


































































































Автор: Телепнев П.П. Кузнецов Д.А.
Теги: авиация и космонавтика летательные аппараты ракетная техника космическая техника междупланетные соединения (междупланетные полеты) космонавтика (аэронавтика)
ISBN: 978-5-7038-5103-6
Год: 2019


П.П. Телепнев, Д.А. Кузнецов
Основы
проектирования виброзащиты
космических аппаратов
П.П. Телепнев, Д.А. Кузнецов
Основы проектирования
виброзащиты
космических аппаратов
Учебное пособие
Под редакцией д-ра техн. наук, профессора В.В. Ефанова
0.
1
£
5
а
Москва
ИЗДАТЕЛЬСТВО
МГТУ им. Н.Э. Баумана
2 0 19
УДК 629.78
ББК 39.62
Т31
Рецензент
член-корреспондент РАН,
зав. кафедрой «Космические системы и ракетостроение»
О.М. Алифанов
Телепнев, П. П.
Т31 Основы проектирования виброзащиты космических аппа¬
ратов : учебное пособие / П. П. Телепнев, Д. А. Кузнецов ;
под ред. В. В. Ефанова. — Москва : Издательство МГТУ
им. Н. Э. Баумана, 2019. — 102, [4] с. : ил.
ISBN 978-5-7038-5103-6
Рассмотрены основы проектирования виброзащиты прецизион¬
ных космических аппаратов для улучшения разрешающей способ¬
ности устанавливаемой на борту целевой аппаратуры при влиянии
динамических источников возмущений. Представлены методы
и средства виброзащиты, а также принципы работы, математиче¬
ские модели и практические примеры создания виброзащитных
устройств. Приведен инженерный алгоритм в виде структурной
схемы обеспечения виброзащиты космических конструкций для
практической реализации.
Для студентов аэрокосмического факультета, обучающихся по
специальностям «Проектирование летательных аппаратов и их
комплексов», «Космические аппараты и разгонные блоки», также
может представлять интерес для специалистов предприятий кос¬
мической отрасли.
УДК 629.78
ББК 39.62
О Телепнев П.П., Кузнецов Д.А., 2019
© Оформление. Издательство
ISBN 978-5-7038-5103-6 МГТУ им. Н.Э. Баумана, 2019
Содержание
Предисловие 4
Сокращения 5
Введение 6
Бортовые источники возмущений 12
Определение воздействий, создаваемых приводами,
исполнительными механизмами и аппаратурой
в рабочих режимах 12
Математические модели механических возмущений
от бортовых источников 16
Методы и принципы создания систем виброзащиты 22
Увеличение диссипативных свойств конструкции
космических аппаратов 24
Системы виброизоляции 33
Динамическое гашение колебаний 45
Активные системы гашения колебаний 80
Литература 101
Предисловие
За последние десятилетия в области проектирования и констру¬
ирования космической техники сформировалось новое научное на¬
правление — обеспечение виброзащиты космических конструкций.
Наибольший интерес к вопросам обеспечения виброзащиты прояв¬
ляют ученые и инженеры Франции, Германии, Испании, а в послед¬
ние годы — и России, Китая, США, Индии. Разработка нового пре¬
цизионного оборудования для исследования объектов космического
пространства обусловливает постановку ряда дополнительных тех¬
нических задач по обеспечению нормальных условий для его функ¬
ционирования. Следует отметить, что в ситуации международной
конкуренции данные задачи должны быть выполнены в достаточно
короткие сроки.
Таким образом, появилась необходимость в создании научно-
технического инструмента, позволяющего специалистам в области
проектирования и конструирования космической техники в сжатые
сроки обеспечить защиту от вибрационных воздействий новейшего
прецизионного оборудования в процессе его эксплуатации [10].
В предлагаемом учебном пособии описаны бортовые источни¬
ки возмущений. Определены воздействия, создаваемые приводами,
исполнительными механизмами и аппаратурой в рабочих режимах.
Приведены математические модели механических возмущений
от бортовых источников.
Рассмотрены основы проектирования виброзащиты прецизи¬
онных космических аппаратов для улучшения разрешающей спо¬
собности устанавливаемой на борту целевой аппаратуры при влия¬
нии динамических источников возмущений. Представлены методы
и средства виброзащиты, а также принципы работы, математиче¬
ские модели и практические примеры создания виброзащитных
устройств. Приведен инженерный алгоритм в виде структурной
схемы обеспечения виброзащиты космических конструкций для
практической реализации.
4
Сокращения
АЧХ
— амплитудно-частотная характеристика
ВЗ
— виброзащита
ВИРК
— высокоинформативный радиокомплекс
ГИВУС
— гироскопический интегратор вектора угловых
скоростей
ГК
— гаситель колебаний
дг
— динамический гаситель
дм
— двигатель-маховик
КА
— космический аппарат
КРТ
— космический радиотелескоп
ОНА
— остронаправленная антенна
ПУ
— приводное устройство
СБ
— солнечная батарея
СВД
— сплавы высокого демпфирования
сис
— силоизмерительный стенд
СУОС
— система управления ориентацией и стабилизацией
СОСБ
— система ориентации солнечной батареи
УВЗ
— узел вторичного зеркала
УМЖД
— управляемые магнитожидкостные демпферы
шд
— шаговый двигатель
ЭМИО — электромеханический исполнительный орган
Введение
В настоящее время развитие космической техники связано с су¬
щественным повышением разрешающей способности целевой ап¬
паратуры, устанавливаемой на борту космических аппаратов (КА)
как научного, так и прикладного назначения, что приводит к уже¬
сточению требований по точности ориентации и стабилизации КА.
Кроме того, сама прецизионная аппаратура характеризуется боль¬
шими габаритными размерами, высоким энергопотреблением и не¬
которыми специальными требованиями. Высокое энергопотребле¬
ние обусловливает необходимость оснащения таких КА панелями
солнечных батарей (СБ) большой площади — крупногабаритными
низкочастотными элементами. Большой объем передаваемой на
Землю целевой информации приводит к необходимости установки
Рис. 1. Космический радиотелескоп
6
Основы проектирования виброзащиты космических аппаратов
систем радиосвязи с достаточно крупными антеннами, которые так¬
же не обладают высокими жесткостными характеристиками.
В качестве примера КА с целевой прецизионной аппаратурой на
борту можно привести космический радиотелескоп (КРТ) (рис. 1),
космический телескоп миллиметрового диапазона (рис. 2), косми¬
ческий телескоп ВКО-УФ (рис. 3), спутник дистанционного зонди¬
рования Земли (рис. 4). Технические характеристики аппаратуры
приведены ниже.
Технические характеристики космического радиотелескопа
Диаметр антенны, м
10
92; 18; 6; 1,35
Диапазоны частот, см
Точность наведения, угл. с
Размах панелей СБ, м
Скорость передачи данных, Мб/с,
в диапазоне частот 15 ГГц
32
16,7
144
Технические характеристики космического телескопа
миллиметрового диапазона
Скорость переориентации, град/с,
Точность наведения оптических осей
Амплитуда стабилизации, угл. с...
Скорость стабилизации, град/с
Размах панелей СБ, м
Скорость передачи данных, Мб/с,
в диапазоне 15 ГГц
0,5 угл. мин...0,1 угл. с
0,3
2,500...0,033
0,0001
Более 18
144
Рис. 2. Космический телескоп миллиметрового диапазона
7
Основы проектирования виброзащиты космических аппаратов
Технические характеристики космического телескопа ВКО-УФ
Точность наведения оптических осей ПН, угл. с 0,1
Скорость переориентации, град/с 0,3
Амплитуда стабилизации, угл. с 2,500...0,033
Скорость стабилизации, град/с 5,0 • 10 4
Размах панелей СБ, м 13
Рис. 3. Космический телескоп ВКО-УФ
Основные технические характеристики
спутника дистанционного зондирования Земли
Точность ориентации по каждой из трех осей, угл. мин Не ниже 5
Точность стабилизации, град/с 0,001
Таким образом, КА с прецизионной целевой аппаратурой на
борту с точки зрения динамики должны обеспечивать высокоточ¬
ное наведение (до десятых долей угловых секунд) на исследуемые
8
Основы проектирования виброзащиты космических аппаратов
Рис. 4. Спутник дистанционного зондирования Земли
объекты, высокую геометрическую точность отражающей поверх¬
ности рефлектора и высокое качество системы доставки научной
информации.
Выполнение данных требований обеспечивается системой
управления ориентацией и стабилизацией (СУОС). Однако в про¬
цессе функционирования возникают механические силы и моменты,
обусловленные колебаниями панелей СБ, изгибом элементов кон¬
струкции, работой различного рода приводов, вентиляторов и дру¬
гой аппаратуры, имеющей вращающиеся массы, которые действуют
на корпус КА и в некоторых случаях из-за своих значений и частот¬
ного состава не могут быть полностью отражены средствами СУОС.
Это приводит к тому, что характеристики выходной информации не
соответствуют заданным параметрам (проблема динамической точ¬
ности, смаз (размытие) изображений и т. д.), что, в свою очередь,
существенно влияет на целевые характеристики КА — разрешение
на местности, точность наведения и др. Решение данной проблемы
является ключевым вопросом при разработке, изготовлении и экс¬
плуатации информационных КА. Ранее эта проблема решалась в ос¬
новном только за счет отработки частотных характеристик упругих
элементов и совершенствования конструкции КА.
Следует отметить, что для информационных КА, оснащенных
крупногабаритной целевой аппаратурой, возникает дополнитель¬
ная проблема, заключающаяся в том, что источники внутренних
9
Основы проектирования виброзащиты космических аппаратов
возмущений могут непосредственно оказывать отрицательное
вибрационное воздействие на целевые характеристики изделия.
В процессе работы вентиляторов, приводов и т. п. на конструкцию
изделия передаются пространственные вибрации малой амплитуды,
лежащие в области средних частот (микровозмущения), которые
отрицательно влияют как на работу командных приборов системы
ориентации, так и на работу целевой аппаратуры и могут в некото¬
рых случаях привести к ухудшению характеристик изделия. Эту за¬
дачу также можно отнести к проблеме динамической точности КА,
но в диапазоне средних частот (5... 100 Гц).
До последнего времени систематический и целенаправленный
учет влияния внутренних источников возмущения на точность
стабилизации и на работу целевой аппаратуры не проводился.
Поэтому, как правило, на борт КА приводы и другую аппаратуру,
имеющую вращающиеся массы, устанавливали без надлежащего
контроля виброактивности. Вследствие недопонимания актуаль¬
ности данной проблемы для современных информационных КА
эти вопросы не были поставлены в достаточно полном научном
и практическом планах.
Для достижения заданных требований по параметрам угловой
стабилизации КА при действии внутренних источников возмуще¬
ний (задач динамической точности) требуется решить комплекс
задач, важнейшими из которых являются:
• анализ требований, предъявляемых к современным инфор¬
мационным КА, в зависимости от назначения КА и устанавлива¬
емой на них научной аппаратуры в целях унификации этих тре¬
бований;
• классификация и анализ основных источников внутренних
возмущений в современных КА для выделения наиболее виброак-
тивных для возможного выключения их в режимах сеансов (во вре¬
мя сеансов наблюдения);
• разработка экспериментальных методов и средств определе¬
ния воздействий, создаваемых приводами, исполнительными меха¬
низмами и аппаратурой в их рабочих режимах;
• учет воздействий исполнительных механизмов в динамической
схеме изделия (для решения задач, связанных со смазом изображе¬
ния и микровозмущениями) на стадии проектирования и изготовле¬
ния изделий для анализа динамической точности неуправляемого
КА как в низкочастотной, так и в среднечастотной областях воздей¬
ствий внутренних источников возмущений;
10
Основы проектирования виброзащиты космических аппаратов
• разработка математических алгоритмов решения задач дина¬
мической точности на базе математических моделей и эксперимен¬
тально определяемых параметров возмущающих воздействий;
• на основе анализа результатов динамических расчетов и об¬
щих требований по параметрам точности для всего КА разработка
частных требований по виброактивности к основным источникам
внутренних возмущений и предъявление этих требований разработ¬
чикам приводов, исполнительных механизмов и аппаратуры;
• разработка рекомендаций по управлению приводными устрой¬
ствами с точки зрения минимизации уровней создаваемых ими ме¬
ханических (вибрационных) воздействий;
• разработка и создание систем виброзащиты, обеспечивающих
снижение амплитуд колебаний агрегатов КА, чувствительных к ви¬
брациям.
Следует подчеркнуть, что лишь при выполнении всех без ис¬
ключения приведенных задач можно рассчитывать на успех в раз¬
работке информационных КА с жесткими требованиями по дина¬
мической точности.
Бортовые источники возмущений
Силомоментные воздействия на КА, обусловленные работой
каких-либо механических устройств, являются внутренними для
системы в целом, если в нее включены все движущиеся массивные
элементы — остронаправленные антенны (ОНА), панели СБ, зерка¬
ла, роторы электромеханических исполнительных органов (ЭМИО)
и т. д.
Определение воздействий, создаваемых
приводами, исполнительными механизмами
и аппаратурой в рабочих режимах
Механические воздействия на отдельные элементы сложной
системы могут быть вызваны различными обстоятельствами, одна¬
ко в общем случае можно утверждать, что причиной любого воздей¬
ствия является неравномерность движения несбалансированных
масс отдельных конструкций КА [17]. Это может быть вращение
ротора двигателя-маховика (ДМ), неравномерное движение зеркал
сканирующего устройства, поворот панели СБ и др. Другими сло¬
вами, механические факторы, приводящие к колебаниям отдельных
элементов конструкции КА, обусловлены инерционными нагрузка¬
ми от ее отдельных элементов.
Таким образом, анализ движения системы может быть выполнен
только при рассмотрении ее как совокупности всех составляющих
элементов, совершающих относительное движение. Выполнение
динамического анализа таких сложных систем, как поведение не¬
жесткого КА при воздействии приводных устройств (ПУ) аналити¬
ческими методами практически невозможно.
Задачу можно существенно упростить при допущении, что соз¬
даваемые ПУ воздействия на систему не зависят от характера возму¬
щенного движения КА. Такое допущение оправданно для ПУ, мас¬
сово-инерционные характеристики подвижных элементов которых
12
Основы проектирования виброзащиты космических аппаратов
существенно меньше аналогичных параметров изделия в целом.
Рассмотрим ПУ, в котором закон движения подвижного элемента
определяется зависимостью ускорения от времени w{t\ например
ротора с моментом инерции /. Если пренебречь силами трения, то
на статор (или на места его крепления) будет действовать момент
М = Пусть теперь тот же самый закон движения ротора
осуществляется, когда ПУ закреплено на некоторой свободной кон¬
струкции, например на КА с моментом инерции /. Можно показать,
что момент М*, действующий на систему, в этом случае составит
Поскольку значение у существенно меньше единицы, можно
принять, что М* = М Таким образом, при принятом допущении
вместо рассматриваемого ПУ можно ввести в систему создаваемое
им силовое или моментное воздействие, рассматривая его уже как
внешнее для системы в целом. Практическая ценность такого под¬
хода состоит в возможности экспериментального определения воз¬
мущений от ПУ на лабораторных стендах с последующим учетом
при моделировании динамики изделия.
На этапах проектирования прецизионных КА механические
воздействия, создаваемые элементами с движущимися и (или)
вращающимися массами, целесообразно задавать с помощью ма¬
тематических моделей, с учетом опыта предыдущих разработок.
По мере дальнейшей проработки изделия с появлением рабочих
образцов этих агрегатов проводится их экспериментальная отра¬
ботка на «виброактивность» и уточнение по результатам испы¬
таний. Параметры силоизмерительного стенда (СИС) компании
Kistler Holdig AG (Швейцария) приведены в табл. 1, а внешний
вид — на рис. 5 и 6.
Данные, полученные в процессе испытаний, подвергаются спе¬
циальной обработке для удаления паразитных составляющих сигна¬
ла, обусловленных фоновым и промышленным шумами, собствен¬
ными колебаниями приспособлений и систем обезвешивания и т. п.
Затем путем анализа полученных результатов строятся эмпириче¬
ские модели, которые используются при решении задач динамиче¬
ской точности.
13
Основы проектирования виброзащиты космических аппаратов
Таблица 1
Параметры СИС
Параметр
Обозначение
Единицы
измерения
Значение
Масса
кг
95
Габаритные размеры
(диаметр * ширина х высота)
мм
600 х 600 х 174
Температурный диапазон
°С
0...70
Измерительные диапазоны
^ Ру
F,
кН
10
10...20
Максимальная нагрузка
10
20
Тарируемые диапазоны измере¬
ний
0...10
0...20
Тарируемые поддиапазоны из¬
мерений
0...1
0...2
Допустимые свободные
моменты
м;, м;
м/
Нм
±500
±1000
Порог срабатывания
F«Fy
Fz
±5
±10
Чувствительность (номиналь¬
ная)
пк/Н
8
3,8
Разброс значений чувствитель¬
ности при приложении силы
внутри панели
F*Fy>Fz
%
±1
Линейность
±0,5
Гистерезис
0,5
Перекрестное искажение
Fx^Fz
F^M,
%
Н-м/кН
Не более ±1
- » -
Не более ±2
~3
14
Основы проектирования виброзащиты космических аппаратов
Рис. 5. Привод ОНА на силоизмерительной платформе
Рис. 6. Многозональное сканирующее устройство гидрометеорологиче¬
ского спутника МСУ-ГС
15
Основы проектирования виброзащиты космических аппаратов
Математические модели механических возмущений
от бортовых источников
Для иллюстрации приведенного выше подхода рассмотрим две
модели приводных устройств КА.
Модель механических воздействий
привода системы ориентации солнечной батареи
Математическая модель воздействий, создаваемых работой при¬
вода системы ориентации солнечной батареи (СОСБ), разработана в
соответствии с алгоритмом управления шаговым двигателем (ШД)
привода и результатами наземных стендовых испытаний данного
устройства (рис. 7).
Рис. 7. Испытания привода СОСБ
Алгоритм управления ШД привода в процессе поворота его вы¬
ходного вала на заданный угол:
• разгон — в течение определенного времени (в рассматривае¬
мом случае 6...8 с) происходит увеличение скорости поворота вы¬
ходного вала путем увеличения частоты подачи управляющих им¬
пульсов (от 1 до 100 Гц) на ШД привода;
16
Основы проектирования виброзащиты космических аппаратов
• движение с постоянной скоростью — ШД работает на посто¬
янной частоте;
•торможение — в течение определенного времени (6...8 с)
происходит уменьшение скорости поворота выходного вала путем
уменьшения частоты (от 100 до 0 Гц) подачи управляющих импуль¬
сов на ШД привода.
