
























































































































































































































































































































































































































































































































































Автор: Туманов А.В. Зеленцов В.В. Щеглов Г.А.
Теги: авиация и космонавтика летательные аппараты ракетная техника космическая техника междупланетные соединения (междупланетные полеты) космонавтика (аэронавтика)
ISBN: 978-5-7038-4811-1
Год: 2018




А.В. Туманов, В.В. Зеленцов, Г.А. Щеглов
Основы компоновки бортового оборудования космических аппаратов j
им. Н.Э. Баумана
А.В. Туманов, В.В. Зеленцов, Г.А. Щеглов
Основы компоновки бортового оборудования космических аппаратов
Рекомендовано Учебно-методическим объединением вузов Российской Федерации по университетскому политехническому образованию в качестве учебного пособия для студентов высших учебных заведений, обучающихся по направлению подготовки 24.05.01 «Проектирование, производство и эксплуатация ракет и ракетно-космических комплексов»
3-е издание, исправленное
МОСКВА
ИЗДАТЕЛЬСТВО
МГТУ им. Н.Э. БАУМАНА 2018
УДК 629.78.05
ББК 39.66
Т83
Рецензенты'.
заместитель Генерального конструктора АО «Военно-промышленная корпорация» «Научно-производственное объединение машиностроения», канд. техн, наук А.И. Бургонский’, д-р техн, наук, проф. кафедры «Космические системы и ракетостроение» Московского авиационного института (национального исследовательского университета)
А.А. Золотов
Туманов, А. В.
Т83 Основы компоновки бортового оборудования космических аппаратов : учебное пособие / А. В. Туманов, В. В. Зеленцов, Г. А. Щеглов. — 3-е изд., испр. — Москва : Издательство МГТУ им. Н. Э. Баумана, 2018. — 572, [4] с. : ил.
ISBN 978-5-7038-4811-1
Рассмотрены этапы проектирования космического аппарата и основные документы, необходимые для выполнения его компоновки. Изложены требования, предъявляемые к компоновке целевого оборудования, а также к аппаратуре системы управления движением и другим системам бортового оборудования. Даны критерии оценки качества выполненной компоновки и обширный иллюстративный материал по обеспечивающим системам бортового оборудования. Описаны элементы бортового оборудования и приведены нормативные документы, регламентирующие его компоновку.
Содержание учебного пособия соответствует курсу лекций, которые авторы читают в МГТУ им. Н.Э. Баумана.
Для студентов, обучающихся по специальности «Космические летательные аппараты и разгонные блоки».
з Все права защищены. Никакая часть данного издания не может быть воспроизве-| 5^4 дена в какой бы то ни было форме без письменного разрешения владельцев автор-| ских прав. Правовую поддержку Издательства обеспечивает Адвокатское бюро “ ® «Сергей Москаленко и партнеры».
УДК 629.78.05
ББК 39.66
© Туманов А.В., Зеленцов В.В., Щеглов Г.А.. 2010
© Туманов А.В., Зеленцов В.В.,
Щеглов Г.А., 2018, с изменениями © Оформление. Издательство
ISBN 978-5-7038-4811-1 МГТУ им. Н.Э. Баумана, 2018
Оглавление
Предисловие ко второму изданию................................. 8
Предисловие ................................................... 9
Введение ..................................................... 11
Принятые сокращения .......................................... 14
1. Общие положения о компоновке космического аппарата...... 17
1.1. Документы, регламентирующие космическую деятельность . 17
1.2. Документы, регламентирующие правовые аспекты использования космического пространства.......................... 21
1.3. Материалы, необходимые для выполнения компоновки КА ... 23
1.3.1. Техническое задание ............................ 23
1.3.2. База данных компоновок существующих прототипов КА ... 24
1.3.3. Единые нормы внешних воздействующих факторов. 39
1.3.4. Расчетно-теоретические исходные данные.......... 46
1.3.5. Общая схема оборудования КА с комплектом габаритных чертежей на приборы бортового оборудования
и кабельные трассы .................................... 47
1.3.6. Циклограмма режимов полета КА и взаимодействия бортового оборудования ................................ 52
1.3.7. Кривая энергопотребления ....................... 54
1.3.8. Таблицы точности установки отдельных приборов оборудования и привязка их к базовым элементам КА ........ 55
1.4. Этапы проектирования и разработки компоновки космического аппарата ............................................ 55
1.4.1. Научно-исследовательские работы................. 56
1.4.2. Опытно-конструкторские работы .................. 56
1.4.3. Техническое предложение......................... 57
1.4.4. Эскизный проект ................................ 61
1.4.5. Технический проект ............................. 65
1.4.6. Разработка проектной технической документации .. 65
1.4.7. Экспериментальная отработка бортового оборудования КА ................................................ 65
1.5. Виды компоновки....................................... 68
4
Оглавление
1.5.1. Геометрическая компоновка .................... 69
1.5.2. Инерционно-массовая компоновка................ 70
1.5.3. Функциональная компоновка..................... 81
1.5.4. Конструктивно-силовая компоновка ............. 81
1.5.5. Аэродинамическая компоновка .................. 82
2. Критерии оценки качества компоновки космического аппарата.................................................... 87
2.1. Методы оценки качества компоновки................... 87
2.2. Главные критерии качества компоновки ............... 89
2.2.1. Обеспечение максимальной эффективности целевого оборудования ........................................ 90
2.2.2. Минимальная масса элементов конструкции и бортового оборудования............................. 92
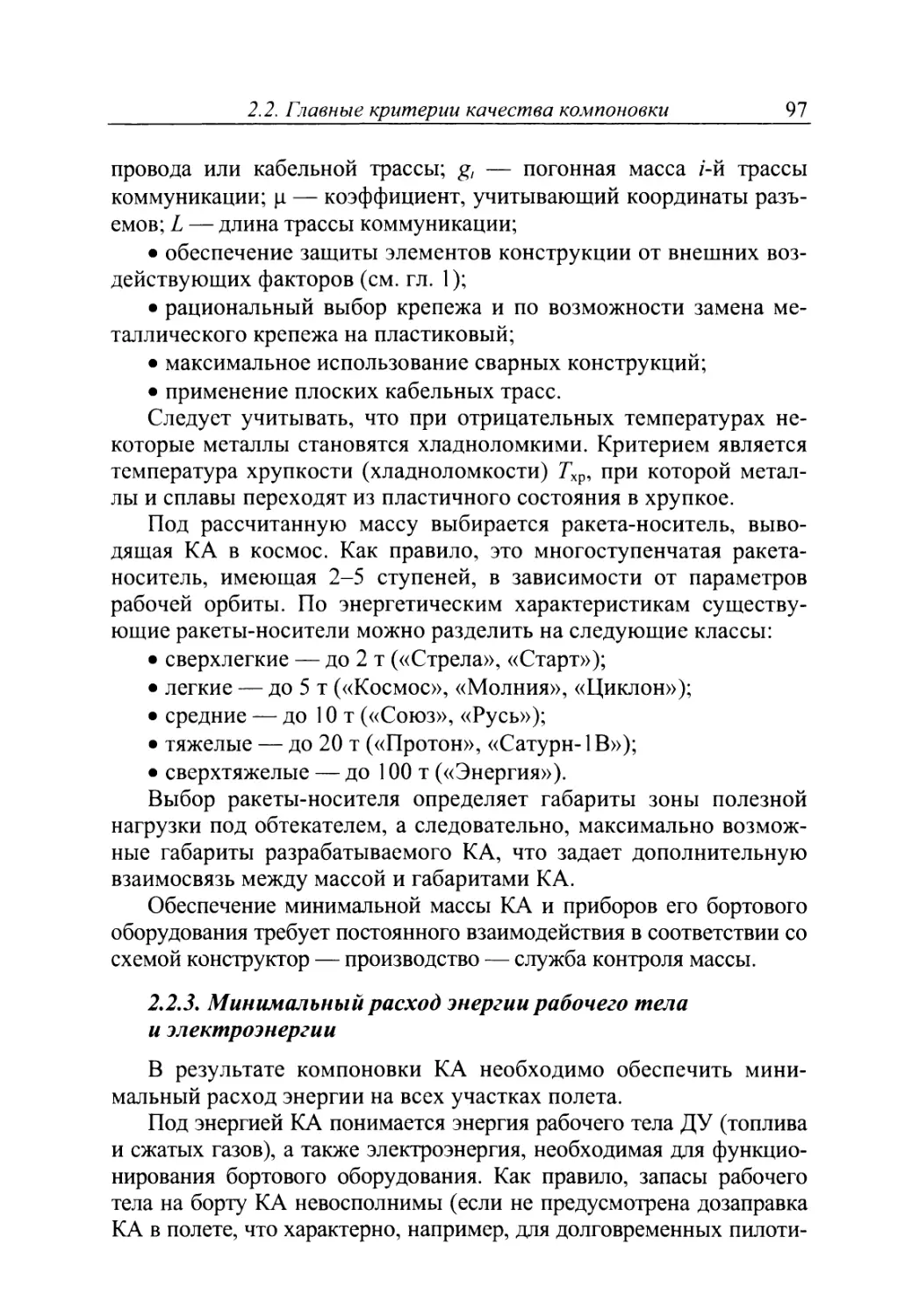
2.2.3. Минимальный расход энергии рабочего тела и электроэнергии .................................... 97
2.2.4. Требуемая надежность элементов конструкции и бортового оборудования ........................... 101
2.2.5. Унификация элементов конструкции и бортового оборудования .......................................... 114
2.3. Проектные критерии качества компоновки............. 119
2.3.1. Анализ возможных нерасчетных взаимодействий бортового оборудования ................................ 119
2.3.2. Исходная плотность компоновки................ 128
3. Определение облика отсеков космического аппарата........ 130
3.1. Выбор внешнего вида космического аппарата.......... 130
3.1.1. Общие сведения............................... 130
3.1.2. Выбор конструктивно-силовой схемы ........... 131
3.2. Конструкции отсеков ............................... 135
3.2.1. Классификация конструкций отсеков............ 135
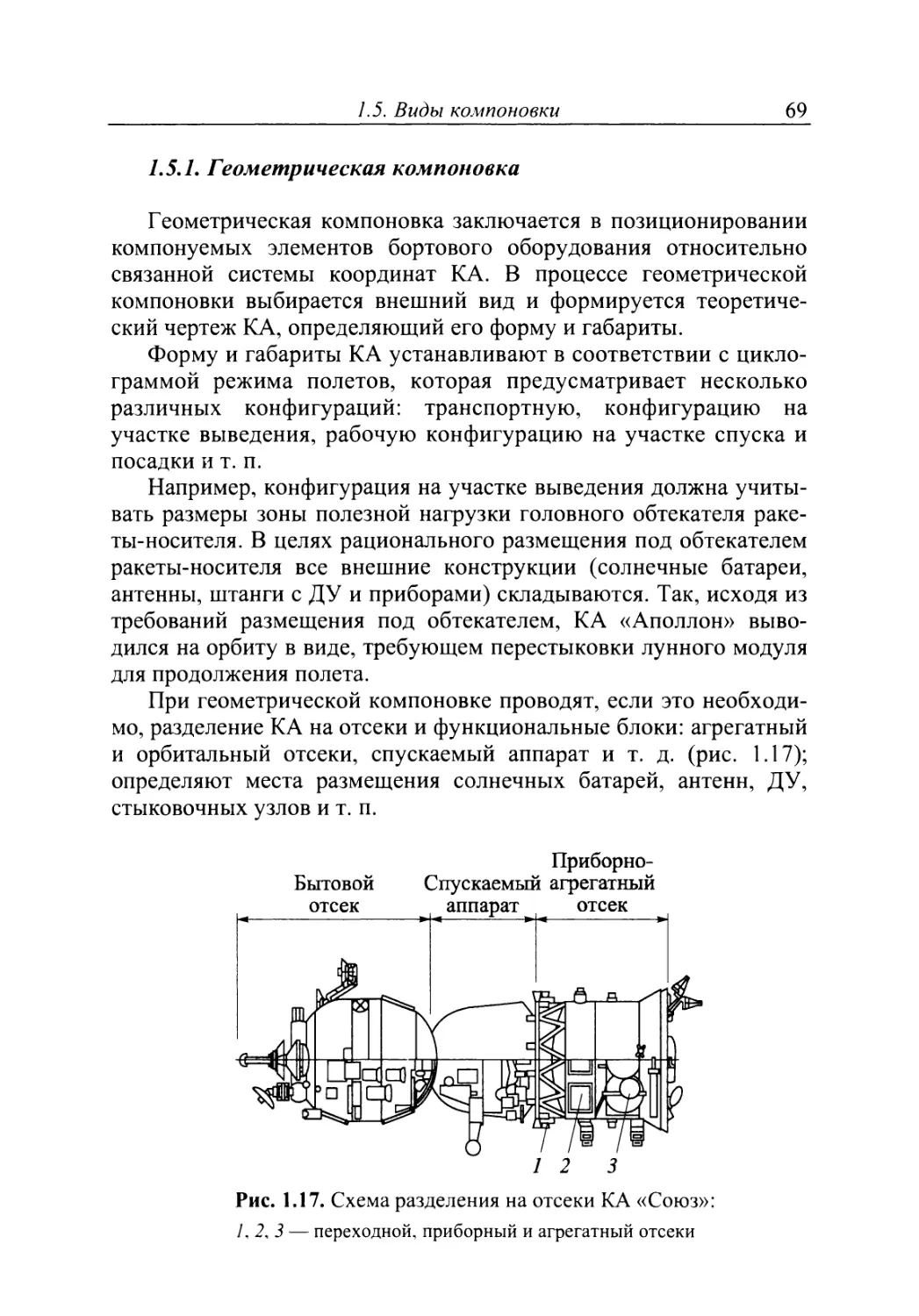
3.2.2. Силовые элементы, используемые при разработке конструктивно-силовой схемы отсека.................. 136
3.2.3. Форма отсеков ............................... 139
3.3. Компоновка герметичных отсеков .................... 140
3.3.1. Компоновка приборных отсеков ................ 140
3.3.2. Особенности компоновки отсека малого удлинения .... 140
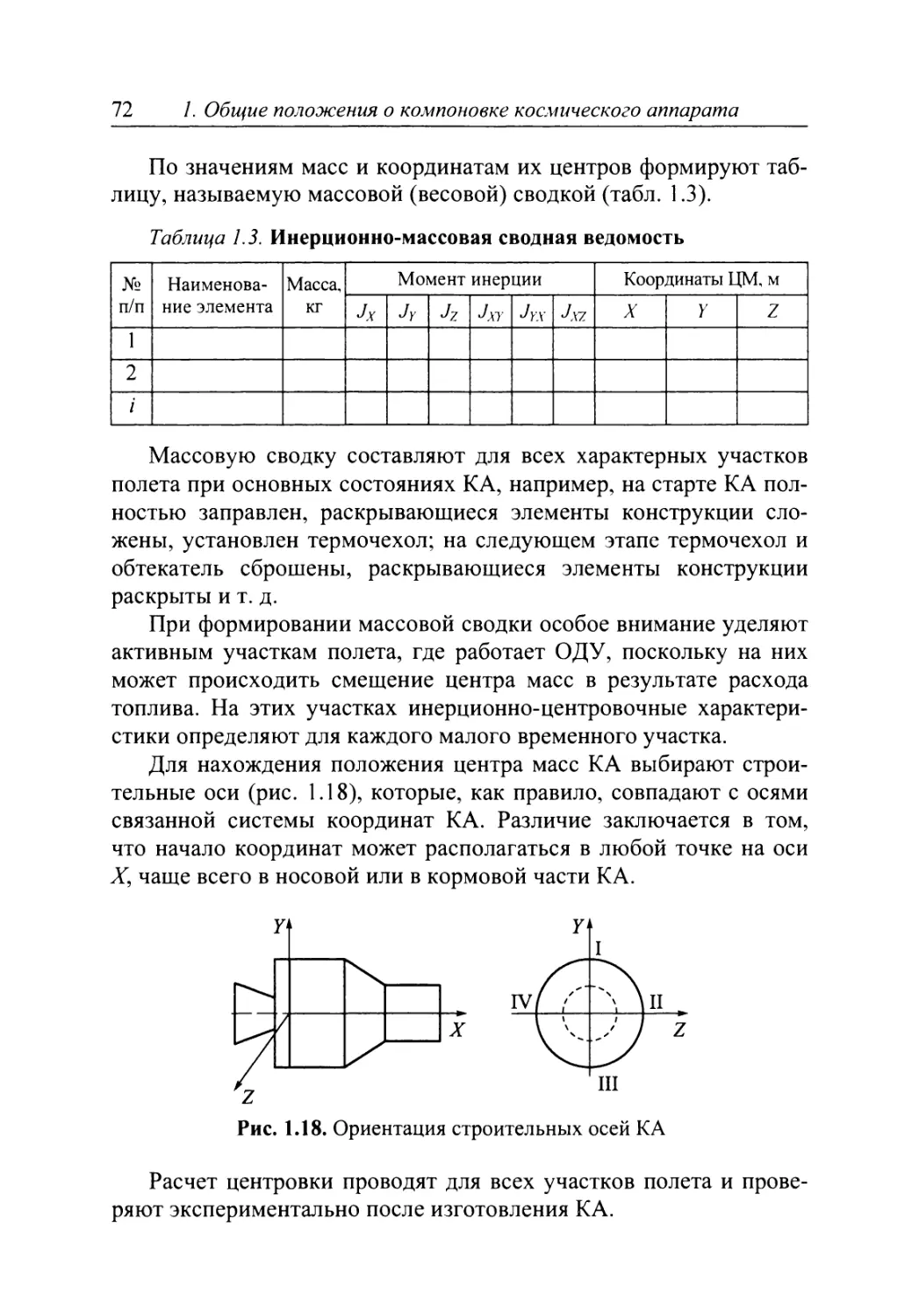
3.3.3. Особенности компоновки отсека большого удлинения . 142
3.3.4. Компоновка приборов в деформируемых отсеках . 144
3.4. Компоновка негерметичных отсеков................... 148
3.4.1. Общие сведения............................... 148
3.4.2. Ферменный отсек.............................. 152
3.4.3. Компоновка негерметичных отсеков наноспутников ... 158
Оглавление
5
3.5. Раскрывающиеся конструкции космических аппаратов........ 163
3.5.1. Конструктивные элементы, раскрывающихся конструкций........................................ 163
3.5.2. Механизмы раскрытия шарниров ............... 164
3.5.3. Механизм раскрытия штанги с магнитометром .. 180
3.5.4. Развертываемая стержневая система .......... 182
3.5.5. Разворачиваемая телескопическая балка....... 182
3.5.6. Механизм развертывания ленты ............... 186
3.6. Блочно-секционная компоновка ..................... 186
4. Компоновка целевого оборудования....................... 191
4.1. Назначение целевого оборудования ................. 191
4.1.1. Мониторинг поверхности суши ................ 191
4.1.2. Мониторинг водной поверхности и ее взаимодействия с атмосферой....................................... 192
4.1.3. Мониторинг атмосферы Земли ................. 192
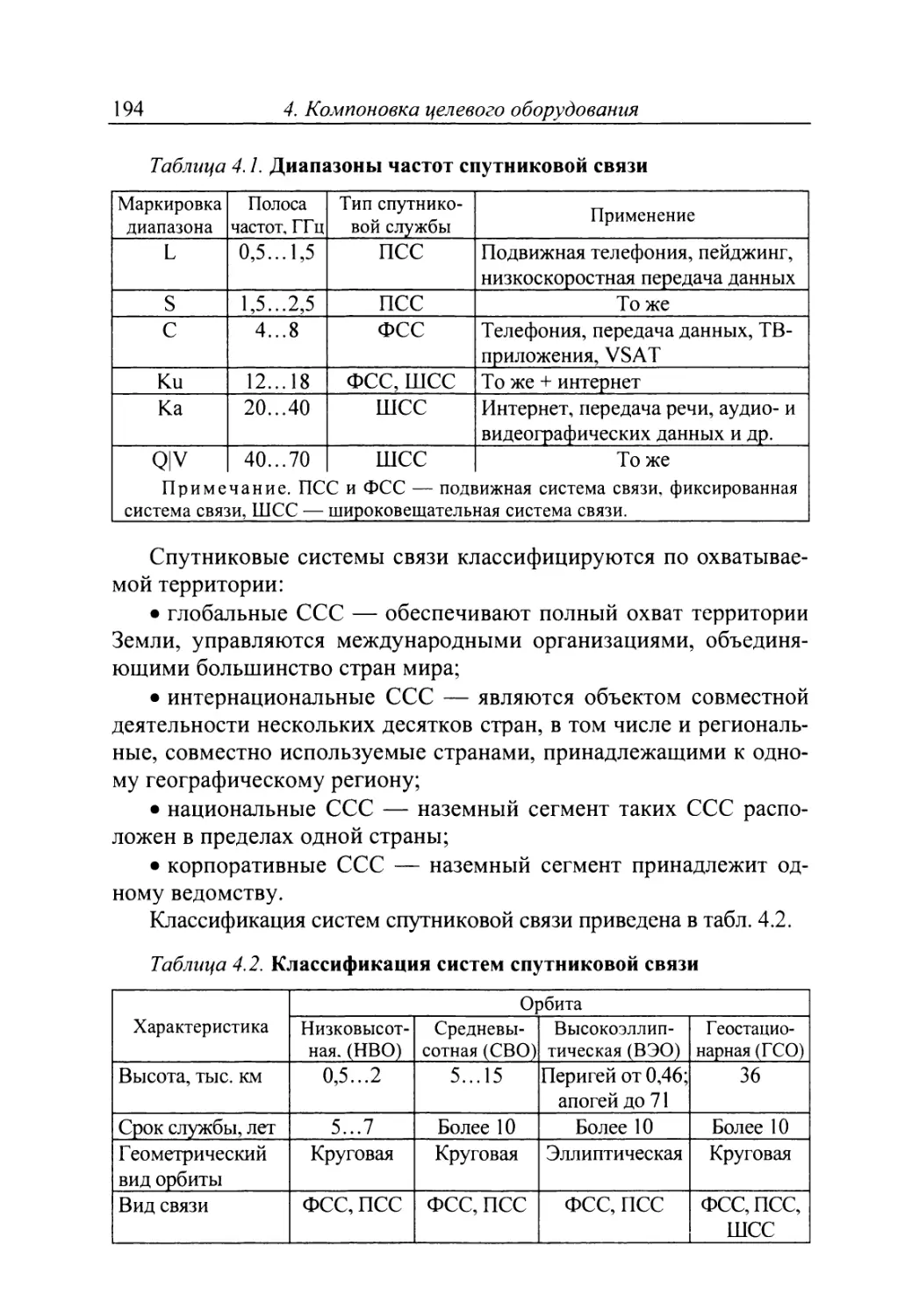
4.1.4. Спутниковая связь .......................... 193
4.1.5. Навигационные космические аппараты ......... 195
4.1.6. Построение системы обзора .................. 196
4.1.7. Получение новых материалов ................. 198
4.2. Особенности целевого оборудования, влияющие на компоновку ............................................... 199
4.2.1. Аппаратура для фотонаблюдений............... 199
4.2.2. Телевизионное сканирующее оборудование ......212
4.2.3. Инфракрасная аппаратура наблюдения...........213
4.2.4. Особенности компоновки микроволнового радиометра .... 217
4.2.5. Радиовысотомеры..............................226
4.2.6. Радиолокационные системы наблюдения .........228
4.2.7. Системы спутниковой связи....................230
4.2.8. Навигация....................................239
4.2.9. Научно-технологическое оборудование..........246
4.2.10. Компоновка бортового оборудования для внеатмосферной астрономии..................................252
4.2.11. Запись и хранение на борту КА полученной информации ..............................................291
4.3. Требования к компоновке целевого оборудования......293
5. Компоновка систем управления движением космического аппарата ................................................. 296
5.1. Общие сведения об управлении движением космического аппарата................................................296
5.1.1. Классификация СУД ...........................296
5.1.2. Активные СУД и требования, предъявляемые к ним.299
6
Оглавление
5.1.3. Задачи, выполняемые БЦВК, состав и компоновка .302
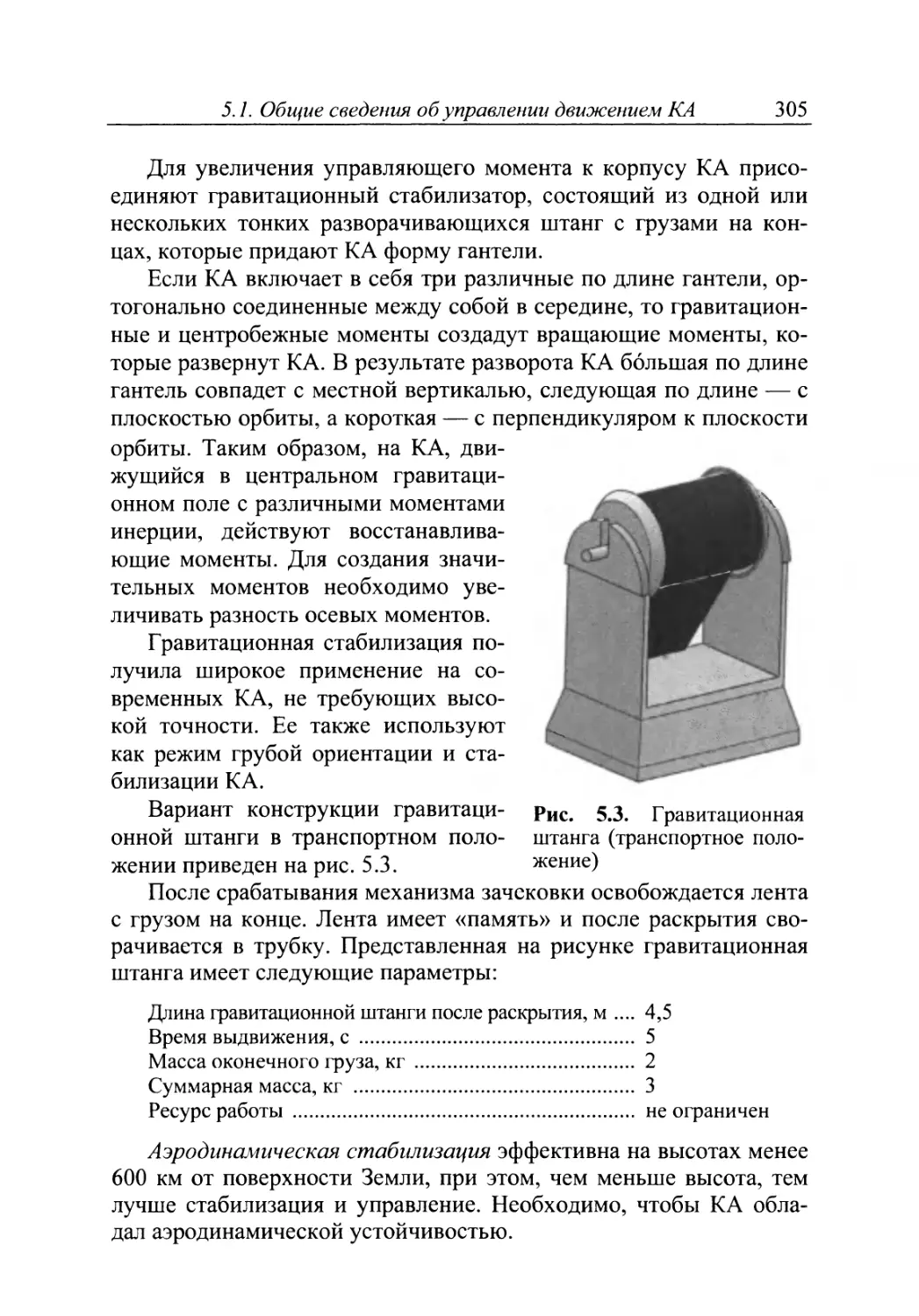
5.1.4. Пассивные системы ориентации и стабилизации ...303
5.2. Компоновка бортового оборудования системы управления движением.................................................307
5.2.1. Особенности компоновки гироскопических приборов ... 307
5.2.2. Особенности компоновки ИКВ ....................308
5.2.3. Компоновка электромеханических исполнительных органов...............................................309
5.3. Компоновка двигателей системы управления движением ..320
5.3.1. Классификация двигателей КА ...................320
5.3.2. Структура системы исполнительных органов, работающих на жидком топливе ...............................321
5.3.3. Требования, предъявляемые к компоновке двигателей.322
5.3.4. Варианты размещения двигателей.................322
5.3.5. Крепление двигателей ..........................325
5.3.6. Электрореактивные и ядерные двигатели КА .333
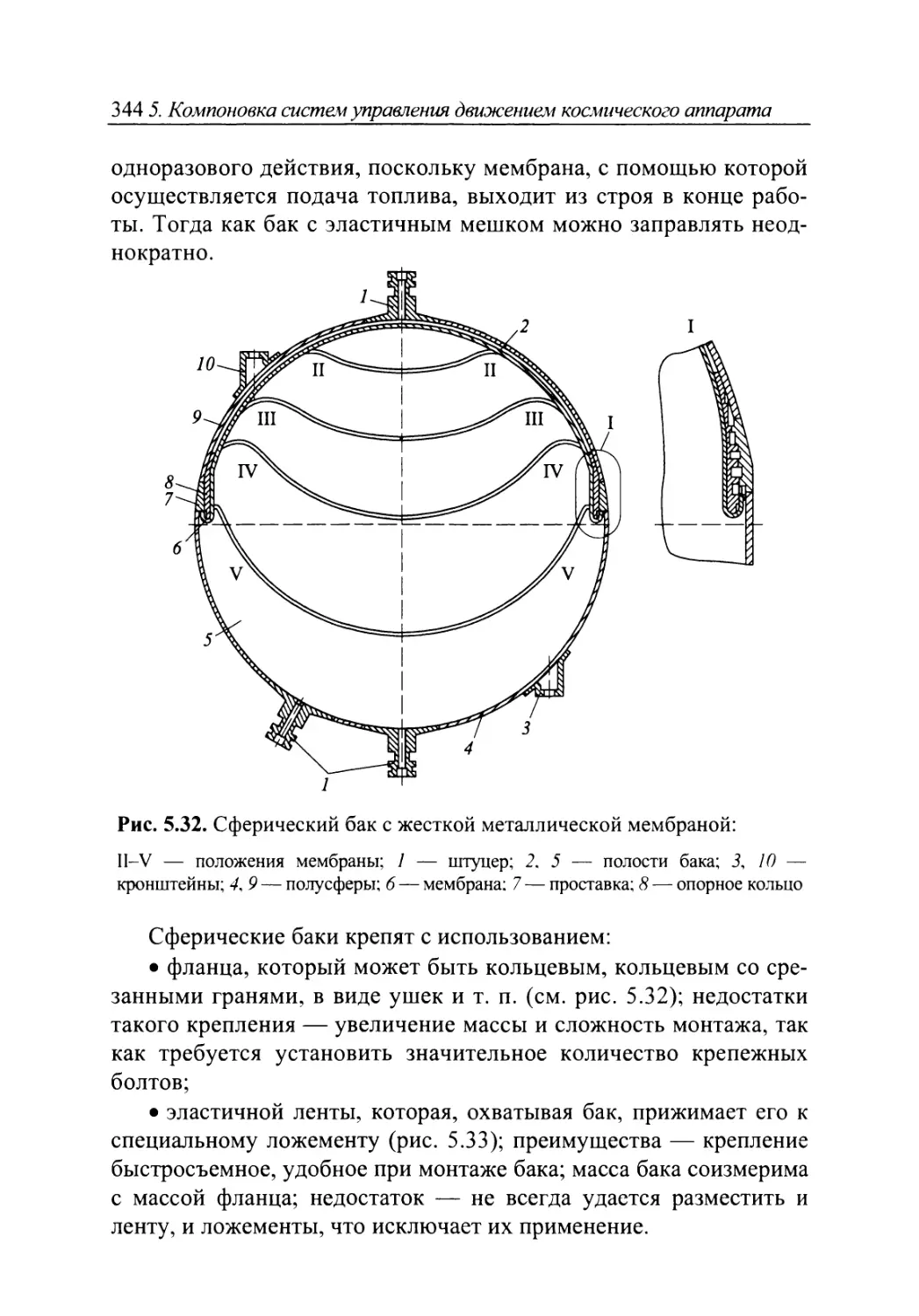
5.3.7. Компоновка топливных баков.....................341
5.3.8. Варианты взаимного размещения баков............349
5.4. Особенности компоновки системы управления движением малых космических аппаратов...............................350
6. Компоновка радиотехнического комплекса управления космического аппарата...........................................357
6.1. Структура и основные особенности систем радиоуправления.357
6.2. Системы радиотехнической связи ......................359
6.3. Управление сближением и стыковкой ...................361
6.4. Радиотелеметрические системы.........................364
6.5. Бортовые антенно-фидерные устройства.................367
6.6. Одноэлементные антенны ..............................372
6.7. Многоэлементные антенны..............................377
6.8. Конструкции и механизмы раскрывающихся антенн........380
6.9. Требования к компоновке антенн ......................395
7. Компоновка оборудования системы генерирования электроэнергии ............................................. 398
7.1. Общие сведения.......................................398
7.2. Электрохимические источники тока ....................402
7.3. Физические источники электроэнергии..................414
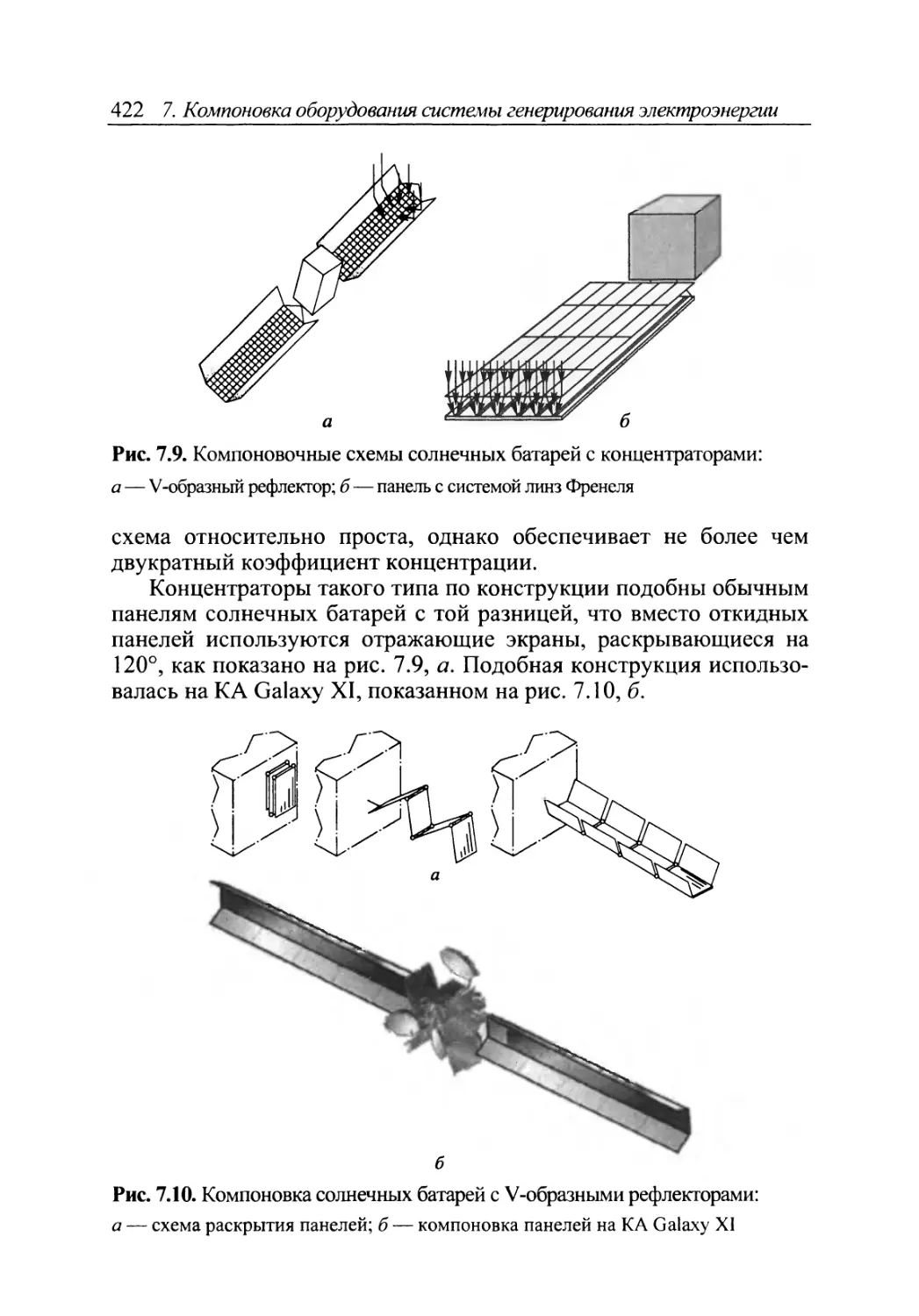
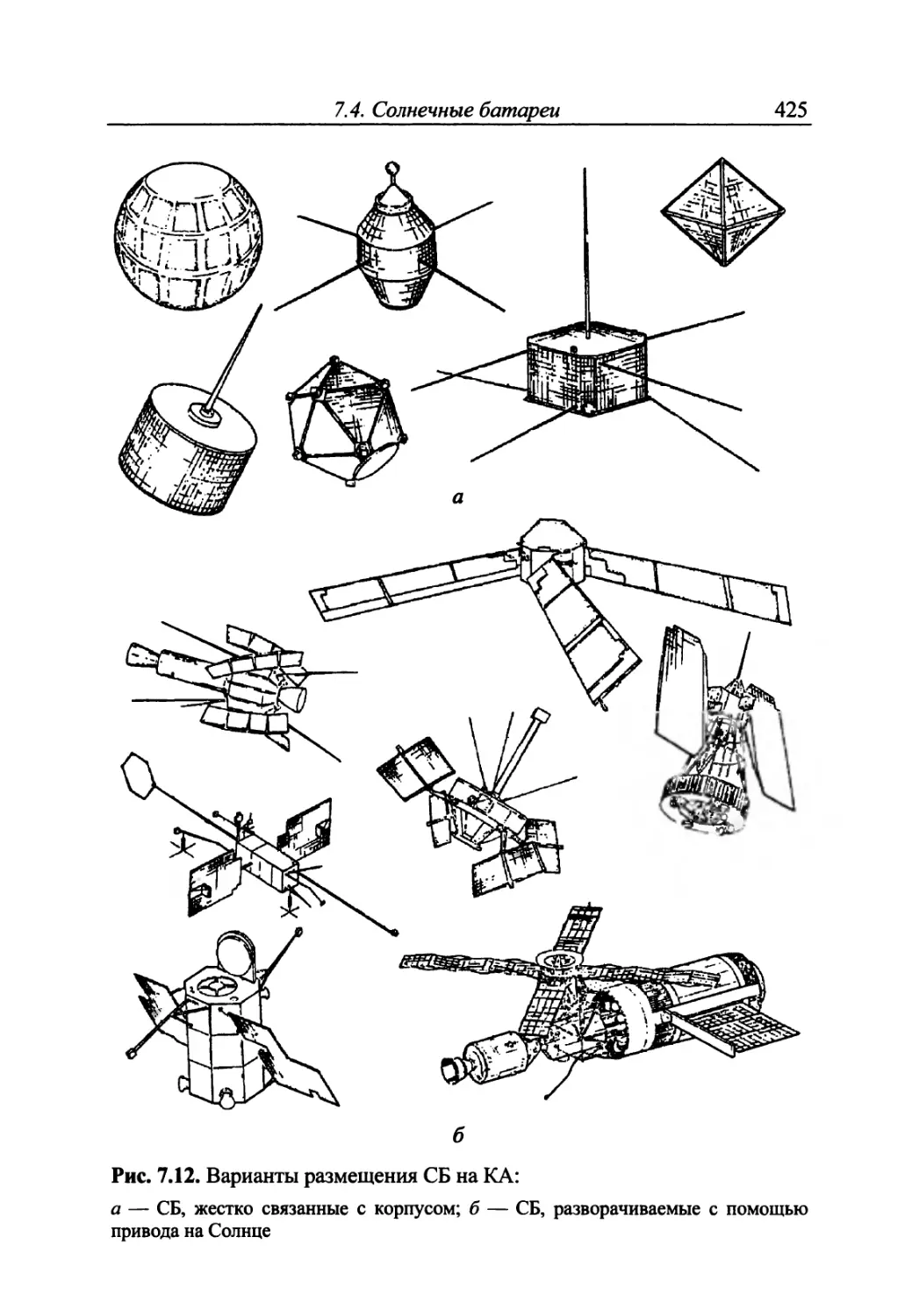
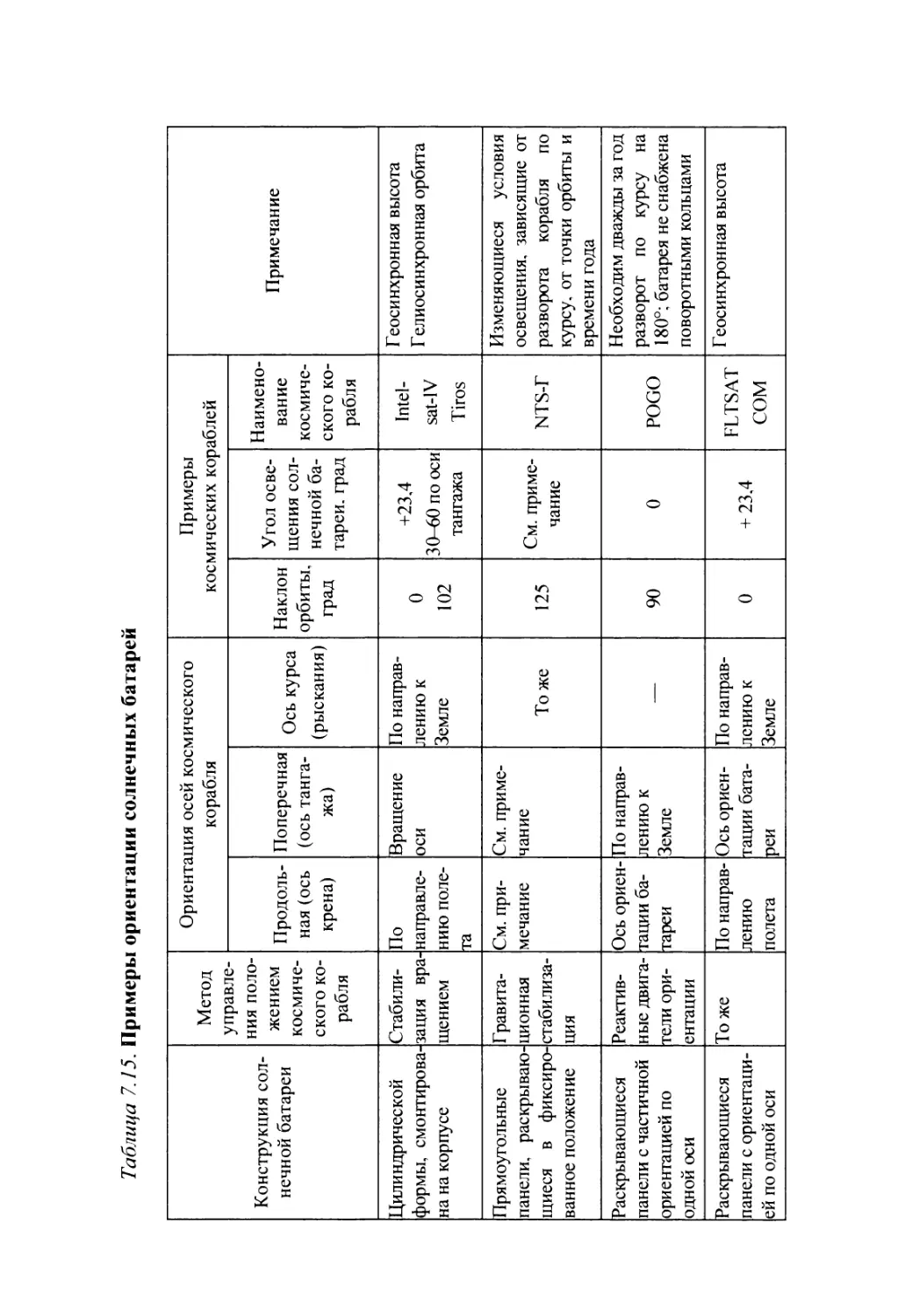
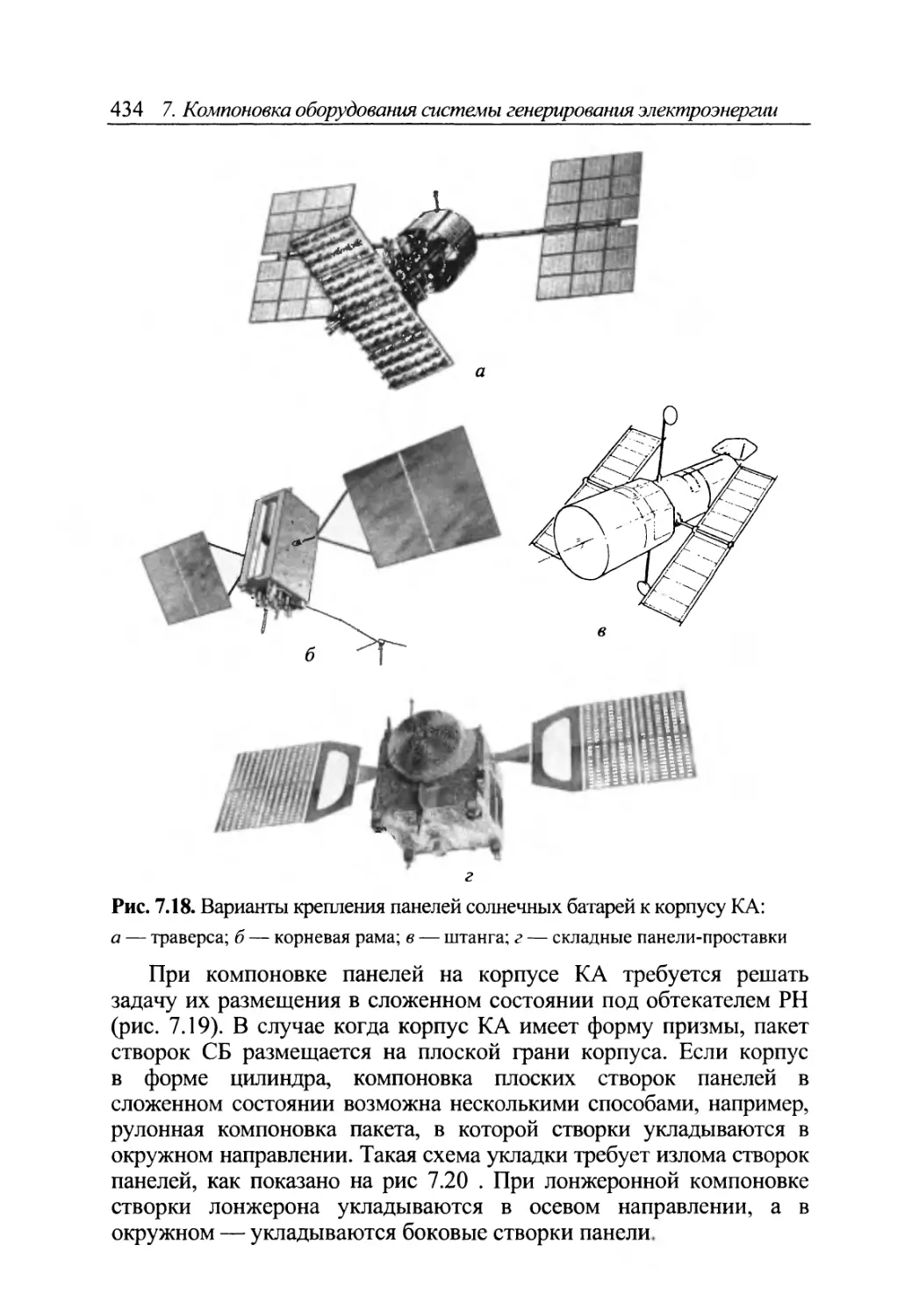
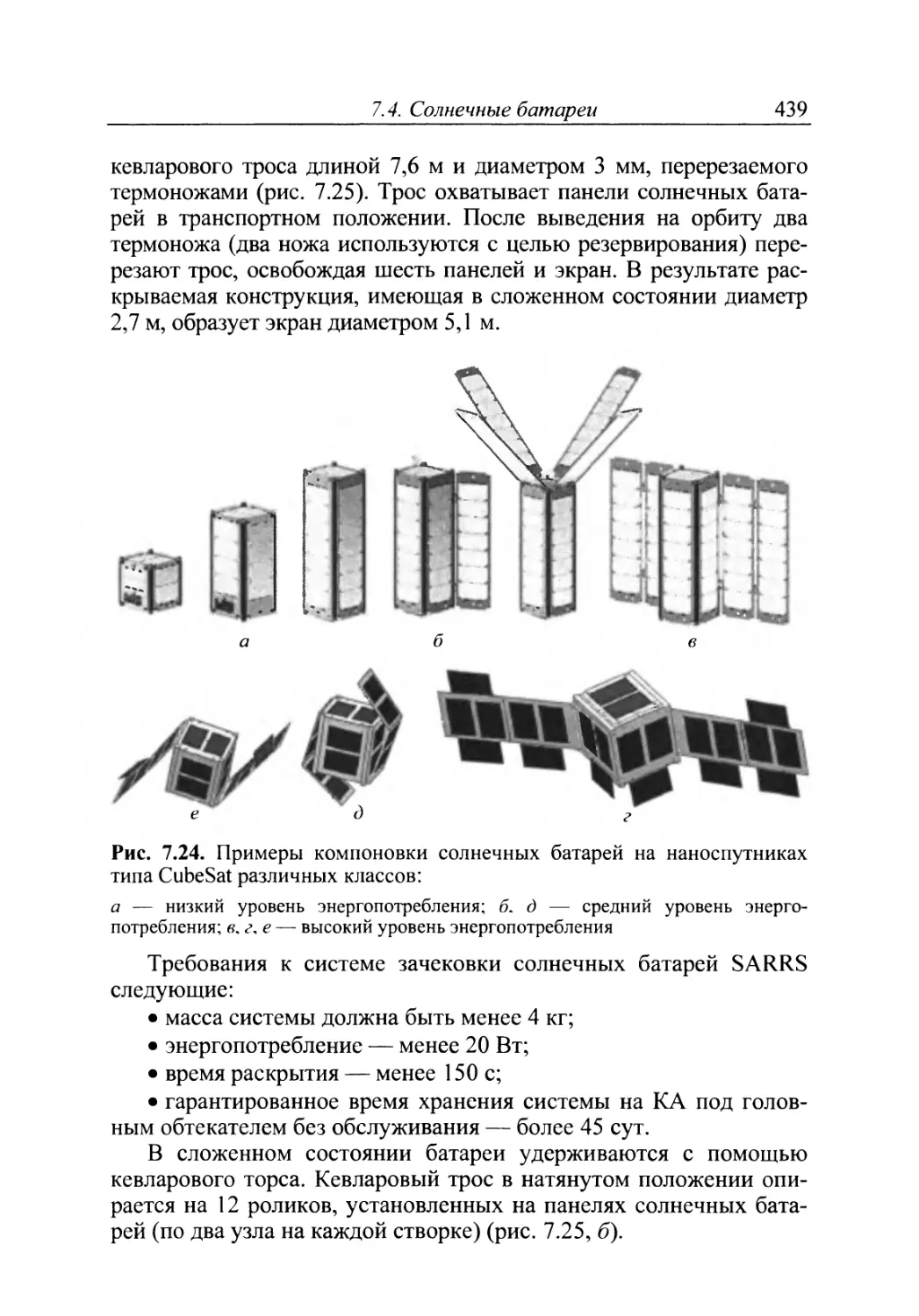
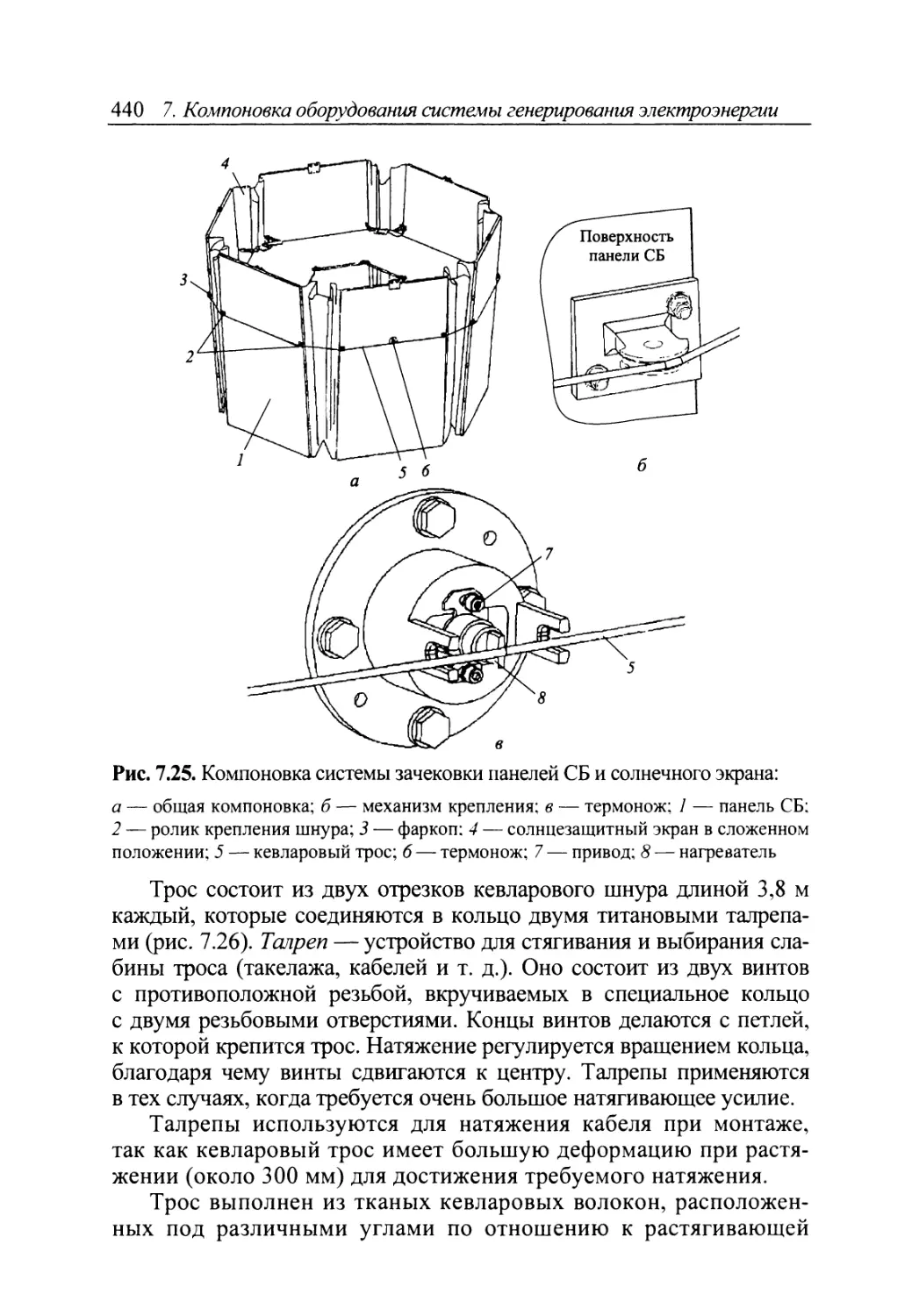
7.4. Солнечные батареи ...................................415
7.5. Космические ядерные энергоустановки..................444
7.6. Компоновка радиоизотопных генераторов ...............453
Оглавление
7
8. Компоновка системы терморегулирования....................455
8.1. Цели и задачи системы обеспечения теплового режима .455
8.2. Основные компоновочные элементы системы обеспечения теплового режима.........................................459
8.3. Схема системы обеспечения теплового режима .........471
8.4. Требования к размещению элементов системы обеспечения теплового режима.........................................473
9. Компоновка системы соединения и разделения элементов конструкции космического аппарата ..........................479
9.1. Общие сведения......................................479
9.2. Пиромеханизмы.......................................481
9.3. Толкатели, пирочеки и механизмы разрыва коммуникаций .... 493
9.4. Требования к компоновке пиромеханизмов .............501
9.5. Адаптеры системы соединения и разделения космического аппарата и ракеты-носителя ..............................503
10. Основы автоматизации компоновки космических аппаратов ..510
10.1. Цели и задачи автоматизации компоновки космических аппаратов................................................510
10.1.1. Цели автоматизации ..........................510
10.1.2. Задачи автоматизации ........................511
10.2. Система компьютерных технологий компоновки космических аппаратов...........................................513
10.2.1. Конструкторские САПР ........................516
10.2.2. Инженерные САПР .............................516
10.2.3. Технологические САПР ........................517
10.3. Принципы автоматизации компоновки космических аппаратов ...................................................519
10.3.1. Электронные геометрические модели ...........519
10.3.2. Параметрическая компоновка КА................525
10.3.3. Способы построения ЭГМ.......................528
10.3.4. Компоновка с использованием электронных макетов .... 535
10.3.5. Приемы автоматизации компоновки КА...........537
10.4. Основные этапы автоматизации компоновки космических аппаратов................................................544
10.4.1. Этапы компоновки ............................544
10.4.2. Пример процесса автоматизации компоновки.....545
10.5. Пример автоматизации компоновки системы управления движением малого космического аппарата ..................551
Контрольные вопросы ........................................560
Литература..................................................564
Предисловие ко второму изданию
Опыт использования перового издания учебного пособия студентами при выполнении курсовых и дипломных проектов по дисциплине «Космические летательные аппараты и разгонные блоки» и по направлению «Ракетостроение и космонавтика» показал, что пособие нуждается в дополнении. Кроме того, за время, прошедшее после выхода первого издания, в результате анализа большого количества материалов, доступных в сети Интернет, статей в журналах «Полет», «Вестник НПО им. Лавочкина», «Космическая техника и технология», а также материалов международных конференций, во второе издание включены новые разделы, графические и справочные материалы. В частности, добавлены: перечень основных нормативных документов, регламентирующих разработку космических аппаратов; пример оформления комплекта документации на малый космический аппарат; компоновка спутников связи и навигации; основные элементы раскрывающихся конструкций; конструкция и способы раскрытия солнечных батарей и антенн; компоновка космических аппаратов для астрономических исследований; компоновка микро- и наноспутников; конструкции механизмов разделения и терморегулирования; компоновка элек-трореактивных двигателей и источников электроэнергии.
Авторы выражают благодарность рецензентам: профессору МАИ А.А. Золотову и заместителю главного конструктора ОАО НПО «Машиностроение» А.И. Бурганскому за ценные указания, сделанные при рецензировании материала, подготовленного ко второму изданию.
Предисловие
В учебном пособии рассмотрены методология формирования внешнего вида космического аппарата, а также собраны основные критерии и принципы, применяемые при компоновке его бортового оборудования, которые необходимо знать начинающему конструктору. Приведены основные характеристики всех видов бортового оборудования: целевого, обслуживающего и вспомогательного. Особое внимание уделено вопросам автоматизации компоновочных работ с помощью компьютерных систем твердотельного параметрического моделирования.
Издание предназначено для студентов, обучающихся проектированию космических аппаратов и разгонных блоков.
Учебное пособие соответствует программам учебных дисциплин специальности «Космические летательные аппараты и разгонные блоки» по направлению «Ракетостроение и космонавтика».
Авторы выражают благодарность рецензентам А.И. Бурган-скому и А.А. Золотову, а также студентке И.А. Халоян и аспиранту С.А. Короткому кафедры «Аэрокосмические системы» за помощь в создании книги.
В гл. 1 изложены общие положения о компоновке космического аппарата, определен набор исходной технической документации, требуемой для выполнения компоновки. Описаны основные этапы компоновочных работ и виды компоновки.
Критерии оценки качества компоновки космического аппарата, методики их оценки сформулированы в гл. 2.
Вопросам выбора внешнего вида и формы отсеков космического аппарата, особенностям компоновки различных отсеков, а также блочно-модульной компоновке посвящена гл. 3.
Правила компоновки целевого оборудования, требования к компоновке целевых систем и особенности целевого оборудования, оказывающие влияние на компоновку, рассмотрены в гл. 4.
10 Предисловие
В гл. 5 изложены особенности компоновки систем управления движением (СУД): компоновки измерительной аппаратуры СУД и системы исполнительных органов СУД.
Вопросам компоновки обслуживающего бортового оборудования (радиотехнического комплекса управления космического аппарата, оборудования систем генерирования электроэнергии и терморегулирования, систем соединения и разделения элементов конструкции космического аппарата) посвящены гл. 6-9.
В гл. 10 даны основы автоматизированной компоновки с использованием современных компьютерных технологий.
Введение
Космический аппарат (КА) — летательный аппарат, предназначенный для выполнения исследовательских задач с помощью целевого оборудования в космическом полете высотой более 100 км от поверхности Земли.
Задачи, выполняемые КА, разнообразны: космические телевидение, связь, метеорология, мониторинг поверхности Земли (поиск полезных ископаемых, обнаружение очагов пожара в труднодоступных местах, проблемы сельского хозяйства), определение координат кораблей и самолетов (например, системами ГЛОНАСС, GPS) и т. д. В пилотируемых полетах от одного-двух витков перешли к полетам в тысячи витков, от спутника массой десятки килограммов — к многотонным космическим станциям. Космические аппараты, посланные с Земли, исследуют Луну, Марс, Венеру, Юпитер и дальний космос. Разработаны и совершают полеты в космос крылатые космические корабли многоразового использования. Многие задачи, имеющие большое промышленно-хозяйственное значение, выполняются малыми космическими аппаратами (МКА).
Постоянная необходимость в создании новых КА вызвана появлением:
• новых технических возможностей, реализация которых значительно повышает тактико-технические и экономические показатели КА и приводит к непрерывному моральному старению существующих КА;
• новых задач, решение которых на существующих КА невозможно, поскольку ограничено время их существования, недостаточны совершенны технические характеристики и т. п.
Один из важнейших этапов создания нового КА — его компоновка.
Для реализации целевых задач КА снабжен комплексом бортового оборудования, состоящего из узлов и агрегатов, которые
12
Введение
выполняют определенные функциональные задачи. Бортовое оборудование подразделяется на целевое, выполняющее заданную целевую задачу, и обеспечивающее (служебное), необходимое для выполнения целевой задачи.
Компоновка бортового оборудования КА — объединение элементов конструкции (отсеков, агрегатов, узлов) и приборов бортового оборудования в систему, предназначенную для выполнения в течение заданного времени функциональных задач КА, определяемых его назначением.
Компоновка — не формальный этап разработки КА, а сложный творческий процесс, заключающийся в создании оригинальной конструкции КА, служащего для реализации предъявляемых к нему требований. Компоновку осуществляют с учетом опыта конструктора, а также новейших достижений науки и техники.
При выполнении компоновки формируются тактико-технические и эксплуатационные характеристики КА, что требует проведения глубокого анализа возможных рациональных вариантов компоновки, особенно на начальных этапах работы.
Компоновка включает:
• определение состава бортового оборудования КА;
• выбор геометрической формы корпуса КА;
• разделение (декомпозицию) корпуса на отсеки, агрегаты и узлы;
• рациональное размещение оборудования в корпусе и отсеках.
Внешний вид КА обусловлен конструктивно-компоновочной схемой, выбор которой проводят исходя из приборного состава оборудования, требований к его герметичности, прочностным и динамическим характеристикам. При выборе конструктивно-компоновочной схемы важна аэродинамическая форма КА.
Процесс компоновки КА и его отсеков представляет собой процесс синтеза системы с большим количеством элементов и связей. Отличительная особенность любой системы — наличие интегративного свойства, т. е. свойства, присущего только системе в целом, а не выводимого из свойств составляющих систему частей. Конструктивная задача компоновки КА как системы с заданными интегративными свойствами — инженерная задача второго уровня с множеством допустимых решений.
При отсутствии автоматизации процесс разработки рационального варианта компоновки занимает длительное время, поскольку инженер-проектировщик должен увязать большое число противо
Введение
13
речивых требований и ограничений, на что необходимо много времени, поэтому в настоящее время внедряются автоматизированные методы компоновки.
Причины, вызывающие необходимость автоматизации проектно-компоновочных работ, обусловлены тем, что за последнее время эффективность труда в сфере производства по сравнению с проектными работами значительно возросла. Также практически исчерпаны возможности выполнения увеличивающегося объема проектных работ за счет роста количества конструкторов, которое в настоящее время сокращается. Кроме того, организация целенаправленной деятельности большого числа специалистов и конструкторов в рамках традиционных форм и методов ведения проектно-конструкторских работ превращается в сложную организационную проблему.
Использование ЭВМ в процессе проектирования компоновки КА обеспечивает:
• сбор, анализ и обработку информации о характеристиках прототипов проектируемого КА и бортового оборудования для выполнения требуемой целевой задачи;
• создание многофункциональной базы данных о КА и его оборудовании с выполненными вариантами компоновок целевого и обеспечивающего оборудования с учетом различных проектных критериев компоновки;
• выбор рациональных вариантов компоновок для дальнейшего проектирования и реализации главных проектных критериев компоновки;
• выпуск комплекта чертежей и схемно-текстовой проектной технической документации на проектируемый КА и его оборудование.
Автоматизацию проектных работ по компоновке КА на базе компьютерных технологий осуществляют путем взаимодействия человека и ЭВМ, причем весьма важен принцип эргодичности, т. е. возможность для инженера-проектировщика играть активную роль в человеко-машинной системе.
Для автоматизированного проектирования КА конструктору необходимо знать главные и проектные критерии компоновки, которые зависят от условий функционирования КА, а также особенности и основные принципы компоновки бортового оборудования, которые во многом обусловлены техническими характеристиками и принципами функционирования этих систем.
Принятые сокращения
ААР — активная антенная решетка
АВУ — астровизирующее устройство
АДД — аналоговый датчик давления
АИМ — амплитудно-импульсная модуляция
АПСН — аппаратура потребителя спутниковой навигации
АФАР — активная фазирующая антенная решетка
АФУ — антенно-фидерное устройство
БВК — бортовой вычислительный комплекс
БГО — бесплатформенный гироскопический ориентатор
БИУС — бортовой измеритель угловой скорости
БКУ — бортовой комплекс управления
БСК — блок сигналов и команд
БЦВК — бортовой цифровой вычислительный комплекс
БЦВМ — бортовая цифровая вычислительная машина
ВВ — взрывчатое вещество
ВИМ — временно-импульсная модуляция
ГМП — гибридно-модульный преобразователь
ГПО — гиростабилизированный прибор ориентации
ГУ — гироскопическое устройство
ДЖС — двигатели жесткой стабилизации
ДМ — двигатель-маховик
ДМС — двигатели мягкой (малой) стабилизации
ДУ — двигательная установка
ЕНВВФ — единые нормы внешних воздействующих факторов
ЖРД — жидкостный ракетный двигатель
ИК — инфракрасный
ИКВ — инфракрасная вертикаль
ИКПМВ — инфракрасный построитель местной вертикали
ИКСА — инфракрасная сканирующая аппаратура
ИП — измерительный пункт
ИУС — измеритель угловой скорости
КА — космический аппарат
Принятые сокращения
15
квц — координационно-вычислительный центр
кди — конструкторско-доводочные испытания
КИА — контрольно-измерительная аппаратура
КИК — командно-измерительный комплекс
кпэо — комплексный план экспериментальной отработки
КС — космическая среда
лки — летно-конструкторские испытания
лс — линия связи
мдш — малоимпульсный детонирующий шнур
МКА — малый космический аппарат
МНА — малонаправленная антенна
МСУ — многоканальное сканирующее устройство
НИР — научно-исследовательские работы
НКУ — наземный комплекс управления
нэо — наземная экспериментальная отработка
оду — основная двигательная установка
ОКР — опытно-конструкторские работы
ОНА — остронаправленная антенна
ОТУ — общее техническое условие
ОЭА — оптико-электронная аппаратура
ОЭАН — оптико-электронная аппаратура наблюдения
пвк — прибор выдачи команд
ПВУ — программно-временное устройство
пгп — прибор геомагнитного поля
пгпо — прецизионная гиростабилизированная платформа ориентации
ПЗС — прибор с зарядовой связью
ПЗУ — постоянное запоминающее устройство
пмо — программно-математическое обеспечение
пси — приемо-сдаточные испытания
РВВ — радиовысотомер вертикаль
РДТТ — реактивный двигатель твердого топлива
РЛС — радиолокационная станция
РДПУ — радиоприемное устройство
РПРУ — радиопередающее устройство
РСА — радиолокатор с синтезированной апертурой
РСПИ — радиосистема передачи информации
РТК — радиотехнический комплекс
РТО — радиационный теплообменник
РТС — радиотелеметрическая система
САПР — система автоматизированного проектирования
САС — срок активного существования
САУ — система автоматического управления
16
Принятые сокращения
свдз — спектрометр видимого диапазона зондирования
сгэ — система генерирования электроэнергии
сдк — система доплеровской коррекции
сжо — система жизнеобеспечения
сио — система исполнительных органов
сктк — система компьютерных технологий компоновки
со — система ориентации
СОТР — система обеспечения теплового режима
СПУ — система полуавтоматического управления
сс — система стабилизации
сскм — система сброса кинетического момента
ссн — система спутниковой навигации
СТР — система терморегулирования
СУД — система управления движением
ттз — тактико-техническое задание
тэг — термоэлектрический генератор
тэмг — термоэмиссионный генератор
УДМ — управление двигателем-маховиком
УИВК — управляющий информационно-вычислительный комплекс
УКЗ — удлиненный кумулятивный заряд
УКК — устройство кодирования каналов
УКП — универсальная космическая платформа
УРК — устройство разделения каналов
УУК — устройство уплотнения каналов
ЦБК — центральный бортовой компьютер
чим — частотно-импульсная модуляция
ШИМ — широтно-импульсная модуляция
эвв — эластичное взрывчатое вещество
эвти — экранно-вакуумная теплоизоляция
эгм — электронная геометрическая модель
эмио — электромеханический исполнительный орган
эмсс — электромеханическая система стабилизации
эоп — электронно-оптический преобразователь
эпк — электропневмоклапан
эхит — электрохимический источник тока
ФАР — фазированная антенная решетка
ЧТУ — частное техническое условие
ЯЭУ — ядерная энергоустановка
1. ОБЩИЕ ПОЛОЖЕНИЯ О КОМПОНОВКЕ КОСМИЧЕСКОГО АППАРАТА
1.1. Документы, регламентирующие
космическую деятельность
При разработке КА, планировании и проведении на нем экспериментальных работ разработчик должен руководствоваться следующими документами.
1. Закон РФ от 20 августа 1993 г. № 5663-1 О космической деятельности (с изменениями и дополнениями).
Настоящий Закон направлен на обеспечение правового регулирования космической деятельности в целях развития экономики, науки и техники, укрепления обороны и безопасности Российской Федерации и дальнейшего расширения международного сотрудничества Российской Федерации.
В Российской Федерации исследование и использование космического пространства, в том числе Луны и других небесных тел, являются важнейшими приоритетами государственных интересов (преамбула в ред. Федерального закона от 29.11.1996 № 147-ФЗ).
2. Основные положения основ государственной политики Российской Федерации в области космической деятельности на период до 2030 года и дальнейшую перспективу от 19 апреля 2013 г. № Пр-906.
Настоящими Основами определяются государственные интересы, принципы, главные цели, приоритеты и задачи государственной политики Российской Федерации в области исследования, освоения и использования космического пространства, включая международное сотрудничество в данной сфере.
18
1. Общие положения о компоновке космического аппарата
3. ГОСТ Р 52017—2003. Аппараты космические. Порядок подготовки и проведения космического эксперимента.
Настоящий стандарт устанавливает порядок подготовки и проведения космических экспериментов, сбора, обработки, хранения и использования материалов космических экспериментов научного, социально-экономического и коммерческого назначения, проводимых на пилотируемых и автоматических космических аппаратах, входящих в состав пилотируемого космического комплекса, создание которых полностью или частично финансируется из средств федерального (регионального) бюджета.
Порядок подготовки и проведения коммерческих и зарубежных экспериментов, проводимых на пилотируемом космическом комплексе, дополнительно определяют условия контрактов и соответствующих международных договоров (соглашений).
4. ГОСТ 19.201—78, Р55996—2014. Техническое задание, требования к содержанию и оформлению.
Техническое задание на проектирование космического аппарата (разрабатывается заказчиком) и технические задания разрабатываемые головным разработчиком КА для изготовления комплектующих изделий, должны быть выполнены в соответствии с настоящим стандартом.
5. ГОСТ 2.102—2013 ЕСКД. Виды и комплектность конструкторских документов.
Техническая документация на изготовление КА выполняется в соответствии с ГОСТ 2.102-2013 ЕСКД. Виды и комплектность конструкторских документов. Межгосударственный стандарт. Единая система конструкторской документации. Виды и комплектность конструкторских документов.
Настоящий стандарт устанавливает виды и комплектность конструкторских документов на изделия всех отраслей промышленности. Стандарт устанавливает общие положения по целевому назначению, области распространения, классификации и обозначению стандартов, входящих в комплекс Единой системы конструкторской документации (ЕСКД), а также порядок их внедрения.
6. ГОСТ 2.002—72. Требования к моделям, макетам и темплетам, применяемым при проектировании.
Настоящий стандарт распространяется на макеты, модели, применяемые в процессе макетного метода проектирования, и на
1.1. Документы, регламентирующие космическую деятельность 19
темплеты, применяемые при методе плоскостного макетирования проектных решений, и устанавливает основные термины и их определения, масштабы и правила изображения макетов, моделей и темтлетов (изделий, зданий, сооружений и их составных элементов), применяемых при разработке проектов промышленных предприятий, опытно-промышленных установок и сооружений.
7. ГОСТ 2.051—2006. Электронные документы.
Устанавливает общие требования к выполнению электронных конструкторских документов изделий машиностроения и приборостроения.
8. ГОСТ 2.004—88. Общие требования к выполнению конструкторских и технологических документов на печатающих и графических устройствах вывода ЭВМ.
Распространяется на конструкторские документы изделий всех отраслей промышленности, технологические документы изделий машиностроительной и приборостроительной промышленности, а также проектную документацию для строительства и устанавливает требования к выполнению конструкторских, технологических и проектных документов на бумажных носителях, получаемых с использованием устройств вывода ЭВМ.
При выборе конструкционных материалов и средств защиты КА от воздействия космической среды необходимо пользоваться данными требованиями.
9. ГОСТ Р 25645.167—2005. Космическая среда (естественная и искусственная). Модель пространственно-временного распределения плотности потоков техногенного вещества в космическом пространстве.
Устанавливает модель пространственно-временного распределения плотности потоков техногенного вещества размером более 0,1 см на удалении от поверхности Земли от 200 до 2 000 км в произвольный момент времени с 2000 по 2025 г. Стандарт предназначен:
• для использования в расчетах при определении условий функционирования и полета космических аппаратов в околоземном пространстве;
• разработки мероприятий по обеспечению экологической безопасности при создании и эксплуатации орбитальных средств;
• обоснования и оценки эффективности мероприятий и рекомендаций, направленных на ослабление антропогенного воздействия на космическую среду;
20
1. Общие положения о компоновке космического аппарата
• обоснования параметров и условий применения наземной и бортовой аппаратуры, предназначенной для измерения характеристик техногенного вещества в околоземном космическом пространстве.
10. ГОСТ Р 53802—2010. Системы и комплексы космические. Термины и определения.
Определения и сокращения, применяемые в разрабатываемой технической документации, должны соответствовать ГОСТу.
Термины, установленные настоящим стандартом, рекомендуется применять при разработке, производстве и эксплуатации космической техники, а также во всех видах документации.
Приведенные определения можно при необходимости изменять, вводя в них производные признаки, раскрывая значения используемых в них терминов, указывая объекты, входящие в объем определяемого понятия. Изменения не должны нарушать объем и содержание понятий, определенных в данном стандарте.
11. ГОСТ Р 52925—2008. Изделия космической техники. Общие требования к космическим средствам по ограничению техногенного засорения околоземного космического пространства.
Настоящий стандарт распространяется на изделия космической техники научного и социально-экономического назначения — системы, комплексы, образцы, аппаратуру, технологическую продукцию и др. изделия, а также на программный продукт и устанавливает требования к содержанию, построению, оформлению, порядку согласования, утверждения и внесению изменений:
• технического задания заказчика на выполнение опытноконструкторских работ по созданию (модернизации) изделий;
• технического задания заказчика на выполнение опытноконструкторских работ по созданию (модернизации) программного продукта для вычислительных машин, предназначенных для эксплуатации в наземных условиях;
• технического задания головного исполнителя ОКР по созданию (модернизации) составной части изделия.
Настоящий стандарт применяется при создании, производстве и эксплуатации изделий космической техники по международным договорам и в ходе реализации международных проектов и программ
1.2. Документы, регламентирующие правовые аспекты...
21
при условии согласия всех заинтересованных сторон, а также в случаях, когда его применение предписано требованиями технического задания на выполнение работ.
12. ГОСТ РВ 2039.304—98. Аппаратура, приборы, устройства и оборудование военного назначения. При разработке КА, имеющего оборонное значение, бортовая аппаратура компонуется в соответствии с ГОСТом.
Он устанавливает классификацию, номенклатуру, характеристики и значения технических требований к аппаратуре, приборам, устройствам и оборудованию по стойкости, прочности и устойчивости к внешним воздействующим факторам (механическим, климатическим, биологическим и специальным средам) в соответствии с условиями их применения в составе объектов вооружения и военной техники. Область распространения и сфера действия стандарта установлены в ГОСТ РВ 20.39.301. Порядок и методы испытаний на соответствие аппаратуры требованиям, заданным в настоящем стандарте, приведены в ГОСТ РВ 20.57.305, ГОСТ РВ 20.57.306 и ГОСТ РВ 20.57.307.
13. ГОСТ 25645.101—83. Атмосфера Земли верхняя. Модель плотности для баллистических расчетов искусственных спутников Земли.
Устанавливает модель плотности, методику расчета и значения средней плотности верхней атмосферы Земли и ее предельных отклонений в диапазоне высот от 120 до 1500 км для различных уровней солнечной активности при неопределенности даты и времени запуска искусственного спутника Земли.
1.2 . Документы, регламентирующие правовые аспекты использования космического пространства
1. Правовой режим космического пространства и небесных тел установлен серией резолюций Генеральной Ассамблеи ООН (1721 (XVI) от 20 декабря 1961 г., 1802 (XVII) от 14 декабря 1962 г., 1884 (XVIII) от 17 декабря 1963 г. и др.) и Договором о принципах деятельности государств по исследованию и использованию космического пространства, включая Луну и другие небесные тела (1967) (Договор по космосу), а также Соглашением о дея
22
1. Общие положения о компоновке космического аппарата
тельности государств на Луне и других небесных телах (1979) (Соглашение о Луне).
2. Принципы, касающиеся дистанционного зондирования Земли из космического пространства. Приняты резолюцией 41/65 Генеральной Ассамблеи ООН от 3 декабря 1986 года.
Термин «дистанционное зондирование» означает зондирование поверхности Земли из космоса с использованием свойств электромагнитных волн, излучаемых, отражаемых или рассеиваемых зондируемыми объектами, с целью лучшего распоряжения природными ресурсами, совершенствования землепользования и охраны окружающей среды.
Термин «деятельность по дистанционному зондированию» означает эксплуатацию космических систем дистанционного зондирования, станций по приему и накоплению первичных данных и деятельность по обработке, интерпретации и распространению обработанных данных.
3. Соглашение о создании международной системы и организации космической связи «Интерспутник» (с изменениями на 30 ноября 1996 года).
Договаривающиеся Стороны,
• признавая необходимость содействия укреплению и развитию всесторонних экономических, научно-технических, культурных и других отношений посредством осуществления связи, а также радио- и телевизионного вещания через искусственные спутники Земли;
• признавая полезность сотрудничества в теоретических и экспериментальных исследованиях, а также в проектировании, создании, эксплуатации и развитии международной системы связи через искусственные спутники Земли;
• в интересах развития международного сотрудничества на основе уважения суверенитета и независимости государств, равноправия, невмешательства во внутренние дела, а также взаимной помощи и взаимной выгоды;
• исходя из положений резолюции 1721 (XVI) Генеральной Ассамблеи Организации Объединенных Наций и Договора о принципах деятельности государств по исследованию и использованию космического пространства, включая Луну и другие небесные тела, от 27 января 1967 г.
1.3. Материалы, необходимые для выполнения компоновки КА 23
1.3. Материалы, необходимые для выполнения компоновки КА
1.3.1. Техническое задание
Существуют следующие формы выдачи технического задания (ТЗ).
1. Заказчик объявляет конкурс на разработку космической системы. Выдает задание на проектирование КА, в котором определяются задачи, которые он должен выполнять.
В задании указывается состав целевого оборудования и его основные характеристики, технико-экономические требования, этапы создания КА, требования к сырью, материалам, комплектующим изделиям, к учебно-тренировочным средствам по управлению КА в процессе полета.
2. На основании анализа потребностей рынка (научные проблемы, хозяйственные, прикладные и т. п.) предприятие-разработчик начинает разработку космической системы. На основании анализа разрабатывается ТЗ на проектирование КА, содержащее все выше перечисленные требования. Одновременно ведется поиск возможных потребителей проектируемого комплекса.
В соответствии с ТЗ предприятие — разработчик КА определяет предприятия-смежников и выдает им частные задания на разработку отдельных систем бортового оборудования КА, а также на наземную контрольно-проверочную аппаратуру и др. средства, обеспечивающие изготовление и запуск КА.
Структура ТЗ определяется ГОСТ Р 55996-2014, а для КА, выполняющих военно-прикладные задачи, — дополнительными требованиями военного заказчика.
Настоящий стандарт распространяется на изделия космической техники научного и социально-экономического назначения — системы, комплексы, образцы, аппаратуру, техническую продукцию и др. изделия, а также на программный продукт (далее изделия) и устанавливает требования к содержанию, оформлению, порядку согласования, утверждения и внесению изменений:
- заказчика на выполнение опытно-конструкторских работ по созданию (модернизации) изделия;
- заказчика на выполнение опытно-конструкторских работ по созданию (модернизации) программного продукта для вычислительных машин, предназначенных для эксплуатации в наземных условиях;
- головного исполнителя опытно-конструкторских работ ОКР по созданию (модернизации) составной части изделия.
24
1. Общие положения о компоновке космического аппарата
Техническое задание на выполнение (ОКР) должно состоять из следующих разделов:
• наименование, шифр изделия, основание, исполнитель, сроки выполнения ОКР;
• цель выполнения ОКР, наименование и индекс изделия;
• технические требования к изделию;
• технико-экономические требования;
• требования каталогизации;
• требования к видам обеспечения;
• требования к сырью, материалам и комплектующим изделиям межотраслевого применения;
• требования к консервации, упаковке и маркировке;
• требования к учебно-проектировочным средствам;
• специальные требования;
• этапы выполнения ОКР;
• порядок выполнения и приемки этапов ОКР.
В зависимости от особенностей программы или программного изделия допускается уточнять содержание разделов, вводить новые разделы или объединять отдельные из них.
Техническое задание является основополагающим документом для создания проектной технической документации на КА и его оборудование, изготовление и запуск. ТЗ подписывают Главный конструктор разработчика системы оборудования и утверждает Главный конструктор разработки комплекса.
1.3.2. База данных компоновок существующих прототипов КА
В настоящее время создано большое количество как отечественных, так и зарубежных КА, каждый из которых имеет свою компоновку и свои конструктивные решения, зависящие от его класса. Существует множество признаков, по которым классифицируют КА (рис. 1.1). Перечислим наиболее общие.
По способу управления КА подразделяют на пилотируемые и автоматические (беспилотные). К пилотируемым КА относятся:
• одноразовые КА многоцелевого назначения типа «Союз» (рис. 1.2), «Аполлон», «ШеньЧжоу»;
• долговременные орбитальные пилотируемые станции типа «Алмаз», «Салют», «Мир» (рис. 1.3), «Скайлэб», МКС;
• спускаемые (возвращаемые) КА типа «Союз» (рис. 1.4), командный модуль КА «Аполлон», возвращаемый аппарат ТКС;
• многоразовые воздушно-космические системы «Буран» (рис. 1.5), «Спейс Шаттл».
Рис. 1.1. Классификация КА
1-------1.....г.... —1
Малые космические аппараты (МКА) Автоматические орбитальные станции Многоцелевые КА Искусственные спустники Земли
26
1. Общие положения о компоновке космического аппарата
Рис. 1.2. Компоновочная схема КА «Союз-13»:
/ — спускаемый аппарат: 2 — бытовой отсек: 3 — шлюз: 4 — обсерватория «Орион-2»; 5 — блистер; 6 — приборо-агрегатный отсек; 7 — комбинированная двигательная установка; 8 — солнечные батареи
Рис. 1.3. Компоновочная схема базового блока орбитальной станции «Мир»:
/ — стыковочный агрегат: 2 — узел подстыковки манипулятора; 3 — переходной отсек; 4 — привод разворота солнечной батареи; 5 — обеспечивающее бортовое оборудование: 6 — индивидуальная кабина; 7 — отсек личной гигиены: 8 — двигатели системы ориентации; 9 — агрегатный отсек; 10 — стыковочный узел: 11 — бегущая дорожка; 12 — шлюзовая камера; 13 — стол: 14 — велоэргометр: 15 — устройство для измерения массы тела: 16 — центральный пост управления; 17 — гироплата
1.3. Материалы, необходимые для выполнения компоновки КА 27
Рис. 1.4. Компоновочная схема С А «Союз»:
/ — переносной светильник с автономным питанием; 2 — кабинный динамик; 3 — светильник рабочего освещения; 4 — пульт управления радиостанциями; 5 — штурвал крышки люка-лаза; 6 — крышка люка-лаза; 7 — светильник киноосвещения; 8 — командно-сигнальное устройство; 9 — телекамера; 10 — приборная панель пульта: // — визир-ориентатор; /2, 16— приборы и агрегаты; 13 — ручки управления кораблем; 14 — иллюминатор; 15 — кресло космонавта; 17 — стойка кресла; 18 — парашютный контейнер
Корабли серии «Союз» (см. рис. 1.2) применяются для пилотируемых полетов и для доставки экипажей на орбитальные станции «Салют», «Мир» и МКС. Модификация корабля «Союз» используется как транспортный корабль «Прогресс» для доставки грузов на орбитальные станции:
28
1. Общие положения о компоновке космического аппарата
Параметры корабля «Союз»:
масса, т ............................. 6,650
наклонение орбиты, град........51,6 (51,59)
период обращения, мин........ 88,86 (89,25)
перигей орбиты, км........... 193,3 (226,8)
апогей орбиты, км............ 272,7 (272,6)
Базовый блок — первый компонент космической орбитальной станции «Мир» (см. рис. 1.3). Основу блока составляет герметичный отсек с центральным постом управления и средствами связи. Он снабжен переходным отсеком, который может использоваться как шлюз для выхода космонавтов в открытый космос. На отсеке установлены пять стыковочных портов для приема транспортных кораблей. Энергообеспечение производится благодаря двум панелям солнечных батарей, установленных на наружной поверхности блока. В негерметичном отсеке, расположенном за рабочим отсеком, размещаются два двигателя с тягой 300 кгс каждый, баки с топливом, снаружи на отсеке установлена антенна для связи с Землей. В рабочем отсеке имеются две каюты для экипажа, кают-компания, устройства для подогрева пищи, беговая дорожка и велоэргометр.
Рис. 1.5. Многоразовый транспортный космический аппарат «Буран» (конструктивно-силовая схема)
1.3. Материалы, необходимые для выполнения компоновки КА 29
Спускаемый аппарат предназначен для возвращения космонавтов на Землю после окончания полета (см. рис. 1.4).
Многоразовый транспортный пилотируемый КА «Буран» (см. рис. 1.5) предназначен для доставки на орбиту и возвращения на Землю больших по массе грузов. Корабль выполнен по «самолетной» схеме. Старт корабля вертикальный на ракете-носителе «Энергия», посадка — на колеса на аэродром. В носовой части расположена кабина экипажа, она имеет два этажа, в верхнем — рабочая зона, в нижнем — бытовая. За кабиной расположены грузовой отсек и шлюзовая камера.
Характеристики корабля: стартовая масса, т ........................ 105
в том числе масса полезного груза, т ........30
посадочная масса, т..........................82
экипаж, чел ..................................2
максимальный вес (без катапультных кресел), т . 10
продолжительность полета, сут.................7
с дополнительными баками ....................30
диапазон наклонения орбит, град.........50... 110
высота орбиты, км:
рабочая круговая .................... 250...500
максимальная............................ 1000
общая длина, м ...........................36,37
ширина фюзеляжа (максимальная) .............5,5
высота на стоянке ....................... 16,35
размах крыла .............................23,92
Автоматические КА совершают полет в автоматическом или телеуправляемом режимах; это межпланетные КА, спутники, предназначенные для решения промышленно-хозяйственных задач, специальные КА для военно-прикладных задач и МКА различного назначения.
По роду решаемых задач КА классифицируют:
• на спутники связи, с помощью которых передают телевизионные сигналы, телефонные и радиопереговоры; по роду обслуживаемого района такие спутники бывают локальными — работающими с определенными пунктами связи, региональными — обслуживающими заданные регионы, и глобальными — обслуживающими земной шар (например, «Экран» (рис. 1.6), «Радуга», «Горизонт» и др.);
• спутники дистанционного зондирования Земли, осуществляющие мониторинг ее поверхности в различных диапазонах электромагнитных волн (с помощью радио- или фотоаппаратуры), например «Алмаз», «Океан» и др.;
30
/. Общие положения о компоновке космического аппарата
Рис. 1.6. Компоновочная схема спутника связи «Экран»:
/ — датчик солнечной ориентации; 2 — корректирующая установка; 3 — радиатор терморегулирования; 4 — пневмосистема; 5 — оптические датчики системы ориентации и стабилизации; 6 — солнечная батарея; 7 — передающая антенна;
8 — антенны командно-измерительной системы; 9 — штыревая антенна
• навигационные спутники, обеспечивающие определение координат положения пользователей (людей, кораблей, самолетов, автомобилей и КА), например ГЛОНАСС, «Надежда» и др.;
• метеорологические спутники, фотографирующие облачность, покрывающую Землю, и передающие эту информацию в центры обработки, на основании полученной информации составляющие прогноз погоды, например «Метеор» (рис. 1.7) и др.;
• научные спутники — для решения научных и промышленно-хозяйственных задач, например космический телескоп им. Э. Хаббла, спутник «Протон-4» (рис. 1.8) и др.;
• межпланетные аппараты, проводящие исследования других планет и дальнего космоса, например «Луна-24» (рис. 1.9), «Марс-3» (рис. 1.10), «Венера», «Фобос» и др.;
• разгонные блоки, предназначенные для выведения и выполнения маневров по доставке полезных нагрузок на рабочие орбиты и в точки стояния, например «ДМ» (рис. 1.11) и др.;
• транспортные корабли, предназначенные для обслуживания орбитальных станций (доставки расходных материалов, смены экипажа и маневров по коррекции): «Прогресс», ATV, HTV и др.
1.3. Материалы, необходимые для выполнения компоновки КА 31
Рис. 1.7. Спутник «Метеор»:
/ — привод системы ориентации солнечных батарей; 2 — панели солнечных батарей; 3 — аппаратура контроля орбиты; 4 — антенны; 5 — телевизионные камеры; 6 — магнитометр; 7 — приемное устройство актинометрической аппаратуры; 8 — приемное устройство инфракрасной аппаратуры
Общие технические характеристики ИСЗ «Метеор» (см. рис. 1.7).
1. Конструктивно контейнер ИСЗ «Метеор» представлял собой цилиндр диаметром 1,1 м и общей высотой — 3,3 м. Ширина ИСЗ с раскрытыми СБ — около 8 м.
2. Полный вес ИСЗ «Метеор» с СБ (полетный вес) — 1280 кг.
3. Средняя потребляемая мощность за виток — до 280 Вт.
4. Точность ориентации контейнера ИСЗ по осям крена и тангажа — не хуже ±2,5°, по оси рысканья — не хуже ±3,5°.
5. Максимальная угловая скорость отклонения осей ориентации ИСЗ не превышала 0,05 %.
6. ТВ-аппаратура давала возможность получать информацию о распределении облачного и ледового покровов с освещенной территории земного шара. При этом мгновенное поле одной ТВ-камеры составляло 38><38 град, что при скорости фотографирования 2 полукадра в минуту и высоте орбиты 900 км давало ширину полосы захвата земной поверхности 1420 км (для высоты орбиты 650 км — соответственно 1000 км). Размер элемента изображения на местности (в надире) составлял 1,8x1,8 км2 для высоты орбиты 900 км и 1,25x1,25 к\Г для высоты 650 км соответственно.
32
/. Общие положения о компоновке космического аппарата
7. ИК-аппаратура работала в спектральном диапазоне 8... 12 мк, что позволяло получать информацию телевизионного типа как с освещенной, так и с неосвещенной сторон земного шара. Ширина полосы захвата земной поверхности у ИК-аппаратуры составляла 1600 км при разрешающей способности в надире 25x25 км2 для высоты орбиты 900 — 1000 км и 15x15 км2 — для высоты 650 км соответственно.
8. Узкоугольный прибор актинометрической аппаратуры работал в спектральных диапазонах 0,3.. .3 мкм, 3.. .30 мкм и 8... 12 мкм. Элементарный угол зрения узкоугольного прибора 4x5° при полном угле сканирования ±90°. Обрабатываемая полоса захвата по земному шару ±2000 км для высоты орбиты 900 км и ±1000 км для высоты 650 км соответственно. Актинометрическая аппаратура позволяла измерять интенсивность потоков радиации системы Земля — атмосфера.
Метеорологическая аппаратура ИСЗ «Метеор» включала телевизионную, инфракрасную и актинометрическую аппаратуру.
Необходимо отметить, что для анализа и прогноза погоды наибольший интерес представляют:
- распределение облачности снежного покрова и ледяных полей;
- температура подстилающей поверхности и верхней границы облаков;
- составляющие радиационного баланса земной поверхности и атмосферы;
- вертикальное распределение температуры и влажности в атмосфере;
- зоны выпадения осадков, их интенсивность;
- распределение очагов грозовой деятельности и др.
Спутник «Экран» (см. рис. 1.6) обеспечивает круглосуточное телевизионное вещание и радиовещание.
Характеристики спутника: масса спутника, кг............................ 2 000
габариты, мм ...................... 7650х7630х12 500
орбита.............................. геостационарная
подспутниковая точка, градусов в. д.............. 90
ресурс, лет ...................................... 3
мощность передатчика, Вт........................ 300
мощность, подводимая к антенне, Вт ............. 200
1.3. Материалы, необходимые для выполнения компоновки КА 33
Такие характеристики позволяют осуществлять прием на сравнительно небольшие и недорогие приемные станции. Также, исходя из задачи удешевления земных станций, выбран и рабочий диапазон 0,62...0,79 ГГц, совмещенный с диапазоном наземного вещания. Системы спутникового телевещания разворачиваются в маленьких населенных пунктах. Появились приемные станции и на судах, работающих на перевозках по Северному морскому пути. Первые «Экраны» были оборудованы одним транспондером и осуществляли трансляцию первой программы Центрального телевидения. Международные правила, регламентирующие уровень сигнала на территории сопредельных государств в рабочем диапазоне и невозможность создания антенны с требуемыми характеристиками, не позволили расширить зону обслуживания спутниковой системы, как это планировалось ранее.
Рис. 1.8. Компоновочная схема научного спутника «Протон-4»:
1 — панели солнечного источника питания; 2 — датчики магнитной индукции: 3 — исполнительные органы системы демпфирования; 4 — контейнер с химическими батареями; 5 — панель с аппаратурой автоматики и управления; 6 — радиатор;
7 — датчик солнца; 8 — приборный контейнер; 9 — комплекс научной аппаратуры
КА «Протон» — тяжелый научный спутник (см. рис. 1.8). Запущено четыре таких спутника. Цель запусков — исследование частиц высоких и сверхвысоких энергий. В частности, запущенный в 1968 г. космический корабль «Протон-4» исследовал первичные космические лучи высоких энергий и энергетический спектр электронов высокой энергии.
34
1. Общие положения о компоновке космического аппарата
Характеристики спутника: назначение ............................... изучение природы
космических частиц тип ракеты-носителя ......................УР-500 (2 ступени)
УР-500К (3 ступени)
масса на орбите, кг....................... 8300, 16 000
масса научной аппаратуры, кг.............. 3500, 12 500
время работы на орбите, сут...............45, 100
параметры орбиты: высота перигея, км......................... 190, 250
высота апогея, км................... 600, 500
угол наклонения, град............... 63,5, 65,0
Автоматическая межпланетная станция «Луна-24» (см. рис. 1.9) предназначена для изучения Луны, забора и доставки лунного грунта на Землю. Станция была запущена с космодрома Байконур 9 августа 1976 года. Доставила на Землю керн Лунного грунта длиной 160 см и массой 170 г. Анализ результатов этого полета впервые дал убедительное доказательство наличия на Луне воды.
Рис. 1.9. Межпланетный аппарат «Луна-24»:
/ — антенна; 2 — приборный отсек ракеты; 3 — топливный бак ракеты; 4 — управляющее сопло: 5 — приборный отсек посадочной ступени; 6 — двигательная установка посадочной ступени: 7 — топливный бак: 8 — телефотометр; 9 — штанга бурового механизма; 10 — буровой механизм; 11 — спускаемый аппарат
1.3. Материалы, необходимые для выполнения компоновки КА 35
Рис. 1.10. Межпланетный аппарат «Марс-3»:
1 — спускаемый аппарат; 2 — остронаправленная параболическая антенна; 3 — антенна научной аппаратуры «Стерео»; 4 — магнитометр; 5 — приборный отсек; 6 — корректирующий и тормозной двигатели; 7 — оптикоэлектронные приборы СО; 8 — оптико-электронный прибор системы автономной навигации; 9 — блок баков ДУ; 10 — панель солнечной батареи;
11 — радиатор СТР
5 6 7
Общая масса КА «Марс-3» (см. рис. 1.10) составила 4000 кг, в том числе сухая масса пролетного аппарата — 2187 кг. Масса научной аппаратуры орбитального аппарата — 117,8 кг. Корректирующая двигательная установка КА «Марс-3» заправлена 1692,47 кг топлива: 590,47 кг горючего и 1102,0 кг окислителя. Запас азота для газовых двигателей системы ориентации — 82,1 кг.
Основу РБ составляет базовый модуль, включающий топливные баки, двигатель, две двигательные установки системы обеспечения запуска, автономный приборный отсек и силовые каркасы (см. рис. 1.11). При необходимости для увеличения выводимой массы КА из состава разгонного блока может исключаться автономный приборный отсек, в котором размещается система управления движением, при этом управление блоком передается на космический аппарат. Блок работает на нетоксичных компонентах топлива: жидкий кислород + керосин. Для обеспечения сплошности среды при запуске маршевого двигателя в условиях невесомости применяется специальная система запуска, в состав которой входят две двигательные установки, работающие на вы-сококипящих компонентах топлива.
Основные характеристики: «ДМ», «ДМ-SL»
Масса конструкции полностью собранного блока, т...3,2, 3,5 Заправляемый запас топлива, т.................16,1, 16,1
Тяга маршевого двигателя 11Д58М в вакууме, тс..8,5, 8,0
Количество включений маршевого двигателя.......до 5
Масса полезного груза, выводимого на орбиту, т.2, 2,5
По массе КА подразделяют на фемтоспутники (до 100 г) пико-(до 1 кг), нано- (1...10 кг), и микроспутники (10... 100 кг), а также на мини-КА (100...500 кг), малые (500... 1000 кг) и большие (более 1000 кг) КА.
36
/. Общие положения о компоновке космического аппарата
Рис. 1.11. Разгонный блок «ДМ», применяемый с ракетой-носителем «Протон»:
1 — ферма переходная; 2 — ферма подвески бака окислителя; 3 — ферма верхняя; 4 — стержни крепления двигателя; 5 — отсек переходный (межбаковый); 6 — ферма опорная
В настоящее время широкое распространение получили малые КА (МКА) (табл. 1.1) массой до 1 000 кг, для выведения которых на орбиту используют конверсионные баллистические ракеты, способные доставлять несколько МКА, что значительно снижает стоимость выведения килограмма полезной нагрузки на орбиту.
1.3. Материалы, необходимые для выполнения компоновки КА 37
Таблица 1.1. Малые КА
Название спутника
«Бауманец» O/OREOS AESP-14
Характеристика
Масса, кг 90 5,5 1,0
Назначение Получение научных данных в области изучения Земли с использованием перспективных методов. Образовательные задачи: приобретение студентами практического опыта проектирования, изготовления и эксплуатации реального КА. Подготовка кадров и базы для развития микро-спутниковых систем Изучение свойств жизнеспособности, роста и адаптируемости некоторых видов микроорганизмов, живущих на Земле в соленых водоемах. Проведение экспериментов, во время которых три различные колонии микроорганизмов будут подвергаться воздействию космической радиации и солнечных лучей. Контроль процессов, происходящих в жестких космических условиях с четырьмя видами различных органических соединений Исследование механизма генерации экваториальных плазменных «пузырей» путем наблюдения за особенностями их возникновения и распределения в глобальном масштабе. Исследования нестабильных плазменных процессов в ионосфере
Изготовитель Россия США Бразилия
38
/. Общие положения о компоновке космического аппарата
Интерес к МКА обусловлен следующими причинами:
• низкой стоимостью разработки и изготовления;
• коротким временем разработки и изготовления;
• малой стоимостью запуска единичного КА; МКА могут выводиться в качестве попутного груза на ракете-носителе или в транспортном корабле при доставке грузов на орбитальную станцию;
• низкой стоимостью и простотой наземного управляющего пункта;
• снижением риска больших финансовых потерь при гибели МКА в случае аварии ракеты-носителя на старте или участке выведения.
На МКА устанавливают целевое оборудование, выполняющее научные, промышленно-хозяйственные и военно-прикладные задачи. Как правило, такое оборудование имеет малые массогабаритные характеристики и энергопотребление.
Компоновка МКА часто выполняется из двух конструктивных элементов: универсальной космической платформы (УКП), на которой размещается оборудование всех обслуживающих систем, необходимых для функционирования целевого оборудования, и платформы целевого оборудования, предназначенной для решения конкретной задачи. Оба элемента обеспечивают выполнение требований по точности, теплоте, энергетическим, вибрационным и другим условиям функционирования целевого оборудования. При разработке компоновки вновь создаваемого КА можно использовать в модернизированном варианте некоторые решения, принятые в ранее созданных КА и успешно зарекомендовавшие себя при эксплуатации.
Для этого на предприятии, разрабатывающем КА, создают базу знаний, содержащую компоновочные решения существующих КА. База знаний непрерывно корректируется и пополняется новыми вариантами компоновок, разработанных на самом предприятии и найденных в литературных источниках и в интернете. Использование конструктивных решений, примененных в существующих разработках и выполненных на других предприятиях, требует специального патентно-правового оформления. Патентно-чистые разработки, которые осуществлены по аналогам, заимствованным из имеющихся проектов, должны обладать принципиальными отличиями от предшественников.
1.3. Материалы, необходимые для выполнения компоновки КА 39
1.3.3. Единые нормы внешних воздействующих факторов
Нормы разрабатывают на каждый тип КА, а иногда на несколько модификаций одного класса, и распространяются они на элементы конструкции, приборы систем оборудования, а также на материалы и покрытия и, кроме того, служат для разработки технической документации и программ наземных испытаний. Единые нормы учитывают влияние космических условий полета, климатических условий эксплуатации и внешних механических и других факторов, действующих на КА при эксплуатации, а также при наземной транспортировке и при выведении КА в космос на ракете-носителе.
С учетом действия космических условий полета должна быть выполнена и компоновка, чтобы все оборудование и элементы конструкции КА сохраняли работоспособность и функционировали в соответствии с заданными техническими требованиями.
Рассмотрим основные космические условия, влияющие на компоновку КА.
Глубокий вакуум. Конструкционные материалы в условиях глубокого вакуума проявляют себя по-разному. Если точка кипения паров металла низкая (например, у цинка, магния, кадмия), то в космических условиях он интенсивно испаряется.
Сплавы таких металлов (например, магниево-цинковые) интенсивно испаряются по всей поверхности конструкции. Если сплав состоит из материалов, у которых точки кипения паров сильно различаются (например, алюминиево-магниевых), то происходит неравномерное испарение (испаряется магний) и ухудшается качество поверхности конструкции.
Длительное время в условиях глубокого вакуума могут работать неорганические материалы (например керамика), состоящие из оксидов и других соединений металлов (алюминий, бериллий, хром, магний, кремний, титан, цинк). Стабильность поведения органических соединений (пластмасс) определяется качеством исходного материала и способами производства.
Наличие трущихся и вращающихся друг относительно друга элементов конструкции приводит к необходимости их смазывания. Кроме того, при высоких удельных давлениях трущиеся пары металл — металл подвержены так называемой холодной сварке. Жидкие смазочные материалы, применяемые в машиностроении, не пригодны для использования в космосе, поскольку при низких тем
40
/. Общие положения о компоновке космического аппарата
пературах они теряют вязкость (или замерзают) и интенсивно испаряются в вакууме. Поэтому следует применять графитовые смазочные материалы или покрытия из металлов (золото, серебро, кобальт, никель и др.). Недостаток таких смазочных материалов в том, что при интенсивном трении они стираются. Трущиеся пары рекомендуется подбирать по принципу неметаллический материал — металл, при этом будет гарантировано смазывание и исключена холодная сварка поверхностей.
Микрогравитация. В процессе полета большинство КА длительное время движется в условиях действия сверхмалых ускорений. Например, к КА, находящемуся на околоземной орбите, приложены две основные внешние силы: сила тяжести и центробежная сила, которые уравновешивают друг друга. Отсутствие ускорений приводит к возникновению эффекта невесомости, который необходимо учитывать при компоновке КА.
В невесомости тепловые и гидродинамические процессы протекают особым образом: нет конвективного теплообмена, в результате отсутствия других сил жидкость занимает в емкости положение, определяемое силами поверхностного натяжения и капиллярными силами сцепления между жидкостью и стенками сосудов, что может привести, например, к отливу жидкости от заборных устройств топливных баков. Для удержания жидкости в требуемом положении применяют различные конструктивные меры, препятствующие отливу жидкости от заборных устройств, или используют специальные двигатели ориентации топлива.
Космическая радиация вызывает повреждение наружной поверхности корпусов КА, образование пар Френеля, что повышает удельное сопротивление, снижает пластичность и вязкость материалов. Основной фактор повреждений органических материалов — ионизационные эффекты. У полимеров наблюдаются два процесса: сшивание — образование поперечных связей, приводящее к возрастанию модуля упругости и твердости, снижению пластичности, растворимости и набухаемости, и деструкция — разрыв межмолекулярных связей, уменьшающий среднюю молекулярную массу. Неорганические материалы (керамика, минералы и т. д.) занимают среднее положение между металлами и органическими материалами. Наименее стойки к радиации полупроводниковые материалы (элементы солнечных батарей) и стекла иллюминаторов. Для увеличения живучести солнечных батарей применяют специальные защитные покрытия.
1.3. Материалы, необходимые для выполнения компоновки КА 41
Метеоритная опасность. Метеоритные тела движутся по эллиптическим орбитам вокруг Солнца, кроме того, Земля окружена пылевым облаком метеоритов, которые создают угрозу для КА, так как могут нарушить герметичность корпуса и повредить оборудование, размещенное на нем. Особую опасность представляют одиночные метеориты, траектории которых нельзя учесть при выборе траектории полета КА. Частоту встречи КА с одиночным метеоритом массой, соизмеримой с массой КА, оценивают по среднему времени между встречами
1
/ср ~ N SV ’
m J г ср
где Nm — число метеоритов, имеющих массу, соизмеримую с массой КА в единице объема; 5* — средняя площадь поперечного сечения КА, м2; Кср — средняя скорость метеорита, м/с.
Наиболее опасны встречи с метеоритами, масса которых больше 2-10 8 кг, однако вероятность такой встречи мала. Мелкие метеориты вызывают повреждения солнечных батарей, оптики и т. д.
Кроме метеоритных потоков, существенную опасность для КА представляет так называемый космический мусор, т. е. обломки ранее запущенных, отслуживших свой срок, не снятых с орбиты и разрушившихся КА. Эти обломки являются серьезной угрозой для космонавтов во время выхода в открытый космос и для самого КА, особенно при стыковке, поскольку могут попадать в плоскость стыка и нарушать герметизацию.
Низкие температуры. При низких температурах конструкционные материалы изменяют свои механические характеристики: металлы и сплавы становятся хрупкими (хладноломкими). По этому свойству их можно условно подразделить на четыре группы:
1) металлы и сплавы с удовлетворительной пластичностью и вязкостью при охлаждении до температуры -70 ... -50 °C (перлитные и мартенситные стали);
2) металлы и сплавы, выдерживающие охлаждение до температуры -120 ... -100 °C (стали с содержанием углерода 0,20...0,35 %, легированные никелем, хромом, ванадием, молибденом);
3) металлы и сплавы с высокой вязкостью при температурах до -196 °C (коррозионно стойкие стали типа Х18Н10Т, алюминиевые и титановые сплавы);
42
/. Общие положения о компоновке космического аппарата
4) металлы и сплавы, работающие при температурах ниже -196 °C (материалы с гранецентрированной кубической решеткой — никель, алюминий, медь, а также их сплавы).
Алюминиевые сплавы Д16 и В95, а также сварные соединения из них, работают до температуры -196 °C. Сварные конструкции из сплавов АМгЗ, АМгб — до температур -235 °C. Титановые а-сплавы и термически обработанные (а + (З)-сплавы функционируют до температуры -253 °C.
Кроме космических условий полета на компоновку влияют тепловые, механические и электромагнитные воздействия, возникающие в процессе работы КА.
