/












































































































































Автор: Осадший В.И.
Теги: авиация и космонавтика летательные аппараты ракетная техника космическая техника авиация навигация
Год: 1972




Текст
7С> коя.
ТРАНСПОРТ 19 7 2
В.И.ОСАДШИИ
ВОЗДУШНАЯ
НАВИГАЦИЯ
Suvorov AV 63-64@mail.ru для http://www.russianarms.ru
В. И. ОСАДШИЙ
Suvorov AV 63-64@mail.ru для http://www.russianarms.ru
ВОЗДУШНАЯ
НАВИГАЦИЯ
ПРИМЕНЕНИЕ РАДИОНАВИГАЦИОННЫХ СРЕДСТВ И АВТОМАТИЗИРОВАННЫХ
НАВИГАЦИОННЫХ КОМПЛЕКСОВ
Утверждено УУЗ МГА СССР в качестве учебника для высших учебных
заведений гражданской авиации
Москва «транспорт» 1972
УДК 629.7.001.1 (075.8)
Воздушная навигация. Осади ий В. И. Изд-во «Транс-
порт», 1972 г , стр. 1—288.
В книге изложены основы теории н методики использования
радионавигационных средств н автоматизированных навигацион-
ных комплексов применительно к оборудованию летательных ап-
паратов и задачам гражданской авиации.
Содержание книги соответствует программе курса «Воздушная
навигация» спецналнзацнн инженер-штурман гражданской авиа-
ции, проходимого после предварительного изучения устройства
технических средств навигации и других общетехннческих дис-
циплин.
Основное внимание обращено на выяснение навигационных
свойств различных технических средств с целью повышения эф-
фективности их использования в полетах. Количественные харак-
теристики точности и надежности навигационных определений
даются с привлечением элементарных сведений из теории вероят-
ностей. Учебник содержит основные понятия, связанные с приме-
нением автоматизированных навигационных средств.
Книга рассчитана на слушателей специализации ннженер-
штурман и смежных специальностей (инженер-пнлот, инженер уп-
равления воздушным движением), а также на летный и руководя-
щий штурманский состав гражданской авиации.
Рис. 177, табл. 5, библ. 26
82-72
3-18-6
ПРЕДИСЛОВИЕ
Книга «Воздушная навигация. Применение радионавига-
ционных средств и автоматизированных навигационных комплексов»
является непосредственным продолжением учебника «Воздушная на-
вигация. Основы теории. Применение геотехнических и астрономи-
ческих средств». М., «Транспорт», 1969 г.
Оба учебника предназначены для обеспечения учебного процесса
по основной части курса «Воздушная навигация» согласно программам
специализации инженер-штурман.
В основу настоящего учебника положены учебные пособия и лек-
ции, подготовленные и прочитанные автором в течение ряда лет
в ВАУ ГА для слушателей штурманской и других специальностей.
Главной задачей курса явилось обобщенное изложение закономерно-
стей навигационной работы экипажа на основе известных технических
характеристик навигационных средств.
При изложении навигационных возможностей различных средств
часто рассматриваются элементы их устройства в степени, необходимой
для изложения их чисто навигационных свойств. Особое внимание
при этом уделяется точностным характеристикам навигационных
средств, а где возможно, указывается оптимальная методика их ис-
пользования и меры повышения эффективности, зависящие от мастер-
ства экипажа.
В некоторых случаях рассматриваются наиболее строгие модели
навигационной задачи (например, учет сферичности Земли), с тем чтобы
затем путем обоснованных упрощений дать и более короткое решение,
определив рамки применимости принятых упрощений. При этом пре-
следовалась в основном методическая цель — ознакомить слушателя
с приемами исследования новых вопросов навигации, которые будут
встречаться в практической работе. Поэтому некоторые выкладки
с учетом сферичности Земли применялись и в тех случаях, когда ко-
нечный результат можно было бы получить и более просто.
В настоящей книге, как и в вышедшей ранее первой ее части [191,
применяется ряд обобщенных понятий и терминов, не являвшихся
традиционными в штурманской литературе («основная логическая
схема навигации», «метод непосредственной коррекции», «управление
навигационным режимом» и др.). Тем не менее использование их по
опыту обучения штурманов представляется оправданным и полезным.
Целью изложения материала разд. II книги «Применение автома-
тизированных навигационных комплексов» является обеспечение ус-
воения слушателями главной идеи автоматизированного самолето-
3
вождения и основных его характерных черт. Отдельные конкретные
вопросы (содержание и методика операций с аппаратурой) изложены
в обобщенном виде, имеющем целью, прежде всего, иллюстрацию основ-
ных положений, но не инструктирование экипажей по эксплуатации
конкретной техники.
Воздушная навигация как научная дисциплина имеет предметом
изучения методы наиболее эффективного применения различных
технических средств, обеспечивающих вождение летательных аппа-
ратов при выполнении производственных задач.
Задачей курса «Воздушная навигация» высшего авиационного
учебного заведения командного профиля является подготовка высоко-
квалифицированных авиационных специалистов (инженеров-пило-
тов, штурманов и диспетчеров) к вождению самолетов с использованием
новейших технических средств самолетовождения в различных ус-
ловиях навигационной обстановки.
Курс «Воздушная навигация» учебного плана находится в тесной
связи с некоторыми общенаучными и специальными авиационными
дисциплинами: с математикой (особенно с теорией вероятностей),
авиационной метеорологией, авиационной картографией, авиацион-
ными приборами, радиотехническими средствами навигации, материал
которых используется как исходный для построения теории и мето-
дики навигации летательных аппаратов. В задачу курса не входит
изучение физических принципов действия и конструкций авиационных
приборов и радиотехнических навигационных средств. Однако нави-
гационные характеристики этой техники и особенности принципов ее
действия в необходимых случаях приводятся с целью вывода или по-
яснения собственно навигационных свойств той или иной аппаратуры
и методики ее применения.
Настоящий курс воздушной навигации не заменяет собой конкрет-
ных методик навигации на каждом типе летательного аппарата,
которые излагаются в специальных инструкциях и других дей-
ствующих документах, но является их общей теоретической основой,
обеспечивающей самостоятельный и творческий подход летного со-
става к освоению новой навигационной техники.
Эта работа не могла бы быть завершена без многосторонней ме-
тодической и организационной помощи, оказанной автору специа-
листами Министерства гражданской авиации. В связи с этим автор
выражает глубокую благодарность тт. В. И. Акимову и А. И Наза-
рову. С особой признательностью автор благодарит рецензентов
профессора Г. Ф. Молоканова, доцента В. Ф. Савченко и заслужен-
ного штурмана СССР М. А. Долматова, оказавших существенное
влияние на содержание и методику изложения материала в учеб-
нике.
РАЗДЕЛ I
ПРИМЕНЕНИЕ РАДИОНАВИГАЦИОННЫХ
СРЕДСТВ
Глава 1
ОБЩАЯ ХАРАКТЕРИСТИКА РАДИОНАВИГАЦИОННЫХ
СРЕДСТВ
Радионавигацией называется раздел воздушной навигации,
в котором рассматриваются вопросы теории и практического исполь-
зования специальных радиотехнических (радионавигационных) средств
(РНС) в целях вождения самолетов и вертолетов по заданным траек-
ториям в назначенные сроки.
§ 1.1. РАДИОНАВИГАЦИОННЫЕ СРЕДСТВА И ИХ КЛАССИФИКАЦИЯ
Все радионавигационные устройства играют в навигации роль сред-
ств сбора информации о координатах и скоростях движения летатель-
ного аппарата и являются датчиками этой информации для экипажа
или автоматизированного навигационного комплекса (АНК), непо-
средственно решающих задачи навигации в процессе полета. Однако,
как правило, радионавигационная аппаратура имеет собственные ин-
дикаторы выходных навигационных данных (углов, расстояний, ско-
ростей, панорамы местности и т. д.), а также счетно-решающие устрой-
ства, перерабатывающие измеренные радионавигационные величины
в сигналы управления летательным аппаратом.
Радионавигационные средства отличаются от других технических
средств сбора навигационной информации тем, что они действуют на
основе использования свойств электромагнитных полей радиотехни-
ческого диапазона, искусственно создаваемых специально для обес-
печения полета или естественно существующих в пространстве.
Электромагнитные поля, используемые для работы радионавига-
ционных средств, создаются:
наземными или орбитальными радиопередатчиками, работающими
независимо от самолетных устройств (приводные радиостанции, ра-
диомаяки, передатчики на ИСЗ);
наземными радиопередатчиками, работающими по запросу с борта
самолета (радиоответчики);
отражениями от земной поверхности электромагнитной энергии,
излученной бортовыми передатчиками;
б
естественными земными и космическими источниками радиоизлу-
чений, которыми в той или иной степени являются все тела.
Элементы навигационной информации могут определяться как на
борту самолета (при использовании радиокомпасов, бортовых радио-
локаторов, допплеровских устройств, приемоиндикаторов радионави-
гационных систем), так и на земле (наземные радиопеленгаторы,
обзорные радиолокаторы). Однако данные, определенные на земле, не
могут еще непосредственно оказать влияние на полет до тех пор, пока
они сами или выработанные на их основе команды управления не бу-
дут переданы на борт.
Вся навигационная информация, получаемая на борту или на зем-
ле, заключена в физических параметрах радиоволны, т. е. в ее ампли-
туде, частоте, фазе и времени прихода. Для решения же навигацион-
ных задач положение и движение самолета в пространстве должно
характеризоваться геометрическими и механическими величинами —
расстояниями, углами, скоростями, ускорениями.
Для выделения скрытой в параметрах радиоволны навигационной
информации используется функциональная зависимость между этими
параметрами и геометрическими или механическими величинами, ха-
рактеризующими положение и движение самолета относительно источ-
ника радиоволн, создающего электромагнитное поле.
Поскольку радиоволны (при соответствующем выборе диапазона)
распространяются независимо от условий оптической видимости, ра-
дионавигационные средства работоспособны практически в любых
метеорологических условиях дня и ночи, что является их важнейшим
навигационным качеством. В то же время зависимость от электромаг-
нитных полей ограничивает область возможного применения этих
средств определенными удалениями от источников излучения (даль-
ностями действия), на которых может быть обеспечен удовлетворитель-
ный прием радиосигналов. Как правило, с удалением от источников
излучения (наземных станций, радиолокационных ориентиров) па-
дает также и точность получаемой навигационной информации.
В соответствии с общими принципами навигационной классифика-
ции технических средств воздушной навигации все радионавигационные
средства делятся на автономные радионавигационные средства и ра-
дионавигационные системы (рис. 1.1). Это деление отражает зависи-
мость работы рассматриваемого средства от наземного обеспечения.
Автономные радионавигационные средства — это бортовые устрой
ства, обеспечивающие получение навигационной информации на основе
использования электромагнитных полей, созданных бортовыми радио-
передатчиками или естественно существующими в пространстве, т. е.
(в обоих случаях) не зависящими от работы каких-либо наземных стан-
ций.
К автономным радионавигационным средствам относят: радио-
высотомеры, радиотехнические измерители путевой скорости и угла
сноса, бортовые панорамные радиолокационные станции, а также и
радиовизиры, основанные на использовании естественных радиоизлу-
чений земных объектов.
6
Абтономные
оадионаВигационные
средства
>| Радиобысот" sppti |
Радиотехнические
измерители пу-
теВой скоростиа
угла сноса -
а) допплероВские
(ДИСС)
В) корреляцион-
ные (КИСС)
БортаВые радио-
локационные
станции (БРЛС)
БортоВые радио-
базары (радио-
теплодизиры)
РаВианаБигацианные системы
РАДИОНАВИГАЦИОННЫЕ СРЕДСТВА |
--------—г ’ —
__
Дальномерные (Дне) Разностно- дальномерные (ОДНО Суммарно- дальномерные (СДНС) Комбиниро- ванные
1
Угломерные
(УНС)
- Радиоком- пасные
- Радиопе- ленгатор ные
Радиома- ячные
дальноме- ры с назем- ными ретрансля- торами
* Дальноме- ры с борте- Вы ми хра- нителями частоты
Угломерно- - дально- мерные (УДНС): а) с назем- ной РЛС буебрлс б) радио- маячные -
Дальномер но розност- но-дально- мерные (ДРДНС)
*- Суммарно- разностно- дальномер- ные (СРДНС)
Рис." 1.1. Классификация радионавигационных средств
В настоящее время автономные радионавигационные средства
входят в состав бортовых навигационных комплексов, в которых они
играют как роль источников непрерывной информации о направлении
и скорости движения, так и роль корректоров мест самолета.
Радионавигационные системы — это совокупность бортовых и на-
земных (или спутниковых) радиотехнических устройств, обеспечива-
ющих при совместной работе получение навигационной информации на
борту самолета. Навигационная информация выдается в форме геомет-
рических параметров, характеризующих положение самолета относи-
тельно наземных станций (угол, расстояние или пх сочетания), по
которым определяется одна или несколько линий положения самолета.
Навигационные свойства системы характеризуются в основном видом
и точностью геометрического параметра, определяемого с ее помощью,
а также формой получаемой линии положения. В зависимости от вида
этого параметра радионавигационные системы можно подразделить
на угломерные, дальномерные, разностно-дальномерные, суммарно-
дальномерные и комбинированные.
Угломерные системы (УНС) позволяют получить пе-
ленг самолета или пеленг радиостанции, что обеспечивает построение
линий положения различного вида: линии равного пеленга самолета
(ЛРПС); липни равного пеленга радиостанции (ЛРПР), называемой
также линией равных азимутов (ЛРА); линии равной разности азиму-
тов двух радиостанций (ЛРРА). Кроме того, существуют угломерные
системы, создающие поверхность положения, близкую к наклонной
плоскости, в которой лежит заданная глиссада планирования при сни-
жении самолета перед посадкой.
Дальномерные системы (ДНС) обеспечивают изме-
рение расстояний от самолета до наземной станции, что позволяет
7
определить линию равного расстояния (ЛРР) — окружность на по-
верхности Земли.
Разности о-д ально мерные системы (РДНС) поз-
воляют непосредственно измерять разность расстояний от самолета до
двух станций, что обеспечивает получение линии положения в виде
сферической гиперболы — линии равной разности расстояний (ЛРРР).
Разностно-дальномерные системы называют также гиперболическими.
С у м м а р н о-д альномерные системы (СДНС) обес-
печивают построение линий положения в виде эллипсов на основе
определения суммы расстояний до двух наземных станций. (В настоя-
щее время сумма расстояний находится по данным гиперболических
систем путем пересчета.)
Комбинированные системы представляют собой
объединение двух из перечисленных основных систем. К ним относят:
угломерно-дальномерные системы (УДНС), дальномерно-разностно-
дальномерные системы (ДРДНС), суммарно-разностно-дальномерные
системы (СРДНС).
Из комбинированных систем наиболее широко распространены
угломерно-дальномерные системы, позволяющие одновременно полу-
чать две линии положения — ЛРПС (ортодромию) и ЛРР (окружность
на поверхности Земли). Некоторые разновидности УДНС показаны
на рис. 1.1.
Эффективность различных радионавигационных средств и, следо-
вательно, целесообразность применения того или иного из них в дан-
ном полете (или на этапе полета) оценивается по содержанию инфор-
мации, автономности, области возможного применения, точности,
оперативности и надежности.
Специфической характеристикой некоторых радионавигационных
систем является пропускная способность. Кроме того, всем радиона-
вигационным средствам дается обобщенная характеристика—рабочая
область средства (системы), объединяющая сведения о возможном
применении (дальности действия) и точности.
§ 1.2. ДАЛЬНОСТЬ ДЕЙСТВИЯ РАДИОНАВИГАЦИОННЫХ СРЕДСТВ
Область возможного применения всех радионавигационных средств
выражается в основном дальностями действия, т. е. максимальным и
минимальным удалениями самолета от источника излучений (станций,
радиолокационных ориентиров), при которых обеспечивается нормаль-
ная работа радиолиний. Кроме того, на область возможного примене-
ния некоторых РНС влияет режим полета (например, крены), вид зем-.
ной поверхности, определяющий характер отражений радиоволн (су-
ша, море, горы), а также наличие радиолокационных ориентиров.
Минимальная дальность действия (Dmln) оценивается раз-
мерами (радиусом) «нерабочей воронки» в непосредственной близости от
наземной станции, зависящими от конструктивных особенностей
наземных передающих и бортовых приемных устройств и их антенных
систем (например, «нерабочая воронка» над приводной радиостанцией
определяется характеристикой направленности приемной антенны
8
радиокомпаса и поляризацией ра-
диоволны над станцией). Величина
ОШ1П, как правило, определяется
экспер пмептально.
Максимальная даль-
ность действия (DmJ зависит от
используемого диапазона волн,
технических характеристик пере-
дающих и приемных устройств и
условий распространения (время
суток, характер земной поверхно-
Рис. 1.2. Дальности действия УК.В-
радиосредств в равнинной местности
сти, рельеф местности, высота по-
лета). При этом для волн различных диапазонов преобладающее зна-
чение имеют обычно только некоторые из этих факторов: для сверх-
длинных (СДВ) и длинных (ДВ) волн — это мощности наземных
станций, электрические свойства земной поверхности и время суток;
для средних (СВ) и коротких (КВ) волн — время суток и состояние
ионизированных слоев атмосферы; для ультракоротковолнового диа-
пазона (УКВ) — высоты полета, антенн наземных станций и препят-
ствий на пути распространения радиоволн.
В оперативной практике штурманской службы дальность действия
радионавигационных средств, работающих в диапазонах СДВ, ДВ
и СВ, как правило, не рассчитывается. Это связано с большой слож-
ностью расчетов и в то же время с относительной стабильностью ве-
личин дальности действия таких средств, устанавливаемых к тому же
стационарно (радионавигационные системы на СДВ и ДВ, вещательные
радиостанции и радиомаяки па СВ). Кроме того, дальности действия
на этих волнах не зависят от высоты полета. Практически дальность
действия таких средств определяется по опыту полетов на трассах.
Средние же значения их приводятся в технических характеристиках
радионавигационных систем.
В УКВ-диапазоне работают наземные радиопеленгаторы и радио-
локационные станции на трассах и в районах аэропортов, угломер-
но-дальномерные системы, системы радиосвязи, бортовые радиолока-
ционные средства и некоторые другие устройства.
Дальности действия УКВ-радионавигационных систем существен-
но зависят от высоты полета и рельефа и поэтому нуждаются в опера-
тивной оценке при подготовке и в процессе полета.
В равнинной местности, т. е. в условиях, когда между самолетом
и наземной станцией рельеф местности меняется плавно и существует
прямая (геометрическая) видимость, дальность действия УКВ-радио-
павигационной системы определяется только высотами антенны и по-
лета самолета над средним уровнем рельефа (практически — над уров-
нем рельефа в районе станции).
На рис. 1.2 показаны радиостанция Р с высотой йот антенны над
средним уровнем равнинной местности и самолет С на высоте ЯОт
относительно того же уровня. Прямая PC касается поверхности Зем-
ли в точке М; 7? — радиус Земли, принимаемой за шар. Наклонные
9
удаления станции и самолета от точки касания (dt и d2) приближенно
считаются равными дугам окружности Р'М и С'М.
Из рисунка видно, что D = dj + d2, но нз прямоугольного тре-
угольника ОРМ
____________ ____________. __ Г~ t. 2
d1 = V(R + hOTy~R* = V2RhOT+h*or =\ 2R]/ hm + ^.
I ^I\
Так как R hor, то второе слагаемое под корнем можно считать
равным нулю, т. е. dx = Y2R } h0T.
Аналогично нз треугольника ОМС d2 — j 2R |ЛН0Т, так как
R Нот-
Тогда
D = d1 + d2 = /2R(/^; + l7^). (1.1)
Подставив в эту формулу значение R = 6 371 км и считая hOT
и Нот выраженными в метрах, получим
D = /Г637Т f । /^+1 ЛМ = 1 / +/777J,
Г \|/ 1000 |/ 1000у 1000
и окончательно
ПЖ3,57(|/Л7Т + ГЙ^),
где D — дальность УКВ-связи в километрах; Лот и Дот — высота
антенны и самолета относительно среднего уровня рельефа в метрах.
Фактически дальность УКВ-связи в этих условиях будет больше
теоретической, что объясняется рефракцией, отклоняющей радиоволну
в атмосфере в направлении к земной поверхности. Действие рефрак-
ции равносильно тому, что радиус Земли при расчете дальности по
формуле (1.1) принимается за 4/3R.
Тогда
О = 2 ±-R + +
На практике в целях обеспечения большей надежности расчета
принято брать коэффициент равным 3,7 (вместо 4,1):
D = 3jtf^T+V7Q). (1.2)
По рис. 1.2 можно также определить минимальную высоту, на ко-
торой должен находиться самолет, чтобы на заданном рубеже с ним
осуществлялась надежная УКВ-связь. Эта высота получается при ре-
шении формулы (1.2) относительно И:
Дт1п = 0.073D2—0,550 +Л0Т.
1
Коэффициенты 0,073 и 0,55 имеют разномерности лт/си-2 и м2х
X кл<-1 соответственно.
10
DtKM
та 700
ООО
:soorr
2000
uoo -
1000
SOO
too
500
Ключ
Оля определения
- -300
Ключ
для определения
ЧОО
tj 15000
И ^000
е4 00
t} 12000
II 000
| 10000
и 0000
Н вооо
1000
0000
- 50оо
У ЧоОО
• 3000 -
• 2000
woo
500
ЧОО
300
too
юе
лОт. м
Л -дальность действия системы
horn -Высота антенны над средним уровнем релье/ра
Нет - Высота полета самолета над тем те уродием
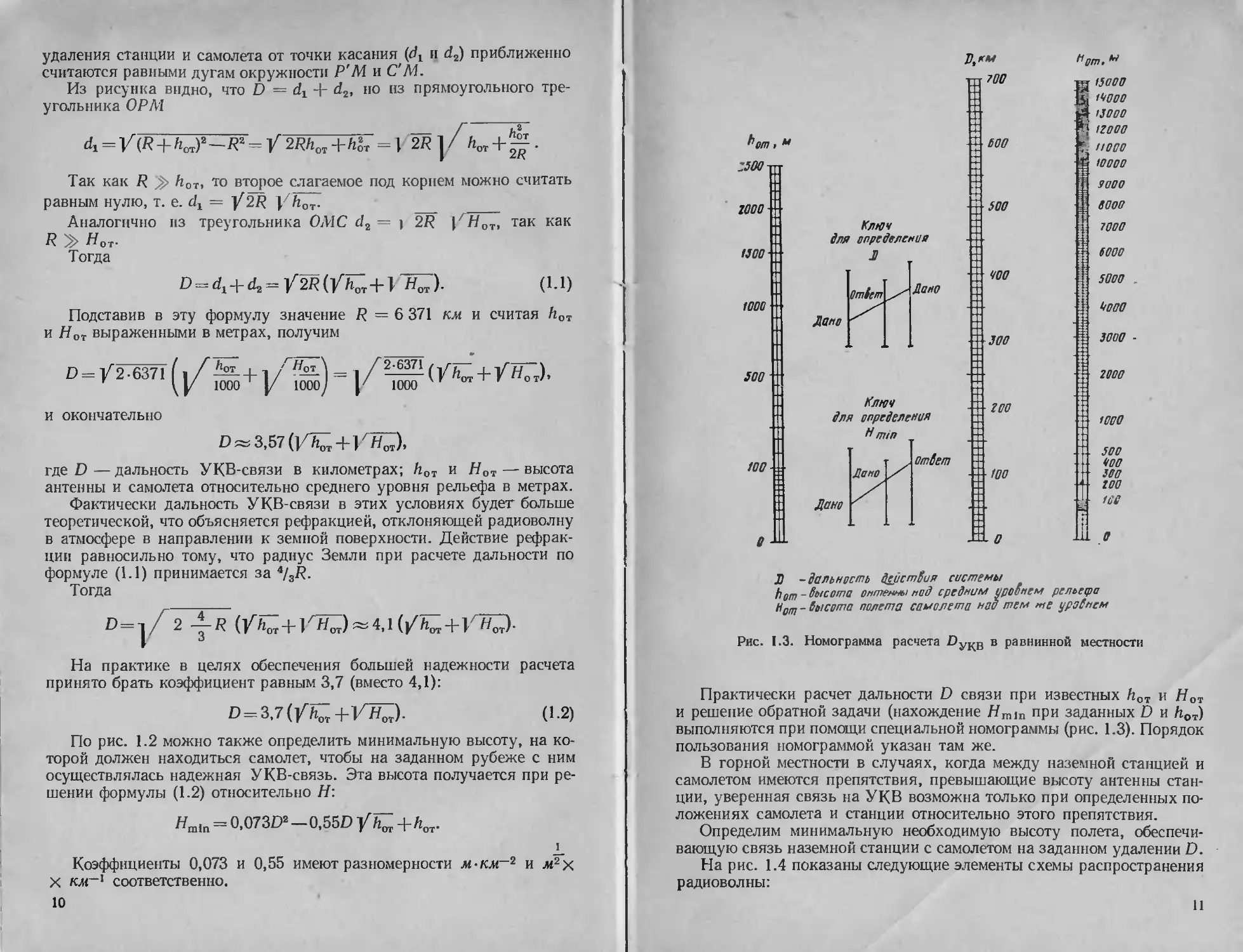
Рис. 1.3. Номограмма расчета £>yj^B в равнинной местности
Практически расчет дальности D связи при известных h0T и Н0Т
и решение обратной задачи (нахождение Ящш при заданных D и /гот)
выполняются при помощи специальной номограммы (рис. 1.3). Порядок
пользования номограммой указан там же.
В горной местности в случаях, когда между наземной станцией и
самолетом имеются препятствия, превышающие высоту антенны стан-
ции, уверенная связь на УКВ возможна только при определенных по-
ложениях самолета и станции относительно этого препятствия.
Определим минимальную необходимую высоту полета, обеспечи-
вающую связь наземной станции с самолетом на заданном удалении D.
На рис. 1.4 показаны следующие элементы схемы распространения
радиоволны:
11
Рис. 1.4. Дальность действия УКВ-радиосредств в горной местности
АС — кривая распространения УКВ от станции А к самолету С
с учетом нормальной рефракции атмосферы;
ММ' — уровень высшей точки мешающего препятствия;
LL' — уровень моря;
BN и ВК — вспомогательные кривые (кривые распространения УКВ
с вершины препятствия);
ЛПр и Ла — высоты препятствия и антенны над уровнем моря,
#min асе 11 от — минимальная абсолютная высота полета и вы-
сота полета относительно уровня препятствия, обеспе-
чивающие прием УКВ-сигналов;
<1Х и d2 — удаления вершины препятствия соответственно от стан-
ции и от самолета.
Исходя из рисунка и учитывая принятые обозначения, имеем:
па In абс = Нгп\п от 4~ ^пр>
Hmtn от = г2 4" z3‘
Величину z2 можно найти, учитывая, что вспомогательная кри-
вая ВК является линией распространения УКВ с вершины препят-
ствия. Поэтому применим формулу (1.2), в которой положим D = d2
(так как ВС х. ВК ~ d2), ho^ = 0 и Яот — zz.
Поэтому
d2 = 3,7J/'z2;
9 --
3,72
0,073d22.
Величину zs найдем, заметив, что криволинейные треугольники
ANB и ВКС могут быть приняты за прямолинейные и подобные.
Тогда
г,= ^(г.+М).
Zj “р Д/l uj uj,
где Bh = hnp—ha.
12
Величину zx можно получить аналогично z2 по формуле
zx = 0,073d!2.
Поэтому z3 == — (0,073d!2 4- Aft).
di
Используя величины z2, z3 и D = d± + d2, получим
Hmln от = *2 + z3 = 0,073d22 + A (0,073d!2 + Aft)
«1
и окончательно
HmlnOT = ^(0,073D + ^, (1.3)
где dj, d2 и D в километрах, a Aft и Hmin от в метрах.
Необходимая для успешного приема сигналов УКВ абсолютная
минимальная высота полета
Ятш абс = Ят1п от+ = 0,0730+^^ + ftnp. (1.4)
\ “1 /
Значение Hmin абс служит исходной величиной для определения
приборных значений минимальной высоты использования УКВ-
средств при полете яа эшелонах или вне эшелонов. Расчеты Hmtn от
и D ведутся по специальным номограммам (рис. 1.5). Порядок решения
задач показан там же.
Пример. Определить минимальную высоту Нот полета, достаточную для
приема сигналов радиомаяка УДНС (например, РСБН-2) на расстоянии D =
= 280 км, если на удалении </х = 20 км от радиомаяка находится препят-
ствие высотой Лпр = 150 м, высота рельефа в районе радиомаяка Лр = 50 м,
а высота излучателя антенны (мачта) над рельефом Лм = 10 м.
'Решение.
Определим сначала </2 и ДЛ.
</2 —О—+=280 —20 = 260 км.
ДЛ = Л„р—Ла=150 —(50+10) = 90 jk.
Дальнейшее решение можно вести аналитически по формулам (1.3) и (1.4) и
графически (по номограмме).
Аналитически по формуле (1.3) найдем
//mln от ~ 260 0,073-280 +--- 6484 м.
а по формуле (1.4)
//mln абс = 6484 +150 » 6630 м.
Расчет по номограмме (рис. 1.5) дает результат Ят1п от *= 6400 м, и,
следовательно, Ят1п абс = 6550 м.
13
^ut~^aoc~ nP
d-i
60
?o
60
30
'Oo
"O
'Oo
'30
'V(
'6o
"O
fffff
'SO
ООО
ifff
ого
03o
fov#
lOSo
3.0(0
того
fOfio
^Ooo
fOo
SOOD
6000
5000
6000
7000
8000
- 3000
10000
11000
12060
13000
Рис. 1.5, Номограмма расчета £>yKB в горной местности для АЛ < 500 м.
Формула для непосредственного расчета максимальной дальности
действия У KB-системы при определенной высоте полета Набс может
быть получена из формулы (1.4). Решая это уравнение относительно
d2 и учитывая, что Dmax = dx + d2max, имеем
Drnix^r/i + 6,85(|/(0,073d, +^-р- 0.29 (Набс-Л1ф) -
(1-5)
где коэффициент 6,85 имеет размерность км2 • л-1, а коэффициенты
0,073 и 0,29 — м км~2.
14
§ 1.3. РАБОЧИЕ ОБЛАСТИ РАДИОНАВИГАЦИОННЫХ СРЕДСТВ
Более полной (по сравнению с дальностью действия) характеристи-
кой эффективности радионавигационного средства является его рабо-
чая область, включающая в себя признаки дальности действия и точ-
ности получаемой навигационной информации (ошибки линии поло-
жения и мест самолета).
Рабочей областью радионавигационного средства (си-
стемы) называется пространство, в котором обеспечивается получение
линий положения или мест самолета с точностью не ниже допустимой
при заданной величине гарантийной вероятности Рг.
Различают «рабочие области по заданной точности линий положе-
ния» и «рабочие области по заданной точности мест самолета». Усло-
вимся в дальнейшем изложении под термином «станция» понимать
также и радиолокационный ориентир, который при определении ЛП
и МС с помощью бортовых радиолокационных станций (БРЛС) играет
роль, совершенно аналогичную наземным станциям систем.
Конфигурация, размеры и расположение рабочей области опреде-
ляются: во-первых, дальностями действия измерительных (или связ-
ных) радиолиний между самолетом и наземными станциями (одной
или несколькими в зависимости от вида системы) и, во вторых, зако-
ном распределения линейных ошибок линий положения или мест са-
молета при различных положениях самолета относительно этих стан-
ций Поэтому для построения рабочей области на карте необходимо,
прежде всего, с помощью кривых Dmln и Dmax ограничить площадь,
над которой физически возможно получение радиосигналов на самоле-
те (рис. 1.6), а затем в пределах этой площади найти область, для ко-
торой удовлетворяется принятый критерий точности.
Если дальность действия радиолиний системы не зависит от высоты
полета (или зависит от нее несущественно), то для каждой станции си-
стемы достаточно построить по одной кривой Dmax, которая огра-
ничивала бы наибольшие дальности действия на различных направ-
лениях от станции. Дальность в каждом направлении зависит от на-
правленности антенной системы наземной станции и условий распро-
странения радиоволн на этом направлении. Если дальность действия
сильно зависит от высоты полета (например, для УКВ-систем), то
приходится строить несколько кривых, характеризующих возмож-
ность приема сигналов станций при различных высотах полета
(^шах^р ^шах/Г,)’
Кривые минимальной дальности действия, являющиеся частью
внутренней границы рабочей области, имеют на карте вид окружностей
с центром в месте наземной станции и радиусом Dmln. С увеличени-
ем высоты полета радиусы таких окружностей увеличиваются.
Нормальная работа радиолиний между самолетом и станцией мо-
жет нарушаться и между границами DraIn и £)тах, что приводит
к «провалам» в.рабочей области. При использовании КВ и СВ они яв-
ляются результатом интерференции поверхностной и пространствен-
15
Рис. 1.6. Кри-
вые£>тах УКВ
радиосредств
при разных вы-
сотах полета
ной волн, а при работе на УКВ — следствием миоголепестковой
формы диаграммы направленности станции в вертикальной плоскости.
Условие падежного приема сигналов одной станции на самолете,
находящемся в точке с координатами £ ит], определяется неравенством
(см. рис. 1.6)
(1-6)
где D(£, т]) — удаление самолета от станции.
В зависимости от числа станций, необходимых для определения
ЛП или МС, количество неравенств типа (1.6) может изменяться от
одного до трех.
Для определения области достаточной точности линии положения
или мест самолета необходимо найти зависимость их ошибок от коор-
динат точек на поверхности Земли.
Рабочие области по заданной точности линий положения
Закон изменения линейных ошибок Ар линий положения опреде-
ляется: во-первых, формой самой ЛП (ортодромия, малый круг, ги-
пербола и т. д.), т. е. вектором ее градиента в каждой точке g(^, rj),
являющимся функцией координат МС, и, во-вторых, зависимостью
ошибки Au измерения геометрического параметра (угла, расстояния,
разности расстояний) от положения самолета относительно станций,
16
т. е. также зависимостью от координат £ и т]. Из основ теории нави-
гации известно, что такой закон имеет следующий общий вид:
Дра>г1)=^Ц)1 (1.7)
g(5. 11)
где зависимости Дн и g, а следовательно, и Др от координат £ и т|
конкретизируются для каждой радионавигационной системы.
Если в выражение (1.7) вместо ДР(£, ц) подставить некоторое
постоянное число — допустимое значение ошибки ЛП Д рдоп, то по-
лучится уравнение кривой равной точности линии положения
В точках, расположенных внутри этой кривой, ошибки Др будут
меньше величины Дрдоп> а вне кривой — больше ее.
Одпако ошибка Др является величиной случайной, поэтому ее
частные значения могут и внутри кривой оказаться большими Дрдоп.
Следовательно, необходимо использовать вероятностные характери-
стики рассеивания линий положения и искать кривую, вдоль которой
частные ошибки Др по абсолютной величине не превосходили бы зна-
чения Дрдоп с заданной вероятностью Рг. Это условие записывается
следующим образом:
Р{|Др|<Дрдоп) = Рг. (1.8)
Из практики известно, что ошибки радионавигационных линий
положения после устранения систематических погрешностей подчи-
нены нормальному закону распределения со средним квадратическим
отклонением ор(£, ч]). Тогда, используя функцию Лапласа Ф(х), мож-
но условие (1.8) переписать в виде
ф /_ АрД°п 1 _ р
(1 2 ар (В, т])]
Отсюда по заданным значениям Дрдоп и Рг, можно определить
допустимое постоянное значение орД0П, при котором обеспечивается
соблюдение условия (1.8):
°РДоп(В; *1) = -7^°- = const,
) 2хРг
где хРг определяется с помощью таблицы приложения 1 как аргу-
мент функции Лапласа х при Ф(х) = Рг.
Это выражение является уравнением кривой равной точности
(равной средней квадратической ошибки) ЛП, соответствующей за-
данным Дрдо11 и Рг. Кривую можно обозначить как величиной ордоп,
так и величиной ДрРг (рис. 1.7).
Пример. Определить ардоп (£, т]) для условий, когда частные ошибки ЛП не
превосходили бы величину АрДОп — 5 км с вероятностью Рг = 0,92.
Решение. Согласно условию, необходимо обеспечить
• Р } \ Др | < 5 юи}=0,92:
17
HmO’
Рис. 1.7.’Рабочая область'по точ-
ности линий положения для радио-
маяка ВРМ-5
дРг (£, П) = Ардоп строятся на
кривые обеспеченной дальности
по таблице Лапласа по величине
Ф(х) = Рг = 0,92 находим аргумент
ха2 = 1,25. Рассчитаем искомое значе-
ние средней квадратической ошибки
5 км
оРдоп С > П) = ——----— 2,8 км.
/Т-1,25
Итак, во всех точках, где о(£, т]) =
== 2,8 км, ошибки ЛП с вероят-
ностью 0,92 не будут превосходить 5 км.
Построение кривых равной точ-
ности линии положения для всех
эксплуатирующихся РНС не пред-
ставляет значительных трудностей.
На плоскости они для всех РНС
являются окружностями.
Кривые т]) = орлоп = const,
или, что то же самое, кривые
карте, где предварительно нанесены
действия станции Dmin и Ошах. За-
тем по карте определяют границы площадей, в которых одновременно
удовлетворяются условия (1.6) и (1.8), в результате чего и получается
рабочая область по заданной точности ЛП (см. рис. 1.7)
Рабочие области по заданной точности мест самолета
В практике навигации наиболее распространенным критерием точ-
ности МС является величина г — радиальное отклонение полученного
места от его истинного положения. Поэтому для определения рабочей
области по заданной точности МС необходимо строить кривую равной
величины радиальной ошибки при заданной гарантийной вероятности
Рг, т. е. кривую гРг — const, каждая точка которой удовлетворяет
требованию
^к<гД0П} = -Рг-
(1-9)
Если предположить, что реальный закон рассеивания МС таков,
что его можно приближенно заменить законом кругового рассеивания,
то задачу построения кривой Грг можно свести к построению кривой
средней квадратической радиальной ошибки соответствующей вели-
чины or. Это следует из выражения интегральной функции распре-
деления кругового закона
Е(/?) = Р{г<7?} = 1— е <"•,
где R — некоторое произвольное фиксированное значение случай-
ной величины г; аг — среднее квадратическое значение случайной
величины г.
18
Подставив в последнее выражение вместо Р величину радиальной
ошибки гРг и приравняв его заданной гарантийной вероятности Рг,
получим
_±г
1— е СГ' = РГ
или
е °Г’=1 — РГ.
Прологарифмировав обе части равенства, получим
2
Рг).
откуда
П) = ~ ~ Рг-----= Р^доа- (1.10)
I _1п(1_рг)
Следовательно, выражение (1.10), являясь уравнением кривой
равной квадратической радиальной ошибки огдоп = const, одновре-
менно будет и уравнением кривой равной радиальной ошибки при ве-
роятности Рт для значения гРг =огдоп]/’—1п(1—Рг). Для вычисления
оТдоп по заданным гРг и Рг удобно пользоваться графиком интеграль-
ной функции распределения кругового закона, представленным на
рис. 1,8, построенном для значений г>г/огдоп.
Пример. Необходимо построить рабочую область при гРг — 10 км и Рг =
— 0,95. Рассчитать соответствующее необходимое значение огдоп.
Решение, а. По формуле (1.10) находим
10 км 10 км
ог доп= = . ~ 5,8 км.
У—1п (1—0,95) V2,99
б. С помощью графика (рис. 1.8) по значению Рг— 0,95 находиМ
~ 1,73. Так как гр = 10 км, то
10 км
огдоп = . — 5,8 км.
1, / о
Рис. 1 8 Интег-
ральная функция
распределения ра-
диальных ошибок
МС при круговом
законе рассеивания
(закон Релея)
19
Для построения по этим данным кривой на поверхности Земли
(глобусе, карте) необходимо найти выражение аг в координатах £ и ц.
Как известно, при определении МС по двум независимым ЛП,
пересекающимся под углом <о:
I ар] + орг
sin to
(111)
В формуле все величины в правой части являются функциями коор-
динат £ И Т].
Тогда с учетом (1.10) уравнение кривой or = const примет следу-
ющий общий вид:
V [ОР1£. п)12 + 1орг(^. П)1а _ Грг
sin со (g, т]) }<^1п(1—Рг)
(1-12)
Левая часть уравнения (1.12) конкретизируется для каждой опреде-
ленной радионавигационной системы (определенных линий положе-
ния), что и будет рассмотрено в последующих главах.
Построение кривой or„0n = const (и, следовательно, кривой
гРг = const) возможно двумя путями: аналитическим методом и мето-
дом поля радиальных ошибок МС.
Аналитический метод состоит в том, что, задаваясь одной из коор-
динат точки (£; или т],). из соотношения типа (1.12) находят вторую
координату (соответственно т)г или £г), а затем по парам полученных
координат строят кривую огДОп = const. Однако этот метод применяют
при достаточно простой форме зависимости (1.12), что не всегда имеет
место.
Рис. 1.9. Семейства изолиний ошибок двух линий положения и угла их
пересечения
20
Рис. 1.10. Построение кривых равной ошибки МС по полю средних
квадратических ошибок
Метод поля средних квадратических радиальных ошибок более
универсален, так как применим при любой форме зависимости (1.12 )
На карте (планшете) исходя из свойств используемых ЛП строятся
три семейства изолиний (рис. 1.9): два семейства изолиний равных оши-
бок ЛП (арн = const, ор2£ = const) и семейство изолиний постоянного
угла пересечения этих линий (сог = const). На подготовленном таким
образом планшете для каждой точки Mt рассматриваемого района (где
возможен прием радиосигналов системы) можно определить вели-
чины ор1г, ор2г и со., по которым для этой точки по формуле (1.11)
вычисляется значение огг.
Для обеспечения вычислений используют номограмму (рис. 1.11).
Пример. Если арг = 6,4 км, ар2 =• 8,8 км и со = 58°, то на номограмме по
ар1 и ор2 находится точка 3, которая затем проектируется по дуге окружности
на ось ор2 (в точку 4). Из точки 4 восстанавливается перпендикуляр к оси ор2,
который продолжается до пересечения с радиальной линией номограммы, со-
ответствующей значению угла со = 58° (точка 5). Длина радиуса окружности,
проходящей через дочку 5, и является значением or, которое можно прочесть,
пользуясь оцифровкой любой из осей (например, в точке 6 оси ар1 находим
or = 12,8 км). Полученное значение записывается на планшете у соответствую-
щей точки (рис. 1.10).
Диалогично находятся значения or для большого количества точек в пред-
полагаемой полосе прохождения кривой огд0П = const. В результате на план-
шете образуется поле значений средних квадратических радиальных ошибок МС.
По этому полю путем графической интерполяции проводятся изолинии
or=const (на рис. 1.10 — кривые аг — 10 км и аг = 20 км).
Метод поля средних квадратических радиальных ошибок трудоемок,
но в ряде случаев может оказаться практически единственно возмож-
ным. Он применим и при выборе других критериев точности МС, на-
пример, если точность МС характеризуется величиной большой полу-
оси эллипса ошибок, соответствующего заданному значению вероят-
ности Рг. Рабочие области РНС приходится находить при разработке
21
Рис. 1.11 Номограмма расчета средней квадратической ошибки МС по
ошибкам двух линий положения и углу их пересечения
схем размещения средств радионавигационного обеспечения полетов
и при составлении карт навигационной обстановки в данном районе
или по трассе. Нанесение рабочих областей на карты навигационной
обстановки позволяет количественно оценить возможную точность на-
вигационных определений с помощью РНС, что обеспечивает раз-
работку оптимального плана использования РНС в конкретном по-
лете.
§ 1.4. ПРОПУСКНАЯ СПОСОБНОСТЬ РАДИОНАВИГАЦИОННЫХ СИСТЕМ
Некоторые радионавигационные системы в силу своего принципа
действия допускают использование их одновременно только одним
самолетом. Это ограничение связано с применением двусторонней
радиолинии типа «запрос-ответ» (так называемые одноканальные
системы).
К таким системам относят, например, радиопеленгаторные угло-
мерные системы и угломерно-дальномерные системы с наземной РЛС.
Однако благодаря небольшим затратам времени на обслуживание каж-
22
дого самолета (0,2—3 мин) такие системы могут в ограниченный
промежуток времени быть использованы несколькими самолетами по-
следовательно. Для характеристики возможностей последовательного
использования радионавигационных систем несколькими самолетами
в ограниченный промежуток времени введено понятие пропускной
способности системы.
Существует несколько математических форм выражения пропуск-
ной способности, основанных на применении понятий теории массово-
го обслуживания:
количество NPp самолетов, которые могут быть обслужены системой,
т. е. получать необходимую им информацию при каждом запросе
наземной станции с заданной гарантийной вероятностью Рг;
вероятность Р успешного обслуживания заданного числа N само-
летов при определенном периоде Т повторения запросов каждым са-
молетом.
Радионавигационные системы, как правило, относят к так назы-
ваемым «одноканальным системам массового обслуживания с отка-
зами», в которых одновременно может обслуживаться только один
самолет. В случае одновременного поступления запроса от второго
самолета этот самолет получает отказ, не приобретая при этом пре-
имущества в дальнейшем.
Пропускная способность одноканальной РНС зависит:
от свойств системы, выражаемых средним временем Zo6cjI обслу-
живания одной заявки;
от характеристики потока заявок, т. е. от так называемого пара-
метра потока X.
При этом считается, что поток обладает некоторыми свойствами,
позволяющими считать его «простейшим» («пуассоновским») потоком.
Такими свойствами являются: стационарность потока — постоянство
средней интенсивности потока, выражающейся через параметр потока
(среднее число заявок в единицу времени); ординарность — прак-
тическая невозможность строго одновременного поступления двух и
более заявок; отсутствие «последствия» — независимость интенсивности
потока в данный промежуток времени от характера поступления заявок
в предыдущее время.
При наличии простейшего потока вероятность pK(f) поступления k
заявок за промежуток времени t выражается соотношением (распре-
деление Пуассона):
... (Мк
Р«(0 = Н- е~м>
к!
где X — параметр потока.
Тогда для случая одноканальной «системы с отказами» вероят-
ность отказа в выполнении заявки
р __ ^обсл
0111 1+^обсл *
23
Отсюда вероятность обслуживания, т. е. пропускная способность
системы
1
(113)
р _ 1____р ___ 1 _ Д^обсл __________
ОбСЛ 0ТК 1+^обСЛ 1+^^обсл
Величина X зависит от числа самолетов, нуждающихся в обслужи-
вании, и от необходимой частоты запросов каждым из них (интервала Т
между запросами одного самолета):
х=А
т
(1-14)
Из (1.13) и (1.14) можно найти число NPr самолетов, которое мо-
жет быть обслужено системой с вероятностью Рг при известных /о0сл
и Т:
NP = Х~Рт -Т. (1.15)
г Рг Сбсл
Пример. Определим пропускную способность автоматического радиопелен-
гатора, если /обсл — Ю сек, интервал запросов пеленгов Т = 2 мин = 120 сек,
заданная вероятность обслуживания Рг = 0,8:
1— Рг 1—0,8
Nr, й=------- 7’ = ———— 120 = 3 самолета.
°-8 РЛбсл 0,8-ю
Следует отметить, что невысокие, на первый взгляд, количествен-
ные показатели пропускной способности, получающиеся по приведен-
ной методике, являются следствием очень жесткой математической
модели процессов обслуживания, в которой под «отказом» понимает-
ся невозможность немедленного обслуживания самолета в каждый
произвольный (случайный) момент времени. Практически же ценность
обслуживания для экипажа, как правило, существенно не умень-
шается, если оно произойдет через несколько секунд (при использова-
нии автоматических У KB-пеленгаторов) или даже через несколько
минут (KB-пеленгаторы или наземные РЛС). Расчеты же по более
точным математическим схемам, как правило, для оперативного ис-
пользования оказываются слишком сложными.
Глава 2
ПРИМЕНЕНИЕ АВТОНОМНЫХ ИЗМЕРИТЕЛЕЙ
НАВИГАЦИОННЫХ ЭЛЕМЕНТОВ И АВТОМАТИЗИРОВАННЫХ
ВЫЧИСЛИТЕЛЕЙ КООРДИНАТ <1
Автономное определение навигационных элементов является ос-
новой выполнения полета методом управления навигационным режи-
мом, при котором задача экипажа состоит в обеспечении равенства
текущих путевого угла, путевой скорости и вертикальной скорости
требуемым (заданным) значениям. При использовании навигацион-
24
ных элементов для непрерывного счисления координат МС возможно
решение навигационной задачи и методом непосредственной коррек-
ции.
В воздушной навигации применяют два радиотехнических метода
автономного определения навигационных элементов: с помощью изме-
рителей, работающих на принципе использования эффекта Допплера;
с помощью бортовых радиолокационных станций (см. гл. 3).
§ 2.1. ХАРАКТЕРИСТИКА ДОППЛЕРОВСКИХ ИЗМЕРИТЕЛЕН
Основой самолетных допплеровских измерителей служат приемо-
передающие устройства, работающие несколькими (тремя-четырьмя)
остронаправленными лучами и измеряющие разности частот колеба-
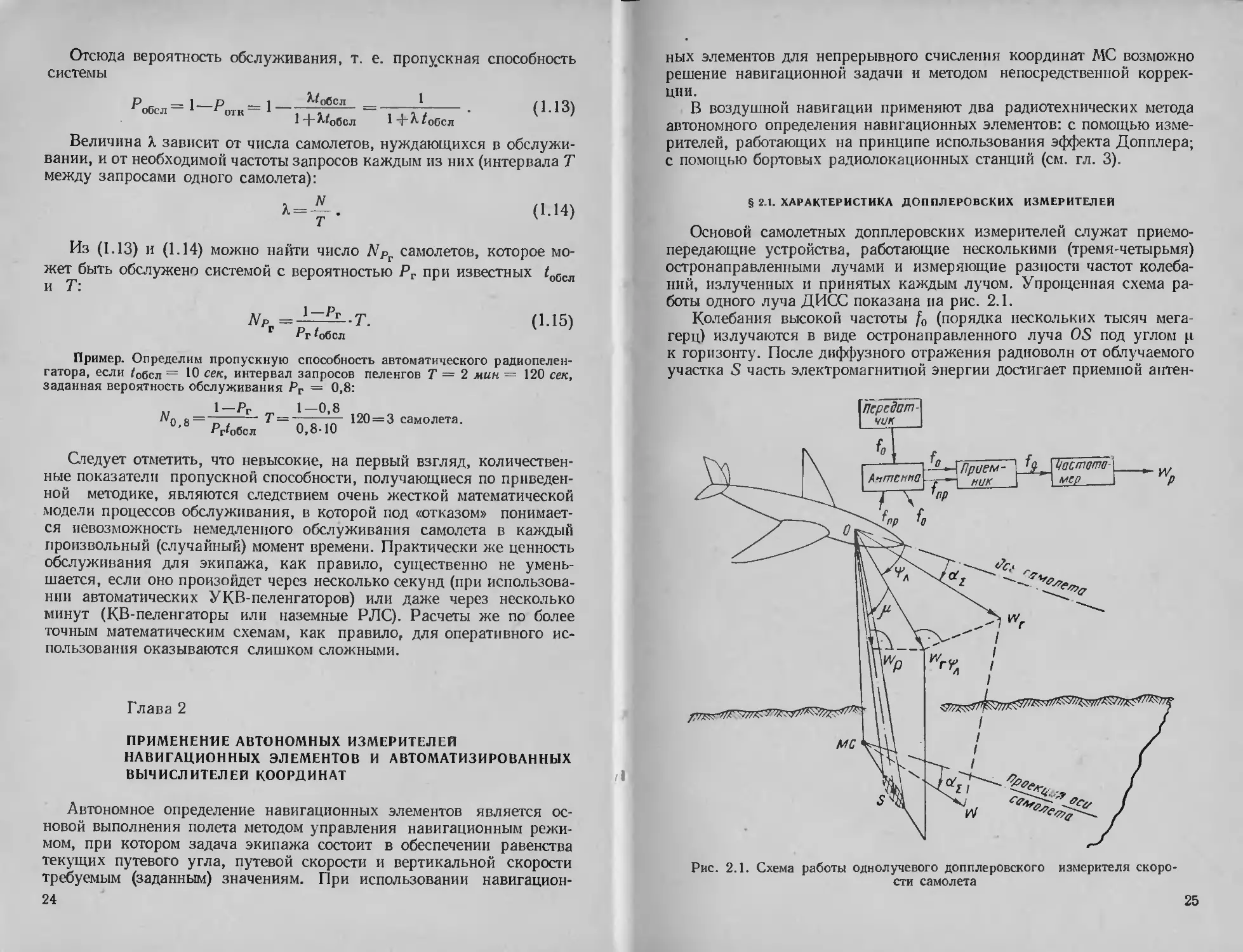
ний, излученных и принятых каждым лучом. Упрощенная схема ра-
боты одного луча ДИСС показана па рис. 2.1.
Колебания высокой частоты f0 (порядка нескольких тысяч мега-
герц) излучаются в виде остронаправленного луча OS под углом ц
к горизонту. После диффузного отражения радиоволн от облучаемого
участка S часть электромагнитной энергии достигает приемной антен-
Рис. 2.1. Схема работы однолучевого допплеровского измерителя скоро-
сти самолета
25
мы, возбуждая в ней колебания с частотой /пр, отличающейся от излу-
ченной:
9U7
fup = fo+/n = /o + T-P,
Ло
где Wp — радиальная (вдоль луча) скорость самолета относительно
отражающего участка; Хо — длина волны излученного
колебания; Д— допплеровский сдвиг частоты.
Приемник выделяет и усиливает разность частот fn (допплеровскую
частоту), которая при постоянной Хо зависит только от радиальной
скорости
= 2^р
In л •
Ло
(2.1)
Если частотомером измерена частота fR, можно вычислить радиаль-
ную скорость самолета
WV=M?. (2.2)
В общем случае, когда полная скорость Wn самолета имеет не-
нулевые проекции на три пространственные оси координат (полет
с набором или со снижением), для измерения всех ее составляющих
необходимо применять не менее трех лучей, не лежащих в одной пло-
скости. Полученная при этом информация в виде значений радиальных
скоростей Wvl, Wp2 и М7Рз обеспечивает при соответствующей ее об-
работке определение горизонтальной и вертикальной составляющих
МД и Wp вектора полной скорости самолета.
Однако при эксплуатации ДИСС, хотя и применяют трех- и четы-
рехлучевые антенны, чаще измеряют только горизонтальную состав-
ляющую й?г полной скорости lVzn.
В таких ДИСС в Зависимости от конструкции антенны и схемы из-
мерителя непосредственно измеряются: модуль и направление векто-
ра UZr относительно продольной оси самолета (U7r и угол сноса аг)
или проекции Wx и Wy полной скорости на продольную и поперечную
оси самолета. Однако во всех случаях в кабине экипажа обеспечивает-
ся индикация значений модуля 1Гг и суммарного угла сноса az.
Важно отметить, что с помощью ДИСС определяется не путевая
скорость W (т. е. не скорость перемещения МС по поверхности Земли),
а горизонтальная составляющая 1Гг полной скорости Wu, которая
только приближенно (для не очеиь больших высот полета) может счи-
таться равной путевой скорости W. Это является следствием самого
принципа действия ДИСС, измеряющего скорости самолета относи-
тельно поверхности Земли непосредственно, а не путем наблюдений за
перемещением по ней МС, как при визуальной или радиолокационной
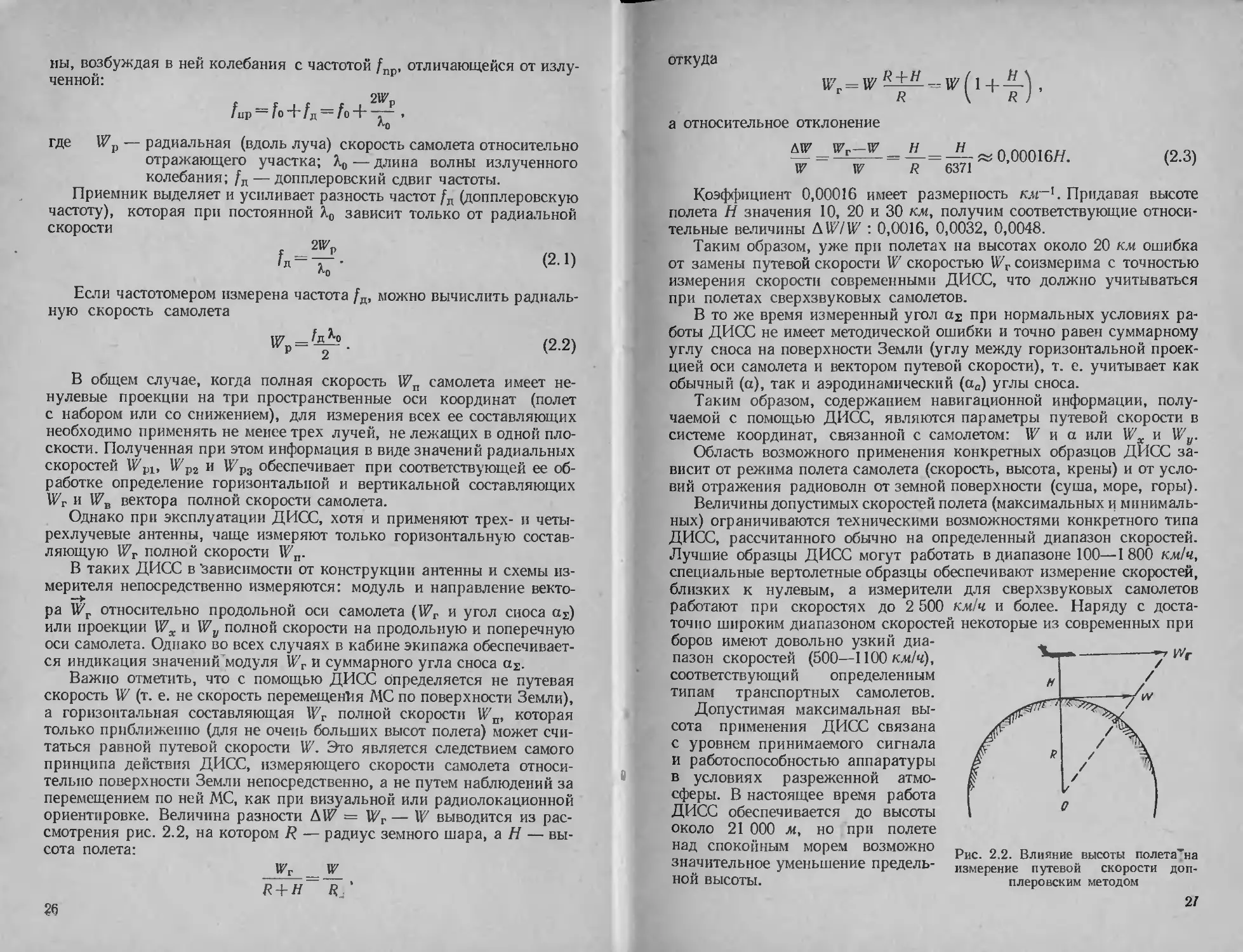
ориентировке. Величина разности Д117 = UZr — W выводится из рас-
смотрения рис. 2.2, на котором Д — радиус земного шара, а Н — вы-
сота полета:
R + H~ R,'
26
откуда
r R
а относительное отклонение
= fcZ. = 2L=JL « 0,00016//.
W W R 6371
(2-3)
Коэффициент 0,00016 имеет размерность км~1. Придавая высоте
полета Н значения 10, 20 и 30 км, получим соответствующие относи-
тельные величины AVV/UZ : 0,0016, 0,0032, 0,0048.
Таким образом, уже при полетах на высотах около 20 км ошибка
от замены путевой скорости W скоростью 1КГ соизмерима с точностью
измерения скорости современными ДИСС, что должно учитываться
при полетах сверхзвуковых самолетов.
В то же время измеренный угол а2 при нормальных условиях ра-
боты ДИСС не имеет методической ошибки и точно равен суммарному
углу сноса на поверхности Земли (углу между горизонтальной проек-
цией оси самолета и вектором путевой скорости), т. е. учитывает как
обычный (а), так и аэродинамический (аа) углы сноса.
Таким образом, содержанием навигационной информации, полу-
чаемой с помощью ДИСС, являются параметры путевой скорости в
системе координат, связанной с самолетом: W и а или Wx и
Область возможного применения конкретных образцов ДИСС за-
висит от режима полета самолета (скорость, высота, крены) и от усло-
вий отражения радиоволн от земной поверхности (суша, море, горы).
Величины допустимых скоростей полета (максимальных и минималь-
ных) ограничиваются техническими возможностями конкретного типа
ДИСС, рассчитанного обычно на определенный диапазон скоростей.
Лучшие образцы ДИСС могут работать в диапазоне 100—1800 км/ч,
специальные вертолетные образцы обеспечивают измерение скоростей,
близких к нулевым, а измерители для сверхзвуковых самолетов
работают при скоростях до 2 500 км/ч и более. Наряду с доста-
точно широким диапазоном скоростей некоторые из современных при
боров имеют довольно узкий диа-
пазон скоростей (500—1100 км/ч),
соответствующий определенным
типам транспортных самолетов.
Допустимая максимальная вы-
сота применения ДИСС связана
с уровнем принимаемого сигнала
и работоспособностью аппаратуры
в условиях разреженной атмо-
сферы. В настоящее время работа
ДИСС обеспечивается до высоты
около 21 000 м, но при полете
Рис. 2.2. Влияние высоты полета’на
измерение путевой скорости доп-
плеровским методом
над спокойным морем возможно
значительное уменьшение предель-
ной высоты.
2/
Величины кренов, при которых еще сохраняется удовлетворитель-
ная точность измеряемых скорости и угла сноса, составляют примерно
5—10°; при больших величинах кренов и углов тангажа, несмотря на
применение многолучевых антенн, ошибки становятся недопустимо
большими. В некоторых конструкциях ДИСС предусматривается ги-
роскопическая стабилизация антенной системы или стабилизация
измеряемых величин путем автоматического введения поправок в за-
висимости от фактических значений углов крена и тангажа.
Влияние отражающих свойств местности проявляется в виде пони-
жения точности или в полной потере информации при полете над водной
поверхностью, а также в неустойчивости показаний над горами. Тео-
ретически при идеально гладкой поверхности воды приемник ДИСС не
должен принимать отраженных сигналов, и, следовательно, не может
использоваться. Однако идеально гладкой поверхность моря не бывает,
поэтому ДИСС вполне работоспособен над водной поверхностью, но
подвержен влиянию так называемого «морского эффекта», который
состоит в занижении измеренной величины путевой скорости на 1,0—
3,7% по сравнению с действительной (в зависимости от ширины луча
станции и степени волнения моря). Объясняется морской эффект, во-
первых, большим различием коэффициентов отражения для воды и су-
ши (при применяемых углах наклона лучей ДИСС он меньше для вод-
ной поверхности), во-вторых, значительными изменениями коэффи-
циента отражения от воды даже при небольших сдвигах угла падения
Рис. 2.3. Зависимость коэффициента
отражения радиоволн k от угла паде-
ния i при различном состоянии моря:
во—море—1 балл по Бофорту, б — 2 балла;
з — 3 балла; г — 4 балла; д —вспаханная
емля (идеальная диф|>у зно -отражающая
поверхность)
луча, чего практически нет над
сушей.
На рис. 2.3 показана зависи-
мость коэффициента отражения ko6
радиоволн от угла падения i луча
при различных состояниях водной
поверхности.
При полете над морем (кри-
вая 2 рис. 2.4) разность углов па-
дения в пределах зондирующего
луча (3—5°) оказывается достаточ-
ной для сдвига средней частоты
допплеровского спектра в сторону
меньших значений по сравнению с
сушей (кривая 1), для которой
производится основная калибровка
ДИСС.*Сдвиг средней частоты при-
водит к ошибке в измерении путе-
вой скорости. Так как ошибка
имеет систематический характер,
уменьшение ее достигается измене-
нием калибровки ДИСС в полете
путем включения режима «Море».
Однако поскольку условия отра-
жения от морской поверхности при
перекалибровке учитываются толь-
28
ко в среднем, ошибка полностью не
устраняется и может иметь остаточ-
ную величину около ±0,2%.
Кроме морского эффекта, на пока-
зания ДИСС над водной поверхностью
воздействует также поверхностный
слой моря, движущийся под влиянием
постоянных течений и ветра. Степень
этого влияния можно оценить, имея в
виду, что скорость морских течений
достигает 3—3,5 км/ч, а скорость вет-
рового сноса—8—16% от скорости
ветра на уровне моря. Таким обра-
зом, при сильном ветре у поверхности
воды показания ДИСС могут иметь
значительные ошибки. Принципиаль-
но эти ошибки можно учесть, имея
характеристику морского течения (по
атласу течений) и информацию о ветре
на уровне воды.
Однако в практике такой учет не-
реален. Поэтому экипаж, применяя
ДИСС над морем, должен помнить о
возможном снижении точности его по-
казаний и при счислении пути чаще
корректировать МС методами незави-
симых определений.
Неустойчивость показаний ДИСС
в полете над горной местностью также
связана с резкими изменениями усло-
вий отражения, так как угол падения
радиоволн, а вместе с ним и коэффи-
циент отражения значительно изме-
няются в зависимости от рельефа.
Техническая точность выдаваемой
ДИСС информации характеризуется
величинами средних квадратических
ошибок угла сноса оа = 0,1—0,5е и
путевой скорости aW/W = 0,001—>
0,005 (т. е. 0,1— 0,5% от W).
Оперативность выдачи навигацион-
ной информации допплеровскими из-
мерителями обеспечивается полной
автоматизацией процессов измерений,
обработки и непрерывной индикации
обоих параметров вектора путевой
скорости. Операции по включению
ДИСС и управлению им в полете до-
статочно просты.
Рис. 2.4. Сдвиг спектра принятых
допплеровских частот над морем
по сравнению с сушей
<^) Вкл
Вкл. Память море Контр!
л ВЫСОК. __ х- ^ Контр
Выкл
Рис. 2 5. Щиток управления
ДИСС
Рис. 2.6. Указатель ДИСС
29
Допплеровский измеритель (без вычислителя координат) управ-
ляется с небольшого щитка (рис. 2.5), который обеспечивает:
включение общего питания аппаратуры (положение «Вкл.») и
включение высокого напряжения (положение «Высок.»);
переключение устройства счисления пути, работающего в комплек-
се с ДИСС, в режим «Память» (положение «Память»);
переключение калибровки схемы из режима «Суша» в режим «Мо-
ре» и обратно;
включение цепей проверки калибровки измерителя («Контр. 1»
и «Контр. 2»),
На индикаторе угла сноса и путевой скорости (рис. 2.6) непрерывно
индицируются текущие значения угла сноса а (стрелочный указатель)
и путевой скорости II/ (цифровой счетчик). На индикаторе имеется
также сигнальная лампочка «Память», загорающаяся при переходе
ДИСС в режим «Память».
§2.2. РЕШЕНИЕ НАВИГАЦИОННЫХ ЗАДАЧ НЕПОСРЕДСТВЕННО
ПО ДАННЫМ ДИСС
Itei Непосредственное использование ДИСС в сочетании с курсовым
прибором (без автоматизированного вычислителя координат) обеспе-
чивает решение следующих навигационных задач:
подбор требуемых курса и воздушной скорости для выполнения
полета по заданной программе методом постоянного навигационного
режима;
полный контроль пути определением МС методом счисления;
определение параметров ветра на высоте полета.
ДИСС полностью обеспечивает выполнение полета по заданной
программе методом постоянного навигационного режима. При этом
экипаж самолета:
выводит самолет на курс следования утр, соответствующий задан-
ному путевому углу ртр;
подбирает требуемую воздушную скорость Утр, обеспечивающую
при неизвестном ветре полет с требуемой путевой скоростью UZTP.
Самолет на курс следования по линии заданного пути (трассе или
маршруту) с помощью ДИСС выводится подбором курса утр по фак-
тическому измеренному адИСс-
После пролета ИПМ с курсом, рассчитанным по прогнозируемому
ветру или с курсом, равным ЗПУ (при отсутствии данных о ветре),
штурман через 1 мин полета отсчитывает по компасу фактический курс
•у самолета и угол сноса адисс по указателю ДИСС. Если сумма вели-
чин у+адисс = Ртр с точностью 1—2°, курс считается подобран-
ным и самолет можно вести этим курсом по линии заданного пути.
При у + адисс Ртр в курс вносится поправка
&У = РТр (у + адисс)
с ее знаком, после чего опять отсчитывается угол сноса по ДИСС и
вновь находится поправка. Как правило, после одного-двух доворо-
тов (поправок) курс подбирается с необходимой точностью.
30
Точность выдерживания требуемого путевого угла сф этим спо-
собом в основном определяется точностью курсового прибора, так
как ошибка оадИсс, вносимая измеренным углом сноса, несуществен-
на по сравнению с ошибкой изменения курса оу. Например, при сред-
ней квадратической ошибке измерения курса оу = 2° и ошибке угла
сноса по ДИСС оадИСс — 0,5° получим
ор = У °Т2 + аадИСс = I Л22 + 0,52 ® 2,06°.
Прибытие самолета в конечный пункт (аэропорт) в заданное время
обеспечивается сравнением фактического значения путевой скорости
IVдисс, отсчитанной по ДИСС, с требуемым ее значением 1Утр. Тре-
буемая путевая скорость определяется на основе контроля пути по
дальности и оставшемуся располагаемому времени полета, т. е.
Vff _^ост
Ч'тр—.
•расп
Обеспечив изменением режима работы двигателей равенство фактиче-
ской путевой скорости W и требуемой путевой скорости IVTP, заме-
чают воздушную скорость V и, если она не выходит за пределы допу-
стимых крейсерских значений, выдерживают ее по аэродинамическому
указателю скорости.
Полный контроль пути с использованием ДИСС, но без автомати-
ческого вычисления координат, может оказаться необходимым только
в случае выхода из строя вычислителя. Тогда на основании показаний
ДИСС и курсового прибора получают навигационные элементы поле-
та — фактическую путевую скорость и фактический путевой угол,
по которым на карте прокладывают линию фактического пути и отме-
чают расчетные места самолета относительно последнего достоверно
опознанного и пройденного ориентира. Благодаря автоматическому
поступлению данных об а и W такие счислимые места могут быть полу-
чены в любой момент времени. Однако ручная обработка автоматиче-
ски поступающей информации нерациональна; поэтому современные
ДИСС комплексируются с автоматическими вычислителями координат
(АВК|.
Определение ветра на основе показаний ДИСС заключается в рас-
чете его направления и скорости по известным курсу, воздушной ско-
рости, углу сноса и путевой скорости с помощью навигационного рас-
четчика, навигационной линейки или других вычислительных инстру-
ментов. Данные о ветре могут быть использованы для предваритель-
ного расчета курса следования на очередном этапе (после поворотной
точки маршрута), чем обеспечивается вывод самолета на следующий
отрезок линии пути. Кроме того, данные о ветре могут быть переданы
на наземные диспетчерские пункты для использования их при решении
задач по управлению воздушным движением, а также для анализа
метеообстановки.
Точность определения скорости ветра по данным ДИСС зависит от
ошибок (оа и ott') самого ДИСС и ошибок оУ определения (учета) воз-
31
душной скорости полета. Средняя квадратическая радиальная ошиб-
ка оU вектора ветра может быть оценена по формуле
где gW и са — соответственно средние квадратические ошибки путе-
вой скорости и угла сноса по ДИСС; gV — средняя
квадратическая ошибка определения воздушной ско-
рости.
Для современных транспортных самолетов в наиболее неблаго-
приятных условиях полета (сильный встречный ветер) можно считать
VIW = 1,3. Ошибка измерения воздушной скорости современными
аэродинамическими приборами eV = 0,01 V. При этом если gW =
= 0,005 W и оа = 0,5°, то средняя квадратическая ошибка опреде-
ления скорости ветра будет равна 0,0163 W, т. е. около 1,6?6 от путевой
скорости.
В более благоприятных условиях (попутный ветер, VIW = 0,9)
ошибка будет несколько меньшей (примерно 0,013 IV7).
§2.3. АВТОМАТИЧЕСКОЕ СЧИСЛЕНИЕ КООРДИНАТ ПО ДАННЫМ ДИСС
Основным методом использования информации от ДИСС является
непрерывное счисление координат самолета с помощью автоматиче-
ского вычислителя (АВК), работающего в комплексе с ДИСС. Непре-
рывно определяемые допплеровским измерителем значения путевой
скорости и угла сноса вместе с сигналами курса от компаса поступают
в автоматическое счетно-решающее устройство, которое указывает
место самолета в ортодромической системе координат, т. е. координаты
х и у (рис. 2.7). Ориентация осей этой системы относительно меридиана
отсчета курса обеспечивается ручным вводом угла рк карты, равного
углу между этим меридианом и выбранным направлением оси ОУ
(оси С). Применение ДИСС в комплексе с АВК связано с исполь-
Рис. 2.7. Система координат при счисле-
нии по данным ДИСС
зованием дополнительных
органов управления и инди-
кации, к которым относят-
ся:
задатчик углов карты
(ЗУК);
счетчик координат (Сч);
включатель счетчиков
(«Счетчик»);
переключатель источников
информации для счисления
пути («ДИСС-АНУ»);
задатчик ветра (для работы
АВК без информации от
ДИСС).
32
Режимы работы АВК
Типовой допплеровский автоматический вычислитель координат
представляет собой счетно-решающее устройство, которое может ра-
ботать в трех режимах: «ДИСС», «Память» и «АНУ».
Режим «ДИСС» является основным режимом работы АВК.
Координаты в этом режиме счисляются по текущим значениям курса у,
поступающим от курсового прибора, и текущим значениям угла сно-
са а и путевой скорости получаемым от ДИСС. Рассмотрим движе-
ние информации в цепях АВК в режиме «ДИСС» по схеме (рис. 2.8),
состоящей из нескольких узлов.
Узел отработки условного курса вырабатывает напряжение по-
стоянного тока, пропорциональное величине у — Рк, т. е. курсу от-
носительно главной ортодромии — оси 0Y (С).
Узел отработки путевой скорости выдает значение модуля W так-
же в виде напряжения постоянного тока \V=.
Узел отработки условного путевого угла выдает величину у — Рк +
+ а — текущее значение путевого угла относительно осн 0Y в виде
угла поворота вала, используемого для непрерывной установки ро-
тора синусно-косинусного потенциометра узла разложения.
Узел разложения W раскладывает вектор путевой скорости на со.
ставляющие Wx = U7sin(y — Рк + а) и Wy = W cos (у — Рк + а)
по осям счисления 0Y и ОХ (С и В).
Рис. 2.8. Блок-схема работы АВК в режимах «ДИСС» и «Память»
2 Осадший в. и » 33
Счетчик координат (рис. 2.9) имеет два интегрирующих двигателя,
которые непрерывно суммируют приращения WXM и при этом
стрелки С и В, сидящие на осях двигателей, указывают ио общей
шкале вычисленные координаты х и у (на рис. 2.8 показан один из
каналов счетчика — канал вычисления координаты у). Кроме того,
счетчик обеспечивает ручной ввод исходных значений координат х0
и у0 места, с которого начинается счисление. Режим «ДИСС» обеспе-
чивает счисление координат при любых маневрах самолета скоростью
и направлением полета, если только углы крена и тангажа не превос-
ходят 5—10°, при достижении которых предусмотрен перевод вычис-
лителя в режим «Память».
Р е ж и м «П а м я т ь» является запасным режимом работы вы-
числителя, предназначенным для продолжения непрерывного счис-
ления координат при перерывах в поступлении допплеровской инфор-
мации (неисправность измерителя, низкий уровень отраженного сиг-
нала, углы кренов или тангажа более 5—10°). АВК из основного ре-
жима «ДИСС» в режим «Память» переключается автоматически спе-
циальной схемой, но может быть переключен также и вручную с пуль-
та управления ДИСС. В этом режиме счисление ведется по текущим
данным о курсе и воздушной скорости и последним данным о ветре,
зафиксированным узлом памяти в момент переключения.
