемый
нормальный элемент, используемый для сличения
государственного эталона вольта СССР с эталоном вольта Международного бюро
мер и весов.
Рабочий эталон применяют для передачи размера единицы
образцовым средствам'измерений высшей точности, а в отдельных
случаях — наиболее точным рабочим средствам измерений.
Образцовое средство измерений — мера, измерительный прибор
или измерительный преобразователь, служащие для поверки по
ним других средств измерений и утвержденные в качестве
образцовых.
Поверка средств измерений — определение метрологическим
органом погрешности средств измерений и установление его
пригодности к применению. . -
Образцовые средства измерений могут иметь разные разряды.
Между разрядами образцовых средств измерений существует со-
подчиненность: образцовые средства измерений 1-го разряда
поверяют, как правило, непосредственно по рабочим эталонам,
образцовые средства измерений, аттестуемые в качестве образцовых
2-го и последующих разрядов, подлежат проверке по образцовым
средствам измерений непосредственно предшествующих разрядов.
Для разных видов измерений устанавливается, исходя из
требований практики, различное число разрядов образцовых средств
измерений.
Рабочее средство измерений применяют для измерений, не
связанных с передачей размеров единиц.
Метрологическая цепь передачи размеров единиц от первичных эталонов
рабочим эталонам, от них.—разрядным образцовым средствам измерений и далее
рабочим средствам измерений, показана на рис. il.l. Передача размеров единиц
осуществляется посредством измерений. Утвержденный в установленном
порядке документ, устанавливающий средства, методы и точность передачи размера
единицы от эталона или образцового средства измерений, рабочим средствам,
13
называется поверочной схемой и оформляется в виде чертежа и текстовой части.
Поверояные схемы подразделяют на государственные, ведомственные н лональ-
ные. -Государственная поверочная схема распространяется на все средства
измерений конкретной физической величины, применяемые в стране
ведомственные схемы используются в рамках отрасли, а локальные относятся к
определенным метрологическим органам. Государственные поверочные схемы
разрабатываются метрологическими институтами, утверждаются в качестве
государственных стандартов СССР и. служат основанием для составления
ведомственных и локальных поверочных схем. Ведомственные' поверочные схемы
представляют собой ведомственный нормативно-технический документ, а
локальные ■— нормативно-технический документ предприятия или ррганизацин.
Допускается разрабатывать их соответственно в виде отраслевых стандартов i(OCT) и
стандартов предприятия (СТП).
Чертеж государственной поверочной схемы (рис. 'Ы) состоит из поля
эталонов, полей образцовых средств измерений 1-го н последующего разрядов, а
также заимствованных из других поверочных схем, и поля рабочих средств
измерений. Поля соответствуют ступеням передачи размера единицы. Они
расположены друг под другом и разделены штриховыми линиями. Наименование
полей указывают в левой части чертежа. На рнс. 1.1 обозначено: 1 —
государственный эталон; 2—метод передачи размера единицы; 3— эталон-копия; 4 —
эталон сравнения (для. международных сличений); 5 — рабочий эталон; 6—8 —
образцовые средства измерений соответствующих разрядов; 9—образцовые
средства измерений, заимствованные нз других поверочных схем, и 10 —
рабочие средства измерений.
Как отмечалось ранее, высшим звеном в метрологической цепи передачи
размеров единиц являются эталоны. Эталоны основных единиц воспроизводят
единицы в соответствии с их определением. Например, государственный
первичный эталон единицы силы тока — ампера—основан на измерении с помощью
токовых весов силы взаимодействия между двумя проводниками с током. Для
представления о совершенстве эталонов' приведем метрологические
характеристики первичного эталона силы тока: среднее квадратическое отклонение
результата не превышает 4-10-6, ^исключенная систематическая погрешность
составляет 8-Ю-6.
Государственные эталоны относятся к ценностям особой государственной
значимости. Их стоимость составляет от 0,7 до 1,6 млн. руб., а государственный
первичный эталон единиц времени н частоты стоит около Й0 млн. руб. Хранят
и применяют эталоны в метрологических институтах страны, в специальных
так называемых эталонных помещениях, где поддерживается строгий режим по
влажности, вибрациям и другим влияющим величинам. Применять эталоны и
образцовые средства для практических намерений запрещается. '
1.6. МЕТРОЛОГИЧЕСКАЯ СЛУЖБА СССР
В развитии отечественной метрологии можно отметить
четыре' э.тапа [3]. Первый этап охватывает почти весь XIX век. Этот *
период характерен активизацией метрологической деятельности и
началом широкого участия русских ученых в работе
международных метрологических организаций. В 1842 г. на территории
Петропавловской крепости в специально построенном помещении
15
было открыто первое централизованное метрологическое и
поверочное учреждение России — Депо образцовых мер и весов, в
котором хранились эталоны длины и массы (платиновая сажень
и платиновый фунт), их копии, а также образцы различных ино--
странных мер. В Депо изготавливались образцовые меры,
проводилась поверка и сличение их с' иностранными мерами. Эта
деятельность регламентировалась «Положением о мерах и весах»
(1842 г.), которое заложило основы государственного подхода к
обеспечению единства измерений.
Для русских ученых этого времени характерно, глубокое
понимание роли места метрологии в науке и жизни. В 1869 г.
Петербургская академия наук направила в Парижскую академию
наук доклад, в котором предлагалось с целью обеспечения
единства измерений в международном масштабе изготовить новые
международные прототипы метра и килограмма и распределить
их однотипные копии между заинтересованными государствами-.
Это предложение было принято, и в результате последующей
работы ученых разных стран была подписана 1 марта Г875 г.
Метрическая конвенция. Она способствовала унификации мер и
расширению метрологической деятельности в национальном и
международном масштабе.' В соответствии с конвенцией Россия
получила платино-иридиевые эталоны единицы массы № 12 и 26
и эталоны единицы длины № 11 и 28.
В 1892 г. управляющим Депо был назначен Д. И. Менделеев,
который так много сделал для отечественной метрологии, что
период с 1892 г. по 1917 г. называют менделеевским этапом
развития метрологии. В 1893 г. он преобразует Депо образцовых
мер и весов в Главную палату мер и весов — одно из первых
в мире научно-исследовательских учреждений метрологического
профиля. Лишь через семь лет в Англии было организовано
метрологическое отделение Национальной физической лаборатории, а
год спустя в США — Национальное бюро эталонов. Под
руководством Д. И. Менделеева была начата работа по созданию
русской системы эталонов и сличению их с английскими
метрическими мерами, а также государственной метрологической
службы, реализована широкая программа научных исследований
в области метрологии. Собственные работы Д. И. Менделеева
по метрологии не утратили своего значения и в наше время.
Ему принадлежит высказывание—«Наука начинается г тех пор,
как начинают измерять. Точная наука немыслима без меры».
Основанные Д. И. Менделеевым научные направления на
долгие годы определили пути развития отечественной метрологии,
обеспечили ей передовые позиции и 'высокий авторитет на
международной арене. Но даже Д. И. Менделееву не удалось в усло-
виях^царизма внедрить в России метрическую систему. С 1899 г.
она применялась в стране факультативно, наряду со старой
русской и британской (дюймовой) системами.
Коренные изменения в метрологической деятельности стали
возможны только при Советской власти. Декрет «О введении меж-
16
дународной метрической системы мер и весов» был принят
Советом Народных Комиссаров (СНК) уже 14 сентября 1918 г.
С* введением метрической системы начался третий этап•в
развитии отечественной метрологии, который продолжался до Великой
Отечественной войны. Главным его содержанием является
переход к государственной метрологической деятельности.
Государственный характер советской метрологии принципиально отличает
ее от метрологии зарубежной.
С первых лет Советской власти правительство уделяло
большое внимание упорядочению состояния измерений в стране.
В. И. Ленин придавал большое значение развитию метрологии
и организации поверочного дела. Ряд постановлений Совета
Народных Комиссаров и Совета труда и обороны (СТО)
обеспечил систематическое и планомерное развитие научной и
организационно-технической деятельности в области метрологии. В 1925 г.
СНК СССР принимает постановление «О признании заключенной
в Париже 20 мая 1875 г. Международной метрической конвенции
для обеспечения международного единства и усовершенствования
метрической системы, имеющей силу в СССР». Тем самым возоб-.
новлялись международные связи нашей страны в области
метрологии. В этом же году создается Комитет по стандартизации при
СТО, председателем которого назначается В. В. Куйбышев.
К 1927 г. завершилась метрическая реформа в СССР.
Четвертый, послевоенный период, характеризуется небывалым
размахом всей метрологической деятельности в стране.
Отличительной его особенностью является повсеместное внедрение
стандартизации как главной организационно-правовой формы
обеспечения единства измерений. Разработана и внедрена
Государственная система стандартизации (ГСС). Организационные принципы
построения и основные задачи метрологической службы страны
в рамках ГСС регламентируются установленной Госстандартом в
1973 г. структурой метрологической службы и основополагающим
ГОСТ 1.25—76 «ГСС. Метрологическое обеспечение. Основные
положения». Государственная метрологическая служба состоит из
почти полутора десятков институтов и более 400 территориальных
органов, возглавляемых Государственным Комитетом по
стандартам с 15 республиканскими управлениями.
Главным центром Государственной метрологической службы является
Всесоюзный научно-исследовательский институт метрологической службы
(1ВНИИМС), осуществляющий разработку научно-методических,
технико-экономических, организационных и правовых основ метрологического обеспечения
и научно-методическое руководство метрологической службой, развитием
эталонной базы и образцовых средств измерений, проведением государственных
испытаний, стандартизацией в области Обеспечения единства измерений, работами
по международному сотрудничеству в области метрологии. Главными центрами
государственных эталонов являются Научно-производственное объединение
«Всесоюзный научно-исследовательский институт метрологии им. Д. И. Менделеева*
(ВНИИМ); Всесоюзный научно-исследовательский^.jJHC^gjyr физико-технических
17
и радиотехнических измерений '(ВНИИФТРИ), НПО -«Метрология» i(r.
Харьков); Сибирский государственный научно-исследовательский институт метрологии
(СНИИМ) и др. Производственной базой Государственной метрологической
службы является 'Всесоюзное объединение «Эталон», опытные н
экспериментальные производства метрологических институтов.
Министерство связи СССР по сравнению с другими министерствами и
ведомствами располагает значительным парком измерительных приборов, в том
числе узковедомственного назначения. Метрологическая служба Министерства
Министерство
Главное научно-техническое управление
-
Служба главного метролога
! 1 !
п
Центральная головная организация
метрологической службы
Подразделение, возглавляемое
главным метрологом
Главные управления
(управления) министерства
Главный метролог
главного управления
(управления)
Головные организации
метрологической службы
Подразделение,
возглавляемое главным
метрологом
Объединения и управления связи
(СУР„УР, ПТУС)
Главный метролог
J
_L
Министерства связи союзных республик
Техническое управление (отдел)
Главный метролог
_|_
Базовые организации
метрологической службы
1__
Метрологическая лаборатория
по поверке и ремонту
средств измерений
Предприятия, учреждения,
входящие в состав управлений
Метрологическая служба
административное
подчинение
функциональные
связи
Рис. 1.2
связи СССР (рис. 1.2) выполняет комплекс работ по о'беепеченню единства и
требуемой точности измерений, что содействует улучшению качества приема и
передачи информации. 'Координацию и организационно-методическое
руководство по метрологическому обеспечению в системе Министерства связи СССР, а
также научно-методическое руководство по метрологическому обеспечению в
проводной связи осуществляет головная организация ЦНИИС, а
научно-методическое руководство по, метрологическому обеспечению радиосвязи,
радиовещания и телевидения — головная организация НИИР. Главные отраслевые
управления Министерства связи СССР, министерства связи союзных республик,
производственно-технические управления связи (ПТУС), территориальные
центры управления магистральными связями и телевидением (ТЦУМС); союзные
узлы радиовещания (СУР) и другие предприятия также входят в структуру
метрологической службы Министерства евяэн СССР.
1.7. МЕЖДУНАРОДНЫЕ
МЕТРОЛОГИЧЕСКИЕ ОРГАНИЗАЦИИ
Рост культурных и экономических связей между странами
потребовал решения задачи единообразия мер в международном
масштабе. Начало международного сотрудничества по вопросам
метрологии было положено в 1870 г., когда в Париже по
предложению Петербургской Академии наук состоялось совещание,
которое должно было «принять меры для 'привлечения внимания
правительств разных стран к необходимости установления
прототипов мер». В 1875 г. 17 государств, в том числе Россия, на
Международной Дипломйтической конференции по метру
подписали Метрическую конвенцию, в соответствии с которой
устанавливалось международное сотрудничество стран. Было создано
Международное бюро мер и весов. Это научное учреждение
должно было содержаться на средства всех стран, подписавших
Метрическую конвенцию. Был учрежден Международный комитет мер
и весов в составе ученых разных стран, осуществляющих
руководство деятельностью Международного бюро мер и весов.
Международное бюро мер и весов, находящееся в Севре (близ
Парижа), хранит международные прототипы мер (метра, килограмма)
и международные эталоны различных единиц, организует
регулярные международные сличения национальных эталонов, в том
числе эталонов электродвижущей силы и электрического
сопротивления.
В 1956 г. была подписана межправительственная концепция
об учреждении Международной организации законодательной
метрологии (МОЗМ). При организации существует Международ-'
кое бюро законодательной метрологии, находящееся в Париже.
Его деятельностью руководит Международный комитет
законодательной метрологии. МОЗМ решает целый ряд задач, имеющих
международное значение, таких как установление характеристик
и качеств, которые должны быть присущи измерительным
приборам, рекомендованным для применения в международном
масштабе, создание центра документации и информации о нацио-
19
нальных службах контроля за измерительными приборами,
перевод и издание текстов законодательных правил об измерительных
приборах и их использовании, изучение задач в области
законодательной метрологии, представляющих международный интерес.
В 1965 г. комиссия СЭВ по стандартизации на своем 10-м
заседании признала целесообразным включить вопросы
метрологии в сферу своей деятельности. Объем и характер работ в
области метрологии в рамках СЭВ существенно изменились в связи
с принятием в 1971 г. Комплексной прог-раммы дальнейшего
углубления и совершенствования сотрудничества и развития
социалистической экономической интеграции стран — членов СЭВ, в
которой была поставлена задача широкого осуществления
совместных работ членов СЭВ в области метрологии по созданию единой
системы эталонов СЭВ, проведению взаимных сличений
национальных эталонов, научно-исследовательских работ с целью
доведения точности эталонов СЭВ до современного мирового уровня,
разработке уникальных высокоточных измерительных установок и
совместному использованию их странами — членами СЭВ.
Программой предусмотрено проведение унификации нррмативно-тех-
нической документации по поверке и клеймению приборов в
отдельных странах, по разработке единых норм точности и др.
Для решения поставленных Комплексной программой задач в
области метрологии комиссия СЭВ по стандартизации в 1971 г.
приняла решение о создании в ее рамках секции по метрологии.
Комиссия приняла свыше 100 рекомендаций СЭВ по
стандартизации в области метрологии для различных областей измерений,
в том числе рекомендации СЭВ по стандартизации на
поверочные схемы, методы поверки рабочих и образцовых средств
измерений, термины и определения. В период 1976—1980 гг. было
создано 9 эталонов СЭВ, разработан перечень, состоящий из 35
эталонов, которые предстоит создать в период 1986—1990 гг.
В 1979 г. на 92-м заседании исполнительного комитета СЭВ
было принято решение -о создании в институте СЭВ по
стандартизации отдела метрологии/ который в- настоящее время принимает
• активное участие в решении сложных и актуальных проблем в
области метрологического обеспечения мероприятий по
сотрудничеству стран — членов СЭВ.
Глава 2. СРЕДСТВА ИЗМЕРЕНИЙ И ИХ
ХАРАКТЕРИСТИКИ
2.1. КЛАССИФИКАЦИЯ СРЕДСТВ ИЗМЕРЕНИЙ
Средство измерений (СИ) — техническое средство, используемое
при измерениях и имеющее нормированные метрологические
характеристики (MX). Метрологическими называют характеристики,
оказывающие влияние на результат и погрешность измерения. Оии
входят в состав технических характеристик, определяющих другие
свойства СИ (например, диапазон частот, габаритные размеры, вид
электропитания и др.). Под нормированием MX понимается
количественное задание определенных номинальных значений и
допустимых отклонений от этих значений. Нормирование MX
позволяет оценить погрешность измерения, достичь взаимозаменяемости
средств-измерений, обеспечить возможность сравнения средств
измерений между собой и оценку погрешностей измерительных
систем и установок на основе MX входящих в их состав средств
измерений. Именно нормирование MX отличает СИ от других подобных
технических средств (например, измерительный трансформатор от
силового трансформатора, измерительный усилитель от обычнога
усилителя).
Как уже указывалось в § 1.1, в соответствии с ГОСТ-все СИ
делятся на шесть видов: меры, измерительные преобразователи,
измерительные приборы, вспомогательные СИ, измерительные
установки'и измерительные системы. Наиболее многочисленной
группой СИ являются измерительные приборы и преобразователи,
которые обобщенно называют измерительными устройствами (ИУ).
В силу большого разнообразия их классифицируют по различным
признакам: по используемым физическим процессам, по
физической природе измеряемой величины, по виду измеряемой величины
или сигнала измерительной информации, по используемым
методам измерений, по особенностям структурных схем и др.
По используемым физическим процессам ИУ
разделяют на механические, электромеханические, электронные,,
оптоэлектронные и т. д.
По физической природе измеряемой величины
различают, например, вольтметры, амперметры, омметры и т. д.
Классификация по этому признаку электронных радиоизмерительных
приборов, их наименование и обозначение даны в ГОСТ 15094—69.
По виду измеряемой величины или сигнала
измерительной информации, а также по способу обработки,
сигнала приборы делятся на аналоговые и цифровые. В
аналоговых приборах показания являются непрерывной функцией
размера измеряемой величины, т. е. могут так же, как и
измеряемая величина, принимать бесконечное множество значений.
21
При этом во времени показания могут быть как непрерывной,
так и дискретной (прерывистой) функцией измеряемой
величины, т. е. различают приборы непрерывного и дискретного
действия. В цифровом приборе непрерывная по размеру и во
времени величина преобразуется в дискретную, квантуется,
кодируется и цифровой код отображается на цифровом отсчетном
устройстве. В результате показания цифрового прибора
являются дискретными во времени и квантованными по размеру,
т. е. могут принимать лишь конечное число значений.
Внешним признаком аналоговых или цифровых приборов
является наличие аналогового или цифрового показывающего или
регистрирующего устройства. Соответственно приборы принято
также разделять на показывающие, допускающие только отсчи-
тывание показаний, и регистрирующие, в которых предусмотрена
автоматическая регистрация показаний. Среди последних, в свою
очередь, различают самопишущие и печатающие. В самопишущих
приборах, являющихся аналоговыми, показания измеряемых
значений величины записываются в виде графика —
осциллограммы, показывающей изменение значения величины во времени,
в печатающих, являющихся цифровыми приборами, результаты
из-мерений печатаются в цифровой форме.
Аналоговые показывающие устройства электронных приборов
обычно представляют из себя электромеханический
преобразователь и аналоговое отсчетное устройство. Последнее состоит из
шкалы, проградуированной с помощью меры и играющей роль
меры при измерении, и указателя, совершающего линейное или
угловое перемещение. В качестве указателя используется либо
стрелка, либо луч света.
Роль показывающего устройства может выполнять и
электронно-лучевая трубка (ЭЛТ), обладающая чрезвычайно малой
инерционностью, что позволяет наблюдать высокочастотные
процессы (до сотен мегагерц, импульсы длительностью до
наносекунд). В качестве аналоговых регистрирующих устройств в
диапазоне частот до 10 Гц используются самописцы, содержащие
электромеханический преобразователь, обеспечивающий
перемещение записывающего узла со специальным пером. Запись
осуществляется специальными чернилами (пастами) на бумаге,
движущейся перпендикулярно направлению перемещения пера. В
некоторых случаях используют термо-, электро- и химочувствитель-
ные бумаги. В диапазоне до 20 кГц применяют светолучевые
осциллографы, в которых запись осуществляется с помощью
специальных гальванометров лучом света на фотобумаге или
фотопленке, а также ультрафиолетовым лучом на специальной
бумаге, самопроявляющейся на свету. Хорошая точность,
чувствительность, многоканальность (до 10 каналов и более), малые
габаритные размеры явились причиной широкого применения этих
приборов. Для регистрации более высокочастотных процессов
используют электронно-лучевые осциллографы с
фотографированием процесса с экрана ЭЛТ. Для регистрации однократных про-
22
цессов применяют также специальные запоминающие ЭЛТ,
позволяющие хранить изображение десятки часов.
Цифровое отсчетное устройство обычно состоит из цифровых
знаковых индикаторов, обеспечивающих воспроизведение
десятичных цифр, и алфавитных индикаторов, позволяющих указать
единицу измеряемой величины. В цифровых регистрирующих
приборах, как правило, осуществляется печатание показаний с
помощью алфавитно-цифровых печатающих устройств со скоростью
до 103 знаков в секунду. Для долговременного хранения
информации используются также различные виды запоминающих
устройств.
Сравнивая точность аналоговых и цифровых приборов,
следует отметить, что цифровое отсчетное или регистрирующее
устройство никак не ограничивает точность цифрового прибора,
так как цифровой код без какой-либо погрешности может быть
отображен на цифровом отсчетном устройстве. Точность
аналоговых приборов ограничивается погрешностями измерительных
преобразователей, создающих перемещение указателя,
погрешностями шкалы и личными (субъективными) погрешностями,
вносимыми оператором (из-за конечной толщины указателя, длины
деления шкалы и разрешающей способности глаза, из-за
парадокса,' из-за погрешности интерполирования при положении
указателя между отметками делений шкалы). В результате
погрешность аналоговых приборов составляет обычно не менее 0,5%.
В то же время погрешность цифровых приборов удается
уменьшить до 10_6%, а при измерении частотно-временных
параметров и менее.
Однако не всегда цифровое отсчетное или регистрирующее
устройство лучше аналогового. При большом числе
одновременно измеряемых величин (контроль сложного объекта) показания
аналоговых приборов воспринимаются легче, так как независимо
от цифр на шкале пространственное положение указателя и
характер его перемещения или осциллограмма регистрируемого
процесса позволяют более оперативно проводить анализ
контролируемого процесса. Подтверждением большей информативности
аналогового отсчетного устройства является разработка для
некоторых ци<}?ровых приборов шкалы в виде расположенных в
линию светодиодов, управляемых цифровой схемой. Эта шкала
воспринимается оператором как аналоговая, хотя прибор является
целиком цифровым.
Наряду с точностью важной характеристикой является
быстродействие ИУ, характеризуемое числом измерений
(преобразований) в единицу времени либо временем одного измерения.. При
измерении изменяющихся во времени величин повышение
быстродействия играет важную роль. В общем случае повышение
быстродействия ИУ ограничивается быстродействием используемой
элементной базы.
Для показывающих приборов обычно не требуется
высокого быстродействия в силу ограниченных возможностей операто-
23
♦
pa при приеме информации. Для регистрирующих приборов, а
также измерительных преобразователей требование
быстродействия является существенным, особенно когда обработка
информации осуществляется с помощью ЭВМ. В этом случае
цифровые ИУ обеспечивают большее быстродействие, так как
цифровой код может непосредственно, без участия оператора,
вводиться в цифровые ЭВМ. .Исключение составляют электронные
осциллографы, позволяющие наблюдать и проводить анализ
формы столь быстро протекающих процессов, преобразование
которых в цифровой код сопряжено с большой погрешностью, либо
вообще невозможно из-за ограниченного быстродействия
цифровых логических элементов (ключей, коммутаторов и т. д.).
Имеются методы увеличения быстродействия цифровых СИ
(параллельная обработка), однако они приводят к усложнению
прибора. Как видно из рис. 2.1, где показаны зависимости
точности от быстродействия для аналоговых ( ) и цифровых
( = ) ИУ, последние точнее аналоговых до определенного
предела. При достаточно высоком быстродействии возможности
. получения высокой точности уравниваются (точка а). Однако
при увеличении быстродействия (кривые правее точки а)
цифровые приборы имеют меньшую точность или вообще ие могут быть
реализованы, в то время как аналоговые приборы осциллогра-
чрического типа обеспечивают измерения.
Таким образом цифровые СИ обеспечивают, как правило,
большую точность и быстродействие, а также удобство
отсчета и возможность полной автоматизации процесса измерения,
и обработки измерительной информации с помощью ЭВМ. К
недостаткам цифровых приборов следует отнести их
сравнительно высокую стоимость. Однако совершенствование интегральной
технологии, введение интегральных схем большой степени
интеграции постепенно снижают стоимость цифровых приборов, а
внедрение микропроцессоров и микро-ЭВМ открывает широкие
перспективы дальнейшего.их совершенствования.
По структурному принципу различают ИУ прямого
действия (преобразования), в которых реализуется метод
непосредственной оценки, и ИУ сравнения, работа которых
основана на методе сравнения. В ИУ прямого действия (рис. 2.2)
преобразование сигнала происходит в одном направлении
последовательно. В данной структурной схеме П, и П2 — преоб-
5ь/ш/о&ействие
Г"
и,
Уг
У
I «< ■ "г |.
X
■*м
'
СУ
_
М
'
п-
Рис. 2.1
24
Рис. 2.2
*
Рис. 2.3
разователи с коэффициентами передачи К\ и Ка- Если
выходной сигнал у получается в форме, доступной для
непосредственного восприятия, рассмотренная структурная схема
характеризует прибор, если сигнал у предиазиачеи Для дальнейшей
обработки или хранения, — преобразователь. Структурная схема
преобразователя, построенного на методе сравнения,
представлена на рис. 2.3. Операция сравнения осуществляется с помощью
сравнивающего устройства (СУ), в котором обычно одна
величина вычитается из другой. Используя выходной сигнал СУ,
с помощью преобразователя П можно управлять мерой и
реализовать нулевой метод сравнения. Поскольку в ИУ,
основанных на методе сравнения, измеряемая величина
уравновешивается (компенсируется) величиной, воспроизводимой мерой, их
также называют ИУ с уравновешивающим (компенсационным)
преобразованием. •
Сравнивая свойства ИУ сравнения и непосредственной
оценки, можно отметить, что первые в общем случае за счет
использования меры имеют более высокую точность., Следует также
отметить различие требований к отдельным преобразователям
ИУ с точки зрения обеспечения точности ИУ. Так, в ИУ
непосредственной оценки общий коэффициент передачи К=К\Кг
(рис. 2.2) и его точность определяется соответствующей
точностью всех преобразований. В ИУ сравнения имеет место
отрицательная обратная связь и его коэффициент передачи К=
= &/(11+&Р), где k и р — коэффициенты передачи прямой и
обратной "цепей. При k$^>\ получаем &«1/р и, следовательно,
точность ИУ определяется главным образом точностью'
преобразователей в цепи обратной связи (т. е. меры), в то время как
коэффициент передачи k может быть нестабильным, лишь бы
было большим петлевое усиление k$. При этом нестабильность
б коэффициента передачи всего ИУ будет в Щ раз меньше
нестабильности коэффициента передачи прямой ветви 6h-
К (1 + 6ft)
8= i+ffO+frOP e 6ft _ 6ft_
К 1 + /СР(1 + 6й) ~КР
Приборы сравнения могут быть выполнены с развертывающим
или следящим уравновешиванием. При развертывающем
уравновешивании величина хм на выходе меры изменяется по одному
и тому же закону, от одного и того же начального значения
до наступления уравновешиванияг «. r^
(рис. 2А,а, где хм — сигнал дис- »>■'■. . &■•
кретно регулируемой меры). При •
следящем уравновешивании после
первого цикла уравновешивания
в дальнейшем осуществляется
автоматическое слежение за изме- ^ * . s> *
нением входной величины (рис. .
2.4,6). Следящее уравновешива- Рис. 2.4
"•25
хг
х„
Рис. 2.5
Рис. 2.6
ние позволяет точнее отследить изменение измеряемой величины,
однако в устройстве со следящим уравновешиванием возможно
самовозбуждение.
По структурным признакам ИУ также можно
классифицировать по числу каналов и по временной
последовательности преобразований входных сигналов. В зависимости от чиС'
ла входных сигналов, несущих информацию об измеряемой
величине, ИУ бывают с одним (например, вольтметр), двумя (фа-*
зометр) и более входами, т. е. соответственно одно- (рис. 2.2),
двух- (рис. 2.5) и многоканальными (рис. 2.6). В зависимости
от временной последовательности преобразований входных
сигналов (если их более двух) различают ИУ с одновременным
(параллельным) преобразованием и последовательным. При
последовательном преобразовании сигналы обрабатываются
поочередно, причем за цикл измерения каждый сигнал через входное
переключающее устройство (коммутатор) подается на вход
преобразователя один раз. Разновидностью последовательного
преобразования является периодическое, когда за время одного
цикла измерения сигналы переключаются многократно.
Последовательное преобразование позволяет уменьшить аппаратурные
затраты за счет перехода от многоканальной структуры к одно-
канальной с входным коммутатором. Помимо снижения
аппаратурных затрат одноканальная структура "ИУ позволяет
уменьшить ряд погрешностей, обычно вызываемых неидентичностыо
характеристик разных каналов.
По точности ИУ можно разделить на образцовые,
используемые для поверки других ИУ и утвержденные в
качестве образцовых, и рабочие, используемые непосредственно в
практических измерениях, не связанных с передачей размера
единиц. По частотному диапазону ИУ можно разделить
на низкочастотные, высокочастотные и СВЧ ИУ; по ширине
полосы частот — на широкополосные и избирательные
(селективные). По месту использования ИУ можно разделить яа
лабораторные и производственные, которые резко отличаются
по условиям эксплуатации, по техническим и метрологическим
характеристикам.
Целесообразно дополнить классификацию измерительных
преобразователей. Их многообразие определяется различием
требуемых видов преобразований. Преобразователи физического рода
26 . ' '
сигнала используются тогда, когда измеряемая величина
неудобна для непосредственного измерения. Так, многие
неэлектрические величины предварительно преобразуются в
электрические, или. одни электрические величины в другие (например,
сопротивление в напряжение). Название таких
преобразователей определяется либо принципом действия, либо родом
входного и выходного сигналов, например термоэлектрический
преобразователь, преобразователь «напряжение—частота».
Функциональные преобразователи обеспечивают необходимую
зависимость между информативными ^параметрами входного и
выходного сигналов. Такие преобразователи носят название:
дифференцирующий, интегрирующий, суммирующий, логарифмирующий
и т. п. Согласование по уровню (размеру) входного сигнала
осуществляется с помощью масштабных преобразователей. К ним
относятся делитель, усилитель, трансформатор тока
(напряжения). Согласование по сопротивлению обеспечивается с помощью
согласующих преобразователей, например согласующий
трансформатор, эмиттерный повторитель. По месту включения в оо-
щей цепи преобразователи делятся на первичные, к которым
подводится измеряемая величина, промежуточные и передающие,
предназначенные для дистанционной передачи сигналов. По
виду характеристики преобразования преобразователи делятся на
линейные и нелинейные.
2.2. МЕТРОЛОГИЧЕСКИЕ ХАРАКТЕРИСТИКИ
СРЕДСТВ ИЗМЕРЕНИИ
И ИХ НОРМИРОВАНИЕ
Для каждого вида СИ, исходя из их специфики и
назначения, нормируется определенный комплекс метрологических
характеристик, указываемый в нормативно-технической
документации на СИ. В этот комплекс должны включаться такие
характеристики, которые позволяют определить / погрешность
данного СИ в известных рабочих условиях его применения.
Общий перечень основных нормируемых метрологических
характеристик СИ, формы их представления и способы нормирования'
установлены в ГОСТ 8.009—72. В него входят:
пределы измерений, пределы шкалы;
цена деления равномерной шкалы аналогового прибора или
многозначной меры, при неравномерной шкале — минимальная
цена деления;
выходной код, число разрядов кода, номинальная цена
единицы наименьшего разряда цифровых СИ;
номинальное значение однозначной меры, номинальная
статическая характеристика преобразования измерительного
преобразователя; .
погрешность СИ;
27
вариация показаний прибора или выходного сигнала
преобразователя;-
полное входное сопротивление измерительного устройства;
полное, выходное сопротивление измерительного
преобразователя или_ меры;
неинформативные параметры выходного сигнала
измерительного преобразователя или меры;
динамические характеристики СИ;
функции влияния;
. наибольшие допустимые изменения метрологических
характеристик СИ в рабочих условиях применения.
Нормирование метрологических характеристик необходимо
для решения следующих задач: придания всей совокупности
однотипных СИ требуемых одинаковых свойств и уменьшения их
номенклатуры, обеспечения возможности оценки
инструментальных погрешностей и сравнения СИ по точности, обеспечения
возможности оценки погрешности измерительных систем по
погрешностям отдельных СИ. Погрешности, присущие конкретным
экземплярам СИ, устанавливаются только для образцовых СИ при
их аттестации.
Рассмотрим указанные характеристики, а также ряд важных
понятий, связанных с ними.
Отсчетные устройства приборов. Отсчетное устройство
аналогового прибора представлено на рис. 2.7: Делением шкалы
называется промежуток А/ между двумя соседними отметками
шкалы. Длина деления шкалы — расстояние между осями двух
соседних отметок. Цена деления шкалы — разность значении
величины, соответствующих двум соседним отметкам шкалы.
Шкалы бывают равномерными и неравномерными. Равномерная
шкала в отличие от неравномерной — шкала с делениями,
постоянной длины и с постоянной ценой деления. Отсчетом называют
число, определенное по отсчетному устройству. Показание
прибора — значение величины, определяемое по отсчетному
устройству и выраженное в принятых единицах этой величины. В
многопредельных приборах, где одна и та же шкала
используется на разных пределах измерения, показание прибора равно
отсчету, умноженному на цену деления для соответствующего
предела измерения. В некоторых случаях показание
определяется с помощью отсчета по прилагаемой к прибору градуиро-
ИМШ/fUU предел - "
_ измерений _ ,,^г Шкала
Верхний предел
измерений
~0\3 « || 5 1 7 в / S
I '' ■ ■ ' ■ ' ' ■ ' ' ' ' ' ' I I . ■ ' i I г и I I I I I I I
9
I 4mi|iiii|iiii|iiii|iiii|iin|iiH
А*
£
А"
Hue. 2.1
28
j Уназате/гь
войной характеристике — зависимости между отсчетом и
значением величины на входе прибора, представленной в виде
таблицы, графика или формулы. Диапазон показаний (ДП)
—область значений шкалы, ограниченная конечным (наибольшим) и
начальным (наименьшим) значениями физической величины,
указанными на шкале. Диапазон измерений (ДИ) — область
значений измеряемой величины, для которой нормирована
погрешность средства измерений. Предел измерений — наибольшее или
наименьшее значение диапазона измерений. Диапазон
показаний и диапазон измерений могут не совпадать, как показано иа
рис. 2.7.
Отсчетное устройство цифрового прибора характеризуется
числом десятичных разрядов и ценой единицы младшего
разряда, которая, очевидно, не может быть меньше шага
квантования. Цифровое отсчетное устройство эквивалентно равномерной
шкале, так как одинаковому приращению цифрового кода
соответствует одинаковое приращение показаний. Поэтому наличие
нелинейности преобразования измеряемой величины в код
приводит к погрешности цифрового прибора. Соответственно к
преобразователям цифровых приборов предъявляется требование
высокой линейности. В то же время в аналоговом приборе
нелинейная зависимость перемещения указателя от изменения
измеряемой величины может быть учтена введением
соответствующей нелинейности (неравномерности) шкалы.
Параметры входного и выходного сигналов средств измерений,
влияющие величины, функции- влияния. Входной и выходной
сигналы СИ характеризуются информативными и
неинформативными параметрами. Информативный параметр входного сигнала
является самой измеряемой величиной или величиной
функционально связанной с измеряемой. Неинформативный параметр не
связан функционально с измеряемой величиной, но влияет на
метрологические характеристики СИ (в частности, на
погрешность). Например, при измерении амплитуды .напряжения
информативным параметром является амплитуда сигнала, а
неинформативным— его частота. Выходной сигнал преобразователя
также может быть охарактеризован информативными и
неинформативными параметрами.
На метрологические характеристики СИ сильно влияют
внешние физические воздействия (климатические, механически^,
электромагнитные) и изменения параметров источников питания —
влияющие величины. По условиям применения СИ различают
нормальные и рабочие условия. Они отличаются диапазоном
изменения неинформативных параметров входного сигнала и влияющих
величин. Нормальными называют условия, для которых
нормируется основная погрешность СИ. При этом влияющие величины и
неинформативные параметры входного сигнала имеют нормальные
значения. Например, для генератора определенного типа
установлены нормальные температурные условия +10...+35°С. В этом
температурном диапазоне гарантируется основная погрешность
29
прибора, указанная в его паспорте. Однако прибор может
работать и в более широком диапазоне температур, Например от 0 до
+ 40° С. Этот диапазон, называемый рабочим, шире нормального.
Для нормальных условий нормируется основная погрешность СИ,
для рабочих — дополнительная. Условия эксплуатации СИ
оговаривают в соответствующих стандартах и делят на группы,
различающиеся значениями влияющих величин.
Зависимость изменения метрологической характеристики СИ
от изменения влияющей величины или неинформативного
параметра входного сигнала в пределах . рабочих условий эксплуатации
называется функцией влияния. Функция влияния может
нормироваться в виде формулы, графика или таблицы. Например, для
высокочастотного (вольтметра дополнительная погрешность- от
частоты обычно задается в виде графика.
Наряду с условиями применения для всех СИ задаются
предельные условия транспортирования и хранения, не изменяющие
метрологические свойства СИ после его возвращения в рабочие
условия.
Характеристики преобразования, быстродействие СИ. Связь,
выражающая зависимость информативного параметра выходного
сигнала от постоянного информативного параметра входного
сигнала, называется статической характеристикой преобразования
СИ. Ее можно представить в аналитическом виде, графическом
или табличном. В аналитическом виде характеристика
преобразования — уравнение y = F(x), которое может быть линейным (рис.
2.8,а) или нелинейным (рис. 2.8,6, в). Заметим, что для прибора,
шкала которого ггроградуирована в значениях измеряемой
величины, всегда у=х (показание равно измеряемой величине) и
графически характеристика преобразования представляет собой
прямую под углом 45° относительно оси х. В то же время угол
отклонения указателя аналогового отсчетного устройства этого прибора
при наличии нелинейных преобразователей (например, в
квадратичном вольтметре) будет нелинейной функцией х. В цифровых
приборах из-за квантования сигнала характеристика
преобразования является ступенчатой функцией (рис. 2.8,г), определяемой
». I »- I V- ■ »
.г: ■г . & ■*
а) ";. S) д) ..■' г;
зо
Рис. 2.8
выражением у = пАх, где у — показание прибора, Ах — шаг
квантования, п — цифровой код измеряемой величины х. При
нелинейных преобразователях необходимо линеаризовать
характеристики преобразования прибора. В аналоговых приборах для
этого используют шкалу с соответствующей неравномерностью. В
цифровых приборах отсчетное устройство эквивалентно
равномерной шкале для линеаризации характеристики преобразования
необходимо в прибор вводить аналоговые линеаризующие
преобразователи либо вычислительные средства, выполняющие
необходимое преобразование цифрового кода.
Динамические характеристики СИ определяют инерционные
свойства СИ и представляют собой зависимость информативного
параметра выходного сигнала от меняющихся" во времени
параметров входного сигнала. К числу динамических относятся
характеристики: импульсная g(<t), являющаяся реакцией
преобразователя на дельта-функцию 8»{t); переходная h(t) — реакция на
единичный ступенчатый сигнал; дифференциальное уравнение СИ;
передаточная функция, являющаяся отношением операторных
изображений выходной величины к входной К(р)=у(р)/х(р); ампли-
тудно- и фазочастотная. Динамические свойства СИ
характеризуются также быстродействием — скоростью и временем измерения
(временем установления показаний).' Скорость измерения
(преобразования) определяется максимальным числом измерений
(преобразований) в единицу времени, выполняемых с нормированной
погрешностью. Время измерения (преобразования) — время,
прошедшее с момента начала измерения (преобразования) до
получения результата с нормированной погрешностью.
Чувствительность, порог чувствительности, разрешающая
способность СИ. Чувствительностью СИ называют отношение
изменения выходной величины (информативного параметра) к
вызывающему его изменению входной величины (информативного
параметра входного сигнала). Различают абсолютную и относительную
чувствительность. Абсолютная чувствительность равна производ-
ной от характеристики преобразования СИ: S=dy/dx=Ay/Ax.
Приближенное равенство для определения чувствительности через
конечные приращения Ах и Ау используется при экспериментальном
определении чувствительности. Для линейных СИ (y=kx)
чувствительность постоянна S = k и может быть определена как S =
=х/у (рис. 2.8,а), для нелинейных чувствительность зависит от
входного сигнала (рис. 2.8,6,в). Для показывающих приборов
признаком линейности или нелинейности характеристики
преобразования является равномерность или неравномерность шкалы. В
ряде случаев (например, в мостах) для характеристики
чувствительности используется относительная чувствительность S=^
= Ду/ (Ах/х), где Ах/х — относительное изменение входной
величины.
Наименьшее значение входной величины, которое можно
обнаружить с помощью данного СИ, называется его порогом чувстви-
31
тельности. Разрешающей способностью СИ называют наименьшее
различимое с помощью данного СИ изменение измеряемой
величины, или наименьшее различимое отличие друг от друга двух
одноименных величин. Порог чувствительности и разрешающая
способность имеют размерность измеряемой величины и обычно
определяются уровнем- его внутренних шумов и нестабильностью
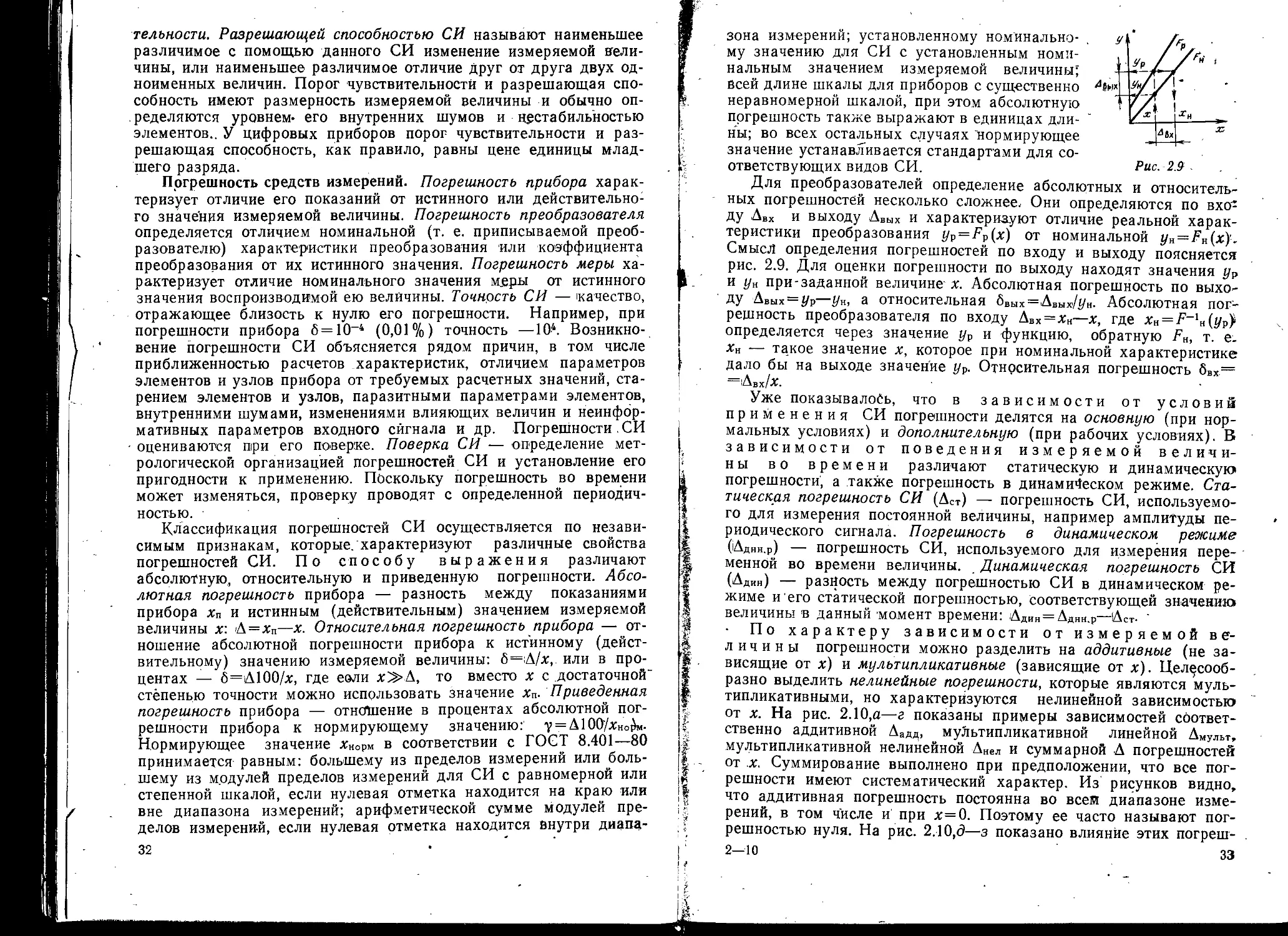
элементов.. У цифровых приборов порог чувствительности и
разрешающая способность, как правило, равны цене единицы
младшего разряда.
Погрешность средств измерений. Погрешность прибора
характеризует отличие его показаний от истинного или действительно1
го значения измеряемой величины. Погрешность преобразователя
определяется отличием номинальной (т. е. приписываемой
преобразователю) характеристики преобразования или коэффициента
преобразования от их истинного значения. Погрешность меры
характеризует отличие номинального значения меры от истинного
значения воспроизводимой ею величины. Точность СИ — качество,
отражающее близость к нулю его погрешности. Например, при
погрешности прибора б = 10~4 (0,01%) точность —104.
Возникновение погрешности СИ объясняется рядом причин, в том числе
приближенностью расчетов характеристик, отличием параметров
элементов и узлов прибора от требуемых расчетных значений,
старением элементов и узлов, паразитными параметрами элементов,
внутренними шумами, изменениями влияющих величин и неинфор-
мативных параметров входного сигнала и др. Погрешности .СИ
■ оцениваются при его поверке. Поверка СИ — определение
метрологической организацией погрешностей СИ и установление его
пригодности к применению. Поскольку погрешность во времени
может изменяться, проверку проводят с определенной
периодичностью.
Классификация погрешностей СИ осуществляется по
независимым признакам, которые, характеризуют различные свойства
погрешностей СИ. По способу выражения различают
абсолютную, относительную и приведенную погрешности.
Абсолютная погрешность прибора — разность между показаниями
прибора хП и истинным (действительным) значением измеряемой
величины х: А=х„—х. Относительная погрешность прибора —
отношение абсолютной погрешности прибора к истинному
(действительному) значению измеряемой величины: б=Л/д:, или в
процентах — 6=Д100/л:, где еоли л:»Д, то вместо х с достаточной"
степенью точности можно использовать значение хП. Приведенная
погрешность прибора — отношение в процентах абсолютной
погрешности прибора к нормирующему значению: у = М0(У/хнО&*-
Нормирующее значение лгНорм в соответствии с ГОСТ 8.401—80
принимается равным: большему из пределов измерений или
большему из модулей пределов измерений для СИ с равномерной или
степенной шкалой, если нулевая отметка находится на краю или
вне диапазона измерений; арифметической сумме модулей
пределов измерений, если нулевая отметка находится внутри диапа-
32
н>
зона измерений; установленному номинально- , у
му значению для СИ с установленным номи- .
нальным значением измеряемой величины; +-
всей длине шкалы для приборов с существенно Hv*\_
неравномерной шкалой, при этом абсолютную Т
погрешность также выражают в единицах
длины; во всех остальных случаях "нормирующее
значение устанавливается стандартами для
соответствующих видов СИ. Рис. 2.9 ■
Для преобразователей определение абсолютных и
относительных погрешностей несколько сложнее. Они определяются по вхо1
ду Лвх и выходу Лвых и характеризуют отличие реальной
характеристики преобразования Ур=Рр(х) от номинальной yn = FK{x}.
Смысл определения погрешностей по входу и выходу поясняется
рис. 2.9. Для оценки погрешности по выходу находят значения уР
и ун при-заданной величине' х. Абсолютная погрешность по
выходу Авых = г/р—У«, а относительная 6вых=Авых/уИ. Абсолютная
погрешность преобразователя по входу ABx=*h—х, где хИ = Р~1н(уР}
определяется через значение ур и функцию, обратную FH, т. е.
хн — такое значение х, которое при номинальной характеристике
дало бы на выходе значение yv. Относительная погрешность 6Вх—
=|Двх/*.
Уже показывалось, что в зависимости от условий
применения СИ погрешности делятся на основную (при
нормальных условиях) и дополнительную (при рабочих условиях). В
зависимости от поведения измеряемой
величины во времени различают статическую и динамическую
погрешности, а также погрешность в динамическом режиме.
Статическая погрешность СИ (Аст) — погрешность СИ,
используемого для измерения постоянной величины, например амплитуды
периодического сигнала. Погрешность в динамическом режиме
(Аднн.р) — погрешность СИ, используемого для измерения
переменной во времени величины. Динамическая погрешность СИ
(Адин) — разность между погрешностью СИ в динамическом
режиме и его статической погрешностью, соответствующей значению
величины в данный момент времени: АДИн = Аднн.р—Аст- "
По характеру зависимости от измеряемой
величины погрешности можно разделить на аддитивные (не
зависящие от х) и мультипликативные (зависящие от х).
Целесообразно выделить нелинейные погрешности, которые являются
мультипликативными, но характеризуются нелинейной зависимостью
от х. На рис. 2.10,а—г показаны примеры зависимостей
соответственно аддитивной Аадд, мультипликативной линейной ДМулм>
мультипликативной нелинейной Анел и суммарной А погрешностей
от х. Суммирование выполнено при предположении, что все
погрешности имеют систематический характер. Из рисунков видно,
что аддитивная погрешность постоянна во всей диапазоне
измерений, в том числе и при д:=0. Поэтому ее часто называют
погрешностью нуля. На рис. 2.10,(3—з показано влияние этих погреш-
2—10 33
V
Aaggl
мульт
\
1
I
tgtx
—1—».
XH X
a)
~'мульт
"£T a
XH X
*)
-Диеп м
A n
_L
^2Гм ДГ
*;
**м **
e)
''мульт'l
^нел''
*"
*;
X„ X
y)
V
*;
Рис. 2.10
ностей на характеристику преобразования СИ. На них.y = FH(x) —
номинальная характеристика преобразования, a y = Fv(x) —
реальная, полученная за счет учета соответствующих погрешностей.
Для рассмотренных случаев «а рис. 2.10,и—м .построены
зависимости относительных значений погрешностей от х. Как видно из
рисунков, бадд убывает с ростом х, а бмульт постоянна. Смысл
рассмотренных составляющих погрешностей можно ^проследить на
примере операционных усилителей, широко используемых в
различных СИ. Аддитивную погрешность обусловливает смещение
нуля усилителя и его дрейф,' а мультипликативную — погрешность
сопротивления нагрузки и его нестабильность (например, под
влиянием температуры) и нелинейную — 'нелинейность
амплитудной характеристики. . «
34 ' - J
По характеру проявления погрешность СИ
разделяют на систематическую и случайную составляющие.
Систематической (Ас) называют составляющую погрешности, величина и
знак которой постоянны или изменяются закономерно. Например,
при усилении постоянного напряжения тем же операционным
усилителем неполная компенсация смещения нуля приведет к
появлению систематической погрешности, которая для данного СИ бу-
' дет постоянной. В принципе эту погрешность можно определить и
осуществить дополнительную компенсацию смещения. В
процессе изготовления СИ именно и идут по такому пути, причем
компенсацию выполняют до определенного предела, при котором
значения систематической погрешности таковы, что ими можно
пренебречь по сравнению со всеми остальными погрешностями. В
любом случае компенсацию можно выполнить лишь с конечной
точностью и какая-то остаточная, неисключенная систематическая
погрешность будет иметь место.
Систематическая погрешность отдельного СИ является
детерминированной величиной, ее абсолютное значение может
задаваться числом (если преобладает аддитивная составляющая) или
функцией, графиком и таблицей, характеризующими зависимость
Ас от влияющих величин или неинформативных параметров
сигнала (при условии, что они детерминированы, так как в
противном случае и. погрешность будет случайной). Однако у
различных СИ одного типа значения неисключенных систематических
погрешностей будут разными, отличаясь случайным образом.
Поэтому неисключенная систематическая погрешность всех СИ
данного типа будет случайной величиной, которую характеризуют
• пределом допускаемого значения Ас.пред или математическим
ожиданием М(АС) и средним квадратичным значением а (Ас).
Характерной особенностью систематической погрешности
является принципиальная возможность ее определения и
последующего учета в виде поправки к результату измерения. Поправка
Ап — значение величины, одноименной с,измеряемой,
прибавляемое к полученному при измерении значения величины хП для
исключения систематической погрешности, т. е. Ап = —Ас. - Иногда
вместо поправки используется поправочный множитель 6„ — чис-
- ло, на которое умножают полученное при измерении значение,
чтобы исключить систематическую погрешность. Поправка и
поправочный множитель определяются либо путем индивидуальной
градуировки СИ, либо путем учета функции влияния величин,
имеющих известные или контролируемые при измерениях
значения.
Другим способом уменьшения систематических погрешностей
является калибровка СИ перед измерениями. При этом обычно на
вход прибора последовательно подают образцовую измеряемую
величину с нулевым значением (для этого вход закорачивают) и
значением, равным конечному значению диапазона измерения от
специальной меры, обычно встроенной в прибор. Такая
калибровка позволяет устранить как аддитивную, так и мультипликативную
*
составляющие погрешности. В настоящее время автоматизация
такой калибровки на базе микро-ЭВМ часто позволяет
осуществлять ее перед каждым измерением за доли секунды. В
результате устраняется не только' систематическая погрешность, но и та
составляющая случайной погрешности, которая во время
калибровки и последующего измерения остается неизменной. В
частности, это позволяет снизить температурное влияние, случайные
изменения которого происходят сравнительно с малой скоростью.
Систематическую погрешность можно существенно уменьшить,
используя специальные методы измерения, например методы
замещения и компенсации погрешности по знаку. При методе
замещения сначала измеряют неизвестную величину, а затем
одноименную воспроизводимую регулируемой мерой. Регулируя меру,
добиваются получения тех же показаний прибора х„. Тогда хм —
величина, воспроизводимая мерой, равна измеряемой и
систематическая погрешность устраняется. Для компенсации погрешности
по знаку проводят два измерения одной и той же величины х
таким образом, чтобы систематическая погрешность была с
разными знаками. Результат измерения определяется как полусумма
полученных показаний хп\ и Xnz и не содержит систематической
погрешности: 0,5(^1+^) = 0,5['(лг+Ас) + (х—Ас)] =х.
Случайная погрешность СИ А — это погрешность, значение
которой изменяется случайным образом. Наличие случайной
погрешности СИ обусловлено, как правило, действием большого
числа случайных причин и обнаруживается при проведении-
повторных измерений неизменной величины в виде случайных отклонений
отдельных наблюдений от некоторого среднего значения. Значение
случайной погрешности отдельного измерения в отличие от
систематической не может быть заранее определено и учтено в виде
поправки к результату измерения. Единственным путем снижения
влияния случайной погрешности СИ на результат измерения
является проведение многократных наблюдений * и их
статистическая обработка. Однако этот прием имеет смысл, если
чувствительность СИ достаточно велика и позволяет фиксировать
изменение показаний СИ из-за случайной погрешности.
Наиболее полной характеристикой случайной погрешности, как
и любой случайной величины, является ее функция
распределения. Следует отметить, что случайная погрешность сложных СИ
часто определяется большим числом отдельных независимых
случайных составляющих, которые обусловлены -погрешностями
отдельных узлов СИ и соизмеримы по значениям (к этому по
возможности стремятся при разработке СИ). Тогда на основании
дентральной предельной теоремы теории вероятностей можно
полагать закон распределения случайной погрешности таких СИ
нормальным (или близким к нормальному). Однако §то справедли-
*Наблюдение при измерении — операция, в результате которой получают1 одно
значение из группы значений величины, подлежащих совместной обработке для
получения результата измерения.
S&
во только для указанных условий, которые могут и не
выполняться, и соответственно может иметь место какой-либо другой закон
распределения.
Функция распределения вероятностей случайной погрешности
СИ должна представляться в виде формулы, таблицы, графика,
либо стандартными аппроксимациями по ГОСТ 8.011—72 (см.
§ 4.3), либо доверительным интервалом с указанием
доверительной вероятности. В виду сложности задания и использования
функций распределения, вместо них случайная составляющая
погрешности СИ может характеризоваться пределом допускаемого
значения среднего квадратического отклонения. Доверительным
называется такой интервал значений погрешности АН^А^АВ
{Ан — нижняя, Ав — верхняя границы интервала), за который не
выходит значение случайной погрешности СИ с заданной
доверительной вероятностью Рлов. Отсюда- вытекает, что доверительная
вероятность — вероятность принятия случайной погрешностью
значения, входящего в доверительный интервал. Доверительная
вероятность характеризует надежность задания случайной
погрешности в виде доверительного интервала и выбирается исходя из
требований практики. При симметричной функции распределения
погрешности доверительный интервал также задают симметричным
±Адов(Ан=—Адов, А8 = Ддов). Таким образом, доверительный
интервал определяется функцией распределения погрешности,
доверительной вероятностью и 'находится из выражения:
РдовГ(Лн"<?£< Ав) = f / (h d A = F (Аа) - F (\) = 2 F (\дов)'
где F (А) — функция распределения случайной погрешности;
/(А) — плотность распределения вероятности случайной
погрешности. При этом принято выражать доверительный интервал
через среднее квадратическое значение а случайной погрешности
(Ад0в=&ст) — важнейшую "характеристику случайной величины.
На рис. 2.11,а показан доверительный интервал для некоторой
симметричной функции .распределения / и заданной
доверительной вероятности РД. Чем больше требуемая доверительная
вероятность, тем, очевидно, больше и доверительный интервал.
Например, для нормального закона- распределения центрированной
случайной погрешности
/=отЬгехр[~т(т)2]-
Как видно из рис. 2.11,6, где показана связь между Адов и РДОв,
при нормальном законе распределения, случайная погрешность
СИ не. выйдет, например, за пределы АДов = Зст с доверительной
вероятностью РЛОв&0,997, т. е. из* 1000 измерений в 997
погрешность СИ А^гЗст и только в 3 измерениях может быть больше.
37
Лд„8
О, S3 7
за\ —
O.SS
гв\ '-
лев
t<?\
Специфической является
погрешность из-за вариации
показаний прибора (выходного сигнала
I преобразователя). Вариация по-
j казачий прибора — разность меж-
\ ду значениями информативного
Г%,« параметра входного сигнала,
соответствующими данной точке ди-
У апазона измерения уП (шкалы),
при двух направлениях его мец-
Рис. 2.11 ленного изменения в, процессе
подхода к данной точке шкалы.
Причинами вариации могут являться трение, гистерезис в
магнитных материалах и др. Для определения. вариации необходимо,
несколько раз медленно изменяя значение измеряемой величины
тсначала со стороны меньших значений хм и а затем со стороны
больших значений |хбг|, подойти ,к данной точке шкалы х„.
Вариация равна Ь= \хм—хб|, где х — средние значения для подходов
с каждой стороны. При реальных измерениях установление
показаний происходит произвольным образом и соответствующая
погрешность Ав из-за вариации имеет случайный характер. Обычно
ее закон распределения считают равномерным в интервале ±6/2.
Систематическая и случайная составляющие погрешности
высокоточных СИ обычно нормируются отдельно. Наряду с таким'
строгим нормированием для большинства СИ, предназначенных
для технических измерений, производится более грубое
нормирование, по пределу допускаемого значения суммы систематической
и случайной погрешностей. На основе этого -устанавливаются
классы точности СИ.
Классы точности. Класс точности —обобщенная характеристика точности
СИ. В соответствии с ГОСТ 8.401—80 классы точности устанавливаются чдля
СИ, у которых суммарная погрешность ((содержащая систематическую и
случайную составляющие) нормируется в виде пределов допускаемой основной и
дополнительной погрешностей. Эти пределы могут выражаться в форме
абсолютных, относительных нлн приведенных погрешностей в зависимости от
характера их изменения в пределах диапазона .измерения, а также условий
применения и ,назиачения СИ.
Пределы допускаемой абсолютной основной погрешности устанавливают по
одночленной или двучленной формуле: А = ±а или Д = ±(а+Ь*), где х —
» номинальное значение меры, показание
прибора или сигнал на выходе
преобразователя, а и Ъ — постоянные числа.
Однозначная формула используется, когда
у СИ преобладает аддитивная состаз-
ляющая погрешности, двучленная —
когда необходимо учитывать и
мультипликативную составляющую. На рис. 2.12
Рис. 2.12 показаны области значений погрешности
38
*а
1 Л =±а
хн
а) ■
—*-
*а
-а
Л=±(а+6х,
-=г=^Г__
fK
/П
1Ьх
X
V
СИ для обеих формул. В обоснованных случаях могут применяться н более
сложные формулы, а также графики нли таблицы. При нормировании абсолютных
значений классы точности принято обозначать буквами латинского алфавита или
римскими цифрами.
При одночленной формуле предел допускаемого значения погрешности
может быть выражен также в виде относительного б и приведенного у значений
в процентах:
Д
±q, т>=- -100 =
Д ±а
5_=—.1оо = —.100:
х х
±а
•^норм
±а
. ^норм
■100 =
•100= ±/>,
*норм
а при двучленной формуле — в виде относительного значения:
в=.А.10Оя=±(5±^.10О
X X
= c + d
— 1
где q, р, с и d — положительные числа в процентах, причем d=a-ilO0/\xs\, c==
= 6-100+d.
Для СИ, пределы допускаемых погрешностей которых выражают в виде
относительных илн приведенных погрешностей, значения q, p, с и d выбираются
из ряда чисел, определяющих пределы допускаемых погрешностей и
применяемых-для обозначения классов точности: 1; 1,5; 2; 2,5;, 3; 4; б и 6X10", где
«= + 1; 0; —'1; —2 и т. д. Это позволяет упорядочить требования к СИ по
-точности и ограничить нх номенклатуру. Числа указанного ряда используются в
условных обозначениях классов точности, применяемых в документации на СИ,
а также обозначениях, наносимых на них. Примеры принятых обозначений
классов точности приведены в табл. 2.1. Пределы всех дополнительных
погрешностей н другие свойства СИ, влияющие иа точность результатов измерений,
также связаны с их классом точности. Эта связь раскрывается в стандартах.
Оценка погрешностей СИ. На этапе разработки СИ
необходимо теоретически оценить ожидаемую погрешность СИ. Эта задача
решается путем анализа уравнения преобразования y = F(x, &,),
Та б л нц а 2.1
Форма выражения погрешности
Приведенная
Нормирующее значение выражено в
единицах измеряемой величины
Нормирующее значение принято равным
длине шкалы
Относительная
Постоянная
Возрастает с уменьшением измеряемой
величины
±[0,02±
:(|Хк/х|-1)]
*) На циферблате прибора эта цифра размещена внутри кружочка.
Предел
допускаемой
погрешности
1.5%
±0,5%
-0,5%
Обозначение
класса
точности
1,5
0,5
0,5*
0,02/0,01
39
отражающего функциональную зависимость выходной величины
СИ у от входной х, и параметров преобразователей &,-, входящих
в СИ. Погрешности этих преобразователей приводят' к появлению-
погрешности СИ Ау. Погрешности отдельных преобразователей
Д&г, обусловленные погрешностями реализации их элементов и
действием влияющих величин, могут быть известны заранее из
технической литературы или имеющейся для этих
преобразователей документации, либо в свою очередь могут определяться через
их собственные уравнения преобразования или путем
дополнительных экспериментальных исследований. При известных значениях
Л&г и постоянном значении измеряемой величины х определение
статической погрешности СИ подобно определению погрешности
косвенных измерений (см. гл. 4).
Для экспериментального определения погрешности СИ
используется образцовое СИ, (или мера измеряемой величины) и искомая
погрешность определяется как разность показаний обоих СИ А =
= хп—х0 (или исследуемого СИ и меры: А=хп—хм). При этом
случайная погрешность образцового СИ -должна быть в 3... 5 раз
' или еще меньше случайной погрешности исследуемого СИ
(достаточно в 3 раза, так как случайная погрешность разности
показаний обоих СИ определяется геометрической суммой их
погрешностей). Оценка последней через средние квадратические значения
дает: <т2 = (<т2п + а2о)1/2=[>а2п+ (ап/3)2]1/2=1,05ап, т. е. .практически/
равна погрешности а„ исследуемого СИ.
Общая методика оценки систематической и случайной
составляющих основной погрешности СИ в заданной точке х диапазона
измерения сводится к следующему. -Сначала необходимо
обеспечить нормальные условия работы СИ. Затем измеряемая
величина подается на оба СИ и путем ее регулировки устанавливается
требуемое показание х„ по шкале исследуемого СИ и
одновременно определяется показание образцового СИ х0. Указанный процесс
повторяется N раз. Погрешность i-ro наблюдения Ai = xn—х0, где
i=l...N, содержит в общем случае систематическую (Ас) и
случайную (Аслг) составляющие: Лг = Ас+Аслг. В качестве оценка
систематической погрешности СИ Ас берется среднее значение А:
Ac='A=2Ai/JV, поскольку значения АСлг имеют разные знаки и
поэтому lim Д= lim 2(Дс+Асл1)/Л^До Затем вычисляются" слу-
чайные погрешности каждого измерения Аслг—Дг—Ас^Дг—А и
оценка среднего квадратического значения случайной
погрешности а=[2А2сл г/ (iV-1)]1/2. ■
Для оценки доверительного интервала случайной погрешности
Ддов = £<т необходимо определить значение коэффициента k\f,
■Рдов), определяющегося функцией распределения вероятностей f
и, требуемой доверительной вероятности Рдов. Если функция
распределения известна, то коэффициент k определить не трудно.
Чаще всего случайная погрешность СИ определяется действием
40 -
большого числа (>5) частных случайных погрешностей
отдельных преобразователей, входящих в СИ, значения которых
соизмеримы. Тогда в соответствии с центральной предельной теоремой
Ляпунова функцию ее распределения можно принять нормальной,
независимо от функций распределения частных погрешностей.
При этом значение коэффициента k при малом числе измерений
(Лг<17) необходимо определять, используя распределение Стью-
дента, которое по мере увеличения N приближается к
нормальному (см. гл. 4). Если же закон распределения неизвестен, решение
о его виде принимается путем проверки гипотезы о его характере
(см. гл. 4, ГОСТ 11.006—74 и 8.207—76) на основе полученных
реализаций случайной погрешности. В принципе для любой
функции распределения справедливо неравенство Чебышева РДОвХ
X (| Дел г| ^ka)^l—l/k2. Однако это очень грубая оценка,
приводящая к завышенному значению доверительного интервала.
Например, для РДов=99% получим.6=10, что почти в 4 раза больше,
чем при нормальном законе распределения.
На основании полученных значений оценок систематической
Ас и случайной ДДбв составляющих погрешности СИ в заданной
точке диапазона измерений можно определить интервал значений
погрешности СИ в виде: Дс—Ддов^Д^Ас+Адов. Учитывая, что
наряду с аддитивной погрешностью может иметь, место и
мультипликативная, указанные исследования необходимо провести во
всем диапазоне измерения. Обычно берут не менее трех точек: в
начале, в середине и конце диапазона.
Полные входные и выходные сопротивления. Входное
сопротивление определяет реакцию входного сигнала на подключение
СИ к источнику входного сигнала с фиксированным выходным
сопротивлением. Выходное сопротивление преобразователя или
меры определяет реакцию ее выходного сигнала на подключение
к выходу фиксированной нагрузки.
Подключение СИ к источнику сигнала вызывает потребление
энергии от объекта измерения и, как следствие, изменение
величины, подлежащей измерению, и соответственно появление
погрешности измерения. В электрических цепях можно выделить два
основных способа подключения СИ к объекту-измерения:
последовательный (например, амперметр, включаемый
последовательно в разрыв цепи) и параллельный (вольтметр, подключаемый
параллельно некоторому участку цепи). Для уменьшения энергии,
потребляемой СИ от объекта, при последовательном включении
необходимо стремиться к уменьшению входного сопротивления
СИ, так как P = IZR.' При параллельном подключении стремятся
обеспечить высокое входное сопротивление, так как P = V2/<R.
Погрешность А, обусловленную потреблением энергии от объекта
измерения, в общем -случае можно определить следующим
образом. Пусть величина, подлежащая измерению, есть x(jco), а
выходное сопротивление объекта измерения, включая сопротивление
линии связи объекта с СИ, — zBbIx(ju)). На вход СИ будет посту-
41
пать величина, значение которой определяется выражением:
х*(\ы)=х (fa) zBX ('}<*>)/[гвх(}>ы)+гвых(}ы)], где 2Bx(jco) — входное
сопротивление СИ. Соответствующая погрешность,
характеризующая отличие величин:
А = Х* (j О)) — X (J0>2= —X 0"в>)/[1+2вж О^Мшх (JW)].
Одной из распространенных измерительных задач в технике
связи является измерение напряжения в широком диапазоне
частот от 0 до 109 Гц. С помощью выражения, полученного выше, для
•относительной погрешности измерения напряжения при отношении
Zbx (jco) /2вых (j'CO) > 1 ПОЛУЧИМ
6=
■х (j со)
= -1/
1 +
(jffl)
.(Jffl)
(jco)
(j со)
Очевидно, что для постоянного тока б«—RBuJRBx.
Для обеспечения высокого входного сопротивления
измерителей напряжения (вольтметров, осциллографов) во входных цепях
используются эмиттерные (катодные) повторители,
обеспечивающие /?вх = 0,5... 10 МОм, и полевые транзисторы, обеспечивающие
на постоянном токе RBX до 109 Ом. Емкость Свх=10... 40 пФ. На
переменном токе сопротивление является комплексным.
Эквивалентная схема входной цепи (рис. 2.13) состоит из
сосредоточенных индуктивности LBX, емкости Свх и сопротивления RBX. При
частотах /<100 МГц влиянием индуктивности можно пренебречь
и Zbx=i#bx/(1+JcoCbx^bx), а практически, начиная с нескольких
килогерц, 2вх»1/}С1)Свх. На частотах />100 МГц индуктивность
и емкость образуют колебательный контур с собственной
резонансной частотой fo— l/2n]f LBXCBX. Очевидно, что при резонансе
напряжение на емкости будет в Q раз больше, чем входное.
Поэтому частота сигнала / должна быть-существенно (3... 10 раз)
меньше собственной резонансной частоты резонанса. При f<Cfo
относительная погрешность, обусловленная резонансом, 6/«/3//\ Для
увеличения верхнего предела частотного диапазона принимают,
специальные меры по уменьшению LBX и Свх: уменьшают длину
входных проводов,' исключают входные клеммы и т. п. Таким
путем удается повысить резонансную частоту до
1,5 ...22 ГГц.
Измерительный прибор соединяется с
измеряемым объектом с помощью линии, обычно
отрезка гибкого кабеля с волновым сопротив-
Рис 213 лением 75 или 150 Ом и длиной 1,0... 1,5 м
Ш"* '*
1 1'Р>Г
Измерительный
"Р npuSofi
Я)
Выносной
блок
h&2L
Измерительный
г"Р прибор
')
42
Рис. 2.14
(рис. 2.14,а). В результате к измеряемому объекту подключается
не сопротивление измерительного прибора znp, а входное
сопротивление линии 2Вх, нагруженной на сопротивление прибора:
' гвх = р Ich у I + (p/znp) sh у l]/[sh у I + (р/гпр) ch у I],
где р, у(р, о) и !- волновое сопротивление, постоянная
распространения и длина соединительной линии соответственно.
Практически Znp>lp и р/>«/, поэтому zBx«pcth p/. Входное
сопротивление уменьшается с увеличением частоты вследствие возрастания
коэффициента $—<siY LC. В диапазоне частот до нескольких
сотен килогерц при длине соединительных проводов не более 1,5 м
zBX остается достаточно высоким. На частотах выше 1 МГц не-
-- обходимо применять специальные меры по устранению влияния
соединительных проводов. Для этого измерительный прибор
подключают к измеряемому объекту через выносной блок (головку,
пробник), обеспечивающий высокоомное входное сопротивление
(рис. 2.14,6). Длина соединительных проводов от входных
зажимов пробника до измеряемого объекта в данном случае
составляет всего 2...3 см. На частотах выше 30...50 МГц длина
кабеля, соединяющего измерительный прибор с пробником,
становится соизмеримой с длиной волны электрических колебаний. В
этом случае в вольтметрах входной сигнал детектируется в
пробнике; что уменьшает погрешности, так как по кабелю передается
постоянный ток.
Рассмотренные погрешности, вызванные изменением zBX,
характерны для измерения напряжения. Однако если
информационным параметром является частота этого же напряжения, то при
том же 2вх никакой погрешности вноситься не будет. Таким
образом, при измерениях любых величин надо хорошо понимать
, принцип действия объекта измерения и влияние на него
подключения СИ.
Глава 3. ПРИНЦИПЫ ПОСТРОЕНИЯ ЦИФРОВЫХ
ИЗМЕРИТЕЛЬНЫХ ПРИБОРОВ
3.1. ПРЕОБРАЗОВАНИЕ ИНФОРМАЦИИ
В ЦИФРОВЫХ УСТРОЙСТВАХ
Цифровой измерительный прибор (ЦИП) автоматически
вырабатывает дискретные сигналы измерительной информации,
показания которого представлены в цифровой форме, т. е. преобразует
непрерывную во времени и по размеру измеряемую величину в
цифровой код. Этот процесс, включающий в себя дискретизацию,
квантование и кодирование непрерывной входной величины, на-
43
I
*;
»
fZJ*SS7SS
f
*a
*7
Xg
Xs
x*
Xj
V x2
xi
■ AX
t
\
нвс
Уровни
кбантобаниЯ
t 23456789 t
ХнЬ
x10
J.,
-<•»
±7
Xg
xs
X*
■i.,
■*■?
±1
•
5 S
■XkiI
Нододая группа
I ■ ■ ■ И II НИ
п1 "г "з "* "s "с
Рис. 3.1
"о ">
зывают аналого-цифровым преобразованием, а измерительный
преобразователь, автоматически осуществляющий этот процесс и:
вырабатывающий дискретные сигналы измерительной информации
о числовом значении входной, величины, — аналого-цифровым
преобразователем (АЦП).
Дискретизацией называется процесс преобразования
непрерывного во времени сигнала измерительной информации x(t) в
дискретный x(ti), равный мгновенным значениям исходного сигнала,
только в определенные моменты времени U — моменты
дискретизации (рис. 3.1). Дискретизация может выполняться путем
выделения отсчетов сигнала в определенные детерминированные
моменты времени. Таким образом от сигнала измерительной
информации, сохраняется только совокупность его отдельных значений.
Промежуток времени А? между двумя моментами дискретизации
называется шагом дискретизации, (а обратная величина l/At=fA —
частота дискретизации). Обычно моменты отсчетов на оси вре-
44
мени. выбираются с постоянным шагом дискретизации, т. е.
имеет место равномерная дискретизация. Применяется и
неравномерная дискретизация.
- Основным вопросом, который решается при дискретизации
изменяющегося во времени сигнала x(t), является правильный
выбор частоты дискретизации. Результатами измерения в цифровых
приборах являются значения сигнала x(U) лишь в моменты
дискретизации t{. Но зачастую важная информация может быть в
сигнале и между этими моментами. Очевидно, чем чаще следуют
моменты дискретизации, тем легче решить эту задачу. Однако
такой подход может привести к неоправданному увеличению
частоты дискретизации, что с одной стороны, приведет- к избыточности
информации, с другой — к ужесточению требований к
быстродействию АЦП и соответственно к его усложнению. Задача
определения промежуточных значений сигнала x(t) является
интерполяционной. Под правильно выбранной частотой дискретизации
следует понимать такую частоту, при которой погрешность
интерполяции будет не более заданной. .
Как показал В. А. Котельников, непрерывная функция x(t) с
ограниченным спектром частот от 0 до fm может быть однозначно
определена при шаге дискретизации 1/2 f~V Доказательство
основано на представлении спектра функции в виде ряда Фурье,
результатом обратного преобразования которого является ряд
х (t) ^ V х (I Д t) ™<»™«-Ш)
где A^=l/2f_1TO — шаг дискретизации; fm — верхняя граница
спектра частот; x(iAt) — отсчеты функции в моменты
дискретизации ti = iAt. Указанный ряд однозначно задает наибольший шаг
дискретизации, при котором теоретически можно точно
определить любые промежуточные значения функции x(t) по ее
отсчетам x(iAt) =x(ti). Уменьшение же шага дискретизации ведет
только к избыточности.
Однако практическое использование этого ряда наталкивается
на трудности. Все реальные сигналы ограничены во времени.
Следовательно, во-первых, ряд будет содержать .лишь конечное
число ч-ленов i=0 ...2fmTc, где Тс — длительность сигнала; во-вторых,
спектр такого сигнала будет бесконечен, в то время как для
разложения в ряд,спектр должен быть ограничен. Это противоречие
можно преодолеть, если выбрать наивысшую частоту сцектра fm
так, что в диапазоне частот от 0 до fm будет сосредоточена
основная часть энергии спектра. Энергия «отсекаемой» части спектра
будет характеризовать погрешность интерполяции. Дисперсия
приведенной погрешности:
D.
1 ] |S(j<a)f»d<B
яТс со.
V^rnax хха\а) >
где числитель — средняя мощность отсекаемой части спектра;
45*
Tc — длительность функции x(t); xmax и Xmin — экстремальные
значения функции. Из этого выражения можно найти сот при
известных значениях прочих величин. Сложность применения ряда
Котельн'икова в качестве интерполирующего полинома в
значительной мере вызвана и сложным видом входящих в него функций, что
затрудняет вычислительную процедуру. Это обусловливает
использование и других интерполяционных полиномов.
Простейшим видом интерполяции является ступенчатая (рис.
3.2,а). Именно по этому закону ■ изменяются показания ЦИП.
Максимальную погрешность интерполяции А легко выразить
Через максимальную скорость изменения функции и шаг
дискретизации At: |A|max=]x'(0 |maxA£. Задаваясь допустимой
погрешностью А, можно определить шаг и частоту дискретизации: At=
=AJ\x'(t) |max. Погрешность можно снизить'при помощи кусочно-
линейной интерполяции, для которой все точки кривой исходной
функции, соответствующие моментам дискретизации, соединяются
отрезками прямых (рис. 3.2,6): ,]A\max=\x"(t)\max.At2/8, откуда,
задаваясь допустимой погрешностью, получаем шаг дискретизации
&t=VSA/\x"(t)\max. Можно использовать полиномы и более
высокого порядка, но простота определения промежуточных
значений с помощью кусочно-линейной интерполяции обусловливает ее
частое использование.
Квантование — это преобразование непрерывной по размеру
величины x(ti) в квантованную хкв(^) путем замены ее
мгновенных значений ближайшими квантованными значениями (рис.
3.1,с). Иначе говоря, процесс квантования сводится к округлению
значений дискретного сигнала до ближайших квантованных
значений — уровней квантования. Эти уровни квантования
образованы по определенному закону с помощью мер. Разность Ах между
двумя уровнями называют шагом (ступенью) квантования. Шаг
&l
х
±-~.
В) \
Рис. 3.2
t г з * 5 е 7 х
| I «)■
-0,5йХ
Рис. 3.3
46
квантования может быть как постоянным > (равномерное
квантование), так и переменным (неравномерное квантование). При
равномерном квантовании значение квантованного сигнала
xKb(ti)=nAx, где n = 0...N — номер соответствующего уровня
квантования. Процесс квантования, связанный с округлением
значения сигнала, всегда ведет к появлению погрешности
квантования, носящей методический характер.
На рис. 3.3,а приведена характеристика преобразования АЦП,
представляющая ступенчатую функцию у=пАх, где Лх — шаг
квантования. Из ее сравнения с идеальной функцией
преобразования у = х видно, что погрешность |ЛКв|^0,5Ах, т. е. не
превосходит половины шага квантования. Это обеспечивается, во-первых,
за счет того, что нулевой уровень квантования совпадает с
нулевым значением x(t), а во-вторых, тем, что первый уровень
квантования, с которым сравнивается измеряемая величина, сдвинут
относительно нулевого всего на половину шага квантования. В
результате, когда х лежит в пределах 0,5Ах... 1,5Ах, выходной
результат у=\Ах и т. д. Следует отметить, что указанные условия
не всегда выполнимы. Так, при измерении интервалов времени
методом .счета числа периодов импульсов известной частоты за
этот интервал времени погрешность- квантования достигает
целого шага квантования: |Акв|^Ах. Для ее уменьшения необходимо
синхронизировать начало временного интервала и приход
первого импульса, задержав его на половину периода относительно
начала этого интервала.
При квантовании сигнала х погрешность Лкв, часто
называемая шумом квантования, имеет характер ломаной линии (рис.
3.3,6) и ее максимальное абсолютное значение равно 0,5Ах. Если
считать, что шум квантования имеет форму зубцов с амплитудой
0,5Ах, то средняя мощность за длительность каждого зубца
составит /эш.кв=Ах2/12. Данное выражение полностью характеризует
среднеквадратическое значение погрешности квантования. Так как
в АЦП нет однозначной связи между выходными и входными
величинами, то, зная выходной код, можно говорить лишь о
вероятности того или иного значения аналоговой величины в пределах
одного кванта. Однако при большом числе-уровней квантования
плотность вероятности мгновенных значений может быть принята
равномерной, что соответствует равной плотности вероятности
погрешности квантования в пределах ±0,5Дх. В этом случае
дисперсия погрешности квантования по уровню о2кв= (0,5Дх)2/3 =
= ^ш.кв, а среднее квадрэтическое значение погрешности 0КВ =
=Ах/2"Кз, т. е. в "КЗ раз меньше максимальной.
Следующим преобразованием измерительного сигнала
является кодирование. Цифровым кодом называют последовательность
цифр или сигналов, подчиняющихся' определенному закону, с
помощью которой осуществляется условное представление
численного значения квантованной величины (рис. 3.1,г). При этом
число импульсов в кодовой группе равно номеру я соответствующего
47
#U)
Аналоговый
преобразователь
-=»■
Аналого-цифровой
преобразователь
Цифровое отсчетное
устройство
/V
=»_
Цифровой выход
Рис. 3.4
* *
уровня квантования. Например, моменту дискретизации (отсчету)
7 соответствует уровень квантования х& и в кодовой группе
содержится 6 импульсов. Отметим, что при кодировании получаемый
цифровой код всегда однозначно соответствует номеру п
выбранного уровня квантования и процесс кодирования не вносит
дополнительной погрешности.
Обобщенная структурная схема цифрового измерительного
прибора представлена на рис. 3.4. Аналоговый преобразователь
преобразует измеряемую величину x(t) в величину,
обеспечивающую нормальный режим работы АЦП. -Это могут."быть
масштабные лреобразования (усиление, ослабление) или преобразования
рода физической величины (например, сопротивления в
напряжение). С выхода АЦП цифровой код поступает на цифровое
отсчетное устройство и цифровой выход, позволяющий исйользовать
цифровой измерительный прибор в качестве преобразователя, а
также подключать "Цифровые регистрирующие устройства.
Метрологические характеристики ЦИП и АЦП во многом определяются
методом аналого-цифрового преобразования. Различают
следующие преобразования:
пространственное, при котором измерительный сигнал
предварительно преобразуется в перемещение, угол поворота и т, п.
некоторого указателя, положение которого определяется с помощью
специальной «кодовой маеки» (кодовые диски и линейки,
электронно-лучевые трубки и т. п.);
число-импульсное, при котором измеряемая величина
(например, частота, временной интервал) предварительно преобразуется
в пропорциональное количество импульсов, число которых подсчи-
тывается цифровым счетчиком;
время-импульсное, при котором измеряемая величина
предварительно преобразуется в интервал времени, значение которого
определяется путем заполнения импульсами опорной частоты и
подсчета этих импульсов цифровым счетчиком;
■частотно-импульсное, при котором измеряемая величина
преобразуется в частоту электрических сигналов, определяемую
подсчетом числа этих сигналов за известный интервал времени_диф-
ровым счетчиком;
амплитудное, при котором измеряемая величина
преобразуется в амплитуду электрического сигнала, определяемую
сравнением с набором опорных электрических величин последовательно
или одновременно;
' 4S '
уравновешивающее (компенсационное), при котором
измеряемая величина уравновешивается величиной, воспроизводимой
цифро-аналоговым преобразователем (ЦАП), выполняющим роль
меры измеряемой физической величины. ЦАП преобразует цифровой
код в непрерывную во времени и квантованную по значению
физическую величину (например, напряжение, ток, сопротивление). По
.алгоритму уравновешивания различают развертывающее и
следящее уравновешивания.
В приборах, основанных на развертывающем уравновешивании,
шаг дискретизации At задается принудительно. При этом он не
.должен быть меньше времени, необходимого для выполнения
аналого-цифрового преобразования, которое определяется как
быстродействием отдельных входящих в состав прибора дискретных
устройств, так и временем, необходимым для завершения переходных
процессов установления сигналов в аналоговых звеньях
(усилителя и т. п.). Кроме того, время преобразования существенно
зависит .от закона изменения уравновешивающей величины на выходе
ЦАП-до наступления момента равновесия. При последовательном
переборе всех значений в диапазоне преобразования для
получения высокой точности необходимо много времени. Время уравно-'
вешивания значительно (на несколько порядков) сокращается при
использовании метода поразрядного уравновешивания (см.
например, § 5.3).
В приборах, основанных на принципах следящего
уравновешивания (см. § 2.1), дискретизация осуществляется не
принудительно, а по мере изменения измеряемой величины. Быстродействие
этих приборов можно характеризовать максимальным временем
разового преобразования при подключении на вход измеряемой
величины. Однако такая характеристика не отражает основной
особенности использования следящих цифровых приборов —
возможности слежения за измеряемыми величинами, изменяющимися
с достаточно большими скоростями. Поэтому для оценки
быстродействия следящих цифровых приборов указывается максимально
допустимая скорость изменения измеряемой величины, при
которой еще сохраняется гарантируемая прибором точность измерения.
3.2. СИСТЕМЫ СЧИСЛЕНИЯ И КОДЫ,
ИСПОЛЬЗУЕМЫЕ В ЦИФРОВЫХ
ИЗМЕРИТЕЛЬНЫХ УСТРОЙСТВАХ
Дискретизированные и квантованные значения сигнала в
цифровых измерительных приборах подвергаются кодированию. На
рис. 3.1,г был показан унитарный код, при котором число
передаваемых импульсов пропорционально квантованному значению
измеряемой величины. Поэтому такой код еще называют
число-импульсным. Представление числового значения в унитарном коде
имеет недостатки, в частности различное число импульсов в
кодовых группах. Громоздкость данного кода привела к распростране-
3 ' . -*
нйю других систем счисления и кодов. Под системой счисления
понимают совокупность цифровых знаков и правил, применяемых
для однозначного представления Чисел. Системы счисления, коды
разделяются на непозиционные и позиционные. К непозиционньш
кодам относят, например, унитарный «од.
Более компактно и удобно выражаются числа в позиционных
системах, к которым относятся десятичная, двоичная,
двоично-десятичная и др. В общем случае в позиционной системе любое
число N можно представить в виде
mNb = anb« + an_1br'-i + ... + Gl P + a0 i° +
+ a_]6-i + ... + a_m6-m= У] atbj,
i=~m
где о — основание системы счисления, равное числу знаков в
данной системе (например, для десятичной 6 = 10, для двоичной Ь =
=2), i=—m...n — номер разряда (позиции), Ы — весовой
коэффициент i-го разряда, a = 0... (fe—1) — разрядный коэффициент.
При записи числа N в позиционной системе используются
только разрядные коэффициенты, а весовые не указываются, так как
определяются порядковой позицией разрядного коэффициента.
Например, число 920,1 в десятичной системе содержит' 4 разряд*
ных коэффициента с весовыми коэффициентами 102 101 10° и 10-1-
Эго.^Э-КР.+г-Ю' + О-Юо + ЬЮ-1. Это. делает представление
информации в-позиционном коде наиболее компактным. Заметим,
что запись числа 920 с помощью унитарного кода потребовала бы
920 знаков.
Десятичная система используется в ЦИП. для отображения
результата измерения. Однако все промежуточные операции в
цифровом приборе предпочитают проводить в двоичной системе
счисления, поскольку электронные устройства с двумя устойчивыми
состояниями отличаются простотой и высокой
помехоустойчивостью. В двоичной системе для представления цифр разряда
используются два символа:* 0 и 1. Перевод числа, записанного в
двоичной, системе, в привычную для нас десятичную требует
проведения вычислительной процедуры: 11011,01 = 1-24+:1 -23+0-224-
+1 • 21+ 1 • 2°+0 • 2-i +1 • 2"2=27,25.
Из приведенного примера видно, что в двоичной системе
счисления весовой коэффициент старшего разряда превышает весовой
коэффициент предыдущего (младшего) разряда в 2 раза, т. е.
они образуют ряд 1, 2, 4, 8, 16, 32 и т. д.
Однако число, записанное в двоичной системе, неудобно для
визуального отсчета, а перевод его в десятичное число требует
затрат времени и вызывает определенные технические сложности.
Поэтому в цифровых измерительных приборах широко
пользуются двоично-десятичным кодом, который образуется путем
представления каждой цифры десятичного чисца соответствующим дво-
.ичным числом. Например, число 27 преобразуется следующим
образом. Цифра 2 записывается как 0010, а цифра 7 — как QUI,
50
т. е. 27i0 = 0010 01112/10- Здесь индекс 10 свидетельствует о записи
в десятичной системе, а 2/10 — о записи в двоично-десятичной.
Представление числа в двоично-Десятичной системе менее
экономно, чем в двоичной. Так, для числа 27 в двоично-десятичной
системе надо иметь 8 символов, а в двоичной только пять (11011).
Однако простота его преобразования в десятичный код
компенсирует этот недостаток.
В двоично-десятичном коде представление каждой десятичной цифры
требует четыре символа. Меньше нельзя, так как с помощью трех символов можно
лслучить лишь 8 комбинаций, а число возможных цифр в каждом разряде
десятичного числа равно 10 (аю = 0... 9). Вместе с" тем четыре символа позволяют
-построить 16 комбинаций,' т. е. шесть комбинаций являются лишними и их
можно удалить. Влолне естественным кажется удаление комбинаций, выражающих
цифры более ;9. Код I, содержащий 110 начальных комбинаций (табл. 3.1),
называют кодом 8421. Он является наиболее 'распространенным, но не единственно
Таблица 3.1
<2,о
0
1
2 '
3
4
I (8421)
оооо
0001
0010
0Q11
0100
II (2421)
оооо
0001
0010
ООП
0100
<*10
. 5
6
7
8
9
1(8421)
0101
оно
0111
1000
1001
II (2421)
ТШ
1100
. 1101
1110
1111
возможным. Для каждой из десяти цифр допустимо совершенно произвольное
закрепление кодовых комбинаций, поэтому число приицип'иальио возможных
кедов довольно' велико. Код II (весовые коэффициенты 2421) имеет разрыв
между цифрами 4 и б. В этом месте проходит ось симметрии. (Каждая кодовая
комбинация над осью отличается от симметричной комбинации под осью
инверсными значениями разрядных -коэффициентов, например десятичное число 3
воспроизводится кодовой комбинацией ОНО; симметрично расположенное
относительно оси число 7 — комбинацией 1001, которая может быть получена из
.0110 путем замены нулей единицами и единицы иулямн. Это свойство полезно
при реализации арифметических операций. Находят применение и другие виды
кодов.
Для многих АЦП выходным является унитарный код. Для
его преобразования в двоичный код используется обычный^
двоичный счетчик, а для преобразования в двоично-десятичный код —
двоично-десятичный счетчик. В последнем каждые четыре
триггера охвачены такими обратными связями, при которых
осуществляется счет не до 24= 16, а до (10, при этом четыре последовательно
включенных триггера образуют счетную декаду.
В зависимости от способа1 передачи коды делятся на
последовательные, параллельные и последовательно-параллельные. При
последовательном коде все его разряды передаются
последовательно во времени по. одной цепи. При параллельном коде все
разряды передаются одновременно, каждый по своей цепи. Это
5L
требует больше цепей, но соответственно сокращает время на
передачу. При большой разрядности кода целесообразно
компромиссное решение — последовательно-параллельная передача, при
которой все разряды кода делятся на группы (например, часто в
группу входит 8 бит — байт). Биты внутри группы передаются
одновременно по параллельным цепям, а группы последовательно
во времени.
При передаче цифровых сигналов на значительные расстояния
код может искажаться под действием импульсной помехи. Для
обнаружения этих ошибок можно использовать различные коды.
Простейшим является применение двоичных кодов с проверкой на
четность. Для этого в код вводится дополнительный разряд,
второму присваивается значение 1, если сумма единиц всех остальных
разрядов нечетна, и значение 0, если сумма четна. Тогда
передаваемая комбинация всегда содержит, четное число единиц. На
приемном конце проверяется четность числа единиц в принятом
коде. Отсутствие четности свидетельствует о возникшей ошибке
(однократной или любой нечетной кратности).
3.3. ЦИФРОВЫЕ ИНДИКАТОРЫ
И ЦИФРОВОЕ ОТСЧЕТНОЕ УСТРОЙСТВО
В настоящее время известно большое число цифровых
индикаторов: газоразрядных, электролюминесцентных, светодиодных, на
жидких кристаллах и др. В газоразрядных индикаторах (типа
ИН) анод выполнен в виде тонкой и редкой металлической сетки,
а катод в виде цифры из тонкой проволочки (рис. 3.5). Катеды
расположены стопкой, один под другим. Объем внутри баллона
заполнен инертным газом, например неоном. Если между катодом
и анодом действует достаточное напряжение, возникает тлеющий
разряд, форма которого повторяет конфигурацию катода. Так как
индикатор показывает цифры от 0 до 9, на цоколе необходимо
иметь десять сигнальных выводов плюс один вывод для ггодачи
напряжения на общий анод. Одновременно должна высвечиваться
только одна цифра, поэтому при индикации управляющее
напряжение действует только между общим выводом и одним из
сигнальных. Главным недостатком газораз-
^_^_^_^_^_^_^ рядных цифровых ламп является необхо-
. димость подачи достаточно высокого уп-
У*\ равляющего напряжения.
I JlZ катод Современная электроника создала эле- -
2 менты индикации, характеристики кото-
~^jr „Анод рых совместимы с выходными характери-
1г стиками низковольтных маломощных
Г" транзисторов и интегральных микросхем.
| """" К ним относятся светодиоды и элементы
———' на жидких кристаллах. Эти типы
индикаторов имеют семи- или десятисегментную
Рис. 3.5 конструкцию. На рис. 3.6 показаны семи-
52 '
Унитарный код-
РиС. 3.6
сегментные индикаторы. Все сегменты размещены на общей
подложке и имеют отдельные выводы. Как видно из рис. 3.6, для
получения цифры 7 необходимо сигналы (1) подать на 'входы 1, 5
и 7. На остальных входах должен быть 0. Низкие управляющие на-ч
пряжения, малая потребляемая мощность и долговечность привели
к широкому распространению этих приборов.
На рис. 3.6 показан пример- построения трехразрядного цифрового отсчетно-
го устройства на семисегментных цифровых индикаторах. Пусть входным
сигналом является унитарный код. Этот код с помощью двончно-десятичного
счетчика преобразуется в параллельный двоично-десятичный код. Для этого счетчик,
содержит три декады, каждая из которых состоит из четырех триггеров,
работающих в счетном режиме и соединенных последовательно. Применение
обратных связей лозвеляет обеспечить последовательный счет десяти импульсов,
поступающих на вход декады. 'После десятого импульса все триггеры
возвращаются в «сходное состояние (0), при этом на выходе счетной декады появляется-
сигнал 1, который поступает на следующую декаду. Таким образом первая
декада единицы, вторая — десятки, третья — сотни. На сигнальных выходах
четырех триггеров имеются сигналы, состоящие из 0 и '1 и отражающие число
импульсов, подсчитанных декадой. Подбирая обратные связи, можно получить
отображение числа поступивших на вход импульсов в любом из кодов, представ-
лениых в табл. 3.1. На рис. 3.6 показан результат счета JV=527 импульсов в>
коде 8421: 0101 0010 0111. Полученный код поступает на дешифраторы, которые-
" 53;
ятреобразуют его в параллельный семиразрядный код, управляющий семисегмеит-
«ымн индикаторами. При использовании других индикаторов, например типа
ИН, необходимы другие дешифраторы, обеспечивающие получение
параллельного десятичного кода.
3.4. СТРУКТУРНЫЕ МЕТОДЫ
УМЕНЬШЕНИЯ ПОГРЕШНОСТЕЙ
Снижение погрешностей является наиболее важной задачей
совершенствования СИ. Существующие способы ее решения можно
-разделить на технологические, конструктивные и структурные.
Методы борьбы с погрешностями существенно зависят от характера
этих погрешностей. Погрешность СИ может быть выражена через
номинальную yH = FH(x) и реальную y—Fp(x) функции
преобразования (|рис. 3.7): A = Fp(x)=—F„(x\. Параллелыное смещение
характеристики преобразования приводит к появлению аддитивной
составляющей погрешности (Дадд = а), изменение ее наклона — к
мультипликативной (Амульт = Ьх), зависимость наклона от значения
измеряемой величины — к нелинейной составляющей (Анел). Все
эти составляющие могут случайным образом меняться во времени.
Технологический способ заключается в совершенствовании
изготовления существующих и разработке новых элементов ИУ,
имеющих меньший разброс параметров и повышенную
стабильность их. Однако его возможности ограничены и, кроме того,
усложнение технологии изготовления и отбраковки элементов
приводит к их удорожанию.
Конструктивные способы предопределяют такое построение
схем, узлов и самих ИУ, при котором погрешности минимальны.
Их отличительной чертой является отсутствие структурной
избыточности, т. е. СИ состоит только из таких измерительных
преобразователей, без которых процесс измерения невозможен. К
наиболее общим из конструктивных методов следует отнести
применение отрицательной обратной связи (ООС) и
уравновешивающего (компенсационного) преобразования, при котором ООС
охватывает все ИУ (см. § 2.1).
,&*си-х(г+ь)+АЯы Как известно, применение
^0р-уг=а+х(1*ъ) ООС позволяет на не-
г/. и.=а+т сколько порядков (в К$ раз,
где ' К а Р —
коэффициенты передачи
соответственно прям'Ой цепи и . цепи
ООС) уменьшить
составляющие погрешности ИУ:
мультипликативную путем
уменьшения
нестабильности коэффициента
преобразования, нелинейную
путем снижения нелинейности
характеристики преобразо-
:54
Рис. 3.7
1 Измерительное
устройство
Вычислитель
Выход
Рис. 3.8
вания. Введение ООС целесообразно только, когда погрешность,
коэффициента передачи цепи ООС существенно ниже погрешности;:
коэффициента передачи цепи прямого преобразования.
Необходимо также учитывать, что ООС снижает чувствительность ИУ (в К$
раз) и не позволяет уменьшить аддитивную составляющую,
погрешности.
Структурные методы коррекции погрешностей основаны на
введении структурной и (или) временной избыточности, т. е. на
использовании в СИ дополнительных устройств и проведения
наряду с измерением искомой величины дополнительных измерений,,
обработка результатов которых позволяет уменьшить погрешность
измерения искомой величины. Структурные методы позволяют
снизить систематическую погрешность и ту составляющую
случайной погрешности, которая во время всех дополнительных
измерений мало изменяется, т. е. корректируют относительно медленно'
меняющуюся составляющую случайной погрешности. Например,
при автоматизации процесса измерения, когда время измерения
обычно составляет доли или единицы секунд, можно осуществить
коррекцию температурной погрешности, случайные изменения
которой происходят достаточно медленно. Заметим, что быстро
изменяющаяся составляющая случайной погрешности такими
методами не уменьшается. Для этого можно использовать только
многократные наблюдения и их статистическую обработку.
Внедрение в цифровые СИ вычислительной техники открывает
широкие возможности использования структурных методов.
Последние делятся на методы образцовых мер, методы обратных
преобразований и тестовые методы.
Метод образцовых мер. Для рассмотрения метода образцовых
мер представим реальную характеристику преобразования в виде-
полиноме у = а{ + а2х+ ... +апхп~1, где ах — коэффициенты,
постоянные на протяжении, времени измерения. Идея метода
образцовых мер заключается в последовательном измерении величины
х и известных величин Lu L2, ..., Ln, воспроизводимых мерами
(рис. 3.8). В результате одного цикла измерений можно составить-
систему уравнений:
lh = аг + а2х + ... + ап х"-1 ,
г/9 = а, + а2 U + ... + ап Ln~l f
Уп = а1 + а2 Lm + -. + ап Lnn ' _
55»
где неизвестными являются х и аг. Система уравнений решается
вычислительным устройством относительно измеряемой величины
х. Очевидно, что при правильном выборе числа мер в системе
получается необходимое число уравнений, позволяющих при
решении исключить неизвестные коэффициенты а,-
Если погрешность СИ содержит только одну аддитивную
составляющую (характеристика преобразования г/4 на рис. 3.7), то
достаточно произвести одно вспомогательное измерение с мерой
i-i = 0. Система имеет вид:
Уо^^ + х,
yx = dx +Llt
откуда х=г/о—г/i + LiU, =о=|/о—г/i.
Если погрешность СИ содержит и аддитивную, и
мультипликативную составляющие (характеристика преобразования г/г на рис.
3.7), то необходимо произвести два вспомогательных измерения с
мерой Li = 0 и с мерой Ы (ее значение обычно берут близким к
верхнему пределу диапазона измерения). Решив систему из трех
уравнений с тремя неизвестными ai, аг и х, нолучим
x^L. + iL.-Ld^^- = L2&=^-..
. У2 — У1 i,=o- У2—У1
Этот алгоритм очень прост и часто используется на практике для
автоматической коррекции аддитивной и мультипликативной
составляющих погрешности.
Если имеет место и нелинейная составляющая погрешности, то
для ее коррекции число мер существенно возрастает.
Одновременно возрастает порядок аппроксимирующего полинома, что
усложняет вычисления. Для преодоления этой трудности обычно
прибегают к кусочно-линейной аппроксимации характеристики
преобразования (г/з'на рис. 3.7): y3=aij + ct2jX, где /=1, 2, ..., т — номер
участка аппроксимации. Процесс измерения и вычисление
осуществляют так же, как и в предыдущем случае, только образцовые
меры Lij и L2j выбирают не Произвольно, а в зависимости от
результата первого измерения х. Результат измерения позволяет
определить номер / участка аппроксимации и выбрать меры в
начале и конце этого участка. При этом требуется /п-М образцовых
мер.
1ч ,
Измерительное
устройство
Обратный
преобразователь .
У
yi
'скор./ -
Выход
у
скор.п
.
Рис. 3.9
56
Подключить к ИУ х
I
7
Запомнить у = F (х)
Т
Подключить к ИУ х
X
Шаг итерации: i = 1
Запомнить Ускор.0-У
Таким образом рассмотренный
метод позволяет осуществлять
коррекцию всех составляющих погрепь
ности, но уменьшение нелинейной
составляющей может требовать
значительного числа мер. Обычно этот
метод используется для измерения
величин, для которых легко создать
образцовые меры.
Итерационные методы. Эти
методы относятся к методам обратных
преобразований, так как в них
используется высокоточный ЦАП, с
помощью которого выходной
цифровой сигнал преобразуется в
физическую величину, однородную с
измеряемой, и подается на вход (рис.
3.9). Эти методы называются
итерационными, так как в них
осуществляется последовательное
приближение результатов измерения к
истинному значению величины.
Существует много разновидностей
итерационных методов. Рассмотрим
одну из распространенных.
В соответствии с приведенным
алгоритмом (рис. 3.10) сначала
производится преобразование
измеряемой величины х. Полученное
значение у запоминается, а ко входу
измерительного устройства (ИУ)
подключается выход обратного
преобразователя. Затем' при первом шаге
итерации (£=1) величина г/скоро = у
поступает на обратный
преобразователь (F-lH — функция его передачи,
обратная функции FH). Полученная
величина л:,=1 преобразуется ИУ в
г/,=1 и вычисляется г/cnopi — первый
скорректированный результат, ко^
торый запоминается. При втором
шаге итерации он поступает на обратный преобразователь и
процесс-повторяется. Общий алгоритм вычисления £-го
скорректированного результата: г/СКОр i= г/скор i-i—г/г + г/ — из предыдущего
скорректированного результата вычесть результат последнего
преобразования и прибавить результат первого преобразования.
Рассмотрим процесс коррекции погрешности ИУ при наличии
аддитивной и мультипликативной составляющих, пренебрегая
погрешностью высокоточного ЦАП. В соответствии с рис. 3.7 при
5Г
Рис. 3.10
шЪдаче на вход ИУ измеряемой величины х получим y = Fp(x) —
= a+x(l+b), в то время как при отсутствии погрешности имели
ьбы уа = Рн(х)=х. Соответственно погрешность составит А=у—ук =
= а + Ьх. При первом шаге итерации: Xi=F-1H(yCKop0)=F~lH(y)=y;
iffi = Fp(xi)=a+xi(l+b); yaopi = г/скоро—yi+ у = 2у—ух=х—(а +
+xb)b. Погрешность первого шага итерации составит ACkopi =
= г/скор1—г/н = — (a+xb)b, т. е. при Ь<1 уменьшилась по
сравнению с погрешностью Л в 1/й раз. При втором шаге итерации: Хг—
= ^~'н(г/скор1)=г/скор1;. yi=h(x?) =а+Хг{\ +b); yCKop2 = yCKopi—y2 +
+у=х+ (a+xb)b2. Погрешность результата второго шага
итерации составит Аскор2=г/скор2—У» = (a+xb)b2, т. е. уменьшилась по
•сравнению с начальной в 1/&2 раз. Если продолжить итерации, то
можно убедиться, что для п шагов итерации погрешность
уменьшится в l/bn раз. Если, например, Ь = 0,1, то для трех шагов
итерации получим уменьшение погрешности в 103 раз, т. е. процесс
итерации быстро сходится.
В [4] показано, что итерационный метод позволяет
корректировать и нелинейную составляющую погрешности.
При применении итерационных методов результирующая
погрешность практически определяется погрешностью обратного
преобразователя. Это позволяет использовать в прямой цепи весьма
грубые преобразователи. Наличие образцового обратного
преобразователя делает этот метод похожим на метод
уравновешивающего преобразования. Однако в последнем, как уже отмечалось,
;не осуществляется коррекция аддитивной составляющей
погрешности прямой ветви.
Тестовый метод. Этот метод основан на дополнительных
измерениях с использованием специальных измерительных сигналов —
тестов, аддитивных и мультипликативных. Аддитивный тест
формируется в виде суммы Ai{x)—x + Qu где 8* — постоянная
составляющая, не зависящая от х, мультипликативный формируется в
виде произведения Аг(х)=Ьхк где ki — независимый от х
коэффициент преобразования (например, реализуемый путем усиления
величины х в k раз). Иначе говоря, указанные тесты получаются
в результате преобразований самой измеряемой величины-*.
Важным преимуществом тестового метода является возможность
уменьшения числа требуемых тестов при кусочно-полиномиальной
аппроксимации характеристики преобразования, так как тесты
функционально связаны с измеряемой величиной и переносятся
• вместе с ней на нужный участок аппроксимации. Наиболее
просто это поясняется на примере кусочно-линейной аппрокеимации,
получившей наибольшее распространение. Характеристика
преобразования на ;'-м участке описывается уравнением у = ац+ацх
(/=1, 2, ...; пг), где пг — число участков (рис. 3.7). При линейной
аппроксимации необходимо иметь два теста Ах(х) и А2{х),
аддитивный и мультипликативный, дополнительные преобразования
которых позволяет определить неизвестные параметры ац и a2j. Ре-
алая систему уравнений
38
y2 = aij + a2jA2 (x),
получим алгоритм тестового метода при кусочно-линейной
аппроксимации: я
У г —Ух
ц = У1 Л2 (х) — у2 А1 (х) ,
Уо Аг{х)—А1{х) Аг(х)~А1(х)
На рис: 3.11 приведена структурная схема измерительного
устройства, работающего по данному алгоритму с одним аддитивным
и одним мультипликативным тестами. Процесс измерения
состоит из трех тактов. В первом ключи Ki и Кг разомкнуты, а Кз-
замкнут и на вход измерительного устройства поступает
измеряемая величина х. На втором также замыкается ключ Ki и на вход
поступает аддитивный тест x.+Q. На третьем такте Кг
замыкается, а остальные размыкаются, подключая на вход измерительного-
устройства мультипликативный тест с величиной kx. Результаты:
Уо, Уи Уг преобразований поступают с выхода измерительного
устройства в вычислительное, реализующее алгоритм, который может-
быть получен из указанного постановкой А\{х)=х+% и А2(х)=-
= kx:
х =
У* —У о
. Уг — Уо k—i
'Отметим, что данный метод является универсальным. Как и»
метод образцовых мер, он позволяет уменьшить аддитивные и
мультипликативные составляющие, а также составляющую
погрешности, связанную с нелинейностью характеристики
преобразования. Его достоинством по сравнению с остальными
структурными методами является отсутствие требования большого числа
Вход
-*♦
Формирователь
аддитивного
теста
1
Сумматор
Формирователь
мультипликативного теста
К,
н»
Измерительное
устройство
-1
—=►
Вычислительное
устройство
1
к.
Выход
Рис. 3.11
59-
«образцовых мер, а также отключения измеряемой величины от
входа прибора, что важно при измерении некоторых неэлектричес-
<жих величин. Более подробно со структурными методами
уменьшения погрешностей можно ознакомиться в [5, 6].
Глава 4. ПОГРЕШННОСТИ И МАТЕМАТИЧЕСКАЯ
ОБРАБОТКА РЕЗУЛЬТАТОВ
ИЗМЕРЕНИЙ
4.1. КЛАССИФИКАЦИЯ ПОГРЕШНОСТЕЙ
Результат измерения, т. е. значение величины, найденное путем
«ее измерения, всегда содержит погрешность. Из повседневного
опыта' ясно, что малой погрешностью можно пренебречь, но при
этом возникает вопрос: как оценить погрешность, и, как
следствие, какую погрешность можно считать малой. Это и составляет
смысл теории и практики обработки результатов измерений.
Погрешность измерения проявляется в совокупном* виде, т. е.
•на практике присутствует суммарная погрешность, обусловленная
рядом факторов, влияющих на^ процесс измерения. Первым шагом
на пути изучения погрешностей является классификация
составляющих суммарной погрешности, выявление закономерностей и
причин появления этих составляющих с целью нахождения
способов уменьшения их влияния на результат измерения.
Для классификации необходимо ввести критерий, в
соответствии с которым суммарную погрешность можно разделить на
составляющие. Далее будут рассмотрены наиболее распространенные
■классификационные признаки и соответствующие им
составляющие суммарной погрешности. Отметим, что эти критерии не
являются единственно возможным и носят условный характер. Этим
объясняется многочисленные попытки ввести новые подходы к
классификации (например, рекомендации 70-й 'сессии
Международного комитета мер и весов (МКМВ) в 1981 г., где
классификационным признаком предлагалось считать возможность или не- ■
возможность определения погрешностей статистическими
методами). Естественно, что рассмотрены будут те классификации,
которые нашли отражение в нормативно-технической документации и
утвердились в научно-технической литературе.
Для проведения любого измерения должен быть выбран метод,
•средства измерения и оператор, следовательно, по источникам
возникновения различают методические, инструментальные
и субъективные погрешности. Методические (погрешности
возникают из-за несовершенства метода измерения, что может быть
следствием недостаточного знания теории явлений, положенных в ос-
60
еову измерения; из-за приближенности используемых для оценки
измеряемой величины соотношений; из-за несоответствия метода;
из-за ограниченности материальных ресурсов; из-за
несоответствия алгоритма измерения Методу и т. п. Как правило,
методические погрешности можно уменьшить в результате теоретического
исследования метода и аналитических зависимостей, описывающих
объект измерения, что приводит к улучшению метода или выводу
о необходимости его замены. Инструментальные погрешности
зависят от погрешностей применяемых средств измерений и чаще
всего проявляются в том, что аппаратура не точно выполняет те
операции, которые заложены в методику измерения;
характеристики аппаратуры имеют разброс параметров от экземпляра к
экземпляру, за счет старения элементов и т. п. Субъективные погреш-
' яоети обусловлены индивидуальными особенностями оператора,
проводящего измерения, его утомляемостью, условиями работы.
Конкретным проявлением этих погрешностей являются
погрешности отсчитывания, интерполяции при отсчитывании, от
параллакса. Севершенствовайие конструкции оточетных устройств
средств измерений приводит к их уменьшению.
Как известно, измерение — нахождение значения физической
величины опытным путем с помощью специальных технических
средств — предполагает сравнение измеряемой величины с
однородной с ней физической величиной, значение которой принято за
единицу, преобразование к виду, удобному для сравнения, и
фиксацию результата сравнения. Отсюда основными составляющими
процесса измерения являются: воспроизведение единицы,
преобразование сигнала об измеряемой величине, сравнение и фиксация.
Поэтому важным признаком классификации являются
составляющие измерения, в соответствии с которыми различают:
погрешность меры, под которой понимают разность между
номинальным значением и истинным значением воспроизводимой ею
величины; погрешность преобразования; погрешность сравнения;
погрешность фиксации результата сравнения.
Погрешность СИ входит составной частью в суммарную
погрешность измерения и учитывается как инструментальная
погрешность (см. гл. 2 и 3).
Классификация погрешностей измерений и средств измерений
отражена в табл. 4.1.
В заключение отметим одно направление метрологической
деятельности, особенно важное при проведении больших
объемов'измерений в различных условиях, что характерно для техники
связи. На практике часто оказывается, что погрешность СИ
составляет малую долю погрешности результата измерений. В то же
время вся сложная и дорогая, измерительная техника нужна
только для получения результатов измерения, к точности которых
предъявляются определенные требования, и поэтому зачастую за
точность результатов измерений ошибочно принимают
погрешность применяемых СИ. Это приводит к большим экономическим
потерям, так как не отражает реального состояния объекта изме-
61
■ ^лассификация погрешностей измерений и средств измерений
Классификационный
признак
, Источник возникновечИя
Составляющие измерения
Условия применения
средств измерения:
нормальные
рабочие
Характер поведения из_
меряемой величины в
.процессе измерения
Способ выражения
Характер проявления
Виды п%грешиостей
Измерений
Методическая
Инструментальная
Субъективная
Абсолютная
Относительная
Систематическая
Случайная
Грубая
Средств измерений
Меры
Преобразования
Сравнения
Фиксация результата
сравнения
Основная
Дополнительная (меры,
измерительного
преобразователя, изменение показаний;
под действием влияющей
величины)
Статическая
В динамическом режиме
Динамическая
Абсолютная: меры,
измерительного преобразователя,
прибора.