Такой алгоритм разгона-торможения позволяет существенно
снизить амплитудные значения момента на выходном валу привода.
Воздействия, создаваемые приводом, можно представить в виде
Mi = М:ы + М:б2>
где Мп — возмущающий момент при движении выходного вала
привода СОСБ, Нм; Л/СБ], МСБ2 — моменты, обусловленные раз¬
гоном (торможением) панелей СБ1 и СБ2, Нм. Изменение момен¬
та МСБ1 приведено на рис. 8.
6...8с
*н.тор
*к.тор
к.раз
t, С
Рис. 8. Изменение момента MQBV действующего при разгоне (торможении)
выходного вала привода:
М{ — момент, возникающий при очередном увеличении (уменьшении) частоты
управляющих импульсов; t — текущее время; tH раз, tK раз — время начала и конца
разгона; Гнтор, ^ктор — время начала и конца торможения; Д*ИМ1у- = 0,005 с ■
тельность импульса момента; = 0,4...0,53 с
момента
• дли-
период следования импульсов
Значение момента М{ вычисляют по формуле
М\ - ^СБ8’
где УСБ — осевой момент инерции панели СБ относительно оси вра¬
щения выходного вала привода; 8 = (5,4...7,3)10-2 1/с2 — угловое
17
Основы проектирования виброзащиты космических аппаратов
ускорение, создаваемое приводом при разгоне (торможении) вы¬
ходного вала привода.
Момент МСЬ2 обусловлен наличием кинематической погреш¬
ности привода и колебательными процессами в системе привод —
нагрузка. Закон и характеристики этой составляющей определены
эмпирически при испытаниях привода. Момент МСБ2 может быть
вычислен следующим образом:
Мс Б2 = As\n(2nvt + ф),
где А — 0,1256 ± 15 % Н • м — амплитуда; v = 1,31 ± 15 % Гц — час¬
тота гармонической составляющей.
Для обеспечения закона сохранения количества движения сис¬
темы фаза гармонической составляющей ф колебаний определяется
из условия
^к.тор
J sin (со/ + ср)сй = 0.
^н.раз
Отсюда следует
COSCO/ -COSCO/
(р = arctg .
sin®'H.pa3-sin®'K.Top
Mas,Им
Рис. 9. Зависимость воздействия от времени при повороте панели СБ
18
Основы проектирования виброзащиты космических аппаратов
Примерный вид зависимости воздействия от времени при пово¬
роте панели СБ представлен на рис. 9.
*
&
€
о
9*
0,008
0,006
0,004
0,002
g 0
g -0,002
g -0,004
£
-0,006
- 0,008
. «Чт
10
■ 1 .rw
I
60 70
80 90
Время, с
Рис. 10. Динамическое поведение КА при повороте панелей СБ:
сплошные штриховые — крен; светлые — тангаж; точки — рыскание
Результаты моделирования динамического поведения КА при
повороте панелей СБ на угол 4° с использованием представленной
модели воздействия приведены на рис. 10.
Модель механических воздействий привода ОНА
Привод работает с постоянной частотой управляющих импуль¬
сов ШД, равной 130 Гц. При этом эквивалентная угловая скорость
поворота ОНА определяется величиной пачки импульсов и перио¬
дом цикла следования пачек. Примерный вид циклограммы работы
привода и соответствующей циклограммы вращающего момента
(момента привода) приведен на рис. 11 и 12.
Поскольку в течение прохождения пачки импульсов угловая ско¬
рость постоянная, момент будет возникать в начале (разгон) и в кон¬
це (торможение) последовательности импульсов [21].
Время действия момента привода (т) определяется законом со¬
хранения момента количества движения:
М7Т=Ф<Л-
19
Основы проектирования виброзащиты космических аппаратов
Тогда время действия момента
м.
Здесь фа — установившаяся угловая скорость, рад/с; Ja — момент
инерции относительно соответствующей оси (а = Z или Y) враще¬
ния; Ма = 15 Н м — момент, создаваемый приводом относительно
оси; У она’ Ууонл — моменты инерции относительно неподвиж¬
ной Уона и подвижной осей вращения Ф0на? Равные соответствен¬
но 2,55 и 5,8 кг-м2.
со, град/с
0,35
Tpi
nil
Тп 2
Т
'41
Ti
^2
TPi
t, с
М, Н м
15
-
г:
Tpi ■
ТР2 '
<1
n
Та
Рис. 11. Циклограммы угловой скорости о вращения привода (а) и момен¬
та привода (б) при наведении ОНА
Результаты моделирования динамического поведения КА при
повороте ОНА на угол, равный 6 угл. мин, со скоростью 0,1 град/с
и TQ = 1 с относительно неподвижной оси вращения vj/0HA представ¬
лены на рис. 12.
20
Угловая скорость, град/с
Основы проектирования виброзащиты космических аппаратов
0,006
0,004
0,002
0
-0,002
-0,004
-0,006
Рис. 12. Результаты моделирования динамического поведения КА при по¬
вороте ОНА при крене, тангаже и рыскании
Го1/1 \ 'Л2/ >' ^ 14 'I 4 16V V '' 18V' ^
Время, с
21
Методы и принципы создания
систем виброзащиты
Значительные проблемы виброзащиты КА и его технологиче¬
ского оборудования от внешних и внутренних возмущений возни¬
кают при проектировании информационных КА нового поколения.
В связи с этим большое значение приобретают научные исследова¬
ния в области создания эффективных средств и методов виброза¬
щиты (ВЗ) и более чувствительных и дешевых средств регистрации
механических возмущений.
К автоматическим КА, предназначенным для передачи больших
объемов специальной информации, предъявляются особые требо¬
вания. Например, для КА узел вторичного зеркала (УВЗ) телескопа
имеет ограничение по смазу изображения не более 5 * 10-6 м, угловое
отклонение посадочного места гиростабилизированной платформы
должно быть менее 0,02", привода ОНА — не более 1 • 10-5 град.
Механические возмущения от гироскопических исполнительных
органов системы управления и вентиляторов систем терморегули¬
рования не должны превышать значения амплитуды 0,01...0,001 g.
Такие показатели обеспечиваются только при оснащении приборов
и конструкций КА ВЗ.
Упругие колебания конструкции КА оказывают негативное вли¬
яние на работу системы управления движением, а следовательно,
и на качество (надежность) решения целевых задач и производи¬
тельность КА.
При ориентации КА угловые перемещения и скорость отно¬
сительно его центра масс должны иметь следующие значения:
ф < 0,02" и со < 10-4 рад/с соответственно. Для достижения требуе¬
мой производительности системы декременты колебаний панелей
СБ КА при амплитудах ниже 10_3 м должны составлять 8 = 0,15...0,2,
а при амплитудах выше 10_3 м — 0,2...0,4 (что связано со временем
затухания переходного процесса после переориентации КА).
22
Основы проектирования виброзащиты космических аппаратов
Для выполнения этих требований необходимо провести ком¬
плекс мероприятий как системного, так и конструктивного плана.
К системным мероприятиям можно отнести оптимизацию алгорит¬
мов и настроек контура управления, выбор соответствующих цик¬
лограмм функционирования ПУ, подбор таких законов управления
для аппаратуры с вращающимися массами, которые позволят под¬
держивать минимальный уровень механических возмущений и т. д.
К конструктивным можно отнести мероприятия, направленные на
снижение массы упругих элементов, увеличение их жесткости (что
часто несовместимо с предыдущим требованием), повышение дис¬
сипативных свойств конструкции, разработку пассивных или актив¬
ных систем виброгашения или виброизоляции.
Представленный ниже материал относится именно к конструк¬
тивным мероприятиям обеспечения динамической точности КА.
Существующие подходы по обеспечению пространственной
устойчивости и стабилизации упругого КА, применяемые при
проектировании, не всегда устраняют негативное влияние упру¬
гих колебаний узлов на общую динамику КА и его выносных
конструкций. Для современных КА, оснащенных оптическими
и микроволновыми телескопами, приборами обеспечения лазер¬
ной связи, а также технологическими модулями, предназначенны¬
ми для работы в условиях микрогравитации, потребовались новые
решения в системах ВЗ.
Основной интерес при исследованиях по применению различ¬
ных систем ВЗ представляет рассмотрение динамического взаимо¬
действия между источником колебаний и объектом ВЗ.
Анализ системы — источник возмущений, объект ВЗ и связи
между ними — позволяет выявить следующие возможные способы
уменьшения колебаний КА:
• снижение уровней механических воздействий, возбуждаемых
источником (снижение виброактивности источника);
• изменение конструкции объекта, при которой заданные меха¬
нические воздействия будут вызывать менее интенсивные колеба¬
ния объекта или отдельных его частей (внутренняя ВЗ);
• присоединение к объекту дополнительной механической
системы, изменяющей характер его колебаний (динамическое
гашение);
• установка между объектом и источником возмущения допол¬
нительной системы, защищающей объект от механических воздей¬
ствий источника (виброизоляция объекта).
23
Основы проектирования виброзащиты космических аппаратов
Снижение виброактивности источника, как правило, связано
с изменением различных параметров и процессов и может быть до¬
стигнуто специальными способами, специфическими для каждого
частного случая.
Виброизоляция — метод ВЗ, в котором две основные подсис¬
темы механической структуры соединены между собой связями.
Этот метод успешно применяется на КА для снижения механи¬
ческих воздействий на приборы и аппаратуру, устанавливаемую
внутри КА для ослабления виброударных нагрузок на КА и его
элементы. Виброизоляция оборудования КА может осущест¬
вляться пассивными, активными и комбинированными методами
и средствами.
Классификация методов и средств ВЗ:
• корреляционные методы ВЗ — снижение виброактивности ис¬
точников вибраций, изменение упруго-диссипативных свойств кон¬
струкций;
• средства ВЗ — системы виброизоляции, динамического гаше¬
ния колебаний, комбинированные средства ВЗ.
Увеличение диссипативных свойств
конструкции космических аппаратов
Диссипацию в каких-либо конструкциях, не оснащенных спе¬
циальными устройствами, обеспечивающими рассеяние энергии
(амортизаторы, виброизоляторы и гасители колебаний), можно ус¬
ловно разделить на три основных вида [22]:
1) акустическое излучение, т. е. переход энергии колебаний кон¬
струкции в энергию какого-либо движения внешней по отношению
к этой конструкции среды (газа или жидкости). Для предусмотрен¬
ного в данном издании класса конструкций этот вид не рассма¬
тривается, поскольку основное их функционирование происходит
в вакууме;
2) конструкционное демпфирование (кулоновское трение), пред¬
ставляющее собой диссипацию энергии колебаний, обусловленную
силами трения, возникающими при относительном движении кон¬
тактирующих поверхностей. Обычно представляется в виде посто¬
янной силы или момента, пропорциональных нормальной нагрузке,
сжимающей поверхности между собой и направленной противопо¬
ложно вектору скорости. В рассматриваемом случае к этому виду
24
Основы проектирования виброзащиты космических аппаратов
демпфирования можно отнести силовые факторы, возникающие
в местах соединения, зачековки, узлах раскрытия рассматриваемых
конструкций;
3) демпфирование, обусловленное свойствами материала, т. е.
перестройками его внутренней структуры.
Повышение конструкционного демпфирования
путем нормировки люфтов и зазоров
Для увеличения демпфирующих характеристик конструкции
различных КА проводили работы по нормировке зазоров в местах
зачековки раскрываемых конструкций между собой после их рас¬
крытия и люфтов в соединениях. Например, в 1998 году для КА
была разработана, испытана и установлена в узлах подкоса панели
СБ демпфирующая система, обеспечивающая необходимые значе¬
ния люфтов и зазоров.
Для получения количественных характеристик и изучения воз¬
можности применения способа демпфирования с помощью остаточ¬
ных колебаний панелей СБ осуществлен цикл экспериментальных
исследований (рис. 13, а). Испытания проводились с зазорами и без
них (с защемлением), причем соединения с люфтом создавали как
в верхнем, так и в нижнем подкосах (рис. 13, б) при поочередном
отсоединении их от панелей СБ.
На рисунке 13, а приведены зависимости логарифмических
декрементов колебаний 5 от амплитуд колебаний панели одного
из тонов СБ, где 1 — исходный вариант; 2 — зазоры в замках вы¬
браны, зазоры в стержнях Д5 = ± 0,5; 3 — зазоры в замках Д = ± 2,5,
зазоры в стержнях Д5 = ±0,5. Видно, что при зазорах порядка
0,25-10_3 м в защелках (рис. 13, в) соединений панелей между со¬
бой и люфте в подкосе 0,5 • 10-3 м коэффициент 5 возрастает от 0,05
до 0,55.
Демпфирование колебаний с применением люфтов и зазоров
в конструкциях рассматриваемого типа наиболее эффективно при
амплитудах колебаний панелей выше 5,0-10_3 м.
Для увеличения диссипативных свойств системы при ампли¬
тудах менее 1,0*10_3 м в люфтовом соединении применяли смазку
ВНИИ НП-207 с добавлением порошка дисульфита молибдена, од¬
нако это не привело к положительному результату.
25
Основы проектирования виброзащиты космических аппаратов
5
0,7
0,6
0,5
0,4
0,3
0,2
0,1
V
/
/
/
V
/
/
!г.
"1
0 2 4 6 8 10 z0, мм
а
А-А
Рис. 13. Демпфирование колебаний с применением люфтов и зазоров:
1 — базовые элементы; 2 — стержень
Сплавы высокого демпфирования
Кроме внешних источников демпфирования, приведенных
выше, существует большое число механизмов, с помощью которых
энергия при колебаниях может поглощаться внутри некоторого ма¬
лого объема конструкционного материала при циклическом дефор¬
мировании. Рассмотрим наиболее существенные из них (табл. 2),
связанные с внутренними перестройками микро- или макрострук¬
тур от кристаллических решеток до эффектов молекулярного уров¬
ня. В этот диапазон входят магнитные эффекты (магнитоупругий
и магнитомеханический гистерезис), температурные (термоупругие
26
Основы проектирования виброзащиты космических аппаратов
явления, теплопроводность, температурная диффузия, тепловые по¬
токи) и перестройка атомарной структуры (дислокации, локальные
дефекты кристаллических решеток, фотоэлектрические эффекты,
релаксация напряжений на границах зерен, фазовые процессы, учи¬
тываемые в механике твердого деформируемого тела, блоки в по-
ликристаллических материалах и т. п.).
Независимо от конкретного вида физического механизма
все реальные материалы при циклическом деформировании по¬
глощают некоторую энергию. Подобные эффекты часто носят
существенно нелинейный характер, поэтому подробный анализ
динамических перемещений с учетом указанных механизмов
демпфирования обычно вызывает затруднения. Однако с помо¬
щью экспериментов на образцах специальных материалов можно
получить качественные, а в некоторых случаях и количественные
оценки, используя специальную характеристику — удельную ра¬
боту диссипативных сил D (т. е. отнесенную к единице объема
энергию, поглощенную за один цикл колебаний) для различных
уровней деформаций.
Удельная работа диссипативных сил очень мала у большин¬
ства обычных конструкционных материалов (рис. 14). Для неко¬
торых уникальных сплавов с высокими демпфирующими характе¬
ристиками, в которых может быть усилен тот или иной механизм
демпфирования, она оказывается несколько большей и принимает
максимальное из всех возможных значение для большинства по¬
лимерных резиноподобных материалов, обычно не используе¬
мых в качестве основных конструкционных элементов, причем
главным в них является какой-либо один конкретный механизм
демпфирования.
Другой подход к получению количественных оценок внутрен¬
него демпфирования материалов состоит в исследовании петли
гистерезиса, которая, как предполагается, может быть получена
экспериментально.
Петля гистерезиса очень узкая, если материал деформируется
без образования пластической области, поэтому ее нелегко обна¬
руживать непосредственно. Однако серповидный характер петли
оказывается довольно общим ее свойством. Во многих исследо¬
ваниях нелинейных динамических перемещений в конструкциях
использовали аналитические представления для подобных петель
гистерезиса.
Петли гистерезиса представлены на рис. 15.
27
Таблица 2
Механизмы демпфирования
Тип перестрой¬
ки внутренней
структуры
Тип демпфирования
Линейное
Нелинейное
Релаксационное
Резонанс¬
ное
Г истере-
зисное
Вязкое
Магнитная
Магнигоу пру гая ре¬
лаксация
Магнито¬
упругий
резонанс
Ферромаг¬
нитный
гистерезис
Температурная
Вихревые токи
Термический гистерезис
Термоупругое демпфи¬
рование (термодиффу¬
зия, тепловые токи)
Атомная
Дислока¬
ционный
резонанс
Дислока¬
ционный
гистерезис
Демпфиро¬
вание, зави¬
сящее от ис¬
тории демп¬
фирования
Демпфирование,
обусловленное
дислокациями
Релаксация дислока¬
ций — область низких
температур
Релаксация дислока¬
ций — область высо¬
ких температур
Деформационный
гистерезис
Демпфирование,
зависящее не
только от дис¬
локаций
Релаксация по грани¬
цам зерен
Вязкоупругая
микроползу¬
честь с за¬
паздыванием
Точечные де¬
фекты
Релаксация на точеч¬
ных дефектах
—
—
—
Демпфирование,
зависящее от
атомов примеси
Демпфирование
по Сноеку
Упорядочивание
с использованием
решений для твердого
деформируемого тела
Деформирование
по Кестеру
Электронные
механизмы
Деформирование, обу¬
словленное фазовыми
процессами в сплош¬
ных средах
Поглощение электро¬
нов ультразвуком
Фононные и фонон-
электронные меха¬
низмы
28
Основы проектирования виброзащиты космических аппаратов
Д Н/м2
Для большинства конструк¬
ционных металлов отклонение
петли гистерезиса от одиночной
кривой незначительно, поэто¬
му и демпфирование, обуслов¬
ленное свойствами материала,
невелико по сравнению с демп¬
фированием, обеспечиваемым
обычными широко применяемы¬
ми способами. Поэтому вопрос
о том, как достичь оптимального
соответствия используемых па¬
раметров, является академиче¬
ским, за исключением случаев,
например, конструкции, рабо¬
тающей в вакууме, где переста¬
ет функционировать большая
часть механизмов демпфиро¬
вания, или использования мате¬
риала, представляющего собой
специальный сплав с высокими
демпфирующими характеристи¬
ками. Поэтому, хотя такие во¬
просы и представляют интерес
при исследовании динамических
перемещений, они в дальней¬
шем рассматриваться не будут,
поскольку материалы, использу¬
емые для изготовления конструк¬
ций с очень высоким уровнем
демпфирования, ведут себя ина¬
че, чем большинство конструк¬
ционных металлов или сплавов
с высокими демпфирующими ха¬
рактеристиками, что и будет по¬
казано далее [5].