К механическим воздействиям относятся: линейные и угловые ускорения, действующие на КА, при динамических операциях (транспортировке, выведении, орбитальном маневрировании и спуске); вибрации и ударные воздействия при различных режимах (особенно при транспортировке по железной дороге на участках выведения, доразгона, орбитального маневрирования); ударные воздействия при запуске и отсечке двигательных установок (ДУ).
Перегрузки возникают при действии на КА ускорений на участке выведения КА, при торможении КА на участке спуска в атмосфере, при маневрировании в космосе, коррекции орбиты и стабилизации. Причины перегрузки — внешние силы, работа ДУ. Перегрузки подразделяются на осевые и поперечные. Конструкцию и бортовое оборудование, устанавливаемое на КА, рассчитывают на определенную максимально допустимую перегрузку.
Вибрации. На КА действуют различного рода вибрации, источником которых являются акустические шумы и местные пульсации сил аэродинамического сопротивления, а также атмосферная турбулентность на участках выведения и спуска, работа двигателей ракеты-носителя, работа двигателей КА при маневрировании и стабилизации, динамическое воздействие от функционирующих приборов бортового оборудования. При компоновке необходимо учитывать диапазоны значений резонансных частот солнечных батарей, антенн и других раскрывающихся элементов конструкций. Менее восприимчивы к вибрациям компактные конструкции малого удлинения с высокими резонансными частотами.
Тепловые нагрузки. На всех участках полета КА воспринимает тепловые нагрузки от различных источников нагрева (внешних
1.3. Материалы, необходимые для выполнения компоновки КА 43
и внутренних). Суммарное количество теплоты, подводимой к КА от внешних источников нагрева
0ВНСШ = (Qc + £?отр ) + е£?пл £?мол ’
где As — коэффициент поглощения солнечной радиации; Qc — количество теплоты, излучаемое Солнцем; Q0Tp — количество теплоты, отраженное от поверхности планеты; е — оптический коэффициент наружной поверхности КА; £)пл — количество теплоты, излучаемое планетой; ^мол — количество теплоты, возникающее при соударении КА с молекулами.
Внутренний источник нагрева — тепловое излучение от приборов и оборудования КА. Суммарное количество теплоты от внутренних источников нагрева
£?вн — ПМ>6 + С?ЭК’
где ц — тепловой коэффициент оборудования; Аоб — мощность электроэнергии, потребляемой оборудованием; £)Эк — количество теплоты, выделяемой экипажем.
Электрические и магнитные помехи. На работу электронноусилительных блоков и приборов систем бортового оборудования КА существенное влияние оказывают электрические и магнитные помехи, возникающие при работе бортового оборудования и действии магнитных полей планеты, приводящие к увеличению погрешностей в работе, а иногда нарушающие функционирование оборудования. Устранить это влияние можно рациональной компоновкой, правильной прокладкой трасс коммуникаций, экранировкой кабельных трасс, включая разъемы, рациональной прокладкой шин питания, защитой от пульсации напряжения, а также применением специальных мер, защищающих электронные блоки от электротехнических помех. Защита от влияния магнитных полей и обеспечение электромагнитной совместимости оборудования осуществляются за счет рациональной компоновки или экранирования аппаратуры.
Собственная атмосфера КА. При полете КА за пределами плотных слоев атмосферы вокруг него возникает облако собственной атмосферы, оказывающее существенное влияние на надежность и работоспособность аппаратуры, расположенной в негерметичных отсеках. Собственная атмосфера существует весь срок функциони
44
/. Общие положения о компоновке космического аппарата
рования на орбите, она формируется за счет дегазации и сублимации конструкционных материалов, неизбежных утечек газов из гермоотсеков, продуктов выхлопа двигательных установок, а также за счет различных пылевых частиц. За счет влияния Солнца и вследствие применения электрического ракетного двигателя (ЭРД) часть частиц, из которых формируется собственная воздушная атмосфера (СВА), находится в заряженном состоянии.
Влияние СВА на работу бортовых систем КА выражается в следующем:
• тепловое воздействие на элементы конструкции, попадающей в поле струи ДУ;
• создание возмущающих сил и моментов при воздействии струи на крупные выносные элементы;
• эрозия поверхности солнечных батарей и терморегулирующих покрытий и осаждение на них продуктов выхлопа реактивных двигателей, что приводит к загрязнению, изменению оптических свойств и ухудшению характеристик солнечный батарей;
• проникновение ионизированных частиц струи внутрь КА приводит к нарушению работы бортовой аппаратуры, чувствительной к такому воздействию;
• повышенное давление внутри негерметичных отсеков КА грозит появлением дуговых разрядов при работе высоковольтной ретрансляционной аппаратуры;
• повышенное давление снаружи КА накладывает ограничения на циклограмму включения электрореактивных двигателей;
• загрязнение поверхности КА при осаждении на него продуктов десорбции материалов, которое особенно велико в первые месяцы функционирования аппарата.
Давление внутри негерметичных КА, создаваемое за счет выделения газов, достигает 10... 10 8 мм рт. ст., при давлении внешнего вакуума 1013 мм рт. ст. Давление внутри КА монотонно снижается с увеличением времени нахождения на орбите, за исключением периодов, когда происходит включение аппаратуры, сопровождающееся резким повышением давления, почти на порядок. Это связано с увеличением газовыделения с поверхности работающей аппаратуры из-за ее разогрева, что влечет за собой увеличение давления внутри всего объема КА.
Аппаратура бортового радиотехнического комплекса (БРТК) и аппаратура управления (АПУ) во время функционирования в негер
1.3. Материалы, необходимые для выполнения компоновки КА 45
метичных отсеках имеет ограничения по максимальному давлению равное 10 5 и 10 4 мм рт. ст. соответственно. Это обеспечивает отсутствие электрических пробоев при работе высоковольтных цепей. Для сброса давления в отсеках предусматривают специальный дренажный тракт (рис. 1.12), выполненный в виде лабиринта в целях защиты аппаратуры от проникновения внутрь плазмы от работающих ЭРД.
Рис. 1.12. Схема дренажного факта КА:
/ — служебная аппаратура; 2 — молекула, прошедшая дренажный тракт; 3 — выходное сечение дренажного тракта; 4 — полезная нагрузка; 5 — молекула, не прошедшая дренажный тракт
Давление внутри КА определяется суммарным выделением газа аппаратурой, расположенной в отсеке. Основной проблемой при расчете давления внутри КА является отсутствие достоверных данных о выделении газов бортовой аппаратурой в рабочем и нерабочем состоянии в космических условиях. Поэтому параметры собственной атмосферы определяются экспериментально во время летно-конструкторских испытаний (ЛКИ).
Использование ионных и плазменных двигателей приводит к интенсивному загрязнению поверхностей солнечных батарей и оптических приборов. Во время полета КА OGO-6 была измерена скорость загрязнения поверхности. Полет длился шесть месяцев в интервале высот 400... 1 100 км. Максимальная загрязненность поверхности, не защищенной от прямого воздействия дегазации, составила 10 4 кг/м2 для не защищенных алюминиевых поверхностей. Максимальное загрязнение от выхлопа ДУ имело место при стыковке орбитальной станции ОС «Скайлэб» и космического корабля «Аполлон», скорость загрязнения датчиков, обращенных в сторону источника загрязнения, составила 6,8 1011 кг/м2 с. Дегазация белых терморегулирующих покрытий привела к увеличению коэффициента поглощения солнечного излучения оц. Наблюдения показали, что цвет поверхностей изменился с белого на различные оттенки желтого и коричневого. Аналогичные результаты были получены при полете ОС «Мир».
46
/. Общие положения о компоновке космического аппарата
СВА КА приводит к снижению работоспособности оптических приборов, звездных и солнечных датчиков и как следствие — к ошибкам в системе управления движением КА. Высокая степень ионизации СВА за счет присутствия выхлопа ЭРД приводит к искажению радиосигналов бортовых радиосистем КА, ухудшению точности проводимых радиоизмерений, приему информации по радиоканалам или к сбоям в работе радиотехнических систем.
Для снижения влияния СВА на работу бортовой аппаратуры КА необходимо:
• использовать конструкционные материалы, максимально устойчивые к условиям космического пространства;
• определить перечень узлов КА и бортовой аппаратуры, подверженных влиянию СВА;
• разрабатывать конструктивно-компоновочную схему КА с учетом минимального влияния ДУ на оптическую и радиотехническую бортовую аппаратуру.
L3.4. Расчетно-теоретические исходные данные
К расчетно-теоретическим исходным данным, необходимым для компоновки КА, разрабатываемым подразделениями предприятия, занимающегося теоретическими разработками, относятся:
• траектория полета КА (параметры орбиты, ориентация ее плоскости в пространстве, период обращения, время существования и циклограмма проведения работ);
• режимы полета (объекты ориентации, рекомендации по работе основной ДУ (ОДУ), коррекции орбиты и т. д.);
• аэродинамические параметры КА с учетом особенностей выведения на орбиту и спуска на Землю;
• расчеты и экспериментальные данные по раскрытию и отделению элементов конструкции КА;
• расчеты по центровке и требуемым моментам инерции с учетом всех режимов полета;
• рекомендации по выбору ракеты-носителя с выдачей требований по акустическим, вибродинамическим, радиационным и тепловым нагрузкам при полете на ракете-носителе;
• точностные характеристики на установку целевого и обеспечивающего оборудования, осуществляющего качественное выполнение целевой программы;
• расчеты на прочность и вибродинамическую устойчивость элементов конструкции КА и бортового оборудования.
1.3. Материалы, необходимые для выполнения компоновки КА 47
1,3.5. Общая схема оборудования КА с комплектом габаритных чертежей на приборы
бортового оборудования и кабельные трассы
После анализа ТТЗ на разработку КА проводят проектный поиск его облика, одним из этапов которого является выбор возможных вариантов систем бортового оборудования.
При компоновке КА устанавливают минимальный набор бортового оборудования, удовлетворяющий заданным требованиям. В первую очередь это касается целевого оборудования, которое обеспечивает выполнение задачи, поставленной перед КА. Однако не менее важное значение имеет выбор обеспечивающего (служебного) оборудования, от качества работы которого зависит функционирование целевых систем.
Поиск рационального состава оборудования — комбинаторная задача, в результате решения которой выбирается сочетание вариантов из области возможных, наилучшим образом удовлетворяющее поставленным целям. Эту задачу еще называют задачей структурного синтеза, поскольку каждому варианту сочетания отвечает определенная структура КА. В качестве целевой функции можно принимать разрешение, точность, надежность, время функционирования КА и т. д. При этом ограничения накладываются на массу, габариты, энергетические характеристики, запасы расходуемых материалов и т. п.
Задачу структурного синтеза оборудования КА можно рационально решить только поэтапно последовательным приближением. Это объясняется тем, что характеристики бортового оборудования часто взаимосвязаны и взаимно противоречивы и зависят от множества варьируемых параметров. Для решения задач структурного синтеза используют метод экспертных оценок, проводимый небольшим конструкторским коллективом проектного комплекса, имеющим опыт и высокую квалификацию.
В настоящее время существуют следующие тенденции в выборе бортового оборудования:
• объединение во вновь разрабатываемом комплексе ранее созданного оборудования (максимальная унификация);
• максимальное снижение доли массы бортового оборудования в общей массе КА;
• применение бортового оборудования, способного работать в условиях космического пространства и не требующего наличия герметичных отсеков;
• снижение стоимости бортового оборудования КА.
48
/. Общие положения о компоновке космического аппарата
На рис 1.13 приведена классификация бортового оборудования.
Бортовое оборудование КА подразделяют на целевое и обеспечивающее.
Целевое оборудование — это бортовое оборудование, выполняющее основные целевые задачи, для решения которых в соответствии с техническим заданием на его разработку создается КА. Компоновка, разработка конструкции КА и всего вспомогательного оборудования должны обеспечивать эффективное функционирование целевого оборудования.
Целевое оборудование решает научные, промышленно-хозяйственные, военно-прикладные задачи и т. д. В состав такого оборудования могут входить космические фотоаппараты для локальной, панорамной и маршрутной съемок подстилающей поверхности; телевизионные и видиконовые камеры для трансляции на Землю изображения; ИК-аппаратура (ИК- и субмиллиметровые сканирующие радиометры); радиолокационная аппаратура; спектрометры с вращающимися фильтрами, магнитометры, масс-спектрометры и другие приборы для изучения космического пространства; автоматы для отбора и экспресс-анализа проб грунта; астрофизическое оборудование; оборудование для медикобиологических и технических экспериментов, а также технологическое оборудование. Перечень оборудования очень разнообразен, поэтому к его размещению на борту КА предъявляют жесткие требования, соблюдение которых обеспечит решение поставленной перед КА задачи.
Обеспечивающее оборудование предназначено для обеспечения выполнения КА целевой функции или комплекса целевых функций, для реализации которых создан КА. Перечислим системы, относящиеся к обеспечивающему оборудованию.
Система управления движением (СУД) управляет движением центра масс и движением относительно центра масс.
Система управления движением центра масс — система автономной навигации и наведения КА, состоящая из приборов, которые определяют координаты местоположения и скорость КА, а также решают задачу наведения, т. е. реализуют требуемый импульс коррекции с помощью ОДУ, изменяя параметры орбиты КА, приемных устройств системы спутниковой навигации, радиовысотомеров, бортового цифрового вычислительного комплекса (БЦВК) и астроинерциальных средств навигации.
Рис. 1.13. Классификация бортового оборудования КА
50
1. Общие положения о компоновке космического аппарата
Система управления движением относительно центра масс — это системы ориентации (СО) и стабилизации (СС) КА, включающие в себя приборы, которые используются при построении требуемой системы координат для проведения целевых работ. Приборы СС создают управляющие моменты, необходимые для удержания КА относительно построенной СО системы координат, при воздействии на КА возмущающих моментов. Для обеспечения стабилизации используются гироскопические ориентаторы, ИК-вертикали, двигатели-маховики, гиродины, бортовые цифровые вычислительные машины (БЦВМ), звездные датчики и датчики Солнца, приборы сброса кинетического момента и реактивные двигатели СУД.
Реактивные двигатели СУД, предназначенные для управления и стабилизации КА в пространстве, включают в себя реактивные двигатели малой тяги или газоструйные сопла, создающие управляющие моменты относительно центральных осей координат КА, управляющие электроклапаны, емкости с рабочим телом, узлы крепления и юстировки двигателей. Эти двигатели подразделяются на двигатели жесткой (ДЖС) (сила тяги 100...200 Н) и мягкой (ДМС) (сила тяги до 20 Н) стабилизации.
Система генерирования электроэнергии (СГЭ) состоит из генераторов электроэнергии различных типов (солнечных и химических батарей, ядерных источников и т. п.), преобразователей, систем электрозащиты, коммутации и распределения электроэнергии, разворота солнечных батарей и силовых конструктивных узлов крепления агрегатов СГЭ на борту КА.
В радиотехническую систему входят радиокомплексы командно-навигационного управления, радиотелсметрические системы и АФУ. Радиокомплексы командно-навигационного управления передают необходимую информацию с пункта управления полетом на борт КА, измеряют координаты и параметры движения КА и передают их на Землю. Радиотелеметрические системы формируют объем измеряемых параметров о работоспособности приборов бортового оборудования КА и после соответствующей обработки передают на наземные пункты приема информации. АФУ состоят из антенн различного типа, коаксиальных кабельных трасс, волноводов, переключающих фильтрующих устройств и приводов разворота антенн на требуемые углы.
Система теплозащиты и СТР, включающая в себя теплозащитные покрытия, которые защищают КА от радиационного нагрева во время орбитального полета, кинетического нагрева
1.3. Материалы, необходимые для выполнения компоновки КА 51
при спуске в атмосфере, обеспечивает нормальные температурные условия в герметических отсеках. СТР состоит из датчиков температуры, регуляторов, теплообменников, радиаторов, насосов, компрессоров и вентиляторов.
Основная ДУ, предназначенная для изменения параметров орбиты КА (высоты, угла наклона плоскости траектории, формы орбиты и т. д.), включает в себя двигатель (или несколько двигателей), систему подачи топлива, баки, заправочные и дренажные устройства, узлы крепления и юстировки двигателей.
Система управления бортовым комплексом КА — совокупность бортовых приборов, обеспечивающих согласованную работу бортового оборудования для реализации всех операций по программе полета КА, контроль функционирования бортовых систем и формирование исполнительных команд, ввод уставок в БЦВК и приборы бортовой автоматики.
Электроавтоматика элементов конструкций служит для раскрытия и поворота солнечных батарей, раскрытия и выдвижения антенн, раскрытия шторок иллюминаторов, срабатывания парашютной системы и т. п. Электроавтоматика технологических люков обеспечивает доступ к приборам и узлам при монтаже и регулировке, выход в космическое пространство, возможность перехода из одного отсека в другой.
Кроме перечисленных систем в обеспечивающее оборудование входят система жизнеобеспечения, система сближения и агрегаты стыковки, система спуска и посадки.
Вспомогательное оборудование — система аварийного спасения, двигатели разделения и увода, а также ДУ, предназначенные для создания искусственной силы тяжести (для ориентации топлива), закрутки КА, увода отдельных сброшенных элементов конструкции.
Для выполнения правильной компоновки, кроме габаритных чертежей блоков, входящих в состав бортового оборудования, необходимо знать схему соединения блоков между собой. На рис. 1.14 приведена общая схема бортового оборудования.
К общей схеме бортового оборудования и комплекту габаритных чертежей прилагаются рекомендации по установке приборов с учетом расстояния между ними, требований к местам установки (наружной или внутренней), к тепловыделению, а также действующим внешним факторам.
52
1. Общие положения о компоновке космического аппарата
Рис. 1.14. Общая схема бортового оборудования
1.3.6. Циклограмма режимов полета КА и взаимодействия бортового оборудования
Циклограмма определяет последовательность функционирования бортового оборудования КА (рис. 1.15).
До старта КА и ракета-носитель проходят предстартовую подготовку по специальным инструкциям в соответствии с циклограммой режимов полета. При положительных результатах предстартовой подготовки дают команду на запуск ракеты-носителя.
Отсчет полетного времени КА начинают с команды на циклограмме — контакта подъема. После заданного времени в соответствии с циклограммой КА отделяется от ракеты-носителя и начинается режим демпфирования (гасятся колебания КА, возникшие в процессе разделения). Демпфирование осуществляется исполнительными ЖРД стабилизации до определенных угловых скоростей КА. Далее происходит процесс создания базовой орбитальной системы координат и включается режим коррекции для построения рабочей орбиты КА. Как правило, на первых витках полета КА проводится тестовый контроль его оборудования, т. е. проверяются все режимы полета КА с учетом включения приборов «холодного» резервирования. После тестового контроля начинает работать штатный режим полета КА.
О 585 587 842 1055
14 мин 2 с 17 мин 35 с
Рис. 1.15. Типовая циклограмма режимов работы бортового оборудования КА:
ГПО — гироскопический прибор ориентации; ПБО — построение базовой ориентации: СГК — силовой гироскопический комплекс; УИВК — универсальный измерительный вычислительный комплекс; ТВ — точность вычислений; ЦВК — центральный вычислительный комплекс; ПЗ — полетное задание; ДМС — двигатель мягкой стабилизации; ПСР — построение системы разворота; СР — специальные работы; ДР — двигатель разворота; РЛС — радиолокационная станция; КП — контакт подъема: КО — контакт отделения; НИП — наземный измерительный пункт
54
/. Общие положения о компоновке космического аппарата
Строится система координат, необходимая для проведения целевых работ, и периодически подключается целевое оборудование. В соответствии с циклограммой работы замеряются параметры орбиты, и при необходимости включается режим коррекции. Телеметрическая информация о функционировании всего бортового оборудования поступает в центр управления полетом, и по результатам анализа принимают технические решения по управлению полетом КА.
В циклограмме работы указан порядок развертывания элементов внешней компоновки (солнечных батарей, антенн и т. п.), что требуется учесть при компоновке этих элементов.
1.3.7. Кривая энергопотребления
Кривая энергопотребления бортового оборудования необходима для проектирования и компоновки СГЭ на борту КА. На кривой указывают энергопотребление в режимах функционирования оборудования. При использовании солнечных батарей, мощность которых зависит от солнечной освещенности, определяются режимы включения буферных батарей для поддержания постоянной требуемой мощности на борту КА. На рис. 1.16 приведен пример кривой энергопотребления СУД КА.
Рис. 1.16. Пример кривой энергопотребления СУД КА:
1 — разворот на СГК; 2 — обратный разворот на СГК; УБК — цифровой бортовой комплекс; ПБО — построение базовой ориентации; СГК — силовой гироскопический комплекс; ПСР — построение системы разворота; СР — система разворота; ГИВУС — гироскопический измеритель вектора угловой скорости; БЦВМ — бортовая цифровая вычислительная машина; УВВ — устройство ввода — вывода команд; БУМ — блок управления маховиками; ДР — двигатели разворота
1.4. Этапы проектирования и разработки компоновки КА
55
1.3.8. Таблицы точности установки отдельных приборов оборудования и привязка их к базовым элементам КА
Высокоточные приборы, имеющиеся на КА, должны быть установлены с требуемой точностью относительно связанной системы координат через контрольные точностные элементы.
При выполнении компоновки КА требования по точности следует реализовать в соответствии с таблицами точности (например, табл. 1.2).
Таблица 1.2. Таблица точности
Номер п/п Прибор Требуемая точность установки Инструментальная точность измерения Примечание
Наименование Обозначение
1 Звездный датчик— блок определения координат звезд БОКЗ-М £££ II II II о О о Точность теодолита —
Замеряя точность установки приборов, определяют погрешности установки, которые затем могут компенсироваться вводом поправок в БЦВМ. Для контроля точности установки высокоточных приборов иногда размещают несколько базовых угольников.
При компоновке высокоточных приборов необходимо предусмотреть средства, обеспечивающие точность выставки (регулировки, термомосты и т. п.).
В ЕНВВФ оговариваются климатические условия при хранении и транспортировке высокоточных приборов на заводе-изготовителе, техническом стартовом комплексе, а также в орбитальном полете.
1.4. Этапы проектирования и разработки компоновки космического аппарата
В соответствии с требованиями и рекомендациями Единой системы конструкторской документации, ГОСТов, ОСТов, а также других нормативных документов разработка компоновки КА подлежит сквозному планированию и проводится на основании ТТЗ и требований, изложенных в разд. 1.5.
Тактико-техническое задание определяет основные характеристики КА и является основополагающим (главным) документом на всех этапах разработки и испытаний КА, в том числе и компоновки.
56
1. Общие положения о компоновке космического аппарата
Разработка компоновки КА включает в себя два этапа:
• научно-исследовательские работы (НИР), т. е. создание нескольких вариантов компоновки проектируемого КА;
• опытно-конструкторские работы (ОКР), на основании которых выбирают один вариант, разрабатывают техническую документацию и проводят экспериментальную отработку аппарата.
Одна из важнейших работ при создании комплексов КА (особенно при внебюджетном финансировании) — проведение маркетинговых исследований, т. е. поиск и изучение рынка по рассматриваемому типу КА (анализ информации о конкурентных аналогах, предварительная оценка тенденций развития космической техники, разработка предварительного бизнес-плана, выпуск рекламных материалов и т. д.). Результаты маркетинговых исследований рассматриваются на заседании научно-технического совета предприятия-разработчика КА, который принимает решение о проектировании КА.
1.4.1. Научно-исследовательские работы
При проведении НИР руководствуются ТТЗ, которое определяет объем теоретических и экспериментальных работ в целях поиска и разработки новых технических решений по основным направлениям проектирования КА, например, изготовление высокопрочных легких конструкционных материалов, теплозащитных покрытий с учетом главных проектных критериев: максимальной эффективности компоновки целевого оборудования, малой массы КА, минимальных стоимости и сроках создания КА. Результаты НИР защищаются на ученом совете головного предприятия с участием заказчика и разработчиков основных систем КА.
1.4.2. Опытно-конструкторские работы
В ОКР входят:
• разработка технических предложений (аванпроекта), эскизного и технического проектов, проектной технической документации;
• изготовление элементов конструкции, узлов и агрегатов КА для проведения экспериментальных автономных и комплексных испытаний, корректировка технической документации по результатам испытаний;
1.4. Этапы проектирования и разработки компоновки КА 57
• производство опытных образцов элементов конструкций КА, бортового оборудования и КА в целом для проведения обязательных испытаний в соответствии с комплексным планом экспериментальной отработки (КПЭО), корректировка технической документации по результатам испытаний; изготовление летных экземпляров КА и проведение ЛКИ.
1.4.3. Техническое предложение
Техническое предложение разрабатывается в случае, если это предусмотрено ТЗ, и должно соответствовать ГОСТ 2.118—73.
Техническое предложение разрабатывается с целью выявления дополнительных или уточненных требований к изделию (технических характеристик, показателей качества и др.), которые не могли быть указаны в ТЗ, и это целесообразно сделать на основе предварительной конструкторской проработки и анализа различных вариантов изделия.
Перечень работ, выполняемых на стадии технического предложения, устанавливается на основе технического задания и определяется разработчиком в зависимости от характера и назначения изделия.
В техническое предложение включают конструкторские документы, предусмотренные ТЗ, в соответствии с ГОСТ 2.102—68. При выполнении документов в электронной форме электронная структура изделия и электронная модель изделия (сборочной единицы, комплекса) выполняются со степенью детализации, соответствующей стадии технического предложения. Конструкторские документы, разрабатываемые для изготовления материальных макетов по ГОСТ 2.002—72, в комплект документов технического предложения не включают. Допускается включать в комплект документов технического предложения электронные макеты вариантов изделия и (или) его составных частей, выполненных по ГОСТ 2.052—2006.
На рассмотрение, согласование и утверждение представляют копии документов технического предложения, скомплектованные по ГОСТ 2.106—96. Допускается по согласованию с заказчиком представлять подлинники документов технического предложения.
Форма представления документов технического предложения (бумажная или электронная), если она не указана в ТЗ, определяется разработчиком по согласованию с заказчиком. Виды доку
58
1. Общие положения о компоновке космического аппарата
ментов устанавливаются согласно ГОСТ 2.102—68. Допускается включать в комплект документов технического предложения документы в различных формах представления.
Общие требования к выполнению документов таковы.
1. В текстовых и графических документах сведения небольшого объема, относящиеся к отдельным вариантам разрабатываемого изделия, рекомендуется оформлять в форме таблицы.
2. В текстовых документах большого объема, содержащих различные для разных вариантов сведения, излагают последовательно для каждого варианта одним из следующих способов:
а) в каждом разделе документа приводят сведения раздельно для каждого варианта, располагая их по подразделам;
б) после разделов, содержащих общие для всех вариантов сведения, вводят раздел, в котором приводят сведения, характеризующие различия вариантов, располагая текст этого раздела по подразделам.
В конце документа может быть помещен раздел (или приложение) «Сравнительная характеристика», где в удобной для сопоставления форме (в виде текста или таблицы) приводят обобщенные сравнительные сведения по всем рассматриваемым вариантам.
3. На чертежах и схемах изображения, относящиеся к различным вариантам, размещают на одном листе или на отдельных листах чертежа или схемы.
4. Таблицу составных частей изделия на чертеже общего вида, а также перечень элементов на схеме (в случае если варианты отличаются составными частями) выполняют одним из следующих способов:
а) в виде одной таблицы, в которой графу «Количество» делят на части по числу вариантов; для вариантов, в которых данная составная часть отсутствует, ставят прочерк;
б) в виде отдельных таблиц для каждого варианта.
5. Наименование варианта, приводимое в таблице, в наименовании подраздела (в случаях, предусмотренных п. 2а) или в заголовке над изображением или таблицей должно быть кратким и содержать сокращенное наименование разрабатываемого изделия и характерную особенность варианта, отличающую его от других вариантов.
Допускается при построении таблиц обозначать варианты римскими цифрами с соответствующим пояснением в том же документе.
1.4. Этапы проектирования и разработки компоновки КА
59
Чертеж общего вида. На стадии технического предложения чертеж общего вида или эквивалентная ему электронная модель сборочной единицы в общем случае должны содержать:
• изображения вариантов изделия, текстовую часть и надписи, необходимые для сопоставления рассматриваемых вариантов, и установления требований к разрабатываемому изделию, а также позволяющие получить представление о компоновочных и основных конструктивных исполнениях изделия, взаимодействии его составных частей и принципе работы изделия;
• наименования, а также обозначения (если они имеются) тех составных частей изделия, для которых необходимо указать данные (технические характеристики, количество и др.) или запись которых необходима для пояснения изображений чертежа общего вида, описания принципа работы изделия, указания о его составе и др.;
• размеры и другие наносимые на изображение данные (при необходимости);
• схему, если она требуется, но оформлять ее отдельным документом нецелесообразно;
• технические характеристики изделия, если это необходимо для удобства сопоставления вариантов по чертежу общего вида. В этом случае технические характеристики в пояснительной записке можно не приводить, а сделать ссылку на чертеж общего вида.
При выполнении чертежа общего вида в виде электронной модели сборочной единицы рекомендуется модели составных частей изделия размещать в отдельных файлах.
Изображения выполняют с максимальными упрощениями, предусмотренными стандартами ЕСКД. Допускается также:
• изображать контурными очертаниями любые составные части изделия;
• изображать только те составные части изделия, которые рассматриваются при сопоставлении вариантов;
• не показывать связи между составными частями изделия, если они не рассматриваются при сопоставлении вариантов.
Наименования и обозначения составных частей изделия на чертеже общего вида указывают одним из следующих способов:
• на полках линий-выносок;
• в таблице, размещаемой на том же листе, что и изображение изделия; в этом случае на полках линий-выносок указывают номера позиций составных частей, включенных в таблицу.
60
/. Общие положения о компоновке космического аппарата
Таблица в общем случае состоит из граф: «Позиция», «Обозначение», «Наименование», «Количество», «Дополнительные сведения».
На электронном чертеже общего вида наименования и обозначения составных частей изделия рекомендуется указывать на полках линий-выносок.
При выполнении чертежа общего вида в электронной форме рекомендуется одновременно отображать электронную структуру изделия (вместо таблицы) и его электронную модель, обеспечив возможность выделения составной части электронной модели при указании соответствующего элемента электронной структуры изделия.
Элементы чертежа общего вида и (или) эквивалентной ему электронной модели сборочной единицы (номера позиций, текст технических требований, надписи и др.) выполняются по правилам, установленным стандартами ЕСКД.
Ведомость технического предложения. В ведомость технического предложения вносят все включенные в комплект документов технического предложения конструкторские документы в порядке, установленном ГОСТ 2.106—96, независимо от того, к какому варианту относится документ.
Допускается в графе «Примечание» указать соответствующий данному документу вариант.
Допускается включать в комплект документов технического предложения эквивалентные документы в различных формах представления, при этом в графе «Примечание» рекомендуется указывать форму представления документа.
Пояснительная записка. Пояснительную записку технического предложения выполняют в соответствии с ГОСТ 2.106—96 с учетом следующих основных требований к содержанию разделов:
• в разделе «Введение» указывают наименование, номер и дату утверждения технического задания;
• в разделе «Назначение и область применения разрабатываемого изделия» приводят соответствующие сведения из технического задания, а также сведения, конкретизирующие и дополняющие техническое задание, в частности:
- краткую характеристику области и условий применения изделия;
- общую характеристику объекта, для применения в котором предназначено данное изделие (при необходимости);
• в разделе «Техническая характеристика» приводят:
1.4. Этапы проектирования и разработки компоновки КА
61
- основные технические характеристики изделия (мощность, число оборотов, производительность, расход электроэнергии, топлива, КПД и другие параметры, характеризующие изделие), установленные техническим заданием, а также характеристики, установленные дополнительно к техническому заданию;
- сведения о соответствии или отклонениях от требований, установленных техническим заданием, с обоснованием отклонений;
- данные сравнения основных характеристик изделия с характеристиками аналогов (отечественных и зарубежных) или дают ссылку на карту технического уровня и качества;
• в разделе «Описание и обоснование выбранной конструкции» приводят описание и обоснование вариантов изделия, рассматриваемых на данной стадии и при необходимости иллюстрации или ссылку на электронные макеты (модели);
• в разделе «Расчеты, подтверждающие работоспособность и надежность конструкции» приводят ориентировочные расчеты, подтверждающие работоспособность и надежность изделия (расчеты показателей долговечности, ремонтопригодности, сохраняемости и др.);
• в разделе «Ожидаемые технико-экономические показатели» приводят ориентировочные расчеты экономических показателей (экономическую эффективность от внедрения в народное хозяйство и пр.) с указанием средств программного и информационного обеспечения автоматизированных систем (в случае их применения для выполнения расчетов);
• в разделе «Уровень стандартизации и унификации» приводят предварительные сведения о примененных в разрабатываемом изделии стандартных и унифицированных сборочных единицах.
1.4.4. Эскизный проект
Эскизный проект разрабатывают, если это предусмотрено ТЗ или протоколом рассмотрения технического предложения; он должен быть выполнен в соответствии с ГОСТ 2.119—73.
Эскизный проект составляют с целью установления принципиальных (конструктивных, схемных и др.) решений изделия, дающих общее представление о принципе работы и (или) устройстве
62 /. Общие положения о компоновке космического аппарата
изделия, когда это целесообразно сделать до разработки технического проекта или рабочей документации.
На стадии разработки эскизного проекта рассматривают варианты изделия и (или) его составных частей (может разрабатываться и без рассмотрения на этой стадии различных вариантов).
При разработке эскизного проекта выполняют работы, необходимые для обеспечения предъявляемых к изделию требований и позволяющие установить принципиальные решения. Перечень необходимых работ определяется разработчиком в зависимости от характера и назначения изделия и согласовывается с заказчиком, если изделие разрабатывается по заказам Министерства обороны.
Конструкторские документы, содержащие различные варианты изделия, выполняют по ГОСТ 2.118—73 в части размещения сведений о различных вариантах, размещения изображений вариантов, построения таблиц, содержащих данные различных вариантов и т. п.
Чертеж общего вида. На стадии эскизного проекта чертеж общего вида или эквивалентная ему электронная модель сборочной единицы в общем случае должны содержать:
• изображения изделия (виды, разрезы, сечения), текстовую часть и надписи, необходимые для понимания конструктивного устройства изделия, взаимодействия его составных частей и принципа работы изделия;
• наименования, а также обозначения (если они имеются) тех составных частей изделия, для которых необходимо указать данные (технические характеристики, количество, указания о материале, принципе работы и др.) или ссылка на которые необходима для пояснения изображений чертежа общего вида, описания принципа работы изделия, указания о составе и др.;
• размеры и другие, наносимые на изображения, данные (при необходимости);
• схему, если она требуется, но оформлять ее отдельным документом нецелесообразно;
• технические характеристики изделия, если это необходимо для удобства сопоставления вариантов по чертежу общего вида.
Изображения выполняют с максимальными упрощениями, предусмотренными стандартами ЕСКД. Составные части изделия,
1.4. Этапы проектирования и разработки компоновки КА
63
в том числе и заимствованные (ранее разработанные) и покупные, изображают с упрощениями (иногда в виде контурных очертаний), если при этом обеспечено понимание конструктивного устройства разрабатываемого изделия, взаимодействия его составных частей и принципа работы изделия.
Изображения составных частей изделия размещают на одном общем листе с изображениями всего изделия или на отдельных (последующих) листах чертежа общего вида.
При выполнении чертежа общего вида в виде электронной модели сборочной единицы рекомендуется модели составных частей изделия размещать в отдельных файлах.
Ведомость эскизного проекта. В ведомость эскизного проекта вносят все включенные в комплект документов эскизного проекта конструкторские документы в порядке, установленном ГОСТ 2.106—96; независимо от того, к какому варианту относится документ.
Допускается в графе «Примечание» указывать соответствующий данному документу вариант.
Можно включать в комплект документов эскизного проекта эквивалентные документы в различных формах представления (в бумажной или электронной форме), при этом в графе «Примечание» рекомендуется указывать форму представления документа.
Пояснительная записка. Пояснительную записку эскизного проекта выполняют по ГОСТ 2.106—96 с учетом следующих основных требований к содержанию разделов:
• в разделе «Введение» указывают наименование, номер и дату утверждения технического задания. Если разработка эскизного проекта предусмотрена не техническим заданием, а протоколом рассмотрения технического предложения, то делают запись по типу «Разработка эскизного проекта предусмотрена техническим предложением...» и указывают номер и дату протокола рассмотрения технического предложения;
• в разделе «Назначение и область применения разрабатываемого изделия» приводят соответствующие сведения из технического задания и технического предложения, а также сведения, конкретизирующие и дополняющие техническое задание и техническое предложение, в частности:
- краткую характеристику области и условий применения изделия;
64
/. Общие положения о компоновке космического аппарата
- общую характеристику объекта, для применения в котором предназначено данное изделие (при необходимости);
• в разделе «Техническая характеристика» приводят:
- основные технические характеристики изделия (мощность, число оборотов, производительность, расход электроэнергии, топлива, коэффициент полезного действия и другие параметры, характеризующие изделие);
- сведения о соответствии или отклонениях от требований, установленных техническим заданием и техническим предложением, если оно разрабатывалось, с обоснованием отклонений;
- данные сравнения основных характеристик изделия с характеристиками аналогов (отечественных и зарубежных) или дают ссылку на карту технического уровня и качества;
• в разделе «Описание и обоснование выбранной конструкции» приводят описание конструкции, обоснование принимаемых на данной стадии принципиальных решений (конструктивных, схемных и др.). При выполнении пояснительной записки в виде электронного документа допускается приводить ссылку на электронные макеты (модели), выполненные по ГОСТ 2.052—2006;
• в разделе «Расчеты, подтверждающие работоспособность и надежность конструкции» приводят:
- ориентировочные расчеты, подтверждающие работоспособность изделия (кинематические, электрические, тепловые, расчеты гидравлических систем и др.);
- ориентировочные расчеты, подтверждающие надежность изделия (расчеты показателей долговечности, ремонтопригодности, сохраняемости и др.);
• в разделе «Ожидаемые технико-экономические показатели» приводят ориентировочные расчеты экономических показателей;
• в разделе «Уровень стандартизации и унификации» приводят предварительные сведения по использованию в разрабатываемом изделии стандартных, унифицированных и заимствованных сборочных единиц и деталей;
- перечень использованной литературы и т. п.;
- перечень средств программного и информационного обеспечения автоматизированных систем, использованных при разработке эскизного проекта.
1.4. Этапы проектирования и разработки компоновки КА
65
1.4.5. Технический проект
На основании анализа, разработанных вариантов эскизных проектов, результатов лабораторных экспериментальных отработок оборудования и конструкции выбирают вариант компоновки КА и состав бортового оборудования.
Разрабатывают подробную компоновку КА с уточнением габаритов приборов бортового оборудования, мест его установки и способов крепления, прокладки электрических кабелей, волноводов и трубопроводов.
Часто для уточнения компоновки изготовляют натурный макет отдельных отсеков или всего КА.
1.4.6. Разработка проектной технической документации
После макетирования, утверждения габаритных чертежей бортового оборудования, входящих в КА, выпускают рабочую компоновку (исполнительную), габаритные и установочные чертежи КА. Одновременно с этим в конструкторских отделах разрабатывают техническую документацию на изготовление КА в целом.
По технической документации, выпущенной конструкторским отделом, изготовляют элементы конструкции, узлы и агрегаты КА для проведения экспериментальных исследований по специальным программам. Космический аппарат, укомплектованный оборудованием, подвергают испытаниям. После положительных результатов испытаний техническую документацию передают в производство для получения штатных (летных) образцов КА.
1.4.7. Экспериментальная отработка
бортового оборудования КА
В процессе создания все бортовое оборудование и КА в целом проходят длительный цикл экспериментальной отработки. Сложность задачи заключается в том, что провести ЛКИ по полной программе, как это делается в авиации, практически невозможно по причине высокой стоимости и ракеты-носителя и ее запуска. Пилотируемые КА, несмотря на большие затраты, отрабатывают в летном режиме. Автоматические КА подвергают комплексным наземным испытаниям, которые подразделяют на два этапа. На первом этапе проводят отработку отдельно блоков, приборов и
66
/. Общие положения о компоновке космического аппарата
систем бортового оборудования, на втором — комплексные испытаний полностью оборудованного КА.
Все блоки бортового оборудования проходят следующие испытания.
На этапе выпуска конструкторской технологической документации для определения работоспособности блоков и приборов в условиях изменения напряжения и температуры, заданных в ТТЗ, а также точностных характеристик, проводят лабораторно-доводочные испытания на одном-двух макетах каждого блока или прибора. Результаты оформляют в виде протокола на каждый из испытанных приборов.
После получения изготовленной по конструкторской технологической документации опытной партии блоков или приборов на заводе-изготовителе осуществляют конструкторско-доводочные испытания по специально разработанной программе. Цель этих испытаний — всесторонняя проверка работоспособности блоков и приборов под влиянием внешних воздействующих факторов, оговоренных в ТТЗ, а также установление запасов работоспособности блоков и приборов при определенных воздействующих факторах. Результаты испытаний оформляют в виде технического отчета, составляемого для всего оборудования, которое разработано данным предприятием для КА.
Приемо-сдаточным испытаниям подвергают каждый блок и прибор после их изготовления. Такие испытания проводят по соответствующему частному техническому условию представители отдела технического контроля и заказчика. Отметку о результатах испытаний записывают в паспорт (формуляр) блока и прибора. Приемо-сдаточные испытания проходят все блоки и приборы бортового оборудования, устанавливаемого на КА.
Типовым испытаниям, осуществляемым в соответствии с частным техническим условием и общим техническим условием, подвергают приборы и блоки в количестве двух штук каждого наименования. Отметку о результатах типовых испытаний проставляют в паспорт (формуляр) каждого прибора или блока.
Для комплексных испытаний изготовляют реальные изделия, на которых размещают штатную аппаратуру. Задача этих испытаний — проверка работоспособности бортового оборудования в экстремальных условиях. Проводят три цикла комплексных испытаний: электрические, тепловые и вибрационные.
1.4. Этапы проектирования и разработки компоновки КА
67
1. Электрические испытания. Перед установкой все блоки и приборы проходят экспериментальную отработку, включающую:
• входной контроль;
• отработку в составе своей подсистемы, в которую входит данный прибор или блок;
• комплексную отработку в составе системы на стендах комплексных испытаний.
После окончания проверок комплект бортового оборудования устанавливают на КА для дальнейших испытаний, которые проводят по штатной технической документации в соответствии со штатной инструкцией. Электрические испытания заключаются в проверке:
• питающих линий бортового оборудования;
• режимов СУД: демпфирования при отделении от ракеты-носителя; восстановления ориентации КА; наведения (коррекции орбиты); ориентации (построения орбитальной, инерциальной и путевой систем координат);
• режима реактивной стабилизации;
• режима электромеханической стабилизации и системы ее разгрузки;
• функционирования вторичных источников питания;
• фазировки и зон настройки антенн и двигателей СС.
2. Тепловые испытания. Как уже было отмечено, при полете КА воспринимает тепловые нагрузки от различных источников нагрева (внешних и внутренних), при этом СТР должна обеспечивать в отсеках заданную температуру. В жилых отсеках пилотируемых КА температура должна составлять 23...25 °C, а в герметичных и негерметичных приборных — 0...40 °C. При тепловых испытаниях в КА монтируют реальную СТР и устанавливают тепловые макеты блоков и приборов бортового оборудования, на которых закрепляют датчики температуры (на теплонапряженных блоках размещают несколько таких датчиков). Датчик температуры также устанавливают в отсеке. В процессе испытаний имитируют такие случаи тепловой нагрузки, как нахождение КА на теневом или освещенном участке орбиты; различные сочетания функционирования бортового оборудования в соответствии с циклограммой режима полета.
В результате подобных испытаний за счет отладки работы СТР удается получить необходимые температурные режимы в отсеках и на местах установки особотеплонапряженных блоков.
3. Вибрационные испытания. Космический аппарат испытывает значительные вибродинамические нагрузки на различных участках
68
/. Общие положения о компоновке космического аппарата
полета (особенно на участке выведения при полете на ракете-носителе). Вибрации возникают при включении собственных двигателей КА во время маневрирования, наведения и стабилизации. Испытываемую машину комплектуют реальной аппаратурой, размещаемой на штатных местах со штатным креплением. Вибрационные испытания проводят как в атмосфере, так и в вакууме по всем трем осям КА (в связанной системе координат). В задачу таких испытаний входят:
• определение собственных частот колебаний блоков и приборов бортового оборудования (особенно крупногабаритных), а также динамических условий в местах их закрепления;
• установление собственных частот раскрывающихся элементов конструкций (солнечных батарей, антенн, штанг с аппаратурой) как на участке выведения (в зачекованном виде), так и в условиях орбитального полета;
• проведение вибродинамических и вибропрочностных испытаний корпуса КА и элементов конструкции с блоками и приборами бортового оборудования.
По результатам испытаний уточняется конструкция крепления блоков бортового оборудования, места расположения замков, фиксирующих раскрывающиеся элементы на участках выведения. Проводятся изменения в конструкции корпуса и элементов несущих конструкций.
1.5. Виды компоновки
После проведенного предварительного выбора состава бортового оборудования, определения массы и габаритов ее блоков, а также ракеты-носителя можно приступать к компоновке КА.
Компоновка — этап работ по проектированию КА (или ракеты), включающий в себя определение внешнего вида КА, выбор его геометрической формы, разделение корпуса на отдельные отсеки, рациональное размещение приборов, узлов и агрегатов, входящих в состав КА (внутри корпуса и вне его), выполнение поставленной задачи, мест стыковки с ракетой-носителем и другими КА.
Условно компоновку можно разделить:
• на геометрическую;
• инерционно-массовую;
• функциональную;
• конструктивно-силовую;
• аэродинамическую.
Рассмотрим подробнее каждую из них.
1.5. Виды компоновки
69
1.5.1. Геометрическая компоновка
Геометрическая компоновка заключается в позиционировании компонуемых элементов бортового оборудования относительно связанной системы координат КА. В процессе геометрической компоновки выбирается внешний вид и формируется теоретический чертеж КА, определяющий его форму и габариты.
Форму и габариты КА устанавливают в соответствии с циклограммой режима полетов, которая предусматривает несколько различных конфигураций: транспортную, конфигурацию на участке выведения, рабочую конфигурацию на участке спуска и посадки и т. п.
Например, конфигурация на участке выведения должна учитывать размеры зоны полезной нагрузки головного обтекателя ракеты-носителя. В целях рационального размещения под обтекателем ракеты-носителя все внешние конструкции (солнечные батареи, антенны, штанги с ДУ и приборами) складываются. Так, исходя из требований размещения под обтекателем, КА «Аполлон» выводился на орбиту в виде, требующем перестыковки лунного модуля для продолжения полета.
При геометрической компоновке проводят, если это необходимо, разделение КА на отсеки и функциональные блоки: агрегатный и орбитальный отсеки, спускаемый аппарат и т. д. (рис. 1.17); определяют места размещения солнечных батарей, антенн, ДУ, стыковочных узлов и т. п.
Приборно-Бытовой Спускаемый агрегатный
Рис. 1.17. Схема разделения на отсеки КА «Союз»:
1,2. 3 — переходной, приборный и агрегатный отсеки
70
/. Общие положения о компоновке космического аппарата
Геометрическую компоновку отсеков начинают с определения комплекта блоков бортового оборудования, размещаемых в данном отсеке. Критерием для этого служит назначение отсека и комплексный подход к решению задачи, поставленной перед КА.
При размещении бортового оборудования в отсеке следует учитывать требования к размещению, указанные в габаритных чертежах на оборудование, заданные положения центра масс и моменты инерции отсека, а также удобства сборочно-монтажных работ в цехе и обслуживания на технической позиции.
1.5.2. Инерционно-массовая компоновка
Инерционно-массовая компоновка — это обеспечение требуемой геометрии масс КА, центровка и балансировка КА относительно строительных осей на всех участках полета.
Обеспечение устойчивости и управляемости накладывает ограничения на положение центра масс и моменты инерции КА. В ТЗ на проектирование КА задают координаты центра масс и его допустимые отклонения. Достижение требуемой точности центровки — трудоемкая задача, для решения которой проводят расчеты на ЭВМ. Определение положения центра масс, выполненное по чертежам, определяют с погрешностью ± 2 %.
Определение положения центра масс КА входит в исходный материал для расчета нагрузок, действующих на КА, а также для нахождения моментов инерции.
Центр масс тела — точка, являющаяся равнодействующей параллельных сил тяжести, приложенных к отдельным частям тела. Процесс определения положения центра масс называют центровкой.
Координаты центра масс КА находят по формулам
Хлм
лл __ Z —1 , у Z —1 . 'у Z —1____
ЛЦМ “ п ’ 7ц.м ~ п ’ ZUM ~ и ’
Z = 1 Z = 1 Z=1
где mt — масса /-го элемента конструкции КА; п — количество элементов конструкции; у,, z, — координаты центра масс /-го элемента.
1.5. Виды компоновки
71
Свойства центра масс КА:
• положение центра масс зависит только от расположения масс элементов КА в пространстве и не зависит от выбора системы координат;
• если материальные элементы конструкции КА неизменно связаны между собой, то и положение их центра масс относительно этих элементов неизменно;
• если массы расположены симметрично относительно какой-либо плоскости, то их центр лежит в этой плоскости;
• если массы симметричны относительно двух плоскостей, то их центр находится на линии пересечения этих плоскостей;
• если массы расположены симметрично относительно трех плоскостей, то их центр лежит на линии пересечения этих плоскостей.
Отклонения положения центра масс задают в виде зависимости |^(гцм-К3)|-8им <0,
где F — функция, определяющая допустимое отклонение центра масс; Уц м — вектор центра масс КА; У3 — вектор заданного (требуемого) положения центра масс; 8ЦМ — допустимое отклонение.
Качество полученной центровки по трем осям определяют по выражению
^(^цм ~ ^тр ) + (Л’ф Л’тр ) + (^ф ^тр ) 9
где Хф, уф, 7ф — фактические координаты центра масс; хтр, у^, zTp — требуемые координаты центра масс.
На всех участках полета положения центра масс образуют в строительных осях некоторую область — QUM. Чем уже эта область, тем совершеннее компоновка КА с точки зрения центровки.
Для проведения центровки необходимо знать массогабаритные характеристики конструктивных элементов КА и приборов бортового оборудования, которые определяются целевыми программами и временем существования.
В результате проектных работ внешней и внутренней компоновки определяют значения масс всех элементов конструкции и приборов бортового оборудования, на этапе геометрической компоновки находят координаты центров масс каждого элемента в строительных осях КА.
72
/. Общие положения о компоновке космического аппарата
По значениям масс и координатам их центров формируют таблицу, называемую массовой (весовой) сводкой (табл. 1.3).
Таблица 1.3. Инерционно-массовая сводная ведомость
№ п/п Наименование элемента Масса, кг Момент инерции Координаты ЦМ, м
Зх JY Л Jxy Jyx Jxz X Y Z
1
2
/
Массовую сводку составляют для всех характерных участков полета при основных состояниях КА, например, на старте КА полностью заправлен, раскрывающиеся элементы конструкции сложены, установлен термочехол; на следующем этапе термочехол и обтекатель сброшены, раскрывающиеся элементы конструкции раскрыты и т. д.
При формировании массовой сводки особое внимание уделяют активным участкам полета, где работает ОДУ, поскольку на них может происходить смещение центра масс в результате расхода топлива. На этих участках инерционно-центровочные характеристики определяют для каждого малого временного участка.
Для нахождения положения центра масс КА выбирают строительные оси (рис. 1.18), которые, как правило, совпадают с осями связанной системы координат КА. Различие заключается в том, что начало координат может располагаться в любой точке на оси X. чаще всего в носовой или в кормовой части КА.
Рис. 1.18. Ориентация строительных осей КА
Расчет центровки проводят для всех участков полета и проверяют экспериментально после изготовления КА.
1.5. Виды компоновки
73
Экспериментальное определение положения центра масс КА осуществляют на сборочной площадке завода-изготовителя после окончательной сборки КА, для чего используют специальные стенды с весами, подъемными механизмами, ложементами, нивелирами и т. д. Положение центра масс находят для каждой из осей КА.
При проведении эксперимента ось X совпадает с продольной осью КА, ось Y перпендикулярна продольной оси и проходит через торец ДУ, ось Z перпендикулярна осям А, У и образует правую систему координат.
При взвешивании КА выставляют в горизонтальное положение по реперным точкам. Расхождение реперных точек по правому и левому бортам не должно превышать 0,5 мм.
Замеры проводят по следующим схемам:
F?a . t
• определение координаты ацм =—-— (рис. 1.19);
Л/КА
^Ц.М
Рис. 1.19. Схема экспериментального определения положения центра масс по оси X:
1 — реперные точки; 2 — весы
74 /. Общие положения о компоновке космического аппарата
• нахождение координаты Уц м
рзУз + рьУь (рис | 20);
^КА
Рис. 1.20. Схема экспериментального определения положения центра масс по оси Y:
1 — горизонт; 2, 3 — весы
F3z3 + F4z4
• определение координаты zUM = ——--(рис. 1.21).
WKA
Расчет инерционных характеристик КА. Инерционные характеристики необходимы для определения параметров СУД КА относительно центра масс.
Из теоретической механики следует, что для однородного тела, вращающегося относительно оси симметрии, связь между векторами момента М и углового ускорения (Ь имеет вид
или по компонентам вектора
А7 х — J % cb j A/f у — J у(Ь у i A4 — Jz * (1.1)
1.5. Виды компоновки
75
Рис. 1.21. Схема экспериментального определения положения центра масс по оси Z:
/ — горизонт; 2. 3 — весы
Выражения (1.1) справедливы, если угол между векторами М и со равен нулю. В общем случае, если угол между векторами М и со не равен нулю, а вектора М и со пропорциональны друг другу и каждая компонента вектора М зависит от компонент вектора со . то составляющие по осям имеют вид
А/ Y — J ХХ^ X JxY^Y JXZ^Z ’
h/f у - Jух X JYY Y JYZ 7 ’ (1 • 2)
- Jzx^x ~^ZY^Y ~JZZ®Z’
где Jxx, Jxy, Jxz — коэффициенты пропорциональности, имеющие размерность моментов инерции. Коэффициенты в формуле (1.2) являются компонентами тензора второго ранга, или тензора инерции тела (КА),
16
1. Общие положения о компоновке космического аппарата
XX ~ XY ~ XZ
J = -JYX JYY - JYZ
\~JZX “ JzY ^ZZ J
Тензор инерции KA характеризует его инерциальные свойства при вращении. Диагональные члены называются осевыми моментами инерции, недиагональные — центробежными. Если = JZv, Jxy = Лу, Jyz = Jzy, то тензор, удовлетворяющий этому условию, называют симметричным. Если одинаковые массы КА расположены симметрично относительно его плоскостей, то тензор инерции является диагональным.
Взаимная ориентация векторов М и со определяется значениями компонент тензора инерции, например, если JXx = Лх = = Jzz = остальные коэффициенты равны нулю, то выражение (1.2) переходит в выражение (1.1). Если центробежный момент инерции относительно осей X и Y равен нулю, то эти оси называют главными.
Оси симметрии КА всегда должны быть главными для обеспечения автономности управления стабилизацией КА по каналам тангажа, курса и крена. При компоновке массы элементов конструкции и приборов бортового оборудования необходимо распределять симметрично относительно плоскостей связанной системы координат КА так, чтобы тензор инерции был диагональным.
Из анализа динамических уравнений вращения вокруг центра масс КА с недиагональным тензором инерции (1.2) следует, что момент, создаваемый исполнительными органами СС по какому-либо каналу, вызывает ускоренное движение сразу по всем трем каналам. В этом случае движение имеет перекрестные связи, лишающие эти каналы автономности. Чем выше центробежные моменты инерции, тем сильнее перекрестные связи. При диагональном тензоре инерции, если оси связанной системы координат XYZ являются главными центральными осями инерции, то движение независимо и управление по каналам тангажа, курса и крена приобретает автономность.
1.5. Виды компоновки
77
Для определения компонент тензора инерции КА на основе массовой сводки составляют ведомость инерционно-массовых характеристик приборов бортового оборудования и элементов конструкции КА (см. табл. 1.3). Для тех же состояний и элементов, что и в массовой сводке, в ведомость вносят координаты центра масс в осях связанной системы координат, массы и моменты инерции относительно собственных центральных осей, параллельных осям связанной системы координат.
Момент инерции каждого тела — величина аддитивная, т. е. момент инерции КА равен сумме моментов инерции его частей относительно центральных осей:
п J=Y^, /=1
где — масса z-го тела, т = р/СК); р, — плотность /-го тела; V, — объем /-го тела; R, — расстояние от оси, относительно которой вычисляется момент инерции.
Для изделий с неравномерно распределенной массой плотность определяют по выражению
Ат р = нт-=
АК
dm ~dV"
где Ат — масса, заключенная в объеме А К
Моменты инерции каждого элемента относительно собственных центральных осей XYZтаковы:
ЛобА\ J (У1 + zi )Рср/^^’
У
Лоб У, J
У
Лоб Z, ~ J + У} )рср ->
У
78
/. Общие положения о компоновке космического аппарата
где i — номер элемента конструкции; К, — объем z-ro элемента; рср, — средняя плотность z-ro элемента конструкции.
К связанным центральным осям XYZ переход осуществляется по теореме Штейнера (рис. 1.22):
Лв — Лоб + .
Рис. 1.22. Схема приведения момента инерции
Моменты инерции в связанной системе координат КА имеют следующий вид:
J Х{ ~~ Лоб X, + (з^соб i + ^соб / ) ’
^Yt ~ соб К, + (^соб / + -*"соб I)’
JZt ~ Лоб Z, + (-^соб i + З^соб i )•
Суммарные моменты инерции всего КА относительно осей связанной системы координат
п п п
х - ^х. ’ - Ха ’ а ~ Ха •
1 1 1
Значения центробежных моментов инерции необходимы для нахождения инерции собственных центральных осей
ЛобА'/У/ ~ J -> Лоб A^Z, “ J xiziPi^V^ “ J V^iPi^r
У. yt У.
В некоторых случаях исходя из условий полета на сумму цен-робежных моментов накладывают ограничения
|Лоб X,Y, | +1Лоб X,Z' | + |Лоб YtZ, | < ?
где 8/ — допуск на сумму центробежных моментов инерции, опреде-
ляющий степень совпадения центральных осей отсека с осями КА.
Известные моменты инерции КА позволяют проводить компоновку двигателей СС и СО КА.
Например, момент Л/, необходимый для разворота КА,
1.5. Виды компоновки
79
М = 7(0 = ^,
где РуАХ — сила тяги управляющего двигателя; L — плечо приложения силы.
Как правило, при проектировании задают величины ш и ш , с помощью которых при известном моменте инерции находят плечо £, что определяет позиции, на которых должны устанавливаться двигатели, или при заданных положениях двигателей их требуемую силу тяги Руп.
Балансировка отсека. Задача статической балансировки КА состоит в приведении его центра тяжести на ось вращения. В дополнение к этому динамическая балансировка КА должна обеспечивать равенство нулю центробежных моментов инерции. Космический аппарат, уравновешенный статически и динамически, является полностью сбалансированным.
Существуют случаи, когда за счет внутренней компоновки отсека невозможно обеспечить заданные для него положение центра масс и моменты инерции, поэтому прибегают к установке балансировочных масс (рис. 1.23).
Рис. 1.23. Схема установки балансировочной массы:
тб — балансировочная масса, обеспечивающая заданное положение центра масс отсека; С’§ — вектор размещения балансировочной массы: Уцм— вектор положения центра масс; — вектор заданного положения центра масс
Точка установки балансировочной массы лежит на прямой, проходящей через требуемый и действительный центры масс отсека, и максимально приближена к границе отсека. Балансировочная масса
80
1. Общие положения о компоновке космического аппарата
п п
пц = min ——;-------zr-p!—,
^,(76eG \Y3-U.\
где Ul — вектор положения /-го элемента; G — множество точек, принадлежащих отсеку.
Для некоторых КА задают ограничения на моменты инерции. Наиболее распространено требование равенства моментов инерции относительно осей А" и К в декартовой системе координат, которое записывают в виде
и
Х[Мл )+(<-, -<J]= °’
где у/9 zt — координаты центра масс /-го элемента; J:I, Jyi — собственные моменты инерции /-го элемента.
Балансировочную массу, отвечающую требованиям равенства моментов инерции относительно осей А" и У, находят из выражения
п
™ — 2=1_______________
Если ось X пересекает отсек, то точка установки балансировочной массы лежит в одной из плоскостей —XOY или ZOX(рис. 1.24).
Рис. 1.24. Схема установки балансировочной массы для обеспечения заданного момента инерции
1.5. Виды компоновки
81
Для сохранения положения центра масс балансировочную массу делят на две равные части.
1.5.3. Функциональная компоновка
Компоновка любого КА как процесс рационального размещения оборудования условно подразделяется на внешнюю и внутреннюю.
Внешняя компоновка определяет геометрические формы КА, его размеры, взаимное расположение отсеков и включает в себя разработку требований к размещению на поверхности корпуса КА приборов, систем и другого оборудования.
Внутренняя компоновка обусловливает размещение оборудования в отсеках КА с учетом требований к их установке, прокладку соединительных коммуникаций и т. п. На наружной поверхности корпуса КА находится значительное количество блоков бортового оборудования (антенн, солнечных батарей, ИК-датчиков, датчиков Солнца и т. д.). При установке необходимо строго выдерживать требуемые зоны обзора, размещая оборудование так, чтобы одни блоки не мешали другим перекрытием зон обзора и действия.
Если оборудование во время полета раскрывается, то при этом не должны перекрываться зоны обзора других приборов.
1.5.4. Конструктивно-силовая компоновка
Конструктивно-силовая компоновка предусматривает:
• создание силовой схемы КА, которая воспринимает основные нагрузки, действующие на КА на всех участках полета;
• органичное сочетание силовых элементов конструкции и полезных объемов внутри и вне этой конструкции при размещении приборов бортового оборудования;
• учет требований производства и эксплуатации;
• обеспечение требуемого ресурса функционирования КА в течение заданного времени эксплуатации на рабочей орбите.
В полете на КА действуют два вида сил: внешние и внутренние.
К внешним силам, действующим на КА, можно отнести: G — силу тяжести; Р — силу тяги ДУ при маневрировании; Руп — силу тяги управляющих двигателей и двигателей стабилизации; X и Y —
82
1. Общие положения о компоновке космического аппарата
аэродинамические силы, действующие на участке спуска в атмосфере; Лоз — возмущающую силу, действующую на КА в полете. Все эти силы характеризуют взаимодействие КА с окружающей средой.
По характеру распределения все внешние силы можно подразделить на три категории:
• объемные или массовые, распределенные по всему объему КА и пропорциональные плотности его материала (силы тяжести и инерциальные силы);
• поверхностные, распределенные по поверхности (аэродинамические, гидродинамические и другие силы);
• сосредоточенные — большие силы, сосредоточенные на малой поверхности, их можно считать силами, если они приложены в точке (сила тяги двигателей и т. д.).
Внешние силы, действующие на корпус КА, приводят к возникновению внутренних сил в несущих элементах конструкций, которые зависят от распределения внешних сил по поверхности корпуса и от характера изменения их во времени.
По характеру изменения во времени все внешние силы делятся на статические, не изменяющиеся длительное время, и динамические, быстро меняющиеся во времени.
Отклонение внешних сил, действующих на КА, от расчетных называют внешними возмущающими силами.
При компоновке бортового оборудования КА рассматривают как тело с низкими частотами упругих колебаний, характерных не только для КА больших размеров, но и для космических систем, которые состоят из нескольких состыкованных КА, вследствие малой жесткости стыковочных узлов. При этом корпуса состыкованных КА в первом приближении можно считать абсолютно жесткими телами, перемещающимися друг относительно друга за счет нежесткой связи между ними с частотами, близкими к 1 Гц. Отсюда становится актуальной задача исследования упругих колебаний КА, оснащенного системой управления.
1.5.5. Аэродинамическая компоновка
Под аэродинамической компоновкой будем понимать выбор формы и габаритов КА, гарантирующих с момента старта и последовательно на всех режимах полета выполнение таких аэродина
1.5. Виды компоновки
83
мических задач, как обеспечение аэродинамической стабилизации и управления полетом КА; требуемых аэродинамических характеристик (аэродинамических коэффициентов, аэродинамического качества); статической устойчивости КА; формирование полей обтекания, обеспечивающих требуемые температуры на поверхности корпуса.
Аэродинамическая компоновка зависит от назначения КА. Все КА можно подразделить на два класса: орбитальные КА, не возвращаемые на Землю, и КА, совершающие мягкую посадку на Землю или другую планету, имеющую атмосферу. Это различие накладывает строгие ограничения на аэродинамическую компоновку.
Траекторию полета КА можно разделить на следующие участки: полеты в атмосфере на участке выведения в космосе, на участке орбитального полета, в атмосфере на участках спуска и мягкой посадки на Землю. На каждом из этих участков аэродинамическая компоновка КА существенно влияет на параметры траектории.
Как правило, при прохождении плотных слоев атмосферы на участке выведения КА закрыт обтекателем, и его аэродинамические формы не влияют на параметры траектории выведения. Исключение составляют многоразовые транспортные космические корабли, которые имеют обтекаемые аэродинамические формы. В верхних слоях атмосферы, после сброса обтекателя, аэродинамические характеристики КА также существенно не влияют на параметры траектории.
На участке орбитального полета аэродинамическая форма КА влияет на время его существования на орбите, что особенно актуально для долгоживущих КА, работающих на малых высотах. При выборе аэродинамической формы орбитального КА следует:
• придавать корпусу КА максимально возможную обтекаемую форму для того, чтобы аэродинамическое сопротивление КА было минимальным (особенно для низколетящих КА); однако возможна и произвольная форма КА (например, куб);
• обеспечивать минимально возможный мидель корпуса КА, поскольку он влияет на аэродинамическое сопротивление и возмущающую силу, вызванную солнечным ветром (особенно для высоколетящих КА);
84
1. Общие положения о компоновке космического аппарата
• учитывать наличие бортового оборудования, требующего размещения в герметичных отсеках, которые необходимо выполнять в виде тел вращения, поскольку такие формы позволяют получать минимальные массы конструкции по сравнению с другими формами при использовании одинаковых материалов и нагрузок, действующих на отсек.
Особенности аэродинамической компоновки спускаемых КА. На участке спуска в атмосфере аэродинамическая форма играет решающее значение, поскольку основная масса кинетической энергии, которой обладает КА, входящий в атмосферу, за счет аэродинамического сопротивления трансформируется в тепловую энергию.
Рассмотрим основные принципы компоновки КА, совершающих посадку на планету с атмосферой. Такие КА делятся на две группы.
К первой группе относятся КА, обладающие значительным аэродинамическим качеством и совершающие посадку на колеса. Аэродинамическая компоновка подобных КА предполагает наличие крыльев или несущего корпуса (например, «Буран» и «Спейс Шаттл»). На участке выведения аэродинамическая форма этих КА обеспечивает необходимый минимум аэродинамического сопротивления.
Вторая группа — КА с малым аэродинамическим качеством, предназначенные не для посадки на аэродром, а для спуска в заданном районе на парашюте или другом посадочном устройстве. К ним относятся средства доставки на Землю со спутников и орбитальных станций различных грузов (экипажа, фотоматериалов, результатов космических экспериментов, продуктов космического производства и т. п.). На участке выведения КА убираются под обтекатель ракеты-носителя и не создают дополнительное аэродинамическое сопротивление.
Задачи аэродинамической компоновки спускаемого КА можно сформулировать следующим образом:
• КА должен иметь минимальные массу и габариты;
• КА должен обладать заданным аэродинамическим качеством, обеспечивающим требуемые маневрирование при спуске, аэродинамическое сопротивление, торможение при полете в атмосфере;
• КА необходимы запас аэродинамической устойчивости и органы управления, позволяющие управлять маневрированием на участке спуска.
1.5. Виды компоновки
85
Основные типы и характеристики спускаемых КА приведены в табл. 1.4.
Форма спускаемого КА в значительной степени определяет вид траектории спуска, а следовательно, и условия (перегрузки и тепловые потоки, возникающие при торможении КА в атмосфере), в которых будет проходить спуск КА.
Спускаемый КА, движущийся по баллистической траектории, испытывает перегрузки, доходящие до 10 ед. Для пилотируемых спускаемых КА, летящих по пологой или планирующей баллистическим траекториям, перегрузка значительно меньше, 2...4 ед. Снизить перегрузки, действующие на такой КА, можно за счет увеличения времени спуска. Это возможно только при управлении КА на траектории полета в атмосфере.
Таблица 1.4. Основные типы и параметры спускаемых КА
Тип спускаемого КА
Характеристика Аэродиамического качества
ьаллистическии малого среднего большого
Форма Сфера Сегментальная Сегментальная Несущий корпус Крылатый
Аэродинамическое качество при числе: М> 1 М< 1 Вид спуска с орбиты Посадка: способ точность, м 0 0 Баллис Верти! ±3( 0 0 этический сальный (пар; ЗОЮ3 0,2... 0,5 0 Скользящий 1ШЮТНЫЙ) 1 ±ЗО-1О3 0,7... 1,2 0,8...0,9 Планир Вертикальный ±10 • 103 1,3...3,0 3,0...5,0 >ующий Самолетный ±50
86
/. Общие положения о компоновке космического аппарата
Максимальные тепловые потоки действуют на КА, спускающийся по баллистической траектории, но поскольку время спуска незначительно, суммарные тепловые потоки сравнительно малы. Если спускаемый КА летит по пологой, или планирующей, баллистической траектории, то удельный тепловой поток, действующий на КА, будет меньше, чем при баллистическом спуске, но суммарный тепловой поток значительно возрастет в связи с увеличением времени полета. Регулировать тепловые потоки, действующие на КА при спуске в атмосфере, также можно, управляя полетом КА.
Управлять КА, летящим по скользящей и планирующей траекториям спуска в атмосфере, можно за счет программного изменения углов атаки а и крена у. Управление с помощью изменения угла атаки требует значительного расхода рабочего тела. Кроме того, при больших углах атаки возможен обдув набегающим потоком боковой поверхности КА, поэтому необходимо разместить на поверхности мощную теплозащиту, что увеличит массу теплозащиты, а следовательно, и массу КА в целом. Управление КА путем изменения угла крена основано на следующем. Известно, что центр масс смещается вверх относительно центра давления по оси симметрии КА, при этом спуск осуществляется на балансировочном угле атаки (осб 0). Вектор подъемной силы лежит в плоскости симметрии и проходит через центр давления, при развороте КА на угол крена происходит перераспределение сил, возникает боковая сила, а вертикальная составляющая подъемной силы уменьшается.
Таким образом, системы ориентации и стабилизации спускаемого КА осуществляют управление боковой и продольной дальностью полета, а также регулируют требуемые перегрузки и тепловые потоки.
При проектировании КА, летящего по скользящей траектории спуска, целесообразно применять аэродинамическую сегментальную форму, обладающую следующими преимуществами:
• удобством размещения полезной нагрузки, компоновки оборудования и парашютной системы;
• относительно небольшими скоростями к моменту ввода парашютной системы (порядка 100...200 м/с);
• реализацией хорошего аэродинамического качества, не требующей наличия специальных устройств;
• требуемой массой теплозащиты, которая не превышает 20 % массы КА.
2. КРИТЕРИИ ОЦЕНКИ КАЧЕСТВА КОМПОНОВКИ КОСМИЧЕСКОГО АППАРАТА
2.1. Методы оценки качества компоновки
Для оценки результата компоновки необходимы количественные критерии, позволяющие сделать объективное заключение о качестве созданной компоновки.
Критерии качества компоновки Kt зависят от варьируемых параметров компоновочной схемы Pt\
K,=f(P},P2,P3,...,P„...,Pn), i = \,...,m. (2.1)
Как правило, параметры Р, определяют форму и взаимное расположение компонуемых элементов, а также их взаимовлияние. Постановка задачи компоновки связана с выбором этих параметров и заданием функциональных зависимостей между ними, т. е. с математической формализацией технических требований к размещению оборудования на борту КА; их подразделяют на две основные группы:
• требование целевого назначения приборов и элементов конструкции;
• требование по исключению нерасчетного взаимовлияния систем.
Первая группа технических требований задается в виде ограничений на расположение каждого прибора, размещаемого на борту КА, которые возникают исходя из условий максимально эффективного функционирования. Прибор должен быть установлен в фиксированной области, заданной в связанной системе координат КА. Например, часто ось Y фотоаппарата должна совпадать или быть
88 2. Критерии оценки качества компоновки космического аппарата
сонаправлена с главной осью инерции Y КА, или технологическая установка по производству сверхчистых материалов должна находиться в зоне действия минимальных микроускорений и т. п.
Для формализации первой группы требований необходимо математическое задание формы, размеров КА и его элементов. При этом используют геометрическое моделирование с помощью методов начертательной (на чертежных листах или плазах) и аналитической геометрии, а также компьютерной графики. В последнем случае говорят об электронном геометрическом моделировании.
Вторая группа технических требований задается в виде качественных и количественных моделей взаимовлияния. Например, при размещении антенн следует учитывать их диаграммы направленности, при установке панелей солнечных батарей — не допускать затенения поверхностей фотоэлектрических преобразователей, при плотной компоновке приборных отсеков — учитывать взаимовлияние температурных полей, которое не должно ухудшать характеристики целевого оборудования.
Формализация данной группы требований основана на построении математических моделей физических процессов теплопередачи, электродинамики, оптики, динамики и прочности конструкций.
Особенность задачи компоновки состоит в том, что параметры Pj являются общими для различных критериев качества. Как правило, изменение некоторого параметра компоновочной схемы улучшает одни критерии качества и ухудшает другие. Таким образом, критерии вступают в противоречие друг с другом, и для оценки необходим общий интегральный критерий, учитывающий степень влияния различных критериев на общее качество компоновки.
Общий критерий (целевая функция) Z формируется на основе метода экспертных оценок и представляется как взвешенная сумма критериев
т
z = (2-2)
/=1
где т — число критериев; а, — весовой коэффициент /-го критерия, который задается экспертами на основе постановки целевой задачи проектирования и опыта разработки прототипов КА.
В результате, с математической точки зрения, поиск наилучшей компоновки КА приводит к постановке математической задачи оптимизации, в которой требуется найти экстремум (минимум или максимум) целевой функции (2.2) многих переменных при ограничениях, определяемых системой неравенств.
2.2. Главные критерии качества компоновки
89
К числу ограничений в математической задаче компоновки, определяющих условия существования КА, относятся, в частности, ограничения по размещению отдельных элементов, ограничения на инерционно-массовые характеристики, эксплуатационные и технологические ограничения.
Полная и непротиворечивая строгая математическая формализация задачи компоновки затруднена тем, что критерии компоновки (2.1), ограничения и целевая функция (2.2) часто могут быть найдены только в ходе анализа больших объемов информации о компоновках прототипов КА. Сбор и обработка информации может занимать длительное время, поэтому возникает необходимость максимальной автоматизации данного процесса для сокращения сроков и повышения качества разработки КА.
Сложность решения задачи компоновки современного КА определяется большой размерностью задачи, т. е. огромным количеством неизвестных параметров, к числу которых относятся обобщенные координаты элементов, размещаемых в отсеке, габариты отсека, номенклатура используемых стандартных изделий (нормалей), параметры режимов работы оборудования и пр.
Поскольку найти аналитическое решение задачи оптимизации компоновки возможно только в небольшом числе частных случаев, то используют численные методы оптимизации компоновки на ЭВМ. При таком подходе требуется автоматизация процесса синтеза и расчета вариантов компоновки в целях анализа наибольшего количества вариантов за заданный промежуток времени.
2.2. Главные критерии качества компоновки
Главными критериями качества компоновки КА можно назвать следующие:
• обеспечение максимальной эффективности целевого оборудования;
• минимальная масса элементов конструкции и бортового оборудования;
• минимальный расход энергии рабочего тела и электроэнергии;
• требуемая надежность элементов конструкции и систем бортового оборудования;
• унификация элементов конструкции КА и бортового оборудования;
90 2. Критерии оценки качества компоновки космического аппарата
• трудозатраты и стоимость изготовления КА;
• эксплуатационные затраты как сумма работ по монтажу, демонтажу, наладке приборов с учетом графиков их обслуживания и замены, а также с учетом показателей надежности элементов (например, наработки на отказ).
В качестве основной задачи проектирования КА перечисленные критерии определяют то, для чего создается КА — наивысшую эффективность выполнения целевых работ. Кроме этого, эффективность напрямую зависит от сроков создания КА и стоимости его жизненного цикла.
2.2.1. Обеспечение максимальной эффективности
целевого оборудования
Эффективность проведения КА целевых работ Э^А зависит от параметров и характеристик целевого оборудования КА, а также от качества выполненной компоновки и характеристик СУД. В общем виде эту зависимость можно записать как
Эка =^Оцр, ПО, /WO, Л\(0, GpT(0, Дер, Дфсс, Яад),
где Эцр — эффективность проведения целевых работ целевым оборудованием, установленным на КА; T(t) — время постоянной ориентации КА в течение полета, обеспечивающее проведение целевых работ; РсудСО — вероятность безотказной работы СУД; МСО — мощность энергопотребления СУД; GpT(r) — расход рабочего тела на управление и стабилизацию; Аф — погрешность СО и СС СУД по углу; Афсс — погрешность СС по угловой скорости; Л?ад — коэффициент, характеризующий адаптивность СУД.
Кроме общего критерия, существуют другие специальные критерии.
1. Критерий экономической эффективности
Эка =
° КА
где F(F) — целевая отдача (сложная функция), т. е. прибыль, полученная в результате исследований, проведенных КА; 3Кд — затраты на производство и эксплуатацию КА.
2.2. Главные критерии качества компоновки
91
2. Критерий эффективности проведения научных работ целевым оборудованием
Э = Рн(/)Р0П(г),
где Рн(0 — вероятность безотказного функционирования КА при решении научных проблем; Роп(0 — вероятность опознавания объекта при научных наблюдениях,
РОп(/) = РразЖ1ЧЖ(С/’расп(0.
Здесь Рраз(0 — разрешение научной аппаратуры; Рп ч(7) — пороговая чувствительность аппаратуры; РТ (t) — вероятность периода обзора; РраСп (0 — распознавание наблюдаемого объекта.
3. Составной критерий, аналогичный целевой функции (2.2) и учитывающий различные частные показатели эффективности,
Э = к(Э\ + к2Э2 +... + кпЭп,
где Э], Э2, ..., Э„ — частные показатели эффективности, входящие в систему частных показателей; к\,къ .... кп — весовые коэффициенты, определяющие относительную зависимость частных показателей от различных проектных решений.
Для обеспечения максимальной эффективности целевого оборудования при компоновке КА необходимо выполнять следующие рекомендации:
• характеристики целевого оборудования, разрабатываемого для данного типа КА, должны отвечать современным техническим требованиям по разрешению, производительности, иметь минимальные массу и габариты, потреблять минимальное количество электроэнергии;
• компоновка должна обеспечивать полное отсутствие в поле зрения оптической аппаратуры и антенных систем элементов конструкции КА;
• целевое оборудование необходимо размещать в местах с минимальными вибродинамическими нагрузками, наилучшими температурными режимами (желательно 15 ± 5 °C) и с обеспечением герметизации оборудования (если это необходимо);
• места установки чувствительных приборов целевого оборудования и систем ориентации и стабилизации должны иметь еди
92 2. Критерии оценки качества компоновки космического аппарата
ное жесткое основание, на которое размещают как чувствительные приборы целевого оборудования, так и чувствительные приборы систем ориентации и стабилизации СУД КА, обеспечивая взаимную привязку их осей с высокой точностью.
2.2.2. Минимальная масса элементов конструкции
и бортового оборудования
В ТТЗ задается, а в процессе проектирования уточняется масса КА. Массовые характеристики КА обусловлены его типом, целевыми задачами, временем существования и существенно различаются в зависимости от типа. В табл. 2.1 приведены массовые характеристики одного из существующих КА.
Таблица 2.1. Массовые характеристики одного из существующих КА
Номер п/п Наименование элемента конструкции Отношение массы элемента к массе КА, %
1 Полностью снаряженный КА 100
1.1 Головной обтекатель с системами разделения, охлаждения, элементами энергооборудования и измерительной аппаратурой 11
1.2 Проставка 1,0
1.3 ДУ, заправленная топливом и газом: 21,0
1.3.1 каркас отсека ДУ 0,906
1.3.2 ДУ сухая 4,73
1.3.3 топливо 14,9
1.3.4 сжатый газ 0,50
1.4 Конструкция герметического отсека с рамой, элементами крепления аппаратуры, покрытиями и герметическими платами 7,95
1.5 Проставка герметического отсека 0,427
1.6 «Юбка» отсека ДУ 0,38
1.7 Рама общей сборки антенны радиотехнического целевого оборудования 1,76
1.8 Воздух в герметическом отсеке 0,25
1.9 Система ликвидации 0,26
2.2. Главные критерии качества компоновки
93
Окончание табл. 2.1
Номер п/п Наименование элемента конструкции Отношение массы элемента к массе КА. %
1.10 1.10.1 1.10.2 1.10.3 1.10.4 Электроавтоматика: электроавтоматика СТР и системы регу- лирования давления электроавтоматика управления пиросредствами и механизмами электроавтоматика системы распределения питания электроавтоматика пневмогидросистемы ДУ 1,04 0,356 0,08 0,50 0,124
1.11 Аппаратура системы документирования 0,10
1.12 Система регулирования давления 0,224
1.13 Пиротехнические устройства без системы разделения обтекателя 0,238
1.14 АФУ 0,214
1.15 Бортовая кабельная сеть 4,04
1.16 1.16.1 1.16.2 1.16.3 СТР: экрановакуумная термоизоляция рабочая жидкость агрегаты, трубопроводы, крепления 4,46 0,262 1,00 3,20
1.17 Управляющий информационный вычислительный комплекс 0,758
1.18 Бортовая аппаратура командноизмерительной системы 0,572
1.19 Радиотелеметрическая аппаратура 0,50
1.20 Аппаратура спутниковой навигации 0,366
1.21 Бортовое синхронизирующее устройство 0,152
1.22 Целевое оборудование 24,0
1.23 1.23.1 1.23.2 СГЭ: бортовая солнечная батарея (2 шт.) блоки бортовой СГЭ 15,7 6,34 9,44
1.24 СУД и бортовая корректирующая система 4,34
1.25 Неучтенные системы и резерв массы 3,7
94 2. Критерии оценки качества компоновки космического аппарата
Масса КА складывается из масс целевого Л/цоб и бортового Л/бОб оборудования, массы Мон конструкции КА и массы топлива М(0:
^КА ~ ^ц.об + ^б об + (0 + ^кон •
Для приборов бортового оборудования вводится массовый критерий Л^боб, (обычно = 0,8...0,9):
г _ Gcx
Лбоб -р; ~ >
^сх ' ^мех
где Gcx — масса схемотехнической части прибора; GMex — масса механической части прибора.
Массу топлива определяют исходя из запаса характеристической скорости, необходимой КА для маневрирования в космическом пространстве.
Масса конструкции зависит от требований к прочности и вибродинамической устойчивости КА, применяемых материалов и технологии изготовления, а также от методов проектирования.
Все внешние воздействующие факторы, воспринимаемые элементами конструкции и приборами КА, могут снижать их надежность, а для оборудования — увеличивать инструментальные погрешности.
Рис. 2.1. Факторы, влияющие на массу конструкции КА
2.2. Главные критерии качества компоновки
95
Масса конструкции Л/кон (рис. 2.1) включает:
• массу силовой конструкции, воспринимающей, перераспределяющей и уравновешивающей внешние и внутренние силы, которые действуют на КА;
• массы дополнительных конструкций, выполняющих вспомогательные действия и не являющиеся силовыми конструкциями.
Силовая конструкция должна удовлетворять требованиям статической и усталостной (обеспечение требуемого ресурса) прочности.
Минимизация массы конструкции определяется конструкторскими решениями, заложенными при выборе конструктивносиловой схемы, глубиной и тщательностью методов расчета и точностью проводимых экспериментов.
Оптимизация компоновки конструкции КА в целях уменьшения его массы проводится многовариантным анализом возможных компоновочных схем с использованием методов автоматизации проектных работ на базе компьютерных технологий. При этом решаются следующие задачи минимизации массы конструкции при компоновке КА:
• необходимость обеспечения минимально возможной массы корпуса КА, в частности, обоснованный подход к выбору формы и объемов герметичных отсеков;
• размещение в герметичных отсеках только того оборудования, которое не может работать в условиях открытого космоса, но его невозможно изготовить в герметичном варианте;
• выполнение оболочки корпуса КА из конструктивных элементов, приведенных на рис. 2.2;
• применение методик равнопрочного конструирования и исключения из компоновки КА дополнительных конструкций, например, при расчете на прочность отсеков КА необходимо учитывать наличие в отсеке приборных рам, также воспринимающих нагрузки (рис. 2.3);
• использование наилучших по своим характеристикам высокопрочных легких материалов (в том числе композиционных), защитных покрытий и т. п. (например, применение композиционных материалов, для изготовления баков, шар-баллонов и других емкостей);
96 2. Критерии оценки качества компоновки космического аппарата
Рис. 2.2. Конструктивные элементы, применяемые при выполнении оболочек корпуса КА:
а — продольные элементы таврового типа: б — продольные элементы в виде ребер; в — продольные элементы в виде Г-образного профиля; г — штампованная панель; д — литая панель; е — панели из гладкого и гофрированных листов; ж — сотовая панель с одним слоем сотового заполнителя: з — то же с тремя слоями сотового заполнителя; 1 — несущий слой; 2 — сотовый заполнитель с шестигранной ячейкой
Рис. 2.3. Приборные рамы в отсеке:
1 — приборная рама; 2 — оболочка корпуса
• необходимость минимизации длины и массы коммуникаций (трубопроводов и кабельных трасс). Массу трассы коммуникаций Л/тк можно представить в виде
MTK=CCTFg(g£,
где Сет — статистический коэффициент, учитывающий особенности прокладки трасс; F — площадь сечения трубо
2.2. Главные критерии качества компоновки
провода или кабельной трассы; g, — погонная масса z-й трассы коммуникации; ц — коэффициент, учитывающий координаты разъемов; L — длина трассы коммуникации;
• обеспечение защиты элементов конструкции от внешних воздействующих факторов (см. гл. 1);
• рациональный выбор крепежа и по возможности замена металлического крепежа на пластиковый;
• максимальное использование сварных конструкций;
• применение плоских кабельных трасс.
Следует учитывать, что при отрицательных температурах некоторые металлы становятся хладноломкими. Критерием является температура хрупкости (хладноломкости) Гхр, при которой металлы и сплавы переходят из пластичного состояния в хрупкое.
Под рассчитанную массу выбирается ракета-носитель, выводящая КА в космос. Как правило, это многоступенчатая ракета-носитель, имеющая 2-5 ступеней, в зависимости от параметров рабочей орбиты. По энергетическим характеристикам существующие ракеты-носители можно разделить на следующие классы:
• сверхлегкие — до 2 т («Стрела», «Старт»);
• легкие — до 5 т («Космос», «Молния», «Циклон»);
• средние — до Ют («Союз», «Русь»);
• тяжелые — до 20 т («Протон», «Сатурн-1 В»);
• сверхтяжелые — до 100 т («Энергия»).
Выбор ракеты-носителя определяет габариты зоны полезной нагрузки под обтекателем, а следовательно, максимально возможные габариты разрабатываемого КА, что задает дополнительную взаимосвязь между массой и габаритами КА.
Обеспечение минимальной массы КА и приборов его бортового оборудования требует постоянного взаимодействия в соответствии со схемой конструктор — производство — служба контроля массы.
2.2.3. Минимальный расход энергии рабочего тела
и электроэнергии
В результате компоновки КА необходимо обеспечить минимальный расход энергии на всех участках полета.
Под энергией КА понимается энергия рабочего тела ДУ (топлива и сжатых газов), а также электроэнергия, необходимая для функционирования бортового оборудования. Как правило, запасы рабочего тела на борту КА невосполнимы (если не предусмотрена дозаправка КА в полете, что характерно, например, для долговременных пилота-
98 2 Критерии оценки качества компоновки космического аппарата
руемых орбитальных станций). Запасы электроэнергии восполнимы при наличии СГЭ в составе бортового оборудования.
Выбор топлива при проектировании КА имеет большое значение, так как физико-химические свойства его компонентов и условия их эксплуатации практически определяют схему, массу, габариты и баллистические характеристики ДУ. Таким образом, тип топлива во многом формирует систему проектных параметров ДУ.
В КА используют газообразные, жидкие и твердые ракетные топлива. Двигательные установки, работающие на сжатом газе, имеют следующие преимущества перед ЖРД: простота конструкции, высокая надежность, возможность получения малых значений силы тяги, отсутствие агрессивных и токсичных продуктов, простота заправочного оборудования, низкая стоимость изготовления и экспериментальной отработки. Однако область применения подобных ДУ ограничена суммарным импульсом силы тяги и силой тяги. Основные недостатки — невысокая экономичность вследствие малого удельного импульса силы тяги и большая удельная масса, связанная со значительной массой баллонов для хранения сжатых газов.
Наибольшую энергетическую эффективность имеют широко применяемые в настоящее время ЖРД на двухкомпонентном жидком топливе со значительным удельным импульсом силы тяги ДУ.
Расход энергии рабочего тела при маневрах определяется траекторией движения КА. Это устанавливает связь между баллистикой КА его компоновкой. Например, на расход энергии рабочего тела для межпланетных КА могут существенно влиять момент старта, необходимое время перелета и использование маневров в гравитационных полях планет.
При работе СУД расход энергии рабочего тела характеризуется параметрами режимов ориентации и стабилизации. Выбором значений силы тяги и моментов включения и выключения сопел ЖРД с учетом параметров угловых движений КА и характеристик СУД можно получить минимальный расход энергии рабочего тела.
Например, систему угловой стабилизации на ЖРД строят, используя принципы релейных систем, которые наиболее просты, имеют наименьшее число элементов и надежны в эксплуатации. В рэлейных системах реактивные сопла функционируют в течение малых промежутков времени, необходимых для устранения отклонений КА от заданного положения. Установившийся режим работы релейных систем — автоколебания (рис. 2.4), параметры предельного цикла которых прежде всего зависят от характеристик чувствительных элементов и возмущений, действующих на КА.
2.2. Главные критерии качества компоновки
99
д
ДО
D +^1
А'
+#il'
Рис. 2.4. Цикл автоколебаний
£
С
Расход энергии рабочего тела непосредственно связан с параметрами автоколебаний — импульсного режима включений сопел.
При запаздывании идеальный цикл автоколебаний (штриховая линия на рис. 2.4) деформируется. При включении сопла в точке А управляющий момент возникает с некоторым опозданием в точке А', с координатами (3 + A3)i и О]. Угол ДО зависит от времени запаздывания тр чем больше время запаздывания (зона нечувствительности), тем на больший угол ДО отклонится КА за время tj.
В точке В', смещенной относительно точки В на угол ДО, должно выключиться сопло, однако запаздывание на время т2 приведет к расширению зоны нечувствительности на величину ДО] . Совместное влияние времен i] и т2 увеличивает период автоколебаний и снижает точность СС КА.
Расход энергии рабочего тела в предельном цикле автоколебаний пропорционален создаваемому ускорению, которое в свою очередь пропорционально силе тяги ЖРД. Для уменьшения расхода энергии рабочего тела целесообразно использовать ЖРД стабилизации с различной силой тяги, например, двигатели ДЖС с силой тяги около 160 Н, ДМС с силой тяги около 13 Н.
Переключение с ДЖС на ДМС зависит от угла и угловой скорости отклонения КА, а также от действующих на КА возмущений, и происходит по сигналам СО.
Расход энергии рабочего тела может быть определен следующим образом.
Сила тяги ЖРД
P = GsVr, (2.3)
где G\ — секундный расход массы топлива; Гг — скорость истечения газа.
Используя выражение для удельного импульса Л = Kr/g, имеем P = GsIsg.
100 2. Критерии оценки качества компоновки космического аппарата
Тогда, зная параметры Р, Is ДЖС и ДМС и время их работы в цикле автоколебаний Д/, получаем
Средний расход рабочего тела за период автоколебаний
Gcp=^G, (2.4)
где Га — период автоколебаний, Га = /выкл + Гвкл (/выкл — время, при котором тяга выключена; ZBKJ1 — время, при котором тяга включена); G — расход массы рабочего тела за единицу времени.
Интегрируя уравнение движения цикла автоколебаний, имеем
2^i = МыкЛ;
2^1 — сЬ|/вкл,
где — угол отклонения; Oj — угловая скорость; cbj — угловое ускорение.
Для идеального цикла автоколебаний
'вкл=21М“1- (2-5)
Поскольку в режиме автоколебаний сопла ДЖС и ДМС большую часть периода /а выключены, то приближенно можно считать
/а=2^/^. (2.6)
Подставляя выражения (2.5) и (2.6) в уравнение (2.4), находим
Угловое ускорение определим как (b}=Mz/Jz; MZ=LP, (2.8)
где Jz — момент инерции относительно оси Z, вокруг которой КА поворачивается; Р — сила тяги ЖРД; L — плечо приложения силы тяги.
2.2. Главные критерии качества компоновки
101
Подставляя выражения (2.8) в (2.7), получаем
Из выражения (2.7) следует, что для уменьшения расхода энергии рабочего тела следует уменьшать зону нечувствительности угловой скорости 6] и увеличивать зону нечувствительности угла отклонения что противоречит требованиям повышения точности СС.
Большой расход электроэнергии приводит к возрастанию мощности СГЭ, что влечет за собой увеличение массы и габаритов солнечных батарей (затрудняет их компоновку), мощности и массы буферных батарей, приборов электроавтоматики, сечений, а следовательно, и массы питающих кабелей.
Расход электроэнергии КА уменьшают проведением следующих мероприятий:
• применением в электрооборудовании микроэлектроники;
• использованием импульсных режимов функционирования целевого и обслуживающего оборудования;
• применением малоэнергоемкой вычислительной техники (БЦВМ);
• использованием односторонних оптико-волоконных линий передачи сигнальной информации.
Для обеспечения надежности применяют «холодное» резервирование, при котором режим ожидания включения резервных элементов совпадает с режимом выключенного состояния. При таком режиме функционирования оборудования значительно сокращается расход электроэнергии.
2.2.4. Требуемая надежность элементов конструкции
и бортового оборудования
Под надежностью КА и его бортового оборудования понимают их свойство выполнять заданные функции, сохраняя свои выходные характеристики в течение определенного промежутка времени при эксплуатации.
Надежность — составляющая эффективности выполнения целевой функции КА. Обычно при проектировании задается надеж
102 2. Критерии оценки качества компоновки космического аппарата
ность (укрупненных) систем бортового оборудования, самого КА и нижняя граница надежности.
Для КА фактическая надежность определяется следующим образом:
п
/=1
где Ht — фактическая надежность z-ro элемента КА; Я” — нижняя граница расчетной надежности.
Основное понятие теории надежности — отказ, т. е. такая неисправность КА или его оборудования, без устранения которой невозможно дальнейшее выполнение всех или хотя бы одной из их основных функций.
Теория надежности оперирует со случайными отказами, т. е. с событиями, причины которых не могут быть установлены и устранены в силу объективных условий. Вероятность получения заданной надежности
п
^ка =ПркоНт(оадл,(а
Z = 1
где Лон(0 — вероятность надежности конструкции КА; Р\, (/) — вероятность надежности целевого оборудования; P2l (/) — вероятность безотказной работы обслуживающего оборудования; Р3/ (7) — вероятность безотказной работы вспомогательного оборудования.
В соответствии с рекомендациями Федерального агентства по техническому регулированию и метрологии отказы принято классифицировать по категориям. Все наблюдаемые отказы в работе можно подразделить на внезапные и постепенные.
Внезапные отказы — отказы, вызванные внезапным изменением состояния отдельных составляющих элементов КА или оборудования либо внезапным внешним воздействием, приводящим к нарушению его функционирования.
Внезапные отказы являются следствием того, что отдельные элементы КА и оборудования имеют запас прочности ниже допустимого и не могут противостоять мгновенным случайным возрастаниям внешних нагрузок, возникающим в реальных условиях его
2.2. Главные критерии качества компоновки
103
деятельности. Физический смысл отказа сводится к тому, что после некоторого сравнительно быстрого количественного изменения происходит нарушение функционирования элемента.
Постепенные отказы происходят вследствие уменьшения внутренней прочности КА или оборудования в результате естественных процессов физического старения и износа материала. В отличие от внезапных отказов постепенные зависят, главным образом, от длительности эксплуатации оборудования, т. е. от срока его службы. Физический смысл постепенного отказа заключается в том, что при постепенном сравнительно медленном количественном изменении того или иного параметра элементы КА или оборудование (когда эти параметры выходят за пределы допустимых значений, предусмотренных техническими условиями) перестают выполнять все или часть основных функций. Постепенные отказы — закономерный и неизбежный результат износа и старения комплектующих деталей и материалов, благодаря чему постепенные отказы можно предупредить, периодически проверяя оборудование и своевременно (если это возможно) заменяя отдельные элементы, близкие к отказу.
Постепенные отказы составляют примерно 70 % общего числа отказов. Суммарное время работы конструкции до полного износа, определяющее технический ресурс объекта, называется долговечностью.
По характеру последствий отказы бывают двух видов:
• катастрофические (полные), приводящие к безусловному прекращению функционирования КА;
• частичные, снижающие эксплуатационные характеристики (эффективность) изделия.
Ненадежной считается система, у которой выходные характеристики находятся за пределами допустимых значений.
Надежность приборов бортового оборудования можно охарактеризовать следующими параметрами:
• вероятностью безотказной работы P(Z);
• средним временем безотказной работы Тср;
• интенсивностью отказов Х(/);
• временем работы до отказа.
Вероятность безотказной работы Р(/) — это вероятность того, что в определенных условиях эксплуатации в пределах заданного времени работы отказа не будет:
104 2. Критерии оценки качества компоновки космического аппарата
P(t)=\-nt/N^
где nt — число элементов, отказавших за время Z; Nq — число элементов (приборов) в начале испытаний.
Вероятность безотказной работы прибора без резервирования, состоящего из т последовательно соединенных элементов,
P0(Z) = exp
где т — число последовательно соединенных элементов; X, — интенсивность отказов z-ro элемента; t, — время работы z-ro элемента.
Если т — время работы до отказа, то вероятность отказа составит
где Q(f) — вероятность отказа за время т (т < t).
Плотность вероятности появления отказов за время т или частота отказов
а(0 = dQ(t) / dt = / (jV0A?),
где 77Д/ — число образцов, отказавших за время Дг.
Математическое ожидание времени безотказной работы
+^° | ZOTK/Az
Т = J a(t)tdt = — X
-оо ^0 / = 1
где nt — число образцов, отказавших в z-м интервале времени; tt — среднее время z-ro интервала, Zz =0,5(ZHp/+ZKp/); Гнр/ — начало работы в z-м интервале времени; tK,р/ — конец работы в z-м интервале времени; /Отк — время, в течение которого откажут все образцы; AZ — выбранный интервал времени.
Интенсивность отказов (рис. 2.5) — отношение числа образцов nh отказавших в единицу времени, к среднему числу образцов тУср, исправно работающих в данном интервале времени:
2.2. Главные критерии качества компоновки
105
Рис. 2.5. Интенсивность отказа образцов
Отказавшие образцы не восстанавливаются и не заменяются. Надежность зависит от количества и качества элементов конструкции, от приборов оборудования, режимов работы электроэлементов, схемного и конструктивного исполнения приборов, технологии изготовления, выбранных конструкционных материалов и т. д. Разброс параметров, влияющих на надежность КА, носит случайный характер, поэтому надежность изделия в целом носит вероятностный характер:
Р(7) = е-Хг при Х(7) = X - const, где X = \.
1
Для повышения надежности элементов конструкции и оборудования КА применяют резервирование, т. е. устанавливают избыточное число элементов, предназначенных для выполнения одинаковых функций. В результате при резервировании отказ одного или даже нескольких элементов не вызывает отказа системы.
Резервирование подразделяется на аппаратное, программное и информационное. Способы общего резервирования можно классифицировать по кратности резервирования, надежности резервных блоков, способу включения резерва, по режиму, в котором находятся резервные элементы, а также по виду переключающих устройств.
Количество резервных элементов (резервных блоков), необходимых для нормального функционирования КА, тп = (7 - й)/Л, где I — общее число элементов, резервных блоков, узлов и приборов; h — число элементов, блоков, приборов и узлов, необходимых для нормального функционирования.
По надежности резервных блоков резервирование подразделяется на равнонадежное, при котором основные и все резервные
106 2. Критерии оценки качества компоновки космического аппарата
элементы обладают одинаковыми характеристиками надежности, и разнонадсжнос, при котором надежность основных и резервных элементов нс одинакова.
По способу включения резерва резервирование можно подразделить:
• на постоянное, когда все резервные элементы включены постоянно:
• резервирование замещением, когда резервный элемент включается после отказа основного:
• с программным (временным) включением, когда резервные элементы заменяют основные по определенной временной программе.
По режиму, в котором находятся резервные элементы, существует:
• «горячее» резервирование, когда режим ожидания резервных элементов полностью совпадает с рабочим режимом:
• резервирование с облегченным режимом, когда режим ожидания резервных элементов характеризуется меньшими нагрузками:
• «холодное» резервирование, когда резервные элементы выключены.
По виду переключающих устройств резервирование бывает:
• с переключателями первого вида, обеспечивающими коммутацию всех резервных элементов в течение всего времени работы:
• с переключателем второго вида, состоящим из нескольких узлов, каждый из которых обеспечивает коммутацию определенной группы резервных элементов только в момент их работы.
Надежность элементов конструкции КА и приборов бортового оборудования зависит от режимов и условий их работы, которые нс одинаковы в различных отсеках. В зависимости от расположения прибора меняются действующие на него факторы (вибрации, нагрев и т. п.).
Связь надежности элементов конструкции КА и приборов бортового оборудования с координатами их установки можно записать в следующем виде:
/кА(Ч = /’р,(т)С’,(.\.у,.г,).
где Ркд(т) — надежность элемента конструкции или прибора бортового оборудования: /^(т) — расчетная надежноеib: С, — коэф
2.2. Главные критерии качества компоновки
107
фициент снижения надежности; х„ yh z, — координаты места установки элемента конструкции или прибора.
Высокая надежность в течение длительного полета КА достигается:
• структурным резервированием отдельных подсистем, например, наличием контура стабилизации на основе электромеханических исполнительных органов различной эффективности и контура стабилизации на основе ДЖС и ДМС;
• резервным замещением приборов и блоков «холодного» резервирования с применением анализаторов отказов, автоматическим переходом на резерв в случае выхода из строя основных работающих приборов;
• постоянным резервированием отдельных приборов, блоков, электроэлементов;
• обеспечением заданных запасов для всех режимов работы (например, режим работы электроэлементов будет правильным, если они функционируют с запасом в 50.. .40 % от номинала).
При расчете надежности бортового оборудования разрабатывается расчетная структурная схема надежности, в которой при последовательно соединенных элементах их надежности перемножаются, а при параллельном — складываются.
Надежность определяется на каждом из этапов разработки КА и зависит от бортового оборудования и применяемых способов повышения надежности.
Способы повышения надежности при компоновке КА. Надежность функционирования бортового оборудования в значительной степени зависит от качественно выполненной компоновки КА:
• выбора рационального способа резервирования в соответствии с временем выполнения операций, выполнения требований экономии электроэнергии и точностных характеристик приборов;
• упрощения структуры приборов, блоков, узлов и т. п.;
• широкого применения принципов унификации и стандартизации приборов бортового оборудования;
• выбора надежных элементов;
• обеспечения облегченного режима функционирования отдельных электроэлементов (резисторов, конденсаторов, микросхем и т. п.) при разработке электронных схем;
108 2. Критерии оценки качества компоновки космического аппарата
• разработки алгоритмов диагностики отказов:
• обобщенного встроенного контроля работоспособности функционирования отдельных приборов и систем в целом для своевременного принятия мер при нештатных ситуациях;
• применения высокопроизводительного высокоточного оборудования и современных технологических процессов.
Основные причины отказов электронных схем (включая интегральные) приведены ниже.
Причина
Процент общего числа отказов. ° о
Дефемы конструкции и внешнею вида...............60
Коррозия металлов................................5
Дефек1ы и коррозия металлизации..................5
Механические повреждения.........................4
Выход параметров за нормы технических условий....3
Обрывы внутриэлементных электрических соединений....?
Программа обеспечения надежности охватывает все стадии проектирования оборудования и состоит из разработки:
• перечня проводимых работ и задач, которые должны решаться в процессе выполнения отдельных работ по обеспечению надежности с указанием метода их решения и предполагаемого объема (на каком количестве приборов) испытаний, а также типа технологического оборудования, используемого при испытаниях:
• предложений об исполнителях работ: предприятиях-смежниках и подразделений головного предприятия с указанием ответственных за проведение отдельных этапов работ:
• предложений о порядке и форме отчетности за выполнение каждого этапа испытаний.
На основании предложений разрабатывается план мероприятий, по своевременному доведению до КПЭО, предусматривающего следующие работы:
• отработка макетов;
• проведение ЛКИ:
• проведение конструкторско-заводских испытаний и частных конструкторских испытаний;
2.2. Главные критерии качества компоновки
109
• стендовая отработка на всех этапах стыковки отдельных приборов и подсистем (входной контроль), отработка подсистем СО, СС, управления движением центра масс и т. д.;
• комплексная отработка в составе КА.
Одному типу изделий соответствует один КПЭО.
Испытания на надежность. Качество выполненных конструкторско-компоновочных работ проверяется при проведении испытаний на надежность, для чего изготовляют опытный образец КА и проводят ускоренные ресурсные испытания. Под ускоренными испытаниями понимают испытания, позволяющие получить информацию о надежности в течение времени, меньшего гарантийной долговечности системы.
Различают ускоренные ресурсные испытания в нормальном и форсированном режимах, для последнего необходимо:
• выбрать форсированный режим;
• определить коэффициент ускорения испытаний;
• оценить полноту и достоверность испытаний;
• обосновать возможность использования полученных результатов.
При проведении ускоренных ресурсных испытаний в форсированном режиме основываются на том, что скорость физико-химических процессов старения зависит от температуры, которая является основным ускорителем. Иногда в качестве ускорителя можно использовать повышенную электрическую нагрузку, влажность, вакуум, вибрацию, частоту включений-выключений приборов электронной техники и т. п.
Коэффициент ускорения испытаний можно записать в виде отношения
„ _ ЖуСк) _ t3
Луск *к(Т 1 t ' ^^'норм/ *уск
где ТУск — температура ускорения испытаний; Тнорм — нормальная температура; Т — заданное время; Гуск — время ускорения, т. е. среднее время работы до отказа элемента при температуре Туск,
1
Поскольку характеристика надежности прибора — вероятность безотказной работы P(t\ то условие эквивалентности будет выглядеть так:
110 2. Критерии оценки качества компоновки космического аппарата
ЖЛопм) = ЖскЛск)-
V э J пирм ' V yvK 7 jVK '
Существующие методики ускоренных испытаний в форсированном режиме позволяют сократить сроки испытаний в несколько раз.
В табл. 2.2 приведены значения вероятности безотказной работы составных систем одного из типов КА.
Таблица 2.2. Значения вероятности безотказной работы составных систем одного из типов КА
Вероятность безотказной работы
Наименование составных систем по техническому заданию по результатам испытаний
КА, включающий бортовой специальный комплекс, в том числе: радиолокационную станцию ИК-аппаратуру канала передачи информации 0,90 0,97 0,90 0,97
Обеспечивающие системы: конструкция и механизмы пиротехнические системы СУД/ДУ система энергоснабжения СТР система регулирования давления бортовой комплекс управления бортовое оборудование командноизмерительной системы управляющий информационновычислительный комплекс бортовое синхронизирующее устройство аппаратура, потребители спутниковой информации система телеметрической информации АФУ 0,999 0,9995/0,98 0,998 0,999 0,993 0,990 0,980 0,998 0,997 0,997 0,999 0,999 0,9995/0,98 0,998 0,999 0,999 0,995 0,980 0,999 0,9999 0,997 0,999
Надежность конструкции. Под надежностью конструкции понимается свойство конструкции как механической системы выполнять заданные функции в течение требуемого времени в реальных условиях воздействия окружающей среды.
Процесс обеспечения надежности конструкции непрерывен и охватывает все стадии разработки и изготовления КА. Однако
2.2. Главные критерии качества компоновки
111
наиболее ответственным этапом является компоновка. Уровнем принятых в этот период технических решений во многом определяется степень фактической надежности КА в целом.
К снижению надежности конструкции можно отнести:
• чрезмерный нагрев конструкции и снижение КПД;
• заедание подшипников и уменьшение точности относительных перемещений в кинематических системах;
• неправильно выбранные материалы и геометрия элементов конструкции, приводящие к отказам.
Основные причины отказов механического оборудования: усталость и ползучесть материала, низкая термостойкость, коррозия, эрозия, отсутствие смазывания, упругая деформация, поверхностная усталость, радиационное воздействие, повреждения, выкрашивание, расслоение, вспучивание, течь в оборудовании, в котором происходит перемещение жидкости.
При разработке компоновки КА, а также при его конструировании и размещении бортового оборудования необходимо обеспечить решение вопросов по всем видам безопасности. Безопасность эксплуатации разрабатываемого КА должна отвечать требованиям ГОСТ 12.1.010—76 (по взрывоопасности) и ГОСТ 12.1.033—81 (по пожаробезопасности). В местах установки пиромеханизмов должна быть исключена возможность выброса форса пламени и горячих газов.
При размещении и конструктивном исполнении раскрывающихся конструкций необходимо предусматривать возможный разлет осколков от срабатывания систем разделения, и исключать их попадание в жизненно важные элементы КА.
В табл. 2.3 приведен пример оформления таблицы возможных аварийных ситуаций (АС), возникающих при расстыковке КА с ракетой-носителем (или разгонным блоком).
Для обеспечения надежности конструкции целесообразно выбрать запас прочности, обеспечивающий несущую способность конструкции. В настоящее время используют коэффициент безопасности
где (is — среднее значение прочности, определяющее появление отказа; — среднее значение напряжения, вызывающее отказ.
112 2. Критерии оценки качества компоновки космического аппарата
Таблица 2.3. Пример оформления таблицы возможных АС, возникающих при расстыковке КА с ракетой-носителем
Номер варианта Возможные АС Возможные причины возникновения АС Участок возникновения АС Средство идентификации Последствия
1 Неразделение КА и ракеты-носителя Отказ пирозамка Стыковочный узел КА и ракеты-носителя Телеметрия Потеря КА
2 Нераскрытие солнечных батарей Отказ одной из пирочек; отказ срабатывания механизма раскрытия Полет КА после разделения с ракетой-носителем То же То же
Запас прочности
Hmax)/QS’
где |1тах — максимальное напряжение, цтах = p.s:s + Kass (<b:s — среднеквадратичное отклонение напряжения; К — коэффициент, К = 3...6); 05— среднеквадратичное отклонение прочности.
На основании теоретических расчетов и экспериментальных исследований напряженно-деформированного состояния конструкции определяются запасы прочности, оценивается долговечность, а в ряде случаев и уровень надежности, которые сравниваются с допустимыми или требуемыми значениями состояния.