Относительная: м-еры,
измерительного преобразователя,
прибора.
Приведенная
измерительного прибора
Систематическая
Случайная
рений. Эффектив^ьш способом решения комплекса задач по пра-г
вильной оценке Погрешностей результатов измерений является
применение единых, хорошо проработанных методов измерений и
обработки результатов, т. е. стандартизация методик выполнения
измерений и обработки полученных результатов. Следование
методике измерения позволяет официально признать правильным
полученный таким образом результат измерения. В этом
заключается правовая сущность методики измерения.
Методикой ^^Черений называют не только совокупность
требований к методам, средствам, условиям и алгоритму измерений, но
и сам нормативно-технический документ, в которое эти
требования сформулированы. Методики измерений стандартизуют или ат-
62
тестуют в соответствии с ГОСТ 8.010—72, в котором
регламентированы порядок аттестации и оформления ее результата, а
также требования к содержанию стандартов и аттестатов методики
измерения. Аттестация методики — это метрологическое
исследование точности измерений с целью определения соответствия
заданным требованиям. Соблюдение методики измерений позволяет
■еще до измерения знать оценки погрешностей или алгоритмы их
получения с использованием данных,, характеризующих условия
измерения. Поэтому йсем министерствам и ведомствам
постановлением Советом Министров СССР № 273 от 4.04.1983 г. вменено
в обязанность обеспечивать унификацию и стандартизацию
методик измерения и проводить работы по оценке погрешностей
измерений с необходимой точностью.
4.2. СИСТЕМАТИЧЕСКИЕ ПОГРЕШНОСТИ
Исключение систематических погрешностей — одна из
главных задач при планировании, подготовке, проведении измерений
и обработке их результатов. На этапе планирования и
подготовки принципиальным является выбор метода и средства измерений,
определение источников и разновидностей систематических
погрешностей и при необходимости — осуществление- мероприятий
по уменьшению влияющих факторов (термостатирование,
экранирование и т. д.).
Для исключения систематических погрешностей в процессе
измерения применяют ряд способов, которые были рассмотрены в
гл. 2 и 3 при оценке погрешностей СИ. Эффективным способом
уменьшения систематических погрешностей является их
рандомизация, т. е- перевод в случайные. Например, если измерять
напряжение несколькими вольтметрами "разных типов одновременно
и усреднять результаты наблюдений, то можно ожидать, что
систематические погрешности (методические и инструментальные),
присущие каждому прибору вследствие случайного выбора
приборов, в какой-то мере скомпенсируются. Этого же эффекта
можно добиться, изменяя случайным образом методику и условия
эксперимента или параметры, от которых зависит не значение
измеряемой величины, но могут зависеть систематические погрешности
этой величины.
Во время обработки результатов наблюдений обнаруживают и
оценивают те систематические погрешности, которые не удалось
исключить, и в результат измерения вносят поправки.
Но любые методы, как правило, не позволяют полностью •
исключить систематическую составляющую погрешности, поэтому нэ
практике всегда остается неисключенная составляющая
результата измерения и встает задача оценки этих погрешностей.
Способы оценки неисключенной систематической составляющей пог*
решности результата измерения регламентируются ГОСТ и будут
рассмотрены далее. ,
63
4.3. СЛУЧАЙНЫЕ ПОГРЕШНОСТИ
Случайные погрешности вызываются большим числом
неизвестных причин, действие которых на каждое наблюдение различно-
и не может- быть учтено заранее. Хотя исключить случайные
погрешности нельзя, теория случайных явлений позволяет уменьшить-
влияние этих погрешностей на результат измерения. Далее будет-
показано, что для этого необходимо провести серию (группу)
наблюдений, причем чем меньшее значение погрешности допустимо
оставить неисключенной, тем больше должна быть эта серия-
Нужно четко понимать, что если случайная погрешность,
полученная для- серии измерений, окажется значительно меньше
погрешности, определяемой классом точности прибора, то, очевидно, нег
смысла пытаться еще уменьшать значение случайной
составляющей погрешности: все равно результаты измерений не станут or
этого точнее. И, наоборот, если случайная погрешность больше
инструментальной, то следует произвести рдц наблюдений, чтобы:
уменьшить влияние случайной погрешности измерения и сделать
эту погрешность меньше или одного порядка с погрешностью
прибора.
Ра-ссмотрим, Как проявляют себя случайные погрешности,
полагая, что в результатах наблюдения исключена систематическая
составляющая погрешности, т. е. имеем дело с исправленным
результатом наблюдений *., Пусть проводится прямое измерение
какой-либо неизменной величины А. Так как в каждом наблюдении
присутствует погрешность, то эти результаты отличаются от
величины А. Обозначим результат t-ro наблюдения а%=А-\-Айх, где
Acii — абсолютная погрешность t-ro наблюдения. Наглядное
представление о поведении результатов наблюдений, содержащих
случайную погрешность, дает полигон или гиетограмма, являющиеся
графическим отображением статистического ряда [1]. На рис. 4Л
показаны гистограмма (штриховая линия) и полигон (сплошная
линия), которые при увеличении числа наблюдений (в пределе
я->-оо) и уменьшении интервалов (Лг-*-0) вырождаются в
плотность распределения. *
Рассмотрим, как связано распределение результатов
наблюдений, содержащих случайную погрешность, с распределением самой
случайной Погрешности. Так как результат i-ro наблюдения и
содержащаяся погрешность связаны соотношением Лй» = й1—А, то
каждый результат наблюдения и погрешность этого наблюдения
отстоят на постоянную величину, а значит, на эту величину
сдвинуты и распределения, так как прибавление постоянной величины
к случайной не меняет характера распределения. Таким образом,
распределение погрешностей Да» и результатов наблюдения сц те
же, но сдвинуты по оси абсцисс друг от друга на величину А, как
* Исправленный результат наблюдения (измерения) — результат наблюдения
(измерения), полученный после внесения поправок в неисправленный результат
(ГОСТ 8.207—76, приложение № 3).
64
■rrfi ,,
ли
,
г/\
г-/
1/
А
?Ч
V
\|
\
К-
АН-1 Л* Л**1
Рис. 4.1
Нормальная
Треугольная
трапециевидная
Равномерная
Антимовальная 1
Амтимодальная Z
Рэлея
р
Л*-
/\:
/ \:
— — — ^— х
— , — — ... нэ-
X
Рис. 4.2
Рис. 4.3
это показано на рис. 4.2. Вид самого распределения —
объективно существующая и наиболее полная характеристики случайной
величины. На практике для описания распределения пользуются
стандартными аппроксимациями. ГОСТ 8.011—72 для
аппроксимации функций распределения плотности вероятностей случайных
погрешностей рекомендует применять следующие стандартные
функции: нормальную (усеченную нормальную), треугольную
(Симтсана), трапециевидную, равномерную, антимодальную 1,
антимодальную 2, Рэлея. Эти распределения показаны на рис. 4.3.
Задача обработки результатов измерений в технике ставится
следующим образом. На основе теории статистической обработки
по конечному числу результатов наблюдений, которое редко
бывает большим, находят оценки параметров распределения,
которое, как правило, считается известным из практических
соображений. Обычно достаточно бывает найти оценку истинного значения
и разброса, характеризующую плотность группировки вокруг
истинного значения.
Оценки — это наилучшие в каком-то смысле приближения к
искомой величине, которые можно получить в данной конкретной
реализации из-за неопределенности за счет случайного характера
результатов наблюдений. Не останавливаясь подробно на
свойствах оценок, которые рассматриваются в математической
статистике [1, 10], отметим, что оценки должны обладать следующими
свойствами: несмещенности — математическое ожидание оценки
равно оцениваемому параметру; эффективности — при. заданном
числе измерений п оценка имеет наименьшую дисперсию по
сравнению с любыми другими; состоятельности — при числе измере-
3—10 65
I
нии, стремящемся к бесконечности, оценка по вероятности
стремится к оцениваемому параметру.
Задачу оценки параметра можно разделить на две части: во-
первых, определить, какую величину, подсчитанную по
имеющейся выборке, принять в качестве значения параметра распределения
(точечная оценка), и, во-вторых, найти интервал вокруг этой
величины, в котором с заданной надежностью будет заключен
искомый параметр (интервальная оценка). Оценки будем обозначать
теми же буквами, что и оцениваемые параметры, но со значком
тильда, например оценка истинного значения А будет
обозначаться А.
Оценка случайных погрешностей прямых измерений при
нормальном распределении результатов наблюдений. Как
показывает опыт, наиболее часто результаты реального физического
измерения распределены по закону, который может быть
аппроксимирован нормальным. Плотность распределения результатов
наблюдений в этом случае может быть записана в виде
. p{ai}=,—l=exp{-lai-M(at)]2) , (4.1)
*К l -\/2пв* М 2а2 /
где М{а$ — математическое ожидание; а2 — дисперсия.
Математическое ожидание представляет значение,
относительно которого происходит разброс слулаиных величин, и является
абсциссой оси симметрии кривой нормального распределения.
Дисперсия характеризует разброс случайных величин вокруг
математического ожидания. Пусть проведено п случайных
наблюдений величины А. Запишем эти результаты в виде
' о^Л + Ай,, о2 = Л + Ай21... , ап = А + Аап. (4.2)
Суммируя почленно левые и правые части равенств (4.2),
получаем
2 аг = пА+ j] Ао;. (4-3)
Путем простых преобразований найдем из выражения (4.3)
точечную оценку истинного значения:
4= -i-V at l- 2 Ааг. (4-4)
Если число наблюдений достаточно велико (строго говоря, п-+оо),
то в силу нормальности распределения абсолютные погрешности
одинаковой величины, но с разным знаком, встречаются
одинаково часто (плотность распределения симметрична относительно
математического ожидания), а значит, второй член в правой
части равенства (4.4) будет равен нулю, т. е.
Нгп — j] Aat = 0. (4-5)
66
Таким образом, из (4.4) следует, что при бесконечно большом
числе наблюдений истинное значение измеряемой величины
равно среднему арифметическому значению всех результатов наблю- .
дений: '
А= — У] ai = a = A . (4.6)
Смысл выражения (4.6) в следующем: точечной оценкой
истинного значения измеряемой величины в случае нормального
распределения является среднее арифметическое. Но на практике
число наблюдений не бесконечно. Рассмотрим подробнее связь
между истинным значением измеряемой величины Л и ее точечной
оценкой — средним арифметическим значением А = а. Чем
меньше число наблюдений п, тем больше величина а зависит от
отдельных результатов наблюдений, но так как результаты
наблюдений — случайные величины, то -среднее арифметическое по
конечному числу наблюдений также будет случайной величиной.
Обозначим через Ad отклонение точечной оценки от истинного
.значения:
Аа = А—А=А — а. (4.7>
Из (4.7) видно, что из-за случайности средних случайными будут
и отклонения Ad. Однако с увеличением числа усредняем,ых
значений влияние величины каждого отдельного наблюдения на
среднее значение а становится меньше, т. е. оценка А обретает так
называемую статистическую устойчивость, а значит, отклонение
оценки от истинного значения Ad меньше зависит от величин
отдельных наблюдений. По смыслу Ad — та погрешность, которую
мы допускаем, взяв вместо истинного значения 'его оценку —
среднее арифметическое а. Эта погрешность, как было уже
отмечено, тоже случайная и также описывается нормальным
распределением с нулевым средним, но с другой дисперсией о2-:
>(Аа) = (2яа^)-1/2ехр[ — (Aa)*/2oh- (4.8)
Нормальность распределения Ad можно строго доказать на
основе центральной предельной теоремы Ляпунова *>. Из (4.7)
очевидно, что среднее а также распределено по нормальному закону
с той же дисперсией а2—. Выразим дисперсию а2^ 'через
дисперсию результатов наблюдений а2. Среднее есть линейная
комбинация независимых случайных величин а%, дисперсия линейной ком-
* Эта теорема утверждает, что сумма большого числа независимых случайных
величии подчиняется нормальному закону даже- тогда, когда слагаемые не
обязательно распределены по нормальному закону. Поэтому (4.8) справедливо в
более широком смысле, чем рассматриваемом. Эта теорема справедлива, если ии
одно из слагаемых ие доминирует иад другими.
3*
,67
бинации независимых случайных величин может быть выражена
через дисперсии слагаемых [1] в следующем виде:
п
»=1
4s^
nDa,
т. е.
■2 _
oL
а
(4.9)
Таким образом, дисперсия среднего из^ п наблюдений в п раз
меньше дисперсии результата наблюдения. Иными словами, если
за результат измерения принять единичное наблюдение, то
разброс такой оценки будет характеризоваться дисперсией а2, а если
усреднить результаты наблюдений и принять среднее по п
наблюдениям за оценку измеряемой величины, то дисперсия ее будет
о2-.
Введем понятие доверительного интервала (А—е; А + е), в
который попадает результат измерения с заданной вероятностью
Л:л. Доверительный интервал — величина неслучайная и его
можно рассматривать в качестве допустимого значения погрешности
измерения величины А, т. е. А=А±г с вероятностью Рсл. Ясно,
что чем больше размер доверительного интервала е, тем с боль^
шей вероятностью в доверительный интервал попадает значение
измеряемой величины. С другой стороны, чем больше разброс,
характеризуемый дисперсией распределения оценки, тем меньше
доверительная вероятность при том же значении доверительного
интервала, как это видно из рис. 4.4. Вероятность попадания в
интервал равна площади под кривой, и в случае меньшей дисперсии
эта площадь больше. Связь между доверительной вероятностью
и доверительным интервалом можно выразить соотношением
e = ka- (4.10)
где k
тей:
коэффициент, который находят по интегралу вероятнос-
ф(£)=2(2я)-'/2 Ьхр(~т)='
Этот коэффициент табулирован и его можно найти, задавшись до
верительной вероятностью РСл (приложение I). \
Но для определения доверительного интервала по (4.10) неиз
вестна дисперсия а "" " " '"""- "апао пои-п^тятн няС;
людений, т. е.
'а '
самое
Рис. 4.4
а ее нужно выразить через результаты наб-
большее, что можно сделать, — это найти
ее оценку. Так как мы считаем
функцию распределения
результатов наблюдений известной, то для
нахождения оценки дисперсии
можно воспользоваться методом
максимального правдоподобия [10, 11].
Вероятность получить результат
наблюдения в интервале ai±0,5Aj
равна р(а{, А, а)Дг, где
р(->—плотность распределения результатов
68
наблюдений, зависящая от а — дисперсий и Л — истинного
значения измеряемой величины. Так как результаты наблюдений
независимы, то вероятность получить все п результаты в этом
интервале равна
Р= U Pi iau А, а) Л,. (4.11)
£=1
Смысл метода максимального правдоподобия заключается в
том, что за оценку параметра распределения берут7то его
значение, при котором вероятность Р будет максимальной. Для этого
частную производную Р по оцениваемому параметру
приравнивают к нулю, т. е. находят значение параметра, соответствующего
экстремуму. Для упрощения, так как постоянные сомножители не
влияют на положение экстремума, рассматривают только
произведение функций р, которое называют функцией правдоподобия:
L К, ... ап. Л, а)= П Pi (ai ■■ ап, А о). (4.12)
(4.13)
(4.14)
(4.15)
(4.16)
(Для упрощения математических выкладок обычно
максимизируют InL, так как у = \пх — строго возрастающая функция.)
Полученная оценка дисперсии применима только в тех случаях,
когда точно известно математическое ожидание, например, когда
разброс показаний измерительного прибора оценивают, проводя
ряд измерений точно известной величины. На практике
определение измеряемого параметра является целью измерений и самое
большее, что*о нем можно узнать — это оценку. Заменим в (4.16)
кеизвестное значение А его оценкой а:
о2=— У, (а—а)2. (4Л7>
п t=\
т
В рассматриваемом случае
(at — A)*
Pi (а„ А, о) = (2 яа2) 2 ехр [- ^=^-]
Поэтому
L- (2яа2) 2 ехр
h 2 (й<-Л)2
2гт2 '
dL
Функция L будет максимальна при -^-=0, т. е.
до2
AL==_JL. + — V (а Л)2 = 0,
1 "
-1,(0'
а^-L J (at-A)*
п i=i
Оценка (4.17) является состоятельной, но смещенной. Получим ^и
состоятельную и несмещенную оценку дисперсии. Для этого
найдем выражение, связывающее оценки (4.16). и (4.17);
преобразуем квадрат суммы (4.16):
V (а;-Л2) = f. [(а;-аЖ«-Л)12= 2 («;-я)2 + 2 («-
й /fi <=i i=i
_Л)2 + 2:2 (а-Л)(а,-а) = | (щ-а)* + п (a-A*J+
-A)(ai—a)^
+ 2 (J-Л) J] (а,-5).
Так как сумма отклонений результатов наблюдений от своего
среднего по определению равна нулю: Б (а —а)=0, то получим
2 («г-«)2= 2
i=i i=i
или
_L v (a;-J)2 = -i- 2 (а{-Л)2-(а-Л)2. (4.19)
« £=1 П 1=1
Отсюда следует, во-первых, состоятельность оценки о2:
|j (а;_а)2 = J (а;-Л)2-л (а-Л)2 (4.18)
п 1=1
(4.20)
так как слагаемые в (4.19) сходятся по вероятности
п i=l
и, во-вторых, выражение (4.19) позволяет найти математическое
ожидание оценки о2 и убедиться в том, что она смещена:
М -L V (а;-^)2= — М 2 («г-Л)2-М (а-Л)2 =
» й ' п "/И
= _!_„а2(а.)_а2(а) = а2(а;)-а2(а). (4'21)
п
Но в соответствии с (4.19) а2{а)=а2{а()/п. Тогда
М [а2] = а (аг) ^-а2 (а;)/л = (я — 1) а2/л. (4.22)
Для Получения несмещенной оценки достаточно (4.22) умножить на
величину пЦп—1) и тогда
S2=_L_ 2 (,ai—a? • • (4'23)
п—1 i=i
70
Эта оценка, по-прежнему состоятельная, так как множитель
п/(п—1) стремится к 1 при л-»-оо, называется выборочной или
эмпирической дисперсией, т. е. ее значение вычисляется по
результатам наблюдений. Но так как точечной оценкой истинного
значения является среднее * а, которое также является случайной
величиной с дисперсией а2-, связанной с дисперсией результатов
наблюдений юг2 выражением (4.9), то оценка дисперсии 52 (Л):
а| = S2 (Л) = —1— 2 (а, - «)2 • (4-24)
Вернемся к определению величины доверительного интервала
е, который был введен формулой (4.10). Теперь в это выражение
вместо неизвестной дисперсии серии можно подставить ее оценку
(4.24), полученную по данным наблюдений. Но при малом числе
наблюдений оценка сама будет случайной величиной,
следовательно, будет случайной величиной и доверительный интервал, а
этого не может быть по определению. Поэтому (4.10) справедливо
лишь при известной дисперсии. При неизвестной дисперсии (т. е. в
реальном случае, когда число измерений не бывает большим)
вводят новый коэффициент ta (п) — коэффициент Стьюдента.
Рассмотрим случайную величину
t = (A —~^)/ЗД = A a/S (A). (4.25)
Эта величина — отношение двух случайных величин, и ее
распределение есть совместная плотность, равная произведению^ функций
распределения S(A) и Ай. Опуская вывод, который можно найти
в [1, 10], получаем функцию распределения этой величины t,
называемую распределением Стьюдента:
p{t,n) = Bn^\+^-lYnl\ (4.26)
где Вп = Г ( — ) /Уп (п— 1) Г ( ^=- ) — нормирующий
множитель, необходимый для того, чтобы площадь под кривой (рис. 4.5)
равнялась единице; Г(-) —
гамма-функция.
Из (4.26) видно, что
распределение Стьюдента
определяется параметром п — числом
наблюдений и не зависит от
неизвестных значений А я а—
Отметим, что в некоторых
случаях распределение Стьюдента
записывают как функцию чи-
Рис. 4.5
* Эту оценку можно получить также формально при помощи метода максималь-
dL
ного правдоподобия, если взять частную производную =0.
да
71
ела степеней свободы k, равного k — n—1. На рис. 4.5 показаны
кривые плотности распределения Стьюдента для разных значений
п. При л-»-оо распределение Стьюдента переходит в нормальное.
Поскольку p(t, n) —четная функция от t, вероятность попадания
t в заданный интервал ±ta равна
А— а
<Ч = 2 f p(t, n)dt^a. (4.27)
(А) ) о
С помощью распределения Стьюдента устанавливается связь
между доверительным интервалом е и надежностью, т. е. по
заданному значению интервала при данном числе наблюдений можно
установить надежность (доверительную вероятность) либо,
наоборот, по доверительной вероятности а и числу наблюдений находить
величину доверительного интервала:
1 z=ta(n)S(A). (4.28)
Если сравнить (4.28) и (4.10), то видно, что в выражении (4.28)
дисперсия а-заменена своей оценкой S(А), а вместо коэффициента
k, не зависящего от числа наблюдений, стоит коэффициент *«.(")>
определяемый по распределению'Стьюдента и зависящий от п.
Таким образом, интервальная оценка (4.28) является функцией
числа наблюдений и может быть найдена по результатам этих
наблюдений. Коэффициент ta(n) табулирован (см. приложение II).
Важно отметить, что для малого числа наблюдений (п<30) замена
ta (n) на k приводит к грубым ошибкам — к кажущемуся сужению»
интервала. Например, при л=5 и а=0,99 /а(л)=4,6, а &=2,60;
т. е. доверительный интервал для распределения Стьюдента в 1,8
раз шире, чем для нормального. При увеличении п эта разница
уменьшается, так как, как отмечалось, распределение Стьюдента
переходит в нормальное, т. е. ta(n) =& при л->-оо.
Рассмотрим пример практического вычисления доверительного,
интервала. Предварительно укажем полезный прием,
облегчающий вычисления. Для .этого используются формулы:
а=«о+— S («!-*<>). (4-29>
52 (Л) =
п (п— 1)
2 {ai—aaf — n{a—a0)
i=i
(4.30>
где а0 — «произвольное среднее», т. е. число, выбранное так,
чтобы разности а— а0 содержали как можно меньше значащих цифр.
Тождественность (4.29) и (4.30) формулам для определения а ж
S (Л) нетрудно доказать. Например,
п £i п i=i п п {=1
Аналогично доказывается справедливость. (4.3Q).
72
Пример. Получено пять результатов наблюдений: 17,32; 17,54; 17,20; 17,67;
17,41. Требуется получить оценку измеряемой величины, считая, что результаты
наблюдений распределены по нормальному закону. Точечная и интервальная
оценки соответственно равны:
1
— Уаг; А = А + е,
»=1
где z = ta(n)S(A) (при заданном a); S (А} =
^Ы |>-
■в|)
.Л2
,iB
качестве произвольного среднего возьмем «о=17,4, результаты вычислений сведем
в таблицу:
п
ui
а,—а0
(cii—ao)*
1
17,34
—0,08
0,0064
2
17,54
0,14
0,0197
3
17,20
-0,20
0,04
4
17,67
0,27
0,0729
5
17,41
0,01
0,0001
Находим: а% 17,428 и S(A) =0,082. Для надежности а=0,95 и п=5 по
таблицам (приложение II) находим ta{n)=2JS. Значение доверительного
интервала:
t> = ta(n)S{A) =2,78- 0,082 = 0,288.
Результат измерения Л=И7,428±0,228.
Найдем то же для надежности, большей a=0,999. iB этом случае ta(n) =
= 8,61, e=i0,706, A= 17,428±0,706. Видно, что при увеличении надежности
растут границы доверительного интервала, что и должно быть.
Интервальная оценка дисперсии результата измерений. В
технике связи и в радиоэлектронике часто требуется определить степень
разброса какого-либо параметра, например нестабильность
остаточного затухания, случайные изменения параметров или
характеристик устройства. Было показано, что дисперсия является
показателем разброса, но при малом числе наблюдений её оценка —
среднее квадрэтическое отклонение — является случайной величиной,
а следовательно, необходимо выяснить степень доверия этой
оценки, т. е. ввести доверительный интервал. Рекомендации по
определению доверительных границ для дисперсии и среднего квадрати-
ческого отклонения дает действующая нормативно-техническая
документация (ГОСТ 11.004—74. Правила определения оценок.и
доверительных границ для параметров нормального распределения).
По-прежнему будем считать, что результаты наблюдений
распределены по нормальному закону. Раньше были получены
точечные оценки дисперсий:
1 " —
для результатов наблюдений S2— "£] (at— o)2^Z^ о2 ;
-1
i=i
73
для результатов измерений (серия из п наблюдений)
S* (Л) = — = ! j\ (щ-Ъ)2 —► а§- .
К ' п п(п—\) ^i " a
Вычислим интервальные оценки, т. е. такой неслучайный
интервал, в котором точечная оценка дисперсии будет находиться с
заданной ^вероятностью. Методика вычисления аналогична
предыдущей: введем распределение случайной величины, связанное с
дисперсией, и определим границы, вероятность попадания в пределы
которых будет равна заданной вероятности а. Введем случайную
величину;
х2=!До^У n-lS2) (431)
где at—а распределена по нормальному закону; а — постоянная
величина. Следовательно; и введенная величина %2 представляет
сумму квадратов нормированных но'рмально распределенных величин.
В [1,10] показано, что такая случайная величина имеет «хи-квад-
рат» распределение (^-распределение):
k- 2
р(Х2)=[2*/2.г(А)]-'(^) 2 ехр (-£-). - (4.32)
где k — число степеней свободы распределения, связанное с
числом наблюдений соотношением k=n—1. На рис. 4.6 приведены
кривые ^-распределения для разных значений k. Они асимметричны,
начиная с k>2 есть максимумы при х2тах—&—2. Для больших
значений k распределение %2 переходит в нормальное с
математическим ожиданием \^2k—1 и дисперсией 1.
Из формулы (4.31) можно, выразить: o2=kS2l%2—y2S2, где у=
=kj%2. Границы доверительного интервала для о2 могут быть
найдены с помощью '^-распределения, как показано на рис. 4.7, где
а — вероятность попадания в интервал (надежность), р—
вероятность непопадания в интервал- (Pi слева от_x2i и р2 справа от %22).
Естественно, что полная вероятность а+Р1+Р2=1. Если положить
вероятность непопадания в доверительный интервал слева и
справа одинаковой, т. е. Pi = P2=(l—a)/2, то можно записать систему
неравенств:
^ X2 = — с вероятностью Pi, (4.33)
<Х|== — с вероятностью а+Рь (434)
*°=^
Исходя из этих неравенств, можно Найти x2i^=X^=X22 или l/v22=^
^52/a2^l/v2i, откуда y2i^a2/S2^y22- Вероятность выполнения
всех этих неравенств равна разности площадей (рис. 4.7) (a+Pi) —
—P,==a. Таким образом, значение дисперсии с надежностью а
будет находиться в доверительном интервале, определяемом неравен-
74
р
Р,з
0,2
0,1
^
\A"Z
лЧ***
/>0*!»~
- I Р (
о s w is zi хг
Рис. 4.6
ством y2iS2^.a2^y22S2. Значения у2х и у22 табулированы (см.
приложение III). Мы нашли доверительный интервал для дисперсии
результата наблюдения. Аналогично дисперсия результата
измерения, состоящего из п наблюдений, может быть оценена из
неравенств y2iS2(A)^o2-<^y22s2(A).
Пример, в серии из 7 наблюдений получено среднее квадратическое
отклонение S2(A)=6. Интервальная оценка будет: для а=0,9 6-0,496<а—<3,23Х
)<а-< 16,16; для а=0,96 б-0,345<с
а
:7,08-5, т. е. И,725<а-^
XS, т. е: 2,4
^35,4.
Выявление и исключение грубых погрешностей измерений. Чем
меньшее число наблюдений, тем больше влияние величины
каждого на результат усреднения, т. е. тем больше оценка зависит от
разброса каждого результата наблюдения. Поэтому наличие грубой
погрешности в результатах наблюдений, особенно при малой серии,
может сильно исказить оценку определяемого параметра,
получаемую, как было показано, на основе статистического усреднения
результатов.
Грубой называют погрешность измерения, существенно
превышающую ожидаемую при данных условиях. На ее появление
повлиял какой-то фактор, несвойственный условиям измерения; это
дает основание исключить результат, содержащий такую погрешность.
Но чтобы результат исключить, нужно установить критерий, т. е.
четко определить, что считать грубой погрешностью, а что нет. Ведь
резкое отличие от других значений может быть следствием
естественного (законного для данного распределения) разброса.
Действительно, если считать, что результаты наблюдений подчинены
нормальному закону распределения вероятностей, они могут с
определенной вероятностью значительно отличаться от среднего. Более
того, чем больше число наблюдений, тем большее отклонение
законно, т. е. их вероятность согласуется с законом распределения.
Докажем это. Пусть результат наблюдения попадает в
доверительный интервал с вероятностью <ц. Вероятность не попасть в этот
интервал равна Pi = l>—ai. Но при п наблюдениях вероятность
попадания всех п результатов в тот же доверительный интервалТрав-
на a=IIai = ani (как вероятность одновременного совершения п
независимых событий). Тогда вероятность непопадания в этот же
интервал при п наблюдениях Р=1—ani = [l — (1—Pi)n] = l—1 +
75
-f-raPi—...««Pi, так как Pi'Cl, и можно пренебречь степенями
выше первой. Получается, что при малых Pi вероятность попадания в
интервал возрастает в п раз; таким образом, вероятность больших
статистических отклонений (т. е. законных для данного
распределения отклонений) растет с ростом числа наблюдений. Другими
словами, чем больше п, тем большее по абсолютному значению
отклонение нельзя считать грубой погрешностью. Поэтому при
принятии решения об исключений или сохранении резко
отклоняющихся результатов наблюдений нужно проявить большую
осторожность и перед этим внимательно проанализировать условия, при
которых получился резко отклоняющийся результат наблюдения.
Когда определенно известно, что резкое отклонение одного из
результатов наблюдений возникло при воздействии факторов, не
свойственных условиям получения остальных результатов,
следует исправить этот результат пересчетом его для условий, при
которых исключается несвойственный фактор. Если такой прием
оказывается невозможным, то нужно обратиться к методам
статистической оценки.
Если результаты наблюдений подчинены нормальному закону,
методы статистической оценки регламентирует ГОСТ 11.002—73.
Правила оценки анормальности результатов наблюдений. Принцип
решения вопроса об анормальности сводится к тому, что по
результатам наблюдений рассчитывается определенная функция
случайной величины, для которой известно распределение вероятностей.
Вычисленное по выборочным данным значение этой функции
сравнивается с ее предельным значением, соответствующим заранее
принятой малой вероятности, называемым уровнем значимости. Если
при этом выясняется, что вероятность подозреваемого в
анормальности результата наблюдения меньше принятой, то выносится
решение, что оцениваемый результат анормален и подлежит
исключению; в противном случае его считают нормальным и не
исключают.
Для проверки анормальности результаты наблюдений
упорядочивают, т. е. записывают в виде ai^a2^fl3... ^ап, и подсчитывав
ют среднее и среднее квадратическое-отклонение:
— 1 " Г 1 " П 1/2
а = т2«ь5= -L1:а(в|_в)« .
п i=i \_п —' i=i
Чтобы оценить принадлежность крайних значений ап или ах к
данной нормальной совокупности и принять решение об
исключении или оставлении ап{а{) в составе выборки, находят отношение
Un = (an—a)/S или Vx = (a—aJ/S. (4.35)
Результаты сравнивают с величиной р, взятой из таблиц v
(приложение IV) для данного числа наблюдений п и принятого уровня
значимости а. Если Un^$, то подозреваемый результат
наблюдения анормален и может быть исключен, в противном случае его
считают нормальным и не исключают. Оценка результата а\
производится аналогично.
76
Практические методы проверки нормальности распределения. До сих пор
мы считали, что случайные погрешности распределены по нормальному закону, и
в соответствии с этим строили методы обработки результатов. Как отмечалось,
хотя в большинстве случаев измерения физических величии предположение о
нормальности оправдано, бывает необходимо проверить, а так ли это в данной
конкретной ситуации. Способы определения статистических характеристик
вытекают из основных понятий теории вероятностей. IB соответствии с этим никаких
точных утверждений о параметрах распределения по результатам наблюдения
делать нельзя. Можно лишь высказать предположение о них, т. е. выдвинуть
гипотезу. Задача проверки гипотезы заключается в том, чтобы установить,
противоречит ли выдвинутая гипотеза данным эксперимента или нет. Степень
соответствия между выдвинутой гипотезой и результатами наблюдений
устанавливается с помощью критерия согласия.
Действующая нормативно-техническая документация [7, 8] устанавливает
правила проверки согласия распределения случайной величины, полученной по
результатам наблюдений, с предполагаемым теоретическим распределением. В
соответствии с этими документами наблюдения должны производиться в
практически одинаковых условиях, исследуемая совокупность результатов должна
быть однородной. Для наблюдений должны применяться средства измерений с
ценой деления не более 0,2 от предполагаемого 'значения среднего
квадратического отклонения исследуемого распределения. При числе наблюдений п>(100
рекомендуется применять критерий Колмогорова и %2; если п>50, то критерий
(В2. Данные критерии позволяют проверять соответствие полученных данных ие
только нормальному распределению. При числе наблюдений «<б0
нормальность их распределения проверяют при помощи составного критерия, состоящего
из двух критериев.
Критерий 1. Вычисляют отношение
d=(j}\ai — A\\nS*, . (4.36)
отклонения. Результаты наблюдения группы считаются распределенными
нормально, если справедливо неравенство d\^q <u<cdq , где dx-q и dq- —
квантили распределения, получаемые из таблицы (приложение V) для числа
наблюдений п, q\p и A—q\p, причем Ц\ — заранее выбранный уровень
значимости критерия.
Критерий 2. Можно считать, что результаты наблюдений принадлежат
нормальному распределению, если не более т разностей |а.—Л\ превзошли
значение Zp/zS, где -
1/2
где S* =
1/2
— смещенная оценка среднего квадратического
S =
— 2(в,-л).
i=i
(4.37)
— оценка среднего квадратического отклонения, Zp»— верхняя квантиль
распределения нормированной функции Лапласа, отвечающая вероятности. р/2
(напомним, что точка гР, в которой интегральная функция распределения F
переходит от значений, меньших Р, к значениям, большим Р, Ре (0,1), называется
квантилью порядка Р: F(zP)^P, F(zp+0)^P). Значения Р определяются из
77
таблицы ((приложение VI) по выбранному уровню значимости q% и числу
результатов наблюдений я. При уровне значимости, отличном от приведенных в
таблице, значения Р находят путем линейной интерполяции.
Если при проверке нормальности .распределения результатов наблюдений
группы для критерия 1 выбран уровень значимости qu а для критерия '2—
уровень q& то результирующий уровень значимости составного критерия q^qi+q2-
Если хотя бы один из критериев 'не соблюдается, то считают, что распределение
результатов наблюдений не соответствует нормальному.
Обработка результатов измерений, распределение которых
нельзя считать нормальным. Результаты наблюдений, нормальность
распределения которых не подтверждается, также должны
обрабатываться для получения оценок измеряемой величины. Здесь можно
рассмотреть два случая. Во-первых, если удается выяснить вид рас-,
пределения результатов наблюдений и оно отлично от
нормального, то задачу оценивания интересующих параметров и в том числе
оценку измеряемого значения можно решить на основе принципа
максимума правдоподобия. Во-вторых, чаще всего, если
распределение нельзя считать нормальным, то не удается установить и
функции распределения. В этом случае предлагаются различные
методы, исходя из предположения симметричности закона
распределения. Общий вывод заключается в том, что за оценку измеряемой
величины для симметричных распределений практически всегда
можно.принять среднее арифметическое результатов наблюдений.
Погрешность такой оценки снижается с увеличением числа
наблюдений в, силу предельной центральной теоремы.
4.4. СУММИРОВАНИЕ ПОГРЕШНОСТЕЙ
Прямые измерения. Погрешность так называемого
«исправленного результата измерения» складывается из случайной
составляющей и неисключенной систематической погрешности. В
соответствии с ГОСТ 8.207—76 считают, что неисключенная
систематическая погрешность результата образуется неисключенными
систематическими погрешностями метода, СИ и другими источниками. За
границы этих составляющих неисключенной систематической
погрешности принимают, например, пределы допускаемых основных
к дополнительных погрешностей СИ, если случайными
составляющими можно пренебречь в силу их малости. При суммировании их
неисключенные систематические погрешности СИ каждого типа
рассматривают как случайные величины. Если данные о виде
функции распределения этих погрешностей отсутствуют, то
распределения считаются равномерными.
Границы доверительного интервала неисключенной
систематической погрешности результата измерения вычисляют с помощью
композиции законов распределения неисключенных составляющих.
При равномерном законе распределения составляющих эти
границы (без учета знака) можно вычислять по формуле 6 =
78
т
=&[' Е 02»]1/2, где б, — границы доверительного интервала i-й не-
исключенной систематической погрешности; k — коэффициент,
определяемый принятой доверительной вероятностью а и числом
суммируемых составляющих т. Обычно используют усредненные по
т значения коэффициентов (погрешность от замены усредненными
коэффициентами точных коэффициентов не превышает 10%),
приведенные в табл. 4.2 для т> 4.
Таблица 4.2
а
к
0,90
0,95
0,95
1,10
0,98
1,30
0,99
1,40
Если т^4, то k определяются более сложно (см. ГОСТ 8.207—76).
В § 4.3 было показано, как находить границы доверительного
интервала е. ГОСТ 8.207—76 регламентирует процесс установления
границ суммарной погрешности Д. В соответствии с этим
рассмотрим два случая: во-первых, если одна из составляющих
преобладает над другой, то меньшей составляющей .пренебрегают, и, во-
вторых, если составляющие соизмеримы, то специальным образом
учитывается влияние каждой из них на границу суммарной
погрешности измерения.
В первом случае рекомендуется оценивать следующим
образом: если 6/5 (Л) <0~,8, то неисключенными'систематическими
погрешностями пренебрегают по сравнению со случайными и
устанавливают, что граница погрешности результата Д=е; если 6/5 (Д)>
>8, то случайной погрешностью по сравнению с
систематическими пренебрегают и устанавливают, что граница погрешности
результата Д=6. Доказано, что при выполнении указанных
неравенств погрешность, возникающая за счет пренебрежения одной из
составляющих, не превышает 15%.
Во втором случае, если указанные неравенства не-
выполняются, то границу погрешности результата измерения находят путем
построения композиции распределений случайной и неисключенных
систематических составляющих, рассматриваемых как случайные
составляющие в соответствии с § 4.3. Если доверительные
границы случайных, погрешностей найдены, границы погрешностей
результата измерения Д (без учета знака) можно вычислять по
формуле
Д = £52, (4.38)
где
^(е + 8)/{5(Л)+[|.|]1/2}
<4.39|
79
— коэффициент, зависящий от соотношения случайной и неисклю-
ченной систематической погрешностей;
52 =
2 ?L+S*(A)
1=1 л
1/2
(4.40)
— оценка суммарного среднего квадратического отклонения
результата измерения.
В простейшем случае результат измерения с указанием его
точности и правильности записывают в виде: Л= ... ; 0= .... ; S(A) =
= ...; п== ... ; где 0 — границы неисключенного остатка
систематических погрешностей, определяемых по ГОСТ 8.207—76. Другие
формы представления результатов измерений регламентированы
ГОСТ 8.011—72.
Косвенные измерения. Простейшим уравнением косвенного
измерения является [1]
Q=F(A, В). (4.41)
где F— известная функция величин А и В, определяемых прямыми
измерениями. Переходя к оценкам этих величин и вводя в
рассмотрение суммарную погрешность Д, представим (4.41) в виде
Q+A = F(A + AA, Б + Ав).
Полагая малыми Да и Дв, разложим функцию F в ряд Тейлора:
д F . . dF . , 1 d2F
— ДлН ДВЧ
дА л '■ д В 2 3 Л2
Q + A = F(A> В) = ^ ДЛ+ <£ Дв+ JL ?2. д* +
2 д В"- в дАдВ ^
Отсюда сразу следует, что
Q = F(A, В), (4.42)
Дисперсия оценки Q будет минимальной, если из всех
возможных оценок А и В будут выбраны те, которые имеют наименьшую
дисперсию (эффективные оценки). Эффективными будут средние
арифметические результатов наблюдения этих величин. Поэтому
эффективная оценка косвенно измеряемой физической величины
получается в результате подстановки в уравнение измерения
средних арифметических значений величин, определяемых прямыми
измерениями.
•Представим погрешности Д в виде суммы систематической 0 и
случайной е составляющих:
Д = 0 + е. V (4.43)
Тогда
© + Е== LL (Qa+*a)+ дт{ (вв + гв) +
о л а о
+ Т Т7> {Qa+гл)2 + Т S (9в+гв)2 + - (144)
Выражения для систематической погрешности получим,
усреднив правую и левую части этого уравнения:
1
2 д В2
Отсюда видно, что при косвенном измерении систематическая
погрешность определяется не только систематическими
погрешностями прямых измерений. Даже при Qa=Qb=0 0^=0, и в
результат косвенного измерения нужно вводить поправку q. Ее значение
находят из (4.45). Ограничимся первыми членами разложения и
вычтем (4.45) из (4.44):
dF . dF
е= — ел Н ев.
д А д В
Усреднение квадрата правой и левой части этого выражения
позволяет найти дисперсию результата косвенного измерения:
\дА)А дАдВ \д В
( д F\* „ . Id F\? „ . 0dF d F
■ =Ы а'+Ы ^ + 2ГаГв0а0вГав\
где гав — коэффициент корреляции между результатами
наблюдений Л и В; од и ав — средние квадратические отклонения
результатов измерения величин А и В. Если Гав=0, то
оа =
дА
•ИН)"<*
и соответственно
д F д F dF д F ,
где — оа и — ав — частные погрешности, а — и функции
дА д В F дА дВ
влияния.
Доверительный интервал при заданной доверительной
вероятности или доверительная вероятность при заданном доверительном
интервале находят при большом числе наблюдений нормально
распределенных независимых величин, определяемых прямыми
измерениями, с помощью интегральной функции нормированного
нормального распределения Ф(&), ибо в этом случае можно считать, что
результат косвенного измерения также имеет нормальное
распределение При малом числе нормально распределенных
результатов наблюдений следует пользоваться функцией распределения
Стьюдента p(t,k) с числом степеней свободы k; определяемым
числом наблюдений при прямых измерениях, их средним квадратиче-
ским отклонением и функциями влияния.
81
Результат косвенного измерения вместе с показателями
качества может быть записан в виде Q = Q+q±it»o; р = ..., где Р —
доверительная вероятность.
Совокупные и совместные измерения. При совокупных и
совместных измерениях искомые Qb Qz,..., Qm и полученные в t-м
опыте в результате прямых или косвенных измерений значения
физических величин Ai, Bu... связаны между собой уравнениями
вида Fi(Qi, Qz,,..., Qm, Ли В{,...)=0, i=l, 2,..., п. После
подстановки в каждое такое уравнение значений Л,, В{,... получим
Fi(Q1,,Q2,...,Qm)=0, (4.47);
где знак равенства имеет уже чисто условный характер, ибо
полученные в результате измерений коэффициенты, входящие в (4.47),
содержат погрешности. Поэтому уравнения вида (4.47) называют
условными.
Если в каждое уравнение ввести слагаемое Vi, обращающее его
в строгое тождество и называемое «невязкой», то задача будет
состоять в том, чтобы найти такие оценки Qi, Q2, •••, Qm, при
которых сумма квадратов невязок будет минимальной, т. е. в
уравнениях
FtiQi, Q2,... ,ЗиН-», = о
п
величины Vi будут удовлетворять условию min 2 v]
Так как —Vi=Fi(Qi, Q2, —, Qm), то требование минимизации
суммы квадратов невязок можно записать в виде
min S of = min S ^ (Qi. % - - Qm)-
i=i 1=1
Функция нескольких переменных F2i достигает минимума в
точке, где все частные производные, ее равны нулю. Поэтому оценки
интересующих нас физических величин Qj находятся из системы
уравнений
2 F,§£ =0, / = 1,-2, ... ,т.
4.5. ПОРЯДОК ОБРАБОТКИ РЕЗУЛЬТАТОВ
ПРЯМЫХ ИЗМЕРЕНИЙ
Резюмируем основные результаты, приведенные в данной главе в
виде рекомендаций по обработке прямых измерений, так как
именно прямые измерения являются исходными для более сложных и
имеют самостоятельное значение.
Если выполняется измерение с однократным наблюдением, то
обычно ограничиваются указанием класса точности или иных
необходимых метрологических характеристик использованного СИ.
При измерениях с многократными наблюдениями обработка их
результатов проводится по-разному в зависимости от числа серий на-
Й2
блюдений, а также от условий и числа наблюдений в каждой
серии, значимости систематических погрешностей, законов
распределения случайных погрешностей и ряда других факторов. В
простейшем случае, когда выполнена одна серия наблюдений с п<15
и невозможно оценить и исключить систематические погрешности,
ограничиваются вычислением среднего арифметического
результатов наблюдений Л (4.6) и оценки его среднего квадратического
отклонения {4.24). Результат записывается в виде: Л, а—.
Во всех остальных случаях в соответствии с ГОСТ 8.207—76
выполняют следующие операции:
1. Исключение известных систематических погрешностей из
результатов наблюдений, пользуясь рекомендациями § 4.2 и гл. 2 и 3.
2. Вычисление среднего арифметического исправленных
результатов наблюдений (т. е. после исключения систематических
погрешностей), принимаемого за результат'измерения (4.6).
3. Вычисление оценки среднего квадратического отклонения
результата наблюдения (4.16).
4. Вычисление оценки среднего квадратического отклонения
результата измерения (4.24).
5. Проверка гипотезы о том, что результаты наблюдений
принадлежат нормальному распределению (§ 4.3).
6. Вычисление границ доверительного интервала случайной
погрешности (случайной составляющей погрешности) результата
измерения (4.38).
7. Вычисление границ неисключенной систематической
погрешности (неисключенных остатков систематической погрешности)
результатов измерения (§ 2.2).
8. Вычисление границ доверительного интервала погрешности
результата измерения (§ 2.4).
Указанный стандарт рекомендует также проверять гипотезу о
нормальности результатов наблюдений при уровнях значимости q
от 10 до 2% и указывать конкретно взятое значение а в
используемой методике. Для определения доверительных границ
погрешности результата измерения доверительную вероятность (надежность)
Р принимают равной 0,95; допускается указывать границы
доверительного интервала для доверительной вероятности Р=0,99. В
особых случаях, например лри измерениях, результаты которых
имеют значение для здоровья людей, допускается вместо Р=0,99
принимать более высокую доверительную вероятность. ГОСТ
8.011—72 устанавливает количественные показатели точности
измерений, способы их выражения и формы представления
результатов. В соответствии с этим точность измерения после обработки
результатов наблюдений должна выражаться одним из следующих
способов:
интервалом, в котором с установленной вероятностью
находится суммарная погрешность измерения. В этом случае форма
представления результатов имеет вид
А; А от Дн до Дв; Р,
83
где А — результат измерения в единицах измеряемой величины;
Д, Лв, Лн — соответственно погрешность измерения с нижней и
верхней границами в тех же единицах; Р — установленная вероятность,
с которой погрешность измерения находится в этих границах.
Например: 130 В; Л от —5 до 7 В; Р=0,95.
При симметричном относительно результата измерения
интервале погрешности результата измерений представляются в виде
А=А±Л, Р.
Числовое значение результата измерения должно оканчиваться
цифрой того же разряда, что и значение погрешности Л;
интервалом, в котором с установленной вероятностью находится
систематическая составляющая погрешности измерения,
стандартной аппроксимацией функции распределения случайной
составляющей погрешности измерения и средним квадрэтическим,
отклонением случайной составляющей погрешности измерения;
стандартными аппроксимациями функции распределения
систематической и случайной составляющих погрешности измерения
и их средними квадратическими отклонениями;
функциями распределения систематической и случайной
составляющих погрешности измерения.
При отсутствии данных о виде функций распределений
составляющих погрешности результата и при необходимости дальнейшей
обработки результатов или анализа погрешностей результаты
измерений записываются в форме
A: A; S(A), n, 0,
где S(A) —оценка среднего квадр этического отклонения результа-
тз измерения; п — число наблюдений; 0 — граница неисключениой
систематической составляющей погрешности результата измерения,
причем если граница вычислена в соответствии с § 4.47, то
следует указать доверительную вероятность Р. Оценки S(A) и 0 могут
быть выражены в абсолютной и относительной (отнесенной к л)
формах.
Выбор способа, которым выражается точность измерения, и
форма записи результата определяются назначением измерений и
регламентируются соответствующими нормативно-техническими
документами.
Часть II. ЭЛЕКТРОРАДИОИЗМЕРЕНИЯ
Глава 5. ИЗМЕРЕНИЕ ТОКА, НАПРЯЖЕНИЯ,
МОЩНОСТИ
5.1. МЕТОДЫ ИЗМЕРЕНИЙ ТОКОВ
И НАПРЯЖЕНИЙ. ИСТОЧНИКИ
ПОГРЕШНОСТЕЙ
Измерение напряжений является наиболее распространенным в*
практике электрорадиоизмерений; токи измеряются реже.
Включение измерительного прибора в цепь не должно (в
идеале) изменять режимов этой цепи, другими словами,
измерительный прибор не должен потреблять мощности из измеряемой цепи.
Отсюда следует, что приборы, включаемые в цепь
последовательно (например, амперметры), должны обладать минимальным
входным сопротивлением; приборы, включаемые параллельно
(вольтметры, осциллографы и т. д.) — максимально возможным.
Напряжение и ток являются процессами, протекающими во
времени, и во времени они могут оставаться неизменными или
меняться. Вольтметры (амперметры) измеряют определенные
интегральные параметры текущего значения напряжения или тока.
Наиболее распространенными в измерительной практике являются
четыре параметра напряжения или тока: пиковое, среднее, средне-
выпрямленное, среднеквадратическое. Далее для определенности*
будет говорить о параметрах напряжения — это же однозначно
относится к токам.
Пиковое значение — наибольшее или наименьшее значение
сигнала за время измерения:
t/m = max {«(*)}, (5-1)
г
где max — операция нахождения максимального (минимального)
т ,
значения сигнала u(t) на интервале измерения Т. Это операция
интегральная в том смысле, что для ее осуществления необходим
анализ и запоминание в течение времени измерения Т.
Среднее за время измерения Т значение определяется
выражением
Vn = ±r\u{f)dt. (5.2).
1 о
По смыслу среднее значение — это постоянная составляющая,
сигнала u(t) за время измерения Т. Графически это среднее зна~
85.
<че«ие за время Т, равное разности площадей под и над осью
времени.
Средневыпрямленное за время измерения значение
определяется выражением
.£/oP.. = 4-(M')U'- (5-3)
■■' о
Геометрически это сумма площадей, ограниченная кривой над и
*под осью времени за время измерения Т. При таком определении
считается, что операция нахождения средневыпрямленного
значения осуществляется с помощью двухполупериодного детектора
средневыпрямленных значений. При однополярном измеряемом
напряжении f/cp и Ucp.B равны между собой.
Отметим, что в измерительной практике используется и однопо-
лупериодное детектирование (положительных и отрицательных
значений). Если нет специальных оговорок, то выпрямление
считается двухполупериодным.
Среднеквадратическое за время измерения значение
определяется выражением
1/=1/ —\u2{t)dt. (5.4)
Квадрат среднеквадрэтического значения напряжения численно
равен средней мощности, рассеиваемой на сопротивлении 1 Ом.
Связь между рассмотренными параметрами описывается тремя
коэффициентами:
амплитуды (пик-фактор), равным отношению пикового
значения к среднеквадратическому:
Ka = UJU; - (5.5)"
формы (форм-фактор), равным отношению среднеквадратиче-
«с.кого значения к средневыпрямленному:
КФ=и!исР.в; (5.6)
. усреднения, равным отношению пикового значения к средне-
выпрямленному:
K,=UJUe?.,. ■ (5-7)
Для указанных коэффициентов очевидно формальное равенство
Ку = КфКа-
Кроме того, для этих коэффициентов справедливо неравенство
Знак равенства выполняется для сигналов постоянного
напряжения и сигналов типа «меандр».
Для каждой формы физически реализуемого сигнала все три
коэффициента определены, и их значение не зависит от
параметре
ров сигнала. Так, для сигнала синусоидальной формы с любой
амплитудой, частотой и начальной фазой:
/Сф = я/21/я«1,11; К* = 1/2 «1,41; Ку = я/2» 1,57.
Для сигнала пилообразной формы вида u(t) = Umt/T, 0^/^Гг
Кф= 2/1/3 «1,16; Яа = /З «1,73; Яу = 2.
Для прямоугольных импульсов со скважностью Q:
Кф=Ка=УЯ; Ky=Q.
Показания любого вольтметра или амперметра
пропорциональны размеру одного из параметров. Вид параметра, на который
реагирует вольтметр, определяет название этого вольтметра. Так,
пиковый вольтметр измеряет размер пикового значения сигнала, т. е.
его показание пропорционально пиковому значению измеряемого^
напряжения; показание вольтметра среднеквадратических
значений (квадратичный вольтметр) пропорционально размеру средне-
квадратического значения измеряемого сигнала.
Очевидно, что все рассмотренные параметры для постоянных
тока и напряжения равны между собой и аналогичные названия*
не имеют смысла для приборов постоянного тока. Такие приборы
называются просто вольтметрами (амперметрами) постоянного
тока или напряжения.
По классификации (ГОСТ 15094—69. Приборы электронные
радиоизмерительные. Классификация, наименования, обозначения)
буква указывает подгруппу, к которой относится прибор: А —
амперметр, В — вольтметр и т> д. Первая цифра обозначает вид: 1 —
постоянный ток (напряжение); 2 — переменный,..., 7 —универ-,
сальный прибор.
Как и любые средства измерения, вольтметры и амперметры
могут реализовать метод непосредственной оценки, или метод
сравнения.
Рассмотрим особенности вольтметров в соответствии с
реализуемым методом.
Вольтметры непосредственной оценки. Эти приборы можно
представить в виде последовательно соединенных измерительного
преобразователя и отсчетного устройства.
На вход преобразователя подается измеряемый сигнал, поД
действием которого на его выходе образуется отклик,
пропорциональный размеру одного из четырех параметров сигнала на входе.
Например, в электромеханическом аналоговом вольтметре^ средне-
выпрямленных значений входной электрический сигнал
преобразуется в механическую величину — угол отклонения стрелки,
пропорциональный средневыпрямленному значению. Чтобы оценить-
размер входного сигнала в принятых единицах, измерения,
необходимо получить на регистрирующем устройстве показание, т. е.
снять отсчет со шкалы, проградуированнои в соответствующих^
единицах. Такая модель вольтметра удобна для рассмотрения вли-
87^
x(t)
Преобразователь
(детектор)
Регистрирующее устройство
(шкала)
Рис. 5.1
яния формы кривой напряжения (или тока) на результат
измерения. Для рассмотрения остановимся подробнее на процессе граду-
жировки вольтметров. Полученные при этом выводы могут быть
перенесены на амперметры.
Принятая модель вольтметра представлена на рис. 5.1, где
„x(t) —сигнал, подлежащий измерению; а —отклик на выходе
преобразователя, функционально связанный с измеряемым сигналом
x(t) одним из выражений (5.1) — (5.4) в зависимости от вида
преобразователя; Ап.— показание, снятое с отсчетного устройства.
Не останавливаясь на специфических, особенностях процесса
градуировки, можно рассмотреть этот процесс с помощью схе-
смы на рис. 5.2. На этой схеме обозначено: Г — генератор сигнала
с регулируемым значением амплитуды; ОВ — образцовый
вольтметр, по которому градуируются исследуемые вольтметры; В\, В2,
В3 — градуируемые вольтметры, состоящие в соответствии с
принятой моделью на рис. 5.1 из преобразователей и градуируемой
шкалы; Ап\, АП2, Апз — показания соответствующих вольтметров.
Будем считать вольтметр В\ — пиковым, В% — средневыпрямленных
значений и 53 — среднеквадратических значений и соответственно
использовать в дальнейших формулах индексы 1, 2 и 3. Меняя
амплитуду сигнала на выходе генератора, мы будем менять
показания образцового и градуируемых вольтметров, иначе говоря,
градуировка в данном случае заключается в том, что измеренное
образцовым вольтметром значение переносится на шкалы
градуируемых для различных значений амплитуды выходного напряже-
/
г
Образцовый вольтметр
среднеквадратических
значений (ОВ)
V?-
Преобразователь
максимальных
(пиковых) значений
Г-
Шкала 1
!
Вольтметр 1 I
Преобразователь
средневыпрямленных
значений
а2
Шкала 2
Преобразователь
среднеквадратических
значений
Ш кала 3
Вольтметр 2
—*-
п2
Вольтметр 3 (
—э- I
J
Рис. 5.2
ния генератора. Но так как у градуируемых вольтметров
преобразователи разные, то на один и тот же сигнал генератора при
одном и том же показании образцового вольтметра у градуируемых,
вольтметров будут разные отклонения. Следовательно, градуиро-
вочные характеристики вольтметров с разными
преобразователями будут различными.
Обычно градуировку проводят на сигнале синусоидальной фор-
мы, а шкалу градуируют в среднеквадратических значениях
синусоидального напряжения. В некоторых случаях градуировка
возможна и в других значениях синусоидального напряжения —
например, пиковый вольтметр градуируют в амплитудных
значениях синусоидального напряжения, но тогда это специально
оговаривается. Для схемы на рис. 5.2 это означает, что Г — генератор-
синусоидального сигнала, ОВ — образцовый вольтметр, показания
которого есть среднеквадрэтическое значение напряжения
генератора. При входном синусоидальном сигнале после проведенной
таким образом градуировки показания всех вольтметров будут
среднеквадратическим значением; т. е. для синусоидального
измеряемого сигнала можно записать следующие зависимости:
•™п1 == ^sln ==z C\ Um sini
АП2Г* Us\n = C2 L/cp.B.sin> (5-8/
''ПЗ == ^sln := сз ^sin>
где Си С2, С3 — градуировочные коэффициенты соответствующих
вольтметров. Выразим их через коэффициенты амплитуды и
формы (5.6) и (5.7):
сх = Usin/Um Sin = 1/tfa sin = 0,707;
c2 = UsiJUcp.B sin = Кф sin = 1,11; (5.9)
C3 = UsiJUsin = 1.
В соответствии с (5.9) выражения (5.8) можно переписать в;
виде:
АП} = ит sln/Ла sin» Ап2 = A^sln ^cp.B.sin» Ап3 = 1 l/sin. (5.10)1
Выражения (5.10) отображают структуру показаний
вольтметров, если они проградуированы в .среднеквадратических
значениях синусоидального напряжения. Отражением этого является cbohi
градуировочная характеристика для каждого вольтметра,
описываемая коэффициентами амплитуды и формы синусоидального
напряжения.
Теперь тремя вольтметрами, проградуированными в
среднеквадратических значениях синусоидального напряжения, измерим
напряжение произвольной формы ux(t). Каждый преобразователь в
соответствии со своей характеристикой преобразования
сформирует отклик, пропорциональный размеру параметра напряжения
89'
<Mx{t) произвольной (несинусоидальной) формы, и показания трех
вольтметров могут быть записаны в виде:
* Ащ = итх/Ка sin = 0,707 Umx;
Лп2 = Кф5ыисрвх= 1,11 £/ср. Ьх; - (5.11)
Ли =1 £/« = £/,.
Из (5.11) видно, что только показание третьего вольтметра
<4пз будет представлять размер параметра напряжения
произвольной формы, т. е. среднеквадратическое значение сигнала ux(t}.
Остальные два (ЛП1 и А„2) не будут параметрами измеряемого
напряжения; действительно, например, Ап\ было бы
среднеквадратическим значением ux(t), если бы параметр Umx, «вычисляемый»
преобразователем пикового вольтметра, умножался- на l/Ках, но
в вольтметре,.проградуированном на синусоидальном напряжении,
параметр Umx «умножается» на 1//Са sin (синусоидального
напряжения) и в общем случае К* хфКа sin-
Рассуждая аналогично, можно убедиться, что показания
первого вольтметра будут параметром измеряемого сигнала
(амплитудой) только, если он проградуирован в амплитудных значениях,
т. е. ЛП1 = £Лвд, а второго, если он проградуирован в средневыпрям-
ЛеННЫХ, Т. е. /4п2='£Л:р.вхж.
Все сказанное позволяет сделать важный вывод:
если вольтметр проградуирован в значениях параметра, на
который реагирует его преобразователь, то показание вольтметра
при любой форме измеряемого сигнала равно размеру параметра
измеряемого сигнала. В этом случае говорят, что показания
вольтметра не зависят от формы напряжения.
Оценим систематическую погрешность, которая получается,
если не учитывать влияния формы измеряемого напряжения. Как
показано, такую погрешность вносят первый (пиковый, програду-
«рованный в среднеквадратичееких значениях) и второй (средне-
выпрямленных значений проградуированный в
среднеквадратичееких) вольтметры. По показанию .первого можно определить
пиковое значение измеряемого несинусоидального напряжения (5.10):
Vmx = AniKasin- Зная Umx и Ках, можно найти
среднеквадратическое значение измеряемого напряжения: Ux=Umx/Kax=AnlX
ХКа sin/Каж- Если пренебречь влиянием формы измеряемого
напряжения, т. е. принять Лп1 за среднеквадратическое значение
измеряемого несинусоидального напряжения, то погрешность будет
равна '
А = Аа1 — Лп1 /Са sinAKa х = Ап1 (1 — /Са gin/Ka x)-
ДЛЯ ВТОрОГО ВОЛЬТМетра МОЖНО ПОЛуЧИТЬ A„2 = K$slnUср.в*.
Средневыпрямленное значение измеряемого напряжения £/ср.вж=
=Лп2//(ф sin. Зная коэффициент формы измеряемого напряжения
Кфх, получаем 'Ux=Ucp.BXK.$x=An2K$x/K$siT,. Погрешность за
«чет того, что показание считаем среднеквадратическим значением
измеряемого напряжения,
А = Дпа—Ап2Кфх/Кф51п = 4п2{1—Кф Х/Кф sin)-
90
Из полученных выражений для погрешностей можно сделать
вывод, что пренебрежение влиянием формы измеряемого
напряжения вызывает тем большую погрешность, чем больше измеряемое
напряжение ux(t) отличается от синусоидального. О степени
отличая мы судим по отличию коэффициентов амплитуды и формы
измеряемого напряжения (Ках и Кфх) от соответствующих
коэффициентов синусоидального напряжения (Ka sin и K<j>sin).
Отметим, что вольтметр, как и другие измерительные приборы,
может быть с открытым, или закрытым входом. Если
"преобразователи и градуировка шкал у вольтметра с открытым входом
совпадает с шреобразователем и шкалой вольтметра с закрытым
входом, то совпадают и градуировочные коэффициенты, так как у
синусоидального напряжения, на котором вольтметры градуируются,
постоянная составляющая отсутствует. При открытом входе
вольтметр измеряет весь сигнал, а при закрытом — за вычетом
постоянной составляющей. В общем виде можно записать
л fc/[w(0l при открытом входе,
\cf[u(t)—£/п.с] при закрытом входе,
(5.12)
(5.13).
где Ап — показание прибора; с — градуировочный коэффициент;
/ — функциональное преобразование типа (5.1) — (5.4), зависящее
от вида преобразователя; Unx — постоянная составляющая
измеряемого сигнала, равная среднему значению.
Для иллюстрации изложенного рассмотрим примеры.
Пример 1. При измерении (однократном) сигнала иесинусоидальной формы
ux(t) пиковым вольтметром с открытым входом получено показание Лп.
Выразить через это показание параметры сигнала u^(t).
1. Для пикового вольтметра с открытым входом в соответствии с (5.1€)
Ап — ситх = итх/Ка 8in=0,707Г/т*; тогда пиковое значение, выраженное через
показание Лп,
Umx=Kb 81пЛп=11,41 Лп.
2. По определению Ux=Umx/Kax, т. е. их=КшпАп/Кьх = г,41Ап/Ка
Ках — коэффициент амплитуды напряжения ux(t).
3. По определению иСр.яХ = их/КфХ, откуда
fcp.Bi = Aa 81пЛп//Сар<:-Кфа:= 1,41 Ац/К&хКфх,
где Кфх — коэффициент формы измеряемого напряжения.
Пример 2. Напряжение ux(t), показанное на _
рис. 5.3, измеряется тремя вольтметрами: пиковых,
средневымрямленных и среднеквадратичных
значений. Выразить параметры этого йапряжения
через показания вольтметров.
Вольтметр 1 — пиковый, вход закрытый,
проградуирован - в пиковых значениях
синусоидального напряжения. Его показание равно
амплитуде без постоянной составляющей: ЛП1= рис дд
где
.
"Г
#т
'
Т
Н
91
Um — Unc. Постоянная составляющая измеряемого напряжения
т
Т
1 ; х ит
о • Q .
Подставив в Ап\ это значение, получаем Ani = Um\(l—1/Q), откуда легко
щыразить пиковое значение напряжения ux(t) через показание Лш вольтметра il:
и = Ani
Um I —1/Q '
Найдем параметры 1/Ср.в и U. По определению K& = Um/U и /Сф = У/^ср.в.
Выразим эти- коэффициенты для конкретного напряжения ux(t), форма
которого показана на рис. 5.3; сначала получим средневыпрямленное и среднеквад-
'ратическое значения этого напряжения:
1 I х U„
£/„„, = —J |и*(01.Л = 1/« —=
ср.в
и =
Q
Т$ и» (0 л
0,5
-\[ х U
= иту— = -
VQ
Подставив эти значения в выражения для К& и Кф, получим
К а х —
ия
и,
U UJVQ
= VQ; Кф:
и
и
cp.i
UmlVQ
Qm/Q
VQ.
?где Q — скважность.
По иайденному пиковому значению и коэффициентам КфХ и Клх выразим
средневыпрямленное и среднеквадратическое значения через показания
вольтметра:
Um Ап1 ., U Ап1
(/ = ■
VQ(1 — 1/Q)
U
cp.i
КфХ Q (1 — 1/0)
Вольтметр 2 — оредневыпрямленных значений, с закрытым входом, програ-
дуироваи в среднеквадратических значениях синусоидального напряжения. Его
показание в соответствии с (,5.10) я (5.13):
^2^^sin(t/cp.B-t/p.c)= Ml (t/cp.B-t/nx).
Подставим сюда (/Ср.в и 1/„.с для напряжения ux(t) (рис. 5.3):
Т + Т J
|,п[-
Проведя элементарные алгебраические преобразования, получаем:
Лп2 ~~ £i*£i£i
ип
2,22{/ I 1— л
СР.В \ Q
1
_1_
Q V"~Q
Откуда <;редневыпрямленное значение, выраженное через показание вольтметра
•2: £/ср.в=Ап2/2,22| 1— — J.
92
Выразим оставшиеся параметры измеряемого напряжения u*(t) через
показание вольтметра
и = кфхисрв
Л^УО"
2,22(1 —1/Q) •
2,22(1 —1/Q)
И, наконец, проанализируем вольтметр 3 — среднеквадратических значений,
■с закрытым входом, проградуированный в среднеквадратических значениях
синусоидального напряжения. Показание такого вольтметра в соответствии с
(5.10): Aaz = Ux. Для измеряемого напряжения ux(t) (рис. б.З)
среднеквадратическое значение
■и, = лпз = (ит-ипс) Y'yr+ uaY-
После преобразований
Но так как UmlY~Q = UmIK&x = U, то Ап3 = ЩЛ+ У 1—rt/Q— }/"Щ], откуда
и=Апз/1-],
а-де обозначено ,[.]=|[1+ |,Л1—1/Q—J/1/Q].
Пиковое значение
Urn — Ка х U ■
[•]
Средневыпрямленное значение
U —g-, Л°з
срв *ф* [-Il/Q '
Приведенные примеры 'показывают, как рассчитать поправку за счет
влияния формы кривой на результат измерения напряжения.
Метод сравнения. Нашел наибольшее применение для
измерения постоянных напряжений. Он основан на сравнении
измеряемого напряжения с падением
напряжения, значение которого
устанавливается с высокой
точностью. Принцип сравнения можно
уяснить из рис. 5.4. Если ЕХ=Е,
то показание гальванометра Гв
«.J7
-©-
L^S
Рис. 5.4
Рис. 5.5
93
равно нулю, тогда, если известно Е, можно с высокой степенью
точности определить Ех. Основное достоинство этого метода
состоит в том, что от объекта измерений теоретически не
потребляется ток, т. е. из;мерение происходит без потребления мощности от
измеряемого объекта. Это, в частности, позволяет измерять .ЭДС
источника. Погрешность измерения с помощью современных средств
составляет около 0,01 ... 0,02%.
Упрощенная принципиальная схема компенсатора постоянного
тока, реализующего метода сравнения, приведена на рис. 5.5.
Процесс измерения складывается из двух этапов: установки
рабочего тока /р и собственно измерения напряжения. Рабочий ток
/р протекает от образцового источника через регулируемый
резистор $0, образцовый резистор RN и компенсационный реостат RK.
При установке /р переключатель находится в положении 1. С
помощью гальванометра сравнивают падение напряжения IpRn на
резисторе RN с ЭДС нормального элемента. (Нормальный элемент
используется в качестве меры ЭДС: Енэ= 1,01865 В при
температуре 20° С, внутреннее сопротивление 500... 1000 Ом, ток 1 мкА).
При равенстве /г=0 (гальванометр показал равенство нулю
проходящего через него тока) £H3=/p/?w, т. е. 1Р=ЕНэЩм- Таким
образом, точность установки рабочего тока определяется точностью
значения ЭДС нормального элемента, точностью сопротивления
резистора RN и чувствительностью гальванометра.
Для измерения напряжения (этап 2) переключатель находится
в, положении 2. Регулируя RK, добиваются нулевого показания
гальванометра. При этом
где R\ — образцовое компенсирующее сопротивление, при
котором гальванометр показал нулевой ток.
Резистор RK обычно выполняется по специальным схемам,
обеспечивающим постоянное сопротивление между точками 1—2 и
переменное сопротивление между точками 1—3. Так как Ех=
=E„vR/K/RN=kRK, где k — постоянная величина, то обычно
резистор RK градуируют в единицах напряжения, что позволяет
получить непосредственный отсчет измеряемого напряжения.
Метод сравнения применяют также для измерения переменных
напряжений, как правило, синусоидальных. Принцип действия
компенсатора переменного тока основан на уравновешивании
измеряемого напряжения их известным напряжением, модули которых
равны по величине, а фазы противоположны. Точность таких
компенсаторов значительно уступает компенсаторам постоянного
напряжения.
Для измерения напряжений сложной формы можно применить
метод сравнения с предварительным преобразованием
измеряемого напряжения переменного тока в постоянное с последующим
измерением его компенсатором постоянного напряжения. Здесь в
погрешности измерения будет присутствовать составляющая за счет
неточности преобразования переменного напряжения в постоянное.
94
5.2. ПРИНЦИПЫ ПОСТРОЕНИЯ
АНАЛОГОВЫХ ЭЛЕКТРОМЕХАНИЧЕСКИХ
И ЭЛЕКТРОННЫХ ВОЛЬТМЕТРОВ
Обобщенная структурная схема аналогового вольтметра (рис.
5.6) включает максимальное число блоков. В зависимости от
назначения вольтметра некоторые из лих могут отсутствовать, за
исключением электромеханического преобразователя, который
является простейшим вольтметром. Диапазон измерений такого
вольтметра соответствует динамическому диапазону
электромеханического преобразователя. Для расширения диапазона в сторону
больших измеряемых напряжений к преобразователю добавляется
входное устройство, которое уменьшает измеряемое напряжение в
известное число раз. Для расширения пределов измерения в
сторону меньших напряжений необходимо включить в схему усилитель.
Если электромеханический преобразователь не измеряет
переменных напряжений, то вольтметр может состоять из
преобразователя и детектора, которые составляют широкий класс так
называемых выпрямительных вольтметров. Вольтметры, содержащие
усилители, обычно называют электронными.
Включение дополнительных блоков не только расширяет
динамический диапазон, но и увеличивает чувствительность
вольтметра, расширяет его возможности. Например, если усилитель
обеспечивает частотную избирательность, то получается селективный
вольтметр, который может быть использован как анализатор
спектра. Но включение дополнительных блоков, вообще говоря,
снижает точность измерения напряжения. Действительно, показание
вольтметра, состоящего только из электромеханического
преобразователя, Лп=Ф[иж(0]» гДе Ф(*) —уравнение преобразования. У
вольтметра со структурой на рис. 5.6
Ап=Ф[Р(ихфКг/Кл)К2],
где F(x) —уравнение преобразования детектора; К\—
коэффициент усиления усилителя 1; Кл — коэффициент деления сигнала во
входном устройстве; Кг — коэффициент усиления усилителя 2.
В простейшем случае, когда характеристики отдельных узлов
независимы, погрешность измерения напряжения ux(t) будет
равна сумме составляющих: '
К =* ДФ + А^ + А/с, + А*г + Д*д.
Входное
устройство
Усилитель 1
переменного
тока
Детектор
Усилитель 2
постоянного
тока
Электромеханический
преобразр- !
ватель
Рис. 5.6
95
Таким образом, неидеальность каждого блока (например,
отклонение величины коэффициента усиления усилителей от номинала)
будет вносить свой вклад в погрешность измерения напряжения.
Рассмотрим кратко требования к блокам.
Входное устройство. Оно должно обеспечивать определенные
(переключаемые) коэффициенты деления измеряемого
напряжения, высокое входное активное сопротивление и малое реактивное.
Для получения определенных коэффициентов деления во
входном устройстве применяют измерительные преобразователи:
делители или трансформаторы напряжения.
- На рис. 5.7 приведены схемы наиболее 'распространенных
делителей напряжения: резистивного (рис. 5.7,а) для низких и
емкостного (рис. 5.7,6) для высоких частот, а также для широкого
диапазона (рис. 5.7,в). Коэффициент деления определяется
отношением выходного напряжения к входному £/2/£Л и может быть
выражен через элементы схемы делителя:
I для схемы на |рис. 5.7,а и в, если RiC^ =|/?гС2,
#1 + # 2
С
для схемы на рис. 5.7,6.
Пределы измерения вольтметров можно также расширить £
помощью добавочных резисторов, включаемых последовательно с
входом вольтметра. Этот способ наиболее часто используется в
простейших вольтметрах постоянного тока и выпрямительных
(детекторных) вольтметрах переменного.
Высокое активное входное сопротивление обеспечивает
согласующий каскад, выполненный в виде повторителя (катодного, эмит-
терного или истокового), входящий в состав входного устройства
электронного вольтметра.
Входное устройство во многом определяет частотную
погрешность. Эквивалентную схему его на высоких частотах можно
представить в виде рис. 5.8. Здесь L]L2 и RiR2— индуктивности и
сопротивления соединительных проводов; Свх — сумма всех
паразитных емкостей и входной емкости схемы; RBX— входное активное
сопротивление вольтметра. Схема на рис. 5.8 представляет собой
последовательный колебательный контур, собственная резонансная
частота которого <о0= (V(Li-\-L2)CBX)-1. Высшая частота измеря-
*д =
96
Рис. 5.7
Рис. 5.8
емого напряжения юв«Сюо. Для повышения резонансной, а значит,
и высшей частоты измеряемого напряжения, необходимо уменьшать
длину соединительных проводов, применять специальные
конструктивные меры. В высокочастотных вольтметрах входное
устройство выполняется в виде коаксиального пробника, в котором
располагают и преобразователь (обычно амплитудный). В этом случае
входная емкость пробника 1,5... 2 пФ, а собственная резонансная
частота около 2... 2,5 ГГц. -л
Электромеханический преобразователь. В электромеханическом
преобразователе (его часто называют измерительным механизмом)
электрический измерительный сигнал преобразуется в
механическую величину обычно в угол поворота стрелки. Момент М,
возникающий в преобразователе под действием измеряемой
электрической величины и поворачивающий подвижную часть в сторону
возрастающих показаний, называется вращающим. Он обусловлен
известным свойством всякого электромеханического устройства:
если в электромеханическом устройстве есть подвижные элементы,
перемещение которых вызывает изменение энергии системы, то
подвижные элементы такого устройства стремятся расположить
так, чтобы энергия была максимальной. Для электромеханических
приборов можно записать общее выражение вращающего
момента, вытекающее из уравнения Лагранжа второго рода:
M=dWe/da, (5.14)
где We — энергия электромагнитного поля, сосредоточенная в
преобразователе; а — угол поворота подвижной части.
По способу преобразования энергии электрического сигнала,
подводимого к прибору, в механическую энергию, под действием
которой перемещается подвижная часть, электромеханические
преобразователи делят на магнитоэлектрические, электромагнитные,
электродинамические, электростатические и индукционные. Для
каждого из них уравнение (5.14) будет иметь свой вид.
Под действием вращающего момента по второму закону Ньютона
подвижная часть будет отклоняться до '.упора при любом значении момента. Для того
чтобы угол поворота а зависел от измеряемой величины, в преобразователе при
повороте подвижной части создается противодействующий момент Л4ПР,
направленный наветречу вращающему и зависящий от угла поворота. По
способу создания противодействующего момента различают преобразователи <с
механическим и с электрическим противодействующим моментом; последние
называют логометрами.
В первой группе приборов МцР создается обычно с помощью упругих
элементов (пружинок, нитей), которые при повороте подвижной части
закручиваются. При этом Мар = та, где т — удельный противодействующий момент,
зависящий от евойств упругого элемента. В установившемся положении
указателя, жестко скрепленного с подвижной частью, вращающий и
противодействующий моменты равны: М=МП1>. Кроме этих двух моментов, при работе прибора
возникают и другие моменты, определяющие характеристики преобразователя.
4—10 97
Несмотря на отличия разных приборов можно выделить ряд
общих для них деталей и узлов: успокоители, служащие для
уменьшения времени установления показания, и отсчетные устройства,
состоящие из шкалы и. указателя, необходимых для определения
числового значения измеряемой величины.
Значительный объем информации о принципе действия, его
характеристиках можно получить из условных обозначений,
наносимых на прибор. Номенклатура, изображение, место расположения
на приборе устанавливается соответствующими нормативными
документами. Как правило, на приборе обозначают тип прибора,
единицу измеряемой величины, класс точности, степень защиты,
род тока и т. п. Наиболее широко применяемые условные
обозначения приведены в табл. 5.1.
Рассмотрим принцип действия основных типов
электромеханических преобразователей и область их применения.
В магнитоэлектрическом электромеханическом преобразователе
вращающий момент создается в результате взаимодействия
магнитного поля постоянного магнита и магнитного поля проводника
с током (обычно в.виде катушки — рамки). Угол отклонения
рамки от нейтрального положения определяется выражением
a = k—\i{t)dt,
Где ft _ коэффициент, зависящий от конструкции прибора и
определяемый геометрическими размерами рамки, индукцией в
воздушном зазоре постоянного магнита, числом витков обмотки; Т —
время измерения, определяемое характеристиками прибора. Как
видно из этого выражения, отклонение стрелки
магнитоэлектрического прибора пропорционально среднему значению входного тока,
знак отклонения зависит от направления тока (если ток
постоянный) или от знака постоянной составляющей для переменного
тока, шкала равномерная. При использовании его с функциональным
преобразователем отклонение стрелки будет повторять закон
преобразования. Например, если преобразователем служит
квадратор, то а будет пропорционально среднему значению квадрата
входного воздействия.
Магнитоэлектрические преобразователи обладают наибольшей
чувствительностью (ток полного отклонения может достигать
0 1 мкА), что позволяет изготовлять приборы вплоть до класса
точности 0,1. Благодаря сильному собственному магнитному полю
влияние посторонних электрических и магнитных полей на
показание прибора практически не ощущается. К недостаткам таких
преобразователей можно отнести сложность, опасность перегрузок
(перегорают тонкие и гибкие токопроводящие проводники).
Перегрузки не опасны магнитоэлектрическому преобразователю с
подвижным магнитом, так как рамка с током неподвижна и к ней
ток может подводиться толстым проводом. Чувствительность
последних значительно ниже. Благодаря указанным достоинствам,
-магнитоэлектрические механизмы широко применяются в сочета-
98
Таблица 5.1
Смысл
Прибор магнитрэлектрический
с подвижной рамкой
Логометр магнитоэлектрический
Прибор магнитоэлектрический
с подвижным магнитом
Логометр магнитоэлектрический
с подвижными магнитами
Прибор электромагнитный
Логометр электромагнитный
Прибор электродинамический
Логометр электродинамический
Прибор электростатический
Прибор индукционный
Логометр индукционный
Тер мо преобразователь
неизолированный
Термопреобразователь
изолированный
Преобразователь с детектором
Электронный преобразователь
Условные
обозначения
Q
0
<!►
Ф4
€
о-
^
-о
ф
&
Т
0
0
oAZo
V
л
-о
Г>»1
и
в
ф
Смысл
Экран электростатический
Экран магнитный
Магнитная индукция в миллитес-
лах, вызывающая изменение
показаний, соответствующее
обозначенному классу точности
Поле электрическое, вызывающее
изменение показания,
соответствующее обозначенному классу
точности
Напряжение испытательное
Прибор применять при
вертикальном положении шкалы
Прибор применять при горизон -
тальном положении шкалы
Ток постоянный
Ток переменный
Направление ориентировки в
магнитном поле земли
Класс точности при нормировке
в % от диапазона измерений
Класс точности при нормировке
в % от длины шкалы прибора
Внимание!
Смотри дополнительные указания
в паспорте и инструкции по
эксплуатации
Зажим, соединенный с корпусом
Зажим для заземления
1
Условные
обозначения
О
о
ш
г—I
ПО)
i 1
&
<—i
-.—
s^
1,5
' 1,5
/ • \
±
±
99
нии с различными преобразователями.
Проще говоря, абсолютное большинство
аналоговых приборов любого вида, при:
меняемых в электрорадиоизмераниях
(частотомеры, фазометры и т. п.), в
качестве индикатора используют
магнитоэлектрические приборы. На основе магнито-
; электрического преобразователя строят
ис' ' гальванометры — высокочувствительные
приборы, служащие не для измерения, а для индикации наличия
тока или напряжения.
Если противодействующий момент создается не механическим
путем, а электрическим, то получается логометр, показание
которого зависит от отношения входных воздействий. В
магнитоэлектрическом логометре подвижная часть выполнена в виде двух
жестко скрепленных между собой рамок / и 2 (рис. 5.9), по обмоткам
которых протекают токи ii(t) и /г^)- Направление тока в обмот:
ках такое, чтобы моменты Mi и М2, создаваемые рамками в
магнитном поле постоянного магнита, действовали навстречу друг
другу. Хотя бы один из них должен зависеть от угла поворота; для
этого магнитное поле в зазоре должно быть неравномерным, что
достигается неравномерностью зазора — обычно сердечник
делается элипсоидальным. При этом угол поворота a = F(-^-\ Т, где
I 1 Г \ Т
J1==k—\h{t)dt и [t=k — \i2{t)dt. Таким образом, отклонение
;подвижной части магнитоэлектрического логометра зависит от
отношения средних значений измеряемых токов, протекающих по
обмоткам рамок.
В электромагнитных электромеханических преобразователях
вращающий момент возникает в результате взаимодействия,
магнитного поля неподвижной катушки, по обмоткам которой
протекает измеряемый ток, с одним или несколькими ферромагнитными
сердечниками, обычно составляющими подвижную часть
преобразователя, жестко скрепленного со стрелкой. При появлении тока в
катушке сердечник стремится расположиться в месте с
наибольшей концентрацией поля, т. е. втягивается в зазор катушки.^При
этом закручиваются пружинки, создавая противодействующий
момент. Отклонение стрелки а = k ^- — Г Р (0 dt, где L — индуктив-
ность катушки, зависящая и от положения сердечника (значит, и
угла поворота подвижной части а). Как видно из этого
выражения, знак угла поворота подвижной части не зависит от
направления тока, т. е. прибор может измерять как переменный ток (сред-
неквадратическое значение), так и постоянный. Шкала в общем
случае неравномерная. Ее можно улучшить, если подобрать
конфигурацию сердечников так,, чтобы изменение dL/da
компенсировало неравномерность.
100
Если на одной оси расположить два сердечника, каждый из
которых втягивается в свою катушку, а моменты направить
навстречу, то можно получить электромагнитный логометр, отклонение
стрелки которого a=/7(/2i//22).
Основным достоинством электромагнитных приборов является
простота конструкции, способность выдерживать большие
перегрузки, возможность измерять и постоянный и переменный ток. К
недостаткам относятся малая чувствительность, сильное влияние
внешних магнитных полей (если не принято специальных мер),
малая точность.
В -электродинамических преобразователях вращающий момент
возникает в результате взаимодействия магнитных полей
неподвижной и подвижной катушек с током. Угол отклонения
a = k (d Mi ,2/d a) /x /2 cos q>,
где Мi,2-— взаимная индуктивность между катушками 1 и 2; k —
конструктивная константа; 1Х и /2 — среднеквадратические
значения токов; ф — фазовый сдвиг между токами.
Электродинамические приборы используются для достаточно
точного измерения тока, напряжения и мощности в диапазоне от
нуля до нескольких килогерц. Недостатком является большая
потребляемая мощность, необходимость в защите от внешних
магнитных полей, сложность конструкции. Такие приборы плохо
переносят механические воздействия: удары, вибрацию, тряску.
Существуют электродинамические логометры, которые
используют как фазометры, частотомеры (на частотах до нескольких
килогерц) и измерители емкостей (фарадметры).
В электростатических преобразователях вращающий момент
возникает в результате взаимодействия двух систем заряженных
проводников, одна из которых неподвижна. Непосредственно
могут измерять только напряжение. Угол отклонения
«-*-г=~г/"™А
где С — емкость системы* заряженных тел; k — конструктивная
константа; u(t)—измеряемое напряжение.
Потребление энергии в таких преобразователях мало. На
показание практически не сказывается частота, окружающая
температура, постоянные магнитные поля. Из-за сильного влияния
внешнего электрического поля требуется электростатическое
экранирование. Ввиду малого значения вращающего момента в
большинстве случаев подвижная часть укрепляется на растяжках и
применяется световое отсчетное устройство. Применяются для измерения
напряжений маломощных цепей в широком диапазоне частот (от
20 Гц до 100 МГц), а также в цепях высокого напряжения
(другая конструкция) для измерения напряжений до сотен киловольт
без добавочных сопротивлений. Класс точности 1—2,5, но
достижим и класс 0,1.
101
Индукционные преобразователи состоят из одного или несколь-:
ких неподвижных электромагнитов и подвижной части в виде
алюминиевого диска. Переменные магнитные поля, направленные
перпендикулярно плоскости диска, пронизывая его, индуктируют в
металле диска вихревые токи. Взаимодействие магнитных потоков с
токами в диске вызывает перемещение подвижной части.
Наиболее часто используются в счетчиках электрической энергии.
Усилители постоянного тока. Как видно из схемы на рис. 5.6,
усилитель постоянного тока (УПТ) усиливает в вольтметре сигнал
до значения, необходимого для эффективной работы
электромеханического преобразователя, и согласует его малое входное
сопротивление с выходным сопротивлением детектора. Полоса
пропускания УПТ начинается с нулевой частоты, и до высших частот
спектра усиливаемого сигнала необходимо обеспечить постоянство
коэффициента усиления. Главной трудностью при построении УПТ
является так называемый «дрейф нуля» — медленные изменения
выходного сигнала при отсутствии на входе информационного
сигнала. Меры борьбы с этим недостатком — основная особенность
УПТ.
По способу построения различают усилители с
преобразованием и без преобразования спектра сигнала.
Структурная схема УПТ с преобразованием спектра показана
на рис. 5.10. Принцип работы основан на том, что входной сигнал
модулирует напряжение вспомогательного генератора,
модулированный сигнал усиливается усилителем переменного тока и затем
демодулируется. После фильтра нижних частот сигнал поступает
на электромеханический преобразователь. Такие усилители
существенно уменьшают значение дрейфа нуля, могут обладать
большим коэффициентом усиления, а недостатком является
ограничение полосы пропускания усилителя сверху.
Усилители без преобразования спектра строят по схеме с
непосредственной (гальванической) связью между каскадами.
Отсутствие реактивных элементов в цепях связи позволяет усиливать
сигналы постоянного тока. Верхняя граничная частота определяется
паразитными реактивными элементами. Такие усилители обладают
широкой полосой пропускания, а уменьшение дрейфа достигается,
как правило, использованием дифференциальных каскадов за счет
различия в усилении противофазных и синфазных входных
сигналов. Анализ зависимости напряжения дрейфа от параметров
усилительных элементов (ламп, транзисторов) показывает, что для
Модулятор ,
1
,
—=■■
Усилитель
модулированного
напряжения
Генератор
1
i
Фильтр
102
Рис. 5.10
снижения дрейфа следует подбирать элементы с одинаковыми
параметрами. Так как точно подобрать пару таких элементов
невозможно, то в усилителях на дискретных элементах, даже несмотря
на регулировочные элементы, позволяющие обеспечить наилучший
режим работы, за счет старения, нагревания и т. п. не удается др-
биться устойчивой компенсации дрейфа. При интегральном
исполнении дифференциальных усилителей напряжение дрейфа
значительно снижается, поскольку для транзисторов, составляющих
интегральную монолитную пару, легче выполнить условия
идентичности характеристик во времени.
Усилители переменного тока. Усилители переменного тока
(напряжения), используемые в вольтметрах, должны обеспечить
большой и высокостабильный коэффициент усиления в заданном
диапазоне частот и температур, малые нелинейные искажения и
малые собственные шумы. Как правило, для выполнения этих
требований используют многокаскадные усилители, охваченные
глубокой отрицательной обратной связью. В некоторых случаях
обратная связь делается частотозависимой, что позволяет изменять
полосу эффективно усиливаемых частот.
В специальных усилителях с высокой избирательностью
полоса усиливаемых частот может перестраиваться по диапазону.
Усилитель позволяет «вырезать» из всего диапазона только
напряжение узкой полосы частот и подать его на детектор. Вольтметр с
таким усилителем называется избирательным.
В усилителях избирательных вольтметров обычно используют
принцип супергетеродинного усиления с одно-, двух- или
трехкратным преобразованием частоты. На рис. 5.11 приведена
структурная схема усилителя с двукратным преобразованием частоты.
Штриховой линией показаны блоки, образующие в вольтметре
усилитель переменного напряжения.
Входное
устройство
Детектор
""I
Фильтр нижних
частот
Преобразователь
частоты 1
Фильтр
промежуточной
частоты
Усилитель
промежуточной
частоты
Преобразователь
частоты 2
Гетеродин 1
L
Усилитель 1
Гетеродин 2
J
Рис. 5.11
103
Частотная избирательность достигается с помощью
преобразователя частоты ПЧ1, гетеродина переменной частоты Г1 и фильтра
промежуточной частоты ФНЧ. Диапазон перестройки гетеродина
Г1 определяет рабочий диапазон частот избирательного
вольтметра.и равен А/раб =/max гет—fminrei- Так как перестройкой
гетеродина Т1 настраивают вольтметр на измерение сигнала определенной
частоты, то гетеродин Г1 градуируют в частотах рабочего
диапазона, т. е. от /тахгет-Ь/пч До fmin гет+/пч. Частотная характеристика
фильтра промежуточной частоты определяет полосу усиливаемых
частот. Основное усиление осуществляет усилитель промежуточной
частоты УПЧ — многокаскадный неперестраиваемый усилитель
переменного напряжения, содержащий несколько каскадов с
большим коэффициентом усиления, охваченный отрицательной
обратной связью для обеспечения высокой стабильности коэффициента
усиления. Каскад второго преобразования, состоящий из
гетеродина Г2 с постоянной 'частотой, преобразователя ПЧ2 и фильтра
нижних частот (ФНЧ), определяет избирательные свойства
усилителя, а следовательно, и всего вольтметра.
Как уже отмечалось, в усилителях (особенно переменного
напряжения) необходимо получить большой и стабильный
коэффициент усиления. Для периодической проверки коэффициента
усиления и его коррекции в состав вольтметра может входить
калибратор уровня — генератор стабильного напряжения, по которому
устанавливается коэффициент усиления.
Детекторные измерительные преобразователи. Детекторные
преобразователи (детекторы) служат для преобразования
поданного на его вход напряжения в пиковое, средневыпрямленное или
среднеквадратическое значение.
Отличительной особенностью амплитудного( пикового)
детектора является наличие элемента памяти, которым служит
конденсатор, «запоминающий» пиковое значение.
Если на амплитудный детектор с открытым входом (рис. 5.12,а)
подается положительное напряжение, то конденсатор С
заряжается в полярности, показанной на рисунке. Постоянная времени
заряда r3=(Ri+Rn)C, где ^ — сопротивление источника зарядного
тока, т. е. выходное сопротивление каскада, предшествующего
детектору; Ra — сопротивление открытого диода. Если постоянная
времени т3 мала (а это стремятся сделать), то диод будет закрыт
напряжением быстро зарядившегося конденсатора и это
напряжение подается на последующий каскад (УПТ или на
электромеханический преобразователь). Конденсатор постепенно разряжается
через резистор с постоянной времени тр=С^р>т3. Диод открыва-
УПГ\
I Г >
—I t-
I)
Рис. 5.12
104
ется только после того, как измеряемое напряжение их станет
больше напряжения на конденсаторе ис и снова подзарядит
конденсатор С. Напряжение на конденсаторе ис тем блике, будет к
..максимальному значению ux(t), чем больше отношение тР/т3.
Рассмотренный детектор «запоминает» максимальное положительное
напряжение. Чтобы измерить отрицательное, нужно изменить
полярность включения диода.
-На рис. 5.12,6 показана схема пикового детектора с закрытым
входом. Постоянная времени заряда r3=(Ri+Ra)C, а постоянная
разряда xp = C{R+Ri). При подаче на вход напряжения ux(t)
положительной полярности конденсатор С зарядится до
максимального значения иЖтах этого напряжения, диод будет закрыт и на
резисторе R будет напряжение uR = ux(t)—uc^ux(t)—Uxmax.
Таким образом, основное отличие от схемы с открытым входом
заключается в том, что выходным напряжением детектора является
алгебраическая сумма напряжений на конденсаторе С и выходного
напряжения детектора. Постоянная составляющая этого сигнала
выделяется, а переменная отфильтровывается с помощью
низкочастотного ЯС-фильтра. При подаче на вход детектора
пульсирующего напряжения постоянная составляющая на резисторе R
определится разностью постоянных составляющих на конденсаторе
С и на входе. Следовательно, постоянная составляющая на выходе
детектора с закрытым входом равна амплитудному значению лишь
переменного сигнала на входе. В зависимости от полярности
включения диода вольтметр с таким детектором будет реагировать
либо на положительное отклонение от среднего значения (постоян-
-ной составляющей), либо на отрицательное значение входного
сигнала.
Качество работы простейшей схемы пикового детектора как с
открытым, так и с закрытым входом определяется соотношением
постоянных времени заряда и разряда: нужно, чтобы постоянная
времени заряда была как можно меньше, а разряда — больше:
Тз^С^д и Xp — CR. Но постоянные времени зависят не только от
сопротивлений, которые не могут быть сколь угодно малыми или
сколь угодно большими, но и от емкости одного и того же
конденсатора С, которая для уменьшения т3 должна быть малой, а для
увеличения тр — большой. Так как это невозможно, то значения
т3 и тр в такой схеме определяются из компромиссных
соображений, а значит, качество работы будет невысоким. Особенно это
проявляется при измерении импульсных сигналов большой
скважности. Для улучшения работы в этих случаях используют
компенсационные и автокомпенсационные схемы амплитудных
преобразователей (детекторов).
На рис.'5.13 приведена упрощенная схема, поясняющая
принцип работы компенсационного амплитудного преобразователя.
Принцип работы сводится к следующему. Конденсаторы малой
емкости С\ (для обеспечения малой постоянной времени заряда) и
С2 (большой) до подачи измеряемого напряжения ux(t) заряжены
до напряжения компенсации Ек> определяемого положением движ-
105
"I*
т
I I fi
L
Д
-W-
Н>И£]
" гтНП
ГУ £
ка потенциометра. Если
измеряемое напряжение ыЖтах<£к, то
диод закрыт напряжением на
конденсаторе С\\ если ихтах>Ек, то
Ci быстро заряжается до ижтах
постоянная времени заряда т3=
C\(Rn+Rn) мала). После окон-
-J- чания сигнала их (или уменьше-
Рис 5.13 ния ег0 значения) конденсатор
С\ начинает- разряжаться через
резистор R, причем тр = /?С1>т3. Падение напряжения за счет
разрядного тока tp на сопротивлении резистора (форма этого
напряжения — экспоненциально-спадающий импульс с амплитудой
"ж max—Ек большой длительности, так как xp = RCi велико)
поступает на вход усилителя с большим коэффициентом усиления,
выходное напряжение которого опрокидывает одновибратор ОВ, о
чем сигнализирует индикатор И. Процесс измерения сводится к
плавной регулировке значения Ек движком потенциометра до тех
пор, пока индикатор И (например, неоновая лампочка) будет то
зажигаться, то гаснуть, т. е. пока не будет достигнуто пороговое
напряжение срабатывания одновибратора. Это напряжение
измеряется вольтметром постоянного тока либо потенциометром, про-
градуированным в значениях напряжения. Чувствительность
преобразователя будет тем выше, чем больше коэффициент усиления
усилителя, к которому не предъявляется жестких требований по
полосе частот ,и искажениям, так как падение напряжения
разрядного тока, которое усиливает усилитель, не содержит
высокочастотных составляющих и его форма на выходе не важна.
Более удобны автокомпенсационные преобразователи, при
пользовании которыми не нужно проводить никаких регулировок.
На рис. 5.14 изображены структурные схемы таких
преобразователей для измерения амплитуды положительных импульсов
напряжения (на рис. 5.14,а — вход закрытый, а на рис. 5.14,6 —
открытый). " ^
Если на вход (рис. 5.14,а) подать положительный импульс,
конденсатор С заряжается через диод Д\ и резистор R. Падение
напряжения на R приложено к входу инвертирующего усилителя,
выходным напряжением которого через диод Д2 дополнительно
заряжается конденсатор С до тех пор, пока напряжение на нем не
вых и
Рис. 5.14
106
станет равным амплитуде измеряемого напряжения их, причем
разность между ними будет тем меньше, чем больше коэффициент
усиления усилителя. Измеряемое напряжение снимается с
нагрузочного резистора Rn.
Входной импульс положительной полярности, амплитуду
которого измеряют, через диод Д\ заряжает конденсатор малой
емкости С] (рис. 5.14,6). После заряда С\ до амплитудного
значения измеряемого напряжения их диод Д, закрывается и
накопленный на С\ заряд перераспределяется между конденсаторами С\
и С2 (C2^>Ci), и ток разряда конденсатора Си проходящий через
R, создает на нем падение напряжения (форма этого
напряжения— экспоненциальный импульс). Это напряжение приложено к
входу инвертирующего усилителя, и его выходной сигнал
подзаряжает С2 до тех пор, пока напряжения на С, и С2 не станут
равными амплитуде измеряемого напряжения их. Установившееся на С2
напряжение измеряется вольтметром постоянного напряжения.
Недостатком рассмотренных преобразователей является их
возможность отслеживать только растущее напряжение ux(t), и для
измерения в общем случае необходимо перед снятием отсчета
разряжать конденсаторы.
Преобразователь средневыпрямленного значения должен
выполнять операцию нахождения модуля измеряемого сигнала
|мж(0| с последующим интегрированием в соответствии с
определением средневыпрямленного значения (5.3).
Схемы детекторов средневыпрямленных значений показаны на
рис. 5.15. В качестве выпрямительных элементов используют
германиевые или кремниевые диоды, вольт-амперная характеристика
которых изображена на рис. 5.16. Качество выпрямления диодами
определяется коэффициентами выпрямления /Св = /прДобР = /?обр/^пр
где /ПР и /0бр — прямой и обратный токи; Rnp и /?86р — прямое и
обратное сопротивления диода. Порядок коэффициентов
выпрямления 103... 105 и значение уменьшается с повышением частоты и
температуры.
В схеме на рис. 5.15,а при положительном измеряемом
напряжении ux(t) прямой ток проходит через диод Д3, резистор RH и
диод Д2; обратный ток —через диод'Д2, резистор Ra, диод Д4. С
резистора RR снимается выходное напряжение uBax=iRBi£es
= Ru(Iap—/обр). Считая диоды одинаковыми, можно записать /пр =
= Ивх/(2/?пр + /?н), /обР = "вх/(2/?0бр + /?н).
Вольт-амперная характеристика диода (особенно прямая
ветвь), а значит, и сопротивление Rnp нелинейны. На начальном
участке ее можно считать квадратичной и только при больших
сигналах она линейна. Значит, в общем виде, /пр и /0бР, а
следовательно, ыВых будут нелинейно связаны с измеряемым напряжением,
и преобразователь не выполняет операции «нахождения модуля»
ux(t), необходимой для определения средневыпрямленного
значения. Для линеаризации рассматриваемого преобразователя
сопротивление резистора RB выбирают много большим Rnp. Тогда /Пр =
= иВх/(2Ящ>+Яв) ««вх/Ян, т. е. в силу i?H>i#np прямой ток можно
считать линейно зависящим от входного напряжения. Ветвь
обратного тока не оказывается прямой, так как не выполняется
неравенство i?06p^J?H, следовательно, сопротивление R06p превалирует над
RH. Значит, даже при RB^>Rnp характеристика преобразования
будет нелинейной за счет обратного тока.
•Резюмируя сказанное, можно сделать вывод, что линейность
характеристики преобразования для любых измеряемых напряжений
(малых и больших) будет тем выше, чем больше RH по сравнению
с Rnp диодов и чем больше коэффициент выпрямления. Кроме того,
большая величина RH стабилизирует характеристики диода, т. е.
можно предъявлять не столь жесткие требования к идентичности
характеристик диодов преобразователя. Но увеличение Rn
снижает чувствительность преобразователя, т. е. чем больше RH, тем
меньше иВых при том же ивх" (см. прямые линии на рис. 5.16).
Выходное напряжение с преобразователя uBhlx(t)=Ki\ux(t)\
, непосредственно или через усилитель постоянного напряжения
подается на магнитоэлектрический прибор, который осуществляет
операцию усреднения. В результате стрелка отклоняется на угол
1 о 'о*
В схеме на рис. 5.15,6 роль нагрузочного сопротивления играют
резисторы R\ и R2. При положительном полупериоде напряжения
ux(t) ток течет через диод Д2, резистор R2 и выходное напряжение
(если не учитывать обратного тока) равно падению напряжения
на сопротивлении резистора R2. При обратном включении
измеряемого напряжения ток течет через Д\ и R\ и выходное напряжение
создается падением напряжения на резисторе R\.
Преобразователь среднеквадратичеаких значений должен
выполнять операцию квадрирования измеряемого напряжения с
последующим интегрированием в соответствии с выражением (5.4).
В вольтметрах операцию квадрирования осуществляют диодные
аппроксиматоры и термоэлектрические преобразователи.
Суть работы аппроксиматора заключается в том, что ветвь
параболы аппроксимируется ломаной линией, как показано на
рис. 5.17. Для получения такой аппроксимации необходимо иметь
элементы, у которых характеристики линейны; их наклоном можно
управлять; характеристика начинается с определенного значения
Et. Всем этим требованиям удовлетворяет элемент в виде диода и
108
*«ых"
")
Рис. 5.18
двух резисторов, показанный на рис. 5.18,а. Действительно,
полагая Яобр^оо, можно получить характеристику, подобную
изображенной на рис. 5.18,^. Линейность обеспечивается тем, что
сопротивление резистора R{ больше Rnp — прямого сопротивления
диода (L/?i»i?pp), наклон (угол а.) — сопротивлением R,u а начало
Ei = R'i/(R.i+R'i)—напряжением смещения, поданным на диод с
делителя, состоящего в i'-м элементе из резисторов Rt и R'i. Чем
больше аппроксимирующих элементов, тем выше качество
приближения ломаной к параболе. Цепь из трех элементов показана на
рис. 5.19. Элементы соединены последовательно, сопротивления
резисторов подобраны так, чтобы £,1<£,2<£,3- При Ex<.u,x{t) <£2
ток течет только через диод Дх; при E2<.ux(t) <ЕЪ токи текут
через диоды Д\ и Д2 и характеристики элементов, начиная со
значений ux{t)>E2 складываются. Диод Д3 включается, если ux(t)>E3.
Такая цепь аппроксимирует только одну (положительную)
ветвь параболы. Отрицательное напряжение детектируется диодом
Д'е, который вместе с диодом Д0 и резистором R0 составляют
линейный двухполупериодный выпрямитель. Принцип работы
линейного детектора вместе с аппроксимирующей цепью легко понять
из временной диаграммы на рис. 5.20. Выходное напряжение
"вых(0 =kifix(t) снимается с резистора RH, через который
протекает сумма токов всех диодов, и подается через усилитель
постоянного напряжения или непосредственно на магнитоэлектрический'
электромеханический преобразователь, усредняющий это
напряжение.
36
До
-to-
I &1 I I ^Z I I ^3
Ai4 Аг U Аз
ИМИ
-*£
RtiW я Л
I "бьк I
Рис. 5.19
109
■
Характеристика
линейного
детектора
Измеряемое
напряжение
Напряжение на
выходе линейного
детектора
ВЫХ{ |
Характеристика
квадратичного
детектора
' Напряжение
на выходе
квадратичного
детектора
Рис. 5.20
Рис. 5.21
Преобразователь сред-
неквадратических
значений на
термопреобразователе,' который состоит из
подогревателя и
термопары, использует эффект
преобразования энергии
электрического тока в
тепло. Входное
напряжение подается на
нагреватель, а выходным служит
термо-ЭДС,
пропорциональная энергии,
выделяемой в нагревателе, т.- е.
квадрату напряжения,
поданного на нагреватель.
Но пои одном термопреобразователе получается большая
погрешность за счет температуры среды, малой чувствительности
термопреобразователя. Для уменьшения погрешности включают две
термопары (ТП, и ТП2) к дифференциальному усилителю, как
показано на рис. 5.21. На нагреватель ТП, подается измеряемое
напряжение и«(0 а на нагреватель ТП2 — выходное напряжение
дифференциального усилителя, т. е ТП2 включен в цепь обратной связи.
Термо-ЭДС первого Еп = ати2х, а второго Е,2=ати2вы*. Анализ
такого включения термопреобразователей показывает, что
напряжение на выходе пропорционально среднеквадратическому. значению
измеряемого сигнала и это выполняется тем точнее, чем больше
коэффициент усиления усилителя и больше чувствительность
термопреобразователей, „„„„„о
Были рассмотрены основные узлы, которые входят в состав
вольтметров. Близкими к вольтметрам приборами являются псо-
*"ВД^™ЖЬнй вольтметр среднеквадратических
значений, амплитудно-частотная характеристика Учителя ю>то-
рого определяется характеристикой входящего в него псофомет-
Еическот фильтра. Псофометрический фильтр отражает частотную
хаоактеоистику избирательности органов восприятия, и вид ее
установлен на основе экспериментальных исследовании и
рекомендаций МККТТ. Упрощенная структурная схема псофометра
показана на рис. 5.22. В его состав входят два псофометрических
ПО
и U)
——=■■
Входное
устройство
Усилитель 1
Квадратичный
детектор
Электромеханический
преобразователь
Эквивалент
Телефонный псофометрический фильтр —
Вещательный псофометрический фильтр —
Усилитель 2
Рис. 5.22
фильтра — с телефонной и вещательной псофометрическими
характеристиками соответственно. Чтобы псофометр можно было
использовать как обычный квадратичный вольтметр, предусмотрен
эквивалент затухания. Согласующий каскад служит для
предотвращения влияния усилителя на характеристики фильтров.
Остальные блоки аналогичны рассмотренным.
Измеритель уровня — это квадратичный вольтметр, шкала
которого проградуирована в логарифмических единицах
(децибелах). Специфическим для измерителя уровня является также
возможность устанавливать определенные значения входного
сопротивления: 600 Ом, что соответствует входному и выходному
сопротивлениям канала тональной частоты, 150, 135 и 75 Ом для
групповых трактов. Избирательный измеритель уровня строится
аналогично избирательному вольтметру.
5.3. ЦИФРОВЫЕ ВОЛЬТМЕТРЫ
И АНАЛОГО-ЦИФРОВЫЕ ПРЕОБРАЗОВАТЕЛИ
г НАПРЯЖЕНИЕ - КОД
Цифровые вольтметры позволяют измерять как постоянное,
так и переменное напряжения. Однако во втором случае
переменное напряжение обычно предварительно преобразуют в постоянное
с последующим измерением цифровым вольтметром постоянного
тока (ВЦПТ). Последний является основной частью многих
приборов в которых измеряемая величина (например, ток,
сопротивление,' температура) предварительно преобразуется в постоянное
напряжение. ,
На рис 5.23 показана упрощенная структурная схема прибора
для измерения постоянного и переменного напряжений на основе
ЦВПТ Входное устройство обеспечивает высокое входное
сопротивление (до 10 ГОм) и расширяет пределы измерения. С его
выхода сигнал поступает на АЦП «напряжение —код» и далее на
цифровое отсчетное устройство (ЦОУ). При измерении постоянно-
111
Фильтр
Аналоговый
преобразователь
Входное
устройство
Аналого-цифровой
преобразователь
Цифровое
отсчетное
устройство
_ ЦисЬо
Рис. 5.23
выход
го напряжения предусмотрена возможность включения фильтра
нижних частот для подавления помех частоты 50 Гц и ее гармоник.
Аналоговый преобразователь предварительно преобразует
измеряемое значение переменного напряжения в пропорциональное
постоянное напряжение. В большинстве цифровых вольтметров
предусмотрен автоматический выбор пределов измерений и
полярности. В последние годы созданы приборы с встроенными
микропроцессорами. Наличие микропроцессоров наряду с полной
автоматизацией управления цифровыми вольтметрами и расширением его
функциональных возможностей позволяет реализовать сложные
алгоритмы коррекции погрешностей (на основе метода образцовых
мер и др., см. § 4.4), а также статистическую обработку данных,
что снижает погрешность измерения.
Современные вольтметры обладают хорошими
метрологическими характеристиками. Диапазон измерений ЦВПТ составляет
обычно от 10~7 до 103 В. Погрешности- лучших образцов порядка
10~5, быстродействие от 102 измерений в секунду до одного
измерения за несколько секунд в высокоточных приборах. Для
переменного напряжения все эти характеристики определяются главным
образом аналоговым преобразователем переменного напряжения в
постоянное. Быстродействие АЦП достигает 108 преобразований в
секунду. Учитывая, с одной стороны, высокую чувствительность и
большое входное сопротивление ЦВПТ, а с другой стороны,
наличие значительных помех (в первую очередь это электростатические
наводки и индустриальные помехи с частотой 50 Гц) особое
значение приобретает обеспечение высокой помехоустойчивости
вольтметра. Последняя оценивается степенью подавления помехи в
децибелах: P=20lg f/п.вх/^п.вых, где ип.вх и f/ц.вых — напряжение
помехи на входе и выходе прибора соответственно. Для подавления
помехи применяют симметричный вход, экранирование, входной
фильтр, а также помехоустойчивые АЦП.- Однако фильтр, обычно
обеспечивающий подавление помехи с частотой 50 Гц на 20...
... 40 дБ, одновременно может существенно увеличить время
измерения (до нескольких секунд) за счет длительного переходного
процесса при изменении входного напряжения.
Рассмотренные метрологические характеристики ЦВ во многом
' определяются видом используемого АЦП. Поэтому он положен в
основу классификации цифровых вольтметров.
112
&
Генератор линейно-
изменяющегося
напряжения
Сравнивающее
устройство
СУ -
—*>
(риггер
Генератор импульсов
• *
~s
Временной
селектор
.- • •
Счетчик
"гр
иг\
КЦО/
АЦП с время-импульсным
преобразованием. В этих АЦП
входное напряжение их последовательно
преобразуется в пропорциональный
ему временной интервал, а затем
Временной интервал Atx—в цифро- «jonj
вой унитарный код. Преобразование ич
напряжения в пропорциональный
временной интервал осуществляется
либо с помощью вспомогательного
линейно изменяющегося
напряжения, либо с помощью
интегрирования измеряемого напряжения.
Рассмотрим структурную схему (рис.
5.24,а) АЦП с генератором
линейно изменяющегося напряжения
(ГЛИН) и временные диаграммы работы (рис. 5.24,6).
Преобразование напряжения их во временной интервал Atx осуществляется
путем его сравнения с линейно изменяющимся напряжением «глин-
Запускающий импульс и3ап приводит в действие ГЛИН и
одновременно опрокидывает триггер. При совпадении напряжений «глин и их
сравнивающее устройство формирует импульс ысу, который
возвращает триггер в исходное состояние. На выходе триггера образуется
импульс длительностью Atx = ux/v, где v — скорость изменения
напряжения «глин- Импульс с выхода триггера открывает временной
селектор на время Atx. Генератор импульсов вырабатывает
импульсы с частотой /г, которые при открытом временном селекторе
поступают на счетчик. Число подсчитанных импульсов N = frAtx=frux/v.
Таким образом, число импульсов, прошедших в счетчик,
пропорционально их. При fr/v— 10™, где п — целое число, множитель fT/v
можно учесть соответствующим положением запятой на цифровом
отсчетном устройстве или указанием единицы измерения (В, мВ,
мкВ).
Погрешность преобразования возникает в основном из-за
погрешности преобразования напряжения их во временной интервал
113
Рис 5.24
Ключ 1
"in
Источник опорного
напряжения
Генератор
счетных импульсов
Интегратор
Ключ 2
Ключ 3
а)
Сравнивающее
устройство
Устройство
управления
V кз г
-»—*• Л—
зал
Счетчик
К цифровому отсчетному
устройству
От*
Uian i
"VJ
"клЗ
VJ
III!!!
5)
Рис. 5.25
(в первую очередь из-за
нелинейности напряжения «глин,
нестабильности скорости его
изменения v, погрешности
сравнивающего устройства, а
также конечного быстродействия
триггера и временного
селектора), а также из-за
погрешности преобразования
интервала Atx в унитарный код
(число импульсов N),
обусловленной нестабильностью
частоты генератора импульсов
и погрешностью квантования в
± 1 импульс.
Погрешность таких преоб-
■■uxt,/rc разователей обычно порядка
0,1%. Быстродействие
достигает 103... 104 преобразований
в секунду. Дальнейшее его
увеличение приводит к росту
погрешности преобразования.
Помехоустойчивость низкая,
так как наличие флуктуа-
ционной .помехи и„
(штриховая линия на рис. 5.24,6)'
приводит к изменению
момента срабатывания
сравнивающего устройства и к
соответствующей погрешности
преобразования. Существен-
"rW =
114
ным достоинством этих преобразователей является относительная
простота.
Среди АЦП с интегрированием измеряемого напряжения
наибольшее распространение получили АЦП с двукратным
интегрированием. Принцип работы такого АЦП состоит в следующем.
Положим, что измеряемое постоянное напряжение Ux подано на
устройство, осуществляющее операцию интегрирования. Роль
такого интегратора может выполнять простейшая ]?С-цепь. При
подаче постоянного напряжения на вход этой цепи напряжение на ее
выходе нарастает в течение некоторого времени практически по
линейному закону, т. е. происходит интегрирование входного
сигнала.