К числу материалов, способ¬
ных гасить микровозмущения на КА с амплитудами ЮЛ.ЛО-4 м,
относят сплавы высокого демпфирования (СВД) с тремя основными
типами механизмов повышенного демпфирования:
Рис. 14. Влияние амплитуды де¬
формации е на удельную работу
диссипативных сил D различных
материалов:
1 — конструкционные материалы;
2 — сплавы высокого демпфирования;
3 — вязкоупругие материалы; 4 — зона
пластических деформаций
Рис. 15. Петли гистерезиса:
7,2 — сильная и слабая нелинейность
29
Основы проектирования виброзащиты космических аппаратов
1) взаимодействие скользящих дислокаций с атомами примеси
(Mg и сплавы на его основе, чугуны);
2) движение границ двойников в термоупругом мартенсите
(сплавы на основе Ni-Ti, Mn-Cu, Cu-Al-Ni, Cu-Al-Zn);
3) взаимодействие движущихся границ доменов со структурны¬
ми дефектами (сплавы на основе Fe-Cr, Fe-Cr-Al, Co-Ni, Fe-Co).
Поиск возможных решений по повышению демпфирующих
свойств конструкций КА с использованием в них СВД из титановых
сплавов проведен совместно со специалистами Самарского авиаци¬
онного института на макетных образ¬
цах УВЗ. Конструкция УВЗ телескопа
приведена на рис. 16.
После расчета динамики УВЗ по¬
лучены первые два тона колебаний,
влияющих наоптическую систему КА:
частота первого тона — вращение
вторичного зеркала вокруг оси А" —
составила 17,7 ±0,15 Гц; частота
второго тона — колебания вдоль
ocwX— 45,0 ± 0,1 Гц. Определены
детали, представляющие собой несу¬
щие кронштейны оптической системы
(спайдеры), которые могут улучшить
вибродинамические характеристики
изделия и обеспечить виброзащиту
вторичного зеркала.
При сравнении различных мате¬
риалов, из которых изготовлялись
элементы конструкции (спайдеры), наиболее оптимальные резуль¬
таты вибродинамических испытаний были получены для крон¬
штейна из титанового сплава ВТ9 с последующей специальной тер¬
мической обработкой.
Результаты эксперимента показали, что изменения статическо¬
го нагружения кронштейна (установка элемента конструкции при
воздействии сил растяжения или сжатия) и различные уровни воз¬
буждения конструкции при перемещениях краев макета вторичного
зеркала в пределах (0,5...8)10-6 м не влияют на динамические пара¬
метры исследуемых конструкций [6].
Применение СВД в кронштейнах УВЗ приводит к увеличе¬
нию логарифмического декремента колебаний 8 в 2 раза на первом
Рис. 16. Конструкция УВЗ
телескопа:
1 — силовой корпус; 2 — спай-
дер; 3 — вторичное зеркало
30
Основы проектирования виброзащиты космических аппаратов
тоне колебаний (8 = 0,003) и в 1,6 раза — на втором (8 = 0,009)
по сравнению со штатными кронштейнами, что также является
малоэффективным.
Управляемые и регулируемые
демпфирующие устройства
Для увеличения логарифмического декремента колебаний про¬
ведено исследование активной демпфирующей системы разработки
ФГУГТ СКТБ «Полюс» (Иваново), в которой использовались управ¬
ляемые магнитожидкостные демпферы (УМЖД) с магнитореоло¬
гической суспензией в качестве рабочего тела (рис. 17). Демпферы
устанавливали в подкос СБ.
а б
Рис. 17. Внешний вид демпферов первого (а) и второго (б) типов
Испытания проводили на двух режимах работы демпферов
УМЖД: пассивном (без подачи напряжения на катушку) и активном
(с подачей напряжения).
В результате испытаний с демпфером первого типа (без под¬
ключения питающего напряжения) частота первого тона колебаний
снизилась на 13 % при амплитудах менее 1,0-10“3 м и на 47 % —
при амплитудах более 1,0-10_3 м. Значение декремента колебаний
увеличилось примерно в 6 раз для первого тона колебаний по срав¬
нению с базовым вариантом без демпфера со штатным подкосом.
Изменились и формы колебаний СБ.
Подача питания на демпфер первого типа привела к увели¬
чению частоты первого тона колебаний на амплитудах более
1,0* 10_3 м на 22 %, значение декремента уменьшилось в 2 раза по
сравнению с вариантом без подачи напряжения. На амплитудах
31
Основы проектирования виброзащиты космических аппаратов
менее 1,0-10-3 м частота и форма колебаний существенно не
изменились.
Испытания с демпфером второго типа (с подачей напряже¬
ния), разработка АО «НПО Лавочкина» (Москва) и ИТМО име¬
ни А.В. Лыкова (НАН Беларуси), показали, что частота первого
тона колебаний СБ уменьшилась на 5 % при амплитудах менее
1,0-10-3 м, а при амплитудах более 1,0 • 10-3 м — на 70 % по сравне¬
нию с базовым вариантом. Форма колебаний этого тона не измени¬
лась, коэффициенты 8 при амплитудах колебаний менее 1,0-10-3 м
остались без изменений, а при амплитудах более 1,0* 10_3 м увели¬
чились в 3,5 раза.
Аналог этой конструкции в дальнейшем был доработан спе¬
циалистами отдела динамики АО «НПО Лавочкина» и Академии
РВСН имени Петра Великого в управляемый амортизатор для ав¬
томобилей ВАЗ «Ока» и Volvo (рис. 18), который демонстрировал¬
ся на 3-й Международной выставке-конгрессе «Высокие техноло¬
гии. Инновации. Инвестиции’98», проходившей в Михайловском
Рис. 18. Амортизаторы
манеже Санкт-Петербурга 16-19 июня 1998 года. Образец магнито¬
жидкостного амортизатора для автомобиля ВАЗ «Ока» занял II ме¬
сто. Амортизатор для автомобиля Volvo получил серебряную медаль
на VI Московском международном салоне промышленной соб¬
ственности «Архимед-2003», проходившем 18-21 марта 2003 года
в КВЦ «Сокольники».
32
Основы проектирования виброзащиты космических аппаратов
Рис. 19. Характеристики амортизатора (за¬
штрихованная область — зона управляемости)
Отработка работоспособности амортизатора была проведена
в ФГУП «НАМИ» (Москва) и в ОАО «Плаза» (Санкт-Петербург),
характеристики представлены на рис. 19.
Системы виброизоляции
В расчетной модели виброзащитной системы можно выделить
три основные части: источник возмущений (источник), объект за¬
щиты (объект), виброизолирующее устройство. В общем случае
источник и объект считаются твердыми телами, движущимися по¬
ступательно вдоль некоторой осиА" (рис. 20, а). Приложенные к сис¬
теме внешние силы F (возмущения) и реакции R и R\ с которыми
виброизолирующее устройство, расположенное между источником
и объектом, воздействует на них, направлены вдоль оси X.
В большинстве случаев масса одного из тел системы — источ¬
ника или объекта — существенно превышает массу другого тела —
соответственно объекта или источника. Тогда движение тела боль¬
шой массы может считаться не зависящим от движения тела малой
33
Основы проектирования виброзащиты космических аппаратов
массы. Если, в частности, большую
массу имеет объект, то его обычно
считают неподвижным; движение
системы вызывается в этом случае
приложенными к источнику внеш¬
ними силами, представляющими со¬
бой силовое возбуждение F = F(t)
(рис. 20, б). Если большую массу име¬
ет источник, то закон его движения
£ = £(/) можно считать заданным; это
движение играет роль кинематическо¬
го возбуждения системы — точнее,
объекта (рис. 20, в). В обоих случаях
тело большой массы называют несу¬
щим, или основанием, тело малой мас¬
сы — несомым.
Схему виброзащитной системы,
представленную на рис. 20, б, обычно
применяют при защите зданий, соору¬
жений, перекрытий или фундаментов
от динамических воздействий, воз¬
буждаемых установленными на них машинами с неуравновешенны¬
ми движущимися частями или иным виброактивным оборудовани¬
ем [15, 23]. Схему, приведенную на рис. 20, в, используют в задачах
виброзащиты приборов, аппаратов точных механизмов или станков,
т. е. оборудования, чувствительного к вибрациям и устанавливаемо¬
го на колеблющихся основаниях или движущихся объектах.
Виброизолирующее устройство представляет собой важнейшую
часть виброзащитной системы; его назначение состоит в создании
такого режима движения, инициируемого заданными возмуще¬
ниями, при котором реализуется цель защиты объекта. Во многих
случаях это оказывается достижимым при использовании безы¬
нерционного виброизолирующего устройства, которое для схем,
приведенных на рис. 20, представляет одноосный виброизолятор.
Для такого виброизолятора реакции R и R' совпадают по значению
(.R = R'\ причем в рассматриваемом ниже простейшем случае реак¬
цию R можно считать пропорциональной деформации 5 и скорости
деформации 5 виброизолятора [3]:
R = с8 + Ь8.
а
т
R ! 1 R
\ X
б
R г
И R’
\
X
т
в
Рис. 20. Принципиальные
схемы виброзащитной
системы:
а — общий случай; б — силовое
возбуждение F= F(t); в — кине¬
матическое возбуждение; ВУ —
виброизолирующее устройство
34
Основы проектирования виброзащиты космических аппаратов
Приведенная зависимость описывает линейную характеристику
простого безынерционного виброизолятора; коэффициенты с и b
называются соответственно жесткостью и коэффициентом демп¬
фирования. При Ъ - 0 зависимость представляет собой характе¬
ристику линейного идеально упругого элемента (пружины); при
с = 0 — характеристику линейного вязкого демпфера.
Виброизоляция гироскопических источников
микровозмущений
На примере космического телескопа рассмотрим виброизоля¬
цию гироскопических источников микровозмущений [13]. Косми¬
ческий аппарат оснащен ультрафиолетовым телескопом с высоким
разрешением, малые колебания элементов оптического тракта (глав¬
ное и вторичное зеркала, фотоприемник) которого могут привести
к существенному искажению получаемой информации. Кроме того,
высокие требования к точности ориентации КА на объект исследо¬
вания обусловливают повышенные требования к чувствительным
элементам СУОС (гироскопический интегратор вектора угловых
скоростей — ГИВУС, датчики гида), малые колебания которых
могут также привести к искажению измеряемой ими информации
и вследствие этого —- к ухудшению качества стабилизации объекта.
Результаты проведенных исследований по определению амплитуд
колебаний элементов оптического тракта и чувствительных эле¬
ментов СУОС, вызванных остаточной
несбалансированностью вращающих¬
ся роторов ДМ, подтвердили их от¬
рицательное влияние на качество вы¬
полнения поставленной задачи. Для
уменьшения влияния данного фактора
на относительные перемещения опти¬
ческого тракта разработан шестисте¬
пенной виброизолятор ДМ.
Функционирование разрабатыва¬
емого устройства продемонстрируем
на примере одностепенного виброизо¬
лятора (рис. 21).
Возмущения, обусловленные оста¬
точным дисбалансом ротора, можно
представить в виде [24]
F = A$>\n(2nft\
Рис. 21. Схема функциониро¬
вания одностепенного вибро¬
изолятора:
1 — корпус: 2 — виброизолятор:
3 — источник вибровозмущений
35
Основы проектирования виброзащиты космических аппаратов
где А — амплитуда воздействия, Н/м; /— частота вращения махо¬
вика, Гц; t — время, с.
Амплитуда возмущающей силы, создаваемой ДМ, определяется
по формуле
А = cm2 = a(27t/)2,
гдеа — остаточный дисбаланс кг-м;со— угловая скорость, 1/с; /—
количество оборотов в секунду, с"1.
В модели механических воздействий ДМ примем, что рабо¬
чий диапазон частот 0...90 Гц, остаточный дисбаланс составляет
7* 10-6 кг-м.
На рис. 22 приведен график зависимости амплитуды возмуще¬
ния рассматриваемого устройства (ДМ) от частоты колебаний.
S
я
К
О
10
20
60
30 40 50
Частота, Гц
Рис. 22. Возмущения, создаваемые ДМ
70
80
90
•©<
^ 0 10 20 30 40 50 60 70 80 90
Частота, Гц
Рис. 23. Зависимость коэффициента динамичности от частоты колебаний
36
Основы проектирования виброзащиты космических аппаратов
Для разрабатываемого устройства при настройках, обеспечива¬
ющих частоту подвеса, равную 10 Гц, и эквивалентный декремент
колебаний, равный 0,3, получим зависимость коэффициента дина¬
мичности от частоты колебаний [3], приведенную на рис. 23.
Зависимость амплитуд механического воздействия, приходящих
на места крепления, будет иметь следующий вид (рис. 24).
Частота, Гц
Рис. 24. Зависимость амплитуд механического воздействия от частоты
колебаний
Таким образом, максимальный уровень воздействия снижен
практически на порядок, а уровень воздействий на резонансной
частоте виброизолятора невысок
вследствие характера возмущающе¬
го воздействия.
Установка виброизоляции позво¬
ляет ослабить механическую связь
между ДМ и корпусом КА, что, с од¬
ной стороны, не будет оказывать су¬
щественного влияния на управление
КА в связи с действием управляюще¬
го момента в частотной области ниже
собственных частот виброизолятора,
а с другой стороны, будет снижать
Уровни микровозмущений по шести
степеням свободы Fx, F', Ft9 My, М,
Mz (рис. 25).
Рис. 25. Силы и моменты, воз¬
никающие при работе ДМ:
1 — корпус КА; 2 — механиче¬
ская связь; 3 — виброизолирую¬
щее устройство; 4 — ДМ
37
Основы проектирования виброзащиты космических аппаратов
Рис. 26. Физическая модель виброизолятора с ше¬
стью степенями свободы
Принципиальная физическая модель разработанного виброизо¬
лятора приведена на рис. 26 [14].
Геометрические характеристики виброизолятора, материал,
число, расположение, форму и сечение стоек подбирали путем ите¬
рационного численного моделирования таким образом, чтобы обе¬
спечить собственные колебания диска (имитирующего ДМ) по пер¬
вым шести тонам колебаний, лежащим в области частот 10 Гц.
Результаты моделирования виброизолятора при выбранных па¬
раметрах приведены в табл. 3 и на рис. 27.
Таблица 3
Результаты моделирования
№ тона
колебаний
Частота, Гц
Вид колебаний
1
7,65
В плоскости Y0Z
2
7,65
В плоскости Х0 У
3
7,68
Крутильные в плоскости XQZ
4
13,27
К плоскости Y0Z
5
13,27
К плоскости ЛЮ Г
6
15,90
По оси Y
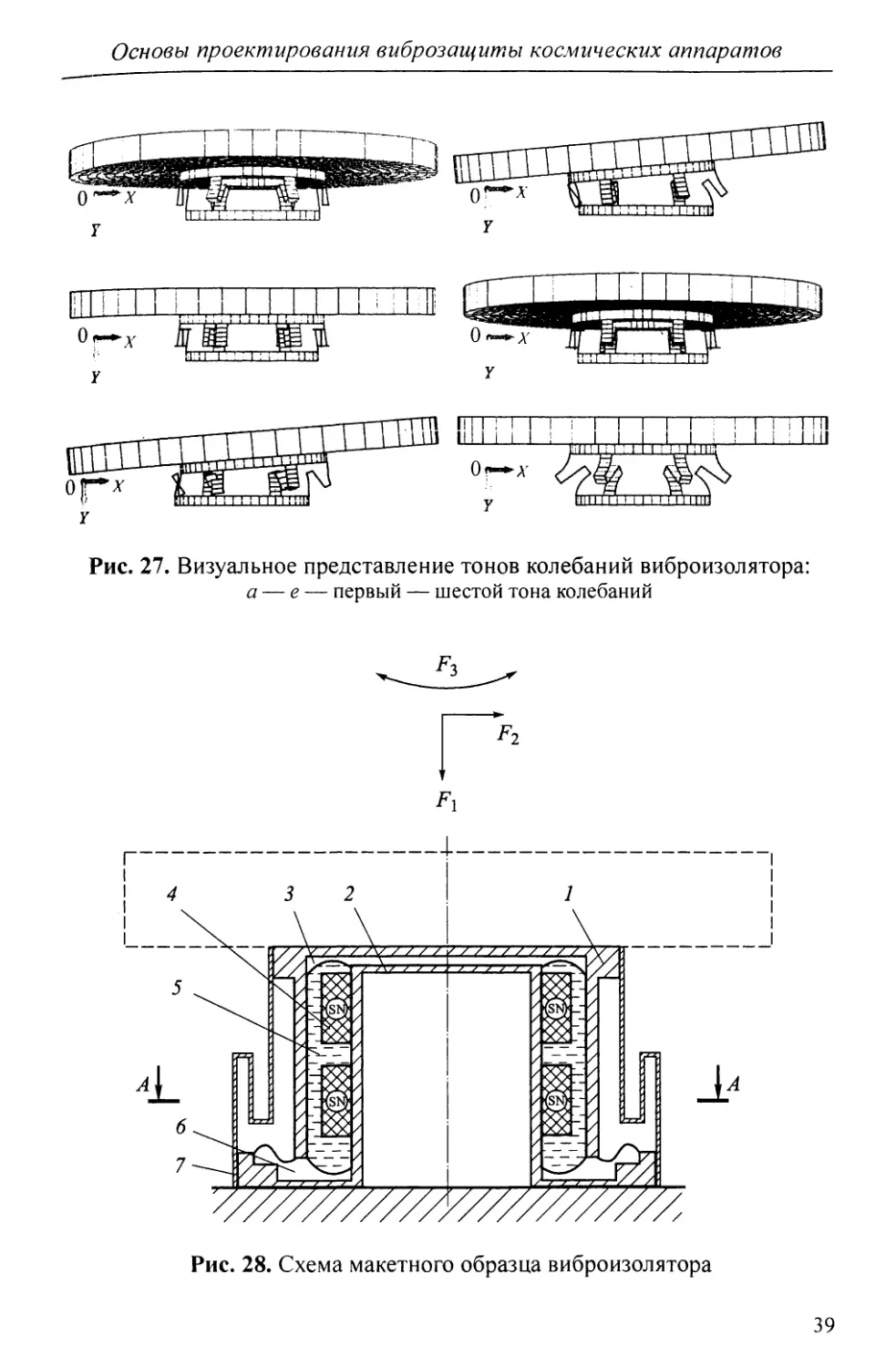
Схема макетного образца виброизолятора представлена на
рис. 28 [4].