Как правило, при проектировании возникает противоречие между стремлением обеспечить максимальную надежность и ограничениями по массе КА.
Проблему получения приемлемой массы целесообразно решать за счет минимизации массы отдельных элементов конструкции и блоков бортового оборудования при сохранении требуемой надежности.
Как отмечалось ранее, на КА в полете действуют вибродина-мические и ударные нагрузки, перегрузки, акустические шумы. Свойство конструкции воспринимать эти нагрузки и при этом нормально функционировать определяется функцией несущей
2.2. Главные критерии качества компоновки
113
способности 7?(Г), значение которой зависит от геометрических параметров конструкции и механических характеристик материала, из которого она изготовлена.
Если Я(/) — предельное значение функции нагружения от воздействующих факторов, то для обеспечения прочности необходимо соблюдение неравенства 7?(7) > H(t).
Коэффициент запаса прочности
П(/) = 7?(0/Я(0.
Конструкция сохраняет способность противостоять воздействующим факторам при r|(7) > 1. Функция резерва прочности
W) = ^(0-W).
Один из самых простых способов обеспечения надежности несущих конструкций КА — обеспечение низкого уровня ее напряженно-деформированного состояния, однако это увеличивает массу, что недопустимо для КА.
Основные ограничения при оптимизации конструктивносиловой схемы КА и элементов его конструкции — механические характеристики материала, технология изготовления конструкции и компоновочная схема КА, при учете стоимости, выполнения сроков создания и обеспечения требуемой безопасности.
Задачу оптимизации конструктивно-силовой схемы КА необходимо рассматривать в плане оптимизации бортового оборудования КА, которое существенно влияет на предельные значения функции H(t) (параметры ДУ, СУД и др.).
Требуемую надежность несущей конструкции КА можно достичь:
1) снижением уровня действующих нагрузок;
2) увеличением значения функции несущей способности 7?(/);
3) уменьшением числа элементов и упрощением их конструкции;
4) снижением значения коэффициентов вариации, а также предельных значений функции нагружения и функции несущей способности элементов конструкции КА.
Первые два способа увеличивают запасы прочности в тех случаях, когда возможно повышение массы КА. Третий способ используют тогда, когда ради снижения массы конструкции можно повышать стоимость и усложнять производство КА. Четвертый способ реализуют везде, где это допустимо.
114 2. Критерии оценки качества компоновки космического аппарата
Обеспечение требуемой надежности конструкции КА предполагает проведение непрерывного контроля и поддержания нормального режима работы всех систем.
2.2.5. Унификация элементов конструкции
и бортового оборудования КА
Под унификацией понимают применение при компоновке КА ранее разработанных, освоенных в производстве и проверенных при ЛКИ элементов конструкций, приборов и отработанных отдельных систем. Например, в настоящее время практически полностью унифицированы ракеты-носители и разгонные блоки, проводятся работы по унификации космических орбитальных платформ и т. д.
К вопросам унификации также относятся задачи многофункционального комплексирования, т. е. когда один прибор выполняет несколько функциональных задач, некоторые приборы решают целевые задачи и одновременно являются обеспечивающим оборудованием. Например, радиовертикаль выполняет функции радиовысотомера; астродатчик служит для точной ориентации КА и участвует в решении навигационных задач; радиолокатор системы стыковки может использоваться как радиовысотомер и т. д.
Максимальный эффект будет при комплексной унификации, когда помимо унификации отдельных приборов и структур унифицируется программно-математическое обеспечение.
Преимущества унификации подтверждаются технико-экономическим обоснованием при сравнении унифицированных и вновь разрабатываемых систем. Проектирование КА с широким внедрением унификации ставит новые требования перед разработчиком. Помимо многовариантных технических решений требуется, чтобы применяемые приборы по своим техническим характеристикам соответствовали перспективным мировым образцам.
Унифицировать можно те элементы и приборы, которые по своим техническим характеристикам отвечают техническим достижениям современной науки и техники.
При оценке качества компоновки используют следующие количественные критерии унификации.
Коэффициент применяемости, характеризующий уровень конструктивной преемственности готовых приборов и узлов в разрабатываемом КА,
2.2. Главные критерии качества компоновки
115
Кпр= P/N.
где N — общее число элементов и приборов бортового оборудования КА; р — число унифицируемых элементов и приборов, р = = N - No, No — число вновь разрабатываемых элементов и приборов бортового оборудования КА.
Коэффициент повторяемости, определяющий уровень внутрисистемного использования однотипных взаимозаменяемых приборов в бортовом оборудовании КА (например, однотипные электроклапаны и исполнительные реактивные двигатели стабилизации по всем трем каналам управления, усилители мощности для управления двигателями стабилизации, гиродины, одинаковые по всем трем каналам управления и т. д.),
хм™
к — /=1_____
7YIIOB ДГ ’
IX
7=1
где Мюв — повторяющиеся однотипные элементы и приборы бортового оборудования КА; п — число повторяющихся однотипных элементов и приборов бортового оборудования КА; Nj — элементы и приборы бортового оборудования КА; N— общее число элементов и приборов бортового оборудования КА.
Коэффициент межсистемной (межпроектной) унификации различных КА количественно подтверждает уровень взаимной унификации для КА различного назначения.
Важнейшие факторы при разработке КА — сроки разработки и стоимость КА при сохранении требований к качественному выполнению целевых работ. В этих условиях унификация приборов бортового оборудования значительно сокращает как сроки разработки, так и стоимость КА. Эффективность унификации можно выразить следующей зависимостью:
т I р
Эун - ^|Х^ун, +^з£сун„
/=1 /=1 /=1
где К\ — коэффициент, определяющий относительную значимость унификации при выполнении целевых работ; — параметр
116 2. Критерии оценки качества компоновки космического аппарата
унификации, характеризующий качество целевых работ; т — количество параметров, определяющих качество целевых работ как целевых систем, так и характеристик СУД, которые влияют на качество; А?2 — коэффициент, учитывающий затраты времени при разработке приборов бортового оборудования; Гун/ — время унификации, затраченное на проектирование, испытания и изготовление КА; / — количество операций, необходимых при проектировании, испытаниях и изготовлении; А?3 — коэффициент, характеризующий стоимость разработки приборов бортового оборудования; Сун/ — стоимость элементов и приборов унифицированного бортового оборудования; р — число унифицированных элементов и приборов.
Поскольку параметры унификации взаимно противоречивы, то целесообразно рассмотреть показатель конкурентоспособности
т
Х^ун/
Пун ~~j Пбаз, ХСун/ /=1
где Пун — показатель конкурентоспособности унифицированного оборудования; Пбаз — показатель конкурентоспособности качества базового оборудования.
Основа унифицированных разработок — база данных существующих решений, являющаяся совокупностью информации об элементах конструкций, приборах, структурах, режимах, программно-математическом обеспечении, контрольно-испытательной аппаратуре, особенностях технологии изготовления и испытаний систем бортового оборудования КА. На рис. 2.6 приведена схема внедрения и реализации рекомендаций по унификации бортового оборудования КА.
С унификацией тесно связаны вопросы управления качеством разрабатываемого КА. Управление качеством элементов КА включает ряд технических и организационно-методических вопросов, таких как организация работ по улучшению качества; систематизация множества факторов, влияющих на качество; разработка методов количественной оценки качества элементов КА, а также их влияние на прибыль и результаты производственно-хозяйственной деятельности.
Рис. 2.6. Схема внедрения и реализации рекомендаций по унификации бортового оборудования
118 2. Критерии оценки качества компоновки космического аппарата
Для обеспечения требуемого качества элементов, приборов и систем КА рекомендуются следующие мероприятия:
• установление соответствия рассматриваемых унифицированных разработок современным научно-техническим решениям;
• проведение необходимого моделирования условий полета и экспериментальных исследований;
• конструирование приборов с использованием базового и блочного принципов;
• входной контроль электроэлементов;
• автономные и комплексные проверки бортового оборудования;
• испытания на надежность и время непрерывного функционирования, а также разработка методов повышения надежности элементов, узлов и приборов;
• специальные сертификационные испытания.
Критерием качества спроектированной системы будет ее эксплуатационная надежность. Однако получить информацию о надежности системы, особенно если это штучное или мелкосерийное производство, весьма проблематично. Для этого проводят ускоренную проверку эксплуатационной надежности.
При широкой унификации приборов бортового оборудования важную роль в обеспечении качества играет сертификация изделий.
Сертификация — принятие мер, проводимых последовательно и систематически в целях обеспечения соответствия бортового оборудования КА их техническим условиям. Сертификация предусматривает:
• получение высоких технических характеристик;
• повышение конкурентоспособности;
• обеспечение стабильного выпуска сертифицированных систем в соответствии с техническими условиями;
• сокращение временных затрат и рациональное использование ресурсов.
Минимизация стоимости создания КА определяется как сумма:
= Эраз -I- Эизг+Энэо+Ээ,
где Эраз — экономия на стадии разработки, т. е. проектных работ и выпуска технической документации; Эизг — экономия при изготовлении; Энэо — экономия на этапе НЭО; Ээ — экономия в процессе эксплуатации.
2.3. Проектные критерии качества компоновки
119
Суммарная экономическая эффективность унификации при обязательном сохранении эффективности проведения целевых работ складывается из экономии времени и стоимости разработки КА и может быть найдена как
Э — А7]Эун -I- Л?2Эавт + АГ3Эуск + Л?4ЭП и + Л?5ЭИЗГ ун,
где Эун — экономия от унификации; Эавт — экономия от автоматизации проектных работ и выпуска технической документации; Эуск — экономия от ускорения испытаний; Эпи — экономия от применения стендов полунатурных испытаний; Эизг ун — экономия при изготовлении унифицированных систем; К\-К$ — коэффициенты, учитывающие процессы унификации, автоматизации проектных работ, ускорения испытаний, использование стендов полунатурных испытаний, технологии изготовления унифицированного бортового оборудования КА.
Экономическая эффективность внедрения предлагаемых мероприятий при создании бортового оборудования с использованием унифицированных систем может составить 40 %.
2.3. Проектные критерии качества компоновки
При рассмотрении вариантов компоновок следует исходить из анализа возможных нерасчетных взаимодействий бортового оборудования КА и исходной плотности компоновки.
2.3.1. Анализ возможных нерасчетных взаимодействий бортового оборудования
Выбор места расположения конкретного бортового оборудования определяется его взаимодействием с другими системами и в итоге влиянием на общие характеристики КА и качество решения целевых задач.
Допустим, что некоторая система отвечает всем требованиям (легка, надежна и экономична и т. п.), но она отрицательно влияет на другие системы, что ухудшает характеристики КА. Как правило, от такой системы отказываются, поскольку нейтрализация ее влияния требует значительных затрат и усложняет конструкцию КА.
120 2. Критерии оценки качества компоновки космического аппарата
Ограничения по надежности связаны с размещением приборов в определенных зонах отсеков КА, где внешние воздействующие факторы на всех этапах жизненного цикла не приводят к выходу приборов из строя с заданной вероятностью. Надежность работы приборов и других элементов зависит от поля внешних воздействующих факторов (вибраций, тепловых и ударных нагрузок), неодинаковых в различных частях КА.
Рассмотрим рекомендации по обеспечению взаимодействия бортового оборудования, важные для компоновки КА.
Механическое взаимодействие. Корпус и оборудование КА должны быть объединены в общую силовую схему так, чтобы передача усилий от любых видов нагружения вызывала минимальные напряжения в конструкции при ее минимальной массе.
Спектр собственных частот КА не должен совпадать со спектром частот вибраций на всех этапах полета (например, действующих на этапе выведения КА ракетой-носителем). Источником вибраций КА могут быть акустические шумы и колебания, возникающие при работе ДУ.
Менее восприимчивы к вибрациям компактные конструкции, имеющие высокие резонансные частоты. Следует отметить, что клепаные конструкции более виброустойчивы, чем сварные. Это объясняется тем, что время успокоения и коэффициент усиления у клепаных конструкций меньше, чем у сварных.
Упругая деформация КА не должна влиять на точность оборудования.
В качестве примера рассмотрим взаимодействие СУД и конструкции КА. На рис. 2.7 приведена схема упругой деформация корпуса КА при по-
/ 2 /
Рис. 2.7. Схема упругой деформации корпуса КА при поперечных колебаниях:
1 — узел; 2 — пучность
перечных колебаниях.
Погрешности угла и угловой скорости, вызванные размещением гироскопических приборов, можно записать в следующем виде:
Дф = Дфж ± Дфупр; Дф = Дфж±Дфупр,
где Дф, Дф — значения угла и угловой скорости КА, снимаемые с гироскопического датчика по каналу измерения; Дфж, Дфж — из
2.3. Проектные критерии качества компоновки
121
менения угла и угловой скорости КА как жесткого тела; Лфупр, Лфупр — изменения угла и угловой скорости КА как упругого тела.
Погрешности угла и угловой скорости КА, вызванные упругими составляющими, следующие:
Афупр ~ Афупр Дфупр$1П &)уПрЛ
Лфупр = дФуПр + A<PynpSin соупр/,
где ЛфуПр, Лфупр — постоянные составляющие погрешности от действия упругой деформации; Лфупр, Лфупр — амплитудные значения переменных составляющих погрешности; соупр — круговая частота упругих колебаний.
Параметры этих колебаний в процессе полета КА могут изменяться в связи с возможным раскрытием и отделением элементов конструкции и выгоранием топлива. Если при установке гироскопический прибор смещен относительно пучности в ту или иную сторону, то он будет давать ложную информацию об угле поворота КА как жесткого тела.
Необходимо проводить виброзащиту бортового оборудования. В процессе эксплуатации корпус КА подвергается интенсивным механическим воздействиям, среди которых наиболее нежелательны вибрации и удары, которые снижают точность приборов, а в некоторых случаях приводят к механическим поломкам. Защитой отдельных приборов бортового оборудования КА от ударов и вибраций служат амортизаторы. Однако требования, предъявляемые к амортизаторам для защиты от удара, не согласуются с требованиями к виброзащитным амортизаторам. Требования, предъявляемые к амортизаторам, зависят от механических, климатических и конструкторских характеристик, обеспечивающих нормальное функционирование амортизаторов при любой схеме нагружения. Кроме того, амортизаторы должны обеспечивать удобство монтажа и крепления прибора, иметь малую массу и габариты, быть взаимозаменяемыми и простыми в изготовлении.
В случае установки приборов на амортизаторах при компоновке необходимо учитывать возможные перемещения прибора и предусматривать соответствующее увеличение зазоров.
Погрешности угла чувствительных приборов, установленных на амортизаторах, составляют
122 2. Критерии оценки качества компоновки космического аппарата
Д<Рч.п=Лфупр+Дфам>
где Д(рам — погрешность, вызванная угловой податливостью амортизаторов при действии ускорения, Дфам = Дфам + Дфам8^П
(Дфам — постоянная составляющая погрешности; Дфам — амплитудное значение переменной составляющей погрешности от амортизаторов; соам — круговая частота собственных колебаний прибора, установленного на амортизаторах).
Для устранения погрешности, вызываемой неправильной установкой прибора на амортизаторах (рис. 2.8, а. б), рекомендуют схему размещения, приведенную на рис. 2.8, в. Амортизаторы следует размещать таким образом, чтобы их оси проходили через центр масс прибора.
Рис. 2.8. Схемы размещения амортизаторов
В космической технике весьма широкое распространение получили резино-металлические амортизаторы типов АП (амортизатор пластинчатый, рис. 2.9), АД (амортизатор демпфирующий, рис. 2.10) и АЧ (амортизатор чашеобразный, рис. 2.11).
а
б
Рис. 2.9. Конструкция (я) и крепление (б) амортизатора типа АП
2.3. Проектные критерии качества компоновки
123
Рис. 2.10. Конструкция амортизатора АД:
1 — стойка; 2 — кольцо разрезное; 3 — кольцо; 4 — крышка; 5 — пружина; 6 — камера; 7 — прокладка; 8 — корпус; 9 — развальцовка; 10 — основание
Рис. 2.11. Конструкция и монтаж амортизатора типа АЧ
Раскрывающиеся и сбрасываемые элементы конструкций должны иметь надежные механизмы раскрытия и отделения. Поведение конструкций при раскрытии или отделении отрабатывается при наземных испытаниях и фиксируется телеметрическими датчиками в полете. Последовательность раскрытия или сброса конструкций, а следовательно, и воздействие на
КА определяются соответствующими циклограммами.
Электромагнитное взаимодействие. При компоновке бортового оборудования необходимо предусмотреть возможность электрического взаимовлияния одних приборов на другие, которое наиболее сильно сказывается при прокладке кабельных трасс. Электрические помехи могут проникать путем:
• взаимодействия через общую шину;
• магнитной (индуктивной) связи электрических сетей;
• электростатической (емкостной) связи электрических сетей;
• электромагнитного излучения работающих приборов.
Помехи уменьшают экранированием цепей с малым уровнем сигнала. Экран, изолируемый и снабжаемый отводом для заземле
124 2. Критерии оценки качества компоновки космического аппарата
ния в одной точке, не должен использоваться в качестве токонесущего провода.
Для передачи слаботочных сигналов применяют два изолированных провода (сигнальный и обратный), которые в электрическом кабеле размещаются рядом. Желательно эти провода перевить в целях симметрирования и защиты от магнитных наводок с шагом 120 мм. Витая пара заземляется с одного конца.
Кабельные трассы сильноточных цепей прокладываются отдельно от сигнальных кабельных трасс, а также от высокочувствительных электронных приборов. Каждая шина питания имеет средства автономного включения и защиты.
Электромагнитные помехи создаются:
• бортовыми источниками электромагнитных полей;
• наземными радиопередатчиками связи коротковолнового (КВ) и ультракоротковолнового (УКВ) диапазонов на участке старта;
• наземными радиолокационными станциями сверхвысокочастотного диапазона (СВЧ) на участке старта.
Электромагнитное поле, возникающее от вышеперечисленных источников, может наводить электрический ток в кабельных трассах опасных цепей КА. Опасными считаются электрические цепи, в которых находятся пиропатроны электрических взрывных устройств, применяемых в механизмах разделения, отделения, раскрытия и т. п. Защита опасных цепей проводится путем специальной конструкции кабельных трасс и заделки их электрических соединений (разъемов).
Опасные цепи считаются защищенными, если:
• не происходит несанкционированного срабатывания пиропатронов электрических взрывных устройств;
• измеренный наведенный ток в мостике накаливания пиропатрона не превышает допустимых значений (0,1 от гарантированного тока несрабатывания электрического взрывного устройства, указанного в технических условиях).
Защиту опасных цепей выполняют следующим образом:
• экраны проводов должны быть изолированы друг от друга и проложен дополнительный внешний экран;
• экраны проводов должны быть изолированы от корпусов разъемов и изделия;
• экраны проводов должны быть введены внутрь соединений (разъемов);
• цепи должны быть скручены с шагом 30...40 мм.
2.3. Проектные критерии качества компоновки
125
Организация шин питания проходит в специальном приборе, называемом прибором распределения питания.
Высокочувствительные к помехам приборы бортового оборудования, при компоновке необходимо устанавливать вдали от аппаратуры, создающей помехи.
Для вращающихся КА необходимо учитывать возникновение вихревых токов в корпусе КА. Магнитное поле токовых систем и постоянных магнитов оборудования КА, взаимодействуя с магнитным полем планеты, создает возмущающие моменты на корпусе КА, парирование которых приводит к дополнительным затратам энергии или рабочего тела двигателей ЖРД СС.
Возмущающий момент определяется по формуле
^воз — <*м *
где бсм — вектор эквивалентного магнитного поля КА; В — вектор индукции магнитного поля планеты.
Вектор эквивалентного магнитного поля можно представить как
«м=ймо+а*,
где бсм0 — вектор магнитного поля собственной намагниченности КА, возникающий от токов и постоянных магнитов в оборудовании КА; бс* — вектор магнитного поля, образованный намагничиванием ферромагнитных материалов КА в магнитном поле планеты.
Некоторые приборы научного и обеспечивающего оборудования весьма критичны к магнитным полям, создаваемым другими приборами, и требуют специальных мер защиты. Магнитометры, измеряющие магнитное поле планеты, должны быть удалены на значительное расстояние от корпуса КА при помощи выносных штанг или предусмотрены другие меры защиты, компенсирующие влияние магнитного поля от работающего оборудования КА. При компоновке чувствительные элементы приборов бортового оборудования необходимо размещать таким образом, чтобы на них не влияло магнитное поле КА.
Защита от статического электричества. Конструктивное исполнение механизмов раскрытия и отделения, солнечных батарей и их составляющих должно выполняться с применением защиты от статистического электричества.
126 2. Критерии оценки качества компоновки космического аппарата
Внешние диэлектрические элементы конструкции солнечных батарей, кроме сетеполотна и специальной изоляции, покрывают токопроводящим покрытием с удельным объемным электрическим сопротивлением не более 103 Омм. Токопроводящее покрытие электрически соединяется с металлическими элементами каркаса и металлоконструкциями корпуса КА. Металлизация панелей солнечных батарей с корпусом КА проводится в соответствии с ГОСТ 1 18707—81 специальными перемычками металлизации, крепящимися к соответствующей клемме привода СО.
Значение электрического сопротивления между любой точкой наружной поверхности панелей солнечных батарей и точкой металлизации (местом электрического соединения элементов конструкции), кроме сетеполотна и специально созданных электоизо-лированных поверхностей, должно составлять не более 1 МОм.
Оптическое взаимодействие. Оптические приборы (телескопы, астродатчики, датчики ориентации на Солнце, ИК-вертикали (ИКВ), фотоаппаратура) требуют такой компоновки на КА, чтобы в их поле зрения не попадали выхлопные газы, истекающие из сопел двигателей, свет бортовых огней, раскрывающиеся конструкции и т. п. Если это требование невыполнимо, следует предусмотреть средства защиты от воздействующих факторов или увод раскрывающихся конструкций из поля зрения оптических приборов во время их работы.
При полете в плотных слоях атмосферы (на участке выведения), если весь КА не находится под обтекателем ракеты-носителя, внешние оптические приборы и стекла иллюминаторов должны быть закрыты сбрасывающимися крышками или обтекателями. Оптимальным является размещение оптических приборов в нишах, закрытых крышками, которые открываются во время работы.
Оптические приборы с широким полем зрения (ИКВ) для исключения бликов, паразитных засветок и других помех от корпуса КА и внешнего оборудования приходится выносить на значительное расстояние, выполнять их складывающимися на корпусе и закрывать обтекателями на участке выведения.
При компоновке оптических приборов следует учитывать, что выхлопные газы ДУ, жидкие массы, удаляемые через дренажные отверстия, — это источники загрязнения и повреждения иллюминаторов и оптических приборов. Для устранения этих источников ЖРД устанавливают в нише (рис. 2.12) так, чтобы выхлопные га
2.3. Проектные критерии качества компоновки
127
зы, выходящие из сопла под углом 120°, ударялись в стенку ниши, а оптические приборы размещают как можно дальше от ДУ.
Оптические характеристики поверхности корпуса КА должны быть согласованы с требованиями СС. Если центр давления от солнечных лучей будет смещен относительно центра масс КА, возникнут возмущающие моменты, на компенсацию которых потребуется расходовать электроэнергию или топливо.
Давление света до высот менее 500 км влияет на движение КА меньше, нежели атмосферное дав
Рис. 2.12. Размещение ДУ и ИКВ:
1 — ЖРД; 2 — КА; 3 — ИКВ
ление, поэтому на этих высотах
его можно не учитывать. На высотах 500...700 км влияние давления света и атмосферного давления одинаково. Однако на высотах свыше 700 км давление света больше влияния атмосферного давления.
Радиационное взаимодействие. Наличие на борту КА ядер-ной установки требует защиты всей конструкции от потоков ра
диоактивного излучения, для чего применяют теневую защиту, максимально удаляя реактор от отсеков КА (рис. 2.13).
Рис. 2.13. Варианты компоновки ядерного реактора и КА:
а — установка на конической проставке; б — установка на раздвигающейся штанге; 1 — ядер-ный реактор: 2 — защита;
3 — тень; 4 — КА; 5 — радиационная защита; 6 — соединительная штанга; 7 — защитный радиатор
Защиту высокочувствительных приборов осуществляют при компоновке корпуса КА.
Для защиты от естественной радиации применяют особо стойкие электрические элементы (микросхемы, конденсаторы и т. д., защитное отключение ЭВМ с запоминанием последней информации).
128 2. Критерии оценки качества компоновки космического аппарата
Тепловое воздействие. Повышение мощности энергетической установки увеличивает площадь и массу радиатора излучателя. Для любой тепловой машины, работающей в составе энергетической установки, существует зависимость между КПД и площадью (массой) излучаемой теплоты. Увеличение числа приборов, радиоэлектронного, научного и технологического оборудования в герметичном отсеке, а также потребляемой ими энергии связано с ростом тепловыделения и, следовательно, с ростом мощности и массы СТР.
Приборы, чувствительные к изменению температуры, должны быть при компоновке максимально удалены от оборудования с интенсивным тепловыделением, а при необходимости теплоизолированы.
Некоторые приборы (например, гироскопы) и системы требуют жесткого температурного режима, поэтому их размещают в герметизированных термостатированных отсеках.
2.5.2. Исходная плотность компоновки
При выполнении компоновки на этапе технических предложений, когда нет точных габаритных чертежей блоков бортового оборудования и не проработана конструкция отсеков, исходную плотность компоновки определяют исходя из статистических данных по компоновке аналогичных отсеков КА, решающих схожие целевые задачи.
На этапе эскизного проектирования, когда проведены основные конструкторские работы по проектированию конструкции отсека и уточнены габаритные чертежи блоков бортового оборудования, выполняют натурный (масштабный) макет отсека (изделия), по которому окончательно уточняют прокладку кабелей, трубопроводов и определяют плотность компоновки.
Плотность компоновки характеризуется коэффициентом
п
/=1
где К — объем приборов бортового оборудования; Ио — объем отсека КА, в котором размещается оборудование, Ко =
п
= 2^ Л К, + ДКдор + ДКл (Д^ —технологический объем, обеспечи-/=1
2.3. Проектные критерии качества компоновки
129
вающий сборку, замену, крепление приборов бортового оборудования; АКДор — объем для дальнейшей возможной доработки приборов; АКЛ — лишний объем вследствие отличия формы приборов от формы отсека).
Плотность компоновки определяется как отношение объема отсека к объему, занятому приборами, агрегатами и элементами конструкции систем с учетом технологических объемов, необходимых для сборки и обслуживания.
Ограничение на массу конструкции обусловливается заданным массовым совершенством конструкции КА — отношением массы полезной нагрузки к массе элементов конструкции и коммуникаций. Ограничения связаны с минимизацией массы силовых элементов, длины трубопроводов и кабелей, соединяющих приборы, использованием силовых элементов конструкции отдельных приборов для повышения прочности и жесткости КА в целом. Рациональное размещение приборов уменьшает объем и площадь поверхности корпуса КА и тем самым снижает массу конструкции.
3. ОПРЕДЕЛЕНИЕ ОБЛИКА ОТСЕКОВ КОСМИЧЕСКОГО АППАРАТА
3.1. Выбор внешнего вида космического аппарата
3 .1.1. Общие сведения
Внешний вид КА определяется исходя из двух критериев:
• обеспечения выполнения целевой задачи, поставленной перед КА;
• размещения под обтекателем ракеты-носителя на участке выведения.
В результате анализа и выбора внешнего вида и габаритов КА разрабатывается теоретический чертеж, служащий основой для аэродинамических и баллистических расчетов, внешней и внутренней компоновки бортового оборудования.
Главная конструкторская база КА — продольная ось, определяемая как линия пересечения вертикальной плоскости симметрии и горизонтальной плоскости, называемой плоскостью строительной горизонтали. Для отсчета осевых размеров КА служит плоскость нулевой дистанции, проходящая через торец опорного шпангоута перпендикулярно продольной оси. Следы пересечения вертикальной плоскости симметрии с наружной поверхностью КА называют теоретическими контурами и обозначают римскими цифрами Теоретические контуры КА в плоскости строительной горизонтали обозначают римскими цифрами II—IV (рис. 3.1). Элементы конструкции, расположенные справа от вертикальной плоскости симметрии (по направлению полета), называют элементами правой стороны (правого борта), а противоположные — левой стороны (левого борта).
3.1. Выбор внешнего вида космического аппарата
131
Рис. 3.1. Основные оси и плоскости КА
3 .1.2. Выбор конструктивно-силовой схемы
После выбора внешнего вида КА в соответствии с задачами, которые он должен выполнить, составом бортового оборудования и требованиями к его размещению, разрабатывается конструктивно-силовая схема и проводится деление КА на отсеки.
Введем следующие понятия.
Отсек — отделенная от открытого пространства оболочкой единая конструкция, внутри и вне которой размещаются агрегаты, узлы и приборы бортового оборудования (приборный отсек, двигательный отсек и т. д.).
Система — множество приборов, агрегатов и узлов, выполняющих определенную функцию (системы управления, система обеспечения мягкой посадки и т. п.).
Агрегат — укрупненный унифицированный элемент конструкции КА, выполняющий отдельные функции в составе системы и обладающий полной взаимозаменяемостью (стыковочный агрегат, турбонасосный агрегат, солнечные батареи и т. д.).
Узел — часть КА или какого-либо устройства, функционально и конструктивно объединяющая более простые элементы или детали (узлы крепления, разворота солнечных батарей и т. д.).
132
3. Определение облика отсеков космического аппарата
Как правило, на участке выведения КА закрыт обтекателем ракеты-носителя для того, чтобы не создавать дополнительного аэродинамического сопротивления и защитить КА от воздействия скоростного напора воздуха. Этот обтекатель во многом определяет внешний вид КА.
Для выполнения целевой задачи на КА устанавливают значительное количество крупногабаритных элементов конструкции (антенн, солнечных батарей, штанг с приборами и т. п.), нахождение которых под обтекателем возможно только в сложенном виде.
Космический аппарат, размещенный под обтекателем, не должен создавать помехи при срабатывании механизма разделения и сброса обтекателя. В целях рационального размещения под обтекателем все внешние конструкции КА складываются и размещаются таким образом, чтобы не выступать за установленную зону
б в
Рис. 3.2. Форма и габариты обтекателей основных российских ракет-носителей: «Рокот» (я), «Союз» (б) и «Протон» (в)
полезной нагрузки. На рис. 3.2 приведены форма и габариты обтекателей основных российских ракет-носителей (штрихпунктирной линией показаны зоны полезной нагрузки, определяющие максимально допустимый размер КА).
Возможны и другие компоновочные решения при интеграции КА и ракеты-носителя. Например, исходя из рационального раз
3.1. Выбор внешнего вида космического аппарата
133
мещения под обтекателем ракеты-носителя «Сатурн» КА «Аполлон» выводили на орбиту в виде, требующем перестыковки лунно-
го модуля для продолжения полета.
Приборы, агрегаты и механизмы, из которых состоит КА, станут аппаратом только в том случае, когда будут объединены в единое целое с помощью элементов конструкции. От правильности выбора конструктивно-силовой схемы КА зависят его масса и работоспособность.
Как правило, отсеки несут определенную функциональную нагрузку, которая часто совпадает с их наименованием. Отсеки могут быть орбитальными, агрегатными, переходными. приборными и т. п. (рис. 3.3, см. рис. 1.17).
Рис. 3.3. Приборный отсек разгонного блока
По исполнению конструктивно-силовые схемы могут быть оболочечными, ферменными, с несущими баками и совмещенными (рис. 3.4).
Привязка блоков, установленных в отсеке, проводится в соответствии с системой координат. Как правило, это связанная система координат, начало которой расположено в центре масс отсека (ось X направлена по оси отсека в направлении полета, ось Y — вертикально вверх и перпендикулярно к оси А, ось Z образует правую систему координат). Плоскость, образованную осями X и Z, называют строительной горизонталью корпуса, плоскость YZ —
плоскостью симметрии.
Внешний вид и форма отсеков КА существенно зависят от его назначения (орбитальный, агрегатный отсек и др.), типа бортового оборудования (необходима герметизация или нет), наличия раскрывающихся элементов (солнечных батарей, антенн и т. п.).
Процесс компоновки КА можно разделить на два этапа. На первом этапе определяют геометрическую форму и размеры КА, конструктивно-силовую схему, проводят расчетно-теоретические работы, выполняют компоновку и устанавливают требуемое значение функции несущей способности R(t).
На втором этапе выпускают рабочие чертежи несущих элементов конструкции, выбирают материал, технологический процесс
134 3. Определение облика отсеков космического аппарата
изготовления, решают вопросы НЭО как отдельных элементов конструкции, так и всего КА в целом. По результатам проведенных работ уточняют конструктивно-силовую схему КА.
Рис. 3.4. Разгонные блоки, выполненные по оболочечной (а) (проект фирмы «Боинг») и ферменной (б) конструктивно-силовой схемам:
1 — отсек полезной нагрузки; 2 — стыковочный шпангоут; 3 — радиоэлектронное оборудование; 4 — теплоизоляция; 5 — ферма: 6 — бак водорода: 7 — баки с топливом двигателей ориентации и баки наддува; 8 — бак кислорода: 9 — маршевые ЖРД
Наиболее общие требования, предъявляемые к конструктивносиловой схеме КА:
• обеспечение необходимых прочности и жесткости для всех расчетных случаев с учетом нагрузок, приходящих от смежных отсеков и конструкций, при минимально возможной массе конструкции;
• технологичность изготовления и стыковки со смежными конструкциями;
• обеспечение размещения оборудования как внутри, так и вне конструкции, свободное обслуживание оборудования на технической позиции;
3.2. Конструкции отсеков
135
• реализация заданных условий по сохранению среды в отсеке (герметичности, влажности, температуры, газового состава атмосферы и т. д.), защита бортового оборудования от пыли и влаги при стартовой подготовке, акустического воздействия на участке выведения, метеоритных потоков и радиации.
Для разработки конструктивно-силовой схемы КА необходимы:
• комплект габаритных чертежей с указанием особенностей размещения, координатами мест крепления и подсоединения к другим блокам (тип и параметры разъемов, размеры штуцеров и т. п.);
• нагрузки, действующие на отсек (при различных случаях нагружения), значения возможных перегрузок и параметры вибраций;
• требования по герметичности, температурному режиму, влажности и т. п.;
• чертежи мест стыковки с соседними отсеками, указанием размеров и типа стыковочных соединений;
• требования по размещению иллюминаторов, технологических и эксплуатационных люков.
После окончательного выбора вида КА разрабатывают его теоретический чертеж, который является основным документом для определения характеристик разрабатываемого КА.
3.2. Конструкции отсеков
3,2.1. Классификация конструкций отсеков
Исходя из требований на разработку конструктивно-силовой схемы отсека, выбирается тип конструкции отсека.
В зависимости от нагрузок, действующих на отсек и комбинации силовых элементов, используемых при проектировании, возможны три вида отсеков: лонжеронный, стрингерный и оболочечный.
Оболочечный отсек представляет собой оболочку-обшивку, подкрепленную поперечными элементами, — шпангоутами. Продольные элементы только местные. Оболочка-обшивка воспринимает все внешние силовые факторы. По такой конструктивно-силовой схеме целесообразно выполнение отсеков орбитальных станций.
В зависимости от функционального назначения отсеки подразделяются на герметичные (приборные отсеки, баки) и негерметичные
136
3. Определение облика отсеков космического аппарата
(защитные оболочки, предохраняющие от метеоритных потоков, проставки и т. п.).
Лонжеронный отсек. Основной силовой элемент — лонжерон, который воспринимает практически весь изгибающий момент, при этом в поясах лонжерона возникают сжимающие и растягивающие усилия. Стрингеры, имеющиеся в подобных отсеках, предназначены для подкрепления обшивки, окантовки больших вырезов и крепления оборудования. Силовые шпангоуты составляют основу отсека и служат для восприятия и передачи сосредоточенных сил, моментов на обшивку и продольный силовой набор. Нормальные шпангоуты придают геометрическую форму отсеку и подкрепляют обшивку. Кроме придания удобообтекаемой формы и обеспечения герметичности, обшивка, если это необходимо, воспринимает крутящий момент и перерезывающую силу, действующую на отсек. По лонжеронной конструктивно-силовой схеме выполняют корпуса орбитальных станций и спускаемых КА.
Стрингерный отсек представляет собой тонкостенную подкрепленную силовым набором оболочку. Продольный силовой набор состоит из часто расположенных (шаг 80...250 мм) силовых стрингеров, подкрепляющих обшивку и воспринимающих с ней весь изгибающий момент. Поперечный набор включает в себя нормальные и силовые шпангоуты. Обшивка более толстая, чем в лонжеронных отсеках, воспринимает изгибающий и крутящий моменты, а также поперечную силу. Стрингерный отсек имеет большие внутренние объемы и допускает свободную компоновку оборудования в отсеке. По стрингерной конструктивно-силовой схеме целесообразно выполнять орбитальные и приборные отсеки, проставки и т. п.
3.2.2. Силовые элементы, используемые при разработке конструктивно-силовой схемы отсека
Силовые элементы, составляющие оболочечный корпус КА, подразделяются на продольные (стрингер, лонжерон), поперечные (шпангоут) и обшивку. Каждый из этих элементов воспринимает те или иные нагрузки, действующие на КА в полете. Рассмотрим эти элементы подробнее.
Лонжерон. Различают основные и вспомогательные лонжероны. Основные лонжероны проходят вдоль всего отсека, воспринимая сосредоточенные продольные силы и изгибающие моменты большой интенсивности (от узлов крепления двигателей, пара
3.2. Конструкции отсеков
137
шютов и т. п.), и составляют основу продольного набора. Вспомогательные лонжероны устанавливают в местах, где необходимо усиление корпуса (большие вырезы в оболочке). В лонжеронах от изгибающих моментов и осевых сил возникают сжимающие и растягивающие усилия. В зависимости от условий нагружения в отсеке может быть от двух до восьми лонжеронов. Лонжероны могут выполняться из катаных или прессованных профилей, а также, в случае больших нагрузок, сборными из нескольких профилей. На рис. 3.5 приведены возможные варианты сечения лонжеронов.
Рис. 3.5. Варианты сечения лонжеронов
В местах пересечения лонжеронов с другими силовыми элементами в последних делаются вырезы. Лонжероны обрываются только в местах стыковки с другими отсеками или при пересечении с мощными шпангоутами.
Стрингер — это продольный силовой элемент, подкрепляющий обшивку и воспринимающий вместе с ней изгибающий момент. Стрингеры изготовляют из прессованных профилей различного сечения (рис. 3.6). Количество стрингеров зависит от типа и габаритов корпуса. При малых диаметрах корпуса шаг стрингеров составляет 80... 100 мм, при больших диаметрах — 150...200 мм. При пересечении стрингеров с другими силовыми элементами выполняют вырезы для прохода стрингера. Для усиления в этом месте устанавливают накладки.
Рис. 3.6. Типовые сечения стрингеров
Шпангоуты составляют поперечный силовой набор корпуса. Как правило, это замкнутые кольцевые конструкции, которые подразделяют по воспринимаемым нагрузкам на силовые (усиленные) и нормальные, по роду выполняемой работы — на торцевые, обеспечивающие стыковку с другими отсеками или ракетой-
138 3. Определение облика отсеков космического аппарата
носителем, и промежуточные, подкрепляющие обшивку на участках между торцевыми шпангоутами.
Силовые шпангоуты предназначены для передачи больших сосредоточенных сил и моментов на обшивку в виде потока касательных напряжений и должны иметь хорошую связь с ней. Конструкции силовых шпангоутов разнообразны (рис. 3.7).
Рис. 3.7. Типовые сечения шпангоутов
Шаг установки шпангоутов определяется из расчета наиболее эффективной работы обшивки и составляет 150...500 мм. Нормальные шпангоуты, выполненные из гнутых или прессованных профилей, обычно состоят из нескольких частей, соединенных накладками.
В местах пересечения шпангоутов со стрингерами в стенке шпангоута делаются вырезы (рис. 3.8).
Рис. 3.8. Типовые решения пересечения стрингеров и лонжеронов со шпангоутами:
а — стрингер закрытого профиля и промежуточный шпангоут; б — лонжерон и промежуточный шпангоут; в — стрингер открытого профиля и промежуточный шпангоут; г — стрингер и концевой шпангоут: / — шпангоут; 2 — заклепочное соединение стрингера и шпангоута; 3 — стрингер (лонжерон); 4 — оболочка; 5 — накладка
Обшивка корпуса образует форму отсека, воспринимает значительную часть изгибающего момента, перерезывающую силу и крутящий момент, а также нагрузки от перепада давления между герметичным отсеком и открытым пространством. Обшивку изго
3.2. Конструкции отсеков
139
товляют из металлических листов (алюминиевых и титановых сплавов, стали) или композиционных материалов. Она может быть гладкой, гофрированной, вафельной. При использовании композиционных материалов обшивка может выполняться с закладными силовыми элементами.
3.2.3. Форма отсеков
Форма отсека корпуса КА зависит от требований к его герметичности. Если отсек герметичный, то он нагружен внутренним давлением, которое колеблется от 0,08 МПа для пилотируемых КА до 0,04 МПа для беспилотных КА. В этом случае исходя из условия максимальной прочности конструкции при обеспечении минимальной массы отсеки выбирают в форме тел вращения (сферы, цилиндра, конуса, тора и т. п.). При необходимости днища у отсеков выполняют в виде овальных панелей.
Форма негерметичных отсеков может быть любой, если она удовлетворяет требованиям по массе и прочности, а также аэродинамическим, противометеоритным, тепловым и другим требованиям (рис. 3.9).
Рис. 3.9. Конструкция негерметичного отсека спутника связи А-2100:
1 — базовая панель; 2 — аккумуляторы; 3 — топливный бак; 4 — антенны ретрансляторов; 5 — излучатель антенн; 6 — панель солнечных батарей; 7 — боковые панели для размещения передатчиков; 8 — всенаправленная антенна;
9 — оборудование связи; 10 — надирная панель; 11 — центральная силовая конструкция (ядро); 12 — боковые панели для размещения антенн
140
3. Определение облика отсеков космического аппарата
3.3. Компоновка герметичных отсеков
3.3.1. Компоновка приборных отсеков
Учитывая возможные перемещения приборов на амортизаторах и зазоры, требуемые по условиям охлаждения, определяется объем приборов, которые необходимо разместить в приборном отсеке. Кроме того, добавляется дополнительный объем, равный 10... 15 % от расчетного, для размещения трасс коммуникаций (крепежных элементов конструкции, кабелей, трубопроводов и т. п.) и резерва при возможных изменениях в составе устанавливаемой в отсеке аппаратуры. Исходя из общей компоновки КА определяют габариты приборного отсека (диаметр и длину). Если размещение приборного отсека полученных габаритов невозможно, то допускается его разделение на несколько отсеков, при этом целесообразно компоновать отсеки по функциональному принципу во избежание наличия лишних трасс коммуникаций между отсеками.
По своим габаритам приборные отсеки можно разделить на отсеки малого (Л = L / D. X < 1) и большого (X > 1) удлинения, где L иО — длина и диаметр отсека.
3.3.2. Особенности компоновки отсека малого удлинения
Поскольку длина (глубина) отсека меньше диаметра, то приборы можно размещать на крепежных элементах конструкций, зафиксированных на стенках отсека (рис. 3.10).
Рис. 3.10. Размещение приборов на стенках отсека:
1 — крепежные элементы; 2 — приборы
Однако подобное размещение приборов нежелательно по следующим причинам:
• необходимость демонтажа приборов первого ряда, создающая неудобство для замены прибора, установленного во втором
3.3. Компоновка герметичных отсеков
141
ряду, при работе в монтажно-испытательном корпусе на полигоне стартовой позиции и в цеху при сборке и наладке;
• значительная нагруженность стенок отсека, так как кронштейны, к которым крепятся приборы, зафиксированы на силовых элементах отсека, что приводит к его несимметричному нагружению и увеличению массы;
• установка герметичных разъемов для подсоединения приборов, размещенных в герметичном отсеке, к приборам, расположенным вне его, на крышке отсека, что приводит к необходимости использовать длинный кабель, позволяющий снять крышку, либо на днище или стенках отсека, что затрудняет эксплуатацию, создает трудности при работе на стартовой позиции и в цеху при сборке, снижает прочность оболочки корпуса вследствие большого числа вырезов и увеличивает массу.
Подобных затруднений можно избежать, если размещать приборы на крышке отсека, при этом приборы крепят непосредственно к крышке или к раме, закрепленной на крышке (рис. 3.11).
Рис. 3.11. Размещение приборов на раме, закрепленной на крышке отсека: 1 — приборы; 2 — рама крепления приборов
Нагрузка от приборов действует на крышку и через фланец крепления к оболочке передается на обшивку. Оболочка отсека нагружена равномерно, в ней отсутствуют вырезы, и она обеспечивает полную герметичность отсека. Разъемы также крепятся на крышке, что значительно уменьшает длину кабелей и трубопроводов, а следовательно, их массу.
На рис. 3.11 рама для крепления приборов имеет крестообразную форму, хотя форма может быть любой, что зависит от вида приборов. В стенках рамы могут выполняться вырезы и отверстия для размещения приборов и прохождения кабелей и трубопроводов. Если масса приборов велика, то возникает опасность нагру-
142
3. Определение облика отсеков космического аппарата
а б
Рис. 3.12. Штырь-фиксатор {а) и конструкция направляющих (б)
жения фланца крепления крышки к отсеку. Для разгрузки фланца и исключения вибраций конца рамы в ее передней части устанавливают штыри-фиксаторы, которые после установки рамы с приборами попадают в специальные отверстия и заклиниваются после затяжки стыка фланца (рис. 3.12, а). Для удобства сборки на стенках отсека устанавливают направляющие, по которым раму с приборами размещают в отсеке (рис. 3.12, б).
Подобная компоновка приборов
бортового оборудования (рис. 3.13) удобна для работы в цехе, при сборке, монтаже, а также на стартовой позиции, поскольку после
Рис. 3.13. Компоновка герметичного приборного отсека выдвижения оборудования из корпуса все приборы и трассы коммуникаций доступны для работы.
3.3.3. Особенности компоновки отсека большого удлинения
Размещение приборов бортового оборудования в приборных отсеках большого удлинения возможно только на приборной раме, жестко соединенной с крышкой отсека. Приборная рама может быть крестообразной формы (рис. 3.14, а\ в виде этажерки (рис. 3.14, б), стержня с дискообразными полочками и т. п.
В зависимости от условий компоновки КА приборный отсек может иметь форму, отличную от цилиндрической, как правило,
3.3. Компоновка герметичных отсеков
143
Рис. 3.14. Приборные рамы крестообразной формы (а) и в виде этажерки (б)
коническую. Компоновка приборов, устанавливаемых в подобном отсеке, ничем не отличается от компоновки приборов в отсеках цилиндрической формы.
К креплению приборов, предъявляются различные требования. Есть приборы, которые допускают жесткое крепление (рис. 3.15)
Рис. 3.15. Варианты жесткого крепления приборов:
1 — композитная пластина: 2 — прибор; 3 — крышка люка; 4 — профиль (стрингер); 5 — обшивка; 6 — болт; 7 — гнездо; 8 — металлическая пластина;
9 — кронштейн; 10 — втулка; 11 — анкерная гайка
144
3. Определение облика отсеков космического аппарата
Рис. 3.16. Варианты крепления приборов на амортизаторах:
1 — прибор; 2 — пластина крепления прибора; 3 — амортизатор; 7, 12. 16 — втулка; 5,9, 15 — шайба; 6 — болт; 7—прокладка-амортизатор; 8— прокладки; 10 — прокладка; 7/, 17 — заклепка; 13 — гайка; 14 — болт; 18 — резинометаллический амортизатор
Приборы, требующие защиты от вибраций, устанавливаются на амортизаторах (рис. 3.16).
После установки некоторые приборы требуют юстировки, для чего применяются специальные крепления (рис. 3.17), позволяющие осуществлять установку приборов с требуемой точностью.
Крепление приборного отсека в корпусе КА может осуществляться с помощью фланца, установленного в передней или задней частях отсека. В этом случае целесообразно совмещать фланец крепления крышки приборного отсека с фланцем крепления приборного отсека в конструкции. Если корпус приборного отсека несущий, то следует использовать продольные силовые элементы, которые можно размещать вне герметичной зоны, чтобы не занимать объем, необходимый для размещения приборов.
3.3.4, Компоновка приборов в деформируемых отсеках
Астрономические и гироскопические приборы, требующие очень высокой точности установки, не допускают нагружения их корпуса.
На корпус прибора, установленного в герметичном отсеке, воздействуют деформации отсека вследствие наддува, испытаний
3.3. Компоновка герметичных отсеков
145
Рис. 3.17. Устройства, позволяющие проводить юстировку приборов после установки:
1 — прибор; 2 — платформа; 3 — корпус отсека; 4. 8 — крепеж; 5 — болт со сферической головкой; 6. 7, 13 — гайка; 9. 15 — кронштейн; 10, 20 — болт; 11 — опора; /2, 17. 18 — вкладыш; 14. 19, 21 — шайба; 16 — контргайка; 22 — сферический сегмент
и выведения в космос. Этого воздействия можно избежать, если использовать некоторые особенности деформации тороидальных оболочек (рис. 3.18) от внутреннего давления. Формулы напряжений в круговой тороидальной оболочке с ростом отношения R/r переходят в формулы напряжений для круговой цилиндрической оболочки, но для
Рис. 3.18. Схема тороидальной оболочки
деформаций такого перехода не существует. Если по формулам двух-
осного напряженного состояния определить значения приращения размеров АОВ и ДСМ , то получим
ДОВ = ^(1-ц), оЕ
(3.1)
где р — давление; 5 — толщина стенки; Е — модуль упругости материала; ц — коэффициент Пуассона.
146
3. Определение облика отсеков космического аппарата
Из выражения (3.1) следует, что деформация радиуса г не зависит от деформации радиуса R.
В направлении полюсов тороидальная оболочка деформируется значительно больше:
2 ( А
\CD = ^— 1-ц+ . 2
М /-(R/r)2)
Можно найти такие размеры поперечного сечения тороидальной оболочки, при которых деформации поперечного сечения горизонтального диаметра от действия внутреннего давления будут отсутствовать. В этом случае крепление гироблоков и других приборов, требующих точной юстировки, выполненное по схеме, показанной на рис. 3.19, не будет подвержено деформациям.
Рис. 3.19. Компоновка прибора в отсеке тороидальной формы: / — скользящая опора; 2 — блок оборудования
Можно взять тороидальную оболочку, поперечное сечение которой будет эллиптическим, при этом большая ось эллипса лежит в плоскости тора (рис. 3.20). Деформация большой оси АВ
( 24
ЬАВ = -Р- 2R2 + 2а2 -2^R2 ~^~\ла2
8^ Ь2 Ъ2
где а. b — оси эллипса, а = Г|г, b = r / Y\.
3.3. Компоновка герметичных отсеков
147
Приравнивая полученное выражение доя деформации к нулю, получаем
=П2(П4-2 + Ц)
2(1-п4)
Рис. 3.20. Схема тороидальной оболочки эллиптического сечения
Стыковочные шпангоуты незначительно влияют на характер поперечных деформаций.
На рис. 3.21 приведен пример конструкции тороидальной оболочки, применяемой в качестве герметичного приборного отсека.
Рис. 3.21. Пример конструкции тороидальной оболочки, применяемой в качестве герметичного приборного отсека
К компоновке приборов в герметичных отсеках предъявляются следующие требования:
• должна обеспечивать заданное положение центра масс и заданный момент инерции;
• приборы должны размещаться в отсеке в соответствии с требованиями установки, указанными на габаритном чертеже;
• при компоновке приборов следует обеспечить отсутствие застойных зон, особенно у приборов с большим тепловыделением;
148
3. Определение облика отсеков космического аппарата
• компоновка приборов должна обеспечивать удобный монтаж при сборке отсека и работе на технической позиции; по возможности необходимо предусмотреть быстрый монтаж и демонтаж приборов.
3.4. Компоновка негерметичных отсеков
3.4.1. Общие сведения
В последнее время широкое применение находят МКА массой до 1 000 кг. Как уже было отмечено ранее, для выведения их на орбиту в качестве ракет-носителей используют конверсионные баллистические ракеты, способные доставлять на орбиту до трех МКА, что значительно снижает стоимость выведения килограмма полезной нагрузки на орбиту.
На МКА устанавливается целевое оборудование, выполняющее научные, промышленно-хозяйственные и военно-прикладные задачи. Как правило, целевое оборудование МКА имеет малые массогабаритные характеристики и энергопотребление.
Обычно бортовое оборудование, устанавливаемое на МКА, имеет герметичное исполнение и не требует больших герметичных отсеков. Это оборудование может компоноваться в отсеках произвольной формы, позволяющей рационально размещать оборудование и устанавливать его под обтекателем ракеты-носителя (рис. 3.22). Наиболее часто такие отсеки имеют форму параллелепипеда (рис. 3.23).
В этом случае отсек представляет собой пространственный каркас со стенками, выполненными из металла или композиционного материала, которые защищают приборы, размещенные внутри, от внешних воздействующих факторов. Сам каркас также может быть изготовлен из металла или композиционного материала. Использование композиционных материалов значительно снижает массу конструкции.
Переход мировых производителей на создание маломассогабаритной космической техники нового поколения открывает все больше возможностей по унификации разрабатываемых КА. МКА делится на две части, функционально связанные между собой. В одной части аппарата размещается обеспечивающее (служебное) оборудование, во второй — целевое. Поскольку состав обслуживающего оборудования у большинства КА идентичен, возможно создание
3.4. Компоновка негерметичных отсеков
149
Рис. 3.22. Компоновка МКА:
1 — батарея; 2 — приемник детектора излучения; 3 — остронаправленная антенна; 4 — звездный датчик; 5 — детектор нейтронов высоких энергий; б — конструкция крепления антенны;
7 — аппаратура MARIE; 8 — двигательный модуль; 9 — бак с гелием; 10 — топливный бак; 11 — УКВ-антенна; 12 — аппаратура THEMIS; 13 — аппаратура PDDU; 14 — нейтронный спектрометр; 15 — приборная рама; 16 — панель солнечной батареи
унифицированного блока обслуживающего оборудования. Этот блок получил название — унифицированная космическая платформа (УКП).
6
Рис. 3.23. Компоновка УМКП-800:
1 — бортовой многофункциональный компьютер; 2 — аппаратура спутниковой навигации; 3 — блок распределения питания; 4 — системы ориентации и стабилизации; 5 — зона размещения целевого оборудования; 6 — панели конструкции корпуса; 7 — система энергообеспечения; 8 — АФУ; 9 — звездный координатор; 10 — командно-измерительная система; 11 — система ориентации солнечных батарей
150
3. Определение облика отсеков космического аппарата
Унифицированная космическая платформа — это общая унифицированная модель для построения КА, которая включает в себя все служебные системы спутника (модуль служебных систем), а также конструкцию модуля полезной нагрузки. В зависимости от типа КА УКП может содержать только служебные системы, без конструкций модуля полезной нагрузки.
Использование УКП имеет ряд существенных преимуществ по сравнению с индивидуально разработанными аппаратами:
• сокращение затрат на проектирование в связи с серийностью производства и возможностью распределения стоимости проектирования платформы между всеми спутниками серии;
• увеличение надежности спутников из-за многократной проверки и отработки их систем;
• уменьшение времени производства спутника до 18...36 месяцев, кроме того производители УКП гарантируют сроки изготовления.
Обычно в состав УКП входят все служебные системы, кроме модуля целевой аппаратуры. Также на платформе предусматривается место для установки полезной нагрузки и антенн (см. рис. 3.23). Иногда часть полезной нагрузки устанавливается в модуле УКП (спутники связи Спейсбас, Экспресс, SS/L 1300 и др.), в корпусе УКП для размещения этих систем отводится место, и они считаются частью платформы. Как правило, платформы выбираются под массу выводимой полезной нагрузки, что, в свою очередь, определяет массу КА и мощность его системы энергообеспечения. Одной из характеристик является отношение массы полезной нагрузки к общей массе КА. В настоящее время это отношение составляет 18... 19% для современных тяжелых спутников.
УКП классифицируют по массе (заправленные):
• легкие — до 2 000 кг с мощностью энергопотребления полезной нагрузки до 6 кВт;
• средние — до 5 000 кг с мощностью энергопотребления полезной нагрузки до 14 кВт;
• тяжелые — более 5 000 кг с мощностью энергопотребления полезной нагрузки более 15...20 кВт.
В табл. 3.1 приведены характеристики УКП, используемых в настоящее время.
Общий вид компоновки платформы AstroSat-100 показан на рис. 3.24.
3.4. Компоновка негерметичных отсеков
151
Таблица 3.1. Универсальные космические платформы, используемые в настоящее время
Название Масса, кг Мощность, кВт Количество изготовленных Производитель
Spacebus 4000 Средш 3000... 5000 te и тяжелы. До 11,6 е платформы 65(7) Thales Alenia Space
Evrostar 3000 6400 6...14 Более 60 EADS Astrum
Aiphabus 6000...6600 12...18 0(1) EADS Astrum/Thales Alenia Space
Boeing 702 6000 До 18 25(15) Boeing
Boeing 601 73 (25) Boeing
SS/L 1300 8000 До 20 83 (25) Space Systems/Loral
A2100AX 2800... 6600 До 15 36 Lockheed Martin Space Systems
KAYP-4 2300...2600 1,7...6,8 31 ОАО ИСС
Экспресс 2000 До 6000 До 14 0(4) ОАО ИСС
Дунфан Хун-4 Star bus До 5200 1450 (сухая) До 8 Легкие плат, 1,5...7,5 12 формы 21 (10) China Aerospace and Technology Corporation Orbital Sciences Corporation
Экспресс 1000 До 2200 До 6 3(18) ОАО ИСС
A2100A 1...4 Lockheed Martin Space Systems
LUCSOR 1600...3000 До 4 0(1) OHB
Навигатор 650... 850 До 2,4 2(6) НПО им. C.A. Лавочкина
Яхта 350...500 До 3,9 4 гкнц им. М.В. Хруничева
Универсальная космическая платформа 950... 1200 До 3000 Вт 4(1) РКК «Энергия»
152
3. Определение облика отсеков космического аппарата
Рис. 3.24. Общий вид компоновки платформы AstroSat-100:
/ — радиопередатчик; 2 — двигатель-маховик по оси Y, 3 — гироскоп; 4 — БЦВМ; 5 — двигатель маховик по осям X и Z; б — топливный бак (гидразин);
7 — энергетический блок; 8 — магнитные датчики; 9 — батарея; 10 — звездный датчик
3.4.2. Ферменный отсек
Наряду с оболочечными отсеками в космической технике широкое применение находят ферменные (рамные) отсеки. В зависимости от расположения стержней фермы подразделяются на плоские, все стержни которых находятся в одной плоскости, и пространственные, стержни которых расположены в разных плоскостях (рис. 3.25).
По роду составляющих стержней фермы бывают трех видов:
• жесткие, состоящие из жестких стержней, воспринимающих растягивающие и сжимающие усилия;
• расчалочные, у которых вместо раскосов жесткой фермы имеются две расчалки, воспринимающие лишь растягивающие усилия;
• смешанные, часть жестких раскосов которых заменена расчалками.
Силовые элементы в конструкции ферменного фюзеляжа — лонжероны (пояса ферм), стойки и раскосы; в вертикальной плос-
3.4. Компоновка негерметичных отсеков
153
кости — распорки и расчалки (гибкие стальные ленты), в горизонтальной плоскости — расчалки или раскосы между фермами и обшивкой. На рис. 3.25 (вид А) показан типовой узел соединения элементов конструкции фермы. Обычно фермы статически определимы, в этом случае они получаются легче.
Рис. 3.25. Конструкция ферменного фюзеляжа:
/ — лонжероны; 2 — стойки; 3 — распорка; 4 — раскосы: 5 — расчалка
Фермы применяют для соединения отсеков между собой, крепления КА к разгонному блоку, ракете-носителю или ДУ.
При компоновке МКА используют каркасные конструкции, состоящие из ряда горизонтальных и вертикальных плоскостей, закрепленных на основном несущем элементе (рис. 3.26).
Ферменные отсеки применяются для размещения крупнога-баритых элементов бортового оборудования: баков, телескопов и пр. Например, ферменный отсек
Рис. 3.26. Каркас МКА
использован для размещения инфракрасного телескопа SPIRIT III при компоновке КА Midcourse Space Experiment (MSX) (рис. 3.27).
154
3. Определение облика отсеков космического аппарата
Рис. 3.27. Компоновка ферменного отсека на КА MSX:
I — отсек целевой аппаратуры; II — ферменный отсек; III — отсек электроники; IV — адаптер для стыковки с ракетой-носителем; 1 — оптическая скамья; 2 — скамья приемника радиомаяка; 3 — телескоп SPIRIT III; 4 — сотопанель +~ с установленной панелью солнечной батареи; 5 — сотопанель -у; 6 — сотопанель -х;
Габариты и конструкция рис. 3.28. Ферма массой 47,1
ферменного отсека показаны на кг изготовлена из многослойного
Рис. 3.28. Ферменный отсек КА MSX:
/ — фитинг для стыковки с отсеком электроники; 2 — стержень; 3 — фитинг для стыковки с отсеком целевой аппаратуры; 4 — верхний диагональный стержень; 5 — фитинг для стыковки с телескопом SPIRIT; 6 — нижний диагональный стержень
графит-эпоксидного композиционного материала, обладающего высокой жесткостью и минимальной теплопроводностью. Укладка слоев композиционных материалов обеспечивает псевдоизотропность свойств стержней. Стержни имеют двутавровое сечение с ребрами между полками для увеличения крутильной жесткости. В уз
3.4. Компоновка негерметичных отсеков
155
лах фермы установлены титановые фитинги. Соединение композитных стержней и титановых фитингов показано на рис. 3.29. Фитинг крепления телескопа (рис. 3.29, а) крепится при помощи системы композитных накладок, распределяющих нагрузку и препятствующих расслоению КМ. Угловой фитинг крепления ферменного отсека (рис. 3.29, б) соединяется со стержнем прямоугольного сечения, установленным на отсеке научной аппаратуры.
Рис. 3.29. Фитинги ферменных отсеков:
а — фитинг крепления телескопа: / — опорная пластина; 2 — косынка; 3 — пластина усиления; 4 — верхняя диагональная двутавровая балка; 5 — титановый фитинг; 6 — треугольная косынка; 7 — нижняя диагональная двутавровая балка; б — верхний диагональный угловой фитинг: / — законцовка стержня, отформованная под фитинг; 2 — пластина усиления; 3 — титановый фитинг для соединения с отсеком целевой аппаратуры; 4 — соединительная втулка отсека целевой аппаратуры; 5 — верхняя диагональная двутавровая балка; все элементы композитные, кроме отмеченных титановых элементов
Ферменный отсек может использоваться также в качестве переходной проставки между другими отсеками. Такие проставки необходимы, если требуется обеспечить разделение отсеков, например возвращаемого аппарата и агрегатного отсека. Конструкция фермы-проставки должна обеспечивать работу стержней преимущественно на растяжение-сжатие. При этом должно выполняться условие устойчивости стержня при действии сжимающих нагрузок. Рациональным решением с точки зрения жесткости и массы отсека является составление фермы из стержней, лежащих на сторонах равностороннего
156
3. Определение облика отсеков космического аппарата
Рис. 3.30. Ферменные отсеки-проставки:
а — ферма малого удлинения; б — ферма большого удлинения с промежуточным силовым поясом
треугольника (рис. 3.30, а). При необходимости удлинения отсека применяют дополнительные силовые пояса (рис. 3.30, б).
Стержни отсеков изготавливают как из металла, так и из композиционного материала. Соединение стержней фермы должно обеспечивать пересечение их осей в точке. Конструкции нерегулируемых соединений стержней с фитингами показаны на рис. 3.31
Рис. 3.31. Соединение металлических стержней с фитингами: 1 — стержень; 2 — фитинг; 3 — замок; 4 — шпилька; 5 — крепеж
3.4. Компоновка негерметичных отсеков
157
и рис. 3.32. В случае когда требуется исключить передачу изгибающих моментов на стержень и обеспечить статическую определимость фермы, применяют фитинги с шарнирами, как показано на рис. 3.33.
Рис. 3.32. Соединение композитных стержней с фитингами:
/ — стержень; 2 — фитинг; 3 — вкладыш; 4 — крепеж; 5 — труба из композиционного материала; 6 — стакан для размещения пирозамка
Рис. 3.33. Конструкция фитинга с шарниром:
1 — стержень; 2 — накидная гайка;
3 — опора; 4 — шпилька;
5 — гайка; 6 — контровочная шайба: 7 — соседний отсек
Кроме прямолинейных стержней для построения ферменных отсеков могут использоваться изогнутые профили. Пример конструкции цилиндрического ферменного отсека показан на рис. 3.34.
158
5. Определение облика отсеков космического аппарата
Рис. 3.34. Цилиндрическая ферма, выполненная из профилей:
1 — стержень; 2 — стыковочный шпангоут; 3,4 — крепежные элементы
3.4.3. Компоновка негерметичных отсеков наноспутников
Космические аппараты пико- и нанокласса массой до 1 и 10 кг соответственно имеют негерметичные отсеки, основой конструкции которых являются штампованные из листового алюминиевого сплава силовые элементы и многослойные печатные платы, на которых размещается бортовое оборудование.
С 1999 г. для негерметичных отсеков применяется спецификация CubeSat, ставшая международным стандартом де-факто для таких аппаратов. Основой стандарта является базовый вариант CubeSat U1, имеющий, согласно спецификациям, размер 10x10x10 мм (объем 1 л) и массу не более 1,33 кг. Система координат CubeSat должна соответствовать изображенной на рис. 3.35. Точка начала системы координат CubeSat совпадает с геометрическим центром CubeSat. Центр масс должен располагаться внутри сферы диаметром 2 см, центр которой расположен в геометрическом центре аппарата. Четыре ребра отсека являются лонжеронами квадратного сечения, которые передают нагрузку при старте и при соединении нескольких спутников в пакет.
Для выведения CubeSat спецификацией предусмотрен транспортно-пусковой контейнер P-POD (Poly picosatellite orbital deployer), рассчитанный на запуск пакета из трех КА размером U1. Общий вид и поперечное сечение пускового контейнера показаны на рис. 3.36. Система координат CubeSat должна совпадать с системой
3.4. Компоновка негерметичных отсеков
159
Контакт отделения, сторона +Z
Рис. 3.35. Габаритный чертеж CubeSat:
1 — пружинный толкатель (2 шт); 2 — сторона + Y; 3 — контакт отделения (2 шт); 4 — сторона +%; I, II, HI, IV — стойки
Рис. 3.36. Транспортно-пусковой контейнер P-POD (а) и габариты зоны полезного груза в его поперечном сечении (б)
160
3. Определение облика отсеков космического аппарата
P-POD при интеграции. На рисунке отмечены зоны полезного груза в контейнере P-POD. Касание стенок контейнера не допускается. Никакие компоненты на боковых сторонах отсека не должны выступать более чем на 6,5 мм по нормали к поверхности. Все детали CubeSat должны быть закреплены во время запуска, вывода на орбиту и функционирования; использование пиротехнических устройств не допускается.
Лонжероны при выходе спутника из контейнера выполняют функцию направляющих. Не менее 75 % поверхности направляющих должны соприкасаться с направляющими P-POD. Для предотвращения холодной сварки и уменьшения трения они должны быть анодированы или покрыты тефлоном. На концах лонжеронов должны быть установлены толкатели и контакты отделения. CubeSat должен комплектоваться не менее чем одним контактом отделения. Габариты и параметры миниатюрных пружинных толкателей указаны в спецификации . В настоящее время бортовое оборудование для спутников CubeSat в значительной мере унифицировано, производится и продается коммерческими фирмами. Описание блоков аппаратуры, и элементов конструкций а также их чертежи и геометрические модели можно найти на сайтах фирм-производителей. Каждый блок аппаратуры компонуется на отдельной
Рис. 3.37. Основные элементы компоновки CubeSat U1:
1 — система электроснабжения; 2 — СВЧ-приемопередатчик; 3 — спектрометр; 4 — полезная нагрузка; 5 — бортовой компьютер; 6 — солнечные батареи: 7 — конструкция; 8 — СВЧ-антенна (диполь)
Подробнее см.: Nason Creedon М., Johansen N. CubeSat p-pod deployer requirements. 2002. URL: http://www.ohlsa.net/data/satellite/cubesat/p-pod-mkl/ppod_mkl_icd.pdf
3.4. Компоновка негерметичных отсеков
161
печатной плате. Внутри отсека CubeSat U1 платы собираются в пакет. Примерный состав бортового оборудования CubeSat показан на рис. 3.37, параметры бортового оборудования приведены в табл. 3.2. Внутрен-
100
няя компоновка отсека приведена на рис. 3.38, где боковые панели условно не показаны. На боковых панелях отсека размещаются, например, солнечные батареи, катушки системы магнитной стабилизации и пр. На двух боковых панелях, согласно спецификации, дол-
Рис. 3.38. Пример внутренней компоновки наноспутника CubeSat U1
жны быть предусмотрены окна для доступа к бортовому оборудова-
нию, установленному внутри отсека.
Спецификацией стандарта CubeSat предусматривается возможность увеличения длины отсека кратно 50 мм. Такие компоновки
Таблица 3.2. Параметры бортового оборудования CubeSat U1
Наименование Обозначение Габариты, мм ДхЩхВ Масса, г
Сборка антенн GOMSpace NanoCom ANT-430 98,0x98,Ox 18,25 30
Система электроснабжения GOM Space NanoPower P31 u 92,8x89,1x25,6 200
СВЧ-приемопередатчик GOM Space NanoCom U482C 95,4x90^x15,1 75
Спектрометр MySpectral Spectruino 101,0x65,0x27,0 —
Полезная нагрузка NanoSatisfi LLC ArduSat Custom — —
Бортовой компьютер GOMSpace NanoMind A712C 96,0x96,0x10,0 55
Солнечные батареи GOMSpace NanoPower Pl 10a 98,0x98,0x2,0 26
Конструкция ISIS 1U CubeSat Frame 100,0x100,0x113,5 100
162
3. Определение облика отсеков космического аппарата
обозначаются 1,5U (170,25 мм), 2U (227,0 мм), 3U (340,5 мм). Полезная нагрузка размещается на верхней панели отсека, как показано на рис. 3.39. При этом габариты не должны выходить за пределы, предписанные стандартами. Для отсека 3U на нижней панели дополнительно предусматривается цилиндрический объем под объектив камеры, размеры которого показаны на рис. 3.40.
Рис. 3.39. Компоновка CubeSat U1 с полезной нагрузкой:
7, 7 — винты потайные с плоской головкой; 2 — внешняя панель полезной
нагрузки; 3 — внешняя полезная нагрузка; 4 — плата адаптера нагрузки; 5 —
винты с круглой головкой; 6 — электронная плата-адаптер полезной нагрузки;
8 — корпус CubeSat
Рис. 3.40. Дополнительный объем под объектив камеры для спутника CubeSat 3U
3.5. Раскрывающиеся конструкции космических аппаратов
163
3.5. Раскрывающиеся конструкции космических аппаратов
В космическом полете, на борту КА, имеется значительное количество оборудования (солнечные батареи, антенны, штанги с научными приборами и др.), которое раскрывается после выведения на орбиту (рис. 3.41). На участке выведения все это оборудование складывается, так как в раскрытом положении оно не умещается под обтекателем ракеты носителя.
а б
Рис. 3.41. Раскрывающиеся конструкции межпланетной космической станции «Вояджер» (а) и миниспутника MagSat (б):
а: 1 — измеритель слабого магнитного поля; 2 — измеритель сильного магнитного поля; 3 — антенна высокого разрешения диаметром 13,7 м; 4 — блок электроники; 5 — датчик космических лучей; 6 — плазма; 7 — индикатор; 8 — ультрафиолетовый датчик; 9 — инфракрасный спектрометр и радиометр; 10 — фотополярометр; 11 — датчик частиц низкого уровня; 12 — гидрозинный двигатель; 13 — оптический измеритель и радиатор; 14 — всенаправленная антенна; 15 — радиоизотопый электрогенератор, б: 1 — дипольная антенна; 2 — солнечная батарея; 3 — базовый модуль; 4 — датчик горизонта и моментный датчик; 5 — штанга; 6 — магнитная катушка по оси Z; 7 — ленточная антенна S-диапазона; 8 — запоминающее устройство; 9 — электроника ATS; 10 — блок контроля температуры электроники; 11 — блок управления положением солнечных батарей; 12 — блок системы управления; 13 — оптический датчик; 14 — звездный датчик; 15 — оптический датчик; 16 — штанга магнетометра (частично раскрытая); 17 — уголковый отражатель; 18 — масштабный магнитометр; 19 — платформа приборов; 20 — измеритель угла; 21 — датчик вектора магнитометра; 22 — датчик ориентации солнечных батарей
164
3. Определение облика отсеков космического аппарата
3.5.1. Конструктивные элементы раскрывающихся конструкций
Рис. 3.42. Вариант штанги, раскрывающейся по схеме пантографа
Как видно из рис. 3.41 и 3.42, научное оборудование может удаляться на значительное расстояние. Солнечные батареи имеют большие площади, антенны могут иметь диаметры до нескольких десятков метров, которые в сложенном положении должны занимать минимальный объем.
Причем антенны требуют определенной ориентации после раскрытия, поэтому раскрывающиеся конструкции имеют различную кинематическую структуру.
К раскрывающимся конструкциям предъявляются следующие требования:
• минимальная масса;
• небольшой объем в сложенном состоянии;
• высокие прочностные характеристики (изгиб, кручение);
• термоустойчивость;
• хорошая регулировка после раскрытия.
Как видно из рисунков, раскрывающиеся конструкции, имеющиеся на борту КА, имеют разнообразную конфигурацию, они должны не только раскрываться, но и складываться. В табл. 3.3-3.7 приведены базовые конструкции, которые могут быть использованы для различных раскрывающихся конструкций.
В табл. 3.3 представлены краткие характеристики 30 линейных раскрывающихся конструкций, способы их раскрытия и конструк
тивные элементы, из которых они изготавливаются, а также рекомендации по их применению.
3.5.2. Механизмы раскрытия шарниров
Панели солнечных батарей, ребра раскрывающихся антенн и др. соединяются между собой и местами крепления с помощью шарнирных соединений. При раскрытии происходит вращение одной части шарнира относительно другой. Наиболее распространенным приводом раскрытия шарнира является пружина. Конструктивное решение подобного привода различно.
Таблица 3.3. Конструктивные решения раздвижных конструкций
Название и схема конструкции Описание, назначение конструкции и механизм раскрытия Примечание
Телескопическая, состоящая из трех частей Треугольная рамная конструкция, поддерживаемая роликами при выдвижении, после раскрытия секции становятся на замок для предотвращения складывания Треугольная конструкция обеспечивает жесткость при высокой нагрузке. Конструкция отвечает требованиям по нагружению и габаритам в сложенном состоянии. В экстренных случаях могут использоваться три секции или меньше. Система нелинейна, поэтому могут быть отдельные неточности после выдвижения. При нагреве и охлаждении имеет минимальные деформации
Телескопическая цилиндрическая Набор концентричных труб различного диаметра. В раскрытом состоянии фиксируется замками. Возможно раскрытие и закрытие Тонкостенная балка плавно раскрывается в среднем на 15 м. Увеличение давления в трубе минимального диаметра обеспечивает относительную гибкость. Выбор отношения диаметра к толщине стенки сИЬ исключает возможность потери местной устойчивости. Требуемая величина перекрытия обеспечивает отсутствие люфта. Градиент температуры стенки может служить причиной прогиба. Поперечное сечение должно сохранять окружность, чтобы избежать заклинивания при раскрытии. Температурный режим должен обеспечивать трение скольжения при раскрытии и закрытии
Продолжение табл. 3.3
Название и схема конструкции Описание, назначение конструкции и механизм раскрытия Примечание
Складывающаяся балка Секция может быть сконструирована из ферм, состоящих из труб или стержней. Секции связаны с помощью шарниров и раскрываются и закрываются при помощи тросовой системы Выбор базовых секций зависит от действующих нагрузок. Люфт в соединении звеньев (шарнирах) должен быть минимальным. При наличии трения система становится нелинейной и динамически неустойчивой. Заклинивание от нагрева маловероятно. Балка требует больших объемов для хранения, чем телескопическая
Линейная Панели соединяются между собой петлями и крепятся к ребру балки. Петли балки длиннее, чем петли на панели. Панели раскрываются в ряд и после раскрытия запираются пружинными замками. Раскрытие производится натяжением троса Конструкция компактна в транспортном положении, позволяет использовать различные агрегаты. Большое количество звеньев кинематической цепи делают конструкцию нелинейной, что затрудняет динамический анализ
Пантограф Три u-образных зажима фиксируют узлы при полном раскрытии. Главным образом используется как нагруженная небольшими нагрузками Конструкция компактна в транспортном положении. Недостаточно устойчива в поперечном направлении и кручении. Прочность конструкции ограничена в раскрытом состоянии вследствие того, что все звенья работают на изгиб. Изгиб от теплового нагружения корректируется
Название и схема конструкции
Раздвижная балка
Описание, назначение конструкции ______и механизм раскрытия___ Две прямоугольные рамы-балки в развернутом состоянии соединены шарнирным соединением с панелью, нагруженной перерезывающей силой. Панель в раскрытом состоянии фиксируется замками, раскрытие производится с помощью лебедки
Раздвижная коробчатая
Панели прямоугольного профиля, имеющие форму фланцев, в продольном направлении соединяются как навесные с помощью пружин кручения. Шарниры скрыты и после полного раскрытия запираются, сворачивание не предусмотрено
Раздвижная решетка
Жесткая продольная балка треугольного сечения с шарниром в каждом узле. Складывание производят в результате натяжения троса, закрепленного в каждом узле. Нагружение узлов происходит как при раскрытии, так и при свертывании
Примечание
Очень удобна в сложенном состоянии, при этом расчетливо спроектированные фиксаторы делают конструкцию неупругой. Вследствие нелинейности добротность конструкции меньше ожидаемой при действии крутящих нагрузок. Фиксаторы делают раскрытие более сложным и менее надежным. Требуется теплозащита, так как тепловые нагрузки мо-гут вызвать деформации____________________
Компактна в сложенном состоянии. Базовая конструкция обеспечивает хорошую работу при кручении. Несмотря на большое удлинение и небольшую жесткость, эта конструкция очень эффективна дня длинных балок. При размещении на солнечной стороне имеет минимальные деформации при перепаде температуры. Сложный температурный профиль может вызывать разгибающее усилие. При неполном раскрытии балка недостаточно жесткая________________
Компактна при хранении. Балка на базе треугольного сечения имеет хорошие прочностные и массовые характеристики. Балка сохраняет свои прочностные характеристики весь период эксплуатации, подготовка к эксплуатации затруднена. Трехтранная конструкция обеспечивает хорошую работу при солнечном нагреве
Продолжение табл. 3.3
Название и схема конструкции Описание, назначение конструкции и механизм раскрытия Примечание
Пространственная решетка Конструкция из композиционного материала раскрывается за счет натяжения троса. Продольные секции балки имеют треугольную форму, может раздвигаться и складываться при помощи реек, закрепленных к узлам секций, возможны деформации ячеек при раскрытии и закрытии Компактна при хранении. Линейная система имеет хорошие прочностные и массовые характеристики Сохраняет свои прочностные характеристики весь период эксплуатации. Воспринимает ограниченные нагрузки, для увеличения которых необходимо увеличить диаметр. Низкие температурные нагрузки не создают проблем. Низкая теплопроводность композиционного материала исключает температурные деформации
Удлиненный пантограф Трехгранная балка-панторгаф состоит из соединенных шарнирами стержней, каждый из которых имеет двояковыпуклую форму и пассивный замок. Стержневая конструкция раскрывается при деформации противоположно расположенных стержней. Конструкция не складывается Компактна в сложенном состоянии. Хорошая жесткость в раскрытом состоянии. Лонжерон имеет рамную конструкцию и подвергается нагружению. Изгибающая нагрузка на балку ограничена. Продольные секции выдерживают более высокие нагрузки, чем поперечные сечения
Название и схема конструкции Описание, назначение конструкции и механизм раскрытия Примечание
Треугольная шина Скрученная пружинная тросовая конструкция. Треугольные профили приварены к лонжерону. Один катет делается гибким и крепится шарнирно, что позволяет сложить две другие вместе. Сложенная балка может быть свернута в рулон. Рулон разматывается электроприводом. Мотор реверсивный, что позволяет разматывать и сматывать рулон. Если сматывание не необходимо, то развертывание может производиться пружиной Для восприятия крутящих нагрузок необходимы дополнительные устройства. Предельная нагрузка скрученного лонжерона имеет допустимые величины. Для исключения крутильных и изгибных деформаций необходимо минимизировать температурный градиент. Линейная динамическая модель позволяет рассматривать ее как вытянутую балку. Очень компактна в транспортном положении
Чечевидная балка Две пружинные ленты с «памятью», сварены краями. Секции сглаживают и наматывают как пожарный рукав для хранения на барабан. Развертывание производится с помощью электропривода, рукав не может быть свернут Система динамически линейна и хорошо хранится в транспортном положении. Балка может растягиваться на расстояние до 15 м. Увеличение балки на большую длину приводит к снижению ее прочности. При определенных нагрузках момент инерции сечений балки может быть немного увеличен. Благодаря сварке краев конструкция балки компенсирует изгиб от тепловых нагрузок
Продолжение табл. 3.3
Название и схема конструкции Описание, назначение конструкции и механизм раскрытия Примечание
Тройная балка (локхид) /о о о о о] Ф >оо( А / О О О О О ( JJ t Балка состоит из трех пружинных лент, соединенных по краям крепежными элементами. Средняя лента наматывается на катушку при помощи реверсивного электропривода Высокая динамическая устойчивость. Относительно компактна при хранении. Эта конструкция особенно подходит для длинных балок. Нагрузка на балку длиной 15 м высокая. Передние и задние стенки испытывают кроме трения и тепловые нагрузки
OQ_- r> n о и и [. О, О, О< ОжО/ Г О’ О' О' О' О'| Три напряженные соединенные ленты, две внешние предварительно напряженные расплющены и намотаны на остов катушки. Средняя пружинная лента, вставленная между ними, также намотана на катушку. Грани трех лент блокируются замками и образуют развернутую балку. Катушка приводится во вращение реверсивным электроприводом Линейная динамическая система, свернутая в транспортном положении. Выдвигается средняя балка. Отношение ширины к длине и толщины к длине пластины ограничивает воспринимаемое усилие при увеличении длины более 15 м. Момент инерции балки может быть незначительно увеличен. Температурный градиент по поверхности балки вызывает большой изгиб. Для облегчения во всех трех гранях могут быть сделаны отверстия
Название и схема конструкции Описание, назначение конструкции и механизм раскрытия Примечание
Взаимосвязанный отк] рулон эытый Две пружинные плоские ленты, намотанные на катушку. При раскрытии балки края соединяются в замок. Катушка заблокирована и развертывается с помощью реверсивного электропривода, что позволяет свертывать балку Система компактна при транспортировке. Балка рассматривается как цельная труба при малой и средней длине (до 15 м). Увеличение длины балки приводит к снижению прочности. Предположительно, что при солнечном нагреве температурные деформации будут линейно возрастать. Цилиндрическая форма может быть нарушена при тепловой нагрузке. Размотанный рулон требует теплозащитного покрытия
Растяжимый рулон с п 5^- [амятью Ленты с «памятью» при транспортировке намотаны на катушку. Этот рулон и является балкой. Рулон разворачивается и сворачивается реверсивным электроприводом Линейная динамическая система, скрученная и компактная в транспортном положении. Балка неэффективна при большой длине. Снижение температуры на стыке маловероятно. Форма отверстия обеспечивается выравниванием температуры. Свернутый рулон нуждается в теплозащите
Упругая спираль |\ \ \ (^) При раскрытии формируется труба из спирально раскрученной, предварительно напряженной ленты. Раскрытие может производиться как само-раскручиванием, так и с помощью электропривода. Электропривод контролирует скорость раскрытия и сворачивает ленту Компактна в транспортном положении, имеет низкую продольную и крутильную устойчивость. Поперечная, продольная и крутящая нагрузки зависят от трения между витками, расположенными внахлест. Для сохранения круглой формы сечения необходима теплозащита. В результате Haipeea материала при скручивании возможны разрывы, что не позволит образовать трубу
Продолжение табл. 3.3
Название и схема конструкции
Описание, назначение конструкции и механизм раскрытия
Примечание
Надувная конструкция
Нанотехнологическое надувное изделие
Труба из пленки, сложенная для хранения, надувается газом (выпрямляется и удаляются морщины). Материал трубы — алюминиевая пленка с покрытием. Надутая газом система может использоваться как монтажная арматура или растяжка. Складывание не предусмотрено
а — внутри тканевого каркаса формируется внутренний слой из пенорезины. Под давлением пенорезина заполняет арматурную сетку, создавая круглую форму; б — трубчатый фибровый материал делается гибким и желеобразным с помощью пластификатора. Газообразная пластифицирующая присадка улетучивается в вакууме, и труба становится жесткой примерно через 20 ч
Нелинейная динамичная конструкция, компактная в свернутом состоянии. Прочность и устойчивость более или менее высокая. Хорошие результаты могут быть получены, несмотря на сложную технологию и необходимость наносить защитный слой, препятствующий деградации материала. Возможно слипание материала при нагреве
Линейна и хороша динамически, удобна в хранении, что объясняется малой удельной плотностью пенорезины. Допускается большой градиент температуры на поверхности. Проблемой может быть контроль температуры поверхности
Название и схема конструкции Описание, назначение конструкции и механизм раскрытия Примечание
Гибкий фал Ф L_U U U U U LL_J * □сооо Цилиндрические секции, имеющие на концах сферические поверхности, в которых размещаются сферы, соединяются при помощи упругой детали, проходящей через конструкцию. Закрепленная на противоположных концах напряженная деталь выстраивает элементы в прямую линию Необходим увеличенный объем для хранения. Стянутые упругим элементом сосредоточенные массы обладают недостаточной прочностью. Тепловые деформации зависят от материала и размера конструкции
Таблица 3.4. Базовые конструктивные элементы, используемые при проектировании раскрывающихся конструкций
Профиль Форма Характеристика профиля Примечание
С ил ош-ной Хорошо работает на растяжение, момент инерции переменный в ортогональной проекции Имеет плоскую поверхность, что обеспечивает экономию материала при изготовлении рамы
Выдерживает высокие нагрузки, имеет равные моменты инерции по ортогональным осям Главным образом используется дня механизмов и изготовления коротких балок и опор
Хорошо работает при изгибе и кручении, имеет постоянный момент инерции Экономия материала при изготовления балок и фитингов
( ) Момент инерции переменен в ортогональном направлении Применяется в сварных конструкциях из сплющенных труб
Труба Хороший торсион, моменты инерции переменны по ортогональным осям Используется в антенных конструкциях в качестве волноводов СВЧ и силовых конструкциях
1 1
То же Применяется в плоских конструкциях для изготовления силовых элементов
Хороший торсион с постоянным моментом инерции Экономичен, используется в различных конструкциях
о Хороший торсион, моменты инерции переменны по ортогональным осям Обычно применяется в изготовлении круглых конструкций
Балка 1 1 Хороший торсион, имеет переменный момент инерции относительно ортогональных осей Используется в конструкциях в качестве подкосов в рамах
Хороший торсион, имеет одинаковые моменты инерции относительно ортогональных осей Используется в симметричных конструкциях, таких как вышки радиоантенн
А Хороший торсион, моменты инерции переменны по всем трем направлениям Используется для симметрично нагруженных и асимметрично нагруженных конструкций
Таблица 3.5. Типовое поперечное сечение балок, используемых в раскрывающихся конструкциях
Форма балки Варианты Примечание
Открытый профиль Небольшая жесткость на кручение, вызванная изогнутостью, ограничивает применение
Низкая жесткость на кручение, при соединении внахлест имеет высокие демпфирующие свойства, применяется в качестве поглотителей колебаний при тепловых нагрузках для радиотехнических антенн
L Широкий ряд типоразмеров позволяет применять как усиливающий элемент узлов конструкций рам и ферм
1 М 1 То же, но с повышенным сопротивлением изгибающим нагрузкам. Применяется в рамных конструкциях и фермах
' || । Используется как основной силовой элемент. Воспринимает изгибающие моменты, действующие по всем трем осям; применяется в силовых конструкциях
I Верхняя полка изгибается, если нагрузка на срез действует не через центр жесткости
Круглая труба О 0 При нагреве возникают изгибные напряжения. Требует специального подхода при разработке конструкций. Рекомендуемые размеры конструкций: диаметр не более 150 мм, длина не более 75 м
Плоская труба 00 Плохо работает на изгиб, теряет форму при изгибе. Применение перегородки, приваренной к кромкам, повышает изгибную прочность и сохраняет форму при изгибе
А Треуголь-у/ \\ ная труба Применяется в тонких ограждениях при ограничениях размера грани не более 150 мм
Таблица 3.6. Возможные способы раскрытия элементов конструкции
Привод Укладка Форма секции Характеристика
Электромеханический привод Хранится на бабине Лента с «памятью» в транспортном положении хранится намотанной на катушку. Выдвижение-свертывание осуществляется при помощи электропривода. Допускается многоразовое использование
А ( I) Допускается многократное выдвижение и свертывание. В свернутом виде хранится на трех катушках
Допускается многократное выдвижение и свертывание. Свернутая трубка хранится на катушке
Развертывается и свертывается с помощью троса, приводимого в движение электроприводом
Телескопическая ДЕ Выдвижение и втягивание может производиться электроприводом, пневматикой или тросовой системой
Складывающиеся Различная Развертывание может производиться с помощью электропривода, пружины или троса
Привод Укладка Форма секции Характеристика
Пружин-ный привод Хранится на бабине Пружинный привод, обеспечивает только раскрытие
Т елескопическая □ А То же
Складывающиеся Различная Пружинный привод, используется для раскрытия в комбинации с электроприводом, обеспечивающим контроль динамики раскрытия
Пневматический привод Т елескопическая Для обеспечения скольжения при раскрытии используются цилиндрические формы. Необходимо обеспечить герметизацию стыков
Складывающиеся Различная
Таблица 3.7. Возможные кинематические решения раскрывающихся конструкций
Метод раскрытия Вариант Характеристика Примечание
Складные Складывается гармошкой Система проста, эффективна, хорошо растягивается, имеет небольшой вес при высокой прочности
Раскрывающийся жесткий механизм, требующий фиксации после раскрытия Многозвенный, стержневой механизм, требующий минимального крепления и пружинного механизма для демпфирования при раскрытии
Надувная конструкция, разворачивается при помощи давления. Изготавливается из металлической фольги, что обеспечивает компактную укладку при хранении Оснащается клапаном для наддува, размер раскрывающейся конструкции ограничен прочностными характеристиками материала, в сложенном состоянии занимает малый объем
Вращаю-щиеся Балка намотана на барабан. Раскрываться может сама или при помощи электропривода; сворачивается при помощи привода Допускает многократное выдвижение и втягивание, без ухудшения быстродействия. Возможно частичное втягивание и выдвижение, без ухудшения прочностных характеристик
Выдвижение происходит за счет применения пружинной ленты с памятью, свертывание с помощью привода Допускает многократное выдвижение и втягивание без нарушения характеристик, ограничения по прочности
Телескопические В сложенном состоянии занимает 20...50 % от развернутого положения, прочностные характеристики зависят от конструкции Проста, способна часто выдвигаться и убираться, имеет цилиндрическую форму или комбинированную
3.5. Раскрывающиеся конструкции космических аппаратов 179
1. Пружина с постоянным крутящим моментом.
Пружина представляет собой ленту и жестко закрепляется на одной половине шарнира, другой конец закрепляется с помощью ролика на другой части шарнира и может свободно перемещаться (рис. 3.43). После срабатывания механизма зачековки конструкция, к которой относится часть шарнира с закрепленным концом пру-
Рис. 3.43. Механизм раскрытия шарнира со свободной пружиной
жины, освобождается. Под действием пружины конструкция начинает разворачиваться, при этом свободный конец пружины, скользя по ролику, скручивается в кольцо. После полного раскрытия срабатывает механизм, фиксирующий конструкцию в
раскрытом состоянии.
2. Витая пружина.
Витая пружина намотана на ось, один конец пружины закреплен на одной части раскрываемой конструкции, другой — на другой (рис. 3.44). После срабатывания механизма зачековки пружина разворачивается и конструкции раскрываются. После раскрытия срабатывает механизм фиксации (рис. 3.45) раскрытой конструкции.
3. Механизм вращения.
На поверхности головок шарнира установлены две ленточные пружины, причем один конец
Рис. 3.45. Механизм фиксации раскрытой конструкции / — фиксирующий штырь
Рис. 3.44. Конструкция шарнира с витой пружиной:
1 — ось пружины; 2 — зазор
180
3. Определение облика отсеков космического аппарата
пружины закреплен на одной части шарнира, другой конец пружины — на другой (рис. 3.46). После расчековки пружины шарнир раскрываются. Преимущество конструкции в том, что в шарнире минимально трение.
а б в
Рис. 3.46. Вращающийся шарнир:
а — транспортная конфигурация; б — раскрывающаяся конфигурация: в — раскрытая конфигурация
4. Моторизация
Пружины устанавливаются по краям шарнира и крепятся концами к частям шарнира (рис. 3.47). После срабатывания механизма зачековки под действием пружин шарнир раскрывается. По мере раскрытия раскрывающий момент меняется. Минимальное значение момента при раскрытии на 30° , максимальный момент достигается при полном раскрытии шарнира, что требует механизма демпфирования.
а б в
Рис. 3.47. Пружинный привод:
а — транспортная конфигурация; б — раскрывающаяся конфигурация; в — раскрытая конфигурация
3.5.3. Механизм раскрытия штанги с магнитометром
Для измерения магнитного поля планеты приборы (магнитометры), измеряющие магнитные поля, должны быть удалены на большое расстояние от КА, на котором они установлены. Это необходимо для того, чтобы исключить влияние собственного
3.5. Раскрывающиеся конструкции космических аппаратов 181
магнитного поля КА на работу приборов. Для выноса приборов применяют раскрывающиеся механизмы, представляющие собой складную штангу с закрепленным на ней прибором (рис. 3.48).
После раскрытия стержней, из которых сделана штанга,
происходит их зачековка механизмами, расположенными в местах размещения шарниров (рис. 3.49).
-z
Рис. 3.48. Порядок раскрытия штанги магнитометра
Рис. 3.49. Механизм фиксации узла раскрытия:
1 — панель крепления к КА: 2 — фиксатор: 3 — запирающий механизм
К механизму раскрытия штанги магнитометра предъявляются следующие требования:
• развертывание штанги крепления магнитометра на заданное расстояние (> 6 м, 19,7 футов) от оси Z;
• оси магнитометра после раскрытия должны отклоняться от осей КА не более чем на ± 0,5°
• угол раскрытия между первым и вторым стержнем после раскрытия доложен быть 180°;
• собственная частота штанги после раскрытия должна составлять не менее 0,57 Гц;
• диапазон температур датчиков магнитометра должен контролироваться;
• при изготовлении штанги использовать максимально немагнитные материалы.
Раскрытие балки происходит при помощи пружин кручения, установленных в каждом из шарниров. В развернутом состоянии
182
3. Определение облика отсеков космического аппарата
механизм фиксируется с помощью фиксатора, одновременно происходит выравнивание балки в раскрытом состоянии. На барабане, закрепленном на оси секции балки, имеется фигурный вырез. В сложенном состоянии фиксатор упирается в барабан, а при повороте барабана фигурный вырез подходит к фиксатору, который под действием пружины входит в отверстие барабана и фиксирует раскрывшиеся секции балки (см. рис. 3.49). Для снижения влияния солнечного нагрева с учетом использования магнитных материалов стержни балки изготавливают из углепластиковой трубы, имеющей следующие размеры: диаметр 40 мм, толщина стенки 1,8 мм. Фитинги выполнены из титановых или алюминиевых сплавов. Пружина, установленная в шарнире балки, развивает момент, равный 2,26 Н • м.
3.5.4. Развертываемая стержневая система
Раскрывающаяся конструкция состоит из повторяющихся модулей октаэдрической формы в продольном направлении, аналогично геодезическому триангуляционному знаку (рис. 3.50). Особенность фермы в том, что боковые грани, имеющие треугольную форму, соединены телескопическим стержнем. В результате развертывания происходит преобразование в ферму. На рис. 3.51 и 3.52 показаны элементы фермы.
3.5.5. Разворачиваемая телескопическая балка
К механизму раскрытия телескопической конструкции предъявляются следующие требования:
• свободно раскрываться и свертываться в соответствии с требованиями безопасности КА;
• обеспечивать беспрепятственное развертывание кабелей и др.;
• раскрываться и складываться как на полную длину, так и на некоторое расстояние, в соответствии с эксплуатационными требованиями;
• использовать, насколько это возможно, для раскрытия минимального количества электроприводов независимо от выполняемой функции;
• иметь простую и надежную конструкцию.
3.5. Раскрывающиеся конструкции космических аппаратов 183
Рис. 3.50. Раскрывающаяся ферма:
а — в сложенном положении и полностью раскрытая; б — элементы фермы; 1 — шарнир; 2 — боковое звено; 3 — треугольное звено; 4 — диагональное звено;
5 — модуль; 6 — секция
а б
Рис. 3.51. Механизм раскрытия телескопической фермы:
а — схема раскрытия: 1 — шарнир; 2 — боковое звено; 3 — диагональное звено; б — ферма в транспортном положении
184
3. Определение облика отсеков космического аппарата
Рис. 3.52. Конструкция стержня:
1 — растягивающаяся пружина; 2 — внешняя труба;
3 — внутренняя труба
• фиксирующий механизм;
На рис. 3.53 показана телескопическая конструкция в сборе (в транспортном положении), на рисунке показаны приводные двигатели, пироустройства и страховочные замки. Конструкция состоит из следующих элементов:
• телескопическая стрела с механизмом развертывания;
• устройство поддержки кабеля при раскрытии конструкции;
• механизм защиты, отключающий питание кабеля при аварии;
• ограничитель, препятствующий выходу трубы из зацепления при
раскрытии.
Рис. 3.53. Телескопическая труба в транспортном положении
Балка состоит из семи вложенных друг в друга трубчатых элементов длиной 400 мм каждый, диаметром 50... 120 мм. При раскрытии телескопической балки каждая труба остается в предыдущей на длину, равную диаметру трубы, чтобы обеспечить жесткость в соединении труб. Материал, из которого изготавливаются трубы, — алюминиевый сплав, толщина стенки трубы 0,4 мм. При раскрытии трубы скользят друг относительно друга по направляющим, обеспечивающим минимальный коэффициент трения и высокую жесткость. Каждая труба заканчивается фланцем, на котором установлен шкив. Скользящие направляющие и перекрытие труб при полном раскрытии балки обеспечивают прочность и жесткость. Минимальная собственная частота телескопической трубы в транспортном положении не более 40 Гц, в раскрытом состоянии без нагрузки — 2 Гц. Процесс раскрытия механизма показан на рис 3.54. Система развертывания обеспечивает параллельное и одновременное развертывание всех труб.
3.5. Раскрывающиеся конструкции космических аппаратов 185
Первая труба выдвигается с помощью электромеханического червячного привода (рис. 3.54, а\ работающего в процессе всего раскрытия. Вторая труба связана двумя тросами, проходящими через два шкива, установленных на каждом торце трубы. Перемещение первой трубы относительно неподвижной трубы определяет движение второй трубы (рис. 3.54, б). Все остальные трубы соединены между собой аналогичным способом. На рис. 3.55 представлен механизм раскрытия телескопической трубы.
Рис. 3.54. Схема раскрытия телескопической трубы:
1 — раскрывающий трос; 2 — шкив; 3 — закрывающий трос; 4 — электродвигатель
Рис. 3.55. Кинематическая схема механизма раскрытия телескопической конструкции с помощью тросовой системы:
1 — датчик кабельной сети; 2 — обратный ход; 3 — прямой ход: 4 — барабан;
5 — реверсивный электропривод; 6 — трос из нержавеющей стали; 7 — датчик: 8 — специальный вкладыш; I, II, III — секции
186
3. Определение облика отсеков космического аппарата
3.5.6. Механизм развертывания ленты
Механизм развертывания ленты показан на рис. 3.56.
Рис. 3.56. Механизм развертывания ленты (кабеля):
1 — оптическая головка; 2 — лента с метками; 3 — свернутая лента; 4 — ось; 5 — мотор; 6 — червяк; 7 — червячное колесо;
8 — корпус
Привод механизма развертывания стальной ленты — червячный. Лента намотана на барабан, длина развертывания 20 м, точность развертывания 2,5 см.
3.6. Блочно-секционная компоновка
Внешний вид КА определяется выбранной конструктивносиловой схемой, которая может быть:
• моноблочной, когда функционально единые системы и агрегаты оборудования размещены в едином корпусе и на его поверхности (орбитальная станция «Алмаз», рис. 3.57);
• свободнонесущей, когда приборы и оборудование расположены «россыпью» на несущих элементах конструкции (МКС «Фобос», рис. 3.58).
Блочно-секционный (модульный) принцип компоновки позволяет разработать универсальную систему с рациональным размещением нагрузок, повысить ее энергетическую эффективность, уменьшить массу, обеспечить удобство проектирования, изготовления и сборку; допускает узкую специализацию блоков.
Блочная конструкция обладает очевидными преимуществами которые дают разделение КА на отдельные блоки.
Рис. 3.57. Компоновочная схема орбитальной станции «Алмаз»:
/ — шлюзовая камера; 2 — люк выхода в космос; 3 — люк перехода в шлюзовую камеру; 4 — антенны системы стыковки; 5 — научная аппаратура; 6 — прибор СС; 7 — гироскопический прибор ориентации; 8 — командно-программный прибор ориентации; 9 — система жизнеобеспечения; 10 — бытовой отсек; И — прибор кольцевого маховика; 12 — кольцевой маховик; 13 — прибор шарового маховика; 14 — микро-ЖРД стабилизации; 15 — шаровой маховик; 16 — ИКВ; 17 — панорамно-обзорное устройство; 18 — радиовертикаль; 19 — оптический визир: 20 — телескопический объектив; 21 — фототелевизионная система; 22 — физический тренажер; 23 — ДУ; 24 — антенна передачи информации: 25 — капсула сброса информации; 26 — двигатель коррекции орбиты; 27 — транспортный корабль «Союз»
188
3. Определение облика отсеков космического аппарата
Рис. 3.58. Компоновка МКС «Фобос»:
1 — остронаправленная антенна; 2 — микродвигатели ориентации; 3 — штанга магнитометров; 4 — антенна радиокомплекса для зондирования ионосферы (длина диполя 40 м); 5 — радиатор-нагреватель; 6.9 — двигатели малой тяги для прецизионного сближения с «Фобосом»; 7 — сбрасываемый зонд; 8 — бак с унитарным топливом; 10 — электроника научной аппаратуры: 11 — радиатор-охладитель; 12 — долгоживущая автономная станция; 13 — экранно-вакуумная теплоизоляция; 14 — баки с окислительным и горючим веществами с вытеснительной системой подачи топлива; 15 — антенна радиокомплекса; 16 — солнечная батарея; 17 — микродвигатель ориентации; 18 — антенна для приема команд с Земли и передачи телеметрии; 19 — научная аппаратура для изучения межпланетного пространства: 20 — научная аппаратура для изучения Марса; 21 — лазер-облучатель; 22 — научная аппаратура для изучения «Фобоса»; 23 — звездный датчик; 24 — прибор для слежения за Солнцем; 25 — научная аппаратура для изучения Солнца
На рис. 3.59 приведена орбитальная станция «Мир», в которую входят основной блок, использованный на всех орбитальных станциях серии «Мир», а также транспортный корабль «Прогресс» и космический корабль «Союз».
Использование блочно-секционного принципа компоновки в космических операциях позволяет разбивать их на отдельные этапы. При этом реализация каждого этапа может быть осуществлена специализированным КА меньшей массы, поскольку на отдельных
3.6. Блочно-секционная компоновка
189
Рис. 3.59. Орбитальная станция «Мир»
этапах требуются меньшие энергетические затраты, чем на всю операцию.
К недостаткам такого принципа относят возрастание сложности операции и массы полезной нагрузки, наличие у каждого КА своей системы управления, уменьшение надежности собранной на орбите конструкции, большое число запусков с Земли, увеличение суммарной характеристической скорости (дополнительные затраты на встречи и стыковки).
Однако снижение энергетических затрат на каждом этапе и разрешение возможности оптимизации состава оборудования существенно повышают эффективность операции.
В зависимости от задач космической операции могут быть использованы следующие способы реализации блочно-секционного принципа компоновки:
190 3. Определение облика отсеков космического аппарата
• сборка КА из модулей или независимых блоков в виде отдельных ступеней;
• сборка из отдельных типовых конструкций (баков, рам и т. д.);
• дозаправка КА топливом на орбите;
• изготовление на орбите отдельных элементов систем, из которых затем собирают КА.
Применение блочно-секционного принципа компоновки позволит использовать часть массы одного КА на другом.
4. КОМПОНОВКА ЦЕЛЕВОГО ОБОРУДОВАНИЯ
В зависимости от решаемой задачи на борту КА может устанавливаться различное целевое (информационное) оборудование:
• аппаратура для фото- и телевизионных наблюдений;
• радиолокационная аппаратура всепогодного наблюдения высокого разрешения;
• ИК-аппаратура наблюдения;
• оптическая аппаратура для фотографирования отдельных выбранных объектов при хорошей освещенности и контрастности;
• радиотехническая аппаратура, обеспечивающая прием и передачу радио- и телевизионных программ, а также телефонных переговоров;
• навигационная аппаратура (ГЛОНАСС и GPS);
• научная аппаратура для проведения астрономических исследований, исследований космического пространства, Солнца, планет и спутников Солнечной системы.
Рассмотрим некоторые задачи, решаемые целевым оборудованием.
4.1. Назначение целевого оборудования
4.1.1. Мониторинг поверхности суши
При мониторинге поверхности суши проводится: определение температуры и влажности почвы; выявление и установление масштабов эрозии почвы; наблюдение за состоянием посевов и лесных угодий; измерение площадей и динамики изменения снежного и ледового покровов; разведка полезных ископаемых; обнаружение и контроль загрязнения поверхности суши; оценка водных ресурсов; оперативное наблюдение за районами стихийных бедствий (наводнений, схода селей и т. п.) и лесными пожарами.
192
4. Компоновка целевого оборудования
Доля поверхности суши, пригодная для жизни людей, составляет примерно 20 % общей поверхности Земли. Значительная часть поверхности занята снежным и ледовым покровом, реками и озерами. Одна из важнейших задач, решаемых с помощью КА, — контроль за гидрологическими объектами и процессами, происходящими на поверхности суши, как в региональном, так и планетарном масштабах. Особое внимание уделяется экологическому состоянию поверхности Земли, связанному со строительством гидротехнических сооружений и промышленных объектов, с вырубкой лесов и внесением удобрений в почву, с заболачиванием и вторичным засолением пустынь от неграмотного орошения и т. п.
4.1.2. Мониторинг водной поверхности и ее взаимодействия с атмосферой
Мировой океан покрывает более 70 % поверхности Земли, являясь вместе с атмосферой основным поглотителем падающего на Землю потока солнечной энергии. Процессы взаимодействия океана (водной поверхности) с атмосферой определяют погодные и климатические условия на Земле.
В последние годы Мировой океан все больше и больше становится областью индустриальной деятельности. Наряду с традиционными отраслями — транспортной системой и выловом морепродуктов — развиваются такие отрасли, как добыча нефти и газа, и это ставит перед КА ряд задач по наблюдению и изучению водной поверхности океана. Мониторинг водной поверхности позволяет контролировать степень загрязнения воды, наблюдать за ледовой обстановкой, айсбергами; проводить изучение и картографирование шельфов; определять температуру водной поверхности, волнения и параметры приводного ветра, содержание планктона и миграцию косяков рыбы, изменение высоты уровня воды; наблюдать энергетические зоны течения, зарождение циклонов и т. п.
4.1.3. Мониторинг атмосферы Земли
Атмосфера — верхний и самый динамичный покров Земли. Ветер и струйные течения, распределение ледяных кристаллов, капельно-жидкой воды и водяного пара, профили температур — весьма динамичные явления, их изменение определяет высоту границы атмосферы, структуру и динамику облаков, образование ураганов и циклонов. Атмосфера Земли требует самого пристального внимания. С помощью КА проводится оперативное наблюдение за степенью загрязнения атмосферы над промышленными регионами, контроль
4./. Назначение целевого оборудования
193
озонового слоя, определение химического и фазового состояний облаков, наблюдение за циклонами.
4.1.4. Спутниковая связь
Космическая радиосвязь — радиосвязь, осуществляемая с помощью космических объектов (космических радиостанций или пассивных ретрансляторов), которые находятся за пределами земной атмосферы. Видом космической связи является спутниковая связь.
Возможны следующие варианты спутниковой связи:
• космический объект — космический объект;
• Земля — космический объект;
• космический объект — Земля.
Спутниковая связь применяется для обеспечения надежной и быстродействующей связи, устойчивой против воздействия естественных и искусственных помех. Исходя из принципа построения, спутниковая связь подразделяется:
• на системы с активной ретрансляцией и задержкой сигнала во времени;
• системы с активной ретрансляцией сигнала в реальном масштабе времени;
• системы с пассивной ретрансляцией.
Системы спутниковой связи (ССС), исходя из охватываемой территории, административной структуры управления и принадлежности КА, делятся:
- на глобальную связь, охватывающую 93 % поверхности земного шара, она реализуется на геостационарных орбитах;
- региональную систему связи, обеспечивающую связь в заданном регионе, она строится на эллиптических орбитах с периодом обращения около 12 ч;
- связь между отдельными пунктами, состоящую из системы спутников, работающих на прямой радиовидимости на круговых орбитах.
Выбор формы орбиты искусственного спутника связи (ИСС) зависит также от площади территории, географического местоположения, конфигурации района. Угол наклона плоскости орбиты зависит от географического положения обслуживаемой территории и от заданного времени функционирования системы связи. Необходимо также учитывать и расположение стартовой позиции, с которой осуществляется запуск КА.
Диапазоны частот, в которых работает спутниковая связь, приведены в табл. 4.1.
194
4. Компоновка целевого оборудования
Таблица 4.1. Диапазоны частот спутниковой связи
Маркировка диапазона Полоса частот, ГГц Тип спутниковой службы Применение
L 0,5...1,5 псс Подвижная телефония, пейджинг, низкоскоростная передача данных
S 1,5...2,5 псс То же
с 4...8 ФСС Телефония, передача данных, ТВ-приложения, VSAT
Ku 12...18 ФСС, ШСС То же + интернет
Ка 20...40 ШСС Интернет, передача речи, аудио- и видеографических данных и др.
QIV Приме система свя • 40... 70 чание. ПС1 $и, ШСС — ШСС С и ФСС — под! широковещателы То же шжная система связи, фиксированная ная система связи.
