/






























Текст
МИНИСТЕРСТВО АВИАЦИОННОЙ ПРОМЫШЛЕННОСТИ СССР
.W® г.
ЭЛЕКТРИЧЕСКОЕ МОДЕЛИРОВАНИЕ
ИЗГИБНЫХ КОЛЕБАНИЙ И МЕТОД
ДИНАМИЧЕСКИХ ЖЕСТКОСТЕЙ
Канд, техн.' наук
И. М. ТЕТЕЛЬБАУМ
ГОСУДАРСТВЕННОЕ ИЗДАТЕЛЬСТВО ОБОРОННОЙ ПРОМЫШЛЕННОСТИ
Москва 1949
тзт
t
В работе рассмотрены методы электрического моделирования из-
гибных и связных колебаний стержневых систем по коэффициентам
влияния и по участкам. Наиболее целесообразным является метод,
при котором каждый участок стержневой системы замещается электри-
ческим многополюсником, воспроизводящим связи между динамиче-
скими силами и перемещениями на его концах.
Моделирование изгибных колебаний приводит также и к распро-
странению метода динамических жесткостей на задачи изгиба. Приме-
нение метода динамических жесткостей позволяет получить уравнения
частот в весьма удобном виде. Соотношения, связывающие значения
сил и перемещений каждого участка, выражаются при этом с помощью
матриц, а система в целом описывается матричным произведением.
1. ВВЕДЕНИЕ
Определение динамических нагрузок в задачах
колебаний валов, стержней и стержневых систем с
жесткими узлами (неразрезные балки, рамы) свя-
зано с весьма трудоемкими вычислениями. При ре-
шении динамических задач строительной механики
существенную помощь может оказать моделирова-
ние, при котором вычисления заменяются измере-
ниями соответствующих величин. Особое значение
имеет электрическое моделирование, получающее
все возрастающее применение в самых разнообраз-
ных областях (см. например []], [2]).
Как будет показано ниже, электрическое моде-
лирование задач строительной механики тесно свя-
зано с перенесением в область динамических расче-
тов из области электротехники более совершенных
методов аналитического исследования периодиче-
ских и переходных явлений, а именно, метода ди-
намических импеданцев (динамических жесткостей)
и операторного метода. Использование электриче-
ской расчетной аппаратуры в динамических иссле-
дованиях удачно сочетается также с происходящим
теперь внедрением электрических приборов для из-
мерения механических вибраций, электрических ме-
тодов возбуждения колебаний в механических
конструкциях и другими проявлениями все увели-
чивающегося применения электротехники и электро-
ники в области экспериментальной динамики.
Примером эффективного использования электри-
ческого моделирования в динамических задачах
строительной механики может служить расчетный
стенд автора для исследования крутильных колеба-
ний валов поршневых двигателей [3], [4], [5], [6],
в котором на экране катодного осциллографа непо-
средственно получаются диаграммы изменения ди-
намических нагрузок во времени, для отдельных
участков системы, при сложном полигармоническом
возбуждении. Результаты моделирования крутиль-
ных колебаний позволяют рассчитывать на эффек-
тивное применение электрического моделирования с
помощью развитых автором методов и для задач
изгиба и изгиба с кручением, и, в первую очередь,
для исследования поперечных колебаний прямых и
коленчатых валов.
Следует отметить, что получение электрических
схем, эквивалентных изогнутому стержню, интере-
совало многих исследователей. Можно указать на
работы Милейковского [7], Линдсея [8], Буша [9],
Крона [10], [11],Гофлина [12]. Однако еслиэлек-
трические модели изгиба стержней и стержневых
систем и были получены, то лишь пригодные для
решения статических задач или, в лучшем случае,
для гармонических колебаний какой-либо заданной
частоты. При переходе от одной частоты к другой
требуется изменять параметры этих моделей, кото-
рые, таким образом, непригодны для исследования
переходных процессов в динамических системах или
вынужденных колебаний при полигармоническом
возбуждении. Необходимость перестройки парамет-
ров при изменении частоты делает подобные мо-
дели мало пригодными и для получения значений
частот собственных колебаний системы, что обыч-
но в первую очередь интересует исследователя.
Вследствие указанных выше ограничений некото-
рые из перечисленных авторов рассматривают элек-
трические аналогии изгиба лишь как средство^ упро-
щения методов численных расчетов, а не моделиро-
вания, т. е. замены расчетов измерениями.
Отсюда понятен интерес, который представляет
изыскание электрических моделей, являющихся точ-
ными динамическими эквивалентами стержневой
системы, применимыми при различных частотах без
какой-либо перестройки. Такие модели были полу-
чены автором (см. также [13]), причем было вы-
полнено существенное условие, чтобы консерва-
тивные и диссипативные звенья упругой системы
замещались пассивными электрическими элемента-
ми томсоновских колебательных контуров, т. е. по-
ложительными параметрами С, L, М, R (т. е.
емкости, самоиндукции, взаимоиндукции и активно-
го сопротивления). Это условие было удовлетворе-
но во всех интересующих нас случаях колебаний
стержневых систем, за исключением тех, где отри-
цательные параметры присущи самой механической
системе, а именно, при наличии гироскопических
сил (отрицательная прецессия) или при наличии по-
стоянной продольной сжимающей силы (задачи
устойчивости). К электрическим моделям, в прин-
ципе своем не содержащим компенсирующих
устройств типа отрицательных параметров, нас при-
вел второй из рассмотренных ниже двух возмож-
ных путей построения моделей динамических упру-
гих систем.
Первый путь состоит в том, что моделируемая
система выражается с помощью коэффициентов
влияния. Предпосылкой моделирования является
предварительное определение расчетным путем ко-
эффициентов влияния, которые находятся для ста-
тической нагрузки. По значениям коэффициентов
влияния составляется модель упругой системы, ко-
торая затем нагружается электрическими эквива-
лентами динамических сил. При этом Для стати-
чески неопределимых систем коэффициенты влия-
ния могут быть получены лишь для основной си-
стемы, а исключение лишних неизвестных проис-
ходит в самой модели. Этот метод моделирования
динамических систем базируется, таким образом, на
известных методах строительной механики — мето-
де сил и методе перемещений [14].
Второй путь заключается в том, что динамиче-
ская система моделируется по участкам. Каждый
3
участок стержневой системы замещается электри-
ческой схемой — многополюсником, воспроизводя-
щим связи между динамическими перемещениями,
углами поворота, изгибающими моментами и пе-
ререзывающими силами на его концах. Участки со-
единяются между собой в соответствии с условиями
сопряжения и граничными условиями. Базой этого
метода моделирования является метод динамиче-
ских импеданцев (динамических "жесткостей, со-
противлений), который уже нашел применение для
расчета крутильных и продольных колебаний [15],
[16], [17]. Следует отметить, что работа над изы-
сканием методов моделирования изгибьых колеба-
ний привела автора к распространению метода ди-
намических импеданцев (жесткостей, сопротивле-
ний) на задачи изгиба стержневых систем. По ме-
тоду динамических импеданцев стержневая система
при растяжении, кручении, изгибе или изгибе с кру-
чением и т. д. аналитически рассматривается авто-
ром так же, как электрическая схема из много-
полюсников Данный метод оказывается полезным
не только для моделирования, но и для упрощения
численных расчетов. Ниже показано, что примене-
ние этого метода к задачам изгибных колебаний
стержней, валов, неразрезных балок и других
стержневых систем с жесткими узлами дает воз-
можность получить уравнения частот в весьма
удобном виде. Соотношения, связывающие значе-
ния сил и перемещений на концах каждого участ-
ка, выражаются при этим с помощью матриц, а си-
стема в целом описывается матричным произведе-
нием. Вопрос о применении метода динамических
жесткостей (импеданцев) в задачах изгиба приоб-
ретает большую ясность в связи с изложением ме-
тодов моделирования, так как здесь требуется сов-
местное рассмотрение и сопоставление как механи-
ческих, так и электрических систем. В применении
к задачам изгиба указанный метод представляет,
таким образом, интерес как аналитический метод
решения широкого круга динамических задач строи-
тельной механики.
2. МОДЕЛИРОВАНИЕ УПРУГИХ СИСТЕМ ПО КОЭФФИЦИЕНТАМ ВЛИЯНИЯ
При электрическом моделировании стержневых
систем исходная упругая система с распределенной
массой предварительно замещается эквивалентной,
в которой так же, как и при численных динамиче-
ских расчетах, все массы приняты сосредоточенны-
ми, а жесткости элементов или коэффициенты влия-
ния определены статическим расчетом или экспе-
риментом.
Переход от параметров динамических систем к
электрическим величинам производится в соответ-
ствии с двумя системами электромеханических ана-
логий. Сопоставление величин в принятых ниже
обозначениях приведено в табл. 1.
Рассмотрим теорию электрического моделирова-
ния упругих систем, для которых зависимости меж-
ду обобщенными силами X и обобщенными пере-
мещениями А в статике (или обобщенными скоро-
стями v в динамике) выражаются следующим об-
разом:
1. С помощью коэффициентов влияния для
смещений:
дй=8иХ1 + « + ...№+... + 8,„Х„ (1а)
или
®»=8«4x>+wx>+---
+ (16)
2. С помощью коэффициентов влияния $ki для
сил:
Д1 + д2 • +₽йбдй+ • • • +₽й„дп (2а)
или
хй= ₽и f t>idt + J v2dt+ ... + J 'Ukdt-Y...
• • • + М vndt. (26)
Коэффициенты и связаны линейным пре-
образованием. Так как на практике линейное
преобразование сопряжено с громоздкими вычи-
слениями, упругая система должна моделировать-
ся в той форме, в какой ее параметры проще
всего могут быть получены из рассмотрения ис-
ходной реальной конструкции (балки, рамы, вала
и т. д.). При анализе крутильных колебаний си-
стема обычно выражается с помощью крутильных
жесткостей, т. е. коэффициентов в то время
как в задачах изгибных колебаний используются
коэффициенты влияния
Рассмотрение электрического моделирования
упругих систем начнем с задач, которые реша-
ются методом сил. Уравнения (1) являются ка-
ноническими. Коэффициенты 8Ы в общем случае
могут быть положительными или отрицательными,
а главные коэффициенты 8/7 только положитель-
ными.
Если внешние силы Xz заданы, то равенства
системы (1а) отображают принцип суперпозиции
сил и при определении перемещений А; содержат
решение в явном виде. В динамических задачах
в точках /=1,2,3..., кроме заданных внешних
сил ХД/), находятся сосредоточенные массы т-
и приложены механические сопротивления kt.
Силы, приложенные в указанных точках системы,
являются функциями перемещений этих точек,
и система (16) превращается в систему вида
^=8«4-[х1(о—т^.
at [ dt
] + • • •
••• +М \хп^-тпа^--кЛ]. (3)
Ci Ci L
Содержанием динамического расчета является
решение системы уравнений (3).
Упругая система моделируется электрической
схемой, которая составляется по типу матрицы ко-
эффициентов влияния так, что в каждой клетке сет-
ки матричной схемы располагается элемент, соот-
ветствующий определенному коэффициенту влия-
ния Для примера балки фиг. 1 такие матрич-
ные схемы изображены на фиг. 2 и 3. В схеме
4
Таблица 1
Механические Электрические величины
величины 1-я система аналогий 2-я система аналогий
Кинетическая энергия Т Энергия магнит- ного поля 1ГМ Энергия электри- ческого поля W3
Потенциальная энергия V Энергия электри- ческого поля IF3 Энергия магнит- ного поля 1ГМ
Рассеяние энер- гии F Рассеяние энер- гии Wr Рассеяние энер гии Wr
Перемещение Д Электрический заряд q Магнитное пото- косцепление W
d\ Скорость v = — „ йЦ Сила тока i = — dt Напряжение dt
Сила X Напряжение и Сила тока i
Виртуальная ра- бота XdA udq idW
Масса m Самоиндукция L Емкость С
Податливость е Коэффициент влия- ния для смеще- ний Б Емкость С Самоиндукция L Взаимоиндук- ция М
Сопротивление потерь k Омическое со- противление R Омическая про- 1 водимость R
Гармоническое колебание Д = Ди sin <i>Z V = <о 'м COS u>t = = UM cos <л( X = XM cos (wt -у ср) Переменный ток i = 1 cos wt и = U cos (ш/ + Переменный ток и = U cos at i = I cos (ш/ + y)
Механический импе- 7, ХМ данц Z = - Гм Динамическая жест- кость (динамиче- ский модуль) Z = <s>Z* = Х“ Дм Электрический импеданц (полное или ка- жущееся сопро- тивление) Z=-" I Электрический адмитанц (полная или ка- жущаяся про- водимость) У = — и
фиг. 2 используется суперпозиция токов при задан-
ных напряжениях, а в схеме фиг. 3 сложение на-
пряжений при заданных токах.