Корпус предлагаемого виброизолятора состоит из смонтиро¬
ванных соосно подвижной 1 и неподвижной 2 частей в виде полых
цилиндров. Подвижная часть корпуса выполнена с глухим торцем
38
Основы проектирования виброзащиты космических аппаратов
Y
Рис. 27. Визуальное представление тонов колебаний виброизолятора:
а — е — первый — шестой тона колебаний
F2
F\
39
Основы проектирования виброзащиты космических аппаратов
и буртиком на внешней поверхности со стороны торца. Неподвиж¬
ная часть корпуса также выполнена с глухим торцем и буртиком
с внешней стороны открытого торца смонтирована с возможностью
захода глухого торца в полость подвижной части с образованием за¬
зора 3 между стенками подвижной и неподвижной частей корпу¬
са. В зазоре на внешней поверхности неподвижной части корпуса
равномерно по окружности закреплены как минимум два ряда по¬
стоянных магнитов 4, которые обращены одинаковыми полюсами
в сторону внутренней поверхности подвижной части корпуса для
создания однородного магнитного поля по окружности. На магни¬
ты нанесена магнитная жидкость 5 в количестве, обеспечивающем
принятие формы замкнутых силовых линий. Зазор с магнитной
жидкостью и магнитами загерметизирован посредством мембра¬
ны 6, смонтированной между двумя частями корпуса.
Подвижная часть корпуса соединена с неподвижной частью
вертикально закрепленными на их буртиках равномерно по окруж¬
ностям упругими элементами в виде пластинчатых опор 7. Каждая
из опор изогнута под прямым углом с образованием зигзагообраз¬
ной формы. Такая форма опор позволяет разместить виброизоля¬
тор в ограниченном пространстве КА и повысить демпфирующие
характеристики самих опор. При этом подвижная часть выполняет
роль опоры для ДМ, корректирующего положение КА с прецизион¬
ной аппаратурой в пространстве.
Внешний вид опытного образца виброизолятора с ДМ приведен
на рис. 29.
Рис. 29. Внешний вид опытного образца вибро¬
изолятора с ДМ
40
Основы проектирования виброзащиты космических аппаратов
Подбор оптимальных параметров демпфирования проводи¬
ли путем сравнения результатов моделирования реакции кон¬
струкции КА на заданное воздействие при различных уровнях
диссипации энергии в упругих элементах виброизоляции (стой¬
ках). Рассмотрим случай влияния воздействия ДМ на линейные
перемещения датчика гида по каналу Y под действием нагрузки
при соответствующих значениях коэффициентов демпфирования
виброизоляторов. Рассмотренные уровни демпфирования приве¬
дены в табл. 4.
Таблица 4
Уровни демпфирования
Коэффициент
демпфирования
Декремент
колебаний
Процент
от критического
0,03
0,094
1,5
0,10
0,314
5,0
0,21
0,660
10,5
0,32
1,005
16,0
0,50
1,571
25,0
2
<D
I
<D
I
<D
О
Коэффициент демпфирования
Рис. 30. Зависимость линейных перемещений датчика гида по оси У
от коэффициента демпфирования при различных частотах возбуждения
41
Основы проектирования виброзащиты космических аппаратов
Выберем несколько резонансных частот: 8,0, 9,1, 14,9, 20,5,
28,0, 45,7 Гц. На рис. 30 приведены линейные перемещения датчи¬
ка гида для выбранных частот возбуждения при различных уров¬
нях демпфирования, соответствующих резонансным частотам
конструкции.
Сравнительный анализ полученных результатов позволяет сде¬
лать вывод, что оптимальным для рассматриваемой схемы вибро¬
изоляции является значение коэффициента демпфирования, равное
0,32, что соответствует декременту колебаний, равному единице.
Все дальнейшие расчеты конструкции проводили с полученными
параметрами демпфирования.
На рис. 31-35 приведены наиболее характерные из полученных
результатов.
2
9,0
10
1
ол
оо
10
1
7,0
10
(D
й
6,0
10
&
5,0
10
И
и
4,0
10
1
3,0
10
о
2,0
10
1,0
10
2
0
а
1
§
&
И
0
1
4>
4.0
3.5
3.0
2.5
2.0
1.5
1,0
5,0
л-7
-7
-7
л-7
-7
-7
-7
л-7
-1
о
1
I!
}
||
k
i
!
а
И
1 !
- \ /
)
jL
К,-Д^
80
10 20 30 40 50 60 70
Частота, Гц
Рис. 31. Линейные перемещения астродатчиков по оси Z
90 100
0
10 20 30 40 50 60 70 80 90 100
Частота, Гц
Рис. 32. Относительные линейные перемещения узлов вторичного и глав¬
ного зеркал по оси Z
42
Угловое перемещение, рад 3? Линейное перемещение, м
10 20 30
40 50
Частота, Гц
60 70 . 80 90 100
с. 33. Относительные линейные перемещения датчиков гида и главного
зеркала по оси Z при нагрузке
1,8*10
1,6*10
1,4*10
1,2*10
1,0*10
8.0-ИГ7
6.0- 1<Г7
4.0-10-7
2.0-1(Г7
0
-6
i
1
;
к
nl
Jin
■ л
ЛИ*’
^..
10 20 30
40 50
Частота, Гц
60 70 80 90 100
Рис. 34. Относительные угловые перемещения узлов вторичного
и главного зеркал по оси X
Он
о
н
(D
1
£
ю
20 30
40 50
Частота, Гц
60 70 80
90
Рис. 35. Относительные угловые перемещения узлов датчиков гида
и главного зеркала по оси X
43
Момент, Н • м Сила, Н
Основы проектирования виброзащиты космических аппаратов
40
30
20
10
0
-10
-20
-30
-40
О 10 20 30 40 50 60 70 80 90
Частота, Гц
а
12
9
6
3
О
-3
-6
-9
-12
О 10 20 30 40 50 60 70 80 90
Частота, Гц
б
Рис. 36. Обобщенные силы (а) и моменты (б) при работе ДМ (серым тоном
выделена область с виброизолятором)
44
Основы проектирования виброзащиты космических аппаратов
Оценку эффективности виброизоляции ДМ на КА проводили
путем сравнения значений амплитуд колебаний, создаваемых ДМ,
при наличии виброизоляторов (толстые линии на графиках) и без
них (тонкие линии). Рассматривали амплитуды линейных переме¬
щений в местах установки датчиков гида, астродатчиков, угловых
скоростей в месте установки ГИВУС, линейных и угловых переме¬
щений вторичного зеркала, угловых перемещений главного зерка¬
ла и относительных линейных и угловых перемещений вторичного
и датчиков гида относительно главного зеркала (см. рис. 25). На¬
грузки характеризуют вид воздействия ДМ в конечно-элементной
модели КА [16].
Полученные оценки влияния вибровозмущений на прецизион¬
ную аппаратуру при наличии виброизоляторов и без них подтверж¬
дают эффективность разработанной системы и обоснованность ее
применения [18].
Абсолютные линейные перемещения снизились в 5-10 раз, аб¬
солютные угловые перемещения — в 7-10 раз, абсолютные угло¬
вые скорости частот — в 10-20 раз в диапазоне частот 0...55 Гц
и в 1,5 раза в диапазоне частот 55...90 Гц. Относительные линей¬
ные и угловые перемещения снизились в 5-10 раз. Сравнительный
анализ подтверждает целесообразность использования виброизоля¬
торов как эффективного средства для устранения нежелательных
микровозмущений, создаваемых ДМ.
Также были проведены экспериментальные исследования ви¬
броизоляции с ДМ «Агат-40». На рис. 36 представлены обобщен¬
ные силы и моменты, полученные в результате испытаний с вибро¬
изоляцией ДМ и без нее.
Динамическое гашение колебаний
Магнитно-жидкостные гасители колебаний
При исследовании увеличения диссипативных характеристик
панелей СБ КА отмечена низкая эффективность конструкционно¬
го демпфирования (применения зазоров, люфтов и демпфирую¬
щих устройств) в области амплитуд колебаний менее 1,0-10“3 м.
Поэтому был рассмотрен метод динамического гашения колеба¬
ний, суть которого состоит в присоединении к объекту ВЗ до¬
полнительных устройств (гасителей), работа которых основана
на принципах перераспределения энергии от объекта к гасителю
колебаний (ГК).
45
Основы проектирования виброзащиты космических аппаратов
Основное достоинство данного подхода заключается в том, что
ГК могут быть размещены в местах пространственных конструкций
КА с максимальными амплитудами колебаний, что обусловливает
наибольшую эффективность рассеяния энергии путем максимиза¬
ции работы диссипативных сил.
Задача состояла в разработке и создании ГК, чувствительных
к силовым воздействиям от 10-4 до 1 Н, успешно функционирую¬
щих в области амплитуд колебаний от 5 ■ 10-6 до 1*10-2 м при час¬
тотах около 1...3 Гц, характерных для СБ рассматриваемых КА —
главных источников виброколебаний.
Одним из способов демпфирования колебаний, сохраняющих
эффективность при таком снижении силовых возмущений и ам¬
плитуд колебаний, может быть применение эффекта «динамиче¬
ского гасителя» для преобразования сверхмалых колебаний КА
в большие (на два порядка выше) колебания эффективной мас¬
сы гасителя и жидкостного трения для диссипации ее энергии
колебаний.
Для примера рассмотрим применение системы магнитно¬
жидкостных ГК на КА дистанционного зондирования Земли
(см. рис. 4).
Оценим динамический отклик КА на нестационарное воздей¬
ствие без ГК. К центральной точке корпуса КА приложен момент
относительно оси X в виде двух прямоугольных импульсов общей
длительностью 60 с (рис. 37). Зна¬
чение приложенного момента (М.)
выберем так, чтобы суммарный угол
поворота КА составил 80° (1,4 рад).
В расчете принято значение коэффи¬
циента демпфирования, соответству¬
ющего логарифмическому декремен¬
ту 8 = 0,01 по всем учитываемым
формам колебаний.
Проведем анализ переходно¬
го процесса при указанном воз¬
мущении (время интегрирования
0.. .150 с). Предварительный анализ
собственных значений и векторов системы уравнений возмущен¬
ного движения показал, что максимальное влияние на движение
КА по оси X оказывает третий тон упругих колебаний панели СБ
(/= 1,367 Гц).
М, Н-м
Мх
0"
-Мх 1 .
0 30 60 90 120 t, с
Рис. 37. График приложенного
момента
46
Основы проектирования виброзащиты космических аппаратов
В соответствии с расчетом в исходном состоянии (без установ¬
ки ГК на панелях СБ) угловая скорость корпуса КА относитель¬
но оси X после снятия воздействия снижается в течение 90 с до
1,4 • 10“3 град/с (рис. 38), что превышает заданное значение точности
стабилизации КА — 1,0* 10-3 град/с.
Для моделирования эффективности системы виброзащиты
(уменьшения времени затухания колебаний КА по указанному
тону упругих колебаний) на концах каждой из двух панелей СБ
установили по четыре ГК. Схема установки ГК приведена на
рис. 39.
tn
О
4
О
3
1
&
2
А
5
1
1
0
О
-1
О
-2
1
-3
-4
ijjllMi.i ,
■i r k1
1 1 . 1
11 . ! • 11:1
1! ;!■|,1j J
! : 1 ! | 1 ! | 1 1 | I
Щ\Ч
: ; : I ' 1
l.iiHiilkiil
i Г ^ i ; ! I г ! i 1
lliiiiiil'l"
■ 1111 ' 1 -
piii
p 111111
plik11'
70 80 90 100 110 120 130 140 150
Время, с
Рис. 38. Изменение угловой скорости корпуса КА относительно оси X
Каждый динамический ГК моделировали консольной невесо¬
мой балкой с сосредоточенной массой на конце. Гасители колеба¬
ний установлены по оси Y КА. Зададим массу активного тела ГК
wr = 0,051 кг, длину балки /г = 0,04 м и ее материал (Е = 7- Ю10 Па).
Тогда частота собственных колебаний ГК:
1 /ЩГ
2n]j тг1?
47
Основы проектирования виброзащиты космических аппаратов
1 5
Рис. 39. Схема установки ГК {1-8) на панели СБ
Таким образом, по требуемой частоте можно определить мо¬
мент инерции сечения модельной балки, имитирующей жесткость
гасителя:
j (2л/) тг1г =] ]46.10-15 м4
3 Е
После введения в конечно-элементную модель балок — имита¬
торов ГК — проведен расчет 25 первых тонов (собственных форм
и частот) упругих колебаний незакрепленной конструкции. Полу¬
чено шесть форм движения КА как твердого тела и 19 низших форм
собственных упругих колебаний конструкции. Результаты расчета
приведены в табл. 5.
Затем проводили анализ переходного процесса при возму¬
щении нестационарным воздействием. В расчетах варьировали
коэффициент демпфирования ГК ег = 25г/гшг, где 5г — логариф¬
мический декремент колебаний ГК. Для всех учитываемых форм
колебаний принято значение декремента 8 = 0,01. Определяли
время затухания колебаний КА (после снятия воздействия) по
угловой скорости относительно оси X до требуемого значения
(1,0-10-3 град/с).
48
Основы проектирования виброзащиты космических аппаратов
Таблица 5
Тона упругих колебаний незакрепленной конструкции
№ тона
колебаний
f Гц
со, рад/с
со2, рад2/с2
1
0,73
4,59
21,1
2
1,18
7,41
55,0
Л
1,28
8,01
64,2
4
1,29
8,09
65,4
5
1,34
8,42
70,9
6
- » -
- » -
71,0
7
- » -
8,43
71,1
8
- » —
- » -
- » -
9
1,36
8,56
73,3
10
1,40
8,78
77,0
11
1,43
9,00
81,0
12
1,45
9,П
83,0
13
2,58
16,22
263,1
14
3,70
23,23
539,5
15
3,71
23,28
542,0
16
3,99
25,09
629,7
17
5,37
33,74
1138,0
18
5,53
34,75
1208,0
19
6,00
37,70
1421,0
На рис. 40 приведены изменение угловой скорости со^. корпуса
КА при действии момента Mx(t) по заданному закону, а также упру¬
гие компоненты угловой скорости (исключая движение твердого
тела) в той же точке после снятия нагрузки Mx(t) при различных
значениях коэффициента демпфирования ег ГК.
Полученные результаты представлены в табл. 6.
49
Основы проектирования виброзащиты космических аппаратов
2.5
2,0
1.5
1,0
0,5
0 20 40 60 80 100 120 140 t, с
а
со v, град/с
0,025
0,020
0,015
0,010
0,005
О
-0,005
-0,010
-0,015
-0,020
-0,025
О 62 64 66 68 70 72 74 76 78 Г, с
б
Рис. 40 (начало). Изменение угловой скорости корпуса КА
а —ег = 0; б —ег равно 0,03 1/с;
■ "■ ■ —
А А
1
Л
L А А
1
Л
Ад -
■ л Л
А
Л А л
\r\l\
(1/1
vu
V/V/'
rv ^
\1
^ V
V v
V
1
50
Основы проектирования виброзащиты космических аппаратов
сох, град/с
0,025
0,020
0,015
0,010
0,005
0
-0,005
-0,010
-0,015
-0,020
-0,025
0 62 64 66 68 70 72 74 76 78 /, с
в
сог, град/с
0,025
0,020
0,015
0,010
0,005
О
-0,005
-0,010
-0,015
-0,020
-0,025
О 62 64 66 68 70 72 74 76 78 с
при различных значениях коэффициента демпфирования ГК:
в — г — ег равно 0,05 и 0,07 1/с соответственно
1
К
\ А г"
\Ш
vv
V
V
1
- 1
II 11А л
л Л 1
\ А А
Л Л л
lyz:
J V V
VVv
V \л
7
V
51
Основы проектирования виброзащиты космических аппаратов
оо v, град/с
0,025
0,020
0,015
0,010
0,005
0
-0,005
-0,010
-0,015
-0,020
-0,025
О 62 64 66 68 70 72 74 76 78 t, с
д
Рис. 40 (окончание). Изменение угловой скорости корпуса КА при раз¬
личных значениях коэффициента демпфирования ГК:
д — ег равно 0,10 1/с
Таблица 6
Зависимость времени снижения угловой скорости КА
от коэффициента демпфирования ГК
ег, 1/с
Время снижения
угловой скорости КА cov
до 1,0-10~3 град/с, с
0,030
17,5
0,040
16,7
0,050
12,1
0,055
11,9
0,060
11,6
0,065
11,2
0,070
7,5
0,075
8,2
0,080
9,0
0,085
9,8
0,090
п,з
0,100
13,0
ГГ -
ffiju
1
! и 1
1 f,
А л
Нтт
!
| j 11
1 ‘ ,
1 Я
/\ А А
/\ А./
ГГ Н
1! i
У'
1 V V
J
J \ *
.. - |
i
J
ii
1
У
V
52
Основы проектирования виброзащиты космических аппаратов
График зависимости времени снижения угловой скорости КА сод.
до 1,0-10-3 град/с от собственного коэффициента демпфирования
колебаний ГК приведен на рис. 41.