Спутниковые системы связи классифицируются по охватываемой территории:
• глобальные ССС — обеспечивают полный охват территории Земли, управляются международными организациями, объединяющими большинство стран мира;
• интернациональные ССС — являются объектом совместной деятельности нескольких десятков стран, в том числе и региональные, совместно используемые странами, принадлежащими к одному географическому региону;
• национальные ССС — наземный сегмент таких ССС расположен в пределах одной страны;
• корпоративные ССС — наземный сегмент принадлежит одному ведомству.
Классификация систем спутниковой связи приведена в табл. 4.2.
Таблица 4.2. Классификация систем спутниковой связи
Характеристика Орбита
Низковысотная. (НВО) Средневысотная (СВО) Высокоэллиптическая (ВЭО) Геостационарная (ГСО)
Высота, тыс. км 0,5...2 5...15 Перигей от 0,46; апогей до 71 36
Срок службы, лет 5...7 Более 10 Более 10 Более 10
Геометрический вид орбиты Круговая Круговая Эллиптическая Круговая
Вид связи ФСС, псс ФСС, псс ФСС, ПСС ФСС, псс, ШСС
4.1. Назначение целевого оборудования
195
4,1,5, Навигационные космические аппараты
Навигация — процесс управления некоторым объектом (имеющим собственные методы передвижения) в определенном пространстве передвижения. Спутниковая навигация — один из основных видов высокоточного определения местоположения морских, воздушных и космических объектов, а также сухопутных средств, движущихся в безориентирной местности. На первом этапе развития космической навигации ее функции выполняли спутники связи. Радиопередатчики геостационарных и иных искусственных спутников связи осуществляли навигационное вещание в глобальном масштабе. Пользователь всякой спутниковой системы должен знать координаты спутника в момент определения своего местоположения. Поэтому наземные радиостанции определяют параметры орбит и координаты местоположения спутников и передают эти данные на спутники, откуда они в кодированном виде передаются пользователю. Дальнейшее развитие космической техники привело к созданию двух глобальных навигационных систем ГЛОНАСС (Россия) и GPS (США). Построение структуры сети навигационных спутников таково, что в каждой точке земной поверхности и околоземного пространства, в которой находится потребитель, в любой момент времени в зоне видимости находится одновременно не менее четырех спутников, взаимное расположение и качество сигналов которых обеспечивает ему возможность координатно-временных измерений с заданными характеристиками. Требование по количественному составу орбитальной группировки обусловлено тем, что заданные точностные характеристики навигационного обеспечения могут быть получены при наличии в орбитальной группировке, например, 21 спутника (по семь спутников в каждой орбитальной плоскости), а остальные обеспечивают «горячий» резерв и высокую устойчивость системы.
Схема выведения навигационного спутника включает: выведение космической головной части на промежуточную круговую орбиту высотой около 200 км; переход на эллиптическую орбиту с перигеем примерно 200 км, апогеем около 19 100 км и наклонением 64,3°; переход на круговую орбиту высотой 19 100 км.
В общем случае эксплуатация спутника предполагает следующие этапы полета:
• выведение спутника на орбиту после отделения его от разгонного блока продолжительностью 5... 12 витков; здесь производится проверка работоспособности всех бортовых систем;
196
4. Компоновка целевого оборудования
• приведение и постановка спутника в системную точку с заданными периодом обращения и угловым положением в системной плоскости (продолжительность этого этапа составляет от одной недели до одного месяца и определяется угловым положением спутника в точке выведения на орбиту и системной точкой спутника);
• штатная эксплуатация спутника;
• нахождение спутника вне системы (например, при проведении профилактических и восстановительных работ по командам с ЦУП).
4.1.6. Построение системы обзора
В настоящее время широкое распространение и развитие получили системы дистанционного наблюдения и мониторинга поверхности Земли. Информация, полученная в результате дистанционного зондирования Земли (ДЗЗ), используется в науке, промышленности, сельском хозяйстве, охране природы, чрезвычайных ситуациях, обороне и т. п. Наблюдение поверхности Земли ведется различными способами: оптическое фотографирование, фотографирование с использованием радиолокационной и инфракрасной техники.
Основные режимы обзора поверхности Земли (рис. 4.1):
• маршрутный режим обзора — режим непрерывной съемки в течение длительного времени, при котором полоса съемки фиксирована относительно следа орбиты на Земле в пределах ширины полосы обзора;
• широкозахватный режим обзора — режим фотографирования сканирующей камерой;
• прожекторный режим обзора — фотографирование объекта с двух точек, что позволяет получить информацию о геометрических размерах фотографируемого объекта.
Рис. 4.1. Режимы обзора земной поверхности из космоса
4.1. Назначение целевого оборудования
197
Существует шесть типов сенсоров ДЗЗ. Простейшие типы сенсоров — аналоговый кадр, получаемый на фотопленке (рис. 4.2, а) и его замена матрицами цифрового фотоаппарата (рис. 4.2, б). При этом может использоваться пленка, воспринимающая ближний инфракрасный диапазон (NIR), или аналогичная матрица цифровой камеры.
Рис. 4.2. Типы датчиков ДЗЗ:
а — аналоговый кадр (пленочная фотоаппаратура); 6 — цифровой кадр (матрицы сенсоров цифровой аппаратуры по каналам RGB+NIR-near infrared); в — сканер поперек полосы полета — сканирующая аппаратура с вращающимся зеркалом и дискретными детекторами; г — сканер вдоль полосы полета — линейный массив сенсоров типа «щетка»; д — линейный гиперспектральный массив с принципом сканирования «метла»; е — гиперспектральная матрица сенсоров с принципом сканирования «щетка»
При формировании кадра для предотвращения «смазывания» изображения необходимо компенсировать движение подстилающей поверхности вследствие движения КА по орбите. Более эффектов-
198
4. Компоновка целевого оборудования
ным является использование движение КА для формирования изображения. Для этого применяется режим формирования изображения сканированием. Применяют сканирование поперек полосы полета вращающимся зеркалом (так называемое whiskbroom — «метла», «веник», рис. 4.2, в) или сканирование вдоль полосы полета линейкой датчиков (pushbroom — «широкая щетка, швабра», рис. 4.2, г).
Технология сканирования вдоль полосы полета используется для получения изображений датчиками спектров и применяется для пассивного ДЗЗ, поскольку не имеет подвижных частей и требует только стабилизации КА на орбите. Камера такого типа состоит из оптической системы проецирования изображения на линейный массив датчиков, как правило ПЗС-матрицу. В датчике линейка сенсоров располагается перпендикулярно направлению полета КА. В каждый момент времени отображаются только те точки, которые лежат в плоскости, образуемой линейкой датчиков и оптическим центром системы. По мере движения КА на линейке фиксируются одномерные изображения подстилающей поверхности (линейки пикселей), из которых формируется двумерная картинка. Такой сканер может собирать больше света, чем аппаратура whiskbroom.
Линейный массив сенсоров наиболее распространен (аппаратура КА SPOT IRS, QuickBird, OrbView и IKONOS). Для KA серии SPOT, линейный массив датчиков состоит из 6000 пикселей. Массив электронных датчиков покрывает угол 4,2°. За 9 с съемки формируется 6000 линеек пикселей и формируется изображение 6000x6000 пикселей.
4.1.7. Получение новых материалов
В большинстве случаев получение материалов связано с образованием жидкой или газовой фазы с последующим затвердеванием или кристаллизацией. Качество материала зависит от процессов, протекающих на свободной поверхности расплава и в зоне затвердевания или кристаллизации. На Земле в условиях действия силы тяжести в жидкой или газовой фазе возникают перепады температуры и концентрации; местная гравитационная конвекция приводит к образованию вихрей, к пульсации температуры и концентрации, что создает переменные условия на границе затвердевания и существенно влияет на качество полученного материала.
Космические аппараты, выведенные на орбиту, предоставляют качественно новые возможности для производства материалов. В космических условиях отсутствует ряд технических проблем, поэтому
4.2. Особенности целевого оборудования, влияющие на компоновку 199
можно изготовить не только высококачественные материалы, но и материалы со свойствами, которые на Земле получить невозможно.
Перспективным для космической технологии является производство полупроводниковых материалов для электронных устройств.
Космическая биотехнология позволяет получать новые биологически активные лекарственные средства.
4.2. Особенности целевого оборудования, влияющие на компоновку
4.2.1. Аппаратура для фотонаблюдений
Фотоаппаратура. Фотографирование применяют для достоверного определения наземных предметов при проведении научных экспериментов, для решения промышленно-хозяйственных и военноприкладных задач.
Фотографирование из космоса имеет следующие особенности: большая высота и скорость полета, вращение Земли, а следовательно, и высокая скорость объекта съемки относительно фотоаппарата, быстрые изменение освещенности поверхности Земли по трассе полета и изменение параметров орбиты вследствие влияния возмущающих факторов. Фотографирование осуществляется через слой атмосферы Земли, что вносит свои помехи, и должно быть полностью автоматизированным. Объективы фотоаппаратуры должны обеспечивать высокое качество изображения по всему полю снимка.
Для получения качественных снимков в момент проведения съемки фотоаппаратура должна иметь малые угловые скорости, объекты съемки должны находиться в условиях максимальной освещенности.
Проекция орбиты КА на поверхность Земли (след) определяется географическими широтой и долготой, которые связаны с элементами орбиты соотношением
tg (р = tg i sin(co3Z + AX'),
где ср — широта; i — угол наклона плоскости орбиты; (о3 — угловая скорость вращения Земли; t — время полета КА от восходящего узла орбиты до точки стояния; АХ' — разность долготы точки стояния и долготы восходящего узла орбиты.
200
4. Компоновка целевого оборудования
Рис. 4.3. Схема к определению зоны обзора (8 — угол места)
Множество проекций орбиты КА на поверхность Земли образует трассу спутника. В зависимости от высоты полета и угла поля зрения фотоаппаратуры вокруг каждой точки на трассе формируется зона обзора. Совокупность зон обзора образует полосу обзора. Все предметы, попадающие в полосу обзора, регистрируются фотоаппаратурой, которая установлена на КА. Значение зоны обзора определяется по следующей зависимости (рис. 4.3):
л (Я, + Н .
Фзо =Т-Уфа-аГСС05 -h------Sin Уф а ,
2 V Лз 7
где Уфа — угол поля зрения фотоаппаратуры; 7?з — радиус Земли; Н— высота полета КА.
По назначению фотоаппаратура классифицируется на разведывательную, то
пографическую и универсальную с высоким разрешением, по принципу действия — на кадровую и щелевую. Космический фотоаппарат — сложное оптико-механическое устройство, процесс работы которого полностью автоматизирован. Отснятый материал обрабатывается на Земле после передачи фотоматериалов; на пилотируемых КА обработка может осуществляться на борту.
Космический фотоаппарат характеризуется следующими параметрами:
• высотой применения Я, м;
• допустимым отношением скорости полета КА к высоте полета, v/H с1;
• фокусным расстоянием/ мм;
• размером кадра изображения мм;
• временем экспонирования Гэкс, с;
• диаметром входного отверстия объектива dBX, мм;
• относительным отверстием объектива dBX /f.
Качество фотоаппаратуры также характеризуется разрешением — максимальным количеством различаемых линий, приходящихся на единицу длины, в фотографическом изображении испытательной таблицы с различной частотой черных линий (миры).
4.2. Особенности целевого оборудования, влияющие на компоновку 201
Разрешение на местности при фотографировании определяется по формуле
1 _ Н
^раз 2/?сис/
где Лсис — разрешение системы объектив — пленка, 1 /7?сис = 1/7?0-ь 4-1 / /?Ф п (7?о — разрешение объектива, лин./мм, = 60... 100 лин./мм; 7?фП — разрешение фотопленки, лин./мм, 7?фп = 100...200 лин./мм).
Зная значение /?pa3, можно определить минимальный размер фотографируемого объекта который можно обнаружить при фотографировании с высоты Н:
пН
где п — коэффициент сложности объекта.
Из формулы следует, что чем больше фокусное расстояние объектива и ниже высота полета КА, тем выше разрешение на местности. Однако увеличение фокусного расстояния объектива и снижение высоты полета уменьшает ширину полосы обзора поверхности Земли. В связи с этим на борту КА устанавливают два типа фотоаппаратов: длиннофокусный с малым углом поля зрения и короткофокусный с большим углом поля зрения. Первый тип фотоаппарата обеспечивает получение детальных фотографий объектов. Снимки, полученные от второго типа фотоаппаратов, служат для обзорного изучения местности и географической привязки первых снимков (рис. 4.4). При необходимости ширина полосы обзора может быть увеличена за счет
Рис. 4.4. Схема размещения автоматической фотоаппаратуры на борту КА:
1 — устройство для разрезания фотопленки и водонепроницаемого уплотнения контейнера; 2 — цилиндрическая часть фюзеляжа КА; 3 — канал подачи фотопленки (пленкопровод); 4 — рычажный механизм для регулировки натяжения фотопленки;
5 — спектрозональные фотоаппараты; 6 — обзорные фотоаппараты; 7 — контейнер с отснятым материалом, возвращаемый на Землю
202
4. Компоновка целевого оборудования
крена КА или установки на КА нескольких длиннофокусных фотоаппаратов. Фокусное расстояние фотоаппаратуры, применяемой для фотографирования из космоса, составляет 1,5... 10,0 м. Однако возрастание фокусного расстояния значительно повышает массу фотоаппаратуры.
Принцип работы щелевого фотоаппарата (рис. 4.5) заключается в непрерывном экспонировании фотопленки во время ее движения в фокальной плоскости фотоаппарата и расположенной позади неподвижной щели. Щель, выполняющая функции фотозатвора, перпендикулярна линии визирования. Метод щелевого фотографирования применяется в условиях плохой освещенности объектов съемки. Фотопленка непрерывно перемещается со скоростью Уф п, равной скорости уиз движения оптического изображения, которая определяется по формуле
^ф.п = г’из = vf!H.
Время экспонирования экс fv ’ J пут где /щ — ширина экспозиционной щели; Н — высота полета КА; f — фокусное расстояние; упут — путевая скорость КА.
Направление полета
Рис. 4.5. Схема щелевого фотоаппарата:
1 — бабина с фотопленкой; 2 — выравнивающее стекло: 3 — объектив с оптическим затвором;
4 — светофильтр
Рис. 4.6. Схема фотоаппарата с длиннофокусным объективом:
1 — зеркало перенацеливания: 2 — приемники видимого диапазона; 3 — рамка изделия; 4 — ИК-приемник; 5 — визирный луч (отклонение визирного луча по крену ±60°. по тангажу -60...0°)
4.2. Особенности целевого оборудования, влияющие на компоновку 203
У современных фотоаппаратов ширина экспозиционной щели изменяется в пределах 2...3 мм. Перемотка и выравнивание фотопленки происходят с помощью барабана.
Для получения снимков с высоким разрешением на местности используют метод щелевого фотографирования с применением фотоаппарата с длиннофокусным объективом (рис. 4.6). На рис. 4.7
Рис. 4.7. Оптическая схема (а) и внешний вид (б) фотоаппарата HiRISE МКА MRO, предназначенного для фотографирования Марса:
7 — механизм фокусировки: 2 — первое зеркало; 3 — бленда первого зеркала; 4 — второе зеркало; 5 — бленда второго зеркала; 6 — третье зеркало; 7 — электроника фотоприемников; 8 — фотоприемники; 9 — фильтры; 10 — первое управляющее зеркало; 11 — второе управляющее зеркало
204
4. Компоновка целевого оборудования
приведены оптическая схема и внешний вид фотоаппарата HiRISE МКА MRO, предназначенного для фотографирования Марса.
При съемках объектов, расположенных на поверхности Земли, вследствие движения КА и вращения Земли возникает сдвиг изображения в фокальной плоскости объектива фотографируемого объекта, что ухудшает качество снимка. Для компенсации сдвига изображения при фотографировании системой управления КА строится путевая система координат, компенсирующая горизонтальную составляющую вращения Земли и движения КА. Компенсация сдвига изображения в фокальной плоскости на фотопленке происходит за счет разворота КА на путевой угол (рпут на широте фотографируемого объекта. Значение путевого угла вычисляется по формуле
(рпуг = arccos(cos i sec фг ш),
где фг ш — геоцентрическая широта КА в момент измерения путевого угла.
На качество полученных фотоснимков влияют три группы факторов:
1) погрешности СО и СС, системы управления КА; неравномерность скорости протяжки фотопленки фотоаппарата; погрешности прогнозирования траектории и целеуказания;
2) сдвиг изображения в результате дисторсии объектива, зависящей от положения изображения точки относительно центра объектива, т. е. от расстояния по длине объекта в момент фотографирования;
3) оптические эффекты, связанные с хроматической аберрацией.
Наряду с пленочной фотоаппаратурой широко применяют фотоаппаратуру с цифровой записью изображения на ПЗС-матрицу (прибор с зарядовой связью), применение которой повышает надежность и значительно сокращает объем и массу блоков за счет исключения механизмов протяжки и обработки фотопленки. Изображение, полученное с помощью цифровых фотоаппаратов, можно сразу передавать с борта КА на Землю. В табл. 4.3 приведены некоторые технические характеристики цифровых фотоаппаратов, предназначенных для фотографирования поверхности Земли и планет из космоса.
Камера NAOMI: характеристики и конструкция. Примером камеры (в англоязычной литературе часто используется термин imager) с линейными сенсорами, в которой реализована технология сканирования вдоль полосы полета, является, аппаратура NAOMI (New AstroSat Optical Modular Instrument). Разработанная кампанией
4.2. Особенности целевого оборудования, влияющие на компоновку 205
EADS Astrium SAS камера высокого разрешения NAOMI успешно использовалась на многих европейских КА ДЗЗ, например AlSat-2, SPOT-6/-7, KazEOSat-1.
Таблица 4.3. Технические характеристики цифровых фотоаппаратов
Характеристика фотоаппарата Тип
Electroop-tical camera (EOC) Многозональная аппаратура MK-4 DMC MCI HiRISE
Вид
Фокусное расстояние, мм 1046 300 — —
Угол поля зрения, град 1,42 46 26,52 —
Относительное отверстие объектива — 1,0:4,5 — —
Формат кадра, км — — 600x500 —
Полоса обзора, км 17 — — 15
Высота, км 685 170...450 — 685
Диапазон задержки — 1/25... 1/200 — —
Разрешение на местности при высоте 200 км, м 6,6 6,0... 7,0 — 1,0
Потребляемая мощность, Вт 46 — — —
Общая масса, кг 35 700 12 120
Габариты, мм — 1418x1300x1025 314x257x240 Диаметр 700, длина 1400
Время существования, лет 3 — — —
Основные элементы камеры:
• телескоп, выполненный из формостабильных материалов на основе кремния с упрощенным терморегулированием;
206
4. Компоновка целевого оборудования
• сборка фокальной плоскости, включающая в себя детекторы излучения и блок первичной аппаратуры (уменьшение габаритов телескопа стало возможным за счет применения сенсоров нового типа, использующих ПЗС-матрицы с технологиями TDI (Time Delay Integration) и MTF (Modulation Transfer Function — частотноконтрастные функции));
• блоки вторичной аппаратуры, включающие блок видеоэлектроники, хранилище данных и служебные блоки. Блок видеоэлектроники позволяет программно изменять частоту опроса линейки сенсоров, что дает возможность настраивать пространственное разрешение 0,5... 10 м.
Широкоугольный телескоп выполнен по схеме Корша с тремя зеркалами (Ml, М2, М3), форма которых задается коническими сечениями и двумя плоскими зеркалами (FM1, FM2), выносящими изображение в сторону (рис. 4.8). Такой объектив позволяет исправлять астигматизм и кривизну изображения, т. е. создавать систему с большим плоским полем зрения.
Рис. 4.8. Оптическая схема камеры NAOMI:
1 — фокальная плоскость сенсоров и фильтров; 2 — выходное отверстие: 3 — пересечение лучей
Для различных КА использовались телескопы с диаметром зеркала от 200 мм (AlSat-2) до 640 мм (KazEOSat-1). В оптической системе телескопа свет разделяется на спектр, который фиксируется линейкой сенсоров. Сенсоры включают TDI линейку из 7000 пикселей для панхроматического канала и четыре линии по 1750 пикселей для муль-тиспектральной съемки. Вид линейки сенсоров показан на рис. 4.9.
4.2. Особенности целевого оборудования, влияющие на компоновку 207
Рис. 4.9. Линейка сенсоров камеры NAOMI
Камера NAOMI имеет модульную конструкцию. Ее характеристики подбираются для каждого КА по желанию заказчика, в частности, могут варьироваться диапазоны мультиспектральных каналов или параметры оптики. Пример характеристик камеры NAOMI для вьетнамского КА VNREDSat-lA (Vietnam Natural Resources, Environment and Disaster-monitoring Satellite-1 А) и казахстанского KA KazEOSat-1 представлены в табл. 4.4.
Таблица 4.4. Характеристики камеры NAOMI для различных КА
Характеристика VNREDSat-lA KazEOSat-1
Оптика Диаметр апертуры 200 мм, фокусное расстояние 5131 мм Диаметр апертуры 640 мм
Панхроматический канал (PAN) 0,45...0,75 мкм 0,45...0,75 мкм
Мультиспек-тральные каналы (MS), 4 В1: 0,45...0,52 мкм (голубой) В2: 0,53...060 мкм (зеленый) ВЗ: 0,62.. .0,69 мкм (красный) В4: 0,76.. .0,89 мкм (инфракрасный спектр) Голубой: 0,45...0,52 мкм зеленый: 0,53.. .060 мкм красный: 0,62.. .0,69 мкм инфракрасный спектр: 0,76... 0,89 мкм
Разрешение в надире: расстояние между центрами пикселей на поверхности (GSD) 2,5 м PAN в надире 10 м MS в надире PAN в надире от 1,0...2,5 м MS: 4...10 м в надире
Параметры сенсоров Кремниевый массив с 7000 пикселей PAN, 1750 пикселей в каждой полосе MS. Шаг пикселя 12x12 мкм (PAN), шаг пикселя 48x48 мкм для MS Массивы кремниевых панелей с 7000 пикселей PAN, 1750 пикселей в каждой полосе MS
Полоса захвата в надире 17,5 км 10... 60 км в зависимости от GSD и числа сенсоров
208
4. Компоновка целевого оборудования
Окончание табл. 4.4
Характеристика VNREDSat-lA KazEOSat-1
Поле зрения (FOR) ±35° относительно надира, за счет разворота спутника ±35° относительно надира, за счет разворота спутника
Дискретизация сигнала 12 бит (кодированный 10 бит для передачи на Землю) 12 бит (динамический диапазон)
Масса Полная (включая вторичную аппаратуру) 18,5 кг масса камеры 13 кг Полная (включая вторичную аппаратуру) 150 кг
Потребляемая мощность 90 Вт 90 Вт
Конструкция камеры показана на рис. 4.10. Камера состоит из установочной плиты, цилиндрической обечайки телескопа 5 с кронштейном крепления б, вторичного зеркала 1 и узла фокальной плоскости. Установочная плита 3 несет все элементы, включая первичное зеркало 7, детекторы и блок аппаратуры 2. Плита крепится к КА изостатически на трех титановых вилочных кронштейнах-биподах.
Принцип изостатического закрепления заключается в том, что оптический прибор соединяется с основанием в трех точках при помощи кронштейнов с шарнирами на концах. При этом две из трех точек подвески диаметрально симметричны относительно оптической плоскости симметрии, а
Рис. 4.10. Конструкция камеры NAOMI:
1 — вторичное зеркало; 2 — блок электроники; 3 — установочная плита; 4 — первичное зеркало; 5 — обечайка; 6 — кронштейн
третья точка находится в оптической плоскости ближе к наиболее освещенному краю рефлектора. При таком закреплении ориентация оптики по отношению к КА не зависит от длины кронштейнов.
Вторичное зеркало установлено на кронштейне-спайдере в передней части обечайки телескопа. Обечайка крепится к плите тремя болтами. Высокие эксплуатационные характеристики телескопа достигаются за счет того, что установочная плита, обечайка и кронштейн-спайдер сделаны из карбида кремния (SiC), имеющего высокую теплопроводность, малый коэффициент теплового рас
ширения и высокую жесткость.
4.2. Особенности целевого оборудования, влияющие на компоновку 209
Все оптические элементы телескопа изготовлены из карбида кремния. Первичное зеркало смонтировано на установочной плите при помощи трех изостатических ножей, изготовленных из инвара, что обеспечивает теплоизоляцию зеркала.
Фокусировка телескопа регулируется изменением теплового режима первичного зеркала. Для улучшения теплового режима зеркал и предотвращения перегрева на солнце в режиме неориентированного полета обечайка телескопа изнутри дополнительно покрыта ЭВТИ. Для устранения засветки вторичного зеркала используется бленда, закрепленная на алюминиевой оболочке, покрытой снаружи ЭВТИ. В результате такой изоляции затраты энергии на регулирование теплового режима зеркал не превышают 5 Вт.
Узел фокальной плоскости включает в себя сенсоры, фильтры и блоки первичной электронной аппаратуры. Масса узла около 5,5 кг, потребляемая мощность 20 Вт.
Пример компоновки камеры NAOMI на трехслойной панели отсека ПН КА AIsat-2 показан на рис. 4.11. На панели устанавливается камера, блок вторичной аппаратуры и звездный датчик. Блок вторичной аппаратуры связан с бортовым компьютером, системой электропитания и системой передачи данных, обеспечивающей передачу информации по радиоканалу Xдиапазона со скоростью 56 Мб/с.
Рис. 4.11. Компоновка камеры NAOMI на панели спутника ДЗЗ Alsat-2:
1 — камера; 2 — звездный датчик; 3 — блок аппаратуры; 4 — поток данных; 5 — канал передачи данных (56 мб/с); 6 — направление полета; 7 — блок питания; 8 — бортовой компьютер; 9 — блок обработки изображений
В качестве примера камеры для наноспутника рассмотрим камеру NanoCam C1U кампании GOM Space.
Камера представляет собой модульную систему, предназначенную для получения изображений. Параметры камеры могут гибко настраиваться производителем по желанию заказчика. Камера состоит из объектива, держателя объектива, платы приема
210
4. Компоновка целевого оборудования
Рис. 4.12. Камера NanoCam C1U:
а — камера в сборе: 1 — радиатор; 2 — блок обработки изображений: 3 — бленда; 4 — оптическая скамья; 5 — винт настройки фокуса; 6 — объектив; 7 — винт настройки диафрагмы; б — вид с разнесенными частями
изображения, платы обработки изображения и программного обеспечения (рис. 4.12).
Камера использует промышленный 35 мм (F1.9...F16) объектив повышенной защищенности компании Schneider Optics. Угол зрения камеры 9,22 градуса. Объектив смонтирован на оптической скамье — кронштейне, который является основным силовым элементом конструкции. Оптические сенсоры расположены на верхней стороне печатной платы, закрепленной под объективом камеры, и закрыты блендами. На нижней стороне расположены процессор, память и интерфейсные разъемы. Камера специально рассчитана на условия работы без теплообмена конвекцией. Электроника камеры производит около 600 мВт тепловой мощности, которая рассеивается радиатором, установленным снизу печатной платы.
Энергопотребление в режиме ожидания 360 мВт, в режиме съемки 634 мВт (длительность режима не более 5 с), в режиме обработки изображения 660 мВт (длительность режима не более 90 с). Напряжение питания составляет 3,3 В. Допустимый тепловой режим камеры в неактивном режиме -40...+85 °C и в рабочем режиме 0...60 °C.
4.2. Особенности целевого оборудования, влияющие на компоновку 211
Камера дает возможность проводить ДЗЗ с минимальными затратами и в соответствии со спецификациями стандарта Cube Sat. Камера формирует изображение и позволяет с высоты 650 км получить разрешение на снимке 80 м/пиксель в оптическом диапазоне длин волн 400... 1000 нм. Тип сенсора CMOS с глубиной цвета 10 бит форматом 2048x1536 пикселей. Обработка данных проводится 210 M1PS-процессором с объемом оперативной памяти 32 Мб и твердотельным накопителем MicroSD объемом 2 Гб. После первичной обработки изображение формируется в сжатом формате jpeg. Возможна покадровая съемка с частотой 3...12 кадр/с. Программное обеспечение использует протокол Cubesat Space Protocol (CSP) и позволяет создать для передачи изображений обычный FTP-сервер со скоростью обмена 400 kbps.
Камера имеет массу 166 г и габариты 96x90x58 мм. Габаритный чертеж камеры показан на рис. 4.13.
Рис. 4.13. Габаритный чертеж камеры
212
4. Компоновка целевого оборудования
Рис. 4.14. Пример компоновки камеры на КА CubeSat:
1 — аккумуляторы; 2 — плата блока питания; 3 — плата бортового компьютера; 4 — плата радиомодуля; 5 — радиатор; 6 — блок обработки изображений; 7 — бленда; 8 — оптическая скамья; 9 — объ-
ектив
Камера разработана для установки в конструкцию стандарта ISIS 1U cubesat structure, что позволяет совместно с бортовым компьютером, радиомодулем, системой управления и системой электропитания получить простейший наноспутник ДЗЗ. Компоновочная схема такого наноспутника показана на рис. 4.14.
4.2.2. Телевизионное сканирующее оборудование
Такое оборудование используется для наблюдения за поверхностью Земли (рис. 4.15). Применение светофильтров и нескольких матриц детекторов позволяет проводить многоспектральную съемку поверхности Земли. Передаваемая на Землю информация обрабатывается в наземной части телевизионного оборудования, представляющего собой сложную систему обработки информации. Создание подобной системы наблюдения обусловлено необходимостью:
• своевременного получения обработанных данных для внесения изменений в программу полета;
• получения оперативной информации для калибровки и коррекции геометрических и фотометрических искажений в получаемых снимках;
• коррекции видеоинформации в целях компенсации погрешностей ориентации КА в момент съемок, отклонений орбиты от круговой номинальной высоты.
После выделения телевизионной информации из потока телеметрических данных необработанный кадр преобразуется в форму, удобную для записи и дальнейшей обработки в БЦВМ.
4.2. Особенности целевого оборудования, влияющие на компоновку 213
Рис. 4.15. Схема телевизионного сканирующего оборудования:
1 — элементы сканирования: 2 — сканирующее зеркало; 3 — объектив: 4 — световод: 5 — фотодетектор: 6 — фильтр; 7 — полоса обзора
В некоторых случаях создают КА, предназначенные только для фотографирования или передачи телевизионного изображения заданных объектов. Компоновка подобных КА имеет свои особенности, поскольку фотоаппарат является основой конструкции. Оси фотоаппарата должны быть строго согласованы со связанной системой координат КА. Выбор формы КА, определение необходимого набора обеспечивающего бортового оборудования, разбивку корпуса КА на отсеки проводят после разработки конструкции фотоаппарата, а компоновка КА подчинена обеспечению основной задачи — рациональному функционированию фотоаппаратуры. Технология изготовления такого КА также имеет особенности. Силовые элементы конструкции, на которой устанавливается фотоаппарат, поступают на завод-изготовитель фотоаппарата, где проводится монтаж и контроль точности монтажа оптических элементов фотоаппаратуры относительно элементов конструкции КА. Затем собранная конструкция поступает на завод-изготовитель КА, где осуществляется дальнейшая сборка.
4.2.3. Инфракрасная аппаратура наблюдения
По типу решаемых задач оптико-электронная и ПК-аппаратура может быть подразделена на следующие виды.
1. Инфракрасная сканирующая аппаратура (ИКСА), предназначенная для получения тепловых карт местности и изображений наземных объектов в любое время года и суток при благоприятных метеорологических условиях, для решения таких научных и промышленно-хозяйственных задач, как изучение районов активного вулканизма, вечной мерзлоты, выявления площадей, пригодных для использования в сельском хозяйстве, контроля состояния земельных угодий, поиска неоднородности океанических течений.
214
4. Компоновка целевого оборудования
2. Трехканальная оптико-электронная аппаратура (ОЭА), служащая для изучения собственного и отраженного излучений облачности и поверхности Земли (поверхности Мирового океана, ледового и снежного покровов), а также построения в трех спектральных диапазонах температурных полей для гидрометеослужбы.
3. Многоканальные сканирующие устройства (МСУ) — оптические радиометры высокого разрешения, предназначенные для исследования природных ресурсов, поверхности суши и океана.
Радиометры позволяют:
• зондировать атмосферу с анализом степени загрязненности, облачности, температуры, химического состава;
• исследовать оптические свойства атмосферы;
• обнаруживать аномалии водных поверхностей;
• исследовать состояние растительного покрова (леса, посевов и т. п.).
4. Оптико-электронные спектрометры видимого диапазона дистанционного зондирования (СВДЗ), с помощью которых измеряют спектральные характеристики излучения поверхности суши и водной поверхности.
5. Оптико-электронная аппаратура наблюдения (ОЭАН), решающая задачи:
• сельского хозяйства (инвентаризация сельскохозяйственных культур, определение их видов и регистрация);
• исследования прибрежных районов (картографирование береговой линии, выявление отмелей, инвентаризация затопляемых земель, обнаружение загрязнений океана);
• лесного хозяйства (определение границ и типа леса, регистрация участков леса, пораженных вредителями, обнаружение районов лесных пожаров);
• географии (исследование районов стихийного бедствия, регистрация в изменениях землепользования, установление границ городских и сельских районов);
• геологии (исследование геологического строения Земли, поиск полезных ископаемых);
• метеорологии (обзор облачного покрова Земли, прогнозирование направления движения циклонов);
• океанографии (исследование биологии океана, морских течений, ледовых покровов).
В табл. 4.5 приведены основные технические характеристики существующей оптико-электронной и ИК-аппаратуры целевого оборудования. В табл. 4.6 представлены сравнительные технические характеристики дополнительных целевых ИК-систем.
Таблица 4.5. Основные технические характеристики существующей оптико-электронной
и ИК-аппаратуры целевого оборудования
Характеристика ИКСА Трехканальный ОЭА МСУ СВДЗ ОЭАН
Вариант 1 Вариант 2
Спектральный диапазон, мкм 7,5...13,5 ДХ^ = 0,5.. .0,7 ДХ,, = 0,8...1,1 ДХУ= 10,5... 12,5 0,42...2,35 — 6 каналов 10,5. ..12,5 — 1 канал 0,5... 1,0 — 5 каналов 10,5... 12,5 — 1 канал 0,43... 0,80 0,45...0,87 3 канала
Ширина полосы обзора при высоте 600 км, км 47 1550 600 200 10 480
Угол поля зрения, град 4°45' ±53 ±53 — 2 46
Линейное разрешение при высоте 600 км, км 45 300...600 10...15 10...15 — 42
Температурная чувствительность, °C 0,8...1,0 0,2 0,2 0,2 — —
Потребляемая мощность, Вт 750 330 1000 800 — ~ 80
Масса, кг 224 95 350 250 — 80
216
4. Компоновка целевого оборудования
Таблица 4.6. Сравнительные технические характеристики дополнительных целевых ИК-систем
Характеристика Вариант
1 2 3
Зона обзора, град 8,3 5,0 5,0
Ширина полосы обзора, км 30 18 18
Разрешение, м 120 18 20
Температурная чувствительность, °C 2,5 0,5 2,5
Диаметр входного зрачка, мм 300 700 810
Фокусное расстояние, мм 500 1 000 1 000
Спектральный диапазон, мкм 3...5 8...14 7...13
Приемник:
количество, шт. 40 100 2
габариты, мм 0,10 х 0,15 0,1 х 0,1
тип InSb PbSnTe CdHgTe
Температура охлаждения, К 80 78 80
Для исследования поверхности Земли применяют ИК-радиометр, позволяющий получать информацию об интенсивности потока тепловой энергии, излучаемой Землей в ИК-спектре (0,8... 13,0 мкм).
Принцип работы ПК-радиометра (рис. 4.16) аналогичен принципу работы телевизионного сканирующего оборудования. Отличие
Рис. 4.16. Схема ИК-радиометра:
/ — сканирующее устройство; 2 — объектив: 3 — абсолютно черное тело; 4 — основное зеркало опорного канала; 5 — охлаждающая диафрагма, образующая апертурный угол; 6 — сосуд Дьюара; 7 — электрический вывод; 8 — магнитофон: 9 — усилитель; 10 — змеевик системы охлаждения; 11 — фоточувствительный элемент: 12 — фильтр: 13 — сектор модулятора; Дв — двигатель
4.2. Особенности целевого оборудования, влияющие на компоновку 217
заключается в том, что фоточувствительный элемент ИК-радиометра помещается в охлаждаемую камеру для повышения чувствительности прибора. На выходе прибора формируется совокупность электрических сигналов, уровень которых пропорционален потоку энергии от наземных объектов, что позволяет получить тепловой портрет наземного объекта или тепловую карту наблюдаемой поверхности Земли.
Инфракрасный радиометр характеризуется следующими параметрами.
1. Пороговая мощность теплового приемника, Вт,
где S — площадь приемника, см2; А/ — частота сигнала на входе усилителя, Гц; D* — обнаружительная способность, обратная пороговой чувствительности, Гц см1/2/Вт.
Отношение сигнал/шум, позволяющее судить о качестве прибора и правильности выбора его технических характеристик,
t FAX
ТГ пор
где (Упор — пороговая мощность теплового приемника, Вт; FAX — световой поток на приемнике.
4.2.4. Особенности компоновки микроволнового радиометра
Количественные измерения энергетических характеристик поля электромагнитного излучения носят названия фотометрических. Интенсивность излучения характеризуется яркостной температурой. В заданном диапазоне частот эта величина равна температуре, которую имело бы абсолютно черное тело, обладающее такой же интенсивностью излучения в данном диапазоне частот.
Кроме видимого и инфракрасного излучения для дистанционного зондирования используется микроволновое излучение с длинами волн радиотеплового излучения 1 мм ... 100 см. В этом диапазоне имеются преимущества по наблюдению атмосферных газов
218
4. Компоновка целевого оборудования
и осадков. Для радиодиапазона электромагнитных волн используют специальный термин радиояркостная температура.
Аппаратура для микроволнового ДЗЗ представляет собой систему, которая выполняет следующие функции:
1) принимает излучения с определенной пространственной разрешающей способностью;
2) с заданной чувствительностью отделяет полезный сигнал от шума;
3) с заданной точностью выдает количественные данные о потоке излучения, в частности его радиояркостную температуру;
4) обеспечивает привязку измеряемых потоков излучения к пространственным координатам излучающих объектов.
Мультипликативная
Регистрирующее устройство
(аддитивные (частотная Шум
помехи) помеха) (аддитивные
временные
помехи)
Рис. 4.17. Основные компоненты микроволновой радиометрической аппаратуры
В состав аппаратуры входят четыре основных компонента (рис. 4.17):
1) антенная система, предназначенная для приема и селекции излучения с исследуемой поверхности;
2) радиометрический приемник, предназначенный для измерения сигнала;
3) устройство предварительной обработки, предназначенное для сопоставления положения излучающего элемента с интенсивностью его излучения;
4) устройство формирования научной информации, предназначенное для представления результатов в заданном формате данных для передачи по каналам связи.
4.2. Особенности целевого оборудования, влияющие на компоновку 219
Рис. 4.18. Схема зон обзора при ДЗЗ с использованием узконаправленной антенны
Антенну радиометра, выведенного на орбиту, окружает среда с неравномерной радиояркост-ной температурой в диапазоне микроволнового излучения. Если полную сферу зоны обзора определить телесным углом в 4л стерадиан, то в большей части этого телесного угла радиояркостная температура не превышает нескольких градусов Кельвина. Однако в направлении на отдельные источники космического излучения: Солнце, Луну, Землю и др. — температура равна сотням и даже тысячам градусов Кельвина. Каждый источник излучения имеет зону обзора в телесном угле Я,. Например, при наблюдении Земли в телесном угле Я3 располагается
источник радиоизлучения, который наблюдается антенной с узкой диаграммой направленности, имеющей главный лепесток с телесным углом Ягл и боковые лепестки с телесным углом Ябк, как показано на рис. 4.18. Фоновое излучение в некотором телесном угле задней полусферы антенны определяется шумовым излучением космического аппарата.
Так как обычно Ягл « Я3, чтобы зондировать в процессе полета большую площадь, применяют сканирование лучом исследуемой поверхности. При сканировании движение луча складывается из движения КА по орбите и движения луча антенны. На рис. 4.19 показаны две схемы движения антенны: построчная и круговая. Построчная схема, при которой ось диаграммы направленности движется в плоскости, проще реализуется, однако размер области, охватываемой лучом на земной поверхности, увеличивается при отклонении луча от вертикали, что может увеличивать погрешность измерений. Круговая схема, при которой ось диаграммы направленности движется по конической поверхности, дает одинаковый размер охватываемой области. За счет сложения скоростей КА и антенны получается сканирование по циклоиде. Если смеще-
220
4. Компоновка целевого оборудования
ние области, охватываемой лучом на земной поверхности по направлению полета, за цикл сканирования превышает диаметр этой области, то имеет место «пунктирная» съемка.
Рис. 4.19. Построчный (я) и
поверхности
круговой (б) методы сканирования
Движение луча в радиотехнических системах осуществляется антеннами с механическим или электронным управлением луча. Электронные системы имеют фазированную антенную решетку. Перемещение луча осуществляется дискретно с помощью фазовращателей в элементах решетки. Такие антенны дают быстрое сканирование и не имеют в своем составе подвижных частей. Однако такие системы обладают значительными потерями полезного сигнала, что ограничивает их применение в микроволновом диапазоне. Для микроволновых радиометров чаще используется механическое перемещение антенны при сканировании. При этом усложняется компоновка таких приборов на КА, так как подвижные элементы микроволновых радиометров возмущают движение КА относительно центра масс и имеют ограничения по зонам обзора, рассмотренные ниже.
Чтобы обеспечить требуемую точность измерения в процессе сканирования, требуется периодически производить калибровку приемника, для чего используется эталонное шумовое радиоизлучение. В качестве такого излучения может служить фоновое излучение космоса с низкой радиояркостной температурой, так называемый «шум холодного космоса», или калибровочное излучение от генератора шума с высокой радиояркостной температурой — «шум горячего источника». В первом случае антенну радиометра
4.2. Особенности целевого оборудования, влияющие на компоновку 221
периодически необходимо нацеливать на область космоса без ярких источников или на плоское зеркало, отражающее данное излучение. Во втором случае шум подается либо непосредственно в приемник, либо на вход антенны от специального апертурного генератора шума: на зеркало антенны или через дополнительную антенну-отражатель. Взаимное расположение источников шума и антенны при калибровке показаны на рис. 4.20.
Рис. 4.20. Взаимное расположение источников излучения и антенны:
1 — рефлектор антенны; 2 — зеркало; 3 — облучатели; 4 — направление на исследуемую поверхность; 5 — направление на «холодный космос»
Например, для радиометра типа «Дельта» разработки ОКБ МЭИ, характеристики которого приведены ниже, используются оба источника калибровочного излучения.
Характеристики радиометра типа «Дельта»:
Частота, ГГц .............................10,65; 18,7; 23,8; 36,5; 89,0; 150,0
Полоса частот, МГц..........................180; 200; 400; 900; 5000; 5000
Чувствительность, К............................................0,05
Погрешность измерения, К....................................0,8... 1,0
Пространственное разрешение, км*км.............51*85; 30*50; 27*45; 18*30; 7,5*12; 7,5*12
Способ сканирования .............................круговое коническое
Угол визирования антенны, град..............................44,8 ± 0,1
Ширина полосы обзора при высоте орбиты 850 км........не менее 1500 км
Угол сканирования, град.........................................110
Период сканирования, с......................................1,7 ± 0,1
Погрешность поддержания периода сканирования, мс................±0,1
Масса прибора, кг........................................не более 55
Потребляемая мощность, Вт................................не более 100
Напряжение питания, В ......................................28 ± 0,6
222
4. Компоновка целевого оборудования
Рис. 4.21. Основные компоновочные элементы микроволнового сканирующего радиометра:
/ — зеркало бортового «горячего источника»: 2 — излучатель бортового «горячего источника»; 3 — рефлектор антенны радиометра; 4 — вращающаяся часть радиометра; 5 — облучатель антенны радиометра; 6 — корпус радиометра; 7 — зеркало для отражения «шума холодного космоса»
Основные элементы радиометра показаны на рис. 4.21.
Радиометр «Дельта» имеет две конфигурации: стартовую и рабочую. При старте все компоновочные элементы находятся в контейнере, основные размеры и привязка которого к осям КА показаны на рис. 4.22. Антенный блок, зеркало антенны и зеркало «горячего
Рис. 4.22. Габариты контейнера радиометра «Дельта» и его привязка к осям КА
источника» расположены в сложенном зачекованном положении внутри пеналов основного контейнера за поворотным блоком (если смотреть по направлению полета). Панель зеркала «холодного источника» также складывается, закрывая контейнер в транспортном положении.
Габариты элементов антенной системы радиометра в рабочем положении показаны на рис. 4.23, а. Для раскрытия складных эле
4.2. Особенности целевого оборудования, влияющие на компоновку 223
ментов в составе прибора имеются механизм подъема антенного блока и механизм разворота зеркал. Кинематическая схема механизмов показана на рис. 4.23, б в транспортном и промежуточном положениях. Выдвижной антенный блок выполнен в виде несущего
а б
Рис. 4.23. Радиометр ОКБ МЭИ в рабочем положении:
а — габариты элементов антенной системы: 7 — зеркало антенны; 2 — защелка;
3 — антенный блок: 4 — зеркало горячего источника; 5 — горячий источник;
б — кинематическая схема радиометра: 7 — зеркало антенны; 2 — зеркало горячего источника; 3 — штырь; 4 — сектор разворота зеркал; 5 — тяга; 6 — антенный блок; 7 — привод разворота зеркал; 8 — горячий источник; 9 — привод подъема антенного блока; 10 — маховик-компенсатор
контейнера, внутри которого помещен вращающийся блок радиометра с электроприводом и неподвижные элементы. На боковой поверхности контейнера имеются две цилиндрические направляющие, снабженные ходовыми гайками, а внутри направляющих расположены ходовые винты, взаимодействующие с этими гайками (см. рис. 4.23, б). Для исключения перекосов контейнера винты связаны друг с другом кинематически. При вращении винтов контейнер двигается вверх, удерживаемый системой роликов, взаимодействующих с направляющими. В конце подъема плоская поверхность нижнего посадочного пояска выдвижного блока плотно прижимается к базовому фланцу в верхней части основного кон-
224
4. Компоновка целевого оборудования
тейнера. На крышке вращающегося блока установлен кронштейн крепления зеркала антенны. На боковой поверхности контейнера закреплен горячий источник. Зеркало горячего источника и антенное зеркало установлены на поворотных вилках, кроме того, оба зеркала имеют возможность развернуться в местах своего крепления на необходимый угол, заданный упорами. Поворот в рабочее положение зеркал осуществляется с помощью пружинных приводов, расположенных в шарнирах.
Приведение радиометра в рабочее положение происходит следующим образом. После срабатывания замка панель холодного источника освобождается и под действием пружинных механизмов разворачивается на 180°, располагаясь параллельно поверхности КА. Далее включается электропривод подъема антенного блока. Через пару винт — гайка антенный блок по направляющим перемещается в рабочее положение (см. рис. 4.23, б). Оба зеркала, сохраняя неподвижное положение относительно антенного блока, по направляющим выдвигаются из пеналов контейнера. После установки выдвигаемого блока в рабочее положение поступает команда на электропривод механизма разворота зеркал. Электродвигатель привода антенн через редуктор, и пару винт — гайка поворачивает звено-сектор, связанный с рычажными системами зеркал. При повороте на 0...300 сектор поворачивает кронштейн крепления антенного зеркала на 45° через штырь, который находится в пазу сектора. При этом антенное зеркало выходит из основного кронштейна и при помощи пружинного механизма занимает рабочее положение относительно своего кронштейна. В то же время кронштейн рычажной системы зеркала «горячего источника» остается все это время практически неподвижным. При дальнейшем движении сектора штырь выходит из паза сектора, но продолжает касаться сектора, антенное зеркало плавно разворачивается при помощи пружинных механизмов до рабочего положения. В это же время при помощи тяги, соединяющей сектор с кронштейном рычажной системы, начинает разворачиваться в рабочее положение зеркало «горячего источника». Зеркала фиксируются в рабочем положении на замках.
Период кругового сканирования антенны составляет 2,5 с. Из них 1,2 с отводятся непосредственно на измерение сигнала от Земли и атмосферы, далее на интервале 0,3 с проводится калибровочное измерение сигнала от «холодного космоса», и далее на интервале 0,4 с — калибровочное измерение сигнала от «холодного космоса» с
4.2. Особенности целевого оборудования, влияющие на компоновку 225
дополнительным шумовым сигналом от бортового «горячего источника». Оставшееся время антенна перемещается между зонами обзора, показанными на рис. 4.24. Для устранения возмущающих моментов, возникающих при вращении антенного блока, в состав радиометра включен электромеханический маховик-компенсатор. Компенсатор установлен на дне контейнера соосно с электродвигателем привода антенны.
Рис. 4.24. Зоны обзора радиометра в процессе кругового сканирующего движения антенны:
1 — многоканальный сканирующий радиометр; 2 — «горячий источник»;
3 — зона «холодного источника»; 4 — панель «холодного источника» (показана в развернутом виде)
Для обеспечения режимов калибровки используется плоский отражающий экран, образующийся при развороте панели «холодного источника». Ось вращения основного зеркала перпендикулярна плоскости отражающего экрана. При калибровке в течение времени измерительного интервала в зону луча основной антенны не должны попадать элементы конструкции. При движении спутника по синхронно-солнечной орбите могут иметь место дополнительные погрешности радиометрических измерений за счет солнечной радиации. Для нейтрализации этого воздействия необходимо повернуть по углу места зеркало «холодного космоса», что обеспечит защитный интервал от направления приема солнечной радиации.
При накоплении данных, полученных на различных витках, необходимо, чтобы погрешность расчета координат подстилающей поверхности была не более половины диаметра засвечиваемого пятна, что соответствует угловой ошибке не более половины ширины луча антенны.
226
4. Компоновка целевого оборудования
Погрешность расчета координат определяется:
• погрешностью измерения текущего углового положения антенны;
• привязкой данных о положении антенны при сканировании к шкале единого времени;
• привязкой механической оси антенны к осям объекта;
• сдвигом электрической оси антенны относительно ее механической оси;
• ошибкой системы ориентации КА;
• погрешностью знания текущего положения КА на орбите.
Привязка механической оси антенны к осям КА определяется оптическим контролем положения оси антенны относительно опорной плиты при сборке КА. Опорная плита антенны фиксируется на КА с погрешностью не более 1'. Результирующая погрешность привязки механической оси радиометра к осям КА не должна превышать 3'.
Ошибка системы ориентации спутника определяет точность оценки координат подстилающей поверхности. Максимальная допустимая ошибка по каждой из координат для современных систем не должна быть более 10', для СКО — не более 5'. Если эти условия не обеспечиваются, то при наличии точных датчиков системы астроориентации необходимо передавать на Землю сигнал ошибки датчиков. Это в ряде случаев реализуется легче, чем обеспечение указанной точности ориентации.
4.2.5. Радиовысотомеры
Радиовысотомеры (рис. 4.25) широко применяются в качестве целевого оборудования для определения высоты полета относительно поверхности Земли. Радиовысотомеры работают в СВЧ-диапазоне.
Для получения профиля поверхности Земли, над которой пролетает КА, необходимо достаточно часто (1 импульс в секунду) посылать зондирующие сигналы. Чем больше точность измерения временной задержки сигнала и точнее ориентация антенны по местной вертикали, тем выше точность измерения высоты. Примерные характеристики радиовысотомера приведены ниже.
Ширина диаграммы направленности антенны, град................2
Ориентация оси антенны относительно надира, град.............0
Зондирующий сигнал, МГц: рабочая частота.........................................13,8
ширина спектра.........................................80 • 106
4.2. Особенности целевого оборудования, влияющие на компоновку 227
Мощность передатчика, Вт.......................................40
Среднеквадратичная флуктуационная погрешность определения средней высоты волн в океане, м...............................0,5
Погрешность оценки балльности, балл...........................1,5
Рис. 4.25. Схема радиовысотомера:
/ — шаг измерения; 2 — след зондирующего луча; 3 — отраженные сигналы;
4 — зондирующие сигналы; 5 — приемно-передающая антенна
Высота, на которой может работать радиовысотомер, зависит от ряда параметров и может быть определена по формуле
WA2S^X2
Н =
где W — мощность передатчика, Вт; А — коэффициент направленного действия антенны (А = 47i5aHg / Z2, — площадь рас-
крытия реальной антенны); 5эф — эффективная отражающая по
228
4. Компоновка целевого оборудования
верхность антенны, м2; X — длина волны передатчика, м; Кш — коэффициент шума приемника, Кш = 3...5; &С-б — постоянная Стефана — Больцмана (&С-б = 1,38-10-23 дм/К); £ — отношение сиг-нал/шум, = 10...20; То — стандартная температура, Го = 293 К; А — ширина полосы пропускания системы, м.
Разрешение по дальности находят как
где КИ — коэффициент, зависящий от формы сигнала (импульса), КИ = 0,5...0,65; с — скорость распространения электромагнитных волн, с = 3-108 м/с; ти — длительность сигнала (импульса).
Для геодезической разведки целесообразно использовать систему глубинного зондирования, построенную по радиолокационному принципу.
При увеличении длины волны радиолокационных зондирующих сигналов (как у радиовысотомера) формирование отраженного сигнала будет происходить не только на поверхности Земли, но и на границе сред с различными отражающими способностями, при глубинах залегания, которые соизмеримы с длиной волны. Поэтому существует возможность создания радиолокаторов для глубинного зондирования Земли, что потребует больших антенн, так как диаметр антенны пропорционален длине волны, а следовательно, и глубине зондирования (см. рис. 4.25).
4.2.6. Радиолокационные системы наблюдения
Впервые радиолокационная система наблюдения была применена в СССР на орбитальной космической станции «Алмаз», запущенной 15 июля 1987 г. как «Космос-1870».
Основой целевого оборудования, применяемого для радиолокационной системы наблюдения (рис. 4.26), является радиолокатор с синтезированной апертурой (РСА). Радиолокатор состоит из двух антенных решеток, закрепленных на корпусе КА, которые обеспечивают съемку наземных объектов с левой и правой сторон относительно трассы полета. Перенацеливание радиолокатора в полете осуществляется за счет разворота КА по крену, что позволяет просматривать полосу шириной 250...300 км и обеспечивает высокую производительность функционирования КА. Съемка ведется в маршрутнонепрерывном режиме. С орбитальной станции «Алмаз-Т», на которой
4.2. Особенности целевого оборудования, влияющие на компоновку 229
было установлено подобное оборудование, просматривалась полоса шириной 40 км и длиной 2.. .240 км, разрешение локатора составляло 10... 15 м. Производительность оборудования была значительно увеличена за счет применения цифровой системы обработки информации. Оперативность съемки обеспечивалась передачей полученных данных по радиоканалу через спутник связи. Съемки, осуществляемые РСА, позволяют проводить исследования в областях экологии, геологической разведки, океанологии и др.
Рис. 4.26. Схема радиолокационной системы наблюдения:
1 — последовательные положения реальной антенны радиолокационной станции; 2 — зона обзора в положении j = 3; 3 — линии равных сдвигов фаз для положений j = 1, 2. 3; 4 — цель q,\ 5 — зона обзора реальной антенны в положении j = 1
В режиме проведения целевых работ РСА используется метод комплексирования гироскопической ориентации орбитальной станции с системой доплеровской коррекции (СДК), которая при
230
4. Компоновка целевого оборудования
надлежит РСА. Эта система формирует сигнал, пропорциональный отклонению осей связанной системы координат орбитальной станции от путевой системы координат. Для такого управления СДК вырабатывает двухполярный сигнал доплеровской коррекции постоянного напряжения и сигнал «захват». По сигналу «захват» от тракта стабилизации отключается сигнал гироскопического прибора ориентации и подключается для управления сигнал СДК, пропорциональный сигналу
Лздк = ^-[^sinCY + ^ан) + (w - Vnp)cos(Y + U)]>
ЛРСА
где v0TH — модуль относительной скорости; ХРСд — длина волны РСА; О, у, V — углы тангажа, крена и курса соответственно; — угол установки антенны на орбитальную станцию; \|/пр — про-граммный угол курса.
В этом режиме управления реализуется точность ориентации и стабилизации орбитальной станции по каналу курса в Iх.
Существуют варианты РСА бокового обзора, состоящие из трех радиолокаторов, разрешением 5...40 м при ширине полосы съемки 20... 170 км и ширине полосы обзора 330 км.
В случае применения РСА на МКА вместо массивной антенной решетки используют развертываемую параболическую антенну диаметром до 6 м. При этом многофункциональный радиолокатор с длиной волны 9,6 см обеспечивает съемку местности с высоким разрешением в пределах двух полос обзора шириной до 500 км по обе стороны от трассы полета.
Для КА с радиолокационной системой наблюдения весьма важна компоновка антенных систем с приводами, которые должны быть устойчивы, осуществлять разворот антенн на заданные углы с необходимой точностью без касания других элементов конструкции КА.
4.2.7. Системы спутниковой связи
Система спутниковой связи (ССС) — один из видов космической радиосвязи, основанный на использовании искусственных спутников Земли в качестве ретрансляторов. Спутниковая связь осуществляется между земными станциями, которые могут быть как стационарными, так и подвижными, а также спутниками между собой. ССС состоит из двух частей передающего и принимаю
4.2. Особенности целевого оборудования, влияющие на компоновку 231
щего комплекса, обе эти части могут быть как космического, так и наземного базирования.
Основным параметром, характеризующим систему спутниковой связи, является зона радиовидимости (зона связи) (рис. 4.27).
Рис. 4.27. Зона связи ИСЗ «Молния»:
1 — апогей; 2 — спутник связи;
3 — зона радиовидимости; 4 — земной пункт космической радиосвязи: 5 — промежуточная орбита; 6 — перигей
Качество сигнала характеризуется параметрами зоны связи:
• заявочная характеристика (ЗАХ) — набор замкнутых контуров постоянного усиления по диаграмме направленности передающей антенны ретранслятора;
• зона покрытия (ЗП) — часть земной поверхности, ограниченная контуром постоянных значений плотности потока мощности, обеспечивающей желаемое качество приема в отсутствие помех (рис. 4.28);
• зона гарантированного уровня сигнала (ГУС) — часть земной поверхности, ограниченная по двум критериям:
в любой точке зоны напряженности поля полезного сигнала она равна заданному нормативному значению или выше его при всех возможных значениях дестабилизирующих факторов, влияющих на качество приема;
в любой точке зоны угол между плоскостью местного горизонта и направлением из этой точки на ретранслятор не больше заданного граничного значения;
• зона регламентированного уровня сигнала (РУС) — часть земной поверхности, ограниченная по двум критериям:
232
4. Компоновка целевого оборудования
в любой точке зоны напряженности поля может быть она равна или выше некоторого нормативного значения при наличии дестабилизирующих факторов;
зона может примыкать к границе оптической видимости, но не может простираться за ее пределы.
Рис. 4.28. Карта покрытия спутника Express AM 22 (угол наклона плоскости траектории 53,0°)
На карте, показанной на рис. 4.28 выделены три зоны. Их количество может быть больше или меньше, это зависит от представленных данных самим провайдером. Получается, что карта как бы разделена на три области (еще их можно назвать «лепестками», «лучами» и т. д.). У каждой области своя определенная мощность сигнала, который принимается как спутником, так и со спутника. Исчисляется такая мощность в ДбВ (децибел-ватт).
Основными характеристиками спутников связи являются количество радиочастотных каналов (ретрансляторов), или стволов, мощность передатчиков в каждом стволе (обычно представляемая как эквивалентная изотропно излучаемая мощность (ЭИИМ)), количество и размеры зон обслуживания.
Формирование принятого и излучаемого сигнала активным ретранслятором осуществляется по схеме, приведенной на рис. 4.29.
4.2. Особенности целевого оборудования, влияющие на компоновку 233
Рис. 4.29. Упрощенная схема бортового ретранслятора (3 ствола)
Бортовой ретранслятор, установленный на КА, принимает сигналы земных станций, усиливает их и передает на Землю или на другой КА. С помощью бортовых антенн передаваемый спутником сигнал фокусируется в один или несколько лучей, чем обеспечивается формирование необходимой зоны обслуживания, сравнительная характеристика которых представлена в табл. 4.7.
Таблица 4.7. Сравнительная характеристика глобальных систем спутниковой связи
Характеристика Название системы
Odyssey ICO Iridium Globalstar
Тип орбиты сво сво нво нво
Число спутников 12 12 66 48
Высота орбиты, км 10 354 10 355 780 1400
Наклонение орбиты, град 50 45 86 52
Масса спутников, кг 2500 2750 690 450
Потребляемая мощность, Вт 4600 8700 1000 1200
Число лучей 61 163 48 16
Срок эксплуатации спутников, лет 15 12 5 7,5
Метод многостанционного доступа CDMA TDMA ТОМА CDMA/ FDMA
Число узловых станций 7 12 25 150...210
234
4. Компоновка целевого оборудования
Окончание табл. 4.7
Характеристика Название системы
Odyssey ICO Iridium Globalstar
Число каналов, эквивалентных 4,8 Кбит/с 3000 4500 Не менее 600 1300
Стоимость проекта, млрд долл. США 2,5 2,8 Свыше 3,5 2,0
Стоимость двухрежимного терминала, долл. США 350 750 3000 750
Тариф, долл. США/мин 0,75 2 3 0,35...3
Структурная схема контура бортовой радиотехнической аппаратуры, установленной на борту спутника связи, осуществляющего прием и передачу информации по каналам радиосвязи, приведена на рис. 4.30.
Рис. 4.30. Примерная структурная схема радиотехнического тракта спутника связи
Спутниковые системы связи могут различаться также и типом передаваемого сигнала, который может быть цифровым или аналоговым. Передача информации в цифровой форме обладает рядом преимуществ по сравнению с другими методами передачи. К ним относятся:
• простота и эффективность объединения многих независимых сигналов и преобразования цифровых сообщений в «пакеты» для удобства коммутации;
• меньшие энергозатраты по сравнению с передачей аналогового сигнала;
• относительная нечувствительность цифровых каналов к эффекту накопления искажений при ретрансляциях, обычно представляющему серьезную проблему в аналоговых системах связи;
4.2. Особенности целевого оборудования, влияющие на компоновку 235
• потенциальная возможность получения очень малых вероятностей ошибок передачи и достижения высокой верности воспроизведения переданных данных путем обнаружения и исправления ошибок;
• конфиденциальность связи;
• гибкость реализации цифровой аппаратуры, допускающая использование микропроцессоров, цифровую коммутацию и применение микросхем с большей степенью интеграции компонентов.
Система спутниковой связи подразделяется исходя из охватываемой территории, административной структуры управления и принадлежности информационным спутниковым системам (ИСС):
• глобальная связь охватывает всю поверхность земного шара, она реализуется на геостационарных орбитах;
• региональная система связи обеспечивает связь в заданном регионе, она строится на эллиптических орбитах с периодом обращения около 12 ч;
• связь с отдельными пунктами, строящаяся на низких круговых орбитах.
Выбор формы орбиты ИСС (рис. 4.31) зависит также от площади территории, географического местоположения, конфигурации района. Угол наклона плоскости орбиты зависит от географического положения территории и от заданного времени функционирования системы связи. Необходимо также учитывать и расположение стартовой позиции, с которой осуществляется запуск ИСС.
Рис. 4.31. Виды орбит:
1 — геостационарная орбита, 2 — высокоэллиптическая орбита, 3 — низковысотная
В зависимости от вида связи КА имеют геостационарную, высокоэллиптическую и низковысотную орбиту.
Геостационарная орбита (ГСО) — круговая орбита, расположенная над экватором Земли (0° широты), находясь на которой искусственный спутник обращается вокруг планеты с угловой скоростью, равной угловой скорости вращения Земли вокруг оси.
236
4. Компоновка целевого оборудования
В горизонтальной системе координат направление на спутник не изменяется ни по азимуту, ни по высоте над горизонтом, спутник «висит» в небе неподвижно. Геостационарная орбита является разновидностью геосинхронной орбиты и используется для размещения искусственных спутников (коммуникационных, теле-трансляционных и т. п.). Спутник связи, работающий на ГСО, обеспечивает глобальную связь.
Спутник должен обращаться в направлении вращения Земли на высоте 35 786 км над уровнем моря. Именно такая высота обеспечивает спутнику период обращения, равный периоду вращения Земли относительно звезд (звездные сутки — 23 ч 56 мин 4,091 с).
Преимущества геостационарного спутника связи следующие:
• не требуется слежение;
• доступны несколько точек доступа в спутниковой связи;
• связь обеспечена в течение 24 ч;
• высокое качество сигнала связи;
• используется широкополосная система связи;
• используется для междугородней связи на любые расстояния;
• низкая мощность передатчика и низкая чувствительность приемника.
Недостатками можно назвать:
• передатчик и приемник, используемые в ССС, требуют большой мощности и чувствительности и большого диаметра антенны;
• спутниковая связь нарушается солнечной активностью;
• эффективность спутниковых компонентов уменьшается вследствие старения;
• стоимость проектирования, изготовления и запуска спутника на орбиту чрезвычайно высока.
Высокоэллиптическая орбита (ВЭО) — тип эллиптической орбиты, у которой высота в апогее во много раз превышает высоту в перигее. Используется для построения региональной связи.
Спутники на ВЭО обладают следующими достоинствами:
• возможность обслуживания очень большой территории (например, такая система может обслуживать всю территорию России);
• обслуживание в высоких широтах (угол места в этих зонах у систем на ВЭО гораздо больше, чем у геостационарных спутников);
• широкое использование различных частотных диапазонов на ВЭО без регистрации (в отличие от геостационарной орбиты, где уже практически не осталось ни свободного места, ни свободных частот);
4.2. Особенности целевого оборудования, влияющие на компоновку 237
• более дешевый вывод на орбиту (примерно в 1,8 раза).
В то же время у систем на ВЭО больше недостатков, чем достоинств:
• необходимость иметь по крайней мере три спутника на орбите (вместо одного геостационарного) для создания квазигеостаци-онарной системы. В случае обеспечения круглосуточного непрерывного вещания количество КА возрастает до семи;
• приемная антенна должна обладать функцией слежения (привод для разворота), поэтому первоначальная стоимость такой антенны и стоимость ее обслуживания будут выше, чем у простой фиксированной антенны;
• в высоких широтах плотность населения гораздо ниже, чем в средних районах, поэтому вопрос окупаемости такой системы очень сомнителен;
• апогей спутников на ВЭО выше, чем у ГСО, поэтому и мощность передатчиков должна быть выше, до 400...500 ватт, как следствие это удорожает спутники;
• орбита спутников на ВЭО обычно пересекает радиационные пояса, что сильно сокращает срок службы КА. Для того чтобы избавиться от этой проблемы, необходимо иметь орбиту с апогеем около 50 тыс. км и перигеем около 20 тыс. км, т. е. использовать орбиту «Тундра»;
• так как КА движутся по орбите, эффект Доплера создает дополнительные трудности для приемников на Земле;
• из-за большого времени распространения сигнала возникают сложности при использовании приложений, работающих в реальном масштабе времени, такими как телефония.
К низкоорбитальным спутникам относятся КА, высота орбит которых находится в пределах 700... 1500 км. Низкоорбитальная группировка может содержать от одного до нескольких десятков малых спутников массой до 500 кг. Для охвата связью большой территории Земли применяют орбиты, на которых могут находиться несколько КА, лежащие в различных плоскостях.
Повышенный интерес к низкоорбитальным системам спутниковой связи объясняется возможностью предоставления услуг персональной связи, включая радиотелефонный обмен, при использовании сравнительно дешевых малогабаритных спутниковых терминалов. Низкоорбитальные системы позволяют обеспечить бесперебойную связь с терминалами, размещенными в любой точке Земли, и практически не имеют альтернативы при
238
4. Компоновка целевого оборудования
организации связи в регионах со слаборазвитой инфраструктурой связи и низкой плотностью населения.
Одним из главных преимуществ, способствующих развитию низкоорбитальных систем спутниковой связи, является биологической фактор. Так, для обеспечения требований биологической защиты человека от излучения СВЧ рекомендуемый уровень мощности непрерывного излучения радиотелефона должен составлять не более 50 МВт. Эффективный прием сигнала такой мощности, например, геостационарным спутником сопряжен со значительным усложнением КА, развертыванием больших антенн и точным их позиционированием. Для низкоорбитальных спутниковых систем длина радиолиний во много раз меньше, и проблема создания многолучевых антенн не стоит так остро. К этим системам относятся прежде всего системы Iridium и Globalslar, создаваемые зарубежными консорциумами при ведущей роли таких крупных компаний-производителей, как Motorola/Lockheed и Oualcomm/Loral соответственно.
Передача информации может осуществляться с помощью лазерного луча. Система лазерной связи получила название OICETS (Японский экспериментально-технологический спутник оптической межорбитальной связи). Преимущество лазерной системы связи по сравнению с радиотехнической заключается в более высокой скорости передачи информации и более высокой мощности сигнала, защищенности от помех, а также меньшей массе и габаритах. На рис. 4.32 приведена схема связи с использованием лазерного луча.
В связи с минимизацией массы КА интенсивно разрабатываются МКА спутниковой связи массой менее 500 кг. Наиболее эффективно они могут использоваться для создания и развития региональных ведомственных, корпоративных систем связи, а также в ССС с повышенными требованиями к закрытости информации. Основными достоинствами МКА связи являются:
• минимизация первоначальных затрат на проектирование спутника;
• минимизация затрат на выведение КА за счет возможности осуществления попутного запуска;
• снижение расходов на страхование рисков;
• возможность выведения на ГСО практически любыми ракетами-носителями;
• повышенная надежность системы связи на базе МКА за счет распределения орбитальной емкости между несколькими КА;
• возможность гибкого освоения орбитально-частотного ресурса;
4.2. Особенности целевого оборудования, влияющие на компоновку 239
• быстрое заполнение орбитальной емкости;
• возможность своевременного занятия национально присвоенной точки стояния и постепенного заполнения выделенного орбитально-частотного ресурса в соответствии с реальными потребностями государства-правообладателя в трафике.
Рис. 4.32. Схема связи с использованием лазерного луча:
I — станция Европейского космического агентства; 2, 10 — радиолиния «Земля — космос»; 3 — КА «Artemis»; 4 — линия визирования; 5 — OICETS; 6 — DRTS;
7 — оперативный центр управления OICETS; 8 — наземная станция DRTS; 9 — центр управления миссией OICETS
Требования к компоновке блоков радиотехнической системы связи аналогичны требованиям к компоновке блоков радиотехнического комплекса управления КА и рассмотрены в гл. 6.
4.2.8. Навигация
Потенциальные возможности спутниковой навигации появились с момента запуска первого ИСЗ. Спутниковые системы навигации широко используются для обеспечения навигации и позиционирования с высокой точностью для всех потребителей на любом месте и в любое время.
В настоящее время работают следующие навигационные системы:
• Глобальная система позиционирования (GPS) разработана и поддерживается на государственном уровне США;
240
4. Компоновка целевого оборудования
• Спутниковая система глобальной навигации (ГЛОНАСС) разработана в России и функционирует в настоящее время.
Европейский Союз запланировал создать глобальную навигационную спутниковую систему (GNSS) Galileo, ожидается, что Galileo войдет в строй в 2015-2016 гг., также планируют создать свои навигационные системы Китай, Индия и Япония.
Основные услуги, которые предоставляют действующие навигационные системы, заключаются в позиционировании, т. е. в определении местоположения объекта в системе географических координат, измерении скорости перемещения объекта и передаче сигналов точного времени.
Рис. 4.33. Схема построения навигационной спутниковой системы
Схема построения системы спутниковой навигации (рис. 4.33) системы ГЛОНАСС и GPS принципиально не отличаются. Система ГЛОНАСС и GPS состоят из космического сегмента, наземного командно-измерительного комплекса и сегмента потребителей.
Система ГЛОНАСС. Состоит из спутников, расположенных в орбитах. Спутники имеют характеристики, приведенные в табл. 4.8.
4.2. Особенности целевого оборудования, влияющие на компоновку 241
Таблица 4.8. Характеристики спутников ГЛОНАСС
Параметр Название спутника
ГЛОНАСС ГЛОНАСС М ГЛОНАСС К
Эффективная изотропная излучаемая мощность навигационного сигнала, дБВт: в углах ±19° в углах ±15° в углах 0° 22(F1),21(F2) 27(F)), 19(F2) 25(F)), 19(F2) 26(F1),21(F2) 30(F)), 23(F2) 28(F)), 21(F2) 26(F)), 21(F2) 30(F) ),23(F2) 28(F1),21(F2)
Суточная нестабильность сигнала 5 - 10“13 1 • I0’13 1 • 10"13
Точность ориентации, град 0,5 (на Землю) 5 (на Солнце) 0,5 (на Землю) 2 (на Солнце) 0,5 (на Землю) 1 (на Солнце)
Тяга двигателей, Н 5 (коррекция) 0,1 (ориентация) 5 (коррекция) 0,1 (ориентация) 0,1 (коррекция) 0,1 (ориентация)
Суммарный импульс для коррекции, Нс 90 000 45 000 45 000
Рабочая мощность солнечных батарей, Вт 1600 2200 2750
Рабочая энергоемкость аккумуляторных батарей, Вт/час 1800 2300 2800
Диапазон терморегулирования, °C: стандартов частоты, газа в термоконтейнере (15...30) ±5 0...40 (15...30) ±1 0...40 (15...20) ±1 -20...50
Ресурс спутника, лет 3 7 10
Масса спутника, кг 1415 1415 995
Энергопотребление аппаратуры спутника, Вт 1000 1270 —
Спутники системы ГЛОНАСС работают в трех плоскостях, орбиты круговые.
Высота полета — 19 100 км, угол наклонения плоскости орбиты — ± 64,8°.
242
4. Компоновка целевого оборудования
Система GPS. Американская система GPS по своим функциональным возможностям аналогична отечественной системе ГЛОНАСС. Ее основное назначение — высокоточное определение координат потребителя, составляющих вектора скорости, и привязка к системной шкале времени. Аналогично отечественной, система GPS разработана для Министерства обороны США и находится под его управлением.
В табл. 4.9 приведены краткие характеристики космических аппаратов, используемых в системе GPS.
Таблица 4.9. Характеристики космических аппаратов, используемых в системе GPS
Тип НКА Масса на орбите Мощность энергоисточников, Вт Расчетный срок активного существования Год запуска первого НКА
Блок-1 525 440 - 1978
Блок-П 844 710 5 1989
Блок-1 IR 1094 1250 7,5 1997
Блок-IIF - - 14-15 2001-2002
Спутники системы GPS работают в 6 плоскостях.
Параметры орбиты спутников системы GPS: высота — 20 183 км, углы наклонения плоскостей орбит — 55°.
В табл. 4.10 приведены сравнительные характеристики систем ГЛОНАСС и GPS.
Схемы построения орбит показаны на рис. 4.34 и 4.35.
Рис. 4.34. Построение системы Рис. 4.35. Построение системы
ГЛОНАСС GPS
4.2. Особенности целевого оборудования, влияющие на компоновку 243
Таблица 4.10. Сравнительные характеристики систем ГЛОНАСС и GPS
Показатель ГЛОНАСС GPS
Число КА в полной орбитальной группировке 24 24
Число орбитальных плоскостей 3 6
Число КА в каждой плоскости 8 4
Наклонение орбиты, град 64,8 55
Высота орбиты, км 19 130 20 180
Период обращения спутника 11 ч 15 мин 44 с 11 ч 58 мин 00 с
Система координат ПЗ-90 WGS-84
Масса навигационного КА, кг 1450 1055
Мощность солнечных батарей, Вт 1250 450
Срок активного существования, лет 3 7,5
Средства вывода КА на орбиту «Протон-К/ДМ» Delta 2
Число КА, выводимых за один запуск 3 1
Космодром Байконур (Казахстан) Мыс Канаверал (Cape Canaveral)
Эталонное время UTC (SU) UTC (NO)
Метод доступа FDMA CDMA
Несущая частота: £1 12 1598,0625=1604,25 7/9 L1 1575,42 60/77 L1
Поляризация Правосторонняя Правосторонняя
Тип псевдошумовой последовательности Л/-последователь-ность код Голда
Число элементов кода: С/А Р 511 51 1000 1023 2,35x1014
Скорость кодирования, Мбит/с: С/А Р 0,511 5,П 1,023 10,23
Уровень внутрисистемных радиопомех, дБ 48 -21,6
Структура навига Скорость передачи, бит/с щюнного сообщения 50 50
Вид модуляции BPSK (Манчестер) BPSKNRZ
Длина суперкадра, мин 2,5 (5 кадров) 12,5 (25 кадров)
Длина кадра, с 30 (15 строк) 30 (5 строк)
Длина строки, с 2 6
244
4. Компоновка целевого оборудования
В табл. 4.11 приведены характеристики существующих навигационных систем.
Таблица 4.11. Основные характеристики систем навигационных спутников
Параметры Навигационная система
ГЛОНАСС GPS Galileo
Число НС (резерв) 24(3) 24 (3) 27(3)
Число орбитальных плоскостей 3 6 3
Число НС в орбитальной плоскости 8 4 9
Тип орбит Круговая (е = 0±0,01) Круговая Круговая
Высота орбиты, км 19 100 20 183 23 224
Наклонение орбиты, град 64,8 ± 0,3 ~55 (63) 56
Номинальный период обращения по среднему солнечному времени 11 ч 15 мин 44 ± 5 с ~11 ч 58 мин 14 ч 4 мин и 42 с
Способ разделения сигналов НС Кодово-частотный (кодовый на испытаниях) Кодовый Кодовочастотный
Несущие частоты радиосигналов, МГц £1 = = 1602,5625...1615,5 £2 = = 1246,4375... 1256,5 £1 = 1575,42 £2=1227,60 £5= 1176,45 Е1 = 1575,42 Е5 = 1191,795 Е5А= 1176,46 Е5В= 1207,14 Е6 = 12787,75
Период повторения дальномерного кода (или его сегмента) 1 мс 1 мс (С/А-код) —
4.2. Особенности целевого оборудования, влияющие на компоновку 245
Окончание табл. 4.11
Параметры Навигационная система
ГЛОНАСС GPS Galileo
Тип дальномерного кода Л/-после-довательность (СТ-код 511 зн.) Код Голда (С/А-код 1023 зн.) Л/-после-довательность
Тактовая частота дальномерного кода, МГц 0,511 1,023 (С/А-код) 10,23 (P.Y-код) Е1 = 1,023 Е5 = 10,23 Е6 = 5,115
Скорость передачи цифровой информации (соответственно СИ- и D-код) 50 зн/с (50 Гц) 50 зн/с (50 Гц) 25,50, 125, 500, 100 Гц
Длительность суперкадра, мин 2,5 12,5 5
Число кадров в суперкадре 5 25 —
Число строк в кадре 15 5 —
Система отсчета времени UTC (SU) UTC (USNO) UTC (GST)
Система отсчета координат ПЗ-90/П390,2 WGS-84 ETRF-00
Тип эфемирид Г еоцентрические координаты и их производные Модифицированные кеплеровы элементы Модифицированные кеплеровы элементы
Сектор излучения от направления на центр Земли ±19 в 0 £1 =±21 вО £2 = ±23,5 в 0 —
Сектор Земли ±14,1 вО ±13,5 в 0 —
246
4. Компоновка целевого оборудования
4.2.9. Научно-технологическое оборудование
Наряду с научными экспериментами, направленными на изучение космического пространства, биологических процессов, происходящих в условиях невесомости, и Земли, на КА проводится комплекс технологических экспериментов, таких как космическая металлургия, получение полупроводниковых материалов, стекла и керамики, медико-биологических препаратов и исследование физических эффектов в условиях невесомости. Первые три направления непосредственно нацелены на получение новых или улучшенных материалов и изделий на борту КА. Задача последнего состоит в развитии науки о поведении вещества в космических условиях с целью создания теоретических основ космического производства.
Основные направления развития космического производства:
• получение полупроводниковых материалов для электроники;
• биотехнология (производство медико-биологических препаратов);
• получение оптических материалов;
• космическая металлургия (изготовление сплавов металлов с определенными физико-химическими свойствами);
• получение композиционных материалов;
• нанотехнологии.
Для проведения технологических экспериментов разработаны специальные универсальные технологические установки, позволяющие проводить различные эксперименты. Все технологические процессы, за исключением получения медикобиологических препаратов, имеют одну схему — это доставка сырья на борт КА и тепловая обработка его для получения требуемых материалов. Нагрев исходного материала осуществляется в специальных устройствах, использующих изотермическое тепло, или нагрев с помощью электроэнергии. Поскольку производственный процесс происходит в условиях невесомости, это позволяет получить чистые материалы, имеющие однородную структуру (особенно кристаллическую). Установка, использующая экзотермическое тепло, представляет собой цилиндрический патрон, заполненный смесью химических веществ, и ампулы с исследуемым материалом. Нагрев с помощью электроэнергии осуществляется в электронагревательных печах, в которых поддерживается температура, равная 1200...2400 °C. Для выращива
4.2. Особенности целевого оборудования, влияющие на компоновку 247
ния кристаллов необходим перепад температуры, для этого ампула с расплавленным сырьем протягивается через зону, имеющую требуемый градиент температуры. Расплавленный материал, попадая в зону с низкой температурой, начинает кристаллизоваться. На рис. 4.36 приведена схема получения кристалла в условиях невесомости.
Использование установок, выполненных по этой схеме, не обеспечивает чистоты полученного кристалла из-за возможных попаданий частиц материала тигля в расплав. Более совершенна схема, использующая метод зонной плавки, при котором сырье расплавляется в зоне высоких температур, но при этом не касается стенок тигля (рис. 4.37). Метод зонной плавки позволяет получить более высокие температуры, размеры зоны определяются условием баланса действующих на расплав массовых сил и сил поверхностного натяжения. Массовые силы на борту КА, обусловленные малыми ускорениями, много меньше силы тяжести. Это означает, что размеры расплавленной зоны в космических условиях и, соответственно, размеры кристаллов, получаемых в таких установках, могут быть значительно больше, чем на Земле.
Рис. 4.36. Схема выращивания монокристаллов из расплава: 1 — расплав; 2 — затравочный кристалл; 3 — механизмы вытягивания и вращения; 4 — шток; 5 — тигель; 6 — индуктор для нагрева расплава
Рис. 4.37. Метод зонной плавки:
1 — расплавленная зона; 2 — индуктор; 3 — стенка печи; 4 — ампула;
5 — стержень исследуемого вещества: 6 — механизм протягивания и вращения стержня
248
4. Компоновка целевого оборудования
Холодная зона
Горячая зона
Шихта
Зона роста
Рис. 4.38. Схема выращивания кристалла из паровой фазы
Выращивание кристаллов возможно в паровой фазе. Ампула с сырьем размещается в печи с перепадом температуры таким образом, что один конец находится в горячей зоне, а другой — в холодной. Массо-перенос осуществляется в парогазовой фазе, а после попа-
дания в холодную зону происходит конденсация с выращиванием кристалла (рис. 4.38).
На российских (советских) и американских КА и ОС проводилось большое количество технологических экспериментов. На рис. 4.39 приведены технологические установки, используемые для проведения технологических экспериментов на советских ОС.
Рис. 4.39. Приборы для проведения технологических экспериментов на станции «Салют-5»:
а — прибор «Кристалл»; б — прибор «Реакция»
Эксперименты по получению материалов в условиях космоса проводились на установках «Сплав-01», «Кристалл», «Магма» с максимальной рабочей температурой 900... 1000 °C и «Корунд» при 1270 °C. За основу технологических экспериментов были взяты ампульные печи.
На установке «Корунд» размещается 12 ампульных печей диаметром 33 мм и длиной 300 мм. Мощность, потребляемая
4.2. Особенности целевого оборудования, влияющие на компоновку 249
установкой, составляет 720 Вт. Исходные образцы помещаются в кварцевые ампулы, жестко закрепленные в контейнерах из жаропрочной стали, протягиваются через заданное температурное поле или устанавливаются в печную трубу с регулируемой по времени температурой.
Исследования проводили на долговременных комплексах «Салют-6», «Союз», «Прогресс», «Салют-7», «Мир», при этом установки размещали в отсеках КА, из которых составляли комплекс. К орбитальной станции «Мир» был пристыкован специальный модуль «Кристалл», в котором находились такие технологические установки.
Рис. 4.40. Общий вид КА «Фотон-М»:
1 — антенна БСКВУ; 2 — антенна бортовой системы телеметрических измерений;
3 — антенна бортовой аппаратуры командно-измерительной системы; 4 — приборный отсек: 5 — агрегатный отсек; 6 — радиатор-охладитель; 7 — электромагнит системы сброса кинетического момента; 8 — платформа средств отделения; 9 — солнечная батарея; 10 — спускаемый аппарат
Для реализации комплекса научно-технологических исследований был разработан КА «Фотон», на котором проводились работы в области биомедицинских исследований, космического материаловедения и прикладные исследования. На рис. 4.40 приведен общий вид КА «Фотон-М». На КА проводились следующие научно-технические работы, в которых применялась соответствующая аппаратура (табл. 4.12).
250
4. Компоновка целевого оборудования
Таблица 4.12. Эксперименты, проводимые на борту спутника «Фотон»
№ п/п Шифр аппаратуры Содержание эксперимента
1 Научная аппаратура дл. ГК-04 я проведения биомедицинских исследований Фундаментальные биомедицинские исследования на гекконах с целью научного обоснования новых подходов к медицинскому контролю, медицинскому обеспечению, профилактике неблагоприятных изменений в организме в космическом полете, а также для получения новых данных по фундаментальным проблемам космической и гравитационной физиологии
2 БИОКУЛЬТИВАТОР Фундаментальные исследования по изучению процесса биодеградации полиэтиленовой пленки микроорганизмами без внесения дополнительных ингредиентов и принудительного удаления продуктов метаболизма в условиях космического полета
3 БИОКОНТ-ФЭ Фундаментальные исследования влияния факторов космического полета на жизнедеятельность и продуктивную способность хозяйственно-ценных микроорганизмов, в том числе в отсутствие магнитного поля, а также для исследования влияния космического полета на развитие эмбрионов рептилий
4 ФЛЮОР-П Фундаментальные исследования кинетики внутриклеточных параметров клеток человека и животных в условиях микрогравитации
5 мтэ Прикладные исследования получения электричества с помощью микроорганизмов-электрогенов и отработка процесса в условиях невесомости
6 спд Фундаментальные исследования влияния космической радиации на биологические образцы, не требующие поддержания их жизнедеятельности в полете (сухие семена высших растений, яйца шелкопряда и др.)
4.2. Особенности целевого оборудования, влияющие на компоновку 251
Продолжение табл. 4.12
№ п/п Шифр аппаратуры Содержание эксперимента
7 Научная аппаратура дл, ППН-1Д-Ф ч проведения биомедицинских исследований Фундаментальные исследования влияния космического полета на биологические свойства микроорганизмов и на абиогенный синтез пептидов и нуклидов
8 ППН-1К-Ф, ППН-2Д-Ф, ППН-2К-Ф, ППН-ЗД-Ф, ППН-ЗК-Ф Фундаментальные исследования по изучению биологически значимых характеристик космического ионизирующего излучения и эффектов его воздействия на биообъекты в условиях открытого пространства, а также исследование и отработка новых методов и средств космической дозиметрии для их последующего применения в перспективных космических миссиях
9 ДОЗИМЕТР РДЗ-БЗ Измерение дозы космического излучения
10 БАББЛ-ДЕТЕКТОРЫ Прикладные исследования по проведению эксперимента в обеспечение разработки датчика, основанного на подсчете количества пузырьков, образованных в детекторе под действием космической радиации
И МЕТЕОРИТ Фундаментальные биологические исследования с помощью искусственного метеорита, на котором проводится исследование изменений, происходящих в горных породах при падении метеоритов на Землю
12 СИГМА Проведение биологических и микробиологических экспериментов с регистрацией температуры в условиях космического полета
Научнс 13 ы аппаратура для провв( КБТС15 дения исследований в области космического материаловедения Фундаментальные исследования в области космического материаловедения, получения кристаллов большого размера
14 КАЛИБР Фундаментальные исследования по материаловедению
252
4. Компоновка целевого оборудования
Окончание табл. 4.12
№ п/п Шифр аппаратуры Содержание эксперимента
15 ВИБРОКОН-ФМ Фундаментальные исследования по изучению влияния управляемых вибраций на теп-ломассоперенос в жидкой фазе при моделировании направленной кристаллизации и процессов растворения в многофазных средах в условиях микрогравитации. С помощью указанной аппаратуры планируется проведение экспериментов
16 СВС-ФМ Фундаментальные исследования процессов самораспространяющегося высокотемпературного синтеза в условиях невесомости
17 БЕЛКА Проведение экспериментов для выращивания кристаллов белков методом жидкостной диффузии и диффузии из газовой среды
18 Научная аппарату} ИМ-ФМ за для проведения других исследований Разработка аппаратуры для регистрации микроускорений
19 ВИБРОЗАЩИТА Фундаментальные исследования влияния вибраций на процессы тепломассопереноса
20 кскм Прикладные исследования, направленные на проведение измерений магнитного поля внутри СА, расчета микроускорений в низкочастотной части спектра от 0 до 0,01 Гц в заданных точках внутри СА, имитации компенсации микроускорений
4.2.10. Компоновка бортового оборудования для внеатмосферной астрономии
Наблюдения астрономических объектов при помощи КА могут проводиться во всех диапазонах длин электромагнитных волн. При выборе астрономических приборов важно учитывать зависимость Г(А) = 3700/1 между длиной электромагнитной волны L в микронах и характерной температурой излучающего ее тела Г в К. Кроме того, необходимо учитывать соотношение между длиной электромагнитной волны и энергией кванта излучения. Так, энергия в 1 эВ
4.2. Особенности целевого оборудования, влияющие на компоновку 253
Радиоастрон UA1
: J : HALCA-
i WMAPB
< SWAS I MSAM/TopHat 1 Planck Herschel МИЛЛИМЕТРОН
X
0%
CGRO AGILE
S Л
X 2 Ё CD
X X (D £
нм 1Q 100%
50%
и
х (D £
&
UL
ИЗ
TOnm тяж
ТмуФ ИХ, 1W1
Длина волны
S
Astro
>X
3
§
g о X §
Непрозрачность атмосферы Земли
Рис. 4.41. Диапазоны наблюдения космических обсерваторий
ISO ; 2MASS СОВЕ IRTS Hipparoos SOFIA JAMES WEBB SPACE TELESCOPE, JWST GALEX HI
HUBBLE SPACE TELESCOPE.HST W IUE Ы
FUSE I Astro 2 ИИ1
ORFEUS BP CHIPS EUVE DXS :
Chandra Copemicua
<>Ч I RXTE Beppo • SAX НЕТЕ-2 Glnga Astro-E2 Vela 5B ГРАНАТ HEAO 1
равна энергии кванта электромагнитного излучения с длиной волны 1240 нм.
Космический телескоп для получения высокой разрешающей способности настроен на строго определенный диапазон. Это может быть телескоп видимого диапазона, радиотелескоп, инфракрасный телескоп, рентгеновский телескоп и т. п. Потенциал любой обсерватории определяется совокупностью ее характеристик: диапазоном частот, чувствительностью для каждого диапазона и пространственным разрешением. На рис. 4.41 представлены диа
254
4. Компоновка целевого оборудования
пазоны длин волн, исследуемые космическими обсерваториями. Из рисунка видно, что космические обсерватории перекрывают большую часть спектра. Особый интерес представляют результаты космических наблюдений в области длин волн, для которых атмосфера Земли является непрозрачной. На рис. 4.41 внизу показан график прозрачности земной атмосферы, на котором видны окна прозрачности. Космические радиотелескопы используются в сочетании с наземными средствами и поэтому работают в области длин волн, проходящих через атмосферу Земли.
Космический телескоп может работать как самостоятельный научный прибор, а также с сетью других телескопов в режиме интерферометра. В режиме одиночного телескопа наблюдения проводятся с максимальной чувствительностью, достижимой с приемниками излучения космических объектов на борту обсерватории. В режиме интерферометра проводятся одновременные наблюдения объекта с нескольких разнесенных в пространстве инструментов, как показано на рис. 4.42. По разности фаз сигналов, приходящих на отдельные инструменты, можно построить результирующее изображение со сверхвысоким разрешением до десятков миллиардных долей угловой секунды.
Интерферометры позволяют заменить телескоп с большой апертурой (которая необходима для получения высокого разрешения) на решетку телескопов с меньшими апертурами. Особенно эффективны интерферометры в радиоастрономии. Ввиду того что к относительно низким радиочастотам предъявляются менее строгие требования к дискретизации и оцифровке сигналов, существует возможность объединять радиотелескопы в сеть радиоинтерферометрии со сверхдлинной базой РСДБ (англ. Very Long Baseline Interferometry. VLBI). При построении космического телескопа-интерферометра может быть использована схема Земля — космос (рис. 4.42, а), когда космическая обсерватория используется совместно с наземными. В перспективе при запуске одновременно нескольких телескопов может быть реализован интерферометрический режим наблюдений космос — космос (рис. 4.42, б), обеспечивающий одновременно и высокую чувствительность, и высокое угловое разрешение, в том числе и на более коротких волнах, экранируемых земной атмосферой.
Компоновка космических обсерваторий строится вокруг их основного инструмента, которым является телескоп. Основными
4.2. Особенности целевого оборудования, влияющие на компоновку 255
Рис. 4.42. Схемы построения космического телескопа-интерферометра: а — интерферометр Земля — космос; б — интерферометр космос — космос; 1 — наблюдаемый объект; 2 — орбитальная обсерватория; 3 — наземная обсерватория компоновочными элементами космической обсерватории являются научный инструмент (телескоп), система экранов, защищающая научную аппаратуру от помех, и служебные системы. Служебные системы могут быть сгруппированы в агрегатном отсеке, на который устанавливаются научные инструменты. Если же телескоп имеет значительные габариты, служебные системы могут компоноваться вокруг научного инструмента. Компоновка космических телескопов различных диапазонов спектра имеет особенности, рассмотренные далее.
КА для гамма-астрономии. Гамма-астрономия изучает объекты, излучающие на длинах волн в диапазоне менее 0,01 нм с частотами более 3x1019 Гц, что соответствует характерной температуре более 108 К. Наблюдения в диапазоне гамма-лучей позволяют исследовать взаимодействие вещества и излучения в экстремальных условиях. Объекты исследования включают в себя: гамма-всплески, черные дыры и нейтронные звезды, сверхновые звезды, пульсары, диффузные выбросы, активные галактики и квазары. Гамма-астрономия низких энергий (200 кэВ ... 10 МэВ) в основном изучает источники гамма-вспышек продолжительностью несколько секунд. Гамма-астрономия высоких энергий (выше 10 МэВ) в основном изучает долгоживущие точечные источники и диффузное излучение. Детекторами гамма-лучей, как правило, служат либо сцинтилляторы, в которых вещество поглощает гамма-кванты, испуская оптические фотоны, либо искровые камеры, в которых высокое напряжение вызывает искровые пробои в тех местах, где гамма-квант взаимодействует с заполняющим камеру газом. На рис. 4.43 в качестве примера показана схема телескопа «Гамма-1», установлен-
256
4. Компоновка целевого оборудования
Рис. 4.43. Схема гамма-телескопа «Гамма-1»:
1 — маска; 2 — система зеркал; 3 — видеокамера; 4 — сцинтилляционный калориметр; 5 — двухзазорная искровая камера; 6 — нижний сцинтиллятор; 7 — верхний сцинтиллятор; 8 — газовый черепковский счетчик; 9 — двенадцатизазорная искровая камера; 10 — антисовпадательные сцинтилляционные счетчики; / / — оболочка отсека КА
ного на космической обсерватории «Гамма», предназначенной для проведения наблюдений в диапазоне 5 кЭв ... 5,0 ГЭв.
Масса КА составляет 7320 кг (масса научной аппаратуры 1700 кг), длина около 8 м, максимальный диаметр корпуса 2,7 м. Компоновка космической обсерватории «Гамма» показана на рис. 4.44. В качестве базы данный КА, состоящий из пяти отсеков, использует высоконадежную платформу «Союз/Прогресс». Агрегатный и приборный отсеки аналогичны отсекам КА «Прогресс».
Особенность компоновки обсерватории состоит в использовании герметичных отсеков научной аппаратуры общим объемом около 20 м3. Система терморегулирования формирует циркуляцию воздуха в отсеках и термостатирование посадочных мест для приборов в негерметичных отсеках. Теплота, выделенная приборами, воздушным потоком передается в общий теплообменник, откуда выносится на внешний радиатор-излучатель. Температура воздуха в отсеках и посадочных мест для приборов поддерживается в диапазоне 0...40 °C, в местах работы научной аппаратуры — 0...30 °C. Давление атмосферы 450...980 мм рт. ст. Внутри большого отсека научной аппаратуры установлен телескоп «Гамма-1». Два других телескопа «Диск-М» для получения изображений неба в энергетическом диапазоне 0,1 ...8 МэВ и «Пульсар Х-2» для наблюдений рентгеновских барстеров, различных транзиентов и пульсаров в энергетическом диапазоне 2...25 кэВ размещены на внешней оболочке малого отсека научной аппаратуры.
4.2. Особенности целевого оборудования, влияющие на компоновку 257
б
Рис. 4.44. Схема размещения приборов и агрегатов (а) и общий вид космической обсерватории «Гамма» (б):
1 — телескоп «Гамма-1»; 2 — отсек научной аппаратуры (малый): 3 — отсек научной аппаратуры (большой); 4 — переходный отсек; 5 — приборный отсек;
6 — агрегатный отсек; 7 — солнечные батареи; 8 — телескоп «Диск-М»; 9 — датчики солнечной ориентации; 10 — датчики звездной ориентации; 11 — счетчики телескопа «Пульсар Х-2»; 12 — привязочный датчик «телезвезда»
258
4. Компоновка целевого оборудования
Отсеки научной аппаратуры и платформа соединены переходным отсеком, на котором расположены две панели солнечных батарей общей площадью 36,5 м2. Система электропитания обеспечивает максимальную мощность 3,5 кВт (ток постоянный, выходное напряжение 24...34 В). Панели солнечных батарей снабжены электромеханическими приводами, обеспечивающими одноосную ориентацию на Солнце. Ошибка при наведении на Солнце по этой оси не превышает 6°.
Рабочая орбита — круговая околоземная высотой 350...400 км с наклонением 51,6°. Для компенсации снижения орбиты используется комбинированная двигательная установка с маршевым двигателем тягой 300 кгс. При работе двигателя стабилизация обсерватории обеспечивается качанием его камеры сгорания и с помощью двигателей ориентации малой тяги. Основные динамические характеристики режима ориентации: амплитуда автоколебаний 3’, угловая скорость автоколебаний до 0,3 угл. мин/с. Точность наведения и стабилизации КА 10...30’. Суммарный запас топлива 780 кг обеспечивает срок существования КА не менее 1 года.
На рис. 4.45 показан компоновочный чертеж гамма-обсерватории «Интеграл». КА массой около 4000 кг выполнен на
Рис. 4.45. Компоновка гамма-обсерватории «Интеграл»
4.2. Особенности целевого оборудования, влияющие на компоновку 259
базе негерметичной платформы. Рабочая орбита высокоапогейная (9000... 153 000 км). Для управления спутником используется двигатель на гидразине, 544 кг которого находится в 4 подвесных баках. Солнечные батареи имеют размах 16 м и обеспечивают мощность 2,4 кВт.
Компоновка научной аппаратуры обсерватории «Интеграл» показана на рис. 4.46. Обсерватория несет два основных прибора.
Рис. 4.46. Компоновка научной аппаратуры КА «Интеграл»:
1 — IBIS; 2 — JEM-X; 3 — звездные датчики; 4 — маски телескопов;
5 — ОМС; 6 — трехслойные панели конструкции отсека научной аппаратуры; 7 — SPI; 8 — скамья научной аппаратуры (трехслойная панель): 9 — агрегатный отсек; 10 — система отделения от ракеты-носителя (PAS 2624)
IBIS— телескоп с кодирующей маской. Рабочий диапазон энергий 15 кэВ ... 10 МэВ. Детекторы телескопа имеют полную площадь около 2500 см2, половина из которых затеняется кодирующей маской.
SPI — германиевый спектрометр, состоящий из 19 отдельных детекторов. Рабочий диапазон энергий 20 кэВ ... 8 МэВ. Германиевые детекторы охлаждаются до температуры около 80 К, что дает возможность достичь энергетического разрешения 2 кэВ на энергии 1 МэВ.
Два вспомогательных прибора JEM-X и ОМС предназначены для изучения объектов в обычном рентгеновском (<1О...2О кэВ) и оптическом диапазонах.
260
4. Компоновка целевого оборудования
КА для рентгеновской астрономии. Рентгеновская астрономия изучает длины волн в диапазоне 0,01 ...20 нм с частотами 3 • 1016...3 • 1019 Гц, что соответствует характерной температуре 106... 108 К. Рентгеновские наблюдения используются для изучения различных астрофизических объектов от скоплений галактик, черных дыр в ядрах активных галактик до галактических объектов, таких как остатки сверхновых звезд и двойных звезд, содержащих белый карлик, нейтронных звезд или черных дыр (рентгеновские двойные источники).
Атмосфера Земли для рентгеновских лучей непрозрачна, и их можно наблюдать только с помощью КА. Большинство небесных источников выделяют основную часть своей энергии в диапазоне рентгеновских лучей 2,48...0,248 нм (0,5...5 кэВ). Выделяют также поддиапазоны: мягкий рентгеновский диапазон (10...0,1 нм, около 0,12... 12 кэВ), где излучение еще заметно поглощается межзвездным газом; жесткий рентгеновский диапазон (0,1...0,01 нм, примерно 12... 120 кэВ), где поглощение несущественно.
Из-за большой энергии рентгеновские кванты практически не преломляются в веществе и отражаются только при очень пологих углах падения, близких к 90°, что ограничивает поле зрения и затрудняет изготовление рентгеновской оптики. Поэтому многие рентгеновские телескопы используют кодирование апертуры для получения изображений. В этой технологии перед матричным детектором устанавливается маска в виде решетки из чередующихся особым образом прозрачных и непрозрачных элементов, которая дает возможность определить путем математической обработки исходное направление рентгеновского фотона. Данный элемент для фокусировки и получения изображений весит меньше, чем другие варианты рентгеновской оптики, но при этом требует большей постобработки для получения изображения. Схема телескопа SIGMA с кодирующей маской, установленного на космической обсерватории «Гранат», показана на рис. 4.47. Кроме телескопов используются также пропорциональные счетчики для регистрации жесткого рентгеновского излучения, позволяющие регистрировать вспышки и приблизительно определять направление на яркие источники.
Орбитальная станция «Гранат», компоновочная схема которой показана на рис. 4.48, создана на базе обсерватории «Астрон». Вы-сокоапогейная орбита (2000x200 000 км), на которую выведена станция, позволяет проводить наблюдения за пределами радиаци
4.2. Особенности целевого оборудования, влияющие на компоновку 261
онных поясов Земли, вносящих очень сильные искажения в измерения. Система ориентации по Солнцу и опорной звезде обеспечивает точность ориентации ±20 угловых минут.
Рис. 4.47. Схема рентгеновского телескопа SIGMA с кодирующей маской:
а — схема телескопа; б — вид кодирующей маски; / — звездный датчик; 2 — блоки электроники; 3 — нижний сцинтиллятор; 4 — фотоумножитель; 5 — гамма-камера; 6 — боковой несовпадательный датчик; 7 — пластиковый сцинтиллятор; 8 — экран; 9 — кодирующая маска
Отсек научной аппаратуры несет большой комплекс телескопов и счетчиков. Рентгеновские телескопы SIGMA, АРТ-П, АРТ-С со сравнительно узким полем зрения позволяют получить изображение наблюдаемого объекта, его точное положение в пространстве, провести спектральный и временной анализ поведения источников излучения, определить степень поляризации ярких источников. «Всплесковый» комплекс, состоящий из приборов «Конус-В», «Вотч», «Фебус» и «Подсолнух», охватывает суммарным полем зрения практически всю небесную сферу и предназначен для регистрации неожиданных кратковременных событий. Эти приборы регистрируют рентгеновские и гамма-всплески, локализуют их, измеряя энергетические спектры и временную структуру, а также обеспечивают патрульное слежение
262
4. Компоновка целевого оборудования
за небесной сферой в рентгеновском диапазоне. Находящийся на борту монитор заряженных частиц КС-18М проводит измерение потоков заряженных частиц в районе КА.
Рис. 4.48. Внешний вид и устройство орбитальной обсерватории «Гранат»:
1 — телескоп SIGMA (Россия, Франция); 2 — прибор «Подсолнух» (Россия. Болгария); 3 — телескоп АРТ-С (Россия); 4 — прибор «Конус»-В (Россия): 5 — прибор «Фебус» (Франция); 6 — панели солнечных батарей: 7 — отсек научной аппаратуры; 8 — прибор «Вотч» (Россия, Дания); 9 — торовый приборный отсек: 10 — звездный датчик системы ориентации: 11 — малонаправленная антенна дециметрового диапазона; 12 — солнечный датчик системы ориентации: 13 — малонаправленная антенна сантиметрового диапазона: 14 — прибор КС-18М (Россия); 15 — телескоп АРТ-П (Россия)
Примером фокусирующего рентгеновского телескопа является телескоп, установленный на космической обсерватории Chandra (AXAF, телескоп им. С. Чандрасекара). Телескоп имеет фокусное расстояние 10 м и поле зрения 1 градус. Схема телескопа и принцип действия фокусирующей рентгеновской оптики показан на рис. 4.49.
4.2. Особенности целевого оборудования, влияющие на компоновку 263
Рис. 4.49. Принцип фокусировки рентгеновского излучения (я) и схема фокусирующего рентгеновского телескопа (б):
I — оптическая ось узла рентгеновского зеркала; И — ось камеры прицеливания; III — ось приемников излучения: IV — излучение от опорных огней: V — линия зрения телескопа: / — узел главного зеркала; 2 — приемники излучения: 3 — опорные огни; 4 — перископ; 5 — камера прицеливания; 6 — зеркало передачи опорных огней; 7 — точка установки коллиматора для наведения зеркала; 8 — рентгеновские лучи; 9 — вложенный массив параболоидов; 10 — вложенный массив гиперболоидов; // — фокус зеркала телескопа
Космический аппарат Chandra массой 4790 кг имеет длину 13,8 м и максимальную ширину 9,5 м. Мощность системы электропитания 2350 Вт. Рабочая орбита обсерватории высокоапогейная (16 000... 133 000 км). Главное зеркало состоит из системы гипербо-лоидно/параболо-идных зеркал максимальным диаметром 1,2 м и длиной 0,838 м. Компоновочная схема телескопа и основные элементы показаны на рис. 4.50.
КА для ультрафиолетовой астрономии. Ультрафиолетовая (УФ) астрономия изучает длины волн в диапазоне 20...400 нм с частотами 7,5 • 1014...3 • 1016 Гц, что соответствует характерной температуре 1О5...1О6 К. Важное обстоятельство, выделяющее УФ-диапазон
264
4. Компоновка целевого оборудования
Рис. 4.50. Компоновка КА Chandra:
1 — малонаправленная антенна; 2 — пропускающие решетки; 3 — спектрометр ACIS; 4 — модуль научной аппаратуры; 5 — камера высокого разрешения; б — оптическая скамья; 7 — панель солнечных батарей; 8 — агрегатный отсек; 9 — камера визира; 10 — солнцезащитный козырек; И — узел рентгеновского зеркала; 12 — двигатели (тяга 470 Н)
электромагнитного спектра среди всех остальных, состоит в том, что именно в этом диапазоне наиболее велика плотность астрофизической информации о звездах и газе. Методы УФ-астрономии позволяют исследовать беспрецедентно широкий список астрофизических объектов и процессов: области звездообразования, прото-планетные диски, массообмен и аккрецию в двойных системах, химический состав звезд и химическую эволюцию галактик, образование массивных звезд, поздние стадии звездной эволюции (звезды горизонтальной ветви, белые карлики и др.), межзвездное пылевое вещество, возрасты и химические особенности звездных населений, тепло-горячий компонент межзвездной среды, протогалактики, историю звездообразования в галактиках, галактические фонтаны, галактический ветер, активные галактические ядра, эволюцию межгалактической среды (реионизация, обогащение металлами), первичное содержание дейтерия (индикатор истории нуклеосинтеза во Вселенной).
Земная атмосфера непрозрачна почти во всем УФ-диапазоне, кроме участка 300...400 нм. Порог обрезания атмосферой УФ-излучения космических источников лежит в пределах 300...320 нм. На более коротких длинах волн наблюдения возможны только с помощью заатмосферных приборов.
4.2. Особенности целевого оборудования, влияющие на компоновку 265
Ультрафиолетовый участок спектра условно делится на следующие участки. Атмосферный, или ближний УФ (200...400 нм), — это участок перекрытия видимого диапазона с подучастками: средним УФ (СУФ — 200...320 нм); ближним УФ (320...400) нм. Дальний, или вакуумный УФ (10...200 нм), сильно поглощается воздухом и его исследование производят с помощью вакуумных спектральных приборов. В данном диапазоне выделяют подучастки: крайний, или экстремальный УФ (КУФ — 10...91,2 нм), у которого нижняя граница по длине волны является одновременно верхней границей рентгеновского диапазона, а верхняя — соответствует потенциалу ионизации атомарного водорода; рентгеновский УФ (10...30 нм) — используется редко; лаймановский УФ (ЛУФ — 91,2... 121,6 нм), у которого верхняя граница соответствует потенциалу возбуждения линии Lya водорода; дальний УФ (ДУФ — 91,2...200 нм).
Ультрафиолетовый телескоп аналогичен по конструкции оптическому телескопу. На рис. 4.51 показана оптическая схема телескопа «Спика», работающего в диапазоне длин волн 110...350 нм. Телескоп построен по системе Ричи — Кретьена с фокусным расстоянием 7860 мм, диаметром главного зеркала 800 мм, вторичного зеркала 264 мм, расстояние между вершинами зеркал 1965,3 мм и
Рис. 4.51. Оптическая схема телескопа «Спика» с элементами системы наведения и стабилизации:
1 — главное зеркало; 2 — вторичное зеркало; 3 — нейтральная точка телескопа; 4 — зеркальная пирамида; 5 — плоское диагональное зеркало; 6 — астродатчик ДПЗО; 7,8 — привод фокусировки; 9 — приводы системы стабилизации: 10 — свет от опорной звезды; II — свет от исследуемой звезды; 12 — телевизионная камера опознания поля
266
4. Компоновка целевого оборудования
вынос фокуса системы за вершину главного зеркала 441,3 мм. Изображение звезды в центре фокальной поверхности при уходе звезды с оси телескопа удерживается с помощью компенсирующего вращения вторичного зеркала на угол ±20' вокруг неподвижной оси, которая находится на оси телескопа на расстоянии 713,7 мм от вершины вторичного зеркала. Точность удержания изображения звезды на приемнике излучения составляет ±0,3". Масса телескопа составляет 369 кг.