Полагая в схеме фиг. 2, что проводимости це-
пей питания и цепей измерения весьма велики по
сравнению с проводимостями элементов матрич-
ной схемы Yik получаем, что
А=ад+ад + ад+...
4 - ад + ум+ад + • • • (4а)
где Ц — внешние напряжения,
I .— измеряемые силы тока.
Принимая в матричной схеме фиг. 2 емкост-
ные проводимости, получаем искомые зависимости
вида (16), а именно:
ll = Ql “77 U1 + ^12 .7 U2 + C13 '77 U3 + • • •
dt dt dt
= C22 ,- «2 + C2S -us+ •. . (46)
Таким образом схема фиг. 2 соответствует
балке фиг. 1, причем
(первая система электромеханических аналогий).
Фиг. I. Схема балки.
Полагая, что в схеме фиг. 3 сопротивления це-
пей питания и цепей измерения весьма велики по
сравнению с сопротивлениями элементов матрич-
ной схемы и что трансформаторы в ней являются
идеальными и имеют коэффициенты трансформа-
ции, равные единице, получаем
— ZXAI, i-Z]2/+^I3Z3 +...
U^ = -yZ21l1±Z22i2±ZMIs± ... (5а)
Фиг. 2. Матричная схема суперпозиции токов.
Изменение знаков коэффициентов влияния до-
стигается переключением концов обмоток трансфор-
маторов.
Принимая в матричной схеме фиг. 3 элементы
взаимоиндукции, как показано на фиг. 4, получаем
искомые зависимости вида (16)
К1 = I, ± Ж12 4 i2 + М13 d L .. (56)
dt dt dt
5
Таким образом схема фиг. 4 соответствует
балке фиг. 1, причем
Mik —^ik
(вторая система электромеханических аналогий).
Так как нашей целью является решение дина-
мических задач, когда (t) представляют произ-
вольные функции времени, то все элементы матрич-
Фиг. 3. Матричная схема суперпозиции напряжений.
ной схемы, соответствующие коэффициентам влия-
ния, должны быть одного вида сопротивлений, при-
чем для удовлетворения дифференциальных урав-
нений (3) необходимо, чтобы они были типа емко-
стных (первая система аналогий) или индуктивных
(вторая система аналогий).
Фиг. 4. Матричная схема из элементов взаимоиндукции.
При этом в схеме фиг. 2 должны быть получе-
ны зависимости вида
Си к +с12 4 к (О-
ail at j (<t|_
—Ъ +•.•• = 4; (6)
а в схеме фиг. 4 зависимости вида:
ddt [i, (t) - q +^12 [z2(0-
-С2 ^-Я2^1+ . . . =Hv' (7)
(it J
Чтобы с помощью схем фиг. 2 или фиг. 4 ре-
шать динамические задачи, необходимо осуще-
ствить моделирование зависимости динамических
сил от перемещений. В схеме фиг. 5 это выполняет-
ся при'помощи специальных электронных усилите-
лей, которые подают в модель дополнительные на-
пряжения, зависящие от соответствующих токов.
«гй = «Л Vk к + Г/г *4 ’ (8)
\ at )
где р-/г— коэффициент усиления;
Пк— коэффициент, учитывающий положение де-
лителей напряжения г.
Фиг. 5. Матричная схема с применением усилителей.
В схеме фиг. 5 сопротивления на входе усили-
телей
Zk^i'k+ifaLk.
Напряжения и~к с нужными знаками склады-
ваются с внешними напряжениями щ(/) и пода-
ются в цепи модели. Приложенные напряжения со-
ответствуют, таким образом, выражениям, стоящим
в квадратных скобках в формулах (6) и (3).
Схемы с электронными усилителями находят се-
бе применение в моделирующих устройствах (см.
[2], [18]). Легко видеть, однако*, что для рассмат-
риваемых нами консервативных и диссипативных
систем со многими степенями свободы такие схе-
мы оказываются чересчур сложными, так как для
них требуется большое количество прецизионных
электронных усилителей >. Обеспечение совместной
работы большого количества усилителей в модели
также связано с целым рядом практических за-
труднений.
1 В схемах [2] потребовалось бы количество усилителей,
вдвое превышающее число степеней свободы системы.
6
Учитывая, что упругие системы отображаются
каноническими уравнениями, где = можно
предложить схемы, в которых такие связи через
усилители не нужны. Эти схемы получаются,
если в матрицах фиг. 2, 3 и 4 наложить друг на
друга равные элементы o.k и 8ft;, как показано на
фиг. 6 и 7.
Здесь цепи измерения и питания, которые в
предыдущих схемах были различными, объедине-
ны между собой. В- таком виде матричные схемы
являются эквивалентами динамических систем.
Фиг. 6. Матричная схема упругой системы
(суперпозиция токов).
Внешние силы, в зависимости от системы ана-
логий, замещены источниками изменяющегося по
заданному закону напряжения или силы тока. Если
на упругую систему воздействуют также силы
инерции сосредоточенных масс и силы сопротивле-
Фиг. 7. Матричная схема упругой системы
(суперпозиция напряжений).
ния, то к выходам схемы (по главной диагонали)
присоединяются комбинированные элементы, изо-
браженные на фиг. 8 для первой системы анало-
гии, а на фиг. 9 — для второй. Внутреннее сопро-
тивление источника напряжения принимается весь-
ма малым, а сопротивление источника тока должно
быть весьма велико по сравнению с сопротивле-
нием модели.
Как показано на фиг. 6 и 7, упругая система,
выраженная с помощью коэффициентов влияния,
при электрическом' моделировании представляется
нами в виде пассивной матричной схемы, число пар
полюсов которой (по главной диагонали) соответ-
ствует числу независимых координат рассматривае-
мой упругой системы. Между напряжениями и си-
лами тока на выходах такой схемы принципиаль-
но* йогут быть получены следующие зависимости:
а) при осуществлении схемы из элементов ти-
па емкостей:
ik=Ck^u' + +c^Ttllk + '--
+Сь^ип (9)
и
\ с /А1 J \ Ь /А’2 J
\ / kk J \ Ь /kn V
Фиг. 8. Схема заме-
щения динамических
нагрузок по 1-й си-
стеме аналогий.
Фиг. 9. Схема заме-
щения динамических
нагрузок по 2-й си-
стеме аналогий.
б) при осуществлении схемы из элементов
типа индуктивностей:
uk = ^ki ~ С + ~ г2 । • • • + — 4 + • • •
CIL (л С Cl-L
... + Mkn^in- (11)
и
L, = /—\ {u.dt+(—\ ^u2dt+-.-
- ••+(-;-) • + (“т;г) f undt. (12)
\ !kk J \ M I kn J
Сопоставляя (16) и (26) с выражениями (9),
(10), (И) и (12), обнаруживаем следующие четыре
возможных способа электрического моделирования
упругой системы:
1. Коэффициенты влияния для смещений выра-
жаются емкостями:
°z4 * ^ik-
2. Коэффициенты влияния для смещений выра-
жаются коэффициентами самоиндукции и взаимо-
индукции:
^ik Lkk,
3. Коэффициенты влияния для сил выражаются
емкостями:
4. Коэффициенты влияния для сил выражаются
коэффициентами самоиндукции и взаимоиндукции:
7
Эти четыре способа моделирования подчиняют-
ся двум системам аналогий электрических и меха-
нических величин. К первой системе аналогий от-
носятся первый и третий, а ко второй системе —
второй и четвертый способы моделирования. Таким
образом для каждой системы аналогий существуют
два способа построения моделей, каждый из них
соответствует определенной системе параметров, ко-
торой описывается исходная упругая система.
Для матричной схемы фиг. 6 зависимости между
силами тока и напряжениями на выходах выража-
ются следующим образом:
4=(Кп+г12 + г18+...) ц _ ад _ ад -...;
Л — ^12^1 + (^12 ' Ь ^21 + ^23 + • • • ) ^2-
-ад-...; (13)
Принимая в матричной схеме фиг. 6 емкостные
проводимости, получаем зависимости вида (9), так
что здесь
Ui ’> ^ik
т. е. данная матричная схема отображает при пер-
вой системе аналогий упругую систему, выражен-
ную через коэффициенты влияния 8ж. При этом,
однако', данная схема имеет ограничения, так как
не дает возможности получить коэффициенты вза-
имного влияния Sac различных знаков, как это тре-
буется в общем случае задач изгиба.
Если в матричной схеме фиг. 6 принять индук-
тивные проводимости, получим зависимость типа
(12), так что здесь
^ik
т. е. данная схема отображает при второй системе
аналогий упругую систему, выраженную через ко-
эффициенты влияния р«,. Для подобных систем при
крутильных колебаниях матрицы коэффициентов
влияния имеют такую структуру, при которой глав-
ные коэффициенты влияния по абсолютной величи-
не равны сумме коэффициентов взаимного влияния,
а все коэффициенты взаимного влияния отрица-
тельны. Вследствие этого, схема фиг. 6 удовлетво-
ряет требованиям моделирования крутильных ко-
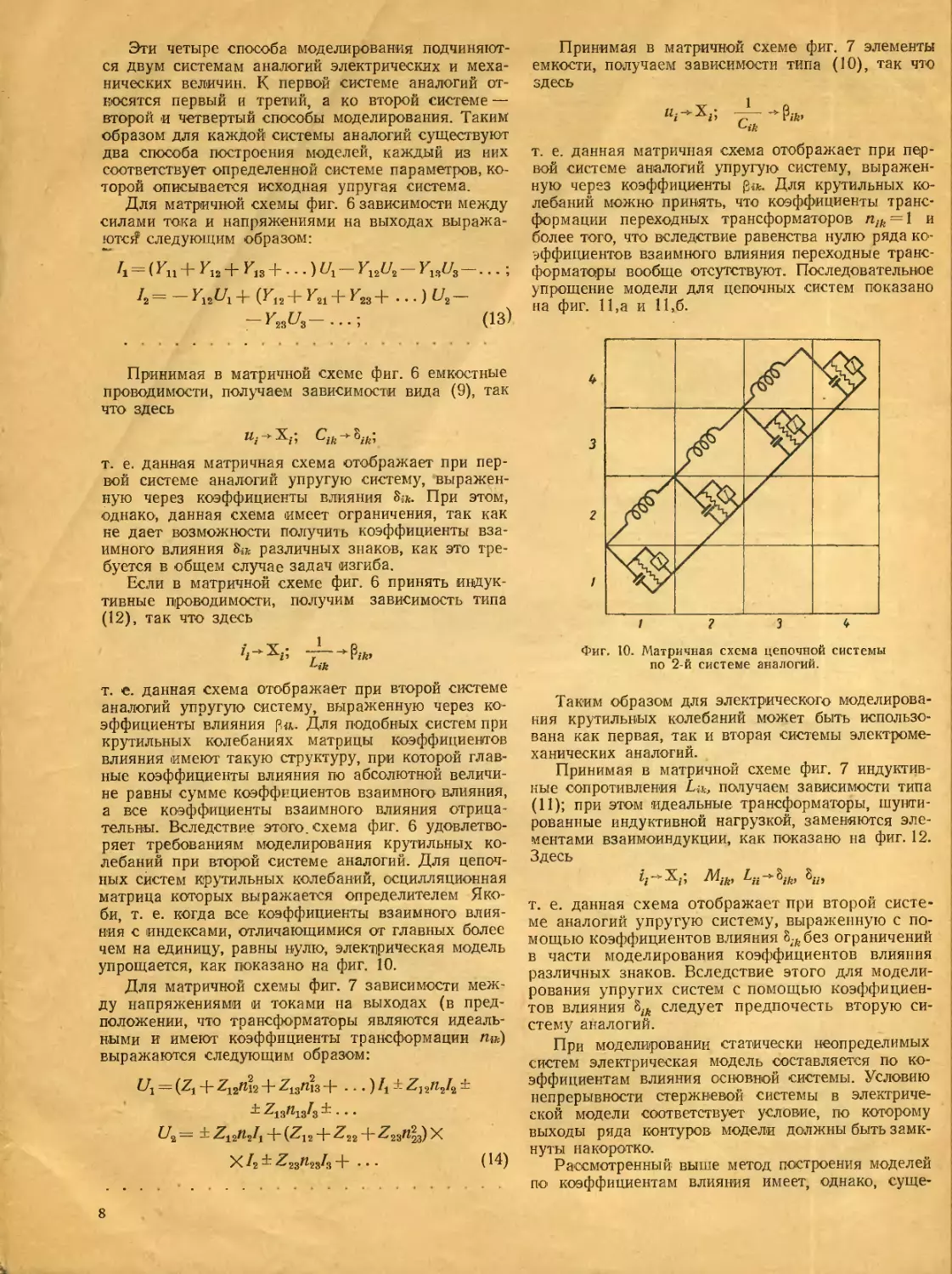
лебаний при второй системе аналогий. Для цепоч-
ных систем крутильных колебаний, осцилляционная
матрица которых выражается определителем Яко-
би, т. е. когда все коэффициенты взаимного влия-
ния с индексами, отличающимися от главных более
чем на единицу, равны нулю, электрическая модель
упрощается, как показано на фиг. 10.
