/















































































































































































































































































































































































































































































































































































































































































































































































































Автор: Биргер И.А. Дружинин Н.И. Житомирский В.К.
Теги: двигатели авиационное оборудование авиатехника пособие для инженеров
Год: 1950




Текст
МИНИСТЕРСТВО АВИАЦИОННОЙ ПРОМЫШЛЕННОСТИ СОЮЗА ССР
АВИАЦИОННЫЕ
ПОРШНЕВЫЕ ДВИГАТЕЛИ
КИНЕМАТИКА, ДИНАМИКА
И РАСЧЕТ НА ПРОЧНОСТЬ
ПОСОБИЕ ДЛЯ ИНЖЕНЕРОВ
ГОСУДАРСТВЕННОЕ ИЗДАТЕЛЬСТВО ОБОРОННОЙ ПРОМЫШЛЕННОСТИ
МОСКВА 1 950
АВТОРЫ:
Кандидат технических наук И. А. Биргер
Инженер Н. И. Дружинин
Кандидат технических наук В. К. Житомирский
Кандидат технических наук М. Я. Кушуль
Кандидат технических наук С. Н. Кунаев
Кандидат технических наук А. И. Петрусевич
Инженер И. А. Пугачеа
Действительный член АН УССР С. В. Сервисен
Кандидат технических наук Н. к* Смольянинов
Инженер Т. А. Сыромятникова
Кандидат технических наук И. М. Тетельбаум
Кандидат технических наук В. Н. Ширяев
НАУЧНЫЙ РЕДАКТОР:
доктор технических наук И. Ш. Нейман
ГЛАВНЫЙ РЕДАКТОР:
Доктор технических наук профессор Т. М. Мелькумов
Замеченные опечатки
Стр. Строка
Напечатано
36 10 снизу 1g =
36 8 „ • ‘g ai, =
г sin (? — ?z — ф) ..
56 2 сверху cosp.cosp, <7‘
70 2 снизу Pz
i=h
115 13 сверху \ dP dp 1
147 3 » P;2=4P}3 =
153 5 . = — 6:ipe5J?n7?‘»2 COS 6a.
160-161 Табл. 2-й и 6-й
135800,
11 строка
снизу во2й
колонке
справа
172 2 снизу; 0,9987
столбец
1/3, 5
201 20 снизу 212008-1
219 1 и 2 где kQ и ka для изгиба и k для
сверху ° D°
кручения — при отношении ——=2, а а
k — соответственно k„ и (полу-
ченные по фиг. 216004-1 или фиг.
216004-11)
268 9 сверху - 0,297).
351 14 . 0,1 мм
360 Н . [14, 20, 21]
381 24 снизу [8, 30, 31, 32]
398 9 сверху h
504 10 сверху «2
574 6 снизу =i sin a tg aj-p
615 16 сверху V ic - ib Л2
659 9 снизу ...[1 — Sin (Pg— Ф)]
681 12 сверху «1
688 7 снизу k
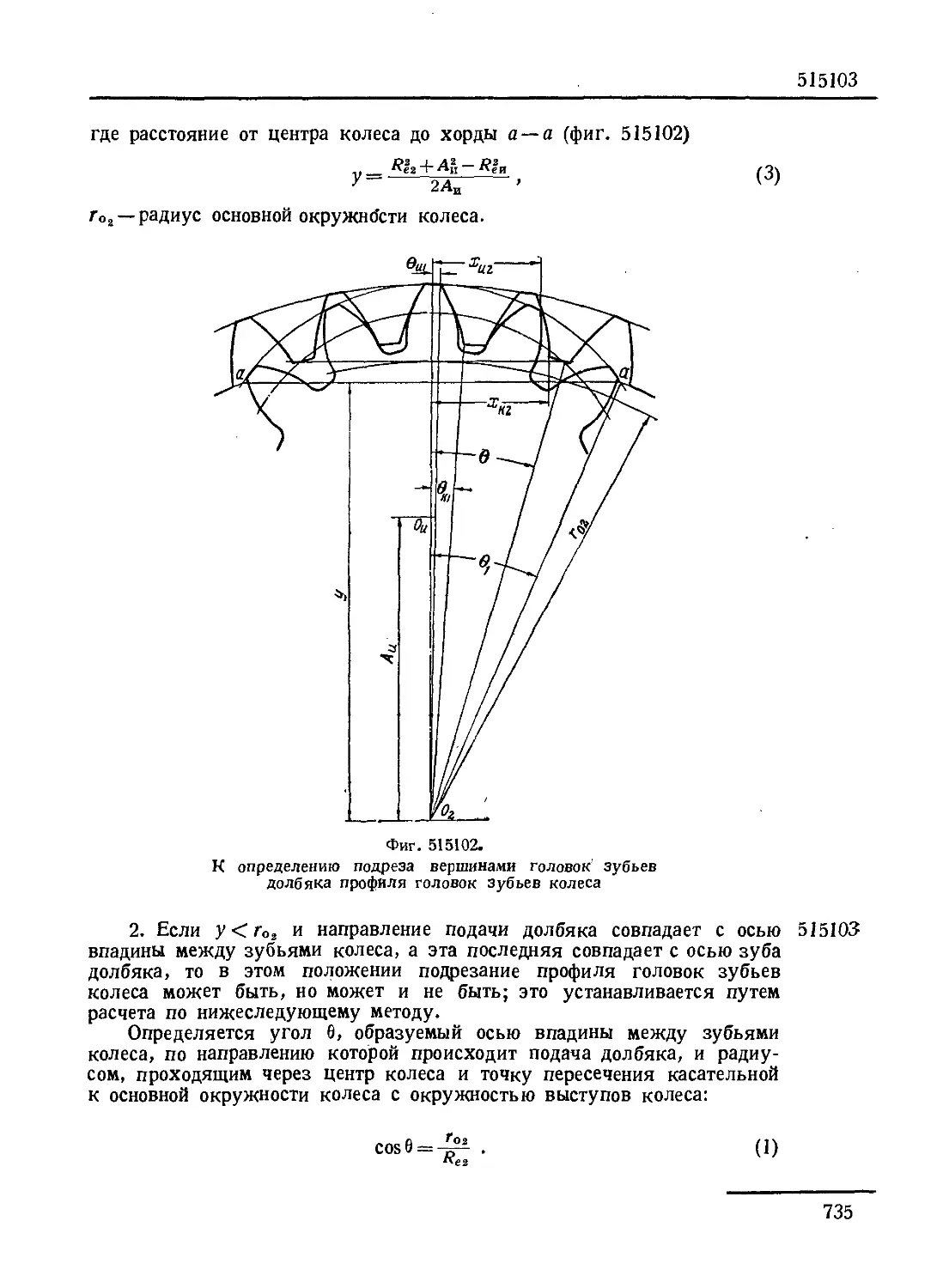
769 13 . вершины зуба колеса с ножкой зу-
ба шестерни
772 8 . Г cos a
таблица 13 . 255
522403
12 колон-
ка слева
• 9 . 141,7
mitz
sin
837 13 сверху • • • Fm (?)
m
Должно быть
tg2aZ[ =
tg2aZj=
г sin (Р — PZ - ф)
L cos р &
Pi^P}i=
= — GSpj T^n^a»1 COS 6a.
3-й и 6-й
0,9997
212010-П
где £0 — соответственно k°a для из-
гиба и k„ для кручения при отно-
D
шении -j-=2 (берутся по фиг.
216002-1 или фиг. 216002-П), а k—со-
ответственно k. или й,
о 'С
- 0,0297).
0,1рь
[21, 23, 24]
[8, 20, 21, 32]
=/slna tgaj-{-
/ic — /д
Л3
. . . [ 1 + sin (Рз - ф)]
*1
*1
вершины зуба шестерни с ножкой
зуба колеса
Гср COS я
25
141,75
sir
•• ------------
Авиационные поршневые двигатели, кинематика, динамика и расчет на прочность.
СОДЕРЖАНИЕ
Часть 1
КИНЕМАТИКА И ДИНАМИКА КРИВОШИПНО-ШАТУННЫХ МЕХАНИЗМОВ
УРАВНОВЕШИВАНИЕ СИЛ ИНЕРЦИИ АВИАЦИОННЫХ ДВИГАТЕЛЕЙ
Кинематика кривошипно-шатунных механизмов............................. 110000
Кинематика нормального кривошипно-шатунного механизма............ 111000
Кинематика кривошипно-шатунного механизма с прицепным шатуном.
Случай, когда Т2=Т........................................... 112000
Кинематика кривошипно-шатунного механизма с прицепным шатуном.
Случай, когда тг=#7........................................... 113000
Силы, действующие в кривошипно-шатуиных механизмах.................... 120000
Силы от инерции двигающихся масс кривошипно-шатунного механизма 121000
Силы от рабочих газов в цилиндрах двигателя...................... 122000
Суммарные силы от газов и инерции двигающихся масс, действующие
в кривошипно-шатунном механизме двигателя ..................... 123000
Уравновешивание сил инерции авиационных двигателей.................... 130000
Силы, вызывающие неуравновешенность авиационного двигателя .... 131000
Общие условия уравновешенности сил инерции авиационного двигателя 132000
Уравновешивание сил инерции вращающихся масс авиационного двигателя 133000
Уравновешивание сил инерции поступательно двигающихся масс авиа-
ционного двигателя ............................................ 134000
Уравновешивание сил инерции двигателей различных типов.......... 135000
Влияние крутильных колебаний системы коленчатого вала на уравнове-
шенность двигателя............................................ 136000
Литература и источники к 100000.
приложения и ЧАСТИ I
ТАБЛИЦЫ ДЛЯ ПОДСЧЕТА КИНЕМАТИКИ И ДИНАМИКИ НОРМАЛЬНОГО
КРИВОШИПНО-ШАТУННОГО МЕХАНИЗМА
Таблица 1. Угловые скорости коленчатого вала ш и их квадраты о»2. .
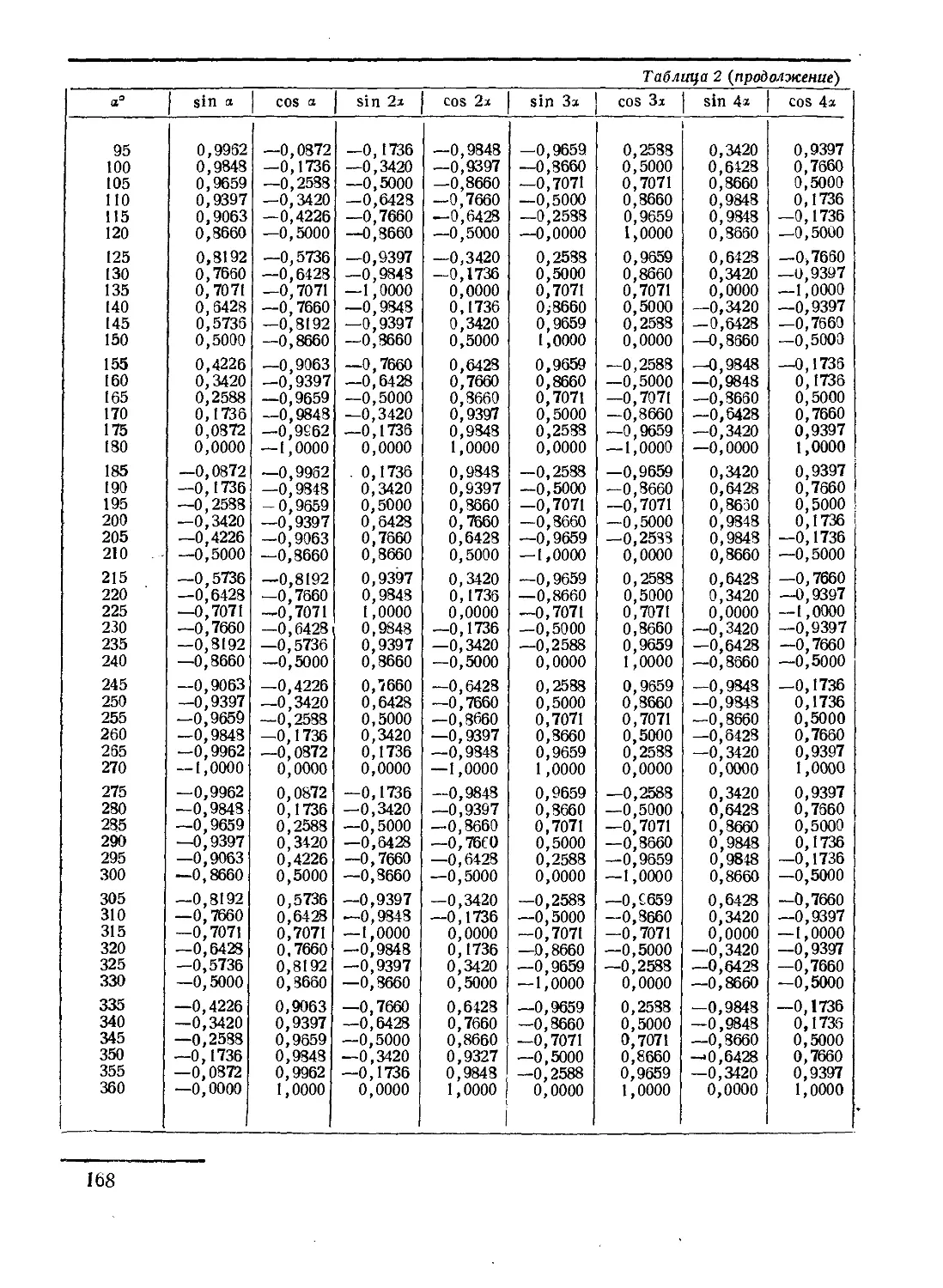
Таблица 2. Величины sin a, cos а, sin 2а, cos 2а, sin За, cos За, sin 4а, cos 4а
при изменении а от 0 до 360°.
в зависимости от а и Я.
» » » а и Я.
» » » а И Я.
» » » а и Я.
» » » а и Я.
Таблица 3. Углы
Таблица 4. Сумма углов (“+3)
Таблица 5. Величины cos
Таблица 6. Величины tg $
sin (а+Р)
Таблица 7. Величины —□—
3
cos (а+Р)
—— в зависимости от а и А.
S,
_-2_ для определения путей поршня.
R
м
—-— для определения ускорении поршня.
R <*>г
Т-
Таблица 11. Значения ——-—~— для определения тангенциальных сил Т{
ЭКп К “>2
от инерции поступательно двигающихся масс.
Таблица 8. Величины
Таблица 9. Значения
Таблица 10. Значения
‘Таблица 12. Значения----- для определения угловых скоростей шатуна.
Часть 2
РАСЧЕТ НА ПРОЧНОСТЬ ДЕТАЛЕЙ АВИАЦИОННЫХ ДВИГАТЕЛЕЙ
Прочность материала и определение запасов........................... 210000
Напряжения и деформации......................................... 211000
Прочность, пластичность и упругость при статических напряжениях 212000
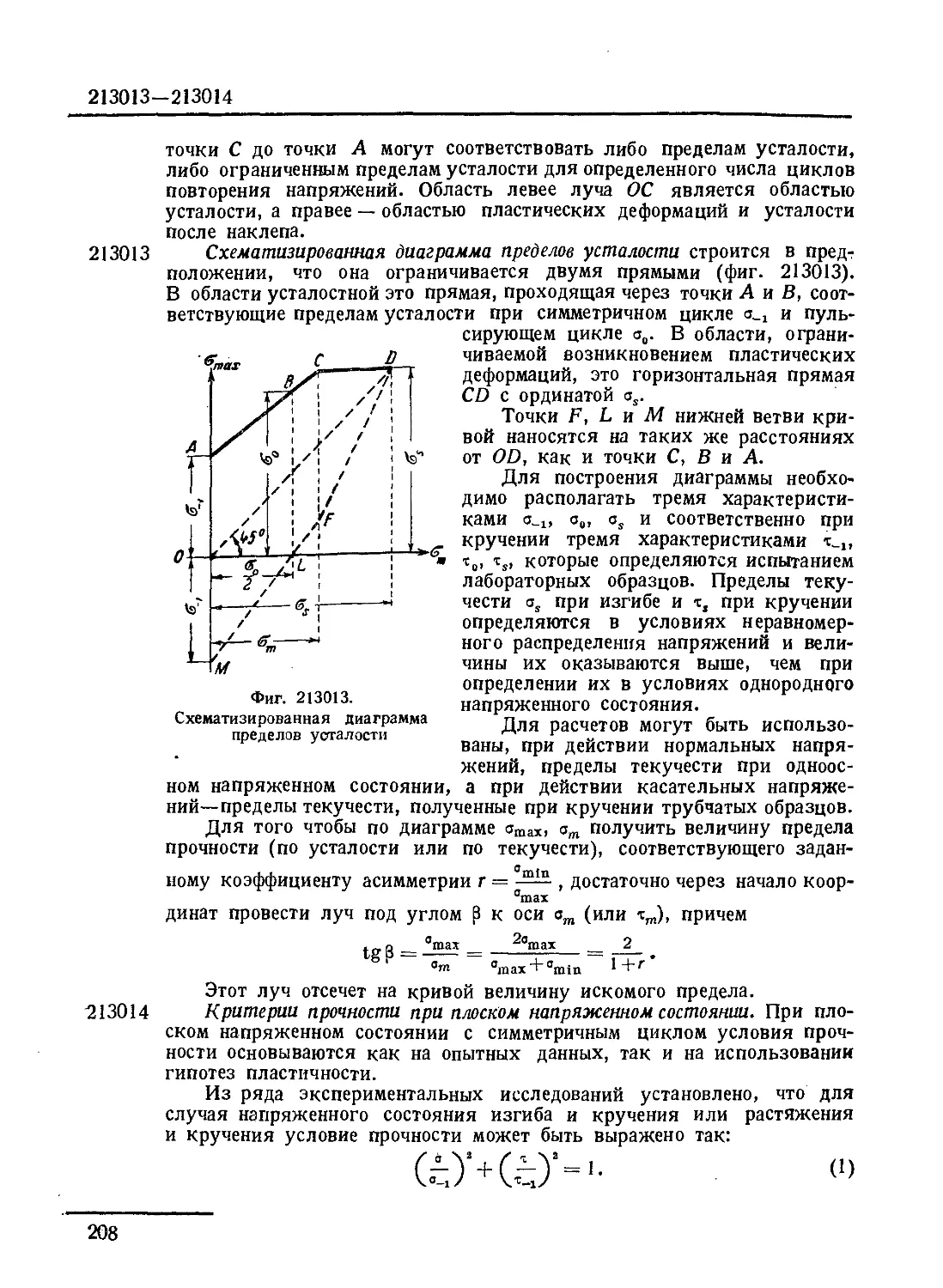
Прочность и долговечность при переменных напряжениях............ 213000
Прочность и пластичность при повышенных температурах............ 214000
Определение запасов прочности................................... 215000
Данные для расчета запасов прочности............................ 216000
Литература и источники к 210000.
Расчет на прочность коленчатых валов................................. 220000
Типичные поломки коленчатых валов.............................. 221000
Расчетные нагрузки............................................. 222000
Методы расчета коленчатых валов................................ 223000
Номинальные напряжения в опасных точках коленчатых валов V-образ-
ных двигателей ......................................z......... 224000
Номинальные напряжения в опасных точках коленчатых валов звездо-
образных двигателей ............................................ 225000
Коэффициенты концентрации напряжений............................ 226000
Определение запасон прочности................................. 227000
Влияние колебаний системы коленчатого вала на его запасы прочности
в V-образиых и звездообразных двигателях.................... . 228000
Способы повышения прочности коленчатых валов конструктивными
и технологическими средствами................................... 229000
Литература и источники к 220000.
Расчет на прочность шатунов.......................................... 230000
Расчет поршневой головки шатуна................................. 231000
Расчет стержня шатуна .......................................... 232000
Расчет кривошипной головки шатуна............................... 233000
Литература и источники к 230000.
Расчет иа прочность поршневого пальца................................ 240000
Типичные поломки поршневого пальца.............................. 241000
Силовая схема и нагрузки, действующие на поршневой палец....... 242000
Поперечные деформации поршневого пальца......................... 243000
Определение напряжений в поршневом пальце, возникающих от овали-
зации поперечного сечения ..................................... 244000
4
Определение напряжений в поршневом пальце от изгиба ............. 245000
Определение касательных напряжений в поршневом пальце............. 245000
Выбор размеров поршневого пальца.................................. 247000
Мероприятия, повышающие прочность поршневого пальца............... 248000
Литература и источники к 240000.
Расчет на прочность резьбовых соединений............................... 250000
Типичные поломки резьбовых соединений............................. 251000
Нагрузки на резьбовое соединение.................................. 252000
Совместное действие нагрузок...................................... 253000
Распределение нагрузки по виткам резьбы........................... 254000
Прочность резьбовых соединений при статических нагрузках.......... 255000
Прочность резьбовых соединений при переменных нагрузках........... 256000
Влияние конструктивных и технологических факторов на прочность
резьбового соединения............................................ 257000
Затяжка резьбовых соединений...................................... 258000
Примеры расчета на прочность резьбовых соединений................ 259000
Литература и источники к 250000.
Статические и динамические испытания деталей авиационных двигателей 260000
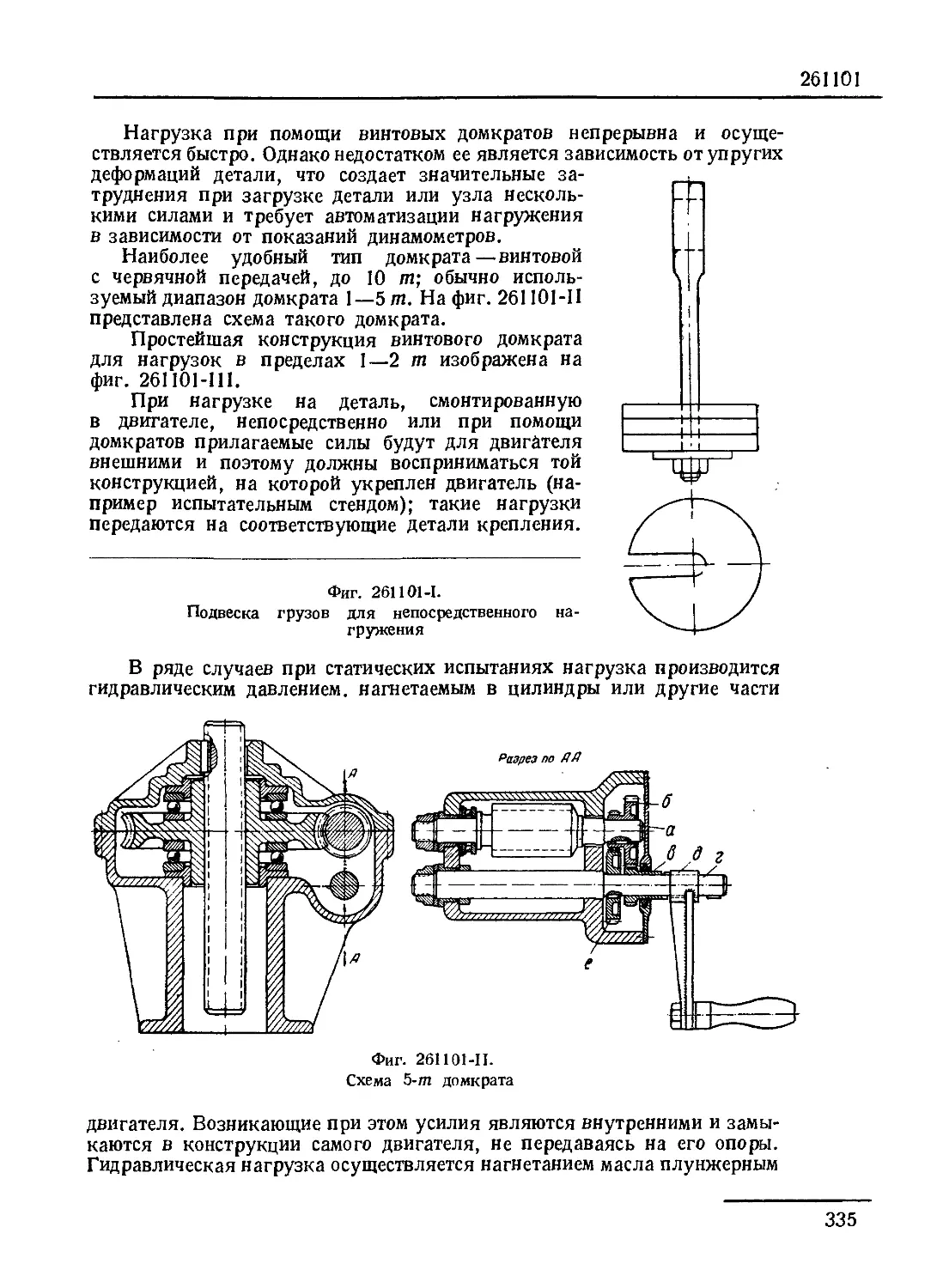
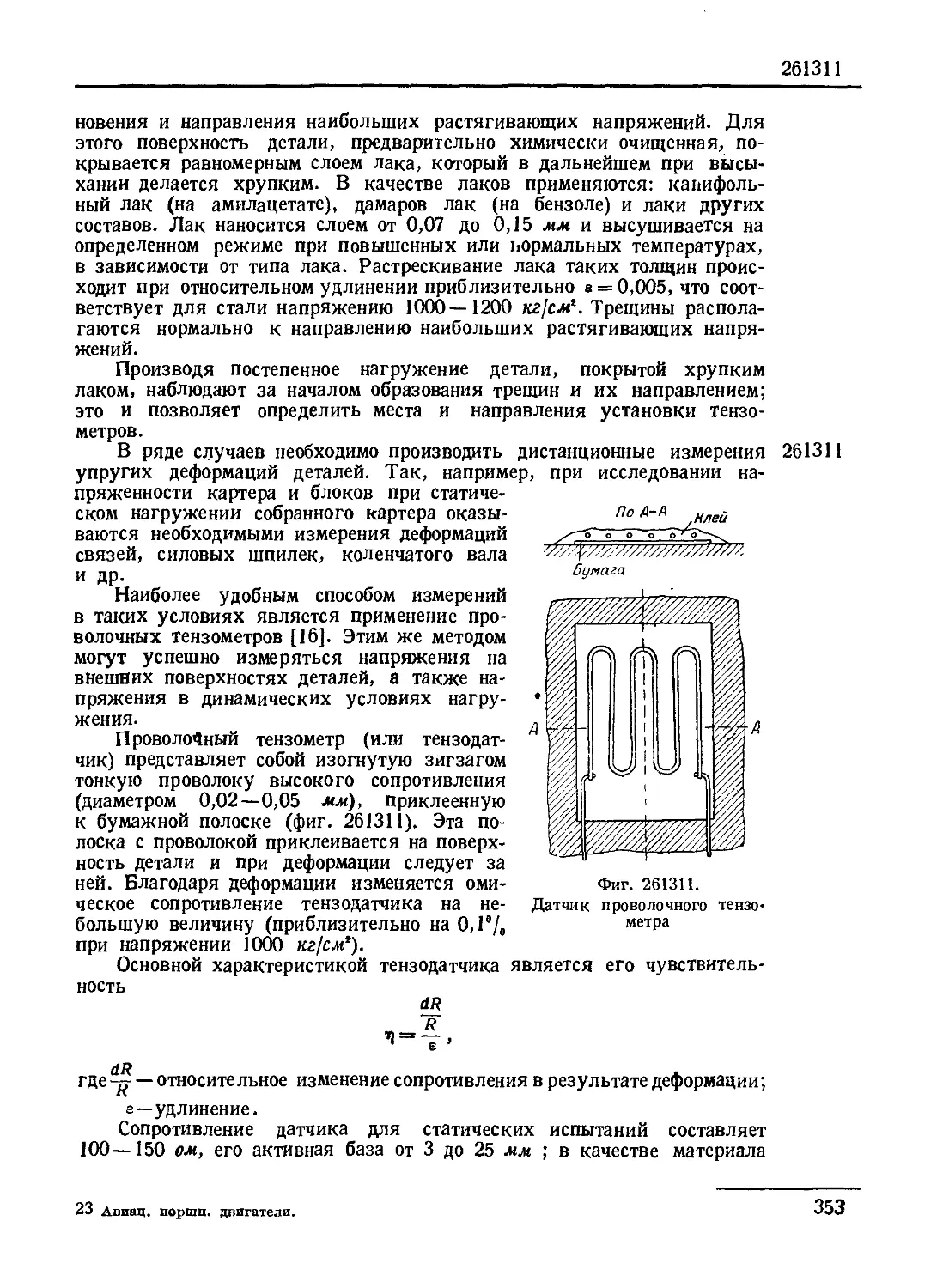
Статические испытания............................................. 261000
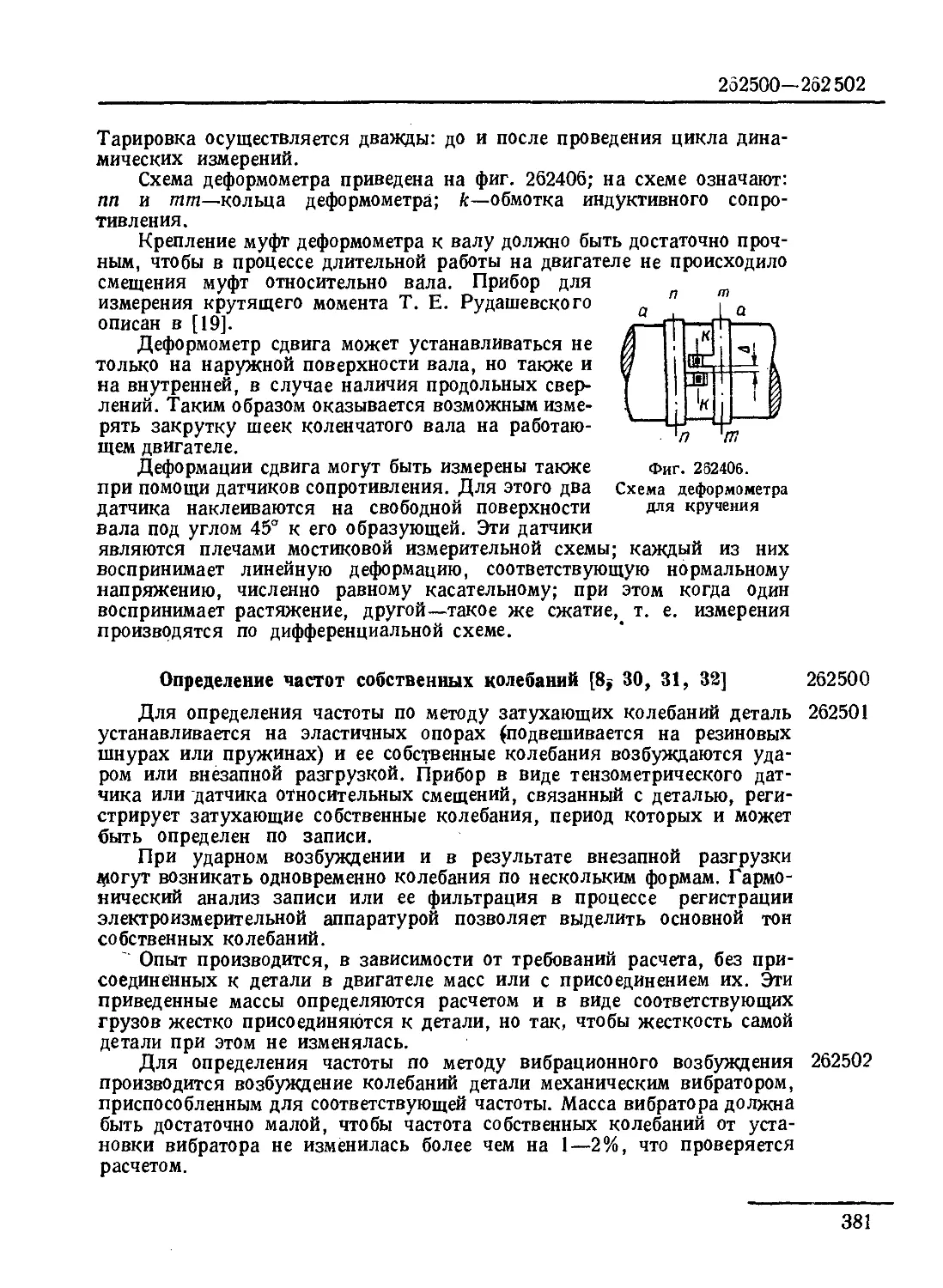
Динамические испытания............................................ 262000
Литература и источники к 260000.
Часть 3
РАСЧЕТ СИСТЕМЫ КОЛЕНЧАТОГО ВАЛА НА КРУТИЛЬНЫЕ КОЛЕБАНИЯ
Расчет эквивалентной системы вала ............................... .... 310000
Расчет жесткостей эквивалентной системы.......................... 311000
Расчет моментов инерции масс эквивалентной системы................ 312000
Приведение масс и жесткостей, связанных с валом двигателя передачей 313000
Составление эквивалентной схемы.................................. 314000
Расчет чисел собственных колебаний системы............................. 320000
Типичные эквивалентные системы и формы их колебаний............... 321000
Приближенная оценка чисел собственных колебаний................... 322000
Метод подбора.................................................... 323000
Расчет вынужденных колебаний . . . .................................... 330000
Силы, вызывающие крутильные колебания............................. 331000
Силы, демпфирующие крутильные колебания........................... 332000
Расчет вынужденных колебаний...................................... 333000
Оценка напряжений по форме колебаний при резонансных оборотах вала . . 340000
Определение резонансных оборотов................................. 341000
"Уравнение работ..................... . ........................ 342000
Определение коэффициента демпфирования для одного колена......... 343000
Определение напряжений по форме колебаний......................... 344000
Расчет необходимых изменений системы и выбор демпфера.................. 350000
Формулы изменения метода подбора.................................. 351000
Выбор демпфера.................................................... 352000
Нелинейные системы................................................ 353000
5
Торсиографироваиие................................................... 360000
Проведение опыта................................................ 361 000
Обработка торсиограмм............................................. 352000
Расчет напряжений по форме колебаний и результатам торсиографи-
рования ........................................................ 353000
Примеры поломок валов от колебаний . . г1...................... 364000
Расчет демпфера...................................................... 370000
Расчет маятникового демпфера.................................... 371000
Определение частот собственных колебаний системы с маятниками . . 372000
Расчет роликового демпфера........................................ 373000
Расчет демпфера трения............................................ 374000
Расчет колебаний системы вал—винт.................................... 380000
Принцип расчета................................................. 381000
Определение динамической жесткости винта........................ 382000
Определение динамической жесткости системы коленчатого вала двига-
теля ............................................................ 383000
Определение частот системы вал—винт............................. 384000
Электрическое моделирование крутильных колебаний валов поршневых двига-
телей ................................................................. 390000
Литература и источники к 300 000.
Часть 4
РАСЧЕТ РАСПРЕДЕЛИТЕЛЬНЫХ МЕХАНИЗМОВ АВИАЦИОННЫХ ДВИГАТЕЛЕЙ
Выбор основных размеров................................................ 410000
Выбор диаметра горловины и высоты подъема клапана................. 411000
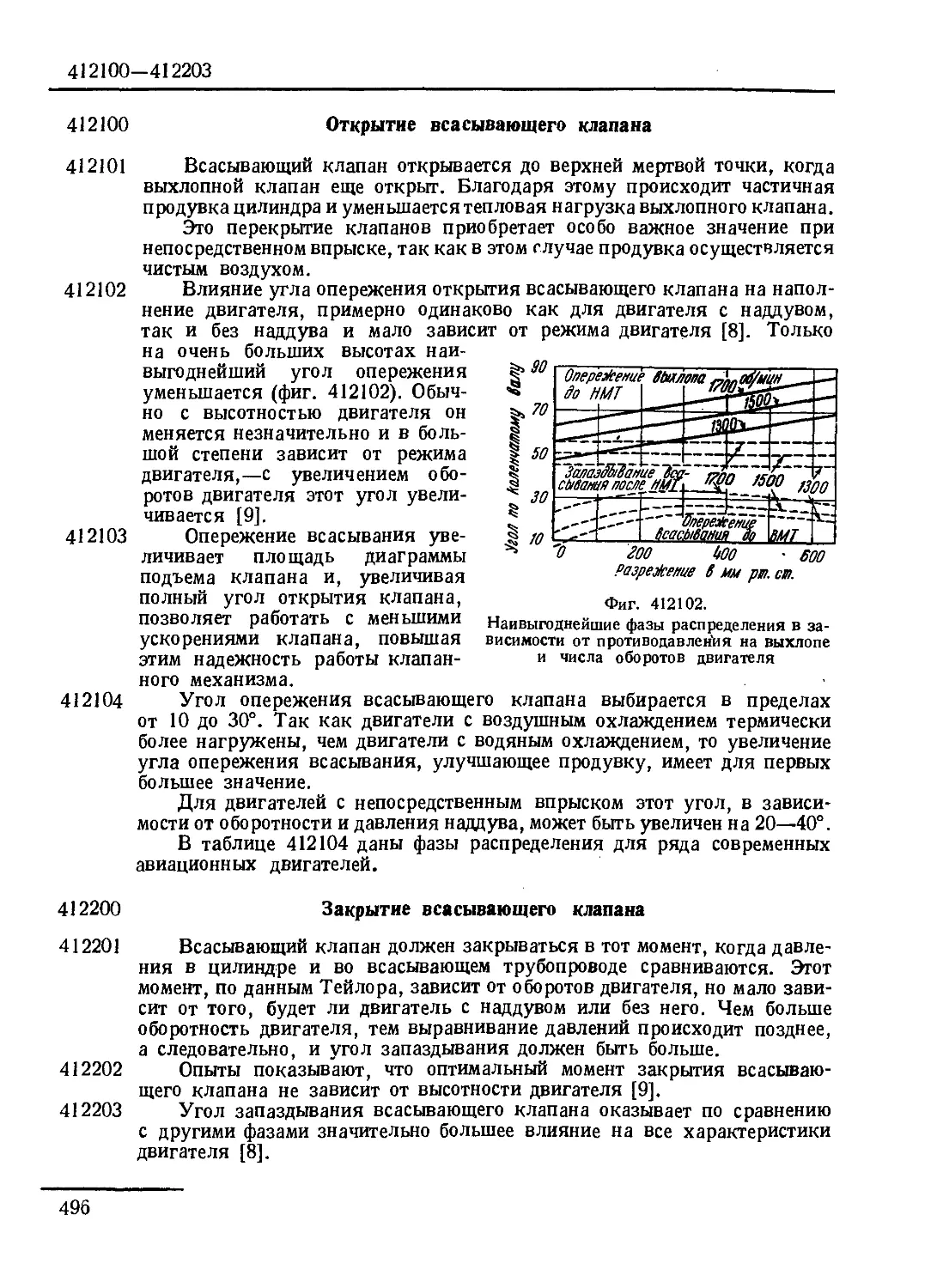
Фазы распределения.............................. ............... 412000
Зазор в клапанном механизме...................................... 413000
Кинематика клапанных механизмов........................................ 420000
Скорости вращения кулачков распределительного механизма......... 421000
Кинематика толкателя, закон движения которого задан............. 422000
Построение профиля кулачка при заданном прямолинейном движении
толкателя................................. ..................... 423000
Построение профиля кулачка рычажных распределительных механизмов
при заданном законе движения клапана.........................• . 424000
Кинематика толкателя, приводимого в движение кулачком, очерченным
дугами кругов и прямыми......................................... 425000
Кинематика клапана, приводимого в движение рычагом ............... 426000
Кинематика профилированного дугой рычага, приводимого в движение
кулачком, очерченным дугами кругов и прямыми..................... 427000
Кинематика пространственного механизма распределения звездообраз-
ных двигателей................................................... 428000
Динамика клапанных механизмов............-............................. 430000
Силы, действующие в клапанном механизме.......................... 431000
Силы и моменты, действующие в клапанном механизме, при передаче
движения от кулачка к клапану через траверсу..................... 432000
Силы и моменты, действующие в клапанном механизме, при непосред-
ственной передаче движения от кулачка к клапану с плоской тарел-
кой .......................................................... 433000
6
Силы и моменты, действующие в клапанном механизме, при передаче
движения от кулачка к клапану через рычаг, профилированный дугой 434000
Силы и моменты, действующие в клапанном механизме звездообразного
двигателя........................................................ 435000
Расчет иа прочность .................................................... 440000
Профиль кулачка.................................................. 441000
Траверса и толкатель............................................. 442000
Клапан........................................................... 443000
Рычаг клапана.................................................... 444000
Оси роликов и рычагов........•................................... 445000
Кронштейн рычагов................................................ 446000
Тяга............................................................. 447000
Кулачковый вал................................................... 448000
Пружины......................................................... 449000
Выбор основных кинематических параметров клапанных механизмов......... 450000
Общие положения для выбора кинематических параметров клапанных
механизмов...................................................... 451000
Выбор кинематических параметров рычажного распределительного меха-
низма .......................................................... 452000
Наивыгоднейший профиль кулачка в отношении время-сечения и
клапанных пружин при заданном их запасе сил................. 453000
Способы уменьшения величин ударных нагрузок в распределительном
механизме...................................................... 454000
Примерный расчет клапвиного механизма авиационного двигателя Даймлер-
Бенц 603 .......................................................... 460000
' Расчет шайбового распределительного механизма......................... 470000
Литература и источники к 400000.
Гильзовое газораспределение четырехтактных авиационных двигателей . . . 480000
Общие положения к расчету гильзового газораспределения............ 481000
Кинематика и динамика гильзового механизма . . . ................. 482000
Определение основных размеров привода и окон гильзового газораспре-
деления ........................................................ 483000
Уравновешивание сил инерции гильзового распределительного механизма 484000
Литература и источники к 480000.
Часть 5
РАСЧЕТ ЗУБЧАТЫХ ПЕРЕДАЧ АВИАЦИОННЫХ ДВИГАТЕЛЕЙ
Основные геометрические соотношения и корригирование зубчатых зацепле-
ний, применяемых в авиационных двигателях.............................. 510000
Основные свойства и зависимости зубчатых зацеплений............... 511000
Основные свойства и зависимости эвольвентного зацепления........ 512000
Корригирование профилей зубьев цилиндрических прямозубых передач
внешнего зацепления.............................................. 513000
Цилиндрические прямозубые передачи внутреннего зацепления .... 514000
Подрезание вершинами головок зубьев долбяка профилей головок зубьев
колеса, имеющего внутренний зубчатый венец....................... 515000
Конические прямозубые передачи.................................... 516000
Литература и источники к 510000.
От редакции.
7
Расчет прямозубых зубчатых колес на прочность и долговечность......... 520000
Определение расчетной нагрузки на зубья зубчатых колес .......... 521000
Расчет на контактные напряжения.................................. 522000
Расчет зубьев на изгиб........................................... 523000
Расчет зубчатых колес на заедание................................ 524000
Влияние конструкции зубчатой передачи на прочность н износостой-
кость зубчатых колес............................................ 525000
Пример расчета зубчатой передачи................................. 526000
Литература и источники к 520000.
Расчет прямозубых зубчатых колес на прочность по сокращенному методу. . 530000
Расчетные нагрузки на зубья зубчатых колес................... . 531000
Напряжения в зубьях зубчатых колес............................... 532000
Особенности расчета на прочность конических зубчатых колес .... 533000
Пример расчета зубчатых колес.................................... 534000
Таблицы основных данных и расчетных величин зубчатых колес неко-
торых авиационных двигателей .................. 535000
Литература и источники к 530000.
Часть 6
РАСЧЕТ ПОДШИПНИКОВ СКОЛЬЖЕНИЯ АВИАЦИОННЫХ ДВИГАТЕЛЕЙ
Основные понятия и положения.......................................... 610000
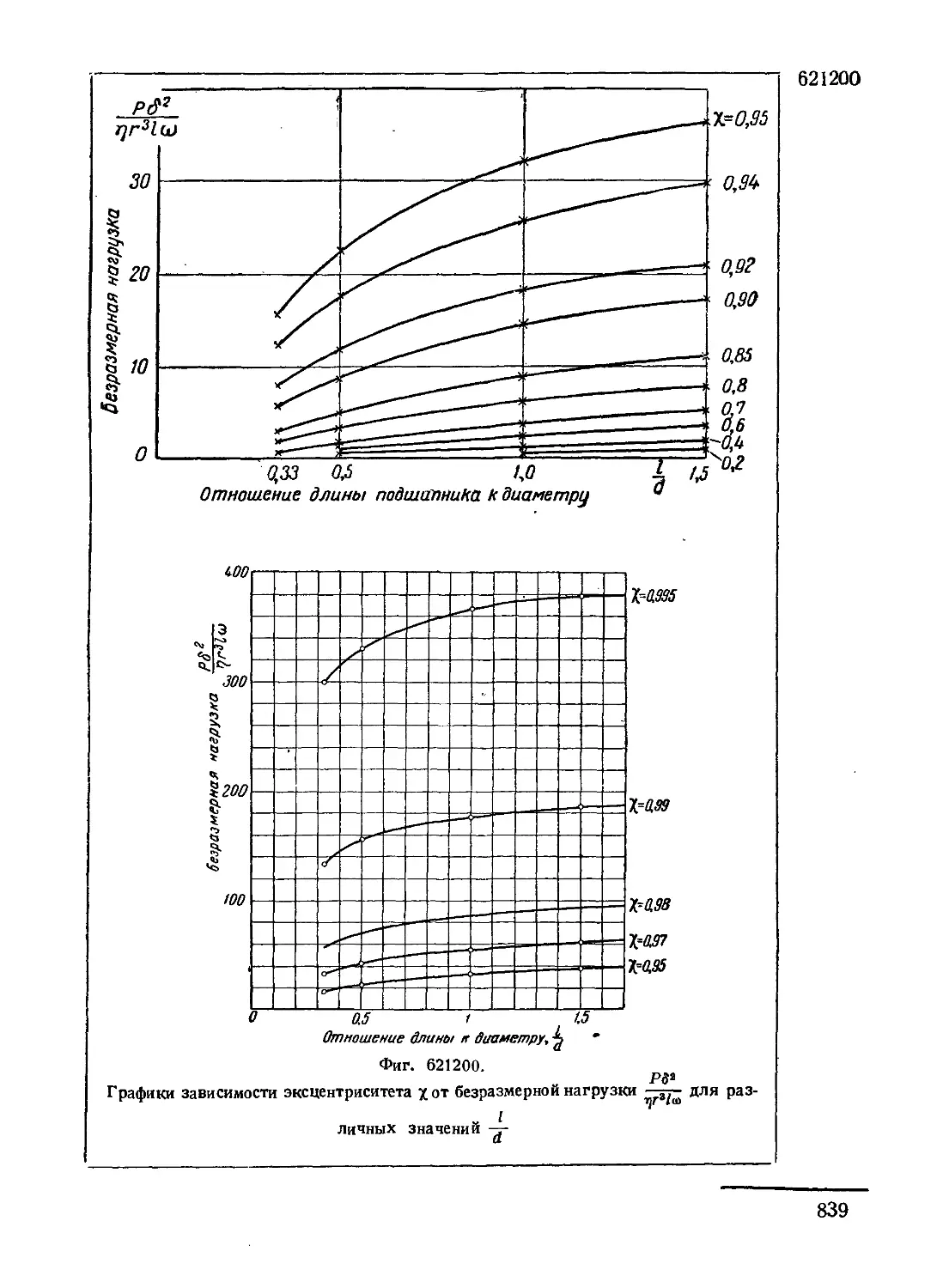
Определение минимальной толщины масляного слоя в подшипнике........... 620000
Определение минимальной толщины масляного слоя в подшипнике при
равномерно вращающейся нагрузке постоянной величины............. 621000
Определение минимальной толщины масляного слоя в подшипнике при
переменной по величине нагрузке постоянного направления ......... 622000
Определение момента и работы трении в подшипнике скольжения........... 630000
Определение момента трения в подшипнике скольжения..........- • 631000
Определение работы трения в подшипнике скольжения................ 632000
Охлаждение подшипника скольжения...................................... 640000
Простейшие случаи прокачки масла................................. 641000
Рекомендуемые формулы для определения прокачки масла через под-
шипник ................................•....................... 642000
Тепловой баланс подшипника скольжения........................... 613000
Метод расчета смазки подшипника скольжения.......................... 650000
Определение толщины масляного слоя............................... 651000
Определение момента Трения....................................... 652000
Определение температуры подшипника и прокачки масла.........• • 653000
Требования к конструкции подшипника скольжения и эксплоатационные
условия, обеспечивающие его надежную работу ........ ... 660000
Литература и источники к 600030.
ПРЕДИСЛОВИЕ
Связанный с развитием конструкций авиационных двигателей рост
литровой мощности, достигнутый увеличением наддува, числа оборотов
и улучшением качества топлива, обусловил повышение напряженности
важнейших деталей. Это повышение явилось результатом возрастания
как основных сйл газовых и инерционных, действующих на детали, так
и сил, связанных с упругими колебаниями, причем габариты, удельный
вес двигателя, а также его числа оборотов всегда ограничивали абсо-
лютные размеры деталей. В то же время характеристики механической
прочности применяемых сталей существенных изменений не претерпели,
и поэтому обеспечение надежности деталей в условиях эксплоатации
достигалось улучшением их формы, применением специальной упроч-
няющей технологии, усовершенствованием расчета и широким исполь-
зованием экспериментальных данных о действительной прочности деталей
и узлов.
Основными факторами, определяющими прочность силовых деталей
двигателя, являются: переменный характер действующих напряжений,
вызывающих усталость металла; общая неравномерность распределения
напряжений и их концентрации, связанные с конструктивной формой де-
тали; жесткости сопрягаемых деталей и узлов, влияющие на величину
и распределение в частях двигателя внутренних усилий, обычно явля-
ющихся статически неопределимыми; технология обработки поверхност-
ных слоев детали, позволяющая существенно изменять ее прочность,
особенно в зонах концентрации напряжений.
В связи с этим расчет на прочность деталей двигателя потребовал
существенной модернизации, которая должна предусматривать, в первую
очередь, отображение влияния усталости, неравномерности распределе-
ния напряжений и технологических обработок, а также опытных данных
о действительной прочности и жесткости деталей. Однако это усовершен-
ствование расчета в настоящее время представляется возможным рас-
пространить лишь на часть важнейших виловых деталей (коленчатый вал,
шатун, болты и шпильки) .
Для многих деталей, за недостатком опытных данных и практики
применения новых способов расчета, приходится пользоваться условным
расчетом по номинальным напряжениям, руководствуясь величинами до-
пускаемых напряжений и деформаций, вытекающими из статистики при-
менения таких расчетов для однотипных деталей.
В связи с этим в настоящей работе, наряду с использованием методов
определения запасов прочности, основывающихся на современных пред-
ставлениях о влиянии режима напряженности, конструктивных и техно-
9
логических факторов на прочность, приведены также условные расчеты
по допускаемым напряжениям.
Большое значение опытных данных о действительном распределении
напряжений и сопротивляемости деталей усталости, для суждения об их
прочности и предпосылках расчета, потребовало затронуть в настоящей
книге в краткой форме вопросы методов статических и динамических ис-
пытаний деталей.
Расширение номенклатуры режимов использования авиационных порш-
невых двигателей и применение сильно форсированных режимов требует
пересмотра исходных данных для расчета на прочность. Целесообраз-
ность проведения расчета применительно к параметрам чрезвычайных или
боевых и повышенных чрезвычайных (с впрыском смесей внутреннего
охлаждения) режимов зависит от общей длительности наработки на этих
режимах и степени увеличения механической напряженности на них. Если
напряженность на чрезвычайных режимах увеличивается более чем на 20%
по сравнений с напряженностью на номинальном режиме и общая дли-
тельность наработки на них превышает 5 часов (1—=-2- 10е циклов), то
следует производить расчет на прочность авиационного двигателя на
двух режимах: на номинальном и на чрезвычайном.
В последующих изданиях, по мере накопления соответствую-
щих данных и опыта, расчет по допускаемым напряжениям будет
заменен расчетом на переменные напряжения для деталей, не охва-
ченных этим новым методом расчета в настоящем издании (например,
расчет на прочность деталей распределительных механизмов).
В составлении книги принимали участие следующие авторы:
В. Н. Ширяев—часть 1.
С. В. Серенсен—разделы 210000 и 260000.
М. Я. Кушуль—раздел 220000.
Н. К. Смольянинов—разделы 230000 и 530000 и соавтор части 4.
Т. А. Сыромятникова—раздел 240000.
И. А. Биргер—раздел 250000.
В. К. Житомирский—часть 3.
И. М. Тетельбаум—раздел 390000.
Н. И. Дружинин—соавтор части 4.
И. А. Пугачев—раздел 510000.
А. И. Петрусевич—раздел 520000.
С. Н. Куцаев—часть 6.
Редактором разделов, касающихся вопросов прочности (часть 2
и раздел 520000), является действительный член АН УССР С. В. Се-
ренсен.
Редактором разделов, касающихся вопросов кинематики и ди-
намики (части 1, 3, 4, 6 и разделы 510000 и 530000), является доктор
технических наук И. Ш. Нейман.
ЧАСТЬ 7
КИНЕМАТИКА И ДИНАМИКА
КРИВОШИПНО-ШАТУННЫХ МЕХАНИЗМОВ
УРАВНОВЕШИВАНИЕ СИЛ ИНЕРЦИИ
АВИАЦИОННЫХ ДВИГАТЕЛЕЙ
СОДЕРЖАНИЕ
части 1
КИНЕМАТИКА КРИВОШИПНО-ШАТУННЫХ механизмов цоооо
Кинематика нормального кривошипно-шатуниого механизма.............. 111000
Основные понятия и обозначения.................................... 111100
Угловые перемещение, скорость и ускорение шатуна.................. 111200
Относительная угловая скорость вращения шатуна вокруг шатунной шейки
> коленчатого вала........................................... 111300
Перемещение поршня...................................• ... 111400
Скорость поршня................................................... 111500
Ускорение поршня.................................................. 111600
Определение основных размеров нормального кривошипно-шатунного
механизма................................................... 111700
Кинематика кривошипно-шатунного механизма с прицепным шатуном.
Случай, когда Тг=т............................................... 112000
Основные понятия и обозначения................................... 112100
Угловые перемещение, скорость и ускорение прицепного шатуна . . . 112200
Перемещение поршня в боковом цилиндре............................ 112300
Скорость поршня бокового цилиндра................................ 112400
Ускорение поршня бокового цилиндра............................... 112500
Определение основных размеров кривошнпно-шатунного механизма с
прицепным шатуном и уг=у...................................... 112600
Кинематика кривошипно-шатунного механизма с прицепным шатуном.
Случай, когда . . . ........................................ 113000
Угловые перемещение, скорость и ускорение прицепного шатуна . . . 113100
Перемещение поршня в боковом цилиндре........................ 113200
Скорость поршня бокового цилиндра................................. 113300
Ускорение поршня бокового цилиндра................................ 113400
Определение основных размеров кривошипно-шатунного механизма с
прицепным шатуном и .......................................... 113500
СИЛЫ, ДЕЙСТВУЮЩИЕ В КРИВОШИПНО-ШАТУННЫХ МЕХАНИЗМАХ 120000
Силы от инерции двигающихся масс кривошипно-шатунного механизма 121000
Силы инерции шатуна............................................... 121100
Определение центра тяжести и момента инерции шатуна............... 121200
Силы, действующие в кривошипно-шатунном механизме от сил инерции
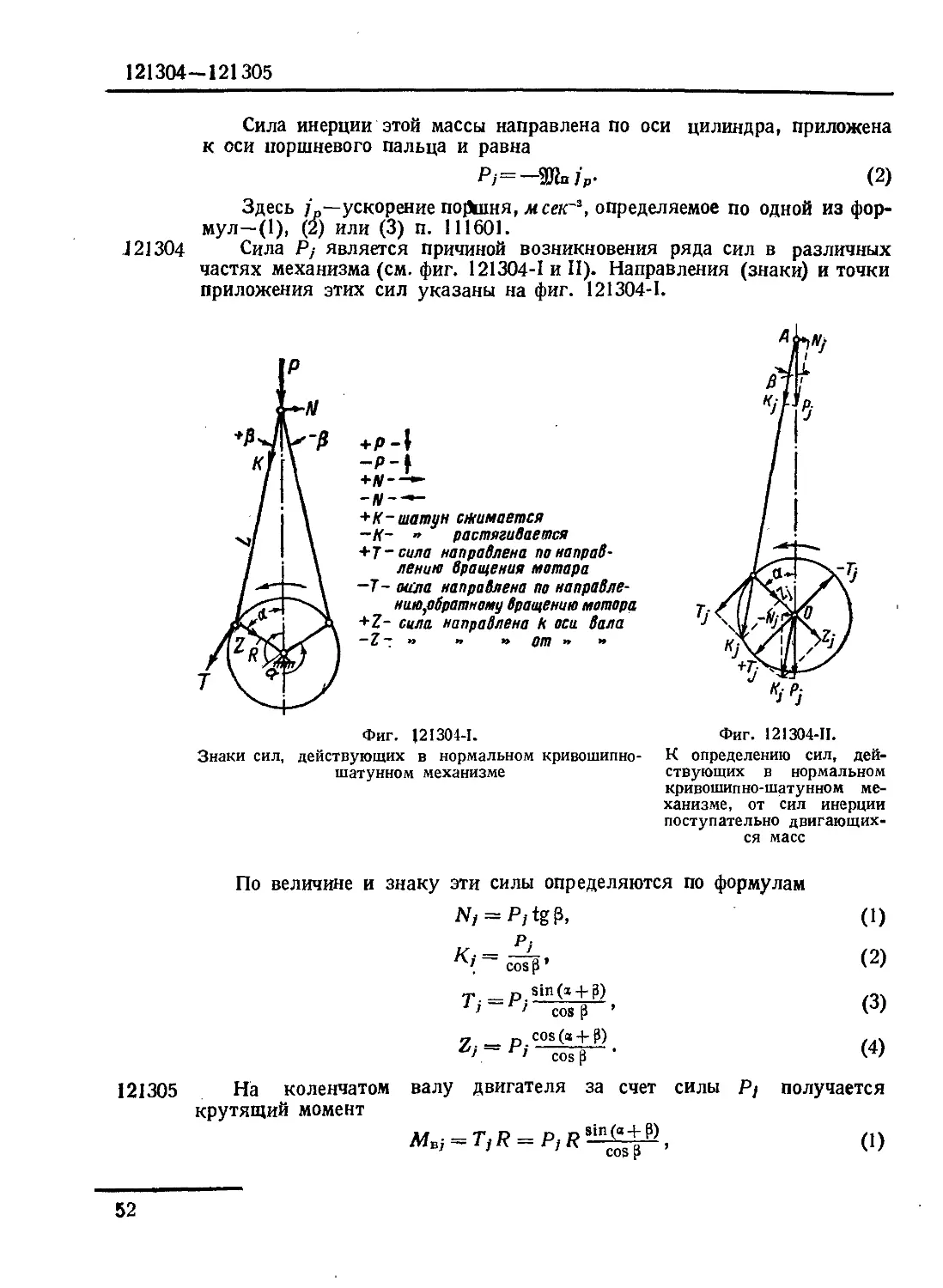
поступательно двигающихся масс в главном цилиндре............. 121300
Выражения для Pj, Tj, и в форме рядов Фурье для случая
нормального кривошипно-шатунного механизма ................... 121400
Силы, действующие в кривошипно-шатунном механизме, от сил
инерции поступательно двигающихся масс в боковом цилиндре . . . 121500
13
Выражения для Pji, Tji, и ЛГф^вформе тригонометрических
полиномов для случая кривошипно-шатунного механизма с прицепным
шатуном ........................................................ 121600
Силы инерции вращательно двигающихся масс........................ 121700
Силы^от рабочих газоц' в цилиндрах двигателя....................... 122000
Определение сил давления газов на поршень по углу поворота кривошипа 122100
Силы, действующие в кривошипно-шатунном механизме, от рабочих
газов в главном цилиндре....................................... 122200
Силы, действующие в кривошипно-шатунном механизме, от рабочих газов
в боковом цилиндре . .......................................... 122300
Гармонический анализ тангенциальных сил от газов................. 122400
Построение индикаторной диаграммы .............................. 122500
Суммарные силы от; газов и инерции двигающихся масс, действующие в
кривошипио-шатуииом механизме двигателя .......................... 123000
Суммарные силы, действующие в кривошипно-шатунном механизме, от
рабочих газов и инерции поступательно двигающихся масс одного
цилиндра ....................................................... 123100
Порядок вспышек в авиационных двигателях разного типа............ 123200
Суммарные силы от всех цилиндров, действующие на данную
кривошипную шейку.............................................. 123300
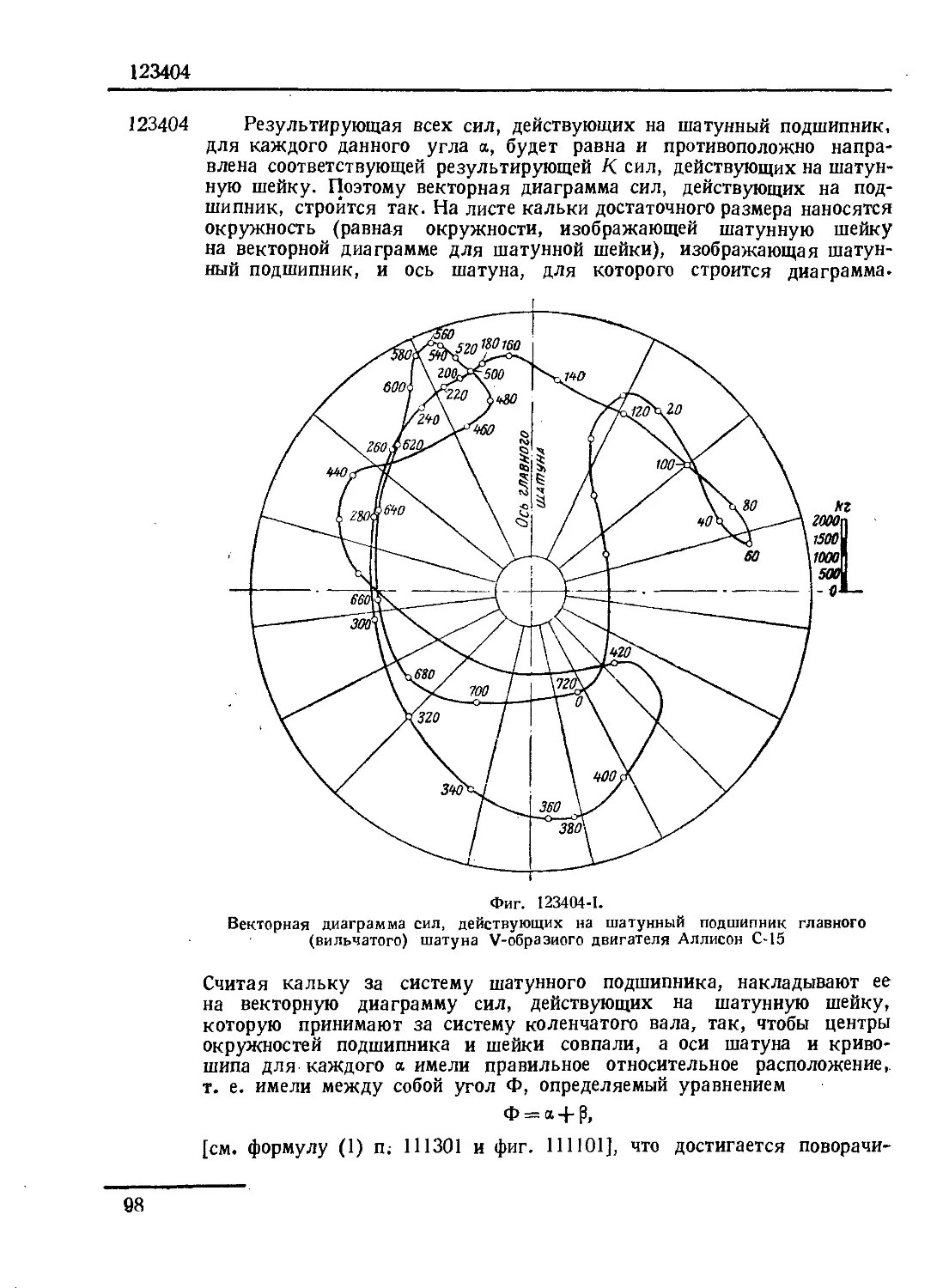
Векторные диаграммы результирующих сил, действующих на шатун-
ную шейку и шатунный подшипник. Средняя сила, действующая на
шатунную шейку. Графики для определения средних сил, действующих
на шатунную шейку в авиационных двигателях разного типа........ 123400
Результирующая сил, действующих нормально к стенке главного цилин-
дра, при наличии кривошипно-шатунного механизма с прицепными
шатунами........................................ . ............. 123500
Крутящие моменты, передающиеся через опорные шейки коленчатого
вала. Суммарный крутящий момент на валу двигателя............... 123500
УРАВНОВЕШИВАНИЕ СИЛ ИНЕРЦИИ АВИАЦИОННЫХ ДВИГАТЕЛЕЙ 130000
Силы, вызывающие неуравновешенность авиационного двигателя .... 131000
Общие условия уравновешенности сил инерции авиационного двигателя 132000
Уравновешивание сил]ииерции вращающихся масс авиационного двигателя 133000
Признаки полной уравновешенности вращающихся масс............ 133100
Уравновешивание вращающихся масс................................. 133200
Балансировка вращающихся деталей................................. 133300
Уравновешивание сил инерции поступательно двигающихся масс авиацион-
ного двигателя.................................................... 134000
Выражения для сил инерции поступательно двигающихся масс .... 134100
Уравновешивание сил инерции к-го порядка поступательно двигающихся
масс двигателя................................................ 134200
Уравиовешивание^сил инерции двигателей различных типов............. 135000
Уравновешивание элементарных двигателей: одноцилиндрового и двух-
цилиндрового V-образного ................................... 135100
Уравновешивание однорядных двигателей.......................... 135200
Уравновешивание V-образных двигателей .......................... 135300
Уравновешивание W-образных двигателей.......................... 135400
Уравновешивание звездообразных двигателей........................ 135500
Уравновешивание Н-образных двигателей.......................... 135600
Уравновешивание многоцилиндровых двигателей особых типов......... 135700
Таблица уравновешенности сил инерции в авиационных двигателях
различного типа............................................. 135800
14
Влияние крутильных колебаний системы коленчатого вала иа уравновешенность 136000
двигателя
Литература и источники к 100000.
Приложения к части 1
ТАБЛИЦЫ ДЛЯ ПОДСЧЕТА КИНЕМАТИКИ И ДИНАМИКИ НОРМАЛЬНОГО
КРИВОШИПНО-ШАТУННОГО МЕХАНИЗМА
Таблица 1. Угловые скорости коленчатого вала ш и их квадраты <оа.
Таблица 2. Величины Sin a, COS a, sin 2а,. cos 2а, sin За, cos За, sin 4а, cos 4а при
изменении а от 0 до 350°.
Таблица 3. Углы И° в зависимости от а и Л.
Таблица 4. Сумма углов (а + fi) в зависимости от а и Л.
Таблица S. Величины cos в зависимости от а и Л.
Таблица 6. Величины tg 3 в зависимости от а и Л.
Таблица 7. Величины в зависимости от а и Л.
Таблица 8. Величины в зависимости от а и Л.
Таблица 9. Значения для определения расстояний поршня от верхнего мерт-
К
вого положения (путей, проходимых поршнем):
|₽=(l + |)_(C0Sa + jcOSfi).
Таблица 10. Значения для определения ускорений поршня:
=—-□ ГCOS(a+^) + ~ (1 .
Ru>2 COS (5(_ ' 1 \ “ / J
Таблица 11. Значения — ^ц>г для определения тангенциальных сил Т;- от инер-
ции поступательно двигающихся масс:
Т] Sin(a + B)r , пч 1 /ЧЛ’1
аЛпДо»3 cosap [C0S(a+3)+A J ’
Ш т
Таблица 12. Значения ~ для определения угловых скоростей шатуна:
/ “5 = Я cos а
О> COS 3 ‘
110000-111104
КИНЕМАТИКА
КРИВОШИПНО-ШАТУННЫХ МЕХАНИЗМОВ *
КИНЕМАТИКА НОРМАЛЬНОГО КРИВОШИПНО-ШАТУННОГО механизма
Основные понятия и обозначения
Кривошипно-шатунный механизм, у которого ось цилиндра пересе-
кает ось коленчатого вала, называется нормальным (фиг. 111101).
При обычных кинематических и динамических расчетах угловую
скорость вращения кривошипа полагают постоянной. Однако при рас-
смотрении некоторых специальных вопросов, как, например, крутиль-
ных колебаний коленчатых валов и др., необходимо учитывать пере-
менность угловой скорости. В каждом таком случае необходимость
учета переменности угловой скорости обязательно оговаривается особо.
Кинематика кривошипно-шатунного механизма охватывает следу-
ющий круг вопросов: угловые перемещения и скорость кривошипа, угло-
вые перемещения, скорость и ускорение шатуна, линейные перемещения,
скорость и ускорение поршня.
Метод изложения принимаем аналитический, поэтому все кинема-
тические величины выражаем аналитически в виде функций от геомет-
рических размеров механизма и независимого переменного, за которое
принимается угол поворота кривошипа а.
Обозначения (см. фиг. 111101):
R — радиус кривошипа; мм, см или м.
L — длина шатуна; мм, см или м.
Z —отношение длины радиуса кривошипа к длине шатуна.
а —угол поворота кривошипа от его начального положения, за кото-
рое принимается положение кривошипа в момент совпадения
его с осью цилиндра (фиг. 111101), отсчитываемый в направле-
нии вращения коленчатого вала двигателя от 0 до 360е; гра-
дусы или радианы.
Р —угловое перемещение шатуна, отсчитываемое от оси цилиндра
до оси шатуна; угол Р принимается положительным, когда
шатун отклонен от оси цилиндра в сторону вращения криво-
* Часть 1 «Кинематика и динамика кривошипно-шатунных механизмов. Уравно-
вешивание сил инерции авиационных двигателей» составлена, в основном, по книге
И. Ш. Неймана «Динамика авиационных двигателей», Оборонгиз, 1940.
2 Авиац. иоршн. двигатели
110000
111000
111100
111101
111102
111103
111104
111-105
17
111106-111201
шипа; при отклонении шатуна в другую сторону от оси цилиндра
угол р считается отрицательным; градусы и радианы.
SP — перемещение поршня, отсчитываемое как расстояние оси поршне-
вого пальца от ее верхнего мертвого положения; мм, см или м.
vp — скорость поршня; мсек-1.
Ур —ускорение поршня; м сек-2.
и —угловая скорость вращения кривошипа; сек"1.
п — число оборотов вала двигателя в минуту; об/мин.
/ — время поворота кривошипа от его начального положения до рас-
сматриваемого; сек-
(Vp)cP-средняя скорость поршня; мсек1.
Ф —угол отклонения оси шатуна от плоскости кривошипа; градусы
или радианы.
шд —угловая скорость вращения шатуна; сек"1.
6 х.—угловое ускорение шатуна; сек-2.
Для размерных величин указана размерность и те единицы, в кото-
рых эти величины принято измерять. Если указано несколько единиц
измерения, это значит, что в последующем изложении применяются
разные единицы измерения. Например, при подсчете Sp, R выгодно изме-
рять в мм, а при подсчетах vp и jp — в м, для того чтобы избежать
в первом случае многозначных десятичных дробей, а во втором—много-
значных чисел. Угловые величины под знаками тригонометрических
функций при пользовании таблицами тригонометрических функций
следует измерять в градусах, а при дифференцировании и интегриро-
вании обязательно в радианах.
111106 Для расчета кинематики необходимо иметь заданными геометриче-
ские размеры L, R и число оборотов коленчатого вала п, об/мин.
111107 Угловая скорость вращения коленчатого вала: ш = ^= const, сек1.
111108 Угол поворота кривошипа от его начального положениям = ш/.
111200 Угловые перемещение, скорость и ускорение шатуна
111201 Угловое перемещение шатуна (фиг. 111101)
Р ® arc sin (k sin а). (1)
Нулевые значения отклонения шатуна
будут при
а = 0° и а— 180*.
Максимальные отклонения шатуна
(₽)шах = arcsin(±A) (2).
будут при
а == 90* и а = 270*.
Фиг. 111101.
Нормальный кривошипно-
шатунный механизм
18
111202-111203
Угловая скорость шатуна 111202
a,i==di = )'a,cM’ сек • (’)
Нулевые значения угловой скорости шатуна будут при
а = 90° и а = 270°.
Максимальные значения угловой скорости шатуна
max = dr (2)
будут при
а = 0° и а= 180°. •
Угловое ускорение шатуна 111203
е*=-Ч1-*2)“2^секЛ (1)
Нулевые значения углового ускорения шатуна будут при
а = 0° И а = 180°,
т. е. при нулевых значениях отклонения шатуна.
Максимальные значения углового ускорения шатуна
(6х)тах=Т^1£=<»2 (2)
будут при
а = 90° и а =270°,
т. е. в моменты максимальных отклонений шатуна, когда угловая
скорость шатуна равна нулю.
На фиг. 111203 дана диаграмма закона протекания по углу
, 1
поворота кривошипа а для л = .==-.
0,3
Фиг. 111203.
Закон протекания функции для Я = ~
2»
19
111300-111401
111300
111301
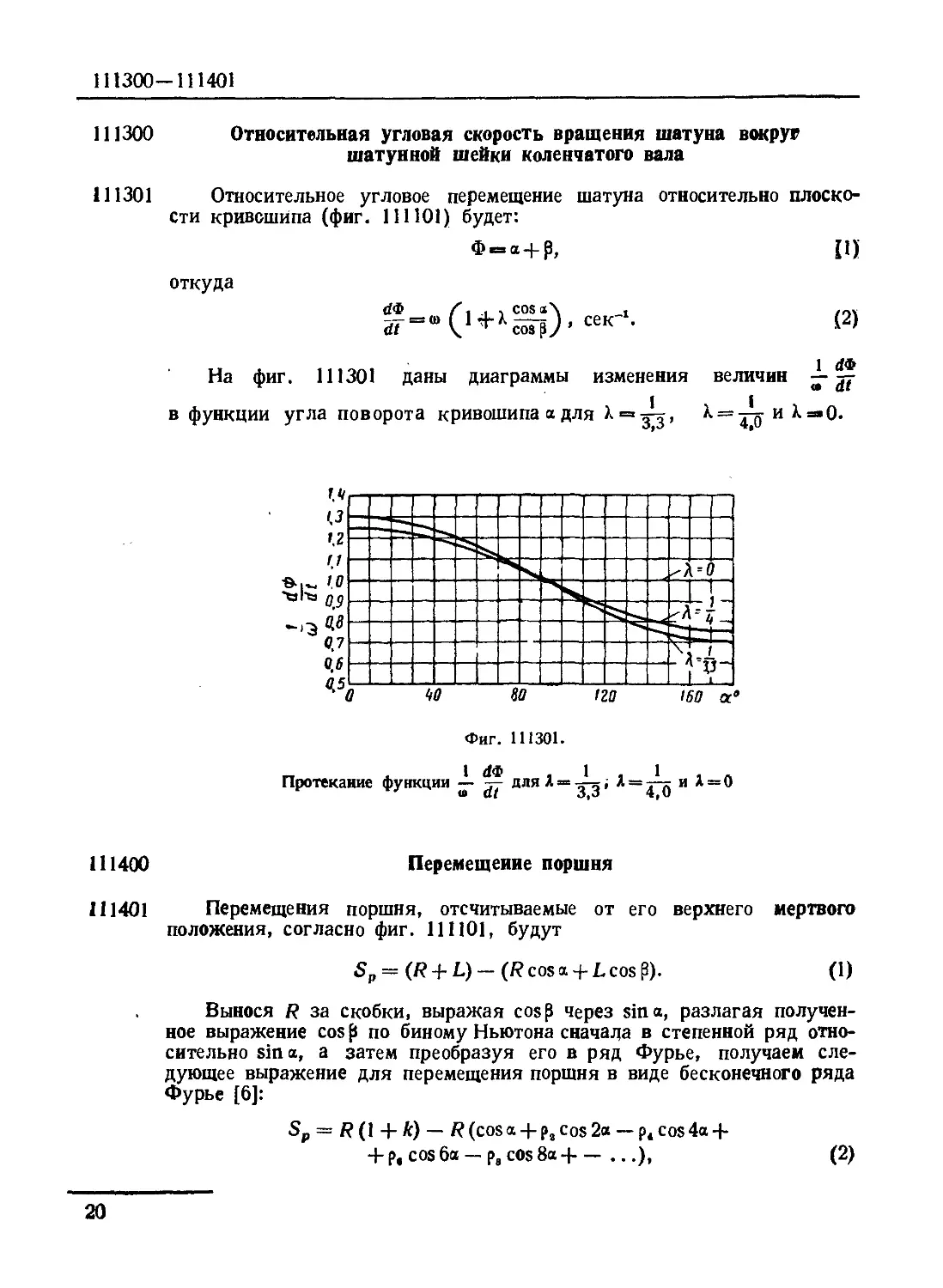
Относительная угловая скорость вращения шатуна вокруг
шатунной шейки коленчатого вала
Относительное угловое перемещение шатуна относительно плоско-
сти кривошипа (фиг. 111101) будет:
Ф«=а + р, (1)
откуда
1 4Ф
На фиг. 111301 даны диаграммы изменения величин —
в функции угла поворота кривошипа а для Ь = -^ик=з0.
Фиг. 111301.
1 йф 1 1
Протекание функции — для Л==уд; ^ = 4^5 и = ®
111400
111401
Перемещение поршня
Перемещения поршня, отсчитываемые от его верхнего мертвого
положения, согласно фиг. 111101, будут
5р = (/? -f- L) — (R cos а + L cos ^).
(О
Вынося R за скобки, выражая cosp через sin а, разлагая получен-
ное выражение cos по биному Ньютона сначала в степенной ряд отно-
сительно sin а, а затем преобразуя его в ряд Фурье, получаем сле-
дующее выражение для перемещения поршня в виде бесконечного ряда
Фурье [6]:
Sp = R(l +к) — R (cos а + рг cos 2а — p4cos4a +
+ р, cos 6а — р8 cos 8а --------...),
(2)
20
111401
где
Х’Д- 128s ' • • • 1
Рз = |* + ^’ + 5Т2К‘ + 35 у , . 2048 Л + • • •
Р< = ях,+А>',+ — К7 4- 4093 ‘ О)
Р. = 512 К + — + 2048 ’
Р8 = 5 1 128s + 1
Как видно, ряд Фурье [формула (2)] является тригонометрическим
несимметричным (так как в нем содержатся лишь косинусовые члены,
а синусовые отсутствуют) рядом, содержащим, кроме нулевой и пер-
вой, только четные кратности угла а. Члены ряда Фурье называются
гармониками, а кратность в них угла а—-порядком гармоник. Таким
образом ряд, представленный формулой (2), кроме нулевого и первого
порядков, содержит гармоники лишь четных порядков.
В таблице 111401 приведены числовые значения коэффициентов
/с, Р«> Ро Р« и Р8» подсчитанные по формулам (3) с точностью до членов
содержащих X7, для различных значений X — от 3^4 Д° 5^5 •
Таблица 111401
Числовые значения коэффициентов к, р2, р«> Р« н Ре для различных Л
л к Pi Р« Р« Ре
1 3,4 0,0747 0,0753 0,000424 0,00000501 0,0000000582
1 3,5 725 729 388 417 475
1 3,6 704 708 355 352 366
1 3,7 686 689 326 307 . 322
1 3,8 667 670 301 237 267
1 3,9 649 652 277 234 222
1 4,0 632 635 256 205 186
21
111401
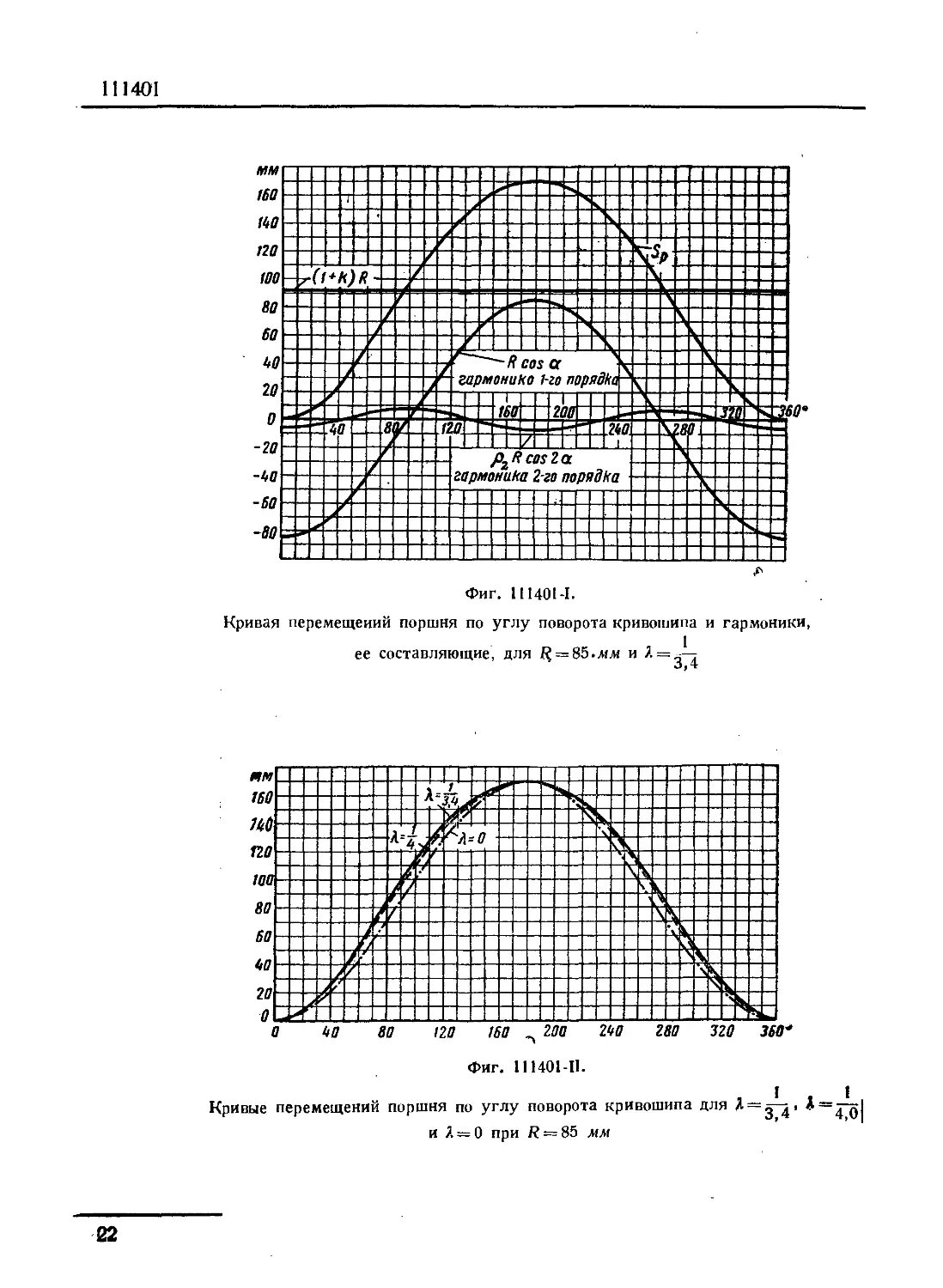
Фиг. 111401-1.
Кривая перемещений поршня по углу поворота кривошипа и гармоники,
ее составляющие, для Й = 85.мл1 и А = ~
3,4
Кривые перемещений поршня по углу поворота кривошипа для Л = 3-4'
и Я = 0 при R = 85 мм
22
111500-111501
Из этой таблицы видно, как быстро с увеличением порядка гар-
моники уменьшаются числовые значения коэффициентов. Поэтому
с достаточной для практики точностью разложение часто ограничивают
вторым порядком и получают приближенную формулу
Sp = К [(j+7) — (cosa + 4cos2a)] • <4)
На фиг. 111401-1 даны кривая перемещений поршня для R = 85 мм
и X = и ее составляющие —нулевая, первая и вторая гармоники.
На фиг. 111401-11 даны кривые Sp по а для
R — 85 мм и X = оЦ, а = Л и к = 0.
э,4 4,U
Скорость поршня
Точное выражение для скорости поршня получается дифференциро-
ванием уравнения (1) п. 111401 повремени t и последующими преобра-
зованиями, что дает:
dS„ dsp п sin (а + Р) . Z1.
= ~dF = “ = R<0 м се1Г ’ 0)
Выражение для скорости поршня в виде ряда Фурье полу-
чается дифференцированием уравнения (2) п. 111401, что дает
vp = R<o (sin a + 2p2 sin 2a — 4p*sin 4a-f-6pesin 6a — 8pasin 8a-|-. ..). (2)
В табл. 111501-1 приведены числовые значения коэффициентов
разложения в ряд Фурье скорости поршня для разных X.
Таблица 111501-1
Числовые значения коэффициентов 2рг, 4р4, 6рв н 8рв
для различных Л
111500
111501
л 2р2 4р< 6рв 8рв
1 3,4 0,1535 0,00170 0,0000301 0,000000465
1 3,5 . 1458 155 250 380'
1 3,6 1416 142 211 293
1 3,7 1378 130 184 258
1 3,8 1340 120 160 214
1 3,9 1304 111 140 178
1 4,0 1270 102 123 149
23.
111501
Достаточно точное приближенное выражение для скорости поршня
будет:
vp = Ru> (%in а + ~ Sin 2с0 . (3)
На фиг. 111501-1 даны кривые скоростей поршня для R — 0,085 м,
п = 2000 об/мин и значений
Кривые скоростей поршня для = ^ = 4*о и —° ПРИ R =0,085 м
и п = 2000 об/мин
На фиг. 111501-П дана кривая скорости поршня для /? = 0,085 м,
X = ~, п = 2000 об/мин и составляющие ее гармоники первого и вто-
Фиг. 111501-П.
Кривая скорости поршня по углу поворота кривошипа и гармоники,
ее составляющие, для /? = 0,085 м, и л = 2000 об/мин
24
111501
Для оценки качества двигателя часто пользуются средней ско-
ростью поршня:
(i'p)cp = R“>, м сек'1. (4)
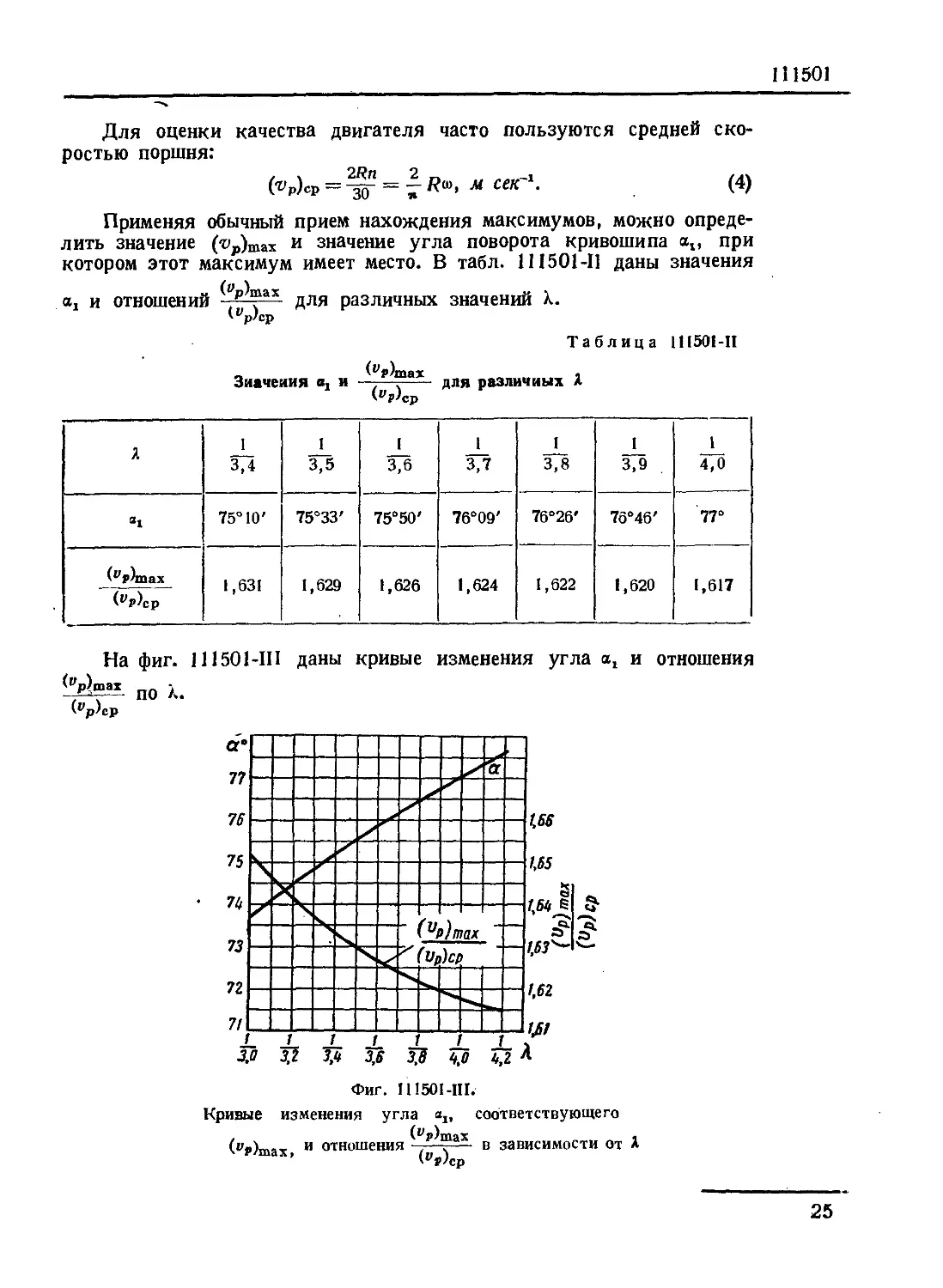
Применяя обычный прием нахождения максимумов, можно опреде-
лить значение (г’р)тах и значение угла поворота кривошипа а1( при
котором этот максимум имеет место. В табл. 111501-11 даны значения
а, и отношений для различных значений л.
'%'ср
Таблица 11I501-II
_ (у₽)тах .
Зиачеиия а, и —-— ---- для различных л
'^Р'ср
я 1 3,4 I 3,5 I 3,6 1 3,7 I 3,8 I 3,9 1 4,0
“1 75°10' 75°33' 75°50' 76°09' 76°26' 76°46' 77°
(^pXnax (^р)ср 1,631 1,629 1,626 1,624 1,622 1,620 1,617
На фиг. 111501-1П даны кривые изменения угла а, и отношения
по л.
(‘'pJcp
Фиг. II1501-П1.
Кривые изменения угла alt соответствующего
и отношения в зависимости от А
v^f^cp
25
111600-111601
111600 Ускорение поршня
II1601 Точное выражение ускорения поршня получается дифференцирова-
нием по времени t и последующим преобразованием уравнения (1)
п. 111501, что дает:
/ = ^ = (Л = /?Ю* Гсоз(а-Ьр) + > cos^ j
>Р dt da K L COS p Tcos3d]
Выражение для ускорения поршня в виде ряда Фурье получается
дифференцированием по времени t уравнения (2) п. II1501, что дает:
/р = /?<вг (cos а + 4?2 cos 2а — 16?4 cos 4а +
+ Збрв cos ба — 64?e cos 8а Н-...). (2)
В табл. 111601-1 даны числовые значения коэффициентов 4р2, 16?v
Зор, и 64р„ для разных к.
Таблица 111601-1
Числовые значения коэффициентов 4р2, 16р4, ЗЗр, и 64?,
для различных Я
А 4р3 16р4 ззр. 64р„
1 3,4 0,3012 0,00678 0,000180 0,00000372
1 3,5 2916 621 150 394
1 3,6 2832 568 127 234
1 3/7 275-5 522 НО 205
1 3,8 2680 482 0,0000931 (71
1 3,9 2608 443 842 142
1 4,0 2540 410 738 119
Так как коэффициенты гармоник быстро убывают (как это видно из
таблицы), то с достаточной для практики точностью ускорение поршня
можно брать, ограничиваясь в ряде (2) членами лишь до второй гар-
26
111601
моники включительно, а сам коэффициент формула (3) п. 111401,
брать в виде р2 = -^к, отбрасывая его члены, содержащие высшие
степени X, что дает:
/р = /?ш2 (COS а 4- л COS 2а). (3)
На фиг. 111601-1 изображены кривая ускорения поршня по углу
поворота кривошипа и первая и вторая гармоники этой кривой для
R = 0,085 м и л = 2000 об/мин.
Фиг. 111601-1.
Крива# ускорения поршня по углу поворота кривошипа и гармоники,
ее составляющие, для /? = 0,085 м, Л = и п = 2000 об/мин
Выражения для максимальных значений ускорения поршня и соот-
ветствующих им углов поворота кривошипа получаются по обычным
правилам отыскания максимумов и минимумов. Если для этой цели
использовать приближенное выражение (формула 3), то получим соот-
ветствующие уравнения для углов:
sin а = 0 и cos а = — ~ . (4)
По первому уравнению углы будут иметь два значения:
04 = 0° и а2=180°.
Первому будет соответствовать положительное значение
(/'p)max = (1 + X) (5)
второму—отрицательное значение
(/Р)тах=-(1 — Х)/?Ш*. (6)
27
111601
Второе уравнение для cos a (cosa.= — дх) имеет смысл лишь для
ему соответствует отрицательное значение
(/р)тах-----С §0 R*0*’
(7)
Нулевые значения ускорения поршня будут при тех углах пово-
рота кривошипа, когда скорость поршня имеет максимальные значе-
ния (см. табл. 111501-11).
На фиг. 111601-11 даны для сравнения кривые ускоре- ,
ний поршня для /? = 0,085 м, п — 2000 об/мин при к= Х = -~,
и /. = 0.
Фиг. 11160I-II.
Кривые ускорений поршня по углу поворота кривошипа для Л = ,
i = и А = 0 при /? = 0,085 ж.и п = 2000 об/мин
Для ускорения практических подсчетов кинематики нормальных
кривошипно-шатунных механизмов в конце этой части помещены%таб-
лицы (табл. 1 — 10 и 12) значений величин ш, ws, sin a, cos а, sin 2а,
COS 2а, sin За, cos За, sin 4а, cos 4а, [3, (а-|-[3), cosfi, tg ft, »
’ Tba* и V" по УГЛУ поворота кривошипа а, подсчитанных
„,,11
по точным формулам для "различных значении л от А = уу до j-g
с изменением знаменателя через 0,1.
28
111700-112101
Определение основных размеров нормального 111700
кривошипно-шатунного механизма
Основными и достаточными геометрическими размерами нормаль- 111701
него кривошипно-шатунного механизма являются длина радиуса криво-
шипа R и длина шатуна L.
Из этих двух основных размеров первоначальным является длина
радиуса кривошипа R, равная в нормальном кривошипно-шатунном
механизме половине хода поршня. х
При заданных для проектируемого двигателя мощности и числе
оборотов его Коленчатого вала ход поршня определяется выбранными
конструктором числом цилиндров двигателя, отношением хода поршня
s
к диаметру цилиндра и литровой мощностью двигателя.
После того как определена длина радиуса кривошипа R, длину
шатуна L определяют, задаваясь величиной отношения 5 = к. При
выборе X необходимо удовлетворить нескольким противоречащим друг
другу требованиям. С одной стороны, выбор малых значений величины X
диктуется желанием уменьшить величину давления поршня на стенку
цилиндра и уменьшить вторую и высшие гармоники сил инерции по-
ступательно двигающихся масс, что имеет большое значение для
уравновешивания двигателя. С другой стороны, малым значениям X
соответствуют большие длины шатуна L и, следовательно, большие
габариты и вес двигателя. Желание уменьшить габариты и вес двига-
теля заставляет выбирать бблыпие значения X.
Практика выработала для различных типов двигателей свои наи-
выгоднейшие средние значения величины X, а именно:
Для V-образных авиационных двигателей величина X лежит обычно
в пределах от до (0,312 — 0,294).
Для звездообразных и W-образных авиационных двигателей вели-
чина X берется обычно в пределах от дЦ до д^ (0,270— 0,256).
Зная R и X, длину шатуна L определяют по формуле
т R
L=i'
КИНЕМАТИКА КРИВОШИПНО-ШАТУННОГО МЕХАНИЗМА С ПРИЦЕПНЫМ 112000
ШАТУНОМ. СЛУЧАЙ, КОГДА 'Г; = 'Г
Основные понятия и обозначения 112100
В случае работы нескольких шатунов на одной кривошипной шейке 112101
коленчатого вала в авиационных двигателях обычно применяется
кривошипно-шатунный механизм с прицепными шатунами. У такого
механизма шатун одного из цилиндров входит в шарнирное соедине-
ние непосредственно с шейкой кривошипа. Этот шатун и соответствую-
щий ему цилиндр называются главными. Шатуны остальных цилиндров
входят в шарнирные соединения с главным шатуном посредством спе-
циальных пальцев, расположенных на кривошипной головке главного
29
112102
шатуна. Такие шатуны получили название прицепных шатунов, а соот-
ветствующие им цилиндры называются боковыми.
На фиг. J12101 дана схема кривошипно-шатунного механизма
с одним прицепным шатуном, на которой проставлены основные обозна-
чения для этого механизма.
Фиг. 112101.
Кривошипно-шатунный механизм с прицепным шатуном
112102 Обозначения (фиг. 112101):
/? — радиус кривошипа коленчатого вала; мм, см или м.
L — длина главного шатуна; мм, см или м.
а — угол поворота кривошипа от оси главного цилиндра; градусы
или радианы.
р — угол отклонения оси главного шатуна от оси главного цилиндра;
градусы или радианы.
г— расстояние оси пальца прицепного шатуна от оси подшип-
ника кривошипной головки главного шатуна; мм, см или м.
I—длина прицепного шатуна; мм, см или м.
а(—угол поворота кривошипа от оси рассматриваемого бокового
цилиндра; градусы или радианы.
— угол отклонения, или угловое перемещение, оси прицепного
шатуна от оси соответствующего бокового цилиндра; угол Pi
принимается положительным, если ось прицепного шатуна
отклонена от осп своего бокового цилиндра в сторону враще-
ния кривошипа; при отклонении оси прицепного шатуна
в другую сторону от оси своего бокового цилиндра угол
принимается отрицательным; градусы или радианы.
i — число цилиндров одной звезды двигателя.
Y — угол между осями бокового и главного цилиндров звезды;
градусы или радианы.
Yt — угол между осью главного шатуна и плоскостью, проведен-
ной через ось подшипника кривошипной головки главного
шатуна и ось пальца прицепного шатуна; градусы или
радианы.
30
112200-112201
ф —разность между углами уг и у (ф = Т1 — у); градусы или
радианы.
Ye —угол между осями двух соседних цилиндров; градусы или
радианы.
S—расстояние оси пальца поршня главного цилиндра (текущее,
для данного я) от оси коленчатого вала; мм, см или м.
So — расстояние оси пальца поршня главного цилиндра от оси
коленчатого вала в момент нахождения поршня в верхнем
мертвом положении; мм, см или м.
Sp — расстояние оси пальца поршня главного цилиндра от его
верхнего мертвого положения, текущее — соответствующее
углу а; мм, см или м.
Si — расстояние оси пальца поршня бокового цилиндра от оси
коленчатого вала для данного яг; мм, см или м.
Soi — расстояние оси пальца поршня бокового цилиндра от оси
коленчатого вала в момент нахождения поршня бокового
цилиндра в верхнем мертвом положении; мм, см или м.
(S^min — расстояние оси пальца поршня бокового цилиндра от оси
кривошипа в момент нахождения поршня в нижнем мертвом
положении; мм, см или м.
Spl — расстояние оси пальца поршня бокового цилиндра от его
верхнего мертвого положения в момент, соответствующий я(;
мм, см или м.
^ — скорость поршня главного цилиндра для данного а; мсек'1.
/р — ускорение поршня главного цилиндра для данного я; мсекг*.
Vpt — скорость поршня бокового цилиндра для данного я;; мсек1.
jpi — ускорение поршня бокового цилиндра для данного мсек ’.
ш — угловая скорость вращения коленчатого вала; сек-1.
е — степень сжатия двигателя.
D—диаметр главного и бокового цилиндров.
С — приведенное расстояние от оси коленчатого вала до дна
цилиндра (при этом условно пространство сжатия прини-
мается цилиндрическим, диаметра D, с плоским дном);
мм, см или м.
о», — угловая скорость прицепного шатуна; сек-1.
- угловое ускорение прицепного шатуна; сек-’.
У современных авиационных двигателей звездообразного типа или
многорядных применяются кривошипно-шатунные механизмы с при-
цепными шатунами и с уг = у. У двухрядных V-образных двигателей чаще
применялись кривошипно-шатунные механизмы с Yl Ф Y. В современ-
ных V-образных авиационных двигателях, за редким исключением,
применяются центральные шатуны.
Из фиг. 112101 видно, что
я=а(-|-р
Угловые перемещение, скорость и ускорение прицепного шатуна 112200
Проектируя на перпендикуляр к оси бокового цилиндра (фиг. 112101) 112201
/, R и г, получаем:
sin₽i = klsin(Rl— S), (1)
31
112202-112203
где
Значения Л и 8 см. на фиг. 112201.
Угловое перемещение прицепного шатуна будет
Фиг. 112201.
определению ки-
рг = arc sin[kisin(al—6)]. (2)
Из уравнения (2) следует, что нулевые значения рг,
т. е. совпадения оси прицепного шатуна с осью боко-
вого цилиндра, будут при
aIt — 8 и aIs = 8-[- 180°.
Максимальные отклонения оси шатуна от оси ци-
линдра будут при
К
аг8=до°+г
аи= 180°аг,.
(3)
нематических па-
раметров криво- Значения максимального угла отклонения опреде-
шипно - шатунного ляются ПО формуле:
механизма с при-
цепным шатуном
(Рг)шах = агс sin (± X,).
112202 Дифференцируя по времени t уравнение (2) п. 112201, получают
угловую скорость прицепного шатуна:
112203 Дифференцируя по времени t уравнение 112202, получают угловое
ускорение прицепного шатуна:
fi - - dtal г-, ) V Sin («»->) /Н
i dt dt2 1 ' cos’^i ‘ '
Максимальные значения (0{)max
(6Jmax= "F —y,— ш' (2)
/1-А?
будут при
— 90° 4- 6 — Яц и ^i = 270°-j-8 = 180° 4”
т. e. при максимальных отклонениях оси прицепного шатуна от оси
его цилиндра.
32
112300-112401
Перемещение поршня в боковом цилиндре 112300
Перемещения поршня в боковом цилиндре отсчитываются в виде 112301
расстояний оси поршневого пальца бокового цилиндра от его верхнего
мертвого положения.
Перемещение поршня бокового цилиндра (фиг. 112101) будет:
Spi — Sol — St = Sol — (R cosa, + r cos P + Z cos рг). (1)
Выражая cosp и cos^ соответственно через углы а и аг и разла-
гая их в ряды Фурье, получим выражение для перемещения поршня
бокового цилиндра в виде ряда Фурье относительно угла аг:
Spl = [Soi - г (1 - кЛ)- I (1 -?.г Лг)] - R {cos аг +
+ -£-[?гС05 2(аг + т)-р4С05 4(аг + т)+ - ...] +
+ ~^-{рггсоз2(аг — г)-рпсоз4(аг — о)+ — ...]}, (2)
где коэффициенты к, ps, р4 и т. д. определяются по формулам (3)
п. 111401, a kt, Ри, ри и т. д. —по тем же формулам с заменой
в них к на кг.
Достаточно точное для практики и удобное для расчетов прибли-
женное выражение для перемещения поршня бокового цилиндра
мОжно получить, если ряд Фурье (формула 2) ограничить гармони-
ками второго порядка, а коэффициенты к, кь рг и р!г ограничить
первыми членами, содержащими к и кг в первой степени. После неко-
торых преобразований [6] приближенное выражение для Spl приобре-
тает вид:
Spi = [Soi’-(r + Z)4-0,25(k3r + M/)]-
—J? [cos аг 4-0,25 Feos (2аг — 6)], (3)
где вспомогательный угол 6 определяется из уравнения:
лг
—j- sin 28 — sin 2f
tge = -J--------------, (4)
-yy-cos 2J + cos2f
а коэффициент F выражением:
лг
—j- cos 28 4- cos 2 f
F =' -Г -----cosl---- • (5)
Скорость поршня бокового цилиндра 112400
Дифференцируя по t выражение (1) п. 112301, после соответствую- 112401
щих преобразований получают точное выражение для скорости поршня:
dSp, nr- , г, е г sin 2(ai-|-г) ,
= -ДГ = R(° ISin + °’5 '' Т - соЛ +
+ 0 5k . (1)
1 ь COS Pl J ' '
3
Авиац. порши, двигатели
33
112500—112601
Для получения -ор, в виде ряда Фурье в функции угла а, следует
продифференцировать по t выражение (2) п. 112301:
vpi = R® {sin at + [2p2 sin 2 (ar 4- y) - 4p4 sin 4 (a, 4- y) 4- +
+ x'[2?I,sin2(a/-8)-4pI<sin4(a/-8)4- — ...]}. (2)
Приближенное выражение для vp{ получается дифференцированием
по t выражения (3) и. 112301:
= R® [sin а( + 0,5 F sin (2а, — 6)]. (3)
112500 Ускорение поршня бокового цилиндра
112501 Дифференцируя по t выражение (1) п. 112401, получают точное
выражение ускорения поршня:
{cosa‘ +
} 7 Г C0s2(3, + y) Л2 sin2 2 (а, + у) Л
' L [_ cos p 4 * cos3 ji J '
л г COS 2 (a, - «) Д* Sin2 2 (a, - 3) -I i
'l L L cos p, * 4 cos3 p, J j ' '
Выражение в виде ряда Фурье получают дифференцированием по t
выражения (2) п. 112401:
ур, =/?о>2 {cosa,4-[4р2 cos 2 (а,4-у) — 16р4 cos4 (a, 4- у) + — ...] +
+ -7; Hbcos 2(а, — 8) — 16р,4cos4(а, — 8)4- — •••]}• (2>
Приближенное выражение для /р, получается дифференцированием
по t выражения (3) п. 112401
/pi — R^2 [cos a, 4- F cos (2a, — 0)], (3)
где вспомогательный угол 0 и коэффициент F находятся соответствен-
но по формулам (4) и (5) п. 112301.
112502 Для обычных расчетов кинематики авиационных двигателей с
прицепными шатунами и у, = у употребляются достаточно точные при-
ближенные формулы: для перемещений формула (3) п. 112301, для ско-
ростей формула (3) п. 112401 и для ускорений формула (3) п. 112501.
112600 Определение основных размеров кривошипно-шатунного механизма
с прицепным шатуном и у, = у
112601 До определения размеров кривошипно-шатунного механизма
с прицепным шатуном определяются размеры главного кривошипно-
* шатунного механизма (см. 111701).
Для случая у, = у неизвестными величинами, подлежащими опре-
делегию, являются длина прицепного шатуна I и расстояние оси
34
112601
шатунного пальца прицепного шатуна от оси кривошипной головки
главного шатуна г. У V-образных и W-образных двигателей нужно
определить величину только одного г; ее берут наименьшей, допускае-
мой конструкцией главного шатуна. Величину I определяют из усло-
вия получения одинаковой степени сжатия как в главном, так и во
всех боковых цилиндрах.
У звездообразных двигателей обычно все прицепные шатуны
делают одинаковой длины. При этом из соблюдения постоянства сте-
пени сжатия во всех цилиндрах величины г получаются различными.
Их находят подбором.
Порядок подбора следующий:
1. Из конструктивных соображений для главного шатуна опреде-
ляют величину (r)min- Для наименьшего уклонения кинематики меха-
низмов с прицепными шатунами от кинематики механизма с главным
шатуном величины г следует иметь наименьшими.
2. Считая все г равными (r)min, из условия постоянства степени
сжатия определяют для всех цилиндров величины Z.
3. Наименьшую из определенных по п. 2 величин (Z)min прини-
мают за длину прицепных шатунов для всех боковых цилиндров.
4. По принятой длине прицепных шатунов I — (Z)min определяют
величины г для всех прицепных шатунов из условия постоянства
степени сжатия.
Условие постоянства степени сжатия для каждого из боковых
цилиндров выражается (см. фиг. 112101) равенством
С-(Sz)min_
c-soZ -s’ ('>
где С — приведенное расстояние дна цилиндра от оси коленчатого
вала, определяемое равенством
C = L + -|±;/?. (2)
Пользуясь равенством (1) и делая ряд упрощений и преобразова-
ний [6], получают следующую приближенную формулу для опреде-
ления длины прицепных шатунов:
Z= —
COS ? ’
(3>
где <р находится из уравнений
2 )^Zzsin-y-
tg<P =----г--- (4)
Здесь есть значение угла (3 в момент нахождения поршня
бокового цилиндра в верхнем мертвом положении. Принимая при-
ближенно, что в этот момент аг — 0, найдем
sin^j^ksiny. (5)
Для прицепных шатунов, пальцы которых расположены симметрич-
но относительно плоскости симметрии главного шатуна, значения г
попарно одинаковы по величине.
3*
35
112602—112603
В случае звездообразных двигателей определяют I по формулам
(3), (4) и (5) только для прицепных шатунов, расположенных в напра-
влении вращения двигателя по одну сторону от плоскости симметрии
главного шатуна. Наименьшее из полученных для I значений принимают
за длину прицепных шатунов для всех боковых цилиндров и по ней
определяют величины г для тех же цилиндров по формуле
г = L cos Pi +1 cos р., (б)
где угол р—тупой, определяемый из уравнения
sin р == -j- sin у; (7)
Пользование приближенными формулами для определения I и г
приводит к неодинаковости степени сжатия в разных цилиндрах. Но
эти расхождения в степенях сжатия меньше производственных допу-
сков на степень сжатия (±0,05). Поэтому пользование приближенными
формулами практически вполне допустимо.
112602 Ход поршня бокового цилиндра
S9l (S^tnin, (1)
где
Sel = R cos an±r cos pi +1 cos р» (2)
и
(Sl)rnln= R COS ala + r cos ps ± I cos pis. (3)
Здесь au И als представляют собой значения угла аг в момент на-
хождения поршня бокового цилиндра соответственно в верхнем и ниж-
нем мертвых
Угол aii
положениях,
определяется из уравнения
J72
— sin 29 — sin'2v
, rl • 1
ajl = JJ2 £
—- cos 29 4- cos -Ь у-
TI П?
Угол а» определяется из уравнения
лг
—г sin 29 — sin2r
. г/ *
tg = -Jji------------------------г
— cos 29 + cos 2v —
rl 1 Лг
(4)
(5)
Углы Pi и p2 определяют по формуле (1) п. 111201, а углы р» и p,s—
по формуле (2) п. 112201 по углам а» и а», учитывая, что a = aI±Y-
112603 При желании определить величины I и г более точно можно вос-
пользоваться формулами:
. (е- I) Ь+(е + 1) ₽- (есо5яц-созя1г) J?-(e cos fli- cos fl,) г
1 ~ е cos Ри - cos рг,
и
(e— I)L+(e+ I)R —(ecosati —со5я1г)7? —(ecos fl»-cos fl»)Z
** ' e cos fli — cos fl, *
36
126603
Фиг. 1I2605-I.
Кривые перемещений поршней различных цилиндров звездообразного двигателя
Бристоль «Центавр» XI
Фиг. 112605-П.
Кривые скоростей поршней различных
цилиндров звездообразного двигателя
Бристоль «Центавр» XI
Фиг. Ц2605-Ш.
Кривые ускорений поршней различных ци-
линдров звездообразного двигателя Бристоль
«Центавр» XI
37
112604-113201
Подсчет по этим формулам ведется также подбором. Сначала при-
ближенно находят I по формуле (3) п. 112601 и г по формуле (6)
п. 112601. По этим значениям I и г определяют углы aZ1, pzi, а!2,
Р2 и $l2. Подставляя значения этих углов в формулы (1) и (2), снова
определяют у?йе более точно и окончательно значения I и г.
112604 Для звездообразных двигателей
У1 = Г=(*-1)Ъ = (*-1)Т’
где
к—номер рассматриваемого цилиндра; этот номер отсчитывают, при-
нимая главный цилиндр первым, в направлении вращения двига-
теля.
В звездообразных двигателях:
/—одинаково у всех боковых цилиндров;
г, Л, klt F, Sol, (SJmin попарно одинаковы для цилиндров, симмет-
ричных относительно главного;
2, (^г)тах, 6, “ц> аг2 попарно одинаковы по величине, но противопо-
ложны по знаку для цилиндров, симметричных относительно
главного.
112605 На фиг. 112505-1, II и III (см. стр. 37) даны для примера по углу
поворота az кривые перемещений, скоростей и ускорений поршней раз-
личных цилиндров двигателя Бристоль «Центавр» XI.
113000 КИНЕМАТИКА КРИВОШИПНО-ШАТУННОГО МЕХАНИЗМА С ПРИЦЕПНЫМ
ШАТУНОМ. СЛУЧАЙ, КОГДА fi ¥= Т *
113100 Угловые перемещение, скорость и ускорение прицепного шатуна
113101 Угловые перемещения шатуна определяются (фиг. 112101) по
формуле:
sin р, = -у sin at — -у sin (р — ф).
113102 Точное выражение для угловой скорости прицепного шатуна по-
лучается дифференцированием-по t выражения 113101
= ^77 [4cos - GO 4 cos — ф) 1 •
113103 Точное выражение для углового ускорения прицепного шатуна
; получается дифференцированием по t выражения 113102
6‘=- [ 4sin а< - GO2 4sin - ф)+
+ GO 4cos^- ф) - (т)’sin ] •
113200 Перемещение поршня в боковом цилиндре
113201 Перемещение поршня (фиг. 112101) определяется по формуле:
Spl = Sel - Sz = SoZ - [tfcos az 4-r cos (p—ф) +1 cos pj. (1)
38
113300-113401
Приближенное выражение для перемещения поршня бокового цилин-
дра с точностью до гармоники второго порядка:
Spl = AB — R [Е cos (а, + Ф) + 0,25 F cos (2a, - 6)], (2)
где вспомогательные углы Фиби коэффициенты Е и F определяются
по формулам
Q у sin ф — I + Q-ЛЛ —% 7 cos ф] у sin ф cos т
tg Ф = — - j —; , (3)
1 + 1 + Г 1 -М - у Лр2 1 у cos ф у sin ф sin т
~ I 4" cos Ф sin у — f р2 cos ф 4- -J- Л cos 2Ф^ ~т sin 2Х
tg 6 = 1-4 1 --------^-7----—-V г -< , (4)
— —— -у Л — cos ф cos у + [ р3 cos ф +— Л -т- cos 2ф ) у cos 2у
1 [ ,+Q~’Afc- Т cos ] Е sin sin т
Е =--------------------ЕБГф , (5)
4 [т Т "Т А 7 cos Ф cos Y + (Y COS ф + -J- Л 7 cos 2ф^ -£ cos 2у ]
F =-------------------------------------------------------------(6)
При подсчете выражений (3)—(6) можно считать
Л=уХ и р, = 7Х.
Коэффициент Ав не определяется, так как уравнение (2) требуется
для определения скоростей и, главное, ускорений поршня.
Скорость поршня бокового цилиндра 113300
Дифференцируя по t выражение (1) п. 113201 для Sp!, получают 113301
точное выражение для скорости поршня
= /?«>[ sin аг+ у 7 sin(£ -ф) + ^4 sin pi]. (1)
Приближейное выражение для vpl получается дифференцированием
по t выражения (2) п. 113201
т>р, = /?«> [Е sin (a, + Ф) + 0,5 F sin (2а, — 8)]. (2)
Вспомогательные углы Фиби коэффициенты Е и Е определяются
соответственно по формулам (3)—(6) п. 113201.
Ускорение поршня бокового цилиндра 113400
Точное выражение для ускорения поршня бокового цилиндра /р, 113401
получается дифференцированием по t выражения (1) п. 113301 для vpi
fpi = [ cos a, + Y J cos(p - ф) + 7 cos p, +
39
113500-113503
Дифференцируя по t выражение (2) п. 113301 для vpl, получают
приближенное выражение
jpi = R®S[E cos (аг4-Ф) + Feos (2^— 0)]. (2)
Уравнение (2) дает ускорение поршня прицепного шатуна с точ-
ностью до гармоники второго порядка.
Выражение для этого ускорения в виде полного ряда Фурье содер-
жит все гармоники как четных, так и нечетных порядков. При решении
некоторых специальных вопросов, например вопросов уравновешенности
двигателей, могут потребоваться гармоники порядков выше второго. Но
аналитические выражения коэффициентов ряда Фурье гармоник высших
порядков чрезвычайно громоздки и сложны. Поэтому в случае необ-
ходимости иметь эти коэффициенты рекомендуется получать их, разлагая
в ряд Фурье каким-нибудь из аналитических или механических спо-
собов гармонического анализа [5,9] кривую ускорения поршня бокового
цилиндра по углу поворота коленчатого вала, построенную для данного
конкретного случая по точной формуле (1) для jpl.
113500 Определение основных размеров кривошипно-шатунного механизма
с прицепным шатуном и уг #= у
113501 При определении основных размеров кривошипно-шатунного меха-
низма с прицепным шатуном размеры главного кривошипно-шатунного
механизма: радиус кривошипа R и длина главного шатуна L, а также
угол между цилиндрами у должны быть выбраны предварительно.
Расстояние оси шатунного пальца прицепного шатуна от оси криво-
шипной головки главного шатуна г берется минимально допускаемым
из условий конструкции главного шатуна.
Длина прицепного шатуна I и угол ф = уг — у определяются по двум
заданным условиям, которые, вообще говоря, могут быть различным
образом выбраны.
113502 Иногда требуют, чтобы расстояние Sa равнялось Se и (Si)min рав-
нялось (S)min, т. е. чтобы оси поршневых пальцев бокового и главного
ццдиндров в моменты верхних и нижних мертвых положений были
соответственно одинаково удалены от оси коленчатого вала. Выполнение
этого условия влечет за собой равенство ходов поршней и степеней
сжатия в боковом и главном цилиндрах [1].
113503 По второму способу, во-первых, удовлетворяется требование равен-
ства степеней сжатия в боковом и главном' цилиндрах, и, во-вторых,
условие, по которому длина прицепного шатуна
Z = L —г. (1)
При наличии этих условий и при тех же габаритах в боковом
цилиндре ход поршня, а следовательно, и мощность получаются на
3—4% больше, чем в главном цилиндре. Последнее обстоятельство
существенно важно, чем и объясняется наибольшее распространение
второго способа выбора размерностей рассматриваемого кривошипно-ша-
тунного механизма.
При втором способе определение угла <]> == у, — у производится при
наличии равенства (1) подбором из условия одинаковости степеней сжа-
тия в боковом и главном цилиндрах [формулы (1) и (2) п. 112601].
40
113503
Обозначим величины а„ соответствующие моментам верхнего и ниж-
него мертвых положений поршня бокового цилиндра, через aZ1 и а/2.
Угол aZ1 близок к 0°, а угол aZs — к 180°. Учитывая это, а также,
что в моменты мертвых положений скорость поршня vpi равна нулю,
после некоторых преобразований [6] получаем:
9 _ F sin 6 - Е sin 2Ф
r6*aZi — Fcos6+ficos2®
и
„ Fsin6+Esin24>
tg Z a/s = f cos 6 -fi cos 2Ф ’
При наличии равенств (2) и (3) после ряда преобразований угол ф
определяют из уравнения
Sin^+T))^—д°М. д- Г (е-1)—+ (з-Н) —~
v‘ 1 и е sin — sin Lv / г । к • /г
—-(sC0SpZ1 — COSpZ2)y — (ecosaZ1 — COSaZ2)-y J , (4)
где вспомогательный угол >] определяется из уравнения:
ecos^-cosp, ,5)
, е sin fij — sin В2 ’ ' '
углы pi и по формуле (1) п. 111201:
sinp^Xsinfr + aJ, J (б)
sin р2 = л sin (у + aZ2), J
а углы pZ1 и pZs по формуле (1) п. 113101:
sinpZ1 = ~sinaZ1 — у sin (ра — ф), 1
р г |
sinpZ2 = -y sinaZs—Tsin(Pa —Ф). J
Для определения величины угла ф по уравнению (4) необходимо
предварительно найти углы aZ1, aZs, рх, р2, pZ1 и pZs, которые являются
функциями угла ф; поэтому угол ф определяется подбором. Для этого
сначала полагают в уравнении (4) углы aZ1 = 0", aZ2=180*, pZ1 = 0°
и Pzs = O’ и, помня, что l = L — r, после ряда преобразований получают
приближенное выражение
. , (s — I) sin В, ,п\
Sin Ф =--i---—7=^---- > (о)
(s+ I) + 2 ]/е cos Pi
где угол pj определяется из приближенного уравнения (6)
sinPi = ksin у.
По найденному из уравнения (8) приближенному значению угла ф
определяют значения углов aZ1, a/2, рх, р2, pZ1 и р/2, а по ним, поль-
зуясь формулой (4), угол ф. Обычно один такой просчет дает доста-
точно точное значение угла ф.
41
113504
В табл. 113503 даны значения угла 9 для V-образных двигателей
с углом у = 60° для разных к и е.
Таблица 113593
Значения угла | для разных Л и е для V-образиых двигателей с углом т=60’
г 1 Л 3,3 3,4 3,5 3,6 3,7 3,8 3,9 4,0 4,1
5,0 5’50' 5’40' 5’30' 5’21' 5° 12' 5° 03' 4’54' 4’47' 4°4Г
5,5 6’08' 5° 58' 5’48' 5’33' 5’28' 5° 19' 5’11' 5’03' 4’55'
6,0 6’25' 6° 14' 6° 03' 5° 52' 5’43' 5’33' 5’24' 5’16' 5’09'
6,5 6’41' 6’28' 6° 17' 6’05' 5° 56' 5’45’ 5’37' 5’29' 5’21'
7,0 6° 54' 6° 42' 6°30' 6° 18' 6’03' 5’58' 5’49' 5’49' 5’32'
На фиг. 113503 эта же зависимость угла ф Дана графически.
Фиг. 113503.
К определению основных размеров кривошипно-шатунного
механизма с прицепным шатуном при
113504 Существуют двигатели, имеющие одинаковые степени сжатия
в главном и боковом цилиндрах, но l=£L—r, угол ф берется у них
обычно больше, чем при наличии условия l = L — r. При выбранном
угле фиг, взятом минимальным из условий конструкции главного
шатуна, длину прицепного шатуна определяют из уравнения:
I — (s-l)L + (s+ l)R-[e cos а^ — cos ai2] R-[s cos (^ -1)-cos (р8 —ф)] г , j.
е cos — cos '
42
113504
Это уравнение непосредственно решить нельзя, так как входящие
в него величины aZl, aZ2, jl2, pZl и р/2 являются сложными функ-
циями I. Поэтому задачу приходится решать подбором. Для этого
сначала, полагая aZ1 = 0°, a/2=180°, pZl = 0, р/2 = 0 и Р2=— опреде-
ляют по уравнению (1) приближенное значение I:
где вспомогательный угол •») определяется по формуле (5) п. 113503:
, S 1 1 /о\
Ч’-г+щ- I * (3)
По найденному из уравнения (2) значению I определяют значения
углов aZ1, aZ2, pZ2, р, и Р2. Эти значения подставляют в уравнение (1)
и снова определяют I, которое получается уже достаточно точным;
и на этом просчет обычно можно закончить.
На фиг. 113504 даны кривые, иллюстрирующие влияние величины
угла ф (значения угла ф взяты в пределах от 0 до 10°) на aZl, a/2,
Фиг. 113504.
Влияние угла ф на кинематические параметры двигателя
I и ход поршня для двигателя с е = 6, R = 76,2 мм, L = 247,65 мм,
' = ^5, г = 69,85 мм и y = 60°. В указанных пределах величина угла ф
очень мало влияет на угол поворота кривошипа, соответствующий рабо-
чему ходу поршня бокового цилиндра; так, например;
43
113505
при <J»= 0’
а,2 -«ii = 176° 11 '40" - 2°20' = 173°51 '40",
при <J)= 10°
ai2 - 04i = 173°59' 15’ - 53' 15" = 173°6'.
Линейный ход поршня с увеличением ф возрастает. При ф=0° ход
поршня в боковом цилиндре почти равен ходу поршня в главном
цилиндре. При ф = Ю° он на 6,09% больше. Длина прицепного шатуна
Фиг. 113505.
Кривые перемещений, скоростей и ускорений поршней главного и бокового
цилиндров двигателя АМ-35
113505 На фиг. 113505 даны для иллюстрации кривые перемещений, ско-
ростей и ускорений поршней главного и бокового цилиндров авиацион-
ного двигателя АМ-35 со следующими данными: г = 7, R«95 мм,
L = 315 мм, *- = з32> г = 76 мм, / = 239 мм, у = 60°, у1 = 66°58',
<J» = 6’58' и п = 2050 об/мин.
120000-121101
СИЛЫ, ДЕЙСТВУЮЩИЕ В КРИВОШИПНО-ШАТУННЫХ
МЕХАНИЗМАХ
СИЛЫ ОТ ИНЕРЦИИ ДВИГАЮЩИХСЯ МАСС КРИВОШИПНО-ШАТУННОГО
МЕХАНИЗМА
Силы инерции шатуна
Обозначения:
М — масса тела; кгсм1 сек* или кгмт1 сек*.
Is — момент инерции тела относительно оси, проходящей через его
центр тяжести и перпендикулярной к плоскости его движения;
кгсм сек* или кгм сек*.
S—центр тяжести тела.
т, —масса, сосредоточенная в точке номер i; кгсм'1 сек* или кгм'1 сек*.
Pj — сила инерции; кг.
П; —момент пары сил инерции; кг см или кгм.
Ml — масса главного шатуна; кгсм'1 сек* или кгм'1 сек*.
Мп — часть массы главного шатуна, сосредоточенная на оси поршневого
пальца; кгсм'1 сек* или кгм'1 сек*.
Мк — часть массы главного шатуна, сосредоточенная на оси цапфы
кривошипа; кгсм'1 сек* или кгм1 сек*.
Ln — расстояние центра тяжести главного шатуна от оси поршневой
головки; мм или м.
Ls — расстояние центра тяжести главного шатуна от оси кривошипной
головки; мм или м.
А/, —масса прицепного шатуна; кгсм'1 сек* или кгм1 сек*.
Mat — часть массы прицепного шатуна, сосредоточенная на оси поршне-
вого пальца; кгсм'1 сек* или кгм'1 сек*.
Мн[ — часть массы прицепного шатуна, сосредоточенная на оси его
пальца, закрепленного в главном шатуне; кгсм'1 сек* или кгм'1 сек*.
1„ — расстояние центра тяжести прицепного шатуна от оси поршне-
вой головки; мм или м.
ls — расстояние центра тяжести прицепного шатуна от оси его пальца,
закрепленного на главном шатуне; мм или м.
Plu — сила инерции поступательно двигающейся массы главного
шатуна; кг.
Plk — сила инерции вращательно двигающейся массы главного шатуна; кг.
Pia — сила инерции поступательно двигающейся массы прицепного
шатуна; кг.
120000
121000
121100
121101
45
121102-121103
Ml— масса приведенного главного шатуна; кгслг1 сек2 или кглг1 сек2.
М'и — часть массы приведенного главного шатуна, сосредоточенная на оси
его поршневого пальца; кгслг1 сек2 или кглг1 сек2.
M'lt — часть массы приведенного главного шатуна, сосредоточенная на оси
цапфы кривошипа; кгслг1 сек2 или кглг1 сек2.
P'l„ — сила инерции поступательно двигающейся массы приведенного
главного шатуна; кг.
PLk — сила инерции вращательно двигающейся массы приведенного
главного шатуна; кг.
121102 При работе кривошипно-шатунного механизма все точки его
шатуна совершают сложное плоское движение в параллельных плоскостях,
перпендикулярных оси коленчатого вала.
Силы инерции сложно двигающегося тела приводятся, как и любая
система сил, к одной силе и к паре сил. Так как шатун обычно имеет
плоскость симметрии, перпендикулярную осям кривошипной и поршне-
вой головок, то и сила инерции и момент пары сил инерции будут
действовать в плоскости симметрии шатуна, являющейся плоскостью
движения его центра тяжести.
Сила инерции шатуна равна произведению массы шатуна на уско-
рение его центра тяжести, направлена обратно ускорению и приложе-
на в центре тяжести шатуна
Pf^-M]S, (1>
где /з —ускорение центра тяжести шатуна.
Момент пары сил инерции шатуна действует в плоскости движения
шатуна, по величине равен произведению момента инерции шатуна Is
на угловое ускорение и направлен обратно угловому ускорению;
П;=-/5-^=-/5е. (2)
121103 Подсчитывать по формуле (1) п. 121102 силу инерции
шатуна трудно, так как аналитическое выражение для ускорения
центра тяжести шатуна получается очень сложным. Поэтому массу
шатуна заменяют динамически эквивалентной в отношении внешнего
действия сил инерции системой сосредоточенных в нескольких точках
масс. Для динамической эквивалентности такая заменяющая система
масс должна удовлетворять ряду условий, которые можно кратко сфор-
мулировать так:
1. Масса должна сохраниться, т. е. сумма масс mt заменяющих
материальных точек должна равняться массе заменяемого тела
i=k
^тп^М. (1)
. 1=1
2. Центр тяжести заменяющих масс должен совпадать с центром
тяжести заменяемого тела, что дает равенство нулю статических момен-
тов заменяющих масс относительно осей, проходящих через центр тяже-
46
121L04
сти и лежащих в плоскости движения центра тяжести тела:
/=*
2 miXi = Q,
Xi (2)
2 т<п=°- |
i=l J
3. Сумма моментов инерции заменяющих масс относительно оси,
проходящей через центр тяжести перпендикулярно плоскости движения,
должна равняться моменту инерции тела
2 + = (3)
Уравнений —четыре; каждая масса вносит три параметра — вели-
чину массы и две координаты; следовательно, для замены требуется
минимум две заменяющих массы, причем двумя из шести параметров
масс можно задаться по произволу. Обычно задаются положением,
т. е. двумя координатами одной массы; тогда величины обеих масс
и координаты другой массы определяются из указанных условий
(1), (2) и (3).
При расчетам динамики двигателей две массы, заменяющие массу
шатуна, обычно помещают на осях головок шатуна. Величины этих
масс определяются по формулам (1) и (2) п. 121103 и равны
Ма = ^М, (1)
= Ь-м- (2)
Условие (3) п. 121103 при этом не соблюдается, так как
МПЬ2П + MKLl = ML^L, Ф ls.
В связи с этим, хотя сила инерции заменяющих масс и равна силе
инерции шатуна, но момент сил инерции заменяющих масс не равен
моменту сил инерции шатуна. Такой заменой вводится добавочный
момент от сил инерции, равный
(3)
Просчеты для ряда шатунов авиационных двигателей показали,
что момент Пь относительно невелик. Поэтому на практике всегда при-
меняют приближенную замену массы шатуна двумя массами, сосредо-
точенными на осях головок шатуна, величины которых определяются
по уравнениям (1) и (2). Добавочным моментом (3) пренебрегают.
Таким способом силы инерции шатуна заменяются двумя силами инерции
РLa — —р (4)
И
= -MKRW*. (5)
121104
47
121105—121201
121105 Для прицепного шатуна по аналогии имеют место соотношения
МП1=^-Мг, (1)
Мкг = ^Мг, (2)
Рщ = — мп tjpf (3)
Массы Мк1 сосредоточиваются на осях шатунных пальцев прицеп-
ных шатунов. Силы инерции этих масс отдельно не рассматриваются,
но включаются в динамику главного шатуна; для этого массу главного
шатуна дополняют массами MKi всех прицепных шатунов, сосредото-
ченными на осях шатунных пальцев прицепных шатунов, после чего
получают так называемый «приведенный главный шатун», масса кото-
рого
М£ = Мь+2Мк|. (4)
Центр тяжести приведенного главного шатуна лежит новой
точке S', лежащей на расстоянии L'a от оси поршневого пальца и на рас-
стоянии Li, от оси цапфы кривошипа; отсюда
М£ = -^-М£, (5)
^ = -^-М£. (б)
Силы инерции приведенного главного шатуна, аналогично 121104,
можно заменить двумя силами инерции:
Р£н=-М'7?ш* (7)
и
P'lb— —M'Djp. (8)
У приведенных главных шатунов звездообразных и W-образных
двигателей центр тяжести лежит в плоскости, проходящей через оси
поршневого пальца и цапфы кривошипа.
У приведенных главных шатунов V-образных двигателей центр
тяжести смещен от указанной плоскости. Это смещение бывает невелико
и им пренебрегают, считая приближенно, что этот центр тяжести нахо-
дится в основании перпендикуляра, опущенного из действительного
центра тяжести на плоскость, проходящую через оси поршневого пальца
и цапфы кривошипа [6].
121200 Определение центра тяжести и момента инерции шатуна
121201 О боз н а ч е н и я (фиг. 121201):
Ga — вес части массы шатуна, отнесенной к оси поршневой головки
шатуна; кг.
GK — вес части массы шатуна, отнесенной к оси кривошипной головки
шатуна; кг.
G —вес шатуна; кг.
Я —число простых качаний шатуна в минуту.
48
121202—121203
lt~расстояние между центром тяжести шатуна и осью качания шатуна,
проходящей через точку А; см.
L—расстояние между центром тяжести шатуна и осью качания
шатуна, проходящей через
точку В; см.
1г — расстояние между осями кача-
ния шатуна, проходящими че-
рез точки А и В; см.
1Х~момент инерции шатуна отно-
сительно оси, перпендикуляр-
ной плоскости его движения
и проходящей через точку х,
которой могут быть точки А,
В и S; кг см сек3.
g~ ускорение силы тяжести; см сек
Фиг. 121201.
К определению центра тяжести шатуна
Определение центра тяжести, веса, момента инерции и разноски масс
проектируемого шатуна, для которого имеется лишь чертеж, произ-
водится подсчетом обычными аналитическими или графоаналитическими
методами.
При наличии изготовленного шатуна указанные в п. 121202 вели-
чины проще, быстрее, точнее и надежнее определяются экспериментально.
Для этой цели употребляют специальные или приспособленные чашечные
весы (фиг. 121203-1) и кронштейн (фиг. 121203-П) для прокачивания
шатунов.
121202
121203
Фиг. 121203-1.
Определение разноски веса шатуна посредством взвешивания
Применяя обычные чашечные весы, пользуются (фиг. 121203-1)
специальными подставками с опорами для головок шатуна в виде сталь-
ных ножей-призм. Для подставки кривошипной головки шатуна нужно
иметь подкладку толщиной:
h = rK-ra,
4
Авиад. порши, двигатели
49
121204
где
гк —радиус внутреннего сверления кривошипной головки шатуна,
гп —радиус внутреннего сверления поршневой головки шатуна.
Прокладка нужна для того, чтобы при равновесии чашек весов ось
шатуна была горизонтальна.
Расстояние между ножами при взвешивании должно равняться длине
шатуна.
Взвешивая шатун обычным способом, получают уравнение
Фиг. 121203-11.
Кронштейн для прокачивания
шатунов
обычно так, что
Gn+GK=G. (1)
Взвешивая шатун на подставках
(фиг. 121203-1), находят, что для рав-
новесия на одну чашку весов (обычно
с поршневой головкой шатуна) нужно до-
бавить груз 2ff, что дает второе уравнение:
GK-Gn=M. (2)
Из уравнений (1) и (2) находят
GK =0,5(G + M),
Gn = G — GK .
До взвешивания шатуна подставки
предварительно уравновешиваются добав-
лением гирь.
Специальные весы для определения
разноски масс шатуна и положения его
центра тяжести имеются разных конструк-
ций и разных фирм. Специальные весы
одним одновременным двойным взвеши-
ванием определяются величины Gn и GK.
Имея величины GK и Gn, можно определить массы Мп и Л4К
и расстояния их до центра тяжести La и LK
(3)
и
Ьк =
I (5)
121204 Метод прокачивания заключается в прокачивании шатуна относи-
тельно двух осей, перпендикулярных плоскости его движения. Поль-
зуясь формулой качания физического маятника, по которой момент
инерции тела относительно оси качания равен
, /6О\2GI -KGi /п
4 = W й5=3б4’7б7Р>
50
121300-121303
’ у
применяют эту формулу дважды, прокачивая шатун на ноже-призме,
сперва относительно оси Л, а затем относительно оси В (фиг. 121201);
учитывая, что = на основании формулы, связывающей моменты
инерции относительно параллельных осей —проходящей и не проходящей
через центр тяжести, находят расстояний центра тяжести шатуна
от точек подвеса и момент инерции шатуна /s:
. 13
I, = —г см,
(2)
где
357826
^1
357826
Н2
п2
— число простых качаний шатуна в минуту относительно оси,
проходящей через точку А,
Н2 — то же относительно оси, проходящей через точку В,
остальные обозначения—см. 121201;
Is = Ia-| Рг = 364,76 /?, кгсм сек2. (3)
Прокачивание производится на кронштейне (фиг. 121203-П), укре-
пленном на стене так, чтобы ребро призмы было горизонтально; выпол-
нение этого требования проверяется уровнем.
Силы, действующие в кривошипно-шатунном механизме
от сил инерции поступательно двигающихся масс
в главном цилиндре
При подсчете сил инерции двигающихся масс двигателя массу
главного шатуна заменяют двумя сосредоточенными массами —на оси
поршневого пальца Мп и на оси шатунной шейки Мк (см. 121104). Пер-
вая масса присоединяется к поступательно двигающимся, а вторая—
к вращательно двигающимся массам.
Обо зна че ни’я:
ТИр —масса комплекта поршня; кглг1 сек2.
SRn — суммарная масса поступательно двигающихся частей в главном
цилиндре; кглг1 сек2.
Р/ —сила инерции поступательно двигающихся масс главного цилин-
дра; кг.
Nf—сила, действующая нормально на стенку цилиндра от силы Pf, кг.
К,—сила, действующая по оси шатуна от силы Pf, кг.
Tj—тангенциальное усилие на ось цапфы кривошипа от силы Pf, кг.
Zj~нормальное усилие на ось цапфы кривошипа от силы Pf, кг.
Af в/—крутящий момент на кривошипе от силы Pf, кгсм.
Мф,—момент, передающийся на подмоторную раму от силы Pf, кгсм.
Суммарная масса поступательно двигающихся масс
Жп = Л4п+Мр. (1)
121300
121301
121302
121303
4*
51
121304-121305
J 21304
121305
Сила инерции этой массы направлена по оси цилиндра, приложена
к оси поршневого пальца и равна
P>=-3Rn/p. (2)
Здесь ускорение поршня, мсек"3, определяемое по одной из фор-
мул— (1), (2) или (3) п. 111601.
Сила Р, является причиной возникновения ряда сил в различных
частях механизма (см. фиг. 121304-1 и II). Направления (знаки) и точки
приложения этих сил указаны на фиг. 121304-1.
+К-шатун сломается
—К- " растягивается
+7 -сила направлена по направ-
лению вращения мотора
-7- аила направлена по направле-
нию^обратному вращению мотора
+Z- сила направлена К оси вала
—1 - » » » ат « »
Фиг. 121304-П.
К определению сил, дей-
ствующих в нормальном
кривошипно-шатунном ме-
ханизме, от сил инерции
поступательно двигающих-
ся масс
Фиг. 12I304-I.
Знаки сил, действующих в нормальном кривошипно-
шатунном механизме
По величине и знаку эти силы определяются по формулам
N/ = P/tg₽, (1)
т — Р зк1(д + ?) /оч
COS 0 ’ W
(4)
На коленчатом валу двигателя за счет силы Р} получается
крутящий момент
Мв; = Т/1? = Р;/?8-Н^Ё), (1)
52
121400-121402
а на подмоторной раме равный ему, но противоположно направленный
момент
(2)
Кроме того, на подмоторную раму целиком передается сама сила Pj.
Для ускорения практических подсчетов динамики нормального
кривошипно-шатунного механизма в конце этой части приложены
таблицы (табл. 5 — 8 и 11) значений величин
cosB tap si.n(g+e , £2-s<2+J). и______
p’ cos? ’ cos? и 2Rn7?0>2
по углу поворота коленчатого вала а для различных значений к — от
к до с изменением знаменателя через 0,1.
Выражения для Pj, Tjt MBj и в форме рядов Фурье для случая 121400
нормального кривошипно-шатунного механизма
Подставляя в формулу (2) п. 121303 выражения для Pj, jps виде 121401
ряда Фурье [формула (2) п. 111601], получают
Pj — — Зйп/?*»2 cos a — 4p29ftn/?(n2cos2a+ 1 б р« ЭДп /?и>2 cos 4а —
— 36pe?!Jin/?<»2cos6a-f—. ..= 2 Д/* cos Ла.
*=1,2, 4,6...
• Отдельные члены этого ряда принято называть силами инерции
различных порядков:
Д;1со5а= — gjjn^’cosa — силой инерции первого порядка;
471cos2a== — 4р12ЛпЯ<в*cos2a — силой инерции второго порядка;
и т. д.
*
cos Аа = (— I)5 А2рЛ9)?п/?u>2cos Ла —силой инерции Л-го порядка (для
Л = 2, 4, б,...).
Ряд Фурье для силы Т, имеет вид 121402
Л«=со к^со
— 2 B*sinAa= 2 Вт* Sin Ла. (1)
*=i *=1
Для нечетных гармоник в этом уравнении коэффициенты Вк имеют
вид:
*-!
В*=(-1) 2 |[(Л- 1)PW + (A+ l)pfcJ, (2)
а для четных:
е‘=-4(1)Ч+4 3
2 1=1,2,3,...;
2 <-От*'2т2Гр,тр.(; (3)
1=1, 2, 3,
к , _
т>1
53
121403-121404
величины коэффициентов р в них определяются по формуле
v+*+1
2 <4>
*=0,1,2, 3, ... 2
причем Pi = 1; р2 == р6 = р7 = ... =0, а сомножители (у) m и (m + 2к)к
определяются по обычной формуле для биномиальных коэффициентов
(п\ — л(л-1)(л-2)... [л-(р- 1)]
( ~ 1 • 2 • 3 ... р ’
Выводы этих формул имеются в [11].
В табл. 121402 даны значения коэффициентов Вк для различных X.
Таблица 121402
Значения коэффициентов Вк для различных А
\ 1 А в* 3,4 3,5 3,6 3,7 3,8 3,9 - 4,0
В, 0,0753 0,0729 0,0708 0,0589 0,0670 0,0652 0,0635
в, —0,5 —0,5 —0,5 —0,5 —0,5 —0,5 —0,5
вз —0,228 —0,221 —0,214 —0,209 —0,203 —0,197 —0,192
в4 —0,0227 —0,0213 —0,0201 —0,0190 —0,0180 —0,0170 —0,0161
В, 0,(2)431 0,(2)394 0,(2)360 0,(2)331 0,(2)305 0,(2)281 0,(2)259
В« 0,(3)766 0,(3)679 0,(3)603 0,(3)539 0,(3)484 0,(3)433 0,(3)390
в, —0,(3)1029 —0,(4)883 —0,(4)762 —0,(4)659 —0,(4)556 —0,(4)494 —0,(4)440
Вв —0,(4)231 —0,(4)193 —0,(4)162 —0,(4)136 —0,(4)115 —0,(5)970 —0,(5)830
В, 0,(5)249 0,(5)202 0,(5)164 0,(5)134 0,(5)110 0,(6)910 0,(6)760
В10 0,(6)653 0,(6)513 0,(6)405 0,(6)323 0,(6)259 0,(6)208 0,(6)169
В11 —0,(7)604 —0,(7)459 —0,(7)352 —0,(7)272 —0,(7)212 —0,(7)166 —0,(7)131
В13 —0,(7)1222 —0,(8)901 —0,(8)672 —0,(8)506 —0,(8)383 —0,(8)293 —0,(8)225
Примечание. Число, стоящее в скобках после запятой, означает число
нулей после запятой.
121403 Пользуясь выражениями для ускорения и скорости с точно-
стью до второго порядка, получают приближенное выражение для
силы Ту:
Т, = у ЭДп Rm* sin а — у Эдн R®* sin 2а -
— № Sin За — Rm" sin 4а.
121404 Выражения для крутящего момента на валу двигателя и момента
пары сил, действующей на подмоторную раму
МВ7- = — M$j = gftn R2 2 Вк sin ka~R 2 Вт* sin ко..
*=i *=i
54
121405—I2I50I
Отдельные члены правой части этого выражения, в зависимости
от значений к, принято называть моментами первого, второго, третьего
и т. д. порядков.
Выражения в виде рядов Фурье для Р, и Мф, употребляются
при исследовании вопросов уравновешивания поступательно двигаю-
щихся масс двигателей, а для Мв, при исследовании крутильных
колебаний систем коленчатых валов двигателей.
Силы, действующие в кривошипно-шатунном механизме,
от сил инерции поступательно двигающихся масс
в боковом цилиндре
Для 'всех 1 величин, относящихся к к ривошипно-шатунному меха-
низму с прицепным шатуном, принимаем обозначения, данные для
главного ’цилиндра (см. 121201 и 121302) с добавлением в индексах
буквы I. иКроме1[того, [обозначим через N'n силу бокового давления
121405
121500
121501
Фиг. 121501.
К определению сил, действующих в кривошипно-шатунном
механизме с прицепным шатуном, от сил инерции посту-
пательно двигающихся масс в боковом цилиндре
поршня на стенку главного цилиндра, приложенную к оси поршневого
пальца и возникающую за счет силы Рц в боковом цилиндре. Согласно
со схемой сил фиг. 121501, действующих в кривошипно-шатунном
механизме, имеем
SRni = Л1пг + Мр1,
Pjl ~ ]pl>
Nn = PiiWi,
(1)
(2)
(3)
55
121502-121601
М' _ г sin(₽-₽i-$) к
N’1 ~ К’1’ <5'
Тц = Кц sin (а, + Pl) + Nji COS а, (6)
Z}1 = Kji cos (аг + ₽i) - Nji sin a, (7)
MB}l = TnR, (8)
Мфц — — Л^в/i* (9)
121502 Ha подмоторную раму передаются:
сила
Рц^-^jpt (1)
и момент
Mw — Мвц. (2)
121503 На коленчатый вал передается крутящий момент Л1в/1, который
нужно прибавить к другим крутящим моментам, действующим на колен-
чатом валу.
121504 В выражение (2) п. 121501 ускорение jpi подставляется по формуле
(1) или (3) п. 112501 для случая у, = у и (1) или (2) п. 113401 для
случая у, ¥= у.
121600 Выражения для Рц,"Тц, MBjl и Мцц
в форме тригонометрических полиномов для случая
кривошипно-шатунного механизма с прицепным шатуном
121601 Приближенное выражение для Рц в виде тригонометрического
полинома с точностью до гармоники второго порядка имеет вид
Рц = — Д1 Rto* COS а — Bt gjfni Rto* sin а —
— 4Д2 ЯИш R«>* cos 2а -'4В, ЭДпг R®2 sin 2а =
= Ац cos а -|- В/1 sin а 4- Ац cos 2а -|- Вц sin 2а. (1)
Коэффициенты Дх, Д2, В, и В, являются функциями геометрических
размеров кривошипно-шатунного механизма и углов у и 9; они прибли-
женно выражаются формулами:
Д2 = cos/y + (j -Т sin sin
Bt = — ^1 — у sin <J> cosy+sin у+
^sin^^l^sin^,
42 = — ykycos^cosy + yy-cos2y +
+ yk £с°зф-J cos2«}>,
В2= — у л -у cos ф sin у + у у sin 2у.
56
121602-121703
Эти формулы даны для случая ¥= у.
Для случая уг = у нужно в формулах (2) положить ф = 0 [б].
Приближенное выражение для тангенциальной силы в виде тригоно- 121602
метрического полинома [6] будет
Tji = (А, A, + Вг В,) Rw3 sin а - (Аг В2 - Аг BJ ЭДпг Ru>3 cos а —
— 1(А’-В,)^г /?o>2sin2a+A1B1^n; Rw3cos 2а-
— 3(А, А^-ВгВ,)^ R^ sin За + 3(4,6, + 4,6,)^ Ra>3cos3a —
— 4(А2,-ВЬШ /?«>2sin4a + 8A2B2^n; fiascos 4а =
k=k к=Ь
= 2 A* COS £а + 2 Вт* sin Ла. (1)
*=1 *=1
Принимая во внимание уравнения (8) и (9) п. 121501, получаем
из (1) выражения для моментов Мв}1 и М$ц
к=Ь f . *=4
Мвц = — Мф}1 =TjtR = R 2 Атк cos ia + я 2 вт* sin Ла. (2)
k=i *=i
В формулах (1) и (2) значения коэффициентов А, Blt А, и В,
следует брать по формулам (2) п. 121601, а коэффициенты под знаками
сумм по следующим выражениям:
А, = - (А,В2-А2В,) Rm*; ATS =3 (А,В,+АВ,) Rm*;
Вп = (А,А, + В,В2)%ЦП1 Rm*; Втз= — 3(А, А-В,В.) ЭДпг
аТ2 = Аг Вг эдпг R< аТ4 = 8А3 в,
в„ = -1 (А - ж вТ4 = - 4 (а; - в:> R**.
Силы инерции вращательно двигающихся масс
1217^0
При постоянной угловой скорости вращающиеся массы дают только 121701
центробежную силу инерции.
Вращательно двигающиеся массы состоят из: 121702
1) массы кривошипа Мкр, кглт'сек2,
2) массы противовесов, установленных на колене вала, Мпр, кгм~*сек*,
3) отнесенной к оси цапфы кривошипа части массы приведенного
главного шатуна М'к.
В зависимости от типа и конструкции двигателя противовесы на
колене вала могут отсутствовать, а на цапфу кривошипа могут дей-
ствовать только центральные шатуны; тогда вместо М'к следует брать Мл
(или ^М„, если на шейку действует несколько шатунов).
Части масс шатунов, отнесенные к оси кривошипа, дают силу 121703
инерции
проходящую через ось цапфы кривошипа и направленную от оси вра-
щения коленчатого вала перпендикулярно к ней.
57
121704-121705
121704 Масса кривошипа дает силу инерции
Ркр----M«P Rs®2 — Мкр R®2,
(1)
где
Rs — расстояние центра тяжести кривошипа от оси вращения колен-
чатого вала, м,
МКр — приведенная к оси цапфы кривошипа масса кривошипа
Мкр = М^р^. (2)
Эта сила инерции проходит через центр тяжести кривошипа пер-
пендикулярно к оси вращения коленчатого вала и направлена от нее.
121705 Масса противовеса дает силу инерции
Rnp — Мпрр5® = ~ Л4ст. Пр® , (1)
где
р5 —расстояние центра тяжести противовеса от оси вращения колен-
чатого вала; м или см;
у —удельный вес материала противовеса; кгм~3 или гмсм~3;
Мст. пр—объемный статический момент противовеса относительно пло-
скости, проходящей через ось коленчатого вала и перпенди-
кулярной п носкости, проходящей через ось вращения коленча-
того вала и центр тяжести противовеса; м* или см*;
g —ускорение силы тяжести; мсек~* или смсект'1.
Сила инерции. Рар направлёна от оси коленчатого вала, проходит
через нее и перпендикулярна к ней.
Обозначим (фиг. 121705):
dx—толщину элементарного объема противовеса в направлении оси
коленчатого вала;
Fx — площадь его в плоскости, перпендикулярной оси коленчатого вала;
рх —расстояние его центра тяжести от оси вращения.
Тогда
апр
Л/ст. пр = Jj Fx?xdx, (2)
апр
а плечо силы инерции противовеса
апр апр
J j Fxfxxdx
IV
Фиг. 121705.
Схема сил инерции про-
тивовесов
f F^x
апр
Значения апр, а'ар, апр и х даны
на фиг. 121705.
58
121706-122103
4
Суммарная сила инерции одного кривошипа 121706
Р,*=-В№. (1)
где
ЭДк = ЛММ (2)
есть сумма приведенной к оси цапфы кривошипа массы кривошипа
и отнесенных к оси цапфы кривошипа частей масс шатунов. При нали-
чии прицепных шатунов
^МК = М'К.
СИЛЫ ОТ РАБОЧИХ ГАЗОВ В ЦИЛИНДРАХ ДВИГАТЕЛЯ 122000
Определение сил давления газоб на поршень 122100
по углу поворота кривошипа
Обозначения:
рг — удельное давление рабочих газов в цилиндре; кгслг2-, 122101
Ро — давление атмосферы на выхлопе; кгсм2-,
Fa — площадь поршня; см2.
Изменение удельного давления рабочих газов в цилиндре на пор- 122102
шень по ходу поршня задается в виде индикаторной диаграммы.
Индикаторная диаграмма получается различными способами. При
проектировании нового двигателя ее строят на основании теплового
расчета двигателя. Для динамического расчета существующего или
проектируемого двигателя можно ограничиться так называемой стан-
дартной индикаторной диаграммой, которая строится на основании
среднего эффективного давления, причем для ряда коэффициентов,
необходимых для ее построения, принимают некоторые, выработанные
практикой средние значения [7]. Наконец, для существующего рабо-
тающего двигателя индикаторную диаграмму получают эксперимен-
тально, посредством записи ее индикаторами. У обычных • двигателей
индикаторные диаграммы для всех цилиндров одинаковы.
Для определения сил давления рабочих газов в цилиндре на пор- 122103
шень строят в достаточном масштабе индикаторную диаграмму
(фиг. 122ЮЗ), обычно на миллиметровке.
Под диаграммой проводят для каждого цилиндра по прямой, парал-
лельной оси V диаграммы и равной длине индикаторной диаграммы.
Для принятых интервалов угла поворота кривошипа подсчитывают
перемещения поршней (расстояния поршней от верхних мертвых поло-
жений) для всех цилиндров и откладывают их в нужных масштабах
на соответствующих, указанных выше, прямых. Соответствующие полу-
ченным точкам ординаты в масштабе удельных давлений дают иско-
мые рг. На фиг. 122103 дано построение для определения рГ по углам
поворота коленчатого вала ,а° для всех цилиндров 9-цилиндрового
звездообразного двигателя Кертисс-Райт «Циклон».
59
122104
122104 Имея удельное давление газов на поршень рт, определяют силу
избыточного давления на поршень Рг по формуле
Рг = (Рг-лИ„.
. ear w № ы «я и мокоэд
1(1. ’ I 1,1 I ' (' If
титоовео бве м б?о бм яеяеяо а
. *?в $00 OfO 560 56O.573’t3‘
«ап'езм^я эм зи ж по гы^гнЧз'
3 B^°2^00!ZO 160 760 ЛЮ 200 22026£256*И*
вгтгшобо го по 7оо боо бййо®'®*”'
620
, 683’29 500 $20 540 '560 5§0 600620660. и5«0;'
683’29'660 660 420 600 380 360 ЗбОЗ^^’О!'
Г КГЗб'Чк 200 220 260 260 280300370335’31'
Ч' №I°3S'M ПО m 80 60 60 20 пГ6^'3''
550*2^80 500 ф 6tf0 660 68Q7ipfo -26‘23‘
Ч' 550’2^560 520 51)0 680 660 6606206m)386°23'
260 . ,
у 236°3l'f2f0 280 3Q0 320 3^0 360ЖбрО^б26’59'
Ч' 236’3V 220 200 180 1б0 160 120 10080 e6*SS'
6^0 too
g бЗТ’ЗУ^ббО 500 , 700 7?0 2fl 60 60 80^103’69'
^'637’35’620 600 580 560 560 520 500680'‘'S3°99l
д 319’31' 360 360 3^0 400 620 660 660680^,500’V’
4 зп’згяо гм г^о гм гго гоо iso ко
Фиг. 122103.
К определению давления газов на поршень в зависимости
от угла поворота коленчатого вала a
Эта сила направлена по оси цилиндра и может считаться прило-
женной к оси поршневого пальца.
60
122200-122301
‘ i-'
Силы, действующие в кривошипно-шатунном механизме,
от рабочих газов в главном цилиндре
Обозначения:
Nr —сила, действующая нормально на стенку цилиндра от си-
лы Рт; кг.
Кг — сила, действующая по оси шатуна от силы РГ; кг.
Тт — тангенциальное усилие на оси цапфы кривошипа от си-
лы Рт; кг.
Zr — нормальное усилие на оси цапфы кривошипа от силы Рг; кг.
Знаки сил, действующих в кривошипно-шатунном механизме, в зави-
симости от их направления принимаются со-
гласно фиг. 121304-1.
Согласно фиг. 122202
г
Фиг. 122202.
К определению сил, дей-
ствующих в кривошипно-
шатунном механизме, от
давления газов в глав-
ном цилиндре
Nr = Prtgp, (1)
~ cos р ’ (2)
Т _Р Sin(» + P) cosр ’ . (3)
z —р COS (а + В) г Г COS Р ' (4)
На дно цилиндра (фиг. 122202) действует
соответствующая давлению газов РГ сила — РГ,
а на коренной подшипник сила Рт. Эти силы
уравновешиваются в системе цилиндр — блок —
картер и внешнего действия на подмоторную
раму двигателя не производят.
Пара сил (ТГ; — ТГ) на кривошипе дает кру-
тящий момент на оси коленчатого вала
Л4вг ~Pr R,
который включается в общий крутящий момент
двигателя. __
Силы (Nr; — Nr) с плечом О А дают момент
Л4фг= Nr АО -
этот момент передается на подмоторную раму
двигателя.
Силы, действующие в кривошипно-шатунном механизме,
от рабочих газов в боковом цилиндре
Для всех сил, действующих в кривошипно-шатунном механизме
с прицепным шатуном, сохраняются обозначения 122201 с добавлением
к ним в индексах буквы I. Силу давления поршня на стенку главного
цилиндра за счет силы Ргг обозначаем через N'rl.
122200
122201
122202
122203
122204
122300
122301
61
122302-122304
1223&2 Согласно фиг. 122302:
^Т1 Pri tg Рр (1)
к ^Г1 Krl cos в’ (2)
М' — Р Г rI rI L COS Р COS Pl ’ (3)
Tri ~ Kri sin (я| + Pi) + N'ri cos a, (4)
cos (04 “F* N ri sin cc. (5)
Соответственно- силе Pri
сила—Pri. Эти силы взаимно
на дно бокового цилиндра действует
уравновешиваются в системе цилиндр —
Фиг. 122302.
К определению сил, действующих в кривошипно-шатунном механизме, от давления
газов в боковом цилиндре
блок — картер и внешнего действия на подмоторную раму двигателя
не оказывают.
122303 На коленчатом валу двигателя за счет силы Рг( развивается кру-
тящий момент
AfBri =Р [Kri sin (а;-|-р()+Nfj cosa],
включающийся в общий крутящий момент на коленчатом валу двига-
теля.
122304 На подмоторную раму двигателя передается момент
Л4фг1 — Л4вг1 •
62
122400-122403
Гармонический анализ тангенциальных сил от газов 122400
Для исследования вынужденных крутильных колебаний систем 122401
коленчатых валов двигателей необходимо иметь выражение для крутя-
щего момента на коленчатом валу двигателя от давления газов
в цилиндре в виде ряда Фурье.
Крутящий момент на валу двигателя 122402
ЛТвг = TrR.
Следовательно, вопрос о разложении в ряд Фурье крутящего
момента приводится к разложению в ряд тангенциальной силы Тг. Эта
тангенциальная сила является периодической функцией угла поворота
коленчатого вала а с периодом для двухтактного двигателя
Т = ^ (1)
и для четырехтактного двигателя
Т=™, (2)
где л — число оборотов коленчатого вала в минуту.
Тангенциальная сила Тт может быть разложена в ряд Фурье: 122403
Тт = F (а) = F (W) = То 4- АГ1 cos (6t) + Дг2 cos (26/) +
+ Агз cos (36/) + ... + Bri sin (6/) -|- ВГ2 sin (26/) +
+ Вгз sin (36/) + ... =T0 -|- Ark cos(fe6/)4~
k=i
+ 3 Brk Sin (A©/), (1)
где
To — среднее тангенциальное^ усилие за один рабочий цикл
от одного цилиндра двигателя, кг;
Агк и Вгк —амплитуды фазовых слагающих гармоники к-го порядка
тангенциальной силы, кг;
6 — круговая частота гармонического момента 1-го порядка,
сек.-1;
к — порядок гармонических составляющих.
Для двухтактных двигателей круговая частота
6 — «>, (2)
для четырехтактных двигателей
6 = £. (3)
63
122404
Коэффициенты ряда Фурье в равенстве (1) определяются обычными
методами гармонического анализа:
2п
Вгк= | f(60sin(^)d(6/),
4 > (4)
Атк = 'i jF cos d
о
и
* 2те
T,=^\F(bt)d(6t)- (5)
о
, Для нахождения этих интегралов можно применять различные
методы—аналитические, графические и приближенные (например, по фор-
мулам Бесселя или методу Рунге и его модификациям [5, 9, 12]). Для
получения гармоник высших порядков с достаточной точностью необхо-
димо при пользовании приближенными методами подразделять диа-
грамму тангенциальной силы Тт в 96 точках.
Коэффициенты Атк и ВгЬ могут быть быстро определены без
построения индикаторной диаграммы, подсчета тангенциальных сил
и построения диаграммы их посредством табличного метода И. Ш. Ней-
мана [б], в основу которого положены расчетная индикаторная диа-
грамма и нормальный кривошипно-шатунный механизм.
Коэффициенты Атк и Вгк могут быть также определены гармони-
ческим анализом диаграммы тангенциальных сил при помощи специаль-
ных механических приборов — гармонических анализаторов разных кон-
струкций [5, б].
Следовательно, тем или иным методом всегда можно определить
коэффициенты Атк и ВГк, т. е. всегда возможно разложить танген-
циальную силу Тт в ряд Фурье.
122404 Косинусовый и синусовый члены одного порядка могут быть объеди-
нены в один член
Ark cos(Mt) + BTk sin(Ar6/) = Ттк sin (И/+ ргА), (1)
где
T^^Ah+Bh,
И д (2)
Рг* = arc tg о—~ •
атк
Ттк называется амплитудой, а рг* — начальным фазовым углом гар-
моники к-го порядка.
Гармонический член вида Ттк sin(Ar6/ + Ргл) может быть разложен
в сумму
Trk sin (кЫ + ргА) = Ark cos (ktit) + Втк sin (кМ),
где
Агл = Ттк sin Л
И 1 (3)
Вгк — Ттк cos Вг^. J
64
122405
Следовательно, тангенциальную силу Тг можно представить в виде:
для двухтактных двигателей
Л = со к = ео
Tr = F(9f) = F(a) = T0 + 3 cos (£«>/) + 3 Bresin(/М) =
Л = 1 Л = 1
= Т# + 2 T'rk sin (Ы -|~ prfc) — Та -f- 2 Ark cos (fca) 4- 2 Brt sin (kx) =
fc=l k=i А=1
= 7'о-|- У TrfcSin (&а4~Ргк) (4)
к=1
и для четырехтактных двигателей
Tr = F(6f) = F (а) = То-|- 2 A-*cos(fcyf)+ 2 Br*sin (fcTZ) =
k=i > *=i
— та + 2 ~21+=
k=l
= To + 2 A?k COS (у 0 + 2 Brk Si" C 2 °0 =
k=l k=l
-To+2 T^sin (|a + Prk). (5)
k=l
Для самых приближенных, прикидочных расчетов можно восполь-
зоваться следующим способом.
В табл. 122405 и на кривой фиг. 122405 даны величины коэф- 122405
фициентов гармонических составляющих тангенциальных сил от газов,
отнесенные к 1 см* площади поршня и в процентах от среднего инди-
каторного давления.
Таблица 122405
Значения величин A'ft, В’гк, Т^к и £гА.
Л Агк В’гк Т’гк РгЛ
1 —30,2 —20,8 35,6 235°25'
2 15,0 29,0 32,6 27°20'
3 —1,37 —32,0 32,2 182°30'
4 —2,82 24,3 24,5 353°20'
5 4,67 —18,2 18,8 165°35'
6 —4,58 14,1 14,8 342°
9 4,23 —5,27 6,76 141°15'
12 —2,62 2,38 3,53 312°15'
15 1,65 —1,10 1,93 123°40'
5 Авиац. цоршн. двигатели
65
122405
Величины коэффициентов гармонических составляющих:
Лг* _ А-тк F^Pi ' 100%,
Вгк Вгк FtPi * 100%,
Т’гЛ тгк F&Pi 100%.
Пренебрегая влиянием на индикаторную диаграмму фаз распреде-
ления, величины А и учитывая в лишь через ее влияние на pit которое
определяется по формулам
для двухтактных двигателей
450N,
Pi ~ vmm >
для четырехтактных двигателей
_ 900Ne
Pt~v}mn'
где
Фиг. 122405.
Амплитуды гармоник тангенци-
альных сил от давления газов
в одном цилиндре двигателя, от-
несенных к 1 см2 площади порш-
(2>
двигэ-
Ne — эффективная мощность
теля, л. с.,
Vh — литраж двигателя, л;
flm — механический коэффициент по-
лезного действия двигателя;
п — число оборотов коленчатого вала-
двигателя в минуту;
можно определить амплитуду гармоники
к-го порядка по формуле
юр (3)
ня, в процентах от среднего
индикаторного давления где значение Т'Гк берется из табл. 122405-
ил и по фиг. 122405.
Нулевая гармоника определяется по формулам
1 г.
для двухтактного двигателя То = — ptFn,
_ 1
для четырехтактного двигателя ТЛ = ^р^п.
(4>
Она является средней тангенциальной силой и вызывает постоян-
ную закрутку вала.
Для двигателей с винтами фиксированного шага, не учитывая зави-
симости т]т от числа оборотов, можно очень приближенно делать пере-
счет амплитуд по формуле
Тгк = (О*Тгк1’ (5>
66
122406
Для работающих по циклу Отто четырехтактных двигателей с нор-
мальным кривошипно-шатунным механизмом, имеющих степень сжатия
е в пределах
8>е>5
122406
и отношение к в пределах
3,2”^ ^4,2’
коэффициенты Фурье тангенциальной силы Тг от газов АГк и ВТк пер-
вых восемнадцати порядков могут быть определены методом И. Ш, Ней-
мана с помощью специальных таблиц [6] и [8].
В основу метода положена теоретическая индикаторная диаграмма
aczz"ba (фиг. 122406), вершина которой для большего приближения
к действительной индикаторной
диаграмме срезана прямой zz" по- Р
стоянного давления рг, равного
Pz -- ^ZpZ,
где р-— давление вспышки теоре-
тической индикаторной диаграм-
мы, а кг — коэффициент снижения О
действительного давления вспышки _
против теоретического. Фиг. 122406.
Принято, что в каждом кон- Теоретическая индикаторная диаграмма
кретном случае следующие вели-
чины, определяющие индикаторную диаграмму aczz"ba, являются
известными:
1) степень сжатия двигателя в;
2) давление конца сжатия рс;
3) давление вспышки р'х;
4) коэффициент кг, принимаемый во всех случаях равным
/4 = 0,85;
5) показатель политропы сжатия пг, принимаемый во всех случаях
равным Hj = 1,35;
6) показатель политропы расширения nt, принимаемый во всех
случаях равным л, = 1,24 и, кроме того, отношение радиуса криво-
О
шипа к длине шатуна Х = £- и площадь поршня F, см*.
Сущность метода заключается в том, что для каждого конкретного
случая определяют отдельно коэффициенты Фурье:
1) тангенциальной силы от давления рабочих газов на поршень
по линии расширения;
2) тангенциальной силы от давления рабочих газов на поршень по
линии сжатия;
3) тангенциальной силы от атмосферного противодавления на поршень
по линиям расширения и сжатия.
5*
67
122406
Суммируя соответствующие коэффициенты Фурье этих трех компо-
нентов, получаем искомые коэффициенты Фурье тангенциальной силы
от давления рабочих газов и атмосферного противодавления на поршень.
Следовательно, для четырехтактного двигателя имеем:
Тг == Г, + 2 cos ^у ®) + 2 Brk s*n ®) =
к~~о
= т» + 3 ’Ь cos ^у я)
fc-1
+ 2 (^р* -ь ) sin (уя)» (о
fc-1
причем
АГк =* Арк + Аак + А\к )
и J (2)
Втк =» Врк + Век ‘F Btk, J
где Т, —среднее тангенциальное усилие на цапфу кривошипа от
одного цилиндра;
к — порядок гармоники; к => 1,2,3 ...;:
а —угол поворота кривошипа, отсчитываемый от начального
положения, соответствующего верхнему мертвому положе-
нию поршня;
Аг* и Втк — косинусовые и синусовые коэффициенты Фурье тангенци-
альной силы от давления рабочих газов и атмосферного
противодавления на поршень;
Арк и ffpk — то же, тангенциальной силы от давления рабочих газов
на поршень по линии расширения;
Aik и Bik— тоже, тангенциальной силы от давления рабочих газов
на поршень по линии сжатия;
Aik и В’к — то же, тангенциальной силы от атмосферного противодав-
ления на поршень по линиям расширения и сжатия.
Силами по линиям всасывания и выхлопа пренебрегаем.
Силы давления газов на поршень и соответствующие им тангенци-
альные силы пропорциональны площади поршня F, поэтому все коэф-
фициенты
Арк, ВГркЬ Aik , Bik, Aik и Б[к
должны быть пропорциональны F.
Силы давления газов на поршень по линии расширения и соответ-
ствующие им тангенциальные силы пропорциональны давлению вспышки
pi теоретической индикаторной диаграммы; поэтому коэффициенты Арк
и Врк должны быть пропорциональны р'2.
Аналогично коэффициенты Aik и В'* должны быть пропорциональны
давлению сжатия рс.
68
122407
Наконец, так как функция по а тангенциальной силы от атмосфер-
ного противодавления на поршень является функцией нечетной, то коэф-
фициенты А1к должны равняться нулю.
Следовательно, выражения для коэффициентов Агк и Вг* должны
иметь вид:
и
Агк — В (pz Арк + Рс Ас*)
(3)
Врк — F (Pz Врк + Рс Век + Bi к)* j
Для каждого конкретного случая величины F, р'2 и рс являются
известными и общими для всех коэффициентов Атк и Втк, поэтому
задача определения последних сводится к определению коэффициентов
Арк, ВРк, Аск, ВСк и Bik- При принятом постоянстве показателей
политроп расширения и сжатия коэффициенты Ар*, Врк, Аск, ВСк
и Bik являются функциями только двух независимых переменных: е
и к. Последнее обстоятельство дает возможность свести в таблицы эти
величины и таким образом позволяет практически решить поставлен-
ную задачу.
Таблицы коэффициентов Арк, Врк, Аск и Век первых восемнадцати
порядков вычислены с пятью десятичными знаками для значений
8 = 5,0; 5,5; 6,0; 6,5; 7,0; 7,5; 8,0
и
1 = 3,2;Р,4;|3,6; 3,8 4,0; 4,2.
Коэффициенты В1к вычислены для тех же значений X.
Погрешность табличных значений коэффициентов не превышает трех
единиц последнего пятого знака после запятой; как правило, эта погреш-
ность еще меньше.
Для значений в и к, не вошедших в таблицы, коэффициенты Фурье
могут быть определены по табличным значениям с помощью какой-либо
из существующих интерполяционных формул.
Имея выражение в виде ряда Фурье для тангенциальной силы Тг
[формула (1) п. 122403], можно написать ряд для крутящего момента 122407
от давления газов в цилиндре
А>=со А>=аэ
МЕГ « RT„ + 2 RATk cos (Л0О + 2 RBrk s*n —
k-i k-i
= /?Te+ 2 RT'rASinfftS/ + prjr) =
A-l
A=oo
•=Af, -J- 2 Wk* cos (A0O + 2 %trk Sin (A0O «
A = 1
к—co
= Ma + 2 Mr* sin (Ш + ₽rA), (1)
*=i
69
122500-122501
где Af0 —средний крутящий момент на валу двигателя от давления
газов, кгсм;
да* и косинусовый и синусовый коэффициенты ряда Фурье,
кгсм;
R — радиус кривошипа, см,
причем имеют место соотношения:
Afe — RT л; SJfrk — RArkj — RBrk;
__________________________________ д эд
Afrfc = RTrk ~ /да* 4- 9??*; tg рг* = =-^ .
rk лгк
(2)
122500
122501
Построение индикаторной диаграммы
Обозначения (фиг. 122501):
е —степень сжатия двигателя.
ра — начальное давление сжатия; кгсм~\
рс — конечное давление сжатия; кгсм~‘.
pi —давление вспышки теоретической индикаторной диаграммы
кгсм.
р2 — давление вспышки дей-
ствительной индикатбр-
ной диаграммы; кгсм~‘.
р* —давление конца расши-
рения; кгсм~г.
л, — показатель политропы
сжатия.
пг — показатель политропы
расширения.
Nel —эффективная мощность
одного цилиндра; л. с.
Vhl — литраж одного цилиндра
двигателя; л.
п — число оборотов двига-
теля; об/мин.
механический коэффи-
циент полезного дейст-
Фиг. 122501.’
Теоретическая индикаторная диаграмма
вия двигателя.
р. — коэффициент полноты индикаторной диаграммы.
ре—среднее эффективное давление двигателя; кгсм~*.
pt—действительное среднее индикаторное давление двигателя;
кгсмт*.
pi —среднее индикаторное давление теоретической индикаторной
диаграммы двигателя; кгсмг*.
Л2= у —коэффициент снижения давления вспышки.
Vc —объем пространства сжатия; см3 или л.
70
122502—122504
Для основных параметров индикаторной диаграммы имеем для 122502
четырехтактного двигателя следующие соотношения:
— 900 N«1 1 Dm Dm nV/а * (1)
P'i=-^ = & , ‘ Mm H (2)
рс = Р<г(^у1=Ра8’’1» (3)
Pi=—-1 > p'u Пг — I I — s “ 8 I — s 8 (4J
(5)’
(6)
Va=rhl + vc, ' (7J
у—. S-T (8)'
Величинами ра, nlt пг, rim, р., kz при построении индикаторной 122503
диаграммы задаются.
Для авиационных двигателей без нагнетателя, при полном откры-
тии дросселя на земле, при построении индикаторной диаграммы при-
нимаются обычно средние числовые значения:
л1= 1,35, р. = 0,95,
лг = 1,24, Аг = 0,85,
т)т = 0,88, ра = 0,9 кгсм~г.
При работе двигателя на высоте, а равно для двигателя с нагне-
тателем значения Dm и ра нуждаются в специальных подсчетах [3];
остальные параметры остаются без изменения.
Имея числовые значения параметров, указанных в 122503, подсчи- 122504
тывают величину рь по формуле (б) п. 122502 и определяют давление
газа по линиям сжатия и расширения соответственно по формулам
Р = Ра'(у)П1 (1)
и
где V — текущее значение объема цилиндра, ограниченного поршнем,
зависящее от положения поршня.
При построении индикаторной диаграммы отношение (р) обыч-
но заменяют отношением отрезков, которыми эти объемы изображаются
на диаграмме.
Для быстрого подсчета и построения по точкам политроп сжатия
и расширения приводится таблица 122504. При пользовании этой таб-
лицей полный объем цилиндра Га = УЛ1 + Ус делится на десять равных
71
122505
частей и для каждого такого деления, а также и для бе-
рутся из таблицы значения величин
(J?)”1-для политропы сжатия,
Гр')”1 — для политропы расширения.
По этим значениям и по найденным раньше величинам ра и рь подсчи-
тываются по уравнениям (1) и (2) соответствующие давления газов р по ли-
ниям политроп сжатия и расширения, по которым и строятся эти линии.
Построенная по точкам примерная индикаторная диаграмма изобра-
жена на фиг. 122501. Такая диаграмма называется теоретической. Она
122505
Фиг. 122505.
Скругленная индикаторная диаграмма
характерные точки скругления
имеет двойные точки на участках cz
и ab, что влечет за собой появление
двойных точек на диаграммах некото-
рых сил, действующих в кривошипно-
шатунном механизме. Кроме того, тео-
ретическая индикаторная диаграмма
не отражает предварения вспышки,
постепенности сгорания и предваре-
ния выхлопа; поэтому для отражения
этих явлений и для приближения
теоретической индикаторной диаграм-
мы к действительной скругляют тео-
ретическую индикаторную диаграмму
так, как это показано на фиг. 122505;
для этого выработаны специальные пра-
вила [3]. Следует, однако, заметить, что
индикаторной диаграммы обычно не
совпадают с расчетными точками; поэтому скругление индикаторной
72
122506
диаграммы не дает экономий4'в трудоемкости динамического расчета
и требует просчетов для дополнительных точек.
При динамических расчетах рационально класть в основу теоре-
тическую индикаторную диаграмму, а скругление двойных точек про-
изводить на кривых сил, что позволяет, при некотором опыте, доста-
точно просто и точно получить требуемую кривую.
каторной диаграммы
Таблица 122504
S В 6 S S 8 6 6 6 S 3 S S В
6,2 6,3 6,4 6,5 6,6 6,7 6,8 6,9 7,0 7,1 7,2 7,3 7,4 7,5
11,742 12,000 12,256 12,515 12,775 13,037 13,304 13,566 13,832 14,099 14,368 14,638 14,919 15,182
9,606 9,800 9,992 10,163 10,380 10,576 10,772 10,967 11,167 11,365 11,564 11,763 11,963 12,164
0,528 0,525 0,522 0,519 0,517 0,514 0,511 0,508 0,506 0,504 0,501 0,499 0,496 0,494
0,645 0,643 0,641 0,638 0,636 0,634 0,631 0,629 0,627 0,625 0,623 0,621 0,619 0,617
Для определения числовых значений давление вспышки р'г теоре- 122506
тической индикаторной диаграммы удобно представить в виде:
откуда
—=А+В—,
Ра Ра
где, согласно формулам (2), (3) и (4) п. 122502,
4 = ___L е"1
Пх—1 1-s1-”8
о _ «2 - 1 S - 1
В— 1 - Л2 1
|Л 1 ~ 8
(I)
(2J
(3)
(4)
и
Для облегчения подсчетов величин p'z, рс и рь дается ряд кривых:
нафиг. 122506-1 — кривые изменений коэффициентов А, формула(3),
и коэффициентов В, формула (4), по е;
73
122506
Фиг. 122506-1.
К определению теоретического давления вспышки pi
Кривые изменений коэффициентов А и В по s
Фиг. 122506-П.
К определению теоретического давления
вспышки р',
Кривые изменений — по для е = 5,0;
Ра Ра
5,5; 6,0; 6,5; 7,0 и 7,5
на фиг. 122506-П — кривые изменений £ по ~ для
Ра Pit
е = 5; 5,5; 6, 6,5; 7 и 7,5;
на фиг. 122506-Ш — кривые изменений eni и е“п« по е.
74
123000-123102
Фиг. 122506-Ш.
К определению давлений конца сжатия и конца расширения
Кривые изменений s”i и в-пз по s
СУММАРНЫЕ СИЛЫ ОТ ГАЗОВ И ИНЕРЦИИ ДВИГАЮЩИХСЯ МАСС,
ДЕЙСТВУЮЩИЕ В КРИВОШИПНО-ШАТУННОМ МЕХАНИЗМЕ ДВИГАТЕЛЯ
Суммарные силы, действующие в кривошипно-шатунном механизме,
от рабочих газов и инерции поступательно двигающихся масс
одного цилиндра
За счет сил инерции поступательно двигающихся масс и давления
рабочих газов в цилиндре в кривошипно-шатунных механизмах возни-
кают силы различных видов. Для расчетов необходимо иметь резуль-
тирующие силы каждого вида; они находятся для каждого вида
простым алгебраическим сложением.
По оси цилиндра действует приложенная к оси поршневого пальца
суммарная сила
Р = Рг + Р/. (1)
На фиг. 123102-1 и 123102-11 даны кривые изменения по углу
поворота кривошипа сил Рг и Р главных цилиндров авиационных
двигателей АМ-35 при Ne=1200 л. с. и п — 2050 об/мин и Алли-
сон С-15 при Ne = 1100 л. с. и п = 3000 об/мин.
На стенку цилиндра действует суммарная сила
N=Nr + N;., (2)
По оси шатуна действует суммарная сила
К = Кг + /</. (3)
123000
123100
123101
123102
75
123102
На ось цапфы кривошипа действует суммарная тангенциальная
сила
T = Tr + Tj.
На ось цапфы кривошипа действует еще суммарная нормальная
сила
Z = Zr Zj.
Фиг. 123102-1.
Кривые изменения сил Рг и Р в главном цилиндре двигателя АМ-35
На коленчатом валу двигателя от сил одного цилиндра действует
суммарный крутящий момент
— Мвт Мв/.
(б)
На подмоторную раму двигателя от сил одного цилиндра действует
суммарный момент
Мф — Л4ф.р Мф} = — Мв.
(7)
76
123103-123104
На подмоторную раму двигателя от одного цилиндра действует
сила инерции Р,, направленная по оси этого цилиндра.
В случае кривошипно-шатунного механизма с прицепным шатуном 123103
нужно найти суммарные силы Pt, Nt, Ki,Ti, Zt и моменты MBi и M$i,
которые определяются аналогично изложенному в 123102.
Фиг. 123102-П.
Кривые изменения сил Рг и Р4в цилиндре двигателя Аллисон С-15
На подмоторную раму будет действовать также сила инерции Рц,
направленная по оси рассматриваемого бокового цилиндра. Кроме
того, к силе, действующей на стенку главного цилиндра, нужно
добавить суммарную силу 9?,, возникающую за счет действия прицеп-
ного шатуна на палец, закрепленный на главном шатуне:
3li = Nh+N'ji,
На фиг. 123104-1 даны кривые изменения сил Рг! и Pi в боковом 123104
цилиндре V-образного двигателя АМ-35 при Ne—1200 л. с.
и л= 2050 об/мин.
На фиг. 123104-11—XV даны кривые изменения сил Pi( Nlt 3llt
Ti и Zt для всех цилиндров первой звезды 18-цилиндрового сдвоенного
звездообразного двигателя Бристоль «Центавр» XI при Ne — 2150 л. с.
и п — 2400 об/мин.
77
123104
Кривые изменения сил Pri и Pt в боковом цилиндре двигателя АМ-35
Кривые изменения сил Р, в цилиндрах 1, 2 и 3 двигателя
Бристоль «Центавр»
78
123104
79
123104
Фиг. 123104-V.
Кривые изменения сил N; в цилиндрах 1, 2 и 3 двигателя Бристоль «Центавр»
Кривые изменения сил в цилиндрах 4, 5 и б двигателя Бристоль «Центавр»
80
123104
Фиг. 123104-V1I.
Кривые изменения сил в цилиндрах 7, 8 и 9 двигателя
Бристоль «Центавр»
6 Авиац. порши, двигатели
81
123104
Фиг. 123104-V11I.
Кривые изменения сил от сил Pt в цилиндрах 2, 3, 4 и 5 двигателя Бристоль
«Центавр»
Кривые изменения сил Э?г от сил Pt в цилиндрах 6, 7, 8 и 9 двигателя Бристоль
«Центавр»
82
123104
Фиг. 123104-Х.
Кривые изменения сил Тj цилиндров 1, 2 и 3 двигателя Бристоль «Центавр»
Фиг. 123104-Х1.
Кривые изменения сил Ti цилиндров 4, 5 и 6 двигателя Бристоль «Центавр»
6*
83
123104
ZiKz
Фиг. 123104-X111.
Кривые изменения сил Zj цилиндров 1, 2 и 3 двигателя Бристоль «Центавр»
Фиг. 123104-X1V.
Кривые изменения сил Zz цилиндров 4, 5 и 6 двигателя Бристоль «Центавр»
84
123200—123202
Фиг. 123104-XV.
Кривые изменения сил Z{ цилиндров 7, 8 и 9 двигателя Бристоль «Центавр»
Порядок вспышек в авиационных двигателях разного типа 123200
Меняя конструкцию распределительного валика’ в отношении рас- 123201
положения кулачков и одновременно конструкцию распределительного
валика и конструкцию коленчатого вала в отношении взаимного
расположения колен у двигателей с одним и тем же числом и распо-
ложением цилиндров, можно достигнуть различных порядков чередо-
вания вспышек в цилиндрах. Порядок вспышек оказывает большое
влияние на динамику двигателя в целом, так как от него зависят
фазы сил и моментов, действующих в отдельных цилиндрах двигателя.
Порядок вспышек может повлиять на суммарный крутящий момент
на валу двигателя, на крутящие моменты на коренных шейках вала,
на уравновешенность двигателя в целом. Изменение расположения
колен вала может повлиять на напряженность коленчатого вала
и картера двигателя за счет изменения величин суммарных сил
и моментов, действующих на эти части двигателя.
Поэтому порядок вспышек в цилиндрах двигателя должен выби-
раться, исходя из ряда требований, предъявляемых к авиационному
двигателю.
Для получения наибольшей равномерности крутящего момента 123202
на валу двигателя и момента, передающегося на подмоторную раму,
необходимо, чтобы вспышки чередовались в цилиндрах через одина-
85
123206
Фиг. 123206-1.
Порядок вспышек в 4-цилиндровом одноряд-
ном двигателе
Фиг. 123206-П.
Порядок вспышек в 6-цилиндровом однорядном
двигателе
Фиг. 123206-111.
Порядок вспышек в 8-цилиндровом двигателе
с цилиндрами, расположенными V-образно под
углом в 60° *
Фиг. 123206-IV.
Порядок вспышек в 12-цилиндровом двигателе с ци-
линдрами, расположенными V-образно под углом в 60°
Фиг. 123206-V.
Порядок вспышек в 12-цилиндровом двигателе
с цилиндрами, расположенными W-образно
Фиг. I23206-VI.
Порядок вспышек в 18-цилиндровом двигателе с ци-
линдрами, расположенными W-образно
Фиг. 123206-VH.
Порядок вспышек в 16-цилиндровом двигателе с ци-
линдрами, расположенными Х-образно
Фнг. 123206-VUI.
Порядок вспышек в звездообразных двигателях
с 3, 5, 7 и 9-ю цилиндрами
123206
123206
Фиг. 123206-IX.
Порядок вспышек в сдвоенных
звездообразных 14- и 18-цилиндро-
вых двигателях с кривошипами,
расположенными под углом в 180°
Фиг. 123206-Х.
Порядок вспышек в 28-цилиндровом четырехрядном звездообразном двигателе,
, 360э
у которого звезды сдвинуты одна относительно другой на угол 7 ==
88
123206
I И
S-й ряд ---------®
6-й ряд --------ф
7-й ряд -0---®
1-й ряд -ф---@
Z-й ряд -®---@
3-й ряд -ф---@
4-й ряд @
Фиг. 123206-Х1.
Порядок вспышек в 14-цилиндровой секции 28-цилиндрового звездообразного
двигателя типа BMW-803
Фиг. I23206-X11.
Порядок вспышек в 24-цилиндровом четырехрядном звездообразном двигателе
с цилиндрами, стоящими один за другим в ряд
89
123206
Фиг. 123206-XIV.
Порядок вспышек в двухтактном шестицилиндровом двигателе с противоположно
двигающимися поршнями
90
I н m is v и
И—®@®pna
3)-®-®-Q>-@-®-1ГряЗ
Э--®-®—-ф—“~©-®-]1ГряЗ
®--©-©-®—“W—
Одновременно. работают
Bea цилиндра.
Фиг. 123203-XV.
Порядок вспышек в двухтактном четырехрядном 24-цилиндровом
двигателе с рядами, расположенными по боковым сторонам
прямоугольного параллелепипеда, и противоположно двигающи-
мися поршнями
123206
123203—123302
ковые промежутки времени или, что то же, следовали через одинако-
вые углы поворота коленчатого вала двигателя. Для двигателя,
имеющего i цилиндров, вспышки должны следовать при четырех-
4 те
тактном цикле через углы поворота коленчатого вала -т-, а при двух-
2те
тактном цикле—через z .
123203 Кривошипы коленчатого вала должны быть расположены так,
чтобы силы инерции вращающихся масс и моменты этих сил были
уравновешены сами собой полностью или имели минимальные величины,
а силы инерции поступательно двигающихся масс и моментов от них
имели уравновешенными, сами собой, возможно большее число низших,
т. е. наибольших по величине, порядков. В основе этих требований
лежит необходимость уменьшения динамических нагрузок на подмо-
торную раму двигателя, могущих вызвать вибрацию винтомоторной
установки на самолете.
123204 Для получения более равномерной нагрузки на участках колен-
чатого вала и снижения максимальных напряжений в нем (при вале
с несколькими кривошипами) следует вспышки распределять так,
чтобы смежные вспышки были в цилиндрах, расположенных по разные
стороны от среднего коренного подшипника.
123205 Порядок вспышек в цилиндрах двигателя сильно влияет на вынуж-
денные крутильные колебания системы коленчатого вала. Простым
изменением порядка вспышек у данного двигателя посредством пере-
делки кулачкового валика иногда можно устранить из области эксплоа-
тационных чисел оборотов двигателя критические резонансы некоторых
порядков. Следует, однако, иметь в виду, что при этом можно внести
в эксплоатационную область чисел оборотов двигателя критические
резонансы других порядков, которые могут быть даже опаснее бывших.
Поэтому совершенно необходимо проводить тщательные расчетные и,
если нужно, экспериментальные проверки для каждого конкретного
случая.
123206 На фиг. 123206-1 —XV (см. стр. 86—91) приводятся схемы поряд-
ков вспышек, обычно применяемых в современных авиационных дви-
гателях разных типов.
123300 Суммарные силы от всех цилиндров,
действующие иа данную кривошипную шейку
123301 Для расчета коленчатого вала на прочность и для расчета шатун-
ного подшипника нужно знать суммарную нормальную силу Ив от
всех сил 1 и суммарную тангенциальную Тв от всех сил Т на дан-
ной шейке кривошипа от цилиндров, действующих на нее.
123302 Для случая всех центральных шатунов на данной кривошипной
шейке к результирующей силе от сил Z всех цилиндров, дейст-
вующих на кривошипную шейку,
= (1)
нужно прибавить центробежную силу 3 Pl» суммы вращающихся масс
Мк шатунов, действующих на эту кривошипную шейку,
ЗРьк = -/?ш’ЗА1к, (2)
92
123304
93
123304
1вк1
Фиг. 123304-1П.
Кривая изменения сил ZB 18-цилиндрового сдвоенного звездообразного двигателя
Бристоль «Центавр»
Фиг. 123304-IV.
Кривая изменения снл Тв 18-цилиндрового сдвоенного звездообразного двигателя
Бристоль «Центавр»
94
123303-123402
в результате чего получается суммарная сила ZB, действующая на дан-
ную шейку кривошипа:
Ztl = Zz+^PIx. (3)
Суммарная тангенциальная сила в этом случае
ТВ = 2Т. (4)
Если на кривошипную шейку действует главный шатун и ряд 123303
сочлененных с ним прицепных шатунов, то
= + (1)
где Zt — нормальная сила от одного бокового цилиндра,
Zl — нормальная сила от главного цилиндра.
К силе Zs нужно прибавить силу инерции Plk массы М'к приве-
денного главного шатуна
‘ (2)
Суммарная сила, действующая на шатунную шейку, будет
ИВ = ИХ+Р£К. (3)
Аналогично суммарная тангенциальная сила будет
TB-3TZ + T£, (4)
где Tt — тангенциальная сила от одного бокового цилиндра,
Тд —тангенциальная сила от главного цилиндра.
На фиг. 123304-1 и II (см. стр. 93) для иллюстрации даны кри- 123304
вые сил Ив и Тв по углу поворота коленчатого вала а V-образных дви-
гателей: АМ-35 при п — 2050 об/ мин и Ne — 1200 л. с. и Аллисон С-15 при
п — 3000 об/мин и Ne = 1100 л. с.
На фиг. 123304-Ш и IV (см. стр. 94) даны кривые сил ZB и Тв
по углу поворота коленчатого вала а сдвоенного звездообразного
18-цилиндрового двигателя Бристоль «Центавр» XI прип — 2400 об/мин
и Ne = 2150 л. с.
Векторные диаграммы результирующих сил, 123400
действующих на шатунную шейку и шатунный подшипник.
Средняя сила, действующая на шатунную шейку.
Графики для определения средних сил, действующих
на шатунную шейку в авиационных двигателях разного типа
Для расчета шатунного подшипника и определения положения 123401
сверления в шатунной шейке, подводящего к нему масло, надо иметь
векторные диаграммы результирующей сил, действующих на шейку
и подшипник.
Поэтому при динамическом расчете двигателя необходимо строить
обе указанные выше векторные диаграммы.
Векторно сила К, действующая на шатунную шейку, определяется 123402
уравнением
K = TB+ZB. (1)
95
123403
Силу К, согласно уравнению (1), можно наводить графически,
построением силового треугольника.
Но так как силы Тв и ZB взаимно перпендикулярны, то величину
силы К можно определять также аналитически по формуле
(2)
123403 При построении векторной диаграммы сил К, действующих на
шатунную шейку вала, шатунная шейка изображается в виде окруж-
Фиг. 123403-1.
Векторная диаграмма сил, действующих на шатунную шейку
коленчатого вала V-образного двигателя Аллисон С-15
ности; на этой окружности наносится направление оси кривошипа,
относительно которого координируются направления векторов К
по их составляющим: Тв, перпендикулярной оси кривошипа, и ZB,
направленной по оси кривошипа. Векторы сил К проходят через ось
шатунной шейки. Концы векторов сил К опираются на окружность
96
123403
шатунной шейки. Векторы сил К строятся в некотором масштабе для
ряда значений угла поворота а коленчатого вала от его начального
положения. Плавная кривая, соединяющая начала всех векторов К,
является векторной диаграммой сил К.
Фиг. 123403-П.
Векторная диаграмма сил, действующих
на шатунную шейку коленчатого вала
18-цилиндрового сдвоенного звездообраз-
ного двигателя Бристоль «Центавр» за
первый оборот коленчатого вала
Фиг. 123403-III.
Векторная диаграмма сил, действующих
на шатунную шейку коленчатого вала
18-цилиндрового сдвоенного звездообраз-
ного двигателя Бристоль «Центавр» за
второй оборот коленчатого вала
На фиг. 123403-1 дана для иллюстрации векторная диаграмма сил,
действующих на шатунную шейку коленчатого вала V-образного дви-
гателя Аллисон С-15 при Ne=1100 л. с. и п = 3000 об/мин.
На фиг. 123403-11 и III даны векторные диаграммы сил, действу-
ющих на шатунную шейку вала 18-цилиндрового сдвоенного звездо-
образного двигателя Бристоль «Центавр» XI при Ne = 2150 л. с.
и п = 2400 об/мин.
7 Авиац. поршн. двигатели
97
123404
123404 Результирующая всех сил, действующих на шатунный подшипник,
для каждого данного угла а, будет равна и противоположно напра-
влена соответствующей результирующей К сил, действующих на шатун-
ную шейку. Поэтому векторная диаграмма сил, действующих на под-
шипник, строится так. На листе кальки достаточного размера наносятся
окружность (равная окружности, изображающей шатунную шейку
на векторной диаграмме для шатунной шейки), изображающая шатун-
ный подшипник, и ось шатуна, для которого строится диаграмма.