В выпускаемых вольтметрах обычно применяют более сложные
интеграторы на операционных усилителях, обеспечивающие
большую точность интегрирования. Напряжение на выходе интеграто-
1 г' U
ра «1(Г) = f Uxdt =——/. Скорость нарастания напряжения
RC g RC
зависит от постоянной RC и, что существенно для построения АЦП,
от значения Ux. За время Т\ выходное напряжение достигает
Т '
u1(T^) = Ux——. На этом заканчивается первый этап работы
RC
АЦП.
На втором этапе измеряемое напряжение Ux отключается и на
вход интегратора подается постоянное опорное напряжение U0
противоположной полярности. Напряжение на конденсаторе
интегратора, накопленное за интервал Гь начинает убывать
2У ' RC * RC 0J ° RC 1 RC l
и через некоторое время станет равно нулю. Допустим, что это
произойдет по истечению временного интервала 7Y Приравняв нулю
правую часть уравнения, получаем Т2= (UX/U0)TU т. е. время,
необходимое для полного разряда конденсатора, линейно зависит от
измеряемого напряжения и не зависит от постоянной RC. Из
полученного соотношения также следует, что Ux может быть
определено, если известны U0, Tx и измерен интервал Т2. Таким образом
в рассмотренном АЦП также происходит преобразование
напряжения во временной интервал. Преимуществом данного АЦП'
перед АЦП с генератором линейного напряжения является
независимость точности преобразования от параметров JZC
Рассмотрим структурную схему (рис. 5.25,а) и временные
диаграммы (рис. 5.25,6) работы АЦП с двукратным интегрированием.
По сигналу ы3ап, поступившему на устройство управления в момент
to, замыкается ключ 1 к Ux подается на интегратор. Для этого в
устройстве управления вырабатывается прямоугольный импульс
напряжением му1 (рис. 5.25,6). Одновременно импульсом ыу3 от
устройства управления замыкается ключ 3. От генератора счетные
импульсы через ключ 3 поступают на счетчик, который работает в
115
i
L
режиме .вычитания. Для этого в момент запуска по команде от
устройства управления в счетчике фиксируется некоторое число
(например, 10000). После поступления 9999 импульсов в счетчике
устанавливается цифра 00000, при этом импульс с выхода счетчика
поступает в устройство управления, которое разомкнет ключ / и
измеряемое напряжение отключится от входа интегратора.
Одновременно с помощью сигнала иу2 замыкается ключ 2. Таким
образом, с помощью генератора импульсов и счетчика удается точно
сформировать временной интервал Т\, что .существенно для
получения высокой точности измерения.
После замыкания ключа 2 опорное напряжение подается на
интегратор и напряжение на его выходе убывает. В течение этого
времени счетчик продолжает работать, но уже в режиме
суммирования, так как к концу интервала 7У в нем был зафиксирован
ноль. Счет импульсов происходит до момента, когда
напряжение на выходе интегратора станет равным нулю. В этот момент
сравнивающее устройство вырабатывает импульс и устройство
управления размыкает ключ 3. Интервал Т2 зависит от измеряемого
напряжения. Как видно из рис. 5.25,6, большему значению Ux
(штриховая линия) соответствует интервал Т2.
За время Т\ на счетчик поступает N импульсов. Как было
показано, T2=(Ux/U0)Tu откуда следует Ux= (T2/T\)U0- Поскольку
T2 = N/FC4, измеряемое напряжение V'ж = —— N. Значения U0, T\
TiFC4
и Fc4 постоянны, поэтому число импульсов N пропорционально
измеряемому напряжению.
Важным достоинством АЦП с двукратным интегрированием
является высокая помехоустойчивость, что легко объяснить, не
прибегая к вычислениям. Действительно, положим, что на входе
прибора вместе с Ux имеется гармоническая помеха. Если период
помехи равен Т\, то ее положительная полуволна, сложившись с Ux,
вызовет ускоренное возрастание напряжения на выходе
интегратора, а отрицательная — замедленное. Так как полуволны помехи
симметричны, результирующее напряжение на выходе интегратора
определится только Ux. Сказанное справедливо лишь тогда, когда
период помехи равен Т\. Поскольку основными помехами являются
помехи с частотой сети 50 Гц и ее гармоники, в рассматриваемых
АЦП интервал Т\ выбирают кратным периоду напряжения сети
70=20 мс.
Погрешность современных интегрирующих АЦП может быть
обеспечена порядка 10~2... 10_3 %. В основном она
обусловливается погрешностью интегратора (нелинейность, дрейф нуля),
нестабильностью опорного напряжения U0, остаточными напряжениями
ключей 1 и 2, нестабильностью порога срабатывания и конечным
быстродействием сравнивающего устройства, а также
погрешностью преобразования временного интервала Т2 в
соответствующее число импульсов, в частности погрешностью квантования в
± 1 импульс. Погрешность опорного напряжения UQ уменьшается
при использовании нормального элемента. Быстродействие интег*
116
-
их
Преобразователь
напряжение — частоте
Генератор
образцовых интервалов времени
ч
1'
/
Ключ
Д?о •-
Счетчик
к ЦОУ
а)
их
и
г
Сумматор
Интегратор
U
ИНТ
н*
Сравнивающее
устройство
6и0
Генератор
прям
X
' «„*,
оугольных импульсов ~
б)
м ! l! ! '
11 M i
«Tit
Puc. 5.26
рирующих преобразователей невелико &„
и составляет 25 измерений в секунду,
так как на одно измерение
затрачивается два периода напряжения (40 мс):
первый период — на первый такт
интегрирования, второй — на второй такт
и на подготовку схемы к следующему
циклу преобразования.
АЦП с частотно-импульсным
преобразованием. В этих АЦП сначала
преобразуется измеряемое напряжение Ux
в пропорциональную частоту импульсов fx, а затем fx — в цифровой
унитарный код. Структурная схема такого АЦП (рис. 5.26,а)
содержит преобразователь напряжение — частота ПНЧ, с выхода
которого импульсы с частотой fx = km4Ux, где knm — коэффициент
преобразования ПНЧ, через ключ поступают на счетчик. Ключ
замыкается на известный интервал времени At0, задаваемый
генератором образцового интервала времени ГО ИВ. Число импульсов N,
прошедших на счетчик, пропорционально входному напряжению
Ux: N=fxAt0=km4At0Ux.
Существует много разновидностей схем ПНЧ. На рис. 5.26,6
приведена схема ПНЧ на базе интегратора, охваченного
импульсной обратной связью, а на рис. 5.26,0 — временные диаграммы,
поясняющие его работу. Напряжение Ux через сумматор поступает
на интегратор. Напряжение на его выходе начинает возрастать.
Как только оно достигнет порога срабатывания U0 сравнивающего
устройства, последнее формирует импульс исч, запускающий
генератор прямоугольных импульсов ГПИ. Генератор вырабатывает
импульс с постоянной вольт-секундной площадью (постоянным
размахом и длительностью) с полярностью, противоположной по-
117
лярности напряжения Ux- Этот импульс через сумматор поступает
на вход интегратора и снижает его выходное напряжение до нуля.
Затем процесс повторяется. В результате частота следования
импульсов fx на выходе сравнивающего устройства будет
пропорциональна напряжению.
Погрешность подобных АЦП определяется погрешностью ПНЧ,
а также погрешностью преобразования частоты в цифровой код и
может быть обеспечена порядка 10~2%. Быстродействие обычно
невелико — до 50 измерений в секунду, так как для подавления
сетевой помехи образцовый интервал времени Ato задается равным
периоду напряжения сети (20 мс). Механизм подавления помехи
легко понять, если учесть, что при действии помехи частота fx на
выходе преобразователя будет изменяться, то возрастая, то
уменьшаясь в соответствии с изменением мгновенных значений помехи.
Но за время А^о, равное периоду помехи, эти изменения частоты в
среднем равны нулю и, следовательно, число импульсов N,
зарегистрированных счетчиком, будет по-прежнему пропорционально
напряжению Ux. Достигаемая при этом степень подавления помех
имеет порядок 60 дБ, как и в интегрирующих АЦП.
АЦП с кодоимпульсным преобразованием. В таких АЦП
измеряемое напряжение уравновешивается компенсирующим, которое
вырабатывается ЦАП. В кодоимпульсных АЦП наибольшее
распространение получили ЦАП на основе делителей напряжения и
тока. На рис. 5.27 приведена одна из возможных схем ЦАП на
основе двоичного делителя напряжения (типа R—2R), в котором
для любого числа разрядов использованы только два номинала
резисторов. Легко убедиться, что при подключении движка t'-ro
переключателя к источнику опорного напряжения ИОН напряжение
в t-й точке U,i = Uион/3. Поскольку в каждой последующей точке по
направлению к выходу (точка т = 5) это напряжение ослабляется
в два раза, то напряжение (/цаПг на выходе при подключении
движка t'-ro переключателя к
*/«n« = tW(3-2m-') = £/eB-2',
где-(/Кв=^ион/(3-2т)—шаг квантования. Зависимость
напряжения £/Цап от напряжения, снимаемого со всех переключателей,
можно представить в виде
ицап = икв^а121^иквЫ,
где сц — разрядные коэффициенты (щ=\, если переключатель
подключен к ииои, и а,{ = 0, если отключен); N — код, подаваемый
на ЦАП. Возможно построение ЦАП, управляемых как двоичным,
так и двоично-десятичным кодами.
Рассмотрим структурную схему АЦП с кодоимпульсным
преобразованием (рис. 5.28,а) и временные диаграммы его работы (рис.
5.28,6). В режиме развертывающего уравновешивания по команде
запуск устройство управления по определенной программе изменя-
118
^ИОН
-гт1—п—п—И—Н—г
переключателями
(кад/И)
Рис. 5.27
ет код, поступающий на ЦАП, который вырабатывает
соответствующее коду выходное напряжение ^цап.
Изменение выходного напряжения ЦАП может производиться
как последовательным перебором всех уровней квантования, так и
поразрядно. Наибольшим быстродействием обладают АЦП с
поразрядным уравновешиванием — с поразрядным законом
изменения компенсирующего напряжения £/цап. При этом измеряемое
напряжение Ux уравновешивают компенсирующим напряжением
£Л,аШ последовательно включая все разряды, начиная со старшего,
и регулируют с помощью сравнивающего устройства. При £/цап>
~>UX сравнивающее устройство выдает в устройство управления
сигнал на отсоединение последнего включенного разряда ЦАП, а
при ицгп<их выходной сигнал сравнивающего устройства
отсутствует и соответствующий разряд ЦАП остается включенным (см.
рис. 5.28,6). В результате перебора всех разрядов осуществляется
компенсация измеряемого напряжения образцовым. При этом
измеряемое напряжение может быть представлено в виде (/ж=(/цап=
= UKBN. Код N, полученный на выходе устройства управления,
подается в ЦОУ.
Временные диаграммы на рис. 5.28,6 иллюстрируют процесс
уравновешивания напряжения Ux = 25 В для АЦП с ЦАП на шесть
двоичных разрядов (t" = 0 ... 5) с шагом квантования UKB=l В. При
первом тактовом импульсе устройство управления выдает сигнал
аь=\. Переключатель 5 в ЦАП подключается к UaoB, и
напряжение на выходе £7цап=£Лв-25 = 32 В. Так как U4aTi>Ux,
сравнивающее устройство выдает соответствующую информацию в
устройство управления (импульс ису) и оно в следующем также
вырабатывает сигнал а5 = 0, отключающий переключатель 5 от Ижон.
Одновременно выдается сигнал а4=1, переключатель 4 замыкается на
UBon и на выходе образуется £/цап=£/кв-24 = 16 В. Так как (/цап<
<.UX, сравнивающее устройство не вырабатывает
корректирующего сигнала и переключатель 4 остается подключенным к 0Ион, а
при следующем тактовом импульсе вырабатывается сигнал оз =
= 1 и т. д. К моменту седьмого тактового импульса на выходе
устройства управления получим параллельный двоичный код N2=
= 050403020100 = 011001, который соответствует числу 25.
Наряду с рассмотренным развертывающим уравновешиванием
может осуществляться и следящее уравновешивание, при котором
119
%
Сравнивающее
устройство
УЦАП
"су
Цифро-аналоговый
преобразователь
1/1 N -
Устройство
управления
47
кЦОУ
6«
"ггЛ
UX=Z5B
*<**
"1
S) -
ттй
I 51
15
ffiTTT
«i ^*i yfi^ti >?♦
к. . к к
a5 = D
"ГТИ
У///Ш////////////Ш°^
У////ЖМЖМь-ъ
аг=0
a,=D
УЖ*-*\
Рис. 5.28
Генератор
тактовых импульсов
производится слежение за разностью между напряжениями (/цап и
Ux и при превышении ею шага квантования соответствующим
образом изменяется ^цап. При этом меньше динамическая
погрешность АЦП, так как погрешность из-за дискретизации не
превышает шага квантования.
Погрешность рассмотренных АЦП может быть получена 10~2 %
и менее. Она определяется аддитивной погрешностью
сравнивающего устройства и погрешностью ЦАП. Достоинствам АЦП
является высокое быстродействие: до 106 преобразований в секунду при
числе разрядов т^ЛО. К недостаткам относятся низкая помехо-
120
ч*
У—
<
^
—^
1
1
! _
и
л.
и -\\
Источник
опорного напряжения
'
Сравнивающее
устройство 1
Сравнивающее
устройство 2
Сравнивающее
устройство п
Рис. 5.29
И W I \
1
1
Дешифратор
•С циф)
.I'"
овому отсчетному
устройству
устойчивость, сложность и высокая стоимость, которая снижается
по мере совершенствования элементной базы, в частности
использования ЦАП и АЦП на основе БИС.
АЦП с параллельным преобразованием. Такой АЦП (рис. 5.29)
обладает наибольшим быстродействием. Его принцип действия
основан на одновременном сравнении измеряемого напряжения Ux
с набором уровней квантования С/*, где i= 1 ... л — номер уровня
квантования.
Структурная схема содержит набор сравнивающих устройств
СУХ — СУп, источник опорного напряжения, создающий ряд
уровней квантования U.it и дешифратор. При подаче на вход АЦП
напряжения Ux на выходах сравнивающих устройств, для которых
Ux>Uu появляется сигнал. Дешифратор анализирует состояние
выходов всех сравнивающих устройств и выдает код,
соответствующий значению в ЦОУ. Таким образом, для получения большего
числа разрядов в данном АЦП необходимо иметь значительное
число сравнивающих устройств, что приводит к существенному его
усложнению. Поэтому рассмотренный метод преобразования
применяют при реализации грубых (с погрешностью б>1%), но
быстродействующих АЦП (до 108 преобразований в секунду).
5.4. МЕТОДЫ ИЗМЕРЕНИЯ МОЩНОСТИ
В цепях постоянного тока мощность Р, потребляемая
нагрузкой R, равна произведению тока / и напряжения U:
p^UI = PR = UVR, 45-15)
121
где Р измеряется в ваттах, U — в вольтах, / — в амперах, R — в
омах.
В цепях переменного тока различают мгновенную p(t) и
среднюю (активную) Р мощности. Мгновенная мощность p(t) =
= u(t)i(t), где u(t) и i(t) — мгновенные значения напряжения и
тока. Активная (средняя за период) мощность
г
Р = —
\p(t)dt.
В технике связи и вещания широко используются сигналы
импульсной формы: радио- и видеоимпульсы. В этих случаях нужно
определять не только среднюю, но и импульсную мощность. Если
огибающая радиоимпульса прямоугольной формы (рис. 5.30,а),
то импульсная Р„ и средняя Р мощности связаны следующим
образом:
Pa = TP/t, (5.16)
где т — длительность радиоимпульса; Т — период следования
импульсов. Практически почти всегда измеряют среднюю мощность
Я и по формуле (5.16) вычисляют импульсную Ри.
Если форма импульса отличается от прямоугольной (например,
1 на рис. 5.30,6), то импульсную мощность определяют по
эквивалентному прямоугольному импульсу 2 той же площади с
длительностью, равной интервалу времени на уровне половины его
амплитуды. В этом случае вводится понятие пиковой мощности ЯПИк =
= РшкфИ, где &фИ — коэффициент формы импульса, равный
отношению максимального уровня импульсной мощности действительного
импульса / к уровню мощности эквивалентного прямоугольного
импульса 2. Тракты, по которым передаются сигналы импульсной
формы, рассчитываются на пиковую мощность.
Измерение мощности широко используется во всем диапазоне
частот, а на СВЧ является единственным способом определения
режимов устройств и цепей. Пределы значений измеряемой мощт
ности заключаются в границах от Ю-15 до 107 Вт. Такие большие
пределы значений и широкий диапазон частот, а также различные
требования к погрешностям измерений мощности привели к
разработке многих методов и выпуску большого числа приборов,
основанных на различных физических принципах.
Измерение мощности в цепях постоянного тока и переменного
тока промышленной частоты. Значение мощности находят прямым
" 1)1/
<—»•
т
-с *■
1
1111/<
/ 0,5Umax \
S)
Рис. 5.30
122
измерением с помощью прибора непосредственной оценки —
электродинамического ваттметра. Показания такого ваттметра
пропорциональны мощности как постоянного тока, так и переменного
промышленной частоты. Неподвижную катушку ваттметра
включают подобно амперметру последовательно нагрузке, а
подвижную— подобно вольтметру параллельно (рис. 5.31,а). При этом
имеют место систематическая и случайная погрешности.
Систематическая погрешность обусловлена мощностью,
потребляемой обмотками катушек ваттметра, и зависит от их
сопротивлений RA и Rv и схем соединения подвижной и неподвижной
катушек. Для схемы на рис. 5.31,а ток, проходящий через
неподвижную катушку, равен току нагрузки /н, а напряжение, падающее на
сопротивлении обмотки подвижной катушки, равно входному
напряжению U=UV—UA + UB. Следовательно, произведение
измеряемого тока и напряжения, т. е. измеряемая мощность
P = UIH = UHIn + UAIH^PH + PA, (5-17)
где Ян и РА — мощности, потребляемые нагрузкой и неподвижной
катушкой.
Для схемы на рис. 5.31,6 ток через обмотку неподвижной
картушки равен сумме токов через нагрузку и обмотку подвижной
катушки: IA = IH+Iv напряжения на нагрузке и подвижной
катушке. При этом измеряемая мощность
P = UHIA^UBIH + UnIv = PH + Pv, (5-18)
где pv __ мощность, потребляемая обмоткой подвижной
катушки.
Относительная систематическая (методическая) погрешность
для схемы на р'ис. 5.31,а.
6=100 Ра/Рн= 100 RA/RH, (5.19)
где б выражена в процентах. Для схемы на рис. 5.31,6
6=100Ру/Рн=Ю0Ян/Яу. (5-2°)
Очевидно, что схему на рис. 5.31,а следует применять при условии
Ра<#н, а схему на рис. 5.31,6 —при условии Rv^>Rh-
Случайная-погрешность определяется классом точности ваттметра.
При больших значениях переменного тока неподвижную
катушку ваттметра включают через измерительный трансформатор тока
(рис. 5.32,а), а если напряжение также высокое, то используют и
Рис. 5.31
123
,—I4g£
в) U
*н "н
«)
S)
-чд^-
Рис. 5.32
Рис. 5.33
измерительный трансформатор напряжения (рис. 5.32,6). При
расширении пределов измерения мощности таким способом
погрешности возрастают за счет фазовых сдвигов измерительных
трансформаторов и неточности определения коэффициента
трансформации.
Значение мощности постоянного тока и переменного тока
промышленной аастоты можно измерить косвенным методом. Для
этого с помощью приборов непосредственной оценки — амперметра и
вольтметра (рис. 5.33,а) измеряют ток и напряжение и
полученные значения перемножают. Погрешности такого метода
измерения мощности определяются погрешностями прямых измерений
тока и напряжения и вычисляются по правилам, изложенным в
гл. 4. Схемы косвенного и прямого измерения мощности
идентичны, поэтому выражения для систематических погрешностей (5.19)
и (5.20) справедливы для обоих видов измерений.
Измерение мощности в цепях переменного тока звуковых и
высоких частот. Косвенные измерения мощности на звуковых и
высоких частотах выполняют с помощью электронных вольтметров
и термоэлектрических амперметров, частотные возможности
которых соответствуют частоте тока в измеряемой цепи. Обычно на
звуковых частотах используют схему измерения, представленную
на рис. 5.33,6, так .как легко подобрать электронный вольтметр с
входным сопротивлением, во много раз большим сопротивления
нагрузки.
На высоких частотах, когда линия передачи энергии от ее
источника к нагрузке является цепью с распределенными
параметрами, значения тока и напряжения в ее сечении зависят от рас-
А
Генератор
в)
'2
■< »-
%
R
н
■«—
Радиопередатчик
б)
U0i^
124
Рис. 5.34
Приемный
преобразователь
Измерительное
устройство
Отсчетное
устройство
Рис. 5.35
стояния до нагрузки. Поэтому вольтметр и амперметр нужно
включать в те места цепи, где ток, проходящий через нагрузку и
амперметр, а также напряжение на нагрузке и вольтметре равны
друг другу соответственно. Амперметр включают возможно ближе
к нагрузке так, чтобы расстояние /, (рис. 5.34,а) было по крайней
мере в сто раз короче длины волны X, соответствующей частоте
измеряемого тока. При /i/A,<0,01 погрешность включения не
превышает 1%. Вольтметр включают на расстоянии /2=.лУ2 от
нагрузки (п= 1,2...).
Мощность генератора можно измерить одним вольтметром,
если известно сопротивление нагрузки RH (рис. 5.34,6). На рис. 5.34,в
показана схема измерения тока в антенной цепи
радиопередатчика; по показанию амперметра 1 и известному сопротивлению
излучения антенны Rs вычисляют мощность: P = PRZ.
Прямые измерения мощности выполняют с помощью
высокочастотных ваттметров. Обобщенная структурная схема такого
ваттметра показана на рис. 5.35. В аналоговом приемном
преобразователе измеряемая мощность преобразуется в пропорциональную ей
другую физическую величину (табл. 5.2), более удобную для
измерения. В измерительном устройстве она измеряется и результат
измерения в аналоговой или цифровой форме фиксируется отсчетным
устройством; шкала последнего, как правило, градуируется в
единицах мощности.
Вольт метровый ваттметр, предназначенный для работы в
диапазоне звуковых частот, состоит из резистивного приемного
преобразователя, представляющего набор прецизионных резисторов
R\—Rn, и электронного вольтметра, проградуированного в
единицах мощности (рис. 5.36,а). Один из резисторов с помощью пере-
Таблица 5.2
Частота
Высокая
Сверх- .
высокая
Ваттметр
Вольтметровый
Квадратичный
С датчиком Холла
Термоэлектрический
Калориметрический
Пондеромоторный
Величина, в которую преобразуется
измеряемая мощность
Переменное напряжение
Постоянный ток
ЭДС Холла
Термо-ЭДС
Теплота
Механическое движение
125
Рис. 5,36
Ю
**1L
Измеритель- •{ к/)
ная схема ч11/
ключателя П подсоединяется в качестве нагрузки к выходным
зажимам генератора или усилителя, мощность которого
измеряется. Напряжение на резисторе связано с измеряемой мощностью
известной зависимостью U= ]/ PR. Оно фиксируется электронным
вольтметром, шкала которого градуирована в единицах
мощности. Промышленность выпускает ваттметр МЗ-19 для работы в
диапазоне частот 20 Гц... 30 кГц с пределами измерения от 0,1 мВт
до 10 Вт и погрешностью 3 ... 10%.
Вольтметровый ваттметр, предназначенный для работы на
высоких и нижнем участке сверхвысоких частот, представляет
собой нагрузку коаксиальной конструкции сопротивлением 75 Ом и
электронный вольтметр (рис. 5.36,6). Нагрузкой является
поглощающий резистор (фарфоровая трубка, покрытая снаружи
углеродистым слоем), помещенный в экран особой формы.
Внутренний проводник / коаксиального входа,
поддерживаемый керамической шайбой 2, соединяется с левым концом
нагрузочного резистора 5 через ступенчатый переход. В экране 4
предусмотрены соответствующие ступенчатые изменения его
диаметра, который далее уменьшается по экспоненциальному закону.
Экспоненциальная часть экрана 6 замыкается правым концом
резистора. Последний точно центрируется относительно образующей
поверхности экрана диэлектрическими тягами 5. Такое
конструктивное решение обеспечивает хорошее согласование входного
сопротивления ваттметра с волновым сопротивлением
коаксиального кабеля, по которому подводится измеряемая мощность. На
резисторе нанесено серебрянное кольцо 7, к которому подключается
амплитудный преобразователь (пиковый детектор), работающий
по схеме с открытым входом.
Выходное напряжение пикового детектора поступает на
измерительную схему и отсчетное устройство, градуированное в
единицах мощности. Преобразователь (детектор), измерительная схема
и отсчетное устройство представляют собой амплитудный (пико-
126
вый) электронный вольтметр, показания которого
пропорциональны мощности, рассеиваемой на резисторе 3.
При измерении напряжения сигналов импульсной формы
показания пикового вольтметра зависят не только от амплитуды
импульсов, но и от их скважности. Для устранения этой зависимости
применяется схема автокомпенсационного вольтметра.
Промышленность выпускает ваттметр МЗ-ЗА для работы в диапазоне
частот 30 МГц... 1,2 ГГц с погрешностью до 15% и пределами
измеряемой мощности от 0,25 до 15 Вт среднего значения и от 5 до
5000 Вт импульсной мощности.
Квадраторный электронный ваттметр работает на основе
известного алгебраического тождества (а + Ь)2—(а—b)2 = 4ab. Здесь
произведение двух величин заменяется их сложением, вычитанием
и возведением в квадрат. В электронных схемах сложение и
возведение в квадрат осуществляется проще, чем умножение.
Подставим в тождество вместо а й b выражения,
соответствующие току и напряжению, т. е. a=U sin со/ и b=RI sin(co£—tp):
[U sin со / + Rl sin (со /—cp)]2— [U sin со /— RI sin (со /—cp)]2 =
= 4 #1//sin (со*—q>) = 4#t7/coscp—4 RUI cos (2w t— cp).
Постоянная составляющая 4RUIcosq> пропорциональна
мощности и ее можно измерить с помощью магнитоэлектрического
миллиамперметра. Переменную составляющую нужно отфильтровать,
для чего достаточно зашунтировать миллиамперметр конденсато-
с
Суммирующее
.устройство
Вычитающее
устройство
а +Ь
—=»■
а -Ь
Квадратор
Квадратор
(а+Ь)'
Вычитающее
устройство
4оЬ
—»■
Фильтр
нижних частот
(а-Ь)-
а)
ром постоянной емкости.
Операции суммирования и вычитания
выполняют операционные
усилители, а возведение во вторую
степень — элементы с
квадратичной характеристикой —
квадраты. Структурная схема квадра-
торного ваттметра представлена
на рис. 5.37,а, а принципиальная
схема, в которой в качестве
квадраторов использованы
термоэлектрические преобразователи, — на
рис. 5.37,6.
Входные зажимы /, 2
ваттметра соединяются с выходом источ-
ника измеряемой мощности (генератора, усилителя), а выходные
3, 4 — с нагрузкой ZH. Ток нагрузки протекает через два
последовательно соединенных резистора R с одинаковыми
сопротивлениями, пренебрежимо малыми по сравнению с модулем сопротивления
нагрузки |ZH|. На этих резисторах падают напряжения Ui = U2 =
= iR, пропорциональные току нагрузки.
Параллельно нагрузке включен резистор Rv, сопротивление
которого много больше \ZH\ и тем более R. Поэтому можно
считать, что снимаемое с Rv напряжение 1/у = Ьин пропорционально
напряжению на нагрузке. Напряжения U\ + Uv и U2—Uv
подаются в цепи нагревателей термоэлектрических преобразователей
ТП1 и ТП2 соответственно. Для уменьшения токов нагревателей
i'i и i2 включены резисторы Ri и R2, сопротивления которых много
больше сопротивлений резисторов R. Таким образом, токи через
нагреватели термопреобразователей будут равны соответственно:
ii={Ui + Uv}/(Ri + rH) и i2=(U2— Uv)/(R2 + rH), где гн —
сопротивление нагревателя.
Как известно, термо-ЭДС Ет пропорциональна квадрату
действующего значения тока нагревателя: ET = kI2, где k, измеренное в
вольтах на ампер в квадрате, — коэффициент пропорциональности,
завмся-щий от типа термопреобразователя. Поэтому выражение
для термо-ЭДС, получаемой от преобразователей ТП1 и ТГЬ,
можно представить в следующем виде:
£ = k- LlU+uv)2dt, (5.21)
Ет, = - hu2—Uvf dt. (5.22)
Термопары включены навстречу друг другу, так что
показания миллиамперметра пропорциональны разности термо-ЭДС
£Т1—Ет2. Учитывая, что Ui = U2 = iR; Uv = kUn и Rl = R2 = R/, на
основании формул (5.21) и (5.22) получаем
£т1 - Er2 = AKkR (i Ua dt = aP,
где а, измеренное в вольтах на ватт, — коэффициент
пропорциональности.
Через магнитоэлектрический миллиамперметр с внутренним
сопротивлением RA протекает постоянный ток 1А, пропорциональный
средней мощности, потребляемой нагрузкой:
/л= £т1т£т2 =-Ц-р=ьр,
КА КА
где Ь — чувствительность квадраторного ваттметра, измеренная в
миллиамперах на' ватт. Шкалу миллиамперметра градуируют в
единицах мощности — ваттах или милливаттах.
Квадраторные ваттметры применяют в диапазоне частот от
десятков герц до 1 МГц. Достоинством их являются независимость
128
"О—©
а)
/"сеч
?
L1
'и
Рис. 5.38
Рис. 5.39
показаний от формы напряжения и тока и малая зависимость от
частоты и фазового сдвига. Погрешность измерения составляет
1,5... 2%. Основной недостаток — требование полной идентичности,
характеристик термопреобразователей.
Теперь рассмотрим принцип действия ваттметра с датчиком
Холла. Датчик Холла представляет собой тонкую пластину,
вырезанную из кристалла кремния или германия, расположенную в
воздушном зазоре электромагнита так, что магнитное поле с
индукцией В перпендикулярно ее плоскости (рис. 5.38). Пластина,
прямоугольной формы снабжена четырьмя контактами с
выводами 1, 2, 3, 4. Если между выводами /, 2 пропустить ток i,
пропорциональный напряжению на нагрузке, а по катушке L
электромагнита — ток нагрузки iH, то под влиянием взаимодействия тока i с
перпендикулярным магнитным полем электромагнита на выводах
3, 4 возникнет ЭДС Холла ех,
e* = kxIB/d,
где k\, Вм/(А-Тл)—коэффициент пропорциональности; / — ток
между выводами /, 2, измеренный в амперах; В — магнитная
индукция, измеренная в теслах; d — толщина пластины в метрах.
Так как ток / пропорционален напряжению на нагрузке и1Ь а В
пропорциональна току нагрузки iH, то ЭДС Холла
пропорциональна мощности, поглощаемой нагрузкой ZH:
ex = qinun = qp,
где q — коэффициент пропорциональности, измеренный в вольтах
на ватт.
Если нагрузка включена в цепь постоянного тока, то ЭДС
Холла также постоянна; если в цепи действует переменный ток
синусоидальной формы, то ЭДС Холла имеет постоянную
составляющую Ех = qUJhCOS ф.
Милливольтметр постоянного тока подключают к выводам 3,
4, и его показания будут пропорциональны измеряемой мощности.
К достоинствам ваттметра с датчиком (преобразователем)
Холла относятся: малое потребление мощности; сравнительно
широкий диапазон частот; независимость показаний от формы на-
5-10 129
пряжения и тока; малая погрешность. Большим, недостатком
является резкое изменение чувствительности ваттметра при изменении
температуры окружающей среды. Промышленность выпускает
цифровой ваттметр Ф4860 класса точности 0,5, состоящий из
преобразователя Холла и цифрового вольтметра постоянного тока.
Измерение мощности в цепях СВЧ. Измерение мощности на
СВЧ выполняется всегда с предварительным преобразованием
энергии электромагнитного поля в другие виды энергии,
преимущественно в тепловую. Измеряют мощность, поглощаемую
согласованной нагрузкой, или мощность, проходящую по линии
передачи энергии к произвольной нагрузке. В соответствии с этим
существуют методы измерения и ваттметры поглощаемой и
проходящей мощности (табл. 5.3).
Таблица 5.3
Мощность СВЧ
Поглощаемая
Методы измерения
Калориметрический
Термоэлектрический
Терморезистивный
Мощность СВЧ
Приходящая
Методы измерения
Ответвления
Пондеромоториый
Поглощаемую мощность измеряют при определении выходной
мощности источника СВЧ энергии — генератора или
радиопередатчика, поэтому в ваттметре поглощаемой мощности приемный
преобразователь содержит эквивалентную согласованную нагрузку.
Следовательно, нагрузкой источника Г (рис. 5.39,а) является сам
ваттметр W, измеряющий поглощаемую им же мощность.
Проходящую мощность измеряют в линии передачи (рис.
5.39,6) при определении мощности, рассеиваемой в произвольной
нагрузке ZH.
При измерении мощности в цепях с распределенными
параметрами определяющую роль в точности измерений играет
согласование сопротивлений в тракте передачи энергии. Если нагрузка с
полным сопротивлением Lh=Rh + jXh подключена к генератору
непосредственно, то, как известно, генератор с внутренним
сопротивлением Zr—Rr + jXT отдает в эту нагрузку мощность
p~iA RJ№+#н)2 + (Хг+*н)21,
(5.23)
где UT — действующее значение напряжения на выходе
генератора. Наибольшую мощность генератор будет отдавать нагрузке при
комплексно-сопряженном согласовании их сопротивлений, т. е. при
Rr = Rn и Хт =—Хв. Значение этой мощности определяется из
формулы (5.23): Ртах=^2г/4#г. Если нагрузка подключена к
генератору через линию передачи, то согласование усложняется. Линии
передачи, как правило, однородны, потери в них пренебрежимо
малы и их "распределенные параметры L и С определяют
волновое сопротивление р= У L/C. Тогда мощность генератора, посту-
130
пающая в согласованную с его выходным сопротивлением линию,
нагруженную на любое сопротивление ZH, будет равна
Рн=Ртах(1-|Г„|2),
где |ГН|—модуль коэффициента отражения от нагрузки по
напряжению, равный отношению амплитуды напряженности поля
отраженной волны Е0 к амплитуде напряженности поля падающей
волны .En: \TH\=E0/En. С другой стороны, коэффициент отражения
также зависит от соотношения значений нагрузки и волнового
сопротивления линии: T=(ZH—p)/(ZH + p), откуда следует, что если
сопротивление нагрузки согласовано с волновым сопротивлением
линии передачи (ZH=p), то коэффициент отражения равен нулю-
и к нагрузке поступает максимальная мощность.
В общем случае, когда и генератор, и нагрузка не
согласованы,
Ри = Ртах(1-|Ги|2)(1-|ГгР)/|1-Гг^н|*, (5.24)
где Гг — коэффициент отражения от генератора.
Практически вместо коэффициента отражения степень
согласования характеризуют коэффициентом стоячей волны ' (КСВ)
Кет и, который связан с коэффициентом отражения следующим
соотношением:
к _ £шах_ 1£п| + |£„1 __ 1 + |Г|
"U Emin \ЕП\ — \Е0\ 1—|Г|
Коэффициент стоячей волны измеряется измерительной линией
или панорамным измерителем КСВ и по его значению
вычисляется по необходимости модуль коэффициента отражения:
|Г| = (Яс,1/-1)/(/Сс,1/-И).
Относительная погрешность измерения поглощаемой мощности
брас вследствие рассогласования полного входного сопротивления
ваттметра (нагрузки), полного выходного сопротивления
генератора и волнового сопротивления линии передачи равна
"рас =: (*в—' mai)/°moi> (5.25)
где Рв — мощность, поглощаемая ваттметром, а Ртах —
наибольшая мощность генератора. Полагая Рв — Ри и ГН=ГВ, где Гв —
коэффициент отражения от ваттметра, из (5.24) получаем
зависимость относительной погрешности от коэффициентов отражения
генератора и ваттметра:
б .- (1—1Гв12)(1—1Гг12) j
рас |1 —ГГГВ|»
В большинстве практических случаев генератор согласован с
линией передачи и Гг=0. Тогда
брас = ~ [Гв!2 = - (Яст U- 1 У/(КСТ и + 1 )2.
Эту систематическую погрешность можно исключить, введя
соответствующую поправку. Значение КСВ ваттметра приводится
в его паспорте.
5* 131
Калориметрический метод относится к наиболее
точным измерениям поглощаемой мощности на высоких и
сверхвысоких частотах. Он широко применяется для измерения средних и
больших значений и мощности различных генераторов и
радиопередатчиков. Приемный преобразователь калориметрического
ваттметра представляет собой нагрузку, поглощающую
электромагнитную энергию. При этом выделяется теплота,
нагревающая некоторое рабочее тело, которое часто является на-
трузкой и может быть твердым или жидким. С помощью
измерительного устройства измеряется температура рабочего тела и
определяется значение мощности.
Наиболее распространены поточные (проточные)
калориметрические ваттметры с непрерывно циркулирующей жидкостью —
■водой, омывающей твердое рабочее тело, или
кремний-органической смесью, являющейся объемной нагрузкой. На рис. 5.40
показан эскиз конструкции приемного преобразователя волноводного
калориметрического ваттметра. В короткозамкнутом отрезке
волновода / помещена стеклянная трубка 2, по которой протекает
жидкость 3, являющаяся нагрузкой. На входе и выходе трубки
температура жидкости равна Т\ и Т2 соответственно. Форма
трубки и ее длина в волноводе, выбираются из условия согласования
тракта, т. е. минимального коэффициента отражения.
В установившемся режиме количество теплоты QH, выделяемой
нагрузкой RH, равно количеству теплоты Qx, отводимой
жидкостью: Qh=0,24ARh*=Q>k
СУД
СуЯУ(Т2—Ti), откуда
/>:=•
^-4,18^ Д7\
0,24*
где суд — удельная теплоемкость жидкости, измеряемая в
Дж/(кг-К); V — объем жидкости, в литрах, протекшей через
калориметр за время измерения t в секундах; AT— разность
температур жидкости на входе и выходе в Кельвинах. Если суд и скорость
протекания жидкости v=Vft постоянны, то измеряемая мощность
пропорциональна разности температур AT : Р = аАТ, где а —
коэффициент пропорциональности, измеряемый в ваттах на кельвин.
Для измерения AT применяют батареи термопар (4, 5 на
рис. 5.40), которые включаются так, что термо-ЭДС батареи 4
^
^JCJ
Рис. 5.40
Рис. 5.41
132
направлена встречно термо-ЭДС батареи 5. Тогда показание
миллиамперметра будет пропорционально AT и его шкалу можно
градуировать в единицах мощности. Для повышения
чувствительности ваттметра перед миллиамперметром включают усилитель
постоянного тока.
Погрешность измерения мощности калориметрическим методом
возникает вследствие изменения удельной теплоемкости жидкости
при ее значительном нагревании, дополнительного нагрева
жидкости за счет ее трения о стенки трубки, изменения скорости
протекания жидкости, потерь теплоты на излучение. Для уменьшения
погрешности используют метод сравнения, при котором тепловой
эффект, вызванный энергией электромагнитного поля СВЧ,
сравнивается с тепловым эффектом, вызванным энергией постоянного
тока или тока низкой частоты.
На рис. 5.41 схематически показан проточный
калориметрический ваттметр, работающий по методу сравнения. Приемный
преобразователь представляет собой нагрузочный резистор Ru
помещенный в камеру /. В аналогичной камере 4 находится резистор
/?2, на который подается мощность Р постоянного тока или
переменного тока низкой частоты. Оба резистора омываются
непрерывно циркулирующей в камерах жидкостью. Процесс измерения
мощности СВЧ заключается в измерении мощности постоянного
тока, значение которой устанавливают так, чтобы температура
жидкости на выходах обеих камер была одинакова. Равенство
температур определяется по нулевому показанию чувствительного
индикатора постоянного тока, соединенного последовательно с двумя
термобатареями 2, 3, термо-ЭДС которых включены навстречу
друг другу. Теплообменник 5 выравнивает температуру жидкости
на входах камер. Очевидно, что в таком калориметрическом
ваттметре отпадают составляющие погрешности за счет непостоянства
удельной темплоемкости, неравномерности течения жидкости, ее
дополнительного нагрева за счет трения.
Измеряемую мощность СВЧ определяют по формуле Р^,=
= Р=//СЭ, где /Сэ — коэффициент эффективности приемного
преобразователя. С помощью этого коэффициента учитывается
неэквивалентность нагревания резистора Ri мощностью СВЧ и резистора
R2 мощностью постоянного тока. Коэффициент эффективности
зависит от частоты и принимает значения 1,0... 0,7 в диапазоне
частот 30 МГц ... 37,5 ГГц.
Погрешность измерения мощности СВЧ определяется
точностью измерения мощности постоянного тока и значения Кэ,
которое приводится в паспортных данных ваттметра.
Метод терморезистора основан на изменении
электрического сопротивления терморезистора под действием теплоты,
вызванной энергией поля СВЧ, р котором он помещается. Изменение
сопротивления определяется температурным коэффициентом
сопротивления терморезистора a = dR/(RdT), где а измерено в
единицах, обратных Кельвинам, dR и R — в омах, dT — в Кельвинах.
133
Терморезистор является поглощающей нагрузкой и потому
расположен в приемном преобразователе ваттметра. Измеряемая
СВЧ мощность замещается мощностью постоянного тока,
эквивалентной по тепловому действию. Изменение сопротивления
терморезистора определяется с помощью измерительного устройства-
моста постоянного тока, в одно плечо которого включен
терморезистор.
Конструктивно терморезистор '(рис. 5.4'2,а) представляет собой бусинку /
(иногда диск) диаметром 0,2 ...0,5 мм, изготовленную методом спекания из
порошкообразной смеси окислов никеля, марганца и кобальта, покрытую тонким
слоем стекла. В 'бусинку запрессовываются платиновые проволочки 2
диаметром 25... 50 мкм. Бусинка заключается в стеклянный баллончик и снабжается,
жесткими латунными выводами 3 диаметром 0,8 мм. Терморезисторы
изготавливаются из полупроводника, поэтому их ТКС отрицательный. Условное
обозначение терморезистора показано на рис. 5.42,6, а зависимости сопротивления
от рассеиваемой мощности для температур окружающей среды 0 и 20° С — на
рис. 5,42,в.
Для измерения мощности на СВЧ кроме терморезисторов
применяются болометры — приемники лучистой энергии. Как и у тёр-
морезисторов, электрического сопротивления
термочувствительного элемента изменяется при нагревании вследствие поглощения
измеряемого потока излучения.
Болометр |(рис. 5.43,а) представляет собой вольфрамовую или платинввую
проволочку 2, заключенную в стеклянный баллончик 3, наполненный инертным
газом. Поперечное сечение проволочки 3... 110 мкм, длина /=1 мм. К ней
приварены латунные выводы 1 для включения в измерительную схему. Условное
обозначение болометра показано на рис. 6.43,6. Проволочные болометры
используются на частотах ниже 1 ГГц. На более высоких частотах применяют
пленочные болометры (рис. 5.43,8). Платиновая или палладиевая пленка 3
напыляется в вакууме на подложку 4 из стекла или слюды, размеры которой
соответствуют сечению волновода. Для включения в измерительную цепь края
подложки покрываются серебром 5.
1
. V\
Я„0м а>
700
500
JD0
100
* 2ffB^\
i '
5
о "с
11
5^-
Г,М0Т
\ А
а)
5)
/is, ом
220
200
160
$
,J * j.
ю
. т I _1
г)
134
Рис. 5.42
Рис. 5.43
Основными характеристиками терморезисторов и болометров
являются: зависимость сопротивления RT от рассеиваемой
мощности RT = f(P); сопротивление в рабочей точке Rr0, равное
сопротивлению постоянному току, при котором терморезистор
согласуется с волновым сопротивлением тракта СВЧ; чувствительность в
d R I
рабочей точке 5Т = —-f , где 5Т измерено в омах на ватт;
dP |ят=#т0
максимальная допустимая рассеиваемая мощность — средняя
-Ртах и импульсная РИтаХ тепловая постоянная времени т в
секундах, равная времени, в течение которого предварительно нагретый
терморезистор остывает до температуры, в е раз меньшей, чем
первоначальная. На рис. 5.43,г приведены типичные
характеристики зависимости изменения сопротивления болометра от изменения
рассеиваемой мощности на них. Выпускаемые в настоящее время
проволочные болометры характеризуются максимальной
допустимой мощностью рассеивания от 10 мВт до 2 Вт, чувствительностью
от 3 до 8 Ом/мВт, сопротивлением в холодном состоянии от 6 до
120 Ом. Пленочные болометры рассеивают мощность до 1 Вт; их
чувствительность составляет 3... 3,5 Ом/мВт при работе на
частотах ниже 10 ГГц. На более высоких частотах она снижается до
0,3 Ом/мВт. Сопротивление в холодном состоянии 50... 75 Ом.
Максимальная допустимая мощность рассеивания
терморезисторами 30 ...40 мВт; импульсная — до 50 Вт. Они устойчивы к
перегрузкам. Чувствительность терморезисторов достигает 100
Ом/мВт, поэтому их широко используют для измерения весьма
малых мощностей. Сопротивление терморезисторов в холодном
состоянии колеблется от десятков ом до нескольких килоом в
зависимости от температуры окружающей среды. Сопротивление в
рабочей точке терморезистора и болометра устанавливается
предварительным подогревом при постоянном токе или токе низкой
частоты.
Терморезисторный ваттметр состоит из приемного
преобразователя, в котором размещен терморезистор или болометр и
элементы согласования; измерительного моста постоянного тока для
определения изменения сопротивления болометра или
терморезистора; отсчетного устройства с цифровой или стрелочной
индикацией; стабилизированного источника питания. Приемный
преобразователь в зависимости от диапазона рабочих частот
изготавливается из отрезка коаксиальной или волноводной линии.
В коаксиальном преобразователе (рис. 5.44,а) терморезистор
или болометр включается в разрыв центрального проводника 1 в
конце закороченной линии. Терморезистор находится в. цепи
тракта СВЧ и одновременно в цепи постоянного тока — одном из плеч
моста. Для развязки этих цепей предусмотрен дроссель 2,
предохраняющий мост от проникновения энергии СВЧ и
обеспечивающий прохождение постоянного тока через терморезистор. Внешний
проводник коаксиальной линии 3 имеет круговую щель,
образуемую фланцем 4, в которую помещена кольцевая слюдяная
прокладка 5; щель с прокладкой является конструктивным конденса-
135
Рис. 5.44
тором Ск; без которого терморезистор был бы замкнут накоротко
по постоянному току. Для энергии СВЧ конденсатор Ск
представляет собой ничтожно малое сопротивление. Коаксиальные
приемные преобразователи применяют в диапазоне частот от 20 МГц до
6 ГГц. На более высоких частотах используют преобразователи
волноводной конструкции.
Волноводный терморезисторный преобразователь (рис. 5.44,6)
представляет собой отрезок короткозамкнутого прямоугольного
волновода /, в широких стенках которого вырезаны
перпендикулярно два коаксиальных патрубка 2, 3. В разрыв центрального
проводника этих патрубков посередине волновода включен
терморезистор. Для согласования терморезистора с волноводом он
должен располагаться'на расстоянии 1= (2п+\)'К/4 от замкнутого
конца волновода. Для установки этого расстояния предусмотрен
поршень 5. Волновод согласуется с коаксиальными патрубками с
помощью ступенчатого перехода, трансформирующего волновое
сопротивление волновода, а в коаксиалах предусмотрены
подвижные короткозамыкающие плунжеры 4, 6. Для обеспечения
прохождения че.рез терморезистор постоянного тока измерительной
схемы в патрубке 2 предусмотрена кольцевая щель, образующая
конструктивный конденсатор.
Измерение мощности СВЧ как функции изменения
сопротивления терморезистора выполняется с помощью моста постоянного
тока. В одно плечо моста включается терморезистор или болометр,
а в остальные три — постоянные резисторы, сопротивления
которых равны сопротивлению терморезистора в рабочей точке. Такой
равноплечий мост обладает максимальной чувствительностью.
Измерение мощности можно выполнять при неуравновешенном или
при уравновешенном состоянии моста.
Ваттметр с неуравновешенным мостом (рис. 5.45,а) работает
так. Сначала мост приводится в равновесие на постоянном токе.
Для этого, изменяя сопротивление резистора R\ в цепи питания
моста, добиваются нулевого показания на шкале микроамперметра
в диагонали моста. Это свидетельствует о равенстве
сопротивления терморезистора всем остальным сопротивлениям R плеч.
Затем на вход преобразователя подают мощность СВЧ,
терморезистор дополнительно нагревается, его сопротивление изменяется,
мост выходит из равновесия и стрелка микроамперметра
отклоняется. Резистор Ядоб ограничивает ток через микроамперметр.
136
"lob
Генератор
Д/
тА\
ffll
Л
Источник
стабильного
тока
ПК
Рис. 5.46
Шкала микроамперметра заранее градуируется в единицах
мощности постоянного тока и его показания соответствуют измеряемой
мощности СВЧ.
Ваттметр с неуравновешенным мостом прост и надежен в
работе; с его помощью можно непрерывно и непосредственно
измерять мощность СВЧ. Однако необходимость предварительной
градуировки и значительная погрешность измерения (до 10%)
ограничивают область его применения. Источниками погрешностей
являются: рассогласование тракта СВЧ с термистором, так как в
процессе измерения сопротивление последнего изменяется;
изменение температуры окружающей среды; нестабильность напряжения
источника питания моста; изменение характеристик
терморезистора при его старении и замене.
Ваттметр с уравновешенным мостом (рис. 5.45,6)
обеспечивает значительно большую точность. Измерение выполняют в два
этапа'. Сначала мост приводят в равновесие при постоянном токе
изменением сопротивления резистора Ri и замечают на шкале
миллиамперметра в цепи питания моста значение постоянного тока /.
Через термистор протекает половина питающего мост тока,
поэтому мощность Ри рассеиваемая на сопротивлении терморезистора
RT, равна
Рх = (V2)2 Я, = /2 Ят/4 = /? Я/4. (5.26)
Затем подается мощность СВЧ, терморезистор дополнительно
нагревается, его сопротивление уменьшается и мост выходит из
состояния равновесия. Мост вторично приводят в равновесие,
уменьшая постоянный ток через терморезистор резистором R\ до
значения /2. Теперь мощность постоянного тока Р2, рассеиваемая на
R, согласно формуле (5.26) равна
Р, = /|Я/4.' (5.27)
137
Очевидно, что разность мощностей постоянного тока равна
измеряемой мощности СВЧ:
/>_ = />!—/>,= (/?-/2) Я/4. (5.28)
Измерение мощности с помощью ваттметра с уравновешенным
мостом является косвенным, так как требует вычислений.
Преимущества по сравнению с неуравновешенным мостом следующие: не
нарушается согласование тракта СВЧ с терморезистором, так как
сопротивление последнего приводится к одному и тому же значению
независимо от значения измеряемой мощности; не нужна
предварительная градуировка; изменения характеристик
терморезисторов от старения и при их замене не влияют на результаты
измерений. Недостатками являются: необходимость двух операций
уравновешивания моста; выполнение вычислений; увеличение
погрешности при малом различии между двумя значениями
измеряемых постоянных токов h и h.
Прямопоказывающий ваттметр с уравновешенным мостом не
имеет этих недостатков; для измерения мощности СВЧ измеряют
не два значения постоянных токов, а их разность A/=/i—h.
Подставим в формулу (5.28) значение тока h=h—А/. После
соответствующих преобразований получаем
P^ = (2I1—M)MR/4, (5.29)
где h — ток питания моста при первоначальном уравновешивании;
А/ — приращение этого тока при вторичном уравновешивании с
заданной мощностью СВЧ.
Если поддерживать значение тока Д и сопротивление R
постоянными, то значение измеряемой мощности СВЧ однозначно
определяется приращением постоянного тока А/: Р-, =/(Д/).
Шкалу миллиамперметра, измеряющего это приращение, можно
градуировать в единицах мощности. Существует много схем прямопо-
казывающих ваттметров с разными способами измерения разности
токов А/. Рассмотрим одну из них, называемую «схемой с шунтом»
(рис. 5.46). Напряжение питания моста, подобного
представленному на рис. 5.45,6, подается от источника стабильного тока.
Первоначальное уравновешивание моста выполняют путем установки
тока /i, при котором RT=R. В дальнейшем значение тока 1\
благодаря действию стабилизатора тока не изменяется. Затем
подают СВЧ мощность Pv, , сопротивление терморезистора
уменьшается и мост выходит из равновесия. Замыкая переключатель П,
подключают цепь шунта и, регулируя сопротивление резистора Rmt
вновь приводят мост в равновесие. Оно наступает вследствие
уменьшения тока, протекающего через терморезистор за счет
ответвления части А/ тока h через шунт. Для измерения А/ в цепи шунта
предусмотрен миллиамперметр, шкала которого в соответствии с
формулой (5.29) градуируется в единицах мощности.
В процессе эксплуатации ваттметра градуировка может
нарушаться при изменении температуры окружающей среды, замене
и старении терморезистора. Для обеспечения постоянства градуи-
138
ровки значение тока /ь получаемое от источника стабильного
тока, устанавливают несколько меньшим, чем нужно для
уравновешивания моста, а точное равновесие получают путем
дополнительного косвенного подогрева терморезистора переменным током
низкой частоты. Источник этого тока и нагревательный элемент НЭ
входят составными частями в прямопоказывающий термисторный
ваттметр. В процессе измерения нарушения первоначального
уравновешивания моста под влиянием внешних причин устраняют
только регулировкой выходного тока генератора низкой частоты, а
значение постоянного тока h сохраняется неизменным.
. На основе рассмотренной схемы (рис. 5.46) выпускают
ваттметры с автоматическим уравновешиванием моста. Для этого вместо
гальванометра в диагональ 1, 2 включают усилитель постоянного
тока с большим коэффициентом усиления, а вместо резистора в
цепи шунта i?m — регулируемый (управляемый) источник
постоянного тока. Напряжение разбаланса, возникающее в диагонали /,
2 при подаче на термистор мощности СВЧ, усиливается
усилителем постоянного тока и используется для управления источником
постоянного тока до восстановления равновесия моста. Значение
тока, пропорциональное измеряемой мощности, фиксируется на
шкале миллиамперметра.
Принцип работы терморезисторного ваттметра дискретного
действия основан на питании его моста импульсным напряжением. Из
(5.16) можно получить
- Р = Рит/:Г = Рит^=№иР, (5.30)
где Р — средняя мощность за период; Ри — импульсная мощность;
г — длительность импульса; Т и F — период и частота следования
импульсов; Wa — энергия импульса. Таким образом из.(5.30)
следует, что если напряжение питания терморезистора представляет
собой некоторую последовательность импульсов, то рассеиваемая
на нем мощность линейно связана с их частотой следования. Это
справедливо, если тепловая постоянная времени терморезистора
много больше периода следования импульсов, что практически
всегда выполняется.
Схема ваттметра дискретного действия (цифрового ваттметра)
приведена на рис. 5.47. Мост аналогичен рассмотренным ранее с
О*
д
г—Щ-
U«
I
Цифровой индикатор
Усилитель
постоянного тока
Управляемый
генератор
Формирующее устройство
ч:
Счетчик
Рис. 5.47
133
тем отличием, что вместо индикатора включены детектор и
усилитель постоянного тока для обнаружения напряжения разбаланса
Д[/. Напряжение разбаланса подается на управляемый по частоте
генератор однополярных прямоугольных импульсов. Эти
импульсы поступают в электронный счетчик и формирующее устройство.
В последнем однополярные импульсы преобразуются в двухполяр-
ные без постоянной составляющей и используются для питания
моста.
В начальном состоянии, когда мост уравновешен, Д£/—0 и
генератор вырабатывает импульс с начальной частотой Fu
значение которой записывается в счетчик в дополнительном коде.
Терморезистор нагревается импульсами с частотой Fi и на нем
рассеивается мощность Pi==WnFi.
При подаче измеряемой мощности СВЧ терморезистор
разогревается дополнительно, мост выходит из равновесия, появляется
напряжение разбаланса AU. Последнее воздействует на элемент,
уменьшающий частоту генератора до значения F2; при этом мост
вновь уравновешивается при мощности P2=W^F2. Частота F2 при
измерении мощности Р записывается в счетчик в прямом коде,
результирующий код в счетчике пропорционален разности частот
F\ и F2. Отсюда измеряемая мощность СВЧ
P^ = P1-P2 = Wa(F1-F2).
Результирующий код фиксируется на шкале цифрового
индикатора, градуированной в единицах мощности. Погрешность тер-
морезисторных ваттметров дискретного действия составляет 0,5%
и менее.
Сущность термоэлектрического метода
заключается в преобразовании энергии СВЧ в термо-ЭДС с помощью СВЧ
термопар, помещаемых в приемном преобразователе в качестве
поглощающей нагрузки. Конструкции термоэлектрических
преобразователей различны (по виду тракта, месту включения
термопар и т. д.), но принципиальная электрическая схема их может
быть представлена на рис. 5.48.
Две термопары соединены для СВЧ тракта параллельно, а для
цепи постоянного тока — последовательно. Термопара выполнена
из двух тонких пленок (висмут — сурьма или хромель — копель)',
напыленных в вакууме на диэлектрическую подложку. Общее
сопротивление двух соединенных
Параллельно термопар должно
равняться волновому
сопротивлению линии передачи /?Тп/2 =
= р. Конструктивный
конденсатор Ск разделяет цепи СВЧ и
постоянного тока. Конденсатор
постоянной емкости С
шунтирует вход измерительного
устройства от ■
высокочастотных составляющих. Усилен-
термолары
f
С
IFi *
ill
чп
К измери/пшно-
Mt/ устройств!/
Рис. 5.48
140
Приемный
преобразователь
Калибратор
Рис. 5.49
ная термо-ЭДС измеряется аналоговым или цифровым (чаще)?
вольтметром, градуированным в единицах мощности. К
достоинствам термоэлектрического метода относятся: широкий диапазон
частот; малое время измерения; малая зависимость показаний от
окружающей температуры; широкие пределы измеряемой
мощности. Главным недостатком метода является малая надежность
вследствие неустойчивости термопар к перегрузкам.
Структурная схема одного из выпускаемых промышленностью
термоэлектрических ваттметров приведена на рис. 5.49. Термо-
ЭДС, возникшая под действием мощности СВЧ в термопарах,
размещенных в приемном преобразователе, через фильтр нижних
частот поступает на усилитель с преобразованием сигнала МДМ
(модуляция — усиление переменного напряжения —демодуляция)'
и далее на цифровой вольтметр, градуированный в единицах
мощности. Для проверки этой градуировки предусмотрен калибратор.
Промышленность выпускает терморезисторные и термоэлектрические
ваттметры поглощаемой мощности с наборами сменных приемных преобразователей
коаксиальной или волноводной конструкции, измерительными устройствами с
ручным или автоматическим управлением, стрелочными или цифровыми отсчет-
ными устройствами. Ваттметры перекрывают весь диапазон частот,
используемый в настоящее время в технике радиосвязи и вещания. Пределы значений
измеряемой мощности составляют от единиц микроватт до единиц ватт. Эти
пределы можно расширить с помощью внешних калиброванных аттенюаторов 'или
направленных ответвителей, включаемых «а входе ваттметра. Класс точности
выпускаемых ваттметров связан с .RGB входной цепи приемного преобразователя
и в соответствии с ГОСТ 13605—75 они соответствуют следующим значениям:
Класс точности 1,0 1,5 2,5 4,0 6,0 10,0
КСВ, не более 1,1 1,1 1,2 1,3 1,4 1,5
Измерение проходящей мощности. По определению
проходящую мощность Рпр выражают следующей формулой:
Л,р = Л, = Л,-Л, = Рп(1-|ГвР), (5.31)
где Рп и Р0 — мощность падающей и отраженной волн
соответственно, а Ги — коэффициент отражения от нагрузки. Ваттметр
проходящей мощности включают в линию передачи между
генератором и нагрузкой; при этом не должна искажаться структура
электромагнитного поля в линии. Несоблюдение этих требований
приводит не только к значительной погрешности измерения, но и к на-
141
Фильтр
нижних частот
Усилитель МДМ
Цифровой
вольтмгетр
рушению режима работы тракта с нагрузкой. Рассмотрим
наиболее распространенные методы.
Метод ответвления реализуется чувствительными
ваттметрами поглощаемой мощности в совокупности с
направленными ответвителями.
Направленный ответвитель предназначен для ответвления
известной части мощности падающей или отраженной волны. Он
состоит из главной линии, включаемой последовательно в линию
передачи СВЧ энергии, и вспомогательной, электрически связанной
с главной через элементы связи и нагруженной с обеих сторон иа
сопротивления, равные ее волновому сопротивлению. По главной
линии распространяется падающая волна от генератора к
нагрузке и отраженная — от нагрузки к генератору. Через элементы свя-
г зи часть энергии обеих волн проникает в вспомогательную линию,
где возникают две волны, бегущие в обе стороны от элементов
связи. Последние устроены так, что в одном направлении вдоль
вспомогательной линии распространяется энергия,
пропорциональная только падающей волне, в другом — только отраженной.
Теория и конструктивные решения направленных ответвителей
изучаются в технической электродинамике. Здесь рассмотрим
устройство и работу направленного ответвителя волноводной
конструкции (рис. 5.50).
Элементы связи между главной и вспомогательной линиями
представляют собой отверстия (щели), расположенные на
расстоянии четверти длины волны Яв в волноводе друг от друга.
Падающая волна (сплошная линия) возбуждает в вспомогательной
линии электромагнитное поле, энергия которого разветвляется в
точках 3 и 4 в обе стороны. В точке 4 и далее направо колебания
находятся в одинаковой фазе, так как расстояния 1—3—4 и 1—2—4
равны друг другу. Следовательно, к выходу вспомогательной
линии проходит сумма возбужденных колебаний. Энергия отраженной
волны (штриховая линия) также возбуждает колебания в
вспомогательной линии, но в точке 4 и далее направо они взаимно
компенсируются, так как расстояния 2—1—3—4 и 2—4 отличаются
на половину длины волны и колебания находятся в противофазе.
Таким образом, к выходу вспомогательной линии ответвителя
поступает часть мощности ДРП
только падающей волны.
Колебания, возникшие за счет
отраженной волны и
распространяющиеся влево (по, схеме), в
точке 3 складываются и, проходя
далее, поглощаются в conpoTHBj
<°п лении нагрузки вспомогательной
линии. Колебания, возбужденные
энергией падающей волны, iB
точке 3 и левее компенсируются, так
как разность расстояний 1—2—
4—3 и 1—3 равна половине дли-
Вспомогате/иная линия^
-iM.ii.iiiiirm
Нагрузка ~{^^.-»-fr"—J—-fr"*-!.!
линия
Рис. 5.50
142
Ваттметр 1
6"
«Я
?3
Б-
Направленный
ответвитель 1
Вычитающее
устройство
■В-
аттметр 2
ЛР
СП
Направленный
ответвитель 2
■й-
К Нагрузке
Рис. 5.51
ны^ волны. Отсюда следует, что, подключив к выходу
вспомогательной линии, направленного ответвителя измеритель мощности, можно
определить значение мощности, проходящей через главную линию.
Если повернуть направленный ответвитель на 180°, то на
выходе появится энергия, пропорциональная мощности только
отраженной волны. Направленные ответвители характеризуются
переходным ослаблением
С=101ё(Рп/ДРп)
и коэффициентом направленности
£>=101g(APn/APo),
где Рп —значение падающей мощности в главной линии; ДРП и
Д^о — значения ответвленной мощности падающей и отраженной
волн в вспомогательной линии. Обычно D равен 20 . 40 дБ- С=
= 10... 30 дБ.
Схема измерения проходящей мощности приведена на рис. 5.51.
Направленные ответвители 1 и 2 с одинаковыми характеристиками
и противоположными ориентациями включены последовательно в
линию передачи. Ответвленные части мощностей падающей и
отраженной волн измеряются поглощающими ваттметрами 1 и 2.
Результаты измерений поступают на вычитающее устройство, на
выходе которого включен измеритель,
градуированный в единицах мощности.
Его показания в соответствии с
формулой (5.31) пропорциональны проходящей
мощности.
Пондеромоторный метод
основан на преобразовании энергии
электромагнитного поля в механическую.
Пондеромоторный ваттметр состоит из
отрезка прямоугольного волновода 1 (рис.
5.52), внутри которого на упругой
кварцевой нити 2 подвешена легкая
металлическая пластинка 4. Нижняя кромка пла-
143
Рис. 5.52
стинки через жесткий кварцевый стержень 5 связана с
зеркальцем 6 и демпфером 7, а верхняя —через упругую кварцевую нить —
с осью измерительной головки. На головке нанесена шкала в
градусах.
Электромагнитная энергия, распространяясь вдоль волновода,
возбуждает в пластинке заряды противоположных знаков и ее
можно рассматривать как диполь с электрическим моментом рэ~
=el, где е — заряд, а I — расстояние между зарядами. На этот
диполь действует электромагнитное поле напряженностью Е, в
результате их взаимодействия возникает момент сил, приложенных
к пластинке: М=рэЕ cos 8, где 8 — угол между осью диполя и
направлением вектора электрического поля. Под действием
момента сил шластинка поворачивается и угол 6 увеличивается
пропорционально проходящей мощности. Чтобы возвратить пластинку в
начальное положение нужно с помощью головки 3 закрутить нить
на некоторый угол Д8. Момент возврата пластинки
определяется совпадением положения светового пятна иа внешней шкале 8
с его положением до измерения, т. е. в отсутствие мощности СВЧ
v волноводе.
Проходящая мощность и угол Д8 связаны следующим
соотношением:
Рпр=:ШД8=аД8,
где а в ваттах на градус определяется экспериментально и
известно для каждого ваттметра. Измерение проходящей мощности
сводится к измерению угла закручивания кварцевой нити ваттметра.
Пондеромоторные ваттметры обеспечивают высокую точность
измерения (погрешность менее 1 %), устойчивы к перегрузкам,
потребляют малую мощность. К их недостаткам относятся большая
чувствительность к вибрациям и сложность в изготовлении. Они
используются преимущественно в метрологических целях (для
поверки, градуировки и т. п.).
Глава 6. ГЕНЕРАТОРЫ ИЗМЕРИТЕЛЬНЫХ
СИГНАЛОВ
6.1. КЛАССИФИКАЦИЯ ГЕНЕРАТОРОВ.
ОСНОВНЫЕ ПАРАМЕТРЫ
Подгруппа приборов, предназначенная для формирования
измерительных сигналов, обозначается буквой Г. Согласно ГОСТ
35094—69 в эту подгруппу входит семь видов приборов. Приборы
вида П используют для проверки генераторов. К виду Г2
относятся генераторы шумовых сигналов; к виду ГЗ — генераторы
низких частот от 20 Гц до 300 кГц, формирующие сигналы сииусои-
J44
дальной формы. Имеется тенденция расширения этого диапазона
вниз 'до долей герца и вверх до единиц мегагерц. К виду Г4
относятся высокочастотные синусоидальные генераторы. Обычно эти
генераторы носят название высокочастотных в диапазоне от 30 кГц
до 300 МГц и СВЧ в диапазоне от 300 МГц до 18 ГГц. Вид Г5
объединяет генераторы импульсов, а вид Г6 —генераторы
сигналов специальной формы. К виду 7 относятся генераторы
качающейся частоты (свипгенераторы).
Основные нормируемые параметры измерительных
генераторов, характеризующие их метрологические и эксплуатационные
свойства, устанавливаются государственными стандартами иа
генераторы конкретного типа. Как правило, указываются следующие
параметры:
форма сигнала измерительного генератора (синусоидальная,
импульсная и т. п.);
параметры сигнала данной формы (частота повторения,
амплитуда, длительность и скважность прямоугольного импульса,
длительность фронта и среза, коэффициент гармоник и т. п.)'; .
пределы регулировки параметров сигнала (диапазон частот,
пределы регулировки ослабления, пределы установки
длительности и т. п.);
пределы допускаемых погрешностей установки параметров
сигнала (установки частоты, амплитуды, длительности импульсов
и т. п.);
нестабильность параметров сигнала за некоторый интервал
времени (указывается при определенных изменениях внешних
условий, напряжения питания, регулировании других параметров
сигнала).
6.2. ОСОБЕННОСТИ ГЕНЕРАТОРОВ
СИНУСОИДАЛЬНЫХ СИГНАЛОВ
Эти генераторы получили наибольшее распространение при
измерениях в технике связи. Требования к нормируемым
параметрам их разработаны наиболее полно. В соответствии с ГОСТ
9788—78 основными параметрами этих генераторов являются:
диапазон частот генерируемых колебаний. Указывается
минимальная и максимальная частота диапазона. Весь диапазон
обычно разбивается на несколько поддиапазонов. Ширина диапазона
характеризуется коэффициентом перекрытия, равным отношению
максимальной генерируемой частоты к минимальной.
Коэффициент перекрытия существенно уменьшается с ростом верхней
границы диапазона, изменяясь от 10 000 для генераторов низких
частот до 1,1 ... 2,0 для генераторов СВЧ;
погрешность установки частоты. Этот параметр указывается
либо для всего прибора, либо отдельно для каждого поддиапазона
и может 'быть основной и дополнительной. Например, основная
погрешность установки частоты генератора Г4-70 равна 1%. У ге-
145
нератора ГЗ-109 основная погрешность установки частоты в
диапазоне от 200 Гц до 20 кГц составляет ±(1+50//ИОм} %. Здесь
/ном — номинальное значение частоты, устанавливаемое по шкале.
Дополнительная погрешность установки частоты зависит от
изменения температуры окружающей среды и изменения уровня
выходного сигнала. Например, у генератора Г4-70 дополнительная
погрешность установки частоты, вызываемая изменением
температуры окружающей среды в пределах рабочих условий, не
превышает ±0,3% на каждые 10° С. Дополнительная погрешность уста-
ковки частоты, обусловленная регулированием уровня выходного
сигнала от наибольшего до наименьшего значения, не превышает
±0,1% на частотах до 250 МГц. В некоторых образцах
современных генераторов для индикации устанавливаемой частоты
используют встроенные частотомеры цифрового типа, погрешность
которых и определяет погрешность установки частоты. Прецизионные
измерительные генераторы с дискретным набором фиксированных
частот (синтезаторы) могут иметь погрешность установки частоты
Ю-4... Г0-5%;
нестабильность частоты. Эта характеристика нормируется как
предел допускаемого изменения частоты. Указывают
кратковременную нестабильность частоты, например, при неизменных внешних
условиях и неизменном напряжении питания за любые 15 мин
работы генератора после установки рабочего режима, и
долговременную (например, за любые 3 ч работы). Нестабильность
частоты зависит от внешних условий и напряжения питания, а также
от механических и электрических параметров колебательных
контуров, резонаторов и активных элементов задающих генераторов.
Ь генераторов с плавной перестройкой частоты кратковременная
нестабильность обычно составляет Ю-3 ... 10~4. Для генераторов с
подстройкой частоты по встроенному кварцевому генератору с
помощью фазовой автоподстройки частоты кратковременную
нестабильность удается уменьшить до 10~7. Цифровые синтезаторы
имеют суточную нестабильность частоты Ю-9;
параметры выходного напряжения. Выходное напряжение
определяется назначением генератора. Низкочастотные генераторы
обеспечивают сравнительно большоех выходное напряжение.
Например,' генератор ГЗ-109 вырабатывает сигнал 16 В, а
высокочастотный генератор Г4-70, предназначенный для настройки
радиоприемных устройств,— сигнал с максимальным напряжением
50 мВ, причем имеется аттенюатор, позволяющий изменять уровень
выходного напряжения от 0 до 90 дБ. Минимальное выходное
напряжение составляет 1,5 мкВ;
погрешность установки уровня выходной мощности
(напряжения). Нормируется как предел допускаемой основной и
дополнительной погрешности установки уровня. Эта погрешность
определяется погрешностью прибора (вольтметра), который
встраивается в измерительный генератор и по которому устанавливается
калиброванный исходный уровень, а также погрешностью
аттенюатора;
146
нестабильность уровня выходной мощности. Нормируется как
предел допускаемого изменения опорного уровня за некоторый
определенный интервал времени (15 мин, 3 ч и т. п.). Этот параметр
зависит от изменений внешних условий, напряжения питания, от
регулировки других параметров сигнала. Особенно важным для
практики является допускаемое изменение выходного уровня при
перестройке частоты генератора, т. е. неравномерность его
амплитудно-частотной характеристики;
уровень гармонических составляющих. Искажения формы
синусоидального сигнала нормируют путем указания предельного
допустимого значения коэффициента гармоник. У генераторов
общего назначения коэффициент гармоник может составлять 0,3...
...2%. Особо высококачественные генераторы имеют
коэффициенты гармоник 0,02... 0,05%;
параметры модуляции выходного сигнала. Модуляция
выходного сигнала осуществляется в генераторах ВЧ и СВЧ.
Нормируются: вид модуляции, пределы регулировки и погрешность
отсчета параметров модуляции;
качество экранировки генератора. Экранировка генератора
необходима для ослабления излучения электромагнитной энергии и,
следовательно, помех. Применяемая экранировка отдельных узлов
существенно снижает уровень помех, однако не может устранить
их полностью. В паспортных данных генераторов обычно
указываются плотность потока мощности вне прибора и напряжение
генерируемой частоты в проводах сети питания;
выходное сопротивление. Измерительные генераторы имеют
определенное выходное сопротивление. Наиболее
распространенными значениями i?Bbix являются 600, 75, 50 15, 10, 5 Ом. Нужное
значение выходного сопротивления выбирается из условий решения
измерительной задачи, например условий согласования с волновым^
сопротивлением подключаемого кабеля.
6.3. НИЗКОЧАСТОТНЫЕ ГЕНЕРАТОРЫ
Номенклатура основных параметров низкочастотных
генераторов должна соответствовать рассмотренным требованиям ГОСТ
9788—78, а также специальному ГОСТ 10501—74. Генераторы
низкочастотные измерительные. Основные параметры. Технические
требования. Методы испытаний. Этот стандарт подразделяет
низкочастотные генераторы на классы точности по частотным
параметрам и параметрам выходного напряжения. За индекс класса
принимается значение основной погрешности установки частоты и
опорного уровня выходного напряжения в процентах. Установлено
6 классов точности по частотным параметрам {F0yi; Fo,$; Fi.o; Fi.s;
•^2.0; F3to) и 5 классов точности по параметрам выходного
напряжения (£А,о; Uz,o; £/3,5; ^4,0; £/б,о). Например, обозначение класса
генератора FiUz,s означает, что основная погрешность установки
частоты не превышает 1%, а основная погрешность отсчета
уровня выходного напряжения не более 2,5%• Для каждого класса точ-
147
ности генератора установлены нормы, за которые не должны
выходить другие параметры генератора: нестабильность частоты,
коэффициент гармоник, погрешность ослабления аттенюатора,
дополнительные погрешности частоты и уровня выходного
напряжения. Кроме того, ГОСТ 10501—74 допускает выпуск
измерительных генераторов с более высокими метрологическими
характеристиками, индекс класса которых может в 10" раз {п — целое
число) отличаться от указанных. Например, генератор с основной
погрешностью установки частоты 10~4% следует отнести к
классу Fl.10-4. •
Низкочастотные измерительные генераторы выполняют обычно
по структурной схеме рис. 6.1. Основным узлом этой схемы
является задающий генератор, схемное и конструктивное решение
которого в значительной степени определяет метрологические
характеристики всего прибора: диапазон частот, погрешность
установки и нестабильность частоты, нестабильность уровня выходного
напряжения, искажения формы синусоидального сигнала.
Усилитель, включенный после задающего генератора,
обеспечивает усиление напряжения и мощности генерируемых
синусоидальных колебаний, развязывает задающий генератор от нагрузки. Такие
усилители охватывают глубокой отрицательной обратной связью
с тем, чтобы обеспечить хорошую равномерность его амплитудно-
частотной характеристики, высокую стабильность коэффициента
усиления, малый уровень нелинейных искажений.
Вольтметр, подключенный к выходу усилителя, позволяет
контролировать калиброванный исходный уровень напряжения на
выходе аттенюатора. Обычно в качестве вольтметров, встраиваемых
в измерительные генераторы, используют электронные вольтметры
средневыпрямленного значения. Погрешность этого вольтметра
непосредственно определяет точность установки уровня.
'1
Задающий
генератор
i
'
1
*
Вольтметр
Усилитель
.
Аттенюатор
Система автоматической
регули
)овки у
ро
вн
я (АРУ
)
Соп
траь
iacyio
сфор
f"
V
щи»
мат
1.
ор
50
600
5000
С "
> 50
> 600
> 5000
—•
—•
Выход
_
Рис. 6.1
148
Аттенюатор позволяет ступенчато (обычно через 10 дБ)
изменять ослабление сигнала на выходе измерительного генератора
в диапазоне от 0 до 60... 120 дБ. Погрешность аттенюатора
вносит свой вклад в погрешность установки уровня выходного
напряжения и составляет обычно 0,5 ... 1,0 дБ.
Выходной согласующий трансформатор, представленный на
структурной схеме рис. 6.1, применяют только в генераторах с
повышенными значениями выходной мощности (порядка 5 Вт) и
напряжения (50 В на нагрузке 600 Ом). В таких генераторах для
достижения малых нелинейных искажений сигнала требуется
тщательно согласовывать выходное сопротивление с сопротивлением
нагрузки, чтобы обеспечить расчетный режим работы выходного
каскада усилителя. Типовые выходные трансформаторы
позволяют работать на нагрузки 5, 50, 600 и 5000 Ом. Поскольку
практически невозможно создать согласующий трансформатор с
равномерной амплитудно-частотной характеристикой во всем
диапазоне 20 Гц... 300 кГц, обычно используют два трансформатора:
один — в полосе 20 Гц ... 20 кГц, второй — в полосе 20 кГц ...
... 200 кГц. Трансформаторы переключают одновременно с
переключением соответствующих поддиапазонов задающего
генератора.. Особенно важно согласовывать сопротивление генератора с
сопротивлением нагрузки при проведении измерений на длинных
линиях. Только при согласовании линии на выходе и входе
реализуется нормальный режим ее работы с точки зрения искажений
сигнала и передаваемой мощности, минимизируется погрешность
измерения затухания и т. п. Для точного согласования
выходного сопротивления генератора с сопротивлением нагрузки можно
использовать дополнительный переменный резистор,
подключаемый последовательно или параллельно к выходу генератора.
Выходные зажимы согласующего трансформатора обычно
путем соответствующей коммутации обеспечивают получение как
симметричного, так и несимметричного выходного сигнала, а
также двух одинаковых по амплитуде и противоположных по фазе
выходных напряжений. Однако следует отметить, что все
характеристики точности установки уровня выходного напряжения с
помощью аттенюатора и шкалы вольтметра градуируются обычно
только при работе на несимметричную нагрузку 600 Ом.
Подавляющее большинство современных измерительных
генераторов не имеет выходного согласующего трансформатора. Они
рассчитаны на выходное напряжение 5 ... 10 на нагрузке 600 Ом.
Выходное сопротивление таких генераторов (нерегулируемое и
равное 600 Ом) определяется конструкцией аттенюатора.
В структурной схеме низкочастотных генераторов
синусоидальных колебаний с повышенными требованиями к точности
установки выходного напряжения и его стабильности может быть
включена система автоматической регулировки уровня выходного
сигнала (АРУ, рис. 6.1). Система АРУ детектирует выходной сигнал
генератора, сравнивает его с сигналом источника опорного
напряжения и изменяет режим работы задающего генератора так, что-
14»
Сигнал управления
Перестройкой частоты
Генератор сигнала
перестраиваемой
частоты
Смеситель
fn-f
Фильтр
нижних
частот
К усилителю
Генератор сигнала
фиксированной
частоты
Сигнал управления
от системы АРУ
Рис. 6.2
бы скомпенсировать изменение
уровня выходного сигнала при
изменении частоты и других
дестабилизирующих факторах.
В результате применения АРУ
погрешность установки
выходного уровня сигнала можно
уменьшить в 4... 6% до 0,4%.
В некоторых измерительных
генераторах система АРУ имеет
внешний вход и допускает
подключение прибора в общую
цепь стабилизации сигнала,
охватывающую, например,
исследуемый объект.
В задающих генераторах
низкочастотного диапазона
используют три схемных
решения: ЯС-генераторы,
генераторы на биениях,
генераторы с диапазонно-кварцевой стабилизацией частоты
(синтезаторы). В простых и дешевых приборах наиболее
распространены ЯС-генераторы. К достоинствам задающего генератора
данного типа следует отнести сравнительно малые искажения
формы колебаний (коэффициент гармоник 0,02... 2%), малую
зависимость амплитуды от частоты, напряжения питания и т. п. Обычно
переход от одного поддиапазона к другому осуществляется
переключением конденсаторов, а плавное изменение частоты в
пределах поддиапазона — изменением сопротивления резистора.
Задающие генераторы на биениях (рис. 6.2) используют в
низкочастотных генераторах с большим коэффициентом перекрытия
частотного диапазона. Задающий генератор содержит два LC-генератора,
один работает на фиксированной частоте /2, а второй плавно
перестраивается.
Преимущества генератора на биениях видны из следующего примера.
Допустим, что требуется построить генератор с диапазоном частот от 20 до
40 000 Гц. Коэффициент перекрытия составляет 40 000/20=2000. Выберем f2 =
=400 кГц, a ft=400... 360 кГц. Сигналы этих генераторов поступают иа
смеситель, в котором вырабатываются комбинационные частоты, в том числе F =
= f2_ft. При перестройке ft от 400 до 360 кГц F изменяется от 0 до '40 кГц.
При этом генератор, формирующий сигнал частоты ft, имеет коэффициент
перекрытия частоты всего 400/860= 1,1.
В некоторых случаях для стабилизации выходного
напряжения используют системы АРУ, управляющие выходным
напряжением генератора сигнала фиксированной частоты.
Стабильность частоты генераторов на биениях
обеспечивается в основном конструктивными мерами: генераторы сигналов
фиксированной и перестраиваемой частоты выполняют так, чтобы все
150
дестабилизирующие факторы влияли на частоту одинаковым
образом. В результате разностная частота в первом приближении
остается постоянной. В итоге нестабильность частоты генераторов
на биениях сопоставима с нестабильностью ЯС-генераторов (0,5...
... 1% за час).
6.4. ГЕНЕРАТОРЫ ВЫСОКИХ ЧАСТОТ
Измерительные генераторы высоких частот диапазона 30 кГц...
300 МГц необходимы в первую очередь для настройки и
испытаний радиоприемных устройств радиовещательной и связной
аппаратуры. Можно выделить две группы таких генераторов:
прецизионные генераторы, предназначенные для испытаний
устройств магистральной и радиотелефонной связи, погрешность
установки и кратковременная нестабильность частоты которых не
должна превышать 10~6. Такие генераторы должны обеспечивать
возможность модуляции сигнала различного вида, в том числе и
однополосной модуляции, а также реализации многочастотной
структуры выходного сигнала. Для создания презиционных
генераторов высоких частот используют методы
диапазонно-кварцевой стабилизации и синтеза частот, рассматриваемые далее;
генераторы общего применения, погрешность установки
частоты которых находится в пределах 0,01 ... 1,5%, а кратковременная
нестабильность частоты больше Ю-6. С помощью таких
генераторов можно проводить измерения чувствительности и
избирательности радиовещательных приемников, качества работы
автоматической регулировки усиления, частотных характеристик фильтров
и усилителей и т. п. В таких генераторах необходим режим
амплитудной и (реже) частотной и импульсной модуляции при
достаточно высоких требованиях к форме огибающей модулированного
сигнала. Для них характерны малое значение калиброванного
выходного сигнала (0,1 ... 1,0 В) и большие пределы регулировки
ослабления выходного сигнала аттенюатором. Только отдельные
генераторы, предназначенные, например, для поверки вольтметров
средней точности, могут иметь повышенное выходное напряжение
30... 100 В.
Нормы на параметры генераторов высоких частот устанавливает ГОСТ
14126—78. Генераторы сигналов измерительные с коаксиальным выходом.
Технические требования w методы испытаний. Понятие класса точности таких
генераторов теперь не используется, а указываются ряды чисел, которые следует
использовать при нормировании метрологических характеристик. Например,
пределы допускаемой основной погрешности установки частоты по отсчетному
устройству следует выбирать из ряда от ±0,01% до ±1,6%, а нестабильность
частоты за любые 15 мии после установления рабочего режима —от ±1-i10_s до-
±5-il0-4. Аналогично сформулированы требования к нормированию других
метрологических характеристик.
Типичная структурная схема генератора высоких частот
общего применения с амплитудной модуляцией представлена на рис. 6^3.
15t
Вспомогательный выход
ЦйгНал управления
\ перестройкой
частоты
J
Усилитель ВЧ
i
,
Электронно-счетный
частотомер
Модулятор
п ,1
Вход сигнала
внешней модуляции
Усилитель ВЧ
Система
автоматической
регулировки
уровня
Генератор НЧ
Аттенюатор
О'
Вольтметр
Рис. 6.3
Задающий генератор, выполняемый обычно на базе LC-контура и
транзистора, включенного по трехточечной схеме с емкостной
обратной связью, работает на частоте /=1/2я|/Г^С.
Плавную перестройку частоты в пределах поддиапазона
осуществляют с помощью конденсатора переменной емкости, переход
от одного диапазона к другому — коммутацией катушек
индуктивности. Поскольку частота генерации обратно пропорциональна
У"С~, коэффициент перекрытия по частоте, как правило, не
превышает 2...3, что существенно меньше, чем, например, у ^С-генера-
торов.
Формирование поддиапазонов некоторых современных
широкодиапазонных измерительных генераторов высоких частот
осуществляется не коммутацией LC-контуров задающего генератора, а
делением частоты (рис. 6.4). В этом случае сигнал задающего LC-
тенератора, плавно перестраиваемого на частоте верхнего
поддиапазона 150 ... 300 МГц, поступает на цепочку делителей частоты
на 2 и только потом через совокупность фильтров на модулятор.
Исключение из контура задающего генератора цепей коммутации
увеличивает стабильность, позволяет практически безынерционно
переходить от одного поддиапазона к другому, поскольку не
требуется время на самопрогрев элементов и одновременно подгонять
•шкалы всех поддиапазонов при изготовлении генератора. При этом
существенно улучшаются шумовые свойства генератора. Однако
такому методу создания широкодиапазонных задающих
генераторов свойствен и ряд недостатков. Требуется тщательная фильтра-
'352
Задающий генератор
Делитель частоты на 2
п делителей с
Л
Полосовой фильтр
Делитель частоты на 2
Полосовой фильтр
JL
Делитель частоты на 2
Полосовой фильтр
1*>
/72
—»•
/74-
/72л
—*■
Рис. 6.4
ция сигнала на выходе делителей, поскольку его форма далека от
синусоидальной. Девиация частоты в режиме частотной
модуляции снижается одновременно с уменьшением несущей частоты. Для
исключения этого эффекта приходится усложнять схему
осуществления частотной модуляции.
Характеристики задающего генератора определяют все
частотные параметры прибора, а также в значительной степени и форму
выходного сигнала. Поэтому при проектировании элементов LC-
контура обеспечивают высокую механическую и температурную
стабильность параметров катушек, конденсаторов и узлов настройки.
Задающие генераторы некоторых современных измерительных
генераторов позволяют работать в режиме не только частотной
модуляции, но и внешней синхронизации, а также в режиме
внешнего управления частотой (обычно в пределах не более 0,1%) с
помощью аналогового сигнала, подаваемого на включенный в контур
варикап. Такие измерительные генераторы можно использовать для
работы в кольце внешней фазовой автоподстройки частоты, для
чего предусматривается вспомогательный высокочастотный выход. К
этому выходу можно подключать внешний или встроенный
электронно-счетный частотомер.
В современных измерительных генераторах используют, как
правило, широкополосные модуляторы и усилители высокой
частоты, а не резонансные, как это было принято ранее. Такое
техническое решение позволяет устранить сложные и громоздкие
механические узлы сопряжения настройки задающего генератора и
резонансного усилителя. При этом, однако, предъявляются более
высокие требования к форме сигнала задающего генератора и уровню
шумов модулятора и усилителя, не обладающих фильтрующими
свойствами.
Изменяя и измеряя низкочастотный модулирующий сигнал,
можно изменять и измерять глубину модуляции. Погрешность изме-
153
рения глубины модуляции определяется при этом искажениями,
вносимыми модуляторами, и составляет обычно 5... 10%.
Другая возможность измерения глубины модуляции сигнала
заключается в использовании метода двойного детектирования
выходного модулированного высокочастотного сигнала. Глубина
модуляции при этом оценивается по отношению выходных
напряжений двух детекторов, один из которых выделяет низкочастотный
модулированный сигнал, а второй — сигнал несущей частоты.
Для поддержания уровня сигнала на выходе аттенюатора
постоянным обычно используют систему АРУ, охватывающий
модулятор и усилитель высокой частоты, причем модулятор
используется как исполнительный элемент этой системы. Постоянная
времени системы АРУ выбирается таким образом, что система не
реагирует на амплитудную модуляцию сигнала звукового диапазона.
Система АРУ обеспечивает не только стабилизацию выходного
напряжения генератора, но и по сути дела близкое к нулю
выходное сопротивление усилителя высокой частоты в точке
подключения детектора. В результате некоторые колебания нагрузки не
изменяют выходного напряжения генератора. На выходе усилителя
высокой частоты последовательно включают балластное
сопротивление i?6 = 50 Ом, которое позволяет соответствующим способом
согласовать выходной тракт при нулевом ослаблении аттенюатора.
Опорный уровень высокочастотного сигнала на выходе
аттенюатора отсчитывают либо по шкале встроенного вольтметра,
использующего детектор системы АРУ, либо по, шкале калиброванного
регулятора (потенциометра) опорного постоянного напряжения
системы АРУ.
С помощью ступенчатого резистивного аттенюатора
производится глубокая регулировка уровня выходного напряжения прибора.
Часто используют две ступени регулировки: 20 и 1 дБ. Для
дистанционной регулировки аттенюаторов в некоторых современных
измерительных генераторах применяют малогабаритные герконо-
зые реле.
6.5. ГЕНЕРАТОРЫ СВЧ
Измерительные генераторы сигналов диапазона 300 МГц...
... 40 ГГц предназначены для измерения чувствительности
приемных устройств СВЧ диапазона, исследования диаграмм
направленности антенн, измерения параметров элементов высокочастотных
трактов радиорелейных линий и телевизионных ретрансляторов.
Измерительные генераторы СВЧ должны обеспечивать
работу с различными видами модуляции несущей, к ним
предъявляются достаточно жесткие требования по экранированию СВЧ
излучения.
Типичная структурная схема измерительного генератора СВЧ
представлена на рис. 6.5. В качестве активного элемента
задающего генератора до настоящего времени используют
отражательные клистроны, снабженные внешним (в диапазоне частот 7...
154
Механическая
' —»>
перестройка
' частоты
Сигнал
управлений
»■
Перестройкой
частоты
3
2
СО
Ч
СО
П
Вспомогательный вЫХоД
п
Направленный
ответвитель
Электронно- сметный,
частотомер
Амплитудный,
модулятор
Сигна/1 частотной
модуляции
Блок переключения,
видов модуляции
т
Сигнал
амплитудной
модуляции
и.
. *
Система
АРУ
*
Измеритель
мощности
Основной бЫхЗД
ЁХбДИЗМерИЩЯ
Мощности
Генератор НЧ
Сигнал дистанционного
управления аттенюатором)
"СигНал йНеШНёй МвдуЛяции
Рис. 6.5
... 8 ГГц) или внутренним объемным резонатором, являющимся
эквивалентом колебательного контура. Геометрическая форма,
размеры и материал резонатора определяют частоту генерации.
Перестройка частоты осуществляется изменением геометрических
размеров резонатора путем перемещения внутри него замыкающих
перемычек или упругой деформации самого резонатора. В небольших
пределах частоту можно изменять электрическим образом —
изменяя напряжение на отражателе клистрона.
Аналогично изменяя режим работы клистрона, можно также
реализовать частотную и амплитудно-импульсную модуляцию
несущей частоты.
Для генераторов СВЧ на клистронах характерен небольшой
коэффициент перекрытия по частоте (1,1 ...2), что связано с
ограниченными возможностями перестройки частоты задающих
генераторов с объемными резонаторами. Поэтому такие генераторы
либо выпускают в виде серий однотипных приборов, рассчитанные
на требуемые участки всего СВЧ диапазона, либо в виде
одного прибора, но с несколькими задающими генераторами.
Задающие генераторы СВЧ на отражательных клистронах
имеют достаточно громоздкую конструкцию и требуют больших и ста»
бильных напряжений питания. В последнее время все чаще в
качестве активных элементов задающих генераторов СВЧ
используют диоды Ганна —полупроводниковые приборы на основе арсени-
155
да галлия. При определенном напряжении питания диод Ганна
представляет собой отрицательное сопротивление, что приводит к
возбуждению в подключенном к диоду объемном резонаторе СВЧ
колебаний.
Для работы в нижней части рассматриваемого диапазона час-
лот (ниже 8... 10 ГГц) в настоящее время уже созданы СВЧ
транзисторы, которые тоже начинают использовать в качестве
активных элементов задающих генераторов.
Стабильность частоты задающих генераторов СВЧ определя-
«тся стабильностью механических параметров объемных
резонаторов, электрического и температурного режимов активного элемен:
та. Для часто используемых коаксиальных резонаторов из
латуни кратковременная нестабильность частоты имеет порядок Ю-4.
Одним из современных технических решений является
использование сферических ферритовых объемных резонаторов из
ферромагнитного кристалла железоиттриевого граната, помещенного в
магнитное поле (ЖИГ-резонаторов). Кратковременная нестабильность
частоты таких генераторов менее 10_6. Изменением
напряженности внешнего магнитного поля можно широко перестраивать ЖИГ-
резонаторы (коэффициент перекрытия до 2) и производить
частотную модуляцию.
Как правило, в диапазоне СВЧ используют самые различные
виды модуляции: амплитудную и частотную низкочастотным
сигналом, амплитудно- и частотно-импульсную при различной
скважности импульсов и т. п. Следует отметить, что модуляция
несущей изменением режима работы задающего генератора обычно
связана с появлением паразитной модуляции: например,
амплитудная модуляция приводит к появлению паразитной частотной
и наоборот. Поэтому в современных измерительных генераторах
амплитудную модуляцию осуществляют на выходе прибора.
Установочным аттенюатором регулируют уровень сигнала,
поступающего на вход направленного ответвителя, который
разделяет поток высокочастотной энергии на две части. К одному выходу
направленного ответвителя, являющемуся некалиброванным
выходом измерительного генератора, подключается встроенный (или
внешний) частотомер гетеродинного типа. С другого выхода
направленного ответвителя сигнал подается на основной
калиброванный выход прибора.
Для создания аттенюаторов СВЧ обычно используют явление
затухания сигнала в так называемом предельном волноводе.
В настоящее время в качестве аттенюатора СВЧ все шире
начинают использовать полупроводниковые р—i—я-диоды. Принцип
действия такого аттенюатора заключается в том, что лод
действием управляющего тока р—i—«-диод открывается и шунтирует
мощность СВЧ сигнала пропорционально значению
управляющего тока. При отсутствии управляющего тока р—i—«-диод
закрывается и вносит в тракт СВЧ лишь незначительное начальное
ослабление.
156
Измеритель мощности вместе с установочным аттенюатором
позволяет установить опорный уровень выходной мощности,
относительно которого производится ослабление выходного сигнала
калиброванным аттенюатором. В СВЧ диапазоне уровень выходного
сигнала оценивают именно по мощности, а не по напряжению или
току, поскольку размеры входных и выходных цепей приборов
соизмеримы с длиной волны. Небольшое отличие полных
сопротивлений источника и нагрузки от характеристического
сопротивления передающего тракта приведет к неоднозначности оценки
напряжения вдоль линии передачи. Измерение напряжения в
волноводах вообще лишено практического смысла. Мощность же,
передаваемая в нагрузку без потерь, является величиной
постоянной в любом сечении тракта СВЧ и поэтому позволяет оценить
уровень сигнала более точно.
Измеритель мощности СВЧ сигнала размещается внутри
измерительного генератора, однако обычно имеет отдельный вход.
Его можно подключить к основному выходу через внешний
разъем с помощью кабеля. Используя измеритель мощности, можно
выделить управляющий сигнал для системы АРУ, которая,
воздействуя на р—i—«-аттенюатор, будет поддерживать постоянную
мощность либо на выходе генератора, либо в требуемой точке
измерительной схемы, включающей исследуемый объект.
6.6. ИСТОЧНИКИ ИЗМЕРИТЕЛЬНЫХ
СИГНАЛОВ С ВЫСОКОЙ СТАБИЛЬНОСТЬЮ
ЧАСТОТЫ (ПРЕЦИЗИОННЫЕ
ИЗМЕРИТЕЛЬНЫЕ ГЕНЕРАТОРЫ)
Для обеспечения многих видов измерений в науке и технике, в частности в
области магистральной связи с эффективным уплотнением каналов, необходимы
источники измерительных сигналов в диапазоне от инфранизких частот до СВЧ
с очень малой погрешностью установки частоты (0,1... 6,001 Гц) и очень малой
кратковременной и долговременной нестабильностью (от Ю-7 за 15 мин до
10~10 за сутки). Соответствующие приборы получили название измерительных
генераторов е диапазонно-кварцевой стабилизацией или синтезаторов частоты.
Эти термины являются синонимами, однако последний из них в современной
литературе используется чаще.
Необходимо отметить, что такие приборы выпускаются в соответствии с
ГОСТ как в рамках подгруппы Г (Генераторы измерительные), так и в рамках
подгруппы Ч (Синтезаторы частот).
Укрупненная схема измерительного генератора синтезаторного типа
представлена на рис. 6.6. Источником сигнала опорной частоты является блок
кварцевого генератора, важным элементом которого является система термостати-
рования, поддерживающая неизменной необходимую температуру кварцевого
резонатора с погрешностью порядка 0,1°. Термостатирование является
непрерывным условием достижения высокой стабильности кварцевого генератора. Можно
подключать и внешний сигнал опорной частоты (например, от квантово-механи-
ческого стандарта частоты). Блок опорных частот формирует несколько сигна-
157
ИнтерпОПяцион ■
ный генератор
Система
термостатирования
Блок
опорного
кварцевого
генератора
с;
LQ
Вход внешнего
сигнала опорнрй
частоть!
Выход
Сигнал
дистанционного
управления
ЗЕ
Выходное
устройство
Блок управления
переключением частот
Сигнал частотной
модуляции
Сигнал внутренней
модуляции
Формирователь
модулирующих сигналов;
?5
СЙГнал внешней модулЯЦШ
Рис. 6.6
лов опорных частот, которые одновременно поступают на блок синтеза частот.
Блок синтеза вырабатывает набор частот генераторов с заданной дискретностью
в заданном диапазоне. Интерполяционный генератор позволяет плавно
перестраивать частоту выходного сигнала в пределах шага дискретности. Блок
управления переключением частот позволяет выполнить как ручное, так н
дистанционное (с помощью аналоговых и цифровых сигналов) управление частотой, в
том числе частотную модуляцию несущей. В выходном устройстве
осуществляются необходимое усиление сигнала по мощности, стабилизация опорного
выходного уровня, регулируемое ослабление с помощью аттенюатора, а также
амплитудная модуляция сигнала.
Возможность управления переключением частот цифровыми сигналами и
реализации сложных видов модуляции несущей частоты является большим
достоинством синтезаторов. Поэтому они необходимы для автоматизации
измерения, автоматической регистрации характеристик каналов связи в процессе
работы, при создании адаптивных (самонастраивающихся) каналов связи и т. п.
Кроме характеристик, общих для всех измерительных генераторов
(диапазон, стабильность и т. п.), синтезаторы характеризуются дискретностью
установки частоты, ослаблением уровня побочных составляющих и шумов в
выходном сигнале относительно уровня выходного напряжения (в децибелах),
временем установления сигналов при переключении частоты, 'Конкретные количествен-
158
ные требования к этим характеристикам, а также стоимость, масса, габаритные
размеры и потребляемая мощность определяют выбор того или иного метода
синтеза частот.
Как видно из рис. 6.6, синтезатор включает в свой состав блок опорных
частот и блок синтеза частот. Блок опорных частот формирует из сигнала
опорного генератора ряд сигналов с фиксированными частотами за счет применения
делителей и умножителей частоты. Система синтеза частот создает иа выходе
сигнал с программируемым значением частоты. Основным элементом системы
синтеза частот является частотная декада, состоящая из узлов, выполняющих
соответствующие арифметические действия над частотами блока опорных
частот и фильтров с фиксированной или переменной частотой настройки.
Существуют два метода построения счетных декад. При методе прямого
синтеза частот выходные сигналы формируются в результате непосредственного
преобразования опорных частот с помощью смесителей, умножителей и
делителей. Частотные декады делят частоту в 10 раз и включаются последовательно.
Число декад определяет дискретность установки частоты. Действительно,
поскольку одна декада делит частоту в 10 раз, то N последовательно
включенных декад делят в £=10" раз.
Допустим, что имеются две .исходные частоты /ч = 1 МГц и f2 = 2 МГц,
отличающиеся друг от друга на 1 МГц. При пяти последовательно включенных
декадах имеем коэффициент деления £=il05 раз, и исходные частоты иа выходе
будут иметь значения 10 и 20 Гц, отличающиеся друг от друга на 10 Гц.
При шести последовательно включенных декадах частоты будут отличаться на
1 Гц, прн семи иа 0,1 Гц и т. д.
Ясно, что с увеличением числа декад разность между частотами сигналов
можно сделать сколь угодно малой. Для расширения частотного диапазона в
синтезаторах применяются также умножители частоты.
Прн построении синтезаторов частот методом косвенного синтеза
умножение и деление частоты исходных сигналов осуществляется с помощью системы
фазевой автоподстройки частоты (ФАПЧ). Применение ФАПЧ позволяет
получить высокую кратность умножения и деления ('100... 120) при переменном
коэффициенте умножения (деления). По принципу работы синтезаторов частот
строят прецизионные генераторы широкого применения.
6.7. ГЕНЕРАТОРЫ ИМПУЛЬСОВ
По широте использования генераторы прямоугольных
импульсов уступают только генераторам синусоидальных сигналов. Они
используются для настройки узлов аппаратуры связи с импульс-
но-кодовой модуляцией, систем радиолокации и т. п. Различают
генераторы прямоугольных импульсов, генераторы одиночных
импульсов, парных импульсов, серий импульсов, кодовых импульсных
последовательностей, псевдослучайных последовательностей.
Основными параметрами генераторов одиночных и парных
импульсов, которые устанавливает ГОСТ, являются: длительность,
амплитуда, частота, временной сдвиг импульса (относительно
синхроимпульса), длительности фронта и среза, неравномерность
вершины. Нормируются погрешность установки параметров
импульсов и нестабильность параметров основных импульсов. Класс точ-
159
Сигнал установки
частоты
*
Задающий
1 генерлтор
Внешний
запуск ■
Разовый
запуск
Блок синхронизации
Сигнал' установки Сигнал установки
задержки длительности
Устройство
задержки
основного
импульса
—JL
Выход синхроимпульсов
Сигнал установки
амплитуды
Устройство
формирования
длительности
основного
импульса
Выходной
формирователь
Выход
Схема
измерения
амплитуды
Рис. 6.7
ности генератора определяется пределом допускаемой
погрешности параметров сигнала и пределами допускаемых значений
искажений сигнала.
Типичная структурная схема простого генератора импульсов
представлена на рис. 6.7. Задающий генератор выполняется либо
по схеме синусоидального либо импульсного генератора. Его
частота и стабильность определяют частоту и стабильность
выходного сигнала. Практически все генераторы импульсов могут
работать как в режиме внешнего запуска, так и в режиме разового
запуска от кнопки на передней панели. Задающий генератор при
этом отключается. Для измерения амплитуды применяются
пиковые или компенсационные вольтметры. Генераторы импульсов,
построенные по данной схеме, обеспечивают погрешность
установки частоты, длительности и временной задержки 3... 10%, а
нестабильность этих параметров за час работы 1 ... 3%.
Для создания прецизионных генераторов импульсов по
частоте, длительности и временной задержке используют кварцевый
опорный генератор, метод синтеза частот и полностью цифровой
•принцип формирования выходного сигнала. В этом случае
период, длительность и временная задержка выходного импульсного
сигнала устанавливаются дискретно с шагом, равным периоду
сигнала опорной частоты. Нестабильность всех этих параметров
также полностью определяется характеристиками нестабильности
опорного кварцевого генератора. Большим достоинством такого
построения генераторов является возможность дистанционного и
программного управления прибором с помощью цифровых
сигналов.
160
6.8. ГЕНЕРАТОРЫ СИГНАЛОВ
СПЕЦИАЛЬНОЙ ФОРМЫ
Генераторы сигналов специальной формы (тип Г6 по ГОСТ
15094—69) представляют собой источники одиночных или
периодических сигналов, форма которых отлична от прямоугольной. Наи-.
более распространенными формами сигналов являются яилообраз-
ная, треугольная, трапецеидальная, колоколообразная и т. п.
Такие сигналы необходимы для моделирования входных
воздействий при настройке и испытаниях каналов связи, медицинской,
геофизической и измерительной аппаратуры.
К настоящему времени еще не разработаны стандарты,
классифицирующие эти приборы и определяющие требования к их
основным параметрам. Общий подход к нормированию параметров
таких генераторов, очевидно, должен быть аналогичен подходу к
нормированию параметров всех измерительных генераторов:
необходимо указать форму сигнала, параметры, характеризующие
форму, в том числе и параметры искажений, пределы
регулировки параметров, пределы допускаемых погрешностей установки
параметров, нестабильность параметров и т. д.
Для создания достаточно простых и дешевых генераторов
сигналов специальной формы широко применяют схемы на основе
интеграторов с нелинейной обратной связью через какой-либо
пороговый элемент с гистерезисом (например, триггер Шмитта).
Структурная схема такого генератора, называемого функциональным,
представлена на рис. 6.8. В процессе интегрирования постоянного
напряжения, присутствующего на выходе триггера Шмитта,
интегратор формирует линейно изменяющееся напряжение. Когда
выходное напряжение интегратора достигает порога срабатывания
триггера, триггер переключается, его выходное напряжение
меняет знак. Вследствие этого напряжение на выходе интегратора
начинает изменяться в противоположную сторону, пока не станет
равным нижнему порогу срабатывания триггера. Далее этот про-
Пороговый
элемент с
гистерезисом
Интегратор —
Выходной повторитель
пилообразного сигнала
Выходной формирователь
синусоидального сигнала
Выходной формирователь
трапецеидального сигнала
Выходной формирователь
импульсного сигнала
-м
-АЛ.
-'АЛ
6-10
Рис. 6.8
!6Г
цесс периодически повторяется и на выходе схемы формируется
симметричное напряжение треугольной формы с одинаковым
временем нарастания и спада. Размах этого напряжения и его
стабильность определяются в основном установкой и
соответственно стабильностью порогов срабатывания триггера. При
использовании прецизионных схем нестабильность размаха сигнала
может быть снижена до 0,1% за несколько часов работы.
Частоту формируемого напряжения можно перестраивать в
широком диапазоне частот от инфранизких до несколько десятков
килогерц, изменяя постоянную времени интегратора. Перестройку
частоты можно осуществлять также электрическим путем,
регулируя напряжение на входе интегратора, коммутируемое триггером
Щмитта. Усложняя схему регулировки этого напряжения, можно
добиться формирования несимметричного треугольного
(пилообразного)- напряжения с регулируемым временем нарастания и
спада.
На основе полученного треугольного напряжения можно
сформировать напряжения трапецеидальной, колслолообразной,
синусоидальной формы. Для этого используют нелинейное
преобразование сигнала треугольной формы с помощью диодно-резистив-
ных схем, обеспечивающих кусочно-линейную аппроксимацию
необходимой характеристики преобразования. Такие схемы
достаточно просты и дешевы, однако обеспечивают ограниченный набор
формируемых сигналов, критичны в настройке, имеют невысокую
точность и стабильность.
Для формирования сигналов произвольной формы в последнее
время начинают применяться функциональные генераторы,
работающие на основе кусочно-линейного синтеза непосредственно
самого сигнала (а не характеристики преобразования треугольного
сигнала). В основе таких устройств лежит генератор линейно
изменяющегося напряжения, длительностью и амплитудой
которого можно управлять. Очевидно, что из серии таких элементарных
линейно изменяющихся сигналов, каждый из которых
начинается там, где окончился предыдущий, можно сформировать сигнал
произвольного вида.
Обычно работой такого генератора управляет микропроцессор,
в память которого вводятся параметры (длительность и
амплитуда) каждого элементарного сигнала из заранее заданного набора
дискретных значений.
Для того чтобы получить исходное значение сигнала, в конце
каждого цикла формируется специальный сигнал возврата к
началу.
Погрешность формирования сигнала, связанная с его кусочно-
линейной аппроксимацией, определяется общим числом
используемых элементарных сигналов и дискретностью установки их
параметров.
Кардинальным решением задачи формирования сигналов
произвольной формы с широкими пределами регулировки и высокой
стабильностью параметров является создание генераторов на ос-
162
Опорный
чварцевый
генератор
Формирователь
адреса
Запоминающее
устройство
Ф
Цифро-аналоговый
преобразователь
ВЫУОД
*•
Блок управления
TF
Сигналы управления
Рис. 6.9
нове цифровых запоминающих устройств (ЗУ) и
цифро-аналоговых преобразователей (ЦАП)., Структурная схема такого
генератора представлена на рис. 6.9. Тактовая частота, работы
устройства задается опорным кварцевым генератором, обеспечивающим
высокую стабильность частотно-временных параметров сигнала.
Сформированные в формирователе адреса кодовые сигналы
подаются на запоминающее устройство, в котором записаны коды
дискретных отсчетов заданного сигнала. В результате
последовательного опроса ячеек ЗУ на его выходе появляется
последовательность цифровых сигналов, которая с помощью цифро-аналогового
преобразователя преобразуется в необходимый аналоговый
сигнал заданной формы. Таким способом можно сформировать
сигнал практически любой формы, произвольно менять начальную
фазу сигнала, «останавливать» в определенные моменты времени
формирование сигнала, запоминать значение сигнала на
необходимый интервал времени. Со стороны нижних частот диапазон
такого генератора практически ничем не ограничен.
Максимальная частота формируемого сигнала определяется
быстродействием ЗУ и ЦАП. Характеристики точности такого генератора по
выходному напряжению определяются объемом памяти и
разрядностью используемого ЗУ, а также характеристиками ЦАП.
Генератор рассмотренного типа представляет собой, по сути
дела, специализированную микро-ЭВМ, работающую по жесткой
программе воспроизведения определенного набора записанных в
ЗУ сигналов. Основной тенденцией дальнейшего развития таких
цифровых измерительных генераторов сигналов произвольной
формы является использование программируемых микро-ЭВМ на
основе микропроцессоров, позволяющих неограниченно расширять
набор синтезируемых сигналов, проводить необходимые операции
коррекции параметров сигнала и сохранения их временной
стабильности в реальном масштабе времени.
6.9. ГЕНЕРАТОРЫ ШУМОВЫХ СИГНАЛОВ
Генераторы шумовых сигналов (вид Г2 по ГОСТ) — источники
электрических шумовых сигналов, значение спектральной
плотности мощности которых или мощность шума в требуемой поло-
6* 163
се частот известны. Генераторы шумовых сигналов используют
.как источники флуктуационных помех с известными
характеристиками при измерении пороговой чувствительности антенн,
усилительных и радиоприемных устройств, при измерении нелинейных
лскажений, как имитаторы сигнала многоканальной связной
аппаратуры и т. п. •
Классификация генераторов шумовых сигналов и номенклатура
их основных метрологических характеристик пока стандартами не
регламентируется. В измерительной практике общепринято
подразделять такие генераторы по диапазону частот и по источникам
шума.
К основным метрологическим характеристикам генераторов
шумовых сигналов.можно отнести:
неравномерность спектральной плотности мощности шума в
заданной полосе частот (шум должен быть близок к «белому»),
• максимальное значение выходного напряжения (мощности),
пределы регулировки выходного напряжения (мощности)
шума,
погрешность установки выходного напряжения (мощности)
шума,
нестабильность выходного напряжения (мощности) шума (с
течением времени, при изменении внешних условий и различных
влияющих величин).
В некоторых случаях могут быть предъявлены определенные
требования к закону распределения шумового сигнала. Для
решения многих измерительных задач достаточно сформировать
шумовой сигнал, закон распределения которого близок к
нормальному. Формирование шумового сигнала с существенно
неравномерным спектром производится с помощью внешних фильтров.
Структурная схема генераторов шумовых сигналов во многом
подобна схеме любого другого измерительного генератора
(например, рис. 6.3). Аналогом задающего генератора в
генераторах шума является источник шума, схемное решение которого в
значительной степени определяет метрологические свойства
всего прибора.
Резисторы как источники шума. Тепловые шумы резисторов
характеризуются малой неравномерностью спектральной плотности мощности в широкой
полосе частот, малой нестабильностью уровня шума 1(менее 1%). Среднеквадратиче-
ское значение напряжения теплового шума резистора определяется выражением
Um= У 4kTRAf, где й=1,38-Ю-23 Дж/К — постоянная Больцмана, Г
—температура, в кельвииах, 7? — сопротивление в омах при нормальной температуре
Г--=290 К, Д/— полоса частот в герцах.
Источники шума на резисторах используют для создания образцовых
генераторов шума в широком диапазоне частот вплоть до GB4. Для стабилизации
уровня шума широко используют термостатирование. Однако малый
абсолютный уровень спектральной плотности шума резисторов (К)-21... Ю-20 Вт/Гц)
предъявляет высокие требования « характеристикам усилителя.
164
Электровакуумные и полупроводниковые диоды. Среднее квадратическое
. значение шумового тока, обусловленного случайным характером термоэмиссии
диода, определяется выражением: /ш= ^2е/0Д/, где е='1,6-10_к9 Кл — заряд
электрона, /0 —ток диода в режиме насыщения, измеренный в амперах.
Уровень шума диодов существенно выше уровня шума резисторов, что
облегчает построение измерительных генераторов. Большим достоинством диодных
источников шума является возможность регулировки уровня шума путем
изменения тока диода, однако по неравномерности и нестабильности спектральной
плотности шума они уступают источникам шума, использующим тепловые шумы
резисторов.
Газоразрядные трубки. Шум этих источников обусловлен хаотическим
движением электронов в плазме. [Вследствие высоких значений «электронной
температуры» плазмы спектральная плотность мощности шума этих источников
может достигать Ю-5... 10~4 Вт/Гц. Однако эти источники шума характеризуются
существенной неравномерностью спектральной плотности и большой
нестабильностью уровня выходного шума. Неудобством при эксплуатации газоразрядных
источников шума является также плохая воспроизводимость характеристик
шумового сигнала от прибора к прибору. Газоразрядные трубки широко
используются для создания достаточно простых генераторов шумовых сигналов
высоких и сверхвысоких частот. При этом они непосредственно встраиваются в
резонаторы и волноводы.