Для матричной схемы фиг. 7 зависимости меж-
ду напряжениями и токами на выходах (в пред-
положении, что трансформаторы являются идеаль-
ными и имеют коэффициенты трансформации п»)
выражаются следующим образом:
ZTj — (Zj + ^12^12 Ч" ^13n13 + - • • )Л ±
± Z13n13/3 ± ...
+ (Zj2 4- Z22 + ^23^2з) X
X Д i Х23и23/.1 (14)
Принимая в матричной схеме фиг. 7 элементы
емкости, получаем зависимости типа (10), так что
здесь
т. е. данная матричная схема отображает при пер-
вой системе аналогий упругую систему, выражен-
ную через коэффициенты Для крутильных ко-
лебаний можно принять, что коэффициенты транс-
формации переходных трансформаторов nik = \ и
более того, что вследствие равенства нулю ряда ко-
эффициентов взаимного влияния переходные транс-
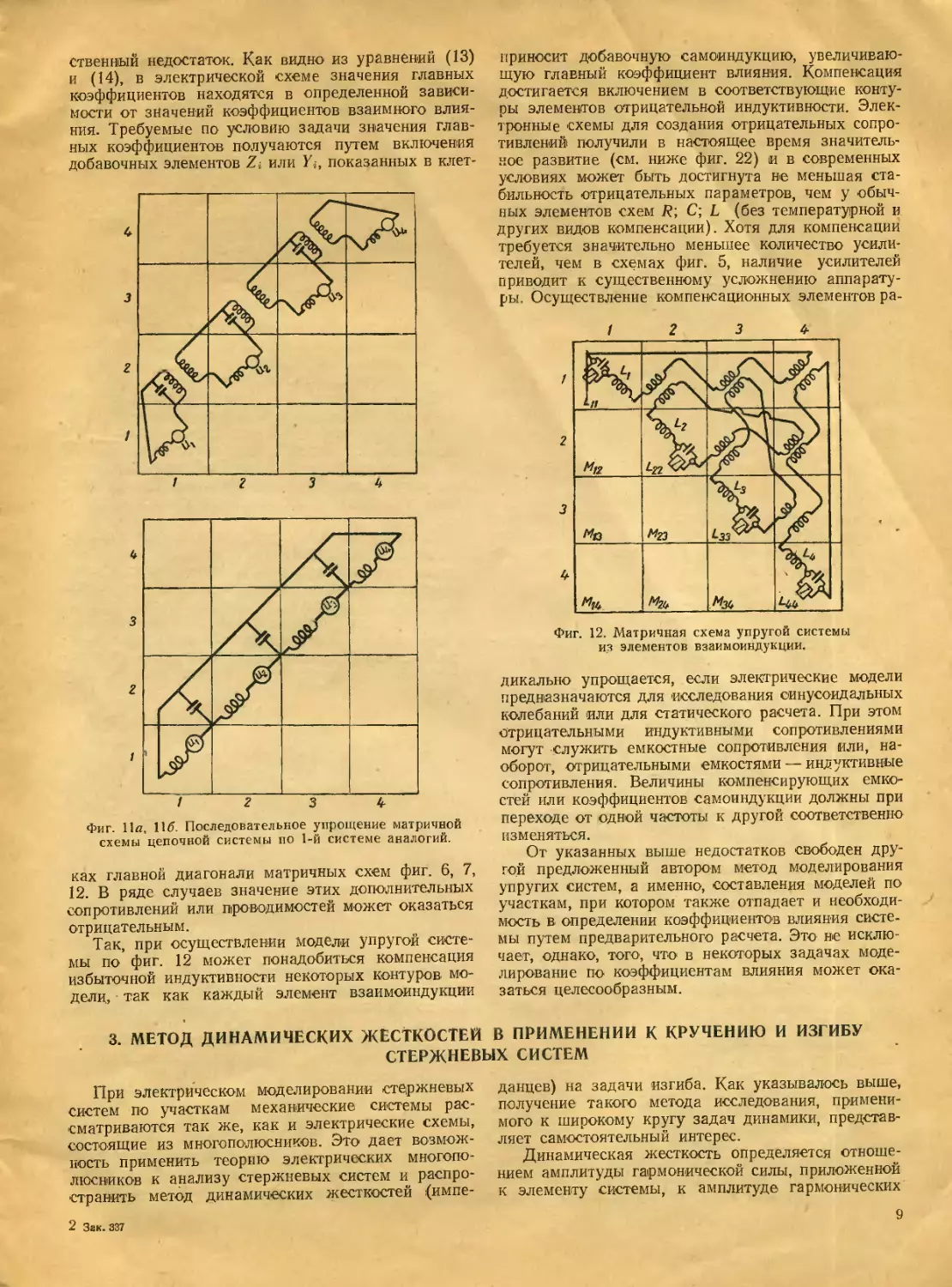
форматоры вообще отсутствуют. Последовательное
упрощение модели для цепочных систем показано
на фиг. 11,а и 11,6.
Фиг. 10. Матричная схема цепочной системы
по 2-й системе аналогий.
Таким образом для электрического моделирова-
ния крутильных колебаний может быть использо-
вана как первая, так и вторая системы электроме-
ханических аналогий.
Принимая в матричной схеме фиг. 7 индуктив-
ные сопротивления La, получаем зависимости типа
(11); при этом идеальные трансформаторы, шунти-
рованные индуктивной нагрузкой, заменяются эле-
ментами взаимоиндукции, как показано на фиг. 12.
Здесь
т. е. данная схема отображает при второй систе-
ме аналогий упругую систему, выраженную с по-
мощью коэффициентов влияния без ограничений
в части моделирования коэффициентов влияния
различных знаков. Вследствие этого для модели-
рования упругих систем с помощью коэффициен-
тов влияния следует предпочесть вторую си-
стему аналогий.
При моделировании статически неопределимых
систем электрическая модель составляется по ко-
эффициентам влияния основной системы. Условию
непрерывности стержневой системы в электриче-
ской модели соответствует условие, по которому
выходы ряда контуров модели должны быть замк-
нуты накоротко.
Рассмотренный выше метод построения моделей
по1 коэффициентам влияния имеет, однако, суще-
8
ственный недостаток. Как видно из уравнений (13)
и (14), в электрической схеме значения главных
коэффициентов находятся в определенной зависи-
мости от значений коэффициентов взаимного влия-
ния. Требуемые по условию задачи значения глав-
ных коэффициентов получаются путем включения
добавочных элементов Z, или У», показанных в клет-
Фиг. Ня, 116. Последовательное упрощение матричной
схемы цепочной системы по 1-й системе аналогий.
ках главной диагонали матричных схем фиг. 6, 7,
12. В ряде случаев значение этих дополнительных
сопротивлений или проводимостей может оказаться
отрицательным.
Так, при осуществлении модели упругой систе-
мы по фиг. 12 может понадобиться компенсация
избыточной индуктивности некоторых контуров мо-
дели, так как каждый элемент взаимоиндукции
приносит добавочную самоиндукцию, увеличиваю-
щую главный коэффициент влияния. Компенсация
достигается включением в соответствующие конту-
ры элементов отрицательной индуктивности. Элек-
тронные схемы для создания отрицательных сопро-
тивлений получили в настоящее время значитель-
ное развитие (см. ниже фиг. 22) и в современных
условиях может быть достигнута не меньшая ста-
бильность отрицательных параметров, чем у обыч-
ных элементов схем Я; С; L (без температурной и
других видов компенсации). Хотя для компенсации
требуется значительно меньшее количество усили-
телей, чем в схемах фиг. 5, наличие усилителей
приводит к существенному усложнению аппарату-
ры. Осуществление компенсационных элементов ра-
дикально упрощается, если электрические модели
предназначаются для исследования синусоидальных
колебаний или для статического расчета. При этом
отрицательными индуктивными сопротивлениями
могут служить емкостные сопротивления или, на-
оборот, отрицательными емкостями — индуктивные
сопротивления. Величины компенсирующих емко-
стей или коэффициентов самоиндукции должны при
переходе от одной частоты к другой соответственно
изменяться.
От указанных выше недостатков свободен дру-
гой предложенный автором метод моделирования
упругих систем, а именно, составления моделей по
участкам, при котором также отпадает и необходи-
мость в определении коэффициентов влияния систе-
мы путем предварительного расчета. Это не исклю-
чает, однако, того, что в некоторых задачах моде-
лирование по коэффициентам влияния может ока-
заться целесообразным.
3. МЕТОД ДИНАМИЧЕСКИХ ЖЕСТКОСТЕЙ В ПРИМЕНЕНИИ К КРУЧЕНИЮ И ИЗГИБУ
СТЕРЖНЕВЫХ СИСТЕМ
При электрическом моделировании стержневых
систем по участкам механические системы рас-
сматриваются так же, как и электрические схемы,
состоящие из многополюсников. Это дает возмож-
ность применить теорию электрических многопо-
люсников к анализу стержневых систем и распро-
странить метод динамических жесткостей (импе-
данцев) на задачи изгиба. Как указывалось выше,
получение такого метода исследования, примени-
мого к широкому кругу задач динамики, представ-
ляет самостоятельный интерес.
Динамическая жесткость определяется отноше-
нием амплитуды гармонической силы, приложенной
к элементу системы, к амплитуде гармонических
2 Зак. 337
9
колебаний этого элемента. Для системы с одной
степенью свободы (фиг. 13) динамическая жест-
кость равна
Z = Ьд = 4- (15)
1
где с— —;—динамическая жесткость упругого
е
элемента;
— <u2m—динамическая жесткость свободной
массы;
шк—динамическая жесткость элемента со-
противления.
Понятия «динамическая жесткость» и «динами-
ческий' импеданц» не являются тождественными.
Фиг. 13. Динамические схемы системы с одной
степенью свободы.
Исходя из электротехнической трактовки, динами-
ческим импеданцем следует считать отношение си-
лы не к перемещению, а к скорости гармоническо-
го движения, т. е.
__Хм . Хм Z
Uu О)ДН <0
Для системы с одной степенью свободы меха-
нический импеданц составляет
(16)
или в комплексной форме
Z = k+j --------— ).