Векторная диаграмма сил, действующих на шатунный подшипник главного
(вильчатого) шатуна V-образиого двигателя Аллисон С-15
Считая кальку за систему шатунного подшипника, накладывают ее
на векторную диаграмму сил, действующих на шатунную шейку,
которую принимают за систему коленчатого вала, так, чтобы центры
окружностей подшипника и шейки совпали, а оси шатуна и криво-
шипа для каждого а имели правильное относительное расположение,
т. е. имели между собой угол Ф, определяемый уравнением
ф == а 4“ Р,
[см. формулу (1) п; 111301 и фиг. 111101], что достигается поворачи-
98
123404
ванием кальки вокруг общего центра окружностей подшипника и шей-
ки в направлении, противоположном направлению вращения кривошипа.
Для каждого угла а, при соответствующем относительном располо-
жении кальки и векторной диаграммы сил, действующих на шатунную
шейку, переносят соответствующие точки векторной диаграммы
на кальку. Полученные на кальке точки объединяют плавной кривой,
которая и будет векторной диаграммой сил, действующих на шатун-
ный подшипник.
Векторная диаграмма сил, действующих на шатунный подшипник глав-
ного шатуна 18-цилиндрового сдвоенного звездообразного двигателя
Бристоль «Центавр»
На этой диаграмме векторы сил проходят через центр подшипника,
начинаются на окружности подшипника и кончаются на кривой.
На фиг. 123404-1 дана векторная диаграмма сил, действующих
на подшипник главного шатуна V-образного двигателя Аллисон С-15
при Ne=1100 л. с. и п = 3000 об/мин.
На фиг. 123404-П дана векторная диаграмма сил, действующих
на подшипники главного шатуна 18-цилиндрового сдвоенного звездо-
образного двигателя Бристоль «Центавр» XI при Ne = 2150 л. с.
и п = 2400 об/мин.
7*
99
123405 -123406
123405 Одной из характеристик работы шатунного подшипника является
средняя по времени или, что то же, по углу поворота коленчатого вала а,
сил К, действующих на подшипник, Кср* Она находится как средняя
ордината развернутой по углу поворота а диаграммы сил К и равна
для четырехтактных двигателей
Kcp=l^da (1)
о
и для двухтактных двигателей
2«
^СР = 2я ^а'
О
. Фиг. 123405-1.
Кривая изменения силы К, действующей на шатунную шейку вала V-образного
двигателя АМ-35, при Ne = 1200 л. с. и п = 2050 об/мин
На фиг. 123405-1, II и III даны развернутые по углу а диаграммы
сил К соответственно для V-образных двигателей АМ-35 при
Ne=1200 л. с. и п = 2050 об/мин и Аллисон С-15 при 7Ме== 1100 л. с.
и п = 3000 об/мин и для 18-цилиндрового сдвоенного звездообразного
двигателя Бристоль «Центавр» XI при Ne = 2150 л. с. и п = 2400 об/мин
с нанесением на них величины Кср-
123406 Определение силы Кср посредством динамического расчета двигателя
достаточно кропотливо и требует много времени. Быстрое определение
силы Кср с достаточной для практики точностью производится при
помощи предложенных И. Ш. Нейманом [6] и даваемых ниже графиков,
100
123405
Фиг. 123405-П.
Кривая изменения силы К, действующей на шатунную шейку вала V-образного
двигателя Аллисон С-15, при Ne — 1100 л. с. и п = 3000 об/мин
Фиг. 123405-Ш.
Кривая изменения силы К, действующей на шатунную шейку вала 18-цилиндро-
вого сдвоенного звездообразного двигателя Бристоль «Центавр», при Ns = 2150 л. с.
и л = 2400 об/мин; Кср= 13200 кг
101
123406
позволяющих упрощенно определять силы Кср для следующих типов
авиационных двигателей:
фиг. 123406-1 — для 6-цилиндровых однорядных авиадвигателей;
Фиг. 123403-1.
К определению Кср на шатунной шейке вала 6-цилиндровых
однорядных авиадвигателей
Фиг. 123406-П.
К определению на шатунной шейке вала 12-цилиндровых V-образ-
ных авиадвигателей
102
123406
фиг. 123406-Ш — для 12- и 18-цилиндровых W-образных авиадви-
гателей;
Фиг. 123406-1П.
К определению Кср на шатунной шейке вала 12- и 18-цилиндровых
W-образных авиадвигателей
фиг. 123406-1V —для 3-цилиндровых звездообразных авиадвигателей
Фиг. 12310S-IV.
К определению Кср на шатунной шейке вала 3-цилиндровых звездообраз-
ных авиадвигателей
103
123406
фиг. 123406-V — для 5-цилиндровых звездообразных авиадвигателей;
Фиг. 123405-V.
К определению Кср на шатунной шейке вала 5-цилиндровых звездооб-
разных авиадвигателей
фиг; 123406-VI —для 7-цилиндровых звездообразных авиадвигателей;
Фиг. 123406-VI.
К определению Кср на шатунной шейке вала 7-цилиндровых звездооб-
разных авиадвигателей
104
123406
фиг. 123406-VII —для 9-цилиндровых звездообразных авиадвигателей.
Фиг. 123 406-VII.
К определению /<ср на шатунной шейке вала 9-цилиндровых звездооб-
разных авиадвигателей
Определение силы Кср по этим графикам производится так.
О б о зн а че н и я:
R —радиус кривошипа; м.
ш —угловая скорость коленчатого вала; сек"1.
i —число цилиндров, действующих на шатунную шейку.
—суммарная масса поступательно двигающихся частей в одном
цилиндре; кгм-1 сек2.
УЯк — суммарная вращательно двигающаяся масса, отнесенная к шатун-
ной шейке; кгм-1 сек2.
е —степень сжатия двигателя.
ре —среднее эффективное давление двигателя; кг см*.
ра —давление начала сжатия; кгсм~2.
Рп—площадь поршня; см2;
Р, ~ +0,5i ЭДп). (1)
Зная все эти величины, определяют для рассчитываемой шатун-
ной шейки величину абсциссы, которая на соответствующем графике
дана в виде функции величин
Р], Рп, ре, Ра И 8.
Подсчитав величину абсциссы, определяют по графику соответ-
ствующую ей величину А ординаты, которая в свою очередь дана
на соответствующем графике в виде функции
*ср
/(fn> е> Р» Р«>'
105
123500-123501
Функция f(Fn, е, ре, ра), входящая в знаменатель, определяется
по известным значениям Fn, е, Ре и ра.
После этого /<ср определяется по формуле
Кер — Af(Fn, е, Pet Ра)‘ (2)
График 123406-П построен для двигателей с углом между осями
цилиндров в 60°, но по нему можно определять достаточно точно
величину Кс-р и для V-образных двигателей с углами между осями
цилиндров в 45 и 90°.
123500 Результирующая сил, действующих нормально к стенке главного
цилиндра, при наличии кривошипно-шатунного механизма с прицепными
шатунами
123501 За счет действия прицепных шатунов на пальцы, укрепленные на
кривошипной головке главного шатуна, будут создаваться нормаль-
ные давления на стенку главного цилиндра от сил, действующих
на поршни боковых цилиндров. Эти нормальные давления надо прило-
жить к нормальному давлению, возникающему от сил, действующих
на поршень главного цилиндра, и найти результирующую всех этих
давлений (см. 123102 и 123103):
+ (1)
Силой определяются износы стенки главного цилиндра и боко-
вой поверхности поршня главного цилиндра.
Силой— являющейся реакцией на силу 91г, вызывается попе-
речный изгиб стержня главного шатуна.
Фиг. 12350Ы.
Кривые изменения сил 31 и V-образного авиадвигателя АМ-35 при Ne = 1200 л. с.
и л = 2050 об/мин
106
123501
71 кг
Фиг. 123501-П.
Кривые изменения сил и SJJj 18-цилиндрового сдвоенного звездообразного
авиадвигателя Бристоль «Центавр» при Ne = 2150 л. с. и п = 2400 об/мин
107
123600—123602
На фиг. 123501-1 даны кривые изменения сил зЯг, и 2 V-образ-
ного двигателя АМ-35 при Ne= 1200 л. с. и и = 2050 об/мин.
На фиг. 123501-11 даны кривые изменения сил и 2^1 18-цилин-
дрового сдвоенного звездообразного двигателя Бристоль «Центавр» XI
при 1Ме = 2150 л. с. и и = 2400 об/мин.
123600 Крутящие моменты, передающиеся через опорные шейки коленчатого
вала. Суммарный крутящий момент на валу двигателя
123601 Крутящий момент от работы всех цилиндров, действующих на
данную шатунную шейку, равен:
Mz = RTB,
где R — радиус кривошипа,
Тв — суммарное тангенциальное усилие, определяемое по форму-
лам (4) п. 123302 и (4) п. 123303.
123602 z Крутящий момент ЛГкр, передающийся через любую опорную шейку
коленчатого вала, равен:
ЛГкр«2Ме-Л1и, (1>
где
2Afs —сумма крутящих моментов всех колен вала, лежащих
к задку двигателя от рассматриваемой шейки (передним
концом двигателя считается конец с пропеллером);
AfH —крутящий момент, затрачиваемый на вращение нагнетателя.
Фиг. 123502-1.
Крутящие моменты, передающиеся
через 1-ю опорную шейку коленча-
того вала 12-цилиндрового V-об-
разного двигателя АМ-35, при N, =
= 1200 л. с. и и = 2050 об/мин
Фиг. 123502-И.
Крутящие моменты, передающиеся
через 1-ю опорную шейку коленча-
того вала 12-цилиндрового V-образ-
ного двигателя Аллисон С-15, при
Ne = 1100 л. с. и п = 3000 об/мин
108
123602
Мкр
Фиг. 123602-III.
Крутящие моменты, передающиеся через 2-ю опорную шейку коленчатого
вала 12-цилиндрового V-образного двигателя АМ-35, при ЛГе=»1200 л. с. и
п = 2050 об/мин
Фиг. 123502-IV.
Крутящие моменты, передающиеся через 2-ю опорную шейку коленчатого
вала 12-цилиндрового V-образного двигателя. Аллисон С-15, при 2V„=I100 л. с.
и п = 3000 об/мин
109
123602
НО
123602
Мкр кг см
10000 —
60000
50000
40000
30000
20000
10000
о
-10000
-20000
Фиг. 123602-V1I.
Крутящие моменты, передающиеся через 4-ю опорную шейку коленчатого
вала 12-цилиндрового V-образвдго двигателя АМ-35, при Ne=1200 л. с. и
л = 2050 об/мин
Фиг. 123602-VII1.
Крутящие моменты, передающиеся через 4-ю опорную шейку коленчатого
вала 12-цилиндрового V-образного двигателя Аллисон С-15, при Ne— 1100 л. с.
и л = 3000 об/мин
111
123602
В случае двигателя без нагнетателя Л4н = 0 и
Мкр = 2(2)
Суммарный крутящий момент на валу двигателя от работы всех
его цилиндров будет равен крутящему моменту, передающемуся через
ближайшую к пропеллеру опорную шейку коленчатого вала.
На фиг. 123602-1 —VIII даны для иллюстрации построенные
по углу поворота коленчатого вала а кривые изменения крутящих
моментов, передающихся через 1, 2, 3 и 4-ю опорные шейки колен-
чатых валов 12-цилиндровых V-образных авиационных двигателей,
АМ-35 при Ne= 1200 л. с. и п = 2050 об/мин и Аллисон С-15 при
Ne=1100 л. с. и п = 3000 об/мин.
130000-131004
УРАВНОВЕШИВАНИЕ СИЛ ИНЕРЦИИ АВИАЦИОННЫХ 130000
ДВИГАТЕЛЕЙ
СИЛЫ, ВЫЗЫВАЮЩИЕ НЕУРАВНОВЕШЕННОСТЬ 131000
АВИАЦИОННОГО ДВИГАТЕЛЯ
Двигатель является уравновешенным, если, работая на установив- 131001
шемся режиме, он действует на его опоры (подмоторную раму) с не-
которыми постоянными по величине и направлению силами и мо-
ментами.
Неуравновешенный двигатель действует на подмоторную раму с пе- 131002
ременными силами и моментами, которые при соответствующих усло-
виях могут возбудить вибрацию частей самолета. Чем больше ампли-
туды переменных сил или моментов, передающихся со стороны двига-
теля на опоры, и чем ближе частота изменения этих сил и моментов
к частоте собственных колебаний частей самолета, тем сильнее и опас-
нее возникающие вибрации. >
Задача уравновешивания двигателя заключается в определении ,131003
опорных реакций и в применении специальных средств для полу- 1
чения этих реакций постоянными или с небольшими изменениями по
величине и направлению, не вызывающими опасных вибраций в системе у
самолета.
Обозначения: 131004
2jPbh—система внешних сил.
2 Мвн—система моментов внешних сил.
2Р/ —система сил инерции двигающихся частей двигателя.
2—система моментов сил инерции двигающихся частей двига-
теля.
2^ф —система сил реакции опор двигателя.
2-Мф —система моментов сил реакции опор двигателя.
i —номер звена механизма двигателя (меняется от 1 до пол-
ного числа звеньев ft).
Gf —вес звена за номером i.
mt —масса звена за номером I.
2,—координаты центра тяжести z-ro звена.
G —вес двигателя.
8 Авяац. порши. двигатели
113
131005-131006
М— масса двигателя.
х,, Ул zs—координаты центра тяжести двигателя S.
Mg — момент сил веса двигателя.
/р2, /12—центробежные моменты инерции всего двигателя.
Мс—момент сопротивления внешней среды вращению винта.
Pi— сила тяги винта.
2 Рр—силы реакции выхлопных газов.
Мр— момент сил реакции выхлопных газов.
Добавление в индексах букв х, у и z дает обозначение компонен-
тов сил и моментов по осям координат.
Центр приведения сил удобно для дальнейшего взять на оси ко-
ленчатого вала.
Очевидно:
i-h
G=2G<- i-1 i-h (H
м = 2 m-’ (2)
1 AfX, = 2j miXi> (3)
f = 1 i~h (4)
Mz,= т&. (5)
i “1
131005
131006
По принципу Даламбера имеют место следующие уравнения:
2 р<ь — 2 Рвн 2 Pj
и
Ж= - 27йвн-2м/.
0)
В систему внешних сил и моментов входят:
1) вес двигателя G,
2) сила тяги винта Рт,
3) силы реакции выхлопных газов ^Рр,
4) момент сопротивления внешней среды вращению винта Мс.
Для практического применения удобнее иметь уравнения (1)
п. 131005 в аналитической форме.
114
131007-132002
Принимаем прямоугольную систему координат, ось z которой на-
правляем вдоль оси коленчатого вала, а начало берем в центре приве-
дения сил.
Части двигателя совершают плоское движение, параллельное пло-
dz d2z
скости ху; поэтому все z постоянны, а и равны нулю.
Вместо двух векторных уравнений (1) п. 131005 можно написать
шесть скалярных уравнений [2]:
2 = — 2 рр* 2 т,‘ "Зр* ’
i=i
i = h
2 ~ 2 ^pv + 2 nii dt2 ’
/=1
2p*z=-2p₽z—(2)
2 мфу = - 2 mpv-mGv+,
i
2 - 3 mpz-mGz-mc+2 (Ч®- dm-
i=l
Вес двигателя постоянен по величине и направлению. 131007
Сила тяги винга и момент сопротивления внешней среды враще-
нию винта при существующих незначительных неравномерностях угло-
вой скорости вращения винта практически постоянны по величине и
направлению.
Суммарная реакция выхлопных газов и ее моменты 2-^р®, 2-^р»>
2аГР2 на установившемся режиме работы двигателя меняются по ве-
личине незначительно и мало влияют на неуравновешенность двига-
теля.
Следовательно, причиной неуравновешенности двигателя являются
в основном силы инерции его поступательно и вращательно двигаю-
щихся масс и моменты от сил веса двигателя.
ОБЩИЕ УСЛОВИЯ УРАВНОВЕШЕННОСТИ СИЛ ИНЕРЦИИ 132000
АВИАЦИОННОГО ДВИГАТЕЛЯ
Двигатель уравновешен, если главный вектор и главный момент 132001
системы инерционных сил и момент сил веса постоянны.
Так как двигающиеся точки двигателя при его установившемся 132002
режиме имеют периодически повторяющееся движение, то в уравнове-
шенном двигателе постоянные значения величин главного вектора и
главного момента системы инерционных сил двигателя должны быть
равными нулю.
8*
115
132003—133102
132003 Аналитически положения п. 132002 выражаются следующими урав-
нениями:
d*Xi п
т‘ dt2 = dt* ~ О’
1=1
d* [ а
‘Hz
dT21яг в О'
132004 Из уравнений 132003 следует, что у уравновешенного двигателя:
О xt> Ук а п0 131006 и z, должны быть постоянными, т. е. центр
тяжести двигателя должен быть неподвижен; 2) центробежные моменты
двигателя I„z и 1хг относительно осей, перпендикулярных оси враще-
ния вала двигателя, должны быть постоянны.
Оси цилиндров авиационных двигателей пересекают ось коленча-
того вала; поэтому силы инерции поступательно двигающихся масс
не дают момента относительно оси z. Центробежные силы инерции
вращающихся масс также пересекают ось коленчатого вала н также
не дают момента относительно оси z. Поэтому при рассмотрении во-
просов уравновешенности двигателя на установившихся режимах и без
учета крутильных колебаний, т. е. считая угловую скорость вращения
коленчатого вала постоянной, последнее уравнение п. 131006 учитывать
не следует.
132005 При соблюдении условия (1) п. 132004 моменты сил веса Mgx, Mgv
и Mgi будут величинами постоянными, т. е. уравновешенными.
133000 УРАВНОВЕШИВАНИЕ СИЛ ИНЕРЦИИ ВРАЩАЮЩИХСЯ МАСС
АВИАЦИОННОГО ДВИГАТЕЛЯ
133100 Признаки полной уравновешенности вращающихся масс
133101 Из общих условий уравновешенности (132003 и 132004) следует,
что центр тяжести уравновешенного вращающегося тела должен лежать
на оси вращения, так как она является геометрическим местом всех
неподвижных точек вращающегося тела; при этом центробежные мо-
менты вращающегося тела 1У, и должны равняться нулю.
133102 Общие условия уравновешенности выведены для неподвижных осей
координат. Для вращающегося тела выгодно перейти к подвижным,
скрепленным с телом осям координат х', у', z', ось z' которых направ-
лена по оси вращения. Воспользовавшись формулами перехода от
неподвижной системы координат к подвижной [2] и полагая =0,
т. е. считая угловую скорость вращения тела постоянной, получаем
116
133103 -133201
следующие условия уравновешенности для вращающегося тела:
Мх&*<=0,
Му№ = О,
/^ш2 = 0,
/^ш2 = 0,
(1)
где М—масса вращающегося тела;
х;, yi, Zs—координаты центра тяжести тела в подвижной системе коор-
динат;
I'vz, /«—центробежные моменты инерции массы вращающегося тела
в подвижных осях координат;
«>—угловая скорость вращения тела (ш = const).
Из этих уравнений следует, что для уравновешенного вращающе-
гося тела должны быть соблюдены в подвижной системе координат
условия:
Xs = O, ]
Уз=О, (
/yi = O, f
/« = 0, J
(2)
т. е. масса вращающегося тела уравновешена, если угловая скорость
постоянна, центр тяжести тела лежит на оси вращения и ось вращения
является одной из главных осей инерции тела.
Если угловая скорость вращения непостоянна, то появляется не- 133103
уравновешенный момент сил инерции относительно оси вращения
где /2 —полярный момент инерции вращающегося тела относительно
оси вращения z.
Причинами переменности угловой скорости коленчатого вала дви- 133104
гателя являются неравномерность крутящего момента двигателя,
а также крутильные колебания системы его коленчатого вала (влияние
которых на уравновешенность см. в 136000).
Соблюдение первых двух условий (2) п. 133102 называется стати- 133105
ческой уравновешенностью, при которой уравновешенными являются
лишь силы инерции, а моменты сил инерции не уравновешены. Соблю-
дение же всех четырех условий (2) п. 133102 называется полной или
динамической уравновешенностью, при которой уравновешены и силы и
моменты сил инерции.
Уравновешивание вращающихся масс
133200
Если вращающееся тело не уравновешено, т. е. уравнения (1) 133201
п. 133102 не удовлетворяются, то для уравновешивания нужно добавить
соответственно подобранные и расположенные массы, которые называ-
ются противовесами. Число уравнений—четыре. Каждая масса вносит
три параметра: статические моменты Л4ПрХПр, Мпрупр и координату znp.
117
133202
Для удовлетворения же четырем уравнениям необходимо иметь четыре
неизвестных параметра; поэтому для уравновешивания вращающегося
тела необходимы минимум два противовеса. Число параметров, вноси-
мых двумя противовесами, будет шесть, т. е. на два больше, чем
можно определить из уравнений (1) п. 133102; поэтому двумя парамет-
рами противовесов надо задаться. Теоретически ими могут быть любые
два параметра из числа их для обоих противовесов, но практически
обычно задаются координатами znp противовесов, т. е. положениями на
оси вращения плоскостей, перпендикулярных оси вращения, в которых
расположены противовесы, так как именно эти параметры особенно
строго лимитируются конструктивными соображениями.
133202 Для примера разберем общий случай (фиг. 133202) уравновешива-
ния произвольных, вращающихся вокруг одной оси zz, с угловой ско-
ростью масс: Mit Mt, Мп. Задаемся положениями вдоль оси zz
плоскостей I и II, в которых по конструктивным соображениям
удобнее всего расположить противовесы.
Примем обозначения:
at—расстояние z-ой массы от плоскости /;
bf~расстояние z-ой массы от плоскости //;
Pf—расстояние центра тяжести z-ой массы от оси вращения zz;
Мпр, МпР—массы противовесов, расположенных соответственно в I и
II плоскостях;
Рпр, Рпр—расстояния центров тяжести масс соответственно Af?ip и ЛГпР
от оси вращения.
Каждая масса при вращении дает центробежную силу инерции
Ра =
(1)
перпендикулярную оси вращения zz.
Каждая из этих сил уравновешивается двумя параллельными ей
и расположенными в плоскостях I и II силами Р| и Р]1, которые
118
133300-133301
определяются из уравнений:
(2)
₽1’ = ₽-^- <3>
В плоскости / получается пучок сил Р}, Р|, ..., Р\, пересекаю-
щихся в одной точке—точке пересечения плоскости / с осью вращения
ZZ.
В плоскости // получается аналогичный пучок сил Р}1, Р’1, ....Р’1.
Находят геометрические суммы сил
i=n
р1=2 р’ <4>
И
р" = 2 Р'1, (5)
Для уравновешивания силы инерции противовесов должны быть
P/np == МдрРпр®8 — Р1 (6)
И
PjLp^AfMpm^pn. (7)
Из (6) и (7) статические моменты противовесов относительно оси вра-
щения zz будут
АР Р1 ' (8)
ПрГпр о>2 ' >
ми п _ Рп ,9)
2У*прРпр —
Угловые положения противовесов в плоскостях / и II определяют
по направлениям геометрических сумм соответственно
i=n i=n
Sp’ и Sp";
i el i
на этих направлениях должны находиться центры тяжести соответ-
ствующих противовесов.
Балансировка вращающихся деталей 133300
При конструировании вращающихся деталей конструктор обязан 133301
давать им такую форму и такое распределение масс (добавляя в нуж-
ных случаях противовесы), чтобы детали были полностью, т. е. дина-
мически, уравновешены.
В производстве за счет неточности изготовления, неоднородности
материалов и др. эта предусмотренная конструктором уравновешен-
ность нарушается.
119
133302-133304
Поэтому готовые вращающиеся детали должны подвергаться
экспериментальной проверке на уравновешенность и обнаруженная
неуравновешенность исправляется путем процесса, называемого
балансировкой.
Аналогично разделению уравновешенности на статическую и дина-
мическую балансировка также подразделяется на статическую и дина-
мическую.
Статическая балансировка основана на том, что у статически
неуравновешенного тела центр тяжести смещен с оси вращения. Балан-
сируемая статически деталь укладывается своими или специально
устроенными для балансировки цапфами на опоры в виде роликов-
дисков или в виде призм-ножей (фиг. 133302) и слегка на них про-
133302
133303
133304
ворачивается.
Если деталь статически уравновешена, т. е. ее центр тяжести
лежит на оси вращения, то она на таких опорах будет в состоянии
безразличного равновесия. В прс-
/ тивном случае деталь будет всегда
возвращаться в положение своего
устойчивого равновесия, когда ее
.s / J центр тяжести будет лежать в вер-
' / тикальной плоскости, проходящей
f, Y у' через ось вращения, ниже оси вра-
с щения. Положение этой вертикаль-
ной плоскости отмечают на детали,
а затем или добавляют в верхней
Фиг. 133302. части ее грузы, обычно в виде на-
Статическая балансировка вращаю- пайки свинца, ИЛИ удаляют часть
щейся детали материала с нижней части детали
посредством спиливания или вы-
сверливания. Затем балансировку повторяют до достижения уравно-
вешенности.
Выпускаются специальные станки для статической балансировки,
работа на которых, не меняя ничего принципиально, дает возможность
не только качественного, но и количественного определения статиче-
ской неуравновешенности [10], что ускоряет балансировку.
Статической балансировкой можно ограничиваться лишь для дета-
лей, имеющих незначительную длину в направлении оси вращения,
например, дисков, узких маховиков, небольших, медленно вращающихся
пропеллеров.
Для более длинных или быстро вращающихся деталей необходима
динамическая балансировка, дающая полную уравновешенность и сил
и моментов сил инерции.
Динамическая балансировка производится на специальных станках
для динамической балансировки.
Существует большое количество станков различных конструкций,
часто специализированных, полуавтоматических и автоматических
[4, 10].
Все станки для динамической балансировки используют вынуж-
денные колебания, возбуждаемые неуравновешенными силами инерции
при вращении балансируемой детали. Огромное большинство станков
при работе использует явление резонанса, при котором: небольшим
120
133305
величинам возбуждающих колебания сил (в данном случае небольшим
неуравновешенностям) соответствуют большие амплитуды колебаний,
что повышает чувствительность станков и точность балансировки;
величины амплитуд вынужденных колебаний пропорциональны величине
возбуждающей силы, т. е. неуравновешенности, и могут служить для
ее измерения; при резонансе колебания отстают по фазе от возбуж-
дающей силы на постоянный угол , что используется для опреде-
ления углового положения неуравновешенности.
Балансируемая деталь 1 (фиг. 133305) устанавливается на своих,
или на специально для балансировки устроенных цапфах, на подшип-
ники (обычно открытые роликовые), на раме 2, называемой люлькой;
133305
последняя может качаться в вер-
тикальной плоскости вокруг оси
шарнира 3 и растянута пружи-
нами 4 — 5, вместе с которыми и
балансируемой деталью образует
колебательную систему. Баланси-
руемая деталь устанавливается
на люльке так, чтобы одна из
плоскостей (на чертеже /), в ко-
торых будут устанавливаться ис-
правляющие неуравновешенность
противовесы, проходила через ось
шарнира. Тогда соответствующие
этой плоскости неуравновешенные
силы будут давать относительно
оси качания люльки момент, рав-
ный нулю, И не будут влиять Схема станка для динамической баланси-
на колебания люльки, которые ровки
будут возбуждаться лишь не-
уравновешенными силами, соответствующими другой плоскости
исправления. Положение на детали плоскостей исправления выбирается
на основании конструктивных соображений и задается конструкторским
бюро, запроектировавшим деталь.
Балансируемую деталь приводят во вращение или с постоянным
числом оборотов, равным числу собственных колебаний системы люль-
ка—балансируемая деталь—растяжные пружины (у одних станков), или
разгоняют до числа оборотов, несколько большего числа собственных
колебаний системы, и выключают привод (у других станков).
В первом случае система все время будет находиться в состоянии
резонансных колебаний. Во втором—предоставленная себе после выклю-
чения привода деталь за счет всевозможных сопротивлений трения
будет вращаться с уменьшающимся числом оборотов и обязательно
пройдет через резонансное число оборотов. По резонансной амплитуде,
записанной или отмеченной на циферблате специального указателя,
и по проделанной предварительно тарировке, а у машин, не регистри-
рующих амплитуд колебаний, успокаивая резонансные колебания
системы люльки и создавая противоположные неуравновешенности
силовые импульсы (механические, электромагнитные или тарирован-
ными пружинами и т. п.), определяют величину неуравновешенности.
121
133306—134101
Угловое положение неуравновешенности определяется построением
специального графика, непосредственным отсчетом по шкалам или
непосредственно на самой детали, проворачивая ее до совпадения
некоторых подвижных указателей или, наконец, специальными отмет-
ками на самой детали, наносящимися в процессе бапансировки.
После того как определены величина и угловое положение неурав-
новешенности для одной плоскости исправления, можно у большинства
станков ограничиться записью этих данных, а затем, переместив де-
таль на люльке так, чтобы через ось качания люльки прошла другая
плоскость исправления, снова произвести балансировку. Далее вносят
исправление сразу в обе плоскости посредством напайки свинца на
легкую сторону или, что применяется чаще, высверливанием материала
на тяжелой стороне детали. Некоторые станки требуют предваритель-
ного внесения исправления в первой плоскости перед балансировкой
второй. У некоторых станков для перехода от одной плоскости к дру-
гой детали переставлять не требуется, а нужно лишь закрепить одну
опору и освободить другую.
В настоящее время существуют балансировочные станки, полностью
автоматизированные, выпускающие деталь отбалансированной и уже
исправленной.
133306
Точность балансировки зависит от веса детали и у современных
станков в среднем равна [6]:
до 0,1 гем для деталей весом до 1 кг
>1,0 » » » » >20»
» 10,0 » » » » » 100 »
» 30,0 » » » » » 500 »
134000
134100
134101
Для деталей, делающих меньше 5000 об/мин, достаточна ориенти-
ровочно следующая точность динамической балансировки [6]:
0,2 гем для деталей весом до 1 кг
2,0 » » » » » 20 »
20,0 » » » > » 100 »
/
УРАВНОВЕШИВАНИЕ СИЛ ИНЕРЦИИ ПОСТУПАТЕЛЬНО ДВИГАЮЩИХСЯ МАСС
АВИАЦИОННОГО ДВИГАТЕЛЯ
Выражения для сил инерции поступательно двигающихся масс
Сила инерции Р, поступательно двигающихся масс в любом ци-
линдре, независимо от вида кривошипно-шатунного механизма, направ-
лена по оси цилиндра и может быть представлена в виде ряда Фурье
к=х> *=оо
Р,= 3 A>cos^a + 3 BjkSinka.,
*=1
где к — порядок гармоники,
А,к и Bjk — амплитуды фазовых составляющих гармоники к-vo по-
рядка; величины Ajk и В,к зависят от кинематических
122
134102
параметров кривошипно-шатунного механизма и пропор-
циональны произведению поступательно двигающейся
в цилиндре массы, радиуса кривошипа и квадрата угло-
вой скорости коленчатого вала двигателя.
Для нормального кривошипно-шатунного механизма ряд для силы 134102
Pj (формула 134101) содержит только косинусовые члены и, кроме пер-
вого порядка, только четные порядки:
Р)г= 3 Ajkcoska.—
k = t, 2, 4,6 .. .
к
= — 3nn/?<u’cosa + gRu/?<o’ 3 ( —l)2£2P*cosb. (1)
*=2, 4,6.. .
В ряду (1)
Ah = — 4р,Зйп/?<»’,
Л*= , (2)
А/. = — ЗбР-дяп/?а»«,
и
+ 256 ** + 4095 *’+•••-
р.—5к-х‘+-2ИГх’+--> > (3)
?s = Т28г ^ + • • • >
...............)
У современных авиационных двигателей значения X таковы, что
коэффициенты рЛ очень быстро убывают с увеличением порядка гар-
моники. Для среднего из употребляющихся в авиационных двигателях
значений л = ^~ амплитуды гармоник 1, 2, 4 и б-го порядков отно-
•3,0
сятся между собой, как
1 : 0,2832:0,00568 -.0,000127.
Поэтому на практике часто пренебрегают силами инерции высших
порядков и употребляют приближенное выражение для силы инерции
Р/, содержащее только гармоники первого и второго порядков:
Pj = — COS а — MfflnRw* cos 2а, (4)
и при уравновешивании стремятся уравновесить силы инерции пер-
вых двух порядков, используя формулу (4).
123
134103-134201
134103 Для случая кривошипно-шатунного механизма с прицепным шату-
ном, когда Yi = Y, ряд 134101 для силы инерции поступательно дви-
гающихся масс имеет вид
pii = ~ {cos а, + [4р2 COS 2 (а, + Y) ~
— 16p<cos4(acl-|-Y) + 36p. cos6(a< + Y)-1--] +
+ [4pi2 cos 2(аг—3) — 16pZtcos4(a, — 3)-|-36р/вС08б(<хг—S)— -j- • • •] j =
= —%RniR°>* cosaj + x
к
x {-£ 2 [(- I)2 Ac’pjt COS Zc (a, + Y)] +
*=2, 4, 6 ...
2 К-1 )y COS A:(a2-&)]}.
*=2,4, 6 ...
Обозначения, входящие в эту формулу, даны в 112000 и 121000.
134104 ® вопросах уравновешивания обычно принимают величину г рав-
ной среднему арифметическому всех действительных значений г дви-
гателя и полагают для главного цилиндра ЗЯп = ЗЯпь
134105 С точностью до гармоник второго порядка сила Р,, будет
Рц = — ЗЯп2/?“’ [cos <xz + F cos (2«г — 6)].
Значения коэффициента F и вспомогательного угла 0 даны
в 112000.
134106 Для случая кривошипно-шатунного механизма с прицепным шату-
ном, когда Yi & Y> выражение для силы инерции поступательно дви-
гающихся масс Рц с точностью до гармоники второго порядка прини-
мает вид
Рц = •—3Kni/?a>’[£cOS(ai + $) + Р COS (2a/;— 0)].
Значения коэффициентов Е и F и вспомогательных углов Ф и ft
даны в 113000.
134200 Уравновешивание сил инерции к-го порядка поступательно
двигающихся масс двигателя
134201 Пусть двигатель имеет п цилиндров.
Сила инерции поступательно двигающихся масс i-ro цилиндра,
согласно 134101, равна
А®»оо
Рц= 2 c°s(*«) sin(Ara)].
*=i
В современных авиационных двигателях оси цилиндров перпен-
дикулярны оси коленчатого вала и обычно пересекаются с ней.
124
134202
В общем случае каждый к-й порядок сил инерции поступательно 134202
двигающихся масс двигателя может быть уравновешен четырьмя про-
тивовесами, вращающимися вокруг оси коленчатого вала в разные
стороны с угловой скоростью Л<о попарно в двух произвольно выбран-
ных плоскостях / и II, перпендикулярных оси коленчатого вала
(фиг. 134202-1).
К уравновешиванию поступательно двигающихся масс.
Схема двигателя
Расстояния оси i-ro цилиндра до плоскостей I и II обозначаем
соответственно а{ и Ь{.
Сила инерции к-го порядка i-ro цилиндра
Pjki = Ajki cos (кл) + Biki sin (ко.) (1)
раскладывается на две параллельные силы, лежащие: одна в плоско-
сти I
= р^ srhi=Aiki cos (ka} + dk B>ki sin ®
другая в плоскости II
Р* = Piki = Ajk< cos (H + Biki sin (b). (3)
Обозначая
bi A _ .1
57+Л A>k{ ~ A>kh
^b, B>ki = B}ki,
ai д-.-д’Г (4)
,la~ lkl
и
^в>-=в"ь.
125
134203
Фиг. 134202-11.
К уравновешиванию сил
инерции А-го порядка по-
ступательно двигающихся
масс в цилиндрах, двигате-
ля; плоскость I
получаем
и
Р]и = Aljki cos (to) + В*ы sin (to)
Piktи Ajki cos (to) Вум sin (Ar<x).
От сил инерции к-го порядка всех ци-
линдров двигателя в плоскости / получается
пучок пересекающихся на оси коленчатого ва-
ла (фиг. 134202-11) сил Р’н, Р}к2, Ру*з,...,
Р}кп-
В плоскости II получается аналогичный
пучок сил Рум, Руку, Рук •Р“п.
Взаимное расположение сил Рум в плоско-
сти I и Рум в плоскости II определяется уг-
лами между осями соответствующих ци-
линдров.
Складывая в каждой из плоскостей I и II
отдельно векторы Дум, Вум и Ду*,-, Ву1,- всех
цилиндров, получим в каждой плоскости
(фиг. 134202-11) по два суммарных вектора Ajjtcos(to), ByytSin(to)
и Ayl cos (to), Bylsin(to), имеющих каждый вполне определенное, неза-
висимое от а направление; величины амплитуд этих векторов будут
следующие:
i=n
А}к ~ 2 ^iki>
l==i
i=n
Bjk~ Вум,
i—1
i=l
(6)
i=l
134203 Дальнейшее рассмотрение проводится для одной плоскости—/, так
как для плоскости II весь расчет ведется совершенно аналогично.
Силу Ay* cos (to) заменяем (фиг. 134203) двумя одинаковыми, противо-
д!
положно вращающимися с угловыми скоростями to силами, равными .
В начальный момент при 1—0 и а = о>/=0 эти силы по направлению
совпадают с вектором Дум
126
134204
Аналогично силу В** sin (кл) заменяем двумя одинаковыми, противо-
, в}к
положно вращающимися с угловыми скоростями к® силами, равными -g-.
В начальный момент при / = 0 и а = ш/=0 эти силы направлены пер-
пендикулярно вектору в}к-
К уравновешиванию сил инерции А-го порядка поступательно
двигающихся масс в цилиндрах двигателя; плоскость I
А • В •
Складывая вращающиеся в одну сторону силы и , получаем
силы: С*, вращающуюся по часовой стрелке, и Dlk, вращающуюся против
часовой стрелки.
Из фиг. 134203 видно, что эти силы по величине равны диагоналям
параллелограма со сторонами 0,5 А** и 0,5 В}* и углом между ними
(90° — <р), где <? есть угол между векторами Aj* и В1,к-
134204
127
134205-134209
134205 Конец вектора Rk результирующей сил С\ и D\ описывает в пло-
скости 1 эллипс с полуосями: большой, направленной по ее (фиг. 134203)
и равной
= d + (1)
и малой, направленной по //, равной
= (2)
которые являются максимальными и минимальными значениями слагаю-
щей результирующей силы к-го порядка в плоскости I.
134206 Все изложенное для плоскости I справедливо и для плоскости II.
134207 Чтобы уравновесить силы инерции к-го порядка поступательно дви-
гающихся масс двигателя, нужно в плоскостях I и II поставить по два
вращающихся вокруг оси коленчатого вала в разные стороны с угловой
скоростью kw противовеса со статическими моментами
т Ск
1Г1 (А®)’
Dk
си
mIIBn — .
1 (*®)« •
pH
*W=(A^-
Массы противовесов mJ й mJ1 должны быть установлены под углами
в 180е к векторам Cj и С” и должны вращаться по часовой стрелке.
Массы противовесов mj и тф должны быть установлены под углами
в 180° к векторам Dk и D11 и должны вращаться против часовой
стрелки.
134208 В частных случаях одна из сил СЛ или Dk
может быть равной нулю; тогда в соответствую-
щей плоскости понадобится не два, а один про-
тивовес. Если сила Ск окажется равной по ве-
личине силе Dk, то в этом случае результирую-
щая Rk будет постоянно направлена по ее и урав-
новешивание достигается двумя одинаковыми, про-
тивоположно вращающимися противовесами.
134209 В соответствующей плоскости векторы сил Ск
и Dk можно просто определить, если известны зна-
чения результирующей силы Rki и /?*, для двух
частных значений угла = и а = <х2 = <Xj Ц* •
При повороте коленчатого вала от «1 до а, на
угол векторы Ск и Dk повернутся на к — ~,
т. е. займут взаимно перпендикулярные поло-
жения, а следовательно, и соответствующие диа-
, гонали параллелограма 134204 будут повернуты
Фиг. 131209. Опреде-
ление векторов Ск и
Dk по двум значени-
ям вектора Rk
128
134210-134211
на 90е. Пусть (фиг. 134209) Rki и — известные векторы ре-
зультирующих сил. Разделим один из них, например R^, по-
полам, а другой, Rki, продолжим за точку О и из середины пер-
вого (точка /) проведем перпендикуляр к Rki- Отложив от
точки / на этом перпендикуляре в обе стороны 0,5 Rki, получим
точки с2 и dt. Тогда Oct дает вектор Ск, a Odt —вектор Dk [6].
Для двигателя, имеющего по расположению цилиндров и колен 134210
вала плоскость симметрии, перпендикулярную оси коленчатого вала,
в плоскостях 1 и II суммы векторов
2 2 и 2
i=l i=l i-1 i=l
1«=П / = П
будут подобны соответственно суммам 2^/*> и 2^/w с коэффициен-
тами подобия (фиг. 134210) для плоскости I
(I)
и для плоскости II
= (2)
Если двигатель имеет плоскость симметрии, перпендикулярную оси 134211
коленчатого вала, или оси всех цилиндров двигателя лежат в одной этой
плоскости, то уравновешивание сил инерции поступательно двигающихся
масс любого к-го порядка можно произвести двумя вращающимися
вокруг оси коленчатого вала в разные стороны с угловой скоростью к®
противовесами, расположенными в плоскости симметрии двигателя.
Обычная конструкция двигателей не позволяет установить противовесы
на оси коленчатого вала в плоскости симметрии и приходится уравно-
9 Авиац. порши, двигатели
129
134212-135101
вешивание вести в общем порядке, т. е. в плоскостях / и II четырьмя
противовесами.
134212 Если оси всех цилиндров двигателя лежат в одной плоскости и при
некотором положении кривошипа двигатель имеет полную симметрию
относительно плоскости, проходящей через ось вращения коленчатого
вала, то оси эллипса сил инерции любого к-го порядка расположены:
одна в плоскости симметрии, а другая—ей перпендикулярно.
134213 Для сложных кривошипно-шатунных механизмов аналитическое
определение коэффициентов ряда Фурье для силы инерции поступательно
двигающихся масс представляет большие трудности. В этих случаях
рекомендуется поступать, как указано в 113401.
135000 УРАВНОВЕШИВАНИЕ СИЛ ИНЕРЦИИ ДВИГАТЕЛЕЙ
РАЗЛИЧНЫХ ТИПОВ
135100 Уравновешивание элементарных двигателей: одноцилиндрового
и двухцилиндрового V-образного
135101 Уравновешивание одноцилиндрового двигателя
В одноцилиндровом двигателе (фиг. 135101-1) центробежные силы
инерции вращающихся масс (к которым относятся масса кривошипа
и отнесенная
к оси
Фиг. 135101-1.
К уравновешиванию сил
инерции одноцилиндро-
вого двигателя
цапфы кривошипа часть массы шатуна) уравно-
вешиваются соответственно подобранными проти-
вовесами. Эти вращающиеся массы эквивалентны
одной вращающейся массе, и теоретически их
можно было бы уравновесить одним противо-
весом, располагая его в плоскости симметрии
колена вала, что практически невозможно. По-
этому противовесы обычно делают в виде двух
масс, жестко связанных с продолжением щек
колена вала, что дает свободный проход шатуну
при работе двигателя. Расчет таких противо-
весов изложен в 121700.
Силы инерции всех
двигающейся массы
ствующих противовесов
Для устранения опасных вибраций одно-
цилиндровой установки обычно ограничиваются
уравновешиванием сил инерции первых двух
порядков, которое можно производить согласно
изложенному в 134200.
На фиг. 135101-11 дана схема для уравнове-
шивания сил инерции первого порядка.
Сила инерции первого порядка равна
порядков поступательно
без применения соответ-
не будут уравновешены.
Pjt — — yRuR®* COS а.
(О
Для ее уравновешивания заставляют в плоскости, проходящей
через ось цилиндра перпендикулярно оси вала, вращаться в проти-
130
135101
воположных направлениях две одина-
ковые массы т (фиг. 135101-11), удов-
летворяющие уравнению
тр —0,5 90UR. (2)
Массы должны быть расположены
так, чтобы при а = 0 имело место
•( = а = 0.
Сила инерции второго.порядка
Pjt = — cos 2а (3)
может быть уравновешена аналогично,
но массы для ее уравновешивания
должны вращаться в противополож-
ные стороны с угловой скоростью 2«>
и удовлетворять уравнению
(4)
При а = 0
у = 2а = 0.
Таким же образом могут быть
уравновешены силы инерции любого
порядка, причем массы противовесов
должны удовлетворять уравнению
R> = O,5pft90M?, (5)
Фиг. 135101-11.
Уравновешивание сил инерции
первого порядка поступательно
двигающихся масс одноцилиндро-
вого двигателя
вращаться в противоположные стороны с угловой скоростью кч> и быть
расположены так, чтобы при а = 0 для j четного у было равно 180*,
к с,
а для у нечетного у было равно нулю.
Фиг. I35101-III.
Уравновешивание сил инерции первого и второго порядков поступательно двигаю-
щихся масс одноцилиндрового двигателя
9*
131
135102
Часто противовесы по конструктивным соображениям не могут
быть расположены в плоскости, проходящей через ось цилиндра; тогда
их приходится располагать в двух плоскостях и применять двойное
число противовесов. На фиг. 135101-Ш представлена одноцилиндровая
установка, у которой уравновешены силы инерции первого и второго
порядков, причем противовесы для второго порядка расположены в пло-
скости цилиндра, а для первого разнесены в двух плоскостях, симме-
тричных относительно оси цилиндра.
135102 Уравновешивание двухцилиндрового V-образного двигателя
Двухцилиндровый V-образный двигатель (фиг. 135102-1) имеет пло-
скость симметрии, проходящую через оси правого и левого цилиндров.
Фнг. 135102-1.
К уравновешиванию сил инерцнн двухцилинд-
рового V-образного двигателя
Поэтому к нему применимо
изложенное в 134211, и для
него можно рассмотреть урав-
новешивание в плоскости сим-
метрии, а затем сделать пере-
счет по формулам (1) и (2)
п. 134210 для выбранных
плоскостей 1 и II. Положив
= и находят
в плоскости симметрии век-
торы Rki и Rm, соответству-
ющие этим углам.
Для сил инерции пер-
вого порядка при «1 — ~ век-
тор /?„ направлен по оси уу
и равен
Ru= — ВДп/?"2 [cos ^ + cos ( — ] cos-j = — 2S0tnR*»’cos’ |; (1)
при as=y+j вектор /?12 направлен по оси хх и равен
/?!»= -ЗЯп/?®* [ -cos(|+ 5) + cos(-^ + j)] sin^=
= - ZffluRv* sin81. (2)
Кроме того, согласно п. 134209 и 134212, R11—D1i:C1 и
где верхние знаки соответствуют случаю Ru>Rlt, а нижние—случаю
Ян < откуда
Сх= 4|(Я11-₽1,)1 = ШЬЯ<*)2|с°Ч1- |
(3)
132
135102
При сц <= у векторы сил Dt и совпадают с осью уу, а при
а.== 4 +v~ с осью хх- Их направления при этих значениях углов а
** м м •
и направления их вращения определяются из соотношений:
при ai = у
Rn = Cj + £>i
И При as = у + у.
R12 = Cj + £>1»
Для сил инерции второго порядка аналогично получаем:
R21 =— [cos (2^) + cos(— cos-2- =
=—2Х§деп Ra>’ cos у cos у , (4)
R22=-/?<*)’[ - cos 2 (4 +40 +cos2(-4+4)]sin i =
= —2/.^11/?<o,sin Ysin-i ( (5)
02 = |(R21 + R,2) = ^nR(*)l|cos}|, (6)
cs = 11 (*k - Ы I = R»‘ | COS 4 Y (7)
При <4 == у векторы сил Dt и Ct совпадают с осью уу. При
a = 4 + 4 эги векторы совпадают с осью хх. Их направления и на-
правления вращения определяются из условия, что при «ц = 4 вектор
R^C^-D, и при а, = у+ £ вектор R„ = С,+ Р2.
Силы инерции первого и второго порядков могут быть уравнове-
шены каждая четырьмя противовесами, попарно вращающимися в раз-
ные стороны в плоскостях I и II вокруг оси коленчатого вала с угло-
выми скоростями соответственно <» и 2<о.
На фиг. 135102-11 даны: суммарная векторная диаграмма неурав-
новешенных сил инерции первого и второго порядков, имеющая вид
вытянутого в направлении оси уу овала, диаграмма центробежной силы
инерции массы ЭДГпр, добавленной к противовесу для частичного урав-
новешивания сил инерции поступательно двигающихся масс, и диа-
грамма оставшихся неуравновешенными сил инерции. Массу $Dfnp обычно
предварительно подбирают так, чтобы развиваемая ею центробежная
сила инерции равнялась полусумме максимальной и минимальной сил
инерции поступательно двигающихся масс. Затем, после сборки двигателя
133
135200—135201
на предварительных испытаниях величину этой массы подбирают
окончательно из
вибраций моторной установки.
У двигателя с углом
между цилиндрами у = 90°
для сил инерции первого
порядка
условий наименьших
Векторная диаграмма уравновешивания сил инер-
ции первого и второго порядков поступательно
двигающихся масс двухцилиндрового V-образного
двигателя с углом между осями цилиндров у.
2Rn=0,0906 кгм^сек1, п=2500 об/мин,/? =0,0525 м,
Л =4-, у = 45ч
4
С, = 0и (8)
т. е. равнодействующая сил
инерции первого порядка
приводится к одному век-
тору, вращающемуся с уг-
ловой скоростью ш в сторо-
ну вращения двигателя, на-
правленному по радиусу кри-
вошипа, и может быть урав-
новешена добавлением соот-
ветствующих масс к проти-
вовесам, уравновешивающим
вращающиеся массы.
Для сил инерции вто-
рого порядка
С = £>, = ^^п/?<ог, (9)
т. е. равнодействующая сил
инерции второго порядка
всегда направлена по осихх.
Максимальная ее величина
(^)тэх-/2 лЖпЯш’.ОО)
Силы инерции вращаю-
щихся масс уравновеши-
ваются обычными противовесами, установленными на продолжении щек
колена вала.
135200 Уравновешивание однорядных двигателей.
Уравновешивание шестицилиндрового двигателя с цилиндрами,
расположенными в ряд
135201 Случай расположения кривошипов под углом 120°
Центробежные силы инерции вращающихся масс в рассматрива-
емом случае (фиг. 13520I) уравновешены сами по себе.
Все силы инерции поступательно двигающихся масс действуют
в плоскости осей цилиндров двигателя и вследствие симметрии двига-
теля относительно плоскости хОу результирующие сил инерции отдель-
ных порядков будут направлены по оси уу.
134
135202
Результирующая сил инерции первого порядка
РЛ=- 2ЭЛ„ Яш*|cos а + cos (а - 120°) + cos (а - 240°)] = 0. (1)
Результирующая сил инерции второго порядка
Pft=- 2ХЭДиЯ<о‘ [cos 2а + cos2 (а — 120°) + cos2(а — 240°)] =0. (2)
Для четвертого порядка аналогично
Л<=0. (3) ‘
Фиг. 135201.
К уравновешиванию сил инерции шестицилиндрового одно-
рядного двигателя
Для первого неуравновешенного—шестого—порядка результирующая
— 2-62-рв ЭйпЯ®2 [cos 6а + cos 6 (а — 120°) + cos 6 (а — 240°)] =
= -63p«?0?nPo>’cos6a, (4)
где
р« = 512 + 2048 '
Эта результирующая равна ушестеренной силе инерции шестого
порядка одного цилиндра и действует по оси уу; величина ее очень
незначительна и оставляется неуравновешенной, так как у современных
двигателей величина ее амплитуды достигает всего лишь 3 — 4 кг.
Случай расположения кривошипов под углом 60° 135202
У шестицилиндровых двухтактных двигателей вспышки в цилиндрах
360 £Г»О о
должны следовать через -g- = 60 , поэтому у таких двигателей колен-
чатые валы должны иметь колена, чередующиеся под углами 60°.
Порядок чередования колен может быть различным, возможных схем 60.
Уравновешенность двигателей с различными схемами коленчатых валов
различна, кроме сил инерции шестого порядка, которые неуравновешены
во всех схемах.
135
135202
Остальные порядки сил инерции или уравновешены или приводят-
ся к парам сил, действующим в плоскости цилиндров, с моментами,
изменяющимися по синусоидам соответствующих порядков. Моменты
этих пар обычно оставляются неуравновешенными, но могут быть
уравновешены обычным способом — четырьмя противовесами, располо-
женными попарно в двух заданных плоскостях и вращающимися по-
парно в разные стороны с угловой скоростью к®.
Из этих 60 схем расположения колен имеются две (фиг. 135202-1
и 135202-11) наиболее интересные практически, у которых уравнове-
шены полностью силы инерции вращательно двигающихся масс и пер-
вый порядок сил инерции поступательно двигающихся масс.
Второй порядок сил инерции поступательно двигающихся масс
в схемах фиг. 135202-1 и II дает неуравновешенные пары сил.
Фиг. 135202-1.
Схема шестиколенного вала с углами между коленами в 60’
1 а щ и v и
Фиг. 135202- II.
Схема шестиколенного вала с углами между коленами в 60°
Для схемы фиг. 135202-1 момент пары сил инерции второго порядка
2/3 ка Я®’sin (2а -ь 60°) =
= 3,46 Я®’sin (2а+ 60°), (1)
где а —расстояние между осями смежных цилиндров.
Этот момент может быть уравновешен четырьмя противовесами,
вращающимися попарно в разные стороны в двух плоскостях с угло-
вой скоростью 2<о, имеющими каждый статический момент
^пр 2 рпр 2~ gjj 2 /3 t'CtyJln R, (2)
где d — расстояние между плоскостями противовесов.
136
135300-135301
При 2а+ 60° = 360° противовесы должны лежать в плоскости
цилиндров, и каждая пара их должна давать момент
- | -2/3 MRn /?<*>’•
Для схемы фиг. 135202-11 неуравновешенный момент пары сил
инерции второго порядка
Л4/2= 4/3 Xagjjn R®’ sin (2а + 60е) =
= 6,928 Ra>a sin (2а + 60°). (3)
Этот момент может быть уравновешен аналогично предыдущей
схеме.
Уравновешивание V-образных двигателей 135300
Уравновешивание 72-цилиндрового двигателя с цилиндрами, 135301
расположенными V-образно под углом 60°
При рассмотрении уравновешенности многорядных двигателей
удобнее находить результирующие сил инерции для каждого ряда и по
ним определять общую результирующую для всего двигателя.
Схема V-образного 12-цилиндрового двигателя дана на фиг. 135301.
К уравновешиванию сил инерции 12-цилиндрового двигателя с цилиндрами,
расположенными V-образио под углом 60Q
Результирующая сил инерции первого порядка в правом ряду,
согласно формуле (1) п. 135201
РП=0.
(1)
137
135301
В левом ряду (ряду с прицепными шатунами)
P^1 = -2E?0?niRo>2[cos<p + cos(cP- 120°) + cos(?-240°)] = О, (2)
где <р — <х — 60°-|-Ф, а значения Е и Ф берутся по формулам (5) и (3)
п. 113201.
Результирующая сил инерции первого порядка для всего двига-
теля будет
Р,=0. (3)
Результирующая сил инерции второго порядка в правом ряду
согласно формуле (2) п. 135201:
Р"2=0. .(4)
Результирующая сил инерции второго порядка в левом ряду
Р*,== - 2РЭДп1 R®’ [cos + cos (?1 + 120°) + cos (Т1 + 240°)] = 0, (5)
где Pi == 2 (а —60°)—6, а значения F и 6 берутся по формулам (6)
и (4) п. 113201.
Результирующая сил инерции второго порядка для всего
двигателя
Р/2= 0. (6)
Первым неуравновешенным порядком в двигателях рассматриваемого
типа для случая Yi Ф у будет третий порядок в левом ряде цилиндров,
т. е. в ряде цилиндров с прицепными шатунами, где третий порядок сущест-
вует. Эти силы инерции действуют в плоскости осей цилиндров ряда с при-
цепными шатунами. Результирующая этих сил в существующих авиацион-
ных двигателях невелика и не превышает 50 кг. Ее можно уравновесить
общим приемом, описанным в 134200, но по незначительности величины
амплитуды этой силы на практике такого уравновешивания никогда
не делают.
Следующим неуравновешенным порядком сил инерции в двига-
телях рассматриваемого типа для всех видов кривошипно-шатунных
механизмов будет шестой. В двигателях с нормальными криво-
шипно-шатунными механизмами и с механизмом с прицепными ша-
тунами при Yi = Y шестой порядок является первым неуравновешенным
порядком.
В существующих авиационных двигателях результирующая сил
инерции шестого порядка не превышает 5 кг-, поэтому ее не уравно-
вешивают.
Силы инерции вращающихся масс двигателя рассматриваемого типа
уравновешены сами собой.
12-цилиндровый V-образный двигатель является одним из, наи-
более уравновешенных в отношении сил инерции типов двигате-
лей.
Уравновешивание сил инерции шестого порядка может быть про-
ведено [6] общим приемом согласно 134200.
138
135400-135401
Уравновешивание W-образных двигателей
Уравновешивание 18-цилиндрового двигателя с цилиндрами,
расположенными W-образно
Силы инерции вращательно двигающихся масс двигателя этого
типа (фиг. 135401) уравновешены полностью.
Аналогично сказанному в 135201 силы инерции первого, второго
и четвертого порядков в двигателях рассматриваемого типа будут
полностью уравновешены.
Если кривошипно-шатунный механизм двигателя рассматриваемого
типа имеет прицепные шатуны с ¥= у, то первым неуравновешенным
135400
135401
Фиг. 135401.
К уравновешиванию сил инерции 18-цилиндрового двигателя с цилиндрами,
расположенными W-образно
порядком сил инерции во всех рядах цилиндров с прицепными шату-
нами будет третий. Следующим неуравновешенным порядком сил
инерции будет шестой.
Если же все кривошипно-шатунные механизмы в двигателе рас-
сматриваемого типа нормальные или с прицепными шатунами, но
с у, = у, то первым неуравновешенным порядком сил Ийерции во всех
рядах цилиндров является шестой.
Силы инерции третьего и шестого порядков могут быть уравнове-
шены противовесами общим методом [6] согласно 134200, но величина
этих сил совершенно незначительна, и практически такого уравно-
вешивания никогда не делают.
139
135500—135501
135500 Уравновешивание звездообразных двигателей
135501 Уравновешивание однорядных звездообразных двигателей,
' у которых = Y
В однорядных звездообразных двигателях (фиг. 135501-1) силы
инерции вращательно двигающихся масс уравновешиваются противо-
весами, поставленными на продолжениях щек коленчатого вала.
К уравновешиванию сил инерции звездообразных двигателей,
у которых yj = y
Число цилиндров i в однорядных звездообразных двигателях
бывает равным 3, 5, 7 илн 9. Условимся нумеровать цилиндры в на-
правлении вращения коленчатого вала, обозначая первый от главного
цилиндра (цилиндра с главным шатуном) номером один и т. д.; тогда
главный цилиндр будет иметь номер I. При этом угол между л-ным
цилиндром и главным цилиндром равен
Так как при а=0 кривошипно-шатунный механизм двигателя
рассматриваемого типа вполне симметричен относительно плоскости zOy,
то оси эллипса равнодействующей сил любого порядка лежат в плоско-
стях симметрии и ей перпендикулярной, т. е. в плоскостях zOy и zOx.
Сила инерции поступательно двигающихся масс в л-ом боковом
цилиндре равна
P^ = -^iR^^^n +
k
+ 2 [(-I)2*’P*cosA:(aIn + Tn)] +
*=2,4,6,...
77 —
+ т 2 [(-l)2^)cos*(aIn-Sn)]| . (2)
*-2,4,6,..,
140.
135501
Для главного цилиндра сила инерции поступательно двигающихся
масс равна
к
PjL= 2 К-1)2 *4 cos к а] (3)
к = 2,4,6,...
Имея в виду, что
azn = a-Yn, (4)
найдем силы инерции первого порядка
} = - yRniR®' cos (а - yn) 1
и 5- (5)
-SRn^’cosa. J
Для первого порядка полуось эллипса в плоскости цилиндров,
совпадающая с осью уу, будет равна модулю равнодействующей
сил инерции первого порядка при а = 0, которая равна
i-1
R^ = - SRn₽“2 ~ yjiniRv* 2 cos (- y„) cos Yn =
i
= -[(яИп~4®1п0 + |(1-1)ЯИп1]₽«’2. (6)
Полуось эллипса, совпадающая с осью хх, будет равна моду-
лю равнодействующей R12 сил инерции первого порядка при
а =» 0° + у = 90°, которая равна
к12 = ~ 5D?nzP“2 2 sin Yn sin Yn = - 4 ЩцЯ®’- (7)
i
Пренебрегая разницей между и 9Rnz> которая невелика, т. е.
полагая получим
(8)
Для сил инерции первого порядка эллипс равнодействующей
превращается в окружность, а сама равнодействующая постоянна по
величине, равномерно вращается с угловой скоростью ш в направлении
вращения коленчатого вала и так как при угле а = 0 совпадает
с радиусом кривошипа, то вращается вместе с ним.
Равнодействующая сил инерции первого порядка эквивалентна
центробежной силе инерции, сосредоточенной на оси цапфы кривошипа
массы ySJJnz, равной половине всех поступательно двигающихся масс
всех цилиндров двигателя. Сила инерции первого порядка уравнове-
шивается посредством добавления соответствующих масс к противо-
весам, уравновешивающим силы инерции вращающихся масс, что соот-
141
135501
ветствует расположению плоскостей I и II в плоскостях, проходя-
щих через центры тяжести этих противовесов.
При выводе формул (б) и (7) использованы свойства тригоно-
метрических сумм:
n = i 1
2 sin £ та. ± у кп = А, I
х1 ? (9>
2 cos [ та. ± кп j = В, •
n=l J
к к
у которых при у дробном А и В равны нулю, а при у целом
А — i sin (та.) и B — i cos (та.).
Аналогично, для сил инерции Л-го порядка, который при у, = у
может быть только четным,
= ( - 1)^[т ?к cO8ka + ^₽("k)cosfc(a-y„-8„)] )
и > (Ю)
Р$ = ( ~ 1У k^SUR^9k cos ко.. J
При а —О
к
= (-1 )Y {р> + PkSRni S Т-cosЬ +
i
i—1
+ 3RnzS [r^)cosA:(b + Sn)cosyn]}. (Il)
i
При *=0 + — =-^
к i ~ *
^ = (-l)rW»2 *2[Tf(№,sint(T" + ysinb] • (I2>
i
Для цилиндров, расположенных симметрично относительно глав-
ного цилиндра,
-£> TP("*)cos^(b-*-8n)cosyn и ^p^sinA^ + ^sinyn
попарно одинаковы, и поэтому
i-i
к 2
₽*! = (-!)\к*№ {р.ЗЯп + 2рЖ.I 2 х С08Ь +
2
+ 2 [ т ^кУ С08 к (Ь + Зп) сое уп ] } (13)
142
135501
и
t-»l
jfc ~
~(- 1 )Т 2k^lnlR^ 2 Т 8in к + 6")8in Ь- <14)
1
В равенствах (13) и (14) суммирование распространяется на -j-
цилиндров по направлению вращения коленчатого вала двигателя.
Для приближенного определения сил инерции второго порядка
принимают
i-i Г (15)
r = 4 (r«+2r«) ; rn = G==r; Л,= 1; Sf = 0 и ?,- = €>. |
1 >
Согласно фиг. 135501-II доказываются соотношения [б]
Л\ cos 2 (уп + Sn) cos Yn =
«= — rL + (r’+y^) cosyn—rL cos 2у„ + -^-Ьг cos3yn (16)
и
Л*п sin 2 (yn + on) sin y„ = — rL + ~ L2 cos yn + rL cos 2yn — ~ L2 cos 3yn. (17)
чаем
По формулам (13) и (14), учитывая выражения (16) и (17), полу-
/?г1 =- 2 [-rL+(r*+i L’)cos 7" -
i
— rL cos 2yn + ~ L2 cos 3yn j (18)
и
~ >'SRni/?«>2 2 [ “ rL + 4 u cos 7" +
i
+ rLcos2yn — -^L2 cos3ynj . (19)
Согласно формулам (18) и (19) и учитывая фор-
МУЛУ (О» Д^я трехцилиндровой звезды получим:
- |жп1/?“2(1-т),
^==4^ш^2(1+3 7)
(20)
(21)
и согласно уравнениям
c. + £s = |^W°>’(i + 3t) > |
С2-£>2 = 4^«0?п1/?‘“2(1-т) . J
Фиг. 135501-11.
К выводу прибли-
женных выраже-
ний для Rk и R2i
звездообразных
двигателей
(22)
143
Силы инерции различных порядков от поступательно двигающихся масс в цилиндрах двигателя
Таблица 135800
Тип двигателя Название двигателя и марка гь, л. с. П О О О. О ю >> 1 скорость гого вала, ный вес [веденных шипу цихся Вес суммарной по- ступательно дви- гающейся массы, кг ежная рции сум- вращаю- ассы кри- ка Результирующие сил инерции различных порядков поступательно двигающихся масс в цилиндрах двигателя, кг Момент от сил инерции поступа- тельно двигающихся масс, кгм Уравновешенность двигателя Примечания
о S в Число О В мину! я ? о Ян’ О о £ ТО S* ® 5 * s с s 2 * s * Э- § У В глав- ном В боко- вом ю 2 - © я JS « £Хя О Я С Н * X « S X 2 Q.2S я 5 ТО 5 д-g е sS (Pjl) max (^/l)min (^/2) max (P j 2) min /3) max (^i'sjmin (Рц) max (T3;4)min (Pj&) max (75/s)min (Р)б) max (73j6)min (Л4 jl) max (^/2) max (^/з)тах (•^/4) max Уравнове- шиваются Остаются неуравнове- шенными из первых шести порядков
о S U s £ >>£ * g.« U й X CQ 2 цилиндре цилиндре (Mji) min (^7'2) min (М/з)пИп (^/4) min противове- сами
8-V-900 Испано-Сюиза 8Fb 300 1 800 188,5 Не вычисл. 2,91* 2,91* Не вычисл. 0 0 1 272 0 0 0 25,9 0 0 0 0 ’ 0 0 0 0 0 0 0 0 0 — 2-й, 4-й и 6-й порядки Шатуны центральные
12-V-600 BMW-VI 7,3Z 680** 1 550** 162,3 3,48 4,22* 4,22* 1 140 0 0 0 0 68 0 0 0 0 0 4,93 0,53 0 0 0 0 0 0 _0 _ 0 — 3-й и 6-й порядки .
12-V-600 Паккард ЗА-2500 . • 835** 2 100** 219,9 3,80 3,60* 3,60* 1 850 0 0 0 0 48,1 0 0 0 0 0 He вычисл. He вычисл. 0 0 0 0 0 0 0 0 “ — 3-й и 6-й »
12-V-600 Роллс-Ройс «Кестрел» IIIS 586 2 700 282,7 3,72 1,77 1,71 2 120 0 0 0 0 9 0 0 0 0 0 0 1,74 0 0 0 0 ~0~ 0 0 0 0 — 6-й порядок Шатуны центральные
12-V-600 Испано-Сюиза Ybrs 860 2 400 251,3 5,75 3,07 2,77 3 150 0 0 0 0 0 0 0 0 0 0 3,76 0,4 0 0 0 0 0 0 0 0 — 6-й » Тг = Y
I2-V-600 Кертис с-1800 750 2 400 251,3 5,42 2,38* 2,38* 2 660 0 0 0 0 21,1 0 0 0 0 0 2,01 0,7 0 0 0 0 0 0 0 0 — 3-й и 6-й порядки
12-V-6O0 Кертисс «Супер-Конкверор» .... 730 2 400 251,3 5,23 1,94 1,79 2 680 0 0 0 0 25,1 0 0 0 0 0 1,7 0,6 0 0 0 0 0 0 ___ 2-й и 6-й »
12-V-600 Лоррен «Петрел» 600 2 600 272,1 4,70 2,39 2,16 2 570 0 0 0 0 0 0 0 0 0 0 1,69 0,03 0 0 0 0 0 0 0 0 -— 6-й порядок Тг = Y
12-W-60’ Лоррен-Дитрих 12Е 470** 1 880** 196 Не вычисл. 1,75* 1,75* Не вычисл 0 0 950 503 0 0 40,16 25,8 0 0 1,19 1,19 0 0 0 0 0 0 0 0 — 2-й, 4-й и 6-й порядки Т» == Y
18-W-400 Фарман 18WD . 820** 1 920** 201 » » 2,48* 2,48* >> » 0 0 0 0 He вычисл. He вычисл. 0 0 0 o' 1,0 0,59 0 0 0 0 0 0 0 0 — 3-й и б-й порядки Tz¥= т
3-цил. звезда НАМИ 65 70 1 630 170 » 1,98* 1,98* » » 594 594 286 118 0 0 8,95 5,2 0 0 0,552 0,176 0 0 0 0 0 0 0 0 1-й порядок 2-й, 4-й и 6-й порядки
3-цил. » Бристоль «Люцифер» 112 1 600 167,5 » » 1,96* 1,96* » » 674 674 320 148 0 0 He вычисл. He вычисл. 0 0 He вычисл. He вычисл. 0 0 0 0 0 0 0 0 1-й » 2-й, 4-й и 6-й » —
9-цил. » Пратт-Уитни «Хорнет» А 525 1 900 199 11,13 3,92 3,68 3 900 5 530 5440 635 602 0 0 2,38 0,174 0 0 0,0112 0,00334 0 0 0 0 0 0 0 0 1-й >> 2-й, 4-й и 6-й »
9-цил. » Бристоль «Меркур» IVS2 490 2 250 205,5 17,78 2,42 2,36 8 300 5 020 4 970 754 721 0 0 1,26 1,13 0 0 0,0505 0,0205 0 0 0 0 0 0 0 0 1-й » 2-й, 4-й и 6-й » —
9-цил. » Райт «Циклон» R-1820 600 1 950 204,1 20,91 3,46 3,27 7730 5 530 5460 691 656 0 0 1,03 0,71 0 0 0,0088 0,0053 0 0 0 0 0 0 0 0 1-й >> 2-й, 4-й и 6-й » —
14-цил. двойная звезда Армстронг-Сидли «Ягуар» IVS . . . 365 1 700 178 Не вычисл. 1,96* 1,96* Не вычисл. 0 0 0 0 0 0 0 0 0 0 0 0 180 180 He вычисл. 0 0 He вычисл. 1-й » 2-й, 4-й и 6-й » —
14-цил. двойная звезда Гном и Рон «Мистраль» К-14 . . . 800 2 400 251,3 14,58 2,62 2,37 7 730 0 0 1 0 0 0 0 0 0 0 0 0 0 1 040 1 000 182 171 0 0 0,49 0,34 1-й » 2-й, 4-й и 6-й » —
* Средний вес поступательно двигающихся масс одного цилиндра.
** Мощность и число оборотов при работе на максимальном режиме.
Авиац. порши, двигатели.
135501
находим
C2 = |4^'R(u2’ 1
r
D2 = 3kLfflulRu)* j
(23)
Так как R22>R21 и C2 > D2, то при a = 0 вектор C2 направлен
по оси yy в ее отрицательном направлении (фиг. 135501-Ш),
а вектор D2—по оси уу в ее положительном направлении, причем
вектор D2 вращается в направлении
вращения коленчатого вала, а вектор
* С2 — в противоположном, с угловой ско-
г ростью 2<о; большая ось эллипса равно-
го—действующей сил инерции второго по-
рядка расположена по оси хх, а малая—
R по оси уу.
_______ЧДля 5-, 7- и 9-цилиндровых звездо-
~ Т?22 образных двигателей имеют место ра-
венства
|*9
Фиг. 135501-111.
К определению векторов С2 и
трехцилиндрового звездообраз-
ного двигателя •
I ‘2
и
Й12 = *К
и Ч у, J
(24)
Из равенства (24) следует, что для
5-, 7- и 9-цилиндровых звездообразных
двигателей эллипс равнодействующей
сил инерции второго порядка превращается в окружность, а сама
равнодействующая является постоянным по величине вектором силы
P/2 = ^4^nlRo>2’
(25)
вращающимся с угловой скоростью 2<о в направлении вращения колен-
чатого вала; при угле а = 0 вектор силы Рц составляет с радиусом
кривошипа угол 180°. ,
В звездообразных двигателях силы инерции второго и высших
порядков остаются неуравновешенными.
У современных однорядных девятицилиндровых звездообразных
двигателей величины сил инерции различных порядков находятся
в пределах
РЛ = 5000 -11000 кг
Pjt- 600 - 1200 »
РЛ = о,б — 1,20 »
Pit= 0,007- 0,015»
144
135502
Уравновешивание двухрядных звездообразных двигателей 135502
с кривошипами, расположенными под углом 180°, и с = у
В сдвоенном звездообразном двигателе (фиг. 135502) цилиндры
одной звезды обычно сдвинуты относительно цилиндров другой на
половину угла между осями двух соседних цилиндров звезды,
т. е. на угол — , где I — число цилиндров каждой звезды (которое
в двигателях этого типа бывает всегда больше трех).
Главные цилиндры обеих звезд и кривошипы коленчатого вала
двигателя располагаются один в отношении другого под углом 180°.
Фиг. 135502.
К уравновешиванию сил инерции сдвоенного звездообразного двигателя с криво-
шипами, расположенными под углом 180°, и -(1 = у
Как указано в 135501, силы инерции первого порядка в каждой
звезде дают равнодействующую
(1)
направленную по радиусу соответствующего кривошипа, которая
в сумме с силой инерции вращательно двигающихся масс своей звезды
дает в каждой звезде суммарную силу, направленную по радиусу
своего кривошипа и равную
P, = (SRfc + yiS»ni)₽«>!. (2)
Эти силы инерции обеих звезд, действуя в противоположные сто-
роны, с плечом а, равным расстоянию между плоскостями осей цилин-
Ю Авиац. порши, двигатели
145
135503
дров звезды, дают пару с моментом
= (%Jlk+ j 1'Ш) R^2a, (3)
которая обычно уравновешивается парой сил инерции вращающихся
масс соответственно подобранных противовесов, установленных на
продолжениях крайних щек коленчатого вала.
Силы инерции поступательно двигающихся масс второго порядка
в каждой звезде дают равнодействующую
Р/2 = ау2Пп1₽®,| (4)
Эти равнодействующие силы вращаются с двойной угловой ско-
ростью в направлении вращения коленчатого вала, каждая в плоскости
осей цилиндров своей звезды, и в момент верхнего мертвого положе-
ния поршня в главном цилиндре своей звезды равнодействующая
составляет угол в 180° с соответствующим кривошипом.
В результате силы инерции второго порядка дают пару сил
с моментом
Л1/2 = 1>. у2Пп1р»га. (5)
Плоскость действия этой пары сил проходит через ось коленча-
того вала и вращается с угловой скоростью 2ш в направлении враще-
ния коленчатого вала. Пара М,2 обычно остается неуравновешенной.
J35503 Уравновешивание четырехрядных звездообразных двигателей с цилиндрами,
стоящими один за другим в ряд, и с Коленами вала, расположенными
под углами в 180°
Двигатель этого типа (фиг. 135503-1) представляет собой четыре
i-цилиндровых звезды, работающие на общий коленчатый вал, схема
которого дана на фиг. 135503-1. Число цилиндров i каждой звезды
обычно бывает больше трех, а главные цилиндры всех звезд расположе-
ны в одном ряду.
Силы инерции первого порядка в каждой звезде дают результи-
рующую
Pji = jiWniR< (1)
направленную по радиусу кривошипа своей звезды, и вместе с силами
инерции вращательно двигающихся масс уравновешиваются в двигателе
в целом, сами собой.
Силы инерции второго порядка поступательно двигающихся масс
в каждой звезде (z > 3) дают равнодействующую
(2)
Векторы этих сил вращаются с угловой скоростью 2<и в направле-
нии вращения коленчатого вала и составляют с радиусами кривоши-
пов своих звезд углы в 180° в момент верхнего мертвого положения
поршня главного цилиндра звезды.
146
135503
Результирующая
гающихся масс всего
сил инерции второго порядка поступательно дви-
двигателя будет:
(3)
К уравновешиванию сил инерции четырехрядного звездообразного двигателя с ци-
линдрами, стоящими один за другим в ряд, и с коленами вала, расположенными под
, углами в 180°
В двигателях рассматриваемого типа силы инерции второго порядка
обычно остаются неуравновешенными.
Фиг. 135503-П.
К уравновешиванию сил инерции J24-цилиндрового четырехрядного звездообразного
двигателя с цилиндрами, стоящими один за другим в ряд
Если в двигателе такого типа главные цилиндры стоят не в ряд
один за другим, как например, в двигателе Юнкере «Юмо»-222
(фиг. 135503-П; главные цилиндры звезд обозначены римскими цифрами
с добавлением буквы г), то в уравновешенности сил инерции первого
135503
порядка, векторы которых направлены для каждой звезды по радиусу
кривошипа и вращаются вместе с ним независимо от расположения
главного цилиндра, никаких изменений не возникает; уравновешенность
же сил инерции второго порядка изменяется, так как взаимное рас-
положение суммарных векторов сил инерции второго порядка для раз-
ных звезд, составляющих двигатель, зависит от относительного рас-
положения главных цилиндров.
Например, когда в первой и четвертой звездах двигателя «Юмо»-222
(фиг. 135503-111, а) поршни находятся в верхних мертвых положениях,
т. е. <Х[ = aIV — 0, то во второй и третьей звездах ап = аш = 240°. Следо-
вательно, в этот момент суммарные векторы сил инерции второго
порядка первой и четвертой звезды, Р*2 и Р*У, составляют со своими
Фиг. 135503-1П.
К уравновешиванию сил инерции второго порядка
кривошипами угол в 180° и направлены по продолжению щек; во вто-
рой же и третьей звездах суммарные векторы сил инерции второго
порядка прошли от своего начального положения угол 2 x 240° = 480“
и составляют, с осями своих главных цилиндров углы в 480°+180° =
= 660° = 360°4-300°, т. е., что то же,—угол в 300° (фиг. 135503-111,6),
а с векторами первых двух звезд —угол в 60°.
Результирующий вектор сил инерции второго порядка всего
двигателя в этом случае, если учесть, что
Р]2 = р" = р”1 = PJ7 = ik (4)
будет приложен в точке пересечения плоскости симметрии коленчатого
вала с осью его и равен
РУ2 = 4и у cos 30° = 2 / 3 /X у 3)lnzR«>2; (5)
при aj=:O0 он составит с первым кривошипом угол в 180°4-30е = 210°;
вектор Руг будет вращаться при этом с двойной угловой скоростью
коленчатого вала 2<и в направлении вращения последнего.
148
135504
Результирующая сил инерции второго порядка в рассматриваемом
типе двигателей обычно остается неуравновешенной, но может быть урав-
новешена общим методом двумя противовесами, вращающимися в произ-
вольно выбранных плоскостях, перпендикулярных оси коленчатого вала,
с двойной угловой скоростью 2ш в направлении вращения последнего.
Уравновешивание сил инерции 28-цилиндрового четырехрядного
звездообразного двигателя, у которого звезды сдвинуты
одна относительно другой на угол у = -дн-
135504
Схема двигателя такого типа, «Уосп-Мейджер» R-4360, дана на
фиг; 135504-1, где главные цилиндры звезд обозначены римскими
цифрами с буквой г.
*у
I
-у
Фиг. 135504-1.
>г | пг
К уравновешиванию сил инерции в 28-цилиндровом четырехрядном звездообразном
360°
двигателе, у которого звезды сдвинуты одна относительно другой на угол у'= •
Силы инерции первого порядка в каждой звезде приводятся к ре-
зультирующему вектору, направленному по радиусу кривошипа и вра-
щающемуся вместе с ним; эти силы могут быть уравновешены вместе
с силами инерции вращающихся масс двумя или четырьмя противо-
весами, установленными на щеках коленчатого вала.
Силы инерции второго порядка приводятся в каждой звезде к резуль-
тирующей силе
149
135504
Сила Pj2 в момент верхнего мертвого положения поршня в главном
цилиндре звезды составляет угол в 180° с радиусом кривошипа этой
звезды.
Сила Р',2 вращается с удвоенной угловой скоростью коленчатого
вала 2ш, в направлении вращения последнего.
Когда в первой звезде ^ = 0° и вектор Р# составляет угол в 180е
с радиусом кривошипа I, во второй звезде, если учесть, что угол
360°
относительного сдвига смежных звезд у' — и 7у =90°, агт = 26у' —
= 270° + 5у', и угол, который составляет сила Р” с радиусом криво-
шипа II, SyjifiT
2хп+ 180°—540°+10у'+180° = 810° + Зу'= 2 • 360° + 90° 4 Зу' = 90° + Зу';
в третьей звезде
аш = 12у'= 90° + 5у'
и угол между Р/I1 и радиусом III
2аш+ 180° = 180°+ 10у' + 180° = 360°+ 90° + Зу' = 90° + 3у';
+У
Фиг. 135504-П.
К уравновешиванию сил инер-
ции второго порядка
наконец, в четвертой звезде
aIV=10y' = 90° + 3y'
и угол между P/У и радиусом IV
2xIV +180° = 360° + бу' = бу'.
Располагая силы Р^, Р/г»
Р"1 и P/У под указанными уг-
лами к своим кривошипам, полу-
чаем систему сил, изображенную
нафиг. 135504-П, Для момента вре-
мени, когда ai = 0, причем каж-
дая из этих сил лежит в плос-
кости своей звезды. Вся эта сис-
тема сил вращается с угловой
скоростью 2с» в направлении
вращения коленчатого вала и
может быть уравновешена общим методом двумя противовесами,
лежащими в выбранных плоскостях и вращающимися с угловыми ско-
ростями 2ш в сторону вращения коленчатого вала.
Обычно эти силы оставляются неуравновешенными.
150
135600-135701
Уравновешивание Н-образных двигателей 135600
Уравновешивание сил инерции 24-цилиндрового двигателя 135601
с цилиндрами, расположенными в четыре ряда,
Н-образно и с кривошипами под углом 120°
Схема двигателя такого типа, Нэпир «Сейбр» VII, дана на
фиг. 123205-XIII.
Силы инерции вращающихся масс уравновешены на каждом колен-
чатом валу полностью.
Силы инерции первого, второго и четвертого порядков поступа-
тельно двигающихся масс уравновешены полностью (см. 135201) в каждом
ряду цилиндров.
Силы инерции шестого порядка в каждом ряду цилиндров равны
ушестеренной силе этого порядка одного цилиндра, но в рядах, распо-
ложенных противоположно, эти силы равны, противоположно напра-
влены и уравновешивают друг друга.
Следовательно, двигатели этого типа уравновешены в отношении
сил инерции, вращающихся масс и сил инерции первого, второго,
четвертого и шестого порядков поступательно двигающихся масс.
Уравновешивание многоцилиндровых двигателей особых типов 135700
Уравновешивание сил инерции шестицилиндрового двигателя 135701
с цилиндрами, расположенными в ряд, с кривошипами под углом 60а
и противоположно двигающимися поршнями
Схема двигателя такого типа, «Юмо»-207 D, дана на фиг. 135701.
Силы инерции и моменты сил инерции вращающихся масс рас-
сматриваемого двигателя для каждого вала в отдельности уравно-
вешены сами собой полностью.
Для каждого вала в отдельности:
а) силы инерции первого порядка
Pjt =• — R®* [cos a + cos (a + 120°) + cos (a -f- 240°) +
-f- cos (a + 180°) 4- cos (a -f- 300°) + cos (a -f- 60*)] = 0; (1)
б) силы инерции второго порядка
Pji. = — 4p22ftn [cos 2a + cos 2 (a + 120°) + cos 2 (a -f- 240°) +
+ cos 2 (a + 180°) + cos 2 (a + 300°) + cos 2 (a + 60°)] = 0; (2)
в) силы инерции четвертого порядка
16р4ЭД?п R®2 [cos 4a + cos 4 (a + 120°) + cos 4 (a + 240°) +
4-cos 4 (a + 180°) + cos 4 (a-f-300°)-f-cos 4 (a+ 60°)] =0. (3)
151
135701
Фиг. 135701.
К уравновешиванию сил инерции шестицилиндрового двигателя с цилиндрами,
расположенными в ряд, с кривошипами под углом 60° и противоположно двигаю-
щимися поршнями
152
135701
Силы инерции шестого порядка для верхнего вала (вала выхлопных
цилиндров)
Pl = - Збр.^п Pw2 [cos ба + cos 6 (а + 120°) + cos 6 (а + 240°) +
+ cos б (а 4- 180°) + cos 6 (а + 300°) 4- cos 6 (а 4- 60°)] =
= ~ б’р‘ЭД?п Рш2 cos ба. (4)
Силы инерции шестого порядка для нижнего вала (вала продувоч-
ных цилиндров) аналогично
Р?в = б’р.ЭДп Pw2 cos 6 (а — а).
Для двигателя в целом
Pj. = Ph + Р/. = ~ Р«>2 [cos ба — cos 0(а — а)] =
= — 2 • б’р.^Кп Р^2 sin За cos 6 (а 4-т;), (5)
где вспомогательный угол ^’определяется из уравнения
, „ sin 6а
^^Г-СОЗба' <б>
Моменты сил инерции первого порядка уравновешены для каждого
вала отдельно.
Моменты сил инерции второго порядка для верхнего вала, если
за полюс моментов принять пересечение осей первого цилиндра и колен-
чатого вала, будут:
М]г = 4р,2Кп Рш2а [0 • cos 2а 4- 5 cos 2 (а 4- 60°) 4-
4-1 • cos 2 (а 4-120°) 4- 3 cos 2 (а 4-180°) 4- 2 cos2(a4-240°)4-
4-4 cos 2 (а 4-300°)],
откуда
A472 = 8|/3pJgRRP«)2acos2(<x4-75°); (7)
то же для нижнего вала
Л4? = - 8/Зр2ЭДпР«)2асо5 2(а4-75°- а), (8)
где а —расстояние между осями двух смежных цилиндров.
Полный момент сил инерции второго порядка для всего двига-
теля
= Ml 4- Ml = 8 J/Tp^n Рш2а [cos 2(a4-75°)-
— cos2 (a 4- 75° — <j)] = 16 ]/3 рДЯп R^a sin a cos 2 (a 4- 75° 4- p), (9)
где вспомогательный угол p определяется из уравнения
= 0°)
153
135701
Момент сил инерции четвертого порядка для верхнего вала
М-4 = 32 /3 Rwza cos 4 (а + 52°,5); (11)
то же для нижнего вала
= - 32 /ЗрЖ R<»3a cos4(a+ 52°,5 - а). (12)
Полный момент сил инерции четвертого порядка для всего двига-
теля
Л1;<=Л1/4 4- Мя = 32 /з R^a [cos 4 (а + 52°,5) -
—cos4 (а + 52°,5 - а)] » 64^3 рЖ R^a sin 2а cos4 (а + 52°,5 + $), (13)
где угол $ определяется из уравнения
, ... sin 4а
tg 4Е = 7---j- . (14)
° 1 — cos 4а ' '
Если бы в двигателях этого типа не было сдвига между валами
выхлопных и продувочных цилиндров (угол з = 0), то эти двигатели
были бы уравновешены полностью в отношении всех рассмотренных
порядков как сил, так и моментов.
Угол сдвига а имеет небольшую величину; например, у двигателя
«Юмо»-207 D
10°.
Поэтому для этого двигателя амплитуда сил инерции шестого
порядка всего двигателя равна амплитуде выхлопной или продувочной
половины двигателя, так как
2 sin За = 2]sin 30° = 1.
Амплитуда момента сил инерции второго порядка всего двигателя
составляет
2 sin □ = 2 sin 10° — 0,348
от амплитуды этого момента выхлопной или продувочной половины
двигателя.
Амплитуда момента сил инерции четвертого порядка всего двига-
теля составляет
2 sin 2а =2 sin 20° = 0,684
от амплитуды этого момента выхлопной или продувочной половины
двигателя.
Силы инерции шестого порядка и моменты сил инерции второго
и четвертого порядков оставляются неуравновешенными.
154
135702
Уравновешивание сил инерции 24-цилиндрового двигателя с цилиндрами, 135702
расположенными по шести в ряд, с рядами, расположенными по боковым
сторонам прямоугольного параллелепипеда, с кривошипами под углом 60°
и противоположно двигающимися поршнями
Схема двигателя такого типа, «Юмо»-224, дана на фиг. 135702-1.
<у
со
Фиг. 135702-1.
К уравновешиванию сил инерции 24-цилиндрового двигателя с цилиндрами, рас-
положенными по шести в ряд с рядами, расположенными по боковым сторонам
прямоугольного параллелепипеда, с кривошипами под углом 60° и противоположно
1 двигающимися поршнями
Силы инерции' вращающихся масо на каждом коленчатом валу
уравновешены полностью.
Составляющие моментов сил инерции вращающихся масс по осям
координат х и у будут:
155
135702
для коленчатых валов выхлопных цилиндров I и II рядов
М7^ = ЗЛ/?®Чо5(а + 240°), |
Л^в==ЗаЭД?в Ra>2sin (а+ 240°); /
то же для III и IV рядов
MJ™ = 3afflK Rtf cos (а + 240 ), 1
MJ™ = ЗаЯПк /?ш2 sin (а + 240°). J
Для коленчатых валов продувочных цилиндров I и IV рядов
М%х = - ЗаЭДк R®2 cos (а + 240° - с), 1
М%у = - 3a%lv Rtf siп (а + 240° - а); )
то же для II и III рядов
MJ™ = —3a%RKRtf COS (а + 240° - а), 1
M®1/== — ЗаЭД?к R<o2sin (а + 240°s). J
В формулах (1) — (4):
а—расстояние между осями соседних цилиндров.
— сумма приведенной к радиусу кривошипа массы кривошипа и отне-
сенных к цапфе кривошипа масс М„ шатунов, действующих на цапфу.
Составляющая суммарного момента сил инерции вращающихся
масс всех валов двигателя по оси х
Mivx = Mjg + Al?™ + MjL + Mj™,
откуда
MjKX = ба R ш2 [cos (а + 240°)—cos (а -f- 240° — а)] =
= 12a2KK/?a>2sin cos (а + 240° + т]), (5)
аналогично по оси у
MjKy ~ 12a Rw’sin sin (a + 240° + у), (6)
где угол >] определяется из уравнения
Вектор результирующего момента сил инерции всего двигателя
MjK = 12a2RK Rtf sin y
вращается с угловой скоростью ш в направлении вращения коленчатых
валов, при а = 0 образует с осью х угол (240° 4-17) и составляет
4 sin у = 4 sin ^^ = 0,3225
от момента одного вала.
156
135702
Если бы валы выхлопных и продувочных цилиндров вращались
без сдвига и, то моменты сил инерции вращающихся масс для
всего двигателя уравновешивались бы полностью.
Силы инерции первого, второго и четвертого порядков поступательно
двигающихся масс уравновешены для каждого вала полностью.
Силы инерции шестого порядка в каждом ряде кривошипно-шатун-
ных механизмов не уравновешены и равны ушестеренным силам от
одного механизма.
Сохраняя прежние обозначения, будем иметь
Р% = - 6s р, ЭДп/? a? cos ба, I
Йе = 6* р, cos 6(а—а), 1^
Р/6Ш = 63Рв 9KnA,<»2cos6a, |
P^n = -62p,gRn^o»2cos6(a-ff), J
откуда для I и III рядов
P/е = — 2 • б3 рв ЗКп R <о2 sin За cos 6 (а 4- ту),
Р1^ = 2 • б3 р, ЭДп /?ш2 sin За cos 6 (а 4- >?)
(9)
и аналогично:
P“JV= - 63p,^/?«?cos6(a + 90°) = 63p,^n/?<o2cos6a;
Р^Г = — б3 рв ЭДп R ®2 cos б (а—а),
P/е1 = — б3 р, ЭДп Я®2 cos ба,
Р™ = б3 р, 9ЛП R ш2 cos 6 (а - а),
откуда для IV и II рядов
= 2-6spe^n/?a>2sin3<JCOs6(a + i,), 1
Р*в = — 2-6’р, 2J?n/?a)asin 3acos6(a + >?). J
В равенствах (9) и (11) угол у определяется из уравнения
z? S1П 6 S ✓ 1 л \
= (,2>
Таким образом силы инерции шестого порядка приводятся к двум
парам сил, имеющим одинаковое направление (фиг. 135702-П) и дающим
суммарный момент
Mj6 = 8 • С3 b р.'ЗКп R ®2 sin За cos 6 (а 4- у) (13)
относительно оси z двигателя, перпендикулярной плоскости ху.
Моменты пар сил инерции первого, второго и четвертого порядков
в каждом ряде кривошипно-шатунных механизмов будут неуравно-
вешены; их величины будут следующие.
157
135702
Моменты пар сил инерции первого порядка
ЛГ-/ = ЗаЭДп/?ш2со5(а+240°), )
М% = — За cos (а + 240° - а), J
М [” = За Rof cos (а + 240°), |
М“/н = - За /?<о2 cos (а + 240° - a) J
и
Мд11 = За Ra>2 cos (а + 240° + 270°) = За R^ sin (а + 240°), )
М??1 =-ЗаЯ®3Sin (а+240°-а), I .
A4/iIV= -За /?ш= cos (а + 240 + 90°) = За /?ш2 sin(a + 240°), [ ’
M7!IV= - За ЗКп sin (а + 240° -a). J
Моменты, выражаемые форму-
лами (14), действуют относительно
оси х, причем положительным счи-
тают направление моментов по ча-
совой стрелке, если смотреть с по-
ложительного направления оси.
Фиг. 135702-II.
К уравновешиванию сил инер-
ции шестого порядка
Суммарный момент относительно оси х будет
М/1Х = М% + 4- Af£m,
Afjia, = ба R®a [cos (а 4- 240°) — cos (а 4- 240° — а)] =
= 12a^n/?®2sin у cos (а 4-240° 4-17). (16)
Относительно оси у действуют моменты, которые можно определить
по формулам (15); их сумма будет
Мцу = 12a Rw3 sin ~ sin (a 4- 240° 4- *)). (17)
Вектор результирующего момента сил инерции первого порядка
равен
Л4Л «= 12a 9Япsin у. (18)
Этот вектор вращается с угловой скоростью коленчатых валов
в направлении их вращения и при <х = 0° составляет с положительным
158
135702
направлением оси х угол в (240° + >?), где угол 17 определяется из урав-
нения (7).
Моменты пар сил инерции второго порядка
Mg = /3 а 4ра R®2 cos 2 (а 4-105°),
=-|/За4р2ЭДп R®2cos2(a+ 105°-а),
Mg11 = -у За 4р2 «Кп/?®2 cos 2 (а + 105° + 180°) =
= -/3a4pa9Kn/?‘»2cos2(a+ 105°),
Mg11 =/За 4ра Ш Л>2 cos 2 (а + 105° — а)
Mg1 = У За 4ра R«>2 cos2 (а + 105е + 270°) =
= — |/За 4р3 ЭКп R0»2 cos 2 (а-|-105°),
Mg1 = /3 а 4р2 ₽<о2 cos 2 (а + 105° - а),
М gv= - У За 4ра ЭДп R®2 cos2 (а 4-105° + 90°) =
= /3 а 4?2 ра>2 cos 2 (а + 105°),
Mgv = - УЗ а 4ра R<o2 cos 2 (а + 105° - а).
Суммарный момент второго порядка относительно оси х
M/2s = Mg + Mg + Mg11 + Mgn = 0.
Суммарный момент второго порядка относительно оси у
м/2„=Mg1 + Mg1 + Mgv+Mgv=0.
(19)
(20)
(21)
(22)
Следовательно, у двигателей этого типа результирующий момент
пар сил инерции второго порядка уравновешен полностью
М/2=0. (23)
Моменты пар сил инерции четвертого порядка
М%= -/3al6p42nnR<o2cos4(a+37°,5),
Mg = У За 16 р4 ЭДп R®2 cos 4(<х + 37°,5 - а),
Mgn = /3al6p4^n7?a)2cos4(a + 370,5+180°)=
= У За 16p45Q?n R®2 cos 4 (а+ 37°,5),
Mgn= — У За 16p4gKnR®2cos4(a + 37°,5- а)
Mg1 =-/За16р4ЭДп/?ш2С054(а + 37о,5+270°) =
— — У За 16p42J?nRm2cos4(a + 37°,5),
Mg1 = УЗ а 16р4 2Пп R“2 cos 4 (а + 37°,5 - а),
Mgv = /3a 16p19J?ntf°>2cos4(a + 370,5 + 90°)== f
= /За 16р4ЭДп₽<о2 cos 4 (а+ 37°,5), |
Mgv = - \/' 3 а 16р4 ₽ш2 cos 4 (а + 37°,5 - а). J
(24)
(25)
159
135800—136003
Суммарные моменты четвертого порядка относительно осей х и у
а следовательно, и результирующий момент пар сил инерции четвер-
того порядка для всего двигателя
Мм = 0. (27)
Моменты сил инерции первого порядка вместе с моментами сил
инерции вращающихся масс могут быть уравновешены противо-
весами, расположенными на продолжениях щек колен валов.
Моменты сил инерции шестого порядка обычно оставляются не-
уравн овешенными.
135800 Таблица уравновешенности сил инерции в авиационных
двигателях различного типа
В табл. 135800 даны величины сил инерции вращательно двига-
ющихся масс и различных порядков сил инерции и моментов сил
инерции поступательно двигающихся масс, а также характеристика
уравновешенности авиационных двигателей различных типов.
136000 ВЛИЯНИЕ КРУТИЛЬНЫХ КОЛЕБАНИЙ СИСТЕМЫ КОЛЕНЧАТОГО ВАЛА
НА УРАВНОВЕШЕННОСТЬ ДВИГАТЕЛЯ
136001 Вопросы уравновешенности двигателей различного типа в отноше-
нии центробежных сил инерции вращательно двигающихся масс
и в отношении сил инерции различных порядков поступательно двига-
ющихся масс рассматривались как количественно, так и качественно
в 135000, исходя из постоянства угловой скорости вращения коленча-
того вала ш как во времени, так и по длине коленчатого вала.
136002 В действительности угловая скорость коленчатого вала двигателя и
не постоянна по величине ни во времени, ни по длине коленчатого
вала, ни по фазе для различных колен вала.
136003 Под действием переменных сил колена вала с приведенными к ним
массами находятся в состоянии вынужденных крутильных колебаний,
как части одной упругой системы с массами — системы коленчатого
вала, в которую входят, кроме самого коленчатого вала, также винт,
редуктор, привод к нагнетателю, крыльчатка нагнетателя и др.
Периодом изменения угловой скорости коленчатого вала для
четырехтактного двигателя являются два оборота коленчатого вала,
а для двухтактного—один оборот.
Угол поворота колена вала от некоторого начального его поло-
жения может быть представлен в виде ряда Фурье
со со
« « шср/ + 2 хк cos (к№) + 2 Ук sin (кМ) =
к=1 fc==i
со
= “ср* + 2 фк sin (JM + 1к), (!)
Л=1
160
136004-136005
где /—время, соответствующее углу поворота а;
“ср —средняя угловая скорость вращения коленчатого вала:
Шс₽~з6’ (2)
л —число оборотов коленчатого вала в минуту;
к = 1, 2, 3, ...—порядок гармоники;
хк и Ук~ амплитуды фазовых слагающих гармоники к-го порядка;
— амплитуда гармоники к-го порядка
= (3)
Yi —фазовый угол
tgb = g; (4)
6 —круговая частота гармонического момента первого порядка,
сек.'1,
для четырехтактных двигателей
6 = ^. (5)
Величины Фк и yfc имеют различные значения для различных
колен вала.
Для переменной угловой скорости ш скорость и ускорение поршня 136004
будут
rfSp rfSp (Ха ..
vp — ~dF e rfT dt ’ ( )
d2Sp dlSp /• d1'\2 dSp
lp— dt2 ^~d^ \JitJ + rfa dt2
или
• i*1 i Vfl d2* tv\
+ шср dt2’ ' '
где с достаточной точностью можно принять для нормального криво-
шипно-шатунного механизма
vPi — R“cp ^sin a -j- ~ sin 2sQ (4)
и
ipi = R“cp (cos а + к COS 2й). (5)
Пусть имеется ясно выраженный резонанс крутильных колебаний 136005
гармоники возбуждающих сил к-го порядка; тогда можно считать
а = шер/4-ф;. sin у шер/ + а0^ , (1)
dt к = “cp+ 2* ш=рФ* cos (4 “cPf + (2)
d2z dt2~~ —ф/с81п| (4 • (3)
11 Авиац. порши, двигатели
161
136006—136007
Так как амплитуда Фк практически очень незначительна, то
можно с достаточной точностью считать в правой части уравнения (3)
и принять
^ = ®ср + 4т«рф*С05(да + а<>) (5)
и
g=_(|wcpy®j£sin0a + a(Q. (6)
136006 Подставляя в уравнение (3) п. 136004 выражения (4) и (5) того же
пункта и выражения (5) и (6) п. 136005, после возвышения в степень,
умножений и тригонометрических преобразований получаем для /р,
следующую формулу:
jp = Rw*p + ^-Ф0 cosa + x(l + |-®jQcos2a4-
+ у 0 + 40 Фь cos ^^ + 0a + (Zej +
+ |(l_|^fcCOS[C4-0a + a.] +
+ k ~2 0 "I- 80 C0S f C 2” "0 a H- a о J +
+ X4(1_|)ofccos[(4-2)a + a0] +
+ ^$^cos[(Z:+l)a + 2a0]+g$icos[(Z:-l)a+2a0] +
+ k Ф1 cos [(Л + 2) a + 2a0] + к g Ф£ cos [(Л - 2) a + 2д0]}
Из этого выражения следует, что период ускорения поршня
составят два оборота коленчатого вала, а не один оборот, как это-
было для = const; в формуле ускорения поршня для случая нор-
мального кривошипно-шатунного механизма появляются гармоники
rfa ,
нечетных высших порядков, чего нет при ^= const; среди гармоник,
явившихся за счет непостоянства угловой скорости, имеются такие,
амплитуды которых по величине сравнимы с амплитудой гармоники
второго порядка для случая, когда = const.
136007 Например, для одного двигателя эксперимент обнаружил
на 1230 об/мин крутильный резонанс системы коленчатого вала с резо-
нирующей гармоникой 9-го порядка. Амплитуда гармоники 9-го порядка
последнего шестого колена вала оказалась равной
Ф, = 0,0141 радиана.
162
136008-136009
По формуле 136006 амплитуда соответствующей (9 + 2)= 11-й гармо-
ники ускорения поршня /р равна
R^ep 4(1 +|)фа= 4(1 +4 >0141 /?шс3р=0,20б/?ш^,
а амплитуда гармоники второго порядка ускорения при ^ = «>ср = const
для этого же двигателя
— 0,279/?«)ср.
На фиг. 136007-1 даны экспериментальная и расчетная торсио-
граммы шестого колена вала, а на фиг. 136007-11 кривые ускорений
Фиг. 135007-1.
Экспериментальная и расчетная
поршня правого цилиндра, ра-
ботающего на шестой кривошип,
без учета и с учетом крутиль-
ных колебаний.
Фиг. 136007-11.
Кривые ускорений поршня
правого цилиндра шестого
кривошипа без учета и
с учетом крутильных ко-
лебаний
торсиограммы шестого кривошипа
-----Ускорение поршня с учетом
крутилЬнЬ/х колебаний
На разных коленах вала кривые ускорений поршня с учетом кру- 136008
тильных колебаний коленчатого вала будут отличными одна от?другой.
За счет крутильных колебаний коленчатого вала амплитуды сил инер- 136009
ции поступательно двигающихся масс различных порядков в различных
цилиндрах будут уже неодинаковыми, как это предполагалось в 135000
П* ------------
163
136010-136013
при разборе вопроса уравновешенности сил инерции в двигателях раз-
личного типа. За счет этого, а также за счет изменения фаз сил инерции
различных порядков в различных цилиндрах, силы инерции этих
порядков, уравновешенные в предположении постоянства угловой
скорости, будут неуравновешены при наличии крутильных колебаний.
136010 Изменяются и силы инерции вращательно двигающихся суммар-
ных масс кривошипов. Они приведутся к силам инерции:
центробежной
Z=-MRs(g)‘, (1)
тангенциальной
T=-MRsd~ (2)
и паре с моментом
•n = -/sg, (3)
где Rs — расстояние центра тяжести S суммарной вращающейся массы М
кривошипа от оси вращения;
Is — момент инерции вращающейся массы М относительно оси,
проходящей через центр тяжести S и нормальной к плоскости
ее движения.
Значения и будут различными [для разных колен вала.
Поэтому вращательно двигающиеся массы, уравновешенные в двигателе
данного типа при = const, будут при ^0 уже неуравновешен-
ными.
136011 Противовесы, особенно при значительных расстояниях между
плоскостями их размещения / и II, участвуя в крутильных колебаниях,
приобретают свои скорости вращения, угловые ускорения, сдвиги фаз и
перестают точно выполнять свои функции, т. е. уравновешивать те си-
лы инерции, для уравновешивания которых они предназначены.
136012 Все нарушения в уравновешенности двигателя за счет крутиль-
ных колебаний передаются в виде неуравновешенных сил и моментов
через опоры двигателя на подмоторную раму и проявляются в виде
вибраций рамы и частей конструкции самолета.
136013 Вибрации могут вызываться не только крутильными колебаниями,
но и другими причинами, как например, неуравновешенностью винта,
неправильностью регулировки карбюраторов и др. Для устранения
вибраций нужно знать их причины.
На практике для выяснения причин, вызывающих вибрации само-
летной конструкции, исследуют на крутильные колебания систему
коленчатого вала двигателя и непосредственно сами вибрации, путем
снятия виброграмм, вибрографом. Основным критерием при выяснении
причин вибрации являются частота вибрации и соотношение между
частотой вибрации и числом оборотов двигателя, т. е. порядок
гармоники вибрации.
164
136014
В качестве примера на фиг. 136014-1 показаны амплитуды колеба-
ний в вертикальном направлении, записанные на подмоторной раме
у задка V-образного двигателя. На режимах около 800 и 900 об/мин
136014
Фиг. 135014-1.
Колебания в вертикальном направлении подмоторной рамы,
записанные у задка V-образного двигателя
имеет место тряска подмоторной рамы; при 1300 об/мин тряска была
заметна, но значительно слабее. Эти режимы являются резонансными
режимами крутильных колебаний системы коленчатого вала двигателя.
Фиг. 13S014-H.
Колебания подмоторной рамы и крутильные колебания систе-
мы коленчатого вала двигателя, установленного на истре-
бителе. I—колебания на моторной раме (вертикальные),
II—крутильные колебания переднего конца коленчатого вала
Попытки устранения этих вибраций подмоторной рамы двигателя
на указанных режимах посредством регулировки двигателя, предпри-
нимавшиеся до снятия виброграммы, конечно, окончились неудачей.
165
136015
На фиг. 136014-11 показаны колебания подмоторной рамы и кру-
тильные колебания системы коленчатого вала при 2700 об/мин другого
двигателя, установленного на истребителе. Причина вибраций в этом
случае также лежала в неуравновешенных силах инерции, вызванных
резонансными крутильными колебаниями системы коленчатого вала.
136015 В тех случаях, когда причиной вибраций самолетной конструкции
являются крутильные колебания системы коленчатого вала двигателя,
установленного на самолет, бороться с этими вибрациями можно либо
путем воздействия на крутильные колебания системы вала, либо путем
изменения упругости крепления двигателя к подмоторной раме.
ЛИТЕРАТУРА И ИСТОЧНИКИ К 100 000
1. Баранов Г. Г., Определение основных размеров кривошипно-шатунного
механизма с прицепным шатуном, «Техника Воздушного Флота» № 5, 1933.
2. Бруевич Н. Г. и Ширяев В. Н., Уравновешивание авиационных двигателей,
изд. Военно-Воздушной Академии им. Н. Е. Жуковского, 1933.
3. За икин А. Е. и др., под редакцией Заикина А. Е., Авиационные двигатели.
Конструкция и расчет деталей, Оборонгиз, 1941.
4. Зельцерман И. М., Современные балансировочные машины, ОНТИ, 1938.
5. Крылов А. Н., Лекции о приближенных вычислениях, изд. Академии Наук,
Ленинград, 2 изд., 1933.
6. Нейман И. Ш., Динамика авиационных двигателей, Оборонгиз, 1940.
7. Нейман И. Ш., Динамика и расчет на прочность авиационных моторов,
ч. I, ОНТИ, 1933.
8. Нейман И. Ш., Гармонический анализ тангенциальных сил от газов,
Сборник № 3, ОНТИ, 1937.
9 . Скарборо Д., Численные методы математического анализа, редакция и допол-
нения Д. Ю. Панова, ГТТИ, 1934.
10. Ширяев В. Н., Методы уравновешивания вращающихся масс, Труды ВВА
№ 63, 1940.
11. Нейман И. Ш., Тангенциальные силы от инерции поступательно двигающихся
масс, «Техника Воздушного Флота» № 5, 1933.
12. Хютте, Справочник инженера, т. I (любого издания).
Приложения к части 1
ТАБЛИЦЫ ДЛЯ ПОДСЧЕТА КИНЕМАТИКИ И ДИНАМИКИ НОРМАЛЬНОГО
КРИВОШИПНО-ШАТУННОГО МЕХАНИЗМА
Таблица 1
Угловые скорости коленчатого вала ш и их квадраты о>2
п 1 “ 1 СО2 | " 1 О)2
1 000 104,72 10 955 2 390 240,85 58 012
1 050 109,95 12 099 2 350 245,09 60551
1 109 115,19 13 259 2 400 251,33 63156
1 159 120,43 14503 2 450 255,55 65 827
1200 125,55 15 793 2 500 251,80 68540
1259 130,99 17135 2 559 257,04 71308
1300 135,14 18 535 2 590 272,27 74 131
1 359 141,37 19 985 2 550 277,51 77 010
1 400 145,51 21 494 2 700 282,74 79 944
1450 151,84 23 059 2 759 287,93 82 932
1500 157,08 24 574 2 809 293,22 85 975
1550 152,32 25 345 2 850 298,45 89 073
1 500 157,55 28 074 2 900 303,59 92 226
1 650 172,79 29 855 2 950 308,92 95433
1 700 178,02 31 593 3 090 314,15 98 596
1 750 183,25 33 585 3 050 319,40 102 013
1800 188,50 35530 3 100 324,63 105 385
1 850 193,73 37 532 3 150 329,87 108812
1 900 198,97 39 587 3 200 335,10 112 293
1 950 204,20 41 698 3 250 340,34 115 830
2 000 209,44 43855 3 300 345,57 119 421
2 050 214,68 45 085 3 350 350,81 123 058
2 100 219,91 48351 3 400 355,05 125 769
2 150 225,15 50 692 3 450 351,28 130 525
2 200 239,38 53 075 3 590 355,52 134 335
2 259 235,62 55 515
Таблица 2
Величины sinz, cosa, sin2z, cos2z, sin3z, cos3z, sin4z, cos4z, при изменении а от 0° до 360°
а° sin а COS а sin 2х cos 2 а sin За COS За sin 4а cos 4x
0 0,0009 1,0090 0,0909 1,0009 0,0090 1,0009 0,0900 1,0000
5 0,0872 0,9952 0,1735 0,9848 0,2588 0,9359 0,3420 0,9397
10 0,1735 0,9848 0,3420 0,9397 0,5000 0,8550 0,6428 0,7650
15 0,2588 0,9559 0,5000 0,8350 0,7071 0,7071 0,8560 0,5000
20 0,3420 0,9397 0,5428 0,7550 0,8550 0,5900 0,9848 0,1735
25 0,4225 0,9053 0,7559 0,6428 0,9559 0,2588 0,9848 —0,1735
30 0,5000 0,8550 0,8550 0,5000 1,0090 0,0090 0,8650 —0,5000
35 0,5735 0,8192 0,9397 0,3420 0,9359 —0,2588 0,6428 —0,7660
40 0,5428 0,7560 0,9848 0,17^5 0,8660 —0,5000 0,3420 —0,9397
45 0,7071 0,7071 1,0909 0,0090 0,7071 —0,7071 0,0009 —1,0000
50 0,7550 0,6428 0,9848 —0,1735 0,5000 —0,8550 —0,3420 —0,9397
55 0,8192 0,5735 0,9397 —9,3420 0,2588 —0,9359 —0,5428 —0,7550
60 0,8669 0,5900 0,8550 —0,5009 0,0009 — 1,0000 —0,8559 —0,5000
55 0,9053 0,4225 0,7550 —0,6423 —0,2588 —0,9559 —0,9848 —0,1735
70 0,9397 0,3420 0,5428 —0,7350 —0,5900 —0,8350 —0,9848 0,1735
75 0,9659 0,2588 0,5009 —9,8559 —9,7071 —0,7071 —9,8569 0,5000
80 0,9848 0,1735 0,3420 —0,9897 —0,8550 —0,5009 —0,6428 0,7650
85 0,9952 0,0872 0,1735 —9,9848 —0,9559 —9,2588 —0,3420 0,9397
90 1,0099 0,0990 0,0000 — 1,0090 — 1,0900 0,0099 0,0000 1,0000 ,
167
Таблица 2 (продолжение)
а° sin а COS а sin 2а cos 2а sin За COS За sin 4а COS 4а
95 0,9962 —0,0872 —0,1736 —0,9848 —0,9659 0,2588 0,3420 0,9397
100 0,9848 —0,1736 —0,3420 —0,9397 —0,8660 0,5000 0,6428 0,7660
105 0,9659 —0,2588 —0,5000 —0,8660 —0,7071 0,7071 0,8660 0,5000
НО 0,9397 —0,3420 —0,6428 —0,7660 —0,5000 0,8660 0,9848 0,1736
115 0,9063 —0,4226 —0,7660 —0,6428 —0,2588 0,9659 0,9848 —0,1736
120 0,8660 —0,5000 —0,8660 —0,5000 —0,0000 1,0000 0,8660 —0,5000
125 0,8192 —0,5736 —0,9397 —0,3420 0,2588 0,9659 0,6428 —0,7660
130 0,7660 —0,6428 —0,9848 —0,1736 0,5000 0,8660 0,3420 —0,9397
135 0,7071 —0,7071 —1,0000 0,0000 0,7071 0,7071 0,0000 —1,0000
140 0,6428 —0,7660 —0,9848 0,1736 0,8660 0,5000 —0,3420 —0,9397
145 0,5736 —0,8192 —0,9397 0,3420 0,9659 0,2588 —0,6428 —0,7660
150 0,5000 —0,8660 —0,8660 0,5000 1,0000 0,0000 —0,8660 —0,5000
155 0,4226 —0,9063 —0,7660 0,6428 0,9659 —0,2588 —0,9848 —0,1736
160 0,3420 —0,9397 —0,6428 0,7660 0,8660 —0,5000 —0,9848 0,1736
165 0,2588 —0,9659 —0,5000 0,8660 0,7071 —0,7071 —0,8660 0,5000
170 0,1736 —0,9848 —0,3420 0,9397 0,5000 —0,8660 —0,6428 0,7660
175 0,0872 —0,9962 —0,1736 0,9848 0,2588 —0,9659 —0,3420 0,9397
180 0,0000 — 1,0000 0,0000 1,0000 0,0000 — 1,0000 —0,0000 1,0000
185 —0,0872 —0,9952 . 0,1736 0,9848 —0,2588 —0,9659 0,3420 0,9397
190 —0,1736 —0,9848 0,3420 0,9397 —0,5000 —0,8660 0,6428 0,7660
195 —0,2588 0,9659 0,5000 0,8660 —0,7071 —0,7071 0,8650 0,5000
200 —0,3420 —0,9397 0,6428 0,7660 —0,8660 —0,5000 0,9848 0,1736
205 —0,4226 —0,9063 0,7660 0,6428 —0,9659 —0,2588 0,9848 —0,1736
210 —0,5000 —0,8660 0,8660 0,5000 — 1,0000 0,0000 0,8660 —0,5000
215 —0,5736 —0,8192 0,9397 0,3420 —0,9659 0,2588 0,6428 —0,7660
220 —0,6428 —0,7660 0,9848 0,1736 —0,8660 0,5000 0,3420 —0,9397
225 —0,7071 —0,7071 1,0000 0,0000 —0,7071 0,7071 0,0000 —1,0000
230 —0,7660 —0,6428 0,9848 —0,1736 —0,5000 0,8660 —0,3420 —0,9397
235 —0,8192 —0,5736 0,9397 —0,3420 —0,2588 0,9659 —0,6428 —0,7660
240 —0,8660 —0,5000 0,8660 —0,5000 0,0000 1,0000 —0,8660 —0,5000
245 —0,9063 —0,4226 0,7660 —0,6428 0,2588 0,9659 —0,9848 —0,1736
250 —0,9397 —0,3420 0,6428 —0,7660 0,5000 0,8660 —0,9848 0,1736
255 —0,9659 —0,2588 0,5000 —0,8660 0,7071 0,7071 —0,8660 0,5000
260 —0,9848 —0,1736 0,3420 —0,9397 0,8660 0,5000 —0,6428 0,7660
265 —0,9962 —0,0872 0,1736 —0,9848 0,9659 0,2588 —0,3420 0,9397
270 — 1,0000 0,0000 0,0000 —1,0000 1,0000 0,0000 0,0000 1,0000
275 —0,9962 0,0872 —0,1736 —0,9848 0,9659 —0,2588 0,3420 0,9397
280 —0,9848 0,1736 —0,3420 —0,9397 0,8660 —0,5000 0,6428 0,7660
285 —0,9659 0,2588 —0,5000 —0,8660 0,7071 —0,7071 0,8660 0,5000
290 —0,9397 0,3420 —0,6428 —0,7660 0,5000 —0,8660 0,9848 0,1736
295 —0,9063 0,4226 —0,7660 —0,6428 0,2588 —0,9659 0,9848 —0,1736
300 —0,8660 0,5000 —0,8660 —0,5000 0,0000 — 1,0000 0,8660 —0,5000
305 —0,8192 0,5736 —0,9397 —0,3420 —0,2588 —0,£659 0,6428 —0,7660
310 —0,7660 0,6428 —0,9848 —0,1736 —0,5000 —0,8660 0,3420 —0,9397
315 —0,7071 0,7071 — 1,0000 0,0000 —0,7071 —0,7071 0,0000 —1,0000
320 —0,6428 0,7660 —0,9848 0,1736 —0,8660 —0,5000 —0,3420 —0,9397
325 —0,5736 0,8192 —0,9397 0,3420 —0,9659 —0,2588 —0,6428 —0,7660
330 —0,5000 0,8660 —0,8660 0,5000 — 1,0000 0,0000 —0,8660 —0,5000
335 —0,4226 0,9063 —0,7660 0,6428 —0,9659 0,2588 —0,9848 —0,1736
340 —0,3420 0,9397 —0,6428 0,7660 —0,8660 0,5000 —0,9848 0,1735
345 —0,2588 0,9659 —0,5000 0,8660 —0,7071 0,7071 —0,8660 0,5000
350 —0,1736 0,9848 —0,3420 0,9327 —0,5000 0,8660 —0,6428 0,7660
355 —0,0872 0,9962 —0,1736 0,9848 —0,2588 0,9659 —0,3420 0,9397
360 —0,0000 1,0000 0,0000 1,0000 0,0000 1,0000 0,0000 1,0000
168
«5
Таблица
Углы 0° в зависимости от а и Л
а° Л (ЗнакХ^ (з,1 1Д2 1/3,3 1/3,4 1/3,5 1/3,6 1/3,7 1/3,8 1/3,9 1/4,0 1/4,1- 1/4,2 {/С? Знак а°
0 + 0°00' 0°00' 0°00' 0°00' 0°00' 0°00' 0°00' 0°00' 0°00' 0°00' 0°00' 0°00' 0°Q0' 360
5 + Г 37 1 34 131 1 28 126 1 23 1 21 1 19 I 17 1 15 1 13 111 ио — 355
10 + 313 307 301 2 56 2 51 2 46 241 2 37 233 2 29 2 26 2 22 ,219 350
15 + 447 4 38 4 30 4 22 4 14 4 07 401 3 54 348 3 43 3 37 332 \3 27 315
20 + 620 608 5 57 5 46 5 36 5 27 518 510 502 4 54 4 47 4 40 434 — 340
25 + 755 735 7 22 708 6 56 6 45 634 5 23 613 601 555 5 46 5 38 — 335
30 + 917 859 8 43 8 27 813 759 746 734 722 711 700 650 6<tl — 330
35 + to 40 10 20 10 01 943 9 26 910 8 55 841 827 8 15 8 03 751 /40 325
40 + 1158 11 35 11 14 10 54 1035 10 17 1000 9 44 9 29 9 15 901 8 48 /8 36 4— 320
45 + 13 1J 1246 12 22 1200 11 39 11 20 1101 1044 10 27 ЮН 9 53 9 42 -028 — 315
50 + 14-Г8 15 19 1351 1325 1301 1239 12 17 1157 1138 11 20 И 02 1046 1031 10 Ю — 310
55 + 14 50 14 22 13 53 1332 1309 1247 12 27 1207 11 49 U31 И 15 10 ф —— 305
60 + 1613 1542 15 13 1445 14 20 13 55 1332 1310 12 50 12 30 12 12 И 54 Н37 — 330
65 + 1700 1627 1556 1528 1500 14 35 14 11 1348 13 26 13 06 1246 12 28 Ию — 295
70 + 1739 1705 1633 1603 1534 1508 14 43 14 19 13 57 1335 1315 12 56 12 37 — 290
75 + 1809 17 34 1701 1630 1601 1534 1508 14 44 14 20 13 58 13 33 1318 12-59 — 285
80 + 18,31 1755 1722 16 50 1621 1553 15 26 1501 1438 14 15 1354 13 34 13 14 — 280
85 + 1845, 1808 17 34 1702 1632 1604 15 37 1512 14 48 14 25 14 04 13 43 1321 — 275
90 + 1849 J 1813 1738 1706 16 36 1608 1541 1515 14 51 1429 14 07 13 47 1327 — 270
95 + 18 45 1808 17 34 1702 1632 1604 1537 15 12 14 48 14 25 14 04 1343 13-24 — 265
100 + 1831 1755 1722 1650 1621 15 53 15 26 1501 14 38 1415 13 54 1334 13 44 — 260
105 + 18 09 1734 1701 16 30 1601 1534 1508 14 44 14 20 1358 13 38 1318 1/59 — 255
110 + 1739- 1705 1633 1603 15 34 15 08 14 43 14 19 1357 1335 13 15 12 55 1237 — 250
115 + 1700 1627 15 56 15 28 1500 14 35 14 11 13 48 13 26 1306 12 46 12 28 1/тв — 245
120 + 1613 15 42 15 13 14 45 14 20 1355 13 32 1310 12 50 12 30 1212 И 54 1137 — 240
125 + 1519 14 50 14 22 13 56 13 32 13 09 1247 1227 1207 11 49 1131 11 15 1059 — 235
130 + 1418 1351 13 25 1301 12 39 12 17 11 57 1138 1120 11 02 10 46 10 31 19.16 — 230
135 + 13 11 1246 12 22 1200 11 39 11 20 1101 1044 1027 10 II 9 56 942 928 — " 225
140 + 11 58 И 35 И 14 10 54 10 35 10 17 1000 9 44 9 29 915 901 8 48 835 — 220
145 1040 10 20 1001 943 9 26 9 10 8 55 841 8 27 815 8 03 7 51 ,/40 — 215
150 + 9 17 8 59 8 43 8 27 813 759 746 734 722 711 7 00 650 Ч>41 — 210
155 + 7 50 735 722 708 6 56 6 45 634 6 23 613 604 555 5 46 5 38 205
150 + 6 20 608 5 57 5 46 5 36 5 27 518 ’ 510 5 02 4 54 4 47 4 40 434 — 200
165 + 4.4/ 4 38 4 30 4 22 4 14 4 07 401 354 3 48 3 43 337 332 '327 — 195
170 + 3 13 307 3 01 2 56 2 51 2 46 241 237 233 2 29 226 2 22 2 19> — 190
175 4- 1 37, 1 34 131 128 1 26 1 23 121 1 19 1 17 1 15 1 13 1 11 116 — 185
180 + ООО ( ООО ООО ООО ООО ООО ООО ООО ООО ООО ООО ООО $00 — 180
tn Таблица
Сумма углов в зависимости от а и А
Х'\ А ^3,1 1/3,2 1/3,3 1/3,4 1/3,5 1/3,6 1/3,7 1/3,8 1/3,9 1/4,0 1/1,1 1/4,2
0 0°(Ж 0W 0W 0W 0’00' 0’00' 0’00' 0°00' 0’00' 0’00' 0’09' 0°00' (ий'
5 07 6 34 631 6 28 6 26 6 23 621 6 19 6 17 6 15 6 13 611 0-10
10 /3 13 1307 1301 12 56 1251 1246 1241 1237 12 33 12 29 12 26 12 22 Д2 19
15 ТОЧ7 19 33 19 30 1922 19 14 1907 1901 18 54 1848 1843 1837 18 32 4827
20 26 20 2608 25 57 25 46 25 36 25 27 2518 25 10 2502 24 54 24 47 24 40 2?3>
25 32 56 32 35 32 22 32 03 31 56 31 45 31 34 31 23 31 13 31 04 30 55 3046 39/3
30 Х17 38 59 3843 3827 3813 37 59 37 46 3734 3722 3711 3700 3359 3£ 41
35 >5.40 45 20 45 01 4443 44 26 4410 43 55 43 41 43 27 43 15 43 03 4251 4/40
40 51 58 51 35 51 14 50 54 50 35 50 17 59 00 49 44 49 29 49 15 49 01 4848 48 36
45 58 11 5746 5722 5700 56 39 5620 5501 55 44 55 27 55 11 54 56 54 42 54/8
50 6418 6351 63 25 63 01 62 39 6217 61 57 61 38 61 20 61 02 6046 6031 60 16
55 .70 19 69 50 69 22 6856 68 32 6809 67 47 6727 6707 6649 6631 6615 &59
60 <76 13 75 42 7513 74 45 74 20 73 55 73 32 7310 72 50 72 30 7212 71 54 71 37
65 8200 81 27 80 56 80 28 80 00 79 35 79 11 73 4 8 78 26 7803 77 46 77 23 7/10
70 87.39 87 05 86 33 86 03 85 34 85 08 8443 8419 83 57 83 35 8315 82 55 82 37
75 9/09 97 34 92 01 91 30 91 01 90 34 9008 89 44 89 20 8858 88 38 8818 8759
80 9831 97 55 9722 9650 9321 95 53 95 25 95 01 94 38 94 15 93 54 93 34 9314
85 10345 103 08 102 34 102 02 101 32 101 04 100 37 10012 99 48 99 25 99 04 9343 9824
90 W|9 108 13 10738 10706 106 36 10608 10541 10515 104 51 10429 104 07 10347 10327
95 11345 11308 11234 112 02 111 32 111 04 11037 11012 109 48 10925 109 04 103 43 108.24
100 11831 11755 11722 11650 11621 115 53 115 26 11501 11438 114 15 11354 11334 11314
105 128 09 122 34 122 01 121 30 12101 120 34 120 08 11944 119 20 11858 118 38 118 18 117 59
110 127 39 127 05 126 33 12603 125 34 12508 124 43 124 19 123 57 123 35 12315 122 56 122 37
115 13200 13127 130 55 130 28 130 00 129 35 129 11 12848 128 23 12803 127 46 127 28 12710
120 136 Т31 135 42 135 13 134 45 13420 13355 133 32 13310 132 59 132 30 132 12 131 54 13'1 37
125 14019 13950 139 22 138 55 138 32 13309 13747 13727 13707 133 49 13331 133 15 135 59
130 114 18 14351 143 25 14301 142 39 142 17 141 57 141 33 141 20 141 02 14046 14031 14016
135 14811 14746 14722 14700 146 39 146 20 14601 14544 145 27 14511 144 56 144 42 144 98
140 151 58 151 35 151 14 15054 150 35 15017 15000 149 44 149 29 14915 149 01 14848 143 36
145 155-40? 15520 15501 154 43 15426 154 10 153 55 15341 153 27 153 15 153 03 152 51 152 40
150 159 158 59 15343 158 27 158 13 157 59 15746 15734 157 22 15711 15700 156 50 .156 41
155 16Й50 162 35 162 22 16208 161 56 161 45 161 34 16123 161 13 161 04 13055 16046 16033
160 166-29 166 08 165 57 165 46 165 36 16527 16518 16510 16502 164 54 164 4 7 164 40 164 34
165 16947 16938 169 30 169 22 16914 169 07 169 01 168 54 168 48 16843 163 37 138 32 16827
179 17813 173 07 173 01 172 56 172 51 172 46 172 41 172 37 172 33 172 29 172 26 17222 17249
175 176 37 17634 17631 17628 17626 176 23 17621 17619 17617 17615 17613 176 11 176.10
180 18908 — 180 00 180 00 18000 180 00 180 00 18000 180 00 18003- 18000 18000 180 00 1^0*00
Таблицам (продолжение)
л “ZT- и£1 1/3,2 1/3,3 1/3,4 1/3,5 1/3,6 1/3,7 1/3,8 1/3,9 1/4,0 1/4,1 1/4,2 I/O
185 183"33 183 2S 18329 183 32 18334 18337 183 39 18341 183 43 18345 183 47 18349 183^0
190 18647 18553 186 59 187 04 18709 18714 187 19 18723 18727 18731 18734 18738 13741
195 19043 190 22 190 30 190 33 190 46 19053 190 59 19105 191 12 191 17- 19123 191 28 191 33
200 103 40 193 52 194 03 194 14 19424 194 33 19442 194 50 194 58 195 06 195 13 195 20 (195 26
205 Я 97 10 197 25 19738 197 52 19304 19815 198 26 193 37 198 47 19356 199 05 199 14 19922
210 1(200 43 201 01 201 17 201 33 20147 202 01 202 14 202 26 202 33 202 49 20300 20310 203 19
215 201^0 204 40 20459 205 17 205 34 205 50 20605 20619 20533 203 45 20557 207 09 20720
220 20802 20825 208 4S 209 05 209 25 20943 21000 210 16 21031 21045 21059 211 12 211 24
225 21/39 212 14 21238 21300 21321 213 40 21359 214 16 214 33 21449 21505 215 18 215 32
230 2^5 42 21609 216 35 21659 21721 21743 21803 21822 21840 21858 21911 21929 21944
235 j2l9 4l 220 10 220 33 221 04 22128 22151 222 13 222 33 22253 223 11 22329 22345 224 01
240 1223 47 224 18 224 47 225 15 22540 22605 22628 226 50 227 10 22730 227 48 228 06 228 23
215 22800 223 33 22904 229 32 23000 23025 230 49 231 12 231 34 23151 232 14 232 32 232 50
250 232.21 23255 233 27 23357 234 23 234 52 235 17 235 41 236 03 236 25 235 45 237 04 ч 237 23
255 2 ЗУ 51 237 2S 23759 238 30 238 59 239 26 239 52 240 16 24040 24102 24122 241 42 242 01
2 S0 24129 24205 242 38 243 10 243 39 244 07 244 34 244 59 24522 24545 246 03 24626 246 46
285 •245 15 24S52 24726 24758 24823 24855 249 23 249 48 250 12 250 35 250 55 251 17 251 33
270 251 11 25147 25222 252 54 25324 25352 254 19 254 45 256 09 255 31 255 53 256 13 25633
275 255 15 25352 25726 25758 258 28 258 55 25923 25948 250 12 26035 26055 261 17 261 36
280 28129 25У51 252 05 262 38 263 10 26339 264 07 264 34 264 59 26522 26545 26606 256 26 266 46
285 257 25 25759 25830 23859 269 26 269 52 270 16 27040 271 02 271 22 271 42 27201
290 2/221 272 55 27327 27357 274 26 274 52 275 17 27541 27603 276 25 27645 27704 277 23
295 277 00 278 33 279 04 279 32 28000 280 25 280 49 281 12 281 34 281 54 282 14 282 32 28250
300 28347 284 18 284 47 285 15 28540 28605 285 28 286 50 287 10 287 30 28743 288 06 288 23
305 289^1 290 10 290 38 291 04 291 28 291 51 292 13 292 33 29253 293 11 293 29 293 45 291-01
310 295 42 29509 295 35 296 59 297 21 297 43 29803 29322 29840 29858 299 14 299 29 29944
315 30149 302 14 302 33 303 00 303 21 30340 •30359 304 16 304 33 304 49 305 04 305 18 395 32
320 30802 30325 308 46 309 03 309 25 309 43 310 00 310 16 31031 310 45 31059 311 12 311 21
325 314 20 32ИЗ 314 40 314 59 31517 31534 31550 315 05 31619 316 33 31645 31657 31709 317 20
330 32101 321 17 321 33 32147 322 01 322 14 32225 322 38 32249 32300 323 10 323 Г9
335 /327 10 327 25 32738 327 52 32804 32815 32826 32837 32847 32856 329 05 329 14 32022
340 333 40 333 52 334 03 334 14 334 24 334 33 33442 334 50 33153 335 06 335 13 335 20 335 25
345 340/3 340 22 340 30 340 33 34046 340 53 340 59 34106 341 12 341 17 341 23 34128 311 33
350 34/47 34853 34659 34704 34709 347 14 34719 34723 34727 34731 347 34 347 33 347 41
355 35323 35123 353 29 35332 353 34 353 37 353 39 35341 353 43 353 45 353 47 35349 35050
350 36W)0 3S000 360 00 3S000 330 00 360 00 360 00 35000 36000 35000 36000 35000 3/0 00 —22
Величины cos 3 в зависимости от а и Я
Таблица 5
а° я Знак 1/3,1 1/3,2 1/3,3 1/3,4 1/3,5 1/3,6 1/3,7 1 /3,8 1/3,9 1/4^ 1/4,1 1/4,2 1/4,3 Знак а°
0 + 1,0000 1,0000 1,0000 1,0000 1,0000 1,0000 1,0000 1,0000 1,0000 1,0000 1,0000 1,0000 1,0000 + 350
5 + 0,9996 0,9996 0,9997 0,9997 0,9997 0,9997 0,9997 0,9997 0,9998 0,9998 0,9998 0,9998 0,9998 355
10 + 0,9984 0,9985 0,9986 0,9987 0,9988 0,9988 0,9989 0,9990 0,9990 0,9991 0,9991 0,9992 О;9992 4- 350
15 + 0,9965 0,9967 0,9969 0,9971 0,9973 0,9974 0,9975 0,9977 0,9978 0,9979 0,9980 0,9981 0,9932 4- 345
20 + 0,9939 0,9943 0,9946 14,9949 0,9952 0,9955 0,9957 0,9959 0,9962 0,9963 0,9965 0,9967 О;9958 + 340
25 + 0,9907 0,9913 0,9918 0,9923 0,9927 0,9931 0,р934 0,9938 0,9941 0,9944 0,9947 0,9949 0,9952 4- 335
30 + 0,9869 0,9877 0,9885 0,989 Г 0,9897 0,9903 0,9908 0,9913 0,9918 0,9922 0,9925 0,9929 0,9933 4- 330
35 + 0,9827 0,9838 0,9848 0,9857 0,9865 0,9872 0,9879 0,9885 0,9891 0,9897 0,9902 0,9906 0,9911 4- 325
40 + 0,9783 0,9796 0,9809 0,9820 0,9830’ 0,9339 0 9848 0,9856 0,9863 0,9870 0,9876 0,9832 0,9888 320
45 + 0,9737 0,9753 0,9768 0,9782 0,9791 0,9805 0,9816 0,9825 0,9834 0,9843 0,9850 0,9857 О;9864 <4- 315
50 + 0,9690 0,9709 0,9727 0,9743 0,9758 0,9771' 0,9783 0,9795 0,9805 0,9815 0,9824 0,9832 0,9840 4- 310
55 + 0,9645 0,9667 0,9687 0,9706 0,9722 0,9738 0,9752 0,9765 0,0777 0,9788 0,9799 0,9808 0,9817 4- 305
60 + 0,9602 0,9627 0,9649 0,9670 0,9689 0,9706 0,9722 0,9737 0,9750 0,9763 0,9774 0,9785 0,9795 4- 300
65 + 0,9563 0,9591 0,9616 0,9633 0,9659 0,9578 0,9695 0,97(1 0,9726 0,9740 0,9753 0,9764 0,9775 4- 295
70 + 0,9529 0,9559 0,9586 0,9611 0,9633 0,9653 0,9672 0,9689 sQ,9705 0,9720 0,9734 0,9746 О;9759 4- 290
75 + 0,9502 0,9534 0,9562 0,9588 0,9612 0,9633 0,9653 0,9571 0,9589 0,9704 0,9718 0,9732 0,9744 4- 285
80 + 0,9482 0,9515 0,9544 0,9571 0,9595 0,9619 0,9639 0,9558 0,9б7о 0,9692 0,9707 0,9721 0,9735 4- 280
85 + 0,9469 0,9503 0,9534 0,9551 0,9587 0,9609 0,9531 0,9650 0,9668 0/9685 0,9700 0,9715 О;9728 4- 275
90 + 0,9466 0,9499 0,9530 0,9558 0,9583 0,9606 0,9628 0,9648 0,9565 0,9683 0,9698 0,9712 0,9726 4- 270
95 + 0,9469 0,9503 0,9534 0,9561 0,9587 0,9609 0,9631 0,9650 0,9668 0,9685 0,9700 0,9715 0,9728 4- 265
100 + 0,9482 0,9515 0,6544 0,9571 0,9596 0,9619 0,9639 0,9658 0,9676 0,9392 0,9707- .0,9721 0,9735 + 260
105 + 0,9502 0,9534 0,9552 0,9588 0,9612 0,9633 0,9653 0,9671 0,9389 0,9704 0,9718 0/9732 0,9744 4- 255
НО + 0,9529 0,9559 0,9586 0,9611 0,9633 0,9653 0,9672 0,9689 0,9705 0,9720 0,9734 0,9?46 0,9759 4- 250
115 + 0,9563 0,9591 0,9616 0,9638 0,9659 0,9678 0,9695 0,9711 0,9726 0,9740 0,9753 0,9764 0,9775 4- 245
120 + 0,9602 0,9627 0,9649 0,9670 0,9689 0,9706 0,9722 0,9737 0,9750 0,9753 0,9774 0,9785 0/9795 4- 240
125 + 0,9645 0,9667 0,9687 0,9706 0,9722 0,9738 0,9752 0,9755 0,9777 0,9788 0,9799 0,9808 0,9817 235
130 + 0,9690 0,9709 0,9727 0,9743 0,9758 0,9771 0,9783 0,9795 0,9805 0,9815 0,9324 0,9832 0,9840 230
135 + 0,9737 0,9753 0,9768 0,9782 0,9794 0,9805 0,9816 0,9825 0,9834 0,9843 0,9850 0,9857 О;9364 + 225
140 + 0,9783 0,9796 0,9809 0,9820 0,9830 0,9839 0,9848 0,9856 0,9853 0,9870 0,9876 0,9882 0,9388 4- 220
145 + 0,9827 0,9838 0,9848 0,9857 0,9865 0,9872 0,9379 0,9885 0,9891 0,9897 0,9902 0,9906 0;9911 4- 215
150 + 0,9869 0,9877 0,9885 0,9891 0,9897 0,9903 0,9908 0,9913 0,9918 0,9922 0,9925 0,9929 0,9933 4- 210
155 + 0,9907 0,9913 0,9918 0,9923 0,9927 0,9931 0,9934 0,9938 0,9941 0,9914 0,9947 0,9949 0,9952 4- 205
160 + 0,9939 0,9943 0,9946 0,9949 0,9952 0,9955 0,9957 0,9959 0,9952 0,9963 0,9965 0,9967 О’, 9968 4- 200
165 + 0,9965 0,9967 0,9969 0,9971 0,9973 0,9974 0,9975 0,9977 0,9978 0,9979 0,9980 0,9981 0,9982 4- 195
170 + -0,9984 0,9985 0,9986 0,9987 0,9988 0,9988 0,9989 0,9990 0,9990 0,9991 0,9991 0,9992 0,9992 4- 190
175 + 0,9996 0,9996 0,9997 0,9997 0,9987 0,9997 0,9997 0,9997 0,9998 0,9993 0,9998 0,9998 0,9998 4- 185
180 + 1,0000 1,0000 1,0000 1,0000 1,0000 1,0000 1,0000 1,0000 1,0000 1,0000 1,0000 1,0000 1,0000 4- 180
Таблица 6
Величины tg З ’в зависимости от а и Л
а° X. Л Знак'\ 1/3,1 1/3,2 1/3,3 1/3,4 1/3,5 1/3,6 1/3,7 1/3,8 1/3,9 1/4,0 1/4,1 1/4,2 1/4,3 Знак а°
О + 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 360
5 + 0,0282 0,0274 0,0265 0,0253 0,0250 0,0242 0,0236 0,0230 0,0224 0,0218 0,0212 0,0207 0,0204 355
10 + 0,0562 0,0545 0,0527 0,0511 0,0497 0,0483 0,0470 0,0457 0,0445 0,0435 0,0424 0;0413 0,0405 350
15 4- 0,0837 0,0810 0,0787 0,0764 0,0740 0,0720 0,0702 0,0582 0,0664 0,0650 0,0632 0,0618 0,0603 345
20 + 0,1110 0,1075 0,1042 0,1011 0,0982 0,0954 0,0928 0,0904 0,0880 0,0858 0,0837 0,0816 0,0799 340
25 4- 0,1376 0,1331 0,1293 0,1252 0,1216 0,1184 0,1151 0,1119 0,1089 0,1063 0,1036 0,1013 0,0986 335
30 4- 0,1635 0,1581 0,1533 0,1487 0,1443 0,1403 0,1364 0,1327 0,1293 0,1260 0,1229 0;il98 0,1172 — 330
35 4- 0,1884 0,1823 0,1766 0,1712 0,1662 0,1614 0,1559 0,1527 0,1486 0,1450 0,1414 0,1379 0,1346 . 325
40 0,2120 0,2050 0,1986 0,1925 0,1868 0,1815 0,1764 0,1716 0,1671 0,1628 0,1587 0,1518 0,1512 320
45 + 0,2342 0,2266 0,2193 0,2126 0,2062 0,2004 0,1917 0,1896 0,1844 0,1796 0,1751 0,1709 0,1667 315
50 4- 0,2549 0,2465 0,2386 0,2313 0,2243 0,2178 0,2116 0,2058 0,2003 0,1951 0,1902 0,1855 0,1811 310
55 4- 0,2739 0,2648 0,2561 0,2481 0,2407 0,2336 0,2269 0,2208 0,2147 0,2092 0,2038 0,1989 0,1941 305
00 4- 0,2908 0,2811 0,2719 0,2634 0,2554 0,2478 0,2407 0,2341 0,2277 0,2218 0,2161 0,2107 0,2055 — 390
65 4- 0,3057 0,2953 0,2855 0,2767 0,2680 0,2602 0,2527 0,2455 0,2389 0,2327 0,2256 0,2211 0,2156 — 295
70 + 0,3182 0,3073 0,2970 0,2876 0,2787 0,2704 0,2626 0,2552 0,2483 0,2417 0,2355 0,2296 0,2238 290
75 4- 0,3278 0,3166 0,3061 0,2952 0,2871 0,2786 0,2704 0,2630 0,2552 0,2487 0,2425 0,2364 0,2306 285
80 4- 0,3349 0,3233 0,3127 0,3026 0,2932 0,2844 0,2761 0,2683 0,2610 0,2540 0,2474 0,2413 0,2352 280
85 4- 0,3395 0,3275 0,3166 0,3064 0,2959 0,2880 0,2795 0,2717 0,2642 0,2571 0,2506 0,2441 0,2382 275
90 4- 0,3408 0,3291 0,3180 0,3077 0,2981 0,2891 0,2807 0,2728 0,2553 0,2582 0,2515 0,2453 0,2392 — 270
95 4- 0,3395 0,3275 0,3166 0,3064 0,2969 0,2880 0,2795 0,2717 0,2642 0,2571 0,2506 0,2441 0,2382 265
100 4- 0,3349 0,3233 0,3127 0,3026 0,2932 0,2844 0,2761 0,2683 0,2610 0,2510 0,2474 0,2413 0,2352 260
105 4- 0,3278 0,3166 0,3061 0,2962 0,2871 0,2786 0,2704 0,2630 0,2552 0,2487 0,2425 0,2364 0,2306 255
ПО 4- 0,3182 0,3073 0,2970 0,2876 0,2787 0,2704 0,2626 0,2552 0,2483 0,2417 0,2355 0,2296 0,2238 250
115 4- 0,3057 0,2953 0,2855 0,2767 0,2680 0,2602 0,2527 0,2456 0,2389 0,2327 0,2266 0,2211 0,2156 245
120 4- 0,2908 0,2811 0,2719 0,2634 0,2554 0,2478 0,2407 0,2341 0,2277 0,2218 0,2161 0,2107 0,2055 — 240
125 4- 0,2739 0,2648 0,2561 0,2481 0,2407 0,2336 0,2269 0,2208 0,2147 0,2092 0,2038 0,1989 0,1941 235
130 4- 0,2549 0,2465 0,2386 0,2313 0,2243 0,2178 0,2116 0,2058 0,2003 0,1951 0,1902 0,1856 0,1811 230
135 4- 0,2342 0,2266 0,2193 0,2126 0,2062 0,2004 0,1947 0,1896 0,1844 0,1795 0,1751 0,1709 0,1667 225
140 4- 0,2120 0,2050 0,1986 0,1925 0,1868 0,1815 0,1764 0,1716 0,1671 0,1628 0,1587 0,1548 0,1512 220
145 4- 0,1884 0,1823 0,1766 0,1712 0,1662 0,1614 0,1569 0,1527 0,1486 0,1450 0,1414 0,1379 0,1343 215
150 4- 0,1635 0,1581 0,1533 0,1487 0,1443 0,1403 0,1364 0,1327 0,1293 0,1260 0,1229 0,1198 0,1172 — 210
155 4- 0,1376 0,1331 0,1293 0,1252 0,1216 0,1184 0,1151 0,1119 0,1089 0,1063 0,1035 0,1013 0,0986 205
160 4- 0,1110 0,1075 0,1042 0,1011 0,0982 0,0954 0,0928 0,0904 0,0880 0,0858 0,0837 0,0816 0,0799 200
165 4- 0,0837 0,0810 0,0787 0,0764 0,0740 0,0720 0,0702 0,0682 0,0664 0,0650 0,0632 0,0618 0,0603 195
170 + 0,0562 0,0545 0,0527 0,0511 0,0497 0,0483 0,0470 0,0457 0,0445 0,0435 0,0424 0,0413 0,0405 190
175 4- 0,0282 0,0274 0,0265 0,0256 0,0250 0,0242 0,0236 0,0230 0,0224 0,0218 0,0212 0,0207 0,0204 185
180 + 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 — 180
мт
tO GO (О O> tO
OG) Ю GO
to co
to co
- to to l\J
to to to to to to
to to to to to to
— to to to to to to to to
_ cos (a 4- В) , Таблица 8
Величины------ ' в зависимости от а и Я ’
COS В
а° X. Я Зиак\^ 1/3,1 1/3,2 1/3,3 1/3,4 1/3,5 1/3,6 1/3,7 1/3,8 1/3,9 1/4,0 1/4,1 1/4,2 1/4,3 Знак а°
0 4" 1,0000 1,0000 1,0000 1,0000 1,0000 1,0000 1,0000 1,0000 1,0000 1,0000 1,0000 1,0000 1,0000 4" 360
5 4- 0,9937 0,9938 0,9938 0,9939 0,9940 0,9941 0,9942 0,9942 0,9942 0,9943 0,9943 0,9944 0,9944 + 355
10 4- 0,9751 0,9754 0,9757 0,9759 0,9762 0,9764 0,9767 0,9769 0,9771 0,9773 0,9775 0,9776 0,9778 + 350
15 4- 0,9443 0,9449 0,9455 0,9461 0,9468 0,9474 0,9473 0,9483 0,9488 0,9491 0,9495 0,9499 0,9503 + 345
20 4- 0,9017 0,9029 0,9041 0,9051 0,9061 0,9070 0,9079 0,9086 0,9095 0,9103 0,9111 0,9118 0,9124 4- 340
25 4- 0,8432 0 8500 0,8515 0,8534 0,8549 0,8563 0,8577 0,8590 0,8603 0,8614 0,8625 0,8333 0,8643 + 335
30 4- 0,7843 0,7870 0,7894 0,7917 0,7939 0,7958 0,7978 0,7997 0,8014 0,8030 0,8046 0,8031 0,8025 + 330
35 4- 0,7111 0,7146 0,7178 0,7209 0,7239 0,7266 0,7292 0,7316 0,7340 0,7350 0,7380 0,7401 0,7419 + 325
40 4- 0,6298 0,6343 0,6384 0,6423 0,6460 0,6494 0,6527 0,6557 0,6586 0,6614 0,6640 0,6665 0,6688 + 320
45 4- 0,5415 0,5469 0,5521 0,5567 0,5614 0,5654 0,5695 0,5731 0,5767 0,5801 0,5832 0,5832 0,5892 + 315
50 0,4475 0,4539 0,4600 0,4656 0,4710 0,4760 0,4807 0,4851 0,4893 0,4933 0,4971 0,5006 0,5040 + 310
55 4- 0,3492 0,3566 0,3638 0,3704 0,3765 0,3822 0,3877 0,3927 0,3978 0,4022 0,4067 0,4106 0,4146 + 305
60 4- 0,2481 0,2566 0,2645 0,2719 0,2789 0,2854 0,2915 0,2973 0,3028 0,3079 0,3129 0,3175 0,3220 + 300
65 + 0,1455 0,1550 0,1639 0,1718 0,1798 0,1868 0,1936 0,2000 0,2061 0,2117 0,2173 0,2223 0,2272 + 295
70 4- 0,0430 0,0532 0,0629 0,0718 0,0801 0,0879 0,0953 0,1022 0,1087, 0,1149 0,1208 0,1231, 0,1317. + 290
75 — 0,0578 О;0470 0,0368 0,0273 0,0184 0,0103 0,0024 0,0049 0,0120 0,0185 0,0246 0,0305 0,0331 285
80 — 0,1562 О', 1447 0,1343 0,1244 0,1151 0,1064 0,0983 0,0905 0,0834 0,0765 0,0700 0,0640 0,0579 —- 280
85 — 0,2510 0,2391 0,2282 0,2181 0,2085 0,1998 0,1913 0,1835 0,1760 0,1689 0,1625 0,1560 0,1537 275
90 — 0,3407 0,3291 0,3180 0,3077 0,2981 0,2891 0,2307 0,2728 0,2553 0,2582 0,2515 0,2453 0,2392 — 270
95 — 0,4253 0,4134 0,4026 0,3924 0,3828 0,3741| 0,3656 0,3578 0,3503 0,3432 0,3358 0,3303 0,3245 255
100 — 0,5035 0,4920 0,4816 0,4717 0,4624 0,4537 0,4456 0,4379 0,4307 0,4238 0,4173 0,4113 0,4052 260
105 — 0,5755 0,5646 0,5545 0,5450 0,5351 0,5279 0,5200 0,5129 0,5056 0,4991 0,4931 0,4372 0,4815 — 255
НО — 0,6410 0,6307 0,6211 0,6123 0,6039 0,5961 0,5883 0,5819 0,5753 0,5691 0,5633 0,5573 0,5524 250
115 — 0,6997 0,6902 0,6814 0,6734 0,6655 0,6584 0,6517 0,6452 0,6391 0,6335 0,6280 0,6230 0,6180 — 245
120 — 0,7519 0,7434 0,7355 0,7281 0,7212 0,7143 0,7085 0,7027 0,6972 0,6921 0,6871 0,6825 0,6780 — 240
125 — 0,7979 0,7905 0,7834 0,7768 0,7707 0,7649 0,7594 0,7544 0,7495 0,7450 0,7405 0,7365 0,7325 — 235
130 — 0,8380 0,8317 0,8256 0,8199 0,8146 0,8096 0,8049 0,8004 0,7962 0,7923 0,7885 0,7850 0,7815 — 230
135 — 0,8727 0,8673 0,8621 0,8574 0,8529 0,8489 0,8447 0,8411 0,8375 0,8341 0,8310 0,8280 0,8250 — 225
140 —. 0,9023 0,8978 0,8937 0,8898 0,8861 0,8827 0,8794 0,8764 0,8735 0,8707 0,8681 0,8655 0,8633 — 220
145 — 0,9272 0,9237 0,9204 0,9173 0,9144 0,9118 0,9092 0,9038 0,9044 0,9023 0,9002 0,8982 0,8964 — 215
150 — 0,9478 0,9451 0,9427 0,9404 0,9382 0,9362 0,9342 0,9324 0,9307 0,9290 0,9275 0,9259 0,9190 — 210
155 —— 0,9644 0,9626 0,9609 0,9592 0,9577 0,9563 0,9550 0,9536 0,9523 0,9512 0,9500 0,9490 0,9480 — 205
160 — 0,9777 0,9764 0,9753 0,9743 0,9733 0,9723 0,9714 0,9706 0,9693 0,9390 0,9383 0,9676 0,9670 — 200
165 — 0,9876 0,9869 0,9864 0,9357 0,9851 0,9846 0,9342 0,9835 0,9832 0,9328 0,9323 0,9819 0,9815 — 195
170 — 0,9946 0,9943 0,9940 0,9937 0,9934 0,9932 0,9930 0,9923 0,9928 0,9924 0,9922 0,9920 0,9918 — 190
175 — 0,9987 0,9985 0,9985 0,9984 0,9934 0,9933 0,9983 0,9982 0,9981 0,9981 0,9930 0,9930 0,9930 —— 185
180 — 1,0000 1,0000 1,0000 1,0000 1,0000 1,0000 1,0000 1,0000 1,0000 1,0000 1,0000 1,0000 1,0000 — 180
1 Со знаком 4-
£
Значения для определения расстояний поршня от верхнего мертвого положения (путей, проходимых поршнем)
^=(I+4')“(COSa+TCOS0 Таблица 9
а° Л 2нак\ 1/3,1 1/3,2 • 1/3,3 1/3,4 1/3,5 1/3,6 1/3,7 1/3,8 1/3,9 1/4,0 1/4,1 1/4,2 1/4,3 Знак а°
0 + 0,0000 0,-0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 0,0000 360
5 + 0,0050 0,0050 0,0050 0,0049 0,0049 0,0049 0,0048 0,0048 0,0048 0,0048 0,0047 0,0047 0,0047 + 355
10 + 0,0201 0,0199 0,0198 0,0196 0,0195 0,0194 0,0193 0,0192 0,0191 0,0190 0,0189 0,0188 0,0187 + 350
15 + 0,0449 0,0446 0.0443 0,0439 0,0437 0,0434 0,0431 0,0429 0,0427 0,0425 0,0423 0,0421 0,0419 + 345
20 + 0,0792 0,0787 0,0781 0,0775 0,0771 0,0766 0,0762 О;0758 0,0754 0,0750 0,0746 0,0743 О; 0739 + 340
25 + 0,1226 0,1218 0,1209 0,1200 0,1193 0,1186 0,1179 0J173 0,1167 0,1161 0,1156 0,1150 0,1145 + 335
30 + 0,1746 0,1733 0,1721 0,1709 0,1699 0,1689 0,1679 0,1671 0,1662 0,1653 0,1646 0,1639 0,1531 + 330
35 + 0,2344 0,2328 0,2312 0,2293 0,2282 0,2269 0,2256 0,2244 0,2233 0,2222 0,2212 0,2202 0,2193 + 325
40 + 0,3013 0,2993 0,2973 0,2953 0,2935 0,2919 0,2902 0,2888 0,2874 0,2859 0,2847 0,2835 0,2823 + 320
45 + 0,3746 0,3722 0,3697 0,3672 0,3552 0,3531 0,3611 0,3594 0,3576 0,3559 0,3544 0,3529 0,3514 + 315
50 + 0,4533 0,4504 0,4475 0,4447 0,4422 0,4398 0,4374 0,4353 0,4333 0,4313 0,4295 0,4277 0,4260 + 310
55 + 0,5356 0,5333 0,5299 0,5266 0,5238 0,5210 0,5183 0,5159 0,5135 0,5112 0,5092 0,5072 0,5052 + 305
60 + 0,6234 0,6197 0,6159 0,6121 0,6090 0,6059 0,6028 0,6001 0,5975 0,5949 0,5926 0,5904 0,5881 + 300
65 + 0,7128 0,7087 0,7045 0,7004 0,6969 0,6935 0,6901 0,6872 0,6843 0,6814 0,6789 0,6765 0,6740 + 295
70 + 0,8033 0,7993 0,7949 0,7904 0,7867 0,7830 0,7793 0,7762 0,7730 0,7699 0,7572 0,7646 0,7619 290
75 + 0,8955 0,8908 0,8860 0,8313 0,8774 0,8734 0,8695 0,8662 0,8629 0,8596 Qi 8568 0,8539 0,8511 285
80 + 0,9869 0,9820 0,9770 0,9721 0,9680 0,9639 0,9598 0,9564 0,9529 0,9495 0,9455 0,9436 0,9406 + 280
85 + 1,0773 1,0722 1,0671 1,0620 1,0537 1,0537 1,0495 1,0460 1,0424 1,0389 1,0359 1,0328 1,0298 + 275
90 + 1,1657 1,1606 1,1555 1,1504 1,1419 1,1419 1,1377 1,1341 1,1306 1,1270 1,1240 1,1209 1,1179 + 270
95 + 1,2516 1,2465 1,2414 1,2363 1,2280 1,2280 1,2238 1,2203 1,2167 1,2132 1,2102 1,2072 1,2041 + 265
100 + 1,3342 1,3293 1,3243 1,3194 1,3112 1,3112 1,3071 1,3037 1,3002 1,2938 1,2938 1,2909 1,2879 + 260
105 + 1,4132 1,4084 1,4037 1,3989 1,3950 1,3911 1,3371 1,3838 1,3805 1,3772 1,3745 1,3716 1,3637 + 255
110 + 1,4879 1,4834 1,4789 1,4745 1,4707 1,4670 1,4634 1,4602 1,4571 1,4539 1,4513 1,4486 1,4459 4- 250
115 + 1,5531 1,5539 1,5498 1,5456 1,5422 1,5388 1,5353 1,5324 1,5296 1,5267 1,5242 1,5217 1,5192 + 245
120 + 1,6234 1,6197 1,6159 1,6121 1,6090 1,6059 1,6028 1,6000 1,5973 1,5919 1,5923 1,5904 1,5881 + 240
125 + 1,6878 1,6804 1,6771 1,6737 1,6710 1,6682 1,6654 1,6631 1,6607 1,6583 1,6553 1,6543 1,6523 235
130 + 1,7389 1,7350 1,7331 1,7302 1,7278 1,7254 1,7229 1,7209 1,7189 1,7168 1,7151 1,7133 1,7112 + 230
135 + 1,7888 1,7864 1,7839 1,7814 1,7794 1,7773 1,7753 1,7735 1,7718 1,7701 1,7686 1,7671 1,7655 + 225
140 + 1,8334 1,8314 1,8294 1,8274 1,8257 1,8240 1,8223 1,8209 1,8195 1,8180 1,8168 1,8155 1,8144 220
145 + 1,8727 1,8711 1,8695 1,8579 1,8665 1,8652 1,8639 1,8627 1,8616 1,8605 1,8595 1,8585 1,8576 + 215
150 + 1,9066 1,9054 1,9042 1,9030 1,8920 1,8910 1,9000 1,8991 1,8983 1,8974 1,8957 1,8959 1,8952 210
155 + 1,9353 1,9344 1,9335 1,9327 1,9320 1,9312 1,9305 1,9299 1,9293 1,9287 1,9282 1,9277 1,9271 205
160 + 1,9586 1,9581 1,9575 1,9569 1,9565 1,9560 1,9556 1,9552 1,9548 1,9544 1,9540 1,9537 1/9533 200
165 + 1,9767 1,9764 1,9761 1,9758 1,9756 1,9753 1,9750 1,9748 1,9745 1,9743 1,9741 1,9739 1,9737 + 195
170 + 1,9897 1,9895 1,9894 1,9892 1,9891 1,9890 1,9888 1,9888 1,9887 1,9886 1,9885 1,9884 1,9883 + 190
175 + 1,9974 1,9974 1,9973 1,9973 1,9973 1,9973 1,9972 1,9972 1,9972 1,9971 1,9971 1,9971 1/9971 + 185
180 + 2,0000 2,0000 2,0000 2,0000 2,0000 2,0000 2,0000 2,0000 2,0000 2,0000 2,0000 2,0000 2,0000 + 180
12 Аииац. порша. двигателя.
Значения ~-2 для определения ускорений поршня Таблица 10
/р _ 1 * COS0 COS(a + g) + у (X]
а° А Знак 1/3,1 1/3,2 1/3,3 1/3,4 1/3,5 1/3,6 1/3,7 1/3,8 1/3,9 1/4,0 1/4,1 1/4,2 1/4,3 Знак а°
0 + 1,3226 1,3131 1,3036 1,2941 1,2862 1,2782 1,2703 1,2635 1,2568 1,2500 1,2442 1,2384 1,2325 + 360
5 + 1'3142 1'3049 1,2955 1,2861 1,2783 1,2704 1,2626 1,2559 1,2493 1,2426 1,2368 1,2314 1,2253 + 355
10 4- 1,2894 И2804 1^2713 1,2623 1,2543 1,2472 1,2397 1,2333 1,2268 1,2204 1,2149 1,2094 1,2039 350
15 1'2484 1,2399 1,2314 112229 1,2159 1,2088 1,2018 1,1958 1,1898 1,1838 1,1786 1,1735 1,1684 + 345
20 + 1,1918 1,1842 1,1765 1,1688 1,1624 1,1561 1,1497 1,1443 1,1389 1,1335 1,1289 1,1243 1,1198 + 340
25 1,1207 I ’, 1140 1,1074 111007 1,0952 1,0896 1,0841 1,0795 1,0749 1,0703 1,0660 1,0621 1,0581 + 335
30 + 1,0360 С 0305 1,0251 110196 1,0151 1,0107 1,0062 1,0024 0,9987 0,9949 0,9917 0,9886 0,9854 + 330
35 + 0,9392 0,9352 0,9311 0,9270 0,9238 0,9205 0,9173 0,9146 0,9118 0,9091 0,9068 0,9045 0,9022 + 325
40 + 0j8320 0,8295 0,8271 0,8246 0,8225 0,8203 0,8182 0,8168 0,8153 0,8139 0,8126 0,8113 0,8100 + 320
45 + 0,7162 0,7154 0,7146 0,7138 0,7133 0,7129 0,7124 0,7120 0,7116 0,7112 0,7109 0,7107 0,7104 + 315
50 + 0,5940 Qi5950 0,5960 0,5970 0,5980 0,5989 0,5999 0,6008 0,6017 0,6026 0,6033 0,6041 0,6049 + 310
55 Qi 4675 0,4703 0,4733 014762 0,4787 0,4811 0,4836 0,4857 0,4878 0,4899 0,4917 0,4936 0,4955 + 305
60 + 0,3392 0,3438 013485 О',3532 0,3571 0,3611 0,3650 0,3684 0,3717 0,3751 0,3780 0,3809 0,3839 . + 300
65 4- 0,2114 0,2178 0,2241 0,2305 0,2359 0,2412 0,2466 0,2511 0,1357 0,2555 0,2600 0,2639 0,2678 0,2717 + 295
70 + 0,0866 0,0946 011026 0,1105 0,1171 0,1236 0,1302 0,1413 0,1468 0,1515 0,1562 0,1610 + 290
75 Qi 0326 010193 0,0143 010050 0,0026х 0,0101х 0,0177х 0,0241х 0,0822 0,0304х 0,0368х 0,0422х 0,0476х 0,0530! 285
80 0,1448 0,1347 0,1245 0,1143 0,1059 0,0976 0,0892 0,0752 0,0682 0,0622 0,0563 0,0503 — 280
85 0^2481 0'2372 0,2263 0,2155 0,2067 0,1978 0,1890 0,1816 0,1742 0,1668 0,1606 0,1545 0,1485 275
90 .— 0^3407 0,3298 0,3187 0,3077 0,2987 0,2897 0,2807 0,2732 0,2657 0,2582 0,2519 0,2455 0;2392 — 270
95 0,4224 0,4115 0,4006 0,3898 0,3810 0,3721 0,3633 0,3559 0,3485 0,3411 0,3349 0,3288 0,3226 265
100 — 0,4921 0,4820 0,4718 0,4616 0,4532 0,4449 0,4365 0,4297 0,4226 0,4155 0,4095 0,4036 0,3976 260
105 0,5503 0,5412 0,5320 0,5227 0,5150 0,5075 0,4999 0,4935 0,4872 0,4808 0,4754 0,4700 0,4646 255
110 — 0,5974 0,5895 0,5815 0,5736 0,5670 0,5605 0,5539 0,5484 0,5428 0,5373 0,5326 0,5279 0,5231 250
115 — 0,6338 0,6274 0,6211 0,6147 0,6094 0'6041 0,5987 0,5941 0,5897 0,5852 0,5813 0,5774 0,5735 __ 245
120 — 0,6308 0,6563 0,6516 0,6469 0,6429 0,6389 0,6350 0,6317 0,6284 0,6250 0,6220 0,6191 0,6161 —• 240
125 0,6796 0,6769 0,6739 0,6710 0,6684 0,6660 0,6635 0,6615 0,6594 0,6573 0,6554 0,6535 0,6516 — 235
130 0,6915 0,6905 0,6895 0,6885 0,6876 О'6867 0,6857 0,6848 0,6839 0,6830 0,6822 0,6814 0,6807 230
135 0,6980 0,6987 0,6995 0,7003 0,7009 0,7013 0,7018 0,7022 0,7026 0,7030 0,7034 0,7036 0,7033 225
140 0,7001 О', 7026 0,7050 0,7075 0,7096 0,7118 0,7139 0,7153 0,7168 0,7182 0,7195 0,7208 0,7221 —. 220
145 __ 0,6991 0,7030 0,7071 0,7112 0,7146 0,7179 0,7211 0,7237 0,7265 0,7292 0,7315 0,7338 0,7361 215
150 — 0,6961 0,7158 0,7070 017125 0,7169 0^7213 0,7258 0,7296 0,7333 0,7371 0,7402 0,7433 0,7465 — 210
155 0,6919 0,6986 0,7053 0,7119 0,7175 0,7331 0,7286 0,7332 0,7378 0,7424 0,7463 0,7502 0,7542 205
100 Qi 6876 0,6952 0,7029 0,7106 0,7170 0,7233 0,7297 0,7350 0,7404 0 /7458 0,7505 0,7551 0,7597 - 200
165 0^6835 0,6919 017004 0,7089 0,7161 0,7232 0,7302 0,7361 0,7421 0,7481 0,7232 0,7583 0,7634 —. 195
170 0,6803 0,6892 0,6983 0,7073 0,7149 0,7225 0,7300 0,7364 0,7429 0,7493 0,7547 0,7602 0,7657 —. 190
175 0,6782 0,6874 0,6968 0,7062 0,7142 0,7221 0,7299 0,7297 0,7366 0,7432 0,7499 0,7556 0,7613 0,7671 — 185
180 — 0,6774 0,6869 0,6964 0,7059 0,7138 0,7218 0,7365 0,7432 0,7500 0,7558 0,7616 0,7675 — 180
1 Со знаком +,
Значения —для определения тангенциальных сил 7} от инерции поступательно двигающихся масс
Tj Sin(a + P) Г , , а. , 1
°° ~~~bos« L С08 (a+P)+~rQ « J J Таблица 11
в° Я Звавх^ 1/3,1 1/3,2 1/3,3 1/3,4 1/3,5 1/3,6 1/3,7 1/3,8 1/3,9 1/4,0 1/4,1 1/4,2 1/4,3 Знак а°
0 + 0,0 0,0 0,0 0,0 0,0 0,0 0,0 0,0 0,0 0,0 0,0 0,0 0,0 360
5 + 0,1515 0,1493 0,1471 0,1448 0,1431 0,1414 0,1396 0,1382 0,1358 0,1353 0,1341 0,1329 0,1316 355
10 + 0,2953 0,2911 0,2869 0,2828 0,2794 0,2760 0,2726 0,2698 0,2670 0,2641 0,2617 О;2593 0/2570 350
15 + 0,4240 0,4182 0,4124 0,4067 0,4020 0,3973 0,3925 0,3886 0,3847 0,3807 0,3773 0,3739 0,3705 345
20 + 0,5319 0,5249 0,5179 0,5108 0,5051 0,4994 0,4936 0,4888 0,4810 0,4791 0,4751 О',4711 0,4671 340
25 + 0,6134 0,6056 0,5978 0,5900 0,5838 0,5776 0,5713 0,5660 0,5607 0,5554 0,5508 о;5462 0,5417 335
30 + 0,6647 0,6568 0,6489 0,6411 0,6347 0,6283 0,6219 0,6166 0,6113 0,6060 0,6004 0/5948 0,5891 — 330
35 + 0,0836 0,6763 0,6690 0,6617 0,6558 0,6499 0,6440 0,6391 0,6342 0,6294 0,6252 0,6210 0,-6169 . 325
40 + 0,6698 0,6638 0,6578 0,6517 0,6466 0,6415 0,6365 0,6326 0,6287 0/6247 0,6213 0,6179 0,6144 320
45 + 0,6250 0,6207 0,6164 0,6120 0,6086 0,6052 0,6018 0,5939 0,5960 0,5932 0,5908 0,5884 0,5861 315
50 + 0,5524 0,5503 0,5482 0,5451 0,5445 0,5429 0,5412 0,5399 0,5386 0,5372 0,5361 0,5350 0,5338 310
55 + 0,4564 0,4569 0,4574 0,4579 0,4583 0,4587 0,4591 0,4594 0,4597 0,4601 0,4604 0,4607 0,4610 305
00 + 0,3431 0,3462 0,3493 0,3524 0,3549 0,3574 0,3600 0,3521 0,3342 0,3664 0,3682 0/3700 0,3719 — 390
65 + 0,2189 0,2245 0,2301 0,2358 0,2405 0,2452 0,2498 0,2536 0,2574 0,2312 0,2645 0,2678 0,2710 295
70 + 0,0908 0,0988 0,1068 0,1147 0,1211 0,1275 0,1340 0,1394 0,1448 0,1501 0,1546 0/1591 0,1636 290
75 — 0,0343 0,0211 0,0079 0,0052 0.00261 0,01041 0,01831 0,02481 0,0313’ 0,0379’ 0,04341 0,0489’ 0,0543’ 4- 285
80 — 0,1510 0,1402 0,1294 0,1186 0,1098 0,1010 0,0921 0,0848 0,0775 0,0702 0,0640 0,0578 0,0516 4- 280
85 — 0,2545 0,2431 0,2317 0,2204 0,2112 0,2020 0,1929 0,1852 0,1775 0,1699 0,1635 0,1571 0,1508 4- 275
90 — 0,3407 0,3297 0,3187 0,3077 0,2987 0,2897 0,2807 0,2732 0,2657 0,2582 0,2519 0,2456 0/2392 + 270
95 — 0,4083 0,3982 0,3881 0,3780 0,3697 0,3614 0,3531 0,3461 0,339Г 0,3322 0,3264 0,3206 0,3147 + 265
100 — 0,4560 0^4474 0,4388 0,4303 0,4232 0,4161 0,4090 0,4030 0,3970 0,3909 0,3857 0,3805 0,3753 + 260
105 — 0,4849 0,4782 0,4715 0,4648 0,4592 0,4535 0,4479 0,4431 0,4383 0,4335 0,4294 0,4253 0,42Ц + 255
110 — 0,4933 0,4917 0,4871 0,4826 0,4787 0,4748 0,4708 0,4674 0,4640 0,4605 0,4575 0,4545 0,4515 4- 250
115 — 0,4925 0,4901 0,4877 0,4852 0,4830 0,4808 0,4787 0,4767 0,4747 0,4728 0,4710 0,4692 0,4675 4- 245
120 — 0,4762 0,4758 0,4754 0,4750 0,4745 0,4740 0,4735 0,4730 0,4725 0^4719 0/4713 0,4707 0,4702 4- 249
125 — 0,4500 0,4514 0,4528 0,4541 0,4551 0,4561 0,4572 0,4580 0,4588 0,4595 0,4601 0,4607 0,4612 235
130 — 0,4164 0,4193 0,4222 0,4251 0,4274 0,4297 0,4320 0,4338 0,4356 0/4375 0,4391 0,4407 0,4422 230
1 зъ — 0,ЭТ80 0,3820 0,3860 0,3899 0,3932 0,3965 0,3997 0,4024 0,4051 0,4078 0/4101 0/4124 0,4147 4- 225
140 0,3363 0,3410 0,3457 0,3504 0,3544 0,3584 0,3524 0,3656 0,3688 0/3721 0,3749 0/3777 0,3305 4- 220
145 —- 0,2931 0,2981 0,3031 0,3082 0,3125 0,3168 0,3210 0,3245 0,3280 0,3316 Qi 3347 0,3378 0,3410 4- 215
150 •— 0,2495 0,2545 0,2595 0,2645 0,2688 0,2730 0,2772 0,2808 0,2844 0,2881 0,2996 0,2931 0,2957 + 210
155 — 0,2061 0,2108 0,2155 0,2201 0,2240 0,2279 0,2319 0,2353 0,2387 0,2422 0,2452 0,2482 0,2513 4- 205
160 0,1634 0,1674 0,1714 0,1755 0,1790 0,1825 0,1859 0,1889 0,1919 0,1950 0,1976 0,2002 0,2028 200
165 — 0,1217 0,1248 0,1279 0,1311 0,1339 0,1367 0,1395 0,1419 0,1448 0,1467 0,1488 0,1509 0,1531 4- 195
170 0,0805 0,0827 0,0849 0,0872 0,0891 0,0910 0,0930 0,0947 0,0964 0,0981 0,0996 0,1011 0,1025 Ч’ 190
1 /о — 0,0400 0,0412 0,0424 0,0435 0,0445 0,0455 0,0465 0,0473 0,0481 0,0490 0,0498 0,0506 0,0513 Ч’ 185
180 — 0,0 0,0 0,0 0,0 0,0 0,0 0,0 о,о 0,0 0,0 0,0 0,0 0,0 4- 180
1 Со знаком + для 75° и со знаком—для 285°,
tor
Значения — для определения угловых скоростей шатуна
ш
“Ь _ Д COS а
~ш cos [J Таблица 12
а° л 1/3,1 1/3,2 1/3,3 1/3,4 1/3,5 1/3,6 1/3,7 1/3,8 1/3,9 1/4,0 1/4,1 1/4,2 1/4,3 Знак а°
0 + 0,3226 0,3125 0,3030 0,2941 0,2857 0,2778 I 0,2703 0,2632 0,2564 0,2500 0,2439 0,2331 0,2326 + 360
5 + 0,3215 0,3114 0,3020 0,2931 0,2847 0,2768 0,2693 0,2622 0,2555 0,2491 0,2430 0,2372 0,2317 + 355
10 4" 0,3181 0,3082 0,2988 0,2900 0,2817 0,2739 0,2665 0,2594 0,2528 0,2464 0,2404 0,2347 0,2292 + 350
15 + 0,3127 0,3028 0,2936 0,2849 0,2767 0,2690 0,2617 0,2548 0,2482 0,2420 0,2361 0,2304 0,2250 + 345
20 + 0,3050 0,2953 0,2864 0,2778 0,2698 0,2622 0,2551 0,2483 0,2419 0,2358 0,2300 0,2245 0,2192 + 340
25 +• 0,2951 0,2857 0,2769 0,2686 0,2608 0,2535 0,2466 0,2400 0,2338 0,2279 0,2222 0,2169 0,2118 + 335
30 + 0,2831 0,2740 0,2655 0,2575 0,2500 0,2429 0,2362 0,2299 0,2239 0,2182 0,2128 0,2077 0,2028 + 330
35 + 0,2689 0,2602 0,2521 0,2444 0,2373 0,2305 0,2241 0,2181 0,2124 0,2069 0,2018 0,1969 0,1922 + 325
40 + 0,2526 0,2444 0,2366 0,2294 0,2226 0,2163 0,2102 0,2045 0,1991 0,1940 0,1892 0,1846 0,1802 + 320
45 + 0,2343 0,2266 0,2194 0,2126 0,2053 0,2003 0,1947 0,1894 0,1844 0,1796 0,1751 0,1708 0,1667 + 315
50 + 0,2140 0,2069 0,2003 0,1941 0,1882 0,1827 0,1776 0,1727 0,1681 0,1637 0,1596 0,1557 0,1519 + 310
55 + 0,1918 0,1854 0,1794 0,1738 0,1686 0,1636 0,1590 0,1546 0,1504 0,1465 0,1428 0,1393 0,1359 + 305
00 + 0,1680 0,1623 0,1570 0,1521 0,1474 0,1431 0,1390 0,1351 0,1315 0,1280 0,1248 0,1217 0,1187 + 300
65 + 0,1430 0,1377 0,1332 0,1290 0,1250 0,1213 0,1178 0,1145 0,1114 0,1085 0,1057 0,1031 0,1005 + 295
70 + 0,1158 0,1118 0,1081 0,1047 0,1014 0,0984 0,0956 0,0929 0,0904 0,0880 0,0857 0,0836 0,0815 + 290
75 + 0,0879 0,0848 0,0820 0,0794 0,0769 0,0746 0,0725 0,0704 0,0685 0,0667 0,0650 0,0333 0,0618 + 285
80 + 0,0591 0,0570 0,0551 0,0534 0,0517 0,0502 0,0487 0,0473 0,0460 0,0448 0,0436 0,0425 0,0415 + 280
85 + 0,0297 0,0287 0,0277 0,0268 0,0260 0,0252 0,0245 0,0238 0,0231 0,0225 0,0219 0,0214 0,0209 + 275
90 — 0,0 0,0 0,0 0,0 0,0 0,0 0,0 0,0 0,0 0,0 0,0 0,0 0,0 •—• 270
95 — 0,0297 0,0287 0,0277 0,0268 0,0260 0,0252 0,0245 0,0238 0,0231 0,0225 0,0219 0,0214 0,0209 — 265
100 —• 0,0591 0,0570 0,0551 0,0534 0,0517 0,0502 0,0487 0,0473 0,0460 0,0448 0,0436 0,0425 0,0415 1 — - 260
105 —— 0,0879 0,0848 0,0820 0,0794 0,0769 0,0746 0,0725 0,0704 0,0685 0,0667 0,0650 0,0633 0,0618 — 255
НО — 0,1158 0,1118 0,1081 0,1047 0,1014 0,0984 0,0956 0,0929 0,0904 0,0880 0,0857 0,0836 0,0815 — 250
115 •—• 0,1430 0,1377 0,1332 0,1290 0,1250 0,1213 0,1178 0,1145 0,1114 0,1085 0,1057 0,1031 0,1005 — 245
120 —• 0,1680 0,1623 0,1570 0,1521 0,1474 0,1431 0,1390 0,1351 0,1315 0,1280 0,1248 0,1217 0,1187 — 240
125 —• 0,1918 0,1854 0,1794 0,1738 0,1686 0,1636 0,1590 0,1546 0,1504 0,1455 0,1428 0,1393 0,1359 — 235
130 — 0,2140 0,2069 0,2003 0,1941 0,1882 0,1827 0,1776 0,1727 0,1681 0,1637 0,1596 0,1557 0,1519 — 230
135 —• 0,2343 0,2266 0,2194 0,2126 0,2063 0,2003 0,1947 0,1894 0,1844 0,1796 0,1751 0,1708 0,1637 — 225
140 —• 0,2526 0,2444 0,2356 0,2294 0,2226 0,2163 0,2102 0,2045 0,1991 0,1940 0,1892 0,1846 0,1802 — 220
145 — 0,2689 0,2602 0,2521 0,2444 0,2373 0,2305 0,2241 0,2181 0,2124 0,2069 0,2018 0,1969 0,1922 — 215
150 — 0,2831 0,2740 0,2655 0,2575 0,2500 0,2429 0,2362 0,2299 0,2239 0,2182 0,2128 0,2077 0,2028 — 210
155 —• 0;2951 0,2857 0,2769 0,2686 0,2608 0,2535 0,2466 0,2400 0,2338 0,2279 0,2222 0,2169 0,2118 — 205
160 — 0,3050 0,2953 0,2864 0,2778 0,2698 0,2622 0,2551 0,2483 0,2419 0,2358 0,2300 0,2245 0,2192 — 200
165 —• 0,3127 0,3028 0,2936 0,2849 0,2767 0,2690 0,2617 0,2548 0,2482 0,2420 0,2331 0,2304 0,2250 195
170 — 0,3181 0,3082 0,2988 0,2900 0,2817 0,2739 0,2665 0,2594 0,2528 0,2464 0,2404 0,2347* 0,2292 — 190
175 —• 0,3215 0,3114 0,3020 0,2931 0,2847 0,2768 0,2693 0,2622 0,2555 0,2491 0,2430 0,2372’ 0,2317 — 185
180 — 0,3226 0,3125 0,3030 0,2941 0,2857 0,2778 0,2703 0,2632 0,2564 0,2500 0,2439 0,2381 0,2326 — 180
ЧАСТЬ 2
РАСЧЕТ
НА ПРОЧНОСТЬ ДЕТАЛЕЙ
АВИАЦИОННЫХ ДВИГАТЕЛЕЙ
СОДЕРЖАНИЕ
части 2
Прочность материала и определение запасов............................ 210000
Напряжения и деформации.............................................. 211000
Прочность, пластичность и упругость при статических напряжениях..... 212000
Прочность и долговечность при переменных напряжениях................. 213000
Прочность и пластичность при повышенных температурах................. 214000
Определение запасов прочности ....................................... 215000
Данные для расчета запасов прочности................................. 216000
Литература и источники к 210000
Расчет иа прочность коленчатых валов................................... 220000
Типичные поломки коленчатых валов.................................. 221000
Расчетные нагрузки..................................................' 222000
Методы расчета коленчатых валов................’..................... 223000
Номинальные напряжения в опасных точках коленчатых валов V-образ-
ных двигателей....................................................... 224000
Обозначения ........................................................ 224100
Определение опорных реакций......................................... 224200
Номинальные напряжения в коренных шейках........................... 224300
Номинальные напряжения в шатунных шейках.......................... 224400
Номинальные напряжения н щеках..................................... 224500
Номинальные амплитуды и средние напряжения в опасных точках........ 224600
Пример расчета номинальных амплитуд и средних напряжений в опас-
' вых точках коленчатого вала....................................... 224700
Таблица номинальных амплитуд напряжений в коленчатых валдх
V-образных двигателей............................................... 224800
Номинальные напряжения в опасных точках коленчатых валов звездо-
образных двигателей . -............................................. 225000
Расчетные схемы..................................................... 225100
Определение опорных реакций......................................... 225200
Моменты и силы, действующие в опасных сечениях шатунных шеек и щек . . . . 225300
Номинальные напряжения в опасных точках коленчатого вала............ 225400
Таблица номинальных амплитуд напряжений в коленчатых валах
звездообразных двигателей..........................:................ 225500
Коэффициенты концентрации напряжений................................. 226000
Определение запасов прочности........................................ 227000
Расчетные формулы.................................................. 227100
Примеры определения запасов прочности.............................. 227200
Минимальные запасы прочности в коленчатых валах авиационных
двигателей ......................................................... 227300
183
Влияние колебаний системы коленчатого вала на его запасы прочности в
V-образиых и звездообразных двигателях.................................... 228000
Коэффициенты динамического усиления.................................... 228100
Коэффициенты динамического усилении при крутильных колебаниях ..... 228200
Коэффициенты динамического усиления при изгибных колебаниях............ 228300
Выводы и некоторые рекомендации....................................... 228400
Способы повышения прочности коленчатых валов конструктивными и
технологическими средствами.............................................. 229000
Конструктивные способы повышения прочности коленчатых валов............ 229100
Технологические способы повышения прочности коленчатых валов.........• 229200
Литература и источники к 220000
Расчет иа прочность шатунов............................................. 230000
Расчет поршневой головки шатуна........................................... 231000
Напряжение в поршневой головке от растягивающей силы инерции......... 231100
Напряжение в поршневой головке от силы,сжимающей шатун................ 231200
Напряжение в поршневой головке от запрессовки втулки и от нагрева
головки............................................................. 231300
Запас прочности в поршневой головке.................................... 231400
Деформация поршневой головки........................................... 231500
Удельное давление на втулке поршневой головки.......................... 231600
Расчет стержня шатуна................................................. 232000
Расчет стержней центральных и прицепных шатунов........................ 232100
Расчет стержня главного шатуна звездообразного двигателя ........ . . 232200
Расчет стержня главного шатуна V-образного двигателя................... 232300
Расчет кривошипной головки шатуна....................................... 233000
Расчет кривошипной головки шатуна рядного двигателя.................... 233100
Расчет нижней головки прицепного шатуна................................ 233200
Расчет кривошипной головки главного шатуна звездообразного дви-
гателя ........................................................... 233300
Удельное давление на вкладыше кривошипной головки шатуна............... 233400
Литература и источники к 230000
Расчет иа прочность поршневого пальца..................................... 240000
Типичные поломки поршневого пальца...................................... 241000
Силовая схема и нагрузки, действующие на поршневой палец................ 242000
Поперечные деформации поршневого пальца................................ 243000-
Определение напряжений в поршневом пальце, возникающих от
овализации поперечного сечения......................................... 244000-
Определение напряжений в поршневом пальце от изгиба..................... 245000
Определение касательных напряжений в поршневом пальце..................... 246000
Выбор размеров поршневого пальца •........................................ 247000
Мероприятия, повышающие прочность поршневого пальца....................... 248000
Литература и источники к 240000
Расчет иа прочность резьбовых соединений ................................. 250000
Типичные поломки резьбовых соединений..................................... 251000
Нагрузки на резьбовое соединение......................................’ • 252000
Основная нагрузка...................................................... 252100
Усилие затяжки........................................................ 252200
Дополнительные нагрузки............................................ • 252300
Совместное действие нагрузок ............................................. 253000
Элементарные схемы затянутых резьбовых соединений...................... 253100
Определение коэффициента основной нагрузки............................. 253200
Сложные схемы затянутых резьбовых соединений........................... 253300
184
Совместное действие основной нагрузки, усилия затяжки и температурной
нагрузки .............................................................. 253400
Распределение нагрузки по виткам резьбы.................................. 254000
Прочность резьбовых соединений при статических нагрузках................. 255000
Прочность резьбовых соединений при переменных нагрузках •................ 256000
Диаграмма предельных напряжений для резьбового соединения.............. 255100
Определение запаса прочности в резьбовых соединениях................... 256200
Влияние конструктивных и технологических факторов на прочность
резьбового соединения ................................................... 257000
Влияние радиуса закругления в основании нарезки........................ 257100
Влияние конструктивной формы резьбового соединения..................... 257200
Влияние материала болта и гайки ....................................... 257300
Влияние способа изготовления резьбы.................................... 257400
Затяжка резьбовых соединений............................................. 258000
Примеры расчета иа прочность резьбовых соединений........................ 259000
Расчет на прочность силовых шпилек..................................... 259100
Расчет на прочность шатунных болтов.................................... 259200
, Литература и источники к 250000
Статические и динамические испытания деталей авиационных двигателей .... 260000
Статические испытания.................................................... 261000
Методы загрузки и измерения усилий при статических испытаниях 261100
Измерение линейных и угловых перемещений............................... 261200
Измерение деформаций .................................................. 261300
Определение напряжений по данным измерения деформаций.................. 261400
Определение жесткостей при кручении.................................. 261500
Определение жесткостей при изгибе...................................... 261600
Определение продольных жесткостей...................................... 261700
Динамические испытания.................................................. 262000
Задачи динамического испытания деталей................................. 262100
Возбуждение колебаний.................................................. 262200
Измерение динамических перемещений..................................... 262300
Измерение динамических деформаций...................................... 262400
Определение частот собственных колебаний............................... 262500
Испытания на прочность при действии динамических нагрузок.............. 262600
Литература и источники к 260000
210000— 211007
ПРОЧНОСТЬ МАТЕРИАЛА II ОПРЕДЕЛЕНИЕ ЗАПАСОВ
НАПРЯЖЕНИЯ И ДЕФОРМАЦИИ [1,4* 14, 16, 17]
Прочность детали, т. е. ее сопротивляемость действующим на-
грузкам, зависит от возникающих в ней напряжений и механических
свойств материала.
Нагрузки, действующие на деталь, могут быть сосредоточенными
и распределенными; они могут вызываться внешними воздействиями
на деталь (например, от давления газов) или влиянием собственных
масс (силы инерции при неравномерном движении). Неравномерный
иагрев как всей конструкции двигателя, так и отдельных ее деталей
является также причиной возникновения в них усилий и напряжений,
которые в этом случае называются тепловыми.
Под влиянием нагрузок, вызванных теми или иными причинами,
в детали возникают внутренние усилия, действующие по отдельным
сечениям (растягивающие или сжимающие силы, перерезывающие силы,
изгибающие и крутящие моменты).
Напряжением называется интенсивность внутренних сил упругости,
соответствующая данной элементарной площадке определенного сече-
ния детали. Напряжение вычисляется для этой площадки как отно-
шение силы к площади, на которую она приходится, т. е. как сила,
приходящаяся на единицу площади. В общем случае сила, а следова-
тельно, и напряжение, называемое полным, направлены наклонно
к площадке.
Нормальным напряжением называется составляющая напряжения,
действующая перпендикулярно к площадке; это напряжение обозна-
чается а,., причем индекс I означает направление нормали к пло-
щадке.
Например, если площадка, по которой действует напряжение,
перпендикулярна к оси х, то нормальное напряжение, действующее
по этой площадке, обозначается ах.
Касательным напряжением называется составляющая напряже-
ния, действующая вдоль площадки; это напряжение обозначается
причем индекс z также означает направление нормали к площадке.
Размерность напряжения кг/мм3 или кг]см\
Под влиянием внешних сил и возникающих при этом напряжений
размеры детали несколько изменяются— она деформируется.
Деформацией называется изменение линейных или угловых раз-
меров детали; обычно эти изменения весьма незначительны по срав-
нению с самими размерами детали.
210000
211000
211001
211002
211003
211004
211005
211006
211007
187
211008-211015
211008 Абсолютное удлинение, т. е. изменение линейного размера lit обо-
значается AZp Абсолютное удлинение положительно при растяжении
и отрицательно при сжатии (укорочение).
211009 Относительное удлинение обозначается ef и является отношением
причем индекс i указывает, в каком направлении происходит удли-
нение.
211010 Относительный сдвиг является углом у, на который изменяется
первоначально прямой угол между двумя направлениями в детали
при ее деформации. Если эти взаимно перпендикулярные направле-
ния обозначаются х и у, то относительному сдвигу присваивается ин-
декс ху.
211011 Относительная объемная деформация (расширение) е является
отношением приращения объема AV к его первоначальной величине V
е = у-.
211012
211013
211014
Упругой деформацией называется такая деформация, которая исчезает
при прекращении действия нагрузки.
Пластической деформацией называется такая деформация, которая,
возникнув сразу или постепенно под действием нагрузки, не исчезает
после ее снятия.
Если в напряженной детали выделить элементарный параллелепипед,
ребра которого параллельны осям х, у и z (фиг. 211014), то в общем
случае по его граням будут действо-
211015
вать напряжения
аж> ххУ’
, хУх> ^Уч
а2’ ^2Х> ^2У’
Условие сопряженности касатель-
ных напряжений требует, чтобы
^ХУ = ^Вх> ХУ2 ^2У > ~ ^Х2>
эти зависимости вытекают из условий
равновесия элементарного параллеле-
пипеда.
Нормальное напряжение по наклон-
ной площадке, нормаль к которой об-
Напряжения, действующие по гра-
ням элементарного параллелепипеда
разует с осями координат углы со значениями косинусов ах, ау, а.-,
составляет:
= °х а2х + Од а2 + аг а2 + 2тзд ах аи + 2^ av аг + 2т,ж ах ах,
как это следует из условий равновесия элементарного четырехгран-
ника (тетраэдра).
188
211016-211022
Касательное напряжение по наклонной площадке с тем же направле- 211016
нием нормали составляет
= (рх ах + 1хУ аи 4- tX2 aj 4- ау 4- *ух ах + *ух <$* 4-
4- (oz az 4" Xzx ах + ххУ ОуУ “ a?V,
где <?№ нормальное напряжение по той же площадке, определяемое
по формуле 211015.
Для характеристики изменения нормальных напряжений в зави- 211017
симости от ориентировки элементарной площадки по нормали N к этой
площадке откладывается вектор, равный
где нормальное напряжение по данной площадке | одг j берется по абсо-
лютной величине.
Если координаты конца вектора обозначить х0, у0 и z0, то подста-
новка a.v из формулы 211015 и замена косинусов углов ах, ау, az через
сиг приводит к уравнению поверхности напряжений Коши:
X* 4- а» Уо + + 2тжВ х0 у0 4- 2тВг у0 z04- 2тгх z0 х0 = Т с2.
Если оси х, у и z совпадут с главными осями поверхности, то
Ух — t2X ~ 0-
В этом случае по граням элементарного параллелепипеда действу-
ют только нормальные напряжения, которые называются главными.
Главные напряжения ах, <з2 и <з3 действуют по трем взаимно пер- 211018
пендикулярным площадкам, по которым касательные напряжения рав-
ны нулю. Одно из главных напряжений (а,) является наибольшим,
другое (<з3) наименьшим.
Главными осями напряженного состояния называются оси, по направ- 211019
лению которых действуют главные напряжения.
Эллипсоид напряжений. Для характеристики изменения полных 211020
напряжений в зависимости от наклона элементарной площадки соста-
вляется уравнение поверхности, на которой располагается конец век-
тора полного напряжения. Если координаты этой поверхности обозна-
чить 8, «] и С, то уравнение поверхности в главных осях выразится
так:
Это и~есть уравнение эллипсоида напряжений.
Нормальное напряжение по наклонной площадке, нормаль к которой 211021
образует с главными осями координат углы со Значениями косинусов
ах, ау и ах, равно в соответствии с 211015
a = fl£ai4-a£a24-ala3.
Касательное напряжение по наклонной площадке с тем же направле- 211022
нием нормали равно
t2 = агх а2 4- а* а2 4- <4 al — (а£ аг 4- а» а2 + а?
189
211023-211030
211023
211024
211025
211026
211027
211028
211029
211030
Октаэдрическим касательным напряжением называется напряжение,
действующее по площадке, равнонаклонной к главным осям, и выра-
жается через главные напряжения:
^ = 4 K(°i — Оз)2 + (°з — <3i)2- О
По этой площадке действует нормальное напряжение
оп= -з_(о1 + оз + оз)- (2)
условиям
В
дальнейшем принимается, что
Фиг. 211028.
Напряжения по наклонной площадке
наклонной площадке (фиг. 211028)
Объемное напряженное состояние соответствует таким
напряженности, при которых все три главные напряжения отличны
от нуля.
Плоское напряженное состояние характеризуется равенством нулю
одного из главных напряжений,
в этом случае <з2 = 0. Плоское
напряженное состояние имеет
место на свободной поверхности
детали.
Одноосное (линейное) напря-
женное состояние характеризует-
ся равенством нулю двух глав-
ных напряжений. В этом случае
только а, #= 0.
Эллипс напряжений для пло-
ского напряженного состояния
определяется уравнением, выте-
кающим из уравнения 211020
^ + ^ = 1
=! + =3
Нормальное напряжение по
составляет
а = ах C0S4 <р + а2 sin4 <р + 2^ sin ср COS ср,
где ср —угол между нормалью к площадке и осью х, отсчитываемый
по часовой стрелке.
Касательное Напряжение по той же площадке в этом случае
т = тЖ2 (cos4 ср — sin4 <р) 4- (<з2 — <зх) sin <р COS <р.
Главные напряжения для плоского напряженного состояния соста-
вляют
Угол наклона ср главных напряжений к оси х определяется из
выражения
tg2? =
»» -
190
211031-211032
Вопрос о том, какое из двух значений ср соответствует тому или
другому главному напряжению, проще всего решается построением
кругов напряжений.
Круги напряжений строятся для определения главных напряжений 211031
через напряжения ах, <з2 и тХ2, а также для определения напряжений,
действующих на площадке заданного направления, через главные. На
оси а (фиг. 211031-1) откладываются нормальные напряжения аж и а2
и, как ординаты, соответствующие этим абсциссам, наносятся вели-
чины и —т22. Прямая, соединяющая точки А и В, является диа-
метром круга, пересечение ее с осью а дает центр этого круга.
Фиг. 211031-1. Фиг. 211031-11.
Круги напряжений Круги напряжений
Круг отсекает на оси а главные напряжения ах и <з3. Углы между направ-
лениями главных напряжений и осью а являются половинными углами
между отрезком АВ и осью а, причем если на схеме действующих
напряжений углы откладываются по часовой стрелке, то на диаграм-
ме кругов они откладываются против часовой стрелки.
Если известны главные напряжения ах и а3, то круги позволяют
определять напряжения по наклонным площадкам. Построив круг
по главным напряжениям а1 и а3 (фиг. 211031-11), проводят через
центр круга луч под углом 2ср к оси а, откладывая его в направле-
нии, противоположном тому, которое принято на схеме действия
напряжений; при этом ср —угол наклона площадки, на которой опре-
деляются напряжения а и т. Пересечение луча с кругом дает точку’ А,
абсцисса которой равна напряжению а, а координата —напряже-
нию т.
Наибольшее касательное напряжение для плоского и объемного 211032
напряженных состояний составляет
. _ а1 - °з
тшах — 2--
и действует по площадке, делящей угол между направлениями глав-
ных напряжений в, и аг пополам.