Конструкция телескопа, показанная на рис. 4.52, выполнена из алюминиевых и титановых сплавов. Стабильность взаимного расположения оптических элементов телескопа достигнута благодаря
Рис. 4.52. Общий вид ультрафиолетового телескопа:
1 — главное зеркало; 2 — бленда главного зеркала; 3 — вторичное зеркало; 4 — бленда вторичного зеркала; 5 — узел вторичного зеркала; 6 — бленда; 7 — корпус;
8 — герметизирующий кожух; 9 — крышка телескопа с приводом; 10 — коническая проставка; 11 — камера опознавания звездного поля; 12 — ультрафиолетовый спектрометр; 13 — ДПЗО; 14 — ДПЗЦ
применению сплава инвар, имеющего весьма малые температурные деформации. Несущий корпус телескопа представляет собой оболочку из алюминиевого сплава, подкрепленную продольными инваровыми лонжеронами, которые соединяют верхний и нижний шпангоуты телескопа. Чтобы повысить крутильную жесткость корпуса телескопа, лонжероны и шпангоуты замкнуты оболочкой, которая лишена продольной жесткости посредством кольцевых, глубоко втянутых гофров, что позволяет исключить какие-либо тепловые деформации оболочки. Главное зеркало телескопа закреплено таким образом, что строго сохраняется статическая определимость системы зеркало — оправа.
4.2. Особенности целевого оборудования, влияющие на компоновку 267
При конструировании телескопа обеспечена защита от помех в виде рассеянного света от Солнца, Земли и Луны. С этой целью внутри трубы телескопа размещена целая система бленд и диафрагм. Их размеры и места установки выбраны с тем расчетом, чтобы интенсивность светового потока от источников, расположенных вне поля зрения приборов, ослаблялась поглощением при многократном рассеивании.
Поскольку оптические поверхности телескопа направлены в открытый космос, они являются наиболее охлажденными и становятся основным местом конденсации паров из собственной атмосферы КА. Для уменьшения вероятности загрязнения оптических поверхностей в процессе длительного пребывания в условиях космоса, материалы для изготовления деталей и узлов телескопа выбирались с учетом минимального газовыделения в вакууме.
Ультрафиолетовый телескоп «Спика» был установлен на космической обсерватории «Астрон», созданной на базе автоматической межпланетной станции «Венера». Компоновка обсерватории показана на рис. 4.53. Вместо блока баков автономной двигательной
Рис. 4.53. Общий вид АС «Астрон»:
/ — опорный цилиндр; 2 — крышка ультрафиолетового телескопа;
3 — подвесные контейнеры; 4 — солнечные батареи; 5 — приборный отсек; б — герметизирующий кожух ультрафиолетового телескопа; 7 — рентгеновские спектрометры СКР-02М
установки стоит герметичный силовой опорный цилиндр, повторяющий внешние контуры (геометрию и координаты посадочных мест) блока баков. Внутри данного отсека размещена цилиндрическая рама с шарбаллонами, а снаружи закреплены два контейнера с аппаратурой, комплекс рентгеновских спектрометров, солнечные батареи, антенны, радиаторы системы терморегулирования. К торцевой части опорного цилиндра (консольно, через коническую проставку) крепится корпус. Во внутренней полости опорного цилиндра размещаются важнейшие регистрирующие и чувствительные
268
4. Компоновка целевого оборудования
узлы телескопа — ультрафиолетовый спектрометр и датчики положения звезд — ДПЗО, ДПЗУ (см. рис. 4.52). Два герметичных подвесных контейнера, расположенных по оси ± У, служат для размещения электронных блоков научных приборов космической обсерватории. Отсеки крепятся при помощи фермы к верхнему и среднему шпангоутам опорного цилиндра. На внутренней раме одного из контейнеров крепится аппаратура дополнительного рентгеновского телескопа-спектрометра СКР-02М, а также два блока электроники УФТ. Внутри второго контейнера размещается аппаратура прибора СКР-01М, а также электроника УФТ и вторичного контура. Приборный отсек — герметичный, имеющий форму тора, — взят полностью с КА «Венера» как по конструкции, так и по расположению бортовых систем внутри отсека. В нем находятся основные служебные системы орбитального модуля. Снизу он крепится к переходной ферме ракеты-носителя, а в верхней части на нем устанавливается опорный цилиндр.
Для маневрирования на рабочей орбите ИСЗ вполне достаточно моментных воздействий, создаваемых исполнительными органами (реактивными газовыми микродвигателями) системы управления ориентацией автоматической межпланетной станции. Газовые реактивные микродвигатели системы исполнительных органов и емкости с газом для них (баллоны со сжатым азотом) также относятся к основным частям КА. Микродвигатели системы исполнительных органов (сопла с электропневмоклапанами) расположены следующим образом: 16 двигателей — на панелях СБ для управления относительно осей X и Z работают по моментной схеме, и 8 двигателей — отдельным блоком на приборном отсеке для управления относительно оси Y — работают по силовой схеме. В связи с возросшей (по сравнению с АМС «Венера») нагрузкой на исполнительные органы системы управления ориентацией потребовалось значительно увеличить запасы рабочего тела (азота) на борту «Астрона». На КА установлено 35 баллонов. Общая масса заправляемого азота -250 кг. Баллоны расположены следующим образом: 11 на юбке приборного отсека; 8 на опорном цилиндре; дополнительные 16 шаробаллонов размещены во внутренней полости опорного цилиндра.
Спутник «Астрон» выведен на сильно вытянутую орбиту (2000...200 000 км), которая почти так же удобна, как геостационарная: спутник скрывается из зоны радиовидимости наземных служб всего на 4 ч за каждые 4 сут и 90 % времени находится вне радиационных поясов Земли, мешающих работе приборов из-за повышенной концентрации заряженных частиц.
4.2. Особенности целевого оборудования, влияющие на компоновку 269
КА для оптической астрономии. Оптическая астрономия изучает длины волн в диапазоне видимого света 40...700 нм с частотами 4 • 1014.. .7,5 • 1014 Гц и характерной температурой 103... 105 К. Оптическая астрономия охватывает широкий спектр наблюдений с помощью светочувствительных телескопов. Она включает в себя визуализацию, где изучается изображение астрономического объекта, фотометрию, где измеряется количество света, идущего от объекта наблюдения, спектроскопию, где измеряется распределение этого света по отношению к длине волны, и поляриметрию, где измеряется поляризация света.
Хотя атмосфера Земли прозрачна для видимого диапазона длин волн, размещение оптического телескопа на КА дает возможность устранить дрожание изображения, вызванное атмосферными неоднородностями, и довести пространственное разрешение оптического прибора до его теоретически возможного дифракционного значения IID (радиан), где I — длина волны; D — диаметр входного отверстия телескопа. Например, для телескопа с диаметром зеркала 2,4 м может быть достигнуто разрешение -0,01" (в земных условиях оно составит в лучшем случае — 0,5" или с адаптивной оптикой 0,1"). Также возможно создать оптический интерферометр с разрешением до 10^" и радиоинтерферометр с базой -1 а. е. и разрешением 10”6... 10’8".
В качестве примера компоновки телескопа видимого диапазона на рис. 4.54 показана схема космической обсерватории Hubble Space Telescope (HST, космический телескоп им. Э. Хаббла), способной выполнять наблюдения в широком диапазоне длин волн от инфракрасного до ультрафиолетового. Телескоп построен по системе Ричи — Кретьена с фокусным расстоянием 57,6 м, диаметром главного зеркала 2,4 м (радиус кривизны 11,04 м), вторичного выпуклого зеркала 300 мм (радиус кривизны -1,36 м), расстоянием между вершинами зеркал 4,91 м и выносом фокуса системы за вершину главного зеркала на 1,5 м.
Космический аппарат HST имеет массу 11 110 кг, длину 13,2 м и диаметр 4,2 м. Две панели солнечных батарей обеспечивают мощность около 2,8 кВт. Обсерватория выведена на низкую околоземную орбиту (551...555 км), что позволяло производить ее обслуживание экипажами транспортных кораблей многоразового использования.
270
4. Компоновка целевого оборудования
Рис. 4.54. Компоновка космического телескопа им. Э. Хаббла:
I — крышка телескопа; II — светозащитный экран; III — передняя оболочка: IV — агрегатный отсек; V — задний кожух; 1 — радиальный блок научного оборудования; 2 — звездный датчик; 3 — осевой блок научного оборудования;
4 — малонаправленная антенна; 5 — фокальная плоскость телескопа; 6 — датчик точного наведения; 7 — цапфа для захвата манипулятором КА «Спейс Шаттл»; 8 — привод солнечной батареи; 9 — ферма телескопа; 10 — магнитная катушка; 11 — замок зачековки остронаправленной антенны в транспортном положении: 12 — поручень для работы астронавтов; 13 — замок крышки телескопа: 14 — узел вторичного зеркала; 15 — центральная бленда; 16 — отсек агрегатов телескопа; 17 — главное зеркало; 18 — основная бленда; 19 — бленда вторичного зеркала; 20 — бленда; 21 — ферма крепления вторичного зеркала; 22 — остронаправленная антенна
Компоновочные элементы обсерватории HST показаны на рис. 4.55. Основой компоновки является телескоп, вспомогательные и служебные системы располагаются вокруг него для обеспечения наилучшей центровки. КА выполнен по модульной схеме, позволяющей его многократное обслуживание. Научные инструменты расположены в хвостовом отсеке на раме таким образом, что их можно независимо заменять в процессе ремонтной миссии.
4.2. Особенности целевого оборудования, влияющие на компоновку 271
Площадь фокальной плоскости (угловой размер около 28') разделена между научными инструментами телескопа на четыре зоны. В каждой зоне установлен модуль научной аппаратуры, имеющий вид параллелепипеда. Эти модули были несколько раз заменены в ходе пяти миссий обслуживания.
Рис. 4.55. Основные компоновочные элементы обсерватории HST:
1 — всенаправленные антенны: 2 — оболочка кормового отсека; 3 — платформа с гироскопами и звездными датчиками; 4 — радиальный модуль научной аппаратуры: 5 — блок оборудования телескопа: 6 — блок вспомогательного оборудования: 7 — ферма телескопа; 8 — основная бленда; 9 — панель солнечной батареи: 10— магнитометры: // — крышка телескопа; 12 — светозащитный экран; 13 — магнитные катушки: 14 — остронаправленная антенна; 15 — модуль обеспечивающего оборудования: 16 — узел вторичного зеркала; 17 — бленда вторичного зеркала: 18 — центральная бленда; 19 — главное зеркало и основной шпангоут: 20 — оптической датчик точного наведения: 21 — узел оборудования фокальной плоскости: 22 — сменный модуль научной аппаратуры
Перспективные космические телескопы должны иметь большие размеры главного зеркала. Так, космический телескоп James Webb Space Telescope (рис. 4.56) (JWST, космический телескоп им. Д. Вебба), предназначенный для работы в видимом и инфракрасном диапазоне спектра (0,7...29 мкм), построен по трехзеркальной схеме Корша. Фокусное расстояние телескопа до плоскости установки сенсоров составляет около 131,4 м, а фокусное расстояние до вторичного фокуса составляет 59,4 м. Главное зеркало диаметром 6,5 м имеет радиус кривизны 15,88 м. Вторичное зеркало
272
4. Компоновка целевого оборудования
находится на расстоянии 7,2 м впереди главного зеркала и имеет радиус кривизны 1,77 м. Третичное зеркало находится на расстоянии 0,79 м позади главного зеркала и смещено от оси на 0,19 м. Радиус его кривизны равен 3,0 м.
Рис. 4.56. Оптическая схема телескопа JWST:
/ — фокальная плоскость: 2 — третичное зеркало: 3 — плоскость, отделяющая зону компоновки оптических элементов от зоны компоновки научных инструментов: 4 — начало системы координат: 5 — вторичный фокус; 6 — вторичное зеркало; 7 — управляющее зеркало; 8 — главное зеркало
В компоновке телескопа JWST громоздкая система бленд не используется, вместо нее применяются раскладные многослойные экраны, затеняющие оптику от засветки и защищающие ее от нагрева. Также для уменьшения фоновой освещенности прибора рабочая орбита космической обсерватории удаляется от Земли. Рабочей орбитой JWST является удаленная на 1,5 млн км от Земли гало-орбита вокруг точки Лагранжа Z2, в которой Солнце затеняется Землей.
На рис. 4.57, а показана обсерватория JWST в развернутом виде с некоторыми из своих критических размеров. Солнцезащитный экран, который пассивно охлаждает телескоп, имеет длину около 25 м и ширину 10 м. Телескопическая штанга, раздвигаясь до 1,5 м, отделяет астрономические инструменты от агрегатного отсека и служит тепловым изолятором. В результате общая высота обсерватории составляет более 10 м.
При выведении космического телескопа JWST его необходимо разместить под головным обтекателем ракеты-носителя семейства EELV, имеющим диаметр 4,2 м, для чего необходимо скомпоновать все его элементы в транспортном положении, и при этом обеспечить максимальную надежность процесса раскрытия всех элементов и прецизионную (нанометровую) точность позиционирования оптических элементов после раскрытия.
4.2. Особенности целевого оборудования, влияющие на компоновку 273
Рис. 4.57. Оптическая схема и компоновка телескопа им. Д. Веба (JWST):
а — рабочая конфигурация; б — транспортная конфигурация; / — панель солнечной батареи; 2 — остронаправленная антенна; 3 — система солнцезащитных экранов; 4 — главное зеркало; 5 — вторичное зеркало; 6 — раздвижная штанга; 7 — головной обтекатель ракеты-носителя (диаметр 4,2 м)
На рис. 4.57, б показана транспортная конфигурация JWST под обтекателем ракеты-носителя. Телескопический кронштейн сложен, и приборный отсек соединен с агрегатным отсеком. Две консоли главного зеркала сложены вдоль приборного отсека. Вторичное зеркало сложено и установлено сверху приборного отсека. Экран в сложенном положении укрывает приборный отсек по периметру.
После того как обсерватория отделяется от ракеты-носителя, развертываются солнечные батареи и панели радиатора так, что система электропитания может начать генерировать мощность. Далее развертывается остронаправленная антенна радиосвязи. Перед развертыва
274
4. Компоновка целевого оборудования
нием телескопа раскрывается многослойный солнцезащитный экран, и телескопическая штанга отодвигает приборный отсек от агрегатного, обеспечивая теплоизоляцию охлаждаемых инструментов.
Развертывание зеркал производится сразу после развертывания экрана, пока эти элементы не достигли криогенной температуры. Тем не менее развертывание возможно и при температуре 30 К. Схема раскрытия консолей главного зеркала показана на рис. 4.58, а. а схема раскрытия фермы вторичного зеркала — на рис. 4.58, б. Для точной юстировки оптики телескопа после раскрытия применяются специальные механизмы системы управления для коррекции ошибок развертывания или искажения, которые происходят во время остывания элементов.
Рис. 4.58. Схема раскрытия телескопа:
а — фазы раскрытия главного зеркала: б — фазы раскрытия фермы вторичного зеркала; М— момент привода механизма; Z— узлы зачековки
4.2. Особенности целевого оборудования, влияющие на компоновку 275
Зеркала для космических телескопов имеют малую удельную массу. Так, например, зеркало телескопа HST диаметром 2,4 м имеет удельную массу 180 кг/м2; бериллиевое зеркало телескопа SIRTF диаметром 850 мм — 26 кг/м2; зеркало телескопа JWST диаметром 8 м — не более 15 кг/м2.
КА для инфракрасной астрономии. Инфракрасная астрономия изучает длины волн в диапазоне 103...106 нм с частотами 3 • 1011.. .4 • 1014 Гц, что соответствует характерной температуре 10... 103 К. В инфракрасном диапазоне изучаются астрономические объекты во Вселенной, которые являются слишком холодными и/или слабыми для изучения в видимом свете. Инфракрасное излучение испускают холодный газ и космическая пыль при температуре 1 000 К и ниже, вплоть до нескольких градусов над абсолютным нулем. Кроме того, расширение Вселенной проявляется в том, что приходящее от удаленных источников видимое излучение смещается в инфракрасную часть спектра. Более отдаленные объекты наблюдаются дальше в инфракрасном диапазоне. Это расширение характеризуется параметром красного смещения Z. Отношение длины принимаемой волны L к длине излученной волны равно 1 + Z. Наиболее удаленные (и, соответственно, раньше всего возникшие) известные объекты имеют Z > 6. Таким образом, их излучение от середины видимого диапазона смещается за пределы 3 мкм.
Диапазон ИК-излучения подразделяют на поддиапазоны: в ближнем ИК-диапазоне наблюдают холодные красные звезды. Космическая пыль в этом диапазоне прозрачна, что позволяет проводить исследования вдоль плоскости Млечного Пути, заполненной пылью; в среднем ИК-диапазоне наблюдают планеты, кометы, астероиды, подогретые звездами пылевые облака, протопланетные диски, экзопланеты, подобные Земле (имеющие температуру порядка 300 К); в дальнем ИК-диапазоне наблюдают облака холодной пыли, центральные регионы галактик, очень холодные молекулярные облака.
Преимущества внеатмосферной астрономии в ИК-диапазоне проявляются, во-первых, в том, что удается преодолеть непрозрачность (см. рис. 4.41) и фоновое тепловое излучение атмосферы, которая препятствует наблюдениям не только с поверхности, но и с самолетов и аэростатов. Во-вторых, оптика космической обсерватории может быть охлаждена до криогенной температуры, чтобы минимизировать свое излучения абсолютно черного тела, что позволяет существенно повысить чувствительность инструментов.
276
4. Компоновка целевого оборудования
Современные детекторы делятся на два класса — болометры и фоторезисторы. Болометры являются устройствами, которые изменяют сопротивление при нагревании поглощенным излучением; они реагируют на излучения в широком диапазоне длин волн более 200 мкм. Фоторезисторы — полупроводниковые приборы, которые изменяют сопротивление при облучении светом. Они эффективны при длине волны 5...200 мкм. Из отдельных детекторов формируются матрицы, аналогичные ПЗС-матрицам, применяемым в оптическом диапазоне. Детекторы регистрируют не только полезный сигнал, но и собственные тепловые шумы, для снижения которых детекторы, как и оптику ИК-телескопа, необходимо охлаждать до криогенной температуры.
Таким образом, отличительной чертой ИК-телескопов является то, что оптика и детекторы излучения должны быть охлаждены до температуры, часто лишь на несколько градусов выше абсолютного нуля. Во многих случаях ИК-обсерватории требуют охлаждения ниже 10 К. Желательно охлаждение ниже температуры реликтового излучения (2,72548 ± 0,00057 К). Это достигается применением криогенных систем обеспечения теплового режима (СОТР). В качестве теплоносителей для различных рабочих температур могут использоваться жидкий гелий (> 5 К), твердый водород (8 К), жидкий неон (30 К), твердый азот (50 К) и жидкий азот (75 К). В процессе работы хладагент неизбежно нагревается и испаряется, поэтому продолжительность работы астрономического ИК-спутника ограничена.
Применяются две схемы СОТР ИК-обсерваторий, показанные на рис. 4.59. Некоторые компоненты, такие как агрегатный отсек КА 2, панели солнечных батарей 5, и звездные датчики 1 являются общими для обеих систем. На схеме телескоп 6 и сенсоры 3 являются идентичными по размеру. В каждой из схем имеется криостат 7, содержащий емкости с жидким гелием (показаны серым цветом).
В схеме с «холодным» стартом (рис. 4.59, а) телескоп целиком размещается в криостате — баке с хладагентом, изолированном и экранированном от источников теплоты (Солнца, Земли и пр.). При такой компоновке ИК-обсерватория может быть размещена на околоземной орбите, однако имеет малый срок службы — порядка нескольких лет.
В схеме с «теплым» стартом (рис. 4.59, б) в криогенном баке захолаживаются только детекторы, а все остальные элементы охлаждаются излучением. Космический телескоп, работающий по такой схеме, должен быть удален от Земли для организации радиационного охлаждения инструментов путем переизлучения паразитного тепла
4.2. Особенности целевого оборудования, влияющие на компоновку 277
в космическое пространство. Этот подход имеет много преимуществ по сравнению со схемой «холодного» старта: меньшая масса и размеры телескопа. Радиационное охлаждение еще более эффективно при использовании гелиоцентрических орбит с радиусом более 1 а. е. Однако детекторы все равно требуют охлаждения в криостате.
а б
Рис. 4.59. Компоновочные схемы ИК-обсерваторий (разрез):
а — «холодный» запуск (околоземная орбита) КА ISO и IRAS; б — «теплый» запуск (гелиоцентрическая орбита) КА «Спитцер» (SIRTF); 1 — звездные датчики; 2 — агрегатный отсек; 3 — сенсоры: 4 — криостат; 5 — панели солнечных батарей; 6 — телескоп; 7 — вакуумная крышка; 8 — чехол
В системе «холодного» запуска телескоп находится в криостате и охлаждается при непосредственном контакте с криогенной емкостью. В системе «теплого» запуска криостат и криогенный бак могут быть гораздо меньше. Телескоп охлаждают за счет теплопроводности и вскипания гелия. Эта схема используется вдали от источников отраженной теплоты (например, Земли) при работе на гелиоцентрической орбите, поскольку в ней требуются цилиндрические тепловые экраны, которые окружают телескоп и охлаждают его излучением до температуры 40 К или ниже и тем самым пропускают к телескопу только малое количество паразитного тепла.
Криостат, который должен выдерживать при наземной подготовке внешнее атмосферное давление в схеме «холодного» пуска, имеет большую массу и габариты, чем в схеме «теплого» пуска. При этом в «холодной» схеме для криостата требуется массивная вакуумная крышка 7, в то время как в «теплой» компоновке требуется
278
4. Компоновка целевого оборудования
только защитить оптику легким чехлом от пыли 8. Бленда в холодной схеме требуется больших размеров, поскольку на околоземной орбите приходится защищать телескоп не только от излучения Солнца, но и от отраженного излучения Земли. В «теплой» схеме бленда требуется существенно меньших размеров.
Примером ИК-обсерватории, построенной по схеме «холодного» старта, может служить КА Infrared Space Observatory, ISO (рис. 4.60). Аппарат массой 2500 кг имеет в рабочем положении длину 5,3 м и диаметр около 2,3 м. Криостат телескопа в начале
Рис. 4.60. Компоновка обсерватории ISO и ИК-телескопа:
/ — адаптер для стыковки с PH; 2 — агрегатный отсек; 3 — звездные датчики; 4 — телескоп; 5 — солнцезащитный экран с панелями солнечных батарей; 6 — пирамидальное зеркало; 7 — датчик положения звезды; 8 — светонепроницаемый экран; 9 — силовая конструкция оптики; 10 — силовая конструкция телескопа и баков с гелием; 11 — бак с гелием (Не II) емкостью 2300 л; 12 — сосуд Дьюара; 13 — охлаждаемые экраны; 14 — бак с гелием (Не I) емкостью 60 л; 15 — иллюминатор с набором фильтров; 16 — клапан гелия входной; 17 — клапан гелия выходной; 18 — бленда; 19 — криокрышка (открывается после выведения); 20 — тубус телескопа; 21 — вторичное зеркало; 22 — бленды вторичного зеркала; 23 — кронштейн-тренога вторичного зеркала; 24 — главное зеркало; 25 — научные инструменты
работы содержит 2300 л жидкого гелия в сверхтекучем состоянии. Оптическая система телескопа Ричи — Кретьена охлаждается до температуры 2...8 К. Диаметр зеркала телескопа составляет 600 мм; точность наведения — несколько угловых секунд дуги, точность
4.2. Особенности целевого оборудования, влияющие на компоновку 279
стабилизации — доли секунды дуги. Время существования телескопа -2,5 года со средней рассеиваемой мощностью инструмента -10 мВт.
Телескоп имеет четыре научных инструмента: камеру с двумя полупроводниковыми матрицами 32x32 пикселя на основе In Sb для диапазона 2,5...5,5 мкм и на основе Si:Ga — для диапазона 4... 18 мкм и набором фильтров; фотометр, перекрывающий диапазон 2,5...240 мкм; коротковолновый спектрометр для диапазона 2,38...45,2 мкм и длинноволновый спектрометр для диапазона 43... 196,9 мкм.
Примером ИК-обсерватории, построенной по схеме «холодного» старта, может служить Space Infrared Telescope Facility (SIRTF), показанный на рис. 4.61. КА, после запуска переименованный
Рис. 4.61. Компоновка ИК-обсерватории SIRTF:
1 — остронаправленная антенна; 2 — двигатели на холодном газе (азоте); 3 — гиродины; 4 — звездный датчик; 5 — экран агрегатного отсека; 6 — переходная ферма; 7 — оболочка криостата; 8 — отсек научных инструментов; 9 — апертурное отверстие телескопа; 10 — главное зеркало; // — внешняя оболочка телескопа; 12 — кронштейн и бленды вторичного зеркала; 13 — бленда телескопа с охлаждаемым криоэкраном; 14 — вторичное зеркало с механизмом фокусировки; 15 — крышка телескопа; 16 — панель солнечной батареи; 17 — экран панели солнечной батареи; 18 — бак с гелием; 19 — агрегатный отсек; 20 — малонаправленные антенны
280
4. Компоновка целевого оборудования
в космический телескоп им. Л. Спитцера, массой 950 кг (из них телескоп — 851,5 кг, экран — 6,0 кг, гелий — 50,4 кг, азот для ССО — 15,6 кг) имеет следующие габариты в рабочем положении: длину 4,45 м и диаметр около 2,1 м. Телескоп имеет зеркало диаметром 850 мм.
В качестве агрегатного отсека использована стандартная спутниковая платформа. Система ориентации строится на использовании автономного звездного датчика. Точность ориентации на гироскопах менее 2". Дополнительно для повышения точности ориентации используются датчики видимого света в фокальной плоскости телескопа. Аналогичная система управления используется и на КА ISO. Также КА использует реактивные двигатели на сжатом азоте для сброса кинетического момента с гироскопов, поскольку магнитная система стабилизации не действует на рабочей гелиоцентрической орбите.
Рабочая температура оптики и сенсоров, равная 5,5 К, достигается захолаживанием жидким гелием, рабочая температура прочих элементов в рабочей зоне около 40 К — использованием экранов и удаленностью орбиты от Солнца и Земли. Основным поглотителем тепла является только главное зеркало телескопа.
Гибридная радиационно-криогенная СОТР построена с учетом того, что на орбите КА всегда находится в тени солнечной батареи-экрана, развернутого на Солнце. Также используется система многослойных экранов, оптимизированная таким образом, чтобы отражать и излучать максимум тепла в пространство. Схема тепловых потоков показана на рис. 4.62. Такая схема не работает на околоземной орбите, поскольку в этом случае излучающие поверхности превратятся в поглотители отраженного тепла от Земли. Оптимизированная криогенная система вместе с рассеянием малой мощности своих инструментов и устранением паразитных тепловых нагрузок дает возможность криогенному телескопу функционировать более 5 лет при начальном запасе жидкого гелия всего 350 л. Средняя рассеиваемая мощность инструментов около 5 мВт.
Телескоп имеет три основных инструмента: ИК-камеру ближнего диапазона, получающую изображение одновременно в диапазонах 3,6, 4,5, 5,8 и 8 мкм на матрице 256x256 пикселей; спектрометр, обеспечивающий низкое разрешение в диапазоне 5...40 мкм и более высокое разрешение в диапазоне 10...38 мкм с матрицей 128x128 пикселей; тепловизор/фотометр, который обеспечивает изображения и спектрофотометрию с низким разрешением при длине волны 25... 160 мкм.
4.2. Особенности целевого оборудования, влияющие на компоновку 281
Рис. 4.62. Схема теплового режима гибридной радиационно-криогенной СОТР ИК-обсерватории в стационарном режиме: стрелки — тепловое излучение; / — агрегатный отсек КА (273 К); 2 — верхний экрана агрегатного отсека КА (118 К); 3 — внутренняя охлаждаемая испарением теплоносителя оболочка экрана (22 К); 4 — внешний экран (35 К); 5 — экран панели солнечных батарей (115 К); 6 — панель солнечных батарей (340 К); 7 —
телескоп (4,4 К); 8 — научные инструменты; 9 — охлаждение экранов испарением теплоносителя (расход 0,275 мг/с)
КА для микроволновой астрономии. Астрономия в микроволновом диапазоне длин волн изучает длины волн в диапазоне 106... 109 нм (от 1 мм до 1м) с частотами 3 • 108...3 • 1011 Гц, что соответствует характерной температуре менее 10 К. Микроволновый диапазон соответствует СВЧ-диапазону радиоволн, включающему в себя дециметровый, сантиметровый и миллиметровый диапазоны. Для наблюдений в данном диапазоне наибольший интерес здесь представляет исследование фонового реликтового излучения низкого уровня, которое считается послесвечением Большого взрыва, оставшегося с самых ранних дней существования Вселенной. Колебания в микроволновом фоновом фоне в различных областях пространства позволяют получить данные о формировании Вселенной. Из-за минимального количества естественных небесных источников диапазон СВЧ-излучения 1...10 ГГц, а также полосы до 25 ГГц, считаются наиболее перспективными для поиска сигналов, которые могут исходить от внеземных цивилизаций. Поиск внеземного разума по программе SETI сосредоточен именно в этом диапазоне.
282
4. Компоновка целевого оборудования
Для исследования реликтового излучения применяются космические обсерватории с большим полем обзора. На рис. 4.63 показан КА Wilkinson Microwave Anisotropy Probe (WMAP, космический телескоп им. Д. Вилкинсона), предназначенный для построения карты источников реликтового излучения. КА имеет массу 840 кг.
Рис. 4.63. Компоновка КА Wilkinson Microwave Anisotropy Probe в рабочей конфигурации:
1 — раскрывающиеся панели солнечных батарей, совмещенные с защитным экраном; 2 — гиродины; 3 — звездный датчик; 4 — теплоизолирующий цилиндр охлажденных научных инструментов; 5 — рупорные антенны приемников излучения; 6 — научные инструменты фокальной плоскости; 7 — верхняя всенаправленная антенна; 8 — 1,4x1.6 м основные рефлекторы; 9 — две антенных системы Грегори, расположенные оппозитно; 10 — вторичное зеркало; 11 — радиатор пассивной СОТР; 12 — верхняя панель агрегатного отсека; 13 — «теплое» бортовое оборудование
Особенностью компоновки WMAP является оппозитная установка двух космических телескопов-радиометров с рефлекторами диаметром 1,4x1,6 м, позволяющая одновременно обозревать два направления для дифференциального измерения разности температур между двумя точками в небе, а не измерения абсо
4.2. Особенности целевого оборудования, влияющие на компоновку 283
лютных температур, что снижает влияние систематических погрешностей.
Набор инструментов обсерватории WMAP включает в себя пассивно охлаждаемые микроволновые радиометры. Прибор имеет пять полос частот 22...90 ГГц для облегчения отделения галактических сигналов от космического фонового излучения. Крупногабаритные радиаторы обеспечивают охлаждение чувствительных усилителей в сборке приемника. Агрегатный отсек КА экранирован от научной аппаратуры. Вся обсерватория находится в непрерывной тени плоского экрана диаметром 5 м. Электрическая мощность, вырабатываемая панелями солнечных батарей, интегрированными в экран, составляет 419 Вт.
Рабочей орбитой WMAP является лиссажу-орбита вокруг точки либрации системы Солнце — Земля £2, которая обеспечивает очень стабильную тепловую среду и высокую эффективность наблюдений, поскольку Солнце, Земля и Луна находятся всегда вне поля зрения прибора.
Одним из основных результатов наблюдений, проведенных космическими микроволновыми обсерваториями, стало открытие темной энергии — необычной компоненты Вселенной, приводящей к ускоренному разбеганию галактик. Для определения природы этой компоненты необходимо проведение новых, более высокоточных измерений.
Примером крупногабаритной микроволновой космической обсерватории является перспективный КА, «Миллиметрон» (проект «Спектр-М») с 10-метровым космическим телескопом, предназначенный для исследования различных объектов Вселенной в миллиметровом и инфракрасном диапазонах на длинах волн 0,02... 17 мм.
Высокая чувствительность достигается за счет глубокого охлаждения зеркальной системы телескопа и приемной аппаратуры. Высокое угловое разрешение обеспечивается благодаря расположению обсерватории на периодической орбите (период обращения 180 сут) в районе точки Лагранжа L2.
Длительность миссии обсерватории «Миллиметрон» рассчитана на 10 лет, из них только 3 года пассивно-активная СОТР будет обеспечивать охлаждение зеркальной системы и приемной аппаратуры КТ-М обсерватории до 4,5 К. Это позволит обеспечить в сочетании с большой собирающей площадью зеркала КТ-М его беспрецедентно высокую чувствительность с учетом того, что соб
284
4. Компоновка целевого оборудования
ственные излучения КТ-М не смогут подавлять слабые сигналы из наблюдаемых объектов.
Масса КА составляет 6600 кг (из них масса ПН БКНА-М 4500 кг, масса модуля служебных систем 1500 кг). Максимальная мощность системы электропитания 3500 Вт.
Обсерватория «Миллиметрон» включает:
• бортовой комплекс научной аппаратуры в качестве полезной нагрузки;
• модуль служебных систем.
Модуль служебных систем (МСС) КА «Спектр-М» предназначен для доставки телескопа обсерватории «Миллиметрон» на орбиту в район точки либрации L2 системы Солнце — Земля и проведения астрофизических исследований. МСС является основным структурным элементом КА, обеспечивающим управление КА на всех этапах функционирования. Стыковка КА с разгонным блоком осуществляется через адаптер, который остается на МСС после отделения от разгонного блока.
Модуль служебных систем строится на базе платформы модуля «Навигатор-М» разработки НПО им. С.А. Лавочкина. Базовый модуль служебных систем разработан как унифицированный модуль для космических аппаратов различного назначения. Аналогичный модуль использован на КА «Радиоастрон». Он состоит из бортового комплекса управления, системы энергоснабжения бортового радиокомплекса, антенно-фидерной системы, телеметрической системы, системы ориентации солнечных батарей, бортовой кабельной сети, системы контроля электризации, системы обеспечения теплового режима, пиротехники и элементов конструкции, двигательной установки, конструкции.
В качестве измерительных средств бортового комплекса управления на КА «Спектр-М» используются звездные приборы ориентации, солнечные приборы ориентации, гироскопический измеритель вектора угловой скорости. Система управления обеспечивает точность ориентации 1", точность стабилизации 0,2".
Процесс функционирования КТ-М обсерватории «Миллиметрон» предполагает следующие мероприятия:
• наведение на исследуемый объект поворотом всего КА средствами служебных систем;
• стабилизация в пространстве в течение сеанса наблюдений средствами модуля служебных систем КА.
Компоновочная схема обсерватории «Миллиметрон» показана на рис. 4.64.
4.2. Особенности целевого оборудования, влияющие на компоновку 285
Оптическая схема телескопа — система Кассегрена — имеет световой диаметр 10 м, эквивалентное фокусное расстояние 70 м, поле зрения 6,7'. Главное складное составное параболическое зеркало из высокомодульного углепластика диаметром 10 м (в сложенном состоянии 3,82 м), фокусное расстояние 2,4 м, точность поверхности 10 мкм. Вторичное гиперболическое зеркало из це-родура диаметром 542 мм, фокусное расстояние 127,367 мм, точность поверхности 3 мкм (СКО), переключающее плоское бериллиевое зеркало размером 420x320 мм.
9 1
Рис. 4.64. Компоновочная схема обсерватории «Мил-лиметрон»:
1 — главное криозеркало; 2 — радиационные экраны; 3 — солнечные батареи; 4 — системы управления и передачи данных; 5 — радио- и лазерная ТМ-антенны; 6 — раскладная ферма; 7 — фокальная аппаратура; 8 — плоское зеркало; 9 — криоконтррефлектор; 10 — криоэкран; 11 — система теплозащитных экранов; 12 — лепестки рефлектора; 13 — центральное зеркало; 14 — опорная ферма рефлектора с охлажденным контейнером; 15 — опора теплозащитных экранов; 16 — неохлаж-даемый отсек; 17 — радиатор; 18 — служебный модуль
Обсерватория «Миллиметрон» доставляется на орбиту в транспортной конфигурации. Для обеспечения ее размещения в габаритах зоны полезной нагрузки под головным обтекателем ракеты-носителя все крупногабаритные элементы выполняются трансформируемыми.
286
4. Компоновка целевого оборудования
Система раскрытия трансформируемых элементов КТ-М предназначена для перевода складных элементов конструкций рефлектора, теплозащитных экранов, криоэкрана и радиаторов из транспортной конфигурации в эксплуатационную.
Транспортная конфигурация КА показана на рис. 4.65, а. Основные фазы процесса раскрытия элементов включают раскрытие
Рис. 4.65. Раскрытие элементов конструкции КА «Миллиметрон»:
а — КА в транспортной конфигурации; б — раскрытие солнечных батарей и стабилизация КА; в — раскрытие радиаторов и элементов сервисных систем; г — раскрытие теплозащитных экранов; д — раскрытие криоэкрана; е — раскрытие рефлектора
солнечных батарей и стабилизацию КА по направлению Солнце — КА с подключением аппаратуры модуля служебных систем (рис. 4.65, б), раскрытие радиаторов и элементов сервисных систем (рис. 4.65, в), разблокировки конструкций теплозащитных экранов, фиксирующих их в транспортном положении, и одновременное раскрытие четырех теплозащитных экранов (рис. 4.65, г), раскрытие криоэкрана (рис. 4.65, д), разблокировку рефлектора и его раскрытие за счет синхронного перемещения 24 лепестков главного зеркала из сложенного положения в эксплуатационное с последующей фиксацией между собой замками-фиксаторами по
4.2. Особенности целевого оборудования, влияющие на компоновку 287
команде с Земли с одновременным обеспечением выключения привода (рис. 4.65, е).
Приводы систем раскрытия в начальный период трансформации телескопа работают при температуре не ниже -160°.
Система обеспечения теплового режима КА предназначена для поддержания требуемых температур телескопа и включает отдельные автономные подсистемы: систему пассивного охлаждения КТ-М, систему активного охлаждения зеркальной системы и охлаждаемого контейнера, систему терморегулирования неохлаждаемого контейнера и ВИРК-М. Формирование температурных режимов элементов КТ-М начинается в процессе перелета КТ-М на рабочую орбиту. В соответствии с условиями работы приборов КТ-М разделен на зоны:
• «холодную», в которую входят зеркальная система (главное зеркало и контррефлектор со своими опорными системами) и контейнер с охлаждаемой аппаратурой;
• «теплую», в которую входит пространство, ограниченное опорой систем охлаждения, неохлаждаемый контейнер и ВИРК-М.
Система пассивного (радиационного) охлаждения служит для защиты КТ-М от теплового воздействия Солнца и Земли на протяжении всего срока службы обсерватории. Она обеспечивает стартовый этап охлаждения КТ-М перед началом функционирования на орбите с уровня температуры при старте миссии -300 К до температуры -50 К на ближайшем к рефлектору теплозащитном экране. Идеология построения системы пассивного охлаждения обсерватории «Миллиметрон» разработана на основе использования экранов, выполненных из металлизированной полиимидной пленки, натянутой на стержневые каркасы. Система пассивного охлаждения КТ-М включает четыре теплоизоляционных экрана и внутреннюю теплозащиту опоры системы охлаждения.
Система активного охлаждения рефлектора КТ-М включается в работу после достижения зеркальной системой и приборами приемного комплекса температуры -50 К и доводит температуру охлаждаемых элементов телескопа до заданного уровня. Система активного охлаждения КТ-М включает криоэкран, криомашины с ключами и теплопроводами.
Активная система обеспечивает охлаждение криоэкрана, опорной фермы рефлектора и охлаждаемого контейнера до тем-
288
4. Компоновка целевого оборудования
пературы 20 К, рефлектора и контррефлектора с опорной системой, переключающего зеркала, элементов опоры центрального зеркала и аппаратуры охлаждаемого контейнера до температуры 4,5 К; отдельных частей приемников, работающих в режиме одиночного телескопа и размещенных в охлаждаемом контейнере, до температур порядка 1-2 К.
В качестве бортовых криогенных машин используются машины замкнутого типа. Охлаждение элементов зеркальной системы и приборов в ОК до заданных температур проводят кондуктивно с помощью гибких теплопроводов и покрытий от «пункта холода 4 К» — холодной головки криогенной машины класса 4 К к элементам КТ с температурой 4,5 К. Компрессоры и блоки управления криомашин располагаются в зоне «неохлаждаемого контейнера».
Тепловыделения аппаратуры, расположенной в неохлаждаемом контейнере, транспортируются с помощью теплопроводов (тепловых труб) к радиаторам, с которых сбрасываются излучением в космос.
Система адаптации и контроля зеркальной системы САИК-М предназначена для обеспечения в автоматическом режиме контроля положения панелей лепестков, формирующих отражающую поверхность главного зеркала, контррефлектора и переключающего зеркала относительно центрального зеркала, а также выполнения процесса адаптации элементов зеркальной системы телескопа к ее оптимальному положению, соответствующему максимальной интенсивности принимаемого сигнала. Центральное зеркало является базовым и не подвергается воздействию системы адаптации.
Блок САИК-М включает в себя измерительную систему для контроля зеркальной системы КТ-М, систему исполнительных органов для адаптации зеркальной системы КТ-М и систему управления.
Система переключения принятого излучения на соответствующий прибор предназначена для направления с помощью переключающего зеркала потока излучения на один из приборов приемного комплекса, работающий в данный момент в зависимости от решаемой задачи исследования, и обеспечения работоспособности САИК-М.
Основными научными инструментами обсерватории «Миллиметрон» являются матрицы болометров для диапазонов 0,2...0,4 мм и 0,7... 1,4 мм с угловым разрешением на волне 0,2 мм и короче 5", а также три спектрополяриметра: низкого разрешения в диапазоне 0,02...0,8 мм, среднего разрешения в диапазонах
4.2. Особенности целевого оборудования, влияющие на компоновку 289
0,03...0,1 мм и 0,1...0,8 мм и высокого разрешения в диапазоне 0,05...0,3 мм.
КА для радиоастрономии. Радиоастрономия изучает длины волн в диапазоне более 1 • 109 нм с частотами менее 3 • 1011 Гц, что соответствует характерной температуре менее 10 К. Радиоастрономия изучает такие объекты, как квазары, радиогалактики, центр галактики, Млечный Путь, пульсары, мазеры. Эта часть спектра полезна в наблюдении горячих газов из межзвездной среды, спектральных линий излучения атомных и молекулярных переходов (включая линию нейтрального водорода с длиной волны 21 см), которые происходят в межзвездной среде или в газовых оболочках вокруг звезд; импульсного излучения от быстро вращающейся нейтронной звезды с сильным магнитным полем. Космические радиотелескопы используются также для изучения очень длинных радиоволн, излучаемых Солнцем, магнитосферами планет-гигантов и межзвездной средой. Поверхности Земли эти волны не достигают, поскольку отражаются от ионосферы.
Радиотелескопы в наименьшей степени нуждаются в тепловой защите и экранировании от засветки. Однако наблюдения в радиодиапазоне затруднены из-за радиопомех, создаваемых работой средств радиосвязи. Чтобы «укрыться» от помех, возможно, вскоре радиоастрономия переместится на обратную сторону Луны и будет использовать естественный спутник как экран от земных радиопередатчиков.
Радиотелескопы имеют крупногабаритные раскладные антенны. Пример компоновки радиотелескопа «Радиоастрон» показан на рис. 4.66. КА имеет массу 3295 кг, полную массу полезного научного груза — -2600 кг, которая включает массу раскрывающейся параболической антенны диаметром 10 м (1500 кг) и массу электронного комплекса, содержащего приемники, малошумящие усилители, синтезаторы частот, блоки управления, преобразователи сигналов, стандарты частоты, высокоинформативную систему передачи научных данных (около 900 кг).
Базовым модулем КА является платформа «Навигатор». Конструктивно модуль представляет собой негерметичный отсек в виде восьмигранной призмы, внутри которой на термостабилизированной сотопанели расположена вся служебная аппаратура, а на его гранях снаружи закреплены агрегаты двигательной установки и панели солнечных батарей. Полная мощность питания системы составляет 2600 Вт, из которых 1150 Вт используется для научных приборов.
290
4. Компоновка целевого оборудования
Рис. 4.66. Компоновочная схема космического телескопа «Радиоастрон»: а — рабочая конфигурация: 1 — базовый модуль «Навигатор»; 2 — малонаправленная антенна; 3 — контейнер научной аппаратуры; 4 — переходная ферма; 5 — проставка основания; 6 — лепестки рефлектора; 7 — штанги опорные; 8 — опорное кольцо с системой зачековки лепестков; 9 — ферма фокального модуля; 10 — радиатор системы терморегулирования холодной плиты; 11 — фокальный контейнер; 12 — малонаправленные антенны; 13 — фокальный узел; 14 — блок антенных облучателей; 15 — центральное зеркало; 16 — механизм раскрытия лепестков рефлектора; 17 — остронаправленная антенна высокоинформативного радиокомплекса: 18 — водородный стандарт частоты; б — транспортная конфигурация
Космический радиотелескоп представляет собой приемную параболическую антенну, оснащенную аппаратурой усиления, приема, преобразования и передачи научной информации на Землю. Средние частоты исследуемых радиодиапазонов принимаемого
4.2. Особенности целевого оборудования, влияющие на компоновку 291
излучения антенной радиотелескопа: 0,324 ГГц, 1,665 ГГц, 4,83 ГГц, 22,235 ГГц.
Антенна космического радиотелескопа выполнена из углепластика. Конструкция антенны складная и состоит из 27 лепестков. Схема складывания аналогична схеме Dornier (см. рис. 4.65). При выведении на целевую орбиту антенна находится в сложенном состоянии. После достижения целевой орбиты выполняется механическое раскрытие антенны радиотелескопа.
Проект «Радиоастрон» представляет собой радиоинтерферометр в составе космического телескопа «Спектр-Р» и наземных радиотелескопов. Высота орбиты «Спектр-Р» составляет 390 тыс. км, что делает его самым длинным радиоинтерферометром на сегодняшний день. Разрешение системы достигнет 8 мкс дуги.
4.2.11. Запись и хранение на борту КА полученной информации
Информация, получаемая с помощью фотографирования, телевизионного или ИК-сканирования, записывается либо на фотопленку с последующей обработкой на борту КА или после доставки на Землю, либо на магнитофонную пленку, с которой изображение передается на Землю. В любом из перечисленных методов качество и оперативность получения информации оставляет желать лучшего.
По сравнению с традиционными приборами, имеющими окулярный ввод изображения, у низкоуровневых телевизионных приборов есть следующие преимущества:
• практически круглосуточная работа путем использования системы автоматической регулировки яркости, автоматического введения нейтральных фильтров и диафрагмирования;
• повышение качества изображения за счет его цифровой обработки в реальном масштабе времени;
• автоматизация процессов обнаружения и распознавания объектов при условии использования ЭВМ;
• ослабление влияния световых помех путем стабилизирования нелинейного усиления и обработки изображения в электронном канале.
В подобных системах запись изображения производится на
ПЗС-матрицу (рис. 4.67), которая рис. 4.67. ПЗС-матрица имеет такие преимущества, как:
292
4. Компоновка целевого оборудования
• малые габариты, масса и энергопотребление;
• постоянство растра, возможность сравнительно простого и точного измерения координат;
• возможность накопления информации;
1 23 4 5
К видеоусилителю
Рис. 4.68. Гибридно-модульный преобразователь с электронной бомбардировкой ПЗС-матрицы: / — объектив; 2 — электроннооптический преобразователь; 3 — фотокатод: 4 — микроканальная пластина; 5 — ПЗС-матрица
• высокая степень однородности распределения чувствительности и разрешения по всей светочувствительной поверхности ПЗС-матрицы;
• удобство обработки сигнала и возможность стробирования;
• высокая стойкость к механическим и климатическим нагрузкам;
• стойкость к световым помехам, возможность их локализации;
• сравнительно низкая стоимость;
• длительный срок службы.
Для повышения чувствительности ПЗС-матрицы ее стыкуют
с электронно-оптическим преобразователем (ЭОП) в целях предварительного усиления света. Такое соединение называют гибридно-модульным преобразователем (ГМП) (рис. 4.68).
В случае необходимости сохранения изображения на длительное
Рис. 4.69. ПЗУ-матрица (257x186 пикселей, 18 Кбайт)
время при продолжении процесса съемки изображение, полученное ранее, переписывается на ПЗУ-матрицу (постоянное запоминающее устройство) (рис. 4.69). По команде с Земли информация сбрасывается с ПЗУ-матрицы на наземное приемное устройство.
4.3. Требования к компоновке целевого оборудования
293
4.3. Требования к компоновке целевого оборудования
К компоновке целевого оборудования на борту КА предъявляются специфические требования. В частности, необходимо:
1) особое внимание уделять взаимному расположению целевого измерительного и фотографирующего (независимо от способа) оборудования и аппаратуры наведения. Вся аппаратура должна размещаться на одной раме (рис. 4.70), поскольку при раздельном размещении
Рис. 4.70. Схемы неправильной (а) и правильной (б) взаимной компоновки целевого оборудования и аппаратуры наведения:
/ — ферма; 2 — ОЭА; 3 — прецизионная гиростабилизированная платформа ориентации; 4 — ИКВ
возникают погрешности, вызванные различным положением датчиков и целевого оборудования. Приборы наведения и регистрирующая аппаратура должны быть соединены жесткой конструкцией;
2) учитывать воздействие проникающей радиации на фотопленку и микросхемы отдельных приборов, для чего устанавливают специальные защитные корпуса, выполненные из материалов, которые обеспечивают защиту приборов от радиационного воздействия;
3) исключать воздействие вибраций и ускорений, возникающих от внешних (вибрации корпуса КА при маневрировании) и внутренних (функционирование различных электромеханических устройств, включая механизм перемотки фотопленки) источников вибрации. Для ослабления возмущений, вызванных вибрациями, чувствительные элементы целевого оборудования или сами приборы устанавливают на амортизаторы;
4) исключать возможность попадания в поле зрения приборов целевого оборудования внешних раскрывающихся элементов конструкции КА (антенн, солнечных батарей, штанг с приборами и т. п.);
294
4. Компоновка целевого оборудования
5) строго выдерживать температурный режим в отсеках, где находятся приборы целевого оборудования. Повышение или понижение температуры приводит к линейным и объемным изменениям размеров, а следовательно, к расфокусировке объективов аппаратуры и ухудшению качества получаемых снимков. Для исключения влияния температурного фактора приборы целевого оборудования (если это требуется) размещают в термостатированных корпусах или отсеках. Для защиты от внешних источников нагрева КА оборудуют СОТР.
На рис. 4.71 представлен вариант компоновки бортового оборудования на спутнике «Нимбус-V». На спутнике установлено
Рис. 4.71. Компоновка бортового оборудования на спутнике «Нимбус-V»:
/ — антенна системы траекторных измерений; 2 — микродвигатель стабилизации по каналу тангажа; 3 — контейнер с приборами системы управления; 4 — сканирующий датчик горизонта; 5 — панель с солнечными элементами; 6. 12 — микроволновой радиометр; 7-9 — ИК-радиометры; 10 — антенна; 11 — научный прибор; 13 — радиатор системы охлаждения; 14 — контейнер с аппаратурой; 15 — элементы конструкции; 16 — солнечный датчик СО солнечных батарей; 17 — микродвигатели стабилизации по курсу
4.3. Требования к компоновке целевого оборудования
295
шесть приборов целевого оборудования: микроволновой радиометр 6, позволяющий с высоты 1000 км получать изображение участка поверхности Земли диаметром 30 км; микроволновой радиометр 72, который дает возможность получить вертикальный профиль содержания кислорода и паров воды в атмосфере; ИК-радиометр 8, работающий в трех диапазонах — с первым каналом, измеряющим отражающую способность поверхности Земли и облаков, вторым и третьим — регистрирующими горные породы (кислые и основные). Кроме того, на спутнике установлены два ИК-радиометра 7, 9, антенна системы траекторных измерений 7, микродвигатель 2 стабилизации по каналу тангажа, микродвигатель 7 7 стабилизации по каналу курса, контейнер 3 с приборами системы управления, сканирующий датчик горизонта 4, панель 5 с солнечными элементами, антенна 70, радиатор системы охлаждения 73, контейнер с аппаратурой 14. элементы конструкции 75, соединяющие контейнер с аппаратурой, солнечные датчики СО солнечных батарей 16.
5. КОМПОНОВКА СИСТЕМ УПРАВЛЕНИЯ
ДВИЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА
5.1. Общие сведения об управлении движением космического аппарата
5.1.1. Классификация СУД
Основное назначение СУД КА — обеспечение эффективного выполнения целевых задач КА.
Эффективность выполнения целевых задач зависит от следующий характеристик СУД:
• времени постоянной ориентации КА на объекты целевых задач;
• вероятности безотказной работы оборудования СУД в течение заданного промежутка времени;
• угловой погрешности СО, СС при выполнении задач;
• погрешности угловой скорости;
• мощности энергообеспечения оборудования СУД.
Система управления движением КА представляет собой комплекс, состоящий из отдельных бортовых и наземных систем, которые объединены циклограммой для решения функциональных задач:
• управления движением центра масс КА, т. е. задач навигации и наведения КА;
• управления движением относительно центра масс, т. е. задач ориентации и стабилизации КА.
Навигация. Задачи навигации: измерение и определение текущих кинематических параметров движения (координат X. К, Z и скоростей X. Y, Z), характеризующих траекторию полета КА,
5./. Общие сведения об управлении движением КА
297
а также определение орбиты КА, расчет отклонений от заданной траектории, нахождение текущих координат проекции КА на поверхность Земли, прогнозирование кинематических параметров движения КА на требуемый период времени полета. Как правило, навигация осуществляется путем использования наземных радиотехнических средств измерения параметров движения центра масс КА, а также с помощью спутниковых систем навигации: (ГЛОНАСС, «Ураган» (Россия), GPS (США)). В этом случае на борту КА устанавливается специальная аппаратура АПСН.
Системы навигации, использующие только бортовые средства измерения и вычисления параметров движения центра масс КА, называются системами автономной навигации. Как правило, такие системы размещают на КА, выполняющих военно-прикладные задачи.
Наведение. Задачи наведения: определение необходимых управляющих воздействий, обеспечивающих приведение КА в заданную точку траектории полета КА в требуемый период времени с заданной скоростью с учетом требуемых ограничений.
Ориентация — управление КА путем совмещения связанной системы координат КА с требуемой опорной (приборной) системой координат, которая задается в проектном задании для выполнения циклограммы функционирования КА. Требуемая система координат задается на борту с помощью приборов СО и может быть неподвижной или перемещаться в пространстве.
Стабилизация — процесс устранения неизбежно возникающих в полете малых угловых отклонений связанной системы координат от опорной системы координат заданной ориентации в результате действия возмущающих моментов.
Движением КА на всех участках траектории полета от момента отделения от ракеты-носителя до момента завершения полета управляет СУД.
Система управления движением должна обеспечивать:
• демпфирование по всем трем осям после отделения от ракеты-носителя;
• ориентацию и стабилизацию КА в орбитальной, путевой, инерциальной и развернутой орбитальной системах координат;
• периодическую точную ориентацию и стабилизацию КА в заданной системе координат при проведении целевых работ;
• длительную ориентацию и стабилизацию КА в орбитальной системе координат на рабочей орбите при отсутствии целевых работ;
298 5. Компоновка систем управления движением космического аппарата
• ориентацию и стабилизацию КА в относительной развернутой орбитальной системе координат на определенные углы для сброса кинетического момента, накопленного электромеханическими исполнительными органами; сброс кинетического момента во время проведения целевых работ не допускается;
• разворот КА на заданные углы в соответствии с программой;
• восстановление ориентации из неориентированного положения;
• ориентацию и стабилизацию КА относительно требуемой системы координат при проведении маневров и коррекции орбиты, включение и выдачу тормозного импульса;
• формирование сигналов управления на электроклапаны ЖРД для обеспечения вакуумирования топливных магистралей ДУ на начальном участке полета;
• контроль функционирования и управления резервированием аппаратуры СУД;
• прием, обработку и хранение полетного задания, получаемого от БЦВК;
• управление КА по каналу курса от сигналов доплеровской коррекции в режиме функционирования радиолокационного целевого оборудования;
• измерение приращения кажущейся скорости центра масс КА в режиме выдачи корректирующего импульса и формирование сигнала коррекции на отключение ДУ при достижении необходимого приращения скорости;
• длительное время функционирования на заданных высоте и угле наклона плоскости орбиты.
В зависимости от способа создания управляющих импульсов и моментов стабилизации и управления ориентацией КА существующие СУД подразделяют на активные, пассивные и комбинированные.
В табл. 5.1 приведено сравнение характеристик активной и пассивной СУД.
Для обеспечения заданного закона управления СУД формирует управляющие моменты нужного значения и знака.
По степени полноты ориентации СУД можно подразделить на системы трехосной и одноосной ориентации.
В системе трехосной ориентации положение каждой из трех осей КА жестко связано с КА. После завершения процесса ориентации КА занимает строго ориентированное положение в пространстве.
5.1. Общие сведения об управлении движением КА
299
Таблица 5.1. Сравнение характеристик активной и пассивной СУД
Характеристика СУД
активная пассивная
Расход бортовых источников питания для функционирования Используется энергия рабочего тела или электроэнергия, имеющаяся на борту КА Не используются бортовые источники питания. Идеально экономичны
Точность ориентации и стабилизации Сложность, надежность Управляющий момент Маневренность Быстродействие Влияние на окружающую среду Высокая (до долей единиц угл. мин) Сложность, ограниченный срок функционирования, определяемый степенью резервирования Большое значение Большая Высокое Загрязняет окружающую среду в результате работы ЖРД Низкая (примерно 5...10°) Простота, высокая надежность и достаточно большой срок службы Малое значение Малая Малое, ориентация КА в течение продолжительного времени Не загрязняет окружающую среду
При системе одноосной ориентации одна из осей КА ориентируется в требуемом направлении (на Солнце или звезду), а две другие занимают произвольное положение.
5.1.2. Активные СУД и требования, предъявляемые к ним
Характерные особенности активных СУД — формирование управляющих импульсов и моментов за счет энергии самого КА (энергии рабочего тела или электроэнергии, имеющихся на борту КА) и их реализация двигателями КА или электромеханическими исполнительными органами (ЭМИО) управления.
Активная СУД состоит из следующих элементов:
• измерительные устройства (акселерометры, гироскопические инфракрасные, астрономические радиотехнические и ионные измерительные устройства, оптические визиры), с помощью которых измеряются угловое положение и угловые скорости КА;
300 5. Компоновка систем управления движением космического аппарата
• усилительно-преобразующие устройства, которые обрабатывают сигналы, полученные с измерительных устройств;
• БЦВМ, вырабатывающие по алгоритмам управления движением команды для исполнительных органов СУД КА;
• исполнительные органы (реактивные двигатели, двигатели-маховики и ЭМИО), в задачу которых входит создание управляющих моментов, разворачивающих КА в заданное положение, а также парирование возмущающих моментов, действующих на КА.
Активные СУД классифицируют:
• по задачам управления (управление движением центра масс и движением относительно центра масс);
• построению структуры (централизованная и распределенная);
• способам резервирования (по надежности резервных элементов — равно- и разнонадежные; по способу включения — постоянное резервирование, резервирование замещением, резервирование с программным или комбинированным включением; по режиму, в котором находятся резервные элементы — «горячее» или «холодное» резервирование, резервирование с облегченным режимом);
• виду переключающих устройств (переключение всех резервных элементов и переключение заданного количества резервных элементов);
• виду автоматизации управления (автоматические, полуавтоматические и телеоператорные);
• типу управляющих органов (реактивные, электромеханические и магнитные);
• способам оптимизации (самоорганизующиеся и адаптивные).
На активную СУД накладываются следующие ограничения:
• по массогабаритным характеристикам и энергетическим параметрам (расход рабочего тела и энергопотребление);
• точности (параметры СУД определяются целевым оборудованием КА, и от этих требований зависит приборный состав СУД); СО и СС бывают высокоточными (погрешность СО составляет 0,1...0,6', погрешность СС — 0,015... 1,5'), средней точности (погрешность СО — 6...60', погрешность СС — 1,5... 15,0' по каждому каналу управления), погрешность ориентации при коррекции по ИКВ в режиме гирокомпасирования не более 10';
• погрешностям СО и СС при выдаче импульсов коррекции и тормозного импульса (не более 1,0...2,0° по каждому каналу управления); максимальная погрешность измерения приращения скорости не должна превышать 0,1 м/с, при выдаче импульса коррекции 0,1...3,0 м/с и ± 3 % от заданного значения скорости из диапазона значений 3... 100 м/с;
5.1. Общие сведения об управлении движением КА
301
• условиям эксплуатации, которые задаются в соответствии с ЕНВВФ для каждого конкретного КА.
Компоновка приборов активной СУД должна обеспечивать:
• выполнение основного критерия проектирования КА (высокая эффективность, низкая стоимость и малые сроки создания КА);
• работоспособность приборов при влиянии внешних и внутренних воздействующих факторов (вибродинамических нагрузок, теплового и электромагнитного воздействия);
• уменьшение эксплуатационных погрешностей приборов (методических и инструментальных, систематических и случайных, абсолютных и относительных);
• максимальную надежность при минимальных расходах энергии рабочего тела и электроэнергии;
• точность установки приборов и возможность их регулировки после монтажа на КА в соответствии с рекомендациями (табл. 5.2).
Таблица 5.2. Требования к точности установки приборов активной СУД МКА
Прибор Точность установки по осям
курса тангажа крена
Звездный датчик* СО 30" по оси X 60" по оси Y 30" по оси Z
Датчик Солнца СО 2' 2' 2'
ИКВ СО 2' 1' 2'
Гироскопический при- Г 1' Г
бор ориентации СО
Магнитометры СС и 1° 1° 1°
ССКМ
Электромагнитный дат- 1° 1° 1°
чик ССКМ
Акселерометр системы 5' 10' 10'
наведения
ГЛОНАСС 25' 25' 25'
Приемное устройство 3° 3° 3°
Вычислительное 5° 5° 5°
устройство системы
ГЛОНАСС
БЦВМ 3° 3° 3°
* Приведена точность ориентации места для его установки относительно ба-
зового угольника.
302 5. Компоновка систем управления движением космического аппарата
5.L3. Задачи, выполняемые БЦВК, состав и компоновка
Бортовой вычислительный комплекс — совокупность вычислительных устройств различного функционального назначения, объединенных информационным интерфейсом между собой и с абонентами бортовых систем и целевого оборудования, связанных между собой (рис. 5.1).
Рис. 5.1. Архитектура бортовой вычислительной среды КА
Бортовой вычислительный комплекс выполняет следующие функции:
• размещение программного обеспечения бортового комплекса управления;
• предоставление вычислительных ресурсов для реализации задач управления бортовыми системами, целевым оборудованием и КА в целом в реальном времени;
• обеспечение взаимодействия с бортовыми системами, входящими в состав бортового комплекса управления;
• организацию управляющих и информационных интерфейсов с бортовыми системами и целевым оборудованием;
• выдачу цифровой телеметрической информации на радиотехнический комплекс;
• прием информации, выданной из БУП в ответ на разовую команду, поступившую в БУП;
• оперативный ввод ПЗ в собственные репрограммируемые запоминающие устройства с контролем правильности его записи.
БЦВК обеспечивает унификацию информационных связей с литературой, выполненной различными разработчиками и содержащей, как правило, различные вычислительные средства и каналы информационного обмена (рис. 5.2).
5. /. Общие сведения об управлении движением КА
303
GPS механизмы
Рис. 5.2. Упрощенная структурная схема бортовой вычислительной среды КА: ЦВК — цифровой вычислительный комплекс: БАОСИ — бортовая аппаратура обработки сигналов изображения; БА КИС — бортовая аппаратура командноизмерительной системы; СТКРП — система трансляции команд и распределения питания; БСКВУ — бортовое синхронизирующее командно-вычислительное устройство; ССН — система спутниковой навигации; СУД — система управления движением; БСТИ — бортовая система телеметрических измерений; НКУ — наземный комплекс управления; БСКВУ-М — бортовое синхронизирующее кординатно-временное устройство; СЭП — система электропитания; БРЛК — бортовой радиолокационный комплекс; ВРЛ — вторичный радиолокатор; SW — электрическая линия; SF — высокочастотная линия
Цифровой вычислительный комплекс имеет функционально законченные узлы, конструктивно выполненные в виде отдельных устройств и содержащие программно-математическое обеспечение, в состав которого входят базовая операционная система, система контроля и диагностики и фундаментальное программное обеспечение. В табл. 5.3 приведены характеристики трех бортовых компьютеров для МКА.
5.1.4. Пассивные системы ориентации и стабилизации
Пассивными называют системы, которые при функционировании используют действующие на КА стабилизирующие моменты, возникающие в окружающей среде (гравитационное и магнитное поля планеты, аэродинамические силы, давление света и т. п.). Стабилизацию КА собственным вращением также можно отнести к пассивным СС.
Гравитационная стабилизация предотвращает вращение КА и обеспечивает его однозначное положение по отношению к планете на определенных высотах. Эффективна для Земли на высоте 200...2000 км при условиях небольших начальных углов и угловых скоростей. Эти условия называют условиями захвата.
Таблица 5.3. Сравнительные характеристики современных бортовых компьютеров в блочном исполнении
Фирма Шифр Радиационная стойкость, надежность Архитектура, вычислительные ресурсы Интерфейсы ввода, вывода Конструктивные особенности Примечание
Astrium (Г ерма-ния) OBCU01 100 крад, 4 • 1(Г8 сбоев/сут Р1750А, 16 разрядов, 1 млн оп./с, резервированная внутренняя шина, 256 Кбайт ОЗУ, 256 Кбайт ПЗУ Специальные радиаль- ные каналы: команды и телеметрия; ориентация и стабилизация; магнитометр. Интерфейсы обмена: RS-422 и специализированные Крей Евромеханика 6U на 7x2 модуля, потребление 17 Вт, масса 13 кг, объем 21 дм3 «Холодное» резервирование каждого из семи модулей
EMS technologies (Канада) ESP6O3 \ — PowerPC, ^разрядов, 177-459 млн оп./с, Compact PCI, 32 Мбайт ДОЗУ, 512 Кбайт СОЗУ, 1 Мбайт ППЗУ Унифицированные и специализированные каналы Крей Евромеханика 6U COTS — технология для низкоорбитальных МКА
ESP1000 100...300 крад R3000, 16 разрядов, 60-75 млн. оп./с, Compact PCI, 32, 2 Мбайт СОЗУ, 1 Мбайт ППЗУ Крей Евромеханика 3U
5.1. Общие сведения об управлении движением КА
305
Для увеличения управляющего момента к корпусу КА присоединяют гравитационный стабилизатор, состоящий из одной или
нескольких тонких разворачивающихся штанг с грузами на концах, которые придают КА форму гантели.
Если КА включает в себя три различные по длине гантели, ортогонально соединенные между собой в середине, то гравитационные и центробежные моменты создадут вращающие моменты, которые развернут КА. В результате разворота КА большая по длине гантель совпадет с местной вертикалью, следующая по длине — с плоскостью орбиты, а короткая — с перпендикуляром к плоскости
орбиты. Таким образом, на КА, движущийся в центральном гравитационном поле с различными моментами инерции, действуют восстанавливающие моменты. Для создания значительных моментов необходимо увеличивать разность осевых моментов.
Гравитационная стабилизация получила широкое применение на современных КА, не требующих высокой точности. Ее также используют как режим грубой ориентации и стабилизации КА.
Рис. 5.3. Гравитационная штанга (транспортное положение)
Вариант конструкции гравитационной штанги в транспортном положении приведен на рис. 5.3.
После срабатывания механизма зачековки освобождается лента с грузом на конце. Лента имеет «память» и после раскрытия сворачивается в трубку. Представленная на рисунке гравитационная
штанга имеет следующие параметры:
Длина гравитационной штанги после раскрытия, м .... 4,5
Время выдвижения, с ......................... 5
Масса оконечного груза, кг .................. 2
Суммарная масса, кг ......................... 3
Ресурс работы ............................... не ограничен
Аэродинамическая стабилизация эффективна на высотах менее 600 км от поверхности Земли, при этом, чем меньше высота, тем лучше стабилизация и управление. Необходимо, чтобы КА обладал аэродинамической устойчивостью.
306 5. Компоновка систем управления движением космического аппарата
В случае применения аэродинамической стабилизации требуется, чтобы аэродинамическая форма КА обеспечивала максимальный управляющий момент в заданном диапазоне значений угловых отклонений при минимально возможном аэродинамическом сопротивлении и максимально возможной крутизне моментной характеристики.
Аэродинамической стабилизации аналогична стабилизация под действием давления света, которое обратно пропорционально квадрату расстояния от Солнца.
Стабилизация КА под действием давления света осуществляется с помощью «солнечного руля» и демпфирующих устройств.
При применении аэродинамической стабилизации и стабилизации под действием давления света не требуются датчики ориентации КА, а необходимая ориентация обеспечивается естественным образом.
Магнитная стабилизация осуществляется за счет взаимодействия магнитных полей планеты и КА, в результате чего возникает момент, используемый для управления угловым положением.
Космический аппарат с пассивной магнитной стабилизацией всегда ориентирован вдоль линий магнитного поля, так что его магнитный диполь согласуется с местным направлением магнитных силовых линий планеты.
С увеличением расстояния от поверхности Земли ее магнитное поле ослабевает (обратно пропорционально кубу расстояния от центра Земли). Однако до высоты 45 000 км при наличии сильного магнитного поля у КА можно получить приемлемый восстанавливающий момент.
Стабилизация вращением. При необходимости стабилизации одной оси КА в инерциальной системе отсчета применяют стабилизацию КА вращением относительно этой оси.
Стабилизация вращением обладает простотой конструктивных решений, высокой надежностью, низкой стоимостью, обеспечивает равномерное освещение КА солнечным светом и позволяет получить умеренный тепловой режим КА. Поскольку при длительном полете под воздействием внешних возмущающих факторов кинетический момент уменьшается, следует поддерживать постоянную скорость вращения КА.
При компоновке пассивной СУД необходимо обеспечить точность установки приборов согласно данным, приведенным в табл. 5.4.
5.2. Компоновка бортового оборудования системы управления ... 307
Таблица 5.4. Точность установки приборов пассивной СУД МКА
Прибор Точность установки по осям
тангажа крена курса
Штанги гравитационной СС КА Штанга гравитационной СС относительно центра масс Двигатель-маховик СС 0,3° 5 мм 15' 0,3° 5 мм 15' 8 мм 15'
5.2. Компоновка бортового оборудования системы управления движением
5.2.1. Особенности компоновки гироскопических приборов
При компоновке гироскопических приборов на КА необходимо, чтобы погрешности установки были минимальными. Для правильной установки гироскопических приборов следует знать частоты и формы колебаний конструкции КА. Гироскопические приборы размещают в пучностях, акселерометры — в узлах волн колебаний КА, чтобы приборы не воспринимали движения КА, вызванные упругими колебаниями корпуса. В полете параметры этих колебаний могут изменяться в результате выгорания топлива и раскрытия или сброса элементов конструкции. Смещения пучности и узла волн относительно места установки гироскопических приборов приводят к погрешностям определения углов и угловых скоростей. Поэтому при выборе места установки гироскопических приборов необходимо учитывать изменение частот и форм колебаний конструкции КА вследствие выработки топлива, сброса или раскрытия элементов конструкций.
В процессе работы гироскопические приборы нагреваются от внутренних и внешних источников нагрева. Поэтому для таких приборов необходимо обеспечить постоянный тепловой режим работы. В противном случае возникнут отрицательные явления: смещение центра масс гиромотора, изменение нагрузки на подшипники, увеличение момента сопротивления опор, изменение жесткости конструкции и собственных частот колебаний. Все это приводит к появлению дополнительных погрешностей в работе приборов. При компоновке гироскопических приборов следует предусматривать специальную защиту от воздействия магнитных полей, точно ориентировать оси прибора относительно осей КА (как правило, на корпусе прибора наносится указатель направления полета).
308 5. Компоновка систем управления движением космического аппарата
Погрешности гироскопических приборов могут быть заранее определены по результатам замеров. Для компенсации погрешностей вводят поправки. В целях их уменьшения все гироскопические приборы устанавливают на одной жесткой плате.
5.2.2. Особенности компоновки ИКВ
При компоновке ИКВ необходимо обеспечить работоспособность, точность измеряемых параметров и помехозащищенность. ИКВ располагают на борту КА так, чтобы в поле ее зрения не было никаких элементов конструкции. При этом следует помнить, чем меньше высота полета КА с ИКВ, тем шире поле зрения прибора. Для предотвращения нагрева прибора на участке выведения на орбиту его следует размещать под обтекателем КА, а если обтекатель отсутствует, то следует предусмотреть отдельный обтекатель для ИКВ. В некоторых случаях ИКВ размещают на штанге или кронштейне, конструкции которых раскрываются после выведения в космос. Такие конструкции должны свободно раскрываться и обеспечивать требуемый угол поля зрения прибора. На кронштейнах устанавливаются телеметрические датчики, дающие информацию об углах раскрытия конструкции и факте фиксированного положения ИКВ после раскрытия. Кронштейны и штанги должны иметь большую жесткость и частотные характеристики, не совпадающие с собственными частотными характеристиками ИКВ. Механизм раскрытия может быть пружинным, газовым или электромеханическим. В любом случае раскрытие должно происходить плавно и без ударов, после раскрытия конструкция фиксируется с помощью замков.
Точность ориентации КА зависит от погрешности выходных сигналов ИКВ. На работоспособность и точность приборов существенно влияет загрязнение оптики прибора. Источники загрязнения — газы от продуктов сгорания топлива при работе ДУ, выделяющиеся из материалов, используемых в конструкции КА, пыль от экранно-вакуумной теплоизоляции и т. п.
Загрязнение устраняют:
• размещением ИКВ как можно дальше от ОДУ и двигателей стабилизации;
• установкой ИКВ в стакане корпуса КА;
• расположением двигателей стабилизации в нишах, изменяющих направление движения газов продуктов сгорания, которые
5.2. Компоновка бортового оборудования системы управления ... 309
разлетаются под углом 60° от оси сопла; ниша препятствует распространению газов по корпусу КА.
Резервные ИКВ закрывают специальными откидными крышками, предохраняющими оптические системы от газов КА и метеоритной пыли.
Механические и тепловые воздействия на ИКВ также нежелательны. При компоновке необходимо размещать приборы в местах, где это воздействие будет минимальным.
5.2.5. Компоновка электромеханических исполнительных органов
В настоящее время для стабилизации и разворотов КА применяют два вида исполнительных органов: ЭМИО и двигатели.
В качестве ЭМИО могут использоваться двигатели-маховики и силовые гироскопы. В обоих случаях управление угловым положением КА осуществляется путем перераспределения суммарного кинетического момента между корпусом КА и вращающимися массами ЭМИО. Двигатели-маховики изменяют свой кинетический момент за счет изменения скорости вращения, силовые гироскопы — за счет изменения взаимного положения роторов, вращающихся с постоянной скоростью. Основное преимущество силового гироскопа — усиление момента, т. е. момент, прикладываемый для поворота вектора кинетического момента ротора гироскопа, значительно меньше возникающего при этом управляющего момента, действующего на КА.
В зависимости от формы МКА и места, выделенного для размещения двигателя-маховика, применяют двигатели-маховики различных типов (плоские, шаровые, кольцевые). Для управления маневрами космических станций с большими моментами инерции используют силовые гироскопы, поскольку при условии создания одинакового управляющего момента силовые гироскопы имеют преимущество перед двигателями-маховиками по массогабаритным характеристикам. Еще одно преимущество силовых гироскопов — линейная зависимость управляющего момента от управляющей функции, что позволяет управлять объектами со сложной динамической схемой (например, КА с большими солнечными батареями или значительным числом раскрывающихся конструкций).
310 5. Компоновка систем управления движением космического аппарата
Двигатели-маховики. Плоские двигатели-маховики (рис. 5.4), используемые на МКА небольших габаритов, обеспечивают достаточно быструю и точную стабилизацию КА в полете. В табл. 5.5 приведены основные характеристики двигателей-маховиков, разработанных в НПП ВНИИЭМ им. А.Г. Иосифьяна.
Рис. 5.4. Плоские двигатели-маховики ДМ (а) и ДМ-1 (б), разработанные НПП ВНИИЭМ им. А.Г. Иосифьяна:
1 — защитный кожух; 2 — монтажная ось; 3 — электрический соединитель; 4 — монтажная поверхность (стрелка показывает направление вектора кинетического момента)
Таблица 5.5. Основные характеристики двигателей-маховиков
Модель Потребляемая мощность при управляющем моменте Л/уц, Вт, не более Управляющий момент Н м, не более Диапазон изменения кинетического момента Н м с, не более Диапазон изменения частоты вращения, мин1 на оборот ащения ро- йка Масса блока, кг Габариты, мм
Л/yi] -Л^пах ч,.=° Электромеханического Электроники D*L А В С
Число импульсов датчика частоты вр тора-махов
ДМ 70 6 0,26 ± 19,6 1100 960 10,5 2,7 390x160 261 168 84
ДМ-1 100 7 0,35 ±29,4 1200 960 14,0 3,5 390x170 271 181 86
ДМ-2* 75 7 0,10 ± 14,0 3500 36 5,0 2,0 260x150 267 168 84
ДМ-3’ 7 1 0,007 ±0,3 6000 36 0,8 130x70 — — —
ДМ-4* 29 5 0,02 ±8,0 6000 36 3,о | 1,0 190x90 200 120 70
ДМ-5’ 27 3 0,02 ± 1,0 6000 36 1,5 150x100 — — —
ДМ-б’ 30 4 0,05 ±5,0 2500 36 3,8 225x100 — — —
ДМ-7’ 14 3 0,02 ±0,1 3000 36 1,5 140x110 — — —
ДМ-8’ 14 3 0,02 ±0,3 3000 36 1,7 170x100 — — —
ДМ-9’ 18 3 0,012 ±4,0 6000 36 2,6 200x100 — — —
* Приведены проектные данные.
312 5. Компоновка систем управления движением космического аппарата
В качестве привода двигателя-маховика применяют двигатели постоянного тока с электронной коммутацией напряжения при управлении. Принцип работы двигателя-маховика заключается в перераспределении суммарного кинетического момента между двигателем-маховиком и КА в целях изменения угловой скорости КА для выполнения требуемого углового маневра (стабилизации или разворота).
Уравнение плоского движения КА можно записать в следующем виде:
Лм^пм +ЛсдЙКА = Ну\ + AL -Мс,
Д.М Д.М Д.М Д.М JJI ф С7
где Уд.м — осевой момент инерции двигателя-маховика; содм — угловая скорость вращения двигателя-маховика относительно корпуса КА; — момент инерции КА; соКА — угловая скорость вращения КА; — суммарный кинетический момент системы КА — двигатель-маховик; Мзл — момент, создаваемый электродвигателем двигателя-маховика, Мзл = ki* (к — крутизна характеристики электродвигателя двигателя-маховика; /я — управляющий ток, поступающий на якорь двигателя-маховика); Л/ф — момент трения в опорах маховика; Мс — момент сопротивления вращению двигателя-маховика, включающий в себя момент аэродинамического сопротивления, момент вязкого трения в опорах и др.).
Для вращения маховика необходимо выполнение неравенства
Ki>HI-
Возрастание момента ведет к увеличению управляющего тока и снижению точности стабилизации КА.
Из приведенных выше соотношений следует, что при изменении угловой скорости вращения двигателя-маховика от содм0 до (Од.мо ± А сод м КА начинает вращаться с угловой скоростью + соКа-
Впервые кольцевой двигатель-маховик (рис. 5.5) был применен для разворота пилотируемой орбитальной станции «Алмаз» вокруг оси X.
Блок питания двигателей СП
Рис. 5.5. Схема кольцевого двигателя-маховика:
СП — система приводов: И70С — передаточная функция обратной связи; / — электродвигатели управления кольцом
314 5. Компоновка систем управления движением космического аппарата
Двигатель-маховик выполнен в виде кольца прямоугольного сечения, которое приводится во вращение двумя приводными станциями, состоящими из электродвигателя, приводного и прижимного роликов, обеспечивающих фрикционную передачу момента на кольцо. Сигналы с тахометрического датчика двигателя-маховика поступают в блоки электромеханической СС и формируют управляющие сигналы.
Кольцевой двигатель-маховик может иметь диаметр, близкий к наружному диаметру орбитальной станции, что позволяет вписывать его во внешний контур станции при компоновке, при этом внутренний объем практически не занимается.
Шаровой двигатель-маховик (рис. 5.6), впервые примененный для стабилизации орбитальной станции «Алмаз», включает ротор-маховик, представляющий собой полый шар, который удерживается в пространстве электромагнитным полем. Шар приводится во вращение электродвигателем с помощью дуговых статорных обмоток, расположенных попарно в трех взаимно перпендикулярных плоскостях. Направление вращения ротора определяется тахометрическими генераторами, установленными на каждой из осей. Управление положением КА осуществляется за счет реактивных моментов, возникающих при изменении скорости вращения шарового ротора-маховика по каждой из осей. Шар центрируется автоматически по сигналам с индуктивных датчиков за счет изменения силы тока в обмотках электромагнитов. Отсутствие механических опор позволяет ротору-маховику свободно вращаться вокруг любой из осей, проходящей через центр масс.
В табл. 5.6 приведены сравнительные характеристики двигателей-маховиков различных типов.
Таблица 5.6. Сравнительные характеристики двигателей-маховиков различных типов
Характеристика Тип двигателя-маховика
плоский кольцевой шаровой
Момент: управляющий, Н м кинетический, Н м с Масса двигателя-маховика, кг Напряжение питания, В Частота вращения, мин1 Диаметр, м Потребляемая мощность, Вт Гарантированный ресурс, ч 0,25 ±20 13 1100 5...50 30 000 200 1000 65 27 ± 10% 83 2,7 30... 1000 1000 3,0 200 80 800 0,6 < 100 10 000
эмсс
Рис. 5.6. Схема шарового двигателя-маховика, разработанного НПП ВНИИЭМ им. А.Г. Иосифьяна: / — статорные обмотки; 2 — электромагнит и датчик системы подвески
316 5. Компоновка систем управления движением космического аппарата
Силовые гироскопы. По мере увеличения массы и габаритов КА возникла необходимость в разработке унифицированных силовых гироскопических СС, которые при относительно низкой потребляемой мощности создавали бы большие управляющие моменты. Для этих целей в космической технике применяют трех- и двухстепенные силовые гироскопы (гиродины).
Гиродины широко используют в космической технике. Управляющий сигнал поступает на моментный двигатель гиродина с чувствительных элементов СО при изменении положения КА под действием возмущающих моментов. Мощность моментного двигателя гиродина зависит от темпа нарастания угловой скорости гироузла, момента инерции гироузла и потерь на трение в опорах.
Создание высокоточной СС, включающей в себя гиродин, зависит от оптимального расположения прибора на борту КА и от оптимального управления его работой, обусловленных обеспечением точностных и динамических свойств гиродина и его узлов.
Гиродин состоит из электромеханических устройств, конструктивно объединенных в отдельный блок, и электронной аппаратуры для питания, управления приводами и электромагнитными полями.
В зависимости от выполняемых функций в гиродин могут входить:
• привод ротора, обеспечивающий его разгон и вращение с номинальной скоростью; состоит из электродвигателя, тахометрического генератора и электронной системы управления;
• система электромагнитных подшипников, центрующая ротор относительно статора при воздействии гироскопических моментов; включает в себя электромагниты, датчики положения ротора и аппаратуру управления токами электромагнитов;
• двигатель прецессии, вращающий гироузел вокруг оси прецессии в соответствии с управляющим сигналом; состоит из двигателя, тахометрического генератора, редуктора и системы управления;
• датчик углового положения гироузла, вырабатывающий сигналы синуса и косинуса угла поворота; включает в себя синуснокосинусный вращающийся трансформатор и аппаратуру преобразования сигналов.
Материалы, применяемые в конструкциях гиродинов, и разработанная технология дегазации позволяют создать в гироузле разрежение, достаточное для того, чтобы не учитывать аэродинамическое сопротивление при вращении ротора. В процессе эксплуа
5.2. Компоновка бортового оборудования системы управления.. .317
тации полость гироузла соединяется с космическим пространством, что дает возможность устанавливать гиродины на внешней стороне КА, при этом полости редуктора и токосъемов надежно герметизируются.
Надежность работы электромеханической СС обеспечивается за счет избыточности системы и перестройки алгоритма управления в случае отказа отдельных гиродинов, а также за счет резервирования электронной аппаратуры и элементов конструкции механических блоков.
Управляющий момент гиродина передается на корпус КА непосредственно через подшипники ротора, поэтому их грузоподъемность и динамическая жесткость являются основными параметрами, определяющими полосу пропускания гиродина, а следовательно, и быстродействие гироскопической СС в целом.
Гиродины обеспечивают точ- У1
ность стабилизация КА до Г. Кинетический момент Ягир гиродина (рис. 5.7) передается посредством принудительного изменения его положения моментным двигателем. Управляющий сигнал поступает на моментный датчик гиродина с чувствительных элементов системы управления. При подаче управляющего сигнала на моментный двигатель прецессии гироскоп будет поворачиваться вокруг оси Z с угловой скоростью coz, за счет чего появится гироскопический момент Л/гир = Ягирс6 z. Вектор Мгир направлен ортогонально
Рис. 5.7. Схема гиродина:
/ — редуктор; 2 — моментный двигатель
плоскости, образованной векторами Ягир и coz. Вектор гироскопического момента А?гир поворачивается с угловой скоростью й v, а его проекции на оси X и Y следующие:
Mx(t) = d(/)Hcosoc(r);
MY(t) = d(/)Hsin ot(/).
318 5. Компоновка систем управления движением космического аппарата
Внешний момент, действующий на КА, придает ему некоторую угловую скорость, под влиянием которой гироскоп гиродина начинает прецессировать в направлении противодействия первоначальному возмущению. Этот процесс будет продолжаться в течение всего времени действия внешнего возмущающего момента, при этом угол поворота КА будет увеличиваться. Стабилизирующее действие гироскопа прекратится, когда угол поворота станет равным 90° и гиродин выйдет на режим «насыщения». Для выведения его из этого режима необходимо устранить накопленный возмущающий импульс (например, с помощью управляющих двигателей). Функциональная схема гиродина, разработанного ВНИИЭМ, показана на рис. 5.8, а основные характеристики приведены ниже.
Рис. 5.8. Функциональная схема гиродина
5.2. Компоновка бортового оборудования системы управления... 319
Момент:
кинетический, Н м с.....................1000
управляющий, Н м........................До 200
Ротор: диаметр, м.............................0,4
частота вращения, мин”1................10 000
Масса с электронной аппаратурой, кг.......160
Потребляемая мощность, Вт.................50
Компоновка электромеханических СС КА имеет ряд особенностей.
Для стабилизации по трем осям КА с помощью плоских двигателей-маховиков необходимо устанавливать на каждую из осей такой двигатель-маховик, который требует выделения значительных объемов в приборном отсеке. Двигатели-маховики следует размещать в центре масс КА или как можно ближе к нему. Это требование также усложняет внутреннюю компоновку приборного отсека.
Вместо трех плоских двигателей-маховиков целесообразно устанавливать один шаровой, который имеет ряд преимуществ по сравнению с плоским двигателем-маховиком: значительно малые массогабаритные характеристики, а следовательно, и меньшие проблемы при компоновке в приборном отсеке, отсутствие нерасчетных гироскопических моментов при вращательном движении КА в нескольких плоскостях. Шаровой двигатель-маховик следует размещать в центре масс КА или близко к нему.
В случае стабилизации КА относительно одной из осей и значительных габаритах КА (диаметр более 1 м) целесообразно использовать кольцевой двигатель-маховик. Такие двигатели-маховики обладают значительным моментом инерции и хорошо компонуются на КА, поскольку кольцо хорошо вписывается в наружный контур КА, что практически не вызывает затруднений при внутренней компоновке отсеков.
Широко применяют стабилизацию с помощью четырех или шести гиродинов. Схема из шести гиродинов обеспечивает наилучшую управляемость КА и возможность сохранения работоспособности даже при отказе двух приборов. Существуют конструкции гиродинов, позволяющие устанавливать их в негерметичных отсеках и на наружной поверхности КА.
Для устранения влияния электромагнитных полей гиродина и шарового двигателя-маховика требуется их экранирование, чувствительные приборы необходимо устанавливать на значительном удалении от источников электромагнитных полей.
320 5. Компоновка систем управления движением космического аппарата
Единое требование, предъявляемое к компоновке всех электромеханических СС, — необходимость размещения блоков электропитания вблизи от ЭМИО для уменьшения длины питающих цепей.
5.3. Компоновка двигателей системы управления движением
5.3.1. Классификация двигателей КА
В качестве исполнительных органов СУД используются двигатели различного типа (ЖРД, газоструйные сопла, электрореактив-ные двигатели малой тяги и др.), которые можно классифицировать следующим образом.
1. По принципу действия (по типу рабочего тела):
• жидкостные двигатели, использующие в качестве рабочего тела продукты сгорания жидких компонентов, которые смешиваются в камере сгорания;
• твердотопливные двигатели, у которых рабочим телом являются продукты сгорания твердотопливной шашки, содержащей горючее и окислительное вещества в виде химического соединения или дисперсной смеси;
• газоструйные двигатели с рабочим телом в виде сжатого газа (азота, гелия);
• ядерные двигатели, которые бывают двух видов: прямого и косвенного действия; в первом случае продукты сгорания в ядер-ном реакторе выбрасываются через сопло и создают тягу; во втором —теплота от ядерного реактора нагревает компоненты жидкого топлива, что повышает удельную тягу;
• электродинамические двигатели, использующие в качестве рабочего тела пучок заряженных частиц, разгоняемый электромагнитным полем.
2. По виду выполняемой работы:
• маршевые двигатели (тяга до нескольких тонн), применяемые для выполнения маневров КА, связанных с изменением параметров орбиты (высота, угол наклона, сход с орбиты);
• двигатели ориентации (сила тяги до 1 т), предназначенные для использования при наведении, стыковке, ориентации и т. п.;
• двигатели стабилизации, подразделяемые на ДЖС (сила тяги десятки килограммов) и ДМС (сила тяги до 10 кг); ДЖС работают при возникновении больших возмущающих моментов, действующих на КА (при выполнении КА маневров, разделении ступеней, раскрытии конструкций и т. д.), ДМС — при малых возмущающих моментах;
5.3. Компоновка двигателей системы управления движением 321
• вспомогательные двигатели, выполняющие вспомогательные функции: разделение конструкций, закрутку, увод отделенных конструкций, топливных емкостей и т. д.
3. По виду подачи компонентов топлива в камеру сгорания:
• вытеснительная система подачи, применяемая при давлении в камере сгорания не выше 3 МПа; подача компонентов из баков проводится при помощи сжатого газа;
• насосная система подачи, используемая при давлениях в камере сгорания более 3 МПа. Подача компонентов осуществляется насосами.
5.5.2. Структура системы исполнительных органов, работающих на жидком топливе
Система исполнительных органов, обеспечивающих маневрирование и стабилизацию КА, — сложная бортовая система, к компоновке которой предъявляются определенные требования. На рис. 5.9 приведена пневмогидросхема системы исполнительных органов КА с вытеснительной системой подачи компонентов топлива.
Рис. 5.9. Пневмогидросхема системы исполнительных органов КА с вытеснительной системой подачи компонентов топлива:
1 — шар-баллон для газа системы наддува: 2 — датчик температуры; 3 — датчик высокого давления газа; 4 — заправочная горловина газа; 5 — пусковой электропневмоклапан (ЭПК); 6 — регулятор давления; 7 — обратный клапан; 8 — датчик низкого давления газа; 9 — дренажная горловина; 10 — бак с горючим веществом; // — бак с окислительным веществом; 12 — датчик давления компонентов топлива; 13 — заправочная горловина для горючего вещества; 14 — заправочная горловина для окислительного вещества; 15 — магистральный клапан компонентов (электрогидроклапан); 16 — фильтр; 17 — датчики давления компонентов топлива; 18 — проверочная горловина и магистраль подачи: 19 — управляющие клапаны подачи компонентов топлива в двигатели; 20 — ДМС; 21 — ДЖС
322 5. Компоновка систем управления движением космического аппарата
Как ясно из рис. 5.9, основные элементы системы исполнительных органов — двигатели, баки с компонентами и шар-баллон для газа систем наддува. Эти элементы значительно влияют как на компоновку, так и на эффективность выполнения КА целевой задачи.
5.3.3. Требования, предъявляемые к компоновке двигателей
При компоновке ДУ на КА необходимо выполнять следующие требования:
• направление вектора силы тяги маршевых двигателей должно совпадать с положительным направлением оси X в связанной системе координат, вектор силы тяги должен проходить через центр масс КА;
• вектор силы тяги двигателей коррекции орбиты должен лежать в плоскости YOZ и проходить через центр масс КА;
• вектор силы тяги двигателей стабилизации (ДЖС и ДМС) КА по крену должен находиться в плоскости YOZ и быть максимально удаленным от оси X, для создания чистого момента двигатели следует располагать парами;
• вектор силы тяги двигателей стабилизации по курсу и тангажу должен быть максимально удален от центра масс КА;
• вспомогательные двигатели размещаются в зависимости от выполняемой задачи, но обязательно парами;
• в узлах крепления двигателей необходимо предусматривать устройства, позволяющие проводить регулировку, обеспечивающую необходимое направление вектора силы тяги;
• размещение двигателей должно обеспечивать удобный подход при монтаже и настройке, сборке и работах на технической позиции;
• недопустима компоновка двигателей, приводящая к обдуву струей воздуха элементов конструкций КА (особенно оптических устройств, солнечных батарей и т. п.).
5.3.4. Варианты размещения двигателей
В зависимости от способа построения СУД КА различают три схемы размещения двигателей при управлении полетом.
1. В сферических координатах. Как правило, все маневры выполняются с помощью одного двигателя, расположенного по оси X. При необходимости проведения маневра КА разворачивается системой стабилизации, ориентируя двигатель в требуемом направлении (рис. 5.10).
5.3. Компоновка двигателей системы управления движением 323
2. В цилиндрических координатах. Все маневры осуществляются двумя двигателями. Один двигатель расположен по оси X. другой перпендикулярно этой оси — по оси Z или У. При необходимости совершения маневра КА разворачивается относительно осиX(рис. 5.11).
3. В декартовых координатах. При управлении полетом в де-
картовых координатах двигатели (рис. 5.12).
Рис. 5.10. Схема размещения двигателя при управлении полетом в сферических координатах (Дв — двигатель)
размещают по всем трем осям
Рис. 5.11. Схема размещения двигателей при управлении полетом в цилиндрических координатах
Центр масс
Рис. 5.12. Схема размещения двигателей при управлении полетом в декартовых координатах
Компоновка двигателей стабилизации. Стабилизация КА заключается в парировании возмущающих моментов, действующих на него. Момент относительно оси X называют моментом крена, момент относительно оси Y — моментом курса (рыскания), момент относительно оси Z — моментом тангажа.
При размещении двигателей стабилизации необходимо, чтобы момент, развиваемый двигателем стабилизации, был больше возмущающего момента, действующего на КА, и обеспечивал угловую скорость вращения
G) — Мдв / .
324 5. Компоновка систем управления движением космического аппарата
Компоновка двигателей стабилизации по каналу курса приведена на рис. 5.13.
Стабилизирующий момент М = Р1 возникает при включении двух двигателей (например, Р+), при этом КА разворачивается относительно оси У.
Рис. 5.13. Компоновка двигателей стабилизации по каналу курса:
Рк . Р* — силы тяги; Л/к — момент, развиваемый двигателями стабилизации по каналу курса
С помощью двигателей (Р и Р ) можно управлять линейным перемещением центра масс КА. Если включить двигатели разных знаков (Р+ и Р ), можно получить линейное перемещение относительно оси X силой, равной F = ±2Р.
Компоновки двигателей стабилизации по каналам крена и тангажа приведены на рис. 5.14.
Рис. 5.14. Компоновки двигателей стабилизации по каналам крена (а) и тангажа (б)
Варианты размещения двигателей стабилизации на спускаемом КА «Аполлон» представлены на рис. 5.15.
5.3. Компоновка двигателей системы управления движением 325
Рис. 5.15. Варианты размещения двигателей стабилизации спускаемого аппарата по каналам курса (а), крена (б) и тангажа (в) и на КА «Аполлон» (г): / — двигатели ориентации по каналу курса (отрицательные); 2, 6 — двигатели ориентации по каналу крена (отрицательные); 3 — двигатели ориентации по каналу тангажа (отрицательные); 7, 7 — двигатели ориентации по каналу крена (положительные); 5 — двигатели ориентации по каналу тангажа (положительные); 8 — двигатели ориентации по каналу курса (положительные); 9 — блоки вспомогательных двигателей ориентации по каналам курса, крена и тангажа; 10 — маршевая силовая ДУ
В случае если невозможно создать необходимый по величине момент при размещении двигателей на корпусе КА, применяют раздвижные штанги, с помощью которых можно получить требуемый момент.
5.5.5. Крепление двигателей
В зависимости от вида выполняемой работы крепление двигателей может быть выполнено в следующих вариантах.
Маршевые двигатели могут быть качающимися и неподвижными.
Качающиеся двигатели устанавливаются в кардановом подвесе и могут поворачиваться в двух плоскостях либо в рамке, позволя-
326 5. Компоновка систем управления движением космического аппарата
а
Рис. 5.16. Варианты крепления камер сгорания качающихся двигателей:
а — в кардановом подвесе (качание в двух плоскостях); 6 — на шаровой опоре: в — в кардановом подвесе (качание в одной плоскости при размещении опоры в зоне критического сечения); г — крепление в кардановом подвесе (качание в одной плоскости при размещении опоры на корпусе камеры сгорания)
ющей вращаться в одной плоскости (рис. 5.16). Как правило, такие двигатели размещают на разгонных блоках.
Камеры сгорания качающихся двигателей допускают менее точную установку, поскольку ее можно компенсировать за счет поворота камеры сгорания.
Неподвижные двигатели могут крепиться с использованием стержневых ферм (рам).
Ферма может состоять из двух кольцевых шпангоутов разного диаметра, один из которых (большего диаметра) крепится к корпусу КА, а второй (меньшего диаметра) — к камере сгорания двигателя. Для крепления на двигателе предусматривается фланец между двигателем и фермой; при большой разности диаметров верхнего шпангоута фермы и фланца камеры сгорания устанавливается коническая проставка (рис. 5.17). Для примера на рис. 5.18 приведены варианты крепления камер сгорания ЖРД.
Для регулировки двигателя при сборке между его фланцем и шпангоутом фермы (или проставкой) размещают регулировочные прокладки, с помощью которых регулируется направление вектора силы тяги двигателя (рис. 5.19).
Для регулировки направления вектора силы тяги двигателей также применяют эксцентриковый болт, который дает возможность проводить регулировку без разборки соединения.
Регулировка положения двигателя также может производиться при помощи регулируемой шаровой опоры (рис. 5.20).
5.3. Компоновка двигателей системы управления движением 327
Рис. 5.17. Крепление маршевого двигателя при установке конической проставки:
/ — двигатель; 2 — коническая проставка; 3 — ферма; 4 — шпангоут корпуса КА
Рис. 5.18. Варианты крепления камер сгорания ЖРД
Рис. 5.19. Варианты регулировки направления вектора силы тяги с помощью прокладок:
1 — регулировочный винт; 2 — фланец двигателя; 3 — упор; 4 — стакан; 5 — косынка
328 5. Компоновка систем управления движением космического аппарата
Рис. 5.20. Регулируемая опора в узлах фермы крепления двигателя
Крепление двигателей на конической юбке используют в тех случаях, когда расстояние между двигателем и корпусом КА мало и нет возможности сконструировать ферму, работающую на сжатие, или когда диаметр корпуса КА больше диаметра камеры сгорания. Для облегчения конструкции в конической юбке выполняют вырезы с отбортовкой. Для придания прочности юбку укрепляют продольными силовыми элементами.
Двигатели СУД СС размещают между топливными бака
ми в плоскости YOZ. Вариант их крепления зависит от свободного места, имеющегося в межбаковом пространстве. Двигатели можно фиксировать с помощью фермы, кронштейнов, установленных на специальных конструкциях или топливных баках.
Крепление ДМС. Двигатели мягкой стабилизации состоят из камеры сгорания, сопла и пускового электроклапана. Все эти элементы объединены в единый блок, который имеет узел крепления (как правило, фланец). Если позволяют требования по моменту, то ДМС по каналам курса и крена (или по каналам тангажа и крена) объединяют в единый блок, который крепят к конструкции или бакам.
Многофункциональный блок ДМС СУД с поворотными соплами (рис. 5.21) разработан для разгонного блока IUS. В качестве топлива используется гидразин N2H4 (монотопливо). Угол поворота сопел составляет 80°, сила тяги одного сопла — 135±7 % Н, удельный импульс — 2270 Н с/кг при давлении в камере сгорания 2,62 МПа; сила тяги одного сопла 21,8±7 %, удельный импульс — 2180 Н с/кг при давлении — 0,69 МПа. Ресурс безотказной работы 1200 с, максимально допустимое время непрерывной работы 380 с. Для примера в табл. 5.7 приведены характеристики ДМС АЛ 0-181 (рис. 5.22) и АЛ 0-210 (рис. 5.23), разработанных фирмой Aerojet.
В табл. 5.8 приведены характеристики ДМС, разработанных в НИИ машиностроения (рис. 5.24).
5.3. Компоновка двигателей системы управления движением 329
Рис. 5.21. Многофункциональный блок ДМС СУД с поворотными соплами: 1-3 — возможные положения сопел
Таблица 5.7. Характеристики ДМС АЛ0-181 и АЛ0-210
Характеристика АПО-181 AJ10-210
Топливо Сила тяги, Н Удельный импульс в непрерывном режиме работы, Нс/кг Давление, МПа: на входном клапане в камере сгорания критическое на входе Температура топлива на входе, °C Соотношение компонентов Длительность работы в непрерывном режиме, с Общее время работы, ч Количество включений Время эксплуатации, лет Масса, кг Относительная масса, кг/Н Уровень вибрационных нагрузок при испытаниях, Н ы2о4+ммг 15,1...17,3 2755...2795 0,69...2,76 2,76 6,90 -7...+49 1,2:2,0 28 800 9,33 Более 500 000 7...10 0,89 0,039 25,40 М2О4+ММГ 379 3040 1,27...29,7 2,76 6,90 -4...+43 1,40:1,83 И 500 850 1...3 1,95 0,00510 10,95
330 5. Компоновка систем управления движением космического аппарата
Рис. 5.22. Двигатель мягкой стабилизации СУД АЛ 0-181, разработанный фирмой Aerojet
31 52
Рис. 5.23. Двигатель мягкой стабилизации СУД АЛ 0-210, разработанный фирмой Aerojet
Таблица 5.8. Характеристики ДМС, разработанных в НИИ машиностроения
Характе-ристика Название
08 5 12 50М 100А 135М 135А 200А 500А/1 400М 200К* 2600
Топливо Азот/ Гелий Воздух/ Азот НДМГ + АТИН О2 (газ) + керосин О2 (газ) + спирт
Соотношение компонентов — 1.85 ±0,2 1.85 ±0.05 1,85 ±0,05 1.85 ±0,15 1.85±0.15 1.85 ±0.15 1.85±0,15 1.85±0.15 2,7:10 1.2
Средняя номинальная сила тяги, Н 0,8/0,73 4,9 13,3 54 98 130,5 130,5 196 490 392,4 186,4 2600
Средний удельный импульс в непрерывном режиме работы, м/с 716/1658 687 2688 2845 3021 3021 3041 3061 3090 2943 2520 2600
Рабочее давление на входе, МПа 1,47... 1,96 1,08... 1,86 1.78...3,43 1,03... 1,32 2.06 0,98...2.16 2,06 2,06 2,06 0,98... 1,96 2,5...6,0 1.47... 1.96 4,5... 5,7
Характе-ристика Название
08 5 12 50М 100 А 135М 135А 200А 500А/1 400М 200К* 2600
Длитель- 0,050... 0,012... 0,030... 0,030... 0,030... 0,030... 0,030... 0,037... 0,050... 0,050... 0,060... 0,015...
ность включе- ния, с 100 3000 10 000 300 3000 2000 2000 2000 3000 1000 100 15
Максимальная длина, мм 93 91 137 253,1 317 274 376 376 600 452 360 464
Масса, кг 0,25 0,35 0,55 1,3 1,5 1,5 1,8 2,0 3,5 3,0 6,3 3,0
Количество включений 80 000 250 000 450 000 100 000 500 000 500 000 500 000 250 000 150 000 10 000 40 000 1000
Рабочее напряжение, В 27 ±5 27 ±5 27 ±5 27 ±5 27 ±7 27^ 27^ 27 ±7 27 ±7 27 ±7 27+б —о 27 ±7
Потребление тока, А, клапанами при 34 В, не более 0,3 0,2 0,2 0,8 0.8 0,8 0,8 1,8 1,8 1,8 0.9 2,0
* Приведены значения рабочего давления для окислительного (числитель) и горючего (знаменатель) веществ.
5.3. Компоновка двигателей системы управления движением 333
Рис. 5.24. Двигатели мягкой стабилизации с силой тяги 13,3 (а) и 130,5 Н (б), разработанные НИИ машиностроения
5.3.6. Электрореактивные иядерные двигатели космических аппаратов
Увеличение длительности полетов автоматических КА потребовало разработки более эффективных двигателей для системы ориентации и стабилизации аппарата в полете. Применение традиционных ЖРД, даже малой тяги, в СУД при условии активного существования КА на орбите в течение 10... 15 лет требует значительных по массе запасов рабочего тела, что сказывается на массе полезной нагрузки. Межпланетные перелеты, особенно пилотируемые, требуют больших запасов характеристической скорости, а следовательно, и больших тяг, развиваемых ДУ, и, как следствие, больших запасов рабочего тела (топлива).
В связи с этим встал вопрос о создании двигателей нового типа, способных длительно работать в режиме малой тяги при сравнительно небольших запасах топлива. Решение этой задачи было найдено в создании электрореактивных и ядерных двигателей.
Электрический ракетный двигатель (ЭРД) — ракетный двигатель, принцип работы которого основан на преобразовании электрической энергии в направленную кинетическую энергию частиц.
Комплекс, состоящий из набора ЭРД, системы хранения и подачи рабочего тела, системы автоматического управления работой двигателя, системы электропитания, называется электроракетной двигательной установкой.
ЭРД характеризуются малым массовым расходом рабочего тела и высокой скоростью истечения ускоренного потока частиц. Нижняя
334 5. Компоновка систем управления движением космического аппарата
граница скорости истечения примерно совпадает с верхней границей скорости истечения струи газов из сопла химического двигателя и составляет около 3000 м/с. Верхняя граница теоретически не ограничена (в пределах скорости света), однако для перспективных моделей двигателей рассматривается скорость, не превышающая 200 000 м/с. В настоящее время для двигателей различных типов оптимальной считается скорость истечения 16 000... 60 000 м/с.
Электрическая мощность ЭРД колеблется от сотен ватт до мегаватт. Применяемые в настоящее время на КА ЭРД имеют мощность 800...2000 Вт. ЭРД характеризуются не очень высоким КПД — от 30 до 60 %.
В качестве рабочего тела в ЭРД могут применяться любые жидкости и газы, а также их смеси. Тем не менее для каждого типа двигателей существуют рабочие тела, применение которых позволяет достигнуть наилучших результатов. Для ЭРД традиционно используется аммиак, для электростатических — ксенон, для сильноточных — литий, для импульсных — фторопласт.
Рис. 5.25. Классификация ЭРД
Недостатком ксенона является его высокая стоимость, обусловленная небольшим производством (менее 10 т в год во всем мире). В качестве основного кандидата на замену рассматривается аргон. Он также является инертным газом, но в отличие от ксенона имеет большую энергию ионизации при меньшей атомной массе. Энергия, затраченная на ионизацию на единицу ускоренной массы, является одним из источников потерь КПД. В настоящее время разрабатывается несколько вариантов ЭРД (рис. 5.25).
Существующие и разрабатываемые двигатели имеют характеристики, приведенные в табл. 5.9-5.12.
Таблица 5.9. Параметрический ряд плазменных двигателей
Рабочая характеристика СПД-35 СПД-50 СПД-60 СПД-70 СПД-100 СПД-140 СПД-200 СПД-290
Тяга, pH 10 20 30 40 83 До 300 До 500 До 1500
Реальное потребление мощности, кВт 0,196 0,350 0,517 0,593 1,221 3...6 3...15 5...30
Ресурс, ч 2500 2250’ 2500* 3100* 7500* 10 000 18 000 27 000
Масса, кг 0,4 0,8 1,2 1,5 3,5 7 15 23
Состояние Инж. модель Летная модель Летная модель Летная модель Летная модель Инж. модель Инж. модель Летная модель
*Без учета потерь рабочего тела на катоде-компенсаторе.
Таблица 5.10. Рабочие характеристики Холловских двигателей повышенной мощности
Рабочая характеристика СПД-140 СПД-160 СПД-180 Т-160 Д-100-1 Д-100-2
Потребляемая мощность, Вт 1,2...6,0 1,35...7,5 1,8...12,0 4,67 1,3...7,5 3,5...15
Тяга, pH 80...280 90...350 120...565 288 80...340 80...650
Удельный импульс, с 1500... 2600’ 1500...26 000* 15 000...2600* 1817 1450...2800* 1800...4250*
кпд *Без учета потерь р 0,5...0,6* »абочего тела на к; 0,5...0,6* атоде-компенсаторс 0,5...0,6* 0,55 0,5...0,6’ 0,5...0,65’
Таблица 5.11. Рабочие характеристики Холловских двигателей малой мощности
Рабочая характеристика СПД-35 СПД-50 Х-40 Малый СПД Д-38
Потребляемая мощность, Вт 200 350 100...500 100...200 400... 1000
Тяга, pH 10 20 8...30 5...10 25...80
Удельный импульс, с 1200 1250 1000... 1900 1100... 1400 1300...250
кпд *Без учета потерь рабо 0,3 чего тела на катох 0,35 [е-компенсаторе. 0,3...0,55 0,25...0,35 0,4... 0,6
Таблица 5.12. Параметры импульсных двигателей эрозионного типа
Рабочая характеристика До модернизации После модернизации
Энергозапас, Дж 100 100
Единичный импульс тяги, рНс 2,2 2,9
Скорость истечения рабочего вещества, км/с 10 10
Цена тяги, Вт/Н 4,4 104 3,1 104
Эффективность, % 11 16
5.3. Компоновка двигателей системы управления движением 337
На рис. 5.26 приведены двигатели серии СПД.
С помощью ионных двигателей с удельным импульсом тяги до 31 000 м/с в США успешно совершен полет к астероидам по проекту Deep Space 1 и реализуется проект Dawn. В Японии также с помощью ионных двигателей реализован проект забора и доставки на Землю образца грунта с астероида по проекту Hayabusa.
Рис. 5.26. Внешний вид ЭРД: а — СПД-60; б — СПД-140
Межпланетные полеты длятся годами, поэтому применение разрабатываемых ЭРД, работающих на ксеноне (или аргоне), потребует значительных по объемам баков для хранения рабочего тела. Кроме того, эти газы имеются на Земле в ограниченном количестве и имеют высокую стоимость (удельная стоимость добычи 20 т ксенона составляет 2500 долл./кг). Поэтому для длительных полетов целесообразно использовать ЭРД, работающие на металлическом рабочем теле.