\ 0)6 /
(17а)
(176)
Формулы (16), (17) выражают закон Ома для
механической системы фиг. 13. К более сложным
динамическим системам применимы правила парал-
лельного и последовательного соединений динами-
ческих жесткостей элементов, аналогичные прави-
лам последовательного и параллельного соединений
электрических сопротивлений и проводимостей. По-
добные методы определения динамических импе-
данцев пригодны, однако, лишь для более простых
динамических систем без перекрестных связей. Ме-
тод динамических импеданцев получил применение
лишь для расчета крутильных и продольных коле-
баний [15], [16], [17].
В связи с рассмотрением крутильных колебаний
нами была дана (см. [5]) электротехническая трак-
товка метода непрерывных дробей Терских и ука-
зывалось, что уравнения частот в виде непрерыв-
ных дробей являются в то же время формулами
расчета динамических жесткостей или импеданцев
цепочных систем. В задачах изгиба методу дина-
мических импеданцев в известной степени отвечает
метод Гогенемзера и Прагера [19], по которому
вводятся величины е и f, непосредственно характе-
ризующие граничные условия и условия сопряже-
ния концов участка системы, а именно:
е = ^ = (~ ‘ , (18)
РУ' \ pEJ) у'
= (--Д/') —’ (19)
р3у \ psEJ J у
причем у — амплитуда перемещения конца уча-
стка при поперечных колебаниях;
М—изгибающий момент;
Q — перерезывающая сила
= (И)
где м — масса единицы длины стержня;
ш —круговая частота поперечных колебаний;
Е—модуль упругости;
J—момент инерции сечения.
Следует отметить, что методы расчета, сходные
с методом Гогенемзера и Прагера, были предло-
жены для некоторых частных случаев стержней с
распределенной массой и в области акустики [7],
[8]. Ввиду наличия в работе [19] подробных таб-
лиц специальных функций применение всех этих
методов расчета приобретает практическое значе-
ние.
Ниже показано, что распространение метода ди-
намических импеданцев (жесткостей) на задачи
изгиба удается. осуществить путем рассмотрения
элементов — звеньев динамической упругой систе-
мы, как многополюсников в электрических цепях.
Зависимости, которые связывают значения сил
и перемещений (или скоростей) на концах каж-
дого элемента динамической системы — «механи-
ческого многополюсника», удобно' выражать в
матричной форме.
Фиг. 14. Динамическая схема цепочной системы.
При рассмотрении продольных или крутильных
колебаний цепочной системы (например фиг. 14)
можно представить, что она составлена из звеньев,
показанных в табл. 2.
Зависимости между амплитудами обобщенных
сил X и перемещений д на концах какого-либо зве-
на выразятся так:
и;,«+1 Pi,i+1
I It:
(21)
Матрица различных типов звеньев приведена в
табл. 2. Элементы этих матриц в общем случае
являются функциями круговой частоты ш.
t а блина 2
Сосредоточенная масса
(момент инерции массы)
т
1 ( — ИШ2)
О 1
Сосредоточенная податливость
е
Стержень или вал с распреде-
ленной массой (длина Г, погонная
масса м; погонная податливость е)
Рычаг или редуктор (передаточное
число п)
Соединяя звенья последовательно, получим для
какой-либо части цепочной системы или для всей
системы в целом:
а23
Ъз
“л-1, п
8S3 I! 1Пп-1.«
а1/г
Выразим граничные условия с помощью дина-
мических жесткостей
Л = Ь-, (23а)
Zn^ (236)
Таблица 3
Точка п
Граничные условия / Защемленный конец Z„ = оо Свободный конец z„ = o
Точка 1 Свободный конец 21 = 0 “1л —0 Pin = 0
Защемленный конец Zi — оо 71п = 0 81л = 0
и умножим матрицу ||1 (—Zj)|j на обе части (22).
Получим зависимость, связывающую Zr и Z„ в
виде
применен метод остатка и требуется лишь числен
ное умножение матриц для заданных значений «>.
Если один из концов цепочной системы (на-
пример, и) свободен, т. е. Х„ = 0, то
Р1«
Tin 81л
Zn
(24)
и
Для заданных граничных условий из
(24) не-
посредственно следуют уравнения частот продоль-
ных (крутильных) колебаний, приведенные в
(25)
(26)
табл. 3.
Получение уравнений частот сводится, таким об-
разом, к определению элементов общей матрицы
системы путем перемножения матриц ее звеньев.
При значительном количестве звеньев для опреде-
ления частот собственных колебаний может быть
т. е. корни уравнения ₽]л = 0 дают значения ча-
стот, при которых входное сопротивление Zl~0,
а уравнения 81п = 0 дают значения частот для
Zj = оо, что соответствует понятиям резонансных
и антирезонансных частот для механических си-
стем [15], [16].
2*
11
Для разветвленных систем вида, показанного
на фиг. 15, условие сопряжения ветвей а, Ь, с...
выражается так:
Zoa + Zob + Zoc + • • • — О,
(27)
откуда уравнение частот
'(•уп) а
- ®(ол) а
^(ол) Ь । Р(ол) с
®(ол) b °(ол) е
= 0.
(28)
Для динамической системы фиг. 16 с разветв-
лением в виде планетарной передачи условие со-
пряжения ветвей будет
~ + ~~ + ~ = 0, (29)
^оа ^оЬ ^ос
а уравнение частот
£(ол) а £(од) Ь | 8(оп) с Q (2Q)
Р(ол) а Р(оп) b Р(ол) с
Такой же метод получения уравнений частот
можно применить и к изгибвым колебаниям, а
также к любым видам связных колебаний изгиба,
кручения и растяжения.
Матрицы звеньев, из которых строится Стержне-
вая система при рассмотрении изгибных колебаний
(фиг. 17), приведены в табл. 4. Для стержня с
равномерно распределенной массой элементы мат-
рицы выражаются с помощью известных трансцен-
дентных функций частоты.
Соединяя звенья последовательно, для всей бал-
ки или вала получим:
Qi
У1
Ф1
й12 ^12 С12 ^12
2112 Д12 G12 Д]2
^12 /12 Д12 ^12
F •^12 Д12 7712
й23 ^23 i С23 ®23
^23 B2S Огз ^23
^23 /2З : £ГгЗ ^23
^23 ^23 i ^23 7^23
Qn И1л Ьщ Сщ din Qn
мп 211и Вт Cin Dm Mn
Уп *1л fin gin hin Уп
Фл £1Л Fin Gln Di„ Фл
(32)
Динамические жесткости для концов системы
характеризуют здесь четыре граничных условия
Фиг. 15. Динамическая схема разветвленной системы.
Фиг. 17. Динамическая схема стержневой системы.
Рассмотрим изгибные колебания балки или ва-
ла. Система составляется из звеньев, показанных
в табл. 4.
Фиг. 16. Динамическая схема системы с планетарной
передачей.
Для каждого звена, можно записать зависимо-
сти между перерезывающими силами Q, изгибаю-
щими моментами М, прогибами у и углами поворо-
та ф на его концах в виде
Zyl = ^-Z^ = ^ (33а)
Л Уг 41
Zyn = ^\ Z,n = ^. (336)
Ул 14л
Поступая так же, как и [при выводе зависи-
мости (24), получим
и i;r.z-Ai
X
й1л bin Cm d\n
711и Bln Cm Dm X
fin gin Kn
Em Fin Gm Dm
Qn
мп
1
о
1
Zyn
о
о
1
о
1
(34)
Qi
м,
У.
ф,-
°i, Ж A, ж bi, ж 7?i, Ж С, ж С», Ж + ± Фж 74/4-1
ei, Ж Д/, ж fi, Ж Д, ж gi, Ж G«, ж £ ± .Уж Фж
- (31)
Выражение (34) следует рассматривать как си-
стему двух однородных уравнений для Qn и Мп.
Нетривиальное решение такой системы требует,
чтобы
det\nik\ = Q. (35)
12
Таблица 4
Стержень, не имеющий массы (длина /; жесткость на изгиб ЕJ) 1 000 / 1’0 0 1 р 1 р_ 6 EJ 2 EJ 1 1 — -L о 1 2 EJ EJ
Сосредоточенная масса т и моментхинерции поворота массы 0е Вращающийся диск (учет гиро- скопического эффекта). Масса и; экваториальный момент инерции массы 0е; полярный момент инер- ции массы 0р 1 0 (— пи»2) 0 0 1 0 ( — 0еш2) 0 0 10 0 0 0 1 1 0 (— исо2) 0 0 1 0 [ - (0С + ©р)ш2] 0 0 ; 1 0 0 0:0 1 'Знак — при положительной прецессии, -|- при отрица тельной прецессии)
Упругая опора (поперечная жест- кость Су; жесткость поворотная С^) к 1 1 о су 0 0 1 I ° СФ 0 0 1 0 0 0 0 1
1
Стержень с равномерно
распределенной массой
где /—длина, м—масса единицы
длины, EJ— жесткость на изгиб.
S= —
2
(chX + cos X)
(chX— cosX)
1
7=—
2
(shX + sin X)
U = (shX — sin X)
S X 7 }’EJ \( ^EJ и\
A Т1 . р J
1 — Т S IEJ \
А z* Н 1 J
is Р 1
— и - и S — т
KEJ MEJ I (’
I2 —-и — т Л — и S
VEJ 1EJ 1
1
13
Зависимость (35) связывает граничные условия, представленные с помощью динамических же-
сткостей
det\nik\ = Q =
lain-Zylein+~-Cln— у1 (bin Zy}fln + z dln zLh™]
\ ^ytl ^-yn / \ T" T" /
(1 Z \ [ 1 \
Ain—+~z C,n — ~Glnj (5ln Z,Fln + ~ Din ~^inj
£yn ^yn ' \ /
(36)
Можно также представить (36) в виде матри-
цы из определителей следующим образом:
ских жесткостей вместо принятых в (19) величин
е и I.
Если на систему наложены связи в виде проме-
жуточных жестких опор (неразрезные балки, мало-
опорные валы), то для пролета между опорами (I
и II) матрица (32) приобретает вид
Из (37) следует, что определители, составляе-
мые из элементов общей матрицы стержневой си-
стемы (32), дают уравнения частот изгибных ко-
лебаний для различных граничных условий, пока-
занных в табл. 5. Элементы общей матрицы систе-
мы (32) определяются путем перемножения матриц
ее звеньев. Так как для заданных граничных усло-
вий требуется определение лишь четырех коэффи-
циентов общей матрицы, то количество операций
при перемножении может быть сокращено за счет
тех рядов и столбцов, которые не участвуют в об-
разовании искомых элементов общей матрицы. При
значительном количестве звеньев здесь также мо-
жет быть успешно применен для определения ча-
стот собственных колебаний метод остатка.
Для стержня с равномерно распределенной мас-
сой (см. табл. 4) уравнение (37) можно выразить
в функциях Гогенемзера и Прагера [19].
1|0|| = Ц1 (-Zyl) ZyiZ^ (-Z^IIX
Сопоставляя (39) и (22), видим, что если в ка-
честве элементов системы при изгибных колеба-
ниях принимать пролеты между жесткими опорами,
то общая матрица системы составляется так же,
как и для продольных или крутильных колебаний,
а уравнения частот непосредственно следуют из
(24). Действительно, для многопролетной балки или
вала можно написать
I
еП III
Фг
5пшЛп1п| Опш filin'
/пш tfiini Лцщ £ЦП1
ДцШ Диш Мпп Д||111
/ill!! бШ1 А||||| в|||||
X
Л1,
Г" м
h(v Sr II
Л4, I
ф* I
(40)
Уравнения частот для неразрезной балки полу-
чаются теми же, что и приведенные в табл. 3 для
крутильных (продольных) колебаний. Свободный
конец здесь соответствует шарнирной опоре.