Генераторы псевдослучайных сигналов как источники шума. Трудности,
связанные со стабилизацией характеристик шумовых сигналов (обеспечения
условия, стационарности), обусловливают поиск новых путей создания генераторов
шумовых сигналов. Одним из таких путей является использование так
называемых псевдослучайных сигналов, формируемых с помощью регистров сдвига,
охваченных логическими обратными связями. Псевдослучайные сигналы в принципе
являются периодическими и регулярными, но имеют достаточно сложную
структуру и по своим характеристикам близки к случайным. Для решения многих
практических задач псевдослучайные сигналы полностью заменяют случайные,
однако имеют чрезвычайно высокую стабильность характеристик и, главное,
достаточно просто формируются с помощью цифровых логических схем. Для
контроля и регулировки характеристик псевдослучайных сигналов можно
использовать специализированные вычислительные устройства на основе
микропроцессоров.
Наконец, в перспективе можно ожидать появления генераторов шумовых
сигналов на основе ЦАП и специализированных микро-ЗВМ,
формирующих.случайную последовательность чисел с заданными свойствами чисто программным
способом.
Глава 7. НАБЛЮДЕНИЕ И АНАЛИЗ ФОРМЫ
ЭЛЕКТРИЧЕСКИХ СИГНАЛОВ.
ЭЛЕКТРОННЫЕ ОСЦИЛЛОГРАФЫ
7.1. НАЗНАЧЕНИЕ ОСЦИЛЛОГРАФА
Осциллографом называется прибор для наблюдения и
регистрации электрических сигналов, а также для измерения их
параметров. Слово «осциллограф» произошло от латинского слова «осци-
лум» — колебание и греческого слова «графо» — пишу. Таким
образом осциллограф в буквальном смысле — прибор для записи
(регистрации) колебаний. В литературе часто встречается термин
«осциллоскоп». В его основу положено слово-«скопео» —
наблюдение. В настоящее время чаще применяется термин
«осциллограф», которым обозначаются приборы как для визуального
наблюдения колебаний, так и для их записи.
Основная функция осциллографа заключается в
воспроизведении в графическом виде различных электрических колебаний
(осциллограмм), так как это принято в радиотехнике. Чаще все-
ю с помощью осциллографа наблюдается зависимость напряжения
от времени в декартовой системе координат. Ось х является осью
времени, а по оси у откладывается напряжение сигнала. При
помощи осциллографа можно измерять различные параметры
сигнала: амплитуду, длительность, частоту, глубину модуляции
и т. п.
Осциллографы делятся на электромеханические и
электронные. В первых образование осциллограммы осуществляется
электромеханическим способом, например за счет отклонения
чернильного пера относительно поверхности бумажной ленты. Основное
достоинство осциллографов такого типа — документальная
регистрация осциллограммы, что при наблюдении медленных
процессов весьма существенно. Для получения осциллограмм,
отображающих быстрые процессы, используются электронно-лучевые
осциллографы, в которых под воздействием электрического
сигнала электронный пучок, вызывающий свечение люминесцирующего
экрана, отклоняется практически мгновенно. Документальная
регистрация осциллограмм выполняется с помощью
фотографирования изображения, для чего некоторые типы осциллографов
снабжаются специальными фотографическими приставками.
Согласно ГОСТ 9810—69 осциллографы обозначаются буквой
«С». Следующая за ней цифра характеризует тип прибора,
например С1 означает, что осциллограф универсальный, 7 — скоростной,
8 — запоминающий, 9 — специальный. .Поскольку промышленность
выпускает большой ассортимент осциллографов каждого типа,
добавляется еще одна цифра — номер прибора в семействе однотип-
166
ных осциллографов. Например С1-40 — полное обозначение
универсального осциллографа. Новым приборам присваиваются
более высокие номера.
7.2. ЭЛЕКТРОННО-ЛУЧЕВЫЕ
ОСЦИЛЛОГРАФИЧЕСКИЕ ТРУБКИ
Основным элементом электронного осциллографа является
электронно-лучевая трубка (ЭЛТ), состоящая из источника
электронов, системы формирования узкого электронного пучка, системы
отклонения пучка в двух плоскостях и люминесцирующего
экрана. Источником электронов является нагретый катод. Оксидный
катод 2 с (подогревателем /, модулятором 3 и ускоряющим
электродом 4 составляет катодный узел. Такая триодная конструкция
позволяет не только получить электронный пучок, но и
осуществить его предварительную фокусировку и модуляцию
интенсивности. Катод представляет собой никелевый цилиндр, на дно
которого нанесен слой активной массы, состоящей из окиси бария,
стронция и т. п. Внутри цилиндра расположена нить подогрева —
спираль, свернутая из вольфрамовой проволоки, покрытая
изолирующим слоем. Ток, проходящий по нити подогрева, накаляет ее.
Тепло передается никелевому цилиндру 2 и разогревает активный
слой, который выделяет атомарный слой металлического бария,
являющегося источником свободных электронов. Максимальный
ток эмиссии, который может отдать катод, зависит от его
температуры, свойств активного слоя и площади. Расположение катода
внутри стеклянной колбы показано на рис. 7.1.
Для управления интенсивностью электронного пучка рядом с
катодом располагается модулятор 3, представляющий собой диск
с малым отверстием. Модулятор ограничивает расходящийся
электронный пучок. Регулируя разность потенциалов между катодом
и модулятором, можно изменять количество электронов,
проходящих через отверстие модулятора в единицу времени. При
достаточно большом отрицательном (относительно катода) потенциале
модулятора электронный пучок можно полностью затереть.
Ограничения поперечного сечения электронного пучка,
осуществляемого модулятором, еще не достаточно для формирования
осциллограммы. Необходима дальнейшая фокусировка электрон-
Рис 7.1 Рис. 7.2
107
ного пучка, осуществляемая с помощью первого анода 4, высокий
положительный потенциал которого вызывает ускорение
электронов, и фокусирующего электрода, регулируемый потенциал
которого позволяет создавать такую конфигурацию поля, что
электронный пучок сжимается в тонкий луч.
Сформированный электронный луч, двигаясь вдоль оси
трубки, попадает в отклоняющее поле, создаваемое двумя парами
отклоняющих пластин 6 и 7, и достигает люминесцирующего
экрана 10. Простейшая конструкция отклоняющих пластин
соответствует плоскому (конденсатору, электрическое поле
которого создается соответствующим напряжением, поданным на вывод.
Одна пара пластин служит для отклонения электронного луча в
вертикальном направлении, а другая —в горизонтальном.
Векторы напряженности электрических полей должны быть взаимно
перпендикулярны, что достигается соответствующим расположением
отклоняющих пластин.
Процесс отклонения электронного луча электрическим полем
иллюстрируется-рис. 7.2. Напряжение £/откл, управляющее
отклонением электронного пучка, приложено к двум
плоскопараллельным пластинам, расположенным параллельно плоскости чертежа.
Пластины разнесены на расстоянии d, следовательно,
напряженность электрического поля Е=иотклМ, причем вектор
напряженности поля параллелен оси у. Первоначально электроны
движутся вдоль оси г. Попав в область электрического поля (точка а),
электроны начинают удаляться от оси. Решение уравнений
движения электронов в электрическом поле показывает, что
траектория на участке о—b параболическая. Правее точки Ь электроны
снова движутся прямолинейно, достигая экрана в точке с и
вызывая его свечение. Таким образом под воздействием £/откл
электронный луч отклонился в плоскости экрана на расстояние h от
центра. Изменяя £/оТКл, можно управлять положением
светящегося пятна на экране. При изменении полярности, а следовательно,
и направления вектора Еу луч будет находиться ниже точки 0.
Размер отклонения h можно определить следующим образом:
где L — расстояние от центра пластин до экрана, I—-длина
пластин, d — расстояние между пластинами, Ua3 — напряжение на
третьем аноде трубки относительно катода.
Из (7.1) следует, что имеется линейная зависимость между
размером отклонения луча на экране h и приложенным к
пластинам напряжением иогкл. Это существенно, поскольку линейная
зависимость между этими величинами позволяет получить
неискаженное воспроизведение осциллограммы. Отметим также, что при
отклонении электронного луча электрическим полем указанная
линейная зависимость между £/0ткл и h имеет место при плоском
экране. Это создает удобства при измерении размера осциллограммы
на экране, а также при фотографировании осциллограмм. Данные
168
свойства обусловили исключительное использование
электрического способа отклонения в осциллографических трубках. Кроме
того, электрический метод отклонения обеспечивает воспроизведение
осциллограмм при частотах сигнала, измеряемых десятками
мегагерц. К сожалению, он не позволяет получить большой угол
отклонения луча относительно оси г, что приводит к необходимости
увеличивать расстояние от пластин до экрана для достижения
нужного размера h. В результате при большом диаметре экрана ос-
диллографические трубки имеют сравнительно большую длину.
Формула (7.1) позволяет определить такой важный параметр
электронно-лучевой трубки, как чувствительность по отклонению
e = /t/£/OTWI = ZL/2<tf/a3. (7.2)
Размерность этой величины — миллиметр на вольт, т. е. е
показывает, какое напряжение £/0ткЛ надо приложить к пластинам для
отклонения луча на 1 мм. Чем выше чувствительность по
отклонению е, тем легче управлять ЭЛТ. Обычно чувствительности по
вертикали и горизонтали еу и ех у осциллографических трубок
различные, что вызвано разным расстоянием пластин до экрана.
Яркость свечения экрана определяется из следующего соотношения:
B = Aj(Uaa-U0)n, (7.3)
где А — постоянная, зависящая от химического состава люминофо- -
ра, / — .плотность тока электронного луча, '£/аз — ускоряющее
напряжение, Uо — начальное напряжение, при котором люминофор
начинает светиться; п — показатель степени, колеблющийся для
разных типов люминофоров от 1 до 2,5. Из (7.3) видно, что
изменение яркости свечения можно обеспечить изменением плотности
электронного пучка. Управление плотностью электронного пучка
достигается изменением потенциала модулятора относительно
катода.
При конструировании ЭЛТ большое внимание уделяется
люминофору экрана. В скоростных (высокочастотных) приборах
необходимо иметь ЭЛТ с большой скоростью разгорания
люминофора. Скорость разгорания люминофора зависит от его
химического состава: она наибольшая для химически чистых веществ и
резко уменьшается при загрязнении. Большая скорость
разгорания обеспечивает достаточную яркость экрана при. высокой
скорости движения луча. При наблюдении низкочастотных сигналов
важное значение приобретает время послесвечения экрана —
время, в течение которого яркость снижается до 1 % от
максимального значения.
По длительности послесвечения экрана условно разделяются на
пять групп: с очень коротким послесвечением (менее Ю-5 с); с
коротким (от Ю-5 до Ю-2 с); со средним (от Ю-2 до Ю-1 с); с
длительным (Ю-1 до 16 с); с очень длительным (более 16 с).
169
7.3. СТРУКТУРНАЯ СХЕМА ОСЦИЛЛОГРАФА
Упрощенная структурная схема осциллографа представлена на
рис. 7.3. Исследуемый сигнал подается на вход усилителя У
через аттенюатор. С выхода усилителя сигнал поступает на
пластины вертикального отклонения луча ЭЛТ. Аттенюатор необходим
при работе с сигналами, имеющими большую амплитуду. Для
управления перемещением луча в горизонтальном направлении
служит генератор развертки, напряжение с которого поступает на
пластины горизонтального отклонения через усилитель X. Для
управления генератором развертки предназначено устройство запуска
развертки. При необходимости генератор развертки можно
отключить и, установив переключатель П2 в нижнее положение, подать
со входа X через усилитель внешний сигнал на пластины
горизонтального отклонения.
ВходУ
Вход
Аттенюатор Y
Усилитель
Внутренняя
синхронизация
Устройство
запуска развертки
синхронизации ^о^зация
ВходЛГ
Рис. 7.3
Для получения осциллограммы исследуемого сигнала
необходимо управлять движением светового пятна на экране ЭЛТ в
горизонтальном и вертикальном направлениях. Смещение пятна в
вертикальном направлении осуществляется сигналом, а в
горизонтальном—напряжением развертки. Генератор развертки
вырабатывает колебания пилообразной формы, показанные на рис. 7.4.
На участке графика ас напряжение развертки щ линейно
нарастает. Время ТпР, в течение которого ир изменяется от
минимального значения до
максимального, называется временем
прямого хода развертки. Участок
cd, который длится время Т0вр,
соответствует обратному ходу
развертки. Время 7пр и Т0йР
составляют период развертки
7Р. Если приложить uv к
горизонтальным отклоняющим пла-
Рис. 7.4
^р
,«■
1
■^
b S
^пр
т9
с
Л /
1W
1 'г
\ t
170
Рис. 7.5 Рис. 7.6
стинам, отключив сигнал от пластин вертикального
отклонения, электронный пучок ЭЛТ будет отклоняться только в
горизонтальной плоскости. При этом светящееся пятно на экране
будет перемещаться в следующей последовательности. При
максимальном отрицательном напряжении ир (точка а на рис. 7.5)
светящееся пятно займет крайнее левое положение (точка а') на
экране. При линейном нарастании ир пятно постепенно
перемещается в точку Ь' и после перемены полярности ир — в точку с'. На
участке а'с' скорость движения пятна будет постоянной,
поскольку ир нарастает по линейному закону и согласно (7.1) имеется
линейная зависимость между смещением пятна на экране и
напряжением, приложенным к пластинам. После достижения точки
с' светящееся пятно начинает перемещаться в обратном
направлении.
Обратный ход осуществляется за время Тобр<^Тпр, поэтому
скорость движения пятна в обратном направлении существенно
выше. Траектория движения пятна во время обратного хода
показана на рис. 7.5 штриховой линией, для удобства изображения
несколько смещенной. Для получения осциллограммы существенное
значение имеет линейность щ на участке прямого хода (ас),
форма ир на интервале обратного хода (cd) не имеет
принципиального значения. Важно только обеспечить .минимально возможную
длительность обратного хода. Таким образом при подаче ир на
горизонтальные пластины ось х является одновременно осью времени
• t, причем при постоянной скорости движения светящегося пятна
на участке а'с' масштаб вдоль оси t является постоянным.
Искажение формы ир на интервале прямого хода вызывает
нелинейность развертки, проявляющейся в неравномерной скорости
движения пятна по экрану и в искажении осциллограммы. Неравно-
171
мерность скорости вызывает неравномерность масштаба вдоль оси
х, что затрудняет оценку параметров сигнала.
Образование изображения на экране ЭЛТ при воздействии двух
напряжений — развертки (ир) и сигнала (ис) —соответственно на
пластинах х и у показано на рис. 7.6. При построении
осциллограммы принято, что период пилообразного напряжения
развертки равен периоду сигнала, а период обратного хода — нулю.
Период развертки условно разбит на четыре равных интервала с
границами, отмеченными на рис. 7.6 через t0, к, t2, t3 и t4. В
момент t0 Ис=0, а ир имеет максимальное отрицательное значение
и световое пятно находится в точке а. В момент t\ напряжение
сигнала имеет максимальное положительное значение, а ир=
= Up т/4 и пятно находится в точке Ь. Аналогичным путем
можно найти положение точек с, d и е на экране ЭЛТ. После
окончания развертки светящееся пятно по прямой линии еа мгновенно
возвращается в исходное положение. Направление движения
пятна во время прямого и обратного хода показано стрелками. В
последующие циклы развертки образование осциллограммы будет
происходить так же, причем все ее точки совпадут с
аналогичными точками осциллограммы, изображенной на рис. 7.6. Таким
образом наблюдатель видит изображение, образованное
наложением на одни и те же места экрана целой серии осциллограмм.
Число таких первичных изображений, зафиксированных в зрительном
образе, зависит от периода'развертки, длительности
послесвечения люминофора и зрительной памяти человека.
Наложение отдельных осциллограмм и образование
неподвижного изображения возможно при выполнении условия, принятого
при построении рис. 7.6, а именно 7С = 7Р. В этом случае любой
периодический сигнал делится на временные интервалы, в
пределах которых «отрезки» сигнала полностью идентичны и при нало-
!72
Рис. 7.7
жении осциллограмм образуется единое неподвижное изображение.
Аналогично образуется изображение осциллограммы, когда Тр=
=пТс. Если л —целое число, то в одном периоде развертки
укладывается ровно п периодов сигнала. Осциллограмма будет
отличаться от изображенной на рис. 7.6 числом периодом сигнала (2,
3 и более), отложенным вдоль оси х. Условие Тр=пТс
устанавливает необходимость выбора периода развертки Тр равным
кратному периоду сигнала. Формирование изображения на экране
осциллографа при нарушении кратности частот развертки и сигнала
иллюстрирует рис. 7.7. Период сигнала, представляющего собой
колебание синусоидальной формы (рис. 7.7,а), ТС>ТР. При
первом цикле развертки (рис. 7.7,6) на экране отображается
осциллограмма в виде отрезка синусоиды между точками Оа, при втором
отрезок ab, при третьем be и т. д. Последовательное появление
осциллограмм I, II, III и IV создает ощущение движения
изображения в направлении, показанном на рис. 7.7,в стрелкой. Скорость
движения осциллограммы тем выше, чем больше отличается
период развертки от периода сигнала. Можно показать, что при Тс<
<ТР осциллограмма будет перемещаться в противоположном
направлении, т. е. справа налево.
Таким образом для получения неподвижной осциллограммы
необходимо подобрать-период (частоту) развертки, равным
периоду (частоте) сигнала. В конструкции осциллографа
предусматривается такая возможность. Однако простого подбора частоты
развертки недостаточно. Поскольку сигнал и напряжение развертки
поступают от разных источников, через некоторое время из-за
нестабильности генераторов установленное равенство периодов
будет нарушено. Решение задачи возможно лишь при
синхронизации генератора развертки осциллографа исследуемым сигналом
или специально сформированным сигналом, частота которого
равна (кратна) частоте исследуемого сигнала. На структурной схеме
показаны цепи подачи сигнала синхронизации, при котором
сигнал синхронизации на устройство запуска развертки поступает
с усилителя Y, или режим внешней синхронизации. На рис. 7.3
показана цепь, соединяющая генератор развертки с модулятором
ЭЛТ. Эта цепь служит для запирания электронного пучка во
время обратного хода развертки еса (рис. 7.6). Линия обратного хода
создает помеху на экране. В идеальном случае, когда To6p=О,
луч мгновенно 'перемещается из точки е в точку а и яркость
линии обратного хода должна быть равна нулю. На практике
длительность обратного хода не может быть равна нулю, электронный
пучок во время обратного хода перемещается с конечной скоростью
и вызывает отчетливо видимую линию обратного хода. Поэтому
в осциллографах применяется принудительное запирание
(гашение) .электронного пучка во время обратного хода, для чего с
генератора развертки на модулятор трубки подаются специальные
гасящие импульсы.
Структурные схемы осциллографов различных типов могут в
некоторых деталях отличаться друг от друга, однако в основном
173
Канал Y
Вход Y I
Аттенюатор
Усилитель
предварительный Y
Линия
задержки
Усилитель•
оконечный Y
Вход2
КаналZ
Усилитель-
ограничитель
Устройство
управления
яркостью луча
I
Выход-
Калибратор амплитуды и
длительности
ВходЛГ-
т
—I
71
Переключатель входа
Усилитель X
П,
Пластины Y
пД
Г^
£
элт
жис^
Пластины X
а^
з-
Устройство
запуска
Канал X
Генератор
развертки
Оконечный
усилитель X
Рис. 7.8
они соответствуют обобщенной структурной схеме, изображенной
на рис. 7.8. Осциллограф содержит три канала X, Y и Z. Канал Y
управляет вертикальным отклонением, содержит аттенюатор,
предварительный и оконечный усилители, линию задержки. Линия
задержки служит для задержки сигнала, что, как будет показано
далее, иногда необходимо при наблюдении импульсных сигналов.
Канал X содержит переключатель входа, усилитель X,
устройство запуска, генератор развертки и оконечный усилитель X.
Переключатель входа обеспечивает либо подключение сигнала
синхронизации с предварительного усилителя Y, либо подачу сигнала
с выходного зажима X. На вход X может подаваться либо сигнал
внешней синхронизации, либо исследуемый сигнал. При работе
с генератором развертки осциллографа переключатели Пх и Я2
устанавливаются в нижнее положение, сигнал синхронизации
поступает на устройство запуска развертки. Пилообразное
напряжение с оконечного усилителя поступает на пластины X ЭЛТ. От-
# ключается развертка при установке Я] и Я2 в верхнее положение.
В этом случае сигнал с выхода X через переключатели входа и
каскады усилителей поступает на ЭЛТ. Переключатели Я3 и Я4
174
отключают отклоняющие пластины от оконечных усилителей. При
этом предусматривается возможность подачи сигналов
непосредственно на пластины X и Y осциллографа, минуя соответствующие
каналы. Отключение выходных цепей усилителей необходимо во
избежание искажений полезного сигнала при его подаче
непосредственно на отклоняющие пластины.
Канал Z служит для управления яркостью луча ЭЛТ. Он
содержит усилитель-ограничитель и устройство управления яркостью
луча. Сигнал с его выхода поступает на модулятор ЭЛТ. Для
повышения точности измерение параметров сигнала в состав
осциллографа включается калибратор амплитуды и длительности. Сиг-
кал калибратора обычно выводится на переднюю панель
осциллографа и с помощью соединительного кабеля может быть подан на
вход канала Y.
7.4. ВИДЫ РАЗВЕРТОК
ЭЛЕКТРОННОГО ОСЦИЛЛОГРАФА
"Простейшим генератором, обеспечивающим получение
пилообразного напряжения развертки,
является-устройство, работа которого основана на заряде и разряде конденсатора.
Известно, что напряжение при заряде и разряде конденсатора
изменяется по экспоненциальному закону. Отклонение луча в ЭЛТ
в этом случае будет осуществляться с неравномерной скоростью.
Для оценки искажений осциллограммы определяют коэффициент
нелинейности
P = (tgo1-tgo2)/tgo1, (7.4)
где tgai и tgci2 — тангенсы углов наклона касательной к кривой
развертывающего напряжения в точках а и b (рис. 7.9),
соответствующих началу и концу прямого хода. В идеальном случае,
когда выражение развертки линейно, tgai = tga2 и р = 0. При
вычислении р тангенсы углов наклона касательной можно найти путем
дифференцирования функции, в рассматриваемом случае путем
дифференцирования выражения:
uc = E[l— exp(—t/RC)]. (7.5)
Формула (7.5) описывает закон изменения напряжения на
конденсаторе с емкостью С, заряжающегося через резистор
сопротивлением R от источника постоянного тока Е. Производная от (7.5)
at НС
позволяет определить tgai и tga2: при t=0 получаем
А а при t = Гпр tg a2 = \Щ = — expf - Tsl
RC p nP s 2 j dt |,=?пр ^c ^ RC
Здесь TnV — длительность прямого хода развертки (рис. 7.9).
Поставив полученные значения tgai и tga2 в (7.4), имеем
= [ 1 — ехр (—ГПР//?С)] -100%. (7.7)
175
tga, =
dUc
dt;
"с
а
/
/
гпр
-,!
*1
djtl-
t
Из (7.7) и (7.5) можно определить
связь между коэффициентом
.нелинейности В и коэффициентом использования
напряжения источника питания \ = щ\Е, где
ир — размах сформированного
напряжения развертки. Если принять ир равным
максимальному напряжению на зарядном
конденсаторе Uc max, достигаемому к концу
Гпр, т. е. «р«Метах, то согласно (7.5) 1 =
Рис. 7.9 =uvIE=\— ехр(—Tnv/RC). Сравнив
полученное выражение с (7.7), имеем В«£ = %/£,
т. е. приблизительно одинаковые В и |. Из этого следует, что для
достижения коэффициента нелинейности развертки порядка 5%
необходимо, чтобы коэффициент использования источника
питания не превышал 5%. Например, если £=100 В, В=5%, то
напряжение развертки составит всего ир=.Е£= 100- 0,05=5 В.
Таким образом, при использовании экспоненты для формирования
пилообразного напряжения высокую линейность можно получить
лишь на начальном участке, т. е. при малом £. Если напряжение
ир меньше необходимого, следует увеличить напряжение
источника питания. Это обстоятельство вызывает неудобства при
проектировании осциллографа. Поэтому на практике прибегают к
различным способам исправления формы (линеаризации)
отклоняющего напряжения.
Известно несколько способов линеаризации пилообразных
колебаний развертки. Один из самых распространенных основан на
стабилизации тока заряда конденсатора. Поскольку напряжение
на конденсаторе ир при заряде его током ia нарастает по закону
uc=-^\hdt, (7.8)
при постоянном токе заряда i3 напряжение на конденсаторе
изменяется по линейному закону. Линейность напряжения
развертки можно обеспечить, если стабилизировать зарядный ток во
время прямого хода. Линеаризация зарядного тока, а
следовательно, и пилообразного напряжения развертки осуществляется путем
применения линейных токостабилизирующих двухполюсников
либо отрицательной обратной связи. Принципы работы таких
устройств подробно рассматриваются в учебниках по импульсной
технике.
При синусоидальной развертке напряжение,
подводимое на вход X осциллографа, изменяется по синусоидальному
закону:
ux = Umlsmu>t. (7.9)
При этом светящееся пятно на экране ЭЛТ перемещается с
неравномерной скоростью, что приводит к искажению формы
осциллограмм. Большой интерес представляет синусоидальная развертка
176
при подаче на вход Y также синусоидального сигнала,
сдвинутого по фазе относительно их на угол <р:
uy = Um2sm{at + <(). (7.10)
Перемещение луча под воздействием их определяется следующим
соотношением:
x = Kxsxux = KxsxUmls\n<x>t, (7.11)
где Кх — коэффициент усиления канала горизонтального
отклонения, еж — коэффициент, характеризующий чувствительность ЭЛТ
по отклонению в горизонтальном направлении и имеющий
размерность миллиметр на вольт. Смещение луча в вертикальном
направлении определяется аналогичной формулой:
у = Ку еу иу = Куеуит2 sin (a t + q>). (7.12)
Выражение (7.12) на основании известной тригонометрической
формулы можно записать в виде
y = KySyUm2 [sin со t cos ф + sin <p cos со t]. (7.13)
На основании (7.11) sin <at=x/KxexUml; cos at= V 1— (x/KxsxUmi)2.
Подставив значения sinco^ и cosco^, получим
y = KyeyUmJ * coscp + sincp]/ 1 — f ——x- VI
L Kx еж Uml r \ Kx еж Uml j J
(7.14)
При ср=90° уравнение существенно упрощается:
(x/KxexUm)*+ (y/KveyUma)*=l. (7.15)
Формула (7.15) представляет собой уравнение эллипса. Если
подобрать Кх и Ку так, чтобы знаменатели в формуле стали
одинаковыми: Kx£xUm]. = K,ySyUm2=R., то получим уравнение окружности
X2+y* = R. (7.16)
Таким образом, для образования эллипса или окружности на
экране на входы осциллографа необходимо подать сигналы
синусоидальной формы одной частоты, но сдвинутые по фазе на 90°.
Обычно для реализации круговой развертки синусоидальное
напряжение от генератора пропускается через фазовращатель,
обеспечивающий сдвиг фаз ф = 90°.
Фазовращатель и схема подключения его к
осциллографу показаны на рис. 7.10. Отметим
важные для измерений особенности
круговой развертки. Светящееся пятно
описывает окружность за время Т = 2п/а, т. е.
период одного оборота равен периоду
вспомогательного напряжения, снимаемого с
генератора. Если генератор формирует сигнал
стабильной частоты, то также стабилен
период обращения светящегося пятна по рис. 7.10
177
Рис. 7.11
окружности. Направление вращения светящейся точки зависит
от знака угла сдвига фаз. Если фаза синусоидального сигнала,
подаваемого на вход У, опережает фазу сигнала, подаваемого на
вход X, на 90°, то вращение происходит против часовой стрелки.
Если поменять сигналы местами, изменится направление
вращения. В этом можно убедиться, построив траекторию движения
пятна на экране осциллографа так, как это сделано на рис. 7.6, но
заменив пилообразное напряжение развертки синусоидальным и
введя ф = 90°.
Круговую развертку можно превратить в спиральную.
Принцип получения спиральной развертки следует из формулы (7.16).
Радиус окружности R = K.X£xUmi = KyZyUm2. Если изменить Umi и
Um% уменьшив их, например, в два раза, равенство не нарушится,
но радиус окружности уменьшится в два раза. Если амплитуды
Umi и ,(jm2 уменьшать плавно, радиус окружности будет
постепенно уменьшаться и на экране осциллографа образуется
изображение спирали (рис. 7.11,а). Управляющее напряжение,
необходимое для получения спиральной развертки, показано на рис.
7.11,6. Амплитуда сигнала, подаваемого на вход X, уменьшается
по линейному закону от U'mx до U"m\. Аналогично должна
уменьшаться амплитуда сигнала, подаваемого на вход У. Такие
сигналы можно получить с помощью амплитудного модулятора.
Несущей в данном случае является синусоида, а модулирующим —
напряжение пилообразной формы. Период спиральной развертки
Тс определяется периодом пилообразного модулирующего
напряжения. Число витков спирали т равно отношению периода Тс =
= 2л/шс к (периоду синусоидального колебания Г = 2л/<о, т. е.
т>=Тс/Т = Тс<л/2л. Следует отметить, что, несмотря на изменение
радиуса окружности, каждый оборот светящейся точки
осуществляется за одно и то же время, что создает определенные
удобства применения спиральной развертки для измерений.
7.5. СИНХРОНИЗАЦИЯ РАЗВЕРТОК
ОСЦИЛЛОГРАФА
Как отмечалось в § 7.4, для получения неподвижной
осциллограммы необходимо, чтобы в одном периоде развертки точно
укладывалось целое число периодов сигнала. Выполнение этого
условия обеспечивается синхронизацией генератора развертки
исследуемым сигналом. При этом развертка работает в непрерывном
режиме. Его отличительная особенность — генератор развертки
продолжает работу при отключении сигнала синхронизации.
Операции по введению развертки в синхронизм проводятся в два
этапа. Вначале подбирается период собственных колебаний
генератора развертки (без сигнала синхронизации), а затем
напряжение синхронизации до получения устойчивого положения
осциллограммы.
Обычно в качестве устройства, управляющего работой
разрядного каскада, используется мультивибратор, работающий в
автоколебательном режиме. Схема такого мультивибратора
представлена На рис. 7.12,а. Мультивибратор собран на транзисторах Тх
и Т2. Обратная связь осуществляется с помощью конденсаторов
Ci и С2. Импульсы синхронизации отрицательной полярности
(рис. 7.12,6) с периодом ГСИНхр поступают на базу Т2 через
конденсатор С3 и диод Д. Форма напряжения показана на рис. 7.12,в.
На участке тп напряжение ив2 изменяется -по экспоненциальному
закону. При отсутствии синхронизирующих импульсов напряжение
«62 уменьшается до нуля по экспоненте и в момент t'2 возникает
релаксационный процесс (штриховая линия). Если в момент t2
на базу Т2 поступает импульс отрицательной полярности с
крутым фронтом, то нулевой потенциал достигается в момент t2 и
период колебаний мультивибратора укорачивается и становится
равным периоду следования синхронизирующих импульсов Гсинхр.
Таким образом для получения синхронизации необходимо, чтобы
период собственных колебаний мультивибратора несколько
превышал период следования импульсов синхронизации. Необходимая
разница в периодах Гсинхр и ТСОб подбирается экспериментально
путем изменения периода ТСОб мультивибратора, причем Крите-
4 А й* сг й
нкг
и'ытЦ\-.
CjV.A
*£
-^•'-^к
**
а)
Рис. 7.12
179
tf,t
^синхр1
AUl
■ Помеха
Импульс синхро-
/^ низании
U ^ ^
Момент
начала релаксации
а)
а)
S)
"!г
1^ /Гмпули:
1
синхронизации
Рис. 7.14
рием правильности выбора ТСОб
является устойчивость
осциллограммы на экране ЭЛТ.
Влияние соотношения
периодов Гсинхр и Гсоб на устойчивость
синхронизации поясняется рис. 7.13. Обычно на мультивибратор
поступают импульсы синхронизации вместе с помехами, внешнего
или внутреннего происхождения. Эти помехи могут иметь как
шумовой, так и импульсный характер. Если период собственных
колебаний мультивибратора Тсоб существенно больше периода
следования синхроимпульсов Гсинхр (рис. 7.13,а), то в момент
прихода импульса синхронизации иб2 еще достаточно велико и
необходимо приращение At/, чтобы вызвать релаксационный процесс.
В этом-случае помеха не в состоянии нарушить синхронизацию.
При Гсоб, близком к Гсннхр (рис. 7.13,6), момент прихода импульса
синхронизации соответствует весьма малому напряжению иб2 и
достаточно импульса с размахом AU' для перевода
мультивибратора в режим релаксации. Если до прихода сигнала
синхронизации на базу Т2 поступил импульс помехи отрицательной
полярности размахом более AU', произойдет преждевременное
срабатывание мультивибратора. Поскольку помеха имеет случайный
характер, момент начала релаксации будет флуктуировать от
цикла к циклу и, следовательно, синхронизация будет неустойчивой.
Рассмотренный пример показывает, насколько важно подобрать
правильно период собственных колебаний мультивибратора.
Помимо подбора Гсоб необходим правильный выбор напряжения
импульсов синхронизации. Из рис. 7.13,а видно, что уменьшение
напряжения синхроимпульса вдвое вызовет нарушение
синхронизации. Излишнее увеличение напряжения синхроимпульсов также
недопустимо, так как при этом возможно срабатывание
мультивибратора в любой момент прямого хода. На практике лучший
результат получают методом постепенного приближения.
Вначале при минимальном напряжении синхронизации подбирают
период развертки приблизительно равным периоду сигнала. Когда
движение осциллограммы замедлится, вводят сигнал
синхронизации. Поочередно подбирая напряжение синхроимпульсов и период
180
Тсоб, добиваются полной неподвижности изображения'
осциллограммы.
Следует отметить, что установление процесса синхронизации
возможно при различных значениях Геб (если, конечно, ТСОб
остаётся близким Гсинхр), т. е. имеется некоторый диапазон
значений Гсоб, в пределах которого возможно установление
синхронизации и который называют диапазоном захватывания. Если
синхронизация установлена, ТСОб мультивибратора можно изменять
в некотором диапазоне, называемом диапазоном удержания, не
вызывая сбоя синхронизации. Обычно диапазон удержания
превышает диапазон захватывания. Полезно, добившись
синхронизации, убедиться, что ручка, с помощью которой устанавливается
период Гсоб мультивибратора, находится в среднем положении.
При этом обеспечивается синхронизация при отклонении частоты
приходящего сигнала в сторону как увеличения, так и
уменьшения. Таким образом мультивибратор, находящийся в режиме
синхронизации, подстраивается под'•исследуемый сигнал.
Рассмотренный режим синхронизации, в результате которого
период колебаний мультивибратора устанавливается равным
периоду сигнала, позволяет получить на экране ЭЛТ осциллограмму
всего лишь одного периода сигнала. На практике встречается
необходимость наблюдать п периодов. В этом случае
мультивибратор работает в режиме деления частоты. На рис. 7.14
поясняется работа мультивибратора при отображении четырехч периодов
сигнала на экране ЭЛТ. Как видно из рис. 7.14 начало
релаксации процесса в мультивибраторе вызвано импульсом /.
Импульсы 2, 3 и 4 не достигают нулевого уровня (рис. 7.14,6) и,
следовательно, не влияют на работу мультивибратора. Импульс 5
вызывает релаксационный процесс. Таким образом в рассмотренном
режиме синхронизация имеется, однако не все импульсы
принимают в ней участие. В одном периоде колебаний мультивибратора
укладываются четыре периода исследуемого сигнала. Из рис.
7.14,6 видно, насколько важен правильный подбор напряжения
импульсов синхронизации. Если увеличить это напряжение в
1,5...2 раза, релаксационный процесс в мультивибраторе может
быть вызван импульсом 4. Таким образом синхронизация в
режиме деления менее устойчива. Чем больше коэффициент
деления, тем ближе расположены друг к другу импульсы
синхронизации, хем уже полоса удержания.
Структурная схема генератора развертки осциллографа
представлена на рис. 7.15,а. Устройство синхронизации и запуска
формирует запускающие импульсы. Для четкой синхронизации
необходимо, чтобы на мультивибратор поступали остроконечные
импульсы с крутым фронтом нарастания. На практике часто
приходится наблюдать на осциллографе плавно изменяющиеся сигналы
(например, гармонические), в этом случае необходимо из них
сформировать синхронизирующие импульсы остроконечной формы.
Для этого используют устройство формирования и запуска, кото-
181
_NJ
_п_
УУ Jl
Вход
—*■
я)
Устройство
синхронизации
и запуска
Мультивибратор
_L-
Вход
Устройство
синхронизации
и запуска
б)
Формирователь
пилообразных
импульсов
J—L
Управляющее
устройство
(триггер)
II
Устройство
сравнения
и блокировки
Формирователь
пилообразны*
импульсов
^~
Усилитель X
Усилитель X
Выход
А'
Выход
"\Г
Рис. 7.15
рое обычно содержит усилитель-ограничитель и
дифференцирующие цепи.
Генератор развертки, построенный по данной структурной
схеме, имеет существенный недостаток. При изменении частоты
развертки необходимо менять параметры элементов как
мультивибратора, так и формирователя пилообразных импульсов. Только
в этом случае можно сохранить высокую линейность
пилообразных импульсов развертки и постоянство их размаха.
Независимость размаха пилообразных импульсов, а следовательно, и
горизонтального размера осциллограммы от частоты создает
удобства при работе с осциллографом. Отпадает необходимость
регулировать горизонтальный размер осциллограммы после
перестройки частоты развертки и существенно упрощается измерение
временных параметров сигнала.
В современных осциллографах применяется калиброванная
развертка, при которой определенному горизонтальному
перемещению луча соответствует определенный временной интервал.
Генератор развертки рассмотренного типа не отвечает данному
требованию, так как изменение параметров элементов схемы
вследствие температурной нестабильности, изменение питающего
напряжения неизбежно вызывает изменение скорости нарастания
напряжения развертки и его размаха. В настоящее время
генераторы развертки рассмотренного типа используются лишь в
простых дешевых приборах.
Структурная схема генератора калиброванной развертки
представлена на рис. 7.15,6. Управляющим устройством здесь
является триггер, обеспечивающий формирование прямоугольных управ-
182
ляющих импульсов необходимой длительности. Существенно, что
длительность сформированного управляющего импульса не
определяется параметрами входящих в состав триггера элементов.
После поступления синхроимпульса триггер срабатывает и его
выходное напряжение обеспечивает пуск формирователя
пилообразных импульсов. Линейно нарастающее напряжение поступает
на устройство сравнения и блокировки, выходной сигнал которого
образуется при достижении пилообразным напряжением
определенного уровня. В этот момент по команде устройства сравнения
триггер переводится в исходное состояние. Таким образом
максимальное значение напряжения развертки в данной схеме является
строго постоянным. При постоянном уровне сравнения размах
пилообразного напряжения не изменяется при переключении вре-
мязадающих элементов в формирователе пилообразных импульсов.
Генератор развертки, в котором применен триггер, работает
в ждущем режиме. Управляющее устройство «ждет»
запускающего импульса с устройства синхронизации и запуска, после чего
начинается формирование прямого хода развертки. Если
запускающих импульсов нет, нет и развертки. Рассмотренную схему
развертки можно перевести в режим непрерывной генерации
пилообразных колебаний. Для этого надо использовать триггер с
одним устойчивым состоянием равновесия. При формировании
прямого хода триггер находится в устойчивом состоянии и
необходимое разрешающее напряжение подается на формирователь
пилообразных импульсов. Когда пилообразное напряжение достигнет
заданного значения, устройство сравнения и блокировки
специальным импульсом переводит триггер в неустойчивое состояние и
удерживает его в этом состоянии в течение некоторого времени.
С прекращением действия импульса триггер самостоятельно
возвращается в устойчивое положение и снова формируется прямой
ход развертки. Обычно в современных.осциллографах
предусмотрена возможность перевода триггера с двумя устойчивыми
состояниями в режим работы с одним устойчивым состоянием с помощью
регулятора «стабильность». Одно положение регулятора
обеспечивает непрерывный режим работы, другое ждущий. В более
сложных осциллографах применяются устройства, которые
автоматически устанавливают автоколебательный режим генератора
при отсутствии запускающего сигнала или ждущий при наличии
запускающих импульсов.
Следует остановиться на функции блокировки развертки,
выполняемой блоком сравнения и блокировки в схеме на рис. 7.15,6.
Формирователю пилообразных импульсов необходимо время для
подготовки к новому циклу развертки. До окончания обратного
хода и переходных процессов управляющие импульсы не должны
поступать на формирователь пилообразных импульсов.
Блокировка триггера на это время осуществляется устройством сравнения
и блокировки, вырабатывающим необходимый сигнал.
В заключение рассмотрим особенности практического
применения ждущей развертки. При наблюдении импульсных сигналов
183
часто приходится иметь дело с короткими импульсами,
следующими друг за другом через сравнительно большие интервалы
времени. Длительность т оказывается много меньше периода Г
следования импульсов. При скважности импульсов <2 = Г/т^100
осциллограмма сигнала, полученная методом непрерывной
развертки, оказывается малоинформативной. Действительно, как
видно из рис. 7.16, короткие импульсы прямоугольной формы
занимают малую часть экрана ЭЛТ. Поэтому обнаружить и оценить
возможные искажения формы импульсов, такие как скол
вершины, выбросы, трудно. Изображенные на рис. 7.16,а импульсы
характеризуются скважностью Q = 30. Дальнейшее увеличение
скважности ещё более усложняет задачу, поскольку нри непрерывной
развертке на экране ЭЛТ можно отображать не менее одного
целого периода сигнала, тогда как интерес представляет лишь
незначительная его часть. Ждущая развертка позволяет
преодолеть эту трудность.
На рис. 7.17 показан принцип действия ждущей развертки. Из
сигнала (рис. 7.17,а) формируются запускающие импульсы (рис.
7.17,6). До прихода импульса триггер генератора развертки
находится в заторможенном состоянии. В момент t\ триггер
срабатывает и начинается прямой ход. За время Гпр напряжение
развертки возрастает от нуля до «ртах (рис. 7.17,е), затем в момент
t2 начинается обратный ход. На интервале Гож генератор развертки
находится в заторможенном состоянии, «ожидая» прихода
следующего запускающего импульса. Развертывающий луч на экране
ЭЛТ за время Гпр отклоняется по
горизонтали на полный размер.
Осциллограмма импульса (рис. а>
7.17,г) занимает значительную
часть экрана и удобна для наблю- "
дения. s)
Как видно из рис. 7.17,а и б,
при ждущей развертке
запускающий импульс должен появиться в
момент U, т. е. до прихода ие-
ис,
UC-> 1-1
б)
1
4 р max
Э.кран ЗЛТ
Рис. 7.16
Энраа 3jjr
Рис. 7.17
184
следуемого импульса. На практике необходимое опережение
запускающего импульса Мзап достигается задержкой исследуемого
сигнала, для чего в состав канала вертикального отклонения
(рис. 7.8) включается линия задержки. Как видно из рис. 7.8,
сигнал на формирователь снимается до входа линии задержки и,
следовательно, опережает на некоторое время исследуемый сигнал.
7.6. КАЛИБРАТОРЫ ОСЦИЛЛОГРАФА
Осциллографы широко используют не только для наблюдения
электрических сигналов, но и для измерения их параметров.
Существуют разные методы повышения точности осциллографических
измерений, однако наиболее перспективен метод калиброванного
отклонения. При наличии линейной развертки горизонтальная ось
является осью времени, а вертикальная — осью напряжений.
Допустим, что развертка идеально линейна и скорость движения
луча в горизонтальном направлении известна. Тогда задача
измерения временного интервала (например, длительности импульса)
сводится к измерению линейного размера интересующей нас части
осциллограммы и делению полученного числа на скорость
развертки. С точки зрения измерений временного интервала выгодно
шкалу регулятора развертки градуировать в единицах 'скорости
отклонения луча. Последнее время, как правило, используют
величину, обратную скорости, которую называют коэффициентом
развертки:
КГ = ТПР/1Г, . (7.17)
где 1Г — длина отрезка горизонтальной оси, соответствующая
длительности прямого хода Гпр. Размерность коэффициента
развертки на разных диапазонах: мкс/см, мс/см или с/см. Временной
интервал определяется умножением размера нужной части
осциллограммы на коэффициент развертки. Изменение калиброванного
коэффициента Кг в современных осциллографах осуществляется
ступенчатым переключением с кратностью изменения Кг в 0,25;
0,5; 1; 2; 5 раз. Плавная регулировка позволяет устанавливать
любые значения Кг между соседними калиброванными ступенями.
Аналогично для характеристики вертикальной чоси
осциллографа введен коэффициент отклонения
KB = Uax/tB, (7.18)
где UBx — амплитуда сигнала, подаваемого на вход У, 1В —
отклонение луча в вертикальном направлении, соответствующее
значению UBx- Коэффициент отклонения выражается в единицах
напряжения, отнесенных к единицам длины или делениям шкалы
на экране осциллографа (В/см; мВ/см; В/дел.; мВ/дел.).
Коэффициент отклонения измеряют ступенями с кратностью 1, 2 и 5.
Плавная регулировка позволяет устанавливать любое некалибро-
ванное значение коэффициента отклонения между соседними
калиброванными ступенями. Иногда осциллографы характеризуют
185
величиной, обратной коэффициенту отклонения, которую называют
чувствительностью канала У. Это менее удобно, так как для
определения измеряемого напряжения приходится применять
операцию деления.
Коэффициенты отклонения и развертки устанавливаются с
некоторой погрешностью. В процессе эксплуатации осциллографа
для обеспечения точности измерения напряжений и временных
интервалов необходима подстройка каналов X и У. Для этого
в осциллографы встраивают калибраторы амплитуды и
длительности, являющиеся источниками эталонных сигналов. Если
калибровочный сигнал — симметричные прямоугольные импульсы
(меандр), функции калибровки амплитуды и длительности можно
выполнить с помощью одного сигнала. Эталонный размах этих
импульсов используют в качестве калибровочного напряжения, а
период повторения — в качестве калибровочного интервала.
Источником первичного сигнала для формирования
калибровочного напряжения обычно является высокостабильный
генератор синусоидальных сигналов. Из этих сигналов формируют
симметричные прямоугольные импульсы. Обычно максимальная
погрешность калибратора амплитуд составляет 1...3%. Процесс
калибровки коэффициента отклонения заключается в совмещении
участков осциллограммы калибровочного сигнала,
соответствующих минимальному и максимальному уровням напряжения, с
линиями шкалы, нанесенными на масштабную сетку (рис. 7.18)! При
этом согласно (7.18) lB=UBX/KB. Так как UBX (напряжение
калибратора) и Кв, установленное экспериментатором, извести^, можно
сравнить расчетное значение 1В и измеренное 1\. Если /в=й=/'в,
необходима калибровка, которая осуществляется изменением
коэффициента усилении канала специальным органом подстройки.
Погрешности, возникающие при измерении напряжения и
временных интервалов. Определение линейных размеров
осциллограммы предполагает совмещение участков осциллограммы со
шкалой и съем показаний. Поэтому для калибровки характерны
погрешности совмещения и отсчета. Обычно погрешность
совмещения не менее 0,15...0,2 мм, а погрешность отсчета 0,3 мм.
Указанное значение погрешности совмещения соответствует так
называемой беспараллаксной шкале. Обычно шкала экрана удалена
от люминесцентного слоя на 4...5 мм. В этом случае при наблю-
S
"
-=1
1
—1
1
1
--1
1
-л
1
—1
1
—1
1
—1
1
—1
l
~1
1
—I
I
—1
,1
1
—1
1
~1
1
"1
1
|
—1
1
"1
1
—1
. Л
1
—1
1
—1
1
—1
1
—1
1
—1
1
-и
1
"1
_ J
Рис. 7.18 Рис. 7.19
186
дении осциллограммы под некоторым углом возникает
погрешность из-за параллакса, которая обычно составляет 1% Для
исключения этой погрешности в современных ЭЛТ шкалу наносят
на внутренней стороне стекла экрана или изготавливают беспа-
раллаксные шкалы, линии которых размещены друг против друга
с обеих сторон прозрачного материала. При наблюдении под
правильным углом линии шкал, нанесенные с разных сторон
совмещены друг с другом. При неправильном угле зрения из-за
параллакса возникает раздвоение изображения, как это показано на
рис. 7.19. Представленное на нем изображение соответствует
случаю, когда линия наблюдения отклонена от перпендикуляра к
поверхности экрана вправо и вверх.
При калибровке горизонтальной оси известны длительность
периода сигнала калибратора и установленный коэффициент
развертки. Для подстройки генератора развертки в осциллографах
предусмотрена специальная регулировка. Погрешность измерения
напряжений и временных интервалов определяется не только
неточностью совмещения и отсчета линейных размеров. На нее
существенно влияют нелинейности амплитудной характеристики
канала У и развертывающего напряжения. Влияние нелинейности
канала У на точность измерения напряжения поясняется на рис.
7.20. Амплитудная характеристика канала (рис. 7.20,а)
представляет собой зависимость отклонения луча по оси у от напряжения
' "вплН3 входных зажимах. Реальная амплитудная характеристика
ОБА нелинейна. Рядом расположена идеализированная
амплитудная характеристика ОВ'А. Допустим, что на вход У подано
эталонное напряжение от калибратора (импульс а') на рис. 7.20,в.
Возможны два случая. В первом случае, когда коэффициент
отклонения строго соответствует установленному по шкале
регулятора, на экране получаем калиброванное отклонение Лкал
(осциллограмма а на рис. 7.20,6). Во втором случае высота полученной
осциллограммы не соответствует /гкал (осциллограмма Ь на рис.
7.20,6) и необходима подстройка изменением коэффициента
усиления усилителя. Поскольку в
конечном результате входное у,
напряжение ивх и /iKajI
одинаковы для обоих случаев, точка А
(координаты КОТОрОЙ Ы„ал, ^кал)
принадлежит одновременно
реальной и идеализированной
амплитудной характеристике.
Таким образом, амплитудная
характеристика может иметь
существенную нелинейность,
однако калибровка оси
формально будет выполнена и
коэффициент отклонения будет
соответствовать номинальному. Ее- »ы Pvc 7 20
187
ли теперь определить напряжение, соответствующее осциллограмме
Ь, умножив вертикальный размер осциллограммы на коэффициент
отклонения, получим U'BX (осциллограмма Ь'). В действительности
из-за нелинейности характеристики осциллограмма Ъ (рис. 7.20,6)
вызвана напряжением U"BX. Абсолютная погрешность измерения,
обусловленная нелинейностью амплитудной характеристики,
определяется разностью между измеренным и истинным значением
напряжения, т. е. А=и'вх—и"ах, а относительная — отношением
й=(ы/вх—и"вх)/и"вх. Данная погрешность является
систематической, однако ее трудно учесть, так как для разных экземпляров
приборов она различна. Практика конструирования
осциллографов показывает, что при нелинейности амплитудной
характеристики канала У, равной 5%, относительная погрешность измерения
напряжения составляет 2...3%. Определение общей погрешности
измерения напряжения, зависящей от суммы разных факторов,
будет рассмотрено далее.
Методы уменьшения погрешностей. Для повышения точности
измерения напряжения в более сложных приборах используют
метод сравнения напряжения исследуемого сигнала с калиброванным
напряжением. Калибратор в этом случае должен вырабатывать
сигнал, напряжение которого может быть установлено с
достаточно высокой точностью. Сущность метода поясняется рис. 7.21.
Калибровочное (меандр) напряжение поступает на регулятор,
который снабжен шкалой, позволяющей произвести отсчет
установленного напряжения. К калибровочному напряжению добавляется
постоянное напряжение, снимаемое с движка потенциометра R.
Благодаря наличию источников Ег и Е2 постоянная составляющая,
снимаемая с R, может быть как положительной, так и
отрицательной полярности. Электронный коммутатор, управляемый
коммутирующими импульсами, подключает к усилителю У поочередно то
измеряемый сигнал, то калибровочное напряжение. При
определенном соотношении между длительностями коммутирующих и
Коммутирующие импульсы
Исследуемый
£,.
" R
Аттенюатор -
канала Y
Электронный
коммутатор
Усилитель Y
smr
Регулятор
калибровочного
напряжения
Источник
калибровочного
напряжения
Регулятор смещения
калибровочных линий
Калибровочные пинии
Экран ЭЛТ
Сигнал
Рис. 7.21
188
Исследуемый сигнал
Г
r-j_+ «и-—1
Усилитель Y
К отклоняющим
пластинам
з».
Вольтметр
постоянного тока
а)
Рис. 7.22
калибровочных импульсов на экране образуются калибровочные
метки (рис. 7.21,6). Потенциометр R позволяет их перемещать
вверх или вниз, а регулятор калибровочного напряжения —
изменять расстояние между ними. Действуя двумя регулировками,
можно совмещать 'калибровочные метки (линии) с
осциллограммой. Результат измерения определяется по шкале регулятора
калибровочного напряжения. Существенным достоинством метода
является подключение погрешности измерения, связанной с
нелинейностью канала У.
Для исключения влияния нелинейности используется также
компенсационный метод, сущность которого поясняется рис. 7.22.
На вход усилителя У кроме исследуемого сигнала поступает
постоянное напряжение с движка потенциометра R. Если усилитель У
пропускает постоянную составляющую, то изменение напряжения,
снимаемого с R, вызовет смещение осциллограммы в
вертикальном направлении. Смещая осциллограмму, например, вниз так,
чтобы ее верхняя часть совпала с линией тп (рис. 7.22,6),
фиксируем изменение постоянного напряжения с помощью
вольтметра постоянного тока. Как видно из рис. 7.22,6,
вертикальный размер осциллограммы равен
расстоянию между линиями тп и т'п'. Таким,
образом напряжение, отсчитанное по шкале
вольтметра, равно размаху сигнала.
Метод сравнения используется также для
увеличения точности измерения временных
интервалов. Сущность метода заключается в
сравнении разности мгновенных значений
пилообразного напряжения развертки,
соответствующих началу и концу измеряемого участка
осциллограммы, с опорным напряжением. Как
видно из рис. 7.23, полному отклонению луча в
горизонтальном направлении соответствует
изменение напряжения развертки от wpmin до
Wpmax. Участку осциллограммы ab
соответствует изменение напряжения развертки, равное
Аи = и2—Ыь При известном значении Aw
измеряемая длительность импульса может быть оп- Рис. 7.23
189
Генератор
развертки
Коммутирующие импульсы
*
Электронный
коммутатор
Усилитель X
К пластинам X
Экран ЭЛТ
Регулятор
с отсчетным
устройством
Источник
калибровочного
сигнала
а)
Рис. 7.24
ределена как At = t2—ti = Au/tga. Так как tga = S— крутизне
.пилообразного колебания, то At=(u2—«i)/S. Поскольку величина S
известна, изменение временного интервала сводится к определению
разности Аи = и2—«ь
На рис. 7.24 показана структурная схема прибора,
основанного на описанном способе измерения временного интервала. На
электронный коммутатор поступает пилообразное напряжение
развертки и калибровочный сигнал. Источник калибровочного сигнала
вырабатывает меандр. Напряжение устанавливается регулятором
с отсчетным устройством. Таким образом на пластины X ЭЛТ
поочередно поступает напряжение развертки и калибровочное
напряжение. Калибровочный сигнал образует на экране две яркост-
ные отметки (точки) (рис. 7.24,6). Это объясняется тем, что
фронты калибровочных импульсов очень короткие, скорость
перемещения луча в горизонтальном направлении велика и линия
развертки незаметна. При воспроизведении плоской вершины импульсов
луч остается на месте и на экране образуется яркая точка.
Расстояние между точками можно изменять, изменяя размах
калибровочного напряжения, положение точек на горизонтальной оси
можно изменять введением постоянной составляющей, снимаемой
с движка потенциометра R (рис. 7.24,а). Совместив точки с
интересующей частью осциллограммы, снимаем показания с отсчет-
ного устройства регулятора калибровочного сигнала.
Для точных измерений формируют также измерительные
импульсы прямоугольной формы, длительность которых
эквивалентна измеряемому временному интервалу. На экране ЭЛТ кроме
исследуемого сигнала получают изображение измерительного
импульса, фронт и срез которого совмещают с границами
измеряемого участка осциллограммы. Параметры измерительного
импульса определяются электронно-счетным измерителем временных
интервалов, встроенным в осциллограф. Погрешность данного
метода складывается из погрешностей совмещения фронта и среза
измерительного импульса с границами измеряемого участка
осциллограммы и погрешности электронно-счетного измерителя
временных интервалов.
190
7.7. МНОГОЛУЧЕВЫЕ ОСЦИЛЛОГРАФЫ
Многолучевые осциллографы предназначены для
одновременного наблюдения на одном экране нескольких сигналов.
Наибольшее распространение получили приборы, позволяющие наблюдать
одновременно два сигнала, как это показано на рис. 7.25. Здесь
осциллограмма I представляет собой сигнал, поступающий на вход
исследуемой цепи, а осциллограмма II — сигнал, снимаемый с
выхода. Для получения данного изображения используется двух-
лучевая ЭЛТ, содержащая внутри общей колбы две электронные
пушки со своими системами фокусировки вертикально и
горизонтально отклоняющих пластин. Обычно развертки обоих лучей
осуществляются от общих генератора и усилителя X, что
обеспечивает отображение обоих сигналов в едином масштабе времени.
Единый масштаб времени позволяет сравнивать мгновенные
значения напряжений, определять временные соотношения, измерять
фазовый сдвиг и т. д.
Из упрощенной структурной схемы двухлучевого
осциллографа С1-55 (рис. 7.26) видно, что управление двумя лучами ЭЛТ
осуществляется с помощью двух идентичных каналов Ух и У2,
содержащих те же элементы, что и каналы вертикального
отклонения обычных осциллографов. Синхронизация периодической и
запуск ждущей разверток предусматривается от исследуемого
сигнала, снимаемого с усилителей обоих каналов.
Особенностью ЭЛТ, применяемой в рассматриваемом приборе,
является гашение луча во время обратного хода развертки с
помощью специальных бланкирующих пластин. При подаче
импульсов с устройства управления яркостью луча на бланкирующие
пластины лучи обеих электронных пушек резко отклоняются в
сторону и не попадают на экран. Разработаны ЭЛТ и с большим
количеством лучей. Так, например, осциллограф С1-33 выполнен
на трубке, имеющей пять лучей. Возможности применения таких
приборов еще более широкие.
Два электрических процесса можно одновременно наблюдать
на экране обычной ЭЛТ, используя электронный коммутатор,
обеспечивающий поочередную подачу сигналов на вертикальные
отклоняющие пластины. Примером такого осциллографа может
служить прибор С1-77, упрощенная структурная схема которого
представлена на рис. 7.27. Сигналы
подаются на входы Y\ и Y2 двух
идентичных каналов. С выходов каналов
сигналы поступают на электронный
коммутатор, управляемый импульса-^—1 ' ' ■— Д^ экран э/i'f
ми, сформированными в генераторе
развертки. Коммутатор может
работать в одном из режимов: I, II, I + II,
Прерывание, Попеременно.
В режимах I и II на экране ЭЛТ
ВОСПРОИЗВОДИТСЯ ТОЛЬКО ОДИН СИГНаЛ, Рис. 7.25
191
Гк
анал Y\
Вход >'i,
Аттенюатор
Предварительный
усилитель
Г
Вход У2
Канал У2
Аттенюатор
Предварительный
усилитель
Линия
задержки
Оконечный
усилитель
Линия
задержки
Оконечный
усилитель
Пластины
гашения лучей
ВходХ
Калибратор
амплитуды и
длительности
Вход2 •
Д1
Ы
?
X,
г-1 !
Устройство управления
яркостью луча
элт
Переключа
тель входа
Устройство
синхронизации и
залускаразвертки
Генератор
развертки
L.
Усилитель X
Канал X
Рис. 7.26
с канала Y\. или У2 соответственно. В режиме I + II
можно исследовать сумму или разность двух сигналов, а также
компенсировать постоянную составляющую одного канала, подавая
постоянное напряжение на другой канал. В режиме Прерывание
сигналы переключаются с частотой 100 кГц, а в режиме
Попеременно после каждого цикла развертки. Смещение осциллограмм
двух сигналов в вертикальном направлении (как показано на
рис. 7.25) осуществляется подбором постоянных составляющих
сигналов, поступающих на коммутатор с предварительных
усилителей каналов Yx и У2. В отличие от двухлучевых осциллографов,
рассмотренный прибор с коммутацией сигналов и обычной ЭЛТ
носит название двухканального осциллографа.
192
Г'
Усилитель предварительный
Канал У~
' Канал У, "I
Аттенюатор
II —
I Вход У,
Калибратор амплитуды и
длительности
L
усилитель предварительный
'Т
Выход
"1
Аттенюатор
I Вход Уг
Коммутатор
Линия
задержки
Усилитель
оконечный
Устройство управления
яркостью луча
У
Переключатель
входа
Устройство синхронизации
и запуска развертки
ЭЛТ
Генератор
развертки
Усилитель X
ZZ3
ВходХ
Рис. 7.27
7.8. СКОРОСТНЫЕ И СТРОБОСКОПИЧЕСКИЕ
ОСЦИЛЛОГРАФЫ
При осциллографировании сигналов импульсных процессов на-
но- и пикосекундной длительности, а также гармонических
колебаний СВЧ возникает ряд специфических особенностей, основной
из которых является сложная конструкция электронных
усилителей, обусловленная чрезвычайно широкой полосой частот. В
настоящее время созданы приборы, имеющие усилители канала У с
полосой пропускания от 0 до 350 МГц.
Другими особенностями являются:
существенное влияние паразитных элементов конструкции
(емкостей отклоняющих пластин, индуктивности проводов, подводя-
7—10 193
щих -сигнал), вызывающие нежелательные резонансы и искажения
формы коротких импульсов;
влияние конечного времени пролета электронов: если период
исследуемого сигнала соизмерим с временем пролета (это имеет
место при частотах свыше 100 МГц), будет снижаться
чувствительность по отклонению; если время пролета' оказывается
равным целому числу периодов отклоняющего напряжения, луч
вообще не будет отклоняться;
сильное уменьшение яркости свечения с увеличением скорости
движения электронного луча относительно экрана ЭЛТ;
резкое возрастание требований к скорости развертки с
увеличением частоты исследуемого сигнала. Так, чтобы получить на
экране шириной 7 см осциллограмму одного периода
синусоидального сигнала с частотой 1 ГГц, необходима скорость развертки
70 000 км/с.
Все это предопределило особенности построения скоростных
ЭЛТ. В частности, выводы отклоняющих пластин скоростных ЭЛТ
впаивают в непосредственной близости с пластинами (через
стекло) . Это существенно уменьшает индуктивности и емкости
выводов по сравнению с обычными ЭЛТ, в которых выводы пластин
делаются через общий цоколь. Оконечные каскады усилителей
осциллографа располагают вблизи выводов пластин.
Важной мерой, позволяющей в значительной мере избежать
влияния, конечного времени пролета электронов на
чувствительность ЭЛТ, является применение отклоняющей системы бегущей
волны, которая представляет собой совокупность коротких
пластин, соединенных между собой через небольшие индуктивности.
Расстояние между пластинами увеличивается вдоль оси z (по мере
приближения к экрану), что исключает попадание отклоненного
электронного луча на пластины. Такая отклоняющая система
является длинной линией с сосредоточенными постоянными. Если
согласовать выходное сопротивление усилителя с волновым
сопротивлением линии, включить на выходе согласованную нагрузку,
то сигнал будет распространяться вдоль линии без отражений.
Если время задержки каждой секции т= У LC (где С — емкость
между парой пластин) равно времени пролета электронов между
соседними секциями, то общие частотные искажения будут
определяться длиной одной секции. Общая чувствительность по
отклонению будет пропорциональна числу секций.
Для повышения энергии электронного луча, для обеспечения
достаточной яркости свечения экрана необходимо увеличивать
ускоряющее напряжение. Однако простое увеличение ускоряюще-
то напряжения согласно (7.2) приведет к снижению
чувствительности по отклонению. Поскольку усиление сигналов в скоростных
осциллографах также сложная задача, такой путь оказывается
неприемлемым. Поэтому используют ЭЛТ с системой послеуско-
рения, основанной на ускорении электронов после того, как луч
прошел отклоняющую систему. Для этого в трубках используются
194
три анода, на последний из которых подается высокое
напряжение до 20 кВ. Яркость свечения существенно увеличивается, по-
. скольку ее значение пропорционально квадрату ускоряющего
напряжения.
В усилителях скоростных осциллографов применяют
транзисторы с граничной частотой до 2,5 ГГц, к мощности которых
предъявляются существенные требования. Данный факт требует
пояснения, поскольку энергия, необходимая для отклонения луча в ЭЛТ,
практически равна нулю. Чем шире полоса пропускания усилителя,
тем меньше должно быть сопротивление нагрузки, на которую он
^работает. Если усилитель работает на секционированную
отклоняющую систему с волновым сопротивлением 150 Ом, то для
получения напряжения 30 В необходим ток 0,5 А. Этот ток должен
обеспечить транзистор.
Для увеличения скорости движения луча необходимо
сформировать пилообразное напряжение с весьма коротким циклом
прямого хода. Как следует из (7.6), скорость нарастания напряжения
при заряде конденсатора зависит от постоянной времени RC-цешп.
Уменьшение емкости конденсатора менее 40...50 пФ
нецелесообразно, так как в этом случае существенную роль начнут играть
паразитные емкости и параметры сигналов генератора развертки
будут зависеть от сменных деталей и различных случайных
факторов. Однако при С = 40...50 пФ обеспечить нужную скорость
нарастания можно лишь при достаточно большом токе заряда,
порядка 0,4...0,6 А, что усложняет устройство питания, вызывает
необходимость применения мощных транзисторов и т. п.
Существенные трудности возникают при формировании короткого
обратного хода и синхронизации.
Задача осциллографирования сигналов быстропротекающих
процессов имеет другое техническое решение, позволяющее
избежать необходимости применения особых ЭЛТ и других сложных
узлов. Сущность этого решения заключается в использовании
временной трансформации исследуемого сигнала, например
стробоскопическим методом, позволяющим, не изменяя формы сигнала,
«растянуть» его во времени и использовать для получения
осциллограммы обычный (не скоростной) осциллограф.
Принцип стробоскопического преобразования сигнала
иллюстрирует рис. 7.28. Исходным сигналом ис (рис. 7.28,а),
повторяющимся с периодом Т, модулируется по амплитуде
последовательность коротких стробирующих импульсов «строб (рис. 7.28,6).
На время At период сигнала меньше периода следования
стробирующих импульсов. Если первый стробирующий импульс
совпадает с началом первого периода сигнала (точка ct\ на рис. 7.28,а),
то второй стробирующий импульс сдвинут относительно начала
периода на время At, третий 2At и т. д. В результате
амплитудной модуляции получаем последовательность импульсов и'с (рис.
7.28,в) в которой каждый импульс имеет размах,
пропорциональный напряжению сигнала в стробируемой точке. Например,
стробирующий импульс 4 появляется в момент времени, когда иссле-
7* 195
Рис. 7.28
дуемый сигнал имеет максимальное значение (точка а4 на рис.
7.28,а), соответственно размах четвертого модулирующего
импульса а4 (рис. 7.28,в) имеет максимальное значение. Огибающая,
соединяющая вершины модулированных импульсов, показана
штриховой линией. Как видно из сопоставления рис. 7.28,а и в, форма
огибающей повторяет форму исходного сигнала, однако ее период
превышает период исходного сигнала в п раз. Таким образом
происходит трансформация сигнала во времени.
Из рис. 7.28 видно, что стробирующие импульсы как бы
перемещаются относительно исходного сигнала, опережая их с
каждым циклом на время At. В рассмотренном примере, через семь
циклов опросный импульс совпадает с точкой ат, соответствующей
ыс = 0, и процесс повторяется снова. Таким образом, в
рассмотренном примере п = 7. Нетрудно определить, что значение п
зависит от выбора At. Чем меньше At, тем чаще располагаются
отсчеты на кривой исходного сигнала и тем больше циклов
необходимо для преобразования одного периода сигнала. Число п
можно определить из очевидного соотношения п = Т/АТ. Таким
образом, трансформация сигнала во времени связана с числом
отсчетов: чем больше отсчетов, тем сильнее растягивается сигнал во
времени. Увеличение числа отсчетов позволяет более детально
проанализировать исходный сигнал. В рассмотренном примере для
простоты специально взят плавно изменяющийся сигнал,
позволяющий показать процесс преобразования с помощью семи
отсчетов. На практике число отсчетов значительно больше, особенно
в том случае, когда исходный сигнал имеет сложную форму и в
нем содержатся резкие перепады напряжения. Однако возможны
случаи, когда число отсчетов окажется излишне большим.
Например, при fc = 4 ГГц и полосе пропускания канала У, равной 1 МГц,
необходимый коэффициент трансформации масштаба времени со-
ставит п=/с//в = 4-109/1 • 106 = 4000. Таким образом, одному
периоду исследуемого сигнала будет соответствовать 400 отсчетов, что
представляется излишним.
Имеется простой способ получения необходимого временного
преобразования без увеличения числа отсчетных точек. Он
заключается в- периодическом пропуске некоторого количества периодов
исходного сигнала. При считывании интервал следования стро-
бирующих импульсов выбирают, чтобы в одном периоде
следования стробирующих импульсов укладывалось целое число
периодов (k) сигнала. Например, можно для первого отсчета
использовать 1-й период сигнала ис, для второго а2 — 11-й, для
третьего — 21-й, для четвертого — 31-й и т. д. Общая трансформация
во времени составит величину kn.
Рассмотренный способ позволяет получить необходимое
преобразование периода сигнала при уменьшенной в k раз частоте
следования стробирующих импульсов, что упрощает конструкцию
стробоскопического осциллографа.
Структурная схема стробоскопического осциллографа
приведена' на рис. 7.29. Для формирования стробирующих импульсов
с нужной величиной временного сдвига используются два
генератора пилообразного напряжения и схема сравнения. Один
генератор формирует «быстрое» пилообразное напряжение (БПН),
и другой — «медленное» (МПН). На выходе генератора МПН
напряжение имеет форму ступенчатого нарастающего напряжения
{рис. 7.30,6). Схема сравнения вырабатывает короткие
остроконечные импульсы (рис. 7.30,в) в моменты равенства БПИ и МПИ.
Линия
задержки
Модулятор
^
J
Усилитель
Расширитель
Усилитель
вертикального
отклонения
Генератор
строб-импульсов
Формирователь
импульсов
подсвета
4>;j:!
Формирователь
синхроимпульсов
Генератор
БПН
Схема
сравнения
Генератор
МПН
Усилитель
горизонтального
отклонения
Рис. 7.29
197
б)
^pacuif
г)
/
У
V-
Until I
a
e)
2&V \3&t
m\—rm -A [•*- i**—*1 *« »-j
"^—b^J
! i i
I i
i h h h h
\
tL
l i
l i
u —
Рис. 7.30
Из этих импульсов генератор стробирующих импульсов
вырабатывает короткие импульсы, поступающие на модулятор.
Усиленные импульсы расширяются до периода повторения.
Образовавшееся ступенчатое напряжение (рис. 7.30,г) подается на
вертикально отклоняющие пластины ЭЛТ. Для достижения большей
четкости изображения плоские участки расширенных импульсов
подсвечивают специальными импульсами (рис. 7.30,5),
формируемыми специальным устройством, и подаются на катод ЭЛТ.
Изображение на экране ЭЛТ показано на рис. 7.30,е. При достаточно
высокой частоте повторения стробирующих импульсов
изображение представляет собой совокупность близко расположенных
ярких светящихся точек. Развертка луча осуществляется от
генератора МПН.
В качестве примера приведем данные промышленного
стробоскопического осциллографа С7-11, имеющего следующие
характеристики. Полоса пропускания канала У от 0 до 5 ГГц,
коэффициент отклонения 5...200 мВ/дел. Блок развертки имеет 17
фиксированных длительностей от 0,05- 10~3 до —10 мкс.
1S8
7.9. ЗАПОМИНАЮЩИЕ ОСЦИЛЛОГРАФЫ
Запоминающими называют осциллографы, позволяющие
запомнить исследуемые сигналы и длительно воспроизводить их
осциллограмму. Особо важное значение имеют осциллографы такого
типа для наблюдения и изучения сигналов однократных
процессов. Обычные осциллографы также способны воспроизводить
сигналы однократных процессов, однако детальное изучение
полученных осциллограмм возможно лишь при применении
фотографирования.
Основу запоминающего осциллографа составляет особая ЭЛТ,
называемая запоминающей (ЗЭЛТ). Такие ЭЛТ делятся на две
группы — полутоновые и бистабильные. Полутоновые ЗЭЛТ
преобразуют электрический сигнал в изображение с полутонами
(подобно кинескопу), бистабильные — в двухтоновое изображение,
содержащее две градации яркости: белое и черное. Поскольку
обычно осциллограммы формируются в двухтоновом виде,
наибольшее распространение в запоминающих осциллографах нашли
бистабильные ЗЭЛТ. Изображение осциллограммы создается в этой
трубке, как и в обычной осциллографической, с помощью люми-
несцирующего экрана. Однако возбуждение люминофора
осуществляется иначе. Вначале с помощью записывающего электронного
пучка на специальной сетке, расположенной перед экраном,
создается потенциальный рельеф. Сетка с шагом 0,1...0,2 мм имеет
металлическую основу, на которую со стороны электронного
прожектора наносится тонкий слой диэлектрика. Перед записью
осциллограммы на сетке создается отрицательный потенциал. Запись
осуществляется пучком с энергией до 3000 эВ. При такой энергии
число вторичных электронов, покидающих мишень (сетку),
существенно больше первичных и потенциал облученных участков
сетки повышается. Если теперь на сетку направить поток рассеянных
электронов от воспроизводящего прожектора, то на экран попадут
лишь те электроны, которые соответствуют участкам сетки,
несущим более высокий потенциал. Таким образом осциллограмма
как бы проецируется на экран.
Осциллографы с ЗЭЛТ характеризуются скоростью записи,
временем воспроизведения и временем сохранения. Под скоростью
записи в километрах в секунду понимают максимальную скорость
перемещения луча по экрану, при которой обеспечивается
запоминание изображения. Временем воспроизведения называют
время, в течение которого обеспечивается непрерывное
воспроизведение записанного при максимальной скорости без потери
качества изображения. Временем сохранения называют время, в
течение которого при выключенном воспроизведении или
обесточенном состоянии прибора обеспечивается сохранение ранее
записанного изображения до последующего воспроизведения или
включения прибора.
Наша промышленность выпускает несколько типов
запоминающих осциллографов. В качестве примера приведем характеристики
199
C8-9A с ЗЭЛТ 13ЛН5: скорость записи не менее 100 км/с, время
воспроизведения 1 мин, время сохранения 16 ч, полоса
пропускания канала вертикального отклонения 0...2 МГц.
7.10. ВЫБОР ТИПА ОСЦИЛЛОГРАФА
ДЛЯ ПРОВЕДЕНИЯ ЭКСПЕРИМЕНТА
В основу решения о выборе конкретного типа осциллографа для проведения
эксперимента ставятся его технические и метрологические характеристики.
Однако знание этих паспортных данных прибора недостаточно, поскольку они не
всегда дают очевидное представление о характере и степени искажения
осциллограммы. Допустим, например, что необходимо исследовать импульсы
треугольной формы. В описании к осциллографу указаны значения параметров
канала У, его полоса пропускания и переходная характеристика. Однако не ясно,
какими они должны быть для неискаженного воспроизведения треугольного
импульса заданной формы и длительности.
Прежде чем выбрать осциллограф следует:
изучить .измерительную задачу. При этом определяют характер сигнала:
гармонический «ли импульсный, ширину его спектра, граничные частоты, время
нарастания и спада, скважность, амплитуду напряжения и т. п. Оценивают
параметры цепи исследуемого объекта, к которому подключается осциллограф:
активную и реактивную составляющие сопротивления, наличие и значение
постоянной составляющей напряжения;
на основе изучения измерительной задачи сформулировать требования к
характеристикам и параметрам осциллографа и осуществить его выбор.
Электрические характеристики и параметры осциллографа. Осциллограф
характеризуется большим числом параметров. К ним относятся: параметры
каналов X, У и Z, параметры ЭЛТ, параметры калибраторов амплитуды и
длительности. Основной причиной искажения формы сигнала являются линейные и
нелинейные искажения, вносимые каналом У осциллографа. Нормируемыми
параметрами амплитудно-частотной характеристики (АЧХ) осциллографа
являются: а) полоса пропускания—диапазон частот, в пределах которого спад
АЧХ не превышает 3 дБ относительно значения иа опорной частоте; б)
номинальный диапазон—диапазон частот, в пределах которого неравномерность
АЧХ не превышает погрешности установки коэффициента отклонения; в)
опорная частота — частота, на которой спад АЧХ отсутствует. Спад АЧХ в
децибелах определяют по формуле
А = 20 lg (hf on/hf изм) >
(7.19)
где hf on, hf нзм — вертикальные размеры осциллограммы иа опорной и
измеряемой частотах.
, Для оценки линейных искажений необходимо знать нижнюю (fH) и верхнюю
(,рв) граничные частоты полосы пропускания канала У. Частота fH определяет
искажения горизонтальных участков импульсов большой длительности, а
частота {в — искажения быстрых перепадов сигнала.
При оценке искажений импульсных сигналов удобно пользоваться
переходной характеристикой (ПХ). В осциллографе ПХ канала У при его аттестации
оценивается по осциллограмме на экране ЭЛТ (рис. 7.31) при подаче на его
вход перепада напряжения. Обычно нормируется: а) время нарастания — вре-
200
менной интервал, в течение которого ПХ нарастает от 0,1 до 0,9 от
установившегося значения; б) выброс — часть ПХ, превышающей установившееся
значение. Численное значение выброса выражают в процентах:
бвыбр = №в/ад-Ю0%. (7.20)
Значение выброса ПХ связано с формой АЧХ. Оптимальной АЧХ,
позволяющей получить минимальное Тф при минимальном выбросе, является АЧХ,
приближающаяся к кривой Гаусса:
Л(/) = ехр[ — 0,35 (ШЬ (7.21)
У большинства осциллографов, выпускаемых в настоящее время, форма
частотной характеристики соответствует формуле (7.21) не только в пределах полосы
пропускания, но и вне ее, т. е. при }>frp. При этом обеспечивается
минимальный размер выброса.
Нормируемым параметром осциллографа являются калиброванные значения
коэффициента отклонения канала У. Максимальное и минимальное значения
коэффициента отклрнения (или обратной величины — чувствительности)
приводятся в описании к осциллографу. Важными параметрами являются входное
сопротивление RBX и входная емкость Свх канала У. Чем больше Rbx и меньше Свх,
тем меньше проявится влияние подключения осциллографа к измеряемой цепи.
Обычно RSx~ 1 МОм, Свх = 20... 40 пФ. При использовании выносного
пробника входная емкость может-быть уменьшена до 1 ... 10 пФ.
Основным параметром, характеризующим канал X осциллографа, является
диапазон изменения длительности развертки. 'В современных приборах
длительность прямого хода развертки Гпр обычно задается в виде коэффициентов
развертки (7.17). Указывается также коэффициент нелинейности развертки.
Обычно в конструкциях осциллографа предусмотрена возможность использования
канала X для подачи внешнего сигнала. Поэтому канал характеризуется также
коэффициентом отклонения, полосой пропускания, входным сопротивлением и
емкостью.
Параметрами канала Z, которые учитываются при выборе осциллографа,
являются: диапазон частот и напряжение модулирующего сигнала, входное
сопротивление и емкость.
Рекомендации по выбору осциллографа. При анализе гармонических
колебаний выбор осциллографа определяется нижней и верхней частотами АЧХ
канала У и коэффициентом отклонения. Частота исследуемого сигнала., должна1
находиться в рабочем диапазоне канала У. Необходимый коэффициент отклонения
определяется из соотношения (7.16). Положим, что исследуемый гармонический
сигнал имеет амплитуду 1.0 м.В. Осциллограф С1-64 имеет канал У с коэффици-
Рис. 7.31
Рис. 7.32
201
ентом отклонения Кв, регулируемым в пределах от 0,005 до 10 В/дел. Рабочая
часть экрана имеет высоту 6 дел. >(48 мм). Согласно (7JL8) при Ks =0,005
размер отклонения в вертикальном направлении Ib = Ubx/Kb= Ю- 10-3/0,-OO5=i2 дел.
Полный вертикальный размер осциллограммы, определяемой размахом
колебаний (от пика до пика), составит 4 дел., т. е. 2/3 высоты экрана, что вполне
достаточно для наблюдения. Следовательно, осциллограф С1-64 пригоден для
решения поставленной задачи.
При .исследовании импульсных сигналов удобно оценивать пригодность
осциллографа по переходной характеристике канала У. Время нарастания
переходной характеристики осциллографа тн.о должно быть в несколько раз меньше
времени нарастания фронта исследуемого сигнала Тф. В табл. 7.1 даны
рекомендации по выбору ПХ канала У. Например, при исследовании колоколообразных
импульсов время нарастания ПХ осциллографа должно быть в б раз меньше
времени нарастания сигнала. При соблюдении приведенных рекомендаций
погрешности воспроизведения амплитуды, времени нарастания и длительности
исследуемых сигналов не превышают 1 ...2%.
Таблица 7.1
Форма импульса *
Отношение ——
Колоколооб-
разная
1/5
Треугольная
1/10
Трапецеидальная с
экспоненциальным
фронтом' и
срезом
1/3
Пригодность применения осциллографа для исследования импульсных
сигналов по АЧХ можно оценить на основе следующего соотношения:
Тн«0,35//в, (7.22)
где fB — верхняя граничная частота канала У в мегагерцах, а тн — время
нарастания ПХ в микросекундах. Используя (7.22), можно установить время
нарастания переходной характеристики канала У по его частотной характеристике.
От нижней граничной частоты fB зависит правильность передачи плоской
вершины исследуемого импульса. Нижняя граничная частота полосы
пропускания канала У и спад плоской вершины связаны соотношением
/н«б/2яти, (7.-23)
где б ==Д/г//ги — относительный спад вершины (рис. 7.32), ти — длительность
импульса. Следует отметить, что спад вершины импульсов связан с наличием
разделительных конденсаторов в межкаскадных связях усилителя канала У. В
осциллографах постоянного тока с открытым входом таких искажений нет.
212
7.11. ОЦЕНКА ПОГРЕШНОСТЕЙ
ИЗМЕРЕНИЯ АМПЛИТУДЫ СИГНАЛОВ
И ВРЕМЕННЫХ ИНТЕРВАЛОВ
При оценке погрешностей измерений, проводимых с помощью
осциллографа, учитывают следующие метрологические
характеристики и параметры: ширину линии луча, погрешность
коэффициента отклонения, погрешность измерения напряжения,
погрешность коэффициента развертки, погрешность измерения временных
интервалов, параметры переходной характеристики, амплитудно-
частотную характеристику. Переходная и амплитудно-частотные
характеристики являются нормируемыми динамическими
характеристиками осциллографа. Необходимые данные для расчета
погрешностей могут быть получены из технического описания
осциллографа конкретного типа.
Некоторые составляющие погрешности можно исключить при
обработке результатов наблюдений. К ним относятся
систематические погрешности, связанные с неравномерностью АЧХ канала
вертикального отклонения, конечное время нарастания переходной
характеристики канала вертикального отклонения. Современные
осциллографы имеют АЧХ канала вертикального отклонения,
описываемую формулой (7.21) или приближающуюся к ней. О
близости АЧХ к оптимальной можно судить по времени нарастания
переходной характеристики и размере выброса. В многокаскадных
усилителях, построенных из условий, получения минимального
времени нарастания переходной характеристики и минимального
выброса (2...3%), спад АЧХ в области верхней граничной частоты
весьма приближается к кривой Гаусса, представленной на рис. 7.33.
Здесь по вертикальной оси отложено относительное значение
спада АЧХ, а по горизонтальной оси — относительная частота f/fB.
По определению граничной частоты /в ей должен соответствовать
спад АЧХ, равный 0,7. Поэтому на рис. 7.33 спад 0,7 (т. е. 30%)
соответствует ///в = 1. Таким образом, при измерении напряжения
синусоидального сигнала из-за спада АЧХ канала вертикального
д,в
W \
■а,2 \
°Л,05 0,1 0,1 0,5 1,0 2,0 f/fb "'' 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8^ f/fb
Рис. 7.33 Рис. 7.34
203
V°/°
-10
-20
JO
отклонения возможна систематическая погрешность измерения до
30%. что значительно превышает погрешность измерения,
связанную с другими факторами. Исключить эту погрешность можно,
используя поправочный множитель, формулу (7.21) или
соответствующий график (рис. 7.34). Размер поправочного множителя
определяется соотношением |=1/Л, где А — значение спада АЧХ,
соответствующее частоте измеряемого колебания.
При измерении длительности фронта и среза импульсов,
соизмеримых с длительностью нарастания переходной характеристики
канала У, возникает погрешность, связанная с конечным
временем нарастания и спада переходной характеристики канала
вертикального отклонения осциллографа. Введение поправки
позволяет устранить этот вид систематической погрешности. При этом
длительность фронта исследуемого импульса определяют с
помощью формулы Тф=^т2ф.0—т2н, где тф.о — длительность фронта
импульса, определенная по изображению на экране осциллографа,
ти — время нарастания переходной характеристики осциллографа.
Кроме погрешностей, определяемых характеристиками
осциллографа и связанных с его внутренними цепями, возможно
возникновение систематических погрешностей, обусловленных
подключением прибора в измеряемую цепь. При этом значения
погрешностей определяются полным входным сопротивлением
осциллографа. Расчет систематических погрешностей такого типа
аналогичен расчетам погрешностей, связанных с подключением
вольтметров.
Помимо систематических погрешностей, поддающихся учету и
устранению, осциллографическим измерениям свойственны
неучтенные систематические погрешности, связанные с погрешностями
коэффициента отклонения, коэффициента развертки,
неравномерностью переходной характеристики. При съеме показаний
возникает случайная визуальная погрешность, состоящая из
погрешности совмещения линий осциллограммы с рисками шкалы и
погрешностей отсчета положения линии относительно делений шкалы.
Методика расчета погрешности содержится в ГОСТ на
электроннолучевые осциллографы. Считается, что визуальная погрешность
совмещения составляет 1/5, а погрешность отсчета 1/3 ширины
луча Ь. При измерении амплитуды импульсов относительная
визуальная погрешность
где Ь и размер изображения h — в миллиметрах.
Кроме визуальной погрешности, при измерении амплитуды
импульсов учитывается погрешность бн, связанная с
неравномерностью переходной характеристики, и бк.о — погрешность
коэффициента отклонения. Суммарная погрешность определяется
соотношением
*/ = /»».„+ 8» + ^.
204
Если в описании осциллографа приведены данные о
статической погрешности измерения напряжения, обозначаемой Ьи, то
суммарную погрешность можно рассчитать по формуле Аи=У&2и+&2н.
Однако значение 6с/ задается обычно для определенного
диапазона размеров осциллограмм, например от 2,4 до 6 см.
Погрешность измерения длительности импульсов
прямоугольной формы оценивают путем учета:
погрешности, вызванной неточностью определения уровня 0,5
амплитуды, равной
бо,5 и = V2 (бС0ВМ • tg ах)« + 2 (60овм • tg а2)з =
= 2^.100)l/tg2ai + tg2a2 = °^Ktg2a1 + tg2cc2100%,
где Ъ — ширина линии в миллиметрах; h — размер изображения
по вертикали в миллиметрах; ai, аг — углы, образованные
соответственно фронтом и спадом импульса и вертикальной линии
шкалы в градусах;
визуальной погрешности:
sB„3^/(^-ioo)4(^-^V-f6.iooo/0)
где бвиз t — визуальная погрешность определения временного
интервала в процентах, Ь — ширина линии в миллиметрах,
/—размер изображения в миллиметрах по уровню 0,5; 6.к.р —
погрешность коэффициента развертки.
Погрешность измерения длительности импульса прямоугольной
формы рассчитывается по формуле
' ' к.р ' 0,5 U ' виз /
Если задана погрешность измерения временных интервалов 6*,
то расчет суммарной погрешности можно производить по
следующей формуле: Аг== V^) + ^lbU-
Пример. На экране осциллографа имеется осциллограмма импульса
прямоугольной формы. Высота осциллограммы /г = 20 мм, ширина на уровне 0,5 /=
= 3й мм, а, = 9°; tx2=10°.
Технические данные осциллографа: ширина линии 6 = 0,8 мм, погрешность
коэффициента отклонения 6к.о = 5%, погрешность коэффициента развертки
бк.р = 6%, бн = 3%. При. измерении установлены: коэффициент отклонения
Л'к.о=10 мВ/см, коэффициент развертки ^к.р=100 мс/см.
Определить параметры импульсов и значения погрешностей:
амплитуда импульсов U = KK.o-h= 10-2 = 20 мВ;
0,4Ь 0,4-0,8
визуальная погрешность бВИз17«=—7—-100= ——-— -100=1,6%;
общая погрешность Аи = V Ь2К 0 + б2 + 6^из и = У52 + 32+1,62 = 6,05%
длительность импульсов тя = ^к.р/= 100-3 = 300 мс;
205
погрешность отсчета
0.46 0,4-0,8.,,
\bU = ""J— Vtg2«i + tg2a2 = -^— Vtg^o + tg» 10" = 0,3o/0;
0,46 0,4-0,8
визуальная погрешность бвиз <« -100 = 100= 1,06%;
общая погрешность
бТ = Vblv + bhu+bls = У6»+ 0,3»+1,06» + 6, \% .
Глава 8. ИЗМЕРЕНИЕ ЧАСТОТНО-ВРЕМЕННЫХ
ПАРАМЕТРОВ И АНАЛИЗ СПЕКТРА
СИГНАЛА
8.1. АНАЛОГОВЫЕ МЕТОДЫ
ИЗМЕРЕНИЯ ЧАСТОТЫ
В связи используется широкий диапазон частот: от нескольких
сот килогерц до десятков гигагерц. Низкочастотное оборудование
охватывает полосы частот от 20 Гц до 120 кГц. Поэтому
измерение частоты является весьма распространенной задачей.
Частота / и время Т являются обратными величинами: /=1/7",
где / измерено в герцах, а Г — в секундах. Кроме того, частота
связана с длиной волны известным выражением: /=с/Я, где с =
= 3-108 м/с — скорость света в свободном пространстве; X —
длина волны в метрах. Следовательно, измерения частоты, времени
или длины волны теоретически равноценны, но практически в
большинстве случаев измеряются частоты и интервалы времени.
Длина волны при необходимости легко вычисляется.
Погрешность измерения частоты и интервалов времени
задается в абсолютных значениях, например. ±10-2 Гц, 10 нс, но чаще в
относительных значениях. Допустимая погрешность измерения
частоты данного устройства должна быть всегда меньше допустимой
погрешности установки этой частоты, по крайней мере, в 3 раза.
Например, несущая частота радиостанции /нес = 1,5 МГц±3 Гц.
Погрешность установки частоты А///Нес = бнес = 3/1,5-106 = 2- Ю-6.
Погрешность прибора для измерения частоты в этом случае
должна быть меньше чем 10~6. Такой прибор должен поверяться еще
более точным устройством; его погрешность не должна превышать
2-Ю-7. Имеются приборы, позволяющие измерять частоту с
погрешностью 10~9 и даже лучше. Измерение низких частот обычно
выполняется со значительно большей погрешностью. Интервалы
времени измеряются с погрешностью 10~4...10~5.
Частоту можно измерять методом сравнения, резонансным ме-
206
тодом и методом дискретного счета. На основе метода
дискретного счета созданы удобные и точные приборы —
электронно-счетные частотомеры с цифровой индикацией, которые вытесняют
приборы для измерения частоты и интервалов времени, основанные
на других методах.
Метод сравнения. Для измерения неизвестной частоты
методом сравнения необходимо иметь генератор сигнала образцовой
частоты и индикатор, с помощью которого можно определить
равенство измеряемой и образцовой частот или их кратность. Если
в качестве индикатора используется осциллограф, то способ
измерения называют осциллографическим; если телефон,
магнитоэлектрический микроамперметр или электронно-оптический
индикатор, регистрирующие совпадение частот, — способом нулевых
биений или гетеродинным способом.
Метод сравнения принципиально пригоден для измерения
низких и высоких частот. Он прост и довольно точен.
Осциллографический способ измерения частоты можно
применить при линейной, синусоидальной и круговой развертках.
При линейной развертке в качестве образцовой
используется частота генератора развертки данного осциллографа.
Напряжение неизвестной частоты подают на вход канала
вертикального отклонения осциллографа, а частоту генератора развертки
(при выведенной ручке напряжения синхронизации) изменяют до
тех пор, пока на экране не получится изображение одного
периода. При этом измеряемая частота равна установленной частоте
развертки. Во многих осциллографах частота развертки
калибрована и погрешность измерения соответствует погрешности
калибровки. На экране осциллографа можно получить изображение
нескольких периодов, при этом неизвестная частота больше
частоты развертки в п раз, где п — число периодов. Практически п'
не должно превышать 5...6. Диапазон частот определяется полосой
пропускания канала вертикального отклонения.
При синусоидальной развертке напряжение
неизвестной частоты подается на вход вертикального отклонения, а
напряжение образцовой частоты — на вход горизонтального
отклонения. Генератор развертки осциллографа выключается.
Изменяя образцовую частоту, добиваются неподвижной или
медленно движущейся фигуры Лиссажу. Если она имеет вид прямой,
эллипса или окружности, то частоты равны: /x=fo- Если
неподвижная осциллограмма получается более сложной формы, то это
свидетельствует о кратности неизвестной и образцовой частот,
которую нужно определить следующим образом.
Полученную фигуру нужно мысленно пересечь вертикальной и
горизонтальной линиями (рис. 8.1) и сосчитать число пересечений
ими ветвей фигуры по вертикали пв и по горизонтали пт.
Отношение этих чисел равно отношению образцовой и измеряемой частот:
nB/«r=fo//x, откуда
fx = fotlrlnB. (8.1)
207
Ж -ХХ С
1ч_У
fx*4* fx^,5f° fx=fl fx'3ft
Рис. 8.1 Рис. 8.2
Напряжения частот можно подавать на противоположные
входы, при этом в (8.1) значение образцовой частоты нужно
умножать на обратное отношение лв/лг.
Синусоидальная развертка применяется до кратности частот,
меньшей 10, так как большее число пересечений трудно
сосчитать. Верхний предел измеряемой частоты определяется полосой
пропускания усилителей в каналах осциллографа. Напряжения
сравниваемых частот 10 В и больше можно подавать
непосредственно на пластины ЭЛТ, минуя усилители. При этом верхний
предел измерения частоты достигает 100 МГц и больше.
Погрешность измерения определяется погрешностью установки
образцовой частоты и нестабильностью обеих частот. Чем больше
нестабильность любой из них, тем быстрее вращается фигура
Лиссажу и труднее определить кратность частот.
При круговой развертке напряжение образцовой
частоты через фазорасщепитель подают на оба входа осциллографа.
На экране осциллографа появляется линия развертки в виде
окружности, которая вращается с частотой, равной образцовой, т. е.
время одного оборота равно длительности периода. Напряжение
неизвестной частоты подают на модулятор ЭЛТ, и оно изменяет
яркость линии развертки 1 раз в течение периода измеряемой
частоты.
Если частоты ,fx = f0, то половина окружности будет светлой,
а половина — темной (рис. 8.2). Если же fx>fo, то окружность
становится состоящей из штрихов, число которых п (светлых и
темных) равно кратности неизвестной и образцовой частот: п =
= fxlfo, откуда fx = nf0.
Если частоты не кратны, то осциллограмма вращается и
измерение затруднено. Круговая развертка позволяет измерять
частоты с кратностью значительно большей, чем при синусоидальной
развертке, так как штрихи считать удобнее, чем пересечения. При
этом можно измерить частоту и ниже образцовой, для чего
напряжение измеряемой частоты через фазорасщепитель подают на
оба входа осциллографа и получают линию развертки в виде
окружности, а напряжение образцовой частоты подают на
модулятор трубки. При неподвижной осциллограмме fx = f0/n.
Погрешность измерения и пределы измеряемых частот
определяются так же, как и при синусоидальной развертке.
208
Способ нулевых биений применяют для измерения высоких
частот. Два напряжения: ul = U1 cos со,/ и «^l^costo^— подают
на нелинейный элемент — смеситель. На выходе смесителя
появляется напряжение многих частот: nfu mf2 — гармонические
составляющие и nfi±mf2 — комбинационные составляющие. В
числе комбинационных частот имеется разность частот первых
гармоник, которая называется частотой биений fe=\fi—/г|- Если
частоты /i и |/2 равны друг другу, то частота биений равна нулю,
поэтому способ измерения двух частот с помощью биений называют
способом нулевых биений.
Схема измерения частоты способом нулевых биений
представлена на рис. 8.3,а. Напряжения образцовой /0 и измеряемой \х
частот подают на вход смесителя. На его выходе включают
индикатор частоты биений, в качестве которого можно использовать
головной телефон. Если плавно изменять образцовую частоту, то
при частоте биений ниже 20 кГц (fe=\fx—/о|<20 кГц) в
телефоне будет слышен тон разностной частоты, понижающийся по мере
приближения частоты /0 к измеряемой частоте fx. На рис. 8.3,6
показано изменение частоты биений /б в зависимости от
изменения частоты /о при неизменной измеряемой частоте fx. В точке а
частота биений равна нулю и значение измеряемой частоты
совпадает со значением образцовой. Однако определить момент,
когда fx = f0, по отсутствию тона в телефоне нельзя, поскольку
человеческое ухо не реагирует на частоты ниже 16 кГц. Появляется
зона «нулевых биений», приводящая к абсолютной погрешности
до 32 Гц.
Для уменьшения этой погрешности можно воспользоваться
несколькими путями. Просто и быстро можно использовать
вилочный отсчет, который заключается в следующем. Устанавливают
некоторую частоту /ю, при которой слышен удобный для
запоминания тон биений, например в точке 1 (рис. 8.3,6). Затем, перейдя
зону нулевых биений, устанавливают образцовую частоту на
значение f2o, при котором появляется прежний тон биений (точка 2).
Очевидно, что среднее арифметическое двух значений образцовой
частоты слева и справа от нулевых биений равно измеряемой
частоте: /ж= (fio + /2o)/2. Дополнительная погрешность, возникающая
при вилочном отсчете за счет неточности определения равенства
Генератор
fx
Ъ
Генератор
/в
Смеситель
Индикатор
4
7,5-tO*
1S
ч
\
fw
,f
V
а
2i
fa
/
/
Л,
Зона „ нулевь;х'
ffuenuu
Рис. 8.3
209
частоты биений, невелика и тем меньше, чем лучше музыкальный
слух у оператора, выполняющего измерения.
Второй путь уменьшения погрешности заключается в замене
телефона магнитоэлектрическим миллиамперметром, т. е. в
замене слухового индикатора визуальным. При частоте биений,
меньшей 10 Гц, стрелка прибора колеблется с частотой биений и при
fx=f0 останавливается на нуле. Хорошие результаты можно noj
лучить, применив для визуального наблюдения нулевых биений
осциллограф или электронно-оптический индикатор.
Следует иметь в виду, что если напряжения образцовой и
измеряемой частот содержат гармоники, то нулевые биения
получаются при условии выполнения равенства nfx=mf0. Это явление
создает неопределенность, для устранения которой полезно знать
приблизительное значение fx. Известно, что интенсивность
гармоник падает с увеличением их номеров, поэтому самая большая
громкость биений получается «а основных частотах и быстро
уменьшается на высших гармониках.
Гетеродинные частотомеры работают по принципу нулевых
биений. Измеряемая частота сравнивается с частотой
калиброванного генератора, а нулевые биения фиксируются телефоном или
другим индикатором. Измеряемая частота определяется по шкале
генератора или по соответствующим таблицам.
На рис. 8.4 представлена структурная схема простейшего
гетеродинного частотомера. Генератор с плавной настройкой
изготовляется из высококачественных деталей, питание его
стабилизировано, и поэтому его выходное напряжение в пределах
каждого поддиапазона имеет макую нестабильность частоты. Генератор
настраивается конденсатором переменной емкости С„, в котором
пластины выполнены таким образом, что обеспечивается
линейная зависимость изменения частоты от изменения положения
ротора конденсатора. Это позволяет интерполировать отсчеты
между делениями шкалы настройки.
Главным источником погрешности измерения частоты
гетеродинным частотомером является нарушение градуировки шкалы
конденсатора С„. Для восстановления градуировки в гетеродинном
частотомере имеется источник опорной (образцовой) частоты —
генератор с кварцевой стабилизацией. По этой частоте перед каж-
-С
Генератор
с плавной настройкой
W
1^
Смеси
УНЧ
Индикатор
L
LJ к
Генератор
с кварцевой стабилизацией
210
Рис. 8.4
дым измерением шкала настройки проверяется и с помощью под-
строечного конденсатора Ск калибруется. Для калибровки
напряжение генератора с кварцевой стабилизацией через ключ К и
напряжение генератора с плавной настройкой подают на смеситель;
шкала настройки при этом устанавливается на определенное
значение, соответствующее опорной частоте /кв. Если на выходе
усилителя низкой частоты УНЧ слышны биения, нужно их свести к
нулю с помощью конденсатора Ск.
Для расширения диапазона измеряемых частот используются
высшие гармоники генератора с плавной настройкой, а для
калибровки —- высшие гармоники обоих генераторов. В результате
при настройке генератора с плавной настройкой появляется много
нулевых биений, что затрудняет отсчет измеренной частоты. Для
устранения такой неопределенности гетеродинные частотомеры
снабжаются градуировочными таблицами или графиками. Шкала
настройки частотомера обычно выполнена двух- или
трехступенчатой с большим замедлением, что позволяет получить большое
число отсчетных точек.
Методика измерения частоты зависит от структурной схемы
данного гетеродинного частотомера и приводится в его описании.
Точность измерения частоты высокая. Источники погрешности:
погрешность значений частоты генератора с кварцевой
стабилизацией; нестабильность этой опорной частоты; нестабильность
частоты генератора с плавной настройкой; погрешность градуировки
его шкалы. Промышленность выпускает гетеродинные частотомеры
трех классов точности, с пределами допускаемых погрешностей:
5-Ю-4, 5• 10~s и 5-10-6. Погрешность опорных частот у каждого
частотомера на порядок меньше. С помощью набора
гетеродинных частотомеров можно перекрыть диапазон измеряемых частот
от 125 кГц до 78,3 ГГц. Процесс измерения частоты
гетеродинными частотомерами довольно длительный; он требует
квалификации и внимания оператора.
Резонансный метод. Резонансный метод измерения частоты
основан на явлении электрического резонанса, возникающего в
колебательном контуре. Метод применяется на высоких и
сверхвысоких частотах. Структурная
схема измерения частоты приведена
на рис. 8.5. Источник напряжения
измеряемой частоты fx
связывается с резонансным частотомером.
Последний представляет собой
высококачественный
измерительный контур с точным
градуированным механизмом настройки и
индикатор резонанса. Для
измерения частоты нужно контур на- [
строить в резонанс с fx по
максимальному отклонению указателя рт. 8.5
Источник
4
Индикатор
резонанса
211
индикатора и произвести отсчет частоты по шкале механизма
настройки или по таблице (графику).
Конструкция измерительного контура зависит от диапазона
частот: на частотах 50 кГц...200 МГц применяют контуры с
сосредоточенными параметрами, из катушек индуктивности и
конденсатора переменной емкости, на более высоких частотах контуры
с распределенными параметрами, т. е. отрезки коаксиальных
линий или объемные резонаторы. Резонансный метод измерения
частоты широко применялся с самого начала возникновения
радиотехники, однако ему присущи существенные недостатки и он
вытесняется методом дискретного счета. К недостаткам резонансного
метода относятся: необходимость подбора связи источника
измеряемой частоты и частотомера; тщательность настройки и
значительная погрешность, составляющая 0,05...0,5%. Погрешность
измерения частоты резонансным методом зависит от добротности
измерительного контура частотомера, от чувствительности
индикатора, точности градуировки шкалы механизма настройки
измерительного контура и отсчета по ней, температуры и влажности
окружающего воздуха, от степени связи частотомера с
источником измеряемой частоты.
Основными характеристиками резонансных частотомеров
являются: диапазон измеряемых частот, погрешность измерения и
чувствительность. Чувствительностью частотомера называется
минимальная поглощаемая им мощность, необходимая для уверенного
отсчета момента резонанса.
Резонансные частотомеры преимущественно применяют для
измерения сверхвысоких частот в виде встроенных узлов
измерительных генераторов СВЧ или отдельных переносных приборов.
Связь частотомера с источником измеряемой частоты
осуществляется через небольшую штыревую или рупорную антенну или
через элементы связи в виде петли, зонда, щели и отверстия.
Для уменьшения связи перед частотомером часто включают
аттенюатор с ослаблением обычно 10 дБ. Иногда частотомер
включают через направленный ответвитель.
В качестве индикатора резонанса применяют детектор
(точечный германиевый или кремниевый диод) и магнитоэлектрический
микроамперметр. Для повышения чувствительности применяют
усилители постоянного тока, а при импульсной модуляции сигнала
СВЧ после детектора включают интегрирующий каскад,
расширяющий импульсы, усилитель низкой частоты и детекторный
вольтметр или осциллограф.
Резонансные частотомеры СВЧ по способу включения в
измеряемую цепь разделяются на проходные и поглощающие.
Колебательный контур проходного частотомера снабжен двумя
элементами связи: входным для связи с электромагнитным полем в
линии передачи энергии и выходным для связи с индикатором.
Момент настройки в резонанс определяют по максимальному
показанию индикатора (рис. 8.6,а); если частотомер не настроен в
резонанс, показаний нет.
212
viitiiiiuizzm
Х&\ tiMii>i>M
ч
*'"""""""\
• >>u/j.>>/r;>>>;>j.-»»»/>j/j»A
а)
I» \
h
В $
ГА,
Vlllllllllll.
1
y?}})}}}ItfM>frrr>
КЗ*
м
\>>>>11>))>1>»>/>/»>/>>>>11т>т
S) Л> "' Г
Рис. 8.6
Поглощающий частотомер имеет только один элемент связи —-
входной, а индикатор, как и частотомер, включен в линию
передачи. Пока контур частотомера не настроен в резонанс с частотой
проходящего по линии электромагнитного поля, показания
индикатора максимальны; при настройке часть энергии поля
поглощается и показания индикатора уменьшаются (рис. 8.6,6). Такой
вариант включения частотомера предпочтительнее, так как
позволяет непрерывно наблюдать за его работой.
8.2. ЦИФРОВЫЕ ЧАСТОТОМЕРЫ
И ИЗМЕРИТЕЛИ ВРЕМЕННЫХ ИНТЕРВАЛОВ
Для измерения частоты fx периодического сигнала достаточно
сосчитать число N его периодов за известный интервал времени
At0. Результат измерения определяется отношением fx=NjAto.
С другой стороны, при измерении неизвестного интервала
времени Atx достаточно подсчитать число периодов Т0 сигнала
известной частоты /о за измеряемый интервал Atx. Результат измерения
представляется выражением Atx = N/fo = NT0. Период сигнала
известной частоты Г0 определяет в данном методе, по сути дела,
цену деления «электронной линейки», с помощью которой
измеряют неизвестный временной интервал. Указанные методы
прямого счета лежат в основе большинства известных цифровых
методов измерения частотно-временных параметров электрических сиг-
нал&в. Так как частота и период сигнала связаны между собой, то-
213
очевидно, что каждая из этих величин может быть определена
косвенным методом по результату измерения другой.
Цифровые частотомеры, оснозанные на методе прямого счета.
Рассмотрим упрощенную структурную схему цифрового
(электронно-счетного) частотомера в режиме измерения частоты (рис.
8.7,а). Исследуемый сигнал «Вх поступает на входное устройство,
где осуществляется необходимое усиление (или наоборот,
ослабление) и фильтрация сигнала. Формирующее устройство
преобразует исследуемый сигнал в последовательность импульсов «фу ,
частота которых равна частоте исследуемого сигнала. Селектор
представляет собой управляемый электронный ключ, который
пропускает на электронный счетчик сформированные импульсы
неизвестной частоты только при наличии на управляющем входе
стробирующего импульса ыуу, длительность которого определяет
время измерения At0. Стробирующий импульс вырабатывает
устройство управления с помощью делителей частоты из сигнала
опорного высокостабильного генератора, и его длительность
выбирается кратной 10ft с, где k — целое число. Число импульсов N,
отсчитанное электронным счетчиком на выходе селектора и
фиксируемое—цифровым отсчетным устройством (ЦОУ),
пропорционально частоте входного сигнала. Так какД/0=Юьс, частота fx=
= AM0-h Гц. Значение множителя 10_ft учитывается положением
десятичной запятой на ЦОУ с указанием размерности
получаемого результата (Гц, кГц).
На основе приведенных диаграмм (рис. 8.7,6) нетрудно
выделить две основные составляющие погрешности измерения частоты
методом прямого счета и оценить их значение. Во-первых, это
погрешность бо формирования образцового интервала времени
Л/о, в течение которого пропускает импульсы временной селектор.
Эта погрешность в основном определяется неточностью начальной
установки и нестабильностью частоты опорного кварцевого
генератора. Обычно в ЦЧ используют термостатированные кварцевые
генераторы с /о = 0,1 ... 1 МГц, максимальная относительная
погрешность частоты которых составляет Ю-7... Ю-9. Это достаточно
малая величина, которой во многих практических случаях можно
пренебречь по сравнению со второй составляющей —
погрешностью дискретности. Действительно, зафиксировать изменение
частоты с помощью счетчика можно только в том случае, если
это приведет к появлению (или пропаданию) хотя бы одного
импульса-. Если учесть также, что исследуемый сигнал и
стробирующий импульс по времени между собой не связаны, возможная
погрешность подсчета импульсов составит ±'1 импульс. В результате
для максимальной относительной погрешности дискретности при
измерении частоты получаем" выражение бд= ± l/N = ±llfxAto.
'Погрешность дискретности можно уменьшить, если момент
начала измерения, т. е. появления стробирующего импульса,
синхронизовать с исследуемым сигналом. Погрешность дискретности при
этом всегда положительна: бд= 1//жЛ^о-
Как видно из приведенных формул, погрешность дискретности
31.4
Входное
устройство
Опорный
генератор
Формирующее
устройство
Делитель
частоты
и
Фу
S
Временной
селектор
л
Устройство
управления
и
ас
Электронный
счетчик
К цифровое
отсчетному
устройству
wwwvm
е*Л
I I I I I I I I I I II
X
1
"»с|
11111111
1)
Рис. 8.7
уменьшается с увеличением измеряе
мой частоты fx и времени измерения "b*",
Ate. При задании любых двух из этих
величин можно вычислить третью.
Расширение частотного диапазона
в сторону высоких частот ограничено
быстродействием элементной базы, в м^ч
частности элементов схемы временного
селектора и счетчика. Поэтому при
измерении высоких частот целесообразно
предварительно разделить частоту
входного сигнала в определенное число
раз и далее использовать относительно
недорогие селекторы среднего
быстродействия, умножая результат на коэффициент предварительного»
деления. Важно помнить, что при измерении высоких частот
относительное значение погрешности дискретности снижается и
становится сравнимым с погрешностью опорного генератора бо.
Поэтому здесь необходимо применять кварцевые генераторы
чрезвычайно высокой стабильности. Для работы на еще более высоких
частотах (1 ГГц и выше) используют гетеродинное
преобразование частоты и измеряют цифровым способом разность частот
исследуемого сигнала и сигнала перестраиваемого
высокочастотного гетеродина.
С уменьшением измеряемой частоты относительное значение-
погрешности дискретности увеличивается. В некоторых пределах,
это увеличение можно скомпенсировать увеличением времени
измерения. Однако при этом уменьшается быстродействие и может
возрасти методическая погрешность, связанная с возможным
изменением частоты исследуемого сигнала в процессе измерения, так как
рассмотренный методом измеряется среднее, значение частоты
сигнала за время измерения Ate. Птоэтому при измерении достаточно
низких частот применение метода прямого счета периодов
неизвестной частоты неэффективно и нецелесообразно. В этом случае
определять частоту следует косвенным методом, измеряя
длительность одного или известного числа периодов исследуемого
сигнала. Такие измерения являются частным случаем рассматриваемых!.
Далее методов измерения временных интервалов.
2,15.
Опорный
генератор
и
ьх ^
-а»
Умножитель
частоты
Формирующее
устройство
ог
/
Временной
селектор
""vv
Устройство
упр
-—
авления
Электронный
счетчик
К цифровому
отсчетному
устройству.
—=*-
Мы.
Рм
.Mi
"ic\ |Hi 11 пи и щццццу г
В)
Рис. 8.8
Цифровые измерители временных
интервалов, основанные на методе
прямого счета. Цифровые
измерители временных интервалов (ЦИВИ)
предназначены для измерения
периода синусоидальных колебаний,
периода следования импульсов,
временных интервалов, заданных
импульсами начала («старт») и конца
(«стоп»), интервалов, заданных в
виде импульса определенной
длительности. Структурная схема
ЦИВИ, основанного на методе
прямого счета (рис. 8.8,а), во многом
похожа на схему рассмотренного
цифрового частотомера. Обычно цифровые частотомеры могут
работать в режиме измерения, как частоты, и временного интервала.
Исследуемый сигнал ивх, период или длительность которого
необходимо измерить, поступает на формирующее устройство. Задача
формирующего устройства и устройства управления —
сформировать из исследуемого сигнала импульс «уу с крутыми фронтами,
длительность которого определяет время открытого состояния
временного селектора. В это время через селектор на электронный
счетчик проходят импульсы иот, называемые иногда метками
времени, период которых задается высокостабильным опорным
генератором. Относительная нестабильность частоты этого генератора
50 непосредственно определяет одну из составляющих погрешности
измерения временного интервала. Поэтому так же, как и в
цифровых частотомерах, в качестве опорных используют
термостатированные кварцевые генераторы.
Минимально возможное значение периода меток времени Гв
определяет абсолютную погрешность дискретности прибора при
измерении однократных временных интервалов. Для уменьшения
периода Т0 частоту опорного генератора с помощью умножителя
частоты умножают в несколько раз. Соответствующая
максимальная относительная погрешность дискретности будет определяться
выражением 8K-=±l/N=±T0/Atx. Обычно для распространенных
ЦИВИ /о=Ю МГц и 70=100 не. Как и при измерении частоты,
-216
погрешность дискретности можно уменьшить, синхронизируя
метки времени с началом измеряемого интервала, тогда 8К=Т0/АТХ.
Поскольку в этом случае погрешность дискретности всегда
положительна, ее максимальное значение можно уменьшить в два
раза путем сдвига меток времени на половину периода Т0
относительно начала измеряемого интервала, тогда бд= ±T0/2Atx. При?
измерении достаточно больших интервалов времени относительная
погрешность дискретности может быть очень малой и сравнимой
с погрешностью из-за нестабильности частоты опорного
генератора. Вот.почему при измерении частоты следования низкочастотных
сигналов целесообразно использовать режим измерения не
частоты, а периода.