В РКК «Энергия» для МКБ «Геркулес» спроектирован ЭРД ДАС-200, работающий на металлическом йоде (рис. 5.27).
Для МКБ «Геркулес» также была спроектирована двигательная установка мощностью 550 кВт, состоящая из трех двигательных отсеков, каждый из которых состоит из 18 маршевых тяговых модулей (ГЛ/марш) на основе ЭРД ДАС-200 и 4 управляющих (ГЛ/упр), а также бака объемом 5,9 м3, вмещающего 15 т ксенона, который хранится в жидком виде при температуре -200 °C, с общей заправкой ксенона до 30 т. Характеристики установки приведены в табл. 5.13.
338 5. Компоновка систем управления движением космического аппарата
Рис. 5.27. Двухступенчатый электроракетный двигатель ДАС-200 на рабочем теле йод:
1 — разрядная камера; 2 — трубопровод; 3 — анод-газораспределитель; 4 — коллектор; 5 — катод первой ступени; 6 — катод второй ступени; 7 — полюсы;
8 — магнитная катушка; 9 — магнитопровод; 10 — термокатод; 11 — держатель: 12 — катодная тепловая труба; 13 — анодная тепловая труба; 14 — стартовый нагреватель; 15 — тепловые экраны
Таблица 5.13. Характеристики тяговых модулей
Параметр Тип модуля
Маршевый Управляющий
Число ТМ 54 12
Тяга, гс 95,5 132
Удельный импульс, км/с 30,2 30,0
Количество включений 104 2104
Количество одновременно работающих двигателей 18 —
В табл. 5.14 приведены основные характеристики двигателя СПД-140Д.
5.3. Компоновка двигателей системы управления движением 339
Таблица 5.14. Характеристики двигателя СПД-140Д
Параметр Режим 1 (с большой тягой) Режим 2 (с высоким удельным импульсом)
Основные рабочие характеристики
Разрядное напряжение U, В 300 800
Тяга F, мН 290 180
Потребляемая мощность, Вт 4500 4800
Удельный импульс УуД( м/с 18 000 27 500
Проектный ресурс, ч 11 000 Не менее 7000
Весовая сводка Система Масса, кг
Двигательный блок ДБ-МОД 9,3
Блок подачи ксенона в анод БПК-А1 для работы на режиме большой тяги 2,5
Блок подачи ксенона в анод БПК-А2 для работы на режиме с большим удельным импульсом тяги 3,0
Блок подачи ксенона в катод БПК-К 2,5
Блок хранения ксенона 9,7
Блок клапанов для подачи ксенона из баков 0,6
Блок ресиверов для стабилизации давления в магистрали подачи ксенона в двигатели 1,7
Модуль ориентации двигателей с блоком управления 26,9
Блок СПУ для обеспечения работы одного двигателя 25
Конструкция, кабели, трубопроводы Масса зависит от конструкции КА в целом
При выведении на высокие орбиты полезных нагрузок используют комбинацию из нескольких ступеней. В табл. 5.15 приведены результаты сравнения ракет-носителей с разгонными блоками с ЖРД при одинаковых ракетах-носителях.
340 5. Компоновка систем управления движением космического аппарата
Таблица 5.15. Сравнительные характеристики средств доставки на ГСО и перспективных СМТ на основе МБ с ЯЭРДУ
Транспортные системы Характеристики
Удельная стоимость доставки ПГ на ГСО, тыс.$/кг Масса ПГ, доставляемого на ГСО за один рейс, т Время доставки ПГ на ГСО, сут Масса ПГ. доставляемая системой на ГСО за 5 лет. т
Транспо1 и с PH «Протон-М» + РБ «ДМ» (Байко-нур) ртные сиспи одноразовых 29 ?мы на базе сущ разгонных блок 2,9-3,3 ествующих ов с ЖРД PH
PH «Зенит -3SL» + РБ «ДМ» («Наземный старт») 41 1,6 — —
PH «Союз-ST» + РБ «Фрегат» (экваториальный космодром Куру) 43 1,39 — —
Транспортные с PH для выведения ГК на НОО истемы на основе многоразовых межорбиталъных буксиров с ЯЭРДУ Электрическая мощность КЯЭУ — 600 кВт; ресурс КЯЭУ — 5 лет, в системе один МБ
«Зенит» («Байконур») 13,3 7,0 126 63
«Протон-М» («Байконур») 8,7 13,4 167 107
«Ангара-5А» («Восточный») 7,4 16,3 189 114
«Ангара-5 А» («Плесецк») 9,6 12,2 166 100
Компоновка модулей ЭРД, как правило, производится на штангах, раскрывающихся после выведения КА на рабочую орбиту. Если ЭРД установлен на РБ, то штанги раскрываются после отделения от последней ступени PH (рис. 5.28).
5.3. Компоновка двигателей системы управления движением
341
Рис. 5.28. Компоновка ЯЭРД с капельным холодильником-излучателем:
а — рабочее положение: 1 — полезная нагрузка: 2 — модули ЭРД; 3 — капельный холодильник-излучатель: 4 — энергоблок в развернутом положении: б — транспортное положение
5.5.7. Компоновка топливных баков
Компоновка топливных баков существенно зависит от их формы. В космической технике обычно используют сферические, цилиндрические и тороидальные топливные баки.
К компоновке баков предъявляются следующие требования:
• расположение баков, при котором по мере выработки топлива не происходит смещение центра масс КА;
• недопустимость перемещения топлива в баках во время маневров КА, поскольку это может привести к смещению центра масс КА;
• обеспечение свободного доступа к заправочным, сливным и дренажным горловинам;
• обеспечение удобного монтажа и демонтажа баков в цехе и на технической позиции.
Компоновка топливных баков зависит от их формы. В космической технике применяются различные формы баков (рис. 5.29).
Форма баков выбирается на этапе разработки конструктивнокомпоновочной схемы и зависит от вида подачи компонентов топлива в двигатель, положения центра масс КА и его габаритов. В разгонных блоках в зависимости от массы топлива, системы подачи могут применяться любые формы баков. В космических аппаратах предпочтение отдается сферическим и тороидальным формам баков.
342 5. Компоновка систем управления движением космического аппарата
Рис. 5.29. Формы баков:
а — цилиндрический с полусферой; б — цилиндрический: в — конусный: г — цилиндрический: д — сложной формы: е — ячеистый бак; ж — сферический бак: з — чечевицеобразный; и — бак в баке; к — торовый бак; л — кольцевой бак
Сферические баки благодаря минимальной площади поверхности при заданном объеме, прочности и удобству компоновки,
КА.
широко применяют на всех
Рис. 5.30. Схема размещения сферических баков при вытеснительной системе подачи компонентов топлива (Г — горючее вещество, О — окислительное вещество)
Сферические баки рекомендуют размещать в плоскости YOZ, баки с окислительным и горючим веществами устанавливают крестообразно, выработка компонентов топлива должна проводиться от периферии к оси симметрии КА или наоборот (рис. 5.30).
Как правило, сферические баки используются при вытеснительной системе подачи топлива, которая может осуществляться с помощью эластичного мешка (рис. 5.31) или жесткой металлической мембраны (рис. 5.32).
5.3. Компоновка двигателей системы управления движением
343
I
1 вариант 2 вариант
Рис. 5.31. Сферический бак с эластичным мешком:
/.9 — полусферы; 2, 7, 13 — желобы; 3, 12 — фланцы; 4. 11 — шайбы; 5 — шпилька; 6. 14 — полости бака; 8 — кронштейн; 10 — эластичный мешок
При системе подачи топлива с помощью свободного эластичного мешка один из компонентов топлива размещается в баке, а другой (газ для вытеснения) подается в мешок.
Недостаток подобной системы подачи — нежесткая фиксация топлива в полости бака, т. е. при маневрировании КА возможно перемещение мешка или перетекание топлива между мешком и стенкой бака.
Этот недостаток отсутствует у системы подачи с помощью фиксированного эластичного мешка, который закрепляется на перфорированной трубке и может только раздуваться или сжиматься в зависимости от места размещения топлива. При такой системе подачи топлива его компонент не следует помещать в мешке, поскольку возникнет большой несливаемый остаток компонента в трубке.
Система подачи компонентов топлива с помощью жесткой металлической мембраны лишена недостатков, присущих системам подачи с помощью эластичного мешка. Однако эта система
344 5. Компоновка систем управления движением космического аппарата
одноразового действия, поскольку мембрана, с помощью которой осуществляется подача топлива, выходит из строя в конце работы. Тогда как бак с эластичным мешком можно заправлять неоднократно.
Рис. 5.32. Сферический бак с жесткой металлической мембраной:
II—V — положения мембраны; 1 — штуцер; 2. 5 — полости бака; 3, 10 — кронштейны; 4,9 — полусферы; 6 — мембрана: 7 — проставка; 8 — опорное кольцо
Сферические баки крепят с использованием:
• фланца, который может быть кольцевым, кольцевым со срезанными гранями, в виде ушек и т. п. (см. рис. 5.32); недостатки такого крепления — увеличение массы и сложность монтажа, так как требуется установить значительное количество крепежных болтов;
• эластичной ленты, которая, охватывая бак, прижимает его к специальному ложементу (рис. 5.33); преимущества — крепление быстросъемное, удобное при монтаже бака; масса бака соизмерима с массой фланца; недостаток — не всегда удается разместить и ленту, и ложементы, что исключает их применение.
5.3. Компоновка двигателей системы управления движением
345
Рис. 5.33. Крепление сферического бака с помощью эластичной ленты:
1 — бак; 2 — заправочный штуцер; 3 — эластичная лента; 4 — тендер; 5 — винт; 6 — опора (ложемент)
Цилиндрические баки применяют в случае размещения большого количества компонентов топлива, невозможности вписать КА в заданный объем (под обтекатель или по диаметру) и, как правило, при насосной системе подачи топлива.
Для применения вытеснительной системы подачи компонентов топлива в цилиндрических баках используют металлический сильфон. Компонент размещается либо в корпусе сильфона, при этом подача осуществляется за счет сжатия сильфона, либо в полости бака, тогда подача идет вследствие растяжения сильфона. В первом случае возникает несливаемый остаток компонента между гофрами сильфона и его несжимаемой частью, во втором — остаток только между гофрами.
Размещение цилиндрических баков аналогично размещению сферических баков (рис. 5.34). Центр масс топлива должен находиться в плоскости YZ. По мере выработки компонента смещение центра масс исключается подачей последнего навстречу в баки с однородным компонентом.
346 5. Компоновка систем управления движением космического аппарата
Рис. 5.34. Схема размещения цилиндрических баков с вытеснительной системой подачи компонентов топлива
Цилиндрические баки крепят с помощью фланцев, которые размещают с одной стороны бака. Другую сторону бака жестко закреплять не следует, поскольку при заправке криогенными компонентами происходит значительное деформирование баков.
Цилиндрические баки должны иметь сферические днища. Масса цилиндрических баков с вытеснительной системой подачи компонентов значительно превосходит массу баков с насосной системой подачи вследствие высокого внутреннего давления, необходимого для вытеснения компонентов.
На рис. 5.35 показан вариант конструктивного исполнения цилиндрического бака с вытеснительной системой подачи компонентов топлива, которая осуществляется с помощью сильфона.
Наряду с вытеснительной системой подачи компонентов топлива на КА может использоваться насосная система подачи (преимущественно в разгонных блоках). При этом баки могут иметь как сферическую, так и цилиндрическую форму.
Недостаток насосной системы подачи — произвольная ориентация компонентов топлива в полости бака в условиях невесомости. Для исключения этого применяют двигатели ориентации топлива, включаемые перед запуском ОДУ. Подобная схема неудобна, поскольку требует значительного числа двигателей ориентации топлива при многократных запусках двигателей. Для многократного запуска двигателей применяют капиллярные системы, задерживающие компоненты около заборников топлива. Такая схема не требует использования двигателей ориентации
топлива.
5.3. Компоновка двигателей системы управления движением
ЗД7
Рис. 5.35. Цилиндрический бак с вытеснительной системой подачи компонентов топлива:
/ — штуцер: 2 — днище; 3, 11 — шпангоуты; 4 — направляющая; 5 — корпус вытеснителя; 6 — дно вытеснителя; 7, 9 — обечайки: 8 — проставка; 10 — сильфон; 12, 13 — полости бака
Рис. 5.36. Тороидальный бак:
1 — штуцер подачи газа: 2 — корпус бака; 3 — штуцер слива топлива; 4 — эластичный мешок: 5 — распределитель газа
Тороидальные баки (рис. 5.36) предназначены для случаев, когда невозможно обеспечить заданную центровку КА, одновременно вписавшись в объем под обтекателем. Так, на КА «Луна», «Марс», «Фобос» и «Венера» тороидальные баки используют как один из несущих элементов конструкции. Подача компонента из тороидального бака производится с помощью эластичного мешка или металлической
мембраны, которая расположена в его экваториальной плоскости.
Однако осуществить подачу компонентов из тороидального бака с помощью металлической мембраны или эластичного мешка трудно, поэтому подачу компонентов из таких баков производят посредством специального устройства (рис. 5.37).
348 5. Компоновка систем управления движением космического аппарата
Рис. 5.37. Тороидальный бак без вытеснительной системы подачи компонентов топлива:
7.2 — нижнее и верхнее днища; 3 — штуцер; 4 — разделительная перегородка: 5 — перегородка; 6 — заборник; 7 — стык с трубопроводом ДУ; 8 — кронштейн
Крепление тороидального бака возможно при помощи фланца, расположенного в его экваториальной плоскости, причем рекомендуется крепление как по внешнему, так и по внутреннему диаметру. Такое крепление обеспечивает нормальную работу тороидального бака. Тороидальный бак крепят с помощью ленты (аналогично сферическим бакам) с опорой его корпуса на специальный ложемент. Ленту размещают под углом 120°.
В схеме тороидального бака (рис. 5.38) вытеснение компонента осуществляется с помощью эластичного мешка или поршня.
Рис. 5.38. Схема тороидального бака в виде шестигранника
5.3. Компоновка двигателей системы управления движением
349
Баки с однородным компонентом располагают под углом 120°. Выработка топлива из всех баков идет в одну сторону (по ходу или против хода часовой стрелки). Поскольку количество компонентов (горючего и окислительного веществ) и их плотность различны, объемы баков будут разными, что повлияет на центровку. Для обеспечения центровки блоки вспомогательного бортового оборудования размещают в свободных объемах.
5.3.8. Варианты взаимного размещения баков
Для обеспечения требуемого положения центра масс КА, габаритов и смещения центра масс по мере выработки топлива возможны различные комбинации размещения баков, например комбинация баков тороидального и сферического (рис. 5.39). Какой компонент поместить в бак той или иной формы, решают при выполнении инерционно-массовой компоновки КА. При подобной компоновке выработка компонентов топлива направлена в разные стороны.
Рис. 5.39. Комбинация тороидального и сферического баков
Для уменьшения длины КА применяют цилиндрические баки с совмещенным днищем (рис. 5.40), что позволяет получить требуемую длину за счет отсутствия проставки между баками. Недостатком такой схемы являются жесткие требования к изоляции совместного днища.
350 5. Компоновка систем управления движением космического аппарата
Рис. 5.40. Разгонный блок ракеты «Ариан-5» с применением цилиндрических баков с совмещенным днищем
Длину КА также уменьшают за счет раздвижных сопел и размещения двигателя в нише (рис. 5.41), находящейся внутри топ-
Рис. 5.41. Разгонный блок фирмы General Dynamics Convair Division с размещением двигателя в нише и с раздвижными соплами
5.4. Особенности компоновки системы управления движением малых космических аппаратов
В СУД (рис. 5.42) МКА, устанавливаемую на У КП, входят:
• СО, которая формирует орбитальную и путевую системы координат, а также измеряет углы и угловые скорости платформы МКА относительно построенных систем координат с учетом заданных программных углов;
СУД центра масс
Акселерометр
СС
ЦБК
Телеметрические
Блок электроники
сскм
27 В
на приборы
д______
параметры
Блок сигналов и команд (БСК)
т
27 В
Рис. 5.42. Структурная схема СУД МКА:
БИУС-В — бортовой измеритель угловой скорости волоконно-оптический: ЦБК — центральный бортовой компьютер; АПСН — аппаратура потребителя спутниковой навигации; УДМ — управление двигателем-маховиком; ССКМ — система сброса кинетического момента; ИКПМВ — инфракрасный построитель местной вертикали; ВОГ — волоконно-оптический гироскоп
352 5. Компоновка систем управления движением космического аппарата
• СС, удерживающая оси связанной системы координат платформы МКА относительно приборной системы координат;
• система управления угловым движением центра масс, обеспечивающая измерение значений приращения линейной скорости МКА, сравнение его с заданным значением и выдачу сигнала на отсечку подачи топлива в двигатель коррекции орбиты;
• система спутниковой навигации.
Поскольку платформа, на которой находится целевое оборудование, должна удовлетворять разнообразным требованиям по управлению, структура ее СУД должна обладать большой гибкостью: удовлетворять требованиям заказчика при минимальных доработках и настройках. В данном случае под гибкостью структуры СУД понимают:
• возможность изменения конфигурации СУД во время полета МКА;
• уточнение проектного приборного состава СУД применительно к конкретному МКА, его задачам и параметрам.
Для структурной схемы (см. рис. 5.42) путем изменения конфигурации СУД в полете реализуются режимы работы, приведенные в табл. 5.16.
Таблица 5.16. Режимы работы СУД МКА
Режим Задействованные приборы Примечание
Астрокоррекция Орбитальное гирокомпасирование: ОГК-1 ОГК-2 Аварийный: 1 2 СО БИУС + Звездный датчик + АПСН БИУС + ИКПМВ БИУС + ИКПМВ + Датчик Солнца ИК + Прибор местной вертикали + Датчик Солнца Звездный датчик + АПСН Отказ БИУС Отказ БИУС, ИК, прибор местной вертикали, датчик Солнца
5.4. Особенности компоновки системы управления движением МКА 353
Окончание табл. 5.16
Режим Задействованные приборы Примечание
Динамический Точный Аварийный: 1 2 Номинальный Резервный Номинальный Резервный СС ЖРД УДМ + ССКМ УДМ + ЖРД ССКМ СУД центра масс Блок акселерометров + Командно-временное дублирование Командно-временное дублирование Система навигации АПСН Передача с наземного комплекса управления на борт навигационной информации Отказ ССКМ Отказ УДМ, ЖРД Отказ блока акселерометров Отказ АПСН
В точном режиме задействован БИУС и периодически звездный датчик (для повышения точности) по трем каналам. В резервном режиме (например, при локализации сбоев в работе звездного датчика) функционируют БИУС и ИКПМВ по коррекции каналов крена и тангажа, а также датчик Солнца по коррекции канала курса СО. В резервном режиме также могут работать БИУС и ИКПМВ (без датчика Солнца), при этом не требуется навигационной информации для преобразования углов датчика Солнца из инерционной в орбитальную систему координат (см. табл. 5.16).
Система стабилизации реализована на базе УДМ и ССКМ (системы разгрузки маховиков), содержащей катушки электромагнита, которые управляются по сигналам магнитометров — построителей проекции вектора магнитного поля Земли на оси МКА (прибор геомагнитного поля (ПГП)). Система сброса кинетического момента также может работать без УДМ (например, в режиме демпфирования угловых скоростей после отделения МКА от ракеты-носителя). При динамических операциях (например, при восстановлении ориентации) СУД обеспечивает угловую стабилизацию с помощью ЖРД. Кроме того, при посредстве ЖРД выполняется угловая стабилизация МКА в период локализации возможной неисправности УДМ или ССКМ.
354 5. Компоновка систем управления движением космического аппарата
Система управления движением центра масс построена на базе высокочувствительных акселерометров, установленных вдоль продольной оси МКА. Заданное значение приращения линейной скорости, по достижении которой СУД центра масс должна выдать информацию на отключение двигателей коррекции орбиты, формируется в ЦБК по уставкам наземного комплекса управления. Информация СУД центра масс, полученная с помощью акселерометров, дублируется для повышения точности отключения двигателей программно-временной командой и радиокомандой.
Спутниковая навигационная система на борту МКА представлена блоком АПСН, непосредственно связанным с ЦБК. Для СУД информация спутниковой системы навигации обеспечивает преобразование углов звездного датчика и датчика Солнца из инерционной в орбитальную систему координат, а также формирование текущего аргумента широты орбиты для вычисления курсового угла путевой системы координат и поправок на методические детерминированные погрешности СО.
Информационная связь СУД с внешними устройствами осуществляется через ЦБК. Связь СУД с ЦБК происходит через БСК по мультикомплексному каналу обмена, выполненному в соответствии с ГОСТ 26765.52—87. Команды и уставки наземного комплекса управления поступают в СУД через ЦБК. Электропитание СУД — постоянный ток напряжением 27 ± 10 % В.
Система телеизмерений получает от СУД и передает на НКУ информацию о параметрах СУД и неисправностях (в случае наличия) в ее работе. От СУД на управляемый привод внешних устройств (антенн, солнечных батарей и т. п.) поступают сигналы об угловом отклонении и угловой скорости платформы МКА по каналу крена относительно орбитальной или путевой системы координат.
Двигатель угловой стабилизации получает от СУД сигналы управления электроклапанами. Двигатель управления движением центра масс МКА получает информацию об отсечке тяги двигателя от СУД через ЦБК.
Алгоритмы СУД реализуются в едином бортовом вычислительном комплексе МКА.
Параметры У ДМ и катушек ЭМ могут изменяться с изменением инерционно-массовых характеристик МКА и внешних возмущающих моментов. Система управления электромагнитными ДУ формируется ЦБК и БСК СУД.
Таблица 5.17. Массогабаритные характеристики и потребляемая мощность приборов СУД МКА
Наименование приборов СУД Количество, шт. Масса, кг Потребляемая мощность, Вт Габариты, мм Примечание
БИУС-В 2 0,8-2,0 = 1,6 8 120 х 80 х Ю Один прибор в «холодном»
Звездный датчик 2 12 = 2 И D = 80, L = 120 резерве. Ход 0,3 град/ч Один прибор в «холодном»
ИКПМВ 1 1,2 3 120 х ЮО х 90 резерве
Датчик скоростей 2 0,65-2 = 13 1,5 2,0 = 6 100 х 80 х 70
Двигатель-маховик УДМ 4 1,5-4 = 6 4-3 = 12 D = 130, Л = 100 Один двигатель-маховик в
ПГП Земли 2 0,3-2,0 = 0,6 — 70 х 60 х 30 «холодном» резерве Один прибор в «холодном»
Катушки электромагнита 3 0,63-3,0= 1,89 2-3=6 D = 30, L = 260 резерве
Блок электроники ССКМ 1 2,5 2 150 x 130 x ЮО
БСК 1 2,5 6 150 x 120 x НО
Блок акселерометров 2 0,3 2,0 = 0,6 5 70 x 60 x 50 Один прибор в «холодном»
Приемное устройство 1 1,5 10 120 x ЮО x 90 резерве
ССН (АПСН) Итого 21 23,69 66 —
356 5. Компоновка систем управления движением космического аппарата
Основная двигательная установка МКА получает информацию об отсечке тяги двигателя от СУД центра масс и ЦБК.
При уточнении приборного состава СУД применительно к конкретному МКА приборы могут быть заменены на более совершенные, или может быть исключен ряд приборов (ИКПМВ, датчик Солнца и т. д.), т. е. уменьшена часть приборного резерва.
Ориентировочный приборный состав СУД МКА. В табл. 5.17 приведен ориентировочный приборный состав базовой унифицированной СУД МКА в соответствии со структурной схемой, представленной на рис. 5.42, массогабаритные характеристики и потребляемая мощность приборов.
6. КОМПОНОВКА РАДИОТЕХНИЧЕСКОГО КОМПЛЕКСА УПРАВЛЕНИЯ
КОСМИЧЕСКОГО АППАРАТА
6.1. Структура и основные особенности
систем радиоуправления
Качество выполнения целевой задачи, поставленной перед КА, во многом зависит от того, как будет выбрано и скомпоновано обеспечивающее бортовое оборудование.
Радиотехнический комплекс управления состоит из бортовых и наземных средств, с помощью которых определяются текущие параметры траектории полета КА, передаются команды управления и принимается информация о состоянии бортового оборудования и результатах работы целевого оборудования. Совокупность радиотехнических комплексов, предназначенных для наблюдения за движением КА, определения параметров его траектории и передачи информации с борта КА на Землю и с Земли на борт КА, называют командно-измерительным комплексом (КИК) (рис. 6.1).
Для передачи с борта КА информации о состоянии бортового оборудования используют телеметрическую аппаратуру. Результаты работы целевого оборудования передают либо в потоке общей информации, либо по отдельным каналам связи. На спутниках связи устанавливают специальную радиотехническую аппаратуру, обеспечивающую теле- и радиовещание, телефонию.
Система радиоуправления предназначена для решения задач дистанционного управления движением КА и работой его бортового оборудования. Общая структура системы радиоуправления включает в себя бортовое оборудование и наземный КИК (см. рис. 6.1), состоящий из измерительных пунктов (ИП) и координационновычислительного центра (КВЦ). На каждом ИП контролируются параметры траектории, осуществляются прием и обработка передаваемой с борта КА информации, а также формирование и передача на борт КА команд. Поскольку КА и Земля вращаются, то время
358 6. Компоновка радиотехнического комплекса управления КА
радиовидимости с каждого ИП ограничено. В КИК входят несколько разнесенных ИП, которые представляют собой стационарные сооружения, а также подвижные ИП. В настоящее время функции ИП выполняют космические ретрансляторы, находящиеся на околоземных орбитах. Управление работой КИК осуществляется из КВЦ, на котором обрабатывается поступающая с ИП информация как о движении КА, так и о состоянии его систем. Координационновычислительный центр дает указания для наведения остронаправленных антенн (ОНА), размещенных на ИП.
Рис. 6.1. Структурная схема КИК:
ЛС — линия связи; ИП — измерительный пункт; КВУ — координационновычислительный центр
Функциональная схема системы радиоуправления полетом КА представлена на рис. 6.2. Управляющие воздействия формируются БЦВМ на основе команд, передаваемых с ИП на базе программ, которые записаны в памяти БЦВМ, а также с помощью информации, поступающей от бортовых систем КА. Так, расчет импульса ДИ, необходимого для осуществления КА маневра, проводится в КВЦ на основе данных траекторных изменений и передается на борт с помощью радиосистемы передачи информации (РСПИ) в виде команд о параметрах исполнения импульса.
Прием и передача радиосигналов производятся с помощью ОНА или совокупности малонаправленных антенн (МНА). В современных системах радиоуправления широко применяется принцип совмещения, при котором один приемник используется для всех си
6.1. Структура и основные особенности систем радиоуправления 359
стем. Сигналы, усиленные приемником, поступают в устройство разделения каналов, где разделяются на сигналы систем радиоуправления траекторными измерениями, командной и радиосвязной систем, а также на сигналы системы автономного радиоуправления.
Рис. 6.2. Функциональная схема системы радиоуправления полетом КА
Система автономного радиоуправления включает в себя измерители высоты, скорости, вертикали, а также измерители дальности, скорости и взаимного углового положения двух стыкующихся КА.
Для обеспечения работы систем автономного радиоуправления часто используют отдельные антенны автономных систем, а также отдельные передатчики и приемники. Телевизионную информацию передают обычно свои каналы связи. В целях повышения надежности бортового оборудования системы радиоуправления, наиболее ответственные его устройства и системы резервируются.
360 6. Компоновка радиотехнического комплекса управления КА
6.2. Системы радиотехнической связи
Космическая радиолиния передачи информации представляет собой систему радиосвязи (рис. 6.3).
Рис. 6.3. Обобщенная схема системы радиосвязи
Канал связи — совокупность технических средств, служащих для передачи сообщений от источника к получателю и состоящих из передатчика, ЛС и приемника. В системе радиотехнической связи используются УКВ-приемники и передатчики, МНА, работающие на передачу и прием. Эффективность связи повышается, когда работой приемников и передатчиков, положением антенн на борту КА и Земле управляет КВЦ. Принятая в России классификация радиоволн приведена ниже.
Длина волны, м Частота, МГц
Сверхдлинные...................... 105... 104 310 3...310 2
Длинные........................... 104... 103 ЗЮ"2...ЗЮ"1
Средние........................... 103...102 0,3...3,0
Короткие..........................Ю2...Ю 3...30
Ультракороткие: метровые..........................10... 1,0 30... 3- Ю2
дециметровые...................1,0...0,1 3* Ю2... 3- 10J
сантиметровые..................Ю~,...Ю"2 3 103...3104
миллиметровые..................10"2... 10 J 3 • 104... 3 • 105
Радиосвязь осуществляется в сантиметровом и дециметровом диапазонах УКВ-волн, поскольку такие волны меньше подвержены влиянию ионосферы, состояние которой зависит от времени года и даже от времени суток. Перечислим ограничения, накладываемые на компоновку систем радиоуправления:
• на габариты и надежность бортового оборудования. Надежность обеспечивается за счет структурной избыточности и дублирования блоков или приборов. Широко используется принцип совмещения
6.3. Управление сближением и стыковкой
361
радиосистем. Приемники, передатчики и антенны могут применяться для РСПИ и радиосистем траекторных измерений;
• на дальность действия (сотни и даже миллионы километров). Поскольку невозможно установить мощные передатчик и высоконаправленную антенну, сигнал, приходящий на ИП, имеет очень малую мощность;
• на принимаемый сигнал. Малая мощность приходящего сигнала и относительно высокий уровень помех приводят к тому, что выделение информации из сигнала без существенных ее потерь можно выполнить лишь при использовании оптимальных или близких к оптимальным алгоритмов обработки либо применением цифровых радиосигналов;
• на траекторию КА, которую можно достаточно точно рассчитать, поэтому параметры приходящего сигнала, направление его прихода, время запаздывания и т. д. определяются с небольшой погрешностью. Наличие прогноза существенно облегчает реализацию высокоточных систем радиоуправления КА, поскольку можно определять не сами параметры, а их отклонение от прогнозируемых.
6.3. Управление сближением и стыковкой
Необходимое условие выполнения сближения и последующей стыковки — близость параметров траектории стыкующихся КА. В результате маневра параметры траектории уравниваются, и один из КА переводится в ближайшую окрестность другого, при этом расстояние между КА не превышает дальности действия бортового радиооборудования стыковки (несколько десятков километров). Далее начинается сближение, целью которого является устранение погрешностей взаимного наведения КА на предыдущем участке полета. Сближение может осуществляться по командам наземного пункта управления полетом (автоматическая стыковка) или с помощью автономного управления стыковкой (ручная стыковка). Стыковка подразделяется на следующие этапы: дальнее наведение, причаливание и собственно стыковка.
Сближение КА на расстоянии более 100 км называют этапом дальнего наведения, который происходит после поиска и захвата КА бортовыми средствами. Задачу дальнего наведения можно решать двумя способами: прямым выведением в точку встречи и с использованием промежуточных фазирующих орбит. Преимущество прямого выведения в точку встречи заключается в том, что
362 6. Компоновка радиотехнического комплекса управления КА
дальность действия бортовой радиолокационной станции наведения не превосходит нескольких десятков километров. Недостаток этого способа — жесткие ограничения на время старта (погрешность в 1 с приводит к промаху 8 км по дальности). Кроме того, поскольку встреча происходит на первом витке, после запуска активного КА недостаточно времени для проверки работы его бортового оборудования. Прямое выведение в точку встречи целесообразно применять при жестком лимите времени на встречу. Дальнее наведение с использованием промежуточных фазирующих орбит позволяет провести полную проверку функционирования бортового оборудования. Недостаток способа — большой промежуток времени, требуемый для маневрирования (3-^1 витка).
Этап причаливания — сближение КА с расстояния 1000...3000 м при скоростях сближения в несколько метров в секунду.
Этап стыковки начинается с момента механического контакта двух КА и заканчивается полным жестким соединением их в единый блок.
Радиотехнический комплекс стыковки состоит из радиолокационной станции на активном КА и радиоответчика на пассивном. Используются две радиолинии, работающие на разных частотах:
• запросная, служащая для обнаружения активного КА пассивным КА и для измерения параметров углового движения пассивного КА;
• ответная, предназначенная для поиска и обнаружения активным КА пассивного КА, измерения параметров углового движения активного КА, дальности R и скорости ее изменения R, а также угловой скорости линии визирования.
В состав оборудования (рис. 6.4) входят бортовой координатор, датчик системы поиска и предварительной ориентации активного КА по каналам тангажа и курса, датчик взаимного крена. В бортовой координатор входит следящий измеритель ориентации линии визирования относительно осей связанной системы координат КА (головка самонаведения), дальномер, измеритель радиальной скорости и антенная система. Оборудование радиоответчика состоит из аппаратуры, взаимодействующей с координатором, измерителей углов между продольной осью КА и линией визирования, антенной системы.
Радиотехнический комплекс сначала работает в режиме активного поиска, обнаружения и ориентации после выведения активного КА в точку встречи, а затем в режиме измерения параметров относительного движения. При поиске радиоответчик, играя роль
6.3. Управление сближением и стыковкой
363
Рис. 6.4. Радиотехническая система стыковки «Курс»:
1 — активный гибридный стыковочный узел ССВП-М; 2 — антенна телевизионной системы «Клест»: 3 — экраны радиотехнической защиты антенн (4 шт.); 4. 5 — узконаправленные антенны автосопровождения 2АСФ1М-ВКА № 1 и 2; б — пассивный стыковочный узел ССВП; 7 — штанга со всенаправленными антеннами АР-ВКА и 2АР-ВКА; 8 — антенна ориентации 4АО-ВКА; 9 — всенаправленная антенна АКР-ВКА; 10 — стыковочная мишень; 11 — антенна ориентации 2АО-ВКА
маяка, с помощью антенны создает всенаправленное излучение в полную сферу на относительной частоте f0TH, Антенны активного КА, захватывая полную сферу, принимают и передают это излучение в измерители предварительной ориентации. Используя полученную информацию, система управления разворачивает активный КА до совмещения продольной оси с линией визирования. После этого происходит захват сигналов маяка узконаправленной следящей антенной, которая берет на себя функции измерителя углов ориентации активного КА. Информация об углах тангажа и курса снимается с датчиков углов на осях карданова подвеса антенны активного КА. Одновременно антенна начинает излучать запросный сигнал на частоте /зап, который играет роль маяка для поиска и обнаружения пассивным КА активного.
364 6. Компоновка радиотехнического комплекса управления КА
6.4. Радиотелеметрические системы
Телеметрическое оборудование КА применяется для измерения и передачи на расстояние информации о значениях измеряемых физических величин, которые могут быть механическими, тепловыми, химическими, электрическими, оптическими и т. д. Процесс получения телеметрической информации включает в себя следующие этапы: преобразование физических величин в электрические сигналы; предварительную обработку информации и ее кодирование; передачу сигналов; декодирование, регистрацию и отображение информации; обработку результатов и представление их в виде, удобном для анализа состояния КА, а также характеристик окружающей среды. Часть этапов выполняется на борту КА, а часть на Земле. Основное средство приема и передачи телеметрической информации — радиотелеметрическая система (РТС).
Телеметрическая информация, поступающая с борта КА, может быть объединена в несколько групп:
• информация о состоянии КА и параметрах, характеризующих режимы работы бортовых агрегатов, узлов и систем;
• информация о характеристиках среды, окружающей КА.
В перечисленные группы входят такие физические величины, как ускорение, температура, давление, вибрация, параметры целевого оборудования, СУД, ДУ, СГЭ и т. д.
С помощью РТС можно получать информацию с борта КА, находящегося на огромных расстояниях (тысячи и миллионы километров).
Телеметрия также находит применение при предполетной проверке КА. Наземное телеметрическое оборудование размещают в специальных приемных станциях. На трассе полета КА устанавливают дополнительные приемные станции. Информация, принятая этими станциями, представляется в форме, удобной для ее передачи в ЦУП.
Упрощенная функциональная схема РТС приведена на рис. 6.5. В состав РТС входят первичные источники измерительной информации (датчики), бортовое оборудование передачи информации и аппаратура приемно-регистрирующей наземной станции. Сигналы с выхода измерительных преобразователей подаются на согласующие устройства, которые приводят их к единому электрическому сигналу, принятому для данной РТС, чаще всего это постоянный ток напряжением 6 В. Структура устройства формирования группового сигнала зависит от метода разделения каналов. В состав
Рис. 6.5. Упрощенная функциональная схема РТС
366 6. Компоновка радиотехнического комплекса управления КА
группового сигнала добавляются синхронизирующие сигналы от хронизатора и другие служебные сигналы, необходимые для разделения каналов при приеме и обработке информации. Групповой сигнал, представляющий собой последовательность отсчетов всех каналов за один цикл измерения с совокупностью синхронизирующих и служебных сигналов, называется полным телеметрическим сигналом. С выхода устройства формирования полный телеметрический сигнал поступает на вход радиопередающего устройства, где производится модуляция одного из параметров несущего (высокочастотного) сигнала и излучение его в заданном направлении.
Наряду с перечисленными элементами аппаратура обработки и формирования группового сигнала РТС может включать в себя запоминающие устройства, устройства масштабирования и др. Запоминающие устройства предназначены для накопления информации на участках полета, где отсутствует связь между контролируемым КА и наземной приемной станцией, и хранят информацию до начала сеанса связи со станцией.
Основные элементы приемно-регистрирующей наземной станции — радиоприемное устройство, устройство селекции и декодирования группового сигнала, устройство синхросигналов (система синхронизации), аппаратура регистрации информации, устройства отображения данных и формирования сигналов времени.
Сигналы преобразования по частоте и декодирования, принятые антенной после усиления, поступают на вход разделителя сигналов, разделяющего групповой сигнал по отдельным каналам и характерным признакам. После разделения каналов осуществляется демодуляция сигналов в каждом канале и восстановление группового сигнала. В целях документирования групповых сигналов вся поступающая информация записывается аппаратурой регистрации информации, имеющей различные способы записи сигналов, и подвергается обработке. Для автоматизированной обработки информации данные представляются в цифровой форме. Основные средства обработки телеметрической информации — универсальные и специализированные ЭВМ.
Радиотелеметрические системы классифицируют:
• по точности значений измеряемых величин и воспроизведения процессов — на низкочастотные РТС с максимальной погрешностью более 5 %, высокоточные прецизионные РТС с погрешностью 0,8 %.
• информативности, т. е. по реальной скорости передачи информации, — на высоко-, средне- и низкоинформативные;
6.5. Бортовые антенно-фидерные устройства
367
• виду модуляции — на с амплитудно-импульсной, широтноимпульсной, временно-импульсной и частотно-импульсной модуляциями;
• способу представления сигналов — на аналоговые и цифровые системы.
Аналоговые РТС характеризуются тем, что значения измеряемой величины передаются непрерывно по амплитуде и непрерывно или дискретно по времени. Современные РТС являются преимущественно цифровыми. Важнейшее преимущество цифровых РТС — высокая точность передачи информации (погрешность менее 0,1 %).
Элементы телеметрических систем. Рассмотрим следующие элементы РТС.
Измерительные преобразователи, или датчики. — устройства, преобразующие измеряемую физическую величину в сигнал (электрический) для передачи, обработки и регистрации.
Согласующие устройства преобразуют выходной электрический сигнал преобразователя в электрическую величину другого вида и согласуют выход преобразователя со входом кодирующей и передающей части РТС.
Коммутирующие устройства используют в передающей части для поочередного подключения отдельных измерительных преобразователей ко входу радиолинии и для распределения принятых сигналов по соответствующим каналам.
Телеметрическая информация с приемника наземной станции в аналоговой или цифровой форме подается на аппаратуру предварительной обработки измерений, предназначенную для их преобразования и запоминания.
6.5. Бортовые антенно-фидерные устройства
Одним из наиболее важных компонентов любой системы радиосвязи являются антенно-фидерные устройства. Для обработки и передачи сигналов между приемопередающей аппаратурой и антеннами применяют комплекс высокочастотных устройств. Дальность и качество связи во многом определяются типом АФУ. Грамотно спроектированная, подобранная, настроенная и установленная антенно-фидерная система поможет увеличить эффективность любой системы радиосвязи.
Антенна — радиотехническое устройство, предназначенное для излучения или приема электромагнитных волн в радиотехнических системах.
368 6. Компоновка радиотехнического комплекса управления КА
Передача и прием электромагнитных волн осуществляется радиотехнической системой, состоящей из радиопередающего устройства, радиолинии, радиоприемного устройства, приемной и передающей антенны (рис. 6.6).
! Радиолиния ;
Рис. 6.6. Схема радиотехнической системы
Высокочастотные электромагнитные колебания, создаваемые передатчиком и модулированные полезным сигналом, преобразуются передающей антенной в электромагнитные волны и излучаются в пространство. Обычно электромагнитные колебания подводятся от передатчика к антенне с помощью линии питания фидера. При этом вдоль фидера распространяются связанные с ним плоские электромагнитные волны, которые передающая антенна преобразует в свободные сферические волны, распространяющиеся в пространстве.
Приемная антенна улавливает сферические волны и преобразует их в связанные волны, передаваемые с помощью фидерной линии в приемник.
Антенны классифицируются:
• по назначению — приемная и передающая;
• длине волны;
• способу возбуждения сигнала — простые излучатели, групповые излучатели, излучающие структуры и апертурные структуры;
• направленности — всенаправленные, остронаправленные;
• конструктивному решению: вибраторная антенна, симметричный вибратор (диполь), несимметричный вибратор, директор-ная антенна, щелевая антенна, апертурная антенна, открытый конец металлического волновода, рупорная антенна, зеркальная антенна, линзовая антенна, антенна с синтезированной апертурой, спиральная антенна, антенная решетка, фазированная антенная решетка, активная фазированная решетка и др.
По конструкции — ферменные, вантовые, сборные, секторные, надувные и зонтичные:
6.5. Бортовые антенно-фидерные устройства
369
• ферменные антенны имеют ферменный складной каркас, состоящий их шарнирно соединенных стержней;
• вантовые конструкции состоят из силового кольца, сетеполотна и системы вантовых растяжек;
• сборные антенны собираются из отдельных панелей и ферм;
• секторные антенны состоят из механически соединенных панелей и ферм;
• надувные антенны формируются из отдельных надувных частей, к которым крепится отражающая поверхность;
• зонтичные антенны имеют конструкцию, подобную дождевому зонту.
Качество работы антенны определяется диаграммой направленности.
Диаграмма направленности — зависимость напряженности электрического поля Е(0, ф, R) на расстоянии R от направления (0, ф).
Антенны также подразделяются по коэффициенту направленного действия (отношение мощности излучения в данном направлении Адн к средней мощности по всем направлениям)
C-N IN 7¥дн ' 7Vcp*
У всенаправленных антенн (штыревых, полуволнового диполя и др.), применяемых в системах связи, телеметрии и навигации, коэффициент С = 0,01...0,10.
Малонаправленные антенны (коническая спираль, рупорная антенна, полуволновая щель и др.) имеют менее изрезанную диаграмму направленности и коэффициент С = 0,1...5,0. При определенной ориентации по одной оси антенны размещаются на соответствующие ориентированные поверхности КА. Иногда устанавливают несколько МНА на ориентированную поверхность КА.
Остронаправленные антенны имеют узкую диаграмму направленности (рис. 6.7), ширина которой по половинной мощности не превышает нескольких градусов. Такая антенна требует точной ориентации на пункт приема-передачи.
У ОНА один из лепестков диаграммы (главный лепесток) значительно больше остальных боковых лепестков. Это отражает факт получения большей части энергии в пределах относительно малого пространственного угла в направлении (0, ф).
Для описания направленности ОНА наряду с нормированной диаграммой направленности Е(0, ф) часто используют значения ширины Аф0 5 и А0О 5 диаграммы направленности, которые характе-
370 6. Компоновка радиотехнического комплекса управления КА
ризуют ширину главного лепестка диаграммы ОНА; чем сильнее направленность ОНА, тем меньше значения ширины Аф0 5 и А0О 5.
l/2g (0,0)
i/2g (0,0)
Рис. 6.7. Диаграмма направленности параболической антенны:
X — длина волны; d — диаметр антенны
Кроме того, используется и такая характеристика напряженности ОНА, как относительный уровень боковых лепестков Рбок диаграммы направленности:
F(e,(p,)
Рбок F(0o(po)’
где 0Z, ср, — направление и ширина z-го бокового лепестка
У ОНА мощность сигнала, излучаемого боковыми лепестками, в 100... 1000 раз меньше мощности, излучаемой главным лепестком.
Антенны радиосистем КА бывают простыми (одноэлементными) и сложными (многоэлементными). Рассмотрим некоторые из них.
Свойства многоэлементной антенны зависят не только от свойств образующих ее простых антенн, но и от способа размещения антенн друг относительно друга. Такая система называется антенной решеткой и состоит из К антенн А\-Ак, имеющих диаграммы направленности 7Д0) и размещенных на равных расстояниях друг относительно друга.
Активной фазированной антенной решеткой (рис. 6.8) называют такую многоэлементную сканирующую антенну, в тракт каждого излучателя (или группы излучателей) которой входит активный элемент (усилитель, синхрогенератор или преобразователь частоты).
Создание АФАР требует решения следующих задач:
• определение ожидаемых характери
стик АФАР, оптимизация параметров и основных узлов в целях получения характеристик АФАР, близких к предельным;
• разработка методик настройки АФАР и измерения ее характеристик;
Рис. 6.8. Структурная схема АФАР (У|-Ух — усилители)
6.5. Бортовые антенно-фидерные устройства
371
• проектирование и изготовление необходимой контрольноизмерительной аппаратуры;
• проведение испытаний и т. д.
Активные элементы усиливают или преобразуют сигналы, подаваемые на их вход, а согласованные излучатели (излучатели с согласующими цепями) обеспечивают высокоэффективный прием энергии в заданных секторе пространства и полосе частот. Области использования АФАР — в передающих, приемных или в приемно-передающих радиотехнических системах.
Система излучателей (или антенное полотно) обычно состоит из однотипных слабонаправленных излучателей (вибраторных, щелевых, рупорных, волноводных). Требуемая излучаемая мощность и необходимое амплитудно-фазовое распределение сигналов, определяющее форму диаграммы направленности, обеспечиваются системой формирования, которая преобразует сигнал в совокупность сигналов, поступающих на входы излучателей.
Фазирующая система формирует необходимое фазовое распределение сигналов, возбуждающих излучатели, которые определяют направление диаграммы направленности АФАР. Распределительная система осуществляет деление мощности генератора по излучателям АФАР и представляет собой делители мощности (рис. 6.9).
Рис. 6.9. Структурная схема АФАР
372 6. Компоновка радиотехнического комплекса управления КА
Если КА не стабилизированы в пространстве или стабилизированы вращением, то антенны должны иметь всенаправленные характеристики излучения. Рассмотрим основные характеристики некоторых типов антенн.
6.6. Одноэлементные антенны
Линейные антенны. К линейным антеннам относятся излучающие системы малых по сравнению с длиной полуволны поперечных размеров, в которых направление протекания тока совпадает с осью системы. По характеру распределения тока их можно разделить на два типа: антенны стоячей волны и антенны бегущих волн. К первому классу относятся, например, вибраторные и щелевые антенны, а ко второму — спиральные антенны и диэлектрические стержневые.
Электрическим вибратором называется излучатель электромагнитных волн в виде линейного цилиндрического проводника радиуса — а с длиной плеч 1\ и /2, между внутренними торцами которых
а б
2L
в г
Рис. 6.10. Виды вибраторов:
а — полуволновой симметричный вибратор; б — вибратор с шунтовым питанием; в — петлеобразный вибратор Пистолькорса; г — двухпетлевой
приложена постоянная ЭД С. Ось Z направлена вдоль оси вибратора и имеет начало в зазоре. Вибраторы применяются как в качестве самостоятельных антенн, так и в сложных антенных системах (рис. 6.10).
Антенны применяются для связи, навигации и радиолокации на частотах 0...5 ГГц (рис. 6.11).
6.6. Одноэлементные антенны
373
а
Рис. 6.11. Конструкции антенн, используемых на КА:
а — полуволновая симметричная вибраторная антенна для КА «Ионосфера»; б — совмещенное антенно-фидерное устройство, состоящее из двух вибраторных антенн линейной поляризации (частота 150 МГц; 400 МГц; габариты 900х350х500 мм; масса — 1 кг); в — антенна дециметрового диапазона бортовой системы телесигнализации КА «Коронас-Фотон» (габариты 400х240х240 мм: масса — 0,45 кг)
Щелевая антенна представляет собой отверстие, прорезанное в металлической поверхности и возбуждаемое каким-либо источником (рис. 6.12). Если щель узкая, то напряжение вдоль нее имеет синусоидальное распределение, которое на концах щели обращается в нуль. Ширина щели имеет размеры: dfk = 0,03...0,05; 2//Х < 0,5, где d— ширина щели, 2/ — ее длина.
6
в
Рис. 6.12. Формы щелей:
а — прямоугольная; б — крестообразная; в — гантельная; г — угловая; д — кольцевая
Цилиндрическая и коническая спиральные антенны. Одноза-ходная цилиндрическая спиральная антенна представляет собой проволочную спираль с постоянным шагом s, выполненную на цилиндрической поверхности радиуса г = а, или конической с углом при вершине — 2р. Один конец спирали остается свободным,
374 6. Компоновка радиотехнического комплекса управления КА
а другой соединен с внутренним проводом с коаксиальной линии. Внешний провод коаксиального кабеля подключается к металлическому экрану, имеющему форму диска (рис. 6.13).
Рис. 6.13. Схема спиральных антенн: а — цилиндрическая; б — коническая
На рис. 6.14 представлены варианты исполнения спиральных антенн.
Рис. 6.14. Внешний вид спиральных антенн:
а — спиральная антенна 137 МГц для передачи метеорологической информации низкого разрешения; б — логарифмическая спиральная антенна дециметрового диапазона КА «Ресурс» (антенна представляет собой коническую двухзаходную спиральную логарифмическую антенну высотой 300 мм, диаметром 220 мм, массой антенны 0,5 кг)
Используются в наземных и бортовых системах для сопровождения целей и передачи телеметрической информации на частотах 100 МГц... 3 ГГц.
Диэлектрическая стержневая система состоит из двух основных частей: возбуждающего устройства и круглого диэлектрического стержня. Стержень может быть цилиндрической и конической формы (рис. 6.15).
Применяются как облучатели в антенных решетках частоты 1...6ГГц.
6.6. Одноэлементные антенны
375
Рис. 6.15. Диэлектрические антенны:
а — цилиндрической формы; б — конической формы
Апертурные антенны. Апертурная антенна — антенна, излучающая с раскрыва. Примерами таких антенн являются рупорные, зеркальные, линзовые и другие типы антенн. Элементарным излучателем в них является элемент Гюйгенса. К апертурным антеннам относятся антенны, у которых может быть выделена плоская поверхность раскрыва 5, формирующая остронаправленное излучение.
Волноводные излучатели являются простейшими апертурными излучателями в диапазоне сантиметровых волн (рис. 6.16). Наиболее распространенными являются антенны в виде открытых концов волноводов — прямоугольные или круглые.
Рис. 6.16. Волновые излучатели:
а — антенна БАСН для приема сигналов со спутниковых систем ГЛОНАСС/GPS; б — антенна дециметрового диапазона телеметрической бортовой системы КА «МЕТЕОР»
Рупорные антенны (рис. 6.17) применяются в диапазоне СВЧ как самостоятельные антенны, а также в качестве излучателей зеркальных и линзовых антенн, используются для передачи информации с космических аппаратов на наземные пункты приема.
376 6. Компоновка радиотехнического комплекса управления КА
Рис. 6.17. Типы рупорных антенн:
а — плоская; б, в — пирамидальные; г — конусная
Также антенны используются в основном как наземные. Рабочая частота — 8,2 ГГц, коэффициент усиления — 17,5 дБ, поляризация — круговая, левая или правая, диаметр 90 мм, длина 220 мм, масса — 0,2 кг. Антенна состоит из рупорного излучателя, фазирующей секции и трансформатора.
Типичный представитель апертурой антенны — зеркальная параболическая антенна, у которой электромагнитное поле в раскрыве образуется за счет отражения электромагнитной волны от металлической поверхности специального зеркала (рефлектора) (рис. 6.18). В качестве источника волны обычно выступает небольшой излучатель, располагаемый в фокусе зеркала, также это может быть любая другая антенна с фазовым центром, излучающая сферическую волну. Основная цель зеркальных антенн сводится к преобразованию сферического или цилиндрического фронта волны в плоский фронт. Используется для связи, радиолокации и радиоастрономии.
6.7. Многоэлементные антенны
377
Параболический рефлектор
Облучатель
б
Рис. 6.18. Схема зеркальной параболической и линзовой антенны
а — сферическая однозеркальная антенна; б — линзовая антенна: 1 — фронт волны, падающей на линзу; 2 — облучатель; 3 — линза; 4 — фронт волны, прошедшей через линзу; F— фокус линзы
6.7. Многоэлементные антенны
Сложная направленная антенна, состоящая из совокупности отдельных слабонаправленных антенн (излучающих элементов), расположенных в пространстве особым образом. Антенные решетки (рис. 6.19) применяются для повышения усиления всей системы
Рис. 6.19. Классификация антенных решеток:
а — линейная; б — дуговая; в — кольцевая; г — плоская; д — цилиндрическая; е — коническая; ж — сферическая; з — неэквидистантная
378 6. Компоновка радиотехнического комплекса управления КА
в сравнении с отдельным антенным элементом, позволяя при этом получить возможность управления формой диаграммы направленности. В качестве элементарных излучателей в антенных решетках могут использоваться различные антенны, как малой, так и большой направленности. Например в простейших решетках в качестве элементарной антенны могут быть установлены симметричные и несимметричные вибраторы, волноводные щели, печатные излучатели и т. п.
Фазированная антенная решетка. Стремление увеличить максимальную излучаемую мощность, надежность, адаптацию к конкретным условиям работы в окружающей среде привело к созданию фазированных антенных решеток. Фазированные антенные решетки отличаются от антенных решеток АР включением в антенный тракт системы фазовращателей или коммутаторов, осуществляющей управление фазовым или амплитудно-фазовым
Рис. 6.20. Пространственный способ возбуждения: а — отражательная ФАР; б — проходная ФАР
распределением для электрического сканирования. Нашли применение различные схемы построения ФАР в зависимости от требований к системе. Пространственный способ возбуждения (называемый еще распределителем оптического типа) допускает два варианта антенн: отражательную ФАР (рис. 6.20, а) и проходную ФАР (рис. 6.20, б).
На рис. 6.21 приведены варианты конструкций фазированных антенных решеток.
6.7. Многоэлементные антенны
379
Рис. 6.21. Структурные схемы некоторых фазированных антенных решеток — линейной эквидистантной с симметричными вибраторами и общим зеркалом (я); линейной неэквидистантной с полноповоротными зеркальными параболическими антеннами (б); плоской с прямоугольным расположением рупорных излучателей (в); плоской с гексагональным расположением диэлектрических стержневых излучателей (г); конформной с щелевыми излучателями (б); сферической со спиральными излучателями (г); системы плоских фазированных антенных решеток (ж):
Ф — линии возбуждения (фидеры); А — зеркальные антенны; Р — рупоры; ВР — возбуждающие радиоволны; Э — металлический экран; Щ — щелевые излучатели; К — коническая ФАР; Ц — цилиндрическая ФАР; С — спиральные излучатели; СЭ — сферический экран; П — плоские фазированные антенные решетки (точками обозначены излучатели); /0 — расстояние между В; /ь 12, Ц — расстояния между А
Дальнейшее совершенствование АР привело к созданию активных фазирующих решеток (АФАР).
Активная фазированная антенная решетка. В активной фазированной антенной решетке (АФАР) каждый излучающий модуль или группа модулей имеют собственный миниатюрный микроволновый передатчик вместо одного, работающего на все излучающие модули.
Управление фазами (фазирование) позволяет радару с применяемой ФАР:
• формировать (при весьма разнообразных расположениях излучателей) необходимую диаграмму направленности антенны (например, остронаправленную типа луч);
• изменять направление луча неподвижной антенны, таким образом осуществляя быстрое (в ряде случаев практически безынерционное) сканирование — качание луча;
380 6. Компоновка радиотехнического комплекса управления КА
• управлять в определенных пределах формой — изменять ширину луча, интенсивность (уровни) боковых лепестков и т. п. (для этого в ФАР иногда осуществляют также управление и амплитудами волн отдельных излучателей).
В АФАР каждый излучающий модуль состоит из антенны, фазовращателя, передатчика и, как правило, приемника (рис. 6.22).
Рис. 6.22. Схема приемо-передающего модуля АФАР:
МШУ — малошумный усилитель; Дер — фазовращатель; АТТ — аттенюатор: УМ — усилитель мощности
Космические аппараты несут на себе солнечные батареи и антенны, которые имеют значительные площади, что усложняет их взаимную компоновку, а кроме того конструкции этих систем имеют значительную массу. В Швейцарской Федеральной политехнической школе Лозанны (Ecole polytechnique federale de Lausanne) разработана система ASOLANT (Advanced SOLar ANTenna, т. e. передовая солнечная антенна), совмещающая солнечные батареи и антенны. Излучатели антенн монтируются в структуру солнечных батарей. Это может быть целый набор антенн под разные частоты, они могут устанавливаться под любыми углами, что обеспечивает связь при разворотах солнечных батарей на Солнце. Совмещение солнечных батарей и антенн позволяет значительно сократить количество раскрываемых конструкций, что повышает надежность, а также упрощает компоновку КА и снижает массу конструкции, за счет чего можно увеличить массу целевого оборудования. Подобная конструкция установлена на германском спутнике Rubin OHB System.
6.8. Конструкции и механизмы раскрывающихся антенн
В рабочем положении большинство антенн, установленных на космических аппаратах, выходят за габариты пространства, предусмотренного для размещения КА под обтекателем ракеты-носителя.
6.8. Конструкции и механизмы раскрывающихся антенн
381
Поэтому на участке выведения все раскрывающиеся антенны складываются таким образом, чтобы уместиться под обтекателем. По способу развертывания антенны можно подразделить на:
• механические — конструкции, соединенные в единую механическую систему, развертывание которой производится за счет энергии пружин и деформированных упругих элементов;
• вращающиеся — раскрываются за счет центробежных сил, возникающих при вращении конструкции вокруг оси:
• пневматические — раскрывающиеся за счет создания избыточного давления во внутренних полостях конструкции;
• пиротехнические — развертываются за счет взрыва заряда или группы зарядов;
• комбинированные — раскрывающиеся за счет комбинации перечисленных выше способов.
Складывающиеся (трансформируемые) антенны потребовали создания гибких радиоотражающих поверхностей с высоким (97...99 %) коэффициентом радиоотражения в рабочем диапазоне частот, минимальным усилием растяжения, высокой стабильностью физико-механических и электрофизических характеристик при хранении и длительном сроке эксплуатации. Этим условиям отвечают материалы:
• металлизированные полимерные пленки;
• металлизированные тканые материалы из синтетических и искусственных нитей;
• металлизированные тканые материалы из искусственных текстильных нитей с включением металлических нитей, обладающих высокой электропроводностью;
• металлизированные трикотажные материалы из полимерных текстильных нитей;
• трикотажные сетчатые материалы из текстильных нитей, состоящих из металлических электропропроводных и химических волокон;
• трикотажные сетчатые материалы из металлических нитей (мононити, комплексной нити, пряжи).
К отражательной поверхности антенн космических систем связи предъявляются специфические эксплуатационные требования, важнейшими из которых являются:
• гибкость и эластичность для обеспечения складывания и развертывания антенны при минимальных усилиях силового каркаса;
382 6. Компоновка радиотехнического комплекса управления КА
• отсутствие складок и заминов при складывании и развертывании каркаса антенны;
• способность выдерживать многократные складывания и развертывания антенны без ухудшения радиоотражающей способности;
• локализация повреждений отражательной поверхности антенны при эксплуатационных нагрузках;
• минимальная масса при заданном размере ячеек;
• устойчивость к воздействию факторов космической среды;
• максимальная радиоотражающая способность при заданных размерах ячеек сетеполотна;
• изотропия основных механических, радиоотражающих и др. свойств.
Трикотажные сетчатые материалы не имеют недостатков, присущих сетчатым материалам из полимерных нитей, обладая при этом всеми их достоинствами: эластичностью, малой массой единицы площади, достаточной прочностью. Металлические сетеполотна не теряют отражающей способности после многократного складывания. Современные разработки с трикотажным сетеполот-ном из металлических нитей могут использоваться для работы антенн на частотах до 40 ГГц.
Для складных антенн существует такая характеристика, как коэффициент трансформации — это отношение объема антенны в сложенном состоянии к площади зеркала антенны в раскрытом состоянии. Кроме того, эффективность конструкции антенны может оцениваться по удельной массе ее квадратного метра. Эффективными значениями этих показателей считают:
• коэффициент трансформации ~ 46;
• масса 1 м2 площади зеркала ~ 37 г/м2.
Стержневые вибраторы в точке крепления к корпусу КА обычно имеют шарнирное соединение, позволяющее повернуть и уложить антенну к корпусу КА. В транспортном положении уложенная антенна удерживается с помощью специального механизма (стопора, или зачековочного механизма). После выведения и отделения от ракеты-носителя происходит раскрытие антенны. Простейшим механизмом раскрытия является пружина, устанавливаемая, как правило, в точке крепления. После раскрытия срабатывает механизм зачековки в рабочем положении.
Телескопические антенны могут раскрываться при помощи тросовой системы, пружин и сжатого газа. На рис. 6.23 приведена схема раскрытия телескопической антенны с помощью тросовой системы.
6.8. Конструкции и .механизмы раскрывающихся антенн
383
а б в
Рис. 6.23. Схема раскрытия телескопической антенны:
а — антенна в сложенном и раскрытом положении и ее сечение; бив — схемы раскрытия антенны: 1-4 — тонкостенные трубчатые секции; 5 — кронштейны; г — сечение антенны
Трубчатая антенна — термообработанная соответствующим образом лента (материал с памятью) наматывается на цилиндрический барабан и удерживается в этом положении с помощью стопора. После открытия стопора лента, являющаяся пружиной, раскру
чивается, используя упругость или при помощи электропривода.
После раскрытия благодаря термообработке принимает трубчатое
сечение (рис. 6.24).
Рис. 6.24. Принципиальная схема ленточной антенны:
d — диаметр; ср — угол перекрытия; f — толщина ленты
384 6. Компоновка радиотехнического комплекса управления КА
Полученная трубчатая конструкция способна воспринимать из-гибные напряжения не хуже бесшовных труб такого же диаметра и толщины стенки. Возможно изготовление трубчатой конструкции, состоящей из двух вложенных друг в друга труб (рис. 6.25).
Рис. 6.25. Ленточная антенна, состоящая из двух лент:
/ — транспортное положение (свернутая): 2 — внешняя труба: 3 — внутренняя труба
Полосы могут быть намотаны на один барабан или на два. При раскрытии происходит свертывание лент навстречу друг другу, при этом ширина внутренней ленты меньше ширины внешней ленты, благодаря чему одна труба вкладывается в другую автоматически.
Раскрытие может происходить за счет упругости скрученных лент или при помощи механизма. На рис. 6.26 приведена циклограмма раскрытия антенны на катушке.
Рис. 6.26. Циклограмма раскрытия ленточной антенны:
а — во взведенном положении катушка удерживается стопором: б — при отделении от космического аппарата срабатывает пиропатрон, удаляя штифт, который удерживает рычаг фиксирующий катушку: под действием пружины рычаг поворачивается, освобождая катушку; в — под действием двух пружин катушка начинает выходить из корпуса; г — катушка выходит из корпуса за 1 с, лента раскручивается и принимает трубчатую форму; раскрытие антенны длиной 20 м происходит за 10 с
6.8. Конструкции и механизмы раскрывающихся антенн
385
Трансформируемые зеркала лепесткового типа. Для создания антенн больших космических телескопов разрабатываются конструкции трансформируемых зеркал различных типов. Твердотельное, параболическое, трансформируемое лепестковое зеркало было предложено впервые фирмой Dornier при разработке космического телескопа инфракрасного диапазона проекта FIRST. Эта же схема раскрытия используется в конструкции 10 метрового зеркала проекта «Радиоастрон».
Лепестковое зеркало представляет собой трансформируемую конструкцию, состоящую из центрального зеркала и набора лепестков. В сложенном состоянии лепестки размещаются в вертикальном положении над центральным зеркалом под обтекателем. В классической схеме раскрытия лепесткового зеркала каждый лепесток связан с центральным зеркалом цилиндрическим шарниром. Раскрытие зеркала осуществляется синхронным вращением лепестков вокруг этих шарниров (рис. 6.27). Показано, что существуют
Рис. 6.27. Схема раскрытия лепестка параболического рефлектора
такие направления осей шарниров, при которых синхронное вращение лепестков приводит к раскрытию зеркала без зацеплений. В раскрытом состоянии центральное зеркало и лепестки образуют параболический рефлектор. На рис. 6.28 показаны этапы раскрытия лепесткового зеркала проекта FIRST.
Наиболее компактной является укладка зонтичной антенны со сферическими ребрами (рис. 6.29). Известны два направления в создании подобных антенн. Первый разработан американской фирмой TRW.
Гибкие радиальные ребра антенны складываются в небольшой контейнер вместе с облучателем, имеющим телескопическую конструкцию. Поперечный размер сложенной антенны определяется
386 6. Компоновка радиотехнического комплекса управления КА
Рис. 6.28. Этапы раскрытия лепесткового зеркала проекта FIRST:
а — зеркало в сложенном (транспортном) состоянии; б — частично раскрытое зеркало; в — раскрытое зеркало
Рис. 6.29. Схема развертывания зонтичной антенны с гибкими ребрами:
/ — гибкие радиальные ребра; 2 — ступица; 3 — полотно отражателя; 4 — струны фиксации ребер относительно центральной штанги с излучателем
диаметром ступицы, служащей основанием антенны. Развертывание происходит благодаря упругости ребер. В раскрытом состоянии концы ребер фиксируются относительно штанги с облучателем с помощью пластмассовых струн. В сложенном состоянии ребра связываются между собой и затем свертываются и удерживаются в свернутом состоянии замком.
Для обеспечения мобильной телефонии на спутнике связи требуется устанавливать крупногабаритные параболические антенны диаметром 5...7 м. Конструкция антенны, развертываемая по технологии Wrap-Rib, включает в себя гибкую отражающую сетку с 16 гибкими алюминиевыми ребрами, прикрепленными к ступице диаметром 0,81 м. Ребра выполнены таким образом, что они могут быть плотно обернуты вокруг ступицы, когда отражатель находится в транспортном положении. При раскрытии антенны ребра разворачиваются (рис. 6.30).
Подобные способы укладки позволяют сворачивать антенны диаметром до 23 м. Для раскрытия антенн большего диаметра необходимо применение механизма вращения.
6.8. Конструкции и механизмы раскрывающихся антенн
387
Рис. 6.30. Рефлектор Wrap-Rib:
а — сложенное положение; б — процесс развертывания; в — развернутое положение;
1 — развертываемое устройство; 2 — ступица; 3 — механизм раскрытия; 4 — ребра
Параболический рефлектор с проецируемой апертурой диаметром 12 м Astromesh используется на спутнике для достижения высокой направленности луча по требуемым зонам обслуживания. Данная конструкция намного больше, чем спутник, и необходимо ее сложить, чтобы уместить под обтекатель ракеты-носителя (рис. 6.31).
Рис. 6.31. Рефлектор Astromesh и спутник в рабочем (а) и транспортном положении (б)
388 6. Компоновка радиотехнического комплекса управления КА
Решение этой проблемы возможно при выполнении следующих требований:
• рефлектор антенны должен занимать малый объем, обеспечивающий размещение ее под обтекателем ракеты-носителя;
• рефлектор в сложенном положении не должен вызывать значительного смещения центра масс КА;
• механизмы, которые раскрывают рефлектор на орбите, должны быть надежными и обеспечивать аккуратное позиционирование рефлекторной поверхности;
• система управления раскрытием должна быть согласована с этим механизмом так, чтобы обеспечить своевременное обнаружение отказа и реагирование на непредвиденные обстоятельства;
• после раскрытия крупногабаритной конструкции должно быть оказано минимальное влияние на систему управления спутником.
Выбранная конфигурация рефлектора является раскрывающейся ферменной конструкцией, которая в сложенном положении занимает объем менее 0,4 % от раскрытого объема. Это позволяет использовать стандартные платформу КА и обтекатель ракеты-носителя, что минимизирует стоимость и повышает надежность.
Рефлектор Astromesh для спутника MBSAT включает в себя проецированную круговую апертуру диаметром 12 м, формируемую параболической сетчатой поверхностью, подвешенной на периметрической ферменной системе. Периметрическая ферма, поддерживающая конфигурацию из геодезических куполов, позволяет получить высокое отношение жесткости к массе. Ферменная система, раскрываемая тросом, обеспечивает эффективное соотношение между объемом в раскрытом положении и объемом в сложенном положении, высокую надежность раскрытия и комфортабельные запасы по усилиям.
Схема раскрытия антенны ферменной конструкции ИСЗ связи приведена на рис. 6.32. Большинство антенн, установленных на КА, имеют параболическую форму и раскладываются при выведении КА на орбиту. Схема раскрытия и механизм, раскрывающий антенну, могут быть разными.
Далее приведены варианты конструктивного решения механизма раскрытия антенн.
1. Антенна спутника INSAT-2E S/С (рис. 6.33)
2. Антенна спутника 1TALSAT Flight 2
6.8. Конструкции и механизмы раскрывающихся антенн
389
4,8 м
Рис. 6.32. Модульная складная крупногабаритная антенна для ИСЗ связи:
а — общий вид ИСЗ; б — схема модуля антенн: 1 — модуль антенны; 2 — складывающаяся рамная конструкция; в — кинематическая схема механизма складного модуля; г — кинематическая схема складной рамы: 1 — диагональная балка; 2 — боковая створка; 3 — нижняя балка: 4 — спиральная пружина привода: 5 — скользящий упругий элемент; 6 — центральная балка; 7 — синхронизирующая балка; 8 — верхняя балка
390 6. Компоновка радиотехнического комплекса управления КА
Рис. 6.33. Компоновка антенн ретрансляторов ИСЗ связи INS АТ-2 Е S/C:
а — общий вид ИСЗ; б — расположение антенн (пунктиром показано транспортное положение): 1 — восточный рефлектор; 2 — западный рефлектор; в — механизмы раскрытия антенн: 1 — направление движения; 2 — внутренний кронштейн; 3 — микровыключатель; 4 — замок; 5 — корпус спутника; 6 — внешний кронштейн; 7 — приводная пружина; 8 —рефлектор
На ИСЗ ITALSAT F2 (рис. 6.34) установлены две откидываемых антенны диаметром 2 м диапазона L-Ka. Комплексный механизм раскрытия и ориентации антенны ADPMSS (The Antenna Deployment & Pointing Mechanism and Supporting Structure) состоит из рычажного механизма раскрытия ADM, который является углепластиковой шарнирно-сочлененной рамой, состоящей из трапеции и рычага, которые связаны друг с другом шарниром.
Соединение рычага с центральным зеркалом антенны производится плавающим карданным подвесом. Механизм предварительно напряжен пружиной, установленной на концевой части рычага.
6.8. Конструкции и механизмы раскрывающихся антенн
391
Рис. 6.34. Общий вид ИСЗ связи ITALSAT F2 и схема механизма раскрытия и ориентации антенны:
а — схема механизма раскрытия; б — антенна в раскрытом положении; в — механизм ориентации антенны; г — компоновка антенн на КА; 1 — интерфейс рефлектора; 2 — страгивающая пружина; 3 — верхняя балка; 4 — трапеция; 5 — пружина привода раскрытия; 6 — демпфер; 7 — кронштейны антенны; 8 — ось вращения рефлектора; 9 — панель корпуса КА; 10 — шаговый электродвигатель; 11 — пружина; 12 — петля кронштейна антенны; 13 — кронштейн антенны; 14 — зазор в интерфейсе; 15 — винт привода; 16 — гайка привода
Трапеция крепится к КА на двух опорах, каждая из которых включает шарнир, привод (пружину кручения) и гидравлический амортизатор. Приводы в шарнирах трапеции и пружинный толкатель, смонтированный на конце рычага, создают крутящий момент, необходимый для движения развертывания антенны. Страгивание антенны после расчековки происходит под действием толкателя на конце рычага. Рефлектор антенны крепится к КА на двух регулируемых шарнирных опорах. Шарниры рефлектора могут перемещаться посредством линейного привода (передача винт — гайка с компенсацией люфта пружиной).
Кронштейны рефлектора антенны выполнены в виде ферменной конструкции. Кроме того, дополнительный стержень, ось которого совпадает с осью шарниров рефлектора, соединяет край антенны с опорой, что предотвращает проворот рефлектора вокруг его оси.
Основные характеристики механизма ADPMSS приведены ниже:
392 6. Компоновка радиотехнического комплекса управления КА
Масса, кг .............................................5,2
Точность наземной установки антенны, град.............±0,3
Точность установки антенны при раскрытии, град......±0,001
Диапазон регулирования положения антенны, град: по азимуту ........................................±2,1
по углу места.......................................±3,1
Разрешение при ориентации антенны, град: по азимуту ........................................ 0,0006
по углу места.......................................0,001
Ошибка ориентации антенны вследствие тепловых возмущений и механических погрешностей, град.................0,05
Угловая скорость ориентации антенны, град/с ...........0,11
Первая собственная частота антенны в рабочем положении.11,1
Ресурс, лет............................................10
Надежность ............................................0,9966
3. Антенны Wrap-Rib спутника MSAT крепятся как показано на рис. 6.35, 6.36.
а
Рис. 6.35. Компоновка крупногабаритных антенн на КА MSAT в развернутом (а) и транспортном положении (б):
/ — приемный рефлектор; 2 — излучатель; 3 — корпус КА; 4 — передающий рефлектор; 5 — лонжерон; 6 — зенит; 7 — надир; 8 — крепежное устройство;
9 — рефлектор в сложенном положении; 10 — шарнир; // — привод; 12 — панель солнечной батареи
6.8. Конструкции и механизмы раскрывающихся антенн
393
Рис. 6.36. Раскладная штанга крепления антенны:
/ — панель КА; 2 — кронштейн; 3 — регулировочные шайбы; 4 — плечевой шарнир; 5 — балка; 6 — рефлектор; 7 — втулка рефлектора; 8 — крестовина; 9 — двухстепенной кордано-вый подвес; 10 — регулировочная шайба подвеса; 11 — энергопоглотитель;
12 — кистевой шарнир: 13 — локтевой шарнир
4. Остронаправленная антенна для связи КА со спутником-ретранслятором (рис. 6.37, 6.38).
Рис. 6.37. Компоновка остронаправленной антенны на КА ДЗЗ ТОРЕХ:
1 — антенна высотомера; 2 — лазерный уголковый отражатель; 3 — доплеровская антенна; 4 — стыковочный узел манипулятора; 5 — энергетический модуль; 6 — двигательная установка; 7 — блок системы управления; 8 — агрегатный отсек; 9 — остронаправленная антенна; 10 — СБ; 11 — антенна G7<S; 12 — микроволновый радиометр; 13 — приборный отсек
394 6. Компоновка радиотехнического комплекса управления КА
Рис. 6.38. Остронаправленная антенна в транспортном положении:
а — вид сбоку: 1 — мачта; 2 — рефлектор; 3, 7 — пироболт зачековки; 4 — привод вращения вокруг оси Х\ 5 — лонжемент антенны; 6 — привод вращения вокруг оси У; 8 — лонжемент мачты; 9 — привод раскрытия; 10 — ось Z; 11 — ось Х\ б — вид сверху: 1 — кабель заземления; 2 — кабель радиоканала; 3 — кабель управления приводом; 4 — кабель пироболта зачековки; 5 — демпфер; 6 — ось %; 7 — ось Y
5. Антенна спутника связи SBS (рис. 6.39).
Рис. 6.39. Компоновка всенаправленной антенны на торце КА связи типа SBS:
/ — рефлектор; 2 — всенаправленная антенна: 3 — привод антенны; 4 — излучатель
6.9. Требования к компоновке антенн
395
Крупногабаритная параболическая антенна. Последовательность раскрытия крупногабаритной параболической антенны приведена на рис. 6.40.
1
г
Рис. 6.40. Возможная последовательность раскрытия крупногабаритной (100 м) антенны в космосе:
а — антенна в сложенном виде; б — выдвижение телескопических штанг с блоком облучателей; в — начало раскрытия опорной конструкции рефлектора (мембрана удерживается с помощью системы тросов); г — вид антенны в раскрытом состоянии: 1 — блок облучателей; 2 — телескопические штанги;
3 — система тросов; 4 — мембрана, образующая отражающую поверхность рефлектора; 5 — опорная конструкция рефлектора; 6 — блок радиоэлектронной аппаратуры; 7 — панели солнечных батарей
6.9. Требования к компоновке антенн
Длина высокочастотных трактов от антенны до электронных приборов, приемника, передатчика и других приборов должна быть минимальной и иметь небольшое число изгибов для устранения энергетических потерь.
Антенны с близкими частотами различных радиотехнических систем должны быть пространственно максимально разнесены между собой. В питающих трактах антенн необходимо предусматривать установку заградительных фильтров для радиосредств, функционирующих на близких частотах.
Корпуса антенн и высокочастотных трактов должны быть заземлены на корпус КА для исключения накопления зарядов статического электричества.
В секторах, образованных шириной диаграммы направленности остро- и слабонаправленных антенн, не должно быть элементов конструкции КА, которые попадают в зону излучения этих антенн.
396 6. Компоновка радиотехнического комплекса управления КА
Крепление и расположение антенн на корпусе КА должны обеспечивать сохранение их геометрических размеров в процессе эксплуатации. Для ОНА допустимая деформация места крепления может быть не более 1/16 Храб, а для слабонаправленных антенн — не более 1/8 Храб, где Храб — рабочая длина волны данной антенны.
При формировании всенаправленной диаграммы направленности одиночную антенну следует размещать на выступающей части КА или на штанге, удаляющей ее от корпуса КА для устранения затенения диаграммы корпусом КА.
Для исключения искажений диаграммы направленности антенна при ее установке должна контактировать с корпусом КА по всему периметру фланца антенны. Переходное сопротивление между корпусами антенны и КА должно быть не более 600 мкОм.
Основное направление конструирования и компоновки антенн — создание складных антенн, раскрывающихся после выведения КА на орбиту. Антенны командных радиолиний и систем связи должны иметь всенаправленные характеристики излучения, такие же характеристики должны быть и у антенн нестабилизированных КА или стабилизированных вращением. Поскольку расчет диаграммы направленности таких антенн невозможен, место установки антенн проверяют экспериментально на специальном макетном аппарате.
Примером компоновки антенн может служить размещение антенн системы поиска спускаемого КА «Союз» (рис. 6.41). На корпусе
Рис. 6.41. Схема размещения антенн на спускаемом КА «Союз»
6.9. Требования к компоновке антенн
397
КА «Союз» установлено две антенны KB-диапазона, которые раскрываются после приземления, одна антенна KB-диапазона размещается в стропах парашюта, что позволяет вести работу во время спуска на парашюте; также на корпусе КА закреплены две антенны УКВ-диапазона, раскрывающиеся после приземления. В зависимости от положения спускаемого КА после приземления раскрываются те антенны, которые могут раскрыться беспрепятственно.
Рис. 6.42. Вариант разме
щения антенн различного типа на КА «Электро-Л»:
/ — датчики геофизической обстановки; 2 — ДУ;
3 — радиатор СОТР; 4 — ОНА; 5 — многоспектральное сканирующее устройство; б — МН А; 7 — средненаправленные антенны; 8 — модуль полезной нагрузки;
9 — ферма служебного модуля; 10 — модуль обслуживающего оборудования; / / — панель солнечной батареи
Щелевые антенны размещаются в корпусе КА и закрываются крышками при транспортировке и на участке выведения. Вариант размещения антенн различного типа на КА «Электро-Л» приведен на рис. 6.42.
7. КОМПОНОВКА ОБОРУДОВАНИЯ СИСТЕМЫ ГЕНЕРИРОВАНИЯ ЭЛЕКТРОЭНЕРГИИ
7.1. Общие сведения
Под СГЭ КА понимают совокупность оборудования, предназначенного для производства, преобразования, передачи потребителям и распределения между ними электроэнергии. СГЭ включает в себя сле-
Рис. 7.1. Схема СГЭ КА:
/ — энергоустановка; 2 — зарядное устройство; 3 — аккумуляторная батарея; 4 — шина постоянного тока; 5 — преобразователи тока; 6—потребители
дующие основные элементы (рис. 7.1): генераторы или энергоустановки, преобразователи (по току, частоте и напряжению), электрические сети.
По принципу получения электроэнергии на борту КА ее источники можно подразделить на химические, физические и механические. Существуют прямые и косвенные способы преобразования энергии в электрическую. К прямым способам преобразо
вания энергии относятся химические
источники тока, солнечные и изотопные батареи, к косвенным — статические и динамические одно- или многоконтурные энергоустановки.
Классифицировать СГЭ можно по типу источника энергии, который
обеспечивает выработку электроэнергии для питания бортовой аппаратуры (рис. 7.2).
Механические — используют для выработки электроэнергии; они могут быть выполнены в виде турбогенератора открытого
цикла, приводимого во вращение с помощью сжатого газа, или в виде маховика с электромашинным генератором, который раскручивается на Земле до нескольких сот тысяч оборотов в минуту.
7. /. Общие сведения
399
Рис. 7.2. Виды первичной энергии и способы ее преобразования в электрическую
Химические — используют для выработки электроэнергии химическую энергию, получаемую в результате химической реакции, протекающей при взаимодействии двух химических элементов (керосин и кислород, водород и кислород и др.). Они подразделяются на тепловые и электрохимические. В тепловых источниках химическая энергия горючего и окислителя преобразуется в механическую в турбогенераторе открытого цикла, двигателе внутреннего сгорания с электромашинным генератором или магнитогидродинамическом генераторе, а затем преобразуется в электроэнергию. В электрохимических происходит непосредственное преобразование химической энергии в электрическую с помощью электрохимических реакций. В качестве электрохимических источников используются аккумуляторные батареи и электрохимические генераторы на основе топливных элементов.
Солнечные источники — вырабатывают электроэнергию за счет потока солнечной энергии и могут быть также разделены на две группы: тепловые и фотоэлектрические. В тепловых солнечная энергия с помощью зеркала концентрируется в фокусе концентратора, где расположен теплоприемник, и переходит в тепловую, которая с помощью динамических или статических преобразователей преобразуется в электрическую. В фотоэлектрических происходит непосредственное преобразование солнечной энергии в электрическую с помощью фотоэлектрических преобразователей.
400 7. Компоновка оборудования системы генерирования электроэнергии
Ядерные изотопные источники — используют для выработки электроэнергии тепловую энергию, получаемую в результате радиоактивного распада изотопа. Тепловая энергия может быть преобразована в электроэнергию с помощью динамических или статических преобразователей. Статические термоэлектрические или термоэмиссионные преобразователи компонуются вокруг изотопного источника теплоты, образуя вместе с ним так называемый радиоизотопный генератор. Ядерные реакторные используют для выработки электроэнергии тепловую энергию, получаемую в результате цепной ядерной реакции. К описанным выше преобразователям здесь добавляется магнитогидродинамический преобразователь замкнутого цикла.
Большинство современных КА используют СГЭ на солнечных батареях (фотоэлектрических преобразователях). Однако выбор вида энергоустановки зависит от двух параметров: потребляемой мощности и времени работы. В табл. 7.1 приведены характеристики источников электроэнергии, применяемых в космической технике. На рис. 7.3 приведена диаграмма целесообразности применения источников электроэнергии в зависимости от потребляемой мощности и времени работы.
100
20
1,0
0,5
Термохимические (машинные) установки
Аккумуляторные батареи
Ядерно-реакторные установки
Ядерно-реакгорные или солнечные энерго-
установки
Топливные элементы
Радиоизотопные генераторы
Солнечные батареи
Солнечные или радиоизотопные генераторы
10 мин 1ч 1 сут 1 нед. 1 мес. 1 год
Время работы
Рис. 7.3. Диаграмма целесообразности применения источников электроэнергии в зависимости от потребляемой мощности и времени работы
Таблица 7.1. Характеристики источников электроэнергии, применяемых в космической технике
Источник электроэнергии Мощность на единицу массы. Вт/кг Емкость на единицу массы. Ач/кг Энергия на единицу массы. Дж/кг Срок службы эдс В t/cp.B
Аккумуляторные батареи:
никель-кадмиевые 5...300 9...26 65...144 2000 циклов 1,36 1,25...1,22
серебряно-цинковые 4...80 35...82 200...450 10...300 циклов 1,86 1,50... 1,40
серебряно-кадмиевые — 22...77 86...300 300... 1000 циклов 1,50 1,15...1,03
Топливные элементы 14...39 — 5400 До 5000 ч 1,10 —
Генераторы:
радиоизотопные 1,5...3,5 — — 1 год и более —
термоэлектрические 5...40 — — 0,05...0,15 —
термоэмиссионные — — — 0,7...2,5 —
Солнечные батареи 3...37 — — 1 год и более — —
Ядерные энергоустановки 2,5...6,8 — — Несколько лет — —
402 7. Компоновка оборудования системы генерирования электроэнергии
7.2. Электрохимические источники тока
В электрохимических источниках тока (ЭХИТ) энергия окислительно-восстановительного процесса, протекающая между электродами, превращается в электрическую энергию. К ЭХИТ относятся гальванические элементы одноразового действия, аккумуляторные батареи и топливные элементы многоразового действия.
Аккумуляторные батареи используются на короткоживущих спутниках в качестве основных источников электроэнергии и буферных — на долгоживущих КА.
Буферные батареи используются при полете КА по участку орбиты, находящемуся в тени или при резком увеличении потребления электроэнергии. Зарядка аккумуляторных батарей происходит во время полета на освещенной части траектории электроэнергией, вырабатываемой солнечными батареями. На рис. 7.4 приведена схема разрядки — зарядки буферной батареи.
5000 Вт 5000 Вт
(Т 0,2 с)
(т 0,2 с)
Miarp»
2200 - 4
0 1 2 3 4 2 24 25 26 27 18001801180218031823 Г, ч
Рис. 7.4. Графики энергопотребления КА и зарядки—разрядки буферной аккумуляторной батареи:
1 — выход КА на орбиту; 2 — теле- и радиосвязь; 3 — коррекция орбиты КА; 4 — торможение и спуск; 5 — ожидание
7.2. Электрохимические источники тока
403
На рис. 7.4 можно выделить следующие участки:
• сеансы повышенного электропотребления бортовой аппаратуры, когда при выходе КА на орбиту ИС Земли или при коррекции орбиты работают практически все системы КА (ДУ, СУД КА, системы радиосвязи и телеметрии и т. д.). Они могут быть также связаны с работой космических технологических установок, специальной научной аппаратуры и т. д. (длятся от нескольких десятков минут до 1-2 ч и более);
• сеансы телевидения и радиосвязи, во время которых осуществляется голосовая связь или передача на Землю телеметрической информации о работе бортовых систем КА (длятся до нескольких десятков минут, т. е. пока КА находится в зоне радиовидимости наземных средств слежения);
• дежурный режим (занимающий наибольшее время), когда непрерывно работают те системы, которые обеспечивают нормальное функционирование КА (система стабилизации, дежурная радиосвязь и ряд других).
Кроме того, в течение всего времени работы СГЭ возможны импульсные потребления электроэнергии в течение 50...200 мс, связанные с пусковыми токами электродвигателей, электромагнитных клапанов и других электропотребителей, а также со срабатыванием пиропатронов.
Масса буферных батарей зависит от времени полета в тени и потребляемой мощности. Напряжение бортовой сети КА U = 26 В. Если время полета в тени /тени, а потребляемый ток
N у _ 1 потр и ’
то необходимая емкость аккумуляторной батареи
F - Jt
По величине необходимой емкости батарей из таблиц выбирают необходимые батареи и их характеристики.
Параметры буферных батарей различных типов приведены в табл. 7.2, 7.3.
Широкое применение в КА (например, «Гонец-Д1», «Ресурс-ДК», «Монитор», «Ямал-200», ГЛОНАСС и др.) получили никельводородные аккумуляторные батареи типа НВ (рис. 7.5), разработанные в ОАО «Сатурн», основные характеристики которых приведены в табл. 7.4.
Таблица 7.2. Характеристики аккумуляторных батарей (США)
Наименование Исполнение Анод Напряжение холостого хода, В Номиналь-ное напряжение, В Удельная энергия на единицу Рабочая температура, °C Количество включений
массы, Вт ч/кг объема, Втч/л
NiOOH-Cd — Cd//KOH//NiOOH 1,29 1,25 30 80 -10...35 2000
NiOOH-H2 IPV H2//KOH//NiOOH 1,32 1,25 55 60 -10...35 2000
NiOOH-H2 CPV H2//KOH//NiOOH 1,32 1,25 55 60 -10...35 2000
NiOOH-H2 SPV H2//KOH//NiOOH 1,32 1,25 55 60 -10...35 2000
AgO-Cd — Cd//KOH//Ag2O/AgO 1,41 1,3/1,1 55 110 -25...60 400
AgO-Zn — Zn//KOH//Ag2O/AgO 1,86 1,6/1,5 90 180 -20...60 100
PbO2-Pb — Pb//H2SO4//PbO2 2,1 2,0 30 60 -40. ..60 100
Na-S — Na//|3"-alumina//S 2,1 1,65 186 304 350 1000
Na-NiCl2 — Na//|3"-alum ina//NiCI2 2,4 2,3 120 100 275 1000
Li-CoOz — Li//EC/DMC/ CoO2 4,0 3,64 120 125 -20...50 1000
Таблица 7.3. Сравнительные характеристики 28-вольтовых аккумуляторных батарей (США)
Анод — катод Количество Номинальное напряжение, В Емкость, А ч Удельная энергия на единицу Масса, кг Объем, л Габариты, дюйм Применение
включений секций массы. Втч объема, Втч
Ni-Cd 30 000 18 21,6 18 25 35 16,0 Н,4 12,3x7,3x7,7 Орбита высотой до 1500 км
SUPER Ni- Cd 30 000 18 21,6 20 25 31 17,9 14,4 13,5x8,1x3,5 То же
IPV Ni-Eb Более 30 000 18 22,5 20 29 16 13,8 13,6 25,0x17,6x3,5 »
2 CELL CPV Ni-H2 10 000 18 22,5 20 31 18 13,1 11,4 18,0x14,5x4,5 Спутники «Марс», «Сервейер»
22 CELL SPV — 22 27,5 15 44 38 9,6 8,6 21,0x05,1 «Марс-98»
Li-ION 1 000 8 28,8 5 90 140 1,6 1,0 —
Ag-Zn Менее 100 18 27,0 40 72 86 15,0 12,6 12,0x8,0x8,0 Исследования Марса
Таблица 7.4. Основные характеристики никель-водородных аккумуляторных батарей ОАО «Сатурн»
Наименование Напряжение, В Емкость, Ач Масса, кг Удельная энергия на единицу массы, Вт ч/кг Тип орбиты Срок активного существования, лет Тип охлаждения Элементы управления Год завершения квалификации
21 НВ-25 26 20 15,50 29 Низкая околоземная 3,0 Контактный СД, ТС 1995
19НВ-25 24 27 14,00 46 То же 5,0 То же СД, ТС, БД 2003
28НВ-40 35 45 27,50 51 » Геостационарная 6...10 Радиационный АДД, ТС 2001
28НВ-45 35 43 39,50 38 То же 5,0 Газовый СД, ТС 1987
28НВ-45 35 43 39,50 38 Высокая эллиптическая 5,0 » СД, ТС 1997
18НВ-50 22 55 26,00 48 — 3,0 — СД, АДД, тс, БД —
28НВ-50 35 53 37,00 50 Высокая круговая 7,0 Газовый АДД, ТС, БД 2002
28НВ-60 35 55 44,50 43 Геостационарная 5,0 » СД, тс 1993
28НВ-70 35 72 48,50 52 То же 7,0 Жидкостный СД, АДД, ТС, БД 1999
Наименование Напряжение, В Емкость, Ач Масса, кг Удельная энергия на единицу массы, Вт ч/кг Тип орбиты Срок активного существования, лет Тип охлаждения Элементы управления Г од завершения квалификации
28НВ-70Р 35 72 54,00 46 Низкая околоземная 3,0 Жидкостный СД, АДД, ТС, БД 2003
30НВ-70 37 72 55,00 49 Высокая эллиптическая 5.. ..7 ТСО СД, АДД, ТС, БД —
30НВ-70А 37 72 65,00 42 Низкая околоземная 5.. ..7 То же АДД, ТС, БД —
40НВ-70 50 72 72,00 50 Геостационарная 10,5 Жидкостный СД, АДД, ТС, КЗОД, БД 1999
40НВ-70 50 72 73,00 49 Высокая эллиптическая 7,0 То же СД, АДД, ТС, БД 2002
22НВ-100 27 100 58,00 47 Низкая околоземная 15,0 » СД, АДД, ТС, БД —
18НВ-100 22 130 52,25 56 Г еостацио-нарная 12,25 Радиационный АДД, ТС, БД 2002
Примечание. ТСО — термостабилизированное основание; СД — контактный сигнализатор давления; АДД — аналоговый датчик давления; ТС — термометр сопротивления; БД — байпасный диод; КЗОД — короткозамыкатель одноразового действия.
408 7. Компоновка оборудования системы генерирования электроэнергии
Рис. 7.5. Никель-водородные аккумуляторные батареи:
1 — аналоговый датчик давления; 2 — контактный датчик давления; I—VI — разные виды исполнения
Параметры никель-водородных аккумуляторных батарей при-
ведены ниже.
Емкость, А ч 8...25 20...40 40...60 60...140
Г абариты 40х(80... 76х(125... 76х(190... 96х(215..
мм 120) 190) 215) 340)
Исполнение Диаметр резьбы под клеммы: I, II II, IV I-IV II-V
анод М4*0,75 М6*0,75 М6*0,75 М8х],0
катод Корпус Корпус, М6*0,75 Корпус, М6х0,75 М8х1,0
Никель-водородная аккумуляторная батарея обладает:
• высокой удельной энергией на единицу массы — 75...85 Втч/кг;
• практически неограниченным сроком службы (гарантия 15 лет при работе на геостационарной орбите и 10 лет — на низкой околоземной);
• работоспособностью в широком диапазоне значений температур (-20...+40 °C);
7.2. Электрохимические источники тока
409
• устойчивостью к перезаряду и переразряду;
• небольшим внутренним сопротивлением (разряжаются токами до 2 В).
Из отдельных никель-водородных аккумуляторных батарей собирается батарея, обеспечивающая необходимую мощность. Корпуса батарей изготовлены из сплава Inconel 718. Требуемый запас прочности корпуса выбирается из условий обеспечения необходимого количества циклов нагружения. Для обеспечения надежности расчет проводят на тройной запас по циклам.
У всех аккумуляторных батарей (кроме батарей с газовым охлаждением — 28НВ-45 и -60) корпус имеет моноблочную конструкцию, что обеспечивает его высокую прочность и позволяет прикреплять батарею в нескольких точках по периметру, а не по всей поверхности днища корпуса.
В случае крепления никель-водородной аккумуляторной батареи в индивидуальных теплосъемных гильзах силовую нагрузку несет теплосъемное основание, на котором установлены гильзы. Таким образом, моноблочная конструкция отличается от гильзовой конструкции тем, что ее можно использовать в качестве силового элемента конструкции КА.
При теплонапряженных режимах эксплуатации и возникновении необходимости увеличения площади аккумуляторной батареи возможно создание аккумуляторной батареи с гильзовой конструкцией корпуса, в которой никель-водородные аккумуляторные батареи в индивидуальных теплосъемных гильзах рас-средоточенно компонуются на теплосъемное основание КА требуемой площади.
Разработчиками аккумуляторных батарей рекомендуются следующие способы их крепления, обеспечивающие оптимальный теплосъем с корпуса батареи (рис. 7.6): к его периметру, а далее на корпус КА; к боковым поверхностям корпуса аккумуляторной батареи; к его днищу.
Источники тока с более высокими энергетическими характеристиками и расширенным диапазоном эксплуатационных возможностей были созданы при отказе от водных электролитов. Наибольшие успехи были достигнуты при разработке литиевых элементов с органическим и твердым электролитом.
410 7. Компоновка оборудования системы генерирования электроэнергии
Охлаждающий газ
жидкость
б
Рис. 7.6. Крепление аккумуляторной батареи к корпусу и подача охлаждающего компонента к его периметру и далее на корпус КА (я), к боковым поверхностям корпуса аккумуляторной батареи (б):
1 — корпус КА; 2 — тепловая труба
Наряду с никель-водородными аккумуляторными батареями в КА применяются литий-ионные аккумуляторы (ЛИА), отличающиеся от никель-водородных более высокими энергетическими характеристиками и расширенным диапазоном эксплуатационных возможностей, которые были получены при отказе от водных электролитов. Наибольшие успехи были достигнуты при разработке литиевых элементов с органическим и твердым электролитом. К герметизации литиевых элементов предъявляются повышенные требования, так как должна быть исключена возможность не только вытекания электролита, но и попадания внутрь воздуха и паров воды, из-за чего возникает опасность пожара или взрыва элемента. В настоящее время в НПО «Сатурн» разработаны литий-ионные аккумуляторные батареи герметичного исполнения. Сравнительные характеристики литий-ионных аккумуляторов, разработанных российскими, японскими и израильскими, фирмами приведены в табл. 7.5.
Разновидностью литиевых аккумуляторов являются источники тока на основе системы литий/тионилхлорид (Li/SOCb). Элементы системы Li/SOCb с жидкофазным катодом обладают наилучшими удельными характеристиками среди литиевых первичных источников тока (до 600 Втч/кг и 1100 Втч/дм3). НРЦ элементов — 3,67 В, рабочее напряжение 3,3-3,5 В в зависимости от тока разряда. Элементы работоспособны в диапазоне температур -60 ... + 85 °C, некоторые до 130 °C. Конструкция элементов Li/SOCI2 аналогична конструкции элементов Li/SO2, но тионилхлорид значительно агрессивнее других электролитов.
7.2. Электрохимические источники тока
411
Таблица 7.5. Сравнительные характеристики литий-ионных аккумуляторов
Технические характеристики LIBM100A24SB АБ KA AMOS 5 блок АБ KA «Благовест»
Разработчик аккумуляторной батареи MITSUBISHI ELECTRIC SAFT ОАО «Сатурн»
Разработчик ЛИА (индекс ЛИА) GS YUASA (LSE100) SAFT (VES-180) ОАО «Сатурн» (ЛИГП-85)
Количество ЛИА 24 40 22
Масса, кг 2,79 1,11 2,34
Энергоемкость, Втч 405 173 370
Удельная энергия, Вт-ч/кг 145 156 158
Энергоемкость аккумуляторной батареи, Вт ч 9500* 7000* 8050”
Г абариты аккумуляторной батареи, мм 705x315x275 760x340x265 648x331x224
Масса аккумуляторной батареи, кг 78 58 58,5
Отношение массы ЛИА к массе аккумуляторной батареи 0,86 0,77 0,88
Удельная массовая энергия аккумуляторной батареи, Вт-ч/кг 122 121 138
Удельная объемная энергия аккумуляторной батареи, Вт-ч/л 156 102 168
* — оценка (для SAFT — подтверждена испытаниями у производителя КА); * * — по результатам предварительных испытаний.
Недостатком литий-водородных аккумуляторных батарей является то, что при длительном хранении этих элементов может наблюдаться провал напряжения, которое затем медленно (в течение нескольких минут) восстанавливается до рабочего. Глубина и продолжительность начального спада напряжения увеличиваются при пониженных температурах.
412 7. Компоновка оборудования системы генерирования электроэнергии
Топливные элементы (рис. 7.7), относящиеся также к электрохимическим генераторам, состоят из пористых электродов — анода и катода, находящихся в сосуде с раствором электролита.
Рис. 7.7. Принцип действия водородно-кислородного топливного элемента (а) и его внешний вид (б):
/ — водородная камера; 2 — электролитная камера; 3 — отрицательный электрод (анод); 4 — электрическая нагрузка: 5 — положительный электрод (катод); 6 — кислородная камера
7.2. Электрохимические источники тока
413
К электродам непрерывно подводится топливо: к катоду — горючее вещество, к аноду — окислительное вещество.
В результате диссоциации и ионизации топлива, происходящих на поверхности катализаторов электродов, образуется разность потенциалов (см. рис. 7.7).
Назначение раствора электролита — обеспечение эффективного переноса ионов окислителя в межэлектродном зазоре. При отсутствии раствора электролита его роль может выполнять ионообменная мембрана или твердый электролит.
В космической технике в наибольшей степени отработаны водородно-кислородные, низко- и среднетемпературные топливные элементы со щелочным электролитом и ионообменными мембранами.
Вольт-амперные характеристики топливных элементов приведены в табл. 7.6
Таблица 7.6. Вольт-амперные характеристики топливных элементов
Сила тока. А Напряжение, В Мощность, кВт Сила тока. А Напряжение, В Мощность, кВт
0 36,8 0 200 31,8 6,37
50 32,8 1,64 310 31,3 9,70
100 32,6 3,26 500 30,4 15,19
150 32,2 4,83
Топливный элемент пожаро- и взрывобезопасен, бесшумен: его эксплуатация полностью автоматизирована. Условия работы топливного элемента, поддерживаемые автоматически: температура 100 °C; давление газов 0,4 МПа; концентрация КОН 38...40 %.
Топливные элементы широко применялись при полете на Луну и в МТКК в качестве источников электроэнергии и воды.
Основные характеристики СГЭ на основе водородно-кисло-родных электрохимических генераторов (ЭГХ) приведены в табл. 7.7.
414 7. Компоновка оборудования системы генерирования электроэнергии
Таблица 7.7. Характеристика СГЭ на основе водородно-кислород-ных ЭХГ
Основные параметры КЭУ «Джемини» «Аполлон» мткк Питание импульсных нагрузок (проект)
Мощность, кВт 2 0,64 31,42 310 7-575
Удельная масса ЭХГ, кг/кВт 50 75 11,2 0,2
Энергоемкость, кВт ч 160 660 1650 133
Удельная энергоемкость, Втч/кг 680' 8802 800 / 9503 65
Ресурс эксплуатационный, гарантированный, ч 340/1000 340 / 500 50004 2,55
Число циклов 1 1 100 75
1 Масса СГЭ без системы управления, межблочных электрических и пневмогидравлических связей и крепежа (не учтена также масса холодильника-излучателя и ряда агрегатов, входящих в состав КА). “ В массе СГЭ учтена масса системы хранения и подачи рабочих тел, масса трех ЭХГ и системы терморегулирования КЭУ с холодильником-излучателем, а также масса пневмогидроарматуры и трубопроводов. 3 Масса СГЭ без системы управления (не учтена также масса холодильника-излучателя и ряда агрегатов, входящих в состав КА). Удельная энергоемкость 800 Вт-ч/кг соответствует наличию двух водородных и двух кислородных баков, а значение 950 Вт-ч/кг — наличию четырех водородных и четырех кислородных баков. 4 Время одного цикла (полета) 168 ч с возможностью увеличения до 720 ч (2000 ч без обслуживания и регламентных работ с СГЭ). 5 Время одного цикла 2 мин.
7.3. Физические источники электроэнергии
В физических источниках электроэнергии тепловая, или лучистая, энергия непосредственно превращается в электрическую. Источники тепловой энергии — химическая (обычное топливо), ядерная и солнечная энергия. К физическим источникам электроэнергии относятся фото-, термо- и термофотоэлектрические, термоэмиссионные и радиационные генераторы.
Термоэлектрический генератор — это преобразователь, в котором прямое преобразование тепловой энергии в электрическую ос
7.4. Солнечные батареи
415
новано на явлении возникновения электрического тока в полупроводниках или металлических спаях (термопарах) под действием разности температур. Удельная мощность термоэлектрического генератора составляет — 5.. .40 Вт/кг, при КПД 4... 14 %.
Термоэмиссионный генератор основан на принципе эмиссии электронов нагретым катодом в межэлектродном зазоре. Такие генераторы могут быть вакуумными, газонаполненными и плазменными. По температуре катода их подразделяют на низко-(900... 1300 °C), средне- (600... 1900 °C) и высокотемпературные (2300...2700 °C). Удельная мощность термоэлектрического генератора составляет — 7... 12 Вт/см“, КПД 10 %.
Термофотоэлектрический генератор преобразует тепловую энергию в электрический ток с помощью фотоэлементов. Удельная мощность — 3...30 Вт/см2 и КПД 7... 18 %.
Радиационный генератор (атомная батарея) преобразует энергию радиоактивного распада в электрическую энергию постоянного тока. Электроны, испускаемые радиоактивным распадом, улавливаются коллектором (отрицательным электродом), который изолирован от внешнего электрода, вследствие чего между ними возникает ЭДС.
7.4. Солнечные батареи
Солнечные батареи являются одним из самых надежных и достаточно хорошо отработанных вариантов обеспечения космического аппарата энергией. Солнечные батареи преобразуют лучистую энергию Солнца в электрическую энергию постоянного тока. Преобразователями являются полупроводниковые солнечные фотоэлементы, последовательное соединение которых образует солнечные батареи. Мощность излучения Солнца на орбите Земли составляет 1366 Вт/м2, это позволяет получать примерно 130 Вт на 1 м2 поверхности солнечных батарей (при КПД 8... 13 %). В зависимости от потребляемой КА электроэнергии площади СБ доходят до десятков квадратных метров.
Выходная мощность СБ определяется по формуле
^вых ~~ Л^сб*^сб Г,
где р — коэффициент полезного действия; Fc6 — коэффициент деградации солнечной батареи, учитывающий изменения эмиссии элементов батареи вследствие влияния космического простран-
416 7. Компоновка оборудования системы генерирования электроэнергии
ства; 5Сб — площадь солнечной батареи; Г — ориентация солнечной батареи относительно Солнца, определяемая как угол между направлением на Солнце и нормалью к поверхности солнечной батареи; qc — солнечная постоянная: суммарный поток солнечного излучения, проходящий за единицу времени через единичную площадку, ориентированную перпендикулярно потоку, на расстоянии одной астрономической единицы от Солнца вне земной атмосферы (1366 [Вт/м2]); г — расстояние КА от Солнца, а.е. (у Земли r= 1,0; у Венеры г = 0,723; у Марса г = 1,52).
Удельная мощность зависит от вида фотоэлектрического генератора и срока службы (табл. 7.8).
Таблица 7.8. Удельная выходная мощность Вт/м2
Срок службы Удельная мощность, Вт/м2
Генератор на основе кремния Генератор на основе многокаскадных GaAs фотопреобразователей
На начало срока 140...170 270... 295
На конец срока 120...135 230...245
Если задана потребная мощность Апот, можно найти площадь солнечной батареи
N
о _______ пот_____
Лсб -2 ’
Чсг n^c6cosr
Солнечная батарея может быть сконструирована из стандартных панелей с выходной мощностью ястп. В этом случае количество панелей определяют как
N _ пот стп м, ’
где пСТ п — количество стандартных панелей; Ап — мощность, развиваемая одной панелью.
Полученное значение количества панелей округляется в большую сторону, поскольку стандартные панели имеют определенную форму и габариты. Это обусловливает компоновку солнечных батарей и накладывает ограничения на их размещение в КА. Стандартная панель имеет определенную массу, что позволяет уменьшить
7.4. Солнечные батареи
417
суммарную массу солнечных батарей только за счет конструкций, механизмов управления и кабельной сети.
Преимущество солнечной батареи, состоящей из стандартных панелей, — ее унификация, снижающая стоимость батареи.
В случае невозможности использования стандартных панелей (невозможности компоновки на КА батареи, полученной формы и габаритов) солнечную батарею выполняют из отдельных элементов фотоэлектрических преобразователей (ФЭП), количество которых определяют по формуле
^ФЭП ” Мтот / ^ФЭП ’
где «фэп — количество элементов, входящих в солнечную батарею; Афэп— мощность, развиваемая отдельным элементом.
Площадь солнечной батареи, собранной из отдельных элементов,
*$с.б ~ ^ФЭП^ФЭП’
где 5фэп — площадь отдельного элемента солнечной батареи.
Необходимо, чтобы 5сб = 5' б, если 5сб > 5'б, то количество элементов необходимо увеличить, если Sc,б < S'c б, то количество элементов можно оставить без изменения (если позволяет допустимая масса) или уменьшить.
Массу солнечной батареи находят по формуле
Ч б — ^ФЭП + ^кон + 7^мех ->
где Л/сб — суммарная масса солнечной батареи; Л/ФЭп — общая масса отдельных элементов, Л/Фэп = /«фэп «фэп («?фэп — масса отдельного элемента); Л/'он — масса конструкции солнечной батареи; Л/мех — масса механизмов управления и кабельной сети.
Масса конструкции солнечной батареи зависит от ее компоновки. Массу механизмов управления и кабельной сети можно определить как некоторую долю от массы отдельных элементов. При компоновке на корпусе КА удельную массу конструкции находят как укон = (0,5...0,6)Л/ФЭП, при компоновке в виде раскрывающихся панелей — как укон = (0,90...0,95)Л/ФЭП. С учетом массовых коэффициентов можно записать
418 7. Компоновка оборудования системы генерирования электроэнергии
б 0 + Yкон + Yмех )^ФЭП ’
где умех — удельная масса механизмов и кабельной сети.
Наибольшее распространение в системах электропитания КА находят кремниевые солнечные элементы в виде тонких пластинок. Интерес представляют высокотемпературные солнечные элементы из арсенида галлия, теллурида кадмия, сульфида кадмия, устойчиво работающие при высоких температурах.
Характеристики солнечных элементов в зависимости от основы приведены в табл. 7.9.
Таблица 7.9. Характеристики ФЭП
Основа элемента КПД, % Граничная температура. °C
Кремний 21,7 150
Фосфид индия 25,0 300
Арсенид галлия 26,0 400
Теллурид кадмия 27,0 400
Фосфид галлия 22,0 650
Сульфид кадмия 19,0 650
Арсенид сурьмы 27,0 450
В зависимости от конкретных условий эксплуатации выпускают различные конструктивно-технологические модификации фотоэлектрических преобразователей:
• с полированной поверхностью;
• текстурированной поверхностью;
• алюминиевым зеркалом на тыльной стороне;
• со встроенными шунтирующими диодами.
Применение многослойных полупроводниковых структур со многими /^-«-переходами для фотоэлектрических преобразователей позволяет существенно повысить эффективность панелей солнечных батарей. С использованием концентрации солнечного света теоретический предел их эффективности составляет 86 %. Например, солнечные элементы на основе композиций полупроводников с тройным переходом GaInP2/GaAs/Ge и кремниевым защитным покрытием, выпускаемые фирмой Boeing SPECTROLAB, имеют в начале работы при 28 °C КПД около 29,4 %. Удельная мощность панелей солнечных батарей на основе таких трехслойных фотоэлектрических преобразователей составляет 330..366 Вт/м~ для панелей > 2,5 м2 и 316...345 Вт/м2 — для панелей < 2,5 м2. Удельная масса фотоэлектрических преобразователей (дополни
7.4. Солнечные батареи
419
тельно к подложке) для пластин толщиной 140 мкм с покрытием 76... 152 мкм составляет 1,76...2,06 кг/м“. Характеристики фотоэлектрических преобразователей с тройным переходом и СБ производства ОАО «Сатурн» приведены в табл. 7.10 и 7.11.