Назначение узла «Память» — непрерывная выработка при работе
АВК в режиме «ДИСС» текущих значений составляющих вектора вет-
ра Ux и Uv по осям счисления данного этапа ЛЗП (которые могли бы
быть использованы для счисления в случае потери допплеровской ин-
формации). Величины Ux и Uv определяются согласно формулам:
Ux = Wx—Vx, Uy = Wy—Vy.
Значения Wx и 117^ поступают с узла разложения W, а значения
Vx и Vv — с узла разложения V (синусно-косинусный построитель),
ротор которого поворачивается электродвигателем ЭД? узла отработ-
ки курса. В результате сравнения одноименных проекций путевой
и воздушной скоростей в
Рис. 2.9. Счетчик координат
АВК
двух идентичных ветвях схемы «Память»
(на рис. 2.8 показана одна ветвь) с по-
мощью магнитных усилителей МУ и от-
рабатывающих двигателей ЭД движки
потенциометров памяти Пих и по-
стоянно занимают положения, соответ-
ствующие текущим значениям Ux и Uy.
В результате на выходе каждой ветви
узла «Память» соответственно имеются
напряжения Vx + t/a.iil/y + Uy.
В момент перехода (или ручного пе-
ревода) счисления в режим «Память»
подача напряжений Wx и \Vv на
магнитные усилители прекращается,
движки потенциометров останавливают-
ся, фиксируя («запоминая») последние
34
значения составляющих ветра U*x и U*y. При дальнейшем полете
на выходе схемы «Память» будут непрерывно образовываться напря-
жения Vx + О*х и + О*у, соответствующие текущим значениям
вектора воздушной скорости и постоянному запомненному вектору
—>
ветра U*(UX, Uy). Эти напряжения подаются на интегрирующие
двигатели счетчика координат вместо напряжений и Wy, т. е.
счисление ведется но воздушной скорости с учетом последних (на мо-
мент включения схемы «Память») данных о ветре.
Счисление в режиме «Память» с запоминанием составляющих вет-
ра по осям координат не ограничивает маневров самолета по курсу
и величине воздушной скорости, но не допускает значительных из-
менений высоты полета и удаления из района, где было произведено
включение режима. Невозможен также переход к новой системе коор-
динат (изменение угла карты Рк), так как во всех этих случаях запом-
ненные величины (Jx и Uy значительно отличаются от истинных.
В режиме «Память» на указателе ДИСС загорается лампочка «Па-
мять», напоминающая о необходимости подготовки к переходу в режим
«АНУ».
Режим «АНУ» является вторым резервным режимом АВК,
применяющимся только при длительном отсутствии информации от
ДИСС. В режиме «АНУ» путь счисляется по воздушной скорости
с учетом ветра, параметры которого вводятся вручную через задатчик
ветра из комплекта НИ-50Б. Работа экипажа с аппаратурой в режиме
«АНУ» не отличается от работы с НИ-50БМ. Точность получаемых при
этом мест самолета в основном зависит от точности курсового прибора
и введения параметров ветра.
Известны также АВК, обеспечивающие непрерывное вычисление
и индикацию параметров ветра — скорости и направления относительно
истинного меридиана.
Счисление при постоянном положении координатных осей
В зависимости от формы ЛЗП предстоящего полета (или его части)
счисление ведется при различном положении начала координат и ко-
ординатных осей ОХ и 0Y. Постоянное положение начала и осей коор-
динат сохраняется при полете на одном прямолинейном участке трас-
сы или при полете в ограниченном районе (например, при заходе на
посадку). Начало и осн координат могут быть перенесены при изме-
нении направления ЛЗП. Расскажем о работе экипажа в этих случаях.
Для использования АВК в режиме «ДИСС» переключатель «ДИСС-
АНУ» на приборной доске самолета нужно установить в положение
«ДИСС». На пульте управления ДИСС необходимо переключатели
установить в положение «Высок.» и «Суша» («Море»), на задатчике
углов карты (рис. 2.10) — угол карты, на счетчике координат—орто-
дромические координаты х0 и у0 начальной точки счисления в системе
координат данного участка.
При полете по трассе начало координат (х = 0, у — 0) выбирается
в начале (или конце) каждого участка, а угол карты (Зк — равным
2* 35
Заданному путевому углу: при использовании ортодромического кур-
са (от ГПК или курсовой системы) рк = 0у, при использовании лок-
содромического компаса (истинного или магнитного) рк = Ри или
Рк= Рм соответственно. Такой выбор начала и осей координат обес-
печивает в полете непосредственный отсчет координат самолета в виде
удаления от начала (или конца) участка вдоль ЛЗП (координата у
или С) и бокового уклонения от нее (координата х или В). Счисление
координат начинается с момента включения на приборной доске тумб-
лера «Счетчик» при пролете исходной точки счисления, координаты
которой х0 и у0 были установлены на счетчике:
На прямолинейном участке ЛЗП работа с аппаратурой АВК вклю-
чает в себя следующие операции:
периодическое уточнение установки угла карты в соответствии
с изменениями путевого угла оси СУ из-за схождения меридианов (при
использовании компаса, выдающего истинный курс) или из-за схож-
дения меридианов и магнитного склонения одновременно (при исполь-
зовании компаса без коррекции Ам);
устранение накопившихся ошибок счисления методом «коррекции
координат», заключающимся в замене отработанных на счетчике
счисленных координат хс и ус координатами и уф, полученными
с помощью более точного метода (по БРЛС или по какой-нибудь ра-
дионавигационной системе). При этом полученные координаты МС (по-
лярные, гиперболические) необходимо перевести в ортодромические
координаты в той же системе, в которой ведется счисление на данном
этапе. В общем случае этот перевод выполняется с помощью полетной
карты, но вносимые при этом графические ошибки сильно снижают
точность получаемых координат. Поэтому применение карты для этой
цели нежелательно. Способ непосредственного оперативного опре-
деления ортодромических координат с помощью БРЛС рассматривает-
ся в следующей главе.
Коррекция показаний курсового прибора по данным допплеров-
ского АВК заключается в воздействии экипажа на точность счисления
координат путем исправления показаний курсового прибора, выдаю-
щего в вычислитель информацию о курсе. Поправка курсового прибора
Рис. 2.10. Задатчик угла
карты АВК
находится при сравнении счисленных
координат с фактическими, определен-
ными с помощью более точных средств
(БРЛС, точные радионавигационные си-
стемы).
Пусть в процессе полета с постоянным
ортодромическим курсом у обнаруживают-
ся систематические уклонения счислимых
МС от соответствующих точных МС
(рис. 2.11) в направлении, перпендикуляр-
ном ЛЗП (оси счисления OY), т. е. при
действительном движении самолета по
ЛФП результаты счисления дают ложную
линию пути ЛФПР, составляющую с пра-
вильной угол Ар.
36
Рис. 2.11. Коррекция показаний курсового прибора по данным АВК
Причинами ошибки могут быть случайные погрешности курса,
установки угла карты и измерения угла сноса. Среди этих ошибок
преобладающую роль играет ошибка курса (оу « 2°), превосходящая
ошибку установки угла карты примерно в 3 раза (afJK = 0,7е) и ошиб-
ку угла сноса в 4—5 раз. Таким образом, практически обнаруженная
ошибка путевого угла может быть отнесена за счет ошибки курса.
Следовательно, измерив в полете ошибку Ар, можно узнать и ошибку
курса, подаваемого в АВК: Ду ~ ДР- Для этого в некоторый момент
времени при наличии точного МС (точка ЛД на рис. 2.11) производится
коррекция показаний АВК — на счетчике устанавливаются точные
координаты самолета хф1 и уф1. При дальнейшем полете в точке ЛД,
для которой также определены точные координаты хф2 и уф2, со счет-
чика считываются счислимые (расчетные) координаты хр2 и уР2.
При условии, что линия фактического пути проходит под неболь-
шим углом к ЛЗП и что отклонения счислимой линии пути ЛФП$
от ЛФП также невелики, можно записать:
Ду « Др^ -Ф-^1 рад = 57>3о . (2.4)
Уф2-Уф1 Уф2—Уф1
Ошибка Ду может быть скомпенсированна вводом такой поправки
в показания шкалы курсового прибора (от которого вычислитель полу-
чает данные о текущем курсе), чтобы исправленные показания
Тпспр = Тизмср 4~ Ау. (2.5)
Точность счислимого места самолета, получаемого с помощью АВК
при работе его в режиме «ДИСС», зависит от ошибок o\V и оа доппле-
ровского датчика, ошибок оу курсового прибора, ошибки орк установ-
ки угла карты, инструментальных погрешностей счетно-решающего
прибора, а также от ошибок определения и установки начальных ко-
ординат участка счисления пути.
Для прямолинейного участка пути S точность счисления (без уче-
та ошибок начальной установки координат и инструментальных оши-
бок счетно-решающего устройства) может быть оценена по средней
квадратической радиальной ошибке места самолета
огдисс = 5 |/^)2 + °“2 + оТ2+°₽к = ™дисс5- (2-6)
37
Рис. 2.12. Расчет допустимого пути счисления в режиме «Память»
где oUZ, оа, оу, ay, opit — средние квадратические ошибки соот-
ветствующих величин, а Шдисс — коэффициент ошибки счисления
в режиме «ДИСС».
Из этой формулы при оу = 2° «0,035 рад, сфк = Г«0,017 рад,
оа — 0,5°«0,008 рад и = 0,005, получим
О/дисс 0,043.
При использовании более точной курсовой системы (оу = 0,5°)
ошибка
°Лдисс ~ 0,023.
Из этих цифр видно, что техническая точность допплеровского
измерителя реализуется неполно из-за больших ошибок курсовой
системы и ошибок определения и установки угла карты, которые
в приведенных примерах вместе составляют 98 и 90% общей ошибки
определения места самолета.
Точность вычисления координат в режиме «Память» значительно
ниже, чем в основном режиме, так как добавляются ошибки измерения
воздушной скорости и ошибки вследствие изменчивости ветра. Тем не
менее режим «Память» значительно повышает надежность прибора
в целом, так как обеспечивает непрерывность счисления координат
при временном выходе из строя допплеровского датчика.
Допустимая дальность полета по трассе в режиме «Память» обуслов-
ливается требованием, чтобы накапливающаяся ошибка координаты х,
т. е. суммарная ошибка Ахг определения бокового уклонения самоле-
та, с достаточной гарантийной вероятностью Рг не превосходила по-
ловины установленной ширины трассы Ы2 (рис. 2.12). Таким образом
должно выполняться условие
р(|Ах2|<А} = Рг (2.7)
или, используя функцию Лапласа,
38
где ох2 — суммарная средняя квадратическая ошибка определения
координаты х, зависящая от пройденного в режиме «Память» пути
5пам. Обозначив аргумент функции Лапласа, соответствующий зна-
чению Ф — Рг через хрг, получим
2 2 стх2
откуда
0X2
b
2У~2Хр
г
(2-9)
Ошибка 0X2 определения бокового уклонения по АВК зависит:
от ошибки охдисс координаты х, образовавшейся в режиме «ДИСС»
к моменту перехода в режим «Память»;
от ошибки счисления координаты х в режиме «Память», зависящей
от погрешностей ввода в вычислитель величин V и у и погрешностей
запомненного ветра — охсч, у, и;
от дополнительного бокового смещения oxs самолета за счет не-
учтенной изменчивости ветра на участке полета SnaM.
Дополнительное боковое смещение
°Х2 = V<™дИСС + ОХсч ,v.u + axs
Составляющие ошибки охДисс> о-х'сч.у.о и oxs можно выразить че-
рез соответствующие радиальные ошибки огдисс, о^сч.у.о и ors,
тогда
а,ДИСС СТГсч. . ars
2 + 2 + 2
При этом условие 2.9 удержания самолета на трассе примет вид
агДИСС агсч. у, и . ars _ в
2 2 2 ~2у~2хР
Г
или после возведения в квадрат
ОГДИСС + Grсч,\V.'U “ЬGrS — •
Рг
Но огсч v и = Шу и SnaM, где ту и — коэффициент ошибки счисле-
2 Ко
ния по воздушной скорости и ветру, a ors — — — S3/2,
где ks — коэффициент пространственной изменчивости ветра, выби-
раемый из специального графика (по высоте полета и времени года).
Учитывая это, получим
4 / Кс \ 2 h4 s
аг2 Д-т2 92 -I_______—1—1 S3 —
и/ДИСС I "‘у. О°пам ~ q I П7 / пам— о ’
’ \ " 1 4Хр
39
•км
9 Ь2
+ Сиднее------— = О-
4Хрг
(2.10)
О ------,---,------------г—
т боо во о woo w,km/v
Рис. 2.13 График допустимого
пути полета в режиме «Память»
режим используется лишь на
13 мин.
Решая уравнение (2.10) относи-
тельно 5пам, получим искомое зна-
чение допустимой длины пути в ре-
жиме «Память» для различных усло-
вий, выражаемых параметрами Ь, Рт,
U I nlV,U О/'ДИСС И ks.
На графике (рис. 2.13) приведены
кривые 5пам в зависимости от W и
niv.u при следующих значениях па-
раметров: b = 20 км, Рг = 0,95,
ОГдцсс = 3 км и ks — 2 км1/2/ч.
Из графика видно, что режим
«Память» можно применять только
ограниченное время: например, при
17 = 600 км/ч и 1Пу,и = 0,04 этот
расстоянии до 130 км, т. е. в течение
Если необходимо найти SnaM для любых других условий при раз-
личных значениях всех шести параметров, можно прибегнуть к реше-
нию с помощью номограммы кубического уравнения [11].
Счисление при изменении системы координат
При изменении направления ЛЗП (развороте на очередной прямо-
линейный этап маршрута) необходимо выполнить операции, обеспечи-
вающие непрерывное счисление координат, но уже в новой ортодро-
мической системе координат, в которой за ось ОУ принята ЛЗП оче-
редного этапа.
Поскольку при развороте в результате крена самолета АВК авто-
матически переходит в режим «Память», необходимо обеспечить, чтобы
еще до начала разворота в блоке «Память» были отработаны и запом-
нены составляющие вектора ветра по новым осям координат Ux* и
Uv*. Тогда в процессе разворота АВК будет вести точное счисление по
воздушной скорости с учетом ветра и показания счетчика можно будет
использовать для вывода самолета на новую ЛЗП, добиваясь нуле-
вого значения координаты х* — 0.
Для этого на ЛЗП1 (рис. 2.14) выбирается точка перестройки
АВК(ТП), удаленная от ППМ на расстояние Ттп, несколько большее
(на 1—3 мин полета), чем точка начала разворота (ТНР). Удаление
ТНР от ППМ равно линейному упреждению разворота Тур.
Кроме того, выбор ТП должен обеспечивать возможность надеж-
ного определения момента пролета ТП не только по счислению, но и
40
(2.U)
независимыми методами (с помощью угломерно-дальномерной систе-
мы, БРЛС и т. п.). Для выбранной ТП определяются координаты в
системе следующего этапа по формулам:
*тп = Дгп sin (Р2—pi);
Утп = —£тп cos (р2—Pi).
Эти же данные можно получить и непосредственно на карте, опу-
стив перпендикуляр из ТП на новую ось OY* и измерив отрезки Хтп и
Утп (см. рис. 2.14).
При проходе ТП устанавливаются:
на задатчике углов карты (ЗУК) новый угол карты рк — р2, рав-
ный путевому углу ЛЗП2;
на счетчике координат — координаты х|п и z/тп-
За время полета между ТП и ТНР вычислитель, работающий в ре-
жиме «ДИСО>, успевает выработать в блоке «Память» величины U*x*
и U** в новой системе, чем обеспечивается непрерывное счисление
в процессе разворота.
Момент начала разворота можно определить по времени полета от
ТП. При выходе самолета на новую ЛЗП показания стрелок счетчика
должны быть:
х* = 0;
= (2-12)
После выхода па новую ЛЗП необходимо при первой возможности
откорректировать координаты для устранения неизбежных ошибок,
накопившихся в процессе перехода к новой системе координат, и вы-
полнить операции, предусмотренные для полета на прямолинейных
участках пути.
§ 2.4. ВОЖДЕНИЕ САМОЛЕТА ПО ДАННЫМ ДОППЛЕРОВСКОГО АВК
Непрерывное определение координат МС по данным ДИСС поз-
воляет в принципе решать главную часть навигационной задачи —
вырабатывать управляющие данные для полета по заданной программе.
Этот процесс в различных образцах АВК автоматизирован в разной
степени.
41
Простейшим приемом управления полетом является дискретное
определение требуемых значений путевого угла ртр и путевой скоро-
сти Ц/трдля полета в очередную контрольную точку ЛЗП от фактиче-
ского МС, отличающегося по разным причинам от программного.Однако
при этом необходимо использовать карту, на которой по данным счет-
чика наносится счислимое МС, а затем графическим путем определя-
ются величины ртр и Soot- По S0CT и располагаемому времени /расп рас-
считывается скорость Ц/тр. Таким образом, в этом случае для вож-
дения самолета применим метод постоянного навигационного режима.
Другой принципиально возможный прием вождения самолета за-
ключается в постоянном приведении показания стрелки В, т. е. счис-
лимого бокового уклонения от ЛЗП к нулю. В данном случае приме-
няется метод непосредственной коррекции по координате х. Одна-
ко указатели координат АВК не приспособлены для достаточно точной
реализации метода В = 0 и он может служить лишь для приближен-
ного выхода на ЛЗП при больших уклонениях.
Оба приема находят в современных АВК свое развитие на основе
дальнейшей автоматизации переработки навигационной информации.
Существуют АВК, в которых по счислимым координатам МС (х и у
или (р и ?.) непрерывно рассчитывается необходимый угол доворота
вектора W и расстояние до фиксированной точки, координаты которой
введены в вычислитель вручную. Удерживая стрелку специального
указателя угла доворота на нуле, можно привести самолет в эту точку.
Требуемая путевая скорость М7тр определяется по величине S0CT.
Скорость выдерживается по указателю скорости ДИСС.
На рис. 2.15 показана блок-схема допплеровского АВК рассмат-
риваемого типа (с аналоговым вычислителем «Минак-5»). В этом АВК
счисление ведется в географической системе координат с непрерывной
выдачей значений <р и X, на счетчиках устройства управления и отобра-
жения (УУО). На других счетчиках УУО непрерывно выдаются теку-
щие направление и скорость ветра, вычисленного по параметрам век-
торов U7 (получаемым от ДИСС) и V (от централи скорости и высоты).
В УУО вручную вводятся также географические координаты одной
фиксированной точки (пункта назначения) <рц и Хц, используя которые
вычислитель непрерывно выдает направление на эту точку и" расстоя-
ние до нее, учитывая при расчетах сфероидичность Земли. Полученные
данные позволяют привести самолет в заданную точку по кратчай-
шему пути.
Следующей ступенью развития АВК (например, НАС-1) является
его сопряжение с автопилотом, на который через блок связи подаются
выходные сигналы с интегрирующего двигателя канала координаты х
(боковое уклонение самолета от ЛЗП). Это обеспечивает автоматическое
соблюдение условия х = 0, т. е. удержание самолета на оси трассы.
При любых боковых отклонениях автопилот плавно выводит самолет
на ЛЗП. Для повышения качества вывода в закон управления вклю-
чается член, пропорциональный производной по времени от бокового
уклонения х, вычисляемой также в блоке связи.
42
Рис. 2.15. Блок-схема допплеровского АВК географической систе-
мы, выдающего также преобразованные полярные координаты
Если при наличии на счетчике нулевого значения координаты х
экипаж с помощью других средств измерил фактическое боковое укло-
нение самолета от ЛЗП Хф#= 0, то, используя специальный задатчик-
индикатор боковых уклонений, уклонение хф можно автоматически
устранить: на задатчике вручную устанавливаются величина и знак об-
наруженного уклонения, после чего самолет по плавной кривой выво-
дится на ЛЗП, а на индикаторе стрелка занимает нулевое положение.
Сопряжение АВК с автопилотом позволяет также вести самолет по
линии, параллельной ЛЗП, или на определенном удалении от нее.
Поскольку сигналы х и х поступают в автопилот непосредственно с
интегрирующего двигателя и дифференцирующей схемы, а не со шка-
лы счетчика, точность их значительно повышается, что обеспечивает
удовлетворительное вождение самолета.
Дальнейшее совершенствование использования информации, полу-
чаемой от ДИСС, заключается в конструктивном комплексировании
допплеровских АВК с другими датчиками навигационной информации
и центральными вычислителями, осуществляемом в современных ав-
томатизированных навигационных комплексах.
43
Глава 3
НАВИГАЦИОННОЕ ПРИМЕНЕНИЕ БОРТОВЫХ
РАДИОЛОКАЦИОННЫХ СТАНЦИЙ
Наличие на борту самолета радиотехнических средств, обеспечи-
вающих панорамный обзор местности вне зависимости от оптической
видимости, коренным образом улучшает условия самолетовождения
в различной навигационной обстановке, намного повышает его точ-
ность и надежность.
Известны два радиотехнических метода получения панорамного
изображения местности:
метод радиолокационного обзора с помощью бортовых радиолока-
ционных станций (БРЛС);-
метод радиовидения с помощью специальных бортовых радиови-
зоров (радиотеплолокаторов), использующих для построения изобра-
жения местности естественные радиоизлучения земной поверхности
и объектов на ней.
В настоящее время в разнообразных образцах аппаратуры исполь-
зуется только метод радиолокационного обзора.
§ 3.1. НАВИГАЦИОННАЯ ХАРАКТЕРИСТИКА БОРТОВЫХ
РАДИОЛОКАЦИОННЫХ СТАНЦИИ
Бортовые радиолокационные станции представляют собой приемо-
передающие устройства, обеспечивающие получение на экране элект-
роннолучевой трубки условной (состоящей из яркостных отметок)
картины обозреваемой местности, а также обнаружение некоторых
видов облаков, самолетов и других воздушных объектов.
БРЛС работают автономно, не требуя какого-либо наземного обес-
печения, но могут входить в состав и неавтономных систем (УДНС
с бортовыми РЛС), использующих в качестве наземных станций радио-
маяк и-ответчики.
Навигационная информация, получаемая на борту самолета с по-
мощью БРЛС, содержится, прежде всего, в наглядном (хотя и условном)
панорамном изображении пролетаемой местности. Это позволяет ре-
шать ряд навигационных задач методами, близкими к методам ви-
зуальной ориентировки: определение места самолета сличением карты
с изображением местности на экране, определение направления по-
лета самолета без применения курсовых приборов и др. Однако по
сравнению с визуальной ориентировкой дополнительно обеспечивается
достаточно точное определение курсовых углов ф ориентиров (объектов)
и дальностей D до них, благодаря чему определяются линии поло-
жения двух видов — ЛРР и ЛРПС.
С точки зрения навигационной значимости элементы обстановки,
изображаемой на экране БРЛС, могут быть разделены на радиолока-
ционные ориентиры, радиолокационные визирные точки и воздушные
препятствия.
44
Радиолокационные ориентиры — такие объекты,
положение которых на местности (а следовательно, и на карте) точно
известно, а сами они могут быть опознаны по экрану станции. К ним
относятся: характерные водоемы, реки, береговая черта, острова
в море и на крупных реках, города, некоторые горные вершины и
хребты, а также искусственные радиолокационные ориентиры (маяки-
ответчики, уголковые отражатели).
Радиолокационные визирные точки — местные
объекты, которые не могут быть индивидуально опознаны по изобра-
жению, не имеют привязки на карте, но хорошо видны на экране БРЛС
и могут служить только для измерения навигационных элементов по-
лета (путевой скорости и угла сноса).
Воздушные препятствия — объекты, находящиеся в
воздухе и могущие угрожать самолету опасностью столкновения с ни-
ми: встречные самолеты, очаги гроз и ливневых осадков, а также зоны
турбулентности атмосферы.
На отечественных транспортных самолетах в настоящее время при-
меняются различные типы БРЛС. Каждая из них имеет свои отличи-
тельные особенности: по виду зоны обзора (круговая или секторная),
по наличию специальных схем защиты от помех, а также схем выде-
ления специальных объектов (гроз, встречных самолетов, наземных
препятствий). Однако основные органы управления у различных типов
БРЛС весьма сходны.
Область возможного применения современных БРЛС обусловли-
вается тактическими характеристиками самой станции, режимом по-
лета (крены) и метеоусловиями, в которых происходит полет.
К тактическим характеристикам БРЛС, влияющим на область воз-
можного применения, относятся высотность и дальность действия.
Высота полета ограничивает возможность использования БРЛС
главным образом по причине ухудшения работы радиотехнических
схем и элементов (волноводы, клистроны и др.) в условиях разрежен-
ной атмосферы. Высотность современных самолетных радиолокаторов
полностью обеспечивает полеты самолетов гражданской авиации.
Дальность действия БРЛС, под которой следует понимать, прежде
всего, дальность надежного обнаружения объекта (ориентира), зави-
сит как от технических характеристик самой станции, так и от харак-
тера наблюдаемой местности: для различных объектов она существен-
но меняется. Средние значения дальностей обнаружения некоторых
объектов современными БРЛС гражданской авиации составляют:
крупных городов — 300—350 км-, небольших городов — 70—100 к.и;
береговой черты (при наблюдении со стороны моря) — 100—200 км;
крупных рек (с направлений, перпендикулярных их течению) — 100—
150 км; средних озер—80—100 км; кораблей в море (в зависимости от
их тоннажа)—до 100 /си; специальных радиомаяков-ответчиков —
до 500 км; грозовой облачности — до 150 км.
Дальность опознавания наблюдаемых ориентиров значительно мень-
ше, так как при этом необходимо не только обнаружить на экране
БРЛС отметку основного ориентира, но и определить его индивидуаль-
ные признаки (форму или расположение относительно других ориен-
45
тиров), для чего нужна более высокая разрешающая способность по
направлению, которая ухудшается с удалением от цели. Однако при
полетах по изученным трассам и ведении непрерывного счисления
пути дальность опознавания близка к дальности обнаружения, так как
возможно распознавать ориентиры по их расположению относительно
опознанных ориентиров или относительно счислимого МС. Для реализа-
ции этих возможностей полезно накопленные в полетах данные по
дальностям опознавания конкретных ориентиров данной трассы отра-
жать на карте навигационной обстановки.
Характер местности и вид объектов наблюдения влияют не только
на дальность обнаружения и опознавания, но и на возможность ис-
пользования БРЛС для навигационных целей. При полете над одно-
образной равнинной местностью, пустыней, открытым морем (вдали
от берегов и островов) БРЛС не может дать почти никакой навигацион-
ной информации, кроме высоты полета и иногда угла сноса, т. е. об-
ласть возможного применения БРЛС ограничена районами, достаточно
насыщенными радиолокационными ориентирами или по меньшей мере
радиолокационно контрастными визирными точками, дающими на эк-
ране устойчивые отметки.
Область возможного применения БРЛС сужается при наличии в
зоне обзора крупнокапельных кучево-дождевых облаков с ливневыми
осадками и грозовыми очагами, дающих яркие засветки на экране
в виде значительных, пятен или точек, а также других видов облачности,
засвечивающих экран менее интенсивно. Иногда метеоусловия могут
полностью исключить использование радиолокатора для ориентировки.
В то же время способность БРЛС «видеть» опасные явления погоды
используется для обеспечения безопасности полета в сложных метеоро-
логических условиях.
Продольные и поперечные крены самолета в случае нестаблизиро-
ванных антенн влияют на возможность использования БРЛС, так как
при этом резко искажаются величины измеряемых курсовых углов
объектов и сильно ограничивается зона обзора.
В зависимости от условий полета БРЛС позволяют решать следу-
ющие навигационные задачи:
общая ориентировка по радиолокационному изображению мест-
ности на экране;
определение места самолета относительно опознанных естественных
ориентиров и специальных радиомаяков-ответчиков:
определение навигационных элементов полета — угла сноса, пу-
тевой скорости и высоты;
маневрирование с целью обхода зон с опасными явлениями погоды;
предотвращение столкновений с самолетами и землей.
5 3.2. ОБЩАЯ ОРИЕНТИРОВКА
Ориентировка по экрану бортовой радиолокационной станции за-
ключается в сопоставлении (сличении) изображаемой на нем картины
пролетаемой местности с картой. Благодаря опознаванию изображений
известных ориентиров, обозначенных на карте, можно на глаз оценить
46
Рис. 3.1. Образование радиолокационного изображения на экране БРЛС
положение самолета относительно этих ориентиров и выбрать необхо-
димое направление полета. Возможность ведения ориентировки по
экрану БРЛС зависит от особенностей получающегося на нем изобра-
жения местности. Изображение на экране электроннолучевой трубки
с радиально-круговой разверткой получается в виде условной картины,
состоящей из яркостных отметок и ориентированной определенным
образом относительно вертикального диаметра экрана, соответствую-
щего продольной оси самолета. О пролетаемой местности судят по рас-
пределению на экране участков различной яркости. Так как каждый
элемент поверхности экрана трубки соответствует определенному уча-
стку местности, яркость его свечения будет определяться характером
отражения радиоволн от этого участка и удалением его от самолета.
Если на земле под некоторым курсовым углом яр (рис. 3.1) на опреде-
ленной дальности D от самолета находится какой-либо хорошо отра-
жающий объект А (населенный пункт, корабль в море), то в соответ-
ствующем месте экрана (на том же курсовом угле = ip и на удале-
нии Оа от центра, пропорциональном наклонной дальности Он) по-
явится яркостная отметка А'. Совокупность таких отметок от всех
объектов на обозреваемой поверхности земли (моря) в пределах даль-
ности обзора и составит условную картину местности на экране.
Условность картины, наблюдаемой на экране БРЛС, состоит в том,
что она зависит не от внешнего вида местных предметов, как при визу-
альном наблюдении, а только от того, какое количество электромаг-
нитной энергии возвращается к антенне БРЛС после отражения от
каждого участка облучаемой местности.
Кроме того, для получения четкого изображения объекта на экра-
не необходимо, чтобы яркость его отметки достаточно отличалась от
яркости отметок соседних участков земной поверхности (объектов),
т. е. необходима определенная степень контрастности наблюдаемого
47
объекта по отношению к окружающему фону. При этом неважно, что
изображается ярче — объект или фон. Некоторые объекты (ориенти-
ры), несмотря на то что сами в направлении самолета энергии не от-
ражают, могут хорошо наблюдаться на экране за счет их контрастно-
сти на ярком фоне интенсивно отражающей поверхности земли: та-
кими объектами явлются водоемы (озера, реки), видимые на индика-
торной трубке как темные пятна с четкими границами, образованными
яркими отражениями от берегов.
Степень сходства условной картины на экране бортового радиолока-
тора с топографическими признаками наблюдаемой местности, а сле-
довательно, и возможность ориентировки в полете зависят от ряда
факторов: тактике-технических характеристик БРЛС (мощность пере-
датчика, чувствительность приемника, разрешающие способности по
дальности и азимуту, возможность регулирования усиления приемника
и наклона антенны, сохранение работоспособности на больших вы-
сотах), положения самолета относительно наблюдаемого участка,
особенностей самой местности.
Мощность передатчика и чувствительно сть
приемника определяют дальность действия станции при обна-
ружении ориентиров и других местных предметов.
Разрешающая способность по дальности бд
влияет на возможность различения объектов, находящихся на неболь-
ших расстояниях один от другого и на одном азимуте (курсовом угле)
от самолета. Она зависит от длительности импульса т передатчика и ка-
чества индикаторной трубки. Под качеством индикаторной трубки здесь
понимается возможность достижения наименьшего диаметра светового
пятна на экране с помощью фокусировки электронного пучка и свойств
люминофора. В современных БРЛС обеспечивается относительный
размер диаметра пятна порядка 0,01 радиуса экрана. Таким образом,
в зависимости от дальности обзора Dp («масштаба развертки») диаметр
пятна может соответствовать различному количеству километров на
местности. Например, для дальности обзора Dp = 100 км диаметр
пятна равен 1 км.
Разрешающая способность БРЛС по дальности
бо =-^ + 0,01Dp, (3.1)
где с — скорость распространения радиоволн (0,3 км!мксек). Так как
при больших дальностях обзора применяются импульсы большей дли-
тельности (т = 0,5—1,0 мксек) и, кроме того, увеличивается размер
пятна (d = 0,01 Dp), разрешающая способность по дальности в этих
случаях ухудшается.
Разрешающая способность по азимуту бд
определяет возможность различения объектов, находящихся на оди- '
наковом расстоянии от самолета и на близких азимутах (курсовых
углах). Она зависит от ширины диаграммы направленности антенны
в горизонтальной плоскости, удаления до наблюдаемых объектов и
качества индикаторной трубки
6л = аП 4-0,01 Dp, (3.2)
48
где а — угол раствора диаграммы направленности по половинной
мощности (в радианах); D —дальность до наблюдаемых объ-
ектов.
С увеличением расстояния D др объектов, а следовательно, и уве-
личением Dv разрешающая способность по азимуту падает, так как
возрастает линейная величина ширины диаграммы направленности
аГ) и значение диаметра светового пятна (равное 0,01 Dp).
В целом при наблюдении более далеких объектов разрешающая
способность БРЛС ухудшается: обнаруживаемые па больших удале-
ниях близкорасположенные ориентиры (объекты) сначала видны на
экране как одна отметка, а по мере приближения к ним самолета начи-
нают различаться раздельно.
Изменение наклона антенны дает, возможность
направлять максимум излучения на нужный объект и получать наибо-
лее яркое его изображение. Для управления наклоном антенны на
пультах БРЛС имеются специальные нажимные переключатели или
рукоятки, управляющие мотором наклона антенны. С изменением
наклона изображение местности на экране резко меняется.
Регулировка усиления приемника позволяет
изменять общую яркость свечения экрана и тем самым выделять нуж-
ные объекты за счет увеличения их контрастности на фоне экрана.
Кроме общей регулировки усиления, БРЛС обычно имеют также вре-
менную (ручную или автоматическую) регулировку усиления прием-
ника — ВРУ или ВАРУ. Работа ВАРУ (ВРУ) заключается в том, что
в течение каждого периода повторения импульсов передатчика большее
усиление получают сигналы, приходящие от дальних объектов. Это
позволяет получать большую контрастность полезных сигналов на
всей площади экрана. Степень автоматической регулировки усиления
устанавливается штурманом вручную с помощью специального потен-
циометра.
На качество изображения местности на экране БРЛС существенно
влияет также соблюдение вертикальности оси вращения антенны: при
отклонении оси вращения антенны от вертикали углы ее поворота уже
не равны курсовым углам ориентиров, в то время как наклонные даль-
ности измеряются правильно. Для устранения этого недостатка в не-
которых типах БРЛС применяется гироскопическая стабилизация
оси антенны, что обеспечивает сохранение нормального изображения
при не очень больших кренах самолета.
На характер радиолокационной картины влияет положение само-
лета относительно наблюдаемого участка местности, так как при
разных направлениях облучения объектов условия отражения радио-
волн от них часто существенно различаются. Особенно это проявляется
при полетах в горных районах и на небольших высотах над рельефом.
Характерным при этом является образование на экране теней от
гор, т. е. необлучаемых участков местности, которые на экране имеют
вид темных пятен, очень похожих на изображение водоемов (рис.
3.2, а). Поскольку картина теней (ложных озер) довольно быстро
меняется при перемещении самолета, от штурмана (пилота) требуются
достаточные навыки в расшифровке изображений на экране. Вид не.
49
которых других объектов (населенные пункты, реки, моря) на экране
БРЛС показан на рис. 3.2, б.
При наблюдении рек и длинных узких водоемов большое значение
имеет направление облучения. Так как разрешающая способность по
дальности в большинстве случаев выше разрешающей способности по
азимуту, узкие водоемы лучше различаются при облучении с направ-
лений, перпендикулярных их длине. По этой же причине (изменение
линейной величины бл) с меньших высот удается рассмотреть такие
детали местности, которые сливаются при наблюдении с больших
высот.
На качество радиолокационной картины существенно влияют се-
зонные изменения состояния местности. Зимний ландшафт, как пра-
вило, дает менее контрастную (тусклую) картину, что объясняется изме-
нениями отражающих свойств суши и водоемов. Мелкие озера и реки
покрываются льдом и снегом и вместо зеркального отражения дают
заметное рассеивание. Наоборот, сильно рассеивавшие в летнее время
поверхности суши по этой же причине рассеивают менее интенсивно,
что приводит к общему ослаблению фона на экране станции.
Из практики известны случаи, когда сезонные условия настолько
сильно изменяли изображение местности на экране, что штурман не
мог опознать в другое время года достаточно характерную в летних
условиях картину района. На рис. 3.3 схематически изображен вид
одного и того же района в летнее время и ранней весной. Летом
(рис. 3.3, а) местность в этом районе легко опознается: четко видны
береговая черта моря, озеро, суша хорошо выделяется яркими засвет-
ками (в центре экрана видно «высотное кольцо»). В весенний период
года (рис. 3.3, б) в описываемом районе моря происходит интенсивное
торошение льда, в результате чего большие акватории приобретают
значительные рассеивающие свойства и па экране БРЛС изображаются
не темным фоном, а ярко светящимися площадями. В то же время часть
прилегающей суши, имеющей относительно гладкий рельеф, покрыта
в этот период года слежавшимся снегом (иногда с ледяной коркой),
что приводит к почти зеркальному отражению от нее радиоволн. В ито-
ге на экране получается совершенно искаженное изображение мест-
Рис. 3.2. Радиолокационное изображение местности
50
Рис. 3.3. Местность на экране БРЛС:
а—летом; б—ранней весной
ности, местами переходящее в негатив летней картины: суша — тем-
ная, море (покрытое льдом) — светлое.
Особый вид на экране БРЛС имеют изображения некоторых видов
растительности, например площади,-на которых убран хлеб. Стерня
резко выделяется интенсивной яркостью свечения. При этом контуры
таких участков четко очерчены на фоне нормального свечения других
частей суши. Очень яркие сплошные отметки протяженностью до де-
сятков километров дают площади в поймах рек, покрытые зарослями
камыша. Структура отметок таких площадей схожа с видом отметок от
крупных промышленных центров.
При использовании радиолокационного изображения местности
для ориентировки необходимо учитывать также свойства ее проекции
на экране БРЛС, т. е. искажения длин и углов.
Способ изображения панорамы местности на экране при отсут-
ствии задержки начала развертки описывается следующими урав-
нениями (уравнения проекции):
Da^DR = YDz + Hz-, (3.3)
Фз = ф, (3.4)
где Dg — расстояние радиолокационной отметки от центра экрана,
измеряемое в километрах наклонной дальности до объекта
(ориентира) на местности;
D — горизонтальная дальность до этого же объекта;
Н — высота полета;
фэ — курсовой угол отметки по экрану;
ф — курсовой угол объекта на местности.
Уравнение (3.3) выражает известную связь между наклонной и го-
ризонтальной дальностями при определенной высоте полета, а урав-
нение (3.4) — точное совпадение курсовых углов объекта на местности
51
и на экране при вертикальном положении оси вращения антенны. Оп-
ределим частные масштабы изображения: т — по''радиусу экрана;
и — по перпендикулярному ему направлению (по окружности равных
расстояний от центра).
Для получения частного масштаба по радиусу найдем, пользуясь
рис. 3.4, отношение элемента dDg наклонной дальности к соответст-
вующему элементу dD горизонтальной дальности на местности (глав-
ный масштаб проекции как обычно принимается равным единице).
(3.5)
аи du j D2JrH2
Чтобы получить частный масштаб по направлению, перпендику-
лярному радиусу, найдем отношение дуги окружности радиуса Dg на
экране к соответствующей дуге окружности с радиусом D на местно-
сти:
Р8^8 = 1 =
Dchp sin р D
(3-6)
Из формул (3.5) и (3.6) видно, что местность изображается на экра-
не БРЛС неравноугольно (т #= п) и в меняющемся от точки к точке
масштабе (тип зависят от О); условие же равновеликости (т-п — 1)
соблюдается во всех точках.
Изображение имеет наиболее крупный масштаб на периферии экра-
на, где р стремится к 90° и поэтому тип приближаются к единице.
Очевидно, здесь же изображение становится близким к равноуголь-
ному (частные масштабы приближаются один к другому), т. е. в общем
случае (при отсутствии задержки развертки) наименее искаженным.
С приближением к центру экрана масштаб по радиусу становится
более мелким (р стремится к нулю), а масштаб по окружности укруп-
няется и при вертикальных углах, близких к нулю, неограниченно
возрастает. Последнее практически означает, что точка О (рис. 3.5),
находящаяся строго на вертикали под самолетом (р = 0, D = 0),
изображается на экране замкнутым кольцом с радиусом, равным истин-
ной высоте полета (Dn = И). Именно благодаря этой особенности
проекции по экрану можно непосредственно измерять истинную высо-
Рис. 3.4. Вывод масштабов изображе-
ния местности на экране БРЛС
ту полета как наклонную (факти-
чески вертикальную) дальность до
пролетаемой в данный момент точ-
ки на земной поверхности.
Часть экрана, находящаяся
внутри окружности радиусаОн= Н,
соответствует наклонным дально-
стям, меньшим высоты полета Н,
т. е. точкам, находящимся не ‘на
поверхности земли, а над ней.
Если под самолетом на удалениях,
меньших высоты полета, во всех
направлениях нет отражающих ра-
52
JO
Рис. 3.5. К определению истинной высоты полета с помощью БРЛС
диоволны тел (самолетов, радиолокационно контрастных облаков), то
этот круг будет выглядеть темным пятном с резко очерченной внут-
ренней границей.
Для определения истинной высоты полета необходимо вручную
(специальным переключателем) опустить диаграмму направленности
антенны до отказа вниз, что создает наиболее благоприятные условия
облучения местности под самолетом и обеспечивает яркое свечение
высотного кольца 2 на экране. Измерив радиус внутренней границы
этого кольца и пользуясь масштабными метками 1, можно получить
истинную высоту полета. Точность определения истинной высоты рав-
на точности измерения наклонной дальности (см. § 3.3).
Для уменьшения искажений изображения на рабочей части экрана
может применяться метод задержки начала развертки. Этот метод со-
стоит в том, что начало развертки на экране электроннолучевой трубки
искусственно, с помощью ручной регулировки с пульта управления,
задерживается по сравнению с импульсом передатчика на время t3,
соответствующее расстоянию Dg (рис. 3.6). В результате расстояние,
измеренное на экране БРЛС от центра до наблюдаемого объекта, будет
Рис. 3.6. Влияние задержки развертки на изображение местности на экране
БРЛС
53
уменьшено по сравнению с действительным на величину задержки раз-
вертки D3. Измерение курсовых углов при вводе такой задержкитне
изменяется.
При задержке начала развертки на экране БРЛС уравнения проек-
ции будут иметь вид:
Oa = DH-D3;
Тогда частные масштабы изображения:
a D
m = smp = — :
_(Dr—D3) di|)3 DH—D?
Ddty
D
Таким образом, закон изменения масштаба по радиусу остается преж-
ним, а по окружности станет другим. Используя это, изменением за-
держки развертки можно приблизить значение масштаба п"к вели-
чине т и получить изображение, близкое к равноугольному. Практи-
чески для равноугольности изображения местности на удалениях,
больших высоты полета (р > 45°), достаточно ввести задержку DB =
= 0,5 Н.
Задержка развертки может быть использована также для повы-
шения разрешающей способности БРЛС.
Разрешающая способность по дальности 6Д, согласно формуле (3.1),
повышается с укрупнением масштаба изображения, так как размеры
светового пятна на экране при крупном масштабе будут соответство-
вать меньшему числу километров. Задержка же развертки позволяет
рассматривать объекты в более крупном масштабе. Например, ориен-
тир, находящийся на удалении 130 км, при введении задержки разверт-
ки DB = 100 км можно наблюдать при дальности обзора Dp =
= 50 км вместо 200 км.
Разрешающая способность по азимуту 6л. согласно формуле (3.2),
наоборот, ухудшается с вводом задержки развертки, так как задержка
приближает отметку объекта к центру экрана (при одном и том же
фактическом удалении его от "самолета) и тем самым увеличивает уг-
ловой размер пятна, определяемый формулой
0П° = 57,3
О.ОЮр
Рн--Рз
0,57 Рр
Рп--
(3-7)
В некоторых БРЛС имеется возможность вводить не только поло-
жительную задержку начала развертки1' (так называемое «закрытие
центра»), но и отрицательную задержку, т. е. опережение развертки
по сравнению с импульсом передатчика («открытие центра»). Та-
кая задержка, наоборот, удаляет отметку от центра экрана и тем
самым снижает влияние размеров пятна на угловую разрешающую
способность. Это видно также из формулы (3.7), если DB считать от-
рицательной величиной. Описанный способ можно применять в слу-
чаях, когда наиболее важным является именно повышение разреша-
ющей способности по азимуту.
54
§ 3.3. ОПРЕДЕЛЕНИЕ МЕСТ САМОЛЕТА
При наличии в зоне обзора БРЛС опознаваемого радиолокацион-
ного ориентира место самолета может быть определено одним из сле-
дующих способов:
по пеленгу самолета и удалению его от ориентира (угломерно-
дальномерный способ);
по двум дальностям от двух ориентиров (дальномерный способ);
по моменту пролета ориентира (частный случай дальномерного
способа);
по двум пеленгам самолета от двух ориентиров (угломерный способ).
В основе всех этих способов лежит определение с помощью БРЛС
исходных геометрических параметров — курсовых углов ориентиров
и дальностей до них, от точности которых зависит в конечном счете
и точность определения места самолета (МС).
Измерение курсовых углов и дальностей
Курсовой угол ф объекта определяется как угол между верти-
кальной линией экрана (курсовой чертой), соответствующей продоль-
ной оси самолета, и визирной чертой подвижного светофильтра, со-
вмещаемой с отметкой этого объекта. Совмещение достигается враще-
нием светофильтра вручную с помощью рукоятки «Указатель ази-
мута» на передней панели индикатора (рис. 3.7), а отсчет курсовых
углов ведется от точки 0 кольцевой шкалы, расположенной по перимет-
ру экрана. В некоторых БРЛС обеспечение курсовой черты предусмот-
рено или с помощью линии, выгравированной на стекле неподвижного
светофильтра, или с помощью специальной электронной метки — ли-
нии, соединяющей центр экрана и точку 0 шкалы курсовых углов.
Точность измерения курсовых углов ориентиров по экрану БРЛС
определяется главным образом ошибкой передачи угла поворота антен-
ны на экран индикатора (офпер = Г)
и, кроме того, рядом других причин
(неточность совмещения визирной
черты с отметкой, скачкообразность
перемещения отметки по экрану,
ошибки параллакса и эксцентриситета
светофильтра, развертки и шкалы
курсовых углов). Для современных
БРЛС, применяющихся в граждан-
ской авиации, общая средняя квад-
ратическая ошибка измерения кур-
сового угла оф « 1°,5°.
Наклонная дальность Du до объ-
екта наблюдения определяется с ис-
пользованием электронного масштаба,
создаваемого на экране кольцевыми
метками, расстояния между которыми
Рис. 3.7. Передняя панель ииди-
катра БРЛС
соответствуют определенному коли-
честву километров (2, 10, 20, 40 км).
55
Для получения дальности по наблюдаемой на экране радиолока-
ционной отметке, находящейся между масштабными кольцами, при-
меняют глазомерную интерполяцию. Можно считать, что макси-
мальная ошибка AmaxDH глазомерной интерполяции между соседними
метками не превосходит 1/4 интервала между ними, т. е. 0,25 АЛ,
где AL — интервал между кольцами в км. Так как средняя квад-
ратическая ошибка равна */3 максимальной, то ошибка измерения
наклонной дальности
Атах Рн __ 0.25AL__АЛ
3 3 ~ 12 '
Таким образом, при расстоянии между кольцами AL = 10 км ошибка
oDH = 0,82 км, при АЛ = 20 км ошибка оРн = 1,65 км.
Точность определения дальностей можно повысить, если произ-
водить измерения в момент совмещения радиолокационной отметки с
одной из масштабных меток экрана. В этом случае исключаются ошиб-
ки глазомерной интерполяции и основное значение будут иметь ошиб-
ки совмещения радиолокационной отметки с масштабной меткой,
которые вместе с неточностями калибровки и другими причинами дают
gD„ ж 200 м.
Поскольку параметром линии равных расстояний (ЛРР) является
не наклонная, а горизонтальная дальность, необходимо пересчитывать
Dn в D с учетом высоты полета относительно уровня наблюдаемого
объекта. При дальностях обзора до 300—400 км и высотах полета до
20 000—30 000 м земную поверхность можно принять за плоскость.
Тогда
d=Yd2h—Н2.
Расчет горизонтальной дальности по Dn и Н можно выполнить
также с помощью специального графика (см. приложение 2).
В зависимости от допустимой ошибки определения горизонтальной
дальности АРДОп иногда можно в целях упрощения расчетов пренебре-
гать разницей между D и DH, т. е. считать измеренную по экрану DH
дальностью горизонтальной (D). Найдем условия допустимости тако-
го упрощения, оценив величину разности этих дальностей:
AD = Dn—D = Dr-VD2h-H2 = D„
или, заменив степень круглой скобки ее разложением в ряд с удер-
жанием двух первых членов и разделив обе части равенства на Л>н,
получим
АР_ j _/’1____1 Я2 \ 1 Н2
Dn~ \ 2 D^J 2 Рп2‘
Таким образом, чтобы относительная ошибка AD/Dn не превосхо-
дила допустимого значения, необходимо обеспечить
_L и2 / АР\
2 Рц2 \ Рн / доп
56 »
или
Например, условие —<0,02 обеспечивается при соотношении
Du
— условие ——<0,01 —при — >7, а условие — <0,05 —
Н Du И Du
при ^>10.
Полученная горизонтальная дальность D используется для про-
кладки на карте или для непосредственных расчетов координат МС.
При прокладке на карте в горизонтальную дальность вносится
дополнительная ошибка oDK, зависящая от тщательности откладыва-
ния расстояний и масштаба карты. Опытом установлено, что средняя
квадратическая ошибка откладывания расстояний составляет 1 мм,
что при разных масштабах соответствует различному числу километ-
ров. Суммарная ошибка на карте
aD2=| oD23M + aD2.
Например, при измерении по кольцам с интервалом AL = 20 км и
прокладке на карте масштаба 1 : 2 000 000 (2 км в 1 лк«)
oDz = /22 + 22 = 2,8 км.
Определение места самолета по пеленгу и удалению от ориентира
Этот способ является наиболее простым и широко распространен-
ным способом контроля пути с применением БРЛС. Сущность его со-
стоит в прокладке на карте линии пеленга самолета (по Ас или ЛСу)
от опознанного ориентира; на этой линии от того же ориентира откла-
дывается горизонтальная дальность D до самолета (рис. 3.8). Истин-
ный пеленг самолета на карте ЛСк получается по формуле, вывод ко-
торой дан в гл. 4:
Ак —Ти + Фор + 180° + о>
где уи — истинный курс в момент наблюдения ориентира; о — схож-
дение меридианов мест самолета и ориентира, равное (лр — Хс) sin <р0,
<р0 — зависит от проекции карты, например, для международной про-
екции величина <р0 равна средней широте листа карты.
При небольших удалениях ориентира (до 100 км) и в невысоких
широтах схождением меридианов можно пренебречь, и формула упро-
стится :
Ак=Ти+%р+180°.
57
Рис. 3.8. Опреде-
ление МС по пе-
ленгу и удалению
самолета от ориен-
тира
Рассчитаем для примера линейную ошибку ЛРПС от пренебрежения схож-
дением меридианов на больших дальностях до ориентира (£> = 250 км) при по-
лете в высоких широтах (60° и 70°). Значение Ас примем равным 90°. В указанных
условиях разность долгот места самолета и ориентира
, „ D 250
л,, --------=-------------=6.7°.
р с lllcoscp lllcos70°
Ошибка Лек равна
АЛск==0== Р-р—^с) sin <ро=6,7°- sin 70°--6,3 ,
откуда линейная ошибка линии равного пеленга самолета
Apjjpnc = АА(К ^ = 0,017-6,3-250 = 27 км.
Аналогичный расчет для широты ср = 60° дает результат Арлрпс = км-
При применении ортодромических курсовых приборов схождение
меридианов не влияет на расчеты ЛСк, если за опорный меридиан при-
нять меридиан ориентира
^oP = Vxop + ^op 4-180°.
Горизонтальная дальность, откладываемая вдоль ЛРПС, полу-
чается из наклонной DH, измеренной по экрану.
Точность определения места по пеленгу и дальности оценивается
величиной средней квадратической радиальной ошибки аг. Поскольку
линии положения ЛРПС и ЛРР пересекаются под углом со = 90°,
аг — У aD2-j-(aAc D)2,
где aD и оАс — соответственно средние квадратические ошибки го-
ризонтальной дальности и истинного пеленга самолета. Но так как
оЛс= KcryS + o^op.
58
для or получим окончательно
or = УоО2 + (оу’и + o-фор) D2. (3.8)
Считая О1р0р = 1,5°; aD — 2 км и приняв оуи = 2°, получим
or = । 2а + [(0,017• 2)г + (0,017• 1,5)2] D2 = /4 + 1,87-10-3 D2.
Отсюда для D — 100 км аг = 4,8 км, а для D = 200 км аг = 8,9 км.
Следует иметь в виду, что формула (3.8) не учитывает характера
наблюдаемого ориентира (степень его «точечности»), а также точ-
ности его нанесения на карту.
Способ определения МС по пеленгу и дальности удобен тем, что
получаемые результаты совершенно не зависят от положения ориенти-
ра в зоне обзора, так как линии положения (ЛРПС и ЛРР) пересека-
ются всегда под углом 90°. Однако при измерениях £>„ и фор следует
обеспечивать одновременность отсчетов. Для этого достаточно сделать
отсчеты DH и фор в одном цикле обзора, так как при этом будет исполь-
зован эффект послесвечения, сохраняющий на это время положение
отметок на экране таким, каким оно было в момент облучения ориен-
тира. В момент облучения необходимо фиксировать и время Т, к ко-
торому относится определяемое место самолета.
Определение ортодромических координат места самолета
В настоящее время координаты места самолета, определяемые при
помощи БРЛС, используются главным образом для коррекции коорди-
нат, непрерывно вычисляемых каким-либо АВК (геотехническим или
допплеровским). При этом счислимые (расчетные) ортодромические
координаты хр и ур самолета заменяются на счетчике фактическими —
Хф и Уф. Фактические координаты могут быть определены по карте,
на которой по данным измерений БРЛС нанесено МС. Однако это при-
водит к большим погрешностям за счет графической работы — при
построении самого МС относительно наблюдаемого ориентира и при
измерении его ортодромических координат.
БРЛС позволяет определить ортодромические координаты МС и
непосредственно по данным, получаемым с экрана, не прибегая к по-
мощи карты. Сущность этого способа состоит в вычислении ортодроми-
ческих координат Хф и уф самолета по точным, заранее (до полета)
измеренным ортодромическим координатам хоР и уор радиолокацион-
ного ориентира и измеренным в полете полярным координатам того же
ориентира относительно самолета — курсовому углу фор и горизон-
тальной дальности D.
На рис. 3.9 показаны: ЛЗП, являющаяся осью OY, радиолокацион-
ный ориентир, участок ЛФП (в общем случае расположенный произ-
вольно относительно ЛЗП), ортодромические координаты самолета
и ориентира в момент наблюдения последнего с помощью БРЛС. Оче-
видно при этом имеют место соотношения:
^Ф ~ ^ор sin (у -f-фор Рк) =хор О sin Лор. 0,
Уф = Уор—D cos (V + Фор — ₽к) =y0p—Dcos Аор. 0, (3.9)
59
где, кроме указанных ранее символов, введены обозначения: (Зк —
угол карты в данной точке ЛЗП, т. е. угол между ЛЗП (осью Y) и ме-
оидианом, от которого измеряется курс самолета; Лор.о — азимут
рриентира относительно главной ортодромии, т. е. линии заданного
пути (ЛЗП).
Практически ориентир пеленгуется при заранее выбранном пе-
ленге ЛОр.о, как правило, таком, чтобы cos Лор.о или sin ЛОр.о были
удобными для расчетов числами, что позволяет упростить формулы
3.9. Например, при Лор.о = 60°
*Ф =хор—0.86D;
4'ф = 4'оР—(З.Ю)
При Лор.о = ±90°, т. е. когда ориентир наблюдается на траверз-
ном относительно ЛЗП направлении, формулы становятся еще проще:
•^Ф ^ор “I”
!/Ф = !/ор-' (ЭИ)
Методика определения момента прихода ориентира на выбран-
ный пеленг ЛОр.о (например, 60° или 90°), т. е. момента, в который
необходимо измерить дальность D, зависит от конструкции азиму-
тальной шкалы (неподвижная или поворотная) индикатора БРЛС.
Однако во всех случаях нахождению ориентира на пеленге А ор.о будет
соответствовать приход его отметки на экране на курсовой угол, опре-
деляемый из соотношения
Т 4“ 'Pop Рк = А>р. о »
т. е.
фор = ЛР.о + Рк—?• (3-12)
Если азимутальная шкала неподвижна (как, например, на РЛВ-ДН
или РПСН-2), то для фиксации на экране необходимого курсового
60
угла визирная черта (или механическая визирка) устанавливается на
значение хрОр, определяемое формулой 3.12. Если азимутальная шка-
ла экрана поворотная (РБП-4 или РОЗ-1), то ее можно установить
на значение фактического курса у, а визирную черту после этого —
на значение Ло.ро + 0К.
Порядок работы при определении ортодромических координат
следующий:
1) при подготовке к полету наметить ориентир и с возможно боль-
шей точностью определить его ортодромические координаты хор
и (/ор>
2) в полете до момента измерений задаться значением Лор. 0; уста-
новить визирную черту на фор тем или иным способом в зависимости
от конструкции азимутальной шкалы; выдерживать постоянный курс;
наблюдать за приближением ориентира на экране к визирной черте;
3) в момент прихода отметки ориентира на визирную черту заме-
тить Dn и показания Т часов;
4) рассчитать ортодромические координаты самолета хф и уф по
одной из пар формул (3.10, 3.11), предварительно переведя DH в D
в соответствии с фактической высотой полета Н.
Определение места самолета по двум дальностям
В этом случае по экрану одновременно определяют наклонные даль-
ности Пн1 и £)н2 до двух опознанных ориентиров (рис. 3.10); эти даль-
ности пересчитывают в горизонтальные и О2; затем радиусами
и О2 проводят на карте две окружности с центрами в местах соответ-
ствующих ориентиров. Местом самолета является одна из точек пере-
сечения этих линий положения.
Основные достоинства этого способа—высокая точность и независи-
мость ее от удаления ориентиров (в пределах дальности обзора БРЛС).
Рис. 3.10. Определение МС по двум дальностям
61
Формулу для средней квадратической ошибки определения места само-
лета по двум дальностям можно получить из общей формулы опре-
деления ошибки по двум линиям положения (1.11), приняв во внима-
ние, что орх = ор2 = gD:
ооУ 2"
аг =---,
sin со
где aD — средняя квадратическая ошибка определения дальности;
w — угол пересечения линий равных расстояний.
^Как видно из формулы, точность определения зависит от угла
<о, т. е. от взаимного расположения самолета и ориентиров, что яв-
ляется недостатком.
Недостатком способа двух дальностей является также необходимость
применения в полете циркуля или специально подготовленной карты.
Несмотря на это, способ двух дальностей находит практическое
применение, особенно в случаях ненадежной работы курсовых прибо-
ров (например, в высоких широтах).
Эффективен этот способ и при использовании радиолокационных
маяков-ответчиков, обеспечивающих большие дальности действия
БРЛС, когда ошибки курсовых приборов значительно ухудшают точ-
ность определения МС по способу пеленга и дальности.
Определение места самолета по моменту пролета ориентира
Способ основывается на возможности определения момента пролета
ориентира по изменению вида его изображения на экране БРЛС. Так
как точка земной поверхности, находящаяся строго под самолетом,
изображается в виде кольцевой отметки с радиусом, равным истинной
высоте полета, с приближением самолета к ориентиру можно заметить
момент слияния его отметки с высотным кольцом, т. е. момент нахож-
дения самолета точно над этим ориентиром. Точность определения
места таким способом может колебаться в некоторых пределах в за-
висимости от интенсивности кольца первых отражений (ширина вы-
сотного кольца), которая связана как с характером местности в райо-
не ориентира, так и с умением штурмана правильно подобрать усиление
приемника. Однако в среднем точность определения МС пролетом ориен-
тира выше точности визуального способа, особенно на больших высо-
тах полета. Если в момент пролета ориентира есть возможность изме-
рить расстояние до другого известного ориентира, то точность опре-
деления МС значительно повысится, так как после потери отметки
первого ориентира в отражениях высотного кольца момент его пролета
может быть зафиксирован с точностью до 1—2 км как момент прихода
второго ориентира на заранее известную наклонную дальность, соответ-
ствующую расстоянию между ориентирами и фактической истинной
высоте полета.
В целом способы определения мест самолета дают большой эффект,
особенно в полетах по постоянным трассам, когда можно заранее по-
добрать наиболее характерные, проверенные на опыте ориентиры и
62
подготовить для них полетную карту. При этом на карте отмечаются
опорные радиолокационные ориентиры и от них в район контрольных
точек трасс проводятся линии равных пеленгов самолета и дуги ок-
ружностей равных расстояний. Пользуясь такими подготовленными
полетными картами, можно быстро и практически без всякой графи-
ческой работы в полете получать места самолета для решения различ-
ных навигационных задач.
§ 3.4. ОПРЕДЕЛЕНИЕ НАВИГАЦИОННЫХ ЭЛЕМЕНТОВ ПОЛЕТА
Современные бортовые радиолокационные станции обеспечивают:
определение угла сноса по виду отраженных сигналов на экране;
определение путевого угла и путевой скорости на контрольном
этапе;
определение угла сноса и путевой скорости по одной радиолока-
ционной визирной точке (базисными способами).
Рассмотрим существо этих способов определения навигационных
элементов полета.
Определение угла сноса подбором положения антенны
по виду отраженных сигналов
Способ основан на использовании эффекта Допплера. Предполо-
жим, что антенна БРЛС не вращается и ориентирована максимумом
диаграммы направленности под определенным углом к оси самолета.
Будем считать, что диаграмма направленности антенны в горизон-
тальной плоскости имеет бесконечно малую ширину и составляет
с вектором путевой скорости W угол 6. Рассмотрим прием отраженных
сигналов от одной точки земной поверхности, наблюдаемой с самолета
под вертикальным углом р, отсчитываемым от горизонтальной пло-
скости.
Принятый на самолете после отражения от земной поверхности
импульс электромагнитной энергии имеет частоту [, несколько отли-
чающуюся от частоты f0 излученного импульса. Величина этого так
называемого допплеровского сдвига частоты (если считать луч беско-
нечно тонким)
fn = f— fo = ^cos0cosp. (3.13)
Из формулы видно, что допплеровский эффект наиболее сильно
проявляется при 6 = 0°, т. е. в случае, когда энергия излучается строго
в плоскости перемещения самолета относительно земли, и, наоборот,
эффект отсутствует, если излучающая антенна ориентирована в тра-
верзном направлении по отношению к линии фактического пути само-
лета. Изложенное относится к идеальному случаю, когда излучение
ведете^ бесконечно тонким лучом, в результате чего при конкретном
угле р отражение происходит от точечного отражателя (от бесконечно
малого элемента поверхности земли). В действительности размеры диа-
граммы направленности конечны (раствор луча в горизонтальной пло-
скости составляет несколько градусов), и отражение будет происходить
63
не от одной точки, а от целого участка земной поверхности (рис. 3.11).
Поэтому частоты сигналов, принятых на самолете после отражения
от разных элементов Sz этого участка, будут отличаться одна от дру-
гой, так как для них различны значения 0г. Суммарный эффект прие-
ма близких, но достаточно различных частот выразится в появлении
частоты биений Д/д, которая будет тем больше, чем больше разность
принимаемых частот, т. е. чем больше разница углов 0г.
Рассмотрим два случая положения диаграммы направленности ан-
тенны относительно вектора путевой скорости U7:
ось диаграммы направлена строго по линии фактического пути само-
лета (0( = 0/, рис. 3.11, а)\
ось диаграммы направлена под некоторым углом к вектору путевой
скорости ~W(Qi Ф 0/, рис. 3.11, б).
На рис. 3.11 для каждого из этих случаев изображена (в сильно
увеличенном виде) отражающая площадь на земной поверхности, со-
стоящая из элементарных отражающих участков S; и S/, симметрич-
ных относительно оси диаграммы. Тогда для первого случая (так как
0г = 0/)
wt = W'l = W cos 0г.
Поэтому частоты сигналов, отраженных от элементов и S/,
согласно формуле (3.13) будут практически одинаковыми, а частота
биений допплеровских частот Д/д будет настолько мала (например,
Рнс. 3.11. Определение угла сноса по виду отраженных сигналов на
экране БРЛС
64
менее 20 гц), что ее можно наблюдать визуально на экране индикатора.
При наблюдении экрана с остановленной разверткой (если она направ-
лена точно по W) это проявляется в медленной пульсации яркости све-
товых пятен и в почти полной их неподвижности.
Во втором случае (так как 0г =^0.')Ц7. Ц7.'. Это приводит к
значительно большей частоте биений, что легко воспринимается гла-
зом. Развертка становится мерцающей, яркие пятна на ней кажутся
быстроперемещающимися, неустойчивыми.
Если вручную вращать антенну, то, наблюдая за изменением харак-
тера свечения развертки, можно очень точно отыскать положение,
соответствующее первому случаю, т. е. совместить ось диаграммы на-
правленности с направлением линии фактического пути самолета.
При этом положение линии развертки на экране будет указывать угол
сноса, который можно отсчитать по шкале курсовых углов.
Практическая точность измерения угла сноса таким способом ха-
рактеризуется максимальной ошибкой, не превышающей 1,5°. Для
создания .наиболее благоприятных условий измерения необходимо ис-
пользовать крупные масштабы развертки, увеличивать наклон ан-
тенны и применять синий светофильтр, позволяющий легче обнаружить
эффект биения яркости.
Определение фактического путевого угла и фактической
путевой скорости на контрольном этапе
После получения на карте двух мест самолета (МС\ и МС2, рис. 3.12)
одним из известных радиолокационных способов отрезок пря-
мой линии, соединяющей эти места, принимается за фактиче-
ский вектор перемещения самолета, т. е. за отрезок фактической ли-
нии пути. Фактический путевой 0 угол измеряется непосредст-
венно по карте как угол между фактической линией пути и истинным
(или условным) меридианом. Угол
0 одноименного с ним средне-
го курса Уср, который выдержи-
вался на контрольном этапе,
“ = Тер-
Путевая скорость рассчитывается
Делением длины отрезка пути 5КЭ
на время t между определениями
первого и второго мест самолета:
сноса получается вычитанием из
Ц7 != *^кэ
t
Точность измерения навига-
ционных элементов способом кон-
трольного этапа с применением
БРЛС зависит главным образом от
3 Осадший_В. И. 65
Рис. 3.12. Определение навигацион-
ных элементов на контрольном этапе
помощи БРЛС
точности определения МС (о^ и ог2)« а также от длины контроль-
ного этапа (§ 2.2 [191):
о W V оп+огг
W ) "2 «кэ
(3.U)
ор° = 57,3°
ОГ1 Н-РГ2
V ~2SK0
Точность способа снижается из-за графических работ на карте (на-
несение двух МС, измерение расстояния 5КЭ и утла [3).
Существенным недостатком способа контрольного этапа является
обязательность опознавания ориентиров, используемых для опреде-
ления мест самолета, что резко ограничивает возможности применения
его в полетах над малохарактерной в радиолокационном отношении
местностью, т. е. именно в тех случаях, когда знание навигационных
элементов особенно необходимо.
Базисные способы определения угла сноса и путевой скорости
Эти способы основаны на измерении курсовых углов ф и наклонных
дальностей Da одной визирной точки в процессе перемещения само-
лета.
Все они не связаны с опознаванием ориентиров, что является боль-
шим преимуществом по сравнению со способом контрольного этапа.
Рассмотрим самый общий из базисных способов, соответствующий
случаю, когда визирная точка находится в произвольном положении
относительно самолета (так называемая боковая визирная точка).
Для определения угла сноса и путевой скорости (рис. 3.13) в на-
чальный момент времени (с запуском секундомера), когда самолет на-
ходится в положении С1У производится первое измерение курсового
угла ф, и наклонной дальности £>п1 боковой радиолокационной точ-
ки О. Затем через время t, в течение
Рис. 3.13. Базисный способ определения
навигационных элементов
те
которого самолет переместится
в положение С2, а курсовой
угол визирной точки изме-
нится на 50—60°, вторично
определяются курсовой угол
ф., и наклонная дальность Оп2
той же точки; в момент сня-
тия отсчетов останавливается
секундомер. Соотношения
между измеренными курсо-
выми углами, горизонталь-
ными (полученными из на-
клонных) дальностями и иско-
мыми углом сноса и путевой
скоростью показаны на
рис. 3.13. Решение получив-
шегося треугольника С\ОС2
Рис. 3.14. Расчет навигационных элементов с по-
мощью навигационного расчетчика НРК-2
можно выполнить ана-
литически или, более
оперативно, графически
с помощью ветрочета
или навигационного рас-
четчика НРК-2 (§ 2.3
[19]).
При применении на-
вигационного расчетчи-
ка НРК-2 используют
его «лимб ветра», «номо-
грамму скоростей само-
лета» (рис. 3.14) и ло-
гарифмические шкалы
путевой скорости. По из-
меренным в процессе
двукратного наблюде-
ния одной визирной точ-
ки (ВТ) фг, Dlt ф2 и О2
на прозрачном лимбе
ветра строятся точки 0х
и 02, имитирующие по-
следовательные положе-
ния этой ВТ относи-
тельно самолета, как бы
расположенного в центре лимба. Для нанесения точек используются
азимутальная шкала лимба ветра, осевая линии номограммы скоростей
и масштабная шкала на ней. Азимутальная шкала устанавливается
делением против стрелки осевой линии номограммы (видимой сквозь
прозрачный лимб). Пользуясь шкалой осевой линии, вдоль нее от цент-
ра лимба откладывают взятое в некотором масштабе расстояние Dlt
в результате чего получается точка 0г. Аналогично строится точка 02,
после этого лимб разворачивается так, чтобы 0г и 02 разместились на
одной из радиальных линий номограммы скоростей, вдоль которой
карандашом проводится через весь лимб линия. В этом положении,
пользуясь дугами окружностей, подсчитывают длину отрезка 0х02
в км (в соответствии с используемым масштабом длин), т. е. получают
длину пути S. Путевая скорость рассчитывается по S и / с помощью
шкал того же расчетчика. Затем лимб разворачивается до положения,
при котором отрезок Ofi, станет параллельным осевой линии номо-
граммы; в этом положении по азимутальной шкале против стрелки
осевой линии отсчитывается угол сноса а со своими знаком.
Знак сноса определяется по положению стрелки осевой линии
относительно нуля азимутальной шкалы: если стрелка правее нуля —
снос положительный, если левее — отрицательный.
Пример. В результате двукратного наблюдения одной визирной точки с ин-
тервалом времени t = 6 мин 10 сек. получены данные: ipj = 45°, Ох = 60 км,
4’г = 122° и £>2 = 42 км. После нанесения па лимб НРК-2 точек Ох и Оа (считая
3* 67
каждое малое деление осевой линии за 3 км) измеряется S = 66 км и рассчиты-
вается
66 км
W =-------------= 640 км/ч.
6 мин 10 сек
Развернув лимб до параллельности отрезка ОгОг с осевой линией, читаем а =
= 4-8°.
Описанный способ определения навигационных элементов W и а
не требует знания ни воздушной скорости, ни курса самолета (направ-
ление полета можно выдерживать по ГПК). Это повышает его точность,
так как исключает влияние на результат погрешностей курсовых
приборов и указателей скорости. Недостатком способа является по-
нижение точности за счет графической работы на расчетчике, когда
масштаб длин нельзя выбрать достаточно крупным.
Из рассмотренного общего способа как частные случаи вытекают
различные варианты базисного способа определения угла сноса и пу-
тевой скорости — способы равных дальностей, прямоугольного тре-
угольника, половинной дальности и визирования точки, находящейся
на фактической линии пути.
Способ определения угла сноса и путевой скорости при двукрат-
ном наблюдении визирной точки на одинако-
вых наклонных дальностях отличается от общего спро-
са только тем, что отсчет второго курсового угла ф2 производится не в
произвольное время, а точно в момент прихода наблюдаемой отметки
на ту же наклонную дальность, что и при определении первого кур-
сового угла, т. е. отсчеты курсовых углов производятся в моменты
пересечения движущейся по экрану радиолокационной отметкой од-
ного и того же масштабного кольца дальности. В этом случае соотно-
шение между относительными координатами визирной точки (ф и D)
и навигационными элементами полета (« и W) можно получить из
Рис. 3 15 Определение навигационных а = *1±^-270в
влементов способом равных дальностей 2
68
Величина пройденного расстояния определяется из того же треуголь-
ника:
S = 2CTK=2Dsin^=^lt-
2
и, следовательно,
По приведенным формулам угол сноса практически рассчитывается
в уме, а путевая скорость— с помощью линейки НЛ-10м или НРК-2.
Достоинством способа равных наклонных дальностей является
более высокая точность, так как исключаются ошибки графической
работы на расчетчике. Недостатками способа являются пониженная
надежность из-за возможности временного исчезновения отметки с
экрана именно в момент ее вторичного прихода на выбранную даль-
ность и ограниченная применимость при использовании БРЛС сек-
торного обзора.
Способы «половинной дальности» и «прямоугольного треуголь-
ника» в настоящее время широкого распространения не имеют ввиду
их сложности и низкой точности.
Измерение угла сноса визированием точек на ЛФП состоит в
определении радиальной линии экрана, вдоль которой перемещают-
ся метки; курсовой угол этой линии равен а. Путевая скорость оп-
ределяется по времени перемещения метки между двумя дальномер-
ными кольцами экрана.
Базисные способы в настоящее время применяются в основном
для определения U7, так как при исправной БРЛС снос более точ-
но и быстро измеряется подбором положения антенны.
Оценим точность определения W по боковой визирной точке при
Di с использованием расчетчика НРК-2.
Если пренебречь неточностью измерения промежутка времени меж-
ду пеленгациями ВТ, то относительная ошибка определения путевой
скорости
_ oS
Г “ S '
т. е. определяется ошибкой пройденного расстояния S, полученного
по фъ Du ф2 и D2 на лимбе расчетчика. Каждая из точек 01 и 02 при
нанесении на лимб имеет радиальную ошибку
or = | /oD| + D2,
где о£)2 и оф2 — суммарные ошибки изменений D и ф по БРЛС и от-
кладывания углов и расстояний на лимбе.
Если измерение дальностей и £)2 производится с глазомерной
интерполяцией между масштабными метками экрана, можно считать
оБ’брлс = 2 км (при AL = 20 км) и офврлс = 1,5° = 0,025 рад.
69
Соответствующие графические ошибки нанесения точек на лимб:
оРграф = км и офграф 0 (установлено опытом). Тогда gDz =
= уЛ22+0,72=2,1 км и оф>£ = отрврлс = 0,025 рад. Таким образом
аг = У 2,12 + 0,0252Р2 = 1 4,4 + 6,25 -10—4 D2. (3.16)
Радиальная ошибка каждой точки вносит в S ошибку, равную -^=
1 2
(ошибка МС по направлению данного отрезка при круговом рассеи-
вании). Кроме того, при считывании S с лимба вносится дополнитель-
ная ошибка за счет неточного определения положения каждой нз этих
точек относительно дуг окружностей, служащих масштабными мет-
ками. Средняя квадратическая величина каждой из этих ошибок aSC4nT=
= 1 где АТпрк — расстояние между дугами номограммы
НРК-2 в км при принятом масштабе. Практически ALHpK может быть
выбрано от 10 до 20 км в зависимости от абсолютных значений изме-
ряемых расстояний и D2. Таким образом, aSc>IHT = 0,82—1,65 км.