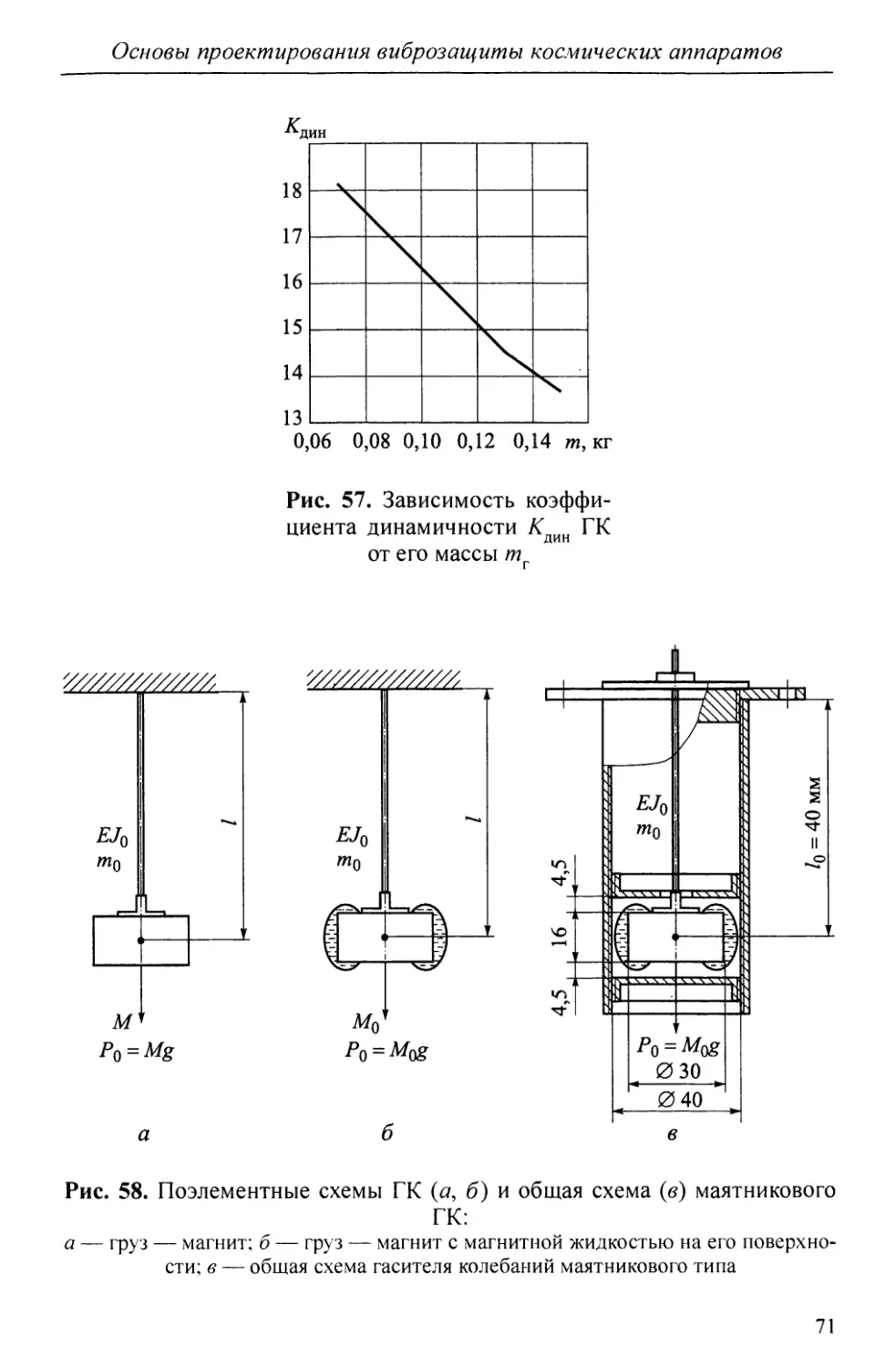
м
о
о
Л
PQ
, 1/с
Рис. 41. Зависимость времени снижения угловой скорости КА oov
до 1,0 • 10~3 град/с от собственного коэффициента демпфирования
колебаний ГК
Таким образом, оптимальное значение коэффициента ег, при ко¬
тором амплитуда колебаний по угловой скорости достигает задан¬
ного значения стабилизации за 7,5 с, составляет 0,07 1/с (декремент
равен 0,52).
В качестве рабочего материала для устройств ГК по результа¬
там серии проведенных экспериментов были выбраны магнитные
жидкости, в качестве основных компонентов системы виброзащи¬
ты панелей СБ — магнитно-жидкостные поглотители колебаний,
хорошо зарекомендовавшие себя в разрабатываемых ранее анало¬
гичных системах. Этот тип устройств характеризуется следующими
показателями:
• высокой эффективностью;
• малой массой;
• высокими ресурсными показателями;
• хорошими показателями диссипации энергии при малых
и сверхмалых амплитудах колебаний объекта ВЗ.
Для получения характеристик элементов системы ВЗ КА,
полученных при математическом моделировании его динами¬
ки, была проведена серия макетных экспериментов. Для под¬
бора их конструктивно-технологических параметров изготовле¬
ны макеты виброгасителей. Макеты, позволяющие варьировать
°пределенными параметрами, разрабатывались таким образом,
53
Основы проектирования виброзащиты космических аппаратов
чтобы обеспечить следующие диапазоны изменения собствен¬
ных параметров.
Параметр Нижняя Верхняя
граница граница
Собственная частота гасителя, Гц 0,9 1,6
Максимальное перемещение рабочего тела, мм 3 10
Масса рабочего тела, г 30 100
Декремент колебаний рабочего тела 0,5 1
Для проведения испытаний разработана и изготовлена серия ма¬
кетных образцов магнитно-жидкостных виброгасителей (рис. 42).
0 60
0 30
0 65
Рис. 42. Схема макетного образца магнитно¬
жидкостного виброгасителя:
1 — корпус; 2 — магнитная жидкость; 3 — магнит;
4 — крышка
В процессе отработки проводили многократные испытания
по определению собственных жесткостных и диссипативных ха¬
рактеристик виброгасителя при различных значениях следующих
параметров:
54
Основы проектирования виброзащиты космических аппаратов
вязкости магнитной жидкости;
намагниченности магнитной жидкости;
объема заправки;
высоты полости (А);
формы и намагниченности активного тела (магнита).
' ^ ' \
Рис. 43. Макетный образец магнитно¬
жидкостного виброгасителя при работе:
1 — корпус; 2 — магнитная жидкость; 3 —
магнит
Для отработки необходимых характеристик ГК собрана специ¬
альная экспериментальная установка (рис. 44) на базе высокочув¬
ствительного СИС фирмы Kistler.
Рис. 44. Экспериментальная установка
55
Основы проектирования виброзащиты космических аппаратов
Отработку осуществляли по следующей методике.
На СИС жестко крепили балку, сечение и геометрические харак¬
теристики которой подобраны так, чтобы первая составляющая соб¬
ственной частоты колебаний была как минимум на порядок выше
рабочего диапазона ГК. В данном случае частота колебаний систе¬
мы балка — гаситель частот составляла 1,56 Гц.
М2,, Н-м
0,030
0,025
0,020
0,015
0,010
0,005
0
-0,005
-0,010
-0,015
-0,020
0 0,5 1,0 1,5 2,0 2,5 3,0 3,5 4,0 t, с
Рис. 45. Результаты цифровой обработки полученного сигнала
Выполняли настройку следующих параметров макета:
• типа магнитной жидкости;
• объема заправки;
• высоты рабочей полости гасителя h.
Макет гасителя строго горизонтально крепили к свободному
концу балки.
Магнитоиндукционным путем проводили возбуждение соб¬
ственных колебаний рабочего тела ГК.
Аппаратурой СИС регистрировался отклик системы, обуслов¬
ленный взаимодействием колеблющегося рабочего тела ГК со стен¬
ками и через балку передаваемого на стенд.
h
i: ' \
1 \
[ 1
f ■■ V
! 1
Л
' i \
!
i
T x\
i i '
V* Г;
!
’V
; V '■
^ .
'' , j' *
<
s
j
. 1
■ ■ i.
1
i
56
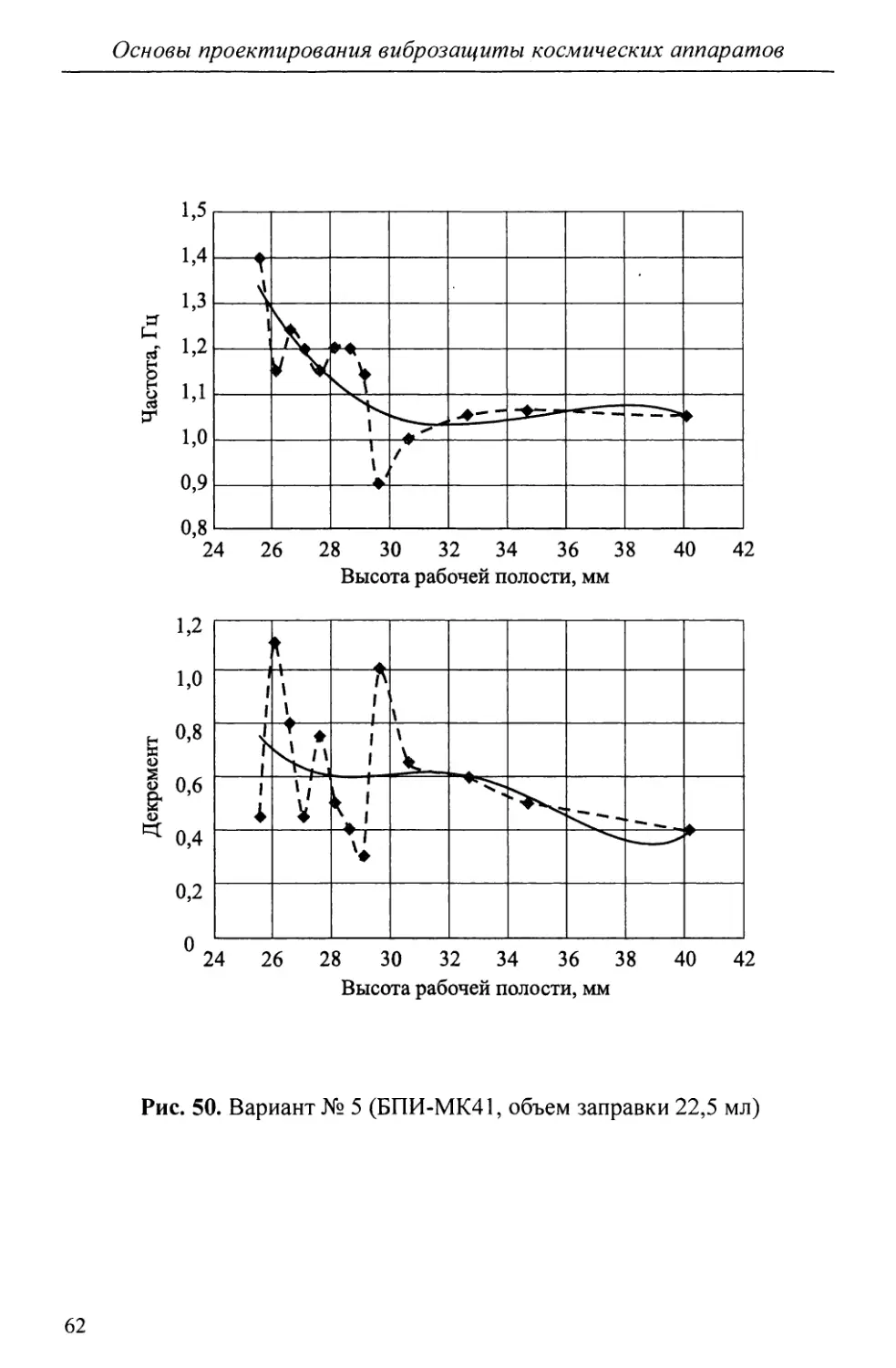
Основы проектирования виброзащиты космических аппаратов
С помощью соответствующих методов цифровой обработки из
полученного сигнала выделялась составляющая, обусловленная
собственными колебаниями ГК (рис. 45); результаты приведены
в табл. 7.
Таблица 7
Характеристики гармонических составляющих сигнала
Гармоника
Частота
Декремент
Амплитуда
Фаза
1
8,16-102
1,00-ю8
4,27-10"3
4,84
2
9,77-10-'
6,75-10-'
7,32-10-3
6,22
3
1,37
7,49-10-'
2,72-10"2
6,28
4
2,50
7,90-10-'
1,33-10-2
4,96-10'°
5
3,60
4,05-10-'
8,05-10"3
1,16
Примечание. Полужирным шрифтом выделена основная составляющая
собственных колебаний ГК.
По описанной выше методике были проведены испытания не¬
скольких макетов гасителей. В качестве рабочего тела во всех ва¬
риантах использован магнит FeBa диаметром 30 мм, высотой
h= 15,7 мм (HN = 0,116 Тл, Hs = 0,123 Тл). Варианты макетов при¬
ведены в табл. 8.
Таблица 8
Варианты макетов
№
варианта
Тип магнитной
жидкости
Объем
заправки, мл
1
БПИ-МК41
15,0
2
БПИ-МК41
17,5
3
БПИ-МК41
20,0
4
БПИ-МК41
21,0
5
БПИ-МК41
22,5
6
МК-45
20,0
7
ММТ-38
20,0
57
Основы проектирования виброзащиты космических аппаратов
ММТ-38
22,5
Результаты проведенных доводочных испытаний для каждого из
опытных образцов макетов при различных значениях высоты рабо¬
чей полости представлены в виде графиков на рис. 46-52, где штри¬
ховые кривые — эксперимент, сплошные — аппроксимация.
Я
U
of
I
24 26 28 30 32 34 36 38 40 42
Высота рабочей полости, мм
1,4
1,2
1,0
б °>8
I 0-6
4)
« 0,4
0,2
0
Г\
1
\
<1
V
м
>
— -
►
24 26 28 30 32 34 36 38
Высота рабочей полости, мм
40 42
Рис. 46. Вариант № 1 (БПИ-МК41, объем заправки 15 мл)
58
Декремент Частота, Гц
Основы проектирования виброзащиты космических аппаратов
’ 24 26 28 30 32 34 36 38 40 42
Высота рабочей полости, мм
24 26 28 30 32 34 36 38 40 42
Высота рабочей полости, мм
Рис. 47. Вариант № 2 (БПИ-МК41, объем заправки 17,5 мл)
59
Декремент Частота, Гц
Основы проектирования виброзащиты космических аппаратов
24 26 28 30 32 34 36 38 40 42
Высота рабочей полости, мм
Высота рабочей полости, мм
Рис. 48. Вариант № 3 (БПИ-МК41, объем заправки 20 мл)
60
Декремент Частота, Гц
Основы проектирования виброзащиты космических аппаратов
24 26 28 30 32 34 36 38 40 42
Высота рабочей полости, мм
'
/ \
1 \
. f
i.
\
V-
\
/!
(t
V
° 24 26 28 30 32 34 36 38 40 42
Высота рабочей полости, мм
Рис. 49. Вариант № 4 (БПИ-МК41, объем заправки 21 мл)
61
Декремент Частота, Гц
Основы проектирования виброзащиты космических аппаратов
я
\
ж
м ч
1
А»
1
1
+
/
24 26 28 30 32 34 36 38 40 42
Высота рабочей полости, мм
Рис. 50. Вариант № 5 (БПИ-МК41, объем заправки 22,5 мл)
62
Декремент Частота, Гц
Основы проектирования виброзащиты космических аппаратов
Высота рабочей полости, мм
Рис. 51. Вариант № 6 (МК45, объем заправки 20 мл)
63
Декремент Частота, Гц
Основы проектирования виброзащиты космических аппаратов
24,4 24,6 24,8 25,0 25,2 25,4 25,6 25,8
Высота рабочей полости, мм
24,4 24,6 24,8 25,0 25,2 25,4 25,6 25,8
Высота рабочей полости, мм
Рис. 52. Вариант № 7 (ММТ-38, объем заправки 20 мл)
64
Основы проектирования виброзащиты космических аппаратов
Из анализа данных результатов макетной отработки ГК можно
сделать вывод, что наиболее близкие к оптимальным характеристи¬
кам (частота 1,35, декремент колебаний 0,52) обеспечивает вариант
№4 ГК (жидкость БПИ-МК41, объем заправки 21 мл) с высотой
рабочей области порядка 27 мм.
Дня иллюстрации эффективности разработанных ГК на рис. 53
представлены два переходных процесса, зарегистрированных при ис¬
пытаниях: первый соответствует колебаниям исходной конструкции,
второй — колебаниям той же конструкции с установленным на ней ГК.
Мг
6
4
2
О
-2
-4
-6
М7
3
2
1
0
-2
-3
-4
0 2 4 6 8
10 12 14 16 18 20
а
0 5
10
15
б
20 25 30
Рис. 53. Переходные процессы:
а — исходная конструкция без ГК; б — конструкция с ГК
В результате проведенных исследований для гашения колебаний
панелей СБ КА был выбран магнитно-жидкостной виброгаситель,
представленный на рис. 54 [12].
Рис. 54. Внешний вид магнитно-жидкостного виброгасителя
65
Основы проектирования виброзащиты космических аппаратов
Гаситель колебаний
маятникового типа
Во многих областях современной техники возникает практи¬
ческая проблема защиты конструкций, приборов и в целом изде¬
лий от ударных и вибрационных механических воздействий. Для
этого создают системы виброзащиты, основными элементами
которых являются исполнительные устройства: виброизоляторы
и виброгасители.
Как правило, КА снабжены антеннами, радиоэлектронны¬
ми системами, агрегатами технологических систем. Последние
в процессе работы могут возбуждать вибрации в широком диапа¬
зоне частот (0...500 Гц). Причиной возмущений на КА являются
как внешние источники, к которым относят аэродинамические,
гравитационные, магнитные, так и радиационные возбудители
колебаний.
Проблема демпфирования колебаний КА и его элементов до не¬
давнего времени не имела законченного решения. Причина заклю¬
чалась в том, что механические, гидравлические демпферы, а также
другие средства ВЗ, как правило, должны опираться на внешнюю
по отношению к пространственной конструкции систему. Это рез¬
ко ограничивало их конструктивные возможности: для выносных
подконструкций, например антенн, СБ, контакт с внешней системой
возможен лишь для малой их части, при этом эффективность таких
средств ВЗ на КА невелика.
Конструкция установки приведена на рис. 55, а. Для решения
поставленной задачи в специальной программе была разработана
конечно-элементная модель установки прибора, геометрия которой
представлена на рис. 55, б. Модель жестко крепится за фланец стой¬
ки. На рис. 55, в приведена форма упругих колебаний конструкции
по первому тону.
С использованием этой программы выполнен расчет первых
тонов (собственных форм и частот) упругих колебаний конструк¬
ции в диапазоне частот 0...100 Гц. Определены первые четыре
тона упругих колебаний, которые являются парными вследствие
осевой симметрии конструкции. Результаты расчета представлены
в табл. 9.
66
Основы проектирования виброзащиты космических аппаратов
А
0 90
а в
Рис. 55. Конструкция установки ГК (а), ее конечно-элементная модель (б)
и форма упругих колебаний конструкции (в):
1 — ГК; 2 — кронштейн; 3 — стойка
Таблица 9
Тона упругих колебаний конструкции установки ГК
№ тона
/ Гц
со, рад/с
со2, рад2/с2
1
14,214
44,65
1993,9
2
- » -
- » -
- » -
3
94,521
296,94
88172,0
4
- » -
- » -
- » -
67
Основы проектирования виброзащиты космических аппаратов
Эффективное гашение колебаний таких конструкций можно
было реализовать, по-видимому, лишь при использовании локаль¬
ных демпфирующих устройств, не контактирующих с внешними
опорными системами. Основные достоинства локальных демп¬
фирующих систем состоят в том, что они могут быть размещены
в тех местах пространственных конструкций, где амплитуды ви¬
браций максимальны и, следовательно, существует возможность
достижения наибольшей эффективности демпфирования колеба¬
ний. В связи с этим возникло предположение, что набор локаль¬
но расположенных демпфирующих устройств, распределенных
по пространственной конструкции сколь угодно большой про¬
тяженности, позволяет демпфировать ее колебания самой слож¬
ной структуры. В данном случае динамический гаситель (ДГ)
не может быть установлен вблизи центра масс прибора. Однако
ни один из известных типов таких демпфирующих устройств не
обладает требуемыми характеристиками. Единственный способ
демпфирования первого тона поперечных изгибных колебаний
(/j = 14,214 Гц), сохраняющих прочностную эффективность самой
конструкции, заключался в применении ДГ в виде консольной бал¬
ки с массой на конце с использованием жидкостного трения, при¬
чем сам ДГ должен быть установлен по оси конструкции в месте
крепления стойки к кронштейну.