Д(Х) /3 В(\} С(х) -^Д(') 1 Is 77 В (X) 5(х)
^EJ >
X -^-Д(Х) Д(х) - 1» В(Х)
№Ег jt IEJ )?ЕJ
^А(к) -З^Л(Х) /3 4 7 с(Ч
Уравнению (38) соответствует «основное урав-
нение» Гогенемзера и Прагера, причем граничные
условия в (38) выражены с помощью динамиче-
1
1
Zyn
1
1
Zfyn
Получение уравнений частот для
неразрезной балки или вала сводит-
ся, таким образом, к определению
элементов общей матрицы (40) из
.(38) матриц отдельных пролетов. Послед-
ние находятся, как было показано
выше, перемножением матриц от-
дельных звеньев (31), из которых со-
стоит пролет.
Метод динамических жесткостей применим и к
любым видам связных колебаний. При изгибе с
кручением матрицы отдельных звеньев приобре-
14
Таблица 5
I
Точкам
Граничные условия Защемленный к = (^->1 Znty онец = QO Скользящий КС ^tty - —fcl нец - co Свободный KO Z^ = 0; Znty нец -0 Шарнир %пу ~ = 0
СЗ Свободный конец Ziy = 0 Ziq = 0
^т = 0 Ain Bin I ^1П Bln C\n = 0 С1П ^1П Gin Din = 0 din Din Ain = 0
I •
D? N £ Ё 1 -е Ч в» II II 1 ° 8 §
Ain Bin J 1П = 0 Bln Cln fin E i n = 0 Cin Din Em ^in = 0 Din Ain ^in &in = 0
Т о ч Защемленный конец Zly = ос Zi^ = со ^in fin Ein Bln = 0 fn Sin Fin Gin = 0 g,n fan Gm Hin = 0 h\n e*n Hin Ein = 0
Скользящий конец Zty — 0 Z,i = со Ein Fin ain ^in = 0 Fin Gin &in cin = 0 Gin Hin din = 0 Hin Ein din atn = 0
Таблица 6
Стержень, не имеющий мае- <21 • 1 0 0 0 0 0 о2
сы при изгибе с кручением М*1 / 1 0 0 0 0 ^42
(Q — перерезывающая сила, 0 0 1 0 0 0
Л<Гф — изгибающий момент, Л/<р — крутящий момент) У1 -— 1 6 _/з ’ EJ 1 Is 2 EJ 0 1 / 0 >2
1 2 I2 EJ 1 ~EJ 0 0 1 0
?1 0 0 / 0 0 1 ?2
15
Продолжение табл. 6
Элемент массы при изгибе с1 1 0 0 (— т о>’) 0 (-ДО?) <?2
с кручением (центр тяжести 0 1 1 0 ( - <W) 0
и центр жесткости не сов- 0 0 0 (— а <ог) 0 (- 0y»2)
падают) 0 0 0 1 0 0 У2
0 0 0 0 1 0 Ф2
• ?1 0 0 0 0 0 1 ?2
тают вид, указанный в. табл. 6. Матрицы здесь свя-
зывают между собой шесть- граничных усло-
вий и т. д.
Все вышеизложенное показывает, что приложе-
ние метода динамических жесткостей к задачам
изгиба и задачам связаных колебаний представляет
существенный интерес для аналитического исследо-
вания динамических упругих систем. Польза от
применения электромеханических аналогий сказы-
вается здесь в том, что стержневые системы рас-
сматриваются, исходя из теории электрических мно-
гополюсников. Другой стороной этого же вопроса
является получение электрических моделей стерж-
невых систем по участкам.
4. МОДЕЛИРОВАНИЕ СТЕРЖНЕВЫХ СИСТЕМ ПО УЧАСТКАМ
Как выше было указано, можно представить,
что модель составляется из отдельных элементов
так же, как составляется из элементов-звеньев
исходная стержневая система. При этом каждый
элемент исходной механической системы замещает-
ся элементом электрической модели — многополюс-
ником, воспроизводящим связи между силами и
динамическими перемещениями на его концах, так,
что матрицы сходственных элементов являются по-
добными. ’’ |
В табл. 7 показаны схемы замещения элемен-
тов упругой системы при кручении или растяжении.
Там же приведены соответствующие им матрицы,
совпадающие с матрицами механических элемен-
тов табл. 2, если в последних заменить перемеще-
ния скоростями.
Схема замещения участка упругой системы, не
имеющего массы, представляет собой четырех-
полюсник, содержащий один конденсатор С при
первой системе аналогий или один элемент само-
индукции L при второй системе аналогий. Сосре-
доточенная масса, наоборот, имеет схему замеще-
ния в виде самоиндукции по первой системе ана-
логий и емкости по второй. Рычаг или редуктор
представлен четырехполюсником в виде трансфор-
матора. Учет распределенной массы моделируемо-
го участка привел бы к необходимости подбора бо-
лее сложных схем замещающего четырехполюсни-
ка. В работе [5] автором было показано, как, поль-
зуясь значениями резонансных и антирезонансных
частот, можно подобрать схему из минимального
числа элементов, чтобы она в интересующем нас
диапазоне частот с достаточным приближением вос-
производила бы участок с распределенными посто-
янными.
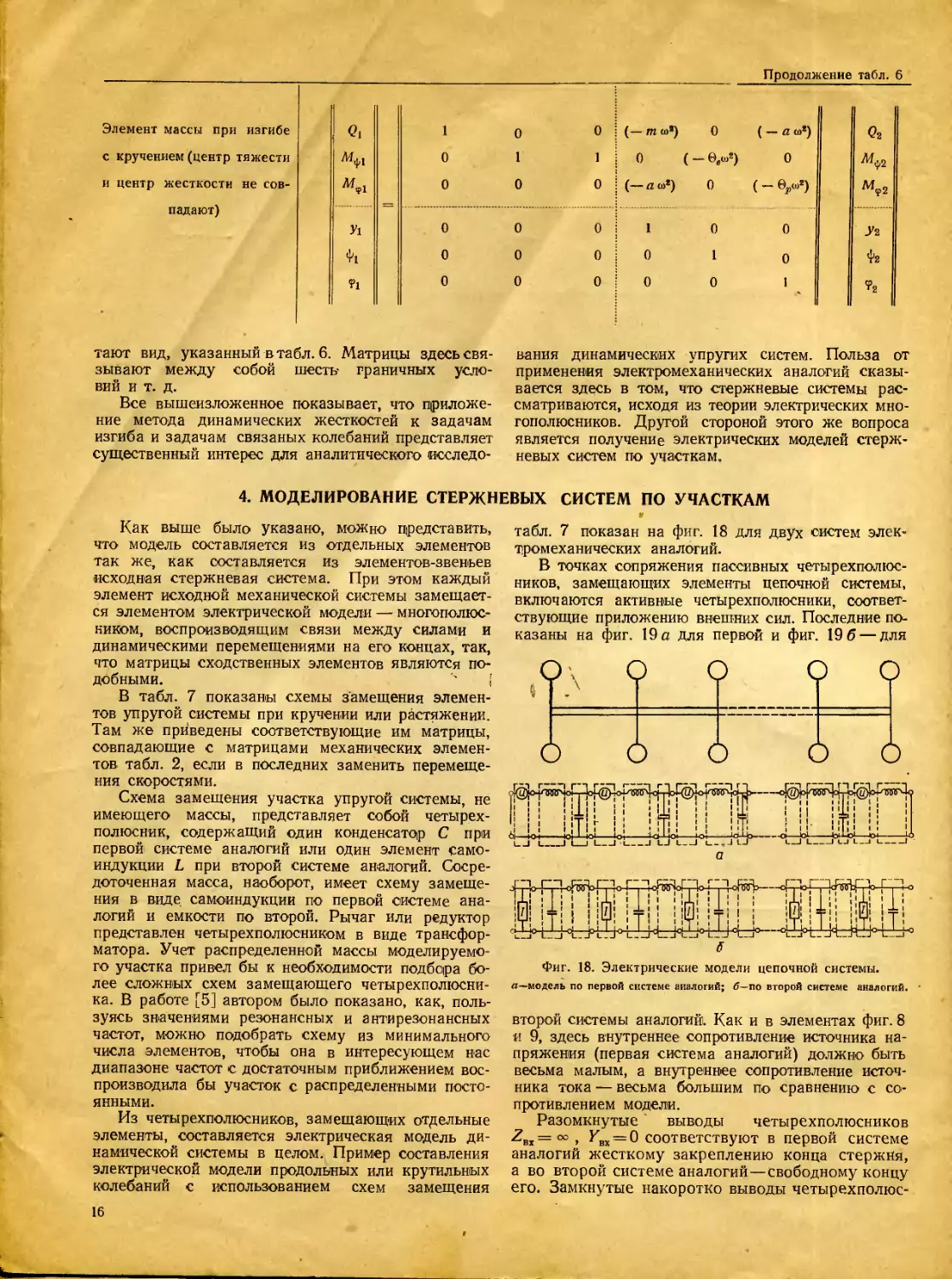
Из четырехполюсников, замещающих отдельные
элементы, составляется электрическая модель ди-
намической системы в целом. Пример составления
электрической модели продольных или крутильных
колебаний с использованием схем замещения
табл. 7 показан на фиг. 18 для двух систем элек-
тромеханических аналогий.
В точках сопряжения пассивных четырехполюс-
ников, замещающих элементы цепочной системы,
включаются активные четырехполюсники, соответ-
ствующие приложению внешних сил. Последние по-
казаны на фиг. 19 а для первой и фиг. 19 б — для
Фиг. 18. Электрические модели цепочной системы,
«—модель по первой системе аналогий; б—по второй системе аналогий.
второй системы аналогий. Как и в элементах фиг. 8
и 9, здесь внутреннее сопротивление источника на-
пряжения (первая система аналогий) должно быть
весьма малым, а внутреннее сопротивление источ-
ника тока — весьма большим по сравнению с со-
противлением модели.
Разомкнутые выводы четырехполюсников
ZBX = оо , Квх = 0 соответствуют в первой системе
аналогий жесткому закреплению конца стержня,
а во второй системе аналогий—свободному концу
его. Замкнутые накоротко выводы четырехполюс-
16
Таблица
Элементы механической
системы
Элементы электрической модели
I система аналогий
о-ЧЯЯЯЯГ'-о
I L г
о — о
II система аналогий
oAWW-o
ника ZBX = 0; FBX = «> наоборот, соответствуют
в первой системе аналогий свободному концу, а
во второй —жесткому закреплению. Различные
случаи моделирования крутильных колебаний ва-
лов подробно рассмотрены автором в работах
[4], [5], [6].
Фиг. 19. Четырехполюсники, моделирующие внешние силы
а—по первой системе аналогий; б—по второй системе аналогий.
Сопоставление фиг. 18 с фиг. 10 и И показы-
вает, что оба рассмотренные выше пути составле-
ния моделей для динамических цепочных систем
продольных и крутильных колебаний (а именно,, по
3 Зак. 337
коэффициентам влияния и по участкам) приводят
к одним и тем же электрическим схемам. Для за-
дач же изгиба, как показано’ ниже, второй путь
моделирования оказывается значительно целесооб-
разнее.
Выше уже отмечалось, что в задачах продоль-
ных и крутильных колебаний соотношения, связы-
вающие значения сил и перемещений на концах
каждого участка, выражаются так же, как и для
электрических четырехполюсников. Задачи изгиба
значительно сложнее, так как здесь необходимо
для каждого участка воспроизвести в схеме заме-
щения связи между восемью величинами, а именно:
перерезывающими силами, моментами, углами по-
ворота и перемещениями на его концах.
Если представить участок стержневой системы
в виде электрической модели, т. е.эквивалентно-
го восьмиполюсника, то последний будет иметь
следующие четыре пары полюсов:
1) Изгибающий момент M-pt-i) и угловое пе-
I г (Тс—1)
ремещение 'prut—т> (угловая скорость --—- =
начала рэссматриваемого участка.
I Институт Г8Ф
и
17
2) Перерезывающая сила Qr(k-i) и прогиб
((1\' (h______________________Ц г \
линейная скорость ——-=Уг(1с_1)) на-
чала рассматриваемого участка.
3) Изгибающий момент Mek и угловое переме-
щение <pefc (угловая скорость <p'fc) конца рассматри-
ваемого участка.