Итак, суммарная ошибка определения длины базы
oSs =
'2
счит •
Пользуясь соотношением (3.16), оценим значение ошибки aSx для случая Dt =
— D2 — 100 км (при этом ЛбПрк = 20 кл|, т. е. о5СЧит — 1,65 км):
oS2
)2
—+2-1,652=4
В зависимости от длины базы S относительная ошибка путевой скорость
oIT oS2
W ~ S ’
если S = 80 км, то
aW
— = 0,050.
При измерениях дальностей методом совмещения визирной точки с масштаб-
ными метками экрана
оП2 = VoDJ'obmТоОграф=] Л0,22 + 0,72 = 0,73 км.
Тогда
or — ]/0,732 + 0,0252D2 = /о,5 + 6,25-1О~4 О2-
При Dx = D2 = 100 км суммарная ошибка измерения базы
, /’ 0,5+6,25.10-4-1002 „ е
oSx = l/ 2 2-------+2-1,652 = 3,5 км,
а соответствующая ошибка путевой скорости
aW 3,5
W ~ S ’
что при S = 80 км дает
о IT
V“0'043-
70
Таким образом, несмотря на десятикратное повышение точности
измерения дальностей, ошибка путевой скорости снизилась незначи-
тельно. Это объясняется тем, что основную роль в образовании ошиб-
ки oSe играют погрешности курсовых углов и графические ошибки ра-
боты на расчетчике.
Для оценки точности определения путевой скорости способом рав-
ных дальностей найдем сначала значения частных относительных оши-
„ (c\v\ (cW\
бок и от неточности измерения дальности и разности
курсовых углов, считая погрешность измерения времени несущест-
венной (о7 = 0).
Соответствующие формулы получим обычным порядком из соот-
ношения (3.15.) Для ошибки ( —:
Дф
2sin —
oWD =---------cD-,
t
oU7\
U7 Jo
„ . Дф
2sin —
2 r,
--------gD
S
или, заменив S его значением 2D sin —
2
oW'x
W Jo
Дф
2 sin— oD
2 oD
„ . ДФ D
2D sin —
2
Для ошибки аналогично получаем:
Дф
D cos —
IV/ 2D Дф о (Дф) 2 , . ,,
оГдф = — COS — . =-----.---а (Дф;;
Дф
D cos — о (Дф)
/olF\ 2 ^_о(Дф) Дф
V W /дф Дф 2 ё 2 ’
2D sin —
2
Суммарная ошибка
(3.17)
(3.18)
(3.19)
71
Ц05
6>У
iv
0,1 О
-5 -СО км
—S=W0km
О 30 00 SO ПО !30 180 а
Рис. 3.16. График ошибок опреде-
ления путевой скорости способом
равных дальностей
Так как измерение дальностей D
в данном случае выполняется мето-
дом совмещения радиолокационной
отметки ВТ с масштабными метками
экрана, следует считать oD = 0,2 км.
Ошибка определения разности курсо-
вых углов
о (Дф) = ]/ 2оф2 = ) 2 оф =
= 1,4-1,5° = 2,1° = 0,036 рад.
С учетом этих значений oD и о(Дф)
по формулам (3.17—3.19) построены
графики ошибок путевой скорости.
На рис. 3.16 показаны графики оши-
бок (кривые / — для S = 60
и 100 /см) и (кривая 2), а так-
, •• (cW \
же график суммарной ошибки
(кривая 3). Из графиков видно, что общая точность измерения IE на
большей части диапазона углов Дф определяется практически только
ошибкой не зависящей от длины пути между измерениями. Если
S > 60 км, то только при Дф>120° частные ошибки становятся со-
измеримыми друг с другом. При Дф, близких в 180°, основную роль
играет ошибка измерения дальностей
равных дальностей переходит в способ визирования точки, находя-
щейся на линии фактического пути. Кроме того, из этого же
графика следует: при S > 60 км длина пути (при углах Дф < 150°)
практически не влияет на ошибку способ равных дальностей
наиболее эффективен при больших углах Дф = 60°—180°, когда
Равна 0’01—0,03. Значительное, в среднем вдвое, повышение
точности определения W способом равных дальностей по сравнению
с общим случаем базисного способа объясняется главным образом
исключением при расчетах графических операций.
W )£
. но в этом слУчае способ
§ 3.5. ОСОБЕННОСТИ ПРИМЕНЕНИЯ РАДИОЛОКАЦИОННЫХ СТАНЦИИ
ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИИ И НАВИГАЦИИ
Особые требования к безопасности полетов вызвали применение в
гражданской авиации специальных бортовых радиолокационных
станций, главным назначением которых является выдача информации
экипажу о наиболее опасных зонах районов грозовой деятельности,
а также предупреждение столкновений с другими самолетами и релье-
фом местности. При этом они сохранили и даже улучшили некоторые
собственно навигационные качества.
72
Такие БРЛС называются радиолокационными станциями преду-
преждения столкновений и навигации (РПСН), а их характерными
представителями являются различные модификации БРЛС «Гроза».
В отличие от обычных БРЛС в РПСН осуществляются:
секторный обзор пространства в передней полусфере (в пределах
курсовых углов ± 100°), в которой могут находиться опасные препят-
ствия — грозы, горы, встречные самолеты;
специальный режим работы, обеспечиваемый особой диаграммой
направленности антенны («узкий .луч», рис. 3.17) для обнаружения
различных препятствий на уровне полета самолета;
анализ структуры грозовых облаков с выявлением наиболее опас-
ных их частей (схема «Изо» — «Эхо» или «Контур») и определение пре-
вышения верхней границы над уровнем полета;
гироскопическая и функциональная стабилизация изображения
на экране, обеспечивающая сохранение зоны обзора и качества изобра-
жения при продольных и поперечных кренах самолета до 15°;
плавное вращение антенны вручную при измерении угла сноса по
виду отраженных сигналов;
управление станцией с рабочих мест пилотов;
полуавтоматическая связь измерительных схем курсового угла
и наклонной дальности с навигационными вычислителями.
Для самолетов различных классов БРЛС «Гроза» комплектуется
в нескольких вариантах: с одним или двумя приемопередатчиками,
с одним или двумя индикаторами (основным и дополнительным), с ан-
теннами различных размеров и расположения (носовой или подфю-
зеляжной).
Экран и оперативные органы управления размещены на передней
панели основного индикатора станции ((рис. 3.18). Органы управления
обеспечивают: включение станции, ручной ввод частоты приемника в
зону автоматической подстройки («Частота»), регулирование общей
яркости изображения на экране («Яркость») и отдельно яркости даль-
номерных сеток («Метки»), ручное управление наклоном антенны («Нак-
лон») и ее азимутальным поворотом (две клавиши слева от экрана)
выбор режима работы станции в зависимости от задач, выбор даль-
Рнс. 3.17. Зона об-
зора РПСП («узкий
луч»)
ности обзора и ручную регулировку качества изображения с целью
выведения необходимых объектов на общем фоне («Контраст»).
Навигационное использование БРЛС «Гроза» возможно в режимах
«Земля», «Снос», «Метео» и «Контур» при дальностях обзора D р = 30,
50, 125, 250 и 375 км (с задержкой D3 = 200 км).
При Dp = 30 и 50 км на экран подаются дальномерные метки че-
рез 10 км, при Dp = 125 км — через 25 км и при Dp = 250 и
375 км — через 50 км.
Дополнительный индикатор (рис. 3.19) имеет одинаковый с основ-
ным экран и рукоятки «Яркость», «Контраст» и «Метки». Рядом с
экраном располагаются световые табло «50», «25» и «10», указываю-
щие своим свечением расстояние в километрах между дальномерными
метками, что позволяет судить об осуществляемой дальности обзора
и масштабе изображения непосредственно по экрану.
Вспомогательные органы управления — переключатели «Резерв,
стаб». и «Резерв, перед.» размещены на приборной доске вне индика-
торов. Переключатель «Резерв, стаб.» отключает гиростабилизацию
антенны (в случае отказа ЦГВ), после чего азимутальное качание ди-
Рис. 3.18. Основной индикатор РПСН «Гроза»
74
Рис. 3.19. Дополнительный индикатор РПСН «Гроза»
аграммы направленности происходит в плоскости, перпендикулярной
«вертикали самолета». Переключатель «Резерв, перед.» обеспечивает
немедленное подключение резервного приемопередатчика, находя-
щегося постоянно в горячем резерве.
Режим «Земля» обеспечивает обзор земной поверхности
впереди самолета с обнаружением крупных городов на дальностях до
300 км (в зависимости от диаметра установленной антенны). При Dp =
= 30, 50 и 125 км облучение ведется одним веерным лучом, при Dp =
= 250 км — поочередно (во время противоположных ходов антенны)
веерным и узким лучами и при Dp = 375 км — только узким лучом.
В последнем случае перед включением Dp = 375 км необходимо на
более короткой развертке (например, 250 км) наклоном антенны до-
биться наибольшей дальности наблюдения фона земной поверхности.
Необходимые для сохранения качества изображения подстроечные
операции в связи с изменениями высоты полета и характера отражаю-
щей поверхности выполняются в станции автоматически. В режиме
«Земля» решаются все навигационные задачи, рассмотренные в преды-
дущих параграфах главы. Ограничение зоны обзора только передним
сектором не исключает определения навигационных элементов общим
базовым способом, хотя и сокращает несколько возможности его при-
менения.
Важным дополнением к режиму «Земля» является режим
«С н о с», обеспечивающий точное определение угла сноса (ста < 1°)
методом наблюдения биений яркости отраженных сигналов на раз-
75
вертке экрана («по виду отраженных сигналов»). При включении ре-
жима «Снос» автоматическое сканирование антенны прекращается
и обеспечивается поворот антенны вручную (вправо и влево) для под-
бора положения, соответствующего фактическому углу сноса (§ 3.4).
Необходимая плавность вращения антенны при этом достигается уп-
равлением от специальных клавиш в сочетании с регулировкой ско-
рости вращения ручкой «Контраст». После подбора положения антен-
ны производится отсчет измеренного угла сноса по градуировке шкалы
экрана, имеющей в секторе ±20° деления с ценой 1°.
Режим «Метео» предназначен, прежде всего, для обнаруже-
ния грозовых облаков и зон турбулентной атмосферы впереди самолета
на уровне высоты полета, но может быть использован также для укло-
нения от столкновений со встречными самолетами и опасным релье-
фом. В этом режиме станция работает узким лучом, качающимся в го-
ризонтальной плоскости (при установлении угла наклона 0°). Малый
угол раствора диаграммы направленности в вертикальной плоскости
(±1,5°—2°) позволяет просматривать впереди самолета только огра-
ниченный горизонтальный слой пространства, исключая с экрана ин-
дикаторов не опасные для самолета объекты, находящиеся значительно
выше или ниже уровня полета. Благодаря этому в РПСН «Гроза»
грозы средней интенсивности видны на значительно больших удале-
ниях (до 150—200 км) по сравнению с БРЛС, с помощью которых грозы
обнаруживаются, как правило, на фоне отражений от земной поверх-
ности. Кроме того, по экрану определяются зоны наибольшей интен-
сивности восходящих потоков воздуха (в режиме «Контур»), а также
вертикальное развитие грозового облака (при использовании наклона
антенны на известный угол).
Выявление наиболее опасных зон в обнаруженной грозовой области
обеспечивается появлением в режиме «Контур» («Изо»—«Эхо»)
на фоне светлых пятен, изображающих грозовые облака, черных про-
валов (рис. 3.20). Места провалов соответствуют участкам с наиболее
интенсивным отражением радиоволн, обусловленным наибольшим
вертикальным движением воздуха, поддерживающим крупные капли
воды. Появление провалов объясняется применением специальной
Рис. 3.20. Расшифровка структуры
грозового облака в режиме «Контур»
(«Изо—Эхо»)
схемы селекции сигналов по ам-
плитуде, не пропускающей на
экран сигналы, имеющие интен-
сивность, большую некоторой по-
стоянной величины. Наиболее опас-
ны участки быстрого перехода от
нормальной атмосферы (вне грозо-
вого облака) к зоне провала, так
как здесь происходит резкий пере-
пад’ скорости вертикального дви-
жения воздуха, что может привести
к повреждению самолета или к
срыву его в штопор.
Первоначальное обнаружение
гроз ведется на развертке £>р =
Рис. 3.21. Экран РПСН при горизонтальном обходе грозы до отворота
(о) и после отворота (б)
= 250 км, что обеспечивает достаточный запас времени и пространства
для построения маневра обхода. Обход грозовых очагов (рис. 3.21)
производится на безопасном от них расстоянии (/бе8 — 15 км)> ко*
торое задается как траверзное удаление внешней границы отметки
грозы от линии курса самолета. Направление отворота определяется
непосредственно по экрану индикатора из условия, чтобы обеспечи-
вался обход грозы по кратчайшему пути.
При выполнении маневра обхода грозы экран можно рассматривать
как точный план картины воздушных препятствий на уровне высоты
полета самолета. Это объясняется тем, что угол визирования р при ис-
пользовании узкого луча стабилизирован и равен 90°. Поэтому масш-
табы изображения на экране по радиусу и по дуге окружности стано-
вятся равными друг другу и постоянными по всей площади экрана
(см. формулы 3.5 и 3.6)
т = sin 90° = 1, п — —----= 1.
sin 90°
Это означает, что картина не имеет нйкаких искажений, а измеря-
емые по экрану дальности равны горизонтальным дальностям до на-
блюдаемых объектов (грозовых очагов, самолетов).
В случае необходимости пролета между грозовыми очагами рассто-
яние между ними в направлении, перпендикулярном линии курса,
должно быть не менее 50 км; 1Сез ъ этом случае следует брать увеличен-
ным (порядка 25 км).
В тех случаях, когда обход грозовых очагов оказывается невоз-
можным из-за их большой протяженности и плотности расположения,
может появиться необходимость пройти выше грозовых облаков. Ре-
шение на такой маневр принимается только после определения превы-
шения Д//гр их верхней границы над эшелоном полета самолета
(рис. 3.22). Для измерения этого превышения применяется подъем
оси диаграммы направленности антенны до положения, при котором
на экране исчезнут отметки грозы. Заметив при этом угол подъема ан-
7/.
Рис. 3.22. Определение превышения грозового облака с помощью РПСН
тенны рэнТ по шкале «Наклон» основного индикатора, можно рассчи-
тывать и линейное превышение А//гр. Считается, что на больших уда
лениях самолета от грозы (80—120 км) угол диаграммы направленно-
сти, на котором исчезает изображение, равен примерно 1,5°. Тогда угол
возвышения верхнего края грозового облака (р,гр) над уровнем само-
лета будет равен измеренному углу подъема антенны иант, умень-
шенному на 1,5°,
Игр ' Нант 1 >5 >
а
~ ^гр tg Игр"
Зная АЯгр и £>гр и учитывая маневренные качества самолета (V и VB),
можно определить возможность прохода над облачностью. При этом
необходимо учитывать установленное минимальное превышение для
полета над грозовыми облаками и необходимость набора безопасной
высоты, не доходя до облака.
Рис. 3.23, Определение опасности сближения со встречным самолетом:
и — опасно; б — неопасно
78
Рнс. 3.24. Обнаружение опасности столкновений с рельефом местности
Определение возможности опасного сближения со встречным само-
летом, летящим на пересекающемся курсе и близкой высоте, может
осуществляться в режиме «Метео» при установке антенны на угол нак-
лона, равный нулю (р. = 0°). Благодаря применению узкого (в верти-
кальной плоскости) луча на экранах индикаторов появляются отметки
только самолетов, летящих на высотах, близких к высоте наблюдаю-
щего самолета, т. е. тех, которые представляют действительную угро-
зу безопасности при пересечении его линии курса.
Самолет, пересекающий линию курса во встречном или попутном
направлении, считается потенциально опасным, если его отметка пе-
ремещается строго к центру экрана индикатора, так как это свидетель-
ствует о сближении самолетов с постоянным курсовым углом, и,
следовательно, о возможности столкновения (рис. 3.23, а). Если от-
метка обнаруженного самолета движется по экрану мимо центра, т. е.
ее курсовой угол непрерывно меняется, то опасного сближения не бу-
дет (рис. 3.23, б).
79
Предупреждение опасных сближений с горами* в режиме «Метео»
возможно при полетах на высотах, меньших 1 000 м над рельефом
местности, когда луч захватывает наиболее высокие вершины по курсу
самолета (рис. 3.24).
Принцип обнаружения опасности столкновения с горами заклю-
чается в следующем. Благодаря узкой диаграмме направленности в
вертикальной плоскости на экране не будут видны объекты, находя-
щиеся под самолетом и во всем пространстве впереди него (до неко-
торого направления ЛрА/). Угол р., определяющий положение линии
ЛхЛ/ относительно горизонтальной плоскости, зависит от диаграммы'
направленности антенны и от интенсивности отраженных сигналов
(т. е. от характера отражающих объектов и их удаления от самолета).
В зависимости от этих факторов он может колебаться в значительных
пределах—от 1°до5°. По мере сближения самолета с препятствием оно
будет перемещаться из зоны обзора в иепросматриваемую зону, и в
некоторый момент его отметка исчезнет с экрана (положение А3 на
рис. 3.24, а). Пропадание отметки будет происходить на тем большем
удалении от препятствия, чем больше превышение Ни самолета над
ним. Если задаться определенной минимальной истинной высотой по-
лета над горой (Нп = Д//без). можно определить контрольную вели-
чину DK, при которой с экрана должны исчезать все отметки назем-
ных объектов, если самолет летит не ниже заданной безопасной высоты
(положение Л2 на рис. 3.24, а). Признаком того, что самолет летит ни-
же безопасной высоты, является сохранение отметки горы на экране
при расстояниях, меньших DK (положения В2 и В3 на рис. 3.24, б).
Например, при р яг 4°, если заданная Д/7без = 900 м, DK будет равно
примерно 10—12 км. Так как качание луча антенны происходит в пре-
делах курсовых углов ±100°, на экране будут выдаваться предупреж-
дения о всех горах, находящихся в передней полусфере.
Глава 4
ПРИМЕНЕНИЕ УГЛОМЕРНЫХ РАДИОНАВИГАЦИОННЫХ
СИСТЕМ
§ 4.1. ОБЩАЯ ХАРАКТЕРИСТИКА УГЛОМЕРНЫХ
РАДИОНАВИГАЦИОННЫХ СИСТЕМ
Угломерными радионавигационными си-
стемами (УНС) называются системы, обеспечивающие определе-
ние на борту самолета или получение с земли навигационной инфор-
мации в виде горизонтального угла, характеризующего взаимное по-
ложение самолета и наземной станции (РНТ).
С помощью УНС определяются следующие угловые параметры:
— пеленг (азимут) Ас самолета относительно наземной станции;
горизонтальный угол, построенный в точке наземной станции меж-
ду меридианом и ортодромическим направлением на МС;
— пеленг (азимут) Лр радиостанции относительно места самолета;
80
Рис. 4.1. Линии положения при использовании угломерных радионавига-
ционных систем
горизонтальный угол, построенный в точке МС между меридианом
и ортодромическим направлением па иЗземную станцию;
— разность пеленгов ДЛР двух радиостанций; горизонтальный угол,
построенный в точке МС, — между направлениями на две наземные
стан ции;
— курсовой угол радиостанции; угол между горизонтальной про-
екцией продольной оси самолета и ортодромическим направлением на
наземную станцию.
Трем первым из перечисленных параметров соответствуют различ-
ные линии положения на земной поверхности, являющиеся изолиниями
постоянной величины этих параметров:
линия равных пеленгов самолета (ЛРПС) соответствует условию
Лс = const и является ортодромией, выходящей из РНТ с направ-
лением Л с (рис. 4.1, а);
линия равных пеленгов (азимутов) радиостанции (ЛРПР, ЛРА)
определяется условием Лр = const в является сложной кривой
(«пространственный овал Кассини») на поверхности земного шара
(рис. 4,1, б):
линия равных разностей азимутов (ЛРРА) соответствует условию
ДЛГ = const и также является сложной кривой (рис. 4.1, в).
Курсовой угол не может являться параметром линии положения,
так как измеряется в системе отсчета, связанной не с земной поверх-
ностью, а с самолетом.
В зависимости от аппаратуры, используемой для получения ис-
ходных геометрических параметров, УНС подразделяются на радио-
пеленгаторные, радиомаячные и радиокомпасные системы.
Радиопеленгаторные УНС обеспечивают определение
пеленга самолета относительно наземной станции путем пеленгации
работающего самолетного передатчика наземным приемным устрой-
ством с направленной диаграммой приема (радиопеленгатором). Для
сообщения на борт самолета полученной навигационной информации
используется дополнительная радиолиния «земля — самолет». В со-
временной авиационной практике используются радиопеленгаторные
УНС, работающие в диапазонах УКВ, КВ и СВ.
81
Радиомаячные УНС также обеспечивают определение
пеленга самолета относительно наземной станции (радиомаяка), по с
помощью ненаправленного бортового приемника, воспринимающего
электромагнитное поле, создаваемое наземным радиопередатчиком с
направленным излучением. В воздушной навигации используются
радиомаяки средневолнового (например, ВРМ-5 и «Консол») и УКВ-
диапазона (азимутальные маяки РСБН-2 и VOR).
Р а д и о к ом п а'сды’е УНС непосредственно обеспечивают
определение на самолете только курсового угла наземного передат-
чика (ненаправленного радиомаяка) или разности курсовых углов
Афр ДВУХ таких передающих станций. Однако сочетание курсового
угла фр с курсом у, полученным от курсового прибора, позволяет вы-
числить пеленг Ар радиостанции и даже (с учетом приближенных ко-
ординат станции и самолета) пеленг Лс самолета.
Таким образом, линия.равных пеленгов самолета (ЛРПС) может
быть получена с помощью всех трех разновидностей УНС, в то время
как линия равных азимутов радиостанции (ЛРА) и равных разностей
азимутов (ЛРРА) — только при помощи радиокомпасных систем.
Область возможного применения УНС определяется главным об-
разом дальностью действия радиолинии «РНТ — самолет» (соответ-
ствующей техническим характеристикам приемных и передающих
устройств системы и диапазону радиоволн), но зависит и от других
факторов: аномальных явлений при распространении радиоволн, у ров-
ня атмосферных помех, а при использовании радиокомпасных УНС
и от режима полета (наличия кренов).
Так как конкретные виды УНС работают в различных диапазонах
волн (УКВ, КВ, СВ, ДВ), то дальности действия их в каждом случае
определяются в соответствии со спецификой распространения волн
данного диапазона.
К аномальным явлениям при распространении радиоволн, влияю-
щим на возможность навигационного использования угломерных си-
стем, относятся ночной, береговой и горный эффекты.
Ночной эффект (поляризационная ошибка) представляет
собой явление хаотичных изменений поля в месте приема в результате
непрерывно меняющейся поляризации волн, отраженных от ионосфер-
ных слоев. Этот эффект наиболее сильно проявляется в периоды пере-
хода от светлого времени суток к темному и обратно, когда стабиль-
ность ионосферы нарушается.
Береговой эффект является результатом рефракции
волны в горизонтальной плоскости при пересечении линии раздела
сред с разной скоростью распространения радиоволн (суша, море).
Он проявляется в искажении пеленгов, если между наземной станцией
и самолетом пролегает береговая черта моря. Особенно большие иска-
жения пеленгов (на длинных волнах до 5°) происходят при острых углах
между направлением «РНТ — самолет» и береговой чертой. Однако
явление берегового эффекта ощутимо только на небольших высотах
полета (порядка нескольких длин волн) и быстро исчезает с удалением
приемного устройства от границы раздела сред.
82
Горный эффект — явление искажения радиопеленгов в
результате интерференции основной радиоволны с радиоволной, отра-
женной от горных хребтов. Эти искажения следует учитывать при по-
летах с небольшими превышениями над горами (порядка 1 000—
1 500 м) и в непосредственной близости к ним (особенно если самолет
находится между наземной станцией и отражающим рельефом).
Для ночного и берегового эффектов существуют методики коли-
чественной оценки их влияния на точность пеленгации [161. Однако
эти методики, исходящие из сильно идеализированных моделей яв-
лений, не дают практических возможностей для оперативного штур-
манского учета ошибок в полете и используются главным образом для
определения области возможного применения УНС в различных фи-
зико-географических условиях.
Точность УНС характеризуется величиной средней квадра-
тической ошибки углового параметра — пеленга самолета (аЛс) или
пеленга радиостанции (оАр). Эта ошибка от долей градуса (0,2—0,5°
для радиомаяков ВРМ-5 и РСБН-2) до нескольких градусов (2—3°
для радиокомпасных УНС и 3—4° для УКВ-пеленгаторов).
Оперативность УНС зависит от вида системы и техниче-
ского совершенства конкретного образца. Необходимо различать,
во-первых, оперативность определения основного навигационного па-
раметра (Др, Дс, ДДР или фр) и, во-вторых, оперативность исполь-
зования результатов измерений для навигационного управления само-
летом.
Наиболее высокую оперативность измерений с непрерывной инди-
кацией значений углового параметра имеют:
радиокомпасные УНС, работающие в комплексе с курсовыми си-
стемами и непрерывно выдающие азимут Др радиостанции;
УВК-радиомаячные УНС (угломерная часть РСБН-2, VOR), вы-
дающие текущий азимут Дс самолета;
курсовые и глиссадные радиомаяки систем инструментального
захода на посадку, позволяющие непрерывно определять положение
самолета относительно заданной вертикальной плоскости и глиссады
планирования.
Менее оперативно определяется угловой параметр радиопеленга-
торными УНС, так как в процесс получения экипажем параметра Дс
обязательно входит неавтоматизированная передача его значения на
борт самолета по радио, занимающая от 10—15 сек для УКВ-радиопе-
ленгаторов до 1—3 мин для неавтоматизированных КВ-радиопеленга-
торов. Оперативность радиомаячных средневолновых и длинноволно-
вых УНС (ВРМ-5, «Консол») еще более низка, так как сам цикл пере-
дачи сигналов занимает 1—2 мин.
Пропускная способность угломерных систем, кроме
радиопеленгаторных УНС, действие которых связано с использованием
двусторонней радиолинии «самолет—земля—самолет», неограниченна.
Пропускная способность радиопеленгаторных УНС в одной из приня-
тых математических форм (РоСсл или Npr) рассчитывается по мето-
дике, изложенной в гл. 1 (формулы 1.13 и 1.15). При этом в качестве
83
среднего времени обслуживания /обсл одиночной заявки используются
характеристики оперативности данного типа радиопеленгатора. Раз-
личные образцы УНС применяются либо для частичного контроля
пути и определения МС, либо для непрерывного управления самолетом
при движении по линии заданного пути, аппроксимируемой одной из
линий положения — ЛРПС, ЛРА, ЛРРА.
§ 4.2. ОПРЕДЕЛЕНИЕ И ИСПОЛЬЗОВАНИЕ ЛРПС. ПОЛУЧЕННЫХ
ПРИ ПОМОЩИ РАДИОПЕЛЕНГАТОРНЫХ УНС
Наземные радиопеленгаторы в зависимости от ориентации антен-
ной системы на местности измеряют пеленги самолета относительно
истинного или магнитного меридианов (Ас или АСы). Коротковолновые
и средневолновые радиопеленгаторы средней и большой дальности
действия используются для определения истинных пеленгов. УКВ-
радиопеленгаторы ближнего действия в зависимости от конкретного
назначения (на трассе или в районе аэродрома) могут выдавать истин-
ный Ас или магнитный АСм пеленги самолета, а также приближенный
магнитный путевой угол £м, который отличается от /1См на 180° и ис-
пользуется для полета на радиопеленгатор (рис. 4.2). Использование
магнитных величин объясняется тем, что в схемах предпосадочных ма-
невров до сих пор применяются магнитные направления посадочных
полос и других линий.
Необходимую навигационную информацию (Ас, ЛСм или fJM) эки-
паж самолета получает от наземного пеленгатора через двустороннюю
радиолинию «самолет —земля —самолет». Эта информация позволяет
контролировать текущее положение самолета относительно ЛЗП про-
кладкой ЛРПС на полетной карте или непосредственным сравнением
измеренной величины Ас с известным заранее (предвычисленным)
его значением в контрольных точках или на участке ЛЗП, для чего
отдельные «контрольные» ЛРПС могут наноситься на карту при под-
готовке к полету.
Точное построение ЛРПС на карте в условиях полета
практически невозможно, так как при любой проекции карты, кроме
гномонической, ортодромия на ней не совпадает с прямой линией и,
следовательно, может быть построена только по точкам. Поэтому на
полетных картах (рис. 4.3) от радиопеленгатора вместо точной ЛРПС
(ортодромии 2) прокладывают заменяющую ее прямую (хорду ортод-
ромии /), которая проходила бы через место самолета. Такая пря-
мая составляет с меридианом пеленгатора на карте угол Аск — пе-
ленг (азимут) самолета на карте. Он отличается от истинного пеленга
Ав самолета на величину поправки за кривизну ортодромии на карте
4к==Л+«- (4.1)
Величина и знак поправки и зависят от проекции карты и положения
самолета относительно пеленгатора.
На картах гномонической проекции изображение
ортодромии совпадает с прямой, т. е. поправка и равна нулю. Но это
преимущество для прокладки ЛРПС в полете не используется, так как
84
получаемая от радиопеленгаторных УНС
Рис. 4.3. Поправка за кривизну ор-
тодромии на карте
такие карты лишены важного навигационного свойства — равноуголь-
ности. Гномонические карты успешно применяют на наземных радио-
пеленгаторных пунктах, определяющих по данным двух-трех пелен-
гаторов место самолета.
На картах поперечной и косой равноугольных
цилиндрических проекций в пределах шестиградусной
зоны (для первой) или полосы карты (для второй), а также на картах
международной проекции в пределах одного листа
поправка и очень близка к нулю и на практике при построении ЛРПС
не учитывается. Проведение же ЛРПС в виде прямой через границы
зон (полос и листов) таких карт приводит к ошибкам, значительно пре-
восходящим ошибки измерения пеленгов самолета КВ и СВ-пеленга-
торами, и поэтому недопустимо.
Более ощутимо отклонение ортодромии от прямой на стерео-
графической, равноугольной конической и
нормальной равноугольной цилиндрической
(меркаторской) проекциях. Для всех этих проекций в
теории картографии выводятся приближенные формулы поправок и,
исходящие из допущения, что изображение ортодромии при длине ее не
более 1 000 км близко к дуге окружности. Если пеленги отсчитывать
от северного направления меридиана (как в северном, так и в южном
полушарии), долготы — к востоку, а южнее широты считать отрицатель-
ными, то формула поправки и для всех трех проекций в обоих полу-
шариях Земли будет иметь вид:
Лр—Хс
и -------
2
. Фр + фс
sm<p0—SID—--
(4-2)
гДе Фр. ^р. Фс и — координаты радиопеленгатора и самолета, а
Фо — широта наименьшего масштаба карты. Эта общая формула кон-
кретизируется для каждого вида проекции с учетом распределения на
ней масштабов длин.
На полярной стереографической проекции
наименьший масштаб достигается в одной точке — полюсе, следо-
85
вательно, <р0 = 90° (для северного полушария) или <р0 = —90° (для
южного полушария). Поэтому
Ч_2с (sin 90O)_sin Vp±2£.
2 ( 7 2
f . . фр + фс
------{ ± 1—Sin ------
2 I 2
На равноугольной конической проекции ми-
нимальный масштаб получается вдоль одной параллели с широтой <р0;
формула поправки при условии, что пеленгатор и самолет находятся
по одну сторону параллели <р0, сохраняется в общем виде (4.2).
На меркаторской проекции параллелью наимень-
шего масштаба является экватор, т. е. <р0 = 0°, отсюда
. фр + Фс
U =-----------SIH —-------
2 2
Ар—Хс
—g-----sinq>cp.
Таким образом, для построения на карте приближенной ЛРПС с
учетом кривизны ортодромии необходимо знать, хотя бы приближенно,
координаты фс и Ас самолета. Это значительно затрудняет прокладку
пеленгов на картах в полете, и поэтому построение ЛРПС на ее полную
длину осуществляется только при небольших (300—500 км) удалениях
самолета от пеленгатора, когда поправкой и можно пренебречь ввиду
малости самой поправки и невысокой точности радиопеленгаторов
ближнего действия. Следует иметь в виду, что приближенная ЛРПС
на карте (хорда ортодромии) является линией положения не на всем
протяжении, а только на небольшом отрезке в окрестности точки МС,
координаты которой учитывались при расчете Лск.
При пеленгации на больших удалениях (КВ пеленгаторы ампли-
тудного и фазового принципа действия) можно строить небольшие
отрезки ЛРПС в районе нахождения самолета, для чего применяется
известный «общий прием построения линий положения на картах»
[211, который называется также методом опорных точек проф. В. В.Кав-
райского.
Метод опорных точек основывается на известных ис-
ходных допущениях теории линий положения, согласно которым
изменение параметра ЛП на величину Ап (рис 4.4) приводит к парал-
лельному смещению этой линии на величину «переноса» d = &р =
Ди _
= —, где g — модуль градиента линии положения в данной точке.
Сущность метода состоит в следующем. Для нескольких фиксирован-
ных «опорных» точек Мо возможного района нахождения самолета пре-
дварительно вычисляются точные значения азимута ЛМо и удаления
£>м0 от радиопеленгатора, а также направление Ag градиента ЛРПС
относительно местного меридиана и «множитель переноса» kn (линей-
86
Рис. 4.4. К методу опорных точек при построении линий положения на сфере (а)
и карте (б)
ное смещение ЛРПС при отклонении измеренного Лсиз от расчетно-
го ЛМо на 1°). Вычисления производятся по формулам элементов орто-
дромии:
ctg АМа = cos фр tg фм. CQsec (кМс—>-р) — sin фр ctg —Хр); (4.3)
cos DM„ = sin фр sin фМо 4- cos фр cos фЛ(„ cos (Хм0 —\>)- (44)
Для определения направления градиента Ag ЛРПС (т. е. направ-
ления переноса d) используется одна из формул, вывод которых при-
веден в приложении 3:
4-2 arctg sin <рср , ДХ, tg 4-90°
Дф cos — 2 2
| sin ДХ cos Фр)
Ае = arccos /-----------} . (4.5)
8 I sinDM I
В формулах (4.3) и (4.5): фМо, АМо, фр, Хр — координаты опорной точ-
ки /Ио и радиопеленгатора; Аф и АХ — их разности фМо — фс и
^Мо -
Множитель переноса
kn км = — = 111,2 sin DMc
g
непосредственно находится из определения величины kn.
87
В полете, зпая приближенное МС на момент получения Ас от ра-
диопеленгатора, выбирают одну из подготовленных опорных точек,
для которой вычислены Л,.,о и /?п. Определив разность АЛИЗ = А сиз —
—Лм0 в градусах, рассчитывают линейную величину переноса
d км = кп-АЛиз-
Затем на карте (рис. 4.4, б) из точки Л1о' проводится прямая с на-
правлением Ag и на ней откладывается отрезок Мо'О' длиной d клг,
полученная точка О' называется определяющей точкой искомой ли-
нии положения. Через эту точку проводится прямая, перпендикуляр-
ная отрезку Мо’О', которая и является изображением отрезка ЛРПС
на карте. Для повышения оперативности метода можно рекомендо-
вать при подготовке к полету в каждой из выбранных опорных точек
Мо' заранее проводить линии переносов М0'О' и наносить на них точки,
соответствующие возможным значениям d = £ПДЛИЗ при различных
разностях измеренных и предвычисленных пеленгов самолета
(АЛ^3 = ±1°, ±2° и т. д.). Тогда прокладка ЛРПС в полете после
определения величины АЛНЗ сведется к одной операции — проведению
перпендикуляра к линии Мо'0' в одной из этих точек или между ни-
ми. Для наиболее важных контрольных точек трассы (поворотные
пункты, контрольные рубежи и т. п.) целесообразно на карте наносить
семейства отрезков ЛРПС, обозначая их непосредственно значениями
измеренный Л°снз. На рис. 4.5 показана схема подготовки карты для
использования дальнего пеленгатора в районе поворотного пункта,
который принят за опорную точку Л40.
В частных случаях, например, при полете по ЛЗП от радиопелен-
гатора контроль пути по направлению может осуществляться без про-
кладки ЛРПС па карте — непосредственным сличением периодиче-
ски получаемого Ас с заданным путевым углом Рарнт, отсчитываемым
Рис. 4.5. Схема подготовки карты для использования метода
опорных точек
88
Рис. 4.6. Линейная ошиб-
ка ЛРПС
от меридиана пеленгатора: сели текущий Ас совпадает с РлРНТ, то са-
молет движется по ЛЗП. При этом можно также определить угол сноса
а = 6, —у,
гХрНТ ‘ЛРНТ
На близких расстояниях от УКВ-пеленгатора благодаря его вы-
сокой оперативности (/обсл = 10—15 сек) в некоторых случаях при-
меняется «курсовой способ» полета на РНТ, заключающийся в том, что
самолет летит с курсом ум, равным £м = Лсм+ 180э, периодически по-
лучаемым от радиопеленгатора.
Линейная ошибка Др ЛРПС на удалении D от радиопеленгатора
при известной погрешности пеленга самолета ДДС может быть получена
из прямоугольного сферического треугольника РСС (рис. 4.6):
sin Ар sinD
sin ДЛС sin 90°
sin Др = sin ДДе sin D
или ввиду малости дуги Др и угла ДДС
Др = ДДДп D, (4.6)
где Др и ДДС выражены в радианной мере.
Сравнивая формулу (4.6) с общей формулой ошибки линии поло-
жения (Др — Au/g) и считая Ди = Д/1с> получим, что модуль градиен-
та ЛРПС
Это выражение может быть получено и непосредственно по общей фор-
муле модуля градиента линий положения, записанной в географиче-
ской системе координат (§ 3.3 [19]).
Если выразить ДДС в градусах, а Др в километрах, формула (4.6)
принимает вид:
Др км = 111,2 ДДС° sin D.
Для относительно небольших расстояний (D 20°»2000 км) мож-
но считать sin D = 0,017 0° = 0,017 и, следовательно,
Др км = 0,017 ДЛС°ОЕМ.
(4-8)
89
Рис. 4.7. Оценка точности контроля пути по дальности при ис-
пользовании одной ЛРПС:
1—точная ЛРПС; 2— фактическая ЛРПС
Если считать ошибку Др свободной от систематической составляющей,
т. е. чисто случайной, формулы (4.6) и (4.8) можно распространить на
среднюю квадратическую ошибку ЛРПС:
ар = co4csin D = 111,2оЛс° sin D\
ар ки = 0,017оЛс° D км. (4.9)
Пользуясь полученными соотношениями, оценим ошибку контроля
пути по дальности AS = ММ' (рис. 4.7) при использовании бокового
радиопеленгатора (или любой угломерной РНТ). Из рисунка
AS = _^P_>
sin <в
где и — угол пересечения ЛРПС с ЛЗП, приближенно равный (без
учета схождения меридианов) разности (Лс + 180°) — р. Тогда
sin D__ АЛСО
sin <в sin св
Таким образом, наибольшая точность контроля пути достигается при
использовании РНТ, находящейся на траверзе линии пути (со = 90е).
§ 4.3. ОПРЕДЕЛЕНИЕ ЛИНИЙ ПОЛОЖЕНИЯ ПРИ ПОМОЩИ
РЛДИОМАЯЧНЫХ УНС
Работа современных радиомаячных УНС, применяющихся в воздуш-
ной навигации, обеспечивается наземными маяками различных типов:
всенаправленными азимутальными УКВ-радиомаяками РСБН-2 и
90
VOR, всенаправленными азимутальными СВ или ДВ-радиомаяками
ВРМ-5 и «Консол»;
зональными азимутальными маяками систем СП-50, ILS и др.
Для приема на самолете сигналов радиомаяков ВРМ-5 и «Консол»
достаточно иметь обычный приемник соответствующего диапазона;
для использования остальных типов радиомаяков требуются специаль-
ные приемоиндикаторные устройства.
Ультракоротковолновые азимутальные радиомаячные системы
Современные отечественные всенаправленные азимутальные УКВ-
радиомаяки РСБН-2, работающие в составе угломерного канала одно-
именной угломерно-дальномерной системы, рассматриваются в гл. 5.
За рубежом широко распространен другой тип всенаправленных
азимутальных УКВ-радиомаяков — радиомаяки VOR.
Принцип действия радиомаяков VOR состоит в создании в
пространстве фазомодулированного радионавигационного поля, поз-
воляющего при использовании специальной бортовой приемной аппа-
ратуры определять азимут (пеленг) самолета относительно радиомаяка.
Антенную систему радиомаяка VOR принято ориентировать относи-
тельно местного магнитного меридиана. Таким образом, на борту само-
лета непосредственно может быть определен только магнитный пеленг
Асм. Однако в бортовой аппаратуре как отечественной, так и зарубеж-
ной, эта исходная информация преобразуется и выдается экипажу в
двух формах, соответствующих принципу индикации «вид с самолета
на землю»: в виде углового отклонения от ЛЗП, проходящей через
маяк, и в виде приближенных значений курсового угла и пеленга ра-
диомаяка относительно текущего места самолета.
Прием сигналов VOR на отечественных самолетах обеспечивается
аппаратурой КУРС-МП, используемой также для работы с посадоч-
ными системами СП-50 и ILS.
Эта комбинированная аппаратура устанавливается на самолетах
в двух комплектах, каждый из которых имеет следующие оперативные
органы управления и индикации:
блок управления полукомплектом — для выбора рабочего канала
радиомаяка VOR и посадочной системы СП-50 или ILS;
пульт выбора радиосистем (один на два полукомплекта) — для
подключения индикаторов к различным системам-датчикам (РСБН-2,
VOR или СП-50 и ILS);
задатчик (сечектор) азимута — для выбора параметра ЛЗП при
полетах на радиомаяк VOR или от него (рис. 4.8);
радиомагнитный индикатор РМИ (рис. 4.9) — для индикации маг-
нитного курса ум (по вращающейся шкале), приближенных КУР двух
радиомаяков VOR (указываются стрелками по внешней неподвижной
шкале), приближенных магнитных пеленгов радиомаяков VOR (ука-
зываются стрелками по вращающейся шкале) и точных (без методи-
ческих погрешностей) КУР радиостанций по данным АРК (стрелки и
внешняя шкала); для вызова на РМИ показаний АРК имеются два
флажковых переключателя «VOR — АРК»;
91
Рис. 4.8. Задатчик магнитных азимутов и нуль-индикатор ЛЗП:
1—переключатель направления полета относительно радиомаяка; 2 — лампочки-иидикаторы;
3— шкала магнитных азимутов (ЗПУ); 4 — рукоятка задатчика; 5 — вертикальная планка
нуль -индикатора
нуль-индикаторы отклонений фактического азимута (пеленга) са-
молета относительно радиомаяка от заданного значения, обычно в ка-
честве этого индикатора используется вертикальная планка пилотаж-
ного прибора (например, НКП-4).
Полет по ортодромии (ЛРПС) на радиомаяк (рис. 4.8, а) или от
него (рис. 4.8, б) выполняется с использованием задатчика азимута
и нуль-прибора. На задатчике устанавливается заданный ортодроми-
ческий путевой угол ЛЗП относительно магнитного меридиана радио-
маяка — рмХрм. При полете от маяка измеряемый ЛСм равен Рмх ,
а при полете на него—величине—РмАрм180°. Отклонение АЛ факти-
ческого ЛСМф от этих величин указывается на нуль-индикаторе таким
образом, что смещение вертикальной планки от нуля шкалы происхо-
дит в ту сторону, где находится заданная линия пути. Следовательно,
совмещая планку с нулем, можно обеспечить движение самолета по
ЛЗП.
Задатчик азимута в сочетании с нуль-индикатором может быть ис-
пользован также для ручного измерения текущего значения ЛСм (или
ЛСм + 180°). Для этого рукоятка задатчика вращается до тех пор,
пока планка нуль-индикатора не совместится с нулем, после чего по
шкале задатчика отсчитывается величина ЛСм (или ЛСм+ 180°).
Точность определения пеленга самолета характеризуется средней
квадратической ошибкой оЛСм=1—3°, а при использовании модифи-
цированных (прецизионных) маяков PVOR повышается до 0,5—1°.
92
Более наглядно, хотя и приближенно, направление на радиомаяк
индицируется в виде курсового угла фрмп, вычисляемого аппаратурой
КУРС-МП по формуле
Фрмп = 4м+180°—Тм
и указываемого поворотом стрелки РМИ относительно неподвижной
шкалы (рис. 4.9). При этом допускается методическая погрешность
из-за сравнения углов ЛСм + 180° и ум, измеряемых относительно
разных магнитных меридианов (мест самолета и радиомаяка). Величина
методической погрешности курсового угла равна суммарному измене-
нию магнитного направления ортодромии па участке между самолетом
и маяком:
^Фрмп ~ ,2 (^м! ^мг)’
где о12 — схождение истинных меридианов; АМ1 — Дм2— разница
магнитных склонений на этом участке. Например, при <рср =60с,
Рис. 4.9. Навигационная информация, получаемая с помощью системы
VOR:
/—неподвижный индекс отсчета магнитного курса; 2 и 3—стрелки отсчета приб-
лиженных КУР и магнитных пеленгов радиомаяков; 4— вращающаяся шкала маг-
нитных курсов и пеленгов самолета; 5—шкала приближенных курсовых углов
радиомаяка; б—переключатель индицируемой информации
93
удалении от маяка 250 км и при | ДМ1 — Дм2 | — 3° максимальная ошиб-
ка будет 7°, а при удалении 100 км — около 2°. С приближением к
маяку эта погрешность убывает до нуля. Та же стрелка РМИ по вра-
щающейся шкале указывает приближенный магнитный пеленг маяка
^рмп = Тм + Ч’рмп. имеющий такую же методическую ошибку, как
и курсовой угол.
Средне- и длинноволновые радиомаячные системы
Всенаправленный средневолновый радиомаяк ВРМ-5 обеспечивает
определение экипажем истинного пеленга Ас самолета путем прослу-
шивания его сигналов при помощи любого приемника, имеющего не-
обходимый диапазон частот.
Антенная система радиомаяка состоит из трех мачт-излучателей,
расположенных на одной прямой линии (база) на расстоянии В друг
от друга, равном двум-трем длинам волн (рис. 4.10). Ориентация ан-
тенной системы на местности определяется азимутом нормали к линии
базы (Ан), характеризующим положение оси двух 120-градусных ра-
бочих секторов, в пределах которых возможно нормальное определение
пеленга самолета. В остальных направлениях (примыкающих к про-
должениям линии базы) использование радиомаяка невозможно из-за
резкого падения точности определений. В некоторых отечественных
маяках этот недостаток устранен за счет совмещения в одной точке
антенных систем двух одинаковых маяков с взаимно перпендикуляр-
ными нормалями (пятимачтовые маяки), в результате чего рабочая
зона становится круговой.
В северном полушарии (Европа, Азия и Северная Америка) ра-
ботают более 10 маяков ВРМ-5 и «Консол». Построенные морскими
ведомствами различных стран они ориентированы своими рабочими
секторами в основном в сторону акваторий морей и океанов, но
пользоваться ими можно и над обширными пространствами
материков.
Дальность действия радиомаяка ВРМ-5 днем над морем, когда ис-
пользуется поверхностная радиоволна, достигает 1 000—1 500 км,
над сушей — около 800 км. При этих дальностях обеспечивается доста-
точная техническая точность пеленгации: па направлениях, близких
к нормали, оАс = 0,2°; на границах рабочих секторов оАс = 0,5 .
В ночных условиях дальность действия увеличивается, так как может
использоваться пространственная (отраженная от ионосферы) волна;
однако при этом заметно снижается точность пеленгации. Ошибки
пеленгации ночью имеют наибольшее значение на удалениях порядка
700 км, где они достигают величин оАс = 1—2°.
Полный цикл работы радиомаяка ВРМ-5 продолжается 1 мин и
состоит из 30-сек вспомогательного и 30-сек измерительного периодов
(рис. 4.11, б). В течение вспомогатетьного периода радиомаяк, работая
ненаправленно (излучает только центральная антенна), передает по-
зывные и длинное (10 сек) тире, используемое для пеленгации с помощью
радиокомпаса. Во время измерительного периода радиомаяк создает в
рабочих секторах поле, закономерно изменяющееся в течение 30 сек
94
каждой минуты. Свойство поля
состоит в том, что в пространстве
попеременно создаются две мно-
голепестковые диаграммы на-
правленного излучения (сплош-
ная и пунктирная линии на
рис. 4.11, а), по одной из кото-
рых в течение 0,1 сек излучается
короткий сигнал «точка», а по
другой в течение 0,4 сек длинный
сигнал «тире». Время излучения
одной диаграммы является пау-
зой для другой, и наоборот, а
общее время излучения пары
смежных сигналов составляет
точно 0,5 сек. Частично пере-
крываясь, эти две диаграммы в
пересечениях своих лепестков
образуют с каждой стороны от
базы маяка по 11 равносигналь-
Рис. 4.10. Рабочая зона радиомаяка
ВРМ-5
ных зон (РСЗ), в которых ин-
тенсивность принимаемых сигналов (точек и тире) одинакова, т, е.
прослушивается непрерывный фон. Путем плавного изменения фаз
токов в антеннах диаграммы в течение 30 сек поворачиваются в направ-
лениях, показанных на рис. 4.11, с; по одну сторону базы—по часовой
стрелке, по другую—против нее. При этом весь веер равносигнальных
зон также поворачивается, а каждая зона к концу измерительного пе-
риода занимает положение зоны, смежной по ходу вращения. После
завершения каждого измерительного периода диаграммы скачкообраз-
но возвращаются в исходное положение. Исходные положения равно-
сигнальных зон строго привязаны к нормали On антенной системы,
составляя с ней (а следовательно, и между собой) определенные углы
(рис. 4.11, а). Пространство вокруг радиомаяка, ограниченное исход-
ными положениями двух смежных равносигнальных зон, называется
«узким сектором», внутри которого Ас определяется однозначно.
В каждом из этих секторов, как это видно из положения лепестков
диаграмм направленности и направления их вращения, измерительный
период начинается с приема сигналов определенного вида — точек или
тире. Секторы точек и тире перемежаются друг с другом, а на полет-
ных картах с нанесенными ЛРПС обозначаются соответствующими
знаками. Кроме того, каждый узкий сектор имеет свой условный но-
мер к(к = 0,±1,±2,±4 и ±5), необходимый для аналитического рас-
чета пеленга самолета при отсутствии специальной карты. Общая для
всех маяков ВРМ-5 схема секторов показана на рис. 4.12.
В течение измерительного периода в каждой точке внутри узкого
сектора будет прослушиваться последовательность 60 сигналов, из
которых первыми идут сигналы, одноименные с названием сектора
(точки или тире), а вторыми—сигналы противоположного вида (тире
или точки). Первые сигналы переходят в противоположные постепен-
95
но, а между ними образуется временная зона (несколько секунд),
в течение которой прослушивается только сплошной фон. Этот момент
соответствует прохождению через место приема вращающейся РСЗ дан-
ного сектора. Ширина РСЗ — это угол, внутри которого при данном
способе приема сигналов (слуховой или инструментальный) различи-
мость вида сигналов не обеспечивается (прослушивается сплошной
тон): он зависит от конструктивных характеристик радиомаяка и ус-
ловий приема. В рабочих секторах ВРМ-5 ширина зоны составляет
0,3—0,7°, увеличиваясь от нормали к границам 120-градусных секторов
Рис. 4.11. Работа радиомаяка ВРМ-5:
а—подвижные диаграммы направленности с равносигиальиымн зонами; б —
еременцйя днаграмма^рабочего цикла
96
[23]. За счет неразличимости сигналов внутри РСЗ общее количество
их за 30-се к измерительный период оказывается меньше 60. Число не-
достающих сигналов &N можно подсчитать по количеству прослу-
шанных «первых» Nx (до зоны) и «вторых» N2 (после зоны) сигналов
A.V = 60—(ZVj-P^).
Следовательно, моменту прослушивания середины РСЗ соответ-
ствует уточненное количество первых сигналов, равное
/у=дг14-^=дг;-1-60~(^1+Л/2) . (4.Ю)
Текущий азимут оси вращающейся РСЗ относительно нормали 6
в каждый момент однозначно определяется по этому числу N и услов-
ному номеру узкого сектора k:
4 Осадший В. И. 97
для зон, вращающихся по часовой стрелке (рис. 4.12),
sin о - Af+60fe _ #+60fe .
~ В ~ 343 ’
120 —
А
(4-11)
для зон, вращающихся против часовой стрелки,
SinO=-^)+^.
120-^-
A
(60—Д') 4 60А
343
(4-12)
Конечные части формул 4.11 и 4.12 относятся к отечественным маякам
ВРМ-5, для которых принято В/к = 2,88.
Зная относительный азимут 0 оси РСЗ, проходящей через точку
приема (самолет), и истинный азимут Ан нормали, легко определить
истинный пеленг Ас самолета:
лс=л1Г+е. (4.13)
Таким образом, для определения по маяку ВРМ-5 азимута само-
лета необходимо знать: 1) главное направление (азимут) нормали
Лп (т. е. проходящее через сектор вращения РСЗ по часовой стрелке);
2) направление вращения РСЗ в районе местонахождения самолета;
3) уточненное количество первых сигналов М; 4) условный номер уз-
кого сектора k. Моментом времени, к которому относится получен-
ная ЛРПС, является середина равносигнальной зоны.
Рассчитанный по этим данным с помощью формул 4.11 (или 4.12)
и 4.13 пеленг самолета Ас может быть использован для построения
на карте ЛРПС одним из способов, изложенных при рассмотрении ра-
диопеленгаторных УНС. Однако практически ЛРПС по ВРМ-5 и «Кон-
сол» строятся в полете на картах, имеющих специальную нагрузку,
которая обеспечивает оперативное построение отрезков этих линий с
помощью одной линейки и без всяких расчетов.
На картах мелкого масштаба (1:4 000 000 и 1 : 6 250 000) нанесе-
ны места радиомаяков и по две-три дуги различных радиусов в пре-
делах 120-градусных рабочих секторов; дуги разбиты азимутальными
делениями с оцифровкой их количеством первых сигналов N и ука-
занием их вида (точки или тире).
На некоторых картах для определения узкого сектора нахожде-
ния самолета на границах этих секторов указаны их истинные направ-
ления в точке радиомаяка (Лс).
На картах более крупного масштаба (например, стереографиче-
ской масштаба 1 12 000000) нанесены семейства ЛРПС, каждая из
которых является точным изображением ортодромии и оцифрована
также соответствующим числом первых сигналов N. В разрывах ли-
ний, являющихся границами узких секторов, указаны соответству-
ющие Ас. (см. прил. 6).
Рассмотрим практическую методику определения параметров и по-
строения ЛРПС на карте в полете.
Для приема сигналов ВРМ-5 может быть использован приемник
радиокомпаса (АРК) или связной приемник средневолнового диапа-
зона. После настройки приемника и опознавания маяка по позывным
экипаж определяет, в каком из узких секторов находится самолет,
для чего используется пеленгация радиомаяка радиокомпасом во вре-
мя 10-секундного ненаправленного излучения или данные счисления
пути. С появлением сигналов измерительного периода производится
подсчет и уточнение количества первых сигналов, для чего сначала
определяется число сигналов до и после РСЗ (Л\ и N2), а затем рассчи-
тывается уточненное значение N по формуле (4.10). В момент прослу-
шивания РСЗ записывается время, к которому относится определяе-
мая ЛРПС.
Определение числа сигналов до равносигнальной зоны и после
нее возможно непосредственным счетом на слух и визуальным наблюде-
нием по индикатору настройки приемника. В последнем случае, на-
блюдая за стрелкой индикатора, следует исходить из того, что каждому
сигналу «точка» соответствует короткий выброс стрелки вправо, а
каждому «тире» — такой же короткий выброс влево от среднего поло-
жения. Равносигнальная зона проявляется при этом в виде прекраще-
ния колебаний стрелки на несколько секунд.
Величину N можно найти и без подсчета сигналов, если использо-
вать секундомер. Включив секундомер при первом сигнале 30-секунд-
ного измерительного периода, нужно заметить по стрелке (не останав-
ливая ее) время до начала равносигнальной зоны в сек (т. е. время
приема первых сигналов), а затем при окончании зоны (т. е. в момент
появления вторых сигналов) остановить секундомер и прочесть время
в сек. Так как каждый сигнал (точка или тире) вместе со смежной
паузой длится 0,5 сек (т. е. на каждую секунду приходится по два сиг-
нала), исправленное число первых сигналов можно определить по
формуле
/V = 2/14-2^i=/1+/2.
После подсчета числа N уточняется правильность ранее определен-
ного узкого сектора нахождения самолета, так как вид фактически
принятых первых сигналов может не соответствовать этому сектору.
Например, вместо предполагавшихся точек (согласно предварительно
определенному сектору) фактически первыми были приняты тире или
наоборот. Это означает, что при приближенном определении сектора
была допущена ошибка. В этом случае необходимо ЛРПС, обусловлен-
ную числом N, выбирать в ближайшем секторе, обозначенном на кар-
те знаками, одноименными с фактически принятыми первыми сигна-
лами. При этом, если число N невелико (менее 30), то следует брать
следующий по ходу вращения зон сектор, если же N больше 30 — то
предыдущий.
После уточнения сектора можно окончательно определить ЛРПС
на карте. Для этого в уточненном секторе отыскивается линия, обозна-
ченная числом, равным найденному N, которая и является линией
положения самолета. При необходимости производится линейная ин-
4* 99
терполяция между нанесенными на карте линиями. На картах без
проложенных линий положения, а только с азимутальными метками,
для построения отрезка ЛРПС находят две ее точки, соответствующие
одинаковым значениям N на двух вспомогательных дугах. На неболь-
ших расстояниях от маяка за одну из этих точек принимается само
место маяка на карте,-
Пример. Для определения ЛРПС использован радиомаяк ВРМ-5 «Рыбачий»,
при этом приближенный пеленг самолета ЛСпр — 9° и на слух определена по-
следовательность сигналов измерительного периода: 8 точек и 48 тире. Азимут
нормали радиомаяка Лн = 25°. Определить параметры для построения ЛРПС
на специальной н обычной картах.
Решение. 1. При использовании специальной карты: а) по приближен-
ному Лепр = 9° определяем, что самолет находится в узком секторе, ограничен-
ном ЛР11С с параметрами Ли = 5° и АСа = 15°; б) определяем уточненное зна-
чение числа первых сигналов
60—(8 + 48)
N=8+-------------= 10 точек;
2
в) в найденном ранее секторе отыскиваем ЛРПС, обозначенную «10 точек»*
которая и является искомой линией положения.
2. При аналитическом расчете Л с и прокладке ЛРПС на обычной полетной
. карте:
а) определяем условный номер узкого сектора, для чего рассчитываем при-
ближенное значение условного пеленга самолета (относительно нормали радио-
маяка)
0Пр = Лепр—Л н — 9°—25° = 344°,
а затем, используя схему секторов (см. рис. 4.12), получаем, что самолет нахо-
дится в секторе с номером k = —2, расположенном в области вращения зон
«по часовой стрелке»;
б) рассчитываем точное значение условного пеленга самолета, используя
формулу 4.11, так как в нашем случае вращение зон происходит «почасовой
стрелке»
(10 + 60 (—2)) ( ПО) „ ,
0 = arcsin{----------l = arcsin——1 = 341 20 ;
( 343 J I 343j
в) вычисляем точное значение истинного пеленга самолета
Лс = Лн + е =25° + 341°21' =6°20'.
В целях упрощения расчетов для некоторых радиомаяков (в част-
ности, «Консол») составлены специальные таблицы, по которым, зная
число N и номер сектора (не совпадающий с номером /г), непосред-
ственно определяется т4с.
Особенность работы пятимачтовых ВРМ-5 заключается в том,
что они в течение двухминутного цикла одну минуту работают с
одним направлением нормали (одна тройка антенн), а следующую
минуту — с направлением, измененным на 90°. При этом излучение
ведется на одной частоте, но с различными позывными. На картах
для этих маяков нанесены азимутальные деления раздельно (раз-
личными цветами). Рабочие 120-градусные секторы частично пере-
крываются, что обеспечивает возможность определения ЛРПС при
любом положении самолета относительно радиомаяка. Однако опера-
тивность определений в неперекрытых секторах сильно снижается,
100
так как рабочее состояние поля в них повторяется через две минуты,
а не через одну, как у обычных маяков.
Низкая оперативность определения ЛРПС ограничивает возмож-
ности применения средневолновых радиомаяков только задачами пе-
риодического контроля пути по одной или двум линиям положения
и делает их неперспективными для автоматизации процесса навига-
ции.
§ 4.4. ОПРЕДЕЛЕНИЕ УГЛОВЫХ ПАРАМЕТРОВ И ЛИНИИ ПОЛОЖЕНИЯ
С ПОМОЩЬЮ РАДИОКОМПАСНЫХ УНС И ИХ ИСПОЛЬЗОВАНИЕ
Радиокомпасные системы непосредственно обеспечивают измерение
только курсового угла -фр наземной радиостанции, в котором не содер-
жится достаточной информации для определения какой-либо линии
положения на поверхности Земли. Использование этого угла без до-
полнительной информации позволяет лишь выполнять полет на радио-
станцию способом постоянного курсового угла.
Использование двух комплектов радиокомпасной УНС (две назем-
ные станции и два радиокомпаса на самолете) дает возможность одно-
значно определить линию положения — линию равной разности курсо-
вых углов двух радиостанций (Дфр = const), являющуюся также ли-
нией равной разности пеленгов (азимутов) этих станций ЛРРПР
(ЛРРА).
Для определения линии равных пеленгов самолета (ЛРПС) и ли-
нии равных пеленгов радиостанции (ЛРПР) необходимо, кроме фр,
использовать информацию о текущем курсе у самолета и приближен-
ных координатах МС — <р и А.
Определение курсовых углов радиостанций при помощи
радиокомпасов
Курсовые углы фр радиостанций (КУР) на самолете измеряют с
помощью бортового автоматического радиопеленгующего устройства —
радиокомпаса (АРК). Оперативным органом управления АРК яв-
ляется щиток управления (рис. 4.13), устанавливаемый на приборных
досках пилота и штурмана. Со щитка управления обеспечиваются
включение питания аппаратуры, ручная настройка на частоту выбран-
ной наземной станции, переключение режимов работы АРК (ненаправ-
ленный прием «АНТ», автоматическая пеленгация «Компас», ручная
пеленгация «Рамка»), включение местного гетеродина «ТЛГ» (при прие-
ме немодулированных колебаний) и регулировка громкости выходного
сигнала. Некоторые АРК имеют устройство предварительной настрой-
ки на ряд частот (до девяти) с кнопочной перестройкой с одной на дру-
гую в полете. У таких АРК (например, АРК-11) имеются два режима
автоматического пеленгования — «Компас-1» и «Компас-2». Особенно-
стью режима «Компас -2» является то, что вместо ненаправленной ан-
тенны используется вторая рамочная антенна, плоскость которой пер-
пендикулярна плоскости основной (пеленгующей) рамки. Этот режим
предназначен для уменьшения влияния помех на входе приемника за
101
счет ослабления сигналов, приходящих с направлений, перпендику-
лярных направлению на радиостанцию. Однако при этом появляется
неопределенность пеленгования на 180°, для устранения которой
приходится использовать грубое представление о направлении на стан-
цию или специальный маневр курсом.
В режиме автоматического пеленгования «Компас» текущие курсо-
вые углы непрерывно индицируются на стрелочных указателях пило-
та и штурмана. Существуют как отдельные указатели КУР, на которые
подаются данные только от АРК (фр), так и совмещенные, объединя-
ющие информацию от АРК (фр) и от курсового прибора (у). Штурман-
ские отдельные указатели (СУШ) (рис. 4.14) имеют поворотную ази-
мутальную шкалу, что позволяет вручную вводить текущий курс у
и таким образом полуавтоматически получать значение пеленга радио-
станции Ар = у + фр. Совмещенные указатели входят в состав кур-
совых систем и имеют автоматически поворачивающуюся шкалу кур-
сов и одну или две стрелки КУР (от двух АРК)- На таких указателях
непрерывно отсчитывается пеленг радиостанции одноименного с кур-
сом наименования (истинный, магнитный, условный). Существуют
Рис. 4.13. Щиток управления АРК
102
также сдвоенные указатели
КУР с неподвижной шкалой
(УПДБ), устанавливаемые у
пилотов.
Нормальное измерение
курсовых углов обеспечивает-
ся только при горизонтальном
полете самолета, так как ось
вращения рамочной антенны,
жестко связанной с корпусом
самолета, автономно по вер-
тикали не стабилизируется,
что приводит к креновым
ошибкам измеренного курсо-
вого угла. Креновая ошибка
КУР является геометрической
ошибкой, связанной с невер-
тикальностью плоскости пе-
ленгации радиостанции ра- Рис. 4.14. Штурманский отдельный ука-
мочной антенной АРК при затель курсовых углов (СУШ)
кренах. Ее величина изме-
няется по четвертному за-
кону, т. е. четырежды проходит через нуль при изменении КУР
на 360°. При кренах до 15° эта ошибка теоретически не прево-
сходит Г, так как продольные крены не достигают этой величины,
а поперечные — непродолжительны. При разворотах же с кренами
более 15° использование АРК становится неэффективным, так как
ошибки измерения курсовых углов прогрессивно возрастают.
Измерение курсовых углов подвержено также поляризационным
ошибкам, возникающим при отклонении плоскости поляризации при-
нимаемой радиоволны от вертикального положения за счет особенно-
стей распространения (отражений от ионосферы). Поляризационные
ошибки оказывают заметное влияние на пеленгацию только в ночное
время, особенно в течение двух часов до и после восхода и захода Солн-
ца. В связи с этим в переходные периоды суток АРК можно применять
только на небольших удалениях от радиостанции (до 150 км), когда
влияние отраженных радиоволн практически отсутствует. В средние
часы ночи пеленгование возможно, но с обязательным осреднением
отсчетов КУР из большого числа наблюдений.
Во всех случаях при пролете над радиостанцией в пределах верти-
кальной конусообразной зоны возможно неустановившееся поведение
стрелок АРК, а также преждевременные и запоздалые изменения их
показаний на 180° (при устойчивом поведении). Причины этих яв-
лений — нарушение в соотношениях величин э. д. с. в рамочной и от-
крытой антеннах АРК и наклон вертикальной диаграммы направлен-
ности открытой антенны из-за несовпадения места ее установки с элек-
трическим нулем самолета. Радиус нерабочей зоны над радиостанцией
(угол раствора конуса) зависит от качества регулировки бортовой ап-
паратуры и размещения открытой антенны на самолете. Его величина,
ЮЗ
Рис. 4.15. К определению радиодевиации АРК
как правило, определяется экспериментально и может достигать ве-
личины двух-трех, высот полета.
К погрешностям измерения КУР относится также систематиче-
ская ошибка, называемая радиодевиацией, равная горизон-
тальному углу между истинным направлением 1 (рис. 4.15) на пеленгу-
емую радиостанцию и направлением нормали 2 к рамке, в которой до-
стигнут нулевой прием сигналов этой станции. Несовпадение измерен-
ного и истинного направлений на радиостанцию является следствием
искажения поля принимаемой волны в непосредственной близости от
самолета в результате интерференции ее с отражениями от корпуса
самолета. Теоретические исследования (20] показывают, что для са-
молетов радиодевиация зависит от КУР по закону, близкому к четверт-
ному. Поправка за радиодевиацию Ар определяется эксперименталь-
но, сравнением показаний АРК (фриз) с вычисленным значением КУР
на известную станцию с места стоянки самолета (фр)
Ар = ФР-Фриз-
Определенные экспериментально поправки Ар сводятся в график
(или таблицу), на основе которого регулируется механизм компенса-
ции радиодевиации АРК. Благодаря этому на указателях отсчиты-
ваются исправленные за радиодевиацию значения КУР
Фр = Фриэ + Др-
Радиодевиационные работы выполняются после постройки самолета
на заводе, а также в установленные сроки в эксплуатационных авиа-
ционных подразделяниях.
Суммарная точность измеренного КУР зависит от качества регу-
лировки схем АРК, точности определения и ввода Ар в компенсатор,
точности работы следящих систем, передающих измеряемые углы на
указатели. Среднюю квадратическую ошибку КУР (офр) можно счи-
тать равной 1,5°.
104
Полет на радиостанцию способами постоянного КУР
Полет способами постоянного курсового угла может осуществлять-
ся как без всякой дополнительной информации от других приборов,
так и с использованием такой информации (данные гирополукомпаса
или измерителя угла сноса). При условии, что выдерживается посто-
янное значение курсового угла, меньшее 90°, и воздушная скорость V,
большая скорости ветра U, самолет будет сближаться со станцией.
В зависимости от величины выдерживаемого КУР различают пас-
сивный, курсовой и активный способы полета с постоянным КУР.
Наиболее простым является пассивный способ полета
на радиостанцию, заключающийся в непрерывном выдерживании по
указателю нулевого значения КУР: фр = 0°. Рассмотрим особенности
линии пути при таком полете в условиях бокового ветра (рис. 4.16).
Уравнение движения центра масс самолета выведем, используя
плоскую полярную систему координат р, 6 с началом в РНТ и с осью,
совпадающей с линией «РНТ — самолет» в исходный момент движения.
Составляющие путевой скорости W самолёта равны:
по направлению текущего радиуса-вектора
^р= - V-t/cos (6+80) =-[V+ (7cos (6+е0)];
по направлению, перпендикулярному радиусу-вектору,
^e = P^- = ^sin(6 + e0).
у
Разделив Wp на We и обозначив j-. = п, получим:
dp V-|-t7cos (0 4- е0)
pdO U sin (0-|-ео)
или
+-ctg (6 + е0)^
d6.
dp . Г п
р [ sin(0 + eo)
есь ре
Рис. 4.16. Схема полета на радиостанцию с постоянным курсовым углом,
равным нулю (пассивный способ)
105
Общий интеграл этого уравнения
1пр= —п In tg в ^е° —lnsin(6 4-е0) + 1пС,
г. е. после потенцирования
__________С_______
Р 6 + е0
tg"—— sin (6 + е0)
Постоянная интегрирования С находится при начальных условиях:
0 = 0, р = 50;
c = so tg" -ysine0.
Тогда решение уравнения примет окончательный вид:
Ел
So tg 2 s>n е0
р =-----------------.
64-е0
tg"—sin (GH-e0)
Анализ этого выражения позволяет установить основные особенности
полета пассивным способом.
Прежде всего отметим, что форма линии пути зависит от многих
факторов (исходного удаления самолета от радиостанции So, скоро-
стей самолета V и ветра U, направления ветра относительно полярной
оси е0) и поэтому заранее неизвестна. Это означает, что пассивный по-
лет не укладывается в основное требование навигации — обеспечение
полета по заданной линии пути—и может применяться только при ус-
ловии, что самолет, летя этим способом, не уклоняется от программной
линии пути более чем на допустимую величину.
Возможность выхода самолета на радиостанцию теоретически за-
висит от значения величины п, т. е. от отношения скоростей самолета
и ветра. Очевидно, для прохода через станцию необходимо, чтобы
р=0, что возможно только при tgn — J,-5 -*оо, т. е. когда ®+е° = 90*
ип> 1 (т. е. V > U). Таким образом, выход самолета на радиостан-
цию должен происходить при 0 = 180° — е0, т. е. в плоскости ветра
с обратного ему направления. Однако даже при п > 1 точный проход
через радиостанцию в режиме пассивного полета практически невоз-
можен: во-первых, из-за нерабочей зоны АРК над станцией, где КУР
не измеряется, и, во-вторых, из-за невозможности в ряде случаев обес-
печить необходимую угловую скорость (достаточно большой крен)
для выдерживания условия фр = 0 вблизи радиостанции, где кривизна
траектории резко возрастет (участок СгР на рис. 4.16). Кроме того,
выход на станцию не с заданного направления нежелателен. Поэтому на
конечной фазе полета пассивным способом, т. е. по достижении предель-
но допустимого крена или при входе в нерабочую зону, необходимо
перейти к полету с постоянным курсом, замеченным по ГПК или КС
106
Рис. 4.17. К выводу максимального бокового уклонения при
пассивном способе полета на радиостанцию
при выдерживании т|)р = 0. В результате ветрового сноса за время по-
лета с этим курсом (если снос не был учтен в самом курсе) самолет прой-
дет в стороне от станции. Для повышения точности отметки момента
пролета станции используются радиомаркерные системы.
Пригодность пассивного способа при выполнении полетов по трас-
сам определяется возможной величиной бокового уклонения самолета
в конкретных условиях каждого участка. Максимальное боковое ук-
лонение хгаах от ортодромии при пассивном полете получается в мо-
мент, когда касательная к линии пути становится параллельной по-
лярной оси С0Р (рис. 4.17) При этом
Xmax = Рх sin 0Х
max г max max
(4-14)
Из рис. 4.17 также следует, что
sin 0,
____*mln _sin е0
U V
откуда
п и
sm = — sm en
max у °
sin e0
n
(4-15)
Тогда, подставив значение sin ®к
Kmax
учетом значения ®Xmax> получим
в (4.14) и вычислив рДп1ах с
Sotg”—-sine0
у 2 sine0
ед +е0 .
tgn jna^s,n(0Xmax+eo)
107
Рис. 4.18. Графики максимальных боковых уклонений и допустимой
длины пути при пассивном способе полета иа радиостанцию
Относительная величина максимального бокового уклонения на пути
длиной Sfl равна
tg" -°- sin е0
*тах _____________2____________
<$о 0х +8о
Sin(%aK + £o)
т.е. с учетом формулы 4.15 является функцией двух величин — п и е0.
График полученной зависимости приведен на рис. 4.18 сплошными кри-
выми. Характер кривых показывает, что боковые уклонения увели-
чиваются с уменьшением отношения скоростей п и при приближении
значений угла ветра к 90—118°. С помощью графика можно рассчи-
тывать максимальные боковые уклонения хтаХ при известных значе-
ниях п, е0 , So, определяя тем самым возможность применения пассив-
ного полета.
Для коридора шириной 20 км, т. е. для хтаХ = 10 км, на графике
построены пунктирные кривые допустимых дальностей 5Д пассив-
ного полета.
Если по графикам боковых уклонений (см. рис. 4.18) выбрать их
максимальные значения для каждого п, то полученный ряд значений
рдах ) — хорошо аппроксимируется гиперболической зави-
' 'шах
симостью вида
/*тах \
\ So / max п
f(n,E0), (4.16)
108
Таким образом, для оценки наибольшего из максимальных боковых
уклонений, получающегося в наиболее неблагоприятных условиях
(при боковых ветрах), достаточно знать только величину п. Ошибки
при этом получаются несколько завышенными по сравнению с точной
формулой (4.16) и графиком (см. рис. 4.18), по зато гарантийность
оценки повышается. Кроме того, расчет упрощается и его можно про-
изводить в уме (без использования графика и счетных инструментов).
Например, зная U — 120 км/ч и V = 600 км/ч, получаем
п = 5 и
= £il = o,O8
\ So /max 5
(по графику для п = 5 и е0 = 100° = 0,078).
Курсовой способ полета на радиостанцию состоит в том,
что самолет устанавливается на фр = 0° не непрерывно, как при пас-
сивном способе, а периодически, через 3—5 мин полета. Между момен-
тами доворотов на фр = 0° пилотирование производится по курсу,
замеченному при фр = 0°. Линия пути при этом будет ломаной, рас-
положенной со стороны выпуклости радиодромии, т. е. с подветренной
стороны (рис. 4.19). Боковые уклонения и время полета по сравнению
с пассивным способом будут несколько увеличенными.
Применение курсового способа целесообразно в условиях помех
радиоприему, когда устойчивые показания радиокомпаса обеспечива-
ются только периодически, а также в случаях, когда необходимо ос-
вободить радиокомпас для пеленгации других станций.
Активный способ полета на радиостанцию (рис. 4.20) яв-
ляется основным в гражданской авиации. Он обеспечивает полет на
радиостанцию по ортодромии от последнего фактического МС.