191
211033-211034
211033 Закон Гука дает зависимость между напряжениями и деформа-
циями линейного типа. Для одноосного напряженного состояния
а = Es,
где s — относительное удлинение;
Е — коэффициент пропорциональности, называемый модулем про-
дольной упругости (измеряется в кг [мм* или кг/см2).
Для чистого сдвига
•с = Оу,
«
где у — относительный сдвиг;
G — модуль сдвига (измеряется в кг^м" или кг/см*).
Поперечная линейная деформация при одноосном напряженном
состоянии составляет
S(1== — р.г,
где р- — коэффициент Пуассона.
Для деформации объема
_01 + °2 + °8_ Е
3 ~ 3(1—2р.) е>
где е = 8i + + в, — относительное изменение объема при деформации;
Е с
_2|1) “ модуль объемного расширения.
Эта зависимость вытекает из выражения для изменения объема
и выражений для закона Гука при объемном напряженном состоянии.
Между модулями Е и G существует зависимость
г- Е
4 2(1 + р) '
Для объемного напряженного состояния законом Гука устанавли-
ваются зависимости между главными напряжениями и главными
удлинениями
01 = х (ех + е2 + е8) + 2Gsi;
°2 — (®1 + S2 + ®з) + 2Gs2;
os =>-(»i + e. + e»)4-2G8g,
. Ер
ГДе Х ~ (1 - 2р) (1 + р) ’
Для плоского напряженного состояния
°i = rn?(’i+p8s);
* г
Е /
°з=Г—^(8з+Р-г1)-
• г
211034 Однородное напряженное состояние имеет место в том случае, когда
напряжения равномерно распределяются по объему (например, растяже-
ние стержня постоянного сечения или кручение тонкостенной трубы).
192
211035—211042
Фиг. 211036.
Схема концентра-
ции напряжений
Неоднородное напряженное состояние характеризуется тем или
иным изменением напряжений по одной или нескольким координатам
(например, при изгибе нормальные напряжения в прямом стержне
изменяются по высоте стержня по линейному закону, при кру-
чении круглого стержня они меняются по линейному закону вдоль
радиуса).
Концентрацией напряжений называется резко выраженная неравно-
мерность распределения напряжений в местах быстрого изменения
кривизны контура детали, резкого изменения сечения (поперечные
отверстия) в местах приложения нагрузок (кон-
тактные напряжения) и в ряде других случаев.
Если не учитывают концентрацию напряжений,
то при расчетах на прочность обычно принимают их
распределение по сечению равномерным или следу-
ющим тому или иному закону, отвечающему изгибу,
кручению или другим случаям, рассматриваемым
в сопротивлении материалов. Величина соответству-
ющих напряжений обозначается о и они называются
номинальными.
При наличии концентрации возникает выражен-
ный максимум напряжений атах и кривая их распре-
деления существенно отличается от распределения
номинальных напряжений а (фиг. 211036); при этом
равнодействующая внутренних усилий равна внеш-
нему действующему усилию, соответствующему рас-
сматриваемому сечению.
Коэффициентом концентрации а называется отношение максималь-
ного напряжения к номинальному:
о °тах
для нормальных напряжении ав= —— ,
о IUdX
для касательных напряжении ат = ——.
Напряжения зтах и ттах должны
в этом случае определяться опыт-
ным путем или вычислением в пред-
положении совершенной упругости.
Переменными напряжениями на-
зываются напряжения, изменя-
ющиеся периодически, с течением
времени (фиг. 211038), т. е. повто-
ряющиеся циклически.
Циклом напряжений называет-
ся замкнутая однократная смена
напряжений, соответствующая пол-
Периодическое изменение напряжений
ному периоду их изменения.
Частотой изменения напряжений называется число циклов за
единицу времени (в минуту или секунду).
Числом циклов N называется общее число циклов напряжений,
действовавших за определенное время работы детали.
Наибольшее напряжение цикла ашах это наибольшая величина
напряжения цикла (алгебраически).
211035
211036
211037
211038
211039
211040
211041
211042
13 Авиац. порши, двигатели
193
211043- 211051
211043 Наименьшее напряжение цикла — наименьшая величина напря-
жения цикла (алгебраически).
211044 Среднее напряжение цикла составляет алгебраическая полусумма
наибольшего и наименьшего напряжений цикла
omax+ amin
от~ 2
211045 Амплитуда напряжений цикла это алгебраическая полуразность
наибольшего и наименьшего напряжений цикла
°шах— °min
----2----•
211046 Коэффициент асимметрии цикла (коэффициент амплитуды)
°mtn
«max
является отношением наименьшего напряжения цикла к наибольшему,
взятому с алгебраическим знаком.
211047 Симметричный цикл имеет наибольшее и наименьшее напряжения
одинаковыми по величине, но противоположными по знаку (г= —1);
величинам, характеризующим этот цикл, присваивается индекс—I.
211048 Пульсирующий цик/i—цикл, имеющий наименьшее напряжение
цикла omin = 0 (г=0); величинам, характеризующим этот цикл, при-
сваивается индекс 0.
211049 Асимметричный цикл — цикл, которому свойственно любое значение
коэффициента асимметрии; величинам, характеризующим этот цикл,
присваивается индекс г.
211050 Неу становившийся режим переменных напряжений характеризуется
изменением величин напряжений и формы цикла с течением времени
Фиг. 211051.
Интегральная кривая вероят-
ности
Дифференциальная кривая веро-
ятности (кривая распределения)
по какой-либо непериодической закономерности, а в ряде случаев под
влиянием случайных воздействий. Напряженность за определенное
время работы детали характеризуется кривыми распределения вероят-
ностей или кривыми частоты (статистической).
211051 Интегральной кривой распределения вероятностей (фиг. 211051) для
величин напряжений называется кривая, связывающая число повторе-
ний напряжений цикла данной величины, или больше ее с величиной
194
2Ц052- 212002
этих максимальных напряжений. Такая зависимость может быть уста-
новлена путем длительной регистрации напряжений, возникающих
в детали при работе двигателя.
Дифференциальной кривой распределения вероятностей для величин 211052
напряжений (фиг. 211052) называется производная от интегральной
кривой. Дифференциальная кривая дает связь между величиной
напряжений и частотой (статистической) их возникновения за опреде-
ленный (достаточно большой для использования статистических
закономерностей) отрезок времени. Таким образом напряжение
с максимальным напряжением цикла оп повторяется за принятый
(достаточно длительный) промежуток времени раз (фиг. 211052).
Напряжения величиной о, и меньше ее повторяются J N, раз
(фиг. 211051 )•
ПРОЧНОСТЬ, ПЛАСТИЧНОСТЬ И УПРУГОСТЬ ПРИ СТАТИЧЕСКИХ 212000
НАПРЯЖЕНИЯХ [1, 3, 4, 10, 15]
Сопротивление пластическим деформациям и разрушению. Под 212001
прочностью детали в условиях статической нагрузки обычно понимается
ее способность сопротивляться действующим усилиям. При этом сле-
дует различать случай хрупкого и случай пластического состояния
металла под действием напряжений в опасных точках детали. То или
иное состояние зависит как от характера напряженности, так и от
механических свойств металла.
Для хрупкого состояния под прочностью понимается сопротивле-
ние разрушению, так как в этом случае по достижении нагрузками
предельной величины возникает внезапное разрушение, причем характер
распределения напряжений и деформаций сохраняется почти неизмен-
ным до самого разрушения.
Для случая пластического состояния по достижении нагрузками
и напряжениями определенной величины возникают пластические
деформации, которые приводят к перераспределению напряжений
и изменению свойств металла (например, к упрочнению, выражающе-
муся в повышении предела текучести). При наступающем в конце
концов разрушении как распределение напряжений, так и форма детали
существенно изменяются, и для расчета становятся неприменимыми
формулы сопротивления материалов, выведенные из предположений
совершенной упругости. В этом случае расчет ведется обычно на сопро-
тивление возникновению пластических деформаций. Такой расчет
основывается на формулах сопротивления материалов, но предпола-
гается, что напряжения, достигнув предельной величины, вызовут
остаточные деформации определенней, условно задаваемой величины.
Обычно соответствующие значения напряжений называются пределами
текучести.
Определение напряжений и расчет на прочность по методам и фор-
мулам сопротивления материалов и теории упругости предусматривают
деформации только в пределах упругости. Поэтому эти методы при-
менимы для расчетов на сопротивление пластическим деформациям
и на прочность при хрупком состоянии материала.
Диаграмма деформирования. Механические свойства материала при 212002
статической нагрузке характеризуются диаграммой деформирования,
13*
195
212003-212004
в той или иной степени связанной с типом напряженного состояния
и стабильностью свойств. Эта диаграмма представляется как зависи-
мость между касательными напряжениями т и наибольшими относитель-
ными сдвигами у (или между истинными напряжениями а и истинными
удлинениями е), так как пластические деформации связаны с действием
касательных напряжений, вызывающих сдвиги. Истинное касательное
напряжение т и нормальное напряжение а вычисляются в области пласти-
ческих деформаций по формулам, учитывающим перераспределение напря-
жений за пределами упругости *). Типы диаграмм t, у для некоторых
металлов, применяемых в моторостроении, приведены на фиг. 212002-1.
Процесс деформирования может изображаться упрощенной диаграммой
истинных напряжений и деформаций, состоящей из двух прямых, как
показано нафиг. 212002-11. Характеристи-
Фиг. 212002-11.
Схематизированная диаграмма дефор-
мирования
Фиг. 212002-1.
Истинная диаграмма деформи-
рования
предел текучести ts; характеристикой сопротивления8 разрушению яв-
ляется предел прочности (в истинных напряжениях). Угол наклона
правой ветви диаграммы характеризует упрочнение при пластической
деформации.
Диаграмма деформирования, пределы текучести и прочности выра-
жаются часто в нормальных напряжениях; при этом определяются
перечисленные ниже характеристики.
212003 Предел упругости ае — напряжение, при котором возникают первые
признаки пластической деформации. Этот предел определяется как
напряжение, отвечающее условно заданной небольшой остаточной дефор-
мации. Обычно допуск остаточного относительного удлинения состав-
ляет от 0,003% до О,О1°/о. Предел упругости изредка используется
в расчетах, если возникает необходимость избегать даже небольших
остаточных деформаций.
212004 Предел текучести as является напряжением, соответствующим
возникновению остаточных деформаций определенной обусловленной
величины. Обычно предел текучести определяют как напряжение, при
котором возникает остаточное относительное удлинение О,2°/о.
х) Соответствующие способы расчета и формулы приводятся в курсах сопро-
тивления материалов: Н. М. Беляев, Сопротивление материалов, 1944;С. П. Тимо-
шенко, Сопротивление материалов, 1946.
196
212005- 212008
Предел текучести при кручении определяется как напряжение,
соответствующее 0,3% относительной остаточной деформации. Предел
текучести широко применяется в расчетах, как характеристика сопро-
тивляемости статическим нагрузкам.
Предел прочности {временное сопротивление) является условным 212005
напряжением, отвечающим максимальной нагрузке при испытании
образца на растяжение или сжатие. При этом эта нагрузка относится
к площади первоначального сечения образца. Для материалов хрупких
в условиях линейных напряженных состояний временное сопротивле-
ние. является расчетной характеристикой прочности при статических
нагрузках.
При деформациях в пределах упругости характеристиками упругих
свойств являются модули упругости и коэффициент Пуассона.
Сопротивление срезу tk является истинным напряжением, при кото- 212006
ром происходит разрушение от среза. Это напряжение вычисляется
при испытании по формулам, учитывающим перераспределение напряже-
ний вследствие пластических деформаций. При хрупком разрушении
сопротивление срезу близко к временному сопротивлению на срез, т. е.
tk ч. Сопротивление срезу является конечной ординатой истинной
диаграммы деформирования в координатах -г, у.
Сопротивление отрыву Sk является истинным напряжением, при 212007
котором происходит разрушение от отрыва. Это напряжение также
вычисляется с учетом перераспределения напряжений вследствие пла-
стичности. При хрупком разрушении от разрыва сопротивление отрыву
близко к временному сопротивлению
Критерии пластичности при однородном напряженном состоянии. 212008
Приведенные характеристики можно использовать в расчете лишь
при простом напряженном состоянии. При сложном напряженном
состоянии необходимо основываться на критериях пластичности и проч-
ности;
При расчете, основывающемся на сопротивлении пластическим
деформациям, используются критерии пластичности, которые определяют
условия возникновения пластических деформаций при сложном напряжен-
ном состоянии. Такие расчеты приходится производить для случая
действия статических нагрузок на детали из пластичного материала.
При расчете, основывающемся на сопротивлении разрушению,
используются критерии прочности, которые определяют условия раз-
рушения при сложном напряженном состоянии. Соответствующие
расчеты приходится производить при действии статических нагрузок
на детали при их хрупком или близком к хрупкому состоянии.
Пластическое или хрупкое состояние материала зависит не только
от его механических свойств, но и от напряженного состояния. Реше-
ние вопроса о том, какой следует вести расчет — на сопротивление
пластическим деформациям, на сопротивление хрупкому разрушению
или на сочетание этих сопротивлений—может качественно основы-
ваться на схемах, характеризующих прочность и пластичность при
плоском и объемном напряженных состояниях. Такой схемой является
диаграмма огибающей кругов предельных напряженных состояний
197
212008
(фиг. 212008-1) в форме, приведенной в курсе А. И. Дымова [4], или
диаграмма «механического состояния» по Я. Б. Фридману [10].
Диаграмма механического состояния приведена на фиг. 212008-11.
По оси абсцисс откладывается а,— приведенное нормальное растяги-
вающее напряжение для точки по
гипотезе наибольших удлинений (Сен-
Венана)
аг — а1 — И (°2 + аз)>
Фиг. 212008-П.
Диаграмма механического состояния
Фиг. 212008-1.
Диаграмма огибающей кругов предель-
ных напряженных состояний
по оси ординат — максимальное касательное напряжение w для той
же точки.
Каждому напряженному состоянию свойственно определенное
отношение
например, при р = 0,25:
для простого растяжения
= 0,5;
для кручения
“ = ^1 ^0,8;
°Г 0+|*)О1
для сжатия
^тах я2 2-
яг 2,io2 ’
для всестороннего (гидростатического) сжатия
Tmai _q
~г
Лучи, проведенные под соответствующими углами р (соответственно
значениям = 0,5; 0,8 и 2) показаны на фиг. 212008-П. На диа-
грамме наносятся линии, характеризующие для данного материала:
198
212008
сопротивление пластическим деформациям, т. е. предел текучести т,
в касательных напряжениях, сопротивление срезу tk и сопротивление
отрыву Sfc в нормальных напряжениях. В зависимости от того, как
расположены эти линии для данного материала, для каждого напря-
женного состояния возникает та или иная форма разрушения или
перед разрушением оказывается превзойденным сопротивление пласти-
ческим деформациям (в их начальной стадии). Нанесенное сплошными
линиями расположение линий ts, tk и Sk является типичным для
конструкционных сталей со значением временных сопротивлений до 100—
120 кг]мм*. В этом случае для всех типичных напряженных состояний
сопротивление определяется величиной сопротивления пластическим
деформациям. Для литых сплавов линия Sk оказывается расположен-
ной левее (пунктир) и для них при растяжении, а иногда и при круче-
нии раньше оказывается превзойденным сопротивление отрыву.
Приведенная диаграмма предусматривает для разрушения от среза
и для пластических деформаций гипотезу наибольших касательных
напряжений, а для разрушения от отрыва—гипотезу наибольших удли-
нений. В связи с трудностью и неточностью определения предельных
линий эта диаграмма имеет преимущественно качественное значение,
характеризуя возможность того или иного вида разрушения в связи
с применяемым для детали материалом и характером напряжен-
ности.
При расчете на статическую прочность приходится иметь дело
с двумя основными случаями:
1) сопротивлением пластическим деформациям, когда расчет про-
изводится по критериям пластичности;
2) сопротивлением хрупкому разрушению от среза или отрыва,
когда расчет производится по критериям прочности.
При плоском и объемном напряженных состояниях условия обра-
зования пластических деформаций определяются критериями пластич-
ности, вытекающими из соответствующих гипотез для однородных или
близких к ним напряженных состояний.
Условие возникновения пластических деформаций может быть вы-
ражено следующей зависимостью:
«1—os = 2'ts —kfaj-f-o,),
где к — коэффициент, характеризующий влияние нормальных напря-
жений.
Если предел текучести при растяжении составляет as, то
Х = —*-1.
О.
Зависимость эта вытекает из предположения, что основной при-
чиной возникновения пластических деформаций являются наибольшие
касательные напряжения 31 ~ °3, но некоторое влияние оказывают также
нормальные напряжения действующие по площадкам наиболь-
ших касательных.
199
212009- 212010
212009
212010
В более общем виде и для широкого диапазона напряженных со-
стояний условие пластичности по Мору выражается системой предель-
ных кругов, огибающая которых и является предельной кривой плат
стичности (фиг. 212008-1).
Условия пластичности для объемного напряженного состояния
могут быть выражены так:
(«х-о,)’ + (a2-°3)2 + (°з-°1)г =
Эта зависимость основывается на том, что возникновение пласти-
ческих деформаций определяется только величиной октаэдрических
касательных напряжений [см. формулу (1) п. 211023].
Для плоского напряженного состояния
^ + ^-О1а3 = 3^.
Сопротивление пластическим деформациям при неоднородных напря-
женных состояниях. Неравномерность распределения напряжений при-
водит к тому, что остаточные деформации детали обусловливаемой вели-
чины возникают при максимальных напряжениях, значительно превы-
шающих предел текучести (значительная пластическая деформация
в малых объемах не сказывается существенно на общих остаточных
деформациях). Предел текучести, соответствующий условно задаваемой
величине остаточных деформаций, определяется экспериментально путем
статической нагрузки детали и измерения деформаций.
Критерии прочности при плоском и объемном напряженных состоя-
ниях. В зависимости от свойств материала и типа напряженного со-
стояния изменяется диаграмма деформирования. Хрупкие материалы
Фиг. 212010-1.
Диаграмма деформи-
рования и кривые
разрушения
В соответствии
характеризуются склонностью к разрушению при
незначительной величине пластических деформаций.
Для них сопротивление отрыву (или срезу) отно-
сительно мало по сравнению с сопротивлением
пластическим деформациям. Пластичные материалы
обладают обратными соотношениями. С увеличением
хрупкости материала и объемности напряженного
состояния (т. е. при снижении величины касатель-
ных напряжений по сравнению с нормальными)
диаграмма деформирования получает все больший
наклон правой ветви и деформация, отвечающая
разрушению, становится все меньше (фиг. 212010-1).
На этой диаграмме по Н. Н. Давиденкову линия ab
соответствует пластическому состоянию, при ко-
тором разрушение получается вязким. Линия ad
соответствует хрупкому состоянию. Линия АВ
ограничивает область пластических разрушений,
а линия CD—область хрупких разрушений.
с этим различно располагаются предельные круги
напряжений и их огибающие (фиг. 212010-11). Как для пластичных,
так и для хрупких материалов (фиг. 212010-П) огибающую можно
рассматривать состоящей из двух ветвей сс и dd. Первая ветвь
сс соответствует разрушениям при преимущественном влиянии каса-
200
212010
тельных напряжений и обычно связана со значительными пластиче-
скими деформациями. Вторая ветвь dd соответствует разрушениям при
преимущественном влиянии нормальных напряжений, которые возни-
кают при незначительных пластических деформациях. Чем пластичнее
материал, тем правее располагается ветвь dd и тем большая объем-
ность напряженного состояния необходима, чтобы вызвать разрушение
от нормальных напряжений. Для хрупких материалов разрушение от
нормальных напряжений может возникать при одноосном растяжении
Фиг. 212010-П.
Предельные кривые для пластичного (слева) и для хрупкого
(справа) материалов
и при кручении (спиральный излом, см. фиг. 212008-1).
При напряженных состояниях и материалах, для которых проч-
ность зависит преимущественно от касательных напряжений, критерием
прочности может служить зависимость
01—О3 = 2^6—А (О, + а3),
где ах и а3—главные напряжения;
"сь—предел прочности при срезе;
к = 2 — 1
а,
аь~предел прочности при растяжении.
Коэффициент к устанавливается экспериментально по ветви оги-
бающей кривой, соответствующей срезу; для этого производится испы-
тание на прочность при различных типах напряженных состояний
(растяжение, кручение, сжатие и др.).
При напряженных состояниях и материалах, для которых проч-
ность зависит преимущественно от нормальных напряжений, критерием
прочности может служить гипотеза наибольших напряжений, по
которой условие прочности выражается так:
= ab или а3 = ow,
где а6—предел прочности при растяжении;
аьа~ предел прочности при сжатии,
201
212011-213002
или гипотеза наибольших удлинений, по которой условие прочности
имеет вид (см. 212008):
°i—н(°а + оа) =
212011 Наличие концентрации напряжений по-разйому влияет на проч-
ность при статических нагрузках в зависимости от пластического или
хрупкого состояния в зонах максимальных напряжений. При этом
концентрация затрудняет образование пластических деформаций, так
как для их возникновения в пределах условно задаваемой и обнару-
живаемой экспериментально величины необходимо, чтобы пластическое
состояние наступило в определенном объеме. Кроме того, . вследствие
пластических деформаций максимум напряжений может смещаться
с поверхности в область объемного напряженного состояния.
212012 Эффективным коэффициентом концентрации при статической на-
грузке условно называется отношение предела прочности <зь при отсут-
ствии концентрации к пределу прочности <зЬк при ее наличии
(M. = J И (Ме=^-
212013 Критической температурой хрупкости при статической нагрузке
называется такая температура, при которой эффективный коэффициент
концентрации резко возрастает благодаря переходу материала детали
в хрупкое состояние.
213000 ПРОЧНОСТЬ И ДОЛГОВЕЧНОСТЬ ПРИ ПЕРЕМЕННЫХ НАПРЯЖЕНИЯХ
[1, 4, 7, 9, 10, 12, 13]
213001 Усталость металла является основным фактором прочности при
действии переменных напряжений. Явление усталости связано с посте-
пенно развивающимися во времени процессами пластических дефор-
маций отдельных групп кристаллитов поли кристаллического конгло-
мерата. На определенной стадии циклического деформирования и
в зависимости от величины действующих напряжений возникает микро-
скопическая трещина или система трещин. При дальнейшем действии
переменных напряжений трещина растет, постепенно занимая все
большую часть сечения и приводит в конце концов деталь к поломке.
В зависимости от величины переменных напряжений а этот процесс
заканчивается при том или ином количестве циклов N.
213002 Кривая усталости характеризует зависимость между максималь-
ным напряжением цикла а (при определенной асимметрии) и числом
циклов N, необходимых для разрушения (фиг. 213002). Кривая нано-
Фиг. 213002.
Кривые усталости
202
213003 - 213007
сится в координатах a, N в линейном (а) или логарифмическом (б)
масштабе. В линейном масштабе кривые обычно имеют асимптотиче-
ский характер, а в логарифмическом дают выраженный перелом к гори-
зонтальной ветви.
Пределом усталости (выносливости) называется то наибольшее
напряжение цикла, которое может выдержать материал без разруше-
ния при весьма большом (условно задаваемом) числе циклов (напри-
мер, при 107 или 108 циклов). Для большинства материалов при числе
циклов 107 правая ветвь кривой становится горизонтальной и соот-
ветствующее напряжение (ордината) является пределом усталости. Для
легких сплавов, а также для большинства металлов при наличии кор-
розии и в условиях высоких температур правая ветвь кривой устало-
сти непрерывно снижается и предел усталости может рассматриваться
лишь в связи с числом циклов действия напряжений.
Предел усталости обозначается аг, где г — коэффициент асимметрии
цикла. Пределы усталости для симметричного цикла обозначаются
и а для пульсирующего цикла а0 и %.
Ограниченным пределом усталости называется наибольшее напряже-
ние цикла, которое выдерживает материал при числе повторений не более
чем N циклов (ордината кривой усталости, соответствующая числу
циклов N). Ограниченный предел усталости обозначается arN-.
Долговечностью (живучестью) называется число циклов, необходи-
мое для разрушения при данной величине напряжений цикла.
Основными факторами, влияющими на прочность при переменных
напряжениях, являются: концентрация напряжений, абсолютные раз-
меры детали, качество поверхности, асимметрия цикла, тип напряжен-
ного состояния. Незначительное влияние на прочность оказывают
форма цикла и частота изменения напражений (при нормальных темпе-
ратурах).
Эффективным коэффициентом концентрации при переменных напря-
жениях называется отношение предела усталости при отсутствии
концентрации напряжений к пределу усталости при ее нали-
чии (а_,)к:
к — °"1 •
1)к
соответственно для касательных напряжений
Приближенно можно принимать
*- = 0,4 +0,6/^.
Величина эффективного коэффициента концентрации зависит от
геометрических очертаний детали, распределения напряжений и меха-
нических свойств материала и связана с влиянием абсолютных разме-
ров. Обычно эффективный коэффициент концентрации для детали (к„)я
определяется как отношение предела усталости на гладком лаборатор-
213003
213004
213005
213005
213007
203
213008
ном образце диаметром 7—10 мм к пределу усталости (<з^)як на
детали или ее модели значительных размеров
/1. \ _ °-i _ (Мо
е0 ’
где (к0)о и s0 — эффективный коэффициент и масштабный фактор со-
гласно 213009.
Между (А,)о и коэффициентом концентрации а, в предположении
идеальной упругости материала существует приближенная зависимость
(Аа)о = 1 +?(а0— !)•
Фиг. 213007.
Коэффициент чувствительности
к концентрации
Значения q для сталей и легких
Коэффициент q называется
коэффициентом чувствительности
к концентрации и зависит от
свойств материала, абсолютных
размеров и распределения напря-
жений.
На фиг. 213007 представлены
значения коэффициента чувстви-
тельности к концентрации на-
пряжений в зависимости от ра-
диуса кривизны сечения в месте
концентрации (радиус галтели,
выточки и т. п.) для различных
отношений -----предела текуче-
сти к пределу прочности.
сплавов применительно к образцам
малого диаметра приведены также в табл. 213007.
Т а б л и ца 213007
[ • Материал Примечание
Сталь углеродистая Сталь легированная Алюминиевые сплавы 0,1—0,3 0,4—0,7 0,2—0,4 Ббльшие величины относятся к меньшим коэффициентам кон- центрации и ббльшим пределам прочности
213008
Масштабный фактор е характеризует влияние абсолютных разме-
ров на предел усталости. При наличии концентрации напряжений для
детали
где (а_1)дк — предел усталости детали;
(о-Ок — предел усталости лабораторного образца с концентрацией,
подобной той, Которая имеется у детали (например, гал-
тель, поперечное отверстие, резьба и т. п.).
При наличии концентрации напряжений для модели с размером d0:
где (<J-1)0K — предел усталости на модели.
204
213009
При 9тсутствии концентрации напряжений
где — предел усталости при отсутствии концентрации напряже-
ний для образца диаметром d0‘,
а_, — предел усталости на гладком лабораторном образце.
Предел усталости для детали (a^)^ в зависимости от предела 213009
усталости на гладких лабораторных образцах определяется различным
образом соответственно тому, как установлен эффективный коэффициент
концентрации.
Фиг. 213009.
Кривая масштабного фактора для сталей
а) Если этот коэффициент к, = определен на лабораторных
-образцах обычных размеров, то
\ _ g-l£KK
— “дГ •
б) Если этот коэффициент (кя)0 = определен на образцах или
' V—1/ОК
моделях увеличенных размеров (размером d0), то
/ X ____. (а-1)о ежк а-1£о£дк
' Ёов. (/<а)0 е9к ’
где е0 — значение масштабного фактора для того же размера при отсут-
ствии концентрации напряжений.
205
213010
213010
в) Если эффективный коэффициент концентрации (&0)од определен
на образцах или моделях таких же размеров, что и деталь, то предел
усталости детали
(о ) = —*
где ед — масштабный фактор для размеров детали при отсутствии кон-
центрации напряжений.
Значения коэффициентов едк и s0 в зависимости от размеров сечения
представлены на графике фиг. 213009.
Кривая 7 относится к полированным валам из углеродистой стали
при отсутствии концентрации напряжений; кривая 2—к шлифованным
и обточенным валам из углеродистой стали при отсутствии концент-
рации; кривая 3—к полированным валам из легированной стали при
отсутствии концентрации напряжения; кривая 4—к шлифованным и обто-
ченным валам из легированной стали при отсутствии коцентрации
и валам из углеродистой стали при наличии концентрации напряже-
ний; кривая 5—к легированным сталям при наличии умеренной кон-
центрации напряжения (галтель rld>O,l и т. п.); кривая 6—к леги-
рованным сталям при наличии резкой концентрации напряжения и к
валам с напрессованными деталями при аь<70 кг/мм2. Кривые 7, 2, 3, 4,
5, 6 относятся к изгибу. Кривая, нанесенная пунктиром, дает значения
£дк и е0 для случая переменного кручения.
Качество обработки поверхности влияет на предел усталости. Сни-
жение предела усталости при данной обработке (s^)u по сравнению
с пределом усталости на гладких, тщательно обработанных образцах
характеризуется коэффициентом поверхностной чувствительности
д = »-1 ~ (°-i)u
Влияние качества поверхности принимается во внимание главным
Фиг. 213010.
Коэффициент чувствительности
к состоянию поверхности
влиянию различных типов обработки
ствительности для конструкционных
образом при расчете вне зон кон-
центрации.
Значения Д в зависимости от
предела прочности приведены на
графике фиг. 213010. Кривая 7
относится к полированным валам;
кривая 2—к шлифованным; кри-
вая 3—к обточенным. С увели-
чением подачи значения Д возра-
стают. При асимметричных цик-
лах переменных напряжений
влияние качества поверхности от-
носят только к амплитуде напря-
жений. При переменном кручении
принимают Дт=О,бДа. Данные по
поверхности на коэффициент чув-
сталей приведены в табл. 213010.
206
213011-213012
Т а б л и ц а 213010
Тип обработки Д Примечание
Полировка Шлифовка Чистовая обточка Грубая обточка Необработанная поверхность при наличии окалины 0,0 0,05—0,15 0,1—0,2 0,2—0,4 0,4—0,6 Более высокие цифры относят- ся к сталям повышенного сопро- тивления и более хрупким. С увеличением подачи свыше 0,2 мм/об имеет место резкое увеличение Д
Диаграмма пределов усталости
Макростроение детали сказывается на пределе усталости. Поперек 213011
волокон предел усталости a_t меньше, чем вдоль:
all = Sa_j;
для углеродистых сталей 6 — 0,8 — 0,9;
для легированных сталей 8 = 0,7 — 0,8.
При значительном насыщении неметаллическими включениями этот
коэффициент может быть еще ниже.
Асимметрия цикла влияет на сопротивляемость переменным напря- 213012
жениям, причем с увеличением статической напряженности напряжение
цикла атах, соответствующее пределу прочности, растет, а амплитуда
ay уменьшается. При действии напряжений с асимметричным циклом,
в зависимости от степени асимметрии, разрушения могут происходить
от усталостных изломов без образования пластических деформаций или
после их образования. В первом
случае прочность характеризуется
сопротивлением разрушению, т. е.
пределами усталости; во втором —
сопротивлением пластическим дефор-
мациям, т. е. пределами текучести.
Для характеристики прочности
в зависимости от асимметрии цикла
используется диаграмма изменения
предельного напряжения цикла атах
(диаграмма Смита) в зависимости от
среднего напряжения (фиг. 213012).
Для левой части кривой макси-
мальные напряжения меньше пре-
дела текучести и прочность характе-
ризуется сопротивлением усталости,
поэтому величины а, являются пре-
делами усталости.
Эта часть кривой получается в
результате испытаний на усталость
при различных асимметриях. В правой части от точки С до точки D
кривая ограничивается пределом текучести и соответствует области,
где прочность определяется либо возникновением условно ограничи-
ваемых пластических деформаций, либо сопротивлением усталости после
образования пластических деформаций. Величины а в левой части от
207
213013-213014
213013
213014
Фиг. 213013.
Схематизированная диаграмма
пределов усталости
точки С до точки А могут соответствовать либо пределам усталости,
либо ограниченным пределам усталости для определенного числа циклов
повторения напряжений. Область левее луча ОС является областью
усталости, а правее — областью пластических деформаций и усталости
после наклепа.
Схематизированная диаграмма пределов усталости строится в пред-
положении, что она ограничивается двумя прямыми (фиг. 213013).
В области усталостной это прямая, проходящая через точки А и В, соот-
ветствующие пределам усталости при симметричном цикле и пуль-
сирующем цикле а0. В области, ограни-
чиваемой возникновением пластических
деформаций, это горизонтальная прямая
CD с ординатой as.
Точки F, L и М нижней ветви кри-
вой наносятся на таких же расстояниях
от OD, как и точки С, В и А.
Для построения диаграммы необхо-
димо располагать тремя характеристи-
ками <з^, а0, as и соответственно при
кручении тремя характеристиками
''о, 'cs> которые определяются испытанием
лабораторных образцов. Пределы теку-
чести as при изгибе и т, при кручении
определяются в условиях неравномер-
ного распределения напряжений и вели-
чины их оказываются выше, чем при
определении их в условиях однородного
напряженного состояния.
Для расчетов могут быть использо-
ваны, при действии нормальных напря-
жений, пределы текучести при одноос-
а при действии касательных напряже-
ний—пределы текучести, полученные при кручении трубчатых образцов.
Для того чтобы по диаграмме атах, <зт получить величину предела
прочности (по усталости или по текучести), соответствующего задан-
ному коэффициенту асимметрии г = ^2-, достаточно через начало коор-
°тах
динат провести луч под углом 3 к оси ст (или тт), причем
. q °тах^°тах __________________________ 2
°max + °min 1
Этот луч отсечет на кривой величину искомого предела.
Критерии прочности при плоском напряженном состоянии. При пло-
ском напряженном состоянии с симметричным циклом условия проч-
ности основываются как на опытных данных, так и на использовании
гипотез пластичности.
Из ряда экспериментальных исследований установлено, что для
случая напряженного состояния изгиба и кручения или растяжения
и кручения условие прочности может быть выражено так:
ном напряженном состоянии,
208
213014
В частном случае, когда a_1 = 2z_1, выражение (1) приводит
к условию прочности:
а’ + 4т2 =
При 3 т^! соответственно получается условие прочности
а2+3т2 = <£.
Если каждый из компонентов изменяется по своему асимметрич-
ному циклу с коэффициентом асимметрии г, то условие прочности
может быть выражено так:
где а,'— предел прочности при асимметрии цикла г для нормальных
напряжений;
т, — то же для касательных напряжений.
В общем случае плоского напряженного состояния, которое задано
главными напряжениями Oj и аа, условие прочности по гипотезе
наибольших касательных напряжений
01 — Оз Ч2’-!
или по другой гипотезе
°! + °3 — 01°2 = °-1-
Если учесть поправки, вытекающие из опытных данных, то пре-
дыдущие выражения будут выглядеть так:
(oi + оа)’Н (с^)2 01°а = °-v
Для материалов хрупких при обычных напряженных состояниях
условия прочности, как показывают опытные данные, могут быть
выражены в виде
(01У — °зу) —'Zy (siy + азу), (3)
где
к" = _ 1.
Для частного случая напряженного состояния изгиба и кручения
или растяжения и кручения, когда Oj-f-a, = а и — а1аа = т2 это условие
выразится так:
(1 — Ху)"а2 + 4 т2 4- 4Хус_1а =-4?,. (4)
В приведенных условиях прочности предполагается, что компо-
ненты напряжений действуют в одной фазе.
Если напряженное состояние является неоднородным, т. е. напряже-
ния неравномерно распределены по объему (например, нормальные
напряжения а являются напряжениями изгиба), то в качестве предела
усталости должны быть использованы пределы, полученные при соот-
ветствующем распределении напряжений.
14 Авиац. порши, двигателя.
209
213015- 214001
213015
213016
При наличии концентрации напряжений в расчет должны вводиться
величины амплитуд напряжений, увеличенные в соответствии с эффек-
тивными коэффициентами концентрации, т. е. Лвст и Л-т?.
К амплитудам напряжений относят также масштабный фактор.
Диаграмма пределов усталости при наличии влияния концентрации
и абсолютных, размеров видоизменяется. Влияние этих факторов относят
к амплитуде напряжений. По диаграмме, полученной для материала на
лабораторных образцах без концентрации, может быть получена такая
же диаграмма для детали путем умень-
шения амплитуд усталостной ветви
диаграммы в отношении 4. Получен-
ную линию, обычно близкую к пря-
мой, экстраполируют до значения
максимальных напряжений, соответ-
ствующих пределу текучести при на-
личии концентрации напряжений (as)K
(фиг. 213016). Для того чтобы по этой
диаграмме получить предел прочности
для детали, выраженный в напряже-
ниях без учета концентрации (номи-
нальных), достаточно провести из
начала координат луч под углом р,
причем
Отат
Диаграмма пределов усталости при
наличии концентрации напряжений
коэффициент асимметрии г определяется также по номинальным напря-
жениям.
Область левее луча ОС' является областью усталости, а правее—
областью пластических деформаций и усталости после наклепа.
214000 ПРОЧНОСТЬ И ПЛАСТИЧНОСТЬ ПРИ ПОВЫШЬННЫХ^ТЕМПЕРАТУРАХ
[2, 4, 6, 10, 11, 15]
214001 Характеристики пластичности и прочности, полученные при обычных
температурах, пригодны лишь до следующих значений температуры:
для нелегированных сталей.......до 300—350°
для легированных сталей.........до 350—4506
для легких металлов............. до 50—150°.
При более высоких температурах эти характеристики изменяются
и становятся зависимыми от длительности действия повышенных темпе-
ратур и напряжений. С повышением температуры предел
прочности (временное сопротивление) и предел текучести
уменьшаются, а пластичность обычно возрастает при недлительном
действии повышенных температур (фиг. 214001). В ряде случаев,
например, для аустенитных сталей, пластичность с повышением темпе-
ратуры снижается.
210
214002—214006
Ползучесть (крип) проявляется в образовании пластических дефор- 214002
маций в процессе длительного действия повышенных температур. Это
явление характеризуется кривыми нарастания деформации а в зависи-
мости от времени t (фиг. 214002). Эти кривые поднимаются тем круче,
чем выше действующее напряжение.
Фиг. 214001.
Зависимость предела текучести
от температуры
Фиг. 214002.
Кривые ползучести (крипа)
Скоростью ползучести называют скорость возрастания пластических 214003
деформаций:
которая определяется по правой части кривой, соответствующей уста-
новившемуся режиму ползучести.
Пределом ползучести
ствующее определенной скорости
называется напряжение, соответ-
ползучести, задаваемой условно
(например, 0,001% в час). С по-
вышением температуры предел пол-
зучести уменьшается.
Деформацией ползучести гс
называется величина пластиче-
ской деформации за данный про-
межуток времени Т. Эта величина
определяется по зависимости
ес — s о + Vc Т,
где г0—отрезок, отсекаемый на оси
ординат прямой, соответствующей
установившейся ползучести (более
точно ес получается непосредствен-
но по диаграмме ползучести).
Прочность при повышенных температурах характеризуется пределом
длительной прочности Этим пределом является разрушающее
напряжение при определенной температуре и длительности действия.
Предел длительной прочности для легированных сталей может быть
меньше предела ползучести и становится основной характеристикой
для расчета. Предел длительной прочности снижается с увеличением
температуры и задается графиками зависимости от времени действия
напряжений при различных температурах (фиг. 214006).
Фиг. 214006.
Кривые длительной прочности
214004
214005
214006
14*
211
214007- 215004
214007
215000
215001
215002
Для асимметричных циклов переменных напряжений в условиях
повышенных температур диаграмма пределов напряжений ограничивается
в правой своей части либо пределами ползучести, либо пределами дли-
тельной прочности (фиг. 214007). При весьма повышенных температурах
215003
ветвь пределов прочности по усталости
может совершенно устраниться.
ОПРЕДЕЛЕНИЕ ЗАПАСОВ ПРОЧНОСТИ
[1, 4, 5, 7, 8, 9, 18]
Расчет на прочность ведется либо
по запасам прочности, либо по допу-
скаемым напряжениям.
Запасом прочности называется отно-
шение разрушающего деталь усилия,
действующего в данном сечении, к уси-
лию, действующему на нее. Если в рас-
сматриваемом сечении действующие
усилия сводятся к нескольким (напри-
мер, крутящий и изгибающий моменты),
то на основании критериев прочности
определяется одно эквивалентное уси-
лие, которое сопоставляется с соответ-
ствующим разрушающим. Вместо отно- фИг. 214007.
шения усилий может приниматься отно- Диаграмма предельных напряже-
шение номинальных напряжений—раз- ни» при повышенных температурах
рушающих к действующим.
При определении запасов прочности должны учитываться основные
факторы, влияющие на прочность: характеристики материала, концен-
трация напряжений, асимметрия цикла, абсолютные размеры.
Величина необходимого запаса прочности связана с возможными
перегрузками детали (не учитываемыми расчетом), с отклонениями в меха-
нических свойствах, со степенью соответствия предпосылок расчета
действительным условиям работы детали и с рядом других факторов.
Допускаемым напряжением называется та наибольшая величина
номинальных напряжений (т. е. вычисляемых по обычным форму-
лам сопротивления материалов без учета концентрации напряже-
ний) в детали, при действии которых еще обеспечивается необходимый
запас прочности. Величина допускаемых напряжений должна отражать
влияние концентрации напряжений, асимметрии цикла и других
факторов, влияющих на прочность детали. Величина допускаемых
напряжений зависит от свойств металла, размеров и формы детали,
метода расчета напряжений и других факторов.
215004 Определение запаса прочности при одноосном напряженном состояний.
а) Если известна схематизированная диаграмма пределов усталости
для рассчитываемой детали, то по коэффициенту асимметрии опреде-
ляется угол наклона ркоси атлуча, отсекающего предел усталости детали
(°г)д, причем tg₽ = j~.
212
215004
Запас прочности
°max
О)
где omax—максимальное номинальное напряжение, действующее в детали.
Соответственно для касательных напряжений
б) Если известна диаграмма пределов усталости для материала
детали без концентрации напряжений (схематизированная), то предел
прочности, вводимый в расчет (учитывающий асимметрию цикла и кон-
центрацию напряжений), отсекается на диаграмме лучом, проводимым
под углом р к оси <зт, причем
tg₽=l +
®дк °"
(3)
где —эффективный коэффициент концентрации на образце (см. 213007).
Выражение (3) вытекает из условия подобия циклов действующих
£
в детали: максимального напряжения — ^^“^тах (см. 213009)
®ДК
и максимального напряжения, выбираемого по диаграмме smaxd =
= om(f+av(f, где индекс d указывает на напряжения, соответствующие
диаграмме пределов усталости для материала. Условие подобия циклов
выражается следующим образом:
°т + ~ °F
max d ди = |g (j.
°тах °т
Запас прочности
где
Л_.
еДН ’
соответственно при переменном кручении, на основании аналогичных
зависимостей
(5)
где
213
215004
в) Если известны основные характеристики механической прочности,
т. е. пределы усталости а_i, а0, т-i, т0 и пределы текучести ss, ts,
то для запаса прочности, который определяется по усталостной ветви
диаграммы, может быть использовано аналитическое выражение. Это
выражение устанавливается из зависимости (4). В связи с прямоли-
нейным очертанием диаграммы omaxd может быть выражено так:
®max d — 5—1 4" ®md (1 V)>
где
' °о
согласно (4)
®md ~ Rs
тогда выражение для запаса прочности па находится из зависимости (4)
( ат + ~2-~ S-1 + smd (1 Ф) = 5-1 + Па Sm (I —ф),
X 6дк У
откуда
о
а
Пз К ’
едк
(6)
где
ф=2_^±»
т °в
и едк—как и в формуле (3).
Соответственно для касательных напряжений
f fV +
п- =
------+ Ф-’
®дк
(7)
где
ф. = 2с-1 =»
Для ветви диаграммы, соответствующей пределу текучести, запас
прочности определяют из выражения (4), принимая во внимание, что
в этом случае, независимо от асимметрии cmax d = ar = as и соответственно
^max d “
ИЛИ
(п4т= ог+’от’
(8)
если учесть изменение предела текучести от концентрации напряжений.
Соответственно для касательных напряжений
’Ш
или.
(9)
214
215005
Следует принимать во внимание меньшую из величин п по фор-
мулам (6) или (8) и (7) или (9).
Формулы (6) и (7) для запасов прочности, основанные на условии
подобных циклов напряжений, действующих и выбираемых на диаграмме,
предполагают равновероятной возможность увеличения статической
и переменной частей действующих напряжений. В ряде деталей можно
заранее полагать, что может изменяться одна из составляющих—пере-
менная или постоянная. Например, в клапанных пружинах вероятно
увеличение амплитуд напряжений благодаря колебаниям при постоянной
статической напряженности, достаточно точно устанавливаемой при
сборке. В болтовых соединениях возможны отклонения по статической
напряженности вследствие непостоянства начальной затяжки, а также
отклонения переменных напряжений вследствие ослабления затяжки
или повышения числа оборотов двигателя.
В связи с этим возможно определение запаса прочности nv только по
амплитуде и пт только по статической напряженности.
Запас прочности
(|0>
где, как и ранее
Т О» ’
и соответственно
Запас прочности пт определяется из выражений (8) и (9). . _
Определение запасов прочности при одновременном действии изгиба 215UO5
и кручения или растяжения и кручения.
а) Если известны схематизированные диаграммы пределов уста-
лости для рассчитываемой детали при изгибе (или растяжении) и при
кручении, то сначала по этим диаграммам определяют пределы уста-
лости для детали при изгибе и при кручении. Для этого на них про-
водят лучи под углами ₽« и рт, причем
tg₽«= и ’
где г, — коэффициент асимметрии номинальных нормальных напряжений;
гх — коэффициент асимметрии касательных напряжений.
Запас прочности по нормальным напряжениям
и —
П'~ а
шах
по касательным напряжениям
П-=^-
xmax
215
215036—215007
Так как
Oil
— == — и — = — ,
=г л, хг ««-
то общий запас прочности по (2) п. 213014 составит
215006
215007
(О
б) Если известна диаграмма пределов усталости для материала
детали (схематизированная), то пределы прочности, вводимые в расчет
и хг (учитывающие соответственно асимметрию цикла и концент-
рацию напряжений), отсекаются на диаграмме лучом, проводимым под
углом рв или к оси ат или тт; эти углы определяются по формулам
ср- ср 'ey
tg?e=i + ^ — 1 + (*в)д£; tg₽T=i + f-£. (2)
**
Запас прочности для нормальных напряжений определяется по
формуле (4) п. 215004, а для касательных напряжений — по формуле
(5) п. 215004.
Общий запас прочности определяется по формуле (1).
в) Если известны основные характеристики механической прочнос-
ти, т. е. пределы усталости т0 и пределы текучести as, ts,
то по формулам (6), (7), (8) и (9) п. 215004 определяются запасы
прочности по нормальным и касательным напряжениям, а общий запас
прочности вычисляется по формуле (1).
Определение запасов прочности для общего случая плоского напряжен-
ного состояния. В общем случае плоское напряженное состояние харак-
теризуется тремя напряжениями sx, и каждое из которых
обладает своей асимметрией цикла.
Предварительно определяются амплитуды srv и trV эквивалентных
напряжений с симметричным циклом согласно (6) и (7) п. 215004:
(srv)x = axV + Ф» ахт\
(arv)y ~ + Фо аУт j
(xrv) — XV + Фг'т-
Для этих напряжений составляются условия прочности по наи-
большим касательным напряжениям
|~(°Г7)х-(°г7)уу । d \ .
запасов прочности в тех случаях, когда .отсутствуют
механических характеристиках, может производиться
Определение
полные данные о
по формулам
С_1
г------1----
КО . °-1
— + —От
бдх О,
(О
«т = 5-----
Ла _
.г+ .т
д» * >
(2)
216
215008-216002
Общий запас прочности вычисляется по формуле (1) п. 215005.
Определение запасов прочности при ограниченной долговечности 215008
(на перегрузочных режимах). Если максимальное значение перегрузоч-
ных напряжений действующих циклов составляет а ограничен-
ный предел усталости этого числа циклов по кривой усталости детали
(°лу)д, то запас прочности составляет:
п = ^°гДг^
Величины (огЛГ)д при отсутствии кривой усталости для детали
могут быть взяты по кривой усталости для металла, но с учетом
влияния концентрации напряжений и абсолютных размеров:
п = е*к °- .
cn
Расчеты на ограниченное число циклов за отсутствием достаточно
точных данных о форме кривой усталости и влиянии различных факто-
ров на нее могут иметь лишь ориентировочное значение.
ДАННЫЕ ДЛЯ РАСЧЕТА ЗАПАСОВ ПРОЧНОСТИ [1, 7, 9, 10, 18] 216000
Механические свойства конструкционных сталей и сплавов приве- 216001
дены в таблице 216001. Характеристики усталости получены на образ-
цах диаметром 7 —12 мм.
При отсутствии опытных данных пределы усталости для сталей
могут приближенно определяться из соотношений
5=1,4-1,6,
= 1,6-2,0,
-‘ = 0,55 - 0,60.
Для легких сплавов:
— =0,55 — 0,60; — =1,4—2,0.
По данным, приведенным в таблицах, и вычислениям по эмпири-
ческим соотношениям, могут быть построены схематизированные диаграм-
мы пределов усталости.
Эффективные коэффициенты концентрации. Для круговых галтелей 216002
сопряжений при переменном изгибе с симметричным циклом (изгиб
с вращением) значения ка представлены на фиг. 216002-1. Все значе-
ния даны для D/d=2. Кривая 7 дает зависимость теоретического коэф-
фициента концентрации от отношения г/d; кривая 2—относится к леги-
рованным сталям аь= 120ч-140 кг[мм2 при диаметре <7=304-50 мм;
кривая 3—к легированным сталям о6= 1204-140 кг/мм2 при диаметре
<7=74-16 мм и к сталям с сь=50 кг/мм2 при диаметре <7=30-4-50 мм;
кривая 4—к сталям с оь=50 кг) мм2, при диаметре <7=7 4- 16 мм.
217
216002
Таблица 213001
Марка по ОСТ Термическая обработка ’6 кг/ммг Ф 0, ’-1 '“-I
25 Нор мализация 43—55 50 24 13 14—25 11—13
45 >> 69 — 40 ' 39 —
38ХА Закалка 860°, масло. Отпуск 550°, масло 83 59 69 —» 38* —- —
39ХМА » 870°, » » 600°, » 107 —— 94 — 48* —
20ХНЗА » 830°, » 560°, » 95 60 87 —» 43—45 . 25—26
25ХНВА 850°, » » 560°, » 127 52 95 60 56* . 28—30
40ХНМА » 810°, » 580°, » 114 58 103 73 55* — 30
18ХНВА » 950°, » » 170°, воздух 116 50 85 55 54—59* — 30—33
37XH3A » 830°, » » 550°, масло 123 52 — — 57* —- —
АЛ-4 » 535°, вода. » 175°, воздух 23 5 21 — 7.5* «— —-
АЛ-5 510°, » 180°, » 24 — 23 — 6* — —
Примечание. о_! дано но испытаниям при изгибе с вращением.
Для других sb следует производить интерполяцию между кривыми
2 и 3 для диаметра </=ЗОч-5О мм и между кривыми 3 и 4 для диаметра
d=7-b-16 мм.
На фиг. 216002-II приведены значения при переменном круче-
нии для сечения диаметром d < 16 мм при отношении D/d—2.
Фиг. 216002-1.
Эффективные коэффициенты концентра-
ции для галтели при изгибе
Фиг. 216002-П.
Эффективные коэффициенты концентра-
ции для галтели при кручении
Кривая 1 дает зависимость теоретического коэффициента концент-
рации от отношения r/d; кривая 2 относится к легированным сталям
сь=100—120 кг[мм\ кривая 3—к сталям ой=50 кг)ммг. Для других
Об следует производить интерполяцию между кривыми 2 и 3.
На фиг. 216002-III приведены поправочные коэффициенты для
пересчета на различные отношения D[d:
k=t(ka-1)4-1,
218
216002
где ка и ft0o для изгиба и к-а для кручения—при отношении 7 = 2, а jk—со-
ответственно и kz (полученные по фиг. 216004-1 или фиг. 216004-П)
при данном отношении D/d.
Кривая 1 дает значения Е для изгиба, кривая 2—для кручения.
Значения ка для валов с напрессованными деталями при изгибе
с вращением представлены на фиг. 216002-1V.
Кривая 7 относится к типу В при сечении диаметром <7=50 мм; кривая
Поправочные коэффициенты
Фиг. 216002-IV.
Эффективные коэффициенты при напрес-
совках
2—к типу С при </=40-:50 мм; кривая 5—к типу А при <7=40-4-50 мм;
кривая 4—к типу С при d— 10=14 мм-
При наличии поперечного отверстия в круглом вале значения (ка)в
для переменного изгиба даны на фиг. 216002-V. Кривая 7 относится
к валам <7=40-4-70 мм при отно-
шении ajd = 0,05-4-0,1; кривая
2—к валам <7=40=70 мм при
a/d=0,15=0,25; кривая 3—к валам
<7=6—8 мм при «/<7 = 0,15 = 0,25.
Значения (к-)0 для переменного
кручения при «/<7=0,1-4-0,25 даны
на фиг. 216002-VI. Кривая 7
относится к валам <7=40=60 мм;
кривая 2—к валам <7= 12-4-16 мм.
На фиг. 216002-V, VI и VII
даны значения эффективных коэф-
фициентов концентрации, вычи-
сленные по нетто сечению.
Коэффициенты ка для случая
Фиг. 216002-V.
Эффективные коэффициенты концентрации
для поперечного отверстия при изгибе
полосы прямоугольного попереч-
ного сечения с поперечным круглым отверстием диаметра <7 даны на
фиг. 216002-VII.
Кривая 7 относится к случаю переменного растяжения-сжатия при от-
ношении <7/6=0,15-4-0,25;кривая 2—переменного изгиба при «/<7=0,1-4-0,25.
219
216003
216003
Для шпоночной канавки при изгибе с вращением круглого вала
коэффициент концентрации Ка в зависимости от предела прочности пока-
зан на графике фиг. 216003-1. Значения Ко вычислены по нетто-сечению.
Фиг. 216002-VI.
Эффективные коэффициенты концентра-
ции для поперечного отверстия при кру-
чении
Фиг. 216002-VII.
Эффективные коэффициенты концентра-
ции для поперечного отверстия при рас-
тяжении-сжатии в полосе
Для шлиц на круглом валу в зависимости от их профиля коэф-
фициент ат составляет: прямоугольный профиль а-=2,5—3,2, эвольвент-
ный профиль с заостренными входящими углами впадин ат = 2,2-ь 2,7,
эвольвентный профиль с закругленной впадиной о^= 1,2-5-1,5.
Фиг. 216003-1.
Коэффициенты концентрации
для шпоночной канавки
Фиг. 216003-П.
Коэффициенты концентрации
для входящего угла
Для входящих углов шпоночного паза при кручении величины ат
в зависимости от р// приведены на фиг. 216003-11.
220
216003
ЛИТЕРАТУРА И ИСТОЧНИКИ К 210000
1. Беляев Н. М., Сопротивление материалов, Гостехиздат, 1945.
2. Бордзыка А. М., Методы горячих механических испытаний металлов, ОНТИ,
1938.
3. ДавидеиковН. Н., Механические свойства и испытания металлов, 2 изд.,
вып. 1, Кубуч, 1933.
4. ДымовА. И., Строительная механика машин, Л.—М., Гос. технико-теорети-
ческое издательство, 1933.
5. КинасошвилиР. С., Определение запасов прочности, Труды № 5—6, 1943.
6. Михайлов-Михеев, Металл в современном котлотурбостроении, Энерго-
издат, 1937.
7. ОдингИ. А., Усталость металлов и допускаемые напряжения в машиностро-
ении, Машгиз, 1947.
8. Сервисен С. В., «Вестник машиностроения» № 5, 1943.
9. СёренсеиС. В., Тетельбаум И. М. .ПригоровскийН. И., Динами-
ческая прочность в машиностроении, Машгиз, 1945.
10. Фридман Я. Б., Механические свойства металлов, Оборонгиз, 1945.
11. Химушин Ф. Ф., Нержавеющие, кислотоупорные и жароупорные стали, Метал-
лургиздат, 1945.
12. Гаф Г. Дж., Усталость металлов (перевод), ОНТИ, 1935.
13. М у р Г. Ф. и Ко м м е р с Дж. В., Усталость металлов, дерева и бетона (пере-
вод), Гостехиздат, 1929.
14. Ляв А., Математическая теория упругости (перевод), ОНТИ, 1935.
15. На дай А., Пластичность, Главная редакция общетехнической литературы, 1935.
16. Тимошенко С. П., Сопротивление материалов, 1946.
17. Тимошенко С. П., Теория упругости, ГОНТИ, 1934.
18. Энциклопедический справочник «Машиностроение», т. 1, кн. 2, Машгиз, 1947.
220000—221002
220000 РАСЧЕТ НА ПРОЧНОСТЬ КОЛЕНЧАТЫХ ВАЛОВ
221000
ТИПИЧНЫЕ ПОЛОМКИ КОЛЕНЧАТЫХ ВАЛОВ
22I00I
Поломки коленчатых валов авиационных двигателей от дефектов
материала встречаются редко. В подавляющем большинстве случаев
изломы коленчатых валов носят усталостный характер; они происходят
от переменных напряжений кручения и изгиба. Разрушение от усталости
начинается в местах наибольших кон-
центраций напряжений. К таким ме-
стам относятся:
I) отверстия для смазки в ша-
тунных и коренных шейках;
Фиг. 221002-1.
Разрушение шатунной шейки
Фиг. 221002-И.
Вид излома шейки коленча-
того вала. Разрушение нача-
лось на внутренней поверх-
ности шейки у края отвер-
стия для смазки
2) галтели сопряжения щек с шейками;
3) места разъемов коленчатых валов звездообразных двигателей.
221002 Шейки нагружены, главным образом, переменными крутящими
моментами. При поломках шеек (фиг. 221002-1) трещины начинаются
у краев отверстий для смазки, где концентрация напряжений наиболь-
шая, и распространяются по спирали в направлении, перпендикулярном
к главным нормальным напряжениям.
222
221003
Края отверстия для смазки обычно менее закругляются с внутрен-
ней стороны, чем с внешней; поэтому трещины могут начинаться не
Фиг. 221002-Ш.
Вид излома шейки коленчатого вала при ^грубой обработке
стенок отверстия. Разрушение началось со стенки отверстия
для смазки
только с наружной поверхности шеек, где номинальные напряжения
наибольшие, но и с внутренней (фиг. 221002-П). Если поверхность
смазочного отверстия грубо обработана,
трещина иногда возникает не с краев,
а со стенки отверстия (фиг- 221002-Ш).
В щеках коленчатых валов возни- 221003
кают напряжения от изгиба, кручения
и растяжения или сжатия. Трещины
обычно начинаются в галтелях сопряже-
ний щек с шейками (с внутренней сто-
роны шеек). В этих местах возникает
значительная концентрация напряжений;
действительные напряжения здесь оказы-
ваются выше, чем в угловых точках
сечения щек, хотя номинальные напря-
жения в углах сечения бывают боль-
шими, чем в серединах широких сторон.
Фиг. 221003-1.
Вид излома щеки. Разрушение на-
чалось в галтели коренной шейки
На фиг. 221003-1 показано типичное разрушение щеки от усталости.
Трещина начиналась, как это_ видно по «линиям отдыха», в галтели
223
221004- 222003
сопряжения. Только при очень толстых и узких щеках разрушение
начинается с углов сечения (фиг. 221003-11); однако щеки подобной
формы в современных авиационных двигателях не встречаются.
221004 В большинстве случаев коленчатые валы звездообразных двигате-
лей разборные. Шатунные шейки обычно сочленяются со щеками при
помощи болтов, стягивающих разрезные проушины щек. На сопряга-
ющихся поверхностях шеек и щек^возникают контактные напряжения.
Фиг. 221003-11.
Вид излома толстой и узкой щеки. Раз-
рушение началось с угла щеки
Фиг. 221004-1.
Поломка щеки коленчатого вала
звездообразного двигателя
Концентрация напряжений при таком соединении не исследована; по
аналогии с концентрацией, возникающей при напрессовке на вал де-
талей, можно предположить, что она не мала [9]. Ветви проушины
обычно ломаются у заделки (фиг. 22I004-I) или по минимальному
сечению вблизи нее.
Контактный характер напряжений, неопределенность коэффициента
трения и коэффициента концентрации напряжений делают расчет узла
разъема одной из сложных и еще не решенных задач. Прочность узла
разъема не исследовалась также и опытным путем. Некоторые сведения
о влиянии предварительного натяга и коэффициента трения на проч-
ность проушины можно найти в [4].
221005 Запасы прочности определяются только для двух видов опасных
мест коленчатого вала: у краев масляных отверстий шеек и в галте-
лях сопряжений неразъемных щек с шейками вала.
222000
РАСЧЕТНЫЕ НАГРУЗКИ
222001 Коленчатые валы рассчитываются на номинальном режиме.
222002 За расчетные нагрузки, действующие на коленчатый вал, принима-
ются силы давления газов и силы инерции двигающихся масс криво-
шипно-шатунного механизма.
222003 Расчетные нагрузки определяются из динамического расчета.
Газовые силы желательно вычислять' из опытной индикаторной
диаграммы, снятой непосредственно с двигателя или его одноцилинд-
224
222004- 223003
ровой установки. Если опытной индикаторной диаграммы не имеется,
она определяется из теплового расчета или строится по стандартному
методу. Газовые силы в настоящем разделе определены из индикатор-
ных диаграмм, построенных стандартным методом.
Кинематика прицепных шатунов при динамическом расчете должна 222004
учитываться, так как она существенно влияет на амплитуды напряже-
ний в опасных точках вала.
Кроме нагрузок, указанных в 222002, на коленчатый вал действуют 222005
инерционные нагрузки от крутильных и изгибных колебаний его
системы. Определит* их расчетным путем практически невозможно;
поэтому нагрузки от вибраций в расчет не вводятся. (Расчет, в кото-
ром учитывается переменный характер действующих сил, но не рас-
сматриваются инерционные нагрузки от вибраций, называется квази-
статическим).
Дополнительные напряжения в коленчатом вале от крутильных
колебаний его системы определяются в части 3 настоящего тома.
Дополнительные напряжения в коленчатых валах авиационных
двигателей от изгибных колебаний экспериментально изучаются только
в самое последнее время [6,7]. Практические возможности использо-
вания результатов этих исследований в расчетах на прочность пока
недостаточны.
Запасы прочности, определяемые без учета вибрационной нагрузки, 222006
носят сравнительный характер и только в первом приближении позво-
ляют установить рациональные размеры коленчатого вала. Надежность
его работы во многом зависит от дополнительной нагрузки, возника-
ющей от вибраций.
Некоторая оценка влияния вибраций на запасы прочности колен-
чатых валов V-образных и звездообразных двигателей дана в 228000.
МЕТОДЫ РАСЧЕТА КОЛЕНЧАТЫХ ВАЛОВ 223000
Коленчатые валы V-образных двигателей рассчитываются как раз- 223001
резные [2].
Запасы прочности у краев масляных отверстий шеек коленчатых 223002
валов V-образных двигателей практически не зависят от выбора рас-
четной схемы. Зато значительное влияние оказывает выбор расчетной
схемы на запасы прочности в галтелях сопряжений щек с шейками.
Если коленчатые валы рассчитываются как разрезные балки, то запасы
прочности в галтелях оказываются заниженными, так как при этом
не учитывается разгружающее действие надопорных моментов. Вли-
яние расчетной схемы коленчатых валов V-образных двигателей на
запасы прочности в опасных точках вала подробнее рассматривается
в 227300.
В звездообразных двигателях наличие дополнительной опоры колен- 223003
чатого вала в носке существенно влияет на его прочность. Для учета
этого влияния и определения реакций в доп?лнительной опоре коленча-
тые валы звездообразных двигателей рассчитываются по схеме нераз-
резной прямолинейной балки.
15 Авиац. порши, двигатели.
225
224000- 224102
224000 НОМИНАЛЬНЫЕ НАПРЯЖЕНИЯ В ОПАСНЫХ ТОЧКАХ КОЛЕНЧАТЫХ ВАЛОВ
V-ОБРАЗНЫХ ДВИГАТЕЛЕЙ
224100 Обозначения
224101 На фиг. 224101-1 дана схема z-того колена вала. Нумерация корен-
ных шеек и колен ведется от винта. В подвижной системе координат
xyz ось Ох располагается в плоскости i-того колена, ось Оу—перпен-
дикулярна плоскости колена, ось Oz совмещается с осью вала. Поло-
жительное направление оси Оу получается поворотом на 90° оси Ох обратно
направлению вращения коленчатого вала, если Смотреть со стороны
винта.
Фиг. 224101-1.
Схема /-того колена вала V-образного двигателя
Положение коленчатого вала в пространстве определяется углом а
между неподвижной осью О® и плоскостью кривошипа первого колена
(фиг. 224I01-II).
Ось Ов обычно направляют параллельно осям ряда цилиндров
с главными шатунами. Если оба шатуна главные, то ось Ов [может
быть направлена параллельно осям любого ряда цилиндров.
224102 ’ На фиг. 224101-1 приняты обозначения:
Zc — результирующая всех сил, действующих в радиальном
направлении на шатунную шейку, включая силу инерции
самой шатунной шейки; сила Zc считается приложенной
к середине шатунной шейки и принимается положительной,
если сжимает.щеки кривошипа;
Те — результирующая всех тангенциальных сил, действующих
на шатунную шейку; сила То считается приложенной к се-
редине шатунной шейки и принимается положительной, если
направлена по вращению коленчатого вала;
226
224200—224201
Р,щ — сила инерции щек;
Рцх', Рцх — составляющие сил инерции противовесов в плоскости ко-
лена;
P,iff; Pjzy — составляющие сил инерции противовесов в плоскости,
перпендикулярной плоскости колена.
Если противовесы расположены в плоскости колена, то
Рjiy ~ Рjig ~ 0.
На фиг. 224101-1 силы инерции щек и противовесов даны в напра->
влениях их действия.
Мир/+1 —крутящий момент, передающийся через заднюю опорную
шейку (более удаленную От винта) z'-того колена.
Мкр i — реактивный момент, скручивающий переднюю опорную
шейку i-того колена.
Хг, Xt+i — компоненты реакций z'-той и z’4-1 опор в плоскости xz от
нагрузок, действующих в i-том колене.
Yi; Yi+i — компоненты реакций z-той и z + 1 опор в плоскости yz от на-
грузок, действующих в z-том колене.
Определение опорных реакций 224200
Компоненты опорных реакций (фиг. 224101-1): 224201
(1)
Xftl = -у Zc + Ai+1, (2)
(3)
У^^тг+в^, (4)
227
15*
224300- 224402
где
л __ I — mi 4’ р , I ~ mi ~~ si р । 4" s2 р
— j rj щ -j---------j < fix -f 2----- ' ;2x>
д .____ ^4- wii ni2 p' j m14~ Si p [ I ms s2 q
rti.i---------j г i щ --------j ri'ix 1 j--------‘jix,
d mi — $i p . тг + ss p
"f — I tjiy 4-------2 l/ith
D _____ mi 4“ S1 П , Z — Ш2 — s2 П
Ofti — --j-- FJ1» 4-----j----^729-
Коэффициенты Ait Д-о, Bt и B/+i постоянны (не зависят от угла a).
224300 Номинальные напряжения в коренных шейках
224301 Коренные шейки рассчитываются только на кручение [2].
224302 Номинальное касательное напряжение в z-той шейке
где И/кр —модуль сопротивления коренной шейки кручению, равный
(если не учитывать масляного сверления)
И'«=в'<,[1-С4)‘]' (2>
причем d и В — соответственно наружный и внутренний диаметры корен-
ной шейки.
224400 Номинальные напряжения в шатунных шейках
224401 Опасные точки шатунных шеек расположены у масляных отвер-
стий. Принимается, что масляное отверстие просверлено в среднем
сечении шатунной шейки (в плоскости действия сил Zc и Тс). В этом
сечении действуют (фиг. 224101-1):
1. Крутящий момент
Л4Кр£ш =-Л4Кр i-f-i-}-У,-+1 R = Л1Кр i — YjR. (1)
2. Изгибающий момент в плоскости колена
Мих = Xt аг — Pjlx (аг — т1 — Si) + Р]Щ (ax — mi) =
=^bia,-P/2x(as-mi-s2) + P/nl(a1-m2). (2)
3. Изгибающий момент в плоскости, перпендикулярной плоскости
колена,
MaiJ = Yt а. - Pjlg (01 - nil - Si) =. У,» о2 - Р1-2В (a, — т2 — s2) . (3)
224402 Обозначим угол между осью Ох и радиусом-вектором г, проходя-
щим через ось масляного отверстия, через у0 (фиг. 224101-1). Угол у®
изменяется от 4-180° до —180°; положительное значение угла у соот-
ветствует повороту оси Ох до совмещения с радиусом-вектором г
по направлению вращения коленчатого вала, если смотреть со стороны
винта.
228
224500-224503
Изгибающий момент в плоскости, проходящей через ось масляного
отверстия, равен
Л4Т= — Л4иа.со8у + Л4И!,51п у. (1)
Положительное значение Л4Т вызывает у края отверстия растяже-
ние.
Номинальные касательные и нормальные напряжения у края отвер-
стия будут:
_ М«р - ш
И'кр
М
0=Ж’
(2)
(3)
где И7кр и Wh —модули сопротивления сечения шатунной шейки соот-
ветственно на кручение и на изгиб;
Г’И'иН-и'кр,
причем di и Si —соответственно наружный и внутренний
шатунной шейки.
(4)
диаметры
напряже-
Номинальные напряжения в щеках
В щеках определяются только нормальные номинальные
ния в точках поперечного сечения, расположенных в серединах широ-
ких сторон (точки 7 и 2 на фиг. 224101-1).
Для левой щеки колена в этих точках возникают нормальные
напряжения:
1) от момента Мих, изгибающего щеку в направлении малой
Жесткости,
(1)
2) от растягивающей щеку силы
S = P/lx-XI., (2)
В точке 7 левой щеки номинальное нормальное напряжение равно
Мих s
^ит7п+^
224500
224501
224502
224503
0(9 =
(1)
а в точке 2 щеки
5
(2)
0(2)= М^_.
где WBmin — модуль сопротивления изгибу щеки в плоскости колена;
F — площадь расчетного сечения щеки;
И/ • = — 731
и и шт — 6 > Vй/
F=bh, (4)
причем b и Л — соответственно широкая и узкая стороны сечения щеки.
229
224504- 224701
224504 Аналогично для правой щеки колена (фиг. 224101-1):
Max=Xi+1mt + Pj2xs2, (1)
S = Pj2x-Xi+1. (2)
224505 Номинальные напряжения в опасных точках 1 и 2 правой щеки
определяются по формулам (1) и (2) п. 224503.
224600 Номинальные амплитуды и средние напряжения
в опасных точках
224601 Если в расчетных точках различных сечений концентрация напря-
жений одинакова (например, точки у краев масляных отверстий),
то наиболее опасной будет та*из них, для которой номинальная ампли-
туда напряжений наибольшая.
224602 При расчете на прочность необходимо:
1. Найти максимальное и минимальное номинальные напряжения
В опасных точках (amax, ®mm и Тщах, tmin)- ДЛЯ ЭТОГО ВЫЧИСЛЯЮТСЯ
цоминальные напряжения по углу поворота а коленчатого вала за цикл
работы двигателя и затем определяются их экстремальные значения.
Иногда положения коленчатого вала, соответствующие экстремальным
напряжениям, очевидны; тогда напряжения вычисляются только для
этих положений.
2. По максимальным и минимальным напряжениям определить
амплитуды и средние напряжения за цикл по формулам
°тах— °min . ''max- Tmin ,
2 > 2 ’ / )
„ °max + °mjn ’max*^ Tmin
2 ’ 2 '
224700 Пример расчета номинальных амплитуд и
средних напряжений в опасных точках
коленчатого вала
В качестве примера берется ко-
ленчатый вал двигателя «Мерлин» XX
224701 (фиг. 224700) [2].
Коренные шейки в сечении по масля-
ному отверстию имеют следующие размеры:
d = 8,5 см; 3 = 6,5 см; IV кр = 79,6 см3.
Наиболее нагружена та коренная шей-
ка, для которой амплитуда момента кру-
чения наибольшая; такой шейкой оказы-
вается пятая (от винта). Из диаграммы
крутящего момента этой шейки (фиг. 224701,
кривая 7) находим экстремальные значения:
(Мкр б)шах — 52320 кгсм,
(А^кР5)ш1п = — 21550 кгсм.
Основные размеры колена вала
двигателя «Мерлин» XX
230
224701
Максимальное и минимальное номинальные напряжения кручения
в пятой коренной шейке определяются по формуле (1) п. 224302:
Xmax = (-^Р5)тах = б57 ~ = (М ъ)ш1а = _
кр **кр
Номинальная амплитуда и среднее касательное напряжение опреде-
ляются по формулам (I) и (2) п. 224602:
Фиг. 224701.
Диаграмма моментов кручения третьей и пятой коренных шеек двигателя
«Мерлин» XX
Немногим меньше амплитуда касательных напряжений в третьей
коренной шейке. Для нее экстремальные моменты кручения (фиг. 224701,
кривая 2) равны
(Л4кр з)шах = 54860 кгсм', 3)min = —17350 кгсм,
Чему соответствуют:
•tmax = 690 кг] см2-, тт1п — 218 кг!см2-, % = 454 кг]см2-, = 236 кг/см2.
231
224702
224702 Шатунные шейки имеют следующие размеры:
rfi = 7,05 см; 51 = 4,4 см; WKP = 58,2 см*; Wa ='29,1 см*.
Масляные отверстия просверлены в плоскости, перпендикулярной
плоскости кривошипа (у° = 90°).
Противовесы расположены в плоскости кривошипов; поэтому
= Р;2Н — о»
колена вала симметричны:
а, = аа = | — 7,7 см.
При принятом методе расчета (по разрезной схеме) нормальные
напряжения у краев масляных отверстий всех шатунных шеек одина-
ковы; следовательно, наиболее напряжена та шатунная шейка, для кото-
рой амплитуда момента кручения наибольшая; такой шейкой оказывает-
' Диаграмма моментов кручения четвертой шатунной шейки двигателя
«Мерлин» XX
ся четвертая. Диаграмма моментов кручения для нее дана на фиг. 224702-1;
из этой диаграммы находим
(Л4Кр4Ш)тах — 47600 К2см; (Л4Кр4ш)пип:::= 15770 К2см,
по формулам (2) п. 224402 и (1) и (2) п. 224602
'tmax = 819 кг/см*; Tmin = — 271 кг/смг; = 545 кг[смг; тт = 274 кг/см*.
По формуле (1) п. 224402 при у0 = 90° имеем (фиг. 224101-1)1
Т.
~ ~ ~2 & I’
232
224703
Экстремальные значения момента Л4Т и нормальных напряжений
соответствуют экстремальным значениям силы Тс; из динамического
расчета, согласно^фиг. 224702-11, находим
(Т’с)тах,— 4407 кг; (PcJmin— — 1372 кг.
откуда (AfT)max= 16960 кгсм; (Л4Г )min = — 5290 кгсм,
и
Стах = = 584 кг/смг; <jmin = (ЛУт!п = — 182 кг/смг;
"и "и
а, = = 383 кг/см‘; ат = °та-?*ат1п = 201 кг]см3.
Размеры расчетного сечения щеки следующие: 224703
Ь = 10,0 см; й = 2,4 см; Игит1п= 9,6 см3; F = 24 смг.
Расстояние т, = 3,55 см.
233
224800
Пренебрегая средними напряжениями (см. 227104), определим
только номинальные амплитуды нормальных напряжений в точках 1 и 2
(фиг. 224101-1).
Амплитуда нормального напряжения, одинаковая для обеих щек,
равна [формулы (1) п. 224602 и (1) и (2) п. 224503]:
__°max— °min . (^их)тах (^их)т!п ®тах— ^т|п____
2 “± 2W 2 ~
И
^imax ~ ^imin Z . т1 1_\
2 + р) ,
где при симметричном колене
^imax — ^Jmin _ (^с )тах (2с )min
2 — 4
Из диаграммы изменения силы Zc по углу поворота а (фиг. 224702-11)
находим
(Zc )тах — 7127 кг; (Zc )mjn = 3920 кг;
следовательно, наибольшая амплитуда равна
= (£c)max-(gc)min + = 1140 К2[сМг.
224800 Таблица номинальных амплитуд напряжений в коленчатых валах
V-образных двигателей
В таблице 224800-1 даны основные размеры коленчатых валов
V-образных авиационных двигателей, а в табл. 224800-11 —номинальные
амплитуды напряжений в шейках и щеках. Из коренных и шатунных
шеек выбраны те, для которых амплитуды напряжений наибольшие;
Таблица 224800-1
Основные размеры (мм) коленчатых валов V-образных авиационных
двигателей
ЛэЦ-. д' .Л» -Z L /Шу 11 (Ж Обо- значе- ния ВК-105ПФ АМ-38Ф «Мерлин» XX Аллисон С-15 DB 601E и DB-605 «Юмо» 211F
1. Диаметр коренной шейки 2. Диаметр шатунной шейки 3. Толщина щеки 4. Ширина щеки 5. Радиус кривошипа 6. Длина одного колена 7. Длина коренной шейки 8. Длина шатунной шейки 9. Радиус галтели d d. h b R I li It r 90,0 75,0 20,0 142,0 85,0 170,0 57,0 72,0 5,0 95,0 80,0 26,1 150,0 95,0 180,0 58,2 69,6 6,0 85,0 70,5 24,0 108,0 76,2 154,6 45,9 59,0 4,0 95,25 76,2 25,5 112,6 76,2 160,0 49,2 60,5 4,5—4,0 100,0 85,0 24,0 130,0 80,0 178,0 54,0 74,0 5,0 100,0 86,0 26,1 140,0 82,5 168,0 49,5 65,5 9,0
234
225000-225102
Таблица 224800-П
Номинальные амплитуды напряжений (кг[см*) в коленчатых валах V-образных
авиационных двигателей
Двигатели Коренные шейки (3-я и 5-я) Шатунные шейки (3-я и 4-я) Щеки
а,-
ВК-105ПФ 470 510 510 1 310
АМ-38Ф 445 545 625 1330
«Мерлии» XX 460 385 540 1 140
Аллисон С-15 345 490 510 1 010
DB-601 305 285 385 1 199
DB-605 370 340 455 1 150
«Юмо»-211Р 290 250 385 795
такими оказались для всех коленчатых валов третья и пятая коренные
шейки, третья и четвертая шатунные. Амплитуды напряжений указан-
ных шеек попарно мало отличаются друг от друга (на 10 — 15 кг/см1)
и в таблице 224800-П объединены. Средние напряжения не приводятся,
так как они практически не влияют на усталостную прочность колен-
чатых валов V-образных двигателей (см. 227104, а также [2]).
НОМИНАЛЬНЫЕ НАПРЯЖЕНИЯ В ОПАСНЫХ ТОЧКАХ КОЛЕНЧАТЫХ ВАЛОВ 225000
ЗВЕЗДООБРАЗНЫХ ДВИГАТЕЛЕЙ
Расчетные схемы 225100
Коленчатые валы звездообразных двигателей различаются числом 225101
опор в картере двигателя. Нафиг. 225101-1 — VI схематически представ-
лены коленчатые и редукторные валы со своими опорами.
Коленчатые валы безредукторных однорядных звезд выполняются
на трех опорах (фиг. 225101-1): в редукторных однорядных звездах
число опор коленчатого вала обычно не более двух (фиг. 225101-11).
Коленчатые валы двухрядных звезд выполняются на трех или
четырех опорах. В самом общем случае вал имеет опоры по обе стороны
каждого колена и дополнительную переднюю опору на носке вала
(фиг. 225101-III).
В некоторых конструкциях отсутствует средняя опора (фиг. 225101-IV)
или передняя — на носке вала (фиг. 225101-V и VI).
Кроме числа опор коленчатого вала, звездообразные двигатели 225102
различаются характером силовой связи редукторного и коленчатого
валов. В двигателях по схемам фиг. 225101-11 и VI при изгибе редук-
торного вала возникают реакции в общих для обоих валов подшипниках
скольжения А и В; эти реакции изгибают коленчатый вал. В констру-
кциях по схемам фиг. 225101-1II, IV и V изгиб вала редуктора
не передается коленчатому валу.
Различие в характере силовой связи имеет значение при виражах
самолета. Возникающий при этом жироскопический момент винта нагру-
235
225103
жает в первом случае не только редукторный, но и коленчатый вал.
Расчет на прочность коленчатого вала звездообразного двигателя при
виражах изложен в [5].
225103 Расчетные схемы коленчатых валов двухрядных звездообразных
двигателей приведены на фиг. 225103-1.
Фиг. 225101-1.
Коленчатый вал однорядного звездообразного двигателя без редуктора
Фиг. 225101-11.
Коленчатый вал однорядного звездообразного двигателя с редуктором
При расчете на прочность коленчатого вала введем систему координат,
неизменно связанную с коленчатым валом (фиг. 225103-П). Ось Ох распо-
ложим в плоскости колен; ее положительное направление принимается
236
Фнг. 225101-Ш.
Коленчатый и редукторный валы двигателя «Геркулес» XI
Фиг. 225101-IV.
Коленчатый и .редукторный валы двигателя М-88
225103
225103
оо
Фиг. 225101-V.
Коленчатый и редукторный валы двигателя «Туин-Уосп» R-1830
Фиг. 225101-VI.
Коленчатый и редукторный валы двигателя A11I-S2
225103
Фиг. 225103-1.
Расчетные схемы коленчатых
валов звездообразных двигав
телей
С направлена от коренной
от коренной к шатунной шейке первого кривошипа. Ось Оу направляется
перпендикулярно плоскости колен; ее положительное направление полу-
чается поворотом оси Ох на 90° в сторону, обратную направлению вращения
коленчатого вала, если смотреть со стороны
винта. Ось Oz совмещается с осью коленчатого
вала.
Положение коленчатого вала координи-
руется углом а между плоскостью колен
и осью цилиндра с главным шатуном пер-
вого (или второго) ряда цилиндров.
На фиг. 225103-11 означают:
Рц и Р'ц — силы инерции крайних противо-
весов за вычетом сил инерции
крайних щек, на которые они
установлены;
Pj2 м P'j2 — силы инерции средних противо-
весов за вычетом сил инерции
средних щек;
С — результирующая сил инерции
вращательно двигающейся мас-
сы приведенного главного шату-
на и шатунной шейки, а также
той части сил инерции первого
порядка поступательно двига-
ющихся масс, которые уравно-
вешиваются противовесами; сила
к шатунной шейке и равна
С=(Х+ -2M^R^+Pia, (1)
где i — число цилиндров одной звезды;
R — радиус кривошипа;
Расчетная схема коленчатого вала звездообразного двигателя
с четырьмя опорами
.239
225200-225202
<u — угловая скорость коленчатого вала;
Р/т — сила инерции шатунной шейки;
Мг — масса всех шатунов одной звезды, отнесенная к вращательно
двигающимся частям;
Л/2 — среднее значение поступательно двигающейся массы в одном
цилиндре
Ма=1[Мр+Мрг(г-1)]; (2)
здесь Afp — поступательно двигающаяся масса в цилиндре с глав-
ным шатуном;
М„1 — то же в цилиндрах с прицепными шатунами;
Z, и Z2— суммарные радиальные силы от газов и инерции масс
всейшатунно-поршневой группы [(Zc)t и (Zc)2], действую-
щие соответственно на первую (от винта) и вторую шатун-
ные шейки, за вычетом силы инерции AfQ Rm2
[см. уравнение (1)]:
Z^Z^-fj^ + ^M^R^, (3)
^ = (Zc)2-(^ + ^a)^; (4)
силы Zj и Z2 принимаются положительными, если сжимают соответству-
ющий кривошип;
Tj и Т2 — суммарные тангенциальные силы, действующие соответственно
на первую и вторую шатунные шейки; принимаются положи-
тельными, если направлены по вращению коленчатого вала.
AfB — момент, идущий на привод нагнетателя;
Х3; — компоненты опорных реакций в плоскости xz Криво-
шипов;
У,; У3; У3; У4— компоненты опорных реакций в плоскости yz, перпен-
дикулярной плоскости кривошипов.
Положительные направления реакций Xt и ¥( (г = 1, 2, 3, 4) сов-
падают с положительными направлениями осей.
Силы Рц, Р'ц. Р}2, Р'/2 и пара сил С — С образуют динамически
уравновешенную систему; их главный вектор и главный момент равны
нулю (фиг. 225103-П), т. е.
Рц + Pj2 + С - Рц - P'i2 - С = О,
Рц (mt + sj + Р/2 (mt — s2) — Рц (l — п,— s[) — Р)2 (I—n2 -J- s^) + .
+ C(l-a1-bi) = O.
(5)
225200
225201
255202
Определение опорных реакций
Коленчатые валы звездообразных двигателей рассматриваются как
неразрезные прямолинейные, свободно опертые балки постоянной жест-
кости на всей длине.
Реакции определяются для вала по схеме фиг. 225103-П. Из реше-
ния для этой схемы могут быть, как частные случаи, получены решения
и для остальных схем.
240
225203-225207
За лишние неизвестные принимаются реакции первой и третьей 225203
опор. Коленчатый вал предполагается опертым на вторую и четвертую
опоры; воздействие первой и третьей опор заменяется реакциями
¥г, Ха и Ys.
Неизвестные реакции первой и третьей опор находятся из условия,
что прогибы вала под удаленными опорами от действующих сил уничто-
жаются силами реакции этих опор.
Прогибы под удаленными опорами обозначаются буквой S с одним 225204
индексом наверху и двумя внизу. Верхний индекс указывает напра-
вление прогиба; для прогибов в плоскости xz кривошипов принимается
индекс х; для прогибов в плоскости yz — индекс у. Первый нижний
индекс, заключенный в скобки, указывает номер удаленной опоры
(1-й или 3-й), под которой отыскивается прогиб (место прогиба). Вто-
рой нижний индекс означает номер сечения (см. фиг. 225103-11),
в котором действует нагрузка, вызывающая прогиб. Все прогибы опре-
деляются (если не сделана оговорка) для нагрузки, равной единице.
Таким образом
S(i)i ; s(3?r — прогибы в плоскости xz кривошипов под 1-й и 3-й опо-
рами от нагрузки pi, приложенной в z-том сечении вала
и равной 1 кг;
s(?))i ; 2(1)1 — прогибы в плоскости yz под 1-й и 3-й опорами от на-
грузки qit приложенной в z-том сечении вала и равной 1 кг.
Все прогибы считаются положительными, если их направления
совпадают с положительными направлениями координатных осей.
По теореме о взаимности перемещений 225205
2^ = 2^; 8Й> = ^>. (1)
Для прямолинейного вала с круглым и постоянным по длине
сечением
sg>-e. га
На этом основании индексы х и у в дальнейшем опускаются.
Реакции от динамически уравновешенной системы сил (Р;1, Р/а, 225206
Р/1> Р/z, С —С, см. фиг. 225103-11) возникают только из-за упругой
деформации коленчатого вала, они невелики, постоянны по величине
и вращаются с угловой скоростью коленчатого вала. Эти реакции
вызывают в коленчатом вале звездообразных двигателей постоянные
небольшие напряжения и на амплитуду напряжений не влияют.
Так как запасы прочности зависят главным образом от амплитуд
напряжений в опасных точках, то при расчете на усталость коленча-
того вала можно пренебречь как самими реакциями от динамически
уравновешенной системы сил, так и вызываемыми ими напряже-
ниями.
Равенство нулю прогибов под удаленными опорами — первой 225207
и третьей —от внешней нагрузки и от реакций ¥г и Xs, У3 при-
водит к системам уравнений в плоскости xz:
8(i) (i)-^i + 2(i) (З)А’з + 8(i) iZi -(- 8(i) = О,
8(3) (i)Xj + 8(3) (3)XS -)- 8(з) iZt 4- 8(3) 2Zz = О
(1)
IS Авиад. порши, двигател!
241
225208—225210
и в плоскости yz:
8(1) (1)^1 + SG) (3)Уз + 8(1) 1^1+ 8(1) 2^2 = 0, |
8(3) <1)У1 + 8(3) (з)Уз + 8(3) 1Т1 + 0(3) 2Т2 = 0. J
Решая систему уравнений (1) относительно компонент реакций
Х4 и Хэ, получим
A’1 = A1Z1 + A2Z2, (3)
Xt-C^ + C'Z,, (4)
где
л _ a(i)(3)a(3)i ~а(3) (3)a(i)i . л 8(1)(3)а(г)2-a(3)(3)a(i)2
1 8(1) (1) «(3) (3) - ^!) (?) ’ 2 8(1) (1) 8(3) (з) — 8^(3)
_ й(1) (з) ~ а(») (О аС) 1 . С = Й(О (3)8(0 2 ~ 8(0 (1) а(3) 2
8(1) (1) 8(3) (3) - 8^) (з) ’ 2 Й(О (1)8(3) (3)-8?1)(3)
причем коэффициенты влияния 8к/ определяются по формулам 225210.
225208 Компоненты опорных реакций Х2 и Х4 остальных двух опор нахо-
дятся из уравнений статики и равны
*,=-( 1 + т)^-т^ + ( (1)
Х4=^-Х1-^-Х. + ^И1-(1 -b+)Z2. (2>
Исключая из (1) и (2) Xi и Х„ получим:
х.^ва+вл,
Xx^DxZx + DA,
(3>
(4)
(5)
(6)
225209 Аналогичные формулы (см. 225207 и 225208) будут справедливы
для компонент реакций Yi(i = l, 2, 3, 4)
Уз’=АТ1 + Д1Т1, уэ=с1т1 + с2т2,
У2 = В1Т, + В2Т2, У4 = О1Т1 + О2Т2.
225210 Коэффициенты At, Bit Ct и Dt (i = l, 2) являются функциями отно-
шений коэффициентов влияния 8W и не зависят поэтому от жесткости
на изгиб ~ той прямолинейной балки постоянного сечения, которой
заменяется коленчатый вал; поэтому (для сокращения письма) в фор-
мулах для коэффициентов 8fc< множитель ~ может быть опущен.
242
225211
Коэффициенты влияния 8W находятся по способу Мора и равны
. г(О<о=з-(*.+0; Ч'ост=4V*;
«<1> 1 = > (I - «.) (21-aj; 8да< = - “4‘ ~ ' ~
’о»—V - Ч); «0> 2=’4‘ (' -'! - »»•
Коэффициенты А1; А2, С\ и С2 (см. 225207) имеют нулевую размер-
ность; поэтому в формулах для коэффициентов ofcf размерность пара-
метров не имеет значения.
опоры
Формулы 225210 без всякого изменения применяются и к другим 225211
расчетным схемам.
Для вала без средней опоры (фиг. 225211) за лишние неизвестные
принимаются компоненты и У, реакции передней опоры и вычисли-
ются коэффициенты влияния 8(1) ,•; тогда
1
e(i) (О
(8р) iZi + 8(1) г^г)>
(8(1) 17*1 + 8(1)2Т2).
(1)
(2)
Остальные реакции находятся из уравнений статики.
1
*0) (О
16*
243
225212- 225213
225212 Для вала без дополнительной передней опоры на носке (фиг. 225212)
за лишние неизвестные принимаются компоненты Ха и Yz реакции сред-
ней опоры и вычисляются коэффициенты влияния 8(з) <; тогда
Х3 — ~ — (8(3) 1^1 4- 8(3) 2^2),
(3) (3)
Г3 = — у--— (8(3) iT! + 8(з) гЛ)*
V) (3)
Остальные реакции находятся из уравнений статики.
225213 В качестве первого примера рассмотрим двухрядный звездообраз-
ный авиационный двигатель Бристоль
(1)
(2)
«Геркулес» XI.
Фиг. 225212.
Расчетная схема коленчатого вала звездообразного двигателя без
дополнительной передней опоры
Расчетная схема коленчатого вала соответствует фиг. 225103-П.
Числовые данные
/,= 12 см\ /1 = 23 см; /, = 22 см; I = 45 см; аг~ 13,3 см; Ь = 12,3 см.
Подставляя численные значения величин, входящих в формулы
225210, получим
8(0 (3)= —1507;
8(0 (1) “ 2736; 8(3) (S) = 1897;
8(i)i =1437; 8(3) 1 ——1478;
8(1)2 =— 1024; 8(3)2 — 1409.
Коэффициенты AJt А2, С, и С, определяются по формулам (5) и (6)
п. 225207 и равны
А, = -0,1707; С, = 0,6438;
А, = — 0,0617; С, = — 0,7919.
244
225214—225301
Реакции второй и четвертой опор находятся из уравнений (3) и (4)
п. 225208, причем коэффициенты В„ Вя, Dlt Da определяются по фор-
мулам (5) и (6) п. 225208 и равны
В, = 0,6060; В, = 0,1920; 0, = -0,0790; О. = — 0,3384.
Компоненты А\, Ха, Хя и Хя опорных реакций в окончательном
виде будут
Л\ = - 0,1707 Z2 — 0,0617 Z2,
Хя = 0,6060 Z, + 0,1920 Z2,
= 0,6438 Z, - 0,7919 Z2,
X, = - 0,0790 Z, - 0,3384 Zt.
Компоненты Y1} Yt, Yt и Ya опорных реакций определяются этими
же формулами с заменой в них X через Y и Z через Т.
В качестве второго примера рассмотрим двухрядный 14-цилиндро- 225214
вый звездообразный двигатель фирмы Пратт-Уитни «Туин-Уосп»
R-1830.
Расчетная схема коленчатого вала соответствует фиг. 225212.
Числовые данные
/1 = /,= 17,7 см; 1 = 35,4 см; a, = fti=10,3 см.
Вследствие симметрии вала относительно средней опоры
S(3)i в~ 8(3)2*
По формулам 225210 находим
8(3) (3) = 4^=4 1> 924,2;
8(3) 1 --(!’ ~ Г, - fll) = -ft (3Z- - а[) = - 715,7.
Компонента Хя реакции средней опоры определяется по формуле (1)
п. 225212
Х8 = 0,7744 (Zj-Z,).
Компоненты Хя и Хя реакций двух других опор определяем из
уравнений (1) и (2) п. 225208, принимая X, = У, = О
Хя = 0,3218 Z, + 0,0962 Z2,
Хя = - 0,0962 Z, - 0,3218 Z,*
Компоненты Уэ, У, и У4 опорных реакций определяются этими же
формулами с заменой в них X через У и Z через Т.
Моменты и силы, действующие в опасных сечениях 225300
шатунных шеек и щек
В таблицах 225301-1 и II даны формулы для определения момен- 225301
тов и растягивающих сил, действующих в опасных сечениях шатунных
шеек и щек коленчатого вала звездообразного двигателя, представлен-
ного на фиг. 225103-II.
245
225302- 225500
В этих таблицах означают:
Мкр — скручивающий момент;
Мях — изгибающий момент в плоскости колена;
Мяв — изгибающий момент в плоскости, перпендикулярной плоскости
колена;
S — растягивающая щеку сила.
225302 Формулы таблиц 225301-1 и II справедливы и для валов без сред-
ней опоры (фиг. 225211); для валов без передней опоры (фиг. 225212)
нужно в формулах таблиц положить Xi = Fi = 0.
Таблица 225301-1
Изгибающие Мах, Миу и скручивающие Мкр.ш моменты в среднем поперечном сечении
шатунных шеек коленчатого вала звездообразного двигателя
Первая шатунная шейка Вторая шатунная шейка
Мях
у Vt (М-а,)+Г. a. Y&
Мкр.щ (T1+Tt—Y1—Y2) R—Ma YtR+Ms
Таблица 225301-П
Изгибающие моменты Мах и растягивающие силы S в щеках коленчатого вала
звездообразного двигателя
Первая щека Вторая щека Третья щека Четвертая щека
Мих X4 (/р+л11)4-Х,л11+ Xj (Z0+m2)-|-X2m2- -Zj (m2-ai)- -Pjr (m2-m1-s1)+ +C (m2—Oj) X4n2-j-Z2 (л2-б.)+ — C (n2 ^1) Х4И1— P/iS'i
S Pp-(X1+X2) C—Pp+Xi+X2 —Zj C-Z2-X4-PJ1 X4+P7'i
225400 Номинальные напряжения в опасных точках коленчатого вала
225401 Номинальные напряжения в опасных точках шатунных шеек опре-
деляется по формулам (2) и (3) п. 224402; номинальные напряжения
в щеках —по формулам (1) и (2) п. 224503.
225402 Номинальные амплитуды и средние напряжения определяются по
формулам (1) и (2) п. 224602.
225500 Таблица номинальных амплитуд напряжений
в коленчатых валах звездообразных двигателей
В этой таблице не даны средние касательные напряжения в щеках
и шейках, так как они мало влияют на величины запасов прочности
(см. 227104).
246
226000—-226002
Запасы прочности в опорных шейках коленчатых валов звездо-
образных двигателей во всех случаях значительно выше запасов проч-
ности в шатунных шейках; поэтому в таблице 225500 данные по опорным
шейкам коленчатых валов также не приведены.
Таблица 225500
Номинальные амплитуды напряжений в коленчатых валах звездообразных
двигателей '
Передняя шатунная шейка Щеки
Г ’о °т 0. °т
М-88 . ! 60 180 230 130 670 210
АШ-82 18 175 580 620 410 430
«Тунн-Уосп» R-1830 27 190 400 700 350 800
«Геркулес» XI 90 180 200 350 400 420
КОЭФФИЦИЕНТЫ КОНЦЕНТРАЦИИ НАПРЯЖЕНИЙ
При расчете на усталость коленчатых валов могут быть использо-
ваны эффективные (ка и к-.) и теоретические (а„ и ат) коэффициенты
концентрации для поперечного отверстия и входящего угла,' получен-
ные на моделях.
Однако, при этом необходимо вводить поправки двух видов:
1. Поправки, связанные с влиянием на коэффициенты к„ и кх
абсолютных размеров детали.
2. Поправки, связанные с фактическим распределением напряже-
ний в кривошипе.
Вследствие сложной формы кривошипа напряжения в нем даже
вне зон концентрации отклоняются от номинальных (вычисляемых по
элементарным формулам сопротивления материалов). Так, при круче-
нии шатунной шейки эпюра касательных напряжений на внешней
поверхности по среднему сечению (фиг. 229108) имеет эллиптическую
форму (согласно экспериментальным данным), а эпюра номинальных
напряжений — окружность.
Поэтому эффективный коэффициент концентрации шейки коленча-
того вала у краев отверстия для смазки при кручении зависит от
местоположения отверстия. Если
ти — номинальное напряжение в шейке вала, равное
-С
и И'кр ’
226000
226001
226002
247
226003- 226006
226003
226004
226005
226006
тн'— замеренное тензометром напряжение в том месте, где должно быть
расположено отверстие для смазки (вне зоны концентрации), то
h ~ '‘’н
коэффициент концентрации у краев отверстия
отнесенный к номинальному напряжению тн
сечении шейки;
коэффициент концентрации при кручении для
поперечного отверстия, полученный по модели;
в — коэффициент, учитывающий абсолютные размеры шатунной
шейки.
Отношение — в этой формуле зависит от формы и геометрических
С»
размеров коленчатого вала; их влияние на величину отношения —
пока недостаточно изучено. Поэтому значение эффективного коэффи-
циента концентрации кх в шатунных шейках, приводимое в 226006,
не учитывает этого отношения ^принимается ^=1^. Зависимость
226002, однако, помогает конструктору выбрать правильное расположе-
ние масляного сверления в шейках коленчатых валов (см. также 229110).
Еще в большей степени могут различаться теоретические коэффи-
циенты концентрации напряжения ао входящего угла и аа в галтели
сопряжения шейки со щекой. Кроме отношения радиуса галтели к тол-
щине щеки , коэффициент концентрации аа в галтели сопряжения
зависит от формы и эксцентриситета внутренних полостей шеек, от
перекрытия шеек и других факторов.
Поправки, связанные с фактическим распределением напряжений
по объему, могут быть надежно определены только опытным путем;
поэтому исключительную роль приобретает опытное исследование проч-
ности коленчатого вала.
Теоретические коэффициенты концентрации аа и ац находятся
тензометрированием коленчатых валов в пределах упругих деформа-
к к
ций, а эффективные коэффициенты и на специальных установ-
ках, на которых валы подвергаются знакопеременным изгибу и кру-
чению.
В расчетах на усталость коленчатых валов рекомендуется прини-
мать следующие значения эффективных коэффициентов концентрации.
а) Для шеек у краев смазочных отверстий при переменном
и кручении (с учетом масштабного фактора)
- = - = 2 5.
Коэффициенты концентрации (1) отнесены к номинальным
жениям в поперечном сечении шеек по масляному отверстию.
где кх — эффективный
для смазки,
в поперечном
(Мн ~~ эффективный
изгибе
(1>
напря-
л.
б) В галтелях щек при изгибе в плоскости колена величина —
248
226007-227101
определяется по графику фиг. 226006, дающему зависимость ~ от вели-
чины отношения радиуса галтели к толщине щеки . Этот график
построен на основании экспериментальных исследований неазотирован-
Фиг. 226006.
Зависимость эффективной кон-
u Ла
центрации напряжении—при
Sa
изгибе в галтели от величины
отношения радиуса галтели
г
к толщине щеки
п
Коэффициенты концентрации в галте-
лях при кручении по формуле (2) отнесены
к номинальному касательному напряжению
в поперечном сечении шейки вблизи гал-
тели.
Так как номинальные касательные на-
пряжения в сечении шейки вблизи галтели
такие же, как и в среднем сечении, то
касательные напряжения, к которым отно-
*
сятся коэффициенты концентрации — , определяются по формуле (1)
п. 224302 для галтелей сопряжения щеки с коренной шейкой и по фор-
муле (2) п. 224402 для галтелей сопряжения щеки с шатунной шейкой.
Рекомендуемые коэффициенты концентрации соответствуют менее
совершенным (по конструкции и технологии) валам. Различными кон-
структивными и технологическими средствами усталостная прочность
коленчатого вала может быть увеличена. Некоторые из этих средств
указаны в 229000.
к к
Пользоваться более низкими значениями коэффициентов ~ и —,
е« 6Т
чем приведенные в 226006, можно только на основании опытных дан-
ных усталостных испытаний коленчатых валов, аналогичных рассчи-
тываемому по размерам, по геометрии мест концентрации, по техно-
логии и по качеству обработки поверхности.
ОПРЕДЕЛЕНИЕ ЗАПАСОВ ПРОЧНОСТИ
Расчетные формулы
Запасы прочности по нормальным напряжениям определяются по
формулам
226007
226008
227000
227100
227101
(1)
249
227102- 227104
Запасы прочности по касательным напряжениям
(2>
Общий запас прочности
Для сталей, из которых изготовляются коленчатые валы, можно
принимать
с_х = 5500 ^2; ^ = 3000^; фв = 0,2; ф, = 0,05.
227102 Для вычисления запасов прочности в шейках (у краев отверстия
/с к
для смазки) значения коэффициентов концентрации — и. — указаны
6<г 6Т
в 226006, формула (1). Номинальные амплитуды касательных и нор-
мальных напряжений т„ и s„ и средние напряжения и ат опреде-
ляются по формулам (1) и (2) п. 224602. Эксгремальные напряжения
за цикл работы двигателя ттах, тт(п, атах, amin в этих формулах
вычисляются из равенств (1) п. 224302 для коренных шеек и из
равенств (2) и (3) п. 224402 для шатунных шеек.
227103 При вычислении запасов прочности в галтелях щек значения —
Е«
£
берутся из графика фиг. 226006, а значения — — по формуле (2)
п. 226005. Номинальные амплитуды и средние напряжения тт
определяются по формулам (1) и (2) п. 224602. Экстремальные нормаль-
ные напряжения amax, amln за цикл работы двигателя вычисляются
по формулам (1) и (2) п. 224503, а экстремальные касательные напря-
жения тшах, тт1п—по формуле (1) п. 224302 для галтелей коренных
шеек и по формуле (2) п. 224402 для галтелей шатунных шеек.
Кроме касательных напряжений от кручения вала, в галтелях
возникают касательные напряжения от изгиба силами Yt (фиг. 224101-1),
перпендикулярными плоскости колена. Касательные напряжения от
изгиба силами Yt меньше касательных напряжений от кручения и дей-
ствуют в точках галтели, где нормальные напряжения от изгиба
в плоскости колена и касательные напряжения от кручения значи-
тельно меньше максимальных; поэтому в первом приближении ими
можно пренебречь. Более подробно о запасах прочности в галтелях
см. в [5].
227104 Влияние асимметрии цикла на усталостную прочность для каса-
( тельных напряжений ничтожно вследствие малого значения коэффи-
циента фт = 0,05. При определении запасов прочности средними каса-
тельными напряжениями можно пренебречь.
Для нормальных напряжений асимметрия цикла влияет в большей
степени (ф<,=0,2) на усталостную прочность. Однако, как показано
в [2], для коленчатых валов рядных двигателей средними напряже-
ниями ат также можно пренебречь.
250
227200—227203
В звездообразных двигателях средние напряжения в опасных
точках вала из-за больших инерционных сил противовесов велики
и при определении па их следует учитывать.
Примеры определения запасов прочности 227200
В качестве примера определяются запасы прочности коленчатого 227201
вала авиационного двигателя «Мерлин» XX (фиг. 224700).
Для наиболее нагруженной коренной шейки (см. 224701)
г„ = 464^; а„ = 0.
Запас прочности в коренной шейке
Для наиболее нагруженной шатунной шейки (см. 224702) 227202
т„ = 545 —2; с„ = 383^.
р см* ° см*
Запасы прочности
л = - - — 3000 - = 2 2
кх 2,5 • 545 ’ '
-- *С-
п __ g-i 5500 ____ _
ка 2,5 • 383 ~
Общий запас прочности в шатунной шейке
па — 2,2 • 5,7 _।
~ ]/ л’ + п» /2,22 + 5,7» ~ ’
Для наиболее нагруженной галтели (см. 224703 и 224702) 227203
о=П40^; т_=545—
и см* 9 ° см2
При радиусе кривизны галтели г = 4 мм и толщине щеки Л = 24 мм .
отношение у = 0,167; для этого значения ~ по графику фиг. 226006
к к
найдем -^=3,25; при кручении галтели — = 2 (см. 266006).
Запасы прочности в галтели
„ _ 5500 _ 1 к
Па~ 3,25-1140
_ зооо _ R
2 • 545
Общий запас прочности в галтели
1,5 2,8
л= .Г-—Z'^= = l,3.
у 1,52 + 2,8»
251
227300-227301
227300 Минимальные запасы прочности в коленчатых валах
авиационных двигателей
227301 В таблице 227300 приведены минимальные запасы прочности в шей-
ках (у краев масляных отверстий) и в галтелях сопряжений щек
с шейками коленчатых валов.
Таблица 227300
Минимальные запасы прочности в шейках (у краев масляных отверстий) и в галтелях щек
коленчатых валов авиационных двигателей
Двигатели Вал разрезной Вал неразрезной
Корен- ные шейки Шатунные шейки Галтели сопря- жений щек Шатунные шейки Галтели сопряжений щек
1 2 3 4 5 6 7 8 9 10 11 12 13 14
п=пт "г п. п Г h п, п к. п п. пг п
| V-образные ВК-105ПФ 2,5 2,4 4,3 2,1 0,250 1,7 2,9 1,5 2,2 2,3
АМ-38Ф 2,7 1,9 4,0 1,7 0,230 1,6 1,5 2,4 1,3 1,8 2,1
«Мерлин» XX 2,6 2,2 5,7 2,1 0,167 2,8 1,3 2,2 1,9
Аллисон С-15 3,5 2,4 4,5 2,1 .0,157 1,6 2,9 1,4 2,3 2,3
DB-601 3,9 3,1 7,7 2,9 0,208 1,6 3,9 1,5 — —
DB-605 3,3 2,6 6,5 2,5 0,308 1,7 3,3 1,5 2,6 2,3
«Юмо»-211Г ..*.... 4,1 3,1 8,5 2,9 0,345 3,5 3,9 2,6 — —
1 Звездообразные | М-88 0,185 6,7 9,2 5,4 2,7 8,3 2,6
АШ-82 0,12 6,8 3,5 3,1 3,3 8,6 3,1
«Туин-Уосп» R-1830 . . 0,16 6,3 4,8 3,8 4,1 7,9 3,6
«Геркулес» XI . . . . ' » 0,15 6,7 9,6 5,5 3,7 8,3 3,4
Примечание. Для коленчатых валов V-образиых двигателей запасы прочности па
в колонке 12 даны для галтелей задних щек.
При расчете по схеме неразрезного вала запасы прочности на изгиб и, промежуточных
щек значительно выше и изменяются в пределах от 3 до 8.
252
227302— 227305
Запасы прочности в коленчатых валах V-образных двигателей. Для
сравнения запасы прочности коленчатых валов V-образных двигателей
даны как для разрезной, так и для неразрезной схемы расчета. При
расчете по неразрезной схеме коленчатые валы рассматривались как
многоопорные балки с прямолинейной осью и с постоянной жесткостью
по всей длине.
Наименьшие запасы прочности коренных шеек лежат в пределах
от 2,5 до 4,1 и не зависят от выбора расчетной схемы.
Шатунные шейки имеют меньшие диаметры, чем коренные; их
запасы прочности изменяются от 1,7 до 2,9 и практически также не
зависят от выбора расчетной схемы. Разница в запасах прочности при
расчетах по обеим схемам для шатунных шеек составляет 7 — 10%
(сравн. запасы прочности в столбцах 4 и 11 табл. 227300).
Запасы прочности при кручении шатунных шеек лт значительно
меньше, чем запасы прочности при изгибе па; следовательно, уста-
лостная прочность шатунных шеек (у краев масляных отверстий) опре-
деляется главным образом амплитудами крутящих моментов.
Наименьшие запасы прочности при кручении в галтелях также
не зависят от выбора расчетной схемы и лежат в пределах от 2,4 до 3,9.
Запасы прочности при изгибе в галтелях щек пв при разрезной
схеме расчета одинаковы для всех щек и изменяются от 1,5 до 1,7
(за исключением коленчатого вала «Юмо»-211Р. Более высокие значе-
ния запасов прочности коленчатых валов двигателя «Юмо»211 F объяс-
нены в 228000).
Если коленчатый вал рассматривать как неразрезную балку, то
можно установить, что запасы прочности при изгибе в галтелях пв
будут различными для различных щек. Наименьшие запасы прочности
на изгиб па имеют галтели задних щек—они'изменяются от 1,9 до 2,3.
Для промежуточных щек па в галтелях значительно больше и лежат
в пределах от 3 до 8.
Таким образом выбор расчетной схемы существенно влияет только
на запасы прочности в галтелях при изгибе па в плоскости криво-
шипа.
Обе схемы расчета (разрезная и неразрезная) не дают правильных
значений па в галтелях. Из-за деформации картера опоры коленчатого
вала перемещаются. Поэтому коленчатый вал правильнее рассчитывать
как многоопорную балку (с ломаной осью и различными жесткостями,
определенными экспериментально), опертую на упругие опоры. Чем
жестче картер по сравнению с коленчатым валом, тем точнее будут
результаты, даваемые неразрезной схемой расчета; наоборот, если упру-
гие осадки опор соизмеримы с деформациями коленчатого вала, он
может находиться в условиях, близких к разрезной балке.
Влияние деформации картера на усталостную прочность коленча-
того вала звездообразного двигателя АШ-82 рассматривается в [5]. Для
V-образных двигателей влияние упругости опор коленчатого вала на его
прочность не исследовано. Однако не подлежит сомнению, что благо-
даря упругости опор значения запасов прочности на изгиб в галтелях па
будут лежать в пределах значений запассв прочности, полученных при
расчетах по разрезной и неразрезной схемам. Таким образом расчет
по разрезной схеме дает заниженное значение по в галтелях, а по не-
разрезной—завышенное.
227302
227303
227304
227305
253
227306 —227308
В действительности запас прочности па в галтели задней щеки—наи-
меньший, так как задняя щека не разгружается надопорным моментом.
Величина па галтели задней щеки может быть установлена сравнительно
точно: она находится между величинами запасов прочности, получае-
мыми при расчетах по методам разрезной и неразрезной балки (столбцы
6 и 12 таблицы 227300), которые между собой отличаются на 30—40%.
Галтели промежуточных щек разгружаются надопорными момен-
тами, не учитываемыми при расчете по разрезной схеме, но не в такой
мере, как это следует из расчета по неразрезной схеме (из-за упру-
гости опор картера).
Несмотря на более высокие запасы прочности па в галтелях, по-
ломки промежуточных щек бывают так Же часты, как и поломки задйих.
Причина этого явления в знакопеременном кручении. Задняя щека
не подвергается знакопеременному кручению; общий запас прочности
ее галтели п = па. Галтели промежуточных щек имеют больший запас
прочности на изгиб па, чем галтель задней щеки, но они подвергаются
знакопеременному кручению. Общий запас прочности п для них может
быть равен и даже меньше общего запаса прочности галтели задней
щеки.
227306 До изучения ряда вопросов, связанных с выбором расчетной схемы
коленчатого вала (влияние деформации картера, зазоров в подшип-
никах и др.), рекомендуется судить об усталостной прочности галтелей
по запасу прочности в наиболее нагруженной галтели, определенному
по методу разрезной балки. Так как этот метод расчета дает одина-
ковые запасы прочности во всех галтелях при изгибе, то наиболее
, нагруженной будет галтель той шатунной шейки, для которой ампли-
туда касательных напряжений наибольшая. Запасы прочности этих гал-
телей приведены в столбце 8 табл. 227300. Используя запасы проч-
ности в галтелях (столбец 8), нужно иметь в виду, что они занижены;
в них не учтена разгрузка галтелей надопорными моментами; поэтому
из того, что запасы прочности в галтелях меньше запасов прочности
у краев масляного отверстия (столбец 4) еще не следует, что галтели
более нагружены, чем края масляных отверстий.
227307 Запасы прочности в коленчатых валах
звездообразных двигателей
Запасы прочности в коренных шейках высоки и не приводятся.
227308 В шатунных шейках у краев масляных отверстий запасы прочности
при кручении не ниже 6 благодаря малым амплитудам касательных
напряжений. Запасы прочности на изгиб в щатунных шейках зависят
от расположения масляных отверстий. Наибольшие изгибающие моменты
действуют в плоскости кривошипов. Чем меньше угол у (фиг. 224101-1)
между осью масляного отверстия и плоскостью кривошипов, тем больше
напряжения изгиба у краев масляных отверстий. Для прочности шатун-
ных шеек выгоднее располагать масляные отверстия под углом
7 = 60 — 90°.
При неудачном расположении масляных сверлений («Туин-Уосп»)
запасы прочности при изгибе уменьшаются до 3—3,8.
254
227309-228102
В галтелях наименьшие запасы прочности при изгибе для валов 227309
со средней опорой меняются в пределах от 3,3 до 4,1; для вала М-88
без средней опоры л„=2,7, несмотря на большое отношение ^- = 0,185.
Запасы прочности в галтелях при кручении изменяются в преде-
лах от 7,9 до 8,6.
Дополнительная опора на носке повышает прочность переднего 227310
кривошипа при изгибе: все валы, снабженные опорой на носке, имеют
больший запас прочности в элементах переднего кривошипа по сравне-
нию с задним.
Некоторые из коленчатых валов, запасы прочности которых ука- 227311
заны в табл. 227300, азотируются; этим достигается понижение эффек-
тивных коэффициентов концентрации (см. 229202). Однако запасы
прочности в табл. 227300 вычислялись без учета упрочняющего дей-
ствия азотизации. Количественная сторона упрочнения еще не настолько
ясна, чтобы этот фактор можно было вводить в расчет.
ВЛИЯНИЕ КОЛЕБАНИЙ СИСТЕМЫ КОЛЕНЧАТОГО ВАЛА НА ЕГО ЗАПАСЫ 228000
ПРОЧНОСТИ В V-ОБРАЗНЫХ И ЗВЕЗДООБРАЗНЫХ ДВИГАТЕЛЯХ
Коэффициенты динамического усиления 228100
По данным табл. 227300, запасы прочности в коленчатых валах 228101
V-образных двигателей ниже, чем в звездообразных. Однако наличие
этого факта не позволяет ещё утверждать, что коленчатые валы звездо-
образных двигателей более надежны с точки зрения усталостной проч-
ности, чем валы рядных двигателей. Приводимые в таблице 227300
запасы прочности получены путем квазистатического расчета (см. 222005).
Инерционные нагрузки, возникающие от вибраций системы коленча-
того вала, и создаваемые ими напряжения в этой таблице не учтены.
А между тем нагрузки от вибраций коленчатого вала могут суще-
ственно изменить величины запасов прочности, вычисляемые при квази-
статическом расчете.
Более точное приближение к действительным напряжениям можно 228102
получить, если, кроме той нагрузки, которая рассматривается при ква-
зистатическом расчете (см. 222002), к коленчатому валу приложить всю
инерционную нагрузку, возникающую от колебаний, и затем рассчи-
тывать валы изложенными методами.
Обозначим запасы прочности:
п — при квазистатическом расчете;
п' — при расчете, учитывающем инерционную нагрузку от вибраций
коленчатого вала;
пк — при расчете, учитывающем инерционную нагрузку только от
крутильных колебаний;
пи — при расчете, учитывающем инерционную нагрузку только от
изгибных колебаний.
Назовем:
общим коэффициентом динамического усиления X отношение
255
228103—228202
коэффициентом динамического усиления от крутильных вибраций кк
отношение
(2)
коэффициентом динамического усиления от изгибных вибраций Хж
отношение
(3)
Судить о действительных запасах прочности коленчатых валов ряд-
ных и звездообразных двигателей и сравнивать их можно, лишь уста-
новив величины коэффициентов динамических усилений.
228103 Коэффициенты динамических усилений недостаточно исследованы;
оценить их можно только по некоторым экспериментальным данным [1, 7].
При этом отношение запасов прочности принимается обратно пропор-
циональным отношению номинальных амплитуд напряжений (а„ тр);
влияние средних напряжений (ат, хт) на отношение запасов прочности
невелико и не принимается во внимание.
228200 Коэффициенты динамического усиления при крутильных
колебаниях
228201 Исследованию динамического эффекта при крутильных колебаниях
в шейках коленчатых валов рядных авиационных двигателей посвящена
работа [1]. Авторы исходили из условия, что все сильные резонансы
крутильных колебаний не должны допускаться; при наличии же их
они устраняются путем изменения системы или применения демпферов.
Поэтому коэффициенты динамического усиления Лк определялись
для умеренных резонансов и вне резонансов.
Метод исследования — электрическое моделирование системы вала
двигателя — позволил рассмотреть большое число модификаций трех
типов коленчатых валов. Для 12 модификаций, наиболее близких
к исследованным типам двигателей, не превосходил 1,33. Это зна-
чение коэффициента динамического усиления (1,33) и рекомендуется
при определении запасов прочности для наиболее нагруженных шеек
(третьей и четвертой) валов рядных двигателей.
228202 В большинстве случаев звездообразные двигатели снабжены одним
или двумя маятниковыми демпферами, настроенными на опасные резо-
нансные гармоники; однако в эксплоатационной зоне чисел оборотов
двигателя могут быть резонансы других гармоник, которые создают
большие дополнительные напряжения.
Торсиографирование ряда звездообразных двигателей, снабженных
маятниковыми демпферами, показало, что номинальные амплитуды каса-
тельных напряжений в шатунных шейках во многих случаях равны
400—450 кг!см*, а иногда достигают даже значений 600— 700 кг/см*.
При квазистатическом расчете благодаря большой равномерности
диаграммы тангенциальных сил номинальные амплитуды касательных
напряжений в шатунных шейках звездообразных двигателей не превос-
ходят 200 кг1см* (таблица 225500).
Таким образом коэффициенты динамического усиления при круче-
нии коленчатых валов звездообразных двигателей практически могут
быть весьма большими, достигая значений кк = 2—3.
256
228300—228303
Коэффициенты динамического усиления при изгибных
колебаниях
Изгибные колебания коленчатых валов особенно опасны для щек.
Инерционные моменты от этих колебаний изгибают щеки в направлении
малой жесткости и вызывают в их галтелях дополнительные нормаль-
ные напряжения.
Из таблицы 227300 видно, что запасы прочности галтелей щек
у большинства коленчатых валов V-образных двигателей малы даже
без учета вибраций; поэтому можно предположить, что дополнительные
напряжения от изгибных колебаний в щеках большинства коленчатых
валов рядных двигателей, повидимому, невелики.
В тех случаях, когда изгибные колебания коленчатых валов рядных
двигателей вызывают большие дополнительные напряжения, запасы проч-
ности в щеках при квазистатическом расчете должны быть увеличены.
Примером может служить двигатель «Юмо»-211 F, а также и после-
дующая его модификация «Юмо»-213. Большой запас прочности (л=2.6)
в щеках этих двигателей (см. таблицу 227300) вызван значительными
изгибными и продольными вибрациями коленчатого вала. Собственная
частота продольных колебаний коленчатого вала «Юмо»-213, по
экспериментальным данным, равна 290 гц, а изгибных—400 гц. При
числе оборотов двигателя п = 2800 — 3000 об/мин резонанс вызывали
6-я и 8,5-я гармоники.
Амплитуды нормальных напряжений
в задней щеке двигателя «Юмо»-213
в зависимости от числа оборотов дви-
гателя
оборота Лмт-
~чатого (ала и
Фиг. 228303-1.
Гга
о
Запись нормальных напря-
жений в задней щеке
на работающем двигателе
«Юмо>>-213 при числе обо-
ротов п = 2950 об/мин,
На фиг. 228303-1 показана запись нормальных напряжений в задней
щеке на работающем двигателе «Юмо»-213 при п=2950 об/мин. На
фиг. 228303-П кривая 7 представляет амплитуды полных нормальных
напряжений в задней щеке в зависимости от оборотов двигателя;
кривые 2 и 3—амплитуды составляющих напряжений от 6-й и 8,5-й
гармоник; кривая 4—амплитуды напряжений без учета вибраций (при
17 Авиац. поршн. двигатели.
228300
228301
228302
228303
257
228304—229000
расчете квазистатическим методом). Коэффициент динамического усиле-
ния Хи, как видно из фиг. 228303-11, близок к 2.
Более низкие значения запасов прочности в галтелях щек па других
двигателей по сравнению с «Юмо»-211Р (см. таблицу 227300) дают
основание предполагать, что для них влияние изгибных колебаний
на прочность щек менее опасно. Это предположение отчасти подтвер-
ждается исследованиями [7]. Для большинства V-образных двигателей
на рабочих числах оборотов не наблюдалось резких резонансов изгиб-
ных колебаний, хотя небольшое изменение оборотов может привести
к резонансу б-й и 8-й гармоник и создать значительные напряжения
(аналогично тому, как это случилось с двигателями «Юмо»).
228304 Изучение изгибных колебаний коленчатых валов звездообразных
двигателей до настоящего времени ограничивалось определением соб-
ственной частоты колебаний.
Экспериментальные данные по дополнительным напряжениям,
возникающим при изгибных колебаниях в звездообразных двигателях,
не опубликовывались; поэтому дать действительные коэффициенты
динамического усиления при изгибных колебаниях не представляется
возможным. Однако инерционные нагрузки при изгибных колебаниях
часто являются причиной поломок щек коленчатых валов звездообраз-
ных двигателей и болтов, крепящих противовесы.
228400 Выводы и некоторые рекомендации
228401 Инерционные нагрузки от крутильных и изгибных колебаний для
коленчатых валов звездообразных двигателей в большинстве случаев
значительно больше, чем для валов V-образных. Несмотря на более
высокие запасы прочности валов звездообразных двигателей (опреде-
ленные квазистатическим методом расчета) по сравнению с запасами
прочности для V-образных, действительные напряжения валов этих
двух типов двигателей, по всей вероятности, одного порядка.
228402 В уменьшении коэффициентов динамического усиления заложены
большие возможности увеличения прочности коленчатых валов звездо-
образных двигателей. Эти возможности пока еще недостаточно исполь-
зуются; в частности, не борются с изгибными колебаниями (применением
демпферов или изменением системы в случае острых резонансов).
228403 При существующих коэффициентах динамических усилений не
рекомендуется понижать запасы прочности, указанные в таблице 227300.
228404 Запасы прочности при учете всех динамических вибрационных фак-
торов не должны быть ниже 1,3— 1,5.
229000 СПОСОБЫ ПОВЫШЕНИЯ ПРОЧНОСТИ КОЛЕНЧАТЫХ ВАЛОВ
КОНСТРУКТИВНЫМИ И ТЕХНОЛОГИЧЕСКИМИ СРЕДСТВАМИ*
Наиболее действенный способ повышения прочности коленчатых
валов—снижение эффективных коэффициентов концентрации напря-
жений кв и
• В составлении этой главы принимали участие инж. Б. Ф. Балашов
и А. С. Лейкин.
258
229100- 229102
Значения кя и Ат могут быть уменьшены различными конструктив-
ными и технологическими средствами.
Конструктивные способы повышения прочности
коленчатых валов
Конструктивные способы состоят в том, что коленчатому валу
придают такую форму, при которой напряжения распределяются более
229100
229101
равномерно по объему коленчатого вала как в зонах концентрации,
так и вне этих зон. Благоприятные конструктивные формы устанавли-
ваются экспериментально (см. 270000). Предварительно изучают тензо-
метрированием влияние
Фиг. 229101.
Кривая повышения уста-
лостной прочности в зави-
симости от повышения ста-
тической прочности
различных форм на теоретические коэффициенты
концентраций а, и ат. [10] Результаты измере-
ний в статических условиях проверяются испы-
таниями на усталость. Как показывают опыты,
более низким теоретическим коэффициентам
а, и ат соответствуют и более низкие эффек-
тивные ка и Ат. Однако повышение усталостной
прочности вала при конструктивных улучше-
ниях меньше, чем повышение статической
прочности. Зависимость между повышениями
усталостной и статической прочности дается
на фиг. 229101; эта зависимость получена при
испытаниях коленчатых валов в натуру.
В качестве примера может служить экспе-
риментальная доводка конструкции щеки ко-
ленчатого вала двигателя Юнкере «Юмо»-211.
Задняя щека коленчатого вала этого двига-
229102
теля часто ломалась из-за больших переменных
изгибающих моментов (см. 228303). Исследо-
вание имело целью увеличить усталостную прочность щеки при пере-
менном изгибе путем понижения значения ко.
На различных модификациях коленчатого вала изучалось влияние
на прочность щеки:
1) радиуса кривизны галтели г;
2) толщины щеки Л;
3) поднутрения галтели в шатунную шейку.
Валы изгибались по схеме фиг. 229102,/. Малобазными тензомет-
рами измерялись напряжения по ширине щеки (по линии АВ излома)
и вдоль галтели в срединной плоскости кривошипа. При г —5 мм
и Л=19,4л«л< наибольшие нормальные напряжения оказались в точках
а и & (фиг. 229102,//), вблизи средней плоскости кривошипа, и равны
«max = 39 кг/мм®. Наибольшее напряжение вдоль галтели расположено
под углом 62° от начала галтели.
При г = 7 мм и Л=19,4 мм (фиг. 229102,///) атах = 30 кг/см*,
а лри г = 7 мм и h *= 21,4 мм (фиг. 229102, IV) атах = 25 кг/мм*.
Поднутрение галтели в шатунную шейку создает более равномерное
распределение напряжения вдоль галтели (фиг. 229102, V и V/); эпюра
напряжений приближается к дуге окружности.
17*
259
г 7им. НоРекная шейка
•г- 7мм. Шатунная шейка
Толщина щеки 19,4 мм
140
229102
35\
^-ЗО^/мм1
№
I 20 I
г-9мм. Разгрузочная канавка
в коленной и шатунной шейках
Глубина в шейке 4мм
Толщина щеки 19.4мм
40
зо\
2520 15 10 5
25^/мнР
Фиг. 229(02.
15 \
-Ю
5
Г
Распределение нормальных напряжений вдоль галтели и по ширине щеки при
коленчатого вала двигателя «Юмо»-211
г-9мм. Разгрузочная канавка
в коренной и шатунной шейках
Глубина б шейке 38мм
Толщина щеки 21.5мм
I зб\
I ,
I 30 .
; -1
изгибе для различных модификаций
229103-229105
В последней модификации (фиг. 229102, VI) максимальное напря-
жение почти вдвое меньше, чем в исходной (фиг. 229102, II), однако
усталостные испытания на изгиб показали, что предел усталости воз-
рос только на 30%.
Влиянию различных конструктивных факторов на усталостную 229103
прочность коленчатых валов посвящены многочисленные исследования.
Приведем краткое извлечение из них-
Влияние радиуса кривизны галтели г. С увеличением радиуса
кривизны усталостная прочность кривошипа повышается, что видно
из графика на фиг. 226006. Галтель иногда описывается двумя и более
Фиг. 229103.
Галтель, описанная несколь-
кими дугами окружности
Фиг. 229104.
Поднутрение галтели в щеку
и шейку
дугами окружностей (фиг. 229103); большим радиусом должна быть
описана та часть галтели, где напряжение наибольшее (в месте начала
усталостной трещины при поломке).
Влияние поднутрения галтели в щеку и шейку. Поднутрение 229104
галтели в коленчатых валах авиационных двигателей обычно не сопро-
вождается повышением усталостной прочности коленчатых валов. Под-
нутрение в щеку (фиг. 229104,а) позволяет увеличить радиус галтели,
не сокращая рабочей длины подшипников, но ослабление щеки в наи-
более напряженном месте канавкой уничтожает эффект от увеличения
радиуса галтели.
Разгружающая канавка в шейке (фиг. 229104,6) повышает уста-
лостную прочность коленчатого вала при изгибе, но уменьшает ее при
знакопеременном кручении.
Испытания коленчатых валов с поднутрением галтелей не дали
положительных результатов.
Влияние перекрытия шеек. Абсолютная величина перекрытия равна 2291®5
е = ~R>
А
где и £>3—диаметры коренной и шатунной шеек,
R—радиус кривошипа.
С увеличением перекрытия усталостная прочность на изгиб может
быть повышена. Особенно сильно сказывается влияние перекрытия
после определенной величины перекрытия (фиг. 229105).
261
229106-229108
229106
229107
Влияние бочкообразной формы
внутреннего сверления шеек. Бочко-
образная форма внутреннего сверле-
ния увеличивает прочность коленча-
того вала при знакопеременном кру-
чении. Концентрация напряжений
в месте перехода бочки в цилиндри-
ческое сверление разгружает галтель
щеки; поэтому внешняя галтель и
место перехода бочкообразного сече-
ния в цилиндрическое должны ле-
жать в одном поперечном сечении
(фиг. 229106).
Влияние эксцентричности внут-
реннего сверления шатунной шейки.
Смещение оси сверления в сторону
от оси коленчатого вала снижает
напряжение изгиба в наиболее на-
пряженном секторе шатунной шейки
Фиг. 229105.
229108
и повышает усталостную прочность Зависимость предела усталости при
на 10—15°/о- изгибе коленчатых валов от величины
Влияние места расположения перекрытия шеек
масляного сверления в шатунной
шейке. Эпюра касательных напряжений от крутящего момента по сече-
нию шатунной шейки неразъемных коленчатых валов имеет овальную
Фиг. 229106.
Бочкообразное внут-
реннее сверление
шеек вала
Фиг. 229108.
Распределение касательных напряже-
ний по среднему сечению шатунной
шейки при кручении (по эксперимен-
тальным данным)
форму (фиг. 229108). Наибольшие напряжения возникают в пло-
скости колена (у = 0, y=180°), наименьшие—в плоскости, перпенди-
кулярной плоскости колена (y —90°, y = 270°).
262
229109-229202
Поэтому из условия прочности коленчатого вала при знакопеременном
кручении масляное отверстие следует располагать под углом у = 90° или
270°. Так, при у = 90° предел усталости при кручении коленчатого вала
двигателя «Юмо» увеличился на 1-1’/о по сравнению с пределом уста-
лости при y = 30° и на' 15°/в по сравнению с пределом усталости при у = 0°.
Прочность вала звездообразного двигателя при знакопеременном
изгибе также увеличивается, если масляное отверстие располагается
под углом у —90°. В этом случае нормальные напряжения у краев
масляного отверстия возникают главным образом от момента Мжд, изги-
бающего шатунную шейку в плоскости, перпендикулярной плоскости
колена. Амплитуда момента Мвд в авиационных двигателях значительно
меньше амплитуды момента Мш, действующего в плоскости колена.
Влияние формы щеки. Наиболее рациональная форма щеки—эллиптиче- 229109
ская. Узкие щеки прямоугольной формы значительно уступают эллипти-
ческим.
Коленчатые валы со скошенными щеками имеют предел усталости
на 5—10%, ниже, чем валы с прямыми щеками.
Технологические способы повышения прочности коленчатых валов 229200
Для повышения прочности коленчатых валов применяются неко- 229201
торые специальные технологические способы обработки, которые уве-
личивают твердость поверхностного слоя металла и вызывают остаточные
сжимающие напряжения, повышающие усталостную прочность вала.
К таким способам технологической обработки относятся: азотирование,
местный наклеп и обдувка стальной дробью.
Азотирование' является эффективным средством повышения 229202
усталостной прочности коленчатых валов.
По данным [12] для коленчатых валов автомобильных двигателей
из хромомолибденовой стали с а6 = 94— 110 кг[ммг азотирование повы-
шает предел усталости при консольном изгибе на 25 — 60°/0.
Исследование влияния азотирования на пределы усталости коленча-
тых валов «Юмо»-211 проводилось на различных сталях, состав
и механические свойства которых приведены в таблице 229202-1. Ре-
зультаты испытаний на усталость кривошипов валов даны в таблице
229202-11.
Таблица 229202-1
Состав и механические свойства сталей экспериментальных кривошипов
двигателя «Юмо»-2И
Сталь С о/ /о Мп /о Сг % V % Ni /о Мо /о кг] мм2. Ф % Ак кгм]смг
Хромоникелевая 0,29 0,66 2,53 0,08 1,54 0,18 107 64 10
Хромованадиевая 0,25 0,64 2,4 0,25 < 0,1 0,23 101 64 —-
Марганцовистая 0,38 1,6 0,11 0,10 — — 90 42. 8
263
229203-229204
Таблица 229202-П
Усилия (в кгм), соответствующие пределам усталости экспериментальных
кривошипов двигателя «Юмо»-211
Сталь Кручение Чистый изгиб
неазотир. азотир. % повышения неазотир. азотир. % повышения
Хромо- никелевая 1600 2100 30 340 550 62
Хромо- ванадиевая 1620 2040 26 390 520 32
Марганцо- вистая 1400 1950 36 310 460 48 1
Как видно из табл. 229202-П, при изгибе эффективность азоти-
рования большая. Марганцовистая сталь дает больший процент повы-
шения предела усталости, чем стали высоколегированные.
Путем азотирования предел усталости для коленчатого вала мотора
Аллисон V-I7I0 при изгибе был увеличен на 70% [8]«
Проводить механические операции после азотирования не реко-
сверление масляного отверстия после азотирования
снижает сопротивляемость знакопеременному кручению
в два раза. Шлифовка галтелей после азотирования
также опасна; микроскопические трещины, часто появля-
ющиеся при шлифовке, и местные ожоги сильно сни-
жают усталостную прочность (на 20—25% при изгибе)
и ослабляют упрочнение, достигнутое азотированием.
Чтобы предотвратить шлифовку галтелей, целесообразно
выбирать канавки (фиг. 229202).
Если деталь, кроме переменных напряжений, под-
вержена ' большому статическому напряжению, то,
как правило, азотирование не дает желаемого эффекта
повышения предела усталости и даже может снизить его.
Опыты по влиянию выдержки при азотировании
показали, что увеличение времени азотирования при
/ = 500°С выше 15—20 час. не приводит к увеличе-
нию предела усталости.
Азотирование ослабляет влияние волосовин, неметаллических
включений, механической обработки и очень хорошо предохраняет сталь
от коррозии.
Местный наклеп поверхности путем накатки роликами галтелей
и обжатия краев масляного отверстия стальным шариком [11] дает
увеличение усталостной прочности автомобильных валов при изгибе
на 40% и при кручении на 20%.
Обдувка стальной дробью галтелей увеличивает предел усталости
при изгибе на 13%. Обдувка дробью обеспечивает повышение предела
усталости валов мотора V-1710 при изгибе на 28%.
мендуется; так,
Фиг. 229202.
Канавка в гал-
тели
229203
229204
264
ЛИТЕРАТУРА И ИСТОЧНИКИ К 220000
1. Житомирский В. К., КинасошвилиР. С. и ТетельбаумИ. М., Дей-
ствительные нагрузки в расчете прочности коленчатого вала, Труды № 116,
1946.
2. КинасошвилиР. С., Расчет прочности коленчатых валов рядных авиацион-
ных двигателей, Труды № 94, 1945.
3. Кинасошвили Р. С., Определение запасов прочности, Труды № 5, 1943.
4. Коган С. А., Расчет разрезной щеки разъемного коленчатого вала звездообраз-
ного двигателя, Труды № 46, 1943.
5. Куш уль М. Я., Прочность коленчатых валов звездообразных двигателей,
Труды № 143, 1948.
6. Майер К., Изгибные колебания коленчатого вала звездообразного двигателя,
Сборник переводов под редакцией В. К. Житомирского, Колебания валов
авиационных двигателей, Оборонгиз, 1941.
7. Натанзои В. Я., Изгибные колебания коленчатых валов авиационных двига-
телей, Труды № 122 и 142, 1948.
8. Прокофьев В. Г., Увеличение сопротивления усталости посредством нагар-
товки дробью, «Американская техника и промышленность:», т. 23, № 6, 1946.
9. Сервисен С. В., Сборник института машиноведения АН СССР, Исследования
в области машиноведения, стр. 58, 1944.
10. Сервисен С. В., Исследование распределения напряжений в коленчатых ва-
лах авиационных двигателей, «Динамика и прочность коленчатых валов», Изд.
АН СССР, 1948.
11. В a n d о w К-, Dauerhaltbarkeit von Stahl- und GuBkurbelwellen, Deutsche Kraft-
fahrtforschung, N. 14, 1938.
12. Williams C., Brown T., Fatigue strength of .crankshafts, «Engineering»
№ 3992, 3993, 1942.
230000-231103
230000 РАСЧЕТ НА ПРОЧНОСТЬ ШАТУНОВ*
231000
РАСЧЕТ ПОРШНЕВОЙ ГОЛОВКИ ШАТУНА
231100 Напряжение в поршневой головке от растягивающей силы инерции
231101
Примем обозначения (фиг. 231101):
R — внешний радиус головки;
Фиг. 231101.
Схема поршневой головки
шатуна
гВн — внутренний радиус головки;
р — радиус перехода от головки к стержню;
Я —ширина стержня шатуна;
Y — центральный угол от вертикального диа-
метра головки до сечения, в котором
сопрягаются радиусы R и р:
н ,
~2 +?
у = 90 + arc cos ууу; (1)
h — текущая толщина головки;
01 — длина верхней головки шатуна;
d—внутренний диаметр головки;
— внутренний диаметр втулки головки;
Fr — площадь сечения головки;
F„t — площадь сечения втулки головки;
Ест — модуль упругости первого рода стали;
Ебр — модуль упругости первого рода бронзы;
Мр — масса комплекта поршня;
/ртах — ускорение поршня в верхней мертвой точке;
- __ « *вя
' 2
(2)
'231102 Поршневая головка рассчитывается на максимальную силу инерции
комплекта поршня, соответствующую верхней мертвой точке поршня
и равную
Pj~ Mp]pmiX.
231103 Принимаем, что давление от этой силы равномерно распределено
по верхней части поршневой головки (фиг. 231103).
* Составлен по работе Р. С. Кинасошвили «Расчет прочности шатунов
авиационных двигателей», Труды № 66, 1945.
266
231104- 231105
Расчетные напряжения в поршневой головке (основные размеры 231104
которой даны на фиг. 231104-1) при такой силовой схеме близко сов-
падите напряжениями, полученными непосредственным измерением; это
Фиг. 231103.
Силовая расчетная схема порш-
невой головки шатуна
Фиг. 231104-1.
Основные размеры поршне-
вой головки шатуна
отчётливо в'иднв из рассмотрения фиг. 231104-1 Г, где на левой половине го-
ловки отложены (от ее наружного контура) напряжения, полученные экспе-
риментально, а на правой—расчетные [1].
Фиг. 231104-11.
Эпюры напряжений поршневой
головки шатуна: на левой сто-
роне—экспериментальные, на пра-
вой—расчетные
Изгибающий момент для участка го-
ловки АВ равен
М. = Мв + NBr (1 — cos у) —
— 0,5P;r(l — cos ф), (Г)
а для участка ВС
Мг = Мв + NBr (1 — cos <р) —
— 0,5P,r (sin <р — cos <р), (2)
где Мв и NB — изгибающий момент и нор-
мальная сила в сечении АА, которые опре-
деляются, если рассматривать головку
как брус малой кривизны, защемленный
в сечении СС, из уравнений
Мвч + NBr (а — sin а) +
+ Р/ ~ (sin а + cos а — “ ) = 0, (3)
. . , / . а sin 2a\
Af0 sin а + NBr Qsin а — 2--j—J +
+₽/i(T-т+-г+’-^)=о- <4>
231105
267
231106-231112
231106
231107
Для определения No и Мв на фиг. 231106 даны графики зависи-
мости NjPj и MjPjr от угла а.
Из фиг. 231106 видно, что с достаточной для практики точностью
можно принять изменение и в зависимости от угла а протека-
ющим по прямым. Отсюда для NB
и Мв получаются следующие вы-
ражения:
231108
231109
NB = P} (0,572 - 0,0008а*), (1)
7Ио = pjr (0,00033а0 - 0,297). (2)
Значения углов а в эти ура-
внения подставляются в градусах.
Нормальная к сечению го-
ловки сила на участке АВ будет
Nt = N„ cos <р + 0,5Р, (1 — cos <р), (1)
а на участке ВС
Na = N0cos? +
+ 0,5P>(sin <р — cos<p). (3)
Из условия совместной дефор-
мации головки и втулки, обеспе-
Графики для определения No и Af0
чиваемой начальным натягом,
можно считать, что на головку
передается не вся сила, а ее некоторая часть, определяемая из соотно-
шения жесткостей на растяжение головки и втулки. Отсюда имеем
N'n = NJ,
Nrt = N2k,
где
^бр^вт
£ст^г
231Ц0 Влиянием втулки на изгиб головки можно пренебречь, так как
отношение жесткости на изгиб втулки к жесткости на изгиб голЬвки
будет величиной порядка 0,02 — 0,04.
231111 Напряжения в поршневой головке, имеющей прямоугольное сечение,
на внешней и внутренней поверхностях соответственно будут:
Гол# бг + й
aaj~
(I)
(2>
2311121 Как показали расчеты ряда поршневых головок, максимальное
,, J напряжение в них возникает на внешних волокнах в месте перехода
головки на стержень, т. е. в заделке, где <р = а. Для этого сечения
268
231113—231115
изгибающий момент и нормальная сила соответственно равны
Мл = PjT (0,542 — 0,0268а - 0,072 cos а - 0,5 sin а + 0,0459а cos а), (I)
= Pj [(0,072 -0,0458а) cos а + 0,5 sin а]. (2)
Максимальное расчетное напряжение на внутренней поверхности 231113
получается около горизонтального сечения головки и у заделки ее.
Напряжения в головке сильно зависят от угла между вертикаль- 231114
ной плоскостью симметрии шатуна и тем сечением, которое является
местом заделки. Чем больше этот угол, тем выше максимальное напря-
жение в головке. На фиг. 231114 показаны расчетные напряжения
от одной и той же растягивающей силы, но с разными углами заделки.
Фиг. 231115.
Изменение изгибающего момента, модуля со-
противления изгибу и напряжения в расчет-
ном сечении при различных углах защем-
ления для двух поршневых головок шатунов
(--------- для головки по фиг. 231104-1)
Фиг. 231114.
Влияние формы поршневой головки
на напряжения
При угле заделки а =110° максимальное напряжение на левой стороне
в два раза меньше напряжения на правой стороне, соответствующей
углу заделки а = 125*.
Так как местоположение заделки сильно влияет на напряжение, 231115
то правильное определение его имеет существенное значение для рас-
чета. Хотя с увеличением угла а (фиг. 231115) увеличивается и изги-
бающий момент, но начиная с места сопряжения внешнего радиуса голов-
ки с радиусом перехода от головки к стержню, увеличивается толщина
сечения. Поэтому сечением защемления правильно считать такое, в кото-
ром напряжение максимально. Это сечение лежит по отношению к верти-
кальной плоскости симметрии шатуна под углом, несколько большим у.
Для определения такого сечения, соответствующего месту заделки,
определяют угол у по формуле (1) п. 231101, берут несколько значений
углов а’==у’-|-р* (фиг. 231101), давая углу р° малые значения, напри-
269
231116-231205
мер, 3° — 5* — 7°, и по формулам пп„ 231111 и 231112 определяют напря-
жения, причем высоту сечения головки находят по формуле
й = (R + Р) cos р — гвн — j/” ps —(R + p)ssinsp|.
Построив диаграмму изменения напряжений в зависимости от угла
а, находят величину максимального напряжения и соответствующее
значение угла а.
На фиг. 231115 дано, в зависимости от угла защемления а, изме-
нение изгибающих моментов, модулей сопротивления изгибу и напряже-
ний в сечении защемления двух поршневых головок.
231116 Изложенным выше методом можно добиться большей прочности
головки увеличением радиуса перехода от головки к стержню шатуна,
сопрягая их таким образом, чтобы угол у (фиг. 231101) был возможно
более близким к 90°.
231117 Встречающиеся формы головок с корсетностью в месте перехода
к стержню следует признать нецелесообразными по причине большой
величины угла защемления.
231118 / Учитывая распределение напряжений от силы инерции по контуру
/головки, следует располагать масляные отверстия (если они имеются)
/ в верхней части головки или под головкой, т. е. в наименее напряжен-
I ных местах.
231200 Напряжение в поршневой головке от силы, сжимающей шатун
231201 Сжимающая шатун сила Рс имеет максимальное значение в момент
наибольшего давления газов в цилиндре и равна разности силы давле-
ния газов на поршень и силы инерции комплекта поршня.
231202 С достаточной для практики точностью можно принять, что сила
Рс максимальна в момент верхней мертвой точки и равна
Ре — PiF n-\-Pj,
где рг—давление вспышки, 'определяемое по индикаторной диа-
грамме;
Р/ — сила инерции комплекта поршня;
Fn — площадь поршня.
231203 Для быстрого определения р2, в пределах изменения степени сжа-
тия двигателя от 4,5 до 7 и среднего эффективного давления pt от 5 до
11 кг/см1, можно воспользоваться следующей формулой:
р2 = 1,826 (е - 1,227) ра 4- 0,442 (е -f-1,875) ре,
где ра — давление начала всасывания.
231204 Распределение давления or силы Рс на нижнюю часть головки при-
нимается косинусоидальным, как эго показано на фиг. 231204.
231205 Принимая, что головка заделана в сечении СС, в месте перехода
ее на стержень, и что участок головки между заделками (со стороны
стержня шатуна) не деформируется, найдем:
270
231206-231207
изгибающий момент для участка головки АВ
M^M. + N.rU-cos?), (1)
а для участка ВС
М2 — Мл + Ntr(l — cos?) —Рс-^- <рsin ? — cossQ , (2)
Фиг. 23120.6.
Графики для определения
Na и Мл
Фиг. 231204.
Расчетная схема поршневой
головки при действии сжима-
ющей силы
АА,
231206-
Л40 Na
где даны величины ~ и р- в зависимости от угла я.
Нормальная к расчетному сечению сила на участке головки АВ 231207
Ni = N» cos ?,
(1)
271
231208- 231301
а на участке ВС
N2 = ~ Гу sin <р — <р sin <р — cos 4-N0 cos <р.
(2)
231208
231209
231210
231211
Нормальная сила, действующая на расчетное сечение головки, при
наличии запрессованной втулки, определяется по формулам п. 231109.
Напряжения в поршневой головке,
имеющей прямоугольное сечение, на
внешней и на внутренней поверхностях
соответственно будут:
°ае= [2ЛГ j(2?V») + Wr] аЛ ’ 0)
<2>
Максимальной величины эти напря-
жения достигают в месте заделки при
<р — а.
Напряжения, полученные расчетом
и тензометрированием, почти совпадают;
это видно, например, из фиг. 231211,
где на правой стороне дана эпюра рас-
четных напряжений, а на левой—экспе-
риментальных, для шатунной головки
по фиг. 231104-1. Изменение зазора
между пальцем и головкой с 0,10 до
0,06 мм не оказывало заметного влия-
ния на величину замеренных напряжений.
Эпюры напряжений поршневой
головки
231300 Напряжение в поршневой головке от запрессовки втулки
и от нагрева головки
231301 Примем обозначения:
А—величина натяга посадки втулки в головку;
аг—термический коэффициент расширения материала головки (для
стали аг= 1-10"');
аЕТ—термический коэффициент расширения материала втулки (для
бронзы ав1 = 1,8- Ю'5);
/—повышение температуры головки при работе двигателя
(/= 100-150° С);
Д{—величина натяга, получающегося вследствие разности темпера-
турных коэффициентов расширения материалов головки и
втулки:
Д| = (^вт аг) W;
£>—внешний диаметр головки;
f*—коэффициент Пуассона (практически принимается рав-
ным 0,3).
Остальные обозначения те же, что и в 231101.
272
231302- 231402
Удельное давление р между головкой и втулкой (считаем
женно это давление постоянным), будет
р= _.д+д*
F rDM2 d2 + d? _ ‘ ,
d pi ~ + И ~ ~ И
I— jEct Ebt —
Напряжение на внешней поверхности головки
, __ 2d2
~ Р Dt — di ’
и на внутренней поверхности
прибли-
(I)
231302
231303
(2)
, D24-d2
°* — Р Di-d? •
Напряжения могут быть получены с достаточной точностью также
при расчете проушины как тонкостенного кольца по формуле
_/ _ ра
“ 2Ъ
(3)
Запас прочности в поршневой головке
Запас прочности в поршневой головке определяют при работе дви-
гателя на режиме пикирования с выключенным газом и при работе
двигателя на номинальном режиме. В обоих случаях минимальный
запас прочности получается для внешних волокон в месте перехода
головки на стержень шатуна, что подтверждается типичными полом-
ками поршневых головок (фиг. 231401).
231400
231401
Фиг. 231401.
Типичный вид поломки поршневой головки шатуна
авиационного двигателя
Тах как напряжения в головке шатуна изменяются по асимме-
тричному циклу, то запас прочности определяют по формуле
231402
где а_х — предел усталости материала на (изгиб при симметричном
цикле;
аа — амплитудное напряжение цикла;
ат — среднее напряжение цикла;
18 Авиац. порши. двигатели.
273
231403-231405
a — коэффициент, определяемый по формуле
о, — предел усталости на изгиб при пульсирующем цикле.
Среднее напряжение и амплитуду напряжений находят по формулам
max “ min
am =----2----- ’ (3)
01max — °min ,
аа = ~--j----- • (4)
231403 Запас прочности на номинальном режиме определяют по формуле
Л =---------—.—
°aj - «во + « ( + °ас + 2 а')
где аа/ подсчитывается по формуле (1) п. 231111;
□ас— по формуле (1) п. 231239;
ад—по формуле (1) п. 231303; если втулка плавающая, то <з'а = 0.
231404 Запас прочности на режиме пикирования определяют по формуле
2в_,
П ------------1---------г
°»>_Оа/+а(%'+%- + 2°а)
где ад, — напряжение сжатия от силы инерции в момент положения
поршня в нижней мертвой точке, определяемое по формуле (1)
п. 231209.
Если втулка плавающая, то вд = 0.
231405 В таблице 231405 приведены расчетные величины запасов проч-
ности ряда поршневых головок современных авиационных двигателей.
При расчете были приняты: а_1=4000 кг[см* и а = 0,2.
Таблица 231405
Данные расчета на прочность поршневых головок шатунов
авиационных двигателей
Название двигателя Запасы прочности Деформа- ция 6, мм Удельное давление к, KsjCM^
номиналь- ный режим режим пикирова- ния
ВК-105А 620
М-38 3,2 5,9 0,011 830
М-88 2,3 3,0 0,020 845
DB-601A 5 6 0,011 700
DB-605 4,7 5,7 0,007 770
«Юмо»-211 5,1 6,9 0,007 525
«Мерлин>> XX 3,2 5,7 0,024 650
Аллисон С-15 2,4 3,9 0,024 600
Райт 2300 — 680
274
231406-232001
Из таблицы 231405 видно, что поршневые головки должны иметь 231406
достаточно высокие запасы прочности, чтобы не ломаться; так, напри-
мер, поршневые головки мотора М-88 неоднократно ломались; у них
был (как видно из таблицы 231405) минимальный запас прочности по
сравнению с запасом прочности головок других авиационных двигате-
лей. После увеличения запаса прочности поломки прекратились.
При запасе прочности порядка 2 поломки можно объяснить неучи- 231407
тываемыми в расчете перегрузками от перекосов, от несимметричной
передачи усилий на головку вследствие большого зазора между голов-
кой и бобышками поршня, от заедания поршня в цилиндре и т. п.
Запас прочности в поршневых головках следует принимать не 231408
менее 3.
Деформация поршневой головки 231500
При расчете головки шатуна с плавающим поршневым пальцем 231501
определяют уменьшение внутреннего поперечного диаметра головки—
под действием сил инерции поступательно двигающихся масс комплекта
поршня в цилиндре
й Р/ясрр-90Т
2 =----10^7----*
где / — момент инерции сечения головки,
Е — модуль упругости,
dcp —средний диаметр головки шатуна,
а — угол заделки.
Величины деформаций поршневых головок шатунов некоторых со- 231502
временных авиационных двигателей на режиме пикирования приве-
дены в таблице 231405.
Учитывая необходимость наличия диаметрального зазора между 231503
втулкой и плавающим пальцем (этот зазор делается обычно равным
0,04—0,06 мм), можно считать, что уменьшение поперечного диаметра
головки шатуна не должно быть больше половины этого зазора (см.
таблицу 231405).
Удельное давление на втулке поршневой головки 231600
Втулку поршневой головки шатуна проверяют на удельное давле- 231601
ние от силы вспышки Р2 в цилиндре по формуле
где а — длина втулки поршневой головки,
— диаметр втулки.
Величина удельных давлений у современных двигателей лежит 231602
в пределах от 500 до 900 кг!смг.
Расчет стержня шатуна 232000
Стержень шатуна рассчитывается на усталость при номинальном 232001
режиме двигателя.
18*
275
232002-232101
232002 В дальнейшем изложении принято называть центральным шатун,
у которого ось кривошипной головки совпадает с осью кривошипной
шейки коленчатого вала и который не имеет прицепного сочленения;
центральный шатун с прицепным сочленением называется главным
шатуном.
232100 Расчет стержней центральных и прицепных шатунов
232101 Примем обозначения (фиг. 232101):
р2 — максимальное давление газов в цилиндре;
рс —давление в момент начала вспышки;
Лд — коэффициент динамического усиления;
Фиг. 232101.
Вильчатый и внутренний шатуны
F — площадь расчетного поперечного сечения стержня шатуна;
среднее расчетное сечение стержня шатуна берется по длине
шатуна в сечении АА, т. е. по середине между центрами от-
верстий поршневой и шатунной головок1;
1Х — момент инерции площади сечения относительно оси хх;
1д — то же относительно оси у у;
ix — радиус инерции сечения относительно оси хх;
1 Выбор этого сечения в качестве расчетного при использовании в дальнейшем
в формулах является условным. Уточнение его положения не производится в связи
с другими допущениями, связанными со сложной формой шатуна и его нагруже-
нием поперечными силами.
276
232102-232112
i9 — радиус инерции сечения относительно оси уу;
L — длина шатуна:
d и da — диаметры отверстий поршневой и кривошипной головок
шатуна;
Fmin — площадь минимального поперечного сечения стержня шатуна.
За расчетную нагрузку на стержни центрального и прицепного 232102
шатунов принимаются силы, действующие вдоль их осей. ,
Силами инерции шатуна, изгибающими его в плоскости движения, 232103
пренебрегают, так как при той оборотности, которую имеют современ-1
ные авиационные двигатели, они сравнительно невелики и достигают
максимальной величины в тот момент, когда основная нагрузка, дей-
ствующая по оси шатуна, мала. Также не учитывают при расчете на .
прочность поперечных колебаний шатуна, так как вследствие их высо-
кой собственной частоты они не оказывают существенного влияния на
его напряженность.
Сила, действующая вдоль оси шатуна, за цикл работы двигателя 232104
изменяется асимметрично.
В четырехтактном двигателе максимальной силой, растягивающей 232105
шатун, является сила инерции поступательно двигающихся масс—Pj,
действующая в момент начала хода всасывания-
Максимальная сила, сжимающая шатун, 232106
Рс = (А — Рс) Fn/Сд + PcFn + Pj.
Коэффициент динамического усиления кя при всех неблагоприят- 232107
ных условиях не превосходит 1,18. При этом значении кя, как показал
ряд просчетов, величина запаса прочности понижается на 10% по
сравнению с таковой [1] без учета коэффициента кя.
Для простоты расчета эффект динамичности не учитывается и кя 232108
принимается равным 1. Уравнение 232106 примет в этом случае сле-
дующий вид:
Pc^=p2Fa + Pj.
С достаточной для практики точностью pz может быть определено 232109
по формуле 231203.
При расчете минимального сечения стержня шатуна (у верхней 232110
головки) сила инерции—Р} является силой инерции массы комплекта
поршня, пальца и поршневой головки шатуна.
При расчете среднего сечения стержня сила—Pj должна включать 232111
и силу инерции части шатуна, находящейся выше расчетного сечения
(если принимать ее движущейся по закону движения поршня).
Максимальное напряжение сжатия стержня шатуна (с учетом его 232112
изгиба) равно
°i — k~, (1)
где к для случая изгиба шатуна в плоскости его движения будет
кх = 1 + 0,000526 ^- = 1 + 0,000526 , (2)
277
232113—232116
а для случая изгиба шатуна в плоскости, перпендикулярной плоскости
его движения, (
£в = 1 + 0,000526 = 1 + 0,000526 (ЬУ . (3)
232113 При определении kv по этой формуле предполагается, что концы
шатуна полностью защемлены и не могут поворачиваться. Вследствие
наличия на концах стержней шатунов головок положение это подтвер-
ждается в достаточной мере.
На фиг. 232113 показан шатун мотора «Мерлин» XX, испытанный
на статическое сжатие. Форма упругой линии подтверждает, что стер-
Фиг. 232113.
Вид изгиба шатуна при статическом сжатии
жень шатуна изогнулся так, как в случае, если бы концы его были
защемлены.
232114 Запас прочности в среднем сечении стержня шатуна, согласно фор-
муле (1) п. 231402, будет
П~ fcPc(l+a)-P7-(l-a)*
232115 Так как центральные шатуны имеют обычно стержни, уширяющиеся
по мере удаления от поршневой головки, то при расчете таких шату-
нов необходимо, помимо запаса прочности в среднем сечении, опреде-
лить запас прочности в минимальном сечении
„ _ 2a_t /^min
п - 77(ПР^р,(1 - а) •
Фиг. 232116.
Вид разрыва стержня прицепного шатуна
232116 . Стержни прицепных шатунов имеют постоянное сечение; поэтому
расчет их ограничивается определением прочности в среднем сечении.
На фиг. 232116 показан прицепной шатун, разорвавшийся во время
работы по среднему сечению.
278
232117
В таблицах 232117-1 и II приведены запасы прочности в стержнях 232117
шатунов ряда современных авиационных двигателей, где через п обо-
значен запас прочности в минимальном сечении, через пх—запас проч-
ности в среднем сечении с учетом изгиба в плоскости движения ша-
туна и через tig—запас прочности с учетом изгиба в плоскости, пер-
пендикулярной плоскости движения шатуна.
Таблица 232117-1
Запасы прочности в стержнях центральных шатунов авиационных двигателей
Двигатели Тип шатуна п Пх nv 7 V
Испано-Сюиза-12 Ybrs . Вильчатый 3,1 2,9 2,9 3,2
Внутренний 3,1 2,9 2,9 3,2
DB-601Aa Вильчатый 2,5 2,4 2,7 0,8
Внутренний 2,1 2,0 2,1 9,8
DB-601E Вильчатый 2,2 1,8 2,4 0,8
Внутренний 1,7 1,7 1,7 8,9
DB-605 Вильчатый I,9 1,9 2,1 1,1
Внутренний 1,7 1,7 1,6 9,5
«Юмо»-211 Вильчатый 1,9 2,0 1,9 10,7
Внутренний 1,9 2,0 1,9 10,7
«Мерлин» XX Вильчатый 1,4 1,7 1,7 8,2
Внутренний 1,4 1,4 1,4 15,3
Аллисон С-15 Вильчатый 1,4 1,6 1,4 19
Внутренний 1,3 1,5 1,4 16
Таблица 232117-11
Запасы прочности в стержнях прицепных шатунов авиационных двигателей
Двигатели Пл. ПУ 7 х 1У
ВК-105 1,7 2,0 1,0
АМ-33 1,6 1,6 5,2
М-63 1,4 1,5 4,1
М-88 1,9 2,0 3,4
АШ-82ФН 1,4 1,5 4,3
Кертисс 1800 2,4 2,4 5,7
Испано-Сюиза 12 Ybrs 2,1 2,5 1,0
Лоррен «Петрель» 2,2 2,2 3,6
Кертисс «Супер-Конкверор» 2,1 2,1 5,7
Бристоль «Меркур» 1VS2 2,2 2,5- 2,3
Райт «Циклон» SGR-1820 1,7 1,8 4,3
Гном-Рой «Мистраль» К-14 2,5 2,9 3,4
Райт GR-2600 1,9 1,9 4,1
BMW-801 1,6 1,6 5,2
279
232200— 232202
При определении запасов прочности усталостные характеристики
материалов для всех шатунов были приняты одинаковыми, так как
шатуны изготовляются из хромоникелевых сталей, имеющих близкие
усталостные характеристики, и обработка поверхностей различных шату-
нов примерно одинакова. При подсчетах были приняты: предел уста-
лости при растяжении-сжатии = 3 500 кг[см2; при пульсирующем
цикле а0 = бООО кг)смг.
Из таблиц 232117-1 и II следует:
1. У большинства шатунов рядных двигателей запасы прочности
в минимальном и среднем сечениях одинаковы. Это обеспечивает равно-
прочность стержня шатуна. Плавный переход к кривошипной головке
необходим для большей жесткости головки и устранения концентрации
напряжений.
2. Отношение моментов инерции 1Х'1у в расчетном сечении не
играет существенной роли. Так, например, при = 16 у шатуна
двигателя Аллисон запасы прочности пх и пц разнятся только на 0,1;
при отношении /ж:/!, = 0,8 у шатунов DB-601Aa пх и пи разнятся
лишь на 0,3. При изменении отношения 1Х: 13 для разных шатунов
в пределах от 3 до 16 пх и пд разнятся не больше чем на 0,1—0,3.
Таким образом в центральных и прицепных шатунах выбор отношения
Ix: h диктуется в основном производственными и конструктивными
соображениями, а не прочностью. Малое влияние отношения 1Х: 1ц на
запасы прочности объясняется незначительностью напряжений изгиба
в сравнении с напряжениями сжатия.
3. Отношение моментов инерций 1Х: 1д необходимо выбирать таким,
чтобы запас прочности пд не был меньше чем пх, так как полного
защемления концов шатунов в действительности может и не быть, как
это предполагается при учете изгиба в плоскости, перпендикулярной
движению шатуна.
4. Для вновь практикуемых шатунов, на основании приведенной
статистики, можно рекомендовать величину запаса прочности 1,8—2,0
с учетом возможности форсирования двигателя без изменения размеров
шатунов. Запас 1,4 хотя и встречается у шатунов современных авиа-
ционных моторов, но является недостаточным (при таком запасе проч-
ности имели место случаи поломок внутренних шатунов двигателя
«Мерлин» XX).
232200 Расчет стержня главного шатуна звездообразного
двигателя
232201 Расчетными нагрузками, действующими на стержень главного
шатуна с прицепным сочленением, являются: переменная сила, дей-
ствующая по его оси (см. 232105 и 232106), и переменная сила реак-
ции от стенки цилиндра, создаваемая действием прицепных шату-
нов, SN2'.
232202 На фиг. 232202 показана пунктирной линией со стрелкой сила
а сплошной линией со стрелкой—реакция от этой силы.
Разложив силу реакции на два направления: по оси шатуна и
перпендикулярно к этой оси, получим две силы: SNJsinp, сжимающую
или растягивающую стержень шатуна в зависимости от ее напра-
280
232203—232206
вления, и SNi'cosp, вызывающую в стержне шатуна изгибное на-
пряжение
l^N't cos ?
~ Wx
где 1Х — расстояние от оси поршневой головки
до расчетного сечения стержня шатуна,
Wx — момент сопротивления изгибу расчет-
ного сечения стержня шатуна.
Для вычисления минимального запаса проч-
ности в стержне главного шатуна можно огра-
ничиться определением запасов прочности в двух
его сечениях: в минимальном у поршневой го-
ловки и в среднем по длине стержня.
Запас прочности в минимальном сечении,
как показали расчеты ряда шатунов звездообраз-
ных авиадвигателей, можно определять без учета
силы SN'i, согласно 232115. Разница в запасах
прочности с учетом и без учета реакции силы
при этих расчетах не превышала 5%.
Для определения запаса прочности в сред-
нем сечении, как показали расчеты ряда шату-
нов звездообразных двигателей, достаточно опре-
делить напряжения на стороне сечения, обращен-
ного в сторону движения шатуна в моменты,
соответствующие: а) вспышке в цилиндре и
б) максимальной силе SN['. Напряжение в мо-
мент вспышки будет максимальным напряжением
стороне сечения, а напряжение в момент макси-
мальной силы —максимальным напряжением растяжения на той же
стороне сечения.
Для примера определим запас прочности в среднем сечении глав-
ного шатуна двигателя «Пегас» XX. Из динамического расчета
двигателя имеем значение сил Рс и SNI по углу поворота коленчатого
вала. Диаграмма этих сил дана на фиг. 232206-1, а размеры шатуна —
на фиг. 232206-II.
В момент вспышки в цилиндре на шатун действуют сила Рс — 8010 кг
и сила SNi=—160 кг.
При а = 640° на шатун действует максимальная сила SN'2= — 1150 кг
и сила Рс =450 кг. Площадь, момент инерции, момент сопротивления
и радиус инерции среднего сечения, отстоящего на расстоянии у = 17,15 см
Фиг. 232202.
Схема сил, действующих
на стержень главного
шатуна
сжатия на указанной
232203
232204
232205-
232206*
от поршневой головки, соответственно равны: Р = 5,63 см2, 1х — 21см*,
IVX = 9,65 см* и !ж = 2,19 см.
Напряжение на передней кромке сечения в момент вспышки, со-
гласно 232112, будет
от = [ 1 + 0,000526 ] =
= |^[l-f-0,000526- (111)*] =1610 кг{см\
281
232206
Фиг. 232206-1.
Диаграмма сил, действующих на стержень главного шатуна
двигателя «Пегас» XX
Фиг. 2322 06-11.
Размеры главного шатуна двигателя «Пегас» XX
282
232206
В момент вспышки а = {3 = 0; поэтому напряжение от реакции
силы SNz будет равно
£» W £»' У , I/O
Знак минус соответствует напряжению растяжения на передней
кромке сечения.
Суммарное напряжение равно
<£= 1610-283= 1327 кг/см2.
Найдем напряжение в момент действия максимальной силы ENJ,
Г. е. при а = 640°.
Напряжение в сечении от сил, действующих вдоль оси шатуна,
равно
__ Рс' . SNjsinP
®» ~ Р COS Р + Р
Значение угла (3, соответствующее углу а = 640°, определяется
из соотношения
sin {3 = j-sin а;
при а = 640° имеем sin{3 = —0,273 и cos [3 = 0,962; отсюда
45) , (-115Э)(-0,273) . , 2
°2 0,962-5,63^” 5,63 ~ 140 кг/см .
Положительный знак напряжения соответствует сжатию на перед-
ней кромке сечения.
Напряжение изгиба равно
„/ел,-.
Суммарное напряжение на передней кромке сечения
=" = Оз + =4= 140- 1970= -1830 кг/см2.
Среднее напряжение и амплитуда напряжений будут
„т=«1+<=.!321-!га=_252 кг/1:л)11
». = -1327 j1830 =1578 „/ел,-.
Запас прочности находим по формуле 231402, приняв с_г = 3500 кг/см1
и а = 0,16 и не обращая внимания на знак, стоящий перед величиной
среднего напряжения, так как влияние асимметрии одинаково для
сталей в области среднего растягивающего и среднего сжимающего
напряжений, т. е.
п —_____I500___= 22
15784-0,16-252
Запас прочности в среднем сечении с учетом изгиба в плоскости,
перпендикулярной к плоскости движения, определяется по формулам
для определения запасов прочности центральных шатунов.
283
232207
Для рассчитываемого шатуна радиус инерции среднего сечения
относительно оси, лежащей в плоскости движения шатуна, zy = 0,775 см.
Сила Р, = 2090 кг; Л, = 14,27 см. Определяем коэффициент ку по фор-
муле (3) п. 232112
' кд = 1 + 0,000526 • ( = 1,044.
Запас прочности находим по формуле 232114
__ 2-3500-5,63 _ ,
Пу ~ 8010- (1 +о, 1бДГШ+2(МН1 -0,16) “
Таблица 232207
Запасы прочности в стержнях главных шатунов звездообразных
авиационных двигателей
Двигатели п пх ‘"у IX
М-88 2,8 3,2 4,8 7,0
М-63 3,0 2,0 4,8 0,8
АШ-82ФН 3,о 1,7 3,5 0,7
Боистоль «Меркур» IVS2 4,0 — 5,2 2,3
Гном-Рон «Мистраль» К-14 3,8 3,7 5,5 15
Райт «Циклон», SGR-1820 2,2 2,4 3,6 4,0
• Райт ОЙ-2эОО 3,9 2,4 5,2 0,9
«Пегас» XX 2,4 2,2 3,4 8,0
232207 Результаты расчетов стержней главных шатунов звездообразных
двигателей, приведенные в таблице 232207, позволяют сделать следую-
щие выводы:
1. Запасы прочности в стержнях главных шатунов звездообразных
двигателей выше, чем для стержней прицепных и центральных шату-
нов. Особенно резкая разница видна при сравнении запасов прочно-
сти пх и пд. Это объясняется зависимостью поперечных размеров
стержня главного шатуна от размеров кривошипной головки.
Надежная работа шатунного подшипника зависит от жесткости
кривошипной головки шатуна. На кривошипную головку главного
шатуна передаются усилия от всех связанных с ним прицепных шату-
нов; поэтому для устранения недопустимо больших деформаций головку
делают очень массивной с плавным переходом к стержню. Эта плав-
ность перехода в большей мере обусловливается поперечным размером
стержня главного шатуна звездообразного двигателя.
Минимальный запас прочности во вновь проектируемых шатунах,
на основании статистических данных расчетов, не должен быть ниже
2,0-2,5.
2. Запасы прочности пх значительно меньше, чем пу, примерно
в 1,5 — 2 раза, в то время как у центральных и прицепных шату-
нов пх и Пд одного порядка. Особенно пв превосходит пх у шатунов
с перевернутым тавром (М-63, Райт GR-2600). По прочности стержня
284
232300-232302
шатуна '"эта конструкция менее рациональна, чем с обычным располо-
жением тавра.
3. Запасы прочности п в минимальном сечении у шатунов с обычным
расположением тавра меньше, чем в среднем сечении. На фиг. 232207
Фиг. 232207.
Вид разрыва главного шатуна
показан главный шатун, разорвавшийся во время работы по минималь-
ному сечению.
4. Отношение моментов инерции 1Х: 1д у главных шатунов звездо-
образных двигателей различно (как и у центральных шатунов) и не
влияет [на прочность стержня.
Расчет стержня главного шатуна V-образного двигателя
Главные шатуны V-образных двигателей рассчитываются так же,
как главные шатуны звездообразных, но максимальная реакция от
силы N'i, в отличие от случая звездообразных двигателей, может быть
и отрицательной и положительной; поэтому минимальный запас в сред-
нем сечении может быть и на передней кромке и на задней.
В таблице 232301 приведены запасы прочности в стержнях главных
шатунов V-образных авиационных двигателей.
Таблица 232301
232300
232301
Запасы прочности в стержнях главных шатунов V-образиых
авиационных двигателей
Двигатели п «X "v
ВК-105 2,1 2,2 2,7 4,1
АМ-38 1,7 1,5 1,6 8,8
Испано-Сюнза 12 Ybrs 2,6 2,7 3,3 3,4
Кертисс 1800 2,5 —. 2,4 12,3
Лоррен «Петрель» 2,4 — 2,4 5,0
Кертисс «Супер-Конкверор» 2,0 1,7 2,1 9,9
Запасы прочности в стержнях главных шатунов V-образных дви-
гателей допускаются той же величины, что и у центральных шатунов,
т. е. порядка 1,5 — 2.
232302
285
233000- 233105
233000
РАСЧЕТ КРИВОШИПНОЙ ГОЛОВКИ ШАТУНА
233100 Расчет кривошипной головки шатуна рядного двигателя
233101 Примем обозначения:
Р— сила, действующая на крышку перпендикулярно к линии
разъема;
М — изгибающий момент в расчетном сечении крышки;
N — нормальная сила в расчетном сечении крышки;
Z — момент инерции расчетного сечения крышки;
/вт — момент инерции сечения вкладыша шатуна;
W — момент сопротивления изгибу расчетного сечения крышки;
F — площадь поперечного сечения крышки;
Fbt— площадь поперечного сечения вкладыша шатуна;
с —расстояние между болтами, которые принимают за средний диа-
метр головки.
233102
Кривошипная головка шатуна рассчитывается на максимальную
силу Р, которая имеет место в момент начала хода всасывания и состоит
233103
233104
из сил инерции поступа-
тельно движущихся масс
в цилиндре и вращательно
двигающихся масс шатуна,
лежащих выше разъема
крышки.
При наличии прицеп-
ного шатуна наибольшее
значение силы Р опреде-
ляется из векторной диа-
граммы сил, действующих
на вкладыш шатуна. Диа-
грамма эта берется из ди-
намического расчета дви-
гателя. Из силы, взятой
по диаграмме, следует вы-
честь силы инерции ниж-
ней крышки и половины
вкладыша.
Расчетным режимом
для крышки шатуна дол-
жен быть режим пикиро-
вания, так как силы инер-
ции имеют максимальное
значение при работе дви-
гателя во время пикиро-
Фиг. 233105.
Расчетная схема для определения напряжений в кри-
вошипной головке шатуна
вания самолета.
233105 При расчете принимается, что давление от силы распределяется
по вкладышу шатуна по косинусоидальному закону (фиг. 233105), пере-
даваясь на крышку по тому же закону, и что вкладыши с головкой
деформируются одинаково; последние предположения основываются на
том, что вкладыши всегда сидят в головке с натягом.
286
233106-233108
Исходя из этих предположений, распределение изгибающих моментов
между крышкой и вкладышем можно производить пропорционально
моментам инерции их поперечных сечений.
Для определения напряжений в крышке шатуна предполагают, что 233106
она составляет одно целое с остальной частью головки шатуна, т. е.
считают, что вследствие сильной затяжки болтов раскрытия стыков
не происходит. Сечение головки шатуна для упрощения расчетов счи-
тают постоянным и равным среднему сечению крышки; вследствие этого
расчетные напряжения и деформации получаются завышенными. Радиус
кривизны головки принимается равным половине расстояния между
болтами.
Согласно расчетной схеме фиг. 233105, изгибающий момент на уча- 233107
стке головки АВ равен
+ cosy) — P-f-J-siny, (1)
а на участке ВС
Мг=Ма + 1У0-^-(1 — cosy) — Р (sin у — cosy Y (2)
где Af0 и No — изгибающий момент и нормальная сила в сечении АА.
которые, если рассматривать головку как брус малой кривизны, заще-
мленный в сечении СС, определяются из уравнений
. Afosina + No-| (sin a— _|_
+ Р 1(4 cos2« — cosa— 2sin <х-ь 4s»n2a + 4 + £_l)=0, (3)
М (a.~sina) — P^( — —~COS sin а ") =0, (4)
\ 74 7s у
Фиг. 233108.
Графики для определения No и Af0
Для определения Мо и No на фиг. 233108 даны графики зависи- 233108
Afo No о
мости —— и-p- от угла <х0.
287
233109—233II5
233109 Из фиг. 233108 видно, что с достаточной для практики точностью
2М0 No
можно принять изменение -рр и -р в зависимости от <х0 по прямым.
Уравнения этих прямых следующие:
Na = P (0,522- 0,003 <0, (1)
= (0,0127 + 0,00083 <). (2)
Значения угла % подставляются в эти уравнения в градусах.
233110 Изгибающий момент в расчетном сечении крышки будет
м — Ма — Рс (0.0127 +0,00083 д°0)
1+^ 20+^)
Нормальная сила в том же сечении
N — N° — р(°.522~ 0,00-3 %)
• + ЛЕ- 1 + 4г
Г г
233111 Напряжение в крышке равно
М . N
233112 Выбор сечения, соответствующего месту заделки, является недо-
статочно определенным. Если считать заделку в тех местах, rjje начи-
наются бобышки под болты, как показано на фиг. 233105, то угол а0
у выполненных шатунов лежит обычно около 40°. Для большей сравни-
мости результатов расчетов принимают этот угол постоянным и рав-
ным 40°; при этом предположении формула 233111 примет следующий вид:
233113 В таблице 233113 приведены напряжения в крышках шатунов
некоторых современных авиационных двигателей, полученные при рас-
чете на режиме пикирования
ПО формуле 233112. Таблица 233113
233114 Так как режим измене-
ния напряжений в крышках
шатунов всегда одинаковый
(напряжения изменяются от
нуля до максимального зна-
чения), то сравнивать напря-
женность отдельных крышек
можно по максимальным на-
пряжениям, не рассчитывая
их на усталость.
233115 Уменьшение горизон-
тального диаметра кривошип-
ной головки шатуна за счет
деформации во время ра-
Напряжеиия в крышках кривошипных головок
шатунов авиационных двигателей
Двигатели Напряжения, кг/сж*
вильчатые шатуны внутренние шатуны
АМ-38 2100 —
DB-601A 1470 3340
DB-605 ИЗО 3390
«Мерлин» XX . . . 1940 3580
Аллисон С-15. . . . ИЗО 2070
288
233116—233122
боты определяется по формуле
8= 4Е'
/ (я) = (1 — sin <х) (0,055 а — 0,064) + (0,792 — 0,172 а) X
а к , sin 2а , . Ч /COS* а . а 1 sin 2а"Ч
-7Г — т4---,---Н — Sin а ) — ( —------------т + —л )•
2 4 * 4 ‘ J \ 4 2к 4 1 4« J
где
(О
(2)
Функция (2) п. 233115 с достаточной для практики точностью
(фиг. 233116) может быть заменена функцией
Фиг. 233116.
Графики для определения деформации крышки
/(а)%6-10’’(<х°-
-90°)2^6 • 10^<2.
Принимая угол <хо = 40°,
найдем уменьшение горизон-
тального диаметра
3— 0,0024 Рс3
Е (/ + /вт) ’
Деформации кривошип-
ных головок шатунов совре-
менных авиационных двига-
телей, вычисленные по фор-
муле 233117, приведены в таб-
лице 233118.
В вильчатых шатунах де-
формации кривошипных голо-
вок лежат в пределах зазора
между вкладышем и шатунной
шейкой коленчатого вала.
Во внутренних шатунах
деформации кривошипных го-
ловок превосходят',“зазор; поэтому эти деформации и соответствующие
им напряжения следует рассматривать условно.
Действительные деформации кривошипных головок меньше вычис-
ленных, так как в расчете не учитывается ужесточение головок бобыш-
ками под болты и за средний
Таблица 233118
Деформации кривошипных головок шатунов
авиационных двигателей
Двигатели Деформации, мм
вильчатые шатуны внутренние шатуны
АМ-38 0,07
DB-605 0,06 0,18
«Мерлин» XX . . . 0,06 0,19
Аллисон С-15. . . . 0,04 0,11
диаметр принимается рас-
стояние между болтами.
Из таблиц 233113 и
233118 видно, что расчетные
напряжения и деформации
в крышках внутренних шату-
нов значительно выше, чем
в крышках вильчатых шату-
нов. Меньшая жесткость го-
ловок внутренних шатунов
допускается потому, что усло-
вия работы их вкладышей
легче, чем вкладышей виль-
233116
233117
233118
233119
233120
233121
233122
19 Авиац. порши, двигатели
чатых шатунов.
289
233123—233301
233123 Поломки кривошипных головок шатунов происходят в местах кон-
центрации напряжений, чаще всего в местах сопряжения бобышек для
болтов с цилиндрической частью крышки.
233200 Расчет нижней головки прицепного шатуна
233201 Нижняя головка прицепных шатунов по своей форме и условиям
работы не отличается от поршневой головки; поэтому все расчетные
формулы для поршневых головок, приведенные в 231000, применимы
и для расчета нижней головки. Входящую в эти формулы силу инер-
ции, действующую на нижнюю головку, принимают максимальной
в момент совпадения оси кривошипа с осью цилиндра рассчитываемого
шатуна и определяют по формуле
Pf = Rv' [мП1(1*аХ)+ (И-л*0Л1и1], (1)
где
а — 1 — 2 у cos у ( 1 — cos у); (2)
у—угол между осями главного и прицепного шатунов;
Мп1—поступательно двигающаяся масса в цилиндре рассчитываемого
шатуна;
МА1—масса прицепного шатуна, отнесенная к оси пальца прицепного
шатуна, закрепленного в главном;
I—длина прицепного шатуна;
г—радиус заклинения пальца прицепного шатуна в главном;
L—длина главного шатуна;
R—радиус кривошипа;
ш—угловая скорость вращения коленчатого вала;
233202 Напряжение и деформации в нижних головках прицепных шату-
нов следует допускать такой же величины, как и в поршневых головках.
233203 Нижние головки разрушаются обычно, подобно поршневым, в мес-
те перехода головки к стержню, как показано на фиг. 231401.
233300 Расчет кривошипной головки главного шатуна звездообразного
двигателя
233301 Кривошипные головки главных шатунов звездообразных двигате-
лей обычно делаются неразъемными; они должны быть достаточно
жесткими, чтобы обеспечивать правильную, с точки зрения гидродина-
мической теории смазки, работу вкладыша. Жесткие головки являются
одновременно и прочными. В практике не наблюдается поломок кри-
вошипных головок шатунов звездообразных двигателей за исключением,
редких случаев поломок в местах концентрации напряжений и около
масляных отверстий для подвода масла к пальцам прицепных шатунов-
290
233302-233402
Встречающиеся в кривошипных головках главных шатунов звездо- 233302
образных двигателей дефекты получаются в результате недостаточной
прочности элементов кривошипной головки и не связаны с ее общей
прочностью. К таким дефектам относятся: поломки проушин, разбива-
ние опорной поверхности в проушине, «дыхание» щек головки.
Определение жесткости кривошипных головок главных шатунов 233303
звездообразных двигателей путем условных расчетнь/х формул ненадеж-
но вследствие большого разнообразия конструктивных факторов, кото-
рые не могут быть учтены расчетом.
Жесткость кривошипных головок главных шатунов звездообразных 233304
двигателей необходимо проверять статическими испытаниями выпол-
Фиг. 233306.
Кривошипные головки шатунов звездообразных двигателей
ненного шатуна, конструктивные размеры которого при проектировании
выбирают на основании опыта удовлетворительно работающих конст-
рукций.
Поломки проушин кривошипных головок объясняются главным 233305
образом высокими напряжениями от запрессовки пальцев, которые
ставятся с большим натягом.
Для прочности проушин и придания большей жесткости головки 233306
в мощных двигателях делают в последнее время по типу фиг. 233306, а.
Если проушина выполнена по фиг. 233306, б, то к ней применимы рас-
четные формулы для поршневой головки с учетом предварительных
напряжений от запрессовки пальцев.
Удельное давление на вкладыше кривошипной головки шатуна 233400
Нагруженность вкладыша кривошипной головки шатуна характе- 233401
ризуется ориентировочно средним и максимальным давлениями, дей-
ствующими на нее за цикл работы двигателя.
В таблице 233402 даны величины средних и максимальных давле- 233402
ниЙ на вкладышах кривошипных головок шатунов современных дви-
гателей, соответствующие номинальным режимам работы двигате-
лей.
19*
291
233403-233404
Таблица 233402
Средние и максимальные давления на вкладышах кривошипных головок
шатунов авиационных двигателей
Двигатели DB-605 СМ 6 S 2 «Мерлин» XX Аллисон С-15 ВК-105 АМ-38 1 М-63 А1П-82 i Райт 2600 «Пегас» XX
Кср> кг/см2 . . 73 114 122 128 98 130 187 - 180 176 193
ктах, кг/см* 108 154 172 169 134 230 250 260 240 230
233403 Из таблицы 233402 видно, что среднее давление на вкладышах
кривошипных головок шатунов у современных 12-цилиндровых V-образ-
ных двигателей достигает 130 кг/см2, а у звездообразных 200 кг]см\
233404 Расчет шатунных подшипников на основании гидродинамической
теории смазки изложен в части 6 настоящего тома. Г рафики И. Ш. Ней-
мана для определения величины Кср даны в части 1 настоящего тома.
ЛИТЕРАТУРА И ИСТОЧНИКИ К 230000
1. Ки на со шв и ли Р. С., Расчет прочности шатунов авиационных двигателей,
Труды № 66, 1945.
2. Ки на со шв и ли Р. С., Определение запасов прочности прн переменных нагруз-
ках, Труды № 55, 1943.
3. Не йма я И. Ш., Динамика и расчет на прочность авиационных моторов, Оборон-
гиз, 1934.
4. СеренсенС. В., Тете л ьба ум И. М. и Приго ровскнй Н. И., Дина-
мическая прочность в машиностроении, Машгиз, 1945.
24О0ДО-241103
РАСЧЕТ НА ПРОЧНОСТЬ ПОРШНЕВОГО ПАЛЬЦА ♦ 240000
ТИПИЧНЫЕ ПОЛОМКИ ПОРШНЕВОГО ПАЛЬЦА 241000
В поршневом пальце возникает при его работе сложное напряжен- 24Ц01
ное состояние: он изгибается как балка, подвергается деформации
сдвига и овализируется. В зависимости от соотношения размеров пальца
меняются отношения величин напряжений, вызываемых этими дефор-
мациями.
Статистика поломок поршневого пальца показала, что чаще всего 241102
причиной поломки пальца являются касательные напряжения и напря-
жения, возникающие при его овализации.
Фиг. 241103-1.
Типичный вид поломки поршневого пальца, идущей по образующей
Основными видами поломок являются поломки, идущие вдоль 241103
и поперек пальца.
Поломки, идущие вдоль пальца (фиг.. 241103-1), могут вызваться
касательным напряжением и напряжениями, возникающими при ова-
лизации пальца.
Такие поломки наблюдаются у тонкостенных пальцев. У толсто-
стенных пальцев поломки, идущие вдоль пальца, наблюдаются только
при наличии пороков материала в виде волосовин, идущих вдоль
пальца. Трещины начинаются с внутренней поверхности пальца
(фиг. 241103-11).
• Составлен по работе Р. С. Кинасошвили—«Расчет поршневого пальца
авиационного двигателя», Труды № 119, 1947.
293
241104-241105
241104
Поломки пальцев в поперечном
толстостенных пальцев. Излом в этих
направлении характерны для
случаях начинается чаще всего
Фиг. 241103-П.
Поломка поршневого пальца, начи-
кающаяся с внутренней поверхно-
сти
Фиг. 241104.
Типичный вид поперечного
излома поршневого пальца
в средней части пальца с внешней поверхности (фиг. 241104). Поломки
эти вызываются напряжениями изгиба при деформациях пальца
как балки на двух опорах.
Фиг. 241105-1.
Переход продольной трещины в поперечную
Фиг. 241105-П.
Переход продольной трещины в наклонную к оси пальца
241105 При распространении трещины можно наблюдать, как продольная
трещина переходит в поперечную (фиг. 241105-1) или начинает распро-
страняться под углом к оси пальца (фиг. 241105-П).
294
241106-242101
Трещины вдоль пальца возникают в средней части пальца (в точ- 241106
ке 7 фиг. 241105) от напряжений, вызываемых овализацией пальца.
В случае возникновения трещины между бобышкой и головкой
шатуна (точка 2 фиг. 241106) долевая трещина вызывается касатель-
Фиг. 241106.
Наиболее напряженные точки (7—4) поршневого пальца
ными напряжениями в месте наибольшего значения поперечной силы.
При термохимическом упрочнении внешней и внутренней поверхностей
трещина может начинаться с внешней поверхности в точке 3 (фиг. 241106).
СИЛОВАЯ СХЕМА И НАГРУЗКИ, ДЕЙСТВУЮЩИЕ НА ПОРШНЕВОЙ ПАЛЕЦ 242000
Закон распределения нагрузки по длине пальца зависит от соот-
ношения жесткостей пальца и поршня, от зазора в бобышках и от
масляного слоя в местах скольжения;
факторы трудно.
Не имея достоверной количественной
картины распределения нагрузки по
длине пальца, но исходя из соображе-
ний деформации изгиба, замеров по длине
оценить количественно эти
Силовая схема поршневого пальца
Фиг. 242102.
К выводу формул определения
овализации поперечного сечения
пальца и напряжений, вызыва-
емых овализацией
242100
242101
пальца деформации овализации, а равно из рассмотрения поломок,
принимают в качестве расчетной силовой схемы при расчете пальца
на изгиб и срез схему фиг. 242101. Принятая схема подтверждается
и тем, что прогибы, подсчитанные по ней, хорошо совпадают с экспе-
риментальными данными [1].
295
242102- 244002
242102 При определении деформации овализации и напряжений, вызы-
ваемых овализацией пальца, исходят из распределения нагрузки по
внешней поверхности пальца по закону косинусоиды (фиг. 242102). [1}
242103 Поршневой палец рассчитывается на нагрузки, соответствующие
расчетным нагрузкам для шатуна (см. 230000).
243000 ПОПЕРЕЧНЫЕ ДЕФОРМАЦИИ ПОРШНЕВОГО ПАЛЬЦА
243001 В существующих поршневых пальцах авиационных двигателей
отношение внутреннего диаметра пальца к внешнему диаметру а =
лежит в пределах 0,45 — 0,75.
243002 Вследствие неравномерного распределения нагрузки по длине
пальца увеличение горизонтального диаметра пальца значительно
больше в средней, наиболее нагруженной части пальца.
Расчетную схему нагрузки см. в 242102.
243003 Линейное увеличение горизонтального внешнего диаметра в сред-
ней части пальца равно [1]
Q j'Z aj U>5—15(« — 0,4) ],
где P —сила, действующая на палец (см. 242103);
Е = 2-10в кг/см* —модуль упругости материала;
Z — длина пальца;
а
а = у — отношение внутреннего диаметра пальца к внешнему диаметру.
Деформации, найденные экспериментально, отличаются от вычислен-
ных по формуле 243003 не более чем на 3%.
244000 ОПРЕДЕЛЕНИЕ НАПРЯЖЕНИЙ В ПОРШНЕВОМ ПАЛЬЦЕ,
ВОЗНИКАЮЩИХ ОТ ОВАЛИЗАЦИИ ПОПЕРЕЧНОГО СЕЧЕНИЯ
244001 Напряжения, возникающие от овализации поперечного сечения
пальца при его работе, вследствие неравномерного распределения
нагрузки по длине пальца, в разных сечениях различны.
Наибольшие напряжения от овализации возникают в средней
части пальца, что подтверждается наблюдениями за поломками.
Расчетную схему нагрузки см. в 242102.
244002/ Напряжения на внешней поверхности поршневого пальца, возни-
/ кающие от овализации его поперечного сечения, могут быть определены
I как напряжения на внешней поверхности кривого бруса прямоуголь-
/ ного сечения по формуле [1]
[2^’(2г + й)\ + Л^] , (1)
где М9 — изгибающий момент в расчетном сечении пальца (в площадке,
наклоненной под углом <р к горизонтальному диаметру)
М. = Prk f 4 cos ? + ~ s’n ? —- <p cos <p — 44 , (2)
X. Z 7* 7* " ✓
296
244003-244004
причем г —средний радиус поперечного сечения пальца,
Р —сила, действующая на палец (см. 242103),
к= 1,5- 15 (а —0,4)3, (3)
а = у (см. 243001),
Л = 4-(d—S) —толщина стенки пальца;
1 —длина пальца;
N9 — нормальная сила в расчетном сечении пальца:
— РА Гу cosy 4--^ sin у — -^-у cosy^ . (4)
Знак минус, стоящий впереди (4), указывает на то, что N<f является
сжимающей силой.
Напряжения на внутренней поверхности поршневого пальца, воз-
никающие от овализации его поперечного сечения, могут быть опреде-
лены как напряжения на внутренней поверхности кривого бруса пря-
моугольного сечения по формуле [1]
5. _ Г-2М (6r~ft)r
l-N.j-S,
причем сохраняются обозначения 244002.
При определении напряжений в поршневом пальце, возникающих
от овализации его поперечного сечения, вычисляются напряжения на
внешней и внутренней поверхностях пальца, возникающие в горизон-
тальном и вертикальном сечениях пальца (т. е. для значений углов
у = 0° и у =90°).
Согласно формулам (1) 244002 и 244003 получают следующие
выражения для. указанных напряжений.
Напряжение на внешней поверхности поршневого пальца в гори-
зонтальном сечении (? = 0°)
244003
244004
’.-О-- й [°'18(2 - Г=-.] [1.5-15 <—0,4)-]. (i)
Напряжение на внутренней поверхности поршневого пальца в гори-
зонтальном сечении (у = 0°)
Напряжение на внешней поверхности поршневого пальца в вертикаль
ном сечении (у = 90*)
га [ои74е^+±>+45][1,5-15(«-о,4)‘1. J3)
Напряжение на внутренней поверхности поршневого пальца в вер-
тикальном сечении (у = 90°)
= 4 [°'174'' У-.У»tД)-tS ] [1,5-15(—0,4>«]. т
297
245000-246002
На фиг. 244004 в качестве примера приведены для одного част-
ного случая эпюры напряжений в поршневом пальце от овализации его
поперечного сечения. Справа показана расчетная эпюра ^напряжений,
Фиг. 244004.
Сравнение экспериментальной эпюры’напряжений с вычис-
ленной эпюрой]
а слева экспериментальная, полученная тензометрированием. Сравне-
ние обеих эпюр напряжений показывает [1], что расчетные напряже-
ния отличаются от экспериментальных приблизительно на 6%.
245000 ОПРЕДЕЛЕНИЕ НАПРЯЖЕНИЙ В ПОРШНЕВОМ ПАЛЬЦЕ ОТ ИЗГИБА
245001 Принятая для расчета силовая схема указана в 242101. Расчетная
нагрузка указана в 242103.
245002 Максимальное напряжение изгиба получается по середине длины
пальца и определяется по формуле [1]:
Чпах Р (Z + 2ft-I,5U)
"max- jy — d3 1,2(1-04) •
где / — рабочая длина пальца;
б —расстояние между бобышками;
а —длина поршневой головки шатуна;
d — наружный диаметр пальца;
а = ^- — отношение внутреннего диаметра пальца к внешнему;
Р —сила, действующая на палец.
246000 ОПРЕДЕЛЕНИЕ КАСАТЕЛЬНЫХ НАПРЯЖЕНИЙ В ПОРШНЕВОМ ПАЛЬЦЕ
246001 Расчетная силовая схема и расчетная нагрузка те же, что в 245001.
246002 Максимальная срезывающая сила действует на поршневой палец
в сечениях, лежащих между бобышкой и головкой шатуна.
298
247000- 247008
Максимальное касательное напряжение в этих сечениях в нейтраль-
ной плоскости определяется по формуле [1]:
0,85Р<1+а + а2"\
‘Стах - !_аГ- J •
Значения величин Р, d и а те же, что и в 245002.
ВЫБОР РАЗМЕРОВ ПОРШНЕВОГО ПАЛЬЦА 247000
Основными размерами поршневого пальца являются: внешний 247001
диаметр, длина и внутренний диаметр.
Внешний диаметр пальца зависит от диаметра поршня и расстоя- 247002
«ия между его бобышками. Зависимость внешнего диаметра пальца d
ют диаметра поршня D и расстояния между бобышками поршня Ь, на
основании статистических данных, может быть выражена приближенно
формулой
d = 0,2D + 0,12&.
Размер b должен быть таким, чтобы удельное давление во втулке 247003
поршневой головки шатуна не превышало допускаемой величины
(см. 230000).
Длина пальца в бобышках, при выбранном внешнем диаметре 247004
пальца, должна быть такой, чтобы удельное давление в бобышках не
превышало 400—600 кг/см*.
Длина пальца обычно составляет 0,7—0,95 D — в зависимости от 247005
конструкции поршня, замков пальца и допускаемых удельных давле-
ний.