Наконец, третья и самая существенная составляющая
погрешности рассматриваемого ЦИВИ возникает при формировании из
входного сигнала импульса, определяющего измеряемый интервал
Atx. В формирователях обычно используют пороговые устройства
типа триггера Шмитта, имеющие определенную нестабильность
порога срабатывания. Кроме того, в измеряемом сигнале могут
присутствовать флуктуационный шум и помехи другого характера.
Все это вызовет случайные изменения длительности
формируемого импульса и соответственно погрешность измерения б3,
называемую погрешностью уровня запуска. Значение этой
погрешности зависит, естественно, от формы анализируемого сигнала uBX(t),
в первую очередь от крутизны его изменения S = duBX(t)/dt в зоне
срабатывания формирующего устройства. Максимальный разброс-
времени срабатывания формирующего порогового устройства из-за
наличия во входном сигнале шума с размахом Um будет
приближенно определяться выражением AtmUm/S.
Очевидно, что при измерении периода и длительности
импульсов с крутыми фронтами погрешность уровня запуска не будет
существенно проявляться. Поэтому для импульсной формы
входного сигнала с длительностью фронта не более половины периода
меток времени при нормировании результирующей (суммарной)-
погрешности ЦИВИ учитывают только погрешности опорного
генератора и дискретности: 6=± У б2о + б2д. При длительности
фронтов исследуемого сигнала более половиньг периода меток
времени погрешность ЦИВИ, обусловленная нестабильностью-
уровня запуска, 63^(At^ + Atc)/Atx, где Дг'ф и Atc — длительности
фронта и среза импульсов, определяющих начало и конец счета.
При синусоидальном сигнале с амплитудой Uc относительная1
погрешность уровня запуска 63=±At/Atx=±Um/nUc, а
результирующая погрешность определения периода будет:
б=±Кб20 + б2д + б2з.
Если измеряемый интервал времени связан с повторяющимися
сигналами, то погрешности дискретности и уровня запуска можно-
существенно уменьшить при измерении периода методом
усреднения, при котором исследуемый периодический сигнал после
входного формирующего устройства подается на цепочку декадных де-
217
лителей, понижающих частоту его повторения n=10ft раз, где
величина k обычно выбирается в пределах от 1 до 5. Затем этот
сигнал подается на селектор, и электронный очетчик
регистрирует число эталонных меток времени, приходящихся на п периодов
исследуемого сигнала. Для того чтобы показания цифрового
индикатора соответствовали измеряемому периоду, используется
перенос запятой ЦОУ на k порядков влево — так осуществляется
деление результата счета в 10fe раз. Относительная погрешность
измерения периода синусоидального сигнала при усреднении
будет определяться выражением 6=± 1^62о+(6д/«)2+(63/я)2.
Метод усреднения можно применить и для повышения
точности измерения достаточно малых повторяющихся (не обязательно
периодических) интервалов времени, сравнимых по длительности
с периодом эталонных меток времени. При этом на входы
селектора, как и при обычном методе прямого счета, подаются
исследуемый сигнал и эталонные импульсы, но счетчик работает в
режиме суммирования числа эталонных импульсов за некоторое,
наперед заданное с помощью соответствующей пересчетной схемы
число п измеряемых интервалов времени. Обычно n=,10ft при k =
= 1... 5. Например, при регистрации повторяющегося интервала
времени, равного 125 не, прибор с Го=ЮО не за 10 000 измерений
в 2500 случаях регистрирует в среднем по два эталонных
импульса и в 7500 случаях — по одному импульсу. Всего счетчик
зарегистрирует 12 500 импульсов, что в среднем соответствует
интервалу времени 125 не. Следует обратить внимание на то, что
время измерения при этом в 104 раз превышает период измеряемого
сигнала. Относительная погрешность измерения длительности
коротких повторяющихся импульсов при использовании метода ус-
реднения будет определяться выражением 6 = ± Y Ь\ + T2alnAt2x,
где п — число усредняемых временных интервалов за время
счета. Важно помнить, что метод усреднения применим, если
сигналы повторяются и частота повторения не синхронизирована с
частотой опорного генератора. Существуют приборы, в которых метод
усреднения позволяет снизить погрешность дискретности со 100 не
при измерении однократных интервалов до 10 пс при измерении
периодических временных интервалов.
Цифровые измерители временных интервалов с нониусным
преобразованием. При измерении коротких однократных интервалов
времени приборами, основанными на методе прямого счета,
определяющей становится погрешность дискретности, обусловленная
конечным быстродействием используемой элементной базы.
Цифровые измерители с нониусным преобразованием временного
интервала (рис. 8.9,а) позволяют реализовать большую точность
при использовании счетчиков ограниченного быстродействия.
Формирующее устройство из входного сигнала ивх, длительность
которого необходимо измерить, вырабатывает стартовый иСТарт и
столовый «стоп сигналы. Стартовый импульс запускает опорный
генератор / с периодом повторения Ти импульсы которого поступают
218
'и
старт
Опорный
Формирующее
устройство
стоп
/!
!
"
Опорный
"енератор 2
Схема
совпадения
''
Арифметическое
устройство
Счетчик 2
К
К ЦОУ
1
* .
Heck
jiii,
Рис. 8.9
на счетчик /. Для того чтобы можно бы- ul
ло измер'ять интервалы времени с
погрешностью дискретности меньшей, чем ' [.
период опорного генератора /, в схему 'u"^k ' \
введен еще один опорный генератор 2 с . —J-
Го К СТОП Т
,,_ . 2, запускаемый импульсом ]
«стоп. Период повторения ■ импульсов иап\
иот2 несколько меньше периода
повторения импульсов и0Г1 и разность АТ =
= Т\—Т2 определяет, по сути дела, шаг
квантования и соответственно
погрешность дискретизации нониусного
преобразования. С каждым периодом импульсы
генераторов будут приближаться друг к
другу по времени (рис. 8.9,6), пока не
совпадут. Этот момент регистрируется схемой совпадения,
вырабатывающей сигнал «ее, который прекращает работу генераторов.
Арифметическое устройство должно объединить показания Nt
счетчика 1 и Nz счетчика 2 по следующему алгоритму: Atx =
= (Ni—l)Tl—(N2~->l)T2=Ti(Ni—N2)+AT(N2—l).
Первое слагаемое в этом выражении представляет «целук>
часть» измеряемого интервала, определенную подсчетом числа
периодов стартового генератора 1. Второе слагаемое определяет
длительность «неучтенного» интервала времени между тем
импульсом генератора /, который еще находится в пределах
измеряемого временного интервала, и стоповым импульсом. С выхода
арифметического устройства код результата поступает на
цифровое отсчетное устройство ЦОУ.
Применение в рассматриваемом ЦИВИ управляемого
стартового опорного генератора позволяет синхронизировать опорные
импульсы с началом измеряемого интервала и измерять
нониусным способом только один «неучтенный» интервал. Однако
управляемые генераторы нониусных преобразователей заметно уступают
по стабильности генераторам с непрерывным режимом работы,
которые можно стабилизировать кварцевыми резонаторами.
Поэтому число уровней квантования Til AT в ЦИВИ с нониусным пре-
219
*-■
формирующее
устройство
старт
и
\РТоп
1
■*■ Опорный
м- генератор
'
'
Схема
отвдадеадя Q
J
1
Q.
Линия задержки
ш w ш w w
19 3 4 5 1
4
Схема
совладения Г
i
.
1
п
Счетчик
-1
К ЦОУ
,, • т
Арифметическое
устройстве
А
Логическое устройство
п
I ,-ф | |г| it Ио
^бх'
'^старт*
^сгоп1
«or'
«лзг
«ее i
*Гх
t
\ *
1 1 1 1 1 1
1 1 1 1 1
\
i
t
t
образованием обычно берут не более 100
и используют такие приборы для
измерения относительно небольших интервалов
времени. Для стабилизации шага
квантования нониусных преобразователей
применяют автоподстройку разности частот
стартового и стопового генераторов или
их принудительную синхронизацию
высокостабильным СВЧ сигналом.
Для точного измерения больших
интервалов времени применяют ЦИВИ с
«' двумя нониусными преобразователями,
в которых основной опорный генератор
работает в непрерывном режиме. В
таких ЦИВИ «целую» часть измеряемого временного интервала
определяют методом прямого счета импульсов высокостабильного
непрерывно работающего опорного генератора. Один нониусныи
преобразователь измеряет «неучтенный» интервал времени до
первого после начала измерений импульса опорного генератора,
другой измеряет второй «неучтенный» интервал. Арифметическое
устройство объединяет показания трех счетчиков и выдает код
результата на ЦОУ. Схема такого ЦИВИ получается достаточно
■сложной.
Цифровые измерители временных интервалов с линией
задержки. Еще один тип ЦИВИ, позволяющий получить достаточно
высокое временное разрешение при использовании счетчиков
ограниченного быстродействия — это измерители, использующие
калиброванную линию задержки (рис. 8.10,6). Формирующее
устройство вырабатывает стартовый иСтарт и столовый иСтоп импульсы,
поступающие на управляемый опорный генератор с линией
задержки в цепи обратной связи.
220
Линия задержки определяет период повторения импульсов
генератора, а управляющие сигналы с формирующего устройства —
число импульсов в серии. Счетчик фиксирует в двоичном коде
длительность измеряемого интервала с погрешностью
дискретности, равной периоду опорного генератора. Интервал времени
между последним импульсом серии и стоповым импульсом
определяется уже с большой точностью с помощью схем совпадений,
подключенных к отводам линии задержки. Число отводов и схем
совпадений зависит от требуемого числа уровней . квантования.
Например, для получения восьми уровней при шаге квантования
10 не необходимо использовать линию задержки на 80 не с
восемью отводами и восемь схем совпадений. По сигналам иСс
логическое устройство вырабатывает код номера последней из
сработавших схем совпадений (обычно из-за конечной ширины
импульсов срабатывает несколько схем совпадений). Арифметическое
устройство объединяет коды на выходах счетчика и логического
устройства и выдает результат на ЦОУ.
К достоинствам ЦИВИ с линией задержки следует отнести
стабильность шага квантования, определяемую стабильностью
параметров линии задержки, и возможность обеспечения высокого
временного разрешения. Известны ЦИВИ такого типа с шагом
квантования 5 пс. Из недостатков можно указать на малое число
уровней квантования (по конструктивным соображениям трудно
выполнить калиброванную линию задержки с большим числом
отводов).
8.3. ИЗМЕРЕНИЕ ФАЗОВОГО СДВИГА
Фазовым, сдвигом, ф называется модуль разности аргументов
двух гармонических сигналов одинаковой частоты: «i=£/1sin(a>£ +
+ Ф1) и u2=U2 sin (at+ q>2), т. е. разности начальных фаз cpi—ф2
(рис. 8.11,а).
Фазовый сдвиг является постоянной величиной и не зависит
от момента отсчета. Обозначим через ДГ интервал времени
между моментами, когда сигналы находятся в одинаковых фазах,
например при переходах через нуль от отрицательных к
положительным значениям. Тогда фазовый сдвиг ф = соА7,=2лА7,/7,) или
Ф = 360АГ/Г, ' (8.2)
где Т — период гармонических сигналов.
Фазовый сдвиг появляется, когда электрический сигнал
проходит через цепь, в которой он задерживается. Колебательные
контуры, фильтры, фазовращатели и другие четырехполюсники
вносят фазовый сдвиг между входным и выходным напряжением <р =
= о)/з, где t3 — длительность задержки в секундах. Усилительный
каскад обычного типа вносит фазовый сдвиг, равный п. Многие
радиотехнические устройства — радиолокационные,
радионавигационные, телевизионные, широкополосные усилители всех
назначений, фильтры — характеризуются наряду с другими
параметрами фазочастотной характеристикой ф(со), т. е. зависимостью
221
и ,.
о
/'
' / s
/
AT
^ >■
Л О
\ r /
vyy
^
■v. .
*
фазового сдвига от
частоты. Фазовая модуляция и
манипуляция широко
применяются в аппаратуре
телеметрии и связи;
измерение фазового сдвига в
этих устройствах
является определяющим как при
Рис. 8.11 настройке, так и в
эксплуатации.
Если напряжения с одинаковыми частотами имеют
несинусоидальную форму, то фазовый сдвиг рассматривается между их
первыми гармониками; при измерении напряжение высших гармоник
отфильтровывается с помощью фильтров нижних частот. Можно
такие напряжения характеризовать временным сдвигом AT (рис.
8.11,6).
Для измерения фазового сдвига наиболее широко применяют
следующие методы: осциллографический, компенсационный и
метод дискретного счета.
Осциллографический метод можно реализовать способами
линейной, синусоидальной и круговой разверток. Ограничимся
рассмотрением первых двух как наиболее распространенных.
Способ линейной развертки осуществляется двух-
лучевым или двухканальным осциллографом, в каналы
вертикального отклонения которого подают напряжения ui = Uis'm((jit + <pi)
и u2=U2s'm((jit+q>2); генератор развертки осциллографа включен.
После уравнивания обоих напряжений осциллограмма будет иметь
вид, представленный на рис. 8.12. Фазовый сдвиг вычисляют по
формуле (8.2), подставляя измеренные длины отрезков / и А/,
соответствующие Т и А.Т.
Способ синусоидальной развертки реализуют
однолучевым осциллографом. В канал вертикального отклонения
подается напряжение iiy = Uv sin (at+(р), а в канал
горизонтального ux=UxSin at; генератор развертки выключен. На экране
осциллографа появляется осциллограмма в виде эллипса (рис.
8.13), уравнение которого имеет вид
у == (В/А) (х cos ф + 1Л42—х2 sin <p),
где В я А — максимальные отклонения по вертикали и
горизонтали соответственно.
Положив х=0, получим вертикальный отрезок уо=В sin<p;
положив у = 0, получим горизонтальный отрезок xo=Asinq. Отсюда
sm<p=±y0IB=±x0/A. Перед измерением удобно уравнять
максимальные отклонения по вертикали и по горизонтали (А = В),
тогда у0 = х0. Для вычисления фазового сдвига измеряют по
осциллограмме отсекаемые на координатных осях отрезки 2х0 или 2у0
и сторону прямоугольника 2А или 2В, в который вписан эллипс:
Ф = ± arcsin (2 у0/2 В) = ± arcsin (2 х0/2 А). (8.3)
222
Рис. 8.12 рис. 8.13
Способ синусоидальной развертки не позволяет определить
фазовый сдвиг однозначно. Когда оси эллипса совпадают с осями
координат, фазовый сдвиг ф равен 90 или 270°. Если большая ось
эллипса располагается в первом и третьем квадрантах, то
фазовый сдвиг 0<ф<90° или 270°<ф<360°; если во втором и
четвертом, то 90°<ф<180° или 180°<ф<270°. Для устранения
неоднозначности нужно ввести дополнительный сдвиг 90° и по
изменению вида осциллограммы легко определить действительный
фазовый сдвиг.' Например, получили ф, равный 30 или- 330°.
Ввели дополнительно +90°. Если осциллограмма осталась в прежних
квадрантах, то ф=330°; если переместилась во второй и
четвертый, то ф = 30°.
Осциллографический метод не требует никаких
дополнительных приборов и прост по идее. Однако он является косвенным,
требует линейных измерений и вычислений, что приводит к
значительным погрешностям. Общая погрешность складывается из
случайных погрешностей: измерения длин отрезков, совмещения
следа луча с линиями масштабной сетки и конечного значения
диаметра светового пятна на экране осциллографа; и
систематических: инструментальной и методической. Инструментальная
погрешность возникает за счет наличия собственных фазовых
сдвигов в каналах осциллографа. Методическая погрешность связана
с наличием гармоник в исследуемых напряжениях.
Погрешность измерения отрезков / можно уменьшить
тщательной фокусировкой луча при малой яркости и применением
осциллографа с ЭЛТ, в которой масштабная сетка нанесена на
внутреннюю поверхность экрана. Фазовый сдвиг в каналах
осциллографа легко обнаружить, подав одно и то же напряжение на
оба входа осциллографа. При отсутствии фазового сдвига на
экране появится прямая линия. Если появляется эллипс, то нужно
измерить значение фазового сдвига по формуле (8.3) и внести в
результат измерения соответствующую поправку. Если поправку
точно определить не удается, то погрешность можно исключить
методом компенсации. Для этого нужно выполнить два измерения:
223
i_
Вспомогательный
фазовращатель
7
к
Рис. 8.14
первое — как обычно, а второе — подав исследуемые напряжения
на противоположные входы осциллографа. В результате первого
измерения получим ф1=ф + Аф, где Аф — неизвестный фазовый
сдвиг в каналах осциллографа. В результате второго ф2= (360°—
—ф)+Лф. Из разности ф2—ф1 = 360°—2ф находим искомый
фазовый сдвиг ф=180°—[(ф2—фО/2].
Компенсационный метод с осциллографической
индикацией реализуется измерительной установкой (рис. 8.14),
состоящей из однолучевого осциллографа, образцового ф0 и
вспомогательного фв фазовращателей. Сначала в установке устраняют
собственный фазовый сдвиг. Для этого замыкают ключ К и
напряжение щ подают на оба входа осциллографа. Указатель шкалы
образцового фазовращателя устанавливают на нуль, а
вспомогательный регулируют до получения на экране осциллографа
прямой линии. При этом вспомогательным фазовращателем
компенсируется собственный фазовый сдвиг измерительной установки.
Для лучшей компенсации усиление обоих каналов осциллографа
устанавливают на максимум. Осциллограмма при этом выходит
за пределы экрана, но это не существенно. Затем размыкают ключ
и подают напряжение щ в канал Y и щ — в канал X; на экране
появляется эллипс или его центральная часть в виде двух
параллельных линий. Регулируя образцовый фазовращатель,
добиваются слияния этих линий в одну прямую, т. е. общего нулевого
фазового сдвига.
Значение фазового сдвига между напряжениями щ и щ по
показанию шкалы образцового фазовращателя определяется
следующим образом. Если напряжение щ опережает по фазе
напряжение щ, то показание по шкале образцового фазовращателя
равно фазовому сдвигу: ф = фо- Если напряжение щ отстает, то
Ф = 360°—фо.
Погрешность измерения определяется в основном
погрешностью градуировки шкалы образцового фазовращателя.
На СВЧ компенсационный метод реализуется способом
короткого замыкания. Собирают измерительную установку, состоящую
из генератора, развязывающего аттенюатора и фазовращателя ф,
выход которого замыкают накоротко (рис. 8.15,а). Когда
генератор включен, в тракте устанавливается стоячая волна. В
произвольном сечении фазовращателя помещают зонд, соединенный с
диодом и индикатором.
224
Образцовый
фазовращатель
/
(Г1
\\
а)
Генератор
Г
Ц
•
\
Аттенюатор
У
Соединительный
волновод
1 /
Фазовращатель
/
ху*
"[Замыкатель.
J
6)
Генератор
&
Аттенюатор
-Й-
JL
<5>
Фазовращатель
т
Испытуемое
устройство
Рис. 8.15
Регулируя фазовращатель, добиваются нулевого показания
индикатора, т. е. совмещают узел напряжения и плоскость сечения,
где расположен зонд, снимают отсчет по шкале фазовращателя
Фь Затем вместо короткозамыкателя к выходу фазовращателя
присоединяют испытуемое устройство (отрезок волновода,
трансформатор, фильтр, переходное устройство и др.), также замкнутое
накоротко (рис. 8.15,6). Узел напряжения смещается; регулируя
фазовращатель, возвращают узел на прежнее место, что
фиксируется по нулевому показанию микроамперметра, и снимают
второй отсчет по шкале фазовращателя фг. Фазовый сдвиг,
вносимый исследуемым устройством ф, равен половине разности этих
показаний; ф=(ф1—фг)/2. Для уменьшения погрешности тракт
должен быть согласованным, а индикатор чувствительным. В
качестве индикатора можно применять селективный вольтметр, а
генератор модулировать низкочастотным напряжением. Частоты
модуляции и настройки селективного милливольтметра должны
совпадать. Полезно помнить, что устройство, геометрическая
длина которого равна длине волны, проходящего по нему сигнала,
вносит фазовый сдвиг, равный 360°.
Преобразование частоты при измерении фазового сдвига. Для
уменьшения погрешности при измерении малых фазовых сдвигов
применяют умножение частоты. Понижение частоты путем
гетеродинного преобразования используют при измерении на высоких
и сверхвысоких частотах.
Умножение частоты приводит к увеличению фазового
сдвига. Если аргументы измеряемых напряжений at + qn и ю^+фг,
то после умножителей частоты с одинаковыми коэффициентами
умножения получим n(at + q>\) и /г(ю^ + ф2) соответственно.
Фазовый сдвиг, измеренный фазометром, ф = /г(ф1—ф2) увеличился в
п раз, и погрешность его измерения может быть меньше. Фазовый
сдвиг между исследуемыми напряжениями ф = ф/л=ф1—ф2.
8-10 ' 225
»l
Входное
устройство
Развязывающий
мост
it2
L
Смеситель i
t
Гетеродин
Входное
устройство
Усилитель
разностной частоты
*
Автоподстройка
частоты
*
Смесите/ib 2
Рис.
1 Кеарцевый
1 генератор
-=»-
Усилитель
разностной частоты
S./6
V
Низкочастотный
фазометр
.,
Гетеродинное преобразование частоты (рис.
8.16) позволяет понижать частоту исследуемых напряжений с
сохранением прежнего фазового сдвига. Напряжения щ и и2 подают
в два идентичных канала, содержащие входные устройства,
смесители и усилители разностной частоты УРЧ? На оба смесителя
через развязывающий мост, устраняющий взаимное влияние
каналов, подается напряжение гетеродина в одинаковой фазе.
Равенство фаз в цепях гетеродин — смеситель достигается
равенством их электрических длин. На выходах смесителей получается
напряжение разностной частоты с исходным фазовым сдвигом.
После усиления эти напряжения поступают на низкочастотный
фазометр для измерения фазового сдвига. Диапазон частот
определяются диапазоном частот перестройки частоты гетеродина.
Имеются фазометры с верхней частотой 1,5 и 7 ГГц. Для
повышения точности измерений гетеродин выполняется с
автоматической подстройкой частоты АПЧ. Частота кварцевого генератора
сравнивается с разностной частотой на выходе усилителя с
точностью до фазы. Погрешность измерения, обычно равная 1...2%,
возникает вследствие неидеальных амплитудных и фазовых
характеристик усилителей разностной частоты и погрешности
низкочастотного фазометра.
8.4. ИЗМЕРЕНИЕ ГРУППОВОГО ВРЕМЕНИ
ЗАПАЗДЫВАНИЯ
Многочастотный широкополосный сигнал, проходя по четырехполюснику,
искажается, т. е. его форма на выходе ие совпадает с формой на входе. Это
искажение возникает вследствие того, что различные частотные составляющие
запаздывают на разное время. Такие искажения присущи телевизионным
сигналам, прошедшим по линии передачи.
Для характеристики четырехполюсников введено понятие группового
времени запаздывания
^гвз = Аф/А(о, (8-4)
226
Рис. 8.17
где Дф — изменение фазового сдвига на
выходе четырехполюсника при изменении частоты
иа До).
Четырехполюсник не вносит искажений, ее-ла>
ли групповое время запаздывания сохраняется
постоянным во всем диапазоне рабочих частот.
Значение /Гвэ легко определить по фазовой
характеристике четырехполюсника, т. е.
зависимости фазового сдвига от частоты (рис. 8.17), с
помощью которой можно вычислить и построить
зависимость группового времени запаздывания от
частоты. Такой способ определения ^Гвз аппаратурио прост, ио требует много
времени и не обеспечивает нужной точности.
Наиболее распространенным методом измерения группового времени
запаздывания является метод Найквиста, заключающийся в сравнении фазового
сдвига огибающих модулированного по амплитуде сигнала на входе и выходе
испытуемого четырехполюсника. На рис. 8.18 приведена упрощенная схема
измерительного прибора, основанного на этом методе. 'Высокочастотный генератор,
вырабатывает сигнал, который модулируется по амплитуде сигналом .низкой
частоты, получаемым от низкочастотного генератора. Модулироваиный сигнал
одновременно поступает «а испытуемое устройство и далее иа амплитудный
детектор 1 и непосредственно на второй детектор 2. Огибающие с выходов обоих
детекторов подаются на входы фазометра, с помощью которого измеряется
фазовый сдвиг между ними. Этот фазовый сдвиг согласно (8.4) можно записать в
следующем виде: ф = 2лЛГвз, откуда trB3 = <p/2nF.
Частота модулирующего сигнала выбирается низкой, например F=0,01 f;
коэффициент модуляции Л1='20... 30%. Поскольку частота модуляции постоянна,
шкалу фазометру ф градуируют в единицах времени.
Для автоматического измерения группового времени запаздывания
высокочастотный генератор выполняют с качающейся частотой. Указатель фазометра
устанавливают на нулевую отметку на центральной частоте высокочастотного
генератора, а при ее качании показания фазометра соответствуют значению ^гвз.
Высокочастотный
генератор
*
Модулятор
*
Низкочастотный
генератор
> "Ъ
//
Испытуемое
устройство
■»—
Амплитудный
детектор 1
*'
фазометр
Амплитудный
детектор 2
Л
Рис. 8.18
8*
227
8.5. ЦИФРОВЫЕ ФАЗОМЕТРЫ
Наиболее распространены цифровые фазометры (ЦФ)
прямого преобразования. В. основу их работы положено уравнение ф =
~(Atv/T)k, где ф — измеряемый фазовый сдвиг; Atv — интервал
времени, соответствующий измеряемому значению <р; Т — период
сигналов; k — Градуировочный коэффициент, задающий
размерность результата измерения (если k = 2n, то результат имеет
размерность радиана, если & = 360, то размерность соответствует
градусам). В соответствии с этим уравнением должны быть
измерены значения Atq, и Т, определено их отношение.Atq, /Т и
произведено умножение на градуировочный коэффициент &
По способам реализации этого измерительного уравнения
различают две группы ЦФ с прямым преобразованием: с
промежуточным преобразованием фазового сдвига в постоянное
напряжение и с время-импульсным преобразованием. При измерении
фазового сдвига на частотах свыше 200 ...300 кГц для уменьшения
погрешности измерения применяют предварительное
преобразование частоты анализируемых сигналов. ~~~
Цифровые фазометры с преобразованием «фазовый сдвиг-
постоянное напряжение — код». Типовая структурная схема и
временная диаграмма работы рассматриваемого ЦФ показаны на
рис. 8.19. Напряжения щ и и2, сдвиг фаз между которыми должен
быть измерен, поступают на входы формирующих устройств / и
2, вырабатывающих прямоугольные напряжения, фронты которых
совпадают с моментами перехода исследуемых напряжений через
нуль. На выходе триггера, управляемого фронтами
прямоугольных сигналов, возникают импульсы, длительность которых
пропорциональна значению Atv. Формирующее устройство 3
стабилизирует размах Up импульсного напряжения, снимаемого с выхода
триггера. Фильтр выделяет постоянную составляющую, подаваемую
далее на вход цифрового вольтметра. Постоянная составляющая
импульсной последовательности, отражающая размер ф,
U=— f u(t)dt = Up —2 = ^Ф-
Т о, т k
Выбирая Up и k так, чтобы Up/k=<lOn, где п — целое число,
можно обеспечить показания вольтметра непосредственно в единицах
измерения фазового сдвига — радианах, градусах, минутах.
Основными составляющими погрешности таких ЦФ являются
погрешности преобразования фазового сдвига в интервал времени, а
затем в постоянное напряжение, и погрешность цифрового
вольтметра.
Цифровой фазометр с время-импульсным преобразованием.
Погрешности промежуточного преобразования фазового сдвига в
постоянное напряжение ограничивают возможность повышения
точности ЦФ. Во избежание этого применяют ЦФ, в которых
временной интервал непосредственно преобразуют в цифровой код,
т. е. осуществляют время-импульсное преобразование. Среди та-
228
Г"
^f-
■"1
Формирующее
устройство 7
'1Ф
Формирующее
устройство 2
Триггер
% f
Формирующее
устройство 3
Зф
Фильтр
Цифровой
вольтметр
"i,u>-.
Блок формирования i
а)
ких ЦФ различают приборы с
измерением за один период исследуемого
напряжения и с измерением среднего
значения за несколько периодов..
Последние называются интегрирующими.
При использовании принципа
измерения за один период формирующее
устройство (рис. 8.20,а) вырабатывает
напряжение щу в виде
последовательности импульсов с длительностью Atq,
и периодом повторения Г (рис. 8.20,6).
Триггер формирует импульс
длительностью, равной периоду Т. Этот
импульс управляет временным
селектором, через который на счетчик
проходят импульсы от генератора
импульсов.
Арифметическое устройство осуществляет считывание общего
числа импульсов N, прошедших на счетчик в течение периода Т,
а также промежуточного числа N ы, соответствующего интервалу
времени Atq. Запись этих чисел в арифметическое устройство
осуществляется по окончании срезов импульсов ЫфУ, итр. В
арифметическом устройстве производится (вычисление отношения
kN&t/NT = kAyT = q>.
Погрешность измерения за один период обусловлена главным
образом погрешностями формирования временных интервалов
Atq, и Т, а также погрешностью дискретности бд(7'). Последняя
определяется в основном погрешностью преобразования
временного интервала Aty в число импульсов N& с
6Д(Г) = ±^--—L ■ k
hM„
=±
hTe
= ±V-
"М Т"'ф /Г'ф ф/г
где f — частота входных сигналов. Из анализа выражения для
погрешности бд можно видеть, что с увеличением частоты входных
напряжений погрешность увеличивается и для ее уменьшения не-
229
Генератор
импульсов
и, О
и2 О
Вреи
сел
Формирующее
устройство
ленк
ект
ой
эр
1
и
сел
!
Счетчик
Триггер
и
Арифметическое
устройство
_! i
i
к цоу
а)
обходимо увеличивать частоту
генератора. По аналогичной схеме, но без
автоматического вычислителя построены ЦФ
типа НФ-3. Результат измерения
получается оператором путем деления N&t
на Nt.
Основным недостатком ЦФ с
измерением за один период является узкий
диапазон рабочих частот и большая
погрешность измерения при наличии случайных
помех в сигналах. Для уменьшения
влияния помех используют схемы с
измерением сдвига фаз за большое число периодов
(102, 103, 104 и т. д.) с последующим
усреднением результата. Цифровой фазометр такого типа имеет
счетчик периодов, позволяющий автоматически прекратить
измерение носле прохождения заранее заданного числа периодов.
Максимальная погрешность дискретности при измерении в течение
большого числа периодов 6д(Гт)
2 бд(Гг), где т
число
периодов, i — номер периода.
Если все погрешности 6(Тг) имеют одинаковые знаки, то
6д (Tm)\ui\x —m /^дгт== jj—• На практике погрешности 6Д(7\)
с равной вероятностью могут принимать значения l/N&t; поэтому
бд(Гт)<|; |бд(Гт) |тах, так как Пгп 8д(Гт)-ИХ Таким образом,
ег->-оо
увеличение числа периодов ведет к снижению случайной
составляющей погрешности дискретности бд.
Для исключения из схемы ЦФ арифметического устройства
используют принцип измерения в течение постоянного времени. На
рис. 8.21 приведена типовая структурная схема такого ЦФ и
временная диаграмма его работы. Исследуемые напряжения их и иг
поступают на блок формирующих устройств, который
вырабатывает напряжение Ибфу в виде последовательности импульсов
длительностью Atq, и периодом Т. Делитель частоты формирует
230
*i<
«2<
Блок
формирующих устройств
бфу
1
Генератор
ИМПуЛЬСОВ
У
Временной
селектор 1
Целитель
частоты
у
Временной
селектор 2
I
дч |
и
сч
Счетчик
К ЦОУ
Тяг
и
«сч
■ в)
Рис. 8.21
а)
из сигналов тактового генератора импуль
сы длительностью, соответствующей вре-^5
мени измерения 7\i3m. Временной селектор
1 управляется напряжением Ибфу. На его
выходе образуются пачки импульсов с ча- иАЧ,
стотой заполнения /г, периодом Т и
длительностью А^ф. Временной селектор 2,
управляемый импульсом ИдЧ, срабатывает в
моменты окончания фронта и среза
импульса ИдЧ, передавая на счетчик
напряжение исч в виде пачек импульсов в
течение времени ГИЗм. Число импульсов NC4,
попавших на счетчик за время Гизм,
определяется выражением
Л'сч =тА(ф/г-= T3BJr Aty/T = nAt Ф/Т = п q>/k,
где Tu3M = n/fr; ш=ТИЗм/Т; п — коэффициент деления частоты.
Погрешность дискретности в этом случае обусловлена
некратностью значений Л£Ф и периода импульсов генератора (8fli), a
также значений Гц3м и периода Т сигнала (6дг). Суммарное
значение погрешности дискретности бд= V~6\i + б2д2, где |6Ai|max =
= &//ф/г; 6д2= ±1/т= ±1/Гиэм/. Очевидно, что бД1 увеличивается
по мере роста частоты f исследуемого напряжения и убывает с
ростом /г. Максимального значения бд1 достигает, когда
погрешность квантования одинакова во всех пачках импульсов, т. е.
усреднения погрешности не происходит, и погрешность всего
измерения соответствует погрешности за период. Для уменьшения
этой погрешности предложены схемы, в которых частота
следования тактовых импульсов модулируется либо низкочастотным,
либо шумовым напряжением. Погрешность бД2 возрастает по мере
уменьшения частоты исследуемого напряжения и
соответственного уменьшения числа пачек импульсов, проходящих на счетчик
прибора за время измерения. Погрешность равна нулю при
кратности периода исследуемого напряжения длительности измерения
и возрастает до максимального значения, когда время измерения
7\,3m~ (m + 0,5)7\ Существенным недостатком схем ЦФ с постоян-
231
ным временем измерения, служащим возможности их применения,
является большое время измерения, зависящее от частоты
исследуемого сигнала и необходимой точности измерения. Это
обстоятельство ограничивает применение ЦФ при измерении на низких
частотах и анализе кратковременных сигналов.
8.6. МЕТОДЫ АНАЛИЗА СПЕКТРА СИГНАЛА
Основные положения спектрального анализа. В технике связи
чрезвычайно широкое распространение получил частотный анализ
сигналов. Теоретически анализируют спектр функции,
отражающий реальный сигнал, известными математическими методами.
На практике спектр исследуют путем воздействия сигнала на
измерительный прибор — анализатор спектра. Этот метод анализа
спектра называют аппаратурным. При теоретическом анализе
допустимы математические абстракции. При аппаратурном анализе
приходится иметь дело с реальным сигналом, существующим на
конечном интервале времени. Известно, что всякая периодическая
функция, отвечающая условиям Дирихле, может быть
представлена рядом Фурье. Реальные сигналы этим условиям
удовлетворяют, поэтому для них справедливо соотношение
и (*) = £/„+S Uhcos (2яЛ-^~ФЛ , (8.5)
где 2л/Г=й>1 — основная частота, Т — период. Таким образом
сложная периодическая функция характеризуется величинами Uh
и фь. Совокупность Uh называют спектром амплитуд (или просто
спектром), а щ — спектром фаз. В технике связи в большинстве
случаев интересуются спектром амплитуд, квадрат абсолютных
значений которых представляет собой энергетический спектр.
Периодическая функция всегда имеет дискретный спектр,
образованный равноотстоящими спектральными линиями. Соответствующие
им частоты находятся в простых кратных соотношениях.
Большое практическое значение имеет разложение вида
u(t)= f ^costK + ^И-фь], (8.6)
где k Принимает как положительные, так и отрицательные
значения. Выражение (8.6) характеризует так называемые
квазигармонические функции. Таковы спектры периодически
модулированных колебаний. В этом случае со0 является несущей частотой.
Непериодические функции имеют сплошной спектр. Сплошные
спектры имеют некоторые виды радиосигналов, а также шумы.
Определяется спектр непериодического сигнала с помощью
интеграла Фурье:
S (со) == J и (t) exp (—/ со f) dt. (8.7)
232
Интегрирование в бесконечных пределах возможно при
теоретическом анализе спектра. При аппаратурном анализе
интегрирование может быть произведено в пределах конечного временного
интервала ti<.t<.t2. Если за начало отсчета времени принять /=
= 0 (момент включения прибора), то измеряемая величина будет
определяться интегралом
St (со) = j и (0 ехр (—/ со t) dt.
(8.8)
Величина St (со), являющаяся функцией не только частоты, но и
■времени, носит название текущего спектра. Именно с текущим
спектром и приходится иметь дело при аппаратурном анализе.
Текущий спектр тем ближе к истинному, чем больше время, в
течение которого ведется частотный анализ, и лишь при t-^oo он
вырождается в истинный спектр колебания.
Одновременный частотный анализ. Сущность одновременного
частотного анализа состоит в применении набора резонаторов,
настроенных на различные частоты и подвергающихся
одновременно воздействию исследуемого сигнала. В качестве резонаторов
используются узкополосные фильтры, на которые параллельно
поступает исследуемый сигнал (рис. 8.22). Выходные
напряжения фильтров после детектирования с помощью коммутатора
поочередно подаются на вертикально отклоняющие пластины ЭЛТ.
Горизонтальная развертка луча ЭЛТ и управление коммутатором
осуществляется от общего генератора ступенчатого напряжения.
Спектральные составляющие сигнала возбуждают колебания
в узкополосных фильтрах. Если фильтры имеют идеальные
частотные характеристики с полосой пропускания Аюф (рис. 8.23,а),
а спектр входного сигнала является линейчатым ^(рис. 8.23,6) с
частотами ел, со2 и соз, сигналы будут возбуждены в фильтрах 1, 2 и
3. На выходах остальных фильтров, настроенных на более
высокие частоты, сигналы будут отсутствовать. На выходах детекторов
/, 2 и 3 образуются постоянные напряжения, пропорциональные
амплитудам гармоник юь ю2 и со3. С помощью переключаемого
Фильтр 1
-^
Детектор 1
Фильтр 2
ч
Детектор 2
I I I
фильтр п
Детектор п
-=*-
* I
I
Генератор
ступенчатого
напряжения
ЭЛТ
-со3
.Г
Рис. 8.22
233
/г,.
sk
12 3 4
~ /ЛШ^,
а)
QJf Шг U/j Ш
S)
Рис. 8.23
электронного коммутатора
напряжения с выходов детекторов
поочередно поступают на
вертикально отклоняющие пластины ЭЛТ.
Ступенчатое напряжение,
управляющее переключением коммута- рис. 8.24
тора, используется также для
отклонения луча ЭЛТ в горизонтальном направлении. При этом
спектральные линии со:, со2 и со3 займут соответствующее положение
относительно горизонтальной оси, как показано на рис. 8.22.
Важнейшей характеристикой анализатора спектра является
его разрешающая способность — способность выделить
(разрешить) две соседние спектральные линии. Количественной мерой
разрешающей способности является наименьший интервал частот
между двумя спектральными линиями, при котором они еще
различаются анализатором. Для рассмотренного случая применения
фильтров с идеальной частотной характеристикой и
минимальными зазорами (рис. 8.23,а) мерой разрешающей способности
является ширина полосы пропускания Аюф. Если частотный
интервал между гармониками будет меньше Асоф, они могут попасть в
один фильтр и образовать на экране ЭЛТ одну спектральную
линию. Реальные фильтры имеют частотные характеристики с
плавным спадом при удалении от частоты резонанса (рис. 8.24,а).
Если частотные характеристики фильтров перекрываются, один
гармонический сигнал с частотой со0 (рис. 8.24,6) вызовет отклик на
выходах фильтров 1, 2 и 3 (рис. 8.24,в). Частоты колебаний
будут соответствовать частотам настройки фильтров, а амплитуды —
ординатам частотных характеристик на частоте со0 (рис. 8.24,а).
Таким образом вместо одной линии анализатор зафиксирует целый
спектр, частоты которого зависят не от частоты исследуемого
сигнала, а от настройки резонаторов. Доказано, что показание
анализатора представляется совокупностью линий, вписанных в
резонансную кривую, но с резонансом на частоте ю0. Из этого
следует, что, если увеличить число резонаторов с равномерна
расположенными резонансными частотами, определение максимума
станет возможным. Более того амплитуду и частоту
синусоидального сигнала можно определить с помощью анализатора точно..
234
Если же анализируется более сложный сигнал, то возникает
неустранимая погрешность, обусловленная тем, что на резонатор
действуют все составляющие спектра одновременно и невозможно
разделить их влияние, а следовательно, и измерить амплитуду и
частоту каждой составляющей.
Последовательный частотный анализ. Метод
последовательного частотного анализа реализуется за счет плавной перестройки-
резонансной частоты узкополосного фильтра. При этом
резонансная частота последовательно совпадает с частотами
гармонических составляющих анализируемого сигнала, которые поочередно
возбуждают сигналы на выходе фильтра. В устройствах
последовательного частотного анализа достаточно иметь один
перестраиваемый фильтр и один детектор, что существенно упрощает
прибор. Однако сам принцип последовательного во времени анализа
говорит о применимости его лишь в случае анализа
периодических сигналов. Для анализа одиночных импульсов данный способ
непригоден.
Перестройка фильтра в широком диапазоне частот при
сохранении высокой избирательности является сложной задачей.
Поэтому способ последовательного анализа видоизменяют так,
чтобы не перестраивать резонансную частоту контура, а перемещать
по шкале частот весь спектр исследуемого сигнала. И в том, и в
другом случае отдельные спектральные линии последовательно
совпадают с частотой настройки фильтоа вследствие
относительного перемещения их на шкале частот. При этом во втором случае
возможно построить фильтр с хорошей избирательностью за счет
усложнения схемы, поскольку нет необходимости в его
перестройке.
Для получения смещающегося по шкале частот спектра
необходимо соответствующим образом преобразовать исходный спектр,
для чего достаточно умножить исследуемый сигнал на
синусоидальное напряжение переменной частоты. Если анализируемый
сигнал выражается функцией Ui = 2Uk cos(k(Hit+<pk), а
вспомогательный ы2 = £Лп sin Ш, то произведение будет равно щи2=
.= f/msinQf2f/ft{cos[(fi—*a,)f—Фй]+со&[(Й + Лю1)^ + фй]}.
Последнее выражение представляет собой модуляционный спектр,
воспроизводящий анализируемый сигнал в виде двух боковых полос,
расположенных симметрично по отношению к несущей частоте Q.
Если частота Q может изменяться, то весь модуляционный спектр
будет перемещаться по оси частот. Если правильно выбрать
пределы изменения частоты Q, на вход полосового фильтра
последовательно поступят спектральные составляющие одной из боковых
полос преобразованного спектра.
Структурная схема анализатора спектра последовательного
типа представлена на рис. 8.25. Сигнал с входного устройства
поступает на смеситель одновременно с ним. На смеситель поступает
сигнал с генератора качающейся частоты, частота которого
изменяется во времени по линейному закону. Преобразованный сигнал
подается на вход узкополосного фильтра. Когда соответствующая
Калибратор v
Входное
устройство
Генератор
Модулптор
6J
Анализатор
, 1
Смеситель
Узкополосный
фильтр
Генератор
качающейся
частоты
Ibm
Генератор пилообразного
напряжения
Детектор
Усилитель
"I
Z£J И,
ЭЛТ
J
Рис. 8.25
гармоника попадает в полосу пропускания фильтра, в нем
возникают колебания. После детектирования и усиления сигнал
поступает на вертикально отклоняющие пластины ЭЛТ. Чем больше
амплитуда гармоники, тем больше отклонение луча в (вертикальном
направлении. Управление частотой генератора качающейся
частоты в отклонение луча ЭЛТ в горизонтальном направлении
осуществляется пилообразным напряжением, поступающим от одного
генератора. Таким образом горизонтальная ось на экране ЭЛТ
является одновременно и осью времени, и осью частот. Генератор
качающейся частоты
вырабатывает синусоидальный сигнал,
частота которого периодически
меняется во времени по линейному
закону. Среднее значение
частоты можно перестраивать, что
позволяет наблюдать спектры
сигналов разных частот, а
также изменять девиацию частоты.
На рис. 8.26 показан один
период изменения частоты Т.
График I соответствует изменению
частоты ОТ (Omin ДО Ютах, при
этом осуществляется анализ
спектра на участке АБ. График
II соответствует меньшей девиа-
Рис. 8.26 ции частоты. При этом анали-
236
Изображения на экране
зируется лишь участок А'Б'
спектра. Поскольку значение
развертывающего напряжения остается
неизменным, изображение
исследуемого участка спектра растягивается
на всю ширину экрана.
Для определения частоты,
соответствующей заданной точке на
горизонтальной оси ЭЛТ, в
анализаторе предусмотрен калибратор.
Обычно калибратор состоит из генератора .,
и модулятора, работающих соответ- ' Рис 827
ственно на частотах со& и сом.
Напряжение синусоидальной формы сом модулирует колебания генератора
по частоте, поэтому на смеситель поступает
частотно-модулированное колебание. Так как модулирующее напряжение синусоидально,
спектр сигнала калибратора имеет дискретный вид (рис. 8.27,6).
Спектральные линии отстоят друг от друга на юм. Если изменять
частоту модулирующего колебания, то можно изменять
расстояние между спектральными линиями, при перестройке ©й весь
спектр калибровочного сигнала будет перемещаться вдоль оси.
Если генератор он и модулятор юм снабдить шкалой для отсчета
частоты, появится возможность измерять частоты спектральных
составляющих исследуемого сигнала. Для этого спектр
калибровочного сигнала накладывается на спектр анализируемого .(рис.
8.27,6) и регулировками о>ь и сом добиваются его необходимого
положения относительно горизонтальной оси.
Основные технические и метрологические характеристики
анализаторов спектра. К числу основных технических характеристик
анализаторов спектра последовательного действия относят:
диапазон частот, полосу обзора, чувствительность, разрешающую
способность, скорость анализа. К метрологическим характеристикам
относят: основную погрешность измерения частоты входного
синусоидального сигнала, погрешность измерения отношения
уровней синусоидальных сигналов, неравномерность АЧХ. Первые два
параметра нормируются ГОСТ. Значение неравномерности АЧХ
указываются в нормативно-технической документации на
конкретный тип анализатора спектра. Неравномерность АЧХ не
нормируют в том случае, если она не учитывается в качестве
составляющей погрешности измерения уровней. АЧХ является
динамической характеристикой анализатора спектра.
В нормативно-технической документации устанавливаются
параметры входа: волновое сопротивление, коэффициент стоячей
волны по напряжению или активное входное сопротивленце и
шунтирующая емкость.
Диапазон частот определяет граничные частоты диапазона, в
пределах которого работает данный прибор. Например,
анализатор спектра С4-46 работает в диапазоне частот 0,1 ...270 МГц.
Иногда рабочий диапазон разбивается на поддиапазоны.
237
»)
Рис. 8.28
Полоса обзора определяет полосу анализируемых частот за
один цикл перестройки генератора качающейся частоты. В
зависимости от типа применяемого прибора и его диапазона частот
полоса обзора может изменяться от сотен герц до десятков
мегагерц. Перестройка полосы обзора осуществляется изменением
девиации частот гетеродина.
Чувствительность определяется минимальной ЭДС, при
которой обеспечиваются нормальные условия работы анализатора
спектра, т. е. необходимое выходное напряжение для получения
удобного размера изображения спектра на экране ЭЛТ,
превышения сигналом уровня собственных шумов и т. п.
Разрешающая способность характеризует способность
анализатора разделить две соседние частотные составляющие спектра.
Так как в основе принципа построения анализаторов спектра
лежит явление резонанса, то их разрешающая способность в
первую очередь определяется свойствами резонансной системы. При
последовательном анализе на резонансную систему воздействует
сигнал с плавно изменяющейся частотой. Если частота меняется
медленно, переходные процессы в колебательной системе не
проявляются и анализатор измеряет частотную характеристику цепи.
Огибающая колебаний, возникающих на выходе контура,
повторяет форму частотной характеристики резонансной цепи. На рис.
8.28,а, б, в показаны: направление изменения частоты, частотная
характеристика колебательного контура и напряжение на его
выходе. Именно такой сигнал после детектирования и усиления
♦ /
*|
а)
г)
"Л
238
Рис. 8.29
образует на экране ЭЛТ одну спектральную линию. На рис. 8.29
показано воздействие двух плавно перестраиваемых
гармонических составляющих на колебательный контур. В этом случае в
резонансном контуре возникнут биения с разностной частотой.
Огибающая колебаний (рис. 8.29,в) имеет два максимума,
характеризующие спектральные линии.
Если спектр состоит из многих линий, то он 'будет отображен
анализатором в виде плавной кривой с рядом максимумов. Ясно, что для увеличения
разрешающей способности необходимо сузить резонансную кривую. Обычно
принято считать спектральные составляющие разрешенными, если глубина минимума
между двумя максимумами достигает половины их высоты. Разрешающая
способность, определяемая при медленной перестройке частоты (так что не
проявляются переходные процессы), является статической. На практике для
получения немелькающего изображения иа экране ЭЛТ процесс анализа должен
происходить гораздо быстрее, что вызывает появление переходных процессов.
В этом случае наиболее интенсивные колебания в контуре возникают ие в тот
момент, когда возбуждающая частота совпадает с резонансной, а несколько
позже, так как резонатор не успевает возбудиться. На рис. 8.30 кривая а
изображает статическую характеристику колебательного контура, а кривая б —
динамическую. 'Как видно из рисунка, при быстром изменении частоты смещается
положение максимума, высота максимума убывает, полоса пропускания
возрастает, кривая становится асимметричной. На правом скате кривой появляется
волнистость из-за биений между собственными и возбуждающими колебаниями.
Следует отметить, что чем выше добротность колебательной системы, тем
дольше протекают переходные процессы и тем сильнее динамическая характеристика
отличается от статической.
Скорость анализа определяется скоростью изменения частоты
генератора качающейся частоты. Увеличение скорости анализа
приводит к увеличению интенсивности переходных процессов и
расширению динамической частотной характеристики резонансной
системы, а «следовательно, и к снижению разрешающей
способности. Вопросы оптимального выбора полосы пропускания
резонансной системы, скорости анализа' для получения максимальной
разрешающей способности детально рассмотрены в [20].
Дисперсионный метод анализа спектра. Метод основан на
применении дисперсионной линии задержки. В дисперсионных
линиях задержки время задержки
гармонического сигнала зависит от его
частоты. Если эта зависимость времени
задержки от частоты линейна,
спектральные составляющие входного сигнала
(например, импульса) будут
появляться на выходе линии поочередно. В
результате огибающая входного
напряжения, линии задержки будет
соответствовать форме спектральной функции
импульса. Чтобы исключить влияние Рис. 8.30
239
кк
Смеситель
■
♦
ЧМ гетеродин
♦
. Блок управления
1
^
Усилитель
Детектор
Генератор
развертки
♦
Дисперсионная
линия задержки
*
Усилитель
вертикального отклонения
f\~"\\
V—7
• Ч. Уэлт
а)
«\
LT1
*>г{
Рис. 8.31
конечной длительности радиоимпульса на
результат измерения, до входа
дисперсионной линии задержки осуществляется
преобразование частоты сигнала с
помощью гетеродина, скорость изменения
частоты которого равна 5 = — 1/а. Здесь a —
коэффициент, характеризующий
дисперсионные свойства линии.
Структурная схема дисперсионного
анализатора спектра представлена на рис.
8.31,а. Сигнал поступает на смеситель, на
который подается чаетотно-модулировамное колебание от
гетеродина.
При анализе импульсного сигнала (рис. 8.31,6) импульс
снимается с усилителя и через детектор поступает на блок управления.
Детектор необходим при исследовании радиоимпульсов. Блок
управления запускает ЧМ гетеродин, частота которого начинает
плавно изменяться, как показано на рис. 8.31,в. После усилителя
преобразованный сигнал поступает на дисперсионную линию
задержки. Напряжение, соответствующее отклику линии на входное
воздействие, усиливается и подается на ЭЛТ. Блок управления
вырабатывает также импульс для запуска генератора развертки.
Примером промышленного дисперсионного анализатора
спектра является прибор С4-47. Этот прибор в комплекте с СВЧ
преобразователем обеспечивает анализ спектров в диапазоне частот
if0МГц... 39,6 ГГц. Разрешающая способность не хуже 50 кГц.
Анализатор позволяет получать спектры не только импульсных,
но и периодических непрерывных сигналов. При анализе
непрерывных сигналов в приборе осуществляется их деление на
отдельные реализации. Максимальная полоса обзора 10 МГц в режиме
анализа спектра радиоимпульсов и 3 МГц в режиме анализа
спектра непрерывного сигнала. ч
Цифровые методы спектрального анализа. Цифровой
спектральный анализ осуществляется путем
240
операций над числами,
представляющими в дискретной форме анализируемый сигнал.
Спектральные характеристики анализируемого сигнала можно
определить с помощью универсальных ЭВМ,
запрограммированных вычислительных устройств — цифровых анализаторов спектра.
Согласно теореме Котельникова сигнал, спектр которого
ограничен сверху частотой /в, полностью описывается отсчетами,
взятыми через интервалы времени At=l/2fB. Дискретизация
сигнала в полосе обзора осуществляется отсчетами мгновенных
значений напряжения сигнала в моменты времени <t=iAt, где i —
целое число, последовательно принимающее значение 0, 1, 2, ... В
результате анализируемый участок (реализация) сигнала
описывается дискретным процессом и(Ш). Спектр непрерывной реали-4
зации при цифровом методе получают путем обработки М
отсчетов сигнала, которые называют объемом выборки. Ограничение
числа отсчетов осуществляется путем умножения непрерывного
сигнала на выделяющую функцию
Л(0= J1 при0^«7\ м
10 при других значениях t,
где Т — длительность анализируемой реализации, определяемая
выражением
Г=ЛШ. (8.10)
Таким образом, при цифровой обработке осуществляется
спектральное разложение не самого сигнала, а последовательности
значений и(Ш) для /, изменяющегося от 0 до М—1.
Для вычисления значений спектральных составляющих по
совокупности дискретных отсчетов сигнала используют алгоритм
дискретного преобразования Фурье (ДПФ):
aft= Mff и (i А 0cos Ц^- , bh= 2"1 и (I A 0sin ^- , (8.11)
[=0 М г'=0 'М
где йи и bh — вещественная и мнимые части комплексного
коэффициента спектра Фурье. После определения аь. и bh
вычисляются коэффициенты спектра амплитуд
ck=Val+bl. (8.12)
Цифровой метод анализа позволяет получить и фазовый спектр
анализируемой реализации:
<pfc=-arctg (&*/<**)• (8.13)
Отметим, что спектр реализации конечной длительности
непрерывен. Алгоритм ДПФ позволяет получить лишь конечное число
спектральных составляющих с частотным интервалом между
ними \AF— 1/Г. На рис. 8.32,а, б, в, г в наглядной форме
иллюстрируются особенности обычного и цифрового анализа спектра. На
рис. 8.32,а и б представлены: непрерывная реализация сигнала и
ее сплошной спектр. На рис. 8.32,в иг — дискретизированная реа-
241
u\
tol
H a t Mat t
1)
C,..<
*)
Рис. 8.32
лизация сигнала и
дискретное
преобразование Фурье отсчетов
сигнала.
Использование ДПФ
эквивалентно применению
анализатора спектра
одновременного типа с М/2
числом узкополосных
^*- (--i)&.f f фильтров. Структурная
г) 'г ' схема цифрового
анализатора спектра
представлена на рис. 8.33.
Анализируемый сигнал, преобразованный аналого-цифровым
преобразователем (АЦП) в цифровом виде поступает на
буферный накопитель. В нем накапливается М оточетов сигнала,
соответствующих реализации длительностью Т. С буферного
накопителя информация подается на вычислители аи и bk и с них на
вычислитель сн. После усреднения полученные данные
передаются в устройство памяти результатов, которое обеспечивает
хранение результатов вычислений и передачу их на индикатор.
Объем вычислений, а следовательно, и время, затрачиваемое
на вычисления, определяется числом М обрабатываемых отсчетов.
Если время, необходимое для вычисления, меньше длительности
выборки Т, возможен спектральный анализ в реальном масштабе
времени, т. е. такая обработка сигналов, при которой не
происходит потерь отсчетов анализируемого сигнала и в то же время
нет возрастающего от реализации к реализации их накопления.
Для убыстрения цифрового анализа разработаны алгоритмы,
позволяющие значительно уменьшить объем вычислений. Такие
алгоритмы получили название быстрого преобразования Фурье (БПФ).
При построении анализатора обычного типа необходимо
выполнить М2 операций умножения и столько же операций сложения.
Таким образом, при увеличении числа отсчетов объем вычислений
растет по квадратичному закону. Сущность БПФ заключается в
том, что последовательность из М отсчетов разбивается на п
более коротких подпоследовательностей. Для определения коэффи-
АЦП
Буферный,
накопитель
Устройство усреднения
Вычислитель а.
Вычислитель 6/.
Устройство
памяти результатов
Вычислитель cj.
К индикатору
242
Рис. 8.33
циентов ak и bk одной короткой последовательности требуется
М2/п2 операций умножения и сложения. Поскольку
подпоследовательностей всего п, то для описания всей реализации необходимо
М2/п операций. Использование БПФ делает цифровые
анализаторы спектра весьма перспективными.
Глава 9. МЕТОДЫ И СРЕДСТВА ИЗМЕРЕНИЯ
ПАРАМЕТРОВ КОМПОНЕНТОВ
И ЦЕПЕЙ
9.1. КЛАССИФИКАЦИЯ МЕТОДОВ
И ПРИБОРОВ ДЛЯ ИЗМЕРЕНИЯ
ПАРАМЕТРОВ ЦЕПЕЙ
С СОСРЕДОТОЧЕННЫМИ ПОСТОЯННЫМИ
Основными параметрами цепей с сосредоточенными постоянными
являются емкость, индуктивность, взаимная индуктивность,
активное сопротивление. Измерение параметров цепей занимает
большой объем в общем -Комплексе измерений в технике связи,
причем в зависимости от диапазона частот применяют различные
методы. Активные сопротивления на постоянном токе, если не
требуется высокой точности, как правило, измеряют омметром.
При необходимости точных измерений используется мостовой
метод. На низких и средних частотах широкое распространение
получили мосты переменного тока. Их модификации с принятыми
мерами для ослабления влияния на результат измерения
паразитных параметров измерительной схемы позволяют производить
измерения с несколько пониженной точностью на частотах до
150... 200 МГц. На высоких частотах, когда резонансные
свойства колебательных цепей сказываются весьма остро, обычно
пользуются резонансными методами измерений.
В соответствии с ГОСТ в подгруппу приборов для измерения
параметров компонентов и цепей с сосредоточенными
постоянными входят следующие виды тари-боров: Е1 — меры, установки чг'тн
приборы для проверки измерителей параметров компонентов
цепей, Е2 — измерители полных сопротивлений и (или) полных про-
водимостей, ЕЗ •— измерители индуктивности, Е4 — измерители
добротности, Е6 — измерители сопротивлений, Е7 — измерители
параметров универсальные, Е8 — измерители емкостей.
243
9.2. ПРЯМЫЕ ИЗМЕРЕНИЯ ПАРАМЕТРОВ
КОМПОНЕНТОВ И ЦЕПЕЙ
Как Отмечалось в § 1.2, прямыми называются измерения, пр»
которых искомое значение величины находят непосредственно из
опытных данных. Реализуются прямые измерения параметров
компонентов и цепей с помощью метода непосредственной оценки
(в омметрах) и метода сравнения с мерой (в мостовых
аналоговых и цифровых приборах).
Измерение сопротивлений на постоянном токе методом
непосредственной оценки. На рис. 9.1 показаны две разновидности схем
омметров. Приборы состоят из источника питания Е, стрелочного
прибора (обычно микроамперметр), добавочного резистора Л?дов
и переменного калибровочного резистора RK. Схемы отличаются
включением стрелочного прибора: в одной схеме он включен
последовательно, а в другой параллельно измеряемому резистору.
При подключении измеряемого резистора Rx к зажимам
прибора в цепи на рис. 9.1,а протекает ток i=Ef(RK+Rx+Rnp + Ri),
где Ri — сопротивление источника питания. Значение тока, а
следовательно, и угол отклонения стрелки прибора зависят от Rx.
Чем больше Rx, тем меньше отклонение стрелки. Таким образом
омметр, выполненный по данной схеме, имеет обратную шкалу,
т. е*. нулевому значению сопротивления измеряемого резистора
соответствует крайняя правая отметка шкалы. В качестве
источника тока обычно в омметрах используются сухие элементы.
Уменьшение ЭДС источника питания приводит к изменению показаний
прибора, поэтому в схеме предусматривается включение
калибровочного резистора RK. Перед измерением прибор калибруют:
замыкают переключатель и, изменяя RK, достигают нулевого
показания прибора. Поскольку зависимость тока, протекающего через
прибор, от измеряемого сопротивления нелинейна, нелинейна и
шкала омметра. Схема, изображенная на рис. 9.1,а, обычно
используется для измерения больших сопротивлений.
Для измерения малых сопротивлений используют схему на
рис. 9.1,6. Прибор калибруют при разомкнутом переключателе,
при этом весь ток протекает через прибор и угол отклонения
стрелки оказывается максимальным. При подключении Rx часть
т©ка ответвляется в параллельную цепь и угол отклонения
уменьшается. Таким образом шкала омметра оказывается прямой. Ток
Рис. 9.1
244
через прибор определяется соотношением i&ERJ[RK(Rnp+Rx) +
+ftno+Rx], из которого видно, что шкала нелинейна.
Рассмотренные схемы омметров являются
простейшими."Промышленные приборы выполняются многопредельными, для чего в
схему вводятся набор дополнительных резисторов, переключаемых
при изменении предела измерения. Это позволяет уменьшить
погрешность измерения и упрощает отсчет показаний.
Большие удобства для построения омметра представляет
применение в качестве стрелочного прибора логометра. Измерение
сопротивления в этом случае основано на измерении отношения двух
токов t, и 4, один из которых протекаемто цепи с известным
сопротивлением, а другой по цепи, сопротивление которой
изменяется. Оба тока создаются одним источником питания (рис. 9.2),
поэтому нестабильность источника практически не вызывает
погрешности измерения. Большие сопротивления измеряют по
последовательной схеме при подключении резистора к зажимам 1, 2.
Относительно малые сопротивления измеряются по параллельной
схеме путем подключения к зажимам 2, 3 (зажимы 1, 2 при этом
закорочены). Приборы с логометрическими измерителями не
требуют предварительной установки нуля.
Измерение больших сопротивлений (до 105 МОм)
осуществляется мегомметрами и тераомметрами. Основные трудности, с
которыми связано конструирование таких приборов, заключаются в
необходимости применять высоковольтные источники питания и
высококачественные изолирующие материалы. Работа этих
приборов основана на измерении падения напряжения на образцовом
резисторе, который вместе с измеряемым резистором образует
делитель напряжения. Измерение напряжения осуществляется
электронным вольтметром. Таким образом часто строятся
многопредельные омметры. На рис. 9.3 представлена схема омметра,
реализующая этот метод. Здесь образцовый и измеряемый резисторы
включены последовательно. Сопротивления R06p и Rx сравнивают,
измеряя напряжения Ux и £/0бр, создаваемые на них одним и тем
же током. Так как отношение напряжений UxjU0ep = Rx/Ro6p, то-
отсчет сопротивления Rx может осуществляться по линейной
шкале стрелочного прибора, которым может быть электронный
вольтметр.
iz if Яобр
г 1 Jr .*" П'1
I—l_iJJ ■ I I гН '
Рис. 9.2 Рис. 9.3
245.
Измерение сопротивлений методом сравнения с мерой. На
этом методе строят мостовые приборы и приборы, основанные на
применении дискретного счета. Основным преимуществом этих
приборов является сравнительно высокая точность измерений.
Мостовые приборы широко распространены для
измерений активных сопротивлений, емкости, индуктивности, взаимной
индуктивности и составляющих комплексных сопротивлений
благодаря высокой точности.
Схема ординарного моста (на практике применяются и более
сложные — двойные мосты) постоянного тока (рис. 9.4)
содержит четыре резистора R\, Rz, R3, Rb образующих четыре плеча. В
•одну из диагоналей мостовой схемы включен
высокочувствительный гальванометр (идикатор нуля), в другую — источник
питания схемы. Изменяя сопротивления плеч моста, можно добиться
равенства потенциалов в точках А и В, а следовательно,
отсутствия тока через гальванометр. Как известно, в этом случае
RiRs = R2Ri. (9.1)
Состояние мостовой схемы, когда ток в цепи гальванометра
отсутствует, называют балансом моста. Из соотношения (9.1)
следует
R,= (R2/R3)Ri. (9.2)
Резистор Ri, включенный в плечо, смежное по отношению к
измеряемому, называют образцовым плечом сравнения. Он является
основным элементом при определении сопротивления Rx и
выполняется в промышленных приборах в виде высокоточного пяти-шес-
тидекадного магазина сопротивлений. Отношение сопротивлений
RzlRz меняется скачкообразно с кратностью 10". Это
обеспечивает широкие пределы измерений.
Важным параметром мостовой схемы является ее
чувствительность. Под чувствительностью в данном случае понимают
минимальное относительное изменение измеряемого сопротивления Ru
которое вызывает нарушение баланса схемы, регистрируемого
гальванометром. Расчеты показывают, что чувствительность
мостовой схемы зависит не только от чувствительности применяемого
гальванометра, но и от сопротивлений резисторов, входящих в
Рис. 9.4 Рис. 9.5
'246
состав его плеч. Для обеспечения высокой чувствительности
сопротивления плеч моста целесообразно выбирать попарно
равными. Часто используют равноплечий мост, т. е. мост, для которого
Rl =Д2 = Аз = А4.
Основная погрешность измерения сопротивления с помощью
мостовой схемы определяется погрешностью выполнения
образцовых резисторов, чувствительностью и числом декад, используемых
в плече сравнения. Дополнительная погрешность возникает из-за
температурных изменений, за счет сопротивления контактов и
проводов,' при помощи которых присоединяют измеряемый резистор
к мосту.
Обычно для мостов постоянного тока задается класс точности
бп, который характеризует погрешность сопротивлений плеч
моста. Рекомендуется при уравновешивании задействовать в.се
декады /?4. Если этого нет, погрешность за счет недостаточного числа
декад в плече сравнения находится как отношение половины
сопротивления последней используемой' декады к значению
сопротивления плеча сравнения, соответствующего равновесию моста:
6дек=(Л#4/#4)-Ю0%. (9.3)
Погрешность за счет конечного значения^ чувствительности
моста определяется следующим соотношением:
»,„- R*~Ri. ■100%. (9-4>
#4 + #4
где R'i —. значение сопротивления плеча сравнения,
соответствующее отклонению стрелки на свою толщину от состояния
равновесия;; R'\ — значение сопротивления плеча сравнения,
соответствующее отклонению стрелки на свою толщину» в сторону,
противоположную отклонению из-за подключения R\. Суммарная
погрешность моста определяется соотношением
«S = К^ + 6дек + вчув. ' (9.5)'
Погрешность промышленных образцов мостов постоянного
тока лежит в пределах от 0,05... 1 %•
Измерительный мост переменного тока (рис. 9.5) отличается-1
от рассмотренного тем, что в нем используется источник
переменного тока и сопротивления его плеч являются комплексными.
Индикатор баланса также рассчитан на переменный ток. Обычно
полагают Zt неизвестным и подлежащим определению. Баланс
моста соответствует условию
Z^Z^Z.Z,, (9.6)
или в показательной форме:
|ZJeJ4" IZgleJ^a = |Z2|eJ4>- (9.7)-
247
Из' соотношений следует, что для баланса моста необходимо,
чтобы !
1Z1||Z,| = |Z,|.|Z4|; (9.8)
ф1+фЗ=ф2 + ф4, (9.9)
Эти соотношения накладывают определенные ограничения на
выбор характера сопротивлений отдельных плеч моста. Например,
при измерении емкости без потерь в схеме, изображенной на рис.
9.6,а, не может быть выполнено условие (9.9). Для обеспечения
баланса моста схема должна быть построена, как показано на
ри. 9.6,6 или в.
Если считать, что неизвестным является Zt, т. е. Z\ — Zx, a Z^
является образцовым Z4 = Zo6P, то, как следует из (9.6),
Zx=(Z2/Z3)-Zo6v. (9.10)
Мосты, в которых образцовое сопротивление _Z06P включено в
-смежное с неизвестным сопротивлением Zx плечо моста, называют
мостами отношения вспомогательных плеч, Мосты, в которых
образцовое сопротивление Z06p включено в плечо, противоположное
по отношению к неизвестному сопротивлению Zx, называются
мостами произведения вспомогательных плеч или мостами проводи-
мостей. Для них справедливо соотношение
Zx = Zi-ZJZ-o№^=Zi /£*Уобр. ("•'*)
На практике для измерения активной и реактивной
составляющих комплексного сопротивления удобно обеспечить раздельный
-отсчет этих составляющих. Под раздельным отсчетом
подразумевается такой режим, при котором активный и реактивный
регулируемые элементы образцового сопротивления при балансе моста
• определяют соответственно только одну составляющую
измеряемого комплексного сопротивления. Тогда один из регулируемых
элементов моста позволит отсчитывать активную, а другой —
реактивную составляющие измеряемого сопротивления.
Для мостов отношения вспомогательных плеч имеем:
Zx = (Z2/Z3) Zo6p = (Z2/Z3) (#обр + J -^обр)-
a) 6) S)
Рис. 9.6
Так как отношение сопротивлений вспомогательных плеч в
общем случае комплексное число, то
Z2/Z3 = a + j р. (9.12>
Тогда, учитывая (9.10) и (9.12), получаем:
Rx + j Хх= (а /?обр-р[Хобр) + ] (а Хобр + р /?обр),
следовательно,
Rx = aRo6p—Р*обР. Xx = aXo6p + $Ro6p. (9.13).
Из этих соотношений следует, что в общем случае мы не
получаем раздельного отсчета: ftx и Хх определяются как активной
(#обр), так и реактивной (Хобр) составляющими образцового
сопротивления Z06p.
Для раздельного отсчета составляющих сопротивления Zx на
соотношения (9.13) необходимо наложить условия: либо а = 0,
либо р = 0. Если а = 0, то ^х=—Р^обр, а Xx = $R0eP. Таким образом
активная составляющая Rx будет определяться только через
•^обр, а реактивная Хх — только через /?0бр.
Как следует из (9.12), для этого необходимо, чтобы отношение
вспомогательных сопротивлений Z2/Z3 было чисто мнимой
величиной, или
Ф2-^Фз=±я/2. (9.14)
Если Р=0, то Rx=aRo6p, а Хх = аХ0бр. В этом случае
необходимо, чтобы отношение сопротивлений вспомогательных плеч было-
чисто вещественной величиной, или
Ф2^Фз = 0. (9.15)
Аналогично можно доказать, что для мостов произведения
вспомогательных плеч требование раздельного отсчета приведет
к необходимости выполнения условий:
ф2+ф4=±я/2 (9.16)
или
ф2+ф4=0. (9.17)
Требование раздельного отсчета и необходимость соблюдения
обоих условий баланса положены в основу выбора параметров
плеч мостовых схем в промышленных приборах.
Из условий (9.8), (9.9) следует, что напряжение питания
мостовой схемы должно быть синусоидальным. В противном случае
эти условия, выполняемые для основной частоты напряжения
питания, могут оказаться невыполненными для частот гармоник и
напряжение на диагонали индикатора при балансе не будет
равно нулю, а лишь пройдет через минимум. Чтобы ослабить
влияние гармоник на точность индикации баланса моста, в цепи
индикатора используют избирательные усилители. В качестве
индикатора обычно применяют устройства, подобные электронным
вольтметрам.
249
Погрешность измерительных мостов переменного тока
содержит следующие основные составляющие: погрешность за счет
ограниченной чувствительности мостовой схемы, погрешность за
счет неточности параметров схемных элементов моста
(сопротивлений плеч), погрешность за счет паразитных емкостей и индук-
тивностей, имеющихся в схеме.
На высоких частотах основную роль играют паразитные
емкостные связи элементов моста между собой, с источником
питающего напряжения, измеряемым объектом и др. Их влияние
сильно возрастает по мере повышения частоты. Все это приводит
к тому, что баланс моста получается неустойчивым, так как
внешнее, воздействие (например, приближение или удаление
экспериментатора) влияет на паразитные емкости и поэтому повторные
измерения одной и той же величины дают различные результаты.
•Одним из способов ослабления паразитных емкостных связей
является экранирование элементов моста. Однако эта мера
расширяет верхнюю границу рабочих частот всего до нескольких
десятков килогерц. Обычные четырехплечие мосты переменного тока в
указанных границах диапазона частот имеют погрешность
порядка 0,5... 1%.
В промышленной измерительной аппаратуре широко
распространены дифференциальные трансформаторные мостовые схемы. В
этих измерительных мостах (рис. 9.7) для измерения
составляющих комплексных сопротивлений используют свойства цепей с
сильной индуктивной связью, при которой отношения напряжений
и токов, действующих в цепях, строго определяются отношением
чисел витков обмоток трансформаторов. В схеме рис. 9.7 обмотки
П\ и п2 трансформатора Трх включены согласно; обмотки п3 и п4
трансформатора Тр2 — встречно.
Условие равновесия мостовой схемы (£/вых = 0) выполняется в
том случае, если _/ж«з=_/обрЛ4, но Ix = E(ti\/n) • (1/2^), а Л>бр =
= £(л2/л) • (1/£обР). Поэтому
Z. = Z06P-^.^ . (9.18)
— — п2 п4
Таким образом, условия равновесия мостаtопределяются
стабильными -и не зависящими от внешних факторов отношениями
чисел витков. Если создать цепи с возможностью раздельного
изменения чисел витков трансформаторов для активной и
реактивной составляющих образцового сопротивления _Z06P, то может
быть обеспечен раздельный отсчет активной и реактивной
составляющих измеряемого сопротивления Zx.
На основе мостовых схем
промышленность выпускает ряд приборов для
измерения сопротивления, емкости и
индуктивности на нескольких
частотах.
В последнее время для измерения
параметров компонентов начали ис-
250
\*
пользовать трансформаторные мостовые схемы, в которых
значение измеряемого комплексного сопротивления
предварительно преобразуют с помощью операционного усилителя в
напряжение, подаваемое затем в цепь измерительного моста.
Операционные усилители обеспечивают высокую защищенность схемы
от паразитных влияний, а трансформаторные плечи позволяют
получить высокие метрологические характеристики. Погрешность
таких промышленных приборов лежит в пределах десятых долей
процента.
Цифровые методы измерения параметров компонентов и
цепей. В основу цифровых приборов положены различные
принципы измерения. Наиболее распространены приборы мостового
типа с поразрядным кодированием, с предварительным
преобразованием сопротивления в пропорциональное ему ■ напряжение; с
время-импульсным преобразованием.
На рис. 9.8 изображена схема цифрового моста для измерения
активных сопротивлений. К диагонали моста CD подключен
источник постоянного напряжения. Для уравновешенного моста
справедливо соотношение RxRz = RiR3, откуда измеряемое
сопротивление
RX— #3-^l/^2
(9.19)
В диагональ моста АВ включен нуль-орган, вырабатывающий
сигналы для автоматического подбора образцовых сопротивлений
Ri и R& Первое из которых {Ri) обеспечивает автоматический
выбор пределов измерения сопротивления Rx, а второе (R2)
определяет измеряемое сопротивление Rx. Выбранная
последовательность включения образцовых сопротивлений обусловлена кодом.
В цифровых мостах чаще всего используют код 2421, т. е.
сначала включают образцовое сопротивление «весом» 2, затем 4,
затем 2 и, наконец, 1. При переходе от старшей декады к младшей
сопротивления образцовых резисторов уменьшаются в 110 раз
(0,2—0,4—0,2—0,1 и далее 0,02—0,04—0,02—0,01). На этапе
измерения сопротивления Rx в плечо fa включают последовательно
во времени четыре группы сопротивлений, обеспечивая 4-знач-
^ Измерительный длон
Рис. 9.8
251
ный отсчет сопротивления Rx. Компенсация моста фиксируется
нуль-органом.
Последовательность циклов работы цифрового моста
обеспечивается блоком управления. С помощью этого блока сначала
выбирают необходимый предел измерения (сопротивление Ri),
затем подбирают образцовые сопротивления (/?2 и в последнем
такте с блока управления подают сигнал на дешифратор,
преобразующий измерительную информацию (определяемую
сопротивлениями Rz), в десятичный четырехразрядный код. Этим
обеспечивается цифровой отсчет измеряемого сопротивления.
Описанный принцип измерения позволяет реализовать
универсальные цифровые приборы для измерения iR, С и L. Погрешность
таких приборов определяется следующими основными
составляющими: погрешностью дискретности и аппаратурной погрешностью
(точностью изготовления резисторов плеч моста, их стабильностью,
качеством коммутирующих узлов, погрешностью за счет
конечного значения порога чувствительности нуль-органа).
В промышленной измерительной аппаратуре широко
распространены цифровые измерители активных сопротивлений, в которых
измеряемое сопротивление предварительно преобразуется в
пропорциональное ему напряжение с последующим измерением
этого напряжения цифровым прибором. Иначе говоря, такой
измеритель состоит из преобразователя сопротивление-напряжение и
цифрового вольтметра.
Принцип преобразования поясняет рис. 9.9,а, где U0ep —
стабильный источник питания схемы, Добр — образцовое
сопротивление. Напряжение, действующее на измеряемом сопротивлении Rx,
несет информацию о значении этого сопротивления. Однако в
данном простейшем случае не будет линейного преобразования
сопротивления в напряжение, так как с изменением Rx будет
меняться не только напряжение на нем, но и общий ток /0бР,
протекающий через делитель ^обр, Rx- Поэтому функция преобразования
Рх= (RJRo6p)Uo6p(l+b) будет нелинейной. В этой формуле
коэффициент 6=—Rxl(Ro6p+Rx) указывает на степень отклонения
функции преобразования от линейного закона. Значительная
нелинейность преобразования рассматриваемой схемы исключает
возможность ее применения в цифровых приборах для измерения
Rx с приемлемой для практики точностью. Используя в схемах
преобразователей, построенных по методу вольтметра —
амперметра, операционные усилители, мож-но
практически исключить отмеченный
?о, недостаток за счет обеспечения пе-
** стоянства тока /0бр при изменении
"с=3—j Rx. Одна из распространенных схем
Ч^\_1 преобразователя показана на рис.
рг~^° 9.9,6. Измеряемое сопротивление Rx
—I ""* включается в цепь отрицательной об-
^ ратной связи операционного усили-
Р,/с. 9,9 теля. При условии, что входное сопро-
252
тивление операционного усилителя велико, коэффициент передачи
такой схемы
^ВЫХ KRx __ Rx /Q 2Q\
•^обр Ro6p + Rx + KRo6v (Ro6v + Rx)/K + R06v
Когда коэффициент усиления операционного усилителя К-*-°°
(практически»достаточно иметь /С=500... 1000), (9.20) принимает
следующий вид:
^вых= —(#х/#обр) ^обР-
Следовательно, при постоянных R06p и U0ep выходное
напряжение схемы линейно зависит от измеряемого сопротивления Rx.
Погрешность приборов, .построенных на основе
рассмотренного метода, зависит от погрешности R0ep и нестабильности С/0бр и
лежит в пределах 1...2%. i
В цифровых приборах, основанных на время-импульсном
преобразовании, измеряемый параметр преобразуется во временной
интервал и затем измеряется методом дискретного счета.
Упрощенная схема такого прибора для измерения емкости изображена
,на рис. 9.10. Вначале управляющая схема включает ключ К и к
цепи R06p, Сх прикладывается напряжение U06p (Roup —
образцовое сопротивление, U00p — высокостабильное напряжение).
Одновременно управляющая схема включает временной селектор и
на счетчик начинают поступать импульсы с кварцевого
генератора. Под действием напряжения U06p потенциал конденсатора Сх
возрастает по закону UCx=U06p[l—ехр(—t/x)], где x=R06pCx.
Спустя время t=x, напряжение, поступающее на нуль-орган с
конденсатора Сх, U'Cx=V0zp[l—exp(^-l)] =0,632Uo6p, сравняется
с напряжением, поступающим на второй вход нуль-органа с
делителя Ru R2 (U{—0,632t/обр). Нуль-орган выдаст импульс на уп-
П
/с к
[
i
Устройство
управления
[
К
Стол д
ч
Генератор
импульсов
п
/СКА \i
Временной
селектор
п*.
= Сх
Нуль-орган
1
у Выкл.
к ■
-П*2/0,63(/6р
У
Устройство
цифрового отсчета
Рис. 9.10
253
равляющую схему, которая разомкнет ключ. Подача импульсов
на счетчик прекратится. В результате на счетчик поступают п=
= /г<=/гТ = /г^обрСж импульсов счета в течение времени t=t.
Следовательно,
Cx = n/frRo6p. (9.21)
Таким образом, при постоянных R06p и частоте колебаний
кварцевого генератора /г емкость Сх определяется числом
импульсов п. По окончании цикла измерения информации со счетчика
поступает на устройство цифрового отсчета. Выбирая разные
значения R06p и частоты /г, можно изменять пределы измерения Сх.
Источниками погрешностей измерений являются:
нестабильность частоты /г, погрешность дискретности, инструментальная
погрешность (определяемая стабильностью и точностью
образцовых элементов), нестабильность источника питания Uo6p.
Из (9.21) следует, что тот же прибор можно использовать и
для измерения сопротивления. Для этого достаточно вместо Сх
включить образцовый конденсатор, а вместо i?06p — измеряемый
резистор Rx. В этом случае сопротивление резистора определится
из формулы Rx = n/fTC06p. Для измерения индуктивности Lx
измеряемую катушку следует включить вместо R06p (рис. 9.10), a R06p
включить вместо конденсатора Сх. В этом случае, после
замыкания ключа К напряжение на /?0бр будет нарастать по экспоненте
с постоянной времени x=Lx/R06p. В момент t=t число импульсов,
зафиксированное счетчиком, будет равно n = frx — frLx/R06p, откуда
Lx=nRo6p/fr. При постоянных R06p и /г индуктивность будет
определяться числом импульсов п.
9.3. КОСВЕННЫЕ ИЗМЕРЕНИЯ ПАРАМЕТРОВ
КОМПОНЕНТОВ И ЦЕПЕЙ
Косвенные измерения параметров компонентов и цепей
обычно выполняют методами вольтметра — амперметра и резонансным.
Метод вольтметра — амперметра. Этот метод основан на
раздельном измерении как постоянного, так и переменного тока,
протекающего в цепи измеряемого сопротивления, и напряжения на
его зажимах (рис. 9.11,а). Метод вольтметра — амперметра
целесообразно применять на низких частотах для измерения
индуктивности и емкости и на постоянном токе для измерения
сопротивления. Включив в схему на рис. 9.1 \,а в качестве
двухполюсника конденсатор, находим его емкостное сопротивление Хс=
= 1/аСх=ис/1, откуда емкость Cx = I/aUc. Здесь со = 2я/ —
круговая частота источника питания схемы. Если включить катушку
индуктивности, то можно определить ее индуктивное
сопротивление XL = d)Lx=UL/I и индуктивность L = Ula>I.
Для метода вольтметра — амперметра характерна
систематическая погрешность. При включении приборов так, как показано
на рис. 9.11,6, погрешность обусловлена тем, что амперметр
показывает сумму токов Iv и / и, следовательно, измеренное сопротив-
254
а) в) S)
Рис. 9.11
жяне R=U/(U/Rx + U/Rv)=Rx/(l+Rx/Rv) отличается от Rx. Здесь
,RV — сопротивление вольтметра. Относительная систематическая
погрешность в процентах определяется соотношением 6 =
= - -100= -100, из которого видно, что ме-
Rx ' ~Ь RxIRy
тодическая погрешность возникает из-за конечного значения
сопротивления iRv- При £JV—>-оо 6-И). Если Rv задано, то для
уменьшения погрешности важно выполнить условие Rx<^Rv, т. е. с
помощью схемы рис. 9.11,6 целесообразно измерять малые
сопротивления. Исключить систематическую погрешность можно,
вычислив ftx = RKl+>RIRv).
В схеме на рис. 9.11,в погрешность возникает из-за того, что
вольтметр показывает сумму напряжений U на Rx и UA на
амперметре. В этом случае (U+UA)/IA= {IaiRx + 1aRa)I1a = Rx +
+Ra- Относительная погрешность б=[(/?—Rx)/Rx) • 190 =
= (Ra/Rx) • 100, откуда следует, что данную схему
предпочтительнее использовать для измерения больших сопротивлений, когда
iRx^>Ra- Методическую погрешность можно устранить, если
известна Ra. Для этого достаточно из результата наблюдения
вычесть значение Ra, которое в данном случае является поправкой.
Метод вольтметра — амперметра является типичным примером
косвенных измерений. При оценке погрешностей после
исключения систематических составляющих следует воспользоваться
соотношениями, приведенными в § 4.4.
Пример. Косвенным методом измерено сопротивление R. Уравнение
косвенного измерения имеет вид R=U/I. Число измерений в серии 50. Получены
следующие результаты: (/ = 40,,2±0,« В; р=0,95; /=56,3±1,2 А; /?=0,95.
Коэффициент корреляции результатов наблюдений rui—О. Найти результат
измерения.
В соответствии с (4.46) для вычисления частных погрешностей необходимо
определить производные dRjdU и dRjdl и средние квадрагические отклонения
ои и ci. * -.;
Частные производные равны dR/dU=l/I и dRjdI=—R/I. Учитывая, что
число наблюдений ©О, воспользуемся таблицей интеграла вероятностей
(приложение I), из которого следует, что вероягйости 0,95 соответствует е = 2о\ Из
условий задачи следует, что et/ = 0,8 и е7 = 1,2. Таким образом, ou = Bvltu =
=0,8/2 = 0,4; ei=£i/t, = 1,2/2=0,6. Частные погрешности равны (dR/dU)au =
= (1/7)0(7 = 0,4/56,3 = 7,1-Ю-3, (dR/dI)ei = — (£///2)сг, = (—40,2/56,32) -0,6 =
=— 7,6-10~3. *
255
Оценка R равна R= 0/7 = 40,2/56,3 = 0,72 Ом. Учитывая, что коэффициенты
корреляции ги 1 — 0, среднее квадратическое отклонение о результата измерения
R найдем по формуле (4.46):
= 1/Л(7,12 + 7,62)-10-6= КГ2.
Задаваясь доверительной вероятностью р=0,95, имеем ен = 2о. Результат
косвенного измерения с указанием его достоверности:
#=0,72±0,02 Ом; р=0,'95.
Резонансный метод измерения параметров компонентов и
цепей. Резонансный метод широко используют для измерения на
низких и высоких частотах параметров линейных
двухполюсников: индуктивности, емкости, добротности контуров и катушек
индуктивности, тангенса угла потерь конденсаторов. Исследуемый
двухполюсник подключают к образцовому конденсатору или
образцовой катушке индуктивности, образуя колебательный контур.
Применяются две разновидности этого метода. Первая из них
основана на явлении резонанса, т. е. резком возрастании
амплитуды вынужденных колебаний в контуре, состоящем из катушки
индуктивности и конденсатора, и зависимости резонансной
частоты от значений емкости и индуктивности. Это пассивный вариант
метода.
Во втором случае контур служит частично-задающей цепью
автогенератора и используется зависимость частоты
автоколебаний от реактивных параметров контура. Этот активный вариант
метода обычно называют генераторным. При таком методе
колебательный контур может иметь существенно более низкую
резонансную частоту, поскольку от контура не требуется высокой
добротности (активное сопротивление контура компенсируется
отрицательным сопротивлением, вносимым цепью обратной связи). Это
позволяет измерять большие емкости и индуктивности, чем в
первом варианте. Отрицательной стороной генераторного метода
является невозможность измерять активное сопротивление.
Пассивный вариант метода реализуется большей частью с
помощью прибора, именуемого измерителем добротности или кумет-
ром (рис. 9.12). Прибор содержит градуированный генератор
плавно регулируемой высокой частоты, колебательный контур,
составленный из образцового
конденсатора переменной емкости и
образцовой катушки индуктивно-
сти^ делитель напряжения,
образованный конденсаторами
постоянной емкости Ci и С2 и
связывающий генератор с колебательным
контуром, и два электронных
Рис. 9.12 вольтметра, один из которых Vt
Генератору
высокой
частоты
-Сг
256
измеряет напряжение на выходе генератора, а второй V2 — на
образцовом конденсаторе (Q-вольтметр).
Куметр снабжен комплектом образцовых катушек
индуктивности, подключаемых к клеммам Lx и позволяющих получить с
образцовым конденсатором любую резонансную частоту в
пределах частотного диапазона прибора. Кроме того, имеются две
клеммы, обозначенные Сх, позволяющие включить параллельно
образцовому конденсатору измеряемый двухполюсник.
Вольтметр Vi имеет на шкале черту, соответствующую
номинальному значению напряжения е, вводимому последовательно в
контур. Шкала вольтметра V2 проградуирована в значениях
добротности контура, что основано на соотношении E = Qe, где Е —
напряжение на емкости контура, Q — добротность, е —
последовательно введенное в контур напряжение.
Куметр с диапазоном частот от 50 кГц до 35 МГц снабжен
образцовым конденсатором, емкость которого может изменяться от
25 пФ до 450 пФ.
Конденсатор Сг влияет на резонансную частоту наряду, с
образцовым конденсатором. Это влияние можно учесть, введя
эквивалентную емкость Сэ=С0брС2/(С0бр + С2). Тогда для резонансной
частоты получаем
ю2. = 1/^эФФ Св. (9.22),
Для измерения индуктивности катушку включают
в контур куметра к клеммам Lx и, установив требуемую частоту
генератора, настраивают контур в резонанс, изменяя емкость
образцового конденсатора. Индуктивность вычисляется по формуле
(9.22). При этом получается эффективная индуктивность,
отличающаяся от действительной из-за неучтенной собственной емкости
Со катушки. Эта емкость складывается из емкостей между
отдельными витками обмотки и считается включенной между ее
концами. ^
На частоте соо = l/VLCo, называемой собственной частотой, в
катушке возникает резонанс индуктивности с собственной
емкостью. На этой частоте катушка обладает чисто активным
сопротивлением. На частотах, выше собственной, ее сопротивление
емкостное.
На частоте cu<Ccuo эквивалентную схему катушки можно
представить последовательным соединением эффективной
индуктивности L3(p(p и активного сопротивления гЭфф. Эти параметры можно
выразить через действительные значения индуктивности и
активного сопротивления формулами:
, L . г
1 — (С0/С00)2 (1—Ш8/Шо)
которые показывают, что оба эффективных значения больше
действительных.
9—1© 2577
Собственную емкость катушки можно найти из результатов
двух настроек контура на разные частоты xai=Vl/L(C3i + Co)',
■<о2= l/l/L(C32+C0), откуда С0= (со22Сэ2—w2iC3i)/((o2i—со2г). Для
удобства вычислений можно положить <»i = 2<»2. тогда
С0=(Сл—4Cai)/3.
Теперь можно определить значение индуктивности, свободное
ют влияния собственной емкости катушки: £=1/<о22(СЭ2+Со).
Пренебрегая потерями в образцовом конденсаторе, для тока
в контуре и для напряжения на конденсаторе при резонансе мож-
«о записать: / = е/гЭфф; Е = е/<орСэгэфф. Кроме того, 1/(йРСэ =
= (0р1Эфф. Отсюда получим выражение для добротности:
е Шр Сэ ''эФФ ЛэФФ
Учитывая исключительно малые потери образцового
конденсатора куметра, измеренное значение добротности контура мвжно
считать одновременно и добротностью катушки.
При измерении добротности произвольноге
контура его катушка индуктивности подключается к клеммам Lx,
а конденсатор — к клеммам Сх куметра. Образцовый конденсатор
устанавливается на минимальную емкость и производится
настройка в резонанс изменением частоты генератора. Добротность
отсчитывается по шкале вольтметра V2, проградуированной в
единицах добротности. Измерение происходит на частоте, более
низкой, чем резонансная частота измеряемого контура, поскольку
параллельно емкости контура включена емкость образцового
конденсатора. Полагая сопротивление контура одинаковым на обоих
частотах, можно показать, что измеренное значение добротности
получилось заниженным. Обозначим параметры измеряемого
контура через LK, Ск, тк. Тогда его добротность:
Qk
__ р __ У^-к/Ск
'к "к
При наличии образцового конденсатора Qx= ^- •
Отсюда Q„ = QiKl+Co6p/CK.
Последняя формула позволяет получить более точное значение
измеряемой добротности, если известна емкость конденсатора
контура Ск.
С помощью куметра можно измерить активную и
реактивную составляющие сопротивления или
проводимости любого линейного двухполюсника. К клеммам Lx
подключают одну из образцовых катушек индуктивности. Контур
куметра настраивают в резонанс на требуемой частоте и
отсчитывают значения емкости C0Dpi образцового конденсатора и
добротности Qi контура. Затем исследуемый двухполюсник подключают
к контуру одним из двух способов: параллельно образцовому
конденсатору или последбвательно с катушкой, и контур вторично
258
настраивают в резонанс на той же частоте, изменяя емкость
образцового конденсатора. Отсчитывают новые значения емкости
Собрг и добротности Qi.
Способ включения двухполюсника зависит от модуля его
сопротивления. Если последний меньше характеристического
сопротивления контура, то двухполюсник включают последовательно с
катушкой, в противном случае — параллельно конденсатору.
Полное сопротивление последовательно включенного
двухполюсника
2—- ^ (s-J ;пН +J ± U Г-1 • Р.23)
— со \У2 Собрг Vi ^o6pi / °> \ ^обрг l>06pi /
Полное сопротивление и полная проводимость параллельно
включенного двухполюсника:
2пар = 9iSl + j ! , (9.24)
— со C06pi (Qi — Qi) со (Собрг — C06Pi)
^паР = соСобР1 (-L _ -Ц + j ш (СобР1-СобР2). (9.25Х
Рассмотрим частные случаи.
При измерении сопротивления резистор-а малого
значения он включается последовательно с катушкой. При
отсутствии у резистора реактивности резонансная настройка
сохраняется (С0бр1 = Собрг), но уменьшается добротность: Qz<.Qi. И*
(9.23) получим
. R=—±-(±-±
со С0бр 1 \ Qa Qi
Наличие реактивности индуктивного характера потребует
уменьшения емкости конденсатора при второй настройке (C0§pi>
>Собрг). В результате в соответствии с (9.23) мнимая часть будет
положительна. При емкостной реактивности резистора C06Pi<
< Собрг и мнимая часть отрицательна.
Резистор с большим сопротивлением включают параллельно
конденсатору. При отсутствии реактивности из (9.24) получим
R=*
1 Q1
со С0бр1 Qi—<
При измерении емкости конденсатор, емкость
которого меньше разности С0бРтах—C06Pmin, включают параллельно
образцовому конденсатору. Первоначальную настройку контура
(без измеряемого конденсатора) производят при емкости
образцового конденсатора, удовлетворяющей соотношению: (C06pi—
—Собрт1п)>Сс. Для второй резонансной настройки емкость
образцового конденсатора необходимо уменьшить на значение
измеряемой емкости. Получаем Ca;=Co6pi—Собрг.
Добротность при включении измеряемого конденсатора
уменьшается, поскольку потери в последнем обычно больше, чем в об-
9* 25»
разцовом. Формула (9.25) представляет эти потери в виде
эквивалентной активной проводимости.
Конденсатор, емкость которого С*> (С0бРтах—Coepmin),
должен включаться последовательно с катушкой. Из (9.23) для
измеряемой емкости получаем Cx = C06piCo6p2/(Co6p2—Co6pi).
Чтобы погрешность знаменателя была того же порядка, что и
погрешность отсчета входящих в него емкостей, разность
последних должна быть максимальной. Это будет при С0бР2= Собр max. С
этой точки зрения желательно вначале настроить в резонанс
контур с включенным измеряемым конденсатором и максимальной
емкостью образцового конденсатора изменением частоты
генератора, а затем при той же частоте настроить контур без
измеряемого конденсатора, уменьшая емкость образцового конденсатора
Ло значения C06Pi.
Индуктивность измеряемой катушки может быть
слишком мала или слишком велика для включения вместо образцовой
(резонансная частота выходит за пределы частотного диапазона
генератора). В этом случае в куметр включают одну из
образцовых катушек, а измеряемую в зависимости от индуктивности
включают 'Последовательно с образцовой катушкой (малая
индуктивность) или параллельно образцовому конденсатору (большая
индуктивность). В первом случае вычисление производится по
формуле (9.23), а во втором — по формуле (9.24).
Если измеряемая катушка индуктивности может быть
включена вместо образцовой, результат измерения находят по формуле
Lx=]l/(u2(Co6p+C0), где Собр — емкость куметра, Со —
собственная емкость катушки.
Существует несколько источников погрешности измерения ку-
метром:
погрешность градуировки образцового конденсатора (около
1%);
погрешность частотной градуировки генератора (около 1%);
погрешность установки выходного напряжения генератора и
погрешность вольтметра Уг (около 5%);
неточность настройки в резонанс (около 0,5% по частоте и
около 1 % по емкости).
При некоторых измерениях погрешность определяется только
частью этих источников. Наименьшая погрешность имеет место
при измерении емкости конденсатора, включенного параллельно,
так как здесь проявляются только первый и четвертый источники
(около 2%). Несколько больше погрешность при измерении
индуктивности катушки (при любом включении), поскольку здесь
добавляется погрешность определения частоты генератора (около
4%). Такого же порядка погрешность можно ожидать при
измерении емкости последовательно включенного конденсатора.
Большая погрешность имеет место при измерении добротности (около
5%). Еще большая погрешность может быть при определении
активных частей полных сопротивлений двухполюсников, особен-
260
но конденсаторов, потери которых малы и поэтому слабо влияют
на добротность контура.
Куметры позволяют измерять практически все параметры
двухполюсников. Однако непосредственный отсчет возможен только
при измерении добротности и сравнительно узкого диапазона,
значений индуктивности на нескольких фиксированных частотах.
В остальных случаях измерения являются косвенными. Расчет
погрешности измерений может быть выполнен с помощью
формулы (4.46). В качестве примера произведем расчет погрешности
измерения индуктивности.
Пример. Определить предел абсолютной и относительной погрешности
измерения индуктивности косвенным методом на основе соотношения Lx=^,
= 1/ш2(Собр + С0).
Из формулы (4.46) имеем
д Lx д Lx д Lx
Д Lх = Д ш + Д Собп + Д Со,
да т (Э Собр Р дС0 °
где Дш, ДСобр и ДС0 — абсолютные систематические погрешности со, С0вр н С*
Частные производные равны: дЬх/д<й=-^2/<й3(С0бр + Со);
<М.*/<ЭСобр = ^1/сог(С„ + С0)2; dZ.«/dC0=—1/соЧ(Совр + С0)2.
Предел абсолютной погрешности измерения
—2 1
<а8 (Собр + С0) со* (Собр + С0)2
Предел относительной погрешности измерения
&L 2 1
L со3 (Собр + Со) I <о2 (С0бр + С0)а I
При резонансе Z.(C0ep + Co) = 1/со2, следовательно, окончательно имеем
Д L Acq А С0бР Д С0
L со С0бр + Со Собр + Со
Генераторный вариант резонансного метода. Обычно для
реализации этого варианта применяется схема, изображенная на
рис. 9,13. Она содержит два одинаковых генератора, в
колебательных контурах которых имеются катушки с равными индуктивнос-
тями.
Контур генератора 2 содержит образцовый конденсатор
постоянной емкости и небольшой подстроечный конденсатор, с
помощью которого устанавливается первоначальное равенство
частот обоих генераторов. Контур генератора / содержит три
образцовых конденсатора: постоянной емкости Со, переменной емкости
Сюбр и ступенчато измеряемой емкости Сгобр. Емкость последнего
конденсатора может изменяться от нуля ступенями, равными
максимальному изменению емкости переменного конденсатора. В
начале любого измерения емкости конденсаторов Cio6p и Сгобр
устанавливаются равными нулю.
Равенство частот генераторов индицируется по нулевым
биениям с помощью телефона или по визуальному индикатору.
261
г'Л=^
~2о5р _
Xinii ?
inn JL
i mi 1—I
'/oSp
[
ctt
Генератор
высокой
частоты
1
Генератор
высокой
частоты
2
Смеситель
н
Усилитель
н
Индикатор
Рис. 9.13
Измеряемая катушка индуктивности включается в
контур генератора 2 последовательно с катушкой контура. После
этого увеличивают емкость переменного конденсатора Ci06p до
достижения равенства частот обоих генераторов. Тогда имеет
место равенство: (C'o+Cto6p)L'o=C"o{L"0+Lx). Поскольку из
начального равенства частот следует C'0L'q= C"oL"0, получаем
Lx = L'0Clo6p/C'0_ (9.26)
Таким образом, измеряемая индуктивность пропорциональна
емкости образцового переменного конденсатора. Для расширения
пределов измерения индуктивности оба генератора выполняются
с несколькими частотными поддиапазонами, переключение
которых сопровождается сменой катушек индуктивности в контурах.
Переходу на соседний диапазон соответствует 10-кратное
изменение индуктивности, а следовательно, такое же изменение
коэффициента пропорциональности в формуле (9.26).
При измерении емкости конденсатор включается
параллельно конденсатору контура генератора 2. Последующее
равенство частот достигается увеличением емкости образцовых
конденсаторов Cio6p и С20бр в контуре генератора 1. Аналогично
предыдущему можно получить выражение для измеряемой емкости:
Сх — ^обР *V^o,
из которого видно, что может иметь место погрешность за счет
неточного равенства индуктивностей в контурах. Эта погрешность
устраняется включением измеряемого конденсатора в контур
генератора 1, но при этом невозможно измерять емкости, большие
начальной емкости контура. Измерение производится в одном
частотном диапазоне.
Можно указать следующие источники погрешности в
генераторном варианте резонансного метода:
погрешность отсчета емкости образцовых конденсаторов;
262
различие в индуктивности одновременно включенных
контурных катушек генераторов;
неточное равенство частот генераторов.
Наибольшую роль играет первый источник — обусловленная
им погрешность присутствует во всех измерениях (около 0,5%).
Второй источник вносит погрешность только при измерении
емкости. Эта погрешность зависит от качества изготовления катушек
и может составлять 0,1 ...0,2%.
Погрешность от третьего источника еще меньше и ее
практически можно не учитывать.
В электронно-счетном измерителе
добротности контура используется явление уменьшения во времени
амплитуды свободных колебаний в контуре, при которых для
напряжения на конденсаторе можно написать:
Uc = V1 exp (—rt/2 L) cos coc t,
где Vi — амплитуда колебаний в момент t = 0, coc = (upV 1—1/4Q2—•
частота свободных колебаний; (оР — резонансная частота контура;
г — активное сопротивление, a Q — его добротность. Учитывая,
что
j_ _ г "1/С/Г __ шр_
2 1 2VLC 2Q '
и пренебрегая различием между сор и ©с, получаем
_ Юр?'
~2Q,
В момент t=QTp амплитуда свободных колебаний
уменьшается до U2=Uiexp(—я). Это означает, что счет числа периодов
свободных колебаний в течение времени, за которое их амплитуда
уменьшается в ехр я раз, позволяет найти значение добротности.
Схема прибора изображена на рис. 9.14. Для фиксации
начальной амплитуды свободных колебаний конденсатор контура,
отключенный от катушки индуктивности, предварительно заряжа-
ис = Ux ехр
cos сор t.
Ограничитель
_J <Рормира-
~~Л ватель
Счётчик
и
цифровой
индикатор
t
Рис. 9.14
263
ется до напряжения Е от источника постоянного напряжения. В
момент /=0 конденсатор контура отсоединяется от источника и
подсоединяется к катушке. При этом Ui=E. Поступление
импульсов на счетчик прекращается, когда амплитуда свободных
колебаний станет меньше напряжения £ехр(—я), снимаемого с
делителя.
В таком измерителе добротности имеются следующие
источники погрешности:
нестабильность порога ограничения;
нестабильность коэффициента передачи делителя напряжения;
сопротивление замкнутого контакта переключателя;
погрешность дискретности;
зависимость частоты свободных колебаний от добротности;
входное сопротивление ограничителя.
Вторым источником можно пренебречь по сравнению с первым,
поскольку стабильность линейной цепи может быть существенно
выше стабильности нелинейной цепи, а пятым источником
можно пренебречь по сравнению с четвертым. Погрешности,
обусловленные остальными источниками, можно оценить следующим
образом.
Относительная погрешность от нестабильности порога
ограничения
A_Q ^ __ In (1 — 6)
Q я '
где б — относительная нестабильность порога ограничения.
Относительная погрешность от сопротивления гк замкнутого
контакта переключателя и входного сопротивления RBX
ограничителя
^Я — __ !jl ■ HlQ — _ Р3
Q ~~ г ' Q ~~~ г #вх
где г — последовательное сопротивление измеряемого контура, а
р — его характеристическое сопротивление.
Наконец, относительная погрешность дискретности:
6Д=№
В заключение следует отметить, что электронно-счетный
измеритель добротности не является универсальным прибором,
поскольку не позволяет измерять другие параметры контура.
9.4. ОСОБЕННОСТИ ИЗМЕРЕНИЙ '
ПАРАМЕТРОВ ЭЛЕМЕНТОВ И ТРАКТОВ
С РАСПРЕДЕЛЕННЫМИ ПОСТОЯННЫМИ
В технике связи на сверхвысоких частотах (СВЧ) широко
применяют кабели, волноводы, световоды различной конфигурации и
размеров. В измерительной технике на этих частотах в основном
264
используют отрезки коаксиальных и полосковых линий, а также
круглых и прямоугольных волноводов различного поперечного
сечения. В табл. 9.1 приведены соотношения, характеризующие
эти линии и волноводы.
Поскольку на СВЧ трудно или вовсе невозможно измерять
абсолютные значения напряжений или токов, определяют их
относительные значения.
Таблица 9.1
Поперечное~сечение и
распределение составляющих поля в
линиях передачи СВЧ
Волновое сопротивление Z
Длина волны Я,
Коаксиальная линия
60 In
КРУГЛЫЙ ВОЛНОВОД С ВОЛНОЙ #01
377
Vi
"l/i —(V1.6W
Ьо
у\—(Х0п,бщ*
а
II111
\\\\\
_.
— '. л
- ;
•S//S///S/S/J/J/'SSS,
Прямоугольный волновод с волной
377
&..
&ЛЛЁЛ.2 w- '*' * vAV«
, ШГГ^/^^
У I — (A«/2a)2
Полосковая линия
120яА
У\ — (Хо/2о)«
W
Хо
у\
Примечание: Х0 —Длина волиы в свободном пространстве; ег — относительная
диэлектрическая проницаемость.
265
Измеряемые величины. На рис. 9.15,а изображена линия
передач СВЧ. С одной стороны ее подключен генератор
синусоидальных колебаний, а с другой — сопротивление нагрузки Z„. В
линии имеет место интерференция волн, распространяющихся в
противоположных направлениях.
Амплитуда суммарного напряжения U(t, I) на расстоянии I от
нагрузки можно определить из уравнения для' волн напряжений
и токов (или электрических Е и магнитных Н полей):
U_(t, l) = Unexp(]yl) + U_0exp(-]yl), (9.27)
Где f _ время; Ua и U0 — амплитуды падающей и отраженной
волн напряжений; 7 = Р_Ja — комплексная постоянная
распространения, символизирующая волновой процесс; a — постоянная
затухания; р=2яДл — фазовая постоянная; Кл — длина волны
в линии.
При измерениях на СВЧ во многих случаях пренебрегают
потерями в линии (а»0), тогда уравнение (9.27) можно
преобразовать следующим образом:
U(t, 0 = С/п exp (j p/) [i+ jf- exp(-jpQ]=E/nexp(JPQ[l +
+ |Г|ехр j (ф—2Р01, " (9-28>
где T — U0/Ua= |Г|ехр j<p — комплексный коэффициент отражения;
<р — фазовый угол коэффициента отражения.
Модуль уравнения (9.28)
\U(t, 01 = l^nl 11+ |TJ exp j 01 - (9'29>
На рис. 9.15,6 показана векторная диаграмма,
интерпретирующая уравнение (9.29). Отрезок ЛС=1; геометрическая сумма
отрезков АС и СВ (отрезок А В) определяет модуль напряжения в
конце линии на нагрузке (при /=0). Перемещаясь от нагрузки к
генератору в сторону возрастания /, мы будем наблюдать
изменение суммарного напряжения при вращении отрезка СВ вокруг
точки С по часовой стрелке с
угловой скоростью 2р. На
рис. 9.15,в изображено
периодическое изменение
суммарного напряжения в
прямоугольной системе координат
(картина стоячих волн
напряжения). Как следует из
рис. 9.15,в и уравнения (9.29),
форма стоячих волн
отличается от синусоидальной и
зависит от модуля |Г], а
фазовый угол ф коэффициента
отражения определяет только их
расположение относительно-
Рис. 9.15 конца линии.
266
Очень часто в технике СВЧ измеряют отношение напряжения
U(t, l) к току I_(t, l), которое определяет полное комплексное
сопротивление^ в данном поперечном сечении линии:
„ U (t, I) U„+Un
Z = =^—- = =°Z=o (9>30)
- Ht.l) _/п 4- /о К
Отношение напряжения к току падающей или отраженной
волны определяет волновое сопротивление линии:
Z,= -f==f. (9.31)
in Jo
С учетом этого соотношения (9.30) нетрудно преобразовать
следующим образом:
1 + Г
Z=ZBT^. (9.32)
Уравнение (9.32) приводит к выводу, что измерение Z
сводится к измерению Г, поскольку ZB — чисто активная величина и
определяется геометрическими размерами линии и типом волн (см,
табл. 9.1). С математической точки зрения уравнение (9.32)
соответствует конформному преобразованию.
Таким образом, основным параметром цепей на СВЧ
является комплексный коэффициент отражения Г. Измерение и
контроль этого параметра производится в широком СВЧ диапазоне с
помощью измерительных линий, направленных ответвителей,
мостов и других устройств.
Измерительные линии. В измерительных линиях используют
отрезки коаксиальных и волноводных линий передач. Часто
вместо коаксиальной линии применяют видоизмененную линию,
центральный проводник которой остается цилиндрическим, а внешний
представляет собой две массивные параллельные пластины (рис.
9.16,а). Основные преимущества такой линии: простота и
механическая прочность конструкции, ничтожно малая эквивалентная
ширина щели при относительно большом расстоянии между
внутренними плоскостями пластин.
На рис. 9.16,6 представлена измерительная линия с
параллельными пластинами. В промежуток между пластинами погружен
зонд 1, обеспечивающий связь детекторной головки 2 с полем в
линии и поглощающий какую-то незначительную часть энергии
в линии.
Детекторная головка вместе с зондом укреплена на
подвижной каретке, которая может перемещаться по направляющим
вдоль щели. К каретке прикреплен визир, позволяющий
отсчитывать значение линейного перемещения каретки (зонда) по
делениям линейки 7. Детекторная головка состоит из настраиваемого
с помощью плунжера резонатора 3, с которым кристаллический
детектор связан петлей (реагирующей на магнитное поле
резонатора). В цепь детектора включен индикатор 4 — магнитоэлектри-
267
б \ I |,„.|..,.1 1 l,„.i.„,l,,.il,iiXi,.l,„il.iiiliiiilijiiliiJ
Рис. 9.16
ческий прибор (если генератор ОВЧ колебаний формирует
непрерывный сигнал) или измерительный усилитель (при
модулированном сигнале СВЧ генератора). Продетектированное
напряжение находится в определенной зависимости от наводимой в
зонде ЭДС, которая в различных точках линии претерпевает
изменение, поэтому индикатор будет показывать изменение напряжения
вдоль линии.
Рассмотрим методики измерений длины волны (частоты),
комплексного коэффициента отражения и полного сопротивления о
помощью измерительной линии.
Измерение длины волны (частоты) сводится к
определению расстояний между минимумами стоячей волны
напряжения в линии, поскольку их положение определяется более точно,
чем 'положение максимумов. Из рис. 9,15,6 и в можно сделать
вывод, что минимумы напряжений получаются тогда, когда векторы
АС и СВ направлены в противоположные стороны, т. е. ср—2fU =
ь=—яп, а полный цикл изменения модуля напряжения
соответствует приращению 2р?=2я. Отсюда ? = 2л/2р = 2я/4л/Лл=Ял/2, а
*.-2(&п-Ы. (9-33>
где I'min и /"min — расстояния от конца линии до двух соседних
минимумов.
Из формул, приведенных в табл. 9.1, следует, что Ял^Яо в
коаксиальной линии и Хя>%о в волноводе.
Значение частоты определяется по формуле
/=с0Дл, (9.34)
где Со — скорость света в свободном пространстве.
Измерение комплексного коэффициента
отражения состоит в определении значений его модуля |Г| и
фазового угла <р,
268
Модуль коэффициента отражения определяется путем
измерения коэффициента стоячей (KeTUJ и бегущей (/Сев) волны
напряжения:
KnV Umln ' *«'- U^ • (9-35)
где Ксви и /Сбв — вещественные числа, поскольку Umax=\Un\ +
+ \U0\ и ф = 0, a C/min = | С/п | — | С/о 1 и 1ф=я соответственно.
Между коэффициентом отражения и величинами /СстС7 и Кб*
существуют довольно простые соотношения:
K«U-I=W' Кб>=ТТт~ ' (9-36>
откуда
Щ=,^МП=^. (9,7)
При измерении Ксти и Кб* определяются показания индикатора
измерительной линии а, соответствующие максимальным и
минимальным амплитудам (атах, атт) напряжений в линии.
В общем случае а = Шт, где k — коэффициент
пропорциональности. Значения степенного показателя зависят от
характеристики детектора. При малых токах детектора т«2, тогда
При измерениях больших Ксви растет относительная погрешность
отсчета amin. Поэтому обычно ограничиваются измерением /Сети»
«3. Большие значения Кет и необходимо измерять методом
«удвоенного минимума» (рис. 9.17). В этом случае (при то = 2)
показания'индикатора с учетом (9.29) равны:
а = *1/*[1 + |Г|»+2|Г|со8(Ф-2р/)]. ( 9.39
Поскольку в минимуме напряжения ф—2p/m)n=—пп, показания
индикатора атш=Ш2п(1 + |Г|2—2|Г|), тогда его удвоенные
показания
2 am]n= k С/а (1 + |Г| -2 \T\cos рД I). (9.40)
Подставляя в (9.40) значение amm и выражая |Г| через Kc*vt
получаем
^cTf/= j/l+l/sin2^-? • (9.41)
Фазовый угол коэффициента отражения связан с
расположением стоячих волн в линии передач, которое, как было замечено,
можно установить путем измерения расстояния от конца линии
ДО ближайшего минимума стоячей волны напряжения. Тогда <p=*
= 2p/'min (рис. 9.15,6 и в). Однако геометрическое и электрическое
положения конца линии не совпадают (наличие неоднородностей
269.
н лита f/sfajrw/twa
£опротивление награни ZH
Рис. 9.17
в виде опорных шайб, переходов,
разъемов). Поэтому за начало
отсчета принимают при
измерении условный конец, который
определяется путем короткого
замыкания конца линии.
Образующиеся при этом стоячие волны
напряжения имеют узлы напряжения,
повторяющиеся через Хц/2. Прак- Рис д 18
тически любой узел напряжения
можно считать местом включения короткого замыкания, т. е.