Таблица 7.10. Характеристики фотоэлектрических преобразователей с интегральным шунтирующим диодом
Характеристика Материал
Si GaInP2/GaAs/Ge
Толщина, мкм Плотность тока, мА/см2: 190 ± 30 160±30
короткого замыкания JK 3 41...46 16,9
в точке максимальной мощности Jmax Напряжение, В: 38,7...44,3 16,0
холостого хода Сх х 0,61... 0,63 2,565
в точке максимальной мощности Umax 0,49... 0,52 2,27
Максимальная удельная мощность ^уд. max? Вт/М 190...225 362
КПД, % Температурные коэффициенты: 14,0... 16,5 26,8
dJK з / dT, мкА/см2 19,8 11,2
б//П1ах / dT> мкА/см2 — 7,3
б/Схх/б/Т,мВ/°С -1,92 -5,9
dCmaJ б/Т, мВ/°С -2,0 -6,2
Таблица 7.11. Характеристики солнечных батарей для геостационарных орбит (h = 36,000 км)
Параметр солнечной батареи Кремниевые фотопреобразователи Фотопреобразователи на основе GaAs
САС, лет 15
КПД (АМО, 28 °C), % 15 1 28,0
Удельная мощность*, Вт/м2:
начало САС конец САС 182/178 96/101 315/309 247/252
Удельная масса, кг/м2 1,35/1,25 1,6/1,6
В числителе приведены данные для каркасов со струнной или пленочной подложками, в знаменателе — для сотовых каркасов
420 7. Компоновка оборудования системы генерирования электроэнергии
При эксплуатации в космическом пространстве солнечные батареи и соответственно фотоэлектрические преобразователи подвергаются воздействию радиации (радиационного пояса Земли, солнечного и космического излучения), в результате чего происходит постепенное ухудшение их электрических характеристик.
В табл. 7.12 приведены значения коэффициентов деградации электрических характеристик фотоэлектрических преобразователей в зависимости от воздействующей дозы радиации.
Таблица 7.12. Значения коэффициентов деградации электрических характеристик кремниевых и на основе GaAs фотоэлектрических преобразователей в зависимости от воздействующей дозы радиации
Электрическая характеристика Доза радиации, эл/см“
1 10м 5 • 1014 1 • 1015 3 1015
Si GaAs Si GaAs Si GaAs Si GaAs
з 0,976 0,998 0,926 0,99 0,892 0,98 0,832 0,95
схх 0,915 0,930 0,857 0,90 0,831 0,88 0,790 0,85
»Лпах 0,981 0,996 0,933 0,98 0,898 0,96 0,831 0,91
Сщах 0,903 0,940 0,844 0,90 0,818 0,88 0,776 0,84
У уд max 0,886 0,940 0,787 0,88 0,735 0,84 0,645 0,77
Для защиты фотоэлектрических преобразователей от агрессивного воздействия космического пространства применяют стекло марки К-208 толщиной (100 + 20) мкм, легированное церием. Размер стекла на 0,2 мм больше размера преобразователя.
В зависимости от требований конкретного проекта на стекло наносят специальные покрытия: просветляющие; УФ- и ИК-фильт-ры; алюминиевое зеркало.
Эффективность солнечных батарей повышается за счет угла падения солнечных лучей на поверхность батареи. Солнечные батареи подразделяются на неориентируемые и ориентируемые на Солнце. На рис. 7.8 показана зависимость удельного выхода электроэнергии от способа размещения солнечных батарей на борту и ориентации на Солнце
Для повышения характеристик солнечных батарей возможно использование концентраторов, обеспечивающих фокусировку солнечного света на поверхности элементов с небольшой площадью, поскольку ток и напряжение в элементах линейно возрастают
7.4. Солнечные батареи
421
с увеличением интенсивности облучения. Применение концентраторов повышает КПД солнечной батареи до 37 %, что считается близким к теоретически предельному значению. Однако концентраторы усложняют конструкцию солнечной батареи, так как требуют ориентации на Солнце с точностью до 1 °.
Рис. 7.8. Зависимость удельного выхода электроэнергии с одного элемента солнечной батареи от компоновки солнечных батарей и ориентации относительно Солнца:
PQ — выход электроэнергии с одного элемента без защитного покрытия и притсутсвии деградации; Р — выход электроэнергии с одного элемента, работающего в реальной конструкции
Для солнечных батарей с концентраторами в настоящее время используются две компоновочные схемы: V-образный рефлектор и панель с системой линз Френеля, которые показаны на рис. 7.9. В V-образном рефлекторе (рис. 7.9, а) солнечные лучи, отражаясь от плоских экранов, перенаправляются на преобразователи. Такая
422 7. Компоновка оборудования системы генерирования электроэнергии
Рис. 7.9. Компоновочные схемы солнечных батарей с концентраторами:
а — V-образный рефлектор; б — панель с системой линз Френеля
схема относительно проста, однако обеспечивает не более чем двукратный коэффициент концентрации.
Концентраторы такого типа по конструкции подобны обычным панелям солнечных батарей с той разницей, что вместо откидных панелей используются отражающие экраны, раскрывающиеся на 120°, как показано на рис. 7.9, а. Подобная конструкция использовалась на КА Galaxy XI, показанном на рис. 7.10, б.
Рис. 7.10. Компоновка солнечных батарей с V-образными рефлекторами: а — схема раскрытия панелей; б — компоновка панелей на КА Galaxy XI
7.4. Солнечные батареи
423
Больший коэффициент концентрации может быть достигнут при использовании прозрачной пленки с напечатанной на ней системой линз Френеля, располагаемой на некотором расстоянии от поверхности панели. При этом линзы Френеля могут обеспечивать концентрацию света в полосу, как показано на рис. 7.9, б, или в точку, что еще больше увеличивает коэффициент концентрации.
Преимущества солнечных батарей с концентраторами заключается в уменьшении количества дорогостоящих фотоэлектрических преобразователей на панели.
К недостаткам концентраторов относится высокая точность ориентации на Солнце. На рис. 7.11 показана зависимость коэффициента преобразования энергии у от азимутального угла ос ориентации для обычной панели (кривая 1 на рис. 7.11) и панели с концентратором (кривая 2 на рис. 7.11). Значение ос = 0° соответствует точной ориентации на Солнце, при которой КПД преобразователей максимален (у = 1,0). Видно, что при отклонении на 60° панель с концентраторами полностью теряет мощность, в то время как обычная панель солнечных батарей вырабатывает 50 % мощности.
Рис. 7.11. Зависимость коэффициента преобразования энергии у от угла ориентации панели ОС для обычной панели (/) и панели с концентратором (2)
Эффективность работы солнечной батареи с концентраторами может снижаться вследствие деградации не только преобразователя, но и поверхностей концентраторов, что снижает надежность данного источника энергии.
Концентрация солнечного излучения на фотоэлектрический преобразователь приводит к их повышенному ультрафиолетовому облучению и значительному нагреву. С увеличением коэффициен
424 7. Компоновка оборудования системы генерирования электроэнергии
та концентрации до С = 1,75 температура преобразователя может увеличиться до 100 °C. В табл. 7.13 приведены данные изменения КПД фотоэлектрического преобразователя при нагреве. Для сохранения эффективности необходимо применение систем охлаждения (например, размещение радиаторов на теневой стороне), что в свою очередь усложняет конструкцию солнечных батарей и увеличивает их массу.
Таблица 7.13. Зависимость КПД (%) фотоэлектрического преобразователя от температуры
Тип ФЭП Базовый режим Т= 28 °C Без концентрации С= 1,0 Т= 58 °C С концентрацией С= 1,75 Г=100°С
Si 13,5 11.9 9,7
Si с повышенным КПД 16,0 14,2 11,6
С двойным переходом 22,0 20,7 18,8
С тройным переходом 25,0 23,3 20,9
Размещение и конструкция солнечных батарей. Конструктивное исполнение и размещение панелей солнечных батарей зависит от их площади. На рис. 7.12 приведены варианты размещения панелей солнечных батарей на КА.
Панели солнечной батареи небольшой площади размещаются на корпусе КА. Возможны два способа крепления:
1) жесткое закрепление (см. рис. 7.12, а), недостатком этого способа является то, что КА должен вращаться относительно вертикальной оси для равномерного освещения поверхности солнечной батареи; он приемлем, если КА стабилизируется вращением относительно этой оси. Пример размещения такой СБ показан на рис. 7.13. Здесь для увеличения площади используется дополнительная телескопически выдвигаемая оболочка;
2) солнечная батарея развязана с корпусом КА и может вращаться, при этом КА остается жестко стабилизированным (рис. 7.12, б).
Панельные солнечные батареи могут быть жестко связаны с КА и ориентированы на Солнце с помощью ориентации аппарата, подобное крепление применялось на первых КА «Союз», площадь
7.4. Солнечные батареи
425
б
Рис. 7.12. Варианты размещения СБ на КА:
а — СБ, жестко связанные с корпусом; б — СБ, разворачиваемые с помощью привода на Солнце
426 7. Компоновка оборудования системы генерирования электроэнергии
Рис. 7.13. Компоновка кольцевой солнечной батареи на КА PALAPA-B, стабилизированном вращением:
а — компоновка панели в сложенном и развернутом виде; б — схема механизма раскрытия панели: 1 — стопор; 2 — направляющая; 3 — пружина сжатия; 4 — система радиальных и тангенциальных упорных роликов; 5 — привод раскрытия;
6 — выдвигаемая кольцевая СБ; 7 — кольцевая СБ на корпусе КА
солнечных батарей составляла 9 м2. Ориентация панельных солнечных батарей, имеющих большие размеры, осуществляется с помощью электроприводов, управляемых по сигналам специальных солнечных датчиков, расположенных на краях панелей. Разворот СБ осуществляется приводом. На рис. 7.14 показан привод КА «Кондор-Э». В табл. 7.14 и 7.15 приведены характеристики систем разворота и ориентаций солнечных батарей.
Таблица 7.14. Сравнительные характеристики систем разворота солнечных батарей
Характери-стики КА Система разворота
«Монитор-М» «Электро-Л» «Ковдор-Э» «Спектр-Р» «Метеор-М»
Модель У10 РЮ ЭЮ Э10-2 830
Состав СОСБ блок (количество блоков) БУ(1) ЭМБ(2) БН(1) ЭМБ(4) БУ(1) ЭМБ(1) БУ(2) ЭМБ(2) БУ(1), ЭМБ(2) БДС(4)
7.4. Солнечные батареи
427
Окончание табл. 7.14
Характери-стики КА Система разворота
«Монитор-М» «Электро-Л» «Кондор-Э» «Спекгр-Р» «Метеор-М»
Управление по командам БКУ по командам БКУ по командам БКУ по командам БКУ по командам БКУ
Скорость вращения СБ 0,57 0,25 0,75 0,25 0,25 0,3
Момент инерции СБ, кг м~ 4 125x7 13 17,25x2 40
Максимальный угол поворота, град без ограничения 180...240 без ограничения без ограничения 120
Погрешность ориентации, град ЗБ5 2Б0 ЗБ5 ЗБ5 2Б0
Потребляемая мощность, Вт 15 20 10 20 20
Масса СОСБ (ЭМБ), кг 17,0 7,0x2 21,5 5,25x2... 4,0x2 12,0 9,3 12,0 9,3 16,0 4,5x2
Ресурс, час 10 000 9700 5000 20 000 10 000
Примечание. СОСБ — система ориентации солнечных батарей, БУ — блок управления, ЭМБ — электромеханический блок, БДС — блок датчиков Солнца, БКУ — бортовой комплекс управления
Характеристики привода СБ КА «Кондор-Э»:
Состав системы.................................. 4 блока
электроприводов, 1 блок управления электроприводами
Угол поворота панелей солнечных батарей, град: при ориентации по крену................. 180
при ориентации по тангажу................... 240
Момент инерции нагрузки на валу электропривода, кг м2: крена....................................... 125
тангажа .................................... 7
428 7. Компоновка оборудования системы генерирования электроэнергии
Максимальная скорость поворота панелей солнечных батарей град/с:
при ориентации по крену.................... 0,25
при ориентации по тангажу.................. 0,75
Максимальная потребляемая мощность, Вт........20
Погрешность информации о положении, град...... 2
Количество транзитных цепей:
силовых (при силе тока до 22,5А
и напряжении от 30 до 60 В) ............... 16
сигнальных (при силе тока до 0,8 А
и напряжении не более 6 В)................. 19
Масса, кг.....................................21,5
Ресурс работы, ч..............................45 000
Рис. 7.14. Привод солнечных батарей КА «Кондор-Э»:
/ — блок управления электроприводами; 2 — блоки приводов крена; 3 — блоки приводов тангажа
Типичная солнечная батарея представляет собой металлическую (или из композиционного материала) конструкцию, на которую устанавливают каркас (сетчатый, струнный, пленочный, сотовый, металлический) с закрепленными на нем фотоэлектрическими преобразователями.
Конструктивное исполнение солнечных батарей зависит от их габаритов. Если площадь солнечных батарей незначительна (потребная мощность не превышает 1 кВт), то элементы, входящие в батарею, можно разместить на корпусе КА. При больших площадях батареи выполняются в виде конструкции, состоящей из панелей, сложенных в транспортном положении и раскрывающихся после выведения в космос. СГЭ орбитальной станции «Салют-6» состоит из трех солнечных батарей площадью по 20 м2 каждая.
Таблица 7.15. Примеры ориентации солнечных батарей
Конструкция солнечной батареи Метод управления положением космического корабля Ориентация осей космического корабля Примеры космических кораблей Примечание
Продольная (ось крена) Поперечная (ось тангажа) Ось курса (рыскания) Наклон орбиты, град Угол освещения солнечной батареи. град Наименование космического корабля
Цилиндрической формы, смонтирована на корпусе Стабилизация вращением По направлению полета Вращение оси По направлению к Земле 0 102 +23,4 30-60 по оси тангажа Intel-sat-IV Tiros Геосинхронная высота Гелиосинхронная орбита
Прямоугольные панели, раскрывающиеся в фиксированное положение Гравитационная стабилизация См. примечание См. примечание То же 125 См. примечание NTS-Г Изменяющиеся условия освещения, зависящие от разворота корабля по курсу, от точки орбиты и времени года
Раскрывающиеся панели с частичной ориентацией по одной оси Реактивные двигатели ориентации Ось ориентации батареи По направлению к Земле — 90 0 POGO Необходим дважды за год разворот по курсу на 180°; батарея не снабжена поворотными кольцами
Раскрывающиеся панели с ориентацией по одной оси То же По направлению полета Ось ориентации бата- реи По направлению к Земле 0 + 23,4 FLTSAT COM Г еосинхронная высота
Окончание табл. 7.15
Метод управления положением космического корабля Ориентация осей космического корабля Примеры космических кораблей
Конструкция солнечной батареи Продольная (ось крена) Поперечная (ось тангажа) Ось курса (рыскания) Наклон орбиты, град Угол освещения солнечной батареи, град Наименование космического корабля Примечание
Разворачивающиеся панели с ориентацией по двум осям » По направлению к Солнцу По направлению полета Ось ориентации батареи То же » » То же » » 32 99 Любой 0 ±6 0 ОАО ERTS-f FRUSA Звездная ориентация за счет вращения относительно оси тангажа Солнечно-синхронная орбита; панели развернуты под углом 33° относительно оси тангажа Ориентация батареи проводится независимо от положения космического корабля
7.4. Солнечные батареи
431
По мере увеличения мощности до 10 кВт и больше стали делать панельные солнечные батареи раскладывающимися, что позволило иметь достаточно компактную компоновку во время выведения КА на орбиту. Панель представляет собой жесткую рамку, изготовленную из алюминиевого или бериллиевого сплавов или композиционного материала. На рамку крепится трехслойная подложка (толщина лицевых листов 0,12...0,15 мм, толщина пакета 4...5 мм), полиамидная пленка толщиной около 50 мкм или мелкая капроновая сетка. На подложку наносится слой электроизолятора толщиной 50...60 мкм, на который специальным клеем приклеиваются фотоэлектрические преобразователи. К сетке преобразователи крепятся с помощью специальных проволочных петель, имеющихся на тыльной стороне каждого. Соединение электрических цепей осуществляется пайкой серебряной проволокой. Панельные солнечные батареи имеют удельную массу 5... 10 кг/м\ при этом примерно 40 % массы приходится на фотоэлектрические преобразователя, а остальное — на конструкцию. Коэффициент заполнения (отношение площади всех преобразователей к площади солнечных батарей) в лучшем случае составляет 0,85...0,9. С учетом сопротивления токопроводов между преобразователями удельная мощность солнечных батарей на основе кремниевых преобразователей составляет 100... 120 Вт/м2 при плотности светового потока за пределами земной атмосферы 1400 Вт/м2. При этом КПД солнечных батарей составляет 7...9 %, в то время как КПД собственно преобразователей достигает 10...12%.
Раскрывающиеся конструкции могут быть различного исполнения в зависимости от типа фотоэлектрического преобразователя. При использовании жестких пластин фотоэлектрического преобразователя их размещают на плоских створках-подложках. Конструкция створок может быть полужесткой, выполненной в виде рамы с натянутым сетеполотном (рис. 7.15), или жесткой, выполненной в виде трехслойных панелей с сотовым заполнителем. Количество створок и их геометрия определяются, с одной стороны, заданным энергопотреблением КА, а с другой — компоновкой КА под обтекателем ракеты-носителя в процессе выведения.
Масса панели солнечной батареи зависит от вида используемого каркаса (табл. 7.16).
432 7. Компоновка оборудования системы генерирования электроэнергии
Рис. 7.15. Солнечная батарея, состоящая из трех панелей жестко закрепленная на корпусе КА:
1 — каркас; 2 — сетеполотно; 3 — струна: 4 — фотопреобразователи
Таблица 7.16. Удельная масса СБ при использовании различных каркасов
Тип каркаса батареи Удельная масса, кг/м2
На основе кремния На основе многокаскадных GaAs фотопреобразователей
Сетка 1,55 1,88
Струна 1,45 1,55
Сотопанель 1,63 1,69
Металл 1,63 1,69
Створки соединяются шарнирами в многозвенный механизм, фиксируемый в транспортном положении системой зачековки. Основные кинематические схемы механизмов раскрытия створок солнечных батарей показаны на рис. 7.16.
Для снижения динамических нагрузок существуют механизмы синхронизации раскрытия створок, как показано на рис. 7.17.
Солнечные батареи большой площади конструируются в виде сложных складных конструкций. Компоновка раскладных панелей солнечных батарей на внешней поверхности КА должна исключать перекрытие ими зон обзора других элементов бортового оборудования (камер, звездных датчиков и пр.). Также должно быть сведено к минимуму возможное затенение панелей друг другом, корпусом, другими элементами конструкции и бортового оборудования. Для
7.4. Солнечные батареи
433
Рис. 7.16. Кинематические схемы механизмов жестких панелей солнечных батарей:
а — укладка «гармошкой»: б — рулонная укладка: в — параллельная укладка
с лонжероном-пантографом
Рис. 7.17. Схемы механизмов синхронизации раскрытия панелей солнечных батарей:
а — пантограф; б — тросовые петли (схематично, как пружина, показаны устройства натяжения); в — разматываемый трос (стрелкой показано направление тормозящего момента)
предотвращения затенения в конструкции панели используют силовые элементы-проставки, предназначенные для выноса рабочих поверхностей на расстояние от корпуса КА. Обычно такие проставки являются ближайшим к корпусу звеном механизмов и выполняются в виде панелей, рам, траверс или штанг, как показано на рис. 7.18.
434 7. Компоновка оборудования системы генерирования электроэнергии
Рис. 7.18. Варианты крепления панелей солнечных батарей к корпусу КА: а — траверса; б — корневая рама; в — штанга; г — складные панели-проставки
При компоновке панелей на корпусе КА требуется решать задачу их размещения в сложенном состоянии под обтекателем PH (рис. 7.19). В случае когда корпус КА имеет форму призмы, пакет створок СБ размещается на плоской грани корпуса. Если корпус в форме цилиндра, компоновка плоских створок панелей в сложенном состоянии возможна несколькими способами, например, рулонная компоновка пакета, в которой створки укладываются в окружном направлении. Такая схема укладки требует излома створок панелей, как показано на рис 7.20 . При лонжеронной компоновке створки лонжерона укладываются в осевом направлении, а в окружном — укладываются боковые створки панели.
7.4. Солнечные батареи
435
Рис. 7.19. Солнечная батарея, состоящая из трех панелей, жестко закрепленная на корпусе КА
а — рулонная схема укладки: 1-4 — створки; 5 — корневой кронштейн; 6 — корпус КА; 7 — привод ориентации; б — в сложенном положении: 1 — узлы зачековки пакета створок; 2 — элктропривод; 3 — борт КА; в — в раскрытом положении: 1 — створки; 2 — корневая створка; 3 — межстворочные шарниры с электроприводом
Возможно использовать тонкопленочные элементы толщиной до 10 мкм без компенсаторов, для чего применяют тонкопленочные многослойные кремний, арсенид галлия и другие материалы. Тонкопленочные элементы позволяют получить мощность на единицу массы до 1 000 Вт/кг при КПД до 25.. .30 %.
436 7. Компоновка оборудования системы генерирования электроэнергии
Рис. 7.20. Схема транспортного и рабочего положения солнечной батареи из четырех панелей
а — схема укладки лонжерона; б — в сложенном положении: / — корпус КА: 2 — привод вращения СБ; 3 — узлы зачековки; в — в раскрытом положении: 1 — сете-полотно с ФЗИ; 2 — корневая створка; 3 — корневое звено лонжерона: 4 — электропривод раскрытия звеньев лонжеронов
Если фотоэлектрические преобразователи в процессе изготовления наносятся на гибкую подложку или пленку, конструктивное исполнение развертываемых панелей солнечных батарей включает полотно, развертываемые силовые элементы и систему натяжения гибкой подложки (рис. 7.21). Полотно преобразователей может быть свернуто в рулон на барабане, радиус которого должен исключать излом, уложено гармошкой (рис. 7.22, а) или с использованием гофра типа оригами (рис. 7.22, б). Силовыми элементами могут быть разрезные упругие балки, свернутые в рулон, развертываемые фермы и вантово-стержневые конструкции, надувные аэробалки и т. п.
7,4. Солнечные батареи
437
Рис. 7.21. Рулонная СБ, выполненная по технологии FRUSA:
1 — подложка из стеклоткани; 2 — ФЭП; 3 — барабанное устройство; 4 — электропривод; 5—трубчатая титановая балка; 6 — стяжка
Рис. 7.22. Конструктивные схемы гибких панелей солнечных батарей:
а — конструкция веерного типа по технологии UltraFlex; б — с развертыванием из гофра-оригами
438 7. Компоновка оборудования системы генерирования электроэнергии
Размещение солнечных батарей на наноспутниках. Примеры компоновки габариты сонечных батарей для наноспутников типа CubeSat с различным уровнем энергопотребления, показаны на рис. 7.23 и 7.24. Если площадь солнечной батареи соизмерима с площадью поверхности КА, то конструкцию панели можно интегрировать в конструкцию корпуса КА (рис. 7.24, а). При больших площадях батарею выполняют в виде откидных панелей (рис. 7.24, б), или более сложных складных конструкций раскрывающейся после выведения в космическое пространство (рис. 7.24, в, г).
Рис. 7.23. Габариты панелей солнечных батарей для наноспутников типа CubeSat:
а — форм-фактор 1U; б — форм-фактор 3U; 1 — печатная плата; 2 — пластина ФЭП; 3 — микросхема; 4 — разъем
Механизмы расчековки солнечных батарей. В сложенном состоянии панели солнечных батарей удерживаются при помощи механизмов зачековки, конструкция которых разнообразна. Рассмотрим конструктивные решения наиболее распространенных способов зачековки. На МКА Microwave Anisotropy Probe массой 840 кг применена новая система зачековки солнечных батарей Solar Array Restraint and Release System (SARRS), основанная на использовании
7.4. Солнечные батареи
439
кевларового троса длиной 7,6 м и диаметром 3 мм, перерезаемого термоножами (рис. 7.25). Трос охватывает панели солнечных батарей в транспортном положении. После выведения на орбиту два термоножа (два ножа используются с целью резервирования) перерезают трос, освобождая шесть панелей и экран. В результате раскрываемая конструкция, имеющая в сложенном состоянии диаметр 2,7 м, образует экран диаметром 5,1 м.
Рис. 7.24. Примеры компоновки солнечных батарей на наноспутниках типа CubeSat различных классов:
а — низкий уровень энергопотребления; б. д — средний уровень энергопотребления; в, г, е — высокий уровень энергопотребления
Требования к системе зачековки солнечных батарей SARRS следующие:
• масса системы должна быть менее 4 кг;
• энергопотребление — менее 20 Вт;
• время раскрытия — менее 150 с;
• гарантированное время хранения системы на КА под головным обтекателем без обслуживания — более 45 сут.
В сложенном состоянии батареи удерживаются с помощью кевларового торса. Кевларовый трос в натянутом положении опирается на 12 роликов, установленных на панелях солнечных батарей (по два узла на каждой створке) (рис. 7.25, б).
440 7. Компоновка оборудования системы генерирования электроэнергии
Рис. 7.25. Компоновка системы зачековки панелей СБ и солнечного экрана: а — общая компоновка; б — механизм крепления; в — термонож; 1 — панель СБ; 2 — ролик крепления шнура; 3 — фаркоп: 7 — солнцезащитный экран в сложенном положении; 5 — кевларовый трос; 6 — термонож; 7 — привод; 8 — нагреватель
Трос состоит из двух отрезков кевларового шнура длиной 3,8 м каждый, которые соединяются в кольцо двумя титановыми талрепами (рис. 7.26). Талреп — устройство для стягивания и выбирания слабины троса (такелажа, кабелей и т. д.). Оно состоит из двух винтов с противоположной резьбой, вкручиваемых в специальное кольцо с двумя резьбовыми отверстиями. Концы винтов делаются с петлей, к которой крепится трос. Натяжение регулируется вращением кольца, благодаря чему винты сдвигаются к центру. Талрепы применяются в тех случаях, когда требуется очень большое натягивающее усилие.
Талрепы используются для натяжения кабеля при монтаже, так как кевларовый трос имеет большую деформацию при растяжении (около 300 мм) для достижения требуемого натяжения.
Трос выполнен из тканых кевларовых волокон, расположенных под различными углами по отношению к растягивающей
7.4. Солнечные батареи
441
М открыто
5-----------------►
Рис. 7.26. Конструкция кевларового троса:
а—общий вид троса; б—талреп; в—крепление троса в петле: 1 — петля; 2—талреп;
3—натяжение; 4—резьба; 5—сжимающее усилие, удерживающие конец троса
нагрузке. При растяжении такого стержня в нем возникают значительные сжимающие усилия, что позволяет создать простую схему крепления законцовок шнура в петле талрепа, использующую силы трения между кевларовыми волокнами. Тепловой нож состоит из керамической подложки, нагревательного элемента размерами 8x10*0,7 мм, с двойным (для резервирования) электронагревательным сопротивлением, который нагревает подложку до температур, превышающих 1000 °C. Два контакта поддерживают нагревательный элемент и обеспечивают электрическую мощность на сопротивлениях. Нагревательный элемент подпружинен для лучшего прилегания к шнуру в процессе резки.
Плоские панели удерживаются с помощью замков. Створка панели солнечной батареи КА INSAT-2 имеет размеры 1,8*2,15 м. Створки, собранные в пакет, фиксируются в плоских узлах зачековки, как показано на рис. 1.Т1. Для компенсации теплового расширения створок в пакете каждый узел зачековки допускает перемещения в направлении, показанном на рис. 7.27 стрелками.
Замки зачековки имеют различную конструкцию (рис. 7.28) и приводятся в действие различными способами (рис. 7.29-7.32).
Система, показанная на рис. 7.30, использует замок с тремя защелками. Две защелки зачекованы пирочеками. Если хотя бы одна чека сработает, то конический диск соскользнет в сторону открытой защелки за счет отклонения стержня, связывающего панели, и стержень освободится.
442 7. Компоновка оборудования системы генерирования электроэнергии
Рис. 7.27. Размещение узлов зачековки на панели солнечной батареи:
1 — направление теплового расширения; 2 — узел зачековки; 3 — панель корпуса КА
Рис. 7.29. Система зачековки СБ на замках:
1 — панель корпуса КА;
2 — пироножи; 3 — стяжка;
4 — петля троса; 5 — кронштейн поддержки троса;
6 — пружина натяжения троса; 7 — рычаг троса
Рис. 7.28. Конструкция замка системы зачековки панелей СБ:
1 — пружина; 2 — стержень; 3 — панель № 3; 4 — узел крепления троса: 5 — панель № 2: 6 — панель № 1; 7 — трос; 8 — проставка; 9 — панель №4; 10 — опора панели; 11 — основание; 12 — плунжер; 13 — рычаг; 14 — панель корпуса КА
Механизм, показанный на 7.31, использует пироножи для перерезания соединительного троса. Для снижения отдачи, возникающей при освобождении троса, предусмотрена система торможения. Вместо пироножа возможно применение термоножа.
7.4. Солнечные батареи
443
Рис. 7.30. Замок системы зачековки СБ с пирочекой:
/ — пружинный толкатель; 2 — пирочека; 3 — панели СБ; 4,7 — центрирующие втулки; 5 — пружинный привод стержня; 6 — стержень; 8 — защелка
5
I ।
Рис. 7.31. Система зачековки панелей СБ КА Microwave Anisotropy Probe (MAP):
1 — зона отсечки; 2 — крепление троса; 3 — трос; 4 — первый пиронож; 5 — пиропатроны; 6 — резервный пиронож; 7 — ограничительная шайба; 8 — ограничительный болт; 9 — ограничитель вращения; 10 — натяжной болт;
11 — шайба — гровер; 12 — система торможения троса
444 7. Компоновка оборудования системы генерирования электроэнергии
7.5. Космические ядерные энергоустановки
Электрореактивные двигатели, используемые на КА, потребляют большое количество электроэнергии, что приводит к увеличению площади солнечных батарей. Межпланетные автоматические станции уходят на значительные расстояния от Солнца, что значительно снижает эффективность солнечных батарей. Необходимы источники электроэнергии, способные заменить солнечные и буферные батареи. Этими источниками могут стать ядерные космические установки (табл. 7.17), разработка которых ведется в России и США. В 1960-1970-х гг. СССР запускал КА, использующие ядерные энергоустановки.
Ядерные энергоустановки можно подразделить на две группы: радиоизотопные генераторы (РИГ) и генераторы на основе термоэлектрических преобразователей. РИГ — устройство, в котором тепловая энергия, выделяющаяся в результате радиоактивного распада изотопа, преобразуется в электрическую с помощью термоэлектрических или термоэмиссионных преобразователей. РИГ состоит из одного (нескольких) тепловых блоков. Конструктивная схема РИГ приведена на рис. 7.32.
Рис. 7.32. Конст-
руктивная схема РИГ:
/ — теплоизоляция; 2 — ампула с изотопом; 3 — изотопный тепловой блок; 4 — термоэлектрический преобразователь; 5 — корпус-излучатель
Достоинства РИГ:
• простая конструкция: статическая одноступенчатая система преобразования первого рода, а также отсутствие движущих частей;
• длительный ресурс работы без обслуживания: может работать годами и десятилетиями, деградируя постепенно;
• возможность использования теплоты от любых источников тепловой энергии: может использоваться одновременно для обогрева и электропитания;
• работает независимо от пространственного положения;
Таблица 7.17. Применение на спутниках радионуклидных термоэлектрических генераторов (РТГ)
и блоков обогрева (БО) на полонии-210 и плутонии-238 (источник гамма-излучения (ИИ) на тулии-170)
Спутник Дата запуска Высота орбиты, км, место нахождения РТГ. БО, ИИ Электрическая тепловая мощность. Вт Время работы, ч
«Космос-84» 03.09.1965 1300 РТГ «Орион-1» на полонии-210 -20 -3000
«Космос-90» 18.09.1965 1300 РТГ «Орион-2» на полонии-210 -20 -3000
«Луна-17» 17.11.1970 Луноход-1 БО на полонии-210 -900 -2000
Орбитальная станция «Салют-1» 19.04.1971 200-222. Станция спущена в Тихий океан 11.10.1971 г. ИИ на тулии-170 — —
«Луна-21» 16.01.1973 Луноход-2 БО на полонии-210 -900 -3000
«Марс-96» 16.11.1996 Падение при запуске в Индийский океан РТГ «Ангел» и БО на плутонии-238 в малых станциях и пенетра-торах -0,2
446 7. Компоновка оборудования системы генерирования электроэнергии
• не зависит от среды (космос, вода, земля), в которой эксплуатируется термогенератор. Не требует управления и присмотра.
Недостатки:
• требуются редкие и дорогие изотопы в качестве топлива, которые сложно и долго производить;
• низкий КПД;
• мощность ограничивается сотнями ватт (РИГ киловаттной электрической мощности уже слабо оправдана, мегаваттной — практически не имеет смысла: будет слишком дорогим и тяжелым).
На рис. 7.33 приведен внешний вид серийного РИГ SNAP-9A.
В настоящее время су-
510
Рис. 7.33. Общий вид генератора SNAP-9A:
1 — излучающие ребра; 2 — штепсельный разъем; 3 — холодная поверхность термоэлемента
ществует возможность разрабатывать ядерные энергетические установки мощностью 100 кВт... 1,5 МВт. Ниже приведены характеристики ЯЭУ мощностью 150 кВт:
Количество модулей .................................. 12
электрическая мощность, кВт:
в транспортном режиме ........................... 150
в режиме энергопитания аппаратуры КА.............40... 150
род тока............................................. постоянный
напряжение, В ....................................... 120
максимальная температура литиевого теплоносителя, °C.930
ресурс, лет.......................................... не менее 5
масса, т ............................................4,5
длина, м............................................. 8,0
максимальный диаметр, м ............................. 3,5
Проект энергетической установки для полета на Марс должен иметь параметры, приведенные в табл. 7.18.
7.5. Космические ядерные энергоустановки
447
Таблица. 7.18. Параметры энергетической установки для полета на Марс
Характеристика Название установки (цифра означает число модулей)
ТРП-37 ТРП-12 ТРП-19 ТРП-27 ТРП-7
Электрическая мощность, МВт 5 10 5 7,5 5
Выходное напряжение, кВ 032 13/2 032 032 1,33
Тепловая мощность, МВт 45 73,3 36,7 54,7 36,7
Отбросная мощность, МВт 39,1 62,3 313 46,5 313
Эффективная площадь холодильника-испарителя, м2 539,7 863,9 419,5 564,5 419,5
Габариты ЯЭУ в стартовом положении
Максимальная длина, м 5,5 5,5 5,5 5,5 5,5
Максимальный диаметр, м 33,8 35 31,5 35 313
Габариты ЯЭУ Максимальная длина, м в рабочел 10,2 / положе! 123 чии 936 1,3 93
Максимальный диаметр, м 33,8 43,1 31,5 35 31,2
Ресурс ЯЭУ, лет до 1,5 ДО 1,5 ДО 1,5 до 1,5 до 1,5
Масса ЯЭУ, т 42,4 53,3 26,3 40 26,3
Относительная масса ЯЭУ, кг/кВт 8,48 5,3 536 5,3 536
В качестве теплоносителя используется изотоп лития-7, имеющий следующие характеристики:
• высокая объемная теплоемкость и низкая упругость пара, что обеспечивает минимальную массу ОСО;
• литий-7 является слабоактивизирующимся теплоносителем (период полураспада — 0,89 с), благодаря чему можно использовать одноконтурную систему охлаждения, что снижает массу ЯЭУ на 20 %;
• твердый в исходном положении изотоп литий-7 делает ЯЭУ более безопасной, как на стадии эксплуатации, так и при выведении.
На рис. 7.34 представлена схема сборки модуля, а на рис. 7.35 приведен внешний вид 10-модульной ЯЭУ с ТРИ на быстрых нейтронах из 19 ЭПТ.
Ядерная энергетическая установка для межорбитального буксира «Геркулес» имеет следующие характеристики:
448 7. Компоновка оборудования системы генерирования электроэнергии
генерируемая ТРП электрическая мощность, кВт ........630
полезная электрическая мощность, кВт: на номинальном режиме........................... 550
в режиме длительного энергоснабжения............. 100... 150
ресурс, лет:
на номинальном режиме............................ 16000
в режиме длительного энергоснабжения ............до 5
длина, м: ........................................... 14,6
холодильника-излучателя.......................... 8
максимальный диаметр, м.............................. 3,8
поверхность холодильника-излучателя, м2.............. 88
полная масса ЯЭУ, кг: ...............................6900
термоэмиссионного реактора-преобразователя.......1920
радиационной защиты..............................965
системы охлаждения...............................1700
системы энергообеспечения .......................1390
удельная масса, кг/кВт...............................12,55
Рис. 7.34. Общий вид модуля
и схема монтажа:
/ — электрогенерирующий пакет; 2 — электромагнитный насос; 3 — система поддержки давления теплоносителя; 4 — секция холодильника-излучателя; 5 — силовая конструкция; 6 — радиационная защита
Радиоизотопный термоэлектрический генератор (РИТЭГ) — радиоизотопный источник электроэнергии, использующий тепловую энергию, выделяющуюся при естественном распаде радиоактивных изотопов, и преобразующий ее в электроэнергию с помощью термоэлектрогенератора. Подбирая подходящий изотоп, можно получить РИТЭГ с требуемым сроком службы и другими параметрами.
Изотопы, применяемые в РИТЭГ, приведены в табл. 7.19.
Таблица 7.19. Изотопы, применяемые в РИТЭГ
Изотоп Способ получения Удельная мощность, Вт/г Объемная мощность. Вт/см3 Период полураспада Интегрированная энергия распада изотопа, кВт ч/г Рабочая форма изотопа
<йСо (кобальт-60) Облучение в реакторе 2,9 -26 5,271 года 193,2 Металл, сплав
238Ри (плутоний-238) Атомный реактор 0,568 6,9 86 лет 608,7 Карбид плутония
**’Sr (стронций-90) Осколки деления 0,93 0,7 28 лет 162,721 SrO, SrTiO3
|44Се (церий-144) То же 2,6 12,5 285 сут 57,439 СеО2
242Ст (кюрий-242) Атомный реактор 121 1169 162 дня 677,8 Cm2O3
147Рт (прометий-147) Осколки деления 0,37 1,1 2,64 года 12,34 Рт2О3
l37Cs (цезий-137) То же 0,27 1,27 33 года 230,24 CsCl
2,0Ро (полоний-210) Облучение висмута 142 1320 138 сут 677,59 Сплавы со свинцом, иттрием, золотом
244Ст (кюрий-244) Атомный реактор 2,8 33,25 18,1 года 640,6 Ст2О3
232и (уран-232) Облучение тория 8,097 -88,67 68,9 лет 4887,103 Диоксид, карбид, нитрид урана
l06Ru (рутений-106) Осколки деления 29,8 369,818 -371,63 сут 9,854 Металл, сплав
450 7. Компоновка оборудования системы генерирования электроэнергии
14 600
Рис. 7.35. Общий вид и габаритные размеры энергетической установки для межорбитального буксира «Геркулес»:
1 — термоэммисионный реактор-преобразователь; 2 — теневая радиационная защита; 3 — блок электрического оборудования; 4 — холодильник-излучатель на основе тепловых труб
Как и в случае атомного реактора, на выходе получается тепло, которое необходимо каким-либо образом преобразовать в электричество. В РИТЭГ для этого можно использовать:
• термоэлектрический преобразователь — соединив два проводника из разных материалов (например, хромеля и алюмеля) и нагрев один из них, можно получить источник электричества;
• термоэмиссионный преобразователь — катод электронной лампы нагревается, и электроны получают достаточно энергии чтобы «допрыгнуть» до анода, создавая электрический ток;
• термофотоэлектрический преобразователь — к источнику тепла подсоединяется фотоэлемент, работающий в инфракрасном диапазоне; источник тепла испускает фотоны, которые улавливаются фотоэлементом и преобразуются в электричество;
• термоэлектрический конвертер на щелочных металлах — используется электролит из расплавленных солей натрия и серы;
• двигатель Стирлинга — тепловая машина для преобразования разности температуры в механическую работу; электричество получается из механической работы с использованием какого-либо генератора.
Ядерные реакторы применяются в случае, если необходимое количество энергии невозможно получить другими способами, например с помощью солнечных батарей или изотопных источников энергии.
В табл. 7.20 приведены ядерные установки, разработанные в СССР и России.
На рис. 7.36. показана конструкция ЯЭУ «Топаз».
7.5. Космические ядерные энергоустановки
451
Рис. 7.36. ЯЭУ «Топаз»:
1 — блок системы подачи пара цезия и приводов органов регулирования; 2 — ТРП; 3 — трубопровод ЖМК; 4 — РЗ; 5 — компенсационный бак ЖМК; 6 — ХИ;
7 — рамная конструкция
Таблица 7.20. Сравнительные характеристики ядерных источников электроэнергии
Характеристика Установка
Бук «Топаз» «Эльбрус-400/200»
Тепловая мощность, кВт 100 150 -4000
Электрическая мощность, кВт 2,5 7 400
Ресурс, мес 6 12 20 лет
Масса, т 0,9 1,2 7
Количество запусков 32 2 —
Год запуска 1970-1988 1987 —
В табл. 7.21 приведены основные характеристики ЯЭУ, разработанных в США.
Защиту бортовой аппаратуры от радиоактивного излучения проводят комбинированным способом: за счет защиты рис. 7.37 и компоновки рис. 7.38.
2
Рис. 7.37. Компоновочная схема узла защиты ЯЭУ 2-го поколения:
7 — первая секция «легкой» радиационной защиты; 2 — привод системы безопасности; 3 — электромоторы системы управления реактором; 4 — диск «тяжелой» защиты
452 7. Компоновка оборудования системы генерирования электроэнергии
18
Рис. 7.38. Компоновка КА с ЯЭУ*
1 — реактор; 2 — электромагнитный насос; 3 — линия контура теплоносителя; 4 — излучатель на тепловых трубах; 5 — термоэлектрический преобразователь; 6 — вынесенная теплоизлучающая панель; 7 — шунт; 8 — блок преобразования мощности и контроля питания вспомогательного оборудования; 9 — датчик радиационных потоков; 10 — радиатор прибора; И — прибор; 12 — средства диагностики; 13 — электродуговые движители; 14 — двигатели ориентации; 15 — бак рабочего тела; 16 — КИК; 17 — выносная штанга; 18 — экран
В США разработаны три типа ЯЭУ.
1. В установках SP-100 используются урановый реактор с литиевым контуром теплоотвода и термоэлектрический генератор, обеспечивающий прямое преобразование тепловой энергии в электрическую. Отвод теплоты к коническому радиатору осуществляется с помощью тепловых передающих труб, заполненных калием. Для предохранения КА от избыточного потока нейтронов и у-излучения используется радиоактивная защита из бериллия, вольфрама и гидрида лития.
2. Установка STAR-C состоит из реактора на основе карбида урана, термоионных преобразователей, радиационной защиты из циркония и гидрида лития, а также цилиндрического радиатора.
3. В установке SNAP-DYN используется реактор (первичный контур), работающий на уране 235U, теплота от которого отводится
7.6. Компоновка радиоизотопных генераторов
453
Таблица 7.21. Основные характеристики ЯЭУ различных типов
Характеристика SP-1OO STAR-C SNAP-DYN
Реактор и генератор
Мощность, кВт:
электрическая 10 10 10
тепловая 274 74 59
КПД, % 4,6 13,5 16,9
Выходное напряжение постоянного тока, В 28...200 12,0 Регулируется
Диаметр, м 0,27 0,50 0,27
Высота, м 0,19 0,66 0,43
Масса, кг 403 408,0 284
Защита
Удаление от реактора для радиационной защиты, м 3,5 5,0 10
Площадь поверхности радиатора радиационной защиты, м2 14 1,3 23,5
Общая масса, кг 1900 1 148,0 1562
с помощью смеси натрия и калия. Во вторичном контуре в качестве теплоносителя применяется смесь жидких гелия и ксенона. Вторичный контур — часть замкнутой генераторной установки, работающей по циклу Брайтона, турбина которой осуществляет запуск электрического генератора.
При необходимости все установки могут изменять уровень мощности в течение нескольких минут. В состав ЯЭУ входят аккумуляторные батареи для начального нагрева КА, запуска ЯЭУ и компенсации краткосрочных пиков необходимой мощности.
7.6. Компоновка радиоизотопных генераторов
К компоновке РИГ на КА предъявляются следующие требования:
• для обеспечения безопасности необходимо предусмотреть защиту изотопной капсулы, поскольку КА, на котором установлен РИГ, представляет собой потенциальную опасность радиоактивного заражения атмосферы и поверхности Земли в случае аварии с
454 7. Компоновка оборудования системы генерирования электроэнергии
ракетой-носителем на участке выведения или аварии КА при возвращении на Землю;
• необходимо предусмотреть принудительный отвод тепла, которое непрерывно выделяет РИГ. Обеспечение теплового режима РИГ, находящегося под обтекателем на Земле, осуществляется принудительным обдувом его поверхности забортным воздухом или с помощью жидкостных магистралей, подводимых к корпусу РИГ. Это также приводит к некоторому увеличению массы КА;
• РИГ в некоторых КА используется не только как источник электроэнергии, но и как источник тепла, что позволяет обеспечить тепловой режим КА. Такое комплексное использование увеличивает КПД РИГ как тепловой машины. Отбор тепла от РИГ и подвод его к обогреваемым элементам КА осуществляются за счет теплопроводности элементов конструкции КА с помощью газового (жидкостного) теплоносителя или тепловых труб;
• назначение КА часто накладывает ограничения на конструкцию РИГ и его компоновку. Например, на КА, предназначенном для измерения межпланетных магнитных полей, магнитные материалы и электрические цепи располагаются таким образом, чтобы свести к минимуму его магнитные поля. Кроме того, часть аппаратуры КА не допускает высокого радиоактивного облучения. Поэтому РИГ должен иметь радиационную защиту или должен быть отнесен на определенное расстояние от чувствительной к облучению аппаратуры. Все это приводит иногда к необходимости установки РИГ на специальном кронштейне, первоначально прижатом к корпусу КА и разворачиваемом после прохождения плотных слоев атмосферы.
8. КОМПОНОВКА СИСТЕМЫ ТЕРМОРЕГУЛИРОВАНИЯ
8.1. Цели и задачи системы обеспечения теплового режима
В процессе полета КА подвергается воздействию нестационарных тепловых нагрузок. В связи с этим, если не предприняты соответствующие меры, температура узлов и агрегатов будет изменяться с течением времени, что может привести к перегреву или переохлаждению оборудования. При этом в элементах конструкции и бортовом оборудовании могут возникать существенные градиенты температуры и, как следствие, деформации конструкции, которые изменят взаимную ориентацию агрегатов, отклонят оптические оси аппаратуры от расчетных значений и приведут к другим нештатным случаям работы бортового оборудования. Для парирования этих эффектов необходимо поддерживать в определенных пределах поля температуры КА, производные полей температуры по времени и градиент по пространственным координатам. Например, для КА SPOT-4 (рис. 8.1) допустимая температура находится в диапазоне значений -20...+50 °C, стабильность температуры по времени должна быть не ниже 5 °С/ч, а максимальные температурные градиенты — 5 °C.
Для поддержания температур элементов конструкции КА, приборов и агрегатов в допустимых диапазонах значений на всех этапах штатного функционирования КА оборудуют системой обеспечения теплового режима. Рассмотрим системы, обеспечивающие функционирование КА на основном этапе полета, их влияние на внешний вид КА и компоновку отсеков.
Общую задачу обеспечения теплового режима можно условно разделить на внутреннюю и внешнюю. Внутренняя задача состоит в регулировании температуры оборудования и элементов кон
456
8. Компоновка системы терморегулирования
струкции в отсеках КА и его отдельных агрегатах. Внешняя задача сводится к обеспечению теплообмена КА с окружающей средой в условиях космического полета.
Рис. 8.1. Космический аппарат SPOT-4:
/ — конструкция (20 + 2 °C); 2 — датчик (20 + 1 °C. стабильность температуры менее 0,1 °С/ч); 3 — двигатель (10...500 °C); 4 — бак (10...50 °C); 5 — таймер (70 + 0,01 °C); 6 — электроника (-20...+50 °C); 7 — генератор (-100...+10 °C); 8 — аккумулятор (-10.. .+10 °C); 9 — антенна (-100...+100 °C)
Решение задачи обеспечения теплового режима связано с организацией теплопередачи от источников нагрева (нагревателей) к стокам теплоты (холодильникам). Способы теплопередачи — конвекция, теплопроводность (кондукция) и излучение (радиация) — имеют на борту КА существенные особенности использования.
Единственный способ теплопередачи между КА и окружающей средой — излучение (радиация), поэтому при проектировании внешнего вида КА необходимо учитывать, что вся его внешняя поверхность испускает, отражает или поглощает ИК-излучение. Таким образом, при компоновке КА одна часть его поверхности может быть использована для пассивного и нерегулируемого теплообмена, а другая часть — радиаторы — для активного управляемого теплообмена. Поверхность КА, теплообмен с которой нежелателен, должна экранироваться специальными теплоизоляционными покрытиями.
В условиях космического полета конвекция ограничена и может быть осуществлена только внутри объемов, заполненных теплоносителем (например, герметичных отсеков с газом или гидравлических контуров с жидким теплоносителем). При этом условия микрогравитации на борту КА требуют дополнительных мероприятий по
8.1. Цели и задачи СОТР
457
организации циркуляции теплоносителя между нагревателем и холодильником.
При кондукции следует учитывать, что не закрытые изоляцией элементы конструкции и бортового оборудования являются тепловыми мостами, по которым теплота перетекает и излучается (в тени) или поглощается (на Солнце) в космическом пространстве. Утечки через такие тепловые мосты — важный фактор, существенно уменьшающий возможности СОТР.
В целом тепловой режим КА описывается уравнением теплового баланса
Т _Т
Мс—^~ = - ср рад dt Rq
где М — масса КА; с — теплоемкость; Тср — средняя температура элемента; t — время; Трад — температура излучающей поверхности, т. е. радиатора; 7?0 — общее тепловое сопротивление между источниками нагрева и радиатором; Qo — количество теплоты, вырабатываемой на борту КА; Q\ — утечки теплоты через тепловые мосты.
Важнейшая информация для обеспечения теплового баланса — характеристики источников нагрева, которые можно подразделить на внешние и внутренние.
При компоновке СОТР КА необходимой исходной информацией является зависимость изменения угла между направлением на Солнце и осями связанной системы координат КА от времени полета. Также требуется информация о времени нахождения КА в тени. На этих участках суммарное тепловыделение внутренних источников нагрева может быть увеличено за счет включения электронагревателей СОТР. Тепловой поток, воспринимаемый КА от планеты, зависит от ориентации КА на различных режимах полета и взаимной ориентации Солнца, планеты и КА. К внешним источникам нагрева можно дополнительно отнести нагрев от соударения с молекулами разреженной атмосферы (для низкоорбитальных КА) и переотражение ИК-излучения от элементов конструкции КА.
Внутренние источники нагрева, устанавливаемые на борту КА, — различные энергоустановки (турбины, ЯЭУ, электрические ДУ), работающие блоки аппаратуры, а также специальные нагреватели СОТР. Энерговооруженность современных КА такова, что обеспечение нормальных температурных режимов невозможно без мощной СОТР.
458
8. Компоновка системы терморегулирования
Система обеспечения теплового режима КА состоит из системы теплоизоляции и СТР.
Система теплоизоляции, предназначенная для уменьшения или ограничения тепловых потоков, включает:
• оптические покрытия, снижающие некалиброванное излучение теплоты с поверхности КА в космическое пространство;
• теплоизолирующие покрытия, предотвращающие утечку теплоты от приборов и агрегатов;
• тепловые сопротивления, служащие для изоляции тепловых мостов.
Система терморегулирования, предназначенная для стабилизации и управления тепловым балансом КА, может быть основана либо на процессах поглощения или выделения теплоты внутри КА, либо на подводе или отводе теплоты извне. СТР подразделяют на пассивные и активные.
Пассивные СТР служат для стабилизации поля температур и тепловых потоков, а также для придания определенных теплофизических свойств системам и конструкции КА. Для регулирования температуры внутри КА могут использоваться реакции с поглощением или выделением теплоты либо изменение агрегатного состояния вещества. К пассивным СТР относятся:
• теплопроводы, перераспределяющие тепловые потоки внутри КА;
• теплоаккумулирующие элементы (с возможным изменением агрегатного состояния хладагента), сглаживающие резкие перепады температур и температурные градиенты;
• радиационные поверхности, служащие для калиброванного сброса избыточного количества теплоты в космическое пространство.
Активные СТР предназначены для управления тепловым балансом КА и, как следствие, температурой отдельных его элементов. Такие СТР включают в себя контуры управления тепловыми потоками, состоящими из объектов регулирования, датчиков, контроллеров (управляющих ЭВМ) и исполнительных органов. Исполнительными органами являются:
• системы сбора и переноса теплоты;
• регулируемые конвективные, термоэлектрические, теплоаккумулирующие и радиационные теплообменные аппараты;
• системы формирования циркуляционных полей для организации конвекции;
• нагревательные элементы для подвода дополнительной тепловой энергии к охлажденным элементам конструкции КА.
8.2. Основные компоновочные элементы СОТР
459
Таким образом, СОТР представляет собой сложный комплекс элементов, органично связанных с компоновкой КА. Создание СОТР начинается одновременно с проектированием и компоновкой КА. Конструкция КА зависит от построения СОТР: многие элементы СТР являются крупногабаритными конструкциями, имеющими специфические требования по размещению. Такие элементы оказывают существенное влияние на внешний вид КА, а в некоторых случаях даже определяют его.
8.2. Основные компоновочные элементы системы обеспечения теплового режима
В СОТР входят как внутренние, так и внешние компоновочные элементы.
К внутренним компоновочным элементам относятся гидравлическая арматура (трубопроводы и клапаны), электромеханические агрегаты (электронасосные агрегаты, регуляторы расхода жидкости и вентиляторы), теплообменные аппараты, контроллеры и датчики. Массогабаритные характеристики этих элементов задаются в исходных данных для проведения компоновки. Относительно влияния на другие компоновочные элементы электромеханические агрегаты СТР являются источниками шума и вибраций в отсеках, где они установлены.
В СОТР КА чаще всего используют газо- и жидкостножидкостные теплообменники. Как правило, в отсеках КА размещают поверхностные рекуперативные теплообменники, которые предназначены для осуществления теплообмена между теплоносителями через теплопроводящую поверхность, разделяющую их. Эта поверхность постоянно омывается потоком теплоносителей, направление которого сохраняется неизменным.
При компоновке КА в целом также важны массогабаритные характеристики теплообменных аппаратов, которые, кроме типа теплоносителя, определяются числом ходов и взаимным направлением их потоков (противоток, прямоток и т. п.), материалом поверхностей теплообмена (рис. 8.2).
Габариты и конструкция теплообменного аппарата выбираются на основе теплового и гидравлического расчетов. При тепловом расчете важнейшей характеристикой является температурный напор (разность температур двух теплоносителей), при гидравлическом — сопротивление агрегата и мощность, необходимая для обеспечения циркуляции теплоносителей.
460
8. Компоновка системы терморегулирования
Рис. 8.2. Схемы поверхностных рекуперативных жидкостно-жидкостных (а) и газожидкостных (б) теплообменников
В теплообменных аппаратах могут использоваться теплоносители, различные как по химическому составу (вода, аммиак и др.), так и по агрегатному состоянию вещества (жидкость, газ). Каждый теплоноситель имеет свои специфические особенности (например, жидкие теплоносители более компактны, но существует опасность их замерзания или закипания).
При создании СОТР в негерметичных отсеках КА широкое применение нашли тепловые трубы.
Тепловые трубы — герметичные теплопередающие устройства, обладающие сверхнизким термическим сопротивлением и работающие по замкнутому испарительно-конденсационному циклу с использованием капиллярного механизма для прокачки теплоносителя.
Простейшая конструкция тепловой трубы (рис. 8.3) состоит из корпуса, капиллярной системы (например, фитиля) и теплоносителя. Один конец тепловой трубы расположен в зоне подвода теплоты, а другой — в зоне отвода теплоты. В зоне подвода теплоты жидкий теплоноситель испаряется, пары переносятся по трубе в зону отвода теплоты, где происходит конденсация теплоносителя. Далее жидкий теплоноситель по капиллярной системе возвращается в зону подвода теплоты.
Рис. 8.3. Простейшая конструкция тепловой трубы:
/ — испарение жидкого теплоносителя: 2 — движение пара по трубе; 3 — теплоизоляция; 4 — конденсация теплоносителя; 5 — капиллярная система (фитиль); 6 — движение конденсата по капиллярной системе; 7 — корпус тепловой трубы
8.2. Основные компоновочные элементы СОТР
461
Тепловые трубы имеют следующие ограничения по использованию:
• звуковые, связанные с достижением скорости звука при движении пара в трубе;
• капиллярные, лимитирующие расход жидкого теплоносителя;
• температурные ограничения конструкции трубы и теплоносителя, при превышении которых труба и капиллярная система могут расплавиться, а теплоноситель — закипеть.
Поскольку циркуляция теплоносителя в трубе происходит без применения дополнительных агрегатов (насосов, клапанов и др.), потребляющих энергию, использование тепловых труб особенно эффективно на МКА.
Распространенным техническим решением в настоящее время является монтаж тепловых труб в сотовых панелях корпуса КА. Внешние слои таких панелей выполняются из алюминиевого сплава, обладающего высокой теплопроводностью. Поверхность таких панелей сама может быть использована в качестве радиатора. Тепловые трубы располагаются в срединном слое панели, как показано на рис. 8.4, и образуют продольные каналы для передачи теплоты.
Рис. 8.4. Расположение тепловых труб в трехслойных панелях корпуса КА:
/ — соты панели корпуса КА; 2 — внешние слои панели корпуса КА: 3 — тепловой мост; 4 — блоки аппаратуры; 5 — тепловая труба; 6 — тепловой поток до 1 Вт/см“
Блоки аппаратуры располагаются на панели таким образом, чтобы обеспечить надежный тепловой контакт с трубами. В местах крепления блоков на панели организуются тепловые мосты, так называемые седла — контактные площадки с большей толщиной металла. Продольные тепловые трубы в сотовых панелях собирают теплоту от приборов и передают его к коллектору — тепловой трубе боль
462
8. Компоновка системы терморегулирования
шей пропускной способности. Коллектор соединяется с радиатором как показано на рис. 8.5.
Соединение тепловых труб с радиатором показано на рис. 8.6. На рисунке показаны четыре тепловые трубы. Как видно из рисунка, в местах контактов с оборудованием и радиатором установлены тепловые мосты — «седла» с крепежными отверстиями: контактные площадки в форме параллелепипедов, внутри которых проходит
Рис. 8.5. Система передачи теплоты в КА «Радиоастрон»:
1 — аппаратура (источник тепла); 2 — коллекторные тепловые трубы; 3 — радиатор; 4 — аксиальные тепловые трубы; 5 — артериальная тепловая труба; 6 — сотовая панель
Рис. 8.6. Подвод тепловых труб к радиатору:
1 — + х горячая труба; 2---х горячая труба; 3 — + х холодная труба: 4---х
холодная труба; 5 — радиатор
тепловая труба. Радиатор для более равномерного прогрева излучающей поверхности также имеет в своем составе систему тепловых труб, как показано на рис. 8.7.
8.2. Основные компоновочные элементы СОТР
463
Имеются три магистральные трубы (горизонтальные на рис. 8.7) и десять вспомогательных труб-ребер (вертикальные на рис. 8.7). Для предотвращения переохлаждения теплоносителя на радиаторе установлены два нагревателя (на рис. 8.7 заштрихованы).
Рис. 8.7. Радиатор с тепловыми трубами (вид с изнанки)
В обычных тепловых трубах движение фаз и фазовые переходы теплоносителя происходят в одной трубе. Однако существуют более сложные конструкции тепловых труб, в которых движение теплоноси-
Рис. 8.8. Контурная тепловая труба:
/ — конденсатопровод; 2 — конденсатор-теплообменник; 3 — паропровод; 4 — капиллярный насос-испаритель
теля организовано в замкнутом контуре. При этом фитиль используется не для транспортировки жидкой фазы, а в качестве капиллярного насоса-испарителя, обеспечивающего трубам, образующим замкнутый
циркуляцию теплоносителя по контур, как показано на рис. 8.8.
Обычно контурная тепловая труба состоит из капиллярного насоса-испарителя с компенсационной камерой для конденсата, конденсатора-теплообменника и трубопроводов для газообразной и жидкой фазы теплоносителя. В камере насоса находится фитиль, заполненный жидким теплоносителем.
464
8. Компоновка системы терморегулирования
Контурные тепловые трубы способны передавать тепловые потоки от нескольких ватт до нескольких киловатт при различной ориентации в гравитационном поле и в невесомости без использования каких-либо дополнительных источников энергии.
Основные технические характеристики контурных тепловых труб (по данным разработчиков данного вида тепловых труб — Института теплофизики уральского отделения РАН):
Максимальная мощность, Вт..................... 100...2000
Термическое сопротивление, °С/Вт..............0,02...0,2
Рабочая температура, °C.......................-20... +180
Эффективная длина, м .........................0,2...20
Диаметр испарителя, мм........................5...30
Диаметр паропровода и конденсатопровода, мм...1,8...8
К преимуществам контурных тепловых труб относятся:
• высокая теплопередающая способность;
• большой напор теплоносителя, что позволяет при наземной отработке располагать источник тепла выше стока теплоты, при этом жидкая фаза будет подниматься вверх против направления силы тяжести;
• позволяют организовать сложную трассировку тепловых труб и передачу теплоты на большие расстояния;
• простота конструкции гибких участков, поскольку в трубах отсутствует фитиль, это дает возможность существенно упростить передачу теплоты через шарниры и подвижные элементы;
• высокая надежность, поскольку нет ограничений, связанных с увлажнением пара теплоносителя и насыщением жидкой фазы газом, происходящих в обычной тепловой трубе;
• конструкция терпима к наличию больших объемов неконден-сированного газа, что увеличивает ресурс труб;
• высокая эффективность, поскольку разделение устройств приема и сброса теплоты позволяет провести их независимую оптимизацию и встраивание в конструкцию;
• возможность эффективной регулировки, поскольку для таких труб достаточно просто организовать регулирование теплопроводности для активного регулирования температуры, а также одностороннюю тепловую проводимость, так называемый тепловой диод.
8.2. Основные компоновочные элементы СОТР
465
К недостаткам контурных тепловых труб можно отнести наличие двух трубопроводных магистралей, которые имеют различные температуры теплоносителя, что необходимо учитывать при их размещении и расчете теплового режима.
Регулируемые тепловые трубы. Обычная тепловая труба — это нерегулируемое устройство. Однако имеются возможности для регулирования ее работы. Необходимо модифицировать одну или несколько ступеней происходящего в ней циклического процесса:
1) испарение;
2) перетекание пара к конденсатору;
3) конденсацию;
4) перетекание жидкости к испарителю.
Например, имеются тепловые трубы, в которых используется явление изменения свойств теплоносителя при изменении температуры. Так, если нагрев теплоносителя становится слишком сильным, то свойства теплоносителя меняются и теплопроводность трубы падает.
Имеется возможность включать и отключать тепловую трубу. Это можно сделать различными способами:
• перекрытием парового потока с помощью заслонки с магнитным приводом;
• замораживанием теплоносителя с помощью термоэлектрического охладителя;
• вытеснением жидкого теплоносителя во вспомогательную емкость;
• блокированием конденсатора инертным газом.
Особым случаем регулирования является создание труб односторонней проводимости. Например, если необходимо передавать теплоту от блока аппаратуры к радиатору, необходимо исключить обратный поток теплоты, чтобы предотвратить перегрев аппаратуры в случае, когда по условиям освещенности радиатор нагревается Солнцем. Для предотвращения обратного потока теплоты применяют тепловые трубы-диоды, схемы которых разнообразны:
• геометрические тепловые трубы, где существенно различаются по форме и размерам зоны испарения и конденсации теплоносителя;
• тепловые трубы, в которых используются жидкостные ловушки: жидкий теплоноситель концентрируется преимущественно у одного края трубы, что создает разные условия для испарения на краях;
• тепловые трубы, у которых в паровом канале расположен обратный клапан, препятствующий обращению движения теплоносителя.
466
8. Компоновка системы терморегулирования
Тепловые трубы также могут быть использованы при разработке СОТР для термоэмиссионных реакторов.
При работе термоэмиссионного реактора, используемого для получения электроэнергии, выделяется значительное количество теплоты. При мощности 35...75 МВт примерно 30...60 МВт отбрасывается, и требуется отвод этой теплоты. Для отвода и охлаждения используется холодильник-испаритель на тепловых трубах. В результате экспериментов, проведенных в РКК «Энергия», было установлено, что наилучшими свойствами обладают тепловые трубы с капиллярной средой (КС) в виде перфорированного экрана с оптимальным размером отверстий d. Тепловые трубы, используемые на межорбитальном буксире «Геркулес», имеют длину порядка 4000 мм и диаметр — 150 мм. В качестве теплоносителя используется практически неактивируемый изотоп литий-7, при температуре 850...950 °C. Создание подобных тепловых труб возможно только с функционально разделенной КС, обеспечивающей высокий капиллярный напор с одновременным низким гидравлическим сопротивлением переносу жидкой фазы теплоносителя из зоны конденсации в зону испарения. Этим требованиям отвечает мелкопористая КС внутренней поверхности корпуса тепловых труб и гидравлически соединенные с ней артерии (рис. 8.9).
Рис. 8.9. Поперечное сечение крупногабаритной артериальной тепловой трубы
1 — артерия; 2 — мелкопористая КС: 3 — стенка тепловой трубы: 4 — субартерии
При течении литиевого теплоносителя в реакторе под воздействием нейтронов образуется гелий (а также неопасные растворяющиеся в литии водород и тритий). Гелий слабо растворяется в литии, и в циркуляционном контуре может происходить самопроизвольное выделение компактной фазы гелия, например в виде газовых пузырей. Локализуясь на поверхности теплообмена и на всасывающей линии электромагнитного насоса, они способны
8.2. Основные компоновочные элементы СОТР
467
нарушить работоспособность системы охлаждения. Поэтому в составе литиевого контура ЯЭУ необходим сепаратор радиогенного гелия, способный работать в условиях невесомости. В РКК «Энергия» в 1990-е гг. был предложен и отработан новый тип сепаратора — капиллярный, в котором выделение гелия в газовую полость осуществляется путем диффузии из раствора гелия в литии (рис. 8.10).
Рис. 8.10. Капиллярный сепаратор гелия из литиевого теплоносителя:
/ — корпус; 2 — капиллярный затвор (рулон перфорированной фольги); 3 — капиллярная структура; 4 — газовая полость, заполненная смесью аргона (газ наддува) и отсепарированного гелия; 5 — капиллярный аккумулятор теплового расширения; 6 — трубка системы подачи аргона (в эксперименте использовалась для отбора проб газа); 7 — металловойлочный капиллярный затвор; 8 — выходной патрубок лития; 9 — входной патрубок лития
К внешним компоновочным элементам СОТР относятся радиаторы, теплоизоляция и оптические терморегулирующие покрытия.
Радиаторы, или радиационные теплообменники (РТО), предназначены для организации теплообмена между КА и космическим пространством посредством излучения. Упрощенно уравнение теплового баланса радиатора может быть записано в виде
<4,^ = ^ 7-р4».
где (Л/с)рад — эффективная теплоемкость радиатора; Трад — температура радиатора; t — время; Гтн — температура теплоносителя; R — тепловое сопротивление; А$ — коэффициент поглощения солнечной радиации; q — удельный тепловой поток от Солнца (с учетом ориентации КА, а также наличия отраженного излучения
468
8. Компоновка системы терморегулирования
от планеты и элементов конструкции), падающий на радиатор; 8 — степень черноты излучающей поверхности; — площадь радиатора; &с-б — постоянная Стефана — Больцмана.
По динамике изменения теплового потока во времени радиаторы можно подразделить на стационарные излучатели с постоянным тепловым потоком и нестационарные излучатели, в которых теплота сначала аккумулируется, а затем излучается в пространство.
Как правило, излучающие поверхности радиаторов современных КА имеют большую площадь, сравнимую с площадью панелей фотоэлектрических преобразователей, и представляют собой наиболее крупногабаритные компоновочные элементы, форма, размеры и масса которых являются определяющими для внешнего вида КА.
Для стационарного излучателя (<7Град / dt = 0), находящегося в тени (внешнего облучения нет, т. е. q = 0), площадь радиатора грубо можно оценить как
Т -Т
F — тн Рад
рад ” Rpk Т4 ’
АЕ/СС-Б 7рад
Конструктивно радиатор состоит из излучающей поверхности, связанной кондуктивно (посредством теплопередачи) с объемами, по которым циркулирует теплоноситель. Существует множество конструкций радиаторов, которые можно классифицировать:
• по типу теплоносителя — без теплоносителя и с теплоносителем (жидкость или газ);
• форме излучающей поверхности — плоские, цилиндрические, лепестковые и т. д.;
• степени развитости излучающей поверхности — без оребрения и с оребрением;
• способу регулирования температуры — нерегулируемые, с регулируемым расходом теплоносителя, с регулируемой площадью, затеняемые жалюзи, с регулируемыми оптическими коэффициентами;
• возможности изменения ориентации в пространстве — жестко связанные с корпусом КА, подвижные (ориентируемые);
• типу метеоритной защиты — экранированные, секционные, без защиты.
Точный расчет площади радиатора см.: Основы теплопередачи в авиационной и ракетно-космической технике / Под ред. В.С. Авдуевско-го, В.К. Кошкина. М.: Машиностроение, 1992.
8.2. Основные компоновочные элементы СОТР
469
Для повышения эффективности мощных радиаторов используют и более сложные технические решения, так, например, для увеличения излучающей поверхности применяют тепловые трубы (рис. 8.11). В целях снижения массы больших радиаторов перспективно использовать капельные радиаторы, где излучение производится с поверхности потока капель теплоносителя, свободно движущегося в пространстве от источника к приемнику по заданной траектории (рис. 8.12).
Рис. 8.11. Использование тепловых труб для увеличения эффективности мощных радиаторов: 1 — тепловая труба: 2 — радиатор
Рис. 8.12. Схема капельного радиатора:
/ — приемник капель; 2 — источник капель; 3 — поток капель теплоносителя; 4 — ферма
Теплоизоляция предназначена для экранирования теплового излучения с защищаемой поверхности. Этот элемент покрытия устанавливается на внешнюю поверхность КА.
На КА используется экранно-вакуумная теплоизоляция (ЭВТИ) (рис. 8.13), представляющая собой пакет из большого числа (20... 100) экранов — слоев тонкой пленки, на которую нанесено зеркальное покрытие, хорошо отражающее ИК-излучение. Для уменьшения теплопередачи слои пленки конструктивно отделены друг от друга так, что площадь касания слоев минимальна. Пространство между слоями дренируется, поэтому после выведения КА на орбиту и дегазации газ между слоями отсутствует, что исключает конвекцию.
470
8. Компоновка системы терморегулирования
Рис. 8.13. Экранно-вакуумная теплоизоляция: слои термостойкой ткани (/) и пленки (2)
Для поверхности КА с температурой, равной температуре радиатора Град, степенью черноты £ и с удельным тепловым потоком q без ЭВТИ степень снижения теплового потока определяется по формуле
Q _______^экр____
^0 (^экр + / ^экр )
где 7о — тепловой поток с ЭВТИ; Еэкр — степень черноты экрана (обычно Еэкр < 0,1); 77Экр — число экранирующих слоев.
При падении на поверхность ЭВТИ удельного теплового потока удельный тепловой поток через поверхность КА составит:
По конструкции ЭВТИ имеет вид многослойного мата, который крепится на корпусе КА при помощи лент и шнуровки. Для защиты экранов от механических и термических повреждений ЭВТИ обшивается защитным слоем прочной термостойкой ткани.
Оптические терморегулирующие покрытия, характеризуемые коэффициентом поглощения As и степенью черноты е, наносятся на все внешние поверхности КА. По отношению этих величин (As. е) покрытия подразделяют на истинные (As ~ 0, е ~ 0) и солнечные (As ~ ~ 0, £ ~ 1) отражатели, а также на истинные (As ~ 1, е ~ 1) и солнечные (As ~ 1, £ ~ 0) поглотители. Обычно значения интегральных коэффициентов покрытий составляют As - 0,3.. .0,2 и е = 0,9. Коэффициенты конкретных покрытий можно найти в специальной литературе.
Чаще всего в качестве покрытий применяют специальные краски, многослойные покрытия (стекло — металл), полировку поверхности элементов, оклейку металлической фольгой, покрытие окрашенными тканями. С использованием нанотехнологий также могут быть созданы покрытия с регулируемыми коэффициентами.
8.3. Схема COTP
471
8.3. Схема системы обеспечения теплового режима
Выбор схемы СОТР происходит в процессе теплового проектирования КА, представляющего собой самостоятельную задачу .
Упрощенная схема СОТР КА, состоящего из приборного и агрегатного отсеков (рис. 8.14), включает ЭВТИ, активную СТР для блока 1 и пассивную СТР для блока 2.
Рис. 8.14. Упрощенная схема СОТР КА:
I — приборный отсек; II — агрегатный отсек; 1 — вентилятор; 2 — теплообменник; 3 — регулятор расхода жидкости; 4 — датчик расхода теплоносителя; 5 — РТО; 6 — жалюзи; 7 — механический привод; 8 — бак: 9 — электронасосный агрегат: 10 — датчик давления; // — ЭВТИ; 12 — оптическое покрытие: /3 — тепловая труба; 14 — датчик температуры
Активная СТР представляет собой газожидкостную СТР. В приборном отсеке I вокруг блока 1 при помощи вентилятора 1 организована циркуляция газа (белые стрелки на рис. 8.14). Теплота от блока 1 путем конвекции газа через теплообменник 2 передается
* Детальные схемы СОТР для автоматических КА см.: Малоземов В.В. Тепловой режим космических аппаратов. М.: Машиностроение, 1980.
472
8. Компоновка системы терморегулирования
жидкому теплоносителю, циркулирующему по гидравлическому контуру, который соединяет приборный и агрегатный II отсеки. Циркуляция теплоносителя осуществляется с помощью электронасосного агрегата 9. На корпусе агрегатного отсека установлен РТО 5 переменной производительности, которая регулируется с помощью жалюзи 6 и механического привода 7. Нагретый теплоноситель, двигаясь по трубопроводам РТО, излучает полученную теплоту в пространство. Для компенсации теплового расширения предусмотрен бак 8.
Регулирование температуры производится по датчику температуры 14. выдающему сигнал о фактическом значении температуры 7бл1 блока 1. В контроллере (электронном регуляторе) фактическое значение температуры сравнивается со значением Т. заданным уставкой, и вырабатывается сигнал рассогласования АТ = Т— То. В соответствии с алгоритмом управления контроллер выдает командные сигналы на регулятор 3 расхода жидкости, который перераспределяет расход теплоносителя между гидролинией, идущей через теплообменник, и перепускной гидролинией. Контроллер также выдает команды на привод жалюзи РТО и электро-насосный агрегат. Параметры гидравлического контура контролируются датчиками давления 10 и расхода 4 теплоносителя. Схема также включает в себя различные клапаны и запорную арматуру, которые на рис. 8.14 не показаны.
Пассивная СТР блока 2 построена на тепловых трубах 13. подающих теплоту к нерегулируемому РТО с оптическим покрытием 12.
При выборе схемы СОТР следует учитывать, что:
• на борту КА ограничено применение активных СТР вследствие дополнительных затрат энергии и массы СОТР;
• на КА использование конвективного теплообмена нежелательно в связи с дополнительными затратами энергии и массы СТР;
• наиболее рационально обеспечивать соответствующий тепловой режим на борту КА пассивными СТР. Из пассивных СТР отвода теплоты применяют тепловые трубы и тепловые аккумуляторы, которые могут быть эффективным средством улучшения массогабаритных характеристик аппаратуры при пиковых нагрузках. Введение в состав узла теплового аккумулятора с фазопереходным веществом, который поглощает рассеиваемую мощность при пиковых нагрузках, а отдает ее за пределы аппаратуры в перерывах между повторными включениями, позволяет снять местные перегревы и использовать пассивные средства охлаждения;
8.4. Требования к размещению элементов СОТР
473
• при размещении бортового оборудования в негерметичных отсеках КА выгодно, чтобы оборудование могло отводить рассеиваемую мощность излучением с наружных поверхностей оборудования.
8.4. Требования к размещению элементов системы обеспечения теплового режима
Как было отмечено ранее, компоновка КА и схема СОТР тесно взаимосвязаны. На этапе эскизного проектирования разрабатываются электрические схемы отдельных блоков и устройств аппаратуры, определяются перечень тепловыделяющих элементов с учетом рассеиваемой ими мощности, а также способы крепления и установки на другие элементы конструкции составной части аппаратуры, строятся временные диаграммы тепловыделения научного и служебного комплексов в зависимости от режимов работы. Далее проводятся расчеты тепловых режимов всех приборов, перечисленных в перечне. По результатам расчетов, как правило, определяют необходимую степень интенсификации процессов тепло-переноса от элементов оборудования к основным стокам теплоты и к силовым элементам конструкций отдельных устройств и КА в целом. Если в бортовом оборудовании есть специфические элементы, требующие индивидуального охлаждения (например, мощные полупроводники), то обеспечение их теплового режима также осуществляется с использованием СОТР КА. На основании расчетов тепловых режимов принимается схема СОТР и формируется перечень элементов системы, подлежащих компоновке.
При компоновке элементов СОТР следует учитывать набор специфических требований. Важнейшая задача — организация надежных тепловых связей между бортовым оборудованием и стоками теплоты внутри КА. При компоновке герметичных отсеков, в которых возникает конвекция, необходимо проводить компоновку каналов для циркуляции газа и проверять ее аэродинамическим расчетом. При компоновке негерметичных отсеков трубопроводы жидкостной СТР и тепловые трубы располагают непосредственно в сотовых панелях, на которые крепятся приборы. Важно обеспечить хорошие кондуктивные связи между приборами и элементами СТР. При этом наличие труб в панелях накладывает дополнительные ограничения на размещение элементов.
Сложная задача внешней компоновки — размещение радиатора. Существуют варианты компоновки, когда неориентируемая излучающая поверхность радиатора интегрируется с конструкцией отсека (рис. 8.15). Ориентируемые радиаторы выполняют
474
8. Компоновка системы терморегулирования
в виде плоских панелей, закрепленных подобно панелям солнечных батарей на внешней поверхности КА (рис. 8.16). Как и панели фотоэлектрических преобразователей, панели радиатора имеют большие пространственные зоны видимости. Для обеспечения
б
Рис. 8.15. Интеграция радиатора с конструкцией отсека КА «Восток» (а) и «Союз» (б):
1 — спасаемый КА; 2 —
приборный отсек; 3 — радиатор; 4 — бытовой отсек; 5 — агрегатный отсек
Рис. 8.16. Компоновка ориентируемых радиаторов (заштрихованы) на МКС
заданного режима работы радиатора его необходимо либо устанавливать в тени (для радиаторов-холодильников), либо, наоборот, на Солнце (для радиаторов-нагревателей). В любом случае требуется исключить попадание элементов конструкции в зоны видимости радиатора. Для различных систем на КА с мощной ЯЭУ размещают отдельные радиаторы (рис. 8.17). В этом случае внешний вид КА во многом определяется габаритами радиаторов.
8.4. Требования к размещению элементов СОТР
475
Рис. 8.17. Размещение радиатора на КА с мощной ЯЭУ под головным обтекателем ракеты-носителя (а) и развернутый вид КА (б):
1 — преобразователь энергии; 2 — реактор с охлаждением жидким металлом; 3 — экран реактора; 4 — фиксированные панели РТО; 5 — развертываемая панель радиатора; 6 — вспомогательная полезная нагрузка; 7 — радиатор системы электропитания; 8 — солнечная батарея; 9 — группа ионных двигателей; 10 — связная платформа; // — агрегатный отсек; 12 — сканирующая платформа; 13 — штанга магнитометра; 14 — радиаторшунт; 15 — линия перелома мачты
На МКА радиаторы либо отсутствуют (теплота отводится (излучается) радиаторами блоков аппаратуры), либо невелики и компонуются как показано на рис. 8.18. При размещении на борту КА нескольких радиаторов задача компоновки с учетом неперекры-тия их зон видимости существенно усложняется.
При компоновке элементов теплоизоляции необходимо учитывать процессы дегазации ЭВТИ, происходящие после выведения КА на орбиту. При размещении ЭВТИ также следует принять во внимание разделение КА на отсеки. Если предполагается разделение отсеков КА, ЭВТИ не должны препятствовать процессу разделения, т. е. быть легкоразъемными.
При выборе оптических коэффициентов важно учитывать затенение поверхности КА внешними компоновочными элементами при различной ориентации на разных участках полета.
Рис. 8.18. Примеры компоновки радиаторов на МКА: 1 — радиатор
Y
8.4. Требования к размещению элементов СОТР
411
Для обеспечения теплоизоляции при компоновке КА необходимо отслеживать возникающие тепловые мосты. Как правило, эффективность ЭВТИ настолько высока, что тепловые мосты являются наиболее существенным фактором нарушения расчетного теплового баланса. Для исключения тепловых мостов при компоновке целесообразно предусматривать изолирующие крышки для сопел ДУ, иллюминаторов и других элементов. При компоновке КА с учетом теплового режима также следует принять во внимание деформацию конструкции под действием неравномерного нагрева. Если важна формостабильность элементов конструкции, используют компенсаторы температурных расширений.
Рис. 8.19. Варианты конструкции теплоизоляции соединений бортового оборудования и корпуса КА:
а — при помощи шайб: / — болт; 2 — шайба; 3 — верхний изолятор; 4 — центральный изолятор; 5 — нижний изолятор; 6 — гайка; б — при помощи стержней; в — крепление блока аппаратуры на теплоизолирующих кронштейнах; г — при помощи оболочек
478 8. Компоновка системы терморегулирования
На рис. 8.19 представлены конструктивные схемы кронштейнов, применяемых для теплоизоляции блоков бортового оборудования. Для этого могут использоваться шайбы (рис. 8.19, а), стержни (рис. 8.19, б) или оболочки (рис. 8.19, г) из материала с низкой теплопроводностью, установленные между крепежными элементами. Блок аппаратуры устанавливается на кронштейнах (рис. 8.19, в).
Важно отметить, что тепловые мосты используются не только для теплоизоляции, но и для теплосоединения — равномерного распределения тепла. Например, для равномерного перетока тепла с освещенной части корпуса КА на затененную используют тепловые проводники — специальные элементы, связывающие панели корпуса КА. В качестве таких элементов могут применяться как тепловые трубы, так и кронштейны из материала с большой теплопроводностью.
9. КОМПОНОВКА СИСТЕМЫ СОЕДИНЕНИЯ И РАЗДЕЛЕНИЯ ЭЛЕМЕНТОВ КОНСТРУКЦИИ КОСМИЧЕСКОГО АППАРАТА
9.1. Общие сведения
Систему разделения можно определить как совокупность устройств, отдельных деталей, которые обеспечивают жесткое крепление частей КА друг к другу. Она осуществляет их разделение с заданными характеристиками и защиту чувствительных органов КА от побочного воздействия входящих в ее состав пиромеханических элементов при срабатывании (рис. 9.1).
Рис. 9.1. Классификация систем разделения по виду используемой энергии
480 9. Компоновка системы соединения и разделения...
Как правило, в состав КА входит несколько устройств, требующих раскрытия или отделения. Это антенны, солнечные батареи, штанги с приборами, крышки люков и др. Для раскрытия и отвода отделяющихся частей на безопасное расстояние используются различные устройства (рис. 9.2).
Рис. 9.2. Классификация элементов систем разделения:
УКЗ — удлиненный кумулятивный заряд; МДШ — малоимпульсный детонирующий шнур: РДТТ — реактивный двигатель твердого топлива; ЖРД — жидкостной ракетный двигатель
Средства разделения отличаются большим разнообразием, которое обусловлено возможностями решать различные задачи по разделению. Независимо от заложенных в конструкцию прин
9.2. Пиромеханизмы
481
ципов она должна осуществлять надежное крепление частей конструкции КА между собой на участке выведения и раскрытие в заданное время и с заданными параметрами, а также надежное крепление в процессе эксплуатации. При отделении отделяемых конструкций система разделения должна обеспечивать увод отделяемой конструкции на безопасное расстояние от КА. Системы разделения должны отвечать следующим требованиям:
• относительная линейная скорость;
• возмущения (угловая скорость), получаемые КА при срабатывании;
• динамические перегрузки, возникающие в конструкции КА при отделении.
Выполнение первого требования обеспечивает надежное разделение и увод без соударения отделившихся частей конструкции, выполнение второго — стабилизацию КА после разделения, и выполнение третьего — целостность конструкции КА, особенно чувствительной электронной и оптической аппаратуры.
Для срабатывания систем разделения используются следующие виды энергии (см. рис. 9.1).
Процесс раскрытия раскрываемых элементов конструкции и отделения сбрасываемых конструкций КА можно разделить:
• на совместный полет до разделения;
• движение на направляющих втулках, шпильках, направляющих и др.;
• движение после схода с направляющих до окончания действия толкателей;
• свободный полет разделяющихся частей до момента их безопасного расхождения.
Линейная скорость разделения приобретается в результате преобразования потенциальной энергии газов высокого давления, генерируемого пиротехническими средствами, в кинетическую энергию отделяющихся частей. Линейная скорость разделения находится в пределах 1,0... 1,7 м/с. Угловые скорости приобретаются по тем же причинам и в результате неравномерного срабатывания пиротолкателей. Прирост угловых скоростей относительно продольной оси для КА массой 1000...2000 кг превышает 0,1 град/с (0,0017 1/с). Как правило, угловая скорость, приобретаемая разделяющимися конструкциями, находится в пределах со v < 0,0017/с; < 0,045/с; coz < 0,0451 / с.
9.2. Пиромеханизмы
Механизмы, в которых в качестве источника энергии используется пиротехника, получили название пиромеханизмов. Источ
482
9. Компоновка системы соединения и разделения...
ники энергии в пиромеханизмах — пиропатроны, пироустройства на основе удлиненного кумулятивного заряда (УКЗ) и малоимпульсного детонирующего шнура (МДШ). По принципу действия различаются пиропатроны (табл. 9.1) со взрывающимся проволочным мостиком и пиропатроны с нитью накаливания.
Таблица 9.1. Характеристики пиропатронов типа ДП4, применяемых в системах соединения и разделения
Тип пиропатрона Масса навески ВВ, г Давление при срабатывании в камере объемом 5 см3. МПа
ДП4-1 0,55 35,0 ± 7,0
ДП4-2 0,78 47,5 ± 9,5
ДП4-3 1,15 70,0 ± 14,0
ДП4^ 1,50 90,0 ± 18,0
ДП4-5 1,80 И 0,0 ±22,0
Пиропатроны со взрывающимся проволочным мостиком (рис. 9.3) инициируются мощным электрическим импульсом (напряжение до 2500 В) с заданными амплитудой и временем нарастания. При взрыве проволочного мостика происходит детонация заряда взрывчатого вещества. Мостик изготовляется из платиновой проволоки диаметром 0,05 мм.
Пиропатроны со взрывающимся проволочным мостиком имеют следующие преимущества:
• высокую быстроту срабатывания;
• минимальный разброс в срабатывании при использовании нескольких пиропатронов;
• относительную нечувствительность к механическим ударам;
• хорошую тепловую стабильность.
Рис. 9.3. Пиропатрон со взрывающимся проволочным мостиком:
/ — электроды; 2 — уплотнение; 3 — взрывающийся проволочный мостик; 4 — заряд тетронитрита: 5 — гильза; 6— корпус
Недостаток пиропатронов этого типа — высокое напряжение, необходимое для срабатывания.
Пиропатроны с нитью накаливания (рис. 9.4) используют свойство металлической нити раскаляться при прохождении по ней
9.2. Пиромеханизмы
483
электрического тока. Пиропатроны этого типа могут срабатывать в неблагоприятных условиях окружающей среды при температуре 90...425 К. Для увеличения надежности применяют две нити накаливания. Минимальная сила тока, необходимая для 100%-ного срабатывания пиропатронов, составляет 3,5 А.
Рис. 9.4. Пиропатрон с нитью накаливания:
/ — индексационные щели электрического разъема: 2 — нить накаливания;
3 — основной заряд; 4 — мембрана; 5 — герметизирующее уплотнение; 6 — изолирующий диск; 7 — инициирующий заряд;
8 — колодка контактного ввода; 9 —
электроды
Для зажигания пиротехнических смесей используются воспламенители, представляющие промежуточное звено между запалом и основным зарядом. В качестве материала основного заряда применяют металлический титан, цирконий, кремний, сурьму, алюминий, которые смешиваются с окислительными веществами для повышения их чувствительности.
В качестве средств крепления применяют пироболты, пирозамки, пирочеки, пиромеханические устройства, пирогайки и т. п.
Разделяющиеся элементы
конструкции соединяют пироболтами. Существует два конструктивных решения пироболта.
Первое решение основано на том, что при подрыве заряда пиропатрона разрушается корпус болта, ослабленный глубоким надрезом. Чем более хрупкой является сталь, из которой изготовлен болт, тем легче его разрушить. Важное значение имеет место расположения надреза: он должен размещаться в плоскости дна камеры, в которой находится заряд (рис. 9.5).
Рис. 9.5. Разрывной пироболт:
/ — плоскость дна камеры (плоскость разделения)
484
9. Компоновка системы соединения и разделения...
Второе решение заключается в том, что пироболт представляет собой пирозамок (рис. 9.6). При срабатывании пиропатрона 1 под давлением газов происходят перемещения поршня 2 и гильзы 3 в противоположных направлениях. Гильза освобождает сухари 7, фиксирующие болт, которые отбрасываются к стенке корпуса, освобождая болт.
Рис. 9.6. Пирозамок:
/ — пиропатрон; 2 — поршень; 3 — гильза; 4 — сухари; 5 — болт
Одно из распространенных средств крепления — шариковый пирозамок. Существует множество конструктивных решений пирозамка. Конструкция пирозамка характеризуется воспринимаемой им осевой нагрузкой, наличием дублирования и т. п. При осевых нагрузках менее 100 кН применяют шариковые пирозамки (рис. 9.7), в которых основным элементом, воспринимающим нагрузки, является шарик. Если осевые нагрузки, действующие на пирозамок, превышают 100 кН, то вместо шариков используют вкладыши. Такие пирозамки практически не имеют ограничений по осевой нагрузке. Преимущества пирозамков:
• отсутствие осколков, образующихся при срабатывании пиросредств;
• незначительные ударные нагрузки на близлежащие элементы конструкции;
• удерживание газов, выделяющихся при срабатывании пиропатронов, внутри пирозамка, что не загрязняет оборудование.
К недостаткам пирозамков можно отнести их конструктивную сложность и недостаточную надежность.
9.2. Пиромеханизмы
485
Для уменьшения динамических нагрузок, действующих на КА, при срабатывании разрывных пироболтов применяются замки с резьбовыми вкладышами или пирогайки (рис. 9.8).
Рис. 9.7. Шариковый пирозамок:
/ — пиропатрон; 2 — казенник; 3 — корпус; 4 — поршень; 5 — чека: 6 — гайка; 7 — шток; 5, 10 — соединенные детали;
9 — плоскость разделения; // — шарик: 12 — гильза
При срабатывании пиропатрона газы давят на поршень и гильзу, перемещаясь, гильза упирается в корпус, а выжимной корпус раздвигает резьбовой вкладыш и выталкивает шток, и происходит разделение.
Существуют два конструктивных решения пирогаек: обтюрированные и необтюрированные. При срабатывании обтюрированной гайки нет осколков и не выделяются отработанные газы. Они применяются в тех случаях, когда необходимо защитить окружающее оборудование. Если этого требования нет, применяются необтюрированные пирогайки (рис. 9.9).
При срабатывании пиропатрона конический клин перемещается и раздвигает сегменты муфты, удерживающие болт, и выталкивает его.
Кроме пиропатронов в качестве замков применяются устройства, использующие взрывчатое вещество. На рис. 9.10 приведен детонационный замок поршневого типа.
486
9. Компоновка системы соединения и разделения...
б
Рис. 9.8. Пирогайка:
а — закрытое положение; б — открытое положение; / — пиропатрон; 2 — буферная зона; 3 — камера высокого давления; 4 — конструкция; 5 — поворотный на 360 ° газопровод; 6 — корпус; 7 — пружинная чека; 8 — центрирующее устройство; 9 — запирающий поршень; 10 — уплотнительное кольцо; 11 — сепаратор; 12 — разрезной сегмент; 13 — кольцо; 14 — базовый фланец; 15 — освобожденный болт
Рис. 9.9. Необтюрированная пирогайка:
/ — удерживающее кольцо; 2 — конический клин; 3 — пиропатрон; 4 — корпус; 5 — сегмент муфты
При срабатывании заряда взрывчатого вещества поршень движется и разрывает болт, имеющий канавку, ослабляющую сечение болта. При этом происходит выталкивание тела болта. Система применяется в случае установки нескольких замков, соединенных одной детонационной линией. Для передачи детонации используются трансляторы детонации (рис. 9.11).
9.2. Пиромеханизмы
487
Рис. 9.10. Общий вид детонационного замка поршневого типа с ЭВВ:
/ — корпус; 2 — болт разрывной; 3 — поршень; 4 — демпфер;
5 — ЭВВ; 6 — транслятор
Рис. 9.11. Общий вид неразрушаемого транслятора детонации:
/ — наружная трубка; 2 — обмотка нитями СВМ; 3 — гайка; 4 — удлиненный заряд; 5 — запирающий конус; 6 — заряд усилитель; 7 — наконечник
Если по условиям компоновки невозможно использовать линейный пирозамок, применяют уголковый пирозамок (рис. 9.12).
Рис. 9.12. Общий вид детонационного уголкового замка поршневого типа на основе ВВ, срабатывающего от электродетонатора:
/ — корпус; 2 — поршень; 3 — болт разрывной; 4 — гайка; 5 — ЭВВ; 6 — электродетонатор
При разделении кольцевых конструкций (крышки и др.) применяется поршневая система разделения (рис. 9.13). На одной из разделяемых конструкций делается кольцевая проточка, на другой — кольцевой выступ, в собранном состоянии выступ вставляется в проточку, на дно проточки укладывается У КЗ, подрываемый детонатором.
488
9. Компоновка системы соединения и разделения...
От преждевременного разделения детали удерживаются с помощью штифтов, которые перерезаются при срабатывании УКЗ.
Рис. 9.13. Схема поршневой системы разделения на УКЗ:
I — корпус; 2 — УКЗ: 3 — кольцевой поршень; 4 — уплотнительные кольца; 5 — штифт
В применяемых пироустройствах на основе УКЗ (табл. 9.2) и МДШ В В взрывчатое вещество делится на две группы: инициирующие, возбуждающие детонацию или горение, и бризантные, предназначенные для совершения механической работы. Бризантные вещества обладают повышенной, по сравнению с инициирующими, мощностью и пониженной чувствительностью к внешним воздействиям.
Таблица 9.2. Характеристики стандартных УКЗ
Диаметр УКЗ, мм Масса ВВ на погонный метр УКЗ, г/пог. м Толщина пробиваемой преграды, мм
СтЗ АМгб
3,0 5,6 3,5 5,5
4,0 10,4 4,0 7,0
5,0 12,5 5,5 9,0
6,0 22,0 7,0 1!
7,0 32,0 8,0 13
8,0 40,0 8,5 15
9,0 56,0 9,0 16
10,0 60,0 И 18
13,0 89,0 14 24
14,5 132 16 26
16,0 176 18 28
19,0 212 21 34
22,0 300 23 40
Детонационные средства разделения широко используются в ракетно-космической технике благодаря ряду преимуществ:
• простоте конструкции;
• высокой надежности срабатывания;
• малым массе и габаритам;
9.2. Пиромеханизмы
489
• большому количеству генерируемой энергии, приходящейся на единицу массы.
Пироустройства на основе УКЗ (рис. 9.14) и МДШ позволяют выполнить отделение конструкции без специальных промежуточных стыков, так как УКЗ работает по принципу перерезания элементов конструкции кумулятивной струей. На рис. 9.15 приведено типовое сечение УКЗ.
Рис. 9.14. Пироустройства на основе УКЗ:
а — с одним УКЗ: / — накладка; 2 — корпус; 3 — УКЗ; 4 — разрезаемая оболочка; б — с дублированным УКЗ: / — корпус разделяемого отсека; 2 — корпус пироустройства; 3 — УКЗ; 4 — накладка
Рис. 9.15. Типовое сечение УКЗ:
а — цилиндрический шнур; б, в — шнуры с кумулятивной выемкой; / — взрывчатое вещество; 2 — металлическая оболочка; 3 — кумулятивная выемка
1
а б в
В зависимости от мощности УКЗ устанавливается на определенном расстоянии от разрезаемой оболочки, только в этом случае энергия УКЗ используется максимально.
На рис. 9.16 — 9.18 приведены схемы размещения пироустройства на основе УКЗ, разработанного в НПО им. С.А. Лавочкина и предназначенного для разрезания оболочки пенетратора.
2 3 4
Рис. 9.16. Пироустройство на основе дублированного УКЗ:
/ — разрезаемая оболочка; 2 — амортизирующая оболочка; 3 — УКЗ; 4 — корпус
490
9. Компоновка системы соединения и разделения...
Рис. 9.17. Схема размещения пироустройства на основе УКЗ:
1 — корпус спасаемого КА; 2 — УКЗ; 3 — электродетонатор; 4 — кронштейн; 5 — защитное устройство
Рис. 9.18. Конструкция системы разделения крышки исследовательского зонда:
/ — крышка; 2 — электрический кабель; 3 — защитный кожух; 4 — лента; 5 — надувная конструкция; б — электродетонирующее устройство; 7 — УКЗ
9.2. Пиромеханизмы
491
Пироустройства на основе УКЗ имеют такие недостатки, как:
• образование большого количества осколков при разрезании оболочки, что требует установки экранов для их улавливания;
• действие значительных ударных нагрузок на отделяемые части конструкции при срабатывании пироустройства.
Для уменьшения ударных нагрузок, действующих на отделяемые конструкции, возможно применение в пироустройствах МДШ (рис. 9.19 — 9.21, табл. 9.3).
Таблица 9.3. Характеристики стандартных МДШ
Заряд, мм Навеска взрывчатого вещества, г/пог. м Масса погонного метра, г
Наружный диаметр Толщина стенки
1,60 0,280 1,12 11,3
1,60 0,300 1,19 12,6
1,77 0,330 1,56 15,9
1,83 0,350 1,63 16,8
2,00 0,376 2,03 21,1
2,31 0,419 2,30 24,7
2,50 0,474 3,01 32,3
2,70 0,507 3,57 37,7
3,00 0,599 4,51 46,8
В случае применения конструкции, приведенной на рис. 9.20, а. снижаются ударные нагрузки, но сохраняется значительный выброс осколков и газов.
а б
Рис. 9.19. Пироустройства на основе МДШ:
а — отечественное пироустройство на основе МДШ: / — корпус: 2 — полиэтиленовое покрытие; 3 — свинцовая оболочка; 7 — магниево-ториевая пластина; 5 — заряд ВВ; б — пироустройство Super Zip фирмы «Локхид»; 1 — МДШ; 2 — полимерная матрица; 3 — труба
492
9. Компоновка системы соединения и разделения...
Пироустройство, показанное на рис. 9.20, б, состоит из двух зарядов, которые заключены в полимерную матрицу, вставленную в сплющенную оболочку из коррозионностойкой стали. При подрыве оболочка становится круглой и разрушает конструкцию по пазам, нанесенным с двух сторон. Все продукты взрыва остаются в оболочке.
Рис. 9.20. Линейные пироустройства на основе МДШ со сплющенной оболочкой и с одним (а) или двумя (б) зарядами:
I — до разделения; II — после разделения: 7 — МДШ; 2 — накладка
Рис. 9.21. Линейные пироустройства на основе МДШ с одним (а) или двумя (б) зарядами:
I — до разделения; II — после разделения; 7 — накладка; 2 — МДШ
Пироустройства на основе УКЗ и МДШ могут применяться для разделения ступеней, разрезания обтекателей перед сбросом, аварийного вскрытия баков и корпусов двигателей.
9.3. Толкатели, пирочеки и механизмы разрыва коммуникаций 493
9.3. Толкатели, пирочеки и механизмы разрыва коммуникаций
После отделения части КА необходимо отвести на безопасное расстояние от КА, для чего применяют устройства, сообщающие отделяемой части относительную скорость, — толкатели. В зависимости от источника энергии, используемого для придания относительной скорости, толкатели подразделяют на пиротолкатели, функционирующие на энергии пиропатронов или на сжатом газе, и пружинные толкатели, работающие на энергии сжатых
пружин.
Пиротолкатели (рис. 9.22), рассчитанные на создание сил 1,1...50,0 кН, используются в конструкциях, которые требуют размещения мощных средств разделения в небольшом объеме при ограничениях по массе или совмещении пирозамка с пиротолкателем.
Газы, образовавшиеся при подрыве пиропатрона, давят на поршень, который начинает двигаться и срезает чеку, удерживающую поршень в транспортном положении. Продолжая движение, поршень сообщает отделяемой части относительную скорость.
После срабатывания пиропатрона поршень может выходить из корпуса пиротолкателя, при этом происходит выброс газов, что нежелательно особенно на КА, предназначенных для высадки на другие планеты. Существуют пиротолкатели, в которых поршень удерживается в корпусе и служит обтюратором пороховых газов.
На рис. 9.23 приведен вариант
Рис. 9.22. Пиротолкатель:
1 — отделяемая часть конструкции; 2 — чека; 3 — поршень; 7 — цилиндр; 5 — пиропатрон; 6 — корпус КА
компоновки пиротолкателя.
Недостатки пиротолкателей — создание значительных ударных нагрузок и большой разброс толкающей силы относительно расчетной.
494
9. Компоновка системы соединения и разделения...
Рис. 9.23. Установка пиротолкателя:
/ — пиропатрон: 2 — корпус; 3 — пассивный отделяемый блок: 4 — шток; 5 — активный отделяемый блок
Рис. 9.24. Пружинный толкатель:
1 — шток; 2 — корпус; 3 — пружина
В качестве рабочего тела в толкателях возможно применение сжатого газа. Такие толкатели создают меньшие ударные нагрузки и имеют небольшой разброс толкающей силы относительно расчетной. Недостаток этих толкателей — необходимость запаса сжатого газа, что значительно увеличивает массу толкателя.
Пневмотолкатели можно использовать при наличии на борту КА емкостей со сжатым газом, необходимым для других целей (вытеснительная система подачи топлива и т. п.).
Пружинный толкатель (рис. 9.24), получивший наибольшее распространение, может использовать энергию сжатых, растянутых или скрученных пружин. Наиболее широко применяют толкатели, работающие на энергии сжатых пружин, которые обладают высокой надежностью.
Надежность такого толкателя
обеспечивается тем, что при разрушении пружина просаживается на виток, сохраняя свою работоспособность, уменьшается только сила расталкивания. При разрушении растянутые или скрученные пружины теряют свою работоспособность.
9.3. Толкатели, пирочеки и механизмы разрыва коммуникаций 495
Пружинные толкатели обеспечивают мягкое разделение КА и отделяемой части. Достоинство пружинных толкателей — возможность их многократной проверки при предполетной подготовке для установления необходимых параметров.
Пирозамок-толкатель. Для повышения надежности разделения применяют механизмы, объединяющие пирозамок и толкатель (рис. 9.25, 9.26). Эти механизмы обеспечивают жесткое соединение конструкций в процессе наземной эксплуатации, на участке выведения на заданную орбиту, а также надежное разделение после выведения на рабочую орбиту. Пирозамок-толкатель срабатывает при подрыве пиропатрона.
Рис. 9.25. Детонационные замки-толкатели:
а — «толкающий» замок: б — «тянущий» замок: 1 — электродетонатор: 2 — заряд-усилитель: 3 — транслятор детонации: 4 — поршень: 5 — болт: 6 — заряд ВВ: 7 — корпус: 8 — демпфер
Замок с сегментными запирающими элементами используется в том случае, когда шариковые запирающие элементы не удовлетворяют по прочности.
На рис. 9.27 приведен пример установки пирозамка-толкателя.
Реактивные двигатели твердого топлива. При разделении конструкций значительных масс и габаритов (отделение КА от разгонного блока, кресла космонавта и т. п.) применяют реактивные двигатели твердого топлива, к которым предъявляют следующие требования: достаточно большой импульс, незначительное отклонение расчетного импульса от реального и малое время работы. Существуют РДТТ, предназначенные только для разделения и отвода отделяемых конструкций. Применяют две схемы разделения с помощью РДТТ. При первой схеме разделения пассивному телу выда
496
9. Компоновка системы соединения и разделения...
ется тормозной импульс, в этом случае РДТТ устанавливают на отделяемой конструкции. При второй схеме РДТТ размещают на активном теле и придают ему дополнительную скорость.
Рис. 9.26. Пирозамок-толкатель:
а — с сегментыми запирающими элементами: / — корпус; 2 — поршень: 3 — шток; 4 — комплект сегментных вкладышей; 5 — поршень силовой; б — поршень-толкатель; б — с шариковыми запирающими элементами: 7 — поршень; 2 — корпус; 3 — шток; 4 — шарик; 5 — гильза; 6 — демпфер; 7 — плоскость разделения; 8 — КА; 9 — адаптер ракеты космического назначения
У РДТТ есть ряд недостатков:
• значительный разброс параметров, которые существенно зависят от температуры заряда;
• раскаленные газы и несгоревшие частицы топлива, вылетающие из сопла при работе РДТТ, оказывают неблагоприятное воздействие на элементы конструкции КА (происходит их нагрев, оседание копоти на оптике и т. п.).
9.3. Толкатели, пирочеки и механизмы разрыва коммуникаций 497
1 2 3 4 5 6 7
Рис. 9.27. Установка пирозамка-толкателя:
/ — активный блок; 2 — плоскость разделения; 3 — пассивный блок; 4 — вкладыш; 5 — шток; 6 — корпус; 7 — пиропатрон
Для разделения можно использовать и ЖРД, при этом активному телу сообщается дополнительная скорость при помощи маршевой ДУ или рулевых двигателей. Применение ЖРД имеет ряд преимуществ по сравнению с применением РДТТ:
• работа системы соединения и разделения на основных компонентах (горючем и окислительном веществах);
• быстрое достижение скорости, требуемой для разделения;
• хорошая управляемость (стабилизация) после разделения, поскольку ЖРД часто совмещают функции средств разделения и управления движением КА.
Возможно разделение конструкций с использованием газовых сопел, работающих на холодном или горячем газе. В качестве рабочего тела применяют остатки газа в пневмосистемах отделяемой части или газ, вырабатываемый специальными газогенераторами.
Недостатки газовых сопел:
• нестабильность импульса разделения, поскольку остаточное давление в пневмосистемах колеблется в значительных диапазонах значений;
• сложность и сравнительно малая надежность системы соединения и разделения.
Применение газовых сопел иногда обусловлено необходимостью сброса остаточного давления в пневмосистемах и вскрытия баков с остатками криогенных компонентов для предотвращения опасности взрыва блока при их испарении.
498
9. Компоновка системы соединения и разделения...
Пирочеки. Кроме отбрасываемых элементов конструкций на КА имеются конструкции, которые в транспортном положении (под обтекателем) сложены, а в рабочем — раскрыты (антенны, солнечные батареи, штанги с датчиками и т. п.). В транспортном положении их удерживают механизмы, получившие название пирочеки (рис. 9.28).
Рис. 9.28. Пирочека:
1 — поршень со штоком-пальцем; 2 — пиропатрон; 3 — корпус; 4 — седло
На корпусе КА устанавливается проушина, в которую входит ухо, размещенное на раскрывающейся конструкции. В транспортном положении ухо и проушина соединяются пальцем, который вытягивается при срабатывании средства разделения. Средства разделения могут использовать энергию пиропатрона, сжатого газа, тягового электромагнита и т. п. Наибольшее распространение получили пирочеки (рис. 9.29), включающие в себя пиропатрон.
При срабатывании пиропатрона (или двух пиропатронов для надежности) пороховые газы давят на поршень, который, перемещаясь, срезает чеку, удерживающую его в рабочем положении, и вытаскивает шток из отверстия в отделяемой конструкции, освобождая ее.
Недостаток пирочеки — наличие пальца, работающего на срез, что значительно утяжеляет конструкцию по сравнению с конструкцией пирозамка.
Для фиксации раскрывающихся конструкций в рабочем положении используют пирофиксаторы (рис. 9.30).
Кроме механических соединений, требующих разделения при отделении конструкций, существуют коммуникации (кабели, трубопроводы и т. п), которые соединяют отделяемые части. Разрыв этих коммуникаций проводится с помощью пироножа или МДШ.
9.3. Толкатели, пирочеки и механизмы разрыва коммуникаций 499
Рис. 9.29. Пирочека с пиропатроном:
1 — пиропатрон; 2 — поршень со штоком: 3 — седло; 4 — корпус; 5 — удерживаемая конструкция
Рис. 9.30. Общий вид пирофиксаторов:
а — крупногабаритный: / — корпус; 2 — шток: 3 — фиксатор: 4 — поршень;
5 — стержень: 6 — пневмоклапан: 7 — пиропатрон; б — малогабаритный: / — корпус; 2 — поршень; 3 — втулка; 4-крышка; 5 — пиропатрон
Пиронож (рис. 9.31) состоит из стального корпуса, поршня с ножом и наковальни. При срабатывании пиропатрона штифт, удерживающий нож, перерезается. Нож ударяет по наковальне и разрезает кабель или трубопровод. При этом наковальня поглощает энергию двигающегося ножа.
Пиронож (рис. 9.32) состоит из стального корпуса, поршня с ножом и наковальни. При срабатывании пиропатрона штифт (или чека) перерезается.
500
9. Компоновка системы соединения и разделения...
Рис. 9.31. Пиронож:
I — пиропатрон; 2 — поршень с ножом; 3 — труба с наконечником; 4 — наковальня; 5 — кабель: 6 — штифт
Рис. 9.32. Общий вид пироножа:
/ — корпус: 2 — нож: 3 — чека: 4 — наковальня: 5 — пиропатрон; 6 — кабель (труба)
Если перерубать коммуникации нельзя, применяют разрывные платы. На рис. 9.33 показана разрывная электроплата.
Рис. 9.33. Разрывная электроплата:
/ — плоскость разделения; 2 — пружинный толкатель; 3 — механический цанговый замок; 4 — трос; 5 — разрывные электроразъемы
9.4. Требования к компоновке пиромеханизмов
501
Разделение газовых и жидкостных магистралей осуществляется при помощи разрывной гермоплаты (рис. 9.34).
Рис. 9.34. Разрывная гермоплата:
/ — замок; 2 — пружина отделения; 3 — гидроразъем; 4 — пневморазъем; 5 — плоскость разделения
При срабатывании пиропатрона происходит раскрытие шарикового замка, и пружины разделения расталкивают платы, при этом происходит разъединение гидро- и пневморазъемов.