Внешний и внутренний диаметры поршневого пальца окончательно 247006
выбираются на основании допускаемых напряжений и деформаций.
Поршневые пальцы современных авиационных двигателей делаются 247007
плавающими; поэтому цикл изменения напряжений для таких паль-
цев можно считать симметричным.
Ввиду симметрии цикла изменения напряжений в плавающих 247008
пальцах и в связи с тем, что остальные характерные напряжения изме-
няются также симметрично, расчет пальца можно делать по допуска-
емым напряжениям, устанавливаемым на основании расчетной стати-
стики.
Расчетными формулами для определения максимальных напряже-
ний в поршневом пальце являются (см. 244004, 246002 и 245002)
следующие [1].
Напряжение на внутренней поверхности поршневого пальца, воз-
никающее от овализации его поперечного сечения
[0,174(-1±^±^-] [1,5- 15(а-0,4)’]. (1)
Касательное напряжение в нейтральной плоскости поршневого
пальца
0.85Р Z1 +а + а’\
Т“ах---d*~ < 1 -
299
247009- 248002
Напряжение изгиба в среднем сечении поршневого пальца
__ Р (1 + 2Ь- 1,5а)
Отах— а, 1,2(1 _а»)
(3)
247009 В таблице 247009 приведены основные данные, напряжения
и величины деформаций овализации, вычисленные по формулам насто-
ящего раздела, для поршневых пальцев некоторых авиационных двига-
телей.
Таблица 247009
Основные данные, напряжения н деформации поршневых пальцеа некоторых
авиационных двигателей
Двигатели =5 =5 и КК 1 1, мм D, мм 1 —' Ъ, мм Р, кг п, об/мин Iм ф о о И » •а» кг СМ* I кг °* см* Ad “шах d по фор- муле 247002]
ВК-Ю5 34 20 108/138 148 53 7400 2700 1265 1200 2660 0,032 36
М-88 34 20 99 146 34 6900 2400 1280 1120 2030 0,031 33,3
АМ-38 36 17,5 146 160 60 14000 — 1090 1680 5000 0,017 39,2
«Мерлин» XX 34,3 22 111 137,3 46,8 8100 2850 1670 1440 2750 0,050 33
Аллисон С-15 36,5 27,8 136,5 140 54 7600 3000 1840 1720 3500 0,103 34,5
DB-601A 36 25 138 150 61 9650 2500 1910 1800 4080 0,072 37,3
DB-605 36 25 138 154 54 11900 2600 2350 2200 5000 0,089 37,3
BMW-801 38 25 141 156 51 9800 2400 1560 1490 3200 0,054 37,3
«Пегас» 31,5 16,2 106 145 32 8300 2250 1150 1360 2760 0,019 32,8
Испано 12 Ybrs .... 34 22 108/138 149,4 51,5 6000 2400 1330 1100 2300 0,032 36,1
Райт GR-2500 38 25,2 109 155,5 49 9450 2400 1980 1450 3540 0,067 37
248000 МЕРОПРИЯТИЯ» ПОВЫШАЮЩИЕ ПРОЧНОСТЬ ПОРШНЕВОГО ПАЛЬЦА
248001
248002
Высокие напряжения, допускаемые в поршневых пальцах некоторых
иностранных авиационных двигателей (например, DB-605), объясняются
применением азотизации внешней и внутренней поверхностей пальцев.
Для сравнительной оценки прочности поршневые
пальцы подвергали исследованию при переменном
напряжении на пульсаторных машинах. Нагрузка
осуществлялась через колодки (фиг. 248002), которые
соприкасались с пальцем по образующим; поэтому
такие испытания не могли воспроизводить действи-
тельную картину напряженного состояния поршневого
пальца и имели целью получить сравнительную
оценку напряжений, возникающих от овализации
поперечного сечения пальца. Было найдено, что проч-
ность (предел усталости при пульсирующем цикле)
пальцев, забракованных из-за наличия волосовин
на внутренней поверхности, на 10 — 30% выше, чем
у пальцев без волосовин, но без азотизации внут-
ренней поверхности. Таким образом азотирование
повышает прочность на 35 — 45%.
Фиг. 248002.
Схема приложения
нагрузки при испы-
тании поршневого
пальца на усталость
300
248003—248005
Многократные сравнительные испытания поршневых пальцев без 248003
поверхностного термохимического упрочнения пальцев с цементирован-
ной внутренней поверхностью показали, что цементация повышает
прочность на 15—20%.
Риски после шлифовки на внутренней поверхности поршневых 248004
пальцев могут снижать их усталостную прочность в два раза.
Рекомендуемые методы определения напряжений являются при- 248005
ближенными. Расчет на прочность поршневого пальца должен допол-
няться испытаниями, позволяющими оценить влияние на прочность
таких факторов, которые не могут быть учтены расчетом.
ЛИТЕРАТУРА И ИСТОЧНИКИ К 240000
1. Кннасошвнлн Р. С., Расчет поршневого пальца авиационного двигателя,
Труды № 119, 1947.
2. Тимошенко и Лессельс, Прикладная теория упругости, 1931.
3. F б р р 1, Vorlesung uber technische Mechanik, Bd. 3, Festigkeitslehre.
4. Mickel E. und Sommer P., Zur Festigkeit von Kolbenbolzen, MTZ, 191,
H. 12, 1941.
5. Ro t ma nn G., Berechnung der Kolbenbolzen fur Fahrzeug-Diselmotoren, VDI,
Bd. 81, № 13, 1937.
6. Schlafke K-, Zur Berechnung der Kolbenbolzen, MTZ, H. 4, 1940.
7. Schwarz H., Merkmale und Kennwerte neuerer auslSndischer Flugmotorkolben,
Luftwissen, H. 10—11, 1942.
250000- 251003
250000 РАСЧЕТ НА ПРОЧНОСТЬ РЕЗЬБОВЫХ СОЕДИНЕНИЙ
25JООО ТИПИЧНЫЕ ПОЛОМКИ РЕЗЬБОВЫХ СОЕДИНЕНИЙ
Поломки резьбовых соединений происходят чаще всего вследствие
обрывов болтов или шпилек. Как правило, обрыв болтов и шпилек
носит усталостный характер, что подтверждается видом изломов и их
расположением.
Фиг. 251001.
Типичный уста-
лостный обрыв
болта
Фиг. 251002.
Различные случаи усталостных обрывов
болтов
251001 Наиболее характерным является обрыв болта или шпильки по пер-
вому работающему витку гайки (фиг. 251001, фиг. 251002, б и в).
251002 Встречаются изломы в местах перехода от резьбовой части болта
или шпильки к гладкой (фиг. 251002, г).
251003 Если переход от стержня болта к головке выполнен с недостаточ-
302
251004- 252302
ным радиусом закругления, то это может явиться также причиной
обрыва болта (фиг. 251002, а).
Наконец, встречаются обрывы болтов в месте перехода от стержня
болта к центрирующему выступу (фиг. 251003).
Три последних типа обрывов
(пп. 251002, 251003, 251004) могут
быть устранены выбором надлежа-
щего размера радиуса закругления,
тогда как обеспечение прочности
в резбовой части болта или шпиль-
ки требует специального расчета.
251004
Фиг. 251003.
Усталостный обрыв болта в месте
перехода от стержня болта к цент-
рирующему выступу (поломки
болта внутреннего шатуна двига-
теля «Мерлин» XX)
НАГРУЗКИ НА РЕЗЬБОВОЕ СОЕДИНЕНИЕ 252000
Основная нагрузка 252100
Основной нагрузкой на резьбовое соединение являются те усилия,
которые должно воспринимать резьбовое соединение во время работы
двигателя.
Так, например, для шатунных болтов основной нагрузкой будут
силы инерции поступательно двигающихся в цилиндре масс и части
массы шатунов, а для силоеых шпилек —соответствующая часть силы,
действующей на дно цилиндра в момент вспышки.
Усилие затяжки 252200
Затяжка резьбовых соединений необходима:]
а) для уменьшения влияния переменных основных напряжений
на прочность резьбового соединения,
б) для создания определенного минимального давления на стыке
соединяемых деталей для его плотности и герметичности.
Для обеспечения этих условий усилие затяжки обычно назначается
значительно больше основной нагрузки.
Дополнительные нагрузки 252300’
Изгибные нагрузки. Статические изгибные нагрузки возни- 252301
кают при перекосах торца гайки или опорных поверхностей сопрягае-
мых деталей, при наклоне оси шпильки и т. п.
Переменные изгибные нагрузки на резьбовое соединение связаны
с упругими деформациями соединяемых деталей и с эксцентриситетом
приложения нагрузки.
Температурные нагрузки появляются в затянутом резьбо- 252302
вом соединении в том случае, если скрепляемые детали и болт (шпилька)
303
252303—253102
252303
253000
253100
253101
253102
нагреваются с различной температурой или обладают различными коэф-
фициентами линейного расширения.
Крутящие нагрузки на болт (шпильку) возникают при
затяжке резьбовых соединений вследствие трения в витках нарезки.
СОВМЕСТНОЕ ДЕЙСТВИЕ НАГРУЗОК
Элементарные схемы затянутых резьбовых соединений
Простейшие схемы затянутого резьбового соединения показаны
на фиг. 253101.
Схема, изображенная на фиг. 253101, а, соответствует работе
шпилек крепления цилиндров двигателей воздушного охлаждения
б *7
Фиг. 253102.
а
Фиг. 253101.
Простейшие схемы затянутого
резьбового соединения.
Т—усилие затяжки;
Р—основная нагрузка
Расчетные схемы для определения усилий в затя-
нутом резьбовом соединении
и шпилек крепления блоков двигателей жидкостного охлаждения
типа BK-I05.
Схема фиг. 253101, б типична для шатунных болтов, болтов флан-
цевых соединений и др.
Для определения расчетным путем усилий в затянутом резьбо-
вом соединении применяются идеализированные схемы, показанные
на фиг. 253102.
При построении расчетной схемы принимаются следующие допу-
щения:
1) основная нагрузка действует вдоль оси резьбового соединения;
2) основная нагрузка приложена нынешней (торцевой) поверхности
скрепляемых деталей (фиг. 253102);
3) скрепляемые детали можно заменить эквивалентными по жест-
кости втулками.
304
253103—253106
Решение задачи удобно проводить [11] с помощью треугольника
деформаций (фиг. 253103).
Если X = — упругая постоянная болта (шпильки), a X, = ~—
упругая постоянная втулки (фланца) (фиг. 253102, о), то углы <р и <1>
можно определить по формулам
<P = arctg^ и <[> = arctgjL (1)
253103
Для резьбового соединения, показанного на фиг. 253102, б, имеем
<P = arctg^ H<!» = arctg-xr|v, (2)
где kt = и л2 = ---упругие постоянные деталей 7 и 2.
Фиг. 253103.
Графическое решение задачи об усилиях в за-
тянутом резьбовом соединении.
Q—полное усилие на шпильку
(болт);
Ру—часть основной нагрузки Р, пере-
дающаяся на шпильку (болт);
R—усилие на стыке деталей;
Т—сила предварительной затяжки
шпильки (болта)
Если величины Ру и Q
определять аналитически, то
для случая одной промежуточ-
ной детали (фиг. 253102, а)
Л-0 “Г
Q^T+Pr^r- W
Для случая двух промежу-
точных деталей (фиг. 253102, б)
СТ
<4>
Коэффициент основной на-
грузки у, характеризующий
эффективность действия основ-
ной нагрузки на резьбовое со-
единение, равен
253104
253105
С точки зрения прочности резьбового соединения желательно
иметь минимальные значения у.
С помощью коэффициента у формулы для Ру и Q принимают
следующий вид:
Ру = ХР, (1)
Q = T + -ZP. (2)
Коэффициент у в первом случае (фиг. 253102, а) равен
20 Авиац, порши, двигатели.
253106
305
253107 -253202
и во втором (фиг. 253102, б)
.. _ ^1 + Xi ...
Яо + + Л2 ' *
253107 Формулы пп. 253104 — 253106 справедливы до тех пор, пока на
стыке промежуточных деталей давление R =£ 0.
После раскрытия стыка основная нагрузка полностью передается
на болт (шпильку).
253200
253201
Определение коэффициента основной нагрузки
Коэффициент у надежнее всего определяется экспериментальным
путем.
На фиг. 253201 показана схема экспериментального определения X
длй шатунного болта. Примем, что шатун с предварительно затянутыми
болтами растягивается определенной
силой Ро. Удлинение болта заме-
ряется микрометром или каким-либо
другим измерительным устройством
(тензометром, датчиком и т. п.)
По величине удлинения болта
определяют нагрузку Ру на один болт.
Для этого достаточно протарировать
болт на соответствующем приспособ-
лении.
Коэффициент х может быть най-
ден по формуле
253202
7 Ро ’
где z—число болтов;
Ро — общая нагрузка на шатун.
При отсутствии эксперименталь-
ных данных коэффициент основной
нагрузки определяется расчетным пу-
тем. Для этого необходимо найти ве-
личины упругих постоянных деталей.
Для болта или шпилек
площадью поперечного
болты двигателя DB
по формуле
Экспериментальное определение ко-
эффициента основной нагрузки для
шатунного болта
с постоянной
сечения (фиг.
605А) упругая постоянная Хо определяется
253202-1; например, шатунные
1 __ 10
'-EoFo'
(О
где
/0 — расчетная длина болта (шпильки);
/% — площадь поперечного сечения;
Ео —модуль упругости материала болта.
Расчетная длина принимается равной расстоянию от нижнего торца
гайки до головки болта, или, в случае применения шпильки, до послед-
него ввернутого витка.
306
253203
Для болта с переменной площадью поперечного сечения
(фиг. 253202-11) упругая постоянная ).о находится по формуле
j(l) 1(2) 1(к) к 1(1)
[ ц I -L 2^ = У-Л— (2)
0 E0F^ + Ео^2) + • • ' + EoF^ Е0Г<'> ’
где А —число участков болта.
Фиг. 253202-1.
Вычисление Ло для болта с по-
стоянной площадью сечения
Фиг. 253202-П.
Вычисление Ло для болта с neper
менной площадью сечения
Определение
(фиг. 253102, а
Для случая, изображенного на
фиг. 253203, считают [11], что дефор-
мация в промежуточной детали рас-
пространяется на полый усеченный
конус (фиг. 253203) с углом при осно-
вании 45°. Заменяя приближенно по-
лый усеченный конус полым цилинд-
ром с внешним диаметром a + lt и
внутренним D, находим
----1±------. (1)
Формулы (2) п. 253202 и (1) к.
253203 соответствуют эксперименталь-
ным данным [19].
Если площадь поперечного сече-
ния промежуточной детали Flt при-
ходящаяся на одну шпильку (болт),
меньше площади поперечного сечения
упругих постоянных промежуточных деталей
и б) расчетным путем представляет большие трудности.
Фиг. 253203.
Определение упругих постоянных
промежуточных деталей.
253203
20*
307
253204—253401
расчетного полого цилиндра, то
принимается
h
EiF. *
(2)
253204
253300
253301
Имея величины к0, к, и к2, находят коэффициент основной нагрузки
по формулам (3) и (4) п. 253106.
Сложные схемы затянутых резьбовых соединений
На фиг. 253301 показана типичная схема работы силовой шпильки
(семейство двигателей АМ-38).
Основной* нагрузкой является в этом случае сила от давления
рабочих газов на дно головки цилиндра в момент вспышки.
Расчет резьбового соединения, пока-
занного на фиг. 253301, подробно изложен
в работе Н. С. Золотарева [4].
Графическое решение этой задачи при-
ведено в курсе П. И. Орлова [9].
Коэффициент основной нагрузки опре-
деляется по формуле
^2 +^3 Z । \
Ло +________Л3 ’
где Хо — упругая постоянная болта;
к, — » » головки блока;
Х2 — » » прокладки;
ks — » » рубашки блока.
Упругие постоянные вычисляются по
формуле
= (2)
где li — длина напряженной части детали;
Е, —модуль упругости материала де-
тали;
Ft — площадь сечения детали, приходя-
Фиг. 253301. щаяся на одну шпильку.
Типичная схема работы сило- Определение коэффициента X экспери-
вой шпильки. ментальным путем проведено для ряда си-
ловых схем М. С. Рапипортом [10].
Опыты М. С. Рапипорта [10]. и Н. С. Золотарева [4] указывают
на практическую применимость формул (1) и (2).
Вопросы определения усилий в затянутых резьбовых соединениях
в более сложных случаях рассматриваются в работах [6], [2].
253400 Совместное действие основной нагрузки, усилия затяжки
и температурной нагрузки
253401 В этом случае можно воспользоваться всеми формулами преды-
дущих параграфов, если считать, что к усилию предварительной
затяжки Т добавляется температурная нагрузка Tt.
308
254000-254002
Таким образом в работе болт (шпилька) оказывается затянутым
силой
Tp^T+Tt. (I)
Величина температурной нагрузки может быть определена по фор-
муле
*
°<АА>
7't = -----к---- , (2)
1
где lt — длина детали;
at — коэффициент линейного расширения детали;
t{ — температура детали;
к — число деталей соединения.
Индекс «О» относится к болту (шпильке).
Полное усилие на болт определится по формуле
Q = T^Tt + ^P = Tp + yP. (3)
Давление на разгружаемом стыке
R = Tp-(l-x)P. (4)
Минимальное усилие затяжки, соответствующее R = 0, равно
7'pmin=(l х) Р‘ (5)
РАСПРЕДЕЛЕНИЕ НАГРУЗКИ ПО ВИТКАМ РЕЗЬБЫ 254000
Вопрос о распределении нагрузки по виткам резьбы рассматривался 254001
в работах Н. Е. Жуковского [5], Жакэ и Мадушки [17].
Аналитическое решение задачи, дающее закон распределения нагруз-
ки по виткам резьбы, предложено в работах [1], [2].
Для резьбового соединения типа «болт-гайка» (фиг. 254002-1) 254002
распределение нагрузки по высоте нарезки выражается формулой
где z —расстояние рассматриваемого сечения от начала координат
(см. фиг. 254002);
^(z) —интенсивность распределения осевых сил по высоте нарезки;
Н — высота гайки.
Величина т определяется формулой
где $ —шаг нарезки;
& —безразмерный коэффициент, характеризующий упругие свойства
резьбы, а также болта и гайки.
309
254003-254004
254004
Фиг. 254002-1.
Распределение нагрузки в
резьбовом соединении типа
«болт-гайка»
Коэффициент ft
деформации изгиба
254003
''Q
z
Фиг. 254003.
Распределение нагрузки
в резьбовом ^соединении
типа «стяжка»
первом случае может
Фиг. 254002-П.
График коэффициента ft; d0—наружный
диаметр резьбы; s — шаг нарезки;
D—наружный диаметр гайки; s = -^.°
зависит в основном от жесткости витка при
и жесткости болта и гайки при деформации
растяжения и сжатия вдоль и перпендикулярно
к оси резьбового соединения.
Значения коэффициента ft для метрической
и дюймовой нарезок даны на фиг. 254002-П;
Для резьбового соединения типа стяжки
(фиг. 254003) распределение нагрузки дается
формулой
?(*)
Qm г ch mz
sh mH
L 1+f;
ch m (H — z)
5
где % и F2 —площади поперечных сечений
соответственно болта и гайки.
Из эпюр фиг. 253002-1 и фиг. 253003
следует, что распределение нагрузки в резь-
бовом соединении типа «стяжки» значительно
благоприятнее, чем в соединении типа «болт-
гайка». Максимальная нагрузка на виток в
быть на 40 — 50% меньше, чем во втором.
Из формулы (1) п. 254002 следует, что нагрузка на первом витке
q (Н) == Qm cth mH.
Влияние высоты гайки отображается множителем
cth mH.
310
255000— 255002
При возрастании Н величина cth mH
настолько быстро приближается к еди-
нице, что, например, увеличение высоты
гайки от Н = (0,5н-0,б) d0 до Н—<х> дает
понижение нагрузки на первом витке
только на 10%.
Эпюры распределения нагрузки в
нормальной и очень высокой гайках по-
казаны на фиг. 254004.
Как видно из приведенных эпюр,
максимальные нагрузки на виток в двух
гайках примерно одинаковы, тогда как
нагрузка на верхний виток в более
высокой гайке резко падает.
Закон распределения нагрузки по
виткам резьбы [формулы (1) п. 254002
и п. 254003] подтверждается фотоэла-
стическими опытами.
Фиг. 254004.
Распределение нагрузки в нор-
мальной и высокой гайках
ПРОЧНОСТЬ РЕЗЬБОВЫХ СОЕДИНЕНИЙ ПРИ СТАТИЧЕСКИХ 255000
НАГРУЗКАХ
Резьбовая деталь (болт, шпилька) характерна как деталь с высокой 255001
концентрацией напряжений.
Для пластичных материалов появляющиеся при статической на-
грузке зоны пластических деформаций выравнивают I распределение
напряжений в местах концентрации напряжений.
При этих условиях статическая прочность резьбовой детали не ниже
прочности гладкого образца, имеющего наружный диаметр, равный
внутреннему диаметру нарезки.
Наоборот, резьбовые детали из относительно «хрупких» материалов
(дуралюмин, высоколегированные стали, термообработанные на макси-
мальное значение предела прочности) показывают понижение прочности
по сравнению с гладким образцом.
При определении запаса прочности резьбового соединения при 255002
статической нагрузке исходят из величины номинальных растягива-
ющих напряжений в теле болта
„ _ Q__ Q.
’ (1)
4
где di— внутренний диаметр нарезки.
Запас прочности по отношению к разрушающим напряжениям
определяют по формуле
<2)
где as —предел прочности (временное сопротивление) нарезанного
стержня, отнесенное к площади Fx.
ЗЦ
255003—255005
Для пластических материалов
'ь >
где «6 —предел прочности (временное сопротивление) гладкого образца.
255003 На основании экспериментальных работ можно притти к следу-
ющим выводам относительно повышения предела прочности в нарезан-
ных стержнях [20]:
1. Диаметр нарезки не оказывает существенного влияния на повы-
шение предела прочности.
2. Нарезки с различным углом профиля (метрические и Витворта)
не отличаются1 по значениям предела прочности а&.
3. Стержни при резьбе с крупным шагом имеют — выше, чем при
аь
резьбе с мелким шагом.
4. Накатанная резьба без последующей термообработки показывает
большее повышение предела прочности, чем нарезанная или изготов-
ленная путем шлифования. Термообработка после накатки резьбы
делает накатанную резьбу эквивалентной нарезанной или шлифованной.
5. Углеродистые и легированные стали одинаковы в смысле повы-
шения предела прочности в нарезке.
б. Алюминиевые сплавы (дуралюмин и др.) показывают пониже-
ние предела прочности по сравнению с аъ гладкого образца до 10%.
Отношение — для сталей с а6 до 90 кг/мм2 можно считать равным
1 = 1,10—1,25.
Для сталей с высоким аь (130 кг/мм2 и больше)
В связи с этим термообработку высоколегированных сталей для
силовых резьбовых деталей целесообразно производить с высоким
отпуском, что несколько понижает значение аь, но улучшает пластиче-
ские свойства материала.
255004 Обычно полагают
Оь =
и тогда формула для запаса прочности на разрыв принимает вид
п6 = ^-. (1)
С1
255005 При определении запаса прочности по формулам (2) п. 255002
и (1) п. 255004 предполагается, что обрыв происходит по телу болта.
1 Этот вывод справедлив и в отношении артиллерийской нарезки (угол про-
филя 90°) [2].
312
255006
Это практически всегда имеет место, если высота гайки выбрана
достаточного размера.
На фиг. 255005 даны результаты опытов по определению высоты гайки,
при которой резьба и тело болта равнопрочны [20].
При проверке статической прочности болта (шпильки) в момент 255006
затяжки резьбового соединения учитываются дополнительные крутя-
щие нагрузки.
Крутящий момент, передающийся на тело болта, определяется [13]
по формуле
Мкр=Р7Ч, (1)
где Т — усилие затяжки при монтаже;
d0—-наружный диаметр нарезки.
Фиг. 255005.
Высота гайки, необходимая для равнопрочности резьбы
и тела болта.
Я
---отношение высоты гайки к диаметру нарезки.
“о
7—гайка с обычным размером под ключ;
2—гайка с уменьшенным размером под ключ.
Пределы прочности
материала болта о4=80 — 90 кг/мм2',
материала гайки oj=60—-70 кг/мм2;
5—гайка с обычным размером под ключ;
предел прочности материала болта о»=42—50 «г/мм2
Коэффициент р зависит от смазки, от состояния боковой поверх-
ности витков, числа затяжек и др. Вследствие этого эксперимен-
тальные данные по определению р сильно расходятся между собой:
В среднем можно считать: при хорошо смазанной гайке и гладкой
поверхности нарезки
р = 0,08;
при несмазанной гайке и негладкой поверхности
р = 0,16.
Касательное напряжение в теле болта в его резьбовой части опре-
деляется по формуле
а в стержне болта диаметра dc
313
255007-256100
255007 Запас прочности по отношению к пластическим деформациям может
быть определен по формуле
б*
ns= - .—— ,
где ^ — предел текучести материала.
256000 ПРОЧНОСТЬ РЕЗЬБОВЫХ СОЕДИНЕНИЙ ПРИ ПЕРЕМЕННЫХ
НАГРУЗКАХ
256100 Диаграмма предельных напряжений для резьбового соединения
Резьбовым соединениям свойственны асимметричные циклы изме-
нения напряжений при среднем напряжении растяжения.
Фиг. 256101.
Диаграмма предельных напряжений для гладкого образца и резьбового
соединения
314
256101-256102
Диаграмма предельных напряжений для гладкого образца и резьбо- 256101
вого соединения приведена на фиг. 256101.
При симметричном цикле, если специальными мерами осевой зазор
в резьбе не устранен, предел усталости резьбового соединения резко
снижается вследствие появления дополнительных ударных напряжений
при перемене знака нагрузки.
Построение диаграммы предельных напряжений для резьбо-
вого соединения по данным испытания гладкого образца.
(к0),—эффективный коэффициент концентрации напря-
жений;
_ предел усталости гладкого образца .
~ предел усталости резьбового соединения ’
$вк—угол граничного луча сектора усталости и сектора
текучести;
agjc—условный предел текучести для резьбового соеди-
нения (ограничение статических напряжений);
А—точка симметричного цикла;
В—точка пульсирующего цикла;
С—точка статического разрушения
При расчете на прочность резьбовых соединений при комбиниро- 256102
ванных нагрузках используется в основном обычная схема расчета 00
на усталостную прочность, развитая в трудах С. В. Серенсена [12],
[13] (см. раздел 210000).
На фиг. 256102 показан способ построения диаграммы предельных
напряжений для резьбового соединения по данным испытаний гладкого
образца [2].
В основе построения лежит гипотеза, согласно которой для детали
с концентрацией напряжений амплитуда переменного напряжения при
315
256103—256201
любой асимметрии цикла принимается в (Л0)я раз меньше, чем соот-
ветствующая амплитуда лабораторного гладкого образца.
Область возможных циклов для резьбового соединения ограничена
сверху условным пределом текучести ask.
Условный предел текучести ask равен напряжению в теле болта,
дри котором во всем резьбовом соединении получаются нежелательные,
с точки зрения условий работы, деформации.
256103 Обычно полагают
ask 3s>
где as—предел текучести материала болта (шпильки).
256104 Для практических расчетов предельную кривую АВС часто заме-
няют хордой АС. Тогда для подобных циклов угол граничного луча
сектора усталости и сектора текучести $sk определится по формуле
. о (Мд с&~ с-1 °sk
gPsA“ (Мд°«-°-1 %
(1)
Если известен предел усталости пульсирующего цикла <з0, то
в порядке уточнения можно использовать предложение С. В. Серен-
сена и Р. С. Кинасошвили [14,8], согласно которому линейная интер-
поляция предельной кривой осуществляется хордой АВ и ее продол-
жением. Тогда
256105 Величина (к~)л зависит в основном:
1) от радиуса закругления в основании нарезки;
2) от типа резьбового соединения и конструктивной формы гайки;
3) от материала болта и гайки;
4) от технологии изготовления резьбы.
В качестве предварительных данных можно использовать табли-
цу 256105.
Таблица 256105
Величины эффективного коэффициента концентрации
напряжений в резьбовом соединении типа «болт-гайка»
Тип резьбы Углероди- стая сталь Легирован- ная сталь
Резьба Витворта 34-4 44-5
Резьба метрическая 3,0-4-4,5 4,04-5,5
256200 Определение запаса прочности в резьбовых соединениях
256201 Для анализа надежности резьбового соединения следует применять
три запаса прочности [2]:
1) по подобному циклу,
2) по переменным напряжениям,
3) по постоянным напряжениям.
316
256202—256203
Формулы для определения запаса прочности по подобному циклу 256202
имеют различный вид в зависимости от того, в секторе усталости или
в секторе текучести находится рабочий цикл (фиг. 256202).
Если
tg ? > tg?sfc,
то цикл находится в секторе усталости, а если
tg? < tg Psfc,
то —в секторе текучести.
Расчетная диаграмма предельных напряжений для
резьбового соединения. '
р—угол асимметрии цикла: tg 8 =
ат
Запас прочности по подобному циклу в секторе усталости опреде- 256203
ляется по формуле (см. 210000)
где ат — среднее номинальное напряжение;
ov — переменное номинальное напряжение.
Напряжения ат и cv вычисляются без учета концентрации напря-
жений.
Для предельной прямой АС (см. 256104)
Ф = (2)
Если известна величина а0, то
♦= —(3)
317
256204-257102
256204 В секторе текучести запас прочности по подобному циклу
256205 Запас прочности по переменным напряжениям определяется
по формуле
„ _ °-1 ~ Ф°т
°v~ (к,)я'т •
256206 Запас прочности по постоянным напряжениям равен
11 ат — ~
°т т °F
256207 Следует учесть, что при затяжке тело болта (шпильки) подвер-
гается скручиванию. В этом случае общие запасы прочности ty, nv, пт
(т. е. запасы прочности с учетом влияния касательного напряжения)
могут быть определены по предыдущим формулам, если величину ст
заменить на а'т, определяемую из соотношения
o'm=V 4i + 3t2.
Из всех запасов прочности имеет наименьшее значение. Однако
допустимые пределы Пу, пт, определяемые из статистических данных
и анализов результатов поломок, будут различными.
256208 В удовлетворительно работающих резьбовых соединениях величины
запасов прочности лежат в пределах
п₽ = 1,3-^—2; пт= 1,3 -: 2; пг=2,5ч-4.
Вследствие влияния высокой затяжки величины гц и пт лежат
несколько ниже обычных значений запаса прочности (п= 1,5 ч- 2,5)
деталей авиационного двигателя.
Величина nv принимается большей, чем п₽ и пт, так как переменные
напряжения и усталостная прочность детали определяются расчетом
не вполне точно.
257000 ВЛИЯНИЕ КОНСТРУКТИВНЫХ И ТЕХНОЛОГИЧЕСКИХ ФАКТОРОВ
НА ПРОЧНОСТЬ РЕЗЬБОВОГО СОЕДИНЕНИЯ
257100 Влияние радиуса закругления в основании нарезки
257101 Понижение усталостной прочности резьбового соединения по срав-
нению с усталостной прочностью гладкого образца связано с концен-
трацией напряжений в основании нарезки.
257102 Коэффициент концентрации напряжений существенно зависит
от радиуса закругления во впадинах резьбы. Опыты [18] показали,
что увеличение радиуса закругления от г=0,10s до г = 0,20s дает
приращение ударной усталостной прочности на 100%.
Обычная метрическая нарезка, допускающая, согласно ОСТ, радиус
закругления г = 0,108s, во многих случаях оказывается недостаточно
прочной для ответственных резьбовых соединений. Это заставило ряд
отечественных (и иностранных) заводов огказаться для ответственных
силовых резьб от стандартных профилей нарезок (силовые шпильки
318
257103 - 257202
двигателя АМ-38, шатунные болты двигателя DB-605A, болт виль-
чатого шатуна двигателя «Мерлин» XX) и применять радиус закруг-
ления I
Фиг. 257104.
Радиусы закругления т > (0,20-4-0,25)5 невыгодны, так как
уменьшается степень перекрытия витков гайки и болта и ухудшает-
ся распределение нагрузки между вит-
ками вследствие меньшей податливости
витка. ' 257104
Для компенсации указанных недо-
статков иногда делают закругление в ос-
новании нарезки так, как это показано
на фиг. 257104.
Резьба с увеличенным радиусом Однако это усложняет изготовле-
закругления ние, тем более что простое увели-
чение радиуса закругления (оптималь-
ное г —0,18s [2]) может быть достаточно эффективно.
Влияние конструктивной формы резьбового соединения 257200
Конструктивная форма гайки влияет на распределение нагрузки 257201
по виткам резьбы и, следовательно, на концентрацию напряжений
в резьбовом соединении.
Согласно 254003, гайка растяжения (резьбовое соединение типа 257202
«стяжки») может повысить прочность резьбового соединения.
Делая сечения гайки переменными по высоте нарезки, можно
добиться еще более равномерного распределения нагрузки по виткам.
Фиг. 257202.
Последовательные конструктивные видоизменения гайки растяже-
ния, приводящие к равномерному распределению нагрузки.
На фиг.1257202 показаны последовательные конструктивные видоизме-
нения гайки растяжения, приводящие к равномерному распределению
нагрузки.
Последняя конструкция (фиг; 257202, ///) позволяет иметь равно-
мерное распределение нагрузки, однако она технологически сложнее
Других.
Гайка -с коническим растянутым хвостом (фиг. 257202, ///) приме-
няется для шпилек крепления гильз в двигателе «Юмо»-213.
319
257203 - 257208
257203
257204
257205
Иногда применяют сжато-растянутую гайку (фиг. 257203), в кото-
рой на растяжение работает лишь нижняя часть гайки.
Конструктивным видоизменением сжато-растянутой гайки является
гайка, изображенная на фиг. 257204.
Наглядное сопоставление значений
усталостной прочности нормальной гайки,
гайки растяжения и гайки по фиг. 257204
дано на фиг. 257205 [20].
Фоома
еа^ни
257206
257207
257208
Фиг. 257203.
Сжато-растянутая
гайка
Фиг. 257204.
Гайка с поднутре-
нием
Фиг. 257205.
Усталостная прочность болтов
из углеродистой стали при
различной форме гаек
К лучшему распределению нагрузки
нической резьбой, гайка увеличенного шага и др. [2].
В резьбовом соединении типа «болт-гайка»
наиболее нагруженным является нижний виток.
Для того чтобы несколько облегчить работу ниж-
него витка, применяются гайки с утопленной резь-
бой (фиг. 257207). В такой конструкции обеспе-
чивается некоторая дополнительная податливость
нижнего витка.
могут 'привести: гайка с ко-
Фиг. 257207.
Гайка с утопленной
резьбой
Конструктивная форма стержня болта (точнее,
его жесткость) влияет на величину передающейся
дополнительной нагрузки на затянутое резьбовое
соединение.
На фиг. 257208 показано
на резьбовое соединение.
влияние жесткости болта (шпильки)
Жесткий болт
Фиг. 257208.
Переменная нагрузка на болты различной жесткости при одинаковых
условиях работы
Податливый болаз
320
257209-257210
Из фиг. 257208 видно, что в болте (шпильке) с меньшим диамет-
ром стержня резьба нагружается меньшей переменной нагрузкой.
Уменьшение диаметра стержня болта благоприятно для прочности
резьбы при возможных ударных и изгибных нагрузках.
Однако уменьшение диаметра ограничено условиями статической
прочности стержня. Обычно в силовых резьбовых соединениях совре-
менных авиационных двигателей
dc = (£,85 ч- l,00)dx,
где dc — диаметр стержня;
dj — внутренний диаметр резьбы.
Особое внимание при конструировании стержня болта следует 257209
уделять местам сопряжения стержня и головки болта, а также глад-
кой и резьбовой частей.
г г
Деталь имеет
фаску
Г
Фиг. 257209.
Формы сопряжения стержня и головки болта.
/—сопряжение одним радиусом;
//—сопряжение двумя радиусами;
III—сопряжение эллиптической галтелью и сопряжение
с коническим участком;
IV—V—сопряжение при наличии центрирующего пояска
На фиг. 257209 показаны формы перехода от стержня болта
к головке. Радиус закругления при сопряжении следует делать
r>0,2do. Большей прочностью обладают эллиптические галтели или
галтели, составленные из двух дуг (фиг. 257209, //), а также переход
с коническим участком (фиг. 257209, III).
При необходимости иметь центрирующий буртик около головки болта
сопряжение можно делать так, как это показано на фиг. 257209, IV и V.
Сферическая опорная поверхность болта улучшает его центровку. 257210
21 Авиац. порши. двигатели.
321
257211-257212
Г s 0,2da
Фиг. 257211.
Формы сопряжения резьбовой . и гладкой
частей болта
257211 Формы перехода от гладкой части стержня к резьбовой даны
на фиг. 257211.
Прочность резьбового соединения в малой степени зависит от вели-
чины шага резьбы s.
При уменьшении возрастает прочность витков резьбы, но
уменьшается прочность тела болта (шпильки).
При ~ = б кольцевая площадь, соответствующая резьбе, состав-
ляет уже б5°/о от площади поперечной сечения стержня по внутрен-
нему диаметру нарезки.
Увеличение -у-до 16 дает повышение статической прочности пропор-
ционально возрастанию площади поперечного сечения (примерно на
15 — 25%). Для силовых резьб
не следует применять > 16.
В интервале от -у- = 6 до
-у-=16 резьбы примерно рав-
нопрочны при переменных на-
грузках. Этим объясняется тот
факт, что в ответственных
резьбовых соединениях встре-
чаются различные — (пример-
£
но в указанных пределах).
Большие ~ благоприятны в смысле меньшей способности к само-
отвинчиванию. Однако при малых шагах труднее добиться правильной
геометрии профиля и, в частности, нужного радиуса закругления
в основании нарезки.
Повидимому, оптимальные ~ лежат в пределах
А = 8-4-14.
S
257212 При конструировании резьбового соединения следует предусмотреть
мероприятия, освобождающие нарезку от дополнительных напряжений
изгиба.
Статические напряжения изгиба могут быть уменьшены путем:
1) введения жесткого допуска: на биение торца гайки, на пере-
кос опорных поверхностей деталей и оси нарезанных отверстий для
шпилек;
2) применения сферических шайб.
Переменные напряжения изгиба, значительно более опасные для
прочности резьбовых соединений, чем статические, могут быть умень-
шены, главным образом, за счет повышения общей жесткости сопряга-
емых деталей, целесообразным расположением болтов (шпилек), а равно
увеличением и тщательной пригонкой поверхностей стыка.
322
257300'—267305'
Влияние материала болта и гайки 257300
Опыты по исследованию усталости резьбовых соединений показы- 257301
вают, что высокопрочные легированные стали не дают существенного
увеличения усталостной прочности по сравнению с обычной углероди-
стой сталью. На основании ряда экспериментальных исследований
можно принять, что для болтов из легированных конструкционных
сталей амплитуда разрушающих переменных напряжений составляет
±(5ч-11) кг]мм* [для болтов тех же размеров из углеродистой стали
амплитуда составляет ± (3,5 ч-9) кг/мм2] *.
Следовательно, во многих резьбовых соединениях легированная
сталь может быть заменена углеродистой. В особенности это относится
к болтам и шпилькам малых диаметров, так как прутки малого диа-
метра из углеродистой стали обладают повышенными механическими
качествами.
В резьбовых соединениях, требующих высокой затяжки (силовые 257302
шпильки, стяжные болты разъемных коленчатых валов и др.), легиро-
ванная сталь не может быть заменена углеродистой, так как предел
текучести легированной стали обычно в 2,5 ч-З раза больше предела
прочности углеродистой.
Запас прочности при статических нагрузках пропорционален вели- 257303
чине аь; однако вести термообработку легированной стали на макси-
мальное аь (низкий отпуск) в применении к резьбовым соединениям
не рекомендуется. Известны случаи, когда применение низкой темпе-
ратуры отпуска (170 —200° С) явилось причиной поломок силовых
шпилек.
Повышенная чувствительность высокопрочной легированной стали
к концентрации напряжений, перекосам и т. п. приводит к необхо-
димости применять высокий отпуск (500ч-600°С) при ее термообра-
ботке.
Для ответственных резьбовых соединений (силовые шпильки, 257304
шатунные болты, стяжные болты разъемных коленчатых валов, шпильки
крепления цилиндров и блоков) применяются стали 24ХНВА,
18ХНВА, 20ХНЗА и 40ХНМА.
Для менее ответственных, средне нагруженных шпилек и болтов
получила распространение сталь 38ХА.
Для малонагруженных шпилек и болтов применяется сталь 45.
Характеристики прочности этих сталей приведены в 210000.
Опыты показали, что материал гайки влияет на усталостную 257305
прочность резьбового соединения.
Болты с гайками из чугуна и дуралюмина обладают усталостной
прочностью на 30—40% большей, чем болты со стальными гайками.
Однако недостаточная статическая прочность таких гаек ограничивает
их применение.
Это относится и к болтам из алюминиевых и магниевых сплавов,
хотя усталостная прочность таких болтов может быть не ниже, чем
у болтов из углеродистой стали.
* Нижние значения относятся к резьбам больших диаметров (40 > 25 мм).
21*
323
2574004-258002
257400 Влияние способа изготовления резьбы
257401 Способ изготовления резьбы может оказать существенное влияние
на прочность резьбы при переменных нагрузках.
При исследовании этого вопроса было установлено:
1. Накатанная резьба в большинстве случаев дает повышение
прочности при переменных нагрузках на 10 —30%.
2. Особенно благоприятна накатка для болтов малых диаметров
из среднеуглеродистой стали.
3. Термообработка после изготовления нарезки всегда неблагопри-
ятна, особенно для накатанной резьбы.
4. Резьба, нарезанная плашками, обладает большей прочностью
при переменных нагрузках, чем резьба, полученная шлифованием.
Совершенно особые результаты показал способ обкатки резьбы
роликами после предварительного нарезания с целью получения плас-
тических деформаций в основании нарезки.
По опытам [20] в результате такой обработки было обнаружено
повышение усталостной прочности резьбового соединения на 100%
(болт М8 из хромомолибденовой стали). Резьба, изготовленная накаткой,
дала увеличение прочности лишь на 10—15%.
При обкатке роликами оснований нарезки в местах концентрации
напряжений возникают остаточные напряжения сжатия, благоприятные
для повышения усталостной прочности. Это свойственно также процес-
сам нитрирования и цементирования резьбы, однако хрупкость поверх-
ностного слоя при такой термохимической обработке снижает благо-
приятный эффект.
258000 ЗАТЯЖКА РЕЗЬБОВЫХ СОЕДИНЕНИЙ
258001 О необходимости затяжки резьбовых соединений указано в 252000.
Потеря затяжки приводит в большинстве случаев к авариям
резьбовых соединений.
258002 Опыты и эксплоатационная практика свидетельствуют о том,
что в процессе работы двигателя затяжка резьбовых соединений
падает.
Причинами падения затяжки резьбовых соединений могут быть:
1. Появление случайных больших сил (детонация, неустойчивые
режимы и др.), превышающих силу затяжки и вызывающих остаточные
деформации в резьбовом соединении и в скрепляемых деталях.
2. Релаксация напряжений с течением времени в резьбовом соеди-
нении и в скрепляемых деталях.
3. Обмятие поверхностных неровностей скрепляемых деталей,
текучесть мягких прокладок и т. д.
Потеря затяжки будет меньше при соблюдении следующих
условий:
1. Минимальное количество промежуточных деталей, особенно
мягких прокладок.
2. Тщательная обработка поверхности стыка.
3. Максимальное упругое удлинение болта (шпильки).
4. Увеличенная предварительная затяжка резьбового соединения.
5. Надежная контровка гайки.
324
258003-258006
Величина затяжки резьбового соединения определяется по урав- 258003
нению [см. формулу (5) п. 253401]
T = aTpmin = a(l-X)P. (1)
Коэффициент а при статических нагрузках принимают равным
«= 1,25—1,5,
а при переменных нагрузках
а= 3— 4.
При переменных нагрузках напряжения затяжки на работающем
двигателе могут достигать величины (0,6 -т- 0,8) as, что, как показывает
практика, не нарушает прочности резьбового соединения [16].
В эксплоатации встречаются случаи перетяжки болтов и шпилек, 258004
особенно коротких; при этом напряжения в болте (шпильке) бывают
близкими к разрушающим.
Представление о напряжении в болте (шпильке) при повороте
л-гранной гайки на одну грань дает следующая формула:
где I — длина растягиваемой части болта (шпильки);
s —шаг нарезки;
п— число граней гайки.
Эта формула выведена в предположении, что фланцы абсолютно
жесткие и площадь поперечного сечения болта (шпильки) постоянна.
Если, например, шестигранную гайку шпильки с 1=15 мм
и с шагом s= 1 мм довернуть на одну грань для совпадения прорези
с шплинтовым отверстием, то это вызовет напряжение в шпильке
0,1 • 2,2 • 10’ 7 2
° ~ 6 0 15— = 24 ООО кг/см .
Даже при учете податливости фланца (обычные значения
Х = 0,2-^-0,3)
a= (1 —0,3) -24000 = 16800 кг/сл1.
Величина напряжений показывает, что в шпильке должны воз-
никнуть пластические деформации (фиг. 258004, /). В этом случае
конструкция шпильки, показанная на фиг. 258004, II, оказывается
более целесообразной.
Для коротких шпилек (см. 258004) нельзя применять контровку 258005
шплинтом при шестигранной гайке и одном шплинтовом отверстии
в шпильке. Один из способов правильной контровки коротких шпилек
показан на фиг. 258005 (двигатель АШ-82 и др.).
Примеры различных конструкций стопорения резьбовых соединений
приведены в работе Я- Ю. Шаца [15].
Для ответственных резьбовых соединений необходим контроль 258006
затяжки, который осуществляется в настоящее время одним из трех
способов:
325
258007
1) по замеру удлинения болта (шпильки);
2) по углу поворота’гайки;
3) по величине крутящего момента.
Из этих способов более удовлетворительным является первый; он
применяется при контроле затяжки шатунных болтов и стяжных бол-
тов разъемных коленчатых валов.
Фиг. 258004.
Влияние уменьшения диаметра стержня на перетяжку
при монтаже.
I—зона пластических деформаций незначительна:
вероятен обрыв шпильки при монтаже;
II—зона возможных пластических деформаций зна-
чительно больше, чем в I-. обрыв шпильки при
монтаже менее вероятен
Фиг. 258005.
Контровка коротких
шпилек
Фиг. 258006.
Применение метода замера удлинений при
контроле затяжки
ШпильКЛ.
Применение метода иллюстрируется на фиг. 258006.
258007 Особые трудности представляет метод контроля по удлинению при
затяжке шпилек, особенно коротких (см. фиг. 258006).
При конструировании ответственных резьбовых соединений следует
предусматривать возможность применения метода контроля затяжки по
замеру удлинений болта или шпильки.
326
259000- 259105
ПРИМЕРЫ РАСЧЕТА НА ПРОЧНОСТЬ РЕЗЬБОВЫХ СОЕДИНЕНИЙ 259000
Расчет на прочность силовых шпилек 259100
Силовые схемы блоков современных авиационных двигателей 259101
весьма разнообразны [9], [10]. Особо важной с точки зрения нагрузок
на резьбовое соединение является конструкция газового стыка.
При торцевом уплотнении, разгружаемом при вспышке (двигатели
АМ-38, «Мерлин» XX), силовые шпильки воспринимают значительные
усилия, необходимые для создания герметичности.
По статистическим данным [10] наружный диаметр резьбы при раз- 259102
гружаемом во время вспышки стыке (двигатели АМ-38, «Мерлин» XX)
= (0,12-г-0,14) Пц, (1)
где £)ц — диаметр цилиндра.
При неразгружаемом уплотнении (двигатели Аллисон С-15,
«Юмо»-213, «Юмо»-222)
= (0,07 ч- 0,09) £)ц. (2)
Величина напряжения предварительной затяжки при монтаже для 259103
двигателей с разгружаемым газовым стыком
а7= 3000 ч-4000 кг[см*-,
для двигателей с неразгружаемым стыком
аг = 2000-е- 3000 кг/см*.
Величина термических напряжений составляет
аг< = 1500 ч- 2000 кг [см*.
Нспряжение затяжки на работающем двигателе
стр = 3500 ч- 5500 кг[см*.
Основной нагрузкой для силовой шпильки является сила давле- 259104
ния газов на дно цилиндра (головку блока) при вспышке. Бдль-
шая часть этой силы передается на близлежащие шпильки; меньшая,
вследствие жесткости рубашки и головки блока, передается и на
другие шпильки.
Опыты, проведенные М. С. Ра пи портом [10], показали, что сила
вспышки на 75-4-85% воспринимается секцией блока, соответствующей
вспышке. В крайних секциях блока этот процент возрастает до 854-95.
В запас прочности принято считать, что усилие вспышки полностью
воспринимается той же секцией (обычно четырьмя шпильками).
Ход расчета на прочность силовой шпильки показан в следующем 259105
числовом примере.
327
259106-259109
Определить размеры резьбы и запас прочности в силовой шпильке
рядного двигателя со следующими данными:
1. Давление вспышки pz = 85 кг/см*.
2. Диаметр цилиндра Ь— 180 мм.
3. Число шпилек на одну секцию блока z=4.
4. Силовая схема двигателя по фиг. 253301; относящиеся К ней
размеры:
Длина растягиваемой части шпильки 1о = 360 мм.
Средняя площадь отсека головки блока, приходящаяся на одну
шпильку, В1 = 4& см*.
Высота сжимаемой части головки блока Zr = 70 мм.
Средняя площадь отсека прокладки, приходящаяся на одну
шпильку, В, = 84,5 см*.
Толщина прокладки 1я = 2,8 мм.
Средняя площадь отсека рубашки блока, приходящаяся на одну
шпильку, В3 = 23 см*.
Высота рубашки блока lt — 278,7 мм.
5. Модуль упругости материала блока и прокладки Ег = В,= Е3 =
= 0,745-10’ кг [см*.
6. Нагрев блока во время работы двигателя Д/ = 75°С.
Температуры шпилек и блока одинаковы.
Коэффициент линейного расширения материала блока а = 22- 10'*.
Расчет проводится в следующей типичной последовательности:
259106 Определение основной нагрузки:
Усилие при вспышке
Р3=~рг =-£- • 18’ • 85 = 21600 кг.
Усилие на одну шпильку (основная нагрузка)
Р = -° = 21600 = 54Q0 кг
Z 4
259107 Выбор материала шпильки и гайки, выбор термообработки:
В качестве материала шпильки выбираем сталь 18ХНВА.
Режим термообработки:
Закалка 870° в масле.
Отпуск с 530*.
Механические качества:
аь=115 кг[мм*-, а, = 92 кг/мм*; х.и = 46 кг/мм*.
Модуль упругости В, «1,95 • 10’ кг[см*.
Коэффициент линейного расширения %=11 • 10"’.
Материал гайки—сталь 38ХА.
259108 Выбор допусков на изготовление резьбы:
Выбираем 1-й класс точности.
259109 Предварительное определение величины поперечного сечения шпильки
Принимаем Rz = 0.20as = 0,20 • 92=1840 кг[см*.
328
259110—259114
Тогда
F\
5400
1840
= 2,94
CM*.
Выбор резьбы по ОСТ: 259110
Выбираем резьбу М22 х 1,5
d1=19,9 мм; /г1 = 3,11 см*, т. е. >2,94 см*.
Определение коэффициента основной нагрузки [см. формулу (1) 259111
п. 253301]
Aj “Ь Л3
*0 +
Диаметр гладкой части шпильки принимаем равным d0= 19,5 мм;
тогда Fe = 2,99 см*.
Остальные размеры даны в задании.
Находим
Хо==£^ = т,95 • 10» • 2^9 = б • 175 ’ 10 ’ см1кг’
Х1== = 0,745 • 10» - 46,О = 0’204 ‘ 10 " СЛ/кг’
в EaF, = 0,745 • 10» • 84,8 = 0,004 ’ 10 см1кг:>
А’ = ~E*Ft = 0,745 • 1 О’ • 23,0 = 1,627 ' 10 * см1кг>
-_______o-QM+Lg”_______= о 204
х “6 • 175 + 0,204 + 0,004+ 1,627
Определение переменного напряжения, действующего на болт
(см. фиг. 257208)
„ - 1 Ру-- 1 У-Р^ 1 0’204 • 5400 - 177 „,1гМ*
V 2 Ft 2 2 3,11 177 Кг>СМ ’
Определение минимального усилия затяжки 259112
ТР mm = (1 - X) Р=(1 -0,204) 5400 = 4300 кг.
Определение усилия затяжки при монтаже 259113
Т = аТрш1п.
Принимая а = 3 (см. 258000), имеем
Т = 3 - 4300=12900 кг.
Определение дополнительной затяжки вследствие нагрева двига- 259114
теля [см. формулу (1) п. 253401]
к
2 — aoWo
1
к
+2
1
329
259115-259124
Согласно заданию = 6 —75°C; тогда к 2 «АЛ = 22 • 10-’ • 75 (7,00+ 0,28+ 27,87) = 5,80 • 10'2; 1 • 10-’ -75 -36 = 2,97- 10-8; к X0+2 }'.= 6 • 175 + 0,204 + 0,004 + 1,627 = 8,01 • IO’’, • 10‘ = 3530 кг.
259115 Определение затяжки резьбового соединения в рабочих условиях Тр = Т + Tt = 12900 + 3530 = 16430 кг.
259116 Определение напряжения от затяжки Т 16430 ®Тр ®min “ ~jp~~ “ -j 11 — 5280 кг[см •
259117 Определение среднего напряжения в поперечном сечении резьбовой части шпильки (см. фиг. 257208) om = Omfn + ov— 5280+ 177 =5457 кг'[см*.
259118 Определение момента, закручивающего шпильку при монтаже (см. формулу (1) п. 255006). Принимаем ? = 0,10; тогда MKP = p7'do = 0,10 • 12900-2,2 = 2940 кгсм.*
259119 Определение касательного напряжения в резьбовой части шпильки Л4 2940 х о,2d» о,2-1,993 1*70 кг)СМ .
259120 Определение приведенного среднего напряжения °m = K°m + 3x’ = l/ (5457)2 + 3 • (1870)2 =6340 кг/см*.
259121 Определение эффективного коэффициента концентрации напряже- ния в резьбе. По таблице 256105+ринимаем (Аа)д == 4,5.
259122 Определение тангенса угла цикла tg Р +177 Е 1,023. °ш 6340
259123 Определение тангенса угла граничного луча (предельного луча сектора текучести) . „ • ° 4,5-115-46 92 , tg В k = = __L = 1,023. (Мд=5-°-1 °s 4,5-92-46 115
259124 Определение сектора цикла
tg₽ —tg(JJk= 1,028—1,023 >0.
330
259125-259202
л₽ =
Цикл находится в секторе усталости.
Определение запаса прочности по подобному циклу
-------------------= 1,38.
4,5 • 1,77 + ^ • 63,40
115
259125
Определение запаса прочности
- 1 о'
1 — °т
в
Определение запаса прочности
Ц — -----------------------—___________
т =т + =к 63,40+1,77
nv =
по переменным напряжениям
43-^-63,4
1______— о ко
4,5-1,77 — ^=>эу-
по постоянным напряжениям
92 =1,41-
259125
259127
Оценка правильности предварительного выбора размеров резьбы. 259128
Запасы прочности п$, пу и пт лежат в допустимых пределах, тяготея
к нижним границам.
Предварительный выбор размера резьбы (М22х1,5) и материала
считаем удовлетворительным.
Выбор способа контроля затяжки: 259129
Выбираем способ контроля затяжки по углу поворота гайки при
монтаже.
Составление указаний по контролю затяжки: 259130
Угол поворота гайки при монтаже определяется по формуле
к
8э = ЗэОгуI; . 12900- 8,01 - 10~’ = 247“.
$ XJ г 0,15
о
Угол б* соответствует повороту гайки на ~4 грани.
Расчет на прочность шатунных болтов 259200
При конструировании шатунных болтов необходимо выполнять 259201
следующие конструктивные рекомендации:
1. Радиус закругления в нарезке — возможно больший (см. 257100).
2. Диаметр стержня болта выполнять уменьшенным, а фланцы
возможно более жесткими (см. 257200).
3. Затяжку болта делать высокой, с обязательным ее контролем
(см. 258000).
4. Правильно выбирать материал болта (см- 257300).
5. Применять эффективную технологию изготовления резьбы
(см. 257400).
6. Делать плавные переходы от резьбовой части и головки к телу
болта (см. 257200).
7. Обеспечить центровку головки болта и предусмотреть жесткий
допуск на биение торца гайки (см. 257200).
Особое внимание должно быть уделено в шатунном болте умень- 259202
шению влияния изгибных напряжений.
Влияние размеров поверхности стыка на величину изгибных напря-
жений [16] иллюстрируется фиг. 259202.
331
259203-259204
Фиг. 259202.
Влияние размеров поверхности стыка
на величину напряжений изгиба.
/—малое плечо изгиба: изгибные
напряжения велики;
//—большое плечо изгиба: более це-
лесообразная конструкция, чем I
Увеличение поверхности стыка снижает добавочные напряжения
изгиба.
259203 Схема расчета на прочность шатунных болтов полностью аналогична
схеме расчета силовых шпилек (см. 259100).
Силовая схема работы шатун-
ных болтов показана на фиг. 253101
и 253102.
Согласно опытам Р. С. Кинасо-
швили [8] коэффициент основной
нагрузки [см. формулу 253105 и фор-
мулу (1) п. 253106]
Х<0,25.
Для болта внутреннего шатуна
двигателя «Мерлин» XX
Х = 0,20,
двигателя DB-605A
Х = 0,15.
Малое значение коэффициента 7.
для шатунного болта двигателя
DB-605A объясняется сильным уменьшением диаметра стержня болта.
259204 Для Предварительного определения размеров шатунного болта поль-
зуются условной величиной а, определяемой по формуле]
где Ря — сила инерции поступательно двигающихся в цилиндре масс
и соответствующей части вращающейся массы шатуна;
Fi —площадь поперечного сечения болта по внутреннему диаметру
нарезки.
Сила Ря, являющаяся основной нагрузкой для шатунного болта,
определяется по следующей приближенной формуле:
₽«=/?<*>’[щп(1+Х)4-/Пв — /пКр] у, (2)
где R — радиус кривошипа,
<о —угловая скорость коленчатого вала,
X —отношение радиуса кривошипа к длине шатуна;
та— поступательно двигающаяся в цилиндре масса;
тв — вращательно двигающаяся масса шатуна;
w«p —масса крышки шатуна;
z — число болтов.
Формула (2) применима для центрального шатуна. В случаях,
когда шатунное сочленение является комплексным, т. е. состоит из
главного шатуна и сочлененного с ним прицепного (или нескольких
прицепных) шатуна, максимальное значение действующей на болт
основной нагрузки Ря определяется из динамического расчета дви-
гателя.
332
259205
Определенные по формуле (1) условные напряжения в шатунных
болтах некоторых современных авиационных двигателей даны в табли-
це 259204.
Таблица 259204
Двигатель АллисонС-15 «Мерлин» XX «Юмо»-211 DB-605A
Шатун внутр. вильч. внутр. вильч. внутр. ВИЛЬЧ. внутр. вильч.
о, кг [см? I860 1950 1780 1980 1220 990 1370 ноо
Конструктивные формы шатунных болтов современных двигателей 259205
приведены в работе В. А. Доллежаля [3].
ЛИТЕРАТУРА И ИСТОЧНИКИ К 250000
1. Биргер И. А., Распределение нагрузки по виткам резьбы, «Вестник машино-
строения» № 11, 1944.
2. Б и р г е р И. А., Расчет резьбы на прочность, Диссертация, 1946.
3. Д о л л е ж а л ь В. А., Конструктивные формы шатунных болтов, Труды
№ 68, 1944.
4. Золотарев Н. С., Расчет и экспериментальные исследования условий работы
силовых шпилек рядного двигателя, Труды № 12, 1940.
5. Жуковский Н. Е., Полное собрание сочинений, т. VIII, стр. 50.
6. КиммельманД. Н., Расчет прочно-плотных резьбовых соединений, Труды
Ленинградской Военно-Воздушной Академии, выпуск б, 1944.
7. К и н а с о ш в и л и Р. С., Определение запасов прочности при переменных
нагрузках, Труды № 55, 1943.
8. К и н а с о ш в и л и Р. С., Расчет прочности шатунов авиационных двигателей
Труды № бб, 1945.
9. О р л о в П. И., Конструкция и расчет авиационных двигателей, Оборонгиз,
1940.
10. Р а п и п о р т М. С., Анализ силовых схем блоков, Диссертация, 1946.
11. Р е т ш е р, Детали машин, 1934.
12. С е р е н с е н С. В., Прочность металла и расчет деталей машин, ОНТИ, 1937.
13. Се рейсе н С. В., Тете л ьба ум И. М. и Пригоровский Н. И.,
Динамическая прочность в машиностроении, Машгиз, 1945.
14. С е р е н с е н С. В., Определение запаса прочности при расчете деталей машин,
«Вестник машиностроения» № б, 1943.
15. Шац Я. Ю., Стопорение резьбовых соединений, Оборонгиз, 1946.
16. A line п, On the strength of highly stressed, Dynamically looded bolts and studs,
ISAE, April 1944.
17. M a d u s c h k a, Beanspruchung von Schraubenverbindungen, «Forschung Ing.-
Wes.» Bd. 7, 1936.
18. S tae d e 1, Dauerfestigkeit von Schrauben, ihre Beeinflussung durch Form, Herstel-
lung und Werkstoff, Mitteilungen der Mat-Prflf. Anst., Darmstadt, H. 4, 1933.
19. Thum und Debus, Vorspannung und Dauerhaltbarkeit von Schraubenverbin-
dungen, 1936.
20. Wiegand und Haas, Berechnung und Gestaltung von Schraubenverbindungen,
Berlin, 1940.
260000- 261101
260000 СТАТИЧЕСКИЕ И ДИНАМИЧЕСКИЕ ИСПЫТАНИЯ
ДЕТАЛЕЙ АВИАЦИОННЫХ ДВИГАТЕЛЕЙ
251000 СТАТИЧЕСКИЕ ИСПЫТАНИЯ
Статические испытания детали обычно имеют целью:
а) определение величины и распределения деформаций и напряже-
ний при действии тех или иных усилий на деталь;
б) определение величины и направления возникающих при нагрузке
перемещений характерных точек детали при действии усилий на деталь
и, в связи с этим, определение жесткостей, коэффициентов влияния и
других величин, необходимых для расчета;
в) определение нагрузок, вызывающих пластические деформации
или соответствующих потере статической устойчивости детали.
Статические испытания могут производиться:
а) на испытательных машинах механических лабораторий,
б) на специальных испытательных стендах.
При проведении статических испытаний измеряются:
а) действующие на деталь нагрузки;
б) возникающие при действии нагрузок деформации и пере-
мещения.
261100 Методы загрузки и измерения усилий при статических
испытаниях [6, 7, 22]
261101 При испытании на стендах усилия, необходимые для деформирова-
ния, могут осуществляться непосредственной нагрузкой через рычаги
или при помощи домкратов винтовых и гидравлических. Вследствие
влияния зазоров, взаимного смещения деталей при нагрузке, нелиней-
ного характера перемещений и по ряду других причин, отражающихся
на деформациях, следует при испытании производить нагрузку узлов
и деталей усилиями, соответствующими по величине тем, которые дей-
ствуют при работе двигателя.
В качестве непосредственной нагрузки применяются грузы, подве-
шиваемые к тягам или рычагам, нагружающим деталь. На фиг. 261101-1
представлена такая подвеска. Вес каждого груза обычно составляет ст
10 до 50 кг.
Непосредственная нагрузка, будучи приложенной, остается неизмен-
ной независимо от деформаций. Недостатками ее являются ступенчатый
характер приложения и известная громоздкость при экспериментах.
334
261101
Нагрузка при помощи винтовых домкратов непрерывна и осуще-
ствляется быстро. Однако недостатком ее является зависимость от упругих
деформаций детали, что создает значительные за-
труднения при загрузке детали или узла несколь- -К
кими силами и требует автоматизации нагружения '
в зависимости от показаний динамометров. i
Наиболее удобный тип домкрата—винтовой
с червячной передачей, до 10 т; обычно исполь- \ 2
зуемый диапазон домкрата 1—5 т. На фиг. 261101-11
представлена схема такого домкрата. .!
Простейшая конструкция винтового домкрата
для нагрузок в пределах 1—2 т изображена на
фиг. 261101-111.
При нагрузке на деталь, смонтированную
в двигателе, непосредственно или при помощи
домкратов прилагаемые силы будут для двигателя
внешними и поэтому должны восприниматься той
конструкцией, на которой укреплен двигатель (на-
пример испытательным стендом); такие нагрузки
передаются на соответствующие детали крепления.
Фиг. 261101-1.
Подвеска грузов для непосредственного на-
гружения
В ряде случаев при статических испытаниях нагрузка производится
гидравлическим давлением, нагнетаемым в цилиндры или другие части
двигателя. Возникающие при этом усилия являются внутренними и замы-
каются в конструкции самого двигателя, не передаваясь на его опоры.
Гидравлическая нагрузка осуществляется нагнетанием масла плунжерным
335
261102-261103
насосом в соответствующие полости двигателя, которые должны быть
уплотнены. Давления, необходимые для испытания, обычно не превышают
50—60 ат; они измеряются манометром, сое-
261102
диненным с нагружаемой полостью.
При проведении экспериментов в механи-
ческих лабораториях применяются универ-
сальные машины на растяжение, сжатие и
изгиб до 30—50 т, работающие по гидрав-
лическому или рычажному принципу. Для
крепления нагружаемой детали пользуются
приспособлениями, позволяющими осущест-
влять необходимую схему действия сил. Сило-
мер машины при испытаниях устанавливается
на ступень, соответствующую величинам при-
Фиг. 261101-Ш.
Схема домкрата до 2 т
261103
меняемых при испытании нагрузок.
Наиболее полно статические испытания
могут быть поставлены на специальных стен-
дах. Закрепление и способы передачи нагрузки на деталь позволяют
в этом случае осуществить необходимую схему действующих сил и
336
261104-261195
произвести бЬлее точное измерение упругих перемещений и дефор-
мации. Нагрузка на стенде осуществляется винтовыми или гидравличес-
кими домкратами и через динамометры передается на деталь.
На фиг. 261103 дана принципиальная схема стенда, предназначенного
для испытания деталей и узлов как в собранном двигателе, так и отдельно
от него. Рядный двигатель закрепляется лапами на горизонтальной
плите, звездообразный—на портале, смонтированном на той же плите.
К носку вала винта при помощи гидравлических или винтовых домкратов
через крестообразное звено могут быть приложены крутящий и изгибаю-
щий моменты. Благодаря этому могут быть осуществлены опыты по за-
крутке системы коленчатого вала, редуктора, вала винта, а также по
изгибу как вала винта, так и коленчатого вала при одновременной за-
грузке картера реактивными силами в коренных подшипниках. При по-
мощи домкратов, устанавливаемых на продольных балках, соединяющих
передний и задний порталы, может осуществляться загрузка опор картера
и коленчатого вала внешними поперечными силами (воспроизводящими,
например, силы инерции неуравновешенных масс). При опытах с дета-
лями отдельно от двигателей они закрепляются на горизонтальной
плите при помощи опорных приспособлений и нагружаются домкратами
по требуемой силовой схеме. Домкраты устанавливаются при этом на
продольные балки, соединяющие порталы, на самые порталы, а также на
горизонтальную плиту.
Способ измерения усилий зависит от условий проведения опыта. 261104
На испытательных машинах нагрузка измеряется силомером машины,
который работает обычно по принципу рычажно-весовой схемы или по
принципу измерения гидравлического давления.
При проведении опытов на стендах нагрузка измеряется упругими или
гидравлическими динамометрами, либо нагрузка прилагается и изме-
ряется через рычажную систему.
Если нагрузка действует вниз, то она определяется весом грузов,
непосредственно подвешенных к рычагу, а если вверх, то нагружающий
рычаг опирается на весы.
Одна из употребительных конструкций упругого динамометра 261105
схематически представлена на фиг. 261105; в таблице 261105 даны габа-
ритные размеры динамометра в зависимости от предельной нагрузки.
Динамометр предназначен для измерения как растягивающих, так и сжи-
мающих нагрузок.
Таблица 251105
Сила Р, кг 1000 3000 10000 30000
Цена одного деления шкалы 1 кг 3 кг 10 кг 30 кг
L 254 297 348 424
Габарит- 1 224 251 288 350
Ь 82 82 90 НО
ные раз- d 50 50 50 50
1 D 208 240 270 356
меры, мм 58 58 58 58
С 16 20 35 50
22 Авиац. порши, двигатели.
337
261106-261201
Динамометры должны тарироваться на контрольных машинах с непо-
средственным приложением нагрузки, в соответствующих лабораториях.
При отсутствии такой возможности динамометры могут тарироваться на
испытательных машинах, точность которых проверена. Каждая тарировка
должна быть произведена несколько раз с выводом средних значений на
всем используемом диапазоне усилий.
261106 При непосредственном приложении нагрузки с помощью рычаж-
ной системы передаточное число системы выбирается таким, чтобы
наибольший прилагаемый груз не превышал 100—200 кг. Если нагрузка
к рычагу прикладывается вверх при помощи весов, то могут быть исполь-
зованы весы или в зависимости от величины потребной силы.
При выборе испытательной машины или стенда, а также динамометров
следует следить за тем, чтобы максимальная измеряемая нагрузка при
опыте была не ниже 0,5 наибольшей нагрузки, свойственной машине или
динамометру на данной ступени нагружения, а минимальная измеряемая
нагрузка не ниже этой же наибольшей нагрузки. Точность опреде-
ления нагрузок обычно принимается не ниже±2%.
261200 Измерение линейных и угловых перемещений [2, 4, 22]
261201 Измерение линейных перемещений в пределах от 0,05 до 1—2 мм
производится при помощи индикаторов с ценой одного деления 0,01 мм
и точностью отсчета 2—Зу. Индикатор показан на фиг. 261201-1.
Для определения абсолютных перемещений индикаторы закрепля-
ются на неподвижных и недеформируемых частях машины или стенда.
338
261201
Щуп индикатора устанавливается в направлении, по которому должно
производиться измерение. Конец щупа должен быть оперт на такую
44
Фиг. 261201-1.
Индикатор
часть детали, чтобы при деформации под нагрузкой не возникали
перемещения конца щупа по детали. На фиг. 261201-11 показан пример
Фиг. 261201-11.
Неправильное опирание щупа
Фиг. 261201-III.
Правильное опирание щупа
неправильной, а на фиг. 261201-1П—правильной установки щупа инди
катера.
22*
339
261201
При проведении измерений абсолютных перемещений следует счи-
таться с возможностью перемещения нагружаемой детали как жесткого
целого, например, из-за движения захватов машины или звеньев стенда
при нагружении вследствие осадки опор и по другим причинам. Для исклю-
чения влияния их на результаты соответствующие перемещения изме-
ряются отдельными‘приборами.
Фиг. 261201-IV.
Измерение относительного перемещения щек при из-
гибе коленчатого вала
Для измерения относительных перемещений деформируемой детали
индикаторы закрепляются на самой детали так, чтобы они воспринимали
взаимное смещение двух ее точек. На фиг. 261201-1V для примера пока-
зано применение индикатора для измерения относительного расхождения
щек при изгибе коленчатого вала. При определении жесткостей измерение
относительных перемещений обычно дает более точные результаты, чем
измерение абсолютных перемещений.
340
261202-261203
Для измерения линейных перемещений (особенно относительных) от 261202
0,001 до 0,05 мм используются тензометры, снабженные удлини-
телями базы. Для этого призмы тензометра устанавливаются на точки,
взаимное смещение которых определяется. На фиг. 261202 показано при-
менение тензометров для определения относительного смещения точек
нижней головки шатуна в месте расположения стягивающих болтов при
их затяжке с целью определения соответствующей жесткости.
Применяемые индикаторы и тензометры должны систематически
проверяться на калибровочной установке, причем погрешность измерения
по индикатору должна быть не выше±2[* и по тензометру±0,3р..
Фиг. 261202.
Измерение^ перемещений при помощи тензометров
Для измерения угловых перемещений (углов поворота) применя- 261203
ются зеркальные приборы с отсчетом показаний через трубу или при
помощи источника света и светового следа на шкале. Схема первого способа
приведена на фиг. 261203. Плоское, оптически правильное зеркало а
укрепляется в сечении, поворот которого следует измерить. Зеркало уста-
навливается так, что в поле зрения трубы б находится шкала в. До дефор-
мации через трубу производится по шкале отсчет, отвечающий точке 1,
после деформации—точке 2. Измеряемый угол составляет
где А—разность отсчетов до и после деформации;
L—расстояние от зеркала до шкалы.
341
261204
Измерение по такой схеме требует соблюдения следующих условий:
1. Труба б и шкала в должны быть расположены в одной плоскости,
в которой производится измерение угла (труба и шкала должны быть
смещены лишь настолько, чтобы не заслонять друг друга).
2. Зеркало должно быть установлено таким образом, чтобы началь-
ный отсчет приходился на часть шкалы, расположенную на наименьшем
расстоянии от зеркала.
2 в
Фиг. 261203.
Измерение угловых перемещений при помощи зеркала и трубы
261204
3. Расстояние L следует выбирать в зависимости от необходимого
увеличения измеряемой величины, а также в соответствии с оптическими
характеристиками трубы (в пределах возможной фокусировки изобра-
жений). Обычно L=l,5—2 м; для труб, обеспечивающих большие фокус-
ные расстояния, L доводится до 5 м.
4. Измеряемые углы не должны превышать 2—3°; при больших
значениях углов вместо плоской шкалы надо применять шкалу на цилин-
дрической поверхности радиуса L, так как в этом случае возникает по-
грешность от замены углов их тангенсами.
Схема второго способа с использованием источника света дана на
фиг. 261204.Источник света 1 посылает через линзу 2 и диафрагму 3 луч на
параболическое зеркало 4, укрепленное на элементе, угол поворота кото-
рого определяется. Луч дает отраженное зеркалом 4 изображение щели
на шкале, по которой производится отсчет А. Измеряемый угол состав-
ляет
А
Измерение по такой схеме требует соблюдения следующих условий:
1. Источник света, зеркало и экран со шкалой должны находиться
в плоскости, в которой производится измерение угла.
2. Луч света должен быть приблизительно перпендикулярен к экрану
при производстве отсчета для недеформированного состояния детали.
342
261205
3. Расстояние L следует выбирать в зависимости от требуемого уве-
личения измеряемой величины, а также в соответствии с оптическими
Фиг. 261204.
Измерение угловых перемещений при помощи зеркала и источника света
свойствами системы, которая должна давать достаточно резкое изобра-
жение световой щели на шкале для обеспечения правильности отсчетов.
Фиг. 261205.
Измерение угла закрутки при помощи инди-
катора
4. Измеряемые углы не
должны превышать 2—3°;
при бблыпих значениях уг-
лов вместо плоского экрана
следует применять экран на
цилиндрической поверхности
радиуса L в связи с приве-
денными в 261203 соображе-
ниями.
Для измерения углов 261205
поворота могут быть исполь-
зованы также индикаторы,
которыми измеряются ли-
нейные перемещения, непо-
средственно связанные с уг-
ловыми. На фиг. 261205
показано применение инди-
катора для измерения угла
закрутки упругой шестерни
редуктора. Корпус инди-
катора связан специаль-
ной державкой с барабаном
343
261300- 261302
шестерни, а щуп индикатора упирается в зуб обода, будучи ориенти-
рованным по касательной к нему. Индикатор измеряет смещение Д обода
относительно барабана. Разделив это смещение на радиус окружности /?,
соответствующий месту соприкосновения щупа с шестерней, получают
угол закрутки:
261300 Измерение деформаций [5, 10, 13, 22, 23]
261301 Измерение деформаций и определение по ним напряжений произво-
дится, как правило, в пределах упругости. Деформации определяются
измерением на поверхности детали изменения линейного расстояния
между двумя точками. Это расстояние, являющееся базой измерительного
прибора, называется базой измерения.
Выбор базы прибора для определения удлинений зависит от измене-
ния напряжений вдоль избранного направления измерений. Показания
тензометра дают при неравномерном распределении среднюю величину
напряжений в пределах базы. Ошибка в определении действительных
максимальных напряжений составляет [24]
где 1—длина базы;
градиент напряжении.
Располагая по данным измерений кривой распределения напряжений
в детали, можно определить градиент, а по нему—ошибку определения
максимума. Кроме того, величина базы тензометра должна быть сообра-
зована с радиусом кривизны поверхности, на которой производится изме-
рение. База тензометра не должна превышать 1=0,1-4-0,2 /?.
Для измерения деформаций вне зон концентрации напряжений на
крупных деталях двигателя (коленчатый и редукторный валы, шатун,
шестерня редуктора, картер, блоки, поршни) используются тензометры
различных конструкций и, в частности, рычажные тензометры с базой
20—10 мм.
Для измерения напряжений вне зон концентрации на средних и мел-
ких деталях двигателя (шестерни и валики привода агрегатов, палец
поршня, пружины редуктора, клапана, траверсы, распределительные
валики и др.) применяются тензометры с базой 5 мм или тензометры с
базой 3—4 мм, называемые обычно малобазными.
Для измерения напряжений в зонах концентрации напряжений при-
меняются малобазные тензометры с базой 1—2 мм.
Увеличением тензометра v называется отношение отсчета по шкале
к измеряемой абсолютной деформации.
261302 Тензометры с базой 20 мм схематически изображены на
фиг. 261302-1, 11 и. 111.
Увеличение тензометров v и их габаритные размеры (высота Н,
ширина b и толщина h) приведены в табл. 261302.
344
261303
Т а б л и ц а 261302
V Высота Н, мм Размеры в плане
Ь, мм Л, мм
Тензометр типа фиг. 261302-1 1100—1200 162 52 17
Тензометр типа фиг. 261302-П 1000—1100 138 48 10
Тензометр типа фиг. 261302-Ш 1003 132 48 14 ।
Фиг. 261302-1.
Тензометр рычажного типа
Фиг. 261302-Ш.
Тензометр рычажного
типа
Фиг. 261302-П.
Тензометр рычажного
типа
Ошибка в определении напряжений составляет при отсчете по
шкале с погрешностью, не превышающей 0,2 мм (0,2 деления):
для базы .20 мм для базы 10 мм
Сталь 20 кг/см3 40 кг/см1
Алюминиевые сплавы 7 » 14 »
Магниевые сплавы 4 » 8 »
Наибольшая деформация, которую может измерять прибор (без пере-
движки стрелки), составляет 50 р, что отвечает напряжению 5000 кг/см2
(при базе 20 мм).
Тензометр оптико-механического типа с базой 2 мм схематически изо-
бражен на фиг. 261303-1. Высота тензометра 100мм, ширина 12 мм, толщина
3 мм, увеличение2000—4000 при использовании микроскопа с увеличением
50—100. При этом увеличении и погрешности отсчета по окулярной шкале
микроскопа 0,3 мм погрешность определения напряжений на стали
составляет около 150—70 кг!см\ на алюминиевых сплавах 50—25 кг)см*
и на магниевых—30—15 кг/см*.
261303
345
261303
Для повышения точности вторая оптическая ступень увеличения
заменяется электрической. Схема прибора для этого случая изображена
на фиг. 261303-11. Изменение зазора, замыкающего магнитную цепь
Тензометр индукционный
Фиг. 261303-1.
катушки, пропорциональное де-
формации, измеряется при
помощи мостиковой схемы с
высокой несущей частотой.
Начальная величина зазора
регулируется при помощи вин-
та. Разбалансировка сопроти-
влений мостика, возникающая
при изменении зазора, изме-
ряется после усиления при
помощи чувствительного галь-
ванометра. Измерительная схе-
ма должна обладать стабиль-
ностью и чувствительностью,
обеспечивающей необходимое
увеличение.
Упрощенная схема измери-
тельного устройства представ-
лена на фиг.261303-111. Катуш-
ки индуктивного сопротивле-
ния, показанные на цепи' как
Тензометр опти-
ко-механиче-
ского типа
настройки) и
Мостик питается от стабилизированного лампового генератора высокой
датчик, включены как плечи
мостика. Другие два плеча
являются регулируемыми (для
позволяют установить начальное равновесие мостика.
датчик
Генера-
тор
я
выпря-
митель
Стабьли
ватар
224/1*24
Фиг. 261303-П1.
Скелетная схема измерительного устройства для индукционного тензометра
2200
частоты (1000—1500 гц). Ток разбалансировки усиливается усилителем
и через детектор поступает в гальванометр (указывающий прибор).
346
261304-261305
Ток, идущий через гальванометр, пропорционален изменению зазора,
т. е. прибор должен иметь линейную характеристику.
В этом типе прибора увеличение составляет 20000—200000 в зависи-
мости от чувствительности измерительной схемы и гальванометра. При
таком увеличении погрешность измерения достигает 5—10 кг]см2 для
стали.
Малобазный тензометр с базой 2 мм изображен схематически на 281304
фиг. 261304. Катушки индуктивного сопротивления к связаны с одним зве-
1Цб'
17
Фиг. 261304.
Тензометр индукционный с малой базой
ном корпуса тензометра а. Якорь я связан с другим звеном. Звенья соеди-
нены друг с другом упругим шарниром ш. Изменение зазора между катуш-
ками и якорем, пропорциональное измеряемому удлинению, измеряется
при помощи высокочастотной мостиковой схемы, как описано выше.
В табл. 261305-1 приведены данные по ряду малобазных тензомет-
ров, разработанных в одном из научно-исследовательских институтов.
В табл. 261305-П приведены данные некоторых малобазных тензо- 261305
метров иностранных конструкций, различных по принципу действия.
347
261306
Таблица 2613Q5-I
Некоторые типы электроиндукционных тензометров Научно-исследовательского
института
Механизм регулировки якоря База мм Механическое увеличение Общее увеличение о Габариты
1. Поперечное переме- щение якоря винтом М2х0,5 2. Поперечное переме- щение якоря винтом М2,ЗхО,4 3. Упругая мембрана . 4. Упругая мембрана . • 4 2 2 2 7,4 4,1 6 4 до 380 000 до 380 000 до 60 000 40000 38x21x18 30,5x13,5x8 26x14x14 19,5x13x13
Таблица 261305-11
Принцип действия База мм Увеличение V Габариты мм
1. Оптико-механический; увеличание дости- гается рычажной передачей и микроско- пом (Лер) 2 10000 35x15x15
2. Оптико-механический; увеличение дости- гается рычажной передачей и микроско- пом (Петерсон) 2 2000—4000 100X12X3
3. Оптико-механический; увеличение дости- гается рычагом механическим и оптиче- ским. Деформация отсчитывается по шка- ле через трубу (Юнкере) 1,5 10000 45 X 20X15
4. Фотоэлектрический; увеличение дости- гается механическим рычагом и фотоэле- ментом, работающим на измерительную схему (Лер) 1—2 50000 40x15x15
5. Фотоэлектрический; увеличение дости- гается механическим рычагом и фотоэле- ментом, работающим на измерительную схему (Джене рэл-Моторс) 1,5—6 до 30000 52 x 20x15
6. Электроиндукционный; увеличение дости- гается механическим рычагом (1:5) и из- менением индуктивного сопротивления, измеряемого мостиком переменного тока высокой частоты (Лер) 0,5—2 100000 37X15X15
7. Тот же (Аскания) 0,5—5 до 30000 . 18x10x12
261306 Крепление тензометра должно обеспечивать правильность прилега-
ния призм к деформируемой поверхности. На фиг. 261306-1 показано
правильное (а) и неправильное (б) положение призмы относительно
поверхности. При установке на поверхности повышенной твердости
(цементированная или азотированная сталь) для лучшего сцепления
призм с поверхностью следует покрывать ее слоем меди толщиной
10-20 р.
348
261306
Прижатие прибора осуществляется либо жесткое при помощи
струбцинок, либо эластичное при помощи шпилек, проволок или дру-
гих устройств. Прижимающая сила должна проходить между приз-
мами, которыми прибор опи-
рается на поверхность детали.
На фиг. 261306-11 пока-
зано прикрепление тензометра
к шейке при помощи жесткой
струбцинки, Сила прижатия
прибора к детали колеблется
в пределах 1 — 2 кг для сталь-
ных деталей и не должна пре-
вышать 1 кг для деталей из
алюминиевых сплавов. Особое
внимание должно быть обра-
щено на крепление малобазных
тензометров, которые прихо-
дится устанавливать по раз-
ным направлениям на сильно
Опирание призмы тензометра на деформи-
руемую поверхность
искривленных поверхностях в
ряде случаев двоякой кривизны. На фиг. 261306-111 показано крепле-
ние „при помощи серьги, на которую сверху нажимает планка, притя-
Фиг. 261306-П.
Крепление тензометра
при помощи струбцинки
гиваемая резиновыми звеньями. Эти звенья улучшают центрировку
прижимающего усилия.
От силы прижатия несколько зависит увеличение; поэтому тари-
349
261307
261307
ровку тензометра следует производить при тех же значениях прижа-
тия, с которыми прибор используется.
Прижатие прибора производится в арретированном состоянии
(если прибор снабжен арретиром). После прижатия арретир освобож-
дается и постукиванием по прибору (или около прибора) карандашом
или другим легким предметом производится проверка устойчивости
установки (прибор не дол-
жен «ползти»). В зависи-
мости от ожидаемого знака
деформации стрелка прибо-
ра устанавливается в на-
чальное положение, обеспе-
чивающее наибольший ход
прибора.
Правильность работы
тензометра проверяется не-
сколькими предварительны-
ми циклами нагрузки — раз-
грузки. Стрелка прибора
должна возвращаться после
разгрузки в начальное по-
ложение. Разница отсчетов
в нагруженном и ненагру-
женном состояниях для двух
соседних циклов должна
быть неизменной. Разности
отсчетов должны быть про-
порциональны разностям на-
грузок, если процесс дефор-
мирования происходит в пре-
делах пропорциональности.
В каждой точке и в каж-
дом направлении измерения
деформаций прибор должен
устанавливаться дважды и
при получении разницы ре-
зультатов двух идентичных ФиГ’
измерений более 10% Сле- Крепление тензометра^^при ^^томощи серьги и
дует производить измерения резиновых яг
в третий раз.
Отсчеты по тензометру производятся для нескольких значений
нагрузки, при этом нагрузка увеличивается -ступенями, обычно тре-
мя-четырьмя. По разности отсчетов для двух значений нагрузки опре-
деляется деформация, соответствующая интервалу возрастания на-
грузки.
Нагрузка и разгрузка для измерения деформаций производится
несколько раз.
По средней разности отсчетов удлинения
т
g &J + ^2 + • •
350
261308-261309
где т — число повторений измерения, определяется относительная
деформация (удлинение) по формуле
где / — база тензометра в мм-,
л —цена одного деления шкалы тензометра (или гальванометра)
в мм измеряемого удлинения;
v — увеличение тензометра.
Цена одного деления шкалы тензометра и его увеличение опреде-
261308
ляются при тарировке. Тарировка производится либо на специальных
калибровочных приборах, либо сравнительным методом на эталонной
балочке. На калибровочных приборах
тензометру дают определенные смеще-
ния, измеряемые оптически с точностью
до О,Гл<л<. Эти смещения даются с оди-
наковыми интервалами, пока не будет
выбрана вся шкала прибора. Для каж-
дого заданного смещения А/ тензометра
производится отсчет 8 по его шкале.
По полученным данным строится тари-
ровочный график в координатах Д1, 8
и определяется цена одного деления
Ы 1
шкалы n = —j- = —.
в V
Эта цена остается постоянной на
всем интервале работы прибора, если
характеристика его является линейной.
Для приборов с нелинейной харак-
теристикой определение деформаций
производится непосредственно по тари-
ровочному графику, причем прибор Фиг. 261308.
перед началом измерений должен выво- Тарировочные кривые электроин-
диться в определенное положение, с тем Аукционного тензометра
чтобы было известно, с какого места
тарировочной кривой следует брать отсчеты. Пример тарировочной
кривой для электроиндукционного тензометра с базой 4 мм и 2 мм
приведен на фиг. 261308.
Для измерения напряжений в зонах концентрации напряжений,
кроме применения малобазных тензометров, может быть использован
метод, по которому деформации измеряются тензометром с переменной
базой, как показано на фиг. 261309-1. Один конец базы тензо-
метра постоянно находится в точке О, другой конец устанавливается
последовательно в точках 1, 2, 3... Для этого база в тензометре
может раздвигаться при помощи винта. По данным измерения удли-
нений Д/ наносится график Д/ в зависимости от длины базы I.
261309»
Производная ee и дает величину относительного удлинения, гра-
фик которой позволяет опрёделить етах, а следовательно, и макси-
мальное напряжение в зоне концентрации.
Этот способ имеет известные преимущества, так как не требует
35!
261310
измерений на малой базе, однако применим он лишь на слабо искрив-
ленных поверхностях или на плоскостях.
Если при деформации детали соблюдается закон линейного рас-
пределения напряжений (а вместе с тем и удлинений), то величины
их могут быть найдены измерением только с одной стороны, и таким
образом могут быть найдены, например, напряжения на внутренней
Фиг. 261309-1.
График измерения тензометром с пере-
менной базой
поверхности стенок картера измере-
ниями только снаружи. Для этого,
как показано на фиг 261309-11, тен-
зометр один раз устанавливается
на поверхность детали (А), а i дру-
гой (Б) —на подставке высотой а.
Фиг. 261309-11.
Схема измерения напряжений в стен-
ках при ' односторонней установке
тензометров
261310
Если удлинение на поверхности составляет Д1, а удлинение на концах
подставок (Д/)*> то удлинение на глубине у под поверхностью
составит
(Д07 = д/-<2!к^у.
Если положить у равным толщине стенки 8, то получится удли-
нение на внутренней поверхности, недоступной в ряде случаев для
непосредственных измерений.
Линейная деформация всегда измеряется по определенному напра-
влению, по которому ориентирован прибор. Для обеспечения ориен-
тировки прибора по заданному направлению при установке на поверх-
ности детали производится разметка направлений и по нанесенным
линиям устанавливается база прибора.
Разметка точек установки тензометров и их ориентировка зави-
сят от задачи, поставленной для решения путем измерения деформа-
ций. В большинстве случаев оказывается необходимым определить
величину и направление максимальных напряжений на поверхности
детали. Для определения точек установки и ориентировки приборов
весьма удобен в этом случае метод хрупких лаковых покрытий [15].
По этому методу возможно предварительно определить места возник-
352
261311
, при исследовании на-
Фиг. 261311.
Датчик проволочного те изо*
метра
новения и направления наибольших растягивающих напряжений. Для
этого поверхность детали, предварительно химически очищенная, по-
крывается равномерным слоем лака, который в дальнейшем при высы-
хании делается хрупким. В качестве лаков применяются: канифоль-
ный лак (на амилацетате), дамаров лак (на бензоле) и лаки других
составов. Лак наносится слоем от 0,07 до 0,15 мм и высушивается на
определенном режиме при повышенных или нормальных температурах,
в зависимости от типа лака. Растрескивание лака таких толщин проис-
ходит при относительном удлинении приблизительно в = 0,005, что соот-
ветствует для стали напряжению 1000—1200 кг/см\ Трещины распола-
гаются нормально к направлению наибольших растягивающих напря-
жений.
Производя постепенное нагружение детали, покрытой хрупким
лаком, наблюдают за началом образования трещин и их направлением;
это и позволяет определить места и направления установки тензо-
метров.
В ряде случаев необходимо производить дистанционные измерения 261311
упругих деформаций деталей. Так, наприм
пряженности картера и блоков при статиче-
ском нагружении собранного картера оказы-
ваются необходимыми измерения деформаций
связей, силовых шпилек, коленчатого вала
и др.
Наиболее удобным способом измерений
в таких условиях является применение про-
волочных тензометров [16]. Этим же методом
могут успешно измеряться напряжения на
внешних поверхностях деталей, а также на-
пряжения в динамических условиях нагру-
жения.
Проволочный тензометр (или тензодат-
чик) представляет собой изогнутую зигзагом
тонкую проволоку высокого сопротивления
(диаметром 0,02—0,05 мм), приклеенную
к бумажной полоске (фиг. 261311). Эта по-
лоска с проволокой приклеивается на поверх-
ность детали и при деформации следует за
ней. Благодаря деформации изменяется оми-
ческое сопротивление тензодатчика на не-
большую величину (приблизительно на 0,1%
при напряжении 1000 кг)см*).
Основной характеристикой тензодатчика является его чувствитель
ность
dR
где—относительное изменение сопротивления в результате деформации;
г—удлинение.
Сопротивление датчика для статических испытаний составляет
100—150 ом, его активная база от 3 до 25 мм ; в качестве материала
23 Авиац. порши, двигатели.
353
261400-261402
обычно используется константановая проволока с чувствительностью
>) = 2,1.
Изменение омического сопротивления пропорционально деформации
и измеряется при помощи мостика сопротивления на постоянном или
переменном токе. При использовании мостика постоянного тока необхо-
димо применять высокочувствительные гальванометры.
261400 Определение напряжений по данным измерения
деформаций [22, 23, 24]
261401 Для линейного напряженного состояния (простое растяжение или
сжатие, изгиб длинного стержня) направления главных удлинений
и напряжений бывают известны, и по этим направлениям производится
измерение удлинения е„ вычисляемое из данных опыта по формуле (1)
п. 261307. Соответствующие напряжения определяются на основании
закона Гука по выражению
а = е, Е,
где Е—модуль продольной упругости.
Модуль упругости может быть принят по справочным данным для
материала той детали или модели, на которой производятся измерения.
Если уверенности в применимости справочных данных нет, то модуль
упругости должен быть определен в механической лаборатории из
опыта на растяжение.
261402 Для плоского напряженного состояния встречаются два основных
случая определения напряжений по данным измерений: а) когда на-
правления главных удлинений и напряжений известны и б) когда они
неизвестны. ’
Если направления главных напряжений известны, то измерение
удлинений производится вдоль них, причем эти измерения сразу дают
главные удлинения и В этом
случае главные напряжения опреде-
ляются по формулам
Е г . ,
°i«t—+
1 I*
где р. — пуассоново отношение.
Если при линейном напряженном
состоянии базу тензометра приходит-
ся располагать под углом <р к извест-
ному направлению главного удлине-
ния е,, как показано на фиг. 261402,
то измеряется удлинение е9, по которому главные удлинения опре-
деляются из зависимостей
е2
Фиг. 261402.
Измерение удлинений при простом
растяжении
=__________2________
61 . (I — р) 4-(1-Ь н) cos 2<? Е<р Л
— РА-
354
261403- 261405
При плоском напряженном состоянии, если известны направления
главных удлинений и измерения деформаций производятся в этих
направлениях, т. е. под углом, 0° и 90° по отношению к одному из
261403
%
------
Фиг. 261403.
Измерение деформаций по напра-
влениям главных напряжений
главных направлений, то (фиг. 261403)
эти удлинения составляют-
е1 = ео°>
еа ~ еэо°*
Определение главных удлинений 261404
е, и es по результатам измерений
удлинений по произвольному напра-
влению основывается на зависимостях
между ними, устанавливаемых из гео-
метрических соображений. Между
удлинением по направлению под
углом <р к «! и главными удлинениями и ег существует зависимость
= Sj cos’ <р + е2 sin’ ф. (1)
Принимая во внимание, что
. 14-COS2» . . 1 —со»2?
COS’ ф = ——-- и Sin’ ф =----5 ,
зависимость (1) можно представить в виде
е, =Ц^-Ь^рС08 2ф. (2)
Соответственно относительный сдвиг выражается через главные
удлинения зависимостью
Тф Е. Е» • Л
^.e 1 _?Sm 2ф.
л и
(3)
Если для плоского напряженного
состояния измерение деформаций про-
изводится под углом ф, и Ф1 + 90°=фа
к направлению в, (фиг. 261404), то
главные удлинения по (2) состав-
ляют
^'-9 1
1 2 2 cos 2?1 ’ I
> - ч+ч Ч~ем |
2 2 2 cos 2?! ‘ )
Фиг. 261404.
Измерение деформаций под
углом к главным направле-
ниям
В том случае, когда направление главных удлинений неизвестно, 261405
измерение должно производиться по крайней мере в трех направлениях.
23*
355
261406-261407
Если тензометры устанавливаются по трем направлениям, накло-
ненным друг к другу под углом 45°, т. е. по направлениям 0°, 45°
и —45° к оси х (фиг. 261405), то направление главного удлинения в!
определяется углом <р0, который образует 8i с направлением измеряе-
мого удлинения е0. Этот угол вычисляется из выражения
S- 45° 645°
То 2е _______е _______е
ze0° — е_45, е45.
(О
261406
Главные удлинения составляют
а1 = ~----------- 4*~2 V*"(е-45° — £45°)S + (2sq° — 845» — S-45’)* ,
А А 9
®s ““ —-—2----------— е45°)2 + (2®6° — ®45° — е-45°)* •
(2)
В качестве иной схемы установки тензометров применяется располо-
жение направлений измерений под углом 60° и 120° друг к другу
Измерение деформаций по трем
направлениям под углом 45°
Фиг. 261406.
Измерение деформаций по трем на-
правлениям под углом 60 и 120’
(дельта-схема)
(дельта-схема), как показано на фиг. 261406. Угол, который образует
направление главного удлинения с направлением измеряемой деформа-
ции, направленной к оси х под углом 0°, определяется из выражения
tgcp =____£ес°~>° .
то Ор _____р ___е
еб0® е120‘
261407
(1)
Главные удлинения составляют
8> = у (е£1“ + е60° + е120°) + у )/" (2Sff> — 86й« — е120°)2 + 3 (в6й- — 8120°)* >
®2 — (%<. + е60° + 8120°) — -3 У' (2во* — г60’ — 81200)2 + з (г6Ь« — 8120»)» .
Находит применение также установка тензометров под углом 60° друг
к другу, как показано на фиг. 261407. Угол <р0 между главным напра-
356
261408-261409
влением ех и/направлением 0° к оси х,
по которому измеряется деформация г0,
определяется из выражения
. Е-60’~ S6C5 ,/-~
tg ?0 2е Е _______ Е ' 3
е-ео° Ебб*
Фиг. 261407.
Измерение деформаций по трем на-
правлениям под углом 60°
(1)
Главные удлинения составляют
6о« + Ево° + s-60° . 1 ----1------; \» I о z- i v
-------2---------Ь"з у (2®о» — в-во’ — гео’) +3(е-бб’ — гво’) >
е0° + Е6О’+ Е-6Ь’ • уГ/гГ-----------I \2 , о?»--------*—Сг
-------3---------"з V (2со° — Е-вС’ — гвС’) + 3 (г-60’ — ебо«) .
Для контроля получаемых результатов, кроме измерений в трех 2fiunR
направлениях, производится измерение в четвертом направлении. Так, Z014U°
при измерении под углами 0°, 45° и—45° к оси х производится допол-
нительное измерение под углом 90°; тогда четыре измеренных дефор-
мации должны удовлетворить условию
е90° + ®0’ = ®45’+г-45’« (1)
При измерении под углами 0°, 60° и —60° к оси х производится
дополнительное измерение также под углом 90°; результаты измерений
должны удовлетворять условию
®9l’ = -3 (2866’ + 2s_e(j’ 8(|°). (2)
Несоблюдение условий (1)
мерении деформаций, которые
Фиг. 261409.
Построение круга деформаций
и (2) характеризует погрешности в из-
могут возникать от ряда причин: неточ-
ность тензометра, ошибки в ориен-
тировке его базы на поверхности
детали и др.
Для проверки вычислений по
приведенным формулам, а также для
замены вычислений графическими
построениями, пользуются кругами
деформаций. На фиг. 261409 по-
казано построение такого круга.
По оси абсцисс откладываются удли-
нения в данном направлении, а по
оси ординат — половинные величи-
ны относительного сдвига у/2 по
направлению, перпендикулярному
удлинению. Точка D характеризует
261409
357
261410-261411
261410
деформацию удлинения в данном направлении и сдвиг в направлении, ему
перпендикулярном. Угол, который составляет это направление с напра-
влением главного удлинения е1; равен <р; на диаграмме луч CD обра-
зует соответственно угол 2? с осью абсцисс. Точки А и В соответ-
ствуют главным удлинениям aj и е2.
Если деформации измерены под углами 0°, 60° и —60°, то центр
круга С будет иметь абсциссу (фиг. 261410-1)
е0’ + s60° + £—60°
3 *
Для того чтобы найти радиус круга, производится следующее
построение. Через точку Е, соответствующую измеренному удлинению ego.,
проводится луч под углом 30° к оси абсцисс до пересечения с верти-
калью, проведенной через точку F. Точка F соответствует измерен-
ному удлинению е_6С". Через точку К проводится горизонталь до пере-
сечения в точке D с вертикалью, соответствующей измеренному
Фиг. 261410-1.
Круг деформаций при измерении
под углами О’, 60’ и —60’
Фиг. 261410-11.
Круг деформаций при измере-
нии под углом ±45°
261411
удлинению so». Точка D находится на круге и определяет его радиус;
круг отсекает по оси а главные удлинения; угол между главным удли-
нением е, и е0= равен <р и определяется по углу наклона луча CD,
который составляет 2?.
Если деформации измерены под углами 0°, 45’ и —45°, то центр
круга С будет иметь абсциссу (фиг. 261410-II)
£-«° + £45°
2
Для нахождения радиуса круга через точку Е проводится луч
под углом 45° до пересечения с вертикалью, проведенной через центр
круга. Через точку К проводится горизонталь до пересечения в точке D
с вертикалью, соответствующей измеренному удлинению е0.. Точка D
лежит на круге и определяет его радиус. Круг отсекает на оси е
главные удлинения e/и в2; угол <р между направлением е0 и главным
удлинением а, определяется аналогично случаю фиг. 261410-1.
По определенным на основании данных измерений главным удли-
нениям находятся главные напряжения согласно формулам 1 п. 261402.
По главным напряжениям строится круг для напряжений, как показано
358
261412—261413
на фиг. 261411, при помощи которого определяются графически
пряжения нормальные о? и касательные ъ9, а также суммарные о
любой наклонной площадки.
на-
ДЛЯ
Фиг. 261411.
Построение круга напряжений.
Эти напряжения могут быть
1ены также по формулам
ff’Zlf?Cos2<p;
Ор— 2
Ч Sin 2?;
ВЫ-
Для наглядного представления 261412
изменении величины напряжений
в данной точке в зависимости от на-
клона площадки строится полярная
диаграмма для и а, как пока-
зано на фиг. 261412-1. Диаграмма
представляет собой эллипс (эллипс на-
для суммарного напряжения
пряжений).
Если у рассматриваемой точки на поверхности деформируемой детали
взять небольшой круг, то после деформации он обратится в эллипс,
как показано на фиг. 261412-11. Для построения этого эллипса доста-
точно отложить удлинения в определенном масштабе по радиус-век-
торам от окружности. Положительные величины откладываются наружу,
отрицательные—внутрь круга. На диа-
грамме нанесены также непосредственно
измеряемые удлинения чо», и а90°.
Для наглядного представления о рас-
рределении напряжений в детали строятся
fl
Фиг. 261412-1.
Полярная диаграмма напряжений
Эллипсы напряжений
диаграммы изменения напряжений вдоль отдельных линий, а также
на поверхности, характеризующие изменение напряжений в зависи-
мости от двух координат.
Кроме измерения на поверхности детали при помощи тензометров, 261413
напряжения могут определяться оптическим методом, который осущест-
вляется на моделях деталей из оптически активной пластмассы. Метод
основывается на свойстве двоякой лучепреломляемости, возникающей
в материале модели при механической напряженности ее. Возникающая
359
261500—261502
интерференция лучей поляризованного света, проходящего через напря-
женную модель, позволяет определить траекторию и величины наибольших
касательных напряжений, т. е. разности главных нормальных на пряжений.
Путем дополнительных измерений или вычислений определяется сумма
главных напряжений и, таким образом, полностью определяется напря-
женное состояние. Оптический метод применяется преимущественно для
определения напряжений при плоском напряженном состоянии. Путем
использования особых свойств ползучести массы, из которой изгото-
вляются модели, при повышенных температурах оптический метод при-
меняется для определения объемного напряженного состояния (подроб-
нее об оптическом методе см. [14, 20, 21]).
261500 Определение жесткостей при кручении [25]
261501 Опытное определение жесткостей при кручении необходимо для
составления расчетных схем по крутильным колебаниям, для подбора
жесткостей эластичных соединений и для решения других задач, возни-
кающих при динамическом расчете двигателя.
Определение крутильных жесткостей производится путем измерения
углов закручивания валов или других элементов при загрузке их си-
лами, вызывающими кручение.
При измерении жесткости данного участка детали, нагруженной
кручением, определяются углы закрутки концевых сечений участка
и <рг. Относительный угол закрутки составляет Д<р = <Р1 — <рг. Если
крутящий момент, вызывающий деформацию, составляет М, то жест-
кость кручения можно определить из выражения
м
с = д^ кгсм.
Для обеспечения достаточной точности измерения необходимо, чтобы
разность Д<р была не слишком мала по сравнению с измеряемыми абсо-
лютными углами и <р2. Если это условие не соблюдается (например,
если сама деталь имеет значительную жесткость, а закреплена нежестко),
то следует использовать измерительные схемы, позволяющие непосред-
ственно измерить относительный угол закрутки рассматриваемого участка
детали.
261502 При измерении крутильных жесткостей коленчатых валов следует
различать две основных схемы передачи нагрузки на вал.
При кручении первого рода крутящий момент прикладывается
к кривошипу по коренным шейкам. При кручении второго рода закру-
чивание осуществляется тангенциальными силами, приложенными к ша-
тунным шейкам.
Для коленчатых валов рядных двигателей схема нагрузки для кру-
чения первого рода изображена на фиг. 261502-1. К хвостовику коленча-
того вала в месте присоединения нагнетателя укрепляется поперечина ab,
удерживающая вал от вращения при нагрузке. К носку коленчатого вала
прикрепляется траверса cd. На один конец траверсы подвешиваются
грузы; другой конец опирается на десятичные весы. Вес грузов и на-
грузка на весы должны подбираться одинаковыми. Величину макси-
мального момента при опыте следует принимать не менее половины
среднего момента двигателя при номинальной мощности.
360
261502
При определении максимального момента, которым нагружают вал,
должна быть произведена проверка статической прочности крепления
поперечины к хвостовику. Плечи траверсы I берутся равными 400—800 мм
с тем, чтобы максимальная нагрузка на конец траверсы не превышала
200 кг. На траверсе устанавливается центробежный вибратор, возбу-
ждающий колебания, необходимые для ослабления сил трения, перед из-
мерением, возникающих в подшипниках при расположении вала в картере.
Фиг. 261502-1.
Определение жесткости при кручении первого рода
Закрутка вала может осуществляться домкратами через динамо-
метры на стенде статических испытаний, как показано на фиг. 261502-11.
При загрузке следует наблюдать за тем, чтобы усилия, развиваемые
каждым домкратом, были примерно одинаковыми, во избежание возник-
новения изгибающих усилий на вал.
Для коленчатых валов звездообразных двигателей закрепление
и нагрузка вала производятся так же, как для валов рядных двига-
телей; при этом должна быть проконтролирована правильность затяжки
разъемного соединения вала.
361
261503
261503 Для коленчатых валов рядных и звездообразных двигателей опре-
деление крутильной жесткости второго рода производится при прило-
жении нагрузки по схеме фиг. 261503-1, осуществляемой на стенде ста-
Фиг. 261502-11.
Определение жесткости при кручении первого рода на стенде
тических испытаний. На соседних кривошипах устанавливаются главные
шатуны а. Коленчатый вал ставится в положение, при котором криво-
шипы наклонены одинаково относительно вертикальной оси. В поршне-
Фиг. 261503-1.
Определение жестко-
сти при кручении
второго рода
вые головки шатунов вставляются пальцы, которыми эти головки соеди-
няются с траверсой т. По середине этой траверсы прикладывается
домкратом вертикальная нагрузка, передающаяся поровну на шатунные
362
261503
шейки. Для обеспечения устойчивости системы, передающей нагрузку,
перемещение поперечины т направляется рычагом р. Общая схема возмож-
ного расположения на стенде статических испытаний представлена на
фиг. 261503-П. Картер устанавливается внутри рамы и опирается
своими лапами на продольные балки Ь, связанные с рамой. Домкрат
g через упругий динамометр передает нагрузку на траверсу т. Напра-
вляющий рычаг р прикрепляется к раме.
Коленчатый вал двухрядного звездообразного двигателя может
быть нагружен кручением второго рода на стенде по той же схеме
Фиг. 26150341.
Определение жесткости при кручении второго рода
(фиг. 261503-П). На шатунные шейки надеваются главные шатуны, кото-
рые выпускаются через отверстия в картере, и шатунные головки при
помощи поршневых пальцев соединяются с траверсой, нагружаемой
домкратом.
Для устранения возможного проворачивания коленчатого вала хво-
стовик его фиксируется при помощи поперечины (которая воспринимает
лишь незначительные разностные моменты, могущие возникнуть вслед-
ствие несимметрии).
Для устранения влияния трения к носку вала укрепляется попе-
речина с вибратором, который приводится во вращение на короткий
промежуток времени перед каждым измерением.
Измерение углов закрутки производится при помощи зеркал. Отно-
сительное угловое смещение соседних шатунных шеек (а не коренных) опре-
деляется при помощи приспособления, изображенного на фиг. 261503-Ш.
Ось а приспособления состоит из двух частей, разжимаемых пру-
жиной б. Эта ось устанавливается по оси коренных шеек вала. С осью
связан рычаг в, упирающийся штифтом в шатунную шейку г. С другой
стороны к этому рычагу прикреплено плоское зеркало д таким образом,
что поворот его относительно рычага можно регулировать для установки
363
261504
видимости шкалы через трубу, по которой производятся отсчеты угла
поворота зеркала.
Поворот зеркала соответствует угловому смещению шатунной шейки
относительно оси вала. Разность этих смещений, измеренных для двух
соседних шатунных шеек, дает закрутку второго рода для кривошипа
коленчатого вала.
Фиг. 261503-Ш.
Приспособление для измерения относительного смещения шатунных шеек
т
261504
При измерении жесткости нагрузка и разгрузка производятся
несколькими ступенями (три-четыре ступени), начиная от некоторой
начальной нагрузки, равной 10—20% максимальной. После каждой сту-
пени нагрузки производится запуск вибратора для снятия сил трения,
а затем делаются отсчеты, результаты которых заносятся в таблицу
(см. табл. 261504).
Т а б л и ц а 261504
Нагрузка Разгрузка
Момент кгсм Отсчет зеркала № 1 Раз- ность Отсчет зеркала № 2 Раз- ность Да Момент кгсм Отсчет зеркала № 1 Раз- ность Ьг Отсчет зеркала № 2 Разность д2
Средн. Дх Средн. Д3 Средн. Средн. Д3
Измеряемое угловое смещение, соответствующее интервалу возра-
стания крутящего момента, составит (отдельно для нагрузки и раз-
грузки)
где L — расстояние от зеркала до шкалы.
364
261600-261601
Фиг. 261504.
График зависимости угла закрутки
от крутящего момента
Величины Д и L должны быть взяты в одних и тех же единицах;
угол ? измеряется в радианах.
По данным таблицы строится график зависимости угла закрутки
ст крутящего момента, как показано на фиг. 261504.
Зависимость между моментом и углом должна быть почти прямо-
линейной. Отклонения свидетельствуют о влиянии сил трения или
о недочетах измерений.
Экспериментальная жесткость оп-
ределяется по зависимости
м
с —— кгсм,
V
где М измеряется в кгсм-, <р —в ра-
дианах.
При экспериментальном опреде-
лении жесткости упругие соедине-
ния (в частности, муфты) нагружа-
ются крутящим моментом на соответ-
ствующей испытательной машине на
кроение или на стенде статических
испытаний. При загрузке измеряются
углы закрутки соединения и строится
диаграмма зависимости угла закрутки от момента, которая и является
характеристикой жесткости соединения.
Определение жесткостей при изгибе [18]
Опытное определение деформаций деталей при изгибе имеет целью
установление коэффициентов влияния для углов поворота и прогибов,
необходимых для расчета лишних неизвестных и перемещений, вызван-
ных изгибными деформациями. Для решения этих задач в ряде случаев
необходимо экспериментальное определение жесткости опор. Вопрос
о жесткости при изгибе связан с определением упругих перемещений под
влиянием поперечных нагрузок. Перемещения, возникающие от изгиба,
зависят от распределения изгибающих моментов и жесткостей по длине
детали; поэтому понятие изгибной жесткости для детали может быть
отнесено к определенному сечению.
При выборе в качестве лишних неизвестных при изгибе опорных
моментов приходится пользоваться для составления канонических уравне-
ний коэффициентами влияния для углов поворота на опоре, т. е. углов,
соответствующих единичным усилиям. При выборе в качестве неизвест-
ных опорных реакций необходимо определять коэффициенты влияния
для прогибов, т. е. прогибов, соответствующих единичным усилиям.
Для определения угловых коэффициентов влияния деталь загружается
поочередно отдельными статическими усилиями, соответствующими
внешним нагрузкам и лишним неизвестным. При этом деталь дол-
жна быть оперта в соответствии с выбранной при расчете основной
системой. Для каждого из усилий измеряются углы поворота в тех
сечениях, в которых составляются уравнения для определения лишних
неизвестных.
261600
261601
365
261602—261603
261602 В качестве примера рассмотрим возможную схему определения угло-
вых коэффициентов влияния для коленчатого вала.
Углы поворота определяются в плоскости кривошипа и в плоскости,
ей перпендикулярной. Для кривошипа несимметричной конструкции
основными схемами загрузки являются нагрузки согласно фиг. 261602:
а—опорный изгибающий момент на левой опоре в плоскости криво-
шипа;
б—опорный изгибающий момент на правой опоре в плоскости криво-
шипа;
в—опорный изгибающий момент в плоскости, перпендикулярной кри-
вошипу на левой опоре;
г—опорный изгибающий момент в плоскости, перпендикулярной кри-
вошипу на правой опоре;
д—.поперечная сила на шатунной шейке в плоскости кривошипа;
И
Фиг. 261602.
Схемы нагружения при определении угловых коэффициентов влияния
е—поперечная сила в плоскости кривошипа на месте крепления левого
противовеса;
ж—поперечная сила в плоскости кривошипа на месте крепления
правого противовеса;
з—поперечная'сила на шатунной шейке в плоскости, перпендику-
лярной кривошипу, и уравновешивающий крутящий момент на левой
опоре;
и—поперечная сила на шатунной шейке в плоскости, перпендику-
лярной кривошипу, и уравновешивающий крутящий момент на правой
опоре; >
к—два равных противоположных крутящих момента, приложенных
на коренных шейках.
Для каждого из этих случаев нагрузки при помощи зеркального
метода измеряются углы поворота на опорах. Измеренные углы, отнесен-
ные к единичным усилиям, и дадут коэффициенты влияния.
261603 Загрузка коленчатого вала производится либо на испытательной
машине с максимальной силой 20—50 т, либо на стенде статических испы-
таний. На фиг. 261603-1 показано расположение коленчатого вала двух-
рядного звездообразного двигателя на машине для случая загрузки
моментом на коренной шейке. Измеряемый при этом угол наклона опор-
ного сечения л не соответствует непосредственно угловому коэффициенту
366
261604
влияния, так как включает в себя также угол перекоса ф, который опре-
деляется по вертикальному перемещению точки В
Угол <рА, соответствующий коэффициенту влияния, составляет
?А = а-ф.
Для того чтобы получить коэффициент влияния, нужно разделить
угол на величину изгибающего момента, действующего в точке В. На
фиг. 261603-П показано расположение коленчатого вала рядного двига-
теля на испытательной машине при-
менительно к загрузке вала попе-
речной силой посередине пролета.
Аналогично может быть загружен
вал звездообразного двигателя. Для
Фиг. 261603-1.
Схема загрузки вала опорным
моментом на универсальной
машине
Фиг. 261603-П.
Схема загрузки вала попе-
речной силой на универ-
сальной машине
осуществления нагрузки вала силой от противовеса точка приложения
силы располагается на щеке.
Загрузка коленчатого вала на стенде статических испытаний осуще- 261604
ствляется винтовыми домкратами; усилия измеряются кольцевыми дина-
мометрами. На фиг. 261604 представлена в качестве примера схема распо-
ложения коленчатого вала при загрузке его силой, перпендикулярной
367
261605
плоскости кривошипа. Крутящий момент передается от хвостовика к флан-
цу ф, который сочленен шарнирно с валиком в. Этот валик шарнирно
соединен в свою очередь с рамой стенда. Вал двумя коренными шейками
Загрузка вала силой, перпендикулярной плоскости криво-
шипа, на стенде статических испытаний
261605
лежит на опорных кронштейнах, причем поворот этих шеек от изгиба на
опорах осуществляется свободно. Нагрузка производится домкратом д
и измеряется динамометром б. Кон-
струкция фланца ф и рычага в
должна обеспечивать свободное пе-
ремещение конца вала в вертикаль-
ной плоскости, но воспринимать
крутящий момент, обладая в этом
направлении большой жесткостью.
Зеркала, применяемые при из-
мерении, закрепляются в оправках,
изображенных на схеме фиг. 261605.
При регулировке положения плоско-
сти зеркало может вращаться во-
круг осей пп и тт, удерживаясь
в определенном положении за счет
сил трения в цапфах.
Фиг. 261605.
Держатель для зеркала
т
п
Своей нижней частью оправка прикрепляется к поверхности вала
в сечении, наклон которого измеряется. Прикрепление осуществляется
припайкой или хомутом, надеваемым на шейку вала. Зеркала могут также
368
261606- 261608
прикрепляться непосредственно к поверхности воском или пластилином.
Расстояние от шкалы до зеркала устанавливается от 1 до 3 м-
При проведении измерений угловых перемещений на испытательных
машинах следует иметь в виду, погрешности, возникающие от наклона
траверсы, на которой располагаются опоры вала. Для исключения
погрешностей угол наклона траверсы должен измеряться специальным
зеркалом, на ней установленным; соответствующая поправка вно-
сится в результаты измерений углов наклона рассматриваемых сечений
вала.
Можно производить измерение относительных углов поворота. Для 261606
этого (фиг. 261606) избираются два сечения: А и В. Изображения
Схема измерения относительного угла поворота
одной шкалы (или двух разных) С—через зеркала, установленные в
избранных сечениях, наблюдаются через две трубы и Ь2. Разность
отсчетов по обоим зеркалам дает относительный угол поворота сечений
А и В, на который общий поворот вала вместе с опорами влияния не ока-
зывает.
Для определения коэффициентов влияния для прогибов коренных 261607
шеек в пределах одного нагружаемого пролета располагаются два криво-
шипа с промежуточной между
ними коренной шейкой, как по- р
казано на фиг. 261607. Нагрузка р I
прикладывается сначала к проме- И
жуточной опоре (при определении л £ ИГ
коэффициента влияния для проги- J Mr
ба от опорной реакции),—и изме- Mr а
ряется перемещение в направле- Фиг 261607.
НИИ СИЛЫ ДЛЯ двух положений Схема измерения прогиба
плоскости кривошипа. Затем сила
прикладывается к одной из ша-
тунных шеек (коэффициенты от сил Z и 7) и измеряется перемещение
на промежуточной коренной шейке. Индикаторы, измеряющие перемеще-
ния, устанавливаются на траверсе испытательной машины, на которой
размещаются опоры. При проведении опыта на стенде индикаторы уста-
навливаются на его неподвижной части.
Для определения углов поворота и прогибов загрузка производится 261608
несколькими (три-четыре) ступенями. После каждой ступени нагрузки
производятся отсчеты по приборам, результаты которых заносятся в таб-
лицу 261608. Максимально допустимая при опыте величина нагрузки
определяется предварительно так, чтобы в вале не возникли остаточные
деформации или чтобы не произошел сдвиг в местах разъема вала (если
вал составной).
24 Авиац. порши, двигатели.
369
261700-261701
Таблица 261608
Нагрузка
Вели- чина на- грузки Отсчет по зеркалу Ks 1 Раз- ность Д1 Отсчет по зеркалу № 2 Раз- ность д2 Т1рогиб № 1 Раз- ность Д1 Прогиб № 2 Разность - Д*
Средн. Д, Средн. Дг Средн. Д, Средн. Д,
Разгрузка
Вели- чина на- грузки Отсчет по зеркалу № 1 Раз- ность Отсчет по зеркалу № 2 Раз- ность Прогиб № 1 Раз- ность Д1 Прогиб № 2 Раз- ност ь
Средн. Д, . Средн. Д, Средн. Д, Средн. Дг
По данным таблицы 261608 строится график зависимости угла пово-
рота и прогиба от нагрузки. Эта зависимость должна быть прямолинейной,
поскольку измерения производятся в пределах упругости.-
По средней разности отсчетов определяется угол поворота а сечения,
отвечающий ступени возрастания нагрузки
д
а—2L’
где Д—средний отсчет в мм;
L—расстояние от зеркала до шкалы в мм.
По средней разности отсчетов по прогибомеру определяется ирогиб
в мм, отвечающий ступени возрастания нагрузки. Прогиб, соответствую-
щий единичному усилию, и будет коэффициентом влияния.
261700 Определение продольных жесткостей
261701 Экспериментальное определение продольных жесткостей оказы-
вается необходимым для расчета болтовых соединений с начальным натя-
гом, для определения упругих перемещений, возникающих в деталях под
действием продольных сил, а также в связи с расчетом продольных коле-
баний. Определение жесткостей сводится к измерению аксиальных пере-
370
261702—261703
мещений, соответствующих определенным усилиям, действующим на
деталь.
Определение продольной жесткости коленчатого вала производится 261702
при нагрузке его или отдельных кривошипов сжимающим усилием, напра-
вленным по оси коренных шеек. Нагрузка может осуществляться на
испытательной машине или на стенде статических испытаний. На
фиг. 261702 представлена схема нагрузки коленчатого вала двигателя
продольным усилием.
При закреплении коленчатого вала, домкрата и динамометра следует
обеспечить центрировку усилия по оси коренных шеек и устойчивость
Фиг. 261702.
Определение продольной жесткости вала
всей нагружаемой системы. Величина продольной силы подбирается так,
чтобы опыт протекал в пределах упругости.
При проведении опыта испытательная машина должна обеспечивать
возможность разместить между опорными поверхностями по длине целый
вал либо отсек, состоящий не менее чем из трех кривошипов (для валов
с несколькими коленами).
При нагрузке производится измерение сближения соседних 261703
коренных шеек двумя индикаторами, закрепленными хомутами на этих
Схема измерения относительного сближения сечений вала
шейках в их срединных сечениях, как показано на фиг. 261703. Индика-
торы снабжаются удлиненными щупами, которые опираются на упорах,
закрепленных также хомутами.
24*
371
262000 - 262202
Нагрузка осуществляется равными ступенями (три-четыре ступени)
и соответственно этим ступеням производятся отсчеты по индикаторам.
Результаты заносятся в таблицу и на график. Зависимость между вели-
чиной нагрузки и сближением шеек должна быть прямолинейная.
Продольная жесткость с определяется, как отношение ступени нара-
стания нагрузки Q к средней величине линейного сближения коренных
шеек Д:
Q I
с=укг1см,
причем Q измеряется в кг, а Д—в см.
262000 ДИНАМИЧЕСКИЕ ИСПЫТАНИЯ
262100 Задачи динамического испытания деталей
262101 Задачами динамического испытания деталей являются:
а) определение частот и форм собственных колебаний деталей и узлов
двигателя;
б) определение характеристик демпфирования;
в) определение динамических усилий и-напряжений в деталях;
г) испытание на усталость при действии переменных напряжений.
Эти испытания непосредственно связаны с опытной проверкой вибра-
ционных расчетов, а также с выяснением характера колебательных явле-
ний в двигателе и способов их устранения. Определение динамических
усилий и напряжений, а также испытание на усталость связаны с провер-
кой прочности детали, в ряде случаев с обоснованием расчета на прочность
и получением необходимых для таких расчетов характеристик.
Для проведения динамических испытаний необходимо возбуждать
колебания и измерять возникающие при этом перемещения или дефор-
мации.
262200 Возбуждение колебаний [8, 11, 17, 20, ,21, 30, 31]
262201 Собственные затухающие колебания могут возбуждаться сообще-
нием ударного импульса детали молотком или путем внезапной разгрузки
предварительно деформированной (в пределах упругости) детали. Частоты
и формы возникающих при этом колебаний зависят от способов закреп-
ления детали и сообщения импульса. При определении собственных частот
незакрепленных деталей они должны Подвешиваться упруго.
В результате воздействия импульса обычно одновременно возбуж-
даются наложенные друг на друга колебания по нескольким формам с раз-
личными частотами. В связи с этим приходится производить гармониче-
ский анализ записи колебаний для выделения отдельных частот. Возни-
кающие колебания могут регистрироваться записью перемещений или
деформаций с помощью соответствующей аппаратуры.
262202 Собственные незатухающие колебания возбуждаются либо при
помощи специальных устройств (возбудителей), либо в результате дей-
ствия на деталь периодических усилий при ее работе в двигателе.
Для возбуждения колебаний в лабораторных условиях применяются
механические вибраторы и электромагнитная аппаратура. Эти устройства
372
262202
передают на возбуждаемую деталь непрерывно действующую, но периоди-
чески изменяющуюся по величине силу с постоянной частотой и постоян-
ной амплитудой.
В большинстве случаев применяются возбудители, дающие простой
гармонический закон изменения возбуждающей силы
Q=Qosin<u/, (1)
где Qo — амплитуда возбуждающей силы;
<в— круговая частота ее изменения.
При действии силы Q на упругую деталь или конструкцию воз-
буждаются колебания, амплитуда которых хв зависит от амплитуды
возбуждающей колебания силы, от отношения частоты ш к частоте
собственных колебаний детали (конструкции) % и от демпфирующих
свойств возбуждаемых элементов [21]. Для детали или конструкции
с одной степенью свободы амплитуда колебаний выразится так:
Р (^о)ст,
(2)
где (х0)Ст = -у — статическое перемещение системы под действием силы Qo,
при жесткости системы с;
б — логарифмический декремент затухания;
Р — коэффициент усиления колебаний.
Амплитуда х0 приобретает наибольшее значение при резонансе,
когда ш —<в0:
(Xg)max = (Х0)ст "у • (3)
При постепенном изменении частоты возбуждения амплитуда ко-
лебаний изменяется, следуя резонансной кривой, изображенной на
Фиг. 262202-1.
Резонансная кривая
Фиг. 262202-П.
Резонансная кривая при нелинейных
колебаниях
фиг. 262202-1. Такая кривая свойственна системам с линейной жест-
костью и линейным (т. е. пропорциональным скорости) демпфированием.
Если линейность не соблюдается и собственная частота зависит от
амплитуды, то форма резонансной кривой видоизменяется, возникает
373
252203—262204
262203
область неустойчивого колебательного состояния системы, как
показано на фиг. 262202-11, и наблюдается срыв амплитуд (область
срывов заштрихована).
Механические вибраторы [17] основаны на использовании сил инерции
неуравновешенных вращающихся масс. Вибраторы бывают двух типов:
Фиг. 262203-1.
Схема ’ненаправлен-
ного вибратора
ненаправленные и направленные; вибратор может
развивать либо сосредоточенную силу, либо момент.
Схема ненаправленного вибратора представлена на
фиг. 262203-1. Неуравновешенная масса вращается
Фиг. 262203-11.
Возбуждение колебаний
данном направлении
в подшипниках корпуса
вибратора; возникающая
при этом центробежная
сила передается через под-
шипники на корпус, а от
него на ту деталь, с ко-
торой он соединен.
Центробежная сила
Q=W<i)’,
где т — неуравновешенная масса;
г — расстояние от оси вращения до центра тяжести неуравно-
вешенной массы;
ш — угловая скорость вращения массы вибратора.
Эта сила является вращающимся вектором; ее проекция на опре-
деленное направление (фиг. 262203-П)лл составляет
P = Q sin ш/ = mr<s>* sin ш/,
т. е; в направлении пп вибратор вызывает гармоническое возбуждение,
передаваемое через корпус вибратора на деталь. С увеличением частоты
растет амплитуда силы возбуждения вибратора по квадратной зависи-
мости от ш. В связи с этим для различных частот возбуждения, а также
для изменения амплитуды Q для данной частоты должна предусмат-
риваться возможность изменения неуравновешенной массы вибратора т
и расстояния г.
262204 Схема конструкции ненаправленного вибратора с эксцентриковой
регулировкой представлена на фиг. 262204-1. Ось вибратора 00 снабже-
на эксцентриком с осью ОхОи
рично расположенным отвер-
стием. При повороте массы Ог
относительно изменяется
расстояние центра тяжести
вращающихся масс от оси 00,
т. е. изменяется г.
Другим способом измене-
ния амплитуды силы, разви-
ваемой вибратором, является
изменение неуравновешенной
массы путем вставки или уда-
ления из нее стержней. Схема
на который надета масса ot с Зксцент-
Фнг. 262204-1.
Схема ненаправленного вибратора с эксцент-
риковой регулировкой
374
262205
конструкции такого вибратора представлена на фиг. 262204-П; в основ-
ной массе вибратора Ot имеются отверстия, которые могут запол-
няться стержнями в зависимости от требуемого изменения тг.
Изменение амплитуды силы вибратора может достигаться также
взаимным поворотом двух неуравновешенных масс а и б, насаженных
Фиг. 262204-П.
Схема ненаправленного
вибратора с регулиров-
кой стержнями
Фиг. 262204-1 И.
Схема ненаправленного вибра-
тора с регулировкой за счет
взаимного поворота масс
Фиг. 262205.
Схема направленного виб-
ратора
на одну и ту же ось вибратора (фиг. 262204-1II), взаимный поворот
которых определяется по шкалам в. Если центры тяжести масс совпа-
дают, то неуравновешенность вибратора наибольшая и он развивает при
данной частоте наибольшую силу. По мере увеличения угла <? между
линиями, соединяющими центры тяжести каждой массы с осью враще-
ния, равнодействующая центробежных сил
уменьшается и составляет:
Q = 2тг ш* cos .
В тех случаях, когда желательно избе- 262205
жать одновременного возбуждения по различ-
ным направлениям, которое вызывает нена-
правленный вибратор, применяются направ-
ленные вибраторы. Такие вибраторы разви-
вают переменное усилие, действующее по-
стоянно по одному и тому же направлению.
На фиг. 262205 представлена схема такого
вибратора. Две одинаковые неуравновешенные
массы вращаются с одинаковой скоростью,
но в противоположных направлениях; для
этого оси их связаны зубчатой передачей с 'пе-
редаточным числом 1:1. Центры тяжести масс
относительно осей расположены таким образом, что массы эти одновре-
менно приходят в крайнее верхнее и крайнее нижнее положения. В этом
случае равнодействующая сил инерции в вертикальном направлении
составит
Q=2mr<o’ sin of .
375
262206-262301
262206
262207
В горизонтальном направлении равнодействующая будет всегда
равна нулю. Для этого вибратора применяются те же способы регули-
ровки величины тг, которыми пользуются в вибраторах ненаправленных;
при этом обе массы должны регулироваться одинаково с соблюдением
симметрии относительно вертикальной оси.
Для возбуждения колебаний моментом, например при экспериментах
с крутильными колебаниями, применяются моментные центробежные
вибраторы. На фиг. 262206 представлена
схема такого вибратора. Две одинако-
вые неуравновешенные массы вращаются
около своих осей с одинаковой скоростью
в одном и том же направлении. Для
этого оси приводятся во вращение зубча-
той передачей от среднего вала.
В этом случае в плоскости, перпен-
дикулярной осям масс, возникает момент
величиной
Фиг. 262206.
Схема вибратора, возбуждающего
момент
М=тг ш2 a sinuit,
где а—расстояние между осями, около
которых вращаются неуравновешенные
массы, а горизонтальные составляющие
сил инерции уравновесятся.
Вращение вибраторов осуществляется электромоторами постоянного
тока; в отдельных случаях может быть применена турбина, работающая
сжатым воздухом (при числах оборотов выше 10000—15000 в минуту).
Для возбуждения важнейших силовых деталей двигателя приходится
осуществлять возбуждение в двух основных диапазонах:
от 1000 до 10000 кол/мин
и от 10000 до 25 000 » »
Амплитуда возбуждающей силы должна составлять от 100 до 500 кг;
мощность двигателя, приводящего в движение вибратор, составляет
3—5 кет. При выборе мощности двигателя следует предусматривать
запас мощности для обеспечения устойчивого числа оборотов. Для
регулирования числа оборотов благоприятно в этом отношении пита-
ние электромотора по схеме Леонардо от отдельного мотор-генера-
тора с независимым возбуждением. В связи с необходимостью давать
вибратору числа оборотов, значительно превышающие числа оборотов
электромоторов, привод вибратора осуществляется через зубчатый редук-
тор. Число оборотов вибратора контролируется тахометром.
262300 Измерение динамических перемещений [12, 20, 22, 25, 26, 30, 32, 33]
262301 Измерение частот и амплитуд крутильных колебаний производится
торсиографами механическими или электрическими. Описание конструк-
ций измерительной аппаратуры и методика измерений, а также определе-
ния демпфирования см. в 300000.
376
262302-262303
Измерение частот и амплитуд линейных колебаний производится 262302
вибрографами механическими или электрическими. В зависимости от
ориентировки прибора производится измерение определенной составляю-
щей колебательных перемещений. На фиг. 262302 представлена схема дат-
чика электровибрографа.
В корпусе датчика вибрографа закреплена ось С, по которой скользит
сейсмическая масса NS, представляющая собой постоянный магнит с полюс-
ными наконечниками Я1 иЯ2. Масса NS удерживается в среднем положе-
нии пружинами П1 ип2, заложенными с начальным натяжением. На внут-
ренней поверхности корпуса
расположены катушки и fc2.
При колебательном перемеще-
нии массы около катушек в
последних индуцируется на-
пряжение, пропорциональное
скорости движения массы от-
носительно корпуса. Корпус
соединяется с вибрирующей
деталью, а сейсмическая масса
при частотах, значительно пре-
вышающих ее собственные,
остается неподвижной. Благо-
даря этому напряжение, раз-
виваемое датчиком, пропорцио-
нально скорости абсолютных Фиг. 262302.
колебаний детали. Это напря- Схема датчика электровибрографа
жение либо непосредственно
регистрируется осциллографом, либо предварительно усиливается усили-
телем. Для записи непосредственно перемещений ток от датчика перед
осциллографом пропускается через интегрирующий контур, для записи
йепосредственно ускорения—через дифференцирующий контур. Частота
собственных колебаний датчика не должна превышать */s от наиболее
низкой регистрируемой частоты. Обычно частота собственных колеба-
ний датчика составляет 3—5 гц. Вес датчика должен быть настолько
малым, чтобы частота собственных колебаний детали от его установки
изменялась незначительно (в пределах 2—3%).
Запись колебаний обычно осуществляется шлейфовым осциллогра-
фом с собственной частотой шлейфа 2000—5000 гц и с чувствительностью
не ниже 5 мм/та. Скорость светочувствительной ленты осциллографа
должна быть в пределах от 10 до 200 см/сек. Одновременно с записью тока
датчика записывается эталонная частота, задаваемая камертоном или
сетью переменного тока. Частота основной (определяющей форму в кривой)
гармоники виброграммы определяется сопоставлением длины отрезка а,
соответствующего N, полным колебаниям по записи колебаний, с дли-
ной отрезка в по записи времени (эталонной частоты), соответствую-
щего Ng полным колебаниям отметчика времени. При эталонной часто-
те у гц частота основной гармоники составит
262303
п
b Nt
377
262400- 262402
262400 Измерение динамических деформаций [12, 18, 19, 21, 26, 29, 32, 33]
262401 Измерение линейных деформаций производится при помощи тензо-
графов, позволяющих регистрировать быстро протекающие во времени
процессы малых изменений длины. База датчиков тензографов составляет
50—20 мм.
Тензограф состоит из датчика, преобразующего изменения длины
базы прибора в модуляцию электрического тока и измерительного устрой-
ства.
Датчики, используемые практически, основываются на изменении
индуктивного или омического сопротивления в зависимости от деформа-
ции поверхности детали, на которой они закреплены.
Так как датчики нередко применяются для измерений в условиях
работающего двигателя, они не должны давать искажений под влиянием
сил инерции от собственных масс; кроме того, они должны быть скомпен-
сированы в температурном отношении.
252402 Датчик, работающий по принципу изменения индуктивного сопро-
тивления, изображен на фиг. 262402-1. На поверхность детали припаи-
Фиг. 262402-1.
Схема индукционного датчика
ваются или привариваются хомуты а. В одном хомуте заклинивается
трубка с индуктивными катушками в другом—трубка с якорем <, распо-
ложенным между катушками.
Начальное положение трубок
фиксируется штифтом г, кото-
рый снимается после закреп-
ления датчика. Ток отводится
по проводникам д. Смещение,
в связи с деформацией, якоря
относительно катушек вызы-
вает изменение их индуктив-
ного сопротивления, регистри-
руемое измерительным устрой-
ством.
Измерительное устройство
изображено упрощенно на фиг.
262402-11. Индуктивные сопро-
тивления катушек датчика L,
и L2 являются плечами мостика. Регулируемое сопротивление А* служит
для установления первоначального равновесия мостика. Мостик питается
током высокой частоты от машинного или лампового генератора. Разностный
378
262403
ток мостика через усилитель и выпрямитель поступает в осциллограф. Не-
сущая частота измерительной схемы обычно принимается в 10 раз выше,
чем наибольшая частота регистрируемого процесса. Измерительное устрой-
ство стабилизируется. Оно должно работать устойчиво, с неизменной
чувствительностью. Одновременно с записью тензограммы на ленте осцил-
лографа должны отмечаться время и положение одного из колен двига-
теля.
Прочность крепления датчика должна обеспечивать удовлетвори-
тельную работу его при ускорениях центробежных и возвратно поступа-
тельных до 2000 g.
В связи с этим датчики делаются возможно более легкими, весом
менее 1 г.
При измерении деформаций невращающихся деталей применяются
датчики такого же типа, но весом до 10—20 г, развивающие разностный
ток, достаточный для регистрации непосредственно осциллографом (без
усиления).
Датчик, работающий по принципу изменения омического сопроти-
вления, по динамическим свойствам обладает большими преимуществами,
262403
Фиг. 262403.
Схема измерительного устройства для датчика сопр»-
тивления
но менее чувствителен, чем описанные выше. Наиболее употребительным
типом датчика является проволочный, выполняемый в основном так же,
как и датчики для измерения статических деформаций. Крепящий датчик
состав должен быть устойчивым при повышенных температурах (до 150°С);
для этого применяется бакелитовый цемент, растворенный в этиловом
спирте. Изменение сопротивления при деформации незначительно, и по-
этому при измерении на движущихся деталях следует пользоваться
датчиками более высокого сопротивления, чем при статических испыта-
ниях. Благодаря этому можно ослабить помехи, возникающие при
передаче тока через скользящие контакты. Для температурной ком-
пенсации в измерительную схему, одновременно с деформируемым датчи-
ком, включается датчик недеформируемый, но находящийся в таких же
температурных условиях, как деформируемый. Для этого деформируемый
и недеформируемый датчики делаются смежными плечами измерительного
мостика, изображенного схематически на фиг. 262403. Этот мостик питается
переменным током от лампового генератора с частотой 5000 гц и выше.
Модулированный ток разбалансировки мостика подается через усилитель
379
262404- 262406
Фиг. 262404.
Схема магнито-
стрикционного
датчика
и детектор на осциллограф, который записывает изменения сопротив-
ления, пропорциональные деформации. При измерении на движущихся
деталях, когда токи от датчика передаются через скользящий контакт,
целесообразно расположение всех плеч мостика на движущейся детали
с тем, чтобы разностный ток передавался через токосъемник.
Проволочные датчики дают изменение сопротивления на 0,2% для
2000 кг/см2 и применимы для измерения напряжений от 200 кг/см2 и выше,
т. е. для измерений на работающем двигателе и при испытании деталей на
стендах. Для измерения меньших напряжений применяются более высоко-
чувствительные датчики.
262404 Повышенной чувствительностью обладают датчики угольного сопро-
тивления и магнитострикционные. Датчики угольного сопротивления
представляют собой тонкие пластинки из пластмассы (0,5 мм), на одну
сторону которых нанесен угольный слой. Пластинка
приклеивается к деформируемой поверхности детали;
изменение ее сопротивления в зависимости от дефор-
мации измеряется при помощи мостиковой схемы, как
в 262403. Эти датчики для напряжения в 2000 кг!см2
дают изменение сопротивления 6%, т. е. они в 30 раз
Чувствительнее проволочных датчиков. Сопротивление
угольных датчиков достигает 10 000 ом, в связи с чем
они имеют преимущества при измерении на движу-
щихся деталях. Недостатками их являются повышен-
ная чувствительность к температурным изменениям
и отклонение характеристики их от линейности.
Датчики магнитострикционные основаны на изменении магнитной
проницаемости при деформации магнитного проводника. В качестве такого
проводника применяется, например, пермалой. Датчик представляет
собой замкнутый магнитный контур (фиг. 262404), звено которого
а приклеивается к деформируемой поверхности, и на звене б расположена
обмотка, являющаяся индуктивным сопротивлением. Изменение этого
сопротивления измеряется при помощи мостиковой схемы, питаемой
током высокой частоты, как описано выше. Такой датчик приблизительно
в 10 раз чувствительнее проволочного датчика и допускает измерение
напряжений, начиная от 10 кг/см2-
262405 Крепление датчиков на деталь производится до установки ее на
испытательный стенд или двигатель. После установки датчиков деталь
подвергается статической нагрузке на испытательной машине или
специальном стенде, причем рядом с датчиками устанавливаются ста-
тические тензометры. Путем сопоставления показаний тензометров и
датчиков - устанавливается цена показаний последних. После проведе-
ния измерений на двигателе деталь вторично подвергается статиче-
ской нагрузке для проверки цены показаний датчиков по статическим
тензометрам.
262406 Измерение угловых деформаций валов производится при помощи
деформометра сдвига. База измерения угловой деформации принимается
в 20—30 мм. Относительный угол поворота сечений по концам базы изме-
ряется датчиками, изменение индуктивного сопротивления которых реги-
стрируется измерительным устройством, как в 262401. Датчики тари-
руются путем статической закрутки вала, причем угол поворота изме-
ряется зеркальными приборами либо тарировка производится в моментах
380
252500-252502
Фиг. 232406.
Схема деформометра
для кручения
Тарировка осуществляется дважды: до и после проведения цикла дина-
мических измерений.
Схема деформометра приведена на фиг. 262406; на схеме означают:
пп и титл—кольца деформометра; к—обмотка индуктивного сопро-
тивления.
Крепление муфт деформометра к валу должно быть достаточно проч-
ным, чтобы в процессе длительной работы на двигателе не происходило
смещения муфт относительно вала. Прибор для
измерения крутящего момента Т. Е. Рудашевского
описан в [19].
Деформометр сдвига может устанавливаться не
только на наружной поверхности вала, но также и
на внутренней, в случае наличия продольных свер-
лений. Таким образом оказывается возможным изме-
рять закрутку шеек коленчатого вала на работаю-
щем двигателе.
Деформации сдвига могут быть измерены также
при помощи датчиков сопротивления. Для этого два
датчика наклеиваются на свободной поверхности
вала под углом 45° к его образующей. Эти датчики
являются плечами мостиковой измерительной схемы; каждый из них
воспринимает линейную деформацию, соответствующую нормальному
напряжению, численно равному касательному; при этом когда один
воспринимает растяжение, другой—такое же сжатие, т. е. измерения
производятся по дифференциальной схеме.
Определение частот собственных колебаний [8; 30, 31, 32]
Для определения частоты по методу затухающих колебаний деталь
устанавливается на эластичных опорах (подвешивается на резиновых
шнурах или пружинах) и ее собственные колебания возбуждаются уда-
ром или внезапной разгрузкой. Прибор в виде тензометрического дат-
чика или датчика относительных смещений, связанный с деталью, реги-
стрирует затухающие собственные колебания, период которых и может
быть определен по записи.
При ударном возбуждении и в результате внезапной разгрузки
могут возникать одновременно колебания по нескольким формам. Гармо-
нический анализ записи или ее фильтрация в процессе регистрации
электроизмерительной аппаратурой позволяет выделить основной тон
собственных колебаний.
' Опыт производится, в зависимости от требований расчета, без при-
соединенных к детали в двигателе масс или с присоединением их. Эти
приведенные массы определяются расчетом и в виде соответствующих
грузов жестко присоединяются к детали, но так, чтобы жесткость самой
детали при этом не изменялась.
Для определения частоты по методу вибрационного возбуждения
производится возбуждение колебаний детали механическим вибратором,
приспособленным для соответствующей частоты. Масса вибратора должна
быть достаточно малой, чтобы частота собственных колебаний от уста-
новки вибратора не изменилась более чем на 1—2%, что проверяется
расчетом.
262500
262501
262502
381
262503
Для определения частоты в свободном состоянии деталь подвеши-
вается на упругих связях и путем изменения числа оборотов возбуди-
теля, установленного на ней, вводится в резонанс по различным фор-
мам упругой линии. Колебания детали измеряются вибрографом или
другим прибором, регистрирующим линейные перемещения, либо тен-
зометрическим датчиком. По данным измерений строится резонансная
кривая зависимости амплитуды от числа оборотов возбудителя. Частота,
соответствующая максимуму амплитуды, и является собственной.
Для определения частот колебания детали, установленной на дви-
гателе с присоединенными массами и при наличии опор ее, возбуждают
вибратором, который развивает необходимое число оборотов и силу,
достаточную для получения удовлетворительно измеряемых амплитуд
перемещений или деформаций. Параметры вибратора устанавливаются
применительно к определенным типам деталей.
Фиг. 262502.
Схема возбуждения изгибных колебаний коленчатого вала звездо-
образного двигателя
При известных величинах масс, присоединенных к детали, и экспе-
риментально определенной частоте могут вычисляться жесткости экви-
валентной динамической схемы.
В качестве примера на фиг. 262502 представлена схема воз-
буждения изгибных колебаний коленчатого вала звездообразного дви-
гателя (при отсутствии вращения). У одного из цилиндров снимается
головка и к поршню прикрепляется высокочастотный вибратор в
20000 об/мин), развивающий силу в 300—500 кг. На валу устана-
вливаются тензометрические датчики, по которым можно установить
резонансы, соответствующие различным формам изгибных колебаний
вала, лежащего в картере на опорах.
262503 Для определения частоты собственных колебаний деталей на рабо-
тающем двигателе используется гармонический характер сил, развиваю-
щихся в двигателе и вызывающих резонанс упругих колебаний детали
при определенном числе оборотов двигателя. Для этого на деталь уста-
навливается торзиограф, виброграф или тензограф и производится
запись угловых и линейных колебаний или напряжений детали при раз-
личных числах оборотов двигателя.
382
262600- 262602
По данным записи строится резонансная кривая суммарной ампли-
туды, или производится гармонический анализ и строятся резонансные
кривые отдельных гармоник. В резонансных областях устанавливается
частота резонирующей гармоники, которая и является частотой собствен-
ных колебаний. Различные резонансные области могут давать различ-
ные частоты, соответствующие разным формам упругих линий вибрирую-
щей детали. По резонансной кривой устанавливаются числа оборотов
двигателя, соответствующие возрастанию амплитуд. По записи коле-
баний на этом числе оборотов визуально или по данным гармони-
ческого анализа устанавливается преобладающая гармоника, частота
которой и дает частоту собственных колебаний детали по определен-
ной форме.
Испытания на прочность при действии динамических^
нагрузок [7, 8, 26, 33]
Испытания производятся путем доведения до разрушения деталей
в натуру или их моделей, а также моделей отдельных частей детали,
на испытательных машинах или на специальных стендах.
Технология изготовления деталей, < подвергающихся испытанию,
должна отвечать нормальной технологии производственного процесса
их; при этом технология изготовления моделей должна обеспечивать
идентичность механических свойств и их распределения по сечению детали
в натуру.
Абсолютные размеры моделей должны давать возможность пере-
носа результатов испытаний на детали в натуру. Для этого размеры моде-
лей должны быть такими, которые соответствуют той части кривой мас-
штабного фактора, где абсолютные размеры уже л^ало сказываются на
пределах усталости. Эти кривые для некоторых конструкционных метал-
лов приведены в 210000.
Испытания деталей на машинах и стендах производятся на уста-
лость при действии переменных напряжений обычно при симметричном
цикле с синусоидальным законом изменения напряжений во времени.
Частота изменения напряжений принимается 2000—5000 в минуту.
Испытания производятся на базе пять-десять миллионов циклов. При
испытании устанавливается кривая усталости для числа циклов от 100000
до пяти миллионов, причем в интервале от 100000 до одного миллиона
должно быть испытано не менее пяти образцов, а общее число испыты-
ваемых деталей для получения кривой усталости и предела усталости
должно быть не меньше восьми. Если определяется только предел уста-
лости, то число образцов может быть уменьшено до пяти. При наличии
значительного разброса результатов испытаний в области больших чисел
циклов производится испытание дополнительного числа деталей на тех же
нагрузках для получения средних величин.
При испытании производится измерение максимального усилия
цикла и определяется число циклов до разрушения. В процессе всего
испытания постоянство величин действующих на деталь нагрузок должно
соблюдаться в пределах ±3%. Измерение нагрузок может не произво-
диться лишь в том случае, если нагрузки развиваются механизмом,
обеспечивающим их постоянство (например, центробежные силы неурав-
новешенных масс при испытании на вынужденных колебаниях).
262600
262601
262602
383
262603- 262605
Испытание каждой детали и модели производится только при одном
и том же цикле напряжений, который не должен изменяться в течение
всего испытания.
262603 Результаты испытания заносятся в таблицу, где. указываются
величины нагрузок цикла по силомеру или по относительным динами-
ческим перемещениям частей детали, и число циклов N до разрушения
по счетчику машины. Эти результаты наносятся также на график, на кото-
ром по оси абсцисс откладываются числа циклов или их логарифмы,
а по оси ординат—величины нагрузок или напряжений. Предел уста-
лости определяется как ордината асимптоты кривой усталости в прямо-
угольных координатах. При изображении в полулогарифмическом
масштабе (по оси абсцисс откладывается 1g N) предел усталости отве-
чает перелому кривой в месте сопряжения наклонной и горизонталь-
ной ветвей.
Передача усилий от нагружающего устройства к испытываемой
детали или модели должна исключать возникновение дополнительных
напряжений и разрушений в местах приложения усилий.
При необходимости оценить прочность детали, работающей в усло-
виях одновременного действия изгиба и кручения, деталь или ее модель
может подвергаться раздельно испытаниям на усталость при кручении
и при изгибе. Прочность при одновременном действии изгиба и кру-
чения может приближенно определяться, исходя из выражения для
.запаса прочности
J___Г Мкр Г , Г Ч, f
L(^Kp)KJ +'L(MH)KJ ’
где Мкр—действующий крутящий момент;
Ми—действующей изгибающий момент;
(Мкр)к—крутящий момент, соответствующий пределу усталости при
асимметрии циклов, свойственной крутящим нагрузкам;
(Ми)к—изгибающий момент, соответствующий пределу усталости при
асимметрии циклов, свойственной изгибающим нагрузкам.
При наличии соответствующего оборудования целесообразно прове-
дение испытаний на одновременное действие переменного изгиба и кру-
чения.
262604 Испытания на прочность коленчатых валов производятся при пере-
менном кручении и переменном изгибе. Испытанию подвергаются обычно
отдельные колена, вырезанные из вала или выполненные в полном соот-
ветствии с геометрией и технологией вала, подлежащего опытной про-
верке на прочность.
Для валов рядных двигателей обычного типа испытанию на круче-
ние по схеме первого рода подвергается часть коленчатого вала, состоя-
щая из одного, двух или трех кривошипов. Одна серия испытаний произ-
водится для части вала, взятой с одного края вала (все кривошипы рас-
положены друг к другу под углом 120°). Другая серия испытаний произ-
водится для части вала, взятой из середины (два кривошипа в одной плос-
кости, третий—под углом 120°).
262605 Испытания на кручение производятся на резонансном стенде. Схема
стенда приведена на фиг. 262605. Испытываемый отрезок коленчатого
вала а закрепляется одним концом в захвате, соединенном с крутильным
динамометром б. Другой конец закрепляется в захвате, соединенном с тра-
384
262606
версой в. С динамометром соединена такая же траверса г. Захваты и дина-
мометр расположены на опорах качения или скольжения, позволяющих
системе свободно деформироваться на кручение. На траверсе в расположен
направленный центробежный возбудитель, вращаемый электромотором по-
стоянного тока е. Мотор питается от отдельного умформера с переменного
на постоянный ток. Мотор центробежного возбудителя управляется от
амплитудного регулятора, который должен обеспечивать постоянство
амплитуды колебаний всей резонирующей системы в пределах ±3%.
Амплитуда крутящего момента измеряется динамометром, деформации ко-
Фиг. 262605.
Схема резонансной установки для испытания вала на переменное кручение
торого определяются зеркальными приборами. Определение усилий,
действующих на испытываемый отрезок вала, может также производить-
ся путем измерения амплитуд углов закрутки при помощи зеркал. Для
этого предварительно вал «тарируется» путем нагрузки известным ста-
тическим моментом и определяется цена измеряемого угла закрутки
в моментах.
Испытание на усталость производится только при симметричном
цикле изменения крутящего момента с частотой до 5000 в минуту.
Не принимаются во внимание результаты тех испытаний, при кото-
рых разрушение последовало в местах закрепления вала в захватах
или в связи с недочетами изготовления образцов.
Результаты испытаний заносятся в таблицу, где указываются номи-
нальные напряжения в разрушившейся части кривошипа и число циклов
до разрушения; кроме того, фиксируются формы разрушений и харак-
тер развития трещины усталости.
Для коленчатых валов звездообразных двигателей испытание на кру- 262606
чение должно производиться по схеме второго рода или по смешанной
схеме. Испытанию подвергается весь вал в собранном виде либо испы-
тываются отдельные части вала.
Испытание производится на резонансном стенде. Схема располо-
жения вала при испытании его передней части представлена на фиг. 262606.
На носке вала жестко закреплена траверса а. Вал лежит своими корен-
ными шейками на опорах, связанных с плитой стенда. Траверса возбу-
ждается центробежным возбудителем б, который вращается электромо-
тором постоянного тока в. Крутящий момент воспринимается шатуном г,
25 Авиац. порши. двигатели.
385
262607
нижний конец которого соединен с динамометром, укрепленным на плите
стенда. Траверса приводится в колебательное околорезонансное дви-
жение путем соответствующей настройки скорости вращения мотора-
возбудителя, управляемого от амплитудного регулятора. Крутящий
момент, действующий на вал, измеряется по усилию, передаваемому
от шатуна к динамометру, или по закрутке носка.
262607 Испытание на переменный изгиб производится на стенде по резо-
нансной схеме при нагрузке кривошипа вала по схеме чистого изгиба
Фиг. 262606.
Схема резонансной установки
для испытания вала при кру-
чении второго рода
Фиг. 262607-1.
Схема резонансной установки для испыта-
ния вала на переменный цзгиб
или по схеме на двух опорах с силой по середине пролета в плоскости
кривошипа и в плоскости, перпендикулярной плоскости кривошипа.
На фиг. 262607-1 представлено возможное расположение испытывае-
мой части вала, состоящей из одного или двух кривошипов на испыта-
тельном стенде. На крайние шейки передаются нагрузки от колеблющейся
в резонансной области системы из траверсы и коленчатого вала. Си-
стема возбуждается центро-
бежными возбудителями, как и
, jXyl ' в предыдущих случаях. От
траверс нагрузка передается
g на коренные шейки вала.
С Испытание на изгиб по-
* перечной силой в середине
А Г • пролета в плоскости криво-
J шипа производится по схеме
фиг. 262607-И. Переменная
нагрузка развивается колеблю-
Фиг. 262607-п. щейся траверсой а, возбуждае-
Схема резонансной установки для испытания мой центробежным возбудите-
вала на переменный изгиб сосредоточенной лем. Нагрузка измеряется ди-
сило'л намометром б или по динами-
ческим деформациям вала.
Испытание на изгиб поперечной силой в середине пролета перпенди-
кулярно плоскости кривошипа производится по схеме нагрузки круче-
нием второго рода коленчатых валов звездообразных двигателей.
Испытание коленчатых валов на изгиб может осуществляться
при помощи пульсаторных машин при цикле изменения напряжений
386
262608
от нуля до максимума с последующим пересчетом результатов на
симметричный цикл для соответствующего металла.
Если вал по данным динамических измерений нагружен значитель- 262608
ными продольными переменными нагрузками, то прочность его может
быть определена соответствующим испытанием на усталость. Схема
Фиг. 262608.
Схема резонансной установки для испытания вала пере-
менными продольными силами
нагружения в этом случае приведена на фиг. 262608. Отдельный криво-
шип а шарнирно связан с плитой стенда и вибрирующей нагружающей
поперечиной б. Поперечина возбуждается центробежным возбудителем в.
Развиваемая нагрузка измеряется динамометром г либо по деформа-
циям вала.
ЛИТЕРАТУРА И ИСТОЧНИКИ К 260000
1. Аистов И. Н., Испытание статической нагрузкой строительных конструкций
и элементов, Стройиэдат, 1938.
2. Апарин Г. А. и Городецкий И. Е., Допуски и технические измерения,
Машгиз, 1947.
3. Безухов Н. И., Испытание инженерных конструкций, Стройиздат, 1939.
4. Давиденков Н. Н., Механические испытания металлов, Кубуч, 1933.
5. Голованов И. П., Методы измерения напряжений, 1938.
6. У па ды ш е в Б. Л., Методика загружения авиационных конструкций при ст»-
тических испытаниях, 1938.
7. Справочная книга по расчету самолета на прочность, ОНТИ, 1937.
8. Статические и динамические испытания, Оборонгиз, 1939.
9. ЕН) бров А. А. и ГлуховскийБ. X., «Техника воздушного флота» № 6,
10. О ч н е в В. Н., Тензометры Гуггенбергера и работа с ними, 1932.
11. Динамические свойства строительных материалов, под ред. проф. Н и л е н-
дера, Стройиздат, 1940.
12. Д м и т р и е в Е. И., Измерения малых перемещений индуктивным методом, изд.
Академии наук СССР, 1945.
13. Экспериментальные методы определения напряжений, Сборник, ОНТИ, 1935.
25»
387
14. П р и г о р о в с к и й Н. И., Исследования в области машиноведения, изд. Ака-
демии наук СССР, 1944.
15. П ри го ро веки й Н. И., Инженерный сборник, т. I, 1940.
16. Раевский Н. П., «Заводская лаборатория» № 5, 1945.
17. Вольфсон В. С., Вибраторы, ОНТИ, 1939.
18. Р у д а ш е в с к и й Г. Е., Мостиковая и трансформаторная индукционные схемы
в применении к измерениям малых деформаций, изд. Академии наук СССР, 1938.
19. Рудашевский Г. Е., Известия ОТН АН СССР № 11, 1945.
20. Ананьев И. В-, Беляев М. М., Техника измерения колебаний, 1947.
21. Энциклопедический справочник «Машиностроение», т. I, кн. 2, Машгиз, 1947.
22. М з н л и Р., Анализ и обработка записи колебаний, Машгиз, 1948.
23. Кокер и Файлов, Оптический метод исследования напряжений, 1936.
24. Ф р о х т М., Фотоупругость, ОНТИ, 1947.
25. Т и м о ш е н к о С. П., Теория колебаний, 1938.
26. Si е be 1 Е., Handbuch f. Werks toffprflfung, Bd. 1 u. II, 1940.
27. Lehr E., Spannungs vertei lung in Konstructionselementen, 1934.
28. ROtscher F. u. Jaschke R., Dehnungsmessungen und ihre Auswertung,
1939.
29. Ker Wilson, Practical solution of torsional vibration problems, v. I, 1942.
30. Geiger, Mechanische Schwingungen und ihre Messung, 1928.
31. Spilth W., Theorie und Praxis der Schwingungsprflfmaschinen, 1934.
32. Steuding, Messung mechanischer Schwingungen, 1928.
33. Experimental stress analysis, 1944, 1945, 1945.
ЧАСТЬ 3
РАСЧЕТ
СИСТЕМЫ КОЛЕНЧАТОГО ВАЛА
НА КРУТИЛЬНЫЕ КОЛЕБАНИЯ
СОДЕРЖАНИЕ
части 3
Основные понятия.......................................• . 300100
Цель расчета и его структура............................... 300200
Расчет эквивалентной системы вала............................... 310000
Расчет жесткостей эквивалентной системы..................... 311000
Формулы для определения приведенных длин элементов вала . . 311100
Учет влияния модуля сдвига................................. 311200
Экспериментальное определение жесткостей................... 311300
Расчет моментов инерции масс эквивалентной системы.......... 312000
Определение моментов инерции вращающихся деталей........... 312100
Определение момента инерции диска, заменяющего массы, свя-
занные с коленом........................... • . . . . 312200
Приведение масс и жесткостей, связанных с валом двигателя пере-
дачей ............’...........................•............. 313000
Составление эквивалентной схемы.......................... . 314000
Расчет чисел собственных колебаний системы...................... 320000
Типичные эквивалентные системы и формы их колебаний........ 321000
Приближенная оценка чисел собственных колебаний............. 322000
Метод подбора ............................................ 323000
Рекуррентные формулы метода подбора........................ 323100
Приложение' метода подбора к сложным системам.............. 323200
Расчет вынужденных колебаний.................................... 330000
Силы, вызывающие крутильные колебания....................... 331000
Гармоники тангенциальных сил давления газов................ 331100
Гармоники тангенциальных сил инерции....................... 331200
Сложение гармоник сил давления газов и сил инерции........ 331300
Силы, демпфирующие крутильные колебания . . . .............. 332000
Расчет вынужденных колебаний................................ 333000
Оценка напряжений по форме колебаний нри резонансных оборотах
вала .......................................................... 340000
Определение резонансных оборотов............................ 341000
Уравнение работ............................................• 342000
Сумма работ возбуждающих моментов.......................... 342100
Работа сил демпфирования в резонансе....................... 342200
Определение резонансной амплитуды |........................ 342300
Определение коэффициента демпфирования для одного колена . . . 343000
Определение напряжений по форме колебаний................... 344000
391
Расчет необходимых изменений системы и выбор демпфера............. 350000
Формулы изменения метода подбора.............................. 351000
Выбор демпфера............................................... 352000
Нелинейные системы......................................... 353000
Торсиографирование ............................................... 330000
Проведение опыта.............................................. 361000
Устройство торсиографа...................................... 361100
Выбор места для установки механического торсиографа........ 361200
Электрический торсиограф . . ............................... 361300
Привод к механическому торсиографу.......................... 361400
Установка торсиографа .................................... 361500
Запись..................................................... 361600
Программа торсиографироваиия................................ 36170G
Обработка торсиограмм ........................................ 362000
Расчет напряжений по форме колебаний и результатам торсиогра-
фирования .................................................. 363000
Форма колебаний............................................. 363100
Определение напряжений...................................... 363200
Коэффициент демпфирования . . ..............•............... 363300
Примеры поломок валов от колебаний............................ 364000
Расчет демпфера................................................... 370000
Расчет маятникового демпфера.................................. 371000
Принцип работы.............................................. 371100
Определение г и I........................................... 371200
Определение момента инерции маятникового противовеса .... 371300
Определение частот собственных колебаний системы с маятниками 372000
Расчет роликового демпфера.................................... 373000
Расчет демпфера трения....................................... Э74000
Расчет демпфера трения со свободной массой . ............... Э74100
Расчет демпфера трения с закрепленными массами.............. 374200
Расчет колебаний системы вал—виит.................................. 380000 .
Принцип расчета . ........................................ . . . 381000
Определение динамической жесткости винта...................... 382000
Определение динамической жесткости системы коленчатого вала
двигателя .................................................... 383000
Определение частот системы вал—винт........................... 384000
Электрическое моделирование крутильных колебаний валов поршневых
двигателей........................‘............................... 390000
Пример составления электрической модели..................... 390100
Методика эксперимента ........................... 390200-
Литература и источники к 300000
300100—300105
Основные понятия 300100
В расчете системы коленчатого вала на крутильные колебания рас- 300101
сматриваются наложенные на равномерное вращение вала перйодиче-
ские угловые отклонения связанных с валом масс в направлении вра-
щения и против направления вращения.
Крутильными колебаниями системы вала называются периодиче- 300102
ские колебания масс на вале в плоскости вращения, при которых участки
вала между массами закручиваются.
Эти отклонения вызываются периодическими изменениями танген-
циальных сил, приложенных к коленам вала двигателя, и являются
следствием крутильной упругости вала. Колебания вала, рассматривае-
мого как жесткое целое (подобно тому, как это делается, например, в при-
ближённом расчете степени неравномерности), не относятся к типу кру-
тильных колебаний.
Эквивалентная система представляет собой вал постоянного диа- 300103
метра, не обладающий массой, с насаженными на нем дисками (сосре-
доточенными массами), заменяющими связанные с валом массы.
Эквивалентность, с точки зрения расчета на крутильные колеба-
ния, заключается в равенстве чисел собственных (свободных) колебаний
действительной и эквивалентной систем и в почти точном совпадении
форм этих колебаний в обеих системах.
Числами собственных (или свободных) колебаний системы вала назы- 300104
ваются те числа колебаний в минуту, с которыми выведенная из покоя
система может колебаться без воздействия внешних сил.
Таких чисел собственных колебаний система вала с п дисками
имеет п—1.
При этом, если систему вывести из покоя произвольным образом
(например,, закрутить вал за концы в противоположные стороны
и освободить его), то одновременно возникнут собственные коле-
бания с различными числами колебаний в минуту, наложенные друг
на друга.
Формой колебаний вала называется график угловых амплитудных 300105
отклонений дисков от положения покоя по длине эквивалентного вала.
Каждому числу собственных колебаний соответствует’ определенная
форма колебаний; при каждом числе собственных колебаний диски сво-
бодно колеблющейся системы отклоняются от положения покоя на раз-
ные величины, находящиеся между собой в одних и тех же отношениях,
независимо от абсолютной величины этих отклонений.
Те сечения вала, которые, при колебаниях не отклоняются от поло-
жения покоя, называются узлами колебания.
393
300106-300109
300106
Форма колебаний обозначается по числу узлов (одноузловая форма,
двухузловая форма и т. д.). Форма с самым высоким для систёмы из п
масс числом колебаний имеет п—1 узел.
Амплитудой колебаний (<р0—в радианах или градусах) называется
наибольшее угловое отклонение колеблющегося диска от положения
покоя.
Отдельные свободные колебания масс на вале для данной формы
происходят по закону синусоиды (гармонические колебания) <p=<posin<i>f.
Это верно для валов, деформация которых прямо пропорциональна
приложенному моменту. Если на вале стоит муфта с резиновыми
300107
элементами, предварительно сжатыми пружинами и т. п., и зависимость
закрутки от момента нелинейна, то колебания системы не будут про-
стыми гармоническими (нелинейные системы).
Мгновенное положение К колеблющейся точки вала (фиг. 300107)
на ее пути АВ (где АВ — спрямленная дуга, описываемая точкой на
вале) при гармонических колебаниях можно
Фиг. 300107.
Схема, поясняющая кинемати-
ку гармонических колебаний:
у = ?osin о»!
представить как проекцию на диаметр АВ
конца радиуса-вектора ОС, длина которого
равна амплитуде <р0, вращающегося с по-
стоянной угловой скоростью <!>= — , где
П — число оборотов в минуту радиуса-
вектора ОС.
Угловая Скорость «в называется кру-
говой частотой колебания.
Угол е между каким-либо рассматри-
ваемым положением вектора OD и его ну-
лев ым положением наз ывается фазовым
углом или фазой.
Одному полному обороту радиуса-век-
тора ОС соответствует одно полное колеба-
ние на пути АВ — В А. Следовательно, число
колебаний в минуту п ='тр = 9,55 и.;
300108
Периодом колебания называется время, в течение которого колеб-
лющаяся точка совершает одно полное колебание, т. е. проходит полный
путь АВ — ВА
Т = 2?в§9Сек.
ш П
300109 Периодический крутящий момент от приложенной к колену вала
тангенциальной силы рассматривают, пользуясь методами гармониче-
ского анализа, как состоящий из суммы синусоидальных моментов (гар-
моник) с различными частотой, амплитудой и фазой.
Число периодов гармоники, приходящееся на один оборот двига-
теля, называется порядком гармоники к, о борот у. Так
как основной период крутящего момента на колене четырехтактного дви-
гателя охватывает два оборота, то полученные из гармонического ана-
лиза крутящего момента гармоники с номерами 1, 2, 3, ... обозначаются
как гармоники 1-го, 1%-го порядков; для двухтактного двига-
теля дробных порядков нет.
394
300110-300207
Вынужденные колебания системы вала под действием периодических 300110
крутящих моментов на коленах вала рассматривают как сумму гармони-
ческих колебаний, вызываемых гармониками отдельных порядков, поль-
зуясь принципом суперпозиции.
Резонансными колебаниями называются колебания под действием 300111
гармоники какого-либо порядка с частотой, равной какой-либо из соб-
ственных частот системы. Возникающие при резонансе сильные (выну-
жденные) колебания системы образуют форму, практически совпадаю-
щую с формой собственных колебаний соответствующей частоты.
Поэтому резонанс обозначают как резонанс одноузловой формы,
резонанс двухузловой формы и т. д., а рассматривая его, как результат
действия возбуждающих сил, обозначают его как резонанс гармоники
%-го порядка, резонанс гармоники 4%-го порядка и т. д.
Обороты двигателя, при которых /возникают резонансы, называют 300112
резонансными или к р и т и ч е с к и м и оборотами.
Напряжения при сильных резонансах, когда отклонения масс от дей- 300113
ствия резонирующей гармоники настолько велики, что колебания масс
происходят приблизительно по синусоидальному закону, с достаточной
для практики точностью вычисляют по форме собственных колебаний
системы и резонансным амплитудам.
Допустимые напряжения определяют, исходя из предела усталости
для вала (см. 200000).
В отдельных случаях учитывают и напряжения, вызываемые при
резонансе другими гармониками, кроме резонирующей.
Цель расчета и его структура 300200
Расчет системы вала двигателя на крутильные колебания должен 300201
определить, при каких оборотах двигателя возникают особенно силь-
ные колебания, и дать оценку величины напряжений вала при этих обо-
ротах.
Так как наиболее сильные колебания возникают при резонансных 300202
оборотах, для определения которых необходимо знать числа собствен-
ных колебаний, то расчет должен содержать определение эквивалентной
системы и нахождение для нее собственных частот.
Для оценки напряжений должны быть известны гармоники крутя- 300203
щего момента и коэффициент демпфирования для вычисления момента
сил сопротивления.
Точное значение коэффициента демпфирования для вновь проекти- 300204
руемого двигателя неизвестно, и результатом расчета напряжений в резо-
нансе может быть лишь приближенная их оценка.
Окончательное суждение о величине напряжений можно вынести 300205
лишь после дополнительного расчета, сделанного на основе записи кру-
тильных колебаний (торсиограмм).
Следует подчеркнуть, что торсиографирование не может освобо- 300206
дить от необходимости производить расчет на крутильные колебания,
так как оценка результатов записи невозможна без знания частот и форм
собственных колебаний системы вала.
Обычно расчет на крутильные колебания носит поверочный харак- 300207
•тер, так как производится для уже готового двигателя или для оконча-
тельно разработанной конструкции. В случае неблагоприятного по расчету
395
300208 -300210
300208
300209
300210
расположения критических чисел оборотов необходимо в систему вала
внести изменения или же поставить демпфер, освобождающий систему
от опасных напряжений при колебаниях.
В расчет, таким образом, должны входить следующие части:
—Определение элементов эквивалентной системы вала.
—Расчет чисел собственных колебаний системы.
—Определение гармоник крутящего момента.
—Оценка напряжений по форме колебаний при резонансных оборо-
тах вала.
—Расчет необходимых изменений системы и выбор демпфера.
После торсиографирования, производимого в период доводки двига-
теля, на основании опытных данных окончательно устанавливается рас-
положение резонансов и производится оценка напряжений по формам
колебаний, соответствующим опытным числам собственных колебаний
[см. 360000 («Торсиографирование»), содержащий методику торсиогра-
фированйя и обработки торсиограмм и расчет напряжений вала на основе
результатов торсиографирования].
Если торсиографирование подтвердит необходимость в устранении
каких-либо резонансов демпфером или обнаружит сильные совместные
колебания системы вал—винт или очень сильные, хотя и не резонансные
колебания, то к основному расчету должны быть добавлены все или неко-
торые из следующих разделов:
—Расчет вынужденных отклонений.
—Расчет демпфера.
—Расчет колебаний системы вал—винт.
310000-311102
РАСЧЕТ ЭКВИВАЛЕНТНОЙ СИСТЕМЫ ВАЛА з 10000
Для расчета на крутильные колебания система вала двигателя заме- 310001
няется эквивалентной системой, состоящей из цилиндрического, не обла-
дающего массой вала постоянного диаметра и ряда насаженных на вал
дисков (сосредоточенных масс).
Жесткости отрезков вала между дисками (жесткость учасВДК <ала— 310002
момент в кгсм, который нужно приложить, чтобы закрутить этот участок
на один радиан) и моменты инерции дисков выбираются так, чтобы числа
собственных колебаний эквивалентной системы были равны числам соб-
ственных колебаний действительной системы вала и форма колебаний
возможно мало отличалась от действительной.
РАСЧЕТ ЖЕСТКОСТЕЙ ЭКВИВАЛЕНТНОЙ СИСТЕМЫ 311000
Для отдельных элементов вала вычисляется их приведенная длина,
т. е. длина участков эквивалентного вала такой же жесткости, как и жест-
кость участков между теми же массами действительного вала.
При этом потенциальная энергия закрученного эквивалентного вала
будет равна потенциальной энергии действительного вала при тех же
закручивающих вал моментах. -
За полярный момент инерции сечения эквивалентного вала прини-
мается полярный момент инерции коренной шейки коленчатого вала.
Формулы для определения приведенных длин элементов вала 311100
См. 311101-311114; индекс «О» относится к эквивалентному
валу.
Цилиндрический участок вала. Длина участка—!; наружный диа- 311101
метр— d; внутренний — 3
I _ I 4»~
® ~ сН - «4 •
Конус (фиг. 311102)
1 »4J ш г з , ™ । i\
!0 = /—(m2 + m + 1),
311102
Фиг. 311102.
где
41
т==-г
42
397
311103—311104
311103
Конус с цилиндрическим сверлением. Обозначим (фиг. 311103-1)
Фиг. 311103-1.
а
1 « ’
а
__4г.
®— а *
Тогда
Два значения функции в квадратных
скобках определяются по фиг. 311103-11
График для расчета приведен-
ной длины конуса с цилиндри-
ческим сверлением
311104
для х = а, и х = а2.
Цилиндр с коническим сверлением. Обозначим (фиг. 311104-1):
Ь,
а ’
h _
Ог“ d
Тогда
Значения функции в квадратных скобках для х = &! и x = bt опре-
деляются по фиг. 311104-11-
I-------е —•
Фиг. 311104-1.
Фиг. 311104-11.
График для расчета приведенной длины цилиндра с кони-
ческим сверлением
398
311105—311107
„ rf.
Если отношение диаметров основании конуса или конического
“8
сверления j- равно 0,8 или более, то можно вычислить приведенную
«2
длину по формуле 311101, заменяя конус цилиндром с диаметром
-а- или, соответственно, .
л
Получающаяся при этом погрешность незначительна.
Закругление. В закругленйе вписывают ломаную линию (фиг. 311105), 311105>
разбивая участок с закруглением на конусы так, чтобы
£>0,8 (или £>0,8).
Заменяют конусы цилинд-
рами с диаметрами
Фиг. 311105.
d=d-i±^ (или8 = Ц12
о , , К определению приведенной длины закруг-
Затем 1„ вычисляют по фор- ления
муле 311101.
Участок с резьбой. За наружный диаметр цилиндрического участка
с резьбой принимается внутренний диаметр резьбы.
Влияние перехода от одного диаметра к другому. ' Местные дефор-
мации уменьшают жесткость участка, на котором имеется переход от
311106
311107
одного диаметра к другому
(фиг. 311107-1).
Это уменьшение жест-
кости учитывается увеличе-
нием длины участка с мень-
Приведенная длина, соответствующая переходу
от dt к d2
Фиг. 311107-1.
Переход от одного диаметра
к другому
шим диаметром на некоторую величину а и уменьшением на ту же
величину участка большего диаметра, т. е. для первого участка
для второго участка
/ = 12- а.
а находится по кривой (фиг. 311107-П) в долях dt в зависимости от
399
311108-311112
d.
и радиуса закругления в месте перехода от одного диаметра к дру-
гому (пунктирная кривая по опытам Портера, см. [8]).
31 ПОЯ Буртик на вале. Если /2 мало по сравнению с dit то может ока-
заться, что 2а близко к /2 (см. 311107) или даже 2а > /2. В этом
случае считается, что буртик на жесткость не влияет, и 1„ вычисляется
на участке /2 для вала с диаметром dt.
311109 Шпоночная канавка ила паз. На участке вала с канавкой за диаметр
цилиндра в формуле 311101 принимается dt= d—kh, где Л — глубина
канавки, а к берется по опытным данным (фиг. 311109).
1 1.2 0.4 2
Фиг. 311109.
К определению приведенной длины участков с канавками
311110 Участок со шлицами. За диаметр d в формуле 311101 принимается
диаметр окружности, касательной ко дну впадины шлиц (фиг. 311109).
311111 Влияние посадки детали на вал.
Фиг. 311111.
К определению приведенной дли-
ны участка с насаженной на вал
деталью
а) Считается, что на участках дли-
ной /' = -j- у краев втулки детали скру-
чивается вал, а на участке = /2 —
скручивается втулка. Это правило отно-
сится и к деталям с прессовой посадкой
и к шпоночным соединениям.
б) Если деталь сидит ьа Конце вала,
то считается, что вал скручивается на
.. d
участке длиной , а втулка на длине
311112 Фланцевые соединения.
Вычисляются
^Рсоед
в) Если деталь сидит на шлицах
(винт, крыльчатка нагнетателя), то счи-
тается, что вал скручивается на длине I
до середины шлицевого участка.
+ n/д
2
где
п — число болтов.
400
зннз
Тогда (один фланец)
'р»
Р соеж
Фиг. 311112.
К определению приведенной длины фланцевого
соединения
Муфта с пружинами. Обозначим (фиг. 311113-1):
Жесткость одной пружины спр кг/см.
Число пружин п.
Радиус расположения пружин R см.
311113
Фиг. 31Ш34.
Схема нелинейной муфты
Тогда жесткость муфты
— спр nR
и приведенная длина
Формулы справедливы,
верительного сжатия. Если
если пружины вложены в муфту без пред-
пружины вставлены с предварительным сжа-
26 Двиац. поршн. Двигатели.
401
311114
тием, то углы закрутки муфты не пропорциональны приложенному момен-
ту (характеристика cJ^Obc на фиг. 311113-11) и формулы 311113 не могут
быть применены. Расчет систем с такими муфтами требует особых
методов [7], [13].
Фиг. 311113-п.
Характеристика нелинейной муфты
311114 Колено вам. Приведенная длина колена определяется по эмпири-
ческим формулам. Для авиационных валов рекомендуется пользоваться
формулами Тимошенко и Картера.
Фиг. 311114.
Обозначения к формулам для определения приведенной длины
колена
Формула Тимошенко:
/о-(2д + О,9й) + (а^О,9й)^ 4-0,77/?^, (1)
Где
'-тт “/'Ц2'-
402
311200-311302
Формула Картера:
/о = (2д+О,8й) + О,75а^^Ч1,51?Ц^. (2)
Учет влияния модуля сдвига 311200
Эквивалентный вал считают стальном. В случае, если определяется
приведенная длина нестальной детали из материала с модулем сдвига
С1( влияние различных модулей сдвига учитывается по формуле
Здесь /' — приведенная длина нестальной детали, найденная по
формулам 311101-311114.
Экспериментальное определение жесткостей
При определении приведенной длины колена по формулам (1)
и (2) п. 311114 для валов обычной конфигурации получаются близкие
значения. Если расхождение между значениями /0 по этим формулам
для вала рядного двигателя превысит 7%, то рекомендуется произвести
опытную закрутку вала (см. 311301-
311310).
Жесткость колена зависит в
значительной степени от зазоров
в подшипниках. Поэтому закручи-
вать нужно вал, лежащий в под-
шипниках в нормально собранном
двигателе.
Для того чтобы затормозить
один конец вала, в каком-либо ци-
линдре между крышкой камеры сго-
рания и днищем поршня заклады-
вают металлическую болванку такой
высоты, чтобы поршень остановил-
ся приблизительно посредине хода;
это делается для того, чтобы сила
давления на крышку, а следова-
тельно, и деформация болванки и
болтов, крепящих крышку, была
как можно меньше (для ослабления
влияния этой деформации на точ-
ность замеров). Болванка (например,
старый поршень двигателя без ко-
лец, подрезанный до нужной длины)
311300
311301
311302
Фиг. 311302.
Определение жесткости по данным
закрутки
должна хорошо опираться на головку цилиндра во избежание смятия ее
при опоре в немногих точках (клапаны из головки вынуть). Рычаг
26*
403
311303-311308
длиной I с платформой для грузов на конце привинчивают к концевому
фланцу вала или надевают на шлицы (удобно использовать втулку
винта, вставляя в качестве рычага трубу или же бракованную лопасть,
просверленную на конце для подвески штанги с платформой).
311303 Замеры ведут с помощью станочного индикатора, упирающегося
в стерженек, укрепленный на фланце; мерить деформацию по рычагу
нельзя, так как он сам прогибается. Деформации вала невелики, поэто-
му радиус стерженька г надо выбирать значительным (порядка
200 — 250 мм). Индикатор должен быть закреплен на картере двига-
теля (у передней лапы рядного двигателя или на ochobhqm картере
звездообразного), так как при установке индикатора вне двигателя
незначительное смещение двигателя как целого при нагружении
рычага или случайных толчках может сильно исказить замеры
деформаций.
311304 Нагружение производят постепенно, накладывая не слишком большие
гири (15 — 20 кг) на платформу.
Необходимо произвести несколько опытов, постепенно нагружая
и разгружая вал.
311305 Линия нагрузки а и разгрузки b вала на диаграмме не совпадают.
Одному и тому же значению М кгсм соответствует при нагрузке <ри
радиан, а при разгрузке <рр радиан.
Предполагая, что трение задерживает вал в ?н и не дает ему при
нагрузке дойти до деформации свободно скручивающегося коленчатого
вала ?с на такой же угол, на какой вал не доходит до положения <рс,
задерживаясь в <?р, делят на диаграмме пополам разности <рн — <?р
и через точки <рс для ряда нагрузок проводят прямую. Жесткость с есть
тангенс угла наклона этой прямой к оси абсцисс, т. е.
__ ОВ кг см
АВ рад
311306 Можно также определить жесткость, исходя из того, что работы
трения при нагрузке и разгрузке вала одинаковы. Планиметрируют
площади под кривой нагрузки а и под кривой разгрузки Ь. Площадь
истинной работы нагружения равна полусумме площадей под а и Ь.
Приняв то же основание, т. е. деформацию опытной закрутки, находят
высоту треугольника, площадь которого равна работе нагружения.
Проходящая через начало координат гипотенуза этого треугольника
представляет собой истинную характеристику закрутки вала.
311307 Для исключения жесткости передней части вала опыт закрутки
проводят два раза, тормозя, например, один раз 2-е колено, а другой
раз 5-е.
311308 В таком случае разность податливостей двух опытов дает подат-
ливость нескольких (в этом примере трех) колен. Если нагрузка при-
лагалась к валу винта редукторного двигателя и деформация измерялась
на этом же вале, то найденную податливость колена — для перехода
к податливости эквивалентной системы -- нужно разделить на Р, где
i — передаточное число редуктора:
__0)винта
^вала
404
311309-312103
Зная податливость колена —, можно вычесть ее из общей подат- 311309
£в
ливости, найденной при закрутке, и найти податливость редукторно-
го вала. Цилиндрический участок от малой шестерни редуктора до
начала первого колена (середины опорной шейки) можно учесть расче-
том по чертежу.
Данные опыта закрутки дают хорошее совпадение расчетных 311310
и опытных частот при двухузловой форме колебаний. Для расчетов
частот трехузловых форм в рядных двигателях и двойных звездах со-
впадение несколько худшее, так как опыт не дает действительных
условий приложения нагрузки в двигателе (кручение 2-го рода, см. 115]).
РАСЧЕТ МОМЕНТОВ ИНЕРЦИИ МАСС ЭКВИВАЛЕНТНОЙ 312000
f СИСТЕМЫ
Моменты инерции сосредоточенных масс в эквивалентной системе 312001
должны быть выбраны так, чтобы кинетическая энергия эквивалент-
ной системы при колебаниях равнялась кинетической энергии действи-
тельной системы.
Определение моментов инерции вращающихся 312100
деталей
Определение моментов инерции вращающихся деталей рекомендует- 312101
ся проводить опытным путем.
Экспериментальное определение моментов инерции деталей произ-
водится прокачиванием детали на ноже или на проволочном подвесе
(крутильный маятник).
Методы прокачки и формулы для определения моментов инерции
по данным опыта см. 312102 — 312105.
Деталь подвешивается на ноже (призме). Отклонив деталь на не- 312102
большой угол (<6°), освобождают ее. Период колебания Т сек. под-
считывается как среднее из трех опытов по 30 — 50 колебаний в каж-
дом (продолжительность 30 — 50 колебаний определяют по секундомеру)»
Обозначим:
Вес детали Q кг.
Расстояние от точки подвеса до центра тяжести детали р см
g — 981 см[сек*.
Момент инерции детали относительно оси, проходящей через ее
центр тяжести,
I. = — р кг см сек3.
Для прокачивания вала рядного двигателя рекомендуется применять 312103
штангу, запиленную как нож (угол ~ 90°) в местах, на которые опира-
ются внутренние поверхности шатунных шеек (для шестиколенного
двигателя, .например, в плоскости осей 2-го и 5-го колен).
405
312104-312106
312104
Детали, которые нельзя надеть на призму, подвешивают на прово-
локе, заделанной в деревянной пробке. Пробку заколачивают в отвер-
Фиг. 312104.
Крутильный маятник.
Определение момента
инерции детали
стие валика детали.
Определив период крутильных колебаний
детали Т сек., вытаскивают из нее пробку и
вставляют в отверстие другой, (контрольной)
детали с известным уже моментом инерции Ц;
затем определяют для этой контрольной детали
период крутильных колебаний Тх.
При замене деталей ничего в подвесе не ме-
няется, так что жесткость подвеса остается той
же. Тогда
312105
Детали, у которых центр тяжести не лежит на оси вращения
(например, коленчатый вал звездообразного двигателя), рекомендуется
прокачивать на бифилярном подвесе. Определяют поло-
жение оси, параллельной оси вращения и проходящей ///////////?
через центр тяжести, например, подвешивая вал на одной.
проволоке за планку, укрепленную на торце вала перпен-
дикулярно к оси вала, и добиваясь горизонтальности
/ =
<гУ
планки.
Две проволоки закрепляются затем на этой планке и
деталь подвешивается на этих двух проволоках так, чтобы
они были параллельны и на одинаковом расстоянии от
оси, проходящей через центр тяжести. Если приспособ-
ление для подвешивания детали (планка и части ее
а
Фиг. 312105.
Крутильный маятник с бифилярным подвесом.
Определение момента инерции детали
312106
крепления) имеет значительные размеры, то определяют также момент
инерции приспособления в отдельности (без детали, на том же подвесе)
и вносят поправку на приспособление в момент инерции детали.
Обозначим:
Длина проволоки — f см.
Расстояние между проволоками — а см.
Вес детали Q кг-
Тогда
. _ $а*Тг
1 16*4 ’
где Т — период полного колебания бифилярно подвешенной детали
в сек.
Если имеются только чертежи, то можно воспользоваться каким-
либо из изложенных в литературе методов расчета массовых моментов
инерции [3, 8, 9].
406
312107-312201
Можно воспользоваться, например, следующим приближенным при- 312107
емом. Определяем суммарную площадь сечений тела F на радиусе
(фиг. 312107). Представим себе, что радиусом г описана цилиндрическая
поверхность, площадь которой равна F. Ширина этого цилиндрического
/7
кольца Ь = 2^г- Найдя для ряда значений г ширину Ь, получим про-
филь диска, момент инерции которого приблизительно равен искомому.
Фиг. 312107.
Определение момента инерции тела по чертежу
Очертание диска будет криволинейным. Заменяя профиль диска сту-
пенчатой ломаной линией, разбиваем диск на цилиндры, моменты инер-
ции которых вычисляются по формуле
1 = Ю_< (dt+i — d?) bt^ у кгсм сек*.
Здесь d и b в см, а у в кг/см*.
Для уменьшения неточности, вносимой заменой профиля диска сту-
пенчатой ломаной линией, рекомендуется брать большое число ступеней
(i = 10—15), чтобы выступающие и входящие треугольники были малы
(фиг. 312107).
Определение момента инерции диска, заменяющего массы, 312200
связанные с коленом
Определение момента инерции /ц диска, заменяющего массы, свя- 312201
занные с одним коленом (моторная масса), производится, исходя из
условия равенства среднего значения за один оборот двигателя кине-
тической энергии поступательно двигающихся масс (т. е. поршня
/«порш и части массы шатуна, относимой к поршню тш. пост) и кинети-
ческой энергии заменяющей массы та, сосредоточенной на оси шатун-
ной шейки.
407
312202-314002
312202
313000
313001
Из этого условия находим:
Шз = 0,5 (/Лд,# пост ТПпорш) (1 "V 0,25 V). (1)
Обозначая момент инерции самого колена /к и массу части шатуна,
относимой к вращающимся массам, тш. Вр, получаем:
/ц — R1 2 [Щш. вр 4" 0,5 (/Пш.пост + Щпорш) (1 4-0,25V)]. (2)
Положение центра тяжести шатуна для разноски его массы, т. е.
нахождения тш. вр и тШлост, рекомендуется определять опытным путем.
ПРИВЕДЕНИЕ МАСС И ЖЕСТКОСТЕЙ, СВЯЗАННЫХ
С ВАЛОМ ДВИГАТЕЛЯ ПЕРЕДАЧЕЙ
Массы и жесткости, связанные с валом двигателя передачей (вал
винта, промежуточные валики передачи к нагнетателю, валик крыль-
чатки нагнетателя), заменяются
(фиг. 313001) эквивалентными
массами и жесткостями так, что-
бы эквивалентная система (т. е.
прямолинейный вал с насажен-
ными на нем дисками) имела
частоту собственных колебаний,
равную частоте действительной
системы. Эквивалентные массы и
жесткости определяются по сле-
дующим зависимостям:
(1)
са = сьГ, (2)
Фиг. 313001. т. е. жесткости и моменты инер-
Эквивалентная схема редуктора ции деталей вала ft, связанного
с валом двигателя а передачей,
при переходе к эквивалентной системе а нужно умножить на квадрат
передаточного числа
314000
314001
314002
СОСТАВЛЕНИЕ ЭКВИВАЛЕНТНОЙ СХЕМЫ
Сосредоточенные массы (диски) эквивалентной системы размещаются
так: диск, заменяющий массу, связанную с коленом, в плоскости вра-
щения, проходящей через ось цилиндра; винт, крыльчатка нагнетателя
и шестерни в плоскости вращения, проходящей через середину их втулки
на вале.
Приведенные длины элементов вала, расположенных между сосре-
доточенными массами, складываются, и таким образом находятся полные
приведенные длины участков вала между массами.
408
314003-314004
Рекомендуется для облегчения расчета чисел собственных колеба- 314003
ний системы (см. типичную эквивалентную систему рядного двигателя
на фиг. 314003) упрощать ее, объединяя малые массы, близко располо-
женные к крыльчатке, и крыльчатку нагнетателя в одну массу. Влия-
ние такого объединения масс на числа и формы колебаний при упругой
связи нагнетателя с валом ничтожно, а достигаемая уменьшением числа
масс экономия времени при расчете значительна.
Крыльчатка.
Ведущая шестерня !Л •
21
._____________
Промежуточный валик!г
Фиг. 314003.
Упрощение эквивалентной системы
Полагают, что объединенная масса находится в центре тяжести
группы объединенных масс, если значения моментов инерции рассма-
тривать как веса.
Тогда, например, для схемы фиг. 314003
v _______________AG ~Ь AG AG . г ___ г । г । г
X,— + » '«-G + A+G-
Находят жесткости с или податливости участков' вала между 314004
дисками (сосредоточенными массами) по нижеприводимым формулам
и получают таким образом в окончательном виде эквивалентную систему
_GiPe . 1 _ t„
С 1е ’ ' О1Ре-
320000-322003
320000 РАСЧЕТ ЧИСЕЛ СОБСТВЕННЫХ КОЛЕБАНИИ СИСТЕМЫ
321000 ТИПИЧНЫЕ ЭКВИВАЛЕНТНЫЕ СИСТЕМЫ
И ФОРМЫ ИХ КОЛЕБАНИЙ
321001 Типичные эквивалентные системы и формы их колебаний показаны
на фиг. 321001.
А. Рядный 12-цилиндровый V-образныЙ двигатель с редуктором
и нагнетателем.
Б. Однорядный звездообразный двигатель с редуктором и нагнета-
телем. Встречается и еще более простая система —без редуктора, состоя-
щая всего их трех масс (дальше она обозначается Bj.
В. Двухрядный звездообразный двигатель с редуктором и нагне-
тателем.
321002 Для схем типа А и В фиг. 321001 необходимо рассчитывать числа
собственных колебаний первых трех форм; для схем типа Б (или Bj)
фиг. 321001—первых двух форм.
321003 В случае более сложных систем, например, типа Г фиг. 321001
(схема двигателя с двумя соосными винтами) может оказаться необхо-
димым вычислить и большее число форм (в случае Г четыре, так как
первые две формы будут иметь близкие низкие собственные частоты).
322000 ПРИБЛИЖЕННАЯ ОЦЕНКА ЧИСЕЛ СОБСТВЕННЫХ КОЛЕБАНИЙ
322001 Перед проведением точного расчета чисел собственных колебаний
рекомендуется найти приближенные значения этих чисел, что сильно
сокращает затрату времени на расчет.
Для оценки чисел собственных колебаний различных форм для
типичных эквивалентных систем рекомендуются следующие приемы.
322002 Определение числа собственных колебаний одноузловой формы пег
Пренебрегая моторными массами, можно рассматривать систему как
двухмассовую: винт—нагнетатель. Тогда
nei = 9,55 с(/в + /н).
^в
Здесь с—жесткость всего эквивалентного вала от винта до нагне-
тателя.
322003 Определение числа собственных колебаний двухузловой формы n«n.
Пренебрегая нагнетателем, объединяют все моторные массы и массу
редуктора в одну с моментом инерции /об, расположенную в центре
410
322003
Винт
Вит
Фиг. 321001.
Типичные формы собственных колебаний
411
322004- 323002
тяжести объединяемых масс, если моменты инерции их рассматривать
как веса.
Находят по приведенной длине участка вала между винтом и объе-
диненной массой жесткость этого участка с. Тогда
леп = Л • 9,55 |/
^В 'об
Коэффициент к имеет следующие значения:
Тип эквивалентной системы по фиг. 321001 А Б В
к 1,10 1,05 1,08
322004 Для безредукторной схемы Bj числа собственных колебаний одно-
узловой и двухузловой форм определяются точно из уравнения частоты
для системы из трех масс:
Щ* щ2 Л £12 г £12 | £23 [ С2зЛ | С12 С23 (Л Л + /3) _ Q
Х.Д /2 ^2 'з J Л ^2^2
322005 Определение числа собственных колебаний трехузловой формы лвп1.
Пренебрегая нагнетателем, объединяют редуктор и передние моторные
массы (для схемы А, фиг. 321001 три моторных массы, для схемы В
фиг. 321001—переднюю звезду) в массу а остальные массы—в мас-
су Л-
Помещают Ц и в центрах тяжести соответствующих групп масс,
рассматривая их моменты инерции как веса.
Из уравнения частоты для трех масс (322004) находят затем <»еп
и <1>еп1. При этом <1>е1П будет близко к искомому, а шец будет давать
худшее приближение к искомому, чем приближенное значение, получен-
ное, как указано в 322003.
323000 МЕТОД ПОДБОРА
323001 При числе масс эквивалентной системы "большем, чем три, реко-
мендуется определять числа собственных колебавнй методом под-
бора, уточняя приближенные значения пе, полученные, как указано
в 322000.
323002 При свободных колебаниях многомассовой системы сумма моментов
, сил инерции всех колеблющихся- масс должна равняться нулю. Сущ-
ность метода заключается в том, что, задавшись произвольной часто-
той и», (собственной частотой системы, найденной приближенно),
вычисляют сумму моментов сил инерции всех масс системы при колеба-
ниях ее с этой частотой. Если эта сумма не равна нулю, а дает неко-
торый положительный или отрицательный остаточный момент /?,, то
расчет повторяют для другого значения частоты и находят /?2 и т. д.