Для осуществления такого полета достаточно, чтобы вектор путе-
вой скорости был постоянно направлен на радиостанцию, т. е. чтобы
продольная ось самолета и направление на радиостанцию составляли
угол, равный углу сноса (см. рис. 4.20). Это достигается выдержива-
нием на указателе АРК постоянного курсового угла
фр = 360° + а. (4-17)
Угол сноса в зависимости от оборудования самолета и условий по-
лета может быть определен:'визуальным измерением по бегу визирных
точек; измерением с помощью БРЛС; автоматическим определением
Рис. 4.19. Схема курсового
способа полета на радио-
станцию
109
с помощью ДИСС; расчетом по известному ветру; подбором в полете
по изменению курсового угла радиостанции.
Активный способ полета на радиостанцию с подбором угла сноса
по изменению КУР заключается в подборе такого курса полета по ГПК,
при котором показание радиокомпаса становится неизменным, равным
360° + а.
Методика выполнения такого полета состоите следующем (рис. 4.21)
Вначале (точка Со) самолет разворачивают на радиостанцию до пока-
зания радиокомпаса ярр = 0°. В этом положении определяют пока-
зание ГПК (или ГПК устанавливают на 0°), и далее в течение несколь-
ких минут полет продолжается с сохранением этого курса по ГПК.
Через некоторое время по значению КУР определяют направление
сноса (положение CJ. При отклонении стрелки радиокомпаса вправо
снос будет левым, при отклонении ее влево (как на рис. 4.21) — пра-
вым. Фиксировать направление сноса по значению КУР можно только
в том случае, если угол отклонения стрелки превосходит среднюю ве-
личину ошибки пеленгации радиокомпасом (примерно 2°). Определив
сторону сноса, задаются его предположительной величиной а0=6°
при V = 600 — 900 км/ч и 8—10° при меньших скоростях полета.
Затем самолет разворачивают в сторону, противоположную сносу,
до достижения ippl = 360° -|- а0 (точка С[), определяют новое по-
казание гирополукомпаса уг1 (или устанавливают снова уг = 0°),
и полет продолжается с новым курсом.
Рнс. 4.21. Схема активного способа полета на радиостанцию при неизвестном
ветре (сносе)
ПО
Если предположительная величина угла сноса а0 оказалась доста-
точно близкой к действительной (с точностью 1 —2°), то при продол-
жении полета с уг1 (или с угЛ= 0°) курсовой угол радиостанции -фр,
не будет существенно меняться и, таким образом, полет будет выпол-
няться активным способом по линии С[Р.
Если же действительная величина сноса не совпадает с предпола-
гаемой, то при полете от Сг' к Р значение КУР изменится. При этом
уменьшение КУР во всех случаях (т. е. при любом знаке начального
угла сноса а0) означает уклонение самолета от линии С/Р вправо,
а увеличение КУР — отклонение влево. Как только четко зафиксирует-
ся изменение КУР (на величину Афр порядка 2°), т. е. будет определе-
на сторона его изменения (увеличение или уменьшение), самолет сле-
дует довернуть до установления нового значения курсового угла ра-
диостанции фР2. Если замечено уменьшение КУР, то необходимо до-
вернуть самолет влево (если увеличение — вправо), доведя показание
АРК до
Фр2 = 360° + ао±-^-,
где знак плюс соответствует уменьшению КУР, а знак минус — уве-
личению.
Установив по АРК необходимый для данных условий фр2, вновь
определяют показание гирополукомпаса уг2 и пилотируют самолет,
выдерживая постоянным это новое значение курса. Подбор КУР про-
должают до тех пор, пока при полете с постоянным курсом по ГПК
не установится постоянный КУР; это достигается двумя-тремя дово-
ротами.
Определение и использование ЛРПС
Линия равных пеленгов самолета может быть определена с помощью
радиокомпасных систем только при использовании дополнительной
информации — курса у и приближенных координат <рс и ус самолета
в момент пеленгования радиостанции.
Параметр ЛРПС, как видно из рис. 4.22, равен
4 = А) + + 180° = у +% + (4-М sin— + 180°, (4.18)
где ос = (Хр — %с) sin — азимутальная поправка направле-
ния ортодромии в точке радиостанции относительно места самолета
(см. [191 § 5.5), условно называемая также схождением меридианов на
сфере. Формула (4.18) пригодна для обоих полушарий Земли, если
южным шпротам приписывать знак минус. Поскольку величина ос
непрерывно в указатели не вводится, при использовании локсодроми-
ческих компасов пеленг самолета Ас можно определить только ди-
скретно.
Применение ортодромических компасов (например, ГПК) исклю-
чает этот недостаток, так как величина ас = (Хр— Хо) sin + Т»
111
где <р0 и Ао — координаты ортодромии на опорном меридиане) стано-
вится постоянной и, следовательно, будучи предварительно вычис-
ленной, может вводиться на шкалу указателя курсовых углов штур-
мана вручную вместе с курсом самолета. В курсовых системах, как
правило, указатели курса и курсового угла совмещены в одном приборе
(например, указатель УШ системы КС), что обеспечивает одновремен-
но с отсчетом КУР (фР) по неподвижной шкале также отсчет величин
Т + % = Ар и Т + Ч’р + 180°=Лр + 180° по вращающейся шкале
курсов. Постоянная величина ос может быть учтена при прокладке
ЛРПС на карте от меридиана радиостанции.
Наибольшее упрощение в определении параметра ЛРПС дости-
гается при выборе для курсового прибора в качестве опорного мери-
диана радиостанции, так как при этом 1Р = и ос = 0, а следова-
тельно,
Лс — = Ар ф-180° — + 'Фр + 180°.
Эта величина на указателе штурмана индицируется непрерывно про-
тив обратного конца стрелки АРК и дополнительных расчетов не
требует.
Информация о фактическом месте самолета в этом случае исполь-
зуется при периодическом вводе широты МС, необходимой для нор-
мальной работы механизма азимутальной коррекции гироагрегатов,
а также при выставке курсовой системы по выбранному опорному ме-
ридиану.
Полученный с помощью радпокомпасных УНС параметр ЛРПС
(Ас) используется, как и при применении радиопеленгаторных систем
(на дальностях до 500—800 км), для расчета азимута самолета на кар-
те (АСк), являющегося параметром прокладываемой на карте прибли-
женной ЛРПС (хорды ортодромии) (рис. 4.23). Особенностью расчета
АСк по Ас в этом случае является объединение поправок за схождение
меридианов на сфере ос и за кривизну ортодромии на карте и в одну
общую поправку.
Рис. 4.22. Вывод формулы азимута
самолета при использовании радио-
компасной УНС
112
Рис. 4.23. Построение ЛРПС на равно
угольных картах:
/—точная ортодромия; 2—хорда ортодромии
Согласно формуле (4.1) с учетом соотношений (4.2) и (4.18) для карт
всех равноугольных проекций
Ак — А + н = А А 1&0° + (\>—A) s’n Фер А
Хр—Xq
4---2—(sin(Po—sintpep), (4.19)
после приведения подобных членов
Хр — Хр
Ак = А А 180° Н-------------------— (sin <р0+sin <рср). (4.20)
Из этой общей формулы подстановкой соответствующих значений
широты наименьшего масштаба <р0 получим частные формулы для раз-
личных проекций.
Для стереографической проекции в зависимости от полушария
Земли ф0 равна + 90° или —90° и, следовательно,
Хп — Хп
Ак =Лр+ 180°+ ~~~ (± 1 +sin<pcp). (4.21)
Для меркаторской проекции <р0 = 0° и
(XD — Хр)
Ак=А +180° + < Sin фср.
Для равноугольной конической проекции ф0 равна широте парал'
лели наименьшего масштаба, принятой для данной конкретной карты,
и формула для ЛСк, если радиостанция и самолет находятся по одну
сторону параллели ф0 (кривые 1 и 2, рис. 4.24), остается в виде соот-
ношения (4.20). В случае расположения РНТ и МС по обе стороны этой
параллели точная ортодромия на карте будет иметь при пересечении
с ней точку перегиба (кривая 3), что усложняет расчет поправки за
кривизну ортодромии на карте. Однако при этом угол между каса-
тельной к точной ортодромии и ее хордой будет значительно меньше,
чем для ортодромии той же длины и направления, но расположенной
по одну сторону параллели ф0; поэтому пренебрежение отличием пря-
мой карты от ортодромии на расстояниях реальной дальности пеленга-
ции радиокомпасными системами становится вполне допустимым.
В полетной практике часто применяют также упрощенные формулы
и для случая равноугольных конических и стереографической проек-
ций. Допущение при этом сводится к принятию и = 0, что равносильно
для конических проекций допущению sin фср = sin ф0, а для стерео-
графической— sin фср — 1. В результате формулы (4.19) и (4.21)
примут вид, приводимый обычно в практических руководствах:
Ак — А А ^80° + (Хр—Хс) sin ф0
и
Ак=А + 180°±(А-М-
113
На равноугольных картах поперечной и косой Цилиндрических
проекций, а также на картах международной проекции ввиду их бли-
зости к плану местности (в пределах одной зоны или полосы — для
цилиндрических и одного листа — для международной) поправка прак-
тически равна нулю, в результате чего формула азимута самолета на
карте (4.19) совпадает с формулой азимута самолета на сфере (4.18).
Оценим практическую точность ЛРПС, для чего предварительно
найдем среднюю квадратическую ошибку <ь4с азимута самолета на
сфере (4.18), считая ошибки величин у, фр, <рс и Ас случайными и неза-
висимыми, а величины <рр и Хр безошибочными. Применяя обычную
методику составления формулы ошибки суммы случайных величин,
получим
оЛс = 1/ oy2+mg + sin2 —-— ol? + (Хр—м cos2 —-— — .
I 4* \ ^ /
Современные курсовые системы (приборы) обеспечивают определение
курса с оу = 2°, радиокомпасы — определение курсовых углов радио-
станций с офр = 1,5°. Считая, что полет происходит в средних широ-
тах (Те+Фс ~ 50—55°), а ошибки знания экипажем текущих коор-
динат МС можно принять равными о<рс = 0,5° и оХс = Г, при пелен-
гации на расстояниях, близких к максимальным (Хр— Хс = 10°),
получим
сАс = 1/ 22 + 1,52 + 0,82-12 + 102-0,622f°’—°’-j2 = = 2,64°.
Рис. 4.24. ЛРПС на картах равноугольной конической проекции
114
Рис. 4.25. Схема полета от угломерной РНТ с использова-
нием одной ЛРПС
Отсюда видно, что влиянием ошибки учета широты самолета (последнее
слагаемое под корнем) можно пренебречь, так как она на несколько
порядков меньше остальных.
Нетрудно показать, что при использовании приближенных ЛРПС,
прокладываемых на карте по параметру Лсн (см. 4.20) и связанных с до-
полнительными ошибками графической работы, основную роль игра-
ют те же ошибки оу, офр и оХс. Таким образом, точность параметра
ЛРПС характеризуется средней квадратической ошибкой оАс =
= 2,6—2,8° и согласно формуле (4.9) линейная ошибка ЛРПС
ор = 0,017 оЛс £> = 0,017 2,7 D = 0,047 •£>« 0,05 D.
Заметим, что величина афр = 1,5° справедлива только в среднем, так
как с удалением от радиостанции точность измерения КУР несколько
снижается.
Использование отдельных ЛРПС, полученных с помощью радио-
компасных систем, сводится к решению задач контроля пути по на-
правлению или дальности. Эти задачи могут решаться как чисто ана-
литическим путем (непосредственно по числовым значениям парамет-
ра ЛРПС на сфере Лс), так и графически (построением на карте при-
ближенной ЛРПС с параметром Лск).
Контроль пути по направлению с помощью одной ЛРПС возможен,
если РНТ расположена на ЛЗП (или ее продолжении), т. е. полет осу-
ществляется от радиостанции или на нее.
При полете от радиостанции (рис. 4.25) можно оценить угловое
боковое уклонение Др самолета от ЛЗП, если сравнить измеренный
Ас с азимутом ЛЗП относительно меридиана Р^р этой же станции,
т. е. с заданным путевым углом, отсчитанным от меридиана станции:
ДР = Л-рХр. (4.22)
Если при определении Ас используется локсодромический курсо-
вой прибор, то возможен только дискретный контроль по направлению,
так как при каждом определении Ас должна вводиться своя (завися-
щая от Хс) поправка на схождение меридианов.
115
В случае же применения ортодромических компасов с совмещенны-
ми указателями (УШ, УГР) текущая величина Лс непосредственно от-
считывается по шкале, чем обеспечивается ее непрерывное сравнение
с рХр и, следовательно, навигационное управление в полете от стан-
ции и на нее по ортодромической ЛЗП заданного направления. Линей-
ную величину бокового уклонения х пеленгацией одной РНТ в прин-
ципе определить нельзя, но если приблизительно известно удаление S
самолета от станции, возможна удовлетворительная оценка этого ук-
лонения
х = Др-5. (4.23)
Точность этой оценки можно характеризовать величиной относитель-
ной ошибки получаемой следующим образом. Из формулы (4.23),
считая ошибки величин Др и S случайными и независимыми,
ох = ]z[a (Др) S]2 + [ДроХ]2,
а из (4.22) (считая оЛс^>орхр)
о(Др) = |/о712+ор2р«оЛс.
Тогда
ох =/оЛ2 Х2+Др2 оХ2 = 0,017Х|/ оЛ°’+(^^Др2,
или, взяв для примера оЛ° = 2,7°, — — 0,1 и Др= 10°,
-у- =0,017 /2,72 + 0,Ю2-102 = 0,049^ 0,05.
Таким образом, ошибка линейного бокового уклонения, получаемая
при пользовании соотношением (4.23), соизмерима с линейной ошибкой
ЛРПС.
В полете от радиостанции после точного прохода самолета через
нее удобно определять угол сноса, сравнивая измеренный в некоторый
момент пеленг Лс самолета со средним значением курса уср, выдер-
живавшегося после прохода станции. Из схемы этого способа
(см. рис. 4.25) видно, что
“ ~ -^с Тср-
ТОЧНОСТЬ измеренного угла сноса оценивается по формуле
оа = У оЛ2 + оусР •
Например, при оЛс = 2,6° и оуср = 2° получим
оа = V2,62 + 22 = 3,3°.
116
Рнс. 4.26. Методиче-
ская ошибка угла сно-
са в полете от угло-
мерной РНТ
Ошибка угла сноса увеличивается, если самолет прошел не точно
через станцию (например, из-за наличия нерабочей воронки), а с бо-
ковым уклонением b (рис. 4.26). В этом случае из треугольника
СВРС получим
b _ Wt
sin Да sin (90° + аф)
Учитывая малость углов сноса (до 15°), можно считать sin Да = Да
и sin (90° + аф) = 1. Тогда
л Ь
Да = —
Wt
или приближенно
Да°«60—.
Wt
Ошибка угла сноса положительна (т. е. аиз > аф), если станция в
момент прохода осталась слева, и отрицательна, если она осталась
справа. С удалением от станции эта методическая ошибка угла сноса
уменьшается и на дальностях более 50 км практически становится
равной нулю, если уклонение b не превышает 1 км. Невысокая точность
способа делает целесообразным его применение только при отсутствии
других, более точных средств измерения сноса (ДИСС, БРЛС), напри-
мер, на легких самолетах.
Определение и использование ЛРПР •
Линия равных пеленгов радиостанции (ЛРПР), являющаяся на
сферической поверхности Земли геометрическим местом точек с оди-
наковым значением пеленга одной радиостанции (см. рис. 4.1, б),
определяется уравнением
Ар = const
117
или в развернутом виде
ctg Ар = cos <р tg <рр cosec (Хр —X)—sin <р ctg (Хр—X), (4.24)
где Лр = у + -фр — постоянный параметр, характеризующий данную
конкретную линию положения.
Параметр Лр получается в результате сложения измеренных у и
фр; сложение выполняется экипажем или автоматически механизмами
совмещенных указателей этих величин. Координаты самолета в явном
виде в выражение параметра ЛРПР не входят, но необходимы для его
получения, так как используются при определении курса: в случае
применения магнитного компаса — для учета магнитного склонения
Ам(<рс. М, а при применении астрономического компаса—для установ-
ки <рс и Хс на вычислителе азимута светил. При использовании орто-
дромических курсовых приборов зависимость от знания координат МС
не столь существенна, так как координаты необходимы только при
начальной выставке ГПК (курсовой системы) и при его коррекциях.
В общем случае (при неограниченных дальностях пеленгования)
форма ЛРПР на поверхности Земли очень сложна («пространственные
овалы Кассини»), Общая картина системы ЛРПР для одной станции,
расположенной на <рр = 40° с. ш., показана на рис. 4.27.
Рис. 4.27. Линии равных пеленгов радиостанции иа сферической
поверхности Земли
118
Отметим некоторые свойства
ЛРПР на поверхности Земли: все
ЛРПР одной станции при возмож-
ных значениях параметра Ар
имеют четыре узловые точки (ра-
диостанция Р, полюсы Pn и Р$
Земли и точка Р' антипода стан-
ции); направление ЛРПР (при дви-
жении к станции) относительно
пересекаемых местных меридианов
непрерывно изменяется и прибли-
женно равно (рис. 4.28):
₽лрпр = ^4р + г, (4.25)
угла между ЛРПР и ортодром и ческим
направлением на радиостанцию
где I — угол между ЛРПР и ортодромией, направленной из той же
точки на станцию; приближенное значение этого угла равно схождению
меридианов на сфере (ос) между рассматриваемой точкой и точкой
радиостанции (приложение 4):
• Ч’Т-Фр
г —(Хр — ?.)sin —
— (^р sin Фср> .
меридиан радиостанции пересекается каждой ЛРПР под утлом, рав-
ным ее параметру Хр;
семейства ЛРПР с параметрами Лр и 360° — Лр расположены сим-
метрично по разные стороны меридиана радиостанции;
из ветвей ЛРПР, находящихся в одном полушарии со станцией,
наибольшую кривизну на удалениях реальных дальностей пеленгова-
ния (до 1 000 км) имеют те, для которых параметр Ар близок к 90
и 270°; с приближением параметра к 0 и 180° ЛРПР сливается с мери-
дианом радиостанции. Это важно для использования ЛРПР в ка-
честве линии, аппроксимирующей ЛЗП, т. е. для полета по заданной
ЛРПР.
Сложность формы ЛРПР исключает оперативное построение ее
на картах не только в полете, но даже и на земле. Централизованное
изготовление карт с семействами ЛРПР также невозможно ввиду
большого количества используемых наземных станций. Поэтому в
воздушной навигации применяются упрощенные методы предвари-
тельной прокладки ограниченных ветвей ЛРПР (на удалениях не
больше 1 000 км от радиостанции).
Упрощенная прокладка возможна на равноугольных и практи-
чески ортодромичных на дальностях пеленгации картах. При этих
условиях ЛРПР на карте представляется дугой окружности, проходя-
щей через МС, станцию и ближайший полюс Земли, так как является
геометрическим местом вершин одинаковых углов Хр, опирающихся
на хорду «станция — полюс» (рис. 4.29). Построение в общем случае
выполняется следующим образом: задаваясь определенным А р, находят
на каждом меридиане такую точку, чтобы проведенная из нее на радио-
станцию прямая составляла с меридианом угол, равный А р. Эту опе-
119
Рис. 4.29. ЛРПР на полетной карте
рацию МОЖНО выполнить с по-
мощью транспортира и длинной
линейки (рис. 4.30, а); совместив
основание транспортира с мери-
дианом и соединив линейкой его
центр с делением Л°р, двигают
транспортир с линейкой вдоль ме-
ридиана до совмещения рабочей
стороны линейки с точкой радио-
станции; в этом положении отме-
чается место центра транспортира
на меридиане, являющееся одной
из точек ЛРПР. Наиболее удобно
такое построение выполняется с
помощью морских транспортиров,
имеющих нуль на обрезе основания
(рис. 4.30, б). Существуют специальные картографические проекции
(сетки Вейра), на которых ЛРПР является прямой линией, однако
они широкого распространения в авиации не получили.
Для прокладки прямолинейных отрезков ЛРПР в окрестности дан-
ной точки может быть использован также общий метод опорных точек,
для чего необходимо знать направление Ag и величину g градиента
ЛРПР в данной точке.
Направление градиента, как перпендикуляра к ЛРПР, равно
Лй — Рлрпр — 90° = Лр -f-1 — 90° = Лр + <тс — 90°,
независимо от положения точки относительно станции, к востоку или
западу от нее.
Определим величину градиента ЛРПР, использовав его общую
формулу, записанную в геосферических координатах:
. /day_______l_/du\2
Г \ дф / cos2 ф \ дХ )
В нашем случае и = Лр и представляется уравнением (4.24).
Рис. 4.30. Построение точек ЛРПР на полетной карте при помощи
авиационного (а) и морского (б) транспортиров
120
Найдем частные производные и продифференцировав это урав-
нение по <р и X. Дифференцированием по ф получаем:
1 дА
-----= —sin <ptg<pp cosec (Хр—Х)—cos (pctg(Xp-X);
sinMp dip
dAp sinMp sinMpCosS
-- e ---------Г <Sin S’ tg <PP + cos <p cos (\ -X)} = — ——-
dtp SinXp — X Sin(Ap — Л) cos <p
Но из сферического треугольника СРцР (рис. 4.28):
sin/p sin(Xp— X)
cos фр sinS
sin (360°—Лс) sin/p
cos <p cos фр
поэт ому
дЛр л . о / sin4c \ ,
----= sin ctg S =---------------- cos qjp I ctg S =
dtp \ cos <p )
sin Ac cos q>p ctg S
cos <p
Теперь дифференцируем (4.24) по X:
1 d/p cos <р tg <рр cos (Хр—X) sin <р
sin’dp dX sin2(Xp—X) sin2(Xp—X)
dAp sin2 Ap cosip sin q>p cos (Xp—X)—sin«pcos<pp
dX sin2(Xp—X) cos <pp
Но числитель второй дроби согласно формуле пяти элементов равен
—sin S cos Ас, тогда
d/p sin2 Лр sin S cos Ac cos4ccos<pp
dX sin2(Xp—X)cos<pp sinS
так как
sin2 Лр cos2<pp
sin2 (Xp—X) sin2 S
Подставив выражение частных производных в формулу градиента,
получим
. f sin2 Лс cos2 <рр ctg2 S 1 cos2 Ас cos2 <pp
I cos2 ip "J” cos2 <p sin2 S
cosqjp r----------------------------
=------------f/^sin2 A cos2S + cos2 Ao •
cos<p sinS
121
Для расстояний не свыше 1 000 км можно считать sin S^S и cos S»
s» 1; тогда формула градиента ЛРПР принимает вид, совпадающий
с аналогичной формулой для ЛРПС
1
Таким образом, умея определить (вычислить) азимут Дро радио-
станций и ее удаление 50 от опорной точки, а также направление и ве-
личину градиента ЛРПР в этой точке, можно использовать метод опор-
ных точек для прокладки прямолинейных отрезков ЛРПР точно так
же, как в случае прокладки отрезков ЛРПС от дальних радиопеленга-
торов (§4.2). Необходимые для этого метода величины Лро и So в слу-
чае радиокомпасных систем можно измерять непосредственно на
полетной карте, так как невысокая точность измерения пеленгов эти-
ми системами делает нецелесообразным применение точных аналити-
ческих расчетов.
Точность определения параметров ЛРПР (Лр) несколько выше точ-
ности определения параметра ЛРПС (Лс) за счет отсутствия ошибки
учета долготы самолета при определении схождения меридианов
л4р = У / 22 ф-1,52 = 2,5°.
Точность ЛРПР на сфере зависит от точности параметра аЛр
и удаления S самолета от станции (в соответствии с формулой гра-
диента)
оЛп
°Рлрпр = gjlpnp = оЛр S- <4-26)
В настоящее время ЛРПР могут быть использованы не только для
периодического определения мест самолета на специально подготов-
ленных картах с линиями положения по двум-трем основным радио-
станциям, как практиковалось до внедрения курсовых систем с со-
вмещенными указателями, но также для оперативного управления
самолетом при полете по выбранной ЛРПР, заменяющей на некотором
участке ортодромическую ЛЗП.
Распространенным приемом контроля пути по ЛРПР является
«выход на предвычнсленный (заданный) пеленг радиостанции», яв-
ляющийся частным случаем метода опорной точки, так как фиксирует
момент достижения нулевой разности между фактическим (измерен-
ным) и предвычисленным пеленгами радиостанции, т. е. ДДР = 0.
Момент выхода на заданную ЛРПР определяется непосредственно по
совмещенному указателю штурмана типа УШ или другому ука-
зателю пеленгов радиостанции (УГР, РМИ из комплекта КУРС-МП).
При отсутствии на приборной доске пилота совмещенного указателя
используется величина предвычисленного курсового угла, получаемого
по формуле
Я’р. пр = -^р Y-
122
Рис. 4.31. Совмещенный указа-
тель курса и курсового угла
(УГР)
Навигационное управ-
ление полетом самолета осу-
ществляется при помощи совмещенного
указателя типа УГР (рис. 4.31), имею-
щего простейшее механическое приспо-
собление для запоминания заданной ве-
личины пеленга радиостанции (задатчик
пеленга). Задатчик, установленный ру-
кояткой на необходимое значение по
подвижной шкале курсов, в дальнейшем
поворачивается при изменении курса
самолета вместе со шкалой, запоминая
заданную величину пеленга радиостан-
ции. При постоянном совмещении
стрелки АРК с задатчиком пеленга само-
лет будет следовать строго по ЛРПР с па-
раметром Ар, установленным на указателе (рис. 4.32). Для удобства
пилотирования задатчик выполнен в виде двух параллельных прямо-
линейных полосок значительной длины (рабочий диаметр прибора),
что обеспечивает высокую чувствительность к рассогласованию между
ним и стрелкой АРК. Совмещенное положение стрелки радиокомпаса
и задатчика пеленга достигается в любой точке ЛРПР и при всяком
курсе самолета (например, при пересечении ЛРПР самолетом—поло-
жение I, рнс. 4.32), но это совмещение будет устойчиво сохраняться
только при определенном курсе (положение IV и V, рис. 4.32). Устой-
чивое совмещение означает, что самолет движется по ЛРПР.
Рис. 4.32. Схема полета по ЛРПР
123
Рис. 4.33 Вывод приближен-
ного значения бокового укло-
нения ЛРПР от ортодромиче-
ской ЛЗП
Курс при полете по ГЛРПР непре-
рывно меняется в соответствии с измене-
нием направления ЛРПР относительно
местных меридианов и изменением угла
сноса. Ось самолета в любой момент
полета составляет с ЛРПР угол, равный
сумме угла сноса а и поправки i = ос
за схождение меридианов МС и РНТ.
Этот угол (а 4- <тс) непрерывно отраба-
тывается на УГР между неподвижным
индексом и стрелкой АРК, совмещен-
ной с задатчиком пеленга.
Замена участка ортодромической
ЛЗП между двумя точками маршрута
отрезком ЛРПР приводит к боковой
ошибке навигации, имеющей системати-
ческий характер. Кроме того, выполне-
ние полета методом непосредственной коррекции по угловой коорди-
нате Ар подвержено и случайным ошибкам измерения самой коор-
динаты параметра Ар.
Определим максимальную величину систематической боковой ошиб-
ки (уклонения ЛРПР от ортодромии) z, ограничившись ввиду отно-
сительно небольших дальностей пеленгации приближенным решением
задачи (на плоскости). На рис. 4.33 схематически представлен участок
равноугольной и практически ортодромической карты с точками полю-
са Pn, места радиостанции Р(ФР, ^р) и места самолета С, находящегося
на удалении S от станции. Меридианы Р^С и Р^Р, а также ортодро-
мическая ЛЗП изображены прямыми линиями; ЛРПР СС'Р, соответ-
ствующая постоянному параметру Ар,—окружностью, проходящей
через указанные три точки и имеющей центр в точке О и радиус г.
Максимальное уклонение ЛРПР от ортодромии имеет место при про-
хождении самолетом точки С, делящей дугу ЛРПР пополам. Тогда
из треугольника ODP
откуда
Разложив второй член скобки в степенной ряд и сохранив первые
два члена (так как S г), получим z = Величину г найдем, вы-
разив ее через заданный пеленг Ар и широту <рр радиостанции из тре-
угольника ОВР
ВР
sin Ар'
124
Но так как
ВР= PNP-= -у (90°—фр) 111,2,
то
(90°—<р°р) 111,2 ~55(90°—<р°р)
2sin>4p siiMp
Тогда
Szsin./1p S2sin/p
8-55 (90°-q>°p) 440 (90°-<p°p) ’
(4-27)
(4.28)
— ~ 0,0023
S
S sin Лр
90° - <pp°
На графике (рис. 4.34), построенном по формуле (4.28), прямы м
линиями показаны максимальные значения относительного уклоне-
ния z/S ЛРПР от ортодромии при различных широтах срр радиостан-
ции для наиболее неблагоприятных значений параметра линии равных
азимутов Ар = 90° (или 270°). Там же проведены две кривые, соответ-
ствующие боковым уклонениям ЛРПР на 5 и 10 км в зависимости от S
и z/S. По этой номограмме можно непосредственно определять длину
пути полета, при которой уклонение ЛРПР от линии заданного пути
не будет превышать 5 или 10 км. Как видно из графика, полет по ЛРПР
с помощью УГР является эффективным для трасс и коридоров, так как
в средних и даже в сравнительно высоких широтах он обеспечивает
полет с уклонением не более 5 км на расстояние до 250—300 км даже
без знания ветра.
Следует отметить, что формула (4.27), выведенная с использованием
значительных допущений, дает всегда завышенные (до 10—15%) зна-
чения, что, однако, только повышает гарантнйпость оценки возможных
боковых уклонений самолета от
ЛЗП за счет кривизны ЛРПР
(систематической ошибки).
Систематическую ошибку от
кривизны ЛРПР можно не-
сколько уменьшить, если выдер-
живать по УГР не величину Лр,
равную пеленгу радиостанции в
начальной точке участка, а не-
которое измененное ее значение
Лр + 6ЛР такое, чтобы новая
ЛРПР пересекала ЛЗП внутри
участка, а боковые ошибки рас-
пределялись по обе стороны от
нее (рис. 4.35).
Случайная составляющая бо-
ковой ошибки, являющаяся
Рис. 4.34. Графики максимальных отно-
сительных боковых уклонений при поле-
те по ЛРПР
125
Рис. 4.35. Схема уменьшения боковых уклонений в полете по ЛРПР за
счет уточнения параметра Ар
следствием ошибок Лр, приводит к рассеиванию МС относительно
выбранной ЛРПР и таким образом складывается или вычитается
с систематической боковой ошибкой, всегда направленной в сторону
экватора. Ее среднее квадратическое значение определяется фор-
мулой (4.26).
Определим вероятность удержания самолета в полосе трассы ши-
риной b при полете по ЛРПР, учитывая случайные ошибки измерения
азимута радиостанции. Задача сводится (§ 3.3 [19]) к нахождению ве-
роятности попадания места самолета в пределы боковых уклонений
от I — Ь/2 до I + Ы„ относительно найденной линии положения, т. е.
в нашем случае относительно ЛРПР, по которой выполняется полет.
При этом за величину / следует принять максимальное отклонение
ЛРПР от ортодромии 1 = 2. Тогда
Р
Ф
(4.29)
Пример. Полет на радиостанцию с расстояния S = 200 км выполняется
выдерживанием по УГР постоянной величины Ар = 60°. Ширина трассы b
= 10 км, широта радиостанции <рр = 55°, ошибка компаса оу=2° и АРКофр =
= 1°. Определить вероятность Р удержания самолета в полосе трассы.
Решение. Определим максимальное значение отклонения ЛРПР от
ЛЗП, пользуясь формулой (4.27):
2002 sin 60°
г= 440(90-55) "2’2КЛ;
S
рассчитаем величину ор на расстоянии D = — — 100 км от станции (точка
наибольшей систематической ошибки z);
5 _____ 200
ор = 0,0174оАр°—= 0,0174 /22+12 — =3,9 км;
126
по формуле (4.29) получим:
1 0,95+0,56
= —[Ф (1,39) +Ф (0,54)] =-------= 0,75.
Важным достоинством метода полета по ЛРПР с помощью указа-
теля типа УГР является его одинаковая пригодность как при полете
на станцию, так и от нее. Несущественным различием является лишь
то, что значение установленного параметра Лр в последнем случае
будет отличаться от путевого угла на величину, близкую к 180° (с точ-
ностью до угла i а: ос).
Значение ЛРПР как для контроля пути, так и для навигационного
управления самолетом сильно возрастает при использовании орто-
дромических курсовых приборов (навигационные ГПК, курсовые
системы в режиме ГПК, астрономические компасы в ортодромическом
режиме). В этом случае линия равных условных пеленгов радиостан-
ции с параметром Л Ру = уу + % представляет собой на поверхности
сферы ортодромию, а на полетных картах практически прямую линию,
совпадая тем самым с линией пеленгов самолета, прокладываемой от
станции. Применение УГР при этом обеспечивает полет по ортодроми-
ческой линии пути и не приводит к методическим боковым ошибкам
при любых дальностях пеленгации.
Определение и использование ЛРРПР
Линия равной разности пеленгов радиостанций (ЛРРПР) является
геометрическим местом точек на поверхности Земли, характеризую-
щихся одинаковой разностью одновременно измеренных пеленгов двух
наземных радиостанций, т. е. соответствует условию
Лр2 — Лр1 = ДЛр = const.
В отличие от других линий положения радиокомпасных угломер-
ных систем для определения ЛРРПР не требуется никакой информа-
ции, кроме данных от двух радиокомпасов. Так как одновременное
пеленгование двух станций производится при одном и том же курсе у
самолета, то постоянство разности ДЛР пеленгов равнозначно посто-
янству разности соответствующих курсовых углов:
ДЛр = Лр2—Лр1 = (у + фр2) — (у + фр1) = фр2—фг1 = Дфр.
Разность курсовых углов двух радиостанций (Дфр) и является па-
раметром ЛРРПР. Ее величина индицируется на двухстрелочном ука-
зателе курсовых углов (указателях УШ и СУШ штурмана, УПДБ
пилота, рис. 4.36) в виде угла между двумя стрелками. Однако в ра-
диокомпасных системах не предусмотрена возможность точного от-
127
Рис 4.36. Двухстрелочный
указатель АРК (пилота)
счета этого угла. Только па СУШ можно,
совместив вручную нуль поворотной шкалы
с одной из стрелок, против другой стрелки
прочесть Дфр.
На поверхности Земли ЛРРПР являет-
ся сферической изогоной, форма которой
совпадает с формой ЛРПР (овалом «Кас-
сини»), если одну из станций считать
полюсом, а величину Дфр — условным
пеленгом второй станции. Однако по-
скольку дальности пеленговании радио-
компасными системами невелики и, следо-
вательно, расстояния между станциями
при условии их одновременного приема
также не могут быть большими, можно пренебречь кривизной поверх-
ности Земли и считать ЛРРПР окружностью, проходящей через две
станции и место самолета.
Так как ЛРРПР не требуют знания курса и места самолета и имеют
высокую точность, их применение эффективно в районах, где затруд-
нена работа курсовых приборов или их коррекция, а также ограничен
выбор наземных радиостанций. В то же время отсутствие точных при-
боров для измерения параметра Дфр и сложность формы самой линии
положения не позволяют применять ее в общем виде. Используется
только частный вид ЛРРПР — при Дфр = 0° или 180°, когда по лю-
бому двухстрелочному указателю АРК можно с высокой точностью
определить совмещение стрелок. В этих случаях ЛРРПР превращается
в ортодромию, проходящую через обе станции и, следовательно, вы-
держивая стрелки строго совмещенными друг с другом, можно обеспе-
чить полет по ортодромической ЛЗП в обоих направлениях, не зная
ветра и не измеряя курса самолета.
Полет по внешнему створу радиостанций осуществляется выпол-
нением условий Дфр = 0° путем совмещения стрелок на указателе АРК
(положение С на рис. 4.37), которые при этом указывают угол сноса.
Отклонение самолета от линии створа означает, что фактическая раз-
ница направлений на две радиостанции Дфр отличается от заданного
нулевого значения, т. е. само значение параметра Дфр ЛРРПР ждан-
ном случае является и его ошибкой Д(Дфр), которая возникает в ре-
зультате погрешностей измерения курсовых углов радиокомпасами
и неточного совмещения стрелок УПДБ пилотом.
Из рис. 4.37 следует, что
А(А%) = А% = 01—02.
где 6г и 62 — вспомогательные
через линейные величины:
малые углы, которые можно выразить
0х= —
1 D
и 0, = —-—
2 D + &
128
Тогда
z
A (А%) = —-------— = —--------,
р D D+b D(D-\-b)
откуда
2=Д(Д%)£<^)
(4.30)
где b — расстояние между радиостанциями; D — удаление само-
лета от ближайшей станции.
.. Ь
Из последнего равенства видно, что величина р^р играет
роль модуля градиента линии положения £лррпр, который в случае’
внешнего створа оказывается при любых b несколько меньше гра-
диента ЛРПС
_ 1
^ЛРПС ~~ р
Рассмотрим ошибку выдерживания внешнего створа в полете от
четвертого разворота к дальней приводной радиостанции, считая при
этом D = 9 км, b = 3 км (расстояние между приводными радиостан-
циями системы ОСП) и А(А%) = Г:
гг. _ = 0,0174-1 = о,625 км-,
D=^ 3
при приближении самолета к дальней приводной станции на расстоя-
ние D = 4 км
zn . = 0,0174 • 1 4(4|—^- = 0,163 км.
д=4 3
Таким образом, способ внешнего створа может использоваться для вы-
держивания предпосадочной прямой, особенно в условиях ненадежной
Рис. 4.37. Схема полета по ЛЗП методом внешнего створа двух
радиостанций
5 Осадший В. И.
129
работы курсовых приборов. Применение его на трассе целесообразно
при Zjjppnp < Zjipnc, где ZjlPPni> и ?лрпс —линейные ошибки ЛРРПР
и ЛРПС. Используя (4.30) и (4.6) с учетом sin D « D, получим
Д(Д%)^^.<Д4О,
т. е. условием'целесообразности применения па трассе способа внеш-
него створа является
д^ХДЛ-^.
Н апример, при D = 100 км и b — 100 км необходимо, чтобы Д(Дфр) <С
< ^„ДЛс, т. е. \(Дфр) < 1—1,5 , что вполне реально.
При полете по внутреннему створу (Дфр = 180°) стрелки АРК
также совмещаются друг с другом, по своими противоположными кон-
цами (рис. 4.38). Угол между стрелками, не равный 180°, означает от-
ход самолета от линии створа (положение Сг на рис. 4.38). При опре-
делении стороны уклонения от ЛЗП считают, что линия створа проходит
через концы стрелок, а место самолета находится на оси их вращения.
Вывод самолета в створ радиостанций (на ЛРРПР) осуществляется
доворотом в сторону линии, соединяющей юнцы стрелок. Устойчивое
совмещение стрелок означает, что курс полета подобран с учетом сно-
са и самолет движется по ортодромии. Неточности определения курсо-
вых углов н совмещения стрелок при пилотировании приводят к боко-
вым уклонениям самолета (положение Сг па рис. 4.38). Ошибкой пара-
метра ЛРРПР в этом случае является величина Д(Дфр) = 180° — Дфр—
дополнение фактической разности курсовых углов до 180°.
Рис. 4.38. Схема полета по ЛЗП методом внутреннего створа
двух радиостанций
J30
Выражение для линейной ошибки выдерживания внутреннего ство-
ра можно получить аналогично предыдущему случаю, используя
рис. 4.38:
т. е. градиент ЛРРПР в этом случае равен £лррпр = Так как
на внутреннем створе всегда D < Ь, то градиент ЛРРПР будет больше
градиента ЛРПС в ~b^_D раз. Максимальное значение бокового
уклонения самолета от ЛЗП па внутреннем створе определится из ус-
ловия
*=A|a(a%)MLo
dD dD \ 1 b J
ИЛИ
b — 2D = 0.
Решая это уравнение, получим D = т. е. максимальное боковое
уклонение zmax возникает при пролете самолетом середины участка
между радиостанциями:
ь ( J>_\
2 \ - 2 / А (Aibp)
гшах = А (Афр) Х ь~ = - (4.31)
Полет по внутреннему створу (Афр = 180°) применяется при захо"
де на посадку на участке между дальней и ближней приводными радио-
станциями. Будем считать b = 3 км, а А(Афр) = 1°. Тогда, согласно
формуле (4.31)
0,0174-1-3 nnlQ
“------=0,013 КМ.
Высокая точность способа внутреннего створа позволяет эффек-
тивно использовать его и при полете на трассе, когда имеется возмож-
ность принимать одновременно сигналы двух радиостанций, находя-
щихся на ЛЗП (впереди и сзади самолета). Максимальная боковая
ошибка при этом рассчитывается также по формуле (4.31), например,
при расстоянии между станциями b = 300 км и ошибке разности КУР
А(Аф],) = Г, zmax = 1,3 км. Контроль бокового уклонения по ЛРПС
дает в этом случае максимальную ошибку ?лрпс = 6,5 км.
Поскольку в полете при совмещении стрелок АРК обеспечивается
подбор курса следования по ЛЗП с учетом фактического (хотя и неиз-
вестного) ветра и на указателе автоматически отрабатывается угол
сноса и, способ внутреннего створа приводит к активному полету на
радиостанцию, но с дополнительным непрерывным контролем угла
сноса по второй станции. Это обеспечивает в случае выхода самолета
из зоны действия задней радиостанции, продолжение полета по ЛЗП
способом активного полета на станцию, находящуюся впереди.
5* 131
$ 4.5. ОПРЕДЕЛЕНИЕ МЕСТ САМОЛЕТА И РАБОЧИЕ ОБЛАСТИ УНС
В принципе определение места самолета при помощи угломерных
систем состоит в совместном решении уравнений двух линий положе-
ния, соответствующих некоторым измеренным значениям их парамет-
ров и относящихся (или приведенных) к одному моменту времени Т:
fi (ф. ^) = «i.
/г(ф. %) = и2.
В результате решения получаются координаты <р и X места само-
лета на момент определения линий положения. Эта система уравнений
при известных (измеренных) и и2 может быть решена: а) анали-
тическим расчетом координат; б) расчетом координат с помощью спе-
циальных графиков или таблиц; в) графическим построением двух
(трех) пересекающихся линий положения на полетной карте.
Аналитический метод решения является наиболее точным, но ре-
ально осуществим только при использовании специальных быстро-
действующих вычислительных машин. При неавтоматизированном
самолетовождении, как правило, применяется графический метод,
заключающийся в построении на карте двух (трех) линий положения
непосредственно в полете или путем предварительной подготовки карт
с нанесением семейств линий положения или их небольших отрезков
для разных значений параметров иг и и2.
Для получения места самолета угломерные линии положения
(ЛРПС, ЛРПР, ЛРРПР) могут использоваться в различных сочетаниях,
но наибольшее распространение получили сочетания двух ЛРПС
или двух ЛРПР.
Определение МС по двум одновременным линиям положения
При нахождении МС этим способом необходимо обеспечить одно-
временность измерения параметров двух линий положения. На со-
временных многоместных самолетах такая возможность практически
всегда имеется благодаря следующим обстоятельствам:
при применении радиокомпасной системы штурман может исполь-
зовать одновременно два радиокомпаса,
при запросе Ас у наземных радиопеленгаторов измерения пеленгов
можно синхронизировать одновременным запросом двух и более пунк-
тов (как на УКВ, так и на КВ);
при определении Ас по двум радиомаякам (например, ВРМ-5) их
сигналы могут прослушивать одновременно два члена экипажа.
Получение в полете параметров линий положения с помощью радио-
пеленгаторных и радиомаячных систем не требует соблюдения специаль-
ного режима полета и каких-либо расчетов. При использовании радио-
компасных УНС в сочетании с ортодромическими курсовыми прибо-
рами также нет необходимости в расчетах, но требуется сохранение
режима горизонтального полета.
Точность МС, получаемого по двум угломерным линиям положения,
оценивается на основе общей формулы средней квадратической ра-
132
дпальноп ошибки (1.11), если в нее подставить выражения для прг
п ор,, соответствующие конкретным используемым линиям (ЛРПС
или ЛРПР).
Если используются две ЛРПС от удаленных на большие расстоя-
ния от самолета РНТ (дальние KB-радиопеленгаторы, мощные радио-
маяки ВРМ-5 или «Консол»), задачу следует решать с учетом сферич-
ности Земли, т. е. считать:
<jpi = <L4cisinDi,
ор2 = оЛс2 sin D2.
Тогда
. = /РЛ2С1 sin2 D1 +оЛ2сг sin2 Р2
sin <о
В данном случае угол ю в точке МС является углом между орто-
дромическими направлениями на две РНТ, т. е. ю = ЛГ2 — Ар1.
Для УНС средней и малой дальности (до 800—1 000 км) можно счи-
тать sin Dl = Du sin D3 = D„ и формула для иг упростится:
CTr_ l^°-4 ci £>1 -|-рДс2 Рз2 (4.33)
sin <о
При использовании двух ЛРПР (только радиокомпасные УНС)
дальности пеленгования, как правило, не превосходят 500—600 км,
т. е. применима формула (4.33), если вместо оЛС] иоЛС2 брать ошибки
пеленгов радиостанций ш4и и сь412 (4.26), а под углом со понимать
угол (Плрпр между ЛРПР в точке МС. Из рис. 4.39 с учетом (4.25)
“лрпр = 0лрпр2 0ЛРПР1 “ С^рг + аг) (Ал 4 °i) =
= (Лр2—Лр1) + (о2—oj = со 4- (о2—ог).
Разница между углами со и (олрпр наиболее существенна при малых
углах пересечения линий положения, в высоких шпротах и при на-
хождении радиостанций по разные стороны меридиана самолета (раз-
ные знаки Oj и о2).
Определение МС по двум разновременным линиям положения
Использование разновременных линий положения становится не-
обходимым в случаях, когда участок пути находится в рабочей области
только одной у гломерной РНТ, пли на самолете отсутствует (неиспра-
вен) второй комплект приемного устройства (АРК, связной прием-
ник), или последовательно запрашиваются два отдельные радиопе-
ленгатора, не сведенные в единую базу.
При этом применяется общий прием приведения двух линий поло-
жения к одному моменту времени, как правило, к моменту определе-
ния параметра последней линии. Этот приекюснован на том, что отре-
зок липин положения, относящейся к моменту времени Т, будучи пере-
несенным на сфере эквидистантно себе на расстояние S = Wt в на-
133
правлении Р вектора перемещения самолета за промежуток времени t,
также является отрезком линии положения на момент Т -f- t. На по-
летных картах при небольших векторах перемещения самолета за
время между пеленгациями двух РНТ (единицы минут) приведение
линии положения к новому моменту времени заключается в простом
параллельном переносе ее на расстояние S = Wt вдоль фактической
линии пути самолета (рис. 4.40). В принципе перенос линии положе-
ния может осуществляться при любой форме линии пути между пелен-
гациями РНТ. Однако практически оба пеленгования всегда выпол-
няются па одном курсе самолета, чем исключается излишнее услож-
нение операции приведения. Приводимые линии положения могут быть
получены как с использованием разных РНТ, так и одной и той же
РНТ, но в разные моменты времени.
После приведения линии положения к одному моменту времени
место самолета находится, как обычно, в точке их пересечения (точка М
на рис. 4.40) и относится к моменту определения параметра второй
линии. Возможность использования приведенных линий положения
в настоящее время возросла, так как с освоением допплеровских изме-
рителей можно переносить линии за небольшие промежутки времени
с высокой степенью точности как по направлению, так и по дальности.
Оценим точность МС, полученного с использованием разновремен-
ных линий положения, для чего предварительно найдем значение сред-
ней квадратической ошибки перенесенной линии. Из рис. 4.41 видно,
что ошибка Дрпрр линии положения при ее переносе связана с радиаль-
ной ошибкой RC4 счислимого места самолета, накопленной на участке
пути СгС2 между пеленгациями. Согласно формуле (2.6) среднее квад-
ратическое значение этой ошибки uRC4 — mS, где m — коэффициент
ошибки счисления. Тогда, считая радиальные ошибки счисления рас-
пределенными по круговому закону рассеивания, можно найти и сред-
нее квадратическое значение дополнительной линейной ошибки орпер
перенесенной линии положения как среднее квадратическое откто-
134
некие в заданном (в данном случае перпендикулярном к самой линии
положения) направлении:
®Рпер
огсч
/2
mS
V2 '
Общая вечичипа средней квадратической ошибки перенесенной ли-
нии положения с учетом ее ошибки up до переноса
<уРобщ=/(уР2+стРпер= |/ ор24
Ошибка МС, полученного по двум угломерным линиям положения,
из которых одна была перенесена па расстояние 5, определится по
формуле
. / т2 S2
1/ а^с1^ + — +cA*2D*2
иг = —---------------------------.
sin со
Построение рабочих областей по заданной точности МС
Построение рабочей области двух угломерных РНТ по заданной
точности МС (ог3 или грг) начинается, как обычно, с оценки максималь-
ной Dmax и минимальной £)mln дальностей действия каждой РНТ и
нанесения соответствующих кривых на карту. Затем на площади, где
обеспечивается надежный прием сигналов обеих РНТ, строятся кри-
вые равной точности в соответствии с конкретным видом используемых
линий положения — ЛРПС, ЛРПР или ЛРРПР.
Рассмотрим построение рабочей области для случая двух ЛРПС при
различной точности определения углового параметра (оЛс1 #= щ4с2).
Используем формулу 4.32, в которой все величины правой части
выразим через биполярные сферические координаты 0! и 02. Рассмат-
ривая сферический треугольник Л41М2С (рис. 4.42), составленный
Рис. 4.41. Оценка ошибки перенесенной ли-
пин положения
Рис. 4.42. Биполярная сис-
тема координат на сфере
135
двумя ЛРПС и линией базы станций, имеем (по формуле синусов
и формуле косинуса угла):
г, sin b . п
sin О, = -----sin 62;
sin со
. гл sin b . п
sin D2 =------sin Of,
sin co
cos co = —cos cos 02 -f-sin 0x sin 02 cos b.
Подставив эти величины в формулу (4.32), получим
1/"оА2 sin2 b sin2 02+оЛ22 sin2 b sin2 0t
иг = --------------------------------------—
sin2 со
sin fe Vo/ct sin2 02 + оДс2 sin2 0t
1—cos2 co
оДс .
или, обозначив = п, где о/1с1 — меньшая из двух угловых оши-
С1
бок РНТ, и заменив cosco его выражением через ©л, 02 и Ь,
__________________ оДс1 sin b sin2 02 + n2 sin2 0!
1 — (cos 0! cos 02—sin 0t sin 02 cos b)2
(4-34)
Эта формула позволяет, задавшись постоянными значениями иг3,
оЛС1> п 11 (’> вычислить пары углов 0л и 0.,, определяющие положение
точек линии равной точности на сфере. Так, задавшись, кроме перечис-
ленных постоянных величин, углом 0Ь можно вычислить угол 02 (или
наоборот).
Получить географические координаты <р и X точек линии равной точности
можно с помощью гномонической сетки, на которую сначала наносятся места
двух РНТ, а затем из них проводятся до пересечения прямые линии ЛРПС (ор-
тодромии) под углами к меридианам, равными:
Дгн1= arctg [tg (.4p2i —0i) sin <PpiJ;
j4rn-> = arctg [tg (Др12 02) sin <Pp>],
где Hpji — истинный азимут PHT2 из места РНТл, а Др12 — азимут РНТл из
места РНТ2 определяются также по гномонической сетке. Углы ДГ111 и ДГ112
можно также получить из углов (Д р21 — 0j) и (ДР12 — 6г) с помощью известной
из картографии номограммы перевода сферических углов в углы на гномониче-
ской проекции. Полученные таким образом географические координаты ряда
точек позволяют построить линию равной точности на карте любой проекции.
При средних дальностях пеленгования и соответственно небольших
базах формула (4.34) упрощается, так как можно считать sin Ь = Ь,
cos b = 1 и, следовательно,
I —(cos 0! cos 02—sin 0j sin 02 cos t)2 =
= 1—cos2(014-02) = sin2(014-0?).
136
Аг Af
Рис. 4.43. Шаблон с кривыми равных ошибок МС при п=3
В этих случаях уравнение линии равной точности в биполярных коор-
динатах на плоскости принимает вид (если cl4Ci брать в градусах):
Vsi-e,+*‘sin4i = —г.— =мв е
sin2(6i+02) 0,0174 nV 1 21 ’
По этому уравнению для конкретного значения п можно построить
семейство кривых с параметрами kni = ЬоА0 , т. е. для каждой ве-
С1
личины заданной ошибки МС получится одна кривая. Такое семей-
ство кривых для п = 3 показано на рис. 4.43. Кривые этого семейства
представляют собой в некотором масштабе границы соответствующих
областей заданной точности МС, которые можно перенести на карту
(или схему) любого масштаба, если эта карта равноугольна и практи-
чески ортодромпчна. Таким образом, совокупность кривых, построен-
ных при одном значении п, но для разных knt (разных orBf), может
играть роль универсального шаблона для построения кривых равной
точности (постоянной ошибки) МС при использовании УНС в случаях,
когда соотношения ошибок gA°2 и cl4cj соответствуют данному зна-
чению п. В случае равноточных угловых измерений по обеим станциям,
т. е. когда = оЛс2, используется шаблон для n= 1; в случаях
неодинаковой угловой точности пеленгации выбирается шаблон с
о/°
числом п, наиболее близким к величине отношения —
аЛс,
Кривые, построенные на шаблоне (например, рис. 4.43), расположены
по одну сторону линии базы А2 Аг и описывают только половину рабо-
137
чей области системы. Вторая половина получается построением фигу-
ры, симметричной первой относительно липин базы станций.
Для удобства переноса найденной па шаблоне кривой равной точ-
ности на карту произвольного масштаба применяется азимутальный
метод, не связанный с масштабами карты и шаблона. Для его осуще-
ствления на шаблоне из мест обеих РНТ проведены семейства радиаль-
ных линий под углами, кратными 10°, начиная от базовой линии; лучи
оцифрованы значениями 0t и 02, т. е. создана координатная сетка би
полярной системы. Для переноса любой точки кривой с шаблона па
карту достаточно определить по радиальным линиям углы 0Х и 02
для этой точки и отложить их в соответствующие стороны от базовой
линии на карте. При выборе биполярных координат по шаблону каж-
дый луч 0j пересечет кривую kni в двух точках, т. е. для каждого зна-
чения полярного угла 0Х получаются два значения другого полярно-
го угла--02 и 02.
В случае равноточной пеленгации двух РНТ (сМci = <Мс2 =
иЛс , т. е. п — 1) кривые постоянных ошибок симметричны не только
относительно базовой линии, но и относительно перпендикуляра,
восстановленного в ее середине. Это видно из рис. 4.44, а также не-
посредственно из симметричности уравнения линии равной точности
относительно переменных 0А и 0.,, которое при п — 1 принимает вид
/ sin^e2+sin^e2_ =------------= k (0 0о).
sin2(6i+02) сМ° 6 0,0174
Каждая кривая, соответствующая определенному значению пара-
метра kx (определенной величине ог3 при известных b и оЛё )> замкнута.
138
1
Однако при значениях > 0,0174 кри-
вые проходят через обе РНТ, а при kx <
<^0,0174 замыкаются, не проходя через
них. Это объясняется следующим. В непо-
средственной близости от PHTj (полюс ко-
ординаты минимальным значением
ошибки МС будет величина огрнпиИп —
= 0,0174оДс^, так как ошибка МС в этой
точке не может быть меньше линейной
ошибки линии положения, проложенной от
другой станции — РНТ2 (при известной
ошибке оЛс° пеленгования и данной дли-
не b базы). Поэтому через РНТ] могут
проходить только те кривые постоянных
ошибок, для которых ог3 достаточно ве-
лика и отвечает условию
Рис. 4.45. Вывод условий
минимальной радиальной
ошибки МС (оптимального
угла пересечения линий по-
ложения)
WPHT 1n,in ^°-0174cMcL
Но так как
<тг3 — 1г1 о Ас Ь,
то
kx^Ac Ь^0,0\74оА°сЬ,
или, после сокращения неравенства на существенно положительную
величину иА° Ь, 0,0174.
Тот же результат можно получить и для точки второй РНТ.
В случае п = 1 нетрудно найти по каждую сторону от базовой линии
точку, в которой достигается наименьшее из возможных значений сред-
ней квадратической радиальной ошибки ormln. Решим эту задачу с
учетом сферичности поверхности Земли (рис. 4.45).
Из соображений симметричности кривых относительно сфериче-
ского перпендикуляра к середине базы при п — 1 точка минимальной
ошибки отИ1п должна находиться на этом перпендикуляре. Но для
каждой точки перпендикуляра /'Л = О2 = D. Тогда из прямоуголь-
ного сферического треугольника MtCB
ь
sin —
• п 2
sin D = ------.
<и
sin —
2
Подставив это значение sin D в формулу (4.32) и считая сгЛci =
= gA°2, получим
0,0174 оЛ° sinJL 0,0245сь4° sin —
sin со sin— sinwsin —
2 2
139
Так как числитель этого выражения является величиной постоянной,
минимум or определяется максимумом знаменателя, т. е. получается
при некотором значении ыОЛП11п, определяемом из уравнения
d
da>
со \ со , 1 . со _
sin w sin — = cos со sin----------------sin со cos — = 0.
2 ) 2 2 2
Это уравнение может быть приведено к виду
tg2 ——2 = 0,
2
откуда
шагт1п = 2 arctg /2 = 109,5°.
Таким образом, минимальная ошибка определения МС достигается
в двух точках на перпендикуляре к базе, в которых угол пересечения
линии положения равен 109,5°, а ее величина
0,0245 сь4с° sin
orinln =---------------------= 0,032 оАс° sin— .
,nln sin 109,5° sin 55° c 2
При небольших b можно считать sin — = — и
2 2
ormln = 0,016 Mc° b.
В случае разноточной пеленгации двух РНТ (cM£i ф о°Ас2, т. е.
п Ф 1) рабочие области имеют следующие особенности (см. рис. 4.43).
1. Кривые постоянных ошибок несимметричны относительно пер-
пендикуляра к базе и смещены в сторону РНТ с меньшей точностью
пеленгации (с большей ошибкой щ4с°)-
2. Точка минимальной ошибки МС располагается ближе к станции
с большей ошибкой пеленгации.
3. При данном п в зависимости от величины параметра kni
кривые постоянных ошибок по-разному располагаются относительно
РНТ, а именно: проходят через обе РНТ (если knt^>0,0174 п);
проходят только через одну РНТ — станцию с большей ошибкой
пеленгования (если 0,0174</?„г<0,0174н); не проходят ни через
одну из станций (если kai < 0,0174).
Чтобы доказать эту особенность, достаточно убедиться, что при
kni <С 0,0174гг кривая постоянной ошибки не проходит через более
точную станцию (PHTJ. Действительно, в непосредственной близости
к PHTj ошибка МС (or) не может быть меньше линейной ошибки одной
линии положения, полученной по другой (менее точной) станции
РНТ,:
or > орг.
140
Но в точке РНТ, ошибка ЛРПС от другой станции
ар2 = 0,0174оД’26 = 0,0174 /юЛС1 Ь,
тогда
ог^0,0174поЛс1 Ь.
Разделив обе части неравенства на положительную величину сМе/,
получим
or
ПЛ”, Ь
> 0,0174 п,
т. е. для прохождения кривой постоянной ошибки через РНТ, необ-
ходимо
*ni^0,0174n,
и, наоборот, если это условие не выполняется, т. е. /гпг<0,0174п,
то кривая не проходит через РНТХ.
Практическая методика построения рабочих областей для опре-
деления МСпри использовании двух ЛРПС в случаях равной и разной
точности пеленгации станции совершенно одинакова, хотя формы кри-
вых равной точности получаются существенно различными.
Пример. Построить рабочую область для определения МС при использова-
нии пятимачтового ВРМ-5 и мощной ненаправленной радиостанции, расстоя-
ние между которыми b = 630 км. Ошибки пеленгования: по ВРМ-5 оЛС1 =
= 0,9° (с учетом прокладки на карте), по радиостанции аАС2 = 2,7°. Допусти-
мая величина ошибки МС г01М = 25 км и 50 км (с гарантийной вероятностью Рг=
= 0,90). Дальности действия РНТ: ^гпахАРК^ 7^° км< ^шахВРМ ~ * 000 км>
^mlnAPK = 10 км< DminBPM= 40 км-
Решение. 1. На карте или планшете (рис. 4.46) строится база станций
длиной 6=630 км. 2. Наносятся границы дальностей действия каждой станции
Omaxi == 1 000 км, Пщ1п1==40 км, Ппах2==750 км, Ю км.
3. Рассчитываются допустимые величины средних квадратических ошибок
МС, соответствующие заданным радиальным ошибкам с Рг = 0,90 (см. § 1.3):
/—In (1—0,90) /—In 0,10 *-52
50
ог2 = ——=32,6 км.
1,52
4. Рассчитываются параметры кривых равных ошибок для обоих заданных
значений or-
16,3
fc.,e 3.=—--— = 0,029 ^0,03;
u ‘ 630-0,9
32,6
*<32 в> =---— = 0,058 х 0,06.
‘ ‘ 630-0,9
5. Определяется необходимый шаблон, для чего вычисляется величина
оЛ’2 2.7°
ПоА°С1 ~ 0,9° ~3'
141
6. С помощью шаблона п ~ 3 (см. рис. 4.43) выбираются пары биполярных
координат 0j и 02 Для ряда точек кривой равной точности с k = 0,03 и k = 0,06.
Для этого при. различных 0t = 10°, 20°, 30° ... 140°, 150° по соответствующей
кривой выбирается значение 02 (одно или два); результаты сводятся в табл. 4.1.
Таблица 4.1
е. 10° 20° 30° 40° 60° 80е 100° 110° 120°
о; 145 123 k - - 104 0,06 87 56 30 11 4
о; 14 13 12 10 — — — — —
е; 124 94 58 Э,03
02 29 36 58 — — — — — —
Примечание. Поскольку на шаблоне для k = 0,6 нанесена только
одна ветвь кривой, необходимо дополнительно построение второй ее ветви
(ближней к базе), интерполируя между кривыми k = 0,05 и k = 0,10. Это поз-
воляет получить несколько вторых значений углов 02 (для 0t = 10°, 20° и 30°).
7. По величине коэффициентов k определяется, через какие РНТ проходят
кривые равной точности для or = 16,3 км и or = 32,6 км. Так как оба коэффи-
циента k в примере больше 0,0174, обе кривые проходят через РНТ с меньшей
точностью пеленгования (оЛ°С2 = 2,7°), т. е. через радиостанцию Через радио-
маяк проходит только кривая, для которой k > 0,0174-3=0,052, т. е. кривая
для or = 32,6 км (так как для исе k = 0,06). Таким образом, при or ₽- 32,6 км
142
(k = 0,06) кривая заданной точности МС проходит через обе станции, а при or
= 16,3 км — только через РНТ2 (с большей ошибкой пеленгации).
8. По данным табл. 4.1 н п. 7, на карте строятся кривые постоянных (допусти-
мых) ошибок (см. рис. 4.46) При переносе кривых на карту безразлично, какую
из точек (PHTj или РНТ2) брать в качестве полюса координаты 0ь задаваемой
целыми десятками градусов. Однако если за полюс координат на шаблоне
выбрана станция большей точности, то и на карте углы 0х должны строиться
также с вершинами в этой РНТ. При этом на карте в некоторых случаях может
получиться кривая, являющаяся зеркальным отражением шаблона, как это име-
ло место в нашем примере.
Полученные кривые оцифровываются значениями средних квадратических
ошибок or, по которым они непосредственно рассчитывались, или значениями
заданных гарантийных ошибок гр с указанием величины Рг.
ГГ
9. На карте окончательно определяется конфигурация рабочей области
как общая часть плоскости, охватываемая одновременно кривыми заданной точ-
ности ог3 и кривыми обеспеченной дальности действия Ртах 11 Prnin В нашем
примере кривые Птах радиомаяка и радиостанции не влияют на рабочую область.
Кривые же Dmlll вырезают из нее участки радиусами 40 юи (у ВРМ 5) и 10 км
(у радиостанции).
Глава 5
ПРИМЕНЕНИЕ УГЛОМЕРНО-ДАЛЬНОМЕРНЫХ
РАДИОНАВИГАЦИОННЫХ СИСТЕМ
Угломерно-дальномерные радионавигационные системы (УДНС)
являются комбинированными средствами, состоящими из угломерных
и дальномерных каналов, что обеспечивает одновременное определение
на борту самолета его пеленга (азимута) и удаления относительно на-
земной станции, т. е. УДНС позволяют находить одновременно две
линии положения (ЛРПС и ЛРР) и, следовательно, текущее место
самолета.
До появления угломерно-дальномерных систем существовали от-
дельно (и существуют в небольшом количестве в настоящее время)
дальномерные (ДНС) и угломерные (УНС) радионавигационные си-
стемы, самостоятельно обеспечивающие решение ряда навигационных
задач.
§ 5.1. НЕКОТОРЫЕ СВЕДЕНИЯ О СВОЙСТВАХ
ДАЛЬНОМЕРНЫХ СИСТЕМ
Дальномерные радионавигационные системы предназначаются для
определения сферических расстояний (по поверхности Земли) от на-
земной станции до места самолета. Технически эта задача решается
через измерение прямой («наклонной») дальности от самолета до стан-
ции либо методом «запрос-ответ», либо сравнением фазы принятого от
наземной станции сигнала с фазой сигнала бортового высокостабиль-
ного генератора частоты. Дальномерные системы первого типа работают
в диапазоне УКВ и представлены целым рядом конструкций: напри-
мер, отечественные — дальномер системы СП-50, дальномерный
канал РСБН-2, зарубежные—ДМЕ, дальномерный капал системы
ТАКАН.
143
Использование в ДНС двусторонних радиолиний ограничивает их
пропускную способность. Этого недостатка не имеют ДНС второго
типа. Дальномерные системы беззапросного принципа действия в на-
стоящее время только разрабатываются. Предполагается, что они бу-
дут работать в диапазоне длинных волн и будут иметь благодаря ис-
пользованию только односторонней радиолинии неограниченную про-
пускную способность и дальность действия до нескольких тысяч кило-
метров.
Дальномерные системы обеспечивают определение с помощью одной
наземной станции линии положения, являющейся линией равных сфе-
рических расстояний (ЛРР) между самолетом и станцией, т. е. окруж-
ность «малого круга» на поверхности Земли. Однако параметр ЛРР
Dc не совпадает с непосредственно измеряемой прямой дальностью
DH и определяется путем расчета с учетом высоты полета.
В зависимости от необходимой точности решения навнгационнсщ
задачи измеренная прямая дальность DH пересчитывается либо в сфе-
рическую дальность Dc, либо, пренебрегая сферичностью Земли, в
горизонтальную дальность D. Из рис. 5.1, считая высоту антенны на-
земной станции пренебрежимо малой, получим:
DS = R2 + (R + H)~-2R (R + Н) cos n =
= 2(1— cost]) (R2 + R//) + №;
Dh = 4 sin2 (R2 + RH) + №.
Отсюда
. » t) Da—Ha
sin- — =___У______
2 +
На дальностях не более 600—700 км дуга сферического расстояния
т] = Dc/R мала.
Поэтому . о и . 2 Dc Dc sin2 — = sin2 — = ——. 2 2R 4R*
Тогда Dc = Dh-H* 4R* 4(R*+RH) ’ D -
144
Если не учитывать сферичность Земли, т. е. положить R — оо
пол) ценная форм) ла дает горизонтальную дальность
d = Yd2—//2.
(5.1)
Относительная ошибка сферической дальности (при замене ее го-
ризонтальной)
При подсчете по этой формуле для высот полета 20 и 30 км относитель-
ная ошибка соответственно равна 0,002 и 0,003, а абсолютные ошибки —
40 и 90 м. Таким образом, параметром ЛРР можно считать горизон-
тальную дальность D, получающуся по формуле (5.1).
В ряде случаев в целях упрощения расчетов горизонтальную
дальность D заменяют непосредственно измеренной прямой («наклон-
ной») дальностью Он (обоснование см. § 3.3).
Положительными качествами ДНС являются:
высокая точность измерения исходного геометрического параметра
DH (и, следовательно, Dc),
слабая зависимость ошибки определения наклонной дальности от
удаления от станции;
постоянство величины градиента ЛРР, равной по всей рабочей об-
ласти системы единице, так как, согласно рис. 5.2, Др = ДПС-
При g = 1 средняя квадратическая линейная ошибка ЛРР
О/Эл т-х
°Рлрр= T-^ = oDc
6ЛРР
Величина линейной ошибки
Рис. 5.1. Зависимость между пря-
мой и сферической дальностями
oDc, как правило, принимается по-
стоянной (например, для систе-
мы ДМЕ oDc = 0,2-?0,3 км).
Рис. 5.2. Вывод формулы градиента
ЛРР на сфере
145
§ 5.2. ОБЩАЯ ХАРАКТЕРИСТИКА УГЛОМЕРНО-ДАЛЬНОМЕРНЫХ СИСТЕМ
В зависимости от технических устройств, обеспечивающих изме-
рения исходных параметров, современные У КВ-у гломерно-дально-
мерные системы могут быть трех видов.
Угломерно-дальномерные системы с наземной РЛС навигационные
параметры определяют на наземных станциях. К ним относятся обыч-
ные наземные обзорные радиолокаторы и радиолокаторы, использую-
щие активный ответ специальных самолетных передатчиков (ответчи-
ков). Для передачи информации на борт самолета в состав таких
систем должны входить средства радиосвязи.
Угломерно-дальномерные системы с бортовыми РЛС получают на-
вигационную информацию непосредственно на самолете и состоят из
самолетного радиолокатора (БРЛС) и наземного радиомаяка-ответ-
чика.
Радиомаячные угломерно-дальномерные системы (наземный радио-
маяк с ответчиком дальномера н бортовое устройство) обеспечивают
определение на борту самолета значений Ас и DH относительно радио-
маяка.
Дальность действия ультракоротковолновых УДНС определяют по
формулам (1.2) и (1.5). Режим полета, в частности крен самолета, не
влияет на возможность применения УДНС с наземной РЛС и радио-
маячных УДНС; УДНС с самолетными радиолокаторами не могут при-
меняться при значительных кренах, так как при этом исключается
точное измерение курсовых углов наземных радиомаяков-ответчиков,
по которым рассчитывается пеленг самолета.
Оперативность получения навигационной информации (Лс и
зависит от вида УДНС. Системы с наземными и бортовыми радиолока-
торами, в которых параметры находятся оператором (штурманом),
обеспечивают только дискретное определение (в течение 1—2 мин)
линий положения и МС. Радиомаячные УДНС полностью автоматизи-
рованы и выдают значения Ас и Du непрерывно на стрелочных или циф-
ровых указателях (системы РСБН-2, ТАКАН, VOR DME).
Использование навигационной информации (нанесение МС на кар-
ту, выработка навигационного решения) занимает дополнительное
время, зависящее от приемов работы штурмана на карте и совершен-
ства инструмента для прокладки. Повышение оперативности исполь-
зования информации» может быть достигнуто применением комбиниро-
ванного навигационного прокладчика (КНП), обеспечивающего нане-
сение МС на карту одной операцией поАс и D (определяемому по из-
меренному Он). Это стало возможным благодаря совмещению в КНП
морского транспортира н измерительной линейки, нанесенной на диа-
метре транспортира (рис. 5.3). Порядок использования прокладчика
показан на том же рисунке.
В радиомаячных системах непрерывно поступающие значения Ас
и Dn могут использоваться как автоматически (автопрокладчики пути
самолета на карте, позиционные и директорные указатели навига-
ционных команд), так и вручную с использованием карты и прокла-
дочного инструмента.
146
Рис. 5.3. Комбинированный навигационный прокладчик (КНП)
Пропускная способность УДНС также различна в зависимости
от их вида. УДНС с наземной РЛС имеют низкую пропускную способ-
ность, так как измерительные операции по обоим каналам (Лс и DH)
неавтоматнзированы и могут выполняться оператором одновременно
только по одному самолету. Время обслуживания одного запроса до-
стигает 2 мин. Количественная характеристика пропускной способ-
ности рассчитывается по методике, изложенной в § 1.4. Пропускная
способность УДНС с самолетными радиолокаторами определяется
только возможностями наземного ответчика, который может ответить
в короткий промежуток времени большому, хотя и не бесконечному,
числу самолетов. Пропускная способность радиомаячных УДНС ог-
раничена только по каналу дальности, по при этом достаточно высока —
до 100 самолетов одновременно.
Точность навигационной информации УДНС определяется точ-
ностью (табл. 5.1) измеряемых параметров оАс и оОн и точностью их
дальнейшей переработки при решении навигационной задачи.
147
Таблица 5.1
Вид УДНС оЛс, град аОп, км
С наземной РЛС 0,5 0,5
С бортовой РЛС 2—3 2
Радиомаячная старого типа (VOR/ДМЕ) 1.5—1,7 0,2—0,3
Радиомаячная нового типа (РСБН-2, «ТАКАН») 0,1—0,25 0,1—0,2
При этом точность параметров линий положения при неавтоматизи-
рованном решении задач реализуется далеко не полностью, так как
при прокладке на карте допускаются погрешности как в углах (до 1°),
так и в расстояниях (до 1 мм карты). Так, например, если проклады-
вать линии положения, полученные с помощью РСБН-2, па карте
масштаба 1 : 2 000 000, то их точность практически будет определять-
ся ошибками графической работы, превосходящими ошибки исходных
параметров в 10—20 раз.
Точность определения МС угломерно-дальномерными системами
зависит только от точности линий положения ЛРПС (орлрпс) и
ЛРР (орлрр), так как их угол пересечения со всегда равен 90° и яв-
ляется оптимальным с точки зрения полного использования точности
исходной информации. Общая формула ошибки МС (1.11) после под-
становки в нее значений орг = орлрпс = oAcD, ор2 = врлрг— vD и со=
= 90° принимает вид
O'-УДНС = /о^Г2 + оП2. (5.2)
Определение МС при использовании УДНС с наземными и борто-
выми РЛС возможно как на карте, так и непосредственным расчетом
условных координат, используемых для коррекции АВК (см. § 3.3).
В отечественных радиомаячных системах, как правило, карта приме-
няется для получения МС только в целях общего контроля полета,
так как координаты МС определяются и используются для коррек-
ции счисления пли для непосредственного управления самолетом с
помощью автоматических устройств, входящих в эти системы.
Общая (суммарная) ошибка MCors, в случаях когда для его опре-
деления приходится пользоваться полетной картон, возникает в ре-
зультате:
погрешностей измерения аппаратурой УДНС исходных парамет-
ров линий положения (оАсгех и oDrex), приводящих к рассеиванию
МС со средней квадратической радиачьной ошибкой огТсХ;
погрешностей графической работы на карте, в которые входят не-
точность нанесения места РНТ на карту огрцт и ошибки откладывания
углов и расстояний от РНТ, вызывающие ошибку агПр-
148
Считая в первом приближении ошибки огтех, огрнт и огпр неза-
висимыми и подчиненными круговому закону распределения, можно
записать
ОГ2 = ^ОГтех + ОГВнт + ОГпр, (5-2')
где
агтех = /D2+oD2; огрнт= 1 мм карты; огпр=] Л<МС2 прD2
По этим формулам с учетом данных табл. 5.1 и известных из практики
погрешностей графической работы па картах обычными транспорти-
ром и линейкой можно рассчитать суммарные погрешности МС ог2.
При использовании карты масштаба 1 :2 000 000 для УДНС с на-
земной РЛС в зависимости от удаления от РНТ ог2 составляет 3—5 км
при доле ошибок графической работы 75—90%. Соответственно для
системы РСБН-2 : = 2,5—3,5 км и доля графических ошибок —
почти 100%.
Построение рабочих областей УДНС
Построение рабочих областей по заданной точности МС для УДНС
всех типов выполняется согласно общей методике, но значительно
упрощается благодаря свойствам поля линий положения этой систе-
мы: £лрр = 1 и со = 90°.