4) Перерезывающая сила Qek и прогиб yek (ли-
нейная скорость y'fc) конца рассматриваемого
участка.
Отсюда следует общий метод построения элек-
трических моделей для задач изгиба стержневых
систем, состоящий в соединении восьмиполюсников
отдельных ее звеньев в соответствии с граничными
условиями и условиями сопряжения.
Приводим граничные условия и условия сопря-
жения для обеих систем электромеханических ана-
логий в табл. 8. Здесь через Z обозначены импе-
данцы, а через У — адмитанцы электрической мо-
дели.
Таблица 8
Условие Первая система аналогий Вторая система аналогий
Жесткое закрепле- ние Zjn Zq ~ °° 1> = оо; ГС = со
Шарнирное закреп- ление '==z Oj Zq ==z СХЭ У*г = 0; Zq=co
Свободный конец Zjr =* 0; Zq =0 Ул=0; У<3 =0
Промежуточная опора Zq =- oo У<2 = 0
= м,=мг 4 4n — 4n иеП — игП
411 = 4п
Шарнир Zjf — 0 Ум= °°
Уе=Уг = Zzj «е! = «Н
Qe^Qr н el = url 4i —
Точка симметрии при симметричной форме колебаний Z3I = co; ZQ = 0 Yx = ao-, Yq=Q
Точка симметрии при антисиммет- ричной форме ко- лебаний Zjf = 0; Zc = oo hf=0; Ус=оо
Предлагая метод построения электрической мо-
дели стержневой системы путем комплектования
восьмиполюсников, мы пока не касались внутрен-
них схем этих восьмиполюсников.
Электрические (схемы многополюсников, соот-
ветствующих звеньям стержневой системы, показа-
ны на фиг. 20 и 21. Эти многополюсники имеют
матрицы, приведенные в табл. 4. Здесь, как мы
видим, удовлетворено условие, состоящее в том,
что консервативные и диссипативные звенья меха-
нической системы замещаются пассивными элемен-
тами электрических цепей (R, L, С), без каких-
либо электронных компенсирующих устройств и
18
введения отрицательных сопротивлений. Последние
оказываются необходимыми лишь при учете гиро-
скопических сил (отрицательная прецессия) и при
наличии, продольной сжимающей силы (потеря
устойчивости).
Полученные схемы замещения представляют
точные динамические эквиваленты звеньев стерж-
Фиг. 20. Электрические модели изгиба стержня,
б—по первой системе аналогий; в— по второй системе аналогий.
невой системы и могут быть использованы для ис-
следования вынужденных колебаний при полигар-
моническом возбуждении и переходных процессов.
Наибольшие трудности представило изыскание
электрической схемы изогнутого стержня, в кото-
рой соотношения между токами и напряжениями
Фиг. 21. Схемы восьмиполюсников для элемента массы.
б
о—по первой системе аналогий; в—по второй системе аналогий.
на входе и на выходе такие же, как и между об-
общенными силами и скоростями на концах рас-
сматриваемого участка.
Предложенная автором электрическая модель
изогнутого стержня (фиг. 20) по первой системе
аналогий содержит три конденсатора равной емко-
сти — Ск, а при второй системе аналогий три оди-
наковых элемента самоиндукции— L*. Каждый из
этих элементов соответствует податливости стержня
на изгиб, а именно;
4
GEJk
где lk—длина участка.
Для получения требуемых зависимостей между
перемещениями у и перерезывающими силами Q,
с одной стороны, углами поворота ф и изгибающи-
(41)
ми моментами М, с другой стороны, в схеме фиг. 206,
составленной по первой системе аналогий, имеются
два трансформатора (идеальных), из которых пер-
вый имеет соотношение чисел витков — 1:4 (4—
длина изогнутого стержня), а второй коэффициент
трансформации — 1:1. В схеме фиг. 20в, состав-
ленной по второй системе аналогий, имеется лишь
один трехобмоточный трансформатор с соотноше-
нием чисел витков — 4: 1:1. Таким образом при
моделировании изгибных колебаний по второй си-
стеме аналогий модель упрощается.
В том, что матрица электрических схем фиг. 20
соответствует матрице изогнутого стержня, не
имеющего массы, можно убедиться, рассмотрев
распределение токов и напряжений в этих схемах.
В качестве примера в табл. 9 произведено со-
поставление механических и электрических величин
для схемы изогнутого стержня, составленной по
второй системе аналогий (фиг. 20,6). Здесь р обо-
d
значен оператор — .
dt
На фиг. 21 дана схема замещения элемента
сосредоточенной массы. В первой системе анало-
гий массе соответствует элемент самоиндукции
£|, а во второй системе —емкость С|. Момент
инерции поворота массы соответственно отобра-
жается элементами £ц и Си. При учете гироско-
пического эффекта элементы £ц и С1( для отри-
цательной прецессии должны быть, как видно из
табл. 4, приняты отрицательными. Отрицательные
параметры L, С могут быть получены с помощью
известных схем использования элек-’"*' иых уси-
лителей с обратной связью. Такие схемы изобра-
жены на фиг. 22. Рассмотрим действие схемы
фиг. 22, а в качестве отрицательной индуктивно-
сти, полагая, что входное сопротивление усили-
теля а<х>, выходное сопротивление = г0, а частот-
ные и фазовые характеристики обеспечивают
неискаженное воспроизведение в заданной полосе
частот. Если на входе усилителя приложено на-
пряжение и выбран встречный способ включения
входа и выхода усилителя, то сила тока через
цепь схемы фиг. 22, а составит
(42)
откуда получим сопротивление цепи схемы
фиг. 22, как двухполюсника
(4.3)
При значениях коэффициента усиления ;>.>!
активное и реактивное сопротивление двухполюс-
Фиг. 22. Схемы получения отрицательных сопротивлений.
ника фиг. 22,а становится отрицательным. Здесь,
таким образом, имеется возможность не только по-
лучить интересующее нас отрицательное реактив-
ное сопротивление, но с помощью отрицательного
активного сопротивления повысить добротность
всей схемы, в которую включается двухполюсник,
показаный на фиг. 22,а.
Аналогично для схемы фиг. 22,6
Z^=z'0 + /’i(l —И)+/и>41(1—р)- (44)
Задача осуществления элементов отрицательно-
го сопротивления сводится, таким образом, к кон-
струированию электронных усилителей с коэффи-
циентом усиления [1=const, что при рациональном
выборе диапазона частот моделирования не пред-
ставляет затруднений.
Таблица 9
Изогнутый стержень Электрическая модель по второй системе аналогий
<5 Л* II о г >—* Ч к~ г1(Л—1)
= Мк_, + lkQk_. гП№-1)+ 4 ,
1 12 = Фа-'-1 + тту- + •— + 1 h UIIk ~ “и(Л-1) + Р1'к11](к-1) + + ) + + PLk^ ит ии(к-1) ...... , . . р~р + + *пJ
1/2 .3 ук =Ук-г + 4 + —-y + — yy Qk-i = Г 4 Ik = Ук-l + lk 1 'i'fc-l > Mk—1 + 77ГГ (A^-j-t- Mk) I- btjk bb.Jk Ulk = Ul(fc-1) + 4 + Д£4(7с-1) + PL^U{k-l) + U1k Ul(k-V) ,[«||№-1) г , ... , . 1 р-р +ZL р' + L/H(k-1) + + гцр J
3*
19
На фиг. 23 дана схема учета податливости
опор как продольной (С0|, Ли), так и угловой
(Соц, £оп). По сравнению со схемами фиг. 21
здесь емкости заменены элементами самоиндукции
и наоборот.
Большой интерес представляет схема замеще-
ния для случая динамического изгиба стержня при
наличии статической продольной силы, приведен-
ная на фиг. 24 (для второй системы аналогий).
С помощью таких моделей могут быть решены не
только задачи колебаний, но и задачи устойчивости
стержневых систем ([20], [21]).
Фиг. 24. Электрическая модель динамического изгиба
стержня при наличии статической продольной силы
(вторая система аналогий).
Фиг 23. Схема восьмиполюсников для упругой опоры,
б-по первой системе аналогий; в—по второй системе аналогий.
Растяжение
А=
2thu
(thu — и)
' и \
2th------и )
2 /
и (и — shu)
2shu I и
I 2th — — и
V 2
Сжатие
t (t — sin /)
A= f
2tg* L. ‘
Сопоставление механической и электрической
систем для этого случая приведено в табл. 10.
Nkll
-----
Таблица 10
Изогнутый стержень при наличии продольной силы
Электрическая модель по второй системе аналогий
Мк = Мк- 1 + Wk-т ±
-^-1)+^-!)- (т£п) < р ~р
1 4
= К-1 +{А_В)
ит ~ К1Щ—в + Лг_в2Р^Л(ь-1) + ц2 , Lk(iii(k-i') +
А—В
гш' + дг _ 'iift;
ЦП UII(fc-l) 1
р ' Р + А— В + 1W
Г А 1
Ук = Ук-л + lk |Ф*-1 + (Л2_В2) 2EJk Mk-i +
+ —-— • — МЛ
2EJk
Г А~В
U№ = П1 №-1) + Zsl“ll(fc-1) + дг _ В2 ^LfeZII(fc-l) +
+ + 1Ш)
, “1Щ--1) , А
+ 1к |—- + л2_вг %г11(Ь-1) +
В т . ]
+ Д2+£2 Ш ]
20
В схеме замещения фиг. 24, таким образом,
имеет место соответствие между следующими вели-
чинами:
4 1 г
——-----------> Ьг,
r2EJk кг см
ел/ д
Nk кг
(45а)
А и В являются известными трансцендентными
функциями продольной силы Nk (см. фиг. 24) [14],
[20]. Знак плюс при /Vfc соответствует сжатию, а
знак минус — растяжению'. Как видно из приве-
денного выше сопоставления, при сжатии само-
нено значением продольной податливости. Схема
замещения для сосредоточенной массы представле-
на на фиг. 28 и имеет такие же обозначения, что
и на фиг. 21.
Электрические модели стержневой системы в це-
лом, полученные из многополюсников отдельных
звеньев, показаны на фиг. 29—31.
На фиг. 29 даны модели неразрезной балки или
многоопорного вала, составленные из восьмиполюс-
ников фиг. 20 и 21. Модель фиг. 29,6 составлена по
первой, а фиг. 29,в — по второй системе аналогий.
Внешние динамические силы и моменты приложе-
ны здесь го всем сосредоточенным массам систе-
мы. Из фиг. 30 видны возможности электрического
моделирования балок и валов с различными вида-
Фиг. 25. Схемы двенадцатиполюсников для участка системы
при изгибе с кручением.
б—по первой системе аналогий; в—по второй системе аналогий.
Фиг. 26. Схемы замещения массы при изгибе с кручением.
б—по первой системе аналогий; в—по второй системе аналогий.
индукция становится отрицательной. Частота соб-
ственных колебаний системы при этом соответствен-
но понижается и при определенном значении — Еп
стремится к нулю. Таким образом электрические
модели могут служить для определения критериев
устойчивости стержневых систем [21].
При связных колебаниях электрические модели
звеньев стержневой системы приобретают допол-
нительное число пар полюсов. На фиг. 25 и 26 при-
ведены схемы двенадцатиполюсников для изгиба с
кручением. На фиг. 25,а и б представлены модели
стержня, не имеющего массы, по первой и второй
системе аналогий и на фиг. 26 — модели массы,
центр тяжести которой не совпадает с центром
жесткости.
Подобные же схемы замещения участков упру-
гой системы могут быть получены и для других
случаев связных колебаний, например, изгиба с
растяжением. Модель упругого стержня фиг. 27 в
данном случае отличается от модели фиг. 25 лишь
тем, что- значение крутильной податливости заме-
ми опор. Для упрощения чертежа в схемах
фиг. 29—31 многополюсники упругих участков изо-
бражены в виде прямоугольников.