Построив кривую /? = /(о>), находят в пересечении ее с осью абсцисс то
значение ш, при котором R — 0. Эта Частота колебаний и есть ис^рмая
—R
собственная частота %. Удобнее строить кривую ^ = /(«>).
323100 - 323101
Рекуррентные формулы метода подбора 323100
В системе из л масс (фиг. 323101) рассмотрим колебания z-той массы 323101
с амплитудой аг. На эту массу действуют: момент сил упругости слева
el-tit, момент сил инерции 714^= — hи момент сил упругости
справа уравновешивающий моменты и (моменты е£_1; z
и e'i;i+1 имеют разные знаки).
Фиг. 323101.
Схема системы к расчету по методу подбора
Можно поэтому написать:
— C'i-i; i—~It + Cf; z-ц =0. (1)
При гармонических колебаниях
i = Ci-i; t sin i+1 = e(; i+l sin
Следовательно,
— *-1;г + Л «*'«* + *; z+i = 0 или e1:z+i = ei_i;i—1^»*. (2\
Момент сил упругости
Ci-, z+l — Cl, f+i (zzz+i — ZZi),
413
323102—323103
323102
откуда
+ (3)
ei: i+i
Пользуясь формулами (2) и (3) п. 323101, можно подобрать соб-
ственную частоту системы ше. Задаваясь амплитудой первой массы аг = 1
для произвольной частоты ш, находят по формуле (2) п. 323101:
<?18 = Mi®1 = - Л®1,
так как момент сил упругости е01 в нескрученном, свободном конце
вала равен нулю.
Затем по формуле (3) п. 323101 определяют амплитуду второй
массы:
Зная амплитуду второй массы, находят, снова пользуясь форму-
лой (2) п. 323101, момент сил упругости на участке 2—3
езз = е18 —Ла»®’ И т* Д- Д° en,n+i-
за последней массой.
Если произвольно заданная частота ш случайно окажется равной
собственной частоте <ве, то система с этой частотой может колебаться
свободно, и правый конец вала не будет скручен (фиг. 323101), также,
как и левый, т. е. en;n+i = 0.
Вообще же, при ш #= ше получается
остаточный момент en;n+1 = R (линия I
на фиг. 323101). Расчет повторяется для
другого значения ш и дает другой оста-
точный момент. Кривую остаточных мо-
ментов для нахождения ше при R — О
выгодно вычерчивать не в координатах
О
R,<&, а в координатах , ®; в этих
последних кривая начинается не от ну-
ля, а в точке, ордината'которой равна
сумме всех моментов инерции масс си-
стемы со знаком минус (фиг. 323102):
323103
Фиг. 323102.
Кривая остаточных моментов
Знание этой точки облегчает интер-
поляцию для одноузловой формы коле-
баний; пользование координатами , ш позволяет вычерчивать кривую
для всех со, не меняя масштаба.
Расчет по рекуррентным формулам рекомендуется вести в таблич-
ной форме (см. табл. 323103).
414
323104
Таблица 323103
В первой графе таблицы 323103 справа стоят номера масс эквива-
лентной системы, а в крайней слева номера участков вала между
массами. Среднюю графу заполняют данными эквивалентной системы.
Так как в формуле (2) п. 323101 Цар* всегда вычитаются из
то все It вписывают в среднюю графу со знаком минус.
При It приписывается множитель ®’. Вместо жесткостей с реко-
мендуется пользоваться податливостями —, так как при расчете на
арифмометре удобнее множить, нежели делить.
Полагаем амплитуду первой массы 01=1 (вторая графа справа).
Умножаем аг на — 1^* (из третьей графы) и записываем произведение
в четвертую графу (моменты сил упругости е, т. е. суммы моментов
сил инерции всех масс до соответствующего участка). Складываем
— с моментом сил упругости предыдущего участка, т. е. в данном
случае с е01 = 0.
Сумма записывается против номера участка 1—2:
г18 = е01 —— А®’-
Таким образом находится результат по формуле (2) п. 323101. Далее
умножаем ellt (из графы четвертой) на — (из третьей графы) и находим
деформацию участка 1—2, равную^. Этот результат подписываем
под fli в графе амплитуд (второй справа) и, складывая его с а,,
находим:
323104
т. е. результат по'формуле (3) п. 323101.
415
323200—323202
Далее процесс повторяется. В конце таблицы в графе е находим
еп. n+i = Я—остаточный момент.
323200 Приложение метода подбора к сложным системам
323201 В разветвленной системе (фиг. 323201) возможны два случая:
а) ветвь состоит из одной или двух масс (например, двигатель
с соосными винтами);
б) ветвь состоит из многих масс (примером может служить двух-
вальный двигатель типа Юнкере или сдвоенный двигатель с.общим ре-
дуктором).
Рекомендуются следующие приемы для расчета чисел собственных
323202 колебаний систем а и б (см. 323202 — 323203).
Ответвленную массу с моментом инерции (фиг. 323201, а)
заменяют массой с моментом инерции Ia, расположенной в плос-
кости и создающей при колебаниях такой же момент сил инерции,
как Д.
Так как амплитуда колебаний а[, возбуждаемых колебаниями массы
Л с амплитудой а„
, I
то условие замены Д массой 13, т. е.
MX = MX,
416
323203
приводит к следующему выражению для 1а:
'-«т-У- (о
Вместо массы 7, в плоскости ее расположения должна быть поме-
щена в эквивалентной системе суммарная масса 12е
[гс = /2 + /3 = /г + . (2)
__
Система делается, таким образом, не разветвленной и рассчиты-
вается, как обычно.
Для каждого пробного значения ш при подборе ше нужно производить
замену по формуле (1).
Прием этот можно применить последовательно ко всем массам
ветви из нескольких масс, начиная с последней из масс, на конце вет-
ви. Если масс много, то выгоднее прием п. 323203. 323203
Разветвление начинается от z-той массы (фиг. 323201, б). Момент
г1;г+1 слагается из моментов с индексами «штрих» и «два штриха»,
т. е. из
И t+i.
Полагают, что х-овая доля ei; <+1 возникает при колебаниях в ветви
«штрих», а остальная доля в ветви «два штриха»;
^•;<+1 = ^;i+i + = XCf;i+l -f- (1 — X)
Начиная от z-той массы, расчет ведется по двум таблицам: в одной
с массами и жесткостями ветви «штрих»; момент на участке v, i + 1
равен xet; f+i; в другой — момент равен (1 — x)eiit+i.
Выражения моментов е и амплитуд а за z-той массой содержат х.
В конце таблиц определяются
/?' = ax + b u R" = cx+d.
Для <в = ше должны быть равны нулю остаточные моменты, т. е.
Я' = 0 и Я" = 0.
Тогда
Рассчитывая таблицы для ряда значений ш, строят кривые
х' — —- и х"= — у в зависимости от <в. Пересечение этих кривых
дает ш = «>(., т. е. собственную частоту системы, и х = хе.
Подставляя хе в таблицы, находят амплитуды масс ветвей и, сле-
довательно, формы колебаний системы.
27 Авиац. порши, двигатели.
417
323204—323207
323204 В расщепленной системе (фиг. 323204) ветви вновь соединяются.
Примером может служить двухвальный двигатель с общим нагнета-
телем. Расчет от z-той массы до Л-той ведут, как в случае п. 323203.
Полученные в таблице для ветви «штрих» и «два штриха» значения
амплитуды Л-той массы а'к и а"к должны быть равны между собой.
Фиг. 323204
Из условия а'к—ак определяется х; подставляя х в таблицы, полу-
чают числовые значения всех а и е до Ar-той массы и заканчивают
расчет таблицы от Л-той до л-ой массы, как обычно, причем
e*;s+i = e'k-i-,k + ek-i-,k— 1какч>2.
Так как
а'к = т'х + п'
и
ак — т"х + п",
то
п' — п"
X = -s-------------------------------------г •
т —т'
Форму колебаний находят из таблицы, рассчитываемой для этой
цели при ш =
323205 -Приемом 323204 можно пользоваться и для разветвленной системы,
если начинать расчет с концов ветвей «штрих» и «два штриха»
(фиг. 323201). Вместо расчета с введением х можно в этом случае
положить а' = 1 и Д1 = 1 и, получив a'k=f=ak, пересчитать ветвь «два
штриха», полагая — вместо а'=1. Тогда при пересчете а'к — ак.
ак
323206 Агрегаты. Ответвление в хвостовой части, образуемое приводом
распределения и агрегатов (водяной и масляной помп, магнето и
при расчете системы вала на крутильные колебания не рассматривают,
так как моменты инерции агрегатов малы и связь их с системой вала
осуществляется тонкими валиками малой жесткости.
323207 В случае, если производится расчет частоты колебаний системы
агрегатов, рекомендуется рассматривать эту систему как закрепленную
в конце, соединенном с валом двигателя.
330000 — 331102
РАСЧЕТ ВЫНУЖДЕННЫХ КОЛЕБАНИЙ 330000
СИЛЫ, ВЫЗЫВАЮЩИЕ КРУТИЛЬНЫЕ КОЛЕБАНИЯ 331000
Крутильные колебания коленчатого вала двигателя возникают 331001
под действием тангенциальных сил, приложенных к шатунным шейкам.
Силы эти изменяются периодически, причем для четырехтактных дви-
гателей период этот соответствует двум оборотам коленчатого вала,
а для двухтактных—одному обороту.
Периодически изменяющуюся силу можно представить как сумму 331002
сил, каждая из которых изменяется по закону синуса. Эти силы
(гармоники) имеют порядковые номера, обозначающие, сколько периодов
гармоники дают в сумме продолжительность одного оборота вала дви-
гателя.
Для определения гармоник крутящего момента строится диаграмма 331003
тангенциальных сил (см. 100000), действующих на одно колено, с уче-
том сил инерции и кинематики прицепного механизма, исходя из инди-
каторной диаграммы и числа оборотов номинального режима. 'Эта
диаграмма подвергается гармоническому анализу, для проведения
которого пользуются каким-либо из описанных в литературе мето-
дов [5,9] или приборами [5].
При отсутствии тангенциальной диаграммы рекомендуется прибли-
женный метод, изложенный в 331100, 331200 и 331300.
Гармоники тангенциальных сил давления газов 331100
Если необходимо получить хотя бы приблизительную оценку 331101
напряжений (по форме колебаний, см. 340000), то можно пользоваться
справочными данными, приведенными на фиг. 331101-1 и 331101-11 или
в литературе [5,9, 15, 17, 18].
По данным исследования [18] на четырехтактном бензиновом 331102
двигателе изменение опережения зажигания и состава смеси мало
сказывается на гармониках тангенциальных сил. Их можно вычислить
для всех порядков от 3-го и выше по формуле
Т __Pis
1г~5к2 ’
где
р, — среднее индикаторное давление в кг/см^-,
е — степень сжатия;
к — порядок гармоники [3; З’Д; 4; 4Х/3; •••]•
27*
419
331102
331103—331203
Таблица 331103
к ТГ
-Для порядков 7«1 1; 2 и 27, можно пользоваться данными [16], 331103
приведенными в таблице 331103. Данные фиг. 331101 или значения Тг
по формуле 331102 и таблице 331103 представляют гармоники танген-
циальных сил давления газов в кг на 1 см'
площади поршня одного цилиндра.
Чтобы найти амплитудное значение гармо-
нической силы, приложенной к колену двига-
теля, нужно произвести векторное сложение
гармоник давления газов от всех цилиндров,
действующих на это колено.
При этом в приближенном расчете можно
не учитывать различия ТГ от главного и от
бокового цилиндров в V-образном двигателе.
Для давлений р{) выходящих за пределы
указанных на фиг. 331001-1 и 331001-11, можно
экстраполировать кривые, которые при высоких значениях р( про-
текают прямолинейно.
1 0,34 Pi
Р/3 0,31 Pi
2 0,23 pi
2Va 0,18 Pi
Гармоники тангенциальных сил инерции 331200
Существенное значение имеют только первые четыре гармоники сил 331201
инерции Тив. С большой точностью можно считать [15]:
Тиа = — r.i'RQ' (cos а 4- k COS 2а) =
(J I Q IS
--г sin а + 4 sin 2а 4- — к sin 3« + -т- sin 4а
4 2 1 4 4
Здесь т' — масса поступательно двигающихся частей одного
цилиндра;
/? —радиус кривошипа;
2 — угловая скорость вращения вала;
D
к— —отношение радиуса кривошипа к длине шатуна.
Для сложения с гармониками сил давления газов гармоники сил 331202
инерции также относят к 1 ел? площади поршня. Значения амплитуд
и фаз первых четырех гармоник сил инерции приведены в табл. 331202
(принято обозначение т = ^г).
Приведенными средними цифрами можно пользоваться при сложении
сил инерции с силами давления газов, когда последние взяты
из фиг. 331101-1 и 331101-П или подсчитаны по таблице 331003.
Начальная точка кривой тангенциальной силы соответствует верх- 331203
ней мертвой точке в начале хода расширения.
421
331300-331301
Таблица 331202
Порядок гармо- ники Амплитуды кг/см2 Фаговый угол Фазовый угол гармо- ники сил давления газов
бензинового двигателя дизеля
в градусах
1 ~rnR№ 4 0 27 25
2 1 — rnRQ* 180 351 353
3 4 189 338 347
4 22 4- zn№a 4 180 315 335
Примечание. Фазовые углы в четвертой и пятой графах
зависят от характера диаграммы тангенциальных сил давления газов.
331300 Сложение гармоник сил давления газов и сил инерции
331301
Для нахождения гармоники крутящего момента 1-го, 2-го, 3-го
или 4-го порядков нужно сложить гармоники сил инерции и сил
давления газов. Порядок расчета следующий.
а) Для номинального режима двигателя определяется среднее
индикаторное давление р,.
б) Из фиг. 331101-1 и 331101-11 или из справочных данных
[5, 9, 14, 17] берется соответствующее принятому р, значение ампли-
туды гармоники Тт.
в) Для номинального числа оборотов по таблице 331103 опреде-
ляется гармоника сил инерции Тин*
; Для приближенной оценки действующих на колено сил принимают,
что масса т' для всех цилиндров одна и та же.
г) Векторы, найденные, как указано в пп. б и, в,, складывают
геометрически, пользуясь фазовыми углами таблицы 331202
Т = ТГ4-ТИВ. (1)
д) Векторы Т от" цилиндров, работающих на одно колено, склады-
ваются геометрически с учетом интервала между вспышками в цилин-
драх и порядка гармоники: £]Т—Тс (фиг. 331301). Если склады-
ваются гармоники только сил давления газов (т. е. все, кроме 1-го,
2-го, 3-го и 4-го порядков), то пункты виг отпадают.
422
331302—332001
е) Найденный суммарный век-
тор Тс умножается на площадь
поршня F и радиус кривошипа R
Тин
MK = TCFR.
(2)
( гармоники')
В качестве примера к 331301
Фнг. 331301.
331302
ДЛЯ ТИПИЧНОГО Случая сложения Сложение гармоник, действующих на
гармоник СИЛ, действующих на Одну шейку в V-образном двигателе
одно колено 12-цилиндрового
V-образного двигателя с порядком зажигания 1—5 —3 — 6—2—4 и
углом между осями цилиндров в блоках в 60°, находим:
Интервал между вспышками на одном колене 420°.
Фазовый угол между векторами гармоник fc-того порядка в глав-
ном и боковом цилиндрах равен к 420°.
К 1 «7» 2 2*/. 3 3*/. 4 4'/2 5 5^2 6
Тс 0,145 Г 1,73 Т 1,41 Т Т 1,93Т 0 1,93Т Т 1,41 Т 1,73 Т 0,145 Т 2Т
Для звездообразного двигателя при сложении гармоник без учета 331303
кинематики прицепного механизма все гармоники, кроме гапмоник
главных порядков (т. е. с номером, равным числу вспышек на оборот
колена или кратным ЧИСлу вспышек^/гГ^ нуль.
"Гармоники главных порядков ск^ывают^__^НфмЩ1ЯШ£Иа. так
что в четырехтактном^дтшателе при i цилиндрах на одно колено дей-
ствует M = iTraFR, где Тга берется по формуле 331102 для порядка
с номером
Расчет только по главным гармоникам недостаточен, так как гармо- 331304
ники низких порядков, особенно в двухрядных звездах, могут вызывать
опасные резонансы. i
Такой приближенный расчет может быть полезен при определении
размеров маятниковых противовесов (см. 371000), обычно предназна-
чаемых для борьбы с главными порядками гармоник. В других слу-
чаях следует обращаться к гармоническому анализу тангенциальной
диаграммы.
Для двигателей дизеля весь расчет Тс такой же, но гармоники 331305
газовых сил Тт для приближенных предварительных расчетов следует
брать по фиг. 331101-11.
Силы, демпфирующие крутильные колебания
332000
Силы сопротивления (демпфирующие силы), возникающие при коле- 332001
баниях, имеют в основном то же происхождение, что и обычные сопро-
тивления двигателя: трение поршней о стенки, трение в подшипниках,
удары в зазорах, воздушное сопротивление вращению винта. Кроме
423
332002—333001
того, переменное кручение вала вызывает потери от внутреннего трения
в металле.
332002 Сопротивления, возникающие при колебаниях в двигателе, на
нерезонансных оборотах невелики и при вычислении амплитуд крутиль-
ных колебаний под действием вынуждающих сил этими сопротивлениями
пренебрегают (см. 333000), если расчетные обороты отличаются от
резонансных на ± 5%.
332003 При резонансе демпфирующие силы вследствие сложности опреде-
ления каждой из действительных потерь в отдельности оценивают неко-
торым суммарным коэффициентом демпфирования (см. 343000).
332004 Влияние демпфирующих сил в резонансе можно оценить, вводя
понятие об амплитуде равновесия. Амплитуда равновесия есть та ампли-
туда, которая установилась бы при условии, что вал деформируется
по форме свободных колебаний под действием очень медленно изменя-
ющихся периодических возбуждающих моментов, т. е. без динамиче-
ского усиления:
. __ MSa
Здесь Sa — векторная сумма относительных амплитуд моторных
масс (принято, что аг = 1);
S/aa — сумма произведений момента инерции каждой массы на
квадрат ее относительной амплитуды для всех масс системы;
А„ — амплитуда первой со стороны нагнетателя моторной массы
(для которой ах=1);
М — возбуждающий гармонический момент;
®е — собственная частота системы.
332005 Истинную амплитуду в резонансе можно ориентировочно определить,
умножая Ао на некоторый коэффициент усиления р, зависящий от сил
демпфирования.
В авиационных двигателях р обычно лежит в следующих пределах:
Р
Однорядные звездообразные двигатели........10 — 20
Рядные двигатели (двухузловая форма).......20 — 40
Рядные двигатели с очень малой жесткостью участка
винт — редуктор (двухузловая форма) . . .10 — 20
Рядные двигатели (трехузловая форма).......40 — 60
Меньшие значения р относятся к резонансам сильных гармоник,
большие значения Р—к резонансам слабых гармоник (несмотря на боль-
ший коэффициент усиления, вследствие того, что величина Ао при сла-
бых возбуждениях мала, бблыпим значениям р в результате обычно
соответствуют более слабые резонансы).
РАСЧЕТ ВЫНУЖДЕННЫХ КОЛЕБАНИЙ
uvuvVV
333001 Если торсиографирование в период доводки двигателя покажет
на используемых оборотах близость резонанса, который должен насту-
пить за пределами используемых оборотов, или окажется, что на одной
записи резко выступает, кроме резонирующей гармоники, еще какая-
либо другая, т. е. двигатель работает при значительном возбуждении
одновременно двух форм колебаний, то для оценки напряжений нужно
424
333002-333005
провести расчет вынужденных колебаний, так как пользование одной
формой собственных колебаний (см. 340000) в этом случае недостаточно
точно. Расчет вынужденных колебаний нужен также при проектирова-
нии маятниковых демпферов.
Для основных заметных на торсиограмме гармоник порядка т, п, ..., 333002
при угловой скорости вращения вала на рассчитываемом режиме 2 про-
водится расчет таблиц по методу подбора «вперед» и«назад», как пока-
зано ниже (см. 351002) для = ®n = nQ и т. д.
Для тех же порядков т, п, ... определяют гармоники момента,
возбуждающего колебания: Мт, Мп, ...
Отклонение i-той массы системы под действием момента, приложен- 333003
ного к Л-й массе, будет
для i < к
Aiik = ai^(ak}, (1)
для i > к
Ai;k^(ai)^ak. (2)
Амплитуда отклонения i-той массы есть геометрическая сумма 333004
отклонений под действием моментов, приложенных к различным коленам
двигателя, т. е. найденных по формулам (1) и (2) при изменении к по
номерам колен:
для Г < к
0)
для I > к
' 2 а.»<2)
Суммирование произведений а (а) удобно производить по следующей 333Q05
форме:
ФОРМА ТАБЛИЦЫ ДЛЯ РАСЧЕТА ВЫНУЖДЕННЫХ ОТКЛОНЕНИЙ
425
333005-333007
Для гармоники порядка р расположение векторов берется по схеме
фиг. 342104 или подобной ей.
Из таблицы для ® = pQ заполняют горизонтальные строки (ак)
и ак и вертикальные столбцы (af) и а, —первая и восьмая графы.
На пересечениях вертикальных и горизонтальных строк выписы-
вают произведения а, (а*) и {а^ак. Эти произведения суммируются
геометрически в соответствии со схемой векторов в правом углу
таблицы; сумма вносится в графу ^а(а). Фазовый угол этой суммы
относительно вектора первого колена вносится в графу <р.
Вращение векторов и отсчет фаз —против часовой стрелки.
333006 Форма вынужденных колебаний под действием одной гармоники
порядка т получается умножением суммы а, (а*) и (at)ak, т. е.
Л4
на для различных i и по этой форме подсчитываются деформации
и напряжения от вынужденных колебаний.
333007 - В случае, если нужно найти напряжения от двух или большего
числа гармоник, необходимо построение теоретических торсиограмм для
масс на концах участка, на котором требуется определить напряжение.
Для вычисления амплитуд и фазовых углов гармоник удобно пользо-
ваться следующей формой:
ФОРМА ТАБЛИЦЫ ДЛЯ РАСЧЕТА ВЫНУЖДЕННЫХ ОТКЛОНЕНИЙ (ВТОРАЯ)
Порядок гармо- ники Р м кгсм R кгсм м т~ R (а) Арад — = т 2 а (а) Фаза мо- мента s° Фаза Ха (а) Фаза отклонения а° = s° + <р°
При заполнении таблицы остаточный момент R выписывается со
м
своим знаком + или— . Масштабу т = не приписывается знак, но
для R<0 в графе «Фаза момента» угол е°, находимый из гармони-
ческого анализа кривой крутящего момента (или тангенциальных сил),
нужно увеличить на 180°.
Сложение гармоник вынужденных колебаний удобно производить
графическим путем. Для этого вычерчивают синусоиды порядков т, п
и т. д. с учетом фазы а, которая слагается из фазы момента, находи-
мой из анализа е° и фазы У, а (а), обозначенной в таблице <р°, относи-
тельно вектора момента на 1-ом колене
а ° = з° -f-9°.
Сложение ординат синусоид рекомендуется производить через
каждые 15° или 10° угла поворота кривошипа.
426
333008-333009
Для определения деформаций участка z; /4-1 строят теоретические 333008
торсиограммы z-той и/4-1-й массы и вычитают ординаты одной торсио-
граммы из другой через каждые 10° или 15° угла поворота кривошипа.
Если максимальная деформация + ?i и минимальная — <р2, то сред-
1 Ф1Ц- Ф<*
няя амплитуда деформации <? =2~ ’ а момент сил упругости
My = Ci; 1 + 1<Р
и напряжение
Если в число складываемых гармоник входит также и резониру- 333009
ющая, то амплитуду ее следует найти гармоническим анализом из
торсиограммы или при расчете до торсиографирования по формуле 342303.
Если из анализа записи эта амплитуда Ат, то для остальных масс
Фаза этой резонирующей гармоники отклонения на 90° меньше
фазы возбуждающего резонанс гармонического момента, т. е.
Ярез =s-f<p — 90°.
Относительные амплитуды af, ат берутся из форм колебаний по
таблице метода подбора для частоты возбуждаемой резонансом формы.
340000 - 341002
340000 ОЦЕНКА НАПРЯЖЕНИЙ ПО ФОРМЕ КОЛЕБАНИЙ ПРИ
РЕЗОНАНСНЫХ ОБОРОТАХ ВАЛА
341000 ОПРЕДЕЛЕНИЕ РЕЗОНАНСНЫХ ОБОРОТОВ
341001 Резонансные или критические обороты определяются по формуле
пРеа=~к ’
где А —порядок гармоники к обороту, а пе —число собственных коле-
баний.
Так как обычно в области используемых оборотов двигателя могут
возбуждаться первые три формы колебаний, а число существенных
гармоник равно 9—12, то число резонансов очень велико, но только
немногие из них сопровождаются значительными колебаниями,
т. е. создают опасные критические обороты.
341002 Для определения положения резонансов, в особенности в системах,
в которых пе изменяется с изменением оборотов (например, в системах
Фиг. 341002.
Определение резонансных чисел оборотов
с маятниковыми противовесами), удобно пользоваться следующей частот-
ной диаграммой: в координатах п (об/мин) и пе (кол/мин) числа соб-
ственных колебаний изображаются горизонтальными прямыми (для
428
342000 -342104
обычных систем) или кривыми (для систем с маятниковыми противове-
сами). Число колебаний, вызываемых при п об/мин гармоникой к-того
порядка, будет кп, т. е. представится наклонным лучом с угловым коэф-
фициентом к. Пересечение лучей гармоник с прямыми или кривыми пе,
когда пе — кп, определяют положение резонансных оборотов на оси аб-
сцисс (фиг. 341002).
УРАВНЕНИЕ РАБОТ
В резонансе устанавливается равновесие между подводом энергии
колебаний в систему и рассеянием этой
ния. Амплитуда колебаний, при кото-
рой устанавливается такое равновесие
Арез, зависит от закона демпфирования,
т. е. от протекания кривой и от ве-
личины вносимой в систему энергии 1УВН
(фиг. 342001). Выражения работы за
цикл 1Уд и Wbh содержат амплитуду
Арез, которая определяется из уравнения
WBH
Фиг. 342001.
Схема, поясняющая уравнение работ
энергии силами сопротивле-
Таким образом для определения амплитуд колебаний в резонансе
необходимо найти 1УВН и IVд.
Сумма работ возбуждающих моментов IVBH
Гармонические моменты действуют на различные колена вала со
сдвигом по времени. Если синусоиду изменения момента по времени
строить с помощью вращающегося вектора, то угол, образуемый векто-
ром в наклонном положении при Л—О с горизонталью,— фазовый угол
или фаза момента, —будет различным для различных колен и разных
порядков.
При подсчете работы, совершаемой гармоникой какого-либо порядка
на всех коленах двигателя, диаграммы крутящего момента на всех
коленах считаются одинаковыми. Это приблизительно верно для гармо-
ник высоких порядков, но для низких гармоник (1/2-го, 1-го, 1 1/2-го
порядка) при неравенстве нагрузок по цилиндрам моменты могут раз-
ниться значительно и соответственно давать большую общую работу
и амплитуды колебаний, значительно превышающие расчетные.
При эксплоатационных нарушениях нормальной работы (замасливание
свечей, перебои в работе магнето, детонация в отдельных цилиндрах)
амплитуды колебаний могут возрастать в 3—4 раза.
Сдвиг между диаграммами тангенциальных сил по времени соот-
ветствует чередованию вспышек.
ЙУгол между векторами гармоник равен интервалу между вспыш-
342000
342001
342100
342101
342102
342103
342104
429
342104
ками на различных коленах (выраженному в градусах угла поворота
кривошипа), умноженному на порядок гармоники.
Например (фиг. 342104, а) в 12-цилиндровом V-образном двигателе
с порядком зажигания по коленам 1—5—3—б—2—4 сдвиг между нача-
лом диаграммы крутящего момента на 1-ми 5-м коленах составит 120°
по углу поворота коленчатого вала или одну шестую от полного цикла
двигателя,- охватывающего два оборота вала; этому соответствует на
фиг. 342104,6 угол 60° между векторами 7 и 5, так как окружность
кривошипов
Z'/s-S’/g-.S’/g ~гарп Згб-; 9 ~гарп.
Фиг. 342104.
Фазовые диаграммы моментов на коленах 12-цилиндрового
V-образного двигателя
соответствует здесь циклу (т. е. 720° по углу поворота вала). Это рас-
положение векторов соответствует, следовательно, сдвигу фаз между
основными периодами диаграммы, т. е. между первыми гармониками
цикла, обозначенными, как гармоники 1/2-го порядка (к обороту).
Векторы гармоник 1-го, 1 112-го и т. д. порядков должны вращаться
для построения синусоид соответствующих порядков с двойной, тройной
и т. д. скоростью; поэтому фазы между ними получаются умножением
углов первой схемы фиг. 342104,6 на 2, 3, 4 и т. д.
Получающиеся диаграммы расположения векторов моментов для
12-цилиндрового V-образного двигателя показаны на фиг. 342104,6.
430
342105-342108
Синусоидальный момент М, приложенный к массе, совершает на 342105
синусоидальном угловом пути этой массы с амплитудой А за один
цикл колебаний работу г. МА sin г, если г—фазовый угол между вектором
момента и вектором пути.
В резонансе з = 90°. Следовательно, в резонансе для одномассовой 342106
системы =
В системе из нескольких масс, к части п которых приложены 342107
гармонические моменты одного порядка, отклонение какой-либо z-той массы
складывается из отклонений, вызываемых каждым из этих моментов.
Суммарное отклонение z-той массы образует фазовый угол е,- с момен-
том Mit приложенным к этой массе. Поэтому работа всех п моментов
будет
i = n
1=1
В резонансе отклонения устанавливаются так, что фазы масс 342108-
равны 0° или 180°, а работа моментов, вносимая в систему, т. е. сумма
Фиг. 342103.
Определение векторной суммы
431
342109-342202
Отсюда вытекает, что сумма проекций должна рав-
няться геометрической сумме Л4гА,- (фиг. 342108), а вектор этой суммы
будет перпендикулярен к направлению вектора отклонений.
Принимая во внимание 342102, можно написать:
i=l i=l
342109 С достаточной для практики точностью можно считать, что в резо-
нансе форма вынужденных колебаний не отличается от формы собствен-
ных колебаний, т. е. ]
—1 = ^» =...== ^5, /п
01 Л* On, v 4
где А — истинные вынужденные амплитуды и а — относительные
амплитуды из таблиц метода подбора для собственной частоты юе.
Следовательно,
WBH — тс AfS А, = тс MAt 2 (2)
так как
= • •Н? ) = -* (•>
Таким образом при определении работы моментов за цикл нужно
сложить геометрически относительные амплитуды а моторных масс
(отнесенные к амплитуде аг), расположив эти амплитуды как векторы
моментов складываемого порядка (см. фиг. 342104).
342200
Работа сил демпфирования в резонансе
342201 Принимают, что сила демпфирования пропорциональна скорости
колебания, т. е. Л4 = Ч где S—коэффициент демпфирования для
одного колена в кг см сек.
342202 При амплитуде колебаний колена Af амплитуда скорости коле-
бания будет а>Аг, и работа за цикл демпфирующего момента, при-
ложенного к i-той массе (так как вектор скорости перпендикулярен
к вектору пути),
1Уд = тсА,Л4д = тс^А1.
(1)
В резонансе при а> = ®е для п моторных масс
i —п
1УД = 2 «Ч А* = тсЧ Af (2)
i = l
432
342300-343003
Определение резонансной амплитуды 342300
Из равенства 1УВН=1У^ получаем на основании формулы (2)
п. 342109 и формулы (2) п. 342202:
it МАг 2 « = «ЦЛ» 2 “*♦
Отсюда
Здесь 2 «<—геометрическая сумма относительных амплитуд Мотори-
ных масс и Аг — амплитуда первой моторной массы. Обычно в расчете
di
не вычисляют относительных амплитуд -ь, а пользуются значениями
аг,... и т. д. из таблицы. В таком случае все значения амплитуд
будут в а, раз больше, чем при ^=1, и формула(1) должна быть из-
менена так:.
л —
-----———-
(2)
в общем виде
Аг =
ОПРЕДЕЛЕНИЕ КОЭФФИЦИЕНТА ДЕМПФИРОВАНИЯ 343000
ДЛЯ ОДНОГО КОЛЕНА
Коэффициент демпфирования у. представляет силу сопротивления 343001
колебаниям в кг, отнесенную к 1 см* площади поршня и скорости коле-
бания на радиусе кривошипа в 1 см[сек
Для одного колена, если сумма площадей всех связанных с ним 343002
поршней Fe и скорость колебания на радиусе кривошипа V, сила
демпфирования будет
следовательно,
Ma = PsR=^FcR'«>,
отсюда
5 = (1)
(в V-образном двигателе Fc —2F, в звездообразном с i цилиндрами
в ряду Fc = iF).
Рекомендуется пользоваться для каждого семейства двигателей 343003
опытными значениями р-, найденными по результатам торсиографиро-
вания (см. 360000).
28 Авиац. порши, двигатели.
433
344000—344006
При проектировании новых типов можно принимать: для рядных
V-образных двигателей:
при двухузловой форме колебаний......................ц=0,001
» трехузловой » » ............ц= 0,0015—0,003
для звездообразных двигателей........................ц=0,002
Оценка демпфирования одноузловой формы по формуле 342300
ненадежна.
Приведенные значения коэффициентов демпфиррвания пригодны
лишь для ориентировки. Во многих случаях они дают расчетную цифру,
сильно отличающуюся от опытной, получаемой при торсиографироваьии,
так как действительные потери энергии при колебаниях слагаются
из нескольких потерь, из которых многие не пропорциональны скорости
(как это было принято выше).
Другой приближенный способ оценки демпфирования [15] см.
в 332000.
344000 ОПРЕДЕЛЕНИЕ НАПРЯЖЕНИЙ ПО ФОРМЕ КОЛЕБАНИЙ
344001 В резонансе всеми гармониками, кроме резонирующей, можно пре-
небречь, если создаваемые резонирующей гармоникой напряжения зна-
чительны. (Значительными можно считать напряжения то>350 кг/смг).
Для резонирующей гармоники вызываемые ею деформации можно
брать по форме собственных колебаний.
344002 Найденная по формуле (3) п. 342300 амплитуда колебаний дает
масштаб формы, так как А/ = A, at.
344003 Для расчета напряжений, пользуясь таблицей метода подбора для
частоты ше, находят момент сил упругости на участке г, i +1
Afy=et; f+1 (Ci+i — c.) A,.
344004 Наибольшие напряжения в эквивалентном вале возникают на
участках с наибольшей деформацией, т. е. на участках, где формы
колебаний протекают наиболее круто.
Однако в действительном вале напряжение отличается от напря-
жения эквивалентного вала в (7-)* раз, и наиболее напряженным
может оказаться участок с менее крутым протеканием формы колебаний.
Если вал имеет сверление, то отношение напряжений равно
a (
d0 < J'
344005 к Если участок вала, для которого определяют напряжение, в дей-
ствительной системе находится на вале Ь, связанном с коленчатым
валом а через передачу, то нужно найденный в 344003 момент умно-
жить на величину, обратную передаточному числу, т. е. на
М' = Afy
344006 Амплитуда переменного напряжения кручения находится по формуле
0)
434
344007- 344008
где W—момент сопротивления наиболее слабого участка действитель-
ного вала на отрезке z; z-|-l (см. 344003).
По формуле (1) определяются напряжения кручения в опорной
и приближенно в шатунной шейках. Для щеки передаваемый через
нее крутящий момент является изгибающим. Поэтому (см. фиг. 311114)
W И = —
щеки — g •
м
Нормальное напряжение щеки сь— не определяет обычно прочности
вала, так как наиболее опасны места концентрации (входящий угол
у шейки или вблизи него), где сь равно нулю или мало. Кроме того,
щеки скручиваются силами Т и их реакциями (см. 200000).
Рассмотрение формы колебаний показывает, что в местах располо-
жения сосредоточенной массы наступает изменение наклона, соответ-
ствующее приложению нагрузки к шатунной шейке. Тангенциаль-
ная сила Tt, действующая при крутильных колебаниях на i-тую
шатунную шейку, равна
-у- !Mi; i+l ~ Mi-i; г
Эту силу можно ввести в расчет, изложенный в 200000, и таким
образом учесть влияние крутильных колебаний на запас прочности.
Так как запас прочности вала зависит от многих факторов, конструк-
тивных и технологических, то предельно допустимые величины запаса
прочности определяются на основании динамических испытаний и упо-
мянутых расчетов (см. 200000),
При отсутствии для рассчитываемого вала результатов испытаний
рекомендуется пользоваться основанными на статистике поломок валов
предельно допустимыми напряжениями кручения для валов из авиа-
ционных валовых сталей (аь= 100—НОкг[мм2)
та = ± 600 кг {см2 или ta = ± 840 кг/см2.
Меньшая цифра относится к валам старых форм, имеющим малые
галтели, прямоугольные щеки, простые сверления.шатунных шеек и т. п.
Большая цифра [15] относится к валам с большими радиусами галте-
лей, бочкообразными сверлениями шеек> чисто обработанными сверлениями
для масла со скругленными краями и тому подобными особенностями,
уменьшающими концентрацию напряжений.
344007
344008
28*
350000-351002
350000 РАСЧЕТ НЕОБХОДИМЫХ ИЗМЕНЕНИЙ СИСТЕМЫ
И ВЫБОР ДЕМПФЕРА
350001 Если расчетные напряжения в резонансе превышают допустимый
предел, то необходимо предусмотреть изменение системы. Вследствие
того, что расчеты со средними справочными значениями коэффициента
демпфирования дафт лишь приблизительные напряжения, обычно
изменения вносят в систему после торсиографирования опытного
двигателя.
350002 Из-за невозможности существенно изменить моменты инерции основ-
ных деталей, смещения числа собственных колебаний добиваются изме-
нением жесткостей:
для одноузловой формы — рессоры или пружины ведущей шестерни
нагнетателя;
для двухузловой формы—вала винта или носка коленчатого вала;
для трехузловой формы — носка вала и колена (за счет изменения диа-
метра внутренних сверлений, толщины щек или даже] диаметра шеек).
351000 ФОРМУЛЫ ИЗМЕНЕНИЯ МЕТОДА ПОДБОРА
351001 Задавшись желаемой собственной частотой системы, просчитывают
таблицу метода подбора для этой частоты два раза: от 1-й массы
до л-й и от л-й до 1-й (см. 351002).
351002 Для нахождения изменения момента инерции z-той массы или жест-
кости участка z; i 4-1, нужного для того, чтобы частота в таблице
стала собственной частотой системы, таблица метода подбора просчиты-
вается два раза: вперед от 1-й массы до л-й и назад—от л-й массы
до 1-й. Величины из расчета назад отмечаются круглыми скобками
(fli); (б’; i+l)>
(«) № участка е , 2 1 — / <1)2 - с а № массы (а)
436
351003—351004
Основные графы таблицы, т. е. все, кроме граф для (о) и (е), запол-
няются, как изложено в 323104. Расчет назад начинают с правого ниж-
него угла таблицы, положив (0^=1, и ведут так же, как и расчет
вперед, но заполняя графы (е) и (а) снизу вверх.
Находимое в конце в верхнем углу слева (R) равняется R. Это
равенство остаточных моментов при расчетах вперед и назад служит
контролем правильности вычисления (R) = R с точностью, зависящей от
точности вычисления амплитуд и моментов в таблице. При обычных
для авиационных двигателей соотношениях величин достаточно совпа-
дения третьей значущей цифры для R.
Если изменение вносится в момент инерции z-той массы, то
<»
Если изменяется жесткость участка z; z-ф-!, то
1 ____________я
ci; i+i (ei; i+1) ei; i+l®*
Найдя б, или -г-!— , подставляют в таблицу L 4- &.• вместо L или
ci; i+1
—т—---1------— вместо —?— и заканчивают расчет таблицы в части
Ч; i+i с i;i+i ci; i+1
от z'-той до л-й массы, чтобы определить форму колебаний измененной
системы.
Желательное смещение пе. Изменение пе смещает все резонансы на 351003
новые обороты. При этом могут быть опасными новые гармоники кру-
тящего момента.
а) Рекомендуется сохранять по возможности не меньше, чем
10%-ный интервал между постоянно используемыми числами обо-
ротов и резонансными.
б) Рекомендуется располагать нежелательные резонансы выше исполь-
зуемых оборотов, чтобы избежать прохода через резонанс.
Оба требования (а и б) в авиационном моторостроении выполнить
трудно. Компромиссное решение состоит в выполнении указанных
требований для наиболее сильных резонансов, в то время как второ-
степенные резонансы располагаются близко к используемым обо-
ротам.
Например, в однорядном звездообразном двигателе с 7-ю цилиндрами
стараются избежать резонансов гармоник 1; 2; 3 х/в; 7.
В рядном 12-цилиндровом V-образном двигателе с порядком зажи-
гания 1 — 5 — 3 — б — 2 —4 стараются избежать резонансов 1 */я; 2; 21/г\
3; 47s; б; 77s гармоник.
Наиболее опасными являются гармоники, для которых велики М 351004
и в формуле (3) п. 342300. Следует помнить, что допущение о равен-
стве М по отдельным коленам на практике не оправдывается, и дей-
ствительная геометрическая сумма +-*Мгаг +-*М3а3 ... может зна-
чительно отличаться от М 3 а- Опыт показывает, что это особенно верно
в отношении гармоник низких порядков (Р/а; 2; 21/3 при порядке зажи-
гания 1 — 5—3 — б — 2 — 4).
437
352000-352003
352000
ВЫБОР демпфера
352001 В авиационных двигателях употребляют демпферы трения жидкост-
ного или полусухого типа и динамические (маятниковые).
352002 Демпфер трения (например, типа Аллисона или Юнкерса) должен
ставиться на участок вала, который сильно деформируется, чтобы обес-
печить достаточный путь для силы трения.
Эти демпферы состоят из двух частей, относительное перемещение
которых соответствует закрутке вала, и должны поэтому ставиться на
участках а или б (фиг. 352002). Одна часть демпфера соединена с массой
на одном конце участка, другая — с массой на другом конце.
Фиг. 352002.
Схема к выбору положения демпфера
^Демпферы этого типа пригодны для уменьшения резонансов двух-
узловой формы, так как при этих резонансах абсолютная величина
колебаний моторных масс обычно достаточна, чтобы обеспечить большой
путь силам трения.
Для одноузловой формы удается обычно ограничиться изменением
системы, выводящим резонансы вниз за нижний предел используемых
оборотов. Если все же необходим демпфер, то для воздействия на эту
форму демпфер трения должен стоять на участке б.
352003 Динамический демпфер применяется для устранения колебаний
как двухузловой, так и трехузловой формы. И в том и в другом случае
демпфер эффективен, если вносит существенное изменение в форму коле-
баний. Установка маятникового демпфера равносильна помещению
в месте его подвески массы с большим моментом инерции (положитель-
ным или отрицательным). Следовательно, помещение демпфера вблизи
таких уже имеющихся масс с очень большим моментом инерции—вблизи
узла—не вносит ничего существенно нового в систему. Маятниковый
противовес около винта, например, бесполезен.
Таким образом динамический демпфер должен помещаться вдали
от узла системы, в точке с большой амплитудой.
438
352004—353002
Те же рассуждения применимы и к формам колебаний звездообраз-
ных двигателей, где особенно удобно применение маятников.
Если резонанс двухузловой формы вызывается, как обычно, гармо-
никами довольно низкого порядка, то в рядном двигателе маятнико-
вый противовес с бифилярным подвесом на двух пальцах в виде
качающегося противовеса может оказаться конструктивно невыпол-
нимым.
В этом случае можно выполнять маятниковый противовес в виде
отдельного агрегата на фланце, поместив его на хвосте коленчатого вала,
или же прибегнуть к демпферу трения.
При трехузловых колебаниях маятниковый противовес окажет необ-
ходимое значительное влияние на форму колебаний при помещении его
в сечениях с большой амплитудой колебаний, т. е. в сечениях в или г
(фиг. 352002).
В двухрядных звездообразных двигателях по тем же соображениям
наивыгоднейшим местом для маятникового противовеса оказывается
передняя или задняя щека, но при очень жесткой носовой части задняя
щека выгоднее, чем передняя.
В сложных системах или в установках с удлиненными валами
при выборе рода и места расположения демпфера нужно руковод-
ствоваться также формой колебаний, как изложено в предыдущих
пунктах.
Рекомендуется при проектировании двигателя иметь в виду возмож-
ное в будущем помещение демпфера на переднем или заднем конце колен-
чатого вала (наиболее вероятные места расположения демпфера).
НЕЛИНЕЙНЫЕ СИСТЕМЫ
Для избежания опасных резонансов иногда прибегают к введению
в систему вала упругой муфты с нелинейной характеристикой.
На фиг. 353002,/ показана характеристика участка вала, на котором
стоит муфта с пружинами, вставленными с предварительным сжатием.
Пока колебания невелики, деформируются только вал и части муфты,
кроме пружин.
Когда момент, передаваемый муфтой, превзойдет Ма, при колеба-
ниях будут работать и пружины. Для очень больших значений <рь харак-
теристика нелинейного участка мало отличается от ab: жесткость системы
мала и частота ее колебаний низкая.
При колебаниях, меньших <ра, система жесткая (линейная) и частота
ее высока. Для такой нелинейной системы вместо обычной резонансной
кривой получается кривая, показанная на фиг. 353002, II.
Для жесткой (линейной) системы получилась бы кривая, показан-
ная пунктиром. При работе на двигателе по достижении величины коле-
баний, отмеченной точкой с, амплитуда увеличивается скачком (точка d)
и при дальнейшем увеличении числа оборотов понижается.
Ветвь кривой се неустойчива, точки на ветви de хотя и возможны,
особенно при переходе с больших оборотов на малые, но практически
тоже не наблюдаются. По записанным на двигателе торсиограммам с нели-
нейной муфтой рассматриваемого типа резонансная кривая имеет харак-
терный вертикальный подъем cd и пологий спуск, как показано
на фиг. 353002, III.
352004
352005
352006
352007
352008
353000
353001
353002
439
353002
Действие нелинейной муфты двоякое: она практически ограничи-
вает амплитуду значением, которое получается в точке скачка d, и сдви-
гает положение максимума от а к cd (фиг. 353002, II).
Возможна нелинейная характеристика другого типа, например,
при резиновых элементах в муфте, когда система с увеличением амплитуды
становится жестче. Тогда кривая фиг. 353002, II отклоняется от резо-
нансной кривой линейной системы не влево, а вправо.
Резонансная кривая нелинейной системы
Значительные изменения, вносимые нелинейной муфтой в резонанс-
ную кривую, можно использовать для исправления неблагоприятной
характеристики крутильных колебаний. Этот метод с успехом приме-
няется, например, в семействе двигателей ВК.
Расчет колебаний многомассовой нелинейной системы труден. Суще-
ствуют методы, позволяющие произвести расчет колебаний для любой
заданной периодической кривой момента [6], и приближенные методы,
учитывающие только одну гармонику и постоянный момент [4].
Опубликованы также упрощенные методы (см. например [4]), но
к результатам расчетов по ним в приложении к двигателю нужно отно-
ситься очень осторожно. Во всяком случае обязательна проверка расчета
торсиографированием. При недостаточно благоприятном результате сле-
дует изменить систему, меняя жесткость пружин или их затяжку, или
и то и другое.
360000-361101
ТОРСИОГРАФИРОВАНИЕ
Для получения действительных критических оборотов двигателя
и напряжений при них записывают крутильные колебания вала с помощью
торсиографа.
Все новые типы двигателей или модификации существующих типов,
а также комбинации серийных типов с новым приводом к винту или
с новым винтом должны подвергаться торсиографированию.
В авиационном моторостроении применяются два типа торсиографа:
механический, основанный на сейсмическом принципе, с записью на цел-
лулоидной ленте, и электрический, индукционный датчик которого тоже
основан на сейсмическом принципе, с записью колебаний на осцилло-
графе.
ПРОВЕДЕНИЕ ОПЫТА
Устройство торсиографа
Торсиограф состоит в основном из двух частей (фиг. 361101): А—
соединяемой жестко (фланцем) с фланцем хвостовика коленчатого вала,
360000
360001
360002
360003
361000
361100
361101
и В—сейсмической массы, сидя-
щей на шариковом подшипнике,
напрессованном на А. Часть А
вращается и колеблется вместе
с валом, а сейсмическая масса В
увлекается во вращение мягкими
цилиндрическими пружинами, со-
единяющими ее с А, но практиче-
ски не колеблется, сохраняя при
установившемся режиме почти со-
вершенно равномерную угловую
скорость вращения. Запись коле-
баний А относительно В пред-
ставляет собой запись отклоне-
ний коленчатого вала от положе-
ния, соответствующего равномер-
ному вращению. Фиг. 361101.
На В укреплено перо С (ал- Торсиограф
мазное); на А—две катушки: пас-
сивная/) с намотанной на нее целлулоидной лентой, и ведущая, торцевые
диски которой выполнены в виде червячного колеса Е. Перематывание
ленты с D на Е производится в момент записи с помощью червяка F
441
361200-361303
и таким образом запись колебаний алмазом на ленте развертывается
по времени. Червяк F укреплен на кожухе G и вместе с ним свободно
сидит на оси торсиографа. Для перематывания ленты при записи кожух G
тормозят с помощью тормоза, охватывающего выступ на G. Тогда чер-
вячное колесо, обкатывая неподвижный червяк, вращается и перематы-
вает ленту. На части А находятся также два электромагнитных реле
(на фигуре не показаны), на якорях которых (шарнирных пластинках)
укреплены алмазные перья для записи отметок времени и оборотов.
Перо отметки оборотов прикасается к ленте через каждые полоборота
червячного колеса (в обычном торсиографе механического типа это соот-
ветствует 10 оборотам коленчатого вала). Замыкание контакта реле от-
метки оборотов производится кулачковой шайбой (с двумя кулачками),
привинченной к червячному колесу. Перо другого реле подводится к
ленте через каждые 0,25—0,1 сек.; замыкание контакта этого реле
производят контактные часы, находящиеся так же, как и источник тока
для питания обоих реле, вне торсиографа. Подвод тока к реле происхо-
дит через кольца и щетки, находящиеся в щеткодержателе Н.
361200 Выбор] места для установки механического’торсиографа
361201 Для получения поддающейся расшифровке записи необходимо поме-
щать торсиограф в такой точке вала, где амплитуды колебаний доста-
точно велики, т. е. далеко от узла колебаний. Так как расположение
узлов в разных формах различно, то это требование нельзя одновременно
удовлетворить для записи всех форм колебаний.
361202 В рядном 12-цилиндровом V-образном редукторном двигателе с на-
гнетателем торсиограф устанавливается на переднем конце коленчатого
вала, т. е. около малой шестерни редуктора. В этом случае хорошо запи-
сываются двухузловая и трехузловая формы, плохо—одноузловая.
361203 Если двигатель не имеет нагнетателя с механическим приводом
(снабжен трубокомпрессором), то торсиограф ставится на хвостовике,
запресованном в задний конец коленчатого вала.
Такая же установка иногда оказывается возможной и в звездообраз-
ном двигателе с нагнетателем. В этом случае хорошо записывается также
и одноузловая форма.
36I3Q0 Электрический торсиограф
361301 В случае применения электрического торсиографа датчики можно
поместить внутри коренных шеек вала в любом месте по длине вала или
на конце вала.
361302 Рекомендуется установка двух датчиков: в переднем конце вала для
получения хорошей записи двухузловой и трехузловой форм и в зад-
нем конце—для записи также одноузловой формы и контроля записи
переднего датчика.
361303 Датчик электрического торсиографа (фиг. 361303, J) состоит из метал-
лического корпуса А, закрепляемого на вале по его оси снаружи или
в опорной шейке. Магнит С связан слабой пружиной с корпусом. При
вращении и колебаниях корпуса вместе с валом магнит С (сейсмическая
масса) вращается почти равномерно, и в обмотке В возникает электро-
движущая сила, пропорциональная скорости колебания. От корпуса
442
361304-361306
и контакта D напряжение подается на усилитель (фиг. 361303,//), снаб-
женный специальными интегрирующими (фиг. 361303, III) и дифферен-
цирующими (фиг. 361303,IV) контурами, которые позволяют записы-
вать углы колебаний, угловые скорости и ускорения.
Этими контурами можно пользоваться также и для проверки состоя-
ния прибора. Для этого сигнал датчика (скорость) подают на дифферен-
цирующий контур (ускорение), а затем последовательно на интегрирую-
/7 • V
> (^/велико/ S
S -Чэ
I К усилителю
-j- Сг/белико/
\Сг/мало/
К усилителю
Rz/мало/
Интегрирование О Дисреренциробание b
JRi/белико/
К усилителю
РгАлало/
Функция С
Фиг. 361303.
Схема электрического торсиографа
щий (снова скорость) и сравнивают непосредственный сигнал с прошед-
шим через два контура. В случае совпадения формы кривых скорости
можно переходить к нормальной записи (с интегрирующим контуром).
В электроторсиографе к усилителю иногда добавляется анализатор 361304
в виде системы фильтров, которую можно настроить на пропуск определен-
ной частоты. Установив фильтр на частоту какой-либо формы колебаний
и изменяя обороты двигателя, можно найти выделенные амплитуды резо-
нирующих гармоник при разных критических оборотах.
Ток от датчика отводится к усилителю с помощью токосъемных 361305
колец и щеток. Размещение токосъемника представляет иногда конструк-
тивные трудности.
В рядном двигателе удобнее всего размещать токосъемник на перед-
нем конце коленчатого вала. В звездообразном двигателе с соосным
редуктором передний конец недоступен и может понадобиться изго-
товление специальной шестерни привода нагнетателя для размещения
токосъемника на заднем конце вала.
Для тарировки датчиков применяются устройства, дающие опре- 361306
деленную амплитуду колебаний [15].
443
361400-361504
361400 Привод к механическому торсиографу
361401 Для получения неискаженной записи торсиограф должен быть как
можно более жестко связан с валом двигателя. Запрессованный в коленча-
тый вал хвостовик с фланцем для торсиографа нужно выполнять малой
длины и большого диаметра (желательно d > 30 мм для обычного тор-
сиографа механического типа).
361402 Если момент инерции торсиографа без сейсмической массы /т и пред-
полагаемая частота колебаний высшей исследуемой формы <ое, то во избе-
жание искажений записи должна быть осуществлена жесткость привода
торсиографа ст, удовлетворяющая условию
c>g 2<bg/T,
361403 Если конструктивное выполнение 361402 невозможно, то при обра-
ботке торсиограммы необходимо учесть искажение записи
Здесь A!t — исправленная амплитуда гармоники;
Л, — опытная амплитуда;
® — частота этой гармоники
361404 В тех случаях, когда деталь, в которую запрессован хвостовик
с фланцем, соединена с коленчатым валом шлицами, соединение должно
быть выполнено без зазоров в тангенциальном направлении (подбор
и притирка, хромирование шлиц и притирка их и т. п.).
361405 Перпендикулярность фланца для крепления торсиографа к оси
коленчатого вала и отсутствие радиального смещения оси фланца должны
быть обеспечены конструктивными мерами. Допустимое радиальное
биение центрирующего выступа фланца 0,02 мм.
361500 Установка торсиографа
361501 При установке торсиографа на фланце хвостовика биение оси тор-
сиографа, измеренное на свободном конце оси, не должно превышать
0,05 мм.
361502 Щеткодержатель должен быть скреплен с неподвижными частями
двигателя так, чтобы он мог свободно покачиваться в плоскости враще-
ния на 20—30°.
361503 Все трущиеся части торсиографа (опорная поверхность Щеткодер-
жателя, ось червяка торсиографа, оси червячного колеса и пассивной
катушки для ленты, червяк и зубья червячного колеса) должны быть
смазаны жидким маслом (костяным или трансформаторным). Смазка
должна часто возобновляться, но не быть обильной. Особенно надо избе-
гать излишка смазки на червяке и червячном колесе во избежание загряз-
нения маслом ленты.
361504 Тормоз должен быть смонтирован так, чтобы не перекашивать при
торможении ось торсиографа. Рекомендуется применять самоцентри-
рующиеся конструкции.
444
361600-361701
Запись 361600
Рекомендуется для каждого числа оборотов (см. 361704) иметь для 361601
обработки участок записи длиной 600—700 мм.
При среднем диаметре намотки ленты на ведущей катушке (чер- 361602
вячном колесе) в D мм, передаточном числе от вала к червячному колесу i
и числе оборотов в минуту коленчатого вала п необходимое время тор-
можения для получения длины записи I находится по формуле
В обычном торсиографе механического типа 1=20, a D меняется от
16 до 30 мм. Для обычной ленты толщиной 0,12 мм, если принять
7=600 мм, получим следующие значения времени торможения для шести
режимов, записываемых на одной ленте (л—число оборотов двигателя
в минуту):
Режимы 1 2 3 4 5 6
t, сек. 13000 п 11800 п 10600 п 9700 п 9000 п 8300 п
Нажатие пера, записывающего колебания, должно быть слабым, 361603
чтобы линия основной записи была тонкой.
Перья записи времени и оборотов должны давать четкую отметку,
для чего следует избегать слишком сильного нажатия их при включе-
нии реле; при слишком большом нажатии соседние отметки могут иметь
неодинаковую длину, что не позволит достаточно точно определить затем
по записи число оборотов двигателя в момент записи.
На каждой ленте рекомендуется немедленно после ее снятия с катушки 361604
записать (стальной иглой): номер ленты, марку двигателя, дату записи,
установку контактных часов (1=0,25 или 1=0,1 сек.), числа оборотов
двигателя (по тахометру), при которых сделаны записи.
Ширина ленты должна точно соответствовать расстоянию между 361605
внутренними стенками червячного колеса: узкая лента может повести
к искажениям записи, так как перо захватывает с собой ленту, сдвигая
ее в пределах зазора (преуменьшению записи).
Программа торсиографирования 361700
Двигатель собирается для торсиографирования в той компоновке, 361701
в которой он будет впоследствии предъявлен на государственные испы-
тания (если это опытный объект) или сдаваться в эксплоатацию (если
торсиографируется серийный двигатель с измененными режимами или
новым винтом).
Характеристики пружин в шестерне редуктора и в приводе нагнета-
теля и их предварительное сжатие, марка свечей и тип карбюратора
должны быть теми же, что и на государственных испытаниях, или, соот-
ветственно, для серийного двигателя—теми же, что и в эксплоатации.
445
361702-362001
361702 Двигатель должен торсиографироваться с тем винтом, с которым
он будет эксплоатироваться.
Предварительное, в период доводки, исследование крутильных
колебаний дает ценный материал для улучшения окончательной харак-
теристики двигателя по колебаниям и может производиться на мулинетке
или тормозном винте.
Однако полученные таким образом характеристики не могут слу-
жить основанием для окончательного суждения о крутильных колеба-
ниях двигателя и должны быть дополнены съемкой при работе двига-
теля на винт.
361703 Съемка торсиограмм производится в следующих условиях:
— при работе двигателя по дроссельной характеристике от самых
низких оборотов, применяемых в эксплоатации, до номинального числа
оборотов;
— при работе по внешней характеристике с номинальным наддувом
в употребительном в эксплоатации диапазоне оборотов;
— при взлетном наддуве, начиная от оборотов на 100 об/мин ниже
и до оборотов на 100 об/мин выше взлетного числа оборотов;
— при режиме пикирования в диапазоне 100 об/мин.
В двигателях с двухскоростным нагнетателем торсиографирование
по внешней характеристике производится также и при работе на второй
скорости.
При наличии особых режимов моторной установки (например, «бое-
вая мощность») торсиограммы снимаются и на этих режимах.
361704 Съемка торсиограмм производится при установившемся режиме через
каждые 25—30 об/мин. Время торможения торсиографа на каждом
режиме определяется по формуле 361602.
361705 Двигатель перед торсиографированием регулируется так, как это
делается при контрольно-сдаточных испытаниях. Не рекомендуется
стремиться к повышенно тщательной регулировке распределения и кар-
бюраторов, которая может повести к недооценке роли низких гармоник
в колебаниях вала исследуемого двигателя при его эксплоатации. С дру-
гой стороны, необходимо, чтобы все оборудование работало нормально,
так как замасливание свечей и т. п. может исказить записи и затруд-
нить обработку.
362000 ОБРАБОТКА ТОРСИОГРАММ
362001 Число оборотов двигателя определяют, обмеряя расстояние между
отметками времени а и отметками оборотов b с точностью до 0,1 мм
(фиг. 362001, /).
Фиг. 362001.
Торсиограмма
446
362002-362005
Тогда, если отметка времени производилась через 0,25 сек., а отметка
оборотов через каждые 10 оборотов,
60
м _ длина минуты в мм иа ленте _ О'29*1' — 9/IAA а
п = длина оборота в мм иа денге = = 2400 У °б/МИН-
Рекомендуется проверять а и b п. 362001, сопоставляя обмеры между 362002
началами отметок и концами их. При малых а и b (первый и вто-
рой режимы записи на ленте) для повышения точности обмера рекомен-
дуется обмерять по 2—3 отметки сразу.
Колебание числа оборотов
Место обмера амплитуды
массы торсиограсра
При обмере нельзя пользоваться участками в начале и конце каждой 362003
записи (длиной 50—100 мм), где лента еще не приобрела полной ско-
рости или уже начала останавливаться.
Для записи обмеров рекомендуется пользоваться следующей формой 362004
таблицы:
Дата опыта: Марка двигателя: Марка винта: Установка контактных часов: ХАРАКТЕРИСТИКА (дроссельная, внешняя . . . )
№ ленты № участка на ленте а мм Ъ мм п об/мин 2Л мм Порядок гармоники А рад.
Число оборотов пишется иглой на ленте в месте обмера. Длина основ- 362005
кого периода колебаний, равная (если двигатель четырехтактный
и отметки на ленте делаются через каждые десять оборотов), накалы-
447
362006-362013
вается циркулем под записью. При этом необходимо выбирать места,
где запись не искажена колебаниями скорости вала двигателя или соб-
ственными колебаниями сейсмической массы торсиографа.
362006 На каждом режиме рекомендуется произвести обмер в трех точках.
362007 Обычно обороты двигателя, полученные обмером записи, расхо-
дятся для одного участка записи на 10—20 об/мин, что связано как
с действительными колебаниями скорости вращения вала, так и с неточ-
ностями записи и ее обмера.
362008 Амплитуда колебаний измеряется микроскопом со столиком, пере-
двигаемым винтом с микрометрической головкой. Обмеряют полную
высоту записи 2а с точностью до 0,01 мм (см. фиг. 362001,1/).
Радиус расположения пера в торсиографе (малой модели) г= 45 мм;
амплитуда Арад =у-
362009 При обмере амплитуд может оказаться невозможным найти
участок ровной записи, т. е. без больших колебаний низкой частоты. Это
бывает, если обороты двигателя по какой-либо причине неустойчивы
(фиг. 362009,1 на стр. 447).
В этом случае можно обмерять амплитуду как расстояние между
огибающими на записи (фиг. 362009, ZZ).
362010 Колебания сейсмической массы торсиографа легко определить по их
частоте (для обычного торсиографа механического типа эта частота
Пт — 350—400 кол/мин.) При частоте колебаний вала ниже 2 пт резуль-
таты замеров уже ненадежны (преувеличение амплитуды).
362011 Там, где запись приближается к синусоидальной, т. е. какая-либо
из гармоник колебаний выступает достаточно резко, порядок этой гар-
моники при обмере амплитуды записывают в таблице, указанной в 362004.
362012 При близости резонансов двух форм на записи могут достаточно
отчетливо выступать две гармоники. В этом случае рекомендуется про-
извести два обмера (фиг. 362009, III): 2ах и 2а2, для того чтобы иметь воз-
можность выявить на резонансной кривой также и резонансы высшей
формы,
362013 По данным обмера строится график амплитуд колебаний в зависи-
мости от числа оборотов двигателя—резонансная кривая (фиг. 362013).
Фиг. 362013.
Резонансная кривая 12-цилиндрового V-образного редук-
торного двигателя
448
362014-363103
Сопоставление чисел собственных колебаний, находимых по резо-
нансной кривой по формуле
пе=кп об/мин,
где А—порядок резонирующей гармоники, может давать разбег значе-
ний пе одной и той же формы для разных к.
Обычно резонансы высоких порядков гармоник (на низких оборотах)
дают несколько более высокое значение пе, чем резонансы низких гар-
моник.
Сопоставление находимого по резонансной кривой пе с расчетным
дает также некоторое расхождение, причем обычно опытное пе несколько
ниже расчетного, так как в расчете не учитывается понижение жестко-
сти носка вала вследствие участия опор в деформации.
РАСЧЕТ НАПРЯЖЕНИЙ ПО ФОРМЕ КОЛЕБАНИЙ
И РЕЗУЛЬТАТАМ ТОРСИОГРАФИРОВАНИЯ
Форма колебаний
Небольшое расхождение между опытным и расчетным пе прини-
мают целиком зависящим от неточности в определении жесткости уча-
стка винт—редуктор.
Для определения формы колебаний, соответствующей опытному
значению пе, рассчитывают таблицу метода подбора для ® = ше до
участка винт—редуктор.
В графе е полагают остаток R — 0, т. е.
/п = йп—1; п (Здесь /п “/винта)-
Затем находят
~ Jno>2 ’ Тп; п-i
и окончательно
1 ?П-1; п
СП-1; П еп-1; П
При подобранном таким образом значении податливости участка
винт—редуктор ——-— таблица для опытной частоты собственных ко-
Сп-1; П
лебаний системы дает форму колебаний, близкую к действительной.
Иногда наблюдаются случаи резкого расхождения опытного и
расчетного пе. Это возможно в следующих случаях:
а) Если возбуждаются сильные колебания лопастей винта, т. е.
если найденная в опыте частота колебаний представляет частоту системы
вал—винт, а не системы вала.
б) Если вследствие деформации опор жесткость носовой части вала
сильно отличается от расчетной и закруткой не определялась.
362014
362015
363000
363100
363101
363102
363103
29 Авиац. поршн. двигатели.
449
363200-363300
в) Если действительная жесткость колена не соответствует расчет-
ной. В этом случае наблюдается сильное расхождение пе только для
трехузловой формы.
В случае а) нужно произвести расчет, учитывающий упругость
лопастей винта, как указано в 380000. Для получения формы колеба-
ний в случае б) рекомендуется применить тот же прием подбора подат-
ливости участка винт—редуктор. В случае в) рекомендуется произве-
сти закрутку коленчатого вала.
363200 Определение напряжений
363201 Масштаб формы дается отношением амплитуды, записанной тор-
сиографом Ат, к относительной амплитуде ат (из таблицы метода под-
бора) для той массы, с которой торсиограф был жестко связан.
363202 Амплитуда Ат берется из резонансной кривой. Запись в пиковой
точке, однако, не бывает вполне синусоидальной, и Ат в резонансе
представляет сумму колебаний от резонирующей и остальных гар-
моник.
Принимая Ат за амплитуду резонирующей гармоники, несколько
преувеличивают масштаб резонирующей формы колебаний и, пользуясь
этой формой, не учитывают влияния возбуждения других форм осталь-
ными гармониками.
363203 Для одноузловой и двухузловой форм при сильных резонансах
пользование Ат без более точного расчета деформаций от нерезониру-
ющих гармоник, как показывает опыт, дает значения напряжений,
близкие к значениям точного расчета, и потому допустимо.
363204 Для трехузловой формы нужно выделить резонансную гармонику
из записи в резонансной точке, измеряя в ряде точек, близких к резо-
нансу, амплитуду этой гармоники, как показано на фиг. 362009, III,
т. е. как расстояние между огибающими, или же путем гармонического
анализа.
При пользовании суммарной Ат из резонансной кривой напряже-
ния, подсчитанные по трехузловой форме, получаются значительно пре-
увеличенными по сравнению с теми, которые дает точный расчет (по
теоретическим торсиограммам).
363205 Момент сил упругости на участке i; i 4-1 определяется по формуле
ат
Напряжения определяются, как изложено в 340000.
363300 Коэффициент демпфирования
Для расчета будущих модификаций того же типа двигателя реко-
мендуется по данным резонансной кривой и гармонического анализа
торсиограммы и тангенциальной кривой определять коэффициент демп-
фирования. Из формулы (3) п. 342300 и формулы (1) п. 343202
находим
_ Mai'S а
И “ FfVAiU'.Sa* '
450
364000-364003
A
Здесь At-dj—— (амплитуды а берутся из таблицы метода под-
бора для ® = »<,), Ат. к — амплитуда гармоники Л-того порядка, выде-
ленная из резонансной торсиограммы гармоническим анализом.
ПРИМЕРЫ ПОЛОМОК ВАЛОВ ОТ КОЛЕБАНИЙ
Поломка валов от крутильных колебаний наступает после многих
часов работы, когда накопится достаточное число изменений напряже-
ний, превышающих предел усталости вала. Нередко поэтому прежде
наблюдались случаи, когда в двигателях, благополучно прошедших
многочасовые испытания на станке, в эксплоатации ломались коленча-
тые валы: общее число часов работы на резонансном режиме на станке
(например, на взлетных оборотах) было недостаточно, чтобы привести
к поломке, в эксплоатации же накапливалась достаточная наработка.
Практика расчета и торсиографирования двигателей с их винтом в пе-
риод доводки устранила опасность того, что сильный резонанс оста-
нется незамеченным. Тем не менее поломки от крутильных колебаний
364000
364001
могут возникнуть вследствие ряда непредвиденных причин.
Рядный 12-цилиндровый V-образный двигатель был благополучен
по крутильным колебаниям. В двигателе вместо деревянных винтов
стали применять металлические. Про-
изошел ряд поломок. Торсиографиро-
вание показало, что у двигателя как
с деревянным, так и с металлическим
винтом имеется сильный резонанс при
эксплоатационных оборотах.
Напряжение от колебаний при
работе с деревянным винтом было
(в носке вала) немного выше 500 кг/см1,
при работе же с металлическим вин-
том 650 кг/см2.
Разница объясняется тем, что де-
ревянные лопасти демпфируют коле-
бания значительно больше, чем метал-
лические. На фиг. 364002 показан
Фиг. 364002.
Резонансные кривые 12-цилиндрово-
го V-образного двигателя с метал-
лическим винтом и с деревянным
винтом
364002
результат торсиографирования этого
двигателя на земле, при котором ме-
таллический винт установили на то же
максимальное число оборотов, что и
деревянный.
Для устранения поломок нужно было бы изменить систему, напри-
мер, смягчить носок вала. В действительности завод вскоре перешел
на редукторную модификацию, что было равносильно смягчению перед-
ней части вала и дало желаемую характеристику крутильных колебаний.
В однорядном 9-цилиндровом звездообразном двигателе, снабжен-
ном маятниковым противовесом на задней щеке, произошло несколько
поломок задней щеки вала. Двигатель был тщательно рассчитан на
крутильные колебания, и противовес, настроенный на 4%-ю гармонику,
устранял единственный опасный резонанс.
Торсиографирование с винтом на самолете показало тем не менее
наличие сильного резонанса 4%-й гармоники (фиг. 364003). Двигатель
364003
29*
451
364004
разобрали и обнаружили сильный на-
клеп на хвосте щеки и стенках паза
противовеса.
Противовес, следовательно, уда-
рялся о щеку и защемлялся: маятни-
ковый демпфер не работал. Защемле-
ние вызывалось значительными, хотя
еще не резонансными, изгибными ко-
лебаниями вала. Для устранения
поломок сделали качающимся также
передний противовес. При этом изме-
нилась характеристика изгибных коле-
баний и уменьшились в два раза
амплитуды колебаний маятников (так
как при том же моменте 4^2-го по-
фиг. 364003.
Резонансная кривая звездообразного
двигателя при отказе в работе маят-
никового демпфера
364004
рядка их стало два); шансы, что оба противовеса застрянут одновре-
менно, также невелики. Мера оказалась вполне эффективной.
Вал маломощного 5-цилиндрового звездообразного двигателя ло-
мался в носке после 100—150 час. эксплоатации. Торсиографирование
Фиг. 364004.
Резонансные кривые 5-цилиндрового звездообразного двигателя
---------------------- хорошая посадка винта;
----------------------плохая посадка винта
452
364005
показало, что в используемой зоне (до 1780 об/мин) опасных резонан-
сов нет. Правда, имеется сильный резонанс при 1 960 об/мин, но запас
по оборотам велик и двигатель не доходит до этого резонанса.
Рассмотрение поломок показало, что задняя часть конического носка
поломанных валов имеет следы наклепов или насветлений. Поломки
начинались от края втулки винта, а иногда во впадине резьбы, име-
ющейся на носке.
Наклепы и насветления на задней части конуса а (фиг. 364004, I) 364005>
навели на мысль, что бывают случаи, когда винт практически сидит
на передней части конуса Ь, лишь касаясь задней. Расчет показал, что
в этом случае находящийся за пределами эксплоатационной зоны резо-
нанс резко снизится по оборотам, так как скручивающаяся длина вала
увеличится на ab. Для проверки подобрали втулку винта, садившуюся
только на конус b с зазором в а. Пунктирная линия на фиг. 364004, II
показывает, как сместился опасный резонанс 5-й гармоники в этом
случае. В действительных условиях, в зависимости от качества
посадки втулки винта на носок вала, возможны всякие положения
резонанса 5-й гармоники между 1600 и 1 960 об/мин. При плохой
посадке винта на вал некоторые из двигателей оказывались в резо-
нансе, что приводило к поломкам.
Основная мера для устранения поломок заключалась в введении
строгого контроля за правильной посадкой винта на заводе и за сохра-
нением ее в эксплоатации.
Кроме того, для уменьшения концентрации напряжений улучшили
чистоту и закругления резьбы и сделали выточку на вале, чтобы конус
втулки выступал за конус вала (см. фиг. 364004, III).
370000—371101
Фиг. 371101.
Схема маятникового
демпфера
370000 РАСЧЕТ ДЕМПФЕРА
371000 РАСЧЕТ МАЯТНИКОВОГО ДЕМПФЕРА1
371100 Принцип работы
371101 Маятник или качающийся противовес на коленчатом вале нахо-
дится в поле центробежной силы (фиг. 371101).
Восстанавливающий момент для обыкновенного
маятника, качающегося в поле силы тяжести,
Mt = mgXt.
Для маятника в поле центробежной силы
Ма =ь mRQ*x2.
Из фиг. 371101 видно, что
Х2 _ г
Xl~R ’
следовательно,
Мц = mRQ^Xt = тгй'х^.
к
Таким образом в выражение восстанавливаю-
щего момента вместо ускорения силы тяжести g
(для обыкновенного маятника) входит ускорение
(для маятника в поле центробежной силы) г22.
Круговая частота колебаний обыкновенного маятника (при малых
углах качания)
Соответственно, для маятникового противовеса
(1)
1 Собственно говоря, название «демпфер» не соответствует принципу работы
маятникового устройства, которое не «демпфирует», т. е. не рассеивает энергии
колебаний, но устраняет действие на некоторые участки системы определенных
гармоник.
454
371102-371104
Следовательно, круговая частота колебаний маятникового противо-
веса пропорциональна числу оборотов вала, на котором маятниковый
противовес висит.
_Круговая частота к-той гармоники = kQ. Если положить 371102
= т- е. wA. = шм, то маятник будет иметь при всех оборотах
двигателя ту же частоту, что и гармоника к-того порядка.
Условие |/"-Е = к можно осуществить конструктивными мерами.
Тогда маятник будет «настроен» на к-тый порядок. Величина к = у
называется «настройкой» маятника.
Настроенный на порядок к маятник, точка подвеса которого колеб- 371103
лется с частотой шр и амплитудой А1( можно рассматривать как доба-
вочную систему с собственной частотой (фиг. 371103), кинематически
возбуждаемую в точке подвеса.
.Фиг. 371103.
Схема замены маятника добавочной массой системы] 1
Амплитуда колебаний массы /' = т (I + г)2 этой добавочной системы
будет
Заменим маятник сосредоточенной массой на вале, так чтобы воз- 371104
действия маятника и заменяющей массы на колебания системы были
одинаковы, т. е. момент сил инерции в сечении 1 от колебаний заме-
няющей массы и передаваемый через см момент сил инерции от коле-
баний массы добавочной системы были равны
Л 1ыАур;
455
371105-371202
здесь
7M = /n(r-f-l)‘,
отсюда
371105 Если настройка маятника к равна порядку возбуждающей гармо-
ники р, ТО 73= со.
Настроенный на порядок к маятник эквивалентен таким образом
при возбуждении системы гармоникой, на которую он настроен, беско-
нечно большой массе, помещенной в точке подвеса. В . этой точке обра-
зуется, следовательно, узел.
371106 При настройке к>р или к<р маятник эквивалентен некоторому
положительному или отрицательному моменту инерции /3 в точке под-
веса, влияющему на частоту и форму колебаний системы.
371107 Изменяя моменты инерции системы, т. е. пользуясь маятником,
можно менять в желательном направлении частоту и форму колебаний
системы, сдвигая тем самым резонансы гармоник на новые обороты.
Для гармоники к при этом, вследствие возникновения узла в системе,
резонанс удается устранить совсем или практически удалить из зоны
используемых оборотов от самых низких до самщх высоких.
371108 Расчет маятникового демпфера состоит в определении необходимых
размеров г и I и момента инерции противовеса /пр ив определении
новых собственных частот системы вала с добавленными к ней одним
или несколькими маятниковыми противовесами.
371200
Определение г и I
371201 При обычно применяемом типе подвеса противовеса на двух паль-
цах (фиг. 371201, 7) все точки противовеса (следовательно, и центр
тяжести) описывают дуги радиусом с^ —d2. Противовес движется как
математический маятник длиной
I = dt~d2 (фиг. 371201, II).
Расчет других видов маят-
ников см. в [10].
371202 Расстояние от оси вала до
центра тяжести противовеса
R = г +1 по конструктивным
соображениям не может быть
выбрано произвольно и для су-
ществующих типов лежит в пре-
делах 100—150 мм.
Фиг. 371201.
Схема маятникового противо-
веса с бифилярным подвесом
456
371203-371301
Если маятник должен быть настроен на порядок к, то, задаваясь 371203
R и -у = Л3, находят
1 = Аа + 1 и г ~
Точная настройка на порядок к по производственным условиям 371204
неосуществима и вообще не требуется. При расчете можно задаваться
= 0,99ft или 7 = 1,01ft,
где ft —порядок гармоники, на которую настроен маятник.
Вследствие того что в расчете не учитывается влияние деформации 371205
деталей и демпфирование колебаний маятника, наивыгоднейшую оконча-
тельную настройку подбирают по результатам торсиографирования двига-
теля с маятниками. Вопрос о выборе положительной (р < ft) или отрица-
тельной (р > ft) настройки решается на основании соображений о жела-
тельном смещении резонанса от гармоники p-того порядка. При р<к
резонанс сдвигается на более низкие обороты, при р> ft — на более высокие.
Наивыгоднейшей настройкой будет та, которая обеспечивает мини- 371206
мальные напряжения вала, т. е. максимальное удаление от опасных
резонансов. Это достигается при некотором, определяемом расчетом
смещении резонанса p-того порядка, для чего требуется определенная
острота настройки маятника на эту гармонику. Торсиографирование
позволяет определить частоту системы с маятниками и подобрать за
счет остроты настройки желаемую частотную характеристику, при кото-
рой удаление от резонанса p-той гармоники не сопровождается значи-
тельным усилением колебаний от других гармоник.
Определив размеры пальцев по силе 371207
P = mRQ\
где т — масса противовеса, находим d2, а затем dt — d^ + l.
Для низких гармоник (Р/г! 2) длина маятника I велика, и выпол-
нение конструкции с подвесом на пальцах оказывается затруднительным
из-за. того, что не удается разместить в щеке или фланце отверстия
с большим диаметром dt. Это затруднение можно обойти, заставляя
массу противовеса перекатываться на катках [17] или изготовляя
особую деталь с дорожкой качения (дуга) вместо круглой втулки
отверстия.
Определение момента инерции маятникового противовеса 371300
Для качающегося противовеса с бифилярным подвесом момент 371301
инерции /3 [см. формулу (2) п. 371104] будет равен
г — г 1 т(г + 1?
1з.ар — ls~r pi >
' “ А2
где ls—момент инерции противовеса относительно оси, проходящей
через его центр тяжести и параллельной оси вала.
457
371302—372004
371302 Для того чтобы настройка маятника действительно равнялась к,
амплитуда его колебаний должна быть мала, так как формула
настройки основана на допущении, что sin срм срм. При больших срм
настройка делается ниже расчетной. Допустимое значение
?м= Ю1-:- 12°.
371303 Если на одномассовую систему действует гармонический момент М,
на частоту которого настроен маятник, то
_ м
m(r+Z)ra2’
Формула дает приближенное значение для <ри и в случае многомас-
совой системы при условии, что упругие моменты, действующие на
рассматриваемую массу системы, малы по сравнению с М.
371304 Для получения точного значения амплитуды колебаний маятника
нужно произвести расчет вынужденных колебаний. Определив т из
конструктивных соображений, нужно проверить по формуле 371303,
не выходит ли срм за пределы 8°. Затем, найдя /пр и прибавив его к i-той
массе, на которой висит маятник, рассчитывают амплитуды вынужден-
них колебашгй этой массы At под действием М на всех коленах
(по схеме 330000).
По найденному из расчета А, определяют точное значение <р„
Это значение не должно превышать 12°.
Гармонйческий момент М берется из анализа для номинального
режима.
Так как М меняется пропорционально квадрату числа оборотов,
то «м остается постоянным и для других режимов (см. 371303).
371305 Может оказаться, что располагаемая массат недостаточна, чтобы
обеспечить малые углы качания, для которых только и применимы
формулы 371301 и 371303. В этом случае можно прибегнуть к специ-
альному профилю пути пальцев, благодаря которому настройка сохра-
нится и при больших углах качания [1].
372000 ОПРЕДЕЛЕНИЕ ЧАСТОТ СОБСТВЕННЫХ КОЛЕБАНИЙ СИСТЕМЫ
С МАЯТНИКАМИ
372001 Частоты собственных колебаний системы с маятниковыми противо-
весами зависят от числа оборотов двигателя.
372002 Для построения кривых ne — f(n) удобнее всего рассматривать
маятники как условные добавочные массы.
372003 Задаются каким-либо порядком гармоники р. Для этого порядка,
пользуясь 371301, находят момент инерции /з.пр+7,, которым заме-
няют Ц в эквивалентной системе.
372004 Для полученной путем замены маятников добавочными мас-
сами системы определяются числа собственных колебаний методом
подбора.
458
372005—373001
Найденные частоты представляют в диаграмме частот (фиг. 372005) 372005
резонансы гармоники порядка р, т. е. точки пересечения луча р-того
порядка с кривыми частоты различных форм. Повторяя этот расчет для
нескольких порядков, определяют для каждой кривой ne = f (и) ряд
точек а, Ь, с, по которым эта кривая может быть построена.
Фиг. 372005.
Кривые собственных частот системы с маятниковым демпфером
Резонансы других гармоник, кроме использованных для построе- 372006
ния, можно найти графическим путем, проводя соответствующие лучи
на диаграмме.
Построение кривых частот облегчается следующими данными: 372007
а) начальные точки кривых для р=оо дают числа колебаний
системы, в которой моменты инерции масс с маятниками увеличены
на Л;
б) числа колебаний системы с закрепленными противовесами изобра-
жаются прямыми, которые служат асимптотами для соответствую-
щих кривых частот системы с качающимися противовесами.
Как ив обычной системе, резонансы, представляемые на диаграмме 372008
пересечениями кривых чисел собственных колебаний с лучами гармоник,
могут быть опасными для вала. При определении напряжений в этих
резонансных точках нужно для каждого резонанса исходить из особой
формы колебаний, определяемой по таблице метода подбора для соот-
ветствующих данной точке частоты и системы.
РАСЧЕТ РОЛИКОВОГО ДЕМПФЕРА 373000
Роликовый маятник (ролики Саломона) применяется в виде цилин- 373001
дрического ролика (Пратт-Уитни), шара (Бристоль «Геркулес»), бочко-
образного ролика (Нэпир) или кольца на неподвижном пальце (внеш-
ний ролик —Де-Хэвилленд «Джипси-Сикс»). Масса его сравнительно
невелика, и он катается на большие углы.
459
373002—373005
Точная настройка при больших углах колебания ролика (свыше ±15°)
невозможна, так как ролик частично перекатывается и частично сколь-
зит. Рекомендуется при больших углах исходить из настройки, соот-
ветствующей чистому скольжению; необходимую затем поправку можно
внести после торсиографирования [13,14].
373002 При обозначениях фиг. 373002 настройка ролика q находится из
выражения <?а =——r ,2 - , если ролик катится без скольжения (для
углов срм до 15°), или из выражения дг =
= у , если ролик скользит.
Здесь i — радиус инерции ролика.
Если ролик цилиндрический, то
П
373003
если ролик катится без скольжения.
Если амплитуда колебания детали, в ко-
торой находится ролик, At, то угол колеба-
ния ролика
где
R^r+S± —
Фиг. 373002.
(плюс в случае внешнего ролика или коль-
ца; минус В Случае внутреннего ролика) Схема роликового демпфера
и R = r4-s, если ролик скользит.
373004 При больших углах качания ролик, устраняя или ослабляя дей-
ствие гармоники, на которую он настроен, вносит новые гармоники
колебаний [13].
Эти гармоники значительно слабее, чем устраняемая, но следует
проверить, не вызывают ли они резонанса в области постоянно исполь-
зуемых оборотов [1,13]. '
373005 При определении А{ в эквивалентной системе ролик с массой т0
заменяют фиктивной массой, момент инерции которой
7a = n?i(r + pi)24
где
Для сплошного цилиндрического ролика
1 2
т, = у т0 и т2 = у тв.
460
374000—374102
РАСЧЕТ ДЕМПФЕРА ТРЕНИЯ
374000
Демпфер трения (фиг. 374001),
Фиг. зтатотг-
рассеивающий энергию колебаний,
которых жестко соединяется с валом,
а другая, тяжелая, свободно сидит
на вале и увлекается во вращение
трением о другую часть демпфера.
Относительное движение этих двух
частей возникает, когда действую-
щий на тяжелую - часть инерцион-
ный момент от колебаний превысит
момент сил трения. В демпфере Юн-
керса на вале закреплены лопатки,
а в свободно посаженной на вал
тяжелой части сделаны камеры,
охватывающие лопатки. Масло в ка-
мерах при колебаниях продавли-
вается через зазоры между лопат-
ками и стенками камер. Оба эти
типа демпферов со свободной мас-
сой сейчас мало применяются в
авиации.
В применяемых на современных
двигателях (фиг. 352002) демпфе-
рах трения свободной массы нет:
обе части демпфера закреплены на
вале, но в таких его местах, ампли-
374001
374002
й?я^"71емпфера*еу-хвг() тр»тя туды которых сильно отличаются
одна от другой; относительное пере-
мещение частей демпфера обеспечивает достаточный путь для сил тре-
ния, чтобы поглотить необходимое количество энергии колебаний.
Расчет демпфера трения со свободной массой 374100
Демпфер трения со свободной массой [15] снижает амплитуды 374101
колебаний всех гармоник, но сильное влияние оказывает только на
резонирующую, на которую он рассчитывается.
Вычисляют, исходя из той формы свободных колебаний с часто- 374102
той для которой рассчитывается демпфер, допустимую амплитуду
первой моторной массы со стороны нагнетателя А±. Допустимой ампли-
туде А1 соответствует деформация наиболее напряженного участка вала
At+1 — Ait при которой (см. 344000)
та — ~Ai^ = 600 кг[смг или 840 кг{с.м.\
" .0
При расчете демпфера трения не принимается во внимание изме-
нение формы под действием демпфера, что, как показывает точный
расчет с учетом демпфера, дает результат, достаточно близкий к дей-
ствительному.
461
374103—374106
374103 Для первой, со стороны нагнетателя, моторной массы вычисляют
«амплитуду равновесия» Ао (см. 332004)
д _ М^а
в~ «iSla* •
Здесь
2 а —векторная сумма относительных амплитуд моторных масс
(принимается at=l),
S/а2 —сумма произведений момента инерции каждой массы на ква-
драт ее относительной .амплитуды для всех масс системы.
374104 Находят допустимый коэффициент усиления
₽ = J (О
(At — допустимая амплитуда первой моторной массы) и по нему отно-
шение момента инерции маховой (свободной) массы демпфера 1Я к
“ = Д (2)
для гидравлического демпфера
для демпфера сухого трения.
Обычно и лежит в пределах 0,1-4-0,3.
По величине и определяется необходимый момент инерции маховой
массы демпфера
/д = и2/а2. (4)
Работа трения в самом двигателе в этом расчете не учтена. Если
ее учесть, то демпфер получается соответственно легче.
374105 Находят момент сил трения, равный необходимому, при котором
демпфер рассеивает максимум энергии (данные выше расчетные фор-
мулы исходят из этого момента):
Л4д, г — 5да>А01н О/
для гидравлического демпфера.
Здесь
= /(й + 1У(и + 2) К2СМ СеК (2)
“ = V 2^ ’ (3)
Аота = • (4)
V 2
374106 Необходимый момент трения Л4Д. г и момент инерции свободной
массы 7Д должны быть обеспечены конструкцией. Для получения най-
462
374107-374203
денного расчетом Мд. г необходим расчет гидравлических потерь
в зазорах между стенками камеры и лопатками или опытный их под-
бор.
Для демпфера сухого трения и больше и соответственно /Д больше, а
Л4Д = ^Л4Д.Г.
Для демпфера сухого трения при расчете конструкции, обеспечи-
вающей необходимый Л4Д, задаются наружным и внутренним радиусами
дисков трения R и г. Тогда расчетный эффективный радиус
n _2(R» + Rr+r’) ...
3(R + r)
И
Мд = иР/?8п, (2)
где п — число поверхностей трения (на 1 меньше числа дисков);
Р — сила нажатия на диски демпфера в кг;
р. — коэффициент трения, который для хорошо смазанных дисков
можно принимать равным 0,08 (сталь по бронзе); при работе
в масляном тумане, без подвода смазки, р. = 0,15.
При расчете Р можно допускать давление на поверхностях трения
до 1,75 кг/см2.
Поглощаемая демпфером работа находится по величине потери
за цикл:
1РЛ = к5д шАоти кгсм. (1)
При числе циклов в секунду / = ^ расход мощности на демпфер
составляет
= 2« • 7500 Л‘ С’
Работа демпфера нагревает протекающее через него масло. При опре-
делении необходимой для отвода тепла прокачки масла можно принимать,
что на 1° повышения температуры каждые 23 л, протекающие через
Демпфер в минуту, отводят тепло, эквивалентное 1 л. с.
Расчет демпфера трения с закрепленными массами
Действительная система с демпфером типа Аллисон (см. фиг. 352002)
нелинейна. Приближенный расчет можно вести, исходя из допущения,
что колебания мало отличаются от синусоидальных.
Расчет проводят, как и в 374102.
Находят при допустимой амплитуде относительной закрутки масс
демпфера АОтП работу 1РД, поглощенную демпфером за цикл, и прирав-
нивают ее работе возбуждающего момента:
374107
374108
374109
374110
374200
374201
374202
374203
ИЛ!Н = А~.М J] а.
(1)
463
374204
Для гидравлического демпфера (в резонансе)
Н^д.р “ кЛ4дв? Aq TH' (2)
Для демпфера сухого трения
= 4ТИд Аотн- (3)
Отсюда определяется необходимый момент трения
(4)
**отн
ИЛИ
Мд^/^-МЗа. (5)
Лотн
Значение Аоти находится по форме колебаний:
Аотн — А1Д — Аэд, (б)
где Ах д и А2 д — амплитуды двух закрепленных частей демпфера,
т. е. амплитуды двух масс по концам рессоры демпфера.
374204 Осуществление расчетного момента трения выполняется, как указано
в 374108 и 374110.
380000-381002
РАСЧЕТ КОЛЕБАНИЙ СИСТЕМЫ ВАЛ—ВИНТ 380000
Обычно в расчете рассматривают винт как некоторую массу, жестко 380001
связанную с валом. Опыт показывает, что при больших диаметрах
и тонких лопастях современных металлических винтов упругостью
лопастей пренебрегать нельзя, и винт надо рассматривать не как массу,
а как добавочную систему, способную, как и вал, колебаться и входить
в резонанс.
Если изгибные колебания лопастей возбуждаются достаточно сильно, 380002
то на резонансной кривой системы вала появляются пики, соответствующие
частотам колебания лопастей. Наблюдаются также смещения некоторых
из резонансов системы коленчатого вала, так как при определенных усло-
виях возбуждаются сильные колебания и вала и винта, а частота совмест-
ных колебаний системы вал — винт отличается от частоты системы вала
с жестким винтом.
Если торсиографирование обнаружит такие сильные совместные 380003
колебания, возбуждаемые ч каким-либо моментом порядка р, то для
определения желательных изменений системы нужно произвести расчет
совместных колебаний вала и винта.
Такой расчет желателен вообще при больших металлических винтах
и до торсиографирования.
ПРИНЦИП РАСЧЕТА
381000
Представим себе систему винт — двигатель (фиг. 381001), разрезан-
ную в а. Если в сечении а действует момент THsinw/, то втулка винта
колеблется на некоторый угол <psino>/.
Отношение
381001
Схема к расчету системы вал —винт
30 Авиац. поршн. двигатели
по аналогии с
М
Y ~ с ПРИ статическом приложении мо-
мента^ можно назвать «динамической
жесткостью» винта [12].
Аналогично, если к правой части
приложить момент TWsino)/, она будет
колебаться с амплитудой <р' в
м
точке а. Отношение — = fcMесть
ческая жесткость системы вала.
той же
динами-
381002
465
381003- 382004
381003 Амплитуды колебаний <р и <?' зависят, кроме величины и частоты
момента Afsinw/, еще от жесткостей и масс системы.
381004 Динамические жесткости Лм и кв меняются с изменением частоты
колебаний. Для какой-то частоты «ое момент М будет вызывать <р = <р',
т. е. система вал — винт может колебаться с этой частотой, как единое
целое. Тогда при = <р', так как знаки моментов на винте и вале
двигателя противоположны
м м , - л
— =----или к»~ — кы •
381005 Определив для правой и левой частей системы кривые кв — / (<“)
и —км = F (ш), можно найти по точкам их пересечения частоты
системы вал — винт.
382000 ОПРЕДЕЛЕНИЕ ДИНАМИЧЕСКОЙ ЖЕСТКОСТИ ВИНТА
382001 Можно показать [15], что
Здесь Mi и *o>! — частоты основного тона изгибных колебаний лопа-
стей при свободной и при закрепленной втулке винта;
а), и *о)2 — частоты первого обертона;
<в3 и *ш3 — частоты второго обертона, и т. д.
ш — частота возбуждения;
/в — момент инерции винта.
382002 Практически для вычисления кв можно ограничиться первыми
двумя-тремя множителями в числителе и знаменателе формулы 382001,
так как частоты и *шп быстро возрастают при переходе к высшим
обертонам и — 50 й Q — стремятся к 1.
382003 От завода-изготовителя винта нужно для расчета системы вал —
винт получить следующие данные: момент инерции винта /в; частоты
собственных колебаний лопастей основного тона и первого обертона
а>1, ш2, *ш3 (желательно и второго обертона ш3 и *<»8).
Если этих данных нет, то их можно получить из опыта.
382004 Значение кв для различных частот возбуждения можно найти
экспериментально (фиг. 382004). Колебания лопастей винта, посажен-
ного на один конец вала, возбуждаются вибратором на другом
конце. Число оборотов вибратора регулируется в пределах от 500
до 12000 об/мин.
Момент 7И, передаваемый валом, измеряется тензометром, а угол
колебания втулки <р — электрическим торсиографом или оптическим
устройством, состоящим из осветителя с линзой, зеркальца на втулке
и экрана.
466
382005— 382008
Зная для данного числа оборотов М и <р, находим кв = у. Построение
графика Ав = /(т) дает нулевые точки, т. е. значения ш», <«2 и т. д.,
и точки бесконечности, т. е. *<»!, *ш2 и т. д.
Знание этих частот необходимо для того, чтобы можно было учесть
влияние вращения винта на кв.
Фиг. 382004.
Стенд для определения динамической жесткости винта
При эксперименте для винтов изменяемого шага сгыт прсЕОднтся 382005
для нескольких углов установки лопасти,
Значения кв при угле установки а можно приближенно найти, 382006
если определены к1 при установке винта ребром в плоскости крутильных
колебаний втулки (а = 90°) и к2 при установке винта во флюгерное
положение, ребром в плоскости,’содержащей ось вала (а = 0°).
Тогда
к$= kr sin1 а + к* cos’ а.
Найденные из опыта значения частот относятся к невращающемуся 382007
винту. При вычислении кв для различных частот возбуждения <» зада-
ются порядком р гармоники, возбуждающей по данным торсиографиро-
вания совместные колебания системы вал — винт.
Если расчет проводится до торсиографирования, то кв необходимо
определить для нескольких значений р.
Угловая скорость винта о>в — -р i (здесь г —степень редук- 382008
ции). Учитывая вращение винта, вводимые в формулу 382001 для расчета
кв частоты определяют [6] для «ь по формуле
“i = о>14И.45а>в (1)
и для по формуле
“г = (2)
Здесь через <» обозначены опытные частоты для невращающегося винта.
30*
46.7
383000—384001
Для *а»х и *а»2 приближенно можно принять следующие коэффициенты
при _
в ДО 1 Л 1 ДО&
1,45 и 4,1
<>!
в (1) и (2) соответственно.
383000 ОПРЕДЕЛЕНИЕ ДИНАМИЧЕСКОЙ ЖЕСТКОСТИ СИСТЕМЫ
КОЛЕНЧАТОГО ВАЛА ДВИГАТЕЛЯ
Для получения динамической жесткости двигателя при частоте
колебаний ш производят расчет таблицы метода подбора для этой частоты,
кончая определением еп- n+i на участке между крайней моторной массой (и)
и винтом (п+1).
Тогда
ь___ gn; n+lCn; n+1
"М j fi с *
£п; п+1-Гып п; п-Н
384000 ОПРЕДЕЛЕНИЕ ЧАСТОТ СИСТЕМЫ ВАЛ - ВИНТ
384001 Кривая кв, как показывает формула 382001, состоит из нескольких
ветвей с нулевыми точками для ш — ®х; ш = и т. д. и с точками
бесконечности для ш = *«>!; ш = *ша и т. д. Если ^ограничиться тремя
Фиг. 384001.
Определение частот колебаний системы вал—винт
468
384002—384004
множителями в числителе и тремя в знаменателе формулы 382001,
то получим кривые, изображенные на фиг. 384001.
При нанесении на график знак одной из динамических жесткостей,
например кв, нужно изменить на обратный.
Частоты о»в1; о>е2; ®ез ... колебаний системы вал —винт определяются
графически по точкам пересечения кривых кв и Лм (а, Ь, с на фиг. 384001).
Все эти резонансы вызываются гармоникой порядка р. Если при
построении кв задаваться р-Pi; Р^Рг и т. д., то на фиг. 384001
будет получено семейство кривых кв и число возможных пересечений кв,
т. е. резонансов, возрастет.
Изменение системы. Если наблюдаемые в опыте и полученные 384002
расчетом значения ««i, ®е2 и т. д. нежелательны, то смещение резонанса
может быть получено либо за счет изменения характеристики лопастей
винта (увеличением или уменьшением их изгибной жесткости), либо
за счет изменения жесткости вала винта.
Влияние изменения жесткости удобно проследить по фиг. 384001;
особенно быстро можно получить результат, если изменение вносится
в вал винта и на фиг. 384001 меняется только кы.
По данным [16], в большинстве случаев изменения вала винта 384003
или носка коленчатого вала оказываются более эффективным средством
для устранения резонанса, чем изменения лопасти в возможных для
заданных условий пределах.
Следует помнить, что изменение системы вала вызовет смещение 384004
не только резонанса при совместных колебаниях системы вал —винт
под действием гармоники p-того порядка, но и резонансов системы
от других гармоник.
Таким образом после подбора изменений вала винта необходимо
повторить нормальный расчет для измененной системы коленчатого вала,
чтобы определить, не сместился ли какой-либо из сильных резонансов
в область используемых оборотов. •
390000-390005
390000 ЭЛЕКТРИЧЕСКОЕ МОДЕЛИРОВАНИЕ
КРУТИЛЬНЫХ КОЛЕБАНИЙ ВАЛОВ ПОРШНЕВЫХ
ДВИГАТЕЛЕЙ
390001 Исследования и расчеты крутильных колебаний, связанные с необ-
ходимостью сопоставления многочисленных вариантов, часто сопряжены
с весьма трудоемкими вычислениями. В подобных случаях большую
помощь может оказать моделирование исходной системы, при котором
вычисления заменяются измерениями в специальных моделях. Особое
значение имеют здесь электрические модели, т. е. такие электрические
схемы, в элементах которых распределение электрических токов или
напряжений происходит таким же образом, как и распределение динами-
ческих усилий в системе вала при крутильных колебаниях. Осуществле-
ние электрических моделей основано на подобии математических зависи-
мостей, описывающих динамические процессы в электротехнике и меха-
нике [2, 11].
390002 Преимуществом электрического моделирования является возможность
осуществления электрических колебательных контуров, параметры
которых легко регулируются в широких пределах. Применение элек-
трических моделей хорошо согласуется с имеющим место переносом
в область динамики авиационных двигателей электротехнических поня-
тий, как например, понятия «динамический импеданс» (или динамиче-
ская жесткость) в расчетах связных колебаний винта и вала. При-
менение электрических моделей удачно сочетается также с происходя-
щим теперь широким внедрением электрических приборов для дина-
мических измерений, в особенности для торсиографирования и вибро-
графирования.
390003 Существует две системы электромеханических аналогий. В первой
системе энергия магнитного поля соответствует кинетической энергии,
а энергия электрического поля—потенциальной. Во второй системе,
наоборот, энергия магнитного поля соответствует потенциальной энер-
гии, а энергия электрического поля—кинетической.
390004 Сопоставление электрических и механических величин произведено
в табл. 390004.
390005 Каждому уравнению баланса сил динамической системы в модели,
составленной по первой системе аналогий, соответствует уравнение
баланса напряжений определенного замкнутого контура схемы, а в моде-
ли, составленной по второй системе аналогий, уравнение баланса токов
определенного узла схемы.
470
390005
Таблица 3'90004
Механические Электрические величины
величины первая система аналогий вторая система аналогий
Угловое перемещение <р Электрический заряд q Магнитное потокосцепле- ние ЧТ
d 9 Угловая скорость S — Сила тока dt Напряжение н=—
Момент силы М Напряжение и Сила тока 1
Виртуальная работа Маа udq id'i"
Момент инерции массы I Самоиндукция L Емкость С
Податливость е Емкость С Самоиндукция L
Сопротивление потерь § Омическое сопротивле- ние R Омическая проводи- 1 мость —
Гармоническое колебание ?=Asin<oZ; 2 = <oAcos<oZ= =2mC0S со/; M=MmC0S (o>t+y) Переменный ток i = I cos <ot и—U cos (<o^+y) Переменный ток u = Ucosu>t z = /cos (<о/-|-у)
Механический импеданс Динамическая жесткость (динамический модуль) М м А Электрический импеданс (полное или кажущееся сопротивление) Электрический адмитанс (полная или кажущаяся проводимость) У = — и
471
390006-390010
390006
Для системы с одной степенью свободы (фиг. 390006-1) уравнение дина-
мического равновесия, в котором в качестве переменной принята скорость,
имеет вид
Фиг. 390006.
Электромеханические
аналогии для системы
с одной степенью сво-
боды
4!+^+^2л==л1(/)-
Уравнение (1) в электрической модели
(фиг. 390006-11), составленной по первой системе
аналогий, соответствует
LS+Rf+H 'Л=С7(/)- (2)
Уравнение (1) в электрической модели
(фиг. 390006-1П), составленной по второй си-
стеме аналогий, соответствует:
Ст“ + ^и+ = (3)
390007 При гармонических вынужденных колебаниях отношение амплитуды
приложенного момента силы М (t) ~ Мт cos (mt -J- у) к амплитуде динами-
ческой скорости крутильных колебаний Q = Qmcos«)Z, т. е. так назы-
ваемый механический импеданс, для системы фиг. 390006-1
составляет:
-/(•'-й)’+Р- О)
Формула (1) выражает закон Ома для механической системы.
Аналогично, в соответствии с законом Ома для электрической цепи
фиг. 390006-11 ее полное или кажущееся сопротивление (импеданс) равно:
z=r=®
Полная или кажущаяся проводимость (адмитанс) электрической
цепи фиг. 390006-1II равна:
390008 Динамической схеме фиг. 390008,1 (рядный двигатель) соответствуют
электрические модели фиг. 390008, II по первой и фиг. 390008, III
по второй системе аналогий.
390009 Для разветвленной системы электрические модели представлены
на фиг. 390009, I, II и III.
390010 Динамическому демпферу в первой системе аналогий соответствует
электрический фильтр—«пробка» (фиг. 390010, I), представляющий для
избранной частоты сопротивление значительно большее, чем для других
частот (для идеального фильтра Z = <x>). Во второй системе аналогий
472
Фиг. 390008.
Электромеханические аналогии для рядного двигателя
390011-390012
Фиг. 390009.
Электромеханические аналогии для разветвленной системы
-390011
390012
(фиг. 390010,11), наоборот, узлу колебаний для заданной частоты соот-
ветствует взаимная компенсация индуктивного и емкостного сопротивле-
ний (т. е. Z — 0; У = оо).
Условие настройки эле- хтгакч L Г
ктрической модели демпфера I < # -пгат4 11
для частоты ш составляет: ~~х «. / 000 Н ~
0)
*^д ''д
Фиг. 390010.
Электрическая модель уп- электрические схемы моделей динамического
ругого винта подбирается соот- демпфера
ветственно 380000 по резо-
нансным ш и анти резонансным частотам (*ш). Для резонансных частот
в первой системе аналогий выходное сопротивление—импеданс модели
винта—должно быть равно нулю, а для антирезонансных частот—беско-
нечно большой величине.
Касаясь применения электромоделирования для нелинейных задач
динамики двигателей, укажем, что моделирование нелинейных упругцх
элементов (например муфт), в связи с изучением псевдогармонических
колебаний в условиях полигармонического возбуждения, возможно осу-
ществить по второй системе аналогий путем использования нелинейных
характеристик ферромагнитных материалов. Регулирование формы
характеристики достигается комбинированием нелинейного элемента
модели из нескольких дросселей с сердечниками различных материалов
и насыщения.
Другой способ моделирования нелинейных элементов заключается
в применении специальных устройств, использующих электронные и ион-
ные приборы.
474
390013-390101
Для решения задачи о квазигармонических колебаниях системы вала
с учетом периодического изменения моментов инерции масс кривошипно-
шатунных механизмов может быть использован следующий способ.
Моменты инерции масс кривошипно-шатунных механизмов замещаются
дросселями, у которых магнитное сопротивление разомкнутого сердеч-
ника периодически изменяется благодаря прохождению в зазоре сердеч-
ника зубцов железного диска, вращение которого, кинематически связан-
ное с устройством, воспроизводящим в модели внешние периодические
силы, соответствует оборотам двигателя.
При составлении электрических моделей нет необходимости в таком
подборе параметров, при котором соблюдалось бы равенство частот
собственных колебаний исходной механической системы и электрической
модели. Чтобы все формы колебаний обеих систем были в точности подобны,
необходимо обеспечить лишь одинаковые соотношения между соответ-
ственными элементами механической системы и модели, а также одинако-
вые коэффициенты усиления в резонансе. Если при первой системе анало-
гий задаться определенным механическим масштабом электрических
напряжений, соответствующих внешним возбуждающим моментам, то
в этом же масштабе получаются значения динамических моментов в эле-
ментах системы.
Подобные же зависимости для токов имеют место при второй системе
аналогий.
390013
390014
Пример составления электрической модели
Задана динамическая схема авиационного двигателя (фиг. 390101).
390100
390101
1,кгсмсекг
100,0
о
1,465 1,465 1,465 1,465 1,4b 5
Х1О~В
0,0406 0,0528
0,0528 0,0528 0,0528
0,0528
1,8
0,0304
0,02635
Ы03~50400 сек~}
002635 0,02635 0,02635
0,02635
0,02635 гн>
j -0,1155 = = 0,01155 --0,015 = =0015 = =0015 = =0015 - =0,015 миф
Генератор
0-20000гц
Фиг. 390101.
Составление электрической модели
475
390102—390202
Составляем электрическую модель по первой системе аналогий.
Определяем круговую частоту механической системы, состоящей из
момента инерции массы, приложенной в одном колене вала, и податли-
вости одного участка коленчатого вала между двумя соседними коленами:
®0м —
___________1__________
у 1,465 • 0,0528 • 10-6
= 3600 сек.-1
390102 Выбираем масштаб частот моделирования, т. е. соотношение частот
электрической и механической систем, соответствующих определенной
форме колебаний, например, масштаб—14.
390103 Круговая частота соответствующей ячейки для электрической модели
составит:
шОэ= 14 • 3600 = 50400 сек.-1
Для получения такой частоты выбираем, из условий удобства
осуществления модели, значения емкости С12 и индуктивности Ьг так,
чтобы
1 — = 50400 сек.-1;
У ^С12
например: Ц — 0,02635 гн (генри)
С12 = 0,015 мкф (микрофарад) == 0,015 • 10-6 ф (фарад).
При этом необходимо стремиться к использованию возможно ббльших,
практически, величин L, значительно превышающих внутреннее сопро-
тивление устройств, воспроизводящих внешние силы.
390104 Электрические параметры остальных элементов модели относятся
между собой так же, как и соответствующие им механические параметры
исходной системы, т. е.
L2: Ls: ... = It: I2'. /s: ...
C12- ^s' • • • = ^12- ^23' ^34 ' • •
390105 Схема электрической модели показана на фиг. 390101, внизу.
390200 Методика эксперимента
390201 Внутреннее сопротивление источников напряжения, воспроизводя-
щих внешние силы при первой системе аналогий, должно быть весьма
мало, а внутреннее сопротивление источников тока, воспроизводящих
внешние силы при второй системе аналогий, весьма велико по сравне-
нию с импедансом модели.
390202 Условиям внезапной нагрузки или разгрузки динамической системы,
при которой возникают свободные колебания, в электрической модели
соответствуют условия включения и отключения постоянного тока или
напряжения. Вынужденные гармонические колебания—переменный ток
различной частоты—в электрических цепях создается электрическими
генераторами, электромагнитными при низких частотах или электронными
(ламповыми) для более высоких.
476
390202
(Анализатор
звуковЬи
частот
НатоднЬш
осциллограф
КатоОнЬш ВолЬтметр
Схема
раватЬ/
датчика
Фиг. 390203.
Принципиальная схема электрического расчетного стенда
Л—проекционные лампы; ФК-фотоэлементы и фотокаскады датчика;
У—усилители; МД—мотор датчика; ДТ— электротахометр; Г—указатель
электротахометра
477
390203— 390204
390203
390204
Электрическая аппаратура дает возможность не только осуществить
в модели гармоническое возбуждение, но и воспроизвести сложную форму
кривой тангенциальных усилий, возбуждающих колебания механиче-
ской системы, и таким образом устранить необходимость разложения на
гармоники с последующим обратным сложением результатов воздей-
ствия на систему каждой отдельной составляющей. С помощью осцилло-
графа и другой электроизмерительной аппаратуры осуществляются
измерение и регистрация процесса изменения усилий или перемещений
во времени, выраженных в электрических величинах, т. е. получение
расчетных торсиограмм или, что удобнее, деформаций между массами.
На фиг. 390203 дана принципиальная схема разработанного канди-
датом техн, наук И. М. Тетельбаумом электрического стенда для
определения частот и форм собственных колебаний и исследования выну-
жденных колебаний систем со многими степенями свободы при полигар-
моническом возбуждении в ряде точек. Стенд предназначается для рас-
чета крутильных колебаний валов авиационных двигателей, причем
результаты, а именно диаграммы изменения динамических моментов
в участках вала при различном числе оборотов непосредственно вос-
производятся на экране осциллографа.
Получение периодических электрических импульсов, имеющих форму
заданной диаграммы возбуждающих сил, производится при помощи фото-
электрического устройства—датчика. На вал, приводимый во вращение
электромотором с широкой регулировкой числа оборотов, насажен
прозрачный барабан из плексигласа, в который вставлена фотодиаграмма
из кинопленки (фиг. 390204-1), изготовляющаяся путем фоторепродук-
ции с чертежа большого масштаба. Фотодиаграмма похожа на сильно
увеличенную фонограмму кинозвукозаписи.
Проходя мимо щелей осветительных устройств, обладающих равно-
мерным светораспределением, диаграмма изменяет величину светового
потока, попадающего на активную поверхность фотоэлементов. Возни-
кающие при этом фототоки усиливаются фотоусилителями, имеющими
в необходимом диапазоне частот малые амплитудные и фазовые иска-
жения. Фотоэлементы расположены по окружности, так что каждый
канал воспроизводит одну и ту же периодическую кривую, но с заданным
сдвигом фаз, для определенного колена вала, и включается в соответ-
ствующую ячейку электрической модели сообразно принятому порядку
чередования вспышек.
478
390205-390206
Осциллограмма воспроизведения диаграммы тангенциальных уси-
лий приведена на фиг. 390204-11. На фиг. 390204-111 показано электриче-
ское сложение тангенциальных усилий для
коренных шеек жесткого вала.
Фиг. 390204-11.
Осциллограмма воспроизведения фото?
Диаграммы
Выбор частоты моделирования производится в результате совмест- 390205
ной оценки ряда факторов. Диапазон частот колебаний системы вала
авиационного двигателя, представляющий практический интерес при
анализе крутильных колебаний, можно оценить в 10-е-300 гц. Указан-
ный диапазон приходится на область значительно более низких частот,
чем это имеет место в акустике и электротехнике слабых токов и при
построении электрических моделей для частот, равных частотам колебаний
двигателей, значения емкостей и индуктивностей элементов модели
оказываются весьма значительными, что затрудняет их практическое
осуществление.
Значительные трудности при низких частотах возникают и в части
обеспечения добротности элементов модели для получения необходимых
коэффициентов усиления в резонансе. Очевидно, что при увеличении
частоты моделирования условия осуществления модели улучшаются.
Повышение частоты моделирования дает также большие преимущества
при конструировании усилительных устройств с необходимыми частотной
и фазовой характеристиками. Ограничение повышения частоты модели-
рования прежде всего обусловливается необходимостью обеспечения
надежной работы механической части датчика тангенциальных сил,
а также связано с частотными ограничениями при выборе измерительного
устройства. Кроме того, при более низких частотах легче устранить иска'
жения при воспроизведении фото диаграммы, связанные с постоянной
времени входного контура фотоэлемента, и уменьшить паразитные влия-
ния различного рода.
Совокупность поставленных выше условий приводит к необходимости
увеличить частоты моделирования от 7 до 15 раз, что соответствует диа-
пазону звуковых частот.
Величина емкостей элементов модели получается в пределах от 39020&
нескольких сотых долей микрофарады до нескольких микрофарад, а индук-
тивностей от нескольких сотых долей генри до нескольких генри. При-
веденные значения параметров модели показывают, что осуществление
дросселей необходимой добротности (к=10-^-30), в соответствии с коэф-
фициентами резонансности авиационного двигателя и стабильной индук-
тивности, является вполне доступным благодаря применению прессован-
ных сердечников и новых магнитных материалов, разработанных для
катушек электрических фильтров. С некоторыми ограничениями воз-
можно также применение катушек самоиндукции без ферромагнитных
сердечников или с применением последних лишь для регулирования
величины параметра.
479
300206
Фиг. 390204-Ш.
Осциллограммы электрического сложения кривых
тангенциальных усилий на коренных шейках
шести коленного вала. Чередование вспышек
1—5—3—6—2—4
Обозначения:
I—диаграмма тангенциальных сил (на 6-й шейке от винта)
//-^/-диаграммы квазистатического сложения
таигенциальных сил:
//-на 5-й шейке (от винта)
III — » 4-й » » »
IV — » 3-й » » »
V - » 2-й » » »
V/— » 1-й » » » и на редукторном вале
480
390207-390214
Необходимое повышение частоты возбуждения при умеренном числе
оборотов вала датчика достигается путем размещения по окружности
барабана нескольких одинаковых циклов фото диаграммы. Для шести-
коленного вала нами принята фотодиаграмма из семи циклов, что дает
возможность симметрично расположить фотоэлементы при необходимых
углах сдвига фаз. Длина одного цикла фотодиаграммы 90 мм, полезная
высота 22 мм. Число оборотов датчика—до 2500 об/мин.
Стенд для расчета крутильных колебаний осуществлен по первой
системе аналогий. В данном случае преимуществами первой системы
аналогий по сравнению со второй являются возможность применения
усилительных устройств меньшей мощности и значительное упрощение
измерительной части.
Динамической схеме рядного авиационного двигателя с упругим вин-
том, изображенной на панели управления стенда, соответствует электри-
ческая модель из 11 элементов индуктивности и 10 конденсаторов (бумаж-
ные радиотехнические конденсаторы и катушки с прессованными сердечни-
ками из порошка альсифера). Элементы схемы осуществляются в виде трех-
декадных наборов, позволяющих задавать трехзначные величины индук-
тивностей и емкостей. Общее количество элементов стенда составляет 32.
Подключение измерительного устройства к различным элементам
модели производится на панели управления при помощи штепсельных
гнезд, размещенных на изображении соответствующих элементов динами-
ческой схемы вала авиационного двигателя.
Чтобы параметры модели не изменились вследствие включения уси-
лителей датчика, последние имеют выходные трансформаторы с коэф-
фициентами трансформации, обеспечивающими весьма малое сопротивле-
ние их в модели. Мощность усилительных устройств датчика—того же
порядка, что и у звуковоспроизводящей аппаратуры.
Процесс изменения упругих моментов в элементах вала, выражен-
ных в электрических величинах через напряжения на конденсаторах,
записывается катодным осциллографом, производя-
щим также контроль диаграммы тангенциальных
усилий. Типичные диаграммы изменения моментов
при вынужденных колебаниях для редукторного
вала показаны, например, на фиг. 390212.
Вместо датчика для определения частот и
форм собственных колебаний используется лам-
повый генератор с широким отградуированным
С-0,208мкф
МП
С=0,52мнф
Фиг. 390212.
Диаграммы упругих моментов на редукторном
вале при вынужденных колебаниях, полученные
на стенде
диапазоном изменения частоты (см. фиг. 390101-11), а в качестве измери-
тельного устройства при моногармоническом возбуждении—катодный
вольтметр.
На фиг. 390214-1 показан общий вид аппаратуры опытного образца
расчетного стенда, а на фиг. 390214-11—внешний вид датчика возбуждаю-
щих сил.
31 Авиац. поршн. двигатели
390207
390208
390209
390210
390211
390212
390213
390214
481
390215
390215
Фиг.’390214-1.
Общий вид расчетного стенда.
I— элентрическая модель; 2 —панель управления; 3—датчин воабуждающих^свмт;
4 —усилительные устройства датчина; 5—щиток с элентротахометром датчина;
4—натодный осциллограф; 7-натодный вольтметр; Я—генератор звуковых частот;
В табл. 390215 для одного авиа-
ционного двигателя приведено сопо-
ставление данных аналитического опре-
деления частот и форм собственных
колебаний с результатами обработки
измерений на модели. Сравнение пока-
зывает, что частоты собственных ко-
лебаний различаются не более, чем
на 1н-1,5%, а ординаты резонансных
упругих линий совпадают с вполне
достаточной практически точностью.
Невязка измерений на модели, вклю-
чая сюда также обработку данных
измерений на логарифмической ли-
нейке, не превышает 2н-3%.
Воспроизведение заданной кривой
возбуждающих сил фотоэлектрическим
датчиком при различных его оборотах
приведено на фиг. 390215.
Фиг. 390214-11.
Внешний вид датчика возбуждаю-
щих сил
482
390215
Фиг. 390215.
Воспроизведение заданной кривой фотоэлектрическим ^датчиком при -различных
оборотах
ЛИТЕРАТУРА И ИСТОЧНИКИ К 300000
1. Житомирский В. К., Маятниковый демпфер малого веса для коленчатых
валов авиационных двигателей, Труды № 43, 1942.
2. Житомирский В. К., КинасошвилиР. С. и Те те л ь ба у мИ. М.,
Действительные нагрузки коленчатых валов, Труды № 116, 1946.
3. Л у р ь е И. А., Крутильные колебания в дизельных установках, Ленинград,
1940.
4. Н а т а н э о н В. Я., Крутильные колебания коленчатых валов с муфтами, обла-
дающими нелинейной характеристикой, Труды № 40, 1943.
5. НейманИ. Ш., Динамика авиационного двигателя, Москва, Оборонгиз, 1940.
6. Нейман И. Ш., Крутильные колебания многомассовой нелинейной системы,
Оборонгиз, 1947. 1
7. Р и э П. М., Резонансный метод определения собственных частот вибраций лопас-
тей воздушных винтов, Труды, вып. 242, 1935.
8. СеренсенС. В., ТетельбаумИ. М. и Пригоровский Н. И., Дина-
мическая прочность в машиностроении (справочное пособие), 2-е издание,
Москва, 1945.
9. Терских В. П., Крутильные колебания силовых установок, Ленинград, 1940.
10. ШтиглицА., Влияние маятников на крутильные колебания (Колебания валов
авиационных двигателей), Сборник переводов-1941 г.
II. Тетельбаум И. М., Электрическое моделирование крутильных колебаний
валов авиационных и других поршневых двигателей, Труды № 87, 1945; см.
также Труды № 121, 1948.
31*
4€3
390215
12. Biot M., Coupled oscillations of aircraft engine propeller systems, «J. of the Aer.
Soc.», v. 7, N 9, july 1940.
ГзТоеп-На r to g J. P., Pendulum vibration absorbers, New-York, John. Wiley,
1938.
14. К ar m m e r e r H., Untersuchungen, Messungen und Erprobung von Fliehkraft-
pendeln in umlaufenden Drehschwingungssystemen, Jahrbuch der DFL, 1942.
15. Ker Wilson W., Practical solution of torsional vibration problems, London,
1941—1942.
16. Ker Wilson W., Contribution to the «Discussion on the measurement of tor-
sional vibrations», Proc, of the Inst, of Meeh. Eng., v. 150, N 1, 1943.
17. Po r te r F., Harmonic coefficiennts of engine torque curves, «Journal of Applied
Mechanics», v. 10, N 1, 1943.
18. T а у 1 о r E. S. and Mo rri s E. M., Harmonic analysis of engine torque, due to gas
pressure, «J. of the Aer. Sc.», v. 3, N 3, N 4, 1936.
ЧАСТЬ 4
РАСЧЕТ
РАСПРЕДЕЛИТЕЛЬНЫХ МЕХАНИЗМОВ
АВИАЦИОННЫХ ДВИГАТЕЛЕЙ
СОДЕРЖАНИЕ
части 4
Выбор основных размеров .... *................................... 410000
Выбор диаметра горловины и высоты подъема клапана............ 411000
Фазы распределения........................................... 412000
Открытие всасывающего клапана . ............................ 412100
Закрытие всасывающего клапана............................... 412200
Открытие выхлопного клапана ................................ 412300
Закрытие выхлопного клапана................................. 412400
Полный угол открытия клапана •............................ 412500
Перекрытие клапанов......................................... 412600
Зазор в клапанном механизме.................................. 413000
Кинематика клапанных механизмов.................................. 420000
Скорости вращения кулачков распределительного механизма . . , 421000
Кинематика толкателя, закон движения которого задай.......... 422000
Кинематика толкателя при его ускорениях, изменяющихся по
линейному закону в зависимости от времени.................. 422100
Кинематика толкателя при его ускорениях, изменяющихся по ли-
нейному закону по пути..................................... 422200
Построение профиля кулачка при заданном прямолинейном движе-
нии толкателя................................................ 423000
Графический метод построения профиля кулачка . . •.......... 423100
Аналитическое определение профиля кулачка................... 423200
Построение профиля кулачка рычажных распределительных меха-
низмов при заданном законе движения клапана.................. 424000
Графический метод построения................................ 424100
Аналитическое определение профиля кулачка................... 424200
Кинематика толкателя, приводимого в движение кулачком, очер-
ченным дугами кругов и прямыми............................... 425000
Кинематика толкателя с роликом при выпуклом профиле кулачка,
очерченном дугами кругов................................... 425100
Кинематика толкателя с роликом при вогнутом профиле кулачка,
очерченном дугами кругов...............•................... 425200
Кинематика толкателя с роликом при тангенциальном кулачке . 425300
Кинематика толкателя, профилированного плоскостью, при про-
филе кулачка, очерченном дугами кругов..................... 425400
Кинематика клапана, приводимого в движение рычагом........... 425000
Кинематика профилированного дугой рычага, приводимого в движе-
ние кулачком, очерченным дугами кругов и прямыми............. 427000
487
Четырехзвениый механизм, как основа рычажного клапанного
механизма.................................................. 427100
Кинематика рычага, приводимого в движение выпуклым кула-
чком, очерченным дугами кругов............................. 427200
Кинематика рычага, приводимого в движение вогнутым кулачком 427300
Кинематика рычага, приводимого в движение тангенциальным
кулачком................................................... 427400
Кинематика простраиствеииого механизма распределения звездо-
образных двигателей ... •............................... 428000
Динамика клапанных механизмов.................................... 430000
Силы, действующие в клапанном механизме...................... 431000
Силы газов . . . . • . . . • ........................... 431100
Силы инерции................ .............................. 431200
Силы пружин................................................. 431300
Силы и моменты, действующие в клапанном механизме, при пере-
даче движения от кулачка к клапану через траверсу............ 432000
Силы и моменты, действующие в клапанном механизме, при непо-
средственной передаче движения от кулачка к клапану с плоской
тарелкой .................................................... 433000
Силы и моменты, действующие в клапанном механизме, при пере-
даче движения от кулачка к клапану через рычаг, профилиро-
ванный дугой.......................................• . . . . 434000
Силы и моменты, действующие в клапанном механизме звездообраз-
ного двигателя .............................................. 435000
Расчет иа прочность.............................................. 440000
Профиль кулачка............................................ 441000
Траверса и толкатель......................................... 442000
Направляющие траверсы....................................... 442100
Шток траверсы.............................................. 442200'
Плечи траверсы.............................................. 442300
Шток толкателя.............................................. 442400
Направляющие толкателя...................................... 442500
Клапан ..................................................... 443000
Ударник клапана .......................................... 443100
Стержень тарелки клапана .................................. 443200
Седло клапана.......................................... • 443300
Шток клапана......................................... • 443400
Направляющая клапана...................................... 443500
Рычаг клапана....................................... • • • 444000
Оси роликов и рычагов ................. . . . ............... 445000
Кронштейн рычагов........................................... 446000
Щеки кронштейна............................................ 446100
Шпильки кронштейна........................................ 446200
Тяга......................................................... 447000
Стержень тяги .............................................. 447100
Сочленение тяги с толкателем и рычагом..................... 447200
Кулачковый вал.......................................• • 448000
Силы и моменты, действующие на кулачковый вал ... - . . . 448100
Расчет кулачкового вала иа прочность....................... 448200
Расчет кулачкового вала иа жесткость....................... 448300
488
Опорные подшипники.......................................... 448400
Пружины..........•............................................ 440000
Определение запаса прочности пружины............,........... 440100
Колебания клапанных пружин.................................. 440200
Подбор клапанных пружин..................................... 449300
Выбор основных кинематических параметров клапанных механизмов . . 450000
Общие положения для выбора кинематических параметров клапанных
механизмов ................................................... 451000
Выбор кинематических параметров рычажного распределительною
механизма................................................... 452000
Наивыгодиейший профиль кулачка в отношении время-сечения и
клапанных пружин при заданном их запасе сил................ 453000
Способы уменьшения величин ударных нагрузок в распределитель-
ном механизме................................................. 454000
Примерный расчет клапанного механизма авиационного двигателя Дайм-
лер-Бенц 603 ..................................................... 460000
Расчет шайбового распределительного механизма..................... 470000
Литература и источники к 400000.
Гильзовое газораспределение четырехтактных авиационных двигателей .... 480000
Общие положения к расчету гильзового газораспределения .... 481000
Типичные схемы механизма гильзового распределения........... 481100
Основные параметры, характеризующие механизм гильзового рас-
пределения ................................................. 481200
Кинематика и динамика гильзового механизма.................... 482000
Кинематика гильзового механизма по схеме 1 ................. 482100
Кинематика гильзового механизма по схеме II................. 482200
Динамика гильзового механизма по схеме I . •................ 482300
Динамика гильзового механизма по схеме 11 .................. 482400
Определение основных размеров привода и окон гильзового газорас-
пределения ................................................... 483000
Определение ширины окон гильзового распределительного меха-
низма для системы окон одинаковой ширины как на гильзе, так
и на цилиндре, кроме одного сдвоенного на гильзе (число окон
на цилиндре на 1 больше числа окон на гильзе)............... 483100
Определение ширины окон гильзового распределительного механиз-
ма для системы окон одинаковой ширины как на гильзе, так и иа
цилиндре, кроме одного сдвоенного на гильзе и двух обслужива-
емых этим окном иа цилиндре (число окон иа цилиндре иа
1 больше числа окон на гильзе).... ....................... 483200
Определение основных кинематических параметров привода гиль-
зового распределительного механизма......................... 483300
Определение высоты окон гильзового распределительного механизма 483400
Взаимное расположение окон на гильзе и окон иа цилиндре и си-
стемы окон иа гильзе относительно системы окон иа цилиндре . 483500
Профилировка окон гильзового распределительного механизма . . 483500
Уравновешивание сил инерции гильзового распределительного меха-
низма .................................................... 484000
489
Уравновешивание сил инерции вращающихся масс кривошипов
гильзового механизма звездообразного двигателя............ 484100
Уранновешиваиие сил инерции гильз гильзового механизма звездо-
образного двигателя ...................................... 434200
Уравновешивание сил инерции вращающихся масс кривошипов
гильзового механизма 6-цилиидрового рядного двигателя . . . 434300
Уравновешивание сил инерции гильз гильзового механизма 6-ци-
лиидрового рядиого двигателя.............................. 484400
Уравновешивание сил инерции гильзового механизма Н-образиого
24-цилиидрового двигателя................................. 434500
Литература и источники к 480000.
410000-411004
ВЫБОР ОСНОВНЫХ РАЗМЕРОВ* 410000
ВЫБОР ДИАМЕТРА ГОРЛОВИНЫ И ВЫСОТЫ
411000
ПОДЪЕМА КЛАПАНА
Клапанный распределительный механизм служит для открытия
и закрытия отверстий в головке цилиндра, через которые происходит
наполнение его свежей смесью и очистка от продуктов сгорания.
Проектирование клапанного механизма начинают с выбора размеров
клапанных седел, внутренний диаметр которых берется возможно боль-
ших размеров, для того чтобы получить возможно меньшие величины
скоростей протекания газов через горловину клапана с целью увеличе-
ния коэффициента наполнения двигателя. Размеры седел, а следовательно,
и диаметр горловины зависят в основном от конструктивных форм
камеры сгорания.
Основные данные клапанов и горловин для ряда современных авиа-
ционных двигателей приведены в табл. 411002.
Обозначения (фиг. 411003):
Fn — площадь поршня;
S —ход поршня;
Vh—литраж цилиндра;
dr —диаметр горловины;
/г — площадь проходного сече-
ния горловины:
411001
411002
411003
i — число клапанов на цилиндр,
п —число оборотов двигателя.
Скорость газов в горловине
определяется по формуле
ХТ _, F__ УдИ
г ~ 30г/г — 30//г * '
Согласно таблице 411004 скоростей газов в горловинах ряда авиа- 411004
двигателей средняя величина скорости Vr равна 65 м/сек для горловин
впускного клапана и 80 м/сек для горловин выхлопного клапана.
* Часть 4 «Расчет распределительных механизмов авиационных двигателей»
составлена в основном по книге И. Ш. Неймана «Динамика авиационных двига-
телей», Оборонгиз, 1940.
491
Размеры клапанов и горловин некоторых авиационных двигателей
Расположение и число цилин- дров Фирма и марка двигателя Площадь поршня Fn см2 Всасывающие клапаны Выхлопные клапаны
а° град. dK мм dK мм S- S- «« dr мм d' мм 5- 5- Q i (число клапа- нов) d мм а° град | dK мм di. мм ак мм ww лр S- S- !в* аг мм г (число клапа- нов) d мм
V- образное, 12 цилиндров ВК-105 171 45 58 49,5 4,25 50 58 4 2 12 45 68 59,5 4,25 60 68 4 1 17,3
АМ-38Ф 201 29°30' 60 52 — 51,0 59,2 — 2 — 50 56 48,3 — 48,5 55,8 —- 2 —
Роллс-Ройс «Мерлин» XX 147,8 45 47,6 44,5 1,6 44,5 46,4 1,59 2 11,05 45 45,7 40,3 2,7 40,3 45,8 — 2 13,72
Аллисон С-15 153,5 30 — 45 — 44,2 — — 2 15,7 45 44,5 40 2,25 41,3 46,4 — 2 15,7
А-образное, 12 цилиндров Даймлер-Бенц 601 Еа 176,5 45 55 50 2,5 50 55 2,5 2 — 45 52 47 2,5 47 52 2,5 2 —
Даймлер-Бенц 603 206,0 45 59 53,5 2,75 53,5 59 2,75 2 — 45 54,4 50 2,2 50 54,4 2,2 2 —
Двойная звезда 14 цилиндров BMW-801 189,5 45 76 69 3,5 70 75 2,5 1 12 45 69 61,2 3,9 64,5 68,5 2,0 1 18
GR 2600-13 190 45 78,7 72 3,35 — — — 1 12,6 45 78,5 69,5 4,5 66,4 76 — 1 17,3
411004
Скорости газов в горловине клапанов авиационных двигателей
Таблица 411004
Расположе- ние и число цилиндров Фирма и марка двигателя D мм со п об/мин а° град. । Всасывающие клапаны Выхлопные клапаны
i (число клапа- нов) Лк мм 4з Гт см2 Уг м/сек IV см2 сек тг' / 7г=йг м/сек i (число клапа- нов) Ль мм м 5= О 7г м/сек а° град. 1
ВК-105 147,5 170 2700 45 2 13 0,260 19,6 66,7 0,128 101 1 13 0,217 28,2 92,7 60
V-образное, АМ-38Ф 160 190 2050 30 2 14 0,257 23,25 53,1 0,278 70 2 14 0,298 17,4 75,0 30
12 цилин- дров Роллс-Ройс «Мерлин» XX 137,2 152,1 2850 45 2 15 0,337 15,55 68,8 0,178 63,3 2 15 0,372 12,75 83,9 45
Аллисон С-15 139,8 152,4 3000 — 2 14,25 — — — 0,128 91 2 14,25 0,345 13,4 87,2 45
Л-обрйз- ное, 12 цилиндров Даймлер- Бенц 601Еа 150 160 2700 45 2 12,93 0,259 19,6 64,9 0,212 66,7 2 12,93 0,276 17,3 73,5 45
Даймлер- Бенц 603 162 180 2500 45 2 14 0,262 22,5 68,7 0,255 72,7 2 14 0,280 19,6 78,9 45
Двойная звезда, 14 цилин- дров BMW-801 155,3 156 2400 45 1 13,76 0,20 37,4 63,2 0,273 109 , 1 13,76 0,229 28,2 83,8 45
411004
411005—411006
411005
Повидимому, наиболее благоприятными для двигателей без наддува
являются скорости Уг = 50 —60 м[сек, а для двигателей с наддувом.
60—80 м[сек.
Более низкие величины относятся к четырехклапанным головкам,,
а более высокие —к двухклапанным.
При скоростях выше указанных желаемое число оборотов двигателя
при заданной мощности может быть достигнуто только путем соответ-
ствующего повышения наддува.
Следующим этапом после выбора диаметра горловины является
выбор подъема клапана hK. Согласно статистическим данным, приведен-
ным в таблице 411004, величина отношения AK/dr изменяется в пре-
делах от 0,2 до 0,37. Поэтому ориентировочно выбирают при проектиро-
вании двигателя
/1К = 0,25dr-:-0,3dr.
Оптимальная величина hK устанавливается путем специальных
экспериментальных исследований на одноцилиндровой установке с цилин-
дром, оборотностью и наддувом, соответствующими проектируемому
двигателю. Окончательная величина hK устанавливается аналогичными.
411006
исследованиями на опытном двигателе.
Оценить влияние диаграммы подъемов клапана на наполнение дви-
гателя чрезвычайно сложно.
В качестве первого приближения в этом отношении, хотя и довольно
грубого, является определение скорости газов по время-сечению, осно-
ванное на допущении, что скорость
газов
наполнения равен 1.
объема
клапан,
за такт
постоянна и что коэффициент
Из равенства
воздуха, засосанного через
объему описанного поршнем
всасывания получим:
где W — время-сечение всасывающего-
клапана от момента верхней мертвой
точки до его закрытия, а /кх — пло-
щадь проходного сечения газов в кла-
пане, равная боковой поверхности усе-
ченного конуса, образующей которого
(фиг. 411003) является перпендику-
ляр АР, опущенный из угла А ко-
нуса клапана на образующую ВС конуса седла клапана.
Когда конец перпендикуляра (точка Р) не попадает на образующую
ВС (фиг. 411006), образующей конуса будет прямая АВ.
Предельным между этими двумя случаями будет тот, когда конец.
Р перпендикуляра АР попадает в точку В; это будет иметь место, когда
подъем клапана достигает величины
К определению проходного сечения
клапана
(1>
, = ______________«
кх sin 2а
(2>
494
412000-412003
Обозначая образующую усеченного конуса через р и средний диа-
метр через а, будем иметь
/к а — (3)
Индексы х показывают, что эти величины —текущие и соответ-
ствуют величине текущего подъема клапана hKX.
В случае, когда
h
Sin 2а ’
величина
рж = cos а (4)
и величина
ах = dK ^кх Sin.2a. (5)
Эти величины в случае
Ч'г-Ч'к
Sin 2а,
равны соответственно
где
и
ФАЗЫ РАСПРЕДЕЛЕНИЯ
(6)
(7)
(8)
(9)
412000
Фазы распределения в авиационном двигателе должны быть подо- 412001
браны таким образом, чтобы обеспечить возможно большее наполнение
горючей смесью цилиндра двигателя и наиболее полное удаление из него
продуктов сгорания.
Для вновь изготовляемого двигателя фазы распределения Ьпреде- 412002
ляются предварительно опытным путем на специальной одноцилиндровой
установке, у которой система распределения должна быть аналогична
таковой изготовляемого двигателя. Окончательно фазы распределения
устанавливаются соответствующими исследованиями на опытном двига-
теле с полной установкой всасывающей и выхлопной систем, которыми
двигатель будет оборудован в зксплоатационных условиях.
Предварительный выбор фаз делается на основании общих сообра- 412003
жений, базирующихся на результатах зкспериментальных работ, прово-
димых в большинстве случаев на зкспериментальных одноцилиндровых
установках.
495
412100-412203
412100
Открытие всасывающего клапана
412101
412102
Всасывающий клапан открывается до верхней мертвой точки, когда
выхлопной клапан еще открыт. Благодаря этому происходит частичная
продувка цилиндра и уменьшается тепловая нагрузка выхлопного клапана.
Это перекрытие клапанов приобретает особо важное значение при
непосредственном впрыске, так как в этом случае продувка осуществляется
чистым воздухом.
Влияние угла опережения открытия всасывающего клапана на напол-
нение двигателя, примерно одинаково как для двигателя с наддувом,
так и без наддува и мало зависит от режима двигателя [8]. Только
412103
на очень больших высотах наи-
выгоднейший угол опережения
уменьшается (фиг. 412102). Обыч-
но с высотностью двигателя он
меняется незначительно и в боль-
шой степени зависит от режима
двигателя,—с увеличением обо-
ротов двигателя этот угол увели-
чивается [9].
Опережение всасывания уве-
личивает площадь диаграммы
подъема клапана и, увеличивая
полный угол открытия клапана,
позволяет работать с меньшими
ускорениями клапана, повышая
этим надежность работы клапан-
'О 200 1/00 ' 600
ь
ь
§
1 10
Разрешение g мм рт. ст.
Фиг. 412102.
Наивыгоднейшие фазы распределения в за-
висимости от противодавлеДия на выхлопе
и числа оборотов двигателя
ного механизма.
412104 Угол опережения всасывающего клапана выбирается в пределах
от 10 до 30°. Так как двигатели с воздушным охлаждением термически
более нагружены, чем двигатели с водяным охлаждением, то увеличение
угла опережения всасывания, улучшающее продувку, имеет для первых
большее значение.
Для двигателей с непосредственным впрыском этот угол, в зависи-
мости от оборотности и давления наддува, может быть увеличен на 20—40°.
В таблице 412104 даны фазы распределения для ряда современных
авиационных двигателей.
412200
Закрытие всасывающего клапана
412201 Всасывающий клапан должен закрываться в тот момент, когда давле-
ния в цилиндре и во всасывающем трубопроводе сравниваются. Этот
момент, по данным Тейлора, зависит от оборотов двигателя, но мало зави-
сит от того, будет ли двигатель с наддувом или без него. Чем больше
оборотность двигателя, тем выравнивание давлений происходит позднее,
а следовательно, и угол запаздывания должен быть больше.
412202 Опыты показывают, что оптимальный момент закрытия всасываю-
щего клапана не зависит от высотности двигателя [9].
412203 Угол запаздывания всасывающего клапана оказывает по сравнению
с другими фазами значительно большее влияние на все характеристики
двигателя [8].
496
Таблица 390215
Сопоставление частот и форм собственных колебаний по данным расчета и данным элекгромоделирования
Элемент Параметры системы Первая форма колебаний (без учета нагнетателя) Вторая форма колебаний (без учета нагнетателя)
динамическая система электрическая модель Результаты измерений на электрической модели Форма упругой линии из аналити- ческого расчета <4 Результаты измерений на электрической модели Форма упругой линии из анали- тического расчета
i .л кгсм сек2 ч генри Напряжение на конден- саторах Ui(i+1) ВОЛЬТ Относительные перемещения масс и,, Л а1=—12 . _Л Щи h ° i+l~ai + ai (i+l) Форма упругой линии at, приведенная к 1,000 Напряжение на конден- саторах н»К+1) вольт Относительные перемещения масс . Ь- U7S Л fli+l=ai+ai(i+l) Форма упругой ЛИНИИ приведен- ная к 1,000
'(i+l) ei(£+l) К№—1 СМ—1 Ci(i+1) микрофарад Относительные закрутки упругих элементов а <ог ('+!) ui G+l) fl.(i+D- °™ с78 и78 - Относительные закрутки упругих элементов а _ о>2 Л(»‘+1) Ui(i+1) i("+D »»“ е78
1 100,0 1,80 14,4 1,465 . 2,2 100 0,096 —0,093 —0,091 — 0,008 0,008
1,2 0,406-10"» 0,1155-10-» 14,40 0,406-14,4 . оп, 0,1278 0,0528-2,20 0,82 — — 2,50 °-48’ o’ira.M '•°" — —
2 1,690 0,0304 — —0,095 +0,821=0,725 0,704 0,695 — 0,008—1,011=—1,003 —0,984 —0,999
2,3 0,0406-10"» 0,01155-10-» 12,05 о Ю-7О2 0,0406-1,205 п 0,1278 0,0528-2,20 = 0,0685 — — 2,50 n ,02 0,0406-2,5 n ... 0,48 0,0528-4,4- 0,101 — —
3 1,465 0,02535 — 0,725+0,0685 = 0,7935 0,771 0,764 — — 1,003 + 0,101=—0,902 —0,886 —0,900
3,4 0,0528-10-» 0,015-10-» 10,40 0,1278* • 1--4^=0,0771 — — 6,40 6 4 0,482 • 1 -4^- =0,335 4,4 — —
4 1,465 0,02635 — 0,7935+0,0771=0,8706 0,845 0,840 — —0,902 + 0,335=—0,566 —0,555 —0,559
4,5 0,0528-10"» 0,015-10-» 8,50 0,1278» • 1 • =0,0630 — — 8,90 * 8.9 0,482 • 1 7, =0,457 4,4 — —
5 1,465 0,02635 — 0,8706+0,0530=0,9336 0,910 0,903 — —0,556 + 0,467=—0,099 —0,097 —0,109
5,6 0,0528-10-» 0,015-10-» 6,40 0, 12782 • 1 • -|^-=0,0475 — — 9,30 0 3 0,482 . =0,488 4,4 — —
6 1,465 0,02335 — 0,9336+0,0475= 0,9811 0,952 0,951 — —0,099+0,488=0,389 0,332 0,375
6,7 0,0528-10-». 0,015-10-» 4,30 0,12782 • 1 •-^-=0,0319 — 7,60 7.6 0,48» • 1 4’-, =0,399 4,4 — —
7 1,435 0,02635 — 0,9811+0,0319=1,0130 0,985 0,984 — 0,389+0,399=0,788 0,774 0,775
7,8 0,0528-10-» 0,015-10-» 2,20 0,12782-1 • 1=0,0163 — — 4,40 0,482-l-l=0,231 — —
8 1,455 0,02535 “EO368=0-66 1,0130+0,0163=1,0293 1,000 1,000 “Еозб8=°>83 0,788+0,231 = 1,019 1,000 1,000
Масштаб моделиро- вания круговая частота единичной механической системы = __ 108 V 1,455-0,0528 круговая частота единичной электрической системы о>оЭ = = 10» у 0,02635-0,0150 частота собственных колебаний, измеренная на модели Невязка измерений 1,0293— 1,000=0,0293 _ 6,28-1023 1отн 50400 -0,1278 Коэффициент усиления электриче- ской модели в резонансе (i+l) , s Г “2'('+1) Ai Л™ - круговая частота собствен- ных коле- баний “1м= = 6,28-^ 14 круговая частота собственных колебаний из аналити- ческого расчета частота собственных колебаний, измеренная на модели Невязка измерений 1,019—1,000=0,019 6,28-3850 „ 50400 ~0,48 Коэффициент усиления электриче- ской модели в резонансе »•<««> круговая частота собственных колебаний ®пм = = 6,28^ 14 круговая частота собственных колебаний из аналити- ческого расчета
е I е к Iй сек.'1
0)оэ сек."1 Лэ гц (Лт 1м секл1 (От 1м сек.-1 Ль гц <1>тт Им сек.-1 “Пм сек.-1
1 отн 11 11 “ВОЗб “78 "йЧ*+1) “‘(>+1) 22 возб 11 и1ы и и ивозб Sci(l-+1) и1(,-+1) 21,5 ВОзб
U 3600 50400 1023 460 460 3350 1728 1706,5
Авиац. поршн. двигатели.
412204-412501
412204 Угол закрытия всасывающего клапана для двигателей с обо-
ротностью от 2000 до 2500 об/мин выбирается равным от 50 до 60°
(см. табл. 412104).
412300 Открытие выхлопного клапана
412301
Момент открытия выхлопного клапана в основном определяется
требованием, чтобы удаление сгоревших газов из цилиндра происходило
412302
с минимальными потерями полезной ра-
боты, т. е. чтобы сумма площадок а и б
(фиг. 412301) была минимальной; с доста-
точной для практики точностью это
имеет место при равенстве площадок
а и б.
Для того чтобы к моменту прихода
поршня в нижнее мертвое положение
Фиг. 412301.
К определению начала открытия
выхлопного клапана
давление газов в цилиндре упало до нуж-
ной величины, с повышением оборотности
двигателя увеличивается и опережение
выхлопного клапана.
412303
412304
412305
С увеличением противодавления на выхлопе угол опережения откры-
тия выхлопного клапана увеличивается [9].
Большой угол опережения открытия выхлопного клапана выгоден,
так как уменьшает инерционные силы клапанного механизма.
Угол опережения выхлопного клапана выбирается в среднем от 60
до 80° (см. табл. 412104).
412400 Закрытие выхлопного клапана
412401 Закрытие выхлопного клапана должно происходить несколько позже
верхней мертвой точки поршня в целях использования кинетической
энергии столба выхлопных газов для отсасывания из цилиндра остаточ-
ных газов.
412402 Позднее закрытие клапана уменьшает инерционные силы клапан-
ного механизма (за счет увеличения полного угла открытия выхлопного
клапана).
412403 Момент закрытия выхлопного клапана для двигателя без наддува
имеет значительно большее влияние, чем для двигателя с наддувом.
При раннем закрытии выхлопного клапана для двигателя без наддува
получается недостаточная очистка цилиндра от сгоревших газов. При
запаздывании конца выхлопа выхлопные газы могут быть втянуты обратно
в цилиндр при ходе всасывания. В обоих случаях следствием является
уменьшение весового заряда свежей рабочей смеси.
412404 Угол запаздывания выбирается от 15 до 25° для двигателей с водя-
ным охлаждением и от 20 до 40° для двигателей с воздушным охлажде-
нием (см. табл. 412104).
412500 Полный угол открытия клапана
412501 Полный угол открытия клапана как всасывающего, так и выхлоп-
ного, увеличивается с повышением оборотов двигателя и наддува.
498
412502—413005
При уменьшении противо-
давления на выхлопе, соглас-
но опытным данным [9] (фиг.
412502), наивыгоднейший пол-
ный угол открытия выхлопного
клапана уменьшается, а всасы-
вающего в пределах противо-
давления на выхлопе от 250 мм
рт. ст. до атмосферного остает-
ся примерно постоянным и да-
же немного уменьшается.
Фнг. 412502.
Полный угол открытия клапана в зависимости
от противодавления иа выхлопе и числа
оборотов двигателя
412502
Перекрытие клапанов
С увеличением наддува и оборотов двигателя наивыгоднейший угол
перекрытия клапанов увеличивается.
Увеличение угла перекрытия особенно важно для двигателей с непо-
средственным впрыском.
ЗАЗОР В КЛАПАННОМ МЕХАНИЗМЕ
Для обеспечения плотного прилегания во время работы двигателя
клапана к седлу делается зазор между клапаном и ведущей его деталью
распределительного механизма (кулачок, толкатель, ударник и т. п.),
так как, нагреваясь, клапан удлиняется. Зазор этот обычно делается
больше необходимого для плотного прилегания клапана к седлу во время
нормальной работы двигателя, чтобы обеспечить плотность прилегания
и при случайных перегревах клапана (выше нормального).
Величина зазора клапана зависит в основном от длины клапана.
У рядных авиационных двигателей с кулачковым валом, располо-
женным в головке двигателя, зазор всасывающего клапана при нормаль-
ной работе двигателя мало отличается от монтажного.
Монтажный зазор выхлопного клапана вследствие большого нагрева
по сравнению со всасывающим при работе двигателя уменьшается; поэтому
его приходится задавать большим, чем у всасывающего, раза в полтора.
В клапанах звездообразных двигателей зазоры в рабочем состоянии
увеличиваются по сравнению с зазорами в холодном состоянии двигателя.
Вызываемые повышенными зазорами усиленные ударные нагрузки
в клапанном механизме могут быть снижены двумя способами.
Первый из них заключается в применении компенсаторов, значи-
тельно снижающих увеличение зазора в клапанном механизме.
При втором применяется специально профилированная кулачковая
шайба, обеспечивающая возможность иметь заранее заданные скорости
клапана в моменты его открытия и посадки.
Зазоры в клапанах вновь построенного двигателя устанавливаются
окончательно опытным путем.
В табл. 412104 приведены величины зазоров в толкателях клапанов
для ряда серийных авиационных двигателей.
412600
412601
413000
413001
413002
413003
413004
413005
32*
420000-421003
420000 КИНЕМАТИКА КЛАПАННЫХ МЕХАНИЗМОВ
421000 СКОРОСТИ ВРАЩЕНИЯ КУЛАЧКОВ РАСПРЕДЕЛИТЕЛЬНОГО
МЕХАНИЗМА
421001 Для четырехтактных двигателей, распределение в которых происхо-
дит при помощи кулачковых валов, скорость вращения последних в два
раза меньше скорости вращения коленчатого вала.
421002 В четырехтактных звездообразных двигателях распределение произ-
водится обычно при помощи кулачковых шайб:
Все кулачки как впускные, так и выпускные, располагаются
каждый по окружности своей шайбы, вращающейся вокруг своей оси,
обычно совпадающей с осью коленчатого вала. Для случая однорядного
звездообразного двигателя, обозначив:
/„ — число кулачков шайбы;
/ — число цилиндров звездообразного мотора, имеем
причем знак плюс имеет место при таком конструктивном выполнении
•передачи вращения к кулачковой шайбе от коленчатого вала двигателя,
когда направление вращения шайбы совпадает с направлением враще-
ния коленчатого вала; знак минус отвечает случаю, когда направление
вращения шайбы обратно направлению вращения коленчатого вала.
421003 В двухрядном звездообразном двигателе число цилиндров каждой
звезды бывает обычно больше трех, т. е. равно 5, 7 или 9; цилиндры
одной звезды сдвинуты по отношению к цилиндрам другой звезды
на половину угла между осями соседних цилиндров одной звезды.
Обозначим:
/ — число цилиндров одной звезды и
/„ — число кулачков шайбы.
В этом случае равномерное чередование вспышек цилиндров двига-
теля ^через углы поворота коленчатого вала может быть получено
только при наличии нечетного числа кулачков шайбы. Поэтому имеем:
а) При / = 5 число кулачков /„ = 3 и направление вращения кулач-
ковой шайбы должно быть одинаково с направлением вращения колен-
чатого вала двигателя.
б) При / = 7 число кулачков /к = 3 и направление вращения кулач-
ковой шайбы должно быть противоположно направлению вращения
коленчатого вала двигателя.
500
422000-422002
в) При i = 9 число кулачков zK = 5 и направление вращения кулач-
ковой шайбы должно быть одинаково с направлением вращения колен-
чатого вала двигателя.
Скорость вращения кулачковой шайбы в 2/к раза меньше скорости
вращения коленчатого вала.
кинематика ТОЛКАТЕЛЯ, закон ДВИЖЕНИЯ 422000
КОТОРОГО ЗАДАН
Обозначения: 422001
йк — полный подъем клапана;
йКх — подъем клапана в данный момент времени;
VKX — скорость клапана в данный момент времени;
/кх — ускорение клапана в данный момент времени;
а — угол поворота коленчатого вала мотора от момента начала подъема
клапана до момента, соответствующего подъему hKX клапана,
в градусах;
ад — угол поворота коленчатого вала двигателя от момента на-
чала подъема клапана до момента конца его посадки, в гра-
дусах;
аг — угол поворота коленчатого вала двигателя, соответствующий
времени нахождения клапана при полном открытии йк, в гра-
дусах;
ал — угол поворота коленчатого вала двигателя от момента начала
подъема клапана до момента его полного подъема, в гра-
дусах;
ал — угол поворота коленчатого вала двигателя от момента начала
подъема клапана до момента перехода положительных ускорений
в отрицательные, в градусах;
«л — угол поворота коленчатого вала от момента перехода положитель-
ных ускорений в отрицательные до момента полного подъема
клапана, в градусах;
Р, Рп, рг, ₽h, Ph и Ph — углы поворота кулачка, соответствующие углам
а, “п, “г, ®h, v.'h и ал поворота коленчатого вала двигателя, в гра-
дусах;
/, t'a, tr, tn, t'n и th — промежутки времени, соответствующие углам a, ан,
«г, «ь, и аь поворота коленчатого вала двигателя;
п — число оборотов коленчатого вала двигателя в минуту;
«к — число оборотов кулачкового вала или шайбы в минуту.
Имеем ряд общих соотношений: 422002
₽ Рп Рг Ph Ph Ph
причем в четырехтактных двигателях отношение — равно:
а) при распределении с помощью кулачкового вала
£ = 2; (2)
501
422100—422102
б) при распределении с помощью кулачковой шайбы (в зведообраз-
ных двигателях)
- - 2i
п* ~ к’
^ = ^ = ах = а_*
1 1п ^г 1л
£ _ _ .₽£_-₽* — fin
t t'a |ГГ fa к‘
(3)
'(4)
Угол а„ и соответственно угол Рп определяются согласно принятым
моментам распределения для данного кулачка.
Принимая в дальнейшем профили кулачков симметричными, имеем:
С&п — &г “f" 2&ft, 1
Рп — рг 4* 28Л, [
/; = fr + 2fft.
(5)
422100 Кинематика толкателя при его
ускорениях, изменяющихся по
линейному закону в зависи-
мости от времени
422101 На участке АВ подъема
клапана (фиг. 422101), соот-
ветствующем промежутку вре-
мени fft, ускорение является
положительным и изменяется
по времени по прямой А^р,
скорость клапана возрастает,
начиная от нуля в точке А,
до своего максимального зна-
чения в точке В; силы инерции
клапана и всего клапанного
механизма за этот период под-
нятия клапана стремятся при-
жать весь клапанный механизм
к кулачку.
422102 На участке ВС подъема
клапана, соответствующем про-
межутку времени Ch, ускорение
является отрицательным и из-
меняется по времени по прямой
В2С,; скорость клапана убы-
вает, начиная от своего макси-
х Диаграмма ус/<зрении клапана
--------------------t’-----------------
Диаграмма скоростей клапана
Диаграмма подъема клапана
Фиг. 422101.
Скорости и пути клапана,
ускорение которого изменяется
линейно по времени
502
422103—422108
мального значения в точке В до нуля в точке С; силы инерции клапана
и всего клапанного механизма за этот период поднятия клапана стре-
мятся оторвать весь клапанный механизм от кулачка; этому срыву
препятствует включенная в клапанный механизм пружина (или несколько
пружин), соответственно подсчитанная с известным запасом на уравно-
вешивание сил инерции клапанного механизма на участке ВС подъема
клапана.
На участке СС', соответствующем промежутку времени tT, клапан 422103
полностью открыт; его ускорение и скорость равняются нулю; силы
инерции клапана и всего клапанного механизма за этот период рав-
няются тоже нулю.
На участке С'В' опускания клапана, соответствующем промежутку 422104
времени th, ускорение является отрицательным и изменяется по времени
по прямой С(В'; скорость клапана возрастает, начиная от нуля в точке С'
до максимального значения в точке В'; силы инерции клапана и всего
клапанного механизма за этот период опускания клапана стремятся
оторвать клапанный механизм от кулачка, чему препятствует указан-
ная выше пружина.
На участке В'А' опускания клапана, соответствующем промежутку 422105
времени tf,, ускорение является положительным и изменяется по пря-
мой В'А!; скорость клапана убывает от своего максимального значения
в точке В' до нуля в точке А'; силы инерции клапана и всего клапан-
ного механизма за этот период опускания клапана стремятся прижать
клапанный механизм к кулачку. Знак плюс ускорения соответствует
принятому за положительное направлению ускорений в пространстве.
Обозначим: 422106
= Й- = р; ~ = д; Ц- = т.
th Zk4 /кС /»С
На участке АВ, соответствующем положительным ускорениям: 422107
Путь клапана
='ЯСт)’-VG)’] «-MGy-WJ] % <>
Скорость клапана
= М (!)•] [£-'£ (ОТ. • <*>
Ускорение клапана
На участке ВС, соответствующем отрицательным ускорениям: 422108
Путь клапана
йКх = Лв + ^[(0 ] « =
о)
503
422109—422110
Скорость клапана
<2’
Ускорение клапана
7«х = /«с[ 1 — СА )] = /кс[1-гтKfc)] • (3)
В уравнениях (1), (2) и (3) время V отсчитывается, как это пока-
зано на фиг. 422101, от момента максимального подъема клапана. Угол
поворота кулачка ₽' соответствует промежутку времени V.
422109 При определении по формулам 422107 — 422108 значений пути, ско-
рости и ускорения клапана заданными являются величины:
йк, 6,, Зл и иг.
Величинами, которые нужно определить, являются
/ка, /кс, р, q И к.
Между этими пятью величинами имеется связь, устанавливаемая
следующими двумя уравнениями:
/ка к (1 + р} = -jKC (1 — *)(! + </), (1)
= (2 + р) к*--^(2 + </)(! — к)1. (2)
Таким образом из указанных пяти величин приходится задаваться
какими-либо тремя.
422110 Случай, когда задаются величинами:
/кС , /кА и q.
Величиной ускорения в момент максимального подъема /кс зада-
ются, учитывая:
1) возможность построения профиля кулачка,
2) габариты клапанных пружин.
Ускорение начала подъема клапана /ка выбирается по величине
напряжения на профиле кулачка в момент открытия выхлопного клапана.
Параметр q, который меньше 1, порядка 0,75 — 0,85, окончательно
определяется из условия одинакового запаса сил пружин в моменты
В и С (фиг. 422101).
В этом случае величины р и к определяются из следующих
равенств:
_ 3 + q /(3 4-g)3 + 4(m-r- l)(M^2~^7) ,..
p=(lz^l±5>li (2)
<3> Ч/' *
504
422111-422112
Случай, когда задаются величинами:
422111
/кА , /кС И к.
Задаваясь величиной к =» 0,3 — 0,4, определяют р и q из равенств
_ М - (1 - к) (2 - к) - тк2
Ч- \-к
М - (1 - /с)2 - тк2 ,
р =---------------------1.
к тк
Рассмотренным в 422100 законом подъема клапана задаются обычно 422112
при профилировке кулачковых шайб звездообразных двигателей,
у которых делаются компенсаторные шайбы; при наличии такой шайбы
клапан уже при начале движения по этому закону имеет некоторую
скорость Vo, и формулы /1) и (2) п. 422107 принимают в этом случае
следующий вид:
()
Vkx=/ka[(-Q Рл+У°- (2)
В формулах (1) и (2) путь клапана й и время t и tb отсчиты-
ваются от начала движения клапана по рассматриваемому в данном
параграфе закону (т. е. когда клапан имеет уже скорость Vo).
В этом случае изменятся и формулы для определения пара-
метров к, р и q.
а) Случай, когда задаются величинами:
/юл, ]кс и q~
i,_ 3 + g-5N-Vr(3 + 7-5N)2+4(m-H)(Al-2-g) ,
к~ 2(1 +т) ’ ( '
(4)
где
б) Случай, когда задаются величинами:
/кА, /кС и А;
M-(l-/c)(2-A)-5NA-m/c2 #
\—к ’
— M-(l -fc)2-mA:2-N(14-5/i:)
тк
По этому закону движения толкателя построены кулачки звездо-
образных двигателей М-85, Бристоль «Меркур», Райт «Циклон» и др.
505
422200-423102
422200 Кинематика толкателя при его ускорениях, изменяющихся
по линейному закону по пути
Рассмотрим два возможные случая:
422201 Ускорения толкателя возрастают по линейному закону по пути.
В этом случае ускорения выражаются уравнением
/кх = ]«А 4" ЛГЙКХ. (I)
Путь толкателя
Лкх = - 2). (2)
Скорость толкателя
^кх — j/”2ЙКх
422202 Ускорения толкателя убывают по линейному закону по пути.
В этом случае ускорение
1кх~ ]кА ЛТЙКа-. (1)
Путь толкателя
h ___^1кА п2 t У М
ПкХ----ЛГ —2~ '
Скорость толкателя
Укх— 2ftKX Q/kA — М ' (^)
Подробно этот закон движения толкателя разобран в [6J.
423000 ПОСТРОЕНИЕ ПРОФИЛЯ КУЛАЧКА ПРИ ЗАДАННОМ ПРЯМОЛИНЕЙНОМ
ДВИЖЕНИИ ТОЛКАТЕЛЯ
423100 Графический метод построения профиля кулачка
423101 Чтобы построить графически профиль кулачка, имея пути толка-
теля с роликом йтх в зависимости от угла поворота кулачка р,
поступают следующим образом (фиг. 423101). Проводят начальную
окружность радиуса гн и концентрическую окружность радиуса гн + р
(где р — радиус ролика); затем проводят вертикальную ось 0кх и под
углом ₽п/2 к ней —луч 0к7; проводят лучи 0к2, 0кЗ и т. д. На этих
лучах откладывают от окружности радиуса (гн4-р) соответствующие
пути оси ролика толкателя йтж и из концов 0Р1, 0Р2, ... ,0рх этих лучей,
как из центров, описывают ряд окружностей радиуса р. Огибающая
этих окружностей является искомым профилем кулачка. Все построе-
ние проводится в увеличенном (обычно в пять раз) масштабе.
423102 При толкателе, соприкасающемся с кулачком плоскостью, поступают
таким же образом: наносят положение плоскости толкателя при раз-
личных углах поворота кулачка ₽ и проводят огибающую этих пло-
скостей, которая и является искомым профилем кулачка. Построение
профиля такого кулачка дано на фиг. 423102.
506
Фиг. 423102.
Построение профиля кулачка при за-
данном законе движения толкателя,
профилированного плоскостью
Фиг. 423101.
Построение профиля кулачка при заданном законе движения
толкателя, профилированного дугой
423102
423200- 423202
423200 Аналитическое определение профиля кулачка
423201 Чтобы определить аналитически профиль кулачка, при известных
законах изменения пути hTX, скорости и ускорения j\x толкателя
с роликом, находят, для разных моментов положения механизма,
полярные координаты точек соприкосновения профиля кулачка с роликом
толкателя х (фиг. 423101).
Координатами точки х будут:
Р4-Д и $!. (I)
Угол Д определяется из уравнения
tgA = Psin?. (2\
° S — р cos р ' '
где
S = rH + p +(3)
<р —угол между радиусом-вектором 0к 0р1 и нормалью 0р1 хк кривой пути
центра ролика, определяемый из уравнения
(4)
здесь о>к — угловая скорость вращения кулачковой шайбы
з»-
Радиус-вектор профиля кулачка Si определяется из уравнения
Si = ps + S2 — 2pScos<p. (6)
423202 Не для любого закона движения толкателя возможно практически
построить кулачок. Условие возможности построения кулачка может
быть получено из следующих соображений.
Радиус кривизны профиля кулачка в точке х будет
Г V"l3/2 I
— [S2^+V2x]’/2
p _ L 4 к -I _ “K ,. 4
S2+2 (X2»Y_/t£S_ ?-S^ + 2V^x-jTXS ?•
у u>K у u>K
В момент максимального подъема толкателя
VIX = О,
откуда
508
423203—423204
Так как на вершине кулачка должно быть
R>0,
то необходимо
s-2z£ Р’ (3)
г
“к
Отсюда, учитывая что ускорение в момент максимального подъема
толкателя /тс отрицательно, при выборе его значения необходимо,
чтобы
|AcKS(y—(4)
или согласно обозначениям фиг. 423101
Для случая толкателя с плоской тарелкой (фиг. 423102) профиль 423203
кулачка определяется координатами
(₽ + Ф) и Slt (1)
которые находятся из уравнений
tg^= (2)
/ V2”
(3)
к
Условие возможности построения профиля кулачка в случае тол- 423204
кателя с плоской тарелкой получается из следующих соображений.
Радиус кривизны профиля кулачка определяется из уравнения
R=s+^~. (1)
к
Кулачок, действующий на плоскую тарелку, должен быть выпуклым,
т. е. должен иметь во всех точках радиус кривизны положительным.
Поэтому должно иметь место:
“к
ИЛИ
iTX>-~S^K. (2)
509
424000—424100
424000
424100
ПОСТРОЕНИЕ ПРОФИЛЯ КУЛАЧКА РЫЧАЖНЫХ РАСПРЕДЕЛИТЕЛЬНЫХ
МЕХАНИЗМОВ ПРИ ЗАДАННОМ ЗАКОНЕ ДВИЖЕНИЯ КЛАПАНА
Графический метод построения
Чтобы построить графически профиль кулачка рычажного меха-
низма с рычагом, профилированным дугой (с роликом), сообщают всему
механизму (фиг. 424100-1) вращательное движение около оси враще-
ния кулачка с угловой скоростью кулачка в направлении, обратном
вращению последнего; вследствие этого кулачок остановится и прямая,
Построение профиля кулачка при заданном законе движения
рычага, профилированного дугой
соединяющая оси вращения рычага и кулачка, будет вращаться в сто-
рону, обратную вращению последнего, занимая последовательно поло-
жения, соответствующие углам поворота кулачка в его необращенном
движении. Ось вращения рычага займет соответственно положения I,
II, III,..., а центр ролика положения 1, 2, 3,..., которые легка
найти по известному г и по известным углам 8. Описывая вокруг точек
1, 2, 3, ..., как центров ряд окружностей радиуса р и проводя огиба-
ющую семейства этих окружностей, получим искомый профиль кулачка.
В зависимости от размера механизма построение это делается в уве-
личенном (в 5—10 раз) масштабе.
Построение лучше всего вести графоаналитическим методом, опре-
делив аналитически расстояния между осями кулачка и ролика S
и находя точки 7, 2, 3, ... пересечением двух дуг: одной с центром
О и радиусом S, а другой с центром последовательно в точках I, II,
III, ... и радиусом г.
510
424200-424201
Для того чтобы определить S, необходимо сначала определить
угол о. Обозначив в начальный момент углы ур и 3 (фиг. 424100-П)
через уро и 8о, определяем, зная пути клапана йк1, угол ур из уравне-
ния
cos yp = cos yPfi — (1)
и так как угловые перемещения обоих плеч рычага одинаковы, имеем
8~Л = Yp-'Гро и s = 8o -F(Yp-Ypc)- (2)
Фиг. 424100-11.
Схема рычажного клапанного механизма с рычагом, профи-
лированным дугой
Аналитическое определение профиля кулачка
При определении профиля кулачка заданными являются:
3 —угол между прямыми, соединяющими ось вращения рычага с «сью
вращения кулачка и с центром дуги рычага;
Y₽ —угол между осью клапана и плечом рычага со стороны клапана;
Укж — скорость клапана;
j'kx — ускорение клапана;
р —радиус дуги рычага;
гн —радиус начальной окружности кулачка;
а2 — расстояние между осями кулачка и рычага;
424200
424201
511
424202
г —плечо рычага со стороны кулачка;
гк—-плечо рычага со стороны клапана;
р —угол поворота кулачка.
Точки касания ролика рычага с кулачком (фиг. 424100-1), а следо-
вательно, и профиль кулачка определяются полярными координатами
S. и (9+Д), (1)
которые находятся из следующих уравнений:
S3 = r34-a2 — 2ra2cosS, (2)
rsin£
Sine=—, (3)
О
, sin e
tg cp s > 74 \
-y— ^«Itsinr -VK;c)4 coss V >
9 = Р + г — so> (5)
где e0 —величина e в момент начала движения рычага.
Согласно фиг. 424100-П
S| = S2 + p2-2Spcos?,' (6)
sinД = sin®. (7)
424202 Условие возможности построения кулачка получается из следу-
ющих соображений.
Радиус кривизны профиля кулачка в точке х определяется из
равенства
R------
1-3'
sin2^
аг sin2<J sin-fp
S
I cos <p
a>K
а3—г cos 5) j j-
(1)
где
, _ S2rK sin Yp tg ? .
V'bx atf sin 5
(2)
Для возможности построения по заданному закону движения про-
филя кулачка необходимо, чтобы при отрицательных значениях вели-
чин радиуса профиля кулачка имело место неравенство
| R | > р, (3)
а также, чтобы на вершине кулачка радиус кривизны был положи-
512
425000-425101
тельным, что согласно равенству (1) приводит к неравенству
I / «с | < rprsft’f~ “к sin Yp max ,
где угол <1> определяется из уравнения
COS Ф =
gj-ra ~(Rr+?)a
2r (Rr + p)
(4)
(5)
КИНЕМАТИКА ТОЛКАТЕЛЯ, ПРИВОДИМОГО В ДВИЖЕНИЕ КУЛАЧКОМ, 425000
ОЧЕРЧЕННЫМ ДУГАМИ КРУГОВ И ПРЯМЫМИ
Кинематика толкателя с роликом при выпуклом профиле кулачка, 425100
очерченном дугами кругов
Ось ролика толкателя движется возвратно-поступательно по пря- 425101
мой, проходящей через ось вращения кулачка.
Обозначения (фиг. 425101):
р —радиус ролика (или грибка) толкателя;
гн —радиус начальной окружности кулачка;
— зазор между роликом и начальной окружностью Кулачка
на температурное расширение в клапанном механизме;
Rr — радиус окружности головки кулачка;
R —радиус дуги АВ профиля кулачка;
Гг —радиус дуги ВС профиля кулачка;
Фиг. 425101.
К кинематике профилированного дугой толкателя, приводимого в движе-
ние выпуклым кулачком
33 Авиац. порши, двигатели
513
425101
425101
Кулачковые
Располо- жение и число цилиндров Фирма и марка двигателя Кулачок Тип кулачка Тип толкателя R мм г? мм Г * ' н ММ р мм
V-образное, 12 цилин- дров ВК-105 Выхлопа Выпуклый Клапан с тарелкой 150 6,65 17,5(19,5) —
Всасыва- ния То же Траверса с плоскостью 150 4,34 17,5(19,5) —
АМ-38Ф Всасыва- ния и вы- хлопа Выпуклый Клапан с тарелкой 150 9,09 20 (22)
Роллс-Ройс «Мерлин» XX То же Вогнутый Рычаг с дугой 19,5 64,8 9,11 13,3 20,5
Аллисон С-15 » » Выпуклый Рычажная траверса 33,05 152,67 10,62 15,54 15,875
Д-образное, 12 цилин- дров Даймлер- Бенц 601 Еа » » Танген- циальный Рычаг с роликом СО 9 14,7 И
Даймлер- Бенц 603 » » То же То же со 9 14,7 11
Двойная звезда, 14 цилин- дров BMW-801 » » Параболи- ческий Толкатель с роликом — — 109 15
* В скобках дано значение теоретического радиуса начальной окружности кулачка.
** В числителе для впуска.
*** При зазоре Лт = 0.
механизмы
Таблица 425102
Лку мм Rr ММ о в О п э р г О hz ** «2 ММ Гк ММ Г мм Г ро Уравнения подъема толкателя, по которым построен профиль кулачка (углы $ в градусах)
13 32,5 9°24' 130° 0° 0° 2 — . — — — Очерчен дугами кругов
13 32,5 9°52' 125° 0° 0° 2 — — — — То же
14 36 10°05' 133° 0° 0° 2 — — — — » »
9,95 23,2 34°07' 175-42' 0° 20°23' 0,5 73,9 96,7 63,38 77° Очерчен дугами кругов
34°31'
10,64 23,2 40°42' 41°54' 4б°27' 168’55' 0° 30°59' 10°04' 0,25 51,7 49,1 36,74 81°07' То же
14°22' 0,51
8,6
23,3 164° 7°07' 0,3 38,5 42,15 28 75°29' Очерчен дугами кругов и прямыми
10°02' 0,6
8,6 23,3 46°27' 164° 30°59' 7°57' 0,40 39,7 47,1 28,5 70°35’ То же
10°17' 0,66
9,34*** 118,34 14°12х *«* 53°28' 0° — — — 62 38 дрдд'*** Первый участок: тангенциальный. Второй участок: ftTx=O,OOO2761602+ + 0,15066 (1—0,3031. Третий участок: йтх=О,0014439 0»4- + 0,129902- — 1,928480+8,9861. Четвертый участок: Лтх=о>ОООО533360»— —О,О3289402 + 41,87170-16,1757
33*
515
514
425102
рх —угол поворота кулачка, соответствующий времени про-
хождения роликом зазора йг, считая от точки А;
Р„, рЛ и рг —углы (значения их приведены в 422001);
рв — угол поворота кулачка, соответствующий прохождению
роликом толкателя участка АВ кулачка;
Рс —то же участка АС;
Р —угол поворота кулачка, отсчитываемый от его началь-
ного положения, при котором ОКА совпадает с ОКО9;
йку —высота кулачка; hKy = Rr~ гп;
ш —угловая скорость вращения коленчатого вала;
п — число оборотов коленчатого вала в минуту;
пк —число оборотов кулачкового вала в минуту;
а и щ — расстояния оси вращения кулачка от центров дуг ради-
усов R и гг;
hjX, Vtx и /тж — соответственно путь, скорость и ускорение толкателя
для данного Р;
Vc —скорость скольжения дуги грибка толкателя по кулачку.
Угловая скорость кулачка
Имеем:
a =R — ru,
a1 = Rr — rr,
к - R + ?
* 01
(1)
(2)
(3)
(4)
(5)
425102 При проектировании кулачка задаются следующими величинами
(см. 410000):
1. Углом поворота кулачка от момента начала открытия клапана
до момента посадки его на седло Рп согласно фазам распределения
рп = ^(180-РЯ1 + аа),
где а1 и а2 —углы опережения и запаздывания всасывания (выхлопа
для выхлопного клапана) по коленчатому валу.
2. Зазором в клапане йг.
3. Высотой подъема клапана йк-
На основании статистического материала (табл. 425102) выбираются
(фиг. 425101):
Гн = 1,3 до 2 йку; (1)
р = 0,8 до 1,5йку для ролика; (2)
р = 2 До 3ftKy для толкателя с грибком; (3)
гг = 0,3 до 1,4/1ку; (4)
R = 5 до 12 ЛкУ. (5)
516
425103-425104
Последовательно определяют следующие величины:
Угол зазора рс из уравнения
cos рт — 1
(R + Р + 0,5йт) йт
а^н + Р + й^) ’
425103
(1)
Полный угол кулачка
Рп = Рп + 2рт.
(2)
Вспомогательный угол <р из уравнения
cos <р = 1 —
ЙКу (Гн + 0>5ЙКу — Г,,)
• a(R — гг)
Угол рв из уравнения
tgPB
kt sin ?
cos <р — 1'
Угол рс из уравнения
s in рс = sin <р,
(3)
(4)
(5)
причем радиусом гг задаются.
Для проверки правильности подсчета углов рв и ₽с можно воспользо-
ваться следующим отношением:
sin(pc-₽B)=4;sin₽B. (6)
Угол вставки в профиль кулачка дуги с центром на оси кулачка
Рг = Рп — 2рс. (7)
Если задаться углом рс, то гг определяется из равенства
Хорда рабочей части дуги толкателя
с = 2р sin (рв —<р). (9)
Пути, скорости и ускорения толкателя при движении его по уча- 425104
стку АВ профиля кулачка (фиг. 425104) определяются из следующих
уравнений:
Путь толкателя
ЬТх = а(У kf — sin2P — cosP) —(Ги + р + Ат)- (1)
Скорость толкателя
VTX = a sin р С1 —^--os Р Л <ок. (2)
/fc?-sin4/
517
425105
Скорость скольжения дуги грибка толкателя по кулачку
V - Г/?- (₽ + ?>cos 3 1 ш
Vc ~ р /*r-sin» d к’
Ускорение толкателя
/тх = а Г cos ₽ - j/^-sin2 i - 1
L 5,111 PJ J
Ускорение толкателя в начальный момент
(/т)а = 0
(3)
(4)
(5)
Фиг. 425104.
Движение толкателя по дуге АВ кулачка
425105 Пути, скорости и ускорения толкателя при движении его по уча-
стку ВС профиля кулачка (фиг. 425105) определяются из следующих
уравнений:
Путь толкателя
ftTx = Gi[cos(₽c-P) + /*2 — sin2(Pc — P)]-(rH + p + /zT). (1)
Скорость толкателя
Скорость скольжения дуги грибка толкателя по кулачку
Ус = Г Гг + (гг + р) -/-cos(3c-^= 1 <ок. (3)
518
425200—425203
Ускорение толкателя
/тх = — Oi<[cos(pc —₽) +
+ /Л2- sin2 (p^pj 4-
4-_____ЛШ*К. (4)
' [^-sin»(^-P)]8'4
Ускорение толкателя в мо-
мент максимального подъема
клапана
(7т)с = — 01 (1 + ^) “к- (5)
Фиг. 425105.
Движение толкателя по ‘дуге
ВС кулачка
Кинематика толкателя с роликом при вогнутом профиле кулачка, 425200
очерченном дугами кругов
Вогнутый кулачок отличается от выпуклого тем, что у него уча- 425201
сток АВ профиля является вогнутой дугой круга (фиг. 425201). При
расчете кинематики толкателя с роликом задаются теми же величинами,
что и для случая выпуклого кулачка.
Обозначим 425202
где
a=R + rB. (2)
В остальном сохраняются обозначения 425101.
Последовательно определяют следующие величины (фиг. 425201):
Угол рт из уравнения
425203
cos рт = 1
(R-p-0,5/zT) Л,
a(rH + P + /t)
G)
Вспомогательный угол <р из уравнения
cos © = 1
^ку (Ги + ^’^ку гг)
a (R4-rr)
Угол рв из уравнения
tg₽B
sin <р
1 - fcj cos ? '
(2)
(3)
519
520
425203
Фиг. 425201.
К кинематике профилированного дугой толкателя, при-
водимого в движение вогнутым кулачком
Фиг. 425204.
Движение толкателя по дуге АВ вогнутого
кулачка
425204—425205
Угол рс из уравнения
sin₽c = ^-^-sin <р. (4)
Для проверки можно воспользоваться следующим соотношением:
sin(pc-pB) = -g sin₽B. (5)
Углы рп и рг определяются из тех же уравнений, что и в 425103.
Если задаться углом рс, то гг определяется из равенства
Лку (R +гв +0,5Лку)
Кг R+Rr-acospe
(6)
Хорда рабочей дуги толкателя с грибком равна
с = 2р sin (Рв4~<р). (7)
Пути, скорости и ускорения толкателя при движении его по 425204
участку АВ профиля кулачка (фиг. 425204) определяются из следующих
уравнений:
Путь толкателя
ftix==a(cosP ——sin2p) —(Гн + р + ЛД. (1)
Скорость толкателя
= а Sin К ~ 1) в>к' (2)
Скорость толкателя в моменты закрытия и открытия клапана
Z cos В \
= a sin рт ( -?===— 1 ) ®к . (3)
Скорость скольжения грибка толкателя по кулачку
Ускорение толкателя
/тж=а [—cos₽+. (5)
Ускорение толкателя в начальный момент подъема
(/т)а = й^=7®к. (6)
При движении ролика по дуге ВС профиля кулачка величины 425205
htx, Vix, Vc и /тх определяются по формулам 425105.
521
425300-425302
425300 Кинематика толкателя с роликом при тангенциальном кулачке
425301 Участок АВ профиля тангенциального кулачка (фиг. 425301)
является прямой.
При расчете кинематики толкателя с роликом задаются теми же
величинами, что и в 425102.
Обозначение величин—см. 425101.
Фиг. 425301.
К кинематике профилированного дугой толка-
теля, приводимого в движение тангенциальным
кулачком
425302 Предварительно определяют следующие величины:
Угол из уравнения
Угол ₽в из уравнения
tg₽B = “^-sin₽c. (2)
Угол рс из уравнения
с°5рс = -5^- (3)
522
425303-425401
Для проверки можно воспользоваться следующим соотношением:
sin0B= psin(pc-ps). (4)
Л2
Углы Зп и Зг определяются из тех же уравнений, что и в 425103.
Если задаться углом Зс, то гг определяется из равенства
Гг — /?г
1 — COS fie '
(5)
Хорда рабочей дуги толкателя с грибком равна
с — 2р sin Зв
(6)
Пути, скорости и ускорения толкателя при движении его по
участку АВ профиля кулачка (фиг. 425303) определяются из . следу-
425303
ющих уравнений:
Путь толкателя
йтх = (гн + р) Q —h-L. (1)
Скорость толкателя
VTx = (rH + p)-^|«>K. (2)
Скорость скольжения дуги
грибка толкателя по кулачку
Ус = [гн + (Гн + р) tg2 ?]®2. (3)
Ускорение толкателя
] тх — (rH + р) co^3 fj ШК • (4)
Ускорение толкателя в на-
чальный момент
(/т) =(Гн + р)«к- (5)
А
Фиг. 425303.
Движение толкателя по прямолинейному
участку профиля тангенциального кулачка
При движении ролика по дуге ВС профиля кулачка величины
йтх, Утх, Ус и jTX определяются по формулам 425105.
Кинематика толкателя, профилированного плоскостью, при профиле 425400
кулачка, очерченном дугами кругов
Приводить в движение данный тип толкателя может только выпу- 425401
клый кулачок.
Подобные кулачки бывают двух типов.
Первый тип, когда дуга радиуса R касается начальной окруж-
523
425402-425403
425402
ности (фиг. 425401-1), и второй тип, когда дуга радиуса /? касается
окружности зазора радиуса r„ + h- (фиг. 425401-П).
Формулы движения толкателя для обоих типов кулачка будут оди-
наковы, если при подсчетах положить, что радиус начальной окруж-
ности гн во втором типе кулачка равен гн-|-йт, и в соответствии с этим
425403
Фиг. 425401-1.
К кинематике толкателя с плоской тарел-
кой
принять угол зазора равным
нулю.
Задаваясь теми же величи-
нами, что и в 425102, и оста-
вляя обозначения п. 425101,
определяют предварительно сле-
дующие величины.
Фиг. 425401-П.
К кинематике толкателя с плоской
тарелкой
Угол из уравнения
cospT=l—-у-
(О
Углы <р, рп> Рс и рг и радиус гг определяются из уравнений 425103.
Необходимо отметить, что при данном типе толкателя ускорения на пер-
вом и последнем участках движения клапана получаются значительными;
поэтому приходится выбирать R возможно меньшим, что приводит,
при удовлетворительной в отношении прочности механизма величине гг,
к невозможности осуществления дуги вставки рг. Действительно, все
кулачки известных подобных механизмов (Испано, Нэпир и др.) не
имеют угла вставки.
Угол рв равен
Рв= <Р’
(2)
Для проверки можно воспользоваться соотношением
sin <р = sin ps = -y sin (рс —?в)- (3)
524
425404—425406
Обозначив ширину кулачка через Ъ и эксцентриситет кулачка по
отношению к толкателю через и (фиг. 425404), определим наименьший
425404
радиус плоской тарелки, теоретически необходимый для того, чтобы
во время работы тарелка соприкасалась с ку-
лачком по всей ширине Ь, из уравнения
(p)min= j/(-2- + u)2 + (asinpB)2. (4)
Фиг. 425404.
К определению минимального
радиуса тарелки толкателя
Пути, скорости и ускорения толкателя при движении его по
участку АВ профиля кулачка (фиг. 425405) определяются из следующих
уравнений:
425405
Путь толкателя
йТх = а(1 — cosp).
(I)
Скорость толкателя
Фиг. 425405.
Движение толкателя с плоской тарел
кой по дуге АВ выпуклого кулачка
Путь толкателя
Утх = а <«к sin 8 . (2)
Скорость скольжения тарелки
толкателя по кулачку
VC = (R — acosp)o>K. (3)
Ускорение толкателя
/тх = а cos р . (4)
Ускорения толкателя в началь-
ный момент
(/т)А = а®Д. ' (5)
Пути, скорости и ускорения
толкателя при движении его по
участку ВС профиля кулачка
(фиг. 425406) определяются из сле-
дующих уравнений:
425406
Лтх - Йку [1 COS (Рс Р)]. (1)
Скорость толкателя
Vt»= sin (Рс —Р) о)к . (2)
525
425406
Фиг. 425406.
Движение толкателя с плоской тарелкой по
дуге ВС выпуклого кулачка
/ V h
JhX "кх
Фиг. 425407.
Диаграмма пути, скорости и ускорения клапана впуска воздуха
авиационного двигателя
526
425407-426003
Скорость скольжения тарелки толкателя по кулачку
Кс = [и-+ ах cos (рс-₽)]«>„. (3)
Ускорение толкателя
jix — axcos(pc р) о>к. (4)
Ускорение толкателя в момент максимального подъема
ах®к. (6)
На фиг. 425407 даны пути скорости и ускорения клапана впуска
воздуха авиационного двигателя, имеющего кулачки второго типа.
КИНЕМАТИКА КЛАПАНА, ПРИВОДИМОГО В ДВИЖЕНИЕ РЫЧАГОМ
Угловые перемещение, скорость и ускорение рычага
425407
426000
426001
drp
7? и
42ТР
dt2 •
считаются заданными.
Фиг. 426001.
Схема передачи движения рычагом
клапану
Обозначения (фиг. 426001):
уРо —угол ур при закрытом кла-
пане;
Yp, — угол yp в момент начала дви-
жения клапана;
YK —угол поворота рычага, соот-
ветствующий полному подъе-
му клапана;
—зазор в клапане;
йк —полный подъем клапана;
гк —плечо рычага со стороны кла-
пана, равное расстоянию от
оси вращения до центра ша-
ровой или цилиндрической
поверхности ударника ры-
чага.
Предварительно определяют угол
Yp в момент начала движения кла-
пана, когда рычаг повернется на
угол т и выберет зазор в клапане
cosy,,, = cosy,,-------(1)
ip0 y
V ---- V
<рт ip0
(2)
Путь клапана согласно фиг. 426001 равен
426002
426003
hKX = rK (cos-yp,— cosyp).
(1)
527
426004-426005
Угол ук определяется из следующих уравнений:
hK COS Y = COS Y , • ртах ‘рт rR ’ (2)
—— у — у i к ip max ipo (3)
Скорость клапана VKz = rBsinrp-17 • (4)
Ускорение клапана
/кг — Г • )•] (5)
426004
Скорость скольжения ударника по торцу штока клапана:
для типа ударника фиг. 426004-1
Ис —(R —гксо5?р) ^ , (1)
для типа ударника фиг. 426004-11
Vc = rKcosrp-^. (2)
Для ударника типа фиг. 426004-II скорость скольжения шаровых
поверхностей равна
v
Vc~~ 2 at '
(1)
Фиг. 426004-1.
Схема ударника
Фиг. 426004-11.
Схема ударника
Фиг. 426005.
Схема ударника
426005
Для ударника типа фиг. 426005 скольжение
валиком ролика и роликом со скоростью
происходит между
Vc = r(l->.cosTp)^
(2)
528
427000-427103
КИНЕМАТИКА ПРОФИЛИРОВАННОГО ДУГОЙ РЫЧАГА, ПРИВОДИМОГО В ДВИ-
ЖЕНИЕ КУЛАЧКОМ, ОЧЕРЧЕННЫМ ДУГАМИ КРУГОВ И ПРЯМЫМИ
Четырехзвенный механизм как основа рычажного клапанного механизма
Кинематическое исследование механизма, состоящего из рычага
с роликом и кулачка, очерченного дугами окружностей, приводится
к кинематическому исследованию четырехзвенного механизма-; поэтому
предварительно дается определение кинематических величин (путей,
скоростей и ускорений) для четырехзвенного механизма.
Пусть закон движения звена а четырехзвенного механизма 0к00Р0р
(фиг. 427102-1) будет тем же, что и кулачка, т. е. пусть это звено
427000
427100
427101
427102
Фиг. 427102-1.
Первая схема четырехзвенного ^механизма
s* u 43 ,
вращается с постоянной угловой скоростью и через тягу I
передает движение ведомому звену
это звено является рычагом).
При данном угле поворота
звена а механизм может зани-
мать два различных положения
(фиг. 427102-1 и 427102-П), что
соответствует двум возможным
видам движения рассматриваемого
механизма. Формулы, которые да-
ны ниже, справедливы для обоих
видов движения. Направление от-
г (в кулачково-рычажном механизме
Фиг. 427102-П.
счета и знаки углов даны на Вторая схема четырехзвенного механизма
фиг. 427102-1.
Для выяснения той четверти, в которой лежат углы, определяемые на
основании нижеприводимых уравнений, надежнее всего в сомнительных
случаях построить в масштабе механизм в соответствующем положении.
Предварительно необходимо определить вспомогательные углы
четырехзвенника ф и е, считая угол р заданным. Имеем
427103
Z2+r2-a! — al ага „
cos ф =------2ГГ-----4- TjT COS р,
tes = ..£sin.L.
° а2 —acosfJ'
О)
(2)
34 Авиац. порши, двигатели
.529
427104-427202
427104 Угловые перемещение, из следующих уравнений: скорость и ускорение звена г определяются
Угловое перемещение <
t„f5 х <sin* (1)
/ г — 1 cos *'
Угловая скорость di a sin р - . г—т Юк , dt г sin* (2)
где р = 360’-(р+ф + 3). (3)
Угловое ускорение
d*t aat 1 di* rl sin* * cos р- sin 8 — cos ф sin р г их dp) ’“«> Н)
где di a sin р d^~~ г sin* (5)
427105 Для случая, когда вместо ролика с кулачком соприкасается участок
рычага, очерченный дугой окружности, приходится при расчете меха-
низма на износ определять скорость скольжения рычага по кулачку Vc-
Vc = [r sin("+3) ~ p]
427200 Кинематика рычага, приводимого в движение выпуклым кулачком,
очерченным дугами кругов
427201 Обозначения (фиг. 427201).
at — расстояние между осями вращения рычага и кулачка;
г — длина плеча рычага;
р — угол поворота кулачка, отсчитываемый от звена о,;
ух — расстояние между осями кулачка и ролика рычага (или цилин-
дрической поверхности, которой очерчен рычаг);
рп — полный угол профиля кулачка;
3 — угол между звеньями г и аг;
di
М — угловая скорость рычага;
— угловое ускорение рычага.
Остальные обозначения даны на фиг. 427201.
Обозначения параметров кулачка даны в 425101.
427202 Для построения профиля кулачка определяется высота кулачка
по заданному подъему клапана. С точностью до ~ 1% можно принять,
что отношение высоты кулачка к высоте подъема клапана равно отно-
шению соответствующих плеч рычага:
Лку — ~z~ (Лк 4~ Лт) •
' к
530
427262
Фиг. 4272®! а.
Фиг. 427201 б.
К кинематике профилированного дугой рычага, ведомого выпук-
лым кулачком. Движение по дуге" АВ
34*
531
427203-427206
Более точно можно определить йку, зная согласно изложенному
в 426003 величину угла поворота рычага, соответствующего полному
подъему клапана hK, определяемому из уравнения (3) п. 426003.
427203 Угол 8 в момент соприкосновения дуги рычага с начальной окруж-
ностью кулачка находится из уравнения
Высота кулачка
йИу = /г! + а* - 2га, cos (8А + уи) — (ги + ?). (2)
427204 Полный угол кулачка
Рп = Рп4-ТК+’кЬ (О
где Рп — полный угол открытия клапана по кулачковому валу;
ткитк1 —углы поворота кулачка, соответствующие прохождению роли-
ком рычага зазоров в клапанном механизме при подъеме
и опускании клапана
= Рт Ра, (2)
Тк1 — Ра Рт1, (3)
Рт = 180+Тг+ет, (4)
Рт1 = 180-Ь — 6Т, (5)
причем значения углов рт, pTt, и 6Т показаны на фиг. 427204, а угол
рЛ есть предельный угол, определение которого дано в 427210.
При наличии равенств (1) — (5) имеем
Рп = Р'п + 20т. (6)
Углы ут и определяются при помощи следующих уравнений:
tgY = _£81п(аА+<> 11}
о«т at — r cos (8i + t)
Р -L р ,
sin 6т = Sin <рт, (8)
Ут
га
427205 Угол поворота кулачка, в пределах которого открыты выхлопной
и всасывающий клапаны, так называемый угол перекрытия кла-
панов, для схемы фиг. 427205 (двигатель DB) равен
Рпер = 360° + Рп - 2рА - 2тк.
427206 Угловые пути, скорости и ускорения рычага при движении его по
участкам АВ и BrAr Профиля кулачка (фиг. 427201) определяются из
следующих уравнений.
532
427206
533
427207
Угловой путь рычага
где
где
iaf» -X — </? + p)sin4>
tg ' ' r — (R -I- p) cos ф ’
угол ф определяется из уравнения
cos<I> = r3+(R + p)i-al~ai
? 2r(R + ?)
Угол e определяется из уравнения
, _ asinp
g е — at — a cos fi *
Угловая скорость рычага
di a sin ц
dt г sin ф Ш,<’
угол р. определяется из равенства
+-F(W)C0SP-
[1. = 360° — (р + 8 + ф).
Угловое ускорение рычага
аа* 1 / . . . п , di \ »
5Г« -(ТГ07 (cos sm S “ sin ₽ cos Ф W )
где
di _ a sinp
dfi г sin >|» *
Угловое ускорение рычага в начале движения
fd2i\________а ('* + р)г
\dt2 J л (R + р) rat sin iji к’
(О
(2)
(3)
(4)
(5)
(6)
(7)
(8)
Для случая, когда вместо ролика рычага с кулачком соприкасается
конец рычага, очерченный дугой окружности, скорость скольжения
рычага по кулачку будет
ст
Угол р в уравнениях (1) — (9) изменяется от рА до рв и от рВ1 до рлх
(см. фиг. 427210).
427207 Угловые пути, скорости и ускорения рычага при движении его по
участкам ВС и профиля кулачка (фиг. 427207) определяются из
следующих уравнений:
Угловой путь рычага
tg(8 _ е) = -Iri+jyiljL , (1)
° ' ’ Г — (Гг + р) COS ф
где угол ф определяется из уравнения
со5ф=^(г^-»;+_^>со5р, (2)
534
427207
а угол e из уравнения
at sin p
a, — cos p ’
Угловая скорость рычага
di at sin Ц
—— = —-----;--г (i)«.
dt r sin Ф
где угол p. определяется из равенства
Р = 360’— (р + 8+4>).
(3)
(4)
(5)
Фиг. 4272076.