Область обеспеченного радиообмена самолета с наземной станцией
рассчитывается по методике определения дальности действия УКВ-
радиосредств. В зависимости от условий распространения УКВ в раз-
личных направлениях от станции эта граница может оказаться окруж-
ностью или кривой более сложной формы. Ее необходимо строить для
различных высот полета (эшелонов), разбив предварительно прост-
ранство вокруг РНТ па секторы, в каждом из которых по условиям
распространения дальность действия примерно постоянна.
Построение границ заданной точности, т. е. линий гРг = const,
всегда может быть выполнено аналитическим методом исходя из фор-
мулы 5.2, из которой получается уравнение линии постоянной (допу-
стимой) ошибки МС
^'доп = -------------= COnSt> (5’3)
которая является окружностью радиуса ООГдоп, описанная вокруг
места наземной станции. В этой формуле значение огДОп связано с за-
данной величиной Грт соотношением 1.10.
Окончательно внешняя граница рабочей области УДНС получается
на карте после нанесения на нее кривых ОП1аХ и Darдоп как граница
общей части площадей, охватываемых этими кривыми.
Внутренняя граница рабочей области определяется радиусом не-
рабочей зоны над станцией, который известен из ее технических ха-
рактеристик.
149
Пример. Построить рабочие области радиомаячной УДНС для гр = 3 л.и
при Рг = 0,98, 7/ = 4 000 м и И = 9 000 м. При этом: •
абсолютная высота антенны станции йа = 20 м\
местность имеет максимальные абсолютные высоты в секторе Ло = 35—
60°, йПр 700 м на удалении от радиомаяка = 60 км, в секторе А 0 = 60—110°
/гПр = 600 м на удалении = 30 км.
В остальных направлениях местность равнинная.
Технические ошибки измерения исходных параметров о4с = CJ,25, oD =
= 0,2 км, обработка информации ведется без применения карты.
Решение.
1. На карте (планшете) наносится место радиомаяка (рнс. 5.4).
2. Рассчитываются аналитически или по номограммам (см. рис. 1.3 и 1.5)
Оглах на характерных направлениях от радиомаяка для обеих заданных высот
полета, принимая их за Птц абс- Значения величин, данных и вычисленных
сводятся в таблицу 5.2.
Таблица 5.2
"абс. м Сектор, град di, км Лпр’ м ДА, м ^111 In СТ’ м Применяемая номограмма d2, км ^1пах — = ^4^, км
4 000 35-60 60 700 630 3 300 Рнс. 1.5 145 205
60—110 30 600 580 3 400 » 130 160
110-35 — —— .— — Рис. 1.3 — 250
9 000 35—60 60 700 680 8 300 Рис. 1.5 250 310
60—110 30 600 580 8400 » 230 260
100—35 — — — — Рис. 1.3 — 375
По полученным значениям Иглах в соответствующих секторах откладываются
точки, соответствующие максимальной дальности, точки соединяются между
собой плавными кривыми. В качестве Dmill принимаются окружности с радиуса,
ми, равными высотам полета самолета 4 000 и 9 000 л:
Рис. 5.4. Построение рабочей области УДНС
150
3. По формуле 1.10 рассчитывается допустимое значение огдоп, соответ
ств ующее заданной г0,оз “* 3 км‘.
3 3
ы доп = , ~ ~ 1 >5 км.
У-1п (1—0,98) УЗ,99
4. Рассчитывается радиус кривой заданной точности МС. Согласно фор-
муле 5.3,
„ | 1,52 —0,22
= 0,0174.0.25 =343 “
Вокруг радиомаяка радиусом 343 км проводится окружность огдоп = 1,5 км,
являющаяся одновременно и линией г0,98 = 3 oi.
5. Граница рабочей области в каждом секторе при данных высотах полета
(4 000 и 9 000 л) определяется той кривой Dmax или огдоп, которая в этом сек-
торе расположена ближе к наземной станции. Так, в секторе Ао = 35—110°
для высоты 9 000 м в качестве границы необходимо выбрать кривую Иглах, так
как в этом секторе она расположена ближе к станции, чем кривая огдоп. В сек-
торе Ао= ИО—35° граница определяется кривой огдоп. При высоте 4 000 м
во всех секторах кривая Пщах лежит внутри кривой агдоп, и поэтому она пол-
ностью определяет границу рабочей области системы.
В пределах рабочей области в зависимости от вида угломерно-
дальномерной системы с ее помощью можно:
контролировать путь самолета определением МС;
определять навигационные элементы движения (путевой угол,
угол сноса, путевую скорость) способом контрольного этапа, а при
использовании радиомаячных систем — и более точными способами;
осуществлять полуавтоматическое (по командным приборам) и ав-
томатическое навигационное управление самолетом;
контролировать движение самолета по заданной траектории сни-
жения.
Кроме того, УДНС может быть включена в состав автоматизиро-
ванных навигационных комплексов в качестве высокоточных датчи-
ков непрерывной информации о текущих координатах места самолета.
§ 5.3. ПРИМЕНЕНИЕ УГЛОМЕРНО-ДАЛЬНОМЕРНЫХ СИСТЕМ
С НАЗЕМНОЙ РЛС
К наземным РЛС, широко используемым при организации полетов,
относятся РЛС кругового и секторного обзора. Основным назначением
первых является контроль за движением самолетов по трассам и в
районе аэропорта, вторые предназначены для контроля и оказания
помощи экипажу при снижении непосредственно перед посадкой.
Навигационная информация в УДНС с наземной РЛС получается
в результате наблюдения радиолокационных отметок самолета
на экране кругового обзора или на экране, имеющем развертку
типа Б с координатами азимут — дальность. Оператор, пользуясь
масштабными электронными метками и применяя интерполяцию,
фиксирует мгновенные азимут самолета Ао и прямую (наклонную)
дальность Dn до него и сообщает их экипажу с указанием момента
времени наблюдения. Некоторые РЛС имеют специальный режим для
151
определения и высоты полета самолета. Полученные данные исполь-
зуются экипажем для определения МС па карте или для уточнения
условных координат самолета вводом их в АВ1\, а также для опреде-
ления навигационных элементов движения.
Недостатком информации от РЛС является ее дискретность и невы-
сокая оперативность как при определении исходных данных, так и при
использовании их на борту самолета, что приводит к ее устареванию.
Определение МС
Место самолета на карте определяется по его полярным коорди
натам Ас и D, для чего можно применять обычные транспортир и линей-
ку, прокладчик КНП (см. рис. 5.3) или предварительную подготовку
карты с нанесением от точки РЛС отрезков ЛРПС (ортодромий) через
5—10’ азимута и окружностей ЛРР через 10, 20 или 40 км удаления.
Такая подготовка карты значительно облегчает работу штурмана и
несколько повышает оперативность определения МС, но очень пере-
гружает карту.
Непосредственное (без применения карты) определение коорди-
нат самолета заключается в преобразовании полярных координат Ас
и D в ортодромические х и у, которые ввиду небольших дальностей
действия РЛС можно отсчитывать в прямоугольной системе коорди-
нат. Преобразование можно выполнить аналитическим путем (с исполь-
зованием линейки НЛ-10М) по формулам, получаемым из рассмот-
рения рис. 5.5:
xc = xp+Ax = xp + Dsin(Ac — ру); |
Ус = г/р + Ду = !/р + О cos (Ас—ру), } ( ’
где хр и г/р — ортодромические координаты наземной РЛС в услов-
ной системе координат, связанной с данным отрезком ЛЗП; Ру — ус-
ловный путевой угол ЛЗП, отсчитанный от истинного меридиана РЛС.
Рис. 5.5. К преобразованию полярных координат самолета в ортодроми-
ческие аналитическим путем
152
Рис. 5.6 Преобразование полярных координат в ортодромические при помощи
расчетчика НРК 2
Очевидно, что хр, ур и f)y можно определить до полета с настолько
высокой точностью, чтобы их погрешности практически не влияли на
конечный результат. Однако оперативность аналитических расчетов
хс и ус столь низка (3—4 мин), что получаемые результаты уже мало
пригодны для коррекции показаний автоматических вычислителей
координат.
Более быстрым, хотя и несколько менее точным, является графиче-
ское преобразование с помощью векторного построителя расчет-
чика НРК-2. При этом определяются величины Дх и Л//, входящие в
формулы (5.4).
Пример. На прозрачный лимб ветра наносится точка с Ас = 60°
и D = 75 км (рис. 5.6), а лимб делением, равным ру = 220’, устанав-
ливается против стрелки диаметра номограммы скоростей. Затем с
помощью прозрачного сектора с ортогональной сеткой, совмещая его с
одним из квадрантов номограммы расчетчика, отсчитываются величины
153
Ах= —25 кл и А// = —70 км с их знаками: положительные отрезки ау
направлены от центра лимба к концу диаметра номограммы, обозна-
ченному стрелкой, а положительные отрезки Ах— вправо по перпен-
дикуляру к диаметру. (В нашем примере принято, что одно большое
деление на шкале диаметра и на секторе равно 20 км.)
Исследования ошибок определения МС за счет технических погреш-
ностей измерения координат и графической работы на НРК-2 дают
следующие величины суммарных
радиальных ошибок и суммарных
ошибок ортодромических коорди-
нат (табл. 5.3).
Сравнивая эти величины оши-
бок <тг с ошибками счисления ко-
ординат с помощью АВК типа
НИ-50 или АНУ-1 («Трасса»), ви-
дим, что уже после пролета само-
Таблица 5.3
D, км or, км ох (оу), км
100 2,7 1,9
200 5,3 3,3
250 6,4 4,5
летом расстояния 100 км ошибки счисления становятся соизмери-
мыми, а в дальнейшем превосходят ошибки определения МС по
РЛС, т. е. коррекция показаний АВК целесообразна.
В приведенных расчетах не учитывалось запаздывание ввода но-
вых координат х и у в счетчик координат АВК- Для его учета достаточ-
но ввести поправку А//зап только в координату у вследствие пере-
мещения самолета в течение времени от определения Ас и D на РЛС
до установки нового значения у на счетчике АВК. Это время /зап =
= 1—2 мин (при работе с НРК-2). Поправка А//зап = U7aan.
Точность учета поправки зависит от точности знания путевой ско-
рости самолета: например, при ошибке путевой скорости А№ = 20—
60 км ч и /зап = 2 мин \z/aan = 0,7—2 км.
Учет ошибки от запаздывания в координате х излишен, так как
боковые смещения самолета за 1—2 мин полета невелики (при W =
= 660 км, ч — не более 1 км).
Значительное повышение точности определения МС может дать
организация синхронного отсчета экипажем координат самолета на
РЛС н момента времени. Так как время полного обращения антенны
наземной РЛС равно 10—20 сек, то отметка самолета на экране дви-
жется скачкообразно. Точные координаты самолета соответствуют
только моменту прохода линии развертки через отметку самолета.
Оператор в этот момент подает команду «Отсчет», штурман замечает
время с точностью до долей минуты, а затем получает значения Ас
и D, относящиеся к замеченному времени. При таком отсчете и при
использовании НРК-2 время запаздывания можно уменьшить до 1 мин
(работа на НРК-2 занимает 20—ЗОсек) и тем самым повысить точность
коррекции МС.
Определение навигационных элементов движения
Определение навигационных элементов движения возможно с
применением карты или без нее, так же как при определении МС. Карта
используется при нахождении фактического путевого угла и путевой
скорости способом контрольного этапа. Для определения мест само-
154
лета используются одна или две наземные РЛС. При этом во всех слу-
чаях желательно исходные параметры Ас и D измерять синхронно
с моментом Т наблюдения.
Точность определения IVх и |3 оценивается на основе соотношений
(3.14). Например, если МС определялись на удалениях от РЛС =
= 100 км и D, = 200 км с применением синхронизированных отсче-
тов и прокладчика КНП на этапе S = 90 км, то, принимая ozy = 3 км
и ог2 = 3,4 км, получим
— = W + 3’4.._ ^ о,О36, <т₽° = 57°,3 : 0,036^2°.
V2-90
проводится прямая, для чего поворотом лимба
на одной из радиальных прямых номограммы
пределами расчетчика), вдоль которой от руки
Применение базисного способа определения навигационных элементов
по данным наземной РЛС заключается в двукратном получении поляр-
ных координат самолета от одной станции с последующим расчетом [3
и 11/. Теоретическая схема способа показана на рис. 5.7. Практически
задача решается графическим способом с помощью векторного пост-
роителя расчетчика НРК-2 в следующем порядке:
по полученным полярным координатам А ~
наносятся две точки
крупным);
через эти точки
точки размещаются
(пересекающихся за
проводится линия;
в этом положении, пользуясь дугами скоростей номограммы,
определяется S как расстояние между точками, измеренное в применя-
емом масштабе;
расчет Uv по полученному S и известному времени t между изме-
рениями полярных координат выполняется по соответствующим шка-
лам, расположенным на той же стороне расчетчика;
для получения значения [3 прямая, проходящая через те же точки,
поворотом лимба располагается параллельно диаметру номограммы,
так чтобы вторая точка была выше первой; в этом положении значение |3
отсчитывается по азимутальной
шкале лимба против диаметра но-
мограммы, обозначенного стрелкой.
Путевой 5гол можно также от-
считать и без проведения линии че-
рез точки: после расположения этих
точек на радиальной прямой сле-
дует прочесть соответствующий ей
угол сноса (с его знаком) и сложить
его с показанием азимутальной
шкалы против стрелки диаметра.
Пример. От наземной РЛС полу-
чены с интервалом / = 6 мин 40 сек
полярные координаты самолета:
ci, и Лс2, £)2 на лимб
(масштаб длин выбирается по возможности более
Рис. 5 7.
ния
Базисный способ определе-
навигационпых элементов при
использовании наземной РЛС
155
Рис. 5.8. Расчет навигационных элементов при помощи НРК-2
ЛС1 = Ю°, DH1 = 71 км, Лсз = 48 , Dh2 = 129 км, высота полета
Н = 8 000 м. Определить фактический путевой угол (3 и путевую
скорость U7.
Решение. 1. Так как измеренные наклонные дальности пре-
восходят высоту более чем в 8 раз, их можно принять за горизонталь-
ные дальности.
2. Масштаб длин выбираем равным 40 км в одном большом делении
шкалы диаметра.
3. Наносим на лимб точки Mi и М2 по их координатам.
4. Разворотом лимба располагаем точки на одной радиальной пря-
мой (пунктирная линия на'рис. 5.8, а) и отсчитываем длину S = 85 км
этапа, по которой рассчитываем путевую скорость W.
5. Проводя от руки прямую через точки Л4Х и М2 и установив ли-
нию параллельно диаметру номограммы, отсчитываем величину Р =
= 77° по азимутальной шкале (рис. 5.8, б).
§ 5.4. ОСОБЕННОСТИ ПРИМЕНЕНИЯ РЛДИОМАЯЧНЫХ УГЛОМЕРНО-
ДЛЛЬНОМЕРНЫХ СИСТЕМ БЛИЖНЕИ НАВИГАЦИИ
Радиомаячные УДНС ближней навигации, кроме общих для всех
УДНС свойств, имеют свои специфические особенности:
полная автоматизация определения Ас и Dn и их непрерывная
индикация на стрелочных или цифровых приборах;
высокая точность измерения исходных параметров (аЛсл
«0°, 12 oDH « 0,1 км),
наличие специальных автоматически действующих устройств,
вырабатывающих частичное решение навигационной задачи методом
15G
непосредственной коррекции координат (позиционных сигналов по
боковому отклонению от ЛЗП);
автоматический контроль работоспособности каналов измерения
азимута и дальности;
автоматизированный контроль прохода самолетом заданных точек
ЛЗП;
возможность выдачи сигналов в другие навигационные системы.
Благодаря этим особенностям радиомаячные УДНС обеспечивают
решение широкого круга задач: они являются системами ближней на-
вигации па трассах, системами инструментальной посадки ( с помощью
курсо-глиссадной радиомаячпой группы), а также средством назем-
ного диспетчерского контроля за полетами самолетов.
Радиомаячные УДНС ближней навигации имеют в своем составе па
земле: азимуталыю-дальномерный радиомаяк, являющийся по су-
ществу совмещением двух станций (азимутального передатчика и даль-
номерного ответчика); посадочные курсовой и глиссадный радиомаяки
и отдельный ответчик дальномера (расположенный вблизи глиссад-
ного радиомаяка); на борту самолета: запросчик дальности; приемно-
индикаторные устройства азимутального и дальномерного каналов
(обеспечивающие также работу и с курсо-глиссадными маяками);
счетно-решающие устройства для выработки позиционных сигналов
по боковому отклонению от ЛЗП и по отклонению от программной
высоты полета.
Режимы работы
Режимы работы радиомаячных УДНС условно делят на навига-
ционные режимы и посадочный режим.
В навигационных режимах информация о МС получается с помощью
основного азимуталыю-дальномерного радиомаяка, что обеспечивает
полуавтоматическое вождение самолета по линии пути заданной
формы, а также программированное снижение. К таким режимам
относят:
режим «Азимут от» («Азимут на»), обеспечивающий полуавтомати-
ческое вождение самолета по ортодромической ЛЗП, проходящей
через радиомаяк;
режим «Орбита» (левая и правая), обеспечивающий полуавтомати-
ческий полет самолета по круговой ЛЗП вокруг радиомаяка;
режим «СРП» (счетно-решающий прибор), который позволяет
вести полуавтоматический иолет по любой прямолинейной ЛЗП,
не проходящей через радиомаяк;
режим «Пробивание облачности», являющийся режимом програм-
мированного (по углу снижения) полета в направлении на основной
радиомаяк системы (является дополнительным к режиму «Ази-
мут на»).
Навигационные режимы могут применяться в полетах по маршрутам
и при заходе на посадку. При их использовании могут решаться
также н дополнительные задачи:
автоматизированный контроль подлета и пролета назначенных то-
чек ЛЗП по специальным сигнальным лампочкам;
157
полуавтоматический подбор требуемого путевого угла для выхода
от любого неизвестного МС в назначенную точку, заданную азимутом,
и дальностью относительно радиомаяка;
определение фактической путевой скорости и путевого угла.
Посадочный режим обеспечивает пилотирование самолета в створе
посадочной полосы по стандартной глиссаде (по курсовой и глиссадной
зонам наземных радиомаяков). В этом режиме могут также опреде-
ляться места самолета, так как, кроме индикации нахождения само-
лета в створе полосы, экипаж получает информацию и об удалении от
посадочного ретранслятора (ответчика) дальномера, расположенного
вместе с глиссадным маяком вблизи траверза точки приземления.
Органы управления и индикации
Для выбора режима работы системы и решения навигационных
задач экипаж использует оперативные органы управления и индика-
торы навигационной информации, расположенные в кабинах пилота
и штурмана.
Щиток управления (ЩУ, рис. 5.9) служит:
для выбора канала работы радиомаяка; для этого используют два
селекторных переключателя: одним устанавливаются десятки но-
мера канала маяка, а вторым — единицы;
для выбора режима работы системы, определяемого информацией,
подаваемой на комбинированный пилотажный прибор (КПП, рис. 5.11),
для чего переключатель рода работы КПП устанавливается в по-
ложения — «Выкл. КПП», «Азимут на», «Азимут от», «Орбита лев.»,
«Орбита прав.», «СРП» и «Посадка»;
для контроля и регулировки схем измерения азимута и дальности,
а также длительности стробирующего импульса схемы, для чего ис-
пользуются две нажимные рукоятки «Контроль»;
Рис. 5.9. Щиток управления РСБН-2
158
Рис. 5 10. Указатели дальности и азимута самолета от радиомаяка
РСБН-2:
штурмана (а) и пилота (б)
для задания параметра АСз ортодромнческой ЛЗП в режиме «Ази-
мут»; для этого используют штурвальный селектор «Азимут» и дву-
шкальный указатель устанавливаемого азимута;
для задания параметра ЛЗП в виде окружности £)3; в этом случае
применяют второй штурвальный селектор «Орбита» с цифровым ука-
зателем устанавливаемого значения радиуса ЛРР;
для включения схемы программного снижения при использовании
вспомогательного режима «Пробивание облачности».
Имеющаяся на ЩУ сигнальная лампочка «Посадка» своим заго-
ранием указывает на переход системы в посадочный режим, который
может быть включен и с другого пульта управления — щитка пилота
(ЩП) независимо от положения селектора режимов КПП на ЩУ.
Селекторы «Азимут» и «Орбита» одновременно служат и для установ-
ки координат контрольных точек, проход которых самолетом авто-
матически индицируется загоранием специальных лампочек «Подлет
и «Пролет» на приборных досках.
Прямопоказывающие приборы дальности и азимута (ППДА) пило-
та и штурмана (рис. 5.10) являются основными индикаторами ис-
ходных измеряемых параметров — истинного пеленга самолета Ас и
прямой (наклонной) дальности D„ от радиомаяка. При работе системы
во всех навигационных режимах показания ППДА не зависят от поло-
жения каких-либо органов управления; в режиме «Посадка» азиму-
тальные шкалы не используются, а счетчики дальности указывают
удаление самолета от наземного ретранслятора дальномера (до точки
приземления). Азимутальная шкала ППДА штурмана (двухступен-
чатая с двумя стрелками) обеспечивает отсчет с точностью ДтаХА0 =
= 2cl4c = 0°,05 (так как цена наименьшего деления равна 0°,1), что
вполне обеспечивает реализацию технической точности измерения
азимута. Указатели дальности обеспечивают отсчет с точностью до
0,1 км (цена деления барабана счетчика). Однако возможность фикса-
ции дальности до долей километра по счетчикам во многих случаях
159
затруднительна, так как при значительной скорости самолета в на-
правлении маяка (или от него) цифры десятых меняются очень быстро.
Комбинированный пилотажный прибор (КПП, рис. 5.11) пред-
ставляет собой совмещенный указатель следующих параметров: ли-
нейных отклонений от выбранной ЛЗП (вертикальная стрелка),
отклонений от текущего значения программной высоты полета в ре-
жимах «Пробивание облачности» и «Посадка» (горизонтальная стрелка)
и курса самолета (азимутальная шкала и радиальная стрелка с круж-
ком). Азимутальная шкала может вручную устанавливаться заданным
значением путевого угла против неподвижного индекса в верхней
части прибора; значение измеряемого курса от этого не меняется.
В центральной части шкалы КПП имеются два бленкера, сигнализи-
рующих своим закрытием исправность каналов измерения азимута
(или курса по КРМ) и глиссады. КПП является основным навига-
ционно-пилотажным прибором угломерно-дальномерной системы,
устанавливаемым в кабине экипажа (в тех случаях, когда радиома-
ячная УДНС не входит в более сложный навигационный комплекс,
вырабатывающий не только позиционные, по и командные сигналы
для управления самолетом).
Блок управления счетно-решающим прибором (БУ СРП, рис. 5.12)
служит для задания ЛЗП в виде прямой, не проходящей через радио-
маяк. Это осуществляется путем ручного ввода величин путевого уг-
ла р ЛЗП относительно истинного меридиана маяка, азимута' Ап
и дальности £)0 одной из точек этой ЛЗП от того же радиомаяка. Все
три величины вводятся штурвальными селекторами и контролируются
по двухшкальным азимутальным указателям (установки р и /10) и
цифровому счетчику (установка О0).
Щиток пилота (ЩП) устанавливается у командира корабля; он
служит для переключения бортового оборудования системы в режим
«Посадка» и выбора необходимого капала специальных посадочных
радиомаяков, входящих в наземное оборудование радиомаячной УДНС.
При отсутствии на аэродроме таких маяков используются посадочные
Рис. 5.11. Комбинирован-
ный пилотажный прибор
системы РСБН-2
Расстояние
ffo цели
Рис 5.12. Блок управления счетно-решающим при-
бором РСБН-2
160
радиомаяки системы СП-50, для чего на борту самолета должны на-
ходиться соответствующие приемные устройства.
Сигнальные лампочки «Отказ азимута» и «Отказ дальности» заго-
раются, если соответствующий канал становится неработоспособным
(в том числе и по причине выключения наземных радиомаяков).
Благодаря высокой степени автоматизации всех процессов работы
системы ручные операции экипажа по управлению ограничиваются
включением системы, выбором и установкой на ЩУ необходимого ка-
нала азимутально-дальномерного радиомаяка и проверкой (если нужно,
калибровкой) измерительных схем азимута и дальности при помощи
оперативных схем азимута и дальности и рукояток «Контроль».
На включение питания, установку номера канала радиомаяка и
настройку на радиомаяк затрачивается до 5 мин. Экипаж окончание
автоматического процесса настройки определяет по ряду признаков:
а) гаснут контрольные лампочки «Отказ азимута» и «Отказ дальности»;
б) прекращается быстрое изменение показаний стрелки и цифровых
указателей на ППДА; в) закрывается бленкер азимутального канала
на приборе КПП.
Измерительные схемы калибруются по инструкциям, в которых
указываются контрольные значения проверяемых параметров и ме-
тодика калибровок. Опыт эксплуатации показывает, что калибровки
схем измерения азимута при переключении аппаратуры на канал но-
вого радиомаяка, как правило, необходимы и должны выполняться
в воздухе.
Другие операции экипажа связаны с использованием счетно-ре-
шающих схем, обеспечивающих выработку позиционных сигналов для
полета по различным ЛЗП. При этом необходимо выбрать режим
работы на ЩУ и установить (на ЩУ или на БУ СРП) соответствую-
щие угловые и линейные параметры.
§ 5.5. ПОЛЕТ ПО ЛИНИИ РАВНЫХ ПЕЛЕНГОВ САМОЛЕТА И ЛИНИИ РАВНЫХ
РАССТОЯНИИ (РЕЖИМЫ «АЗИМУТ» И «ОРБИТА»)
В результате автоматизированного решения навигационной зада-
чи с помощью радиомаячной УДНС, позволяющего исключить исполь-
зование карты, возможен полет самолета по линии равного пеленга в
направлении от радиомаяка или на него. Самолет по такой линии за-
данного пути может двигаться при условии постоянного сохранения
равенства
4 = 4, (5.5)
где Ас — измеряемое системой текущее значение истинного азимута
самолета относительно наземного радиомаяка, а А3 — его заданная
величина (параметр ЛРПС). Возникающее при невыполнении усло-
вия (5.5) боковое отклонение самолета от ЛЗП (рис. 5.13)
x = (4-/lcn)'D. (5.6)
Величина х служит параметром, по которому производится управ,
ление боковым движением самолета (метод непосредственной коррек’
6 Осадшнй В. И. 161
Рис. 5.13. Схема полета в режиме «Азимут» системы РСБН-2
цни координат). Для непрерывного вычисления х используются из-
меряемые системой Ас и D и вводимое вручную (селектором «Азимут»
на ЩУ) значение Асз. На нуль-прибор (вертикальная стрелка КПП)
подается величина г, связанная с боковым отклонением х приближен-
ной зависимостью, показанной па рис. 5.14 сплошной кривой. Если
фактический курс самолета отличается от величины заданного путевого
утла менее чем на 90°, то направление отклонения стрелки КПП (впра-
во или влево) указывает, где находится ЛЗП по отношению к самолету,
т. е. в каком направлении следует разворачивать самолет для выхода
на лее. При выдерживании стрелки КПП на нуле шкалы (в централь-
ном кружке) выполняется условие 5.5 и самолет движется по ЛЗП.
Нелинейность зависимости вызвана необходимостью обеспечить до-
статочный диапазон боковых отклонений самолета в пределах шкалы
ограниченных размеров и в то же время необходимостью получения
наибольшей чувствительности
г,цел ед
Рис. 5.14. Закон управления вертикальной
стрелкой КПП (чувствительность прибора)
вблизи нулевых значении х и
z, т. е. при непосредственном
выходе на ЛЗП и полете по
ней.
Вывод самолета на ЛЗП
по показаниям КПП
Поскольку показание вер-
тикальной стрелки КПП яв-
ляется позиционным сигналом
(т. е. определяет только от-
клонение от ЛЗП, по пе ско-
рость его изменения), оно не-
достаточно для плавного вы-
вода и надежной стабилиза-
ции самолета на ЛЗП.
11оэтому показания стрелки
КПП сочетаются с показа-
162
Рис. 5.15. Схема вы-
вода самолета на ЛЗП
при отсутствии ветра
ниями стрелки курсового прибора, шкала которого установлена нз
значение заданного путевого угла Р3, отсчитанного от того же мери-
диана, что и курс, подаваемый на прибор.
Так как компасная шкала установлена на значение путевого угла
ЛЗП, отклонение компасной стрелки от неподвижного индекса КПП
(рис. 5.15) указывает величину угла Ау между заданным направле-
нием полета и осью самолета, т. е. угол подхода самолета к линии за-
данного пути. В то же время вертикальная стрелка КПП своим откло-
нением от центра прибора показывает величину z, соответствующую
линейному смещению х самолета от той же ЛЗП.
Если совместить верхний конец вертикальной стрелки КПП с круж-
ком компасной стрелки и вести самолет так, чтобы совмещение сохра-
нялось, самолет будет приближаться к ЛЗП с постепенно уменьшаю-
щимся углом подхода и при отсутствии ветра плавно «впишется» в
ЛЗП с курсом, равным заданному путевому углу.
При наличии ветра картина полета усложняется. Пусть в некото-
рый момент времени самолет находится в точке М (рнс. 5.16, а), вы-
полняя полет при совмещенных концами стрелках КПП и курса. Как
видно из рисунка, в этом случае проекция путевой скорости самолета
на боковую ось, перпендикулярную ЛЗП,
Wx = — = V sin Ay 4- U sin е0,
dt
где V и U — модули скоростей самолета (воздушной) и ветра; Ау —
угол, составленный ЛЗП и осью самолета (угол подхода); 8 — угол
ветра относительно данной ЛЗП.
Согласно правилу полета с совмещенными стрелками (рис. 5.16, б)
sin Ау — — —.
г
Величина отклонения z = /(х) стрелки КПП выражается в долях
условной единицы, за которую принято расстояние от центра прибора
6* 163
Рис. 5.16. Вывод уравнения бокового движения при выходе на ЛЗП по
КПП при боковом ветре
до четвертой точки, соответствующее такому боковому отклонению
хнач самолета от ЛЗП, с которого начинается эффективное действие
вертикальной стрелки КПП после «отшкаливания». Эта величина бо-
кового отклонения, отложенная в обе стороны от ЛЗП, определяет
зону действия КПП. В принятой примерной зависимости г = /(х)
(см. рис. 5.14) зона действия КПП равна 5,4 км. Величина г является
константой прибора и равна
г= - усл' еД;- = 1,37 усл. ед.
sin 47°
Таким образом, в общем случае
sin Ду — — = — 0,73 f (х).
Подставив значение sinAy в формулу для Wx, получим дифферен-
циальное уравнение бокового движения самолета (т. е. уравнение
относительно координаты х):
— —0,73 Vf (х) + t/sin е0
dt
или, разделив переменные,
164
Практическая возможность интегрирования этого уравнения за-
висит от вида функции f(x). В первом приближении её можно аппрок-
симировать отрезками прямых по участкам (см. рис. 5.14). Аналити-
чески это приближение выражается линейной зависимостью
z — f (х) = kx + b,
где k и b меняются по участкам:
при—5,4 < х < —2,5
при — 2,5 <х< 2,5
при 2,5<х< 5,4
k = 0,11 и
6 = 0,27 и
6 = 0,11 и
Ь= —0,39,
Ь = 0,
6 = 0,39.
(5.8)
(5.9)
Проинтегрируем уравнение 5.7, подставив в него выражение для
z = f(x) из формулы (5.8):
[ ----------—------7--= —V [ dt,
0,73fex + 0,73 5-^p- J
где х0 — координата, при первом совмещении стрелок КПП. В резуль-
тате получим
—i—In [0,73 6х + 0,73 6 — 6'5ine°]* Vt-
0,73k I V )А-0
отсюда
In |о,73 6х + 0,736—-0,73 kVt +
+ ln [0,736xu + 0,736 — .
( ° VI
После потенцирования получим
0,73kx + 0,736 — = е-°.7зш (0 уз/гх , 0 73b _ ^sine^l
V 1 0 V J
и окончательно
х = х0е-°’73*^+ —1_{о,736— —[е-о.7з*17 —1}_ (5.Ю)
Из полученного конечного уравнения бокового движения самолета
видно, что при t =0 х = х0, а при неограниченном продолжении по-
лета с совмещенными стрелками КПП, т. е. при оо , боковое от-
клонение самолета от ЛЗП
хСЛ=-----(Tsi£eo_ _ const (5.Н)
k 0,73k V v
т. e. самолет будет лететь параллельно ЛЗП на некотором удалении от
нее (рис. 5.17). При этом в формуле (5.11) следует считать 6 = 0,
165
так как вблизи ЛЗП кривая зависимости /(х) аппроксимируется сред-
ним прямолинейным отрезком, для которого, согласно формуле (5.9),
k = 0,27 п /> = 0.
Тогда
U sin еп с t U sin е0
«V оо — О > 1 ' " .
0,73-0,27 V V
При полете параллельно ЛЗП вертикальная и компасная стрелки
КПП перестают перемещаться, а курс оказывается подобранным по
фактическому ветру. Установившийся угол между компасной стрелкой
и неподвижным индексом является углом сноса а (положение С на
рис. 5.17).
Как видно из формулы 5.11, величина и знак смещения фактической
линии путл от заданной не зависят от начального положения самолета
относительно ЛЗП (от х0); фактическая линия п}тп всегда смещена от
ЛЗП в подветренную сторону (в направлении сноса с ЛЗП), а
знак хж (вправо пли влево от ЛЗП) определяется знаком величины
sin е0. Однако в зависимости от первоначального положения самолет
выйдет па линию пути, параллельную ЛЗП, либо до пересечения
самой ЛЗП, т. е. до прихода вертикальной стрелки на нуль (кри-
вая 1, рис. 5.17), либо после этого (кривая 2). Очевидно, пересе-
чение ЛЗП произойдет, если в исходном положении самолет находится
в наветренной стороне от ЛЗП, а сближение без пересечения — при
исходном положении его в подветренной стороне. Этот вывод может
быть сделан также и чисто аналитическим путем, если принять в урав-
нении 5.10 х = 0 и Ь = 0 и найти условие положительности корня
этого уравнения (значение времени t не может быть в нашей задаче от-
рицательным).
Рис. 5.17. Конечный этап вывода самолета па ЛЗП при ветре
166
Таким образом, при боковом ветре правило совмещения стрелок,
обеспечивая плавное сближение с ЛЗП и подбор курса по фактиче-
скому ветру, не позволяет окончательно вывести самолет на ЛЗП.
Поэтому на последнем этапе вывода в непосредственной близости от
ЛЗП, когда стрелка КПП подходит к центральному кружку, переходят
к управлению самолетом по одной этой стрелке. В это время самолет
находится на удалении 500—600 м от ЛЗП с практически подобранным
курсом полета.
Удерживая некоторое время вертикальную стрелку на нуле, само-
лет стабилизируют на линии пути, автоматически отрабатывая при
этом угол сноса на приборе (если курсовая шкала КПП была установ-
лена вручную на заданное значение путевого угла).
В проведенном анализе процесса выхода на ЛЗП самолет рассмат-
ривался как материальная точка, т.е. не учитывались его маневренные
качества, в частности, возможность выполнять развороты с определен-
ным радиусом. В то же время эти свойства самолета существенно влия-
ют на возможность выполнения маневра, определяемого правилом
совмещения стрелок. Для плавного выхода на ЛЗП самолет должен
допускать развороты с определенными требуемыми кренами.
Можно показать, что величина требуемого крена будет наибольшей
в начальный момент совмещения стрелок и уменьшается по мере при-
ближения к ЛЗП. Величина крена, кроме того, зависит от воздушной
скорости, скорости ветра, угла ветра и угла подхода самолета к ЛЗП.
При этом требуемый крен тем бопьше, чем больше начальный угол
подхода, а также увеличивается при наличии составляющей ветра в
сторону ЛЗП. В соответствии с этим для конкретных условий сущест-
вует предельно большое значение угла подхода, до которого возможен
выход на ЛЗП по КПП. Однако сама конструкция прибора КПП ог-
раничивает максимальный угол подхода величиной 47°, соответству-
ющей положению вертикальной стрелки на четвертой точке шкалы
(рис. 5.16, б).
С учетом правила совмещения стрелок и маневренных возмож-
ностей самолета процесс выхода на ЛЗП по прибору КПП можно рас-
членить на несколько характерных этапов (рис. 5.18).
1. Приближение к ЛЗП с большими углами подхода до расстояния
хп[, начала разворота, зависящего от возможного радиуса R разворота
(участок / на рис. 5.18), и сноса самолета ветром за время /90 разво-
рота на 90‘
х„р = R ± Ut90 sin е0 = R I 1 ± Л- Y
\ 2 п J
где п = V/U', знак плюс соответствует подходу к ЛЗП с наветренной,
а знак минус — с подветренной стороны.
2. Полет с постоянным креном, т. е. с допустимым радиусом раз-
ворота (участок 2), в процессе которого угол подхода уменьшается до
допустимого для полета по КПП, а компасная и вертикальная стрелки
приходят к совмещению своими концами.
167
Рис. 5.18. Этапы вывода самолета на ЛЗП по КПП системы РСБН-2
3. Полет по правилу совмещенных стрелок (участок 3):
а) при подходе с подветренной стороны—до выхода на линию, па-
раллельную ЛЗП (точка г), и прекращения движения совмещенных
стрелок;
б) при подходе с наветренной стороны—до пересечения ЛЗП, т. е.
до прихода вертикальной стрелки в центр шкалы.
4. Полет по одной вертикальной стрелке с приведением ее к центру
и стабилизацией в этом положении—окончательный вывод самолета
на ЛЗП и полет по ней подобранным курсом.
Эта последовательность вывода самолета на линию пути в основ-
ном сохраняется и в других режимах нуль-вождения по КПП.
Подобранный курс позволяет продолжать полет в том же направ-
лении и за пределами дальности действия радиомаяка.
Точность полета по ЛРПС
Точность полета по ЛЗП (ЛРПС) в режиме «Азимут» зависит от
точности определения и индикации текущего бокового отклонения
стхОпР самолета и от точности выдерживания его нулевого значения
охппп (удержания вертикальной стрелки КПП в центре шкалы) при
пилотировании. Так как схема обработки сигнала на КПП решает
формулу 5.6, то
^опр = V<ь4?из D2 4- СгЛ^з D2 + ДА2 CfD2 + ОХннстр •
В этой формуле
ДА—-АС113—Асз и <l4c3 = ]/ <tAji3u + оАуст
168
зависят как от ошибки знания азимута ЛЗП (сМлзп), так и от ошиб-
ки установки этого азимута на щитке управления (оЛуот); стл'нпетр —
ошибка отработки сигнала на КПП, которую можно считать равной
0,017-0°, 1D, т. е. не выше ошибки измерения азимута системой.
Тогда, пренебрегая в формуле для ох0пР членом ЛЛстО, имеющим
более высокий порядок малости по сравнению с остальными, и считая
// П° I \ 2
о°, i2+ 1 » o°,i
(если азимут ЛЗП определяется аналитически с точностью стАдзп =
= 0°,1), получим
<тхопр = 0,0174 D /0,12 + 0,12 + 0,12 л 0,003 D.
Ошибка пилотирования <тх1ШЛ зависит от среднего квадратического
отклонения сггпил вертикальной стрелки КПП от центра, выраженного
в условных единицах. Приняв за максимальное отклонение вертикаль-
ной стрелки радиус центрального кружка, равный 0,2 усл. ед., полу-
чим Ст2пил = 0,2 : 3« 0,066 усл. ед. С учетом формулы 5.8 при k =
= 0,27 и Ь = 0 соответствующее боковое отклонение самолета от
ЛЗП
0,066 п
охпил = —~ = —’— ~ 0,25 км.
пил k 0,27
Таким образом, в режиме «Азимут» общая ошибка выдерживания
ЛЗП
<JX2 = /ох?пр + <тх£„л = /(0,003 О)2 + 0,252.
При дальностях 100, 200 и 300 км <7*2 соответственно равны 0,4,
0,65 и 0,94 км.
При измерении А03 по карте даже крупного масштаба ошибка
<7хОпр увеличивается до 10 раз, а общая точность выдерживания ЛЗП
практически будет равна стхх = 0,030; таким образом, при О = 100 км
oxs = 3 км.
Определение навигационных элементов движения
Путевую скорость и путевой угол с помощью радиомаячной УДНС
можно найти способом контрольного этапа и базисным способом. Но
так как при этом точность нахождения результатов определяется фак-
тически только точностью графических работ на карте или на расчет-
чике, эти способы далеко не исчерпывают техническую точность си-
стемы. Поэтому при использовании радиомаячной системы в режиме
«Азимут» применяют особые способы определения навигационных эле-
ментов движения.
Полуавтоматическое определение угла сноса в полете по ЛРПС
(на или от радиомаяка) основано на высокой точности выдерживания
ЛЗП при использовании КПП. Зная значение заданного путевого угла
РзХ» участка ЛЗП в той же системе отсчета (относительно того же опор-
169
кого меридиана 10), что и используемый курс самолета ух», можно счи-
тать, что фактический путевой угол совпадает с рзх,>. При этом угол
сноса
а~Рф>.„ VCpXo — ₽зХ0 VcpV
Угол сноса может быть также получен без вычислений, простым
отсчетом по шкале курсов КПП, установленной Па значение факти-
ческого путевого угла (принимаемого равным ЗПУ участка ЛЗП —
РзХ0 как угол между стрелкой компаса и неподвижным индексом).
Положительный знак сноса соответствует направлению отсчета, сов-
падающему с движением часовой стрелки. В обоих приемах точность
измерения угла сноса зависит в основном от точности определения
среднего курса, так как ошибка фактического путевого утла значи-
тельно меньше ошибки среднего курса
ста = 1/ .
' ~фЛо * • Ср Ащ ’ ср Ло
Путевая скорость в полете по ЛРПС определяется по скорости
изменения дальности до радиомаяка:
Ц7 = |£>i~D11 , (5.12)
где D2 и Dj — горизонтальные дальности, определяемые пересчетом
из соответствующих наклонных дальностей Ои3 и Dnl, отсчитываемых
по счетчику прибора ППДА. Пересчет существенно снижает оператив-
ность определения путевой скорости. Если в формуле (5.12) разность
ДЕ) = D2 — Di принять равной измеренной разности ДОИ = Dn2 —
Д, 1, то это вызовет методическую ошибку А(ДО).
При этом относительная ошибка
Д(ДГ>) Я2 _ _ W2
Д£) “ 2Dj D2 2Р?
при ЕД > 10/7 не превосходит 0,005
Благодаря высокой точности измерения дальностей радиомаяч-
ными УДНС оказывается возможным определять путевую скорость
на коротких базах (20—30 км), но при этом начинают оказывать су-
щественное влияние ошибки измерения промежутка времени.
Общее выражение для случайной ошибки путевой скорости полу-
чается дифференцированием выражения 5.12 noDj, D2 и t:
ДЦ7 = — —— Д/
t t Г-
Отсюда
170
пии, так как gD^ =- gD., = gD и \D = \Vt,
aW7_ , /\ (^\2 V
uz I (SD ' ф t /
(5.13)
Считая oD — 0,1 km, AD = 20 km, ta 100 сек (IVх = 600—800 км.ч)
и суммарную ошибку интервала времени между измерениями даль-
ностей Gt = 1 сек, получим
Таким образом, ошибка в измерении путевой скорости вследствие
неточного отсчета времени соизмерима с ошибками из-за неточного
измерения дальностей. Чтобы влияние ошибок измерения времени бы-
ло несущественным, необходимо повысить точность измерения интер-
вала времени так, чтобы выполнялось условие
1 ~\/2aD
t 3 ' bD
/ 2 cP
3 ’ Wt ’
Выражая W в километрах в Час, gD — в километрах, a t — в секун-
дах, получим
Gt< 1740 —.
IV'
Например, если W = 710 км/ч, gD = 0,1 км, ошибка интервала вре-
мени не должна превосходить 0,25 сек. Такая точность может быть
обеспечена с помощью точных авиационных хронометров.
Практически путевая скорость измеряется в таком порядке:
после достижения устойчивой стабилизации самолета на ЛЗП
(при zIinn = 0) в момент появления на счетчике ППДА удобного
для отсчета значения дальности включают секундомер;
следя за изменением показаний счетчика дальности, останавливают
секундомер при изменении первоначальной дальности на 20 или 30 км-,
рассчитывают путевую скорость по формуле (5.12) с помощью ли-
нейки НЛ-10Д1 или расчетчика НРК-2.
Автоматизированный контроль следования по ЛЗП
Автоматизированный контроль точности следования самолета по
ЛЗП заключается в периодическом (в отдельных точках) сравнении
текущих полярных координат Ас и D с их программными значениями
(координатами заданных контрольных точек) Акт и £>кТ. Контрольные
значения координат А1(Т и Е>1(Т задаются во всех режимах работы
системы селекторами «Азимут» и «Орбита» щитка управления. В ре-
жиме «Азимут» азимут контрольной точки, находящейся на ЛЗП, всег-
171
да совпадает с заданным азимутом ЛРПС ЛСз, поэтому дополнитель-
ной установки этой координаты нс требуется.
При одновременном выполнении двух условий:
I ^03 I А/41(Оптр >
I В ^3 I < А^коптр
схема контроля срабатывает п загорается специальная лампочка.
Конструкцией схемы предусмотрено по два значения каждой из вели-
чин ЛД!011Тр и Д£)1(011Тр: одно для сигнализации подлета к контроль-
ной точке, второе — для сигнализации точного прохода этой же точки.
При подлете к контрольной точке на расстояние примерно 20 км за-
горается зеленая лампочка «Подлет», а при пролете над ней и доста-
точно точном следовании по ЛЗП загорается красная лампочка
«Пролет».
Автоматизация простейших логических операций значительно об-
легчает работу экипажа.
Полет по линии равных расстояний
Полет по линии равных расстояний, т. е. по дуге окружности с
центром в точке радиомаяка, выполняется в режиме «Орбита» (пра-
вая или левая),* обеспечивающем соблюдение условия (рис. 5.19)
D = D3.
Параметром (позиционным сигналом), по которому производится уп-
Рис. 5.19. Схема полета по линии раВ'
иых расстояний (режим «Орбита»)
равление полетом, является ве-
личина бокового отклонения са-
молета от ЛЗП
x = D—D3. (5.14)
Для полета по ЛРР на щитке
управления задается номер ка-
нала радиомаяка, включается
положение «Орбита правая» (или
«Орбита левая») и селектором
«Орбита» устанавливается необ-
ходимое значение радиуса ЛРР.
Схема нуль-вождения отрабаты-
вает сигнал бокового отклоне-
ния самолета по формуле (5.14)
в виде отклонения вертикальной
стрелки КПП, при удержании
которой в центре шкалы самолет
будет следовать по линии за-
данного пути. Как и в режиме
* Станция справа или слева со
ответственно.
172
«Азимут», отклонение вертикальной стрелки z связано с линейным
отклонением х самолета от ЛЗП (в данном случае от дуги окруж-
ности) зависимостью, аналогичной той, которая показана на рис. 5.14.
Это позволяет выводить самолет на орбиту практически так же, как
п в режиме «Азимут», —по правилу совмещения стрелок. Особенность
вывода при этом заключается в установке курсовой шкалы КПП
на значение рпх путевого угла касательной к ЛРР в предполагае-
мой точке выхода на нее (см. рис. 5.19).
Для автоматической сигнализации пролета контрольных точек на
ЛЗП (орбите), кроме установленного при задании линии пути значе-
ния П3, достаточно селектором «Азимут» на щитке управления уста-
новить азимут выбранной контрольной точки. Последовательность
загорания зеленой и красной лампочек при приближении к контроль-
ной точке — такая же, как и в других режимах.
Благодаря использованию только дальномерного канала УДНС
точность выдерживания ЛЗП в виде ЛРР очень высока: охг 0,25 км
при аналитическом определении параметра Плрр. Если же значение
Рлрр измеряется по карте (т. е. сгОлрр = 1 мм карты = 1—2 км),
то сг*2 полностью определяется ошибкой этого измерения и техниче-
ские возможности системы остаются неиспользованными.
Несмотря на высокие точностные характеристики, практическое
применение режима «Орбита» в гражданской авиации ограничивается
частными случаями, так как криволинейность линии пути исключает
его использование в полетах по трассе па более или менее значитель-
ных участках.
§ 5.G. ПОЛЕТ ПО ПРОИЗВОЛЬНОМУ ПРЯМОЛИНЕЙНОМУ МАРШРУТУ
Наиболее часто радномаячные УДНС используются при полете по
произвольной (т. е. не проходящей через радиомаяк) прямолинейной
линии пути. Навигационная задача и в этом случае решается стабили-
зацией самолета на ЛЗП методом непосредственной коррекции по бо-
ковой координате. Ввиду небольших дальностей действия УКВ-
систем сферичность Земли не учитывается (задача решается «на пло-
скости»), чем и объясняется использование термина «прямолинейная
ЛЗП».
Принцип решения задачи в режиме «СРП»
Принцип решения задачи (рис. 5.20) заключается в автоматическом
вычислении текущего значения бокового отклонения х самолета от
ЛЗП по непрерывно измеряемым системой значениям А и D самолета
от радиомаяка и постоянным параметрам отрезка ЛЗП, заданного
в системе координат, связанной с этим маяком; сигнал бокового от-
клонения, подаваемый на нуль-прибор, обеспечивает управление бо-
ковым движением самолета. Параметрами прямолинейного отрезка
ЛЗП являются координаты Ао и Do одной из его точек — опорной точ-
ки О—и условный путевой угол р относительно истинного меридиа-
на радиомаяка.
173
Боковое отклонение самолета
от ЛЗП (см. рис. 5.20)
х = / —р = £) sin (0—А)—
— Z)o sin (Р — Ло). (5.15)
Условием движения самолета
точно по ЛЗП является обеспе-
чение нулевого значения вели-
чины х. Второй член выражения
(5-15) Dosin(P — Ао) является
для данного отрезка пути по-
стоянной величиной, равной
кратчайшему расстоянию р от
радиомаяка до ЛЗП. Первый
члеп Dsin (р — Л) при измене-
нии текущих координат само-
лета А и D будет сохранять по-
стоянное значение только при
условии движения самолета точно по ЛЗП или параллельно ей; в об-
щем же случае он будет изменяться.
Величина х вычисляется непрерывно специальным электромехани-
ческим счетно-решающим прибором (СРП), который по вводимым в него
вручную параметрам линии заданного пути—Р(ЗПУ), Ао (угол цели)
и О0 (расстояние до цели) —и по непрерывно поступающим от измери-
тельных схем текущим координатам самолета А и D вырабатывает
обе величины I и р, входящие в выражение для х, и сравнивает их
между собой. Результат сравнения определяет положение вертикаль-
ной стрелки КПП: при / = р стрелка располагается в центре шкалы,
при I р она отклоняется в сторону, соответствующую знаку раз-
ности. Управляя самолетом так, чтобы вертикальная стрелка постоян-
но находилась в центре, пилот обеспечивает нулевое боковое откло-
нение, т. е. полет по ЛЗП.
При полете по прямолинейной ЛЗП с использованием режима
«СРП» на щитке управления устанавливается помер канала радиомая-
ка и род работы «СРП»; на блоке управления счетно-решающего при-
бора (БУ СРП) задаются параметры, определяющие ЛЗП: [•>, Аи и D„;
на КПП шкала курсов устанавливается на значение заданного путе-
вого угла участка ЛЗП, измеренного относительно того же меридиа-
на, что и курс самолета. Для автоматического контроля подлета и
пролета отдельных точек ЛЗП на щитке управления дополнительно
к прежним установкам необходимо ввести полярные координаты Л[(Т
и DK4 очередной выбранной контрольной точки (обязательно находя-
щейся па липпи пути).
Так как закон отклонения стрелки КПП z = /(х) аналогичен изоб-
раженному на рис. 5.14 для режима «Азимут» (хотя и может иметь
несколько другие параметры), методика вывода самолета на ЛЕП и
полета по пей в режиме «СРП» нс отличается от методика полета
в режиме «Азимут».
174
Точность выдерживания линии пути в режиме «СРП»
Режим «СРП» связан с использованием значительно большего объ-
ема информации и с более сложной ее переработкой, чем другие ре-
жимы работы радиомаячиых УДНС. Это расширяет навигационные
возможности системы, по одновременно является причиной возникно-
вения ряда ошибок, влияющих па точность полета по ЛЗП, которая
в общем несколько ниже по сравнению с режимами «Азимут» и «Ор-
бита».
Отклонение самолета от ЛЗП при использовании режима «СРП»
является следствием систематических и случайных причин:
методической ошибки решения задачи в результате ввода в схему
СРП текущей наклонной дальности Он вместо горизонтальной даль-
ности D;
погрешностей определения и установки на БУ СРП параметров ЛЗП
Р, Ао и Do;
погрешностей измерения текущих координат самолета А и О,
вводимых в СРП автоматически;
инструментальных погрешностей механизмов и схем СРП и систе-
мы визуальной -индикации;
неточности выдерживания вертикальной стрелки КПП на нуле в
результате ошибок пилотирования.
Методическая ошибка режима «СРП» AxM является следствием
того, что СРП, получая от измерительной схемы дальности заведомо
большее расстояние £)п (вместо О), отрабатывает завышенное значение
величины /, а следовательно, и завышенную разность х = I — р.
В результате при удержании вертикальной стрелки КПП на нуле са-
молет смещается от ЛЗП в сторону радиомаяка на величину
^Хм~ XDH XDi
где Хдн и xd—величины боковых отклонений, вычисленных соответ-
ственно с учетом наклонной и горизонтальной дальностей. Тогда»
используя соотношение (5.15), получим
Дхм = [DfI sin (0 —A)—Do sin (Р — /40)] —
— [Dsin(0—A)—Dosin(0—Ао)| = (£)„—£)) sin (0—А). (5.16)
Так как для точек линии заданного пути (см. рис. 5.20)
£) =----,
sin (0— Д)
то
DH = VH2+D2 = I / н2 + —------------ -
I sin2(P —Л)
175
Подставляя значения для D и Он в выражение (5.16), получим
Axw=f]/ Н2+----------------------5---)sin(P—Л) =
,ч \И sin2(P—Я) sin (Р—А)/ н ’
= Vfl2sin2(₽—Л) + р2 —р.
(5.17)
Из 5.17 видно, что максимальное значение методической ошибки имеет
место при пролете самолетом ближайшей к радиомаяку точки ЛЗП
(точка Д на рис. 5.20) и равно
ДхМтах = V^ + P2~P-
(5.18)
Значения максимальной величины методической ошибки при раз-
личных удалениях р радиомаяка от линии пути и различных высотах
И полета приведены на графике рис. 5.21.
Как видно из графика, ошибка Дхмтах при некоторых условиях
может достигать нескольких километров. Такой ошибкой даже при
полетах на высотах менее 12 км, пренебрегать не следует, тем более,
что благодаря своему систематическому характеру она поддается
частичному учету. Полный учет методической ошибки был бы связан
с довольно сложным законом изменения ее значения при перемещении
самолета вдоль линии пути, из-за чего полностью учесть эту ошибку
в полете затруднительно. Для уменьшения методической ошибки сле-
дует вводить в СРП исправленное (увеличенное) значение дальности
опорной точки Du на величину
ДО 0= ,
0 2 sin (Р-До)
где Дл-мП1ах рассчитывается по формуле 5.18 или выбирается из графика
для известных условий предстоящего полета (Д и р).
Такое исправление вводи-
мого в СРП Do приводит к сме-
щению фактической линии пути
самолета в направлении, пер-
Рис. 5.21. Графики максимальных
значений методической ошибки ре-
жима «СРП»
Рис. 5.22. Способ уменьшения методи-
ческой ошибки режима «СРП»
176
пендикулярпом ЛЗП на постоянную величину 0,5 AxMmax, в резуль-
тате чего боковые отклонения из-за методической ошибки распреде-
ляются по обе стороны от ЛЗП, а абсолютные величины их не будут
превосходить половины ошибки Дхлппах (рис. 5.22).
В частном случае, когда опорной точкой является ближайшая
к радиомаяку точка N ЛЗП, т. е. когда р — Ао = 90°,
АО0 = .
° 2
Такой выбор опорной точки, как будет показано, имеет и другие
преимущества.
Суммарная случайная ошибка выдерживания ЛЗП в режиме
«СРП», если исключить из рассмотрения инструментальные погреш-
ности и ошибки пилотирования, складывается под влиянием случайных
ошибок пяти параметров: [5, До, Do, А и D.
Величина ошибки выработки параметра х, по которому произво-
дится управление боковым движением самолета, может быть найдена
после дифференцирования выражения (5.15) по этим пяти параметрам
с последующим переходом к конечным разностям:
Ах — sin ф —Л) AD — D cos ф—А) АД Д- О cos ф—Д) Ар —
—sin ф—До) АО0 + .О0 cos (Р —До) АД0 —Do cos ф — До) Ар;
Ax — sin ф—А) АО—Deos ф—Д) АД Д-[Deos ф—Д) —
— Do cos (Р—Д)] Ар —sin ф — До) ДО0 Д- Do cos ф—До) АД0.
Считая ошибки всех пяти параметров независимыми, можно убе-
диться в том, что средняя квадратическая ошибка выработки пара,
метра х
стх = /sin2(P —Д)<тО2Д-О2cos2 ф-Д)оД2Д-[Оcos ф—Д) — *
" —Do cos (Р—До)]2 <тр2 Д- sin2 ф—До) crD2 Д- D2 cos2 ф — До) стД2.
Для облегчения анализа изменим это выражение с использова-
нием соотношений, очевидных из рис. 5.20:
Do cos ф—A0) = NO = d0-,
D cos ф — Д) = КС = d\
Sin2 ф — До) — -^2= 2^2 ’>
sin2 ф— Д) — 1 —cos2 ф—A) « 1
177
где dn — удаление опорной точки 0 от «траверзной точки» N ЛЗП, а
d — текущее удаление самолета от липни траверза радиомаяка МК.
В результате получим
<™=1/ (\-^'\^+d^A2+(d-d0)2 (5.19)
V \ DJ р +dg
В этой формуле первые два члена подкоренного выражения зависят
от текущего МС (т. е. от величины d и D) и ошибок измерения его коор-
динат оА и оО, третий член зависит от удаления d — d0 самолета от
опорной точки О и ошибки ввода в СРП путевого угла ЛЗП; последние
два члена — только от положения (выбора) опорной точки О на ЛЗП
и от ошибок оь40 и оОо ввода ее координат в СРП.
Закономерности изменения общей ошибки ох при движении само-
лета на участке ЛЗП (рис. 5.23) определяются соотношением всех этих
факторов и особенно относительными величинами ошибок оф, оД0
и <т£)0 по сравнению с ошибками <уА и <jD. Крайними случаями, встре-
чающимися на практике, являются:
случай грубого определения параметров ЛЗП, когда, например,
сф, <jA0 и о£)0 в 10 раз превосходят соответствующие ошибки измере-
ния координат самолета <уА и crD (кривые семейства /);
случай точного определения параметров ЛЗП, когда оф st о/10 «
st о/1 и oD0 st oD (кривые семейства //).
Рис. 5.23. Графики суммарной боковой ошибки полета в режиме
«СРП» при различных выборах опорной точки (d0) и точностях
исходных данных
178
Каждая кривая обоих семейств соответствует определенному вы-
бору опорной точки, заданной расстоянием du.
Первый член формулы (5.19) при всех условиях не оказывает замет-
ного влияния на общий результат, так как боковое уклонение ахр =
= sin(p — A)aD от неточности измерения текущей дальности не
может превзойти величины 0,1 км. В дальнейшем его можно не учи-
тывать, и формула (5.19) упростится.
ох = \ / d2 аЛ2 Ь (d—d0)'2 op2 + /' аО2 + d-0 аЛ2. (5.20)
г Р Ни
Вез вывода приведем математическую зависимость, при которой
общая ошибка ох будет минимальной.
d -d —Рр2 = d°
ПЛ|”1П оР2+аД2 , аДа
+--------------------------
Из этого соотношения видно, что в случае грубого определения путево-
го угла (например, о|3 = 1Г, аоЛ = 0 ,1) б/СТл-т1п~^о' т- е- минимальная
ошибка, имеет место в момент пролета самолетом траверза опорной
точки (см. кривые семейства 1 на рис. 5.23). В случае точного опре-
деления путевого угла (например, ар = аЛ = О’, 1) <Ампнп —
т. е. точка минимальной ошибки находится посередине между точкой
и опорной точкой О (см. кривые семейства //).
Оптимальный выбор опорной точки
Графики рис. 5.23 позволяют решать вопрос рационального вы-
бора опорной точки.
В случаях грубого определения параметров ЛЗП (например, при
измерении р, Ло и£)она карте), как видно из хода кривых семейства /,
положение опорной точки оказывает большое влияние на общую
точность полета по маршруту. На большей части маршрута (от d =
= —300 км до d = +100 км) минимальные ошибки получаются при
совпадении опорной точки с точкой N, т. е. при d0 = 0 (так называе-
мая «траверзная» опорная точка). При этом величины ошибок по срав-
нению со случаем выбора опорной точки в конце участка ЛЗП (d0 =
= 300 км) снижаются в 2—7 раз. Для остальной части ЛЗП возможен
другой выбор опорной точки, например с d0, равной 100 или 200 км,
который бы обеспечивал меньшие ошибки, чем при d0 = 0. Однако до-
стигаемый при этом небольшой выигрыш точности не оправдывает
усложнения методики расчета координат этой точки (необходимо иметь
график) и переустановку их на СРП.
При возможности точного определения параметров ЛЗП (а|3 —
= аЛп = 0°,1, uDn = 0,1 км) повышается точность выдерживания
линии пути (см. семейство кривых // па рис. 5.23) и технические воз-
можности системы в этом случае используются наиболее полно. Точ-
ные параметры ЛЗП могут быть получены аналитическим расчетом
179
по геодезическим данным о координатах пунктов маршрута и места
радиомаяка. И в этом случае оптимальным положением опорной точ-
ки для всех ЛЗП является точка А7 (т. е. d0 = 0), что также подтверж-
дается ходом кривых семейства II иа рис. 5.23.
Итак, выбор опорной точки на траверзе радиомаяка является на-
ивыгоднейшим для обеспечения точности навигации во всех случаях
полетов с использованием режима «СРП».
При таком выборе опорной точки, кроме повышения точности вы-
держивания ЛЗП, упрощается также подготовка установочных дан-
ных, так как при d0 = 0, угол f> — Ао = 90° и, следовательно Ао =
= (J ± 90°; здесь знак плюс соответствует положению радиомаяка
слева от ЛЗП, а знак минус — положению справа. Эта простая зави-
симость позволяет определять величину из точно известного значения
путевого угла 0 изменением его иа 90°. Кроме того, при применении тра-
верзной опорной точки упрощается и определение второй ее коорди-
наты Do, которая в этом случае равна кратчайшему расстоянию р от
радиомаяка до ЛЗП и может быть вычислена предварительно с высо-
кой точностью.
Рекомендации по выбору опорной точки, основанные иа анализе
формулы (5.20) и иллюстрирующих ее графиков рис. 5.23, построенных
для значения параметра р = 100 км. полностью приемлемы и при
любых других значениях р во всем возможном диапазоне (до 300 км).
Это объясняется тем, что член формулы (5.20), содержащий р, меняет-
ся медленно и его изменения практически не влияют иа общее значение
ошибки <тх. Это особенно справедливо при малых и нулевых cf0, т. е.
при использовании траверзной опорной точки.
Определение навигационных элементов
После достижения стабилизации самолета на ЛЗП при полете в ре-
жиме «СРП» (стрелка КПП устойчиво находится на нуле) факти-
ческий путевой! угол определяется как величина, равная
заданному путевому углу рзх0 участка ЛЗП.
Угол сноса рассчитывается по фактическому путевому углу
Рзх„ и среднему фактическому курсу усрх0, отсчитанному от того же
меридиана, что и путевой угол рзх0, или непосредственным отсчетом
по КПП, компасная шкала которого установлена на значение рзх0
(как и в режиме «Азимут»).
Путевая скорость определяется общим вариантом ба-
зисного способа с применением для вычислений навигационного рас-
четчика или способом контрольного этапа.
Счетно-решающий прибор позволяет также определить полуавто-
матически требуемый путевой угол на любую точку,
заданную полярными координатами Ац и относительно радиомаяка,
независимо от знания экипажем места своего самолета. Для этого ко-
ординаты Ац и заданной точки устанавливаются на БУ СРП, а
рукоятка ЗПУ вращается до тех пор, пока вертикальная стрелка КПП
не займет нулевого положения, показание шкапы ЗПУ при этом ука-
жет искомый путевой угол относительно меридиана маяка. Этот прием
180
может использоваться, например, при выходе в любую точку на ЛЗП
после вынужденного отклонения от маршрута из-за обхода грозовых
очагов, когда МС известно с недостаточной точностью. Важно отме-
тить, что задаваемая точка может и не находиться в пределах даль-
ности действия данного радиомаяка (например, при небольшой высоте
полета самолета); достаточно только чтобы ее удаление от маяка укла-
дывалось в диапазон дальности схемы СРП. Определив требуемый
путевой угол и развернув самолет по стрелке КПП для полета в задан-
ную точку, можно до выхода из зоны действия радиомаяка подобрать
курс, обеспечивающий выход в эту точку.
Возможность на коротком участке в режиме СРП подобрать курс,
учитывающий фактический (неизвестный) ветер, обеспечивает выпол-
нение полета и вне рабочей области радиомаяка, в пределах расстоя-
ний (времени), пока ошибки метода постоянного навигационного ре-
жима не возрастут до недопустимых значений. Расчет допустимого
пути полета без поступления информации от УДНС может выполнять-
ся по методике, изложенной в § 2.3 для режима «Память» АВК при
отказе ДИСС. При этом вместо огдисс следует брать величину огуднс
(ошибки МС в момент выхода самолета из зоны радиомаяка), а вместо
irtv.u — коэффициент счисления, соответствующий применяемому
бортовому средству (например, для АВК с ДИСС).
§ 5.7. ИСПОЛЬЗОВАНИЕ УГЛОМЕРНО-ДАЛЬНОМЕРНЫХ СИСТЕМ
В РАЙОНЕ АЭРОДРОМА
Угломерно-дальномерные системы всех видов и особенно радио-
маячные УДНС могут эффективно применяться при маневрировании
в районе аэродрома, при вылетах и заходах на посадку, когда требова-
ния к точности, надежности и оперативности навигации существенно
возрастают. Например, для успешного выполнения посадки самолет
должен быть надежно введен в узкую зону курсового посадочного ма-
яка, имеющую на удалении 1 350 м от начала ВПП ширину 120—
190 м.
Неудачный заход на посадку и связанное с ним его вынужденное
повторение приводит к перерасходу летного времени, значительно
усложняет воздушную обстановку над аэродромом, снижает экономи-
ческие показатели рейса. В то же время в зонах подхода к аэродрому
и захода на посадку усложняется и сама навигационная программа
полета: полет производится с частыми изменениями направления
(курса), с переменной скоростью и большим вертикальным маневром.
Особым требованием является сокращение общей продолжительности
маневра в районе аэродрома, связанное с необходимостью повышения
пропускной способности аэропорта.
УДНС с наземной РЛС (обзорные и посадочные радиолокаторы)
являются в основном средствами диспетчерского управления полетами,
но используются также и как вспомогательные средства, облегчающие
экипажам построение маневра захода на посадку. При этом навига-
ционная задача (выработка решения) часто решается на наземном
пункте управления, а экипаж получает готовую консультативную или
181
командную информацию на изменение курса, высоты и скорости. Од-
нако возможности этих УДНС ввиду их низкой оперативности и про-
пускной способности очень ограничены.
Радиомаячные УДНС, например РСБН-2, отличающиеся высокой
степенью автоматизации,обеспечивают горизонтальный и вертикальный
маневр само пета при полете по коридорам зоны аэродрома, построение
захода на посадку, а при наличии специальных посадочных радиомая-
ков — и снижение до выхода под облака. Для выполнения горизон-
тального маневра используются непрерывная информация о текущих
значениях А и D (прибор ППДА) и режимы нуль-вождепия «Азимут»,
«СРП» и курсовая часть ре'жима «Посадка»; для вертикального манев-
ра — режим «Пробивание облачности» и глиссадная часть режима
«Посадка».
Полет в зоне подхода
При полете по коридорам воздушной зоны аэродрома как при вы-
лете, так и при прилете (соответственно с набором высоты или сни-
жением) для горизонтального маневра удобно применять режим
«СРП». Причем, так как отрезки ЛЗП между пунктами изменения на-
правления полета, как правило, коротки, а удаление самолета от радио-
маяка не превосходит 80—100 км, установочные операции на БУ СРП
можно упростить, выбирая для двух участков одну общую опорную
точку Оо (рис. 5.24). Тогда для перехода к следующему участку ЛЗП
достаточно на БУ СРП изменить только одну установку путевого уг-
ла. Небольшое в этих условиях снижение точности из-за отказа от оп-
тимального выбора опорной точки оправдывается повышением опера-
тивности. Оценить ожидаемую точность выдерживания ЛЗП по уча-
сткам можно с помощью графика рис. 5.23, зная величины dn и d02
и максимальные значения dlmax и rf.2inaX при данной конкретной схеме
маневра (см. рис. 5.24).
Для маневра в районе аэродрома следует пользоваться только точ-
ными установочными данными Ао, О0 и (5, так как это обеспечивает при
rfn < 100 км выдерживание ЛЗП с ошибками не более 2ох = 400—
500 м (см. кривые семейства //на рис. 5.23).
С целью оперативного использования данных прибора ППДА для
основных точек маневра, например точек начала каждого разворота
(Ci, С2, С3, ..., рис. 5.24), определяются точные координаты At и Dt,
которые записываются на крупномасштабной схеме маневра. При пе-
ресечении самолета линии азимута контрольной точки (по показаниям
азимутальной шкалы прибора ППДА) фактическое удаление самолета
от радиомаяка (по счетчику дальномера ППДА) сравнивается с кон-
трольным значением дальности D,, чем определяется точность прохода
этой точки.
Вертикальный маневр в районе аэродрома, как правило, обеспе-
чивается с помощью барометрических высотомеров и вариометра.
В частном случае, при подходе строго в направлении на радиомаяк
или с небольшим уклонением от него возможно программированное
снижение с применением режима «Пробивание облачности».
182
Рис. 5.24. Испопьзованпе РСБН 2 при горизонтальном маневре в районе
аэродрома
В режиме «Пробивание облачности» на горизонтальную стрелку
КПП подается напряжение, пропорциональное разности Л/У между
фактической высотой полета над уровнем радиомаяка HVa и некото-
рым программным значением высоты Нп, соответствующим текущему
удалению D от маяка. Удерживая горизонтальную стрелку на нуле,
обеспечивают сначала снижение с постоянным для данного типа само-
лета углом аСн, а затем, с некоторого удаления Dvinin, горизонталь-
ный полет на высоте Нт1п (рис. 5.25). Программная высота Нп выра-
батывается специальной потенциометрической схемой как линейная
функция от D, причем ввиду малых величин угла снижения наклонную
дальность можно считать равной горизонтальной. При этом
| Winln + /e(D-DHi|iln) при D>D„inin-,
п W.nm при 0<D<E>nniIn.
Величины Нп11п, Dy/niin и k—параметры программы, обусловливающие
форму траектории снижения и заданные для каждого типа самолета;
^inin — минимальная высота, ниже которой самолет не должен сни-
жаться без применения курсо-глиссадных систем (например, 600—
700 л«); D//rnln » 15 км — соответствующее высоте Hmin удаление
самолета от радиомаяка; k = sinaCII — коэффициент, определяющий
угол наклона траектории снижения к горизонту.
183
Фактическая высота полета НРг> поступает от барометрического
датчика, шкала которого устанавливается штурманом па значение
атмосферного давления Ро на аэродроме.
Поскольку угол снижения ас„ связан с вертикальной Ев и траек-
торной (полной) U/n скоростями соотношением
sinac„= -А,
w п
то при выдерживании его постоянным (стрелка КПП на нуле) самолет
имеет вертикальную скорость, зависящую от фактической траектор-
ной скорости Wn. При сильном попутном ветре требуемая для выдер-
живания программы вертикальная скорость может оказаться для дан-
ного типа самолета слишком большой и, следовательно, программное
снижение невозможным.
Ручная установка начала отсчета барометрической высоты дает
возможность преднамеренно изменять высоту перехода в горизон-
тальный полет. Если в датчик высоты ввести давление, большее дей-
ствительного на уровне радиомаяка, то будет отработано меньшее зна-
чение текущей барометрической высоты Н, в результате чего при
пилотировании по нулевому показанию стрелки самолет будет лететь
выше заданной траектории. В этом случае самолет при подлете к
радиомаяку на дальности Dnmin и при выдерживании стрелки на нуле
перейдет к горизонтальному полету на высоте, большей Нт1п.
Заметим, что в принципе программное снижение по прибору КПП
возможно также и в направлениях, не совпадающих с направлением
Рис. 5.25. Схема вертикального маневра с использованием
режима «Пробивание облачности»
184
Рис. 5.26. Схема вертикального маневра при использовании бокового радиомая-
ка РСБН-2 и режима «Пробивание облачности»: при траверзном удалении мая-
ка, большем £>ят[п (а), и при удалении, меньшем DHinin (б)
на радиомаяк (рис. 5.26). Но при этом угол снижения не остается по-
стоянным, а будет непрерывно уменьшаться до нуля при подходе само-
лета к траверзу N радиомаяка, после чего начнет возрастать, т. е.
самолет перейдет в набор высоты. Если при этом траверзное расстоя-
ние до радиомаяка меньше постоянной для данной программы величи-
ны DWmin, то еще до подхода к траверзной точке, когда текущая даль-
ность до маяка снизится до D^min (точка L на рис. 5.26, б), самолет
перейдет к горизонтальному полету. Горизонтальный полет будет
продолжаться до пролета точки М на D = Dnmin, после чего начнется
набор высоты.
Построение захода на посадку
Радиомаячные УДНС типа РСБН-2 обеспечивают заход на посадку
до входа в зоны курсового и глиссадного радиомаяков практически по
любой установленной схеме. Наиболее типичными случаями при этом
являются;
вписывание в траекторию прямоугольного маршрута до третьего
разворота — при углах подхода к ВПП, больших 90“;
выход на траекторию четвертого разворота — при углах подхода
до 90°.
Примерная схема использования УДНС после прохода входного
коридора для вписывания в траекторию захода до третьего разворота
в точке К, с координатами Л1(., и DI(3 показана па рис. 5.27. От выхода
коридора (точка Ко) самолет выполняет полет в режиме «СРП» по пря-
мой при опорной точке 01( т. е. с установками на БУ СРП :
ЗПУ = Рвх, Л = j 01 и D = D01.
Подобрав курс в режиме «СРП», экипаж ведет самолет по компасу
и одновременно устанавливает на БУ СРП данные для полета на уча-
стке при той же опорной точке О1; но с другим путевым углом
(ЗПУ = рз). В данном случае так же, как и в зоне подхода, целесооб
разно отступить от выбора оптимальной опорной точки, упростив за
|85
счет этого процесс переустановки данных при переходе от участка
K0Ki к участку К2А3.
Момент начала третьего разворота контролируется по показаниям
ППДА, для чего заранее должны быть определены и записаны на схе-
ме точные координаты точки /<3 ввода в разворот. Использование ав-
томатической сигнализации подхода и прохода в процессе захода на
посадку оказывается малоэффективным ввиду недостаточной точности
и значительных затрат времени на частую переустановку координат
контрольных точек.
Полет от третьего разворота к началу четвертого можно выполнять
обычными способами по расчетному курсу с учетом ветра и контролем
МС по ППДА.
Для выполнения наиболее ответственного и сложного этапа захо-
да — выхода на посадочную прямую (в створ ВПП) — используются
в зависимости от расположения радиомаяка относительно ВПП ре-
жимы «СРП» или «Азимут». Однако в обоих случаях начало четвер-
того разворота должно быть определено с помощью ППДА по коор-
динатам Ац и £)ц, рассчитанным с учетом фактического ветра. Это не-
обходимо для того, чтобы в случае, когда боковая (по отношению
к ВПП) составляющая ветр’а 67 х является попутной иа участке выхода
к четвертому развороту, можно было выполнить разворот без превы-
Рис. 5.27. Схема выхода к третьему развороту при заходе па поезд
ку с использованием системы РСБН-2
сь
тения допустимого крена, а когда она является встречной — умень-
шить длину пути маневра вдоль посадочной прямой.