На фиг. 31 приведены электрические модели
плоской рамы, выполненные для примера, по- вто-
рой системе электромеханических аналогий. Мо-
дель фиг. 31,6 составлена с учетом продольной по-
датливости стержней из двенадцатиполюсников
фиг. 27 и 28. Если в схемах фиг. 31,6 пренебречь
продольной податливостью стержней, получим
схему 31, в, состоящую из восьмиполюсников
фиг. 20 и 21.
Таким образом мы получаем удобный общий
метод построения электрических моделей стержне-
вых систем с сосредоточенными массами. Очевид-
но, что, увеличивая число участков, можно с по-
мощью таких моделей подойти к учету распреде-
ленных масс.
В заключение отметим, что для построения элек-
трических моделей изогнутых балок могут служить
базой также оригинальные механические модели,
21
I
полученные Натанзоном [22] в виде шарнирной це-
пи и состоящие из невесомых стержней, точечных
масс и пружин. В этих механических моделях
используется соответствие между изгибающими мо-
ментами и скоростями перемещений узлов шарнир-
свободны модели стержневых систем, составлен-
ные из восьмиполюсников, позволяющие рассмат-
ривать колебания балки в перемещениях {у, <f).
Полученные автором схемы моделирования
стержневых систем по участкам дают точное ди-
при изгибе с растяжением.
б—по первой системе аналогий; я—по второй системе аналогий.
0-1
Д$Ь<
-о
= -
о
о
у-ъ
о-
о-
°+
сн----тяягашт'----ро
'г । Lyl j
Дди
О?----ОЛ00000’----
•т'-лст!
о*...... ...
U---------------
Д^( с
——Sat
6
о
От
р-ъ ;
От
о
Cyz = Сд’—/П/
Cai~-Qgj
6
Фиг. 28. Схема замещения массы при изгибе
с растяжением.
б— по первой системе аналогий; в—по второй системе аналогий.
ной цепи. Особенностью механических моделей [22]
(а следовательно, и электрических моделей, по-
строенных по такому же принципу) является от-
намическое подобие, причем не требуют усили-
тельных устройств. Этот метод и является наибо-
лее целесообразным для электрического модели-
Фиг. 29. Электрические модели неразрезной балки или вала, составленные из восьмиполюсников.
сутствие непосредственного эквивалента для углов рования задач изгибных и связных колебаний
поворота ф и затруднительность учета инерции стержневых систем, а в первую очередь, валов
поворота масс. Как было показано выше, от этого двигателей.
22
Фиг. 31. Электрические модели плоской рамы.
23
5. ЭКСПЕРИМЕНТАЛЬНАЯ ПРОВЕРКА МЕТОДА МОДЕЛИРОВАНИЯ ПО УЧАСТКАМ
Основные вопросы практического осуществле-
ния аппаратуры для электрического моделирова-
ния стержневых систем были решены автором в
связи с созданием расчетного стенда для исследо-
вания крутильных колебаний валов поршневых
двигателей (фиг. 32), в котором с помощью ка-
тодного осциллографа можно получить диаграммы
динамических нагрузок участков системы при
сложном полигармоническом возбуждении. В ра-
ботах [4], [5] автором подробно освещены во-
Фиг. 32. Расчетный стенд для исследования крутильных колебаний валов порш-
невых двигателей. Слева—стол с элементами модели и панелью управления.
На столе—генератор звуковых частот, катодный вольтметр и катодный осцил-
лограф. В середине—фотоэлектрический датчик внешних сил. Справа—стойка
усилительных устройств к датчику.
просы выбора параметров модели, частоты моде-
лирования, методов задания внешних сил и про-
изводства измерений. Особенностью получения мо-
делей изгибных колебаний явилось обеспечение
требуемых характеристик трансформаторов, входя-
щих в схемы замещения упругих элементов стерж-
невой системы. Произведенные испытания показа-
ли возможность осуществления таких трансформа-
торов, при практически достаточной точности мо-
делирования.
Выбор масштаба частот при моделировании
изгибных колебаний основывается на тех же со-
ображениях, что и при крутильных колебаниях.
Соотношение частот для электрической модели
(например, выполненной по второй системе ана-
логий)) и исходной механической системы выра-
жается в соответствии с (41) следующим обра-
зом:
EJk , (46)
J.
где величины с одинаковыми индексами к и i
относятся к сходственным элементам механиче-
ской и электрической систем. При этом масса mi
соответствует емкости Ci, податливость на изгиб —
индуктивности, а длина участка стержневой систе-
мы — соотношению чисел витков обмоток
трансформатора — 11к для сходственного' элемен-
та мЪдели.
Диапазон частот механических колебаний
стержневых систем обычно приходится на область
значительно более низких частот, чем это имеет
место в акустик и электротехнике слабых токов.
Чтобы получить доступные для практического осу-
ществления достаточно' малые значения индуктив-
ностей и емкостей элементов мо-
дели, а также необходимую ве-
личину коэффициента усиления в
резонансе, может потребоваться
повышение частоты моделирова-
ния и переход в диапазон звуко-
вых частот, который представ-
ляет также значительные пре-
имущества в части осуществле-
ния электронных усилителей.
Предел повышения частот моде-
лирования ставится в связи с не-
обходимостью уменьшения раз-
личных паразитных явлений.
Внешние силы и моменты, в
зависимости от системы анало-
гий, представлены в электриче-
ских моделях источниками изме-
няющегося ПО' заданному закону
напряжения или силы тока. Усло-
виям внезапной нагрузки или
разгрузки динамической системы
в модели соответствуют условия
включения или отключения источ-
ника постоянного напряжения
или силы тока. Для исследова-
ния частот и форм со'бственнных
колебаний нами использовался
ламповый генератор звуковой частоты с отгра-
дуированным непрерывным диапазоном. Электри-
ческая аппаратура дает возможность воспроиз-
вести и сложные полигармонические электрические
импульсы, имеющие заданную форму возбуждаю-
щих сил механической системы, и таким образом
устранить необходимость разложения на гармони-
ческие составляющие с последующим сложением
результатов воздействия на систему каждой от-
дельной составляющей. В расчетном стенде автора
(фиг. 32) получение периодических электрических
импульсов заданной формы производится при по-
мощи специального фотоэлектрического устрой-
ства-датчика.
На фиг. 33 показана опытная установка автора
для электрического моделирования изгибных ко-
лебаний прямых валов, которая была перемонти-
рована из стенда, служившего для моделирования
других систем. Назначением этой установки для
исследования изгибных колебаний валов являлась
экспериментальная проверка идеи метода модели-
рования динамических систем по> участкам. Основ-
ная задача заключалась при этом в эксперимен-
тальном определении на модели форм упругих ли-
ний и частот собственных колебаний систем, для
которых хорошо известны точные решения и в со-
поставлении результатов.
24
Модели изгибных колебаний были осуществле-
ны ПО' второй системе аналогий, при которой тре-
буется вдвое меньшее количество трансформато-
ров.
В качестве элементов этих моделей нами б&ли
применены обычные бумажные радиотехнические
конденсаторы и тороидные катушки самоиндукции
с прессованными сердечниками (типа Пуликовских
катушек). Для элементов модели, которые варии-
ровались в процессе эксперимента, были исполь-
зованы трехдекадные наборы индуктивностей и
емкостей, сконструированные для расчетного стен-
да крутильных колебаний (фиг. 34а и 346). Здесь
любая трехзначйая величина индуктивности или
емкости набирается с помощью 12 миниатюрных
выключателей, выведенных на переднюю панель.
Фиг. 33. Опытный стенд для моделирования изгибных
колебаний. На переднем плане—панель управления,
слева катодный вольтметр, справа—генератор звуко-
вых частот.
Трансформаторы модели изгибных колебаний
должны обладать значительным реактанцем хо-
лостого хода при весьма малых значениях актив-
ного сопротивления и сопротивления рассеяния
обмоток. В описанных ниже экспериментах приме-
нялись трансформаторы с сердечниками Ш-19.
При толщине пакета 5 см реактанц вторичных об
моток составил около 4 гн. В дальнейшем предпо-
лагается перейти на трансформаторы с сердечни-
ками из пермалоя. Чтобы добиться полной иден-
тичности вторичных обмоток трансформаторов и
уменьшить рассеяние, был применен следующий
способ. В каждом трансформаторе выполнялось
6 концентрических обмоток, которые соединялись
попарно1 следующим образом: 1—6, 2—5, 3—4, или
1—6, 2—4, 3—5, причем обе внутренние обмотки
использовались в качестве вторичных. Первичная
обмотка 1—6 была снабжена отпайками для изме-
нения коэффициента трансформации.
Задание граничных условий и внешних сил/ а
также измерение перемещений и углов поворота
элементов системы, производились на панели
управления, врезанной в крышку стола.
Панель управления выполнена следующим об-
разом. На текстолитовое основание накладывает-
4 Зак. ?37
ся лист ватманской бумаги с электрической схе-
мой стенда, изображенной на фиг. 35, и отвер-
стиями для штепсельных гнезд. Чертеж покрывает-
ся листом плексигласа с аналогичными отверстия-
ми. Сообразуясь со схемой, экспериментатор под-
ключает в штепсельные гнезда штеккеры измери-
тельного устройства, устанавливает в соответ-
ствии с граничными условиями необходимые пере-
Фиг. 34а. Блок индуктивных катушек.
Фиг. 346. Блок конденсаторов.
мычки и задает внешние силы. Как видно из схе-
мы фиг. 35, каждому упругому участку вала со-
ответствует блок модели, ограниченный пунктир-
ной линией. Данная панель ранее использовалась
для других целей, а расположение штепсельных
гнезд в ней было оставлено и для задач изгиба. За-
черненные гнезда выведены на клеммы (сборки), к
которым подключаются элементы модели.
Определение форм упругих линий производи-
лось путем измерения напряжений на гнездах
25
1
верхнего ряда конденсаторов схемы фиг. 35
при гармоническом возбуждении. Напряжения на
конденсаторах нижнего ряда характеризуют углы
поворота, пропорциональные при гармонических
колебаниях соответствующим скоростям. В каче-
стве измерительного устройства применялся ка-
тодный вольтметр (см. фиг. 33), обладающий зна-
чительным сопротивлением и не искажающий, та-
ким образом, параметров модели при измерении.
Внешние силы .задавались с помощью1 генератора
звуковых частот (см. фиг. 33), подключавшегося к
модели через значительное сопротивление. Резо-
нансные состояния определялись по максимальным
отклонениям вольтметра при изменении частоты
генератора и при постоянной величине питающего
тока. .
динамические и статические упругие линии здесь
совпадают и могут быть рассчитаны по элемен-
тарным формулам. Электрическая модель как для
консоли, так и для жестко заделанной балки, со-
стояла из трех одинаковых блоков — восьмипо-
люсников (см. фиг. 20), причем во втором' случае
рассматривалась лишь половина симметричной
балки. Bi электрической модели, таким образом,
имелась возможность измерять перемещения и
углы поворота для точек: 0, 73 I, 7S I, 1> гДе
/=3/л- — длина консоли или половина длины сим-
метричной балки. Электрическое напряжение, со-
ответствующее максимальному прогибу, было при-
нято равным 12 в. Как видно из рассмотрения
фиг. 36 и 37, кривые I, изображающие упругие
линии при приложении электрических эквивален-
Фиг. 35. Схема опытного стенда для
моделирования изгибных колебаний.
Первая задача экспериментальной проверки ме-
тода моделирования по участкам заключалась в
выяснении, насколько правильно восьмиполюсник,
содержащий не идеальные, а реальные элементы,
воспроизводит соотношения между перемещениями
и углами поворота на концах упругого стержня
при различных видах нагружения. Результаты ис-
пытания одного блока модели при различных гра-
ничных условиях приведены в табл. 11.
Напряжение, соответствующее' перемещению
конца изогнутого стержня (у2 или ф2), во всех
опытах принималось и=\2 в. Длина участка
/ = 1.
Как видно' из этой таблицы, все Соотношения,
характерные для изогнутого стержня, верно ото-
бражаются электрической моделью — восьмипо-
люсником, что позволяет на опыте удостовериться
в правильности изложенных выше принципов
электрического моделирования изгиба.