К кинематике профилированного дугой рычага, ведомого выпуклым
кулачком. Движение по дуге ВС
Угловое ускорение рычага
d2t a,a., 1 / . » -о , di\ ,
ы=(Т-пггИН^ (cos f1 sln s ~fin ₽cos * dp)
где
d5 £i sin p ...
dp r sin f'
Угловое ускорение рычага в момент максимального подъема клапана
а. (Rr + p)8
(Гг + Р)га.5т(«л + Тв)юк-
Когда вместо ролика рычага с кулачком соприкасается конец
рычага, очерченный дугой окружности, скорость скольжения рычага
535
427208—427210
по кулачку будет
(9)
427208
427209
Угол р в уравнениях (1) — (9) изменяется от рв ДО Рс и от рсх до
рвх (см. фиг. 427210).
Для того чтобы определить угловые перемещения, скорости и уско-
рения при всех углах поворота кулачка, необходимо знать значения
углов поворота кулачка, в пределах которых движение рычага совер-
шается по рассматриваемому участку профиля кулачка. Эти углы р
называются предельными.
Угол р является углом поворота кулачка, отсчитываемым от пря-
мой, проходящей через оси вращения кулачка и рычага.
Перед определением величин предельных углов надо найти необхо-
димые вспомогательные углы (см. 427209).
Угол <р определяется из уравнения (фиг. 427201)
р __ j (Rr rB)(Rr + rB 2гг)
СМ ? - 1-------2a(R —г7)---
Угол у в момент соприкосновения дуги рычага с кулачком в точке В
определяется из уравнения
(1)
а1 + У%~
С“Т« = —
(2)
где
Ув = (Я + ?)!4-а’-2а(Я-Н)со5Т. (3)
Угол 6 в момент соприкосновения дуги рычага с кулачком в точке В
определяется из уравнения
sin6B = <р. (4)
Угол 6 в момент соприкосновения дуги рычага в точке С опреде-
ляется из уравнения
sin 6С = R~'fr sin <р- (5)
“1
427210 Предельный угол р, соответствующий началу движения дуги рычага
по дуге АВ радиуса R, определяется из уравнения (см. фиг. 427210)
со.(₽Л-18О-)-&+^±^. (1)
Предельный угол р, соответствующий началу открытия клапана,
определяется из уравнения (4) п. 427204.
Предельный угол р, соответствующий концу движения дуги рычага
по дуге АВ, равен
Рв = 180° + 6В + ТВ. (2)
Предельный угол р, соответствующий началу движения дуги рычага
по дуге BiAx радиуса R, равен
рВ1=180° — 6 в + Y в- (3)
536
427210
Фиг. 427210.
К определению предельных углов для выпуклого кулачка, ведущего рычаг, профили
рованный дугой
Предельный угол р, соответствующий закрытию клапана, опреде-
ляется из уравнения (5) п. 427204.
Предельный угол р, соответствующий концу движения дуги рычага
по дуге BxAi, равен
= Ра- (4)
Предельный угол р, соответствующий началу движения дуги
рычага по дуге ВС радиуса гг, равен
Рв ~~ Чв 8С + 6В
(5)
Предельный угол р, соответствующий концу движения дуги рычага
по дуге ВС, определяется из уравнения
гп-й (Яг + р)! + а|-г!
cospc- (b)
Предельный угол (3, соответствующий началу движения дуги
рычага по дуге С1В1 радиуса гг, равен
₽с=₽с!- (7)
537
427211-427302
Предельный угол р, соответствующий концу движения дуги рычага
по дуге CiBi, равен
Зк-Гв + 0с-бв. (8)
Угол поворота кулачка, соответствующий движению дуги рычага
по участку кулачка АС, равен
Pi = 6с + 180° + Рс — Ра>
а но участку кулачка
(9)
(Ю)
Pii==6c-18O°-₽c + Pa.
Фиг. 427211.
Диаграммы пути, скорости и ускорения клапанов авиационного'
двигателя Аллисон С-15
Угол вставки, соответствующий участку кулачка CCt, равен
Рг — Рп — 26(7.
(Н)
427211 В качестве типичного примера на фиг. 427211 даны пути, скоро-
сти и ускорения клапанов авиационного двигателя Аллисон С-15,
основные параметры кулачка и рычага которого указаны в табл. 425102.
427300 Кинематика рычага, приводимого в движение вогнутым кулачком
427301 Обозначения — те же, что в 425101 и 427201 (фиг. 427301).
427302 Для определения профиля кулачка высота кулачка Лку опреде-
ляется по формулам 427202 и 427203, а полный угол кулачка рп —по
формулам 427204 с заменой уравнения (10) для определения угла <р,
538
427302
Фиг. 427301а.
Фиг. 4273016.
К кинематике профилированного дугой рычага, ведо-
мого вогнутым кулачком
539
427303—427304
(фиг. 427302) на уравнение
~ ₽)3 + а* — г* ~ аг
C0S^- 2fl(R-P)--------------
427303
427304
Угол перекрытия клапанов для схемы фиг. 427303 равен
Рпер= Рп 2р^ 2тк.
Угловые пути, скорости и ускорения рычага при движении его
по участкам АВ и В1А1 профиля кулачка (фиг. 427301) определяются
из следующих уравнений.
Фиг. 427302.
К определению угла зазора
Фиг. 427303.
К определению угла перекрытия
Угловой путь рычага
p)C0S Ф ’ ' 7
где угол ф определяется из уравнения
, г* + (R — р)! — al — а1 , ага а
С°Н = 2г(К-й —<2>
а угол е из уравнения
tga = aSing>-ft-. (3)
at — a cos 3
Угловая скорость рычага
dS=_£sinj< (4)
dt г sin ф
где угол р. определяется из равенства
fi = 360°-(Р-Н + ф). (5)
540
427305—427307
Угловое ускорение рычага
d’i аа, I /* . , . п , d4\ ,
d? = (R^r sl^ Q COS [X S in 8 - sin Р cos ф (6)
где
d®____a sin ц ‘
dp г sin ф" * '
Угловое ускорение рычага в начале движения
: а (r*+p)\* (я\
\41*уа (R— р) гаг sin к‘ ‘ '
Когда вместо ролика рычага с кулачком соприкасается конец
рычага, очерченный дугой окружности, скорость скольжения рычага
по кулачку будет
Угол р в уравнениях (1)—{9) изменяется от рА до рв и от рВ1
до рА1 (см. фиг. 427301).
Угловые пути, скорости и ускорения рычага при движении 427305
дуги рычага по участкам ВС и профиля кулачка определяются
из уравнений 427207.
Для определения угловых путей, скоростей и ускорений рычага 427306
надо предварительно найти углы р, в пределах которых дви-
жение рычага совершается по рассматриваемому участку профиля
кулачка, причем сначала находится ряд вспомогательных углов
(см. 427307).
Угол <р определяется из уравнения (фиг. 427301) 427307
cos ср = 1
_ (Rr-fH) №-^гн-2гг)
2a(R + rr)
(1)
Угол у в момент соприкосновения дуги рычага с кулачком в точке В
находится из уравнения
cosy£
_ Уд+а"~гг
~ 2Ува«
(2)
где
ув = (Я-р)* + а! —2a(R —p)cos<p. (3)
Угол 6 в момент соприкосновения дуги рычага с кулачком в точ-
ке В определяется из уравнения
sin 0В = ^=-Psin ср. (4)
Ув
Угол 6 в момент соприкосновения дуги рычага с кулачком в точ-
ке С находится из уравнения
sin 0с = —Гг sin <».
и а, т
(5)
541
427308—427309
427308 Предельный угол (3, соответствующий началу движения дуги
рычага по дуге АВ радиуса R, определяется из уравнения (см. фиг. 427301)
Предельный угол р, соответствующий началу подъема клапана,
равен
+ (2)
Предельный угол (3, соответствующий концу движения дуги рычага
по дуге АВ, равен
— 7в+®в- (3)
Предельный угол р, соответствующий началу движения дуги
рычага по дуге B,A, радиуса R, равен
Psi —Тв — (4)
Предельный угол ₽, соответствующий посадке клапана на седло,
равен
^ = Т.- (5)
Угол р, соответствующий концу движения ролика по дуге BiA,,
равен
Ра! = Ра- (6)
Предельные углы р, соответствующие движению дуги рычага
по дугам ВС и (углы Рв, рс, Pci и p'Bi), определяются по урав-
нениям (5) —(8) п. 427210.
Угол р поворота кулачка, соответствующий движению дуги рычага
по участку кулачка АС, равен
Р1 = ес^(Рл-рс), (7)
а по участку кулачка C,AL
Рн = 6с + (Ра — Рс)- (8)
Угол вставки, соответствующий участку кулачка СС1Л определяется
из уравнения (11) п. 427210.
427309 В качестве типичного примера на фиг. 427309 даны диа-
граммы пути, скорости и ускорения клапана, приводимого в дви-
жение вогнутым кулачком, для авиационного двигателя «Мер-
лин» XX, основные параметры кулачка и рычага которого указаны
в табл. 425102.
542
427400-427404
Фиг. 427309.
Диаграммы пути, скорости и ускорения клапана авиационного двигателя
Роллс-Ройс «Мерлин» XX
Кинематика рычага, приводимого в движение
тангенциальным кулачком
427400
Обозначения те же, что в 425101 и 427201 (фиг. 427401). 427401
Для определения профиля кулачка высота кулачка Лку находится 427402
по формулам 427202 и 427203, а полный угол кулачка рп — по фор-
муле (б) п. 427204, где угол 6 определяется из уравнения
*
cos 6
Гк+р sin у.
(I)
Угол перекрытия клапанов для схемы фиг. 427403 (схема рычаж- 427403
ного механизма двигателя DB) будет
Риер — Рп 2Р^4 2тк. (1)
При определении угловых путей, скоростей и ускорений рычага 427404
во время его движения по прямым кулачка АВ и В1А1 рассмот-
рим механизм кулачок-рычаг как механизм вращающейся кулисы
(фиг. 427401).
543
427404
Фиг. 423.401а. Фиг. 4274016.
К кинематике профилированного дугой рычага, ведомого тангенциальным
кулачком. Движение по прямой АВ
Фиг. 427403.
К определению угла перекрытия
427405 -427407
Угловой путь рычага
8 = 180’-(? + ф), (1)
где угол ф определяется из уравнения
(2)
Угловая скорость рычага
dS / a, sin В . \
Л“(.-Гя4-О“- (3>
Угловое ускорение рычага
S“^^(sin5 + si^Cos^)<’ (4)
где
dS Z д, sin?
< г sin ф 7 • ' '
Угловое ускорение в момент начала движения рычага
rn2sin«A в> 1 '
Для случая, когда вместо ролика рычага с кулачком соприкасается
конец рычага, очерченный дугой окружности, скорость скольжения
рычага по кулачку будет
0+£)•• Р)
Угол р в уравнениях (1) —(7) изменяется от рА до рв и от рв
до рА1(см. фиг. 427408).
Угловые пути, скорости и ускорения при движении дуги толка- 427405
теля по участкам профиля кулачка ВС и определяются по форму-
лам 427207.
Для определения угловых путей, скоростей и ускорений рычага 427406
находят углы р, в пределах которых движение рычага совершается >
по рассматриваемому участку профиля кулачка, для чего сначала
находится ряд вспомогательных углов (см. 427407).
Угол у в момент соприкосновения дуги рычага с кулачком в точ- 427407
ке В определяется из уравнения (фиг. 427401)
где
У в = ai— (гв - гг)! + (ги + р)'.
Угол 6 в момент соприкосновения дуги рычага с кулачком в точ-
ке В определяется из уравнения
СО50в«Ц±-₽. (2)
35 Авиац. поршн. двигатели
545
427408
Угол в в момент соприкосновения дуги рычага с кулачком в точ
ке С определяется из уравнения
г __ г
COS0C = ^_2*4
(3)
427408 Предельный угол
рычага по'прямой АВ,
р, соответствующий началу движения дуги
определяется из уравнения (см. фиг. 427408)
cospA =
(ги + р^ + д!-^
2 (г и + ?) а2
(1)
Предельный угол р, соответствующий началу движения клапана,
равен
Рт = ft + б-с- (2)
Предельный угол р, соответствующий концу движения дуги толка-
теля по прямой АВ, равен
?в = Тв + бв* (3)
Предельный угол р, соответствующий началу движения дуги
толкателя по прямой В^, равен
Pbi = 7в — 6в- (4)
546
428000-428002
Предельный угол р, соответствующий посадке клапана на седло,
равен
(5)
Предельный угол р, соответствующий концу движения дуги толка-
теля по прямой В1Д1, равен
?АХ=?А- (6)
Предельные углы р, соответствующие движению дуги толкателя
по дугам ВС и С1В1 (углы р'в, рс, Pci и р'в1), определяются из уравне-
ний (5)-(8) п. 427210.
Углы поворота кулачка, соответствующие движению дуги толка-
теля по участкам кулачка АС и СгАх (углы и рп), определяются
из уравнений (7) и (8) п. 427308.
Угол вставки, соответствующий участку кулачка ССг, и угол мак-
симального отклонения рычага от его начального положения, соответ-
ствующего закрытому клапану, определяются из уравнения (II)
п. 427210.
КИНЕМАТИКА ПРОСТРАНСТВЕННОГО МЕХАНИЗМА РАСПРЕДЕЛЕНИЯ 428000
ЗВЕЗДООБРАЗНЫХ ДВИГАТЕЛЕЙ
При проектировании пространственных механизмов распределения 428001
задаются следующими величинами:
1) максимальным подъемом клапана;
2) конструктивной схемой механизма;
3) величиной зазора в клапане (на основании имеющегося опыта) и
4) продолжительностью открытия клапана по фазам распределения.
Для построения профиля кулачка по заданному подъему клапана 428002
с точностью до 5 — 15% можно определить высоту йку кулачка из
уравнения (I) п. 427202.
Точно йку равна
Sin ТТШаХ2~ ТТ° Sin [ - (е + Фз) ] -
- { Z [ N~cS-^ COSCYrmax- 6 ~ фз) ] ’ + 2 COS (Уттах-б-^-М-
- / LN ~ cos(Yi° ~е ~фз) ]8+2 cos (Гт° -е -’’о) - м},
где
^фз = *И? = Ъ
величины N, Н, К, М и углы ф,, фа определяются из уравнений (6)
п. 428007, угол 6 — из уравнения (1) п. 428006;
Уттах —угол ут в момент максимального подъема клапана;
Ytt —угол ут в момент начала открытия клапана;
Гю—угол ут при закрытом клапане;
Уттах — Уто + Ук;
Утт = Уто + 't-
35*
547
428003-428006
Углы ук и т находятся из уравнений 426002 и 426003.
428003 Полный угол кулачка определяется по формуле
Рп = (180° + а0 + а3),
где Pti> Рт2 — углы по кулачку, соответствующие зазору й- в клапан-
ном механизме (в начале подъема и конце опускания
клапана);
ао, «з — углы опережения и запаздывания всасывания и выхлопа
(по коленчатому валу);
пК) п — числа оборотов кулачковой шайбы и коленчатого вала
в минуту.
428004 Уравнения движения центра ролика толкателя (на рабочем участке)
выбирают обычно такими, чтобы диаграмма ускорений толкателя по
времени (по углу поворота распределительной шайбы) состояла из прямо-
линейных участков. В этом случае зависимость между подъемом тол-
кателя Лта и углом ₽ поворота кулачковой шайбы будет параболи-
ческой кривой 2-го или 3-го порядка [см. уравнение (1) п. 422107].
428005 Участки кривой центра ролика толкателя, предназначенные для
части профиля кулачка, служащей для компенсации зазора, обычно
очерчиваются дугой окружности и архимедовой спиралью (например,
в моторе Райт «Циклон»). При этом скорость клапана в моменты его
открытия и закрытия не должна превышать величины порядка 1,0 м/сек.
428006 Определив пути hTX, скорости VTX и ускорения /Тх толкателя,
переходим к определению угловых путей, скоростей и ускорений клапан-
ного рычага; перед изложением хода вывода уравнений для угловых
путей т'т рычага найдем вспомогательные углы согласно схеме
фиг. 428006, где приняты следующие обозначения:
х — ось коленчатого вала;
z — ось цилиндра;
у — ось, перпендикулярная плоскости xz и проходящая через
точку 0 — начало координат системы xyz;
AjAz — ось толкателя;
DNi — ось клапана;
А'В— тяга, помещающаяся в пространстве;
ВС — плечо рычага г со стороны тяги;
CD — плечо рычага гк со стороны клапана;
b — плоскость качания рычага (в этой же плоскости находится
ось клапана);
t, е, <р, аг — углы, обычно помещаемые на чертежах двигателя и характери-
зующие расположение осей толкателя, клапана и плос-
кости качания рычагов относительно выбранных осей х, у, z;
А' — центр сферы нижнего наконечника тяги;
С — точка пересечения оси рычага с плоскостью Ь\
D. — центр ролика рычага со стороны клапана;
В — центр сферы верхнего наконечника тяги;
ха>Уа>2а~ координаты точки А при закрытом клапане;
Хс, yc,zc — координаты точки С;
I — длина тяги;
р — угол поворота распределительной шайбы.
548
428006
549
428007
Из треугольников KK'Aj и К’А'А1 (фиг. 428006) определяем
углы 6 и ф
tg8 = , (1)
& cos (? — е) ' 1
. sin т /пх
созФ = -г-д- . (2)
* sin и ' ’
428007 Для определения угловых путей, угловых скоростей и угловых
ускорений рычага выводим зависимость между угловым путем рычага
и перемещением толкателя. Согласно нижеследующим уравнениям
[(2) — (4) п. 428008] определяются:
ут — угловой путь рычага;
— угловая скорость рычага;
«Р-р-
^7 — угловое ускорение рычага.
На фиг. 428005 показано расположение звеньев механизма отно-
сительно координатных осей х, y,z. Верхний конец тяги В вращается
вокруг точки С, а нижний конец тяги А’ движется по оси толкателя
по закону движения последнего.
При перемещении толкателя на величину hTX координаты центра
сферы нижнего наконечника тяги А' будут (см. фиг. 428006)
XAf :== ХА ' ^тх SHI t, )
У А’ = у а +^тх cos X Sine, J- (1)
ZA'=Za +hxx cost cose. J
Соответствующие координаты точки В будут
хв = Хс + г sin ут cos )
У в = Ус ~r (sin <р cos Yt—cos<p sin sin ях), (2)
Zb = Zc — r (cos cos Yr + sin <? sin Y‘Tsin aj. J
Обозначим
xA — xc = x0,
Ус~Уа = У.,
zc - = z0.
Проекции тяги на оси х, у, z будут:
1Х = ха — (ЛТЛзт 14-г sin Yr cos aj,
ly~ y„ — [r (Sinjcp cos Yr — COS (f>sin Yt sin aj + йта cost Sine], (3)
lz ~ zo — [r (COS <p COS Yt + Sin <p sin Yt sin aj + Лтх COS t COS e].
Так как
i* = ii+tl+isz, (4)
550
428008
то, подставляя в уравнение (4) выражения для 1Х, 1в, 12 из равенств (3),
предварительно заменив в них переменное уг на уТ1 и полагая
Yt = Yti + 0, (5)
где угол 6 определяется по формуле (1) п. 428005, вводим обозначения:
xg + Уо + Zo 4-г! — Г = М,
Х„ sin х 4- ye COS х sin е 4- zo COS X COS e = N,
X„ Sin 6 COS «1 + (y0 Sin <P + Z„ COS <f>) COS 6 +
+ sin <4sin 6 (z0sin - yocos?)=K,
x0 cos 6 cos — (y0 sin <p + z0 cos <p) sin 6 4-
+sin a, COS 6 (z„ Sin <f — y0 COS <f>) = H,
sin 6 [sin т COS «! 4- sin a2 COS T Sin (? — a)] -[> cos 9 COS T COS ( <?— e) = tg ф2,
COS 9 [sin T COS *1 + Sin ajCOStSin^ -» з)]— sin9 COS i: COS (<p — e) =
и находим
Af4- h^—2NhTX~2r {(K—hTX tg <J>X) cos Yti 4- (Я—hxx tgф2) sin Yti]=0. (7)
Угловые пути, скорости и ускорения рычага определяются из следу- 428008
ющих уравнений.
Обозначим]
H-Awtg^ ctg7i’
произведя соответствующие преобразования уравнений (7) п. 428007
и (1) п. 428008 и принимая во внимание уравнение (5) п. 428007,
определим угловой путь рычага из уравнения
c»s[Tl-(8 + ,)]=^t^^sin,. (2)
Дифференцируя уравнение (2) по времени t и вводя вспомога"
тельный угол ф2 согласно 428002, преобразуем уравнение для опреде-
ления угловой скорости рычага к виду
djr Ут* Sin , {ц- [ ftTJ + cos (Тт-О - ф2) ] } (3)
dt г (W — tg фа) sin [гт — (0 4- т])]
Дифференцируя выражение (3) по времени t, после преобразований
получим уравнение для определения углового ускорения рычага
£ -с*81т. - (’+4)1
________Ут х Sin И]____ .
~ г (Н - йт ж tg ф2) sin [Тт - (в 4- >])) +
j_____2 sinS) tg ф, sin (Тт - 8-фз) v <^Тт z4A
+ (Н-йт:|^ф2)зк1[тт-(в-Н)] созфз тх dt * >
Определив угловые пути, скорости и ускорения рычага, по форму-
лам (1), (3) и (4) п. 426003 найдем пути скорости и ускорения клапана.
551
428009- 428011
428009 Приводим значения параметров и коэффициентов, указанных
в равенствах (6) п. 428007, для различных существующих схем меха-
низмов.
Схема 1 механизма распределения двигателя BMW-801
Схема 1 распределительного механизма BMW-801 отличается
от приведенной на фиг. 428006 схемы тем, что ось толкателя лежит
в плоскости y'z! на расстоянии хл от плоскости yz, образуя угол е
с осью г'.
В этом случае
t = 0 = О,
и формулы (6) п. 428007 примут вид
N == у о sin е -£ Zo COS е,
/<= Уо sin<p + zocos<p,
Н = х0 cos а, — (у0 cos ср — z0 sin ср) sin ax,
tg фх = COS (cp — e) = COS ф,
tg <J>S = sin (cp — e) Sin a, = sin Ф sin ax.
Схема 2 механизма распределения двигателей М-88, М-90
и Гном-Рон «Мистраль» К-14 Rsd
428010 Для этой схемы (фиг. 428006)
а1Е=е = 0,
и формулы (6) п. 428007 примут вид
N = х0 sin т 4- z0 cos х,
К = х0 sin 6 +(у0 sin ср -4- z0 cos ср) cos 6,
Н ~ х„ cos 6 — (у0 sin ср 4т z0 cos ср) sin 9,
tg'9i = cos<j>,
tg^ = o.
Значения tg и tg ф2 получены после преобразований с учетом
формул (1) и (2) п. 428006.
428011 Схема 3 механизма распределения двигателей М-63, АШ-82, Райт «Циклон»
и Пратт-Уитни
Для этой схемы (фиг. 428006)
= т = 9 = 0,
ф = ср — е,
552
428012-428014
и формулы (6) п. 428007 примут вид
N — уе Sin е + 20 cose,
K = yosin<p+zo cos?,
Н = х0,
tg ф, — COS (? — e) = cos ф,
tg^ = O-
Схема 4 механизма распределения двигателя Бристоль «Юпитер» V111 428012
Для этой схемы (фиг. 428006)
а1 = ф = е = с = б = 0,
и формулы (6) п. 428007 примут вид
N = z0,
K = yosin?4-zocos?,
W = x0,
tg Ф1 = COS ?,
tg'?a = O.
Схема 5 механизма распределения двигателя Бристоль «Юпитер» VII 428013
Для этой схемы (фиг. 428006):
», = ф = Е = t = б = = 0,
и формулы (6) п. 428007 примут вид:
N = z0,
K = z0,
Н = х0,
tg ф» = 1.
tg*?a = о.
В качестве типичного примера на фиг. 428014 даны пути, скорости 428014
и ускорения толкателя и клапана механизма распределения авиацион-
ного двигателя BMW-801; основные размеры механизма указаны
в табл. 425102.
553
428014
J v и
Фиг. 428014.
Диаграммы пути, скорости и ускорения толкателя и клапана
авиационного двигателя BMW-801
430000-431103
ДИНАМИКА КЛАПАННЫХ МЕХАНИЗМОВ
СИЛЫ, ДЕЙСТВУЮЩИЕ В КЛАПАННОМ МЕХАНИЗМЕ
Силами, действующими в клапанном механизме, являются:
силы давления газов на клапан,
силы инерции,
силы пружин,
силы трения,
веса деталей клапанного механизма.
Последними двумя видами сил обычно пренебрегают вследствие
их незначительности.
В момент начала движения клапана все эти силы нагружают кла-
панный механизм. При дальнейшем движении клайана, когда давления
газов на его тарелку со стороны цилиндра и со стороны горловины
клапана уравновесятся, клапанный механизм нагружают лишь силы
инерции и силы пружин.
Силы газов
Закон изменения сил давления газов на клапан во время их про-
текания через горловину является очень сложным, и надежных матема-
тических формулировок для него не имеется.
Для начального момента открытия выхлопного клапана результи-
рующая сила давления газов на клапан равна (фиг. 411003)
^кг — prfu Ptfr — [рГ (rfr)2 Pt rfr]»
где
d'T и диаметры конуса горловины, в см;
fu— площадь тарелки клапана со стороны цилиндра, в см2;
— площадь тарелки клапана со стороны горловины, в см2;
р,— давление на клапан со стороны горловины, в кг/см2,
рг~ давление на клапан со стороны цилиндра, в кг/см2.
Закон изменения сил Ркт при дальнейшем открытии клапана неиз-
вестен. Для упрощения расчетов принимают, что давления на клапан
со стороны цилиндра и со стороны горловины выравниваются в НМТ
поршня и что эти давления в интервале от начала открытия клапана
до момента, соответствующего НМТ поршня, изменяются линейно
430000
431000
431001
431100
431101
431102
431103
555
431104-431105
в зависимости от угла поворота коленчатого вала. В таком случае сила
давления газов может быть выражена следующей формулой:
Ркгх= Ркг [ 1 —
где
аир— текущие углы поворотов коленчатого вала и кулачковой
шайбы;
и р4 — углы опережения выхлопа по коленчатому валу и кулачко-
вой шайбе.
Зависимость между этими углами дана уравнениями 422002.
431104 Величину давления газов со стороны горловины берем равной
атмосферному давлению.
431105 Величину давления со стороны цилиндра определяем по формуле
_____________2________________ р.24
2 + (е-1) r^l4-AA-^cosa + -^cos2a^ j j
(1)
где рг — давление вспышки;
в — степень сжатия двигателя;
Коэффициенты для
“а 6 5 5,1 5,2 5,3 5,4 5,5 5,6 5,7 5,8 5,9 6,0 6,1 6,2.
45° 0,1528 0,1492 0,1456 0,1424 0,1393 0,1362 0,1331 0,1304 0,1277 0,1251 0,1226 0,1201 0,1177
50° 0,1570 0,1545 0,1499 0,1465 0,1434 0,1402 0,1372 0,1342 0,1315 0,1289 0,1263 0,1237 0,1213
55° 0,1625 0,1588 * 0,1551 0,1515 0,1483 0,1450 0,1418 0,1388 0,1359 0,1333 0,1307 0,1282 0,1257
60° 0,1685 0,1645 0,1607 0,1572 0,1538 0,1505 0,1472 0,1442 0,1412 0,1384 0,1357 0,1330 0,1305
65° 0,1755 0,1713 0,1675 0,1638 0,1603 0,1568 0,1536 0,1504 0,1473 0,1444 0,1416 0,1388 0,1332
70° 0,1834 0,1793 0,1753 0,1715 0,1678 0,1643 0,1608 0,1576 0,1544 0,1513 0,1484 0,1455 0,1428
75° 0,1950 0,1899 0,1845 0,1805 0,1766 0,1730 0,1696 0,1662 0,1629 0,1597 0,1565 0,1534 0,1505
В 8,10 8,30 8,51 8,73 8,95 9,17 9,38 9,60 9,82 10,05 10,27 10,49 10,72
С 3,16 3,20 3,25 3,29 3,34 3,38 3,43 3,48 3,53 3,57 3,62 3,66 3,70
556
431106-431107
к — отношение радиуса' кривошипа к длине шатуна;
п, — 1 1 —е1-”» п. _ . па— 1 г—1
Р* ~ п^Т 1 _ el-n, ® “ x_ei-n2Pi~ BPa + Cph (2)
где nt= 1,35—показатель политропы сжатия;
л2 = 1,24 — показатель политропы расширения;
fj. = 0,95 — коэффициент полноты индикаторной диаграммы;
ра — давление перед клапаном, уменьшенное на 5% за счет
перепада давления в клапане;
Pi — среднее индикаторное давление.
Для упрощения расчетов коэффициенты А, В и С для различных е
и углов опережения даны в табл. 431105.
При подсчете этой таблицы было принято X = 1 /3,6, что дает в ве-
личинах А погрешность меньше 1%.
Действием сил газов для всасывающего клапана пренебрегают 431106
вследствие их незначительности.
В табл. 431107 даны величины ускорений, скоростей и сил газов, 431107
действующих в распределительных механизмах, для ряда современных
авиационных двигателей.
Таблица 431105
определения сил газов
8 «2 6,3 6,4 6,5 6,6 6,7 6,8 6,9 7,0 7,1 7,2 7,3 7,4 7,5
А < 45° 0,1154 0,1132 0,1111 0,1091 0,1071 0,1052 0; 1034 0,1016 0,0998 0,0981 0,0965 0,0949 0,0934
50° 0,1190 0,1167 0,1146 0,1125 0,1105 0,1085 0,1066 0,1048 0,1030 0,1013 0,0996 0,0980 0,0964
55° 0,1233 0,1209 0,1186 0,1165 0,1145 0,1125 0,1105 0,1085 0,1077 0,1049 0,1032 0,1015 0,0997
60° 0,1282 0,1252 0,1232 0,1211 0,1189 0,1168 0,1149 0,1129 0,1110 0,1092 0,1073 0,1056 0,1039
65° 0,1337 0,1312 0,1288 0,1266 0,1243 0,1221 0,1200 0,1180 0,1161 0,1142 0,1123 0,1104 0,1086
70° 0,1402 0,1376 0,1350 0,1326 0,1304 0,1282 0,1261 0,1240 0,1219 0,1199 0,1179 0,1160 0,1142
75° 0,1478 0,1452 0,1426 0,1401 0,1337 0,1353 0,1331 0,1309 0,1288 0,1268 0,1248 0,1228 0,1208
В 10,95 11,18 11,40 11,63 11,86 12,10 12,33 12,56 12,80 13,03 13,27 13,51 14,15
С 3,75 3,80. 3,84 3,89 3,93 3,97 4,02 4,06 4,11 4,15 4,20 4,24 4,29
557
8SS
I Двойная • звезда, 14 | цилиндров д—образ- ное, 12 цилин- дров V-образное, 12 цилин- дров Располо- жение и число цилиндров
BMW-801 Даймлер- Бенц 603 Даймлер- Бенц 601Еа Аллисон С-15 Роллс-Ройс «Мерлин» XX ! АМ-38Ф ВК-105 Фирма и марка двигателя
о Ел 749 о о 8 1474 2606 ГЪ й t-5 Ускорения в момент открытия клапана | Выхлопной клапан |
§ 1456 । 1098 1650 1110 Г3| *3 о| о 2909 2263 1451 2571 1 t-5 положи- тельные Ускорения в момент перемены их знаков
1 о 1 ю —423 1 GO GH С> 1 GH 1 к о -316 -123 -274 1 1 го СО ьо СЪ й де отрица- тельные
1 & -709 1 GH 1 00 GO о 1 GO О 1 GH 3> 5 Ускорения в момент максимального подъема клапана
0,47 96'0 С> СО 0,72 0,45 О С> мкек Скорость в момент начала и конца от- крытия клапана
0,0726 0,0367 0,0314 0,0316 0,0255 8 сл 0,0538 кг сек2 Приведенная к кла- пану масса
GO QO 211,5 to 155,5 199,4 го О) ГО сл газовые Силы, действую- щие на клапан, в момент открытия выхлопн. клапана
О 28,45 23,4 12,7 от 82,5 £ й инерцион- ные
4^ «й> 36,77 22,4 21,3 ю GO СО 30,7 пружины
Те же, что и для > выхлопного клапана 2506 ГЪ де Ускорения в момент открытия клапана Всасывающий клапан 1
8 3 СЪ Л де положи- тельные Ускорения в момент перемены их знаков
1 W Js й отрица- тельные
Н Jc й де Ускорения в момент максимального подъема клапана
0,47 О 3 0,65 0,52 0,45 С> иээ/и- Скорость в момент начала и конца открытия клапана
0,063 0,0367 0,0272 0,0321 0,0256 0,055 О О 8 8 о •— О) го кг сек2 Приведенная к кла- пану масса
s
Ускорения, скорости и силы, действующие в распределительных механизмах
ZOII£fr
431200-431301
Силы инерции 431200
Силы инерции поступательно двигающихся деталей клапанного 431201
механизма находят по формуле
где т — масса поступательно двигающейся детали, в кг сек2,
j — ее ускорение, в м/сек2.
Момент сил инерции рычага относительно оси качания будет 431202
где
I — момент инерции массы рычага относительно оси качания,
в кг см сек2.
—угловое ускорение рычага в 1/сек .
При определении сил инерции от пружин принимают, что переме- 431203
щения витков пружины пропорциональны их расстоянию от крайнего
неподвижного витка. На основании этой зависимости можно при опре-
делении сил инерции клапанного механизма заменить массу пружин
фиктивной массой, равной половине массы пружины, движущейся по
закону движения крайнего подвижного витка пружины, т. е. по закону
движения клапана, толкателя или тяги в зависимости от того, с чем
соединен крайний подвижный виток пружины
где тпр — масса пружины, в кг сек2/м,
j — ускорение концевого витка пружины, в м/сек2.
Силы пружин 431300
Силу цилиндрической пружины (фиг. 431301) подсчитывают по 431301
формуле
1 Gd1 , (П
^°р m8iD3'’ 14
где d — диаметр проволоки,
D — средний диаметр вит-
ков пружины, в см;
i — число рабочих витков
пружины, которое обыч-
но берется меньшим
числа действительных
витков на 2 — 3 витка;
G — модуль упругости вто-
рого рода материала
пружины, принимае-
мый для хромованадие-
вой стали, из которой
обычно делаются кла-
панные пружины, рав-
ным 800000 кг/см2;
559
431302—431303
/ — прогиб пружины в см, соответствующий силе пружины, Рпр;
т— коэффициент, учитывающий влияние скалывающих напря-
жений и перерезывающих сил и определяемый из следующих
отношений:
D .,11
С d ; т — + 2с 2с1
(2)
Так как с для клапанных пружин меняются в довольно узких
пределах (от 8 до 10), то с точностью до долей процента можно принять
т = 1,05. Очень часто при расчете клапанных пружин его не учитывают,
принимая т= 1; получающаяся в результате этого неточность расчета
перекрывается неточностью при определении числа рабочих витков
пружины, выдержать которое для производства представляет значитель-
ные трудности.
Подставляя в уравнение (1) величины т= 1,05 и G = 800000 кг/см2,
получим
Рпр = 95200 / = 95200 ~ f. (3)
431302
Силу конической пружины (фиг. 431302) подсчитывают по формуле
Р /
п₽ т 8i D3 - 3D2e + 4De2 - 2е3 ’
-Нен- —
Фиг. 431302.
К расчету конической
пружины
где 2е— разность между максимальным и минимальным средними
диаметрами витков пружины.
431303
В случае совместной работы нескольких пружин можно заменить
их (фиг. 431303) одной эквивалентной пружиной, полагая, что жесткость
эквивалентной пружины равна сумме жесткостей отдельных пружин
&= Ь, + Ь2 + ... bk = ,
/1 /2 /Л
где РПрк — сила /с-той пружины;
fk — соответствующая этой силе деформация.
560
431304-431309
Максимальная сила эквивалентной пружины равна сумме макси-
мальных сил отдельных пружин
2^прв ^чр 1 4" Рпр 2 4" ••• Рпр к~
Деформация эквивалентной пружины, соответствующая нагрузке
£Рпр) равна
Сила эквивалентной пружины в момент начала подъема клапана
ЗРпро= SPn₽= SPn₽ - bhM,
где Лк — полный путь клапана.
Сила эквивалентной пружины в зависимости от деформации,
соответствующей пройденному пути клапана, равна
2 Рпр х ^Рпро 4” х»
Определение сил клапанных пружин по силам инерции клапан-
ного механизма производится на основании следующих соображений.
Силы инерции клапанного механизма на первом участке подъема
клапана и на втором участке его опускания прижимают клапанный
механизм к кулачку. На втором участке подъема клапана и на первом
участке его опускания эти силы стремятся оторвать его от кулачка.
Для того чтобы отрыв не происходил, в клапанный механизм вводят-
ся пружины, прижимающие клапанный механизм к кулачку. Для
обеспечения заданных законов движения развиваемая пружинами сила
теоретически должна равняться силам инерции клапанного механизма,
отрывающим последний от Кулачка. Учитывая, что действительные
силы инерции вследствие возможных неточностей изготовления профиля
кулачка и упругости звеньев распределительного механизма, а также
и силы пружин вследствие неточности принятого расчета пружин могут
отличаться от расчетных, подбирают пружины так, чтобы создаваемые
ими силы превышали соответствующие расчетные силы инерции на
50—100%. В таблице 431308 даны запасы сил клапанных пружин для
ряда авиационных двигателей.
Имея закон движение клапана и закон изменения по времени
приведенных к клапану сил инерции КР/ всего клапанного механизма,
431304
431305
431306
431307
431308
431309
строят диаграмму этих сил по
путям клапана (фиг. 431309).
На этой же диаграмме строят
диаграмму суммарных сил пру-
жин (которая будет прямой).
Определенный по этой диа-
грамме минимальный запас сил
пружин, который будет иметь
место в точке касания кривой
сил инерции с прямой, прохо-
36 Авиац. поршн. двигатели.
Фиг. 431309.
Силы пружин и силы инерции
561
431309
Запасы сил
Расположение и число цилиндров Фирма и марка двигателя Минимальный запас сил пружин
Число пружий Момент минимального запаса Кулачок Сила инерции кг Сила пру- жины ^пр кг Запас пружины %
V-образное, 12 цилиндров ВК-105 2 Максимальный подъем клапана Впуска воздуха 23,2 35,5 53
АМ-38Ф* 2 — Всасы- вания и выхлопа 19,2 80 306
Роллс-Ройс «Мерлин» XX 2 Максимальный подъем кла- пана То же 21,2 52,2 146
Аллисон С-15 2 Перемена знака ускоре- ний То же 31,19 50,69 63
Л-образное, 12 цилиндров Даймлер-Бенц 601 Еа 2 Для р = 100 — 100° То же 28,1 46 64
Даймлер-Бенц 603 2 То же То же 33 77,5 134
Двойная звезда, 14 цилиндров BMW-801 3 Перемена знака ускоре- ний Выхлопа 38,6 64,1 66,5
* Одинаковый для всего пути.
562
431309
клапанных пружин
Таблица 431308
Максимальный запас сил пружин Макси- мальная сила пружин на клапан кг Макси- мальная сила пружин, отнесен- ная к пло- щади клапана кг/см2 Мини- мальная сила пружин кг Мини- мальная сила пружин, отне- сенная к пло- щади клапана кг/см* Отношение между мак- симальными силами пружин (за единицу принята сила внут- ренней пружины)
Момент максималь- ного запаса Кулачок Сила инер- ции ) кг Сила пру- жины р * Пр кг Запас пру- жины °/ /о
Перемена знака ускорений Выхлопа 15,7 32,5 107 44,0 1,22 20,8 0,79 to to
— — — — — 80 38,5 ' — 1 : 1,5
Перемена знака ускорений Всасывания и выхлопа 4,05 27,6 580 52,2 2,93 21 1,18 1 : 2,11
То же То же 12,23 33,82 176 53 3,12 21,3 1,25 1 : 1,72
То же То же 14,3 34,2 139 55,2 2,6 22,4 1,05 1 : 1,55
То же То же 13 51,17 293 79,4 3,48 34,75 1.5 I : 1,6
Максималь- иый подъем клапана Всасывания 35,1 126 259 123,2 3,38 44 1,17 1 : 1,59; 1 : 2,92
33*
563
Таблица 431315
беса (в граммах) двигающихся деталей распределительных механизмов
Расположение и ЧИСЛО цилиндров Фирма и марка двигателя Момент инерции рычага кг см сек2 Клапан впуска Клапан выпуска Тарелка клапана Замок Траверса или ком- плект толка- теля Пружины Расчетный вес со- бранного комплекта клапана
наруж- ная внутрен- няя
V-образное, 12 цилиндров ВК-105 — 209 339 49,6 115 292 68,5 105 24 40 395 527
АМ-38Ф — 283 122 72 48 117 — 107 60 540 553
Роллс-Ройс «Мерлин» XX 0,003 151,3 160,3 44 — 76 34 250 260
Аллисон С-15 0,003 185 180 45 10 — 100 50 310 315
Д-образное, 12 цилиндров Даймлер-Бенц 601 Еа 0,00129 0,00155 184 225 28 13 — 55 30 267 308
Даймлер-Бенц 603 0,00177 245 245 35 20 — 75 45 360
Двойная звезда, 14 цилиндров BMW-801 0,003 375 440 70 12 430» 200 50 647 712
431309
♦ Включая вес тяги.
Примечание. Числитель соответствует всасыванию, знаменатель—выхлопу,
431310—432001
дящей через нулевую точку суммарной характеристики пружин, должен
быть не меньше 50 — 100%.
Имея величину / (фиг. 431309) и запас сил пружин максималь- 431310
ную силу пружин определяют из уравнения
f — h'a *
где й^—путь клапана, отсчитываемый от его максимального подъема
до момента, соответствующего минимальному запасу клапанных пружин.
Определение необходимой силы пружин при закры- 431311
том клапане производится на основании следующих соображений.
Сила пружин выхлопного клапана должна быть достаточной для
удержания клапана в закрытом состоянии во время хода всасывания.
Разрежение в цилиндре может доходить до 0,6 кг/см*, а следователь-
но,пружины должны создавать при закрытом клапане такую силу, удельное
давление которой, отнесенное к площади тарелки клапана, было бы
равно величине не менее 1 — 0,6 = 0,4 кг}см\
f Пружины всасывающего клапана сильно наддутого высотного 431312
авиадвигателя должны быть достаточно сильными для того, чтобы не
произошло преждевременного открытия клапана. В этом случае сила
пружин при закрытом клапане должна быть больше силы
Р= ~(dl~di)(pa~Pa),
где dr —диаметр горловины всасывающего клапана в см;
dt — диаметр штока клапана в см;
ра — давление перед клапаном в кг/см*;
рл — атмосферное давление в кг)см*.
Достаточная начальная сила пружин необходима также для того, 431313
чтобы устранить подпрыгивание клапана на седле после его посадки;
последняя происходит обычно с некоторой определенной скоростью,
соответствующей зазору между клапаном и толкателем. Величина
силы пружин, необходимая для этого, может быть определена только
экспериментальным путем.
При выборе пружин должна быть учтена их прочность (см. 449000). 431314
В табл. 431315 даны веса двигающихся деталей механизма рас- 431315
пределения для ряда авиационных двигателей.
СИЛЫ И МОМЕНТЫ, ДЕЙСТВУЮЩИЕ В КЛАПАННОМ МЕХАНИЗМЕ, 432000
ПРИ ПЕРЕДАЧЕ ДВИЖЕНИЯ ОТ КУЛАЧКА К КЛАПАНУ
ЧЕРЕЗ ТРАВЕРСУ
Обозначения (фиг. 432001): 432001
Рнг — сила давления газов на клапан,
3 Рар — суммарная сила пружин одного клапана,
/на:—ускорение клапана,
/та, — ускорение толкателя,
Ута: — скорость толкателя,
т„—масса клапана (включая половину масс пружин),
/Пт — масса траверсы или толкателя,
565
432002-432006
Y — угол между направлением силы S и осью траверсы,
Д — угол между осями траверсы и клапана,
®к — угловое ускорение кулачкового вала.
Фиг. 432001.
Силы, действующие в клапанном механизме, при передаче
движения от кулачка к клапану через траверсу
Остальные обозначения те же, что и в 425101.
432002 Сила Ркг определяется из уравнений 431102 и 431105.
432003 Сила инерции комплекта клапана
Pjx — — tJlnjкх тх COS Д.
432004 Сила инерции траверсы
Р jt — WZt/tx.
432005 Сила между клапаном и траверсой
Р« = — PjR 4" Р«г*
432006 Составляющая силы S, действующая по оси траверсы, равна
S, = 2PK-P/T.
56 6
432007-433002
Составляющая силы S, действующая нормально к оси траверсы,
Si=S,tgY.
Сила, действующая на кулачок,
5 = -^-.
cos у
Угол у определяется из следующих уравнений: для выпуклого
и вогнутого кулачков на участке АВ (фиг. 425104 и 425204)
1 • о
sin Y^y sinp.
То же на участке ВС (фиг. 425105)
sinr = £-sin(₽c- р).
Для тангенциального кулачка на участке АВ |(фиг. 425303)
У = р.
Крутящий момент на кулачковом валу от силы S
м„—s.^.
Приведенная к клапану сила инерции кла-
панного механизма, на которую рассчитываются
клапанные пружины, равна
СИЛЫ И МОМЕНТЫ, ДЕЙСТВУЮЩИЕ В КЛАПАННОМ
МЕХАНИЗМЕ, ПРИ НЕПОСРЕДСТВЕННОЙ ПЕРЕДАЧЕ
ДВИЖЕНИЯ ОТ КУЛАЧКА К КЛАПАНУ С ПЛОСКОЙ
ТАРЕЛКОЙ
Обозначения согласно 432001 (фиг. 433001).
Сила инерции клапана
P/к ~ — WIk/kx*
432007
432008
432009
432010
432011
432012
433000
433001
433002
Фиг. 433001.
Силы, действующие в клапанном механизме
при непосредственной передаче движения от
кулачка к клапану с тарелкой
567
433003-433006
433003 Сила, действующая на кулачок,
Фиг. 433006.
Пример диаграммы сил пружин и сил инерции выхлопного
клапанного механизма авиационного двигателя
433004 Приведенная к клапану сила инерции клапанного механизма,
на которую рассчитываются клапанные пружины, равна
КР} = PjK-
Фиг. 433007-1.
Пример диаграммы сил, действующих на выхлопной кулачок
авиационного двигателя
433005 Крутящий момент от силы 3 на кулачковом валу
433006 На фиг. 433006 дан пример диаграммы сил пружин и сил инерции
выхлопного клапанного механизма авиационного двигателя.
568
433007-434004
На фиг. 433007-1 предста- 433007
влена диаграмма сил, дей-
ствующих на выхлопной ку-
лачок для того же двигателя,
что и на фиг. 433006; на фиг.
433007-11 — диаграмма суммар-
ного крутящего момента на ку-
лачковом валу того же дви-
гателя.
Фиг. 433007-11.
Пример диаграммы суммарного кру-
тящего момента на кулачковом валу
авиационного двигателя
СИЛЫ И МОМЕНТЫ, ДЕЙСТВУЮЩИЕ В КЛАПАННОМ МЕХАНИЗМЕ, 434000
ПРИ ПЕРЕДАЧЕ ДВИЖЕНИЯ ОТ КУЛАЧКА К КЛАПАНУ ЧЕРЕЗ РЫЧАГ,
ПРОФИЛИРОВАННЫЙ ДУГОЙ
Обозначения (фиг. 434001): 434001
/р — полярный момент инерции рычага относительно его оси вращения,
Г;р —момент от сил инерции рычага.
Остальные обозначения — согласно 432001 и 427000.
Момент от сил инерции рычага 434002
Mjp— Ip др •
Сила между клапаном и рычагом 434003
Р« = ~ + Р«г-
Сила, действующая на кулачок, 434004
С _ р Гк 81п ТР___ ft 1
rein* Г Sint
569
434005—434010
434005
434006
434007
434008
434009
434010
Приведенная к клапану сила инерции клапанного механизма,
по которой рассчитываются клапанные пружины,
KPj =*Pjx+Mj р -
При определении сил, действующих на ось рычага, пренебрегают
центробежными силами рычага вследствие их незначительности.
Проекция силы S на направление, перпендикулярное оси клапана,
Se = Ssin(fr-HP-H).
Проекция силы £ на ось клапана
SK=8 cos (y,+у» + 4»)-
Сила, действующая на ось рычага,
Рв=/(Рк + 5к)> + 5:.
Фиг. 434001.
Силы, действующие в клапанном механизме,
при передаче движения от кулачка к клапану
через рычаг с роликом
Сила S при повороте ку-
лачкового вала меняет свое
направление: поэтому при оп-
ределении опорных реакций на
кулачковом валу силу S нуж-
но разложить на две силы,
направление которых не долж-
но зависеть от угла поворота
Фиг. 434010.
К разложению силы S, действу-
ющей на кулачок
кулачкового вала. Наиболее удобным является проектирование силы S
на направления оси цилиндра и перпендикулярное к ней.
570
434011-435002
Согласно обозначениям фиг. 434010 проекция силы S на ось
цилиндра равна
Sj — Scos 4-8 + ф, (1)
а проекция S на направление, перпендикулярное оси цилиндра,
Ss = S sin 4-84- ф^ . (2)
Для тангенциального кулачка нужно при движении дуги рычага
по прямым АВ и В А (фиг. 425303) заменить (8 + ф) на (180° —₽).
Крутящий момент на кулачковом валу от силы S равен 434011
А4»п = /** Р« —- Af in-:-“ •
9 \ 19 Гк sin Yp J 0>к
СИЛЫ И МОМЕНТЫ, ДЕЙСТВУЮЩИЕ В КЛАПАННОМ МЕХАНИЗМЕ 435000
ЗВЕЗДООБРАЗНОГО ДВИГАТЕЛЯ
Обозначения (фиг. 43500I-I, II и III): 435001
/Ль —масса комплекта тяги, включая половину массы пружины
на тяге.
Р;т —сила инерции массы комплекта толкателя.
P/z, — сила инерции массы комплекта тяги, отнесенной к рычагу
клапана.
Р/ь —сила инерции массы тяги, отнесенной к толкателю.
P/tn — слагающая от силы P,t в плоскости вращения, направленная
по плечу рычага.
PjLt — слагающая от силы Р/r, в плоскости вращения рычага, напра-
вленная перпендикулярно к плечу рычага.
Рпр —сила пружины тяги.
S —сила, действующая между кулачком и роликом толкателя.
St —слагающая силы S, действующая нормально к оси толкателя.
S2— слагающая силы S, действующая по оси толкателя.
Q — сила между толкателем и тягой, действующая по оси тяги.
Qt — слагающая силы Q, действующая нормально к оси толкателя.
Qs — слагающая силы Q, действующая по оси толкателя.
Pl— сила, действующая по тяге в точке В.
Р£ — слагающая силы Pl, действующая в плоскости движения
рычага.
Pbj, — слагающая силы Pl, действующая на тягу в точке В перпен-
дикулярно плоскости качания рычага.
| Рв—сила, действующая на ось вращения рычага.
Рк—сила, действующая между рычагом и клапаном.
Мкр — крутящий момент на кулачковой шайбе.)
Остальные обозначения — те же, что и в 428002 — 428008.
Для определения сил, действующих на отдельные звенья меха- 435002
яизма, найдем вспомогательные углы а, р, ь и £ (фиг. 435001-I и II).
571
435002
Силы, действующие в механизме распределения звездообразного авиа-
ционного двигателя
572
Фиг. 435001-11.
Силы и моменты, действующие на тол-
катель и шайбу звездообразного авиа-
ционного двигателя
на ось клапанного рычага
435002
435003—435007
435003
435004
435005
а) Угол а между тягой А'В и проекцией тяги на плоскость &
вращения рычага определяется из уравнения
А'А‘Ь
sina=A^B’ (О
где А'В=/,
АА& = zc sin f—ус cos <? — zA—COsе j cosgi + 2xcsin—
— hTX (cos sin f — sin sin aj.
Перед изложением хода получения А'А6' длины перпендикуляра,
опущенного из точки А' на плоскость Ь, находим координаты точек
Са(хСв, Уса> zca) и Ва(хв„, Ува> 2 в) (фиг- 435001-1), полученных после
вращения плоскости b с находящимся в ней рычагом DCB, вокруг
оси DN до совпадения с плоскостью а:
X )
хс =—г-; Хп =хг +rsinY„: ।
Уса—Ус~ Xccosftgaj УВа = Уса~ r cos Yl sin <p; > (1)
Zca-?c4-xcsin <p tgai; zBa = zCa — r cos Yl cos <p; J
далее находим НА'— расстояние между плоскостями АНЕ и а:
ИА' =zCasin <р - уСаcos? -zA “"j*;6-*. (2)
На основании уравнений (1) п. 435004 получим
Н А' — zc sin <р — ус cos <р+хс tg ax - zA S1 , (3)
435006
а затем проводим плоскость с через точки А', В'а (фиг. 435001-1),
перпендикулярную плоскостям а и Ь, и наносим отрезки, лежащие
в этой плоскости.
Из фиг. 435001-IV (на которой изображена плоскость с, приведенная
на фиг. 435001-1), с помощью уравнения (3) п. 435005, из подобия тре-
угольников A'AiP, PA'aN' определяется значение A'AJ.
б) Угол р. между проекцией тяги на плоскость b и отрезком ВВ1
определяется (фиг. 435001-1) иэ уравнения
435007
где
AiB'b = i sin a tg Я1 + hTX - r sin Yl,
ВАь = I cos a.
в) Угол Y1 между осями толкателя и тяги определяется из урав-
нения (фиг. 435001-11)
COSY1=-y-, (1)
где 1а — проекция тяги на ось толкателя.
574
435008-435011
Проектируя lX) lg, lt на направление оси толкателя, получим:
la = lx s*n x + ly sin e cos x 4- lg cos 8 cos T. (2)
Подставляя в уравнение (2) lx, la, lx из формул (3) п. 428007,
после преобразований получим:
N - Г Л1Х + cos (Тх — 0 — ф3)"]
COSY1=-----LJ
г) Угол $ между плоскостями ВА'А и A'0'L (фиг. 435001-1 и П) 435008
или, что то же, между силами S, и Qlt определяется из уравнения
. тт, 4- ли. + ее,
cos £= — ' 1 '_=— 1 ,
Ут* 4- л» 4-е3. }/'m?4-nf 4- е{
где т, л, е— коэффициенты при неизвестных х, у, z в уравнении
плоскости ВА'А,
mv nt, ег — то же в уравнении плоскости A'O’L.
Перед получением в окончательном виде формулы для угла $ при- 435000
водим ход определения коэффициентов т, п, е и т1г пг, ег.
Уравнение плоскости, проходящей через точку В, будет
т(х — хв) + п (у — Ув)+е(2 — zB) = 0. (I)
Уравнение плоскости ВА'А получим при условии, чтобы уравне-
ние (I) удовлетворялось координатами двух других точек А' и А:
т(хА. — хв) + л(уд/ — ув) + е(2А' — zB) = 0, 1 (2
т(хА-Хв)+п(ул— ув) + е(2А— zB) = 0.1
Определив из уравнений (2) отношения ™ ~ , предварительно
подставив в них значения координат точек А' и В из уравнений (I)
и (2) п. 428007 и вводя найденные отношения в уравнение (I)
п. 435009, после преобразований получим на основании (3) п. 4280Ю7
уравнение плоскости ВА'А. Соотношение между коэффициентами т, п, е
будет следующим: j
т: п : е —
— cost (/2 sin в — /„coss): (lz sin t — lx cos t cos e): (lxcos -t sin s—la sin x). (3)
Плоскость A'O'L параллельна плоскости yz, и поэтому уравнение ее 435010
имеет вид [см. (I) п. 428007]
х — (Хл— AixSin t) =0, (I)
а следовательно,
/”i=l; n1 = e1 — Q. (2)
Подставив в уравнение 435008 значения т, п, е и пи е1г 435011
после преобразований получим окончательное выражение для опреде-
575
435012-435017
ления угла Е
COS cos т (/, sin е-/ц cose) j.
Уcos Ч (/, sin е — lvcos е)а + (/.sin т — /Scos т cos е)> + (/zcos т sine — /vsint)* ’
где lx, la, lz без особого труда определяются по формулам (3)
п. 428007.
При просчете ряда двигателей с подобными механизмами было
получено, что значения углов а, |», м! меняются в пределах 1°;
следовательно, при определении сил и моментов можно считать эти
углы постоянными и равными начальным значениям их, т. е. положить
в формулах 435003, 435006, 435007, 435011
Йм=Ои у»
435012 В отдельных звеньях пространственного клапанного механизма
действуют следующие силы (фиг. 435001-1, II, III).
435013 Сила, действующая на рычаг со стороны клапана,
РК в РКГ "i" ^РИ> Р/к»
435014 С другой стороны рычага (в точке В) на него действуют силы,
равные
sinTt ~м/р СП
(2)
Pi,p = P£tg а. (3)
435015 Сила, действующая по оси тяги в центре шарнирного ее соединения
с толкателем, равна
в-₽£ + ₽^-^_-₽,Ь. (I)
где
п ^£fSin(Tl-!x) + P/bnCOS(Tl-|.)
P/L = --------------------------(2)
РДч — — 2 r dt* ’ ,La ~~ 2 dt У ’ '3)
п! ____ тт *
* /Д — ’у’/ Тар
435016 Сила, действующая по оси толкателя в точке А',
Q^Qcosb-
435017 Сила, действующая нормально к оси толкателя в точке А',
Q^Qsin^.
576
435017
Фиг. 435024.
Диаграмма сил, действующих в распределительном механизме выхлопа
звездообразного авиационного двигателя BMW-801
37 Авиац. пэрши. двигатели.
577
435018—435025
435018 Сила, действующая в центре ролика по оси толкателя,
Sa = Qa Р/т.
435019 Сила, действующая нормально к рабочей поверхности профиля
кулачка,
с __
COS у
435020 Сила, действующая нормально к оси толкателя в центре ролика,
Sj = S sin у.
435021 Сила, действующая на опору в плоскости движения рычага,
Р*о = (Р£)’ + Р’к - 2Р£ Ря cos (ур + у, + и-ут).
435022 Крутящий момент на кулачковой шайбе
V
MKp = Sc = St-~,
где «> к — угловая скорость вращения шайбы,
с —плечо силы S.
435023 Силы инерции поступательно двигающихся деталей клапанного
механизма и момент сил инерции рычага относительно его оси качания
определяются согласно положениям, приведенным в 431201 и 431202.
435024 На фиг. 435024 изображена диаграмма сил, действующих в простран-
ственном механизме распределения авиационного двигателя BMW-80L
435025 В табл. 431107 даны основные величины сил газов, пружин, инер-
ции и приведенные к клапану массы двигающихся деталей клапанного
механизма для ряда авиационных двигателей.
440000—441002
РАСЧЕТ НА ПРОЧНОСТЬ
ПРОФИЛЬ КУЛАЧКА
Обозначения:
S —сила, действующая на кулачок, в Хг;
—радиус выпуклой дуги кулачка, в см;
/?а —радиус вогнутой дуги кулачка, в см;
р —радиус дуги толкателя, в см;
Е — модуль упругости, в кг [см*;
Ь — ширина кулачка, в см.
Напряжения на профиле кулачка находятся по формулам Герца
(в кг[см*)'.
1. В случае сжатия двух круглых цилиндров
’•=о,175Ш+т)-
440000
441000
441001
441002
Фиг. 441004.
Диаграмма напряжений по Герцу на профиле кулачка
(выхлопа) авиационного двигателя DB-603
37*
579
Таблица 441004
Основные размеры н напряжения на профиле кулачка
Расположение и число цилиндров Фирма и марка двигателя Максимальные напряжения Максимальное напряжение от силы пружины
Момент максималь- ного напряжения Сила S, кг Радиус кри- визны профиля кулачка, мм Радиус роли- ка р, мм Расчетная ши- рина кулачка мм Напряжение по Герцу а кг/см'2 Сила S пру- жин, кг Радиус кри- визны профиля кулачка, мм Радиус роли- ка р, мм Расчетная ши- рина кулачка мм Напряжение по Герцу а 1 кг/см2
V-образное, 12 цилиндров ВК-105 Перемена знака ускорений 422 150 ОО 16 8290 44 6,65 — 16 4000
АМ-38Ф То же 183 9,1 оо 14 7300 80 9,09 — 14 4800
Роллс-Ройс «Мерлин» XX То же 336 19,5 20,5 13 9990 79,5 9,11 20,5 13 6100
Аллисон С-15 То же 258 35 15,87 9 10050 71 10,62 15,87 9 6950
Л-образное, 12 цилиндров Даймлер-Бенц 601 Еа То же 457 оо 11 12,5 11700 85,5 9 11 8 9100
Даймлер-Бенц 603 Перемена знака ускорений 236 оо 11 12,5 12100 136 9 11 8 11500
Двойная звезда, 14 цилиндров BMW-801 Начало открытия выхлопного клапана 688 111,4 15 6 18280 180 32 15 6 10500
441002
441003—442102
2. В случае сжатия круглого цилиндра и плоской плиты
(2)
3. В случае сжатия выпуклого и вогнутого круглых цилиндров
о-»0,175^(1-4.). (3)
Входящая в формулы 441002 сила S определяется в двух вариантах: 441003
а) с учетом всех действующих в клапанном механизме сил;
б) с учетом только сил пружин (для режимов работы двигателя
на малых оборотах).
В табл. 441004 даны основные размеры и напряжения на профиле 441004
кулачков современных авиационных двигателей.
На фиг. 441004 приведена диаграмма напряжений по Герцу на про-
филе кулачка (выхлопа) авиационного двигателя DB-603.
ТРАВЕРСА И ТОЛКАТЕЛЬ
Направляющие траверсы
4420001
442100
Фиг. 442101.
Распределение удель-
ных давлений по по-
верхности направля-
,ющей толкателя
Расчет направляющей траверсы ведут на смятие от силы нор- 442101
мальной к оси траверсы, принимая, что удельные нагрузки (см.
фиг. 432001) изменяются по длине направляющей
по закону прямой ее (фиг. 442101).
Обычно ограничиваются определением макси-
мального и среднего удельных давлений в макси-
мально нагруженной точке направляющей, т. е.
в точке конца направляющей траверсы, ближай-
шего к силе Sj (точка Ег на фиг. 442101).
В точке Ei удельное давление будет
^=-^(2H-3ft0-3A„), (1)
а в точке Еа
К = ^(l + 3bB-3hTX). (2)
В формулах (1) и (2) обозначают:
А»®—путь траверсы от момента начала открыт!
Ь„ — значение параметра Ъ в момент начала открытия клапана.
Для направляющей траверсы, изображенной на фиг. 432001, удель- 442102
ное давление в точке Ег будет
(2/о + 3&о-й«) 0)
и в точке Еа
к-- ('. + 36.-2Л.,). (2)
В формулах (1) —(2):
Ьв и 1в —значения параметров b и I в момент начала открытия клапана.
клапана;
581
442103—442301
442103 Для максимально нагруженной точки направляющей траверсы
(точка Е, на фиг. 442101 и точка Ej на фиг. 432001) определяется
величина fcVTX, характеризующая работу трения в этой точке, причем
fc —удельное давление в этой точке, в кг/см*,
Vtz—скорость траверсы в данный момент, в м/сек.
442200 Шток траверсы
442201 Шток траверсы рассчитывается на изгиб от силы Slt действующей
нормально к оси траверсы (фиг. 432001).
Изгибающий шток траверсы момент будет
(1)
Эта формула справедлива для расположения центра дуги траверсы
как вне направляющей траверсы, так и внутри нее.
Напряжение от изгиба
где №и — момент сопротивления изгибу расчетного сечения штока тра-
версы.
442202 Пример. Поверхность траверсы двигателя, по которой скользит
кулак,—плоская. В момент перемены знака ускорений
у = 0°; Sa =5=853 кг; Л4И =Л4кр =1810 кгсм;
аи = 2290 кг/см*.
442203 В момент начала открытия клапана вследствие неточности регу-
лировки зазоров в клапанах может возникнуть дополнительный изги-
бающий момент, действующий на траверсу от силы одного клапана.
Расчетным сечением в этом случае будет то же сечение штока
траверсы, что и в 442201. Обозначив через р плечо силы Ря, действу-
ющей по клапану, относительно центра тяжести расчетного
находят величину добавочного изгибающего момента
М и = р Ря.
Напряжение изгиба будет
сечения,
(1)
(2)
клапана
соответ-
442201]
Суммарное напряжение изгиба в момент начала открытия
определится по напряжению <зя [формула (2) п. 442203] и по
ствующему этому моменту напряжению аи [формула (2) п.
с учетом направления действия изгибающих моментов.
442300 Плечи траверсы
442301 Плечи траверсы рассчитывают на изгиб как консольную балку,
защемленную у штока и нагруженную силой Ря, действующей по оси
клапана (фиг. 432001).
582
442302-442402
Эта сила для траверсы выхлопного клапана будет максимальной
в момент его открытия за счет сил давлений газов, а для всасываю-
щего—обычно в момент перемены знаков ускорений. Напряжение
на изгиб в каком-либо сечении х—х плеча траверсы будет
где р — плечо силы Рк относительно расчетного сечения;
WB —момент сопротивления на изгиб расчетного сечения.
В случаях, когда ось клапана не перпендикулярна к плечу тра-
версы, последнее, помимо напряжения на изгиб, испытывает напряжение
растяжения (сжатия), которое определяется слагающей силы клапана по
плечу.
Пример. Оси клапанов авиационного двигателя образуют угол 442302
Д = 13° с осью штока.
Рк = 494 кг; р — 20 мм; WB = 1,03 см3;
F = 3,05 см3; Sa = 990 кг/слЛ
Шток толкателя 442400
Расчет штока толкателя отличается от расчета штока траверсы. 442401
так как на шток толкателя действуют силы с двух сторон (фиг. 442401);
поэтому он подвергается не только изгибу, но и сжатию силой Sa,
действующей по оси толкателя.
Напряжения изгиба в штоке толкателя определяются согласно (I)
и (2) п. 442201.
Напряжения сжатия определяются по формуле
(1)
где F — площадь расчетного сечения.
Суммарное напряжение будет
Sc = аи о. (2)
Пример. Для авиационного двигателя М-88 в момент начала откры- 442402
тия выхлопного клапана:
Sa = 543 кг; 5, = 38,4 кг; F = 0,982 см3;
Wa =0,266 см3; Ь=3,67 см; Мв = 141 кг см.
Напряжения в штоке толкателя со стороны кулачка будут
а = 553 кг[см3; аи=530 кг/см3; Sa = 1083 кг/см3.
583
442402
Фиг. 442401.
расчету толкателя и
сочленения тяги с толкателем и рычагом
584
442500-443201
Направляющие толкателя 442500
Отличие расчета направляющих толкателя от расчета направля- 442501
ющих- траверсы заключается в том, что (см. фиг. 442401) благодаря
действию на толкатель сил Qr и Sj с двух сторон, причем силы не лежат
в одной плоскости, нужно определять удельные давления отдельно
для каждой из сил и затем складывать их геометрически по формуле
к = Kfc’ + к$ + 2fcj к% cos 5,
где 5 —угол между силами Sx и Qls.
В остальном расчет ведется так же, как и для направляющих
траверсы.
Пример. Для авиационного двигателя М-88 максимально нагру- 442502
жена ближайшая к кулачку точка направляющей толкателя.
—91 кг; Qi=174 кг; fr0 = 3,67 см; Zo — 5,52 см;
/ = 6,25 см; dT =15 мм; $ = 59° 29'; к =58 кг!смг;
kVt х = 121 кгм/см2 сек.
КЛАПАН 443000
Ударник клапана 443100
Расчет ударника производится на максимальную силу рк, действую- 443101
щую по оси клапана в момент открытия выхлопного клапана.
Для типа ударника по фиг. 426004-1 напряжение определяют 443102
по формуле Герца, принимая модуль упругости Е для стали равным
2-10е кг[см*-.
а = 0,3881^= 6570 lX ,
’ R ’ R
где R—радиус шаровой поверхности ударника, которой он соприка-
сается со штоком клапана.
Для типа ударника по фиг. 426005 напряжения находятся по фор- 443103
муле (2) п. 441002.
Для типа ударника по фиг. 426004 напряжение смятия между 443104
штоком и соприкасающейся с ним плоскостью ударника определяется
по формуле
удельное давление по шаровой поверхности ударника
4Р
01 = «(</* —йв) *
Стержень тарелки клапана 443200
Стержень тарелки (фиг. 433001) у клапана, приводимого в движение 443201
непосредственно кулачком, рассчитывается на сжатие и изгиб силой S
в момент перехода положительных ускорений клапана в отрицательные.
585
443202 — 443401
Напряжение изгиба от силы S будет
Напряжение сжатия
°с=-£. (2)
Здесь AfKp определяется из уравнения 433005;
УИи и F — минимальные момент инерции и площадь расчетного сечения
стержня тарелки вне резьбы;
Р/к—сила инерции самого клапана.
Суммарное напряжение равно
Еа = аи4-ас. (3)
443202 Пример. Для клапана впуска смеси авиационного двигателя:
№и = 0,96 см*; F=\,$5cm*;
Af„p = 556 кг см; Р, к = 99 кг;
бс = 60 кг/см*; ' аи = 580 кг/см*;
2]о= 580 + 60 — 640 кг[см*.
443300 Седло клапана
443301 Седло клапана рассчитывают на удельное давление от максималь-
ной силы, действующей на клапан:
где p’z — давление вспышки;
dr и dr— диаметры клапанного седла (фиг. 411003).
443302 Пример. Для выхлопного клапана авиационного двигателя:
di = 58 мм; dr =52 мм; р'х = 81 кг/см*; £ = 417 кг/см*.
443400 Шток клапана
443401 Шток клапана рассчитывают на сжатие в наименьшем сечении от
максимальной силы Р«, действующей на клапан.
Напряжение сжатия будет
где F — расчетная площадь штока клапана.
Этот расчет является весьма условным. В действительности шток
клапана испытывает знакопеременную нагрузку в условиях значитель-
ного нагрева. Поэтому шток клапана следует рассчитывать на уста-
лость при переменной нагрузке в условиях высокой температуры.
586
443402—444002
Однако отсутствие соответствующих экспериментальных и статистиче-
ских данных не позволяет пока вести расчет на усталостную прочность.
Пример. Для выхлопного клапана авиационного двигателя: 443402
Рк ='494 кг; F = 0,97^сл<а; ас = 507_кг/смг.
Направляющая клапана 443500
Расчет направляющей клапана ведется на основании тех же поло- 443501
жений, что и расчет направляющей толкателя (см. 442000).
Максимальная величина удельного давления определяется из 443502
уравнения
, _ 6Рке
Кша* — ~др~ г
где е — эксцентриситет силы Рк относительно оси клапана (см.
фиг. 434001);
Рк — сила, действующая по оси клапана;
d — диаметр клапана;
I — длина направляющей клапана.
Для клапанного механизма с непосредственным приводом в дви- 443503
жение клапана от кулачка (фиг. 433001) уравнение принимает следу-
ющий вид:
,, 6Мкр
Кшах — др
Произведение fcmax|VK х для конечной точки направляющей клапана 443504
определяется согласно 442103.
РЫЧАГ КЛАПАНА 444000
Рычаг клапана рассчитывается на изгиб и сжатие как со стороны 444001
клапана, так и со стороны кулачка (фиг. 444001).
• Чтобы выявить максимально напряженное сечение, приходится по- 444002
вторять расчет для нескольких сечений. Максимальное напряжение
в рычаге клапана бывает обычно при действии максимальной силы Рк.
Фиг. 444001.
К расчету рычага
587
Таблица 444005
Основные напряжения в рычагах клапанов
Расположение и число цилиндров Фирма и марка двигателя Со стороны кулачка Со стороны клапана
со s- 55 а. со s; я м 5 SI о w s; и. <м У О 3 а кг1смг к 55 55 к а. Ми кг см со 5 я м 5 S о м U. О* У О м о м
V-образное, 12 цилиндров Роллс-Ройс «Мерлин» XX 336 225 85 51,5 0,159 1160 0,89 0 1160 225 17 383 0,156 2460 0,847 0 2460
Аллисон С-15 2х 258 20 90° 0,824 1230 1,97 0 1260 Напряжения меньше, чем со стороны кулачка
Л-образное, 12 цилиндров Даймлер-Бенц 601 Еа 457 — — 0,292 925 1,18 194,5 1119 307 15,6 482 0,271 1775 1,14 3,1 1778
Даймлер-Бенц 603 455 — — 0,316 « 826 1,23 214 1040 277 17,8 495 0,271 1830 1,14 29 1859
Двойная звезда, 14 цилиндров BMW-801 590 15 — 1,11 933 3,91 0 933 414 4,7 1940 1,959 994 3,01 33,2 1027
444003—445004
Суммарное напряжение в рычаге клапана 444003
S.=.₽['+S2^],
где F — площадь расчетного сечения;
W — момент его сопротивления;
— угол между плоскостью расчетного сечения и перпендикуля-
ром к направлению силы;
Р—сила, действующая на рычаг;
р — плечо силы Р относительно центра тяжести сечения.
У рычагов некоторых двигателей (например, «Мерлин») средняя 444004
плоскость рычага не перпендикулярна оси вращения рычага; поэтому
в сечениях рычага получаются скручивающие пары, но вследствие их
незначительной величины ими обычно пренебрегают.
В табл. 444005 даны основные размеры и напряжения в рычагах 444005
клап^а для ряда авиационных двигателей.
ОСИ РОЛИКОВ И РЫЧАГОВ 445000
При расчете осей роликов и рычагов принимают нагрузки распре- 445001
деленными (по длине втулок) на них равномерно.
Обозначения: 445002
d — диаметр оси;
8 —диаметр сверления оси;
F — расчетная площадь сечения оси;
РИи —момент сопротивления оси на изгиб;
I — длина втулки рычага или ролика;
L — длина нагруженной части оси;
/вых, /вс— соответственно длйны втулок рычагов выхлопного и всасы-
вающего клапанов;
Р —сила, действующая на ось.
При расчете осей рычага' и ролика определяются: максимальные
удельные давления во втулках; напряжения изгиба; напряжения среза
и скалывающие напряжения при изгибе, которые обычно для выхлоп-
445003
ного клапана получаются в момент его открытия, а для всасывающего
Напряжение среза
Фиг. 445004.
т — # (3) К расчету осей
с 2F * ' > ролика и рычага
445004
589
445005—445006
Напряжение изгиба
445005
445006
PL
°и ~ 81УИ
(4)
Скалывающее напряжение при изгибе на внутренней поверхности
сверления оси
0,0834 + Р
тшах = ц/ • (5)
Для схемы фиг. 445005:
Фиг. 445005.
К расчету осей ролика и
рычага
Удельное давление ьа втулке рычага
Удельное давление в опоре при сим-
метричной нагрузке *
Максимальное удельное давление в опо-
ре, если будет действовать сила от одного
рычага:
2p(L-ily
«irnax —
Напряжение среза
Напряжение изгиба
р
Xc~2F'
_ Pl
°и ~ 4W„ •
(4)
(5)
Скалывающее напряжение при изгибе на внутренней поверхности
сверления оси:
0,0834 f d + a+ Р
» —I . (6)
Для схемы фиг. 445006:
Удельное давление на втулку рычага
выхлопного клапана
Лвых=5^. (1)
То же всасывающего клапана
Лве = -^. (2)
“вс
Фиг. 445006. *
К расчету осей ролика
и рычага
590
Таблица 445007
Основные размеры и напряжения в осях роликов и рычагов
Расположение и число цилиндров Фирма и марка двига- теля d1 мм L мм / мм Расчетная сила, кг Удельное давление под роликом или ступицей рычага Удельное давление в опорах Срез Изгиб Примечания
F см2 К кг/см2 Fi см* «1 кг[смг tc кг/см2 WH см3 ®и кг/см3
V-образное, 12 цилиндров Аллисон С-15 7 17 9 516 0,63 820 0,56 920 — 0,0334 2930 « То же
17,43/12,8 101,6 63,6 888 11,1 80 6,5 134 794 0,363 3064 Валик рычага
Л-образное, 12 цилиндров Даймлер-Бенц 501 Еа 14/7 37 28 339/169,5 1,68 202 1,26 259 283 0,253 474 То же
10/5 24 16 457 1,6 285 0,8 570 724 0,092 1500 Валик ролика
Даймлер-Бенц 603 14/7 37 28 363 1,63 213 1,26 288 295 0,253 412 Валик рычага
10/5 24 16 456 1,6 285 0,8 570 722 0,092 1500 Валик ролика
Двойная звезда, 14 цилиндров BMW-801 20 61,8 35,8 1125 7,2 156 5,2 216 0,595 1450 Валик рычага
8 21 8 688 0,64 1075 1,04 631 912 0,0502 3595 Валик ролика толкателя
1В знаменателе—внутренний диаметр.
445006
445007—446101
Удельное давление на опорах оси рычага
к_______Рта -
(L-iBC-2iBHX)d • w
Напряжение изгиба в оси рычагов от сил, действующих на рычаг
всасывающего клапана,
°И ~ g|y (С + 21 вых) • ,(4)
То же от сил, действующих ьа рычаг выхлопного клапана,
би ~ 8W„ ^вс)- (5)
Напряжение среза определяется только от сил выхлопного клапана
р
_ вых /л\
Те = -2Г * (6)
445007 В табл. 445007 даны основные размеры и напряжения в осях
роликов и рычагов авиационных двигателей.
446000 КРОНШТЕЙН РЫЧАГОВ
446100 Щеки кронштейна
446101 Щеки кронштейна рассчитывают на изгиб от силы Рх и растяже-
ние (или сжатие) от силы Ри (фиг. 446101).
Суммарное напряжение равно
“1—Т—П Г X J лаА N W « \Z$TT L-е— Д J LI н L—р—_ У!а= — IV, + Р ’ где Wt — момент сопротивления изгиба рас- четного сечения; F — площадь расчетного сечения. Обычно максимальное напряжение бу- дет иметь место в момент начала откры- тия клапана или в момент перемены зна- ков ускорений. Фиг. 446101. К расчету кронштейна рычага
592
446200—447101
Шпильки кронштейна
Шпильки кронштейна рассчитывают на нераскрытое стыка по его
опорной поверхности (фиг. 446101).
Обозначения:
W'z — момент сопротивления изгибу сечения кронштейна, совпада-
ющего с его опорной поверхностью, относительно оси z—z;
F’ — площадь этого сечения;
/б — площадь минимального сечения шпильки кронштейна;
i — число шпилек.
Шпильки должны быть затянуты с силой, которая создавала бы
в стыке напряжения смятия, на 25% превышающие напряжения раз-
рыва, вызываемые силами Рх и Рв, действующими на ось рычагов,
в предположении, что кронштейн составляет одно целое с головкой.
Напряжение растяжения в стыке кронштейна с головкой цилин-
дров (считаем их монолитными) равно
Сила затяжки шпилек
Рб = 1,25аР' ,25 + Р,) . (2)
Напряжение в шпильке
_ рб 1,25
°ш <7в = ilo
(3)
Пример. Для кронштейна рычагов авиационного двигателя DB-603
в момент начала открытия клапана выхлопа имеют место следующие
величины:
1. Щеки кронштейна
W2 = 0,58 см8; Fj= 1,85 см2; Ру = 38 кг;
у =1,1 см; Р^-ЗбО кг; 2]° = 703 кг/см*.
2. Шпильки кронштейна
1^2 = 6,16 см*; F'= 11,3 см’; р = 2 см;
/б = 0,32 см*; Ру = 38 кг; Рх = 360 кг;
<з — 120,4 кг/см*; D = 4 см; Р6 = 1700 кг;
аш = 2650 кг/см*.
ТЯГА
Стержень тяги
Стержень тяги рассчитывают по формуле Эйлера на максимальную
силу, действующую по ее оси. Для выхлопного клапана эта сила будет
в момент его открытия. Для всасывающего клапана обычно эта сила
максимальна в момент перемены знаков ускорений.
38 Двиац. порпш. двигатели
446200
446201
446202
446203
446204
446205
447000
447100
447101
593
447102-448001
447102 Критическая сила по формуле Эйлера
FI
(1)
где Е — модуль упругости материала тяги;
/ — экваториальный момент инерции сечения тяги;
L — длина тяги.
Определив критическую силу, находят запас прочности по вели-
чине отношения критической силы Ркр к силе, действующей по тяге, Q
п=%. (2)
447103 Пример. Для тяги выхлопного клапана авиационного двигателя
BMW-801
Q = 690 кг; Ркр = 3158 кг;
L = 39,4 ем; = 4 58
/ = 0,226 см*. «
447200 Сочленение тяга с толкателем и рычагом
447201 Обычное сочленение тяги с толкателем и рычагом изображено на
фиг. 442401. 1
447202 Сочленение тяги с толкателем рассчитывается по формуле Герца
на нагрузку силой Q
а = 0,388QE* (Г1~Г2)*.
* г1га
447203 Расчет сочленения тяги с рычагом зависит от конструктивного
оформления этого узла, которое в выполненных конструкциях весьма
разнообразно. Чаще всего это сочленение рассчитывается по формуле
Г ерца.
447204 Пример. Для нижнего сочленения тяги с толкателем в авиацион-
ном двигателе М-88 имеют место следующие величины:
G = 3,6 мм; ri = 3,5 мм; Q = 582 кг; Е = 2,2 • 10’ кг [см*;
а — 10090 кг[см*.
448000 КУЛАЧКОВЫЙ ВАЛ
448001 Обозначения (фиг. 448001):
I — расстояние между опорами вала;’
i — порядковый номер кулачка;
li 3— расстояние средней плоскости z-того кулачка от ближайшей
задней опоры (т. е. от опоры, ближайшей к распределитель-
ной шестерне);
6 п — то же от ближайшей передней опоры;
Sj — силы, действующие на кулачки;
Sis — составляющие этих сил в плоскости, перпендикулярной к оси
цилиндра (плоскость х—х);
594
448001
Sfi/ — то же в плоскости осей цилиндров (плоскость у—у);
Л/кр — крутящий момент на кулачковом валу от соответствующей
силы S;
2'ЛТкр — крутящий момент в передней опорной шейке рассматривае-
мого пролета вала;
2"Л4кр — то же в задней опорной шейке;
— то же в расчетном сечении;
d — наружный диаметр кулачкового вала;
8 — внутренний диаметр кулачкового вала;
Фиг. 448001.
Схема сил и моментов, действующих на кулачковый вал
— момент сопротивления на изгиб расчетного сечения кулачко-
вого вала:
О)
И\<р — то же на кручение:
Wkp = 2И/и; (2)
с — рабочая длина подшипника;
/ — экваториальный момент инерции расчетного сечения вала:
/ = ^(d‘-S<); (3)
G — модуль упругости материала вала 2-го рода;
Е —модуль упругости материала вала 1-го рода;
L —длина кулачкового вала от распределительной шестерни до
оси наиболее удаленного от него цилиндра.
При расчете на прочность принимают кулачковый вал разрезанным
на отдельные участки плоскостями, перпендикулярными его оси и про-
ходящими через середины опор. Расчет на прочность проводят для
каждого из этих участков в отдельности, предполагая, что через
каждый из этих участков передается тот же крутящий момент, что и
в неразрезанном вале. Хотя расчетное сечение и выбирается в средней
плоскости кулачка, но местным усилением за счет самого кулачка пре-
небрегают и за расчетное сечение кулачкового вала принимают его
сечение между кулачками.
38*
595
448100—448200
448100 Силы и моменты, действующие иа кулачковый вал
448101 Силы S, действующие на кулачки (только для клапанного меха-
низма с непосредственным действием кулачка на клапан с плоской та-
релкой), имеют одно направление.
В общем случае силы S, действуя в плоскостях, перпендикуляр-
ных оси кулачкового вала, имеют разные направления. Так как сече-
ние кулачкового вала является кольцевым, то при расчете вала на
прочность удобно разложить все силы S по двум направлениям,
а именно:
а) в направлении плоскости у —у, проходящей через оси цилин-
дров или параллельно ей, и
б) в направлении плоскости х —х, перпендикулярной к плоскости
у —у (см. фиг. 448001).
Предварительно каждая из сил S переносится в ось кулачкового
вала, что создает закручивающие вал моменты Sa (фиг. 448001).
Кроме сил и крутящих моментов от кулачков рассматриваемого
пролета кулачкового вала, на конечные сечения пролета будут дей-
ствовать полные крутящие моменты, передающиеся через зти сечения
в неразрезном вале.
448102 Опорная реакция на передней опоре будет
RB=/Rk + R',n, (1)
где
Rxn =
Z &
Rgu~ haSjy.
Для задней опоры
где
—У linSix,
Rg3 — knSjg.
(3)
(4)
448200 Расчет кулачкового вала на прочность
Для каждого участка вала между двумя соседними опорами опре-
деляют по углу поворота его р все действующие на него силы и кон-
цевые крутящие моменты.
При расчете считают силы действующими в средних плоскостях
кулачков.
Далее определяют в вале то сечение и тот угол р, для которых
получается максимальное напряжение. В результате действующих на
рассчитываемый участок сил от кулачков и концевых крутящих момен-
тов расчетное сечение вала подвергается изгибу некоторым моментом Л4И
и скручиванию некоторым моментом Мкр. Эти моменты определяются
обычным путем.
596
448300—448302
Напряжения от этих моментов будут:
от изгиба
от кручения
al
ткр — 7П • (2)
" кр
Максимальное скалывающее напряжение по третьей теории прочности
тшах — ~2 °и 4т’,р. (3)
В табл. 448200 даны основные размеры и напряжения в кулачко-
вых валах для ряда авиационных двигателей.
Расчет кулачкового вала иа жесткость
448300
Кроме расчета на прочность, кулачковый вал должен быть прове- 448301
рен на изгибную и крутильную жесткости, так как обе эти величины
являются характерными при оценке степени приближения к условию,
положенному в основу кинематики и динамики распределительного
механизма, а именно, что распределительный механизм является абсо-
лютно жестким. В действительности этого нет, и наиболее упругим
звеном клапанного механизма является кулачковый вал, в особенности
(вследствие своей длины) в отношении кручения.
Изгибная жесткость кулачкового вала характеризуется максималь- 448302
ным прогибом его в средней плоскости соответствующего кулачка (для
которого этот прогиб будет максимальным).
Стрела прогиба в плоскости х — х (фиг. 448001) под действием
силы S, в том сечении, где она приложена, будет
То же в плоскости
(1)
(2)
Прогибы от этой силы в средних плоскостях Л-того кулачка, лежа-
щего слева от этой силы, равны
Уь* = ^7Г (-Пи+14^ - Ца1кв),
У*в = (“lka +l4ka ~ Z?a lk°>-
(3)
(4)
Прогибы от той же силы в средних плоскостях к-того кулачка,
лежащего справа от этой силы, равны
Ук* = -ъ&г (-& +1Чк° -lkJ- <5>
Ук„ = 1к* +1Чк* ~ 1‘“ 1к*У
597
448302
Основные размеры и
Расположе- ние и число цилиндров Фирма и марка двигателя Число ку- лач- ковых вали- ков на ци- линдр ъ мм d мм «о мм 'и ММ ММ ММ ^8 ММ 1 мм
V-образное, 12 цилиндров ВК-105 1 16 34 28 46 117,5* 105 113* 335,5
АМ-38Ф 2 16 32 23 34,5 — 34,5 — 180
Роллс-Ройс «Мерлин» XX 1 13,4 25,34 17,67 38 45 38 45 154,4
Аллисон С-15 1 12,8 28,65 22,92 12,4 — 12,4 — 177,2
Л-образное, 12-цилиндров Даймлер-Бенц 601 Еа 1 12,5 8* 28 21 55 — 55 — 179
Даймлер-Бенц 603 1 12,5 8* 27,8 21,5 58 — 58 — 190
* Для кулачков всасывания
598
448302
Таблица 448290
напряжения в кулачковых валах
Максимальное напряжение
момент макси- мального напряже- ния S кг ми кгсм см3 си кг! см1 М€ кгсм ск кг/см3 •Стах кг[см3 I см* У мм
Начало открытия выхлоп- ного кла- пана 422* 2803 2,08 1345 355 85 672 3,54 3,74 —
Макси- мальный крутящий момент 278 780 2,33 335 1250 258 305 0,016
То же 336 1278 1,22 1045 170 70 525 1,54 0,104
2x258 1915 1,36 1405 90 33 703 1,95 0,098
» 460 2540 1,48 1715 272 92 850 2,07 —
» 456 2545 1,35 1950 400 147,6 985 1,88 0,219
599
448303—449102
Суммарный прогиб для i-того кулачка
у> = /(Syix)8 + (2у1вЛ
(7>
448303
где 2 У/х — суммарный прогиб i-того кулачка в направлении х—х;
2 У<« — то же в направлении у — у.
Обычно принимают, что величина этого прогиба не должна пре-
вышать 0,05 — 0,1 мм.
Крутильная жесткость кулачкового вала определяется максималь-
ным углом его закрутки под действием крутящих моментов от кулачков
цилиндра, наиболее удаленного от распределительной шестерни.
Этот угол закрутки вала равен
* ~ 26/ •
448400 Опорные подшипники
448401 Подшипники кулачкового вала рассчитываются на максимальное и среднее удельные давления опорных реакций. Максимальное удельное давление на подшипник будет ь — (П К max - • V/ Среднее удельное давление fr — ^ер (2> «ср - cd • w Здесь КтЖ1 — максимальная сила, действующая на опору; Кер — средняя сила, действующая на опору; силы Кш« и Кер определяются от сил, действующих на два соседних с опорой пролета вала.
449000 ПРУЖИНЫ
449100 Определение запаса прочности пружины
449101 Величина напряжения -tK в пружине определяется по силе Ряр пру- жины в момент максимального открытия клапана. Согласно обозначе- ниям 431301 , = k (1) где . 4с-1 0,615 /2) *~4с —4 1 с ’ с— £ (см. фиг. 431301).
449102 Вычисленное по формуле (Q п. 44910! напряжение дает предста- вление лишь о статической прочности пружины. В действительности
600
449103
клапанная пружина подвержена действию периодически изменяющейся
по величине силы, и расчет ее должен вестись на усталость.
В настоящее время основными трудностями расчета клапанных
пружин на усталость являются:
а) недостаточность экспериментальных данных о пре дедах усталости
при кручении пружинных сталей;
б) затруднительность надежного определения действительной ампли-
туды напряжений в пружине вследствие вибрации пружины.
Расчет пружин на усталость упрощается, если принять, что вдали
от резонанса вибрация клапанных пружин не может сильно влиять
на закон изменения по времени напряжений в пружине, так как даже
полное сжатие пружины увеличивает максимальное напряжение при
открытом клапане в среднем на 20%.
Поэтому, полагая пружину вне резонанса, можно при расчете
исходить из ее статической характеристики.
Обозначим: 449103
-t, — предел усталости на кручение материала пружины при пуль-
сирующем цикле в кг[см*-,
— предел усталости на кручение при симметричном цикле
в кг!см*\
"'max — максимальное напряжение цикла в кг/см*;
Tmtn — минимальное напряжение цикла в кг[см*\
п — запас прочности;
/max — прогиб пружины при максимальном открытии клапана в см\
Лк —подъем клапана в см.
Запас прочности определяется из равенства
где
1 t \
та “ 2 '"Стах тт11У-
(1)
(2)
— ’2^' ('cmax4"<mta), (3)
^min /тах*“^к ц\
=—--— . (4)
max------------------------------------------'max
Полагая, согласно данным испытаний пружин, для стали 50ХВА
(из которой обычно делаются клапанные пружины)
т, = 5300 кг/см*; = 3400 кг[см*
и принимая для
*•=—W <5>
1+Т
601
Таблица 449103
Клапанные пружины
Расположе- ние и число цилиндров Фирма и марка двигателя Пружина Средний диаметр D, мм Диа- метр про- воло- ки d, мм D C~d Число рабо- чих вит- ков i Пол- ное число вит- ков 1’ Дли- на в сво- бод- ном состо- янии LCb,am Дли- на в сжа- том состо- янии1 мм Зазор меж- ду витка- ми в сжа- том состо- янии Д, мм Мак- си- маль- ное нап- ряже- ние 2 ^тах, кг[смг Мак- си- маль- ная сила пру- жины Лтр, кг Запас проч- ности п 1 Лк
V-образное, 12 цилиндров ВК-105 Наружная 41,75 4,2 9,95 6 8 80 37 0,91 4420 30,8 1,8 3,33
Внутренняя 28,75 2,8 10,2 7,75 9,75 72,5 29,5 0,47 4400 13,2 1,80 3,33
Наружная 37,2 3,8 9,8 5,5 7,5 62,9 30 0,62 4470 25 1,62 2,53
Внутренняя 27 2,5 10,8 6 8 48,8 21,5 0,47 4160 9,5 1,62 2,10
АМ-ЗЗФ Наружная 46 4,8 9,6 3,5 5,75 —- 26 0,77 5900 43 1,21 —
Внутренняя 34 3,75 9,1 4,5 7 — 26 0,67 6060 32 1,21 —
Роллс-Ройс «Мерлин» XX Наружная 36,6 4,4 8,3 4,5 6 53 27,3 0,82 3380 35,40 1,60 1,71
Внутренняя 26 3,05 8,53 6,25 7,75 49,8 25,6 0,61 3920 16,8 1,53 1,61
Аллисон С-15 Наружная 40,2 4,5 8,92 5 7 57,5 31,8 0,87 3730 33,5 1,70 1,80
Внутренняя 29,1 3,4 8,56 6 8 51,3 29,2 0,82 3710 19,5 1,59 1,55
Д-образное, 12 цилиндров Даймлер-Бенц 601. Еа Наружная 33,1 3,8 ' 8,72 3,75 5,75 50,5 28 2,5 5150 33,5 1,21 1,74
Внутренняя 23,3 2,9 8,05 5 7 49,7 28,5 2,24 5400 21,7 1,12 1,64
Даймлер-Бенц . 603 Наружная 34/37,5 . 4,5 7,56/8,33 4 6 55,6 24,7 1,67 4890 48,9 1,41 2,21
Внутренняя 25/27,4 3,4 7,35/8,05 5,5 7,5 57,2 23,8 1,53 5180 39,5 1,37 2,38
Двойная звезда, 14 цилиндров BMW-801 Наружная 53 6,3 8,4 3,5 5,5 62 40,74 2,65 3500 64 1,68 1,54
Средняя 39,4 5 7,83 5,5 7,5 64 40,74 1,23 3250 40,3 1,90 1,69
Внутренняя 23,9 3,5 8,25 6 8 51 32,24 1,21 3760 21,9 1,48 1,36
449103
'При полном открытии клапана.
'Без учета кривизны проволоки и напряжения среза.
449200—449202
[см. формулу (2) п. 449101] его среднее значение в интервале с = 8|— 10
равным
кс= 1,1,
получим для определения запаса прочности пружины следующую зави-
симость:
13200 1
— ---------л--- <6)
““ 1+1,44 ~—
'max
В таблице 449103 даны запасы прочности для клапанных пружин
ряда современных авиационных двигателей, просчитанные по формуле
(6) п. 449103.
Колебания клапанных пружин 449200
Учесть в цифровых величинах влйяние резонанса на прочность 449201
пружин пока не представляется возможным. В руках конструктора
имеются два способа борьбы с резонансом клапанных пружин —
см. 449202 и 449203.
Увеличение собственной частоты колебаний пружин сдвигает резо- 449202
нансные обороты кулачкового вала. Резонансные колебания пружины
создаются вследствие этого гармониками более высоких порядков,
амплитуды которых с увеличением порядка имеют общее стремление
к уменьшению, а следовательно, уменьшаются и резонансные колеба-
ния пружины.
Рикардо рекомендует брать отношение числа собственных колебаний
пружины к оборотам кулачкового вала порядка Ь = 10, причем
пк
это число во избежание попадания в резонанс не рекомендуется брать
целым.
Частота собственных колебаний пружин определяется по формуле
лс = 940 ]/-£, (1)
где р — жесткость пружины, т. е. сила, деформирующая пружину
на 1 см-,
w — вес рабочих витков пружины.
Принимая модуль упругости сдвига G = 800000 кг/см3, удельный
вес пружинной стали у = 7,86 г[смг, можно представить формулу (1)
в следующем виде:
пв = 2,08 • 10’^1, (2)
где I — число рабочих витков пружины, или
пс = 7,4-~(3)
В таблице 449202 даны числа собственных колебаний клапанных
пружин и величины & для ряда серийных авиационных двигателей.
603
Таблица 449202
Числа собственных колебаний клапанных пружин
Расположе- ние и ЧИСЛО цилиндров Фирма и мар- ка двигателя Число обо- ротов кулачково- го вала в минуту Пк Наружная пружина Внутренняя пружина
Вес рабочих витков пружины W г Сила р, деформи- рующая пружи- ну на 1 см кг/см Число соб- ственных колебаний пружины в минуту Лс . Пс 0= — Пк Вес рабочих витков пружины W г Сила р, деформи- рующая пружи- ну на 1 см, кг/см Число соб- ственных колебаний пружины в минуту Пс
V-образное, 12 цилинд- ров ВК-105 1350 85,5 7,17 7700 5,7 33,8 3,08 8970 6,65
АМ-38Ф 1025 72 18,2 15000 14,6 42 11,4 15500 15,1
Роллс-Ройс «Мерлин» XX 1425 61,5 13,87 14100 9,83 29,2 6,9 14500 10,15
Аллисон С-15 1500 78,7 13,25 12200 8,1 39 9 ' 14300 9,5
д-образное, 12 цилинд- ров Даймлер-Бенц 601 Еа 1350 35 15 19500 14,5 20 10,3 21300 15,8
Даймлер-Бенц 603 1250 55 20,2 19060 15,2 32 12,6 19500 15,6
Двойная звезда, 14 цилиндров BMW-801 1200 142 30,45 13300 И,1 105* 41 17,65* 11,56 12200* 15700 10,3* 13,1
449202
* Для средней пружины,
449203-449204
Уменьшение зазора между витками ограничивает возрастание 449203
амплитуд колебания при резонансе.
Зазор при максимальном подъеме клапана определяется по формуле
Ьсв-/^-1)4-2^ (1)
где:
Д—зазор между витками пружины при полностью открытом
клапане;
/ — прогиб пружины при полностью открытом клапане;
Дж —длина пружины в свободном состоянии;
z’n —полное число витков пружины;
i — рабочее число витков пружины;
8 — высота запила концов пружины (фиг. 431301).
Согласно табл. 449103 величина Д в среднем берется от 0,2 до 2,60.
Из уравнений (6) п. 449103 и (3) п. 449202 вытекает следующая 449204
зависимость между максимальным напряжением в пружине ттах, запа-
сом ее прочности п и частотой собственных колебаний пс при заданной
высоте подъема клапана йк
AUJUUU е Г\г
к=== ~ 5,ОбТцг1ах*
Фиг. 449204.
К расчету пружины
Формула 449204, формула (6) п. 449103 и графики фиг. 449204
позволяют легко проанализировать взаимное влияние четырех характер-
ных для клапанной пружины параметров: п,ттах, / и пс.
605
449300—449303
449300
Подбор клапанных пружин
449301 Порядок расчета пружин следующий. Задавшись величиной / (как
видно из таблицы 449103, величина -г- изменяется от 1,36 до 3,33)
“к
и запасом прочности п, находят тшах и пс. Если пс будет в 8 — 10
и более раз выше числа оборотов кулачкового вала, то можно остановиться
на выбранных величинах и перейти к определению геометрических
размеров пружины.
Диаметр проволоки пружины при заданном запасе сил пружин
находится из соотношения
/ стк
d= У 0 31J^max(/-/4) 387/ ’
’ /х н/ ттах
причем масса нерабочих витков оценивается в 40% от массы рабочих.
В этой формуле означают:
тк — приведенную к клапану массу распределительного механизма;
р. — запас сил клапанных пружин;
jx — ускорение, соответствующее минимальному запасу сил клапанных
пружин;
й' — путь клапана от момента, соответствующего /х, до максимального
подъема (фиг. 431309);
/—прогиб пружины при максимальном подъеме клапана,
c^Djd.
449302 При проектировании нескольких пружин на один клапан исходят
из условия равной прочности пружин. Для этого необходимо, чтобы
величины с, — и / для всех пружин были одинаковыми. При этом все
пк
зависимости 449204 для одной клапанной пружины остаются справед-
ливыми для каждой из клапанных пружин.
Задаваясь диаметральным зазором между пружинами, равным 2мм,
определяют геометрические размеры пружин по уравнениям 449303
и 449304, в которых индексами «нар», «вн» и «ср» обозначены соответству-
ющие геометрические размеры наружной, внутренней и средней пружин.
449303 Для двух пружин
С _ _2(c»+l)^B + 0,4(c+l)d„ ...
10° 0,349^ (/-й') 387/ с(с-1У •
I Tmax
Из уравнения (1) определяют и далее
Ови = С6?вн, "I
^иар = (С+1^ВН1+0<2, (2)
I
Ояар = С£?иар" J
Для упрощения подсчетов в табл. 449303 даны величины С по (1),
увеличенные в 100 раз, для разных диаметров стандартной проволоки
и разных значений с.
606
449304
Таблица 449303
К подбору двух пружин
С ^ВН 1,6 2 2,2 2,5 2,8 3 3,5 4 4,5 1 5
8 с 1,00 11,52 1,82 2,31 2,87 3,27 4,39 4,68 7,14 8,76
4нар 2,3 2,9 3,1 3,5 3,9 4,1 4,8 5,4 6,1 6,7
8,5 С 0,92 1,39 1,67 2,12 2,63 3,00 4,04 5,22 6,57 8,06
4нар 2,3 2,8 3,1 3,4 3,8 4,1 4,8 5,3 6,0 6,6
9 С 0,85 1,28 1,54 1,96 2,43 2,78 3,74 4,84 6,03 7,47
4нар 2,2 2,8 3,0 3,4 3,7 4,0 4,7 /5,2 5,9 6,5
9,5 С 0,78 1,19 1,43 1,82 2,26 2,53 3,48 4,50 5,66 6,95
4иар 2,2 2,7 3,0 3,3 3,7 3,9 4,6 5,2 5,8 6,4
10 С 0,73 1,11 1,33 1,69 2,11 2,41 3,25 4,21 5,30 5,51
4 нар 2,2 2,7 2,9 3,3 3,6 3,9 4,5 5,1 5,7 6,3
10,5 С 0,63 1,04 1,25 1,59 1,93 2,26 3,05 3,95 4,93 6,12
&нар 2,2 2,6 2,9 3,2 3,6 3,8 4,4 5,0 5,6 6,3
11 с 0,64 0,98 1,17 1,50 1,86 2,13 2,87 3,74 4,69 5,76
4нар 2,1 2,6| 2,8 3,2 3,6 3,8 4,4 5,0 5,6 6,2
Определив величину С по уравнению (1) и задавшись с по
табл. 449303, подбирают соответствующую величину dBB и на основании
уравнений (2) находят все остальные геометрические размеры пружин.
Величину t/Hap необходимо довести до размера диаметра стандарт-
ной проволоки и произвести пересчет.
Для трех пружин
449304
с ==
100 0,349гшах(/~^) ~ 387f
L | [ (с-И)»4Вк + <Мс у + j" (c-H)dB„ + 0,2у + A
(1)
Определив С по уравнению (1) и задавшись с, находят по табл. 449304
с?вн для стандартной проволоки, а затем и геометрические размеры
клапанных пружин
Овн '—• С6?ви,
г/ - (с+1)4вп + 0,2
«ср— с_ , ,
^Оср = С6?ср,
. __(с+О 4ср + 0,2
«иар— ,
-^иар — С^иар- .
(2)
Получив величины dep и </ИаР из табл. 449304, доводят их до раз-
меров стандартной проволоки, наиболее близких к полученным, и снова
пересчитывают пружины.
607
449304
Таблица 449304
К подбору трех пружин
С j ^вн 1,6 2 2,2 2,3 | 2,5 1 ! 3 1 3,5 4
8 dcp С ^нар 2,3 2,36 3,3 2,9 3,48 4,0 3,1 4,12 4,3 3,5 5,18 4,8 3,9 6,35 5,3 4,1 7,21 5,6 4,8 9,58 6,4 5,4 12,28 7,3
8,5 dcp С <1нар 2,3 2,10 3,2 2,8 3,10 3,8 3,1 3,68 4,1 3,4 4,63 4,6 3,8 5,69 5,1 4,1 6,46 5,4 4,8 8,59 6,2 5,3 11,03 6,8
9 de > с ^нар 2,2 1,89 3,1 2,8 2,80 3,7 3,0 3,32 4,0 3,4 4,18 4,5 3,7 5,13 5 4,0 5,84 5,3 4,7 7,78 6,1 5,2 10,00 6,7
9,5 dep С ^нар 2,2 1,71 3,0 2,7 2,54 3,6 3,0 3,01 3,9 3,3 3,81 4,4 3,7 4,63 4,8 3,9 5,32 5,1 4,6 7,10 5,9 5,2 9,13 6,6
10 dep С ^нар 2,2 1,56 2,9 2,7 2,32 3,5 2,9 2,76 3,8 3,3 3,49 4,2 3,6 4,30 4,7 3,9 4,89 5,0 4,5 6,52 5,7 5,1 8,40 6,5
10,5 dep С d«ap 2,2 1,44 2,8 2,6 2,14 3,4 2,9 2,54 3,7 3,2 3,22 4,1 3,6 3,97 4,6 3,8 4,51 4,9 4,4 6,03 5,6 5,0 7,77 6,3
И 1 dep С ^нар 2,1 1,33 2,7 2,6 1,93 3,3 2,8 2,35 3,5 3,2 2,98 4,0 3,6 3,68 4,5 3,8 4,19 4,8 4,4 5,60 5,5 5,0 7,22 6,2
450000-451003
ВЫБОР ОСНОВНЫХ КИНЕМАТИЧЕСКИХ ПАРАМЕТРОВ
КЛАПАННЫХ МЕХАНИЗМОВ
ОБЩИЕ ПОЛОЖЕНИЯ ДЛЯ ВЫБОРА КИНЕМАТИЧЕСКИХ
ПАРАМЕТРОВ КЛАПАННЫХ МЕХАНИЗМОВ
Основные кинематические параметры клапанного механизма должны
быть выбраны так, чтобы удовлетворять следующим четырем основным
требованиям:
1. Коэффициент наполнения цилиндра двигателя—максимальный.
2. Величина сил инерции клапанного механизма должна позволять
конструктивное осуществление клапанных пружин.
3. Силы инерции—возможно меньшей величины.
4. Силы ударов в момент открытия клапана и в момент его посадки
на седло вследствие наличия в клапанном механизме зазоров должны
быть умеренной величины и при изменении зазоров в клапанном меха-
низме (во время работы двигателя) силы эти должны изменяться воз-
можно меньше.
Для выполнения первого условия 451001 необходимо обеспечить
наибольшее время-сечение клапана или наи^Вьшую площадь диаграммы
подъема клапана. Для этого нужно, чтобы ж лапан возможно быстрее
открывался, возможно дольше оставался открытым при его максималь-
ном подъеме и возможно быстрее закрывался. Предел такому быстрому
открытию и закрытию клапана ставят возрастающие силы инерции
клапанного механизма, увеличивающие его нагрузки (что ведет к уве-
личению конструктивных размеров и веса механизма) и требующие
постановки соответственно более сильных клапанных пружин (что при
проектировании клапанного механизма создает известные габаритные
затруднения).
Помимо этого, увеличение быстроты открытия и закрытия клапана
приводит к увеличению скорости удара в моменты начала открытия
и посадки клапана на седло, что увеличивает силу удара со всеми
вытекающими отсюда последствиями. Поэтому увеличивать быстроту
открытия и закрытия клапана можно только до известного предела,
который в основном и лимитирует величину время-сечения клапаьа.
Отсюда видны противоречия между первым основным требованием
451001 и тремя последующими: нельзя увеличить время-сечение, не
увеличивая или ускорений или начальной скорости клапана.
В отношении второго требования 451001 нужно иметь в виду, что
хотя величины сил инерции, по которым подбирают клапанные пружины,
и желательно иметь возможно меньшими, но это приводит к уменьше-
39 Авиац. порши, двигатели
450000
451000
451001
451002
451003
609
452000- 452003
Фиг. 452001.
Схема рычажного механизма газораспреде-
ления
нию время-сечения. Поэтому в каждом конкретном случае приходится
принимать компромиссное решение, жертвуя обычно время-сечением для
получения сил инерции, приемлемых для располагаемого габарита
клапанных пружин.
452000 ВЫБОР КИНЕМАТИЧЕСКИХ ПАРАМЕТРОВ РЫЧАЖНОГО
РАСПРЕДЕЛИТЕЛЬНОГО МЕХАНИЗМА
452001 Для механизмов с передачей движения от кулачка к клапану
через рычаг (фиг. 452001) при симметричном профиле кулачка диаграмма
подъема клапана получает-
ся несймметричной вследствие
влияния на кинематику кла-
пана углового перемещения 3
рычага.
На несимметричность диа-
граммы подъема влияют сле-
дующие основные кинематиче-
ские параметры механизма:
расстояние аг между осями
кулачка и рычага, расстояние г
между осями ролика и рычага,
радиус р дуги окружности ро-
лика рычага. Неудачное соот-
ношение между указанными
параметрами при выборе их
конструктором приводит к по-
лучению большой несиммет-
ричности в диаграмме подъе-
ма клапана и, как след-
ствие:
а) к более мощным клапан-
ным пружинам, требующим
больших габаритов места
для их размещения;
б) к большим положительным ускорениям клапанного механизма,
создающим в соответствующие моменты большие нагрузки в нем от
инерционных сил.
452002 Обозначения (фиг. 452001):
Лк — максимальный подъем клапана;
ЛкУ—высота кулачка;
гн—радиус начальной окружности кулачка;
г„ —плечо рычага со стороны клапана;
радиус дуги вставки головки кулачка;
Ypmax —угол Yp между осью клапана и плечом рычага со стороны кла-
пана при подъеме Лк;
YPe —то же при закрытом клапане;
ук—-разность углов уршм и Yp* (полный угол качания рычага).
452003 Задавшись симметричным профилем кулачка, можно получить
наиболее близкий к симметричному закон движения клапана, что
610
452004
достигается выбором кинематических параметров механизма по фор-
мулам
1 >
2sinyTK
fl2 = 1/Л,’2+ (Гн + р) (/'н + р 4- Лку)- (2)
Фиг. 452004-1.
Диаграммы пути, скорости и ускорения клапана для трех
пар значений параметров г и а2
Пример. Пусть заданы (фиг. 452001):
452004
йк = 12,7 мм;
гг— 12,14 мм;
hKy = 8,87 мм;
г в = 16,34 мм
гк —62,48 мм
р = 11 мм.
Ypo = 94°22';
Профиль кулачка тангенциальный.
39*
611
452004
По формуле [см. (1) п. 426003]
Лк = Гк (COS УрО ~ COS Yp max)
находят
COS Yp maxCOS УрО ~ = 0,27955,
Yp max=105°14',
ук= 11’52'.
По формулам (1) и (2) п. 452003 определяют
^ку 8,87 . л
г =---------— =-------.----= 42,87 лии,
2 sin 4г 2sin-i-H°52'
2 к 2
а2 = 1/г2 + (Ги + р) (Ги + р + Лку) = j/4 2,87® 4-27,34-36,21 — 53,18 мм.
На фиг. 452004-1 даны для сравнения диаграммы пути ftKX, ско-
рости Укх и ускорения /кх клапана йо углу р для трех пар значений
параметров г и са.
Фиг. 452004-11.
Диаграммы сил пружин и сил инерции по пути клапана для трех пар
* значений параметров
612
453000 —453002
На фиг. 452004-11 даны для сравнения диаграммы приведенных
к клапану сил инерции клапанного механизма KPj, суммарной силы
пружин одного клапана 2 по пути клапана hKX для тех же? зна-
чений параметров г и с2, при качении ролика рычага по участкам
ВС и CJSl (фиг. 452001) профиля кулачка.
В табл. 452004 приведены значения выполненных параметров г и а2
для современных авиационных двигателей, а также подсчитанных для
этих же двигателей по формулам (1) и (2) п. 452003.
Таблица 452004
Фирма и марка двигателя Параметры
гв мм р мм Аку ММ Гк град. выполненные вычисленные по формулам (1)и(2) п. 452003
Г мм «2 ММ . Г мм <*2 ММ
Роллс-Ройс «Мер- лин» XX . . . 13,3 20,5 9,95 9° • 63,38 73,9 63,38 74,1
Аллисон С-15 . . 15,54 15,87 10,66 16’42' 36,7 51,7 36,7 51,7
Даймлер-Бенц 601 Еа . . . . 14,7 11 8,6 17’44' 28 38,5 27,9 40,6
Юнкере «Юмо»- 211 F .... 13,8 11,5 12,9 10’17' 72 80,1 72 78,5
Даймлер-Бенц 603 14,7 11 8,6 17’24' 28,5 39,7 28,45 41
НАИВЫГОДНЕЙШИЙ ПРОФИЛЬ КУЛАЧКА В ОТНОШЕНИИ ВРЕМЯ-СЕЧЕНИЯ 453000
И КЛАПАННЫХ ПРУЖИН ПРИ ЗАДАННОМ ИХ ЗАПАСЕ СИЛ
В 431308 была обоснована необходимость иметь известный запас 453001
силы пружины. Для получения наименьших размеров пружин и наи-
большего время-сечения клапана кулачок на участках отрицательных
ускорений (те участки, на которых силы инерции стремятся оторвать
механизм от кулачка) должен быть профилирован таким образом, чтобы
запас сил пружин клапана для всех точек этих участков был одина-
ков.
С точки зрения удовлетворения требованию 453001 наилучшим будет 453002
профиль кулачка, удовлетворяющий следующим условиям: ’
1. Положительные ускорения клапана (ускорения клапана, соответ-
ствующие тем участкам его движения, на которых силы инерции при-
жимают механизм к кулачку) должны быть постоянными по величине
и максимально возможными.
2. Отрицательные ускорения клапана должны изменяться по линей-
ному закону в зависимости от пути клапана.
Эти два условия позволяют получить максимально возможное время-
сечение клапана при данной постоянной величине запаса сил пружин
клапана.
613
453003
453003 Указанный в 453002 закон изменения ускорения клапана по его
пути дан на фиг. 453003. Чтобы полностью определить этот закон,
необходимо знать следующие величины:
1. Ускорение jA клапана на участке АВ его подъема; этим ускоре-
нием задаются, исходя из предпосылок выбора величин положительных
ускорений.
2. Величину hi участка АВ подъема клапана.
3. Ускорение jB клапана, соответствующее точке В его подъема.
4. Ускорение jc клапана, соответствующее точке С полного подъема
Лк клапана.
Таким образом неизвестными являются три величины: hi, jB и /с.
К выбору клапанных пружин
Для их определения имеются два условия (фиг. 453003)
Лк = Л14-йг, (1)
— (2)
где th — время полного открытия клапана;
th — время прохождения клапаном пути Л^
/л — время прохождения клапаном пути й2.
Поэтому для решения задачи поступают следующим образом:
1. Задаются значением величины ht и, пользуясь условиями (1)
и (2), определяют соответствующие значения ускорений jB и /с (как
именно это делается, указано в 453004).
2. Строят диаграмму время-сечения клапана и определяют ее пло-
щадь.
3. Строят характеристику суммарной силы клапанных пружин, при-
нимая во внимание заданный запас мощности пружин. Эта характерн-
ей
453004—453005
стика представляет собой (фиг. 453003) прямую линию FE0, проходя-
щую через точку О пересечения прямой В^ ускорений с осью абсцисс
Л. Наклон прямой определяется заданным запасом сил пружин и пря-
мой ускорений BjCj.
4. Согласно полученной характеристике суммарной силы подбирают
пружины.
Сделав такие просчеты для ряда значений останавливаются на том
значении hu при котором получаются достаточное время-сечение клапана
и удовлетворительные конструктивные размеры клапанных пружин.
Для определения по заданным величинам jA, hK, и th ускорений
jB и jc и закона изменения пути клапана по времени поступают сле-
дующим образом.
Так как кривые пути, соответствующие положительным и отрица-
тельным ускорениям, имеют в точке сопряжения общую касательную,
то из условия касания и сопряжения получают два уравнения
453004
-U=cos/a-4
1с
Ja^i~ ~2 + }’в)- (2)
Согласно уравнению (1) п. 422107 и принимая во внимание, что
в рассматриваемом случае р = 1,
(3)
>А
Определив Л2, t'h и fh из уравнений 453003 и подставив их вели-
чины в уравнения (I) и (2), решают два последние уравнения графиче-
ским путем, задаваясь величинами /с и /в, так как непосредственно
их решить невозможно. Если соотношения между /с и /в получатся
неудовлетворительными, то придется изменить величины jA и h^.
Для определения по заданным величинам /А, hK, th и / (фиг. 453003)
ускорений ]в и /с и закона изменения пути клапана по времени посту-
пают следующим образом.
Из уравнений (2) п. 422202, (2) п. 453003 и (3) п. 453005 полу-
чают следующие соотношения:
453005
(1)
и
Лг • s Г /"2/А(ftK—й2)"1
2/~Sn [6, V (2/ —Ла) J
(2)
из которых, исключив th, находят й2.
Из уравнений 453003 и (3) п. 453004 находят Л1( t'h и th-
Законы изменения пути и скорости клапана по времени на участке
АВ находят из уравнений (1) и (2) п. 422107, а на участке ВС— со-
гласно уравнениям (2) и (3) п. 422202:
Лк» = Лк-х = Лк-Л^8тг^- (3)
1с~1в £ “ h2
615
454000—454002
и
VK«=/2x(/c-^x). (4)
Закон движения толкателя на участке прохождения зазора в кла-
пане может быть выбран или тем же, что и на первом участке подъема
клапана, или любым другим (см. 454002).
454000 СПОСОБЫ УМЕНЬШЕНИЯ ВЕЛИЧИН УДАРНЫХ НАГРУЗОК
В РАСПРЕДЕЛИТЕЛЬНОМ МЕХАНИЗМЕ
454001 Удары в клапанном механизме в моменты открытия клапана и по-
садки его на седло возникают вследствие наличия в нем зазора на тем-
пературное расширение звеньев механизма.
Если эти удары умеренной величины, то они могут быть даже
полезны для клапанного механизма, так как сбивают нагар с седла
клапана; но если удары выходят за пределы допустимых, то могут
вызвать износ и наклепы в стыках звеньев клапанного механизма.
Поэтому силы ударов должны быть сведены к допустимым величинам.
Определить величину этих сил расчетным путем не представляется
возможным; поэтому ограничиваются назначением определенных скоро-
стей при ударе на основе опытных данных статистического материала
и соображений общего порядка. Обычно величину этой скорости берут,
в зависимости от массы движущихся частей распределительного меха-
низма, в 0,5—1 м[сек (при больших массах выбирается меньшая ско-
рость). Задавшись величиной скорости при ударе, нужно позаботиться
также о том, чтобы при изменении зазора эта величина возможно меньше
изменялась.
454002 В механизме с кулачками, очерченными дугами кругов, с целью-
избежать сильных ударов и резких изменений ударных нагрузок при
изменении зазоров участок профиля кулачка, соответствующий зазору,
очерчивается очень часто выпуклой дугой (авиационные двигатели Кер-
тисс, Аллисон, «Мерлин») такого радиуса, который позволяет осуще-
ствить выбранную скорость удара.
Если
— скорость удара;
— зазор в клапанном механизме (по кулачку);
<ок— угловая скорость вращения кулачкового вала, а остальные
обозначения — согласно фиг. 454002, то радиус профиля кула-
чка может быть определен по формуле
й 2(rH + p) + ftT
* = -2—------------. (1>
у (ra + f + h^-^-(rK+9)
Определенный по этой формуле радиус обычно получается очень
небольшой величины; поэтому он выполняется только для участка про-
филя кулачка, соответствующего зазору, а далее кулачок профилируется
выпуклой дугой (двигатель «Мерлин»), прямой (Кертисс) или вогнутой
дугой (Аллисон).
616
454003
Угол зазора в этом случае определяется по уравнению (1)
п. 425103.
Угол определяется по уравнению
sin =-нД—sin (2)
П + Р
Фиг. 454002.
К уменьшению ударных нагрузок в распределитель-
ных механизмах
В отношении кинематики и динамики клапана кулачок с дугой для 454003
уменьшения зазора эквивалентен кулачку, у которого величины а, га
и (согласно обозначениям 425101) должны быть заменены соответ-
ственно новыми, найденными из следующих уравнений (см. фиг. 454002):
а) для выпуклого кулачка
Ов = (R1 + р)а + (гн + р + Й-с)* — 2 (/?! + р) (гн + р + йт) COS ф- , (1)
Гн» = /?1 оэ, (2)
sin ₽„ = sin <]ч; (3)
б) для вогнутого кулачка
Ов = К (/?Т—Р)2 + (гн + Р + Йт)г + 2 (/?! - р)(гн + р + Л-) cos , (4)
^Н» ” @9 Rif (5)
sin ртв = sin *т; (6)
МЭ
в) для тангенциального кулачка
Гнв = (Гн + р + йт) cos — Р, (7)
Ртэ = фт* (8)
€17
454004
Произведя эту замену в профиле кулачка, кинематический и дина-
мический расчет можно вести по формулам, данным в 425000 и 426000
для кулачков соответствующих профилей.
454004 В распределительных механизмах звездообразных двигателей,
не имеющих специальных компенсаторов для сохранения зазора постоян-
ным в холодном и горячем состояниях двигателя с целью не допустить
повышения ударных нагрузок (так как в горячем состоянии зазор,
а следовательно, начальная и конечная скорости движения клапана
увеличиваются) употребляются компенсаторные шайбы.
В этих шайбах участок профиля, соответствующий началу движе-
ния, очерчивается по архимедовой спирали, уравнение которой в поляр-
ных координатах в рассматриваемом случае будет
S — at, (1)
где S — расстояние между осями кулачковой шайбы и роликом толка-
теля;
/ — время, соответствующее S;
а — постоянный коэффициент.
Путь толкателя согласно формуле (1) будет
Йтх =S-(rH + p) = a/-(rH-f-p). (2)
Скорость, постоянная на всем участке профиля кулачка, очерченном
по этому закону, будет равна
V™ = а. . (3)
Ускорение равно нулю.
Участок профиля кулачка, очерчиваемый по этому закону, делается
обычно на угле поворота кулачковой шайбы несколько большем, чем
тот, который соответствует возможному наибольшему зазору клапана
в горячем состоянии.
Архимедова спираль сопрягается обычно с начальной окружностью
кулачковой шайбы дугой несколько большего радиуса, чем радиус
ролика толкателя.
Основным недостатком компенсаторной шайбы является то, что она
уменьшает величину время-сечения клапана.
460000-460001
ПРИМЕРНЫЙ РАСЧЕТ КЛАПАННОГО МЕХАНИЗМА 460000
АВИАЦИОННОГО ДВИГАТЕЛЯ ДАЙМЛЕР-БЕНЦ 603
Расчет клапанного механизма мотора Даймлер-Бенц 603 (фиг. 460001) 460001
проведен на основании данных мерительной лаборатории, полученных
путем обмера деталей.
Фиг. 460001.
Схема клапанного механизма авиационного двигателя DB-603
При расчете были сделаны следующие допущения:
1) давления на выхлопной клапан изменяются линейно по углу
поворота коленчатого вала от момента начала открытия клапана до
момента, соответствующего положению поршня в НМТ, где давления
выравниваются;
619
460002—460004
2) зазоры между ударником и клапаном не изменяются по вели-
чине при нагревании двигателя;
3) зазор у выхлопного клапана принят равным зазору у вса-
сывающего.
460002 Основные данные
Число оборотов кулачкового валика лк= 1250 об/мин.
Число всасывающих клапанов и рычагов на один цилиндр —по 2.
Число выхлопных клапанов на один цилиндр —по 2.
Число кулачков на один цилиндр—2.
Зазор между ударником и клапаном всасывания —0,4 мм.
Зазор между ударником и клапаном выхлопа— 0,66 мм. Фазы рас-
пределения:
Начало открытия выхлопного клапана — 64е до НМТ.
Конец закрытия выхлопного клапана —43е после ВМТ.
Начало открытия всасывающего клапана — 65° до ВМТ.
Конец закрытия всасывающего клапана — 54° после НМТ.
460003 Профиль кулачка
Обмером были определены подъемы /zTX центра ролика толкателя
(фиг. 423101) с точностью до 0,025 мм по углу р поворота кулачкового
вала и определены соответствующие координаты точек х профиля
кулачка.
Графоаналитические исследования табличных значений координат hTX
по р и координат точек х показали, что профиль кулачка симметричен
и очерчен дугами кругов и прямыми.
На фиг. 441004 приведены размеры выявленного профиля кулачка.
Расхождения между экспериментальными и теоретическими значениями
й1Х при одном и том же угле р не превышают 0,02 мм.
460004 Кинематика рычага
Принимая обозначения, принятые в 425101, 426001 и 427201, имеем
аа = 39,7 мм; гя=И,7 мм; Гк = 47,1 мм;
г = 28,5 » р— 11 мм; гг = 9 мм;
/?г = 23,3 » vpo=7O°35'.
Для нахождения угловых путей, скоростей и ускорений рычага
определяют углы р, в пределах которых движение рычага совершается
по рассматриваемому участку профиля кулачка, для чего сначала нахо-
дят ряд вспомогательных углов.
Угол у в момент соприкосновения ролика с кулачком в точке В
из уравнения (1) п. 427407
Н4-а«-г2
C0S^~l^r~’
620
460004
где
У В = (Rr — Гг)8 — (Гн — Гг)8 + (Гн + р)8,
Ув~ 28,85 мм,
Y =45’50'.
« 15
Угол 6 в момент соприкосновения ролика с кулачком в точке В
из уравнения (2) п. 427407
со8бв = Ц±-р, 6в = 27°03'.
У в
Угол 6 в момент соприкосновения ролика с кулачком в точке С
из уравнения (3) п. 427407
cos6c = 6с = 66’30'.
Аг Г г
Предельные углы 0, соответствующие началу и концу движения
ролика по прямым АВ и В^, из уравнений (1) и (6) п. 427408
cos Ра = COS рА1 = = 45’44'.
4 VbtP)0!
Предельные углы р, соответствующие концу и началу движения
ролика по прямым АВ и BjAj, из уравнений (3) и (4) п. 427408
₽в = Тв + 6в; рй= 72’53';
?в1 = ув-6в; рВ1= 18’47'.
Предельные углы р, соответствующие началу и концу движения
ролика по дугам ВС и радиуса гг, из уравнений (5) и (8) п. 427210
Рв = 7в— 6С-|~6В',* рв = 6°23';
Рв1 = Тв4*6с — 6В; рВ1 = 85°17'.
Предельные углы р, соответствующие концу и началу движения
ролика по дугам ВС и С^ радиуса гг, из уравнений (6) и (7) п. 427210:
рс = рС1 = 44’34'.
Угол вставки рг, соответствующий участку ССг профиля кулачка,
очерченному дугой круга радиуса RT, находят из уравнения (11)
п. 427210
?г = Рп — 2бс; Рг = 31°.
Перед определением пути, скорости и ускорения клапана находят
угловые пути, угловые скорости и угловые ускорения рычага.
При движении ролика рычага по прямым АВ и В^ (фиг. 427401)
угол р изменяется, согласно 460004, от рА = 45’44' до рв = 72’53' и от
0В1= 18’47' до рА1 = 45’44'.
621
460004
Таблица 460004-1
Пути, скорости и ускорения рычага (угловые) и клапана
Участок AB |
? 45’44' 55° 64’ 72’53' 18’47' 23’ 37’ 45’44'
а2 cos р 27,711 22,772 17,404 11,684 37,584 35,051 31,704 27,711
(ra + р) - а2 cos р —2,011 2,928 8,295 14,016 —11,884 —9,351 —6,004 —2,011
COS ф —0,0736 0,1027 0,2911 0,4918 —0,4170 —0,3231 —0,2107 —0,0705
Ф 94’03' 84’06' 73’04' 60’33' 114’39' 109’09' 102’10' 94’03'
Ф + Р 139’47' 139’06' 137’04' 133’26' 133’25' 137’09' 139’10' 139’47'
S 40’13' 40’54' 42’55' 46’34' 45’34' 42’51' 40’50' 40’13'
а2 sin р 28,429 32,518 35,632 37,941 12,783 18,639 23,891 28,429
rsin ф 28,429 28,349 27 263 21,818 25,904 26,924 27,859 28,429
dB/d3 0 0,1470 0,3088 0,5287 —0,5055 -0,3077 —0,1424 0
dS/dt 0 19,223 40,391 69,154 —65,250 —40,247 —18,626 0
sin S + sin В cos ф ~ dp sin2 $ 0,6489 0,6742 0,8326 1,2353 0,9614 0,8152 0,7032 0,6489
d2 B/d/2 15464 16067 19842 30630 22911 19427 16753 15464
a - 0 0’41' 2’43' 6’21' 6’21' 2’38' 0’37' 0
70’35' 71’16' 73’13' 76’56' 76’56' 73’13' 71’12' 70’35'
cosifpo - cos yp 0 0,0112 0,0450 0,1063 0,1063 0,0437 0,0101 0
ftux 0 0,527 2,119 5,007 5,007 2,058 0,476 0
vKX 0 0,858 1,822 3,173 —3,039 — 1,815 —0,830 0
/к X 687 723 917 1456 1093 893 752 687
Рпр (выи ) 164’ 154’44' 145’44' 136’51' 25’57' 17’44' 8’44' 0
Рпр (вс) 0 9’16' 18’16' 27’09' 137’03' 146’16' 155’16' 164°
Таблица 460004-11
Пути, скорости и ускорения рычага (угловые) и клапана
Участок BC Bi
? 6’23' 19’ 32° 44’34' 44’34' 58’ 72’ 85’17'
COS ф 0,4913 0,4432 0,3461 0,2111 0,2111 0,0293 —0,1907 —0,4166
ф 60’34' 63’41' 69’45' 77’49' 77’49' 88’19' 101’ 114’57'
flj sin ₽ 1,5902 4,6561 7,5776 10,034 10,034 12,123 13,599 14,251
flj cos р 14,211 13,521 12,126 10,187 10,187 7,5776 4,4187 1,1759
a2 — fli cos £ 25,489 26,179 27,574 29,513 29,513 32,122 35,281 38,524
tge 0,0624 0,1778 0,2748 0,3400 0,3400 0,3775 0,3854 0,3699
& 3’34' 10’05' 15’22' 18’47' 18’47' 20’41' 21’05' 20’18'
(rr +p)sin(< 17,418 17,926 18,764 19,550 19,550 19,992 19,632 18,182
(rr + P) cos Ф 9,826 8,864 6,922 4,222 4,222 0,583 —3,814 —8,332
r — (ГГ + p) COS ф 18,674 19,636 21,578 24,278 24,278 27,914 32,314 33,832
tg (« - s) 0,9327 0,9129 0,8695 0,8050 0,8050 0,7162 0,6075 0,4935
5—8 43° 42°24' 41’01' 38’50' 38’50' 35’37' 31’17' 23’16'
5 46’34' 52’29' 55’23' 57°37' 57’37' 56°18' 52’22' 46’34'
? + 5 + ф 113°31' 135’10' 158’08' 180° 180’ 202’27' 225’22' 246’28'
P 246’29' 224’50' 201’52' 180’ 180’ 157’23' 134’38' 113’32'
460004
460004
Таблица 460004-11 (продолжение)
Участок ВС СхВ.
ах si П|х —13,112 —10,081 —5,3253 ’ 0 0 5,500 10,176 13,110
г sin ф 24,821 25,544 26,739 27,859 27,859 28,489 27,976 25,909
d6/dfi 0,5283 0,3946 0,1991 0 0 —0,1930 —0,3637 —0,5050
dS/dt 69,102 51,614 26,042 0 0 —25,244 —47,572 —66,185
(d6/dt)2 4775 2664 678,2 0 0 637,3 2263 4380
• * • D Л COS p Sin 0 — sin £cos —0,3185 —0,6194 —0,8093 —0,8445 —0,8445 —0,7631 —0,6223 —0,5000
do cos [i sin 6 — sin £cos —0,4199 —0,7711 —0,9194 —0,8838 —0 , 8838 —0,7637 —0,6459 —0,6050
sin2 ф
d2 6/dt2 —7155 —13140 —15667 —15061 —15061 —13014 —11007 —10310
8,- 8o 6’21' 12’16' 16’10' 17’24' 17’24' 16’05' 12’09' 6’21'
Yp 76°5б' 82’51' 86°45' 87’59' 87’59' 86’40' 82’44' 76’56'
cos Ypo - cos Yp 0,1063 0,2079 0,2757 0,2972 0,2972 0,2743 0,2059 0,1063
Лкх 5,007 9,792 12,985 14,00 14,00 12,919 9,698 5,007
Vkx 3,170 2,412 1,225 0 0 —1,187 —2,223 —3,037
Jkx —277 —598 —735 —709 —709 —610 —501 —426
Рпр(выхл) 136’51' 124’14' 111’14' 98’40' 67’40' 54’14' 40’14' 26’57'
Рпр (вс) 27°09' 39°46' 52’46' 65’20' | 96’20' 109’46' 123’45' 137°03'
460005
По заданному углу ₽ по формулам (1)—(7) п. 427404 последова-
тельно определяют углы ф, 8, угловые скорости и угловые ускоре-
на й
ния рычага.
При движении ролика рычага по дугам ВС и С,В, (фиг. 427207)
угол ₽ изменяется согласно п. 460004 от Рв = б°23' до Вс = 44’34'
и от ₽с = ₽сх = 44°34' до ^ = 85° 17'.
По заданному углу р по формулам (1)—(7) п. 427207 последова-
тельно определяют углы ф, е, 8, р., угловые скорости и угловые
ускорения рычага.
Все,гвычисления приведены в табл. 460004-1 и 460004-11.
Кинематика клапана
460005
По формулам (1), (5), (6) п. 426003, имея заданными значения угло-
вых путей, скоростей и ускорений рычага (см. табл. 460004-1 и 460СЮ4-П),
определяют пути Лк1, скорости VKI и ускорения клапана.
Фиг. 460005.
Диаграммы пути, скорости и ускорения всасывающего клапана
авиационного двигателя DB-603
40 Двиац. порши, двигатели.
625
460006
На фиг. 46Э005 даны диаграммы пути, скорости и ускорения кла-
пана по углу поворота кулачкового валика.
460006 Силы и моменты, действующие в клапанном механизме
Принимая обозначения 431102 для момента начала открытия выхлоп-
ного клапана (фиг. 411003), имеем
рг = 9,8 кг/см1; /ц = 23,2 см2;
р0=0,81 кг/см2 /г=19,6сл<!;
Ркг = 211,5 кг;
следовательно, РКТХ = 211,5 Q — —,
где а'—угол открытия выхлопного клапана до НМТ по углу поворота
кулачкового валика а' ~32°.
Для механизма выхлопа и всасывания (см. 432001 и 434001):
Фиг. 460006-1.
Диаграмма сил пружин и сил инерции клапанного механизма авиационного
двигателя DB-603
тк~0,0367 кг м~2 сек2;
/р —0,00177 кг см сек2;
SPnp = 3,28 hKX + 34,75,
где
hKX — в мм,
^1Рпр в кг»
Значения тк, 1Р и SPnp были определены после взвешивания,
прокачки и тарировки соответствующих деталей.
По формулам 433002, 434Э02 —434005, 434009 и 434011 (фиг. 434001)
определяют значения сил и моментов, сил PjK, Mjp, Рк, S, КР/, Р„ и AfK₽.
626
Диаграмма сил, действующих в механизме выхлопного
клапана авиационного двигателя DB-603
Фиг. 460006-1 п.
Диаграмма суммарного крутящего момента на ку-
лачковом вале авиационного двигателя DB-603
460006
628
Таблица 460006
Силы и моменты, действующие в клапанном механизме выхлопа и всасывания авиационного двигателя DB-603
Участок АВ ВС ссх СД вд Размер- ность
?пр* 8° 18°16' 27 °09' 39°46' 52°46' 65°20' 96° 19' 109°46' 123°46.' 137’03' 146" 16' 156° град.
Pj« —26 1 —33,65 —53,45/10,16 21,95 27,0 26,03 0 22,4 18,39 15,64 —32,96 —27,2 ' кг
0 26,03 —40,30
S^np 35,9 41,69 51,17 66,85 77,35 80,65 80,65 77,10 66,55 51,17 41,49 35,9 кг
Л<Г ' 0 0 0 0 0 0 0 0 0 0 0 0 кг
13,95 101,5 162,5 211,5
рк 62,0 75,3 105 44,9 50,4 54,6 80,65 54,7 48,2 35,5/91,5 74,4 63,1 кг
41 80,65 54,6 62 137/193 237 277
M!V —28 —35 —54 23 28 27 0 23 19 18 —40 —34 —29 кгсм
13 0 27
S 107 138 216 71 73 78 83 135 82 74 56/178 137 111 кг
136 83 97 236/357 409 456
р0 95 134 223 72 69 65 107 56 43 57 29/103 127/202 87 88 кг
75 107 65 253 353
с 0,342 0,842 1,31 1,01 0,533 0 0 0,550 1,02 1,31 0,823 0,372 СМ
Л^кр 37 116 282 74 42 0 0 —45 —75 —73/—233 —113 —41 кгсм
93 99 309/467 339 216
*Р) — — — 26,8 33,0 31,7 0 27,3 22,5 19,5 — — кг
13 0 31,7
/2РПП \ Нг®-1 • 100% \КР) / — — — 150 134 154 — 182 196 162 — — %
293 — 154 —
460006
’ Начало открытия клапана по всасыванию соответствует рПр=8в, а по выхлопу рПр=156°.
Примечание. В числителе—для всасывания, в знаменателе—для выхлопа (от ^пр= 123’46' до 156°).
450007—460008
Суммарный крутящий момент, действующий на кулачковом валике,
определялся последовательным суммированием результирующего крутя-
щего момента одного цилиндра от выхлопа и всасывания согласно рас-
положению кулачков на валике. За 0° было принято начало открытия
выхлопного клапана в первом цилиндре со стороны винта.
Силы Sj и Sg получены разложением силы S, действующей на ку-
лачок, по двум взаимно перпендикулярным направлениям хх и уу,
лежащим в средней плоскости вращения кулачка.
Все вычисления по определению сил и моментов для клапанных
механизмов приведены в табл. 460006. Соответствующие диаграммы
приведены на фиг. 460006-1, 460006-11 и 460006-Ш.
Расчет профиля кулачка на смятие 46000,
Согласно принятым в 441001 обозначениям (фиг. 441004)
р — 11 мм-, Ь = 12,5 мм.
Принимаем Е = 2,2 • 10* кг/см2.
Значения силы S даны в табл. 460006.
Для прямолинейных участков АВ и В^А, профиля кулачка напря-
жения по Герцу на профиле кулачка находят по формуле (2) п. 441002
а! = 0,175^-,
где
R, = р = 11 ММ.
Для участков ВС и CjBi профиля кулачка по формуле (1) п. 441002
о4 = 0,175^|(4 +-,
b ₽ У
где
7?1 = гг = 9 мм.
Для участка СС, профиля кулачка по формуле (1) п. 441002
O! = 0,175^f^- + -') ,
Ь т ’
где
/?,. =/?г = 23,3 мм.
На фиг. 441004 дана диаграмма напряжений по профилю кулачка
(выхлопа).
Расчет на прочность рычага клапана 460008
Согласно принятым в 444003 обозначениям для максимально напря-
женного сечения I—I (фиг. 444001, а) находят
F— 1,14 см*-, W =*0,271 см*\ р=1,8 см-, <р = 83°.
Суммарное напряжение в сечении I—I рычага клапана «аходят
по формуле п. 444003
629
460009
где сила Р=РК = 2П кг для момента начала открытия выхлопного
клапана находится из табл. 460006.
Подставляя в эту формулу значения F, р, W, cos? и Р, находят
1859 кг/см2.
Для других сечений рычага суммарное напряжение меньше.
460009 Расчет на прочность кронштейнов рычагов
Щеки кронштейна. Согласно принятым в 446102 обозначениям
находят (фиг. 446101)
W3 = 0,58 см3; F=l,85 см3; у =1,1 см;
Рх = 360 кг; Рд = 38 кг.
Суммарное напряжение в расчетном сечении щек определяют по фор-
муле 446101
W, + F *
Подставляя в формулу значения Рх, у, W2, Рд и F, находят
2 а =703 кг/см3.
Шпильки кронштейна. Согласно принятым в 446202 обозна-
чениям находят (фиг. 446101)
WJ = 6,16 см3; F' = 11,3cm3; р = 2 см;
/б = 0,32 см3; i = 2; D = 4 см (основание крон-
штейна круглое);
Р„ = 38 кг; Рх = 360 кг; P^=VIQ кг.
Напряжение в шпильке определяют по формуле (3) п. 446204
_ 1,25 fPxPF' р \
Подставляя в эту формулу значения г, /б, Рх, р, F', и Рд,
находят
аш = 2650 kzJcm3.
Расчет осей роликов и рычагов, кулачкового валика и клапанных
пружин производят по методу, изложенному в 445000, 448000 и 449000.
Основные размеры и напряжения для них даны' в табл. 445007, 448402
и 449301.
470000—470001
РАСЧЕТ ШАЙБОВОГО РАСПРЕДЕЛИТЕЛЬНОГО МЕХАНИЗМА 470000
В опытных немецких авиационных двигателях Даймлер-Бенц DB-611, 470001
DB-612 и других процесс газораспределения осуществляется с помо-
щью плоских вращающихся шайб с вырезанными в них окнами. На
фиг. 470001 приведена подобная схема механизма газораспределения для
рядного авиационного двигателя.
Газораспределительные шайбы
Фиг. 470001.
Схема шайбового распределительного механизма
Шестерня А валика вертикальной передачи от коленчатого вала
заставляет вращаться плоскую шайбу В. Последняя сообщает движение
шайбе С соседнего цилиндра и т. д. При вращении шайбы окна ее
и окна в головке цилиндра совмещаются и тем самым осуществляется
процесс газораспределения. Распределительная шайба имеет два окна,
а головка цилиндра — два диаметрально расположенных окна для вса-
сывания газов в цилиндр и два других, также диаметрально распо-
ложенных окна для выхлопа газов из цилиндра.
При такой конструкции распределительного механизма в четырех-
тактных двигателях шайба вращается с угловой скоростью в четыре
раза меньшей угловой скорости коленчатого вала.
631
470002—470003
470002 Обозначения (фиг. 470001):
Гб, гм — радиусы окружностей окон всасывания и выхлопа головки
цилиндра;
г — радиус дуги окружности бокового профиля окна шайбы (обычно
г = г6У,
R — радиус окружности, по которой расположены центры окружности
радиусов Гб, Гм и г;
Y — угол между диаметром, на котором расположены центры окруж-
ностей радиусов г, и диаметром, на котором расположены центры
окружностей радиусов гб;
<*»ш —угловая скорость вращения шайбы;
6 — угол между радиусами, проведенными из центра 0 в центры
окружностей радиусов Г.
470003 Площадь открытия всасывающего окна определяется из равенства
/б = 4 (®6 — Sin еб) — у г* (е'— sin e), (1)
Фиг. 470003-1.
К расчету проходных сечений
где углы еб и е (фиг. 470003-1) определяются из уравнений
cos ®е ^rt~r6~at
cos 2 “ 2гба
е
COS-j) «
2га
(2)
(3)
Входящий в уравнения (2) и (3) параметр а находится (фиг.
470003-11) из равенства
а = 2R sin -ЦЫ, (4)
причем рвб определяется из уравнения
sinJresr-S-6’ а (5)
Л*
₽ = <*>пЛ
(6)
632
470004—470008
Продолжительность открытия окон всасывания по углу поворота 470004
шайбы ₽шб определяется из равенства (фиг. 470004)
Ршб = б 2рв 5,
причем угол рвб находится из уравнения (5) п. 470003.
Угол вставки рВб> т. е. угол поворота шайбы, соответствующий 470005
постоянной максимальной величине площади проходного сечения всасы-
вающих окон (2л Гб) в их диаграмме открытия, равен
₽вб=6-2^,
Фиг. 470003-П. Фиг. 470004.
К определению параметра а К определению фаз распределения шайбового мехат
низма распределения
причем
Sin4 = ^-6.
При помощи угла рВб находят предельные углы, которые
приходится определять при построении диаграммы открытия окон вса-
сывания.
Для окон выхлопа остаются в силе все соотношения 470003 — 470005 470006
с заменой индекса «б» на индекс «м».
Угол перекрытия окон выхлопа и всасывания по углу поворота 470007
шайбы Рп определяется из равенства (фиг. 470007)
₽п = 0 — (Y + Ром + ₽Пб),
причем углы Рое и ₽Ом находятся согласно уравнению (5) п. 470003
(для угла Ром в этом уравнении гб заменяется гм).
При проектировании шайбового газораспределения продолжитель- 470008
ностью открытия окон всасывания и выхлопа и их перекрытием зада-
ются ориентировочно, полагая их теми же, что и в клапанном газо-
633
470009
распределении; эти параметры устанавливаются окончательно экспери-
ментально на соответствующих экспериментальных установках.
470009
Размеры R, г, г5, гм, 6 и у выбираются так, чтобы при выбранных
значениях продолжительности открытия окон выхлопа и всасывания
и их перекрытия время-сечение окон распределения получалось наиболь-
шим; при всех прочих одинаковых условиях это будет иметь место
при возможно больших размерах радиусов г, Гб и гм, что лимитируется
конструктивными возможностями.
Для облегчения выбора основных размеров и параметров шайбо-
вого механизма газораспределения на фиг. 470009 дается номограмма R,
Го Ршб, И^б для одного окна при п = 2150 об/мин, 6 == ₽Шб 'и г = Гб-
Фиг. 470009.
Номограмма для определения размеров и параметров шайбо-
вого механизма распределения
634
470010—470011
Способ пользования номограммой: задаются R и рШб’, из точки,
лежащей на оси R, соответствующей взятому значению R, проводят
луч параллельно оси IV6 и луч в ту точку шкалы значений рШб. кото-
рой соответствует взятое значение ршб.
Точка пересечения первого луча с соответствующей кривой ршб опре-
делит искомое 1¥б, а второго — со шкалой г б определит искомое Гб.
При другом значении п, например пх, соответствующее ему Wx
находят по формуле
W6x = ~W6,
пх
где п = 2150 об/мин, a Ибз находят из номограммы.
В окнах шайбы иногда делаются перемычки (фиг. 470001) шириной 470010
1,5 — 2 мм и, как правило, острые углы округляются радиусом 4 — 5 мм.
Рядом расчетов установлено, что подобное конструктивное оформле-
ние окон снижает значение W, вычисленное по вышеприведенным зави-
симостям, в среднем на 4 — б%.
------- АМ-згф\ „ .
-------D8-60I /с шаи6ои
Фиг. 470011.
Диаграммы изменения площади проходных сечений
в двигателях АМ-38Ф и DB-601
В качестве примеров на фиг. 470011 приведены диаграммы измене- 470011
ния /к по а (углу поворота коленчатого вала) для авиационных дви-
гателей АМ-38Ф и DB-601 при клапанном и шайбовом механизмах
газораспределения.
635
470011
ЛИТЕРАТУРА И ИСТОЧНИКИ К 400000
1. Дружинин Н. И., Кинематика и динамика пространственного механизма рас-
пределения звездообразных моторов, Труды № 6, Оборонгиз, 1939.
2. Дружинин Н. И., Выбор кинематических параметров рычажного механизма
распределения, Труды № 58, Оборонгиз, 1943.
3. Нейман И. Ш., Динамика и расчет на прочность авиационных моторов, Спра-
вочник, ч. II, Госмашметиздат, 1939.
4. Нейман И. Ш., Динамика авиационных двигателей, Оборонгиз, 1940,-
5. С м о л ь я н и н о в Н. К., Профилировка кулачка по заданным законам движения
клапана при передаче движения от кулачка к клапану через рычаг, Сборник №4,
Оборонгиз, 1938.
6. Смольянинов Н. К., Отрицательные ускорения клапана и пружины распре-
делительного механизма, Сборник № 4, Оборонгиз, 1938.
7. Смольянинов Н. К., Проектирование клапанных пружин, «Техника Воздуш-
ного Флота» № 6, 1940.
8. Т а у 1 о г Е., Valve timing of engines having intake pressures hagher then exhaust,
NACA Technical Note № 405.
9. SchmidtF. R., Gaswechsel Vorgang und Grenzen der Ventil-Viertakt-Steuerung
bei Flugmotoren, Luftfahrtforschung, V. 16, N 5, 1939.
480000—481104
ГИЛЬЗОВОЕ ГАЗОРАСПРЕДЕЛЕНИЕ ЧЕТЫРЕХТАКТНЫХ
АВИАЦИОННЫХ ДВИГАТЕЛЕЙ*
ОБЩИЕ ПОЛОЖЕНИЯ К РАСЧЕТУ ГИЛЬЗОВОГО ГАЗОРАСПРЕДЕЛЕНИЯ
Типичные схемы механизма гильзового распределения
В звездообразных авиационных двигателях гильзовое газораспре-
деление применяется с индивидуальным приводом каждой гильзы;
в рядных двигателях один привод обслуживает две гильзы (24-цилиндро-
вый двигатель Нэпир «Сейбр» П-А).
Схема передачи от коленчатого вала к кривошипу, ведущему гильзу,
для звездообразного 18-цилиндрового авиационного двигателя Бристоль
«Геркулес» XI показана на фиг. 481102-1; кривошип вращается с угло-
вой скоростью шк, в два раза меньшей скорости вращения коленчатого
вала ш.
Схема передачи к гильзам по типу четырехрядного Н-образного
авиационного двигателя «Сейбр» П-А показана на фиг. 481102-11.
Типичные схемы привода гильзы кривошипом показаны на
фиг. 481103-1 и фиг. 481103-11.
Различие между этими механизмами заключается в том, что
в механизме по схеме фиг. 481103-1 (схема 1) корпус шарового шарнира
укреплен на гильзе, а в механизме по схеме фиг. 481103-II (схема II) —
на кривошипе; поэтому для схемы I расстояние между осью гильзы
и центром шарнира остается постоянным, а в схеме II оно переменно.
Схема I привода применяется фирмой Бристоль для звездообраз-
ных авиационных двигателей «Геркулес» и «Центавр», а схема II—фир-
мой Нэпир для двигателя «Сейбр» П-А.
В дальнейшем мы ограничимся рассмотрением только этих двух схем
приводов гильз, -как единственно получивших широкое применение
в авиационных двигателях.
Наиболее типичной системой окон для гильзового механизма авиа-
ционных двигателей является система пяти окон на цилиндре и четырех
на гильзе (два впускных, одно выпускное и одно, служащее и для
впуска и для выпуска), что позволяет вести всасывание через три окна
и выхлоп через два при ширине нормальных окон, соответствующей
четырехоконной системе.
480000
481000
481100
481101
481102
481103
481104
♦ Раздел 480000 написан Н. К. Смольяниновым в соавторстве
с А. А. Снитковым,
637
481104
о
со
оо
Схема привода гильз авиационного двигателя Бристоль «Геркулес» XI
481104
Фиг. 481102-П.
Схема привода гильз авиационного двигателя Нэпир «Сейбр» Н-А
Фиг. 481103-1.
Схема гильзового распределительного механизма авиационного двигателя
Бристоль «Геркулес» XI
639
481104
481200—481201
Такая система окон принята как фирмой Бристоль для двигателей
«Геркулес» (фиг. 481103-1) и «Центавр» (фиг. 481104) (пунктирной
линией на этих фигурах даны конфигурации окон более ранних кон-
Фиг. 481104.
Схема гильзового распределительного механизма авиационного двигателя
Бристоль «Центавр» XI
струкций), так и фирмой Нэпир для двигателя «Сейбр^ П-А
(фиг. 481103-П).
Основные параметры, характеризующие механизм гильзового 481200
распределения
Основным параметром, характеризующим механизм гильзового^ 481201
газораспределения, является средняя скорость газов в окнах. Эта
скорость определяется по время-сечению так же, как и для клапанного
механизма (см. 411006): .
где Vh — литраж цилиндра,
W — время-сечение окон гильзы (для окон впуска от момента верх-
ней ВМТ поршня до их закрытия),
/Кж — площадь проходного сечения окон гильзы для момента вре-
мени t.
Диаграммы площадей проходных сечений /кж впускных и выпускных
окон по углу поворота кривошипа для двигателей «Геркулес» XI и «Сейбр»
П-А даны на фиг. 481201-1 и II.
. Для гильзового газораспределения отношение время-сечения
впускных окон к время-сечению выпускных больше, чем для соответ-
ствующих проходных сечений клапанов обычного (клапанного) газо-
распределения. В гильзовых механизмах оно достигает величины 1,7;
Отношения эти для ряда авиационных двигателей с • гильзовым
газораспределением даны в табл. 481201.
41 Авиац. поршн. двигатели
641
481201
Фиг. 481201-1.
Диаграммы проходных сечений впускных и выпускных окон гильзового
распределительного механизма авиационного двигателя «Геркулес» XI.
Обозначения:
Сплошная линия—нормальное окно перекрывается нормальным.
Пунктир—укороченное по ширине окно на цилиндре перекрынается
сдвоенным окном на гильзе.
Пунктир с точкой—для не уменьшенных по высоте окон на цилиндре
Фиг. 481201-П.
Диаграммы проходных сечений впускных окон гильзового распределитель-
ного механизма авиационного двигателя «Сейбр» П-А.
Обозначения:
Сплошная линия—нормальное окно перекрывается нормальным.
Пунктир—нормальное окно на цилиндре перекрывается обрезанным
сдвоенным окном на гильзе
642
481201
Таблица 481201
Фазы и средние скорости прохода газов в распределительных механизмах
авиационных двигателей
Наименование двигателя Система распределитель- ных механизмов Число оборотов коленча- того вала на номинальном режиме, об/мин Впуск Выпуск
Фазы Время- сечение IV см2 сек Средняя скорость газов vcp м/сек Фазы Время- сечение IV см2 сек Средняя скорость газов V v ср м)сек
Начало а? до ВМТ поршня Конец а? после ! НМТ поршня Начало до НМТ поршня Конец а? после ВМТ поршня
«Центавр» XI 05 та 2400 50 55 0,4454 65,7 55 15 0,271 по
«Геркулес» 100 О 2400 50 55 0,454 65,7 J 55 15 0,271 по
«Геркулес» XI Л 2500 15 55 0,404 68,2 55 15 0,270 102
«Сейбр» П-А t; S U 3500 40 65 0,267 57,1 65 40 0,193 79,3
АШ-82ФН 05 2400 25 44 . 74 35
М-88Б та X 2375 '12 54 » - 65 18 —— —
«Мерлин» XX X та 2850 31 52 0,178 63,3 72 12,5 — —
Аллисон-15 Е 3000 52 66 0,128 91 , 76 25 — ——
Даймлер-Бенц 1 2700 65 54 0,212 66,7 64 43 — —•
Средние скорости выпуска газов, определенные по время-сечению,
примерно одинаковы для авиационных двигателей с клапанным и гильзо-
вым распределением.
Для уменьшения средних скоростей нужно увеличивать проходные
сечения окон, что может быть достигнуто следующими мерами.
1. Увеличением радиуса кривошипа привода гильзы; такой путь,
увеличивая только высоту окон, может оказаться малоэффективным
из-за перекрытия окон цилиндра поршнем и возможного лимитирования
высоты окон на цилиндре по соображениям оребрения цилиндра; увели-
чивая расстояние между центром шарнира и осью гильзы, этот путь
ведет к увеличению нагрузок в гильзовом механизме, облегчает воз-
можность перекоса гильзы и увеличивает габарит механизма газорас-
пределения.
2. Уменьшением числа окон, что, не давая существенной выгоды
во время-сечении, приводит к таким размерам окон по ширине, которые
могут явиться, недопустимыми в отношении работоспособности уплотни-
тельных колец.
3. Выбором наивыгоднейшей конфигурации контура окна; как пока-
зали исследования В. П. Бандурина, величина время-сечения окон раз-
личной конфигурации меняется мало.
4. Улучшением обработки зеркал гильзы и цилиндра, что позволяет
делать уплотнительные перемычки меньших размеров; но и это мероприя-
тие очень мало влияет на величину проходных сечений.
41»
643
481202—481203
Отсюда становится ясным, что возможности уменьшения скорости
газов в гильзовых распределительных механизмах значительно больше
лимитированы, чем в клапанных механизмах; однако конструктивные
особенности гильзового распределительного механизма позволяют полу-
чить более высокий коэффициент наполнения, чем в двигателях с клапан-
ным газораспределением, при одинаковых расчетных средних скоростях
газов в проходных сечениях.
481202 Фазы распределения для двигателей с гильзовым распределительным
механизмом выбираются на основе тех же положений, что и для клапан-
ных механизмов (см. 412000).
Сравнение фаз газораспределения гильзовых и клапанных совре-
менных авиационных двигателей (табл. 481201) приводит к заключению,
что фазы незначительно разнятся друг от друга.
Как видно из таблицы 481201, у современных авиационных двига-
телей с гильзовым распределением углы опережения выпуска и запазды-
вания впуска делаются равными, и поэтому мертвые точки гильз для
этих механизмов соответствуют мертвым точкам поршня (см. 483401).
481203 В таблице 481203 даны основные размеры гильзовых механизмов
некоторых авиационных двигателей (см. фиг. 483101 и 483201).
Таблица 481203
Основные размеры гильзовых механизмов авиационных двигателей
Услов- ное обо- значение Размер- ность «Герку- лес» XI «Цен- тавр» XI «Сейбр»! П-А
Число оборотов коленчатого вала двигателя п об/мин 2500 2400 3500
Внутренний диаметр гильзы D ММ 146,1 146,1 127
Ход поршня S з> 165,1 177,8 120,7
Толщина стенки гильзы 8 » 3,5 3,9 2,3
Радиус кривошипа привода гильзы Лк » 35,6 35,6 32,2
Расстояние между осью гильзы и центром шарнира Lk » 97,3 97,3 81,5*
-г|- II И | И 2,74 2,74 2,55
Высота окон й ММ 52 1 52 49,4
* В мертвом положении гильзы.
644
481203
Продолжение табл. 481203
Услов- ное обо- значение Размер- ность «Герку- лес» XI «Цен- тавр» XI «Сейбр» П-А
Ширина нормальных окон 1 мм 55,9 55,6 46,79
Ширина сдвоенного окна 1П 61,7 61,8 55,04*
Расстояние между соседними орди- натами, касательными к профилям одноименных окон на цилиндре и гильзе, в момент ее положения на середине пути вдоль оси цилиндра X » 1,5 2 2,75
Расстояние между соседними ордина- тами, касательными к профилям разноименных окон на цилиндре 'Ид » 17,3 18,2 11,25
Расстояние между соседними ордина- тами, касательными к профилям одноименных окон т » 58,9 59,6 52,29
Полный угол поворота гильзы 27 m ах град. 42°56' 42°56' 43°06'
Горизонтальный ход гильзы по раз- вертке 2Zmax ММ 57,4 57,6 49,8
Радиус скруглений профилей окон Г 7,54 (19/64') 7,54 (19/64') 6,35 I1/*')
Радиус окружности, заменяющей огибающую » 52,8 45,1 43,1
Ширина узких окон на цилиндре '1 50,9 50,6 —
Ширина уплотнительной перемычки )> 19,2 19,2 15
Максимальный угол отклонения гиль- зы от среднего положения 7 шах град. 21°28' 21°28' 21°33'
Максимальная скорость гильзы по оси V шах м[сек 4,65 4,48 5,88
* Расчетная ширина сдвоенного окна без среза; действительная ширина рав
на 46,79 мм.
645
482000—482102
482000
482100
482101
КИНЕМАТИКА И ДИНАМИКА ГИЛЬЗОВОГО МЕХАНИЗМА
Кинематика гильзового механизма по схеме I (фиг. 482100).
Обозначения:
D — внутренний диаметр гильзы;
8 — толщина стенки гильзы;
/?к — радиус кривошипа привода гильзы;
LK — расстояние между центром шарнира привода гильзы и осью
гильзы;
Р — угол поворота кривошипа привода гильзы от его начального
положения в момент верхней мертвой точки гильзы;
482102
<р — угол поворота гильзы от ее положения в момент верхней
мертвой точки;
шк = — угловая скорость вращения кривошипа привода гильзы;
о> — угловая скорость вращения коленчатого вала двигателя;
ьк
Перемещение гильзы вдоль ее оси
s = Rr (1 — cosp). (1)
Скорость гильзы вдоль ее оси
V = /?««>«sin р. (2)
Ускорение гильзы вдоль ее оси
/ = Rk <в!к cos р. (3)
646
482103
т
Графики величин s, V и j для авиационного двигателя «Геркулес» XI
даны на фиг. 482102.
Фиг. 482102.
Перемещения, скорости и ускорения гильзы вдоль ее оси
у авиационного двигателя «Геркулес» XI
Угол поворота гильзы
<P = arcsin(kKsinp). (1)
Максимальная величина этого угла будет при углах поворота
кривошипа гильзы (3 = 90° и 270°
’Ртах == аГС S1H Хк. (2)
Перемещение развернутой в плоскость гильзы, соответствующее
вращательному ее движению,
ж (D4-23)
Максимальное перемещение
£max = 36Q (D ф 28) <Ртах- ^4)
Угловая скорость гильзы
COS В
<Вр = Лк<В„-г . (Э)
к Kcos? ' 1
Выражение для <вг в форме тригонометрического полинома имеет вид:
482103
647
®Р==ХК (^(piCOsp+PsCosSp + pjCOsSp-hp, cos7₽ + p, cos9₽ 4- ...), (6)
482200—482201
где
n i t 1 i 2 । i j । 25 -e , 245 - g (
P1 “ 1 + 8 + 64 « + 1024 K + 4-64* Л« + ’ • • ’
о __ Г ' ),2 I }4 I 45 i в I 245 i » ।
Hs \ 8 к+128 к+1024 k + 4096 k+”’
3 . a , 25 .. . . 175 . . .
ps J28 *-b + 1024 ak+ 409s 4 + • • •>
f 5 . e . 245 . 8 . \
Pv <1024 кк + 8-64гАк+ • • • )’
35 18 ,
P* — 32s ^b + • • •
Угловое ускорение гильзы
(7)
Фиг. 482103.
Угловые пути, скорости и ускорения гильзы авиационного
двигателя «Геркулес» XI
(8)
Выражение для 6Г в форме тригонометрического полинома имеет вид:
ег= — ЛкШкСр! sin p + SpjSinSp + SpjSinSp + IpjSinTp + QpgSinOp-f- ...). (9)
Графики величин <р, шг и 6Г для авиационного двигателяя Геркулес» XI
даны на фиг. 482103.
482200 Кинематика гильзового механизма по схеме II (фиг. 482200).
482201 Обозначения:
LK — расстояние между осью ^льзы и центром шарнира привода
в момент мертвых точек гильзы:
648
482202—482203
Остальные обозначения те же, что и в 482101.
Пути, скорости и ускорения гильзы в направлении ее оси опреде- 482202
ляются по формулам (1), (2) и (3) п. 482102.
Угол поворота гильзы 482203
<p = arctg(kKsmP). (1)
Максимальный угол поворота гильзы будет в моменты поворота
кривошипа гильзы на углы 0 = 90° и 270°
’Ртах = аГС tg Хк. (2)
Перемещение развернутой в плоскость гильзы, соответствующее ее
вращательному движению,
Максимальное перемещение
_МД+2Д) ,4)
сшах — 3QQ ушах* \*J
Угловая скорость гильзы
шг = кк шк cos2 <р cos р. (5)
Выражение для шг в форме тригонометрического полинома имеет вид:
®г = Хк <вк (р; cos р + Р; cos Зр + pg cos 5р + р; ces 7Р + pi cos 9Р + ...), (б)
649
482300—482304
где
o'— 1 ____L 1 X 4 5 1 * I 7 1 8
Pi-1 4"+-8 Лк-б4*к + 128*к-...,
o'=^K 3 1‘ l 9 5 1 7 1 8 I
р» ~4 ~ 16 Лк + 64 Л« ~6l Лк + • • • ’
_________5 Xе I _Ё X 8_ V (7)
р8~ 16 64 Хк+б4кк ••”
Л8 *7
О' _ к____7 1 8 I
— 64 256 к + • • • ’
Р» “ 256 ’ •'
Угловое ускорение гильзы
6Г = — кк <1>к (kK sin 2q> COS2 р + Sin Р) COS2 <р. (8)
Выражение для 6Г в форме тригонометрического полинома имеет вид:
0Г= — ккш2 (p'sin^ + Зр' sin3^ +5pjsin5р + 7р,sin7p + 9р'sin9р+• • .).(9)
482300 Динамика гильзового механизма по схеме I
482301 Силами, действующими в гильзовом механизме, являются силы
инерции и силы трения; силы трения возникают как от давления на
гильзу поршня, так и от сил инерции.
Силы трения в гильзовом механизме довольно значительны; однако
в дальнейшем рассматриваются лишь инерционные силы, так как
надежных данных для определения сил трения в этих механизмах еще
не имеется.
482302 Обозначения:
тт — масса гильзы;
1Г — момент инерции гильзы относительно ее оси;
тк — приведенная коси цапфы кривошипа гильзы масса кривошипа.
Остальные обозначения см. 482101.
482303 Сила инерции от движения гильзы вдоль ее оси
Р j = — mrj.
Эту силу, пренебрегая несимметричностью гильзы относительно оси
вследствие ушка, за которое ведет ее кривошип, считаем действующей
по оси цилиндра.
482304 Пара сил инерции от вращательного движения гильзы
Иj — — It Sf.
Ось этой пары направлена по оси гильзы.
650
482305—482402
Сила Qj, действующая на шарнир привода от пары сил П, 482305
(фиг. 482305), будет
П<
Qi = т—~~ ‘
' LK cos <р
Эта сила действует в плоскости, перпендику-
лярной оси гильзы, и нормальна к оси цапфы
кривошипа гильзы.
Суммарная сила, действующая на шарнир при-
вода, будет
- Pim = VPT+Qai-
Принимая (см. фиг. 482305) за положительное
направление:
для
для
для
482306
482307
ДЛЯ
силы
силы
силы
силы
Pj — вертикальное вниз;
Qj — горизонтальное вправо;
Zj — от оси цапфы кривошипа привода
гильзы к оси приводящего валика;
Tj — направление вращения кривошипа
привода гильзы,
получим следующие выражения для действующих
сил.
По радиусу кривошипа привода гильзы
Z; = P;-cosp —Q; sinp. (1)
Фиг. 482305.
Схема сил, действующих в гильзо-
вом механизме типа Бристоль (по
схеме I)
Сила, перпендикулярная радиусу кривошипа привода гильзы,
sin P + Q/COS?. (2)
Сила инерции кривошипа 482308
Р js — — Л1к RK <Вд;
эта сила направлена по радиусу кривошипа.
Динамика гильзового механизма по схеме П 482400
Обозначения те же, что в 482201 и 482302. 482401
Сила инерции гильзы Pj от движения ее вдоль оси и пара сил 482402
инерции гильзы П/ от ее вращательного движения определяются
согласно 482303 и 482304.
651
482403—482405
482403 Сила Qh действующая на шарнир от пары сил инерции П, гильзы,
будет (фиг. 482403)
77; cos ?
Q;=—7— •
Эта сила действует в плоскости, перпенди-
кулярной к оси гильзы, и нормально к прямой,
проходящей через центр шарнира привода и ось
гильзы.
482404 Суммарная сила, действующая на шарнир,
Р/ш = /₽? + <?/•
482405 Принимая (см. фиг. 482403) за положитель-
ное направление:
для силы Pj — вертикальное вниз;
для силы Qj — горизонтальное вправо;
для силы Zj — от оси цапфы кривошипа привода
гильзы к оси приводящего ва-
лика;
для силы Т/ — направление вращения кривошипа
привода гильзы,
получим следующие выражения для действую-
щих сил.
Фиг. 482403.
Схема сил, действующих в гиль-
зовом механизме типа Нэпир (по
схеме II)
По радиусу кривошипа привода гильзы
(1)
Zj~Pj cos р — Qj cos <р sin р.
Силы инерции, действующие в гильзовом механизме
авиационного двигателя «Геркулес» XI
652
482405
Таблица 482405
Силы, действующие в гильзовых механизмах авиационных двигателей
Размер- ность «Герку- лес» XI «Цен- тавр» XI «Сейбр» П-А
Вес гильзы g кг 5,0 5,7 2,2
Масса гильзы тг кгсек2[см 5,1-10-’ 5,8-10"3 2,24 - 10-э
Момент инерции гильзы относи- тельно ее оси 'г кгсм сек2 0,300 0,330 0,072
Массовый статический момент кри- вошипа привода гильзы МС1 кг сек2 45-10-’ 45-10-’ 45-10-’
Сила инерции кривошипа привода гильзы pf* кг 0,8 0,8 3,4
Максимальная сила инерции гиль- зы от движения ее по оси Ifylmax » 310 325 243
Максимальная пара сил инерции гильзы (^ртах кгсм 2040 2050 827
Максимальная сила, действующая на шарнир привода гильзы от пары сил Пу (^Ртах кг 225 225 94
Максимальная сила, действующая на шарнир привода гильзы (^/ш)тах » 310 325 243
Максимальная радиальная сида, действующая на кривошип при- вода ГИЛЬЗЫ (^ртах 310 325 243
Максимальная тангенциальная си- ла, действующая на кривошип привода гильзы (Т'Ртах * 59 74 62
Максимальная сила вдоль оси цапфы кривошипа привода гильзы (^/olmax » — — 31
653
482406—483101
Сила, перпендикулярная радиусу кривошипа привода гильзы,
Tj = Pj sin £ 4- cos <p cos p. (2)
Сила, действующая вдоль оси цапфы кривошипа,
P/o = Q;sin?. (3)
Сила инерции кривошипа определяется согласно 482308.
482406 В табл. 482406 приведены значения максимальных величин сил
инерции, действующих в механизмах гильзового распределения ряда
авиационных двигателей.
На фиг. 482406 даны графики сил инерции Pj, Qj} Tj и Zj, дей-
ствующих в механизме гильзового распределения авиационного двига-
теля «Геркулес» XI.
483000 ОПРЕДЕЛЕНИЕ ОСНОВНЫХ РАЗМЕРОВ ПРИВОДА И ОКОН ГИЛЬЗОВОГО
ГАЗОРАСПРЕДЕЛЕНИЯ
483100 Определение ширины окон гильзового распределительного механизма для
системы окон одинаковой ширины как на гильзе, так и на цилиндре,
кроме одного сдвоенного на гильзе (число окон на цилиндре на 1
больше числа окон на гильзе)
483101 Определение основных размеров окон гильзового газораспределения
производят, развернув наружную цилиндрическую поверхность гильзы
на плоскость1.
Обозначения (фиг. 483101):
D— внутренний диаметр гильзы;
S —толщина стенки гильзы;
L — длина развертки наружной цилиндрической поверхности гильзы
на плоскость:
L = u(£> + 28); (1)
Z — ширина нормальных окон на гильзе и цилиндре;
/д —ширина сдвоенного окна на гильзе;
А, — расстояние между ординатами, касательными к профилям одно-
именных перекрываемых окон на цилиндре и на гильзе в момент
поворота кривошипа привода гильзы от ее ВМТ на 90° для окон
впуска и на 270° для окон выпуска;
Д2 —то же для неперекрываемого соседнего окна; обычно делают
А^А^Д; (2)
/Иц — расстояние между ординатами, касательными к профилям сосед-
них разноименных окон на цилиндре;
1 В общем случае основные размеры окон при заданной кинематике гильзы
можно определить методом, с помощью которого намечаются размеры окон двух-
тактных двигателей.
654
483102— 483105
in — расстояние между ординатами, касательными к профилям сосед-
них одноименных окон; т одинаково как для окон на цилиндре,
так и для окон на гильзе;
тТ — расстояние между ординатами, касательными к профилям соседних
разноименных окон на гильзе;
Стах ~ максимальная величина перемещения развертки в направлении
оси Ох от мертвого положения гил^ы; етах определяется из
уравнения (4) п. 482103 для гильзового механизма по схеме 1
и из уравнения(4) п. 482203 для гильзового механизма по схеме II.
Фиг. 483101.
Развертка по наружной поверхности гильзы системы окон гильзы и цилиндра. Ширина
всех окон, за исключением сдвоенного окна, на гильзе одинакова
Расположение окон на гильзе и расположение окон на цилиндре 483102
делаются для каждой системы окон на одном уровне.
Расстояния Дит, выбираются минимально возможными из уело- 483103
вий обеспечения герметичности окон впуска и выпуска. Чем больше
зазоры между гильзой и цилиндром, чем ниже точность обработки
кромок окон и чем хуже условия смазки зеркала цилиндра, тем боль-
шими должны быть взяты величины Д и тц.
В’табл. 481203 даны величины Диш, для некоторых современных
авиационных двигателей.
Расстояние между ординатами, касательными к профилям одноимен- 483104
ных окон, делается одинаковым как на цилиндре, так и на гильзе
и составляет
т=/-Ь2Д,
где I определяется согласно 483105.
Для системы окон одинаковой ширины как на гильзе, так и на 483105
цилиндре, кроме одного сдвоенного на гильзе (фиг. 483101), на пери-
метре L цилиндра располагаются i окон впуска и выпуска (число окон
на цилиндре на 1 больше числа окон на гильзе), которые образуют
655
483106—483201
(i — 2) перемычки между одноименными окнами и две перемычки между
разноименными; поэтому
L — П -4- (z — 2) т + 2тд. (1)
Принимая во внимание равенство 483104, найдем ширину нормаль-
ных окон:
L — 2тц — — 2)
где L определяется согласно равенству (1) п. 483101, а Д и тц —со-
гласно 483103.
483106 Ширина сдвоенного окна на гильзе (фиг. 483101) определяется из
уравнения
2/4“ Шц =/д 4-2fmax» (1)
Так как
2гюах = 14-Д, (2)
то
1ц = 1-$-П1ц — (3)
Ширина сдвоенного окна на гильзе /я, обслуживающего окна впуска
и выпуска на цилиндре, ограничивается условиями работы на этом
участке уплотнительных колец; последние могут быстро изнашиваться,
проваливаясь в гильзу на этом участке.
У авиационного двигателя «Геркулес» XI ширина сдвоенного окна
соответствует 46°,2 по периметру гильзы; такой же угол сдвоенного
пкна*был первоначально и у гильзы двигателя «Сейбр» П-А, но впо-
следствии одна сторона этого окна была обрезана (см. фиг. 481103-П)
и ширина его была сделана равной ширине остальных окон, соответ-
ствующей 40°45' по периметру гильзы.
483200 Определение ширины окон гильзового распределительного механизма
для системы окон одинаковой ширины как на гильзе, так и на цилиндре,
кроме одного сдвоенного на гильзе и двух обслуживаемых этим
окном окон на цилиндре (число окон на цилиндре на 1 больше числа
окон на гильзе)
483201 В случае, когда ширина сдвоенного окна на гильзе /я, определен-
ная согласно 483106, получится чрезмерной в отношении работоспособ-
ности уплотнительных колец, ширину /я уменьшают до величины, обес-
печивающей работоспособность уплотнительных колец. Соответственно
уменьшают и ширину тех двух окон на цилиндре, которые обслужи-
ваются сдвоенным окном на гильзе.
Обозначив ширину этих двух окон через 1г (фиг. 483201), найдем:
L—(i — 2) 1-j-21,-j-(z — 2) tn -J- 2тц (I)
и
21, — /я-ф 2етах = 1ц 4" 14" А* (2)
656
483202—483302
Принимая во внимание уравнение (2) и уравнение 483104, получим
для определения ширины I нормальных окон на цилиндре и гильзе
следующее выражение:
L-m -i
-27-3—
(3)
Фиг. 483201.
Развертка по наружной поверхности гильзы системы окон гильзы и цилиндра. Ширина
всех окон, за исключением сдвоенного окна на гильзе и двух уменьшенных окон
на цилиндре, одинакова
Ширина уменьшенных окон на цилиндре 1, (перекрываемых сдвоен- 483202
ним окном на гильзе) определяется из уравнения (2)
1 2 ’
Определение основных кинематических параметров привода гильзового 483300
распределительного механизма
Основными кинематическими параметрами привода гильзового рас- 483301
пределительного механизма, подлежащими определению, являются:
LK — расстояние между центром шарнира привода и осью гильзы (для
гильзового механизма по схеме 11 LK — расстояние между центром
шарнира и осью гильзы в моменты ее мертвых точек),
— радиус кривошипа привода гильзы.
Расстояние LK выбирается минимально возможным по конструктив- 483302
ным соображениям.
В практически выполненных конструкциях авиационных двигате-
лей имеют место следующие зависимости:
в двигателях Бристоль LK== 0,666 D,
в двигателях Нэпир LK = 0,676 D,
где D — внутренний диаметр гильзы.
42 Авиац. порши, двигатели
657
483303—483305
483303
Максимальное угловое отклонение гильзы от ее положения в момент
ВМТ определяется из уравнения
Ттах —
gmax 180
-1(О + 2«) "
А
(1)
или, если принять во внимание равенство (2) п. 483106,
. 180 1 + Д _ „ 1+Д
Тшах— к О + 2« 57’25О4-2«*
483304 Для гильзового механизма с кинематикой по схеме I согласно урав-
нению (2) п. 482103 имеем:
1 Я»
Sin <Pmax в '-к — >
откуда для определения радиуса кривошип^ привода гильзы получается
следующее уравнение:
#к = l-'K Sin ^maxj
где LK определяется согласно 483302, а <ртах — согласно 483303.
483305 Для гильзового механизма с кинематикой по схеме II согласно
уравнению (2) п. 482203 имеем:
tg Tmax — ,
откуда
#к = I-к tg фтах,
где L« определяется согласно 483302, а <рШах — согласно 483303.
483306 Для приближенного определения радиуса кривошипа привода гиль-
зового распределительного механизма можно исходить из следующих
данных. Практика выполненных конструкций показывает, что для пяти-
оконных на цилиндре и четырехокоьных на гильзе гильзовых систем
180°
угол 2«?тах берется на 2 — 2i° меньшим -у; так, например, для дви-
гателя «Геркулес» XI этот угол принят равным 42°56', а для двига-
теля «Сейбр» П-А —43°06'.
Принимая
<Ртах = 22°30'-1° = 21о30'
и
£« = 0,670,
получим следующие зависимости (см. 483304 и 483305):
для гильзового механизма с кинематикой по схеме I
#« = 0,2460, (I)
для гильзового механизма с кинематикой по схеме II
#« = 0,264 0. (2)
658
483400—483404
В выполненных конструкциях:
для двигателей «Геркулес» XI и «Центавр» XI (схема 1)
Я,< = 0,2440,
для двигателя «Сейбр» П-А (схема И)
Як = 0,267 О.
Определение высоты окон гильзового распределительного механизма
Высота окна выпуска (фиг. 483I0I и 483201) соответствует ходу
гильзы вдоль оси от момента НМТ гильзы до момента закрытия окна
впуска. Поэтому, принимая во внимание уравнение (1) п. 482102
и фиг. 483401, для определения йвп имеем следующее уравнение:
йвп = S (180°) - s (рк.вп) = 2ЯК - Як [ 1 - cos (90° - ₽, - ф)] =
= Яв[1 4-sin(P,+ф)].
483400
483401
Высота окна выпуска (фиг. 483101 и 483201) йвып соответствует
ходу гильзы вдоль оси от момента открытия окна выпуска до момента
НМТ гильзы. Поэтому, принимая во
внимание уравнение (1) п. 482102 и
фиг. 483401, для определения йВЫп
имеем следующее уравнение:
Йвып — S (180°) — S (Рк.вып) —
= 2ЯК - Як [ Г- cos (90° - р8 + ф)] =
= ЯК[1 +sin (Р8-ф)].
Высоту окна впуска йвп и высоту
окна выпуска йвып делают обычно одина-
ковыми, т. е.
Йвп = Йвып = Й5
при этом условии, принимая во
ние формулы 483401 и 483402,
гилЬзы
поршня
гилЬзк
Фиг. 483401.
(I)
внима-
имеем
483402
483403
Диаграмма фаз гильзового рас-
пределительного механизма
Як[1 + sin (р2 + ф)] =
= ЯК[1 — sin(ps —ф)],
откуда
й —Ё?___₽»
• 2
(2)
В случае, когда Р8 = Р2, угол ф = 0 и ВМТ гильзы совпадает по
времени с ВМТ поршня.
При наличии условия (1) 483403 высота окон будет определяться
из уравнения 483401 или 483402 подстановкой в них значения угла ф
из равенства (2) п. 483403. Имеем:
й = Як(1 + 81п^+Ь).
483404
42*
659
483405—483502
483405 Расстояние йп между кромками окси на гильзе и на цилиндре
в момент ВМТ гильзы (фиг. 483101 и 483201) определится из уравнения
йп = 2/?к-й.
У окон на цилиндре авиационных двигателей «Геркулес» XI (фиг.
481103-1) и «Центавр» XI (фиг. 481104) высота й уменьшена по срав-
нению с расчетной и высотой окон на гильзе; это уменьшение вызвано
соображениями оребрения цилиндра и отчасти перекрытием цилиндро-
вых окон поршнем, о чем подробнее см. в 483504.
483500 Взаимное расположение окон на гильзе и окон на цилиндре и системы
окон на Гильзе относительно системы окон на цилиндре
483501 Для гильзового распределительного механизма с системой окон
одинаковой ширины как на гильзе, так и на цилиндре, кроме одного
сдвоенного на гильзе (число окон на цилиндре на I больше числа окон
на гильзе), имеем (фиг. 483101):
а) для системы окон на цилиндре:
ширина окон I определяется согласно уравнению (2) ц. 483105;
размер перемычек тп выбирается согласно указаниям 483103;
размер перемычек т определяется согласно уравнению 483104;
б) Для системы окон на гильзе:
ширина нормальных окон I и ширина перемычек /и—такие же, как
для системы окон на цилиндре; ширина сдвоенного окна 1Д опреде-
ляется согласно уравнению (3) п. 483106; размер перемычки тТ
определяется из уравнения:
/Лг — 2етах +/лп == l-f-Л +шп;
в) расстояние йп для момента нахождения гильзы в ВМТ опреде-
ляется согласно уравнению 483405;
г) система окон на гильзе в момент нахождения ее в ВМТ сдвинута
на развертке относительно системы окон на цилиндре (см. фиг. 483101)
на расстояние етах;
д) ВМТ гильзы сдвинута относительно ВМТ поршня (в момент вспышки
в цилиндре) на угол ф (по углу поворота кривошица привода гильзы;
см. фиг. 483402), определяемый по уравнению (2) п. 483403.
483502 Для гильзового распределительного механизма с системой окон
одинаковой ширины как на гильзе, так и на цилиндре, кроме одного
сдвоенного на гильзе и двух обслуживаемых этим окном окон
на цилиндре (число окон на цилиндре на 1 больше числа окон на гильзе;
фиг. 483201), имеем:
а) для системы окон на цилиндре:
ширина окон I определяется согласно уравнению (3) п. 483201; ширина
окон lj определяется согласно уравнению 483202; размер перемычек
тп выбирается согласно указаниям 483103; размер перемычек т
определяется согласно уравнению 483104;
б) для системы окон на гильзе:
ширина нормальных окон I и ширина перемычек m такие же, как
для системы окон на цилиндре; ширина сдвоенного окна /д опреде-
660
483503—483504
ляется согласно указаниям 483201, а размер перемычки тт — из урав-
нения
тг = / 4-Д + тп.
Разделы «в», «г» и «д» п. 483501 остаются в силе и для 483502.
Окна гильзового газораспределения на цилиндре располагают вдоль 483503
оси цилиндра так, что плоскость верхних кромок этих окон совпадает
с плоскостью окружности соприкосновения днища головки цилиндра
с гильзой (см. фиг. 481 ЮЗ-1 и 481104).
Если (см. фиг. 481103-1) высота окон h получается больше sc (где sc— 483504
расстояние между плоскостью окружности соприкосновения днища головки
цилиндра с гильзой и плоскостью окружности соприкосновения днища
поршня с гильзой в момент ВМТ поршня), то поршень на некотором
участке своего хода около ВМТ будет перекрывать нижние части
цилиндровых окон и нижние части гильзовых окон при движении
гильзы около ее НМТ. Поэтому нижние участки цилиндровых окон
фактически не работают, их можно закрыть и высоту цилиндровых
окон сделать меньше й.
Высота цилиндровых окон йп определится в этом случае из урав-
нения
Йц = Sr (Рс) Ад, (1)
где sr(₽с) —путь, пройденный гильзой вдоль оси от ее ВМТ до момента
совпадения плоскости нижних кромок гильзовых окон с
плоскостью окружности соприкосновения днища поршня
с гильзой (при движении поршня от его ВМТ);
йп —расстояние между нижними кромками гильзовых окон
и верхними кромками цилиндровых окон в момент ВМТ
гильзы;
Рс —угол поворота кривошипа привода гильзы, соответствующий
величине пути гильзы sr (рс)-
Согласно уравнению (1) п. 482102
Sr (Ре) = ЯК(1-COSРе) (2)
расстояние йи определяется по уравнению 483405
йп = 2/?к —й. (3)
Угол рс находится из уравнения
Sr (Рс) йп =* Sp (ас) 4* Sc, (4)
где sp(ac) —расстояние, пройденное поршнем от его ВМТ при повороте
соответствующего кривошипа коленчатого вала на угол ас
(от ВМТ);
sc —расстояние между плоскостью окружности соприкосновения
днища головки цилиндра с гильзой и плоскостью окруж-
ности соприкосновения днища поршня с гильзой в момент
ВМТ поршня;
ас —угол, соответствующий углу рс-
661
483600—483601
Связь между углами ас и ₽с определяется, следующим уравнением,
вытекающим из рассмотрения фиг. 483401:
«с = 2 [рс - (180° + ф)] = 2 (рс - ф) - 360°, (5)
причем угол ф определяется согласно уравнению (2) п. 483403
(б)
Расстояние sp(ac) определяется по формуле, соответствующей кине-
матике кривошипно-шатунного механизма (см. 100000).
Высота цилиндровых окон йп [см. уравнение (1)] проще всего опре-
деляется путем графического решения уравнения (4); для этого на одном
чертеже строят графики функций
Sr (Рс) Йд = /г (Рс)
И
Sp (ac) 4“ Sc = /д (Рс) >
при этом абсцисса точки пересечения графиков функций /г (рс) и /п (рс)
определит угол рс, а ордината этой же точки даст высоту цилиндровых
окон йп.
Фиг. 433601.
К построению профиля нормального окна впуска
авиационного двигателя «Геркулес» XI
483600 Профилировка окон гильзового распределительного механизма
483501 Определив согласно 483100 или 483200 ширину нормального окна I
и согласно 483400 высоту окна й, производят профилировку нормаль-
ных окон впуска гильзового распределительного механизма. Для этого
строят сначала исходный
профиль окна; за исход-
ный профиль принимается
прямоугольник со сторо-
нами I и й, углы которого
скруглены радиусом г,
равным радиусу фрезы,
обрабатывающей профили
окон. Далее вычерчивают
(фиг. 483601) относитель-
ное положение окна с ис-
ходным профилем на гиль-
зе Г и окна с таким же
профилем на цилиндре Ц
для момента открытия
впускных окон, т. е. для
угла поворота радиуса
кривошипа привода гильзы
от ее ВМТ рВд = 180°-[-ф — (см. фиг. 483401), причем угол ф опреде-
ляют согласно уравнению (2) п. 483403. Так как в этот момент окна
впуска еще не должны быть открыты, а исходный профиль окон этому
условию не удовлетворяет, то исходный профиль окон на цилиндре и
гильзе корректируют, применяя следующий прием: проводят общую
662
483602
касательную АВ к окружности 02 скругления исходного профиля
окна цилиндра и окружности Ог скругления исходного профиля
окна гильзы и заменяют участок а&с исходного профиля окна цилиндра
линией аАВс.
При движении окна гильзы относительно окна цилиндра центр Ot
окружности скругления будет двигаться по кривой 0206, определяемой
кинематикой привода гильзы; огибающая окружностей радиуса г с цент-
рами на кривой О2О3 срежет нижний левый угол исходного профиля
окна цилиндра, и по этой огибающей теоретически и следует скорре-
ктировать исходный профиль окна цилиндра на участке cde.
Однако практически эту огибающую заменяют окружностью (см.
483602 и 483603); угол Bed полученного профиля для удобства обра-
ботки профиля окна и возможности этой обработки одной фрезой заме-
няют кривой.
Профиль нормального окна впуска на гильзе делается одинаковым
с таковым на цилиндре, но повернутым относительно последнего
на 180°. Аналогичным образом строятся и профили нормальных окон
выпуска. Положение окна с исходным профилем на гильзе относительно
окна с таким же профилем на цилиндре строится для окон выпуска
в момент закрытия этих окон, т. е. при угле поворота радиуса криво-
шипа привода гильзы от ее ВМТ
РвЫП = 1 80 ф -|- Р4.
Для построения профиля сдвоенного окна на гильзе и профилей
обслуживаемых этим окном впускного и выпускного окон на цилиндре
(см. 483201) принимают за исходный профиль сдвоенного окна на гильзе
прямоугольник со сторонами 1д (см. 483201) и й, углы которого скруг-
лены радиусом г; за исходные профили соответствующих окон впуска
и выпуска на цилиндре принимают прямоугольники со сторонами 1г
и й, углы которых скруглены также радиусом г.
Дальнейшее построение профилей всех трех окон производится
в основном согласно вышеизложенному; при этом (см. фиг. 483201)
профиль левой половины сдвоенного окна соответствует профилю впуск-
ного окна на цилиндре, а профиль правой половины сдвоенного окна—
профилю выпускного окна на цилиндре. Верхняя кромка сдвоенного
окна очерчивается по прямой, касательной к окружностям скругления
радиуса г.
В качестве первого примера профилировки окон гильзового газо-
распределения рассмотрим построение профиля нормальных впускных
окон авиационного двигателя «Геркулес» XI (фиг. 481103-1). Построе-
ние профиля ведется согласно 483601 и показано на фиг. 483601
и 483602. В этой конструкции окон угол исходного профиля Bed
(фиг. 483601) заменяется участком вертикальной прямой с^, касатель-
ной к окружности 02, и участком окружности 03 радиуса г, касатель-
ной к прямой с2с и к нижней кромке bed исходного профиля окна
на цилиндре; огибающая окружностей радиуса г с центрами на кривой
020t заменяется (фиг. 483601 и 483602) дугой окружности радиуса р,
касательной к окружностям 02 и 03, с центром 0Р, лежащим на прямой
еО5Ор, перпендикулярной к стороне de исходного профиля в точке е
касания огибающей de.
483602
663
483602
Основные геометрические параметры профиля определяются следую-
щим образом.
Ширина окна на развертке / определяется согласно уравнению (3)
п. 483201.
Высота окна й находится согласно 483404.
Радиус закругления г берется
К построению профиля нормального окна
впуска авиационного двигателя «Герку-
лес» XI
'ласно указаниям 483601.
Координаты центра окруж-
ности Ог будут
Х2 = 1 — [imax + Г + С (Рвп)] ~
=='2^~ [уД +г + «(₽вп)] > (О
где, согласно 483601,
₽вп*= 180°+ «]>-₽,, (2)
а е(Рвй) определяется по уравне-
нию (3) п. 482103, причем пола-
гают ₽ = ₽вп;
у2 = 2RK - s (₽вП) + г, (3)
где $(рвп) определяют по уравне-
нию (1) п. 482102, полагая
Расстояние а от центра ок-
ружности Ot до левой кромки исходного профиля окна будет
а я= emax + е (₽йп) — г=у(г + д) + г (₽»«) ~ г•
(4)
Расстояние Ъ от точки е (точка касания огибающей окружностей
радиуса г с центрами на кривой O2OS, фиг. 483602) до нижней кромки
исходного профиля окна будет
b = RK + r- (5)
Соединяя центры окружностей О, и Os прямой и проводя перпенди-
куляр из середины отрезка прямой 030s до его пересечения в точке О9
с прямой еОР, перпендикулярной к левой кромке исходного профиля
окна, получим центр О9 окружности, касательной к окружностям О,
и О5 и являющейся участком окончательного профиля окна. Радиус р
этой окружности будет
+ (6)
где вспомогательный угол р определяется из уравнения
tgp = ^. (7)
Исключая из уравнений (6) и (7) угол р, получим для ? следую-
щее выражение:
а2 — 2Ы + b2 zo\
Ча-г)~‘ (8)
664
483603
Для гильзового распределительного механизма двигателя «Гер-
кулес» XI (фиг. 481103-1) имеем следующие данные:
0=146,1 мм; S = 3,5 мм; Л =52 мм; 1 = 55,9 мм; г —7,54 мм (19/64");
7?к = 35,6 мм; LK = 97,3 ш<;Хк = 0,366; Д = 1,5 мм; ^^7°30'; р2 = 27°30';
Р, = 27°30'.
Подсчитываем:
ф=Ц^ = О;
₽вп = 180° + 9 - р! = 180° - 7°30' = 172°30';
sin <рвп =*Sin рвп; sin <рвп = 0,366 sin 172°30'; <рвп = 2°46';
s (Рвп) = ₽« (1 - cos Рвп) = 35,6 (1 - cos 172°30') = 70,9 мм;
е(рВп)=1^(4 + 9?“ = Т^(^ + 3’5) -2’767 = 3’63
х2 = у 1~ [4-Л + г + е(рвп)] =
= 4 • 55,9-• 1,5 + 7,54 + 3,68) = 15,98 мм;
у2 = 2Як-$(рвп) + г = 2 • 35,6 - 70,9 + 7,54 = 7,84 мм;
а = 4- (I+Д) + е (рвп) - г = 4 (55,9 + 1,5) + 3,68 - 7,54 = 24,84 мм;
b = /?K + r = 35,6 + 7,54 = 43,14 мм; р =g^-2*r+ft- = 52,8 мм.
&V* Г)
Основные размеры рассмотренного окна даны на фиг. 481103-1
и й табл. 481203, а фазы распределения в табл. 481201.
В качестве второго примера профилировки окон гильзового газо-
распределения рассмотрим построение профиля нормальных впускных
окон авиационного двигателя «Сейбр» П-А (фиг. 481103-11).
Построение профиля ве-
дется согласно 483601 и пока-
зано на фиг. 48360+1 и
483603-11. В этой конструк-
ции окон (фиг. 483603-1)
угол abc исходного профиля
срезается прямой АВс, ка-
сательной к окружностям 01
и Оя; угол профиля между
прямой АВс и нижней кром-
кой исходного профиля
скругляется окружностью Оя
радиуса г; огибающая ок-
ружностей радиуса г с цент-
рами на кривой* O2OS за-
меняется (фиг. 483603-1 и
483603-11) дугой окружности
48360+
Фиг. 483603-1.
К построению профиля нормального окна
впуска авиационного двигателя «Сейбр» П-А
665
483603
радиуса р, касательной к окружностям 03 и 0S} с центром Ot, лежащим на
прямой fO5OP, перпендикулярной к стороне de исходного профиля в
точке е касания огибающей с de.
Основные геометрические параметры профиля находят следующим
образом.
Ширина окна на развертке I определяется согласно уравнению (2)
п. 483105.
Высота окна h находится согласно
К построению профиля нормального окна
впуска авиационного двигателя «Сейбр» 1I-A
483404.
Радиус закругления г бе-
рется согласно указаниям 483601.
По фиг.483603-11 и 483603-111
имеем: координаты центра ок-
ружности Oj
Xi = r; у, = Л-г; (1)
координаты центра окружности О3
Хз = ~2 *~ г+е(Рвп)] > |(2)
Уз ~ 2Rk—5(рвп)4*Г, J
где согласно 483601
₽вп=180в + ф-р1, (3)
а е(рЕп) определяют по уравне-
нию (3) п. 482203 и s (₽вп) — по
уравнению (1) п. 482102, пола-
гая ₽-рвл-
Расстояние к между центра-
ми окружностей (?! и Ot будет
к = К(х8 - *1)” + (У. - Уi)1 •
(4)
Вспомогательные углы <р, е и угол
деляются из следующих уравнений:
2г
cos = -р , (5)
Ье= (б)
5 У1-Уз v ’
о = <р— е. (7)
Из прямоугольного треуголь-
ника OjOtE (см. фиг.483503-П), сто-
роны которого
0^ = 1 —а-r и О1Е = й —2г,
а
/0ДЕ = 5,
имеем
8 (фиг. 483603-Пи 483603-ПI) опре-
К построению профиля нормального
окна впуска авиационного двигателя
«Сейбр» П-А
666
483603
откуда
а —I — г — (h — 2r)ctg3. (8)
Величина Ь находится из равенства
b = RK + г. (9)
Радиус р окружности, заменяющей огибающую окружностей ради-
уса г, с центрами на кривой 020s (см. фиг. 483603-1) определится
из уравнения (8) п. 483602
Для гильзового распределительного механизма двигателя «Сейбр» П-А
(фиг. 481103-П) имеем следующие даннные:
0=127 мм; 3 = 2,3 мм; й = 49,4 мм; 1 = 46,79 мм;
г = 6,35 мм (7/'); /?к = 32,2 мм; LK = 81,5 мм; лк = 0,393;
Д = 2,75 мм; ^ = 20°; р2 =32’30'; р3 = 32’30'.