Для учета ветра предварительно определенный «штилевой» ази-
мут точки начала четвертого разворота А4 0 исправляется поправкой
ЛЛ4; при этом Л4 = Л4.о + АА4.
Для случаев расположения радиомаяка на оси ВПП или вблизи
от нее (до 200 — 300 л) поправка
ЛЛ4° = 57°,3 (5.21)
или для решения на линейке НЛ-10М
sina/lr=-^^-, (5.22)
где — время разворота на угол 90';
Д4 — удаление начала четвертого разворота от маяка (пример-
но 20—30 км).
Знак поправки ДА4 целиком определяется знаком боковой состав-
ляющей ветра Ux и не зависит от направления разворота при заходе
на посадку.
При использовании для выхода на посадочную прямую режима
«СРП» выбирается траверзная опорная точка ЛС; при этом устанав-
ливаемые на БУ СРП параметры (рис. 5.28, а) равны:
ЗПУ = 0П (истинный посадочный путевой угол);
Ао — йп ± 90 (знак плюс, если маяк слева от ВПП);
Do = Рп (удаление радиомаяка от оси ВПП).
Определив начало четвертого разворота по уточненному значению
азимута Л4, экипаж вводит самолет в разворот с постоянным креном
(например, 15 ). В процессе разворота ведется наблюдение за верти-
кальной стрелкой КПП, а с момента совмещения ее верхнего конца
с кружком компасной стрелки начинается пилотирование по правилу
совмещения стрелок. После выхода ио КПП на посадочную прямую
(вертикальная стрелка на нуле) при приближении к точке входа в зону
курсового посадочного радиомаяка (определяется по достижении
дальности £>твк п° ППДА) система переключается в режим «Посадка»
(или КПП подключается к системе СП-50). С этого момента горизон-
тальная стрелка начинает указывать положение самолета относитель-
но глиссады, а вертикальная — относительно оси зоны курса посадоч-
ного радиомаяка; заход завершается по сигналам этих маяков.
Режим «Азимут на»» — более точный по сравнению с режимом
«СРП» — используется в случаях, когда радиомаяк расположен в ство-
ре ВПП (оптимальный случай) или смещен от ее оси па расстояние
не более 400—500 м. Выход на посадочную прямую производится
с предварительным выходом на вспомогательною линию — линию
азимута точки входа в зону курса (ТВК), находящуюся на удалении
12—14 км от начала ВПП (рис. 5.28, б).
Для определения точного азимута этой точки Атвк> выставляемого
па щитке управления, достаточно задаться ее удалением от радпомая-
187
ка Dtbk и иметь точные значени смещения рп радиомаяка от оси ВПП
и истинного путевого угла посадки рп При этом
Авк — Рп + 180° 4- arcsin ( .
\DTUK /
Если маяк находится слева (по направлению захода) от ВПП, ве-
личине рп приписывается знак минус. После выхода по КПП на вспо-
могательную линию и достижения по ППДА дальности Дтвк система
переключается в режим «Посадка».
Вписывание в траекторию захода до третьего разворота и дальней-
ший выход на посадочную прямую возможен также и по другой схеме.
Обратнопосадочная прямая в которую «вписывается» само-
лет, задается (см. рис. 5.27) траверзной опорной точкой с коор-
динатами Ао = An1 — Рп — 90° (при правом смещении радиомаяка
относительно захода) и Do = рп + — Ра+ Ьпк. Здесь: р„ —
смещение маяка от оси ВПП; Ьп„ — ширина прямоугольного мар-
шрута; ЗПУ — рп + 180°.
Рис. 5.28. Схема выхода на предпосадочную прямую с исполь
зоваинем: а) режима «СРП» и б) режима «Азимут на»
188
Рис. 5.29. Схема выхода к четвертому развороту с «прямой»
Выход к третьему и четвертому разворотам осуществляется ана-
логично предыдущему случаю, а для выполнения четвертого разво-
рота используется режим «СРП» при опорной точке Na (траверзная
точка посадочной прямой).
Установки на БУ СРП: ЗПУ = рп; Ло — рп — 90° (при правом
смещении маяка); Dn — рп должны быть выполнены до начала чет-
вертого разворота. Этот вариант захода более удобен, имеет простые
расчеты и установки параметров. Методическая ошибка режима
«СРП» от несовпадения горизонтальной и наклонной дальностей на
этапе захода на посадку имеет незначительную величину (вточкеЛ\ —
менее 20 м, в точке входа в глиссаду— менее 10 лг) и введения попра
вок не требует.
Заход на посадку выходом на траекторию четвертого разворота
осуществляется при возможности снижения до высоты 400—600 м
на подходе к аэродрому и, как правило, при углах подхода до 901
(рис. 5.29). Маневр строится с расчетом, чтобы перед вписыванием в
траекторию четвертого разворота был участок горизонтального полета
на высоте 400—600 м, необходимый для выпуска шасси и проведения
других предпосадочных операций. Поворотная точка В па посадочной
прямой должна быть удалена от начала ВПП примерно на 12—14 км
плюс линейное упреждение разворота (ЛУР). Точное же ее положение
может быть задано дальностью до радиомаяка £>в- Подход к траекто-
рии четвертого разворота возможен с применением режима «СРП» ме-
тодом подбора ЗПУ при опорной точке В (поворотная точка). Для
этого на БУ СРП выставляются координаты точки В:
Л0 = Лв = рп+ 180°4-arcsin ( ;
\ив /
Do = DBl
а затем рукоятка селектора ЗПУ вращается до приведения вертикаль-
ной стрелки КПП к нулю. После фиксации рукоятки в этом положении
выполняется полет по нулевому показанию КПП, в результате чего
подбирается курс следования в точку В с учетом ветра.
Выполняя полет с этим курсом по компасу (с учетом необходимых
поправок), экипаж перестраивает систему для выходана посадочною
189
прямую При этом используется либо режим «Азимут па», либо режим
«СРП» с той же опорной точкой В. При использовании режима «Ази-
мут» соответствующие данные могут быть выставлены на щитке управ-
ления заранее, так как они не влияют па использование режима «СРП»
при выходе в точку В. При использовании режима «СРП» достаточ-
но на БУ СРП заменить подобранное ранее значение |3д значением
посадочного путевого угла 0П.
Разворот (доворот) на посадочную прямую начинается при под-
ходе вертикальной стрелки КПП к определенной точке горизонталь-
ной шкалы прибора: при углах подхода А[3П = 20—40 — к 1-й точ-
ке, при А|3П = 40—70 — к 2-й точке, при Af>n = 70—90 — к 3-и,
считая от центра. Затем применяется правило совмещенных стрелок
до прихода вертикальной стрелки к границе центрального кружка.
После выхода на посадочную прямою и достижения дальности до ра-
диомаяка, равной Дтвк (по ППДА), включается режим «Посадка».
Глава 6
ПРИМЕНЕНИЕ РАЗНОСТНО-ДАЛЬНОМЕРНЫХ
РАДИОНАВИГАЦИОННЫХ СИСТЕМ
§0.1. ХАРАКТЕРИСТИКА РАЗНОСТНО-ДАЛЬНОМЕРНЫХ
РАДИОНАВИГАЦИОННЫХ СИСТЕМ
Разностно-дальномерные радионавигационные системы (РДНС)
нашли широкое распространение в практике вождения воздушных
и морских судов. Системы используют для определения мест движу-
щихся объектов как на небольших (до 600—700 км), так и па расстоя-
ниях в несколько тысяч километров. В Северном полушарии рабо-
тают десятки станций разностно-дальномерных систем различных
типов: Лораи-А, Лоран-С, Декка, Дектра и др. В настоящее время
вводится в действие глобальная сверхдлинноволновая радионавига-
ционная система «Омега», состоящая из восьми наземных станций,
рассчитанных на дальность действия до 11 000 км.
Минимальный комплект системы, необходимый для получения
одной линии положения, состоит из двух наземных передающих радио-
станций (РНТ), работающих в согласованных по частотам и времени
режимах, и бортового приемо-индикаторного устройства (ПИ), с по-
мощью которых обеспечивается определение разности прямых про-
странственных расстояний А£)п (разности наклонных дальностей) от
самолета до двух фиксированных точек — мест установки радиопере-
датчиков. Эта информация позволяет определить одну поверхность
положения AD„ = const, являющуюся двухполостным гиперболои-
дом вращения с фокусами в местах станций (III на рис. 6.1). Зная,
кроме того, абсолютную высоту полета Н, т. е. используя вторую по-
верхность положения — концентрическую с земным шаром сферу ра-
диуса R + Н, можно получить пространственную линию положения
самолета как пересечение гипербопоида со сферой (кривая IV на
190
Рис. 6.1. Поверхности и липин положения при использовании РДНС
рис. 6.1). Для получения линии положения самолета на земной поверх-
ности необходимо построить центральную проекцию пространствен-
ной линии IV на сферическую поверхность земного шара (кривая V).
Однако эта кривая будет геометрическим местом проекций точек МС
с одинаковой измеренной АД// только при одном значении высоты
полета Н\ при той же &Dh, но другой высоте, на поверхности Земли
будет получена другая линия положения. Таким образом, однознач-
ность линии положения на поверхности Земли при определенной ве-
личине измеренного на высоте параметра АД// не обеспечивается.
В настоящее время принято считать, что при данной величине из-
меренной разности пространственных дальностей АД// места самолета
на сферической поверхности Земли независимо от высоты полета раз-
мещаются вдоль линии равных разностей расстояний (ЛРРР), для ко-
торой в каждой точке разность АД поверхностных дальностей до на-
земных станций численно равна измеренной на самолете разности про-
странственных дальностей АД//. Такое допущение обосновывается,
во-первых, тем, что отклонение Д от Д// за счет высоты в значитель-
ной степени компенсируется несколько большей скоростью распро-
странения радиоволн в свободном пространстве по сравнению с их
приземной скоростью и, во-вторых, частичной компенсацией различий
Д и Д при образовании их разности.
В зависимости от используемой модели Земли (шар или эллип-
соид) координаты точек линии положения на земной поверхности (или
карте) могут быть рассчитаны из условий постоянства значений раз-
ности ортодромических (для шара) или геодезических (для эллип-
соида) расстояний до опорных точек (станций системы), координаты
которых известны.
Липпи постоянной разности расстояний АД = const на поверх-
ности Земли (как на сфероиде, так и на шаре) имеют вид сложных кри-
вых, напоминающих гиперболы С удовлетворительной для практики
191
Рис. 6.2. Семейство ЛРРР
на сфере
точностью эти линии можно считать сфери-
ческими, а в некоторых случаях даже плос-
кими гиперболами. Однако в отличие от
плоских гиперболы на сфере и эллипсоиде
являются замкнутыми кривыми (рис. 6.2).
МС определяется при одновременном исполь-
зовании двух пар (двух баз) РДНС, позво-
ляющих измерить параметры двух гиперболи-
ческих линий положения.
Непосредственно измеряемой с помощью
РДНС физической величиной является раз-
ность времени Ат распространения радио-
волн от двух наземных станций до самолета
(импульсные РДНС) или разность фаз Дгр
электромагнитных колебаний, принимаемых от этих станций (фазо-
вые РДНС).
В первом случае (например, в системе Лоран-А) геометрический
параметр линии положения АО связан с измеряемой физической ве-
личиной Ат соотношением
АО = сАт,
(6.1)
где с — скорость распространения радиоволн.
Однозначность между Ат и АО обеспечивается согласованностью
режимов излучения импульсов ведомой станции по отношению к
ведущей (введением специальных задержек передачи ведомой станции).
Линии положения на картах оцифровываются непосредственно
количеством микросекунд разности времени Ат.
Во втором случае, когда на самолете измеряется разность фазАср
двух колебаний, однозначность соответствующего геометрического
параметра ЛРРР ДО не обеспечивается. Это объясняется тем, что раз-
ность фаз может быть однозначно измерена только в пределах одного
периода колебаний используемой радиоволны; в точках приема, для
которых разности расстояний АО до двух РНТ отличаются на целое
число длин волн пХ, фазометры дадут одинаковые показания.
Найдем связь между Аср и АО при фазовом методе. Пусть колеба-
ния, излучаемые двумя РНТ синхронно и в фазе, приходят к самолету
с разницей времени Ат. В общем случае, когда Ат больше времени
одного периода Т колебаний,
\х = пТ 4-АТ,
где п — целое число, а АТ —доли одного периода.
Тогда из формулы 6 1
АО = с (пТ 4- АТ) = псТ 4- сАТ.
Используя известное соотношение сТ = Z, получим
ДО=пХ4-у АТ = ^-(п + у-
192
Но — = — и тогда
Г 2л
= + (6.2)
Следовательно, на поверхности Земли существуют различные
ЛРРР с одинаковыми значениями параметра Аср. Полосы, ограничен-
ные дв}мя соседними изолиниями с измеренной разностью фаз Аф = О,
называются «дорожками» гиперболического поля. При пересечении
самолетом границы дорожки отсчеты фазометра будут повторяться.
Ширина дорожки d, т. е. линейное расстояние между соседними изо-
линиями с одинаковой разностью фаз, зависит от длины волны и по-
ложения наземных станций. Как будет показано далее,
Ф
2 sin —
2
где ф — угол между направлениями иа две РНТ в точке приема, на-
зываемый «углом станций».
На липни базы двух станций, где ф = 180°, ширина дорожки d0 =
= 0,5 X. Таким образом, исходя из формулы 6.2, полный параметр
ЛРРР при фазовом методе должен состоять из величины п, характе-
ризующей конкретную дорожку (номер дорожки), и числа опре-
деляющего положение самолета внутри дорожки (доля дорожки).
Номер дорожки (для устранения неоднозначности линии положе-
ния) может находиться аппаратурно или при участии экипажа.
Так, в РДНС типа Лоран-С, являющейся импульсно-фазовой систе-
мой, грубо, но однозначно параметр ЛРРР (Ат, мксек) определяется
импульсным методом, а точно — фазовыми измерениями. При этом весь
процесс измерения Ат и устранения неоднозначности автоматизиро-
ван. В фазовой системе Декка возможны как полуавтоматическое,
так и чисто ручное устранение однозначности по данным других на-
вигационных средств, например—счисления пути.
Работа экипажа при навигационном использовании РДНС су-
щественно зависит от формы и оперативности индикации результа-
тов навигационных измерений и степени автоматизации их даль-
нейшей обработки для получения навигационных решений.
Индикация навигационной информации в современных РДНС да-
же в приеме индикаторах одной и той же системы неодинакова, так
как потребители (авиация, морской флот) предъявляют к бортовому
оборудованию и его стоимости различные требования. По виду нави-
гационной информации авиационные приемо-индикаторы можно раз-
делить на:
индикаторы параметров гиперболических линий положения (ги-
перболических координат МС), выдаваемых в цифровой (Ат мксек)
или условной буквенно-цифровой форме (номер и доля дорожки);
7 Осадший В. И. 193
индикаторы преобразованных (негиперболических) координат, вы-
дающие географические или прямоугольные координаты МС, а также
некоторые величины, характеризующие положение самолета относи-
тельно программной линии пути (боковые уклонения от ЛЗП, пеленги
и расстояния до заданных точек и т. п.);
наглядные индикаторы МС на картах или проекционных
экранах.
Все образцы современных авиационных приемо-индикаторов пол-
ностью автоматизированы и только в некоторых случаях требуют руч-
ных операций ’— ввод кодов необходимых станций, установка исходных
данных для устранения неоднозначности, контроль за общей исправ-
ностью работы аппаратуры. Это и определяет их высокую оператив-
ность и возможность управления с места пилота.
Область возможного применения РДНС определяется главным об-
разом условиями распространения радиоволн (электрические свой-
ства земной поверхности и ионосферы, уровень атмосферных помех),
влияющими на дальность приема на самолете сигналов от наземных
станций, но зависит также и от метода поиска сигнала и прин-
ципа измерения физического параметра линии положения (Ат
или Aq>).
Электромагнитная энергия диапазона СВ и ДВ от наземных станций
к самолету распространяется двумя путями: вдоль поверхности Земли
(поверхностная волна) и с отражением от ионосферных слоев (прост-
ранственная волна). Наибольшая точность навигационных измерений
обеспечивается при приеме сигналов на поверхностных волнах, од-
нако при помощи пространственных волн можно значительно увели-
чить дальность действия системы.
Средневолновые импульсные системы (Лоран-А имеет рабочую ча-
стоту f = 1 750—1 950 кгц) на поверхностной волне днем над морем
обеспечивают дальность до 1 500 км. Длинные и особенно сверх-
длинные радиоволны (ДВ и СДВ) отличаются еще большей дальностью
распространения поверхностного луча и обеспечивают при достаточ-
ной мощности в любое время суток дальность до 2 500 км (импуль-
сно-фазовая система Лоран-С при f = 100 кгц) и даже 10 000—
11 000 км (фазовая система Омега при f = 10 кгц). В то же время длин-
новолновые РДНС типа Декка, работающие в режиме непрерывного
излучения, из-за вредного влияния пространственных волн практи-
чески используются на дальностях до 600—700 км днем и значительно
меньших (до 130—420 км) — ночью.
Решающее значение для применения РДНС в данном районе име-
ют также геометрические факторы — размеры и расположение баз
РНТ.
Полная характеристика области возможного применения конкрет-
ной РДНС, как и любой радионавигационной системы, достига-
ется построением ее рабочей области по допустимой величине
ошибки МС.
Положительной особенностью РДНС является независимость их
применения от режима полета — скоростей, ускорений и кренов са-
молета.
194
Пропускная способность РДНС благодаря использованию в них
однонаправленных линий передачи информации (только «земля —
самолет») является неограниченной.
Высокая точность работы наряду с большой дальностью дей-
ствия является отличительной чертой РДНС. Точность измерения ге-
ометрического параметра гиперболической линии положения — ве-
личины разности АД поверхностных расстояний до двух РНТ — за-
висит, прежде всего, от точности измерения физических параметров
радионавигационного поля в месте нахождения самолета — разности
времени Ат или разности фаз Аф.
Причинами погрешностей измерений являются:
неточности синхронизации режимов работы наземных станций си-
стемы;
нестабильность условий распространения радиоволн;
инструментальные ошибки аппаратуры.
Импульсные РДНС (например, Лоран-А) обеспечивают получение
разности Ат на поверхностной волне с ошибкой ст(Ат) около 1 мксек;
импульсно-фазовые системы (Лоран-С) на тех же волнах имеют ошибку
ст(Ат) = 0,3 мксек.
Соответствующие ошибки геометрического параметра ЛРРР под-
считываются по формуле
ст (АД) = ест (Ат) = 0,Зст (Ат), (6.3)
где с — скорость распространения радиоволн.
Действующая фазовая система Декка позволяет измерять раз-
ность фаз днем с точностью <т(Аср) = 0,05 фазового цикла, а ночью
со значительно большей ошибкой и на меньших расстояниях.
Система Омега измеряет разность фаз днем с ошибкой сг(Аср) =
= 0,02—0,03 фазового цикла (т. е. примерно?—10°), а ночью ст(Аф) =
= 0,04—0,05 цикла (14—18е).
Ошибка геометрического параметра ЛРРР, измеренного фазовым
методом, выразится соотношением
ст (АД) = — ст (Аф), (6.4)
2л
которое получается из формулы 6.2 дифференцированием по перемен-
ной Аф с переходом к средним квадратическим отклонениям. В этой
формуле X — длина волны, на которой производятся фазовые изме-
рения (волна сравнения), отличающаяся в некоторых системах от дли-
ны волны несущих колебаний.
Например, при длине волны сравнения X = 715 м и ошибке из-
мерения разности фаз на самолете ст(Аф) = 0,05 фазового цикла (или
0,05-2л рад) ошибка измерения геометрического параметра линии
положения
ст (АД) = —0,05-2л = 36 м.
2л
7*
195
$ 6.2. СПОСОБЫ И МЕТОДИКА ИСПОЛЬЗОВАНИЯ РДНС
Основное назначение РДНС — точное определение текущих коор-
динат самолета с целью периодической коррекции счисления пути
или полного решения навигационной задачи в горизонтальной пло-
скости методом непосредственной коррекции МС. Однако РДНС могут
использоваться и для решения частных задач навигации: контроля
пути по одной линии положения (по направлению или дальности),
определения навигационных элементов движения, обеспечения управ-
ления самолетом при полете по ЛЗП различной формы, обеспечения
точной встречи объектов навигации (самолетов, судов) над морем или
другой безориентирной местностью. Известен успешный опыт приме-
нения РДНС Декка на авиахимработах в сельском хозяйстве, при ко-
торых достигалась точность следования самолета по ЛЗП до 15 м.
Методика работы экипажа при использовании РДНС определяется
главным образом степенью автоматизации бортовой аппаратуры и
видом индикации навигационной информации в кабине самолета.
Определение линий положения и мест самолета на полетных картах
Общей операцией при использовании РДНС является преобразо-
вание гиперболических координат самолета, непосредственно измеряе-
мых системой, в координаты какой-либо из навигационных систем (гео-
графической, ортодромической и т. и.), в которой задана программа
полета.
Простейшим способом такого преобразования является нанесение
на обычную полетную карту сети ЛРРР с оцифровкой их значениями
измеренного физического параметра (Ат в мксек — Лоран-А, С или
условным буквенно-цифровым кодом, содержащим номер «дорожки»
и ее десятичную долю, — Декка). Место самолета находится как ре-
зультат пересечения двух линий положения, а его координаты опре-
деляются непосредственным измерением по карте с помощью соответ-
ствующих координатных линий (меридианов и параллелей или глав-
ной ортодромии и перпендикуляров к ней).
В случае использования импульсно-фазовой системы Лоран-С с
автоматизированными приемо-индикаторами основные операции эки-
пажа при определении линии положения состоят в следующем.
Бортовой приемник установкой селекторного переключателя на-
страивается на пару станций, в рабочей области которых находится
самолет. На панели управления приемо-индикатором, как правило,
есть сигнализация, ипформихрующая о приеме или отсутствии сигналов
нужной пары станций.
После автоматического вода аппаратуры в рабочий режим (сле-
жение за сигналами станций и измерение Ат) с индикаторов (как пра-
вило, цифровых) считывается значение разности времени Атпр
(в мксек). Однозначность параметра при этом обеспечивается автома-
тически.
Если сигналы одной (ведущей или ведомой) или обеих станций
принимаются на пространственной волне, в полученное значение
196
OJ' 132° 131’ 130° 129° 128° 127° 126’ 125’ 12^’ 123° 722“ _ 721°
Рис. 6.3. Схема специальной нагрузки карты с ЛРРР
АтпР необходимо ввести поправку 6т на условия распространения ра-
диоволн. Поправка зависит от положения самолета относительно ис-
пользуемых станций и от времени суток. Поправка выбирается из спе-
циальных таблиц, нанесенных в разных местах карты, и имеет буквен-
ные обозначения, показывающие, сигналы какой из станций принима-
ются после отражения в данное время суток. Например, сочетание
знаков GS + 10D означает положительную поправку 10 мксек для
дня (D) в случае приема на поверхностной волне (graund wave) сиг-
налов ведущей станции, а на пространственной (shy wave) сигналов
ведомой станции. Сочетание SG — 01N показывает, что поправка от-
рицательна и дается для случая приема на пространственной (отра-
женной) волне сигналов ведущей станции в ночных условиях (Д').
При приеме сигналов обеих станций па отраженной волне поправка
имеет вид SLO — W + 02 D, т. е. содержит, кроме величины и знака,
только обозначение пары SLO — W и указание времени суток.
В результате введения поправки 6т исправленное значение пара-
метра ЛРРР имеет вид
Ат = Атпр + 6т.
По значению Ат на карте системы Лоран-С (рис. 6.3) непосредст-
венно или с применением интерполяции находится линия положения
самолета. Семейства ЛРРР, соответствующие каждой паре станции,
197
наносятся на карту своим цветом и маркируются буквенными обозна-
чениями, например 2Н2 — 4500.
При использовании фазовой системы Декка экипаж после вы-
полнения исходных установок для выбора конкретной «цепочки»
станций (одна ведущая и три ведомых) непрерывно получает па-
раметры сразу трех линий положения. Параметры каждой ЛРРР
индицируются на отдельном указателе (декометре), обозначенном
своим цветом (зеленый, красный и фиолетовый), соответственно цве-
ту, которым обозначена используемая ведомая станция. Декометр
(рис. 6.4) представляет собой измеритель разности фаз (фазометр)
и имеет шкалы трех масштабов: шкалу зон однозначного определе-
ния (10 латинских букв, появляющихся в окне прибора); шкалу номе-
ров дорожек — с длинной стрелкой; шкалу долей дорожки — с ко-
роткой стрелкой.
При одном полном обороте короткой стрелки стрелка номера до-
рожек перемещается на одно деление. В свою очередь при полном обо-
роте длинной стрелки в окне шкалы изменяется буквенное обозначе-
ние зоны. Декометры имеют рукоятки для ручного ввода исходных
показаний: зоны и номера дорожки. Таким образом, если в исходном
положении МС точно известно и, следовательно, с карты можно снять
зону и номер дорожки, то, установив их на декометре, обеспечивают
однозначность определения линий положения, так как все пересечения
самолетом границ дорожек и зон (полные обороты короткой и длинной
стрелок) будут автоматически регистрироваться в показаниях соот-
ветствующих шкал. Таким образом, многозначность фазового изме-
рения в данном случае устраняется методом привязки. Однако исход-
ная привязка с точностью до половины ширины дорожки (т . е. несколь-
ко сот метров) на самолете практически невыполнима, кроме случая
установок данных на стоянке, предварительно точно привязанной к
гиперболическому полю. Поэтому в системе Декка предусмотрен ре-
жим устранения многозначности, действующий в течение 0,5 сек
Рис 6 4 Декометр точных дорожек
фазовой РДНС
Рис 6.5. Декометр опознавания до
рожек РДНС Декка
198
Рис. 6.6. Схема полетной карты для использования системы Декка
каждой минуты (для каждой из трех пар станций данной цепочки)
и позволяющий определять номер дорожки на специальном (четвер-
том) декометре опознавания дорожек, общем для трех пар станций.
Уменьшение многозначности основано на временном переходе си-
стемы к измерению разности фаз на более длинной волне сравнения
(на временном расширении дорожек в несколько раз). Декометр опо-
знавания (рис.6.5) имеет указатель промежуточных дорожек 4 в виде
вращающегося сектора и указатель номеров дорожек 5 — шестилуче-
вая «звездочка».
В течение каждой минуты на декометре кратковременно подсвечи-
вается каждая из трех шкал (красная 1, зеленая 2 и фиолетовая 3),
по которой и отсчитывается номер дорожки как показание луча звез-
дочки, оказавшегося внутри секторного указателя. Номера дорожек
вручную устанавливаются на основных декометрах, с которых в даль-
нейшем считаются параметры ЛРРР. Для построения МС по двум
ЛРРР выбираются показания двух декометров, дающих наиболее бла-
гоприятный угол пересечения линий положения,
Описанная методика получения линий положения и МС на картах
при больших скоростях полета недостаточно оперативна и может
применяться только в качестве резервной.
В настоящее время основным методом определения МС на карте
по данным фазовых РДНС является непрерывное вычерчивание на
ней (рис. 6.6) фактической линии пути при помощи автоматического
путепрокладчика, подключаемого к выходу приеме индикатора ие-
199
посредственно или через специальный вычислитель-преобразователь
координат.
Для работы автоматического путепрокладчика необходимы сигна-
лы, которые двигали бы карту и записывающее перо в соответствии с
изменениями положения самолета в гиперболическом поле. Если эти-
ми сигналами являются непосредственно приращения гиперболических
координат (отсчеты указателей временной разности или номеров до-
рожек), следует преобразовать карту таким образом, чтобы семейства
гипербол превратились в прямые линии, пересекающиеся под постоян-
ным (хотя бы для данного района) углом. Такое упрощение приводит
к большим искажениям карты (см. рис. 6.6), к потере ею основных на-
вигационных качеств — равноугольности и постоянства масштаба, а
следовательно, и формы изображаемых линейных и площадных ориен-
тиров, делает ее непригодной для измерений. Однако прокладчики с
картами такого типа в авиации существуют, что объясняется отно-
сительной простотой построения механизмов прокладки. При этом
(на картах некоторых прокладчиков системы Декка) основная нагруз-
ка карты состоит из линии воздушной трассы с обозначенной шириной,
поворотных и других контрольных точек ЛЗП, зон аэропортов, а так-
же разреженной сети спрямленных гиперболических линий положе-
ния, обозначенных буквами зон и номерами дорожек. Дополнительно
на всем протяжении трассы даны отметки расстояний от последнего
пройденного контрольного пункта или оставшегося расстояния до оче-
редного пункта: это позволяет довольно просто определять путевую
скорость, зафиксировав время полета между пересечениями двух от-
меток дальности.
В более совершенных образцах приемо-индикаторов как импульс-
но-фазовых (Лоран-С), так и фазовых систем (Декка МК-16) применяют
цифровые вычислители, позволяющие пересчитывать гиперболические
координаты в географические или любые сферические. Последнее обес-
печивает управление автоматическим путепрокладчиком, отобража-
ющим текущие МС на обычной (неискаженной) полетной карте.
Вождение самолета по линии заданного пути
Непрерывная и достаточно точная индикация текущих МС на карте
путепрокладчика (как на искаженной, так и на обычной) обеспечивает
возможность прямого применения метода непосредственной коррек-
ции для стабилизации самолета на ЛЗП любой заданной формы. С этой
целью на картах путепрокладчика особым цветом выделяется полоса
трассы в соответствии с установленной ее шириной. Пилот, наблюдая
за движением пера самописца по такой карте, может управлять само-
летом так, чтобы не допускать выхода пера из обозначенных границ
трассы. Однако качество регулирования при таком примитивном ис-
пользовании информации о МС не может быть достаточно высоким и от
пилота требуются специальные навыки в подборе устойчивого режима
на каждом участке ЛЗП. Более рационально непрерывная информа-
ция о МС используется в автоматизированных навигационных ком-
плексах, использующих данные РДНС (например, в ЛНК типа
«HARCO»).
200
Другим приемом вождения самолета с использованием информации
от РДНС является полет по ветви гиперболы, если она достаточно
хорошо совпадает с ЛЗП. При следовании по гиперболической дорож-
ке показания стрелки точного декометра должны оставаться постоян-
ными, что позволяет подбирать курс по компасу для небольших уча-
стков пути. Этот прием может оказаться полезным при отказе путе-
прокладчика, но при исправной работе указателя дорожки.
Особым способом применения РДНС при решении навигационных
задач является способ организации встречи объектов навигации в без-
ориентирной местности. Поскольку для встречи необходимо только
знание относительного положения двух объектов, задачу можно ре-
шать без привязки к местности, используя только систему гипербо-
лических координат. Координатные линии гиперболического поля в
результате изменчивости условий распространения радиоволн нахо-
дятся в подвижном относительно местности состоянии. Однако все
изменения гиперболических координат будут одинаковыми для обоих
встречающихся объектов, и, следовательно, добившись путем взаимной
информации совпадающих показаний бортовых индикаторов, можно
обеспечить надежную встречу.
В случае встречи двух самолетов для обеспечения безопасности
необходимо согласовывать их высоты полета.
Определение угла сноса а с помощью РДНС при автоматической
индикации МС на карте возможно после подбора режима устойчивого
следования по ЛЗП (перо путепрокладчика движется строго по оси
трассы): по компасу замечается фактический курс самолета у, который,
если необходимо, приводится к системе отсчета, одноименной с путе-
вым углом |3, обозначенным на карте; затем по формуле а = р —у
рассчитывается угол сноса. Путевая скорость определяется как резуль-
тат измерения времени движения пера путепрокладчика между двумя
отметками пройденного (оставшегося) расстояния от пункта на карте.
При использовании в путепрокладчике неискаженных карт навига-
ционные элементы определяются непосредственно по двум МС методом
контрольного этапа.
Существуют самолетные приемо-индикаторы РДНС со специаль-
ными вычислителями, обеспечивающими автоматический расчет теку-
щих составляющих путевой скорости по меридиану и параллели, а
также расчет и индикацию текущего направления на одну из несколь-
ких заранее заданных фиксированных точек и остающегося до нее
расстояния. На основе такой информации формируются сигналы уп-
равления автопилотом по заданной программе.
§ 6.3. ОЦЕНКА ТОЧНОСТИ ЛИНИЙ ПОЛОЖЕНИЯ И МЕСТ САМОЛЕТА
Ошибки линии равных разностей расстояний
Причиной ошибки ЛРРР Дрлррр является погрешность в опреде-
лении ее геометрического параметра — разности расстояний до двух
станций Д(Д£>). Согласно формуле 1.7
о (ДО)
О’ ЛРРР = “--,
«ЛРРР
201
где gjjppp — модуль градиента величины разности поверхностных
(сферических) расстояний от места самолета до станций.
Как известно [14], градиент разности скалярных функций равен
геометрической разности градиентов этих функций.
В нашем случае рассматриваемая функция AD = D2 — Dlt т. е.
согласно приведенной теореме g&o = go2 —gDi- Чтобы найти модуль
градиента образуем скалярный квадрат от обеих частей этого
равенства:
(gL)2 = (go.—gof = (go,У — 2 (gZ. go,) + (gOt У,
или
glD = gD, ~ 2gD, gDt COS ф + gl, ,
где ф — угол между градиентами ~gD1 и go2 (т- е. между направлениями
из точки МС на станции, называемый углом станций (рис. 6.7). Но
так как (§ 5.1) градиент изменения дальности на сфере равен единице,
т. е. goi = gD2= 1> получим
gw = 2 — 2 cos ф = 2 (1 —cos ф) = 4 sin2 —.
Отсюда модуль градиента
£лррр = £до = 251’п у
и формула ошибки ЛРРР принимает окончательный вид:
а (ДО)
ар лррр =-----т- •
2sin —
2
Из полученной формулы видно, что величина ошибки ЛРРР зави-
сит от угла ф, связанного с положением самолета относительно стан-
ций системы. Она минимальна при нахождении самолета меж-
ду станциями на линии базы АВ (ф = 180°) увеличивается по мере
Рис. 6.7. К выводу формулы градиента
ЛРРР на сфере
Рис. 6.8. График коэффициента
линейной ошибки ЛРРР
202
удаления от нее во всех направлениях. На обоих продолжениях ли-
нии базы угол ф = 0° и, следовательно, ор при конечном значении ошиб-
ки исходного геометрического параметра а(ДП) будет неограниченно
возрастать.
Изменение ошибки ЛРРР при уменьшении угла ф станций от
20 до 0° показано на графике коэффициента линейной ошибки (рис. 6.8).
&ЛРРР = —-— =----—-
?ЛРРР 2sin —
2
Для получения линейной величины ошибки ЛРРР достаточно умно-
жить известную величину а(ДД) на коэффициент линейной ошибки
£лррр , взятый для данного угла ф.
Пример. Для ст(ДИ) = 100 м = 0,1 км и при ф = 20° (/г20 = 2,4)
ошибка
«трлррр = k20 • ст (ДО) = 2,4 -0,1= 0,24 км,
а для ф = 2°(£2 = 28,6) <тЛррр = 2,86 км.
Ошибки мест самолета
Точность МС, определенного в пересечении двух ЛРРР на поверх-
ности Земли, оценивается средней квадратической радиальной ошиб-
кой or на основании формулы (1.11). В эту формулу необходимо под-
ставить значения ошибок apL и ар, используемых гиперболических
линий положения:
р (АО1)
4’1 ’
2 sin-^
2
<тр2 =
а (ДР,)
2sin^-
2
(6.5)
где <т(ДО1) и о(ДО2) — средние квадратические ошибки определения
исходных геометрических параметров каждой из ЛРРР (формулы 6.3
и 6.4), а фх и ф2 — углы станций двух пар РНТ, использованных для
получения двух ЛРРР. Кроме того, необходимо выразить угол пере-
сечения линий положения со через те же углыфх и ф2. При этом само-
лет может оказаться в одной из шести характерных зон (секторов),
показанных на рис. 6.9. Основными (рабочими) из них являются
зоны I—IV. В зонах / и II, как видно из рис. 6,9, а,
ы Ф1 + Ф2
2
(6.6)
что следует из свойства сферической гиперболы делить в каждой точ-
ке угол между направлениями на две станции (угол станций) пополам.
При нахождении МС в зонах III и IV имеет место другое соотношение
(рис. 6.9, б):
Ф1 —Фг
2
203
С учетом соотношений 6.5 и 6.6 для точек / и II зон средняя квад'
ратическая ошибка
s2 /о (ДР2) \2
„ lllj I "г . 1|12
2 sin— j I 2sin—7— /
2 / \ 2 /
ipi+ipa
sin--------
2
Если считать = о(ЛГ>2) = <т(ДГ>), что близко к действитель-
ности при одинаковых условиях распространения радиоволн от всех
трех станций, получим
Рис. 6.9. Зоны рабочей области РДНС
204
называется коэффициентом радиальной ошибки РДНС. Этот коэффи-
циент зависит только от геометрических факторов — положения само-
лета относительно баз станций. Как видно из формул, йрднс, а следо-
вательно, и or не определены только на продолжениях баз обеих
пар станций, т. е. прифх = 0° или ф, = 0°,
По формуле 6.8 можно построить зависимость йрднс от углов 4'1
и ф,, для чего, задаваясь некоторым фиксированным значением йрднс
и рядом частных значении одного из углов (например, ф.2), вычисляют
значения второго угла. График такой зависимости для случая нахож-
дения самолета в зонах / и // приведен на рис. 6.10. Пользуясь графи-
ком, можно решать задачу определения ошибки МС or, если известна
величина ошибки измерения исходного геометрического параметра
ст(ЛД) и углы станций и ф, (например, по карте с нанесенными
ЛРРР).
Наиболее полное представление о распределении радиальных
ошибок для РДНС, состоящей из трех станций, дают кривые
равных ошибок, которые можно построить также с помощью графи-
205
ков (см. рис. 6.10). Положив в уравнении 6.7 аг = агаоа и раздели в
обе части на известное значение o(AD), получим
^(Ф1>4’2) =
2sinA±*slnbsi„'i
2 2 2
_ ££доп _ const.
с (AD)
Вычислив для условий данной конкретной задачи величину k =
= -~щ=^ можно по графику подобрать достаточное число пар углов
(фп ф2), каждая из которых определяет на сферической поверхности
Земли одну точку, принадлежащую искомой кривой равной ошибки.
Совокупность таких точек на сфере, соответствующих определенному
значению коэффициента /грднс, и составит контур равной точности МС,
который может быть оцифрован величиной аг, принятой для расчета
/грднс, либо величиной гРг> связанной с аг при заданной вероятности
Рт соотношением (1.10).
Построение таких контуров на карте требует преобразования углов
Ф1 и ф2 в географические координаты с учетом координат наземных
станций, что хотя в принципе и не сложно, но очень трудоемко. Но
так какдребования к точности границ рабочих областей не очень вы-
соки, часто даже при значительных удалениях от наземных станций
применяется приближенное построение кривых ar = const, т. е. без
учета кривизны Земли, считая углы ipj и ф2 плоскими, а карту —
планом местности.
Для построения одной точки в зонах 1 или II на листе кальки из
некоторой точки О проводят прямую OL0 и,
Рис. 6.11. Построение кривой постоянной ради-
альной ошибки РДНС:
/—трафарет; 2 — карта
отложив от нее в разные
стороны углы и ф2,
строят два луча OLt и
ОЬ2. Полученный трафа-
рет 1 (рис. 6.11) накла-
дывают на карту 2, до-
биваясь положения,
чтобы все три луча про-
ходили через соответст-
вующие станции (луч
OLU должен проходить
через ведущую стан-
цию). При этом общая
вершина О углов укажет
на карте одну из точек
линии равных ошибок.
При построении точек в
зонах III и IV углы
Ф1 и ф2 на кальке
строятся по одну сторону
от основного луча OL0
(т. е. образуется раз-
206
Рис. 6.12. Кривые равной радиальной ошибки РДНС:
а) при угле баз <р=90° и б) при ф=»120°
^S
092>
Q
1
<0
2
-is
7J
2
ность углов (ф2 — ipi). Этот же метод можно применять и для прак-
тического построения кривых равной точности на сфере (например,
на навигационном глобусе масштаба 1 : 10 000 000). Но при построе-
нии вместо трафарета на кальке необходимо иметь сферический
транспортир с тремя длинными гибкими линейками, закрепляемыми
под углами ipj -и ф2 ДРУГ относительно друга.
Форма кривых равной точности РДНС зависит от размеров и вза-
имного расположения баз станций: от величины отношения и
угла пересечения двух баз. На рис. 6.12 показаны кривые равных оши-
бок МС с различными параметрами /грднс при разных углах <р пересе-
чения баз (при bi = b2 и одинаковых ошибках параметров обеих ЛРРР).
Кривые, как правило, своими различными ветвями проходят через
все три станции. Однако при некоторых значениях брднс ветви кривых
могут проходить только через одну или две из них, или даже замыкать-
ся, минуя все станции. Существуют кривые, пересекающие линии баз
между станциями (рис. 6.12, а и б). Продолжения линий баз не пере-
секаются ни одной из кривых, так как в точках этих прямых одна из
ошибок ЛРРР неограниченно возрастает, т. е. /МС определено быть не
может. В отдельных точках кривых в укрупненном масштабе показаны
эллипсы рассеивания МС и их ориентация, что дополнительно харак-
теризует распределение ошибок.
Как видно из рис. 6.12, контуры равной точности РДНС имеют слож-
ную многолепестковую форму, зависящую от взаимного расположе-
207
ния наземных станций. Изменяя расположение станций, можно доби-
ваться наиболее рационального расположения рабочей области
системы в обслуживаемом районе полетов.
Применение вторичных линий положения
Повышение эффективности использования полей РДНС достигается
также выбором наиболее выгодных пар станций, что, как правило,
возможно, так как «цепочка» объединяет до трех-четырех пар стан-
ций, работающих одновременно на разных каналах. Бортовой приемо-
нндикатор на необходимую пару настраивается простым переключе-
нием селектора. Новейшие приемные устройства РДНС (авиационные
приемо-индикаторы систем Декка и Омега) являются двухканальными,
т. е. позволяют принимать сигналы двух пар станций одновременно,
чем обеспечивается синхронность двух линий положения при опре-
делении МС.
Кроме того, современная вычислительная техника позволяет вы-
полнять на борту самолета преобразования исходных линий положе
ния в так называемые «вторичные линии положения», углы пересе-
чения которых со в данном районе могут быть ближе к оптимальному
Рис. 6.13. Поле вторичных линий положения РДНС
208
значению, чем у исходных ЛРРР.
Сущность преобразования исходных
параметров ADj и AD2 заключается
в следующем.
Если для данной точки имеются
параметры двух ЛРРР ADi = Dj — D2
и ^D1 = D3—D2 (D2 —расстояние
до j, общей ведущей станции), то из
них можно образовать вторичные па-
раметры: разность
6 (А£>) = ADj — AD2 = (Dj — D2) —
(Рз—D2) = Z)2 —D3 = ct
и сумму
V(AD) = AD14-AD.,=
= D14-D3—2D2 = cx.
Рис 6.14. Схема оптимальных
комбинаций вторичных линий по-
ложения РДНС
Кривая с постоянным значением параметра сь является гипербо-
лой с фокусами в точках ведомых станций («третье поле гипербол»).
Кривые же, соответствующие постоянным значениям параметра cv,
будут более сложными, но они в некоторой части пространства почти
ортогональны с кривыми семейства вторичных гипербол (рис. 6.13).
Градиент поля вторичных гипербол всегда больше градиента исход-
ного поля (так как расстояние между ведомыми станциями длиннее
основных баз). Градиент же поля линий положения второго типа мо-
жет как возрасти, так и уменьшиться (особенно на больших удалениях)
по сравнению с исходным полем ЛРРР. Поэтому та или иная комбина-
ция вторичных линий положения используется только в той части
рабочей области системы, где она дает наибольшую точность определя-
емого МС. Переход от одной комбинации к другой при перемещении
самолета осуществляется переключением специального селектора.
Пример комбинаций вторичных линий положения системы Декка
с тремя ведомыми станциями показан на рис. 6.14. Как и УДНС,
РДНС наиболее эффективны при использовании их для автоматиче-
ской коррекции счисленных координат. При этом операции экипажа
в полете в зависимости от совершенства вычислителя сводятся к ми-
нимуму или полностью устраняются.
РАЗДЕЛ II
ПРИМЕНЕНИЕ АВТОМАТИЗИРОВАННЫХ
НАВИГАЦИОННЫХ КОМПЛЕКСОВ
Ни одно отдельно взятое техническое средство навигации
не является универсальным ни по объему решаемых задач, ни по при-
менению в различных условиях навигационной обстановки. Поэтому
практикой самолетовождения уже на первых этапах его развития был
выработан основной принцип навигационной ра-
боты, заключающийся в совместном использовании различных,
независимых друг от друга, навигационных средств.
Основная идея этого принципа — достижение наибольшей точности
и надежности выполнения операций за счет компенсации недостатков
одних датчиков навигационной информации преимуществами других.
Например, объединение в курсовых системах магнитного, астрономи-
ческого и гироскопического датчиков направления обеспечило надеж-
ное получение курса самолета практически в любых условиях полета —
на прямолинейных участках ЛЗП и на разворотах, в областях нор-
мального поля Земли и вне их, в условиях видимости небесных
светил и под облаками.
Возникающие при большом объеме поступающей информации труд-
ности ее обработки преодолеваются всесторонней автоматизацией из-
мерительных, вычислительных и логических операций, т. е. повыше-
нием производительности умственного труда экипажей.
В этом разделе учебника рассматриваются основные современные
проблемы воздушной навигации и возможные пути их решения при-
менительно к гражданской авиации.
Глава 7
ОСНОВЫ АВТОМАТИЗИРОВАННОГО РЕШЕНИЯ
НАВИГАЦИОННЫХ ЗАДАЧ
§7.1. СОВРЕМЕННЫЕ ПРОБЛЕМЫ ВОЗДУШНОЙ НАВИГАЦИИ
И ТЕХНИЧЕСКИЕ ВОЗМОЖНОСТИ ИХ РЕШЕНИЯ
Развитие гражданской авиации и расширение ее применения в раз-
личных областях народного хозяйства непрерывно изменяют и усло-
вия решения навигационных задач в полете.
Скорости самолетов гражданской авиации при переходе к реак-
тивной технике возросли с 300—350 до 600—800 км/ч, т. е. более чем
210
в 2 раза. Максимальные эксплуатационные высоты полетов поднялись
с 4 000—4 500 до 10 000—11 000 м, т. е. также более чем вдвое. В на-
стоящее время в связи с освоением сверхзвуковых самолетов (напри-
мер, Ту-144) происходит новое, еще более существенное изменение
летно-технических характеристик: скорости возрастут до 2 100—
2 500 км'ч (более чем в 3 раза), а высоты — до 20000—21 000 м (в 2 ра-
за). Таким образом, менее чем за 20 лет высотно-скоростные харак-
теристики самолетов повысились в 5—7 раз.
Существенно меняются формы траекторий полетов и режим скоро-
стей. Переход к реактивным самолетам привел к значительному возра-
станию доли негоризонтальных и криволинейных участков траекторий
и к необходимости их точного учета. Однако скоростной режим в те-
чение одного полета менялся не очень сильно. У сверхзвукового транс-
портного самолета профиль и скоростной режим полета практически
все время будут переменными. Характерными этапами сверхзвуко-
кового полета являются: набор высоты примерно до 10 000 м на до-
звуковой скорости, разгон самолета в горизонтальном полете и наборе
высоты с преодолением звукового барьера, крейсерский полет на сверх-
звуковой скорости (М = 2—2,5) с продолжающимся набором высоты
до 18 000—21 000 л«, снижение самолета до высоты эшелона подхода
к аэродрому. Время на набор высоты и снижение при полете на
полную дальность составит около 40% от общего времени полета,
в то время как у дозвукового самолета это время составляет 10—12% .
Повышение интенсивности воздушного движения предъявляет
новые требования к точности навигации в целях предупреждения
столкновений между самолетами в воздухе при пересечениях воздуш-
ных трасс, а также для обеспечения приема прибывающих в зону аэ-
ропорта самолетов. Точная навигация является главным фактором,
позволяющим повысить пропускную способность воздушных трасс
за счет более плотного бокового, вертикального и продольного эшело-
нирования.
Для повышения экономической эффективности транспортных по-
летов дальние рейсы, например через океаны, организуются с выбором
оптимального маршрута, учитывающего распределение ветра на трас-
се. Такие маршруты более сложны для навигационного обеспечения по
сравнению с обычными ортодромическими трассами и требуют спе-
циальных мер для их успешного выполнения. Влияние экономики про-
является также в тенденции к сокращению летного экипажа, что тре-
бует, в частности, обеспечения командира экипажа автоматизиро-
ванными бортовыми и наземными техническими средствами.
Общая логическая схема навигационного процесса1, оставаясь
в принципе неизменной, практически реализуется при скоростных и
высотных полетах с существенными особенностями, вытекающими из
требований к технике и методике навигации конкретных летательных
аппаратов. Для обеспечения наибольшей надежности и точности в лю-
бых возможных условиях полета на борту современного самолета
необходимо иметь несколько независимых датчиков курса и скорости
1 См. § 1.5 [191.
211
полета, работающих на различных принципах действия, а определение
текущих координат вести как методами независимых определений,
так и методами счисления. Увеличение числа каналов сбора навига-
ционной информации достигается также путем дублирования некоторых
одинаковых датчиков.
Особенности траекторий и временных характеристик движения
самолетов требуют выполнения всех вычислительных и логических
операций немедленно в реальном масштабе времени или даже с уп-
реждением (прогнозирование хода полета) и тем самым определяют
необходимость высокой оперативности при сборе и обработке инфор-
мации.
Повышенные требования предъявляются также и к пилотированию,
которое должно обеспечить высокое качество регулирования режима
полета и особенно качество переходных процессов: плавность (апе-
риодичность), краткость (малую постоянную времени), астатизм (от-
сутствие систематической ошибки по окончании переходного процесса),
устойчивость. Для выполнения этих задач необходимы повышение
точности и оперативности выработки решений на изменение положе-
ния органов управления самолетом и его двигательной установкой.
Реализация отмеченных требований приводит к усложнению ин-
формационных процессов на борту летательного аппарата, резкому
повышению их объема н темпа.
В связи с развитием средств сбора навигационной информации,
усовершенствованием и созданием новых датчиков курса, высоты,
скорости, угла сноса, параметров линии положения и других величин
экипаж получает такой объем исходных данных, который не может быть
полностью использован при решении задачи навигации «ручными»
способами, когда основные вычислительные и логические операции
выполняются штурманом или пилотом Это является следствием ог-
раниченных возможностей человека при обработке информации в про-
цессе управления.
На современном этапе развития авиационной техники человек-
оператор имеет недостаточную скорость восприятия информации и вы-
полнения вычислительных операций. При этом процесс считывания
исходных данных со шкал приборов вынужденно упрощается, так как
человек не успевает реализовать непрерывно поступающую информа-
цию и поэтому оперирует с некоторыми осредненными значениями на-
вигационных величин. Само осреднение при этом выполняется прибли-
женно, что значительно искажает действительную картину полета
Например, при счислении пути «вручную» курс, воздушную скорость
и ветер приходится считать постоянными на значительных участках
линии пути, хотя фактически они непрерывно меняются.
Недостаточное быстродействие исключает решение навигационных
задач по точным аналитическим зависимостям, связывающим исходные
величины и конечные результаты, приводит к замене их приближен-
ными соотношениями, а часто даже графическими построениями па
карте, расчетчике’или номограмме.
В условиях повышения доли режимов с переменными параметрами
(изменения курса, наличие ускорений) такое упрощение приводит
212
к большим ошибкам в определении МС и решении навигационной
задачи в целом.
Существенным недостатком человека-оператора является также
его ограниченная возможность оперировать с многозначными числами,
даже при использовании средств механизации счета (линейки, номо-
граммы и т. п.), что непосредственно сказывается на точности ре-
зультатов.
Из других недостатков человека, как звена в системе управления,
следует отметить утомляемость при выполнении однообразных опе-
раций, подверженность мешающему воздействию внешних факторов,
малую оперативную память.
Все эти недостатки особенно сказываются на тех этапах полета,
где навигационные и пилотажные задачи тесно переплетаются между
собой (при сложном маневрировании на маршруте и заходе на посадку).
Определение целесообразного воздействия на органы управления само-
летом на основании показаний навигационных приборов требует в этих
случаях быстрого и точного учета таких характеристик движения,
как скорости изменения (производные) координат, без чего не обеспе-
чиваются плавный вывод и удержание самолета на программной
траектории. Выработка пилотажных решений чисто инту итивным или
рефлекторным (приобретенным в процессе предыдущего опыта и тре-
нировок) путем в условиях современных полетов уже себя не оправ-
дывает. Так, при использовании для захода на посадку только нуль
индикаторов курса и глиссады пилот практически не в состоянии точ-
но вести самолет по заданной программе, так как эти приборы не дают
информации о скоростях изменения координат.
Таким образом, затруднения в решении навигационных задач на
современном этапе можно охарактеризовать как отставание методов и
техники обработки навигационной информации, вызванное бурным
ростом технических характеристик летательных аппаратов граждан-
ской авиации. Это явление характерно не только для авиации: во
всех областях современной техники наблюдается необходимость со-
вершенствования процессов управления, в первую очередь улучшения
качества информационно-логических процессов. И подобно другим
областям техники отставание процессов управления, какими являются
навигация и пилотирование, может быть преодолено на основе их ав-
томатизации.
Применение автоматизации для совершенствования навигации
и пилотирования современных самолетов основывается на ряде пре-
имуществ вычислительных устройств по сравнению с человеком-опе-
ратором (пилотом или штурманом) при решении задач общей логиче-
ской схемы навигации.
Эти преимущества следующие: высокая скорость выполнения вы-
числительных и простейших логических операций, высокая (при при-
менении цифровых машин практически неограниченная) точность вы-
числений, большая оперативная память и малое время обращения к
ней, быстрая реакция на внешние сигналы, меньшая подверженность
ошибкам при выполнении многократно повторяющихся операций,
отсутствие «усталости».
213
Однако преимущества автоматических устройств при выполнении
конкретных операций навигационного процесса не умаляют ведущей
роли человека на пилотируемом летательном аппарате, для которого
любая машина является орудием, повышающим производительность
труда. Человек обладает целым рядом психофизиологических свойств,
позволяющих решать навигационные задачи, как и вообще задачи уп-
равления, в условиях, когда машина оказывается неэффективной.
К таким свойствам относятся:
большой диапазон принимаемых сигналов;
способность к инициативе в случаях изменения обстановки, требу-
ющих творческого решения задачи и выработки суждений в условиях
недостаточности поступающей информации;
длительная память, позволяющая учитывать накопленный опыт.
Таким образом, решение навигационных задач в современных и
ближайших перспективных условиях развития гражданской авиации
можно представить как автоматизированное управление самолетом
при участии и под контролем человека.
При этом основными задачами автоматизации
навигации являются:
сбор первичной информации от всех применимых в данных условиях
датчиков;
обработка полученных данных оптимальными способами;
полное (по трем координатам) решение навигационной задачи
с использованием точных аналитических зависимостей на основе опти-
мального комплексного использования различных датчиков;
решение всех вычислительных и логических задач в реальном мас-
штабе времени, с наименьшим временем запаздывания;
обеспечение наглядной и оперативной автоматической индикации
внешних условий и навигационных элементов движения самолета;
повышение экономичности полетов.
§ 7.2. ПРИНЦИП И ОСНОВНЫЕ ОПЕРАЦИИ АВТОМАТИЗИРОВАННОГО
НАВИГАЦИОННОГО ПРОЦЕССА
На базе современной техники можно создать автоматическую си-
стему управления, обеспечивающую решение задач воздушной нави-
гации без всякого участия человека. Известны образцы беспилотных
самолетов и других летательных аппаратов, навигационно-пилотаж-
ное оборудование которых обеспечивает взлет, полет с необходимым
маневрированием по заданной траектории и посадку. Однако надеж-
ность и стоимость этих средств далеко не соответствуют требованиям
гражданской авиации. Поэтому все современные автоматизированные
навигационные средства гражданских самолетов развиваются как
средства автоматического выполнения возможно большей части функ-
ций общей логической схемы навигации под контролем и управлением
экипажа, осуществляющего ответственные, но несложные (в основном
логические) операции.
Автоматизированным навигационным ком-
плексом (АНК) называется совокупность . конструктивно свя-
214
занных между собой бортовых навигационных средств, обеспечиваю-
щих решение экипажем навигационной задачи при совместном исполь-
зовании нескольких (бортовых, наземных, спутниковых) датчиков
исходной информации и автоматическом выполнении вычислитель-
ных и части логических операций. В состав АНК входят следую-
щие характерные группы бортовых средств:
датчики навигационной информации (ДНИ);
один или два навигационных вычислителя (НВ);
устройства управления, индикации и сигнализации (УУИС);
вспомогательные устройства (блоки коммутации, специальные
источники электропитания и др.).
Решение навигационной задачи заканчивается выработкой сиг-
налов отклонения самолета от заданной пространственно-временной
траектории (программы) полета и выбором алгоритма (метода)
устранения отклонений с определением регулируемых параметров
(г, г, Др, ЛЯ и т. д.).
Непосредственное управление самолетом осуществляется группой
бортовых устройств, составляющих автоматизированный
пилотажный комплекс (АПК). Взаимодействие АНК и АПК
состоит в том, что АПК, приняв навигационную информацию от АНК,
формирует на ее основе командные пилотажные сигналы по крену,
тангажу и воздушной скорости и реализует их через автопилот или
командно-пилотажные (директорные) приборы. Тесно связанные меж-
ду собой АНК и АПК составляют в совокупности навигацион-
н о-п илотажный комплекс самолета (НПК).
Общая схема работы АНК
Общая схема работы АНК (рис. 7.1) складывается из выполнения
следующих основных операций.
Перед полетом производится навигационное програм-
мирование, заключающееся в формировании и вводе в память
НВ информации, характеризующей заданный пространственно-вре-
менной график движения и параметры наземных средств коррекции.
Наиболее совершенные АНК с цифровыми вычислителями требу-
ют ввода только географических координат, высот, времен прохо-
да всех ППМ и координат средств коррекции. Преобразование этих
данных в параметры, непосредственно используемые при решении
навигационных задач, выполняется в НВ автоматически. В другие
АНК (как правило, с аналоговыми НВ) вводятся уже готовые про-
граммные данные для каждого этапа полета (путевые углы, расстоя-
ния, ортодромические координаты средств коррекции), расчет которых
по исходным данным должен выполняться вне АНК при подготовке
к полету.
В полете по данным автономных датчиков (допплеровских, инер-
циальных, аэродинамических) ведется непрерывное счисле-
ние текущих координат места самолета (МСсч).
Периодически или непрерывно производится определение координат
независимыми методами (МСие8) с помощью автономных средств
215
Независимые
определения
координат мс
Счисление
координат
МС
Оптимизация
(коррекция)
МС
виия
CV Ч
МС0П7
Индикаии
МСмрч
псЗ
программирование
Хранение навига-
ционных программ
,гинбб\
‘нация г
\Mjx
СроВнение 7
мс{
МС
в бод
исходных
донных
Сигналы
управления
самолетом
Выработка
набигационного
решения
а) и
б)й\н—~О
Выработка
пипототного
решения
1гр- ** тр,
VJp
(Индикация'
[рассоглои
( доний .
Рис. 7.1. Общая схема решения навигационной задачи в АНК
(БРЛС, астроориентатора, визуально) или радионавигационных си-
стем (УДНС, РДНС). По результатам независимых определений про-
изводится оптимизация текущих координат, оп-
ределяемых комплексом, которая может выполняться автоматически,
полуавтоматически или вручную.
Полученные оптимизированные координаты МС0ПТ сравниваются
с программными (заданными) координатами МСа, в результате чего
—>
определяется вектор рассогласования г или его со-
ставляющие — боковое отклонение г самолета от ЛЗП и ошибка ДЗ
по дальности в текущий момент времени. На основании данных
о векторе рассогласования вырабатывается навигаци-
онное решение: во-первых, выбирается метод навигации
(«непосредственная коррекция» или «управление навигационным
режимом») и, во-вторых, определяются регулируемые параметры
принятого метода.
При методе непосредственной коррекции регулируемыми парамет-
рами, приводимыми к нулевым значениям, являются отклонения те-
кущих координат самолета от их программных значений в данный
момент времени; линейное боковое отклонение z от ЛЗП (ошибка бо-
ковой координаты) и расчетное значение ошибки Д7' времени при-
бытия в контрольную точку (являющееся следствием ошибки ДЗ
продольной координаты) или угловое уклонение ДЛС самолета от
ЛЗП, заданной как ЛРПС относительно УДНС (РСБН или VOR/DME)
и также ошибка ДТ времени прибытия.
Если применяется метод управления навигационным режимом,
регулируемыми будут параметры вектора путевой скорости — путе-
вой угол |3 (или его поправка ДР) и величина путевой скорости U? (или
поправка Д1Е).
Получаемые текущие значения регулируемых параметров, а часто
и их производные (также формируемые в АНК), передаются в пило-
тажный комплекс для выработки сигналов управления самолетом.
216
В процессе автоматизированного решения навигационных задач
управляющая роль экипажа обеспечивается работой устройств
управления, индикации и сигнализации
(УУИС), которые позволяют постоянно или периодически (по вызову)
получать информацию о текущих координатах, элементах движения,
параметрах вектора рассогласования, состоянии основных частей ком-
плекса.. На основе этой информации экипаж следит за автоматическим
процессом навигации, ио при необходимости вмешивается в его ход,
используя пульты управления для реализации навигационных реше-
ний, выходящих за рамки возможностей автоматики.
Основу АНК и АПК, обеспечивающую им качественно новые воз-
можности по сравнению с другими навигационными средствами, со-
ставляют вычислительные устройства, используемые на всех этапах
обработки информации. Центральный вычислитель может выполнять
не только операции собственно навигационной задачи, но и вычисли-
тельную обработку в целях оптимизации первичных измерений (на-
пример, курса, путевой скорости), а также автоматический контроль
работы датчиков и своих собственных вычислительных схем. Харак-
теристиками вычислительного -устройства, примененного в данном
АНК, во многом обусловливаются навигационные возможности ком-
плекса в целом.
В настоящее время в гражданской авиации применяются навига-
ционные вычислители, построенные на базе аналоговых элементов,
и вычислители с бортовыми цифровыми вычислительными машинами
(БЦВМ).
Переход к автоматизированному решению навигационных задач
при использовании многих источников информации требует решения
ряда принципиальных вопросов, связанных с выбором основной си-
стемы координат АНК, вида аналитических зависимостей для решения
навигационных задач, способов отыскания оптимальных значений
навигационных параметров и координат МС при наличии избыточной
информации, объема и вида необходимой индикации различных нави-
гационных величин, способов управления автоматическими устрой-
ствами со стороны экипажа.
Основная система координат АНК
Основной системой координат автоматизированного навигацион-
ного комплекса называется система, применяемая в нем для вычис-
лительных операций при счислении координат самолета, их сравне-
нии, коррекциях и выработке управляющих сигналов.
Проблема основной системы координат и связанное с ней навига-
ционное программирование возникли в связи с необходимостью при-
менения аналитических методов обработки информации о координатах
самолета, получаемых от нескольких разнородных датчиков — АВК,
БРЛС, астроориентаторов, УДНС, РНДС и др. Каждый из этих дат-
чиков выдает координаты в своей специфической системе: АВК и астро-
ориентатор — в географической (геосферической) и ортодромической;
БРЛС и УДНС—в полярной относительно различных наземных точек,
217
РДНС — в криволинейной (гиперболической) относительно двух баз
наземных станций. При использовании полетной карты была возмож-
ность наносить МС в любой системе координат, для чего на ней, кроме
географической, строились вспомогательные координатные сетки: би-
полярная—для УНС; азимутально-дальномерная—для УДНС; гипер-
болическая—для РДНС; ортодромическая—для АВКортодромической
системы координат и т. д. Тем самым взаимное положение нескольких
МС, относящихся к одному времени, но полученных разными путями,
было видно непосредственно на карте, их расхождения измерялись
линейкой и для каждого МС легко определялось отклонение от заданной
программы, также нанесенной на карту в виде маршрута полета. Од-
нако такой прием совместной обработки информации от различных дат-
чиков не может быть основой автоматического решения навигационных
задач главным образом из-за неточности графических построений. Ис-
пользование картографического материала сохраняется в АНК толь-
ко в целях обобщенной наглядной индикации хода полета на фоне
изображения местности.
В качестве основной системы координат АНК, как правило, при-
меняется ортодромическая система, связанная либо с ортодромией
каждого участка маршрута («частные ортодромии»), либо с одной
ортодромией для района полета («главная ортодромия»). На рис. 7.2
показано расположение на сфере осей главно-ортодромической (Ох
и Оу) и частно-ортодромической (0Z и 05) систем координат для од-
ного и того же маршрута. Отсчет продольной координаты (у — в ГО-
системе и 5 — в ЧО-системе) производится от конца этапа, т. е. эта
координата имеет отрицательные значения и достигает нуля только в
ППМ (КПМ) каждого участка.
Выбор ортодромической системы в качестве основной объясняется
тем, что в ней благодаря применению формул плоской тригонометрии
проще всего реализуется непрерывное определение текущих координат
МС. Кроме того, в этой системе довольно просто обеспечиваются срав-
Рис. 7.2. Главно ортодромическая (ГО) и частно-ортодромическая
(40) системы координат на сфере
218
пение координат при коррекциях МС по данным радионавигационных
средств и выработка навигационных и пилотажных решений, так как
одна частно-ортодромическая координата (Z) непосредственно пред-
ставляет собой боковое отклонение от ЛЗП, а другая (S) — оставшееся
расстояние до контрольной точки (ППМ). Наконец, ортодромическая
система координат наиболее удобна при использовании навигацион-
ного гирополукомпаса (НГПК) — основного курсового прибора со-
временных самолетов гражданской авиации.
Аналитические зависимости для решения задач в АНК
Современная вычислительная техника, особенно цифровая, поз-
воляет реализовать сложные математические зависимости сфероиди-
ческой геометрии и решать по ним навигационные задачи с любой
необходимой степенью точности. Однако невысокая точность исходных
данных (особенно при использовании курсовых приборов) позволяет
для решения задач воздушной навигации считать поверхность Земли
сферической и применять математический аппарат сферической три-
гонометрии. Этому соответствует и применение в АНК ортодромиче-
ской системы координат в качестве основной. В то же время все исход-
ные координаты точек на земной поверхности известны только в гео-
графической системе, т. е. на эллипсоиде.
В зависимости от требуемой точности замена эллипсоида шаром
выполняется различными методами.
В простейшем случае Земля принимается за шар с радиусом R =
= 6 371 км, а геосферические координаты <р и X считаются равными
географическим фгеогр и Хгеогр; такое упрощение приводит к макси-
мальным ошибкам в расстояниях до 0,5% и в углах — до 0,4°.
В другом случае исходные географические координаты фГРОгр
и ^теогр предварительно с помощью метода проф. В. В. Каврай-
ского переводятся в геосферические по формулам:
Ф Фгеогр ~ сsin 2<ргеогр = фГС0Гр 8 39 sin 2<ргеоГр,
^- = ^теогр» (7-1)
а Земля считается шаром с радиусом R = а(1 —-^)=6372,9 км, где
а = 6 378 245 м — большая полуось эллипсоида Красовского, с=
= -—- « J.r, — его сжатие, b = 6 356 863 м — малая полуось.
а 300 J
Этот прием обеспечивает уменьшение максимальных ошибок до 0,08%
в расстояниях и до 6' — в углах.
Наконец, пересчет географических координат в геосферические
можно выполнять по тем же формулам (7.1), но радиус Земли выбрать
таким, чтобы вдоль заданной ортодромии частный масштаб отобра-
жения эллипсоида на сфере был равен единице:
R = аГ 1 —у (1—sin2 р cos2 ф)];
219
где <р и Р — геосферическая шпрота и путевой угол в любой, в том чис-
ле и начальной, точке заданной ортодромии (так как вдоль ортодромии
произведение sin P-cospp = const). При этом методе достигается точ-
ность отображения расстояний до 0,001 %.
Однако и сферические зависимости используются часто только для
подготовки исходных данных, вводимых в АНК, а само решение на-
вигационных задач ведется по еще более простым зависимостям—фор-
мулам прямолинейной тригонометрии. Это обеспечивает значительное
упрощение аппаратуры навигационных вычислителей, сохраняя в то
же время при определенных условиях вполне удовлетворительную
точность результатов.
Возможность применения плоской тригонометрии в навигационных
задачах зависит от величин рассматриваемых расстояний, которые
лишь в отдельных случаях достигают нескольких тысяч километров
(при счислении координат над океаном между коррекциями и при ис-
пользовании систем дальней радионавигации). При применении же
БРЛС, большей части УНС и УДНС ближней навигации расстояния
не превосходят 400—500 км.
Представление о степени искажения результатов расчетов при за-
мене сферических треугольников плоскими дает теорема Лежандра,
согласно которой углы плоского треугольника со сторонами, равными
сторонам сферического, б^дут уменьшены на 1/а сферического избытка
(«эксцесса») данного сферического треугольника:
М-Л ______л _ е _ ,
'сф ^пл з —З/?2
где£д — площадь сферического или, приближенно, плоского треуголь-
ника, a R — радиус земного шара. Например, при рассмотрении пра-
вильного треугольника со сторонами D = 500 км
ДА = . з^2 = = 0.0009рад« 3',
а при сторонах D — 1 000 км — ДА — 12'.
В основе счисления координат по формулам прямолинейной триго-
нометрии лежит использование упрощенной ортодромической системы
координат с таким выбором главной ортодромии (оси Оу), чтобы ЛЗП
на всех этапах проходила с возможно меньшими отклонениями от
нее. В этих условиях точные («сферические») формулы счисления орто-
дромнческих координат (см. § 7.3 [191) при использовании ортодроми-
ческого датчика курса принимают вид:
x = x0+.fU7sin(₽y-₽ нуЖ
о
У = Уо + 5 №cos (Ру—₽ку) dt, (7.2)
о
где Ру — текущий условный путевой угол, Рку — условный «угол
карты» (заданный путевой угол главной ортодромии).
220
Применение в АНК упрощенных формул для счисления координат
приводит к методическим ошибкам тем большим, чем больше факти-
ческие значения координаты х отличаются от нуля, т. е. при полете
по маршрутам, не совпадающим с главной ортодромией. Нетрудно за-
метить, что при полете по ортодромическим меридианам, т. е. перпен-
дикулярно главной ортодромии (0у — [\.у = 90 ), методическая
ошибка отсутствует (так как cos(|>y - 0ку) = 0); наибольшей она бу-
дет при полетах с направлениями, близкими к главной ортодромии,
но на некотором удалении от нее, когда угол [iy — Рку близок к пулю.
Известны расчеты [201, на основании которых можно показать, что
неучет сферичности Земли в полете поЛЗП, параллельной в начальной
точке главной ортодромии, приводит к относительным радиальным
ошибкам счисления МС, определяемым выражением
Г Хо ----------—
1 £' + *()»
где S — пройденный путь, хп — начальное удаление от главной ортод-
ромии, выраженное в радианах (долях радиуса Земли). Например,
при S = 500 км = 0,079 рад и х0 = 200 км = 0,031 рад относитель-
ная ошибка МС — 0,0013, а при х0 = 100 км — = 0,0006.
Однако в условиях полетов гражданской авиации для конкретного
заданного маршрута всегда можно выбрать такое положение главной
ортодромии, чтобы полет все время проходил вблизи нее, т. е. при ма-
лых значениях х, и тем самым практически исключить ошибки счисле-
ния, связанные с применением упрощенных формул (7.2). Даже в слу-
чаях возникновения в полете необходимости резко изменить маршрут
в сторону от главной ортодромии современные АНК обеспечивают воз-
можность оперативного перехода на счисление в системе координат,
связанной с новой главной ортодромией, т. е. в области малых значе-
ний координаты х.
> Другая часть вычислительных операций, выполняемых АНК,
представляет собой преобразования для перевода координат самолета,
определенных различными независимыми методами, в координаты
основной системы данного АНК, что необходимо для сравнения их со
счислимыми или с программными координатами.
В зависимости от применяемых средств (систем) независимого
определения МС исходные координаты выражаются в разных системах:
географической, биполярной (двухазимутальпой), полярной сфери-
ческой, гиперболической и др. При этом возможен как непосредствен-
ный переход от исходных координат к основным, так и через коорди-
наты промежуточной системы. Например, гиперболические коорди-
наты, определяющие положение МС относительно двух баз станций,
могут быть предварительно пересчитаны в географические координаты
пли в сферические полярные относительно ведущей станции РДНС
(р, 0), а затем уже в основную систему АНК — ортодромическую.
Применение упрощенных аналитических зависимостей (формул
прямолинейной тригонометрии) при координатных преобразованиях
допустимо, как правило, только при определении МС с помощью радио-
221
навигационных средств (систем) ближнего действия (БРЛС, УДНС
ближней навигации), когда опорные ориентиры, используемые при оп-
ределении МС, удалены от фактического места самолета и от ЛЗП не
более чем на 300—350 км. В этих случаях сферические треугольники
могут решаться как плоские с такими же сторонами и углами. Воз-
можные при этом ошибки могут быть оценены с помощью теоремы Ле-
жандра.
Способы оптимизации навигационной информации
Оптимизация исходных навигационных данных (текущих координат
и навигационных элементов движения) состоит в том, что из нескольких
значений одной и той же величины, полученных с помощью различных
датчиков, но относящихся к одному моменту времени, формируется
новое, более точное значение этой величины. При этом решение вопроса
о том, какое значение измеряемой величины является наиболее точным,
т. е. наивероятнейшим, возможно только на основе учета вероятност-
ных характеристик исходных сигналов.
В принципе схема наиболее полной оптимизации состоит в том,
что сначала оценивается степень доверия к сигналу каждого отдель-
ного датчика, а затем с учетом этой оценки из всех сигналов составляет-
ся такое новое значение измеряемой величины, чтобы оно удовлетво-
ряло некоторому выбранному критерию оптимальности. Критерием
оптимальности может служить, например, минимум средней квадра-
тической ошибки искомой навигационной величины.
Сложность оценки каждого из составляющих сигналов заключается
в том, что в процессе полета их вероятностные характеристики непре-
рывно меняются: ошибки АВК растут с увеличением времени полета,
ошибки радионавигационных линий положения и МС изменяются в
зависимости от удалений от наземных станций систем и других гео-
метрических и физических факторов и т. д.
В настоящее время на основе накопленного опыта автоматизации
навигации летательных аппаратов и морских судов разрабатывается
общая теория оптимальной обработки навигационных сигналов, имею-
щая целью обеспечить рациональные алгоритмы получения наивероят-
нейших значений как отдельных навигационных величин, так и те-
кущих МС, используемых для навигационного управления самолетом
((11, [26] и др.).
При правильной обработке данных точность оптимизированного
значения навигационной величины выше наиболее высокой точности
исходных величин. Однако осуществление наилучшего способа опти-
мизации требует сложной бортовой аппаратуры и обеспечивается толь-
ко при использовании цифровых вычислительных машин. Поэтому в
наиболее распространенных в гражданской авиации АНК, имеющих
вычислители аналогового типа, задачи оптимизации определения МС
решаются упрощенным полуавтоматическим путем, при котором оценка
достоверности информации от различных датчиков выполняется штур-
маном (пилотом), после чего к вычислителю АНК подключается тот
датчик координат (параметров), который считается в данных условиях
222
полета наиболее точным. Оптимизация, осуществляемая простой за-
меной данных менее точного датчика данными более точного, получила
название коррекции навигационных данных. Примерами полуавтома-
тической оптимизации являются периодические коррекции показаний
курсовых систем для устранения накапливающейся погрешности кур-
са от собственного ухода гирополукомпасов (режимы «МК» и «АК»)
или коррекция счисленных координат МС по данным УДНС, БРЛС
и других датчиков.