условным концом линии. Тогда, исходя из рис. 9.18, 1т1п = 1кз—In, где
1КЗ _ расстояние от конца линии до ближайшего узла
напряжения при коротком замыкании, а /н — расстояние до ближайшего
минимума при включенной нагрузке.
Обращаясь снова к рис. 9.15,6, приходим к выводу, что
направление отсчета изменилось на обратное и расчетный угол
коэффициента отражения определяется теперь так:
Ф = я-2|Нт1п=я-2р(гкз-0. (9.42)
Вычисление полного сопротивления нагрузки Z* сводится к
конформному преобразованию уравнения (9.30) при известных |Г|
и <р. Практически эта задача решается с помощью готовых
круговых диаграмм, весьма упрощающих вычисление искомых
значений активного и реактивного сопротивлений нагрузки по
измеренным ЗНачеНИЯМ /Сети ИЛИ /Сбв И ф.
В заключение необходимо обратить внимание на важную
закономерность, знакомство с которой позволяет оценить знак
реактивного сопротивления нагрузки. На рис. 9.18,6 показано
изменение по закону jXK3 = jZBtgP? сопротивления закороченной на кон-
де линии. Индуктивному сопротивлению XL нагрузки
соответствует эквивалентное удлинение линии в пределах от 0 до XJ4, а
емкостному Хс — от К/А до К/2. Следовательно, минимум стоячей
волны напряжения в первом случае может быть сдвинут относи-
570
тельно условного конца линии в сторону нагрузки на значение
0 — А-л/4, а во втором — на W4—Ял/2. Если сдвиг минимума
ограничен условием /mins^W4, следует оговорить направление сдви-
га. При XL сдвиг по-прежнему отсчитывается в сторону нагрузки,
а при Хс — в сторону генератора. Это условное изменение
отсчета не имеет никакого отношения к временным свойствам
индуктивности и емкости, а получается вследствии периодического
повторения стоячих волн в линии.
Основные составляющие погрешности измерительных линий
вызваны шунтирующим действием зонда; неравномерностью поля
в линии; отражениями от краев щели, фланцев, коаксиальных
разъемов; механизмом индикации. Суммарная погрешность
измерений у стандартных коаксиальных линий составляет 6...7%, а
волноводных — несколько меньше, 4...5%.
Кроме измерительных линий с продольной щелью и
перемещающимся вдоль нее зондом, известны двущелевые линии с
неподвижным зондом и фазовращателем, бесщелевые с короткозамк-
нутой нагрузкой с переменной фазой и другие конструкции,
однако они применяются крайне редко.
Измерительные направленные ответвители. Направленные
ответвители позволяют определять амплитуды падающих и
отраженных волн, 'распространяющихся по СВЧ линиям передач.
Чаще всего применяют волноводные ответвители. На рис. 9.19,а
изображен однонаправленный ответвитель. Под воздействием
токов, протекающих по стенкам основного волновода, щели А и В
возбуждают во вторичном волноводе электромагнитные волны,
которые распространяются в разные стороны. На рис. 9.19,6
показаны схемы сложения возбуждающихся волн. Если энергия
падающей волны Р„ распространяется слева направо, то поле,
возбужденное щелью А, сложится в фазе с полем, возбужденным щелью
В, так как пути (W4), пройденные ими, равны. Энергия
суммарного поля Р'„ ibo вторичном волноводе поглотится нагрузкой.
Поля этой волны,
распространяющиеся от щели В к щели А
(справа налево), сложатся в противо-
фазе, так как их пути будут
отличаться на полволны и, если
они равны, то взаимно
уничтожатся, т. е. Р"ПтО. Таким
образом энергия поля,
возбуждающегося во вторичном
волноводе под действием падающей
волны, не вызовет тока в цепи
детектора.
Аналогичное рассмотрение
процесса сложения полей,
возбужденных щелями А и В при
распространении энергии
отраженной волны, позволяет сделать рис. 9.19
271
Вторичный
волновод
вывод о том, что ток, вызываемый в цепи детектора, будет
пропорционален мощности Р'0. v
Для измерения коэффициента отражения используют два
последовательно включенных однонаправленных ответвителя,
каждый из которых определяет мощность волны, соответствующую Ра
либо_Р0. Отношение мощностей во вторичном волноводе является
мерой коэффициента отражения в основном тракте:
Р0 __ Ро |Г!2
-^-1Г = ^- (9.43)
Для измерения коэффициента отражения также применяют
двунаправленные ответвители, которые позволяют сравнивать
мощности волн, распространяющихся в двух направлениях.
Однако в таких ответвителях возникают дополнительные погрешности
и точность измерения коэффициента отражения падает.
^Возможно сочетание направленного ответвителя с
измерительной линией. На первом этапе измерений в этом случае
наблюдения ведутся по индикатору направленного ответвителя. Когда
коэффициент отражения уменьшится, продолжают измерения с
помощью измерительной линии. В других случаях направленный от-
ветвитель измеряет модуль, а измерительная линия — фазовый
угол коэффициента отражения. Погрешность измерения в таких
случаях выше, чем у измерительной линии, но появляется
возможность непрерывного контроля процесса согласования в тракте
свч.
Направленные ответвители являются основным элементом
автоматических измерителей коэффициента стоячей волны
напряжения.
9.5. ИЗМЕРЕНИЕ АМПЛИТУДНО-
И ФАЗОЧАСТОТНЫХ ХАРАКТЕРИСТИК ЦЕПЕЙ
Измерители амплитудно-частотных (ИАЧХ) и фазочастотных
(ИФЧХ) характеристик относятся к группе приборов для
наблюдения и исследования характеристик радиоустройств. Измерить
амплитудно-частотную характеристику (АЧХ) четырехполюсника,
т. е. зависимость коэффициента передачи четырехполюсника от
частоты, можно с помощью перестраиваемого генератора и
вольтметра. В этом случае искомая зависимость строится по точкам.
При этом возможны потери отдельных элементов АЧХ в
промежутках между ними. Процедура измерения занимает сравнительно
много времени, в течение которого возможно изменение
измеряемой АЧХ под воздействием различных дестабилизирующих
факторов.
Измерительная задача решается более оперативно при
использовании специального панорамного измерителя АЧХ с осциллог-
рафическим индикатором. Отечественные приборы для
исследования АЧХ обозначаются «XI». Упрощенная функциональная схема
272
Генератор
качающейся частоты
Генератор модулирующего
напряжения
Усилитель
Аттенюатор
Выход Д
Блок частотных
меток
Усилитель вертикального,
отклонения
т
Аттенюатор
Предварительный
усилитель и
детектор
i Вход
Исследуемый четырехполюсник
Рис. 9.20
измерителя АЧХ с ЭЛТ приведена на рис. 9.20, а временные
диаграммы, поясняющие его работу, на рис. 9.21.
Измерительный сигнал вырабатывается генератором
качающейся частоты, которым управляет пилообразное напряжение,
поступающее с генератора модулирующего напряжения (рис. 9.21,а).
В результате воздействия модулирующего напряжения частота
синусоидального колебания генератора качающейся частоты
Частотная
метка
Рис. 9.21
273
(ГКЧ) изменяется по линейному закону, как показано на рис,
9.21,6, от /max до fmin. Средняя частота /ср соответствует режиму
собственной настройки ГК.Ч при отсутствии модулирующего
•напряжения. После окончания одного периода модулирующего
колебания частота ГКЧ возвращается к значению /min и снова
возрастает по линейному закону. Заметим, что ГКЧ должен
вырабатывать частотно-модулированные колебания без .паразитной
амплитудной модуляции, так как при измерении АЧХ должна
изменяться только частота измерительного сигнала. Это
накладывает определенные трудности на конструирование ГКЧ.
Модулированный по частоте сигнал с ГКЧ поступает на
усилитель и аттенюатор. Усилитель служит для усиления
измерительного сигнала, а также исключения влияния перестраиваемого
аттенюатора на ГКЧ. Аттенюатор в совокупности, с усилителем
позволяет изменять в широких пределах напряжение выходного
сигнала, что необходимо, поскольку каждый исследуемый
четырехполюсник может иметь свой коэффициент передачи. Например,
при измерении АЧХ заграждающего фильтра может возникнуть
необходимость в подаче измерительного сигнала большой
амплитуды. При измерении АЧХ усилителя с большим коэффициентом
усиления выходной сигнал прибора, наоборот,- должен быть
малым. Вход исследуемого четырехполюсника соединяется с
выходом измерительного прибора. Сигнал с его выхода возвращается
обратно в измерительный прибор. Если исследуемый
четырехполюсник содержит детектор (например, усилитель с детектором),
то сигнал через аттенюатор и переключатель поступает на
усилитель вертикального отклонения и на пластины ЭЛТ. Если
исследуемый четырехполюсник детектора не содержит, то сигнал
через переключатель поступает на предварительный усилитель, в
котором сигнал усиливается и детектируется, а затем подается на
усилитель вертикального отклонения.
При прохождении через исследуемый четырехполюсник
частотно-модулированный сигнал приобретает амплитудную модуляцию,
причем огибающая несет информацию о форме АЧХ исследуемого
объекта. В результате воздействия продетектированного сигнала
на вертикально отклоняющие пластины и пилообразного
напряжения развертки на горизонтально отклоняющие пластины на
экране ЭЛТ образуется изображение АЧХ. Модулирующее
напряжение для ГК.Ч и напряжение развертки ЭЛТ формируются
одним генератором, поэтому отклонение луча на экране и
изменение частоты колебаний, воздействующих на исследуемый
четырехполюсник, осуществляется синхронно. Таким образом ось X на
экране ЭЛТ является одновременно и осью времени, и осью
частот.
Для измерения частотных параметров АЧХ исследуемого
четырехполюсника необходимо знать частоты, соответствующие
определенным точкам горизонтальной оси, для чего используют
специальные метки. Метки образуются путем смешивания сигналов
опорной и качающейся частот в блоке частотных меток, который
274
содержит генератор опорных частот, стабилизированный кварцем.
Путем переключения резонатора опорный генератор
перестраивается на несколько опорных частот, например: 1, 10 и 100 кГц.
Сигнал с опорного генератора поступает на широкополосный
усилитель, в котором усиливается как сигнал основной частоты
(.например, 1 кГц), так и его гармоники (2, 3, 4 кГц и т. д.). Таким
образом образуется сетка частот. Переключением основной
частоты можно добиться сетки частот с дискретностью 10 и 100 кГц.
Выбор опорных частот и гармоник зависит от частотного
диапазона, на который рассчитан прибор.
Сигналы опорных частот поступают на смеситель, на который
подается также сигнал с ГКЧ. При совпадении частоты ГК.Ч с
гармониками опорных частот на выходе смесителя образуются
сигналы, из которых с помощью фильтра низких частот
формируются частотные, метки. После усиления метки поступают на
усилитель вертикального отклонения и наблюдаются на экране ЭЛТ
в виде вертикальных всплесков (рис. 9.21,в).
Динамический диапазон измерительного сигнала,
поступающего с выхода исследуемого четырехполюсника, может быть
достаточно большим, поскольку коэффициент передачи
четырехполюсника в исследуемой полосе частот может изменяться в тысячи раз.
В этом случае целесообразно представление АЧХ на экране ЭЛТ
в логарифмическом масштабе, как это принято при графическом
изображении АЧХ. Логарифмический масштаб по вертикальной
оси обеспечивается усилителем с амплитудной характеристикой
логарифмической формы. Поскольку масштаб становится
нелинейным, для измерения коэффициента передачи АЧХ
используется калибратор, сигнал с которого может быть подан на усилитель
вертикального отклонения.
В процессе измерения АЧХ осуществляются следующие
регулировки в приборе:
средней частоты ГКЧ для совмещения ее со средней частотой
АЧХ исследуемого четырехполюсника;
полосы качания для получения достаточной ширины обзора
АЧХ;
уровней выходного и входного сигналов с помощью
аттенюаторов.
Кроме этих регулировок, являющихся специфическими, в
ИАЧХ, как и в обычном осциллографе, регулируются яркость
изображения, фокусировка луча, смещение изображения в
горизонтальном и вертикальном направлениях.
Рассмотренная структурная схема является упрощенной.
Современные ИАЧХ более сложны и соответственно обладают
большими возможностями при проведении экспериментов. Например,
ГКЧ обычно состоит из двух генераторов, один из которых
работает на фиксированной частоте, а второй перестраивается.
Рабочий диапазон частот ИАЧХ разбивается на поддиапазоны.
Переход от одного поддиапазона к другому осуществляется
переключением элементов генератора фиксированной частоты.
275
В современных ИАЧХ предусматриваются различные режимы
качания частоты. Например, периоды качания частоты могут
изменяться от 0,01 до 40 с. Может быть предусмотрена ручная
перестройка и качание частоты, разовое качание частоты с ручным
запуском.
По значению полосы качания ИАЧХ делятся на узкополосные,
среднеполосные, широкополосные, комбинированные. Так, ИАЧХ,
работающие в частотном диапазоне от 20 до 30-10е Гц,
считаются узкополосными, если полоса качания не превышает 0,01 от
максимальной частоты диапазона, среднеполосными, если полоса
качания менее 0,6/тах, широкополосными, если полоса качания
охватывает весь частотный диапазон.
По допустимым погрешностям частотных параметров ИАЧХ
делятся на пять классов, по допустимым значениям амплитудных
погрешностей — на три класса. Следует отметить, что по
допустимым значениям частотных и амплитудных погрешностей ИАЧХ
может относиться к разным классам.
К нормируемым характеристикам измерителей частотных
характеристик относятся: диапазон несущих частот; погрешность
шкалы несущих частот; полоса качания; выходное напряжение;
неравномерность собственной АЧХ в полосе качания
(динамическая характеристика); периоды качания и другие.
Для неискаженного воспроизведения АЧХ на экране
измерителя необходимо выполнение ряда условий. При исследовании
активных четырехполюсников (например, усилителей) возможны
искажения формы АЧХ из-за нелинейности их амплитудных
характеристик. Искажения этого типа легко выявить, увеличив
напряжение, снимаемое с ГКЧ. Если теперь форма АЧХ изменяется, то
нелинейные искажения имеют место. При этом напряжение на
входе должно быть минимальным.
При измерении АЧХ четырехполюсников с большим
затуханием выходное напряжение мало и появляются искажения формы
АЧХ, связанные с нелинейностью детектора. Для большинства
детекторов, применяемых в ИАЧХ, нормальный режим
детектирования обеспечивается при напряжении не менее 0,2 В. Если
выходное напряжение четырехполюсника меньше, необходимо применить
широкополосный усилитель.
Нормальная работа ГКЧ возможна лишь при работе прибора
на согласованную нагрузку. Выходное сопротивление ГКЧ,
рассчитанного на низкие частоты, обычно составляет 600 Ом, а на
высоких 50 или 75 Ом. Если сопротивление исследуемого
четырехполюсника существенно отличается от указанных значений,
применяют согласующие устройства.
В ИАЧХ частота выходноцо сигнала изменяется во времени.
Если время пребывания измерительного сигнала в полосе
пропускания исследуемого четырехполюсника соизмеримо с его
постоянной времени, то возможно искажение формы АЧХ из-за
переходных процессов. Наличие таких динамических погрешностей
обычно устанавливают, уменьшая частоту модулирующего напряже-
276
ния пилообразной формы или полосу качания частоты. Если при
этом не наблюдается смещения положения максимума АЧХ или
изменения его значения, то динамические погрешности малы. ,
Остальные виды погрешностей ИАЧХ нормируются ГОСТ. К
их числу относятся: погрешность измерения частоты; погрешность
измерения относительной амплитуды; отклонение частотного
масштаба на экране ИАЧХ от заданного закона; неравномерность
собственной АЧХ и др.
Приборы для измерения фазочастотной характеристики
строят на сходных принципах. Для измерения ФЧХ также необходим
ГКЧ, сигнал с выхода которого должен поступать на исследуемый
четырехполюсник. Приемная часть прибора, однако, должна
выявлять не амплитудные изменения выходного сигнала, а фазовый
сдвиг между сигналом, действующим на входе исследуемого
объекта, и сигналом на его выходе. Напряжение, пропорциональное
фазовому сдвигу, может формироваться с помощью фазового
детектора, на входы которого подаются сигналы со входа и выхода
исследуемого объекта. После усиления сигнал поступает на
вертикально отклоняющие пластины ЭЛТ. В современных
измерителях ФЧХ сравниваемые сигналы проходят ряд преобразований,
что позволяет обеспечить работу фазового детектора на
фиксированной частоте. Смысл таких преобразований поясняется рис. 9.22.
Сигналы Uci и £/с2 одной частоты, несущие информацию о
фазовом сдвиге, поступают на два смесителя. На оба смесителя
поступает сигнал гетеродина, частота которого равна /c+/npi==fr, т. е.
выше частоты сигнала на /пРь называемую первой промежуточной
частотой. В результате нелинейных преобразований на выходах
смесителей образуются комбинационные частоты. Усилители
промежуточной частоты (УПЧ) настроены на частоты,
представляющие собой разность /г и /с, т. е. на /npi. В первом канале сигнал
первой промежуточной частоты подвергается вторичному
преобразованию в смесителе 3, на который подается сигнал с частотой /к»
от кварцевого генератора. На выходе смесителя 3 образуется
сигнал с частотой /пР2, равной разности /npi—/кв. Обычно /Кв выбирает-
УПЧ
■'пр.г
(сигнал с опорной фазби^
(сигнал с переменной фазой)
Канал 2
Канал 1
(/)
Смеситель 1
УПЧ
•'np.l
Гетеродин
/СЧр.,=/г
Смеситель 3
♦
Кварцевый
генератор
4а'
и
с2
<4>
Смеситель 2
УПЧ
Jnp.l
Смеситель 4
Рис. 9.22
277
ся порядка 20... 30 кГц. В смесителе 4 происходит преобразование
частот /„pi и /пр2. Поскольку они отличаются на значение частоты
кварцевого генератора, разностная частота на выходе смесителя
4 равна fKB. Все преобразования позволяют сохранить фазовые
соотношения. На выходе сигнал Ui, снимаемый с кварцевого
генератора, является опорным, а сигнал U2, снимаемый со смесителя
4, имеет фиксированную частоту, но переменную фазу, зависящую
от свойств исследуемого четырехполюсника. Заметим, что часто»
ты обоих сигналов равны частоте кварцевого генератора
независимо от частоты приходящего сигнала. Это позволяет строить
широкополосные измерители ФЧХ с фазовым "детектором,
работающим на фиксированной частоте. Естественно, что при перестройке
частоты испытательного сигнала, поступающего от ГКЧ
измерителя ФЧХ, необходимо соответствующим образом перестраивать
частоту гетеродина в преобразователе, изображенном на рис. 9.22.
Такая перестройка осуществляется автоматически, путем
использования системы автоматической подстройки частоты (АПЧ)
гетеродина по частоте приходящего сигнала. Применение
описанного метода приводит к усложнению прибора, однако вполне
оправданно, так как позволяет построить измерители ФЧХ, работающие
в широком диапазоне частот.
9.6. ИЗМЕРЕНИЕ НЕЛИНЕЙНЫХ ИСКАЖЕНИЙ
В ЭЛЕКТРИЧЕСКИХ ЦЕПЯХ
Электрические цепи делятся на линейные, нелинейные и
параметрические. Последние два типа цепей отличаются от
линейных тем свойством, что могут создавать новые гармонические
составляющие в спектре отклика по сравнению со спектром
входного сигнала. В том случае, когда это явление не используется в
устройстве, содержащем данную цепь, оно весьма нежелательно,
так как часто создает вредные побочные эффекты. Вызванные им
изменения сигнала называются нелинейными искажениями.
Источником нелинейных искажений являются элементы цепей,
у которых ток не пропорционален приложенному напряжению.
Это, как правило, диоды, транзисторы и лампы.
В технике связи нелинейные искажения особенно
нежелательны в трактах систем многоканальной связи с частотным
разделением каналов и в трактах электроакустических устройств. В
первом случае нелинейные искажения приводят к переходным
помехам между каналами, а во втором к неприятному слуховому
ощущению. В обоих случаях нелинейные искажения возникают
главным образом в электронных усилителях, которые и являются ос-
новым объектом при их измерении.
Нелинейные искажения зависят от многих параметров сигнала
:и цепи, а их проявление может быть весьма многообразно. Так,
нелинейные искажения зависят от амплитуды и формы сигнала.
Наиболее существенна зависимость от амплитуды, с увеличением
которой нелинейные искажения растут. Влияние формы на степень
278
нелинейных искажений подтверждается тем фактом, что сигнал
в виде прямоугольных импульсов с двумя горизонтальными
участками вообще не может быть искажен безынерционной цепью при
любой степени ее нелинейности.
Некоторое влияние на величину нелинейных искажений может
оказать частота сигнала. Обычно нелинейные искажения в
усилителях увеличиваются с ростом частоты. Это связано с увеличением
токов через паразитные емкости схемы.
Нелинейные искажения в усилителях могут по-разному
проявляться в зависимости от характера нагрузки. В резонансном
усилителе форма выходного напряжения остается практически
синусоидальной при любых нелинейных искажениях, которые
проявляются только в нелинейном характере зависимости между
амплитудами входного и выходного сигналов (амплитудная
характеристика).
Таким образом, нелинейные искажения представляют довольно
сложное явление. Вместе с тем существует практическая
необходимость сравнивать различные электрические цепи по размеру
присущих им нелинейных искажений так, чтобы можно было просто и
однозначно решить, какая из цепей в этом отношении лучше или
хуже другой. Это можно сделать только тогда, когда степень
нелинейных искажений оценивается одним единственным числом.
Такое число вызывается коэффициентом нелинейных искажений.
Оно очень упрощенно отражает сложное явление и поэтому не
может в разных устройствах одинаково хорошо отражать реальное
влияние нелинейных искажений на рабочие параметры.
В результате появились различные способы определения
коэффициента нелинейных искажений и соответственно различные
методы его измерения. Прежде всего это касается выбора
измерительного сигнала. В качестве последнего могут применяться:
гармонический сигнал, сумма двух или большего числа
гармонических сигналов, шумовой сигнал. Виду сигнала соответствуют
методы измерения нелинейных искажений: одночастотный, двухчас-
тотный, многочастотный и метод шумовой загрузки, называемый
также статистическим.
Кроме того, методы могут различаться способом обработки
выходного сигнала. По этому признаку методы делятся на
графоаналитические, фильтровые и компенсационные. В настоящее время
наиболее распространены фильтровые методы: одночастотный,.
двухчастотный и трехчастотный.
Для более подробного рассмотрения отдельных методов
потребуются некоторые количественные соотношения между входным в
выходным сигналами в цепи с нелинейными искажениями. При
этом будем рассматривать только безынерционные цепи без
реактивных элементов и периодические измерительные сигналы.
Зависимость между мгновенными значениями входного а
выходного напряжений удобно вьгразить в виде степенного
полинома:
«вых = а0 + 0l UBX + a2 t/|x + а3 U^ +... (9.44)
27»
Входное напряжение в общем случае можно представить
суммой гармонических колебаний кратных частот:
где Umh и a>k — амплитуда и частота k-й гармоники входного
напряжения. Тогда
П I П \2
«вых= а0 + аг У\ Umh cos coft t + c^ (2 Umh cos щ t) +
6=1 \ft=n )
. +«з fi] t/mftcoscoft^ +... (9.45)
В результате возведения в степень суммы косинусов получим
косинусы в степени выше первой и произведения косинусов
различных степеней и разных частот. Применяя далее к этим
выражениям тригонометрические формулы для степеней и произведений
косинусов, можно представить ряд (9.45) в виде суммы
постоянной составляющей и гармонических слагаемых с частотами
составляющих входного сигнала, с частотами, кратными частотам
составляющих входного сигнала, и с комбинационными частотами типа
со = р щ ± q со2 ± г со3 ±.., (9.46)
Наличие последних отличает спектр выходного (искаженного)
сигнала при двух- и многочастотных методах от аналогичного
спектра при одночастотном методе. Число комбинационных частот
быстро растет с увеличением числа гармонических составляющих
во входном сигнале и с увеличением степени полинома (9.45). Для
трех гармонических составляющих во входном сигнале и полинома
3-й степени в выходном напряжении получаются гармонические
составляющие с частотами и амплитудами, приведенными в табл.
9.2. Если надо получить спектр выходного сигнала для одной или
двух частот на входе цепи в формулах табл. 9.2, то нужно
положить соответственно: ит2 = 0, £/тз = 0 или £Лпз = 0.
Из табл. 9.2 можно сделать следующие выводы:
постоянная составляющая и амплитуды четных гармоник
выходного сигнала определяются только членами четных степеней
полинома (9.45);
амплитуды нечетных гармоник выходного сигнала
определяются только членами нечетных степеней полинома (9.45);
члены четных степеней полинома порождают комбинационные
частоты, для которых сумма коэффициентов в выражении (9.46)
четна, а члены нечетных степеней порождают комбинационные
частоты, для которых та же сумма нечетна;
номер высшей гармоники в выходном сигнале и наибольшее
значение суммы коэффициентов в выражении (9.46) для
комбинационных частот равны степени полинома (9.45).
Продукты нелинейных искажений в многочастотных методах
характеризуются порядком. Последний определяется суммой аб-
280
Таблица 9.2
Члены
полинома
Со
Oi«bx
02«2M
аз«3и
Частоты
колебаний
0
(Dl
(02
(03
0
2(01
2е>2
2шз
(0l±(02
(0l±(0s
(02±(0з
(01
(02
(03
2(0i±(02
2(01±(0з
2(02 ±(Оз
Wi ±2(o2
to, — 2шз
(02±2(0з
(01±(02±(0з
3(о1
3(02
Зшз
Амплитуды колебаний
До
a til mi
aillmi
uiUms
2 U mi
a^m2/2
а*112тз12
O-zU mi!l-l тг
(IzUmi'Uma
(IzUmzUmS
3asUmi (<£/2ml + 2£/2m2 + 2£/2m3) /4
3a3 Umi (2>£/2m, +l£/2m2+2£/2тз) /4
3asUm3 (2Vm\+2£/2m2 +№тз) /4
Заз'£/2т!^т2/4
Заз!£/2т,,£/тз/4
Za^miUmil^
Заз1/т1<£/2т2/4
Заз£/т1'£/2тз/4
Заз.£/тг£/2тз/4
SaiUmiUmiUms/i
aiUsmi/i
СУ£/3т2/4
аз!/3тз/4
солютных значений коэффициентов в выражении (9.46): 2(|р|-1-
+ Ы + И+-).
Из табл. 9.2 видно, что порядок продуктов нелинейности
определяется членом полинома (9.45). Поэтому продукты второго
порядка называются- квадратическими, а третьего порядка —
кубическими. Соответственно квадратическими и кубическими
называются и сами искажения.
Кроме того, продукты нелинейных искажений различаются
родом. К продуктам первого рода относятся те, для которых
алгебраическая сумма коэффициентов в правой части (9.46) равна
единице. Все остальные продукты нелинейных искажений относятся
ко второму роду. Особенностью продуктов первого рода является
то, что, возникая в различных местах протяженного электрического
тракта, они складываются синфазно, т. е. арифметически, при
условии линейности фазочастотной характеристики тракта. Во всех
остальных случаях продукты нелинейных искажений одинаковых
частот, возникая в разных точках одного тракта, складываются
векторно, т. е. с разными фазовыми углами. Поскольку арифме-
281
тическое сложение при прочих равных условиях дает наибольшую
•сумму, оно является самым неблагоприятным для систем связи.
Квадратические продукты, очевидно, не могут быть первого
рода, как и вообще продукты четных порядков. По изложенным
соображениям кубические искажения наиболее опасны в
многоканальных системах связи и возможность их раздельной оценки
представляет существенное достоинство метода измерений.
Рассмотрим более детально отдельные методы.
Одночастотный метод. Продуктами нелинейных искажений в этом методе
будут только высшие гармоники. Их амплитуды обычно быстро убывают с
ростом номера-. В силу этого, при оценке нелинейных искажений практически
можно пренебречь всеми гармониками выше третьей. Соответствующий
коэффициент нелинейных искажений называется коэффициентом гармоник и определяется
одной из двух формул:
Vuj + ul+... , Уи\ + и\+...
кг = - ; tfr = — >
где U\, иг< Us — среднеквадратическое значение отдельных гармоник выходного
сигнала. Обычно непосредственно измеряется коэффициент К'г, так как при этом
не требуется выделять фильтром первую гармонику выходного напряжения.
Коэффициент Кт может быть вычислен по формуле:
Кг = KjV\ + К'г 2 •
Для К'г<0,2, Кг** К'г с погрешностью менее 2%.
В проводной связи применяется также затухание нелинейности:
eH = 20lg-—[дБ]; ан = 1п—— [Нп].
Лг Аг
Используя данные табл. 9.2, можно выразить коэффициент гармоник через
коэффициенты полинома (9.44) (3-й степени) и амплитуду входного напряжения:
Для измерения коэффициента гармоник можно воспользоваться частотно-
избирательным вольтметром, который для этого подключают к выходу
исследуемого объекта и последовательно настраивают на первую, вторую и третью
гармоники (а при необходимости и на более высокие). Значение коэффициента
гармоник находят расчетным путем.
Более удобно проводить измерения с помощью специальных измерителей
нелинейных искажений. Простейшая схема такого прибора изображена на рис.
9.23. Она содержит входное устройство, перестраиваемый режекторный фильтр и
квадратичный вольтметр с плавным аттенюатором. Режекторный .фильтр в
идеальном случае должен иметь бесконечное затухание на частоте первой
гармоники измерительного сигнала и нулевое затухание на частотах высших
гармоник. Обычно этот фильтр реализуется с помощью мостовой схемы из
резисторов и конденсаторов, имеющей частотно-зависимое условие равновесия, в
частности с помощью двойного Т-образного моста. Для получения малого затуха-
282
ф
Входное
устройство
Режекторный фильтр
2
• -т—
1
'Т
Квадратичный вольтметр
и аттенюатор
Рис. 9.23
«ия на частотах высших гармоник используют активный фильтр, т. е.
содержащий электронный усилитель и депи обратной связи.
Квадратичный вольтметр сначала е помощью переключателя соединяют с
выходом входного устройства, после чего регулировкой аттенюатора
устанавливают отклонение стрелки вольтметра на всю шкалу, соответствующую 100%
К'г. После этого вход вольтметра соединяют с выходом режекторного фильтра.
При этом показание вольтметра соответствует значению измеряемого ./('г.
Измерители нелинейных искажений обычно снабжаются генератором
измерительного сигнала на одну фиксированную частоту 1 кГц. Для измерений в
диапазоне частот предполагается использовать внешний генератор.
Погрешность измерения коэффициента гармоник таким прибором имеет
несколько источников:
наличие высших гармоник в выходном напряжении генератора;
конечное затухание режекторного фильтра на основной частоте
измерительного сигнала;
различное затухание режекторного фильтра на частотах высших гармоник;.
погрешность измерения среднего квадратического значения напряжения
вольтметром.
Относительная погрешность от первых двух источников возрастает с
уменьшением измеряемого значения ./('г. Эти источники погрешности ограничивают
возможность измерения малых нелинейных искажений и средства уменьшения
таких погрешностей имеют большое практическое значение.
Высшие гармоники генератора могут быть ослаблены фильтром нижних
частот, включенным на выходе генератора. Достаточное затухание режекторного
фильтра на частоте первой гармоники обеспечивается одним из двух способов..
Первый состоит в стабилизации частоты генератора и частоты равновесия
моста, а второй — в автоматической подстройке частоты максимального затухания
режекторного фильтра к частоте первой гармоники генератора. Второй способ,
уменьшает не только погрешность, но и время измерения, устраняя трудоемкую
ручную регулировку. Этот способ применен в отечественном приборе С6-7.
Двухчастотный метод. При этом методе измерительный сигнал
представляет сумму двух гармонических сигналов, частоты которых не кратны между
собой. В этом случае продуктами нелинейных искажений будут высшие гармоники
исходных частот и сигналы с комбинационными частотами.
Общий принцип определения коэффициента нелинейных искажений здесь
остается прежним: используется отношение среднеквадратического значения
суммы продуктов нелинейных искажений в выходном сигнале к аналогичному
значению его неискаженной части. Однако для удобства практической реализации
метода часто вместо всех продуктов нелинейных искажений измеряются только
сигналы комбинационных частот (и даже только часть из них), а вместо
неискаженной части выходного сигнала — весь выходной сигнал.
28а
Существует два варианта двухчастотного метода. 'В первом из «их
составляющие измерительного сигнала выбирают с равными амплитудами и близкими
частотами. Для оценки нелинейных искажений используют составляющую
•спектра с разностной частотой, так что измеряются только квадратичесние
искажения.
Во втором варианте частота f, выбирается в нижней половине полосы
пропускания исследуемого объекта, а частота f2— в верхней половине, причем
/г должна быть в несколько раз больше fi. Амплитуда сигнала с частотой fo
берется в 4... 5 раз меньшей амплитуды сигнала с частотой f\. Под влиянием
нелинейности испытуемого объекта происходит амплитудная модуляция сигнала
большей частоты сигналом с частотой f,. За коэффициент нелинейных
искажений принимается коэффициент возникающей амплитудной модуляции. При этом
методе результат определяется как квадратическими, так и кубическими
искажениями, но раздельная их оценка не производится.
Можно показать, что метод взаимной модуляции по сравнению с одно-
частотным методом дает выигрыш в чувствительности более чем в три раза.
Метод мало чувствителен к шумам, поскольку модулированный сигнал
выделяется фильтром с относительно узкой полосой пропускания.
Недостатком метода является невозможность применять его к трактам с
относительно узкой полосой пропускания.
При реализации первого варианта метода применяют избирательный
вольтметр и два генератора '(рис. 9.24).
При реализации второго варианта используется схема на рис. 9.25, правая
часть которой представляет измеритель амплитудной модуляции методом
двойного детектирования.
Генератор /j
Генератор /2
$>
$
Сумматор
£
Исследуемый
объект
£
Избирательный
вольтметр
Рис. 9.24
Генератор /,
Генератор /2
£
MWWW
£
Сумматор
^v-
£
Исследуемый
объект
^>
Измеритель
амплитудной
модуляции
284
Рис. 9.25
Погрешность измерения первым вариантом метода определяется
погрешностью вольтметра с учетом его избирательности. Требования к последней
зависит от выбора исходных частот и от размера измеряемых нелинейных
искажений: чем ближе исходные частоты к разностной частоте и чем меньше
измеряемые искажения, тем выше требования к частотной избирательности вольтметра.
Для метода взаимной модуляции можно указать два источника
погрешности:
паразитная амплитудная модуляция генератора с частотой f2;
погрешность схемы измерения коэффициента модуляции.
Только первый источник ограничивает возможность измерения малых
нелинейных искажений. (Влияние этого источника можно ослабить, включив
узкополосный фильтр на выходе генератора с частотой f2.
Трехчастотный метод. Этот метод применяется для оцеикн кубических
искажений по продуктам нелинейности первого рода. Измерительный сигнал
представляет сумму трех гармонических сигналов с равными амплитудами и
близкими частотами: fu f2 и /з. Продукты нелинейности первого рода содержат три
составляющие с частотами, близкими к исходным: fi+/2—/з, f\—fz+fo и —fi +
+ /г+/з- Для того чтобы ни одна из частот этих составляющих не совпадала с
какой-либо из исходных частот, необходимо выполнить условие: f2—fi*£h—'
W2(/i<f2<f3). ,B этом случае любая из трех составляющих, возникших в
результате нелинейных искажений, может быть измерена избирательным
вольтметром.
Обозначая среднеквадратическое значение одной составляющей с
комбинационной частотой через UK, а всего выходного напряжения через U„ , получаем
для коэффициента кубических нелинейных искажений:
KB3=4i/„/i/2 .
Коэффициент 4 учитывает значение 16 составляющих с комбинационными
частотами и равными амплитудами.
Схема для измерения трехчастотным методом показана на рис. 9:26. Квад-
ратические искажения трехчастотным методом измерять не имеет смысла,
поскольку ни одна из требуемых составляющих с комбинационной частотой не
зависит от всех трех слагаемых измерительного сигнала.
Погрешность трехчастотного метода определяется погрешностью
вольтметра и конечным значением его частотной избирательности. Требования к
последней здесь особенно высокие, поскольку используемые для измерений продукты
Генератор /\
=»
Генератор /2
=>
Генератор /з
=»
Сумматор
J>
Исследуемый
объект
^>
Избирательный
вольтметр
Рис. 9.26
285
Генератор
шума
Режекторный
фильтр
Исследуемый
объект
"♦*"
Полосовой
фильтр
Квадратичный
вольтметр
Рис. 9.27
нелинейности имеют частоты, близкие к частотам исходных составляющих из
мерительного сигнала.
Пример. Определить погрешность измерения коэффициента Квз, если на
пряжения UK и Uу, измерены с погрешностями Д£/„ и At/y .
Так как измерения косвенные, то погрешность измерения Km = AUKHJ^
ределится следующим общим выражением:
Дли производных получаем:
оп-
дКв
■ = 4/U.
s>
\д Кнз
4У«
ui
дик
Следовательно:
Д Kbs = (4/Us) Л Un—(4 UK/U22) Д иг.
Полученное выражение определяет максимальное значение неисключеннок
еистематической погрешности.
Метод шумовой загрузки. В этом методе в качестве измерительного сигнала
применяется белый шум. Такой сигнал можно рассматривать как предельный
случай миогочастотного сигнала, и в этом отношении он в наибольшей степени
приближается к реальным сигналам, передаваемым в системах связи.
Продуктом нелинейного преобразования шумового сигнала является тоже
шум, который для измерения необходимо отделить от неискаженной части
выходного сигнала. Для этого в спектре входного шумового сигнала с помощью
полосового заграждающего фильтра вырезается относительно узкое «окно», т. е.
участок частот, свободный от сигнала. Такой шумовой сигнал подается в
качестве измерительного на вход испытуемого объекта.
- В спектре выходного сигнала «окно» оказывается заполненным шумом в
тем большей степени, чем больше нелинейные искажения. Напряжение 11'т вых
этого шума выделяется соответствующим полосовым фильтром и измеряется
квадратичным вольтметром. Тем же вольтметром измеряется суммарное
напряжение иш вых выходного сигнала.
Значение коэффициента нелинейных искажений определяется как отношение
этих двух напряжений:
Дн та==и ш вых/£>ш вых.
Схема измерений и спектры шума изображены на рис. 9.27.
Можно указать следующие источники погрешностей измерения этим
методом:
погрешность измерения шумового напряжения вольтметром;
отклонение частотных характеристик затухания фильтров от идеальных.
286
Часть III. ИЗМЕРЕНИЯ В ТЕХНИКЕ СВЯЗИ
Глава 10. ИЗМЕРЕНИЯ В АВТОМАТИЧЕСКИХ
СИСТЕМАХ ЭЛЕКТРОСВЯЗИ
10.1. ЦЕЛИ И ЗАДАЧИ ИЗМЕРЕНИЙ
Работа телефонной сети, отдельных АТС, сети в целом
характеризуется объемом ее продукции, т. е. телефонной нагрузкой и ее
качественными показателями. Постоянный рост городских и
сельских телефонных сетей, введение новых видов обслуживания
существенно влияют на увеличение объема телефонной нагрузки, и,
естественно, обеспечение хорошего качества и эффективного
использования коммутационного оборудования все в большей
степени становится зависимым от регулярности измерений,
систематического сбора и правильного толкования статистических
данных нагрузки.
Измерения телефонной нагрузки могут производиться с
различной целью, и при этом может быть получено различное количество
информации. В результате обеспечивается:
возможность оперативного контроля за качеством
обслуживания в направлениях и абонентских группах, а также возможность
выявления перегруженных направлений и отдельных источников
нагрузки для принятия эксплуатационных мер;
получение достоверных статистических данных для
проектирования новых станций и сетей;
получение данных для прогнозирования на ближайшую и
дальнюю перспективу параметров телефонной нагрузки;
практическая проверка основных положений теории
телефонных сообщений, уточнение и разработка новых методов расчета
коммутационного оборудования, а также разработка новых
методов измерения параметров телефонного сообщения на
эксплуатационных сетях, уточнение действующих инструкций и
рекомендаций по статистической обработке результатов измерений для
создания новых усовершенствованных программ обработки данных
на ЭВМ.
Конкретный выбор измеряемых параметров, сама методика
организации измерений существенно зависят от технических
возможностей оборудования АТС. Так, в АТС декадно-шаговых систем
имеется возможность измерения нагрузки на ступенях шаговых
искателей (ШИ) по расходу тока, а при наличии абонентских счет-
287
чиков могут быть также получены данные о числе состоявшихся
занятий на одну абонентскую линию.
Наличие управляющих приборов, маркеров и регистров в
координатных системах упрощает задачу и позволяет извлекать
информацию непосредственно от этих приборов. Еще более
упрощается задача измерения на электронных и квазиэлектронных
станциях с централизованным управлением, так как в
централизованном управляющем устройстве сосредоточивается практически вся
необходимая информация, все сведения о категории вызывающего
абонента, о путях установления соединения и о результатах
обслуживания вызова.
Поскольку статистические измерения параметров телефонного
сообщения есть измерения случайных реализаций различных
величин, то объем и продолжительность таких измерений будут
зависеть от того, как быстро среднее арифметическое наблюдаемых
значений случайной величины сходится по вероятности к ее
математическому ожиданию. Эта быстрота сходимости будет зависеть
от ряда факторов и в первую очередь от значения дисперсии, от
свойств измеряемых величин и принятого метода измерения.
На выбор методики измерения, обработку статистического
материала, а также на организацию измерений отдельных
параметров телефонного сообщения существенно влияют экономические
затраты, необходимые для проведения и обработки измерений, в
сопоставлении с достаточностью и ценностью извлекаемой
информации.
Основные„определения. При желании абонента А установить
соединение с абонентом Б происходит занятие соединительного
пути (линии) на время установления соединения и ведения
разговора. Суммарное время занятия таких пучков линий называют
телефонной нагрузкой. При этом различают обслуженную,
поступающую и потерянную нагрузку.
Обслуженная коммутационным устройством за промежуток
времени U...t2 телефонная нагрузка y(U, t2) есть суммарное
время занятия всех выходов коммутационного устройства за
рассматриваемый промежуток времени.
Поступающая (потенциальная) на коммутационное устройство
за промежуток времени U ... t2 телефонная нагрузка A(tu h) —это
нагрузка, которая была бы обслужена коммутационным
устройством, если бы каждому телефонному вызову тотчас было
предоставлено соединение.
Потерянная коммутационным устройством за промежуток
времени U ... t2 телефонная нагрузка An(tu t2) есть часть поступающей
нагрузки, определяемая разностью между поступающей A(tu t2) и
обслуженной y(tu t2) нагрузками.
Обслуженную (поступающую, потерянную) нагрузку,
отнесенную к единице времени, называют интенсивностью обслуженной
(поступающей, потерянной) нагрузки. За единицу времени
наблюдения за нагрузкой принимают обычно час наибольшей нагрузки
(чнн), под которым понимают непрерывный интервал времени в
288
60 мин, в течение которого нагрузка достигает максимального
значения.
Единицей измерения телефонной нагрузки служит телефонное
часо-занятие (ч.-зан.), а ее интенсивности — эрланг (Эрл) — одно
телефонное часо-занятие за один час.
Если за единицу времени принят чнн, то для обозначения
интенсивности нагрузки становится излишним указание промежутка
времени наблюдения за ней и для ее обозначения достаточно
одного символа У.
Объектами первичного учета могут быть: число вызовов,
поступающих от источников разных категорий; число вызовов по
межстанционным соединительным- линиям различных
направлений; число занятий различных видов — состоявшихся разговоров,
случаев занятости и неответа абонентов, ошибок абонентов;
вызовов, не окончившихся разговором по техническим причинам;
продолжительность разговоров, прослушивания сигнала контроля
посылки вызова при ответе и неответе абонента и сигнала
«занято»; число одновременно занятых приборов. В соответствии с
целями измерений для экономии времени и средств необходимо
выбирать минимальное число объектов наблюдений.
10.2. ПРИНЦИПЫ ИЗМЕРЕНИЙ ПАРАМЕТРОВ
НАГРУЗКИ И ПОТЕРЬ
Измерения параметров нагрузки и потерь можно
классифицировать следующим образом [22]:
по способу получения данных — автоматические и ручные;
по способу регистрации измеряемой величины — прямые и
косвенные;
по способу организации процесса измерений — непрерывные,
периодические и эпизодические (спорадические);
по охвату объектов изучаемой совокупности — сплошные и
выборочные.
Ручные измерения допускается применять только при
отсутствии автоматической аппаратуры, так как они являются слишком
дорогостоящими и не обеспечивают необходимой точности
измерений.
Примером прямых измерений может служить регистрация
числа вызовов с помощью счетчиков при измерении числа
поступающих вызовов, а косвенных измерений — измерение интенсивности
обслуженной нагрузки путем регистрации числа одновременно
занятых приборов через некоторые интервалы времени.
Непрерывные измерения являются дорогостоящими и
организуются при измерении коэффициентов концентрации нагрузки,
определении характера распределения нагрузки по часам суток, дням
недели, месяцам года. В большинстве случаев параметры
нагрузки измеряются периодически, так как это дешевле непрерывных
измерений, и при выборе соответствующей длительности
измерений обеспечивают требуемую точность. Эпизодические (спорадиче-
10—10 289
ские) измерения могут начинаться, например, при появлении
симптомов неудовлетворительной работы оборудования. Для экономии
средств и затрат труда при наблюдении за параметрами
нагрузки применяются, как правило, не сплошные, а выборочные
измерения. В математической статистике вся подлежащая изучению
совокупность однородных элементов называется генеральной, а
часть генеральной совокупности, отобранная для измерения, —
выборочной совокупностью.
При измерении нагрузки наиболее распространены, следующие
три принципа: непрерывного измерения, сканирования, подсчета
числа случайных событий. Принцип непрерывного измерения
обслуженной нагрузки поясняется схемой на рис. 10.1. Каждый
прибор имеет измерительный резистор R, через который ток
протекает, когда прибор занят, и не протекает, когда он свободен:
(10.1)
напряжение
i(t)=-jv(t),
где v{t) —число устройств, занятых в момент t; U-
пит.ания.
В приборе, измеряющем ампер-часы, ток интегрируется за весь
пертод измерения Т, так что обслуженная нагрузка составит
yQ = k\i{t)dt, (10.2)
о
где k — градуировочная постоянная.
Принцип сканирования заключается в том, что следящее
устройство поочередно подключается к линиям исследуемого пучка
и при занятой линии посылает импульс в суммирующий счетчик.
В этом случае интенсивность обслуженной нагрузки определяется
как среднее число одновременно занятых линий:
У0-
(10.3)
ЩрЯлмашлц
2°«
f=i )
где Vi — число занятых линий при £-м сканировании; п — общее
число сканирований.
Принцип подсчета числа случайных событий основан на
приеме импульса при появлении каждого события. Таким способом
регистрируется число поступивших,
обслуженных и потерянных вызовов
при измерении потерь по вызовам,
число случаев занятости всех линий
пучка при изменении потерь по
времени и т. д. Этот принцип" можно
использовать также при измерении
нагрузки, обслуженной
устройствами, время занятия которых
постоянно.
Все три принципа широко
применяют в аппаратуре измерения
параметров нагрузки и потерь.
^—I I-—^о—-
I
I /пёль
.£
CfemvuK
-^
Рис. 10.1
290
«Ш
о>
10.3. ПОЛУЧЕНИЕ РЕЗУЛЬТАТОВ ИЗМЕРЕНИЙ
Основными задачами получения результатов измерения
являются вычисления оценки измеряемого параметра и степени
достоверности этой оценки.
При статистических измерениях за наиболее вероятное
значение измеряемой величины принимается среднее арифметическое
значение. Различают среднюю генеральной совокупности
(генеральную среднюю)
и среднюю выборочной совокупности (выборочную среднюю)
тп I тп
х= I] *}Щ / S »>. (Ю.5)
/=1 / i=i
где Nj, tij — число элементов /-й группы соответственно в
генеральной и выборочной совокупностях; X,, xj — значения
варьирующего признака элементов /-й группы соответственно в генеральной
и выборочной совокупностях; k, m — число групп элементов, в
каждой из которых варьирующий признак принимает одно из сво-
k
их значений, причем 2,Nj = N — число элементов генеральной со-
i=i
тп
вокупности, 2 tij = n — число элементов выборочной совокупности.
/=i
Степень расхождений между собой отдельных значений
изучаемого признака характеризуется среднеквадратическим
отклонением, равным для выборочной совокупности
/тп
2 (х}-х)*пДп-1) (10.6)
и для генеральной совокупности
*- Vi
{Xj — XfNf/N. (I0.7)
Важнейшей задачей обработки результатов измерений является
оценка их точности. При обработке результатов измерений
параметров нагрузки и потерь необходимо учитывать погрешности
регистрации, вносимые измерительной аппаратурой (аппаратурные);
представительности выборки (репрезентативности); грубые или
промахи.
Аппаратурные погрешности, в первую очередь, обусловлены
принятым принципом измерений и классом точности
измерительных приборов. Так, при непрерывном измерении обслуженной
нагрузки (рис. 10.1) аппаратурная погрешность зависит от допусков
сопротивлений резисторов R, допустимых колебаний напряжения
источника питания, класса точности прибора, фиксирующего
ампер-часы.
It* 291
Максимальная относительная аппаратурная погрешность ба в
данном случае является суммой относительных погрешностей,
возникающих вследствие неточности изготовления резисторов 6я,
колебаний напряжения ди, погрешности измерительного прибора бп:
*а= У/н + бЬ + Ы. (10.8)
При использовании принципа сканирования состояния
коммутационной системы фиксируются лишь через интервалы
сканирования т. Ясно, что чем меньше т, тем меньше погрешность, связанная
со сканированием. Среднее значение относительной погрешности
лри измерениях с использованием сканирования вычисляется по
формуле
*°~ /т (тг7>-2)' (10-9)
где с— суммарное число занятий за период наблюдений; со = т/? —
«отношение интервала сканирования т к средней длительности
одного занятия t.
При использовании принципа подсчета числа сигналов от
различных источников одним общим счетчиком появляются
погрешности вследствие совпадения импульсов от нескольких источников.
Ясно, что чем больше интенсивность поступления импульсов и
длительности импульсов, тем больше вероятность совпадения
импульсов.
Погрешность репрезентативности является следствием того,
что выборочная совокупность — часть генеральной совокупности, а
так как часть всегда отличается от целого, то и выборочные
характеристики х и а(х) могут отличаться от аналогичных
характеристик 1й0о генеральной совокупности.
Погрешность репрезентативности в значительной степени
зависит от способа отбора и объема выборки. Существуют различные
способы выборочных наблюдений: случайный, типический,
серийный. При случайном отборе каждая единица генеральной
совокупности имеет одинаковые со всеми другими возможности попасть в
выборочную совокупность.
В некоторых случаях может оказаться целесообразным
рассматривать совокупность единиц не целиком, а расчлененную на
группы (типы), единицы каждой из которых оказываются более
всхожими друг на друга, чем во всей совокупности. Выборка,
произведенная в случайном порядке в каждой из установленной
типических групп, называется типической. Объем выборки в каждой
типической группе устанавливается пропорционально ее
удельному объему в генеральной совокупности. При типическом отборе в
•выборочной совокупности отдельные группы оказываются
представленными в такой же пропорциональности, что и в генеральной
Совокупности. Это увеличивает точность выборочного наблюдения.
Серийная выборка предполагает отбор из генеральной
совокупности не отдельных единиц, а целых серий. Серии единиц от-
292
бираются по случайному принципу, внутри же серии обследование
производится методом сплошного учета.
Вычисление погрешности репрезентативности рассмотрим на
примере случайного отбора. Процесс отбора при случайной
выборке может быть повторным или бесповторным. Повторный отбор
состоит в том, что каждый элемент, попавший в выборку, после
регистрации снова возвращается в генеральную совокупность и в
дальнейшем может еще раз попасть в выборку. Бесповторный
отбор состоит в том, что каждый элемент, попавший в выборку, в
генеральную совокупность не возвращается и таким образом
повторному измерению не подвергается.
Средняя абсолютная погрешность репрезентативности
случайной повторной выборки приближенно рассчитывается по формуле
|ЛП « <т {x)lVn, (10.10)
где о(х) —среднеквадратическое отклонение выборочной
совокупности, рассчитывается по (10.6); п — число элементов выборочной
совокупности.
Поскольку состав выборочной совокупности является
случайным, то выборочная средняя в отдельных выборках может
значительно отличаться от генеральной средней. Учитывая, что
выборочные средние распределены по нормальному закону, с
определенной вероятностью можно утверждать, что отклонения
выборочной средней от генеральной средней не превысит заданного
значения Ап, которая называется предельной погрешностью
выборки, а вероятность — доверительной вероятностью.
Предельная погрешность выборки Ап связана со средней
погрешностью цП соотношением
Ап = 2(Яп, (10.11)
где z -^ коэффициент, зависящий от вероятности, с которой
гарантируется предельная погрешность.
Относительная погрешность повторной выборки бп с
доверительной вероятностью p(z) рассчитывается по формуле
bn=bnlx=*zo(x)jxVn = zViVn, (№.12)
где V=a(x)jx—коэффициент вариации, представляющий собой
отношение среднеквадратического отклонения- а(х) к среднему
значению признака выборочной совокупности.
Выражения (10.10) — (10.12) справедливы, если число
элементов выборочной совокупности п достаточно большое, например
л>20... 50. Только в этом случае выборочные средние
распределены по нормальному закону. При малых выборках кривая
распределения выборочных средних является плосковершинной и
описывается не нормальным распределением, а распределением Стью-
дента.
Предельная погрешность малой повторной выборки рассчиты--
вается по формуле
A„=i„-1(a(x))/K^T1 (10.13)
293
где tn-\ — коэффициент Стьюдента, зависящий от доверительной
вероятности p(tn-\)^ объема выборки.
При и = оо значения zn-\ совпадают со значениями z нормаль-
' ного распределения, а при и=20... 50 различие относительно
невелико. Подробные таблицы значений z и zn-\ приведены в '[22].
Для вычисления погрешности репрезентативности ' случайной
бесповторной выборки правые части выражений (10.10), (10.12) и
(10.13) необходимо домножить на Vl—n/N, где N — число
элементов генеральной совокупности.
Грубые погрешности или промахи являются следствием
недостатка внимания экспериментатора. Источником их могут быть,
например, неисправности в измерительных приборах или в
коммутационной аппаратуре. Для устранения промахов необходимо
соблюдать аккуратность и тщательность в работе и записях результатов.
При планировании измерений должны быть предприняты
необходимые меры для устранения промахов.
При определении точности результатов измерений следует
учитывать погрешности как аппаратурные ба, так и
репрезентативности бР. Предельную суммарную относительную погрешность
измерений 6s можно определить как сумму квадратов предельных
значений этих погрешностей:
б2= Vbl + 8l. (10.14)
Доверительная вероятность суммарной погрешности измерений
в первом приближении может оцениваться доверительной
вероятностью погрешности репрезентативности.
Кроме погрешности измерений достоверность конечного
результата зависит от точности вычислений при обработке результатов
измерений. Рекомендуется придерживаться следующего правила:
погрешность вычислений должна быть примерно на порядок (т. е.
в 10 раз) меньше суммарной погрешности измерений.
10.4. ОПРЕДЕЛЕНИЕ ОБЪЕМА ИЗМЕРЕНИЙ
Как установлено в § 10.3, некоторые составляющие суммарной
погрешности измерения, например обусловленные классом
точности Приборов, не зависят от объема измерений, другие
составляющие, например погрешность репрезентативности, в основном
определяются объемом измерений.
Из выражения (10.10) следует, что с увеличением,объема
измерений погрешность репрезентативности уменьшается, однако
уменьшать ее целесообразно только до тех пор, пока суммарная
погрешность измерений не будет в основном определяться
аппаратурной погрешностью. Практически при измерении параметров
телефонной нагрузки относительную погрешность
репрезентативности принимают порядка 5... 10% с доверительной вероятностью
0,95 или 0,99.
294
Для расчета минимального объема выборки п с заданной
доверительной вероятностью p(z), исходя из предельной погрешности
достоверной выборки 6Ш решим уравнение (10.12) относительно
п:
nn = z2 (У2/82) (10.15)
Для бесповторной выборки
«бп = (Z2. V8 Л0/(6|п N + Z2 У2). (10.1 6)
До начала измерений коэффициенты вариации V в (10.15) и
(10.16) неизвестны, поэтому объем выборки можно определить
лишь приближенно, задавшись значениями коэффициентов
вариации по результатам предыдущих аналогических измерений. После
получения результатов измерений необходимый минимальный
объем выборки уточняется.
Современные средства учета нагрузки и потерь отличаются высокой
степенью автоматизации процесса измерений и обработки результатов.
Структурная схема устройства для измерения параметров телефонной нагрузки
представлена на рис. 10.2. Эта схема работает следующим образом. Устройство
подключения и преобразования информации выполняет три основных функции:
позволяет подключиться к требуемой для исследования группе линий, т. е.
выполняет функцию коммутации;
преобразует сигналы, характеризующие состояние линии, в сигналы,
удобные для передачи и подсчета электронными счетчиками;
.осуществляет передачу преобразованных сигналов на электронные счетчики
импульсов.
Часть схемы, реализующая вторую и третью функции, представлена на
рис. 10.3. Эта схема содержит п входов. Если г-я линия занята, то на г'-м входе
появляется положительный потенциал. На -выходе дифференцирующей цепи в
этот момент появляется импульс, который через схему ИЛ Hi поступает на
счетчик числа занятий. Пренебрегая вероятностью одновременного изменения со-
Электронные
счетчики
Устройство опроса
счетчиков
1-я линия
2-я линия
•
•
и-я линия
Устройство
подключения и
преобразования
информации
Устройст во
долговременной памяти
Устройство управления
контроля и
программирования
ЭВМ
Генератор
импульсов
отсчета
времени
Рис. 10.2
t-я ЛИНИЯ
f—=»-
Дифференцирующая цепь 1
#-Я лИНия
Схема совпадения 1
t-^-
Дифференцирующая цепь и
ИЛИ,
К счетчику
числа занятии
1..-.И
Схема' совпадения п
-П
или,
К счетчику
общего времен^
занятости
Рис. 10.3
стояния нескольких линий, получаем, что число импульсов на выходе схемы
ИЛИ1 за 'Некоторый промежуток времени равно общему числу занятий
рассматриваемых л линий на том же промежутке времени.
На схемы совпадений (входы а) поступают сигналы е линий и импульсы
(входы б) от устройства управления контроля ^программирования (рис. '10.2).
Импульсы формируются из сигнала генератора импульсов отсчета времени, так
что на схемы совпадений они поступают не одновременно. Временные сдвиги
между «ими обеспечивают поочередное попадание -импульсов в счетчик общего
времени занятости. Прохождение импульсов в этот счетчик возможно лишь
тогда, когда на входы а схемы совпадений поступают положительные потенциалы
с контролируемых линий, при наличии занятости линии. Таким образом за одни
период сигнала генератора импульсов отсчета времени в счетчике фиксируется
число импульсов, равное числу .занятых линий (так как вероятностью
изменения состояния пучка за период работы генератора можно пренебречь). Очевидно,
число импульсов 'на выходе схемы ИЛИ2 за некоторый промежуток времени од:
нозначно определяет нагрузку, пропущенную пучком из л линий «а том же
промежутке. Импульсы с выходов схем ИЛИ подсчитываются электронными
счетчиками.
>В течение некоторого времени ««(формация о нагрузке -накапливается в
электронных счетчиках (рис. 10.2), а затем по сигналу из устройства управления
производится опрос счетчиков ,и накопленная информация фиксируется в
устройстве долговременной памяти, например на перфоленте.
Современные генераторы импульсов отсчета времени могут формировать
импульсные последовательности требуемой частоты с высокой точностью
расположения импульсов. Однако при измерениях нагрузки и потерь не требуется
высокой точности. Поэтому импульсы отсчета времени иногда формируют с помощью
обыкновенных электрических часов, которые имеются иа каждом предприятии, и
делителей или умножителей частоты.
В устройство управления, контроля и. программирования вводятся данные о
программе, объеме и периодичности производимых измерений с указанием того,
в какие часы и минуты подлежат обследованию те или иные группы приборов,
•.направления и абоненты.
Информация, записанная в долговременную память, передается на ЭВМ,
которая обрабатывает результаты измерений.
296
Глава 11. ИЗМЕРЕНИЕ ХАРАКТЕРИСТИК
МНОГОКАНАЛЬНЫХ СИСТЕМ
ПЕРЕДАЧИ
11.1. ЦЕЛИ И ЗАДАЧИ ИЗМЕРЕНИИ
Высокое качество передачи и воспроизведения сообщений можно
обеспечить при условии, что тракт передачи в целом и его
составляющие удовлетворяют установленным требованиям. Эти
требования нормируются, т. е. определяются номенклатура параметров
и характеристик, их значения и характер поведения, а также
допуски. Таким образом, обеспечение «необходимого качества»
сводится к поддержанию ряда поддающихся объективной
количественной оценке электрических параметров в заданных пределах.
Целью измерений является определение значений
электрических параметров и характеристик и сравнение их с допустимыми.
Согласно основным положениям Единой автоматизированной сети
связи страны (ЕАСС) каналы и тракты являются
универсальными, т. е. в системе может передаваться информация различного
вида (речь, телевидение, передача данных) с помощью различных
сигналов. Каждый вид сигналов определяется (описывается)
своими специфическими характеристиками, а система передачи
должна обеспечивать высокое качество передачи независимо от вида
сигнала. Поэтому нормируемые параметры системы передачи
должны не зависеть от вида передаваемых сигналов, а должны
характеризовать ее пригодность к передаче любого вида
информации. Для их введения необходимо принять соответствующую
модель системы. Тракты и каналы передачи полезных сигналов, а
также пути распространения помех практически всегда можно
представить в виде четырехполюсника, и поэтому основные
характеристики каналов и трактов выбраны аналогично
характеристикам четырехполюсника.
Измерения характеристик системы и ее составляющих
проводят при строительстве и монтаже, чтобы отбраковать изделия, не
удовлетворяющие требованиям технических условий, и устранить
допущенные при строительстве и монтаже повреждения и
ошибки. По окончании монтажа станционной аппаратуры проводят
настроечные измерения, подтверждающие правильность регулировок.
Измерения параметров трактов и каналов, находящихся в
эксплуатации, проводят в порядке профилактики для подтверждения
стабильности характеристик либо для определения характера и мест
повреждения. Контрольные измерения выполняют, как правило,
без нарушения работы системы в дополнение к предусмотренным
в аппаратуре устройствам непрерывного контроля. При
обнаружении показателей, не удовлетворяющих эксплуатационным нормам,
осуществляется настройка с закрытием связи, после которой все
297
электрические характеристики должны соответствовать значениям,
указанным в настроечных нормах.
Все указанные измерения выполняются в соответствии с
требованиями ГОСТ и соответствующих инструкций, утвержденных
Министерством связи СССР. Эти же документы регламентируют
методику измерений и типы измерительной аппаратуры.
Многоканальные системы, используемые в настоящее время
для организации связи большой протяженности, действуют по
принципу частотного разделения каналов, при котором сигналу
каждого канала выделяется определенная часть полосы частот,
передаваемой по линии. Системы с различной шириной
используемой полосы сравниваются по числу каналов тональной частоты
(ТЧ) шириной 3,1 кГц (общая ширина полосы с промежутком
между соседними каналами ТЧ составляет 4 кГц), т. е. канал ТЧ
является единицей оценки пропускной способности системы. Для
канала ТЧ ЕАСС нормируется 19 параметров, в частности: полоса
эффективно передаваемых частот; номинальные относительные
уровни; входное сопротивление; структура номинальной цепи;
остаточное затухание (03) канала, отклонение его среднего
значения от номинального, среднеквадратическое отклонение 03- во
времени от среднего значения на частоте 800 Гц; искажение частоты;
скачкообразные изменения фазы во времени; частотная
характеристика 03 (амплитудно-частотная характеристика — АЧХ);
абсолютное групповое время запаздывания, частотная
характеристика отклонения группового времени запаздывания (ЧХ ГВЗ);
амплитудная характеристика; нелинейные искажения.
Даже этот неполный перечень дает представление о
многообразии нормируемых параметров только для канала ТЧ.
Соответствующий ГОСТ нормирует также требования и электрические
параметры сетевых групповых трактов.
Ряд приведенных характеристик измеряется способами, бпи-
санными в соответствующих разделах настоящей книги, далее
будут рассмотрены некоторые специфические характеристики и
методы их измерения.
11.2. МЕТОДЫ ИЗМЕРЕНИЯ ЗАТУХАНИЙ
Значения напряжений сигналов и помех, действующих в
различных точках трактов передачи, колеблются от долей пиковоль-
та до десятков вольт, мощность — от долей пиковатта до единиц
ватт.. Для облегчения измерений и сравнения значений такого
большого диапазона пользуются логарифмом отношения этих
величин (относительные уровни) или логарифмом отношения их к
условным величинам', принятым за нулевую отметку
логарифмической шкалы (абсолютные уровни), выраженные в децибелах.
Так как моделью канала связи считается четырехполюсник, то
его характеристики (а значит, характеристики каналов и трактов)
удобно также выражать логарифмическими характеристиками.
К этим характеристикам относятся затухания четырехполюсников,
298
"г, It
Рис. 11.1
а также такие параметры, как зату-~ [-——-■ иич
хание несогласованности, затухание I i
асимметрии. С понятием затухания I
связана количественная оценка вза- J | r ,
имного влияния линий — ее оцени- [_^_j
вают переходным затуханием. ^~
Затухания четырехполюсников.
Общие понятия. Затухание является
энергетической мерой передачи гармонического сигнала через
четырехполюсник и в общим виде (в децибелах) определяются
следующим уравнением:
Л = 101§(ЛАРа)( (Ц.1)
где Р\ и Р2 — полные мощности опорного или входного сигнала и
сигнала на нагрузке измеряемого четырехполюсника.
В зависимости от того, какое рассматривается затухание,
смысл полных мощностей Р\ и Р2 различен. Это является
следствием того факта, что четырехполюсник может быть согласован или
нет (и по входу и по выходу), а значит, могут возникать
отражения мощности, т. е. энергетические потери. Но какой бы смысл не
закладывался в значения Р\ и Р2, это всегда полные мощности
синусоидальных сигналов. Поэтому, если измерительный сигнал
генератора наряду с основной частотой содержит гармонические
составляющие, то измерение нужно проводить только на
основной частоте, т. е. принять меры к подавлению высших гармоник
(применяются фильтры нижних частот) или пользоваться
избирательными измерительными приборами.
Согласно рекомендациям МККТТ в технике связи
рассматривают три вида затуханий: собственное, рабочее и вносимое.
Собственное затухание определяется выражением (11.1),
если Pi и Р2 — полные мощности, развиваемые на входе и выходе
четырехполюсника, нагруженного на согласованное сопротивление,
т. е. ZH=Z2.
Пояснение сравниваемых мощностей дает рис. 11.1, где Zr —
сопротивление генератора или выходное сопротивление
предыдущего каскада; Zx — входное сопротивление четырехполюсника;
Z2 — выходное сопротивление четырехполюсника; ZH—
сопротивление нагрузки четырехполюсника; Ь\, 1\ и U2, h — напряжения и
токи на входе и выходе четырехполюсника; ИЧ — исследуемый
четырехполюсник. Используя эти обозначения, можно записать
для собственного затухания:
V\
Лс= 10 lg ^- = 10 lg
= 20 1g£-'-10lgfi-
£i_ =20lg ^- — lOlg^i- =
u\
Если четырехполюсник симметричен,
= ZH, то Z{ = Z2 = Z^ и
Ac=2Q\g(U1/U2).
т. е. Z\ = Z2
(11.2)
а так как Z2=
(11.3)
299
Собственное затухание является параметром
четырехполюсника, не зависящим от условий его включения — именно это
позволяет выражать его не через существующие в цепи мощности, а
через значения входных сопротивлений. Наиболее просто это можно
сделать исходя из входных сопротивлений в режиме холостого
хода и короткого замыкания, т. е.
ac=Re(arth]/ZK3/Z*x). (11.4)
Обеспечить режим работы с полным согласованием во всем
диапазоне частот в рабочих условиях не удается, поэтому
собственное затухание не характеризует работы четырехполюсника в
действительных условиях.
Рабочее затухание определяется выражением (11.1), если
Рх — полная мощность, которую выделяет генератор на
согласованной с ним нагрузке; Р2 — полная мощность, которую этот же
генератор отдает в нагрузку ZH через рассматриваемый
четырехполюсник.
Пусть на сопротивлении Zr (рис. 11.2,а) выделяется полная
мощность Pi,-а на сопротивлении ZH (рис. 11.2,6), подключенном
к тому же генератору через четырехполюсник, выделяется полная
мощность Р2. Таким образом, рабочее затухание
Лр=10 1б£-
Ю lg
v\
^L =20 lg U-±-
10 lg
Zs
(11.5)
Но при согласовании Ul = IlZr = (E/2ZT) -Zr = E/2..„
Следовательно, (И.5) можно переписать в виде,4p = 201g(£/2£/2)—l01g(Zr/ZH)*
Из этого выражения видно, что знание ЭДС генератора
может облегчить измерение — нужно измерять только U2 и
рассчитать 10lg(Zr/ZH). Постоянство Е и его независимость от
характеристик четырехполюсника создает удобство при автоматизации
измерений.
Как видно из (11.5), Ар не зависит от параметров
четырехполюсника, а связано со значениями сопротивления генератора и
нагрузки четырехполюсника. Рассматриваемая мощность Pi
характеризует генератор и в этом смысле является опорной (т. е. такой
с которой сравнивают по определению), а не входной для
четырехполюсника: действительно, на рис. 11.2,6 на входе
четырехполюсника в общем случае РвхфРь Рабочее затухание можно
выразить через собственное затухание четырехполюсника, и это вы-
I,-
К
L-Ь
*>
300
Рис. 11.2
г-
г
L51
I ZX
U, М^-*г
J-J^x
")
. )
L.
ч^_п
z, z>
s)
Рис. 11.3
ражение включает члены, отражающие несогласованность
включения.
Вносимое затухание определяется выражением (11.1), если
Р\ — полная мощность, которую выделяет генератор на
сопротивлении ZH; P2 — полная мощность, которую выделяет генератор на
том же сопротивлении ZH, но подключенном к нему через
рассматриваемый четырехполюсник (рис. 11.3). Таким образом, вносимое
затухание
2Н
Ui
^B=101g^- = l01g^.^=20 1g^
(11.6)
Отметим, что Ux не равно входному напряжению
четырехполюсника, т. е. ихфивх.
На практике (по крайней мере не на СВЧ, где измеряют
непосредственно мощности) затухания измеряют измерителем
уровня, т. е. прибором, измеряющим напряжения. Мощность и
напряжение связаны зависимостью P = u2/Z, и с учетом этого выражение
(11.1) можно переписать в виде
Л= 10 1g^-=20Ig ^i-
Р2 U2
lOlgf-
/2
(11.7)
где Ux — напряжение, выделяющее мощность Pi ,на сопротивлении
Zi; U2— то же для мощности Р2 на сопротивлении Z2.
Измеритель уровня измеряет абсолютные уровни напряжения,
поэтому преобразуем (11.7) так, чтобы затухание выражалось
через абсолютные уровни:
Л = 20 lg ^iZ^S.
и,/и0
10 1g^- = 20Ig ^L
Z2 s U0
-20 lg U-f-
(11.8)
_10 lg|- =Ll-L2-lQ\g
где Uq — напряжение, принятое за нулевое значение шкалы
абсолютных уровней напряжения; Lx и L2 — абсолютные уровни
напряжений U\ и U2 соответственно.
По рекомендации МККТТ за нулевую отметку шкалы уровней
мощности принят 1 мВт, поэтому нулевое значение шкал
абсолютных уровней напряжения (и тока) определяют исходя из того
сопротивления, на котором данное напряжение (ток) выделяет
1 мВт, т. е. U0= V PoRo= KlO~3Po, где U0 — выражено в
вольтах, R0 — в омах.
301
Рассмотрим особенность измерителя уровня, связанную с тем,
что он может иметь разное входное сопротивление и разные
шкалы (с разными значениями U0). Пусть измеряется уровень
напряжения на резисторе Rx (рис. 11.4). При высокоомном входном
сопротивлении измерителя уровня показание по г'-й шкале можно
представить
^iBo = 201g^-10Ig|s- , (11.9)
где U0i — нулевой уровень напряжения, соответствующий
сопротивлению ^ог- Если на измерителе уровня ИУ установлено
значение входного сопротивления RBX, то измеритель уровня можно
представить в виде параллельного соединения RBX и измерителя с
высокоомным сопротивлением (рис. 11.4,6). Показание в этом
случае будет
Например, для шкалы, проградуированной для /?ог = 600 Ом (т. е.
£/0г = 0,775 В), при высокоомном входе показание будет Лв0 =
U R
= 20 lg— 10 lg —- ,а при входном сопротивлении i?Bx = 600 Ом
6 0,775 &600 F v
Если £^ = 600 Ом, то
Л = 201й-^е lOlg— = 20lg-^ + 3 дБ.
"Б 0,775 б 2 б 0,775
Измерение затуханий четырехполюсников. Рабочее затухание
измеряют методом известного генератора и методом Z. Оба
метода могут быть реализованы с помощью двух отсчетов или
сравнением с затуханием образцовой меры (магазина). Поясним
сущность этих методов.
В выражение рабочего затухания входит мощность опорного
сигнала, которая обусловлена параметрами генератора Zr и Ег.
Если они известны, то используют метод известного генератора,
реализуемый либо с помощью двух отсчетов (рис. 11.5,а), либо с
помощью сравнения (рис. 11.5,6). По схеме на рис. 11.5,а
измерителем уровня ИУ с высокоомным входом измеряют уровень на-
302
,*)
т—tTttj—i
ЯГЩ
ич
гш:
7Г7]
мГ~о—з:
h Zc Z»
АБ -|_Х
ч
L.
Zc'Zr
is)
.J
Puc. 11.5
пряжения на ZH(LH), и при известной ЭДС генератора (его
уровень LE) рабочее затухание
^p = ^/2-^H+101g4L = L£-LH+101g4L-20lg2. (11.11)
По схеме на рис. 11.5,6 необходимо иметь образцовый магазин
МЗ, у которого ZBXM = ZF. Регулируя затухание магазина, следует
добиться одинаковых показаний в положениях 1 и 2
переключателя. В положении 1 переключателя показание измерителя уровня
будет L1 = 20]g-^--M0l£?-^- = L„+101g-5°- . В положении
U,
U
Ro
Zs
Zn
2 L2 = 201g^f-+101g-^ = LM+101g
Так как L] = L2, то
£м_£н_)_ lOlg-^5 10lg—= 0. Но затухание магазина и его
уровень на выходе связаны со входным: LM = LE/2—Ам- Отсюда
AM = LE!2-LH+10 ]g(ZJZN) = Ap. (П.12)
Если ZH = Z„, то АМ = АР.
Вместо измерителя
уровня в схеме рис. 11.5,6 мож- |—-pi
но поставить высокоомный \/?х\] I
вольтметр и добиваться оди- |
наковых показаний. U-
Если ЭДС и внутрен- Lhq;
нее сопротивление генера- I—I а)
тора неизвестны или их z/2
р)1Д^У
1
UZr
т
г
т
и
Е
I
• ]
А
-
1
Рис. 11.6
Рис. 11.7
303
номиналы не подходят, то используют метод Z, основанный
яа замене реального генератора эквивалентным с заданным
внутренним сопротивлением. Для этого между генератором и
измеряемым четырехполюсником включаем сопротивление Z, в результате
чего получаем эквивалентный генератор с другими параметрами.
Для схемы на рис. 11.6,а /=£r/(Zr + ZBX); U = E—IZr. Для схемы
на рис. 11.6,5 /=[/1(Z+ZBX); U2=Ul~IZ. Из сравнения этих
выражений видно, что за ЭДС эквивалентного генератора,
образованного методом Z, принимают выходное напряжение U\
реального генератора с внутренним сопротивлением Z.
В схеме на рис. 11.7,а метод Z реализуется с помощью двух
отсчетов. Первый получают в положении / переключателя, когда
сопротивления R равно входному сопротивлению измерителя
уровня; в этом случае L0 = 20 lg -^- -f 10 lg -^- = LUJ2+10 lg -^ . Вто-
2i/o R R
рой отсчет снимается в положении 2 переключателя с сопротивления
нагрузки ZH измерителем с высокоомным входным
сопротивлением, и тогда L2 = 20 lg -^S- -f 10 lg -$L = Lu + 10 lg -^ . Рабочее
затухание по этим двум отсчетам Лр = Лу/2— Lu -flOIg—S-,
R
и если |ZH| = R, то
Ap = Lxj/2—Lu .
Для схемы 11.7,6 в положении / переключателя показание
измерителя уровня ^- = 20^— 4-10lg-^- = LH+10lg-^-. В по-
Vо Zn Zh
ложении 2 L2 = 20Ig-^--fl0lg^- = LM+101g-52-. С по-
и0 2м Zu
мощью магазина затуханий добиваемся, чтобы LX = L2, и так как
LM = LE/2—AM, получим
4p = 4M+101g(ZM/ZH). (11.13)
Если ZM = ZH, то ЛР = ЛМ.
Отметим, что схема на рис. 11.7,а используется для
неуравновешенного четырехполюсника, а схема на рис. 11.7,6 — для
уравновешенного (уравновешенным называется четырехполюсник с
«горизонтальной» осью симметрии, электрически симметричный с
«вертикальной»). Естественно, что и ту и другую схему можно
использовать для любого четырехполюсника: уравновешенного или нет
(т. е. ставят два сопротивления по Z/2 для уравновешенного либо
одно Z для неуравновешенного).
Погрешность измерения рабочего затухания способом двух
отсчетов определяется погрешностью измерения уровней
напряжения и составляет около ±0,5 дБ. При способе измерения с
магазином погрешность составляет примерно ±0,1 дБ и обусловлена
погрешностью магазина — в основном это погрешность
дискретности. Для уменьшения общей погрешности вместе с магазином ис-
304
пользуют стрелочный измерительный прибор, диапазон измерения
которого равен одному дискрету магазина, и обеспечивают
погрешность около ±0,0ГдБ.
Для измерения вносимого и собственного затухания также
используют способы двух отсчетов или сравнения с магазином
затуханий при условии включения четырехполюсника в соответствии
с определением данного затухания.
Большинство узлов аппаратуры многоканальных систем имеет
сопротивление, близкое к номиналу и мало зависящее от частоты.
Для частот линейного спектра сопротивление кабеля в рабочем
диапазоне меняется также незначительно. Поэтому при измерении
характеристик трактов нет необходимости применять специальные
схемы, которые используются при измерениях отдельных
элементов тракта. Значения уровней в различных точках тракта
определяют измерителем уровня, входное сопротивление которого
устанавливают либо равным заданному RBX, либо во много раз
превышающим сопротивление тракта. При использовании RBX
измеритель уровня подключают вразрез (рис. 11.8,а), т. е. взамен
последующих элементов тракта, либо при их отсутствии на оконечных
или промежуточных пунктах, где аппаратура отдельных групп
наращивается постепенно. Высокоомный вход используют, если
измеритель подсоединяется параллельно тракту (рис. 11.8,6). Такие
измерения соответствуют определениям затуханий. Погрешности
этих измерений тем больше, чем больше отклонение входных
сопротивлений отдельных элементов тракта от номинальных
значений. Размеры этих отклонений в ряде случаев соизмеримы с
допустимыми отклонениями измеряемых уровней. Поэтому - способ
измерений следует выбирать в соответствии с рекомендованными
методическими указаниями для данного тракта. Образцовые
измерения, с результатами которых сравнивают параметры в процессе
эксплуатации, проводят, как правило, способом параллельного
подключения избирательных измерителей уровня.
Если затухания, значения которых найдены в соответствии с
определениями, имеют отрицательный знак, то их называют
усилением.
Алгебраическую сумму значе- ■ "^ZIZ^ ' I
ний всех затуханий и усилений .—p-dH—(-)—I I—|-°4Т
тракта, содержащего ряд после- [~Jt__ 7
довательно включенных
согласованных четырехполюсников,
называют остаточным затуханием
(если сумма положительна) или _
остаточным усилением (сумма _
отрицательна). Нулевое остаточ-.
ное затухание означает, что
измерительные уровни на входе и
выходе тракта одинаковы, т. е.
интенсивность сигнала в данном
тракте не меняется.
а)
'Z
Z = Z,,
Измеряемые объекты
Для обеспечения неискаженной передачи остаточное
затухание (усиление) трактов должно оставаться неизменным во
времени. Поэтому важной характеристикой трактов является
нестабильность остаточного затухания. Для его измерения на вход тракта
подают измерительный сигнал с номинальным уровнем LBX и
фиксируют уровни Li на выходе тракта. Измерения проводят п раз
через заданные промежутки времени. Для каждого измерения
находят остаточное затухание L0i = LBX—Li (усиление), а затем
определяют среднее:
[А,ср = — t 4,1 (Ч.ср = — j^Soi) . (11.14)
п i=i \ п t=i /
Среднеквадратическое отклонение остаточного затухания
°-/(^-L-)^- <1U6>
Среднее значение и среднеквадратическое отклонение
остаточного затухания, как и время измерения, число и интервалы
измерений, нормируются.
Входное сопротивление, коэффициент отражения,
несогласованность, асимметрии трактов. Входное сопротивление трактов и их
элементов является в общем случае комплексной величиной. Для
облегчения согласования подключаемых друг к другу элементов в
системах многоканальной связи стремятся реактивную часть
сделать близкой к нулю, а активную определенного значения
нормируют. Но у элементов, коэффициенты передачи которых
непостоянны по частоте (фильтры, амплитудные выравниватели),
реактивная составляющая значительна и для контроля их исправности
необходимо измерять и нормировать полные сопротивления Z —
=R+]X на разных частотах. Основным методом определения Z
является измерение активной и реактивной составляющих с
помощью мостов переменного тока (см. гл. 9). Но измерение в
диапазоне частот мостовыми методами — трудоемкая задача, и если
не требуется высокой точности, то применяют упрощенные методы.
В частности, удовлетворительное представление о входном
сопротивлении дает коэффициент отражения, выражаемый в
процентах:
P=\ZX-R/ZX+.R\, (11.16)
где R — номинальное сопротивление.
Если Zx=f((£>), то коэффициент отражения также изменяется с
частотой и обозначается р(со). Чем ближе Zx к номинальному
значению, тем р(со) меньше, и при нормировке устанавливают
крайние значения, которые р(со) не должно превышать.
При измерениях обычно определяют не коэффициент
отражения, а однозначно с ним связанное «затухание несогласованности»
Ан, выражаемое в децибелах:
AH = -20\gp = 20\g\Zx + R\/\Zx-R\. (11.17)
306
Рис. 11.9 Рис. 11.10
При ZX = R Лй=оо и уменьшается по мере рассогласования.
Затухание несогласованности измеряется с помощью
измерительного генератора и измерителя уровня, включенных в
неуравновешенный мост по схеме на рис. 11.9. В положении
переключателя / Un = Il(R + Zx), где /[ протекает через R и Zx. В положении
переключателя 2 U22=Us—Ur, где UB= UJ2 = Ii (R + Zx)/2 и U2 =
= I\ZX. Подставив UB и Ur в U22, получим U22 = Ii(R+Zx)/2 —
—IiZx = Il(R—Zx)/2. Отношение напряжений при разных
положениях переключателя
UU/U22 = 2(R+ZX)/(R-ZX).
Прологарифмировав
20\gUll/U22 = 20\g(R + Zx)/(R~Zx)+20\g2 = AH + 6 дБ,
найдем
. A„ = 20lg Un/U22—6 дБ = 11—L2—6 дБ, (11.18)
где (L\—L2) — разность показаний измерителя уровня в
положениях 1 я 2 переключателя.
Для увеличения точности применяют дифференциальные
мосты, в которых плечи ав и вб образованы обмотками
дифференциального дросселя или трансформатора, а отсчет разности уровней
получают с помощью магазина затуханий.
Понятию «затухание несогласованности» близко понятие
«затухание асимметрии», характеризующее степень симметрии
кабельных цепей и элементов аппаратуры, собранных по уравновешенной
схеме. Для четырехполюсников рассматривают затухание
асимметрии со стороны входа и выхода. Если принять обозначения в
соответствии с рис. 11.10, то коэффициент асимметрии со стороны
входа
Л асвх = 20 lg| Z10+Z20! /1 Z10--Z2o 12 (11.19)
и со стороны выхода
4ac.Bb,x = 201g|Z30 + Z4o|/|Z3o-Z4o|2. (11.20)
Сравнивая выражения (11.19) и (11.20) с (11.17), видим, что их
структура идентична, а значит, для измерения затухания
асимметрии пригодны методы и схемы измерения затухания
несогласованности.
307
I
fl
1
ъ
НУ
Z,l
Влияющая
линия
Z" г
—.. —« 1
Pi
У
> \
Ри
\ Ргг. г
-*' =tJ
//У|
Ргг
Pz
ZCZ Линия, t cZ
подверженная влиянию
Рис. 11.12
На практике часто не
требуется высокой точности при
измерении и поэтому прибегают к
упрощенным схемам (рис. 11.11), с
Рис. ll.ll помощью которых получают
результаты, не точно
соответствующие определениям (11.19) и (11.20). Схема на рис. 11.11,а
позволяет измерить затухание асимметрии со стороны входа
Алс.ът=Ц-12-Ас, (11-21)
а схема на рис. 11.11,6 — затухание со стороны выхода
^ас.вых = L\ L2, (11.Zz)
где L\ и L2— показания измерителя уровня в положениях
переключателя 1 я 2 соответственно; Ас — характеристическое
затухание четырехполюсника.
Затухание асимметрии также нормируется.
Оценка взаимного влияния. Переходные помехи, возникающие
из-за паразитных связей между цепями, количественно
оцениваются переходными затуханиями между влияющей и подверженной
влиянию цепями. Влияющей считается та цепь, в которой есть
источник сигнала. Схема возникновения переходных помех и
рассматриваемые мощности, определяющие переходные затухания,
показаны на рис. 11.12. Считая, что линии нагружены
согласованно и Zci, Zc2— характеристические сопротивления влияющей цепи
и цепи, подверженной влиянию, на рис. 11.12 обозначено: Pi —
полная мощность источника сигнала, развиваемая на ближнем
конце; Рц — полная мощность, принятая на дальном конце
влияющей линии за счет передачи Л; Р2 и Pi2 — наведенные на
ближнем и дадьнем концах подверженной влиянию линии полные
мощности. Эти мощности появляются .также за счет работы
передатчика влияющей линии и взаимного влияния линий. Переходное
затухание на ближнем конце оценивается соотношением
A,6=101g(^AP2)-^i-£2+l01g|Zc2/Zcl|. (П.23)
Переходное затухание на дальнем конце
i4n.„=10Ig(P1/P3J = L1-L2l + 10lg|Zo2/Zcl|, (П.24)
где Li — уровни напряжений в соответствующих точках линий
(рис. 11.12).
308
Влияющая линия
>„
Яиния,
Zzi noBiepmet
Влиянию
мная\ zc?
*)
Линия,
повверженная влиянию \
Рис. 11.13
Переходные затухания определяются измерителями уровня, а-
также панорамными прлборами, отражающими на экране ЭЛТ
частотную характеристику переходного затухания. Схемы
измерения переходных затуханий на ближнем и дальнем концах
представлены на рис. 11.13,а и б соответственно. Процесс измерения'
сводится к регулировке затуханий магазина до тех пор, пока
показания измерителя уровня (вход высокоомный) не станут
одинаковыми в обоих положениях переключателей. Переходное
затухание на ближнем конце Ап.б = Ам + 10 lg|Zc2/Zci I; на дальнем кон-
це АПП = АМЦ- 101g -^2- +АС1, где АоХ — характеристическое
Z'ci
затухание влияющей цепи, так как сравниваются мощности Pi2 к-
Рц, а по определению нужно сравнивать с Ру. Уровни этих
мощностей связаны соотношением: L\ = Ln+Acy.
Телеизмерения на кабельных магистралях. Одним из
эффективных методов повышения надежности систем передачи является-
непрерывный контроль системы. При этом оптимальным является
контроль обобщенных параметров, т. е. таких, которые
характеризуют оборудование в целом. Непрерывный контроль экономически,
целесообразен только при автоматизации измерений, так как при
этом повышается его эффективность, надежность результатов при
одновременном снижении трудозатрат и квалификации
обслуживающего персонала. Причем контроль должен охватывать как
аппаратуру оконечных пунктов (ОП), обслуживаемых усилительных
пунктов (ОУП), так особенно необслуживаемых УП (НУП),
являющихся основной составной частью линейных трактов систем;
передачи.
В частности, обобщенными параметрами, подлежащими
контролю,' можно считать остаточное затухание и суммарные помех»
(их мощность), возникающие в тракте, так как они обусловлены-
изменениями целого ряда явлений: нелинейных и собственных
помех, защищенности от переходов с других трактов и т. п. Кроме
обобщенных параметров, полезно периодически контролировать на
магистрали состояние отдельных элементов, узлов и участков
линейного тракта, что позволяет прогнозировать выход их за преде-
309»
лы нормы, а по этим результатам вести восстановительный ремонт
•или регулировки.
Оборудование контроля обобщенных параметров и состояния
отдельных элементов, узлов и участков линейного тракта входит
в состав оборудования систем передачи и называется
оборудованием телеобслуживания. Оборудование телеобслуживания
обеспечивает передачу сигналов управления из ОУП в НУП, по которым
подключается измерительная аппаратура (генераторы, датчики и
т. п.), размещенная в НУП, к контролируемым узлам или входу
линейного тракта. Кроме этого, оно должно обеспечить передачу
сигналов извещения для персонала станции (ОУП или ОП), по
которым судят о состоянии (нормальном или аварийном) системы
передачи.
Развитие микроэлектроники и вычислительной техники
значительно повышает уровень автоматизации. Средства
вычислительной техники, входящие в систему контроля, по программе должны
проводить контроль и обработку результатов, на основании
которых дается обобщающий вывод, включается резервная аппаратура
и т. п. Широкое использование микропроцессоров, обусловленное
их доступностью и дешевизной, позволяет включать их в состав
аппаратуры системы. Это создает предпосылки для создания
рассредоточенных систем контроля. Такие системы автономны, не
требуют управления с центральной станции, а по программе
проводят контроль и измерения прилегающей к ним аппаратуры
(«своей»), передавая на центральную станцию обобщенный
результат. Рассредоточенность устройств контроля позволяет
осуществить больший объем и глубину контроля на месте, не
перегружая аппаратуру центральной станции и не занимая линий
передачей данных управления и т. п. При разработке рассредото:
•ченных систем контроля по-новому встают вопросы выбора
контролируемых параметров, организации процесса измерения —
контроля с учетом новых качественных возможностей.
11.3. ПРИБОРЫ МНОГОЦЕЛЕВОГО
НАЗНАЧЕНИЯ
Комплекс характеристик каналов и трактов, которые
необходимо измерять, 'требует разнообразной аппаратуры. Для удобства
пользования требуемая аппаратура агрегатируется в виде
специализированных комплектов или пультов и конструктивно
объединяется в виде передвижных стоек. С усложнением систем связи и
улучшением их качества требования к метрологическим
характеристикам измерительных приборов растут. Поэтому разработка
этих приборов должна опираться на последние достижения
радиоэлектроники и вычислительной техники.
Рассмотрим состав и назначение находящихся в эксплуатации
■комплектов измерительных приборов многоцелевого назначения, а
также принцип построения приборов для измерения линий
импульсным методом.
-310
Структура и назначение комплектов приборов и измерительных пультов*.
Рассматриваемые далее приборы позволяют настраивать, эксплуатировать >и
ремонтировать каналы и тракты систем, предназначенных для построения ЕАСС.
Комплект приборов ИП-ТЧ предназначен для измерения параметров
каналов ТЧ в диапазоне частот от 30 Гц до 15 кГц. В его состав входят
измерительный генератор ИГ-НЧ и измеритель уровня ИУ-НЧ. Измерительный
генератор ИГ-НЧ вырабатывает измерительные сигналы синусоидальной формы в
диапазоне 30 Гц... 15 нГц с уровнями —39,9... +19,9 дБ (на нагрузке 600 Ом).
Регулировка уровня ступенями по 10,1 и 0,1 дБ. Регулировка частоты ступенчатая^
и плавная с погрешностью не хуже ±'5%. Синусоидальные колебания на выходе-
получаются путем преобразований от одного исходного стабильного
кварцевого генератора.
Измеритель уровня ИУ-НЧ предназначен для измерения уровней напряжения.,
в широкополосном и избирательном режимах, затухания несогласованности,
затухания асимметрии, модуля полного сопротивления по методике, рассмотренной
ранее. Измерения производятся в диапазоне частот не менее 0,3 ... 15 кГц; в
узкополосном режиме полосы пропускания переключаются и могут составлять
10 Гц или 70 Гц. Прибор обеспечивает сопротивление входа 600 Ом или выео-
коомное ((более 20 кОм), диапазон измеряемых уровней в широкополосном
режиме— 70...+20 дБ, в избирательном не менее —100...+20 дБ. Частота
измеряемого сигнала определяется встроенным электронно-счетным частотомером,
работающим в режиме измерения частоты с временем измерения 0,05 с.
Измерительный пульт ИП-2,1 представляет комплект приборов,
предназначенных для измерения в диапазоне 0,01... 2,1 МГц, в групповых и линейных
трактах высокочастотных систем передачи емкостью до 300 каналов ТЧ.
Нижняя граничная частота выбрана исходя из требования обеспечения измерений в-
сзмых низкочастотных групповых и линейных трактах (нижняя частота пред-
группового тракта — ПГ равна 12 кГц). Комплект позволяет осуществить весь-
комплекс измерения трактов, включая измерения АЧХ с индикацией на экране
ЭЛТ и затухание нелинейности.
В комплект входят следующие приборы:
измерительный генератор ИГ-2,1; диапазон частот от Г0 кГц до 2,1 МГц с-
уровнями —61... 0 дБ. В генераторе 'предусмотрен режим качания частоты в-
разных полосах и с разными скоростями;
измеритель уровней универсальный ИУУ-2,1; работает как в
широкополосном, так и в узкополосном (избирательном^, режимах. Основная погрешность
отсчета частоты во всем диапазоне частот не более ±300 Гц. Входное
сопротивление 600, 135, 150 Ом и высокоомиое (более десятков килоом);
измеритель частотных характеристик ИЧХ-2,1; позволяет визуально измерять
частотные характеристики затухания и усиления (АЧХ);
магазин затуханий МЗ-2,1; обеспечивает настроечные и эксплуатационные-
нзмерения в диапазоне 0... 2,1 МГц; рассчитан для использования при уровне-
входного сигнала не более 8,7 дБ. Входное и выходное сопротивления 160 или-
75 Ом; максимальное затухание 102,1 дБ, начальное 0,07 дБ;
Коммутационная панель КП-2,1; совместно с ИГ-2Д и ИУУ-2,1 обеспечивают
измерение рабочего затухания и усиления, переходного затухания, затухания
несогласованности и асимметрии, а также согласование схем с различными
характеристическими сопротивлениями; может использоваться совместно с МЗ-2,!;
Для измерения сигналов с уровнями выше 8,7 дБ и т. п.;
311'
измерительные фильтры нижних (ФНЧ-2,1) и верхних (ФВЧ-2,1) частот
•предназначены для измерения затухания нелинейности широкополосных каналов,
труггповых и линейных трактов высокочастотных систем передачи.
Измерительный пульт ИП-10 (25) представляет комплект приборов для измерения основных
параметров широкополосных каналов, групповых н линейных трактов
высокочастотных систем передачи по коаксиальному кабелю К-120, К-300, К-1920 в
диапазоне 0,05 ... 10 (25) МГц. В состав пульта входят следующие приборы и
устройства:
измерительный генератор ГИ-25;
измеритель уровня избирательный ИУИ-25;
■измеритель уровня широкополосный ИУ-25;
прибор коммутационный ПК-25 (в его состав входят измеритель уровня
опорный ИУО-25, магазин затуханий МЗ-50-2 и коммутационная панель ПК);
'фильтры нижних (ФНЧ-25) и верхних (ФВЧ-25) частот.
Все приборы размещены на тележке, приспособленной для перемещения по
линейно-аппаратному цеху (ЛАЦ). Точность приборов пульта достаточна для
настроечных и эксплуатационных измерений трактов связи только в диапазоне
частот до 10 МГц. В диапазоне от 10 до 25 МГц погрешность возрастает.
Методы определения расстояния до места повреждений.
Импульсный метод. При обнаружении места повреждения в
качестве измерительного сигнала используют постоянный и переменный
ток, а также импульсные сигналы.
Измерения постоянным током проще и позволяют находить
место повреждения изоляции. Разработано много методов
измерения, так как существует много разновидностей повреждений,
которые характеризуются наличием или отсутствием
поврежденных проводов, равенством или различием сопротивлений проводов,
■отношением сопротивления изоляции относительно земли и
между проводами и т. д. Большинство этих методов используют
мостовые схемы, измеряющие сопротивление провода до места пов-
вреждения.
При измерении переменным током определяют обрыв
проводов (жил) разбитость, (перепутывание) пар в симметричных
кабелях, сосретодоченную омическую асимметрию, сосредоточенную
связь между цепями и понижение сопротивления изоляции.
Методы измерения на переменном токе основаны на эффекте
отражения электромагнитной энергии от места неоднородности (хотя в
ряде случаев используют и мосты переменного тока).
Основным достоинством импульсного метода является
возможность различать несколько повреждений и измерять расстояния
до каждого из них. Но импульсный метод не исключает методов
нахождения расстояния до повреждения постоянным и
переменным токами, а дополняет их, так как в ряде случаев уступает по
своим характеристикам. Импульсный метод хорошо определяет
локальные (сосредоточенные) повреждения, но, например,
понижение сопротивления изоляции на участке в некоторых случаях
может быть не обнаружено.
3L2
В основе импульсного метода определения расстояния до места*
повреждения лежит отражение электромагнитной энергии
импульса от неоднородности среды распространения — а повреждение
проявляется в появлении неоднородности. Посланный в линию импульс
(зондирующий) распространяется по линии со скоростью v и за
время %=2l/v пройдет расстояние до повреждения и от
повреждения назад до прибора (отраженный импульс). Если измерить
время между зондирующим и отраженным импульсами, то, зная
скорость распространения v, можно определить расстояние до
неоднородности l=xv/2. Таким образом, прибор для измерения
расстояния до повреждения импульсным методом должен обеспечивать
генерирование импульсов и измерение времени т,
пропорционального расстоянию до повреждения. В качестве измерителя
временного интервала используется обычно осциллографический
индикатор на ЭЛТ. В последнее время используют и цифровые
измерители. Для лучшего наблюдения картины на экране ЭЛТ
импульсы посылаются в линию периодически и результат наложения
нескольких периодов дает устойчивую картину на экране ЭЛТ.
Если обозначить амплитуды зондирующих импульсов U3, то,,
считая, что в линии нет потерь, отраженные импульсы будут
приходить с амплитудой
£/0 = rt/3 = [(ZH-Zb)/(ZH + ZB)]£/3, (П.25>
где Г — коэффициент отражения; Z„ — сопротивление в месте
неоднородности; ZB — волновое сопротивление линии.
Если ZH>ZB, то отраженный импульс будет иметь тот же знак,.
что и зондирующий; при обрыве ZH = °o и £/о=£/3. Если Zh-<Zb>-
то знаки противоположны; при коротком замыкании ZH=0 и Uo =
= 0 (рис. 11.14). При отсутствии согласования входного
сопротивления прибора с линией последует отражение от входа —этот
процесс может повторяться многократно, пока энергия импульса не
рассеется на оконечных сопротивлениях. Для предотвращения
этого входное сопротивление должно быть регулируемым.
Важными характеристи- 1д1Ш Жда/№ ^
ками прибора,
реализующего импульсный метод,
являются максимальная даль- &i
ность действия и разрешаю
щая способность.
Максимальная дальность «
действия определяется двумя
в
в
Рис. 11.14 Рис. 11.15
313.
группами факторов: энергетическими и временными.
Энергетические факторы сводятся к тому, что на входе прибора энергия
отраженного импульса должна быть-не меньше порогового значения, т. е.
такой, чтобы отраженный импульс можно было наблюдать на
экране. Неоднородность с точки зрения энергетических факторов
можно обнаружить на большем расстоянии, если больше будет
энергия зондирующего импульса, коэффициент усиления усилителя
приходящего сигнала, чувствительность ЭЛТ и если меньше будет
затухание линии, уровень шума. Временные факторы сводятся
к тому, что максимальная длительность развертки, подаваемой на
пластины горизонтального отклонения ЭЛТ, вместе с
максимальной задержкой развертки относительно зондирующего импульса
должна быть больше задержки отраженного импульса, т. е.
Tmax<?,pmax+tpmax. Но ТЭК КЭК Гр max+Tp max1» Т3, ТО
Ттшх<Тл, (Н.26)
лде Т3 — период повторения зондирующих импульсов. Сказанное
-поясняется рис. 11.15, на котором показаны: зондирующие
импульсы с периодом следования Т3 (рис. 11.15,а); развертка
длительностью Гр,-задержанная в каждом цикле на тр (рис. 11.15,6);
отраженные импульсы на временной оси и соответствующие им
изображения на экране ЭЛТ (рис. 11Л5,в и г). Временной
масштаб для всех четырех диаграмм один и тот же. Для отраженного
зшпульса (рис. 11.15,в) выполняется условие %i<T3, т. е. он
приходит на вход прибора до следующего зондирующего импульса:
первому зондирующему импульсу соответствует первый отражен--
ный импульс в том же цикле и на экране будут возникать
импульсы (зондирующий и отраженный) каждый цикл. В случае,
показанном на рис. 11.15,г, %2>Т3, поэтому первый отраженный импульс
(за счет энергии первого зондирующего импульса) придет во
время II цикла, второй отраженный — во время III цикла и т. д. На
экране (рис. 11.15,г) изображение первого отраженного импульса
сбудет таким же, как для несуществующего в I цикле импульса /'
(показан штриховой линией), причем задержка импульсов 1 я Г
связана соотношением т'2=Т2—Т'з, т. е. считая, что принят имПульс
/, мы допускаем ошибку на l = T3v/2. Так как этот процесс
повторяется периодически (т. е. прием k—1 импульса в k-м цикле), то
изображение будет устойчивым и по качеству визуально не
отличимо от показанного на рис. 11.15,в.
Отметим, что временные факторы имеют место только, если
выполнены энергетические факторы.
Разрешающая способность — минимальное расстояние между
двумя повреждениями, при котором эти повреждения будут
наблюдаться раздельно. Разрешающая способность определяется
длительностью зондирующего импульса ти и равна
/т1п=ТиИ/2. (11.27)
Для увеличения разрешающей способности (т. е. уменьшения
imin) длительность импульса нужно уменьшать. Но уменьшение
314
длительности ведет к расширению его спектра, что может
привести к искажению принимаемого импульса за счет затухания в
линии высокочастотных составляющих спектра. Кроме того, при-
уменьшении длительности импульса уменьшается, его энергия, а.
значит, и дальность действия. Таким образом, выбор
длительности—результат компромисса между различными факторами.
Обобщенная структурная схема прибора для определения
расстояния до повреждения импульсным методом представлена на
рис.^ 11.16. Кварцевый генератор вырабатывает частоту FK, из ко-
трой путем деления формируется частота повторения
зондирующих импульсов Fp и, следовательно, частота развертки для ЭЛТ,
а также частота меток дальности FM. Частоты Fp и FM
регулируются изменением коэффициентов деления частоты кварцевого
генератора. Импульсы с частотой Fv=FK/k через регулируемую
линию задержки / запускают генератор зондирующих импульсов,,
длительность которых (а иногда и форма) регулируется. С
выхода этого генератора зондирующие импульсы могут подаваться в
линию с раздельного выхода (Выход), либо через
дифференциальную систему на клемму Общий. Часть энергии зондирующего
импульса просачивается на вход усилителя и, попадая на пластины
У ЭЛТ, создает отметку, соответствующую моменту ухода в линик>
Кварцевый генератор
"
Регулируемый
делитель частоты
Регулируемый
делитель частоты
у
'
->■
,г
■»■
Генератор меток
Регулируемая пиния
задержки 2
Регулируемая
линия задержки 1
V
Генератор зондирующих
импульсов ,
1
С
(
, S ^
-71
-и
Генератор
развертки
Дифференциальная
система
!
Общиу
Рис.
*
11.16
—.
Lr\
1
и
Усилитель
1
№3
1
315.
Рис. 11.17
зондирующего импульса. На этот же усилитель поступает
отраженный импульс с раздельного входа (Вход) или с клеммы
Общий. Коэффициент усиления этого усилителя регулируется, что-
-бы обеспечить амплитуду импульса, достаточную для отклонения
луча ЭЛТ по вертикали. Напряжение развертки подается на
пластины X с генератора развертки, длительность которой
регулируется, а момент начала развертки определяется импульсами
синхронизации, поступающими с выхода регулируемой линии
задержки 2, которая задерживает начало развертки относительно
зондирующего импульса. Время т задержки отраженного импульса
относительно зондирующего определяется на экране ЭЛТ по
меткам (получаемым от генератора меток), расстояние между
которыми в единицах длины можно рассчитать, зная v и FM, или про-
градуировать.
Второй метод определения т —метод задержанной развертки.
Суть этого метода можно пояснить рис. 1-1.17, где показаны
временные диаграммы зондирующего и отраженного импульсов и ос-
цилограммы, соответствующие разным взаимным положениям раз-
•вертки и импульсов. Если после наблюдения изображения (рис.
11.17,о) вводить задержку развертки до тех пор, пока
отраженный импульс на экране не займет место, где был зондирующий,
то введенная задержка тзр=т, т. е. измеряемое время равно
введенной задержке. Если шкала регулятора задержки проградуиро-
.вана в единицах длины, то с этой шкалы можно снять отсчет.
, Импульсный метод можно
использовать для определения рассто-
1 пара П v яния до повреждения на одной
линии (измеряемая линия в этом
случае подключается к клемме Общий)
либо для определения места
сосредоточенной связи и разбитости пар —
в этом случае используют
раздельные вход и выход. На рис. 11.18 по-
■* казано подключение к прибору ли-
Рис. 11.18 ний при определении места сосредо-
316
К выходу
прибора
Ко входу
прибора
1
2 пара
ъ
1 точенной связи. Зондирующий импульс проходит по 1-й паре до
| места сосредоточенной связи, а отраженной — по 2-й паре от
места сосредоточенной связи до входа прибора. Расстояние до места
сосредоточенной связи определяется как и расстояние в одной
линии. Отметим, что то виду отраженного импульса можно
определить и характер неоднородности — обычно для этого составляют
таблицу соответствия «вид импульса — характер повреждения», так
как «отличаемые» повреждения составляют ограниченную
группу. Такими являются обрыв, короткое замыкание, сосредоточен-
ное понижение изоляции, сосредоточенная емкость (например
смялся экран коаксиального кабеля) и т. п. '
11.4.. ИЗМЕРЕНИЯ
В ВОЛОКОННО-ОПТИЧЕСКИХ
СИСТЕМАХ СВЯЗИ
За последнее время накоплен некоторый опыт разработки и
эксплуатации экспериментальных оптических кабельных систем
связи. Накоплен опыт промышленного изготовления оптических
кабелей и элементов линий (устройства ввода, разъемы,
источники света, фотоприемники и т. п.). Основу волоконно-оптической
линии связи составляет оптический кабель, содержащий
несколько волоконных световодов, заключенных в общую оболочку. Основ-
. ными параметрами оптического кабеля, определяющими
оптические и информационные характеристики линии связи, являются:
затухание за счет потерь в кабеле, ширина полосы пропускания
частотного спектра полезного сигнала (для аналоговых систем
передачи информации), уширение импульса (для цифровых систем
передачи), переходное затухание между оптическими волокнами
в кабеле. Кроме перечисленных параметров, представляют инте-
| рее такие показатели, как уровень сигнала, отношение сигнал-шум,
уровень импульсных помех и др.
Измерение затухания оптических кабелей. Потери мощности
сигнала при распространении по оптическому кабелю зависят от
свойств материала, геометрии волокна, от защитной оболочки.
Дополнительные потери возникают из-за изгибов кабеля.
Коэффициент затухания а характеризует качество передачи информации
по оптическому кабелю. В связи с этим представляют интерес
методы его измерения. Наиболее распространены методы, основан-
j ные на измерении уровней сигнала, и методы обратного рассеяния.
Метод измерения уровней основан на сравнении оптических
сигналов на входе и выходе кабеля (рис. 11.19). В качестве источ-
;, ника излучения могут использоваться источник белого света (ши-
t' ; рокополосное излучение) и арсенид-галлиевый лазер (фиксиро-
|;| ваная длина волны). В первом случае необходимая для измере-
^ ний полоса частот формируется в монохроматоре — своеобразном
\ фильтре, работающем в оптическом диапазоне. Основу его сос-
:1. тавляют интерференционные фильтры. Применение оптических ис-
I 317
Блок ввода
Рис. 11.19
точников излучения разных типов позволяет измерять затухания
в диапазоне 0,5... 1,1 мкм.
Световой поток, прошедший монохроматор, через оптическую
систему 2 поступает на полупрозрачное зеркало 3.
Полупрозрачное зеркало расщепляет поток на две составляющие. Одна часть
поступает через оптическую систему на фотодетектор 1, а вторая
через кювету с иммерсионной жидкостью 4 — на полированный
торец световода 5. Иммерсионная жидкость, в которую погружен
конец световода, имеет коэффициент преломления, равный
коэффициенту преломления отражающей оболочки.. Это позволяет
избавиться от влияния света, проходящего через отражающую
оболочку. Световой поток, прошедший через световод, поступает на
фотодетектор 2. С обоих фотодетекторов информация поступает на
блок обработки. При обработке информации учитывается, что
фотодетектор / получает лишь часть светового потока, 'поступающего
на испытуемый кабель. Поскольку коэффициент затухания
измеряется в децибелах на километр, необходимо учитывать реальную
длину измеряемого образца кабеля. В качестве индикатора можно
использовать стрелочный прибор или самописец. Рассмотренная
установка позволяет измерять также зависимость затухания от
длины волны излучения.
На практике, при монтаже и эксплуатации оптических кабелей
нет необходимости в измерении затухания в диапазоне длин волн.
Поэтому можно существенно упростить оптическую часть прибора.
Применение импульсного источника света вместо непрерывного
позволяет перейти от измерения абсолютного значения мощности
к измерению амплитуды. При этом исключается влияние на
точность измерения посторонних фоновых засветок фотодетектора.
На рис. 11.20 приведена упрощенная структурная схема
опытного образца аппаратуры для измерения затухания оптических
кабелей в'процессе монтажа и эксплуатации.
318
Задающий"
генератор
Управляемый
источник тока
Коммутатор
излучателей
•'
Излучатель 1
Излучатель 2
Оптический
соединитель 1
Оптический
соединитель 2
Гетеродин
Котировочное
устройство
Й
Фотоэлектрический
преобразователь
Усилитель
сигнальной
. частоты
Преобразователь
частоты
&А
Преобразо ■
ватель
Аттенюатор
Режекторный
фильтр
Фильтр
нижних частот
Рис. 11.20
Измерительная аппаратура состоит из генератора
оптического измерительного сигнала и приемника. Генератор (рис. 11.20,а)
состоит из задающего генератора, управляемого источника тока,
коммутаторов излучателей 1 и 2. Оптические волокна
подключаются к излучателям с помощью оптических соединителей. Одно
волокно является контрольным, второе — объектом измерения. В
экспериментальном приборе сформированные оптические
импульсы имели частоту следования 3409 Гц, скважность 2, мощность
около 150 мкВт. Длины волн оптического излучения 850 и 960 нм.
Приемник (рис. 11.20,6) представляет собой гетеродинный
измеритель уровня первой гармоники тока с фотоэлектрическим
преобразователем на входе. Волокно измеряемого оптического
кабеля с помощью юстировочного устройства подводится к входу
фотоэлектрического преобразователя, который преобразует оптическое
излучение в последовательность импульсов электрического тока.
Эти импульсы усиливаются усилителем сигнальной частоты,
представляющим собой активный ^С-фильтр, настроенный на
частоту первой гармоники измерительного сигнала. Усиленный сигнал
поступает на вход преобразователя частоты одновременно с
сигналом гетеродина (в описываемой установке 3333 Гц). Сигнал
промежуточной частоты 76 Гц выделяется фильтром нижних частот
и режекторным фильтром, подавляющим спектральные
составляющие с частотами сигнала и гетеродина. С помощью аттенюатора
осуществляется переключение уровней измерительного сигнала.
Преобразователь выделяет средневыпрямленное значение
напряжения, которое регистрируется стрелочным прибором.
319
Методика измерения вносимого затухания сводится к
определению разности относительных уровней измерительного сигнала
в децибелах при подключении приемника к выходу генератора
через контрольное волокно (pi) и при включении приемника через
измеряемый объект (р2), т. е.
asa = Pi—p2. (11.28)
Для измерения уровня р\ генератор и приемник соединяют
контрольным отрезком оптического кабеля. Значение р\ в децибелах
определяется выражением
Pi=Poi—an—(Z21—(ico, (11.29)
где poi— уровень измерительного сигнала на выходе генератора;
ац и 021 — соответственно величины затуханий, обусловленные
потерями в точке присоединения отрезка волокна к выходу
генератора и к входу приемника; ас о — затухание контрольного волокна.
Уровень сигнала в децибелах.
Р2=Р02— «12— а22~ «ВНО- (11.30)
где Рог, ai2, И22 — величины, аналогичные рои аи, а2\, полученные
при измерении авн о, оптического кабеля.
Используя выражения для рх и р2, имеем
«вн = Pi—Pi = (Р01—Р02) + (ai2—aii) + (a23—a21) + aBH 0—ac 0.
(11.31)
Как видно из (11.31), измеренное значение aBHо будет равно авн
лишь при равенстве нулю слагаемых, заключенных в скобки, и
при аВно>асо. Последнее условие выполняется достаточно
просто. В этом случае максимальная погрешность
А = (Ро1—Po2) = (ai2 —aii) + (a22—«21). (11.32)
Погрешность измерения является систематической и при
правильной методике измерения не превышает половины допустимой
погрешности прибора. Уменьшение этих погрешностей
достигается: стабилизацией режима работы генератора (poi=Po2)j
уменьшением абсолютных значений а^, ап, агг, a2i и различий между
ними путем хорошей подготовки торцов волокон, точной
юстировкой; применением иммерсионной жидкости в месте стыка
оптического кабеля с генератором и приемником.
Измерение расстояния до места повреждения оптического
кабеля. Определение места повреждения оптического кабеля
основывается на тех же принципах, что и для обычных кабелей из
металла. Однако вместо электрического импульса используется
оптический зондирующий импульс, сформированный в специальном
устройстве. Структурная схема экспериментальной установки
представлена на рис. 11.21.