Для обеспечения сборки конструкций, которые впоследствии будут разделяться, и вос
приятия перерезающих сил в полете и при рИСв 935. Направля-транспортировке в местах стыка устанавли- ющий штифт ваются направляющие штифты (рис. 9.35).
В зависимости от действующих сил и технологии изготовления штифты имеют различные размеры (диаметр и длину).
9.4. Требования к компоновке пиромеханизмов
Как правило, современная пиромеханическая система соединения и разделения состоит из нескольких пиромеханизмов, приводимых в действие пиропатронами.
502
9. Компоновка системы соединения и разделения...
Рис. 9.36. Схема подсоединения нескольких одновременно срабатывающих пиромеханизмов:
/ — трубопровод; 2 — пирозамок-
Пиропатроны имеют большой относительный разброс по времени срабатывания и массе газа, образующегося после подрыва; возможны случаи их отказов. Для повышения степени надежности при использовании нескольких одновременно срабатывающих пиромеханизмов рекомендуется проводить их подсоединение по схеме, приведенной на рис. 9.36.
При компоновке пироболты, пиротолкатели и пирозамки следует размещать симметрично, чтобы не вызвать возмущающие моменты, воздействую
толкатель; 3 — коллектор: 4 — пиротехнический генератор
22° 30'
(регулировка толкателей)
щие на активное и пассивное тела (рис. 9.37).
В большинстве случаев разделение осуществляется с отно
сительными линейными скоростями, равными 1,0... 1,5 м/с, и угловыми скоростями, составляющими не более 0,02 с-1. При этих значениях происходит безопасное разделение и восстановление заданного положения КА в пространстве с помощью ДМС.
(место установки втулки)
Рис. 9.37. Схема размещения пирозамков и пиротолкателей на стыке КА и ракеты-носителя:
/ — толкатель; 2 — пирозамок: 3 — БИРС-Э; 4 — переходная система;
5 — ось пирозамка; б — втулка: 7 — шпангоут плоскости стыка; 8 — плоскость разделения КА и плоскости стыка; 9 — шпангоут КА
9.5. Адаптеры системы соединения и разделения КА и PH
503
На рис. 9.38 представлена конструктивная схема системы разделения торового отсека с использованием энергии пирозарядов.
Рис. 9.38. Схема разделения крышки и торового контейнера:
/ — транслятор детонации; 2 — замок детонационный; 3 — замок с детонатором
Разделение должно произойти без импульсивного воздействия на конструкцию КА разделение осуществляется при помощи элементов, содержащих термитный пиросостав и вставки из легкоплавкого материала.
9.5. Адаптеры системы соединения и разделения космического аппарата и ракеты-носителя
Механическое соединение КА с ракетой-носителем или разгонным блоком производится с помощью адаптера, в качестве которого могут использоваться стержневые фермы и конические оболочки. Более сложные конструкции, предназначенные для крепления нескольких КА при кластерном запуске, называются диспенсерами полезной нагрузки.
В настоящее время для каждой ракеты-носителя существует несколько стандартных адаптеров (рис. 9.39), служащих для вывода различных полезных нагрузок.
Адаптеры SCA (рис. 9.40), разработанные фирмой SAAB Ericsson Space, используются в ракетах-носителях разных типов, включая «Союз», «Протон», «Зенит» и «Рокот». Характеристики адаптеров SCA фирмы SAAB Ericsson Space приведены ниже.
504
9. Компоновка системы соединения и разделения...
Z?KA, ММ ... D? бл, мм.. Н, мм.....
Масса, кг.
SCA 937 SCA 1194 SCA 1166
945,3 1 194 1 666
1 920 1 920 1 920
504 369 400
49 58 60
Примечание. ОКА — диаметр опорного шпангоута КА; £)р бя — диаметр опорного шпангоута разгонного блока; Н— высота адаптера.
Рис. 9.39. Адаптер ракеты-носителя «Зенит-28ЬВ»: / — пироболт; 2 — ступень ракеты-носителя; 3 — КА
На рис. 9.41 приведено сечение опорного шпангоута адаптера SCA, на рис. 9.42 — профиль ответного опорного шпангоута, устанавливаемого на КА.
Рис. 9.40. Адаптер SCA:
1 — плоскость стыка с КА; 2 — плоскость стыка с разгонным блоком
Космический аппарат крепится к адаптеру как при помощи пироболтов, так и с использованием фланцевого соединения и ленточного хомута. Кроме элементов крепления КА, на адаптере устанавливают элементы системы соединения и разделения
9.5. Адаптеры системы соединения и разделения КА и PH
505
(пружинные толкатели и пиротолкатели (рис. 9.43), отрывные электроразъемы и др.).
01184,28 ?0,зо
01144
01215 +0ДЗ
© 0,10
L 0,05
О 0,30
О 0,30
01209,17+0’13
+0,13 о
Рис. 9.41. Сечение опорного шпангоута адаптера SCA: / — плоскость разделения
Применение пироболтов для крепления КА к ракете-носителю приводит к возникновению ударных нагрузок, достигающие 4000 g при разделении, поэтому расположение чувствительной аппаратуры на КА вблизи адаптера нежелательно. Для снижения ударных нагрузок до 1000 g используют крепление КА к адаптеру при помощи ленточного хомута, стянутого одним пирозамком. Лента имеет коробчатое сечение и плотно охватывает состыкованные фланцы шпангоутов
506
9. Компоновка системы соединения и разделения...
Рис. 9.42. Профиль ответного опорного шпангоута, устанавливаемого на КА: / — плоскость разделения
Рис. 9.43. Установка пиротолкателя на стыке КА и ракеты-носителя:
1 — корпус; 2 — упор; 3, 11 — гайки; 4 — поршень; 5 — втулка; 6 — сухарь: 7 — болт; 8 — пружина увода; 9 — ловитель; 10 — опора; 11 — пружина; 12 — шпангоут КА; 13 — шпангоут плоскости стыка; I — плоскость разделения КА
9.5. Адаптеры системы соединения и разделения КА и PH
507
КА и адаптера, препятствуя их разъединению (рис. 9.44, а). После срабатывания пирозамка лента сбрасывается со состыковочных фланцев посредством пружинных экстракторов, и происходит отделение КА (рис. 9.44, б). Сброшенная лента улавливается специальными фиксаторами. Размещение ленточного хомута на адаптере SCA показано на рис. 9.45.
Рис. 9.44. Схема крепления КА к адаптеру при помощи ленточного хомута:
а — лента охватывает состыкованные фланцы шпангоутов КА и адаптера: б — сброс ленты после срабатывания пирозамка и отделение КА; / — лента; 2 — адаптер; 3 — КА
После выхода на целевую орбиту КА должен быть отделен от разгонного блока или последней ступени ракеты-носителя, для чего используют пружинные толкатели или пиротолкатели, обеспечивающие КА заданные линейную и угловую скорости. Точность ориентации КА при разделении во многом определяется инерционно-массовыми характеристиками КА.
Для придания КА вращения относительно продольной оси X применяют толкатели, установленные под углом к продольной оси разгонного блока, либо проводится предварительная закрутка связки КА и разгонного блока. Для придания КА вращения относительно оси Y или Z используют два набора толкателей с разными импульсными характеристиками. Если требуется выполнить разделение КА с поддержанием заданной трехосной ориентации, то применяют толкатели с одинаковыми импульсными характеристиками. Например, на адаптере SCA пружинные толкатели находятся
508
9. Компоновка системы соединения и разделения...
Рис. 9.45. Размещение ленточного хомута на адаптере SCA:
/ — ловушка ленты; 2 — пружинный толкатель; 3 — лента; 4 — фиксатор ленты: 5 — электроразъемы; 6 — экстрактор ленты; 7 — пирозамок
внутри конического адаптера (см. рис. 9.45). Диаметр штока толкателей 8 мм. Характеристики пружинных толкателей для адаптера SCA приведены ниже.
Ход Ход штока, Начальная сила, Конечная сила,
мм Н Н
Минимальный.......... 7,5 ±0,3 1 500±20 1 365 ±20
Максимальный......... 77,7 ±0,3 1 500 ±20 100 ±20
Кинематические параметры разделения КА и разгонного блока приведены в табл. 9.4.
9.5. Адаптеры системы соединения и разделения КА и PH
509
Таблица 9.4. Кинематические параметры разделения КА и разгонного блока
Кинематический параметр Относительная скорость разделения (вдоль оси X). м/с Угловая скорость вращения вокруг осей, град/с При разделении КА без вращения
X Уи7 точность ориентации по трем осям, град максимальная угловая скорость по трем осям, град/с
DM-SL DM-SLB «Рокот» «Фрегат» «Протон» «Стрела» « Зенит-2 SL В» «Старт-1» «Ангара» Раз о,з 0,3 0,3...1,0 Рак Более 0,3 Менее 0,6 Более 2,8 (0,7...0,15) ±10% 0,6 сгонные С 5,0 ета-носг Менее 9,0 2,5 Менее 1,0 3,0 i.ioku 2+0,5 тель 6±0,8 <2,5 ±1,3 ±2,5 ±2,5 ±2,5 ±5,0 ±2,0 ±0,6 ±0,5 ±1,5 ±1,8 ±2,5 ±1,5
Пружинные толкатели адаптера ракеты-носителя «Старт-1» развивают силу 1 060± 10 Н при ходе штока 30 мм, ракеты-носителя «Стрела» — силу 120 Н для КА массой до 800 кг и силу 200 Н для КА массой до 2000 кг.
10. ОСНОВЫ АВТОМАТИЗАЦИИ КОМПОНОВКИ КОСМИЧЕСКИХ АППАРАТОВ
10.1. Цели и задачи автоматизации компоновки космических аппаратов
1 0.1.1. Цели автоматизации
Для ускорения разработки вариантов компоновки КА, а также для повышения точности и качества каждого варианта используются компьютерные технологии. Важность автоматизации компоновки КА следует из необходимости сокращения ее сроков при высоких требованиях к качеству.
Комплексы программ, применяемые при решении задач автоматизации компоновки КА, относятся к системам автоматизированного проектирования (САПР).
Средства геометрического моделирования, имеющиеся в САПР, обеспечивают высокую точность расчета положения тел в пространстве. Средства математического моделирования физических процессов, встроенные в САПР, позволяют оценивать взаимовлияние оборудования. За счет применения указанных средств можно существенно повысить качество компоновки КА.
Средства САПР обеспечивают высокую скорость получения вариантов компоновки КА при относительно низких финансовых затратах. Ускорение процесса происходит за счет организации и накопления баз данных электронных геометрических моделей (ЭГМ), позволяющих многократно применять уже созданные модели стандартных изделий (нормалей), унифицированных узлов и пр. При использовании САПР можно эффективно переносить
10.1. Цели и задачи автоматизации компоновки...
511
удачные технические решения с одной модели на другую (например, разработка некоторых классов компоновок отдельных узлов КА может быть полностью проведена в автоматическом режиме, т. е. без участия человека).
Автоматизация компоновки КА наиболее эффективна в случае построения единой системы организации информации, касающейся разрабатываемого КА, его прототипов и аналогов, а также информации о предприятиях и фирмах, которые составляют кооперацию при проектировании, изготовлении и эксплуатации КА. Поэтому в настоящее время компьютерные технологии компоновки КА — это часть информационных технологий владения и поддержки жизненного цикла изделия, сокращенно называемых CALS-технологиями (Computer-aided Acquisition and Life cycle Support).
Цель применения CALS-технологий — повышение качества работ на протяжении всего жизненного цикла КА, в том числе на этапе его компоновки. Использование CALS-технологий позволяет:
• обеспечить информационную поддержку проекта путем организации многопользовательской базы данных, хранящей информацию о КА в электронной форме;
• осуществлять в реальном времени электронный обмен данными, касающимися КА, между всеми организациями, которые задействованы в жизненном цикле и таким образом вести параллельное проектирование КА;
• проводить эффективную кооперацию предприятий-смежников с использованием компьютерных сетей и интернет-технологий;
• сократить время и суммарную стоимость разработки и эксплуатации КА за счет увеличения скорости обмена информацией между разработчиками;
• проверять конструкторские решения на самых ранних этапах проектирования КА.
1 0.1.2. Задачи автоматизации
Таким образом, первая задача компьютерных технологий компоновки КА заключается в построении информационной среды для управления технической информацией, основанной на международных стандартах.
512 10. Основы автоматизации компоновки космических аппаратов
Внедрение компьютерной техники ни в коем случае не отменяет участия человека в процессе компоновки КА. С учетом множества рассматриваемых факторов современные САПР не дают возможности полностью автоматизировать процессы формализации и решения задач компоновки КА. Для анализа информации и принятия решений требуется привлечение опыта человека (конструктора). Поэтому второй задачей автоматизации компоновки КА является организация интерактивного диалогового проектирования с распределением функций между человеком и САПР.
Процесс компоновки КА имеет итерационный характер и тесно связан с процессами проектирования бортового оборудования и процессами уточнения целевых задач, для решения которых создается КА. Дополнительные факторы, влияющие на процесс компоновки, могут проявляться как вводные, которые возникают на каждом этапе проектирования. Контроль процесса проектирования человеком позволяет учесть при компоновке эти факторы. Способность к творческому решению задачи с использованием ассоциативного поиска дает возможность человеку находить в процессе компоновки КА нестандартные технические решения, не заложенные изначально в программу поиска.
Применение САПР позволяет максимально использовать при компоновке КА известную информацию о существующих прототипах.
Функции САПР следующие:
• решение геометрических задач размещения и интерференции компонентов при компоновке КА;
• хранение информации и управление базами данных;
• поддержка процесса формализации математической задачи компоновки отсека при помощи языков программирования высокого уровня, экспертных систем, баз знаний и технологии Data mining (добычи данных);
• математическое моделирование взаимовлияния компонуемых приборов;
• численное решение формализованных математических задач оптимизации, получение количественных значений свойств компонуемых элементов;
• документирование результатов процесса компоновки: выпуск чертежей, схем, отчетов и расчетно-пояснительных записок в электронной форме.
10.2. Система компьютерных технологий компоновки... 513
При работе с САПР человек решает задачи:
• концептуализации проекта компоновки, т. е. постановки целей и задач в зависимости от имеющихся исходных данных и тщательного анализа базы данных компоновок прототипов КА;
• разработки архитектуры КА и его отсеков;
• формализации компоновки (определения целевых функций, ограничений, варьируемых параметров и методов решения задачи);
• оценки результатов, полученных при помощи САПР, внесение изменений в ТЗ;
• принятия решений.
Интерактивное взаимодействие человека с САПР позволяет корректировать функциональные требования и совершенствовать математические модели.
10.2. Система компьютерных технологий компоновки космических аппаратов
Для автоматизации компоновки КА на основе CALS-техноло-гий строится система компьютерных технологий компоновки КА (СКТК), которая состоит:
• из базы данных, хранящей исходные документы и результаты компоновок;
• средств удаленного доступа к базам данных на основе локальных вычислительных сетей или интернет-технологий;
• автоматизированных рабочих мест, оснащенных элементами САПР.
Основной структурный элемент организации информации, используемый при автоматизации компоновки КА, — ЭГМ.
Электронной геометрической моделью КА называется компьютерная база данных, содержащая информацию о форме, размерах и других свойствах КА, которые зависят от его формы и размеров.
Электронная геометрическая модель КА, созданная при помощи САПР, используется для проведения расчетов взаимовлияния оборудования, оценки технологических и эксплуатационных свойств данного варианта компоновки. После проведения компоновки ЭГМ КА применяется на всех этапах жизненного цикла КА: от разработки компьютерной графики для рекламы изделия до создания эксплуатационной документации, учебных материалов и тренажеров (рис. 10.1). Технологии виртуальной реальности поз
514 10. Основы автоматизации компоновки космических аппаратов
воляют получать объемные изображения ЭГМ. На основе ЭГМ с использованием технологии быстрого прототипирования (объемной печати) могут быть автоматически изготовлены из пластика высокоточные макеты элементов конструкции КА.
Исходные данные для автоматизации компоновки КА — базы данных прототипов, нормалей, бортового оборудования и электронной документации.
Рис. 10.1. Области использования ЭГМ:
ЦУП — центр управления полетами
Базы данных прототипов содержат информацию о компоновках существующих типов КА, ЭГМ узлов и агрегатов, отработанных в эксплуатации (например, база данных прототипов может содержать ЭГМ стыковочных узлов, узлов двигателей стабилизации и ориентации, иллюминаторов и т. п.). Эффективность использования СКТК определяется объемом баз данных прототипов и частотой их пополнения. Пополнение этих баз данных проводится разработчиками узлов и агрегатов, а также сотрудниками бюро научно-технической информации. Базу данных прототипов также автоматически пополняют все компоновки, полученные с помощью СКТК.
Базы данных нормалей содержат ЭГМ стандартных изделий (крепежных деталей, уплотнений, арматуры трубопроводов, элек
10.2. Система компьютерных технологий компоновки... 515
троразъемов и т. д.), используемых в конструкции КА. Как правило, базы данных нормалей, соответствующих ГОСТам, создают и поддерживают предприятия — разработчики САПР.
Базы данных бортового оборудования включают в себя ЭГМ приборов, аппаратуры и элементов конструкций проектируемого КА. Пополнение этих баз данных обычно осуществляется непосредственно разработчиками оборудования.
Базы данных электронной документации содержат характеристики приборов и КА в целом: циклограммы работы, кривые энергопотребления, таблицы точности и схемы связей (электрических, гидравлических и пр.) между приборами, размещаемыми на борту КА. Это могут быть текстовые и графические документы, электронные таблицы или компьютерные модели приборов.
Автоматизированные рабочие места СКТК оборудуются компьютерами — рабочими станциями, устройствами ввода и вывода информации (планшетами, сканерами, принтерами, плоттерами и т. п.), а также средствами для использования технологий быстрого прототипирования (3 D-принтерами) и виртуальной реальности (например, специальными очками и стереоэкранами). Состав аппаратного обеспечения конкретного автоматизированного рабочего места СКТК зависит от типа решаемых задач. В минимальной конфигурации автоматизированное рабочее место обычно состоит из персонального компьютера, удовлетворяющего требованиям используемого программного обеспечения.
Средства удаленного доступа СКТК позволяют пользоваться описанными выше базами данных коллективу разработчиков со своих автоматизированных рабочих мест. Такие средства включают в себя программное и аппаратное обеспечение, необходимое для организации вычислительных сетей. При этом осуществляются контроль и защита информации от несанкционированного доступа и изменения, разграничение доступа к данным и организация параллельного проектирования, т. е. возможность редактирования одного электронного документа несколькими разработчиками.
В СКТК КА применяются САПР на базе различных CALS-техно-логий, среди которых три наиболее используемые:
• CAD (Computer-Aided Design) — конструкторские САПР;
• САЕ (Computer-Aided Engineering) — инженерные САПР;
• САМ (Computer-Aided Manufacturing) — технологические САПР.
516 10. Основы автоматизации компоновки космических аппаратов
10.2.1. Конструкторские САПР
Конструкторские САПР, или CAD-системы, являются основными при проведении компоновки КА, поскольку предназначены для формирования внешнего вида изделия, создания ЭГМ и выпуска на их основе конструкторской документации. Такие системы позволяют:
• проводить математическое моделирование геометрии (т. е. формы и размеров) компоновочных элементов и их взаимного расположения в заданной системе координат как в интерактивном, так и в автоматическом режимах;
• осуществлять оптимизацию формы, размеров и допусков ЭГМ, обеспечивая выполнение требований к размещению оборудования;
• моделировать структуру компоновки, т. е. создавать базы данных, хранящие информацию о составе сборочных единиц, на основе которых автоматически формируются различные спецификации, ведомости нормалей и покупных изделий;
• вычислять инерционно-массовые характеристики элементов, что дает возможность автоматизировать процесс инерционномассовой компоновки КА;
• выпускать в электронном виде чертежи компоновок, полученных на основе ЭГМ;
• создавать различные расчетно-пояснительные записки и другую документацию в электронном виде;
• проводить параллельную компоновку КА группой конструкторов с использованием средств удаленного доступа СКТК и ин-тернет-технологий;
• создавать средствами компьютерной графики и технологии виртуальной реальности изображения вариантов компоновки КА для анализа и оценки технических решений.
10.2.2. Инженерные САПР
Инженерные САПР, или CAE-системы, предназначены для проведения численными методами математического моделирования разнообразных расчетов (прочностных, динамических, тепловых, аэродинамических и др.). Эти системы обеспечивают выполнение требований к взаимовлиянию бортового оборудования при
70.2. Система компьютерных технологий компоновки... 517
компоновке КА. В качестве исходных данных CAE-системы используют ЭГМ, созданные в CAD-системах. На основе таких ЭГМ строятся схемы, конечно-элементные или конечно-разностные сетки, используемые для проведения расчетов и оптимизации режимов работы компонуемых элементов. Результаты расчетов часто отображаются непосредственно на ЭГМ КА в виде полей напряжений, деформаций, температурных и других полей, что позволяет визуализировать области возникновения нежелательного взаимовлияния компонуемых элементов. На основе полученных результатов осуществляется выпуск в электронном виде отчетов и расчетно-пояснительных записок.
10.2.3. Технологические САПР
Технологические САПР, или CAM-системы, служат для разработки и управления технологическими процессами, проектирования оснастки и выпуска необходимой технологической документации на основе ЭГМ изделия. В настоящее время наиболее распространенными функциями CAM-систем являются:
• создание программ обработки деталей для станков и автоматической сборки для роботов;
• управление прогрессом изготовления по ЭГМ деталей ЭГМ различной оснастки (например, стапелей);
• разработка программ автоматического контроля изделий на координатно-измерительных машинах.
Использование CAM-систем в процессе автоматизации компоновки КА позволяют на самых ранних этапах его проектирования анализировать затраты на изготовление и испытания различных вариантов. Такой подход дает возможность получать компоновки, обладающие наилучшей технологичностью в соответствии с критериями, указанными в гл. 2.
Современные САПР, используемые для организации интерактивного диалогового проектирования КА, представляют собой системы управления базами данных ЭГМ. Основные элементы человеко-машинного интерфейса САПР рассмотрим на примере интерфейса САПР SolidWorks (рис. 10.2).
Интерфейс САПР SolidWorks включает в себя стандартное окно приложения операционной системы, панели инструментов и окна открытых файлов, называемые окнами документов. Каждое окно документа состоит из графической области, где визуализиру
518 10. Основы автоматизации компоновки космических аппаратов
ется геометрия ЭГМ, и области, в которой отражаются структура и элементы базы данных ЭГМ.
Графическая область окна дает возможность конструктору проводить компоновку в наиболее наглядной форме, изучать полученную ЭГМ компонуемого узла с разных ракурсов, строить разрезы и сечения, визуализировать зоны пересечения тел и т. п.
Рис. 10.2. Интерфейс САПР SolidWorks:
/ — строка меню; 2 — панели инструментов; 3 — окно приложения; 4 — окно документа; 5 — база данных объектов; 6 — графическая область:
7 — область браузера объектов
В процессе компоновки КА часто требуется управлять не только внешним видом ЭГМ, но и структурой базы данных, поэтому использование только графической области окна при создании ЭГМ КА недостаточно. При автоматизации компоновки непосредственная работа с базой данных ЭГМ происходит с помощью специального элемента интерфейса — браузера объектов, позволяющего редактировать параметры и взаимосвязи ЭГМ.
Построение оптимальной структуры базы данных ЭГМ, учитывающей возможности и ограничения конкретной САПР, во многом
10.3. Принципы автоматизации компоновки космических аппаратов 519
определяется опытом и квалификацией специалиста СКТК. ЭГМ КА, построенная на основе оптимально организованной базы данных, дает существенный выигрыш в использовании ресурсов компьютера.
Для увеличения эффективности автоматизации компоновки КА необходимо знать основные принципы построения и этапы создания ЭГМ.
10.3. Принципы автоматизации компоновки космических аппаратов
10.3.1. Электронные геометрические модели
Информация в базе данных ЭГМ КА (рис. 10.3) хранится в виде структурных единиц, называемых геометрическими элементами. Геометрический элемент описывается математическим аппаратом аналитической геометрии и обладает набором свойств (например, свойства точки — ее координаты в системе координат ЭГМ). Геометрические элементы могут быть как простыми, так и составными, т. е. образованными из множества простых элементов.
Геометрические элементы, которые используются в процессе создания ЭГМ КА в качестве базовых (например, осевые линии, базовые плоскости и поверхности, опорные точки, системы координат), называются вспомогательной геометрией. Совокупность геометрических элементов, образующих форму КА, называется основной геометрией ЭГМ.
В базе данных ЭГМ информация организована в виде иерархии геометрических элементов, построенной по принципу родитель — потомок. Каждый вновь создаваемый элемент основан как минимум на одном, а чаще на нескольких созданных ранее геометрических элементах. Так, например, геометрический элемент «окружность» создается на основе элемента «плоскость» вспомогательной геометрии. В этом случае элемент «плоскость» выступает в роли родителя, а элемент «окружность» — в роли потомка. В свою очередь геометрический элемент «цилиндр» создается с использованием элемента «окружность» в качестве контура образующей, т. е. элемент «цилиндр» является потомком элемента «окружность», а элемент «плоскость» — общим родителем для элемента «окружность» и для созданного на ее основе элемента «цилиндр». В качестве общего родителя всех элементов выступает базовая система координат ЭГМ.
520 10. Основы автоматизации компоновки космических аппаратов
Электронная геометрическая модель КА
Геометрия КА
Форма и размеры отсеков, бортового оборудования и их элементов конструкции
Вспомогательная геометрия
Оси, базовые плоскости и поверхности, опорные точки, системы координат
Геометрический элемент
Базовая система координат КА
Атрибуты модели КА
Материал шпангоута
Рис. 10.3. Пример общей структуры базы данных ЭГМ КА
Кроме геометрических элементов в базе данных ЭГМ хранятся ее атрибуты (см. рис. 10.3), содержащие обозначения, параметры отображения трехмерных тел на плоском экране монитора, информация о физических свойствах материала, комментарии разработчиков, технические условия и другие данные, касающиеся КА.
По характеру используемых геометрических элементов все ЭГМ подразделяются на три типа: каркасные, поверхностные и твердотельные. В СКТК используются все указанные типы ЭГМ.
В каркасной ЭГМ в качестве геометрических элементов применяются точки, прямолинейные отрезки и кривые. В каркасной ЭГМ форма КА представляется либо набором сечений, связанных образующими кривыми (рис. 10.4), либо сеткой, аппроксимирующей поверхность при помощи множества отрезков, которые соединяют узлы сетки (рис. 10.5).
Недостаток каркасной ЭГМ — отсутствие однозначной информации о принадлежности к ЭГМ точек, расположенных между образующими кривыми или линиями сетки. Данная информация не всегда может быть получена интерполяцией кривых, поскольку
10.3. Принципы автоматизации компоновки космических аппаратов 521
каркасная ЭГМ не содержит информации об ориентации и о видимости граней, натянутых на каркас. Это создает большие трудности как при расчетах интерференции (взаимного пересечения) геометрических элементов, так и при отображении ЭГМ, поскольку
Рис. 10.4. Эскиз компоновки агрегатного отсека КА (я) и каркасная ЭГМ компоновки в разных ракурсах (б), созданная с использованием набора сечений и образующих кривых:
1 — ЖРД; 2 — оболочка; 3 — бак; 4 — образующие оболочки; 5 — образующие бака; 6 — контур сопла ЖРД
522 10. Основы автоматизации компоновки космических аппаратов
проекция каркаса на плоскость экрана сложна для визуального восприятия (см. рис. 10.4). На проекции сложно отличить видимые грани геометрической формы от скрытых (невидимых граней). Низкая точность аппроксимации поверхности сетками определяет трудности, возникающие при вычислении инерционно-массовых и других физических характеристик тел сложной формы.
Рис. 10.5. Каркасная ЭГМ приборного отсека КА, созданная с использованием сетки
Однако каркасная ЭГМ обеспечивает наивысшую скорость компьютерной обработки, поскольку содержит минимально необходимую информацию о форме и размерах изделия. Представление поверхности при помощи сетки позволяет легко адаптировать ЭГМ к расчетам в CAE-системах, например методом конечных элементов.
В поверхностной ЭГМ геометрические элементы задаются набором криволинейных поверхностей и плоских граней (рис. 10.6). Информация, которую содержит поверхностная ЭГМ, позволяет однозначно определить положение любой точки на поверхности тела. Это дает возможность рассчитывать интерференцию геометрических элементов и строить линии пересечения поверхностей тел. Информация позволяет с помощью средств компьютерной графики получать качественные изображения компоновочных элементов, что делает процесс разработки наглядным, существенно облегчая работу конструктора.
Как и каркасная ЭГМ, поверхностная ЭГМ не позволяет однозначно решить задачу о принадлежности телу произвольной точки,
10.3. Принципы автоматизации компоновки космических аппаратов 523
лежащей вне поверхности. Этот тип ЭГМ применяется при компоновке КА для различных вспомогательных построений, например, для задания теоретических обводов корпуса аэрокосмической системы, задания зоны допустимого размещения приборов в отсеке КА и т. д.
Рис. 10.6. Представление элементов конструкции КА с помощью поверхностных ЭГМ: подкрепленной панели обшивки (а) и шпангоута (б)
Наиболее совершенными являются твердотельные ЭГМ, поскольку в них используются геометрические элементы, однозначно определяющие принадлежность телу каждой точки его объема, что дает возможность, например, корректно строить разрезы (рис. 10.7) и сечения моделируемых изделий.
Недостаток твердотельных ЭГМ — их сложность. Большое количество информации, содержащейся в базе данных твердотельной ЭГМ, требует распределения и хранения в виде отдельных файлов. Современные системы твердотельного моделирования включают в себя три основных типа файлов (рис. 10.8):
1) файлы деталей, содержащие информацию о геометрии твердотельных ЭГМ;
2) файлы сборочных единиц с информацией о взаимном положении и взаимосвязях между отдельными компонентами в узле и элементах, общих для нескольких собранных деталей (например, крепежное отверстие, проходящее через несколько деталей, или сварной шов);
3) файлы электронных чертежей, которые содержат информацию о проекциях твердотельных ЭГМ (деталей и сборочных единиц) на плоскость, а также необходимые по ГОСТам элементы оформления конструкторской документации (основная надпись, размеры, допуски, шероховатости и пр.).
524 10. Основы автоматизации компоновки космических аппаратов
Рис. 10.7. Разрез твердотельной ЭГМ агрегатного отсека КА (на выносных видах показаны сечения элементов, автоматически построенные при отображении разреза на основании информации о распределении материала в ЭГМ):
1 — оболочка; 2 — бак; 3 — ЖРД
Рис. 10.8. Основные типы файлов на примере модели отсека КА
Разделение твердотельной ЭГМ на файлы позволяет:
• рационально организовать структуру базы данных ЭГМ в компьютере и исключить дублирование информации;
• экономить вычислительные мощности компьютеров при работе с ЭГМ;
10.3. Принципы автоматизации компоновки космических аппаратов 525
• создавать библиотеки унифицированных элементов ЭГМ путем организации хранилищ файлов;
• организовать параллельную работу с ЭГМ для многих пользователей через интернет или локальную компьютерную сеть;
• повысить надежность хранения данных и устойчивость ЭГМ к возможным отказам программного и аппаратного обеспечения САПР;
• интегрировать базу данных ЭГМ с другими CALS-техно-логиями.
Твердотельное моделирование используется во всех современных системах САПР, так как позволяет описывать параметры сплошной среды, из которой сделан моделируемый объект, и, в частности, значительно точнее рассчитывать инерционномассовые характеристики и вычислять интерференцию компонентов.
10.3.2. Параметрическая компоновка КА
Основа методологии автоматизации компоновки с помощью СКТК — параметризация ЭГМ, которая подразумевает включение в атрибуты ЭГМ взаимосвязь между элементами ЭГМ.
Принципы параметризации можно пояснить на простейшем примере. Пусть компоновка КА предусматривает наличие двух отверстий, предназначенных для крепления агрегата к корпусу КА. В базе данных ЭГМ КА им соответствуют два геометрических элемента с именами «Отверстие!» и «Отверстие?». Для каждого отверстия в базе данных хранится свойство «диаметр отверстия», которое обозначим как «Отверстие! .Диаметр» и «Отверстие?. Диаметр».
Если параметризация не используется, то свойства независимы: диаметр каждого отверстия необходимо задавать отдельно. Когда требуется сделать диаметры отверстий равными, конструктор вводит два раза в компьютер одинаковое число. При необходимости изменения диаметра одного из отверстий конструктору следует помнить о равенстве диаметров и следить за изменением свойств у каждого отверстия.
При использовании параметризации в базу данных ЭГМ добавляется специальный атрибут — параметрическая взаимосвязь
526 10. Основы автоматизации компоновки космических аппаратов
«равенство» между свойствами объектов: «Отверстие!.Диаметр = = Отверстие2. Диаметр».
В этом случае для изменения свойств конструктору необходимо вручную изменить диаметр только одного отверстия. Наличие взаимосвязи приведет к автоматическому изменению диаметра другого отверстия. Пока существует параметрическая взаимосвязь, диаметры отверстий в ЭГМ будут оставаться равными. Для двух крепежных отверстий экономия времени, которую обеспечивает параметризация, невелика. Но если в ЭГМ есть хотя бы десять одинаковых отверстий, то экономия времени при изменении их диаметров будет весьма существенной. В случае параметрической взаимосвязи отношения между геометрическими элементами сохраняются при редактировании до тех пор, пока взаимосвязь не будет удалена из базы данных.
Параметрические взаимосвязи можно подразделить на два класса: явные и неявные.
Явные параметрические взаимосвязи, непосредственно определяющие параметры, бывают двух видов:
• управляющие размеры — специальные атрибуты ЭГМ, которые задают абсолютные значения расстояний, углов, диаметров геометрии ЭГМ;
• математические выражения (формулы) — атрибуты, которые устанавливают функциональные зависимости между свойствами объектов, атрибутами ЭГМ и управляющими размерами. Например, диаметры сферических баков горючего и окислителя могут быть вычислены по известной массе топлива, массовым плотностям компонентов и стехиометрическому коэффициенту; на основе заданного объема и диаметра цилиндрического отсека также может быть найдена его длина.
При параметризации ЭГМ в формулах можно использовать программы, написанные пользователем на языке программирования высокого уровня. При автоматизации компоновки с помощью таких программ возможно решение частных математических задач компоновки, например решение задачи обеспечения заданной центровки КА.
Неявные параметрические взаимосвязи (табл. 10.1) определяют геометрические отношения, задавая взаимное расположение объектов.
10.3. Принципы автоматизации компоновки космических аппаратов 527
Таблица 10.1. Примеры неявных параметрических взаимосвязей
Наименование Описание взаимосвязи
«Равенство» «Совпадение» «Коллинеарность» «Горизонтальность» «Вертикальность» Равные длины отрезков, диаметры окружностей и т. д. Совпадение двух точек или точки и линии (кривой) Отрезки находятся на одной линии Отрезок горизонтален в текущей системе координат Отрезок вертикален в текущей системе координат
В качестве примера рассмотрим один из возможных вариантов задания параметрических взаимосвязей в каркасной ЭГМ профиля сечения лонжерона (рис. 10.9), где явные взаимосвязи заданы управляющими размерами, а неявные обозначены словами. Каркасная ЭГМ на рис. 10.9 полностью определена взаимосвязями.
Рис. 10.9. Вариант задания параметрических взаимосвязей в каркасной ЭГМ профиля сечения лонжерона:
/ — точка начала координат; 2 — контур профиля; 3 — ось
528 10. Основы автоматизации компоновки космических аппаратов
Наличие параметрических взаимосвязей — важнейшее преимущество САПР. Применение взаимосвязей позволяет создавать сложные компоновки, зависящие от небольшого числа параметров, что снижает размерность задачи и обеспечивает эффективную формализацию задачи компоновки. Поскольку число параметров значительно меньше числа геометрических элементов, из которых состоит ЭГМ, выигрыш во времени при редактировании вариантов компоновки получается существенный.
10.3.3. Способы построения ЭГМ
При работе с СКТК КА необходимо знать особенности построения ЭГМ деталей и сборочных единиц, а также выпуска электронных чертежей.
Построение ЭГМ детали компонуемого узла заключается в последовательном выполнении операций по созданию и редактированию геометрических элементов в базе данных ЭГМ. При этом в графической области САПР (см. рис. 10.2) в соответствии со свойствами и структурой объектов визуализируется вид моделируемой детали.
Электронная геометрическая модель детали включает в себя вспомогательную геометрию, каркасные, поверхностные и твердотельные ЭГМ (см. рис. 10.3).
К элементам вспомогательной геометрии относятся точки, оси, плоскости и системы координат, с помощью которых организуется «виртуальное пространство» модели, в котором будут размещаться другие геометрические элементы.
Каркасные ЭГМ задают контуры направляющих и образующих, на основе которых впоследствии параллельным переносом или вращением формируются поверхностные и твердотельные ЭГМ.
Поверхностные ЭГМ, создаваемые при помощи вспомогательной геометрии и каркасных ЭГМ, являются объектами, лишенными толщины, и служат для задания теоретических обводов детали.
Основные геометрические элементы детали — твердотельные элементы ЭГМ, при создании которых происходит определение областей модели, заполненных материалом.
Существуют два режима твердотельного моделирования: добавление (собственно формирование твердого тела) и удаление (вырезы и отверстия) материала. К базовым способам формообразования твердотельных элементов с добавлением материала относят параллельный перенос контура, заданного каркасной ЭГМ, поворот кон
10.3. Принципы автоматизации компоновки космических аппаратов 529
тура каркасной ЭГМ вокруг оси, построение твердотельного элемента сложной формы по направляющим и сечениям, заданным отдельными каркасными ЭГМ. Более сложные твердотельные элементы получают путем дополнительного редактирования: построения фасок и скруглений, зеркального отражения относительно вспомогательной плоскости, создания массивов элементов.
На рис. 10.10 приведен пример построения ЭГМ твердотельного элемента конструкции КА. Процесс создания ЭГМ подобен изготовлению элемента «в металле». Сначала создается заготовка, затем производится ее обработка — фрезеровка окна и сверление отверстий.
В файлах ЭГМ сборочных единиц задают контекст сборочной единицы: информацию о номенклатуре и взаимном расположении собираемых компонентов. В этих же файлах содержится минимум геометрических элементов вспомогательной геометрии, которые принадлежат сборочной единице в целом и организуют ее «виртуальное пространство». В основном в файлах сборочных единиц хранятся ссылки — адреса файлов, в которых находится информация о собираемых компонентах: ЭГМ деталей и сборочных единиц. Это дает возможность гибко корректировать структуру сборочной единицы и не дублировать информацию, когда, например, в сборочную единицу входит нескольких экземпляров одного компонента. Параметризация ЭГМ сборочной единицы осуществляется установлением двух видов взаимосвязей.
Первый вид параметрических взаимосвязей в сборочной единице задает сопряжения между компонентами. Каждое сопряжение устраняет одну или несколько степеней свободы компонента сборочной единицы. Отсутствие сопряжений оставляет деталь незакрепленной. На рис. 10.11 показан пример размещения ЭГМ ДУ в ЭГМ агрегатного отсека КА путем задания сопряжений типа «Совпадение».
Второй вид параметрических взаимосвязей определяет зависимости в контексте сборочных единиц между свойствами геометрических элементов, сохраненных в различных файлах компонентов сборочной единицы. Так, диаметр отверстия, содержащийся в базе данных файла ЭГМ одной детали, в контексте ЭГМ сборочной единицы можно связать с диаметром вала, сохраненным в файле ЭГМ другой детали. При этом если, например, при проведении компоновки будет увеличен диаметр вала, то диаметр отверстия также автоматически изменится.
530 10. Основы автоматизации компоновки космических аппаратов
Силовой элемент
{Т~| Примечания
Легированный алюминий (сплав 1060) й Й Освещение ® Твердые тела(1)
< $> Плоскость Спереди
< £> Плоскость Сверху
< $> Плоскость Справа
Исходная точка СК а ® Уголок
[У, (-) Эскиз профиля сечения
В Ц| Вырез
[У, (-) Эскиз профиля выреза
а
Силовой элемент
jt -] Примечания
1= Легированный алюминий (сплав 1060) щ Й Освещение
g (£) Твердые тела(1)
<С> Плоскость Спереди
: <$> Плоскость Сверху
<$> Плоскость Справа
Исходная точка СК
Е Уголок
fy, (-) Эскиз профиля сечения
а @ Вырез
fy, (-) Эскиз профиля выреза
В Ц] Отверстие
(У, (-) Эскиз отверстия
б
Силовой элемент
|Т~] Примечания
1— Легированный алюминий (сплав 1060)
S Й Освещение
И !С1 Твердые тела(1)
< $> Плоскость Спереди
< £> Плоскость Сверху
< £> Плоскость Справа
Исходная то<-ка СК
Е Уголок
fy, (-) Эскиз профиля сечения
Н |д] Вырез
fy, (-) Эскиз профиля выреза
Б © Отверстие
(У, (-) Эскиз отверстия
в
Рис. 10.10 (начало). Построение ЭГМ твердотельного элемента конструкции КА:
а — создание уголка; б — вырез окна для стрингера; в — вырез отверстия; 1 — эскиз профиля сечения; 2 — эскиз профиля на грани; 3 — эскиз профиля
10.3. Принципы автоматизации компоновки космических аппаратов 531
Силовой элемент
|Т~| Примечания
Легированный алюминий (сплав 1060)
W 1*1 Освещение
Э |б1 Твердые тела(1)
< $> Плоскость Спереди
< $> Плоскость Сверху
<\> Плоскость Справа
Jp. Исходная точка СК
у Уголок
[у, (-) Эскиз профиля сечения
3 Ц| Вырез
[у (-) Эскиз профиля выреза
3 Отверстие
[у, (-) Эскиз отверстия
ее? Массив отверстий
Силовой элемент
{Т | Примечания
1= Легированный алюминий (сплав 1060)
р; Освещение
Ж (Ы Твердые тела(1)
< $> Плоскость Спереди
Плоскость Сверху
< $> Плоскость Справа
Исходная точка СК
В ® Уголок
[у (-) Эскиз профиля сечения
Н @ Вырез
[у (-) Эскиз профиля выреза
Г-j О)
[у (-) Эскиз отверстия
Массив отверстий
Щ Массив массива отверстий
Силовой элемент
(TJ Примечания
£= Легированный алюминии (сплав 1060)
щ Освещение
М !<61 Твердые тела(1)
< £> Плоскость Спереди
< $> Плоскость Сверху
< $> Плоскость Справа
Исходная точка СК
Н ® Уголок
[У, (-) Эскиз профиля сечения
Г-3 @ Вырез
[У, (-) Эскиз профиля выреза
Н Отверстие
Гу (-) Эскиз отверстия
£££ Массив отверстий
Щ Массив массива отверстий
Рис. 10.10 (окончание). Построение ЭГМ твердотельного элемента конструкции КА:
г — создание массива отверстий; д — создание отверстий линейным массивом; е — готовая деталь; 4 — исходный объект; 5 — прямоугольный массив; 6 — группа объектов; 7 — линейный массив группы объектов
532 10. Основы автоматизации компоновки космических аппаратов
Рис. 10.11. Пример размещения ЭГМ ДУ в ЭГМ агрегатного отсека путем задания сопряжений типа «Совпадение»:
а — сопряжение осей сопла (/) и отсека (2); б — сопряжение главной плоскости сопла (3) и фронтальной плоскости отсека (4); в — сопряжение контактирующих поверхностей
Два возможных вида параметрических взаимосвязей в сборочной единице определяют два методических подхода к компоновке КА. При первом подходе по габаритным чертежам сначала формируются твердотельные ЭГМ всех компоновочных элементов сборочной единицы, а затем в контексте сборочной единицы задаются сопряжения между ними (см. рис. 10.11).
Во втором подходе базовый геометрический элемент сборочной единицы — компоновочный эскиз, создаваемый в контексте ЭГМ сборочной единицы. В качестве компоновочного эскиза используется каркасная или поверхностная ЭГМ, определяющая га
10.3. Принципы автоматизации компоновки космических аппаратов 533
бариты и взаимное расположение еще несозданных ЭГМ деталей. С использованием взаимосвязей в контексте сборочной единицы твердотельные ЭГМ компонентов сборочной единицы строятся на основе компоновочного эскиза (рис. 10.12).
Рис. 10.12. Построение ЭГМ бака на основе компоновочного эскиза агрегатного отсека КА:
а — взаимосвязь геометрических элементов в контексте сборочной единицы; б — построение твердотельного элемента; в — ЭГМ детали в контексте сборочной единицы; 1 — компоновочный эскиз; 2 — эскиз детали; 3 — параметрическая взаимосвязь «Корадиальность»
Электронная геометрическая модель компоновки КА, построенная таким способом, позволяет путем редактирования ограниченного числа параметров, описывающих компоновочный эскиз, изменять форму и размеры сразу множества компонентов, взаимосвязанных в контексте сборочной единицы.
Электронные чертежи — производные электронные документы от ЭГМ деталей и сборочных единиц. На современном этапе развития CALS-технологий электронные чертежи носят вспомогательный характер, поскольку для анализа компоновки существуют мощные средства компьютерной графики и прикладной математики, а для производства изделия и его макетов в материале используют непосредственно твердотельные ЭГМ. При проведении автоматизации компоновки КА создание электронных чертежей требу
534 10. Основы автоматизации компоновки космических аппаратов
ется для удобства работы конструкторов, привыкших оперировать традиционными технологиями. Чертежи, распечатанные на бумаге, служат юридическим документом, подтверждающим принятые технические решения.
Способ получения электронных чертежей состоит в проецировании ЭГМ на плоскость чертежа и снабжении проекции необходимыми стандартными графическими обозначениями (рис. 10.13). Если электронный чертеж является элементом базы данных ЭГМ изделия, то при его построении устанавливается и в дальнейшем поддерживается параметрическая взаимосвязь между ЭГМ и отображаемой проекцией так, что любое изменение в ЭГМ отображается и на соответствующих проекциях чертежа.
1. Направление перегрузок - любое
2 На плоскости Б и В застойных мест воздуха не допускается
Йгоростъ воздушного потока 0,1 м/с не менее) пускается поджатие жгутов на размере Г до размера 50 max
Рис. 10.13. Электронный чертеж блока бортового оборудования
Объединение электронного чертежа компоновки с твердотельной ЭГМ компоновки позволяет связывать с документом не только проекции геометрических элементов, но и атрибуты ЭГМ, например различные технические требования. При создании электронного чертежа сборочной единицы автоматически создается спецификация и расставляются позиции на чертеже.
10.3. Принципы автоматизации компоновки космических аппаратов 535
База данных электронного чертежа хранит информацию о чертежных листах и чертежных видах, расположенных на них. Оформление электронных чертежей должно соответствовать требованиям, предъявляемым государственными и отраслевыми стандартами к оформлению бумажных чертежей. В электронный чертеж в соответствии с требованиями стандартов могут быть добавлены обозначения размеров, осей, центров отверстий, условные обозначения шероховатости, резьбы, допусков формы и расположения поверхностей, унифицированные графические обозначения и текстовые блоки. Внешний вид этих обозначений определяется соответствующими стандартами.
Автоматизация разработки электронных чертежей построена на использовании шаблонов документов (основных надписей, спецификаций и пр.). При наличии архива шаблонов документов эффективность разработки электронных чертежей многократно возрастает.
10.3.4. Компоновка с использованием электронных макетов
Как правило, ЭГМ узлов и агрегатов при компоновке КА представляют собой ЭГМ сложных сборочных единиц, состоящих из сотен деталей. В этом случае для ускорения процесса построения вариантов компоновки используют особые, упрощенные твердотельные ЭГМ — электронные макеты.
Электронным макетом изделия называется ЭГМ, описывающая его внешнюю форму и размеры, а также позволяющая оценить его взаимодействие с элементами производственного и эксплуатационного окружения. Электронный макет имеет идентичные с полной ЭГМ инерционно-массовые и другие физические характеристики. Таким образом, электронный макет, применяемый в СКТК КА, — это аналог габаритных чертежей, используемых при традиционном способе компоновки КА. Электронные макеты либо создаются разработчиками приборов, либо строятся при проведении компоновки по габаритным чертежам.
На различных этапах проектирования используются электронные макеты разной степени детализации. На этапе эскизного проектирования, когда состав компоновочных элементов известен приближенно и выбирается на основе статистики по изделиям-прототипам, в электронные макеты агрегатов разработчиками за
536 10. Основы автоматизации компоновки космических аппаратов
кладываются определенные запасы габаритного объема, занимаемого элементом, чтобы учесть свободное пространство, которое необходимо, например, для подвода коммуникаций или технического обслуживания.
Рассмотрим полную ЭГМ прибора (рис. 10.14, а\ состоящую из 200 ЭГМ деталей, и его электронный макет (рис. 10.14, б), выполненный как одна твердотельная деталь. Геометрия электронного макета достаточно полно отражает внешнюю форму исходной ЭГМ, а также расположение кронштейнов и электрических разъемов. В то же время информация о внутренней структуре прибора опущена как несущественная при компоновке. Использование макета значительно экономит ресурсы компьютера. Более упрощенный электронный макет габаритного объема (рис. 10.14, в), который прибор будет занимать на борту КА, используется на этапе эскизного проектирования для обеспечения требуемых запасов объема. Для иллюстрации запасов габаритного объема внутри макета изображен более точный электронный макет.
Рис. 10.14. Полная ЭГМ (а) прибора, его электронный макет (б) и упрощенный электронный макет габаритного объема (в)
Кроме экономии вычислительных ресурсов электронные макеты также решают задачу защиты интеллектуальной собственности, когда разработчик прибора не хочет раскрывать ноу-хау, заложенные в конструкции, и предоставляет компоновщику только информацию, которая необходима для увязки прибора в отсеке.
10.3. Принципы автоматизации компоновки космических аппаратов 537
Развитие компьютерных технологий связи позволяет разработчикам узлов и агрегатов размещать на интернет-сайтах электронные макеты своих изделий. В настоящее время доступны ЭГМ множества изделий, начиная от твердотельных ЭГМ крепежных элементов и заканчивая электронными макетами насосов, звездных датчиков, пиротехнических систем, антенн и др. При компоновке КА конструктор, использующий СКТК, может выбрать через сеть Интернет поставщика тех или иных агрегатов, проверив оптимальность компоновки в ЭГМ КА электронных макетов этих агрегатов.
На ранних этапах компоновки элементы конструкции также представляются в виде упрощенных электронных макетов, что сохраняет необходимый уровень детализации ЭГМ и дает возможность быстро создавать варианты компоновки.
На каждом этапе проектирования ЭГМ КА детализируется и уточняется. Электронные макеты габаритных объемов заменяются все более точными электронными макетами (см. рис. 10.14). CALS-технологии параллельного проектирования позволяют конструктору через сеть Интернет поддерживать в реальном времени связь с разработчиками узлов и агрегатов. В свою очередь разработчики элементов имеют полную информацию о текущей компоновке, форме и размерах областей, доступных для размещения их систем. На самых ранних этапах компоновки применение параллельного проектирования уменьшает запасы объема, увеличивает плотность размещения приборов и определяет оптимальные геометрические параметры КА.
10.3.5. Приемы автоматизации компоновки КА
Как уже было отмечено, при компоновке КА применяют все виды ЭГМ (каркасные, поверхностные и твердотельные). Каркасные ЭГМ, являющиеся вспомогательными, образуют «скелет» компоновки, задавая форму и расположение основных элементов. На рис. 10.15 показан пример использования каркасной ЭГМ агрегатного отсека КА для размещения электронного макета топливного бака.
Поверхностные ЭГМ применяют для задания границ зон размещения приборов внутри отсеков. Эти зоны, например, разделяют области установки оборудования и области, занятые силовыми элементами конструкции КА (рис. 10.16). При таком подходе средства геометрического моделирования САПР позволяют контролировать интерференцию электронного макета устанавливаемого агрегата с использованием поверхностной ЭГМ зоны разме
538 10. Основы автоматизации компоновки космических аппаратов
щения. На рис. 10.16 такая интерференция имеет место, что свидетельствует о неправильном размещении агрегата.
Получению плотных компоновок препятствуют функциональные требования к размещению приборов, эксплуатационные ограничения и технологические требования. При помощи поверхностных
Рис. 10.16. Контроль интерференции электронного макета устанавливаемого агрегата с использованием поверхностной ЭГМ зоны размещения: 1 — интерференция электронного макета агрегата с зоной размещения; 2 — поверхность зоны размещения агрегатов
Рис. 10.15. Пример использования каркасной ЭГМ агрегатного отсека КА для размещения электронного макета топливного бака
ЭГМ могут быть выделены зоны действия указанных ограничений. Например, как поверхностные ЭГМ могут быть заданы зоны действия повышенных ударных или тепловых нагрузок, рассчитанные с помощью средств САЕ-систем.
Основные элементы ЭГМ КА — твердотельные ЭГМ, на основе которых строятся электронные макеты оборудования, отсеков и элементов конструкции, размещаемые в контексте сборочной единицы КА. На рис. 10.17 приведен пример размещения электронных макетов габаритных объемов аппаратуры в агрегатном отсеке (элементы конструкций крепления приборов и оболочка отсека на рис. 10.17 не показаны).
Компоновка твердотельных ЭГМ производится как в диалоговом режиме, так и с помощью алгоритмов автоматического размещения элементов, при этом могут использоваться:
10.3. Принципы автоматизации компоновки космических аппаратов 539
• комбинаторные методы, применяемые для размещения небольшого числа элементов перебором всех возможных вариантов;
• дискретные методы, эффективные для размещения большого числа идентичных элементов на фиксированных позициях или заданной плоскости приборной рамы с минимизацией длины связей;
• непрерывные методы, требующие самых больших вычислительных затрат и применяемые для размещения сложных геометрических объектов в произвольном объеме.
Рис. 10.17. Пример размещения электронных макетов аппаратуры в агрегатном отсеке
Кроме задачи автоматизации размещения аппаратуры в отсеках КА средствами CAD-систем решается задача автоматизации размещения элементов на внешней поверхности КА. Эта задача имеет ряд особенностей. Во-первых, внешние элементы размещаются не в объеме, а на поверхности. Во-вторых, элементы, устанавливаемые на КА, обычно имеют изменяемые в процессе работы форму и ориентацию относительно КА. В-третьих, внешние элементы часто имеют пространственные зоны обзора, размеры которых больше, чем размеры самих элементов. Как правило, эти зоны обзора не должны перекрываться.
Поскольку большинство КА выводится на орбиту под обтекателем ракеты-носителя, задача компоновки элементов на внешней
540 10. Основы автоматизации компоновки космических аппаратов
поверхности отсеков подразделяется на две подзадачи: компоновку элементов в рабочем положении исходя из целевого назначения аппаратуры и поверочную компоновку элементов под обтекателем ракеты-носителя.
Таким образом, функциональные требования к автоматизированному размещению аппаратуры на внешней поверхности КА делятся на следующие группы:
• требования к размещению и креплению внешних элементов на поверхности КА с учетом изменения их геометрии и ориентации в процессе работы;
• требования к ориентации и свободному (незатененному) расположению зон обзора внешних элементов в пространстве относительно системы координат отсека и КА в целом, требования привязки элементов к внутренней компоновке КА;
• требования к размещению внешних элементов в сложенном состоянии под обтекателем ракеты-носителя.
Для учета изменения геометрии и ориентации внешних элементов в процессе работы их электронные макеты выполняются в нескольких конфигурациях, среди которых необходимо выделить транспортную конфигурацию (элемент находится под обтекателем ракеты-носителя) и рабочую конфигурацию (элемент занимает ее после развертывания). На рис. 10.18 показаны транспортная и рабочая конфигурации электронного макета панели солнечной батареи.
Рис. 10.18. Транспортная {а) и рабочая (б) конфигурации электронного макета панели солнечной батареи
Для удовлетворения ограничениям, связанным с затенением зон обзора, электронные макеты внешних элементов отсека содержат поверхностные ЭГМ зон обзора (зоны обзора иллюминаторов, диаграммы направленности антенн, зоны обзора фотоэлектрических
10.3. Принципы автоматизации компоновки космических аппаратов 541
преобразователей). При компоновке внешних элементов, наряду с интерференцией самих элементов, проверяется и интерференция зон обзора (рис. 10.19). Из рис. 10.19 ясно, что диаграмма направленности интерферирует с зоной действия ДУ, что может привести к помехам в работе радиотехнического комплекса КА, поэтому компоновка, показанная на рис. 10.19, должна быть доработана.
Рис. 10.19. Компоновка элементов на внешней поверхности КА с учетом зон обзора панелей фотоэлектрических преобразователей, диаграммы направленности антенны и зоны действия ДУ
Кроме контроля интерференции зон обзора в САПР может проверяться затенение внешних элементов при помощи систем фотореалистической визуализации. Затенение элементов рассчитывается путем трассировки лучей от источника света, имитирующего Солнце. На рис. 10.20 приведен пример контроля затенения панелей солнечных батарей с использованием систем фотореалистической визуализации. Тень от антенны падает на панель фото
542 10. Основы автоматизации компоновки космических аппаратов
электрических преобразователей, что снижает вырабатываемую электрическую мощность.
При размещении внешних элементов в сложенном состоянии под обтекателем ракеты-носителя решается задача, аналогичная задаче внутренней компоновки отсеков. В этом случае роль полезного объема для размещения элементов выполняет зона полезной
Рис. 10.20. Контроль затенения панелей солнечных батарей с использованием систем фотореалистической визуализации:
1 — направление хода лучей; 2 — тень от антенны
нагрузки обтекателя ракеты-носителя. На рис. 10.21 приведен пример компоновки КА «Фобос-Грунт» в сложенном состоянии под обтекателем ракеты-носителя «Союз-СТ».
Рис. 10.21. Пример компоновки КА «Фобос-Грунт» в сложенном состоянии под обтекателем ракеты-носителя «Союз-СТ»
10.3. Принципы автоматизации компоновки космических аппаратов 543
После размещения электронных макетов оборудования ЭГМ используется для размещения гидравлических, электрических и др. коммуникаций (рис. 10.22). При таком подходе обеспечивается максимальная плотность компоновки и вычисляются наиболее точные параметры трубопроводов и кабельных трасс.
Рис. 10.22. Построение электронного макета кабельной трассы в ЭГМ агрегатного отсека
Кроме ЭГМ аппаратуры для анализа ее зон обслуживания и компоновки различных люков для оценки эксплуатационных характеристик компоновки могут быть использованы электронные эргономические макеты людей и инструментов (рис. 10.23).
Рис. 10.23. Пример электронного эргономического макета при проектировании люка агрегатного отсека КА
544 10. Основы автоматизации компоновки космических аппаратов
10.4. Основные этапы автоматизации компоновки космических аппаратов
10.4.1. Этапы компоновки
Процесс автоматизации компоновки КА СКТК состоит из следующих основных этапов.
1. Подготовка исходных данных: построение по габаритным чертежам или получение от разработчиков ЭГМ компонуемых элементов, форма и размеры которых известны.
2. Построение в CAD-системе ЭГМ компоновки, задающей контекст сборочной единицы, компоновочные эскизы и пространственные ЭГМ зон размещения элементов.
3. Размещение элементов компоновки в контексте сборочной единицы. Удовлетворение первой группы требований к компоновке, исходящих из целевого назначения приборов и заданных инерционно-массовых характеристик. Проверка интерференции ЭГМ компонентов между собой и зонами размещения. Внесение исправлений в ЭГМ. Доработка узлов. Проработка в контексте сборочной единицы ЭГМ элементов конструкции.
4. Удовлетворение второй группы требований к компоновке. Моделирование взаимовлияния оборудования в САЕ-системах. Внесение исправлений в ЭГМ. Проработка в контексте сборочной единицы ЭГМ экранов и других технических решений, позволяющих исключить взаимовлияние компонентов.
5. Получение общих характеристик компоновки: плотности компоновки, окончательных инерционно-массовых характеристик, невязки расположения центра масс и осей инерции, запасов массы и объема, которыми обладает компоновка. Внесение исправлений в ЭГМ. Проработка в контексте сборочной единицы ЭГМ конструкции и расположения балансировочных масс и других подобных элементов. На этом этапе также возможна оценка технологических и эксплуатационных ограничений с использованием САМ-систем, электронных эргономических макетов и технологий виртуальной реальности.
6. Выделение и формализация отдельных задач компоновки. Задание математических выражений для целевых функций, ограничений, варьируемых параметров на базе созданной ЭГМ. Выбор методов решения задач. Постановка и решение средствами САЕ-систем математических задач оптимизации компоновки отдельных отсеков и КА в целом. Оценка результатов и внесение исправлений в ЭГМ.
10.4. Основные этапы автоматизации компоновки космических... 545
7. Документирование результатов компоновки: выпуск чертежей, схем, отчетов и расчетно-пояснительных записок в электронной форме.
10.4.2. Пример процесса автоматизации компоновки
Рассмотрим реализацию описанного процесса на примере. Пусть на этапе эскизного проектирования средствами САПР необходимо скомпоновать внутри герметичного приборного отсека такие агрегаты, как фотоаппарат, блоки электронной аппаратуры, агрегаты СТР, блок телеметрии. Местоположение фотоаппарата в системе координат отсека задано. Для обеспечения функционирования фотоаппарата в отсеке требуется разместить иллюминатор и бленду. Герметичный отсек представляет собой цилиндр диаметром 2000 мм и длиной 1 000 мм. Расположение связанной системы координат задано. Начало координат находится в геометрическом центре цилиндра. Ось X совпадает с осью цилиндра по направлению полета КА, ось Y перпендикулярна оси X и лежит в вертикальной плоскости, ось Z дополняет систему координат до правой. Для размещения агрегатов предлагается использовать крестообразную приборную раму, выдвигаемую из отсека.
На первом этапе разработчики агрегатов представляют для компоновки габаритные геометрические электронные макеты своих изделий (рис. 10.24).
Рис. 10.24. Габаритные геометрические электронные макеты блоков электронной аппаратуры телеметрии (б), агрегатов СТР (в) и фотоаппарата (г)
546 10. Основы автоматизации компоновки космических аппаратов
На втором этапе создается контекст сборочной единицы ЭГМ отсека. В данном контексте задается система координат и размещаются каркасные ЭГМ отсека и приборной рамы (рис. 10.25).
Рис. 10.25. Каркасные ЭГМ отсека (а) и приборной рамы (б)
Рис. 10.26. Поверхностные ЭГМ зон размещения агрегатов (/) и центра масс (2) в контексте ЭГМ отсека
Рис. 10.27. Электронный макет приборной рамы
Поверхностные ЭГМ зоны размещения агрегатов, учитывающие запасы объема на размещение элементов конструкции отсека, и зоны размещения центра масс отсека показаны на рис. 10.26.
Третий этап включает в себя наибольшее число операций геометрического моделирования. Прежде всего создают электронный макет приборной рамы (рис. 10.27).
Далее внутри зоны размещения агрегатов на макете приборной рамы располагают электронные макеты агрегатов (рис. 10.28) с учетом того, что центр масс отсека должен находиться в зоне размещения центра масс.
10.4. Основные этапы автоматизации компоновки космических... 547
Рис. 10.28. Установка электронных макетов агрегатов на приборную раму:
1 — зона размещения агрегатов
В интерактивном режиме проверяют интерференцию макетов агрегатов и зоны размещения. При необходимости проводят коррекцию ЭГМ (рис. 10.29).
Рис. 10.29. Проверка интерференции макетов агрегатов и зоны размещения при компоновке ЭГМ:
а — наличие интерференции; б — отсутствие интерференции после проведения коррекции ЭГМ
548 10. Основы автоматизации компоновки космических аппаратов
Рис. 10.30. Доработка электронного макета приборной рамы (добавлены вырезы для установки агрегатов)
После того как агрегаты находятся в заданной зоне размещения, осуществляется доработка электронного макета приборной рамы: в местах интерференции электронных макетов рамы и агрегатов выполняются вырезы (рис. 10.30).
В заключение третьего этапа создаются электронные макеты элементов конструкции отсека (рис. 10.31, 10.32). При этом иллюминатор с блендой включаются в конструкцию отсека. Окончательный электронный макет компоновки отсека показан на рис. 10.33.
Рис. 10.31. Электронный макет корпуса отсека:
1 — шпангоут; 2 — направляющая; 3 — оболочка; 4 — иллюминатор; 5 — бленда
На четвертом этапе проводят математическое моделирование взаимовлияния оборудования в CAE-системах. В качестве примера на рис. 10.34 приведен результат моделирования температурных полей в отсеке.
10.4. Основные этапы автоматизации компоновки космических... 549
Рис. 10.32. Электронный макет крышки отсека
Рис. 10.33. Окончательный электронный макет компоновки отсека (зоны размещения не показаны)
Рис. 10.34. Пример моделирования температурных полей в САЕ-системах:
а — расчетная сетка; 6 — результат моделирования
550 10. Основы автоматизации компоновки космических аппаратов
На рис. 10.35 представлен пример оценки эксплуатационных свойств компоновки с использованием электронных эргономических макетов, показаны габаритные макеты основных элементов оснастки, необходимой для проведения обслуживания агрегатов в отсеке. Форма и размеры ЭГМ оснастки получены на основе ЭГМ компоновки отсека.
Рис. 10.35. Оценка эксплуатационных свойств компоновки с использованием электронных эргономических макетов
Обобщенные характеристики компоновки вычисляются на пятом этапе. Плотность компоновки оказывается низкой; существуют запасы объема.
На шестом этапе на основе созданной ЭГМ отсека можно сформулировать ряд математических задач оптимизации, например задачу минимизации объема отсека. В качестве варьируемых параметров можно взять атрибуты ЭГМ, определяющие параметрические взаимосвязи в сборочной единице.
Выпуск электронных чертежей и схем осуществляется на седьмом этапе. На рис. 10.36 показана компоновка отсека.
Процесс автоматизации компоновки завершается. Полученный вариант компоновки подвергается всестороннему анализу с учетом как ранее известных, так и новых, дополнительных факторов и при необходимости дорабатывается.
Дальнейшая работа с ЭГМ компоновки должна быть направлена на уточнение атрибутов электронных макетов, детализацию ЭГМ и учет все большего числа факторов, возникающих на различных этапах жизненного цикла изделия.
/ 0.5. Пример автоматизации компоновки системы...
551
Рис. 10.36. Компоновка отсека
10.5. Пример автоматизации компоновки системы управления движением малого космического аппарата
Пусть необходимо провести компоновку приборов СУД МКА. Все приборы предназначены для работы в условиях космоса и могут быть установлены в негерметичном отсеке.
Корпус МКА имеет форму параллелепипеда с квадратным основанием (рис. 10.37), длина стороны которого равна 800 мм. Высота параллелепипеда — 1000 мм. Начало связанной системы координат
552 10. Основы автоматизации компоновки космических аппаратов
Рис. 10.37. Теоретический чертеж корпуса МКА, имеющего форму параллелепипеда
МКА. Блок ПГП является
находится в геометрическом центре параллелепипеда. Ось X направлена по направлению полета КА, ось Y перпендикулярна оси X и лежит в вертикальной плоскости, ось Z дополняет систему координат до правой. Центр масс МКА должен находиться внутри сферы радиусом 100 мм с центром в начале координат.
Для размещения приборов предла
гается использовать плоские грани параллелепипеда. По условиям работы звездный датчик, ИКПМВ, датчик Солнца, АПСН должны быть расположены на внешней поверхности
выносным и устанавливается на штанге
длиной 1 м. Блок АПСН комплектуется антенной длиной 0,5 м.
Исходные данные для проведения компоновки — приборный состав системы (табл. 10.2), габариты и массы компонуемых приборов (табл. 10.3). Компонуемые элементы имеют форму параллелепипедов и цилиндров. Габаритные геометрические электронные макеты блоков СУД приведены на рис. 10.38.
Таблица 10.2. Массовая сводка МКА
Номер п/п Наименование прибора Масса, кг Координаты центра масс, м
ГцМ 4 „
1 АПСН 1,50 0,015 0,035 0
2 Блок акселерометров 0,30 0,10 0,040 0
3 БИУС-В 0,80 0,05 0,060 0
4 БСК 2,50 0,10 0,075 0
5 Блок электроники 2,50 0,10 0,060 0
6 Звездный датчик 1,0 0,10 0 0
7 Датчик Солнца 0,65 0,065 0 0
8 ИКПМВ 1,20 0,10 0 0
9 ПГП 0,30 0 0 0
10 УДМ 1,50 0,08 0 0
И Электромагнит 0,63 0,15 0 0
Таблица 10.3. Ведомость моментов инерции МКА
Номер п/п Наименование прибора Масса, кг Момент инерции, кг м~ Координаты центра масс, м
Л Л Л А Л.- Лз м 1 ц м 4 м
1 АПСН 1,50 0,000809 0,000372 0,000634 0,000172 0 0 0,015 0,035 0
2 Блок акселерометров 0,30 0,003337 0,018697 0,021211 0,005486 0 0 0,10 0,04 0
3 БИУС-В 0,80 0,00534 0,004167 0,006507 0,0024 0 0 0,05 0,06 0
4 БСК 2,50 0,022271 0,036854 0,052083 0,01875 0 0 0,10 0,075 0
5 Блок электроники 2,50 0,013333 0,034667 0,045333 0,015 0 0 0,10 0,06 0
6 Звездный датчик 1,00 0,001512 0,00409 0,00409 0 0 0 0,10 0 0
7 Датчик Солнца 0,65 0,000293 0,001062 0,001062 0 0 0 0,065 0 0
8 ИКПМВ 1,20 0,001815 0,004908 0,004908 0 0 0 0,10 0 0
9 ПГП 0,30 0,000212 0,000145 0,000112 0 0 0 0 0 0
10 УДМ 1,50 0,009492 0,007949 0,007946 0 0 0 0,08 0 0
11 Электромагнит 0,63 0,000071 0,00476 0,00476 0 0 0 0,15 0 0
554 10. Основы автоматизации компоновки космических аппаратов
Рис. 10.38. Габаритные геометрические электронные макеты блоков СУД:
/ — УДМ; 2 — блок электроники; 3 — антенна АПСН; 4 — БСК; 5 — БИУС-В: 6 — ПГП; 7 — ИКПМВ; 8 — АПСН; 9 — датчик Солнца; 10 — блок акселерометров; / / — электромагнит; 12 — звездный датчик
Эскизная конструктивно-силовая компоновка корпуса МКА выполнена в виде каркасных ЭГМ силовой рамы и панелей (рис. 10.39).
Рис. 10.39. Каркасная ЭГМ корпуса МКА: II—VI — панели; VII — каркас
10.5. Пример автоматизации компоновки системы...
555
Внутренняя компоновка приборов СУД начинается с размещения исполнительных органов УДМ и электромагнита в трех плоскостях системы координат (рис. 10.40). Гиродины УДМ размещаются в центре каркасных панелей I, II и VI. Катушки ЭМ располагают так, чтобы обеспечить максимальное плечо управляющих сил.
Цель дальнейшей внутренней компоновки (рис. 10.41) — размещение приборов БИУС-В, блока акселерометров, БСК, блока электроники в соответствии с принципиальной схемой (см. рис. 5.42) и с учетом центровки МКА.
Рис. 10.40. Размещение исполнительных органов СУД:
1 — УДМ; 2 — ЭМ
Рис. 10.41. Внутренняя компоновка приборов СУД:
1 — БСК; 2 — БИУС-В; 3 — блок электроники: 4 — блок акселерометров
Цель внешней компоновки — размещение на внешней поверхности КА панелей звездного датчика, датчиков Солнца, ИКПМВ, магнитометров ПГП на штангах и АПСН с учетом зон обзора оптических систем (рис. 10.42).
После получения первоначального варианта компоновки проводится анализ взаимовлияния оборудования. В качестве примера рассмотрим анализ влияния электромагнитного поля, создаваемого катушками электромагнита на работу других приборов СУД МКА. Катушка электромагнита при работе создает вокруг себя область повышенной напряженности магнитного поля, которую можно моделировать с помощью поверхностной ЭГМ зоны влияния электромагнита (рис. 10.43). Анализ интерференции электронных макетов
556 10. Основы автоматизации компоновки космических аппаратов
Рис. 10.42. Внешняя компоновка приборов СУД с учетом зон обзора:
1 — антенна АПСН: 2 — магнитометр ПГП;
3 — штанга: 4 — АПСН: 5 — датчик Солнца; 6 — зона обзора датчика Солнца: 7 — зона обзора ИКПМВ;
8 — ИКПМВ; 9 — звездный датчик; 10 — зона обзора звездного датчика
а б
Рис. 10.43. Проверка влияния магнитного поля катушек электромагнита на блок электроники с помощью поверхностных ЭГМ зон влияния:
а — блок электроники попадает в зону влияния электромагнита; I — зона влияния электромагнита; II — интерференция блока электроники с зоной влияния электромагнита; б — измененное положение блока электроники; 1 — БСК; 2 — УДМ; 3 — блок акселерометров; 4 — электромагнит; 5 — блок электроники
10.5. Пример автоматизации компоновки системы...
557
приборов с зонами влияния катушек электромагнита позволит проверить выполнение требований к компоновке МКА. Из рис. 10.43, а ясно, что в зону влияния катушек электромагнита попадает блок электроники. Требуется изменить размещение этого блока, как это показано на рис. 10.43, б.
После удовлетворения требований к размещению приборов контролируется центровка МКА, для чего создается ЭГМ зоны размещения центра масс и проверяется интерференция его текущего положения с этой зоной (рис. 10.44).
Рис. 10.44. Контроль центровки МКА с помощью ЭГМ зоны размещения центра масс:
/ — электромагнит; 2 — БИУС-В; 3 — звездный датчик; 4 — АПСН; 5 — УДМ; 6 — БСК; 7 — датчик скоростей; 8 — ИКПМВ; 9 — блок акселерометров; I — фактическое положение центра масс; II — зона размещения центра масс
Вариант компоновки, показанный на рис. 10.44, не удовлетворяет условиям центровки МКА. Поэтому необходимо уточнить размещение приборов СУД для балансировки КА, при этом в качестве балансировочной массы будет использован БСК как наиболее массивный блок. БСК размещается на панели I. Выде
558 10. Основы автоматизации компоновки космических аппаратов
лим и формализуем задачу балансировки МКА как отдельную задачу компоновки.
За целевую функцию примем расстояние R от фактического центра масс МКА до начала связанной системы координат, которое будем минимизировать:
7? ~~ \1 м + -К? + м —> min. у ц.м ц.м ц.м
Рис. 10.45. Координаты размещения БСК на панели I:
1 — УДМ: 2 — БСК
Координаты центра масс МКА -м, Уц.м, Zu м зададим как функции от двух варьируемых параметров — координат Н и V БСК в системе координат панели I (рис. 10.45). Значения этих функций вычисляются в САПР по ЭГМ компоновки: хц.м =/(//, г); уцм =/(д И; = =f(H, V).
В результате необходимо найти минимум функции двух переменных R(H, V) min. Ограничениями являются размеры панели I. Варьируемые параметры не должны выходить за пределы V е [-350; 350]; Н е [-370; 370]. Изменяя координаты БСК в пре-
делах, определяемых размерами панели I, получаем значения целевой функции R (табл. 10.4), с помощью которого найдем минимальное значение целевой функции R (выделено в табл. 10.4) и соответствующие координаты БСК (// = 200, V= -350).
Таблица 10.4. Значения целевой функции R в зависимости от значений координат БСК
К мм И, мм
370 300 200 100 0
320 122,58 124,12 123,72 124,04 125,06
220 115,68 114,91 114,48 114,82 115,93
120 106,58 105,74 105,27 105,65 106,85
0 95,84 94,92 94,39 94,81 96,15
-100 73,73 72,53 71,84 72,39 74,13
-200 65,25 63,88 63,09 63,72 65,70
-300 57,07 55,50 54,60 55,32 57,58
-350 53,14 51,45 50,47 51,26 53,69
10.5. Пример автоматизации компоновки системы...
559
После повторной проверки интерференции и взаимовлияния приборов СУД на основе ЭГМ компоновки создаются электронные чертежи. Основные виды полученной компоновки СУД МКА приведены на рис. 10.46.
Рис. 10.46. Основные виды компоновки СУД МКА
Такой вариант компоновки СУД МКА подвергается всестороннему анализу с учетом различных факторов, в результате чего принимается решение о необходимых изменениях.
КОНТРОЛЬНЫЕ ВОПРОСЫ
К главе 1
1. Какие документы необходимы для выполнения компоновки?
2. Из каких этапов состоят разработка компоновки и проектирование КА?
3. Каковы природа собственной атмосферы негерметичного отсека КА и ее влияние на выполнение целевых задач?
4. Для чего нужна экспериментальная отработка бортового оборудования и какие ее виды вы знаете?
5. Для чего нужна инерционно-массовая компоновка КА и как она проводится?
6. Что такое аэродинамическая компоновка КА?
7. Что предусматривает конструктивно-массовая компоновка?
К главе 2
1. Какие критерии выбора компоновки вы знаете?
2. Как обеспечивается надежность функционирования КА?
3. Какие мероприятия необходимо провести для снижения массы и энергопотребления бортовой аппаратуры?
4. Что такое унификация бортового оборудования?
5. Как обеспечивается защита бортового оборудования от вибраций, электромагнитного излучения, статического электричества и теплового воздействия?
К главе 3
1. Как выбирается конструктивно-силовая схема КА и каково ее влияние на работоспособность аппарата?
2. Какие силовые элементы используются при построении конструктивно-силовой схемы отсеков КА?
3. Каковы особенности компоновки герметичных отсеков?
4. Что такое деформируемые приборные отсеки, их форма и принципы компоновки в них аппаратуры?
Контрольные вопросы
561
5. Расскажите о способах крепления приборов бортовой аппаратуры в отсеках?
6. Что такое унифицированные космические платформы?
7. Из каких элементов состоит ферменный отсек КА?
8. Какие особенности имеет компоновка наноспутников?
9. Какие функции выполняют раскрывающиеся конструкции КА и каковы требования, предъявляемые к ним?
10. Какие базовые конструктивные элементы раскрывающихся конструкций вы знаете и какие геометрические характеристики они имеют?
11. Какие кинематические способы раскрытия раскрывающихся конструкций вы знаете?
12. Что собой представляют механизмы, раскрывающие конструкции?
13. Как раскрывается телескопическая ферма?
14. Как раскрывается телескопическая труба?
К главе 4
1. Какие виды целевого оборудования вы знаете? Каково их назначение?
2. Оптическая аппаратура дистанционного зондирования Земли и требования к ее компоновке.
3. Как строится система обзора поверхности планеты?
4. Расскажите об устройстве камеры NAOMI и ее компоновке.
5. Что такое радиометр? Каковы основные принципы его компоновки?
6. Какие зоны связи и виды связи в системе спутниковой связи вы знаете?
7. Навигационные спутниковые системы: назначение и требования к компоновке.
8. Какие технологические процессы проводятся на борту КА?
9. Назначение космического телескопа-интерферометра и требования к его компоновке.
10. Какая компоновка у космической обсерватории «Гамма»?
11. Какая компоновка у орбитальной обсерватории «Гранат»?
12. Каковы компоновка и система обеспечения теплового режима ультрафиолетового телескопа (УФТ)?
13. Какая компоновка у ИК-обсерваторий?
14. Как выглядит компоновочная схема космического телескопа «Ра-диоастрон»?
К главе 5
1. Каковы назначение СУД и ее классификация?
2. Какие требования предъявляют к активным СУД?
3. Какие функции выполняет БЦВМ в системе управления движением?
4. Какие виды и принципы работы пассивной СУД вы знаете?
5. Какова конструкция и какие требования предъявляют к компоновке ЭМИО?
562
Контрольные вопросы
6. Назовите назначение и принцип действия двигательных установок СИО?
7. Какие требования предъявляют к компоновке двигателей стабилизации? Как выбирают место для установки двигателей стабилизации?
8. Какие способы крепления двигательных установок вы знаете?
9. Какие формы и конструкции топливных баков вы знаете? Каковы требования к их компоновке?
10. Назовите классификацию и принцип действия электрореактивных двигателей.
11. Каковы особенности компоновки ядерных двигателей?
К главе 6
1. Что такое РТК КА? Каковы его назначение и состав?
2. Как работает система радионаведения при стыковке? Ее компоновка и принципы работы.
3. Какую роль играет телеметрическая система КА?
4. Каково назначение бортовых АФУ? Их классификация.
5. Каковы требования к компоновке АФУ на КА?
6. Принцип действия и конструкция фазированной антенной решетки.
7. Назовите классификацию механизмов раскрывающихся антенн, требования к их конструкциям.
8. Какие виды телескопических антенн и способы их раскрытия вы знаете?
9. Что такое лепестковые антенны? Их конструкция и способы раскрытия.
10. Как раскрываются крупногабаритные антенны? Какова их конструкция?
К главе 7
1. Каковы назначение системы энергообеспечения и ее структура?
2. Расскажите об аккумуляторных батареях и их компоновке.
3. На каком принципе основана работа топливных элементов?
4. Как выбрать площадь солнечной батареи?
5. Каковы назначение буферных батарей и принцип их выбора?
6. Какие способы повышения эффективности СБ вы знаете?
7. Как компонуются солнечные батареи?
8. Расскажите о конструкциях раскрывающихся СБ.
9. Какое назначение у ядерных энергоустановок, какие требования предъявляют к их компоновке?
К главе 8
1. Какие задачи выполняет СОТР?
2. Каковы конструкция и принцип действия компоновочных элементов СОТР?
Контрольные вопросы
563
3. Какие требования предъявляют к выбору схемы СОТР?
4. Какие требования предъявляют к компоновке элементов СОТР?
5. Каковы назначение и конструкция ЭВТИ?
6. Каково назначение тепловой трубы? Ее принцип действия и компоновка.
К главе 9
1. По какому принципу классифицируются системы разделения?
2. Расскажите о конструкции пироболтов.
3. Что такое пирогайка? Расскажите о ее конструкции?
4. На каком принципе основаны разделение с использованием УКЗ и их компоновка?
5. Расскажите о конструкции механизмов разделения с МДШ.
6. Расскажите о конструкции пирозамков.
7. Расскажите о конструкции толкателей.
8. Каковы конструкция адаптеров и их назначение?
К главе 10
1. Как разделяются функции человека и машины при автоматизированной компоновке КА?
2. Приведите примеры использования ЭГМ компоновки КА на различных этапах его жизненного цикла.
3. Какие параметрические взаимосвязи могут быть заданы при компоновке панели солнечных батарей на поверхности цилиндрического отсека?
4. Назовите основные этапы процесса автоматизированной компоновки транспортного КА, предназначенного для снабжения орбитальной станции.
Литература
Основная
1. Закон РФ от 20 августа 1993 г. № 5663-i «О космической деятельности» (с изменениями и дополнениями).
2. Основные положения основ государственной политики Российской Федерации в области космической деятельности на период до 2030 года и дальнейшую перспективу от 19 апреля 2013 г. №пр-906.
3. ГОСТ Р 52017—2003. Аппараты космические, порядок подготовки и проведения космического эксперимента.
4. ГОСТ 2.102—2013 ЕСКД. Виды и комплектность конструкторских документов.
5. ГОСТ 2.118—73 ЕСКД. Техническое предложение.
6. ГОСТ 2.119—73 ЕСКД. Эскизный проект.
7. ГОСТ 2.002—72. Требования к моделям, макетам и темплетам, применяемым при проектировании.
8. ГОСТ 2.051—2006 ЕСКД. Электронные документы. Общие положения.
9. ГОСТ 2.004—88. Общие требования к выполнению конструкторских и технологических документов на печатающих и графических устройствах вывода ЭВМ.
10. ГОСТ Р 52925—2008. Изделия космической техники. Общие требования к космическим средствам по ограничению техногенного засорения околоземного космического пространства.
11. ГОСТ Р 55996—2014. Системы космические. Требования к содержанию и построению разделов технического задания на разработку изделий космической техники научного и социально-экономического назначения.
12. ГОСТ Р 25645.167—2005. Космическая среда (естественная и искусственная).
13. ГОСТ Р 53802—2010. Системы и комплексы космические. Термины и определения.
14. ГОСТ РВ 20.39.304—98. Аппаратура, приборы, устройства и оборудование военного назначения.
Литература
565
15. ГОСТ 25645.101—83. Атмосфера Земли верхняя.
16. ГОСТ 2.052-2007 ЕСКД. Электронная модель изделия. Общие положения. М.: Изд-во стандартов, 2005.
17. Авдуевский В.С., Успенский Г.Р. Космическая индустрия. М.: Машиностроение, 1989. 568 с.
18. Акишин А.И. Работоспособность космического оборудования при воздействии собственной внешней атмосферы аппарата. URL: http://nuclphys.sinp.msu.ru/school/s07/s07_03.pdf
19. Антовиль А.М. Теория механизмов и машин. М.: Высшая школа, 1961.256 с.
20. Астрофизические исследования на космической станции «Астрой» / под ред. А.А. Боярчука. М.: Физматлит, 1994. 416 с.
21. Беляев А.В., Зеленцов В.В., Щеглов Г.А. Средства выведения космических летательных аппаратов: учеб, пособие для курсового и дипломного проектирования. М.: Изд-во МГТУ им. Н.Э. Баумана, 2007. 56 с.
22. Беляев Н.М., Беляк Н.Л., Уваров Е.И. Реактивные системы управления космическим летательным аппаратом. М.: Машиностроение, 1979. 384 с.
23. Береговой Г.Т., Яковлев А.И., Туманов А.В. и др. Моделирование систем полуавтоматического управления космическим кораблем. М.: Машиностроение, 1986. 178 с.
24. Витер В.В., Петровский В.Л., Кучейко А.Н. Космические аппараты радиолокационного наблюдения И Новости космонавтики. 2001. № 3. С. 42^3.
25. Вудсон У., Коновер Д. Справочник по инженерной психологии для инженеров и художников-конструкторов. М.: Мир, 1968. 517 с.
26. Гаврилов В.Н. Автоматизированная компоновка приборных отсеков летательных аппаратов. М.: Машиностроение, 1988. 136 с.
27. Гейхман И.Л., Волков В.Г. Основы улучшения видимости в сложных условиях. М.: ООО «Недра-бизнесцентр», 1999. 280 с.
28. Гладкий В.Ф. Динамика конструкции летательного аппарата. М.: Наука, 1969. 495.
29. Гнеденко Б.В. Курс теории вероятностей. 6-е изд., перераб. и доп. М.: Наука. Гл. ред. Физматлит, 1988. 448 с.
30. Гришин В.Ю., Ракитин А.В., Костров В.В. Облик перспективного вычислительного комплекса космического базирования с гибкой архитектурой для обработки сигналов. URL: http://www.mivlgu.ru/conf/armand2013/klr-2013/pdf/KRL_S_8.pdf
31. Данилкин В.А. Собственная внешняя атмосфера космических аппаратов и ее влияние на параметры радиосигналов бортовых радиотехнических систем И Теплофизика и аэромеханика. 2008. Том 15. № 1. С. 75-76.
32. Дементьев Г.П., Захаров А.Г., Казаров Ю.К. Физико-технические основы создания и применения космических аппаратов. М.: Машиностроение, 1987. 264 с.
566
Литература
. Добряков А.А. Методы интеллектуализации САПР. М.: Наука, 1992. 289 с.
34. Добряков А.А., Петрикевич Б.Б., Сычев М.П. Особенности использования ЭВМ при поисковом конструировании: учеб, пособие. М.: Изд-во МГТУ им. Н.Э. Баумана, 2000. 256 с.
35. Елисеев А. С. Техника космических полетов. М.: Машиностроение, 1983. 31 1 с.
36. Ефанов В.В., Горовцов В.В., Котомин А.А., Душенок С.А. Детонационные устройства и системы разделения универсального космического разгонного блока «Фрегат» // Полет. 2009. № 2. С. 8-14.
37. Ефанов В.В., Тимофеев В.И. Новые пиромеханические системы и устройства разделения конструкций прецизионных космических аппаратов И Общероссийский научно-технический журнал «Полет». 2003. № 2. С. 44^8.
38. Ефремов Г.А., Туманов А.В., Хромушкин А.В. Особенности компоновки систем управления орбитальной станции. М.: Изд-во МГТУ им. Н.Э. Баумана, 1993. 76 с.
39. Ефремов Г.А., Туманов А.В., Зеленцов В.В. Особенности компоновки чувствительных и гироскопических приборов. М.: Изд-во МГТУ им. Н.Э. Баумана, 1993. 54 с.
40. Захаров Ю.А. Проектирование межорбитальных космических аппаратов. М.: Машиностроение, 1984. 176 с.
41. Ильинский В. С. Вопросы изоляции вибрации и ударов. М.: Советское радио, 1960. 159 с.
42. Инженерный справочник по космической технике / под ред. А.В. Солодова. М.: Воениздат, 1977. 430 с.
43. Итоги науки и техники. Серия «Ракетостроение и космическая техника». Том 9. М.: Винити, 1985. 288 с.
44. Cals-технологии. URL: http://www.cals.ru
45. КА Спот-4. URL: http://spot4.cnes.fr/spot4_gb/index.htm
46. Каракотин И.Н., Кудинов А.С. Определение параметров собственной атмосферы в отсеках космических аппаратов. Научно-технические разработки КБ «Салют». М.: Машиностроение, 2011. 397 с.
47. Каргин Н.Т., Волоцуев В.В. Конструкция и проектирование изделий ракетно-космической техники. Ч. 1. Конструирование изделий ракетно-космической техники: электронное учебное пособие. Самара: Самарский гос. аэрокосм, ун-т им. С.П. Королева, 2012.
48. Каргу Л.И. Системы угловой стабилизации космических аппаратов. М.: Машиностроение, 1973. 173 с.
49. Каргин Н.Т., Волоцуев В.В. Конструирование изделий ракетно-космической техники [электронный ресурс] : электрон, дан. М.; Самара: Минобрнауки России: Самарский гос. аэрокосм, ун-т им. С.П. Королева
Литература
567
(Национальный исследовательский университет), 2012. 1 эл. Опт. Диск (cd-rom).
50. Конструкция и проектирование космических летательных аппаратов. Учебник для средних учебных заведений / Н.И. Паничкин, Ю.В. Слепушкин, В.П. Шинкин, Н.А. Яцынин. М.: Машиностроение, 1986. 344 с.
51. Колесников КС., Козлов В.И., Кокушкин В.В. Динамика разделения космических аппаратов. М.: Машиностроение, 1977. 224 с.
52. Компоненты cubesat. URL: www.clyde-space.com
53. Конструирование автоматических КА / под ред. Д.И. Козлова. М.: Машиностроение, 1996. 448 с.
54. Космические аппараты и специальное оборудование для космического производства. URL: http://www.k2x2.info/nauchnaja_literatura_prochee/ kosmicheskaja_tehnologija_i_proizvodstvo/p4.php
55. Космонавтика: энциклопедия / под ред. В.П. Глушко; редколлегия: В.П. Бармин, К.Д. Бушуев, В.С. Верещагин и др. М.: Советская энциклопедия, 1985. 528 с.
56. Крахин О.И., Фатьянов С.А. Механизмы развертывания складных космических антенн на основе сплавов с памятью И III Всероссийская конференция «Радиолокация и радиосвязь» ИРЭ РАН, 26-30 октября 2009 г. С. 744-748.
57. Кулешова Н. Гцеренин ИД., Шейхет А.И. Орбитальная астрофизическая обсерватория «Гранат»: проблемы управления И Земля и Вселенная. 1994. № 2. URL: http://epizodsspace.no-ip.org/bibl/ziv/1994/02/ granat.html
58. Ли К Основы САПР (CAD/CAM/CAE). Спб.: Питер, 2004. 560 с.
59. Литий-ионные аккумуляторы космического назначения, основные направления работ и полученные результаты / С.Д. Лихоносов, В.А. Попов, В.П. Кулыга, Ю.В. Каллут, А.В. Пачуев И Атомная энергетика. 2014. № 32. С. 39^6.
60. Малозе.мов В.В. Тепловой режим космических аппаратов. М.: Машиностроение, 1980.
61. Малышев Г.В., Блейх Х.С., Зернов В.И. Проектирование автоматических космических аппаратов. М.: Машиностроение, 1982. 152 с.
62. Машбиц Л.М. Зоны обслуживания систем спутниковой связи. М.: Радио и связь, 1982. 108 с.
63. Микрин Е.А. Бортовые комплексы управления космических аппаратов: учеб, пособие. М.: Изд-во МГТУ им. Н.Э. Баумана, 2015. 246.
64. Михайлов В.Ф., Брагин И.В., Брагин И. С. Спутниковая аппаратура дистанционного зондирования Земли. М.: Вузовская книга, 2008. 340 с.
65. Мюррей Д. Solidworks. М.: «Лори», 2001.450 с.
66. Неронский Л.Б., Михайлов В.Ф., Брагин И.В. Микроволновая аппаратура дистанционного зондирования поверхности Земли и атмосферы. Ч. 2. Радиолокаторы с синтезированной апертурой антенны: учеб, пособие. Спб: ГУАП, 1999.220 с.
568
Литература
67. Норенков И.П. Основы автоматизированного проектирования: учеб, для вузов. М.: Изд-во МГТУ им. Н.Э. Баумана, 2000. 360 с.
68. Описание миссии ISO. URL: http://iso.esac.esa.int/mission_ over-view.html
69. Основы проектирования летательных аппаратов (транспортные системы): учебник для технических вузов / В.П. Мишин, В.К. Безвербый, Б.М. Панкратов и др.; под ред. В.П. Мишина. М.: Машиностроение, 1985. 360 с.
70. Основы теплопередачи в авиационной и ракетно-космической технике: учебник для авиационных специальностей вузов / под ред. В.С. Авдуевс-кого, В.К. Кошкина. М.: Машиностроение, 1992. 528 с.
71. Основы расчета импульсов сил, действующих на конструкцию ЛА при разделении удлиненными кумулятивными зарядами / В.В. Ефа-нов, Е.Н. Кузин, К.М. Пичхадзе, В.П. Челышев И Общероссийский научно-технический журнал полет. 2004. № 2. С. 3-10.
72. Петров К.П. Аэродинамика транспортных систем. М.: Издательская группа URS.S, 2000. 368 с.
73. Проектирование гироскопических приборов. Т. 1 / под ред. Д.С. Пельпора. М.: Выс. шк., 1977. 216 с.
74. Полежаев ПН., Полуэктов В.П, Космическая обсерватория «Гамма» И Земля и Вселенная. 1991. № 3.
75. Поляченко В.А., Туманов А.В. Управляемый «Алмаз» // Авиация и космонавтика. 1993. № 8. С. 41-ЛЗ.
76. Потемкин А. Трехмерное твердотельное моделирование. М.: КомпьютерПресс, 2002. 296 с.
77. Рабочие чертежи корабля «Буран». URL: http://www.buran.ru/ htm/cherch.htm
78. Радиолокационные системы землеобзора космического базирования / В.С. Верба, Л.Б. Неронский, И.Г. Лейпов, В.Э. Турук; под ред. В.С. Вербы. М.: Радиосвязь, 2010. 680 с.
79. Расчет и проектирование систем разделения ступеней ракет / К.С. Колесников, В.В. Кокушкин, С.В. Борзых, Н.В. Панкин. М.: Изд-во МГТУ им. Н.Э. Баумана, 2006. 376 с.
80. Сверхлегкие солнечные батареи на базе бескаркасных пленочных конструкций, формируемых центробежными силами, для широкого класса космических аппаратов. URL: http://www.icsti.su/base/base2/ tec/0059.shtml
81. Симонъянц Р.П. Компоновка функциональных узлов КЛА. М.: Изд-во МГТУ им. Н.Э. Баумана, 1983. 52 с.
82. Синявский В.В. Научно-технический задел по ядерному электро-ракетному межорбитальному буксиру «Геркулес» И Космическая техника и технологии. 2013. № 3. С. 25-45.
83. Система управления разгонным блоком: учебное пособие / В.Н. Андреев, Р.И. Бенк, А.Г. Бровкин; под ред. А.С. Сырова. М.: Изд-во МАИ Принт, 2010. 272 с.
Литература
569
84. Солнечные батареи скрестили с радиоизлучателями. URL: http://www.membrana.ru/particle/9206
85. Солнечные и аккумуляторные батареи для космических аппаратов. URL: http://www.federalspace.ru/2011/
86. Сонин Е.К. Радиоэлектронное оборудование космических аппаратов. М.: Энергия, 1972. 93 с.
87. Спутники связи: учеб, пособие / В.В. Филатов, В.Д. Евтифеев, Л.Н. Лебедева, В.И. Халиманович. Красноярск: Сиб. гос. аэрокосм. У-т, 2005. 120 с.
88. Таленс Я.Ф. Работа конструктора. Ленинград: Маш. Ленингр. Отд-ние, 1987. 255 с.
89. Телескоп Chandra. URL: http://chandra.harvard.edu
90. Технология 3D-печати в задаче моделирования раскрытия большого космического зеркала / В.И. Буякас, М.Ю. Архипов, М.В. Белов, С.В. Матвеев. М.: ООО «Иклит». URL: http://labl8.ipu.ru/projects/ conf2010/2/3 8.htm
91. Технология ЗО-печати в задаче моделирования раскрытия большого космического зеркала. URL: Ab 18.ipu.ru/projects/conf2010/2/38.htm
92. Технология сборки и испытаний космических аппаратов: учебник для высших технических учебных заведений / И.Т. Беляков, И.А. Зернов, Е.Г. Антонов и др.; под общей ред. И.Т. Белякова, И.А. Зернова. М.: Машиностроение, 1990. 352 с.
93. Технология глобальной спутниковой навигации: какие бывают системы, параметры и функции. URL: http://habrahabr.ru/company/ promwad/blog/202722/
94. Трикотажные металлические сетеполотна для отражающей поверхности трансформируемых наземных и космических антенн. URL: http ://rustm. net/cata 1 og/art i c 1 e/1101 /htm 1. htm 1
95. Туманов А.В., Зеленцов В.В., Суханов ЭД. Особенности проектирования унифицированных систем управления движением космических аппаратов. М.: Изд-во МГТУ им. Н.Э. Баумана, 2002. 108 с.
96. Федоров П.В., Пермяков В.Д. Космическое фотографирование. М.: Недра, 1978. 352 с.
97. Яковлев А.И. Моделирование и оптимизация адаптивно-игровых систем. М.: Изд-во МАИ, 1997. 266 с.
98. Burdick H.F. A precision six-meter deployable boom for the mariner-venus-mercury ’73 magnetometer experiment. Proc. 9th aerospace mechanisms symposium. October 17-18, 1974.
99. Containment structure for radially deployable devices И M. Casebolt Patent Us 5773108. 1998.
100. Costabile K, Lumaca F., Marsili P., Noni G., Portelli C. New antenna deployment, pointing and supporting mechanism 11 Proc, of 30th aerospace mechanisms symposium. May 15-17, 1996. Pp. 65-75.
570
Литература
101. David G. Gilmore spacecraft thermal control handbook: fundamental technologies. Aiaa. 2002. 836 p.
102. Ishikawa H., Meguro A. Relationship between the difficulty index and the evaluation accuracy of ground deployment testing // Proc, of 36th aerospace mechanisms symposium NASA Cleveland. Ohio. May 15-17, 2002. Pp. 353-366.
103. Isostatic support structure or fixed or re-orientable large size antenna reflectors us 20080198093.
104. Ishikawa H., Meguro A. Relationship between the difficulty index and the evaluation accuracy of ground deployment testing // Proc, of 36th aerospace mechanisms symposium. May 15-17, 2002. Pp. 353-366.
105. Isis. URL: http://www.isispace.nl
106. Geos-20m cable boom mechanism by Schmidt G.K., Suttner K.S. Proc. 11 th Aerospace mechanisms symposium. April 28-29, 1977.
107. Gomspace. URL: http://gomspace.com/
108. Литиевые элементы питания. URL: http://www.timel.ru/elementy-pitania.html
109. Jones S.R. Topex high-gain antenna system deployment actuator mechanism // Proc, of 25th aerospace mechanisms. May 8-10, 1991. Pp. 285-302.
110. Jones S.R. Topex high-gain antenna system deployment actuator mechanism // Proc, of 25th aerospace mechanisms symposium. May 8-10, 1991. Pp. 285-302.
111. Koryo niura design and operation of deployable truss structure / Proc. 18th aerospace mechanisms symposium proceeding of a symposium. May 2-4,1984.
112. Klinker D.H., Shuey K., Clair D.R.St. MSAT boom joint testing and load absorber design // Proc, of 28th aerospace mechanisms symposium. May 18-20, 1994. Pp. 285-302.
113. Macnaughton J.D., Weyman H.N., Groskopfs E. The bi-stem — a new technique in unfurlable structures. Proc, of the 2nd aerospace mechanisms symposium. May 4-5, 1967.
114. Nagesh G., Ravindran S., Bhat N.C. Latch-up anomaly study for reflector deployment of insat-2e satellite // Proc, of 37th aerospace mechanisms symposium. May 19-21,2004. Pp. 87-96.
115. Nason /., Creedon M. Johansen N. Cubesat p-pod deployer requirements. 2002. URL: http://www.ohlsa.net/data/satellite/cubesat/p-pod-mkl/ ppod_mkl_icd.pdf
116. Nagesh G., Ravindran 5., Bhat N.C. Latch-up anomaly study for reflector deployment of insat-2e satellite // Proc, of 37th aerospace mechanisms symposium. May 19-21,2004. Pp. 87-96.
117. New antenna deployment, pionting and supporting mechanism // V. Costabile, F. Lumaca, P. Marsili, G.Noni, C.Portelli. Proc, of 30th aerospace mechanisms symposium. May 15-17, 1996. Pp. 65-75.
Литература
571
118. Olson М.С., Briggs L.W., Pentecost J.В. Reliability breakthrough: positioning mechanism with an antenna deployment/electrical and mechanical redundancy // Proc, of 13th aerospace mechanisms symposium. April 26, 27, 1979. Pp. 137-150.
119. Cube Sat Kit. URL:http://www.cubesatkit.com/
120. Revision 13, Cubesat design specification. URL: http://gwww.cubesat. org/images/developers/cds_rev 13_fmal.pdf
121. Stewart A.C., Jason H. Hair intricacies of using kevlar cord and thermal knives in a deployable release system: issues and solutions // Proc, of 36th aerospace mechanisms symposium. May 15-17, 2002. Pp. 243-256.
122. Solar cell array design n77- 14 193 handbook, volume 1 (jet propulsion lab.) 496 p he a21/mf aOl cscl 22b - unclas 63/18 58973.
123. Spacecraft power technologies / A.K. Hyder, R.L. Wiley, G. Halpert, D.J. Flood, S. Sabripour. Imperial college press, 2003. 470 p.
Дополнительная
1. ГОСТ 19.201—78. Техническое задание, требования к содержанию и оформлению.
2. Принципы, касающиеся дистанционного зондирования Земли из космического пространства. Приняты резолюцией 41/65 Генеральной Ассамблеи ООН от 3 декабря 1986 года. URL: http://www.un.org/ru/documents/ declconv/conventions/earthremotesensing.shtml
3. Соглашение о создании Международной системы и организации космической связи «интерспутник». URL: http://docs.cntd.ru/document/1901803
4. Гобчанский О. Проблемы создания бортовых вычислительных комплексов малых космических аппаратов // Современные технологии автоматизации. 2001. № 4. С. 28-34.
5. Ильин И. С. Выбор номинальной орбиты КА «Миллиметрон» из семейства периодических орбит в окрестности точки либрации L2 системы Солнце — Земля. URL: http://www.kiaml.rssi.ru/pubs/prep_2013_046.pdf
6. Космические системы связи: учебное пособие / В.Ф. Михайлов, В.П. Мошкин, И.В. Брагин: ГУАП, 2006. 174 с.
7. Островский В.Г., Смоленцев А.А., Соколов Б.А., Черашев Д.В. Космическая техника и технологии ГУАП, № 2/2013. С. 42-53.
8. ФИАН им. П.Н. Лебедева. Сайт миссия «миллиметрон» URL http://millimetron.ru/index.php/ru/
9. ADELE: Articulation De Deploiement & Lames D’enroulement Eric BLANC*Proc. of a symposium sponsored by the national aeronautics and space administration. May 13-15, 1992.
10. James Webb Space Telescope: large deployable cryogenic telescope in space / Lightsey P.A., Atkinson C., Clampin M., Feinberg L.D. // Optical En
572
Литература
gineering. 2012. Vol. 51(1). P. 19. URL: http://opticalengineering. spiedigital-library.org/oe_51_l_011003.pdf
11. Klinker D.H., Shuey K., D.R. St. Clair MSAT boom joint testing and load absorber design // Proc, of 28th aerospace mechanisms symposium NASA Cleveland. Ohio. May 18-20, 1994. Pp. 285-302.
12. Matthew D. Lallo Experience with the Hubble Space Telescope: 20 years of an archetype // Optical Engineering. 2012. Vol. 51(1). URL: http://www.stsci.edu/institute/org/telescopes/Reports/LalloOE2012.pdf
13. Mcguire J.R., Yura J.A. Advances in the analysis and design of constant-torque springs // Proc, of 30 th aerospace mechanisms symposium proceedings of a symposium. May 15-17, 1996.
14. Robert M. Warden Low-Cost Tubular Antenna Deployer For Wisp-2 I Proc. 29 th aerospace mechanisms symposium. May 17-19, 1995.
15. WMAP Mission Overview. URL: http://map.gsfc.nasa.gov/mission/
Учебное издание
Туманов Анатолий Васильевич Зеленцов Владимир Викторович Щеглов Георгий Александрович
ОСНОВЫ компоновки БОРТОВОГО ОБОРУДОВАНИЯ КОСМИЧЕСКИХ АППАРАТОВ
Редактор К.А. Осипова Технический редактор Э.А. Кулакова Художник Я.М. Асинкритова
Корректор 7(9. Я. Морозова Компьютерная графика О. В. Левашовой Компьютерная верстка АЮ. Ураловой
Оригинал-макет подготовлен в Издательстве МГТУ им. Н.Э. Баумана.
В оформлении использованы шрифты Студии Артемия Лебедева.
Подписано в печать 01.11.2017. Формат 60x90/16.
Усл. печ. л. 36,0 печ. л. Тираж 100 экз.
Издательство МГТУ им. Н.Э. Баумана.
105005, Москва, 2-я Бауманская ул., д. 5, стр. 1.
press@bmstu.ru www.baumanpress.ru
Отпечатано в ПАО «Т8 Издательские Технологии»
109316, Москва, Волгоградский проспект, д. 42, корп. 5.
ИЗДАТЕЛЬСТВО
МГТУ ИИ. Н.Э. БАУМАНА
В Издательстве МГТУ им. Н.Э. Баумана вышло в свет учебное пособие Л.Н. Лысенко «Наведение баллистических ракет»
Год издания: 2016
Тип издания: Учебное пособие
Объем: 448 стр. / 36,4 п. л.
Формат: 70 х 100/16
ISBN: 978-5-7038-4528-8
Изложены научные и методологические основы наведения баллистических ракет. Рассмотрены вопросы программирования движения (задачи наведения) и информационно-навигационного обеспечения управления (задачи навигации), а также проблемы определения точности стрельбы (задачи оценки точности возмущенного движения). Показаны направления решений соответствующих задач при создании ракетных комплексов тактического, оперативнотактического и стратегического назначения, возможные пути совершенствования баллистико-навигационного обеспечения полета ракет указанных классов.
Содержание пособия соответствует курсу лекций, читаемых в МГТУ им. Н.Э. Баумана.
Для студентов технических вузов, слушателей военных академий, а также аспирантов, инженеров и научных работников, специализирующихся в области баллистики, динамики полета и управления движением летательных аппаратов.
Информацию о других новых книгах можно получить
на сайте Издательства МГТУ им. Н.Э. Баумана:
http://baumanpress.ru
По вопросам приобретения обращаться в отдел реализации Издательства: телефон: 8-499-263-60-45;
факс: 8-499-261-45-97
e-mail: press@baumanpress.ru
ИЗДАТЕЛЬСТВО
МГТУ ИИ. Н.Э. БАУМАНА
В Издательстве МГТУ им. Н.Э. Баумана вышло в свет 3-е издание учебника Н.М. Иванова, Л.Н. Лысенко «Баллистика и навигация космических аппаратов»
Год издания: 2016 Тип издания: Учебник Объем: 528 стр. / 42,9 п. л. Формат: 70* 100/16 ISBN: 978-5-7038-4Э40-6
Изложены теоретические основы и методы решения практически значимых прикладных задач баллистики и навигации космических аппаратов. Показано, что баллистико-навигационное обеспечение полета и баллистические характеристики космических аппаратов в значительной степени определяются целевым назначением, зависят от действующих технических ограничений, а также физических условий космического пространства и (или) атмосфер планет, в которых происходит движение космических аппаратов.
Рассмотрены основные тенденции развития и разработка алгоритмов решения задач баллистико-навигационного обеспечения оперативного управления полетом.
Описаны последние достижения в области теории и практики решения задач космической баллистики. Содержание учебника соответствует курсу лекций, читаемых в МГТУ им. Н.Э. Баумана.
Для студентов высших учебных заведений, обучающихся по направлению подготовки «Ракетостроение и космонавтика».
Информацию о других новых книгах можно получить
на сайте Издательства МГТУ им. Н.Э. Баумана:
http://baumanpress.ru
По вопросам приобретения обращаться в отдел реализации Издательства: телефон: 8-499-263-60-45;
факс: 8-499-261-45-97
e-mail: press@baumanpress.ru
ИЗДАТЕЛЬСТВО
МГТУ ИИ. Н.Э. БАУМАНА
В Издательстве МГТУ им. Н.Э. Баумана вышло в свет 3-е издание учебника М.В. Добровольского под редакцией Д.А. Ягодникова «Жидкостные ракетные двигатели. Основы проектирования»
М. .. Д061 -ОВОЛЬСКИИ
Жидкостные Ракетные
вигатели
Основы проектирования
Год издания: 2015 Тип издания: Учебник Объем: 464 стр. / 38 п.л. Формат: 70x100/16 ISBN: 978-5-7038-4145-7
Изложены основы проектирования жидкостных ракетных двигателей (ЖРД). Даются основные положения теории, методы расчета и описание узлов и агрегатов двигательных установок с ЖРД. Рассмотрены процессы расширения газов в соплах, смесеобразования и теплообмена, а также методы профилирования сопел, расчета форсунок, определения форм и объема камеры сгорания. Приведены системы подачи с турбонасосными агрегатами и вытеснительные системы подачи с газовым, пороховым и жидкостным аккумуляторами давления. Изложены методики и примеры расчетов элементов конструкции и ЖРД в целом.
Третье издание (1-е — 1968 г., 2-е — 2005 г.) дополнено параметрами отечественных и зарубежных ЖРД конца XX в.
Соответствует курсам лекций, читаемых в МГТУ им. Н.Э. Баумана.
Для студентов и магистрантов высших технических учебных заведений. Может быть полезен также инженерам и аспирантам, специализирующимся в области ракетной техники.
Информацию о других новых книгах можно получить
на сайте Издательства МГТУ им. Н.Э. Баумана:
http://baumanpress.ru
По вопросам приобретения обращаться в отдел реализации Издательства: телефон: 8-499-263-60-45;
факс: 8-499-261-45-97
e-mail: press@baumanpress.ru