При коррекциях средняя точность оптимизированного результата
не может превысить точность данных используемого корректирующего
датчика, приближаясь к ней лишь при идеальном выполнении вычис-
лительных операций. Это объясняется тем, что при таком способе оп-
тимизации информация от менее точного (менее достоверного) датчика,
будучи просто отброшенной, не учитывается в конечном результате и,
следовательно, не используется для повышения его точности.
Устройства управления, индикации и сигнализации
Устройства управления, индикации и сигнализации (УУИС),
несмотря на различия их индивидуальных функций, имеют в струк-
туре АНК общее назначение — обеспечивать экипажу возможность
активного управления процессом подготовки и выполнения полета на
всех его этапах как при использовании автоматического канала ком-
плекса, так и при частичном или даже полном нарушении его работо-
способности. В последнем случае навигация должна осуществляться
неавтоматизированными способами на основе информации от отдельных
датчиков комплекса или дополнительных («аварийных») навигационных
приборов.
Устройства УУИС занимают в современной воздушной навигации
особое место, являясь связующим звеном между человеком и автома-
том, так как без специальных устройств человек не смог бы восполь-
зоваться всей навигационной информацией, собираемой па борту са-
молета в результате работы многочисленных приборов.
К группе УУИС относятся:
пульты управления всеми входящими в АНК датчиками навига-
ционной информации, центральным вычислителем и индикаторами;
индикаторные приборы, входящие как в состав отдельных ДНИ,
так и общие для всего комплекса;
навигационные сигнализаторы, расположенные на пультах отдель-
ных датчиков, пультах управления АНК и на специальном табло на-
вигационной сигнализации (ТНС).
Пульты управления (ПУ) "'обеспечивают включение в
работу всех составных частей АНК, их предварительную и предполет-
ную проверку, ручной ввод исходных (или текущих) данных при про-
граммировании полета на земле и в воздухе, переключение режимов
работы отдельных систем комплекса и всего комплекса в целом. В со-
временных навигационных пультах преобладают органы управления
дискретного типа — селекторные переключатели и кнопки ввода циф-
223
ровых параметров (вместо рукояток н плавных шкал), упрощающие
работу оператора.
Индикаторные приборы (навигационные индикаторы)
являются источниками всей информации, поступающей в распоря-
жение экипажа в полете. Особенностью требований к индикатору
в составе АНК является сосредоточение всей необходимой информации
на возможно меньшем количестве объектов наблюдения (шкал, счет-
чиков, экранов) в кабине экипажа и обеспечение оперативного (немед-
ленного) доступа к любому потребовавшемуся элементу информации.
При этом должна достигаться предельная ясность индицируемого со-
держания, исключающая какое-либо перекодирование данных для
их осмысливания и дальнейшего использования. Для сокращения
общего числа наблюдаемых приборов индикаторы в АНК выполня-
ются совмещенными и даже многофункциональными, т. е. па одни и
те же указатели (шкалы, стрелки, цифровые и знаковые указатели)
вызываются в зависимости от необходимости разные параметры. На
одном указателе может последовательно индицироваться до 20 раз-
личных величин. Таким образом, в течение основного времени полета
на индикаторах можно иметь только те параметры, по которым непо-
средственно контролируется полет (например, боковое отклонение от
ЛЗП, оставшееся расстояние до ППМ), а параметры, используемые
периодически, вызываются на короткое время, не отвлекая внимание
экипажа на протяжении всего остального полета.
В настоящее время в связи с разработкой сверхзвуковых граждан-
ских самолетов за рубежом исследуются (с применением методов
инженерной психологии) вопросы целесообразной индикации навига-
ционных данных, создаются и опробуются различные варианты на-
вигационных приборов.
Известны несколько типов многофункциональных («интеграль-
ных») навигационных индикаторов:
стрелочно-шкальные совмещенные указатели нескольких парамет-
ров (например, плановые навигационные приборы ПНП), на которых
одновременно индицируются курс, угол сноса, заданный путевой угол,
курсовые углы двух радиомаяков (радиостанций), величина отклоне-
ния от ЛЗП н некоторые сигналы;
цифровые индикаторы, указывающие одновременно один или два
параметра, но позволяющие последовательно вызывать до 10 и более
параметров (пар параметров), например цифровые указатели и X,
z и S и т. д.;
картографические индикаторы с движущейся рулонной картой;
проекционные индикаторы навигационной обстановки (ПИНО),
позволяющие непрерывно наблюдать положение текущего МС па фоне
движущегося картографического изображения местности, некоторые
элементы движения салюлета (0, 1С) и внешней обстановки, а также,
по вызову,— таблицы с различными справочными данными (схемами
захода на посадку, радиоданными, инструкциями по проверке аппа-
ратуры). Этот тип индикаторов, использующих оптический или элект-
ронный проекционный экран, в настоящее время все чаще рассматри-
вается как основное средство контроля со стороны экипажа за автома-
224
тпческим полетом самолета, особенно при отсутствии на борту штур-
мана.
Для успешного автоматизированного управления самолетом эки-
паж, кроме основной навигационной информации, нуждается также в
индикации ряда признаков работы самого АНК: работоспособности
его датчиков и вычислителя, фактически осуществляемого этапа про-
граммы, режима работы комплекса и другой вспомогательной инфор-
мации. Это связано, прежде всего, с тем, что внимание экипажа, осво-
божденное от непрывного наблюдения за множеством отдельных при-
боров, должно своевременно привлекаться к тому из них, в работе
которого возникли какие-либо ненормальности или показания кото-
рого приближаются к некоторым контрольным (или нежелательным)
значениям. Кроме того, автоматика АНК в ряде случаев может решать
не только чисто вычислительные задачи, связанные с измерением, оп-
тимизацией и индикацией различных навигационных величин и
команд, но и логические задачи, связанные с переходом к очередному
этапу программы или с оптимальной самоорганизацией комплекса.
В результате этого АНК «самостоятельно» разворачивает самолет или
изменяет режим своей работы, заменяет датчики исходной
информации, выдает экстренные команды на автопилот. Чтобы свое-
временно обратить внимание экипажа на все изменения в состоянии
датчиков и вычислителя АНК и на автоматические изменения режима
управления самолетом, применяются визуальные сигнализаторы,
выполненные, как правило, в виде светящихся ламп с определенным
текстом: «Память», «Отказ НВ», «Отказ азимута», «Проверь коорд
РСБН», «Смена ЛЗП» и т. д. Основная часть сигнализаторов объеди-
нена в табло навигационных сигналов (ТНС), расположенное на вид-
ном месте в кабине. Для целей сигнализации может использоваться
также экран знаковой электроннолучевой трубки, иа котором появляет-
ся соответствующий информационный текст.
В последующих главах рассматриваются (в обобщенном виде)
основные вопросы применения АНК с аналоговыми и цифровыми вы-
числителями.
Глава 8
ПРИМЕНЕНИЕ АВТОМАТИЗИРОВАННЫХ
НАВИГАЦИОННЫХ КОМПЛЕКСОВ С АНАЛОГОВЫМИ
ВЫЧИСЛИТЕЛЯМИ
§ 8.1. характеристика типового автоматизированного
НАВИГАЦИОННОГО КОМПЛЕКСА С АНАЛОГОВЫМ ВЫЧИСЛИТЕЛЕМ
Автоматизированные навигационные комплексы с аналоговыми вы-
числителями созданы на базе автоматических вычислителей координат
с допплеровскими датчиками скорости и имеют более широкие возмож-
ности программирования полета
В Осадший В. И 2J5
Состав комплекса
В АНК с помощью вычислителя объединяются несколько датчиков
навигационной информации (рис. 8.1): точная курсовая система (ТКС),
допплеровский измеритель скорости н сноса (ДИСС), система воздуш-
ных сигналов (СВС), бортовая радиолокационная станция типа РПСН,
бортовая аппаратура угломерно-дальномерной системы ближней нави-
гации и посадки (РСБНП).
В состав центрального устройства комплекса — навигационного
вычислителя (НВ)—входят следующие основные блоки:
1) электронные и электромеханические блоки, предназначенные
для счисления, преобразований и коррекции координат, вычисления
параметров ветра и решения других частных задач;
2) пульты управления вычислителем: пульт режимов работы НВ
(рис. 8.2); задатчики-индикаторы ортодромическпх координат (рис. 8.3)
самолета 1 и 2, ППМ 3 и наземных средств коррекции 4; задатчики-
индикаторы заданных ортодромических путевых углов участков мар-
шрута 5; задатчик путевых углов ЛЗП («НЭПУ») относительно мери-
диана радиомаяка 6, используемого для коррекции координат; задат-
чик-индикатор параметров ветра (рис. 8.4); механизм управления пере-
крестием (МУП) на экране БРЛС (рис. 8.5, г);
3) индикаторы номеров ППМ и ТПМ (точек посадочного маневра)
и индикаторы корректирующих поправок AZ и АХ (рис. 8.5, б, а).
Рис. 8.1. Обобщенная блок-схема АНК с аналоговым вычислителем:
1—управление режимам» ИВ и АПК; 2— обмен программными и текущими дан-
ными; 3 — данные наблюдения за экраном БРЛС (РПСН)
226
Рис. 8.2. Пульт управления навигационным вычислителем (пульт режи-
мов работы)
Кроме того, для индикации режимов и признаков работы всего
АНК имеется блок световых табло, управляемых также от НВ
(рис. 8.5, в).
На общей блок-схеме АНК (см. рис. 8.1) показаны главные инфор-
мационные связи датчиков, вычислителя, индикаторов и САУ, осу-
ществляемые в различных вариантах в зависимости от конкретной,
выполняемой в данный момент (период времени), функции НВ и кон-
кретного режима управления самолетом.
Точная курсовая система (TKQ постоянно выдает
в НВ текущий условный курс уу самолета, отсчитанный от выбранного
условного меридиана, и при необходимости магнитный или астрономи-
ческий курс. В то же время в ТКС из НВ поступают заданный путевой
угол, индицируемый на подвижном треугольном индексе указателя
УШ-3, и широта МС, которая автоматически вводится в механизм
азимутальной коррекции гироагрегатов.
Система воздушных сигналов (СВС) непрерывно
выдает в НВ истинную воздушную скорость V для вычисления пара-
метров б и U ветра, счисления координат при отсутствии допплеров-
ской информации, выработки расчетных угла сноса и путевой скоро-
сти, а также барометрическую высоту полета для выработки необхо-
димых параметров в режимах коррекции и вертикального маневра.
Допплеровский измеритель скорости и
сноса (ДИСС) выдает в НВ: в режиме «Импульсное счисление» —
две допплеровские частоты f.a и /д2, в режиме «Аналоговое счисление» —
угол сноса а и путевую скорость W. В режиме «Память» («Счисление
по СВС») в ДИСС из НВ поступают значения а и It7, используемые для
индикации при отсутствии допплеровской информации.
8* 227
/
Рис. 8.3. Задатчики индикато-
ры типового навигационного
вычислителя:
1 и 2—задатчики-индикаторы (счетчики)
текущих (счисленных или преобразо-
ванных) координат самолета; 3— задатчики координат ППМ; 4— задатчики
координат нааемиых средств коррекции; 5 — задатчики-индикаторы ОЗПУ;
6 — задатчик ИЗПУ ЛЗП относительно меридиана радиомаяка
228
Угломерно - дальномерная
система ближней навигации
и посадки (РСБНП) выдает в НВ ази-
мут Ас и наклонную дальность DH самолета
относительно наземного радиомаяка, которые
используются для определения точных (радио-
технических) координат в основной системе
АНК, необходимых для коррекции счислен-
ных координат.
Самолетная бортовая ра-
диолокационная станция (на-
пример, РПСН типа «Гроза») обеспечивает из-
мерение курсового угла и наклонной даль-
Рис. 8.4. Задатчик-инди-
катор параметров ветра
пости до опознанного радиолокационного ориентира, по которым
рассчитываются мгновенные координаты самолета в ЧО-системе,
используемые далее для коррекции счисленных координат. Кроме
того, БРЛС в сочетании с НВ позволяет определять ЧО-координаты
наблюдаемого на экране неизвестного радиолокационного объекта,
т. е. обеспечивает его «расшифровку».
Система автоматического управления са-
молетом (САУ) служит для преобразования выходной навигационной
информации, вырабатываемой НВ, в сигналы управления самолетом
по крену и тангажу. В САУ из НВ поступают сигналы перехода на
определенные режимы управления, информационные сигналы работо-
способности схем НВ, боковое уклонение Z самолета от ЛЗП (по счис-
лению) и его производная Z по времени, заданный путевой угол для
выхода в очередную запрограммированную точку, угол 6 наклона
траектории при выполнении вертикального маневра.
а)
S)
Отказ НВ УпраВл от нВ Упрабл ивп маяка
Счислен СВС Курс о Ви я стаОили- ЗОиия Вертин манеВр Второй круг
Смена ЛЗП 7коорд РСЬП
д)
Рис. 8.5. Индикатор корректирующих поправок (а), табло номеров ППМ
и ТМП (б), табло навигационной сигнализации (в), МУП (а)
229
Центральная гировертикаль (ЦГВ) связана не-
посредственно с некоторыми датчиками навигационной информации
(ТКС, ДИСС, антенная система РПСН), обеспечивая их сигналами
отклонения «самолетной вертикали» от вертикали истинной.
Рассмотрим принцип решения основных задач АНК в последо-
вательности общей схемы операций, изложенной в § 7.2.
Счисление и преобразование координат
В качестве основной системы координат АНК применяется упро-
щенная ортодромическая (плоская прямоугольная) система. При этом
ось Оу этой системы (см. рис. 7.2) может совпадать или с ортодромией
кажого прямолинейного участка (этапа) ЛЗП — частио-ортодроми-
ческая система,—или с ортодромией, соединяющей начало и конец
всей ломаной ЛЗП — главно-ортодромнческая система. Для выбора
одной из систем на щитке управления НВ имеется переключатель
«ГО-ЧО» (см. рис. 8.2).
Непрерывное счисление координат выпол-
няется или непосредственным суммированием (интегрированием) ли-
нейных перемещений AS; самолета, получаемых подсчетом количества
принятых периодов /Уд допплеровской частоты за время движения
(«Импульсное счисление»), или интегрированием путевой скорости
по времени («Аналоговое счисление»).
Первый способ обеспечивает более высокую точность, так как при-
менение импульсных счетчиков сокращает аппаратурные преобразо-
вания информации н связанные с ними погрешности (например,исклю-
чается вычисление путевой скорости). Поясним сущность импульсного
счисления на очень упрощенном примере.
Предположим, что при работе ДИСС используется один луч, име-
ющий постоянный угол р наклона к горизонту и расположенный в
—
вертикальной плоскости, проходящей через вектор 117 (т. е. если ан-
тенная система развернута на угол сноса). При этом частотомер изме-
ряет величину допплеровского сдвига частоты
/д= 2«Zcosp , (8.1)
Л
где р и X — постоянные для данной установки ДИСС величины. Со-
ответствующий период допплеровской частоты
Т — 1 - 1
д /я 2W cos р
Путь, проходимый самолетом за время Тд,
ASy =WT=W'—— = —— = const, (8.2)
Д д 2Fcosp 2cosp
т. е. не зависит от величины путевой скорости.
230
При движении самолета в течение времени А/ будет принято N% =
Аг
= — полных периодов и, следовательно, путь, пройденный за
Тд
это время самолетом,
1
Число подсчитывается после преобразования непрерывных
колебаний с частотой /д в последовательность коротких импульсов
с периодом повторения Тп. Изменения W в полете вызывают изме-
нение промежутков времени Тд между соседними импульсами, т. е.
за то же время Л/ будет принято новое количество периодов (импуль-
сов) /V/.
В реальных ДИСС с четырехлучевой неподвижной антенной систе-
мой лучи расположены симметрично относительно продольной оси
самолета и наклонены к плоскости горизонта под одинаковым углом р
(рис. 8.6). Разностные сигналы лучей 1 и 3, 2 и 4 дают допплеровские
частоты /Д1 и /д2, соответствующие лучам 1 и 2. Значения этих частот
зависят только от радиальных скоростей сближения самолета с отра-
жающими элементами sx и s2 земной поверхности, т. е. от проекций
путевой скорости самолета IP на эти лучи — и 1РР2’
f _2W/P1 f _2\Vp2
'Д1 /Д2 j— .
где X — длина волны передатчика ДИСС. Но так как
rpl = lPcos (1рл + «) cosp;
1Рро = W cos (гр,—a) cos p,
TO
2U7
/Д1 = — cos (грл + a) cos p = aW cos (грл + a);
A
2U’
f Д2 = — cos (грл—a) cos p = aW cos (грл— a),
л
где
2 cos p
— постоянная для данной установки
ДИСС величина.
Иначе
/д1 = п1Р [cos ipqcosa—sin тр i sin a];
/д3 = aW [cos грл cos a + sin грл sin a[,
откуда
/Д1 + f д2 = cos грл cos a = 2a cos грл lPnp,
/л»—/Д1 — 2a W sin ipл sin a = 2a sin i[\ W6,
где Uznl> = W cos a и IPC = W sina — продольная (по осп самолета
и боковая составляющие путевой скорости. Тогда
_ Д1Т /д2
np 2a cos грл
W'g — ^да ^Д1
2a sin грл
231
Найдем зависимость проекций 1Г8 и Wz путевой скорости на оси
ЧО-системы координат от принимаемых допплеровских частот /Д1
и /да (рис. 8.7):
Ws = cos (у—Р3) — Wcsin (у—Р3);
Wz = U7np sin (у—р3) + Wc cos (у—Р3).
Подставив сюда выражения для Ц/щ, и U7C через /Д1 и /Д2, получим:
Ws = ,ь f^2 cos +Aucos (V—
Zu COS
—/д2 sin (у—p J ctg фл +/д1 sin (y—P3) ctgipj;
WZ = ----Ц- [/Д2 cos (у — ₽з) ctg /Д1 cos (у — рз) X
2а cos 1|’л
X ctg^ + ^sin (у—рз) +/д1 sin (у—рз)1.
За конечный малый промежуток времени г (например, 0,1 сек)
приращения координат по осям S и Z составят:
AS = т = -—1—- [/ 2 т cos (у — рз) 4-/Д1 т cos (у—Р3)—
2а cos 4л
— /д2 т sin (у—р,) ctg фл+/д1 т sin (у—рз) ctgт|?л]; <
AZ = Wz т = -—!— [/д2 т cos (у — Р3) ctg фл —
2а cos грл
—/д! * cos (у—Р3) ctg фл 47д2-г Sin (у —рз) 4- /Д1Т sin (у —р3)].
Произведения типа /д1т и /д2т с учетом (8.2) и (8.3) представляют собой
числа Ni и периодов допплеровской частоты, принимаемые по лу-
чам 1 и 2 (рис. 8.6) за промежуток времени т, т. е. с учетом умножения
на соответствующие тригонометрические множители и на общий по-
стоянный коэффициент за скобками дают некоторые пасти приращений
координат AS, и AZ4 за этот промежуток времени
(8-4)
Рис. 8.6. Образование радиальных
скоростей самолета Ц7р
Рис. 8.7. Разложение скоростей при
счислении координат
232
Рис 8.8. Блок-схема (упрощенная) счисления координат импульсным
методом
Решение формул (8.4) в навигационном вычислителе ведется цик-
лами продолжительностью /ц « 0,4 сек. В течение одного цикла па-
раллельно определяются приращения AS и AZ координат.
Цикл состоит из четырех тактов (I, II, III и IV) по 0,1 сек. В течение
каждого такта формируется по одному из четырех членов каждой фор-
мулы (8.4), т. е. какая-то часть приращений координат ASi и AZi,
А5ц и AZn и т. д. Таким образом, за один цикл (четыре такта) под-
считывается примерно 1/i расстояния, пройденного самолетом по осям
S и Z. Это учитывается при дальнейшем прохождении информации
в вычислителе.
Упрощенная схема решения задачи счисления импульсным методом
представлена на рис. 8.8.
По сигналам синхронизирующего устройства вычислителя с ДИСС
на вход измерительной схемы через переключатель Hj поочередно
подаются частоты /Д1 (в тактах II и IV) и /д2 (в тактах I и III) в виде
последовательностей стандартных импульсов.
В результате в тактах I и III (за 0,1 сек) в схему поступит определен-
ное число импульсов — N2 = /д2т, а в тактах II и IV — Л\ = /Д1т.
В такте I со схемы «Формирование временного строба» в устройство
«Умножение на строб» подается сигнал, представляющий собой вре-
менной строб продолжительностью т cos (у — Р3), ограничивающий
время подсчета импульсов f;(2 частью промежутка т, в результате
чего па выходе схемы получается величина /Д2т cos(y—рз), т. е. первый
член скобки в формуле (8.4). Эта величина через переключатель П3
поступает на реверсивный счетчик импульсов канала S, где преобра-
233
зуется в последовательность импульсов, управляющих шаговым дви-
гателем ШД8.
। Ось шагового двигателя поворачивается на угол, соответствую-
щий величине принятого сигнала; угол поворота оси двигателя
через сельсинную следящую систему передается на счетчик индика-
тора координаты S.
Одновременно в такте I число импульсов N.2 cos(y—Р3) со схемы
«Умножение на строб» поступает в схему «Умножение на ctg фл»,
откуда число импульсов 7V2cos(y — р ) ctg фл подается на реверсив-
ный счетчик канала Z и далее, преобразуясь в шаговом двигателе в
приращение координаты Z, через вторую сельсинную передачу — на
счетчик индикатора координаты Z. Так формируется первый член фор-
мулы (8.4) для AZ.
В такте II переключается П1( в результате чего из ДИСС поступает
число импульсов N2 = fR1r, которые далее проходят через схему
так же, как и N.2 в такте I (так как переключатель П8 положения
не изменил). В этом такте подсчитываются вторые члены формул.
В такте III переключатель ГТ возвращается в положение такта I,
а переключатели П2 и П3 переходят в положения III, IV. При этом
из схемы «Формирование временного строба» поступает временной
строб т sin(y — Р3) и умножение на ctg фл производится в канале S.
В такте III формируются третьи члены формул (8.4).
В такте IV переключается только ГГ и формируются четвертые
члены. .
Итак, в течение каждого цикла на счетчиках S и Z обновляется
информация о текущих координатах самолета.
Необходимая для получения временных стробов величина у — рз
вырабатывается по текущему курсу у, поступающему из ТКС, и путе-
вому углу Р3 ортодромического участка ЛЗП, вводимому вручную
в задатчик-нндикатор путевого угла (см. рис. 8.3).
Аналоговый метод счисления координат в АНК—вспомогательный,
применяется при отказах допплеровского датчика для продолжения
счисления координат по воздушной скорости (от СВС) и запомненному
или введенному вручную ветру.
Счисление координат в главно-ортодромической системе выполняет-
ся на тех же элементах АНК аналогично счислению в частно-ортодро-
мических координатах.
Как при импульсном, так и при аналоговом счислении положение
продольной оси Оу системы координат (при счислении в ГО) или оси S
(при счислении в ЧО) задается установкой на одном из задатчиков
путевых углов 5 (рис. 8.3) ортодромического путевого угла, соответ-
ствующего выбранному опорному меридиану (относительно которого
отсчитывается курс, и на счетчиках координат самолета (/ или 2) —
фактических координат х0 и (или Zo и So) самолета в момент включе-
ния счисления.
На сигнальных лампочках счетчиков верхней пары в зависимости
от выбранной системы координат (ГО или ЧО) подсвечиваются бук-
венные обозначения хну (или Z и S).
234
Одновременно с основным
счислением текущих координат
самолета в ГО- или ЧО-системе
навигационный вычислитель
обеспечивает их преобразование.
Для преобразова-
ния г л а в н о-о р т о д р о-
м и ч е с к и х координат
х и у в части о-орт о-
дромические Z и S отно-
сительно отрезка O'S ЛЗП, по
которому летит самолет (теку-
щий участок ломаной ЛЗП), не-
обходимо задать параметры но-
вой системы относительно исход-
ной: координаты хо' и уо- на-
чала (очередного ППМ ломаной
ЛЗП) и заданный путевой угол
Рчо оси O'S (рис. 8.9). Связь
Рис. 8.9. Преобразование ГО-координат
самолета в ЧО-координаты
между
новыми («преобразованными») и исходными
(«счисленными»)
координатами устанавливается из рис. 8.9, если учесть, что продоль-
ные координаты у, уо- и S находятся в области отрицательных зна-
чений, а Д₽3 = Рчо— Pro:
—5= — (у—Ус)cosAPj-H-Xo' —х) sin Др„
или
S = (У—У<у) cos Ар, + (х—х0-) sin Дрз; (8.5)
z = — (У—Уо1) sin Дрл + (х—хо-) cos Дрз. (8.6)
Преобразованные координаты Z п S используются для управления
самолетом по текущему боковому уклонению самолета от ЛЗП и для
определения момента подхода к ППМ.
Преобразование части о-о ртодромических
координат Z и S в части о-о ртодромические ко-
ординаты Z' и S'следующего участка ЛЗП выпол-
няются по формулам, получаемым на основании рис. 8.10:
—S'= — S6 — [Zsin Дрз—(—Seos Дрз)];
S' = S6 + Zsin др3—ScosAP3; (8.7)
Z'=—S sin ДР3 + Z cos Др . (8.8)
Как видно из формулы (8.8), для определения преобразованной
координаты Z' по счислимым Z и S достаточно ввести в НВ только
величину ДР3. Для определения же преобразованной координаты S'
(оставшегося расстояния до следующего ППМ) необходимо, согласно
формуле (8.7), дополнительно задать S6—длину следующего этапа
пути. Постоянное наличие преобразованных координат Z' и S' поз-
воляет в любой момент перейти от стабилизации самолета на текущем
235
Рис. 8.10 Преобразование ЧО-коор-
динат в ЧО координаты другого
этапа ЛЗП
Рис. 8.11. Схема решения за-
дачи «КР» при счислении в
ЧО-координатах
участке ЛЗП к выходу на последующий и стабилизации самолета на
нем. Переход к полету к следующему участку ЛЗП, включая опреде-
ление момента начала разворота (на удалении 5уРот ППМ), выпол-
няется автоматически.
Текущие координаты самолета преобразуются также с целью вы-
работки параметров навигационного режима для полета по кратчай-
шему расстоянию в заданную точку—требуемого путевого угла [Зкр
и кратчайшего расстояния ЗкР.
Формулы преобразования в случае счисления в ГО-системе коор-
динат получаются из соотношений (8.5) и (8.6), если положить:
*о'=хц, f/o* = f/H, Z = 0, Д₽3 = Д₽ир;
SKp = (J/—1/1() cos Дркр 4-(x—xn) sin Д₽кр; (8.9)
°= — {У—f/Jsin Дркр + (х—x4)cosA₽Kp. (8.10)
При включенном режиме «КР» (см. рис. 8.2) по этим формулам
непосредственно получаются текущие значения SItP и ДркР, где
ДРкр — необходимая поправка к программному значению путевого
угла Р8 для получения РкР. Величина 01(Р = Р3 + Д^кР автомати-
чески отрабатывается на «свободном» (т. е. неиспользуемом в данный
момент для счисления) задатчике-индикаторе ПУ 5 (рис. 8.3), а вели-
чина SKP—на «свободном» счетчике координаты S самолета (/ или 2).
При счислении в ГО-системе рпР используется для автоматиче-
ского полета методом управления навигационным режимом с опреде-
лением (в данном случае) рассогласования между требуемым ркР
и фактическим путевым углом р = у ф- а, которое затем приводится
к нулю. Величина 5кР используется для контроля пути по дальности
и регулирования скорости полета в соответствии с располагаемым вре-
менем /расп.
Если счисление ведется в ЧО-системе координат, то значения Д0кР
и SJtP получаются на основании рис. 8.11:
SKp = (S—SI() cos Д₽кр ф- (Z- Zu) sin Дркр; (8.11)
- (3-5Ц) sin Д₽кр ф- (Z- Zu) cos Д₽кр = 0. (8.12)
236
Соотношения (8.11) и (8.12) по структуре одинаковы с (8.9) и
(8.10), поэтому решаются с помощью тех же вычислительных уст-
ройств, а результаты выдаются также на задатчике-индикаторе ПУ
и счетчике координаты S.
По этим Ркр и SI(p строится новый ЧО-участок ЛЗП, на него
принудительно переводится счисление и затем выполняется полет
методом непосредственной коррекции координаты Z.
Навигационный вычислитель АНК обеспечивает также преоб-
разование высоты полета в параметры управ-
ления движением самолета в вертикальной плоскости — разность
фактической Н и программной На высот или угол 0 снижения, оп-
ределяемый соотношением
Н-Н3
$сн
где Н — текущая высота, На — конечная высота, на которую необ-
ходимо выйти с расстояния SCH. Эти параметры могут быть исполь-
зованы в САУ для выработки пилотажных команд, индицируемых на
позиционных или директорных приборах.
Оптимизация (коррекция) счисленных координат
В АНК с аналоговым вычислителем применяется, как правило,
простейший способ оптимизации координат самолета — автоматизи-
рованная коррекция с использованием РСБН (неавтономная коррек-
ция) или РПСН (автономная коррекция).
При ручной (неавтоматизированной) коррекции значения координат МС,
полученные любым способом (от наземной РЛС, визуальным наблюдением и др ),
предварительно переводятся в основную систему координат АНК, в которой
ведется счисление—х и у или Z и S, а затем вручную устанавливаются на «ра-
бочих» счетчиках.
При автоматизированной коррекции сравниваются полученное
независимым методом МСнез и счисленное МССч, вырабатываются и ин-
дицируются рассогласования AZ = ZHe8 — ZC4 и AS = SHC8 —
— SC4 (или AX и АУ) между их координатами, по полученным дан-
ным принимается решение о целесообразности коррекции и коррек-
тирующие поправки AZ, AS (или АХ, АУ) передаются на рабочие
счетчики. Определение корректирующих поправок, их наглядная
индикация, а также ввод (после принятия решения) в счетчики осу-
ществляются автоматически. Логическая часть задачи выполняется
экипажем, принимающим решение о возможности коррекции в зави-
симости от степени доверия к координатам, полученным независимым
методом, по сравнению со счисленными.
Принцип коррекции ЧО-коордпнат при использовании системы
РСБН (или зарубежных маяков VOR/DME) рассмотрим по рис. 8.12.
237
Исходными данными для решения задачи коррекции являются: ЧО-
координаты 5Р и Zp радиомаяка, подготовленные при программирова-
нии полета (см. § 8.2); заданный путевой угол |3ИЗ ЛЗП относительно
истинного меридиана радиомаяка, также определяемый при программи-
ровании; измеренные системой РСБН во время полета истинный пе-
ленг Ас и наклонная дальность Du самолета относительно радиомаяка;
текущая барометрическая высота полета Н, поступающая от СВС
и принимаемая приближенно отнесенной к уровню радиомаяка. Связь
между этими величинами и текущими точными ЧО-координатами S
п Z самолета устанавливается по рис. 8.12, а с учетом соотношения
между DH, Н и р согласно рис. 8.12, б:
S—Sp = — DH cos р cos Ир$;
Z—Zp = —£>п cos р sin /ps,
или
(S—Sp) sec р = — DH cos Лр5;
(Z—Zp)secp=—£>Hsin/p$, (8.131
где HPs = Лс + 180 —Риа — условный пеленг радиомаяка отно-
сительно частно-ортодромической оси S, принимаемой за условный
меридиан. Инструментовка этих формул производится при помощи
нескольких электромеханических (аналоговых) следящих систем, свя-
зывающих выходную схему РСБН (Лс, О„), ручные задатчики НЭПУ
(Риз) 11 ЧО-координат радиомаяка (Sp, Zp), датчик высоты СВС (Я),
а также специальную схему отработки угла р по измеренным текущим
Оп и Н.
Расхождения между счисленными (ZC4, SC4) и полученными со-
гласно формуле (8.13) точными (радиотехническими) координатами
Z и S для наглядности индицируются на специальном индикаторе
Рис. 8.12. Коррекция координат по данным РСБН
238
(см. рис. 8.5, а), если переключатель находится в положении «Инди-
кация»:
AZ = Z —ZC4;
AS —S—SC4- (8.14)
После принятия решения на коррекцию установкой переключателя
в положение «Коррекция» поправки AZ, AS вводятся на рабочие счет-
чики текущих координат самолета и приводят их показания к точным
(корректированным) значениям. Изменения показаний счетчиков вы-
зывают управляющее воздействие на самолет со стороны САУ, приво-
дящее к маневру самолета до достижения нулевого показания Z.
Ппи режиме счисления в ГО-системе координат процесс коррекции
аналогичен изложенному, ио в НВ вводятся не S,, и Zp, а ГО-коор-
динаты и хр радиомаяка, а на индикаторе поправок отрабатываются
значения Аг/ и Ах, по которым экипаж может судить о возможности
выполнения коррекции.
При коррекции с помощью БРЛС используется радиолокационный
ориентир (РЛО) с точно определенными при программировании ЧО-
координатами. Для наглядного сравнения МСцез с МСсч из НВ
в БРЛС поступают текущие значения курсового угла фсч и наклонной
дальности DIIC4 ориентира, вычисленные по текущим счисленным ко-
ординатам самолета и запрограммированным координатам РЛО.
По фСч и О11СЧ на экране индикатора БРЛС строится электронное
перекрестие. Несовпадение изображения РЛО с перекрестием означает
расхождение между МСпсз и МСсч. Ручное наложение перекрестия на
изображение РЛО с помощью механизма управления перекрестием
(см. рис. 8.5, г) позволяет определить поправки к фсч и D„c,„ а сле-
довательно, и их исправленные значения фрло и ПНрл0, по которым
сначала вычисляется условный пеленг РЛО (относительно ЛЗП)
АрлОЗ = фрлО +V — Риз»
а затем на основании формул (8.13) определяются и корректированные
координаты S и Z самолета. Как и при использовании РСБН, величины
корректирующих поправок AS и AZ индицируются на индикаторе
поправок.
Кроме оптимизации координат, АНК позволяет при обнаружении
систематических боковых ошибок счисления осуществить также кор-
рекцию курсовой системы, для чего используется «блок дискретных
_ поправок» (БДК).
I
<о
Режимы управления самолетом
При реализации навигационных решений в полете с АНК возможно
несколько режимов управления самолетом: в горизонтальной плоско-
сти — «Основной», «Кратчайшее расстояние», «Курсовая стабилиза-
ция» и управление по курсовой зоне посадочного радиомаяка; в вер-
тикальной плоскости — «Вертикальный маневр» и режим управления
по радиоглнссаде.
239
В зависимости от конкретной навигационной обстановки различные
сочетания этих режимов позволяют выполнять необходимые маневры.
Основной режим автоматического управления самолетом
заключается в стабилизации нулевого бокового уклонения самолета
от ортодромической ЛЗП — частной ортодромии. Повышение ка-
чества регулирования при этом достигается введением в закон управ-
ления самолетом первой производной по времени от бокового уклоне-
ния Z, вырабатываемой также в НВ и непрерывно передаваемой в САУ.
Основной режим обеспечивает также автоматический переход на
очередной участок ЛЗП. Сигналом к осуществлению перехода являет-
ся величина оставшегося расстояния S = —Syp до ППМ. С этого мо-
мента начинается управление самолетом по боковому уклонению от
следующего участка ЛЗП, что обеспечивается продолжением счисления
в новой системе ЧО-координат и выдачей результатов на вторую пару
счетчиков (на которых ранее индицировались преобразованные коор-
динаты Z'u S', полученные согласно формулам 8.7 и 8.8).
Режим «Кратчайшее расстояние» («КР») — вспо-
могательный, но широко применяется при автоматическом управлении
самолетом. Прн счислении в ГО-системе он заключается в поддер-
жании фактического путевого угла [3, равным непрерывно выраба-
тываемому в этом режиме требуемому путевому углу ртр = Р3 + Др3,
где ДР3 формируется согласно формуле (8.12). Следовательно, уп-
равление самолетом в этом режиме в отличие от основного ведется по
схеме следящей системы, непрерывно разворачивающей вектор путевой
скорости самолета в требуемое, но заранее не известное положение.
При счислении в ЧО-системе режим «КР» позволяет отрабатывать па-
раметры новой ЛЗП ((Ркр, 5кр)для управления относительно нее по Z.
В режиме «Курсовая стабилизация» («КС») НВ
отключается, а управление самолетом осуществляется с помощью САУ
непосредственно от курсовой системы. При этом полет продолжается
с постоянным курсом уг, запомненным в момент включения «КС».
Курсовая стабилизация применяется для сохранения прежнего нави-
гационного режима на время, пока производятся различные операции
со счетчиками координат (ручная коррекция, задание точки для ре-
жима «КР»), так как любые изменения показаний этих счетчиков не-
медленно сказываются (через САУ) на управлении самолетом.
Управление по курсовой зоне наземного
посадочного радиомаяка выполняется без использова-
ния НВ, с помощью отдельного счетно-решающего устройства команд-
ного навигационного комплекса, которое выдает управляющие сигна-
лы па прибор визуальной индикации или в автопилот.
В режиме «Вертикальный маневр» (переключатель на щитке уп-
равления устанавливается в положение «ВМ») управление самолетом
осуществляется от НВ и заключается в стабилизации угла снижения
траектории (0 = const), задаваемого на специальном щитке пилота
или штурмана.
Управление по сигналам глиссадного по-
садочного радиомаяка, так же как и управление по кур-
совой зоне, выполняется без применения навигационного вычислителя.
240
Решение задачи захода на посадку
При полете в районе аэродрома навигационный вычислитель вы-
рабатывает данные для маневрирования до входа самолета в зоны
посадочных радиомаяков, т. е. практически до начала четвертого раз-
ворота перед посадкой. Выдерживание направления по створу ВПП
и снижение на посадочной прямой выполняются с помощью пилотаж-
ных комплексов различных типов («Путь», «Привод» и др.), исполь-
зующих в этом случае информацию непосредственно от радионавига-
ционных посадочных систем (СП-50, ILS). Однако для повышения на-
дежности выполнения захода на посадку АНК не прекращает выработ-
ки всех необходимых данных для выполнения четвертого разворота
и для дальнейшего полета по посадочной прямой. Это позволяет при
необходимости повторного захода снова перейти к управлению от НВ.
Для построения маневра захода на посадку может быть использо-
ван режим «Кратчайшее расстояние» при счислении координат в ГО-
системе, привязанной к ВПП аэродрома (рис. 8.13). Если известны ГО-
координаты поворотных точек маневра в зоне аэродрома, то последо-
вательное использование режима «КР» позволяет провести самолет по
любой ломаной линии пути до ввода его в зону курсового радиомаяка.
Переход к счислению в этой системе координат от ЧО-системы, исполь-
зовавшейся па маршруте, осуществляется при подходе к зоне аэро-
дрома. Он заключается в преобразовании ЧО-координат самолета на
последнем маршрутном участке путем ввода в НВ координат Х1(ПМ
и Укпм КПМ, определенных в ГО-системе с началом в центре ВПП и
с направлением 0Y главной оси, равным посадочному путевому углу
Рэп-
Для повышения оперативности переходов от одного участка пред-
посадочного маневра к другому'в АНК может включаться специальный
блок предпосадочного маневра (БПМ), с помощью которого предва-
рительно запоминаются координаты 8—10 точек предпосадочного ма-
невра (ТПМ), вводимые в
процессе полета автомати-
чески в вычислитель в
установленном при про-
граммировании порядке.
БПМ (рис. 8.14) имеет ряд
рукояток для ввода ко-
ординат X и Y ТПМ, тумб-
лер включения режима
«Установка программы»,
переключатель «Прав. —
лев.», направления разво-
ротов при повторном за-
ходе, кнопку принудитель-
ной смены ТПМ, а также
небольшой планшет для
графического изображения
предпосадочного маршрута
Рис. 8.13. Схема решения задачи захода на
посадку с применением АНК, работающего в
ГО-снстеме координат
241
Уст прог. корой
Принуд Выел лей праВ
Рис. 8.14. Блок посадочного маневра (БПМ)
по координатам ТПМ. Ввод координат ТПМ осуществляется с исполь-
зованием счетчиков задатчика-индикатора координат ППМ 3 (рис. 8.3).
Так как координаты некоторых ТПМ маршрута повторного захода по-
стоянны для всех аэродромов (Х5(9) = А’6 = 0), а также могут
ПОВТОРЯТЬСЯ (Хтцм7 Хтпм8, Ктпм6 } тпм7> ^Тпмв- ^Тпм5(9))> БПЛ1
отсутствуют рукоятки для отдельных координат (А ТГ1Л1 5,6, 8 и 9;
Y ТПМ 7,8 и 9). Эти координаты вводятся автоматически при установке
других, равных им координат; например, при вводе Хтпм7 одновремен-
но вводится Хтпм8, при вводе Утпм6 —
^ТПМ7 11 Д-
В полете имеется возможность вручную («принудительно») менять
порядок использования ТПМ, пропуская некоторые точки. Сигнал
подлета к ТПМ. являющейся вершиной угла «четвертого» разворота
(ТПМ5 на рис. 8.13), играет роль команды на переключение управле-
ния самолетом по сигналам курсо-глиссадных радиомаяков.
§ 8.2. ПОДГОТОВКА К ПОЛЕТУ С АВТОМАТИЗИРОВАННЫМ
НАВИГАЦИОННЫМ КОМПЛЕКСОМ С АНАЛОГОВЫМ ВЫЧИСЛИТЕЛЕМ
Подготовка к полету состоит из предварительной и предполетной.
Предварительная подготовка заключается в программировании
траектории предстоящего полета, составлении штурманского плана и
оформлении навигационных документов и справочных материалов.
Программирование полета и составление штурманского плана ведутся
параллельно, так как они тесно связаны между собой.
242
Предполетная подготовка сводится к проверке работоспособ-
ности навигационного бортового оборудования, в частности аппара-
туры комплекса. Однако не следует забывать о необходимости преду-
сматривать в штурманском плане полета запасной вариант навигацион-
ной работы па случай выхода из строя навигационного вычислителя
Навигационное программирование маршрута полета
Навигационное программирование полета по конкретному маршру-
ту включает в себя:
получение навигационного задания на полет—исходных координат
точек заданной траектории и контрольных моментов времени их про-
хода;
расчет параметров программной траектории по этапам в основной
системе координат данного АНК;
выбор опорных ориентиров коррекции (средств коррекции) для
независимых определений МС и приведение их исходных координат
к основной системе координат АНК;
ввод в устройство памяти АНК программной информации и хране-
ние ее в течение всего полета или отдельных этапов. Последняя опе-
рация так же, как и последующие установки программных данных,
является неотъемлемой составной частью процесса программирования
и выполняется при предполетной подготовке и в самом полете.
Навигационное задание на полет представляет
собой перечень всех поворотных пунктов заданного маршрута (ППМ)
с указанием планируемого времени Т3 нх прохода, а также высоты
Ня полета на каждом участке траектории. Для расчетов элементов
программы необходимо определить географические (или приближенно
геосферические) координаты всех ППМ; если координаты в задании
не указаны, их можно измерить по карте достаточно крупного мас-
штаба.
Исходя из координат ППМ, определяются параметры
каждого из ортодромических участков ЛЗП:
направление рин относительно истинного меридиана в начальной точке
и длина S. Как правило, эти расчеты выполняются по формулам сфе-
рической тригонометрии, причем геосферические координаты для по-
вышения точности могут пересчитываться из географических по фор-
мулам (7.1).
Поскольку в навигационный вычислитель для каждого участка
ЛЗП должно вводиться направление относительно условного меридиа-
на, по которому работает курсовая система и который в зависимости
от условий может экипажем изменяться, то первоначально целесооб-
разно вычислить для всех участков истинные путевые углы в их на-
чальных и конечных точках ((Зин, рпк), из которых затем легко полу-
чаются необходимые рз каждого этапа (рис. 8.15).
Истинный путевой угол ортодромнческого участка в начальной
точке рассчитывается по формуле
ct ё Pmi = cos Ф11 g <P2 cosec (12—lj) — si n <px ct g (A2—lj), (8.15)
243
где фх, Ij, ф2 и Х2 — координаты заданных ППМ, ограничивающих
данный участок.
Истинный путевой угол того же участка ЛЗП в конечной точке по-
лучается после этого из соотношения
sin 0ИК = sin pUIIcos фх sec ф2. (8.16)
Целесообразно сразу же вычислить разности путевых углов в ко-
нечных и начальных точках участков (схождение меридианов на
данном отрезке пути)
ai — Рик i Рин i
•
и углы разворота линии пути у поворотных пунктов, равные разностям
истинных путевых углов двух участков линии пути в точке данного
ППМ:
APi, i-l — Рип, i — Рик, £-!•
Очевидно, углы разворота ЛЗП у ППМ равны также разностям
путевых углов этих участков, измеренным относительно любого услов-
ного меридиана.
После выбора условного меридиана, по которому предполагается
выставить курсовую систему, можно окончательно рассчитывать про-
граммные параметры всех участков ЛЗП. Для этого достаточно пере-
вести истинный путевой угол первого участка в условный, вводя не-
обходимую суммарную поправку Дх (см. [19], табл. 5.6)
Ру I — Риг + Axi,
а затем рассчитать и РИ1- каждого участка:
Ру2 — Pyi + АРг,х»
РуЗ = Ру2 “Ь АРз,2>
pyl —Ру, J-l + APi, i-l,
244
Длина каждого участка рассчитывается с использованием величины
истинного путевого угла рин,г этого участка в начальной точке:
sinSj = sin (Х(.+1 —X,)cos фг+1 cosec РИ1Ь i.
Программирование вертикального манев-
р а ввиду его простоты (установочными данными являются требуемое
изменение высоты и горизонтальная база SCH маневра) не требует
предварительных расчетов.
Ортодромические координаты Zp и Sp р а д и о-
маяка РСБН или радиолокационного ориенти-
р а, необходимые для коррекции МС, получаются пересчетом из опре-
деляемых заранее геосферпческих координат фр, Хр и параметров уча-
стка ЛЗП, на котором предполагается производить коррекцию. Из
прямоугольного сферического треугольника PVN (рис. 8.16):
cos (90° — Zp) = sin L sin (Д>у—270°)
или
sin Zp = sin Leos Дру, (8.17)
где Apy — азимут радиомаяка (или радиолокационного ориентира)
из точки V вертекса данного ортодромического участка. Из треуголь-
ника PnPV
COS L = Sin фр Sin фу + COS фр COS фу cos (Xp— Xy),
откуда sinL = pr 1— [5Шфр5тфу -ф созфр cos фу cos (Xp— Xv)]2. (8.18)
Далее (8J9)
Ho ctg ApV можно определить по общей формуле (8.15) направ-
ления ортодромии, проходящей через две известные точки У(фу, Ху)
и Р(фр, Хр):
ctg ApV = cos фу tg фр cosec (Хр—Ху)—sin фу ctg (Xp— Xy). (8.20)
Координаты точки вертекса получаются по известным формулам
сферической тригонометрии:
COS фу =СО5ф15ШРпп;
ctg (Ху—Хр) = sin фу tg ₽1[Н.
где фу и Ху — координаты начальной точки ортодромического участка
ЛЗП, а ри„ — истинное направление ортодромии в этой точке.
Подставляя в формулу (8.17) полученные выражения для sin L
(8.18) и cos Apv (8.19) с учетом соотношения (8.20), получим
sinZp=i 1 — [sin фр sin фу + cos фр cos фу cos (Хр—Ху)]2 х
cos фу (бфрсозес (Хр—Ху)—sin фу ctg (Хр—Ху)
У 1ф [созфу tg фр cosec (Хр — Xj—sin фу ctg(Xp — Ху)ф
245
или после некоторых преобразований
sin Zp = sin cos (pv—cos <pp sin <pи cos (Zp—lv).
Для получения второй координаты Sp рассмотрим сферический
треугольник РКО (рис. 8.17), из которого
cos 1 = sin (90°—Zp) sin (90°—Sp),
откуда
cos Sp = sec Zp cos I.
Но из треугольника РР^О
cos I = cos (90°—<pp) cos (90f — <p2) ф- s i n (90°—<pp) sin (90° — <pp) X
X cos(Zp—Z2) = s i n <pp s i n <p2 4- cos <pp cos (p2 cos (Xp—1,).
Тогда
cos Sp = secZp [sin (ppsin<p, ф-cos <ppcos <p2cos (Zp—12)].
Для получения путевого угла ортодромии относительно ис-
тинного меридиана радиомаяка рассмотрим треугольник P^VM
(см. рис. 8.16), являющийся прямоугольным при вершине V. Значе-
ние угла [Кр при вершине Л1 находится из соотношения
cos Рхр = sin [90°—(90°—фр)] sin (Ху— ?.р) = sin sin (Ху—lp).
Однако угол Рлр определяется по этой формуле неоднозначно, так
как косинус является функцией четной. Поэтому из двух значений
Jzfb.p необходимо выбрать одно, наиболее близкое к общему направ-
лению ортодромии в рассматриваемом районе.
Расчеты программных параметров по полученным формулам це-
лесообразно вести с помощью ЦВМ по специализированным програм-
мам, однако их можно выполнить и в условиях производственных
подразделений, используя простейшие средства механизации счета —
арифмометры и клавишные счетные машины.
Ориентировочные значения путевых углов Pyf, длин ортодроми-
ческих участков ЛЗП, координат Zp и Sp средств коррекции и углов
Рис. 8.16. Вывод формулы величины Рис. 8.17. Вывод формулы величины
Sp
246
|%.р можно получать непосредственными измерениями по карте доста-
точно крупного масштаба. Опп полезны н для контроля правильности
результатов, получаемых по точным формулам, с целью исключения
грубых промахов при выполнении расчетов.
Оформление программы полета
Результаты программирования предстоящего полета удобно оформ-
лять в виде таблицы (например, табл. 8.1), содержащей необходимые
установочные параметры по всем этапам маршрута, а также некоторые
данные, используемые при изменении условий полета (смена опорного
меридиана, возвращение с маршрута и др.).
Таблица 8.1*
Маршрут: Ташкент—Москва
Опорные меридианы:
1) магнитный ИПМ....................Дм=+4,5°;
2) магнитный КПМ.................... ^М — +®° •
Установочные параметры Дополнител ьные данные
Пункты участков ЛЗП средств коррекции дм ₽ от ИПМ
1Н
№ ППМ маршрута fy/i> град Z U). км 5 (У), км 7 S ИЗПУ, , Р . Р град (*р> , , км км фср ₽лк i(Ji град град от КПМ’ град
Ташкент 267,5 241,5 0 0 —115 Р/м РСБН 271,3 +6 —113 Радиолокационный +4,5 272 0
41 271 —22,5
1 Чардара 279 253 0 0 —279 ориентир — —92 —258 Радиолокационный + 5 282,5 + 1
41 280,5 -21,5
2 Тамдыбулак 266 240 0 —330 ориентир — +31 —160 +5,5 41 267,5 264,5 +3 —19,5
3 4 Ургенч 253,5 227,5 0 —340 +5,5 41 252 249,5 +6 —16,5
* Числовые данные таблицы являются ориентировочными, а некоторые из
ннх (по средствам коррекции) — условными.
Таблица рассчитывается для полета в одном направлении с исполь-
зованием в качестве опорного магнитного меридиана ИПМ (первая
строка руг каждого пункта). Для обеспечения возможности перехода к
использованию магнитного меридиана КПМ (например, при заходе на
посадку) все pyi пересчитываются относительно этого меридиана и
записываются второй строкой. Данные графы «Z(x)» имеют ненулевые
247
Значения только при использовании ГО-спстемы координат, например,
при маневрах в зонах аэропортов. Установочные параметры средств
коррекции при полете в заданном направление ие зависят от выбора
опорного меридиана. При использовании радиолокационного ориен-
тира графа ИЗПУ (табл. 8.1) не заполняется.
В графах «Дополнительныеданные»записываются: магнитные скло-
нения Дм пунктов маршрута и средняя широта <рср участков ЛЗП;
начальные рП11 и конечные |3ИК истинные путевые углы участков ЛЗП;
суммы поправок за схождение меридианов па участках ЛЗП от дан-
ного пункта до ППМ (числитель) и до КПА1 (знаменатель). Заметим,
что каждая поправка Sa, относительно ППМ получается как сумма
разностей (5ИН — Рии всех предыдущих строк таблицы, а разность
поправок SOj относительно КПМ и ИПМ является для данного марш-
рута величиной постоянной (в нашем случае —22,5“).
Графы «Дополнительные данные» позволяют легко составить таб-
лицу и для обратного маршрута при любом выборе опорного мери-
диана.
Навигационная программа полета, выраженная в таблице, являет-
ся дополнением к общему штурманскому плану полета, разрабатывае-
мому с учетом использования как автоматизированных, так и обычных
средств навигации.
При полете с использованием АНК основное внимание в штурман-
ском плане уделяется контролю за работой датчиков навигационной
информации, своевременному вводу в них необходимых параметров,
определению уходов гироскопов курсовой системы, выбору и осуществ-
лению оптимальных вариантов коррекции координат. Важнейшим
элементом работы экипажа является также постоянное наблюдение
за факторами, влияющими на безопасность полета: грозами, другими
самолетами, высотой полета.
§ 8.3. ПОЛЕТ ПО МАРШРУТУ С ИСПОЛЬЗОВАНИЕМ АНК
Полет по маршруту с использованием АНК выполняется по общим
правилам навигации, согласно штурманскому плану и подготовлен-
ной программе.
Предполетная подготовка
В предполетную подготовку АНК входят проверка его работоспо-
собности, ввод параметров первых участков ЛЗП, выставка курсо-
вой системы.
Проверка работоспособности АНК включает в себя проверку дат-
чиков навигационной информации и навигационного вычислителя.
При проверке НВ определяется исправность схем счисления, пре-
образования координат, коррекции и режима «КР». Проверка выпол-
няется по специальным инструкциям путем ввода контрольных ве-
личин, по которым автоматически отрабатываются проверяемые па-
раметры. Выставка курсовой системы до выруливания па ВПП может
быть выполнена с высокой точностью (до нескольких угловых минут),
248
если на стоянке имеются средства точного определения фактического
курса самолета. Такими средствами являются переносные эталоны
истинных направлений, работающие на принципе гирокомпаса (могут
быть включены и в состав бортового оборудования, хотя будут исполь-
зоваться только 'на земле, перед взлетом), теодолиты, бортовые астро-
номические компасы или астроориентаторы.
Некоторое усложнение подготовки курсовых систем перед вылетом
оправдывается значительным повышением точности курсоуказапия
в течение всего времени полета, так как современные прецизионные
гироскопы удовлетворительно сохраняют направление в течение не-
скольких часов.
Выставка параметров первых участков ЛЗП особенно необходима
при сложной форме маневра выхода из зоны аэродрома (ломаная ЛЗП,
состоящая из нескольких коротких отрезков). В этом случае исполь-
зуется счисление в главно-ортодромической системе координат, при-
вязанной к ВПП, и автоматизированное управление самолетом в ре-
жиме «Кратчайшее, расстояние». Начало ГО-системы совмещается
с центром ВПП, а ось Оу — с ее направлением.
Подготовка НВ к такому маневру ведется еще па стоянке после
включения питания АНК:
на «первой паре» счетчиков координат самолета (па которых при
установке «ГО» загораются лампочки х и у) выставляются значения
координат центра ВПП — х — 0 и у = 0, а на первом задатчике ПУ
ортодромии — направление ВПП относительно используемого опор-
ного меридиана (как правило, меридиана аэродрома);
на задатчике координат ППМ («третья пара» счетчиков), на котором
также горят лампочки х и у, устанавливаются ГО-коордннаты первого
поворотного пункта в зоне аэродрома хх и yY\
после включения тумблера «КР» (па щитке управления НВ) на
«второй паре» счетчиков координат самолета автоматически отрабо-
таются величины Z = 0 и S = Х[(р, а на втором задатчике ПУ — ве-
личина |3yi, т. е. направление из центра ВПП иа этот ППМ. Одновре-
менно это же значение |Зу1 будет передано на подвижной треугольный
индекс указателя курса УШ-3 как величина заданного путевого угла;
на задатчике координат средств коррекции устанавливаются ГО-
координаты хр и ур радиомаяка РСБН 2 и величина НЭПУ — направ-
ление ВПП относительно истинного меридиана, проходящего через
радиомаяк.
Взлет и выход из зоны аэродрома
После выруливания и установки самолета по оси ВПП
производится проверка, и если необходимо, уточнение выставки кур-
совой системы по выбранному для первых этапов полета опорному
меридиану. Для этого с помощью ручного задатчика курса (на пульте
TKQ добиваются, чтобы показания стрелки «К» на указателе ТКС рав-
нялись условному курсу взлета относительно опорного меридиана.
В частных случаях условным курсом может быть магнитный курс
взлета или даже магнитный курс относительно меридиана аэродрома
249
назначения. Окончательная проверка выставленного курса (если не
применялась точная выставка на стоянке) может быть проведена во
время разбега (до отрыва!), когда самолет движется с курсом, точно
совпадающим с направлением оси ВПП (ошибка не более 0,3—0,5 ).
В процессе разбега, при проходе самолетом центра ВПП,
являющегося исходной точкой счисления (так как при предполетной
подготовке на счетчиках координат были установлены х0 = 0 и у0 =
= 0), включается «счисление импульсное» (или «аналоговое» и нави-
гационный вычислитель начинает работать. Однако управление само-
летом пока производится вручную.
На установленной инструкцией высоте коман-
дир экипажа подключает САУ к НВ, чем приводится в действие меха-
низм автоматического пилотирования, и самолет начинает разворачи-
ваться для следования на первый ППМ зоны аэродрома по кратчай-
шему расстоянию (так как установлен режим управления «КР»).
В процессе полета к первому ППМ на первой паре счетчиков индициру-
ются непрерывно меняющиеся ГО-координаты самолета х и у, на счет-
чике «Z» второй пары сохраняется значение Z = 0, а на счетчике «5»
непрерывно отрабатывается оставшееся кратчайшее расстояние до
этого ППМ — SKT>.
При подлете к первому ППМ зоны (ППМ2) па удаление около 20 км,
когда курс полета уже автоматически подобран и стабилизирован
с учетом фактического ветра, управление самолетом отключается от НВ
(включением тумблера «Курсовая стабилизация» на ПУ НВ) и полет
продолжается методом постоянного навигационного режима с сохра-
нением этого курса. В это время штурман вводит в счетчики третьей
пары ГО-координаты х2 и у2 ППМ2, а на удалении, несколько большем
расчетного 5лур от ППМП выключает тумблер «КС». При этом управ-
ление снова подключается к НВ и полет выполняется в режиме «КР»
относительно ППМ.». Аналогичные операции производятся экипажем
при полете на каждом прямолинейном участке маневра в зоне аэро-
дрома.
При маневрировании в зоне аэродрома до выхода на ИПМ трассы
целесообразно провести коррекцию счисленных коор-
динат с помощью аэродромной системы РСБН-2, для радиомаяка
которой были подготовлены программные параметры хр, ур и НЭПУ,
равные истинному направлению ВПП
После разворота в режиме «КР» па последний ППМ зоны (т. е.
на ИПМ трассы) осуществляется переход к счислению в частно-орто-
дромпческой системе координат и к основному режиму автоматического
управления самолетом (по Z и Z). Этот переход осуществляется выклю-
чением «КР» и включением положения «ЧО» на пульте НВ, в резуль-
тате чего показания второй пары счетчиков не изменяются по срав-
нению с режимом «КР», счетчики первой пары «освобождаются» (лам-
почки «х» и «//» на них гаснут), а на задатчиках координат ППМ (тре-
тья пара) н координат ориентиров коррекции (четвертая пара) вместо
лампочек «х» и «у» загораются лампочки «Z» и «5». Управление само-
летом будет обеспечивать его стабилизацию относительно осп участка
ЛЗП с данными, отработанными в режиме «КР» к моменту его выклю-
250
чения (Z = 0 и X = ХкР). Освободившийся задатчик ПУ и задатчик
координат ППМ используются для ввода ЧО-коорднпат начальной
точки первого трассового участка ЛЗП — Zx = О, X = Хх и fiyl, ко-
торые выбираются из таблицы программных параметров (см. табл. 8.1).
На «свободной» паре счетчиков отработаются и в дальнейшем будут
непрерывно индицироваться текущие ЧО-координаты самолета в
системе первого трассового участка.
В зависимости от намеченного штурманского плана перед выходом
на ИПМ может быть осуществлен перевод ТКС па новый опорный
меридиан. При этом во время отработки показаний курсовой системы
управление самолетом выполняется в режиме курсовой стабилизации.
Полет по маршруту (трассе)
После подготовки НВ, выполненной па последнем участке зоны
аэродрома, выход на ЛЗП первого трассового участка осуществляется
без вмешательства экипажа. При подходе к ИПМ на расстояние ХуР,
величина которого заложена в конструкции данного НВ, управление
самолетом автоматически переключается на первую пару счетчиков
координат (на них загораются лампочки «Z» и «S») п самолет автома-
тически разворачивается для выхода на первый участок маршрута.
Вторая пара счетчиков координат самолета «освобождается», лампочки
на ней и на задатчике ПУ2 гаснут. В дальнейшем самолет автоматиче-
ски стабилизируется относительно оси данного участка ЛЗП.
На задатчиках координат ППМ и свободном задатчике ПУ вруч-
ную вводятся программные параметры следующего участка трас-
сы (Z = О, X = X.,, ПУ2 = Ру2)- Эти операции повторяются после
каждого автоматического перехода самолета па очередной участок
программной ЛЗП.
В процессе автоматического полета по маршруту штурман, кроме
периодического ввода последовательных программных данных, пе-
риодически вводит в ТКС величину <рср для очередного участка ЛЗП,
производит коррекции счислимых МС, определяет и компенсирует
систематические ошибки курсовой системы, следит за исправностью
гироскопов ТКС (по величине расхождения в показаниях двух гиро-
агрегатов), решает задачу прибытия в контрольные пункты в назна-
ченное время. При необходимости снижения на участке маршрута эки-
паж использует НВ (режим «вертикачьный маневр»), задавая высоту
снижения ДЛ3 и горизонтальную базу Хсн, на которой должно про-
изойти снижение.
Коррекция координат МС по данным системы
РСБН выполняется экипажем (штурманом) в следующем порядке:
на задатчиках координат средств коррекции устанавливаются
ЧО-координаты Zp и Хр радиомаяка, а на задатчике ИЗПУ — истин-
ный путевой угол 0ПЗ ЛЗП относительно меридиана этого радиома-
яка;
на пульте управления НВ (см. рис. 8.2) включается положение
«РСБН», при этом загорается табло «? координаты РСБН», а на инди-
каторе поправок (ИП) отрабатываются рассогласования между счис-
ленными и измеренными РСБН координатами самолета согласно форму-
251
ле (8.14). Если AZ и AS велики, необходимо проверить правильность
выставки координат маяка (Zp, Sp) и |3ИЗ, а также, используя другие
средства (наземную РЛС, БРЛС, угломерные системы, визуальные
наблюдения), убедиться в том, что причиной больших AZ и AS яв-
ляются именно ошибки счисления. После этого можно приступать
к коррекции с помощью РСБН;
на индикаторе поправок включается положение «Коррекция».
При этом НВ вычисляет точные координаты Z и S самолета (по соот-
ношениям 8.13) и вводит их в счетчики, благодаря чему осуществляет-
ся коррекция координат, продолжающаяся в дальнейшем непрерывно
до выхода самолета из зоны действия радиомаяка или до выключения
штурманом одного из переключателей — «Корр. РСБН» (па ПУ НВ)
или «Корр.» (на ИП).
Коррекция одной координаты Z может осуществ-
ляться и по радиомаяку VOR (без ответчика ДМЕ), расположенному
в пройденном или очередном ППМ. Точное значение Z определяется
в НВ по формуле
Z = АЛДрм,
где АЛ — поступающее из Курс-МП отклонение самолета от задан-
ного азимута, а DpM — счисленное удаление самолета от маяка фор-
мируется в самом НВ (Орм — | Scq | при полете на маяк, и DpM =
= I Syq — Scq | при полете от маяка). Для коррекции на ПУ НВ уста-
навливается режим VOR, па счетчиках координат средств коррек-
ции — Zp = 0 и Sp = 0 (полет на маяк) или Zp = 0 н Sp = Syq (по-
лет от маяка). Тогда на рабочем счетчике «Боковое отклонение» от-
работается корректированное значение координаты Z.
Коррекция счисленных координат при по-
мощи БРЛС выполняется в следующем порядке:
на задатчиках координат средств коррекции выставляются ЧО-
координаты Zpjio и 5рло радиолокационного ориентира (задатчик
НЭПУ не используется);
по экрану индикатора БРЛС опознается запрограммированный
РЛО, на ПУ НВ включается «РЛВ, корр.»; при этом загорается табло
«Коррекция РЛО», в САУ поступает сигнал «КС» (самолет перестает
управляться от НВ), на экране появляется электронное перекрестие,
построенное по счисленным фсч и DHCq (см. § 8.2);
на индикаторе поправок включается «Индикация»;
с помощью рукояки -МУП перекрестие накладывается на изоб-
ражение РЛО и на счетчиках ИП отрабатываются величины AZ и AS.
При отпускании рукоятки опа возвращается в нейтральное положе-
ние, а перекрестие продолжает перемещаться по экрану уже в соответ-
ствии с движением самолета, оставаясь (пока не накопились ошибки
счисления) совмещенным с изображением РЛО;
на индикаторе поправок устанавливается «Корр.», в результате
чего отработанные поправки вводятся в счисленные координаты;
селектор коррекций на ПУ НВ выключается; при этом автомати-
чески выключается режим управления «КС» и самолет начинает управ-
ляться от НВ, но уже по откорректированным данным.
252
Ручная коррекция МС, по данным визуального наблю-
дения наземной РЛС и других навигационных средств, заключается
в установке непосредственно па счетчиках «Z» и «X» (или «х» и «у»)
текущих координат самолета уточненных значений соответствующих
ортодромических координат. Кнопочное управление с двумя скоро-
стями ввода позволяет выполнить эту операцию достаточно оператив-
но и точно. Однако общая точность ручной коррекции снижается по
сравнению с автоматизированной за счет неодновременности опреде-
ления координат и их ввода в НВ. Поэтому корректировать вручную
целесообразно одну боковую координату Z, которая при движении
самолета меняется медленно.
При использовании наземной РЛС имеется возможность более точ-
ной и оперативной коррекции бокового уклонения от трассы. Для
этого на индикаторе наземной станции должна быть точно нанесена
ось воздушной трассы, относительно которой оператор, пользуясь
измерительным инструментом, определяет значение Z и немедленно
передает его на борт. Штурман, принимая эту информацию, устанав-
ливает получаемую величину Z на счетчике, чем и выполняется коррек-
ция по боковому направлению.
Коррекция показаний курсовой системы
в полете основана на обнаружении систематических боковых ошибок
счисления, выявляемых в результате нескольких последовательных
коррекций МС. После первой коррекции МС производятся еще две
с примерно равными интервалами, при каждой из которых замечаются
показания Z (до их автоматического устранения в результате маневра
самолета). Если эти Zx и Z2 имеют одинаковые знаки и близки по аб-
солютной величине, то это значит, что курсовой прибор имеет систе-
матическую погрешность. Величина необходимой поправки Ду для
ввода в указатели курса рассчитывается по формуле
л i Z
Ду = arctg-----,
$корр
где Z и SKOpp — средние величины бокового уклонения и расстояния
между местами последних двух коррекций. Полученная поправка
вводится при помощи блока дискретных коррекций (БДК) курсовой
системы.
Особые случаи применения НВ — счисление коор-
динат МС при отсутствии допплеровской информации, т. е. в режиме
«Память» ДИСС или при полном его отключении. В режиме «Память»
счисление продолжается по воздушной скорости, поступающей от СВС,
и запомненному в период работы ДИСС ветру. При отключении ДИСС
необходимо на его пульте управления установить режим «Память»
и ввести в задатчик-индикатор ветра (см. рис. 8.4) имеющиеся данные
о ветре—6 и U. Направление ветра должно отсчитываться от истинного
меридиана очередного ППМ (конечная точка данного участка ЛЗП),
а на задатчике НЭПУ необходимо выставить путевой угол ЛЗП отно-
сительно этого же меридиана, т. е. величину (5ПК, имеющуюся в таблице
программных данных.
253
Некоторые отдельные навигационные приемы в маршрутном полете
В ряде случаев — обход гроз, возвращение па аэродром вылета,
полет па запасной или вновь заданный аэродром назначения — эки-
паж вынужден частично или полностью изменять заданный маршрут
полета. При этом маневрирование возможно с автоматическим управ-
лением от НВ, на основе сочетания различных его режимов — основ-
ного, кратчайшего расстояния и принудительной смены ЛЗП (переклю-
чатель «ЛЗП! — ЛЗП2» па щитке НВ).
Основные случаи выполнения маневров сводятся в две группы:
маневры вписывания в какую-либо ранее или вновь.запрограмми-
рованную ЛЗП;
маневры выхода в программную пли вновь заданную точку по крат-
чайшему расстоянию.
При выполнении маневров первой группы используются только ос-
новной режим управления и схема принудительной схемы ЛЗП (пере-
ключатель «ЛЗП! — ЛЗП2», рис. 8.2):
1) для выхода и продолжения полета по участку ЛЗП, с которого
ранее уклонился самолет (например, при обходе грозы — траектория 1,
рис. 8.18), достаточно вновь подключить управление самолета к НВ
(отключенное при обходе грозы), после чего самолет автоматически
развернется и с определенным углом подхода Дрп будет сближаться
с ЛЗП, а в непосредственной близости от нее будет управляться в ос-
новном режиме (по Z и Z);
2) преднамеренный полет параллельно ЛЗП на заданном удалении
Z3 (траектория 2, рис. 8.18) обеспечивается ручной установкой иа ра-
бочем счетчике координаты «Z» величины Z = Z3 со знаком, противо-
положным желаемому смещению от ЛЗП (для полета справа от ЛЗП на
удалении 20 км вводится Z3 = —20 км). После этого самолет авто-
матически выполнит необходимый маневр;
3) для полета в обратном направлении (траектория 3) на «свобод-
ном» задатчике ПУ выставляется ПУ = Рпсх 4-180°, а на задатчиках
координат ППМ—Z = 0, 5 =SlICX, где S1ICX и Р11СХ—длина про-
граммного участка ЛЗП и его путевой угол (в прямом направлении),
переключатель принудительной смены ЛЗП переводится из нептраль-
Рис. 8.18. Маневры вписывания при помощи НВ в заданную ЛЗП
254
Рис. 8.19. Маневры выхода при помощи НВ в заданную точку
пого в положение, соответствующее свободным счетчикам. При этом
самолет начнет разворачиваться на обратный курс и будет подхо-
дить к ЛЗП с постоянным углом 4рп, а затем перейдет на управление
в основном режиме; переключатель принудительной смены ЛЗП воз-
вращается в нейтральное положение. Если самолет не разворачивает-
ся, необходимо ввести в НВ дополнительный сигнал — установить
вручную на рабочем счетчике «Z» показание 1—2 км, тогда автомати-
ческое устранение ненулевого значения Z будет происходить отно-
сительно нового (обратного) направления ЛЗП, т. е. самолет произ-
ведет разворот;
4) переход к полету по очередному программному участку ЛЗП,
по без прохода конечного ППМ предыдущего участка (траектория 4,
рис. 8.18), осуществляется одним принудительным включением очеред-
ной ЛЗП (если программные данные очередного участка уже были
установлены), после чего переключатель возвращается в нейтральное
положение. Самолет движется к очередной ЛЗП сначала с постоян-
ным углом подхода, а затем по плавной кривой;
5) полет от конечного ППМ любого программного участка по новой
ЛЗП (например, уход на другой аэродром — кривая 5, рис. 8.18)
не отличается от полета по очередному программному участку, если
новые данные (ру, Z = 0 и S) были своевременно введены в НВ вместо
программных.
Общей особенностью выполнения маневров второй группы (рис. 8.19)
является автоматическая отработка параметров рКр, SKp и Z = О
для полета в заданную точку с помощью схемы преобразования «КР»
и использование схемы принудительной смены ЛЗП.
1. Для выхода в конечный ППМ программного участка ЛЗП после
вынужденного отклонения (траектория. У, рис. 8.19) необходимо иа
задатчике координат ППМ установить координаты Z — О, S — О
и включить схему преобразования «КР». Тогда па свободном задатчике
255
«ПУ» отработается угол ркр, а на свободном счетчике координат са-
молета— величина Хкр до этого ППМ. Затем переключатель прину-
дительной смены ЛЗП переводится в положение, соответствующее
свободным счетчикам (на которых лампочки «Z» и «X» не горят), и вы-
ключается тумблер «КР». При этом лампочки на рабочих счетчиках
«Z» и «X» координат самолета гаснут, а на бывших свободных — за-
гораются и на них отрабатываются текущие координаты Z и X до
ППМ. Переключатель принудительной смены ЛЗП устанавливается
в нейтральное положение. После подключения НВ к САУ полет будет
осуществляться в основном режиме управления (по Z и Z) по ЛЗП,
определяемой величинами 0кр и Хкр в момент выключения схе-
мы «КР».
2. Выход па конечный ППМ следующего участка маршрута после
обхода грозы, если соответствующие значения 0, X и Z уже были
введены в НВ, осуществляется после предварительного перевода счис-
ления в ЧО-систему координат следующего участка (тумблер «ЛЗП1 —
ЛЗП?» устанавливается в положение свободных в данный момент счет-
чиков, например, «ЛЗП2», а затем возвращается в нейтральное поло-
жение). После этого на задатчиках координат ППМ устанавливаются
значения Z = 0 и X = О (координаты заданной точки выхода в ЧО-
системе ЛЗП2) и включается схема «КР», что приводит к отработке на
ставших свободными счетчиках ЛЗП1 величин 0^, Z = 0 и Х1(р.
Установив тумблер «ЛЗП! — ЛЗП2» в положение ЛЗП!, выключают
«КР». После подключения НВ к САУ самолет будет следовать в задан-
ный ППМ, после чего тумблер «ЛЗП1 — ЛЗП2» необходимо установить
в нейтральное положение, а на вновь освободившиеся счетчики ЛЗП2
выставить параметры следующего участка ЛЗП.
3. Полет из любой точки К программного участка в произвольно
заданную точку ППМ/ выполняется после предварительного ввода в
НВ координат этого ППМ/ в ЧО-системе текущего участка ЛЗП и вклю-
чения схемы «КР». При подходе к точке поворота К на расстояние Хур
счисление принудительно переводится на свободную пару счетчиков,
«КР» выключается, а тумблер «ЛЗП! — ЛЗП2» возвращается в нейт-
ральное положение. Самолет будет следовать в заданную точку ППМ/
(траектория 3, рис. 8.19).
Вход в район аэродрома и построение захода на посадку
Использование АНК рассматриваемого типа в районе аэродрома
возможно как при наличии в комплексе специального блока посадоч-
ного маневра (БПМ), так и без него.
При работе без БПМ комплекс обеспечивает автоматическую вы-
работку навигационных решений для одного участка ЛЗП методом
«кратчайшего расстояния» при счислении координат в ГО-системе,
связанной с центром ВПП и направлением посадки (см. § 8.1). Но для
этого счисление координат предварительно должно быть переведено
в эту систему на последнем перед КПМ участке маршрута: на свобод-
ном задатчике ПУ выставляется направление посадки, а в задатчик
координат ППМ вводятся ГО-координаты этого КПМ хцпм и 1/кпм-
256
Курсовая система должна быть приведена к меридиану отсчета поса-
дочного направления, как правило, к магнитному меридиану аэрод-
рома. На удалении 50—70 км от КПМ (по индикатору текущих
координат) счисление переключается в режим «ГО», после чего вклю-
чается тумблер «КР», чем обеспечивается полет по той же ЛЗП, но при
управлении по путевому углу. После перехода к режиму «ГО», но до
подхода к КПМ целесообразно перевести вычислитель в режим непре-
рывной коррекции по аэродромной системе РСБН или в крайнем случае
выполнить разовую коррекцию координат по этой системе. Непосред-
ственно перед КПМ (Хост = 15—20 км) управление самолетом отклю-
чается от вычислителя включением тумбпера «КС» (курсовая стаби-
лизация), а на задатчике координат ППМ выставляются координаты
хтпм, и {/тпм1 первой точки предпосадочного маневра ТПМр После
этого «КС» выключается, чем возобновляется управление в режиме
«КР», но уже для полета в точку ТПМ!. До подхода к ТПМХ аналогично
предыдущему выставляются координаты хтпмг и z/тпмг следую-
щей точки ТПМ2.