Подсч итываем:
ф = 1Ык = 0;
рвп = 180° + ф-₽1= 180° —20°= 160°;
tg ?вп = Хк sin рвп; tg ?вп = 0,393 sin 160°; ?вп = 7’40';
s (рвп) = Rk (1 — cos рвп) = 32,2 (1 — cos 160°) = 62,47 мм;
e (м=iJj (4+s) =15) С1?+2'3)7’667=8’81 mm'>
хх = г = 6,35мм; y2 = h — r — 49,4 — 6,35 = 43,05 мм;
= у I — у Д + r 4-e (рвп) ] =
= у • 46,79 - - 2,75 + 6,35 + 8,81) = 6,86 мм;
yt =2RK~s (рвп) + г = 2 • 32,2 — 62,47 + 6,35 = 8,28 мм;
к = /(х2-х1)2 + (у2-у1)2 = 34,77 мм; ’
tge^*2—’ = 0,01478; 8 = 0’51';
& У1-У2
cos? =-^ = 0,365; ? = 68’35'
8 = ? — s = 67’44';
а = I — г — (й — 2r) ctg 3 =
= 46,79 - 6,35 - (49,4 - 2 • 6,35) ctg 67’44' = 25,4 мм;
Ъ = /?„ + г = 32,2 + 6,35 = 38,55 мм;
а2-2Ьг + Ьг ,
Р=—"Л— = 43,1 мм.
г 2 (а —г)
Основные размеры рассмотренного окна даны на фиг. 481103-П
и в табл. 481203, а фазы распределения —в табл. 481201.
667
484106
484000-
484000
484100
484101
484102
484103
484104
484105
484106
УРАВНОВЕШИВАНИЕ СИЛ ИНЕРЦИИ ГИЛЬЗОВОГО
РАСПРЕДЕЛИТЕЛЬНОГО МЕХАНИЗМА
Уравновешивание сил инерции вращающихся Масс
кривошипов гильзового механизма звездообразного двигателя
Обозначения:
PjK — сила инерции кривошипа гильзового механизма;
и — угловая скорость коленчатого вала двигателя;
t — текущее время, отсчитываемое от момента положения гильзы
первого цилиндра в BAJT;
i—число цилиндров звезды двигателя;
т — порядковый номер вспышки для рассматриваемого цилиндра.
(В дальнейшем принято, что вспышки следуют чёрез цилиндр
в направлении против вращения часовой стрелки).
Угол между силой PjK и осью соответствующего цилийДра, в ко-
тором происходит m-ая по порядку вспышка (отсчет порядка вспышек
ведется от цилиндра 1 на фиг. 484102),
для момента времени t будет
Pm = 4*-(m-l)-^ .
Угол между осью Оу (фиг. 484102) и
осью того цилиндра, в котором происхо-
дит m-ая вспышка,
<pm»(m-l).2^-.
Угол между силой PjK и осью Оу
(фиг. 484102) будет
6₽ = ?m+?m=i/ + (m-l)--^. (1)
К уравновешиванию вращаю-
щихся масс кривошипов, веду-
щих гильзы, звездообразных
авиационных двигателей
Угол между силой PjK и осью Ох
6х = 6„4--^ = ^-/ + (т-1)- 4^ + 4- (2)
Перенося все силы Р]К в точку О, получим в точке ОГгруппу
векторов сил PjK, равных по величине и расположенных друг к другу
(согласно уравнению 484104) под равными углами — ; следователь-
но, эта группа сил уравновешивается сама собой.
От переноса сил Р;к в точку О возникает момент
m=i m=i
^lM}K = ^lPiKasm^m^PiBa'^l sin Z-(m—1) =0.
m—i
Таким образом для звездообразного двигателя силы инерции PjK
вращающихся масс кривошипов привода гильзового механизма пблно-
стью уравновешены сами собой.
668
484200-484202
Уравновешивание сил инерции гильз гильзового 484200
механизма звездообразного двигателя
Для цилиндра звезды, в котором происходит т-ая по порядку 484201
вспышка, слагающая силы инерции гильзы в направлении ее оси
[см. 482102, формулу (3)]
^Э/гт== —COS рт. (1)
Проекции сил инерции гильз на оси Ох и Оу будут:
m=i
2„ ₽'г = 2 (cos C0S ?rn) =
m = l
= —±mrRK< {S cos [y/ + (m—1) -jL] +
m=l
m=i .
4-2 cos [(m —1) • 3 —у/] } (2)
m=l
и
m—t
2xP/r = -mr/?K0)^2 [C0S₽mSin?m] =
m—1
= —4mr₽K®K {2 Sin + 0 -у1] +
m=l
m=t
+ 2 sin [(m-l)3-y—у/]]. (3)
m-=l
Для звездообразных двигателей с числом цилиндров i = 9, 7 и 5
имеем
ЗЛ’г = 2хР/г=0- (4)
Для 3-цилиндрового двигателя
2„ Р/г= —-|mr^K“KCOS^y Q (2')
и
2 xpir = т п1гЯк®к sin (у t) . (3')
Для цилиндра звезды, в котором происходит m-ая по порядку 484202
вспышка, пара сил инерции р-го порядка (по вспышкам) гильзы будет
[см. формулу (9) п. 482103 или формулу (9) п. 482203]
П)рт = Ir^Kpfp sin (ppm), (1)
где р*= 1, 3, 5, . . .
669
484202
Векторы этих пар направлены по осям соответствующих цилиндров.
Спроектировав эти векторы на оси Оу и Ох и просуммировав их,
получим
m=I
2 [ sin<P?m) COS =
m=i
m=i
=4/’<0«х«/’рр {S sin +
m=i
+ 2 sin [p-f-/-(p + 2)(/n-l)^-]J (2)
m=i
2x^p=WAKppP2 [ein (ppm) Bin <pm] =
m=i ,
= 4 ^k^kPPp { 2 cos [p-^-(P + 2)(m-1)-^-] —
m=l
m«=f
-2 cos[p-^-(p-2)(m-l)^-]}. (3)
m^i
Для Неуравновешенными будут пары 3-цилиндрового двигателя 1, 4, 7, 10, . .. сил инерции следующих порядков: 5, 8, 11, ... ;
ДЛЯ 5-цилиндрового двигателя 3, 8, 13, . . . 7, 12, 17, ... ;
Для 7-цилиндрового двигателя 5, 12^ 19, . . . 9, 16, 23, ... ;
ДЛЯ 9-цилиндрового двигателя 7, 16, 25 . . . 11, 20, 29, ... .
Общие выражения для проекций на оси Ох и Оу суммарного век-
тора неуравновешенных пар сил инерции р-го порядка будут
= Т /ХЛкРРрsin p^-t (4)
и
2х/7/р = ± /г“к>-кРРр cos р ~ t, (5)
например, для 2-рядного звездообразного 18-цилиндрового двигателя
«Центавр» XI первой неуравновешенной парой будет от одного ряда
цилиндров пара 7-го порядка, для которой
(2!;^Л?)тах — [2х^/т)тах ~ 5,9 К2 СМ.
670
484300—484303
Для 2-рядного звездообразного 14-цилиндрового двигателя типа
«Геркулес» XI первой неуравновешенной парой будет от одного ряда
цилиндров пара 5-го порядка, для которой
~ (2х^Л'б)тах ~ 119 KZC/A.
Для случая 2-рядного звездообразного двигателя с вращением
кривошипов, ведущих гильзы в одну сторону, неуравновешенные мо-
менты удваиваются, а при противоположном вращении этих кривоши-
пов моменты взаимно уравновешиваются.
Уравновешивание сил инерции вращающихся масс 484300
кривошипов гильзового механизма 6-цилиндрового
рядного двигателя
Обозначения те же, что и в 484101 и 484102. 484301
Спроектировав силы PfK кривошипов гильзового механизма на оси 484302
Ох и Оу (фиг. 484302) и сложив эти проекции, получим
т=6
Р/к cos= PjK 2р cos (yt 4- m) = О (1)
m=i m=i
И
2xP/Ksinpm = P/K S'xsin(4/ + “Tm)=0- m
Следовательно, силы инерции вращающихся масс кривошипов гиль-
зового механизма в б-цилиндровом рядном двигателе уравновешены
сами собой.
Фиг. 484302.
К уравновешиванию вращающихся масс кривошипов, ведущих гильзы,
6-цилиндрового рядного двигателя
Неуравновешенной остается пара сил от силы инерции Р;К, лежа- 484303
щая в плоскости, параллельной плоскости осей цилиндров.
671
484304-484403
Для случая порядка вспышек в цилиндрах 1 — 5—3 — 6 —»2 — 4 и при
условии равных расстояний между осями цилиндров I неуравновешен-
ная пара сил будет
Мк = 2/3 lPjK cos(~-+30°) . (I)
В случае, если расстояние между осями двух средних цилиндров
Ф I, неуравновешенная пара сил будет
М' = МК. (2)
484304 Для порядка вспышек 1 — 2 —4 —6 —5 — 3 неуравновешенная пара
сил инерции вращающихся масс кривошипов гильзового механизма
при равенстве всех расстояний между осями цилиндра I будет
Мк = IPJK ( 7 cos + /3 sin -у-) . (1)
В случае, если расстояние между осями средних цилиндров G ф I,
неуравновешенная пара сил будет
Ж = Мк 4- 2 (I, -1) Р1К cos ( 4) • (2)
484305 Указанная в 484303 и 484304 пара сил инерции может быть урав-
новешена обычными методами, указанными в «Динамике авиационных
двигателей».
484400 Уравновешивание сил инерции гильз гильзового
механизма 6-цилиндрового рядного двигателя
484401 Суммируя силы инерции гильз —Р/г от их движения вдоль осей
цилиндров, получим
2 cos(^-+-£m)-0.
m=l m—1
484402 Пара от сил инерции Р/г, лежащая в плоскости осей цилиндров
(если пренебречь несимметрией гильзы вследствие прилива для ее
привода), будет неуравновешена.
Для случая порядка вспышек в цилиндрах 1—5 —3 — 6 —2—4 и
при равных расстояниях между осями цилиндров I неуравновешенная
пара от сил Р/г
Мг = -2 /3 Пгк/ЛгО)* cos + 30°) : (I)
Если расстояние между осями средних цилиндров =# I, то неурав-
новешенная пара сил
М; = МГ. (2)
484403 Для порядка вспышек 1—2—4—6—5—3 и при условии равных
расстояний между осями цилиндров I неуравновешенная пара от сил Р;г
будет
Мг= 1Рктг®к ^7 cos-^+/3sin . (1)
672
484404—484502
Если расстояние между осями средних цилиндров 1г #= I, неуравно-
вешенная пара сил будет
лт; = Л1Г 4-2 (Zj — Z)/?Kmr<o*cos(-^Q . (2)
Указанная в 484402 и 484403 пара сил может быть уравновешена 484404
обычными методами, указанными в «Динамике авиационных двигателей».
Суммируя пары сил инерции р-го порядка гильз 484405
П iPm~ Кр?р sin [р -J /- (от - 1) р] ,
получим результирующую пару, действующую в плоскости, перпенди-
кулярной осям цилиндров, и равную
m*=i
2 77/р = /г<»£лкРРр2 sin [ру*-('л-1)Д=р] ;
т—1
так как р имеет только нечетные значения (см. 482103 и 482203),
a i четно (i = 6), то всегда будет иметь место
2п/Р=о,
и, следовательно, пары сил инерции гильз П, всех порядков в рядном
6-цилиндровом двигателе уравновешены сами собой.
Уравновешивание сил инерции гильзового механизма Н-образного 484500
24-цилиндрового двигателя
Силы инерции вращающихся масс, а также силы инерции гильз 484501
от их движения вдоль осей цилиндров уравновешены сами собой для
каждого из рядов подобно тому, как это изложено в 484302 и 484401,
фиг. 481102-П.
Согласно 484303 и 484304, неуравновешенные пары сил от сил
инерции PjK вращающихся масс кривошипов гильзового механизма для
одного и другого рядов цилиндров равны по амплитуде; так как в дви-
гателе рассматриваемого типа эти пары сдвинуты по фазе на 180° и
действуют в параллельных плоскостях, то результирующая пара от
указанных сил инерции равна нулю.
Пары сил инерции гильз уравновешены сами собой согласно изло- 484502
женному в 484402 и 484403.
ЛИТЕРАТУРА и ИСТОЧНИКИ К 480000
1. Рикардо Г. Р., Быстроходные двигатели внутреннего сгорания, ОГИЗ, Гос-
трансиздат, 1932.
2. Сеничкин Г. В., Авиационные двигатели с бесклапанным распределением;
Оборонгиз, 1940.
43 Авиад. доршн. двигатели
ЧАСТЬ 5
РАСЧЕТ
ЗУБЧАТЫХ ПЕРЕДАЧ АВИАЦИОННЫХ
ДВИГАТЕЛЕЙ
СОДЕРЖАНИЕ
части 5
Основные геометрические соотношения н корригирование зубчатых за-
цеплений, применяемых в авиационных двигателях..................... 510000
Основные свойства н зависимости зубчатых зацеплений............ 511000
Теорема основного закона зацепления и его следствия.......... 511100
Основные соотношения......................................... 511200
Графические методы построения профиля зуба .................. 511300
Линия зацепления и ее свойства............................... 511400
Коэффициент перекрытия (продолжительность зацепления).... 511500
Основные свойства и зависимости эвольвеитного зацепления .... 512000
Основные параметры и зависимости, характеризующие эвольвент-
ное зацепление.............................................. 512100
Зависимость между двумя любыми дуговыми толщинами зуба. . 512200
Коэффициент перекрытия (продолжительность зацепления) . . . 512300
Удельное скольжение.......................................... 512100
Влияние межосевого расстояния на зацепление.................. 512500
Корригирование профилей зубьев цилиндрических прямозубых пере-
дач внешнего зацепления........................................ 513000
Исходный контур, характеризующий зацепление.................. 513100
Основные понятия и определение коррекции .................... 513200
Коэффициент коррекции.Положительная и отрицательная коррекция. 513300
Зубчатые передачи с корригированными зубьями при беззазорном
зацеплении................................................... 513400
Устранение интерференции от подреза профилей зубьев путем кор-
ригирования................................................. 513500
Изменение межосевого расстояния до заданного размера путем кор-
ригирования........................................... .... 513600
Цилиндрические прямозубые передачи внутреннего зацепления 514000
Основные свойства и зависимости цилиндрических прямозубых
передач внутреннего зацепления.............................. 514100
Зависимость между двумя любыми дуговыми толщинами зуба вну-
треннего зубчатого венца.................................... 514200
Коэффициент перекрытия (продолжительность зацепления). . . . 514300
Особенности корригирования зубьев колес с внутренним зубчатым
венцом....................’................................. 514400
Зубчатые передачи внутреннего зацепления с корригированными
зубьями при беззазорном зацеплении. . •..................... 514500
Устранение интерференции от подреза профилей зубьев путем кор-
ригирования................................................. 514600
Устранение интерференции профилей головок зубьев путем кор-
ригирования................................................. 514700
Устранение интерференции от неправильного выхода зуба из впадины. 514800
Интерференция от толщины зуба............................... 514900
Подрезание вершинами головок зубьев долбяка профилей головок
зубьев колеса, имеющего внутренний зубчатый венец........... 515000
677
Сущность подрезания профиля головок зубьев колеса и метод про-
верки возможности подрезания................................ 515100
Конические прямозубые передачи................................. 516000
Основные свойства и зависимости конических прямозубых передач 516100
Приближенное зацепление конических передач.................. 516200
Корригирование профилей зубьев конических передач............ 516300
Литература и источники к 510 000.
От редакции.
Расчет прямозубых зубчатых колес на прочность и долговечность, . . . 520000
Виды повреждения авиационных зубчатых колес, причины их и
меры борьбы с ними.......................................... 520100
Порядок расчета авиационных зубчатых передач и условия при-
менимости предлагаемого метода расчета ..................... 520200
Исходные данные, необходимые для расчета зубчатой передачи . 520300
Определение расчетной нагрузки на зубья зубчатых колес........ 521000
Определение расчетного крутящего момента..................... 521100
Учет нагрузок, вызываемых крутильными колебаниями системы,
включающей рассчитываемую передачу......................... 521200
Теоретические предпосылки к определению динамической нагруз-
ки, вызываемой ошибками в шаге или в профиле зубьев . . 521300
Определение динамической нагрузки по Бакингему и эксперимен-
тальные данные............................................. 521400
Динамическая нагрузка из-за накопленной ошибки в окружном шаге 521500
Определение динамической нагрузки, возникающей на зубьях
прямозубых колес из-за ошибок в основном шаге............... 521600
Суммарная удельная расчетная нагрузка на зубья ........ 521700
Расчет на контактные напряжения................................ 522000
Контактные напряжения и контактные деформации зубьев .... 522100
Опасные точки зацепления при расчете на контактные напряжения 522200
Расчет прямозубых колес на контактные касательные напряжения 522300
Допускаемые контактные напряжения........................... 522100
Расчет зубьев на изгиб ....................................... 523000
Теоретические предпосылки к расчету зубьев на изгиб.......... 523100
Расчет на изгиб ............................................. 523200
Допускаемые напряжения изгиба............................... 523300
Расчет зубчатых колес на заедание.......................• . . 521000
Теоретические предпосылки к расчету на заедание........... 524100
Расчет на заедание.......................................... 524200
Влияние конструкции зубчатой передачи на прочность н износостой-
кость зубчатых колес.......................................... 525000
Пример расчета зубчатой передачи............................... 526000
Литература и источники к 520 000.
Расчет прямозубых зубчатых колес на прочность по сокращенному методу. 530000
Расчетные нагрузки на зубья зубчатых колес..................... 531000
Расчетный крутящий момент..................................• 531100
Нагрузки на зуб зубчатого колеса...................... . . 531200
Напряжения в зубьях зубчатых колес ............................ 532000
Контактные напряжения в зубьях зубчатых колес............... 532100
Расчет зубьев зубчатых колес на изгиб . .................... 532200
Определение коэффициента формы зуба......................... 532300
Особенности расчета на прочность конических зубчатых колес . . . 533000
Пример расчета зубчатых колес................................. 534000
Основные данные и расчетные величины зубчатых колес ..... 535000
Литература и источники к 530000.
510000—511102
ОСНОВНЫЕ ГЕОМЕТРИЧЕСКИЕ СООТНОШЕНИЯ
И КОРРИГИРОВАНИЕ ЗУБЧАТЫХ ЗАЦЕПЛЕНИЙ,
ПРИМЕНЯЕМЫХ В АВИАЦИОННЫХ ДВИГАТЕЛЯХ
ОСНОВНЫЕ СВОЙСТВА И ЗАВИСИМОСТИ ЗУБЧАТЫХ ЗАЦЕПЛЕНИЙ
Основной закон зацепления и его следствия
Передаточным отношением зубчатого зацепления называется отно-
шение угловых скоростей вращения сцепляющихся зубчатых колес
(фиг. 511101)
/ _ “i . i _
1а ш, * al *
Передаточным числом называется отношение угловой скорости веду-
щего колеса к угловой скорости ведомого.
Теорема основного закона зацепления
Для того чтобы передаточное отношение сохранялось постоянным,
необходимо, чтобы общая нормаль к профилям зубьев в точке касания
их всегда проходила через постоянную точку на линии центров, деля-
щую межцентровое расстояние ОХО, обратно пропорционально угловым
скоростям. Эта постоянная точка Р (фиг. 511101) называется полюсом
зацепления.
Окружности радиусов гх и г,, проведенные из центров Ох и О,,
называются начальными окружностями.
При вращении колес 7 и 2 с постоянными угловыми скоростями
<»1 и ш, начальные окружности катятся без скольжения одна по другой.
Если dt и d, - диаметры начальных окружностей колес 7 и 2, то
при ilt = -^- = const
; 11)1 — °аР — da —
~ «>, ~ — п, •
Любые два зубчатых колеса с эвольвентными профилями зубьев
позволяют осуществить правильное зацепление их при различных рас-
стояниях между осями вращения, а следовательно, и при различных
начальных окружностях.
Зацепление же любого эвольвеитного зубчатого колеса с зубчатой
рейкой (см. 513100), устанавливаемой на различных расстояниях от оси
510000
511000
511100
511101
511102
679
511103—511104
вращения зубчатого колеса, происходит при различных начальных пря-
мых рейки, но при одной и той же начальной окружности зубчатого
колеса (если предположить, что направление перемещения рейки обра-
зует с линией зацепления угол, равный углу зацепления).
Та начальная окружность
эвольвентного зубчатого колеса,
при которой происходит зацепле-
ние его с зубчатой рейкой, назы-
вается делительной окруж-
ностью.
Фиг. 5III01. Фиг, 511104.
Определение передаточного отношения Следствия из теоремы основного
закона зацепления
511103 Так как начальные окружности зубчатых колес катятся одна по
другой без скольжения, то расстояния между соседними зубьями каж-
дого из колес, измеренные по этим окружностям, равны друг другу;
это расстояние называется шагом зацепления.
Из основного закона зацепления вытекают два следствия, на основе
которых можно производить профилирование зубьев зубчатых колес
(см. 511104 и 511105).
511104 Отрезок &i<Zi (фиг. 511104) нормали к профилю зуба колеса 1, прохо-
дящей через какую-либо точку его kY и пересекающей начальную окруж-
ность этого колеса в некоторой точке а1г равен отрезку Лаа2 нормали
680
511105—51120
к профилю зуба колеса 2, проходящей через ту точку его kt, которой
он в момент зацепления касается профиля зуба колеса 1 в данной точке kt.
Это следует из того, что в момент касания профилей точки Л2 и
совпадут, а точки аг и аг пересечения этих нормалей с начальными
окружностями, придя в полюс зацепления, сольются друг с другом
(фиг. 511104).
Длина дуги начальной окружности одного колеса от полюса заце- 511105
пления Р до точки пересечения ее с нормалью, проходящей через
какую-либо точку кг профиля зуба этого колеса, равна длине дуги
начальной окружности второго колеса от полюса Р до точки at пересе-
чения ее с нормалью, проходящей через ту точку Л2 профиля зуба
второго колеса, которой он в момент зацепления касается точки а2
профиля первого колеса (фиг. 511104).
Основные соотношения 511200
Обозначим шаг зацепления через t, а числа зубьев колес через 511201
zx и z2; имеем
причем
. red. «d2
t —---L=------ =
Z1 Z2
dr d2 t
т = — — —— .
Z, Z2 n
(1)
(2)
Величина m называется модулемзацепленияи измеряется в мм.
В СССР установлен следующий стандарт нормальных модулей 511202
(ОСТ 1597) в мм:
0,3; 0,4; 0,5; 0,6, 0,7; 0,8; 1, 1,25; 1,5; 1,75; 2; 2,25; 2,5; (2,75);
3; (3,25); 3,5; (3,75); 4; (4,25); 4,5; 5; 5,5; 6; 6,5; 7; 8; 9; 10;
11; 12; 13; 14; 15; 16; 18; 20; 22; 24; 26; 28; 30; 33; 36; 39;
42; 45; 50.
Значения модулей, заключенные в скобки, применяются только
в исключительных случаях.
В США и Англии, кроме понятия «модуль зацепления», приме- 511203
няется понятие «диаметральный питч» (diametral pitch), который обо-
значается буквой р. Принимая во внимание, что в США и Англии
принята «дюймовая система» единиц, имеем
= = = Л (1)
Z1 Z2 Р ’ ' 7
причем
р = -^—= = (2)
r d2M <дм '
Связь между тир устанавливается следующим уравнением: 511204
Zl Zi
z! <*?м
25,4,
при этом 1 дюйм считается равным 25,4 мм.
681
511205—511206
511205 Основные размеры внешнего зубчатого венца показаны на
фиг. 511205.
Основные размеры внешнего зубчатого венца
511206 Стандартные размеры зубьев нормальной высоты выражаются
в функции модуля т. Согласно ОСТ 6922 (фиг. 511206-1)
высота головки зуба
Л' = т, (I)
высота ножки зуба
(2)
h" = 1,2т.
Фиг. 511206-1.
Рейка с зубом нормальной высоты
Стандартные размеры зубьев укороченной высоты выражаются
в функции модуля т. Согласно ОСТ 6922 (фиг. 511206-11)
682
511207—511208
высота головки зуба
h' — 0,8т,
высота ножки зуба
h" = m.
(1)
(2)
Фиг. 511206-П.
Рейка с зубом укороченной высоты
В настоящее время обе рейки (фиг. 511206-1 и 511206-П) отменены
для цилиндрических колес; для конических колес эти рейки оставлены
к применению (см. 513101).
Размеры пары зубчатых колес с зубом нормальной высоты могут 511207
быть выражены в функции модуля т и чисел зубьев z2 и z2. Для
указанных зубчатых колес имеют место следующие соотношения:
диаметры делительных окружностей
dK1 = 2r^~z1 = mz1, )
2гд3 = — z2 = mzz, J
диаметры окружностей выступов
Dei = 2/?el = dJll + 2ft/ = mz1 + 2m = m(z1 + 2), 1
De2 = 2Re2 = dM4-2ft, = mz2 + 2m = m(z24-2); J 1 '
диаметры окружностей впадин
О1-1 = 2/?11==(1д1 —2ft" = mz1 —2,4m = т(г2 —2,4), 1
D,-2 = 2Rf2 = ds2—2ft" = mz2 —2,4m = m(z2 —2,4). J '
Размеры пары зубчатых колес с зубом укороченной высоты могут 511208
быть выражены в функции модуля т и чисел зубьев zY и z2. Для ука-
занных зубчатых колес имеют место следующие соотношения:
диаметры делительных окружностей
d^2T^^z. = mz„
t (О
^Д2 = 2гд2 = —z2 = mz2;
683
511300—511302
диаметры окружностей выступов
Del*=2Rel~dlll + 2h' = mz1+l,6m = m(zl+ 1,6), 1
Dei = 2Rei = dx2 + 2ft' = mzi-\-\,Qm = m (z2 4-1,6); J
диаметры окружностей впадин
DX1 = 2/?fl = dxl — 2ft" = mz, — 2m = m (zx — 2), 1
Dk2 = 2Rti = dxa — 2h” = mzi — 2m — m (zt — 2). J
511300
511301
Графические методы построения профиля зуба
Построение профиля рабочей части зуба посредством точек зацепле-
ния (метод Рело). По заданному профилю зуба одного колеса и по задан-
513302
Фиг. 511302-1.
Графическое построение профиля зуба
посредством точек зацепления
ным начальным окружностям обоих
колес находятся линия зацепле-
ния и профиль зуба второго ко-
леса. Основа этого метода заклю-
чается в том, что сначала нахо-
дится точка зацепления, т. е. та
точка, в которой выбранная точка
заданного профиля и искомая точка
определяемого профиля совпадают
в момент зацепления, а затем,
пользуясь этой точкой зацепления,
находится искомая точка, принад-
лежащая определяемому профилю.
На фиг. 511302-1 показано
применение описываемого метода
для построения профиля зуба ко-
леса с внешним зубчатым венцом
по заданному профилю зуба колеса
с внешним же зубчатым венцом,
а на фиг. 511302-11—применение
этого метода для построения про-
филя зуба колеса с внутренним
зубчатым венцом по заданному
профилю зуба колеса с внешним
зубчатым венцом.
Порядок построения искомых
профилей следующий.
По нанесении начальных ок-
ружностей обоих зубчатых колес
и построении заданного профиля
зуба в положении, когда его ра-
бочая сторона проходит через по-
люс зацепления Р> выбирают на
заданном профиле те точки, напри-
мер кг и кг, по которым хотят найти соответствующие точки искомого
профиля (фиг. 511302-1 и 511302-11).
684
511303
Через выбранные точки проводят нормали к заданному профилю
и продолжают их до пересечения с начальными окружностями этого
колеса в точках аг и
На начальной окружности колеса, профиль зуба которого опре-
деляется, откладывают дуги Pat — Pat и РЬг~ '-—РЬ1.
из центра 01 проводят
дуги окружностей 7\ и 7\.
На дугах Т, и Т2 из
точки Р как из центра
делают засечки qt и qt
дугами окружностей, ра-
диусы которых соответ-
ственно равны fli*! и &!*2.
Через точки qt и q2 из
центра О, проводят дуги
окружностей и U2.
На дугах U,. и Ut из
соответственных точек а2
и bt как из центров де-
лают засечки nt и п2 ду-
гами окружностей, ра-
диусы которых соответ-
ственно равны <?!*! и bjct.
Проделав аналогичное
построение для несколь-
ких точек л1г nt ... и
соединив точки nlt nt ...
плавной кривой, получают
искомый профиль зуба
второго колеса.
Соединив точки qu
qt ... плавной кривой,
получают линию ‘, на ко-
торой происходит зацеп-
ление заданного профиля
Графическое построение профиля зуба
посредством точек зацепления
зуба одного колеса с найденным профилем
зуба второго колеса, т. е. линию зацепления.
Второй, более простой и более совершенный метод построения про-
филя зуба позволяет вычертить искомый профиль по точкам без по-
строения линии зацепления.
На фиг. 511303-1 показано применение этого метода для построения
профиля зуба, колеса с внешним зубчатым венцом по заданному профилю
зуба колеса с внешним же зубчатым венцом, а на фиг. 511303-П—при-
менение метода для построения профиля зуба колеса с внутренним
зубчатым венцом по заданному профилю зуба колеса с внешним зуб-
чатым венцом.
Порядок построения искомых профилей в обоих случаях следующий.
По нанесении начальных окружностей и построении заданного про-
филя зуба в положении, когда его рабочая сторона проходит через
511303
1 Неподвижной плоскости.
685
511303
полюс зацепления Р, выбирают на заданном профиле те точки, напри-
мер и к*, по которым хотят найти соответствующие точки искомого
профиля (фиг. бПЗОЗ-Ги 511303-11).
Фиг. 5i 1303-1.
Графическое построение профиля
зуба
Графическое построение профиля зуба
Фиг. 5H 303-II.
Через выбранные точки проводят нормали к заданному профилю
и продолжают их до пересечения с начальными окружностями этого
колеса в точках flj и bt.
Через точки и проводят из центра Ох лучи, которые засекают
в точках Mt и М2 дугами окружностей, имеющих центром точку 01
и радиусы Otkt и OJc*.
Откладывая дуги Ра* = Ра* и РЬ* = -^ РЬ* на начальной
окружности колеса, профиль зуба которого определяется, находят
точки а* и Ь*.
Через полученные точки а* и Ь* проводят из центра О* лучи,
на которых от тех же точек а* и Ь* откладывают отрезки aaN1 = a1M1
и b*N*~btM*.
Так как отрезки a.^N* и b*N* можно отложить от точек а* и Ь*
как внутри начальной окружности, на которой лежат эти точки, так
и вне ее, то в целях выбора правильного направления необходимо
686
511304
пользоваться следующим указанием. Если какой-либо из указанных
выше отрезков одного колеса (профиль зуба которого задан) внешнего
зацепления лежит внутри его начальной окружности, то соответствующий
равный ему отрезок второго колеса (профиль зуба которого строится)
внешнего зацепления должен обязательно лежать вне начальной окруж-
ности последнего, и наоборот.
В случае, если колесо, профиль зуба которого отыскивается,
является колесом внутреннего зацепления, соответственные равные
отрезки обоих колес должны лежать либо внутри, либо вне начальных
окружностей.
Далее, из точки аа проводят дугу радиусом, равным aj^, а из
точки —дугу радиусом Точка 13 пересечения этих дуг и будет
точкой определяемого профиля, соответствующей точке к3 заданного
профиля.
Проводя из точки Ь3 дугу радиусом, равным bik„, а из точки N,—
дугу радиусом, равным М3к3, находят точку /а пересечения этих дуг,
которая и будет точкой определяемого профиля, соответствующей
точке к3 заданного профиля.
Аналогичным построением находят и другие точки определяемого
профиля.
Соединив точки 1и 13 ... плавной кривой, получим искомый про-
филь зуба второго колеса.
Построение нерабочей части профиля зуба. Профиль зуба колеса’
имеет, кроме рабочей части,
В пределах этой части
всегда находится опас-
на прочность сечение
(если зуб рассматри-
как защемленную бал-
поэтому необходимо
511304
зуба
ное
зуба
вать
ку);
уметь точно определять про-
филь переходной части зу-
ба.
При расчете рассматри-
ваются два основных случая:
1) когда зуб зуборезного ин-
струмента, которым нареза-
ются зубья колеса, имеет
у вершины острую кромку
(точка е на фиг. 511304-1)
и 2) когда зуб инструмента
скруглен у вершины дугой
ек окружности с центром
Оеь (фиг. 511304-11). Первый
случай рассматривается в
применении к нарезке зубьев
колеса внутреннего зацепле-
ния, а второй в применении
его к нарезке зубьев колеса
внешнего зацепления при
наличии подреза профиля.
еще нерабочую или переходную часть.
Фиг. 511304-1.
Графическое построение переходной части про-
филя зуба
687
511305—511306
Каждый из рассматриваемых
случаев применим для нарезки зубьев
511305
колес внутреннего и внешнего зацеплений.
Задача построения пере-
ходной части профиля зуба
представляет собой частный
случай задачи, рассмотрен-
ной в 511301-511303.
Особенность решения
этой задачи любым из рас-
смотренных в 511301 —
511303 методов в примене-
нии к первому случаю со-
стоит в том, что построе-
ние искомого профиля осу-
ществляется по одной точке
е заданного профиля.
Построение искомого про-
филя зуба колеса во втором
случае ведется по заданному
профилю ек зуба инстру-
мента. Единственная осо-
бенность в этом построении,
которую в целях ясности
следует отметить, состоит
в том, что нормаль в любой
точке дуги ек должна обя-
зательно проходить через ее
511306
центр Оек (фиг. 511304-П). фиг. 511304-П
Решение задачи прово- Графическое построение переходной части про-
дится согласно 511301— филя зуба
511303 и показано на фиг. 511304-1 и 511304-П, где дано построение
конечных точек а, с не', к’ и одной произвольной средней точки Ь, ?
переходной части профиля.
Изложенное в 511301 и 511305 построение профилей зубьев колес
применимо и в случае, когда одно из колес заменяется зубчатой рейкой
(зубчатым колесом, имеющим бесконечно большое число зубьев). Отличие
заключается только в том, что начальная окружность колеса заменяется
начальной прямой рейки.
Построение профиля зуба колеса по заданному прямолинейному
профилю зуба рейки производится следующим образом.
На чертеже наносят в возможно большом масштабе начальную
окружность колеса и начальную прямую рейки, а затем строят задан-
ный профиль зуба рейки в положении, когда его рабочая сторона
проходит через полюс Р (фиг. 511306-1 и фиг. 511306-11).
Построение определяемого профиля начинают с точки к (точка
касания окружности скругления и прямой на фиг. 511306-1; острая
кромка на фиг. 511306-П).
К заданному профилю проводят нормаль в точке кг до пересечения
ее с начальной прямой рейки в точке аг.
Откладывают на начальной окружности колеса дугу Раг, равную
длине отрезка Раг прямой.
688
44 Авиац. порши. двигатели
Графическое построение профиля зуба
Фиг. 511306-11.
Графическое построение профиля зуба
511306
511307—511402
В точке а, восстанавливают перпендикуляр к начальной прямой
до пересечения его в точке bj. с перпендикуляром kjblt опущенным
на него из точки кг.
Через точку at проводят луч к центру О колеса, на котором
от точки at откладывают отрезок atbt = a1b1.
Из точки at радиусом, равным отрезку проводят дугу до пере-
сечения ее в точке дугой, проведенной из центра ft, радиусом, равным
отрезку bjc^
Точка Ц является искомой точкой определяемого профиля зуба
колеса.
Затем выбирается вторая точка на заданном профиле зуба рейки
и аналогичным приемом находится вторая искомая точка lt опреде-
ляемого профиля зуба колеса, и так далее.
Построение переходной части профиля (по заданной закругленной
части профиля) производится аналогичным способом согласно 511305
и показано на фиг. 511306-1.
511307 Кривые, образующие рабочую и нерабочую части профиля зуба,
могут либо плавно переходить одна в другую (иметь общую касатель-
ную в точке перехода), как это имеет место, например, в рассмотрен-
ном первом случае (фиг. 511304-1), либо пересекать одна другую,
как это имеет место, например, в рассмотренном втором случае
(фиг. 511304-П). Это зависит от соотношения между параметрами зубо-
резного инструмента, с одной стороны, и числом зубьев нарезаемого
зубчатого колеса, с другой.
511400 Линия зацепления и ее свойства
511401 При построении методом Рело профиля зуба одного колеса по задан-
ному профилю зуба второго колеса строится попутно линия зацепления,
которая представляет собой геометрическое место точек касания про-
филей зубьев в процессе работы колес.
Линия зацепления определяется выбранным профилем зуба одного из
зубчатых колес, диаметрами начальных окружностей колес и полюсом
зацепления. Часть линии зацепления (фиг. 511401-1 и 511401-П), которая
расположена между точками пересечения q и п ее с окружностями
выступов, называется активной частью линии зацепления.
511402 Линия зацепления дает возможность легко определить направление
усилия между зубьями зубчатых колес в любой момент зацепления,
так как направление усилия (если пренебречь трением между зубьями)
совпадает с направлением прямой, проходящей через полюс Р и ту точку
линии зацепления, в которой происходит касание профилей зубьев
в рассматриваемый момент зацепления (направление усилия совпадает
с направлением общей нормали к профилям в точке их касания).
Угол, образуемый направлением усилия между парой зубьев
в любой точке зацепления их и касательной в этой точке к окруж-
ности, проведенной через нее из центра вращения зубчатого колеса,
называется углом давления.
Так как окружности, проведенные из центров вращения колес
через любую точку зацепления пары зубьев этих колес (за исключе-
нием полюса зацепления) пересекаются в этой точке, то и касатель-
ные к этим окружностям в указанной точке также пересекаются.
690
511403
Окружности, проведенные через полюс зацепления из центров враще-
ния колес, будут иметь в полюсе зацепления общую касательную.
Поэтому:
1) в любой точке зацепления (например, в точке к фиг. 511401-1)
пары зубьев (за исключением полюса зацепления) углы давления <4
и а2 на каждый из этих зубьев различны;
Фиг. 511401-1.
Определение линии зацепления
и ее свойств
Фиг. 511401-11.
Определение линии зацепления и
ее свойств
2) в полюсе зацепления (фиг. 511401-11) угол давления а на каж-
дый из зубьев будет один и тот же; угол давления в этом случае
называется углом зацепления. *
Линия зацепления дает возможность выяснить вопрос о взаимном 511403
скольжении профилей зубьев в любом участке их зацепления. Для
44*
691
511500—511501
этого на линии зацепления отмечают начало и конец (точки и mt
на фиг. 511401-1) рассматриваемого участка и, пользуясь точками
т1 и mt, находят те точки к1г пг и kt, пв на профилях зубьев, кото-
рыми зубья касаются друг друга в начале и в конце рассматривае-
мого участка зацепления.
Абсолютная величина разности длин этих участков профилей, т. е.
^k1n1 — ^ktni и представит собой величину скольжения профилей
друг по другу на рассматриваемом участке mjitt линии зацепления.
Отношения
_ —Mi - —] -'М,
и
_ _ I -Ml
представляют собой величины скольжения, приходящиеся на единицу
длины соответствующего участка профиля, т. е. величины удельных
скольжений соответственно для профилей зубьев первого и второго
зубчатых колес.
511500 Коэффициент перекрытия (продолжительность зацепления)
511501 Дугой зацепления называется дуга, на величину которой пере-
катятся одна по другой начальные окружности зубчатых колес за время
нахождения в зацеплении одной пары их зубьев.
На фиг. 511501-1 показаны три последовательные положения про-
филей пары зубьев двух колес в процессе их зацепления: начальный
момент зацепления, зацепление в полюсе Р и конечный момент зацеп-
ления.
Продолжительность зацепления от начального момента до зацеп-
ления в полюсе Р определяется длиной дуги -~'AtP начальной окруж-
ности ведомого колеса (фиг. 511501-11), на которую за это время
точка А, отойдет от полюса Р. Обозначая через угол, который
соответствует этой дуге и на который повернется ведомое колесо
в процессе этой части зацепления, найдем
^А,Р = г1?1. (1)
Продолжительность зацепления от полюса Р до конца зацепления
определяется дугой ^А,Р начальной окружности ведущего колеса
(фиг. 511501-П), которую за это время проходит точка А, ведущего
колеса. Обозначая через угол, который соответствует этой дуге
и на который повернется ведущее колесо в процессе этой части зацеп-
ления, найдем
^PA^w (2)
Продолжительность зацепления каждой пары зубьев двух колес
определяется дугой •
^А,Р + —РА, = —А.РА^г^. + г^,. (3)
692
511502
Правильная передача вращательного движения при помощи двух 511502
зубчатых колес обеспечивается только тогда, когда зацепление каждой
последующей пары зубьев их начнется раньше, чем закончится зацеп-
ление предыдущей пары зубьев.
Фиг. 511501-111.
Определение коэффици-
ента перекрытия; конеч-
ный момент зацепления
Фиг. 511501-1.
Определение коэффи-
циента перекрытия;
начальный момент
зацепления
Фиг. 511501-11.
Определение коэффици-
ента перекрытия; за-
цепление в полюсе Р
Так как при вращении зубчатых колес начальные окружности их
катятся друг по другу без скольжения, а расстояние между соседними
зубьями каждого зубчатого колеса, измеренное по этим окружностям,
равно шагу зацепления, то практическое осуществление правильной
693
511503
передачи вращательного движения возможно только при условии,
если
Г1Ф1 + Г.Ф1>/
или
М1!
t
> I-
Величина
М1 + Г1?»
называется коэффициентом перекрытия и выражается в долях
шага зацепления.
511503 Если коэффициент перекрытия г выражается целым положитель-
ным числом к, то дуга зацепления
+ (1)
В этом случае в любой момент в зацеп-
лении находятся к пар зубьев, за исключе-
нием моментов начала и конца зацепления
каждой пары их, когда в зацеплении нахо-
дятся (Л-f-l) пар зубьев.
Если s выражается целым числом к с не-
которой дробью S, то дуга зацепления равна
ГхТх + г,?, = «*. = (*+8)/ = W +8*. (2)
Величина е позволяет определить те
участки дуги зацепления, на которых про-
исходит одновременное зацепление (£+1) пар
зубьев и к пар зубьев.
Определение этих участков требуется при
расчете зубьев на прочность.
В процессе зацепления пары зубьев двух
колес точка зацепления их, являющаяся точ-
кой приложения усилия, с которым зуб од-
ного колеса действует на зуб второго, меняет
свое положение.
Фиг. 511504.
Определение участков профилей зубьев и участ-
ков дуги зацепления, которым соответствует
зацепление одновременно двух пар зубьев:
Участкам и а2а'л профилей зубьев и участ-
кам ~ A-fit и ~А2С, дуги зацепления соответ-
ствует зацепление одновременно двух пар зубьев
4
694
511504—512102
Рассчитывая зуб на изгиб, обычно считают это усилие приложен-
ным к его вершине и делают допущение, что когда рассчитываемый
зуб, зацепляясь с зубом второго колеса, коснется его своей вершиной,
вся нагрузка передается одной парой зубьев; это в действительности
не имеет места, если s> 1 (и если при этом неточность шага по нормали
каждого колеса составляет величину меньшую, чем прогиб зубьев от
действующей на них силы), и такой расчет в применении его, например,
к случаю, когда 1 < s < 2, не учитывает того, что в момент зацепле-
ния рассчитываемого зуба его вершиной часть полной нагрузки берет
на себя и вторая пара зубьев. Поэтому рассчитанный таким методом
зуб будет иметь излишне большой запас прочности, а зубчатые колеса
будут утяжелены.
Расчет зуба колеса на прочность с учетом продолжительности
зацепления и имеет целью более правильный учет при расчете величины
действующей на зуб силы и точки ее приложения.
На фиг. 511504 показано определение участков дХ и д2д' профи-
лей зубьев, а также и участков и Д2С, дуги зацепления, которым
соответствует нахождение в зацеплении одновременно двух пар зубьев
зубчатых колес для случая 2 > е > 1.
ОСНОВНЫЕ СВОЙСТВА
И ЗАВИСИМОСТИ ЭВОЛЬВЕНТНОГО ЗАЦЕПЛЕНИЯ
Основные параметры и зависимости, характеризующие
эвольвентное зацепление
Для образования профилей зубьев зубчатых колес в настоящее
время пользуются почти исключительно эвольвентной кривой, которая
по сравнению с циклоидальными кривыми обладает двумя важными
преимуществами, а именно:
1) нечувствительностью зацепления эвольвентных профилей к изме-
Фиг. 512102.
Определение эвольвенты
нению расстояния между
осями вращения их,
2) возможностью со-
пряжения в пару любых
двух эвольвентных профи-
лей.
Эвольвента круга или
развертка круга (фиг. 512102)
представляет собой траекто-
рию точки прямой, катящей-
ся без скольжения по ок-
ружности. Эта окружность,
являющаяся эволютой (гео-
метрическим местом центров
кривизны) эвольвенты, на-
зывается в теории эволь-
вентного зацепления основ-
ной окружностью, а
катящаяся по ней прямая,
511504
512000
512100
512101
512102
695
512103—512104
являющаяся нормалью к эвольвенте в любой ее точке, называется
производящей прямой.
Точка эвольвенты, лежащая на ее основной окружности, называется
начальной точкой эвольвенты.
512103 Основные свойства эвольвенты круга следующие:
1. Отрезок нормали, лежащей между любой точкой эвольвенты
и точкой касания ее с основной окружностью, является радиусом кри-
визны для этой точки эвольвенты.
2. Нормаль, проведенная к эвольвенте в любой ее точке, является
касательной к ее основной окружности.
3. Радиус кривизны эвольвенты в любой ее точке равен длине
дуги основной окружности между центром кривизны эвольвенты в этой
точке и начальной точкой эвольвенты.
4. Длина дуги основной окружности между центрами кривизны
эвольвенты в любых двух ее точках равна разности радиусов кривизны
ее в этих точках. t
512104 На фиг. 512104-1 и 512104-П показано зацепление двух эвольвент
и основные элементы зацепления их.
1. Отрезок (?!<?, = А прямой между центрами вращения О^и Ог
называется межцентровым расстоянием.
Фиг. 512104-П.
Определение основных элементов эволь-
вентного зацепления
Фиг. 512104-1.
Определение основных элементов эволь-
вентного зацепления
696
512105
2. Общая внутренняя касательная BlBi к основным окружностям
представляет собой при эвольвентном зацеплении линию зацепления
пары зубьев. Отрезок BiB, называется теоретической длиной линии
зацепления.
3. Точка Р пересечения линии центров с линией зацепления
является полюсом зацепления или просто полюсом.
4. Окружности, радиусы которых (OtP) и г, (OtP) (фиг. 512104-1),
а центры Ог и (?,, имеющие точку касания в полюсе зацепления,
являются начальными окружностями.
5. Углы а2 и а, (фиг. 512104-11), образуемые нормалью к эволь-
вентам в точке их касания к и касательными в этой точке к окруж-
ностям, проведенными через нее из центров и Ot, являются углами
давления в точке А\ первой эвольвенты и в точке kt второй эвольвенты.
6. Угол а (фиг. 512104-1) между общей касательной обеих началь-
ных окружностей в полюсе зацепления и линией 'зацепления (угол
давления в полюсе зацепления) называется углом зацепления.;
Согласно фиг. 512102 512105
r„ = R cos aR. (1)
Частным случаем равенства (1) является зависимость между
радиусом г„ основной окружности, радиусом т начальной окружности
и| углом зацепления а (фиг. 512104-1)
ro = rcosa. (2)
Согласно фиг. 512102 имеем
^еАВ = ^eA-ir^AB = Вк
или
r<>(V + »R) — rotg»R,
откуда
[ф = tg ад— ад = 6ад.
Угол ф = 6в между прямой ОК и прямой Ое является тригоно-
метрической функцией угла давления а в точке к эвольвенты. Угол 6«
называется инволютой и обычно обозначается inva
6a== tga — a = inva. (3)
Таблица значений 6a приведена в 'труде «Авиационные поршне-
вые двигатели. Нормали и стандарты двигателей и агрегатов», 1949.
Согласно фиг. 512102
6e = inva=/(^)*-l-arctg /(£)*-1. (4)
Выражение (4) является уравнением эвольвенты в полярных
координатах (R, 0с).
Из зависимости (3) вытекает следствие: угол а между двумя
произвольными радиусами-векторами Ri и R2 (причем Rt < Rt) эволь-
венты равен разности инволют соответствующих им углов давле-
ния ах и as
3 == 6а2 6а2 (5)
697
512200—512202
512200
512201
512202
Зависимость между двумя любыми дуговыми толщинами зуба
Если известны основные параметры зубчатого колеса, то толщина S
зуба его по дуге делительной окружности тоже известна. Толщину
зуба по дуге окружности радиуса R (фиг. 512201) определяют при
помощи зависимости (5) п. 512105,
принимая во внимание, что форма
зуба симметрична относительно сред-
ней осевой его линии
2^--2-^5 = е««-е-
Зависимостью 512201 прихо-
дится пользоваться, например, при
решении следующей задачи: у двух
зубчатых колес с числами зубьев
Zi и zs известны толщины зубьев
и Ss по дугам делительных ок-
ружностей радиусов Гд1 и г^2
(фиг. 512202) и угол давления ав
Фиг. 512201. Фиг. 512202.
Определение зависимости между дуговыми Определение основных элементов пере
толщинами зуба дачи
соответствующий этим радиусам; требуется определить при беззазорном
зацеплении: 1) угол зацепления а; 2) радиусы начальных окружностей
G и rs; 3) межосевое расстояние А.
Меньшее зубчатое колесо 7 с числом зубьев zt в дальнейшем на-
зывается шестерней, а большее зубчатое колесо 2 с числом зубьев
zs—колесом.
698
512202
Зацепление рассматриваемых зубьев сопровождается касанием на-
чальных окружностей с неизвестными радиусами Г1 и гг. Сумма неиз-
вестных толщин зубьев Srl и Sra по дугам этих начальных окружно-
стей составляет также неизвестный шаг зацепления /0.
Таким образом можно написать
Sri + Srs =(1)
Пользуясь зависимостью 512201, выражают Srl через Sn a Sri
через Ss
•Srl = 2G(2-^ +6«0-Л), (2)
Sr2 = 2r2 (2^ + е’»-е«)- (3)
Так как радиусу гД1 шестерни и радиусу колеса соответствует
один и тот же угол давления ав, а радиусам rt и г2 их соответствует
один и тот же угол давления а, то согласно формуле (1) п. 512105
cosa0 = ^=^, (4)
ЛД1 Гж2
cos a , (5)
ri ra
где roi и r#2 — радиусы основных окружностей шестерни и колеса.
Из уравнений (4) и (5) следует
- г°2 = Га = (6)
Гд1 roi 'I Z1 ’ '
Подставляя в уравнение (1) Srl и Srs из равенств (2) и (3), при-
нимая во внимание (6) и имея в виду, что
получим следующее уравнение для определения угла а:
д _________________________ д , г1 (§1 + Sj) — 2пгх1 ,
..~2r^zt+z^ •
Имея угол зацепления а и радиусы основных окружностей, по
формуле (2) п. 512105 определяют радиусы начальных окружностей
шестерни и колеса
Г1 ~ Гд1 COS a ’
COS а0
Сумма этих радиусов
Гх + Г3 = (гй1 + М с^° = а = А, (10)
представляет собой межосевое расстояние при беззазорном зацеплении
зубьев, причем
Гд1+ Гд2 = Ао.
699
512203—512301
512203
512300
512301
Зависимостью 512201 приходится пользоваться при проверке
толщины зуба по дуге окружности выступов (головок), на которой эта
толщина может получиться равной нулю и даже отрицательной.
Рекомендуется не делать толщину зуба по окружности головок
меньше одной десятой модуля [12].
Коэффициент перекрытия (продолжительность зацепления)
Согласно 511502 коэффициент перекрытия эвольвентных профилей
зубьев шестерни и колеса равен
е = 2111±£*?»
z.
(О
В эвольвентных передачах согласно формуле (2) п. 512105
Фиг. 512301.
Определение коэффициента перекры-
тия эвольвентных передач
Г = г 01
1 COS а
* COS а
(2)
После подстановки значений
Г1 и г, из (2) в формулу (1) получаем
_ ГО1?1 + ГО1? 2
6 ~ /, cos> •
В этом выражении слагаемое roi <р3
представляет собой длину дуги ос-
новной окружности шестерни, кото-
рой соответствует угол поворота ее
<?! в процессе зацепления от момента
зацепления в точке q до момента
зацепления в полюсе Р; слагаемое
Гог?, представляет собой длину дуги
основной окружности колеса, которой
соответствует угол поворота ?s колеса
в процессе зацепления от момента
зацепления в полюсе Р до момента
зацепления в точке п.
Из фиг. 512301 следует
г01 = В.Р - B2q = qP, (4)
rO2 ?t = BtP — Btn =='Pn. (5)
При наличии равенств (4) и (5)
выражение (3) принимает вид
е==пР±Р? = п?
/, COS a t, cos а ’ ' '
где nq — длина активной части линии
зацепления.
700
512302
Имея в виду, что
. ___________________________ 2теГ!_2яг,
и заменяя гг и г, соответственно значениями и ^-а, найдем
/Pcosa = ^ = ^ = /O. (7)
Zj Zj
Величина t0 является шагом по основной окружности обоих колес
и называется основным шагом.
После подстановки (7) в выражение (6) получим
пР + Pg nq * /о • (8)
Из рассмотрения фиг. 512301 следует
пР = Bsn—- В,Р
или
1г = пР = у RU - га02 -У Л — Гй • (9)
и
Pq = Btq - BJ>
или
h = pq = У пъ — rh — yri — zti (Ю)
и
У — Гог + У Ret — r*01 — A sin а. (Н)
Формула (9) справедлива при условии, если для колеса
Rei< у Г02 + A* sin* а, (12)
и при условии, что активная часть профиля зуба шестерни не под-
резана.
Необходимо иметь в виду, что применение в авиационных двига-
телях зубчатых колес с подрезанной активной частью профиля зуба
не рекомендуется, в том числе и для так называемых «мало ответствен-
ных» передач.
Зная активную часть линии зацепления эвольвентных профилей, 512302
легко найти участки профилей двух сопряженных зубьев шестерни
и колеса, которым соответствует одновременное нахождение в зацепле-
нии к или (к 4-1) пар зубьев (с этим вопросом приходится сталкивать-
ся при расчете зубьев шестерни и колеса на прочность).
Если, например, коэффициент перекрытия 2>е>1, то участки
профилей двух сопряженных зубьев, которым соответствует нахожде-
ние в зацеплении одной и двух пар зубьев шестерни и колеса, опре-
деляются так, как указано на фиг. 512302.
701
512400
512400 Удельное скольжение
Удельные скольжения зубьев лю-
бых профилей друг по другу опреде-
ляются согласно формулам 511403
„ 1 '—
Применяя эти формулы к зубьям
с эвольвентными профилями, рассма-
тривают бесконечно малый участок
Фиг. 512302.
Определение участков эвольвентных
профилей зубьев и участков линии
зацепления, которым соответствует
зацепление одновременно двух пар
и одной пары зубьев
nq = eta; ng' = qn' = ta;
nn' = qq' = t0(e-l).
Участкам b2b'2 (причем аа{ ф Ь2Ь'3)
и ata2, bj.b'i (причем Ь±Ь[) про-
филей зубьев и участкам пп' и qq'
линии зацепления соответствует за-
цепление одновременно двух пар
зубьев.
Участкам а[Ь{ и a^bi (причем
а[Ь'1=^а'2Ь'1) профилей зубьев и участ-
ку n'q' линии зацепления соответ-
ствует зацепление одной пары зубьев
линии зацепления, которому соответствуют бесконечно малые дуги
kitii и ktn2 эвольвентных профилей зубьев. Центральные углы
этих бесконечно малых дуг обозначим соответственно через и <р2,
а радиусы кривизны их — через pi и р2; тогда
к^ = рх <рх, 1
' ' кгп2 ~ р2<р2. j
Ввиду того, что угол между радиусами кривизны эвольвенты
в любых двух точках ее равен центральному углу, который соот-
ветствует дуге основной окружности между центрами кривизны
эвольвенты в этих точках и равен углу поворота зубчатого колеса,
можно написать
?1 _z2
Zi
(3)
702
512500—513101
Выражение (1) при наличии равенств (2) и (3) принимает для
эвольвентных профилей зубьев следующий вид:
у = 1 ___ , 1
V ~ 1 —• . I
*а Ь zi )
(4)
Влияние межосевого расстояния на зацепление 512500
Эвольвентное зацепление обладает очень важным свойством, заклю-
чающимся в том, что от изменения расстояния между осями вращения
зубчатых колес передачи правильность зацепления профилей зубьев
их не нарушается (с точки зрения сохранения постоянства передаточ-
ного числа).
Согласно формуле (2) п. 512105
г = Го1
1 COS а ’
И
A COS а = (Г! 4-rj COS а = Го1 + Го2. (1)
Если межосевое расстояние А будет больше на величину ДА, то,
согласно равенству (1)
(А + ДА) cos а — Го1 + г02 = A cos ав, (2)
откуда
COSa = ААа cosa°- <3)
Для этого случая справедливым является соотношение (6) п. 512301.
Следовательно, изменение межосевого расстояния зубчатой пере-
дачи влечет за собой изменение радиусов начальных окружностей дбоих
зубчатых колес и угла зацепления, а следовательно, и продолжитель-
ности зацепления их, причем правильность зацепления профилей
зубьев не нарушается (передаточное число остается постоянным).
Этим ценным свойством эвольвеитного зацепления пользуются
при корригировании эвольвентных профилей зубьев зубчатых колес.
КОРРИГИРОВАНИЕ ПРОФИЛЕЙ ЗУБЬЕВ ЦИЛИНДРИЧЕСКИХ 513000
ПРЯМОЗУБЫХ ПЕРЕДАЧ ВНЕШНЕГО ЗАЦЕПЛЕНИЯ
Исходный контур, характеризующий зацепление 513100
Эвольвентные зубчатые колеса одного модуля и одного угла зацеп- 513101
ления полностью характеризуются контуром исходной рейки, которая
представляет собой предельное зубчатое колесо, имеющее бесконечно
большое число зубьев.
703
513101
Профиль зубьев такой рейки (фиг. 513101-1) состоит из прямых
линий, составляющих с осью зуба рейки угол, равный углу зацеп-
ления <х0.
При нарезании зубьев зубчатого колеса реечным инструментом
(червячным фрезером, гребенкой) зубчатая рейка, нарезая зубья,
обкатывает шестерню. В последний момент обработки зубчатого колеса
начальная прямая рейки катится по делительной окружности зубчатого
колеса; поэтому зубчатое колесо по делительной окружности его имеет
шаг t и модуль зацепления т, равные соответственно шагу tp и модулю
тр рейки, т. ’е.
t — tp и т = тр. (1)
Диаметр делительной окружности зубчатого колеса равен
dR = mpz = mz, (2)
Где z — число зубьев зубчатого колеса.
Фиг, 513101-1,
Определение исходного контура и исходной рейки
Следует подчеркнуть различие между ,делительной окружностью
и начальной окружностью зубчатого колеса. Обе эти окружности
совпадают только в (О)-передаче и в (У-О)-передаче (см. 513200).
В передачах других типов (V-передачи) эти окружности не совпа-
дают, а поэтому шаг tv и модуль т„ зацепления, соответствующие
начальной окружности, не будут одинаковы в этих передачах соот-
ветственно с шагом tp и модулем тр рейки; обычно в этом случае
между параметрами, относящимися к начальной окружности, и пара-
метрами, относящимися к делительной окружности, устанавливается
вполне определенная связь, выражаемая следующими равенствами:
dm________m __ t___cosb
~ гп, ~ t, ~cosao ’ ' '
где d^,d^.,m,t,a.a относятся к делительной окружности, a dt, т„,
t„, а —к начальной окружности;
здесь dft — диаметры делительных окружностей зубчатых колес
7 и 2 (шестерни и колеса);
а, и a — углы зацепления рейки и передачи.
704
513101
Исходные рейки, в соответствии с которыми в СССР изготовлялся
до настоящего времени зуборезный инструмент для обработки зубьев
зубчатых колес авиационных двигателей, показаны на фиг. 511206-1
и 511206-11.
Рейка с'зубом нормальной высоты (ГОСТ 3058-45)
Фиг. 513101-П.
В настоящее время обе указанные рейки ГОСТ отменены для цилин-
дрических колес и заменены рейками, показанными на фиг. 513101-П и
513101-III, которыми и надлежит пользоваться при проектировании зуб-
чатых колес; для конических зубчатых колес рейки фиг. 511206-1 и
511206-П оставлены к применению.
Фиг. 513101-III.
Рейка с зубом укороченной высоты (ГОСТ 3058-45)
На фиг. 513101-1 и 513101-IV показаны соответственные параметры
зубчатых венцов зубчатого колеса с произвольным числом зубьев и зубча-
той рейки, а на фиг. 5I3101-V представлено беззазорное зацепление
их зубьев.
45 Авиац. порош, двигатели
705
513102
При стандартном некорригированном профиле зубьев толщина зубьев
рейки и ширина впадин между ними по делительной (средней) прямой
рейки равны между собой и равны также толщине зубьев зубчатого колеса
Фиг. 513101-IV.
Фиг. 513101-V.
К определению исходного контура зуба К определению исходного контура гзуба
и исходной рейки и исходной рейки
Фиг. 513102.
определению фланкирован ия
профиля зуба
513102
и ширине впадин между ними по дуге его делительной окружности;
поэтому делительная прямая рейки и делительная окружность зубчатого
колеса касаются друг друга в полюсе зацепления при беззазорном заце-
плении их зубьев; в процессе зацепления
при вращении зубчатого колеса и при
поступательном перемещении рейки дели-
тельная окружность колеса и делительная
прямая рейки катятся без скольжения
ДРУГ по другу.
Фланкированием головки зуба зубча-
того колеса называется изменение части
теоретического профиля ее, что дости-
гается путем плавного среза его по
эвольвенте (фиг. 513102). Наибольшая
величина среза, имеющая место на ок-
ружности выступов, должна быть равна
суммарной упругой деформации нагру-
женных зубьев, находящихся в одновре- ц
менном зацеплении с рассматриваемым
зубом.
Фланкирование применяется в целях предотвращения преждевре-
менного неправильного (с ударом) входа зубьев в зацепление вследствие
упругих деформаций нагруженных зубьев, находящихся в зацеплении,
706.
513200—513301
а также в целях достижения плавного увеличения нагрузки на зуб после
входа его в зацепление и перед выходом из зацепления.
Достигнуть указанных целей с помощью фланкирования можно
только тогда, когда осуществленному фланкированию будет соответство-
вать суммарная упругая деформация нагруженных зубьев.
Если величина среза будет больше суммарной упругой деформации
нагруженных зубьев, то некоторый участок фланкированной части про-
филя головки зуба не будет принимать участия в зацеплении, что повлечет
за собой уменьшение коэффициента перекрытия передачи.
Если величина среза будет меньше суммарной упругой деформации
нагруженных зубьев, то цель фланкирования будет достигнута только
частично.
фланкирование зубьев зубчатых колес требует соответствующего
фланкирования исходного контура зуба рейки или долбяка.
Основные понятия и определение коррекции 513200
Корригированием зубьев колес зубчатого зацепления называется 513201
изменение стандартных размеров зубьев, имеющее целью улучшение
условий работы зубчатых колес.
Здесь рассматривается основной способ корригирования эвольвент-
ного профиля зуба колеса—корригирование смещением.
Корригирование смещением достигается путем большего или мень-
шего углубления зуборезного инструмента по сравнению с тем углубле-
нием его, какое имеет место при нарезании зубьев обыкновенного зубча-
того колеса, не имеющего смещения профиля.
Корригирование смещением позволяет получить:
1) заданное отношение между толщиной зуба и шириной впадины,
2) заданное отношение между высотой головки зуба и высотой его
ножки.
При корригировании смещением остаются неизменными;
1) основные и делительные окружности колес;
2) начальные (делительные) окружности колес, если корригиро-
вание не затрагивает расстояния между осями вращения колес
(У-0)-зацепления;
3) угол зацепления при (У-О)-зацеплении.
Зубчатые колеса, профиль зубьев которых смещен в направлении 513202
от центра зубчатого колеса, называются (V- +)-колесами или фау-
плюс-колесами (фиг. 513202-1); зубчатые колеса, профиль зубьев
которых смещен в направлении к центру зубчатого колеса, называются
(V—)-колесами или фау-минус-колесами (фиг. 513202-П).
Обычные нормальные зубчатые колеса, профиль зубьев которых
не смещен, называются 0-колесами или нулевыми колесами.
Коэффициент коррекции 513300
Положительная и отрицательная коррекция
Корригирование путем смещения эвольвентного профиля зуба 513301
колеса характеризуется величиной радиального смещения хт исходной
зубчатой рейки от положения, при котором имеет место беззазорное
45*
707
513302
зацепление ее зубьев с некорригированными зубьями зубчатого колеса,
до положения беззазорного же зацепления ее зубьев с корригирован-
ными зубьями зубчатого колеса (фиг. 513301). х называется коэф-
фициентом смещения п рофил я зуба.
Фиг. 513202-1.
К определению (V-+ )-колеса
Фиг. 513202-П.
К определению
(V- — )-колеса
513302
При беззазорном зацеплении исходной рейки с корригированным
зубчатым колесом (фиг. 513301) делительная окружность последнего
будет касаться не делительной прямой рейки, как это имеет место
при зацеплении ее с некорригированным зубчатым колесом (фиг. 513101-V),
а другой, параллельной ей прямой, называемой начальной прямой
и находящейся от первой на расстоянии хт.
Вследствие того, что в процессе зацепления начальная линия
исходной рейки и делительная окружность зубчатого колеса катятся
друг по другу без скольжения, толщина зубьев корригированного
708
513303
зубчатого колеса S по дуге делительной окружности его равна ширине
впадины Тв между зубьями рейки по ее начальной линии, т. е.
S = TB. (1)
Ширина впадины между
делительной окружности его
начальной линии,
т. е.
зубьями зубчатого колеса SB по дуге
равна толщине зуба рейки Т3 по ее
SB = Т3.
(2)
по любой
исходного
Так как шаг
начальной прямой
профиля рейки равен шагу t
по делительной прямой ее,
то сумма из толщины зуба
и ширины впадины по дели-
тельной окружности зубча-
того колеса равна сумме из
толщины зуба и ширины
Фиг. 513301.
К определению положительной кор-
рекции колеса с внешним зубчатым
венцом
О
впадины по делительной прямой исходной рейки, т. е. шагу ее
= (3)
Величина ДТ (фиг. 513301), т. е. смещение исходной рейки в направ- 513303
лении, перпендикулярном к радиальному смещению ее,
ДТ = 2mx tg а0
характеризует собой изменение соотношения между шириной впадины /
и толщиной зуба по начальной прямой исходной рейки сравнительно
с соотношением между ними по делительной прямой ее.
По делительной прямой исходной рейки толщина зуба Та и ширина
впадины Тв равны между собой и равны половине шага, т. е.
Т3 = Тв = 1. (1)
По начальной прямой исходной рейки, лежащей ближе, чем дели-
тельная прямая ел (фиг. 513301), к центру зубчатого колеса, толщина
зуба рейки равна
Та=1 —Д/ = щ 0--2xtg<xo), (2)
709
513304—513305
а ширина впадины рейки
т* = | + дт = т Q-+2xtgcQ . (3)
В этом случае, согласно равенству S = Тв, толщина корригиро-
ванных зубьев зубчатого колеса по делительной окружности его больше
толщины некорригированных зубьев и равна
« = Тв = |+ДТ = щ (| + 2xtga0) . (4)
Коррекция, в результате которой толщина корригированных зубьев
зубчатого колеса становится больше толщины некорригированных
зубьев его, благодаря положительному значению х, называется поло-
жительной коррекцией.
513304 Из рассмотрения фиг. 513301 видно, что при положительной кор-
рекции получаются (V- + )-колеса.
Теоретический радиус окружности выступов (головок) (V- +)-
колеса
Re = r + m(f + x) = r + h', (1)
где
Л' = щ(/ + х). (2)
Радиус окружности впадин его
R{ = r — mtf+c — х) = г~ Л', (3)
где
ff =m(f+c — х). (4)
При нарезке корригированных зубьев колес путем большего
513305 углубления инструмента по сравнению с углублением его при нарезке
некорригированных зубьев получаются следующие соотношения для
корригированного зубчатого колеса.
По начальной прямой рейки, лежащей дальше, чем средняя линия
ее (фиг. 513305), от центра зубчатого колеса, толщина зуба рейки равна
Ta={ + AT = m(| + 2xtga0) , (1)
а ширина впадины рейки
TB=|-AT = m(^-2xtga0). (2)
В этом случае, согласно равенству $=ТВ, толщина корригирован-
ных зубьев зубчатого колеса по делительной окружности его меньше
толщины некорригированных зубьев и равна
5 = Тв = 1-ДТ = щ ^-2xtga0)j (3)
Коррекция, в результате которой толщина корригированных зубьев
зубчатого колеса становится меньше толщины некорригированных зубьев
710
513306—513401
его, благодаря отрицательному значению х, называется отрицатель-
ной коррекцией.
фиг. 513305.
К'определению-отрицательной коррекции ко-
леса с_внешним зубчатым венцом
Из рассмотрения фиг. 513305
видно, что при отрицательной
коррекции получаются (V—)-
колеса.
Теоретический радиус ок-
ружности выступов (головок)
(V—)-колеса
/?. = г+т(/—х) = г+Л', (1)
где
Л' = щ(/-х). (2)
Радиус окружности впадин
его
Ri *= г—т (f + с + х) = г — Л',
(3)
где
+ c + (4)
Вследствие того, что лю-
бые два эвольвентных про-
филя могут находиться в пра-
вильном зацеплении между
собой, возможны различные
комбинации пар из (V- + ),
(V—)-колес и (О)-колес; на-
пример:
1) (О)-передачи (нулевые
передачи) из (О)-колес;
2) (Р-О)-передачи (фау-ну-
левые передачи) при зацепле-
нии (V- 4- )-колеса с (V—^ко-
513305
513307
3) (У)-передачи (фау-передачи), т.
зубчатых колес, кроме вышеуказанных
лесом, имеющих одинаковые
по абсолютной величине, но
противоположные по знаку зна-
чения коэффициента коррек-
ции х;
е. все возможные комбинации
двух.
Зубчатые передачи с корригированными зубьями 513400
при беззазорном зацеплении
Беззазорным зацеплением зубьев колес называется такое, при кото- 513401
ром рабочие и нерабочие стороны сцепляющихся зубьев одновременно
находятся в зацеплении.
711
513402—513404
Понятие «беззазорное зацепление» является понятием теоретическим.
В действительности между нерабочими сторонами зубьев, находя-
щихся в зацеплении, всегда имеется некоторый минимальный зазор,
определяемый требованиями технологии изготовления колес и условиями
работы зубчатой передачи. Этот зазор делают минимально возможным
для смягчения ударов зубьев зубчатых колес, могущих возникнуть во
время работы их от вибрации тех элементов конструкции, с которыми
связаны зубчатые колеса передачи.
513402 В беззазорном зацеплении могут находиться зубья как некорриги-
рованных, так и корригированных зубчатых колес.
Ниже определяются углы зацепления и межосевые расстояния зуб-
чатых колес с корригированными зубьями при условий их беззазорного
зацепления и при теоретических толщинах зубьев.
513403 Применим уравнение (8) п. 512202 к зацеплению корригированных
зубьев шестерни и колеса с числами зубьев соответственно zt и z2,
коэффициенты смещеьия профилей зубьев которых обозначим через х,
и х2.
Пользуясь формулой (5) п. 513303, находим толщины корригиро-
ванных зубьев по дугам делительных окружностей их, которые при
беззазорном зацеплении с исходной рейкой касаются начальной линии
рейки
S1 = zn O + tg“«) ’
Sa = m (^-f-2xstg aQ ,
(Si 4- S,) Zi = m -f- 2 (Xi -fc x2) tg a„] zx = 2it + 4гд1 (x, + x2) tg a„.. .
Обозначив угол зацепления профилей зубьев зубчатых колес при
зацеплении их между собой через а, по формуле (8) п. 512202 будем
иметь
513404 Обозначая через rlt га и А соответственно радиусы начальных окруж-
ностей шестерни и колеса с корригированными профилями зубьев
и межосевое расстояние их, соответствующие углу зацепления а при
беззазорном зацеплении зубьев этих колес, по формуле (9) п. 512202
найдем
т _/мс°8а» )
1 cos“ ’ J (1)
__Гж> COS д0 I ' '
s COS a J
И
А-Г1 + г2 = А,^. (2)
При Х1 = х2 = 0 будут иметь место 0-колеса (нормальные некорриги-
рованные колеса).
При Xi=— х2 будут иметь место соответственно (\7- + )-колесо
и (V-— )-колесо, имеющие одинаковые по величине, но противоположные
712
513405—513405
по знаку сдвиги профилей зубьев, т. е. будет иметь место (V-0)-nepe-
дача.
Применяя к (У-О)-передаче формулу 513403, найдем
« = «. (3)
и, согласно формулам (1) и (2)
А-А,. (5)
Формулы (3)—(5) показывают, что при беззазорном зацеплении
корригированных зубьев зубчатых колес в (У-О)-передачах зубья имеют
те же значения угла зацепления, радиусов начальных окружностей
и межосевого расстояния, что и некорригированные в (О)-передачах.
Радиальное смещение профилей зубьев у корригированных зубчатых
колес в (VJ-передачах влечет за собой изменение величины радиального
зазора между окружностями выступов и впадин по линии центров; по-
этому в каждом частном случае необходимо проверять величину зазора,
так как он может получиться или недостаточным, или равным нулю,
или даже отрицательным.
Проверка зазора производится следующим образом. Если Rel и Res—
теоретические радиусы окружностей выступов (головок) корригирован-
ных шестерни и колеса (У)-передачи, подсчитанные по формулам (1)
п. 513304 и (1) п. 513306; R(1 и Ria—радиусы окружностей впадин
(ножек) их, подсчитанные по формулам (5) п. 513404 и (3) п. 513406,
а А—межосевое расстояние их, подсчитанное по формуле (2) п. 513404,
то радиальный зазор между теоретической окружностью выступов
шестерни и окружностью впадин колеса будет
C1x=A-(Rcl4-R/s), (1)
а радиальный зазор между теоретической окружностью выступов колеса
и окружностью впадин шестерни
C, = A-(Res + Rfl). (2)
Если оба значения С, и Св получаются больше допустимого мини-
мального значения радиального зазора Cmin или равны ему, то их сле-
дует оставить без изменения и принять к выполнению, а теоретические
радиусы окружностей выступов зубчатых колес принять за рабочие.
Если оба значения Сх и Cs или одно из них получатся меньше Cmin,
то, в целях осуществления минимально допустимого радиального
зазора, теоретические радиусы окружностей выступов обоих зубчатых
колес или того из них, окружности выступов которого соответствует
радиальный зазор, меньший Cmin, необходимо уменьшить на величину
ДС^С^-С, (3)
или на величину
AC, = CmJn-Cs. (4)
513405-
513406-
713
513500-513501
513500
513501
Минимальным значением радиального зазора можно считать
СшЩ = 0,157/П.
Принятое в СССР нормальное значение радиального зазора
С = 0,2т.
Устранение интерференции от подреза профилей зубьев
путем корригирования
На фиг. 513501 показано зацепление в полюсе профилей зубьев
шестерни и колеса, причем профиль зуба шестерни подрезан. При ука-
занных стрелками направлениях
Фиг. 513501.
К определению интерференции от под-
реза
вращения правильное зацепление эволь-
вентных профилей зубьев будет
происходить до момента прихода
на линии зацепления В, Bt точки U
(точка заострения профиля, полу-
чающаяся от подреза зуба при на-
резке, называемая точкой подреза)
в точку I.
За точкой i будет происходить
соприкосновение точек участка i, а,
профиля зуба колеса 2 с одной и
той же точкой подреза U профиля
зуба шестерни 7; это явление и
называется интерференцией от под-
реза.
Интерференция от подреза не
будет иметь места, если будет устра-
нен подрез профиля зуба или если
точка подреза U будет находиться
на нерабочей его части.
Чтобы установить возможность
подреза профиля зуба у проекти-
руемого зубчатого колеса (число
зубьев z, угол зацепления с исход-
ной рейкой а0 и коэффициент вы-
соты головки зуба /, равный та-
ковому исходной рейки), надлежит
пользоваться формулой
_ 2/
2т1п~ет?
Если Z больше Zmia, то про-
филь зуба проектируемого зубча-
того колеса не будет подрезан; ес-
ли же z меньше гш,а, то он будет
подрезан.
На диаграммах 513501-1 и
513501-11 показана зависимость
714
Z min
Фиг. 513501-1.
К определению zmjn — минимального числа зубьев шестерни
с неподрезанным профилем зубьев нормальной стандартной
высоты (/=1; ао = 20°)
Фиг. 513501-11.
К определению zmln —минимального числа зубьев шестерни
с неподрезанным профилем зубьев укороченной стандартной
высоты (/ = 0,8; <zo = 20’)
513501
513502—513503
513502
513503
минимального числа зубьев zmin от коэффициента / высоты головки
зуба исходной рейки и от угла зацепления <х0.
Проверка возможности подреза профиля зуба зубчатого колеса при
нарезке его зубьев долбяком типа Феллоу, имеющим число зубьев zB,
угол зацепления, соответствующий делительной окружности, а0 и диаметр
окружности выступов DeB = 2/?еи, производится следующим образом.
Определяется коэффициент коррекции (профильного смещения) зуба
долбя ка хи по формуле
(1)
Находятся угол зацепления аи шестерни с долбяком по
п. 513403
в =в + 2<x + x»)tga
«и ао 2 + ги 6 °
и межосевое расстояние их по формуле
. _ т (ги+г) cos а0
Аи— 2 cos <хи
формуле (1)
(2)
Определяется расстояние Р между точкой касания линии зацепле-
ния с основной окружностью и точкой пересечения личии зацепления
с окружностью выступов по формуле
Р = Аи sinaH—Реи 1"оИ> (3)
где гои—радиус основной окружности долбяка.
Если получится Р > 0, то профиль зуба зубчатого колеса непод-
резан;
если Р = 0, то будет иметь место предельный случай между непод-
резанным и подрезанным профилями зуба;
если Р < 0, то профиль зуба зубчатого колеса подрезан.
Если шестерня и колесо с числами зубьев zl и zs находятся в зацеп-
лении и имеет место подрез профиля зубьев шестерни, то чтобы узнать,
принадлежит ли точка подреза U рабочей части профиля или нет, необ-
ходимо вычислить радиус окружности, проходящей через точку под-
реза U, по формуле
= + у. (1)
Радиус окружности впадин шестерни (колеса) при обработке зубьев
долбяком
/?1.1 = ^1==Аи-Реи. (2)
При нарезке зубьев шестерни реечным инструментом высота под-
реза у определяется следующим образом:
e=ricossae — R(l — sin %) — (3)
v =------. (4)
' 6 Гх COS «0 sin’a, ' '
Величина R в формуле (3) —радиус закругления .вершины зуба
рейки.
716
513504
При нарезке зубьев шестерни долбяком типа Феллоу, имеющим
число зубьев ги, модуль т, угол зацепления а„, радиус основной окруж-
ности Гт, радиус окружности выступов ₽си> высота подреза у опреде-
ляется следующим образом:
Аи — Rii Ren , (5)
г = 1 2, + Zn ’ cosa _ го1+гои (6) (7)
ли
ea = Г1 cos’ (Хи + Гои cos <X„ + sin (Хи)/ Rin— rin — Аи, (8)
p2 v — и 0)
f 6rx COS ая Sin* a„ *
Вычисляемая по формуле (5) величина Аи — расстояние между
осями вращения шестерни и долбяка при снятии последней стружки;
вычисляемый по формуле (7) угол аи является углом зацепления их
в этот момент.
Определив ги, устанавливают, какое из неравенств
Asina > ]/rb —+ гао2 (Ю)
илц
A sin a< ги — Гм -)-Rig — Л2
(И)
удовлетворяется.
Если удовлетворяется неравенство (10), то интерференция от под-
реза не будет иметь места, так как точка подреза U в этом случае
принадлежит нерабочей части профиля зуба.
Если же удовлетворяется неравенство (11), то интерференция от
подреза будет иметь место, так как точка подреза U принадлежит
в этом случае рабочей части профиля зуба.
Для устранения подреза профиля зуба следует или вести обработку 513504
зубьев с помощью специального зуборезного инструмента или применить
коррекцию, ведя обработку зубьев обычным инструментом. Для второго
способа решения задачи (с применением коррекции) необходимо опреде-
лить наименьшее значение коэффициента радиального смещения про-
филя зубьев х, при котором подрезанный профиль зубьев становится
неподрезанным. Значение этого коэффициента определяется (при изгото-
влении реечным инструментом) по формуле
Xs=2^Zi/==/-|/sin’a0,
zmin z
где z — число зубьев рассчитываемого колеса;
/ — коэффициент высоты головки зуба.
Вопрос о том, какую из двух возможных передач—(V-0) или
(V) — осуществить, решается в зависимости от конструктивного реше-
ния каждой конкретной задачи.
717
513600-513603
Необходимо помнить, что не следует допускать в работу зубчатые
колеса с подрезанной активной частью профиля зуба, даже в так назы-
ваемых «мало ответственных» передачах, так как путем коррекции
подрез может быть всегда устранен.
513600 Изменение межосевого расстояния до заданного размера
путем корригирования
513601 В процессе решения конструктивных задач часто приходится незна-
чительно изменять расстояние А между осями сцепляющихся шестерни
и колеса, оставляя без изменения числа их зубьев (передаточное число)
z2 и z2, модуль т и угол а0 зацепления инструмента для нарезки
зубьев.
Положим, что для расстояния А было запроектировано нормальное
нёкорригированное зубчатое беззазорное зацепление, для которого
А0 = отЦ^. (1)
Если бы по каким-либо причинам потребовалось несколько изме-
нить расстояние А„ до некоторой величины А, то осуществить безза-
зорную передачу простым изменением расстояния Ал на А, оставляя
те же нормальные некорригированные зубчатые колеса, невозможно
(хотя правильность эвольвентного зацепления и сохраняется, если в > 1,
но оно сопровождается наличием зазора между нерабочими сторонами
парных зубьев). Для осуществления в этом случае беззазорного зацеп-
ления прибегают к коррекции зацепления.
Угол зацепления корригированной передачи определяется по формуле
(10) п. 512202
COS а = ° А . (2)
Сумма коэффициентов коррекции согласно выражению (8) п. 512202
<3>
Дальнейшее решение задачи, т. е. установление значений х2 и х2, будет
зависеть от конкретных значений параметров и размеров зубчатых колес
в каждом отдельном случае, а иногда и от конструктивых особенностей
и условий работы узла или агрегата, в котором монтируются зубчатые
колеса.
513602 Одно из решений этой задачи, наиболее простое, состоит в том, что
принимают отношение коэффициентов смещения профилей зубьев х2 и х,
равным обратному отношению чисел зубьев шестерни и колеса z2 и za, т. е.
_ z2
513603 Кроме соотношения 513602, между х2 и х2 могут быть и иные соот-
ношения, зависящие от тех требований, которым должны удовлетворять
зубья шестерни и колеса в процессе работы их под нагрузкой. Например,
соотношение между х2 и х2 должно быть таким, чтобы зубья шестерни
и колеса имели одинаковые наибольшие напряжения или чтобы удель-
718
514000-514104
ное скольжение при зацеплении вершины зуба шестерни было равно
таковому при зацеплении вершины зуба колеса, и т. п.
Выравнивание удельных скольжений подробно изложено в [5].
ЦИЛИНДРИЧЕСКИЕ ПРЯМОЗУБЫЕ ПЕРЕДАЧИ
514000
ВНУТРЕННЕГО ЗАЦЕПЛЕНИЯ
Основные свойства и зависимости цилиндрических прямозубых передач 514100
внутреннего зацепления
Все основные свойства и зависимости зубчатых зацеплений, изло- 514101
женные в 511000 и 512000, кроме 511208, 511209, 512200 и 512300, рас-
Фиг. 514103.
Определение основных размеров колеса с
внутренним зубчатым венцом
При некорригированном зацеплении
ношения:
Диаметр делительной окружности
пространяются и на передачи
внутреннего зацепления.
Соотношения (2) и (3)
п. 511207 и (2) и (3) п. 511208
применимы к меньшему зубча-
тому колесу передачи внутрен-
него зацепления, т. е. к ше-
стерне.
Основные отличия передачи 514102
внутреннего зацепления от пе-
редачи внешнего зацепления
заключаются в следующем:
1. Большое колесо пере-
дачи внутреннего зацепления
имеет внутренний зубчатый
венец.
2. Эвольвентным профилем
зуба внутреннего зубчатого
венца является вогнутая сто-
рона той же самой эвольвен-
ты, которая образует профиль
зуба внешнего зубчатого венца,
имеющего то же самое число
зубьев и тот же модуль.
3. Шестерня и колесо вра-
щаются в одном направлении.
Размеры зубьев внутрен- 514103
него зубчатого венца, показан-
ные на фиг. 514103, выража-
ются в функции модуля со-
гласно 511205 и 511206.
Размеры колеса с внутрен- 514104
ним зубчатым венцом являют-
ся функциями модуля и числа
зубьев.
имеют место следующие соот-
= /nza, (1)
719
514105—514202
Диаметр окружности выступов
Det = 2/?es = — 2й' = mz3 — 2m~m(zt — 2). (2)
Диаметр окружности впадин
Dtl = 2Rtl = + 2й" = tnz3 + 2,4т = т (z3 + 2,4). (3)
514105 При зубьях укороченной высоты (коэффициент высоты головки
зуба / = 0,8) имеют место следующие соотношения:
Диаметр делительной окружности
d,- = 2r.s = — 'z3=mz3. (1)
Диаметр окружности выступов
De2 = 2Rt!l = d^ — 2h' = m(za —1,6). (2)
Диаметр окружности впадин
Dia = 2Rti = dAS + 2h" = tn (z3 + 2). (3)
Межосевое расстояние
A = = (4)
514200 Зависимость между двумя любыми дуговыми толщинами зуба
внутреннего зубчатого венца
514201 Если известны основные параметры зубчатого колеса с внутренним
зубчатым венцом, то толщина S3 зуба его по дуге делительной окруж-
ности тоже известна. Толщину зуба по дуге окружности радиуса R
(фиг. 514201) определяют при помощи зависимости (5) п. 512105, при-
нимая во внимание, что форма зуба симметрична относительно средней
осевой линии его и что профилем зуба является вогнутая сторона эволь-
венты
514202 Зависимостью 514201 приходится пользоваться в ряде случаев,
например, при решении такой задачи: у шестерни и колеса с числами
зубьев и z3 передачи внутреннего зацепления (фиг. 514202) известны
толщины зубьев Si и Ss по дугам делительных окружностей радиусов
г х и гл3 и угол давления а0, соответствующий этим радиусам; тре-
буется определить при беззазорном зацеплении: . 1) угол зацеп-
ления а; 2) радиусы начальных окружностей г3 и rs; 3) межосевое рас-
стояние А.
Обозначив через t„, Sri и Srs соответственно шаг зацепления и дуго-
вые толщины зубьев первого и второго колес по начальным окруж-
720
514202
ностям, радиусы которых гх и гг, можно написать
Srx + Srs= tv. (1)
Определение зависимости
между дуговыми толщинами
зуба колеса с внутренним
зубчатым венцом
Определение угла зацепления, ра-
диусов начальных окружностей и
межосевого расстояния корригиро-
ванной передачи
(2)
Согласно выражению 514201
s'--2r-G-fe+e«~4)- ,3»
Согласно формуле (1) п. 512105
COSao=^ = ^, (4)
ГД1 ГД2
COSa = -^ = -^, (5)
ri г2 ’ ' '
46 Авиац, порши, двигатели
7>1
514203—514301
где г01 и roS —радиусы основных окружностей первого и второго зуб-
чатых колес.
Из уравнений (4) и (5) следует
Тда /с\
Г 01 rl г1
Подставляя Sri и8йв уравнение (1) из равенств (2) и (3), при-
нимая во внимание (6) и имея в виду, что
= (7)
Z1
получают для определения угла а следующее уравнение:
еа~еа0+ 2глГ(<-^) •
Имея угол а0, радиусы основных окружностей и найдя угол зацеп-
ления а по формуле (2) п. 512105, определяют радиусы начальных
окружностей шестерни и колеса
COS а0 Л
l~ cos“ ’ I (9>
_ Гд2 COS а0 ' f V
2 COS а )
Разность этих радиусов
rs - G = - гж1) = А = А. (10)
представляет собой межосевое расстояние при беззазорном зацеплении
зубьев, причем
гд,-гд1 = А0-
514203 Зависимостью 514201 приходится пользоваться при проверке тол-
щины зуба по дуге окружности выступов колеса с внутренним зубча-
тым венцом, на которой эта толщина может получиться при проекти-
ровании передачи, равной нулю и даже отрицательной.
514300 Коэффициент перекрытия (продолжительность зацепления)
514301 Согласно (3) п. 512301 коэффициент перекрытия
е = ЛЧЧ+Л?». , fl>
tv COS а 4 '
Из фиг. 514301 следует
r0'Pi = B1?-B1P = 9P (2)
и
r„?s = B2P-B2n = nP. (3)
При наличии равенств (2), (3) и уравнения (7) п. 512301 выраже-
ние (1) принимает вид
е = nP+Pq = пд z4i
ft, cos a f0 ' '
722
514301
Из рассмотрения фиг. 514301 следует:
пР = В2Р — В2п
Определение коэффициента перекрытия
эвольвентных передач внутреннего заце-
пления
пд = УRh — r?i — —Г02+-A sin л
(7)
Формула (5) справедлива при
условии
/?е2 > У Го2 + Аг sins а (8)
и при условии, что активная часть
профиля зубьев шестерни не подре-
Определение участков эвольвентных
профилей зубьев и участков линии за-
цепления, которым соответствует зацеп-
ление одновременно двух пар и одной
пары зубьев:
n? = s/0; П9'=?п' = /О;
nn'^qq'= ta(z — 1).
Участкам и bibi (причем аха[ 4= Ь2Ь',)
и a2as и №1 (причем Ф ^Ь’,) профи-
лей зубьев и участкам пп' и qq' линии
зацепления соответствует зацепление
одновременно двух пар зубьев.
Участкам а[Ь[ и а'2Ь’3 (причем а[Ь[ =/= а'2Ь'2)
профилей зубьев и участку n’q’ линии
зацепления соответствует зацепление
одой пары зубьев
и
46*
723
514302—514402
зана (см. 512301) или точка подреза принадлежит неактивной части
профиля.
514302 Применение 512302 к передачам внутреннего зацепления ясно из рас-
смотрения фиг. 514302, аналогичной фиг. 512302.
514400 Особенности корригирования зубьев колес с внутренним
зубчатым венцом
514401 Согласно 514102 профилем зуба колеса с внутренним зубчатым вен-
цом является вогнутая сторона той же самой эвольвенты, которая обра-
зует профиль зуба колеса с внешним зубчатым венцом, имеющим то же
самое число зубьев и тот же модуль. Это свойство профиля позволяет
при рассмотрении вопросов корригирования передач с внутренним
зацеплением заменять зацепление исходного профиля рейки с коле-
сом, имеющим внутренний зубчатый венец, зацеплением исходного
профиля рейки с условным колесом, имеющим внешний зубчатый
венец.
Условное колесо имеет то же число зубьев и тот же модуль, что и заме-
няемое колесо (колесо с внутренним зубчатым венцом). Зубьям заменяе-
мого колеса соответствуют впадины условного колеса и наоборот. Зависи-
мости размеров корригированного колеса с внутренним зубчатым венцом
от параметров исходной рейки будут аналогичны таковым для размеров
условного колеса; эти зависимости даются в 514402—514604.
514402 Под положительной коррекцией колеса с внутренним зубчатым вен-
цом понимается коррекция, в результате которой толщина корригиро-
ванных зубьев его становится больше толщины некорригированных
зубьев.
В результате такой коррекции профиль зубьев (V--J-)-колеса
с внутренним зубчатым венцом сместится в направлении к центру зубча-
того колеса, но при этом коэффициент радиального смещения профиля
зубьев х будет положительным.
Для колеса с внешним зубчатым венцом смещению профиля зубьев
в направлении к центру колеса соответствует отрицательная коррекция
(см. 513202).
Под отрицательной коррекцией колеса с внутренним зубчатым вен-
цом понимается коррекция, в результате которой толщина корригиро-
ванных зубьев его становится меньше толщины некорригированных
зубьев.
В результате такой коррекции профиль зубьев (V—)-колеса
С внутренним зубчатым венцом сместится в направлении от центра зубча-
того колеса, но при этом коэффициент радиального смещения профиля
зубьев х будет отрицательным.
Для колеса с внешним зубчатым венцом смещению профиля зубьев
в направлении от центра колеса соответствует положительная коррек-
ция (см. 513202).
Приведенные в 514402 определения положительной и отрицательной
коррекций колеса с внутренним зубчатым венцом показывают, что воз-
можно применение одних и тех же формул (4) п. 513303, (2) и (4) п. 513304
К (V-H-)-KonecaM как с внешним, так и с внутренним зубчатым
венцом, а формул (3) п. 513305, (2) и (4) п. 513306 к (V—-)-коле-
сам как с внешним, так и с внутренним зубчатым венцом.
724
514403- 514502
При положительной коррекции толщина корригированного зуба
колеса с внутренним зубчатым венцом по дуге его делительной окруж-
ности, согласно п. 513303, равна
S2 = m Q +2x2tga0) .
Теоретическая высота головки зуба колеса с внутренним зубчатым 514403
венцом при положительной коррекции равна
h' = m(f+xt). (1)
Теоретический радиус окружности головок (выступов) зубьев колеса
с внутренним зубчатым венцом при положительной коррекции
/?е2 = ГД2-Л' = Гд2-/И(/ + Хг), (2)
где
_ _ mz2
Гд2 — ~2~ • W
Теоретическая высота ножки зуба колеса с внутренним зубчатым
венцом при положительной коррекции
А’ = /и(/ + С-х2). (4)
Радиус окружности ножек (впадин) зубьев колеса с внутренним
зубчатым венцом при положительной коррекции
Ri2 = Гд2 + Л" = Гд2-|-Л1 (/Ч-С — Х2). (5)
При отрицательной коррекции зависимости 514402 и 514403 сохра- 514404
няются с заменой у хг знака 4- на знак —.
Зубчатые передачи внутреннего зацепления с корригированными зубьями 514500
при беззазорном зацеплении
При корригировании зубчатых передач внутреннего зацепления 514501
могут иметь место (как и в случае корригирования зубчатых передач
внешнего зацепления, см. 513307) три вида передач:
(V-0), (V-+) и (V--).
В передачах V-О) расстояние между осями колес то же, что и у
некорригированной передачи.
В передачах (V- + ) внутреннего зацепления расстояние между
осями колес уменьшается, а в передачах (V—) внутреннего зацепления
увеличивается по сравнению с расстоянием между осями колес у некор-
ригированной передачи.
В передачах (V-О) коррекция достигается одинаковым по величине,
но противоположным по знаку, смещением х, и х2 корригируемых профи-
лей зубьев колес зацепления.
В передачах (V-+) и (V—) коррекция достигается различными
комбинациями смещений профилей х, и х2, которые зависят от цели,
преследуемой коррекцией. ,
Углы зацепления а (У)-передачи, коэффициенты смещения профилей 514502
зубьев шестерни и колеса которых х, и х2, определяются на основании
725
514503-514601
зависимости (8) п. 514202 путем подстановки в место суммы (Si + SJZi
ее значения
mzt [к + 2 (х, + х2) tg а0] = 2кгД1 + 4гД1 (х, + х2) tga0 = (Sx + S2) z^,
тогда
6=6 - 2(Xi+Zj)tgя0.
a a0 Z2-Zi & 0
514503 Обозначая через rlt гг и А соответственно радиусы начальных
окружностей шестерни и колеса с корригированными профилями зубьев
и межосевое расстояние их, соответствующие углу зацепления а при
беззазорном зацеплении их зубьев, найдем по формулам (9) и (10)
п. 514201
г = r«icosg°, ]
cosg ! (i)
Г = r^C0S а° I
2 COS a ’ /
A = r*~r^A^> (2)
причем g и гг — радиусы начальных окружностей шестерни и колеса;
а0 —угол зацепления инструмента.
Применяя к (У-О)-передаче формулу 514502, имеем
a = a0
и согласно формулам (1) и (2)
G = гД1; г2 = Гд2
и
А = Л.
514504 Содержание 513405 и 513406, за исключением формул (1) и (2)
п. 513406, полностью относится и к передачам внутреннего зацепления.
514505 В (V)-передачах внутреннего зацепления радиальный зазор между
теоретической окружностью выступов шестерни (с внешним зубчатым
венцом) и окружностью впадин колеса будет равен
C^R^-CA + R^). (1)
Радиальный зазор между теоретической окружностью выступов
колеса и окружностью впадин шестерни
С. = /?е2-(А + /?«1). (2)
514600 Устранение интерференции от подреза профилей зубьев
путем корригирования
514601 В 513501 приведено объяснение явления интерференции от подреза,
могущего иметь место в передачах внешнего зацепления. Этот вид
интерференции может быть и в передачах внутреннего зацепления, если
726
514602—514603
профиль зуба шестерни подрезан и точка подреза U принадлежит
рабочей части его, как это показано на фиг. 514601.
Если Zj и —числа зубьев шестерни и колеса передачи внутреннего 514602
зацепления и у шестерни имеется подрез профиля зуба, то чтобы узнать,
принадлежит ли точка U подреза рабочей части профиля или нет,
необходимо по формулам (1), (2) и (3) п. 513503 вычислить радиус rv
окружности, проходящей через точку подреза U, и установить, имеет
ли место неравенство
Asin <Х< Rl2 — rlz — ^Ги— Го1» (1)
где rv — радиус окружности, проходящей через точку подреза.
Фиг. 514601.
К определению] "интерференции от подреза' в передаче внутреннего
[зацепления
Если неравенство (1) имеет место, то интерференции от подреза
не будет, так как точка подреза U в этом случае принадлежит нерабочей
части профиля зуба.
При этом величина входящего в неравенство (I) радиуса окружности
выступов (головок) колеса с внутренним зубчатым венцом /?вд должна
удовлетворять неравенству
Re2> ^^2 +A2 sin* а. (2)
Неравенство (2) п. 514602, общее для всех передач внутреннего 514603
зацепления, в применении его к (0)- и к (У-О)-передачам внутреннего
зацепления может быть преобразовано в зависимость /?ег от z2, - и а0.
727
504604
Так как
mz,
Го2 = -у cos % (1)
И
A=A0=^fcA), (2)
то
«<»> в / 1-Ж2-'Г>п’“ • (3>
514604 Применение неравенства (3) к (У-О)-передачам внутреннего зацепле-
ния для случая ги = г01 позволяет получить зависимость наименьшего
значения коэффициента смещения профилей зубьев шестерни и колеса х,
при котором интерференция от подреза не будет иметь места, от основ-
ных параметров передачи. Так как в (У-О)-передачах
Re2 = m(^ -/-xY
то неравенство (3) п. 514603 принимает следующий вид:
Число зубьев колеса
Фиг. 514604.
Зависимость между zmln, гг и z2 при /=1 и ао = 2О1’
На диаграмме фиг. 514604 дана зависимость между минимальным
значением х и числами зубьев и z2 шестерни и колеса (V-O)-ne-
редач внутреннего зацепления при f— 1 и ао = 2О°. Более подробно
см. [10].
728
514700—514702
Устранение интерференции профилей головок зубьев
путем корригирования
514700
Если в передаче внутреннего зацепления разность между числами 514701
зубьев колеса и шестерни меньше определенного предельного значения,
зависящего от параметров передачи, то эвольвентные профили головок
пары их зубьев могут притти в соприкосновение за один оборот шестерни
более чем один раз; при этом один раз соприкосновение зубьев будет
правильное и произойдет на линии зацепления; в остальных случаях
профили зубьев пересекутся и передача застопорится.
Так как это явление происходит благодаря пересечению профилей
головок зубьев колес, то оно называется интерференцией головок зубьев.
Фиг. 514701.
К устранению интерференции головок зубьев шестерни и колеса
При проектировании передач внутреннего зацепления необходимо
учитывать возможность интерференции головок зубьев и исключить
эту возможность соответствующим подбором параметров передачи
(фиг. 514701).
Отсутствие интерференции головок зубьев в передаче внутреннего 514702
зацепления устанавливается наличием неравенства
Ф >- Ф,
т Z2
где угол ф (фиг. 514702) является углом между радиусом, проведенным
из точки Ог (ось вращения колеса) в точку А пересечения окружностей
головок зубьев шестерни и колеса, и радиусом, проведенным из точки Ог
729
514703
в вершину flj зуба колеса; при этом зубья шестерни и колеса находятся
в зацеплении в полюсе зацепления. Угол Ф является углом между
радиусом, проведенным из точки Ог (ось вращения шестерни) в точку А,
и радиусом, проведенным из точки Ог в вершину fli зуба шестерни;
514703
z, и z2 — числа зубьев ше-
стерни и колеса.
Углы Ф и <]) в неравенстве
514702 находятся из рассмо-
трения треугольника О1О2А
(фиг. 514702).
Обозначая угол зацепления
через а0, угол давления в вер-
шине flj зуба шестерни через а,,
причем
cos (1)
найдем разность инволют этих
углов
8.-Ч~е..- (2)
Обозначив разность (Ф —8Х)
через Ф', т. е.
Ф —81 = Ф', (3)
из треугольника OiO2A находим
Фиг. 514702.
К определению углов Ф и ’К
Найдя Ф' по формуле (3), определяем угол Ф.
Аналогично предыдущему, обозначая угол давления в вершине аг
зуба колеса через а2, причем
cos а2 = ,
ке2
найдем разность инволют углов а0 и а2
8*=ч-ч-
Обозначив сумму (ф + 32) через ф', т. е.
Ф4А = Ф',
из того же треугольника О^А находим
cos ф' =
2^е2А
(5)
(б)
(7)
(8)
Найдя ф' по формуле (7), определяем угол ф.
На диаграмме 514703 дана для (У-О)-передач внутреннего /зацепле-
ния зависимость предельной минимальной разности чисел зубьев колеса
и шестерни (z2—zj от числа зубьев z, (шестерни), определяющая наличие
или Отсутствие интерференции головок зубьев шестерни и колеса пере-
дачи. Зона диаграммы между кривой и осью абсцисс соответствует нали-
730
514704-514802
чию интерференции. Профили зубьев шестерни и колеса передач, для
которых имеет место диаграмма 514703, корригированы путем смещения
профилей на величину х, взятую по графику 514604.
Фиг. 514703.
Зависимость (z2 — zx) от zlr определяющая наличие или отсут-
ствие интерференции головок зубьев шестерни и колеса
Следующие мероприятия могут устранить интерференцию головок 514704
зубьев:
1) увеличение угла зацепления;
2) увеличение разности между числами зубьев колес передачи;
3) уменьшение высот головок зубьев колес.
Если одного из этих мероприятий в отдельности недостаточно, то при-
меняются одновременно два или даже все три мероприятия.
Устранение интерференции от неправильного выхода зуба 514800
из впадины
Конфигурация неэвольвентной переходной части профиля зуба одного 514801
колеса передачи может быть такой, что в процессе зацепления этого
колеса с другим колесом вершины зубьев второго колеса придут в непра-
вильное зацепление с нерабочей частью впадин между зубьями первого
колеса. Это явление называется интерференцией от неправильного выхода
зуба из впадины.
Неэвольвентная переходная часть профиля зуба колеса зависит
в основном от того, каким инструментом производится нарезка зубьев
колеса; соответствующим выбором инструмента можно устранить интер-
ференцию От неправильного выхода зуба из впадины.
В сомнительных случаях возможность интерференции от неправиль- 514802
кого выхода зуба из впадины проверяется графически. Для этого по методу,
изложенному в 511305, строят профиль переходной части зуба проверяе-
мого колеса и относительную траекторию вершины сопряженного зуба
парного колеса в системе проверяемого колеса.
Если относительная траектория вершины сопряженного зуба пар-
ного колеса пересечет контур переходной части зуба проверяемого колеса
(фиг. 514801-1), то интерференция от неправильного выхода зуба из впа-
дины будет иметь место.
731
732
514802
К определению интерференции от неправиль-
ного выхода зуба из впадины
Колесо
Фиг. 514801-П.
К определению интерференции от неправильного
выхода зуба из впадины
514900—514903
Если траектория вершины зуба парного колеса коснется кривой
контура рабочей части профиля зуба проверяемого колеса (фиг. 514801-11),
то интерференция рассматриваемого типа не будет иметь места.
Интерференция от толщины зуба
Если эвольвентный профиль зуба колеса, имеющего внутренний
зубчатый венец, подходит близко к основной окружности, то макси-
мальная ширина впадины между зубьями
колеса будет находиться на некоторой
окружности, большей его основной окруж-
ности (фиг. 514901).
У профиля зуба шестерни (с малым
числом зубьев), которая может находиться
в зацеплении с колесом, эвольвентная
часть профиля зуба простирается до ос-
новной окружности; максимальная тол-
щина зуба шестерни находится на некото-
рой окружности, большей его основной
окружности.
Ввод в зацепление и вывод из зацепле-
ния шестерни и колеса могут быть осу-
ществлены при некоторых соотношениях
параметров зацепления только путем тор-
цевого ввода зубьев шестерни во впадины
между зубьями колеса (фиг. 514901); ра-
диальное перемещение шестерни, находя-
щейся в зацеплении с колесом, в этом
случае невозможно.
По этой же причине невозможна и
нарезка зубьев колеса долбяком (шестер-
ней) путем радиальной подачи (углубле-
ний) последнего.
Чтобы установить, возможно ли ради-
альное перемещение шестерни внутри ко-
леса до зацепления их зубьев в полюсе Р
(фиг. 514901), необходимо сравнить макси-
мальную толщину Simax зуба шестерни
с шириной впадины Saa между зубьями
колеса по хорде окружности выступов
(головок) его.
- ог
Фиг. 514901.
К определению интерференции
от толщины зуба
Если окажется, что
Si max > S2£I ,
(1)
то радиальное перемещение шестерни внутри колеса невозможно.
Входящая в неравенство (I) максимальная толщина Simax зуба
шестерни подсчитывается по формуле
S1 max = 2г01 (2^ + еао) • (2)
Входящая в неравенство (1) ширина впадины между зубьями колеса
определяется следующим образом.
514900
514901
514902
514903
733
514904—515102
Находится угол давления а2а в вершине зуба колеса по формуле (1)
п. 512105
С08а-=Й <3>
и по формуле 512201
Определяется угол <р2£1 (фиг. 514901) в радианах и пересчитывается
в градусы
^=57,2958^. (5)
Искомая ширина впадины будет
S2a=2/?e2sin?2a. (6)
514904 В случае передач, для которых имеет место неравенство (1), изго-
товление шестерни с внутренним зубчатым венцом производится спе-
циальным инструментом—фасонным резцом.
515000 ПОДРЕЗАНИЕ ВЕРШИНАМИ ГОЛОВОК ЗУБЬЕВ ДОЛБЯКА ПРОФИЛЕЙ ГОЛОВОК
ЗУБЬЕВ КОЛЕСА, ИМЕЮЩЕГО ВНУТРЕННИЙ ЗУБЧАТЫЙ ВЕНЕЦ
515100 Сущность подрезания профиля головок зубьев колеса и метод проверки
возможности подрезания
515101 В процессе нарезания зубьев колеса с внутренним зубчатым венцом
долбяком (например, типа Феллоу) при радиальной подаче последнего,
при некоторых соотношениях между размерами колеса и размерами
долбяка, происходит срезание профиля головок зубьев колеса верши-
нами головок зубьев долбяка.
Поэтому при выборе долбяка для нарезки зубьев колеса с внутрен-
ним зубчатым венцом необходимо проверять возможность указанного
срезания профиля головок зубьев колеса.
Проверка возможности среза профиля головок зубьев колеса верши-
нами головок зубьев долбяка состоит в рассмотрении трех положений
долбяка и колеса по отношению друг к другу.
515102 1. Если хорда а —а (фиг. 515102), проведенная через точки пере-
сечения окружностей выступов долбяка и колеса, касается основной
окружности колеса или проходит вне ее, то подрезания профиля голо-
вок зубьев колеса не будет. Условие это выражается неравенством
У>Го2, (1)
очевидным из фиг. 515102.
Если хорда а —а пересекает основную окружность колеса, то под-
резание профиля голово’к зубьев колеса может быть, но может и не быть.
Это условие выражается неравенством
У <гОг,
(2)
734
515103
где расстояние от центра колеса до хорды а— а (фиг. 515102)
R^ + A^-R^
У
2АИ
Го2 —радиус основной окружи бсти колеса.
(3)
Фиг. 515102.
К определению подреза вершинами головок' зубьев
долбяка профиля головок зубьев колеса
2. Если у < Го2 и направление подачи долбяка совпадает с осью 515103
впадины между зубьями колеса, а эта последняя совпадает с осью зуба
долбяка, то в этом положении подрезание профиля головок зубьев
колеса может быть, но может и не быть; это устанавливается путем
расчета по нижеследующему методу.
Определяется угол 6, образуемый осью впадины между зубьями
колеса, по направлению которой происходит подача долбяка, и радиу-
сом, проходящим через центр колеса и точку пересечения касательной
к основной окружности колеса с окружностью выступов колеса:
cos 6 —
?О2
^ег
(1)
735
515103
Определяется угол вх между той же осью впадины и радиусом,
проходящим через центр колеса и точку пересечения окружностей вы-
ступов долбяка и колеса:
С08в‘ = 1&- (2)
Подрезание профилей головок зубьев колеса может происходить
только в пределах угла
— 6.
Определяются последовательно углы, образуемые той же осью впа-
дины между зубьями колеса и радиусами, проходящими через центр
колеса и через ближестоящую к указанной оси вершину каждого (в пре-
делах угла Ф) зуба колеса.
Углы в радианах:
для вершины первого зуба колеса
с ___ 0,5/ __ Sei _ ____S,.2 .
K1 — rs 2Res ~ Z2 2Rel ' (
для вершины второго зуба колеса
для вершины третьего зуба колеса
(0,54-2)/ Se2 _ 5% Se3 .
к3~ r,_ 2Rei zz 2Re2 ’ (5)
для вершины п-ого зуба колеса
А _ [0,54-(п- 1)] / S,,, _(2п-1)к $е2 .
°кп Г 2 2/?ез Z-2 2/?е2 ’ (°)
здесь — дуговая толщина зуба колеса по окружности выступов.
Аналогично определяются соответственные углы, образуемые той же
осью и радиусами, проходящими через центр долбяка и через дальше
отстоящую от указанной оси вершину каждого зуба долбяка.
Углы в радианах для вершины первого зуба долбяка
для вершины второго зуба долбяка
6 5еи । / __ ^еи .
И2 = -пр-Г7 пр--------Г— ,
для вершины третьего зуба долбяка
д _ Sen . 2/ _ Se[t 4« 4
и3 2/?еи г и 2/?еи za ’
для вершины л-ого зуба долбяка
д ___ , (п ~ 1) /_ SeB (П 4- 1) .
"ип— 2/?еи‘ ra ~2Re~^ zH ’
(8)
(9)
(10)
здесь Sen —дуговая толщина зуба долбяка по окружности выступов.
735
515104
Определяются расстояния от оси впадины между зубьями колеса,
по направлению которой происходит подача долбяка, до соответственных
вершин зубьев колеса и долбяка.
Для первых зубьев колеса и долбяка
Х«1 = Re2 Sin > 1
Хи1 = Sin 0и1 5 J
для вторых зубьев’колеса и долбяка
Хк2 = ReZ Sin 6к2 , 1
Хи2 Rew Sin 6и2 *, j
для л-ых зубьев колеса и долбяка
Хкп = ReZ Sin вкп > 1
Хип = Rew Sin ®ип • J
Если получится хк > хи, то подрезание профиля головок зубьев
колеса вершинами зубьев долбяка не будет иметь места.
Если для некоторых зубьев окажется хк < хи, то профиль головок
этих зубьев будет подрезан.
3. Если у <Го2 и направление подачи долбяка совпадает с осью зуба 515104
колеса, а эта последняя совпадает с осью впадины между зубьями
долбяка, то в этом положении подрезание профиля головок зубьев
колеса может быть, но может и не быть, что устанавливается путем
расчета, аналогичного изложенному в 515103.
Рассматриваемое взаимное положение колеса и долбяка получается
из положения, рассмотренного в 515103, путем поворота колеса и дол-
бяка на угол, соответствующий половине шага зацепления их. Поэтому
формулы для углов в' и ви, соответствующих углам вк и ви (см. 515103),
получаются из формул для углов 6К и 6И путем прибавления к их зна-
чениям постоянного угла поворота; к углам 6К колеса прибавляется
0,5? тс _ . _ 0,5? тс
угол —— = —, а к углам долбяка 0И прибавляется угол —— = —.
^2 Гц 2И
Следовательно,
угол для вершины первого зуба колеса
= = (1)
для вершины второго зуба колеса
ек2=бк2+^-=—(2)
для вершины третьего зуба колеса
+ (3)
для вершины л-ого зуба колеса
6кп=6ип = И)
47 Авиац. порши, двигатели
737
515104
Угол для вершины первого зуба долбяка
0и1 — 9и1 Ч’
ГС ___ п | ,
2и 2и 2Т?еи ’
(5>
для вершины второго зуба долбяка
2/?еи ’
для вершины третьего зуба долбяка
6иЗ = виз + -т-
2И
. $ек .
2и + 2Т?еи ’
для вершины л-ого зуба долбяка
Пользуясь формулами (11) —(13) п. 515103, путем замены в них
углов 6К и 0И соответственно углами 6» и 0^, получают формулы
для расстояний от оси зуба колеса, по направлению которой про-
исходит подача долбяка, до соответственных вершин зубьев колеса
и долбяка.
Расстояния для первых зубьев колеса и долбяка
Х«1 = ReZ Sin 6Ki , 1
Хи1= Rew sin 6И1 J J
для вторых зубьев колеса и долбяка
х^ = /?е2 85пе;2, )
Хи2 = Rew Sin 0и2 j J
для третьих зубьев колеса и долбяка
Хкз = ReZ sin 0к3 , | (10)
Хиз = Rew sin ; j
для n-ых зубьев колеса и долбяка
Х«п Re2 Sin ©кп > I (11)
Хип — Rew Sin 0ИП . J
Если получится Хк > Хи, то подрезания профиля головок зубьев
колеса вершинами головок зубьев долбяка не будет.
Если для некоторых зубьев окажется х« < Хи, то профиль головок
этих зубьев будет подрезан.
738
516000—516102
КОНИЧЕСКИЕ ПРЯМОЗУБЫЕ ПЕРЕДАЧИ
516000
Основные свойства и зависимости конических прямозубых передач 516100
Для передачи вращения между двумя пересекающимися осями при- 516101
меняются конические зубчатые колеса (фиг. 516101).
В системе шестерни 7 (фиг. 516101) может быть выделен конус РОР1Г 516102
который в процессе вращения конических колес катится без скольже-
ния по конусу РОРг, принадлежащему системе колеса 2. Эти конусы
Фиг. 516101.
Н определению основных свойств и зависимостей кони-
ческих прямозубых передач
называются начальными конусами конической передачи; прямая
OP — L является образующей начальных конусов. Взяв на прямой ОР
точку А и рассматривая ее принадлежащей один раз конусу POPlt
а другой раз конусу РОР2, найдем следующее основное соотношение
конической передачи:
u = ®iG = ®2r2, (1)
где и —скорость точки А (одинаковая для обоих начальных конусов),
“i и «в, — угловые скорости вращения начальных конусов (конических
шестерни и колеса).
Углы и Х2 между образующими начальных конусов и осями вра-
щения их называются углами начальных конусов.
Окружности больших оснований начальных конусов называются на-
чальными (делительными) окружностями шестерни и колеса.
47*
739
516200—516201
Диаметры начальных окружностей РР, и PPt соответственно равны
^1=2rw = mz1, |
dx2 = 2rx2 = mz2, J
(2)
где т — модуль зацепления, a zt и z2 —числа зубьев шестерни и колеса.
Согласно формуле (1) и из рассмотрения фиг. 516101 имеем
°*2 __sin Я, _ гЛ1 __ zt
®! 81пЛ2 гд2 ?2
Угол между осями вращения шестерни и колеса, равный
8 = Х1 + Х2, (4)
называется межосевым углом.
Из уравнений (3) и (4) имеем
, . sind
tg*! =----------— ,
cos S + —
, •> sind
tgX2=---------
cosd + —
Z2
Из уравнений (5) определяются углы и Х2.
Из треугольников РОВа и РОВа имеем
jТГд2 /TIZj ^^"2
sinsinA2 ~ 2 sinAj ~2 sinЛ2 ’
Представляя L как произведение т и I, т. е.
L — ml,
получим
I = 21 = 2*
2sinA! 2 sin Л,*
(5)
(6)
(7)
(8)
516200
516201
Приближенное зацепление конических передач
Профилирование зубьев конических зубчатых колес практически
осуществляется по следующему приближенному способу. Сущность этого
способа заключается в том, что профилирование зубьев конических
зубчатых колес передачи заменяется профилированием теоретических
цилиндрических зубчатых колес. Эти теоретические колеса образуются
так. Через точку Р (фиг. 516101) линии ОР касания начальных конусов
передачи проводится прямая О^О*, перпендикулярная линии ОР. Точки
пересечения О' и О'г прямой, перпендикулярной к ОР в точке Р, соот-
ветственно с осью ОО' и осью ОО' вращения начальных конусов опре-
деляют собой отрезки О2Р и О2Р, являющиеся образующими дополни-
тельных конусов РОаР, и РО'Ра. Развернув боковые поверхности допол-
нительных конусов в плоскость, получим две неполных окружности
(см. фиг. 516101) с центрами в точках Оа и Ог и точкой касания Р.
Радиусы этих окружностей равны
г — • г — Гд2 (I 'i
'д1пр COSAj ’ 'д2пр cosA2’
740
516202
Угол сектора развертки первого дополнительного конуса будет:
₽х = ^1 =2kcosXx. (2)
Д1 пр
Соответственно для второго дополнительного конуса имеем
= = 2ircoskB. (3)
'«2 пр
Окружности радиусов гя1пр и ГдапрС центрами Ох и 02 (фиг, 516101)
и являются начальными окружностями теоретических цилиндрических
зубчатых колес.
Если zx и z2 — числа зубьев конических колес 7 и 2, то числа
зубьев (теоретические) теоретических зубчатых колес будут
z-=£z^A* <5>
Если f12 есть передаточное отношение конической передачи, то пере-
даточное отношение передачи между теоретическими цилиндрическими
зубчатыми колесами Г1г будет:
•, _ ZT1 _ Zx COSZ2 _ . COSAa
12 ~ Zt2 ~~ z2 cosAx ~~ 12 COS Лх '
При 8 = 90* (см. фиг. 516101)
*12 =
Профилирование теоретических цилиндрических зубчатых колес
производится так же, как и обычных цилиндрических зубчатых колес;
все зависимости от модуля зацепления основных размеров зуба сохра-
няются.
Основные размеры зубчатого венца конического зубчатого колеса, 516202
которые необходимо наносить на его рабочем чертеже, показаны на
фиг. 516202, а формулы для вычисления этих размеров приводятся
ниже.
Диаметр делительной (начальной) окружности определяется
согласно формуле (2) п. 516102.
Угол л. начального (делительного) конуса находится по формуле
(5) п. 516102.
Длина образующей начального конуса L или I определяется соот-
ветственно согласно формуле (6) или (8) п. 516102.
Высота начального конуса шестерни и колеса
//x = ^lCtgAx, ‘
(1)
W2 = ^ctgX2.
Угол головки зуба Е
tgS = r- (2)
741
516202
Фиг. 516202.
К определению основных размеров зубчатого венца кониче-
ского зубчатого колеса
Угол ножки зуба т
tgx = £. (3)
Угол внутреннего конуса tj
т] — к — с. (4)
Угол внешнего конуса р
р = Х4-Е. (5)
Высота внешнего конуса Е
Е — Н — Л' sin к. (6)
Высота малого внешнего конуса е
Диаметр окружности выступов
De = dK + 2h' cos К. (8)
Размеры зубьев конических шестерни и колеса определяются так
же, как для теоретических цилиндрических шестерни и колеса.
Если известна Sr дуговая толщина зуба по окружности известного
радиуса R цилиндрического зубчатого колеса Sr, то хордальная (теоре-
тическая) толщина Sr зуба, соответствующая дуге Sr, определяется
так.
742
516300—516302
Находится угол $я (в градусах), соответствующий половине дуги
Sr, по формуле
Sr
5Д = 57,2958 .
Искомая хордальная (теоретическая) толщина зуба (толщина зубо- мера) Sr = 2R sin Er. (9)
Определяется Д — стрелка дуги SR —
Д = R(1 — cosEr). (Ю)
Высота зуба от хорды Sr до окружности (высота зубомера) = —R-^Д, выступов по оси зуба (Н)
где Re — радиус окружности выступов. Если дана дуговая толщина некорригированного зуба по делитель- ной окружности, то хордальная толщина его
S' = mzsinE, а высота зубомера (12)
q = т [у(1 — cosS)<H] , (13)
где центральный угол
5 = у (градусов). (14)
Практическая хордальная толщина зуба отличается от теоретической
на величину отклонения, ограничиваемую верхним пределом ф и ниж-
ним пределом у; среднее значение хордальной толщины зуба
— Q Ф + У
° ср — о 2 •
Отклонения для толщины зуба (ф и у) берутся по 107 МТ.
Угол конусности зуба конического зубчатого колеса (фиг. 516202)
подсчитывается по формуле
(15)
Корригирование профилей зубьев конических передач
Корригирование конических передач современных авиационных
двигателей ограничивается применением (У-О)-передач. Поэтому ниже
приведены указания для корригирования только конических (V-0)-
передач.
Корригирование конической (У-О)-передачи сводится к корригиро-
ванию цилиндрической (У-О)-передачи, числа зубьев шестерен и колеса
которой равны теоретическим числам зубьев (zT1 и zTS) конических
шестерни и колеса.
516300
516301
516302
743
516302
Все указания 513000 о корригировании цилиндрических (V-0)-
передач полностью относятся и к корригированию конических (V-0)-
передач.
Основные размеры зубчатых венцов корригированных конических
шестерни и колеса конической (У-О)-передачи те же, что и некорри-
гированных шестерни и колеса (О)-передачи (фиг. 516202).
Формулы, приведенные в 516202 для вычисления размеров зубча-
того венца конического зубчатого колеса, применимы и для вычисления
указанных размеров корригированных шестерни и колеса конической
(У-О)-передачи.
Теоретические высоты и Л' головок зубьев шестерни и колеса
(У-О)-передачи определяются соответственно по формулам (2) п. 513304
и (2) п. 513306.
Теоретические высоты Л' и й' ножек зубьев их определяются соот-
ветственно по формулам (4) п. 513304 и (4) п. 513306.
Дуговые толщины Sj и SB по дугам делительных окружностей
теоретических цилиндрических шестерни и колеса определяются соот-
ветственно’по формулам (4) п. 513303 и (3) п. 513305.
ЛИТЕРАТУРА И’ИСТ 04 НИ К И К 510000
1. Ди ке р Я. И., Эвольвентное зацепление с прямыми зубцами, 1935.
2. Д и к е р Я. И., Внутреннее зацепление прямозубое и косозубое, НКМ СССР,
Оргаметалл, 1938.
3. Добровольский В. В., Некоторые особенности внутреннего зацепления,
«Вестник металлопромышленности» № 5, стр. 98—101, 1937.
4. Ка Лужников А. Н., Методы корригирования цилиндрических шестерен
с прямым зубом (Внешнее зацепление), вып. I, ОНТИ, 1937.
5. Калужников А. Н., Анализ зацепления зубчатых передач и новый метод
корригирования, Машгиз, 1940.
6. К е т о в X. Ф., Эвольвентное зацепление, ОНТИ, 1934.,
7. Колчин Н. И. и Болдырев В. В., Аналитическая теория современных
зацеплений конических зубчатых колес, ОНТИ, 1937.
8. Колчин Н. И., Теория зацепления конических шестерен в связи с методами
их нарезания, ОНТИ, 1936.
9. Миловидов С. С., Теория зубчатого зацепления, 1935.
10. П уга че в И. А., Цилиндрические зубчатые передачи внутреннего зацепления,
Оборонгиз, 1939.
11. Решетов Л. Н., Корригирование эвольвентных зацеплений, ОНТИ, 1935.
12. Бакингем Е., Цилиндрические зубчатые колеса (перевод с английского),
ОНТИ, 1935.
13. Р е т ш е р Ф., Детали машин, т. И, гл. 25, стр. 477—598 (перевод с немецкого).
Го смашмети здат, 1933.
14. Ш и б е л ь А., Зубчатые колеса, ОНТИ, 1931.
15. Сборник монографий «Мировая техника», Конструкция шестерен и зубчатых пере-
дач, вып. 4, Главная редакция литературы по машиностроению и металлообработке,
1935.
16. В а с k i и g h a m Е., StirnrSder mit geraden ZShnen (De tsche Bearbeitung Von
G. Olah), J. Springer, Berlin, 1932.
17. Backingham E., Manual of gear design (Section two), Spur and internal gears,
«Machinery», N.-Y., 1935.
18. Hiitte, Справочник инженера, т. И (любого издания).
19. М е г г i 11 Н. Е., Simplified design of corrected gear, «Machinery», London, v. 43,
№ 1120, 1934.
ОТ РЕДАКЦИИ
Расчет на прочность и долговечность зубьев зубчатых колес, при
современном состоянии этих вопросов, является условным. Эта услов-
ность расчета, заставляющая оценивать полученные расчетом результаты
только как сравнительные, вызывается:
1) отсутствием экспериментально проверенного метода, позволяю-
щего надежно определять расчетным путем добавочные динамические
нагрузки на рассчитываемый зуб, создаваемые неточностью изготовления
зацепляющихся зубчатых колес;
2) отсутствием экспериментально проверенного метода, позволяю-
щего надежно определять расчетным путем распределение действующих
в зубчатой передаче усилий между несколькими парами зубьев, находя-
щихся одновременно в зацеплении;
3) трудностью учета при расчете изменений в величине и характере
нагрузки на рассчитываемый зуб, вызываемых деформациями при работе
конструктивных элементов, связанных с рассчитываемой зубчатой переда-
чей, и деформациями самой передачи;
4) отсутствием надежных данных о величине коэффициента трения
между зубьями рассчитываемой передачи и о характере изменения этого
коэффициента за цикл работы рассчитываемого зуба;
5) отсутствием достаточных данных о прочности при переменных
контактных напряжениях материала зуба в условиях его работы, т. е.
при наличии относительного качения и скольжения сцепляющихся зубьев
и при наличии трения между ними;
6) отсутствием данных, проверенных экспериментально непосред-
ственно на зубчатых передачах, о местных контактных перегревах в сопри-
касающихся зубьях и влиянии на это смазки зубьев и ряда других факто-
ров, могущих привести к заеданию в зубьях.
Учитывая сказанное, редакция дает в 520000 и 530000 расчет зубьев
зубчатых колес в двух вариантах.
Первый вариант (раздел 520000) «Расчет прямозубых зубчатых колес
на прочность и долговечность» написан кандидатом техн, наук А. И. Пет-
русевичем.
745
Второй вариант (раздел 530000) «Расчет прямозубых зубчатых колес
на прочность по сокращенному методу» написан кандидатом техн, наук
Н. К. Смольяниновым.
В первом варианте А. И. Петрусевич развивает новые и уточняет
применявшиеся до последнего времени в практике авиационного моторо-
строения методы расчета зубьев зубчатых передач. Развиваемые А. И. Пет-
русевичем методы следует рассматривать как перспективные, но пока
еще недостаточно апробированные практикой широкого применения
в области авиационного моторостроения.
Во втором варианте Н. К. Смольянинов излагает способы расчета
зубьев зубчатых передач, применявшиеся в практике авиационного моторо-
строения до последнего времени. Этот вариант расчета не охватывает
вопросов (излагаемых А. И. Петрусевичем): о долговечности зубчатой
передачи, о заедании зубьев и о дополнительной динамической нагрузке
на зуб, вызываемой накопленной погрешностью в шаге зацепления.
До получения достаточных экспериментальных и расчетных данных,
как при помощи специальных экспериментальных установок, так и непо-
средственно из практики эксплоатации зубчатых передач авиационных
двигателей, результаты каждого из вариантов расчета следует рассматри-
вать как условно-сравнительные, подходя к оценке их с учетом практики
эксплоатации зубчатых передач, аналогичных по конструкции и харак-
теру работы рассчитываемой передаче.
520000—520101
РАСЧЕТ ПРЯМОЗУБЫХ ЗУБЧАТЫХ КОЛЕС НА ПРОЧНОСТЬ 520000
И ДОЛГОВЕЧНОСТЬ
Виды повреждения авиационных зубчатых колес, причины их 520100
и меры борьбы с ними
Поломка зубьев—наиболее опасный по своим последствиям вид 520101
разрушения зубьев, обычно приводящий (когда зубья ломаются по всей
длине или когда отломившиеся куски зубьев попадают в зацепление)
зубчатые передачи к внезапному и полному выходу из строя.
Причиной поломки зубьев, при надлежащей конструкции зубчатой
передачи и при достаточно высоком качестве ее изготовления и монтажа,
может быть либо недостаточная прочность при переменных напряжениях
Фиг. 520101.
Поломка зуба конического зубчатого колеса
зубьев на изгиб (что обнаруживается по характерному виду поверхности
излома), либо, если зубья подвергаются воздействию больших перегрузок
или ударных нагрузок (например, при переходе числа оборотов через
резонансную зону), недостаточная статическая прочность или недо-
статочная ударная прочность (сопротивляемость ударным нагрузкам—
однократным или с небольшим числом повторений). Чаще всего зубья
ломаются вследствие концентрации напряжений из-за недостаточного
радиуса выкружки у корня зуба или грубых следов инструмента на поверх-
ности выкружки.
Нередко причиной поломки зубьев является неравномерное распре-
деление нагрузки по их длине; в таких случаях разрушение начинается
с края зуба. Если конические зубчатые колеса (хотя бы одно зубчатое
колесо из пары) расположены консольно, то в случае поломки зуба из-за
перегрузок разрушение начинается с более толстого конца (фиг. 520101),
747
520102
на котором, вследствие деформации валов, нагрузка концентри-
руется.
Прочность зубьев при переменных напряжениях можно повысить-
следующими способами: а) увеличить модуль зацепления (если это не при-
ведет к недопустимому уменьшению запаса надежности против заеда-
ния—см. 524000); б) применить усиливающую зуб коррекцию зацепления
или изменить высоту зуба исходного контура; в) увеличить радиус вы-
кружки у основания зуба; г) применить фланкирование зубьев; д) увели-
чить точность изготовления зубчатых колес (наибольшее влияние на проч-
ность зубьев при переменных напряжениях оказывают ошибки в основ-
ном шаге и ошибки, вызывающие неравномерное распределение нагрузки
по ширине зубчатых колес); е) применить сталь с наибольшим пределом
усталости при изгибе (при этом следует иметь в виду, что наивысшая
прочность зубьев обеспечивается лишь при применении цементации или
азотирования зубчатых колес с поверхностей зубьев, включая и поверх-
ности выкружек у корней зубьев); ж) увеличить толщину твердого слоя
(при применении цементованных или азотированных зубчатых колес);
з) увеличить гладкость поверхности выкружки (например, посредством
специальной шлифовки и полировки); и) применить технологию обработки
зубьев, обеспечивающую отсутствие уступа от шлифовального круга
в опасной зоне у корня зуба, а также отсутствие рисок и других следов
инструмента на поверхности выкружки; к) применить обдувку дробью
поверхности выкружки.
Указанными способами повышается также и статическая прочность
зубьев на изгиб. Однако некоторые из них (например, «в», «з» и «к»)
в значительно меньшей степени повышают статическую прочность зубьев,
чем усталостную. В тех редких случаях, в которых решающую роль
играет ударная прочность зубьев, для повышения последней необходимо
прежде всего осуществить следующие мероприятия:
а) увеличить радиус выкружки у корня зуба; б) предохранить по-
верхность выкружки от цементации или азотирования; в) применить
сталь, обеспечивающую после термообработки наибольшую ударную
вязкость.
В тех случаях, когда поломке зуба предшествует сильный износ
зубьев из-за заедания или выкрашивания, приводящий к местному иска-
жению профиля зуба или к значительному местному отклонению профи-
лей нескольких зубьев от их правильного положения по отношению к про-
филям остальных зубьев, причиной поломки зуба являются большие
динамические нагрузки на изношенных зубьях, а не недостаточная проч-
ность зуба. В таких случаях необходимо прежде всего устранить причины
заедания или выкрашивания, что может вполне предотвратить поломку
зубьев.
520102 Выкрашивание выражается в образовании оспинок или продолгова-
тых ямок, а иногда крупных раковин на рабочих поверхностях зубьев.
Оно начинается на поверхности ножки зуба, обычно вблизи полюсной
линии зуба (фиг. 520102-1). На цементованных рабочих поверхностях
зубьев в начале выкрашивания обычно появляются очень мелкие поры,
иногда еле заметные на-глаз, которые затем, постепенно увеличиваясь
в размере и числе, покрывают поверхность ножек зубьев (а иногда и голо-
вок) до тех пор, пока не произойдет обминания (фиг. 520102-11) или
задира зубьев. Зубчатые колеса в состоянии работать еще длительное
748
520102
время (десятки и даже сотни часов), прежде чем начавшийся процесс
выкрашивания доведет поверхности зубьев до полного разрушения.
Многие быстроходные авиационные зубчатые колеса (например,
в передачах к нагнетателям) работают с контактными напряжениями,
Фиг. 520102-1.
Выкрашивание вблизи полюсной линии зуба
лежащими вблизи предела контактной усталости поверхностных слоев
зубьев. Этим можно объяснить встречающееся нередко явление, заклю-
чающееся в том, что зубчатые колеса в передачах данной марки авиацион-
ного двигателя либо работают дли-
тельное время без выкрашивания, ли-
бо, при менее качественном изгото-
влении и монтаже, подвергаются вы-
крашиванию сравнительно быстро.
В первом случае контактные напря-
жения ниже предела контактной уста-
лости и, следовательно, зубчатые ко-
леса могут работать без выкрашивания
неограниченно долго. Во втором случае
это соотношение нарушено (например,
вследствие повышенных динамических
нагрузок из-за неточностей обработки
зубьев или вследствие концентрации
нагрузки по ширине зубчатых колес).
Усталость поверхностных слоев
при контактных напряжениях, яв-
ляющаяся причиной выкрашивания
рабочих поверхностей зубьев, зависит
от прочности при переменных напря-
жениях материала в поверхностных
слоях зубьев, от смазки (например,
от ее вязкости), от величины и напра-
вления скорости скольжения, от вели-
чины скорости качения (средней ско-
рости перемещения контактной линии
по рабочим поверхностям), а также
от гладкости поверхностей зубьев.
Для повышения сопротивляемости
рекомендовать следующие мероприятия:
Фиг. 520102-П.
Обминание зуба с выкрошенной ра-
бочей поверхностью
зубьев выкрашиванию можно
а) увеличить диаметры зубчатых
колес или их рабочую ширину; б) увеличить угол зацепления (поскольку
749
520103—520104
это приводит к увеличению радиусов кривизны профилей зубьев в полюсе
зацепления); в) выбрать зацепление с коэффициентом перекрытия свыше
двух и изготовить зубчатые колеса с такой точностью, при которой обеспе-
чивается одновременное и эффективное участие в зацеплении не менее
двух пар зубьев (часто это мероприятие дает меньшее возрастание сопро-
тивляемости зубьев выкрашиванию, чем увеличение угла зацепления
до значения, соответствующего коэффициенту перекрытия около 1,2);
г) увеличить гладкость рабочих поверхностей зубьев; д) обеспечить наи-
высшую твердость рабочих поверхностей зубьев.
Следует иметь в виду, что сопротивляемость поверхностей зубьев
выкрашиванию резко снижается, если зубчатые колеса работают с пере-
косом, т. е. если нагрузка вдоль зубьев распределяется неравномерно.
520103 С выкрашиванием не следует смешивать отслаивания, которому
подвержены азотированные и цианированные зубья (а также и цементо-
ванные зубья при недостаточно высоком качестве термообработки или
при недостаточной прочности сердцевин зубьев), разрушающиеся при
перегрузках вследствие раздробления твердой корки. При работе без
значительных перегрузок азотированные и цианированные зубчатые
колеса имеют не меньшую долговечность, чем цементованные.
Высокая концентрация нагрузки у краев зубьев может вызывать
скалывание уголков зубьев, причины которого кроются также в высоких
контактных напряжениях.
520104 Заедание происходит в результате металлического контакта, когда
между зубьями не образуется непрерывная масляная пленка (смазка
Фиг. 520104-1.
Натир на головке зуба
выдавливается), что в быстроходных и тяжело нагруженных передачах
можно объяснить выделением—на наиболее удаленных от полюса уча-
стках зацепления —большого количества теплоты трения и повышением
температуры в зоне контакта до такой величины, при которой не обеспе-
чивается жидкостное трение между зубьями (вследствие резкого умень-
шения вязкости масла).
Легкую форму заедания иногда называют н а т и р о м
(фиг. 520104-1), тяжелую—з а д и р о м. Натир на более или менее зна-
чительных участках поверхностей зубьев нежелателен, так как приводит
к износу этих участков, а следовательно, к искажению профиля зубьев.
750
520105—520202
Кроме того, натир может перейти в более тяжелую форму заедания,
при которой рабочие поверхности становятся грубыми и происходит
ускоренный износ зубьев (фиг. 520104-11). Нередко встречается огра-
ниченный задир, обусловленный резко выраженным кромочным
контактом зубьев. При заедании коэффициент трейия резко возрастает
и потери мощности на трение между зубьями соответственно увеличи-
ваются, что в быстроходных передачах может привести к чрезмерному
общему нагреву передачи.
Запас надежности против заедания можно повысить следующими
способами: а) уменьшить модуль зацепления; б) применить фланкирование
зубьев; в) применить коррекцию зацепления, выравнивающую запас
надежности против заедания в начале и в конце зацепления пары зубьев;
г) увеличить твердость и гладкость рабочих поверхностей зубьев; д) при-
менить, где это возможно, одну из противозадирных смазок [6] или про-
тивозадирную химическую обработку зубьев [12].
Износ зубьев может вызываться недостаточной гладкостью их поверх-
ностей, особенно в период приработки—п риработочный износ,
или наличием в масле абразивных частиц—а бразивный износ.
Кроме того, зубья могут интенсивно изнашиваться в результате заедания
или после значительного (прогрессивного) выкрашивания. Последнее
сокращает площадь контакта, приводит к обминанию поверхностей ножек
зубьев, к уменьшению гладкости поверхностей, к выдавливанию смазки
на невыкрошившихся участках поверхности вблизи оспинок и наполняет
смазку взвешенными частицами металла. Все это делает неизбежным
переход от выкрашивания к интенсивному износу зубьев.
Склонность к любому из указанных видов повреждений зубьев воз-
растает с уменьшением точности изготовления и монтажа зубчатых колес
и с увеличением неравномерности распределения нагрузки по длине
зубьев. Последняя определяется не только точностью механической обра-
ботки и сборки зубчатых колес, но и деформацией их валов и опор, а также
самих зубчатых колес под нагрузкой.
Порядок расчета авиационных зубчатых передач
и условия применимости предлагаемого метода расчета^
Размеры авиационных зубчатых колес обычно выявляются в процессе
конструирования агрегата, содержащего зубчатую передачу, и оконча-
тельный расчет их на прочность и долговечность производится в виде
поверочного расчета. Поэтому в дальнейшем расчетные формулы
приведены в таком виде и данные для расчета расположены в таком
порядке, в каком ими пользуются для поверочного расчета. Тем не менее,
для того чтобы избежать неудачных вариантов при выборе размеров пере-
дачи, даны также некоторые формулы для предварительного проектиро-
вочного расчета (см. 522306).
Необходимо иметь в виду следующие условия применимости предла-
гаемого метода расчета зубчатых передач:
1. Зубчатые колеса должны быть обеспечены надлежащей по количе-
ству и качеству смазкой.
2. Зубчатые колеса не нагреваются свыше 90—100° (для обеспечения
чего должны быть предусмотрены соответствующие условия их охла-
ждения).
520105
520106-
520200'
520201
520202
751
520203—520300
3. Технологическими и конструкционными мероприятиями обеспе-
чивается равномерное распределение нагрузки по рабочей ширине зубча-
тых колес.
4. Перекосы зубчатых колес относительно друг друга, вызываемые
как деформациями валов и опор (конструкционные перекосы), так и неточ-
ностями механической обработки и сборки (технологические перекосы),
не учитываются при расчете. Такое допущение основано на том предполо-
жении, что некоторый небольшой перекос может быть компенсирован
начальным износом (за период приработки) и смятием рабочих поверх-
ностей зубьев, а также деформацией тела зубчатых колес. Однако вопрос
о том, при каких конструкционных и технологических перекосах можно
считать такое допущение приемлемым в случае цементованных зубчатых
колес, остается неясным. Если по причине неточностей изготовления
или деформации валов и опор зубчатые колеса работают не всей своей
рабочей шириной, то при поверочном расчете таких передач в первом
приближении следует подставлять в расчетные формулы в качестве рабо-
чей ширины зубчатых колес фактическую ширину зацепления, устанавли-
ваемую по блеску рабочих поверхностей зубьев.
Область применения изложенного здесь метода расчета ограничи-
вается прямозубыми передачами (цилиндрическими с внешним и внутрен-
ним зацеплением и коническими). Непрямозубые передачи (косозубые
и шевронные цилиндрические, криволинейнозубые конические, гипоид-
ные, червячные) применяются лишь в немногих типах авиационных
двигателей и методы расчета их имеют много специфических особенностей,
не позволяющих с уверенностью использовать данные, не проверенные
достаточно широкой практикой эксплоатации в условиях авиации.
520203 Для планетарных передач, если распределение нагрузки по сател-
литам неизвестно, предлагаемый здесь метод расчета можно применять
только условно—для сравнительных расчетов.
520300 Исходные данные,^необходимые для расчета зубчатой передачи
1. Передаваемая зубчатой передачей мощность NB в л. с. и макси-
мальный крутящий момент за цикл двигателя Afmax, или коэффициент к,
равный отношению максимального крутящего момента к среднему, при
номинальном режиме работы двигателя.
2. То же — при наиболее тяжелом режиме работы (например, при
взлетном или при чрезвычайном режиме работы).
3. Числа оборотов в минуту шестерни и колеса при указанньйс
режимах работы.
4. Род нагрузки (зубья работают одной или обеими сторонами).
5. Размеры передачи и элементов зацепления: межцентровое рас-
стояние А в см; рабочая ширина зубчатых колес b и длины зубьев
в опасном сечении Ь{ и в см; угол зацепления а; модуль зацепления
т в мм; коэффициент высоты головки зуба основной рейки /0; коэф-
фициенты коррекции для шестерни и для колеса 5, и
6. Числа зубьев шестерни и колеса zt и z2.
7. Пределы прочности аь и пределы текучести os, либо пределы
усталости <з„ или материалов зубьев шестерни и колеса (сердцевин
зубьев) в кг/см*, а также твердости поверхностного слоя зубьев шестер-
ни и колеса по Роквеллу Hrc (или по Бринеллю Нв).
752
521000—521103
8. Ошибки в основном шаге зубьев шестерни и колеса А/о1 и Д/02
в микронах (или наибольшая разность основных шагов шестерни
и колеса До); накопленные ошибки в шаге или (если зубчатые колеса
изготовлены) диаграммы накопленных ошибок в шаге зубьев шестерни
и колеса, если окружная скорость выше 15 м!сек.\
ОПРЕДЕЛЕНИЕ РАСЧЕТНОЙ НАГРУЗКИ НА ЗУБЬЯ
ЗУБЧАТЫХ КОЛЕС
Определение расчетного крутящего момента;
Определение максимального передаваемого шестерней редуктора
авиационного двигателя крутящего момента может производиться двумя
«способами: приближенным и уточненным.
При приближенном способе расчет ведется по максимальному
за цикл двигателя крутящему моменту, найденному из динамического
расчета двигателя. Следовательно, в этом случае не учитываются на-
грузки о*г крутильных колебаний системы коленчатого вала двигателя.
Ввиду сложности определения нагрузок от крутильных колебаний,
особенно при проектировании новой конструкции, чаще приходится
пользоваться приближенным методом расчета. Как показала практика
расчетов и торсиографирования, нагрузки от крутильных колебаний
на зубчатые колеса редукторов в нерезонансных зонах составляют около
50% от среднего крутящего момента и, следовательно, действительные
нагрузки на зубья мало отличаются от нагрузок, определяемых про-
стым динамическим расчетом. В зоне резонанса возможны двукратные
и даже ббльшие перегрузки, и учитывать в соответствующих случаях
нагрузки от крутильных колебаний необходимо; однако эти резонанс-
ные зоны являются, как правило, запретными в’эксплоатации.
Большие вибрационные нагрузки резко снижают долговечность
рабочих поверхностей зубьев лишь в тех случаях, когда максимальная
вибрационная нагрузка приходится на одни и те же зубья шестерни
(или колеса) 5а каждый ее (его) оборот. Поэтому, например, шестерня
тихоходной ступени передачи нагнетателя будет больше страдать от
вибрационной нагрузки при ровном (например 2; 2,5; 4 и т. п.) пере-
даточном числе, чем при неровном.
Расчетная нагрузка на зубья зубчатых колес определяется при
номинальном режиме работы двигателя. В . порядке дополнительного
расчета вычисляются нагрузки при резонансных режимах, лежащих
в пределах рабочих чисел оборотов двигателя, и при наиболее тяжелом
режиме нагрузки рассчитываемой передачи.
N
Передаваемый зубчатым колесом крутящий момент М=71620 — кгсм,
где JV —передаваемая зубчатым колесом мощность, л. с.,
п — число оборотов зубчатого колеса в минуту.
Если передаваемый зубчатым колесом крутящий момент за цикл
двигателя не изменяется, то расчетный крутящий момент определяется
по формуле 521103; например, так определяется расчетный крутящий
момент зубчатой передачи к нагнетателю в турбокомпрессоре, или
зубчатой передачи от коленчатого вала к нагнетателю, при отсутствии
резонанса крутильных колебаний системы коленчатого вала двигателя.
521000
521100
521101
521102
521103
48 Авиац. поршв. двигатели.
753
521104—521301
521104 Если за цикл двигателя крутящий момент изменяется, то при при-
ближенном расчете расчетным крутящим моментом является Afmax, т. е.
максимальное его значение за цикл, определенное без учета дополни-
тельного момента от крутильных колебаний системы. Например, зубча-
тые колеса редукторов авиационных двигателей рассчитываются (при
приближенном расчете) по максимальному за цикл двигателя эффек-
тивному крутящему моменту, передаваемому шестерней редуктора:
Л4щах ~ Мк,
где к — отношение максимального крутящего момента к среднему,
взятое из диаграммы суммарных крутящих моментов на коленчатом
валу двигателя (полученной при его динамическом расчете).
521200 Учет нагрузок, вызываемых крутильными колебаниями системы,
включающей рассчитываемую передачу
521201 При расчете с учетом крутильных колебаний следует пользоваться
формулой:
Mmax==M + Me = W,
*
где М — передаваемый шестерней средний крутящий Момент, опреде-
ляемый по формуле 521 ЮЗ, в кгсм,
М„ — максимальное значение передаваемого шестерней крутящего
момента от крутильных колебаний в кгсм.
521300 Теоретические предпосылки к определению динамической нагрузки,
вызываемой ошибками в шаге или в профиле зубьев
Ошибкой в основном шаге называется разность между действитель-
ным и номинальным размерами основного шага. Ошибкой в профиле
называется измеренное по нормали расстояние между Двумя эволь-
вентами теоретической основной окружности, ограничивающими действи-
тельный профиль в пределах его рабочего участка в плоскости враще-
ния. Суммарной ошибкой в основном шаге называется наибольшая по
абсолютной величине разьость ошибок в основном шаге шестерни
и колеса, взятых со своим# знаками.
521301 Ошибки в основном шаге и в профиле зубьев зубчатых колес вы-
зывают динамические нагрузки на зубья, причем ошибки в профиле
обычно вызывают меньшие динамические нагрузки [8], чем ошибки
в основном шаге. Поэтому при расчете прямозубых колес учитываются
лишь эти последние ошибки.
Из-за ошибок в основном шаге могут возникать два вида удара
зубьев: удар в начальной контактной точке —кромочный удар,
когда основной шаг у ведомой пары зубьев 2 — 4 (фиг. 521301-1)
больше, чем у ведущей 1 — 3, и удар в начале зацепления одной пары
зубьев — ср е д инн ый удар — в обратном случае (фиг. 521301-11).
Если разность основных шагов сопряженных зубчатых колес будет
больше деформации зубьев, то линии CAtB на фиг. 521301-1 и II будут
линиями действительного зацепления. ,
754
521302 —521303
Срединный удар происходит вследствие того, что при зацеплении
на участке кромочного контакта АйВ (фиг. 521301-11) возникает неравномер-
ность вращения зубчатых колес, которая приводит к сближению профилей
Фиг. 521301-I.
Кромочный удар зубьев
зубьев 3 и 4 со скоростью,
возрастающей до тех пор,
пока они не встретятся в точ-
ке С с ударом.
Фиг. 52I301-II.
Срединный удар зубьев
Скорость (в см/сек) срединного удара (сила которого мало отличает- 521302
ся от силы кромочного удара) в момент выхода неударяющейся пары
зубьев из зацепления может быть определена [5] по следующей фор-
муле:
v„e= 100®(|±1)
где v — окружная скорость, м/сек;
i — передаточное отношение Q —
Ло—суммарная ошибка в основном шаге, см;
А — межцентровое расстояние, см;
Fiи Рг ~ радиусы кривизны профилей зубьев в конечной контактной
точке (рабочего участка линии зацепления);
а — угол зацепления.
Обозначим приведенные к основным окружностям массы зубчатых 521303
колес, приходящиеся на 1 см их рабочей ширины, через /пг и т2
(см. 521503). Кинетическая энергия относительного движения (в на-
чальный момент удара) этих масс вдоль линии зацепления в неко-
торый момент времени полностью перейдет в потенциальную энергию
деформации зубьев (если не учитывать деформации валов и опор).
Будем считать удельную (т. е. приходящуюся на 1 см рабочей
ширины зубчатых колес) силу реакции профилей зубьев 3 — 4
(фиг. 521301-11) состоящей в этот момент времени из удельной силы
нормального давления
_ Р
Ря~ Ь СО8а ’
48*
755
521 304—521305
где P — окружное усилие и b — рабочая ширина зубчатых колес, и из
удельной силы удара
где U — сила удара на всей длине зубьев.
Скорость срединного удара представляет собой разность составляющих
и v3 (в направлении скорости удара) от скоростей абсолютного дви-
жения зубьев 7 и 2 в точке В (фиг. 521301-11). Если ударяющаяся
пара зубьев под действием силы ря, приходящейся на 1 см ширины
зубчатых колес, имеет деформацию 6р, то, полагая деформацию пропор-
циональной силе, имеем:
где с — удельная жесткость зубьев в кг] см? (удельная жесткость зубьев
равна отношению удельной силы нормального давления к вызываемой
ею упругой деформации зубьев).
Дополнительная деформация от силы и будет 8Ц = у . При при-
ближенном выводе формулы для определения силы удара и можно
исходить из предположения, что пока предыдущая (неударяющаяся)
пара зубьев не выйдет из зацепления, кинетическая энергия движения
зубчатых колес (с неодинаковыми скоростями) не будет превращаться
в энергию деформации зубьев и за это время будет происходить лишь
перераспределение деформации пар зубьев 7 — 2 и 3 — 4 при неизмен-
ной суммарной энергии деформации зубьев.
Пусть в момент выхода предыдущей пары зубьев из зацепления
скорости движения зубьев 3 и 4 в точке С в направлении линии за-
цепления будут и v3. Тогда, имея в виду, что при изменении де-
формации зубьев по отношению к 8р работа внешней нагрузки на каж-
дом зубчатом колесе равняется работе реакции профиля ря, получим
по закону сохранения энергии:
им? . mtvl (mi + m3)(w')2_“8u_/п
2 "* 2 2 “ 2 2с ’ k '
где d' — составляющая скорости по линии зацепления обоих зубьев
в точке С (фиг. 521301-11) в момент максимального сжатия зубьев 3—4.
По закону сохранения количества движения:
m1v1 + m3v3 = {m1 + mi)'v'. (2)
521304 Из уравнений (1) и (2) п. 521303, полагая -р, — z/3 = v,, получаем
u = с,
где nia — удельная эффективная масса зубчатых колес, равная
_ т1т2
ГПа — ~ •
“И Шз
521305 Участие в зацеплении в первый момент удара неударяющейся пары
зубьев, а также упругость валов, ослабляют силу удара. Учитывая
первое коэффициентом 0,6, а второе коэффициентом 0,9[5]; принимая
75в
521306—521307
c= 165 000 кг/см2 [2]; определяя массы шестерни и колеса, как массы
соответствующих сплошных цилиндров; вводя компенсируемую (благо-
даря повышенной деформации зубьев при кромочном контакте) ошибку 8;
полагая vt — иос и допуская следующее упрощение в выводе:
sin а р* 0,342
Г~Т\ pf ~ OJ57^ ’
получаем приближенную формулу для определения динамической
нагрузки
и — 0,8 v А ~ °) кг[см,
где Д, и & — в микронах;
zu— передаточное число (z\2 > 1).
Если с шестерней жестко связана массивная деталь, имеющая в р 521305.
раз больший момент инерции, чем сама шестерня, то значение и,
найденное по формуле 521305, следует увеличить в
(Р + 1)018 +1)
Р-НЪ-Н
раз.
Массивная деталь, жестко связанная с колесом, сказывается на зна-
чении и мало.
Главными допущениями, положенными в основу вывода формулы 521307
521305, являются: 1) при ударе вновь вступающих в зацепление зубьев
кинетическая энергия движения (возникшего в результате кромочного
контакта) масс зубчатых колес переходит в потенциальную энергию
деформации зубьев и валов, которая затем расходуется в результате
демпфирования возникших при ударе колебаний зубчатых колес; 2) детали,
связанные с зубчатыми колесами, имеют настолько податливые связи,
что при определении силы удара массы этих деталей можно не учитывать;
3) деформация самих зубьев происходит безинерционно; 4) в момент
удара зубьев колебательное движение, возникшее при предыдущем ударе,
считается затухшим; 5) разность основных шагов больше деформации
зубьев.
Первое допущение направлено в сторону повышения надежности
расчета, так как, помимо деформации зубьев, иногда оказывает влияние
и деформация обода колеса, которая для передач авиационных двигателей
в некоторых случаях может оказаться довольно значительной.
Второе допущение может быть устранено путем уточненного расчета
с учетом масс деталей, упруго связанных с зубчатыми колесами [5].
Однако, как показывают такие расчеты, упруго связанные с зубчатыми
колесами массы в передачах авиадвигателей на величине динамической
нагрузки сказываются мало.
Третье допущение не вызывает сколько-нибудь значительной погреш-
ности из-за малой величины масс ударяющихся зубьев, особенно, если
учесть, что основная часть деформации зубьев приходится на деформацию
сжатия в зоне контакта.
Четвертое допущение оправдывается до некоторой степени тем, что
существующие в момент удара (еще не затухшие) колебания в состоянии
757
521308—521309
521308
усилить возникшие при новом ударе колебания лишь в том случае, когда
удар этот приходится на период увеличения сжатия предыдущей пары
зубьев, но при этом соответственно уменьшится скорость нового удара
зубьев.
В результате исследования явления удара в том случае, когда дефор-
мация равна или больше ошибки в шаге, найдено, что и к этому случаю
применима формула 521305.
Очень существенным для авиационных передач, особенно нагнета-
521309
тельных, является существование предела, которым ограничивается сила
удара. Верхний предел динамической нагрузки можно определить из того
предположения, что при очень большой окружной скорости зубчатые
колеса, в силу своей инерции, будут вращаться равномерно, и неточности
нарезания будут компенсироваться целиком за счет деформации зубьев.
Следовательно, этот предел равен силе, которая требуется для того, чтобы
сдеформировать зубья на величину ошибки в шаге или в профиле. Напри-
мер, погрешность в шаге или в профиле Д=10 р. приведет к дополнитель-
ной нагрузке сД, приблизительно равной 165 кг!см.
Формула 521305 выведена для нефланкированных зубьев, т. е. для
зубьев, имеющих эвольвентный рабочий профиль, и вступающих в зацеп-
ление с ударом,
Фиг. 521 зоэ.
Ошибка в профиле
зуба при прямо-
линейном искажен-
ном участке про-
филя
действия ошибки
вследствие наличия ошибок в основном шаге. Если же
зубья фланкированы (см. 513102), т. е. профили зубьев
у вершин выполнены с отклонениями от эвольвенты
(в тело), то формула 521305 не применима, и динами-
ческую нагрузку следует определять по формуле:
12,4 До
it — ---------2____ •
( 2 д_ 47 Л ’
₽я к1б,5До+йг03У
обозначения те же, что в 521302 и 521303, a di — диа-
метр начальной окружности шестерни.
Посредством фланкирования ошибка в основном
шаге переводится в ошибку в профиле, динамическая
нагрузка из-за действия которой и определяется по
приведенной формуле. Однако следует иметь в виду,
что эта формула выведена [4] при допущении, что
искаженный участок профиля (участок динамического
в профиле Д) является прямой линией, касательной
к точной эвольвенте (фиг. 521309), причем
АВ ~ 2Дгг sin а ,
где а — угол зацепления.
Например, при Д = 0,005 см, i\ — 5 см и а — 20°, получаем
АВ 1,3 мм. Если длина фланкированного участка будет в ₽ раз
больше, чем длина участка АВ, а наибольшая глубина фланкирования
будет равна До, то коэффициент 47 в формуле для определения и
следует увеличить в раз. Если ошибка в окружном шаге или в про-
филе Д больше До, то в эту формулу вместо До следует подставить Д.
758
521400—521402
Определение динамической нагрузки по Бакингему 521400
и экспериментальные данные
По Бакингему [11], если не учитывать (специальным расчетом) 521401
связанные с зубчатыми колесами массы, имеем:
р
где Р —окружное усилие, кг;
ft —рабочая ширина зубчатых колес, см-,
Д — «ошибка в действии», равная большему значению из двух:
л) суммарная ошибка в основном шаге, б) ошибка в профиле; точнее,
под ошибкой в действии следует понимать наибольшее смещение по
делительной окружности одного из зубчатых колес пары от положения,
соответствующего равномерному вращению этого зубчатого колеса при
равномерном вращении парного зубчатого колеса за период зацепления
одной пары зубьев;
v — окружная скорость, м{сек-,
а — угол зацепления;
удельная жесткость зубьев:
для зубьев нормальной высоты
с= 112000 кг[см2 при а — 14,5°,
с = 116000 кг/см* при а, = 20°;
для укороченных зубьев
с ~ 120000 кг [см* при а = 20°.
Эта формула выведена теоретическим путем при учете только
ошибок в профиле зубьев. Несмотря на это, вследствие ряда неточно-
стей вывода, она дает преувеличенную динамическую нагрузку [4].
В опытах [10] по определению динамических нагрузок на зубья 521402
прямозубых колес испытываемая пара зубчатых колес нагружалась
до определенного окружного усилия и затем приводилась в движение
со скоростью, постепенно увеличивающейся до тех пор, пока электри-
ческий ток, проходящий через зацепляющиеся в данный момент зубья,
не прерывался.
Если бы ток прерывался при возникновении сколь угодно малого
зазора, то при анализе экспериментальных данных силу удара было бы
легко определить. Так как при максимальном разжатии зубьев их дефор-
мация равнялась бы нулю, то при максимальном сжатии они имели бы
деформацию, равную 2§р (см. 521303), т. е. в этом случае и рав-
нялось бы рв. В действительности ток продолжает передаваться через
зубья и при некоторой величине зазора между ними, и поэтому дан-
ными эксперимента можно воспользоваться лишь зная величину этого
зазора.
При анализе экспериментальных данных следует исходить из пред-
положения, что толщина масляной пленки, при которой еще передается
759
521500—521501
ток, не превышает 3 —4 р.. Эта толщина легко определяется, если при-
нять, что динамическая нагрузка пропорциональна окружной скорости..
На фиг. 521402 приведены
экспериментальные значения
у (при 2,—-18, z3 = 48, т =
= 8,51 мм и 6 = 25,4 мм),
найденные на основании ука-
занного предположения, а так-
Ц
же теоретические значения —,
полученные по формуле 521305
(при значении 8 = 7р.) (с уче-
том 521306), и по формуле
Бакингема (см. 521401). Из-
этой фигуры видно, что фор-
мула Бакингема дает значения
динамической нагрузки значи-
тельно большие эксперимен-
тальных или найденных па
формулам 521305 и 521306.
На практике расхождения бу-
дут еще большими, так как
в указанных опытах с ше-
стерней была жестко связана
массивная деталь, увеличи-
вающая эффективный момент
инерции зубчатых колес при-
мерно в 3 раза, что на прак-
тике встречается весьма редко.
Таким образом можна
предположить, что формула
Бакингема дает завышенные
значения динамической на-
Фиг. 521402.
Эксперимеитальные и теоретические значения
отношения динамической нагрузки к окружной
скорости
грузки. Однако, поскольку
расчет авиационных зубчатых
колес носит в большинстве
случаев сравнительный харак-
тер (т. е. служит целям сравнения проектируемых передач с оправ-
давшими себя в работе передачами) и поскольку во многих кон-
структорских бюро авиационной промышленности накоплены обшир-
ные данные сравнительных расчетов зубчатых колес при использовании
метода Бакингема, в предлагаемых методах расчета используются как
формула 521305, так и формула 521401.
521500 Динамическая нагрузка из-за накопленной ошибки
в окружном шаге
521501 Ошибкой в окружном шаге называется разность между
действительными размерами двух соседних шагов в плоскости враще-
ния (по окружности, близкой к делительной).
760
521502
Накопленной ошибкой называется сумма двух, наибольших
по абсолютной величине, но противоположных по знаку, смещений
одноименных профилей в какой-либо плоскости вращения от их теоре-
тическдго положения относительно некоторого профиля, положение
которого условно принято за правильное.
Местной накопленной ошибкой называется алгебраиче-
ская сумма отклонений действительных размеров шагов от среднего
(по окружности измерения) шага на некоторой дуге.
Если в конструкции предусмотрены достаточно упругие соединения
между зубчатыми колесами и связанными с ними массивными деталями,
то накопленная ошибка в шаге не будет вызывать больших динами-
ческих нагрузок за исключением тех, редко возможных случаев, когда,
вследствие совпадения частоты силовых импульсов, обусловленных
наличием накопленной ошибки, с частотой собственных колебаний,
возникнут опасные резонансные крутильные колебания системы. Возник-
новение таких колебаний требует в соответствующих случаях специаль-
ных исследований.
Значительно большее влияние может оказать местная накопленная
ошибка в шаге при неблагоприятном характере
худший случай будет тот, при котором
скорость накопления ошибки в шаге,
будучи сама по себе значительной, в не-
которой точке (по окружности измерения)
меняет свой знак. В этом случае можно
применить теорию, представление о кото-
рой дано в 521303, к системе, состоящей
из упругой связи между шестерней и
связанной с ней деталью, удельную (от-
несенную к единице рабочей ширины зуб-
чатых колес) жесткость которой обозна-
чим через Ci, и из следующих масс
(фиг. 521502):
/И1 и та — удельные массы шестерни и
521502.
накопления. Наи-
ее
Фиг. 521502.
Упрощенная схема расположения
масс и упругих связей в зуб-
чатой передаче
колеса (и жестко связанных
с ними деталей), приведенные к линии зацепления, в кг секшем*; т№1
и тсв. з — массы упруго связанных с шестерней и с колесом деталей,
отнесённые, к 1 см рабочей ширины зубчатых колес и к их радиусам
основных окружностей, в кг сек*/см\
Если удельная жесткость связи между Wi и /псв-1 меньше, чем
между /па и /псв. а, то в первом приближении допустимо учитывать
упругость только первой связи и рассматривать две массы по концам
этой связи: /т?св1 и суммарную массу (Щ14-Ща + /псв. а). Скорость относи-
тельного движения этих масс в точке изменения знака скорости накопле-
ния ошибки в шаге:
2Д£« cos я
где Aj —местная накопленная ошибка в шаге шестерни или колеса
на числе зубьев Zz, соответствующем полупериоду собственных коле-
баний рассматриваемой системы и определяемом по формуле 521504;
в формулу 521502 следует подставлять большее значение As из Axt и Asa;
761
521503-521505
в—окружная скорость;
а—угол зацепления;
t—шаг зацепления.
521503 Применяя формулу 521304 к рассматриваемой системе, получаем
следующее выражение для определения удельной динамической нагрузки,
вызываемой местной накопленной ошибкой в шаге:
2 COS а
“1 = ^7----------
1
тэс1
или
я» l,2AsC!,
(1)
где тэ — приведенная к линии зацепления удельная эффективная масса
зубчатых колес и связанных с ними деталей в кг сек*[см*:
1 (т1Ц-т1 +
(2)
Э тсв. l + + + 1 ’
Ci —удельная жесткость соединения между шестерней и связанной
с ней массивной деталью:
1 м
C1 ~ 10‘ftr3 v
' и' в тзаяр
Р)
М
здесь-------отношение крутящего момента в кгсм к углу закручива-
?аакр
ния в радианах соединения, вызываемому этим крутящим моментом;
Ь~ рабочая ширина зубчатых колес, ел;
/„ — радиус основной окружности, см.
Удельные массы
инерции:
определяются по соответствующим моментам
т h .
mi hr* ’
т = 7* • т —1 свл • т =-
1 * А,3 ’ 'Л'В. i— ’ '"св.а— . »
orоа or„j РГ02
521504 Число зубьев Zs, на котором должна измеряться местная накоплен-
ная ошибка, определяется по формуле:
2t V К’
. Z Z
если zs > ~2 , то следует принимать zs = у .
521505 Если упругое соединение между колесом и связанной с ним мас-
сивной деталью более упруго, чем соединение >между шестерней и связан-
ной с ней массивной деталью, то тэ следует определять по формуле:
т __ (тсв. 1 + 4- Ша) /Пев, а]
3 /Пев. 1 + + тг + тсв. ,У •
и в формулу 521504 следует подставлять в качестве сх удельную жест-
кость соединения между колесом и связанной с ним массивной деталью.
Так как в авиационных конструкциях соединения между зубчатыми
колесами и связанными с ними массивными деталями, как правило,
настолько упруги, что даже полная компенсация накопленной ошибки
762
521600—521603
за счет деформации этих соединений не вызывает больших допонитель-
ных нагрузок на зубья, то в предлагаемом здесь методе расчета дина-
мическая нагрузка из-за местной накопленной ошибки в окружном шаге не
учитывается. В тех случаях, когда желательно установить, достаточно ли
упруги указанные соединения, или определить допустимые погрешности
делительных механизмов зубообрабатывающих станков, рекомендуется
прибегать к изложенному здесь методу определения динамической
нагрузки, вызываемой накопленной ошибкой в окружном шаге.
Определение динамической нагрузки, возникающей на зубьях 521600
прямозубых колес из-за ошибок в основном шаге
На основании кратко изложенной в 521300 теории удара прямых 521601
зубьев удельная (приходящаяся на 1 см ширины зубчатых колес)
динамическая нагрузка, возникающая на прямых зубьях при входе их
в зацепление или при выходе из зацепления предыдущей пары зубьев,
определяется по формуле:
« = 0,8»
" <12
где »—окружная скорость по начальной окружности, м]сек (для пла-
нетарных передач —окружная скорость относительного движе-
ния, т. е. окружная скорость при остановленном водиле);
А —межцентровое расстояние, см;
До —разность (в микронах) между наибольшим основным шагом
одного зубчатого колеса и наименьшим—другого; если ошибки
в основном шаге шестерни и колеса равны Д/о1 и Д/Оа, то
Д„ = Д41 —Af03; если значения Д/01 и Д/о, берутся из рабочих
чертежей, то в неответственных случаях за До принимают
наибольшую вероятную разность основных шагов шестерни
и колеса До = |/ Д^ + Д/о\;
/‘is —передаточное число (отношение числа зубьев колеса к числу
зубьев шестерни);
О —компенсируемая ошибка; можно принимать 8 = 5р при До>1Ор.
и 8 = у при До < 10р..
На основании 521308 следует учитывать предельно возможное значе- 521602
ние динамической нагрузки, вызываемой ошибкой в основном или в
окружном шаге или ошибкой в профиле; этой ошибке дадим обобщенное
обозначение Д.
Максимальная удельная сила удара, возможная при данном Д,
равна
Umax = 16,5 (Д-8),
где ДиЭ-в микронах, и —в кг! см.
Если и > umax, то следует принимать и = umax- Значения 8 здесь
те же, что и в 521601.
При расчете на заедание (см. 524201), когда для определения 521603
температуры рабочих поверхностей зубьев необходимо учитывать
не мгновенное значение нагрузки, а среднее значение ее на пути, равном,
763
521604—521605
по крайней мере, нескольким ширинам полоски контакта [9], реко-
мендуется определять umax по следующей формуле:
tlmn-r--- 6 (А '— И)
521604 При выводе формулы 521601 принималось, что удельная жест-
кость пары зубьев, равная отношению удельной силы нормального
давления к вызываемой ею упругой деформации, с = 165000 кг/см*,
и удельная эффективная масса пары зубчатых колес в кг сек*/см*
определялась KaKj
тя =—1—=-
э tn1 + mi
где Mi и тг — удельные, т. е. приходящиеся на 1 см рабочей ширины
зубчатых колес, массы стальных цельнокованных шестерни и колеса,
приведенные к радиусам их основных окружностей (т\ и гг~радиусы
начальных окружностей в см):
т1 = 0,0000144 rj;
та = 0,0000144 i\.
Такие условные значения масс близки к истинным значениям
удельных эффективных масс большинства зубчатых передач; поэтому
формулу 521601 можно считать применимой при предварительном расчете.
Однако в ряде случаев в зависимости от конструкции передачи, дей-
ствительная эффективная масса может значительно превосходить
условную. Поэтому, если значение и значительно ниже максимальной
удельной силы удара umax (см. 521602 и 521603), то необходимо в вычи-
сление динамической нагрузки по формуле 521601 ввести поправку
(см. 521605).
521605 Если зубчатое колесо (т. е. шестерня или колесо) и жестко связан-
ные с ним детали имеют больший момент инерции, чем цельнокова-
ный диск, диаметр и толщина которого соответственно равны диаметру
начальной окружности и рабочей ширине зубчатого колеса, то действи-
тельная удельная масса больше условной.
Действительные удельные массы шестерни и колеса, т. е. массы
в кг сек*/см*, приходящиеся на 1 см рабочей ширины зубчатых колес
и приведенные к соответственным радиусам основных и окружностей,
определяются по формулам:
где 7' — суммарный момент инерции шестерни и жестко связанных с ней
деталей, кг см/сек*;
7' —то же для колеса.
Действительная удельная эффективная масса данной пары зубчатых
колес в кг сек*/см*:
764
521606—521702
и скорректированная сила удара
11=111/ — .
г т
Примечание. Если масса т'г значительно больше массы т',
то вычисление т2 излишне и можно ограничиться поправкой, при-
веденной в 521306.
При малых окружных скоростях величина силы удара может 521606
оказаться незначительной. Однако, если упругость соединений между
зубчатыми колесами и связанными с ними массивными деталями мала,
то на величине динамической нагрузки будет сильно сказываться инер-
ция этих деталей. Для того чтобы не производить динамический расчет
сложной системы, можно ориентироваться на максимальное возрастание
динамической нагрузки, возможное по этой причине. Для этого, по ана-
логии со сказанным в 521308, необходимо руководствоваться следующим
правилом:
Если и < СтА, то следует принимать и = cxA, где сх — удельная
жесткость в кг/см-микрон соединения (валов, муфты) между шестерней
и ближайшей связанной с ней массивной деталью (или между колесом
и связанной с ним массивной деталью, если это соединение более
упруго и ошибки зацепления будут компенсироваться за счет его дефор-
мации), определяемая по формуле 521503.
В среднем сх = 2 кг/см-микрон при малоупругом соединении зубча-
того колеса со связанными с ним деталями ис! = 0,5н-1 кг!см-микрон —
при упругом соединении.
Суммарная удельная расчетная нагрузка на зубья 521700
Суммарная расчетная нагрузка на зубья складывается: а) из полезной 521701
передаваемой нагрузки; б) из нагрузки, вызываемой крутильными
колебаниями системы, включающей рассчитываемую передачу, от внешних
силовых импульсов; в) из динамической (ударной) нагрузки и, возника-
ющей из-за ошибок в основном шаге зубьев шестерни и колеса.
Назовем сумму первых двух нагрузок внешней нагрузкой. 521702
Внешняя удельная нагрузка (действующая нормально
к рабочим поверхностям зубьев) определяется по формуле:
_ 2М ...
db COS а ’ ' '
если расчетным крутящим моментом ЛГ является момент, определяемый
по формуле 521103, либо по формуле:
__ /о\
db cos а ’ ' '
если расчетный крутящий момент определяется по формуле 521104
или 521201.
В этих формулах:
Л —диаметр начальной окружности того из зубчатых колес пары, кру-
тящий момент на котором подставляется в формулу;
я —угол зацепления.
765
521703-522101
521703
521704
522000
522100
522101
Удельная динамическая нагрузка и определяется по
формуле 521601, с учетом поправок, указанных в 521602, 521604,
521605 и 521606.
Суммарная удельная расчетная нагрузка на зубья равна сумме
внешней удельной нагрузки и удельной динамической нагрузки.
РАСЧЕТ НА КОНТАКТНЫЕ НАПРЯЖЕНИЯ]
Контактные напряжения и контактные деформации зубьев
Контактное напряжение сжатия между двумя прижатыми друг
к другу гладкими круглыми цилиндрами распределяется поперек
полоски контакта по эллиптическому закону (фиг. 522101). Наибольшее
контактное напряжение сжатия, возникающее в каждом из двух прижа-
Фиг. 522101.
Распределение нагрузки по полоске
контакта между двумя цилиндрами
тых друг к другу прямых зубьев,
можно считать равным контактному
напряжению сжатия, возникающему
в каждом из двух прижатых друг
к другу круглых цилиндров, ради-
усы которых (pj и р2) соответственно
равны радиусам кривизны профилей
зубьев в данной точке зацепления.
Это напряжение может быть опреде-
лено по следующей формуле, справед-
ливой: а) при коэффициенте Пуассона
материалов поверхностных слоев
у. = 0,3; б) при отсутствии трения
между поверхностями; в) при беско-
нечно большой длине полоски кон-
такта:
ас =0,418 j/y, (1)
где ас — наибольшее контактное напряжение сжатия, кг]см*‘,
д — удельная контактная нагрузка (нагрузка на 1 см длины полоски
контакта), кг)см\
Е — эффективный модуль упругости материалов поверхностных слоев
в кг)см*-.
2EiE>
E^Et'
для стальных зубьев эффективный модуль упругости равен
модулю упругости стали;
р — эффективный радиус кривизны рабочих поверхностей в сж;
- = - ± - , где pj и р2 — радиусы кривизны профилей зубьев
Р Р1 Ра
шестерни и колеса в точке зацепления, в которой определяется
контактное напряжение; знак минус —для внутреннего зацеп-
ления .
766
522102
(2)
Для полюса зацепления Р имеем:
А/ц sin а
fp~ 2(i12±l)’
где d, —диаметр начальной окружности шестерни, см;
i12 = — передаточное число;
а —угол зацепления.
В тяжело нагруженных авиационных зубчатых колесах контакт- 522102
ные напряжения сжатия при нормальной нагрузке достигают
10000—15000 кг/см2, а при перегрузках (например, при переходе числа
оборотов через резонансную зону)—еще больших значений.
В условиях всестороннего сжатия, которое существует в точке
с максимальным контактным напряжением сжатия, нормальные напря-
жения не являются опасными. Этим и объясняются столь высокие зна-
чения максимальных контактных напряжений сжатия, которые встреча-
ются в некоторых работающих передачах.
Для того чтобы оперировать с величинами напряжений, согласующи-
мися с прочностными характеристиками данного материала, рекомендуется
производить расчет по контактным напряжениям сдвига. Эксперименты [8]
показывают, что усталостная прочность поверхностных слоев при качении
со скольжением значительно меньше, чем при чистом качении. Поэтому
в основу расчета положено максимальное контактное напряжение сдвига,
найденное с учетом сил трения скольжения. Если, ориентируясь
на неблагоприятные условия трения смазанных зубьев, принять коэф-
фициент трения равным 0,2 и неизменным по ширине полоски контакта,
то максимальное контактное напряжение сдвига получит значение
0,34 ас на глубине 0,4 Ь1} где Ьх — полуширина полоски контакта [1].
Это напряжение почти не отличается от максимального контактного
напряжения сдвига при параболическом законе распределения нагрузки
поперек полоски контакта (при ее полущирине, равной значению Ьг
по формуле 522103), принятого здесь в качестве условного расчетного;
^ = 0,145 1/^ = ^g.
г р 2,оо
Однако, как показывают экспериментальные исследования, усталост-
ные трещины при контактных напряжениях в большинстве случаев
возникают на самой поверхности (в поверхностном слое толщиной поряд-
ка 15 — 25 р.) и при этом на той из рабочих поверхностей, на которой
скорость скольжения имеет противоположное направление по отношению
к скорости качения (т. е. на поверхности ножек зубьев). Последнее
можно объяснить тем, что на эту поверхность слой смазки действует
с большими касательными силами, чем на поверхность, на которой
скорость скольжения совпадает по направлению со скоростью качения [7].
Так как вопрос о величине контактных напряжений с учетом сил,
действующих в слое смазки, еще недостаточно исследован, расчет
на контактные напряжения условно производим по максимальному кон-
тактному напряжению сдвига, используя для его определения формулу
522102, причем допускаемые контактные напряжения сдвига следует
определять на основании экспериментальных и эмпирических данных
по усталости рабочих поверхностей зубьев и роликов.
767
522103—522202
Имеющиеся экспериментальные данные позволяют предположить,
что опасное контактное напряжение сдвига, возникающее при работе
смазанных зубьев непосредственно у поверхности, близко по величине
к условному расчетному контактному напряжению сдвига.
522103 Полуширина полоски контакта Ьх (в см) может быть определена
по формуле:
обозначения см. в 522101.
522104 Сближение центров двух сжатых цилиндров, которому может быть
приравнено сближение центров кривизны рабочих поверхностей зубьев
(деформация контактного сжатия), может быть определено [3] по формуле:
_ 2g(l—ц») . 2n£(h + b) _ 2g /. 2 а} -
522200 Опасные точки зацепления при расчете на контактные
напряжения
522201 При перемещении точки зацепления зубьев шестерни и колеса вдоль
линии зацепления эффективный радиус кривизны непрерывно изменяется.
Центр кривизны профиля эвольвеитного зуба для любой его точки
расположен в точке касания линии зацепления с основной окруж-
ностью. Для шестерни этой точкой является точка В1; для колеса—
точка В2 (фиг. 531209). Пунктирной линией BjCBj показано (в масштабе
фигуры) изменение эффективного радиуса кривизны ?= вдоль
линии зацепления. Кривая BiCBa является параболой. Для случая,
изображенного на фигуре, максимальный эффективный радиус кривизны
Ршах находится вне пределов рабочего участка линии зацепления.
Обозначим крайние точки рабочего участка линии зацепления
через Ех и Е2 и крайние точки участка зацепления одной пары зубьев
через Fx и F2. Наименьший эффективный радиус кривизны будет при
зацеплении в точке Е2 пересечения линии зацепления с окружностью
головок колеса. Однако в этой точке при достаточно точных основных
шагах зубьев шестерни и колеса нагрузка будет распределяться на две
пары зубьев. Поэтому контактное напряжение в точке Ё2 может быть
больше, чем в точке Е2.
522202 Контактные напряжения в точках Е2 и F2, вызываемые удель-
ной контактной нагрузкой q, могут быть определены посредством
умножения контактного напряжения в полюсе зацепления Р (при той
же удельной контактной нагрузке) на коэффициенты относительного
удельного давления Се2 и Cf2, равные отношениям контактных напряже-
ний в точках Е2 и F2 к контактному напряжению в полюсе зацепления.
Так как полоска контакта имеет некоторую ширину 2ЬХ (см. 522103),
то радиус кривизны в центре этой полоски не может быть очень малым,
даже при зацеплении зубьев вблизи основной окружности шестерни
или колеса. Поэтому коэффициент относительного удельного давления
в точке Е2 часто не отражает действительного контактного напряжения,
достигая в некоторых удовлетворительно работающих передачах очень
768
522203— 522204
больших значений (когда расстояние от основной окружности до бли-
жайшей точки рабочего профиля мало). Даже в том случае, когда
начальная точка контакта совпадает с основной окружностью шестерни
(предельный случай по условию отсутствия подрезания) и теоретический
радиус кривизны равен нулю, фактический радиус кривизны в середине
полоски контакта обычно будет превышать 0,3 т. Поэтому коэффициент
относительного удельного давления следует определять не в самой
точке Е3, а на некотором расстоянии от нее —в точке, в которой
обеспечивается «полное зацепление» (в отличие от кромочного). Эта
точка на ножке зуба шестерни будет отстоять дальше от центра шестерни,
чем основная окружность, по крайней мере на величину Ьг. Обозначим
расстояние этой точки от полюса зацепления через Г2. Обычно можно
принимать величину Г3 равной меньшей величине из следующих двух:
/2 (см. 512301) и рР1—0,3 т, где рР1 = r3 sin а — радиус кривизны зуба
шестерни в полюсе зацепления.
При высоких контактных напряжениях вместо 0,3 т можно вычи-
тать 0,6 т. Точнее,
обозначения см. в 522101, 522102 и 522203.
Коэффициенты относительного удельного давления в точках Е3 и F, 522203
(фиг. 531209) можно определять с учетом последнего замечания
по формулам:
г _ 1 .
’2
где /' — расстояние от полюса зацепления до точки «полного
зацепления» вершины зуба колеса с ножкой зуба
шестерни (см. 522202);
Zj — расстояние от полюса зацепления до точки зацепления
вершины зуба колеса с ножкой зуба шестерни
(см. 512301);
РР1 = Г1 sin а — радиус кривизны профиля зуба шестерни в полюсе
зацепления (здесь G —радиус начальной окружностц
шестерни и а —угол зацепления);
(О,
i13= — передаточное число;
/„ — основной шаг.
Аналогичным образом определяются коэффициенты (вместо I*
надо подставлять /') и CF1 (вместо /3 — подставлять /3).
При достаточно точном изготовлении передачи нагрузка на участках 522204
зацепления E3F3 и EJ^ будет распределяться на две пары зубьев,
пропорционально жесткости каждой из них. Величина части общей
нагрузки на зубья, воспринимаемой парой зубьев в точке Ех или Е3
49 Двиац. поршн. двигатели.
769
522205—522207
(фиг. 531209), может быть найдена, если будут известны удельные
жесткости зубьев сЕ в точках Е, и Еа и с? в точках Ft и F2, а также
суммарная ошибка в основном шаге До. Например, для точки Ё2 имеем:
Отсюда
1 ч— . 1 г
СЕ СЕ CF
или с учетом динамической нагрузки (см. 521703):
, Рн + “ , До
Рне2 + “е2= —1 •
1 + С~ CF СЕ
522205 В результате теоретического исследования деформации эвольвент-
ных зубьев [2] найдено: сЕ = 125000 кг)см2, сЕ~ 165000 кг[см2 и
Ср =180000 кг/см2. Деформация зубьев на 60 — 65% состоит из дефор-
мации контактного сжатия Зс > которая почти прямо пропорциональна
приложенной нагрузке и модулю упругости зубьев и мало зависит
от величины радиусов кривизны (находящихся в формуле для опреде-
ления ос под знаком логарифма, см. 522104); поэтому удельные жестко-
сти сЕ и сЕ практически мало зависят от формы зубьев и различие
между ними обусловлено только различием точек приложения нагрузки.
522206 На основании 522204 и 522205 расчетная нагрузка в точке Е2.
(фиг. 531209) для нефланкированных зубьев определяется следующим
образом: если
рн+и> 12,5ДО,
то
рв е2 з- «е2=°>43 (Рн + “)+7>1 д»;
’врли же
Рн+«<12,5ДО,
то
РВЕ2 + “В2 = рв +U,
где До — разность между наибольшим основным шагом одного зубчатого
колеса и наименьшим другого, в микронах.
В точке F2 расчетная нагрузка та же, что и в полюсе зацепления
при l2<t0.
522207 Хотя контактное напряжение в полюсе зацепления всегда меньше,
чем в точке F2 (фиг. 531209), а последнее, в свою очередь, может быть
меньше, чем контактное напряжение в точке Е2, выкрашивание обычно
начинается, как показывают практика и эксперименты, вблизи полюса
зацепления или одновременно по всей поверхности ножки зуба шестерни.
Так например, в одной нагнетательной передаче с числами зубьев-
Zi— 13 и z2 = 52 и с коэффициентом высоты головки зуба / = 0,8 кон-
тактное напряжение в точке F2 было на~38% больше, чем в полюсе
зацепления (эффективный радиус кривизны в точке F2 был в 1,9 раза
меньше, чем в полксе зацепления). Несмотря на это, выкрашивание-
770
522208—522301
в большинстве случаев начиналось вблизи полюса зацепления на нож-
ках зубьев шестерни, а в некоторых случаях даже на ножках зубьев
колеса.
Эксперименты [8] показывают, что зависимость контактного напряже-
ния, при котором начинается выкрашивание по прошествии некоторого
•заданного числа циклов напряжений, от скорости скольжения имеет
минимум при небольших скоростях скольжения. Удельные скольжения,
соответствующие этому минимуму, редко бывают меньшими (по абсолют-
ной величине — большими), чем — 0,22.
Следовательно, в большинстве случаев опасной точкой является
точка на ножке зуба шестерни (если материалы зубьев шестерни
и колеса одинаковы), расположенная вблизи полюса зацепления, кото-
рую при расчете условно можно считать совпадающей с полюсом зацепле-
ния. Поэтому за основной расчет на контактные напряжения здесь при-
нят расчет по контактному напряжению в полюсе зацепления.
Экспериментальных данных о влиянии скорости скольжения на уста- 522208
лость при контактных напряжениях очень мало, для того чтобы на их
основании дать значения допускаемых контактных напряжений для
точек Е и F (фиг. 531209). Однако, так как передачи, у которых
контактные напряжения в этих точках превышают контактные напря-
жения в полюсе зацепления соответственно в 1,4 и 1,7 раза, начи-
нают выкрашиваться вблизи полюса зацепления, рекомендуется допускае-
мые контактные напряжения для этих точек (если производится
проверка напряжений в них) принимать соответственно на 40 и 70%
больше допускаемого контактного напряжения для полюса зацепления.
Расчет прямозубых колес на контактные касательные напряжения 522300
Контактное касательное напряжение (условное) при контакте зубьев 522301
стальных цилиндрических прямозубых колес в полюсе зацепления
может быть найдено по одной из следующих формул, полученных путем
преобразования формулы 522102 (модуль упругости Е для стали при-
нят равным 2150000 кг/см*)'.
О)
, = 51 с | / + ц> 0'12 ± V sin 20° . ,2)
1 V d3 sin а ’ ' '
~ '°5 I)3 sin 40°
Т Д|13 г п3 ¥ b sin 2а ‘ '
В этих формулах:
ра — внешняя удельная нагрузка в кг]см, определяемая по фор-
муле 521702;
и — удельная динамическая нагрузка в кг{см, определяемая
по формуле 521601 или 521602;
рр — эффективный радиус кривизны в полюсе зацепления в см
(см. 522101);
i12 = “1 — передаточное число; i12 всегда больше единицы;
49*
771
522302
d2 — диаметр колеса, см;
а — угол зацепления;
А — межцентровое расстояние, см;
N
----отношение передаваемой зубчатой передачей средней (при
Па
расчетном режиме нагрузки) мощности к числу оборотов
в минуту колеса;
к — отношение максимального за цикл двигателя крутящего
момента к среднему без учета крутильных колебаний
(см. 521104) или с учетом крутильных колебаний системы,
включающей передачу (см. 521201);
<Р = —------коэффициент динамической нагрузки;
Рн “Г и '
b — рабочая ширина зубчатых колес, см;
а — угол зацепления.
Знак плюс относится к внешнему зацеплению, минус — к внутрен-
нему.
522302 При расчете конических прямозубых колес формулы (1)—(3)
п. 522301 получают следующий вид:
т = 213]/^, где J- = + (1)
V ?ср Pep sina<
т = 515 sin 20°. (2)
V dcp2 sin*
= 108 i / а А У 0'12 + о8 sin 4°9 гэл
Т i12(£ —0,5ft) |/ п2 <р Ь sin 2л ' '
Последние две формулы применимы только при межосевом угле
г = 90°.
Обозначения те же, что и в предыдущем пункте, с той лишь раз-
ницей, что в формулу 521702 вместо d следует подставлять dcp— сред-
ний диаметр шестерни или колеса по начальному конусу, а при опреде-
лении и в формулу 521601 вместо v надо подставлять гср — среднюю
окружную скорость и вместо А следует подставлять L — 0,5b (или
4-r| — 0,5b при 3 Ф 90°); при проверке по формулам 521503 и 521504
следует под шагом t понимать средний шаг, под эффективной массой
тэ—эффективную массу, приведенную к окружности с радиусом г cos а,
И ПОД ОКРУЖНОЙ СКОРОСТЬЮ V — СреДНЮЮ ОКРУЖНУЮ СКОРОСТЬ Гер •
Кроме того:
Xi и Х2 — углы при вершинах начальных конусов;
di и d2—диаметры начальных окружностей шестерни и колеса, см;
dCp 2— средний диаметр колеса по начальному конусу, см;
L — конусное расстояние, см; при 3 — 90°:
772
522303—522307
При определении контактных напряжений в точках Ег и Ft можно 522303
пользоваться формулами и указаниями, приведенными в 522202 и 522203,
с учетом 522206. Если угол зацепления а =20° и коэффициент высоты
зуба / = 0,8, то при числе зубьев шестерни 2Ш> 13 вычисление т для
точки F2 излишне.
Допустимые числа циклов напряжений: 522304
где /?со — допускаемое касательное контактное напряжение Rc при
Nn = 10’ (см. 522400). 4
Допустимые числа часов работы шестерни и колеса, в течение кото- 522305
рых они могут работать при расчетном режиме нагрузки без прогрес-
сивного выкрашивания, определяются по формулам:
(V Л7
Т = д~1 и Т ’= ц~ л~2
1 OOffjZij * 60a2n2 ’
где о, и а2 — числа циклов , зацеплений за один оборот шестерни
и колеса; ' .
и л2 — числа оборотов в минуту шестерни и колеса.
Если Ntl. д. j или Nn. д.2 превышает 25 • 10’ (или 10’ при /7В< 350),
то рабочие поверхности данного зубчатого колеса могут работать без
выкрашивания (с исправным парным зубчатым колесом) неограниченно
долго, так как число циклов напряжений, соответствующее пределу
усталости при контактных напряжениях, не превышает указанного.
По формуле (3) п. 522301, принимая т = Rc, можно найти b при 522306
заданном А, или А при заданном Ь, или, наконец, А при заданном Ь]А,
а именно:
. z 10s x2N к . ,.sstn40°
А = 108 1./N к 0'12 ± I)3 sin 40°.
Rcilt V п2 ? b sin 2л ’
A~(i -4- 108 YN k 1 sin40°
Л-(/12±1)|/ , (3)
где
m _ i 11O(<12± l)n2k f sin 40° ..
R* V i12 sin 2a w
или
, 2,16 • 106(Д —d)(i12 ± I)2&sin40°
? 1 /?2Al12 sin 2a ’ W
За расчетное значение <p принимается большее из двух, найденных
по формулам (4) и (5). Если А неизвестно, то для определения <р вычи-
сляется предварительно значение А при <р = 1 по формуле (2) или (3),
по которому и находится <р.
При проектировочном расчете конической передачи с межосевым 522307
углом 3 = 90° в формулах 522306 следует заменить А на L — 0,5b
и i±l на )/i2 + 1.
773
522308-522402
522308
522400
522401
522402
Уменьшить контактные напряжения в цилиндрической прямозубой
передаче, не изменяя ее межцентрового расстояния и ширины зубчатых
колес, можно посредством коррекции зацепления, при которой, в резуль-
тате выбора большой суммы коэффициентов коррекции, достигается
значительное увеличение угла зацепления. Например, при увели-
чении угла зацепления до 26° допускаемая нагрузка возрастает
в Й»= 1,22 раза’ т-е- на 22%-
В тех случаях, когда деформация зубьев значительно больше сум-
марной ошибки в основном шаге зубьев, целесообразна коррекция,
позволяющая увеличить коэффициент перекрытия до значения свыше
двух, чем будет достигнуто распределение нагрузки на две пары зубьев.
Допускаемые^контактные напряжения
Так как допускаемое контактное напряжение определяется по мини-
мальной твердости поверхностных слоев зубьев, а расчетное контактное
напряжение находится с учетом динамической нагрузки, подсчитываемой
при наиболее неблагоприятном характере и при наибольшей величине
ошибок нарезания, то при определении допускаемых контактных напря-
жений можно ориентироваться на средние значения экспериментально
найденных пределов контактной усталости. На этом основании, при
достижении равномерного распределения нагрузки
по ширине зубчатых колес и надлежащей чистоты рабо-
чих поверхностей зубьев, если при расчете должным образом
учтены динамические нагрузки, можно назначать допускаемые контакт-
ные напряжения, исходя из средних значений экспериментально найден-
ных пределов контактной усталости.
Имеющиеся экспериментальные данные [8], а также поверочные
расчеты оправдавших себя в работе передач позволяют рекомендовать,
при соблюдении указанных в 522401 условий, следующие формулы для
определения допускаемых контактных напряжений /?с:
а) Для цементованных зубчатых колес из легированных сталей
(при достаточной прочности сердцевины, когда ^лСсердц > 40):
в/’кР
/?с= 120//rc J/~. (4)
б) Для цианированных и азотированных зубчатых колес, при отсут-
ствии больших перегрузок,
/?с=108ЯЛс)У^. (2)
Если твердость сердцевины цианированных или азотированных
зубьев Ндс отличается от твердости их рабочих поверхностей Ндс
больше, чем на 20%, для цианированных зубьев и больше, чем на 35%,
для азотированных, то
(3)
Для азотированных зубьев вместо 132 надо подставлять 143.
774
522403—523101
в) Для зубчатых колес, не подвергавшихся цементации, цианиро-
ванию или азотированию:
• /'1П7
Rc=10HB l/^. (4)
В этих формулах:
Нвс и Нв — числа твердости поверхностного слоя зубьев по Роквеллу
(шкала С, нагрузка 150 кг) и по Бринеллю;
М, —рабочее число циклов напряжений за расчетный период:
N^bOanT, (5)
где а — число зацеплений каждого зуба рассчитываемого зубчатого ко-
леса за один его оборот;
п — число оборотов в минуту рассчитываемого зубчатого колеса;
Т — общее число часов работы передачи.
Если Ntl > 107, то при Нв < 350 следует принимать N4=107.
Если Nu > 25 • 107, то при Нв > 350 следует принимать УУЦ = 25 • 107.
В настоящее время еще не имеется достаточно данных для расчета
авиационных зубчатых передач, особенно быстроходных. Например,
отсутствуют эксперимеьтально установленные значения пределов контакт-
ной усталости при больших числах циклов напряжений и эксперимен-
тальные данные по предельным значениям динамической нагрузки.
В силу этого, при назначении допускаемых напряжений следует руко-
водствоваться, помимо указанных в 523402 рекомендаций, данными
поверочных расчетов аналогичных передач, оправдавших себя в работе.
Контактные напряжения сдвига в зубьях зубчатых передач некото-
рых авиадвигателей приведены в таблице 522403. Найденные в резуль-
тате поверочных расчетов значения долговечности рабочих поверхностей
зубьев оказались в некоторых случаях малыми (например, у шестерни
редуктора авиационного двигателя «Мерлин» XX). Однако при анализе
результатов этих расчетов следует иметь в виду, что обычно авиаци-
онный двигатель большую часть времени работает с меньшей, чем номи-
нальная, мощностью.
РАСЧЕТ ЗУБЬЕВ НА ИЗГИБ
Теоретические предпосылки к расчету зубьев на изгиб
При приложении нагрузки в какой-либо точке зуба, например,
к его вершине (фиг. 523101), наибольшее нормальное напряжение а
в корне зуба со стороны приложения нагрузки (со стороны растяжения)
или с обратной стороны (со стороны сжатия) можно определить из сле-
дующего уравнения:
рР = уа/,
в котором рр— приложенная по нормали к профилю зуба удельная рас-
четная нагрузка;
Z — шаг зацепления (/ = тс/п, где т — в см).