Источником излучения оптических импульсов (Х=0,85 мкм,
-г=10-8 с) служит полупроводниковый лазер, управляемый
модулятором. Оптический импульс вводится в оптический разветви-
320
Оптический разветвитель
Модулятор
Т
Задающий
генератор
"
Линия
задержки 1
Полупроводниковый лазер
'
1
Линия
задержки 2
(( ■
''
Фотодетектор
'
\
Блок поиска
^
Блок цифрового отсчета
Рис. 11.21
Устройства
согласования
Широкополосный
усилитель
?'
- Осциллограф '
/1
-
тель, который предназначен для пространственного разделения
оптических сигналов: зондирующих импульсов, вводимых в оптический
кабель, и импульсов, отраженных от места повреждения и
направляемых на фотодетектор. Оптический кабель (волокно)
присоединяется к прибору с помощью устройства сопряжения. С выхода
фотодетектора электрический сигнал, соответствующий
отраженному оптическому сигналу, поступает через широкополосный
усилитель на блок поиска, ас его выхода — на блок цифрового
отсчета времени запаздывания. На второй вход блока через линию
задержки / от задающего генератора поступает опорный импульс.
От этого же задающего генератора подаются импульсы и на
модулятор.
В установке предусмотрена осциллографическая индикация
показаний: на экране осциллографа можно наблюдать опорный и
отраженный импульсы. Для исследования волокон большой
длины, а также для наблюдения аа импульсами, отраженными от
соединений и выходного торца, предусмотрена линия задержки 2 с
переменным временем задержки. На ее вход поступают импульсы
от задающего генератора, а с ее выхода—на вход устройства
синхронизации осциллографа. Переключение времени задержки
позволяет установить отраженный импульс в заданное положение на
экране осциллографа.
Блок цифрового отсчета предназначен для отсчета времени
появления первого отраженного импульса. Отраженный импульс
может поступать от нескольких мест повреждения волокна или от
соединителей. Это может привести к сбою отсчета и
неопределенности показаний. Блок поиска позволяет последовательно измерять
П-Ю i 321
время появления отраженного импульса от каждой
неоднородности.
Точность показаний прибора зависит от длительности
зондирующего импульса, быстродействия фотодетектора и блока
цифрового отсчета, а также полосы пропускания волокна. Расстояние
до места повреждения определяется по формуле lx=vt3/2, где v —
скорость распространения света в волокне, t3 — время задержки
ютраженного импульса относительного исходного.
При применении полупроводникового лазера, излучающего
импульсы мощностью порядка 80 мВт и коэффициенте затухания
<Хо=Ю дБ/км, удается испытывать кабели длиной до 2 км.
Экспериментальный прибор обеспечивал погрешность отсчета места
повреждения порядка ±1,0 м.
Измерение дисперсии сигнала. Под дисперсией понимают
рассеяние во времени составляющих сигнала, прошедшего
оптический кабель связи. Дисперсия вызывает фазовые искажения
сигнала и ее оценивают по различию времени распространения,
составляющих спектра или по уширению передаваемых импульсов.
Зависимость группового времени распространения от длины
волны можно получить, измерив задержку или фазу огибающей
модулированного сигнала, прошедшего оптический кабель связи.
Схема измерения представлена на рис. 11.22. Модулированный
сигнал от светодиода вводится через оптическую систему в кабель.
Пройдя кабель, сигнал поступает на оптическую систему, в
состав ко.торой входит интерференционный фильтр. С помощью
интерференционного фильтра осуществляется, частотная фильтрация
сигнала. С выхода оптической системы сигнал поступает на
фотодетектор. Полученный электрический сигнал подается на фильтр
нижних частот, с помощью которого подавляются гармоники
основного сигнала, образующиеся за счет нелинейности
светодиода. Разность фаз огибающей сигнала и модулирующего сигнала
оценивается с помощью фазометра.
Измерение уширения сигнала. Для измерения уширения
импульсов служит установка, структурная схема которой
представлена на рис. 11.23. В качестве источника излучения используется им-
Оптическая система ввода излучения Интерференционный фильтр
Рис. 11.22
322
Оптическая сист'5Ма ВвбДа Излучения
1 2
Рис. 11.23
пульсный полупроводниковый лазер. Управляет лазером
задающий генератор. Световые импульсы вводятся в оптический кабель.
Оптические системы ввода сигнала содержат полупрозрачные
зеркала 1 и 2 соответственно на входе и выходе кабеля, через
которые частично проходит и частично отражается световое излучение..
Это обеспечивает многократную циркуляцию сигнала в
оптическом кабеле. Дисперсия определяется путем сравнения на экране
осциллографа ширины импульсов, которые претерпели
неоднократную циркуляцию в кабеле, с шириной исходного импульса.
Совмещение импульсов на экране осциллографа достигается за счет
применения регулируемой линии задержки. Использование
многократных отражений сигнала от полупрозрачных зеркал позволяет
для оценки уширения импульсов использовать сравнительно
короткие оптические кабели.
Оценка погрешности измерения уширения импульсов
осуществляется по методике, изложенной в § 7.11, посвященному осцил-
лографическим измерениям. Ее следует рассчитывать, понимая под
погрешностью совмещения погрешность совмещения линий
осциллограмм импульсов, прошедших многократную циркуляцию в
оптическом кабеле, и исходных импульсов.
11.5. ИЗМЕРЕНИЕ ХАРАКТЕРИСТИК
СЛУЧАЙНЫХ СИГНАЛОВ
Исследование, контроль и настройка систем связи часто
требуют знания параметров случайных сигналов для построения их
математических моделей, оценки средних и действующих значений,
локализации источников возмущений, измерений на фоне помех
слабых сигналов, оценки степени взаимосвязи сигналов,
определения спектральной плотности. Для этого используются методы и
средства измерения статистических характеристик (СХ) сигналов.
Общие принципы построения измерителей СХ можно пояснить с
помощью структурной схемы на рис. 11.24. Схема содержит три
блока: входное устройство, обеспечивающее подготовку входного
сигнала (масштабирование, согласование полных сопротивлений,
11* 323
К цифровому
отсчетному
устройству
Г'
геи)
Входное
устройство
Аналого-цифровой
преобразователь
Запоминающее
устройство
Вычислительный
преобразователь
Устройство управления
») L.
Измерительный преобразователь
x(t)
Входное
устройство
Модулятор
Счетчик
Тактовый
генератор
ПУСК
Амплитудный
селектор 1
Л
Регулятор
уровня анализа
б)
Амплитудный
селектор 2
Рис. 11.24
Формирующее
устройство 1
К цифровому
отсчетному
устройству
Вычислительный
преобразователь
формирующее
устройство 2
исключение или выделение постоянной составляющей и т. п.)";
измерительный преобразователь, предназначенный для
преобразования аналогового сигнала в цифровой и преобразования
последнего в соответствии с определяющим алгоритмом измеряемой СХ;
цифровое отсчетное устройство (ЦОУ).
Основные определяющие алгоритмы, используемые при
измерении СХ, приведены в табл. 11.1, где ^ — моменты
дискретизации (t=l, 2,..., N); At — шаг дискретизации; Xj=jAx — уровень
квантования; Ах—шаг квантования; /=0, 1,..., k... ; v=l, 2, ...
..., М — номер значения функции корреляции; я'(*,-)'— число
событий X].
Отличие алгоритмов преобразования при измерении СХ в
первую очередь сказывается на измерительном преобразователе,
который содержит аналого-цифровой преобразователь;
вычислительный преобразователь, осуществляющий преобразования в
соответствии с заданным алгоритмом; запоминающее устройство,
необходимое в ряде случаев для промежуточного хранения данных, и
324
Таблица 11.1
JN» п/п
Наименование
характеристики
Обозначение
Алгоритмы
1
2
3
4
5
6
7
Математическое
ожидание (среднее
арифметическое)
Дисперсия, среднее квад-
ратическое
Функция плотности
распределения
Функция распределения
Частость (вероятность)
СОбыТИЯ Xj
Функция корреляции
Спектральная плотность
т. х
P{Xj)
F(x^Xj=k)
R(vM)
G(CD)
1 N
D = -^ZTf, \xVi)-m\*
n (xj) /N A x
ft
Л x 2 P (*/)
n (Xj) IN
1 N
2 x(t.)x(t{_v)
N
1
м
— У1 (v Д t) cos ibvA/
устройство управления. Измерители СХ могут быть одноканаль-
ными и многоканальными и изготавливаются в виде как одноцеле-
вых, так и многофункциональных средств измерений.
Следует отметить, что для.определения ряда СХ вычислитель
можно реализовать достаточно просто, так как суммирование
кодов выполняется обычным счетчиком, а усреднение при JV=10a,
где а — некоторое целое число, — соответствующей установкой
запятой на ЦОУ.
Таким образом математическое ожидание можно вычислить с
помощью обычного счетчика. Для измерения функций
распределения и плотности распределения, а также частоты событий
(строки 3, 4, 5 табл. 11.1) перед суммированием соответствующих кодов
с выхода АЦП их необходимо предварительно сравнить с
определенным кодом, записанным в регистре. Так, для определения
функции распределения суммированию подлежат только те коды,
которые не превосходят код, соответствующий уровню квантования Xj,
а для определения функции плотности распределения и частости
событий — только те коды, которые равны коду уровня X].
Для оценки дисперсии необходимо помимо суммирования
осуществить вычитание математического ожидания и возведение в
квадрат. В принципе последние две операции могут выполнить
аналоговым способом, если на входе измерительного прибора включить
разделительную емкость, устраняющую постоянную составляющую
сигнала, и квадратор. Если же использовать цифровой способ, то
вычислительный преобразователь усложняется. Последнее
относится и к остальным СХ, где требуется проводить операции
перемножения кодов.
325
Однако использование микро-ЭВМ на основе микропроцессвров
позволяет в настоящее время успешно решать эти задачи,
обеспечивая универсальность измерителей СХ.
Наряду с изложенным отметим, что при измерении некоторых
характеристик устройство прибора можно существенно упростить.
В частности, рассмотрим измеритель значений функции
распределения и функции плотности распределения вероятностей (рис.
11.24,6), которые, как известно, дают наиболее полную
статистическую информацию о случайной величине. Прибор работает
следующим образом. После входного устройства сигнал x(t)
поступает на модулятор, на выходе которого образуются дискретные
отсчеты x(ti), соответствующие моменты дискретизации t=l,
2, ... ,N, задаваемым тактовым генератором. Счетчик задает общее
число этих отсчетов N=\0a, где а — некоторое целое число.
Дискретные отсчеты поступают на амплитудные селекторы 1 и2,
пороги срабатывания которых определяются уровнями квантования Ху
с выходов регулятора уровня анализа. В результате на выходы
амплитудных селекторов проходят только импульсы x(ti), большие
соответствующих уровней анализа. Эти импульсы через
формирующие устройства 1 и 2, нормирующие их .амплитуду, поступают на
вычислитель.
При измерении функции распределения F (x^ZXj) ключ
разомкнут. С выхода амплитудного селектора / на вычислитель
поступают импульсы, соответствующие отсчетам x(ti)^>Xj. Функция
распределения вычисляется по алгоритму
F (х < xj) = 1 — п(х > Xj)/N = [N— n(x> Xj)]/N,
где 7V == 10га —- общее число отсчетов; п(х>хд) — число отсчетов
x(ti)>Xj. Указанный вычислитель может быть реализован на
реверсивном счетчике, в который предварительно заносится число N.
При измерении функции плотности распределения p(Xj) ключ
замкнут. В этом случае с амплитудного селектора / на
вычислитель поступают импульсы для отсчетов x{tt)>Xj, а с
амплитудного селектора 2 — для отсчетов x(U) >*я-1- Вычисление
производится согласно алгоритму
Р (Xj) = [п (х >Х])—п (х >'xi+i)]/N- А х,
где п(х>хд) и n(x>Xj+l) —число соответствующих отсчетов.
В этом случае в качестве вычислителя можно использовать
простой счетчик, на вход которого через логическую схему
проходят импульсы отсчетов x(ti)>x]- при условии отсутствия
импульсов отсчетов x(ti)>Xj+\.
Из рассмотрения работы прибора можно видеть, что в нем
вместо АЦП используются более простые устройства.
В заключение остановимся на погрешностях измерения СХ. В
общем случае их можно разделить на методические и
инструментальные. Инструментальные погрешности в основном
определяются погрешностями аналоговых узлов, так как цифровая обработка
может осуществляться с любой требуемой точностью. Методиче-
326
ские погрешности обусловлены рядом факторов: размером шага
дискретизации, погрешностью дискретности, конечным числом
отсчетов N.
Размер шага дискретизации А^ при измерении СХ можно
выразить через амплитуду Um верхней граничной частотой ©„
исследуемого сигнала и наибольшее допустимое значение погрешности
дискретности Дд/Д^=Дд/(Ов£Лп.
Погрешность из-за конечного числа отсчетов N можно оценить
с помощью дисперсии результата измерения СХ. Дисперсия
математического ожидания D(m)=D[x(t)]fN, дисперсия измеренного
значения дисперсии D(Da3li)=D2[x(t)]l (N— 1), где D[x(t)] —
дисперсия входной величины, дисперсия частости событий
Измерение статистических характеристик сигналов цифровых
систем связи. Наиболее распространенными параметрами,
измеряемыми в цифровых системах связи (ЦСС), являются значения
частости ошибок в канале и параметры искажения формы
импульсов. Значения частости определяются коэффициентом ошибок
Кош=п0шШ, где п0ш — число ошибочно принятых элементов
информации (единичных или кодовых комбинаций), а N — число
переданных элементов.
При определении параметров искажений формы импульсов,
помимо традиционных характеристик импульса (крутизны
фронта и среза, уровня, длительности), в ЦСС определяют фазовое
дрожание цифрового сигнала (джиттер), проявляющееся в виде
случайного временного смещения цифровой посылки относительно
положения, определяемого значением тактовой частоты. В
результате джиттера период следования импульсов на приемном конце ЦСС
не сохраняется постоянным, а изменяется случайным образом в
некоторых пределах около значения, определяемого тактовой
частотой. Для описания статистических свойств этого временного
смещения обычно используют такие СХ, как его математическое
ожидание и дисперсия.
При построении измерителей, коэффициентов ошибок (ИКО)
используют два различных принципа измерения. В первом из них
ошибка определяется как разность между принятым и
переданным элементом некоторой тестовой последовательности. В
качестве последней, как правило, используют псевдослучайные двоичные
последовательности (ПСП), которые по своим статистическим
характеристикам близки к характеристикам реальных сигналов. В
основе второго принципа лежит определение ошибки по
нарушению правила кодообразования, используемого при передаче
реального сигнала. Это возможно при наличии некоторой избыточности
кода.
На рис. 11.25 приведена структурная схема ИКО,
построенного на основе использования ПСП. Генератор ПСП 1, управляемый
тактовым генератором /, формирует тестовую ПСП, которая
поступает в исследуемую ЦСС. На приемном конце с помощью вы-
327
Генератор
ПСП 1
i,
■*
Тактовый
генератор 1
СИСТЕМА
СВЯЗИ
Детектор
ошибок
м
Генератор
ПСП 2
1.
Выделитель
тактовой частоты
Рас
Ключ 1
/I
11.25
i
'
Ключ 2
-
Счетчик
ошибок
К цифровог
отсчетному
устройству
Триггер
Счетчик
тактов
«
-ПУС
делителя тактовой частоты осуществляется фазирование —
синхронизация по элементам ПСП идентичного генератора ПСП 2. По
достижении состояния синхронности на выходе детектора ошибок,
который сравнивает тестовый сигнал из канала связи с сигналом
от генератора ПСП 2, появится поток ошибок. При замкнутом
положении ключа / ошибки подсчитываются счетчиком ошибок, с
выхода которого число ошибок пош подается на ЦОУ.
Ключ / замыкается на время, определяемое числом тактов
А'=10а, где а — целое число. Это время задается с помощью
ключа 2, счетчика тактов и триггера, начиная с момента подачи
команды «ПУСК»- По этой команде триггер опрокидывается и
замыкает ключи 1 и 2. После заполнения счетчика тактов N импульсами
триггер возвращается в исходное состояние.
Для получения значения коэффициента ошибок число
переданных тактов N учитывается путем указания на ЦОУ порядка
10~а полученного результата подсчета ошибок пош.
Наличие на приемном конце генератора ПСП 2, идентичного
генератору ПСП /, т. е. знание передаваемого сигнала,
существенно упрощает задачу измерения коэффициента ошибок и, в
частности, построение детектора ошибок. Однако при этом требуется
прерывать передачу информации. В реальных условиях (без
перерыва связи) устройство детектора ошибок усложняется. В этом
случае он работает на основе проверки правильности построения
принимаемых кодов. Но в общем структурная схема приемной
части ИК.0 остается такой же, только отсутствует генератор ПСП 2.
Погрешности ИКО складываются из двух составляющих. Во-
первых, это инструментальные погрешности детектора ошибок,
приводящие к пропуску ошибки. Во-вторых, это методическая
погрешность, вызванная малым числом фиксируемых ошибок пош
из-за их -малой вероятности (10~5 'И менее для исправных ЦСС) и
ограниченного времени измерения. При пош>10 относительное
значение погрешности b — ±t$lYпош, гДе ^p = arg0fp
обратная функция Лапласа, р
328
доверительная вероятность.
Классификация методов измерения фазового дрожания (джит-
тера) цифрового сигнала зависит прежде всего от наличия или
отсутствия в месте измерения сигнала опорного тактового
генератора, определяющего начальную фазу исходной импульсной
последовательности. Задача существенно упрощается при наличии
опорного генератора. Такой случай имеет место либо при контроле
характеристик одного регенератора, либо при исследовании цепи
регенераторов в режиме работы «по шлейфу».
Для измерения фазового дрожания при наличии опорного
сигнала наряду- с осциллографическими методами нашли место
методы, основанные на преобразовании фазовых смещений
импульсной последовательности в пропорциональное напряжение с
последующим измерением этого напряжения пиковым или средне-
квадратическим вольтметром, что позволяет определить
максимальные и среднеквадрэтические значения фазового дрожания. В
этом случае для получения напряжения, пропорционального
фазовому дрожанию цифрового сигнала, можно использовать,
обычный фазовый детектор на основе триггера с раздельными входами,
выходной сигнал которого после соответствующей фильтрации
может быть подан на цифровой вольтметр, Его показания будут
определять численное значение величины фазового дрожания в
долях тактового интервала.
Структурная схема одного из вариантов построения
измерителя фазового дрожания линейного тракта представлена на рис.
11.26. Здесь использован метод, основанный на выборке и
запоминании сигнала в интервалах времени, определяемых длительностью
Входное
устройство
/о
Устройство
задержки
*
Фильтр нижних
частот 1
-=»■
Схема выбора и
запоминания
М
Формирователь стробирующих
импульсов
Детектор
1
К цифровому
вольтметру
/
Фильтр нижних
частот 2
1
*
Выделитель
тактовой частоты
Входное
устройство
-з-
Фазовый
детектор
Т
1
Фильтр нижних
частот 2
Генератор
_
-*•
6)
Рис. 11.26
Детектор
*
К цифровому
вольтметру
Фильтр нижних
частот 1
329
фронта тактовых импульсов. Исследуемый импульсный сигнал,
пройдя через фильтр нижних частот 1 (при этом фронты
растягиваются), поступает на схему выборки и запоминания. Схема
управляется стробирующими импульсами с формирователя.
Частота импульсов равна частоте опорного генератора /о. Устройство
задержки стробирующих импульсов создает такую задержку стро-
бирующих импульсов относительно импульсов опорного
генератора, при которой момент начала действия стробирующего
импульса совпадает с серединой фронта исследуемого сигнала. Это
обеспечивается за счет автоматического регулирования задержки
сигналом с выхода схемы выборки, поступающим на устройство
задержки через фильтр нижних частот 2.Г На выходе схемы выборки
при этом будет выделен поступающий на детектор (пиковый или
среднеквадратического значения) сигнал, пропорциональный
измеряемому параметру — фазовому дрожанию цифрового сигнала.
Подобные схемы применяются для измерения фазового дрожания в
системах с тактовой частотой до 8448 кГц.
При измерении фазового дрожания цифрового сигнала в
отсутствие опорного сигнала наиболее рациональным является
использование фазовой автоподстройки частоты местного опорного
генератора под среднюю частоту исследуемого сигнала. Структурная
схема такого измерителя приведена на рис. 11.26,6. С помощью
выделителя тактовой частоты выделяется тактовая частота
исследуемого сигнала, представляющая собой непрерывную
последовательность импульсов с частотой, изменяющейся в пределах /т±
±Д/. Изменение частоты Д/ определяется фазовым дрожанием.
Этот сигнал подается на фазовый детектор, с помощью которого
сравнивается его частота (фаза) с частотой (фазой) местного
генератора, управляемого напряжением с выхода детектора через
фильтр нижних частот /. На выходе детектора создается
напряжение, пропорциональное изменению частоты (фазы) исследуемого
сигнала.
Наряду с рассмотренными методами измерения джиттера
можно также использовать быстродействующие цифровые
измерители временных интервалов. Действительно, джиттер как
низкочастотная фазовая модуляция импульсной последовательности
приводит к изменению периода этой последовательности. Для
регистрации небольших изменений периода порядка 100 не с
погрешностью около 1 не за время 10~4 с и более (это время
определяется максимальной частотой джиттера—10 кГц) могут быть
применены стандартные цифровые частотомеры с метками времени
50 ..- 100 не, работающие в режиме усреднения, например
приборы 43-47, 43-50. Изменяя время усреднения, можно проводить
анализ частотного спектра исследуемого джиттера. Кроме того,
могут использоваться цифровые измерители временных
интервалов, работающие в наносекундном диапазоне.
Глава 12. ИЗМЕРЕНИЯ В СИСТЕМАХ
РАДИОСВЯЗИ И РАДИОВЕЩАНИЯ
12.1. ИЗМЕРЕНИЕ НАПРЯЖЕННОСТИ
ЭЛЕКТРОМАГНИТНОГО ПОЛЯ И ПОМЕХ
Помехи и шумы в каналах связи. Помехами называют
напряжение (ток) постороннего происхождения, появляющиееся в
каналах связи и ограничивающее дальность передачи полезных
сигналов. Помехи, частоты которых лежат в полосе звуковых частот,
создают слышимый в телефоне или громкоговорителе шум,
снижающий качество связи или вещания. Высокочастотные помехи,
проходя через аппаратуру канала связи, также могут проявляться в
виде шумов. Помехи в полосе видеочастот ухудшают изображение
на экране кинескопа телевизора.
В зависимости от источника возникновения и от характера их
воздействия помехи делятся на собственные помехи канала связи,
взаимные, создаваемые влиянием каналов связи друг на друга, и
внешние (наводки) от посторонних электромагнитных полей.
Собственные помехи или шумы возникают от источников,
находящихся в данном канале связи. Они существуют независимо от
передачи информации по другим каналам связи и в основном
определяются следующими причинами: флуктуационными шумами;
пульсацией выпрямленного напряжения источников питания;
контактными шумами, вызываемыми недоброкачественными контактами в
аппаратуре и на линиях, кратковременными короткими
замыканиями, тресками, создаваемыми токами разряда конденсаторов,
микрофонными шумами и акустическими, попадающими в
микрофоны, продуктами нелинейных искажений в аппаратуре тракта
передачи.
Особое значение имеют флуктуационные помехи, вызываемые
случайными колебаниями (флуктуациями) некоторых физических
величин около их среднего значения. К ним относятся: тепловые
флуктуации в резисторах, дробовой эффект в электронных лампах,
флуктуации контактных разностей потенциалов и магнитных
параметров. Тепловые флуктуации в резисторах, обусловленные
движением свободных электронов в веществе, создают переменное
напряжение. Спектральная плотность флуктуационных помех постоянна
во всем используемом в технике связи диапазоне частот. Это
усложняет борьбу с их влиянием на работу каналов и аппаратуры
связи, так как эти помехи невозможно устранить без потери
информационного сигнала.
Взаимные помехи, возникающие при передаче информации по
соседним каналам, появляются в результате недостаточного
переходного затухания между данным каналом и влияющими
каналами, незначительного затухания фильтров, предназначенных для
разделения каналов или для подавления частот, различных пов-
331
реждений в аппаратуре влияющих каналов (выход из строя ламп,
разбалансировка преобразователя частоты, нарушение
заземления и экранирования аппаратуры, повреждение фильтров,
появление асимметрии в аппаратуре).
Внешние помехи делятся на промышленные, радиопомехи,
атмосферные и космические. Промышленные помехи создаются в
результате'влияния электромагнитных полей различных
электрических устройств: линий электропередач, электрооборудования
промышленных предприятий, медицинских установок, контактных
сетей электрофицированного транспорта (трамвая, троллейбуса),
световой рекламы на газоразрядных лампах и т. д. Радиопомехи
возникают от излучения радиостанций различного назначения,
спектр которых по каким-либо причинам накладывается на спектр
полезных сигналов тракта связи. К атмосферным относятся
помехи, вызванные различными атмосферными явлениями:
магнитными бурями, северными сияниями, грозовыми разрядами и т. д., а
к космическим—электромагнитные помехи, создаваемые
излучением Солнца, видимых и невидимых звезд, туманностей в
соответствующих диапазонах частот.
Мешающее действие шумов в проводных каналах определяется
отношением напряжения шумов к напряжению полезного
сигнала. Это отношение оценивается разностью уровней полезного
сигнала и шумов, называемой защищенностью канала от шума.
Иногда напряжение шумов измеряют в точке тракта с известным
полезным уровнем и получают защищенность в данной точке.
В радиотехнике особое внимание уделяют, флуктуационным
шумам, определяющим предельную чувствительность устройства —
радиоприемника или усилителя, поэтому последние характеризуют
коэффициентом шума. Коэффициент шума показывает, как
ухудшается отношение сигнал-шум на выходе некоторого линейного че«
тырехполюсника при прохождении через него сигнала с
некоторым отношением сигнал-шум на входе.
Исследования показали, что при воспроизведении речи и
музыки необходимо иметь вполне определенные соотношения
сигнал-шум. Так, предел понимания речи составляет 10 дБ (1,15 Нп);
нормальный прием речевого сигнала обеспечивается при 20 дБ
(2,3 Нп). Хорошее воспроизведение радиовещания возможно при
40 дБ (4,6 Нп), а высококачественная передача музыки — при
60 дБ (6,9 Нп). В телефонных и вещательных каналах мешающее
действие шумов определяется наличием в их частотном спектре
составляющих, которые наиболее сильно воздействуют на слух
человека.
Известно, что не все частоты одинаково воспроизводятся
телефоном или громкоговорителем и воспринимаются ухом.
Поэтому при определении действия шумов на -речевые и музыкальные
сигналы необходимо учитывать частотную зависимость
чувствительности слуха и частотные характеристики телефона и
громкоговорителя. Доказано, что наибольшая чувствительность системы
332
телефон — ухо лежит в области 80Q Гц, а громкоговоритель —
ухо — в области 1000 Гц. Эти значения легли в основу оценки
шумов в каналах связи и вещания, рекомендованной
Международным консультативным комитетом телефонии и телеграфии
(МККТТ).
Псофометрические характеристики, псофометр. Помехи
измеряют с учетом избирательности органов восприятия (слуха и
зрения) и неравномерности АЧХ различных устройств каналов
связи, вещания и телевидения. Для этого при измерении помех в
области звуковых частот в телефонных и вещательных каналах
определяют не общее напряжение помех, а так называемое псофо-
метрическое напряжение. При измерении помех в телевизионных
каналах используют частотную характеристику чувствительности
глаза, для чего применяют взвешивающий фильтр нижних частот
с характеристикой затухания, учитывающей воздействие на
телевизионное изображение различных отношений сигнал-помеха на
разных частотах спектра видеосигнала.
Псофометрическим называется напряжение U^ помех,
существующее на нагрузочном резисторе сопротивлением 600 Ом,
согласованным с выходным сопротивлением питающей его цепи, и
измеряемое с учетом неодинакового воздействия напряжений
различных частот / на качество телефонной или вещательной
передачи. Неодинаковость воздействия учитывается весовым
коэффициентом Af отдельных составляющих напряжения относительно
весового коэффициента Л8оо для частоты сравнения 800 Гц при
телефонной передаче и -4юоо для частоты 1000 Гц при вещательной
передаче. В соответствии с этим псофометрическое напряжение
для вещательной передачи U^ = yr2(AfUf)z/Al0Oo. Часто
рассматривается и псофометрическая ЭДС Е^, которая численно равна
удвоенному значению U^.
Весовые коэффициенты установлены многолетними
исследованиями и рекомендуются МККТТ на очередной период для всех
стран мира.
Зависимость весовых коэффициентов от частоты называется
псофометрической характеристикой. На рис. 12.1 приведены
псофометрические характеристики для телефонной (/) и
радиовещательной (2) передач.
Псофометром называется электронный А,^6
измерительный прибор для измерения помех
в каналах связи и вещания. Он
представляет собой электронный вольтметр (рис. 12.2)
с избирательностью, определяемой псофо- ~*°
метрическими характеристиками.
Основными узлами псофометра являются полосовые *49
фильтры: / с телефонной псофометрической
характеристикой и 2 с вещательной. Для из- -во
мерения общего напряжения помех без
учета весовых коэффициентов вместо фильтров Рис. 12.1
333=
п
Эквивалентное
звено
-Входное
устройство
J
и.
Полосовой
фильтр 1
Полосовой
фильтр 2
Усилитель
Детектор
Рис. 12.2
включается эквивалентное звено, затухание которого равно
затуханию псофометрических фильтров на средних частотах. Входное
устройство обеспечивает значительное входное сопротивление —
200 кОм на средних частотах и не менее 6 кОм на краях
диапазона. Предусмотрено также низкоомное входное сопротивление
600 Ом, необходимое для согласования входа псофометра с
измеряемой цепью.
Детектор с квадратической характеристикой позволяет
измерять действующее значение всех частотных составляющих
напряжения. Стрелочный индикатор представляет собой
магнитоэлектрический микроамперметр, градуированный в пределах 0,05... 100 мВ.
В процессе эксплуатации телефонных каналов систематически
проверяют напряжение шумов, измеряя их в точке канала с
установленным уровнем передачи 7 дБ (0,8 Нп).
Схема измерения псофометрического напряжения шума в
канале показана на рис. 12.3. В том случае, когда сопротивление в
месте измерения отличается от 600 Ом, псофометр следует
включать через согласующий трансформатор; псофометрическое
напряжение шума для сопротивления 600 Ом вычисляют по
формуле £/ф= С/1/"б00/|р|, где U — измеренное псофометром
напряжение на сопротивлении, не равном 600 Ом: |р| —модуль волнового
сопротивления измеряемого канала связи. Псофометрическое
напряжение шума, полученное в результате измерения, не должно
превосходить допустимое напряжение, установленное нормами
МККТТ для данного типа канала.
Допустимое напряжение шума устанавливается для точки
канала с относительным уровнем полезного сигнала рг. Допустимое
напряжение шума для другой точки с относительным уровнем по-
600 Ом
Оконечная
станция А
Канал связи
Оконечная
станция Б
600 Ом
Псофометр
334
Рис. 12.3
лезного сигнала ,р2 можно определить по формуле U$2 =
= £/ф1ехр{Р2—Рй.
Для полного представления о шумах в канале связи надо еще
знать защищенность полезного сигнала от шума, частотный спектр
шума и внятность шума. Защищенность а канала связи от шумов
определяется как разность между уровнями сигналов рс и шумов
рш: а = рс—рш, дБ (Нп), или a = ln(Uc/Um), Нп и a = 20\n(Uc/Um),
дБ.
Частотный спектр определяется действующими значениями
отдельных составляющих напряжения помехи Uu Uz которые
измеряют селективными измерителями уровней или анализаторами
спектра. Внятность шума исследуется прослушиванием с помощью
телефона.
При отсутствии псофометра напряжение помех можно
приближенно оценить, измеряя их суммарное напряжение Um
электронным вольтметром среднеквадратического значения или
'измерителем уровня. В последнем случае, когда измеритель уровня
градуирован в неперах или децибелах, напряжение вычисляется по
формулам
иш = — е"№3, или £/ш = — 10" №/20,
k k
где иш — в милливольтах; р — уровень в неперах или децибелах
соответственно по шкале; k — псофометрический коэффициент,
равный 1,25 при ширине полосы частот 2400 Гц и 1,33 при ширине
полосы до 3100 Гц. При таком измерении предполагается, что
помехи равномерно распределены в полосе пропускания канала.
Погрешность псофометров задается классом точности электронного
вольтметра.
Измерение напряженности поля. Для определения диаграммы
направленности антенн, характера распределения излученной
электромагнитной энергии вдоль земной поверхности, дальности
действия радиостанций и ретрансляторов, наличия паразитных
излучений радиопередающих устройств, качества экранировки
индустриальных и атмосферных радиопомех и других характеристик,
оценивающих качество радиосвязи, телевизионного и
радиовещания, необходимо измерять интенсивность
электромагнитного поля существующего в форме плоской волны.
Интенсивность характеризуется векторами: плотности потока энергии П,
Вт/м2, напряженности электрического поля Е, В/м, и
напряженности магнитного поля Н, А/м. Напряженности электрического и
магнитного полей совпадают по фазе и в любой момент времени
пропорциональны друг другу, причем коэффициент
пропорциональности между ними (волновое сопротивление среды) зависит от
свойств среды, в которой распространяется электромагнитная
волна, и равен Y ц/е. Для свободного пространства V щЫъ= 120я=
= 376,6 Ом.
Все три вектора перпендикулярны друг другу и численно
связаны между собой следующими соотношениями: П = ЕН; Н =
335
= Е/120л; Е="^120лП. С Невидно, что мощность Р потока
энергии, проходящего через некоторую поверхность площади 5,
равна P = fIS. Отсюда следует, что для измерения интенсивности
электромагнитного поля можно измерять любой 'вектор. Практически
удобнее всего измерять напряженность электрического поля Е.
которая выражается в В/м, мВ/м, мкВ/м.
Важной характеристикой поля является его поляризация.
Различают линейную эллиптическую и круговую поляризации. При
линейной поляризации вектор Е сохраняет свое направление вдоль
определенной прямой. Относительно земное поверхности сущест-
вуют две линейные поляризации: вертикальная и
горизонтальная. Эллиптическая поляризация характеризуется непрерывным
вращением вектора Е в плоскости, перпендикулярной направлению
распространения, с одновременным изменением его длины. При
круговой поляризации длина вектора не меняется.
Напряженность электрического поля можно вычислить по
измеренной мощности на согласованной нагрузке приемной антенны;
если известна ее эффективная площадь S:
£=1/120лР/5. (12.1)
Основными методами измерения напряженности
электрического поля являются методы эталонной антенны
и'сравнения. В первом случае используется антенна известных размеров
и формы, которая располагается в электромагнитном поле в
плоскости, параллельной плоскости поляризации электромагнитной
волны. В антенне индуктируется ЭДС
e=Eha, (12.2)
где ha—действующая высота эталонной антенны. Значение /гд
определяется расчетным путем для любой конструкции антенны и
поэтому является известным, а значение Е измеряется
вольтметром или с помощью амперметра. По этим данным вычисляется
напряженность поля. В диапазоне длинных, средних и коротких
волн напряженность электрического поля лучше определять по
напряжению на выходе эталонной антенны, в метровом или
дециметровом диапазонах (до 30 см) — по току в антенне, а на
волнах короче 30 см — по мощности.
Метод сравнения осуществляется способами замещения и
калибровки. При замещении напряжения, индуктированное в
произвольной антенне измеряемым электромагнитным полем,
сравнивается с напряжением, индуктированным в той же антенне
замещающим полем эталонного генератора; этот способ часто
называют споособом эталлонного поля; При калибровке
измерительное устройство перед каждым измерением калибруется по
эталонному генератору, входящему в состав этого устройства.
Выбор метода определяется интенсивностью поля. Для
измерения сильных полей вблизи источника излучения удобен метод
эталонной антенны, для измерения слабых полей — метод
сравнения.
336
Рамка
■#■
Вольтметр
Рис. 12.4
На основе метода эталонной
антенны созданы простые
измерительные устройства — измерители
поля; на основе метода
сравнения — измерительные приемники, рис. 12.5
измерители напряженности
поля и плотности потока мощности. Для измерения напряженности
помех и напряженности поля помех применяются как
перечисленные приборы, так и специальные измерители помех.
Измерители поля состоят из эталонной антенны и прибора для
измерения в ней напряжения, тока или мощности. В качестве
эталонной можно использовать любую антенну, характеристики
которой известны. При измерениях в диапазоне длинных, средних
и коротких волн применяются рамочные антенны, в диапазоне
метровых и дециметровых волн-—полуволновые вибраторы, а в
диапазоне сантиметровых волн — рупорные антенны. Иногда
пользуются и простыми штыревыми антеннами.
Измеритель поля с рамочной антенной представлен на рис. 12.4.
Рамка, квадратная или круглая, состоит из одного или N витков
изолированной проволоки; число витков зависит от диапазона
частот, для которого она предназначается. Чтобы распределение
тока в рамке можно было считать равномерным, длина одного
витка должна быть меньше Х/8, где X — длина волны
электромагнитного колебания, напряженность поля которого измеряется. Кон-,
денсатор переменной емкости служит для настройки всего
индикатора на частоту источника излучения, поле которого
измеряется в данный момент. Найдем действующую высоту рамки со
сторонами а и b (рис. 12.5,а), для чего определим индуктированную
в ней ЭДС I при прохождении под некоторым углом ср (рис. 12.5,6)
вертикально поляризованных радиоволн с напряженностью поля
Е. В вертикальных проводах рамки индуктируются две ЭДС,
направленные навстречу друг другу: e{ = Eb sinat и e2 = Eb sinto(^—
—/з), где ^3 = d/c=acos<p/c — время запаздывания ЭДС во
втором проводе относительно ЭДС в первом проводе; с — скорость
света.
Фазовый сдвиг со/3 между двумя ЭДС выражается через
длину волны: co4 = w a cos ф/с=2я/7'(а/с) cos cp= (2я аД) cos ср.
Реализующая ЭДС в рамке е является разностью ех и е2: e=Eb{sin at—
337
—sin[c>^— (2яаД)со8ф]} = 2Eb sin(яД) а cos cp cos (со?—я/Я) а cos ф.
Ее амплитуда пропорциональна числу витков рамки N:
--2EbNsm{ — a cos ф
А
■2EabN ~cos(p = 2E~^-cos(f.
А А
(12.3)
Сопоставляя (12.2) и (12.3), получаем выражение для
действующей высоты рамки
(12.4)
. I 2я SN
Лд = — = cos ф.
Е-
Формула (12.4) справедлива для рамок любой формы.
Множитель соэф характеризует направленные свойства рамки. Для
получения максимальной ЭДС плоскость рамки должна совпадать с
направлением на источник излучения, тогда ф = 0 и созф=1
(рис. 12.5,б).
Напряженность поля измеряется следующим образом.
Рамочную антенну настраивают и ориентируют на максимум приема.
Отмечают показание вольтметра, т. е. напряжение на
конденсаторе в момент резонанса:
</с = /рХ„=™-^." О2-5)
где /Р — ток антенны при резонансе; RP— активное сопротивление
антенны на рабочей частоте со; С0 — емкость переменного
конденсатора при резонансе. Подставляя в это уравнение (12.2) и решая
его относительно напряженности поля Е, получаем
E = UcRvaC0/ha. (12.6)
Заменив hA его значением [выражение (12.4)], сократив 2я и
заменив произведение частоты на длину волны скоростью света
(Xf = c^3-I0s м/с), получим окончательно в вольтах на метр
E = 3-\0*UCRVC0/SN, (12.7)
где Uc — в вольтах; R?— в омах; С0 — в фарадах; S — в
квадратных метрах. Формула (12.7) справедлива лишь в том случае,
если вносимое в рамочную антенну активное сопротивление вольт*
метра пренебрежимо мало по сравнению с активным
сопротивлением Rv самой антенны.
Если сопротивление Rp и абсолютное значение емкости С0
неизвестны, напряженность поля можно определить по добротности
рамочной антенны: Qp=l/toC0i?p. Подставив это выражение в
формулу (12.7), получим
E = Uc/haQv. (12.8)
Добротность рамочной антенны легко определяется в
процессе измерения, для чего нужно отметить три отсчета на шкале
переменного конденсатора: при резонансе ао и по обе стороны от
338
0,707 -
oct ссд ос2 ос
1/2
Рис. 12.6
Рис. 12.7
него cti и а.2 при одинаковых показаниях вольтметра £/ci (рис. 12.6).
Добротность вычисляется по формуле
QP
at
±tV
"c-^cl
"2.
(12.9)
aa—aj
Если установить значение Ua = 0,707 Uc, то выражение под
корнем превращается в единицу и тогда (12.9) приводится к виду
E = UC (a2—aJ/Лд К + а2).
Промышленностью выпускаются измерительные рамочные
антенны на диапазон 0,15... 30 МГц, который перекрывается
четырьмя антеннами.
Измеритель поля с полуволновым вибратором (рис. 12.7)
работает следующим образом. В промежуток между плечами
вибратора, т. е. в пучность тока, включается термомиллиамперметр,
сопротивление нагревателя RT которого известно. Сопротивление
полуволнового вибратора Rx постоянно и примерно равно 73 Ом.
Таким образом, наведенная в антенне ЭДС легко определяется
умножением показания / термомиллиамперметра на сумму
сопротивлений RT и Rz Разделив значение ЭДС на действующую
высоту (длину) полуволнового вибратора /1д=Я/я, получим
напряженность электрического поля: E=nl(73-\-(Rr)X.
Полуволновый вибратор при измерениях должен быть
ориентирован так, чтобы на нем возникла максимальная ЭДС. Он
может располагаться горизонтально или вертикально в зависимости
от ориентации вектора Е, т. е. поляризации поля. Полуволновые
вибраторы, применяемые в диапазоне частот 150... 1000 МГц,
выполняют из трубок, которые вставляются друг в друга для
возможности-изменения длины антенны.
В полосе частот от 30 до 150 МГц, где рамки слишком малы, а
вибраторы сдишком велики, применяют простые вертикальные
штыревые антенны. Если длина (высота) штыря / меньше
рабочей длины волны в пять и более раз, то его действующая высота
не зависит от частоты и приблизительно равна половине его
длины: /1дЯ*//2.
Измеритель поля для диапазона сантиметровых волн состоит
из рупорной антенны, волноводного аттенюатора поглащающего
339
h-
типа и измерительного устройства.
Последнее представляет собой
либо детектор и стрелочный,
микроамперметр (рис. 12.8,а), либо
термисторный измеритель мощно*
сти (рис. 12.8,6). Для
согласования с детектором или термисто-
ром волновод индикатора
заканчивается подвижным поршнем.
Измеритель с детектором
позволяет выполнять только
относительные измерения, причем показание
% мосту стрелочного прибораподдержива-
ется постоянным, а интенсивность
поля определяется по показаниям
шкалы аттенюатора. Измеритель
с термисторным измерителем мощности позволяет определять и
абсолютное значение напряженности поля из выражения (12.1)..
При подстановке в это выражение значения измеренной
мощности следует учитывать ее ослабление аттенюатором на входе из
мерителя. Если эффективная площадь 5 антенны не известна, то
ее вычисляют по формуле S = GX2[4n2, где G — усиление
антенны по мощности по сравнению с изотропным излучателем; Я —
длина волны, на которой выполняется измерение.
Промышленностью выпускается большое число рупорных измерительных антенн
со штативами, прекрывающих - диапазон частот от 100 до
36 500 МГц.
Измерителями определяются интенсивности полей,
напряженность которых превышает десятки милливольт на метр.
Погрешность измерений составляет 30..40%- Основными причинами
погрешностей измерителей с рамочными антеннами являются
наличие антенного эффекта рамки за счет емкости ее на Землю и
неточность ее ориентировки и настройки, измерителей с вибратора*
ми — влияние близости к вибраторам земной поверхности и
оператора, а также неточность ориентировки вибратора; измерителей
с рупорными антеннами — неточность измерения мощности,
неполное согласование и погрешность определения эффективной
площади или коэффициента усиления рупсрной антенны.
Измерительные приемники разработаны для измерения малых
напряженности поля. Эти устройства представляют собой
чувствительные супергетеродинные радиоприемники с вольтметром на
выходе, делителем напряжения в тракте промежуточной частоты
и аттенюатором на входе. Для уменьшения погрешности перед
каждым измерением шкалу выходного прибора калибруют по
напряжению внутреннего калибровочного генератора. Если такой
приемник укомплектован измерительными эталонными антеннами,
то он является измерителем напряженности поля, без антенн — по
существу, выполняет роль селективного вольтметра и называется
измерительным приемником.
340
Аттенюатор
Генератор
Усилитель
высокой
частоты
-*•
Смеситель
а
Гетеродин
Усилитель
промежуточной частоты
Рис. 12.9
Детектор
Усилитель
низкой частоты
Телефон
<£>
Упрощенная структурная схема измерителя напряженности
поля представлена на рис. 12.9. Процесс измерения делится на три
этапа: предварительную настройку, калибровку и измерение. Для
предварительной настройки к входу измерителя напряженности
поля подключают антенну и настраивают его на частоту
радиостанции, напряженность поля которой измеряют. Чтобы откалиб-
ровать прибор точно на рабочей частоте, настройку осуществляют
по максимальному показанию выходного вольтметра при
произвольных значениях ослабления входного аттенюатора и
коэффициента деления в тракте промежуточной частоты.
Калибровка состоит в том, что на вход усилителя высокой
частоты подают известное напряжение калибровочного генератора
и, регулируя усиление по высокой частоте (при отсутствии деления
в тракте промежуточной частоты), устанавливают стрелку
выходного вольтметра на условное деление. При этом усиление всего
приемника приводится к известному значению. После калибровки
генератор отключают, включают антенну и, регулируя ослабление
аттенюатора высокой частоты и коэффициента деления на
промежуточной частоте, устанавливают стрелку выходного вольтметра в
удобное для отсчета положение. Шкала вольтметра проградуиро-
вана в значениях входного напряжения усилителя высокой
частоты, поэтому его показание £/=£/1д/(ааад.н, где аа и ад.н —
коэффициенты ослабления аттенюатора и делителя напряжения
соответственно, К — коэффициент усиления. Отсюда напряженность
поля E==UlhAKaaaAM. Значения hA и К для каждой частоты
известны, поэтому определение значения напряженности поля Е не
вызывает затруднений.
Пределы измерения напряженности поля такими приборами —
ст долей микровольта до 105 мкВ/м, а измерителями плотности
потока мощности — от 0,07 мкВт/см2 до 30 мВт/см2. Погрешность
измерения достигает ±30%. Причины ее возникновения те же, что
и в измерителях поля.
Измерение радиопомех. Радиопомехи могут возникать во
время работы различных промышленных электрических установок, ме-
341
дицинскои высокочастотной аппаратуры, контактных сетей
электротранспорта, двигателей внутреннего сгорания,
электроинструмента, лифтов, бытовых электрических приборов и ряда других
причин. Эти и подобные им источники создают помехи в виде
электромагнитных полей различной частоты, которые засоряют
окружающее пространство, затрудняют выполнение измерений и работу
радиоприемных устройств.
В СССР установлены общесоюзные нормы допустимых
индустриальных радиопомех в диапазоне от 0,15 до 300 МГц. Измерять
же помехи необходимо в диапазоне от 10 кГц до 1000 МГц. Для
определения уровня помех измеряют напряжение между зажимом
источника помехи и его корпусом или напряженность поля как
электрического, так и магнитного методами, регламентированными
подробнейшим образом в том же документе, где приведены нормы
допустимых помех. Метод и порядок измерения зависят от вида
источника помех.
Напряжение радиопомех или напряженность их поля
измеряют приборами, подобными измерителям напряженности поля и
измерительным приемникам. Усилия ученых многих стран
направлены на разработку единых методов оценки радиопомех, единых
методов контроля источников радиопомех, единой
терминологии и т. д.
В рамках МЭК создан Международный специальный комитет
по радиопомехам. Одной из главных задач этого комитета
является унификация основных характеристик измерителей радиопомех.
Разработаны и утверждены технические требования к
измерителям помех и методы измерений в трех участках диапазона частот:
10 ... 150 кГц, 0,15 ... 30 МГц и 30 ... 1000 МГц.
Радиопомехи в большинстве случаев имеют хаотический
импульсный характер, поэтому в выходном вольтметре они должны
усредняться так, чтобы можно было оценить их мешающее
действие. Усреднение выполняется при помощи так называемого
квазипикового детектора. Главными его характеристиками являются
формально устанавливаемые постоянные времени цепей заряда и
разряда. При выборе этих постоянных предполагается, что
напряжение на нагрузке детектора изменяется по экспоненциальному
закону. На рис. 12.10 приведена эквивалентная схема
квазипикового детектора. Напряжение £Д снимается с контура
промежуточной частоты, эквивалентное сопротивление котороего представлено
резистором Як- Детекторный диод рассматривается как
идеальный с линейно-ломаной характеристикой. Предположим, что
постоянное внешнее напряжение V\ внезап-
-fl. (si , . , но подано на вход схемы. Напряжение
f ^ | | f на нагрузке детектора U будет
возрастать в соответствии с формулой 0 =
— Ui[l—exp(—t/RKC)]. Через интервал
времени, определяемый постоянной
времени заряда г=т3 = #кС, напряжение
достигает значения U=Ui(\—е-1) ~0,632f/i.
Рис. 12.10
342
Если при заряженном до напряжения Uc конденсаторе
отключить источник внешнего напряжения, то на нагрузке детектора
напряжение будет уменьшаться в соответствии с формулой £/=
= Uc exp (—t/Д^С). Через интервал времени, определяемый
постоянной времени разряда t^xWa = RAC, напряжение достигает
значения U=Uce-1« 0,368[/с.
Из изложенного следует, что постоянная времени заряда
численно должна быть равна интервалу времени, в течение которого
при внезапно приложенном синусоидальном сигнале на вход
измерителя помех напряжение на нагрузке детектора достигает
63,2% своего установившегося значения. Постоянная времени
разряда должна быть численно равна интервалу времени, в течение
которого при внезапно снятом сигнале напряжение на нагрузке
детектора снизится до 36,8% своего начального значения.
Кроме квазипикового детектора, в измерителях радиопомех
предусмотрены детекторы среднего, действующего и пикового
значений, включаемые соответствующим переключателем. Это
позволяет при измерении помех по сопоставлению показаний получить
некоторые дополнительные данные о характере помехи и, кроме
того, использовать измерители помех в качестве измерителей
напряженности поля радиостанций (при наличии модуляции) и
селективных вольтметров.
Для возможности сопоставления результатов измерений
напряжения или напряженности поля радиопомех установлены
полосы пропускаемых частот усилителями промежуточной частоты
измерителей помех на уровне —6 дБ: 200 Гц для принимаемых
частот от 10 до 150 кГц; 9,0 кГц от 0,15 до 30 МГц и 420 кГц от 3»
до 1000 МГц. В СССР разработана серия измерителей помех,
отвечающая всем международным требованиям на весь диапазон
частот 10 кГц... 1000 МГц. Погрешность измерения в зависимости
от характера измеряемой величины составляет от ±2 до ±4 дБ.
Чувствительность достигает долей микровольта. Погрешность
установки частоты ±1 %•
»
12.2. ИЗМЕРЕНИЯ В РАДИОПЕРЕДАЮЩИХ
И РАДИОПРИЕМНЫХ УСТРОЙСТВАХ
Измерения характеристик связного и вещательного оборудования могут
проводиться во время его испытаниями в процессе эксплуатации. В литературе
измерения параметров при испытании и налаживании оборудования, а также
при профилактических осмотрах и ремонте часто называют предупредительным
контролем, а измерения, проводимые непосредственно в процессе передачи
(приема) информации, — оперативным.
Измерении при испытаниях и налаживании. Амплитудную характеристику
можно, измерять по напряжению низкой или высокой частоты, для всего
устройства или его части.
Структурная схема измерения в передатчике приведена на рис. 12.1U. На
вход передатчика (автоматическая регулировка напряжения выключена) пода-
34Э
Генератор
низкой
частоты/
Рис. 12.11
»
ется низкочастотный сигнал. Значения i/BI и £/Вых напряжений, которые могут
изменяться плавно или ступеням», определяются по показаниям вольтметра.
Амплитудная характеристика на заданной частоте 1/Вых=^'(iC/Bx) строится в
виде графика (рис. 12.11,а). Для получения достоверных результатов загрузку
передатчика осуществляют в рекомендованных техническими условиями
пределах. Загрузка передатчика определяется с помощью измерителя мощности.
Погрешность измерения 1... 2 дБ.
Высокочастожрая колебательная мощность на выходе передатчика
оценивается по ее пиковым или средним значениям. Непосредственно измерить
пиковую мощность не всегда возможно, поэтому ее определяют расчетным путем по
результатам измерений средней мощности. Средняя мощность передатчика
может быть определена одним из методов, описанных в :§ 6.4.
На рис. 12.12 приведена структурная схема измерения.. На вход
передатчика подается синусоидальное напряжение низкой частоты с таким уровнем,
чтобы получить на его выходе среднюю мощность несущей частоты РСр н,
определяемую по показаниям измерителя мощности. Амплитуда несущей Um
определяется по осциллографу, калиброванному для выходных напряжений
передатчика. Пиковая мощность определяется по формуле
' Рт = 2Рср." '('12:10)
В однополосном радиопередатчике среднюю мощность определяют следую»
шим образом. Вначале на вход передатчика подают синусоидальное
напряжение низкой частоты fi с таким уровнем, чтобы на выходе передатчика
получить мощность РСр, равную примерно половине полезной пиковой мощности;
значение получающегося пикового напряжения будет U m\. После этого на его
вход вместо одного тона подают синусоидальные напряжения двух танов f, и
/г одинаковых амплитуд, значения которых устанавливают так, чтобы
наибольшая комбинационная составляющая напряжения соответствовала допустимому
уровню. Значение пикового напряжения на выходе передатчика Um2 снова
определяют по осциллографу.
344
Генератор
низкой
частоты f г
Передатчик
"И
v
дд
Генератор
низкой
частоты /|
Возбудитель
Усилитель
высокой
частоты
I
п
Осциллограф
Элемент связи _
V4r
Измеритель
мощности
Делитель
напряжения
Рис. 12.12
Возбудитель
/=1 МГЦ
10к
Y Z X
о о о о
обр
1160
Приёмник
(100 кГц)
Y
Источник
образцовой
частоты 100 кГц
: 160
10к
sh
Рис. 12.18
Генератор
Измеритель
мощности
Согласующий элемент
V
V
Измеритель
напряженности поля
Передатчик
Рис. 12.14
345
Выходная пиковая мощность будет равна
Рт = ( UmilUmi) Pep. (12.11)
Погрешность косвенного измерения пиковой мощности по результатам
прямых измерений средней мощности в значительной степени зависит от
линейности амплитудной характеристики передатчика.
Коэффициент бегущей волны фидера определяют с помощью
направленного ответвителя (см. § 6.4).
Амплитудно-частотную характеристику измеряют следующим образом: . на
вход передатчика (рнс. 12.11) подают напряжение UBX, уровень которого
приблизительно равен половине номинального входного уровня. При неизменном
входном уровне изменяют частоту / и отмечают показания вольтметра £/ВЫх
на выходе передатчика. Неравномерность характеристики в децибелах
оценивают по формуле
UBai/UB*=20\gU,flUm. (12.12)
и строят график в виде функции частоты f (рис. 12.11,6). Вместо Um можно
принять значение на заданной частоте.
Отклонение несущей и ее стабильность определяются на выходе
возбудителя или самого передатчика. На рис. '12.13 .изображена структурная схема
установки. Измерения проводят методом круговой развертки '(см. § 8Л). В
качестве источника образцовой частоты /0бр может служить кварцевый генератор
или радиоприемник стандартных сигналов (ГОСТ 13924—80). Суточную
нестабильность вычисляют по результатам измерений частоты в течение '10 суток.
Отклонение несущей частоты определяют путем многократных настроек
возбудителя, измерений его выходных частот fB и сличений полученных данных с
табличными значениями. В возбудителях или синтезаторах с дискретной сеткой
частот такие измерения позволяют выявить неисправные узлы.
Побочные излучения передатчика измеряют тщательно экранированной
аппаратурой, поскольку мощность сигналов передатчика в сотни и тысячи раз
больше мощностей побочных составляющих. Измерения следует проводить в
диапазоне рабочих частот передатчика непосредственно' иа его выходе либо в
отдаленных местах.
Измерение побочных излучений может проводиться с помощью
направленного ответвителя (см. § 5.4). Мощность побочного излучения на данной частоте
вычисляют по формуле Pnoe='(U2n—U20). Напряжения падающей Un и
отраженной U0 волн определяют анализатором спектра, а волновое сопротивление
фидера ZB можно рассчитать в зависимости от его размеров и конфигурации.
Абсолютные значения напряжений в данном месте фидера находят е учетом
переходного затухания направленного ответвителя.
В отдалении от передатчика уровень побочных излучений можно оценить с
помощью измерителя напряженности поля или приемного устройства. В этом
случае вначале определяют напряженность поля побочного излучения
передатчика Е, (рис. 12.14), затем, выключив передатчик, измеряют напряженность
поля вспомогательного генератора £2, мощность которого известна. Тогда
мощность побочного излучения на данной частоте Pnoe — PBcn(Ei/E2)2.
Чувствительность в радиоприемных устройствах должна измеряться с
учетом уровня собственных шумов, полосы пропускания и эффективности антенны.
Основная структурная схема измерения показана на рис. 12.15. Радиоприем-
346
Генератор
стандартных
сигналов
Эквивалент
антенны
Приемник
Рис. 12.15
Полосовой фильтр
на частоту
модуляции
Широкополосный
полосовой фильтр
N3
ник настраивают на частоту генератора сигналов и устанавливают регулятором
громкости напряжение на выходе полосового фильтра, соответствующее
стандартной мощности на выходе приемника. Затем выключают модуляцию и
измеряют напряжение на выходе широкополосного фильтра. Изменяя напряжение
генератора « положение регулятора громкости, добиваются одновременного
выполнения двух условий: требуемой выходной мощности при модуляции и
напряжения шума, соответствующего заданному соотношению при выключенной
модуляции.
Избирательность — параметр, позволяющий установить способность
радиоприемника ослаблять мешающее действие сигналов с частотой, отличной от
частоты принимаемого сигнала. Она определяется многими способами. Наиболее
часто измеряют избирательность по соседнему каналу и ширину полосы
пропускания резонансной кривой.
Избирательность по соседнему каналу определяют, как правило, двухеиг-
нальным методом. На рис. 12.16 изображена общая структурная схема
включения приборов. На вход приемника через эквивалент антенны одновременно с не-
модулированным полезным сигналом подается модулированная помеха на
частоте соседнего канала. Уровень мешающего сигнала регулируется так, чтооьг
уровень помехи был на 20 дБ ниже уровня, достигнутого при модулированном
полезном сигнале в отсутствии помехи. Измерения в диапазонах дециметровых
и сантиметровых волн проводят при следующих расстройках: ±5 и ±9 кГц в
положении регулятора Узкая полоса и ±18 кГц в положении регулятора
Широкая полоса. В других поддиапазонах измерения выполняют при других
расстройках. Глубина модуляции полезного и мешающего сигналов 30%.
Ширину полосы пропускания и крутизну скатов резонансной кривой
находят односигнальным методом. В этом случае фиксируют постоянное
напряжение на выходе детектора. Затем производят расстройку генератора,
одновременно увеличивая уровень сигнала и определяя частоты (fi), на которых сигнал
увеличивается на 6 дБ (при неизменном напряжении на выходе детектора). Эти
частоты и определяют ширину полосы пропускания. После этого расстраивают
генератор до частот, на который входной сигнал (опять же при неизменном
напряжении на выходе детектора) возрастет на величину d (20, 40, 60 или
80 дБ). Крутизну скатов оценивают отношением d/(/z—U) в децибелах иа герц.
Рассмотренные методики измерения требуют установки регулятора
громкости в положение, соответствующее созданию на выходе приемника стандартной
мощности.
347
Генератор
стандартных
сигналов 1
* i
! Частотомер
1
Генератор
стандартных
i сигналов 2
i—^»
Эквивалент
антенны
■ V
Приемник
Вольтметр
Широкополосный полосовой
фильтр
Вольтметр
-=•-
Анализатор
спектра
Рис. 12.16
Я >йпо
Г пр
Генератор
высокой частоты
-**-
Е I
п
-0-
-0-
I Эквивалент антенны .
Приемник
R
Рис. 12.17
**
Устройство ПИ
Устройство
документальной
регистрации
. 1
2
1 1
I
п |
< I
1
2
С I
I
Устройство НИ
Устройство НИ
• п I
•
Ри
Устройство НИ
с. 12.18
Р
Передатчик 1
1
у~
Передатчик 2
1
Р 1
I
1
-*
)
Передатчик п
,
1
J
348
При выполнении измерений приемное устройство должно быть установлено
в экранированном помещении, питающая сеть снабжена сетевыми фильтрами.
Соединение генератора сигналов с входом приемника должно осуществляться
через эквивалент антенны. На рие. 12:17 приведена одна из возможных схем
соединения, для которой 'расчет эквивалента антенны выполняется по формулам:
#i = tfnpVl— tfr/Япр. Да = Дг/Vl— Яг/Япр.
Ei = (RnP/Rr)E(l — У I— Rr/Rnp).
Уровень входных напряжений не должен превышать максимальное
напряжение, при котором амплитудная характеристика приемника остается
линейной.
Измерения в процессе передачи информации. На рис. 12.18 изображена
структурная схема автоматической системы измерений, состоящая из устройств
лепрерывных измерений (НИ), периодических измерений (ПИ) и
документальной регистрации результатов измерений. Устройства НИ обеспечивают
измерение значений параметров, определяющих работоспособность передатчика, а
устройства ПИ значения параметров, определяющих качественные показатели
передатчика. Устройства документальной регистрации фиксируют сигналы о
возникшей неисправности, поступающие с устройств НИ и ПИ.
Устройства НИ устанавливаются на каждом передатчике, устройства ПИ и
документальной регистрации предназначены для работы с несколькими
передатчиками.
Используемые в системе измерения носят «допусковый характер», при
которых сигнализация и регистрация результатов .измерений производятся только
при выходе измеряемых параметров за допустимые, заранее установленные
пределы. При этом измеряются абсолютные значения параметров или сравниваются
сигналы на входе и выходе измеряемого объекта.
Вначале измеряют превышение сигналом звука определенного значения на
входе передатчика, а также снижение глубины модуляции или уровня
несущей частоты.
Методом сравнения фиксируется пропадание сигнала звука на выходе
передатчика и изменение коэффициента передачи.
На рис. 1-2.19 приведены структурные схемы устройства НИ и самого
передатчика. Устройство НИ подключено к входу и выходу передатчика и к
входу модулятора.
К входу передатчика устройство НИ подключено до регулятора уровня, и
после усиления сигнал звука поступает на блоки «Контроль превышения вход- <
,ного уровня» и «Контроль пропадания сигнала на входе». В этих блоках
сравниваются абсолютные значения уровней приходящего Сигнала звука е
заданными нормированными значениями. Сигнал со входа передатчика подается
также в блок «Контроль пропадания сигнала на выходе», в котором его уровень
сравнивается с уровнем на выходе передатчика. Поэтому тревожный сигнал
«пропадание сигнала» на выходе передатчика поступает с сигнализатора только
при наличии сигнала звука на его входе.
Уровень несущей измеряется с помощью постоянной составляющей продетек-
чнрованного напряжения, которое фиксируется узлом «Контроль снижения
уровня несущей». Измерение коэффициента передачи осуществляется с помощью
• электронного логометра, на который поступают продетектированиые. сигналы с
349
Г"
Передатчик N.
Звуковая
программа!
Усилитель-ограничитель
На устройство ПК
1_1
Модулятор
Генератор
1 v
I
Реле.1
Логометр"
L
реле 2
Авто компенсатор
i-$»4 Усилитель входа
Усилитель выхода
Контроль пропадания сигнала
на входе
на выходе
Контроль
превышения
входного
уровня
недомодуляции
по выходу
снижения
уровня
несущей
Сигнализация
1
На устройства
документальной
регистрации
I Сигналы с блоков НК
Рис. 12.19
выхода передатчика и со входа модулятора. При изменении коэффициента
передачи более допустимого с логометра поступает сигнал тревоги.
Узел сигнализации обеспечивает общую звуковую и индивидуальную
световую индикации по каждому параметру, который измеряется устройством НИ.
Одновременно с сигналами световой индикации от узла поступают сигналы на
устройство документальной регистрации и систему телесигнализации. Сигналы
звука, поступающие со входа модулятора и с выхода передатчика, используют
также в устройстве ПИ (через контакты реле /).
' На рис. 12.20 представлена структурная схема устройства ПИ, которое
периодически подключается к измеряемым передатчикам коммутатором,
автоматически реализующим такое соединение через устройство НИ. Для этого от
350
Выход
Усилитель 2
Блок
сравнения
Вход 2
Вход 1
Блок измерения
Помех
Л
Измеритель
нелинейных
искажений
Блок документальной регистрации
От устройств НИ
Рис. 12.20
каждого устройства НИ передатчиков на вход устройства ПИ поступают два
сигнала звука (образцовый и искаженный) и один сигнал автоматического
управления. Образцовый, сигнал следует со входа модулятора на вход усиллтеля
1, а искаженный (после детектирования модулированного высокочастотного
сигнала) — с выхода передатчика на вход усилителя 2. Усиленные сигналы
поступают на блоки сравнения (со схемой автоподстройки), измерения помех и
измерения нелинейных искажений.
В блоке сравнения средние значения образцового и искаженного сигналов
выравниваются, что необходимо для оценки возможных нелинейных искажений.
При наличии этих искажений (и равенстве средних значений) пиковое
значение нскаженного сигнала будет отличаться от пикового значения образцового
f-e»
t
1
1
Блок памяти 1
1
N
1 1
1 !
i i -4—1 ^
ii i i
! ! МЧ
i »--
i i -, i j
U
|
Блок памяти 5
" ! 1
|_—' I.
1—
Блок опроса
''
А
i
Блок
управления
и
Часы
,
Блок
индикации
Печатающее
устройство
=»-На Все блоки
Рис. 12.21
351
сигнала. На выходе блока сравнения появится сигнал, пропорциональный
размеру искажений. Если этот сигнал превышает допустимое значение, включается
тревога. Одновременно с сигналами о наличии неисправности происходит
дистанционная передача сигналов в устройство документальной регистрации
отклонений и возвращения параметров в пределы допуска. Устройство (рис. 12.21)
обеспечивает регистрацию четырех параметров десяти измеряемых объектов.
Сигналы поступают на входы блоков памяти параметров и запоминаются в
них на все время регистрации. Из блоков памяти в блок опроса поступают
сигналы, разрешающие прохождение тактовых импульсов из блока опроса в блоки
памяти, часов и управления.
Такты опроса формируются с помощью опорной частоты кварцевого
генератора, находящегося в блоке управления. Они считывают регистрируемую
информацию из блоков памяти и часов в блок управления, где также формиру»
ются сигналы, регулирующие работу печатающего устройства. Блок индикации
позволяет управлять работой всего устройства и производить установку и
запуск часов.
12.3. ИЗМЕРЕНИЯ В ТРАКТЕ ПЕРЕДАЧИ
ТЕЛЕВИЗИОННОГО СИГНАЛА
Телевизионный канал должен обеспечивать прохождение сигнала е
минимальными искажениями формы. Для этого нормируются его
амплитудно-частотные, фазочаетотные, амплитудные и импульсные характеристики. Полезная
информация обычно содержится в полосе частот телевизионного сигнала от 25 Гц
до 6,5'МГц. Этот сигнал ноеит название видеосигнала, а тракт, по которому
он передается (без модуляции несущей), — видеотрактом. Трудности измерения
характеристик тракта передачи телевизионного сигнала связаны с его большой
протяженностью. При измерении, например, частотной характеристики
четырехполюсника сигнал с выхода прибора (измерителя АЧХ) поступает на его вход и
с выхода четырехполюсника возвращается обратно в измерительный прибор.
Такое измерение возможно потому, что вход и выход четырехполюсника
находятся рядом. В телевизионном тракте экспериментатору обычно доступен либо
его вход, либо выход.
Имеются и другие особенности, связанные со спецификой телевизионного
сигнала. Например, измерение нелинейных искажений в телевидении с помощью
коэффициента гармоник не применяется. Это объясняется двумя причинами.
Во-первых, телевизионный сигнал содержит вспомогательные сигналы — гасящие
и синхронизирующие импульсы, которые прн измерении коэффициента гармоник
создают помехи. Если же вспомогательные сигналы исключить, резко
изменится режим работы аппаратуры, что повлияет на результат измерения.
Во-вторых, телевизионный сигнал резко несимметричен, поэтому при одном и том же
коэффициенте гармоник качество изображения (особенно цветного) может
существенно отличаться.
Важную информацию о состоянии тракта передачи можно получить,
измерив его амплитудно-частотную характеристику. Одним из' широко
распространенных является способ измерения АЧХ, основанный из применении
испытательного сигнала, изображенного на рие. 12.22, Этот сигнал содержит шесть «паке-
тов> синусоидальных колебаний разных частот, обычно выбираемых в пределах
от 0,5 до 6 МГц. Длительность испытательного сигнала подбирается так, чтобы
352
Синхронизирующий
импульс
I
Рис. 12,22
она не превышала длительности одной строки и сигнал вписывался между
двумя строчными гасящими импульсами. Гасящие импульсы являются
вспомогательным сигналом, с помощью которого гасится луч кинескопа в телевизоре во
время обратного хода по строке. Более узкий импульс является строчным
синхронизирующим импульсом, обеспечивающим синхронизацию генератора
строчкой развертки телевизора. Весь период /СтР равен 64 мкс, из них 5 мкс
составляет длительность синхронизирующих импульсов. Наличие этих
вспомогательных сигналов обеспечивает при измерениях тот же режим работы, что и при
прохождении сигнала.
Данный испытательный сигнал можно использовать для измерения АЧХ без
перерыва передачи полезного телевизионного сигнала по линии. Для этого
испытательный сигнал передается во время обратного хода луча по кадру, в
течение которого имеются свободные интервалы, не используемые для передачи
телевизионного сигнала. Точное расположение испытательных сигналов (знание
которого необходимо для их выделения) установлено рекомендациями
Международного консультативного комитета по радио (МККР).
Измерить переходные характеристики видеотракта можно с помощью
импульсов прямоугольной формы с крутыми фронтом и срезом. Однако
применение прямоугольных импульсов для оценки качества передачи высокочастотной
части спектра телевизионного сигнала не всегда приводит к положительным
результатам. Дело в том, что телевизионная аппаратура имеет ограниченную
полосу пропускания, т. е. ее частотная характеристика эквивалентна частотной
характеристике фильтра нижних частот. Испытательные импульсы прямоугольной
353
12-10
формы имеют спектр частот, Выходящий за верхнюю границу полосы
пропускания канала. Поэтому форма осциллограммы будет искажена из-за ограничения
спектра испытательного сигнала, в то время как менее широкополосный
телевизионный сигнал пройдет канал связи без искажений. Поэтому для измерения
характеристик телевизионного канала применяют так называемый
синус-квадратичный импульс и{1) =siii2wrp^. График этой функции при U=\ (рис. 12.23,а) и
ее частотный спектр (рис. 12.23,6) взаимно связаны.
Как ьидно из риг. 12.23,6, относительная амплитуда спектральных
составляющих оказывается равной пулю при \Т—Л и основная часть энергии спектра
приходится на участок от 0 до {Т. Это свойство спектра синус-квадратичного
импульса обусловливает удобства его применения для измерений.
Действительно, допустим, что синус-квадратичный импульс подается .на устройство,
имеющего граничную частоту пропускания [тах = 6,5 МГц. Всегда можно подобрать
длительность имп)мьса Т '(рис. 12.23,а) такой, чтобы его спектральные
составляющие не выходили за пределы /max. В рассматриваемом случае 7"='l/fmax =
= 1/6,5-10—0 = 0,154 мкс. При прохождении импульса вычисленной длительности
через устройство с частотной характеристикой, равномерной до граничной
частоты 6,5 МГц, спектр не искажается и, следовательно, форма импульса
практически остается неизменной. Если же полоса пропускания устройства окажется
менее 6,5 МГц, то произойдет потеря высокочастотных составляющих спектра
и напряжение импульса на выходе уменьшится.
На рис. 12.23,в графически показано относительное изменение напряжения
синус-квадратичного импульса длительностью 0,154 мкс на выходе устройства
(/) и относительное изменение длительности импульса (2) в зависимости от
граничной частоты. Как видно из графика, увеличение граничной частоты от 0,6
до 3,5 МГц вызывает практически пропорциональное увеличение амплитуды
выходного импульса. Таким образом, по изменению испытательного
синус-квадратичного импульса можно сделать вывод о форме частотной характеристики. На
практике используют синус-квадратичные импульсы длительностью 0,16...
и
1,0
0,5
\т/г
т
V
Г/2
t
с)
Рис. 12.23
\
\
fy
^z
6,0
4,0 ,
I-
I
„II
f,Z 2,<r.},6 4,в /Т,МГЦ
354
*,mt
. ,Уро$ен1
f-p черного
Рис. 12.24
u
uh,A
Ш
Рис. 12.25
... 0,17 мкс или 0,08 ... 0,1 мкс,
позволяющие оценивать
частотные искажения в
области 3 и 6 МГц.
Для измерения степени
уменьшения амплитуды
испытательного импульса при
прохождении по
видеотракту пелесообразно одновременно с ним передавать более длительн:
иал, не зависящий от вносимых частотных искажений. На рис.
осциллограмма испытательного сигнала длительностью 64 мкс,
иус-квадратичный импульс / и опорный сигнал 2 (прямоугольпь
тельностью 26 мкс). Для обеспечения режима работы аппаратур
щего передаче, обычного телевизионного сигнала, в состав испь
нала включены гасящие и синхронизирующие импульсы 3.
Амплитудную характеристику видеоканала можно измерит
пилообразного испытательного колебания, осциллограм'ма которс
рнс. 12.25,а. Периодически повторяемый испытательный сигнал
щие импульсы, с помощью которых в аппаратуре автоматически!
ся правильное положение сигнала относительно амплитудной
усилительного элемента. Напряжение испытательного сигнала,
вход испытуемого устройства, должно быть равно номинальном;
пряжению, на которое это устройство рассчитано. Если амплит
ристика устройства нелинейна, то произойдет искажение формы
сигнала на выходе (рис. 12.25,6). Применение импульсов пилоо
удобно тем, что позволяет оценить нелинейность на всех учас
ной характеристики. Однако численная оценка нелинейности затр
этому сигнал такой (формы целесообразно использовать для гр;
амплитудной характеристики. Оценка нелинейности упрощается
нии испытательного сигнала ступенчатой формы (рис. 12.25,е). г
держит несколько ступенек одинакового размера, которые из mi
прохождения через испытываемое устройство (рис. 12.25,г). К;
нейности является отношение 'наименьшего размаха m к иаиболы
но на практике число ступенек ие превышает 8 ... 1:0. Ступенчат
ный сигнал позволяет обнаруживать изменение кривизны амшп
тернстики лишь иа ее отдельных участках, в то время как пилос
тательиый сигнал дает представление о всей амплитудной харар
грешность измерений при ступенчатом испытательном сигнале сост
Более эффективным методом выявления нелинейности ампл:
теристики устройства является применение рассмотренных испыта
12*
' пни -*
сигналу
чтя.
В)
IIIIIUIIIIIIIIIIIIIIIIIIIIIII|IIIIIIU у
8)
Рис. 12.26
лов в сочетании с синусоидальным сигналом. На рис. 12.26,а показан
испытательный сигнал пилообразной формы с наложенным на него высокочастотным
сигналом. Измерительный сигнал с выхода испытуемого устройства подается на
узкополосиый фильтр, настроенный на частоту синусоидального сигнала. Если
амплитудная характеристика линейна, на выходе устройства получается сигнал,
показанный иа рис. 12.26,6. Нелинейность амплитудной характеристики
проявится в изменении амплитуды синусоидального сигнала (рис. il2.26,e). Степень
нелинейности оценивают по формуле п= {l+m/M) -100%, где т — минимальная,
а М—максимальная амплитуды синусоидального напряжения. На рис. 12.26,г,
д, е иллюстрируется применение ступенчатого измерительного сигнала в
сочетании с синусоидальным.
Описанные способы измерения характеристик видеотракта широко
применяют для оценки его состояния во время передачи. При наличии серьезных
неисправностей контроль и измерения осуществляются с помощью
специализированной измерительной аппаратуры, обеспечивающей большую точность измерений.
Оценка погрешностей измерения характеристик телевизионного тракта
осуществляется по методике оценки погрешности осциллографических измерений,
описанной в § 7.11.
Глава 13. АВТОМАТИЗАЦИЯ ИЗМЕРЕНИЙ
13.1. ОСНОВНЫЕ НАПРАВЛЕНИЯ
АВТОМАТИЗАЦИИ ИЗМЕРЕНИЙ
Разработка, исследование, настройка и эксплуатация
радиоэлектронных комплексов и систем связи требуют проведения большого
количества измерений. При этом по мере использования все более
тонких закономерностей, по мере нарастания сложности системы
и аппаратуры повышаются требования к точности, скорости и до-
356
*^6товерности получаемых результатов. Возрастают удельный вес и
означение косвенных и совокупных измерений, расширяется
использование математических методов обнаружения ошибок и
уменьшения-погрешностей измерений. Усложняется обработка
полученных результатов измерений — часто она должна выполняться в
резальном масштабе времени по алгоритмам, изменяющимся в
процессе измерения в зависимости от получаемой измерительной
информации. Все это приводит к значительному росту трудоемкости
и стоимости измерений и требует создания специальных
автоматизированных технических средств-измерения.
Условно основные направления автоматизации и черты этих
направлений отображены в табл. 13.1. Различают частичную
автоматизацию измерений, основной целью которой являются совер-
- шествование измерительных приборов путем введения вычисли-
< Таблица 13.1
Автоматизация
Частичная
Непрерывный
контроль
Полная
Конкретные мероприятия
Замена косвенных измерений прямыми — увеличение числа
приборов с непосредственным отсчетом.
Построение прямопоказывающих приборов.
Создание многофункциональных приборов.
Применение панорамных приборов
Регистрация контролируемых значений.
Сигнализация при выходе за пределы нормы.
Использование отклонения от нормы в качестве сигнала,
управляющего органом регулировки
■Автоматизация регулировок в измерительных приборах»
Регистрация результатов измерения:
докумеитальн ая;
запоминание и ввод.в ЭВМ.
Создание измерительио-ииформациоииых систем и
измерительно-вычислительных комплексов
тельной' процедуры в процессе косвенных измерений и получение
в результате прямых показаний или использование таких
структур приборов, алгоритм работы которых позволяет
непосредственно измерять обратные величины, отношения, произведения и Т. п.
Указанное направление основано на использовании в приборах
встроенных микропроцессоров, которые решают не только задачи
управления, вычисления, но и позволяют расширить
функциональные возможности приборов, улучшить метрологические
характеристики панорамных измерителей. При частичной автоматизации роль
I оператора-исследователя велика и заключается в принятии
решения о воздействии на объект измерения. Непрерывный контроль,
представляющий собой регистрацию контролируемых значений
Параметров измеряемого объекта, сигнализацию выхода пар амет-
13е—10 357
ров за пределы нормы и использование отклонения от нормы в
качестве сигнала-ошибки, воздействующего на объект измерения,
сводит к минимуму участие человека в измерительном процессе.
Для полной автоматизации измерений характерны
автоматизация регулировок в измерительных приборах без участия человека,
а также не только выдача информации в напечатанном виде, но и
в форме, удобной для ввода в ЭВМ, которая хранит,
обрабатывает данные измерений, проводит анализ, управляет процессом и
выдает окончательный результат потребителю. Главным
направлением, включающим в себя основные черты полной автоматизации
измерений, является создание измерительно-информационных
систем (ИИС), под которыми понимают системы, предназначенные
для автоматического получения количественной информации
непосредственно от изучаемого объекта путем измерения и
контроля, обработки этой информации и выдачи ее в виде
совокупности именованных чисел, высказываний, графиков, общих выводов
и .команд, отражающих состояние данного объекта. Последующее
развитие измерительно-информационных систем привело к
созданию измерительно-вычислительных комплексов (ИВК). И ИИС,
и ИВК представляют собой совокупность программно
управляемых технических средств (измерительных, вычислительных,
вспомогательных) , имеющих блочно-модульную структуру.
Отличительной чертой ИВК является больший удельный вес вычислительных
и программных средств, что дает новые качества ИВК по
сравнению с ИИС.
Первые ИИС разрабатывались индивидуально для каждой
конкретной измерительной задачи, причем всякий раз заново
разрабатывались не только структура, но и все функциональные узлы.
Такой подход оказался нерентабельным — срок разработки был
большим, стоимость ИИС высокая. Поэтому был взят курс на
агрегатный, блочно-модульный принцип построения, который
позволяет строить систему из конструктивно законченных и
выпускаемых серийно блоков и приборов. Агрегатный принцип
построения резко сокращает сроки проектирования системы, система
получается гибкой, упрощаются техническое обслуживание и
модернизация, повышается надежность. Существуют два способа*
агрегатирования ИИС и ИВК. Первый способ — построение из
унифицированных функциональных блоков, узлов и модулей, образующих
агрегатные комплексы Государственной системы промышленных
приборов и средств автоматизации (ГСП). В настоящее время
'промышленностью выпускается 20 агрегатных комплексов, среди них
агрегатные комплексы средств электрорадионзмерительной
техники (АСЭТ), вычислительной техники (АСВТ), контроля и
регулирования (АСКР) и другие. Второй способ — построение системы
из различных приборов, выпускаемых промышленностью, но в
которые введены каскады (узлы), непосредственно не относящиеся
к выполнению измерительных функций, а обеспечивающие
только передачу сигналов между отдельными компонентами системы.
Этот способ наряду с достоинствами первого позволяет осущест-
358
вить широкую кооперацию как в масштабах страны, так и
международную.
И в первом и во втором способах для обозначения средств
сопряжения, обеспечивающих совместимость и взаимодействие
устройств в ИИС или ИВК, общепринят термин «интерфейс» (англ.
fnterfaqe). Хотя такие системы сопряжения могут4 содержать
цепи для передачи аналоговых сигналов, как правило, интерфейс
рассчитан на выполняемый по командам обмен данных между
устройствами в цифровой форме и содержит необходимую для этого
номенклатуру цепей. Чтобы устройства, участвующие в обмене
информацией, могли взаимодействовать, необходимо определить
совокупность конструктивных механических, электрических и
логических условий. Если такая совокупность условий определена, то
интерфейс называется стандартным. По отношению к интерфейсу
система (комплекс) в общем виде может "быть представлена как
"совокупность приборов, передающих информацию в другие
приборы (приборов-источников ПИ); приборов, воспринимающих
информацию от других приборов (приборов-приемников ПП);
устройств, управляющих обменом информации по (программе
(контроллеров К). Конкретный прибор может выполнять не одну, а
несколько функций. Например, цифровой частотомер может
выдавать результаты измерения частоты — тогда он
прибор-источник, и принимать команды о режимах работы, времени измерения
и т. п.— тогда он прибор-приемник.
Соединение приборов и блоков осуществляется по линиям
связи (линиям интерфейса); группа линий, предназначенных для
выполнения одной операции в программно-управляемом процессе
передачи, называется шиной интерфейса. Назначение отдельных шин
и линий, их номенклатура и взаимное расположение являются
базовыми для любого стандартного интерфейса. По взаимному
расположению (топологии) различают в основном трн структуры
интерфейсов: цепочечная, радиальная и магистральная. На рис. 13.1
показаны эти структуры. В цепочечной структуре (рис. 13.Г,а)
функциональные устройства соединены последовательно,
контроллера может и не быть, скорость обмена минимальна.
Применяется в сравнительно простых системах с малым числом приборов. В
радиальной структуре (рис. 13.1,6") выделено центральное
устройство— контроллер, с которым каждое устройство связано
индивидуальными шинами, адресация определяется номером
индивидуальных шин (разъемов), скорость обмена информацией
максимальна. Контроллер должен иметь возможность подключаться к боль»
шему числу линий. В системах с магистральной структурой (рис
13.1,в) имеются коллективные шины, к которым подсоединяются
все источники, приемники и контроллер. Все сигналы, проходящие
по шинам магистрали, в принципе доступны всем приборам.
Однако обычно в каждый момент времени обмен происходит
между парой приборов, например ПИ—ПП (диалоговый режим)^ а
контроллер с помощью процедуры адресации определяет
приборы, участвующие в диалоге; либо между одним или несколькими
Ij£
ПрИеМНИК*
ИСТОЧНИК
ф
Приемник- •
источник
====Ф
*
" Приемник»
источник
1
4
•■ л>т ■!■- .. ■» : ——"^———
И
Приемник^
источник
9)
Контроллер
Приемник-
источник
Приемник»
источник
Я
МАГИСТРАЛЬ
I
7^
Приемник
Источник
Рис. 13.1
Привмник-
' источник
Контроллер
приборами системы и контроллером. В магистральной структуре
по сравнению с радиальной меньше затрат, иа оборудование
(кабелей, разъемов), скорость обмена ниже. Обычно магистральная
структура предпочтительна при большом числе приборов в
системе.
Существует бельшое число стандартных измерительных интерфейсов.
Наибольшее распространение получили международные стандартные интерфейсы
КАМАК (САМАС) и МЭК. В странах — членах СЭВ КАМАК рекомендован в
качестве стандарта для научного приборостроения и получил широкое
'применение. В стандарте КАМАК регламентированы механические конструкции,
разъемы, напряжения питаний, и т. п. Магистраль по стандарту КАМАК является
миоголниейявй (86 линий связи) с раздельными шинами для передачи команд,
йдресвв, данных. Характерной чертой для КАМАК является жесткая
нормализация всех механических конструкций. Продуманная и рациональная
конструкция, многолинейносхь магистрали и ее быстродействие делают 'КАМАК
оптимальным для сложных научных экспериментов, связанных с интенсивными
потоками информации.
■ С. другой стороны, часто не требуется таких объемов информации и КАМАК
становится аппаратурио избыточным. Кроме того, жестко заданная конструк-
3so-
.ция не позволяет использовать серийно выпускаемые приборы. Указанные осо-
. .Ценности стандарта КАМАК обусловили его неприемлемость в
контрольно-измерительной аппаратуре систем и устройств свизи. Для создания ИИС и ИВК в
этой области используется и в дальнейшем (в проектируемой аппаратуре
ЕАСС) найдет еще более широкое применение- стандарт МЭК. Из агрегатируе-
мых комплексов ГСП для построения ИИС в технике связи основным является
агрегатный комплекс средств электроизмерительной техники (АОЗТ), который,
■кт к стандарт МЭК, рассмотрим подробней.
13.2. АГРЕГАТНЫЙ КОМПЛЕКС СРЕДСТВ
ЭЛЕКТРОИЗМЕРИТЕЛЬНОЙ1 ТЕХНИКИ
Состоит из функционально и конструктивно закончейных
устройств, образующих ряды однотипных по выполняемым
функциям устройств, отличающихся между собой основными
характеристиками. Устройства АСЭТ построены на модульных и микромо-
> дульных элементах общего и специального применения. Комплекс
соггоит из следующих групп устройств, ^различающихся по
выполняемым функциям.
Устройства сбор а и преобразования
информации включают в себя первичные измерительные преобразователи
. {датчики) электрических и магнитных величин, электрические
преобразователи, такие, как измерительные усилители,
функциональные преобразователи постоянного тока и модуляторы,
коммутаторы, преобразователи цифровых кодов и цифро-аналоговые
преобразователи (ЦАП).
Устройства измерения и отображения
информации включают в себя аналого-цифровые преобразователи
<АЦП) с различными входными и выходными величинами, элект-
. роизмерительные приборы, в том числе аналоговые, цифровые,
показывающие и регистрирующие.
Устройства обработки и хранения
информации включают в себя устройства дискретизации, определения
динамического диапазона и областей измеряемого сигнала, сжатия
информации, определения величин, связанных функционально с
измеряемыми, аналоговых и цифровых специализированных, и запо-
.минающих устройств.
Устройства управления, формирования
управляющих воздействий и блоки связи включают ,в себя
таймеры и часы, которые формируют сигналы и кодовые
эквиваленты значения текущего бремени; программные устройства
(контроллеры), которые управляют функциональными блоками
системы; устройства управления, включающие в себя
вычислительные средства (мини-ЭВМ, микропроцессоры, которые позволяют не
Только осуществлять программное управление, но и калибровку,
С коррекцию температурной погрешности, линеаризацию,
диагностику неисправностей, первичную обработку измерительной
информации). Блоки связи решают задачу согласования потоков
информации, служебных сигналов между сопрягаемыми средствами
361
в, соответствии с принятыми стандартными интерфейсами и
представляют собой устройства согласования входных и выходных
сигналов по уровням и мощности.
13.3. ИНТЕРФЕЙС МЭК
' Международная электротехническая комиссия (МЭК) в 1975 г.
приняла стандарт на интерфейс, который получил название
«Стандарт МЭК». В СССР применение этого стандарта
регламентирует ГОСТ 26.003—80, в странах СЭВ IMS-2, в США — 1ЕЁЕ-488, в
ФРГ— ОЩ IEC 66.22 и т. д. Таким образом, этот международный
стандартный измерительный интерфейс широко распространен во
гвсех технически развитых странах и используется для создания
ИИС и ИВК на основе различных измерительных приборов,
различных ЭВМ и дополнительного оборудования.
Взаимосвязь приборов в системе осуществляется при помощи
магистрали, состоящей из 16 линий, сгруппированных по
функциональному признаку в три шины: информационную (8 линий),
согласования передачи (3 линии) и общего унравления (5 линий).
Взаимосвязь приборов в интерфейсе МЭК иллюстрируется
рис. 13.2, где система состоит из прибора-источника (ПИ),
прибора-приемника (ПП), контроллера (К) и прибора, совмещающего
функции ПИ и ПП. Как видно
из этого рисунка, приборы
системы равноправны по
отношению к линиям магистрали, все
линии которой подключаются к
приборам через специальные
блоки. Эти блоки (называемые
«интерфейсным модулем»,
«интерфейсной приставкой»,
«интерфейсной картой» и т. п.)
должны «переводить»
информацию с «языка» магистрали на
язык прибора и наоборот.
Большим преимуществом
интерфейса МЭК является как раз то,
что в принципе для любого
цифрового прибора можно^
создать такой интерфейсный
модуль и прибор будет способен
работать в составе ИВК или
ИИС на основе интерфейса
МЭК. Отметим, что такие
модули, выпускаемые в виде
интегральной схемы, практически
не удорожают прибор.
Вся информация и много-
рцс J32 проводные команды передают-
Интер<рейсний
модуль
Информационная
шина
Шина согласования
передачи
Шина од~щега
управления
Г101-,
ЪМ
NRFB
NIMC
IFC
SR0
КЕН
£61
•Jjfil*
362
ся по информационной шине асинхронно, в оба направления.
Интерфейс не накладывает ограничений на кодирование информации;
единственным требованием является необходимость передавать
последовательность из восьми двоичных символов (байт). Но так как
существует ряд мини-ЭВМ, применяемых в качестве контроллеров,
используют определенные системы кодирования — чаще всего
международный стандартный телеграфный код № 5 (в СССР ему
соответствует с некоторыми модификациями код ГОСТ 13.052—74,
в США —ASKII). Этот код содержит семь информационных сим-
воловк а восьмой используется в магистрали для проверки на
четность, что позволяет обнаружить единичную ошибку в пределах
одного байта. Назначение шины, линий, а также их краткие
характеристики приведены в табл. 13.2.
Т.аблица 13.2
Название
шины
Шина со- ,
гласоваиия
передачи
(синхронизации)
Шина
общего
управления
(управления)
Информационная
шниа
(шина данных)
Международно^
название
линнв
DAV
NRFD
NDAC'
ATN
IFC
SRQ
REN
EOI
DI01
:i
DI08
Название
по ГОСТ
сд
гп
ДП
УП
ои
30
ДУ
кп
лдо
ЛД7
Смысл передаваемого по лнннн сигнала
«Информация достоверна».
Указывает, что данные, установленные на
информационной шнне, верны и
можно принимать этот байт
«Не готов к приему информации»
«Информация не принята»
«Интерпретатор команда —
сообщение»
«Очистить интерфейс» —
устанавливает магистраль в исходное
состояние .
«Запрос на обслуживание»
«Дистанционное управление»,
«Конец или идентификация
многобайтового сообщения*
Передается побайтно либо
информация (ATN-0), либо адреса и команды
(ATN-1)
Кто
посылает в
системе
пи
пп
пп
К
к
ПИили
ПП
К
ПИ или
К
ПИ или
К
Для обращения к прибору или установ.ления диалога ПИ-НГЩ
контроллер должен вызвать нужные приборы посылкой их
адресов. Адреса, как и команды, передаются по линиям
информационной шины. По линиям DIOl ... DI05 передается либо сам адрес
363
Таблица 13.3
Назначение передаваемого ло
линиям DIO байта
*
Универсальная команда (UC)
Вторичнаи команда (SE)
Адрес приемника' (ADL)
Адрес источника (ADT)
Запрет приемникам
воспринимать
Запрет источнику передаиать
Запрет воспринимать команду
8-я 7-я
.0
1
" 0
1
0
1
1
Линии
6-я
0
1
1
0
1
0
1
информационной
5-я 4-я
X X
X X
X X
X X
1 1
1 1
1 1
ШНИЫ
3-я
X
XXX
1
1
1
2-я
X
XXX
1
1
1
"1-я
X
XXX
1
1
1
Примечание: х означает, что в этом разряде может быть 0 нли 1 в зависимости от
кода адреса нли команды.
(присвоенный прибору), либо код команды, а по DI06... DI07 —
признак, как это показано в табл. 13.3.
Каждому прибору в системе присваивается свой адрес в виде
пятиразрядного двоичного числа (устанавливается обычно с
помощью пяти тумблеров или перемычек в интерфейсном модуле).
Максимальное число адресов равно 31 (одна комбинация, как вид-
. но из табл. 13.3, команда запрета), т. е. потенциально может быть
до 31 прибора-источника и.столько же приборов-приемников. При
необходимости для увеличения числа адресов можно использовать
вторичные команды (тоже 31), тогда адресов будет 961 и
каждый адрес передается двумя байтами. Если нужно, чтобы группа
приборов воспринимала одни и те же данные, то этой группе
присваивается один и тот же адрес. После адреса посылаются
команды, устанавливающие режим работы приборов.
Для примера рассмотрим следующую задачу: нужно подать измерительный
сигнал на объект измерения, измеркть напряжение иа выходе объекта,
отпечатать этот результат. Задача решается измерительной системой на основе
«интерфейса МЭК, которая содержит: измерительный генератор '(1Ш1), цифровой
вольтметр (ПИ), печатающее устройство (ТШ2) и контроллер i(K), в памитн
которого хранится программа измерений. Возможный алгоритм решения этой
задачи такой системой изображен на рис 13.3 и 13.4, причем рнс. 13.3
отображает работу системы под управлением контроллера, а рис. 13.4 —■ режим диалога
ПИ —ПП. Рассмотрим работу алгоритма.
" 1. По команде IK (REN) контроллер устанавливает режим дистанционного
управления — все приборы системы переходят в режим управлении от
магистрали. Команда REN — одиопроводная универсальная, поступающая на все
приборы системы.
2. По команде 2К (IFC) контроллер устанавливает узлы приборов,
связанные с интерфейсом, в исходное состояние («очистить»).
3. По команде Ж (ATN) указывает-, что. информация по шине DIO
должна интерпретироваться как команды и адреса. Получив эту команду, все
приборы анализируют адреса i(t. е. к магистрали подключаются дешифраторы
адреса приборов ДША). Адресованные команды до получения адреса прибор не
может воспринимать.
364
ПП1
X Начало У (_ Начало ")
пи - , : ппг
(^Начало ") ( Начало, ")
На рис. 13.4'
Рис. 13.3
365
к
от рис. 13.3
ПИ
от рис. 13.3
7 J
ПП2 ,
от рис. 13.3
DAV
i
NHED, NDAC
1ГЩ
НЕТ
УСТАНОВИТЬ
БАЙТ.
УСЛОВИЕ
ОШИБКИ
NRED
2ПП
f КОНЕЦ j
НЕТ
DAV
-ЗПИ
ЗАПИСАТЬ
БАЙТ
4ЛП
NDAC
NRED
ЗПП
DAV
-4ПИ
НЕТ
ЧЕТНОСТЬ
NDAC
БПИ
EOI
NDAC
EOI
5ПИ
4ПП
ATN
С КОНЕЦ J
НЕТ
М4К
NDAC
*П§*< EOi
5ПП
НЕТ
ДА
^ КОНЕЦ )
Рис. ISA
3fifi
4. По команде 4К (адрес приемника ПШ ADL1) контроллер посылает по
информационной шине код адреса генератора семиразрядным двоичным кодом,
т. е. в одном байте. ((Например, в коде 0100001 6-й и 7-й разряды — 01—озна:
чают-'признак ADL, а все остальные — 00001—собственно адрес, установленный
тумблерами на интерфейсном модуле генератора при компоновке системы.) Этот
адрес воспринимает только ПП1 н включает дешифратор команд (ДШК), т. е.
только ПШ будет принимать посылаемые контроллером команды. Дри этом
ПШ и ПИ находятся по-прежнему в состоянии ожидания адреса.
б. По команде 6К контроллер посылает по информационной шине коды
режимов работы генератора, т. е. указывает уровень и т. п. сигнала, который
должен подаваться на объект измерения. На программе показано, что резйимы
передаются мяогобайтным сообщением, т. е. каждый байт представляет коды
универсальной и вторичных команд (см. табл. 13.3). 'Когда все команды переданы,
контроллер посылает однопроводную команду 6К i(EOI), и генератор должен
выполнять свою приборную функцию (ИПФ), т. е. выдавать измерительный
сигнал. Команда EOI должна быть снята до посылки нового адреса или команд.
6. Командами 7К... 9К аналогично вызывается вольтметр. После измерения
напряжения вольтметр посылает запрос на обслуживание SRQ командой 1 ПИ.
Контроллер, восприняв эту команду, вызывает адрес и устанавливает режимы
работы печатающего устройства (команды 10K...'12K), а также, посылая
команду 13IK (ATN), отдает управление магистралью приборам ПИ и ПП2,
между которыми установлен диалог. После команды ATN все коды, передаваемые
го информационной шине, интерпретируются как информация об измерениях,
т. е. вольтметр должен передать результаты измерения для печати.
Режим диалога иллюстрирует рис. ,13.4, из которого видно, что контроллер
до конца диалога в работе не участвует. Отличительной особенностью режима
диалога является «квитирование информации», т. е. каждый байт переданной
информации сопровождается передачей по шине согласования передачи команд
«запрос» (NRFD) — «ответ» (DAV) — «подтверждение» (NDAC).
7. В соответствии с процедурой диалога ПИ включает DAV ((команда 2ПИ),
ТШ— NRFD, NDAC (команда ПОП). Это исходное состояние диалога.
Источник (вольтметр ПИ) проверяет состояние приемника: если исходное состояние
правильно, то он выставляет на шине байт данных, если нет, то сигнализирует
d наличии ошибки и обмен прекращается.
8. Если цифропечатающее устройство готово к приему (т. е. к выполнению
своей приборной функции), то оно указывает об этом, установив NRFD
{запрос) —команда ЙЩ источник (вольтметр) выставляет команду ЗПИ
(DAY), т. е. отвечает, что данные выставлены и их можно принимать.
9. Если есть DAV, то ПП принимает байт данных, устанавливает команду
ЗПП — NRFD (т. е. состояние готовности кончилось и он находится в
состоянии приема информации) и (проверяет байт на четность. Если условие четности
байта выполняется, то ПП дает подтверждение принятого байта — команда
4ПП (NDAC); в противном случае информация не принята (NDAC).
10. В ответ на NDAC источник устанавливает DAV (4ПЦ), т. е. с этого
момента данные принимать гаельзя. Приемник включает NDAC (5ПП).
' - 11. Если у источника есть еще информация, то цикл повторяется, если нет,
то посылкой 5ПИ обмен прекращается и контроллер 'берет управление
магистралью на себя— команда 14К (ATN).
367
iB интерфейсе принята отрицательная логика, т. е. логической единице
соответствует низкий уровень, логическому нулю — высокий, что необходимо для
выполнения логического сложения сигналов, поступающих в линию от разных
источников. Уровни сигналов соответствуют уровням ТТЛ: высокий уровень
неменее 2,4 В, низкий —не более 0,8 В; во входных и выходных цепях
применяются ТТЛ схемы или устройства, совместимые с , ТТЛ схемами по уровням.
Приборы соединяются в систему при помощи гибких стандартных кабелей,
каждый из которых заканчивается двусторонним штепсельным разъемом с винтовым'
креплением. Э^то позволяет устанавливать - одни .разъем «а другой и собирать
системы любой конфигурации. Максимальная длина кабелей магистрали не
должна превышать 20 м, число приборов в обычном режиме ие более 15.
Существуют стандартные способы расширения как числа (приборов, так и длин»
кабеля. При использовании служебной связи возможно использование
интерфейса на разнесенных (приемной и передающей) стаициях.
13.4. МИКРОПРОЦЕССОРЫ И МИКРО-ЭВМ
В ЦИФРОВЫХ ИЗМЕРИТЕЛЬНЫХ
ПРИБОРАХ И СИСТЕМАХ
Развитие техники все больше повышает требования к
метрологическим характеристикам измерительных средств, к
автоматизации процессов измерения и обработки измерительной информации,
к обеспечению возможности сопряжения отдельных
измерительных средств в ИИС. Удовлетворение этих требований путем
синтеза для каждого ЦИП специальных устройств с жесткой
структурой на базе цифровых логических схем малой и средней
степеней интеграции ведет к резкому усложнению самих ЦИП,
снижению их надежности, сильному увеличению материальных и
временных затрат на их проектирование и изготовление и
практически сдерживает их дальнейшее развитие. Синтез указанных
устройств в виде специализированных БИС, как правило, также ока-J
зывается экономически не целесообразным, так как
проектирование и изготовление таких БИС может быть оправдано лишь при
очень большой серийности (как, например, для электронных
часов, калькуляторов).
Появление микропроцессоров (МП), являющихся
универсальными и поэтому в силу большой серийности достаточно дешевыми
БИС, 'позволяет создавать также достаточно дешевые микро-ЭВМ,
которые могут непосредственно встраиваться в ЦИП и
производить всю логическую и математическую обработку цифровой
измерительной информации программными методами. При этом
микро-ЭВМ может выполнять функции управления процессом
измерения (контроллера), математической обработки измерительной'
информации (вычислителя-калькулятора) или преобразования
информации к виду, необходимому для отображения на средствах
индикации, и регистрации, а также для передачи на внешние
устройства в автоматизированных измерительных комплексах в
соответствии с требованиями интерфейса.
368
Микро-ЭВМ создаются на основе МП и ряда вспомогательных
. БИС (ввода — вывода, интерфейсных, приоритетного прерывания
'Я ДР-Ь образующих микропроцессорный комплект (МПК), а
также БИС запоминающих устройств (ЗУ), включающих оперативные,
" постоянные и пёрепрограммируемые ЗУ (ОЗУ, ПЗУ, ППЗУ). Так,
,> промышленностью выпускается ряд микро-ЭВМ семейств «Элект-
' роника С5», «Электроника НЦ», «Электроника 60» и других,
среди которых имеются модификации в многоплатном, одноплатном
и, последнее достижение интегральной технологии, в
однокристальном исполнении. Среди существующих МПК следует выделить
серии К580, К587, К589, которые различаются быстродействием, по-
'"_,■ требляемой мощностью, организацией команд и позволяют решать
' широкий круг задач. Малые габариты, экономичность, надежность
\ и достаточная дешевизна МП и микро-ЭВМ способствуют их бы-
;. строму внедрению в ЦИП.
! Важнейшим достоинством использования программных мето-
: дов является то обстоятельство, что функции одной и той же
микро-ЭВМ могут достаточно легко изменяться при соответствующем
| изменении программы путем смены ПЗУ или перепрограммиро-
1 вания ППЗУ. При этом схема самой микро-ЭВМ может быть в из-
\ вестной степени минимизирована в соответствии с решаемой
задачей путем установки ЗУ лишь необходимого объема, установки
необходимого числа БИС ввода — вывода и пр.
, Таким образом, одна и та. же микро-ЭВМ может использовать-
-';■ ся в самых разнообразных ЦИП и выполнять различные функции,
i достаточно лишь ввести в нее соответствующую программу. Это,
ic во-первых, позволяет значительно сократить время и материаль-
С ные затраты на разработку и изготовление новых ЦИП и приво-
I дит к их значительному упрощению, удешевлению и увеличению
I; надежности. В частности, в настоящее время считается, что циф-
£.- ровое устройство, содержащее около. 50 корпусов малой и средней
f степеней интеграции, экономически целесообразнее выполнить на
% МП. Этот чисто количественный критерий уже может служить ос-
| нованием для использования МП. При этом МП может использо-
I: ваться самостоятельно (как, например, в качестве устройства уп-
\ равления в АЦП поразрядного уравновешивания), так и в сос-
к таве соответствующей микро-ЭВМ.
Во-вторых, наличие в составе ЦИП микро-ЭВМ с ее
способностью проведения сложной обработки измерительной
информации и автоматического управления процессом измерения
позволяет реализовать сложнейшие алгоритмы измерений, ранее
невозможные из-за технических трудностей. Поэтому можно утверждать,
*••' что современные ЦИП нельзя создать оптимальным образом без
* учета тех возможностей, которые даёт использование в них МП и
микро-ЭВМ.
13.5. ФУНКЦИИ МИКРОПРОЦЕССОРОВ
И МИКРО-ЭВМ В ЦИП
Микропроцессоры и микро-ЭВМ позволяют полностью
автоматизировать процесс управления ЦИП. Анализируя цифровую
информацию о состоянии внешних (на лицевой панели) и
внутренних органов управления работой ЦИП, команды и другую
цифровую информацию, поступающую от интерфейса при работе ЦИП
в составе ИИС, а также информацию о самой измеряемой
величине, неинформативных параметрах сигнала и влияющих величинах,
микро-ЭВМ может вырабатывать команды для автоматической
установки соответствующих режимов работы ЦИП в процессе
измерения. При этом возможность быстрой логической обработки
большого количества информации и выработки соответствующих
управляющих команд позволяет реализовать такие алгоритмы,
связанные со сложной коммутацией узлов и даже отдельных
элементов ЦИП, которые ранее не представлялись возможными из-
за больших технических затрат.
В результате наряду с автоматизацией выбора вида измерений
в универсальных ЦИП, пределов измерений, вида обработки
измерительной информации возникает возможность
автоматического выбора оптимального режима работы ЦИП, изменения режима
по заданной программе, самонастройки и быстрой
автокалибровки ЦАП.
Широкие возможности математической обработки
измерительной информации в микро-ЭВМ позволяют реализовать сложные
виды измерений (косвенные, совместные, совокупные), измерение
случайных величин и характеристик сигналов и процессов,
расширить функциональные возможности ЦИП для измерения
различных величин. Математическая обработка также легко
позволяет представить информацию в удобном виде. Например,
результат измерения напряжения в цифровых вольтметрах можно
представить как в вольтах, так и в логарифмическом масштабе,
результат измерения в цифровых частотомерах можно легко пересчитать
из частоты в период и наоборот. Сравнивая результат измерения
с некоторыми значениями, хранимыми в ЗУ микро-ЭВМ, можно
осуществить допусковый контроль изделий. Возможность
вычислять отношение двух результатов измерения напряжения
позволяет, например, легко реализовать с помощью цифрового
вольтметра измерение коэффициентов передачи четырехполюсников,
сопротивления двухполюсников и т. д. Микро-ЭВМ, анализируя
результаты отдельных аналого-цифровых преобразований (выборок)
исследуемого процесса, может определять его максимальные и
минимальные значения, статистические и спектральные
характеристики.
Таким образом, математическая обработка позволяет строить
многофункциональные приборы, причем изменение функций
достигается выбором соответствующей программы, хранимой в ЗУ (или
вводимой перед началом измерения) микро-ЭВМ.
370*"
Достоинством применения микро-ЭВМ является возможность
улучшения важнейших метрологических характеристик ЦИП, в
* первую очередь точности, путем уменьшения случайных и
систематических погрешностей измерения.
Для уменьшения случайных погрешностей используют
статистическую обработку результатов наблюдений, что, как известно,
позволяет уменьшить среднеквадрэтическое значение погрешности
измерения в 1/ТГ'раз, где п — число наблюдений.
Систематические погрешности можно уменьшать различными
методами, в частности за счет автоматического введения в
результат измерения поправки, которая хранится в памяти или
вычисляется тиикро-ЗВМ при известном законе изменения погрешности.
При этом возникает возможность линеаризации характеристик
прибора и автоматического учета действия влияющих величин и
неинформативных параметров сигнала. Кроме того, проведение
автоматической калибровки позволяет уменьшить аддитивную и
мультипликативную составляющие систематической погрешности, а при
определенных условиях и погрешность нелинейности.
Наличие быстрой автокалибровки позволяет резко снизить
требования к точности стабильности элементной базы ЦИП, требует-*
ся лишь их кратковременная стабильность на время между
калибровками. В результате упрощается элементная база и
удешевляется измерительное устройство. Соответственно снижается
влияние дестабилизирующих внешних факторов, в том числе таких
важных, как температура, напряжение питания и др. Это в свою
очередь приводит к расширению диапазона условий эксплуатации
прибора.
Следует также заметить, что в любом ЦИП измерительная
информация преобразуется в соответствии с определенным
математическим алгоритмом. Преобразователи, рсуществляющие эти
преобразования, всегда вносят некоторую погрешность.
Математическая обработка информации в микро-ЭВМ может
выполняться с любой требуемой точностью. Отсюда вытекает, что любой
ЦИП с микро-ЭВМ следует строить так, чтобы информация об
измеряемой величине с наименьшими аппаратурными затратами
и погрешностью преобразовать в цифровую форму, а дальнейшую
обработку осуществлять математически. На этом пути таятся
огромные резервы увеличения точности измерения, возникает
возможность разработки принципиально новых методов
'измерения.
Микро-ЭВМ позволяет также упростить решение заДачи преоб-
- разования измерительной информации (кодирование,
перекодирование) для ее индикации или регистрации на внутренних или
внешних устройствах отображения (цифровых индикаторах,
алфавитно-цифровых или графических дисплеях, цифропечатающих
устройствах и др.), а также для передачи по линиям интерфейса
в другие (приборы ИИС. Облегчение отображения разнообразной
алфавитно-цифровой информации дедает ее более наглядной.
371
.Использование микро-ЭВМ позволяет программными методами
(или с небольшими дополнительными аппаратурными затратами)
реализовать в ЦИП интерфейсные функции, т. е. функции обмена
информацией с различными внешними устройствами в ИИС.
Микро-ЭВМ позволяет осуществлять диагностику и
самодиагностику исправности ЦИП путем контроля режимов работы
отдельных узлов и даже элементов прибора. Для этого вводятся
тестовые сигналы или дополнительные пороговые устройства,
сигнализирующие об отклонении режимов работы от допустимых
значений (например, для контроля питающих напряжений).
Самодиагностика осуществляется в микро-ЭВМ с помощью
специальных диагностических программ. Эти меры позволяют
предотвратить появление грубых погрешностей измерения.
13.6. СТРУКТУРА МИКРО-ЭВМ ДЛЯ ЦИП
И ТРЕБОВАНИЯ К ЕЕ ХАРАКТЕРИСТИКАМ
Обобщенная структура микро-ЭВМ для ЦИП и ее
информационные связи показаны на рис. 13.5 и 13.6 соответственно.
Микро-ЭВМ содержит МП, генератор тактовых импульсов (ГТИ),
стабилизированный кварцем, ОЗУ или ОЗУэ — энергонезависимое
ОЗУ со своим источником питания — батареей, ПЗУ или ППЗУ,
устройство приоритетного прерывания УПП, устройство ввода—
вывода УВВ, программируемый таймер Т, шину адреса ША,
шину данных ШД, шину управления ШУ, входы цифровой
информации ЦИ. Назначение большинства элементов очевидно.
Устройство приоритетного прерывания предназначено для организации
прерываний текущей программы по запросам на обслуживание от
внешних устройств. Таймер позволяет изменять режимы работы
ЦИП во времени, энергонезависимое ОЗУ предназначено для
хранения данных, которые могут вводиться в него для решения
конкретной измерительной задачи и должны храниться при
выключении прибора (например, уставки при допусковом контроле), или
для хранения промежуточных результатов обработки информации,
например при нарушении питания. Выходы ША, ШД, ШУ
позволяют наращивать объем памяти микро-ЭВМ или обеспечить к ней
прямой доступ.
Следует указать, что задачи управления и математической
обработки информации могут сильно' отличаться требуемым
быстродействием либо их объем может быть слишком велик для одной
микро-ЭВМ. В этом случае используют две микро-ЭВМ, обычно
одну для задач управления, а другую — для математической
обработки.
Использование МП и готовых микро-ЭВМ, а также
разработка специализированных микро-ЭВМ для решения конкретной
измерительной задачи требуют учета целого ряда факторов. Прежде
всего необходимо определить алгоритмы управления
измерительным процессом и математической обработки измерительной
информации, требуемую точность обработки и максимально ■ допус-
372
я/
Микропроцессор
^
"
■
"
.
'
i
■
*>
,
,
i
\
ф *
,
Генератор тактовых_>шпуль.сов
Устройство приоритетного
прерывания
Оперативное запоминающее
устройство
Энергонезависимое оперативное
запоминающее устройство
Программируемое запоминающее
устройство
Устройство ввода — вывода
Таймер
__ Шина адреса
Шина данных
__ Шина управления
"Т
Ква
,
_L
i
i
»*■
Рис. 13.5
Информации об" измеряемой величине'
Информация о влияющих величинах
И Не'информативкых параметрах сигналов
Информация р состоянии внешних органов управления/
на лицевой панели
^>
Информация 0 режимах работы элементов И узло£ ЦИП
И управление ими
4=^
Улравление устройствами индикации И регистрации
результатов измерения
К
Обмен информацией Через Интерфейс
к^=а
Микро-эвм
Рис. 13.6
373
nn Й2?°ТРЯ На все Увеличивающееся количество и качество мик
• всегда явлТтУСКаеМЫХ пРомышленностью, их использование н^
» ™aM5?1SSo0™№™ Решением-задачи. Во-первых, вы!