Вторая фаза предпосадочного маневра — вписывание в стандарт-
ную схему захода — осуществляется выводом самолета на один из уча-
стков «большого прямоугольного маршрута» (к траверзу ДПРМ,
третьему или четвертому развороту) в режиме «КР» при выставке на
задатчике ППМ ГО-координат хвп и увп точки вписывания. При прибли-
жении к этой точке на расстояние, примерно равное Хур (по счетчику
преобразованных координат), самолет вручную разворачивают на
курс, соответствующий данному участку схемы — посадочный или
обратный посадочному, и выполняют полет, ориентируясь показа-
ниями счетчиков текущих координат х и у.
Блок программы посадочного маневра обеспечивает предваритель-
ное запоминание ГО-координат всех ТПМ при подходе и на стандарт-
ной схеме захода (большой прямоугольный маршрут) в последователь-
ности их прохождения. Переход к счислению в аэродромной ГО-
системе выполняется так же, как без БПМ, а затем самолет в режиме
«КР» последовательно автоматически выходит на все запрограммиро-
ванные точки, последняя из которых совпадает с вершиной угла чет-
вертого разворота.
После этого управление самолетом подключается к вычислителю
пилотажного комплекса, использующего сигналы курсо-глиссадной
группы радиомаяков.
В главе были рассмотрены основные вопросы, связанные с приме-
нением одного из возможных типов АНК с аналоговым вычис-
лителем. В настоящее время такие АНК широко распространены в оте-
чественной и зарубежной гражданской авиации.
Следует, однако, иметь в виду, что конкретные образцы и даже се-
рии приборов одного типа могут существенно отличаться друг от друга
режимами работы, перечнем решаемых задач, оперативными орга-
нами управления. Поэтому конкретные методики использования раз-
личных АНК могут быть построены только с учетом характеристик
того или иного комплекса.
9 Осадший В. И.
257
Глава 9
ПРИМЕНЕНИЕ АВТОМАТИЗИРОВАННЫХ
НАВИГАЦИОННЫХ КОМПЛЕКСОВ С ЦИФРОВЫМИ
ВЫЧИСЛИТЕЛЯМИ
Преимуществами применения в составе АНК бортовых цифровых
вычислительных машин (БЦВМ) по сравнению с использованием ана-
логовых вычислителей являются:
возможность резкого повышения степени автоматизации навига-
ции за счет реализации большого количества вычислительных и ло-
гических операций (задач), что обеспечивает использование точных
формул при допустимых габаритах и весе вычислителя;
практически неограниченные возможности повышения инстру-
ментальной точности решения навигационных задач, а также широкие
возможности учета методических погрешностей датчиков исходной
навигационной информации;
удобство сопряжения с современными индикаторами, возможность
выдачи на индикацию обобщенных (интегральных) навигационных па-
раметров;
большие возможности автоматического контроля правильности ра-
боты как самого вычислителя, так и всех составных частей (систем)
комплекса, снижающие затраты времени и облегчающие работу эки-
пажа при подготовке к полету и в самом полете;
высокая техническая надежность и (в перспективе) небольшая
стоимость, достигаемая за счет отсутствия прецизионных элементов
и широкой унификации блоков бортового оборудования для АНК раз-
личных типов самолетов.
Эти качества делают БЦВМ основой построения современных и
перспективных АНК для средних и крупных самолетов гражданской
авиации.
§ 9.1. ХАРАКТЕРИСТИКА ЛВТОМАТИЗИРОВАННОГЦ НАВИГАЦИОННОГО
КОМПЛЕКСА С ЦИФРОВЫМ ВЫЧИСЛИТЕЛЕМ
Широкие вычислительные возможности БЦВМ позволяют разра-
батывать АНК в различных вариантах, отличающихся как составом
датчиков навигационной информации, так и взаимными связями меж-
ду ними. При этом стараются достичь наиболее точного, надежного
и экономичного решения навигационных задач для конкретного типа
самолета.
Например, комплексы самолетов «Боинг-747» и «Конкорд» построе-
ны в основном на использовании трех инерциальных навигационных
систем (ИНС) с вычислителями и бортовой метеорологической РЛС,
а в районах аэродромов—радионавигационной системы ближней
навигации п посадки (РСБНП) VOR-DME-ILS. При этом в их со-
став не входят ни ДИСС, ни радионавигационная система дальней
навигации (РДНС), пи астрономические средства. На других совре-
менных самолетах АНК предусматривает сочетание гироинерциальной
258
Рис. 9.1. Обобщенная блок-схема АНК с цифровым вычислителем:
1—текущие и программные данные для индикации; 2 — ввод исходных данных, вызов инди-
кации, управление режимами НВ; 3 —обмен посадочной информацией
системы с ДИСС, имеет центральный навигационный вычислитель,
а также ряд радионавигационных датчиков информации (РСБНП,
РСДН, бортовую РЛС). Поэтому о «типовом» АНК с БЦВМ в насто-
ящее время можно говорить только условно, подразумевая такой ком-
плекс, в котором осуществлены наиболее типичные для современного
уровня техники способы решения навигационных задач и конструк-
тивные формы.
Рассмотрим в обобщенном виде один из возможных вариантов АНК
с цифровым, вычислителем, типичный для современного магистраль-
ного самолета гражданской авиации. Структурная схема такого обоб-
щенного АНК (рис. 9.1) имеет в своем составе:
современные автономные и неавтономные датчики навигационной
информации (ДНИ);
центральный навигационный вычислитель (ЦНВ) на базе БЦВМ
(иногда с блоком сменной внешней памяти — СЗУ);
устройства управления, индикации и сигнализации (УУИС).
Аппаратура датчиков навигационной информации (как автоном-
ных, так и радиотехнических систем), как правило, дублирована и
даже троирована, что необходимо для обеспечения высокой надежности
комплекса.
9*
2t9
Характерным типом нового датчика навигационной информации
являются инерциальные навигационные системы (ИНС)* и курсовер-
тикали (КВ). Первые из них заменяют одновременно устройства из-
мерения курса (компасы), путевой и вертикальной скоростей (ДИСС
и вариометр), углов крена и тангажа (центральную гировертикаль);
вторые заменяют все датчики угловых параметров (компасы и вер-
тикали).
Инерциальная навигационная система (гироинерциальная систе-
ма — ГИС) состоит обычно из двух-трех независимых инерциальных
датчиков. Каждый из датчиков представляет собой горизонтально ста-
билизированную инерциальную платформу, автоматически ориентиру-
ющуюся одной из своих осей по истинному меридиану места, а дру-
гой — по параллели. Укрепленные па платформе акселерометры из-
меряют составляющие ускорений самолета по этим осям, что после
первого интегрирования позволяет найти составляющие путевой ско-
рости, а после второго — приращения координат самолета в направ-
лениях меридиана и параллели.
Таким образом, ИНС в сочетании с навигационным вычислителем
в принципе может обеспечить решение навигационной задачи в пол-
ном объеме. Однако недостаточное техническое совершенство инер-
циальных элементов пока требует комплексирования ИНС с датчиками
других принципов действия — автономными и неавтономными радио-
навигационными средствами.
Система курсовертикалей (СКВ), составляемая также из двух-
трех независимых гироблоков, устанавливается на самолете при от-
сутствии инерциальной системы. Каждый гироблок является датчиком
трех углов — курса, крена и тангажа. При этом гироплатформа может
либо ориентироваться определенным образом относительно меридиана,
либо быть «свободной в азимуте». Последнее означает, что нулевая
ось горизонтальной гироплатформы при начальной выставке ориен-
тируется произвольно (обычно по оси самолета на стоянке) и в полете
ее направление не корректируется. Такая курсовертикаль непосред-
ственно выдает гироскопический курс, т. е. курс относительно нуле-
вой оси платформы. Снятый с выхода платформы гироскопический
курс уг преобразуется в необходимые для счисления и индикации виды
курса — истинный уи, ортодромическнй (условный или так называе-
мый гирополукомпасный) относительно опорного меридиана угпк,
гиромагнитный угм— при помощи дополнительных устройств СКВ
(например, блока преобразования курса ВПК) или даже в центральном
вычислителе комплекса.
Преобразование в ВПК гироскопического курса в ортодромическнй
достигается непрерывным вводом интегральной поправки Qjsintpd/,
компенсирующей вращение Земли, а привязка полученного ортодро-
мического курса к определенному опорному меридиану (получение
условного курса)—путем начальной выставки. Начальная выставка
курса производится при помощи специальных внешних или бортовых
На рис. 9.1. ИНС ие показаны.
260
устройств (магнитного, астрономического датчиков, оптического пелен-
гатора, бортового или переносного гирокомпаса). В состав СКВ в ка-
честве корректирующего датчика курса входит также индукционный
магнитный чувствительный элемент. Информация о текущих крене
и тангаже используется в различных системах как навигационного,
так и пилотажного комплексов.
Работой трех курсовертнкалей управляют с общего пульта систе-
мы, на котором должны быть органы выбора режима работы (под-
готовка КВ, выставка, ГПК, МК), ручной задатчик начального кур-
са, рукоятки и шкалы для ввода широты и азимутальных поправок
(схождение меридианов, магнитное склонение), а также сигнальные
лампы исправности каждой КВ. Однако возможны АНК с раздельным
управлением курсовертикалями, имеющими свои индивидуальные
пульты.
Остальные датчики навигационной информации (ДИСС, СВС,
БРЛС, РСБНП, РДНС, астроориентатор1) играют ту же роль, что и
в АНК с аналоговыми вычислителями.
Центральный навигационный вычислитель, построенный на базе
бортовой цифровой вычислительной машины (БЦВД1), является ос-
новным вычислительным и логическим устройством комплекса. Он
работает по заранее заданным постоянным алгоритмам, т. е. как спе-
циализированная ЦВМ.
БЦВМ решает следующие основные задачи:
запоминает (хранит) исходные данные для конкретного полета:
координаты <рп и Хп всех пунктов маршрута и наземных средств коррек-
ции срск и Хск, координаты <раэр и Хаэр аэродромов и параметры раз-
личных схем подхода и захода на посадку, константы, характеризую-
щие условия предстоящего полета. Исходные данные могут вводиться
в.память с пульта управления либо с помощью сменного запоминаю-
щего устройства (комплекта предварительно изготовленных для
данного маршрута перфорированных или магнитных карт);
программирует полет, т. е. автоматически рассчитывает по исход-
ным данным и запоминает параметры ЛЗП в основной системе коор-
динат АНК (вычисленные по <рп£ и Xni значения длин Sf и путевых уг-
лов рэг участков ЛЗП), и рассчитывает по <pCKi и ZCKi радиомаяков
(радиолокационных ориентиров) их ортодромическпе координаты
ZCKi и $ск1 относительно соответствующих участков ЛЗП;
счисляет текущие координаты самолета в основной системе коор-
динат АНК (например, в ЧО-системе);
пересчитывает (преобразует) счисленные ЧО-координаты Z и S
в ЧО-координаты Z' и S' относительно очередного участка ЛЗП, не-
обходимые для автоматического перехода к счислению в системе коор-
динат этого участка, начиная с момента начала разворота перед ППМ;
оптимизирует (корректирует) счисленные координаты самолета по
данным независимых методов определения (по информации от РСБН,
РДНС, БРЛС и других ДНИ);
1 На рис. 9.1 не показан.
261
пересчитывает текущие ЧО-координаты МС (после оптимизации)
в текущие географические координаты <р и Z, используемые для инди-
кации, а также для обеспечения работы систем комплекса (например,
при образовании поправки, учитывающей вращение Земли, для
ВПК СКВ);
пересчитывает текущие <р и Л в прямоугольные координаты х и у
самолета на картографических кадрах проекционного индикатора
навигационной обстановки (НИНО) или на кадрах планшета с движу-
щейся рулонной картой с определением номера кадра, в котором
находится в данный момент место самолета;
решает ряд эпизодических задач:
а) определяет координаты наблюдаемого на экране БРЛС радио-
локационного ориентира;
б) рассчитывает прибытие в ППМ (КПМ) в заданное время (по
расписанию);
в) обеспечивает вертикальный маневр с заданными параметра-
ми — выход на заданную высоту в определенную точку программного
маршрута;
г) рассчитывает располагаемое ьремя и дальность полета при фак-
тическом запасе топлива на заданной высоте полета;
д) оперативно изменяет программу полета (например, при полете
на запасный аэродром или при обходе грозы);
непрерывно вычисляет параметры ветра, используемые при отказах
допплеровского измерителя для счисления по данным системы воздуш-
ных сигналов (по Ки);
вырабатывает сигналы управления самолетом (через пилотажный
комплекс) в горизонтальной и вертикальной плоскости (обычно на-
вигационный вычислитель выдает в пилотажный комплекс текущие
значения Z и Z = W2 и отклонения от заданной высоты полета А//);
вырабатывает данные для системы сигнализации, привлекающей
внимание экипажа к тому или иному элементу навигационной обста-
новки в процессе полета;
автоматически контролирует исправность систем вычислителя,
систем ДНИ, входящих в АНК, и комплекса в целом с выдачей сигна-
лов «Исправность ЦНВ» и «Готовность АНК».
Устройства управления, индикации и сигнализации (УУИС) АНК
с БЦВМ состоят из устройства управления комплекса в целом и уст-
ройств управления его отдельными системами (датчики информации).
В УУИС комплекса входят: пульт управления и индикации (ПУИ),
два многофункциональных плановых навигационных прибора (ПНП),
проекционный индикатор навигационной обстановки (ПИНО) и табло
навигационной сигнализации (ТНС).
Системы-датчики, входящие в АНК, имеют: пульты управления,
индикаторы некоторых навигационных параметров (барометрические
высоты Н760 и Дотн, воздушная скорость V, курсовой угол фоР и даль-
ность DH до радиолокационного ориентира, гиперболические коор-
динаты самолета тг и т2), сигнализаторы состояния (работоспособности
и действующего режима) данной системы. При этом основные навнга-
262
ЗАДАЧИ ПОД Г АНК
Рис. 9.2. Пульт управления и индикации типового цифрового нави-
гационного вычислителя
цпонпые параметры и сигналы выдаются, как правило, не на индика-
торах систем-датчиков, а на обобщенных многофункциональных при-
борах комплекса (например, на приборе ПНП) и на табло навигацион-
ной сигнализации (ТНС).
Коротко остановимся на УУИС комплекса.
Пульт управления и индикации типового АНК (рис. 9.2) имеет на
лицевой панели все органы управления комплексом, с помощью ко-
торых организуются подготовка и выполнение навигационной про-
граммы полета. Пульт принципиально должен иметь:
263
панель режимов пульта (имеет переключатель и две сигнальные
лампы «Индикация» и «Ввод») обеспечивает выбор соответствующего
режима. В режиме «Ввод» вводятся необходимые исходные данные;
в режиме «Индикация» обеспечивается индикация текущих навигаци-
онных данных и результатов решения навигационных задач;
панель индикации навигационных данных, которая состоит из двух
семиразрядных и одного двухразрядного цифровых и знаковых инди-
каторов. Два семиразрядных индикатора обеспечивают выдачу по вы-
зову оператора (штурмана, пилота) одиннадцати пар различных на-
вигационных параметров, определяемых положением «селектора ин-
дикации и ввода».
Первый из семи разрядов используется для указания различных
знаков («+», «—», «С», «Ю», «В», «3»), остальные—для числовых зна-
чений индицируемого параметра (углов, расстояний, скоростей,
времени, номеров). Двухразрядный индикатор «Пункт» служит для
указания, независимо от режима пульта, номера выходного (концевого)
ППМ пролетаемого ортодромического участка ЛЗП. Сигнальная лампа
«Подлет» загорается за 2—3 мин до подхода к этому ППМ. Каждый
разряд всех индикаторов представляет собой миниатюрную матрицу,
состоящую из семи (или более) светодиодных сегментов, возбуждая
которые в различных комбинациях слабыми постоянными токами,
можно получить яркие изображения цифр или букв (знаков);
панель наборного поля чисел, включающая 10 числовых (от 0 до 9)
и две коммутирующие кнопки «Ввод» и «Сброс», служит для состав-
ления различных числовых значений навигационных величин и ввода
их в память БЦВМ;
селектор индикации и ввода параметром, имеющий 11 положений,
в каждом из которых на семиразрядных индикаторах индицируются
соответствующие пары числовых параметров, являющихся либо реше-
нием навигационной задачи, либо значениями вводимых в БЦВМ дан-
ных, необходимых для решения задач;
панель селекторов средств коррекции «СК» и решаемых задач
«Задачи», содержащая два пятипозиционнык переключателя и испол-
нительные кнопки с сигнальными лампами «Корр.» и «Реш.», служит
для выдачи в БЦВМ команд на выполнение коррекций МС с помощью
определенных средств (РСБН, РСДН, БРЛС или вручную) или команд
на решение одной из частных задач (расшифровка радиолокационной
метки на экране БРЛС <рск, Аск — «Расш»., оценка точности ДТ вы-
полнения расписания полета—«Расп.», подготовка вертикального ма-
невра с заданными параметрами Н3, S3 — «ВМ», оценка располага-
емого штилевого пути ST и времени полета /т при фактическом запасе
топлива — «Топл.»);
панель способов задания действующих на текущем участке ЛЗП
ППМ «Пункт», средства коррекции «СК» и аэродрома «Аэр.»: из про-
граммы, ранее введенной в память БЦВМ, или «оперативно» — вво-
дом данных вручную через пульт;
панель включения и подготовки АНК к работе, содержащая шести-
позиционный переключатель «Подг. АНК» с рабочими положениями
264
«Контр. НВ», «Ввод прогр.», «Контр, прогр.», «Контр. АНК», «Рабо-
та» и сигнальные лампы готовности вычислителя и комплекса в
целом.
В положении «Контр. НВ» обеспечивается автоматический самокон-
троль вычислителя по внутренним алгоритмам, т. е. определяется его
готовность к принятию программы и к дальнейшей работе. При уста-
новке селектора в положение «Ввод прогр.» через ПУН вся программа
маршрута вводится в память ЦНВ.
Для проверки правильности введенной программы при установке
переключателя в положение «Контр, прогр.» производится автомати-
ческий розыгрыш полета с эталонными значениями путевой скорости
угла сноса и с учетом курсов, равных ЗПУ каждого участка. Этот ро-
зыгрыш может проводиться и в ускоренном темпе (с увеличенной
до 10 раз путевой скоростью), что экономит время подготовки к полету.
Режим «Контр. АНК» обеспечивает быструю предстартовую проверку
работы всех систем, входящих в АНК, и связей между ними.
При установке переключателя в положение «Работа» начинается
счисление координат самолета по данным датчиков навигационной
информации.
Плановый навигационный прибор ПНП (рис. 9.3) является типич-
ным обобщенным (многофункциональным) индикатором, применяю-
щимся во многих АНК. На ПНП с помощью указателей различных
типов (подвижной азимутальной шкалы, стрелок, цифровых счетчи-
ков, световых и механических сигнализаторов) отображается инфор-
мация о параметрах, характеризующих движение самолета в горизон-
тальной плоскости (в плане).
Воображаемая вертикальная линия, проходящая через центр при-
бора с неподвижным силуэтом самолета, имитирует продольную ось
самолета. На этой же линии находится нуль шкалы углов сноса и не-
подвижный индекс 5 для отсчета текущего курса по вращающейся ази-
мутальной шкале 2.
Центральная часть прибора с разрезной крестообразной стрелкой 7
и смещающейся параллельно ей планкой 12, шкалой боковых откло-
нений в виде ряда точек и двумя подсвечиваемыми треугольными сиг-
нализаторами 10 может быть развернута относительно азимутальной
шкалы на любой угол (автоматически или с помощью рукоятки), чем
имитируется положение заданной линии пути на местности. Вид ЛЗП
в зависимости от режима управления самолетом задается:
а) из памяти НВ — как ЧО-участок программного маршрута с соот-
ветствующим ППМ и программным ЗПУ; в этом случае смещение план-
ки указывает счисленную величину и знак бокового отклонения само-
лета от ЛЗП;
б) с пульта селектора азимута аппаратуры РСБНП (например,
КУРС-МП) — как линия равного пеленга самолета относительно радио-
маяка РСБН при полете на или от него; планка указывает угловое от-
клонение АД от заданного азимута самолета (Дс или Асы); положение
радиомаяка относительно самолета (впереди, сзади), при этом ука-
зывается подсвечиванием соответствующего треугольного сигнализа-
тора.
265
Рис. 9.3. Плановый навигационный прибор
в) из посадочной части аппаратуры РСБНП — как ось зоны кур-
сового радиомаяка системы посадки (СП-50, ILS); планка указывает
угловое отклонение ек самолета от оси зоны курса.
Во всех этих случаях соответствующее направление ЛЗП (програм-
мный ЗПУ, заданный азимут маяка или самолета, направление посад-
ки) индицируется на счетчике 8 ЗПУ, связанном со стрелкой 7.
Для задания только направления полета ЗПУ (в отличие от жест-
ко связанной с землей ЛЗП) используется индекс 9 «ЗК»*, переме-
щающийся по окружности азимутальной шкалы от ручки «ЗК» или ди-
станционно с пульта пилотажного комплекса. Другой счетчик 4 «Д»
указывает дальность Он до наземного ответчика дальномерной систе-
мы, обычно совмещенного с азимутальным радиомаяком РСБН. В не-
рабочем положении цифровой счетчик «перечеркнут» бленкером.
По азимутальной шкале с помощью двух специальных стрелок
(3 и 11) также отсчитываются направления на две радиостанции (по
данным двух АРК и курсовой информации) или на два радиомаяка
♦ Обозначение «ЗК» («заданный курс») неточно, так как фактически задает-
ся ПУ без связи с конкретной ЛЗП.
266
системы РСБН. В случае использования АРК пеленг радиостанции /р
измеряется без методических ошибок и имеет наименование, одинако-
вое’с курсом, подаваемым на ПНП. При работе по радиомаякам РСБН
(типа VOR) показаниям стрелок свойственны методические ошибки
из-за неучета при расчете КУР схождения меридианов (и изменения
магнитного склонения) между местами самолета и радиомаяка (анало-
гично ошибкам индикации на РМИ).
Угол сноса, измеряемый ДИСС, отсчитывается по специальной
шкале против подвижного индекса 6.
Навигационные приборы типа ПНП в современных навигационно-
пилотажных комплексах дополняются командными приборами КПП,
на которых экипажу выдается командная (директорная) информация о
требуемом пилотажном режиме — кренах и тангажах, обеспечивающих
оптимальную реализацию решений.
Проекционный индикатор навигационной обстановки ПИНО
(рис. 9,4) предназначен, прежде всего, для наглядного представления
текущего МС и вектора путевой скорости на фоне изображения мест-
ности в целях непрерывной оценки их положения относительно ЛЗП.
Кроме того, на экране ПИНО, имеющем диаметр до 200 мм, могут ин-
дицироваться в зависимости от необходимости: данные о других трас-
сах, воздушные коридоры и зоны с особым режимом полетов, действу-
ющие радионавигационные и связные средства, сведения о погоде в
районе полета, крупномасштабные схемы маневров в районах аэро-
портов и различные справочные данные (в виде таблиц, схем, текстов
инструкций и т. п.). Такая большая информационная способность
ПИНО обеспечивается благодаря наличию в его конструкции не ме-
нее двух систем проектирования изображений на один экран и гибкой
системе управления содержанием и движением этих изображений при
помощи команд БЦВМ.
Носителями информации в ПИНО является фотопленка с кадрами
картографического и справочного материала и знаковая электронно-
лучевая трубка, содержащая в памяти набор необходимых цифр,
букв, символов и геометрических фигур. Известны ПИНО, построен-
ные только на оптическом принципе получения изображения, только
на электроннолучевом принципе и на их сочетании. Информации на
экране совмещаются при помощи оптической системы, обеспечивающей
также повороты изображения в соответствии с изменениями направ-
ления полета.
Изображение местности (карты) на экране может быть ориенти-
ровано либо по географическому меридиану (север вверху экрана),
либо по направлению ЛФП (вид с самолета на землю). Текущее МС
изображается неподвижным индексом в центре экрана, но для увели-
чения обзора вперед этот индекс может смещаться к его нижней части.
Масштаб изображения местности по маршруту обычно равен
1 : 2 000 000, а в районах аэродромов — 1 : 500 000. Оптическая си-
стема прибора позволяет с тех же кадров получить изображения и в
масштабах 1 :4 000 000 и 1 : 1 000 000, что расширяет районы обозре-
ваемой местности соответственно при полете по маршруту и в районе
аэропорта.
267
Рис. 9.4. Проекционный индикатор навигационной обстановки:
/ — кнопки-лампы включения режима работы; 2 — ручное вращение карты; 3 —сов-
мещенный оптико-электронный экран; 4— вращающаяся азимутальная шкала
(V. 0); 5 — ручка поступательного перемещения карты; 6 —сигнализатор отключе-
ния карты; 7—указатель кадра карты; 8—переключатель ориентации изображе-
ния; 9—переключатель вида информации «карта-справка»; 10— указатель кадра
справки; 11— выбор кадров справки; 12—указатель ФПУ; 13— маркер места са-
молета; 14— регулятор яркости изображения; 15— кнопка смещения маркера;
16—кнопки выбора масштаба карты
Фактическая линия пути индицируется направлением радиуса-
вектора, проведенного из МС (центра экрана) под углом Р = у + а
к меридиану. Длина вектора может быть размечена точками, соответ-
ствующими одной, двум и т. д. минутам полета в соответствии с фак-
тической путевой скоростью. Таким образом, на экране появляются
прогностические места самолета.
С помощью ПИНО возможен также ввод в память БЦВМ заданного
маршрута путем последовательных совмещений всех ППМ с центром
экрана (при ручном управлении изображением). Однако недостаточ-
ная точность такого способа подготовки маршрута не позволяет при-
менять его как основной при полетах по трассам ограниченной ширины
(±5 или ±9 км).
268
Табло навигационной сигнализации АНК состоит из большого
числа ячеек, которые по содержанию можно разделить на характер-
ные группы:
сигнализаторы, подтверждающие нормальную работу систем АНК,
в том числе указывающие действующие режимы аппаратуры; они вклю-
чаются автоматически и горят непрерывно или загораются кратко-
временно при ручном включении режимов контроля какой-либо
системы или АНК в целом;
сигнализаторы автоматического решения различных логических
задач по определению: приближения к ППМ (сигнал «Подход»); входа
в зону действия радиомаяка («Зона РМ»); необходимости коррекции
счислимого места («Корректируйся»); входа в допустимую зону верти-
кального маневра («Готов ВМ»); начала фактического разворота перед
ППМ («Разворот») и т. д.;
сигнализаторы отказов аппаратуры, загорающиеся автоматиче-
ски по данным устройств встроенного контроля систем или БЦВМ и
позволяющие определить частично или полностью отказавший датчик
информации (например, «Нет резерва ДИСС» и «Отказ ДИСС»).
Конкретная форма сигнализаторов (обычные лампы, лампы с надпи-
сями, мигающие лампы), а также их размещение решаются по об-
щему плану компоновки кабины экипажа в тесной связи с системой
сигнализации пилотажного комплекса. При этом в АНК обычно пре-
дусматривается сигнализация способа навигационного управления
самолетом: от навигационного вычислителя, непосредственно от радио-
навигационных средств, от курсового гироскопа или вручную.
§ 9.2. ПОДГОТОВКА К ПОЛЕТУ
При использовании АНК с БЦВМ предварительная подготовка
экипажа к полету за счет полной автоматизации расчетов при програм-
мировании маршрута значительно упрощается, но в то же время эки-
паж лишается имевшейся при работе с картой возможности усвоить
маршрут, систему ориентиров и радионавигационных средств. Поэто-
му в процессе предварительной подготовки экипаж должен специаль-
но ознакомиться с маршрутом полета по бортовой карте и с его изобра-
жением на экране ПИНО, поскольку проекционное изображение имеет
некоторые особенности.
В бортовой навигационной документации целесообразно иметь:
подготовленную бортовую карту;
графический навигационный план полета (рис. 9.5), оформленный
в виде мнемосхемы, отражающей общую конфигурацию маршрута с
указанием номеров ППМ, ЗПУ и длин участков ЛЗП, номеров и рас-
положения средств коррекции для каждого участка;
таблицу координат всех ППМ, координат и радиоданных средств
коррекции (на случай отказа ПИНО).
В зависимости от обеспеченности исходными данными предвари-
тельная подготовка может иметь существенные особенности и раз-
личную трудоемкость. При этом возможны следующие характерные
случаи:
269
1. АНК имеет СЗУ и комплект перфокарт (или магнитных карт),
подготовленных для данного маршрута, а также микрофильм для
ПИНО с нанесенной программной ЛЗП и с таблицами координат всех
ППМ и средств коррекции (радиомаяков, баз РДНС, РЛО) с радиодан-
ными наземных станций.
2. АНК имеет все, перечисленное в п. 1, но отсутствует СЗУ.
3. АНК не имеет СЗУ, а на микрофильме района полета не на-
несена ЛЗП, отсутствуют таблицы ППМ и средств коррекции.
В первом случае аппаратура вычислителя АНК может считаться
предварительно готовой к полету, если она исправна и в СЗУ введен
комплект перфокарт для заданного маршрута. При предполетной под-
готовке потребуется проверка правильности введенной программы
путем автоматического розыгрыша полета.
Во втором случае в предварительную подготовку АНК включает-
ся ввод через пульт ПУН исходных данных заданного маршрута, ко-
торые предполагаются известными (по таблицам координат на справоч-
ном кадре ПИНО или другим источникам аэронавигационной инфор-
мации).
В третьем случае экипажу приходится самому (полностью пли ча-
стично) определять координаты ППМ и средств коррекции, после чего
подготовка сводится к предыдущему случаю.
Требования к точности исходных данных в условиях полетов по
узким трассам гражданской авиации (±5 км от оси маршрута) опреде-
ляются главным образом необходимостью одинакового задания ППМ
для всех самолетов, выполняющих полеты по одной трассе. Этого
можно достигнуть централизованной подготовкой точных географи-
ческих координат всех ППМ по каждому маршруту. Желательно иметь
также единые точные данные и о координатах основных радионавига-
ционных средств коррекции — радиомаяков РСБН и баз РДНС.
Число разрядов индикаторов пульта ПУН обеспечивает ввод гео-
графических координат с точностью до десятых долей1 минуты, что
соответствует величине дискретности ввода 185 м для широты и еще
меньшей линейной величине для долготы (так как /дх = 1,85х
X AX'cos (р км).
Рис. 9.5 Схема навигационного плана полета
270
Исходные данные в память БЦВМ вводятся в следующем примерном
порядке.
На пульте ПУН, включенном в режим «Ввод», селектор «Подг.
АНК» устанавливается в положение «Контр. НВ», загорается сигналь-
ная лампочка «Испр. НВ», указывая на готовность вычислителя к
приему данных. Переключив селектор в положение «Ввод прогр.»,
начинают вводить данные исходного пункта маршрута (ИПМ). Для
этого, установив селектор индикации в положение «7В, №п», на левом
индикаторе кнопками наборного поля чисел набирают значение Т3,
а на правом индикаторе — номер ИПМ (например, «О»). При нажатии
кнопки «Ввод» данные засылаются в соответствующую ячейку памяти
БЦВМ и одновременно очищаются оба индикатора. Затем, включив
селектор индикации в положение «<рп, Ап», набирают при помощи соот-
ветствующих кнопок значения и наименования широты и долготы
ИПМ и засылают их в память БЦВМ нажатием кнопки «Ввод». Ана-
логично вводятся Т3, №п и координаты первого и всех остальных ППМ
заданного маршрута.
После ввода данных всех ППМ приступают к вводу данных средств
коррекции — номеров и координат радиомаяков РСБН, РЛО и баз
РДНС, для чего используются положения «№Ск» и «ФСи/ХСк» селек-
тора индикации. Конкретный вид средства коррекции учитывается
кодовым сочетанием, содержащимся в самом номере средства. В слу-
чае использования систем РДНС после общего номера «тройки» по-
следовательно вводятся географические координаты всех трех стан-
ций «тройки».
Для автоматизации навигации при выходе из района аэродрома
и при заходе на посадку (до перехода на управление по сигналам по-
садочных маяков) в принципе можно использовать тот же алгоритм
БЦВМ, что и на маршруте. Например, при вылете в качестве первых
ППМ могут быть запрограммированы центр ВПП («ИМП»), точка «пер-
вого разворота» после взлета («ППМ № Ь>) и другие точки маневра
до выхода на первый участок трассы. Однако маневр выхода из района
аэродрома, а также маневр захода на посадку может меняться даже в
течение суток (например, при изменении направления ветра). Поэтому
в nei оторых АНК предусматриваются специальные дополнительные
пульты управления маневром в районе аэродрома, позволяющие вы-
брать один из предварительно запрограммированных вариантов траек-
тории и даже выполнять полет между запрограммированными точками
в любой необходимой по обстановке последовательности.
Ввод некоторых данных с помощью пульта ПУИ по сравнению с
использованием СЗУ с готовыми перфокартами маршрутов требует
дополнительных затрат времени. Однако он обеспечивает автоном-
ность подготовки к любому маршруту вне зависимости от наличия пер-
фокарт.
Предполетная подготовка аппаратуры АНК с БЦВМ включает
в себя.
автоматическую проверку работоспособности ЦНВ и всех систем
комплекса, заканчивающуюся выдачей экипажу обобщенных («инте-
гральных») сигналов готовности каждой системы и АНК в целом;
271
контрольный автоматический розыгрыш полета по заданной про-
грамме, осуществляемый в ускоренном темпе, с наблюдением по эк-
рану ПИНО и индикаторам ПУИ хода «полета» по заданному маршруту.
Если эта проверка была полностью проведена в процессе предваритель-
ной подготовки, то па предполетной подготовке можно ограничиться
частичным контролем (розыгрышем одного или двух этапов полета),
одновременно проверяется наличие в справочных кадрах микрофиль-
ма всех необходимых для полета данных;
начальную подготовку (прогрев) и выставку гироагрегатов систе-
мы курсовертикалей (инерциальной системы) по горизонту и в азимуте
(относительно продольной оси самолета на стоянке), выполняющихся
также автоматически. При этом может автоматически определяться
и запоминаться постоянная составляющая собственного ухода (дрей-
фа) гироскопов, учитывающаяся в полете при формировании курса;
ввод начального курса в блок преобразования курса (ВПК) в за-
висимости от принятой системы отсчета ортодромических направлений
на данный полет или его этап. Эта операция выполняется различными
методами—гирокомпасированием, по известному пеленгу ориентира,
по магнитному или астрономическому датчику, а также по направле-
нию ВПП во время разбега самолета при взлете;
включение аппаратуры РСБН (или РДНС) и настройку ее на первый
радиомаяк (базу РДНС); если данные этого радиомаяка уже введены
в память БЦВМ, то тумблер «СК» на ПУИ устанавливается в положе-
ние «Прогр.», если радиомаяк не был предварительно запрограмми-
рован, то его данные вводятся оперативно, для чего тумблер «СК»
устанавливается в положение «Оперативно» и после установки селек-
тора индикации на «(рСк/ЛСк» вводятся его координаты (без предва-
рительного ввода номера);
выставку координат исходной точки счисления:
а) установкой на индикаторах ПУИ вручную <р и X места стоян-
ки самолета (если они известны с точностью не ниже одной десятой
минуты);
б) с использованием режима коррекции по ближайшему радиомая-
ку РСБН (методика коррекций изложена в следующем параграфе),
в) предварительным вводом в память БЦВМ ср и X центра ВПП.
§ 9.3. ОСОБЕННОСТИ ВЫПОЛНЕНИЯ ПОЛЕТА ПРИ ИСПОЛЬЗОВАНИИ
ЦИФРОВОГО ВЫЧИСЛИТЕЛЯ
При использовании цифрового вычислителя экипаж не выполняет
каких-либо измерений и расчетов. Решение всех задач обеспечивается
переключениями органов управления на пультах и реже—вводом го-
товых числовых значений координат точек (гр, X, Z, S, Н) и заданных
моментов времени (Т3). Вычислительная машина играет роль кон-
сультанта человека, точно и немедленно отвечающего иа его вопросы,
но оставляющего за ним право вводить в действие подготовленные ре-
шения. Эго позволяет сосредоточить внимание экипажа на анализе
общей картины полета, освобождает его для логической оценки об-
становки и более глубокой подготовки решений.
272
При этом работа в полете проводится по выработанному на предпо-
летной подготовке плану, представленному в графической форме
(см. рис. 9.5). При нормальной работе АНК бортовая карта может не
использоваться, но должна находиться в положении, обеспечивающем
немедленнсе ее применение.
Перед выруливанием со стоянки па предварительный старт эки-
паж включает предстартовую автоматическую проверку готовности
комплекса («Контр. АНК») и получает сигнал о готовности комплекса
к полету (загорается лампа «Готов АНК»).
При использовании для счисления информации от инерциальных
средств счисление может быть начато на стоянке самолета (перед вы-
руливанием), координаты которой q 0 11 известны и введены в память
БЦВМ через пульт ПУИ («ср/Х»).
Если для счисления в данном АНК необходима некоторая ско-
рость движения (при использовании некоторых образцов ДИСС
и СВС), то режим «Работа» включается в процессе разбега при проходе
центра ВПП, координаты которого (<рвпп и Хвпп) перед выруливанием
были выставлены на индикаторах ПУИ и введены в память вычис-
лителя. С момента включения режима «Работа» начинается счисление
текущих координат самолета, а при включении (на пульте пилотаж-
ного комплекса) управления самолетом по сигналам НВ и автомати-
ческое приведение бокового отклонения Z к нулю.
Пульт ПУИ при этом находится в режиме «Индикация», селектор
индикации — в положении «Z/S», тумблеры «Пункт», «СК» и «Аэр.» —
в положении «Прогр.». Двухразрядный индикатор «Пункт» указывает
номер очередного ППМ, левый и правый индикаторы указывают соот-
ветственно расчетное боковое отклонение Z (при автоматическом уп-
равлении оно поддерживается равным нулю) и оставшееся до ППМ
расстояние S.
На приборах ПНП, куда автоматически поступает программное
значение ЗПУ данного участка, планка своим нулевым отклонением
от центра указывает на правильность (по счислению!) следования са-
молета по трассе. Одновременно на экране ПИНО проектируется кар-
тографическое изображение местности в радиусе 50, 100, 200 или
400 км в зависимости от выбранного масштаба. В районе аэродрома
используется радиус обзора 50 или 100 км, иа трассе— 200 км.
Работа экипажа на каждом участке трассы состоит из:
наблюдения по индикаторам (ПУИ, ПИНО, ПНП) за точностью
следования самолета по ЛЗП, для чего требуется управлять индика-
торами, вызывая на них тот или другой навигационный параметр;
управления работой вычислителя при решении различных задач
и режимами управления самолетом (через пилотажный комплекс);
периодического проведения коррекций координат МС;
управления датчиками навигационной информации (главным об-
разом настройка радионавигационной аппаратуры, если не предусмот-
рена автоматическая настройка по программе).
Рассмотрим операции, выполняемые экипажем при коррекции счис-
ленных координат по информации от различных корректирующих
средств.
273
Коррекция с помощью РСБН почти полностью автоматизирована.
Если маяк запрограммирован для данного участка, то для подготовки
коррекции достаточно, проверив включение тумблера «СК» н положе-
нии «Прогр.», установить на панели коррекции ПУП положение
«РСБН» и селектором вызвать индикацию величии корректирующих
поправок AZ и AS. По величинам этих поправок с учетом навигацион-
ной обстановки принимается решение о реализации подготовленных
поправок или об отмене коррекции. Для реализации коррекции на-
жимается кнопка «Корр.», после чего загорается и непрерывно горит
сигнальная лампа «Корр.». Непрерывная коррекция прекращается
при установке селектора в положение «Откл.» или автоматически при
выходе самолета из рабочей области радиомаяка. Если данные радио-
маяка ранее в память НВ введены небыли, то их вводят дополнительно,
устанавливают тумблер «СК» в положение «Операт.», переводят пульт
в режим «Ввод», набирают и вводят условный номер и координаты
маяка (№Ск, <рСк и 1Ск)> после этого снова переводят ПУИ в режим «Ин-
дикация» и выполняют коррекцию в описанном выше порядке.
Коррекция по данным гиперболических систем РДНС, несмотря
на принципиально различные со случаем РСБН алгоритмы обработки
информации, выполняется аналогично.
Коррекция МС с помощью бортового радиолокатора характерна
тем, что корректирующие поправки AZ и AS отрабатываются полу-
автоматически после ручного (с помощью механизма управления пере-
крестием, см. рис. 9.1) совмещения на экране электронного перекре-
стия с меткой опознанного радиолокационного ориентира. Последу-
ющие операции те же, что и для РСБН.
Ручная коррекция координат может выполняться при необходи-
мости. Для ее подготовки известные координаты упрежденного МС Z
и S вводятся вручную на индикаторы ПУИ при установке селектора
коррекции в положение «Ручн.». В момент пролета самолетом упреж-
денной точки включается исполнительная кнопка «Корр.».
Точное выполнение временного графика полета (расписания) обес-
печивается периодическим определением величины АТ отклонения
времени прибытия в любой программный ППМ от заданного значения
Т3. После включения селектора «Задачи» в положение «Расп.» и се-
лектора индикации в положение «Тв №п» в вычислитель вводится зна-
чение Т3 и номер контролируемого ППМ. После нажатия кнопки
«Реш.» и загорания одноименной лампочки ПУИ переводится в ре-
жим «Индикация» и при положении АТв/рэ на левом индикаторе
читается ответ — АТ. Отклонение полученной величины АТ от нуля
характеризует опоздание или преждевременный пролет проверяемого
ППМ. В простейшем виде задача решается по формуле
ЬТ =Т -I_____—-------Т
—'тскТ П7 з>
w ДИСС
где Ттек — текущее время; S0CT — общее оставшееся расстояние до
контролируемого ППМ; №дисс — фактическое значение путевой ско-
рости в момент решения задачи.
274
Непрерывное (практически достаточно частое) решение задачи по
формуле с одновременным изменением W для приведения АТ к нулю
обеспечивает прибытие в любой заданный пункт в назначенное (вве-
денное через пульт) время Т3, если это время не противоречит тех-
ническим возможностям самолета по диапазону допустимых скоро-
стей.
Решение задачи вертикального маневра заключается в определе-
нии SHM — удаления от очередного ППМ точки начала изменения
высоты, обеспечивающего выход на заданный эшелон Н3 в определенной
точке ЗЛП, заданной ЧО-координатной S3. Задача решается по алго-
ритму оптимального маневра, в результате чего для данных условий
(с учетом продольной составляющей ветра) рассчитывается горизон-
тальная протяженность траектории маневра ASbm и определяется ве-
личина SIIM = S3—А5вм (знак минус необходим, так как полет
до ППМ происходит в области отрицательных значений координаты
S, а величина ASbm положительна). Исходные данные задачи На и S3
вводятся при положении селектора индикации в «//B/S3(SHM)» и
установке селектора «Задачи» в положение «ВМ». Ответ SHM индици-
руется на правом индикаторе после перевода ПУИ в режим «Инди-
кация», заменяя на нем ранее введенную величину S3. На табло
сигнализации загорается специальная ячейка, указывающая на окон-
чание подготовки маневра, а при подходе самолета к ППМ на рас-
стояние S„M появляется сигнал разрешения маневра. Реализация
маневра начинается после включения летчиком специального сигна-
ла с пульта пилотажного комплекса. Если подготовленный маневр
почему-либо на возможном участке пути не реализован, на ТНС
появляется запрещающий сигнал, а вертикальный канал САУ авто-
матически блокируется.
Другие частные задачи (топливные расчеты, расшифровка РЛО)
решаются экипажем при помощи операций, сходных по характеру с
описанными. АНК обеспечивает автоматическое управление самолетом
также и при разворотах у ППМ. За несколько минут до подхода к ППМ
на ПУИ загорается специальная сигнальная лампочка «Подлет»,
предупреждающая о предстоящем автоматическом развороте на оче-
редной участок ЛЗП. При достижении точки начала разворота (на
удалении SyP от ППМ) самолет автоматически переходит на управ-
ление по боковому отклонению от нового участка ЛЗП и начинает
разворачиваться для выхода на него. На ТНС появляется сигнал
«Разворот», на двухразрядном индикаторе ПУИ происходит смена
номера ППМ, лампа «Подлет» гаснет, на приборе ПНП задатчик ЛЗП
(крестообразная стрелка) автоматически разворачивается в новое по-
ложение относительно азимутальной шкалы, а планка начинает ука-
зывать боковое отклонение от новой ЛЗП. На экране ПИНО наблю-
дается разворот изображения, соответствующий развороту самолета.
На всех остальных запрограммированных участках трассы работа ком-
плекса происходит аналогично описанному.
Аппаратура АНК позволяет частично изменять навигационную про-
грамму и в полете, используя алгоритм полета в заданную широтой
и долготой оперативную точку маршрута (ОПМ) с построением к
275
ней от текущего МС нового ЧО-участка ЛЗП. На ПУИ тумблер «Пункт»
устанавливается в положение «Операт.», селектор индикации —
«<рп/Лп», производится ввод координат нужной точки, после чего само-
лет автоматически следует на ОПМ. На индикаторе «Пункт» при этом
может индицироваться какой-либо условный код (например, «99»),
сигнализирующий о полете на внепрограммный ППМ (ОПМ). При
подлете к этому пункту задается следующий и т. д. Если после полета
по нескольким внепрограммным участкам необходимо вернуться на
основную ЛЗП и продолжить полет по ней, в «оперативном» режиме
выходят на один из программных ППМ, а перед подходом к нему тумб-
лер «Пункт» включается в положение «Прогр.» Если в АНК задейст-
вован алгоритм ввода программы через ПИНО (см. § 9.1), то оператив-
ное маневрирование на маршруте возможно и без ввода координат
ОПМ. Вместо этого выбранный ОПМ вручную приводится в центр
экрана ПИНО и специальным включателем его приближенные коор-
динаты засылаются в память БЦВМ. При полете в районе аэродрома
АНК с БЦВМ обеспечивает автоматическое маневрирование в горизон-
тальной плоскости—полет по заданным ТПМ и вписывание в стандарт-
ную схему захода на посадку. Для этого в память БЦВМ каким-либо
способом должны быть заложены координаты ТПМ маршрута подхода
и стандартной схемы захода на посадку. В качестве общей основы раз-
личных схем захода может быть применена схема стандартного пря-
моугольного маршрута, используемая при выполнении повторных
заходов. Различные конкретные схемы заходов на посадку (с прямой,
выходом к траверзу ДПРА4, к разворотам 3 и 4, малый прямоугольный
маршрут) получаются в результате вписывания траектории самолета
в различные участки основной схемы. Современные АНК с БЦВМ
могут хранить в своей сменной памяти (СЗУ) постоянные варианты
схем маневра для одного-двух основных аэродромов, записанные в
виде координат всех ТПМ подхода и захода по схеме. Для вы-
бора из памяти БЦВМ одного из вариантов подхода (обычно в виде
номера КПМ) и одного варианта захода на посадку служит спе-
циальный пульт управления заходом на посадку (ПЗП), обеспечива-
ющий, кроме того, включение алгоритма аэродромного маневра (вме-
сто алгоритма маршрутного полета), а также оперативное изменение
некоторых элементов выбранной схемы путем принудительного удли-
нения или сокращения длин ее участков согласно командам служб
УВД. Последняя задача решается при помощи кнопочного управления
с пульта ПЗП, позволяющего выполнять полет «от точки к точке»
и задерживать или приближать разворот при подхое к каждой из них.
Для запасных аэродромов, схемы маневров на которых в СЗУ не
были введены, имеется возможность по разрешению служб УВД выхода
на ВПП по упрощенной схеме подхода—с прямой заданного направ-
ления. Необходимые для автоматизации этого маневра координаты
центра ВПП и направления (срвпп, ^впп и путевой угол посадки) вво-
дятся через пульт ПУИ при положении «Аэродром — Оперативно»,
ПРИЛОЖЕНИЯ
Приложение 1
2 е
Таблица значений функции Лапласа Ф(х)=—=\е 1 dt
X Ф (X) А X Ф (х) д X Ф (X) Д
0,00 0,0000 564 0,95 0,8209 218 1,90 0,9928 14
0,05 0,0564 561 1,00 0,8427 197 1,95 0,9942 11
0,10 0,1125 555 1,05 0,8624 178 2,00 0,9953 10
0,15 0,1680 547 1.Ю 0,8802 159 2,05 0,9963 7
0,20 0,2227 536 1,15 0,8961 142 2,10 0,9970 6
0,25 0,2763 523 1,20 0,9103 126 2,15 0,9976 5
0,30 0,3286 508 1,25 0,9229 111 2,20 0,9981 4
0,35 0,3794 490 1,30 0,9340 98 2,25 0,9985 3
0,40 0,4284 471 1,35 0,9438 85 2,30 0,9988 3
0,45 0,4755 450 1,40 0,9523 74 2,35 0,9991 2
0,50 0,5205 428 1,45 0,9597 64 2,40 0,9993 2
0,55 0,5633 406 1,50 0,9661 55 2,45 0,9995 1
0,60 0,6039 381 1,55 0,9716 47 2,50 0,9996 1
0,65 0,6420 358 1,60 0,9736 41 2,55 0,9997 1
0,70 0,6778 334 1,65 0,9804 34 2,60 0,9998 0
0,75 0,7112 309 1,70 0,9838 29 2,65 0,9998 1
0,80 0,7421 286 1,75 0,9867 24 2,70 0,9999 0
0,85 0,7707 262 1,80 0,9891 20 2,75 0,9999 0
0,90 0,7969 240 1,85 0,9911 17 2,80 0,9999 1
3,00 1,0000
Приложение 2
Номограмма пересчета наклонной дальности в горизонтальную
0° г * 6 6 10 'г ,6 '8 20 22 7* 26 28 50 32 56 36 58 60 62 66 66 В,к П
277
Приложение 3.
Вывод формул для направления градиента ЛРПС.
Обозначим (рис. П.1): Р(фр А.р)—место РНТ; А1о(ФмО’ — опорная точка
в районе нахождения самолета; Амо — истинный пеленг опорной точки из точки
РНТ; В — истинное направление ортодромии РМ0 в точке Af0; d — «перепое»
ЛРПС от опорной точки; Ag — азимут градиента ЛРПС в точке Мо (азимут пе-
реноса).
Из рис. П.1 видно, что
A g = В+90е = (Лмо о) + 90°,
где о — разница в истинных направлениях ортодромии РМ0 в точках Р и Мо.
Найдем предварительно величину
tg 2 — tg 2 / ’
Так как В — 180° — В', можно записать
2
° ^мо 180* В ^лто -^мо +
tg 2 —tg 2 tg 2 — etg
Применим к знаменателю формулу аналогии Непера:
(90е-Фм.)-(90е-Фр)
АХ
(90° - Фм.) 4- (90е - Фр) C‘g 2
COS’-----------------------—
Фм„ 4 фр
где фер — 2
2
Д<р
cos----
2 ДА
—--------etg —,
sin фСр 2
дФ = Фр— Фмо. ТогДа и
ДА
si^eptg —
Дф
окончательно получим
о
18
Рис. П.1
2
н
278
tr = 2arcfg
sin Фер . _ 1 \
Аф kJ 2
А<р к *
cos----- s’
(П.3.1)
Полученное соотношение является точной формулой «схождения меридианов
иа сфере».
При относительно небольших удалениях пеленгации DM можно считать
Аф ДА АХ *
Дф < 20° и АХ < 20°; тогда cos — ~ 1 и tg— ~ —. После подстановки этих
значений в (П 3.1) получим приближенную формулу схождения меридианов
АХ- , .
о —2 sin фср —Ал sin фср.
Используя точную и приближенную формулы для величины о, получим соответ-
ствующие формулы для направления градиента ЛРПС:
точная формула
лв=лм„+2агс1е
sin фср АХ
Аф 6 2
cos 2
+90°,
(П.3.2)
(П.3.3)
приближенная формула
лв = лмо+ АХ sin фср + ЭО0.
Другую форму выражения Ag можно также получить из рис П.1, рассмат-
ривая треугольник
ppnm0-.
sin В' sin АХ
cos фр " sinDMo
. к COS <Рр
sin В ~ sin АХ----—-
sinDM,
Но В'=270°—Ag,
Отсюда
. COS фп
поэтому SinB =—COS Ag Н СО5Л^=—Sin АЛ —д
(П.3.4)
?lg = arccos { — sin Al
COS Фр
279
Приложение 4
Вывод формулы для угла между ЛРПР и ортодромией
Из рис. П.2а видно, что искомый угол I равен
» = ₽ — Ар.
Тогда
18Р~1ел» .
w l + tspig^p ’
где P — текущее направление (путевой угол) ЛРПР относительно истинных ме-
ридианов.
Найдем tgP, используя рис. П.2 б, из которого следует
cos tpdl cos <pd (Al)
• tg p — =
dq) dq>
(П.4.1)
так как dl = —d(Al).
d(Al)
Величину производной —-— найдем, дифференцируя уравнение ЛРПР
dtp
(см. формулу 4.24), предварительно переписав его в виде
ctg Ар sin Al = tg фР совф—sin ф cos А1.
Дифференцируя по ф, получим:
, d(AA)
ctg Ар cos ДА ———— —tgqip sin ф—cos ф cos Al-ф-
, d (Al)
•ф sin ф sin ДА---;
dф
tg фр sin ф-фсозф cos ДА
dф ctg Ap cos Al—sin ДА sin ф
(sin фр sin ф-f-cosфcosфр cos Al) sinAp
(—cos Ap cos ДА + sin Ap sin ДА sin ф) созфр
Заметим, что выражение, стоящее в скобках числителя, равно cos S, а выражение
в скобках знаменателя cosA'. Тогда
d (ДА) cosSsin Ар
dф cos A'cos фр
Но так как согласно рис. П. 2а
sinAp sin А'
cos фр cos ф
d (ДА)
то
d (Al)
dtp
Тогда, подставив выражение
cosS sin A'
cos A' cos <p
d(Al)
Для ——
dtp
cosS
tg P= — costp tg A ------
costp
,, cosS
= tg A-------
cos <p
в формулу (П.4.1), получим
cosS tg Д'.
280
Далее
tg₽—tg-4p — cosStg/Г — 1§Лр
t g i=tg (₽- лр) = 1+tgptgj4p = T^^slg74g^“ ’
или
cosS sin A' cos Лр4^зт Лр cos A'
tg i — —---—----;----“: ~77~. ~
созЛ созЛр—cosS sin A sin zip
Заметив, что выражение в знаменателе равно косинусу угла ДА с обратным
знаком, получим точную формулу
sin Лр cos А' 4^sin А' созЛр cos S
tg i =
cos ДА
При удалении от радиостанции меньше 1 000 км (S° < 9°) можно считать cos S =
= 1 и созДА = 1. Тогда
tg i = sin Лр cos А' 4=^sin A' cos Лр = з1п (Лр4- Л').
Но
Л' = 180° —(Лр4^о)
и, следовательно,
tg i = sin {Лр 44180°—Лр—o))=sin (180°—о) = sin о.
Так как углы I и о малы (единицы градусов), можно приближенно считать
tg? ~ i и sino = о, т. е. i х о.
Приложение 5
Шаблоны кривых равных ошибок МС для УНС
281
Приложение 6
Схема участка полетной карты с ЛРПС от радиомаяков ВРМ-5
«Рыбачий» и «Каиин Нос»
282
СПИСОК ЛИТЕРАТУРЫ
1. Автоматизация судовождения. Под ред. А. А. Якушевича. М., «Транс-
порт», 1967.^364 с.
2. Андерсон Э. Принципы навигации. М., Воениздат, 1968, ЗЮ^с.
3. Астафьев Г. П., Шебшаевич В. С., Юрков Ю. А. Ра-
диотехнические средства навигации летательных аппаратов. М., «Советское
радио», 1962. 693 с.
4. Астафьев Г. П. Самолетные радиопеленгаторы. Л., РИО ВАУ ГА,
1966. 42 с.
5. Б а р а н о в Ю. К. Использование секторных радиомаяков в судовож-
дении. М., «Транспорт», 1966. 86 с.
6. Б е л а в и н О. В. Радиотехнические средства самолетовождения. М.,
Оборонгиз, 1956. 220 с.
7. Богомолов А. Ф. Основы радиолокации. М., «Советское радио»,
1954. 303 с.
8. Б ы к о в В. И., Никитенко Ю. И. Фазовая радионавигацион-
ная система Декка-навигатор. М., «Транспорт», 1969. 176 с.
9. В е н т ц е л ь Е. С. Теория вероятностей. М., Физматгиз, 1962. 564 с.
10. Воздушный транспорт. Реферативный журнал, М., 1967, № 5, рефе-
рат 5.В.75 — «Переносный гироскоп».
11. Глаголев Н. А. Курс номографии. М., «Высшая школа», 1961.
268 с.
12. Д е н и со в В. Г. Навигационное оборудование летательных аппа-
ратов. М., Оборонгиз, 1963. 382 с.
13. Импульсные радионавигационные устройства. Перевод с английского
под ред. Д. Д. Дьякова. М., Воениздат, 1955, 488 с.
14. К а в р а й с к и й В. В. Избранные труды. Т. I. Л., Изд-во Управ-
ления начальника Гидрографической службы ВМФ. 1956. 358 с.
15. М а р к о в Г. В., Острогский Л. А. Справочник пилота и
штурмана гражданской авиации. М., «Транспорт», 1971. 327 с.
16. О д и н ц о в В. А. Радионавигация летательных аппаратов. М.,
«Машиностроение», 1968. 408 с.
17. О с а д ш и й В. И. Основы теории воздушной навигации. Л.,
РИО ВАУ ГА, 1968. 114 с.
18. О с а д ш и й В. И. Рабочие области радионавигационных систем.
Л., РИО ВАУ ГА, 1967. 60 с.
19. О с а д ш и й В. И., Чернышев Г. А. Воздушная навигация.
(Основы теории. Применение геотехнических и астрономических средств). М.,
«Транспорт», 1969. 430 с.
20. Р а ч к о в с к и й Н. Г. Основы теории автоматизированного самолето-
вождения. М., «Машиностроение», 1966. 126 с.
21. Селезнев В. П. Навигационные устройства. М., Оборонгиз,
1961.615 с.
22. Скиба Н. И. Современные гиперболические средства дальней радио-
навигации. М., «Советское радио», 1967. 94 с.
23. С м и р н о в с к и й А. Ф. Радионавигационные средства (Курс ко-
раблевождения. Т. 5, кн. 5), Л., Изд-во Гидрографического управления Мини-
стерства обороны Союза ССР, 1967. 640 с.
25. Справочник авиационного штурмана. Под ред. В. И. Соколова. М.,
Воениздат, 1957. 415 с.
26. Ч е л п а н о в И. Б. Оптимальная обработка сигналов в навигацион-
ных системах. М., «Наука», 1967. 392 с.
283
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Автоматизированный навигационный ком-
плекс (АНК) 214—215
— пилотажный комплекс (АПК) 215
Аналитические зависимости для решения
задач в АНК 219—222
АНК с аналоговым вычислителем 225—230
—------блок-схема 226 (рис. 8.1)
-------задатчики индикаторы НВ 228
(рис. 8.3)
-------пульт управления НВ 227 (рис 8.2)
— с цифровым вычислителем 258—269
------ — блок-схема 259 (рис. 9.1)
Антенна БРЛС, вертикальная ось 49—50
Блок посадочного маневра (БПМ) 242
(рис. 8.14)
— схема АВК географической системы 43
(рис. 2.15)
— управления счетно-решающим прибором
РСБН-2 160 (рис. 5.12) — 161
БРЛС, дальность действия 45—46
— мощность передатчика 48
— разрешающая способность по азимуту
48—49
— решение навигационных задач 46
— чувствительность приемника 48
БЦВМ 261—262
Вектор рассогласования 216
Взлет и выход из зоны аэродрома 249—251
Вождение самолета по данным АВК 41—43
---по ЛЗП 200—201
Вторичные линии положения 208
(рис. 6.13) —209
Вход в район аэродрома 256—257
Гировертикаль центральная 230
Гироинерциальная система (ГИС) см.
Инерциальная навигационная система
Дальность действия РНС максимальная
9—10
-------в горной местности 11—12
(рис. 1.4) — 14 (рис. 1.5)
-------минимальная 8—9
—------в равнинной местности 9
(рис. 1.2) — 11 (рис. 1.3)
Декометр опознавания дорожек РДНС 198
(рис. 6.5)
— точных дорожек фазовой РДНС 198
(рис. 6.4)
ДИСС 25-30
— автоматическое счисление координат 32
(рис. 2.7) — 41
— действие в полете над горной местно-
стью 29
— допустимая высота применения 27
(рис 2.2)
— измерение скорости и сноса 227
— контроль пути 31
— «морской эффект» 28 (рис. 2.3) — 29
(рис. 2.4)
— определение ветра 31—32
— подбор курса 30—31
— решение задач 30—32
284
— схема работы однолучевого измерителя
скорости 25 (рис. 2.1)
— указатель 29 (рис. 2.6) — 30
— щиток управления 29 (рис. 2.5) — 30
Задание на полет навигационное 243
Задатчик индикатор параметров ветра 229
(рис. 8.4)
Задатчик магнитных азимутов 92 (рис 4.8)
— угла карты АВК 36 (рис. 2.10)
Задачи автоматизации навигации 214
— навигационные, решение 216 (рис. 7.1)
Заход на посадку 185—190, 256—257
----решение задачи 241 (рис. 8.13)—242
Зоны рабочей области РДНС 204 (рнс. 6.9)
Индикатор корректирующих поправок НВ
229 (рис. 8.5)
— навигационный 224
Инерциальная навигационная система 260
Информация навигационная, получаемая
93 (рис. 4.9)
Карта полетная для системы Декка 199
(рис. 6.6)
Коррекция по данным гиперболических си-
стем РДНС 274
— координат МС по данным РСБН 251—
252
— МС с помощью бортового радиолокато-
ра 274
---- ручная 253
— одной координаты
— показаний КС 253
------ курсового прибора по данным АВК
36—37 (рис. 2.11) —38
— ручная 274
— счисленных координат при помощи
БРЛС 232
Кривая постоянной радиальной ошибки
РДНС 206 (рис. 6.11)
Кривые равной радиальной ошибки РДНС
207 (рис. 6.12)
Курсовой угол 55—57
----индикатор АРК ЮЗ (рис. 4.14)
----радиостанции 101—104
Лапласа функции 278
Линии равных разностей расстояний 191
----на сфере 192 (рнс. 7.2)
----расстояний, ошибки 201—203
Линия положения и МС» определение при
помощи РДНС 196—200
— равной разности пеленгов радиостанции
(ЛРРПР) 127—131
— равных пеленгов радиостанции (ЛРПР)
117—127
-------иа полетной карте 120 (рис. 4.29;
4.30)
---- — сферической поверхности Земли
118 (рис. 4.27)
----— самолета 111—112 (рис. 4.23)
------- на картах конической проекции 114
(рис. 4.24)
ЛРПС, линейная ошибка 89 (рис. 4.6)
— построение на карте 84—85 (рис. 4.3) —
Маневры вписывания при помощи НВ в
заданную ЛЗП 254 (рис. 8.18)
— выхода при помощи НВ в заданную
точку 255 (рис. 8.19)
Место самолета 55—63, 152—154
----определение по двум дальностям 61
(рис. 3.10)
------одновременным линиям положения
132—133
— — — моменту пролета ориентира 62—63
------ортодромических координат 59—60
(рис. 3.9) — 61
------по пеленгу и удалению от ориен-
тира 57—58 (рис. 3.8) — 59
------разновременным линиям положе-
ния 133—134 (рис. 4.40) — 135
----ошибки 203—208
Местность, масштаб изображения иа эк-
ране БРЛС 52 (рис. 3.4)
— радиолокационное изображение 50
(рис. 3.2)—51 (рис. 3.3), 53 (рис. 3.6)
Метод опорных точек 86—87 (рис. 4.4) —
88 (рис 4.5)
Навигационно-пилотажный комплекс
(НПК) 215
Нави! ационный комбинированный про-
кладчик (КНП) 147 (рис. 5.3)
Наклон антенны БРЛС 49
Пуль-индикатор ЛЗП 92 (рис. 4.8)
Область рабочая по заданной точности
МС 135—142 (рис. 4.46), 149—150
(рис. 5.4) — 151
Оптимизация навигационной информации
222—223
— (коррекция) счисленных координат 237—
238 (рис. 8.12) —239
— текущих координат 216
Ориентиры радиолокационные 45
Ошибка угла сноса в полете от угломер-
ной РНТ 117 (рис. 4.26)
Перевод наклонной дальности в горизон-
тальную 278
Подготовка к полету 269—272
— предполетная 248—249
Полет в зоне подхода 182—185
— с использованием цифрового вычисли-
теля 272—276
— по ЛЗП методом внешнего створа 2-х
радиостанций 129 (рис. 4.37)
------ внутреннего створа 2-х радиостан-
ций 130 (рис. 4.38)
— по линии равных пеленгов 161—172
----— расстояний 172—173
— произвольному прямоугольному марш-
руту 173—181
— ЛРПР, схема 123 (рис. 4.32)
— маршруту 251—253
----с использованием АНК 248—257
----навигационные приемы 254—256
— на радиостанцию активным способом
109—110 (рис. 4.20; 4.21) — 111
----курсовым способом 109 (рис. 4.19)
----пассивным способом 105 (рис. 4.16) —
109
— по угломерной РНТ с использованием
одной ЛРПС 115 (рнс. 4.25)
Преобразование ГО-координат в ЧО-коор-
динаты 235 (рис. 8.9)
— ЧО-координат в ЧО-координаты следую-
щего участка ЛЗП 235—236 (рис. 8.10)
Препятствия воздушные 45
ПресекционныЙ индикатор навигационной
обстановки (ПИНО) 267—268 (рис. 9.4)
Прибор навигационный плановый (ПНП)
265—266 (рис. 9.3)
— пилотажный комбинированный 160
(рис. 5.11)
Приборы индикаторные 224
Программа полета, оформление 247—248
Программирование вертикального маневра
245—246
— маршрута полета навигационное 243—
247
— навигационное 215
Пульт управления ЦНВ 263 (рис. 9.2) —
265
Пульты управления (ПУ) 223—224
Путевой угол фактический 65—66
Рабочая область по заданной точности ли-
нии положения 16—18 (рис. 1.7)
----мест самолета 18—22
----РНС 15-16 (рнс. 1.6)
Радиодевиация 104 (рис. 4.15)
Радиолокационная станция бортовая само-
летная 229
----предупреждения столкновения и на-
вигации (РПСН) 72—80
Радиомаяк ВРМ-5 95 (рис. 4.10)—96
(рис. 4.11)—97 (рис. 4.12) — 101
— «Консол» 100
Радионавигация 5
Радионавигационные системы 7—8
----• дальномерные 7—8
---- комбинированные 8
----разностно-дальномерные 8
— — суммарно-дальномерные 8
----угломерные
— средства автономные 6—7
----классификация 7 (рис. 1.1)
— устройства 5
Радмопеленгаторные УНС 81
Разностно-дальномерные радионавигацион-
ные системы (РДНС) 190—209
Расчет коэффициента радиальной ошибки
РДНС 205 (рис. 6.10)
Регулировка усиления приемника БРЛС
49
Режим «АНУ» 35
— «ДИСС» 33—34
— «Память» 34—35
----• при вычислении координат 38
(рис. 2.12)—40 (рис. 2.13)
— управления самолетом 239—240
-------«Кратчайшее расстояние» 240
-------«Курсовая стабилизация» 240
------- основной 240
Режимы работы допплеровского АВК 33
(рис. 2.8) — 35
РПСН «Гроза» 73—80
— — дополнительный индикатор 75
(рис. 3.19)
----основной индикатор 74 (рис. 3.18)
------ режим «Земля» 75
-------«Контур» 76—77
-------«Метео» 76—80
-------«Снос» 75—76
Сигнальные лампы РСБН-2 161
Система автоматического управления
(САУ) — 229
— ближней навигации радиомаячная 156—
161
— воздушных сигналов (СВС) 227
— инерциальная навигационная 260
— координат АНК 217
----главно-ортодромическая 218 (рис. 7.2)
------ частно-ортодромическая 218 (рнс. 7.2)
— курсовертикалей 260
— УДНС, использование в районе аэро-
дрома 181—190
Системы радиомаячные средне- и длин-
новолновые 94—101
— угломерно-дальномерные 143—156
Скорость путевая 65—66, 180
Способность пропускная РНС 22—24
Станции радиолокационные бортовые 44—
46
285
Схема уменьшения боковых уклонений в
полете по ЛРПР 126 (рис. 4.3о)
Счетчик координат 34 (рис. 2.9)
Счисление при измерении системы коор
динат 40—41 (рис. 2.14)
— координат непрерывное 230—235
----блок-схема 233 (рис. 8.8)
— текущих координат МС 215—21G
Табло навигационной сигнализации АНК
269
-------НВ 229 (рис 8.5)
— номеров ППМ и ТПМ 229
Точки визирные радиолокационные 45
Точная курсовая система (ТКС) 227
Угломерно-дальномерная система ближней
навигации и посадки (РСБ11П) 229
Угломерные радионавигационные системы
80—81
Угол путевой 180
— сноса 180
----определение подбором положения ан-
тенны по виду отраженных сигналов 63—
64 (рис. 3.11) —65
Указатели дальности и азимута РСБН 2
159 (рис. 5.10)
Указатель АРК двухстрелочный 128
(рис. 4.36)
УКВ-радиомаяки 91—94
Уклонения боковые при полете по ЛРПР
125 (рис. 4.34)
УНС» оперативность 83
— пропускная способность 83—84
— радиокомпасные 82
— радиомаячные 82
— радиопеленгаторные 81
Управление по курсовой зоне наземного
посадочного радиомаяка 240
— полетом навигационное 123 (рис. 4.31)
— по сигналам глиссадного посадочного
радиомаяка 240
Устройства управления, индикации и сиг-
нализации (УУИС) 223—225
Формулы для направления градиента
ЛРПС 279—280
— угла между ЛРПР и ортодромией 281—
2Ь2
Щиток пилота 160—161
— управления АРК 102 (рис. 4.13)
---РСБН-2 158 (рис. 5.9) —160
Экран БРЛС 46—47 (рис. 3.1)
Элементы движения самолета навигацион-
ные 154—156
— навигационные, определение иа КЭ 65
(рис. 3.12) — 66
-------базисным способом 66 (рис. 3.13)
-------способом равных дальностей 68
(рис. 3.15) — 72
Эффект береговой 82
— горный 83
— ночной 82
ОГЛАВЛЕНИЕ
Стр.
Предисловие 3
РАЗДЕЛ I. ПРИМЕНЕНИЕ РАДИОНАВИГАЦИОННЫХ СРЕДСТВ
Глава 1. Общая характеристика радионавигационных средств . . 5
§ 1.1. Радионавигационные средства и их классификация . . . . 5
§ 1.2. Дальность действия радионавигационных средств .... 8
§ 1.3. Рабочие области радионавигационных средств......... . . 15
§ 1.4. Пропускная способность радионавигационных систем ..... 22
Глава 2. Примеисиие автономных измерителей навигационных
элементов и автоматизированных вычислителей координат............24
§ 2.1. Характеристика допплеровских измерителей . ...............25
§ 2.2. Решение навигационных задач непосредственно по данным ДИСС 30
§ 2.3. Автоматическое счисление координат по данным ДИСС.........32
§ 2.4. Вождение самолета по данным допплеровского АВК............41
Глава 3. Навигационное применение бортовых радиолокационниых
станций........................................................ 44
§ 3.1. Навигационная характеристика бортовых радиолокационных
станций..................................................... ... 44
§ 3.2. Общая ориентировка.................................. .... 46
§ 3.3. Определение мест самолета........................... .... 55
§ 3.4. Определение навигационных элементов полета................63
§ 3.5. Особенности применения радиолокационных станций предупрежде-
ния столкновений и навигации.....................................72
Глава 4. Применение угломерных радионавигационных систем ... 80
§4.1. Общая характеристика угломерных радионавигационных систем 80
§ 4.2. Определение и использование ЛРПС, полученных при помощи
радиопеленгаторных УНС...........................................84
§ 4.3. Определение линий положения при помощи радиомаячных УНС 90
§ 4.4. Определение угловых параметров и линий положения с помощью
радиокомпасных УНС и их использование....................... ... 101
§ 4.5. Определение мест самолета и рабочие области УНС..........132
Глава 5. Применение угломерно-дальномерных радионавигационных
систем . . . . .......... ... 143
§ 5.1. Некоторые сведения о свойствах дальномерных систем.......143
§ 5.2. Общая характеристика угломерно-дальномерных систем.........146
§ 5.3. Применение угломерно-дальномерных систем с наземной РЛС . . 151
§ 5.4. Особенности применения радиомаячных угломерно-дальномерных
систем ближней навигации........................................156
§ 5.5. Полет по линии равных пеленгов и линий равных расстояний (ре-
жимы «Азимут» и «Орбита») .... ........... ... . . 161
§ 5.6. Полет по произвольному прямолинейному маршруту...........173
§ 5.7. Использование угломерно-дальномерных систем в районе аэрод-
рома 181
287
Стр.
Глава 6. Применение разностно-дальномерных радионавигационных
систем..........................................................190
§ 6.1. Характеристика разностно-дальномерных радионавигационных
систем........................................................ 190
§ 6.2 Способы н методика использования РДНС.................... . 196
§ 6.3. Оценка точности линии положения и мест самолета..........201
РАЗДЕЛ II ПРИМЕНЕНИЕ АВТ0МАТИЗИР0ВАНННЫХ НАВИГА-
ЦИОННЫХ КОМПЛЕКСОВ
Глава 7. Основы автоматизированного решения навигационных задач 210
7 .1. Современные проблемы воздушной навигации и технические воз-
можности их решения.............................................210
§ 7.2. Принцип и основные операции автоматизированного навигацион-
ного процесса.............................................. ... 214
Глава 8. Применение автоматизированных навигационных комплек-
сов с аналоговыми вычислителями.................................225
§ 8.1 Характеристика типового автоматизированного навигационного
комплекса с аналоговым вычислителем.............................225
§ 8 2 Подготовка к полету с автоматизированным навигационным
комплексом с аналоговым вычислителем........................... 242
§ 8.3. Полет по маршруту с использованием АНД................ . 248
Глава 9. Применение автоматизированных навигационных комплек-
сов с цифровыми вычислителями .... . ........258
§ 9.1. Характеристика автоматизированного навигационного комплекса
с цифровым вычислителем....................................... 258
§ 9.2. Подготовка к полету.................................... 269
§ 9.3. Особенности выполнения полета при использовании цифрового
вычислителя.................................................. . . 272
ПРИЛОЖЕНИЯ......................................................277
СПИСОК ЛИТЕРАТУРЫ 283
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ............................................284
Виталий Иванович Осадшнй
ВОЗДУШНАЯ НАВИГАЦИЯ
Редактор В. Л. Стерлингов
Техн, редактор Р. А. Иванова
Корректор А. П. Новикова
Сдано в набор 28/II 1972 г. Подписано в печать 13/XI 1972 г.
Формат бумаги 60Х90’/16. Печ. л. 18,0. Уч.-изд. л. 18,91.
Тираж 8 000 экз. Заказ 850. Цена 76 коп Т 19303.
Изд. № 1-1-1/17 № 3970
Издательство «Транспорт». Москва, Басманный туп., 6а
Московская типография № 4 Главполиграфпрома
Государственного комитета Совета Министров СССР по делам
издательств, полиграфии и книжной торговли
Б. Переяславская, 46