Были определены оптимальные параметры ДГ для прибора,
установленного на корпусе КА, а также массовые и инерциальные
характеристики ДГ: масса ДГ тг = 0,07 кг, длина балки /г = 0,04 м,
свойства ее материала (Е = 7 * 1010 Па). Балку считали невесомой.
Тогда частота собственных колебаний гасителя
Проводили прямой частотный анализ модели в диапазоне
частот 0...20 Гц, возникающих от воздействия постоянного уско¬
рения, равного 1 м/с2, по оси Y. Определяли амплитуды ускорений
Отсюда
3 Е
68
Основы проектирования виброзащиты космических аппаратов
и перемещений по оси Y в центре масс прибора и в зависимости от
частоты строили соответствующие амплитудно-частотные характе¬
ристики (АЧХ).
На рис. 55, а приведена АЧХ линейных ускорений по оси Y
в центре масс прибора без гасителя (коэффициент динамичности
К = 30,21), на рис. 55, б—с гасителем при его нулевом декременте
Частота, Гц
а
(N
30,210
26,540
1
22,870
CJ
55
S3
<D
19,190
Ok
§
о
15,520
QJ
О
И
11,850
>55
<L>
М
55
8,174
4,501
0,828
1,000 3,714 6,429 9,143 11,860 14,570 17,290
Частота, Гц
б
Рис. 56. АЧХ линейных ускорений по оси Y без гасителя (а)
и с гасителем (б)
69
Основы проектирования виброзащиты космических аппаратов
(5г = 0). Последний задается в зависимости от свойства материала
гасителя в виде коэффициента демпфирования 2С/С0, для которо¬
го справедливо соотношение 2С/С0 = 8г/тт. Декремент для осталь¬
ных материалов конструкции 8м принят равным 0,09 (коэффициент
демпфирования 0,03). При этом подбирали такое значение момен¬
та инерции поперечного сечения ГК Уг, при котором оба пика на
АЧХ будут иметь одинаковую амплитуду, в результате получили
Jr= 1,91 *10"13 м4.
Далее определяли оптимальное значение декремента ГК §г. Уве¬
личивая его значение, достигали максимального сближения двух
пиков на АЧХ при 5Г, равном 0,03, 0,06, 0,09 и 0,122 соответственно.
Установлено оптимальное значение 8г = 0,122. Также исследовали
влияние массы гасителя тг на его эффективность при этом же зна¬
чении декремента гасителя.
Жесткость ГК должна оставаться неизменной, поэтому
уменьшали длину балки /. При этом справедливо соотношение
л т
т\г / т2г = /2г / 1\г- Были исследованы АЧХ линейных ускорений по
оси ГКА для значений шг, равных 0,09, 0,11, 0,13 и 0,15 кг. В табл. ГО
и на рис. 56 приведены расчетные значения длины ГК и коэффици¬
ента динамичности Кдш. Видно, что эффективность гасителя воз¬
растает с увеличением его массы.
Таблица 10
Значения параметров ГК
тг, кг
м
Кди„
max
min
среднее
0,07
0,040
19,30
17,00
18,15
0,09
0,037
18,48
15,40
16,94
0,11
0,034
17,57
14,00
15,79
0,13
0,033
16,55
12,51
14,53
0,15
0,031
15,70
11,70
13,70
70
Основы проектирования виброзащиты космических аппаратов
0,06 0,08 0,10 0,12 0,14 т, кг
Рис. 57. Зависимость коэффи¬
циента динамичности К _ ГК
дин
от его массы тг
P0 = Mg
P0 = MQg
Рис. 58. Поэлементные схемы ГК (а, б) и общая схема (в) маятникового
ГК:
а — груз — магнит; б — груз — магнит с магнитной жидкостью на его поверхно¬
сти; в — общая схема гасителя колебаний маятникового типа
71
Основы проектирования виброзащиты космических аппаратов
в
Рис. 59. Схемы определения характеристик ГК (а), измерительной аппа¬
ратуры (б) и определения динамических характеристик ГК с полезной на¬
грузкой (в)
На рис. 58 [9] представлены поэлементные схемы, а также об¬
щая схема маятникового пассивного магнитно-жидкостного ГК.
Разработан и изготовлен ГК маятникового типа, настроенный на
частоту резонанса системы 14,2 Гц (рис. 59, а). Проведены испыта¬
ния на СИС по определению динамических характеристик данного
устройства, в частности по подбору рационального демпфирования
с имитацией полезной нагрузки (рис. 59, в).
Сравнительные результаты экспериментальной отработки ГК
маятникового типа представлены на рис. 60.
72
Основы проектирования виброзащиты космических аппаратов
1 ,
ill:!
!;!
1 * \}»i
i' 11!' "
"IS""?!:
И , 1 ' I
|| ii, Jm
! ''I !! \
f1" * I' I
i n ii n j I, i,
T- 11 Ji ll '\ |v ,
И1М
'i 'I |I ' |'
1 I1. 1 и 1*
'1 1* И111
> 1 у « ! i 1
1 11 ‘Ий1
V Ami
L Шш
1* ' I' /I I
W 1 H,l"l"
"j 1
liillli''!'!'
1 « I A i l| »
" 'i i i 1 и 1
i" 11 i "i1
i"' 11, i1111
i ни
1 ' Ч 1
1II il 1
' II ll 1' ‘1 ll 1
'Mil I'Jl l| I
■ii i| ,i i ,i
h 'hi 11 /'
4 h'i ,i
tor1'''
1 Vl'WB
\ 1 1 |'п ||
1 'I1'1 г
1 Т11|'!
| \\ и I1 ,i
г ill <1 111
II '
II 1 II,I11,1
II 1 I'll1’I1
,l".|'! 11,1
1"1 ■ 1.11 " l'
,"||, ,1 11,1
I1 III, I 1 II ||
"И"! 'in
'Ill'll 11IV
'• II
II i; 1 'l II
II || ll l' || ,1
111 ' 1 1 11 1
h'1,11',!
' l"| l' l,L
! '! '' '! !• !
Ы'
!
j 4 . i 1
1 *“l |T *1 Г 1
1! '{W
I l<!|
1 ) ! i I '
1 и j III I'
|l II n 1 l( ,1
,1 II H w 1. ,1
i1 n I, ,']«i
l ‘ \ ' •
! Ч U II 1* l| ii
ll 11 1 I1 I| 4
* n M i
* I* i| i* -»| i
i' i' ij i1 >i >
ii<,_vi
ч / ■
/! J
t .
О 0,5 1,0 1,5 2,0 2,5
Время, с
Рис. 60. Результаты экспериментальной отработки ГК:
полужирные линии — с ГК; штриховые — без него
Гашение колебаний путем настройки
динамических характеристик упругих подконструкций
Остаточные колебания больших низкочастотных конструкций
КА после смены ориентации КА, поворота панели СБ и т. п. су¬
щественно осложняют процесс управления КА и обеспечение не¬
обходимых параметров его ориентации в пространстве. Колебания
панели СБ с амплитудой 0,5 мм обусловливают амплитуду коле¬
баний угловой скорости корпуса КА 0,5-10-4 град/с — предельно
допустимую для изделий рассматриваемого класса. Как показыва¬
ет опыт разработки динамических схем (уравнение возмущенного
движения КА в условиях внешних и внутренних возмущений), под¬
твержденный наземными и летными испытаниями, демпфирующие
свойства таких конструкций существенно снижаются с уменьшени¬
ем их амплитуды колебаний. Декремент колебаний таких конструк¬
ций на малых амплитудах снижается до значений 0,012, тогда как
для нормального функционирования СУОС требуются значения не
73
Основы проектирования виброзащиты космических аппаратов
ниже 0,05, т. е. как минимум в 4 раза выше. Таким образом, про¬
блема увеличения диссипативных характеристик конструкции КА
имеет важное значение при разработке КА рассматриваемого типа.
На практике не всегда имеется возможность изготовить соответ¬
ствующий элемент конструкции КА (например, панель СБ) с необ¬
ходимыми демпфирующими свойствами. Это может быть связано,
например, с особенностями конструкции этого элемента (агрега¬
та), обусловленными требованиями его функционирования, слож¬
ностями изготовления и испытаний, организационно-администра¬
тивными проблемами (например, при заказе агрегата в сторонней
организации) и т. д. Поскольку достаточно обеспечить приемлемую
продолжительность переходного процесса, а не уровень демпфиру¬
ющих характеристик, предлагается в качестве гасителей (поглоти¬
телей механической энергии) использовать другие дополнительные,
оптимально — уже имеющиеся на борту элементы конструкции, до¬
ступные для модернизации [20].
Для иллюстрации практического применения предложенного
подхода рассмотрим модернизацию конструкции штанги магни¬
тометра гидрометеорологического спутника для использования её
в качестве гасителя энергии механических колебаний корпуса, об¬
условленных остаточными колебаниями панелей СБ и обеспече¬
ния необходимой продолжительности переходного процесса после
воздействий, вызванных исполнительными органами системы
управления и внутренними источниками возмущения (например,
приводами системы управления ориентацией СБ или ОНА). Схе¬
ма конструкции гидрометеорологического спутника приведена на
рис. 61. Для оценки эффективности предложенного подхода прове¬
дем имитационное моделирование динамической реакции рассма¬
триваемого КА на тарированное внешнее воздействие в исходном
состоянии и с модернизированной штангой магнитометра.
Уравнения возмущенного движения КА будут иметь вид
[М]Х + [D]Jt + [К]Х + J = F;
jm
'V1
V
х = <
ja>dt
>; Я = <
со
>\ 1 = <
ю
Я
ч j
ч
74
Основы проектирования виброзащиты космических аппаратов
3
Рис. 61. Схема конструкции гидрометеорологического спутника:
1 — ОНА; 2 — штанга магнитометра; 3 — панели СБ
Здесь X — вектор неизвестных; V — вектор линейной скорости
центра масс КА; со — вектор угловой скорости КА; q — вектор
обобщенных координат определяющих упругие перемещения
элементов конструкции КА; F — вектор внешних и внутренних
(включая управляющие) сил и моментов, действующих на КА,
Р
F =
вектор всех сил, действующих на КА; Т — век¬
тор всех моментов; Q — вектор обобщенных сил, соответствую¬
щих обобщенным координатам системы; [М] — матрица масс КА,
/«[£]
[0]
[Ч
[М\ =
[0]
[/]
[В]
; m —
масса всего КА; [/] — тензор инер-
[А]
[В]
[Е].
Ч.
-In
-Лз“
ции объекта,
[/]=
~h\
hi
~hi
; Ist (s, t= 1,2,3) — моменты
rh\
~hi
hi _
75
Основы проектирования виброзащиты космических аппаратов
инерции КА в связанной системе координат, кг-м2 (s = t — цент¬
ральные, s ±t— центробежные); [0], [Е] — нулевая и единичная ма¬
трицы соответствующей размерности; [А\, [В] — матрицы коэффи¬
циентов инерционных связей, определяющих влияние обобщенных
ускорений qi (колебания упругих элементов) на поступательное
и угловое ускорения центра масс КА соответственно;
’[0] [0] [0]
,2
[К] =
[0] [0]
[0]
со,
- квадрат круговой частоты по /-му
[0] [0] [diag(co,)]_
тону колебаний упругих осцилляторов; [Я]:
[0] [0] [0]
[0] [0] [0]
[0] [0] [diag(e,)]
е(. — коэффициент демпфирования по /'-му тону колебаний упругих
осцилляторов; J — вектор, определяющий нелинейные по угло¬
вым скоростям составляющие и кинетические моменты вращаю¬
щихся маховиков,
[0]
(73 -72)cozcov + 723(coz -со^) + 712сод.ох -73|Сохсоу + Нх + Я,сог -Я„сог
•/ = •{(/, -73)содсо. + 7,3(сод -coz)-7l2co,.co. + Ii2coxav + Нг + Н т_ -Н.сод
U2 - 7,)содсо„ +7,2(со;-со;.) + 713co„coz -723содсо. + Я. + Нусод - ЯЛсо,,
[0]
В качестве внешнего воздействия использовали момент, дей¬
ствующий одновременно относительно трех осей КА (рис. 62).
2
X
1,5
£
1,0
0>
S
о
0,5
S
0
1
-0,5
1
-1,0
со
О
PQ
-1,5
1
.
1
1
3 А
1' i
j
1 1
Время, с
Рис. 62. Циклограмма возмущения КА, использованная
при сравнительном моделировании
76
Основы проектирования виброзащиты космических аппаратов
Модернизация штанги магнитометра заключалась в изменении
жесткостных и демпфирующих свойств ее корневой части, т. е. из¬
менении значений элементов матриц [М\ (коэффициенты инерцион¬
ных связей), [К] (коэффициентов жесткости) и [D\ (коэффициентов
демпфирования), соответствующих уравнениям колебаний штан¬
ги, представленной выше математической модели. Эти изменения
были выполнены для сближения собственных частот системы, об¬
условленных колебаниями панелей СБ, и частот, определяемых
колебаниями штанги. Математическое моделирование полученной
системы уравнений подтвердило целесообразность выбранного
подхода к решению задачи уменьшения времени переходного про¬
цесса возмущенного движения КА. Полученные сравнительные
результаты численного моделирования для наиболее подходящих
значений жесткостных и диссипативных параметров штанги и ис¬
ходного процесса приведены на рис. 63. Для сравнения различных
вариантов настройки времени затухания переходного процесса при¬
няли время уменьшения амплитуды колебаний в 4 раза.
Рис. 63. Сравнительные результаты численного моделирования реакции
КА на тестовое воздействие (полужирные линии — результат после мо¬
дернизации, светлые — исходный)
Анализ полученных результатов позволяет сделать заключение,
что использование предложенного метода при соответствующих на¬
стройках параметров обеспечит сокращение времени переходного
процесса более чем в 5 раз.
77
Время переходного процесса, с Время переходного процесса, с
Основы проектирования виброзащиты космических аппаратов
350.00
300.00
250.00
200.00
150.00
100.00
50.00
0
0,21 0,22 0,23 0,24 0,25 0,26 0,27 0,28
Частота колебаний штанги магнитометра, Гц
а
120,00
100,00
80.00
60,00
40.00
20.00
0 0,05 0,10 0,15 0,20 0,25 0,30 0,35 0,40 0,45
Декремент колебаний
б
Рис. 64. Варианты сравнительных зависимостей времени переходного
процесса от жесткостных (а) и диссипативных (б) характеристик штанги
магнитометра
к
ч
ч
/
/
>
«
*
а
ч ч
- ч <
S
к
4
г- •- V-'
^
4
ч
ч
ч
"1
\
1. \
4
)
►
1
ч
ч
* \
a f
Ч.
ч
\
V
/
/
/
"ч-. '«
1 Ч
й
( /)
i
\В^ 1
V
>8
' , ✓ 'J
у'
78
Основы проектирования виброзащиты космических аппаратов
Вследствие особенностей предложенного подхода, основанного
на снижении механической энергии системы путем резонансного
возмущения колебаний упругого элемента, используемого в каче¬
стве гасителя, до амплитуд, позволяющих проводить диссипацию
энергии, выбор жесткостных и демпфирующих характеристик
упругого элемента (штанги) имеет решающее значение для обеспе¬
чения его эффективности. С одной стороны, необходимо достичь
максимально возможных перемещений активной массы ГК (путем
механического раскачивания ее в резонанс), а с другой — выбрать
демпфирующие характеристики ГК, обеспечивающие максимально
возможную работу диссипативных сил и несущественно снижаю¬
щие амплитуду перемещений рабочей массы ГК в резонансе.
Для определения диапазонов рассматриваемых параметров про¬
ведена серия модельных расчетов динамического поведения КА. На
рис. 64, а представлены зависимости времени переходного процес¬
са от жесткости корневого сечения штанги магнитометра (задана
частотой собственных колебаний штанги) для различных значений
демпфирующих характеристик (заданы декрементом колебаний).
На рис. 64, б приведены зависимости времени переходного про¬
цесса от значений демпфирующих характеристик (декремент) при
различной жесткости корневого сечения (частота собственных ко¬
лебаний штанги).
В соответствии с полученными зависимостями для сокраще¬
ния времени переходного процесса в 2,5 раза (до 100 с) требуется
настройка собственной частоты колебаний штанги магнитометра
в диапазоне 0,244...0,264 Гц, т. е. 0,255 ± 4,3 %.
я 6>°
iJQ
1 5,0
I. 4,0
s °
« 2,0
0 20 40 60 80 100
Время, с
Рис. 65. Изменение полной механической энергии системы до (/)
и после (2) модернизации штанги магнитометра
2
1
/
/
79
Основы проектирования виброзащиты космических аппаратов
Для иллюстрации эффективности предложенного метода на
рис. 65 приведены графики изменения полной механической энер¬
гии системы до и после введения конструктивных изменений штан¬
ги магнитометра при одинаковом возмущении КА.
Рассмотренный подход к улучшению собственных динами¬
ческих характеристик КА в части повышения его диссипативных
свойств можно назвать «альтернативным демпфированием». Под
этим термином следует понимать использование модификации кон¬
структивных параметров одних элементов конструкции КА (в дан¬
ном случае штанги магнитометра) для повышения эквивалентного
демпфирования колебаний системы, вызванных остаточными коле¬
баниями других осцилляторов (панели СБ), конструктивная дора¬
ботка которых невозможна либо нежелательна.
Активные системы гашения колебаний
Данный метод основан на управлении потоком энергии на входе
в колебательную систему конструкция — система виброизоляции
(демпфирования) — чувствительный элемент (полезная нагрузка).
Активное виброгашение сводится к компенсации вибрации за¬
щищаемого объекта дополнительным источником механической
энергии.
Активные системы виброгашения применяются в тех областях,
где предъявляются особо жесткие требования к допустимому уров¬
ню вибрации: при виброизоляции прецизионных станков и старто¬
вых платформ ракет, для защиты пилота от перегрузок и повышения
комфортности транспортных средств и т. п.