пускаемые микро-ЭВМ рассчитаны на широкий круг задач и ™
этому могут быть избыточны для конкретной задаче что при круп"
тЬа?РамИНВо ЛпИ?°ДСТВе ЦИП М0ЖеТ пРивесТи к ™2шТэ1
™£« В?-вт°Рых, они могут не удовлетворять ряду важнейших
требовании, выдвигаемых конкретвой задачей, илиГ возмХГс5
их использования может ограничиваться какой-либо пои^иноТ
Si^Si ЭВМ 3ДГНЧИВЫМ ЯВЛЯ6ТСЯ «-ользов^^ТноГисталь
ные микро-ЭВМ. Однако их программирование производится не
цЖ£Е£° ПРИ изготовлении БИС, что при маРлоГсеДрийноСТи
n^nJn. Ч6СКИ невыгоДнО- В результате может потребоваться
разработка специализированной микро-ЭВМ. Таким образом не-
щихМП°„ГпеТИТЬ' ЧТ° 0ГРани™"быстродействие существую-
SSL^J позволяет решать с их помощью все задачи цифровой
™Йп КИ сигналов' и п°э™му при проектировании ЦИП й
ходимо искать разумный компромисс между аппаратными и
программными средствами их решения. Р
™ ?пмИС' 137 приставлена структурная схема прибора с мик-
Г„~Э пМ системного применения, в котором микро-ЭВМ
обеспечивает решение всех указанных выше задач в ЦИП и исподется
для управления интерфейсом. При ЭТОм для обработкиTiepS
сного сообщения в стандартном интерфейсе МЭК-ATN Та воем я
не более 200 не (допустимая реащиГштерфЗса]Г применяются
специальные аппаратурные средства. Для организации^ микропГо
цессорного управления интерфейсом тщательно акал™ю?ся
ШсТзТ? пъТ И Реализа«ии интерфейсных функций (см
E2L ™ }- Эти ДиагРаммы служат основой для
последующего программирования микропроцессора "следую
^ИНТп6рфеЙСНОе спряжение прибора с микропроцессором
требует сравнительно небольших аппаратурных затрат для присое-
мТ«Т КЗНаЛ0В BB0*aTBbIB0*a данных микропроцессорной сис?е-
Фейсом n'noILT ЙнтеРФейса- А требуемые для управления интер-
?н «JL P n Ра НЫе сРедсТва так же- ^к и аппаратурные,
должны быть ориентированы на применение как для внешних так и
тГп™бЕНИУ°ЧеК С0ПРяжения интерфейса (интерфейсной
части прибора). Если микропроцессор управляет интерфейсной и
функциональной частями прибора, то точки сопряжения
функциональной части прибора с интерфейсом могут быть выделены
только программно по условиям разделения интерфейсных и прибор-
374
С
Магистраль интерфейса МЭК
7Y
^>
Интерфейсная часть
lz
Устройство приема - передачи, кодирования и декодирования сообщений
Микро-ЭВМ \7
ж
Аппаратная реализация
функций интерфейса-
Устройство параплельного ввода - йывода
7\ZS
1Z
Устройство параллельного ввода — вывода
^Г7\
Шина данных
чиг
<Н1 ^ <Ь
1 >
Шина адреса
Ж
ftlUl Ъ
]
Шина управления
VV
Оперативное
запоминающее
устройство
У\7
Постоянное
запоминающее
устройство
оо
Устройство
параллельного
ввода — вывода
л л
Функциональная часть
lz
Цифровые и аналоговые схемы функциональной части прибора
I
\>
ft
\7
Аналоговые выходы
Аналоговь1е входы •' Индикаторы
Рис. 13.7
Клавиатура
375
но-ориентированных программ. При этом должны быть тщательно
распределены приоритеты каждой из причин прерываний между
интерфейсом и функциональной частью прибора.
Для реализации интерфейса с микропроцессором нельзя вес-
пользоваться общими решениями. В каждом конкретном случае
необходимо учитывать реализуемые интерфейсные функции, здшы
применяемых приборов и микропроцессоров, элементную базу и пр.
В связи с дальнейшим развитием ИИС и расширением
использования средств вычислительной техники — микропроцессоров,
микро- и мини-ЭВМ разработчики ИИС стали выделять в составе
ИИС универсальное ядро — измерительно-вычислительный
комплекс (ИВК). Такое автоматизированное средство измерения а.
обработки информации предназначено для исследования (контроля,
испытаний) сложных объектов и представляет собой совокупность
программно управляемых технических средств (измерительных,
вычислительных, вспомогательных), имеющих, блочно-модульную
структуру, определенную организацию и связи, обеспечивающие
получение, преобразование, накопление, обработку и выдачу
измерительной, командной и другой информации в соответствующей
форме, в том^лисле для воздействия на объект исследования.
В состав ИВК по существу входят и программные средства.'
По сравнению с ИИС в ИВК не включают каналы, связи, ка-
налообразующую аппаратуру, первичные измерительные
преобразователи (датчики) ■ и устройства стимулирующих воздействий на
объект исследования. Однако ИВК не имеет фиксированной
структуры, а представляет собой. совокупность программно
управляемых измерительных, .вычислительных и вспомогательных средств.
Применение блочно-модульного по функциям и исполнению
принципа построения ИВК и наличие специальной организации
переключаемых связей между блоками позволяют на основе одного
ИВК реализовать некоторое конечное множество систем. Такая
гибкость структуры необходима, поскольку ИВК предназначены
для создания систем автоматизации измерительного
эксперимента и экспериментальных исследований новых образцов техники
или материалов, а также сложных инженерных сооружений.
Степень требуемой перестраиваемое™ структуры различна для
разных областей применения.
13.7. ОСОБЕННОСТИ ПОСТРОЕНИЯ
ЦИФРОВЫХ ОСЦИЛЛОГРАФОВ
Влияние автоматизации на технические возможности приборов удобно
проследить на примере цифровых осциллографов. Сравнительно небольшой опыт,
накопленный в этой области, уже позволяет сделать вывод о перспективности
таких приборов. Характеристики аналоговых осциллографов достигли в
настоящее время исключительно высокого уровня, особенно по ширине
воспроизводимой частотной полосы и чувствительности. Однако метрологические
возможности ЭЛТ и аналоговых каналов оказались недостаточными для решения
многих измерительных задач. Для повышения точности измерения параметров
376
|ериодичеоких сигналов в аналоговые приборы стали встраивать дополнитель-
яе цифровые блоки. Осциллографирование же однократных сигналов
продолжалось осуществляться с низкой точностью. Эта задача была решена только е
поением цифровых осциллографов.
Отметим их главную особенность: перевод измерительного сигнала в
цифровую форму позволяет использовать для его запоминания цифровые запоминаю-
|щие устройства. В этом случае появляется возможность обработки такого сиг-
шала, как сигнала периодического, а также отображения его на плоском матрич-
Йом экране. Основной недостаток цифрового осциллографа — ограниченная по-
*лоса пропускания, обусловленная относительно низким быстродействием
аналого-цифровых преобразователей и запоминающих устройств. Однако при иссле-
довании периодических сигналов стробоскопический метод преобразования
сигнала позволяет получить полосу, соизмеримую с полосой аналогового
осциллографа. Иногда строят комбинированные приборы, сочетающие аналоговые узлы,
(для получения быстродействия) и цифровые |(для обеспечения высокой
точности измерений).
Обобщенная структурная схема цифрового осциллографа изображена на?
рис. 18.8. Аналоговые измерительные сигналы вертикального и горизонтального-
каналов поступают на входное устройство, которое осуществляет согласование
^их амплитудных и мощностных характеристик с входными параметрами АЦП,-
После преобразования последовательность кодов исследуемых сигналов запн-
■сывается в запоминающее устройство, из которого они поступают в процессор*.
^для логико-математической обработки, или в устройство отображения для зна-
кографической индикации, или на внешние устройства и ЭВМ для дальнейшей
' регистрации и обработки.
Дискретные измерительные сигналы поступают непосредственно в
запоминающее устройство по линиям внешнего интерфейса или через специальный вход,
процессора. Сигналы синхронизации вырабатываются во входном устройстве
£ (при внутренней синхронизации) либо поступают на процессор от исследуемого
объекта (при внешней синхронизации). Запоминающее устройство цифрового
*(«
Вход Г
ВходХ
Входное
устройство
Аналого-
цифровой
преобразователь
Запоминающее
устройство
Осциплографический
индикатор
Внутриприборный Интерфейс
Дискретные
Измерительные
сигналы
Сигнал
синхронизации
Процессор
О
Внешний /\ 1\
интерфейс N^i г/
ЭВМ, регистратор
и другие внешние
устройства
[Команды от оператора
Рис.. 13.8
гтш
осциллографа 'предназначено для записи и хранения следующих видов
информации: кодов измерительных сигналов, промежуточных и окончательных
(результатов их обработки; масштабных н корректирующих коэффициентов;
символов используемого в осциллографическом индикаторе алфавита, всевозможных
меток, маркеров и другой служебной информации; программ обработки а
управления режимами. Соответственно выделяется: (Оперативное запоминающее
устройство, которое должно обладать высокой скоростью записи (частота
записи не менее частоты дискретизации АЦП); запоминающее устройство
служебной информации (ЗУСИ); запоминающее устройство программ (ЗУП).
Запоминающее устройство служебной информации предназначено для хранения
выводимой на индикацию числочбуквеаной информации. Начертание цифр, букв,
меток, знаков црн эксплуатации прибора обычно не меняются. Поэтому ЗУСИ
строят на постоянных запоминающих устройствах (ПЗУ). В качестве ЗУП
используют перепрограммнруемые запоминающие устройства большого объема,
в которые записываются программы для решения специальных задач. Ооцилло-
графнческнй индикатор индицирует осциллограммы измерительных сигналов,
знакографическую информацию, полученную в результате измерительных и
вычислительных процедур, всевозможные метки и маркеры.
Внутрнпрнборный интерфейс в значительной мере определяет гибкость
структуры цифрового осциллографа, возможность наращивания числа входных
устройств, АЦП, объема памяти, эффективности использования программных
средств для задания режимов логико-математической обработки сигналов, а
также скорость записи измерительных сигналов. Процессор осуществляет
синхронизацию и управление работой блоков, задание режимов, логнко-математнче-
скую обработку сигналов, связь цифрового осциллографа с внешними
устройствами н оператором. Процессор может выполняться с жестким нлн гибким
алгоритмом функционирования на основе аппаратных н программных средств. В
качестве элементной базы процессора используют логические схемы,
микропроцессорные наборы, микро- и мннн-ЗВМ.
В настоящее время разработаны универсальные цифровые осциллографы,
являющиеся то сути дела ооцнллографнческнми системами и. обеспечивающие
решение полного набора задач в предполагаемой области использования.
Процессор таких приборов обеспечивает всю логико-математическую обработку
сигналов, их документирование, задание режимов и другие функции, что
обеспечивается развитыми программными средствами. Выбор режима работы прибора
осуществляется с помощью структурного графа, подобного приведенному на
Рис. 13.9
378
|>йс. 13.9. Здесь в вершинах поставлены соответствующие физические блоки и
уз.лы, а ребра — возможные соединения блоков. Сплошные линии показывают
Гяути измерительной информации, штриховые—пути сигналов управления. Здесь-
йгакже: АС — аналоговые измерительные сигналы, Ф — фильтр, К-коммутатор,.
;Ан — анализатор уровня, УУ — устройство управления, У —усилитель, АЛУ —
арифметнческо-логическое устройство, П — память, И — индикатор, ДС—
дискретные измерительные сигналы. Например режим осциуыографнровання
периодических сигналов соответствует графу: АС, У, АЦП, И.
13.8. МЕТРОЛОГИЧЕСКИЕ ХАРАКТЕРИСТИКИ
ИНФОРМАЦИОННЫХ ИЗМЕРИТЕЛЬНЫХ
СИСТЕМ
Одним из центральных вопросов теории и практики
измерительных систем является их метрологическое обслуживание. Как
| и для любого средства измерений, конечная цель метрологичес-
, кого: обслуживания измерительных систем — обеспечение
заданного уровня точности измерений, что невозможно, в частности,.
■ без достоверной оценки погрешности измерений. На погрешность
'Измерений оказывают влияние:
свойства измерительной системы, отражаемые ее
метрологическими характеристиками;
условия эксплуатации, отображаемые характеристиками влия-
- ющих величин;
свойства объекта измерений, описываемые характеристиками
сигналов, параметры которых подлежат измерению, и другими-
характеристиками объекта измерений, влияЪщими на погрешность-
измерений (полные внутренние сопротивления источников сигна-
. лов и т. д.);
- метод измерейия и методы измерительных преобразований'
■'i внутри системы, порождающие методические погрешности;
алгоритм обработки результатов прямых измерений с помощью-
встроенного в измерительную систему вычислительного устрой-
: ства (рис. 13.10).
Большое разнообразие объектов, обслуживаемых ИИС, и
условий эксплуатации порождает многообразие измерительных
систем по их составу, структуре, принципу действия,
функциональным возможностям. Можно выделить три наиболее характерные
' Области применения измерительных систем: научные исследова-
' ния, испытания и контроль сложных изделий, управление техно-
", логическими процессами.
< Отличительные особенности ИИС для научных исследований
' состоят в повышенных требованиях к метрологическим характе-
: ристикам, большом разнообразии измеряемых величин,
развитости средств регистрации информации, большой емкости
оперативной и внешней памяти вычислительных устройств, сложности
"алгоритмов обработки результатов измерений,-повышенных тре-
'* бованиях к универсальности систем по охватываемым диапазонам
379
Погрешность измерений
Jj Алгоритмы обработки
результатов прямых
измерений
Характеристики
погрешности
алгоритмов
обработки *
Методы испытаний и контроля ИС и ее
компонентов — гарантия свойств ИС
Свойства ИС и ее
компонентов
Метрологические
характеристики ИС и ее
компонентов
Методы экспериментального олределенил
метрологических характеристик ИС
Характеристики влияющих величин
Условия эксплуатации ИС
Характеристики погрешности
измерений
Методы определения
Характеристик погрешности
измерений по исходным данным
л К 1\
Характеристики
методической
погрешности
измерений
Характеристики
объекта
измерений
Объект
измерений
Методы измерений и
преобразований сигналов в ИС
Рис. 13.10
измерения и видам измеряемых величин, возможности
самонастройки, адаптации системы. '
Используемые для испытания изделий ИИС делятся на две
«группы в зависимости от вида испытаний. К первой относятся
«системы испытаний опытных образцов, которые в значительной
адере приближаются к системам для научных исследований. В этой
труппе измерительные системы с фиксированным составом
входящих, в них средств измерений в '• значительной мере вытеснены
агрегатными измерительно-вычислительными комплексами с
изменяемой по количеству и составу используемых средств
измерений структурой. Число измерительных каналов в таких
системах достигает 2000, число разнотипных каналов — нескольких
десятков. Выполняется сложная обработка большого массива
информации. Ко второй группе относятся ИИС для испытаний
серийных изделий, которые отличаются от систем первой группы
меньшем количеством измерительных каналов (обычно не более
:200), меньшей сложностью обработки информации, но они более
стабильны по своему составу. Обычно с одной и той же вычис-
380
тельной частью работают несколько (по числу испытательных,
^гендов) измерительных частей системы.
;, В составе автоматических систем управления технологически-
"-ц процессами (АСУТП) ИИС отличаются большим числом из-
еряемых параметров, значительной разнесенностью в
пространнее точек, в которых осуществляется измерение, и большой про-
' яженностью проводных линий связи, индивидуальной привязкой^
^ технологическому объекту, развитостью устройств визуального-
Представления информации, применением в их составе специали-
ированных вычислительных устройств.
. Таким образом ИИС большей частью представляют собой
специфичные средства измерений, особенности которых не позволяют-
' использовать для них в неизменном виде опыт метрологического-
5 обеспечения измерительных приборов и . измерительных преобра-
; зователей. К числу этих особенностей-прежде всего относятся:
комплектация измерительной .системы как единого изделия из*
частей, выпускаемых резличными заводами, на месте эксплуатации.^
В результате отсутствует заводская нормативно-техническая
документация (технические условия), регламентирующая в частностк-
' метрологические требования к измерительным системам, как к еди-
.ному изделию, гарантируемые изготовителем;
; разнесенность на значительные расстояния (иногда до с-отеш
■километров) отдельных частей измерительной системы и, как след-
; ствие, различие внешних условий, в которых они находятся;
возможность развития, наращивания измерительной системы
fв процессе эксплуатации или возможность изменения ее состава-
\ (структуры) в зависимости от целей эксперимента, что по
существу исключает или затрудняет регламентацию требований к та-
^сим системам в отличие от обычных средств измерений
(измерительных приборов и т. д.), являющихся «завершенными»
изделиями на момент выпуска их заводом;
i размещение отдельных частей измерительной системы на
перемещающихся объектах. В результате одна (передающая) часть
':. системы может работать с различными другими (приемными)
г частями в процессе одного и того же цикла измерений по мере-
перемещения объекта. При выпуске и ери эксплуатации таких.
,; измерительных систем заранее неизвестны конкретные экземпля-
ь ры приемной и передающей частей, которые будут работать сов-
; местно, тем самым отсутствует «стабильный» объект, для
которого регламентируются метрологические требования;
включение первичных измерительных преобразователей в
состав технологического оборудования, что затрудняет контроль,
измерительной системы в целом.
Разработка инженерных методов решения вопросов метроло-
гического обеспечения измерительных систем и стандартизация-
этих методов^ находятся в стадии становления. Чтобы обеспечить
) выполнение конечной задачи, решаемой с использованием метро-
'логичёских характеристик измерительной системы (оценку
погрешности измерений), необходимо компенсировать отсутствие-
38Ь
норм на метрологические характеристики системы в целом. Такая
компенсация возможна тремя путями:
определением метрологических характеристик измерительной
системы расчетным путем по метрологическим характеристикам
составных частей системы;
экспериментальным определением метрологических
характеристик измерительной системы в целом для каждого ее экземпляра
индивидуально;
расчетом погрешности измерений по метрологическим
характеристикам' составных частей, минуя (явно) этап определения
метрологических характеристик измерительной системы в целом.
В общем случае в соответствии со стандартами для ИИС
нормируют следующий комплекс метрологических характеристик,
обеспечивающий использование расчетного метода определения
погрешности конечного результата измерений:
1. Характеристики систематической составляющей основной
погрешности измерительного канала: предел Дсд допускаемого
значения, математическое ожидание М[АС] и среднеквадратичес-
кое отклонение о"(Ас) систематической составляющей At основной
погрешности измерительного канала данного типа.
2. Характеристики случайной составляющей основной погреш-
яости измерительного канала: предел <тд(Д) допускаемого
значения среднеквадратического отклонения, номинальная
нормализованная автокорреляционная функция г^(Л) или номинальная
спектральная плотность S^ (<o) и пределы допустимых отклонений
от указанных номинальных функций случайной составляющей А
основной погрешности измерительного канала данного типа.
3. Предел Ьд допускаемого значения вариации выходного
сигнала измерительного канала данного типа.
4. Характеристики, отражающие взаимодействие
измерительного канала с объектом измерений.
5. Полное выходное сопротивление измерительного канала,
заканчивающегося измерительным преобразователем.
6. Динамическая характеристика измерительного канала: одна
яз номинальных функций связи между изменяющимися во време- ,
яи входным и выходным сигналами (передаточная функция,
импульсная весовая функция, переходная характеристика, ампли-
тудно- и фазочастотные характеристики и т. п.) и предел
допускаемого отклонения от указанной номинальной функции связи
или любая характеристика, позволяющая установить связь
изменяющихся входного и выходного сигналов.
7. Неинформативные параметры выходного сигнала
измерительного канала с измерительным преобразователем на выходе.
8. Номинальная функция влияния я|)н(|) и предел допускаемо- *
го отклонения от номинальной функции измерительного канала.
9. Метрологические характеристики, отражающие, взаимное
влияние канала на канал.
382 ~
Часть IV. ОСНОВЫ СТАНДАРТИЗАЦИИ
Глава 14. ГОСУДАРСТВЕННАЯ СИСТЕМА
СТАНДАРТИЗАЦИИ
14.1. ОСНОВНЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ
В ОБЛАСТИ СТАНДАРТИЗАЦИИ
В условиях научно-технической революции понятие стандартиза-
ция охватывает широкую область общественной деятельности,,
включающую в себя научные, технические, хозяйственные,
экономические, юридические, эстетические, политические аспекты. Во>
всех странах развитие государственного хозяйства, повышение эф- -
фективности производства, улучшение качества продукции, рост
3 жизненного уровня связаны с широким применением различных,
форм и методов стандартизации. Правильно поставленная стан-
- дартизация способствует развитию специализации и
кооперирования производства.
Исключительно благоприятные условия для полного
использования возможностей стандартизации обеспечивает социалистиче-
- екая система хозяйства. Развитие в СССР стандартизации на
государственном уровне, выработанные у нас принципиально новые
пути стандартизации, высокая экономическая эффективность or
внедрения стандартов отвечает задаче соединения достижений
s. технического прогресса с преимуществами социалистического,
строя.
По мере повышения требований к качеству выпускаемой
продукции и эффективности общественного производства, увеличения
объема и сложности производства роль стандартизации все более-
| возрастает.
В нашей стране действует государственная система
стандартизации (ГСС), объединяющая и упорядочивающая работы по»
стандартизации в масштабе всей страны, на всех уровнях
производства и управления на основе комплекса государственных
стандартов. ГСС включает в себя стандарты, содержащие
совокупность взаимосвязанных правил и положений, определяющих
основные понятия, цели и задачи стандартизации; организацию и>
методику планирования и проведения работ по стандартизации;,
порядок разработки, внедрения и обращения стандартов и других
нормативно-технических документов по стандартизации; порядок
:- внесения в них изменений; контроль за внедрением и соблюдением
стандартов; объекты стандартизации; категории и виды стандар-
383.
тов; правила построения, изложения, оформления и содержания
стандартов и др.
Основные понятия и термины в области стандартизации
разработаны с учетом рекомендаций международных организаций по
-стандартизации и. приняты многими странами, в том числе и СССР.
Стандартизация — установление и применение правил с целью
упорядочения деятельности в определенной области на пользу и
«при участии всех заинтересованных сторон, в частности для
достижения всеобщей оптимальной экономии при соблюдении условий
"эксплуатации (использования) и требований безопасности.
Стандартизация .основывается на объединенных достижениях иауки,
техники и передового опыта и определяет основу не только
настоящего, но и будущего развития и должна осуществляться
неразрывно с прогрессом.
Приведенное определение показывает многогранность деятель-
лости по стандартизации. Из него, в частности, следует, что,
будучи направленной на разработку обязательных для исполнения
<норм, правил и требований к продукции, стандартизация должна
обеспечить возможно полное удовлетворение интересов
производителя и потребителя, повышение производительности труда,
экономное расходование материалов, энергии, рабочего времени и
гарантировать безопасность при производстве и эксплуатации.
Объектами стандартизации являются изделия, нормы, правила,
требования, методы, термины, обозначения и т. п., имеющие
перспективу многократного применения в науке, технике,
промышленности, сельском хозяйстве, строительстве, на транспорте и в связи,
-в культуре, здравоохранении, других сферах народного хозяйства,
а также в международной торговле.
В последние десятилетия в СССР характерно
распространение стандартизации также на область управленческой и
организационно-методической деятельности. В зависимости от формы
руководства стандартизацией и сферы действия стандартов
различают государственную, национальную и международную
стандартизацию.
Государственная стандартизация — форма развития и
проведения стандартизации, осуществляемая под руководством
государственных органов по единым Государственным планам
стандартизации.
Национальная стандартизация — проводится в
масштабе"государства без государственной формы руководства.
Международная стандартизация *— проводится специальными
•международными организациями или группой государств с целью
облегчения взаимной торговли, научных, технических и
культурных связей.
Особое место в международной стандартизации занимают
работы, проводимые странами — членами ХЭВ в интересах их
развития.
384
Устанавливаемые при стандартизации нормы оформляются в
виде нормативно-технической документации по стандартизации —
стандартов и технических условий.
Стандарт — нормативно-технический документ по
стандартизации, устанавливающий комплекс норм, правил, требований к
объекту стандартизации и, утвержденный (принятый)-
компетентным органом. Стандарт разрабатывается на основе достижений
науки, техники, передового опыта и должен предусматривать ре-
. шения, оптимальные для общества. Стандарт может быть разра-
_ ботан как на магистральные предметы (продукцию, сырье,
образцы веществ), так и на нормы, правила, требования к объектам
организационно-методического и общетехнического характера
труда, порядок разработки документов, нормы безопасности, системы
управления качеством и др.
Технические условия (ТУ) — нормативно-технический
документ по стандартизации, устанавливающий комплекс требований
к конкретным типам, маркам, артикулам продукции. Технические
условия являются неотъемлемой частью комплекта технической
документации на продукцию, на которую они распространяются.
Стандарт Совета Экономической Взаимопомощи (СЭВ) —
нормативно-технический документ СЭВ по стандартизации,
фиксирующий результаты конкретной деятельности органов СЭВ по
стандартизации.
14.2. ЦЕЛИ И ЗАДАЧИ СТАНДАРТИЗАЦИИ
В условиях планового социалистического хозяйства
стандартизация направлена иа достижение следующих основных целей:
ускорение технического прогресса, повышение эффективности
общественного производства и производительности труда (в том
числе инженерного и управленческого); улучшение качества
продукции и обеспечение его оптимального уровня; совершенствование
организации управления народным хозяйством и установление
рациональной номенклатуры выпускаемой продукции; развитие
специализации в области проектирования и производства продукт
ции; рациональное использование производственных фондов;
экономию материальных и трудовых ресурсов; обеспечение охраны
здоровья населения и безопасности труда; развитие
международного экономического, технического и культурного сотрудничества;
создание условий для развития экспорта товаров, отвечающих
требованиям мирового рынка.
Ш соответствии с поставленными целями задачами и
направлениями стандартизации являются:
установление требований к качеству готовой продукции на
оснвве стандартизации ее качественных характеристик, а также
характеристик сырья, материалов, полуфабрикатов и
комплектующих изделий;
разработка и установление единой системы показателей
качества продукции, методов и средств контроля и'испытаний, а так-
'38S
же необходимого уровня надежности изделий с учётом их
назначения и условий эксплуатации;
установление норм, требований и методов в области
проектирования и производства с целью обеспечения оптимального
качества и исключения нерационального многообразия видов,
марок и типоразмеров продукции;
развитие унификации промышленной продукции как
важнейшего условия специализации производства, комплексной
механизации и автоматизации производственных процессов, повышения
уровня, взаимозаменяемости, эффективности эксплуатации и
ремонта изделий;
обеспечение единства и достоверности "измерений в стране,
создание государственных эталонов единиц физических величин и
совершенствование методов и средств измерений высшей точности;
установление единых систем документации, в том числе
унифицированных, используемых в автоматизированных системах
управления, установление систем классификации и кодирования
технико-экономической информации, разработка форм и систем
организации производства;
установление систем стандартов в области обеспечения
безопасности труда, охраны природы, и улучшения использования
природных ресурсов.
14.3. ВИДЫ И МЕТОДЫ СТАНДАРТИЗАЦИИ
Наряду со стандартизацией, осуществляемой в масштабах государства, в.
СССР широко используются:
отраслевая стандартизация, осуществляемая в отдельных отраслях
промышленности с целью обеспечения единства технических требований и норм к
продукции отрасли и создания условий для кооперации и специализации в этой
отрасли.
Под отраслью понимается совокупность предприятий и организаций
независимо от их территориального расположения и ведомственной
принадлежности, разрабатывающих и (или) изготавливающих определенные виды продукции,,
относящиеся к номенклатуре продукции, закрепленной за министерством,
являющимся ведущим в ее производстве (например, приборостроение,
промышленность средств связи);
республиканская стандартизация, проводимая в союзной (республике в целях
установления требований и норм иа продукцию, ие охваченную государственной
или отраслевой стандартизацией;
местная стандартизация, проводимая «а предприятиях (объединениях) и
устанавливающая требования, нормы и правила, применяемые только на
данном предприятии.
В зависимости от последующего влияния на развитие народного хозяйства
можно выделить три вида стандартизации, принципиально отличающиеся
подходом к установлению в стандартах соответствующих норм:
стандартизация по достигнутому уровню, устанавливающая показатели,
отражающие свойства существующей и освоенной в производстве продукции, и
таким образом фиксирующая достигнутый уровень производства. Такой подход
386
характерен при стандартизации показателей качества продукции массового
производства межотраслевого применения (радиокомпоненты, реле, крепежные
изделия, некоторые виды сырья и материалов и др.);
опережающая стандартизация, заключающаяся в установлении повышенных
по отношению к уже достигнутому на практике уровню норм, требований к
объектам стандартизации, которые согласно Прогнозам будут оптимальными в
последующее время. Прн этом в зависимости от реальных условий в стандартах
могут устанавливаться ступени качества, имеющие дифференцированные
показателя, нормы, характеристики и сроки их введения.
Таким образом, опережающая стандартизация ставит определенные задачи
перед разработчиками и (изготовителями продукции, побуждая их к
совершенствованию объектов стандартизации (конструкций, сырья, материалов,
технологических процессов), повышению производительностн труда н улучшению
качества.
При стандартизации конкретных видов промышленной продукции,'
состоящей из большого числа деталей, узлов, агрегатов, задачей является установление
таких требований к ней и ее компонентам (норм, показателей, характеристик),
которые обеспечивали бы необходимый для потребителя высокий уровень
качества конечного изделия. Понятно, что стандартизация показателей ш
характеристик конечного изделия может быть проведена на основе существующих
стандартов, отражающих достигнутый уровень производства входящих в него
материалов, деталей, сборочных единиц н др. Однако при подобном подходе к
стандартизации возможности целенаправленного управления качеством конечного
изделия и получения оптимальных решений ограничены;
комплексная стандартизация, при которой для оптимального решения
конкретной проблемы осуществляется целенаправленное и планомерно установление
и применение системы взаимосвязанных требований как к самому объекту
комплексной стандартизации в целом, так и к его основным элементам. Являясь
новым и одним из важнейших направлений в работах по стандартизации,
комплексная стандартизация призвана обеспечивать разработку и внедрение '
комплексов взаимосвязанных и согласованных стандартов, охватывающих
совокупность требований к объектам стандартизации: изделиям, их составным частям,
сырью, материалам, покупным изделиям, технологии изготовления, упаковке,
транспортировке и хранению, эксплуатации и ремонту. Кроме норм и
требований, относящихся к материальным объектам, комплексная стандартизация
охватывает также общетехнические нормы, системы документации, нормы
техники безопасности и охраны труда и т. п.
Примерами объектов комплексной стандартизации являются аппаратура и
оборудование для радиовещания и телевидения, аппаратура проводной связи,
аппаратура записи и воспроизведения звука и т. п. Основанная иа системном
подходе, комплексная стандартизация создает благоприятные условия для
планомерного развития соответствующих отраслей промышленности.
К современным методам осуществления комплексной стандартизации
относится разработка программ комплексной стандартизации наиболее важных видов
продукции в масштабах страны, отрасли, союзной республики. /Комплексная
стандартизация отдельных видов продукции осуществляется также в рамках
СЭВ. .
В зависимости от метода решения основной задачи различают несколько
форм стандартизации:
387
Симплификация — форма стандартизации, заключающаяся в простом
сокращении числа применяемых при разработке изделия или при его производстве
марок и сортиментов материалов, полуфабрикатов, комплектующих изделий и
т. п. до количества, /технически и экономически целесообразного, достаточного
для выпуска изделий с требуемыми показателями качества. Как правило, прн
снмплифнкации в объекты стандартизации .не вносят каких-либо существенных
технических усовершенствований. Являясь простейшей формой и начальной
стадией более сложных форм стандартизации, симплификация оказывается
экономически выгодной, так как приводит к упрощению производства, облегчает
материально-техническое снабжение, складирование, отчетность.
Унификация — рациональное уменьшение числа типов, видов и размеров
объектов одинакового функционального назначения. Объектами унификации
наиболее часто являются отдельные изделия, их составные части, детали,
комплектующие изделия, марки, материалов и т. п. Проводится унификация на основе
анализа и изучения конструктивных вариантов изделий, их применяемости,
путем сведения близких по назначению, конструкции и размерам изделий, их.
составных частей и деталей к единой типовой (унифицированной) конструкции..
При необходимости в конструкцию унифицируемых изделий и их элементов
вносят технические усовершенствования и доработки. Таким образом
устанавливается минимально необходимое для практики число типов, видов и типоразмеров
изделий, обладающих высокими показателями качества и полной
взаимозаменяемостью.
В настоящее время унификация является наиболее .распространенной и
эффективной формой стандартизации. Конструирование аппаратуры, машин и
механизмов с применением унифицированных элементов позволяет не только
сократить сроки разработки и- уменьшить стоимость изделий, но и повысить их
надежность, сократить сроки технологической подготовки и освоения производства.
Типизация — это разновидность стандартизации, заключающаяся в
разработке и установлении типовых решений (конструктивных, технологических,
организационных и т. п.) на основе наиболее прогрессивных методов н режимов
работы. Применительно к конструкциям типизация состоит в том, что некоторое
конструктивное решение (существующее или специально разработанное)
принимается за основное — базовое для нескольких одинаковых или близких по
функциональному назначению изделий. Требуемая же номенклатура и варианты
изделий строятся иа основе базовой конструкции путем внесения в иее ряда
второстепенных изменений и дополнений.
Типизация технологических процессов включает в себя создание типовых
процессов изготовления деталей, выполнения сборочных операций, методов
измерения н контроля и т. п. Типовой технологический процесс создается на
основе тщательного анализа технологии производства соответствующих изделий.
Агрегатирование — метод создания новых машин, приборов и другого
оборудования путем компоновки конечного изделия из ограниченного набора
стандартных и унифицированных узлов и агрегатов, обладающих геометрической и
функциональной взаимозаменяемостью.
'Возможность многократного применения элементов набора в различных
модификациях машин и приборов одного класса или близких по назначению
обеспечивает конструктивную преемственность прн создании новых изделий,
позволяет использовать освоенные в производстве узлы и агрегаты, значительно
сокращает трудоёмкость проектировании, изготовления и ремонта изделий, повы-
388
шает уровень взаимозаменяемости продукции, способствует специализации
предприятий, механизации н автоматизации производственных процессов, улучшает
качество продукции, а также облегчает перестройку производства прн переходе
предприятий на освоение новой продукции.
14.4. КАТЕГОРИИ И ВИДЫ СТАНДАРТОВ
Стандарты в Советском Союзе являются обязательными в
пределах установленной сферы их действия и подразделяются на
следующие категории:
Государственные стандарты Союза ССР — ГОСТ;
отраслевые стандарты — ОСТ;
республиканские стандарты союзных республик — РСТ;
стандарты предприятий — СТП.
Государственные стандарты обязательны к применению всеми
предприятиями, организациями и учреждениями союзного,
республиканского и местного подчинения во всех отраслях народного
хозяйства СССР и союзных республик. Они распространяются
преимущественно на объекты межотраслевого применения, нормы,
параметры, требования, показатели качества продукции, термины,
обозначения и др., необходимые для обеспечения единства и
взаимосвязи различных областей науки и техники, производства, а
также на продукцию массового и крупносерийного производства
широкого и межотраслевого применения. В частности, объектами
государственной стандартизации должны быть:
общетехнические и организационно-методические правила и
нормы (ряды номинальных частот и напряжений электрического
тока, предпочтительные числа, требования охраны природной
среды, рационального использования природных ресурсов и др.);
общие требования к продукции, имеющей межотраслевое
применение (по устойчивости к воздействиям внешней среды,
радиационной стойкости и др.);
основные эксплуатационные свойства и технические
характеристики групп однородной продукции, имеющей межотраслевое
применение (сырья, материалов, машин, приборов) и методы их
контроля;
межотраслевые требования и нормы техники безопасности и
производственной санитарии;
научно-технические термины, определения и обозначения; ■■
единицы физических величин, государственные эталоны
единиц, физических величин, методы и средства поверки средств
измерений, нормы точности и методики выполнения измерений,
правила государственных испытаний средств измерений;
системы конструкторской, технологической, управленческой
документации, формы и системы организации производства;
системы классификации и кодирования технико-экономической
информации.
Государственные стандарты утверждает Государственный
комитет по стандартам СССР (Госстандарт СССР).
380
Отраслевые стандарты обязательны для всех предприятий и
организаций данной отрасли, а также для предприятий и
организаций других отраслей, применяющих (потребляющих)
продукцию этой отрасли. Отраслевые стандарты
организационно-методического характера обязательны только для предприятий и
организаций министерства, их утвердившего.
Отраслевые стандарты устанавливают требования к продукции,
не относящейся к объектам государственной стандартизации и
необходимые для обеспечения взаимосвязи в производственно-
технической и организационно-управленческой деятельности
предприятий и-организаций отрасли. В частности, объектами
отраслевой стандартизации могут быть: изделия серийного и
мелкосерийного производства; конкретные виды продукции, общие
технические характеристики для которой установлены
государственными стандартами; детали и сборочные единицы, технологическая
оснастка и инструменты, сырье, материалы, полуфабрикаты,
технологические нормы и типовые технологические процессы
внутриотраслевого применения; нормы точности и методики выполнения
измерений.
Отраслевые стандарты могут ограничивать применение
государственных стандартов для используемой в отрасли
номенклатуры изделий, типоразмеров и т. п.
Отраслевые стандарты утверждает министерство, являющееся
ведущим в производстве данного вида продукции. Порядок
разработки и утверждения государственных и отраслевых стандартов
установлен в ГОСТ 1.2—68.
Республиканские стандарты обязательны для всех предприятий
и организаций республиканского и местного подчинения данной
союзной республики независимо от их ведомственной
подчиненности и устанавливают требования к продукции, выпускаемой
этими предприятиями и организациями, в том случае, когда на
нее отсутствуют государственные или отраслевые стандарты. При
отсутствии государственных или отраслевых стандартов на ту или
иную продукцию действие республиканских стандартов
распространяется и на предприятия союзного подчинения,
расположенные на территории союзной республики.
Номенклатура продукции, на которую утверждают
республиканские стандарты, устанавливается по согласованию с
Госстандартом СССР и с соответствующим ведущим министерством.
Республиканские стандарты утверждает Совет министров или Госплан
союзной республики.
Порядок разработки и утверждения республиканских
стандартов устанавливает ГОСТ 1.3—68.
Стандарты предприятия обязательны только для предприятия
(объединения), утвердившего данный стандарт. Стандарты
предприятия могут распространяться на составные части
разрабатываемых или изготавливаемых на предприятии изделий;
внутренние нормы и правила в области управления и организации
производства, управления качеством продукции; оснастку и инструмент,
390
типовые технологические процессы, методики измерений и
контроля.
Стандарты предприятия могут также ограничивать с учетом
особенностей данного предприятия применение номенклатуры
деталей, узлов, материалов, установленной стандартами других
категорий. На поставляемую предприятием продукцию стандарты
предприятия не разрабатываются.
В зависимости от назначения и содержания Государственная
система стандартизации устанавливает на продукцию стандарты
всех категорий следующих видов:
общих технических условий;
общих технических требований (технических требований);
параметров и (или) размеров;
типов, основных параметров и (или) размеров;
конструкции и размеров;
марок;
сортамента;
правил приемки;
методов контроля (испытаний, анализа, измерений);
правил маркировки, упаковки, транспортирования и хранения;
правил эксплуатации и ремонта;
типовых технологических процессов.
Общетехнические и организационно-методические стандарты
(на общие нормы, показатели качества, методы расчета и
проектирования, термины и определения, единицы физических величин,
системы, классификации и кодирования, требования к поставке,
требованиям к изготовлению и др.) на виды не подразделяются.
14.5. ОСНОВНЫЕ ПРИНЦИПЫ
СТАНДАРТИЗАЦИИ
Результаты стандартизации оцениваются теми изменениями,
которые она внесла в народное хозяйство, в развитие
научно-технического прогресса. Для того чтобы эти изменения были
положительными, т. е. чтобы стандартизация была эффективной, при
ее проведении необходимо соблюдение определенных принципов.
Основные из них и их краткие характеристики приведены ниже.
Целенаправленность и технико-экономическая целесообразность
означают, что проведение работ по стандартизации, разработка
любого стандарта должны быть обоснованы (потребностями
изготовителя, потребителя, ожидаемые технико-экономическим
эффектом и др.) и направлены на решение конкретных задач на
соответствующих уровнях производства и управления (государство,
отрасль, союзная республика, предприятие).
Научный подход и использование передового опыта
регламентированы ГОСТ 1.0—68, который устанавливает, что показатели,
нормы, характеристики и требования, включаемые в стандарт,
должны соответствовать передовому уровню науки и техники и
основываться ,на результатах научно-исследовательских и опыт-
391
но-конструкторских работ. Поэтому разработка всех видов и
категорий стандартов должна вестись с учетом и использованием
научных достижений в соответствующих областях, а в
необходимых случаях разработке стандартов должно предшествовать
проведение научно-исследовательских работ.
Прогрессивность и оптимальность стандарта следует из самой
сущности стандартизации, отраженной в ее определении. Новые
стандарты на продукцию должны не только отвечать
современным запросам, но и учитывать тенденции развития
соответствующих отраслей.
В стандартах наряду с типами и видами продукции, серийное
и массовое производство которых освоено, должны быть
предусмотрены новые, более прогрессивные нормы и требования к
продукции, опережающие достигнутый уровень производства,
устанавливаемые на основе обязательного использования
проверенных на практике отечественных и зарубежных открытий и
изобретений, опубликованных за последние десять лет до утверждения
стандарта.
При разработке стандартов необходимо стремиться получить
оптимальное сочетание устанавливаемых показателей, норм и
требований к продукции с затратами на их достижение, обеспечить
максимальный экономический эффект при минимальных затратах.
Необходимость взаимной увязки стандартов вытекает из
основных целей и задач стандартизации. Показатели, нормы,
характеристики, требования, устанавливаемые в стандартах,
разрабатываемых в СССР, должны также соответствовать стандартам СЭВ,
международным стандартам и учитывать рекомендации
международных организаций.
Комплексность стандартизации является одним из основных
принципов. Практика стандартизации привела к двум
направлениям ее развития: от частного к целому; от целого к частному.'
Первому направлению соответствует развитие стандартизации
снизу вверх: от сырья к готовой продукции, от общих
конструктивных деталей и элементов к машинам, приборам, аппаратам.
Оно характерно для тех изделий общего применения, которые
изготавливают на специализированных заводах массового
производства (электронные приборы, провода, крепежные и
установочные изделия, шестерни и др.).
Второе направление характеризует развитие стандартизации
сверху вниз, т. е. от стандартизации основных параметров
сложных объектов производства (приборов, систем, машин) к
стандартизации их элементов (агрегатов, узлов, деталей). Понятно, что
гарантией стабильного высокого качества конечного изделия здесь
может быть только комплексная стандартизация, проводимая в
соответствии с приведенным ранее определением.
Функциональная взаимозаменяемость стандартизованных
изделий — это свойство независимо изготовляемых деталей и
сборочных единиц занимать свое место в изделии без дополнительной
обработки. Функциональная взаимозаменяемость предполагает не
392
только возможность нормальной оборки, но и нормальную работу
изделия после установки в нем новой детали или другой
составной части взамен вышедшей из строя. Стандарты на продукцию
в необходимых случаях должны устанавливать нормы и
требования, обеспечивающие функциональную взаимозаменяемость
изделий.
Принцип предпочтительности используется при проведении
унификации, типизации, агрегатирования и разработке
стандартов на изделия широкого применения, решение задачи
рационального выбора и установления градаций количественных значений
параметров изделий (размеров, номиналов, масс и др.) и должен
основываться на использовании рядов предпочтительных чисел.
Установление на их основе рядов параметров
(параметрических рядов), с одной стороны, препятствует неоправданному
расширению номенклатуры и типоразмеров вновь создаваемых
изделий, а с другой, позволяет установить такие
технико-экономические характеристики изделий, которые соответствуют современным
требованиям, и учесть перспективы развития соответствующих
видов продукции.
В СССР действует система предпочтительных чисел,
установленная ГОСТ 8032—56. Предпочтительные числа и ряды
предпочтительных чисел (ряды Р). Применяются также
предпочтительные числа, построенные по рядам, принятым Международной
электротехнической "комиссией (ряды Е).
14.6. ОРГАНЫ И СЛУЖБЫ СТАНДАРТИЗАЦИИ
В СССР создана и успешно функционирует система органов и служ'б
стандартизации (рис. 14Л), проводящих работы по стандартизации (>в том числе и
в области метрологии и метрологического обеспечения) на' всех уровнях
управления народным хозяйством. Система построена по
территориально-отраслевому принципу и включает в себя: ,
общесоюзные органы стандартизации и их службы;
* органы и служ'бы стандартизации в отраслях народного хозяйства;
органы и службы стандартизации в союзных республиках.
Основные положения, регламентирующие номенклатуру и структуру органов
и служб стандартизации в стране, их компетенцию устанавливает ГОСТ 1.1—68.
Государственная система стандартизации. Органы и службы стандартизации.
Общесоюзным органом государственного управления, осуществляющим
руководство стандартизацией и метрологией в стране, является Государственный
комитет СССР по стандартам. Госстандарт СССР несет ответственность за
состояние и дальнейшее развитие стандартизации и за проведение единой
технической политики в области стандартизации и метрологии в стране. Главными
задачами Госстандарта СССР являются:
определение основных направлений развития и разработка
научно-методических и технико-экономических основ стандартизации и метрологии;
стандартизация основных показателей качества продукции, общих
требований к ее разработке, производству, приемке и методам (испытаний, организация
работы по аттестации качества промышленной продукции в стране;
14-10 393
Госстандарт СССР
Институты
х~х
Республиканские
управпения и центры
гтт
С
Министерства
Головные организации
X JL JL
Лаборатории Госнадзора
С
п^п
) .а
Предприятия
У / I 1 \
Рис. /4./
развитие унификации Промышленных изделий как важнейшего условия
специализации, комплексной механизации и автоматизации производства;
обеспечение единства и достоверности измерений в стране, укрепление и
развитие государственной метрологической службы и эталонной базы, создание
■новых и совершенствование существующих методов и средств измерений высшей
точности;
стандартизация методов и средств измерений, контроля и испытаний, а
также значений физических констант, аттестация стандартных образцов веществ ч
материалов;
организация и проведение государственных испытаний средств измерений;
государственный надзор за соблюдением стандартов и технических
условий, за состоянием и применением измерительной техники в отраслях
народного хозяйства.
В соответствии с этими задачами Госстандарт СССР выполняет следующие
функции:
разрабатывает проекты перспективных и годовых планов государственной
стандартизации (и представляет их на утверждение или утверждает), рассмат-
•394
ривает и согласовывает проекты планов отраслевой и республиканской
стандартизации;
осуществляет методическое руководство и координирует деятельность
министерств и ведомств в области стандартизации; ' • ;
разрабатывает и утверждает важнейшие стандарты и другие нормативно-
технические документы по стандартизации межотраслевого значения,
утверждает разработанные министерствами государственные стандарты;
устанавливает единицы физических величин, допускаемых к применению в
стране, разрабатывает, утверждает и хранит государственные эталоны
физических величин;
представляет в установленном порядке Советский Союз в международных
организациях по вопросам стандартизации и метрологии, координирует
деятельность советских организаций по этим вопросам в СЭВ и в других
международных организациях, контролирует выполнение министерствами
(ведомствами) обязательств СССР, вытекающих из решений органов СЭВ и других
международных организаций по стандартизации.
Руководство работами по стандартизации и их координацию Госстандарт
СССР осуществляет непосредственно или через свои'научно-исследовательские
институты, территориальные органы, а также через отраслевые и
республиканские головные и базовые организации по стандартизации.
Институты Госстандарта СССР разрабатывают научно-технические,
методические, экономические и правовые основы стандартизации и метрологического
обеспечения, подготавливают предложения по комплексной и межотраслевой
стандартизации, разрабатывают проекты стандартов и др.
Территориальные органы охватывают всю территорию страны и реализуют
функции и права Госстандарта СССР на закрепленной за ними территории.
Структура территориальных органов включает в себя:
республиканские управления Госстандарта СССР;
республиканские центры метрологии и стандартизации Госстандарта СССР
(РЦМС);
областные (краевые, автономных республик, межобластные) лаборатории
государственного надзора за выполнением стандартов и измерительной техникой
Госстандарта СССР (ЛГН).
Республиканское управление непосредственно руководит республиканским
центром метрологии и стандартизации и лабораториями государственного
надзора, а также координирует деятельность предприятий и учреждений системы
Госстандарта СССР, находящихся в республике.
Центры метрологии и стандартизации несут ответственность за
научно-методическое обеспечение развития стандартизации и метрологии в союзных
республиках, проводят научные исследования и осуществляют функции и права
лабораторий государственного надзора Госстандарта СССР иа закрепленной
территории.
Областные лаборатории государственного надзора за стандартами и
измерительной техникой отвечают за состояние и развитие стандартизации и
метрологического обеспечения на предприятиях и в организациях, расположенных иа
территории области.
Территориальным органом Госстандарта СССР предоставлено право
контроля за внедрением и соблюдением стандартов и состоянием измерительной техни-
14* 395
ки на предприятиях и в организациях, расположенных «а закрепленной
территории .независимо от их ведомственной подчиненности.
Службы стандартизации в Министерстве связи СССР. Успешное выполнение
задач по стандартизации во всех отраслях .народного хозяйства неразрывно
связано ие только с деятельностью Госстандарта СССР и его органов и служб, но
и с четкой работой отраслевых служб стандартизации, которые создаются в
системе каждого министерства. Систему службы стандартизации МС СССР
образуют:
отдел стандартизации Министерства, руководящий деятельностью
отраслевых служб стандартизации и -обеспечивающий координацию работ по
стандартизации в отраслевом масштабе. Этот отдел входит в состав Главного научно-
технического' управления (ГНТУ) министерства;
базовые организации по стандартизации (ЦНИИС —по проводной связи,
НИИР —по радиосвязи, радиовещанию и телевидению, Центральное
конструкторское бюро (ЦКБ) —по почтовой связи и телеграфу);
отделы (лаборатории, бюро) стандартизации в министерствах связи союзных
республик, НИИ, КБ, производственно-технических управлениях связи (ПТУС),
территориальных центрах управления магистральными связями и телевидением
(ТЦУМС), союзных узлах радиовещания (СУР).
Функции базовых организаций по стандартизации в соответствующих
подотраслях заключаются в следующем;
Научно-техническое и организационно-методическое руководство работами
по стандартизации в подотрасли и непосредственное выполнение наиболее
важных работ;
координация работ отделов по стандартизации, НИИ, КБ и предприятий,
а также контроль за выполнением этих работ;
изучение научно-технического уровня развития подотрасли и оценка
стандартизуемой продукции, изготовленной в СССР и за рубежом;
разработка научно-методических основ и направлений развития подотрасле-
вой стандартизации, а также предложений по направлениям развития
государственной стандартизации применительно к задачам дайной подотрасли а
отрасли связи в целом;
определение номенклатуры продукции, подлежащей охвату государствешы-
ми и отраслевыми стандартами, и разработка планов внедрения стандартов, а
подотрасли;
разработка научно-технической документации (НТД) по стандартизации и
подготовка предложений по своевременному пересмотру устаревших
документов;
проведение экспертизы разрабатываемой в отрасли научно-технической
документации, а также проектов изделий для оценки в иих уровня
стандартизации;
осуществление совместно с отделом по стандартизации ГНТУ
ведомственного контроля за внедрением и соблюдением стандартов и ТУ и организациои-
ио-методическое руководство деятельностью служб стандартизации иа
предприятиях отрасли.
Низшим звеном в системе служб стандартизации МС СССР являются
отделы (лаборатории, бюро) стандартизации в НИИ, КБ и иа предприятиях.
Силами этих отделов решаются следующие основные задачи:
396
разработка НТД иа производимую (разрабатываемую) продукцию и
подготовка предложений по их своевременному пересмотру;
проведение работ по стандартизации н унификации продукции и
технологической оснастки;
внедрение стандартов и ТУ и контроль за их соблюдением;
нормокоитроль всей технической документации, разрабатываемой иа
предприятии.
В состав типового отдела стандартизации производственного предприятия
входят бюро НТД, бюро |(групна) внедрения стандартов, бюро стандартизации
и унификации, группа технологической стандартизации и Служба нормокоитро-
дя.
14.7. ОРГАНИЗАЦИЯ СЛУЖБЫ ИНФОРМАЦИИ
ПО СТАНДАРТИЗАЦИИ
Обязанности информационного обеспечения в области стандартизации и
метрологии возложены на органы и службы стандартизации Госстандарта СССР
министерств и ведомств.
Госстандарт СССР ежегодно издает указатели «Государственные стандарты
СССР», содержащие перечни зарегистрированных в его органах государственных
и республиканских стандартов -и технических условий, информацию об их
изменениях, а также перечни иностранных и международных стандартов.
Непосредственное научно-методическое руководство работами по развитию
системы научно-технической информации-- в области стандартизации
осуществляет Всесоюзный научно-исследовательский институт технической информации,
классификации и кодирования \(0ВНИИКИ) Госстандарта СССР. Одной из
главных задач института является обеспечение народного хозяйства материалами о
достижениях отечественной и зарубежной науки в области стаидартизацин,
метрологии и контроля качества.
В существующем при ВНИИКИ 'Всесоюзном информационном фонде
стандартов и технических условий |(ВИФС) проводится учет и государственная
регистрация стандартов и технических условий: учитывает и хранит отечественную
и зарубежную нормативно-техническую документацию; обеспечивает
предприятия, организации и учреждения зарегистрированными стандартами и
техническими условиями по их разовым запросам. .Комплектование фондов стандартов и
технических условий в органах научно-технической информации по
стандартизации предприятий и организаций производится централизованно, через
магазины-коллекторы Госстандарта СССР.
Информацию об отраслевых стандартах и обеспечение ими
заинтересованных предприятий и организаций всех отраслей народного хозяйства
осуществляют министерва (ведомства), утвердившие эти стандарты.
Службы стандартизации предприятий организуют информацию
заинтересованных подразделений о действующих стандартах и технических условиях, их
изменениях, осуществляют регистрацию стандартов предприятия, обеспечивают
подразделения необходимой нормативно-технической документацией по
стандартизации.
397
14.8, ГОСУДАРСТВЕННЫЕ И ОТРАСЛЕВЫЕ
СИСТЕМЫ СТАНДАРТОВ
НА ОБЩЕТЕХНИЧЕСКИЕ НОРМЫ,
ТЕРМИНЫ И ОПРЕДЕЛЕНИЯ
На основе комплексной стандартизации в Советском Союзе
разработаны и успешно функционируют системы стандартов,
каждая из которых охватывает определенную сферу деятельности,
проводимой в общегосударственном масштабе или в определенных
отраслях народного хозяйства.
Нормати&но-техническую и организационно-методическую
основу производства конкретных видов, типов, групп продукции
составляют отраслевые системы стандартов, регламентирующие
технические характеристики, требования к качеству и надежности
изделий, способы и методы достижения и контроля этих
требований и др. Отраслевые системы включают также комплексы
стандартов на термины, определения и обозначения, применяемые в
отрасли.
К отраслевым системам относится, например, система
стандартизации изделий электронной техники. -За основу разработанной
системы стандартов (государственных и отраслевых) приняты
сферы их действия: проектирование, производство, применение и
эксплуатация. В соответствии с этим принципом в систему
стандартизации электронных приборов входят комплексы стандартов:
на конструкции и размеры приборов; на классы приборов; на сфе-
,ру проектирования приборов; на сферу производства приборов;
на сферу применения приборов; на поставку приборов; на
организационно-методическую документацию.
.я Стандарты на конструкции приборов включают габаритные и
присоединительные размеры, соответствующие международным
рекомендациям на корпуса, на технические требования,
конструкцию и размеры упаковки.
В комплекс стандартов на классы электронных приборов
входят стандарты на термины и определения, системы обозначений,
системы параметров, ряды параметров, методы измерений и
руководство по применению.
Определяющим стандартом, относящимся к сфере
проектирования, является «Положение о порядке проведения НИР и ОКР».
В сфере производства в отраслях, как правило, используются
единые государственные системы стандартов.
Единые государственные системы стандартов обеспечивают
единообразие и наивысшую эффективность проведения важнейших
вадов работ, общих для различных отраслей народного хозяйства.
Киодобным системам относятся Государственная система
стандартизации (ГСС), Единая система конструкторской
документации (ЕСКД), Единая система технологической подготовки
производства (ЕСТПП), Единая система технологической документации
(ЕСТД), Единая система классификации и кодирования технико-
398
экономической информации, Государственная система обеспечения
единства измерений (ГСИ), Государственная система стандартов
безопасности труда (ГССБТ) и др.
Рассмотрим некоторые из них.
Единая десятичная система классификации и
кодирования.технико-экономической информации. Огромные масштабы
производства в нашей стране, быстрый технический прогресс
промышленности и связанное с этим увеличение потоков информации,
циркулирующей в народном хозяйстве, требуют оперативной ее
обработки для планирования, учета и эффективного управления
деятельностью предприятий и отраслей. Этой цели служит
общегосударственная автоматизированная система сбора и
обработки*информации на базе государственной системы вычислительных
центров и единой автоматической сети связи страны.
Работа АСУ требует применения машинного языка, т. е.
перевода технико-экономической информации на язык цифровых
кодов. Для этого создана Государственная система классификации
и кодирования, включающая комплекс взаимосвязанных
общесоюзных классификаторов промышленной и сельскохозяйственной
продукции, конструкторской документации н технологический
классификатор.
Под системой классификации объектов технико-экономической
информации понимают совокупность правил, определяющих
распределение объектов по классам (классификационным группам)
на основании общих признаков, присущих объектам данного рода
и отличающих их от других. В основу классификации
закладывается логическая последовательность признаков, следовательно,
процесс кодирования предмета существенно упрощается, так как
он осуществляется в однозначном соответствии с принятой
системой классификации.
Кодирование технико-экономической информации на основе
системы классификации позволяет непосредственно по коду
объекта судить о его характеристиках (конструкциях, технологических,
эксплуатационных). Система классификации и кодирования
должна обеспечивать четкую систематизацию всех объектов по их
техническим и экономическим характеристикам с присвоением
каждому объекту единого кода.
Государственная система классификации и кодирования
объектов технико-экономической информации и ее стандартизации
создают необходимые предпосылки для унификации и
агрегатирования, способствуют развитию специализации производства,
значительно сокращают номенклатуру выпускаемых промышленностью
изделий, упрощают систему материально-технического снабжения
благодаря сокращению номенклатуры заказов оборудования,
запасных частей и инструмента и тем самым повышают
мобилизационную готовность промышленности.
Комплексы стандартов, составляющие системы классификации
и кодирования, обеспечивают единообразие методов
классификации и кодирования экономической информации, устанавливают
399
единство кодовых обозначений и создают условия для
стандартизации технической документации.
Разработанный у нас в стране Общесоюзный классификатор
промышленной и сельскохозяйственной продукции (ОКП)
внедряется в практику планирования, учета и управления народным
хозяйством. Он представляет собой систематизированный свод
кодов и наименований продукций-, выпускаемой в народном
хозяйстве, иначе, говоря, ОКП — это своеобразный словарь,
предназначенный для кодирования продукции (изделий) цифровыми
кодами для последующей машинной обработки.
Основой ОКП является Единая десятичная .система
классификации промышленной и сельскохозяйственной продукции
(ЕДСКП), утвержденная Госпланом СССР. В классификации
принят принцип последовательной конкретизации классификационных
группировок. Все множество. продукции подразделяется на
100 классов в соответствии с отраслями производства
(однородностью производственного процесса) и конкретизируется по
свойствам и назначению продукции. Затем каждый класс
подразделяется на 10 подклассов, каждый подкласс — на 10 групп,
каждая группа — на 10 подгрупп и каждая подгруппа — на 10 видов.
Каждый вид может включать до 9999 конкретных наименований
продукции (путем простого перечисления или использования
дополнительных признаков классификации). Перечисленные пять
ступеней деления продукции, образующие высшие
классификационные группы, используют для кодирования групповой
номенклатуры продукции.
Класс объединяет высшие классификационные группы и
конкретные виды продукции, характеризуемые комплексом
однородных признаков независимо от принадлежности этой продукции к
отрасли народного хозяйства. Например, в самостоятельные
классы выделена продукция тяжелого машиностроения (класс 41),
продукция станкостроения (класс 47) и т. д., поэтому, какая бы
отрасль народного хозяйства не производила эти изделия, их
будут классифицировать по соответствующему классу. Работу по
созданию классификаторов продукции проводят в ЧССР, ГДР (на
базе единой классификации, принятой СЭВ), США, ФРГ и
других странах.
Единая система конструкторской документации (ЕСКД). Эта
система устанавливает для всех организаций страны порядок
организации проектирования, единые правила выполнения и
оформления чертежей и ведения чертежного хозяйства, что упрощает
проектно-конструкторские работы, способствует повышению
качества и уровня взаимозаменяемости изделий и облегчает чтение
и понимание чертежей в разных организациях. Используя ЕСКД,
можно применять ЭВМ для проектированиям обработки
технической документации. Она будет способствовать развитию
кооперирования промышленности и использованию при
проектировании новых изделий отдельных частей и деталей ранее созданных
конструкций.
400
Весь комплекс утвержденных стандартов «Единая система
конструкторской документации», включающий свыше 200 стандартов,
делят на следующие основные части:
ГОСТ 2.001—70, 2.101—68...2.121—73. Основные положения
(виды изделий, виды конструкторской документации, стадии
разработки, требования к чертежам и т. д.);
ГОСТ 2.201—77. Классификация и обозначение изделий в
конструкторских документах;
ГОСТ 2.301—68...2.317—69. Общие правила выполнения
чертежей; -■'-_■
ГОСТ 2.401—68...2.427—75. Правила выполнения чертежей
различных изделий;
ГОСТ 2.501—68...2.503—74. Правила обращения
конструкторских документов (учет, хранение, дублирование, внесение
изменений) ;
ГОСТ 2.601—68...2.603—72. Правила выполнения
эксплуатационной и ремонтной документации;
ГОСТ 2.701—68...2J92—74. Правила выполнения схем;
■ ГОСТ 2.801—74...2.857—75. Правила выполнения строительных
документов и документов для судостроения;
прочие стандарты.
Следует отметить, что стандарты на эксплуатационную и
ремонтную документацию введены вцервые. Большое значение имеет
ГОСТ 2.116—71. ЕСКД- Карта технического уровня и качества
продукции, в котором зафиксированы достигнутый и
перспективный уровни качества изделий, а также показатели лучших
отечественных и зарубежных аналогов. Эту карту используют для
оценки изделий при их аттестации или при определении
целесообразности их дальнейшей модернизации или снятии с
производства. Сейчас.разрабатывают ЕСКД СЭВ.
Единая система технологической подготовки производства
(ЕСТПП). Важнейшим этапом обеспечения высокого качества
продукции является технологическая подготовка производства
(ТПП).
В процессе изготовления изделий производится доводка их
качества. Современному объекту производства свойственно
значительное количество, изменений и модификации конструкции и
технологии изготовления, т. е. практически работы по
технологической подготовке не прекращаются до смены объекта производства.
Иначе говоря, подготовка производства является непрерывным
процессом.
В Технологической подготовке производства есть круг общих
вопросов, не зависящих от отраслевой принадлежности
предприятий, например методы технологической классификации и
кодирования деталей, сборочных единиц, технологических процессов,
оборудования, оснастки, инструмента, формы конструкторской и
технологической документации (с учетом возможности применения
вычислительной техники) и др.
401
/
Единая система подготовки производства включает комплекс
стандартов, устанавливающих современные методы и средства
организации управления и решения задач технологической
подготовки производства, и решает следующие задачи:
технологический анализ изделия;
организационно-технологический анализ производства;
планирование, учет и управление ТПП;
разработка комплекса технологических процессов;
построение системы контроля качества;
проектирование и изготовление средств производства;
разработка нормативной базы производства;
отладка технологических процессов, оборудования и оснастки.
Как единая система, ЕСТПП выдвигает ряд требований к
другим общетехническим и отраслевым системам, таким, как
классификация и кодирование элементов ТПП; построение системы
информации; типизация и стандартизация средств и
технологические процессов основного и вспомогательного производства;
стандартизация правил оформления технологической и
организационно-технической документации. Последнее регламентируется
стандартами Единой системы технологической документации
(ЕСТД).
Единая система технологической документации представляет
собой комплекс государственных стандартов, устанавливающих:
формы документации общего назначения (маршрутная карта
технологического процесса, сводная подетально-технологическая
спецификация, карта эскизов, схем и наладок и др.|;
правила оформления технологических процессов и формы
документации для процессов литья, раскроя и нарезания заготовок,
механической и термической обработки, сварочных работ,
процессов, специфичных для отраслей радиотехники, электроники и др.
Существует тесная связь между ЕСТД и ЕСКД. Эти системы
играют большую роль в улучшении управления производством,
повышении его эффективности, во внедрении, автоматизированных
систем управления и т. д.
Государственная система обеспечения единства измерений
(ГСИ). На. современном этапе научно-технического прогресса
измерительная информация нужна практически во всех областях
человеческой деятельности: научной; производственной;
экономической; международного сотрудничества.
Правильные, точные и достоверные измерения обеспечивают
соответствие выпускаемой" продукции требованиям стандартов,
техническим условиям и другой нормативно-технической
документации. Таким образом измерения лежат в самой основе
производства и в огромной мере определяют возможность получения
качественной' продукции.
Массовость измерений, огромное разнобразие измеряемых
физических величин, методов и средств измерений, применяемых в
народном хозяйстве, потребовали разработки в рамках ГСС
единой системы метрологического обеспечения разработки, производ-
402 ~
ства, испытаний и эксплуатации продукции, научных
исследований и других видов деятельности во всех отраслях народного
хозяйства СССР.
Само понятие метрологическое обеспечение определяется как
«установление и применение научных и организационных основ,
технических средств, правил и норм, необходимых для
достижения единства и требуемой точности измерений».
При этом единство измерений означает такое "их состояние,
при котором результаты измерений выражены в узаконенных
единицах, и погрешности измерений известны с заданной
вероятностью.
Научной основой метрологического обеспечения является
метрология — наука об измерениях, методах и средствах
обеспечения их единства и способах достижения требуемой точности.
В единую Государственную систему метрологического
обеспечения народного хозяйства входят:
система государственных эталонов единиц физических
величин, обеспечивающая воспроизведение единиц с наивысшей
точностью;
система передачи размеров единиц физических величин от
эталонов ко всем средствам измерений с помощью образцовых
средств измерений;
система разработки, постановки на производство и выпуска
в обращение рабочих средств измерений, обеспечивающих
требуемую точность характеристик продукции, технологических
процессов и других объектов в сфере материального производства,
при научных исследованиях и других видах деятельности;
система обязательных государственных испытаний средств
измерений «44», предназначенных для серийного или массового
производства и ввоза их из-за границы партиями,
обеспечивающая единообразие средств измерений при разработке и выпуске
в обращение;
система государственной и ведомственной поверки или
метрологической аттестации средств измерений, обеспечивающая
единообразие средств измерений при их изготовлении, эксплуатации
и ремонте;
система стандартных образцов состава и свойств веществ и
материалов, обеспечивающая воспроизведение единиц величин,
характеризующих состав и свойства веществ и материалов;
система стандартных справочных данных о физических
константах и свойствах веществ и материалов, обеспечивающая
достоверными данными научные исследования, разработку
технологических процессов и конструкций изделий, процессов получения
и использования материалов.
Основными целями и конечным результатом метрологического
обеспечения являются:
повышение качества продукции, эффективности управления
производством и уровнем автоматизации производственных
процессов;
403
обеспечение" взаимозаменяемости деталей, узлов и агрегатов,
создание необходимых условий для кооперирования производства
и развития специализации;
повышение эффективности научно-исследовательских и опытно-
конструкторских работ, экспериментов и испытаний;
обеспечение достоверного учета и повышение эффективности
использований материальных ценностей и энергетических
ресурсов;'
повышение эффективности мероприятий по профилактике,
диагностике и лечению болезней, нормированию и контролю условий
труда и быта людей, охране окружающей среды, оценке и
рациональному использованию природных ресурсов;
повышение уровня автоматизации управления транспортом и
безопасности его движения;
обеспечение высокого качества и надежности связи.
Общие, единые правила и нормы метрологического
обеспечения устанавливаются в стандартах Государственной системы
обеспечения единства измерений (ГСИ). -Основными объектами
стандартизации ГСИ являются:
единицы физических величин;
государственные эталоны и общесоюзные поверочные схемы;
методы и средства поверки средств измерений;
номенклатура нормируемых метрологических характеристик
средств измерений;
нормы точности измерений;
способы выражения и формы представления результатов
измерений и показателей точности измерений;
методика выполнения измерений;
методика оценки достоверности и формы представления
данных о свойствах веществ и материалов;
требования к стандартным образцам состава и свойств
веществ и материалов;
организация и порядок проведения государственных испытаний,
поверки и метрологической аттестации средств измерений,
метрологической экспертизы нормативно-технической, проектной,
конструкторской и технологической документации, экспертизы и
аттестации данных о свойствах веществ и материалов;
термины и определения в области метрологии.
ГОСТ 1.25—76 регламентирует конкретное содержание
метрологического обеспечения на различных уровнях управления и
производства (Госстандарт СССР, Министерства, предприятия),
осуществляемое как сотрудниками метрологических служб, так и
производственным инженерно-техническим персоналом. К основным
процедурам, проводимым в рамках метрологического обеспечения
предприятия (организации) при разработке, производстве,
испытаниях и эксплуатации продукции, следует отнести:
анализ состояния измерений, разработку и осуществление на
его основе мероприятий по совершенствованию и упорядочению
измерительного дела на предприятии;
404
установление рациональной номенклатуры измеряемых
параметров и оптимальных норм точности измерений;
создание и внедрение современных методик выполнения
измерений и средств измерений, испытаний и контроля; выбор
рациональной номенклатуры средств измерений для проведения,
измерительного эксперимента, контроля и управления;
проведение метрологической экспертизы, конструкторской,
технологической и нормативно-технической документации для
обеспечения выполнения требований соответствующих стандартов
ГСИ и отраслевых стандартов, норм и требований, вытекающих
из задач метрологического обеспечения;
контроль за соблюдением метрологических правил и требова- -
яий при проведении научных исследований и на всех стадиях
разработки, производства и испытаний изделий.
Сеть государственных и ведомственных метрологических
органов, осуществляющих деятельность, направленную на обеспечение
единства и точности измерений в стране (т. е. метрологическое
обеспечение), образует метрологическую службу, структура
которой аналогична структуре органов и служб по стандартизации.
Глава 15. МЕЖДУНАРОДНАЯ СТАНДАРТИЗАЦИЯ
Международное разделение труда и связанная с этим
международная торговля, научно-техническое сотрудничество потребовали
достижения международных соглашений и разработки
международных технических документов, нормативные требования которых
имели бы однозначное значение и для изготовителя, и для
потребителя. В этих документах должны содержаться размерные
характеристики, технические требования, методы и условия
испытаний, точные определения величин, которые следует измерять,
сведения о приборах, с помощью которых производятся
измерения, данные о точности этих^ приборов и методах их поверки.
Кроме того, в этих документах должны быть указаны требования
к качеству продукции и исходного сырья, методы определения
качества, а также достоверные сведения о всех материалах и
'веществах, которые используются в процессе производства.
В соответствии с этими сложными и многосторонними
требованиями в настоящее время в сферу международной
стандартизации входят по крайней мере четыре самостоятельных, жр
взаимосвязанных аспекта: стандартизация типоразмеров, методик
испытаний и технических требований; метрология и измерительная
техника; контроль качества; служба обеспечения исследователей,
конструкторов и технологов достоверными данными о физико-
химических, механических и всех прочих свойствах веществ и
материалов (стандартными справочными данными).
405
В развитии международной стандартизации заинтересованы
не только страны с развитой экономикой, но и развивающиеся
страны, которые только начинают создавать свою национальную
экономику.
В международной стандартизации участвует ряд организаций:
Международная организация по стандартизации (ИСО),
Международная электротехническая комиссия (МЭК), Европейская
организация по контролю качества (ЕОКК), Международная
организация законодательной метрологии (МОЗМ), Международное
бюро мер и весов (МБМВ) и др. Международные стандарты и
рекомендации этих организаций, формально не являясь
обязательными еормативными документами, фактически в
современных условиях широкого развития научно-технического и
экономического сотрудничества между странами соблюдаются всеми
заинтересованными сторонами в той мере, в какой это
определяется их потребностью.
Активную работу в области международной стандартизации в
странах социалистического содружества проводит Совет
Экономической Взаимопомощи и его Международный институт
стандартизации. Разработанные и утвержденные в установленном по-,
рядке, стандарты СЭВ имеют силу государственных стандартов
для стран — членов СЭВ (например, СТ СЭВ 1052—78.
Метрология. Единицы физических величин).
15.1. МЕЖДУНАРОДНАЯ ОРГАНИЗАЦИЯ
ПО СТАНДАРТИЗАЦИИ
Международная организация по стандартизации (ИСО)
заменила существовавшую до второй мировой войны Международную
организацию ОСА и начала официально функционировать с
1947 г., когда был утвержден Устав ИСО. В Уставе назначение
ИСО определено следующим образом:
. «Целью Организации является содействие развитию
стандартизации в мировом масштабе для облегчения международного
товарообмена и взаимопомощи, а также для расширения
сотрудничества в области интеллектуальной, научной, технической и
экономической деятельности».
В частности, для достижения этого она может:
принимать меры для облегчения координации и унификации
национальных стандартов и с этой целью издавать нужные
рекомендации;
устанавливать международные стандарты;
по возможности способствовать и облегчать разработку новых
стандартов, содержащих общие правила, одинаково применяемые
как в национальном, так и в международном масштабе;
организовывать обмен информацией о работе своих
Комитетов — Членов;
сотрудничать с другими международными организациями,
406
заинтересованными в смежных вопросах, в частности по их
просьбе изучать вопросы, относящиеся к стандартизации.
Международная организация по стандартизации является
наиболее представительной из всех организаций, работающих в этой
области.
Членами ИСО являются национальные организации по
стандартизации. Каждая страна может быть представлена в ИСО
только одной организацией. Члены ИСО согласно Уставу
именуются Комитетами — Членами; в настоящее время в ИСО
входят 89 стран (из них 72 действительных члена и 17 Членов-крр;
респондентов).
Категория Членов-корреспондентов введена с 1964 г. по
решению Совета ИСО. Членами-корреспондентами ИСО могут быть
страны, которые не имеют своих национальных организаций по
стандартизации (развивающиеся страны). В настоящее время
Членами-корреспондентами являются такие страны, как Барбадос,
Камерун, Либерия, Исландия, Кувейт, Мадагаскар, Мозамбик,
Оман, Тунис, Ливан и др.
Функции организаций по стандартизации в этих странах
обычно выполняют правительственные органы или другие организации,
обратившиеся в ИСО с просьбой о приеме их в качестве Членов-
корреспондентов. Член-корреспондент имеет право получать
информационную литературу, а также рекомендации и стандарты
ИСО (бесплатно). Представителям стран
Членов-корреспондентов дано право участвовать в заседаниях технических комитетов
ИСО, в качестве наблюдателей.
Высшим законодательным органом ИСО является общее
собрание представителей всех национальных организаций по
стандартизации Комитетов — Членов. Это собрание, именуемое
Генеральной Ассамблеей, решает наиболее важные вопросы
деятельности ИСО и определяет ее политику.
Рабочими органами "ИСО по созданию международных
стандартов являются технические комитеты (ТК), подкомитеты и
рабочие группы (РГ). Технические комитеты состоят из
представителей Комитетов — Членов, пожелавших участвовать в их
работе; они создаются Советом ИСО при соблюдении следующих
условий:
если хотя бы один из Комитетов — Членов ^вносит
предложение о создании нового ТК;
если не менее пяти Комитетов — Членов согласятся активно
участвовать в его работе;
если большинство Комитетов — Членов дадут согласие на
создание нового ТК. - •
Если после этого Совет ИСО сочтет необходимым создание
нового ТК, то он утверждает eгo^ название и определяет область
работы.
Каждый Комитет — Члей, определяет статус своего участия в
работе каждого ТК в зависимости от степени заинтересованности
в тематике соответствующего ТК.
407
В технических комитетах с обширной тематикой создаются
подкомитеты (ПК), а также рабочие группы (РГ), в которых
рассматриваются узкие вопросы.
На 1 января 1982 г. в составе ИСО насчитывалось 162 ТК и
более двух тысяч ПК и РГ.
Проекты стандартов разрабатываются ТК в соответствии с
(программами их работ, принимаемыми Комитетами — Членами
каждого ТК в той области деятельности, которая утверждена
Советом ИСО для соответствующего4 технического, комитета.
Активность работы ТК, характеризуемая количеством выпущенных ими
документов, различна.
VIII сессия Генеральной Ассамблеи ИСО приняла решение о
прекращении выпуска международных рекомендаций ИСО и
переходе к разработке международных стандартов. Согласно
решению Совета ИСО для принятия проекта стандарта в качестве
международного необходимо одобрение его 75% Комитетов — Членов,
участвовавших \в голосовании. До принятия этого решения Советом
ИСО было утверждено более 1700 международных рекомендаций.
, Международная организация по стандартизации через свои
ТК поддерживает связи более чем с 300 экономическими и
техническими международными, правительственными организациями.
Большинство стран — членов ИСО активно участвуют в
работе этой организации, поскольку она дает большой экономический
эффект. Развитые страны стремятся возглавить секретариаты
технических комитетов, так как получают большие преимущества в
выборе объектов международной стандартизации. Это позволяет
влиять на рынки сбыта, на экономику других стран, на
техническую политику ИСО," а также защищает национальные интересы
и позволяет проводить согласованную политику определенных
групп стран. По этим причинам крупные капиталистические
страны стремятся руководить работой ТК. Так, Великобритания ведет
секретариаты 32 технических комитетов, Франция — 28, США — 15.
В настоящее время Советский Союз воглавляет секретариаты
10 технических комитетов, 32 подкомитетов и 13 рабочих групп.
СССР активно участвует в работе 133 технических комитетов, а
в 20 ТК участвует в качестве наблюдателя. Деятельность СССР
в ИСО, имеющая тенденцию к дальнейшему расширению,
позволяет создавать благоприятные условия для расширения экспорта
продукции.
Учитывая важность дальнейшего углубления и
совершенствования работ по международной стандартизации, в Советском
Союзе создан Советский национальный комитет для участия в
Международной организации по стандартизации (СовИСО).
СовИСО, в состав которого вошли представители ведущих
министерств и ведомств, должен вырабатывать единую техническую
политику нашей страны в ИСО, максимально использовать опыт
зарубежной стандартизации в интересах -развития всех отраслей
промышленности Советского Союза.
408
15.2. МЕЖДУНАРОДНАЯ
ЭЛЕКТРОТЕХНИЧЕСКАЯ КОМИССИЯ
Старейшая организация по международному сотрудничеству
в области стандартизации МЭК формально была утверждена в
1906 г. в Лондоне. -
Международная электротехническая комиссия является в
настоящее время основным международным органом в области,
стандартизации в электротехнике и радиоэлектронике. Одновременное
существование двух международных организаций по
стандартизации (ИСО и МЭК) вполне оправданно. Если сфера
деятельности ИСО распространяется на все отрасли промышленного и
сельскохозяйственного производств, то область распространения МЭК
ограничивается лишь двумя отраслями. Однако изделия этих двух
отраслей, применяемые в подавляющем большинстве отраслей
народного хозяйства, нуждаются в постоянном повышении уровня
их стандартизации.
Устав МЭК определяет основную задачу комиссии в
содействии координации национальных стандартов в области
электротехники, радиоэлектроники и связи. Рекомендации, издаваемые
МЭК, содержат точки зрения стран — членов МЭК. Хотя
рекомендации МЭК не являются обязательными документами, они
могут быть использованы при разработке национальных
стандартов, причем степень их применения устанавливается самими
странами. Помимо стандартизации, МЭК осуществляет работы'по
международной сертификации изделий электронной техники. Она
сотрудничает с 52 международными организациями.
С 1975 г. рекомендации МЭК получили статус международных
стандартов.
Членами МЭК в настоящее время являются 44 страны,
национальные комитеты - которых дали согласие подчиняться Уставу
МЭК и Правилам процедуры этой комиссии.
Для участия в работе МЭК любая страна создает
национальный комитет, представляющий ее в Комиссии. Каждая страна
имеет в МЭК один голос.
Международной электротехнической комиссией руководит
Совет МЭК, который собирается не реже одного раза в год.
Досрочный созыв Совета осуществляется по требованию не менее
четырех' представителей национальных комитетов или Президента
МЭК.
Международные стандарты разрабатываются ТК,
создаваемыми Советом МЭК.
Новые ТК создаются в МЭК по мере того, как возникают
новые направления в электротехнике и радиоэлектронике и
расширяется номенклатура изделий и материалов, включаемых в
сферу международной торговли.
На раннем этапе деятельности МЭК основное внимание уде-
'лялось разработке международных нормативно-технических
документов на изделия сильноточной техники и общетехнических стан-
409
дартов (терминология, системы единиц, графические обозначения
и т. п.). Отработанная МЭК система единиц была в последующем
пеложена в основу электрических единиц системы СИ. В перибд
между первой и второй мировыми войнами МЭК разработано
25 рекомендаций по единицам измерений, графическим
обозначениям для схем сильноточной аппаратуры, высоковольтной
коммутационной аппаратуре, цоколям и патронам осветительных ламп
и т. п. Первое издание международного электротехнического
словаря (1938 г.) содержало определение 1800 терминов на восьми
языках. '
Если до .60-х годов деятельность МЭК главным образом
охватывала промышленные изделия, то в последующие годы все
большее внимание уделялось электробытовым приборам. Такое
изменение направления работ явилось следствием все более широкого
потребления электрической энергии в быту, что значительно
увеличило объем торговли электробытовыми приборами на мировом
рынке. В последующие годы и до настоящего времени в
деятельности МЭК все больший вес имеют работы по электронике и
дальней связи. Так, за период с 1947 г. до 1971 г. "было создано
45 технических комитетов и подкомитетов по электронной
аппаратуре, электрорадиоэлементам, радиопередающей и радиоприемной-
аппаратуре, ядерному приборостроению,
контрольно-измерительной аппаратуре, медицинской аппаратуре и системам управления.
Технические комитеты МЭК по тематике проводимых ими
работ могут быть разделены на десять групп:
общетехнические вопросы, терминология, обозначения,
величины и единицы;
двигатели и электрические машины;
линии передач и их оборудование;
кабели и провода;
электрооборудование;
бытовые электроприборы и освещение;
измерительные приборы, системы управления промышленными
предприятиями;
изоляция;
источники питания;
радиосвязь, радиооборудование и электронная аппаратура.
В настоящее время в МЭК действует около 200 ТК и ПК-
Проекты стандартов, разрабатываемых ТК, считаются
принятыми, если лротив их принятия проголосовали не более 1/5
национальных комитетов.
Число стандартов, издаваемых МЭК, постоянно растет. Так,
если в 1960 г. их было 120, в 1971 г. — около 600, то в настоящее
время действует более 1350. Необходимо отметить, что многие
стандарты МЭК, относящиеся к наиболее прогрессивным отраслям
техники, многократно пересматривались с тем,, чтобы они
соответствовали современному научно-техническому уровню. Темпы
работы МЭК характеризуются большим ростом объема выполняемых
работ (на 15...17% ежегодно), что является следствием
постоянно
ного роста международной торговли изделиями электротехники.; и
электроники. ■ - '"
Сотрудничество МЭК с ИСО обеспечивается путем
установления прямых связей между ТК этих двух организаций: 35
технических комитетов МЭК взаимодействуют с 43 техническими
комитетами ИСО.
Советский Союз участвует в работе МЭК через Советский
комитет МЭК (СовМЭК), действующий при Госстандарте. Наша
страна участвует во всех технических комитетах и подкомитетах
МЭК силами 98 головных (базовых) организаций по
стандартизации.
Стандарты МЭК используются при разработке яовых и
пересмотре действующих государственных стандартов. Одновременно
ведутся работы по внедрению отечественных^ требований в
международные стандарты МЭК. Благодаря этому государственные и
отраслевые стандарты по электротехнике и электронике
значительно приближены к соответствующим стандартам МЭК. Так, в
большом числе государственных и отраслевых стандартов нашли
полное или частичное отражение стандарты МЭК. Ряд
стандартов МЭК был разработан ло основе советских стандартов.
Стандарты МЭК, как правило, применяют при экспортных
поставках электротехнического оборудования и электронных
изделий; их учитывают также при аттестации продукции на
государственный Знак качества.
Кроме ИСО и МЭК существует ряд других международных
организаций, работа которых связана со стандартизацией в
области радиотехники и связи. Для специалистов в области
радиоэлектроники наибольший интерес представляет Международный союз
электросвязи (МСЭ). В него входят два международных
консультативных комитета: по радио — МККР, по телефонии и
телеграфии — МККТТ- МККР,, в частности, занимается распределением
частот и стандартизацией в области обмена телевизионными
программами.
15.3. МЕЖДУНАРОДНАЯ ОРГАНИЗАЦИЯ
ЗАКОНОДАТЕЛЬНОЙ МЕТРОЛОГИИ
Эта организация существует с 1956 г. и в настоящее время
объединяет 46 стран. Ее основной задачей является установление
единства измерений в международном масштабе для обеспечения
сопоставимости результатов измерений и исследований,
проводимых разными странами, для достижения единообразия
технических характеристик изделий, свойств веществ, материалов и другой
продукции, являющимися предметом товарообмена между
государствами. МОЗМ разрабатывает рекомендации по оценке
погрешностей измерений, метбдам измерений, общим вопросам теории
измерений, методам поверки средств измерений, терминологии,
условным обозначениям и т. п. Кроме того, МОЗМ является
научно-техническим Центром по обмену информации о деятельности
411
национальных организаций по надзору за средствами измерений.
Высшим органом этой организации является Международная
конференция по законодательной метрологии, а оперативную
работу выполняет Международное бюро законодательной
метрологии (МБЗМ). Проекты международных рекомендаций по
вопросам законодательной метрологии разрабатываются
специализированными рабочими органами стран, входящих в МОЗС. Эти
органы, названные секретариатами-докладчиками, утверждаются
Международной конференцией.
Практическая ^деятельность по обеспечению единства
измерений в международном масштабе осуществляется Международным
бюро мер и весов (МБМВ). МБМВ имеет научные лаборатории,
размещенные на интернациональной территории в г. Севр
(Франция). Основной задачей этого бюро является хранение и
поддержание международных эталонов различных, единиц физических
величин и сличение с ними национальных эталонов.
15.4. СТАНДАРТИЗАЦИЯ,
ПРОВОДИМАЯ В РАМКАХ СЭВ
Главная экономическая задача СЭВ — содействовать
планомерному развитию народного хозяйства, ускорению
экономического и технического прогресса в странах — членах СЭВ, повышению
уровня индустриализации стран с менее развитей
промышленностью, непрерывному росту производительности труда и
неуклонному подъему благосостояния народов этих стран. Основой
экономического сотрудничества этих стран — членов СЭВ является
международное взаимовыгодное разделение труда, специализация и
кооперирование производства, обеспечивающие значительное
повышение производительности и экономичности производства. Это
потребовало проведения больших работ по стандартизации. Для
этого созданы Постоянная комиссия СЭВ по стандартизации
(ПКС) и Институт СЭВ по стандартизации. Основные
направления деятельности органов СЭВ по стандартизации заключаются
в установлении и унификации: национальных стандартов и другой
нормативной документации; рационального ассортимента
продукции, ее параметров и показателей качества на базе научно
обоснованных рядов; технических условий на изготовление, испытания
и приемку, упаковку, маркировку, транспортирование и хранение
продукции; унифицированных понятий, определений, терминов,
правил оформления технической документации, обозначений и др.
Органы СЭВ по стандартизации и все национальные органы
стран — членов СЭВ успешно проводят большую работу по
созданию и внедрению стандартов и рекомендаций СЭВ. При этом, они
обязательно учитывают рекомендации и стандарты
международных организаций, в том числе, например, стандарты и
рекомендации в области метрологии: СТ СЭВ 1708—79. Организация и
проведение государственных испытаний средств измерений, СТ СЭВ
403—76. Эталоны. Способы выражения погрешностей^ <и др.
412
о
ч
к
о.
а
а
Я
S
о)
В"
S
о
а .
О
О
о
о
II
8
ю
о>
о
II
8
о
о
о
II
8
1
СЧСЧ
СЧСЧ
СЧ —
СЧСЧ
сч —
1
с
S
ос* сою
-00100
CNCNCN——« — —. — —. —.
СОСЯ—'СЯЩ СЛ СО CN 00 —■
сощоося —■ cNint—ооо
СОЩЩЩСО СО СО СО СО С--
о оооо
OKNCOIO
оо оо о
щ оо ■* о t~-
щ Tf TfTf СО
ю о оо ■* оо osow
«COlOf-00 ОСЧСОЮСО
со со со со со г-*- t^- г- t^-1^-
ооооо ооооо
« сч со « t--
■*■ СО СО СО С
■* 1Л СО Г** О —< О СО Ю Ю
СОООО-нСО TMOSOOO
со со t-* t-* г** t—■ с*-» t*-. t^-1*»
ооооо ооооо
sssss
OOOQI
ЩСО t~- 00 (
К
а
ы
о
а
с
к
К
?!
^§
о
ы
eg
о
ч
S
о.
■С
- __._ _. . ■ t-~ О Ю 00 CN СО 00 —■
—'^N000— CNCNCO**ini*5incOCOCOr--
— — — — CNCNCNCNCNCNCNCNCNCNCNCNCNCN
Щ СО Г— CN * СО —< 00 СО О СО Г— —< * 00О СО СО
—< * со оо о о —< —'счечтем^^-^ююю
—. — —.—.—'CNCNCSCNCNCNCNCNCNCNCNCNCN
m*Tft--oocOTfOTfOTfobc4moo-HTfco
— *СОГ--ООСЛО—<—«CNCNCNCOCOCO*'*'*
— — — — _..—.CNCNCNCNCNCNCNCNCNCNCNCN
incNOcoco — oocoe»cot— —'in oo —'Tfcpog
^^tosoooiooo^—oicNcNmwmco
—« — — —' —— —«CNCNCNCNCNCNCNCNCNCNCN
COrfincOt—00СЯО —'CNCOTfincOt—00СЛО
_,_, — — — — _, — —_<>}
s
к
X
Ы
Ы
Ы
а
С
о
а
к
к
н
<
CQ
feci
s
s
о
4
s
o.
С
s?
£
3
n
s
s
aoooNtoto-4
OOCftO—«—«CN CN CN
cocot—t—t—t—t—t—
Oooooooo
COTfOTfOOCOOO
CNC0COTfTf*Tfin
oooooooo
Tfoocomooopo—■
00CO00CNt--TfQ00
00Г--СОСОЩЮ1П*Ф
0000000000000000
oooooooo
t: rsrr^o o>cncnoo
COOOCNCOCNOOTf
CftCftooaooooooooo
00000 0*00
CD —CO—(D-HtO-4
— CNCNCOCOTfTflO
**» ^jMWS* ^>*««Й? *3s**fe|t^««#
•« - -
к
s
s
*
о
ч
s
о.
a
G)
s
s
CO
ST
s
о
us
9
00 Г-* I-* I-* t^-
г-* со со со со
sssss
OftTfCN —
Tf CO CO CO CO
CO CO CO CO CO COCOCOCOCO CO CO CO CO CO CO CO CO CO CO
CCW«00) 00 t—COCO Щ О 00 CO Щ "Я" CO CO ОСЛО»
00 00 00 00 t^ t-* t-* f~ t-* f~ f~COCOCOCO СОСОСОЩЩ
CNCNCNCNCN CN CN CN CN CN CNCNCNCNCN CN CN CN CN CN
cn ~oe»c>
юлю**
оо t—t—cp со
■* ч^с
■* T(<Tf
(NCNCNCNCN <N <N <N <N <N
те те со со со cortcrSA
CNCNCN CNcN
CO
<N(N<N<N<N
00 t— t^COCO
о оооо
>oo оо
О» CN CNcNcN
ООООО ОООАФ С7>О>0>О>С7>
t^ t^ t^ t-^ t-~
00 00 t^ t^ CO
CO CO CO CO CO
(ОФЮЮЮ
CO CO CO CO CO
—i CNcorfin cot~ooe»<p poooo ooooo
CNCNCNCNCN CN CN CN CN CO * 1Д CO t-- 00 St О О О О
—■ CNCOlO
ы
s
a
Q
к
ы
ct
ы
а
с
о
£*
• «w
sg
©н
O'W
jaiCQ
.о
<u
s
s
CU
о
4
s
o.
CO 00C0—■ 0ОЮЮО1* COOlDTfCO —■ 00 E- 00 00
5§0> - - - ОООСЛ — СО cNO>CO-»CN —CTiOOt^CO
TJ< CO CO CO CO COCNCNCNCN
_ _ CN^COOOO
CO CO CO CO CO
—.—i CN CN (
55555
f~ CO 'S' CN О
CO 1—00 АО
Tf 4- ■» ■* Ш
ooooo ooooo ooooo ooooo
00 Ю О CO CN
—i - -(NO
ОСЛС0 - -
-и со — оо со
00 — COCO C
00 CNOtnO
00t-- CO Tf Tf
CN Ш 0> CO 00
CO CN —■ —■ О
Tf tj< CO CO CO CNCNCNCNCN CNCNCNCNCN
o> — —< о о
5>t— см in en
— <N CO COCO
in t— со со oo
—■ comt--. oo
CNTf CO COCO
О —< CN CO f
m m m ю m
in со — oo ю
in со t-~ t-~ oo
m m m m m
ooooo ooooo ooooo ooooo
Ю CO CO CO
Tf -ЩСО CO
m a> - - -
CN —'00 Ш ■*
t— CO CO —< *
CO CNtnt- Ш
—.CO CN 00 ■*
ОСПСЛ 00 00
COCOCNCNCN CNCNCNCNCN
CN—'—'—'—'
шт
CO 00 CO CN CO
t— СЛ -^ CO *
Tf Tf in mm
en —•—■ —.o
10МЮ010
m m m m со
00 CO* О h-
O— CNCO CO
CO CO CO CO CO
ooooo ooooo ooooo ooooo
-C3C0-
CDt--00CnO —. CN CO Tf m CDf-OOClO
Приложение
VI. ЗНАЧЕНИЯ Р ДЛЯ ВЫЧИСЛЕНИЯ Zp/Z
10
11—14
15—20
21-22
23
24—27
28—32 .
33—35
36—49
т
1
J
1
2
2
2
2
2
2
р при (а,)- юо%
i%
0,98
0,99
0,99
0,98
0,98
0,98
0,99
0,99
0,99
2%
0,98
0,98
0,99
0,97
0,98
0,98
0,98
0,98
0,99
5%
0,96
0,97
0,98
; 0,96
0,96
0,97
0,97
0,98
0,98
СПИСОК ЛИТЕРАТУРЫ
1. Веицель Е. С. Теория вероятностей. — М.: Государственное издательство
фиэишнматемэтической литературы, 1962. — 564 с.
2. Пугачев В. С. Теория вероятностей и математическая статистика. — М.:
Наука, 1979. — 496 с.
3. Шишкин И. Ф. Качество и единство измерений: Учебное пособие. — Л.:
СЗПИ, 1982. — 84 с. ^ ' "
4. Шляидии В. М. Цифровые измерительные устройства. — М.: Высшая школа,
1981. — 335 с.
5. Кончаловский В. Ю. Цифровые измерительные устройства. — М.: Эиерго-
атомиздат, 1985. — 304 с.
< 6. Страхов А. Ф. Автоматизированные измерительные комплексы. — М.: Эиер-
гоиздат, 1982. — 216 с.
7. Хазаиов Б. И. Интерфейсы измерительных систем. — М.: Энергия, 1979.—
120 с.
8. Интерфейсы для программируемых приборов в системах автоматизации экс-
перимеита/Н. И. Гореликов, А. Н. Домарацкий, С. Н. Домарацкий и, др.;
Под ред. Л. С. Ситиикова. — М.: Наука, 1981. — 262 с.
9. Электрические измереиия/Р. М. Демидова-Панферова, В. Н. Малиновский,
В. С. Попов и др.; Под ред. В. Н. Малиновского. — М.: Эиергоиздат, 1982.—
392 с.
ГЮ. Ориатский П. П. Автоматические измерительные приборы. — Киев: Вища
школа, 1973. — 550 с.
11. Шумилин Н. П. Измерения в технике проводной связи. — М.: Связь, 1980.—
192 с.
12. Мирский Г. Я. Радиоэлектронные измерения. — М.: Энергия, 1975. ■— 600 с.
13. Ромбро В. С., Фарбер Ю. Д. Измерения характеристик миогокаиальных
систем связи. — М.: Связь, 1977. — 272 с.
14. Кушиир Ф. В., Савеико В. Г., Верник С. М. Измерения в технике связи.—
М.: Связь, 1976. — 432 с.
15. Яловицкий М. П. Электрические измерения иа линиях связи. — М.: Радио
И связь, 1984. — 144 с.
16. Зингереико А. М., Баева Н. Н., Тверецкий М. С. Системы миогокаиальиой
связи. — М.: Связь, 1980.— 440 с.
.17. Кривошеее М. И. Основы телевизионных измерений. — М.: Связь, 1976.—
536 с.
.18; Найденов А. И., Новопольский В. А. Электроиио-лучевые осциллографы. —
М.: Эиергоатомиздат, 1983. — 232 с.
«19. Основы эксплуатации средств измереиий/В. А. Кузнецов, А. Н. Пашков,
О. А. Подольский и др.; Под ред. Р. П. Покровского. — М.: Радио, и связь,
1984. — 184 с.
-416
20. Метрология в технике радиосвизи/А, Ф. Пиоитковская-, В, К, Богдановаг
А. П. Волоснов, Э, В. Тетиевская; Под ред. А, Ф. Пионтковской. — М.:
Радио и связь, 1983. — 184 с
21. Верник С. М., Кушннр Ф. В., Рудницкий В. Б. Повышение точности
измерений в технике связи. — М..: Радио и связь, 1981. — 200 с.
22. Ориатский П. П. Автоматические измерения и приборы: Учебник для
вузов. — 4-е изд. — Киев: Вища школа, 1980. — 560 с.
23.-Лившиц Б. С, Пшеничников А. П., Харкевич А. Д. Теория и телетрафика:
Учебник для вузов. — 2-е изд. — М.: Связь, 1979. —224 с.
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Агрегатирование 388
Амперметр 254
Анализ спектра 232
дисперсионный 239
одновременный 233
последовательный 232
цифровой 240
Анализатор спектра:
метрологические характеристики 232
разрешающая способность 234, 238
чувствительность 238
Асимметрия трактов 306
Болометр 134
Быстродействие 24, 31, 377
Вариация показаний 28
Ваттметр:
вольтметровый 125
калометрический 132
квадраториый 127
поидеромоториый 143
с датчиком Холла 129
с мостом неуравновешенным 136
— уравновешенным 137
термоэлектрический 140
цифровой 139
электродинамический 123
Величина:
влияющая 29
физическая 6
Вероятность 68, 75
доверительная 37, 68
Влияние взаимное 308
Вольтметр:
градуировка 89
избирательный 103
непосредственной оценки 87
цифровой 111
Воспроизводимость измерений 10
Время измерения (преобразования)
Гальванометр 100, 246
Генераторы:
высокой частоты 151
импульсные 159
классификация 144
иа биениях 150
нестабильность 146
низкочастотные 147
параметры выходного сигнала 146
погрешность установки уровня
выходной мощности 146
частоты 146
прецизионные Д57
псевдослучайных сигналов 165
развертки il81
СВЧ 155
сигналов специальной формы 161
уровень гармонических
составляющих 147
шумовые 163
Головка детекторная 43, 97
Групповое время запаздывания, из>
мереиие 226
Датчик Холла 129
Декада счетная 159, 53
Делители напряжения 96
Дешифратор 53
Джитер 327
измерение 329
Диапазон:
измерений 29, 112 j
показаний 29
. частот генератора 145, 151, 154, 157
Диоды шумовые 164
Дискретизация 44
Дисперсия 66
выборочная 71
измерение в оптических кабелях
322
оценка 73
Длина волны, измерение 268
Добротность:
измеритель резонансный 256
— электронно-счетный 263
417
?Единнца физической величины 10
{Единство измерений 7
„Затухание:
в волоконно-оптических кабелях
317
вносимое 301
измерение 302
переходное собственное 299
погрешность измерения 304
рабочее 300
Значение измеряемой величины 67
оценка 73
'Зонд измерительной линии 267
Избирательность радиоприемника 347
"Излучения передатчика побочные 346
'Измерения:
.абсолютные 9
воспроизводимость 10
в процессе передачи информации
349, 352
динамические 8
достоверность '10
единство 4
•косвенные 8
методика 62
.относительные 9
погрешность 10
правильность 10
принцип 9
прямые 8
совместные 9
совокупные 8
сходимость 10
точность 10
Измеритель временных интервалов
цифровой 216
— мощности СВЧ
термоэлектрический 140
— параметров нагрузки 289
— с нониусным преобразователем 218
Импульс:
зондирующий 313
. синус-квадратичный 354
'Индикатор цифровой 52
'Интервал доверительный 40, 68, 79
'Интерфейс:
КАМАК 360
МЭК 362
Искажения нелинейные 278
методы измерения 282—285, 355
(Калибратор:
анализатора спектра 237
осциллографа 185
Квантование 46
Класс точности 38
Коды 49,^51
Компенсатор 93
Комплекс измерительно-вычислатело-
ный 259
Конвенция метрологическая 17
Контроллер 360
Коэффициент:
амплитуды 86
гармоник 282
градуировочный 89
корреляции 8 Г
кубических нелинейных искажений
285
нелинейности пилообразного напря-
- жения 175
отражения 306*
развертки 185
стоячей волны 131
усреднения 86
формы 86
эффективности приемного
преобразователя 133
Куметр:
аналоговый 256
цифровой 263
Линия измерительная 267
Математическое ожидание, оценка 70
Метод измерения 9
— максимального правдоподобия 69
— образцовых мер 55
— проверки нормальности
распределения 77
— шумовой"загрузки 286
Множитель поправочный 35
Методика измерения 62
Метрология 6
Микропроцессор 368
Множвтель поправочный 35
Модуляция в генераторах 147, 153,
156
Мост измерительный 137
Мощность:
измерение в цепях 121, 122, 124
поглощаемая 130
проходящая 130
МЭК 243, 409
Яадежность оценки 73, 74
Напряжение переменное, значения:
пиковое 85
средневыпрямленное 86
среднее 85
(Ореднеквадратическое 86
Напряженность поля, измерение 335
"Несогласованность трактов 306
'Нестабильность частоты
измерительных генераторов 141, 146, 157
Нормы МККТТ на уровень шума 334
Определение объема измерений 294
Организации законодательной
метрологии международные 19, 406
(Осциллографы:
.выбор 201
418
запоминающие 199
каналы X, У 174
классификация 166
многолучевые 191
параметры 200
развертка ждущая 175
— калиброванная 182
— пилообразная 175
— синусоидальная 176
— спиральная 178
рекомендации по выбору 201
сихронизация 172
скоростные 193
стробоскопические 195
структурная схема 170
цифровой 376
Ответвитель направленный 142, 271
Отклонение среднеквадр этическое 76
Оценка 65
интервальнзя 73
несмещенная 70
случайных погрешностей 66
точечная 67
Поверка 13, 32
Погрешность:
абсолютная 32
аддитивная 33
грубая 75
динамическая 33 .
дополнительная 33
инструментальная 61
методы уменьшения итерационные
57
калибровки 35
образцовых мер 55
— — структурные 54—58
тестовые 58
мультипликативная 33
нелинейная 75
основная 33
относительная 32, 62
приведенная 32
репрезентативности 292
систематическая 35, 63
случайная 35, 64
^субъективная 61
фиксации результата 61
Поправка 35
Порядок обработки результатов
наблюдений 82
Предел допускаемой погрешности
средства измерения 39
Преобразование Фурье:
быстрое 242
дискретное 241
Преобразователь:
аналого-цифровой 44, 111
— с интегрированием измеряемого
напряжения 115
— с преобразованием
время-импульсным 113
— — кодоимпульсным 118
— — параллельным 121
— — частотио-импульсным 117
волноводный терморезисториый 13f>
детекторный пикового значения 104
— средневыпрямленного значения
107
— среднеквадратического значения-
108
измерительный 7
классификация 26
индукционный 101
магнитоэлектрический 98
сопротивление — напряжение 252
термоэлектрический 128
электродинамический 101
электромагнитный 100
Прибор:
аналоговый 22, 95
измерительный 7
— цифровой 43, 48
Приемник измерительный 340
Принцип измерения 9
— предпочтительности 392
Пробник 43
Псофометр ПО, 333
Пульт измерительный ИП-2,1 311
Радиопомехи, измерение 341
Распределение нормальное 76
Резистор поглощающий 126
Рекомендации МККТТ, 299, 301, 353
Сдвиг фазовый 221
метод измерения компенсационный
224
осциллографический 222
Симплификация 388
Синхронизация развертки 179
Система
информационно-измерительная 358
—■ классификации и кодирования
единая 399
— конструкторской документации
единая (ЕСКД) 400
— обеспечения единства измерений
государственная 402
— стандартизации 383
— технологической подготовки
производства единая 401 '
Служба метрологическая 15
Сопротивление:
полное 41
трактов входное 306
Спектр 232
Способность разрешающая
импульсного прибора для определения места
повреждения линии 313
Средство измерений 7
вспомогательное 8
классификация 21
образцовое 13, 40
419- •
рабочее 13
Стандарт 385
государственный 389
отраслевой 390
предприятия 390
республиканский 386
Стандартизация:
комплексная 387
международная 389
местная 386
национальная 384
опережающая 387
отраслевая 386
служба 394
Стьюдента распределения 72
— коэффициент 71
Суммирование погрешностей:
косвенных 80
прямых 78
Сходимость измерений 10
Термопреобразователь 110
Терморезнстор 134
Типизация 388
Точность средств измерений 32
Тракт телевизионный, измерение ха-
. рактернстнк 354
Трансформатор измерительный 124
Трубка:
газоразрядная 165
электронно-лучевая 167
— конструкция 167
— чувствительность по
отклонению 169
— яркость 169
Унификация 388
Уравнение Лагранжа 97
Усилители тока:
переменного 103
постоянного 102
Условия технические 383
Установка измерительная 8
Устройство:
отсчетное 28
— цифровое 23
измерительное 23
— прямого действия 24
— следящего уравновешивания 25
— уравновешивающего
преобразования 25
Уширенне сигнала, метод измерения
Э23
Фазометры цифровые:
с преобразованием время-нмпульс-
ным 229
— фазовый сдвиг — постоянное
напряжение — код 228
Фильтр псофометрнческнй 111
Функция распределения погрешности
37
методы измерения 224
Характеристика:
амплитудно-частотная, измерение
272
—: телевизионного тракта 355
метрологические 27
— информационно-измерительных
систем 379, 382
преобразования средств измерений,
динамическая 31
—■ статическая 30
фазочастотная, измерение 272
Частость ошибок, измерение 327
Частота, методы измерения 206
гетеродинный 210
нулевых биений 209
резонансный 2М
- сравнения 207
цифровой 213
Чувствительность:
радиоприемных устройств,
измерение 346
средств измерений 31
Шины данных, адреса, управлении
372
Шум квантования 47
в канале связи 331
Эталон:
государственный 15
копия 13
первичный 12
рабочий 13
свидетель 13
специальный 12
ОГЛАВЛЕНИЕ
Предисловие •..».»••••! 3
4aCTbl. ОБЩИЕ СВЕДЕНИЯ О МЕТРОЛОГИИ
Глава 1. предмет и задачи метрологии
1.1. Основные термины, применяемые в метрологии . - 6
1.2. Классификация измерений 8
1.3. Основные характеристики измерений 9
1.4. Физические величины и единицы 10
1.5. Эталоны н образцовые средства измерений 12
1.6. Метрологическая служба СССР 15
1.7 Международные метрологические организации 19
Глава 2. средства измерении и их характеристики
2.1. Классификация средств измерений . . ' 21
2.2. Метрологические характеристики средств измерений и их
нормирование 27
Глава 3. принципы построения цифровых измерительных
ПРИБОРОВ
3.1. Преобразование {информации в цифровых устройствах * 43
3.2. Системы счисления « коды, используемые в цифровых измерительных
устройствах 49
3.3. Цифровые индикаторы н цифровое отсчетное устройство .... 52
3.4. Структурные методы уменьшения погрешностей 54
Глава 4. погрешности и математическая обработка
РЕЗУЛЬТАТОВ ИЗМЕРЕНИИ
4.1. Классификация погрешностей 60
4.2. Систематические погрешности 63
4.3. Случайные погрешности 64
-4.4. Суммирование погрешностей 78
4.5. Порядок обработки результатов прямых измерений 82
Часть II. электрорадиоизмерения
Глава 5. измерение тока, напряжения, мощности
5.1. Методы измереянй "токов и напряжений. Источивки погрешностей 85
5.2. Принципы построения аналоговых электрамеханнческнх и
электронных вольтметров- .95
5.3. Цифровые вольтметры и аналого-цифровые преобразователи
напряжение—код 111
5.4. Методы измерения мощности 121
Глава 6. генераторы измерительных сигналов
6.1. Классификация генераторов. Основные параметры ... . . . 144
6.2. Особенности генераторов синусоидальных сигналов 145
6.3. Низкочастотные генераторы . .'147
6.4. Генераторы высоких частот 151
6.5. Генераторы СВЧ 154
6.6. Источники измерительных сигналов с высокой стабильностью частоты
(прецизионные измерительные генераторы) 157
6.7. Генераторы импульсов 159
6.8. Генераторы сигналов специальной формы 161
6.9..Генераторы шумовых сигналов 163
Глава 7. Наблюдение и анализ формы электрических
сигналов; электронные осциллографы
7.1. Назначение осциллографа 166
7.2. Электронно-лучевые осцнллографнчеокне трубки 167
421
7.3. Структурная схема осциллографа . . . . '. . ..■ . . . 170
7.4. Воды разверток электронного осциллографа 175
7.5. Синхронизация разверток осциллографа 179
7.6. Калибраторы осциллографа 185
7.7. Многолучевые осциллографы 191
7.8. Скоростные и стробоскопические осциллографы . . . *~. . . 193
7.9. Запоминающие осциллографы 199
7.10. Выбор .типа осциллографа для проведения эксперимента . . . 200
7.11. Оценка погрешностей измерения амплитуды чсигралов и временных
интервалов ...... 203
Глава 8. измерение частотно-временных параметров
И АНАЛИЗ СПЕКТРА СИГНАЛА
8.1. Аналоговые методы измерения частоты 206
8.2. Цифровые частотомеры и измерители временных интервалов . . . 213
8.3. Измерение фазового сдвига 221
8.4. Измерение группового времени запаздывания 226
8.5. Цифровые фазометры ....:.- 228
8.6. Методы анализа спектра сигнала 232
Глава 9. методы и средства измерения параметров
компонентов и цепей
9.1. Классификация методов и приборов для измерения параметров цепей
с сосредоточенными постоянными . ......... 243
"9.2. Прямые измерения параметров компонентов и цепей 244
9.3. Косвенные измерения параметров компонентов и цепей .... 254
9.4. Особенности измерений параметров элементов и трактов с
распределенными постоянными v 264
9.5. Измерение амллитудно- и фазочастотных характеристик цепей . . 272
9.6. Измерение нелинейных искажений в электрических цепях .... 278
Часть III. измерения в технике связи
Глава 10. измерения в автоматических системах
ЭЛЕКТРОСВЯЗИ
10.1. Цели и задачи измерений 287
10.2. Принципы измерений параметров нагрузки и потерь 289
10.3. Получение результатов измерений . . . . , . . . . . 291
10.4. Определение объема измерений 294
Глава 11. измерение характеристик многоканальных
СИСТЕМ ПЕРЕДАЧИ
11.1. Цели и задачи измерений' , ■ >, 297
11.2. Методы измерения затуханий 298
11.3. Приборы многоцелевого назначения 310
11.4. Измерения в волоконно-оптических системах связи- 317
11.5. Измерение характеристик случайных сигналов ....... 323
Глава 12. , измерения в системах радиосвязи
и радиовещания
12.1. Измерение напряженности электромагнитного поля и помех . , . 331
12.2. Измерения в радиопередающих и радиоприемных устройствах . , 343
12.3. Измерения в тракте передачи телевизионного сигнала 352
Глава 13. автоматизация измерении
13.1. Основные направления автоматизации измерений 356
13.2. Агрегатный комплекс средств электроизмерительной техники ... 361
13.3. Интерфейс МЭК 362
13.4. Микропроцессоры и микро-ЭВМ в цифровых измерительных
приборах и системах , 368
'13.5. Функции микропроцессоров и микро-ЭВМ в ЦИП , . ... . 370
422
13.6. Структура микро-ЭВМ для ЦИП и требования к ее характеристикам 372
13.7. Особенности построения цифровых. осциллографов . . . . . 376
13.8. Метрологические характеристики информационных измерительных
систем . ■ '..... 379
Часть IV. основы стандартизации
Глава 14. государственная система стандартизации
14.1. Основные .понятия и определения в области стандартизации . . 383
14.2. Цели и задачи стандартизации 385
14.3. Виды и методы стандартизации 386
14.4. Категории и виды стандартов 389
14.5. Основные принципы стандартизации 391
14.6. Органы и службы стандартизации 393
14.7. Организация службы информации по стандартизации .... 397
14.8. Государственные и отраслевые системы стандартов на общетехниче-
акие нормы, термины и определения 398
Глава 15. международная стандартизация
15.1. Международная организация по стандартизации 406
15.2. Международная электротехническая комиссия 409
.15.3. Международная организация законодательной, метрологии ... 411
15.4. Стандартизация, проводимая в рамках СЭВ . . . . . • • 412
2 г*
Приложение I. Таблица интеграла вероятностей Ф(к)=——- ) X
У 2л о
Xexpf— ^\dt = a 413
Приложение II. Коэффициенты Стьюдента ta 4'3
Приложение III. Коэффициенты y2i и Т2г. определяющие доверительный
интервал *|*
Приложение IV. Предельные значения fS для проверки грубой погрешности 415
Приложение V. Квантили распределения d *|j>
Приложение VI. Значения Р для вычисления Zp/г *j°
Список литературы *}£
Предметный указатель 4»°
Учебное пособие
Борис Петрович Хромой, Андрей Владимирович Кандинов,
Александр Леонидович Сенявский, Александр Арнольдович Котович,
Алексей Сергеевич Владимиров, Дмитрий Федорович Тартаковский,
Анатолий Борисович Селибер, Владимир Игоревич Соколов,
Раиса Вениаминовна Яралошвили, Юрий Владимирович Аксентов,
Флор Васильевич Кушнир, Валерий Леонидович Ленцман
МЕТРОЛОГИЯ, СТАНДАРТИЗАЦИЯ И ИЗМЕРЕНИЯ В ТЕХНИКЕ СВЯЗИ
Заведующий редакцией В. Л. Стерлигов. Редактор Э. М. Горелик.
Переплет художника Ю. В. Архангельского. Художественный редактор Т. В. Бусарова.
Технический редактор Г, Я. Зыкина. Корректор Г. Г. Казакова
ИБ J& 769
Сдано в набор 29.12.85 Подписано в печать 14.04.86
Т-09257 формат 60X90/ie Бумага типограф. № 3 Гарнитура литературная
Печать высокая Усл. печ. л. 26,5 Усл. кр.-отт. 26,5 Уч.-изд. л. 29,97
Тираж 20 000 экз. Изд. № 20627 Зак. № 10 Цена 1 р. 30 к.
Издательство «Радио и связь». 101000 Москва, Почтамт, а/я 693
Московская типография № 5 ВГО «Союзучетиздат» 101000 Москва, ул. Кирова, д. 40