Не менее показательным является сравнение
форм упругих линий, полученных путем моделиро-
вания и путем расчета. На фиг. 36 такое сопостав-
ление произведено для консольной балки, не имею-
щей массы, с силон, приложенной на конце, а на
фиг. 37 — для балки с жестко заделанными кон-
цами и силой посередине. Ввиду отсутствия массы,
тов гармонических внешних сил различной частоты
(100, 400, 2000, 3000 гц), совпадают весьма близ-
ко между собой и с расчетной формой, показанной
сплошной линией. С несколько большей погреш-
ностью совпадают углы поворота сечений балки,
представленные кривыми II. Расчетная кривая
здесь также изображена сплошной линией.
Характерным является то обстоятельство, что
совпадение форм упругих линий получается и при
малом количестве блоков — восьмиполюсников, со-
ставляющих модель изогнутого стержня.
Аналогично для модели консольной балки из
четырех равных участков единичной длины полу-
чаются следующие величины отношения макси-
мального' угла поворота к максимальному прогибу;
Частота Измеренная Расчетное
моделирования величина значение
гц Uц шах/'UI max Фшах/Утах
100 0,355
300 0,380
1000 0,380 — — 0,375
2-4
2000 0,380
26
^^$5 я
•ч "^5 lOOi 2000 гц
р
Хзоооги
>5
юо+гооогц 400^2000гц
л 3000гц J г» =—- \юогц
5^ \3000гц
* .
0 0.1 0,2 ИЗ £1 0,4 0,5 0,6 0,7 0,8 0,9 I
Фиг. 36. Сопоставление упругих линий (кривые I) и углов поворота (кривые И), полученных для консоли
путем моделирования и расчета.
Фиг. 37. Сопоставление упругих линий (кривые I) и углов поворота (кривые II), полученные для балки,
заделанной по краям путем моделирования и расчета.
4*
27
Таблица 11
Схема балки а .л - - ‘ а
О’4м * Г' \ ® ° 1 V
Граничные условия У1 = 0 М2=0 Ф1 = о q2= р © й, II II —Л -э- О' о о II II У1 = о у2 = 0 = 0 -Mg = № У1 = 0 М2 = М Ф1 = 0 q2 = 0 У1 = 0 у М1 = 0 д
Соотношение величин для механической системы 1 /з у — р. 2 3 EJ ’ Qi = Р; , 1 12 12 2 EJ Ml = М2 = —Х-1Р-, Q,=P-, 1 /з 12 EJ * — | CN м <N СО 1 CN 1 ~ 1 1 II И II II <5 ф? -и II II 1 £ II С * II. б?' 1 / ф, = М; 6 EJ 1 / фо — — М, 3 EJ М Qi — -; м Q2—t
Электриче с кие г модели с ука- занием теоре- тического рас- пределения на- 0 1 __ 0 _1~ю4 3 ф 0 Л 4 5 0 1 1 0 _Г] ГЛ4 HZ7 3 1 jit В ГП—J о г\э <5 С, с: *“ 0 Зо-^w и 2 0 1 ©J—Д4 1—ГГ ни
пряжений при 1 = 1 546^7о °8 Т 2 и Съ Ч е а Со? 5 6 7 8 5 б 7 в и и и у Т у Т™ 0 ц « У Т
Вольты ир “(400) “(1200) UP 1 “(400) “(1200) “₽ “(400) “(1200) ир “(400) «(1200) ир | “(400) i “(1200)
Сопоста- вление расчет- ных дан- ных (мр) с данны- ми изме- рений в моделях при ча- стоте 400 гц («400) « 1200 гц (“1200> «20 12 12 12 12 12 12 0 0 0 6 5,9 6,0 0 0 0
к35 «48 0 0 0 0 0 0 0 0 0 0 0 0 6 5,9 6,0
18 17,7 17,8 0 0 0 12 12 12 12 12 12 12 12 12
И56 6 5,9 6 12 11,5 11,7 4 3,8 3,9 2 1,8 1,9 0 0 0
“б7 6 5,9 6 0 0 0 4 4,0 4,1 4 4,0 4,0 6 5,8 . 5,9
“78 0 0 0 12 11,4 11,7 8 7,7 7,8 2 1,9 2,0 6 5,8 5,9
«37 12 11,7 11,8 12 11,4 11,7 0 0,6 0,3 6 5,9 6,0 0 0,2 0,2
и46 12 11,9 11,9 12 11,4 11,8 0 0,8 0,3 6 5,9 6,0 0 0,5 0,3
Погрешность при определении углов поворота
сечений балки с помощью моделей во всех случаях
получается в сторону преуменьшения и при низ-
ких частотах возрастает. Это находит объяснение
прежде всего в том, что трансформаторы модели
не являются идеальными, оказывают некоторое
шунтирующее действие, а также создают дополни-
тельные потери напряжения. К тому же выводу
приводит и рассмотрение данных табл. 11, в ко-
торой измеренные напряжения равны или меньше
расчетных. Однако при рациональном выборе диа-
пазона частот моделирования совпадение данных
расчета и измерения получается достаточно близ-
ким. Для расширения рабочего диапазона частот
моделирования в сторону низких частот в дальней-
шем предполагается увеличить габариты трансфор-
маторов и перейти к применению сердечников вы-
сокой проницаемости.
На фиг. 38 показаны резонансные кривые бал-
ки, изображенной там же. Для такой балки с
двумя равными массами на одинаковых расстоя-
ниях от опор и- между собою точные значения ча-
стот собственных колебаний составляют
(47)
28
В электрической модели были приняты следую-
щие значения параметров элементов:
А- ^£.^0,2 гн;
6EJ
т С± = С2 = 0,2 мкф-,
Фиг. 38. Резонансные кривые для балки с двумя массами,
полученные путем моделирования. 7—напряжение (скорость)
для точки 1; 2— напряжение (скорость) для точки 2.
/гц
Фиг. 39. Изменение частот собственных колебаний в зави-
симости от величины сосредоточенных масс (емкостей Ct
модели).
замены в формулах (47) механических величин
электрическими эквивалентами составляют
106
0,2-6-0,2-Зз
= 357
f2 = 1380 гц.
Как видно из фиг. 38, частоты, определенные
экспериментальным путем, весьма мало' отличают-
ся от расчетных величин (1—2,5%).
На фиг. 39 для той же системы приведен
график изменения первой и второй частот собствен-
ных колебаний в. зависимости от величины сосре-
доточенных масс т, т. е. от емкости конденсато-
ров С- Сплошными линиями показаны расчетные
кривые, а кружками отмечены значения частот,
полученные путем измерения в электрической мо-
дели.
На фиг. 40 изображен спектр частот собствен-
ных колебаний для балки с семью массами на рав-
ных расстояниях (фиг. 41). Расчетные значения
частот, отмеченные пунктирными линиями, вычи-
слялись по формуле [23]:
ш2 =
EJ
mlk
in
cos —---
л+1
2-b cos
in
n-f-l
(48)
0 1000 2000 3000гц
Фиг. 40. Спектр частот для балки с семью массами. Пунк-
тир—расчетные значения частот, сплошная—измеренные
значения частот.
Фиг. 41. Модели симметричной балки,
а—для частот нечетных порядков: б -для частот четных порядков.
29
где п—количество масс;
/А — расстояние между массами;
i — порядок частоты собственных колебаний,
причем,
А-Л =0,2 гм;
6EJ к
т-+С=Ъ,\ мкф-, lk=\.
Для определения частот нечетных порядков
(7=1, 3, 5, 7) использовалась электрическая мо-
дель фиг. 41,а, а частот четных порядков (i=
=2, 4, 6)—модель фиг. 41,6.
Полученные результаты экспериментальной про-
верки принципа моделирования стержневых систем
по участкам подтверждают правильность выдвину-
тых автором предложений.
Метод динамических жесткостей как в его ана-
литической форме, так и в форме электрического
моделирования, имеет все необходимые предпосыл-
ки для успешного применения к задачам изгибных
и связных колебаний стержневых систем и, прежде
всего, к задачам определения критических скоро-
стей валов современных двигателей.
ЛИТЕРАТУРА
1. Тетельбаум И. М., Электрические расчетные и
моделирующие устройства. «Обзорный бюллетень ЦИАМ",
1946, № 10-11.
2. Гутенмахер Л. И., Электрические модели фи-
зических явлений. „Электричество", 1948, № 8.
3. Тетельбаум I. М., Новый метод спрощения
разрахунку крутильных коливань вал1в. 1. Б. АН УССР,
1943, № 3.'
4. Тетельбаум И. М„ Электрическое моделиро-
вание крутильных колебаний валов поршневых двигателей.
Оборонгиз, 1945. Труды ЦИАМ № 87.
5. Тетельбаум И. М., Исследование крутильных
колебаний валов поршневых двигателей путем электриче-
ского моделирования. М. БНТ МАП. 1948, Труды ЦИАМ
№ 121.
6. Тетельбаум И. М., Электрическое моделиро-
вание как метод исследования динамических крутильных
нагрузок валов поршневых двигателей. „Динамика и проч-
ность коленчатых валов*, Сборник ИМАШ АН СССР. Изд.
АН СССР, 1948. .
7. Милейковский С. Т., К вопросу о приведе-
нии колеблющегося стержня к восьмиполюсной системе.
Ж. Т. Ф. 1941, вып. 8.
8. R. Lindsay, Filtration of elastic waves in solid rods,
J. A. S. A. 1934, Xe 3.
9. V. Bush., Structural analysis by electric circuit analogies,
J. of the Franklin Inst., 1934, № 3, vol 217. p. 289.
10. G- Kron, Tensorial analysis and equivalent circuits of
elastic structures, J. of the Franklin Inst, vol. 238,1944, № 6.
11. G. Kron, Equivalent circuits for the numerical solution
of the critical speeds of flexible shafts, J. of Appl. Meeh. 1946, № 2.
12. Гофлин А. Л., Электрическая модель балки, ле-
жащей на упругом основании. „Электричество", 1947, № 5.
13. Тетельбаум И. М„ Электрическое моделирова-
ние упругих систем в динамических задачах строительной
механики. „Повышение прочности деталей машин", Изд. АН
СССР. (Сборник докладов 1944 г).
14. Рабинович И. М., Строительная механика стерж-
невых систем, М., Стройиздат, 1946.
15. М. Biot, Coupled oscillations of aircraft engine—propeller
systems, J. A. S. 1940, v. 7, № 9.
16. Житомирский В. К., Крутильные колебания
системы вал-винт авиационного мотора, М. ЦИАМ 1945,
(диссертация).
17. Диментберг Ф. М., Применение метода „дина-
мической жесткости" для расчета связных колебаний. „Ди-
намика и прочность коленчатых валов", Сборник ИМАШ
АН СССР, Изд. АН СССР, 1948.
18. R. Feiss, Regenerations Theorie und Siabilitat von-
Regelungen Schweizerische Bauzeitung, 1940, № 9.
19. Г о г e н e м з e p К. и Прагер В., Динамика со-
оружений, Л.—М., 1936.
20. К о р н о у х о в Н. В., Точный метод проверки ус-
тойчивости плоских рам, ВИТ, 1937, № 3.
21. Ч у д н о в с к и й В. Г., Частота собственных коле-
баний стержней и рам и динамический критерий их устой-
чивости (укр.), Киев, 1939, И. С. М. АН УССР, вып. 40.
22. Н а т а н з о н В. Я., Изгибные колебания коленчатых
валов авиационных двигателей. М. БНТ МАП 1948, Труды
ЦИАМ № 122.
23. Филлипов А. П., Методы расчета сооружений
на колебания. Стройиздат., 1941.
СОДЕРЖАНИЕ
Стр.
1. Введение...................................... 3
2. Моделирование упругих систем по коэффициентам
влияния ................................... ... 4
3. Метод динамических жесткостей в применении к
кручению и изгибу стержневых систем 9
Стр.
4. Моделирование стержневых систем по участкам . . 16
5. Экспериментальная проверка метода моделирования
по участкам . у................................ 24
6. Литература ... -.......... 30