522403
523000
523100
523101
775
523102—523103
Коэффициент пропорциональности у, зависящий от геометрических
размеров зуба, от точки приложения силы рр, от стороны зуба, на кото-
рой определяется напряжение а, и от
трения (если она учитывается), назы-
вается коэффициентом формы
зуба.
523102 Нормальное напряжение а в корне
зуба равняется алгебраической сумме
напряжений изгиба и сжатия. На сто-
роне растяжения напряжение сжатия
вычитается из напряжения изгиба,
а на стороне сжатия —складывается
с ним. Следовательно, коэффициент
формы зуба на стороне растяжения
будет больше, чем на стороне сжатия.
Так как отношение пределов усталости
при пульсирующем цикле при растя-
жении и при сжатии, как правило,
меньше отношения напряжений в зубе
со стороны растяжения и со стороны
величины и направления силы
Фиг. 523101.
Опасное сечение зуба (по изгибу>
при приложении нагрузки к вер-
шине зуба
сжатия, расчет должен
производиться по нормальному напряжению
растяжения.
Коэффициент формы Зуба при расчете по напряжению со стороны
растяжения определяется по следующей формуле:
1
у
бте — . ,,,
т п sin в'
7$iV ’
cos о ( — 1 cos р —
r \_ mJ т
где ^—отношение плеча изгибающего момента к модулю (фиг. 523101);
С.
^ — отношение хордальной толщины основания зуба в опасном сече-
нии к модулю;
3' —угол действия на зуб суммарной силы (полученной путем
геометрического сложения силы нормального давления с силой
трения);
р —угол трения.
В случае работы зуба обеими сторонами с одинаковой нагрузкой
(паразитки, сателлиты некоторых планетарных передач) второй член
в этой формуле можно не учитывать.
523103 Расчет зубьев шестерни и колеса на изгиб ведется по двум опас-
ным точкам зацепления: точки Ег и Ег (фиг. 531209), в которых
нагрузка приложена к вершине зуба одного из зацепляющихся зубьев,
и точки Fj и Ft, соответствующие ближайшим к вершине зуба точкам
профиля, в которых вся нагрузка воспринимается одной парой зубьев.
Распределение нагрузки между двумя парами зубьев в момент зацеп-
ления одного из них своей вершиной рассмотрено в 522204 и 522206.
Соответствующие расчетные формулы приведены ниже (см. 523201).
Коэффициенты формы зубьев шестерни и колеса при зацеплении
в точках Fi и F2, т. е. по ближайшим к вершинам зубьев линиям зоны
776
523200—523203
зацепления одной пары зубьев, называются коэффициентами формы
зубьев с учетом перекрытия и обозначаются через у61 и yei. Их также
можно найти по формуле 523102, но значения ~ и 3' должны
при этом определяться при зацеплении в точке F, или F2.
Расчет на изгиб 523200
Нормальное напряжение в опасном сечении зуба вычисляется по 523201
формулам:
° /у У ’
Рн + u + 16,5До b
0= 2,32?у " V ’
_Рн + » £
-°- ty* Ъ' ’
(1)
(2)
(3)
где а —нормальное напряжение в кг/см*, определяемое на основании
следующих трех предположений о приложении удельной нагрузки рн4-и:
а) нагрузка приложена к вершине зуба —при расчете по формуле (1);
б) нагрузка распределена между двумя парами зубьев и рассчитывается
зуб, нагруженный у вершины—при расчете по формуле (2); в) нагрузка
приложена к зубу по ближайшей к его вершине линии зоны зацепле-
ния одной пары зубьев —при расчете по формуле (3);
Ь — рабочая ширина зубчатых колес в см-,
д' —длина зуба в опасном сечении в см-,
t— шаг зацепления в см-,
у й уе — коэффициенты формы зуба без учета перекрытия и с учетом
его (см. 523203);
До — наибольшая разность основных шагов шестерни и колеса в мик-
ронах.
При рн4-и> 12,5До расчет следует вести по формулам (2) и (3),
а при рн + и< 12,5 До—по формуле (1).
Значения величин ря и и при расчете зубьев на изгиб следует опре- 523202
делять по номинальному режиму работы, но рекомендуется также про-
изводить проверку наибольших напряжений при резонансных режимах
и при наиболее тяжелом режиме работы двигателя (взлетном, чрезвы-
чайном, боевом).
Расчет зубчатых колес нагнетателей и вспомогательных механизмов
следует производить по наиболее тяжелому режиму их работы.
Коэффициенты формы зуба у и уе определяются по формуле 523102. 523203
Для 20-градусного некорригированного внешнего зацепления их можно
определять, пользуясь данными табл. 523203.
Во второй графе этой таблицы содержатся значения коэффициентов
формы зуба, найденные без учета трения (но с учетом сжатия от нор-
мально действующей на профиль зуба силы) для зубьев, изготовленных
по методу деления с радиусом закругления у основания зуба, равным
0,2т. Значениями у из этой графы можно пользоваться для ориенти-
777
523203
Таблица 523203
Коэффициенты формы зуба у при 20-градус-
ном внешнем некорротированном зацеплении
и при /„=1
Число зубьев Коэффициенты формы зуба у
при Г1=0,2 т* при гр=0,3 т**
/о=1 /о—0*8
16 0,101 0,115 0,145
17 0,102 0,118 0,148
18 0,104 0,120 0,152
19 0,105 0,122 0,155
20 0,106 0,124 0,157
21 0,108 0,123 0,150
22 0,110 0,128 0,162
24 0,112 0,131 0,166
23 0,114 0,134 0,170
28 0,117 0,135 0,172
30 0,120 0,137 0,175
32 0,123 0,139 0,177
35 0,128 0,141 0,179
37 0,131 0,142 0,180
40 0,136 0,144 0,182
45 0,142 0,146 0,184
50 0,145 0,149 0,186
60 0,150 0,153 0,188
80 0,158 0,161 0,190
109 0,162 — —
150 0,166 — —
300 0,170 — 1
• Значения у в этой графе подсчитаны для
зубьев 20-градусного некорригированного за-
цепления нормальной высоты (/о=1), очер-
ченных по эвольвенте, дуге окружности
с радиусом г{=0,2 т и переходной линии
(при z<37), параллельной линии симметрии
зуба. Этими значениями у можно пользо-
ваться при приближенном расчете на изгиб
шлифованных на станках типа Маага зубчатых
колес.
• * Значения у (по данным А. М. Понер-
Панина) в этих графах подсчитаны для
зубьев, нарезанных без коррекции инстру-
ментом, имеющим в качестве исходного кон-
тура контур рейки со следующими показа-
ровочного расчета шлифован-
ных тарельчатыми кругами
зубьев (при коэффициенте вы-
соты зуба основной рейки /„ Ф 1
имеем у « утабл
Для ведущих зубьев, для
которых сила трения увеличи-
вает напряжение изгиба, учет
влияния силы трения произ-
водится посредством умноже-
ния табличных значений коэф-
фициента формы зуба на по-
правочный коэффициент, рав-
ный
1
1+и/’
где f—коэффициент трения
(см. 523204) и
7J—коэффициент, который
с точностью ± 10%
можно принимать рав-
ным (гр—радиус за-
кругления вершины зу-
ба инструментальной
рейки):
•*1 = 1,0 при г,= 0,2/п и /„ = 1;
’*1=1,1 при гр — 0,Зш и/0 = 1;
т) = 1,3 при Гр = 0,3/п и/0 = 0,8;
»)= 1,8 при определении уе.
При учете трения для ве-
домых зубьев поправочный
коэффициент следует брать
равным ) _ .
Для зубьев с 20-градус-
ным некорригированным зацеп-
лением, изготовленных по ме-
тоду обката инструментом, со-
ответствующим стандартной ис-
ходной инструментальной рейке,
значение ys можно определить по формуле:
телями: «0=20 , /0=1 и 0,8; с=0,2 т и ра-
диус закругления у вершины зуба<Гр=0,3 т.
приближенное
1
1 ± 1,8/ ’
где Zj —число зубьев зубчатого колеса, для которого определяется ув;
z2 —число зубьев парного зубчатого колеса;
е—коэффициент перекрытия;
778
523204—523301
/о— коэффициент высоты зуба основной рейки;
/ — коэффициент трения.
Коэффициент трения скольжения между зубьями по эксперимен- 523204
тальным данным [8] обычно лежит в пределах 0,07-М), 12 и редко пре-
вышает 0,15. Однако в случае металлического контакта, вызываемого
заеданием, коэффициент трения может возрасти до 0,25 — 0,3. При рас-
чете ведущих зубьев, ориентируясь на наибольший коэффициент трения
при удовлетворительной смазке, можно принимать/ = 0,15. Если же
имеется опасность возникновения хотя бы кромочного заедания
(см. 524000), то рекомендуется принимать / = 0,3.
При производстве сравнительных расчетов влияние сил трения
можно не учитывать. Для повышающих передач в этом случае необхо-
димо производить два отдельных сравнительных расчета: один —по проч-
ности зубьев шестерен и другой, не сравнимый с первым, по прочно-
сти зубьев колес.
Прочность зубьев шестерни и колеса данной зубчатой пары может 523205
быть повышена посредством соответствующей коррекции зацепления,
при которой достигаются одинаковые запасы прочности на изгиб зубьев
шестерни и колеса.
При расчете на изгиб зубьев прямозубых конических колес следует 523206
учесть замечания, относящиеся к определению значений рв и и, приве-
денные в 522302.
Коэффициент формы зуба для конического зубчатого колеса опреде- 523207
ляется по эквивалентному числу зубьев 2'э = ^-д так же, как для
цилиндрического колеса, при этом в формулы 523201 следует подстав-
лять средний шаг зацепления.
Допускаемые напряжения изгиба* 523300
По характеру работы зубья авиационных зубчатых колес подвер- 523301
жены в большинстве случаев пульсирующему (от нуля до максимума)
изгибу. В этих случаях необходимо, чтобы
где /?и — Допускаемое напряжение изгиба при работе зуба только одной
стороной, кг/см2’,
* А. И. Петрусевич рекомендует в предлагаемых им формулах для расчета
зуба на прочность при изгибе относить кс — эффективный коэффициент концентра-
ции напряжений у корня зуба—к с0—пределу усталости материала зуба при пуль-
сирующих циклах напряжений изгиба, а не к—амплитуде этих напряжений,
как это принято при расчете других деталей поршневых двигателей в части 2 на-
стоящего тома.
Поскольку, пока при расчете зубьев зубчатых зацеплений рядом авторов было
принято относить к-, к с0, поскольку это влияет на коэффициент запаса прочности
зуба в сторону надежности расчета, а также учитывая, что имеющийся большой
статистический материал по запасам прочности в осуществленных зубчатых пере-
дачах получен при отнесении ks к с0, Редакция настоящего тома оставляет без
изменения излагаемый А. И. Петрусевичем расчет зубьев на прочность при изгибе.
779
523302—523305
с0 —предел усталости материала зубьев (сердцевины) при пульси-
рующих циклах напряжений изгиба, кг/см* (см. 200000);
— эффективный коэффициент концентрации напряжений у корня
зуба;
л —коэффициент запаса прочности, учитывающий колебания свойств
материала, влияние чистоты поверхности, остаточных напря-
жений и других факторов.
Если зубья работают с симметричными циклами напряжений изгиба
(паразитки, сателлиты некоторых планетарных передач), то в формулу
523301 вместо с0 следует подставлять с-., —предел усталости материала
зубьев (сердцевины) на изгиб при симметричных циклах напряжений
(см. 200000). В этом случае второй член правой части формулы 523102
не учитывается.
523302 Для зубьев с цементованной или азотированной выкружкой
*в=1 +ч?1(«—1),
где ^ — коэффициент чувствительности зуба к концентрации напряже-
ний (для цементованной выкружки с радиусом не менее 0,2т, если
толщина цементованного слоя больше 1/10 толщины зуба у его основа-
ния и поверхность выкружки гладкая, можно принимать »j1==0J2,
а при полированной выкружке принимать /са=1);
а — теоретический коэффициент концентрации напряжений.
Для зубьев, не подвергавшихся цементации или азотированию
и закаленных до твердости выше 35 по Роквеллу, можно принимать
к„ = а,
а при твердости зубьев ниже 35 по Роквеллу
к- = 0,9а.
523303 По формуле Тимошенко
а= 1 +0,15р',
где Sf —толщина основания зуба в опасном сечении;
г,- — средний радиус выкружки (переходной кривой).
523304 Запас прочности на изгиб
Со G—1
п = ~ или п =
в зависимости от характера цикла напряжений (обозначения см. в 523301).
523305 В настоящее время еще недостаточно данных для уточненного расчета
зубьев авиационных зубчатых колес на изгиб. Например, имеется очень
мало данных об эффективных коэффициентах концентрации напряже-
ний для цементованных или азотированных зубьев. Ввиду этого, помимо
рекомендованных значений /?и следует руководствоваться данными пове-
рочных расчетов, оправдавших себя в работе передач, подобных рас-
считываемой передаче.
780
524000—524201
РАСЧЕТ ЗУБЧАТЫХ КОЛЕС НА ЗАЕДАНИЕ .
Теоретические предпосылки к расчету на заедание
Приведенный здесь расчет зубчатых колес на заедание основан на
предположении, что заедание возникает при повышении температуры
рабочих поверхностей (местном и мгновенном —в моменты зацепления)
до такого значения, при котором смазка и пограничный слой полностью
теряют свои смазывающие и адсорбционные свойства и выжимаются из
зоны контакта. Эта температура приближается, по всей вероятности,
к температуре испарения смазки с поверхности металла. Поверочные
расчеты зубчатых колес, у которых наблюдалось заедание, и роликов,
на которых производилось испытание смазок на противозадирные свой-
ства, показывают [8], что 'приводящее к заеданию повышение темпе-
ратуры рабочих поверхностей обычно лежит для закаленных сталей
в пределах 200 — 250° и не превышает 300°. Формула для прижатых
друг к другу цилиндров, вращающихся с окружными скоростями и vt
(в см[сек), имеет следующий вид [9]:
& = 0,83 ,
(V М1сл + V Л2ТаС3Г2 ) V Ъ±
где & —повышение температуры рабочих поверхностей, °C;
/ — коэффициент трения скольжения;
<? —удельная контактная нагрузка, кг1см;
— полуширина полоски контакта, см (см. 522103)';
лх и л2— коэффициенты теплопроводности материалов цилиндров,
кгсм/см сек град;
h и I,-удельные веса материалов цилиндров, кг!см*;
Ci и сг — теплоемкости материалов цилиндров, кгсм]кг град.
В среднем для хромоникелевых сталей можно принимать
).ус= 14.
Расчет на заедание следует производить для четырех точек зацеп-
ления: для крайних точек зацепления Ei и Ег (фиг. 531209) и для край-
них точек участка зацепления одной пары зубьев и F2. Учитывая
сказанное в 522202 и допуская в некоторых случаях небольшое огра-
ниченное (кромочное) заедание, можно заменить проверку на заедание
для крайних точек зацепления проверкой в точках зацепления, отсто-
ящих от крайних на расстоянии не менее 0,3 /и:
/' = /,— 0,3т и /'=/2 —0,3m.
Расчет на заедание
При расчете на заедание прямозубых колес рекомендуется пользо-
ваться следующими формулами:
а) В крайних точках зоны работы одной пары зубьев: на ножках
(на головках, если I, > /„) зубьев шестерни
&' — С |/ Cf2
tg — О
(1)
524000
524100
524101
524102
524200
524201
781
524201
на ножках (на .головках, если 1г > /0) зубьев колеса
tp ~
где
С= 192/ iX(——
с laz/ у 1000) 1000 ilt
(2)
(3)
б) При ря + и> 12,5Д0 на ножках зубьев шестерни в точке их пол-
ного зацепления с вершинами зубьев колеса
на ножках зубьев колеса в точках их полного зацепления с вершинами
зубьев шестерни
(5)
в) При рнЧ-и< 12,5До можно пользоваться формулами (4) и (5), под-
ставляя в них 1 вместо ~\f (0,43 + 7,1 .
* к Рн + Ц /
Обозначения:
/„ — основной шаг, сл<;
с —расчетное контактное напряжение сдвига (см. 522301; если
ц>6(Д„ —б), то при определении т для расчета на заедание
следует принимать ц==6(Д„ — б);
Hj —число оборотов в минуту шестерни; для планетарных передач
_eooo»OTH
где иотн — скорость относительного движения, т. е. окружная скорость
при остановленном водиле;
z12 —передаточное число;
pn—внешняя удельная нагрузка, кг/см (см. формулы 521702);
и — удельная динамическая нагрузка, кг]см (см. формулы 521601
и 521603);
Д„ —наибольшая разность основных шагов шестерни и колеса
в микронах.
Значения Св, Cf и рР1 определяются по формулам 522203, значения
h и 1а — по формулам 512301, значения Гг и /' — по формулам 524102.
Значения / и рР1 подставляются в см.
Коэффициент трения / для шлифованных, шевингованных или хорошо
приработанных зубьев можно принимать равным 0,08 — 0,1.
782
Таблица 524203
Поверочные расчеты зубчатых передач иа заедание (по ножкам зубьев шестерен) *
Расчетные величины Обо- значе- ния Раз- мер- ность Редукторы Передачи к нагнетателям
ВК-Ю5 «Юмо»- 211 DB-601A Аллисон F-3R Роллс- Ройс «Мерлин» XX ВК-105
Высота головки зуба колеса Расстояние от полюса до крайней точки зацеп- ления головки зуба ко- леса по формуле 512301 Расстояние от полюса до расчетн. точки зацеп, на ножке зуба шестер- ни по формуле 524102 . Радиус кривизны про- филя зуба шестерни в полюсе зацепления . . Коэффициент относи- тельного удельного дав- ления в точке Ez по фор- муле 522203 Удельная динамиче- ская нагрузка при рас- чете на заедание . . . Суммарная удельная расчетная нагрузка при расчете на заедание . . Контактное касатель- ное напряжение при рас- чете на заедание по фор- муле (2) п. 522301 . . . Коэффициент, учиты- вающий снижение на- грузки из-за участия в зацеплении второй пары зубьев Повышение темпера- туры на ножках зубьев шестерни по формуле (4) п. 524201 Ла 1 2 1 2 ч и Рн+и •С 0,43+ 7,1А0 Рн + Ц см » » » кг]см » кг!см* °C 0,5486 1,314 1,108 3,65 1,093 90 910 4350 0,586 148 0,5 1,317 1,167 3,25 1,115 42 662 3840 0,559 115 0,475 1,339 1,189 2,82 1,166 54 724 4370 0,557 155 0,557 1,2285 1,038 2,952 1,145 114 1054 4925 0,592 165 0,4765 1,2705 1,085 2,22 1,274 30 1100 5650 0,495 205 0,22 0,582 0,5 0,706 1,713 24 176 3780 0,753 166 0,18 0,434 0,417 0,932 1,227 24 101 2580 0,992 120 0,18 0,49 0,423 0,577 1,798 24 140 3540 0,836 165 0,18 0,484 0,417 0,962 1,227 24 72 2180 1 105
* Размеры зубчатых передач и основные расчетные величины приведены в табл, 522403.
524201
*f а б л й ц а 522403
Контактные напряжения сдвига и значения долговечности рабочих поверхностей зубьев зубчатых колес некоторых авиационных двигателей при номинальном реЖ
Расчетные величины Обозна- чения Раз- мер- ность Редукторы * Передачи к нагнетателям
ВК-105 сч S Е 2 DB -301 А Аллисон F-3R Роллс-Ройс «Мерлин» XX ВК-105 Аллисон F-3R Роллс-Ройс «Мерлин» XX Бристоль «Центавр» XI «Ю МО» -222 А/В Нэлир «Сейбр» П-А Пратт- Уитни R-2800-59
Мощность, передаваемая зубчатой передачей при номинальном режиме ра- боты двигателя .... N., Л. с. 1100 930 1050 1000 1235 220:2 220:2 350:4 350:4 123 128 215:2 215:2 159 159 186:2 342:2 342:2 203 423 187 310 160:2 160:2
Отношение максимального крутящего момента к среднему к 1,4 1,2 1,25 1,32 1,35 1 1 1 1 1 1 1 I 1 1 1 1 1 1 1 1 1 1 1
Число оборотов в минуту шестерни об/мин 2700 2300 2400 2500 2850 10250 25900 13150 33100 7200 26400 10400 27000 8575 23200 5470 7600 21603 15600 22500 23800 33300 8910 19300
Межцентровое расстояние . А м м 240 255 230 209,55 219,46 99 99 99 99 107,95 88,9 118,11 118,11 123,1 123,1 150,28 150,28 150,28 122 122 119,5 119,5 117,54 117,54
Рабочая ширина зубчатых колес b » 56,2 63 68 61 64 26 15 23 15 25,5 22,2 37,4 16 39 17,5 19 34,75 21,75 26 80 14,15 26,9 39,63 15,95
Угол зацепления а град. 22°20'10" 20° 18° 15'49" 25° 20° 20° 20° 20° 20° 25° 20° '20° 22°30' 20° 22° 30' 20° 20° 20° 20° 20° 21°41'47" 23° 11'45" 20° 20°
Модуль зацепления . . . т ММ 6,857 5 6,35 6,182 2,75 2,25 2,25 2,|Й5 4,233 2,54 2,54 2,623 2,54 2,674 2,116 2,116 2,116 2 2 2,54 2,54 2,903 2,116
Коэффициент высоты го- ловки зуба колеса . . п — 0,8 1 0,95 0,877 0,771 0,8 0,8 0,8 0,8 0,839 0,815 0,565 0,835 0,565 0,857 0,854 0,845 0,844 1 1 0,901 0,57 0,854 0,841
Число зубьев шестерни . . Z1 — 28 38 35 22 21 15 25 15 255 15 15 29 25 24 25 42 34 37 32 24 26 20 18 35
Число зубьев колеса . . . —. 42 64 56 44 50 57 63 73 63 33 55 73 65 73 67 100 108 105 90 98 67 72 63 76
Наибольшая разность основ- ных шагов шестерни и колеса Дц микрон 2) 12 14 24 10 8 8 8 8 20 15 15 15 15 15 15 15 15 14 20 18 10 12 13
Диаметр начальной окруж- ности шестерни .... мм 192 190 180 139,7 129,82 41,25 53,25 33,75 56,25 63,5 38,1 50,8 65,58 60,95 65,85 88,9 71,96 78,32 64 ‘ 48 65,8 52 52,2 74,08
То же, колеса » 288 320 280 279,4 309,12 156,75 141,75 164,25 141,7 152,4 139,7 185,42 170,5 185,42 179,16 211,66 228,6 222,24 180 195 171,72 186,94 182,88 161
Окружная скорость . . . V м/сек 27,15 22,87 22,6 19,05 19,36 22,15 76,3 23,3 97,5 23,9 52,7 27,7 92,7 27,7 81,2 25,5 28,6 88,6 52,3 55,6 83,2 90,6 24,4 74,9
Передаточное число . . . *12 — 1,5 1,684 1,553 2 2,38 3,8 2,52 4,87 2,52 2,4 3,67 3,65 2,6 3,04 2,68 2,38 3,18 2,84 2,82 4,08 2,58 3,6 3,5 2,17
Динамическая нагрузка по формуле 521601 .... и кг [см 337 189 208 ‘215 105 57 242 53 310 157 207 126 500 141 440 162 157 515 251 303 517 295 95 394
Предельная* динамическая нагрузка по формуле 521602 . . . ^шах ъ 248 116 149 314 83 66 66 63 63 248 155 165 165 165 165 155 165 165 149 248 215 83 116 132
Крутящий момент, переда- ваемый шестерней, по формулам 521103 и 521104 кгсм. 40900 34 800 39200 36300 41900 768 304 476 189 1270 347 740 285 1310 491 1217 1610 567 918 1346 563 657 643 297
Внешняя удельная на- грузка по формуле 521702 Рн кг[см 820 620 670 940 1070 152 77 116 48 173 88 83 59 117 91 153 137 71 117 75 128 104 65 53
Контактное касательное на- пряжение по формуле (2) п. 522301 Г кг[см* ' 4700 4050 4620 5150 5780 4120 3070 3990 2740 3980 4740 3730 3340 3350 3530 3550 3780 3290 3870 4710 4190 3250 3240 3110
Долговечность шестерни ** по формулам 522304 и 522305 Л час. 670 СО 850 405 185 390 оо 00 СО оо 65 со СО оо ОО ОО ОО СО . со 79 182 СО ОО ОО
Авиац. порши, двигатели.
* Принято Д=й0.
*♦ Подсчитана при /?co=7®J0 кг [см2 соответственно твердости поверхностного слоя HR(} > 58. Долговечность условная, так как она подсчитана, исходя из неизменности режима нагрузки.
Таблица 524203 (продолжение)
Расчетные величины Обо- значе- ния Раз- мер* ность Передачи к нагнетателям
Аллисон F-3R Роллс-Ройс «Мерлин» XX
Высота головки зуба колеса ha см 0,355 0,207 0,1435 0,219 0,1435 0,229
Расстояние от полюса до крайней точки зацепления головки зуба колеса по формуле 512301 )> 0,772 0,543 0,405 0,514 0,405 0,542
Расстояние от полюса до расчетной точки зацепления на ножке зуба шестерни по формуле 524102 » 0,645 0,47 0,329 0,435 0,329 0,452
Радиус кривизны профиля зуба шестерни в полюсе за- цепления РЛ » 1,342 0,652 0,869 1,256 1,042 1,279
Коэффициент относитель- ного удельного давления в точке Ег по формуле 522203 Ч —. 1,263 1,73 1,208 1,163 1,15 1,173
Удельная динамическая на- грузка при расчете на заеда- ние и кг)см 90 60 60 60 60 60
Суммарная удельная рас- четная нагрузка при расчете на заедание .... ря + и » 263 148 143 119 177 151
Контактное касательное на- пряжение при расчете на за- едание по формуле (2) п. 522301 кг)смг 3550 3625 3070 2435 3200 2700
Коэффициент, учитывающий снижение нагрузки из-за уча- стия в зацеплении второй пары зубьев Повышение температуры на ножках зубьев шестерни по формуле (4) п. 524201 .... 0,434-1^1 °C 0,97 160 1 . 293 1 .74 1 1 112 70 1 130
524201
Таблица 524203 (продолжение)
50 Авиац. поршн. двигатели.
Расчетные величины Обо- значе- ния Раз- мер- ность Передачи к нагнетателям
Бристоль «Центавр» XI «Юмо»-222 А/В Нэпир «Сейбр» 11-А Пратт-Уитни R-2800-59
Высота головки зуба колеса Расстояние от полюса до крайней точки зацепления го- ловки зуба колеса по форму- / h 2 СМ 0,181 0,179 0,1785 0,2 0,2 . 0,229 0,145 0,248 0,178
ле 512301 . • Расстояние от полюса до расчетной точки зацепления на ножке зуба шестерни по ^2 f » 0,492 0,494 0,497 0,543 0,545 0,572 0,355 0,664 0,485
формуле 524102 Радиус кривизны профиля зуба шестерни в полюсе за- I 2 » 0,433 0,430 0,433 0,483 0,485 0,493 0,279 0,577 0,421
це пления Коэффициент относитель- ного удельного давления в Р.Р1 » 1,52 1,231 1,34 1,095 0,821 1,235 1,025 0,889 1,266
точке Е2 по формуле 522203 . Удельная динамическая на- грузка при расчете на заеда- ч 1,118 1,176 1,152 1,243 1,461 1,202 1,131 1,55 1,14
ние Суммарная удельная рас- четная нагрузка при расчете и к?!см 60 60 60 54 90 78 30 42 48
на заедание Контактное касательное на- пряжение при расчете на за- Рн + U » 213 197 131 171 165 206 134 108 101
едание по формуле (2) п. 522301 Коэффициент, учитывающий снижение нагрузки из-за уча- стия в зацеплении второй 0,43+ 7,1Л0 KZjCM* 3070 3090 2450 3100 3370 3250 2760 2660 2300
пары зубьев Повышение температуры на ножках зубьев шестерни по Рв+и 1 1 1 1 1 1 1 1 1
формуле (4) п. 524201 .... °C 66 81 98 143 215 _____ 190 87 120 84
524201
524202—525003
524202 Расчет конических колес на заедание производят по формулам
524201, подставляя в них значения ta, 1и?р эквивалентных цилиндри-
ческих колес.
524203 Вычисленные значения &шах в проектируемых передачах не должны
превосходить соответствующих значений 8ШаХ в аналогичных (по Кон-
струкции, размерам и условиям работы) передачах, проверенных
в работе. Для цементованных зубчатых колес значения б, как правило,
не превосходят 250°.
Результаты расчета на заедание зубчатых передач некоторых авиа-
ционных двигателей приведены в табл. 524203 (при / = 0,1).
525000 ВЛИЯНИЕ КОНСТРУКЦИИ ЗУБЧАТОЙ ПЕРЕДАЧИ НА ПРОЧНОСТЬ
И ИЗНОСОСТОЙКОСТЬ ЗУБЧАТЫХ КОЛЕС
525001 Прочность и износостойкость зубчатых колес зависит не только
от параметров зацепления, качества материала и качества изготовле-
ния самих зубчатых колес (см. 520I0I—520104), но и от конструкции
зубчатых колес и зубчатой передачи в целом. Особенно важно в кон-
струкции передачи предусматривать «упругие компенсаторы» для умень-
шения влияния накопленной ошибки в шаге, перекосов зубчатых колес
из-за деформации валов и опор и «технологических» перекосов.
525002 Если приведенная к линии зацепления масса колеса значительно
превосходит массу шестерни и если при этом с шестерней связана мас-
сивная деталь, то податливость соединения шестерни с этой деталью
бывает иногда недостаточна для того, чтобы местные накопленные
ошибки в шаге шестерни и колеса не вызывали чрезмерных динами-
ческих нагрузок на зубья. В таких случаях необходимо увеличивать
податливость соединения между шестерней и связанной с ней массивной
деталью, например, посредством: а) увеличения длины или уменьше-
ния диаметров валов на участке этого соединения; б) применения спе-
циального упругого валика, проходящего через тело шестерни.
Применение пружинного соединения обода колеса с центром не всегда
является наиболее эффективным мероприятием (если это мероприятие
оценивать только по уменьшению влияния погрешностей в шаге зубча-
тых колес). Выбрать наиболее эффективный вариант конструкции с этой
точки зрения можно только в результате сравнения динамических нагру-
зок, определенных расчетом по формуле 521503 для каждого варианта,
или экспериментально.
525003 Конструктор должен оценивать влияние деформации валов и опор
на работу зубьев. В первую очередь необходимо стремиться к тому,
чтобы деформации валов и опор не вызывали значительных перекосов
зубчатых колес по отношению друг к другу (фиг. 525003-1). В неко-
торых случаях необходимо учитывать также перекосы от выбирания
зазоров во вкладышах подшипников и от несоосности шеек.
Если произведение b tg у, где Ь— рабочая ширина зубчатых колес
и у —угол перекоса, превышает двойную деформацию зубьев 28р = -£^,
где ра~ удельная контактная нагрузка при равномерном ее распределе-
нии по контактной линии и сР~ удельная жесткость пары эубьев
в полюсе зацепления (сР= 180000 кг/см2), то это значит, что нагрузка
786
525004—525005
будет распределяться лишь по части длины зуба (фиг. 525003-11) даже
при идеально точном изготовлении зубчатой передачи. При b tg у < 2£р
нагрузка будет распределяться по закону трапеции.
Необходимо стремиться к тому, чтобы при наибольшем возможном
в данной зубчатой передаче относительном перекосе зубчатых колес,
найденном с учетом перекоса от погрешностей механической обработки
ции валов
Распределение нагрузки при
работе зуба не всей длиной
и монтажа (см. 525005), зубья участвовали в работе по всей рабочей
ширине зубчатых колес и чтобы нагрузка распределялась достаточно
равномерно по длине контактных линий.
Для достижения этого следует, во-первых, располагать опоры зуб- 525004
чатых колес так, чтобы деформация валов и опор под нагрузкой вызы-
вала по возможности меньший перекос зубчатых колес; если это невы-
полнимо, то необходимо увеличить жесткость валов; во-вторых, реко-
мендуется выбирать такую конструкцию зубчатых колес, при которой
сравнительно небольшое смещение действующей на зубья силы от цен-
тральной плоскости зубчатой передачи вызывало бы поворот хотя бы
одного из зубчатых колес пары (в плоскости действия этой силы) на
угол, достаточный для того, чтобы компенсировать суммарный перекос
зубчатых колес (см. 525003).
Такая «компенсирующая податливость» может быть достигнута,
например, при пружинном соединении обода с центром или’при применении
такой конструкции колеса, при которой обод соединяется со ступицей
тонким (мембранообразным) диском с большими отверстиями в нем.
Толщину обода и диска колеса рекомендуется выбирать настолько малой,
насколько это допустимо по условиям прочности.
При определении относительного перекоса зубчатых колес необходимо 525005
учитывать «угол технологического перекоса» («угол неприлегания зубьев»)
Тт- Среднее вероятное значение может быть определено по формуле:
Хт=]/Г + A ₽i + Yn cos2 а + Yh sins а,
где Apx —угол отклонения полюсной линии зуба шестерни от образу-
ющей ее начального цилиндра (параллельной оси зубчатого
колеса);
50*
787
526000
A£s—то же, колеса;
уп —угол перекоса осей подшипников;
ун—угол непараллельное™ осей подшипников (при расположении
осей в одной плоскости);
а—угол зацепления.
При проектировании новых зубчатых передач следует оговаривать
в технических условиях требование контакта зубьев (по краске) по всей
длине зубьев.
526000 ПРИМЕР РАСЧЕТА ЗУБЧАТОЙ ПЕРЕДАЧИ
Произвести поверочный расчет тихоходной ступени нагнетательной
передачи по следующим исходным данным: N„ = -|- = 76,7 л. с.; к—1;
n, = 11430 об/мин; пг = 3200 об/мин; А = 80 мм-, ft = 25 мм; ft' = ft' = 25 мм;
а = 20°; т = 2,5лм; /о = О,8; ^ = ^=0; Zi=I4; z,=50; abl=ai,t;
а0 9000 кг/см2; HRo = 58; До = 8р.
Ра счет
Сначала определяем динамическую нагрузку и (см. 521601). Имеем:
^=>14 • 0,25 = 3,5 см;
v =
3.14-3.5.11430
100-60 100-60 “
20,93 м/сек;
ils = -^==g = 3,572.
8 Z, 14
Динамическая нагрузка (см. 521601)
и = 0,8 V \ f = 0,8 • 20,93] \f = 50 кг/см.
• /ц г 3)5<2
Максимальная сила удара (см. 521602)
Umax = 16,5(Д—8) = 16,5(8 —4) = 66 кг/см.
Так как u < umax, то расчет производим по и =>50 кг/см.
Передаваемый* шестерней крутящий момент при номинальном режиме
работы (см. 521103):
МН1 = 71620 71620 • = 480 кгсм.
Внешняя удельная нагрузка (см. 521702)
Р* = ^-Я= 35 2258°09Т= 1,7 Кг1СМ’
Контактное напряжение сдвига (см. 522301) при а = 20°
, _ 515 /<£в+Д1Д..-Ф_»> _ 515 /(1П+ГОЧЗ.И2+1) _
Допускаемое контактное напряжение сдвига при N4 = 107 (см. 522402)
RCo = 120 Hrc = 120 • 58 = 7000 кг/см2."
788
526600
Допустимое число циклов напряжений (см. 522304)
№-« = = '°' (да)‘ = 274 if-
Так как Nu. д превышает 25-107, то зубчатые колеса могут работать
без выкрашивания неограниченно долго. Так как влияние накопленной
ошибки в шаге не учитывается, подразумевается, что либо ее величина
мала, либо конструкция агрегата содержит достаточно упругие соеди-
нения для легкой компенсации накопленной ошибки в шаге. В против-
ном случае допустимые числа часов работы шестерни и колеса
(см. 522305) могут оказаться меньше, чем:
Т — ^ч‘л — 25 '— 365 час
1 1 ~ 60аЛ ~ 60 • 11430 ~ 003 4dt
т _ N4.;i 25. 107
ls 60а2п2 ~ 60-3-3200
434 часа.
Так как pa + u=I67> 12,5До=1ОО, то расчет зубьев на изгиб
производим по формулам (2) и (3) п. 523201. Так как материалы
зубьев шестерни и колеса одинаковы, рассчитываем только зубья
шестерни. Значения коэффициентов формы зуба шестерни (найденные
после построения контура зуба шестерки при радиусе закругле-
ния у вершины зуба исходной инструментальной рейки, равном
0,3 т = 0,75 мм):
у, = 0,137; ys = 0,2155.
Нормальное напряжение в опасном сечении зуба шестерни при
приложении нагрузки к вершине зуба (см. 523201)
рн + и + 16,5Д0 Ь _ 117 + 50 + 16,5-8
2,32/у, ~ 2,32 • 3,14 • 0,25 • 0,137
• 1 = 1200 кг/см*.
То же при приложении нагрузки по ближайшей к вершине зуба
линии зоны зацепления одной пары зубьев
_ Ря + u Ъ_________117 + 50 . gg_ кг]..л
61 ~ O'ei ~ 3-14 0,25-0,2155 1 Уй/ Кг1СМ '
Принимая в первом приближении а = 2 и т) = 0, 2, получаем
(см. 523302)
k'= 1, 2.
Запас прочности на изгиб (см. 523304) при к,— 1,2:
„ _ 9000 ~ о_
П1~ 1,2-1200 = 6’25’
Так как зубчатые колеса некорригированные, то расчет на заедание
производим по ножке зуба шестерни.
789
526000
Расстояния от полюса до начальной и конечной контактных точек
(см. 512301):
' - т[/(%М'+4(>+1) -£si" " ] -
-т [/ (¥,г 0.342)’ + 4 ($+1)-$. 0,343] -0,527 см;
'• = Т [/($Sin“)’ + 4(¥+l)-4sir,a]-
-Т [ /GrW42)'+4(®+l)-0Т2• °’342] = °>45 см’
1'2 = 12- 0,3т = 0,527 - 0,3 • 0,25 = 0,452 см.
Радиус кривизны зуба шестерни в полюсе зацепления
' pPi = fj sin а = 1,75 • 0,342 = 0,5985 см.
Коэффициенты относительного удельного давления (см. 522203):
^V0-£)0±dfc)"
= 1./Г1 0.452 \/ , 0,452 \ ~ /ет= 1,83
V V 0,5985 7 \. +3,572 0,5985 7
= 7tmcos а = 3,14 • 0,25 • 0,94 = 0,738 см-
= =
' X ₽Р1 7 X >12ppi 7
_ 1 = 1 = 1 303’
«/>. 0,738 - 0,45 X / 0,738 - 0,45 \ /0,589 ’ ’
V V 0,5985 7 V + 3,572 • 0,59857
Umax = 6 (А — 8) = б 4 = 24;
Тзаед = 4020 |/= 3700 кг/см1.
Коэффициент С для расчета на заедание при f — 0,1 (см. 524201):
= >92:0,1
Повышение температуры рабочих поверхностей зубьев (см. 524201):
♦,-C)ZC«j/(0,43+^V -Л---------------------
Ч
Ppi
790
526000
-552/1,83 /(o,43 + nyiy
0,452
0,5985 + V 1 + 3,572-0,5985
0,738 - 0,45
= 522 • ]/ 1,303
0,738 - 0,45 ] 7 0,738-0,45
0,5985 + V * + 3,572 • 0,5985
Поскольку в работающих без заедания передачах встречаются зна-
чения & порядка 250°, то полученные здесь значения & можно считать
допустимыми.
ЛИТЕРАТУРА И ИСТОЧНИКИ К 520000
1. Ковальский Б. С., Проблема грузоподъемности крановых ходовых колес,
докторская диссертация, Институт машиноведения АН СССР, 1943.
2. Петрусевич А. И., Деформация зубьев с эвольвентным нормальным
20-градусным зацеплением, Материалы Центрального бюро редукторостроения
ЦНИИТМАШ, 1937.
3. Петрусевич А. И., Напряжения и деформации в сжатых цилиндрах, Мате-
риалы Центрального бюро редукторостроения ЦНИИТМАШ, 1938.
4. Петрусевич А. И., «Вестник металлопромышленности» № 8 — 9, 1940.
5. Петрусевич А. И., Сборник «Вопросы расчета и конструирования деталей
машин», Институт машиноведения АН СССР, 1942.
6. Петрусевич А. И., «Вестник машиностроения» № 12, 1944.
7. Петрусевич А. И., Качество поверхности и прочность материалов при
контактных напряжениях, АН СССР, 1946.
8. Петрусевич А. И., Зубчатые и червячные передачи, Справочник-энциклопе-
дия «Машиностроение», т. 2, 1948.
9. Blok Н., «General discussion on lubricants and lubrication», t. 2, London, 1937.
10. Buckingham E., Dinamic loads on gear teeth, N.-Y., 1931.
11. Buckingham E., Manual of gear design, s. 2, N.-Y., 1935 (имеется русский
перевод изд. 1948 г.).
12. Mansion D., «Engineering» № 4152, 4154 и 4155, 1945.
530000—531104
530000 РАСЧЕТ ПРЯМОЗУБЫХ ЗУБЧАТЫХ КОЛЕС НА ПРОЧНОСТЬ
ПО СОКРАЩЕННОМУ МЕТОДУ
531000 РАСЧЕТНЫЕ НАГРУЗКИ НА ЗУБЬЯ ЗУБЧАТЫХ^КОЛЕС
531100 Расчетный крутящий момент
531101 Расчетная нагрузка на зуб зубчатого колеса определяется в основ-
ном при номинальном режиме работы двигателя.
В порядке дополнительного расчета вычисляются в необходимых
случаях нагрузки при режимах резонансных крутильных колебаний
системы коленчатого вала двигателя, лежащих в пределах рабочих
чисел, оборотов, и при наиболее тяжелом, в отношении прочности
зубьев зубчатого колеса, режиме двигателя.
531102 Средний крутящий момент, передаваемый зубчатым колесом, равен
М~ 71620— кгсм,
п
где N — передаваемая зубчатым колесом мощность, л. с.,
л —число оборотов зубчатого колеса в минуту.
Если передаваемый зубчатым колесом крутящий момент за цикл
двигателя не изменяется, то расчетный крутящий момент определяется
по приведенной формуле; например,- так находится расчетный крутящий
момент зубчатой передачи к нагнетателю в турбркомпрессоре или зуб-
чатой передачи от коленчатого вала к нагнетателю, при отсутствии
резонансных крутильных колебаний системы коленчатого вала.
531 ЮЗ Если за цикл двигателя крутящий момент, передаваемый зубчатым
колесом, изменяется, то расчетным крутящим моментом является Мтах,
т. е. максимальное значение М за цикл. Например, зубчатые колеса
редукторов авиационных двигателей рассчитываются по максимальному
за цикл двигателя эффективному крутящему моменту, передаваемому ими:
Afmax = kM кгсм,''
где к — отношение величин максимального крутящего момента и среднего,
взятых из диаграммы суммарных крутящих моментов на коленча-
том валу двигателя (полученной при его динамическом расчете).
531104 При расчете с учетом крутильных колебаний вместо формул 531102
и 53II03 следует пользоваться следующей:
Afmax = М + М„ кгсм,
792
531200-531204
где М — передаваемый зубчатым колесом средний крутящий момент,
определяемый по формуле 531102,
Мв — максимальное значение передаваемого зубчатым колесом вибра-
ционного крутящего момента.
Как показала практика расчетов и торсиографирования, вибрацион-
ные моменты, передаваемые зубчатыми колесами редукторов авиацион-
ных двигателей в нерезонансных зонах, составляют примерно 50% от
среднего крутящего момента; поэтому моменты, определяемые по фор-
мулам 531104 и 531 ЮЗ, отличаются в этом случае незначительно.
На опасных резонансных режимах нагрузки могут быть значительно
более высокими, но на этих режимах двигатели, как правило, не должны
работать.
Нагрузки на зуб зубчатого колеса 531200
Расчетное статическое окружное усилие, действующее на зубчатое 531201
колесо, равно
р __^тах
Г ’
где г —радиус начальной окружности зубчатого колеса, см.
Удельная тангенциальная статическая нагрузка на зубчатое колесо 531202
(нагрузка в направлении касательной к начальной окружности, при-
ходящаяся на I см длины соприкосновения зубьев) равна
р Ро
гуе Ь —длина соприкосновения зубьев по начальным цилиндрам, см.
Удельная нормальная к профилю зуба статическая нагрузка 531203:
(приходящаяся на 1 см длины соприкосновения зубьев) равна
а cos а ’
где а —угол зацепления зубчатой передачи.
Удельная нормальная к профилю зуба динамическая нагрузка 531204-
(действующая на зубья при их входе в зацепление или при выходе
из зацепления предыдущей пары зубьев), возникающая вследствие
неточности в обработке зубьев зубчатых колес, определяется либо
по формуле 531208, либо по следующей формуле [3]:
п = 0,8о 1/" KZfcM,
где и—окружная скорость по начальной окружности, м1сек’, в случае
планетарных и дифференциальных передач вместо v в эту
формулу следует подставить i>OTH—относительную окружную
скорость (т. е. скорость при остановленном поводке);
Д —межцентровое расстояние колеса и шестерни передачи, см;
ixs — передаточное число (отношение числа зубьев колеса к числу
зубьев шестерни);
До — наибольшая положительная разность между основными шагами
колеса и шестерни передачи (суммарная погрешность в основном
шаге зацепления) в микронах; значение До определяется:
793
531205—531208
а) в готовых передачах путем обмера основных шагов;
б) в изготовляющихся передачах —по допускам на основной
шаг, указанным на рабочих чертежах колеса и шестерни
передачи;
в) при отсутствии данных по пунктам а и б по стандартным
допускам на основной шаг;
8 —компенсируемая ошибка в микронах, принимаемая:
при Доэ=1О р. ... 8 = 5 р.,
при Дв < 10 р. ... 8= .
531205 Максимальная удельная сила удара, возможная при данном Д„,
равна [3]:
Umax = 16,5 (До — 8) кг]см.
Если нагрузка и, определяемая согласно 531204, больше ишах,
то за расчетную динамическую нагрузку следует принимать итят.
531206 Суммарная удельная нормальная к профилю зуба нагрузка по Пет-
русевичу [3] равна
Рп = Рн+и>
где Рн определяется по формуле 531203, а и —согласно указаниям
531204 и 531205.
531207 Удельная тангенциальная динамическая нагрузка, возникающая
при работе зубчатых колес вследствие неточности их изготовления,
согласно приближенному методу Бакингема [8,9], равна
Рд =------^~17^кг1СМ’
1+0,15^®
V
где Ъ — длина зуба, см;
у —окружная скорость по начальной окружности, м)сек\
В = РС +сД • 10"* кг/см, (2)
причем Рс — берется согласно 531202;
Д —ошибка в действии, принимается равной До и берется
согласно 531204;
с —удельная жесткость зубьев в KzfcM2, значения которой
для стальных зубчатых колес по Бакингему пои- Таблица 531207
ведены в таблице 531207. 531208 Суммарная тангенциальная удель- ная нагрузка на зубчатое колесо по Бакингему РБт направлена по касатель- ной к начальной окружности и равна сумме удельной статической и удель- ной тангенциальной динамической на- грузок: Рбт = Рс +Рд кг!см. (1) Угол зацеп- ления Коэффи- циент высоты зуба Удельная жесткость зубьев с, HSfCM?
20° 20° 14,5° 0,8 1,0 1,0 120000 116000 112000
794
531209
Соответствующая удельная нормальная к профилю зуба нагрузка
равна
РБ = — . (2)
COS а ' >
При достаточно точном изготовлении зубчатой передачи суммарная
удельная нормальная к профилю зуба нагрузка Р, на участках нахождения
в зацеплении двух пар
зубьев, распределяется на
обе пары зубьев обратно
пропорционально жестко-
стям каждой из этих пар
(фиг. 531209).
Для определения рас-
четной нагрузки в этом
случае служат следующие
два уравнения:
Рея + Pfi = P> (1)
= Д • 10’*, (2)
CF
Фиг. 531209.
Характерные участки зацеп-
ления цилиндрических прямо-
зубых колес
531209
где Ре2 — нормальная к профилю зуба удельная сила, действу-
ющая по площадке соприкосновения Е2 первой пары
сцепляющихся зубьев, кг/см;
Ppi — нормальная к профилю зуба удельная сила, действующая
по площадке соприкосновения Fi второй пары сцепляю-
щихся зубьев, кг/см-,
се и cF-Удельные жесткости пары зубьев в моменты зацепления
зубьев в точках Е и F, кг/см2;
Д —ошибка в основном шаге зацепления, в микронах.
795
532000—532102
Решая уравнения (1) и (2), имеем
Ре2 —
ь • кг*
~-+ т-
CF СЕ
(3)
В результате теоретического исследования деформации эвольвентных
зубьев найдено для стальных шестерен (см. 522205):
сЕ — 125000 кг]см* и ср = 165000 кг]см*.
Подставляя эти значения жесткостей в уравнение (3), получим
р *>+16,54
-----pF-’ <4>
При расчете по Бакингему нагрузка Р определяется согласно
формуле (2) п. 531208, а при расчете по Петрусевичу —согласно 531206.
Так как деформация зубьев в основном определяется величиной
деформации контактного сжатия, которую можно принять прямо пропор-
циональной приложенной нагрузке и модулю упругости материала зубьев
и которая мало зависит от величины радиусов кривизны профилей
зубьев в месте их касания, то влияние на удельную жесткость формы
пары зубьев можно не учитывать и пользоваться формулой (4) для расчета
всех практически встречающихся цилиндрических шестерен.
р
В случае большой ошибки в шаге зацепления, когда Д > микрон,
при нахождении в зацеплении вершины зуба вся нагрузка передается
на один этот зуб:
Ре2 = Р- (5>
532000 НАПРЯЖЕНИЯ В ЗУБЬЯХ ЗУБЧАТЫХ КОЛЕС
532100 Контактные напряжения в зубьях зубчатых колес
532101 Хотя контактное напряжение в полюсе зацепления Р всегда меньше,
чем в точке Ft (фиг. 531209), а последнее, в свою очередь, может быть
меньшим, чем контактное напряжение в точке В2, выкрашивание начи-
нается обычно, как показали практика эксплоатации и эксперименты,
вблизи полюса зацепления, одновременно по всей поверхности ножки
зуба шестерни; поэтому основной расчет на контактное напряжение
ведется для момента соприкосновения колеса и шестерни в полюсе
зацепления.
532102 Максимальное контактное напряжение сжатия определяется для
случая нажатия двух цилиндров по формуле
/р Г-±~
сс = 0,592 I/ —yP1 кг]см*>
' Ё, + Ё,
где Р —расчетная нагрузка, нормальная к поверхности зубьев зуб-
чатых колес в точке касания, преходящаяся на 1 см контакт-
ной длины зуба, кг/см;
796
532103—532106
Pi и р, —радиусы кривизны профилей зубьев шестерни и колеса
в точке их зацепления, см;
Ei и Eg—модули упругости материалов шестерни и колеса, кг]см?.
Знак < —» в формуле, бецется для внутреннего зацепления.
При контакте в полюсе зацепления для стальных шестерен с модулем 532103
упругости, равным Е—2,15- 10*, контактное напряжение сжатия будед
Ос
= 867
dgsin а
где dg — диаметр начальной окружности колеса;
ilg—передаточное <число;
а —угол зацепления.
При желании сравнить долговечности зубчатых передач, исходя 532104
из величин контактных напряжений сжатия, подсчитанных по прибли-
женному методу Бакингема, можно воспользоваться данными Бакингема
по допускаемым контактным напряжениям сжатия, приведенным в таб-
лице 532104. При этом следует иметь в виду, что полученные величины
долговечности должны рассматриваться только как сравнительные для
аналогичных конструкций.
Таблица 532104
Твердость по Допускаемые напряжения, кг/см2
Бри- неллю Роквел- лу, шкала С при числе нагружений:
110’ 2-10’ 5-10’ 10-10’
450 45 13100 11800 10200 9200
500 48 14700 13300 11500 10300
550 51 16300 14700 12700 11400
600 54 17800 16000 14000 12500
Контактное напряжение сдвига для зубьев стальных цилиндрических 532105
прямозубых колес в полюсе зацепления определяется по формуле:
_ — °с — ЧП1 if £ О .
2,88 —Y d,sina
При угле зацепления а = 20° контактное напряжение сдвига опреде- 532106
ляется по формуле:
Х=5151/Егап).
Г dg
При достаточно равномерном распределении нагрузки по ширине
зубчатых колес и надлежащей чистоте рабочих поверхностей зубьев,
допускаемые контактные напряжения можно назначить, исходя из сред-
них, экспериментально найденных значений пределов контактной уста-
лости.
797
532200—532203
В таблицах 535 000-1V, V и VI приведены величины контактных
напряжений сжатия в зубчатых колесах некоторых авиационных дви-
гателей.
532200
Расчет зубьев зубчатых колес на изгиб
532201
532202
При расчете зубьев на изгиб напряжения определяют для двух
моментов зацепления:
а) когда нагрузка приложена к вершине зуба и в зацеплении
могут находиться две пары зубьев (фиг. 531209, точки Ei и Е2);
б) когда в зацеплении находится одна пара зубьев (фиг. 531209,
точки F, и Р2).
Для случая (фиг. 532202), когда зуб нагружается в его вершине
и в зацеплении находятся две пары зубьев, нагрузка РЕ2 определяется
согласно формуле (4) п. 531209,
а напряжение изгиба в опасном
сечении зуба (у его основания)
по формуле:
РЕ2 COS а Ь ,
где а — угол
дачи;
b — длина
кг/см*, (1)
зацепления пере-
общей линии со-
прикосновения
зубчатых колес
чи, см;
Ьг — длина зуба у
зубьев
переда-
корня,
(в опасном сечении),
/ — шаг передачи, см;
уь — коэффициент формы
ба, определяемый
гласно 532300;
аа —коэффициент концентра-
ции напряжений у кор-
ня зуба, равный
а, = Ц-0,15г-
см;
зу-
со-
(2)
s =
532203
Фиг. 532202.
К определению коэффициента формы зуба
при нагрузке, приложенной к вершине
зуба
где а —толщина зуба в опасном сечении;
г,- —радиус выкружки у основания зуба в опасном сечении.
В случае, когда выкружка зуба подвергнута термохимической
обработке (азотизация и т. п.), принимают <г3=1.
Р
Когда ошибка в шаге зацепления А > ПРИ нахождении в за-
цеплении вершины зуба вся нагрузка передается на один этот зуб
(см. 531209) и напряжение изгиба в опасном сечении зуба будет
Р COS а Ь , ,
X “• кг1‘м
где Р определяется по формуле 531206 при подсчете динамической
798
532204—532205
нагрузки по Петрусевичу и по формуле (2) п. 531208 при подсчете
динамической нагрузки по Бакингему.
Для случая (фиг. 532204), когда зацепление происходит в ближайшей 532204
к вершине точке участка профиля зуба, соответствующего зацеплению
одной пары зубьев так, что вся нагрузка воспринимается одной парой
зубьев, напряжение изгиба в опасном сечении зуба будет
Р COS Л Ь , »
»>“ кг'ся’
где yLa—коэффициент формы зуба с учетом перекрытия, определяемый
согласно 532300.
К определению коэффициента формы зуба при нагрузке,
соответствующей моменту выхода из зацепления второй
пары зубьев
После вычисления напряжений от изгиба определяют запас прочно- 532205
сти, как частное от деления предела усталости на вычисленное напряже-
ние. По характеру своей работы зубья зубчатых колес авиационных
двигателей в большинстве случаев подвержены пульсирующему изгибу
(напряжения меняются от нуля до максимума); значительно реже зуб
работает при знакопеременных напряжениях (паразитки и сателлиты
некоторых планетарных передач).
Обозначим предел усталости на растяжение (кг[см2):
— при пульсирующем цикле,
а^ —при симметричном цикле.
Запас прочности будет равен:
для зубьев зубчатых колес, работающих по пульсирующему циклу,
(О
длр зубьев зубчатых колес, работающих по симметричному циклу,
'-V' (2)
799
532300—532303
При отсутствии точных данных о пределах усталости для материала,
из которого изготовляются зубья зубчатых колес, можно принимать
для стальных зубчатых колес:
a_i = 5600 кг/смг,
ов=1,60 g^i=9000 кг/см*.
Для оценки получаемых расчетом значений напряжений в зубьях
зубчатых колес и запасов прочности могут служить приводимые в 535000
таблицы, подсчитанные для зубьев зубчатых колес ряда авиационных
двигателей.
532300 Определение'коэффициента формы зуба
532301 На рассчитываемый зуб (фиг. 532202 и 532204) в точке К касания
его с зубом парного колеса действуют:
а) удельная (на 1 см длины зуба) нормальная к профилю зуба
нагрузка Р;
б) удельная (на 1 см длины зуба) касательная к профилю зуба
нагрузка от силы трения Q.
532302 В расчетном сечении АВ ведущего зуба зацепления (у которого
нагрузка от силы трения Q направлена так, как показано на фиг. 532202
и 532204) нагрузки Р и Q вызовут следующие напряжения:
1. На стороне растяжения зуба
Ораст= цг J------р-1 +Q + -p-J —ар —ap + aQ -J- oQ. (1)
2. На стороне сжатия зуба
Pl cosy . Psinv . Л f k cosy\ , , „ . > „
Осж= w т 4-----р-1 +Q ---------р- ) =ар 4-op-f-oo —О0, (2)
где / — расстояние от точки М (фиг. 532202 и 532204) до рассчи-
тываемого сечения АВ, см;
f—угол между направлением силы Р и нормалью к оси
симметрии зуба;
W = у— момент сопротивления изгибу расчетного сечения АВ
(для единичной длины зуба), см8;
а—толщина зуба в расчетном сечении АВ, см;
F — площадь расчетного сечения АВ (для единичной длины
зуба равна а), см1;
к—плечо нагрузки Q относительно точки С, см;
Q^fP, (3)
здесь / — коэффициент трения.
532303 В расчетном сечении ведомого зуба зацепления (у которого нагрузка
от силы трения Q направлена противоположно направлению, указанному
на фиг. 532202 и 532204) нагрузки Р и Q вызовут следующие напряжения:
I. На стороне растяжения зуба ।
PZ cosy PsijiY „ f к . co§f\ > iw
Ораст = —--------p— — Q Q 4- -p- ) — ap ap — aQ—aQ. (I)
800
532304
2. На стороне сжатия зуба
Pi cos , Psinx п (к cosx"\ • , <> , * „
°сж = —щ— Н р---------Q --------р~ J — ар -\-ap~OQ 4*Oq> (2)
где приняты те же обозначения, что и в 532302.
Действительные напряжения будут отличаться от вычисленных 532304
по формулам (1) и (2) п. 532302 и 532303 как за счет условности опре-
деления динамической составляющей нагрузки на зуб, так и за счет
неопределенности коэффициента трения /, определяющего нагрузку Q
[см. формулу (3) п. 532302]. Помимо этого, достаточно условным являет-
ся и определение распределения нагрузки на каждую из несколькях
(вообще говоря) пар зубьев, находящихся одновременно в зацеплении
(вследствие неточного знания жесткостей зубьев). Поэтому полученные
расчетом напряжения приходится рассматривать как условно-сравнитель-
ные.
Данные расчетных напряжений и запасов прочности при переменных
напряжениях в зубьях зубчатых колес ряда авиационных двигателей
показывают, что опасными напряжениями в вубе являются напряжения
растяжения.
Если за основную составляющую напряжения ораст (см. формулу (1)
п. 532302) принять напряжение а'р = , то для ведущего зубчатого
колеса учет напряжений от силы трения
°0 + °0e Pf + F )
увеличит напряжение а'Р на 8—10% при расчете на нагрузку, прило-
женную к вершине зуба, и на 11 — 15% при расчете на нагрузку, при-
ложенную в ближайшей к вершине зуба точке участка профиля зуба,
соответствующего нахождению в зацеплении одной пары зубьев (полагаем
коэффициент трения /=0,1).
Напряжения от сжатия ар= силой Р компенсируют в некоторой
степени напряжения oq и o'q. Так как, согласно сказанному выше,
полученные расчетом напряжения приходится рассматривать как условно
сравнительные, то для простоты расчета при определении напряжения
в зубе можно принимать во внимание только первый член в выражении
для браст (см. формулу (1) п. 532302), корректируя не принятые во вни-
мание напряжения а'р, а'о и o'q заменой cosy на cos а (где а —угол зацеп-
ления передачи), т. е. принимать:
Pl cos a 6lPcosa
браст — aL« и? e а’ ” ' *'
Как показывают произведенные расчеты, для стороны растяжения зуба
ведущего зубчатого колеса отношение величины напряжения, вычислен-
ного по формуле (1), к величине напряжения, вычисленного по формуле
(1) п. 532302, близко к единице; поэтому определение напряжения
растяжения в зубе ведущего колеса по формуле (1) п. 532304 дает
правильные расчетные результаты. Применение этой формулы для опре-
деления напряжения растяжения в зубе ведомого зубчатого колеса дает
завышенные величины напряжения по сравнению с определенными
51 Авиац. порпш. двигатели
801
to
532304
Таблица 532304-1
Коэффициенты формы зубьев нормальной высоты без учета перекрытия (yz) и с учетом перекрытия
У Lt Число зубьев рассчитываемого колеса
12 13 14 15 16 17 18 19 20 21 22 23 24
Зацепление у вершины Без учета перекрытия Ух 0,079 0,083 0,087 0,090 0,094 0,097 0,099 0,102 0,104 0,106 0,107 0,109 0,110
Число зубьев парного колеса 12 13 14 15 ' - С учетом перекрытия у№ > 0,105 » » 0,123 » » » 0,145 » » 0,153 0,154 0,156 0,157 0,158 0,150 0,162 0,163 0,152 0,164 0,156 0,158 0,168 0,159 0,172 0,173 0,172 0,174 0,176 0,178 0,175 0,178 0,180 0,181 0,179 0,181 0,183 0,185 0,183 0,185 0,187 0,189 0,187 0,189 0,191 0,193 0,190 0,192 0,194 0,195
15 17 18 19 20 » » » » » » » » » » » » » 0,159 0,150 0,151 0,152 0,164 0,165 0,133 0,157 0,169 0,170 0,159 0,170 0,172 0,173 0,174 0,175 0,175 0,178 0,179 0,180 0,179 0,181 0,182 0,184 0,185 0,183 0,185 0,185 0,187 0,189 0,187 0,188 0,189 0,191 0,192 0,190 0,192 0,193 0,195 0,195 0,194 0,195 0,197 0,199 0,290 0,197 0,199 0,200 0,202 0,203
21 22 24 25 28 30 » » » » » » » » » '» » » » » » » » 0,155 0,155 0,157 » 0,171 0,172 0,174 0,176 0,177 0,179 0,175 0,177 0,179 0,180 0,182 0,183 0,181 0,182 0,185 0,185 0,188 0,189 0,185 0,187 0,189 0,191 0,193 0,194 0,190 0,191 0,194 0,195 0,197 0,199 0,194 0,195 0,197 0,199 0,201 0,203 0,198 0,199 0,201 0,203 0,205 0,207 0,202 0,203 0,205 0,207 0,209 0,210 0,205 0,205 0,208 0,210 0,212 0,214
33 35 39 43 » » » » » » » » » » » » » 0,180 0,182 0,183 0,184 0,135 0,187 0,188 0,190 0,191 0,193 0,194 0,195 0,195 0,198 0,199 0,201 0,201 0,202 0,204 0,206 0,205 0,206 0,208 0,210 0,209 0,210 0,212 0,214 0,213 0,214 О’, 215 0,218 0,215 0,218 0,220 0,222
48 55 65 80 » » » » » » » » - » » » » 0,186 0,188 > » 0,192 0,194 0,196 0,199 0,198 0,199 0,202 0,204 0,202 0,204 0,207 0,210 0,208 / 0,209 0,212 0,215 0,212 0,214 0,216 0,219 0,215 0,218 0,221 0,224 0,220 0,222 0,225 0,228 0,224 0,225 0,229 0,232
Таблица 532304-1 (продолжение)
51*
У* Уц Число зубьев рассчитываемого колеса
25 26 27 29 31 33 36 40 45 50 55 65 80
Зацепление у вершины Без учета перекрытия Vl 0,112 0,113 0,114 0,117 0,118 0,120 0,123 0,125 0,123 0,131 0,133 0,138 0,143
12 0,193 0,195 0,197 0,202 0,205 0,209 0,213 0,218 0,225 0,230 0,235 0,242 0,252
13 0,195 0,197 0,199 0,204 0,208 0,212 0,216 0,221 0,228 0,233 0,238 0,245 0,255
14 0,197 0,199 0,202 0,206 0,210 0,214 0,218 0,223 0,229 0,233 0,240 0,247 0,257
15 0,199 0,202 0,204 0,209 0,213 0,216 0,221 0,226 0,232 0,233 0,243 0,250 0,260
16 0,200 0,203 0,205 0,210 0,214 0,217 0,223 0,223 0,234 0,240 0,245 0,252 0,262
17 0,202 0,204 0,207 0,212 0,216 0,219 0,224 0,230 0,235 0,241 0,245 0,254 0,264
18 0,204 0,206 0,209 0,213 0,217 0,221 0,225 0,231 0,233 0,243 0,248 0,256 0,267
Сб 19 0,205 0,208 0,210 0,215 0,219 0,223 0,228 0,233 0,240 0,245 0,250 0,258 0,259
0) е? о к 20 0) 0,207 0,209 0,212 0,217 0,221 0,224 0,230 0,235 0,242 0,247 0,252 0,260 0,271
о о 21 тия 0,208 0,210 0,213 0,219 0,222 0,226 0,231 0,237 0,244 0,249 0,254 0,262 0,273
я 22 Л 0,209 0,212 0,215 0,220 0,224 0,228 0,233 0,238 0,241 0,245 0,250 0,255 0,265 0,275
Сб 24 !> s 0,212 0,214 0,217 0,223 0,227 0,239 0,235 0,248 0,253 0,259 0,237 0,278
26 а 0,214 0,216 0,220 0,225 0,229 0,233 0,239 0,244 0,250 0,255 0,250 0,270 0,281
28 я 0,216 0,219 0,222 0,227 0,231 0,235 0,240 0,247 0,252 0,258 0,254 0,273 0,284
Ю м* 30 £ g 0,218 0,220 0,223 0,229 0,233 0,237 0,243 0,249 0,255 0,260 0,266 0,275 0,285
о е? 33 ст 0,220 0,222 0,225 0,231 0,235 0,239 0,245 0,251 0,257 0,233 0,269 0,278 0,289
S 33 о 0,222 0,224 0,227 0,233 0,238 0,242 0,247 0,253 0,260 0,255 0,271 0,280 0,293
39 0,223 0,226 0,229 0,235 0,240 0,244 0,249 0,255 0,263 0,238 0,274 0,284 0,295
43 0,225 0,228 0,232 0,238 0,242 0,246 0,251 0,258 0,265 0,270 0,273 0,286 0,298
48 0,228 0,230 0,234 0,239 0,244 0,248 0,254 0,260 0,257 0,273 0,279 0,289 0,299
55 0,229 0,233 0,236 0,242 0,247 0,251 0,257 0,233 0,270 0,277 0,233 0,292 0,305
65 0,233 0,235 0,239 0,245 0,250 0,254 0,259 0,257 0,274 0,280 0,283 0,295 0,303
80 4 0,236 0,239 0,242 0,249 0,253 0,258 0,264 0,270 0,278 0,284 0,290 0,299 0,314
532304
532304
Таблица 532304-П
Коэффициенты формы зубьев укороченной высоты без учета перекрытия yL и с учетом перекрытия уи
Число зубьев рассчитываемого колеса
Ух'- Угв 12 13 14 15 16 17 18 19 20 21 22 23
Зацепление у вершины Без учета пере- крытия yL 0,103 0,110 0,114 0,117 0,120 0,123 0,123 0,128 0,131 0,133 0,135 0,137
Число зубьев парного колеса
12 0,138 0,144 0,146 0,150 0,155 0,160 0,165 0,169 0,174 0,179 0,183 0,183 0,188
13 0,140 0,152 0,157 0,132 0,167 0,172 0,176 0,180 0,184 0 188 0,190
14 0,142 0,147 0,153 0,159 0,160 0,164 0,169 0,173 0,178 0,183 0,186 0,190 0,192 0 '192
15 0,143 0,148 0,155 0,163 0,171 0,175 0,180 0,184 0,188 0,194
13 0,144 0,150 0,157 0,162 0,167 0,172 0,177 0,181 0,183 0,189 0,193 0,195 0,196
17 0,145 0,151 0,158 0,164 0,168 0,173 0,178 0,182 0,187 0,191 0,197
18 <0 0,146 0,152 0,159 0,165 0,169 0,175 0,179 0,183 0,188 0,192 0,194 О'193 0; 198
19 0,148 0,153 0,160 0,165 0,167 0,171 0,176 0,181 О', 185 0,190 0,198 0,200
20 К S 0,149 0,154 0,161 0,172 0,177 0,182 0,187 0,191 0,195 О',199 0,202
21 2 а 0,149 0,155 0,163 0,168 0,173 0,178 0,183 0,188 0,193 0,195 0,200 0,203
22 0,149 0,156 0,164 0,169 0,174 0,175 0,179 0,184 0,189 0,194 0,197 О'202 0,204
23 К 0,149 0,157 0,165 0,170 0,180 0,185 0,190 0,195 0,198 0,203 0,205
25 S 0,149 0,159 0,166 0,171 0,176 0,182 0,187 0,192 О', 197 0,199 0,205 0^207
27 о 0,149 0,160 0,138 0,173 0,177 0,183 0,188 0,193 О'; 199 0,201 О'203 О'209
29 о 0,149 0,162 0,169 0,174 0,179 0,185 0,189 0,195 0,200 0,203 0,208 0'210
о
33 0,149 0,164 0,166 0,171 0,176 0,182 0,187 0,193 0,198 0,203 0,206 0,211 0,-213
37 0,149 0,173 0,173 0,184 0,186 0,189 0,195 0,199 0,205 0,208 0'213 0,215
41 0,149 0,168 0,175 0,180 0,191 0,197 0,202 О', 207 0,210 0,214 0,218
48 0,149 0,170 0,177 0,183 0,188 0,194 0,199 0,-204 0,209 0,213 0,217 0,220
55 0,149 0,172 0,178 0,185 0,189 0,195 0,193 0,202 0,206 0^211 0,215 0'219 0'222
65 0,149 0,175 0,181 0,187 0,192 0,204 0,208 0,214 0,217 0,221 0,225
80 0,149 0,175 0,183 0,188 0,194 0,200 0,206 0,211 0,216 0,219 О', 224 0,’227
со
Продолжение табл. 52230VII
Число зубьев рассчитываемого колеса
24 25 26 27 29 31 33 36 40 45 55 65 80
Зацепление у вершины Без учета пере- крытия yL 0,139 0,141 0,143 0,144 0,147 0,150 0,151 0,154 0,156 0,159 0,163 0,165 0,167
Число зубьев парного колеса
12 13 14 15 0,192 0,193 0,195 0,197 0,194 0,196 0,198 0,199 0,197 0,198 0,201 0,203 0,199 0,201 0,293 0,205 0,203 0,205 0,207 0,209 0,207 0,209 0,211 0,213 0,210 0,212 0,215 0,216 0,215 0,217 0,219 0,221 0,219 0,222 0,223 0,225 0,224 0,225 0,228 0,229 0,229 0,232 0,234 0,235 0,233 0,236 0,238 0,240 0,238 0,240 0,242 0,243
16 0,199 0,201 0,204 0,207 0,211 0,214 0,218 0,222 0,227 0,231 0,237 0,242 0,245
17 0,200 0,203 0,205 0,208 0,212 0,216 0,219 0,224 0,228 0,233 0,239 0,244 0,247
18 0,202 0,204 0,207 0,209 0,214 0,217 0,221 0,225 0,229 0,234 0,241 0,245 0,248
19 0,203 0,206 0,208 0,211 0,215 0,219 0,222 0,227 0,231 0,235 0,242 0,247 0,250
20 К 0,204 0,207 0,210 0,213 0,217 0,221 0,224 0,228 0,232 0,237 0,244 0,249 0,252
21 S Q. И 0,206 0,208 0,211 0,213 0,214 0,218 0,222 0,225 0,229 0,234 0,239 0,245 0,250 0,254
22 Ф j Q. 5 ф 0,207 0,209 0,215 0,219 0,223 0,227 0,231 0,235 0,240 0,247 0,251 0,255
23 0,208 0,211 0,213 0,214 0,216 0,220 0,224 0,228 0,232 0,235 0,241 0,248 0,252 0,257
25 0,209 0,215 0,218 0,222 0,226 0,229 0,233 0,238 0,243 0,250 0,254 0,253
27 S g 0,211 0,214 0,217 0,229 0,224 0,227 0,231 0,235 0,240 0,245 0,252 0,256 0,259
29 ф 0,213 0,216 0,219 0,222 0,226 0,229 0,233 0,237 0,242 0,247 0,253 0,258 0,251
33 и 0,216 0,219 0,222 0,225 0,228 0,232 0,236 0,240 0,245 0,250 0,256 0,261 0,265
37 0,218 0,221 0,224 0,226 0,223 0,231 0,235 0,238 0,242 0,247 0,253 0,259 0,264 0,257
41 0,220 0,224 0,229 0,234 0,237 0,241 0,244 0,249 0,256 0,263 0,266 0,269
48 0,223 0,226 0,228 0,232 0,236 0,239 0,243 0,247 0,252 0,258 0,256 0,269 0,272
55 0,225 0,228 0,231 0,235 0,238 0,242 0,246 0,250 0,255 0,260 0,268 0,272 0,275
65 0,228 0,230 0,233 0,237 0,240 0,245 0,248 0,253 0,258 0,263 0,271 0,274 0,278
80 0,231 0,234 0,236 0,239 0,243 0,248 0,252 0,255 0,260 0,266 0,274 0,278 0,281
532304
532305—533001
(2)
по формуле (I) п. 532303; поэтому расчет зубьев ведомых зубчатых
колес приводит к увеличению фактического запаса прочности зуба.
Формулу (1) можно представить в следующем виде:
Р COS а
где уь — коэффициент формы зуба, равный
а2
Уь — 6/Z ’
(3)
здесь / — шаг зацепления.
В таблице 532304-1 даны величины коэффициентов формы зубьев
нормальной высоты без учета перекрытия (Уь) и с учетом перекрытия (уг,е).
В таблице 532304-11 даны те же величины для зубьев укороченной
высоты (высота зуба принята равной 0,8 от нормальной). (Таблицы 532304-1
и II составлены А. М. Понер-Паниным).
532305 Для графо-аналитического определения коэффициента формы зуба
[формула (3) п. 532304] тщательно вычерчивают профиль зуба в возможно
большом масштабе (см. фиг. 532202 и 532204); точку М пересечения
направления действующей на зуб силы Р с осью зуба соединяют
с точкой А рассчитываемого сечения зуба АВ; из точки А проводят
перпендикуляр AD к прямой AM до пересечения его в точке D с осью
зуба; отрезок оси зуба £>С = х = 1,5 /уь будет пропорционален у^.
Для каждого положения точки К приложения силы к зубу получает-
ся свое значение коэффициента формы зуба; последний при расчете
зуба на прочность необходимо определять для двух моментов зацепле-
ния зуба:
1) у вершины зуба уь (фиг. 532202);
2) в ближайшей к вершине зуба точке участка профиля зуба, соот-
ветствующего зацеплению одной пары зубьев у^ (фиг. 532204).
В части практических указаний следует обратить внимание на опре-
деление опасного сечения зуба АВ, которое для каждого положения
точки К (фиг. 532202 и 532204) имеет соответствующее место. Для
каждого положения точки К следует наметить у корня зуба несколько
пробных сечений и вычислить для них значения коэффициента формы
зуба. Наименьшее значение этого коэффициента и будет соответствовать
опасному сечению.
533000 ОСОБЕННОСТИ РАСЧЕТА НА ПРОЧНОСТЬ КОНИЧЕСКИХ
ЗУБЧАТЫХ КОЛЕС
533001 Расчет зуба прямозубого конического зубчатого колеса произво-
дят условно по формулам расчета зуба прямозубого цилиндрического
колеса, заменяя коническое колесо (фиг. 533001) условным цилиндри-
ческим.
Диаметр средней начальной окружности конического колеса будет
dcp = d —ftsink см, (I)
где d—диаметр наибольшей начальной окружности конического
колеса, см;
806
533002
b—длина зуба конического колеса, см;
X—угол начального конуса конического колеса.
Диаметр условного цилиндрического
колеса
Число зубьев условного цилиндри-
ческого колеса
2Т=~, (3)
cos Л’ '
где z—число зубьев конического ко-
леса.
Шаг условного цилиндрического ко-
леса /т равен шагу по средней начальной
окружности конического колеса /ср, т. е.
t? =tcp = t^ = ^mT = ктср = кт^, (4)
где t—шаг по наибольшей начальной ок-
ружности конического колеса,
тт — модуль условного цилиндрического
колеса,
/«ср— модуль конического колеса по сред-
ней начальной окружности,
т—модуль конического колеса по наи-
большей начальной окружности.
Фиг. 533001.
К расчету конических зубчатых
колес
Модуль условного цилиндрического колеса
/пт = тср = т-£.
(5)
Окружная скорость по средней начальной окружности конического
колеса
Vcp = V^-P, (6)
где с—окружная скорость по наибольшей начальной окружности кони-
ческого колеса.
При определении динамической нагрузки по формулам 531204
и 531207 заменяют:
v на vcp
и
А на (L — 0,5Ь) при 8 = кх 4- л, = 90°,
или
533002
А на Q/^4-(f|_0,5b ) при 8 Ф 90°,
£07
533003—534000
где b— длина зуба, см;
L—конусное расстояние, см (см. фиг. 533001):
-_________________________________
и 2 sin Л
533003 Коэффициент перекрь/тия и зоны одновременного зацепления двух
и одной пары зубьев передачи определяют, как те же величины соот-
ветствующих условных цилиндрических шестерен с теоретическим чис-
лом зубьев, определяемым по формуле (3) п. 533001.
533004 Контактное напряжение сжатия определяется по формуле:
ос =8671/. (1)
’ Mk sinasinAj ' г
Контактное напряжение сдвига определяется по формуле:
чпп / Psin (2\
*в301d2bKsinasin Л, ’ ' '
где Р~~нормальная к профилю зуба нагрузка, кг;
и углы при вершине начальных конусов;
d, и dt—диаметры наибольших начальных окружностей, см;
<3>
533005 При расчете зуба конического зубчатого колеса на изгиб коэффи-
циент формы зуба, радиус закругления у корня зуба и коэффициент
концентрации берутся такими же, как для условного цилиндрического
зубчатого колеса.
534000 ПРИМЕР РАСЧЕТА ЗУБЧАТЫХ КОЛЕС
Произвести расчет тихоходной ступени передачи гателя «Мерлин» XX по следующим основным данным: нагнетателя дви-
N = 214 -у л. с.; л, = 10400 об/мин; п2 = 2850 об/мин;
А= 118,1 мм a = 20°, Zx = 20; z, = 73; / = 0,9; v — 27,65 м{сек; а = 5,12 мм; rt — 0,7 мм; Д = 15 р; Ь = 37,4 мм; с= 118000 кг/см?; гп = 2,54 мм; Ь1 = 39 мм; 112 = 3,65; 1 = 7,98 мм; d1 = 50,8 мм; d2= 185,42 мм; yL = 0,127; Угл = 0,206; ов = 9000 kzJcm2.
Определение нагрузок
Средний крутящий момент при номинальном режиме (см. 531102),
передаваемый шестерней (2, = 20), равен
^ = 71620^=71620.-^^ = 740 кг см.
808
534000
Расчетное статическое окружное усилие (см. 531201)
Удельная тангенциальная статическая нагрузка (см. 531202)
Удельная нормальная к профилю зуба статическая нагрузка
(см. 531203)
Р 7R
Р* ~ = (\94 ~ 82,8 кг1см'
Динамическая удельная нормальная к профилю зуба нагрузка
по Петрусевичу (см. 531204)
г <12
8 принимаем равным 5 ь так как Д= 15 > Юц;
н=0,8-27,65 \f -Ц^=126 кг/см.
г 3,65 1
Максимально возможная удельная сила удара по Петрусевичу
(см. 531205)
Umax = I б, 5 (Д—S) = 16,5 • 10 = 165 кг/см,
следовательно, в расчете принимаем и= 126 кг{см.
Суммарная удельная нормальная к профилю зуба нагрузка по Пет-
русевичу (см. 531206)
Рп = Рн + « = 82,8+ 126 = 208,8^209 кг}см.
Удельная тангенциальная динамическая нагрузка по Бакингему
(п. 531207)
D________В_______________255
• д УбВ УЗ 74-255 2^8 К^1СМ‘
1+о, 1 +о,15ЦУу21
В = Рс 4-сД-10-4 = 78+177 = 255 кг/см.
Суммарная тангенциальная удельная нагрузка по Бакингему
(см. 531208)
Рбт = Рс + Ря = 78 + 218 = 296 кг/см.
Суммарная удельная нормальная к профилю зуба нагрузка по Бакин-
гему (см. 531208)
г, ^*Бт 296 О1_ ,
Рб~ COS а - 6^4 ~ 315 кг/с-М-
809
534000
Сила, действующая на вершину зуба, если исходить из нагрузки
по Петрусевичу (см. 531209),
РП+16,5Д 209+16,5-15 ,
Ре2— 2,32 — 2,32 —197 кг]см.
То же по Бакингему
кгМ.
Контактное напряжение сжатия в полюсе зацепления, если исхо-
дить из нагрузки по Петрусевичу (см. 532103),
ос = 8671/£g-(fia + 1) = 8671/Ю700 кг[см*.
Г d2sina ' 18,542-0,342 '
То же по Бакингему
Ос =8671/ 3^65 = 13200 кг/см^
w 1 О j ОтЛ* V, Jti
Соответствующие контактные напряжения сдвига будут (см.532105)
•: = = 3700 К2/СЛ42 и Т = 4570 кг{см*.
Z,OO 4,00
Так как 12,5 Д= 187 < P^s = 197, то расчетной нагрузкой на вер-
шину зуба будет РЕа.
Напряжение изгиба без учета концентрации напряжений будет
(см. 532202), если исходить из нагрузки по Петрусевичу
COS а-Ь
o'S^V^ к21см'
XZ у ( v 9 Ж I vl • *7
То же по Бакингему
228-3,74 _.-Л .
0,799-0,127-3,9 — 2 Э° *2ICM ‘
Если учесть, что термообработки, снимающей концентрацию напря-
жений, не было сделано, то коэффициент концентрации будет (см.(2)
п. 532202):
а, =1 + 0,15^=14-0,15^ = 2,1,
и напряжения изгиба с учетом концентрации напряжений будут
а = 2,1-1750 = 3670 кг [см*,
а = 2,1 -2150 = 4520 кг[см*.
810
535000
Напряжения от изгиба в момент выхода из зацепления одной пары
шестерен (см. 532204), если исходить из нагрузки по Петрусевичу
Pncosa-Z> 209-0,94-3,74 , 1СП , ,
01~ tyLsbl ~ 0,799-0,206-3,9 П60 K2/CJW .
То же по Бакингему
Рбт ь 296-3,74 , 2
°l~ 0,799-0,206-3,9 — 730 KZICM ’
То же с учетом коэффициента концентрации
0!= 1160-2,1 =2430 кг[см*-,
ох = 1730-2,1 =3620 кг/см*.
Соответствующие запасы прочности будут:
для случая нагрузки зуба у его вершины, без учета коэффициента
-концентрации напряжений
9000
П 1750
_ . 9000
— Э,1; И —2150
= 4,2;
то же, с учетом коэффициента концентрации напряжений
_9000 _ _ 9000
п — 3660 — 2’э’п 4520
= 2,0;
для момента выхода из зацепления одной пары шестерен, без учета
’.коэффициента концентрации напряжений
п
£229 = 78.п_^=5 2-
1160 ',o’n-1730
*
то же, с учетом коэффициента концентрации напряжений
9000 0 „ 9000 „ „
П ~ 2430 ~ 71 п — зб20 — 2,э-
ОСНОВНЫЕ ДАННЫЕ И РАСЧЕТНЫЕ ВЕЛИЧИНЫ ЗУБЧАТЫХ КОЛЕС
В таблицах 535000-1—IX приведены основные данные и расчет-
ные величины зубчатых колес некоторых авиационных двигателей
(см. стр. 812—825).
535000
811
Таблица 535000-1
Основные данные и расчетные параметры по зубчатым передачам редукторов некоторых авиационных двигателей
Условные обозначе- ния Размер- ность ВК - 105 «Юмо»-211 DB-601A Аллисон F-3R Роллс-Ройс «Мерлин» XX
Эффективная мощность двига- теля Л. с. 1100 930 ' 1050 1000 1235
Число оборотов коленчатого вала п об/мин 2700 2300 2400 2600 2350
Число зубьев шестерни Z1 — 28 38 36 22 21
Число зубьев колеса Z2 — 42 64 56 44 50
Угол зацепления а град. 22°20'10* 20° 18° 15'40" 25° 20°
Модуль зацепления т ММ 6,857 5 5 6,35 6,182
Шаг зацепления t » 21,55 15,7 15,7 19,92 19,4
Коэффициент высоты зуба f — 0,8 1 0,95 0,877 0,771
Длина соприкосновения зубьев шестерни и колеса при заце- плении в полюсе b мм 56,2 63 68 61 64
Длина зуба у корня » 70 63 73 65 69,2
Толщина зуба в опасном сечении » 13,7 10,5 10,0 13,3 7,5
Радиус закругления зуба у его основания п » 2,45 2,4 2,5 1,87 2,5
Коэффициент формы зуба Уь — 0,133 0,127 0,105 0,135 0,128
То же с учетом перекрытия Уи — 0,189 0,259 0,191 0,214 0,182
Погрешность в основном шаге зацепления X микрон 20 12 14 24 10
Отношеняе максимального мо- мента на валу двигателя к среднему к — 1,4 1,2 1,25 1,32 1,35
535000
Таблица 535000-П
Основные данные и расчетные параметры планетарных передач___________________
Обозначе- ния Размер- ность М-88 АШ-82 Пратт-Уитни R-2600 «Юмо»- - 222А/В1 Пратт-Уитни R-2800> 59
Тип редуктора _ у конический цилиндр. цилиндрич. цилиндрич. цилиндр.
Номинальная мощность двигателя Соответствующее число оборотов N, Л. c. 1100 1700 2400 1500 2260 1625
коленчатого вала п об/мин 2400 2400 2990 2550
Число зубьев ведущего колеса . . — 60 66 135 55 54
Число зубьев сателлита Число зубьев неподвижной шесте- Zc/zcT — 32/37,8 18 15 20—20* 15—30*
рни гн/гнт — 30/34,5 30 105 95 108
Число сателлитов я — 3 6 20 6 6
Передаточное число редуктора . . i — 2/3 11/16 9/16 11/30 1/2
Угол зацепления ct град. 20° 20° 22°30' 20° 22°30'—28’19'30'*
Модуль зацепления пг/шср MM 4,5/4 4,93 15,65 2,45 3,5 4,046—3,58*
Шаг зацепления t » 12,58 7,7 11 12,7—11,23*
Коэффициент высоты зуба .... Погрешность в основном шаге за- f — 1 1 50(10)** 1 1 0,93—0,8*
цепления Угол начального конуса неподвиж- A микрон 70 (35)** 29°54'57" 20 (10)** 12 10
ной шестерни град. — — — —
Угол начального конуса сателлита Отношение максимального момен- Лст » 32°08'20’ — — — —
та на валу двигателя к сред- нему к — 1,37 1,37 1,38 1,35 1,51
Длина соприкосновения зубьев ше-
стерни н колеса при зацеплении в полюсе Ь мм 30 25 22 51 43,35—17,3*
Длина зуба у корня Радиус закругления зуба у его bi » 30 25 22 57,5 0,8 45—23,9* 1,25—1,33*
основания rt » 9 — —
Толщина зуба в опасном сечении . » 8,52 —- — 6,05 8,8—8,2*
Коэффициент формы зуба .... Vl — 0,109 0,093 0,085 0,091 0,117—0,203* 0,236
То же с учетом перекрытия . . . Радиус начальной окружности ве- У/.е — 0,192 120*** 0,16 164,3 0,135 165,4 0,185 96,25
109,3
дущего колеса rB мм
Радиус начальной окружности са- теллита rc »> 54*** 44,8 18,4 35 30,3—53,6*
Радиус начальной окружности не- подвижной шестерни ra » 60*** 74,7 128,6 166,25 193,3
* Левая цифра—относится к сателлиту, сцепляющемуся с ведущей шестерней, а правая-к сателлиту, сцепляющемуся с неподвижной
шестерней. " _
♦ * Без скобок даны погрешности в основном шаге зацепления, полученные путем обмера зубчатых колес на находившемся в экс-
плоатации двигателе, а в скобках—наиболее вероятные погрешности для новых зубчатых колес этого класса»
♦ По среднему модулю.
535000
Таблица 535000-П1
Основные данные и расчетные параметры по зубчатым передачам к нагнетателям некоторых авиационных двигателей
Обозна- чения Размер- ность ВК-105 Аллисон F-3R Роллс-Ройс «Мерлин» XX
Мощность нагнетателя Число оборотов шестерни Число зубьев шестерни Число зубьев колеса Угол зацепления Модуль зацепления Шаг зацепления Коэффициент высоты зуба Длина линии соприкосновения зу- бьев шестерни и колеса при зацеп- лении в полюсе Длина зуба у корня Толщина зуба в опасном сечении . Радиус закругления зуба у его основания Коэффициент формы зуба То же с учетом перекрытия . . . Погрешность в основном шаге за- цепления N П1 Z1 Za а т t f b bl аг гг Уг Уи Д л. с. об/мин град. мм » мм » » » микрон 220 :2 10250 15 57 20 2,75 8,65 0,8 26 26 4,8 1,2 0,111 0,175 8 220: 2 25900 25 63 20 2,25 7,07 0,8 15 15 4,34 0,85 0,133 0,213 8 350:4 13150 15 73 20 2,25 7,07 0,8 26 26 3,93 0,95 0,111 0,176 8 350 :4 33100 25 63 20 2,25 7,07 0,8 15 15 4,34 0,85 0,133 0,213 8 128 7200 15 35 25 4,233 13,29 0,9 25,5 25,5 8,4 1,4 0,130 0,195 20 128 23400 15 55 20 2,54 7,98 0,8 22,2 23 4,3 1,0 0,100 0,134 15 215 :2 10400 20 73 20 2,54 7,93 0,9 37,4 39 5,12 0,7 0,127 0,203 15 215:2 27000 25 65 22°30' 2,623 8,25 0,9 16 19 5,14 0,6 0,130 0,181 15
535000
Таблица 535000-111 (продолжение)
оо
сл
Обоз- наче- ния Размер- ность Роллс- Ройс «Мерлин» XX Бристоль «Центавр» XI «Юмо»-222 A/Bt Нэпир «Сейбр» ПА Пратт- Уитни R-2300-59
Мощность нагнетателя Число оборотов шестерни Число зубьев шестерни Число зубьев колеса Угол зацепления Модуль зацепления Шаг зацепления Коэффициент высоты зуба Длина линии соприкосновения зубь- ев шестерни и колеса при зацеп- лении в полюсе Длина зуба у корня Толщина зуба в опаснэм сечении . Радиус закругления зуба у его ос- нования Коэффициент формы зуба То же с учетом перекрытия . . . Погрешность в основном шаге за- цепления N П1 Z1 z2 а т t f b ai ri Vl Уи A Л. c. об/мин град. MM » MM » » » микрон 159 8675 24 73 20 2,54 7,93 0,9 39 40 5,17 0,7 0,122 0,191 15 159 23200 25 67 22°30' 2,674 8,41 0,9 17,5 19 5,12 0,6 0,150 0,196 15 186: 2 5470 42 100 20 2,116 6,65 0,86 19 19,5 4,15 0,7 0,125 0,213 15 342:2 7600 34 108 20 2,116 6,65 0,85 34,75 35,5 4 0,7 0,118 0,190 15 342 :2 21600 37 105 20 2,116 6,65 0,86 21,75 23 4,1 0,9 0,122 0,208 15 200 15300 32 90 20 2 6,28 1 23 23 3,85 0,6 0,111 0,254 11 423 22500 24 93 20 2 6,23 1 80 80 3,8 1,05 0,101 0,199 20 187 23300 23 67 20 * 21°41'47' 2,54 7,93 0,9 14,15 14,3 5,1 1,0 0,1085 0,244 18 310 33300 20 72 20 * 23° 11'45" 2,54 7,93 0,9 23,9 28 5,35 1,2 0,121 0,200 10 160 :2 8010 18 63 20 2,903 9,12 0,87 39,63 41,24 5,1 1,0 0,109 0,193 12 160: 2 19300 35 76 20 2,116 6,65 0,8 15,95 22,03 4 0,6 0,123 0,200 13
♦ В числителе—угол инструмента, а в знаменателе—угол сборки зубчатых колес.
535000
Таблица 535000-IV
co
»—*
05
Расчетные нагрузки и контактные напряжения в зубьях зубчатых колес редукторов некоторых авиационных двигателей
Обозна- чения Размер- ность ВК-105 «Юмо»-211 DB-601A Аллисон F-3R Роллс- Ройс «Мерлин» XX
Максимальный крутящий момент ^иах кг см 40900 34800 39200 36300 41900
Радиус начальной окружности шестерни . ri мм 95 95 90 69,85 64,91
Радиус начальной окружности колеса . . г2 ъ 144 160 140 139,7 154,56
Удельная жесткость зубьев С кг/см2 120000 116000 116000 118000 120000
Окружное усилие Ро кг 4260 3660 4355 5200 6460
Удельная (на единицу длины) нагрузка на зуб от окружного усилия Рс кг/см 758 581 640 852 1000
Окружная скорость по начальной окруж- ности V м/сек 27,15 22,87 22,6 19,05 19,36
Удельная сила удара пары зубчатых колес по Петрусевичу и кг/см 337 189 208 215 105
Максимально возможная удельная сила удара пары зубчатых, колес по Петру- севичу umax ъ 248 116 149 314 83
Удельная нагрузка от окружного усилия, нормальная к профилю зуба ...... » 820 620 670 940 1070
Суммарная удельная нагрузка по Петрусе- вичу, нормальная к профилю зуба . . . рп 1068 736 819 1155 1153
Контактное напряжение сжатия при рас- четной нагрузке по Петрусевичу .... С кг/,см2 13500 11650 13300 14800 16500
Контактное напряжение сдвига при расчет- ной нагрузке по Петрусевичу V » 4700 4050 4620 5150 5780
Удельная тангенциальная динамическая на- грузка по Бакингему р д кг/см 707 500 538 686 676
Удельная тангенциальная суммарная на- грузка по Бакингему хэТ » 1465 1081 1180. 1540 1675
Суммарная нормальная нагрузка по Бакин- гему, нормальная к профилю зуба . . . рв 1580 1150 1245 1700 1780
Контактное напряжение сжатия при рас- четной нагрузке по Бакингему G кг/см2 16600 14600 16500 18000 20700
Контактное напряжение сдвига при расчет- ной нагрузке по Бакингему ...... 5750 5050 5730 6250 7200
535000
32 Авиац. порши, двигатели.
00
Таблица 535000-V
Расчетные нагрузки и контактные напряжения в зубьях сателлитов планетарных редукторных передач некоторых
авиационных двигателей
[ Обоз- наче- ния Размер- ность М-88 АШ-82 Пратт-Унтнн R-2600 «Юмо»- 222 А/Вх Пратт- Уитни R-2300-59
Погрешность й основном шаге зацепле- ния . „ . Д микрон 70 35 50 10 20 10 12 10
Средний крутящий момент двигателя на номинальной мощности М кгсм 32800 50800 47700 56Q00 45600
Максимальный крутящий момент дви- гателя на номинальной мощности . . 45000 69500 — 65800 . 75500 69000
Окружное усилие на ведущем колесе редуктора р гов кг 3750 4230 __ 4000 . 7840 6300
Окружное усилие на сателлите .... р 9 1250 705 1,1 НИИ 200 1310 1050
Удельная (на единицу длины) нагрузка на зуб от окружного усилия . . . . р г с кг/см 416 282 91 . 256 243
Относительная окружная скорость . . V от м/сек 10,1 — 12,9 18,15 — 18,5 14,0
Условная удельная сила удара пары зубьев по Петрусевичу и кг/см 187 127 185 62 81 47 86 50
Максимально возможная удельная сила удара пары зубьев по Петрусевичу и max 9 1070 495 740 82 247 82 127 82
Удельная нагрузка от окружного уси- лия, нормальная к профилю зуба . . Суммарная удельная нагрузка по Пет- русевичу, нормальная к профилю зуба р* )> 442 300 «ММ* 98 273 263
рп 629 569 485 362 179 145 359 313
Контактное напряжение сжатия в по- люсе зацепления при расчетной на- грузке по Петрусевичу а кг/см* 15400 14600 13800 11900 11500 9400 12400 11350
Контактное напряжение сдвига в полю- се зацепления при расчетной нагруз- ке по Петрусевичу ......... т » 5350 5060 4800 4130 3630 3270 4300 3910
Удельная тангенциальная динамиче- ская нагрузка по Бакингему. ... р* кг/см 645 470 560 290 265 176 290 253
Удельная тангенциальная суммарная нагрузка по Бакингему э 1061 886 842 572 356 267 546 496
Суммарная удельная нагрузка по Ба- кингему, нормальная к профилю зуба Контактное напряжение сжатия в по- люсе зацепления при расчетной на- грузке по Бакингему РБ » ИЗО 942 898 611 386 288 580 537
'в кг/см* 21100 18800 18700 15400 15100 13400 15800 15000
Контактное напряжение сдвига в по- люсе зацепления при расчетной на- грузке по Бакингему . и 9 7320 6500 6500 5350 5270 4630 5500 5220
535000
Таблица 535000-VI
оо
ь-*
оо
Расчетные нагрузки и контактные напряжения в зубьях зубчатых колес приводов к нагнетателям некоторых
авиационных двигателей
Обо- зна- чения Раз- мер- ность ВК-105 Аллисон F-3R Роллс-Ройс «Мерлин» XX
Средний крутящий момент Радиус начальной окружности шестерни Радиус начальной окружности колеса . . Передаточное число Удельная жесткость зубьев Окружное усилие Удельная (на единицу длины) нагрузка на зуб от окружного усилия Окружная скорость по начальной окружности Удельная сила удара пары зубчатых колес по Петрусевичу Максимально возможная удельная сила удара пары зубчатых колес по Петру- севичу . Удельная нагрузка от окружного уси- лия, нормальная к профилю зуба . . Суммарная удельная нагрузка по Петрусевичу, нормальная к профилю зуба Косинус угла зацепления Контактное напряжение сжатия при расчетной нагрузке по Петрусевичу. . Контактное напряжение сдвига при рас- четной нагрузке по Петрусевичу . . . Удельная тангенциальная динамическая нагрузка по Бакингему Удельная тангенциальная суммарная нагрузка по Бакингему Суммарная удельная нагрузка по Бакин- гему, нормальная к профилю зуба . . Контактное напряжение сжатия при расчетной нагрузке по Бакингему . . . Контактное напряжение сдвига при расчетной нагрузке по Бакингему . . М Г1 г% hi с Ра Рс V и umax Рн РП COS a 0 ч Р> РБт РБ а V кгсм мм » кг/см* кг к г/см м/сек кг/см » » » кг/см* » кг/см » » кг/см* » 738 20,625 78,375 3 8 120000 372 143 22,15 57,3 66 152 209 0,94 11900 4120 205 348 370 15800 5500 304 28,125 70,875 2,52 120000 108 72 76,25 242 66 73,5 142 0,94 8850 3070 163 235 250 11700 4070 473 16,875 82,125 4,87 120000 282 108 23,25 53 63 115 163 0,94 11500 3990 180 288 303 15500 5400 189 23,125 70,875 2,52 120000 67 45 97,45 309 66 47,6 114 0,94 7900 2740 138 183 195 10300 3580 1270 31,75 73,2 9 4 118000 401 157 23,93 157 248 173 330 0,903 11500 3930 328 485 533 14700 5070 347 19,05 69,85 3,67 120000 182 82 52,65 207 135 87,5 252 0,94 13350 4740 245 327 348 J60&0 5560 740 25,4 92,71 3,65 118000 292 78 27,65 126 165 82,8 209 '0,94 10600 3580 218 296 315 13200 4570 285 32,79 85,32 2,6 118000 87 54 92,65 500 165 58,2 223 0,925 9600 3340 224 278 301 11100 3860
535000
Таблица 535000-VI (продолжение)
оо
ю
сл
to
Обо- зна- чения Раз- мер- ность Роллс-Ройс «Мерлин» XX Бристоль «Центавр» XI «Юмо»-222 А/Вх Нэпир «Сейбр» П-А Пратт- Уитни R-2890-59
Средний крутящий момент м кгсм 1310 491 1220 16Ю 568 920 1340 562 667 642 295
Радиус начальной окружности шестерни Г1 мм 30,48 33,42 44,43 35,97 39,14 32 24 33,4 25 25,1 37,04
Радиус начальной окружности колеса . . г* » 92,71 89,57 105,8 114,25 111,09 90 98 85,86 93,47 91,44 80,5
Передаточное число —— 3,04 2,69 2,38 3,17 2,84 2,82 4,08 2,58 3,6 3,5 2,18
Удельная жесткость зубьев С кг/см2 118000 118000 117000 117000 117000 116909 115000 118000 118000 118000 120009
Окружное усилие Удельная (на единицу длины) нагрузка Ро кг 431 147 275 447 144,5 288 558 170,0 262 24,7 80
на зуб от окружного усилия Окружная скорость по начальной Рс кг{см 110 84 145 128,5 66,8 111 70 120 97 62,3 50
окружности Удельная сила удара пары зубчатых V м!сек 27,68 81,15 25,5 28,8 88,6 52,3 56,7 83,2 90,6 24,4 75
колес по Петрусевичу Максимально возможная удельная сила удара пары зубчатых колес по Петру- и кг/см 141 440 162 159 515 261 303 517 295 95 394
севичу Удельная нагрузка от окружного уси- ШАХ 165 165 165 165 165 149 248 215 83 116 132
лия, нормальная к профилю зуба. . . Суммарная удельная нагрузка по Петрусевичу, нормальная к профилю ра 117 91,3 155 137 71 118 74 129 105 66 53
зуба рп 258 256 317 296 236 266 322 344 188 161 185
Косинус угла зацепления Контактное напряжение сжатия при COS а —— 0,94 0,924 0,94 0,94 0,94 0,94 0,94 0,929 0,919 0,940 0,940
расчетной нагрузке по Петрусевичу . Контактное напряжение сдвига при 0 кг/см2 11400 10200 10500 10900 9470 11100 13600 12100 9350 9330 8930
расчетной нагрузке по Петрусевичу . . Удельная тангенциальная динамическая г » 3860 3530 3650 3780 3290 3870 4710 4190 3250 3240 3110
нагру зка по Бакингему Удельная тангенциальная суммарная кг! см 243 251 279 260 232 254 266 320 206 174 199
нагрузка по Бакингему Суммарная удельная нагрузка по Бакин- ₽Бт » 353 335 424 388 299 365 333 440 303 233 249
гему, нормальная к профилю зуба . . Контактное напряжение сжатия при РБ » 376 364 449 413 318 388 357 472 329 252 264
расчетной нагрузке по Бакингему . . Контактное напряжение сдвига при 0 кг/см2 13450 12100 12400 12500 11000 13500 14300 14200 12500 11700 10700
расчетной нагрузке по Бакингему . . 4670 4200 4320 4350 3839 ’ 4680 4950 4930 4340 4060 3720
535000
Таблица 535000-VH
Напряжения в зубьях шестерен редукторов
Обозна- , чения Размер- ность ВЦ-105 «Юмо»- 211 DB-601A Аллисон F-3R Роллс- Ройс «Мерлин» XX
Отношение дл начальным и Коэффициент Коэффициент ( Коэффициент Шаг зацеплен! Погрешность Максимально равная 12,5 g L Л 5 m g я _ я О Л . . ж Ч ю X И s >> >» S сх « а сх е ч о о с 2 § g « п И £ « & | | о г а ч .- = CQ С rt q с*) X а: я ины соприкосновения зубьев по цилиндрам к длине зуба у корня концентрации напряжений.... юрмы зуба без учета перекрытия [»ормы зуба с учетом перекрытия 1Я При определении з основном шаге зацепления . . возможная удельная нагрузка, Д* Удельная нагрузка на зуб . . Напряжение изгиба То же с учетом коэффициента концентрации Запас прочности То же с учетом коэффициента концентрации Ь1Ъг яа Уь t р ас четв Д Ре cos я «1 П1/Яо мм ы х н а г р микрон кг]см » кг/см* » 0,84 1,84 0,133 0,189 21,55 узок по 20 250 558 1640 3020 5,5 3,0 1 1,655 0,127 0,259 15,7 Петру с 12 150 379 1900 3140 4,8 2,9 0,92 1,6 0,105 0,191 15,7 е в и чу 14 175 433 2420 3870 3,7 2,3 0,938 2,07 0,135 0,214 19,92 24 300 609 2120 4400 4,3 2,1 0,925 1,45 0,128 0,182 19,4 10 125 531 1980 2870 4,5 3,1
Нагрузка приложена При зацеплении одной к вершине зуба (за- пары зубьев передачи цепление двух пар (ПРИ выходе из за" , . цепления второй пары зубьев передачи) зубьев передачи) Удельная нагрузка на зуб . . Напряжение изгиба То же с учетом коэффициента концентрации Запас прочности То же с учетом коэффициента концентрации При определении Удельная нагрузка на зуб . . Напряжение изгиба То же с учетом коэффициента концентрации Запас прочности То же с учетом коэффициента концентрации Рп cos а °а яа яа Па Па/®, расчет PBC0Sa °i а, П1 П1/я, кг!см кг/см* » ны х наз кг/см кг/см2 » 990 2040 3750 4,4 2,4 ' р у 3 0 К Г 765 2250 4130 4,0 2,2 690 1700 2820 5,3 3,2 го Б а к и т 545 2740 4530 3,3 2,0 787 2420 3880 3,7 2,3 i г е м у 605 3380 5400 2,7 1,7 1050 2310 4790 3,9 1,9 820 2850 5930 3,2 1,5 1080 2840 4120 3,2 2,2 790 2940 4260 3,1 2,0
При зацеплении одной пары зубьев передачи (при выходе из за- цепления второй пары зубьев передачи) Удельная нагрузка на зуб . . Напряжение изгиба То же с учетом коэффициента концентрации Запас прочности То же с учетом коэффициента концентрации р^ Вт «а °а«, Па Па/Я, кг/см кг]см2 » 1465 3020 5560 2,9 1,6 1081 2650 4390 3,4 2,0 1180 3700 5920 2,4 1,5 1540 3380 7000 2,7 1,3 1675 4380 6350 2,1 1,4
* Приложена к вершине зуба; в зацеплении находится только одна пара зубьев.
535000 __________________________________________535000
Таблица 535000-VIII
Напряжения в зубьях сателлитов планетарных редукторных передач
Обозна- чения Размер- ность М-88 АШ-82 Пратт- Уитни R-2500 «Юмо»- 222 А/В, Пратт- Уитни R-2S00-59
Отношение длины соприкосновения зубьев по начальным цилиндрам к длине зуба у корня Коэффициент концентрации напряжений .... bib яа — 1 1,15 1 1 0,835 2,14 0,93 2
Коэффициент формы зуба без учета перекрытия Ут. — 0,109 0,093 0,085 0,091 0,117
Коэффициент формы зуба с учетом перекрытия Утл — 0,192 0,13 0,135 0„185 0,233
Шаг зацепления t мм 12,58 15,05 7,7 11 12,7
I Погрешность При определении в основном шаге зацепления . . . ра с ч е1 Д Н Ы X НЕ микрон (груз 70 0 к п 35 0 П е 50 трус 10 е в и ч 20 У 10 12 10
Максимально равная 12,5 возможная удельная нагрузка, Д* — к г [см .. 875 437 025 125 250 123 150 125
<0 1 Удельная нагрузка на зуб . . PjjCOS 1 » 590 407 455 214 165 124 220 191
о m « о- К С S § i £ j Напряжение изгиба °1 кг/сл? 4300 3410 3120 1470 2520 1900 2000 1235
сх м м g, е ct © о . с То же с учетом коэффициента концентрации °1яа » 4910 3850 —— — —— 4280 2470
м s Е ш 5. в 5 « Л §• § «= Запас прочности «1 — I,3 Кб 1,8 3,8 2,2 3,0 4,5 7,3
я “ й 5* X к =f ” То же с учетом коэффициента концентрации — 1,13 1,46 — — — — 2,1 3,6
« Е в S Е й о. _ я S. « О Удельная нагрузка на зуб . . . Рп СОЗ я к г/см - — 535 455 340 105 134 337 290
ч S с 5 ° а” 5 « g S о « Напряжение изгиба Kl/CM2 — 2220 — 1300 — 1290 1460 930
Я О §• а о а ч ° 5 5 S Й ш ® То же с учетом коэффициента концентрации °2Я, » — 2520 — — — — 3270 1800
« 3 К § 4 > о к S S " 5 « Запас прочности па — — 2,5 — 4,1 — 4,4 0,0 9,7
с ” ±г л е о С с То же с учетом коэффициента концентрации П,/я. — — 2,14 — — — — 2,7 4,8
ложена ба (за- х пар дачи) При определении Удельная нагрузка на зуб . . . расче Ре cos я Т Н Ы X н кг/см агру 930 з ок 515 по Б; 695 1 ки н 314 гему 281 182 313 282
Напряжение изгиба кг/см2 5803 4480 4780 2150 4330 2780 2780 1820
?? s' a В o « g То же с учетом коэффициента концентрации • • ®i“s » 7530 5060 — — — — 5950 3040
S S g О " в я S Запас прочности — 0,82 1,25 1,17 2,0 1,3 1,9 3,2 4,9
a & 2 « fe » в £ к & То же с учетом коэффициента концентрации ”i/a« — 0,73 1,1 — — — — 1,5 2,5
’§ 5 Й §. Удельная нагрузка на зуб . • кг 1см 1051 838 342 573 350 267 540 493
Et EX g s ° 2 CO 5* Напряжение изгиба °а кг /см2 — 3670 — 2290 3430 2569 2380 1590
E S о 4 SC 0.0) « „ GJ О СЬ Q CQ H Q 5 g § и c То же с учетом коэффициента концентрации «2 я, » — 4220 — —> — 5100 3180
Kg я § q *Q м « CO CQ § Л w 5 «з Запас прочности Th — — 1,53 — 2,5 1,6 2,2 3,8 5,7
g|§. § ” То же с учетом коэффициента концентрации . , nt/a. — — 1,2 — — — — 1,8 2,8
* Приложена к вершине зуба; в зацеплении находится только одна пара зубьев.
535000 535000
Таблица 535000-IX 1
Напряженка жзгава в вубьях шеотереи нагнетателей
535000
Обозна- чения Размер- ность ВК-105 Аллисон F-3R Роллс-Ройс «Мерлин» XX
Отношение длины соприкосновения зубьев по на-
чальным цилиндрам к длине зуба у норня .... Ь/Ь1 1 1 1 1 1 0,855 0,958 0,842
Коэффициент концентрации напряжений «а м 1,6 1,8 1,62 1.8 1,9 1,645 2,1 2,28
Коэффициент формы зуба без учета перекрытия. . 0,111 0,133 0,111 0,133 0,130 0,100 0,127 0,130
Коэффициент формы зуба с учетом перекрытия . . VLs — 0,175 0,213 0,176 0,213 0,195 0,164 0,206 0,181
t мм 8,65 7,07 7,07 7,07 13,29 7,98 7,98 8,25
При опр&деленни расчетных нагрузок п о Петрусевичу
Погрешность в основном шаге зацепления . .... д мнкрон 8 8 8 8 20 15 15 15
Максимально возможная удельная нагрузка, рав-
— кг/см 100 100 100 100 250 187 187 187
а в Н >. дл Удельная нагрузка на зуб Р]$ cos « » 138 111 122 100 258 202 185 188
Л И И <о С ср и «««Ид Др* »S * 5 Напряжение изгиба То же с учетом коэффициента 01 кг! см2 1440 1180 1560 1066 1490 2160 1750 3670 1480
концентрации » 2300 2120 2520 1930 2830 3560 3380
в Ий = и§'& Запас прочности То же с учетом коэффициента «1 — 6,2 7,6 5,8 8,5 6,0 4,2 5,1 6,1 2,7
концентрации , . п1/«а — 3,9 4,2 3,6 4,7 3,1 2,5 2,5
ср л-, Д н®й®оЧ°|Й® Удельная нагрузка на зуб Напряжение изгиба : . . То же с учетом коэффициента Рп COS 3 02 кг/см кг/си<2 197 1300 133 . 880 158 1270 107 710 300 1160 237 1550 197 1160 206 1165
концентрации . °ааа » 2070 1600 2050 1290 2200 2550 2430 2660
“ Э 8 ё*и я « Й§< Запас прочности То же с учетом коэффициента п2 — 6,9 10,1 7,1 12,5 7,7 5,8 7,8 7,7
ди “.иИд концентрации . п2/«а — 4,4 5,6 4,4 7,0 4,1 3,5 3,7 3,4
При определении расчетн ы х нагрузок по Бакингему
ж л R й Н й*** Удельная нагрузка на зуб Pr cos « кг/см 204 155 178 134 338 241 228 216
S и Й 3 *» s й « Я дИд ₽ 2.ЙН яи® « Напряжение изгиба д кг/см? 2120 1645 2270 1420 1950 2570 2150 1700
То же с учетом коэффициента
{ц Ч «Р К п «НЙЙИ А®* концентрации » 3400 2920 3680 2560 3700 4220 4520 3880
Запас прочности То же с учетом коэффицвеита П1 — 4,4 4,3 4,0 6,2 4,7 8,5 4,2 5,3
* н «&чи8 со
концентрации «1/», — 2,7 2,4 2,4 3,5 2,5 2,1 2,0 2,3
ацепле- ОДНОЙ : зубьев едачн выходе цепле- второй : зубьев , едачи) Удельная нагрузка на зуб рБт кг [см 348 235 288 183 485 327 296 278
Напряжение изгиба То же с учетом коэффициента 02 кг/см? 2300 1560 2310 1220 1870 2130 1730 1580
концентрации . оз«в » 3680 2820 3740 2210 3560 3500 3620 3580
Д- н w Запас прочности.' . . То же с учетом коэффициента п2 — 3,9 5,8 3,9 7,4 4,1 4,8 4,2 5,2 5,7 2,5
концентрации «2/» а •— 2,4 3,2 2,4 2,6 2,6 2,5
* Приложена к вершине вуба; в аацецлеции находится только одна дара зубьев,
Продолжение т а б л и ц ы 535000-IX
00
Обозна- чении Размер- ность Ролле «М^| -Ройс ЛИИ» -X Бристоль «Юмо»-222 А/В1 Нэпир «Сейбр»И-А Пратт- Уитни R-28 00-59
«Центавр» XI
Отношение длины соприкосновения зубьев по иа-
чальным цилиндрам к длине зуба У копия .... ь/&1 — 0,975 0,920 0,975 0,978 0,945 1 1 0,99 0,96 0,96 0,72
Коэффициент концентрации напряжений •— 2,11 2,28 1,89 1,86 1,68 1,94 1,54 1,765 1,67 1,755 2
Коэффициент формы зуба без учета перекрытия. . — 0,122 0,150 0,125 0,118 0,122 0,111 0,101 0,1085 0,121 0,109 0,128
Коэффициент формы зуба с учетом перекрытия. . »£в — 0,191 0,196 0,218 0,190 0,208 0,254 0,199 0,244 0,200 0,193 0,200
Шаг зацепления 1 лсм 7,98 8,41 6,65 6,65 6,65 6,28 6,28 7,98 7,98 9,12 6,65
При определении расчетная нагрузок п о П е т р у с е в и ч у
Погрешность в основном шаге зацепления .... к микро 15 15 15 15 15 14 20 18 10 12 13
Максимально возможная удельная нагрузка, рав-
иая 12,5 Д* •— кг J см 187 187 187 187 187 175 250 225 125 150 162
а ж Д И д Удельная нагрузка иа зуб ..... РЕ cos * » 205 201 229 220 196 202 264 255 140 146 162
Напряжение изгиба То же с учетом коэффициента п кг/с№ 2050 1470 2690 2740 2280 2900 4170 2920 1390 14Ю 1375
концентрации » 4320 3340 5100 5100 3740 5620 6420 5140 2320 2470 2750
М *"» W А Я S О® Н * Н к я в Запас прочи ости . То же с учетом коэффициента ”1 — 4,4 6,1 3,4 3,3 4,0 3,1 2,2 3,1 6,5 6,4 6,5
концентрации ........... П1/«, — 2,1 2,7 1,8 1,8 2,4 1,6 1,4 1,8 3,9 3,6 3,3
а £. и й Удельная нагрузка иа эуб Рц cos « кг 1см 243 237 298 278 222 250 303 319 172 151 174
Ьо^®ОВ„<вЕ1 Напряжение изгиба То же с учетом коэффициента ’2 кг/см2 1560 1330 1990 2150 1520 1570 2430 1620 1030 820 940
S°»53&eB« концентрации » 3300 3030 3760 4000 2550 3050 3740 2860 1720 1440 1880
„ ® й “и а « За Запас прочности То же с учетом коэффициента n2 — 5,8 6,8 4,5 4,2 5,9 5,7 3,7 5,6 8,7 11,0 9,6
д и 5-я и и концентрации ns/*a — 2,7 3,0 2,4 2,2 3,5 3,0 2,4 3,2 5,2 1 6,2 4,8
При определении ра счетных и а г р у в о к по Бакин гему
Удельная нагрузка иа зуб Pr cosa кг/см 253 244 282 267 230 250 278 308 196 182 194
$ И И §>>® И Напряжение изгиба То же с учетом коэффициента кг/см2 2520 1780 3300 3330 2680 3580 4400 3550 1950 1760 1640
концентрации . < *l»g » 5300 4050 6250 6200 4500 7020 6750 6270 3250 3100 3280
S S S я и §§ a Запас прочности То же с учетом коэффициента П1 — 3,6 1,7 5,1 2,7 2,7 3,4 2,5 2,0 2 д 5 4,6 5,1 5,5
концентрации . «l/“a — 2,2 1,4 1,4 2,0 1,3 1,3- 1,4 2,8 2,9 2,7
» £. • « я Удельная нагрузка иа эуб рБт кг/см 353 335 424 388 299 365 336 440 303 236 249
§о2й©ч2ди Напряжение изгиба То же о учетом коэффициента 52 кг/см2 2250 4760 1880 4270 2850 3000 2040 2300 2690 2220 1810 1290 1340
во»5ол»« концентрации . , . . »2»з » 5380 5580 3420 4470 4140 3920 3020 2260 2680
Запас прочности n2 — 4,0 4,8 3,1 3,0 4,4 3,9 3,4 4,0 5,0 7,0 6,7
“и®вяЭ§«и То же с учетом коэффициента
д я £.« нн концентрации n2l<f3 1.9 2,1 1,7 1,6 2,6 2,0 2,2 2,3 3,0 4,0 3,4
Приложена к вершине ауба; в вацецлении находится только одна пара вубьев,
535000
535000
ЛИТЕРАТУРА И ИСТОЧНИКИ К 530000
1. Доллежаль В. А., Редукторы числа оборотов авиационных двигателей,
Оборонгиз, 1945.
2. ПетрусевичА. И. и Сабуров М. 3., Обработка зубчатых колес и редук-
торов, Машгиз, 1946.
3. Петрусевич А. И., О расчете прямозубых колес по Бакингему, «Вестник
металлопромышленности» № 8—9, 1940.
4. П е т р у с е в и ч А. И., Динамические нагрузки на зубья зубчатых колес, в сбор-
нике «Вопросы расчета и конструирования деталей машин», Институт машинове-
дения АН СССР, 1942.
• 5. ПетрусевичА. И. Расчет и конструирование деталей машин. Наибольшие
нагрузки, выдерживаемые зубчатыми колесами, «Вестник машиностроения»
№ 12, 1944.
6. Ульяницкий Д. Д., Расчет шестерен авиационных моторов, Оборонгиз,
Труды, вып. 32, 1939.
7. Под редакцией Д и к е р Я. И., Конструкция шестерен и зубчатых передач, Сбор-
ник монографий «Мировая Техника», Серия—машиностроение, вып. 4, 1935.
8. Buckingham Е., Dinamic loads'on gear teeth, Нью-Йорк, 1931.
9. В u c k i n g h a m E., Manual of gear design, t. 2, Нью-Йорк, 1935.
10. Крутов H. В., Расчет шестерен авиамоторов, 1936.
11. Lewis W., Investigation of the strenght of gear teeth, «American Machinist»
(N.-Y.), v. 16, № 18, 1893.
12. Lewis W., Horse-power of gear-teeth, «American Machinist» (N.-Y.), v. 16,
№ 25, 18^3.
ЧАСТЬ 6
РАСЧЕТ
ПОДШИПНИКОВ СКОЛЬЖЕНИЯ
АВИАЦИОННЫХ ДВИГАТЕЛЕЙ
СОДЕРЖАНИЕ
части 6
Основные понятия н положения..................................... 610000
Вязкость масел . ».......................................... 610100
Уравнения гидродинамики в случае смазки..................... 610200
Задача расчета смазки подшипников авиационных двигателей . . 610300
Определение минимальной толщины масляного слоя в подшипнике . . . 620000
Определение минимальной толщины масляного слоя в подшипнике
при равномерно вращающейся нагрузке постоянной величины . . . 621000
Постановка задачи........................................... 621100
Определение толщины масляного слоя.......................... 621200
Определение минимальной толщины масляного слоя в подшипнике
при переменной по величине нагрузке постоянного направления 622000
Постановка задачи........................................... 622100
Определение толщины масляного слоя......................... 622200
Определение момента и работы трения в подшипнике скольжения . . . 630000
Определение момента трения в подшипнике скольжения............ 631000
Определение работы трения в подшипнике скольжения............. 632000
Охлаждение подшипника скольжения................................. 640000
Простейшие случаи прокачки масла.............................. 641000
Рекомендуемые формулы для определения прокачки масла через
подшипник...................................•................. 642000
Тепловой баланс подшипника скольжения..................... . 643000
Метод расчета смазки подшипника скольжения....................... 650000
Определение толщины масляного слоя............................ 651000
Определение момента трения................................... 652000
Определение температуры подшипника и прокачки масла.......... 653000
Требования к конструкции подшипника скольжения и эксплоатациоиные
условия, обеспечивающие его надежную работу...................... 660000
Литература и источники к 600 000.
610000 -610101
ОСНОВНЫЕ понятия и положения
При обильной смазке и выполнении некоторых условий в зазоре
подшипника скольжения может образоваться и автоматически поддер-
живаться тонкий слой смазки, полностью разделяющий поверхности
вала и подшипника. При этом трение твердых тел (вала о подшипник)
заменяется трением в промежуточном жидком слое и поверхности сколь-
жения почти не изнашиваются. Коэффициенты трения в подшипниках
при этом относительно малы [23]; в подшипниках Скольжения они
равны, примерно, 0,002 — 0,008 и зависят от вязкости масла, условий
работы и размеров подшипника.
При малой толщине смазочного слоя трение в по'дшипниках отно-
сительно велико, и поверхности вала и подшипника изнашиваются
заметно. Износ происходит вследствие взаимного задевания микровы-
ступов на поверхностях скольжения и царапания твердыми микрочасти-
цами, переносимыми маслом. На поверхностях скольжения могут иметь
место микропроцессы шлифования, резания, смятия и течения металла;
на изнашиваемых площадках в поверхностном слое может меняться
структура металла, переходя в мелкокристаллическую, близкую к аморф-
ной; при больших скоростях на поверхностях скольжения могут происхо-
дить местные оплавления и сваривания.
Трение, при котором поверхности скольжения непосредственно
соприкасаются и при котором происходят, в той или иной мере, ука-
занные явления, называется граничным. Коэффициенты трения при
этом зависят не только от вязкости масла, но и от физических и хими-
ческих свойств металлов и масла. При граничном трении функцию
смазки выполняет частично и тонкий слой мягкого металла, который
наносят гальванически на рабочую поверхность подшипников некоторых
двигателей.
В лабораторных условиях при изучении граничного трения созда-
вались слои смазки толщиной порядка КН —10_6 см.
Износ и трение при граничной смазке зависят и от молекулярных
свойств смазки.
Вязкость масел
Вязкость, или внутреннее трение, есть свойство жидкости ока-
зывать сопротивление воздействию внешних сил, стремящихся произ-
вести относительное перемещение слоев или частиц ее.
По закону Ньютона сила трения т на поверхности слоя, выделен-
ного в потоке жидкости линиями тока, отнесенная к единице поверх-
610000
610001
610002
610100
610101
829
610102-610103
ности слоя, пропорциональна производной от скорости жидкости v
по нормали п к поверхности слоя:
где ?] —коэффициент абсолютной вязкости (или просто абсолютная
вязкость).
610102 Размерность коэффициента абсолютной вязкости в технической
г , кг сек
системе единиц [tj] = ,
в физической системе [>]] = дН^ ;
последняя единица называется пуаз.
Между технической и физической единицами существует зависи-
мость
. кг сек 1000 • 981 дн сек по , днсек по , „
1=---------Гоо5-^—=98,1 ~о?- = 98’ пуа3,
Абсолютную вязкость определяют по протеканию жидкости через
капилляры с помощью формулы Пуазейля
где q—объем жидкости,^вытекающей в 1 сек.;
г —радиус поперечного сечения капилляра;
Z — длина капилляра;
р—разность давлений в начале и конце капилляра.
Это определение производится при выполнении условия ламинар-
ности течения:
Re = -^<2000, (3)
ig z
где v — скорость течения жидкости;
у —удельный вес жидкости;
d—диаметр поперечного сечения капилляра;
g — ускорение силы тяжести.
Отношение абсолютной вязкости жидкости т; к плотности жидкости
р называют кинематической вязкостью.
610103 Практически чаще определяют так называемую относительную вяз-
кость. В СССР принято определять относительную вязкость по Энг-
леру. Относительной вязкостью по Энглеру называется отношение
времени истечения 200 см* данной жидкости при данной температуре
из вискозиметра Энглера ко времени истечения такого же количества
дестиллированной воды при 20° С. Это отношение выражают в граду-
сах Энглера (°Е).
Перевод относительной вязкости по Энглеру в абсолютную вязкость
в технических единицах производится по одной из эмпирических
формул, например:
7]=у (0,000716 Е-^^).
830
610104
Вязкость масла зависит от сорта масла, его температуры и давления. 610104
На фиг. 610104-1 представлены графики вязкости масел марок МК, МС
и МЗС в зависимости от температуры при атмосферном давлении. Эти
графики показывают, что вязкость резко убывает с возрастанием темпера-
Фиг. 610I04-I.
Вязкость масел МК, МС, МЗС в зави-
симости от температуры при атмосфер-
ном давлении
Фиг. 610104-11.
Вязкость трех сортов американских масел
в зависимости от давления и температуры
туры. Уменьшение вязкости приблизительно обратно пропорционально
третьей степени температуры.
На фиг. 610104-11 представлены графики вязкости трех минеральных
(американских) масел в зависимости от температуры и давления [14].
С возрастанием давления вязкость возрастает. При низких температурах
влияние давления на вязкость более значительно, чем при высоких.
Свойство масел менять вязкость в зависимости от температуры и да-
вления следует учитывать при выборе масла, особенно для работы при
высоких температурах. При обычных нагрузках на подшипники совре-
831
610105—610200
менных авиационных двигателей в 100—200 кг1см? влияние давления
на вязкость заметно, но в подшипниках участки с максимальными давле-
ниями в масляном слое являются также участками и с максимальной
температурой; поэтому влияние одного фактора компенсируется до извест-
ной степени влиянием другого.
В последующих выводах и расчетах вязкость масла принимается
постоянной, соответствующей средней температуре масляного слоя
и атмосферному давлению.
610105 При граничной смазке большое значение имеет маслянистость масла.
Под этим свойством понимают способность масла образовывать на метал-
лической поверхности прочные уплотненные пленки масла (адсорбиро-
ванные пленки) с пониженным сопротивлением сдвигу в пограничном
слое. Маслянистость зависит от физических и химических свойств масла
и смазываемого им металла. Общепринятой количественной оценки масля-
нистости пока еще нет. Маслянистость при одной и той же вязкости
масел оценивают по уменьшению трения и износа поверхностей при
граничном трении.
610200 Уравнения гидродинамики в случае смазки
Уравнения гидродинамики вязкой жидкости Навье-Стокса для слу-
чая смазки подшипников (т. е. для случая малого зазора между почти
параллельными поверхностями) были преобразованы и упрощены О. Рей-
нольдсом [7].
Упрощение общих уравнений было произведено на основа-
нии следующих, частично экспериментально проверенных поло-
жений:
1) силы инерции и силы тяжести частиц жидкости малы по сравнению
с силами вязкости;
2) жидкость несжимаема;
3) составляющие скоростей частиц, перпендикулярные к поверхности
скольжения, малы по сравнению с составляющими вдоль поверхности
скольжения;
4) изменения продольных скоростей по продольным координатам
малы по сравнению с изменениями тех же скоростей по координате,
перпендикулярной к поверхности скольжения;
5) толщина слоя мала по сравнению с радиусами кривизны поверх-
ностей скольжения;
6) на смазанных поверхностях жидкость имеет скорость этих
поверхностей;
7) давление в жидкости на границах слоя с внешней средой зави-
сит от внешних условий.
Координатные оси были выбраны при этом следующим образом:
ось х—на одной из поверхностей скольжения в направлении относитель-
ного движения;
ось у — перпендикулярно к поверхности скольжения;
ось z —на поверхности скольжения перпендикулярно к относительному
движению.
Связь между давлением в жидкости р, составляющими скорости
и, v, iv (соответственно вдоль оси х, оси у и оси z) и вязкостью
смазки т] устанавливается следующими уравнениями:
832
610300—610301
др дги
дх а='^дуг ’
#—о;
у
др _ дг& .
дг дуа ’
ди , до , div п
d^+ dF+ dF = u-
При граничных условиях
u—U0, v — O, w = 0 при у = 0, "J
u—U1} v = U1^4-V, w — 0 при y = ft; j
(1)
(2)
р=р1> на краях слоя (на границах с внешней средой).
После интегрирования этих уравнений получаются следующие
выражения для составляющих скорости частицы масла:
‘•-^<у-ь>у+».Чг+и" 1
г' = 0; } (3)
(?~»У’ I
и для касательных [напряжений в пограничных слоях по направле-
ниям х и г:
(4)
'z 2 dz ’
причем знак минус берется для' у = 0 (на поверхности вращающегося
вала), а плюс —для y = h.
Уравнение для распределения давлений в слое имеет вид
Л(Л’й)+МЛ‘19в6^в+3^)*2^ (5)
и Л </ Л j \J(г 04 j
где ft —толщина масляного слоя, представляющая собой непрерывную
функцию от х и z; вязкость ц —величина постоянная.
Задача расчета смазки подшипников авиационных двигателей 610300
Излагаемая методика расчета смазки подшипников двигателя осно- 610301
вана на теории смазки подшипников ограниченной длины для двух
видов переменной нагрузки:
1) равномерно вращающейся вместе с валом нагрузки, постоянной
величины [4] (при неподвижном вкладыше);
2) нагрузки постоянного направления переменной величины [3] (при
невращающемся вале и неподвижном вкладыше).
53 Авиац. поршн. двигатели
833
610302
Расчет основан также на экспериментальных результатах по оп-
ределению прокачки масла через подшипники при различных усло-
виях [5].
610302 Работа подшипника двигателя зависит от следующих эксплоатаци-
онных и конструктивных факторов: числа оборотов вала, нагрузки на
подшипник, величины зазора подшипника, диаметра и длины под-
шипника, размеров и формы масляных отверстий (а также количества
и расположения их), качества масла и его температуры, давления
масла на входе в подшипник, жесткости конструкции узла подшипника,
прочности слоя заливки, прирабатываемости материала и некоторых
других второстепенных факторов.
Задача расчета подшипника для данных условий работы заклю-
чается в подборе основных параметров подшипника: зазора, масляных
отверстий, температуры и давления масла на входе, таким образом, что-
бы при рабочем интервале температур подшипника создавался
прочный, несущий масляный слой достаточной толщины (для надеж-
ности работы и уменьшения износа до минимально допустимого зна-
чения). Основные размеры подшипника (длина и диаметр), выбираемые
на основании конструктивных и прочностных соображений, должны
быть проверены также и с точки зрения надежности смазки.
620000-621100
ОПРЕДЕЛЕНИЕ МИНИМАЛЬНОЙ ТОЛЩИНЫ МАСЛЯНОГО 620000
СЛОЯ в ПОДШИПНИКЕ
Работа подшипника быстроходного двигателя возможна лишь при
условии обильной смазки, необходимой для образования масляной
пленки достаточной толщины и для интенсивного отвода тепла трения.
Благоприятным фактором поддержания жидкостного трения в подшип-
нике двигателя является перемена направления нагрузки на подшипник.
Благодаря переменам направления, непрерывным или скачкообразным,
действие нагрузки переносится с тонких участков слоя смазки на тол-
стые. Высокие поддерживающие давления в масляном слое образуются
благодаря реакции вязкой жидкости, выжимаемой из зазора между
шипом и вкладышем. Возобновление масляного слоя в зазоре проис-
ходит благодаря непрерывному заволакиванию масла вращающимся
валом из канавок или отверстий, подводящих масло к трущейся
поверхности подшипника.
Определение толщины масляного слоя и работы трения в подшип-
нике при переменной нагрузке производят приближенно, заменяя пере-
менную нагрузку некоторой эквивалентной нагрузкой. (см. 650002),
состоящей из: 1) постоянной по величине напрузки, равномерно вра-
щающейся с угловой скоростью вращения вала, и 2) переменной по
величине нагрузки, действующей импульсивно в направлении рассма-
триваемого элементарного участка поверхности подшипника.
ОПРЕДЕЛЕНИЕ МИНИМАЛЬНОЙ ТОЛЩИНЫ МАСЛЯ НОГО, СЛОЯ В ПОДШИПНИКЕ 621000
ПРИ РАВНОМЕРНО ВРАЩАЮЩЕЙСЯ НАГРУЗКЕ ПОСТОЯННОЙ ВЕЛИЧИНЫ
Постановка задачи 621100
К центру вала радиуса г (фиг. 621100-1), находящегося в подшипнике
радиуса R, приложена сила Р постоянной величины, вращающаяся
вместе с валом с той же угловой скоростью <о (центробежная нагрузка).
Зазор между валом и подшипником заполнен маслом.
'Центр вала в этом случае описывает некоторую окружность ма-
лого радиуса (меньшего R — г), равномерно вращаясь вокруг центра
подшипника. К валу приложены следующие силы: сила Р, давление
масляного слоя и трение масляного слоя (центробежной силой инерции
вала в этом движении можно пренебречь как малой по сравнению
с силой Р).
Сила Р в подшипниках двигателей обычно составляет несколько
тысяч килограммов; она почти полностью уравновешивается давлением
53*
835
621100
в масляном слое, так как сила трения относительно мала (несколько
десятков килограммов).
Переменная толщина масляного слоя (фиг. 621100-1)
й = 8 —ecosf,
где
8 = /?-г
(О
(2)
е—абсолютный эксцентриситет;
—угол, отсчитываемый от наиболее узкого места зазора.
Фиг, 621100-1.
Вал в подшипнике; радиальный зазор
Л=7?—г; абсолютный эксцентриситет е;
наименьшая толщина масляного слоя Amin
Фиг. 621100-11.
Схема движения вала в подшип-
нике при центробежной нагрузке;
траектория центра вала; серповид-
ный слой масла, выдавливаемый
при элементарном перемещении
' Давления в масляном слое, возникающие при движении центра
вала по окружности радиуса е, определяются согласно уравнению (5)
п. 610200. Скорость центра вала равна еш, ее проекция на направле-
ние О А равна еш sin у и
dh 1 ,, . 1 .
-5- » —(8 — е cos <р) = — е sin <?,
dx rdf v т' г ’’
,, dh 1
</, • = r <0 —esm <p = e«) sin <p.
Знаки у слагаемых и 2 V выражения (5) п. 610200 должны
быть противоположными, так как вращение вала уменьшает давление,
получающееся вследствие сближения поверхностей скольжения; Ut=0.
Уравнение (5) п. 610200 примет вид:
£ СЛ’ ЙО * (Л’ Ю = 6^m sin ? - 2 еш sin ?) (3)
836
621200
или в развернутом виде может быть записано так:
дгр з е sin у др . . d2p 6т|» егг sin ? . .
d?2 *" 5—е cos <р dip *" dz2 (5—ecosp)3 ' '
Фиг. 621100-11 показывает, что при элементарном перемещении
вала из зазора вытесняется серпообразный (заштрихованный на фигуре)
слой масла. Высокие поддерживающие давления в слое возникают
вследствие реакции выдавливаемой вязкой жидкости. Границами
несущего слоя приняты концы серпообразного слоя и торцы подшип-
ника, т. е.
р = 0 для <р —0; <р = тс и z = 0; z=l. (5)
Определение толщины масляного слоя 621200
Решение уравнения (4) п. 621100 при граничных условиях (5)
п. 621100 может быть представлено в виде двойного ряда [4]:
. т
sin----
р= 2 (о
т=1, 3,5,...
где
РМ~^ 2 X"«n> т,
n=0, 1, 2, 3...
X = -^г = — относительный эксцентриситет;
ип,т — некоторые функции, зависящие от ?, л и т.
Приравняв суммарное давление в масляном слое приложенной на-
грузке Р, получим зависимость относительного эксцентриситета X от
, „ р«2
безразмерной нагрузки —.
"° PS2
В табл. 621200-1 даны значения безразмерной нагрузки —
в зависимости от различных значений эксцентриситета X (от 0,2 до 0,995)
для различных значений отношения длины подшипника к диаметру .
В графическом виде табл. 621200-1 представлена на фиг. 621200.
Наименьшая толщина масляного слоя определяется равенством
ftmln=8 (1 — X). (2)
Таблица 621200-1 показывает, что при заданных размерах подшип-
ника с увеличением нагрузки Р эксцентриситет X увеличивается и,
следовательно, наименьшая толщина масляного слоя уменьшается.
Уменьшение вязкости масла или угловой скорости w понижает
наименьшую толщину слоя.
837
621200
Таблица 621200-1
Значения безразмерной нагрузки
1} Г3 Z о>
1 х 0,33 0,5 1 1,5 СО
0,2 0,4 0,6 0,7 0,8 0,85 0,90 0,95 0,07 0,19 0,48 0,85 1,8 2,9 5,7 15,8 0,15 0,4 0,9 1,8 3,1 4,8 8,7 22,5 0,5 1,1 2,3 3,5 6,0 8,7 14,3 32,0 0,8 1,75 3,4 4,9 7,7 10,9 17,0 36,3 1,9 4,0 6,7 8,8 12,6 22,8 42,9
0,97 0,99 0,995 32,7 133,2 299,6 42,6 155,5 328,7 54,4 174,0 365,2 63,0 184,0 378,2 69,8 202,2 403,3
При беспредельном увеличении безразмерной нагрузки наимень-
шая толщина масляного слоя убывает до нуля.
Практически, однако, минимальная толщина масляного слоя может
уменьшаться не до нуля, а только до некоторого постоянного значе-
ния вследствие шероховатости поверхностей. Предельным значением
ее следует считать сумму высот неровностей обеих поверхностей
скольжения. Высота микронеровностей при чистовых обработках при-
водится в табл. 621200-11 (согласно ГОСТ 2789-45).
Таблица 621200-П
Метод обработки Максимальная высота неров- ностей, |4
Полирование чистовое .... Хонинг предварительный . . Лапинг чистовой Суперфиниш Шлифование чистовое .... Расточка алмазом Расточка чистовая 0,1 — 0,4 0,1 — 0,4 0,05— 0,2 0,05— 0,25 0,2 — 0,8 0,32— 1,6 1,25—2,5
Неточности геометрической формы подшипника и вала больше, чем
указанные в табл. 621200-П величины; например, для двигателя М-105
конусность, корсетность и ; бочкообразность коренных и шатунных
шеек коленчатого вала допускается до 10 р (по заводским техническим
усл овиям).
838
621200
Фиг. 621200.
„ Рй2
Графики зависимости эксцентриситета хот безразмерной нагрузки для раз-
„ I
личных значении -v-
а
839
622000—622201
То же относится и к вкладышам.
Так как минимальная толщина масляного слоя в подшипниках
авиационных двигателей мала (составляет всего несколько микрон),
то только в хорошо приработанном подшипнике может образовываться
тонкий масляный слой.
622000
622100
622200
622201
ОПРЕДЕЛЕНИЕ МИНИМАЛЬНОЙ ТОЛЩИНЫ МАСЛЯНОГО СЛОЯ В ПОДШИП-
НИКЕ ПРИ ПЕРЕМЕННОЙ ПО ВЕЛИЧИНЕ НАГРУЗКЕ ПОСТОЯННОГО
НАПРАВЛЕНИЯ
При действии кратковременной нагрузки ударного действия на под-
шипник масло из зазора подшипника выдавливается в торцы и по
окружности. В слое вязкого масла возникает реакция выдавливания,
которая возрастает с уменьшением слоя. Толщина масляного слоя
зависит от следующих факторов: от величины переменной силы Р (f),
длительности ее действия т, вязкости масла радиального зазора 8,
радиуса г и длины подшипника I.
Постановка задачи
В начальном положении центры
совпадающими. Вал примем
Фиг. 622100.
Схема движения вала в подшипнике
при действии переменной нагрузки по-
стоянного направления
вала и подшипника будем считать
невращающимся. Переменная толщина
масляного слоя (фиг. 622100)
ft = 8 —е cos?, где е = 8/. — расстоя-
ние между центрами вала и под-
шипника (абсолютный эксцентриси-
тет), угол ? отсчитывается от вер-
тикали. Распределение давлений
в масляном слое дается дифферен-
циальным уравнением (5) п. 610200’,
которое в данном случае примет
вид [3J
так как 17в = 0, иг = 0 и У =
Длину цапфы обозначим через Z.
Граничными условиями задачи
будут (фиг. 622100):
р = 0 для ?=±у и для 2 = 0;
2 = 1.
Определение толщины масляного слоя
Решением уравнения 622100 при указанных пограничных условиях
устанавливается, что эксцентриситет / зависит от безразмерного импульса
О
где г—длительность действия силы P(f) (продолжительность импульса).
840
622202
Эта зависимость приведена в табл. 622201 для различных значе-
ний отношения длины I к диаметру d.
Таблица 622201
Значения безразмерного импульса
— 1 0,167 0,25 0,50 1,0 1,5 ОО
0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 0,92 0,94 0,95 MUI W^-OO Op 1 Ъ Ъх'ЪЪх 1 1 1 0,04 0,1 0,2 0,3 0,45 0,7 1,3 2,8 7,3 9,7 13,0 0,2 0,4 0,65 1,1 1.7 2,6 4,3 7,7 18,5 23,7 30,5 0,5 1,1 2,0 3,1 4,7 6,9 10,8 17,7 35,6 43,3 54,1 0,8 1,8 3,2 4,8 ‘ 7,1 10,3 15,3 23,9 44,5 53,1 65,3 2,0 4,3 7,1 10,4 14,5 19,9 27,6 40,0 66,6 77,1 92,1 103,1
В графическом виде таблица 622201
Безразмерный импульс
представлена на фиг. 622201.
Таблица 622201 дает возможность
определить перемещение центра
вала не только от центра под-
шипника, но и от смещенного,
начального положения вала, опре-
деляемого эксцентриситетом
Конечный эксцентриситет у опре-
делится в этом случае по сум-
марному безразмерному импульсу,
для чего к данному импульсу
прибавляется импульс, соответ-
ствующий начальному эксцентри-
ситету ув (по табл. 622201), и
затем находится
Экспериментальная проверка
таблиц 621204 и 622201 подтвер-
дила их правильность [3].
Фиг. 622201.
Графики зависимости от безразмерного
т
Л2 Г
импульса —— \ Pdt для различных зна-
>jr3Z J
о
ченийу
При изменении диаметраль-
ного зазора подшипника 23 и
неизменных прочих условиях ра-
боты эксцентриситет у меняется,
вследствие чего меняется и мини-
мальная толщина слоя Йппп*
С точки зрения обеспечения наи-
622202
841
622203
большего значения минимальной толщины масляного слоя наиболее
благоприятным интервалом изменения зазора 28 является такой, при
котором эксцентриситет у равен 0,4-4-0,8 (фиг. 622202). При увели-
чении или уменьшении зазора, ведущего к выходу из этого интервала
эксцентриситета /, толщина масляного слоя уменьшается. Практически
в коренных и' шатунных подшипниках значения у бывают выше опти-
мального значения’ 0,8.
0,02 0,06 0,06 0.08 0,10 0,12 0,16 0,16 0,18 0,20D-d,MM
Фиг. 622202.
Графики зависимости минимальной толщины масляного слоя от
диаметрального зазора
522203
Опыты показывают, что при минимальной расчетной толщине мас-
ляного слоя в 2 — Зр- подшипники двигателей изнашиваются интенсивно.
Такую минимальную толщину слоя можно допускать только для двига-
телей, от которых не требуется длительная работа, измеряемая сотнями
часов. При минимальной толщине слоя от 5 до 8р подшипники рабо-
тают сотни часов со средним износом.
630000—631000
ОПРЕДЕЛЕНИЕ МОМЕНТА И РАБОТЫ ТРЕНИЯ 630000
В ПОДШИПНИКЕ СКОЛЬЖЕНИЯ
Температура подшипника двигателя зависит от работы трения
в подшипнике, температуры и количества протекающего через подшип-
ник масла, температуры картера, теплопроводности металлических
стенок, соприкасающихся с подшипником, теплоемкости масла и некото-
рых второстепенных факторов. Наиболее существенными из перечислен-
ных факторов »являются: работа трения в подшипнике, температура
и количество протекающего через подшипник масла.
Подшипник быстроходного двигателя может работать длительно
и надежно только при режиме жидкостного трения. Для поддержания
температуры подшипника и минимальной толщины слоя в заданных
интервалах, обеспечивающих режим жидкостного трения, температура
и количество масла, прокачиваемого через подшипник, должны быть
строго регулируемы.
ОПРЕДЕЛЕНИЕ МОМЕНТА ТРЕНИЯ В ПОДШИПНИКЕ 631000
скольжения;
Касательное напряжение (сила трения на единицу поверхности) на
границе масла и вала согласно формуле (4.) п. 610200
, _d_P_
>х~ h 2 dx‘
Элементарный момент трения равен
dM = fxr*d?dz = dtf'dz ~^d£r* dfidz.
Интегрируя первое слагаемое по всей окружности и вдоль оси,
а второе —по нагруженной половине подшипника и вдоль оси, получим
следующее выражение для момента трения в подшипнике:
2я 1 то I
М = $ 5 Т \ hd£r*d<?dz^
0 0 0 0
7Ю Z
2тс гцгг1 , v8r Г Г . . .
* А 0 0
где р — определяется согласно (1) п. 621200.
843
631000
riur2l
Графики отношения момента трения М к в зависимости от
эксцентриситета х Для различных значений — .
844
632000
Таблица 631000
Значения отношения
Af/Ир
/ в
1 1 3 1 2 1,0 1,5
0,2 0,4 0,6 0,7 0,8 0,85 0,9 0,95 6,4 7,0 7,9 9,0 10,8 12,5 15,5 22,5 6,4 7,0 8,0 9,2 11,1 13,0 16,2 23,8 6,5 7,1 8,4 9,8 12,0 14,1 17,7 26,0 6,5 7,2 8,7 10,2 12,6 14,8 18,6 27,2
0,97 0,9Э 0,995 30,0 55,6 82,1 32,0 57,9 85,2 33,4 61,5 89,4 35,0 62,8 90,8
В таблице 631006 даны значения отношения момента трения М
wr2Z I
к в зависимости от эксцентриситета х и -j-
Таблица 631000 показывает, что момент трения сильно зависит от
положения вала, т. е. от эксцентриситета у.
При данном значении эксцентриситета / момент трения М пропор-
ционален вязкости масла и скорости скольжения v, обратно пропорцио-
нален зазору S, пропорционален длине подшипника I и квадрату радиуса
гг. В графическом виде таблица 631000 представлена на фиг. 631000.
ОПРЕДЕЛЕНИЕ РАБОТЫ ТРЕНИЯ В ПОДШИПНИКЕ
СКОЛЬЖЕНИЯ
632000
Мощность трения /?т равна произведению момента трения М на
угловую скорость
/?т == Мш кгм/сек. (1)
Количество тепла, эквивалентное этой мощности:
= <2>
845
640000—641001
640000 охлаждение подшипника СКОЛЬЖЕНИЯ
Тепло трения, образующееся в подшипнике авиационного двигателя,
отводится, главным образом, прокачиваемым через подшипник маслом.
Для прокачки нужного количества масла через узкий зазор подшипника
необходимо наличие определенных условий: соответствующих размеров
зазора подшипника и отверстий для масла, их числа и расположения,
необходимого давления и температуры масла.
Увеличить прокачку масла через подшипник можно следующими
способами:
1) увеличением диаметрального зазора подшипника;
2) увеличением размера и количества масляных отверстий, иногда
и расположения их;
3) повышением давления масла;
4) применением масла малой вязкости.
Отметим, что все указанные мероприятия связаны с возможным
ухудшением работы подшипника. Увеличение диаметрального зазора
подшипника, например, может уменьшить несущую способность слоя
масла. Увеличение размера и количества масляных отверстий может
повести к излишне большой прокачке масла, к нарушению сплошности
масляного слоя и уменьшению несущей способности подшипника.
Слишком высокое давление масла может также привести к излишне
большой прокачке масла, к переполнению картера двигателя маслом
и к другим нежелательным последствиям. Малая вязкость масла мо-
жет вызвать уменьшение толщины масляного слоя и интенсивный износ.
В зазоре подшипника авиационного двигателя масло практически
возобновляется до 200 и более раз в течение секунды. В эксплоатации
резкое снижение прокачки масла приводит к утоныпению масляного
слоя, резкому увеличению износа подшипника, увеличению работы
трения, разрушению антифрикционного слоя и даже к выводу под-
шипника из строя.
641000 ПРОСТЕЙШИЕ СЛУЧАИ ПРОКАЧКИ МАСЛА
641001 Зазор образуется параллельными плоскостями (фиг. 641001). Вели-
чина зазора постоянна. Верхняя плоскость неподвижна, нижняя дви-
жется параллельно верхней со скоростью v. В неподвижной плоскости
сделана канавка, перпендикулярная к направлению скорости; канавка
непрерывно заполняется маслом под некоторым небольшим давлением.
При движении нижней плоскости из канавки непрерывно уносится
масло, количество которого в секунду Qj равно половине произведения
846
641002
скорости v на высоту зазора й и длину канавки I (причем длина I
перпендикулярна к скорости):
Q^-^vhl.
В случае подшипника происходит то же: масло из канавок, кото-
рыми оканчиваются масляные сверления на поверхности скольжения,
Фиг. 641001.
Прокачивание масла через зазоры скользящими
поверхностями
уносится вращающимся валом и, попадая в область зазора с большими
давлениями, частично вытекает в торцы. Подшипник в этом случае
подобен насосу.
Зазор образуется плоскостью и параллельным ей кругом радиуса R 641002
(фиг. 641002). Величина зазора постоянна. Масло подается в зазор под
Фиг. 641002.
Прокачивание масла через зазоры, образуемые
высоким давлением
давлением р через концентрическое отверстие в круге; радиус отвер-
стия гв. Количество вытекающего масла Q равно:
61П- 1
Г
Часть прокачиваемого через подшипник масла
давления, определяется по аналогичной формуле с
нечность длины (в виде натурального логарифма
(1)
Qa, зависящая от
поправкой на ко-
отношения длины
847
641003—641004
подшипника к диаметру раззенковки отверстия):
где йг — величина зазора подшипника в месте подачи масла.
641003 Подшипник в этом случае подобен уплотнению. Полная прокачка
масла через подшипник с круглым отверстием для подачи масла опре-
деляется по формуле
С ph3
Q = Avh^ + —1-P~e, (1)
In ~
do
где 7]cp — средняя вязкость масла, соответствующая температуре вытека-
ющего из подшипника масла;
А и С — постоянные, которые должны быть определены из опытов.
В случае нескольких отверстий надо взять соответственное коли-
чество слагаемых второго вида [формула (2) п. 641002].
Для отверстий овальной или иной формы прокачку можно опре-
делить приближенно, подобрав соответствующий радиус эквивалент-
ного круглого отверстия. Например, для эллиптического отверстия
диаметр d0 можно взять равным полусумме осей.
В первом слагаемом для случая некруглого отверстия вместо dB
надо взять размер отверстия вдоль оси подшипника Ь. Для овального
отверстия формула будет иметь вид
Q = (2)
In-j- Чср
d°
641004 Возьмем два круговых цилиндра, расположенных один в другом
конаксиально. Диаметры цилиндров D и <Z; длина I. В средней части
какого-либо цилиндра сделана глубокая окружная канавка; зазор между
цилиндрами и канавкой заполнен маслом. В канавке поддерживается
давление масла р. Из канавки масло вытекает по зазору в обе стороны.
Ширина канавки Ь. Диаметральный зазор D — d мал сравнительно с d.
Количество вытекающей в оба торца жидкости
0=-—^—^, (1)
4 3 1-Ъ у) ’ 4 ’
a=~(D — d).
В случае эксцентрического расположения цилиндров (эксцентриси-
тет х) формула (1) принимает вид
(2)
848
642000—642003
РЕКОМЕНДУЕМЫЕ ФОРМУЛЫ ДЛЯ ОПРЕДЕЛЕНИЯ ПРОКАЧКИ МАСЛА 642000
ЧЕРЕЗ ПОДШИПНИК
Через подшипники авиационных двигателей необходимо прокачи-
вать для отвода тепла трения сравнительно большие количества
масла — примерно 1 — 8 л/мин.
Ниже даются экспериментально проверенные формулы [12] для
определения в разных случаях прокачки масла через подшипник.
Опыты, которые послужили для проверки этих формул и определения
численных коэффициентов их, проводились при следующих условиях:
диаметральный зазор от 0,11 до 0,22 мм, средняя нагрузка кср от 19
до 240 кг/см*, длина подшипника 85 и 41 мм, диаметр 82 мм, число
оборотов от 560 до 3560 в минуту, давление подачи масла от 1,3 до 8 ат,
температура входящего масла от 66 до 93°, температура подшипника
в верхней части, наиболее нагретой, от 71 до 140° С.
Прокачка масла Q для случая круговой канавки в средней части
подшипника (фиг. 642001) равна
642001
где / — относительный эксцентриситет;
d— диаметр вала, мм;
/—длина подшипника, мм;
Ь — ширина канавки, мм;
р — давление масла в канавке, мм;
8 — абсолютный радиальный зазор, мм;
^ВЫХ абсолютная вязкость выходящего
_________„ кгсек
масла в —
При экспериментальной проверке фор-
мулы 642001 глубина канавки была 2 мм.
Прокачка масла для случая круглого
ковкой (фиг. 642002)
Q л/мин = 0,1 Ovhed0 4- ~~
Фиг. 642001.
Подшипник с круговой канавкой
отверстия в вале с раззен-
642002
In 4-1,вых ’
4о
где и—скорость скольжения, м/сек',
he — зазор в подшипнике в месте входа масла, мм;
d0 — диаметр раззенковки на поверхности скольжения, мм.
При экспериментальной проверке формулы отверстие в вале диа-
метром 5 мм оканчивалось глубокой раззенковкой, диаметр которой
на поверхности скольжения был равен 15 мм; угол раззенковки
был 90°.
Прокачка масла для случая отверстия и канавки по дуге (фиг. 642003) 642003
Q л/мин = 0,\(М1еЬ
.. 0,14 ph*
In 4 1,вых
^0
54 Авиац. порши. двигатели.
849
642003
Фиг. 642002.
Вал с круглым отверстием и раззенковкой
Вал с отверстием и канавкой по дуге
Сеч. по а-а
Фиг. 642004.
Вал с отверстием и плоской лыской
850
642004—642006
где b—ширина канавки, мм;
(/„—среднее арифметическое ширины b и длины с канавки:
• b Ч- с
d„ = —2~ мм.
При экспериментальной проверке формулы 642003 размеры были
следующие: с = 30 мм; Ь~8 мм; глубина канавки 5,3 мм.
Прокачка масла для случая отверстия с плоской лыской 642004
(фиг. 642004) определяется по формуле
Q л/лшн = 0,035ойе/>-}--^^-^- .
in 4 1вых
При экспериментальной проверке формулы размеры лыски были:
вдоль оси вала 6 = 23 мм; хорда 16 мм; стрела 0,8 мм;
. 23+16 с
(/ = —— = 19,5 мм.
£
Прокачка масла для случая двух отверстий с плоской лыской 642005
(фиг. 642005) определяется по формуле
Q л/мин = 0,025 vheb+ — •
lndJ Чвых
Размерности входящих в эту формулу величин те же, что
в 642002.
При эксперименте размеры были следующие: размер лыски вдоль
оси вала 6 = 50 мм; хорда 16 мм; стрела 0,8 мм; два масляных отвер-
стия диаметром по 5 мм на расстоянии 15 мм от середины (по обе
стороны).
Вал с двумя отверстиями и плоской лыской
Св» по о а
Прокачка масла для случая двух отверстий и двух канавок в сред- 642006
ней части вала по дуге (фиг. 642006)
Q л/мин — 1,25 .
Чвых
54*
851
642007-643001
Размерность величин:
р — ат; 3 — мм; ^ — кгсек/м2.
Фиг. 642006.
Вал с двумя отверстиями и двумя канавками по дуге
При экспериментальной проверке формулы 642006 размеры были
следующие: ширина канавки 6 мм; глубина 2 мм; центральный угол,
соответствующий дуге канавки, 100°.
642007 Приближенные формулы 642000 достаточно надежны для тех границ
входящих в них параметров, которые указаны в 642000; они могут
не дать достаточной точности при очень больших скоростях скольжения
или при малых давлениях подачи масла.
Формула 642001 прокачки для подшипника с полной круговой
канавкой в средней части применима для всех значений переменных,
так как она получена теоретическим путем и подтверждена многочис-
ленными опытами, кроме скоростей скольжения выше 15 м/сек, для
которых она не проверена.
643000 ТЕПЛОВОЙ БАЛАНС ПОДШИПНИКА СКОЛЬЖЕНИЯ
643001 При обычных услових работы авиационного двигателя из коренного
подшипника маслом отводится, примерно, 0,4 — 0,6 Кал/сек тепла; отдача
стенками в окружающую среду составляет, примерно, 0,01 —0,05 Кал/сек.
Количество масла, которое надо прокачать через подшипник для отвода
тепла трения QB л/мин, в предположении, что все количество тепла
отводится маслом, определяется из равенства
QH Д? . 0,4 _ Мш
60 ~ 427 ’
где Д/ = 1ВЫХ — 1ВХ —повышение температуры прокачиваемого через под-
шипник масла;
средняя теплоемкость 1 л масла принята равной 0,4 Кал/л°С;
М — момент трения подшипника, кгм;
о —угловая скорость вращения вала, ——.
852
643002—643003
Температура выходящего из подшипника масла, как показывают опыты 643002
(табл. 643000 и фиг. 643002), оказывается примерно средней между темпе-
ратурой входящего масла и температурой подшипника. Объясняется это,
вероятно, тем, что главным источником тепла в подшипнике при жидкост
ном трении является масляный слой
в узкой части зазора, а отчасти
и сами поверхности скольжения,
соприкасающиеся и трущиеся
своими микровыступами. Масло и
поверхности скольжения в узкой
части зазора имеют близкие тем-
пературы. Масло, вытекающее из
широкой части зазора, составляет
основную часть прокачки; оно
нагревается при движении от по-
верхностей скольжения, от тре-
ния и от смешения с маслом, вы-
текающим из узкой части зазора.
Температура этого средненагре-
того масла и является практиче-
ски температурой вытекающего
масла.
йэротермаметр
Фиг. 643002.
Экспериментальный подшипник
В табл. 643000 приводятся экспериментальные данные по тем- 643003
пературе подшипника и масла и по прокачке масла через подшип-
ник. Для сравнения в таблице приведены также расчетные данные
по прокачке.
При эксперименте диаметр шейки вала был 82 мм; длина подшип-
ника 85 мм; масло—близкое к МК; масло подавалось в зазор через круглое
отверстие в вале, раззенкованное до диаметра 15 мм. Температура
подшипника измерялась с помощью термопары в верхней нагруженной
зоне; температуры входящего и выходящего масла измерялись аэротер-
мометрами.
Т а б л иц а 643000
Опытные данные Расчетные данные
п об/мин ^ер кг) см2 D—d мм р ат ^ЭКСП л!мин И _ . и О ** о ^ВЫХ °C ^подш °C ра2 X л) мин
7]Г3/о>
1400 19 0,16 4,0 1,15 37 66 84 2,8 0,62 1,2
1500 19 0,16 3,9 1,3 52,5 69 86 2,9 0,63 1,4
2360 19 0,16 3,6 2,35 70 90 107 3,7 0,67 2,3
2920 19 0,16 1,3 2,4 86 109 134 6,5 0,80 2,9
2680 19 0,16 2,1 2,9 93,5 117 132 6,6 0,81 2,9
1840 43 0,16 2,7 1,65 60 86 107 10,6 0,86 2,0
2400 43 0,17 4,2 3,35 80 103 123 15,5 0,905 3,35
3080 43 0,17 3,9 3,25 76,5 101 130 14,3 0,9 3,9
3160 43 0,17 2,3 2,7 76,5 101,5 131 14,0 0,9 3,5
853
643003
Эти, а равно и другие [5] опыты подтверждают, что температура
выходящего масла приблизительно равна среднему арифметическому
температур входящего масла и подшипника.
Температура масляного слоя в узкой части зазора близка к тем-
пературе подшипника (или вала). В последующем при определении
эксцентриситета вала температура несущего масляного слоя подшипника
принимается равной температуре подшипника.
650000-650002
МЕТОД РАСЧЁТА СМАЗКИ ПОДШИПНИКА СКОЛЬЖЁНИЯ 650000
Работа подшипника двигателя при данном режиме его работы зави- 650001
сит от следующих факторов: величины зазора подшипника, температуры
и давления масла на входе.
Задача расчета смазки подшипника заключается в подборе диаме-
трального зазора подшипника, размера масляных отверстий (а также
количества и расположения их) и в определении оптимальных и допусти-
мых значений температуры и давления масла.
Температура и давление масла меняются в широких пределах в зави-
симости от режима работы двигателя; зазор подшипника также постепенно
увеличивается вследствие износа; поэтому при расчете следует учитывать
интервалы этих величин.
Нагрузки на подшипники авиационных двигателей переменны по 650002
величине и направлению. На фиг. 650002-1, II, III, IV представлены
z?z
27В
/80°?
180?
'•
Sil”/
240°
260
220'
276
300
620'
Sr0
S » moo Кг
5 f wo? ” 307°
Й J- 4000 /9
a 5000 »
Диаграмма
\ 520°/
203°/
.oS613°X
> 490°
\^^~-^J\48O°
1 ^0°)460°
/ 440°^^°'
; s' \юо°
86°
$180°
•°/420°
60°
4/3°
ьоо°
394°
660° ; (340°
686° J
680° e „ ioo° 720° geo0
686°
Фиг. 650002-1.
нагрузки на подшипник главного шатуна
звездообразного двигателя
типичные диаграммы нагрузок на подшипники в зависимости от угла
поворота коленчатого вала.
На фиг. 650002-1 представлена диаграмма нагрузки на подшипник
главного шатуна звездообразного двигателя. Вектор нагрузки на этот
855
650002
Фиг. 650002-11.
Диаграмма нагрузки на средний корен-
ной подшипник рядного V-образного дви-
гателя
Фиг. 650002-111.
Диаграмма нагрузки на шатунный
подшипник рядного V-образного дви-
гателя.
Фиг. 650002-IV.
Диаграмма нагрузки на подшипник
внутреннего шатуна рядного V-об-
разного двигателя
856
650003—650004
подшипник вращается неравномерно; за два оборота вала вектор нагрузки
поворачивается на угол 720°. Величина вектора нагрузки изменяется
сравнительно незначительно относительно его среднего значения за цикл.
На фиг. 650002-П показана диаграмма нагрузки на средний коренной
подшипник рядного V-образного двигателя. В этом случае за один оборот
вала вектор нагрузки поворачивается на 360°. Диаграмма показывает,
что нижняя половина подшипника нагружена сильнее верхней. Вектор
нагрузки дважды резко меняет направление действия.
На фиг. 650002-Ш представлена диаграмма нагрузки на шатунный
подшипник рядного V-образного двигателя. Вектор нагрузки в этом
случае за два оборота вала поворачивается на 720°, дважды резко меняет
направление действия и на тех же участках меняет направление своего
вращения по отношению к направлению вращения вала.
На фиг. 650002-IV показана диаграмма нагрузки на подшипник
внутреннего шатуна V-образного двигателя за два оборота вала. В этом
случае значительную часть своего времени действия
направление вектора нагрузки близко к оси шатуна.
Шатун и подшипник совершают качательные движе-
ния относительно вильчатого шатуна с относительно
незначительным углом качания (порядка 30°).
При расчете подшипника на жидкостное трение
в случае фиг. 650002-1 переменная нагрузка заме-
няется средней нагрузкой, вращающейся равно-
мерно вместе с валом. Величина средней нагрузки
определяется как средняя ордината развернутой по
углу поворота коленчатого вала диаграммы нагрузки
на подшипник.
В случае фиг. 650002-IV нагрузка заменяется
результирующими импульсами, действующими по-
переменно вверх и вниз (фиг. 650003). Результи-
рующие импульсы определяются как геометриче-
ская сумма элементарных импульсов, для чего
векторы нагрузки, соответствующие ее последова-
тельному положению за рассматриваемый интервал
времени, геометрически складываются и результи-
рующий вектор умножается на элементарный про-
межуток времени Д/, где Д/ есть время перехода
вектора нагрузки от одного положения к другому—
соседнему, причем диаграмма нагрузки строится
так, что все Д/ одинаковы (векторная диаграмма
сил на подшипник строится через определенный
угол поворота коленчатого вала, например, в слу-
чае фиг. 650002-IV через 20°).
В случаях фиг. 650002-П и 650002-1II в рас-
чет вводятся средняя и максимальная нагрузки
за цикл.
Для шатунных подшипников средние нагруз-
ки достаточно точно определяются по графикам
И. Ш. Неймана (см. 100000).
производится для номинального режима работы дви-
гателя по следующей схеме.
650003
650004
1Г
3 I s кг сек
II Ю »
Фиг. 650003.
Диаграмма $ импуль-
сов на подшипник
внутреннего шатуна
рядного V-образного
двигателя (см. фиг.
650002-IV)
Расчет смазки
857
651000—651001
Берется несколько значений температуры из интервала возможных
рабочих температур подшипника, одинаковых с максимальной темпера-
турой масла в зазоре (80—160°). Для каждого значения темйературы
вычисляются минимальная толщина масляного слоя, работа трения и
количество масла, необходимое для отвода тепла трения при различных
значениях диаметрального зазора подшипника, например, от 0,06
до 0,20 мм.
Минимальная толщина масляного слоя определяется (см. 650003):
для случая фиг. 650002-1 по средней нагрузке, для случаев фиг. 650002-11
и III по максимальной нагрузке, для случая фиг. 650002-IV по макси-
мальному импульсу. Работа трения и количество масла, необходимое
для отвода тепла трения, находятся по средней нагрузке.
Для тех же данных вычисляется количество масла, которое может
протечь через подшипник. Сопоставляя полученные результаты для
каждого значения температуры подшипника, определяют интервал зна-
чений зазора, в котором устанавливается тепловое равновесие, т. е.
И котором количество масла QH, необходимое для отвода тепла трения,
равно (или меньше) количеству его QB, которое может протечь через под-
шипник.
Интервалы значений основных факторов и конструктивные параметры
должны быть подобраны в зависимости от желательной температуры
подшипника и допустимой минимальной толщины масляного слоя.
651000 ОПРЕДЕЛЕНИЕ ТОЛЩИНЫ МАСЛЯНОГО СЛОЯ
Определение минимальной толщины масляного слоя для случаев
диаграмм нагрузок, представленных на фиг. 650002-1, II, III, произво-
Р52 I л.
дится по безразмерной нагрузке и значению согласно графику
фиг. 621200. В случае нагрузки, представленной на фиг. 650002-IV,
толщина слоя определяется по максимальному значению безразмерного
т
импульса Pdt и отношению^ согласно графику фиг. 622201.
О
651001 Пример 1. Данные для расчета: нагрузка — согласно фиг. 650002-11;
средняя нагрузка за цикл Рср=4120 кг; максимальная нагрузка
за цикл РШах 6370 кг; обороты вала « = 2850 об/мин; диаметр вала
d = 85 мм', температура входящего масла /Вх = 60°; длина подшипника
/ = 35,4 мм\ масло МК; давление подачи масла р=5,5 ат-, в зазор
масло подается через две частичных круговых канавки в средней части
шипа, расположенных симметрично относительно плоскости разъема
подшипника; ширина канавок 6 мм', дуга каждой канавки 100°
(фиг. 642006).
Расчет производится для трех значений температуры подшипника:
100°, 120° и 140°.
Вычисление минимальной толщины масляного слоя производится
по вязкости масла, соответствующей температуре подшипника (см. 643002).
Безразмерная нагрузка при £> — d = 28 = 0,10 мм и т]100 = 0,0020 кг сек/л*’
будет
Рй2 6370 • 0,0000s2 _ g о
~ 0,0020 • 0,0425s - 0.0354 • 299 ’ ’
858
651002—652002
Соответствующее значение эксцентриситета для = 0,42
d оЭ
по графику фиг. 621200 равно у = 0,92; наименьшая толщина слоя
Лтш = 0,05 (1-0,92) = 0,004 мм.
Для других значений температуры подшипника 1° получены следу-
ющие значения йт1п (в микронах):
100° 120° 140°
Amin, Ц 4,0 2,6 1,8
При повышении температуры подшипника от 100 до 140° минималь-
ная толщина масляного слоя уменьшилась в 2,2 раза.
Пример 2. Подшипник внутреннего шатуна 12-цилиндрового рядного 651002
двигателя. Максимальный импульс силы за время, соответствующее
углу поворота коленчатого вала от 20 до 280°, равен 46,5 кг сек
(фиг. 650003). Диаметр подшипника £> = 90 мм; длина подшипника
1 = 22 мм; диаметральный зазор D— d = 0,08 мм; температура подшип-
ника принимается равной 100°.
Безразмерный импульс
в2 I DAt 0,000042 • 46,5 1О с
4100r2Z 3 ГЯГ ~ 0,0020 • 0,00009112 • 0,022 =
о
Соответствующее значение эксцентриситета
7 = 0,95.
Наименьшая толщина слоя
Amin = S(I -7.) = 0,04(1 -0,95) = 0,002 мм.
При температуре 120° наименьшая толщина слоя будет около
0,001 мм. При диаметральном зазоре 0,06 мм минимальная толщина
будет для каждого значения температуры несколько большей.
ОПРЕДЕЛЕНИЕ МОМЕНТА ТРЕНИЯ 652000
Момент трения определяется по средней вязкости, соответствующей 652001
средней температуре между температурами подшипника и входящего
масла, для средней равномерно вращающейся нагрузки.
Пример. Данные для расчета: нагрузка — согласно фиг. 650002-П; 652002
средняя нагрузка за цикл РСр = 4120 кг; обороты вала п = 2850 об/мин;
диаметр вала d = 85 мм; длина подшипника ( = 35,4 мм; масло МК;
температура входящего масла /вх = 60°.
Расчет производится для трех значений температуры подшипника:
100°, 120° и 140°.
859
653000—653002
При температуре подшипника 100° средняя расчетная температура
/ср = 80°.
Момент трения для эксцентриситета / = 0,88, соответствующего
средней нагрузке Рср = 4120 кг, будет (см. 631000):
М-15,=15,0кгм.
Для других значений температуры подшипника момент трения
имеет следующие значения:
100° 120° 140°
М, кгм 1,25 1,14 0,87
Как показывает эта таблица, с повышением температуры подшип-
ника момент трения сильно уменьшается, например, при температуре
подшипника 140° момент трения в 1,5 раза меньше, чем при темпера-
туре 100°. t
Количество масла QH, которое необходимо прокачивать через под-
шипник для отвода тепла трения, определяется равенством
<?пд/ • 0,4 _
60 127’
например, для температуры подшипника 100°, при Д/ — tcp — /вх = 20°;
<о = 299 — ; Л4 = 1,25 кгм:
сек.’ ’
QH =6,6 л/мин.
653000 ОПРЕДЕЛЕНИЕ ТЕМПЕРАТУРЫ ПОДШИПНИКА И ПРОКАЧКИ МАСЛА
Прокачку масла определяют по средней температуре (см. 642000).
653001 При расчетах входящий в формулы прокачки параметр й’ (см. 642002—
642005) определяют как среднее арифметическое из его значений за цикл.
Пример. Данные для расчета те же, что в 651001.
653002 Для случая смазочных канавок подшипника согласно фиг. 642006
прокачка масла определяется по формуле (см. 642006)
QB = 1,25— .
4 ’lep
В эту формулу следует ввести поправочный множитель на длину
подшипника, взяв его в виде отношения длины экспериментального
подшипника к длине рассчитываемого, т. е. 35-^ =2,4.
Расчет производится согласно п. 650004.
Результаты расчетов подшипника при разных температурах /Подш
и разных зазорах D — d сведены в таблицы 653002-1, II и III.
860
653002
Таблица 653032-1
t =109°; =60°
ПОДШ ’ BI
(£>—d), мм 0,08 0,10 0,12 0,14 0,16 0,18 0,22 Примечания
ftmin, I* 6,0 6,0 5,4 4,9 4,6 4,5 3,0 - Определяется по сред- ней нагрузке при 413О
-^Кал[сек 0,96 0,87 0,81 0,79 0,77 0,75 0,74 Определяется по fcp= = 80° и 1) = 7]30
Qn, л/мин 7,2 6,6 6,1 5,9 5,8 5,6 5,5 Определяется для пе- репада температуры Af= =/ —t =20° ’ср *вх
QB л/мин 0,3 0,5 0,9 1,4 2,0 2,9 5,3 Определяется для i)30 и давления масла 5,5 ат
Из таблицы 653002-1 следует, что температура 100° в подшипнике
установится при прокачке масла 5,5 л/мин при зазоре 0,22 мм и дав^
лении подаваемого масла 5,5 ат. Наименьшая толщина масляного слоя,
соответствующая средней нагрузке, будет 3 р.. Наименьшая толщина
масляного слоя при максимальной нагрузке на подшипник Ртах = 6370 кг
будет 2 р..
Т а б-л иц а 653902-11
t = 120°- t = 60°
*П0ДШ — > *вз uv
(D—d), мм 0,03 0,10 0,12 0,14 0,16 Примечания
... , К ал 1 сек 4,0 3,6 3,3 3,1 2,8 Определяется по средней на- грузке при 7)120
0,63 0,58 0,58 0,55 0,55 Определяется по t= 90° и 1 = 4,0 Р
QH, л!мин 3,2 2,9 2,9 2,8 2,8 Определяется для перепада температуры А/ =39°
QB, л!мин 0,4 0,8 1,3 2,1 3,1 Определяется для ч,0 и Да- вления масла 5,5 ат
Из таблицы 653002-11 следует, что температура 120° в подшипнике
установится при прокачке масла 2,8 л/мин при зазоре около 0,16 мм
и давлении подаваемого масла 5,5 ат. Наименьшая толщина масляного
слоя, соответствующая средней нагрузке, будет 2,8 р. Наименьшая
толщина масляного слоя при максимальной нагрузке будет 2 р..
Из таблицы 653002-1II следует, что температура 140° в подшипнике
установится при прокачке масла ~2,2 л/мин, при зазоре 0,13 мм и дав-
лении подаваемого масла 5,5 ат. Наименьшая толщина масляного слоя,
861
653002
Таблица 653002-Ш
^ПОДШ — 140°, fBx — 60°
(£>—d), мм 0,08 0,10 0,12 0,14 Примечания
3,0 2,7 2,4 2,1 Определяется по средней нагрузке при i;140
Л4в> -427- > Кал^ек 0,63 0,61 0,59 0,57 Определяется по /ср=100° и ») = П1О0
QH, л[мин 2,4 2,3 2,2 2,1 Определяется для пере- пада температуры At = 40°
Q*, л/мин 0,5 1,0 1,7 2,7 Определяется для i)100 и давления масла 5,5 ат
соответствующая средней нагрузке, будет ~2,2 р.. Наименьшая толщина
масляного слоя при максимальной нагрузке будет ~ 1,8 р..
Полученные результаты сведены в табл. 653002-IV.
Таблица 653002-IV
* подт 1 вых 23 = D—d мм Лт1п п0 Рср Н ^mln п0 ^тах Н QB, л[мин
100 80 0,22 3 2 5,5
120 90 0,16 2,8 2 2,8
140 100 0,13 2,2 1,8 2,2
Эта таблица показывает, что для зазора в интервале от 0,13 до
0,22 мм при температуре подачи масла 60° и давлении подаваемого
масла 5,5 ат температура подшипника будет в интервале от 140 до 100°.
С увеличением зазора температура подшипника убывает. С увели-
чением зазора в тех же пределах прокачка масла увеличивается
от 2,2 до 5,5 л/мин, несмотря на уменьшение температуры подшипника.
Минимальная толщина масляного слоя для средней нагрузки составляет
2 — 3 р.; с понижением температуры минимальная толщина слоя увели-
чивается.
Следует подчеркнуть, что прокачка масла является одной из основ-
ных величин, определяющих работоспособность подшипника.
Величина минимальной толщины масляного слоя устанавливается
конструктором в зависимости от качества обработки подшипника и от
условий работы узла, в котором он находится.
Влияние на работу подшипника температуры входящего в подшип-
ник масла и его давления легко определяется подсчетами, аналогичными
изложенным в 653002.
660000—660002
ТРЕБОВАНИЯ К КОНСТРУКЦИИ ПОДШИПНИКА 660000
СКОЛЬЖЕНИЯ И ЭКСПЛОАТАЦИОННЫЕ УСЛОВИЯ,
ОБЕСПЕЧИВАЮЩИЕ ЕГО НАДЕЖНУЮ РАБОТУ
Основным требованием, предъявляемым к подшипникам авиацион- 660001
ных двигателей, является надежность работы.
Надежность работы подшипника скольжения авиационного двига-
теля зависит от ряда факторов; главнейшими из них являются:
а) конструкция того узла двигателя, к которому относится подшип-
ник (см. 660003).
б) конструкция самого подшипника (см. 660004).
в) материал подшипника и технология его изготовления (см. 660005).
г) условия эксплоатации подшипника (см. 660006).
В таблицах 660002-1 и II приведены основные данные по шатунным 660002
и коренным подшипникам и их смазке некоторых авиационных дви-
гателей.
Интервалы основных данных по шатунным подшипникам рядных
и звездообразных двигателей следующие.
Скорость скольжения: v=8—10 м!сек.
Нагрузка в рядных двигателях ЛСр=П0—130 кг/см*, ктлх—
= 130—200 кг!смг-, в звездообразных Лср=176 —185 кг/см2; ктах=
= 200—255 кг[см\
Отношение длины подшипника к диаметру в рядных двигателях
составляет 0,6—0,75, а в звездообразных 0,8—0,9.
Диаметральные зазоры в подшипниках рядных и звездообразных
двигателей представлены на фиг. 660002 в зависимости от диаметра
вала (на фигуре нанесены средние значения зазоров).
Диаметральный зазор шатунных подшипников рядных и звездообраз-
ных двигателей в зависимости от диаметра шейки представляется при-
ближенно следующим линейным уравнением:
D—d=0,00230d—0,076,
где d и D—d в мм.
Толщина втулок главных шатунов звездообразных двигателей
3,2—3,5 мм.
Натяги посадки разнообразны: от 0,01 до 0,14 мм.
Толщина слоя заливки свинцовистой бронзой от 0,17 до 0,80 мм.
Количество масляных отверстий в шатунных шейках различно:
в шейке двигателя Райт «Циклон» GR-2600 сделано по два отверстия
863
650002
660002
Основные данные по шатунным
подшипникам и их смазке
Таблица 660002-1
Рядные двига тели Звездообразные двигатели
М-105 АМ-35 Роллс-Ройс «Мерлин» XX Аллисон V-1710-C15 Даймлер-Бенц DB-601A Юнкере «Юмо»-211 B/D М-88 14-цилин- дровый М-62 и М-63 9-цилиндровые Райт «Циклон» GR-2600 14-цилиндровый BMW-801 14-цил ин- дровый
Номинальная иость, л. с. Число оборотов к чатого вала в мин Удельная наг- рузка на шатун- ный подшипник кг[см* Система смазки к шипно-шатунного низма Сорт масла Давление масл входе в двигатель Температура ма входе в двигатель Температура мае выходе из двигател Прокачка масла двигатель, л)мин Диаметр шат шейки, мм Длина рабочей подшипника, мм Диаметральный шатунного подшиг ММ Величина и масляных отверст Химический материала заливк Толщина вкладь Толщина залив! Натяг посадки дыша, мм Материал вала мообработка мощ- олен- уТу ь лтах fccp риво- меха- а на , ат ела на °C :ла на я, °C через унной части зазор шика, форма ИЙ состав и 1ша,ш1 <и, мм вкла- и тер- 1100 2700 134 97 Через вал МС, МК, МЗС 5—9 40—70° Не выше 110° 40—55 75 57 0,07—0,09 БрС-30 2,5 0,5—0,7 0,01—0,03 53А1, цементирован 1200 2050 196 ПО Через вал МС, МК, МЗС 7,5—8,5 80—85° Не выше 120° 55—65 80 53 0,07—0,12 1 сверление в шейке диаметром 6,2 мм раззенко- вано на поверх- ности до диамет- ра 9 мм БрС-30 2,5 0,7 0,049—0,07 Закален 1250 2850 172 122 Маслопровод с к опорным п Спецификация DTD-109 или МС, МЗС Норм. 5,6; миним. на 5 мин. 4,2 Не ниже 15° при пуске; макс, на 30 мин. 90°; макс. на 5 мин. 95° 70 48 Вильчатый по кри- вошипной шейке 0,09—0,10 2 сверления в шейке диаметром • 5 мм 70,5% Си; 29% РЬ; 0,5% Ag 5 0,17—0,7 Азотирован 950 2500 169 128 ответвлениями одшипникам МС, МЗС Реком. 4,2—4,6; макс. 8,4; миним. на малом газе 1,05 Для МС: реком. 70—80°; макс. 80°; миним. 40° Для МЗС: реком. 60—70°; макс. 75°; миним. 35° 76,2 46 Вильчатый по кри- вошипной шейке 0,102—0,126 2 сверления в шейке диаметром 5,6 мм с лысками 71,5% Си; 27% РЬ; 1,5% Ag 5 0,3—0,7 0,066—0,102 Близок к ЭИ-84; закален 950 2300 1 Специальные | роликовые под- ) шипники Маслопровод с от- ветвлениями к опорным подшип- никам Близкий к МС Миним. 2,6 70—75° 90—100° Миним. 54 86 1 Специальный > роликовый I подшипник 80% Си; 20%, РЬ 6 0,8 0,025—0,065 Цементирован 950 2300 Через вал Близкий к МС 4—6 75° 95° 50—54 76 Вильчатый по криво- шипной шейке 0,08—0,10 80% Си; 20%, РЬ; 5 0,035—0,045 Закален 950 2375 201 Через вал Касторовое, МС, МЗС 5—7 Не ниже 40° 90—105° 20 88 70 0,07—0,09 В шейке два сверле- ния и лы- ска по об- разующей 70% Си; 28,5% РЬ; 1,5% Ag 0,5—0,8 0,01—0,02 Цементи- рован 850 2100, 2200 255 185 Через вал МС, МК 4,5—6 Норм. 60—70°; макс. 90° 100°; макс, на 10 мин. 120° 19 82,4 78 В средней части гиперболического подшипника 0,11— 0,13; на краях 0,15—0,17 В шейке 1 или 2 сверления и лы- ска по образую- щей БрС-30 3,2 0,5—0,8 0,03—0,05 53А1, закален 1300 2300 240 176 Через вал Спецификация Райт Ns 5817 5,3—6,3 Реком. 71°; норм. 93°; макс. 104° 63,5 92 73 0,114—0,165 . В шейке два сверле- ния под углом 90°; между сверлениями выборка шириной 20 мм; около сверле- ний выборки по об- разующей длиной 35 мм, шириной 13 мм 3,5 0,5—0,8 0,089—0,14 Цементирован 1460 2400 Через вал Для МС 55—62° 51 84 68 0,12—0,14 В шейке 3 сверления диаметром на поверх- ности 8 мм 3,5 Цементи- рован
55 Авиац. поршн. двигатели.
865
864
998
Таблица 660002-П
Основные данные по коренным подшипникам и их смазке рядиых двигателей
М-105 АМ-35 Роллс-Ройс «Мерлин» XX Аллисон V-1710-C15 Даймлер-Бенц DB-601A Юнкере «Юмо»-211 B/D
Номинальная мощ- ность, л. с. 1100 1200 1250 950 950 950
Число оборотов ко- ленчатого вала в ми- нуту 2700 2050 2850 2600 2300 2300
Удельная нагрузка на коренной ПОДШИПНИК кг)смг 2-й • ^шах 133 192 160 177 122 148
, /:ср 79 106 108 97 63 78
4-й . - ^шах 171 222 190 115 119 205
Аср 119 146 127 80 79 141
Диаметр коренной шейки, мм Длина рабочей части подшипника, мм 90 43 95 38 85 33,5 95,25 38 100 46 85
Диаметральный зазор коренного подшипника, мм Цилиндриче- ские и гипер- болические подшипники; в средней части подшипника 0,08—0,11 Гиперболический подшипник; в сред- ней части под- шипника 0,08—013, на краях 0,12—0,17 В средней части подшипника 0,09—0,10; конические края В средней ча- сти подшип- ника 0,102— 0,126; кониче- ские края Гиперболический подшипник; в сред- ней части подшип- ника 0,12—0,14, на краях 0,15—0,17 Цилиндриче- ский подшип- ник; в средней части подшип- ника 0,08—0,10
Величина и форма мас- ляных отверстий б сверлений, расположен- ных симмет- рично, диамет- ром 5 мм I сверление в шей- ке диаметром 6,2 мм, раззе'нко- вано до диамет- ра 9 мм 4 сверления и 2 канавки,располо- женные симмет- рично относитель- но плоскости разъема; канавки длиной 52 мм, шириной 3,2 мм 4 сверления и 2 канавки, рас- положенные симметрично относительно плоскости разъема 2 сверления и ка- навка длиной 200 мм, шири- ной б мм
660002
660003
с большими выборками в ненагруженной части шейки; в двигателе
BMW-801 три отверстия; в двигателе Пратт-Уитни (не включенном
в таблицу) сделано пять отверстий.
Интервалы основных данных по коренным подшипникам рядных
двигателей следующие.
Скорость скольжения: г»=8—10 м/сек.
Нагрузки: Аср = 79—146 кг/см*, Атах = 115—222 кг/см2.
Отношение длины к диаметру составляет 0,4—0,5.
Фиг. 660002.
Диаметральные зазоры коренных и шатунных подшип-
ников рядных и звездообразных двигателей
Диаметральный зазор коренных подшипников (см. фиг. 660002)
представляется приближенно следующим линейным уравнением:
D—d=0,00230 d—0,106,
где d и D—d в м.
Толщина вкладышей 2^5—6 мм.
Некоторые вкладыши делаются с буртиками или крепятся винтами
к ложу картера.
Зазор подшипников в краевых частях увеличивают, придавая
рабочей поверхности подшипника гиперболическую форму или срезывая
краевые части подшипника по конусу.
Прокачки масла через рядные двигатели составляют 40—65 л/мин,
что дает в среднем на подшипник от 1,5 до 3 л/мин. Измерения прокачки
на двигателе М-105 показали, что на смазку коренных и шатунных под-
шипников идет 55—60% всей прокачки. Температура масла, вытекаю-
щего из двигателей, не превышает 120°; температура подшипников может
значительно превышать это значение.
В авиационных двигателях абсолютно жесткая конструкция вала 660003
и подшипника не встречается. Недостаточно жесткими с точки зрения
работоспособности подшипника скольжения могут оказаться и вал и под-
шипник.
55*
867
650004—660005
Конструкция узла, в котором расположен подшипник скольжения,
должна, по возможности, обеспечивать во время работы минимальные
относительные деформации подшипника и шейки, поддерживаемой этим
подшипником. Наличие относительной деформации подшипника и шейки
в неблагоприятных случаях может повести к полусухому и даже к сухо-
му трению между подшипником и валом.
Влияние жесткости подшипника и формы зазора на распределение
давлений в масляном слое представлено на фиг. 660003.
р кг/см*
р кг/смг
Фиг. 660003.
Кривые распределения давлений в масляном слое подшипников в зависи-
мости от жесткости и формы их
Все кривые получены при одной и той же внешней нагрузке.
На фиг. 660003, а кривая распределения давления в масляном слое имеет
параболический вид; толщина масляного слоя приблизительно равно-
мерна. На фиг. 660003, б кривая распределения давления в средней
части подшипника поднимается выше, чем на фиг. 660003, а. Объясняется
это тем, что в случае б края подшипника более податливы, чем в случае а.
На фиг. 660003, виг кривые имеют впадины в средней части вслед-
ствие защемления вала на краях подшипника.
Наиболее благоприятным случаем распределения давления в слое
следует считать случай а с равномерной толщиной масляного слоя.
Как показали 100-часовые заводские испытания подшипника главного
шатун а звездообразного двигателя М-62, в результате естественного износа
радиальный зазор подшипника у краев оказался на 0,015—0,025 мм
больше зазора в средней части (при длине подшипника 78 мм)-
660004 Для обеспечения жидкостного трения на краях подшипника сколь-
жения (которое может быть нарушено из-за деформации вала и неточ-
ностей монтажа) рекомендуется придавать рабочей поверхности его форму
гиперболоида или срезать края по конусу.
Толщина вкладышей и способы фиксации их в гнездах разнообразны;
с точки зрения надежности работы подшипника следует предпочесть
такую конструкцию его, при которой лучше сохраняется форма поверх-
ности скольжения подшипника, получающаяся после приработки, и обес-
печивается посадка вкладышей в гнездо (например, вкладыши с бурти-
ками, с закреплением винтами).
660005 Зазор подшипника следует выбирать в соответствии с указаниями
650000.
868
ббОООб
Материалы подшипников для авиационных двигателей должны обла-
дать высокой усталостной прочностью при рабочих температурах; хоро-
шей прирабатываемостью и пластичностью рабочего слоя; способностью
противостоять заеданию при относительном недостатке смазки; анти-
коррозийностью и высокой теплопроводностью.
Основными материалами для заливки коренных и шатунных подшип-
ников авиационных двигателей являются свинцовистые бронзы. Образцы
химического состава свинцовистых бронз указаны в табл. 660002-1
Следует указать на некоторые недостатки свинцовистых бронз: плохую
прирабатывавмость, недостаточную коррозийную стойкость, требова-
тельность бронз к чистоте и обилию смазки.
Для повышения работоспособности свинцовистых бронз рабочую
поверхность подшипников часто покрывают слоем свинца толщиной
0,005—0,02 мм. Свинец ускоряет приработку, хорошо удерживает масло
на поверхности, частично выполняет функции смазки при ее недостатке.
В послевоенное время широкое распространение получили серебря-
ные подшипники с свинцово-индиевым покрытием, изготовляемые гальва-
ническим способом. Толщина слоя серебра, нанесенного на сталь, после
расточки составляет 0,3—0,5 мм. На серебро наносится слой свинца
толщиной 0,02—0,04 мм и слой индия толщиной 0,002 — 0,003 мм (для
придания рабочему слою антикоррозийности). Слой свинца и индия
служит рабочим слоем на все время работы подшипника.
Материалом для валов приняты легированная сталь 53А1 и близкие
к ней марки. Цементация поверхностей шеек улучшает работу подшип-
ников, особенно при твердом антифрикционном сплаве.
Вязкость масла для данного двигателя берется в соответствии с зазо- ббОООб
ром подшипника: при больших зазорах рекомендуется более вязкое масло,
при малых зазорах—менее вязкое, сообразно с расчетом смазки подшип-
ника (см. 650000).
Температура масла на входе в подшипник ограничивается определен-
ным интервалом в соответствии с расчетом подшипника; повышение тем-
пературы масла на входе ведет к соответствующему повышению средней
температуры на всех участках смазки.
При приработке подшипник должен работать в облегченных усло-
виях по нагрузке, скорости, температуре и давлению масла. В отношении
температуры и давления масла на входе следует ввести ступенчатость
(подобно тому, как это делается в отношении нагрузки и числа оборотов).
Повышать температуру и понижать давление следует по мере приработки
подшипника так, чтобы и в первые часы работы подшипника обеспе-
чивалась достаточная толщина масляного слоя, предохраняющая поверх-
ности скольжения от интенсивного износа.
ЛИТЕРАТУРА И ИСТОЧНИКИ К 600 000
1. ДьячковА. К., Расчет смазки подшипников быстроходных двигателей, Маш-
гиз, 1939.
2. Д ь я ч е н к о П. Е., Критерий оценки микрогеометрии поверхности, изд. Акаде-
мии Наук СССР, 1942.
3. К у ца е в С. Н., Определение толщины масляного слоя в подшипнике признако-
переменной нагрузке, Труды № 59, Оборонгиз, 1934.
4. К у ц а е в С. Н., Теория смазки подшипника ограниченной длины при центробеж-
ной нагрузке, Труды II Всесоюзной конференции по трению и износу в машинах,
Институт машиноведения АН СССР, 1948.
869
ббОООб
5. Куца ев С. Н., Прокачка масла через подшипники авиационного двигателя.
Труды № 120, Оборонгиз, 1947.
6. О рло в П. И., Смазка легких двигателей, ОНТИ, 1937.
7. Гидродинамическая теория смазки. «Классики естествознания», Сборник под редак-
цией и с дополнительными статьями акад. Л. С. Лейбензона, ОНТИ, 1936.
8. Трение и износ в машинах, Труды Всесоюзной конференции по трению и износу
в машинах, Доклады, т. I и II, Изд. Академии Наук СССР, 1939.
9. Ш и б е л ь А., Скользящие опоры (подшипники и подпятники). Конструкция
и расчет, Перевод В. К. Запорожца, ОНТИ, 1936.
10. АрчбютЛ. и Дилей Р. М., Трение, смазка и смазочные материалы. Перевод
под ред. Ф. Я. Мананеева, Госгоргеолнефтеиздат, Ленинград, 1934.
11. Б а р р Г., Вискозиметрия. Перевод под ред. М. И. Усановича, ГОНТИ, 1938.
12. Ada m N. К., Molecular forces in friction and boundary lubrication» Proceedings
of the general discussion on lubrication and lubricants, London, 2, 1937.
13. Barnard D. P., Oil flow in complete journal bearings, «JSAE», v. XVII,
• pp. 205—209, 1925.
14. В r a d f о r d L. J. and Vandegrift C. G., Relationship of the pressure-vis-
cosity effect to bearing performance, Proceedings of the general discussion on lubri-
cation and lubricants, London, v. 1, 1937.
15. В a u e г K-, Einfluss der endlichen Breite des Gleitlagers auf Tragfflhigkeit und
Reibung, «Ing. Wes.», Ill—IV, 1943.
16. В г о о k s D. B. and Sparrow S. w., Oil flow through crank shaft and connecting
rod, bearing, «JSAE», v. XXI, 1927.
17. Dennison, Film-lubrication theory and engine bearing design, Trans. ASME,
v. 58, № 1, 1936.
18. Fogg A., Measurement of boundary friction in an oscillating bearing machine.
Proceedings of the general discussion on lubrication and lubricants, London, v. 2,
1937.
19. G fl m b e 1 - E ve r 1 i n g, Reibung und Schmierung im Maschinenbau, Berlin,
1925.
20. Lasche O., Die Reibungsverhflltnisse in Lagern mit hohen Umfangsgeschwin-
digkeiten, «ZVD1» v. 46, 1902.
21. Needs S. J., Effects of side leakage in 120° centrally supported journal bearings,
Trans. ASME, v. 56, 1934 and v. 57, 1935.
22. Nflcker W., Ueber den Schmiervorgang im Gleitlager, VDI Forschungsheft,
№ 352, 1932.
23. Sc h n e i d e r E., Versuche fiber Reibung in Gleit- u. Ro Hen-La gem, «Petrolettm», -
v. 26, № 7 u. 11, 1930.
24. Stone M., Film-lubrication in sleeve bearings, Trans. ASME АРМ, v. 2,
№ 2, 1935.
25. Vogelpohl G., Die rechnerische Behandlung des Schmierproblems beimLager,
Oel und Kohle vereinigt mit Petroleum , № 1, 9u, № 3, 34, 1940.