В общем случае такие системы содержат чувствительные эле¬
менты, управляющие, усилительные и исполнительные устрой¬
ства. В качестве чувствительных элементов используют датчики,
регистрирующие силы возбуждения КА или его кинематические
параметры — перемещение, скорость, ускорение. Сигналы датчи¬
ков характеризуют качество ВЗ и используются для формирования
сигналов управления, осуществляемого элементами цепи обратной
связи. После усиления сигналы подаются в исполнительное устрой¬
ство, формирующее управляющее воздействие.
Рассмотрим работу этих систем. Пусть защищаемый объект
сместился вниз от требуемого уровня. Датчики перемещения выра¬
батывают пропорциональный этому перемещению сигнал, который,
поступая на управляющее устройство, позволяет ему перевести
80
Основы проектирования виброзащиты космических аппаратов
клапан в положение, открывающее доступ сжатого воздуха в баллон
или жидкости под давлением в камеру. В камере, таким образом,
повышается давление, стремящееся возвратить объект в исходное
положение. Чем больше отклонение объекта от положения равно¬
весия, тем больше уровни сигналов датчиков перемещений и управ¬
ляющих сигналов регулятора и тем больше избыточное давление
в рабочих камерах. Если объект смещается вверх, то, наоборот, дав¬
ление в камерах уменьшается, что приводит к перемещению объек¬
та вниз. Таким образом, активная система поддерживает положение
объекта в определенном положении. Такие системы, использующие
пневматические или гидравлические элементы, находят все боль¬
шее применение в системах ВЗ.
Недостатком таких активных систем является низкое быстродей¬
ствие, обусловленное особенностями характеристик применяемых
в них жидкостей и газов. Значительно большим быстродействием
обладают активные системы виброгашения, в которых источниками
дополнительного силового воздействия являются электродинами¬
ческие вибраторы.
Однако применение метода активной виброзащиты ограничива¬
ется невозможностью обеспечения широкой частотной полосы га¬
шения различных мод колебаний. При расширении полосы частот
возникают условия для положительной обратной связи, и вместо
ослабления наступает неустойчивая работа системы, а на некото¬
рых частотах даже самовозбуждение, проявляющееся в резком воз¬
растании амплитуд колебаний системы. Следует отметить, что воз¬
можность самовозбуждения является одним из самых значительных
недостатков активного виброгашения. Поэтому при реализации ак¬
тивных методов виброзащиты необходимо проводить анализ устой¬
чивости и условий самовозбуждения системы.
Во всех случаях использования активных систем виброзащиты
необходимо учитывать, что при этом в вибрационное поле вводится
дополнительная колебательная энергия, которая проявится в какой-
то области пространства, причем если эта область будет невелика,
то увеличение в ней колебательной энергии может быть большим.
Важным классом активных систем виброгашения являются
адаптивные системы, параметры которых могут изменяться, под¬
страиваясь под изменения, например, режима работы объекта, что¬
бы обеспечить минимум передачи вибрации.
Применение метода активной виброзащиты сдерживается не¬
возможностью обеспечения широкой частотной полосы гашения,
81
Основы проектирования виброзащиты космических аппаратов
сложностью необходимой аппаратуры. Вместе с тем в ряде слу¬
чаев, в частности, при снижении вибрации на дискретных часто¬
тах, применение активных методов компенсации может быть це¬
лесообразным по техническим, конструктивным и экономическим
соображениям.
Применение пьезоэлектрических материалов
Одним из направлений ВЗ прецизионной аппаратуры КА явля¬
ется применение пьезоэлектрических материалов.
Несмотря на то что пьезоэффект давно известен и теория и тех¬
нология создания пьезокерамических материалов активно развива¬
лись начиная со второй половины XX века, пьезокерамика считает¬
ся одним из перспективных материалов XXI века. Это обусловлено
тем, что уникальные свойства пьезокерамических элементов до сих
пор не в полной мере востребованы в науке, технике и технологиях.
Пьезоэлектрический эффект присущ как некоторым природным
кристаллам (кварц, турмалин), так и поликристаллическим сегнето-
электрикам (пьезокерамика).
Чувствительность пьезокерамики в режиме обратного пьезоэф¬
фекта в десятки раз выше чувствительности пьезоэлектрических
кристаллов. Выпускаемые серийно пьезокерамические элементы
могут иметь самую разнообразную конфигурацию — от плоской
(цилиндрические, прямоугольные пластины) до объемной (сферы,
полусферы) (рис. 66).
На базе пьезокерамических элементов реализуются различные
кинематические схемы исполнительных механизмов перемещений,
в которых управляющее электрическое напряжение преобразуется
в перемещение подвижного звена. Для увеличения диапазона пере¬
мещений в пьезоэлектрическом исполнительном механизме приме¬
няют многослойные пьезоэлементы (рис. 67).
Многослойные пьезоэлементы состоят из чередующихся тон¬
ких слоев пьезокерамики и электродов. Толщина керамического
слоя обычно 0,2...0,6 мм. В многослойном пьезоэлементе каждый
слой соединен с последующим слоем электрически параллельно.
Перемещение, создаваемое структурой, является суммой переме¬
щений всех слоев. Преимущество такой конструкции заключается
в том, что при заданном значении управляющего напряжения пере¬
мещение, создаваемое структурой, возрастает в N раз (N — чис¬
ло слоев). Многослойные пьезоэлементы изготавливают по стан¬
дартной технологии многослойных конденсаторов. На начальном
82
Основы проектирования виброзащнты космических аппаратов
Рис. 66. Пьезокерамические Рис. 67. Конструкция много-
элементы слойного пьезоэлемента:
L 2 — внешний и внутренний
электроды
этапе формируется пакет из тонкослойных пластин или шайб, при
большом давлении пакет уплотняется и спекается при высокой
температуре.
Пьезоэлектрические исполнительные механизмы с учетом
компактности, удобства управления перемещением и быстродей¬
ствия идеальны при использовании в станкостроении для пода¬
вления как вынужденных, так и автоколебаний в технологической
системе. Обеспечивая перемещение от 1 до 300 мкм с точностью
0,01...0,005 мкм, они способны развивать усилия до 50 кН, при
этом собственная частота механизма составляет не менее несколь¬
ких килогерц. Кроме того, эксплуатация пьезоактюаторов в про¬
мышленной аппаратуре в течение пяти лет показала их высокую
надежность: частота отказов менее 1 %.
Высокая жесткость, быстродействие, широкая частотная поло¬
са гашения, небольшие габаритные размеры, простота конструкции
дают возможность адаптивно изменять параметры технологической
системы. Для этого технологическая система оснащается контуром
управления, который по своей структуре может быть замкнутым
или разомкнутым. В системе с разомкнутым контуром управления
с помощью пьезоэлектрического исполнительного механизма осу¬
ществляется компенсация возмущающей силы. В системе с замкну¬
тым контуром управления измеряется отклонение регулируемой
координаты технологической системы с последующей отработкой
рассогласования исполнительным механизмом [8].
Применение таких автоматических систем обеспечит минимум
передачи вибрации, что будет способствовать резкому повышению
83
Основы проектирования виброзащиты космических аппаратов
качества обрабатываемых деталей, увеличению срока службы ин¬
струмента и снижению уровня шума при обработке.
Наиболее распространенным и наиболее эффективным в насто¬
ящее время в микроэлектронике и нанотехнике вариантом виброга¬
сителя с глубоким подавлением вибраций является виброгаситель
на пьезоэлектрических движителях и пьезоэлектрических датчиках
с отрицательной обратной связью. Эффект подавления вибраций
проявляется в диапазоне частот 10... 100 Гц и достигает 40 дБ.
Недостатками таких устройств являются их сложность и, как
следствие, высокая стоимость.
Еще одно из направлений исследований по применению пьезо¬
элементов в системе виброзащиты связано с пассивным шунтирова¬
нием пьезоэлементов. При этом пьезоэлементы соединены с внеш¬
ним элементом системы управления. Сам пьезоэлемент может
быть использован как исполнительный механизм в системе, а через
электроды пьезоэлемент шунтируется некоторым электрическим
сопротивлением, поэтому и используется термин «шунтированный
пьезоэлемент». Электрическое сопротивление выбирается таким,
чтобы произошло поглощение электрической энергии, преобразо¬
ванной из механической энергии, действующей на пьезоэлемент.
Шунтированная модель в основном сводится к вариантам с раз¬
личными схемами включения резистора и конденсатора. При резис¬
тивном шунтировании свойства пьезоэлементов имеют частотную
зависимость, подобную зависимости для упруговязких материалов.
Шунтирование с применением резистора вносит электрический ре¬
зонанс, который может быть оптимально настроен на собственную
частоту конструкции.
Свойства трансформации энергии пьезоэлементом устанавлива¬
ются варьированием коэффициентом электромеханической связи к.
При испытаниях в диапазоне частот 400...3000 Гц использовали
шесть пакетов пьезоэлементов ПП-12 (рис. 68, а), каждый из кото¬
рых состоял из девяти пластин (материал ЦТС-19).
В результате установлено влияние сопротивления, подключен¬
ного к пьезоэлементам, на декремент колебаний 5 и резонансную
частоту. При сопротивлении 550 Ом наблюдалось увеличение 8
в 2 раза по сравнению с системой с разомкнутым контуром управ¬
ления; при подаче синусоидального сигнала произвольной частоты,
подаваемого на пьезоэлементы, получено увеличение 5 в 2,5 раза.
Эти эффекты наблюдались в резонансной зоне, соответствую¬
щей собственной частоте конструкции 2300 Гц, но и применение
84
Основы проектирования виброзащиты космических аппаратов
пьезоэлементов с собственными частотами ниже 10 Гц приводило к
такому же положительному эффекту, только изменялось сопротив¬
ление в шунтирующем контуре.
Результаты испытаний на вибростенде представлены на рис. 68, б.
Проводимые исследования пьезоэлементов с пассивным шунти¬
рованием показали положительный эффект. Это представляет инте¬
рес, особенно с учетом того, что при использовании пьезоэлементов
в системах активной виброзащиты требуются мощные усилители,
т
<ъ и
£ 1600 1800 2000 2200 2400 2600 2800 3000 3200
Частота, Гц
б
Рис. 68. Конструкция с прокладками из пьезокерамики (а) и зависимость
коэффициента динамичности от частоты колебаний:
1 — вибростенд; 2 — пьезокерамический элемент; 3 — с подключенным сопро¬
тивлением; 4 — с системой с разомкнутым контуром управления
85
Основы проектирования виброзащиты космических аппаратов
чувствительные датчики и преобразующая электронная аппаратура,
что является проблематичным с точки зрения энергозатрат в конту¬
рах системы управления КА.
Модификация закона управления
приводными устройствами
Во многих случаях для борьбы с нежелательными вибрациями
конструкции КА более эффективно не рассеивать энергию остаточ¬
ных колебаний, а уменьшать уровень возмущения или модифици¬
ровать его характер таким образом, чтобы избежать резонансных
явлений и, следовательно, не допустить высоких амплитуд коле¬
баний. Для иллюстрации применения этого подхода на практике
рассмотрим модификацию алгоритма управления приводом ОНА.
Критерием, по которому будем определять эффективность данного
подхода, выберем амплитуду перемещения фазового центра ОНА
в направлении ее электрической оси. Для обеспечения качественно¬
го процесса передачи на Землю научной информации перемещение
фазового центра не должно превышать 0,25 мм [1].
Для поиска оптимального с точки зрения минимизации уровней
механических воздействий на КА алгоритма управления приводом
ОНА рассмотрим следующие варианты:
1) импульсный алгоритм управления (частота колебаний ШД
130 Гц, угловая скорость ОНА определяется величиной пачки им¬
пульсов и длительностью цикла);
2) частотный режим (угловая скорость определяется частотой
следования импульсов);
3) антирезонансный режим — импульсный режим с наложени¬
ем определенной зависимости на соотношение величины пачки им¬
пульсов и длительности цикла.
Для сравнения эффективности уменьшения механических воз¬
действий определим динамическую реакцию конструкции КА на
работу привода ОНА по приведенным алгоритмам управления во
всем требуемом диапазоне скоростей.
Физический смысл антирезонансного режима управления мож¬
но представить следующим образом. Разгон и торможение вызы¬
вают моментные воздействия разного направления. Таким образом,
можно подобрать такую величину пачки импульсов, чтобы в мо¬
мент торможения гасить энергию колебаний, сообщенную системе
при ее разгоне. Подбор величины пачки импульсов для реализации
такого характера управления приведен на рис. 69 [2].
86
Основы проектирования виброзащиты космических аппаратов
Рис. 69. Подбор величины пачки импульсов:
7р = 1//1» f\ — частота первого тона колебаний в соответ¬
ствующей плоскости
Таблица 10
Варианты работы привода ОНА
V,
град/с
ДП
V
t, с
м,
Нм
Режим
управления
0,02
6,00
0,28600
0,01000
15
5,000000000
Импульсный
0,04
6,00
0,28600
0,01000
15
2,500000000
- » -
0,20
6,00
0,28600
0,01000
15
0,500000000
Импульсный
0,02
0,16
0,00385
0,00192
75
0,134615385
Частотный
0,04
0,16
0,00385
0,00192
75
0,067307692
- » —
0,20
0,16
0,00385
0,00192
75
0,013461538
Частотный
0,02
11,67
0,56000
0,01000
15
9,720000000
Антирезонансный
0,04
11,67
0,56000
0,01000
15
4,860000000
- » -
0,20
11,67
0,56000
0,01000
15
0,970000000
Антирезонансный
В табл. 10 представлены рассмотренные в процессе математи¬
ческого моделирования режимы работы системы управления при¬
водом ОНА при ее повороте относительно оси ОУОНА (по каналу \|/),
87
Основы проектирования виброзащиты космических аппаратов
где vj; — угловая скорость движения ОНА; АП — число импульсов
в пачке; Гр — время работы привода; т — длительность действия
момента воздействия; М— момент воздействия; Т — время цикла.
Для иллюстрации поведения конструкции КА при работе приво¬
да ОНА в различных режимах на рис. 70-72 приведены некоторые
Рис. 70. Упругие перемещения фазового центра при импульсном режиме
управления приводом ОНА
0,02
I 0,01
I
о
I
&
с-0,01
-0,02
Время, с
а
Частота, Гц
б
Рис. 71. Упругие перемещения фазового центра при частотном режиме
управления приводом ОНА
Основы проектирования виброзащиты космических аппаратов
Время, с Частота, Гц
а б
Рис. 72. Упругие перемещения фазового центра при антирезонансном
режиме управления приводом ОНА
из полученных в процессе исследования результатов при угловой
скорости движения ОНА, равной 0,06 град/с, где на рис. 70, а пред¬
ставлен полученный процесс, а на рис. 70, б — его спектральный
состав.
Для определения влияния различных режимов управления
приводом ОНА на его виброактивность выполнен обобщающий
анализ данных, полученных при имитационном моделировании
динамики КА.
В табл. 11 и на рис. 73 приведены значения максимальных пере¬
мещений фазового центра в направлении электрической оси ОНА,
полученные при имитационном моделировании динамики КА для
различных режимов работы системы управления приводом ОНА.
На основании полученных результатов можно сделать вывод,
что переход на частотный либо антирезонансный режим управле¬
ния работой привода ОНА позволит снизить перемещения ее фазо¬
вого центра до заданного в техническом задании уровня. Следует
отметить, что применение частотного режима управления умень¬
шает уровни перемещений фазового центра более чем на порядок
ниже требуемых.
Для подтверждения теоретических результатов по обеспечению
необходимых уровней перемещения фазового центра ОНА ниже
приведены данные, полученные в процессе наземных испытаний
балки высокоинформативного радиокомплекса (ВИРК). На балке
89
Q
S'
S
vg
сз
CL
H
X
X
0 <
8 5
s °
C3 X
■©■ g
5 «
= §
1 «
1 I
« P"
6 &
* ^
2 О
=S
03
s
X
о
*
л
5
x
X
X
QJ
T
C3
X
ro
о
=3
X
03
Q.
X
03
X
Режимы
Антирезонансный
Уменьшение
амплитуды
по отношению
к импульсному
режиму
1,6
ON
V©
(N
3,0
in
Максимальная
амплитуда, мм
(N
сГ
0,134
0,112
0,149
0,133
Частотный
Уменьшение
амплитуды
по отношению
к импульсному
режиму
25,1
23,4
16,9
31,2
11,3
Максимальная
амплитуда, мм
0,007
0,011
0,017
0,014
0,017
Импульсный
Максимальная
амплитуда, мм
СП
00
сГ
0,251
0,287
0,449
0,196
Угловая
скорость
слежения,
град/с
0,02
0,04
0,06
0,08
0,10
90
Основы проектирования виброзащиты космических аппаратов
5,0 Ю-4
4,5-1(Г4
1 4,0 • 10—4
| « 3,5 -10-4
5 8 3,0-Ю"4
| g 2,5 10~4
| § 2,0 -10-4
§ S -4
У-е- 1,5 10
СО 7
^ 1,0 -кг4
0,5 1(Г50 0,02 0,04 0,06 0,08 0,10 0,12
Рис. 73. Максимальные перемещения фазового центра
ОНА:
1 — 3 — импульсный, антирезонансный и частотный режимы
ВИРК установлен привод, на который устанавливали ОНА, изготов¬
ленную по штатной технологии.
Перемещения фазового центра ОНА определяли для трех поло¬
жений балки ВИРК:
• vi/ = -70°, о = 0;
• \|/ = 0, о = 0;
• \|/ = +80°, о = 0.
В процессе проведения испытаний управление приводом ОНА
осуществлялось двумя различными способами.
1. Импульсный режим — импульсы на ШД подаются пачками
с постоянной частотой /шд, эквивалентная угловая скорость движе¬
ния ОНА определяется величиной пачки импульсов и периодом их
следования (время работы Гр, число импульсов яи и время цикла Гц).
Время работы связано с числом импульсов в пачке следующей за¬
висимостью: ии = /шдГр. Эквивалентная угловая скорость движения
определяется соотношением ф = , где Дф = 2,6923 • 10_3 — угол
Гц
поворота выходного вала ШД за один импульс. Схема, иллюстриру¬
ющая этот режим управления, приведена на рис. 74, а.
0,02 0,04 0,06 0,08 0,10 0,
Скорость поворота ОНА, град/с
91
Основы проектирования виброзащиты космических аппаратов
Период следования ипульсов
Пачка -*■
импульсов Пауза
1
Т
Т
Р2
т
2Р i
ц /
t
7
щ
1
ГЧ2
т
а
Рис. 74. Схемы импульсного (а), ступенчатого (б) и пилообраз¬
ного (в) режимов управления приводом ОНА:
fQ, /к — начальная и конечная частота
2. Частотный режим — ШД работает постоянно, эквивалент¬
ная угловая скорость движения ОНА определяется частотой пода¬
чи управляющих импульсов в данный момент времени. В процессе
проведенных испытаний были опробованы три вида частотного ре¬
жима управления:
92
Основы проектирования виброзащиты космических аппаратов
1) постоянная частота (следящий);
2) ступенчатый режим смены частоты — режим плавного (с за¬
данным шагом (А/) по частоте) разгона и торможения (рис. 74, б).
3) пилообразный режим смены частоты — режим поддержания
эквивалентной угловой скорости антенны путем циклического пе¬
рехода с одной фиксированной частоты на другую (рис. 74, в).
Выделив максимальные значения амплитуд колебаний в полу¬
ченных зависимостях, можно провести их сравнительный анализ.
Результаты сравнения представлены на рис. 75, где приведены за¬
висимости максимальных вибрационных перемещений фазового
центра ОНА от скорости ее поворота при различных положениях
балки ВИРК.
О 0,02 0,04 0,06 0,08 0,10 0,12
Скорость слежения, град/с
а
Рис. 75 (начало). Перемещения фазового центра ОНА для различных
положений балки ВИРК (/щД = 130 Гц) при импульсном {а) режиме
управления
93
Амплитуда,
Основы проектирования виброзащиты космических аппаратов
О 0,02 0,04 0,06 0,08 0,10 0,12 0,14
Скорость слежения, град/с
б
Рис. 75 (продолжение). Перемещения фазового центра ОНА
при следящем (б) режиме управления
94
Амплитуда,
Основы проектирования виброзащиты космических аппаратов
0,00016
0,00014
0,00012
0,00010
0,00008
0,00006
0,00004
0,00002
0 5 10 15 20 25 30 35
Шаг по частоте ШГ, Гц
в
для различных положений балки ВИРК (/шд = 130 Гц)
при частотном ступенчатом (в) режиме управления
95
Основы проектирования виброзащиты космических аппаратов
О 5 10 15 20 25 30 35
Шаг по частоте ШГ, Гц
г
Рис. 75 (окончание). Перемещения фазового центра ОНА для различ¬
ных положений балки ВИРК (/шд = 130 Гц) при пилообразном (г) ре¬
жиме управления
Максимальные значения вибрационных перемещений фазового
центра ОНА, полученные в процессе экспериментальных исследо¬
ваний, представлены в табл. 11.
Экспериментальные данные подтверждают результаты матема¬
тического моделирования как по характеру поведения конструкции,
так и по амплитудным значениям вибрационных перемещений фа¬
зового центра ОНА.
Анализ полученных результатов позволяет с точки зрения ми¬
нимизации амплитуд перемещения фазового центра рекомендовать
частотный (ступенчатый либо пилообразный) режим управления
с шагом изменения частоты 8 Гц. Для обеспечения используемых
скоростей слежения 0.. .0,1 град/с необходимые частоты управления
должны находиться в диапазоне 0...40 Гц.
96
Основы проектирования виброзащиты космических аппаратов
Таблица 11
Максимальные вибрационные перемещения фазового центра, мм
Режим управления приводом ОНА
о *'
® °
I II
II р
o' о.
II II
> р
\|/ = +80°,
1) = 0
Импульсный
0,270
0,240
0,620
Частотный с постоянной
частотой ШД
0,110
0,109
0,240
Частотный ступенчатый
0,094
0,040
0,150
Частотный пилообразный
0,116
0,075
0,190
Рекомендованный
0,097
0,050
0,117
Применение рекомендованного режима работы позволяет сни¬
зить уровни вибрационных перемещений почти в 5 раз [7, 19].
Кроме того, максимальные зарегистрированные амплитуды
перемещений фазового центра при частотном режиме управления
с шагом изменения частоты 8 Гц почти в 2 раза ниже значений, ука¬
занных в техническом задании на КА: 0,25 мм.
При проектировании виброзащиты прецизионных КА пред¬
лагается руководствоваться структурной схемой, приведенной на
рис. 76.
В соответствии с целями и задачами в первую очередь форми¬
руются требования для целевой прецизионной аппаратуры. Целе¬
вая прецизионная аппаратура является уникальной — существует
только в одном экземпляре, что часто приводит к отсутствию ис¬
следований в области ее работоспособности в условиях того или
иного вибронагружения. Изготовитель целевой аппаратуры стре¬
мится в первую очередь соответствовать требованиям техническо¬
го задания, оснастив КА высокоточными приборами с заданными
параметрами. Однако вопросы, в каких условиях будут эксплуати¬
роваться данные приборы, изучения вибрационной обстановки на
борту прорабатываются либо в последнюю очередь, либо вообще
не рассматривается в связи с ограниченными сроками поставки
прецизионной аппаратуры. Как следствие, часто производители
97
Основы проектирования виброзащиты космических аппаратов
Рис. 76. Структурная схема обеспечения виброзащиты КА
целевой прецизионной аппаратуры не могут точно указать, при
каких уровнях вибраций изготовленная аппаратура начнет давать
сбои в виде так называемого смаза изображений, электрических
помех и других негативных эффектов. Количественные оценки,
исходящие из числа пикселей матриц и других математических
выкладок, не позволяют определить пороговые уровни критиче¬
ских вибровозмущений, которые можно установить только с по¬
мощью экспериментальных исследований.
Необходимо также предъявлять требования к источникам ви¬
бровозмущений на борту КА и к виброустойчивости самого преци¬
зионного оборудования. Специалисты, занимающиеся разработкой
КА с целевой прецизионной аппаратурой на борту, должны учиты¬
вать взаимосвязи между источниками вибровозмущений и преци¬
зионной аппаратурой на всех этапах проектирования и конструи¬
рования КА начиная с момента составления технического задания
и разработки эскизного проекта.
98
Основы проектирования виброзащиты космических аппаратов
Варьируя параметрами источников вибровозмущений, можно
значительно изменять условия эксплуатации прецизионной аппа¬
ратуры. Согласно представленной структурной схеме (см. рис. 76),
в первую очередь следует использовать именно корреляционные
методы обеспечения виброзащиты в виде изменения алгоритмов
и режимов работы как источников вибровозмущений, так и самой
прецизионной аппаратуры, а также учитывать конструктивные до¬
работки для изменения собственных динамических характеристик
элементов КА.
Изменение алгоритмов и режимов работы оборудования позво¬
ляет устранить нежелательные вибрационные явления даже в про¬
цессе штатной эксплуатации изделий в космическом пространстве,
когда возникают сообщения о неисправности. Например, при по¬
явлении смаза изображений можно дать рекомендации по ограниче¬
нию скоростей вращения электромаховичных исполнительных ор¬
ганов или смене режима работы привода ОНА [7]. Частным случаем
данного метода является использование специальных алгоритмов
для обработки нечетких изображений, полученных с помощью пре¬
цизионного оборудования. Методы изменения алгоритмов и режи¬
мов работы оборудования следует рассматривать в первую очередь,
так как они являются самыми оперативными, малозатратными и по¬
зволяют решать возникающие проблемы без изменения конструк¬
тивно-компоновочной схемы КА.
Во вторую очередь необходимо провести оценку возможности
конструктивных доработок упругих элементов КА. Часто крити¬
ческие вибровозмущения возникают из-за резонансных эффектов.
Поэтому за счет изменения частотных или диссипативных характе¬
ристик упругих элементов конструкции КА можно избежать дости¬
жения критических значений возмущений. Данные методы эффек¬
тивны на ранних этапах проектирования конструкции КА или при
решении локальных ситуаций, когда требуется развести частотные
составляющие виброколебаний, чтобы не возникало резонансных
возмущений, а также при необходимости сокращения времени за¬
тухания того или иного переходного процесса [11].
Возможны ситуации, когда корреляционные методы виброза¬
щиты не могут в достаточной мере обеспечить выполнение КА
поставленной миссии. В данном случае прецизионная аппарату¬
ра оказывается настолько чувствительной, что возникает необхо¬
димость кардинального изменения вибрационной обстановки на
99
Основы проектирования виброзащиты космических аппаратов
борту КА. Часто требуется снижать уровни бортовых возмущений
на целом диапазоне частот или повышать декременты колебаний
для отдельных элементов конструкции КА. Для решения таких си¬
туаций используются средства виброзащиты в виде виброизолято¬
ров, виброгасителей или комбинированных средств виброзащиты.
В связи с увеличением технических требований к прецизионной
аппаратуре и отсутствием возможности постоянного снижения
возмущений, создаваемых источниками вибраций, использова¬
ние средств виброзащиты является актуальным и приоритетным
направлением.
Литература
[1] Архипов М.Ю., Телепнев П.П., Кузнецов Д.А. К вопросу о чис¬
ленном моделировании динамики конструкции космического аппарата
«Спектр-Р» // Вестник НПО имени С.А. Лавочкина. 2014. № 3. С. 96-99.
[2] Бу тыл кин А.Ф., Телепнев П.П., Ермаков В.Ю., Штенберг Ш.Е. Ме¬
тоды гашения вибраций корпуса и панелей СБ КА с помощью исполни¬
тельных устройств его системы ориентации // Сборник научных трудов.
Актуальные вопросы проектирования космических систем и комплексов.
Вестник НПО имени С.А. Лавочкина. 2005. Вып. 5. С. 432-^37.
[3] Вибрация в технике: справочник в 6 т. Т. 5. 2-е изд., испр. Защита
от вибраций и ударов / под ред. чл.-корр. АН СССР К.В. Фролова. М.: Ма¬
шиностроение, 1985.456 с.
[4] Ермаков В.Ю., Телепнев П.П., Кузнецов Д. А. Магнитожидкостный
виброизолятор. Пат. РФ на полезную модель № 147177, 2014.
[5] Нашиф А., Джоунс Д., Хендерсон Дж. Демпфирование колебаний /
пер. с англ. М.: Мир, 1988. 488 с.
[6] Телепнев П.П., Ермаков В.Ю. Проектирование устройств гаше¬
ния колебаний конструкции космических аппаратов / сост. В.В. Ефанов,
И.Л. Шевалев; под ред. В.В. Ефанова, К.М. Пичхадзе. В 2 т. Т. 1. Проек¬
тирование автоматических космических аппаратов для фундаментальных
научных исследований. М.: Изд-во МАИ, 2012. 526 с.
[7] Телепнев П.П., Ефанов В.В., Кузнецов Д.А., Ермаков В.Ю. Анализ
режимов работы космического аппарата «Спектр-Р» для различных ал¬
горитмов управления приводом остронаправленной антенны // Вестник
НПО имени С.А. Лавочкина. 2014. № 3. С. 100-103.
[8] Хомяков В., Николаев Ю., Шереметьев К. Борьба с вибрациями
в прецизионной металлообработке // Техномир, 2006. № 1 (27).
[9] Ермаков В. Ю., Ефанов В. В., Кузнецов Д. А., Лемешевский С.А.,
Митъкин А.С., Москатинъев П.В., Скуридина О.Е., Телепнев П.П., Чубу-
кова И.А. Магнитожидкостный виброгаситель. Пат. РФ на изобретение
№2657700, 2018.
[10] Кузнецов Д. А., Ефанов В. В. Методический аппарат обеспече¬
ния виброзащиты космических конструкций // Актуальные вопросы
101
Основы проектирования виброзащиты космических аппаратов
проектирования автоматических космических аппаратов для фундамен¬
тальных и прикладных научных исследований. 2017. Вып. 2. С. 279-284.
[11] Ковалёв Л.В., Митъкин А.С., Телепнев П.П., Цыплаков А.Е. Моде¬
лирование динамического поведения КА с учетом конструкционных не¬
линейностей его нежестких элементов // Вестник НПО имени С.А. Лавоч¬
кина. 2017. № 1.С. 7-12.
[12] Анисимов В. Ю., Ермаков В.Ю., Кузнецов Д.А., Телепнев П.П., Ер¬
макова Л. В., Гена В.Я., Витушкина Е.В., Борисов Э.В. Устройство для га¬
шения низкочастотных вибраций. Пат. РФ на полезную модель № 144547,
2014.
[13] Ермаков В.Ю., Кузнецов Д. А., Телепнев П.П., Сова А. Н. Предложе¬
ние по решению проблемы виброзащиты прецизионной оптико-электрон¬
ной аппаратуры космического аппарата «Спектр-УФ» // Вопросы электро¬
механики. Труды ВНИИЭМ. 2013. Т. 135. № 4. С. 17-20.
[14] Ермаков В.Ю., Ефанов В.В., Клишев О.П., Кузнецов Д. А., Телеп¬
нев П.П., Цытаков А.Е. Новый способ снижения вибровозмущений целе¬
вой аппаратуры на борту прецизионных космических аппаратов // Космо¬
навтика и ракетостроение. 2014. № 6 (79). С. 80-85.
[15] Рулев С.В., Лебедев А.Г., Николаев А.В., Шульга В.М., Телеп¬
нев П.П., Кузнецов Д. А., Ермаков В.Ю. Весоизмерительные устройства для
заправки баков разгонного блока «Фрегат» (к 50-летию космической де¬
ятельности НПО имени С.А. Лавочкина)// Вестник НПО имени С.А. Ла¬
вочкина. 2015. № 3. С. 74-80.
[16] Кузнецов Д.А., Телепнев П.П., Ермаков В.Ю. Подход к решению
вопроса по прогнозу уровней возмущений для электромаховичных ис¬
полнительных органов // Вестник НПО имени С.А. Лавочкина. 2016. № 3.
С. 116-119.
[\1] Геча В.Я., Ефанов В.В., Клишев О.П., Кузнецов Д. А., Москати-
нъев И.В., Телепнев П.П. Влияние вибраций на целевую прецизионную ап¬
паратуру космических аппаратов // Общероссийский научно-технический
журнал «Полет». 2015. № 3. С. 20-24.
[18] Кузнецов Д. А. К вопросу лабораторных исследований по созданию
системы виброизоляции бортовых гироскопических устройств // Актуаль¬
ные вопросы проектирования автоматических космических аппаратов для
фундаментальных и прикладных научных исследований. 2015. С. 200-203.
[19] Telepnev P.P., Efanov V.V., Kuznetsov D.A., Ermakov V. Yu. Analysis
of SPEKTR-R Spacecraft Operating Modes for Various Algorithms of High
Gain Antenna Drive Control // Solar System Research. 2015. Vol. 49. No 7.
Pp. 610-613.
[20] Телепнев П.П., Ефанов В.В., Кузнецов Д.А. Идентификация дина¬
мической модели КА по данным телеметрии при летных испытаниях // Об¬
щероссийский научно-технический журнал «Полет». 2017. № 7. С. 12-20.
102
Основы проектирования виброзащиты космических аппаратов
[21] Ефанов В.В., Герасимчук В.В., Кузнецов Д. Л., Митькин А.С., Те-
лепнев П.П., Цыплаков А.Е. Моделирование механических возмущений
привода остронаправленной антенны космического аппарата планетных
исследований // Общероссийский научно-технический журнал «Полет».
2017. №8. С. 19-25.
[22] Герасимчук В.В., Ефанов В. В., Кузнецов Д. А.,. Телепнев П.П.
К вопросу о повышении диссипативных характеристик конструкции кос¬
мического аппарата// Космонавтика и ракетостроение. 2018. №3 (102).
С. 103-110.
[23] Шулъга В.М., Лебедев А.Г., Борисов В.Г, Сова А.Н., Ерма¬
ков В.Ю., КузнецовД.А. Методическое и экспериментальное обоснование
технологии заправки разгонного блока «Фрегат» компонентами топлива
из транспортно-заправочных контейнеров методом весового дозирования
(к 80-летию образования НПО им. С.А. Лавочкина) // Вестник НПО имени
С.А. Лавочкина. 2017. № 2. С. 187-191.
[24\ Герасимчук В. В., Ефанов В. В., Ермаков В. Ю., Кузнецов Д. А., Ло-
ханов И.В., Телепнев П.П., Цыплаков А.Е. Решение задачи обеспечения
допустимых уровней вибронагруженности исполнительных органов си¬
стемы ориентации космического аппарата // Общероссийский научно-тех¬
нический журнал «Полет». 2018. № 8. С. 33-38.
О научном редакторе учебного пособия
ещ sj:*-
#111®
Ефанов Владимир Владимирович —
доктор технических наук,
профессор,
главный научный сотрудник
АО «НПО Лавочкина».
Ученый в области системного
анализа и проектирования
служебных систем автоматических
космических аппаратов.
Учебное издание
Телепнев Петр Павлович
Кузнецов Дмитрий Александрович
Основы проектирования
виброзащиты
космических аппаратов
Редактор J1.T. Мартыненко
Художник В.А. Филатова
Корректор Ю'Н. Морозова
Компьютерная верстка И.Д. Звягинцевой
Оригинал-макет подготовлен
в Издательстве МГТУ им. Н.Э. Баумана.
В оформлении использованы шрифты
Студии Артемия Лебедева.
Подписано в печать 22.02.2019. Формат 60x90/16.
Уел. печ. л. 6,6. Тираж 150 экз.
Издательство МГТУ им. Н.Э. Баумана.
105005, Москва, 2-я Бауманская ул., д. 5, стр. 1.
press@bmstu.ru
www.baumanpress.ru
Отпечатано в ПАО «Т8 Издательские Технологии»
109316, Москва, Волгоградский проспект, д. 42, корп. 5.
Рассмотрены основы проектирования виброзащиты прецизионных
космических аппаратов для улучшения разрешающей способности
устанавливаемой на борту целевой аппаратуры при влиянии дина¬
мических источников возмущений. Представлены методы и средства
виброзащиты, а также принципы работы, математические модели и
практические примеры создания виброзащитных устройств. Приведен
инженерный алгоритм в виде структурной схемы обеспечения вибро¬
защиты космических конструкций для практической реализации.
Телепнев Петр Павлович
кандидат технических наук, начальник отдела «Динами¬
ки и виброзащиты космических конструкций» АО «НПО
Лавочкина». Основные научные работы связаны с вопро¬
сами динамики КА и обеспечением их высокоточностных
характеристик в процессе летной эксплуатации.
Кузнецов Дмитрий Александрович
кандидат технических наук, ведущий инженер-конструк¬
тор отдела «Динамики и виброзащиты космических кон¬
струкций» АО «НПО Лавочкина». Основные научные ра¬
боты посвящены проектированию средств виброзащиты
для прецизионных космических аппаратов.
ISBN 978-5-7038-5103-6
9ll7 8 5 7 0 3118 5 1 0 3 611
www.baumanpress.ru